/



























































































































































































































































































































































































































































Автор: Ким Д.П.
Теги: математическая кибернетика автоматика автоматизация теория автоматического управления
ISBN: 5-9221-0534-5
Год: 2004
Похожие




Текст
УДК 519.711
ББК 32.965
К 40
Ким Д. П. Теория автоматического управления. Т. 2. Много-
Многомерные, нелинейные, оптимальные и адаптивные системы: Учеб.
пособие. - М.: ФИЗМАТЛИТ, 2004. - 464 с. - ISBN 5-9221-0534-5.
Книга посвящена теории автоматического управления многомерных,
нелинейных, оптимальных и адаптивных систем. В ней наряду с традицион-
традиционными материалами (методы фазовой плоскости, гармонической линеариза-
линеаризации, функции Ляпунова и исследования абсолютной устойчивости, методы
теории оптимального и адаптивного управления) рассматриваются метод
анализа и синтеза систем большой размерности, основанный на векторной
функции Ляпунова, метод синтеза путем линеаризации обратной связью и
ряд других нетрадиционных для учебников и учебных пособий по теории
автоматического управления вопросов.
Для студентов технических вузов, обучающихся по направлению подго-
подготовки «Автоматизация и управление». Может быть рекомендована инженер-
инженерно-техническим и научным работникам соответствующих специальностей.
Табл. 5. Ил. 65. Библиогр. 69 назв.
Рецензенты:
кафедра «Автоматика и процессы управления» Санкт-Петербургского
государственного электротехнического университета (ЛЭТИ; зав. кафед-
кафедрой — доктор технических наук, профессор Н.Н. Кузьмин)',
доктор технических наук, профессор О. С. Колосов (Московский энер-
энергетический институт).
© ФИЗМАТЛИТ, 2004
ISBN 5-9221-0534-5 (Т. 2) © д. п. Ким, 2004
Оглавление
Предисловие 9
Глава 1. Представление в пространстве состояний. Неко-
Некоторые математические сведения 11
1.1. Уравнение системы в нормальной форме 11
1.2. Преобразование уравнений линейных систем в нормальную
форму 13
1.3. Общая формула решения системы линейных дифференциаль-
дифференциальных уравнений 17
1.4. Управляемость объекта управления 19
1.4.1. Управляемость линейных объектов A9). 1.4.2. Управ-
Управляемость линейных стационарных объектов B1). 1.4.3. Под-
Подпространство управляемости B5). 1.4.4. Каноническая форма
управляемости B6).
1.5. Канонические формы уравнения и модальное управление ... 28
1.6. Стабилизируемость линейных стационарных систем 34
1.7. Равномерная непрерывность и лемма Барбалата 36
1.8. Лемма Калмана-Якубовича 38
1.9. Векторное дифференцирование 39
Задачи 42
Глава 2. Нелинейные системы. Метод фазовой плоскости 45
2.1. Нелинейные статические характеристики. Особенности нели-
нелинейных систем 45
2.2. Определение устойчивости 47
2.3. Орбитальная устойчивость. Автоколебания 51
2.4. Изображение процессов на фазовой плоскости 53
2.5. Фазовые портреты и типы особых точек 55
2.5.1. Фазовые портреты и типы особых точек линейных
систем E5). 2.5.2. Фазовые портреты нелинейных систем E7).
2.6. Метод фазовой плоскости анализа и синтеза систем 60
2.6.1. Анализ нелинейных систем F0). 2.6.2. Синтез систем с
переменной структурой F2).
Задачи 66
Оглавление
Глава 3. Метод гармонической линеаризации 68
3.1. Гармоническая линеаризация 68
3.2. Вычисление коэффициентов гармонической линеаризации
при симметричных колебаниях 71
3.2.1. Коэффициенты гармонической линеаризации нелиней-
нелинейных звеньев с однозначной характеристикой G1). 3.2.2. Коэф-
Коэффициенты гармонической линеаризации нелинейных звеньев с
неоднозначной характеристикой G4).
3.3. Исследование симметричных автоколебаний 81
3.3.1. Аналитический способ исследования автоколебаний (81).
3.3.2. Графический (частотный) метод исследования автоколе-
автоколебаний (85).
3.4. Несимметричные колебания 87
3.4.1. Вычисление коэффициентов гармонической линеариза-
линеаризации (87). 3.4.2. Исследование несимметричных колебаний (95).
3.5. Вынужденные колебания и вибрационная линеаризация .... 97
3.5.1. Вынужденные колебания (98). 3.5.2. Вибрационная ли-
линеаризация A00).
Задачи 105
Глава 4. Метод функций Ляпунова 107
4.1. Знакопостоянные и знакоопределенные функции 107
4.1.1. Определение знакопостоянных и знакоопределеных
функций A07). 4.1.2. Положительно определенные квадратич-
квадратичные формы A09).
4.2. Устойчивость неавтономных систем 111
4.2.1. Теоремы об устойчивости A12). 4.2.2. Теоремы о не-
неустойчивости A17).
4.3. Устойчивость автономных систем 119
4.3.1. Теоремы об устойчивости A19). 4.3.2. Теоремы о не-
неустойчивости A23).
4.4. Устойчивость при постоянно действующих возмущениях ... 124
4.5. Исследование нелинейных систем по линейному приближе-
приближению 127
4.5.1. Уравнение Ляпунова и критерий Ляпунова устойчивости
линейных систем A27). 4.5.2. Критерий устойчивости Ляпу-
Ляпунова по линейному приближению A30).
4.6. Оценка времени регулирования 135
4.7. Методы построения функций Ляпунова 137
Задачи 140
Глава 5. Абсолютная устойчивость 142
5.1. Система сравнения. Необходимое условие абсолютной устой-
устойчивости 143
Оглавление
5.2. Прямой метод Ляпунова исследования абсолютной устойчи-
устойчивости 144
5.3. Частотные методы исследования абсолютной устойчивости 146
5.3.1. Линейная часть устойчива A46). 5.3.2. Линейная часть
неустойчива A48).
5.4. Доказательство критерия Попова 150
5.5. Квадратичный критерий абсолютной устойчивости 158
5.5.1. Эрмитова матрица и эрмитова форма A59). 5.5.2. Ло-
Локальная связь. Минимальная устойчивость A61). 5.5.3. Квад-
Квадратичный критерий A62). 5.5.4. Методы построения квадра-
квадратичной формы локальной связи A65).
5.6. Круговой критерий абсолютной устойчивости 169
Задачи 172
Глава 6. Линеаризация обратной связью 174
6.1. Обычная линеаризация и ее недостатки 174
6.2. Линеаризация обратной связью 175
6.3. Некоторые сведения из дифференциальной геометрии 177
6.3.1. Производные и скобки Ли A77). 6.3.2. Диффеоморфизмы
и преобразование нелинейных систем A81). 6.3.3. Теорема
Фробениуса A82).
6.4. Линеаризация обратной связью по состоянию 184
6.5. Линеаризация обратной связью по выходу 189
6.5.1. Относительный порядок A92). 6.5.2. Внешняя и внут-
внутренняя динамика A93).
6.6. Нуль-динамика и синтез алгоритмов управления 197
6.6.1. Нуль-динамика A97). 6.6.2. Синтез алгоритма стаби-
стабилизации A98). 6.6.3. Синтез алгоритма управления в задаче
слежения A99).
Задачи 201
Глава 7. Системы большой размерности. Векторная функ-
функция Ляпунова 203
7.1. Дифференциальные неравенства 204
7.2. Экспоненциальная устойчивость. Теорема Красовского 206
7.3. Декомпозиция и децентрализация 212
7.3.1. Декомпозиция B12). 7.3.2. Преобразование Луенберге-
ра B15). 7.3.3. Децентрализация по входу B16).
7.4. Векторные функции Ляпунова 220
7.4.1. Норма матрицы B20). 7.4.2. Устойчивость агрегиро-
агрегированной системы B21). 7.4.3. Критерий устойчивости М-мат-
риц B24). 7.4.4. Устойчивость агрегированной системы с
нелинейными взаимосвязями B29).
Задачи 235
Оглавление
Глава 8. Методы синтеза систем управления 238
8.1. Метод обратной задачи динамики 238
8.2. Синтез систем с переменной структурой 241
8.2.1. Условия скольжения и попадания B41). 8.2.2. Уравнение
движения в скользящем режиме B44). 8.2.3. Стабилизация
линейного стационарного объекта B46).
8.3. Синтез систем, основанный на методе функций Ляпунова .. 260
8.3.1. Синтез параметров регулятора B61). 8.3.2. Достаточ-
Достаточные условия стабилизируемости и синтез законов управ-
управления B62). 8.3.3. Синтез стабилизирующего закона уп-
управления при линейном относительно состояния уравнении
объекта B66).
8.4. Синтез систем методом линеаризации обратной связью 269
8.5. Синтез стабилизирующих законов управления методом деком-
декомпозиции 270
Задачи 275
Глава 9. Методы теории оптимального управления 277
9.1. Общие положения и постановка задачи 277
9.1.1. Общая постановка задачи оптимального управле-
управления B78). 9.1.2. Примеры постановки задач оптимального
управления B79). 9.1.3. Классификация задач оптимального
управления и их преобразования B83).
9.2. Метод множителей Лагранжа (методы классического вариа-
вариационного исчисления) 285
9.2.1. Уравнения Эйлера B85). 9.2.2. Уравнения Эйлера-
Лагранжа B87). 9.2.3. Правило множителей Лагранжа для
задач оптимального управления с фиксированными конца-
концами B88). 9.2.4. Правило множителей Лагранжа для за-
задач оптимального управления с подвижными концами B91).
9.2.5. Правило множителей Лагранжа для задач оптимального
управления с нефиксированным временем B94).
9.3. Принцип максимума Понтрягина 297
9.3.1. Задача с закрепленными концами и фиксированным
временем B97). 9.3.2. Задача с подвижными концами и не-
нефиксированным временем B99). 9.3.3. Задача максимального
быстродействия. Теорема об п интервалах C02). 9.3.4. Вы-
Вырожденные задачи C05). 9.3.5. Особые задачи C06).
9.4. Метод динамического программирования 307
9.4.1. Инвариантное погружение и функциональное уравне-
уравнение C07). 9.4.2. Принцип оптимальности C09). 9.4.3. Функ-
Функции и уравнения Беллмана C11). 9.4.4. Достаточные условия
оптимальности C14).
9.5. Наблюдаемость и восстанавливаемость 316
Оглавление
9.5.1. Наблюдаемость линейных стационарных систем C16).
9.5.2. Каноническая форма наблюдаемости. Обнаруживае-
мость C20). 9.5.3. Принцип двойственности управляемости
и наблюдаемости C21). 9.5.4. Наблюдатели полного поряд-
порядка C22). 9.5.5. Наблюдатели пониженного порядка C23).
9.6. Синтез оптимальных систем управления 326
9.6.1. Метод фазовой плоскости синтеза оптимальной по быст-
быстродействию системы C26). 9.6.2. Синтез оптимальной по
интегральному квадратичному критерию нестационарной ли-
линейной системы управления C28). 9.6.3. Синтез оптимальной
по интегральному квадратичному критерию стационарной
линейной системы управления C32). 9.6.4. Синтез оптималь-
оптимального линейного регулятора выхода C36). 9.6.5. Синтез оп-
оптимальной системы по критерию обобщенной работы C38).
9.6.6. Метод прогонки решения задачи синтеза оптимальной
линейной системы C41).
Задачи 346
Глава 10. Анализ систем и синтез оптимальных систем
управления при случайных воздействиях 350
10.1. Случайные величины и процессы 350
10.1.1. Случайные величины и их характеристики C50).
10.1.2. Случайные процессы и их характеристики C53).
10.1.3. Некоторые типы случайных процессов C55).
10.2. Анализ линейных систем и синтез оптимальных параметров
при случайных воздействиях 358
10.2.1. Преобразование случайных процессов линейными сис-
системами C58). 10.2.2. Анализ линейных систем в переходном
режиме C62). 10.2.3. Анализ линейных систем в установив-
установившемся режиме C63). 10.2.4. Синтез параметров системы по
минимуму среднеквадратической ошибки C67).
10.3. Винеровская задача оптимальной фильтрации 368
10.3.1. Постановка винеровской задачи оптимальной
фильтрации C68). 10.3.2. Уравнение Винера-Хопфа C69).
10.3.3. Формирующий фильтр C71). 10.3.4. Фильтр Вине-
Винера C74).
10.4. Фильтры Калмана-Бьюси 377
10.4.1. Задача оптимальной фильтрации при белых шу-
шумах C77). 10.4.2. Фильтр Калмана-Бьюси при цветном шуме
объекта C85). 10.4.3. Фильтр Калмана-Бьюси при цветном
шуме наблюдения C88). 10.4.4. Вырожденная задача опти-
оптимального оценивания C91). 10.4.5. Линеаризованный фильтр
Калмана-Бьюси C94).
10.5. Стохастические оптимальные системы 396
10.5.1. Стохастическое оптимальное управление и уравне-
уравнение Беллмана C97). 10.5.2. Стохастическая оптимальная
линейная система при полной информации о состоянии C98).
Оглавление
10.5.3. Стохастическая оптимальная линейная система при
неполной информации о состоянии. Принцип разделения D00).
Задачи 408
Глава 11. Адаптивные системы управления 411
11.1. Общие положения. Постановка задачи 411
11.1.1. Назначение адаптивных систем управления D12).
11.1.2. Структура и типы адаптивных систем управле-
управления D13). 11.1.3. Общая постановка задачи адаптивного
управления D15). 11.1.4. Общая характеристика методов
синтеза адаптивных систем управления D16).
11.2. Алгоритмы адаптивного управления с ЭМ 417
11.2.1. Алгоритм адаптивного управления линейным объ-
объектом 1-го порядка D17). 11.2.2. Адаптивное управление
по состоянию линейным объектом D21). 11.2.3. Адаптивное
управление по выходу линейным объектом с единичным от-
относительным порядком D25). 11.2.4. Адаптивное управление
по выходу линейным объектом с относительным порядком,
превышающим единицу D31). 11.2.5. Адаптивное управле-
управление по состоянию нелинейным объектом D35). 11.2.6. Адап-
Адаптивное управление и робастность D38).
11.3. Адаптивное управление с идентификатором 440
11.3.1. Идентификация и модель для получения оценки D40).
11.3.2. Градиентный идентификатор D42). 11.3.3. МНК-иден-
тификатор D46). 11.3.4. МНК-идентификатор с экспоненци-
экспоненциальной потерей памяти D49). 11.3.5. Выбор коэффициента
потери памяти D52). 11.3.6. Сравнительная характеристика
различных методов получения оценки D53).
Задачи 455
Список литературы 456
Предметный указатель 460
ПРЕДИСЛОВИЕ
Учебное пособие написано на основе лекций, читавшихся автором
в Московском государственном институте радиотехники, электроники
и автоматики (МИРЭА) в течение более чем тридцати лет (с 1967г.)
студентам специальности «Автоматика и телемеханика» и других
специальностей. Данное пособие является вторым томом книги «Тео-
«Теория автоматического управления» и посвящено теории многомерных,
нелинейных, оптимальных и адаптивных систем управления. Оно
включает вторую и третью части программного материала курса
«Теория автоматического управления», предназначенного студентам,
обучающимся по направлению «Автоматизация и управление» в те-
течение более одного семестра. Пособие состоит из одиннадцати глав.
В главе 1 рассматриваются такие общие вопросы теории автома-
автоматического управления, как преобразования дифференциальных урав-
уравнений в нормальную форму, управляемость, стабилизируемость, ка-
канонические формы уравнения. В связи с каноническими уравнениями
рассматривается так называемое модальное управление. Кроме того,
для удобства приводятся некоторые сведения из математики, которые
необходимы для изучения последующих глав.
Глава 2 посвящена общей характеристике нелинейных систем,
определению устойчивости, изображению процессов на фазовой плос-
плоскости и типам особых точек. Здесь также рассматривается метод фа-
фазовой плоскости исследования систем управления и синтеза систем с
переменной структурой.
Глава 3 посвящена методу гармонической линеаризации. Рассмат-
Рассматриваются задачи исследования автоколебаний и вынужденных колеба-
колебаний, а также вибрационной линеаризации.
В главе 4 представлен материал, связанный с методом функций
Ляпунова. Приводятся теоремы об устойчивости и неустойчивости
автономных и неавтономных систем, теоремы об устойчивости нели-
нелинейных систем по их линейному приближению, уравнения Ляпунова
и критерий Ляпунова об устойчивости линейных систем. Рассмат-
Рассматриваются метод оценки времени регулирования с помощью функции
Ляпунова и методы построения функций Ляпунова.
Глава 5 посвящена методам исследования абсолютной устойчивос-
устойчивости. Здесь наряду с традиционными для учебных пособий материалами
(прямой метод Ляпунова, частотный метод Попова, круговой кри-
критерий) излагаются вопросы, связанные с квадратичным критерием.
10 Предисловие
В главе б рассматриваются методы линеаризации обратной
связью — метод линеаризации обратной связью по состоянию и метод
линеаризации обратной связью по выходу. Приводятся математичес-
математические сведения (производные и скобки Ли), необходимые при рассмот-
рассмотрении этих методов.
В главе 7 изучаются вопросы, связанные с системами большой
размерности. Основной материал посвящен методам анализа и син-
синтеза систем управления путем их декомпозиции и агрегирования.
Глава 8 посвящена методам синтеза систем управления. Здесь
рассматривается метод обратной задачи динамики, синтез систем с
переменной структурой высокого порядка, синтез систем управления,
основанный на методе функций Ляпунова, линеаризации обратной
связью и методе декомпозиций.
В главе 9 излагается теория детерминированных оптимальных
систем управления. В ней приводятся постановка и классификация
задач оптимального управления, методы классического вариационного
исчисления, принцип максимума и метод динамического программи-
программирования. Здесь рассматриваются вопросы наблюдаемости, восстанав-
восстанавливаемости и обнаруживаемости, задачи максимального быстродейст-
быстродействия, синтез оптимальных систем по интегральному квадратичному
критерию и по критерию обобщенной работы.
Глава 10 посвящена анализу и синтезу оптимальных систем управ-
управления при случайных возмущениях. В начале главы приводятся ос-
основные сведения из теории случайных процессов. Затем рассматри-
рассматривается задача анализа линейных систем управления при случайных
возмущениях и синтез параметров регулятора, обеспечивающих мини-
минимум среднеквадратической ошибки. Основное внимание в этой главе
уделяется оптимальной фильтрации и синтезу стохастических опти-
оптимальных систем управления. Здесь рассматриваются фильтр Винера,
фильтры Калмана—Бьюси при белых и цветных шумах объекта и
наблюдения, принцип разделения и синтез стохастических оптималь-
оптимальных систем управления по среднеквадратическому интегральному
критерию оптимальности.
В главе 11 рассматриваются адаптивные системы управления.
Здесь изучаются вопросы, связанные с методами синтеза адаптивных
систем управления с эталонной моделью и идентификатором.
Автор выражает искреннюю благодарность академику И.М. Ма-
Макарову за поддержку и помощь, доцентам Н.Д. Дмитриевой и О.А. Тя-
Тягу нову, прочитавшим рукопись и сделавшим ряд полезных замечаний.
Автор также благодарен заведующему кафедрой «Управление и
информатика» МЭИ профессору О.С. Колосову и заведующему ка-
кафедрой «Автоматика и процессы управления» ЛЭТИ профессору
Н.Н. Кузьмину за рецензирование рукописи.
Глава 1
ПРЕДСТАВЛЕНИЕ В ПРОСТРАНСТВЕ СОСТОЯНИЙ.
НЕКОТОРЫЕ МАТЕМАТИЧЕСКИЕ СВЕДЕНИЯ
В этой книге при рассмотрении большинства задач уравнения
системы управления представляются в нормальной форме. Поэтому
первые два параграфа посвящены вопросам преобразования диффе-
дифференциальных уравнений в нормальную форму. Далее рассматрива-
рассматриваются такие общие вопросы теории автоматического управления, как
управляемость, стабилизируемость, канонические формы уравнения.
В связи с каноническими уравнениями рассматривается так назы-
называемое модальное управление. Кроме того, для удобства приводятся
некоторые сведения из математики, которые необходимы для изучения
последующих глав.
1.1. Уравнение системы в нормальной форме
Если уравнения системы разрешены относительно старшей произ-
производной, то их всегда можно преобразовать к системе уравнений 1-го
порядка. Например, пусть система описывается уравнением
М . (п-1)
х = F(x,x,..., х ,t).
Его можно преобразовать к виду
Х\ — Х2,
х2 = ж3,
хп = F(x1,x2,...,xn,t),
(п-1)
где х\ = ж, Х2 = ж, ..., хп = х .
Аналогичное преобразование можно произвести, когда система
описывается несколькими уравнениями. Пусть, например, система
описывается уравнениями
У\ =Fx {yi,yi,yi,y2,№,i),
У2 =F2 {yi,yi,yi,y2,y2,t) -
12 Гл. 1. Представление в пространстве состояний
Их можно преобразовать в следующую систему уравнений 1-го по-
порядка:
Х1 = Х2,
Х2=Х3,
Х3 =Fx (x1,X2,X3,X4,Xb,t),
2/2 =ХА.
Здесь Ж1 = 2/i, Ж2=2/1, х3 = jji, х4 = 2/2, хъ = у2.
В общем случае уравнения управляемой системы можно предста-
представить в виде
Xl = /l (Х!,Х2, . . . ,Xn,U!,U2, . . . ,Ur,t) ,
Х2 = f2(xi,X2,- • • ,Xn,U1,U2,. . . ,Ur,t) ,
Хп = /п (Ж1,Ж2,. . .,Xn,UbU2,. ..,Ur,t),
уг = ftx (ЖЬЖ2,. . . ,Xn,Ui,U2,. ..,Ur,t),
у2 = h2 (X!,X2, . . . ,Xn,U!,U2, . . . ,Ur,t) ,
Ут = hm(x1,x2,...,xn,u1,u2,...,ur,t).
Здесь xi,X2,... ,хп — фазовые координаты, или фазовые перемен-
переменные; ui,u2,... ,иг — управляющие параметры, или управления;
2/1 ? 2/2 5 ••• 5 2/т — выходные переменные; t — время.
Уравнения, записанные в виде системы дифференциальных урав-
уравнений 1-го порядка, разрешенных относительно производной, называ-
называются нормальной формой Коши или просто нормальной формой.
В векторной форме приведенные уравнения принимают вид
x = f(x,u,t), A.1a)
y = h(x,u,t). A.16)
Здесь х называют фазовым вектором или вектором состояний, и —
вектором управления или просто управлением, а также входной пе-
переменной или просто входом, у — выходным вектором или просто
выходом. Множество всех векторов состояний (фазовых векторов)
называют пространством состояний или фазовым пространством.
Уравнение A.1а) называют уравнением состояния, а уравне-
уравнение A.16) — уравнением выхода или уравнением наблюдений.
В этой книге всюду вектор рассматривается как вектор-столбец.
Так что имеем
Х = (Ж1Ж2 ... Ж„) , U = (щ U2 . . . Ur) , у = B/1 2/2 ... Ут) ,
где Т обозначает операцию транспонирования. Вектор также будем
рассматривать как матрицу-столбец.
1.2. Преобразование уравнений системы в нормальную форму 13
Если вход и выход системы являются скалярными величинами, то
такие системы называют одномерными. Если хотя бы одна из ука-
указанных переменных является векторной, то такие системы называют
многомерными.
1.2. Преобразование уравнений линейных систем
в нормальную форму
В общем случае уравнение одномерной управляемой системы
(объекта) имеет вид
(п-1)
г у
(ш)
.. . + апу = Ьои
(ш-1)
и
М () () ()
у +аг у + .. . + апу = Ьои +Ьг и + ... + Ьти (т^п). A.2)
Рассмотрим отдельно три случая: т = 0, т = п и 0<т<п.
А) т = 0. В этом случае, разрешив уравнение A.2) относительно
старшей производной, получим
п (п-1)
у = Ьои- а,! у - ... - апу.
Положив у = xi, у = Х2, • • •, 2/ = хп, получим
XI =Х2,
Х2 = Жз,
В векторной форме эта система принимает вид
где
х =
XI
Хп-1
А =
Ь =
X =
У =
0
0
0
—а
- Лх + bm,
т
= С X,
1
0
0
0
1
0
— 0>п-2
... 0
... 0
1
... -ах
с =
14
Гл. 1. Представление в пространстве состояний
Б) т = п. В этом случае уравнение A.2) можно преобразовать к
виду .
#1 = ж2 + kiu
жп_1 = хп
хп = —
где
у = х\ + кои,
г
В векторной форме эта система принимает вид
х = Лх + bu,
где
х =
XI
Хп-1
А =
у = с
0
0
0
_-ап
А;2
кп-1
кп
х + А;о^,
1
0
0
— О"п-1
, С =
-а
' 1 "
0
0
0
0 ... 0
1 ... 0
0 ... 1
п-2 ... -с
A.3а)
A.36)
Ь =
Докажем справедливость приведенных преобразований. Продиф-
Продифференцируем обе части соотношения A.36) последовательно п раз,
подставляя вместо производной Х{ ее выражение из A.3а). Тогда
получим
у = ±i + коп = Х2 + к\и + коп,
у — Х2 + к\п
(n-1)
= xn + kn-iu + kn-2U + ... + ко и ,
......
= жп + kn-\u + kn-2u + ...
(n)
A.4)
Теперь выразим из полученной системы уравнений и уравне-
уравнения A.36) переменные Ж1,Ж2,...,жп через переменную у и ее произ-
1.2. Преобразование уравнений системы в нормальную форму 15
водные. Из A.36) получаем
х\ — у — кои.
Далее из полученной выше системы уравнений находим
х2—у — к\и — кой,
х% = у — к2и — к\й — кой,
(п-1) . (п-1)
хп = У - kn-iu - кп-2и - ... - ко и .
Подставим полученные выражения для х\,х2,... ,хп в уравне-
уравнение A.4). Тогда получим
М fi.n-1) . (n-l)v
?/ =-ai( 2/ - kn-xu - kn-2u - ... - ко и )-
Лп-2) . (n-2)
- cl2{ у - kn-2u - kn-3u - ... - ко и ) - ...
... - an(y - kou) + knu + kn-iu + ... + kou .
Перенесем слагаемые, содержащие переменную у и ее производ-
производные, в левую часть, и в правой части произведем приведение подобных
членов. Тогда получим
(п) (п-1)
У + ai 2/ + ... + ап2/ =
= кои +(fci+fc) + (fe + k + ^)
... + (кп + aifcn_i + а2кп-2 + ... + ап&0) п.
Приравнивая коэффициенты при одинаковых производных в правых
частях этого уравнения и исходного уравнения A.2), находим
bo = ко, Ъ\ = к\ + сцко, Ь2 = к2 + ai/^i + a2^o5
..., bn = кп + aikn-i + a2kn-2 + ... + anko.
Очевидно, эти равенства можно записать в виде
ко = bo, к\ — Ь\ — а\ко, к2 —Ь2 — {а\к\ + а2ко),
• • •, кп = ЬП- (aikn-i + а2кп-2 + ... + апк0),
или
г
ко = bo, ki — bi- 22ajki-ji г = 1,2,... ,n.
Последнее рекуррентное соотношение совпадает с A.3в).
Способ преобразования, который рассмотрен в этом пункте, можно
использовать и тогда, когда т удовлетворяет неравенству 0 < т < п,
так как уравнение A.2) при т < п является частным случаем, когда
первые т — п коэффициентов в правой части равны нулю.
16 Гл. 1. Представление в пространстве состояний
Пример 1.1. Пусть управляемая система описывается урав-
уравнением п 1 , 1
_ 0Др+ 1
У ~
Требуется преобразовать это уравнение в нормальную форму.
Решение. Запишем исходное уравнение в обычной форме:
0,01 'у + 0,1 у + у + у = 0,1 и + и.
Разделим обе части на 0,01. Тогда получим
У' + 10 у + 100 у + 100 у = 10 и + 100 и.
В данном случае коэффициенты уравнения равны
п1 = 10, а2 = 100, а3 = 100, Ъо = Ьх = 0, 62 = Ю, Ь3 = 100.
По формуле A.3в) найдем коэффициенты кг (г = 0,1, 2, 3):
ко = bo = 0, ki = bi — а\ко =0, к2 = b2 — {а\к\ + а2^о) = Ю,
кз = Ьз — {а\к2 + «2^1 + аз&о) = 0.
В соответствии с формулами A.3а) и A.36) уравнения в нормальной
форме имеют вид
Х\ — Х2,
х2 = х3 + 10 и,
х3 = -10 х3 - 100 х2 - 100 хъ
В) 0 < т < п. В этом случае можно предложить еще один способ
преобразования, который отличается от способа, рассмотренного в
предыдущем пункте [16].
Пусть управляемая система описывается уравнением
у = —*- — и, 0 < т < п.
и аорп + ai^-1 + ... + ап
Запишем это уравнение формально следующим образам:
1 _ 1 _
bopm +biprn~1 + ... + bm У ~ аорп +сцрп-1 + ... + ап и ~ Xl'
Отсюда имеем
(аорп + агр71-1 + ... + ап)х1=щ у = (Ьорт + Ьхрш~х + ... + Ьт) хх.
Первое уравнение соответствует случаю т = 0, и его можно пре-
преобразовать к виду
х2 =
Хп — 1 — Хп^
1 , ч
жп = — [и — апх\ — ап-2х2 — ... — а\хп)
ао
1.3. Общая формула решения системы уравнений 17
Второе уравнение принимает вид
у = boxm+i + Ь\хш + ... + Ьшх\.
Последнее уравнение и предыдущая система уравнений представляют
собой нормальную форму исходного дифференциального уравнения.
1.3. Общая формула решения системы
линейных дифференциальных уравнений
Рассмотрим решение системы линейных дифференциальных урав-
уравнений с постоянными и переменными коэффициентами. При этом
будем пользоваться векторной записью. Для того чтобы указать, что,
например, z является s-мерным вектором, в дальнейшем часто будем
использовать запись z Е Rs.
Пусть задано дифференциальное уравнение
где А — (п х п)-матрица, В — (п х т)-матрица, С — (п х ^-мат-
^-матрица. Элементы всех матриц, вообще говоря, являются переменными,
т.е. зависящими от времени. Здесь неизвестной переменной является
вектор х, a u, f — известные функции времени.
Наряду с уравнением A.5) рассмотрим однородное уравнение
х = Лх. A.6)
Пусть
хA) _ /д.A) д.A) ХA)\Т хB) _ /^B) хB) хB)\Т
х(п) _ / (п) х(п) х(п))Т
являются п линейно независимыми решениями однородного уравне-
уравнения A.6). Любую такую систему решений называют фундаменталь-
фундаментальной системой решений. Матрица
A) (п)"
Ci . . . X) J
(!) Ы
столбцами которой являются решения фундаментальной системы,
называется фундаментальной матрицей уравнений A.5) и A.6). Так
как столбцы фундаментальной матрицы Ф(?) являются решениями
однородного уравнения A.6), то она удовлетворяет матричному урав-
уравнению
Ф(?) = АФ(г).
Если Ф(^) является фундаментальной матрицей уравнения A.5)
и обращается в единичную матрицу при t = to (Ф(^о) = In, In —
2 Д.П. Ким
18 Гл. 1. Представление в пространстве состояний
единичная матрица порядка п), то его решение, удовлетворяющее
начальному условию x(?q) — х°, можно записать в виде [50]
to
Матрица
h-\T)[B{r) u(r) + C(r) f(r)] dr) .
to J
\ A-7)
составленная из фундаментальной матрицы, является фундаменталь-
фундаментальной, т.е. ее столбцы образуют фундаментальную систему решений.
Она обращается в единичную матрицу, когда ее аргументы равны
между собой:
X(t,t) =X(to,to) =/.
Будем называть эту матрицу нормированной фундаментальной
матрицей. Она обладает следующими очевидными свойствами:
X(t,t')X(t',to)=X(t,to), X-1(t,t0)=X(t0,t), A.8a)
X(t,to) = AX(t,to). A.86)
С помощью нормированной фундаментальной матрицы A.7) ре-
решение неоднородного уравнения A.5), удовлетворяющее начальному
условию х(?о) = х°, можно представить в виде
t
x(t) = X(t, *o)x° + Jx(t, г) [В(г) u(r) + C(r) f (r)] dr. A.9)
Эту формулу называют формулой Коши.
Если матрица А является постоянной, то фундаментальная мат-
матрица X(t,r) зависит только от разницы t — т. Кроме того, если в
этом случае воспользоваться матричным экспоненциалом, то решение
можно записать, как в скалярном случае.
Матричным экспоненциалом или матричной экспонентой от по-
постоянной квадратной матрицы А называется матрица той же размер-
размерности, что и матрица Л, которая обозначается через еА и определяется
соотношением
еЛ = 1 + А+±А2 + ±А3 + ...
Матричный экспоненциал от At определяется аналогично и имеет
следующий вид:
Исходя из этого определения не трудно убедится, что справедливы
следующие соотношения:
2eAt
eAt d2eAt _ ,2 At
т.е. правило дифференцирования матричного экспоненциала такое
же, как и правило дифференцирования обычной экспоненты eat.
1.4- Управляемость объекта управления 19
Для матричного экспоненциала справедливы следующие операции:
еАе~А = /, е~А = (еА)~\ eAteAs =
Если А и В являются матрицами одинаковых размерностей, то в
общем случае [9]
еАев ф евеА, еАев ф еА+в.
Только в том случае, когда А В = В Л, справедливы равенства
еАев = евеА, еАев = еА+в.
Когда в уравнениях A.5) и A.6) матрица А является постоянной,
их фундаментальной матрицей является матричная экспонента eAt,
и решение неоднородного уравнения A.5) при начальном усло-
условии х@) = х° принимает вид
x(t) = eAt (x° + [е-Ат [В(т) u(r) + С(т) f(г)] а!т) . A.10)
1.4. Управляемость объекта управления
Одним из фундаментальных понятий в теории автоматического
управления является управляемость. Для определения этого поня-
понятия рассмотрим управляемую систему (объект), которая описывается
уравнением
х = /(х, u, t), xGi?n, u G iT, A.11)
где х — вектор состояния, и — управление (вектор управления).
Управление u = u(t) = (ui(t) U2(t) ... ur(t))T называется кусоч-
кусочно непрерывным, если все его компоненты щ(г) являются кусочно
непрерывными. Кусочно непрерывные управления называют допус-
допустимыми.
Определение 1.1. Управляемая система (объект) A.11) назы-
называется управляемой или вполне управляемой, если, каковы бы ни были
точки х° и х^ в фазовом пространстве Rn, существует допустимое
управление, определенное на конечном интервале [to,t/] и перево-
переводящее систему A.11) из начальной точки х(?о) = х° в конечную точ-
точку х(*/) =хЛ
Другими словами, если объект вполне управляем, то он может
быть переведен допустимым управлением из произвольного началь-
начального состояния в любое другое состояние за конечное время.
1.4.1. Управляемость линейных объектов. Рассмотрим ли-
линейный объект, который описывается уравнением
х = Лх + Би, х G iT, ueiT. A.12)
В случае линейного объекта справедливо следующее утверждение.
2*
20 Гл. 1. Представление в пространстве состояний
Утверждение 1.1. а) Линейный объект A.12) вполне управ-
управляем, если, каково бы ни было начальное состояние x(?q) — х°, су-
существует допустимое управление, определенное на конечном ин-
интервале [to,t/] и переводящее объект A.12) в конечное состояние
x(t/) = 0, т. е. в начало координат.
б) Линейный объект A.12) вполне управляем, если, каково бы
ни было конечное состояние x(t/) = x^, существует допустимое
управление, определенное на конечном интервале [to, t/] и переводя-
переводящее объект A.12) из начального состояния x(tо) = 0, т. е. из начала
координат, в конечное состояние x(t/) = хЛ
Утверждение остается справедливым, если в первой части в ка-
качестве конечной точки вместо x(ty) = 0 выбрать любую другую фик-
фиксированную точку, а во второй части вместо начальной точки x(to) =
= 0 выбрать любую другую фиксированную точку.
Доказательство, а) Формула Коши A.9) в случае уравне-
уравнения A.12) принимает вид
t
x(t) = X(t, t0) x° + Jx(t, t)B{t) u(r) dr.
to
Управление, переводящее объект A.12) из начального состояния
x(to) = x° в конечное состояние x(t/) = x^, должно удовлетворять
уравнению
*/
х' = X(tf,t0) х° + jX{tf,r)B{r) u(r) dr. A.13a)
Поэтому достаточно показать, что последнее уравнение имеет ре-
решение. Очевидно, решение этого уравнения совпадает с решением
уравнения
*/
0 = X(tf,t0) x° + Jx(tf,T)B(r) u(r) dr, A.136)
если
или
х° =
Но по условию решение уравнения A.136) существует при любом
начальном условии, что доказывает первую часть утверждения 1.1.
б) При нулевом начальном условии из формулы Коши получаем
tf
xf = Jx(tf,T)B(T)u(T)dT.
*о
1.4- Управляемость объекта управления 21
Это уравнение по условию имеет решение при любом конечном сос-
состоянии. Решение уравнения A.13а) совпадает с решением последнего
уравнения, если
& =xf -X(tf,to)x°,
что доказывает вторую часть утверждения 1.1.
1.4.2. Управляемость линейных стационарных объектов.
Пусть уравнение A.12)
описывает стационарную систему, т.е. матрицы А и В являются
постоянными. Введем в рассмотрение матрицу
У=[В АВ А2В ... А71-1 В], A.14)
столбцы которой представляют собой столбцы матрицы В и про-
произведений матриц АВ, А2В, ..., Ап~1В. Эту матрицу называют
матрицей управляемости.
Критерий управляемости линейных стационарных
систем. Линейный стационарный объект вполне управляем тогда
и только тогда, когда матрица управляемости имеет максималь-
максимальный ранг, т. е. когда ее ранг равен п.
Напомним, что ранг матрицы равен числу независимых строк,
числу независимых столбцов и порядку отличного от нуля минора
максимальной размерности.
Определение 1.2. Пару (А, В) называют управляемой или
вполне управляемой, если ранг матрицы управляемости A.14) ра-
равен п.
Ниже при доказательстве критерия управляемости используется
теорема Кэли-Гамильтона, которая формулируется следую-
следующим образом:
любая (п х п)-матрица удовлетворяет своему характеристи-
характеристическому уравнению
det [XI - А] = Ап - аХ71'1 - с2Хп~2 - ... - сп = О,
т. е. справедливо равенство
Ап - dA71'1 - с2Ап-2 - ... - сп1 = 0. A.15)
Доказательство критерия управляемости. В силу ут-
утверждения 1.1 достаточно ограничиться случаем, когда х(?о) = х° =
= 0. Решение уравнения A.12) при постоянных матрицах А и В и
начальном условии х(?о) = х° = 0 имеет вид (см. A.10))
22 Гл. 1. Представление в пространстве состояний
Отсюда, положив t = tf и х(^) = х-^, получим
t
х/ = feMtf-r)Bu(T) dr
О
Необходимость. Из определения матричной экспоненты имеем
eA(t,-r) = j + A{tf - г) + i A2(tf - гJ + |j A\tf - rf + ...
Подставив это выражение в равенство A.16), получим
х/ = Всх0 + АВосх + А2Всх2 + ..., A.17)
о
Из равенства A.15) получаем
Ап = С1Ап-г + с2Ап~2 + ... + сп1.
Умножив обе части этого равенства справа на матрицу В, получим
АпВ = схАп-хВ + с2Ап~2В + ... + спВ.
Умножив обе части последнего равенства слева на Л и подставив
справа вместо АпВ его выражение из последнего равенства, найдем
Ап+1В = с{^)Ап-1В + 41} Ап~2В + ... + с^В.
Далее, продолжая аналогичные операции над получаемыми соотноше-
соотношениями, будем иметь
Ап+кв = cWAn-iB + с^)Ап-2В + + с{к)в^ fe = 1? 2,...
Используя эти соотношения, можно исключить из A.17) все А1 В
с I ^ п. Следовательно, конечное значение х(?/) = х^ может быть
представлено в виде линейной комбинации столбцов матрицы управ-
управляемости, и точка, определяемая этим значением, при любом конеч-
конечно непрерывном управлении будет принадлежать пространству, по-
порождаемому столбцами матрицы управляемости. Поэтому если ранг
матрицы управляемости меньше п, то будет существовать под-
подпространство, в которое нельзя будет перевести объект.
Достаточность. Объект будет вполне управляем, если уравне-
уравнение A.16) относительно неизвестного управления имеет решение при
любом хЛ Решение будем искать в виде [15]
1.4- Управляемость объекта управления 23
где z — вектор из Rn. Подставив это выражение для управления в
уравнение A.16), получим
х/ =
где
D =
Таким образом, вопрос о существовании решении интегрального
уравнения свелся к вопросу о существовании решения алгебраичес-
алгебраического уравнения. Полученное алгебраическое уравнение имеет реше-
решение при любом х^, если det D ф 0. Следовательно, достаточно пока-
показать, что выполняется последнее соотношение. Допустим противное:
det D = 0. Тогда соответствующее однородное уравнение имеет не-
ненулевое решение, т.е. существует вектор z ^ 0 такой, что Dz = 0.
Умножив это равенство слева на zT и подставив выражение для D,
получим
TDz = JzTeA^-^B(eA^-^B)Tzdr = j \zTeA{t^T^B\2 dr = 0.
В силу непрерывности подынтегрального выражения последнее ра-
равенство возможно, если на всем интервале 0 ^ г ^ tf выполняется
равенство
Дифференцируя это тождество по г, получим соотношения
zTAkeA^f~T)B = 0, к = 0,1,..., п - 1,
откуда при г = tf находим
zTAkB = 0, fe = 0, l,...,n- 1.
Заметим, что А0 = /. Из последних равенств следует, что нену-
ненулевой вектор z из Rn ортогонален всем векторам-столбцам матрицы
управляемости, что невозможно, так как ранг матрицы управляе-
управляемости равен п. Следовательно, допущение, что det D = 0, неверно.
Критерий управляемости полностью доказан.
Пример 1.2. Определить, при каких значениях параметра а
объект, заданный уравнениями
&1 —Х\ + U2,
Х2 = Хз + Ui,
ХЗ = -Хз + СШ2,
вполне управляем.
24
Гл. 1. Представление в пространстве состояний
Решение. Матрицы А и В в данном случае имеют вид
А =
О О
О 1
О -1
в =
"О
1
О
1"
О
а
Найдем произведения матриц АВ и А2В:
1
О
О
0
0
0
0"
1
-1
1
0
г
0
а
=
0
0
г
а
—а
1 О
о о
А2 В = А(АВ) =
О 0 -1
Для матрицы управляемости имеем
У=[В АВ А2 В] =
0
0
г
а
—а
=
0
0
г
—а
а
0
1
0
1
0
а
0
0
0
1
а
—а
а 0 -а
0
а
Минор, составленный из первого, второго и четвертого столбцов,
имеет вид
Г0 1 Г
а
Аз =
0
а —а
= 2а.
Он отличен от нуля при а/0. При а = 0 все элементы последней
строки матрицы управляемости обращаются в нуль, и ранг матрицы
управляемости не может быть больше 2. Поэтому рассматриваемый
объект вполне управляем при а/0.
Утверждение 1.2. Одномерная управляемая система, описы-
описываемая уравнением
= Ърр
у
0 < m < п,
аорп + а\рп 1 + ... + ап
где не все коэффициенты hi [г — О, 1,..., т) равны нулю, вполне
управляема.
Доказательство. Как было показано в параграфе 1.2, если
преобразовать последнее уравнение в нормальную форму, то уравне-
уравнение состояния примет вид
О 1 0 ... О 1 ГО
0 0 1 ... 0 0
х = Лх + Ви =
0
-ап
0
0
х +
U.
1.4- Управляемость объекта управления
25
Вычислим произведения матриц, необходимые для получения мат-
матрицы управляемости:
АВ =
О
О
1
А2 В = А(АВ) =
О
-а2
Продолжая вычисления, нетрудно заметить, что в произведе-
произведении Ак В (к < п — 1) в (к + 1)-й строке снизу стоит единица, выше —
одни нули и в произведении Ап~1В в первой строке (сверху) стоит
единица. Поэтому в матрице управляемости на неглавной диагонали
будут стоять одни единицы, левее этой диагонали — одни нули.
Следовательно, детерминант матрицы управляемости будет отличен
от нуля, и управляемая система вполне управляема.
Инвариатностъ свойства управляемости к линейным
преобразованиям. Свойство управляемости при неособом линейном
преобразований не меняется. Действительно, рассмотрим неособое
линейное преобразование
x = Tz, detT^O.
При таком преобразовании уравнение A.12) принимает вид
z = Аъ + Ви,
где
Убедимся, что пара (Л, В) вполне управляема. Для матрицы управ-
управляемости этой пары имеем
У= [В АВ А2В ... Ап~1В].
Как нетрудно убедиться,
Ак = Т~хАкТ, АкВ = Т~хАкВ, к = 1,2,..., п - 1.
Подставив эти выражения в последнее соотношение, получим
У=Т-г[В АВ А2В ... Ап-1В]=Т~1У.
Так как матрица Т~х неособая и ее ранг равен п, то ранг матрицы
управляемости У «преобразованного объекта» равен рангу матрицы
управляемости У исходного объекта.
1.4.3. Подпространство управляемости.
Определение 1.3. Область, состоящую из всех точек прост-
пространства состояний, в которые может быть переведена управляемая
система допустимым управлением из начала координат за конеч-
конечное время, называется ее областью управляемости.
26
Гл. 1. Представление в пространстве состояний
Если управляемая система вполне управляема, то ее область уп-
управляемости совпадает со всем пространством. Если ранг матрицы
управляемости управляемой системы не равен максимальному зна-
значению (т.е. размерности пространства состояний), но больше ну-
нуля, то говорят, что управляемая система не вполне управляема или
частично управляема. Если управляемая система частично управ-
управляема, то, как следует из доказательства критерия управляемости,
область управляемости совпадает с подпространством, порождаемым
совокупностью независимых столбцов матрицы управляемости. Это
подпространство называют подпространством управляемости.
Пусть, например, управляемая система описывается уравнениями
Эти уравнения соответствуют уравнениям, рассмотренным в при-
примере 1.2, при а = 0. Поэтому матрица управляемости имеет вид
У =
0 10 10 1
10 0 0 0 0
0 0 0 0 0 0
Эта матрица имеет два линейно независимых столбца: х^1) = @ 1 0)т,
хB) = A 0 0)т. Поэтому векторы подпространства управляемости
имеют вид х = (xi X2 0)т.
1.4.4. Каноническая форма управляемости. Пусть ранг мат-
матрицы управляемости линейной стационарной управляемой систе-
системы A.12) равен I (/ ^ п). Рассмотрим неособое преобразование z =
= Тх, где матрица преобразования имеет вид Т = [Ti T?\ и строится
следующим образом: Т\ является (п х /)-матрицей, и ее столбцами
являются / независимых столбцов матрицы управляемости; Т2 яв-
является (п х (п — /))-матрицей, и ее столбцы выбираются так, чтобы
матрица Т была неособой. При таком преобразовании уравнение A.12)
принимает вид так называемой канонической формы управляемости
All A12
0 A22
и,
или
Вщ,
A.18)
где z^1) — /-вектор, z^2) — (n — /)-вектор, in — (/ x /)-матрица,
Ai2 — (I x (n — /))-матрица, Л22 — ((^ — /) x (n — /))-матрица, 5i —
(/ x г)-матрица.
1.4- Управляемость объекта управления
27
Из структуры уравнений A.18) видно, что вектор тУ2> неуправля-
неуправляем, так как на его изменение управление ни непосредственно, ни через
другие фазовые координаты, зависящие от управления, не оказывает
никакого влияния. Вектор z^ вполне управляем, т.е. его можно изме-
изменять нужным образом путем выбора соответствующего управления.
Пример 1.3. Преобразовать уравнения
Х\ =
х2 =
U,
ХА = -Х2 - Х4
в каноническую форму управляемости.
Решение. Матрицы Л, В и их произведения АВ, А2В, А3В
имеют следующий вид:
А =
0
0
1
0
1
1
0
-1
1
0
0
0
0"
0
0
-1
5
в =
0"
0
0
-1
АВ =
А2В =
А3В =
Составив из этих матриц матрицу управляемости, получим
У= [В АВ А2В А3В] =
10 10
0 0 0 0
0 10 1
0 0 0 0
Матрица управляемости имеет два независимых столбца, и ее ранг
равен 2. Матрицы Т\,Т2 иГ выберем следующим образом:
0
0
0
0"
0
1
0
1
0
0
0"
0
0
1
Т=[Тг Т2} =
10 0 0
0 0 10
0 10 0
0 0 0 1
Преобразование z = Tx имеет вид
z2
1
0
0
0
0
0
1
0
0
1
0
0
0"
0
0
1
~Xi~
x2
хз
x4
~Xl~
хз
x2
x4
28
Гл. 1. Представление в пространстве состояний
Уравнения в новых переменных принимают вид
Z\ — Х\ — Х2 + Хз + U = Zs + Z2 + U,
Z2 = Х3 = Хг = Z!,
%3 = %2 = %2 = ^3,
Z4 = Х4 = —Х2 — Х4 = —^з — ^4,
ИЛИ
Zl = Z2+ Z3+ U,
Z2 = Z\ ,
i4 = -2?з -
Используя векторные обозначения z^1) = {z\ Z2)T и z^2) = B:3
эти уравнения можно записать в виде
»<"=
;
; s
1 О
-1 -1
Из канонической формы управляемости следует, что на фазовую
координату z\ управление воздействует непосредственно (оно входит
в уравнение для z\), на фазовую координату Z2 управление воздейству-
воздействует через z\ (z\ входит в уравнение для Z2), а на фазовые координаты z%
и Z4 управление никак не воздействует, т.е. эти координаты являются
неуправляемыми.
1.5. Канонические формы уравнения
и модальное управление
Ввиду того что существует множество эквивалентных форм
представлений уравнений состояний, можно выбрать из них наиболее
удобное для использования в данном конкретном случае. Такие формы
уравнений называют каноническими [4]. Поскольку возможно много
различных приложений, используется несколько канонических форм.
Здесь рассмотрим преобразование уравнений состояний в каноничес-
каноническую форму, называемую управляемой формой Луенбергера.
Уравнение состояния вида
О 1 0 ... О 1 ГО
0 0 1 ... 0 0
z = Аъ + Ви =
0
-а>п
0
0
z +
A.19)
1.5. Канонические формы уравнения и модальное управление 29
называется управляемой формой Луенбергера [4]. Характеристическое
уравнение матрицы А этого уравнения имеет вид
det (XI - А) = Хп + сцХ71-1 + ... + ап = 0. A.20)
Коэффициентами характеристического уравнения являются элементы
последней строки матрицы А уравнения A.19) с противоположным
знаком.
Теорема 1.1. Для того чтобы уравнение состояния
х = Лх + Би, xeiT, ueR, A.21)
неособым преобразованием можно было преобразовать в управляе-
управляемую форму Луенбергера A.19), необходимо и достаточно, чтобы
пара (А, В) была вполне управляема.
Доказательство. Необходимость следует из того, что управ-
управляемая система, описываемая уравнением A.19), является вполне
управляемой (см. доказательство утверждения 1.2) и свойство управ-
управляемости не меняется при неособом преобразовании.
Докажем достаточность, т. е. покажем, что существует неособое
преобразование х = Tz, при котором исходное уравнение преобразу-
преобразуется к виду A.19), где
Так как пара (А, В) вполне управляема, то матрица управляемости
У= (В АВ ... А71'1 В)
является неособой. Поэтому линейное алгебраическое уравнение
ЬтУ=@ 0 ... 0 1),
где h является неизвестным n-вектором, имеет решение. Подставив в
последнее уравнение выражение для матрицы управляемости, полу-
получим
hT(B АВ ... Ап~1В) = @ 0 ... 0 1),
или
TAn-1
0, ..., hTAn-1B = l. A.22)
Рассмотрим матрицу
Эта матрица является неособой в силу того, что матрица
30
Гл. 1. Представление в пространстве состояний
hTA
hTAn-l
[В АВ
\п-\ ;
hTB
hTAB
hTAB
hTA2B
hTAnB
hTAnB
hTA2n-2B
является неособой. Последнее следует из того, что, так как в силу
равенств A.22) все элементы на неглавной диагонали последней мат-
матрицы равны единице, а над ней равны нулю, det R = 1 или det R = — 1.
Искомым преобразованием является преобразование
hTA
hTAn-l
или
zx — hTx,
zn = h'A
Т лп-1
X.
A.23a)
A.236)
Действительно, дифференцируя последние равенства по времени
и подставляя выражение для производной х из A.21), получим
ii = hTx =
z2 =
hTBu =
+ hTABu =
= z2,
in-г = hTAn~2ic = ЪТАп-^ + hTAn~2Bu = nj
zn = h31^-1* = ЬтЛпх + hTAn~1Bu = ЬтЛпх + и.
Подставляя в последнее равенство выражение для Ап из соотношения
Ап = -ахАп~х - ... - ап-ХА - ап1,
которое получается из теоремы Кэли-Гамильтона, находим
zn = -a1hTAn~1x - a2hTAn~2x - ... - anhTx + и,
или, учитывая A.236),
zn = -aizn - a2zn-i - ... - anzi + и.
Таким образом, исходное уравнение преобразуется в управляемую
форму Луенбергера при помощи преобразования A.23).
При неособом преобразовании характеристические уравнения ис-
исходной системы A.21) и преобразованной системы A.19) det (XI — А) =
= 0 и det(XI — А) = 0 совпадают (см. далее § 1.6).
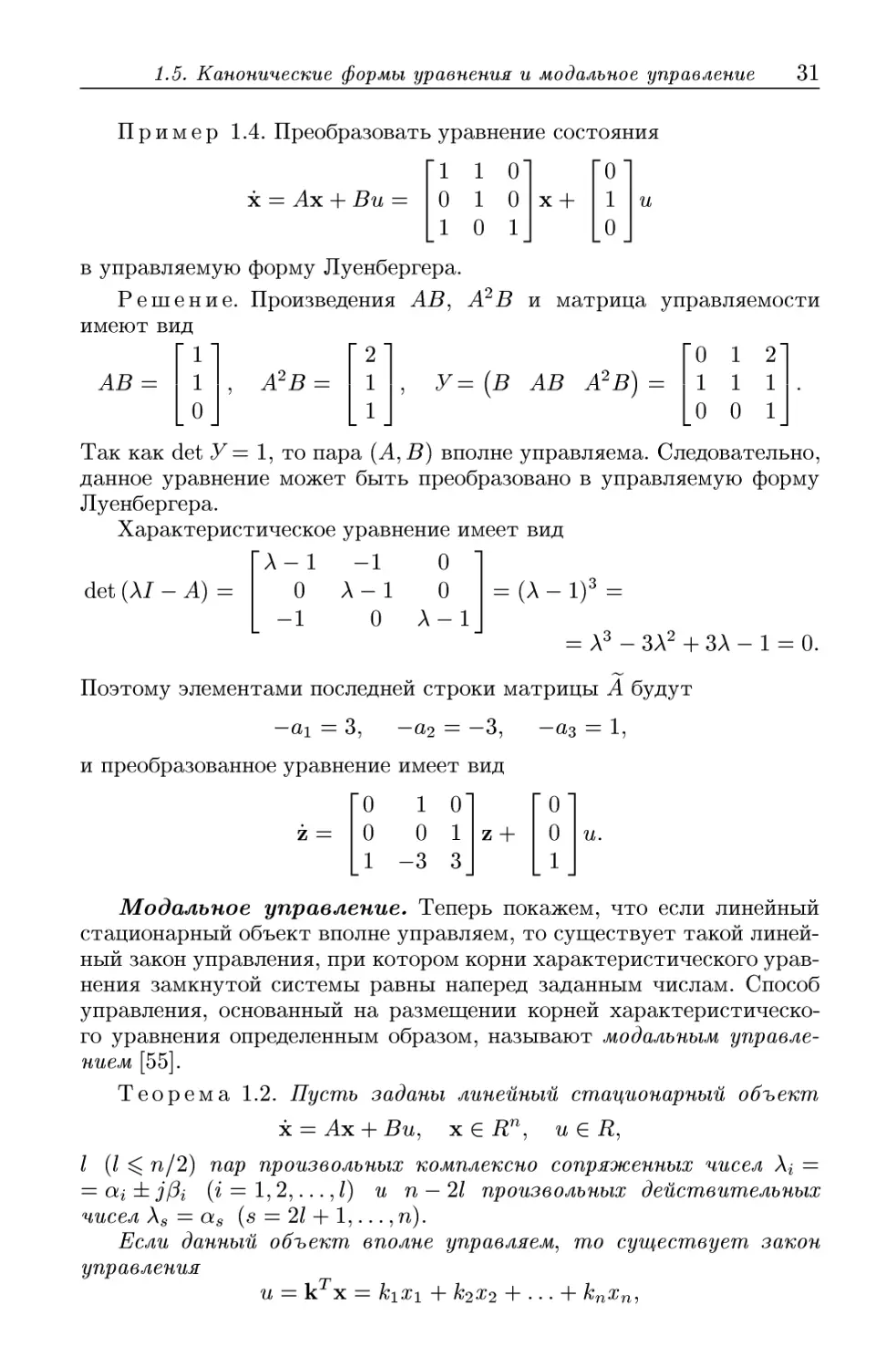
1.5. Канонические формы уравнения и модальное управление 31
Пример 1.4. Преобразовать уравнение состояния
х = Лх + Ви =
в управляемую форму Луенбергера.
Решение. Произведения АВ, А2В и матрица управляемости
имеют вид
0
1
1
1
0
0"
0
1
х +
"
1
0
АВ =
1
1
0
, А2В =
2
1
1
У=(В АВ А2 В) =
1
0
1
1
0
2"
1
1
Так как det У — 1, то пара (Л, В) вполне управляема. Следовательно,
данное уравнение может быть преобразовано в управляемую форму
Луенбергера.
Характеристическое уравнение имеет вид
"А-1 -1 О
det (XI - А) = О А-1 О
-1 О А-1
= А3 - ЗА2 + ЗА - 1 = 0.
Поэтому элементами последней строки матрицы А будут
—сц = 3, -а2 = -3, -а3 = 1,
и преобразованное уравнение имеет вид
z =
0
0
1
1
0
-3
0"
1
3
Z +
"
0
1
и.
Модальное управление. Теперь покажем, что если линейный
стационарный объект вполне управляем, то существует такой линей-
линейный закон управления, при котором корни характеристического урав-
уравнения замкнутой системы равны наперед заданным числам. Способ
управления, основанный на размещении корней характеристическо-
характеристического уравнения определенным образом, называют модальным управле-
управлением [55].
Теорема 1.2. Пусть заданы линейный стационарный объект
х = Лх + Би, xGi?n, и е R,
I (I ^ ть/2) пар произвольных комплексно сопряженных чисел \ =
= OLi ± jPi (i = 1, 2,...,/) и п — 21 произвольных действительных
чисел Xs = as (s = 21 + 1,..., n).
Если данный объект вполне управляем, то существует закон
управления
и = ктх =
32
Гл. 1. Представление в пространстве состояний
при котором корни характеристического уравнения замкнутой сис-
системы равны заданным числам.
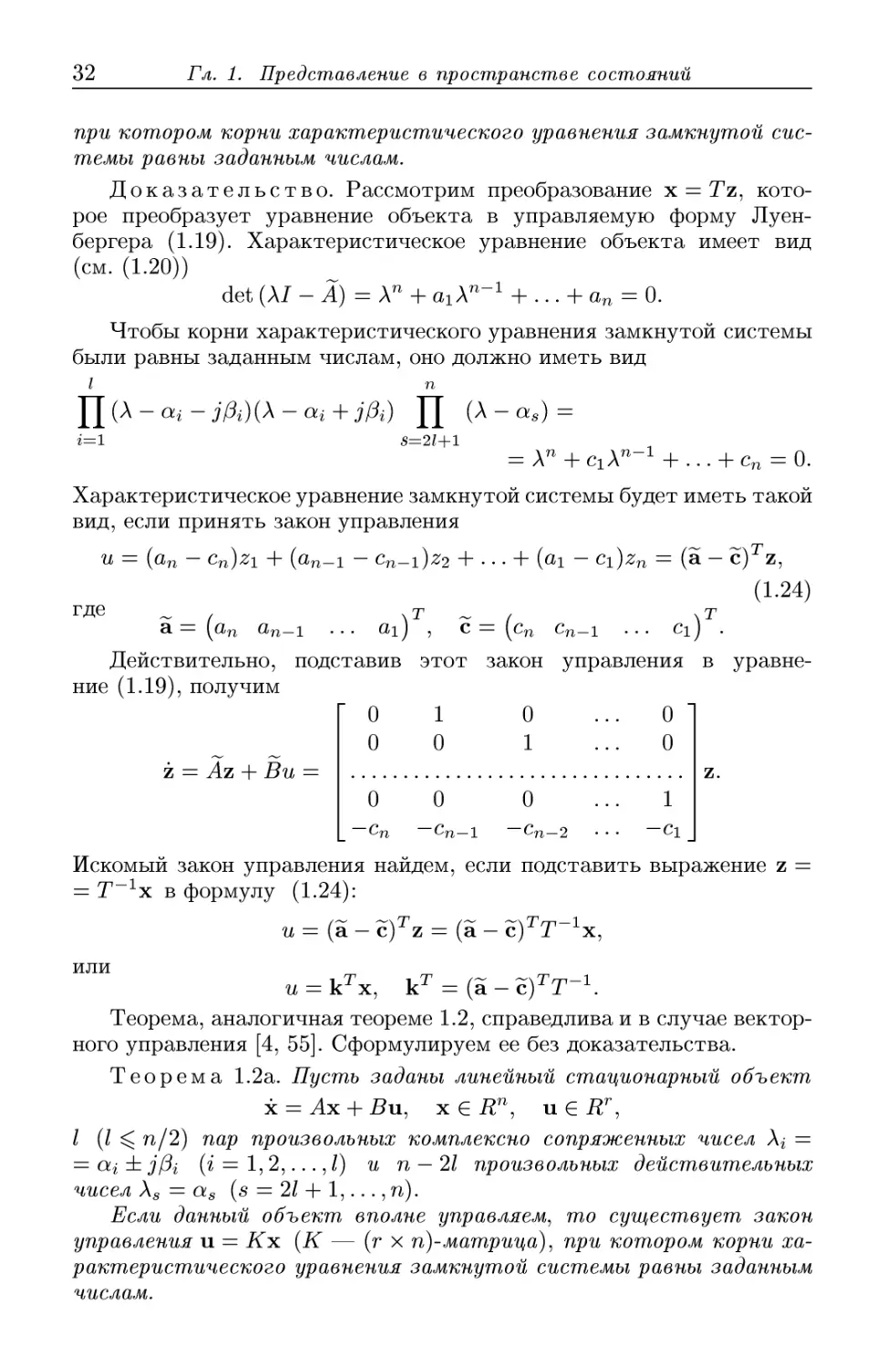
Доказательство. Рассмотрим преобразование х = Tz, кото-
которое преобразует уравнение объекта в управляемую форму Луен-
бергера A.19). Характеристическое уравнение объекта имеет вид
(см. A.20))
det (XI -А)=\п + сцХ71'1 + ... + ап = 0.
Чтобы корни характеристического уравнения замкнутой системы
были равны заданным числам, оно должно иметь вид
(X-as) =
5=2/+1
г=1
Характеристическое уравнение замкнутой системы будет иметь такой
вид, если принять закон управления
и = (ап - cn)zi + (an-i - cn-i)z2 + ... + (ai - ci)zn = (а - c)Tz,
A.24)
где _ Т „ т
а = [ап an_i ... ai) , с = [сп cn_i ... cij .
Действительно, подставив этот закон управления в уравне-
уравнение A.19), получим
0 1 0 ... 0
0 0 1 ... 0
z = Аъ + Ви =
0
о о
-Сп-1 -Сп-2
1
Z.
Искомый закон управления найдем, если подставить выражение z =
= Т^х в формулу A.24):
и = (а - c)Tz = (а - с)тГ~1х,
u = kTx, kT = (a-c)TT-1.
Теорема, аналогичная теореме 1.2, справедлива и в случае вектор-
векторного управления [4, 55]. Сформулируем ее без доказательства.
Теорема 1.2а. Пусть заданы линейный стационарный объект
х = Лх + Би, х е Rn, ueiT,
/ (/ ^ ^/2) /iftp произвольных комплексно сопряженных чисел Xi =
= oti =Ь j/3^ (г = 1, 2,...,/) и п — 21 произвольных действительных
чисел Xs = as (s = 21 + 1,..., n).
.Еслг/ данный объект вполне управляем, то существует закон
управления и = Кх (К — (г х п)-матрица), при котором корни ха-
характеристического уравнения замкнутой системы равны заданным
числам.
1.5. Канонические формы уравнения и модальное управление 33
Утверждение 1.3. Пусть характеристическое уравнение од-
одномерной управляемой системы A.21) имеет вид
Для того чтобы характеристическое уравнение замкнутой сис-
системы имело вид
нужно выбрать закон управления вида
где
u=(a- c)Tz = (а - с)тГ~1х,
а = (ап an_i
с = (сп
hTA
hTAn-l
а векторная переменная hT в последней матрице определяется из
ЬТБ = О, ЬТЛВ = О, ..., hTAn-1B = l.
Это утверждение непосредственно вытекает из теорем 1.1 и 1.2.
Пример 1.5. Управляемая система описывается уравнением
х =
0
1
1
1
0
0"
0
1
х +
"
1
0
и.
Определить закон управления, при котором корни характеристи-
характеристического уравнения замкнутой системы равны Ai52 = — 1 ± 3j, A3 = — 1.
Решение. Согласно утверждению 1.3, чтобы найти требуемый
закон управления, нужно знать коэффициенты характеристических
уравнений управляемой и замкнутой систем, а также обратную мат-
матрицу преобразования уравнений управляемой системы в управляемую
форму Луенбергера. Характеристическое уравнение управляемой сис-
системы имеет вид (см. пример 1.4)
А3 - ЗА2 + ЗА - 1 = 0,
а характеристическое уравнение замкнутой системы — вид
(А + 1 - 3j)(A + 1 + 3j)(A + 1) = А3 + 3 А2 + 12 А + 10 = 0.
В принятых выше обозначениях
а\ = -3, а2 = 3, а3 = —1, с\ =3, с2 = 12, с3 = 10
и соответственно
S=(a3 a2 ai)T=(-l 3 -3)Т, с = (с3 с2 сг)Т = A0 12 3)Т.
3 Д.П. Ким
34
Гл. 1. Представление в пространстве состояний
Чтобы определить матрицу Т 1, нужно сначала составить и ре-
решить систему уравнений
ЪТВ = О, ЪТАВ = О, ЪТА2В = 1.
Входящие в эти уравнения матрицы имеют вид
А =
Поэтому указанные выше уравнения принимают вид
h2 = 0, h1-\-h2= 0, 2fti + h2 + h3 = 1.
Отсюда получаем hT = @ 0 l). Произведения hTА и hTA2 имеют
вид
hTA=(l 0 1), hTA2= [2 1 1].
Поэтому для матрицы Т~х получаем соотношение
1
0
1
1
1
0
0
0
1
, в =
0
1
0
, АВ =
1
1
0
, А2В =
2
1
1
- hT -
hTA
hTA2
—
1
2
0
0
1
1"
1
1
а искомый закон управления принимает вид
= (-11 -9 -6)
1
2
0
0
1
1"
1
1
_жз_
= -21Ж1 -6х2 - 2бж3.
1.6. Стабилизируемость линейных стационарных
систем
Одним из важных понятий при рассмотрении задач управления яв-
является стабилизируемость. Управляемая система (объект) называется
стабилизируемой, если существует закон управления, при котором
замкнутая система асимптотически устойчива. Здесь мы рассмотрим
стабилизируемость только линейных стационарных систем.
Определение 1.4. Линейный стационарный объект
называется стабилизируемым, если существует закон управления
u = ifx, при котором замкнутая система х = (А + ВК)х асимпто-
асимптотически устойчива.
Если объект вполне управляем, то он стабилизируем, что следует
из теоремы 1.2а. Однако обратное неверно: объект может быть ста-
стабилизируем, но не вполне управляем. Поэтому возникает проблема
стабилизируемости, т.е. проблема определения критерия стабили-
1.6. Стабилизируемостъ линейных стационарных систем 35
зируемости. Но прежде чем переходить к этой проблеме, рассмотрим
инвариатность корней характеристического уравнения системы к
линейным преобразованиям.
Инвариатность корней характеристического урав-
уравнения систем к линейным преобразованиям. Корни ха-
характеристического уравнения линейных стационарных систем не
изменяются при линейном неособом преобразовании.
Рассмотрим линейную стационарную систему, которая описыва-
описывается уравнением
х = Лх + Би, х е Rn, ueiT.
При неособом преобразовании х = Tz данное уравнение преобразует-
преобразуется к виду ~ ~
z = Аъ + 5и,
где А = Т~1АТ, В = Т~ХВ.
Характеристическое уравнение исходного уравнения имеет вид
det (IX -А) = \1Х -А\=0,
а характеристическое уравнение преобразованного уравнения — вид
det(/A-l) = \1Х-А\ =0.
Покажем, что эти уравнения имеют одни и те же корни.
Умножив матрицу IX — А слева на Т, а справа на Т, получим
ТAХ - А)Т-Х =1Х-А.
Отсюда, учитывая, что определитель произведения квадратных мат-
матриц равен произведению определителей их сомножителей [21] для
характеристического уравнения преобразованной системы находим
|Г| |/А-Л| IT! = \IX-A\ =0.
Так как матрица Т является неособой, то IT] /0 и \Т\ ф 0. Поэто-
Поэтому из последнего соотношения имеем
|/А-Л| = \1Х-А\ =0,
что доказывает наше утверждение.
Вернемся к проблеме стабилизируемости. Рассмотрим неособое
преобразование х = Tz, преобразующее уравнение управляемой сис-
системы в каноническую форму управляемости A.18):
Стабилизируемость системы, описываемой этими уравнениями,
означает, что существует закон управления u = Kz, при котором
векторные переменные z^1) и z^2) замкнутой системы стремятся
к нулю при t —У оо. Так как в первом из приведенных уравнений
пара (An,Bi) вполне управляема, то существует закон управления
u = KzA\ при котором замкнутая подсистема, описываемая этим
3*
36 Гл. 1. Представление в пространстве состояний
уравнением, устойчива, и векторная переменная z^1) будет сходиться
к нулю, если векторная переменная тУ2\ которая в этом уравне-
уравнении выступает как внешнее воздействие, будет стремиться к нулю
при t —> оо. Но, как следует из второго уравнения, последнее будет
иметь место в том и только том случае, когда во втором уравнении
матрица А22 будет устойчива.
Критерий стабилизируемости. Для того чтобы линей-
линейная стационарная управляемая система, которая не вполне управ-
управляема, была стабилизируема, необходимо и достаточно, чтобы мат-
матрица А22 в канонической форме управляемости была устойчива.
Пример 1.6. Исследовать стабилизируемость управляемой сис-
системы, которая описывается уравнениями
&1 = Х2 + Хз + U,
Х2 — Х2,
х3 = хг,
Х4 = —х2 — #4-
Решение. Эта система была рассмотрена в примере 1.3, и, как
там было показано, эти уравнения в канонической форме управляе-
управляемости принимают вид
Для того чтобы рассматриваемая система была стабилизируема,
согласно критерию стабилизируемости матрица в правой части вто-
второго уравнения должна быть устойчивой. Характеристическое урав-
уравнение этой матрицы имеет вид
А
-л2
А
Корнями этого уравнения являются Ai52 — =Ы, т. е. указанная матрица
неустойчива, и, следовательно, система нестабилизируема.
1.7. Равномерная непрерывность
и лемма Барбалата
При рассмотрении нелинейных и особенно адаптивных систем
широко используется лемма Барбалата. Но прежде чем переходить
к рассмотрению этой леммы, вспомним, что такое непрерывная и
равномерно непрерывная функции.
1.7. Равномерная непрерывность и лемма Барбалата 37
Функция f(t) называется непрерывной на интервале [to,oo), если
при любом положительном е и любом t' Е [to, 00] существует такое
положительное число 5 = 5(e,t'), что \f(t) — f(t')\<e, как только
t-t'\< 8.
Функция f(t) называется равномерно непрерывной на интерва-
интервале [to,oo), если при любом положительном е и любом t' Е [?о5 °о]
существует такое положительное число 8 = 8(е), что \f(t) — f{t')\ <
< г, как только \t — t'\ < 8.
Различие непрерывной функции от равномерно непрерывной функ-
функции состоит в том, что положительное число 8, которое можно по-
подобрать для заданного г, в случае непрерывной функции зависит не
только от ?, но и от t'. Равномерная непрерывность предполагает,
что по заданному е можно подобрать такое 8 = 8{е), что неравенст-
неравенство \f(i) — f(tf)\ < ? будет выполнятся, как только \t — t'\ < 8 при
любом t' G [to, oo].
Лемма Барбалата (Barbalat; см. [69]). Если дифференцируе-
дифференцируемая функция f(t) имеет конечный предел при t —> оо и ее произ-
производная f(t) равномерно непрерывна, то f(t) —У 0 при t —У оо.
Доказательство. Докажем от противного. Допустим, что про-
производная f(t) не стремится к нулю при t —> оо. Но тогда существует
положительное число го такое, что для любого положительного чис-
числа Т, как бы велико оно ни было, существует значение t\ > Т, при
котором справедливо неравенство |/(^)| ^ ?о- Следовательно, можно
построить последовательность ti (ъ = 1, 2,...), стремящуюся к беско-
бесконечности при г —у оо и такую, что выполняется неравенство
\f(U)\2eo, г = 1,2,... A.25)
Так как производная f(t) равномерно непрерывна, то существует
такое положительное число 77, что для любого t' G [to, 00) выполняется
неравенство
f
как только \t' — t\ < г]. В частности, если принять t' = ^, то из
последнего неравенства получаем
!/(*<)-/(*)!< у при \ti-t\<r,.
Из этого неравенства и неравенства A.25) следует, что справедливо
неравенство
|/(*)|> у при \ti-t\<ri, г = 1,2,...
Проинтегрировав обе части последнего неравенства на интерва-
интервале [ti — 77, ti + 77], получим
/l/(*)ldt= pit)
U-n
)dt
U-v
>
38 Гл. 1. Представление в пространстве состояний
Равенство слева вытекает из того, что производная f(t) на интервале
интегрирования не меняет знака, так как на этом интервале она
непрерывна и удовлетворяет ограничению \f(t)\ > го/2.
Из последнего неравенства получаем неравенство
которое выполняется при любом ^, как бы велико оно ни было. А это
противоречит тому, что функция f(t) стремится к конечному пределу
при t —У оо. Лемма доказана.
Установить равномерную непрерывность исходя из определения не
всегда просто. Более удобным, если функция дифференцируема, мо-
может оказаться рассмотрение производной: дифференцируемая функ-
функция равномерно непрерывна, если ее производная ограничена. Поэто-
Поэтому из леммы Барбалата получаем следующее следствие.
Следствие. Если дважды дифференцируемая на интерва-
интервале [to,oo) функция f(t) имеет конечный предел при t —У оо и вторая
производная на этом интервале ограничена, то производная f(t)
стремится к нулю при t —У оо.
Пример 1.7. Адаптивная система описывается уравнениями
ё = -e
в = -ew(t),
где е — ошибка слежения, О — ошибка оценки параметра (разность
между оценкой и истинным значением параметра), w(t) — ограни-
ограниченная непрерывная функция.
Требуется установить ограниченность переменных и сходимость
ошибки слежения к нулю при t —У оо.
Решение. Рассмотрим квадратичную форму V = е2 + О2, со-
составленную из переменных, входящих в уравнения адаптивной сис-
системы. Ее производная по времени имеет вид
V = 2её + 200 = 2е(-е + Ow(t)) + 20(-ew(t)) = -2е2 ^ 0.
Так как функция V ограничена снизу нулем и ее производная отрица-
отрицательна или равна нулю, то функция V сходится к конечному пределу
при t —> оо. Из ограниченности функции V следует, что переменные е
и 0 ограничены, и так как по условию и функция w(t) ограничена, то
из уравнений следует, что производные ё и 0 также ограничены. По-
Поэтому вторая производная V = — 4её ограничена, а согласно следст-
следствию V = — 2е2 —у 0 и соответственно е —у 0 при t —У оо.
1.8. Лемма Калмана—Якубовича
В гл. 11 при рассмотрении адаптивных систем управления исполь-
используются строго вещественно-положительные передаточные функции и
лемма Калмана-Якубовича. Поэтому в данном параграфе остановим-
остановимся на этих вопросах вкратце.
1.9. Векторное дифференцирование 39
Передаточная функция W(s) линейной стационарной системы уп-
управления называется строго вещественно-положительной, если все
ее полюса располагаются в левой полуплоскости (система устойчива)
и вещественная часть частотной передаточной функции W(ju) при
всех uj ^ 0 положительна:
ReW(juj)>0 VcOO.
Отметим ряд очевидных необходимых условий того, что пере-
передаточная функция Изъявляется строго вещественно-положительной:
— годограф частотной передаточной функции W(ju) (ампли-
(амплитудно-фазовая частотная характеристика) должен располагаться пол-
полностью в правой полуплоскости;
— относительный порядок г передаточной функции W(s) не дол-
должен превышать 1 (г = 0 или г = 1);
— не только полюса, но и нули передаточной функции W(s) долж-
должны располагаться в левой полуплоскости.
Лемма Калмана-Якубовича. Для того чтобы у вполне
управляемой стационарной линейной системы управления
it = Ax + Bu, ?/ = cTx, xEiT, u,yeR, A.26)
передаточная функция W(s) = cT(Is — А)~1В была строго вещест-
вещественно-положительной, необходимо и достаточно, чтобы сущест-
существовали положительно определенные матрицы Р и Q такие, что
выполняются соотношения
ATP + PA = -Q, PB = c. A.27)
Лемму Калмана-Якубовича иначе можно еще сформулировать
следующим образом.
Пусть стационарная линейная система A.26) вполне управляема
и устойчива (собственные значения матрицы имеют отрицатель-
отрицательные вещественные части).
Тогда для того чтобы существовали положительно определен-
определенные матрицы и такие, что выполняются соотношения A.27), необ-
необходимо и достаточно, чтобы
ReW(jcj) = Re[cT(/jo; - А)'1 В] > 0 Vo; ^ 0. A.28)
1.9. Векторное дифференцирование
В дальнейшем в различных главах будет использовано векторное
дифференцирование, которое позволяет использовать более компакт-
компактную и наглядную запись. Поэтому в этом параграфе кратко рассмот-
рассмотрим определения и свойства векторного дифференцирования (сим-
(символ = обозначает равенство по определению).
40
Гл. 1. Представление в пространстве состояний
1) Производная вектора х = [х\ Х2 ... хп) по скаляру t:
dXl \
dx def / dxT >
' ~dt ~ \~dfj
dx def
dt
dxn
dt I
2) Производная скалярной функции s = s (x) по вектору х =
xi x2 ... xn) :
ds def / ds ds \
dx \dxi dxnJ
3) Производная векторной функции f (x) (f =/i ... /n)T) no
вектору x = (xi
ГТ1
... xn) :
df def
dh \
4fn
Wx /
dx\ ''' dxn
fn dfn
- dx\ ''' dxn -
Используя приведенные определения и обычные правила диффе-
дифференцирования, можно получить следующие правила векторного диф-
дифференцирования .
1°. Производная скалярного произведения по скаляру t:
d (хТу) = dxT т dy = т dx т dy
dt dt У dt У dt dt'
Если у = x, то имеем
dt
dt
dt
Вывод:
d (xTv)
2°. Производная произведения матрицы и вектора по скаляру t:
_ dA
dt dt
dx
dt'
A — (m x п)-матрица, зависящая от t.
1.9. Векторное дифференцирование
41
Вывод:
d(Ax) _
dt ~
dt
dt
3=1
п
3 = 1
п
3=1
п
V"^
/ ¦/
- 3 = 1
dt Xj
dd2j
dt Xj
danj
dt j
-
it
3 = 1
n
У П r\
3 = 1
n
L 3=1
d:
dXj
' ~dt
dxj
1 dt
t
-
dA
dt
x + A —.
dt
3°. Производная скалярного произведения по вектору х =
[х\ Х2 ... хп) :
d (yTz) =zt dy_+ т dz_
Если у = z, то имеем
Вывод:
d(yTz) _ ,
г=1
dx.
г=1
г=1
г=1 г=1 г=1 г=1
xi дх\ дхп дхп\ dx dx
4°. Производная квадратичной формы по вектору х =
{xi x2 ... хп) :
dx v J ~
Q — симметрическая (п х п)-матрица, не зависящая от х.
Вывод:
п п
d ( т гл \ d v^
П П
г=1 j=l
п п
г=1
42
Гл. 1. Представление в пространстве состояний
г=1
п п
г=1
г=1
= 2
1=1
л^ ^г,
г=1
г=1
2 ^ Xiqin = 2xTQ
1=1
5°. Производная сложной векторной функции по скаляру t:
dy _ ду dx _ _„/ /,u
Вывод:
dy
dt
dm\
dt
dy2
dt
dyn
\ dt
dyi dxi dyi_ dx2_
dxi dt 0x2 dt ''' dxn dt
dy2 dxi
dxi dt
dxn ~
dt
dy2 dxn
^ dx^ , ,
2 dt dxn dt
dyn dxi dyn dx2 dyn dxn
. dxi dt dx2 dt dxn dt _
dyi dyi
dxi 0x2
dyn дуп
dxi дх2
oyi
дхп
дУ2
дхп
дуп
дхп -
ИГ
~df
dxn
L dt J
_ dy_
Задачи
1. Преобразовать в нормальную форму уравнения систем, задан-
заданных следующими передаточными функциями:
10
\ ТТЛ / \
а) Wyu (р) =
у
Х\ ТТЛ / \
; б) Wyu (р) =
у
В)
2. Преобразовать в нормальную форму следующие уравнения:
1.9. Векторное дифференцирование 43
в) 'у + 4у + 2у = 2'й + и + Аи + 1;
(iv)
г) у + У +Ау + 2у = 2и +й + Аи + 1.
3. Исследовать управляемость систем, которые описываются урав-
уравнениями:
а) жх
б) жх
в) жх
г) жх
д)*1
е)жх
= Жх +
= Жх +
= Жх +
= Жх +
= Жх +
= х2,
х2
х2
х2
х2
х2
х2
+ ^х
+ U\
+ ж4
+ U\
= Ж]
, х2 =
1 Х2 —
, х2 =
, х2 =
, х2 =
. +ж2,
жх;
Жх +
Жх +
Жх +
Жх +
хз =
и2,
и2.
х2Л
х2,
¦хз -
хз =
хз =
хз =
f ж4 +
ж2
х2
хз
Жх
щ
+
+
=
+
хз;
хз,
х2 +
Х3 +
ж4 =
ж4 =
Х3+'
ж4 =
ж4 =
--хз +
Жх +
Жх +
ж2 +
ж4 +
ж4;
ж4;
ж4;
и2.
4. Выяснить, при каких значениях параметров а и Ъ вполне управ-
управляема система, которая описывается приведенными уравнениями:
а) жх = жх + ж2 + аи, х2 = ж2 + Ьщ
б) жх = жх + аи, х2 = ж2 + ?ш;
в) жх = жх + ж2 + а^х, ж2 = ж2 + их, ж3 = ж3 + Ьи2\
г) жх = жх + ж2, ж2 = жх + ж2 + б^х, ж3 = ж3 + &п2.
5. Преобразовать в каноническую форму управляемости следую-
следующие уравнения:
а) жх = жх + ж2 + и\, х2 — жх + ж2, ж3 = жх + ж3 + и2,
ж4 = ж2 + ж4;
б) жх = ж2, ж2 = жх + ж2, ж3 = ж3 + ж4 + щ, ж4 = ж3 + ж4 + и2;
в) жх = жх + щ, х2 = ж2 + ж4, ж3 = жх + ж3 + и, ж4 = ж2 + ж4;
г) жх = жх + ж2, ж2 = жх + ж2, ж3 = ж3 + ж4 + и2,
х4 = жз + ж4 + щ.
6. Исследовать стабилизируемость систем, которые описываются
уравнениями, приведенными в задаче 5.
7. Преобразовать в управляемую форму Луенбергера следующие
уравнения:
а) жх = жх + ж2, ж2 = жх + ж3, ж3 = ж3 + ж4 + и,
Ж4 = Жз + Ж4 + Щ
б) Жх = Жх + Ж2, Ж2 = Жх + Ж3, Ж3 = Ж3 + Ж4, Ж4 = Ж3 + Ж4 + Щ
ж3 + ж4;
ж4 + и.
в) жх =
г) жх =
Жх + Ж2,
Жх + Ж2,
х2 =
ж2 = ,
ж2 -
хх Л
¦Ьжз,
- ж2 Л
хз
-хз,
= Хз
хз =
+ ж4 •
: ж2 -+
+ и,
-хз +
ж4
Ж4 :
ж4,
= Хз
44 Гл. 1. Представление в пространстве состояний
8. Пусть управляемые системы описываются уравнениями:
а) х\ = х\ + ж2, ж2 = х\ + ж3, ж3 = ж2 + ж3 + п;
б) xi = xi + ж2, ж2 = ^1 + жз, ж3 = ж2 + ж3 + п;
в) Ж1 = Ж1 + жг, х2 = ж2 + жз, ж3 = Ж1 + п;
г) ±i = жг, ж2 = ж3, ж3 = Ж1 + ж2 + и.
Определить законы управления, при которых характеристические
уравнения замкнутых систем будут иметь следующие корни:
1) Ai = -1, А2 = -2, А3 = -3;
2) Ai = -I, A2 = -2 + 3j, A3 = -2-3j.
9. Пусть управляемые системы описываются уравнениями:
2р +
Определить законы управления, при которых характеристические
уравнения замкнутых систем будут иметь следующие корни:
1) Ai = -1, А2 = -2, Аз = -3;
2)Ai = -l, A2 = -2 + 3j, A3 = -2-3j.
Глава 2
НЕЛИНЕЙНЫЕ СИСТЕМЫ.
МЕТОД ФАЗОВОЙ ПЛОСКОСТИ
Практически все системы управления, строго говоря, являются
нелинейными, т.е. описываются нелинейными уравнениями. Линей-
Линейные системы управления являются их линейными моделями, которые
получаются путем обычной линеаризации — линеаризации, состоящей
в разложении нелинейных функций в ряд Тейлора и отбрасывании
нелинейных слагаемых. Однако такая линеаризация не всегда возмож-
возможна. Если нелинейность допускает обычную линеаризацию, то такая
нелинейность называется несущественной. В противном случае нели-
нелинейность называется существенной. Существенными нелинейностями
обладают всякого рода релейные элементы. Даже в тех случаях, когда
обычная линеаризация возможна, часто на конечном этапе исследова-
исследования может потребоваться рассмотрение исходной нелинейной модели.
2.1. Нелинейные статические характеристики.
Особенности нелинейных систем
Нелинейные статические характеристики. Здесь будут
рассмотрены статические характеристики некоторых нелинейностей.
На рис. 2.1 представлены релейные характеристики разных видов:
характеристика идеального реле (а); характеристика реле с зоной
нечувствительности (б); характеристика реле с гистерезисом (в);
характеристика реле с зоной нечувствительности и гистерезисом (г);
характеристика квантования по уровню (д).
На рис. 2.2 представлены кусочно линейные характеристики: ку-
кусочно линейная характеристика с насыщением (а); кусочно линейная
характеристика с зоной нечувствительности и насыщением (б)] кусоч-
кусочно линейная характеристика с зоной нечувствительности (в); люфт
(характеристика звена с люфтом) (г); диодная характеристика (д);
кусочно линейная характеристика с гистерезисом и насыщением (е).
46
Гл. 2. Нелинейные системы. Метод фазовой плоскости
— с
Х2 '
С
— с
-Ь^
Х2 '
С
—>
>
— с
*—
b xi
-Ь
I
Х2 *
Q
— а
>
у
а 1
с
, XI
г д
Рис. 2.1. Релейные характеристики
где
Рис. 2.2. Кусочно релейные характеристики
Нелинейные системы по сравнению с линейными обладают рядом
принципиальных особенностей. В частности, такими особенностями
является следующее:
— не выполняется принцип суперпозиции, и исследование нели-
нелинейной системы при нескольких воздействиях нельзя сводить к иссле-
исследованию при одном воздействии;
— устойчивость и характер переходного процесса зависят от ве-
величины начального отклонения от положения равновесия;
— при фиксированных внешних воздействиях возможны несколь-
несколько (а иногда и бесконечное множество) положений равновесия;
2.2. Определение устойчивости 47
— возникают свободные установившиеся процессы, которые в
линейных системах невозможны (например, автоколебания).
Универсальных аналитических (математических) методов иссле-
исследования нелинейных систем нет. В процессе развития теории автома-
автоматического управления были разработаны различные математические
методы анализа и синтеза нелинейных систем, каждый из которых
применим для определенного класса систем и задач. Наиболее широко
используемыми методами исследования нелинейных систем являются:
— метод фазовой плоскости;
— метод функций Ляпунова;
— метод гармонической линеаризации (метод гармонического ба-
баланса) ;
— методы исследования абсолютной устойчивости.
Любое исследование более или менее сложных нелинейных сис-
систем, как привило, заканчивается математическим моделированием.
И в этом отношении математическое моделирование является одним
из универсальных (неаналитических) методов исследования. В этой
книге будут рассмотрены все указанные выше методы исследования
нелинейных систем и ряд других методов.
2.2. Определение устойчивости
При рассмотрении линейных систем было принято следующее
математическое определение устойчивости: линейная система называ-
называется устойчивой, если общее решение однородного описывающего ее
дифференциального уравнения стремится к нулю при стремлении вре-
времени к бесконечности. Очевидно, это определение нельзя распростра-
распространить на нелинейные системы. Поэтому в общем случае используются
другие определения устойчивости. Существует множество различных
понятий и определений устойчивости. В этой книге будут рассмотре-
рассмотрены наиболее широко используемые понятия устойчивости, основанные
на определениях, данных A.M. Ляпуновым.
Пусть система управления описывается уравнениями
Уг =
или, в векторной форме,
y = Y(y,t). B.1)
Допустим, что y*(t) = (yl(t) y%(t) ... Vn(t))T — частное реше-
решение уравнения B.1), которое описывает интересующее нас движение.
Это движение и само решение называют невозмущенным движением
(траекторией). Любое другое решение и движение, которое описы-
описывается этим решением, называют возмущенным движением (траек-
(траекторией).
Принимается, что в фазовом пространстве (пространстве сос-
состояний) Rn рассматриваемой системы введена евклидова метрика
48 Гл. 2. Нелинейные системы. Метод фазовой плоскости
(норма), т.е. длина (норма) вектора у, и расстояние между точ-
точками у^1) и уB) определяются следующим образом:
\
г=1
\
У г
г=1
Если у(?) = B/1 (?) 2/2 (?) • • • yn(t))T — какая-либо траектория сис-
системы B.1), то точка в фазовом пространстве, соответствующая этой
траектории в текущий момент времени t, называется изображающей
точкой.
Определение 2.1. Невозмущенное движение y*(t) называется
устойчивым по Ляпунову, если для любого положительного числа е
найдется такое положительное число S, что расстояние между из-
изображающими точками невозмущенной траектории y*(i) и какой-
либо возмущенной траектории y(t) в любой момент времени t ^ to
меньше е, если только расстояние между этими траекториями в
начальный момент t = to меньше 5, т.е. если выполняется условие
|У*(*)-У(*)|<е Vi^o, если |y*(i0) - y(to)| < 6. B.2)
Число S, которое определяется по заданному числу г, в общем
случае зависит как от е, так и от начального момента to. Если можно
выбрать число 5, не зависящее от начального момента to, то говорят,
что невозмущенное движение равномерно устойчиво.
Определение 2.2. Невозмущенное движение называется асимп-
асимптотически устойчивым, если оно устойчиво по Ляпунову и сущест-
существует такое положительное число rj, что расстояние между изображаю-
изображающими точками невозмущенной и возмущенной траекторий стремится
к нулю при стремлении времени к бесконечности, как только рас-
расстояние между этими траекториями в начальный момент меньше rj,
т.е. когда выполняется условие
|у*(t) - y(t)| -> 0 при t -> оо, если |у*(*0) - У(*о)I < V- B-3)
Прежде чем переходить к другим понятиям устойчивости, преоб-
преобразуем исходное уравнение. Дело в том, что при исследовании устой-
устойчивости методом функций Ляпунова уравнения системы управления
должны быть записаны в отклонениях, т.е. так, чтобы невозмущен-
невозмущенному движению соответствовало нулевое решение.
Введем новые переменные, которые определяются следующим об-
образом: х = у — у*. В новых переменных уравнение B.1) примет вид
x = X(x,t), B.4)
где Х(х,?) = Y(x + y*,?) —y*(t). При этом невозмущенному движе-
движению системы B.4) соответствует нулевое решение х*(?) = 0. Кро-
Кроме того, нулевое решение (начало координат) является положением
равновесия системы B.4). Действительно, имеем Х@,?) = Y(y*,?) —
~y*W = O- Таким образом, при таком преобразовании проблема
2.2. Определение устойчивости
49
устойчивости невозмущенного движения сводится к проблеме устой-
устойчивости положения равновесия. Любое ненулевое решение является
возмущенным движением.
Определение 2.3. Положение равновесия х = 0 системы B.4)
называется устойчивым по Ляпунову, если для любого положительно-
положительного числа е найдется такое положительное число ?, что в любой момент
времени t ^ to расстояние от изображающей точки возмущенного
движения до начала координат |х(?)| меньше г, когда начальное
отклонение |х(?о)| меньше 5, т.е. когда выполняется условие
|х(?)|<? Vt^to, если
Определение 2.4. Положение равновесия х = 0 системы B.4)
называется асимптотически устойчивым, если оно устойчиво по
Ляпунову и найдется такое положительное число rj, что возмущенное
движение х(?) стремится к началу координат, если начальное откло-
отклонение |х(?о)| меньше rj, т.е. когда выполняется условие
х(?) —У 0 при t —> оо, если |х(?о)| < V-
Приведенным определениям устойчивости можно дать следующую
геометрическую интерпретацию. Устойчивость по Ляпунову означа-
означает, что, если задана сфера S? радиуса г, то существует сфера S$
радиуса 5 такая, что, если возмущенное движение начнется внут-
внутри сферы 5E, то изображающая точка никогда не достигнет сфе-
сферы S?, т. е. движение будет происходить внутри сферы S? (рис. 2.3, а).
а б
Рис. 2.3. К определению устойчивости
Асимптотическая устойчивость означает, что выполняется условие
устойчивости по Ляпунову и существует сфера Sv радиуса rj такая,
что если возмущенное движение начинается внутри сферы S^, то оно
стремится к началу координат при стремлении времени к бесконеч-
бесконечности (рис. 2.3, б).
Если положение равновесия х = 0 асимптотически устойчиво, то
множество всех начальных точек х°, из которых возмущенное дви-
движение приходит в начало координат при стремлении времени к бес-
бесконечности, называется областью притяжения начала координат.
4 Д.П. Ким
50 Гл. 2. Нелинейные системы. Метод фазовой плоскости
Иначе говоря, если точка х° принадлежит области притяжения начала
координат, то выполняется условие
limx(x°,?)->• О при ? —)> оо,
где х(х°, t) — решение уравнения B.4) при начальном условии х(?о) =
— X рЦХ ,toj — X ).
Определение 2.5. Положение равновесия х = 0 системы B.4)
называется глобально устойчивым, если оно устойчиво по Ляпунову
и при любых начальных условиях все ее фазовые координаты ограни-
ограничены при всех t ^ to.
Это определение устойчивости тесно связано с определением ус-
устойчивости по Лагранжу. Система B.4) называется устойчивой
по Лагранжу, если все ее решения ограничены на всем интерва-
интервале 0 ^ t < оо [36]. Очевидно, положение равновесия х = 0 систе-
системы B.4) будет глобально устойчиво, если оно устойчиво по Ляпунову
и устойчиво по Лагранжу.
Определение 2.6. Положение равновесия х = 0 системы B.4)
называется асимптотически устойчивым в целом или глобально
асимптотически устойчивым, если оно устойчиво по Ляпунову и
возмущенное движение стремится в начало координат из любого
начального положения.
Другими словами, положение равновесия называется глобально
асимптотически устойчивым, если его область притяжения совпа-
совпадает со всем фазовым пространством.
Теперь рассмотрим, как соотносится определение устойчивости
линейных систем с рассмотренными здесь определениями устойчи-
устойчивости. Если положение равновесия линейной системы устойчиво, то
возмущенное движение стремится к положению равновесия из любого
начального положения. Так что принятое в теории линейных сис-
систем определение устойчивости совпадает с определением глобальной
асимптотической устойчивости.
В случае линейных систем положение равновесия (система) счи-
считается неустойчивым, если не выполняется критерий устойчивости,
т.е. если не все корни характеристического уравнения расположены
в левой полуплоскости. Однако в общем случае с понятием неустой-
неустойчивости не все так просто. Поэтому специально остановимся на его
определении. При этом, как и выше, сферу радиуса р с центром в
начале координат обозначим Sp.
Определение 2.7. Положение равновесия х = 0 системы B.4)
называется неустойчивым, если существует такое число е > 0, что
для любого числа S > 0 найдется такая точка внутри сферы S$,
что возмущенное движение, начинающееся в этой точке, достигает
сферы S?.
Другими словами, положение равновесия х = 0 системы B.4) на-
называется неустойчивым, если существует такое число е > 0, что не
2.3. Орбитальная устойчивость. Автоколебания 51
найдется сферы Ss, которая не содержала бы внутри себя точки,
начиная с которой возмущенное движение достигает сферы S? .
Это определение является логическим отрицанием определения
устойчивости по Ляпунову. Поэтому если положение равновесия не
является устойчивым по Ляпунову, то оно неустойчиво.
Положение равновесия линейной системы, неустойчивое в том
смысле, как это принято в теории линейных систем, не обязатель-
обязательно будет неустойчивым в определенном выше смысле. Как увидим
дальше, если линейная система неустойчива (т.е. не все корни ее
характеристического уравнения являются левыми), но имеет место
маргинальная устойчивость (характеристическое уравнение не имеет
правых корней), то система может быть устойчива по Ляпунову.
2.3. Орбитальная устойчивость. Автоколебания
Пусть y*(i) и y(t) — невозмущенное и возмущенное движение
соответственно. Выше при определении различных понятий устойчи-
устойчивости мы руководствовались тем, как изменяется со временем рас-
расстояние p[y*(i),y(i)] = |y*(?) —y(i)\ между изображающими точка-
точками этих движений. Однако если невозмущенное движение является
периодическим и совершается по замкнутой траектории (например,
движение небесных тел), то важно, как ведет себя изображающая
точка возмущенного движения относительно траектории невозмущен-
невозмущенного движения, а не относительно его изображающей точки. Поэтому
при рассмотрении периодических процессов используются понятия
устойчивости, отличные от рассмотренных выше, — орбитальная
устойчивость и асимптотическая орбитальная устойчивость.
Введем следующие обозначения: L* — траектория невозмущенно-
невозмущенного движения, т.е. L* = {у: у = у*(?), t ^ to}; p(y,L) — расстояние
от точки у до траектории L, т.е. до ближайщей точки этой траек-
траектории.
Определение 2.8. Невозмущенное движение y*(t) называется
орбиталъно устойчивым, если для любого числа е > 0 найдется такое
число 5 > 0, что при всех t ^ to расстояние от изображающей точки
возмещенного движения до траектории невозмущенного движения
меньше е (p(y(i),L*) < e) при условии, что в начальный момент это
расстояние меньше S (p(y(to),L*) < S) [25].
Определение 2.9. Невозмущенное движение y*(i) называет-
называется асимптотически орбиталъно устойчивым, если оно орбитально
устойчиво и найдется такое положительное число rj, что расстояние
от изображающей точки возмущенного движения до траектории не-
невозмущенного движения стремится к нулю (p(y(i),L*) —> 0) при t —>¦
—у оо, если это расстояние в начальный момент не превышает rj
(p(y(to),L*)<rj).
Иначе говоря, невозмущенное движение y*(i) асимптотически
орбиталъно устойчиво, если вокруг его траектории L* существует
4*
52 Гл. 2. Нелинейные системы. Метод фазовой плоскости
такая окрестность, что если возмущенное движение начинается в этой
окрестности, то его траектория со временем сольется с траекторией
невозмущенного движения L*.
Из устойчивости по Ляпунову следует орбитальная устойчивость.
Из асимптотической устойчивости следует асимптотическая орби-
орбитальная устойчивость. То есть если невозмущенное движение устой-
устойчиво по Ляпунову, то оно орбитально устойчиво, и если невозму-
невозмущенное движение асимптотически устойчиво, то оно асимптотически
орбитально устойчиво. Обратное не верно: вообще говоря, из орби-
орбитальной устойчивости не следует устойчивость по Ляпунову, и из
асимптотической орбитальной устойчивости не следует асимптоти-
асимптотическая устойчивость.
Более того, если невозмущенное движение является периодичес-
периодическим, то оно не может быть асимптотически устойчивым. Действи-
Действительно, пусть невозмущенное движение y*(t) является периодической
функцией с периодом Т: y*(t) = y*(t + T). Рассмотрим возмущенное
движение y(i) = у*(? + а). Это возмущенное движение не стремится
к невозмущенному движению, как бы мало ни было расстояние между
изображающими точками возмущенного и невозмущенного движений
в начальный момент. Каким бы малым ни было число rj в условии
|у(^о) ~~ У*(^о)| < Ц, если указанное расстояние отлично от нуля и
больше некоторого положительного числа ?о? т0 в силу периодич-
периодичности y*(t) sup \y(t) — y*(t)\ > eo , как бы велико ни было t'. Сле-
t>tl
довательно, расстояние между изображающими точками не может
стремится к нулю.
В теории нелинейных систем важную роль играет понятие авто-
автоколебаний, введенное в теорию колебаний А. А. Андроновым.
Определение 2.10. Автоколебаниями называются асимптоти-
асимптотически орбитально устойчивые свободные колебания (периодические
движения).
Автоколебания являются незатухающими колебаниями, которые
устанавливаются и поддерживаются в системе за счет собственных
источников энергии, причем амплитуды этих колебаний определяются
свойствами системы, а не начальными условиями. Системы, в ко-
которых возникают автоколебания, называются автоколебательными
системами.
Автоколебания возможны только в нелинейных системах. Незату-
Незатухающие свободные колебания возможны в маргинально устойчивых
линейных системах. Однако эти колебания не являются автоколе-
автоколебаниями, так как они не удовлетворяют условиям асимптотической
орбитальной устойчивости.
Если на выходе какой-либо системы возникают незатухающие
колебания, то чтобы проверить, являются ли эти колебания авто-
автоколебаниями, можно поступить следующим образом: подать на вход
системы возмущающее воздействие, которое приводит к незначите ль-
2.4- Изображение процессов на фазовой плоскости 53
ному изменению амплитуды; если после устранения возмущающего
воздействия амплитуда колебаний со временем восстанавливается, то
эти колебания являются автоколебаниями, в противном случае они не
являются автоколебаниями.
2.4. Изображение процессов на фазовой плоскости
Если уравнения системы управления представлены в нормаль-
нормальной форме, то вектор состояния системы однозначно определяет ее
состояние. Каждому состоянию системы в пространстве состояний
соответствует точка. Точка, соответствующая текущему состоянию
системы, называется изображающей точкой. При изменении состоя-
состояния изображающая точка описывает траекторию. Эта траектория на-
называется фазовой траекторией. Совокупность фазовых траекторий,
соответствующая всевозможным начальным условиям, называется
фазовым портретом.
Наглядно фазовую траекторию и фазовый портрет можно пред-
представить в случае двухмерного фазового пространства. Двухмерное
фазовое пространство называется фазовой плоскостью.
Фазовая плоскость — это координатная плоскость, в которой по
осям координат откладываются две переменные (фазовые координа-
координаты), однозначно определяющие состояние системы второго порядка.
Метод анализа и синтеза системы управления, основанный на пост-
построении фазового портрета, называют методом фазовой плоскости.
Рассмотрим систему управления второго порядка, которая описы-
описывается уравнениями
Хг =Х1(Х1,Х2),
Х2 = Х2(Ж1,Ж2).
Решение этой системы дифференциальных уравнений
Xi = Xi(x°,t), i = 1,2,
при начальном условии х(?0) = х° = (х\ х^)Т представляет собой
параметрические уравнения фазовых траекторий. Параметром здесь
является время. Построив фазовые траектории по этим уравнениям
при различных начальных условиях, получим фазовый портрет.
Уравнения B.5) являются дифференциальными уравнениями фа-
фазовых траекторий в параметрической форме. Разделив второе уравне-
уравнение на первое, получим дифференциальное уравнение
dx2 _ Х1(х1,х2)
dxi ~ Х2(ж1,ж2)'
решение которого непосредственно связывает фазовые координаты.
Это уравнение будем называть (непараметрическим) дифференциаль-
дифференциальным уравнением фазовых траекторий.
54
Гл. 2. Нелинейные системы. Метод фазовой плоскости
Точки, в которых правая часть уравнения B.6) равна отношению
нулей, называются особыми. Особые точки являются корнями систе-
системы уравнений
Xi(xux2) = 0, г = 1,2.
Как следует из уравнений B.5), в особых точках фазовая ско-
скорость х равна нулю. Следовательно, особые точки являются положе-
положениями равновесия. Через особые точки может проходить более одной
траектории, в то время как через неособые точки проходит только
одна траектория.
Часто при изображении процессов на фазовой плоскости за фазо-
фазовую координату Х2, которую откладывают по оси ординат, принима-
принимают производную х\ координаты х\, откладываемой по оси абсцисс. В
этом случае уравнение B.6) принимает вид
и фазовые траектории обладают следующими свойствами. В верхней
полуплоскости изображающая точка движется слева направо, так
как х\ — Х2 > 0 и х\ возрастает. В нижней полуплоскости, наоборот,
изображающая точка движется справа налево, так как х\ — Х2 <
< 0 и х\ убывает. На оси абсцисс (х2 = 0) производная dx2Jdx\ — оо
(за исключением точек равновесия), и поэтому фазовые траектории
пересекают ось абсцисс под прямым углом.
По фазовому портрету можно судить о характере переходных
процессов. В частности, по фазовой траектории можно построить без
расчетов качественно временную характеристику — кривую зави-
зависимости х\ от времени, и, наоборот, по временной характеристике
можно качественно построить фазовую траекторию.
В качестве примера сначала по фазовой траектории построим
временную характеристику, а затем по временной характеристике —
фазовую траекторию. Пусть задана фазовая траектория (рис. 2.4, а).
Х2
С X!
а б
Рис. 2.4. Построение временной характеристики по фазовой траектории
Отметив на ней характерные точки (начальную точку, точки пере-
пересечения с осями координат), нанесем соответствующие им точки на
временной плоскости и соединим их плавной кривой (рис. 2.4, б).
2.5. Фазовые портреты и типы особых точек
55
С В~
а б
Рис. 2.5. К построению фазовой траектории по временной характеристике
Пусть теперь задана временная характеристика (рис. 2.5, а). От-
Отметив на ней характерные точки (начальную точку, точки экстрему-
экстремума и точки пересечения с временной осью), нанесем соответствую-
соответствующие им точки на фазовую плоскость и соединим их плавной кривой
(рис. 2.5,6).
2.5. Фазовые портреты и типы особых точек
Фазовые портреты нелинейных систем характеризуются большим
разнообразием, чем фазовые портреты линейных систем. Однако ти-
типы особых точек линейных и нелинейных систем совпадают. Здесь
имеются в виду те особые точки, в окрестностях которых уравнения
нелинейных систем допускают линеаризацию.
2.5.1. Фазовые портреты и типы особых точек линейных
систем. Пусть линейная система второго порядка описывается урав-
уравнением
х + а\х + а2х = О,
или, в нормальной форме,
Х2 = —
B.7)
Решение, фазовый портрет и типы особых точек зависят от корней
характеристического уравнения
Л2 + а\\ + а2 = 0.
Из уравнения B.7) следует, что рассматриваемая система имеет
одну особую точку в начале координат. В зависимости от вида фазо-
фазового портрета в окрестности особых точек последние подразделяются
на различные типы.
В табл. 2.1 приведены временные характеристики, фазовые порт-
портреты и типы особых точек при различных корнях характеристичес-
характеристического уравнения.
56 Гл. 2. Нелинейные системы. Метод фазовой плоскости
Таблица 2.1
Тип корней
Кривая переход-
переходного процесса
Фазовый порт-
портрет
Тип особой
точки
Чисто мнимые
Центр
Комплексные
с отрицательной
действительной
частью
Устойчивый
фокус
Комплексные с
положительной
действительной
частью
Х2
Неустойчивый
фокус
Действительные
отрицательные
Устойчивый
узел
Действительные
положительные
Неустойчивый
узел
Действительные
разных знаков
Седло
2.5. Фазовые портреты и типы особых точек
57
Когда корни характеристического уравне-
уравнения являются чисто мнимыми, фазовые траек-
траектории являются эллипсами или окружностя-
окружностями, т.е. они являются замкнутыми.
Замкнутым фазовым траекториям соот-
соответствуют незатухающие колебания (перио-
(периодические режимы). Однако эти колебания не
являются автоколебаниями, так как их ампли-
амплитуда зависит от начальных условий и они не
являются асимптотически орбитально устой- рис 2.6. К определе-
чивыми. нию устойчивости осо-
Положение равновесия, соответствующее бой точки типа центр
особой точке типа центр, является устойчи-
устойчивым по Ляпунову. Действительно, по заданному е можно выбрать
нужное S (см. определение 2.3) следующим образом. В качестве S вы-
выбирается любое положительное число, меньшее или равное половине
длины меньшей оси эллипса, касающегося изнутри окружности ра-
радиуса е (рис. 2.6).
2.5.2. Фазовые портреты нелинейных систем. Нелинейные
системы могут иметь несколько положений равновесия (особых точек)
и характеризуются большим разнообразием фазовых портретов. Если
правые части нелинейных уравнений
Xi = Xi(x1,x2), г = 1,2,
допускают линеаризацию в окрестностях особых точек, то эти осо-
особые точки могут быть лишь тех же типов, что и особые точки в
случае линейных систем. Чтобы определить тип какой-либо особой
точки, нужно произвести линеаризацию правых частей приведенных
уравнений в окрестности этой точки, а затем по линеаризованным
уравнениям определить ее тип.
В качестве примера рассмотрим фазовый портрет нелинейной
системы, которая описывается уравнениями [53]
xi = —#i(l + х\) — 2ж2,
Х2 — Х\ + Х2-
Приравняв правые части нулю, получим следующие уравнения для
особых точек:
-?i(l + x\) - 2х2 =0,
Х1 + Х2 = 0.
Эта система уравнений имеет три решения:
1) х\ =0, Х2 = 0; 2) х\ = 1, Х2 = —1; 3) х\ — —1, Х2 = 1.
В окрестности первой точки линеаризованные уравнения име-
ютвид х = Х2х
= Х\ + Х2-
58
Гл. 2. Нелинейные системы. Метод фазовой плоскости
Характеристическое уравнение этой системы уравнений
А + 1 2
-1 А-1
= Л2 + 1 = О
имеет чисто мнимые корни Ai52 = ±j. Следовательно, точка @,0)
является особой точкой типа центр.
В окрестности точки A,-1) линеаризованные уравнения име-
имеют вид
Щ = —4771 — 2г72,
т = т + т,
где T]i = х\ — 1, г}2 — Х2 + 1. Характеристическое уравнение этой сис-
системы уравнений
А + 4 2
-1 А-1
= У + ЗА - 2 = 0
имеет вещественные корни с разными знаками: Х±2 = (—3 =Ь у17)/2.
Следовательно, точка A, —1) является особой точкой типа седло.
В окрестности третьей точки (—1,1) линеаризованные уравне-
уравнения принимают точно такой вид, что и в предыдущем случае, если
принять щ = х\ + 1, rj2 = Х2 — 1. Следовательно, точка (—1,1) также
является особой точкой типа седло.
На рис. 2.7 представлен фазовый потрет рассматриваемой систе-
системы. Из этого рисунка видно, что точка равновесия @, 0) устойчива по
Ляпунову, а две другие точки равно-
равновесия неустойчивы. Если движение
начинается внутри замкнутой жир-
жирной линии, то возникает колебатель-
колебательный (периодический) процесс. Если
движение начинается вне указанной
замкнутой кривой, то возникает рас-
холящийся процесс.
Как следует из рассмотренно-
рассмотренного примера, при наличии несколь-
нескольких точек равновесия возможны раз-
различные типы фазовых траекторий.
Особые кривые (жирные кривые
на рис. 2.7), разделяющие фазовую
плоскость на области с разными ти-
типами фазовых траекторий, называ-
называются сепаратрисами.
Фазовые портреты нелинейных систем могут содержать другой
тип особой кривой — изолированные замкнутые траектории. Эти
кривые называются предельными циклами. Если изнутри и снару-
снаружи фазовые траектории сходятся к предельному циклу (рис. 2.8, а),
то такой предельный цикл называется устойчивым предельным
циклом. Устойчивому предельному циклу соответствует асимптоти-
Рис. 2.7. Фазовый портрет нели-
нелинейной системы
2.5. Фазовые портреты и типы особых точек
59
2.8. Предельные циклы
чески орбитально устойчивое периодическое движение (автоколеба-
(автоколебания). В системе, у которой фазовый портрет имеет вид, представ-
представленный на рис. 2.8, а, автоколебания возникают самопроизвольно при
любых начальных условиях. В этом случае говорят, что имеет место
мягкое самовозбуждение [1].
Если фазовые траектории изнутри и снаружи предельного цикла
удаляются от него (рис. 2.8,6), такой предельный цикл называет-
называется неустойчивым предельным циклом. Периодический процесс, соот-
соответствующий неустойчивому предельному циклу, нельзя наблюдать.
Если движение начинается внутри такого предельного цикла, то про-
процесс сходится к положению равновесия. Если движение начинается
вне такого предельного цикла, то процесс расходится. Неустойчивый
предельный цикл служит границей области притяжения, или грани-
границей устойчивости положения равновесия (начала координат).
Возможны два предельных цикла (рис. 2.8, в, г). Внутренний пре-
предельный цикл на рис. 2.8, в устойчив, и ему соответствуют автоколе-
автоколебания, а наружный предельный цикл неустойчив и является границей
области автоколебаний: автоколебания возникают при любых началь-
начальных отклонениях, не выходящих за наружный предельный цикл.
Наружный предельный цикл на рис. 2.8, г является устойчивым и
соответствует автоколебаниям, а внутренний предельный цикл явля-
является неустойчивым и является границей области притяжения положе-
положения равновесия. В системе с таким фазовым портретом автоколебания
возникают при достаточно большом отклонении системы от положе-
положения равновесия — отклонении, выходящем за пределы внутреннего
предельного цикла. Если движение системы начинается внутри не-
неустойчивого предельного цикла, то она приближается к положению
равновесия. В этом случае говорят, что имеет место жесткое само-
самовозбуждение [1].
60 Гл. 2. Нелинейные системы. Метод фазовой плоскости
2.6. Метод фазовой плоскости анализа
и синтеза систем
Как мы видели, по фазовому портрету системы можно судить о ее
устойчивости и характере переходных процессов. Метод исследования
систем, основанный на построении их фазового портрета, называется
методом фазовой плоскости. Достоинством метода фазовой плоскос-
плоскости является то, что он позволяет наглядно представить всевозможные
процессы, происходящие в системе, и является точным, а не прибли-
приближенным (как, например, метод гармонической линеаризации, который
мы рассмотрим далее). Его недостатком является то, что он применим
только к системам второго порядка.
2.6.1. Анализ нелинейных систем. Процесс анализа нелиней-
нелинейных систем методом фазовой плоскости рассмотрим на конкретных
примерах.
Нелинейная система с реле с зоной нечувствитель-
нечувствительности. Система (рис. 2.9, а) описывается следующими уравнениями:
1, е >а,
и=< 0, |е| ^ а,
[-1, е < -а.
Введем новые переменные: х\ = е, Х2 = х\. В новых переменных урав-
уравнения системы примет вид
{1, х\ > а,
0, \xi\ ^ а,
-1, х\ < -а.
Разобьем фазовую плоскость на три области /, //, III прямыми
х\ = а и х\ = —а (рис. 2.9, б). В пределах каждой области и = const.
Поэтому, разделив в последней системе второе уравнение на первое и
проинтегрировав его, получим х\ — —2их\ + С.
В области / (х\ < —а) и = — 1, и уравнение фазовых траекторий
имеет вид х\ — 2х\ + С\\ оно определяет семейство парабол, направ-
направленных вправо. В области // (\х\\ ^ а) и = 0, и уравнение фазовых
траекторий имеет вид х\ — Съ] оно определяет семейство прямых,
параллельных оси абсцисс. В области /// {х\ > а) и = 1, и уравне-
уравнение фазовых траекторий имеет вид х\ — —2х\ + Сз; оно определяет
семейство парабол, направленных влево.
Как видим, уравнения фазовых траекторий во всех трех областях
различаются между собой, и при переходе из одной области в другую
через границу происходит переключение с одного вида траекторий на
другой. Линии, на которых происходят такие переключения, называ-
называются линиями переключения.
2.6. Метод фазовой плоскости анализа и синтеза систем
61
9 = 0
А-'
А' II
В
в' т
Рис. 2.9. Нелинейная система с реле с зоной нечувствительности (а) и
его фазовый портрет (б)
На основе полученных уравнений построен фазовый портрет сис-
системы (рис. 2.9,6). Как следует из этого рисунка, при ненулевых
начальных условиях в системе возникают незатухающие колебания.
Амплитуда колебаний зависит от начальных условий, и, следователь-
следовательно, эти колебания не являются автоколебаниями. Положение равнове-
равновесия (начало координат) неустойчиво, так как, если принять е < а, то
какое бы малое положительное число S мы ни выбрали, возмущенное
движение, начинающееся внутри сферы радиуса ?, всегда достигает
сферы с радиусом е.
Нелинейная система со скользящим процессом. Система
(рис. 2.10) описывается уравнениями
у = kia, a = с signe,
Вводя новые переменные х\ = у, Х2 —
образовать к следующему виду:
Х\ — Ж2,
Х2 — —к\с sign (&2Ж2 + xi)-
е = -(к2у + у).
xi, эти уравнения можно пре-
преРис. 2.10. Нелинейная система со
скользящим процессом
Разделив второе уравнение на пер-
первое, получим такое уравнение:
dx2 _ — к\с sign {к,2Х2 + х\)
dX\ X2
Прямая А В на рис. 2.11, которая описывается уравнением
+ х\ =0, или Х2 = — A/&2)жъ делит фазовую плоскость на две об-
области: область I (к2Х2 + х\ > 0) и область //
(&2#2 + #1 < 0)- Последнее уравнение в об-
области / принимает вид
А
dx2 = —kicdxi,
—к\с
или
X2
в области // — вид
II
-— = —, или Х2 dx2 = k\cdx\.
dx\ Х2
Рис. 2.11. Фазовый порт-
портрет нелинейной системы
Решив эти уравнения, получаем следую- со скользящим процес-
щие уравнения для фазовых траекторий: сом
62 Гл. 2. Нелинейные системы. Метод фазовой плоскости
в области / 2 о у ,/о
#2 = — 2к\сх\ + d;
в области II о
х2 = 2к\сх\ + G2-
Эти уравнения являются уравнениями парабол, направленных на-
навстречу друг другу. На основе этих уравнений построен фазовый
портрет (см. рис. 2.11). Из этого рисунка следует: если изображаю-
изображающая точка не находится на линии переключения (прямая АВ), то
она до достижения этой прямой будет двигаться по одной из фазо-
фазовых траекторий. Как только изображающая точка пересечет линию
переключения, она попадет на одну из фазовых траекторий, направ-
направленных в сторону линии переключения. Поэтому изображающая точка
опять будет двигаться в сторону линии переключения, пока не пе-
пересечет ее. Как только изображающая точка снова пересечет линию
переключения, она опять окажется на фазовой траекторий, направлен-
направленной в сторону линии переключения. Поэтому изображающая точка по
достижении линии переключения будет двигаться по ней, теоретичес-
теоретически совершая колебания с бесконечно малой амплитудой и бесконечно
большой частотой. В действительности, так как реле обладает конеч-
конечной скоростью переключения, частота не будет бесконечно большой,
а амплитуда бесконечно малой.
Таким образом, когда изображающая точка достигнет линии пе-
переключения, она теоретически будет скользить по этой линии и дви-
двигаться к положению равновесия. Такой процесс называют скользящим
режимом.
2.6.2. Синтез систем с переменной структурой. Структура
системы определяется составом элементов (звеньев) и связью между
ними. Изменить структуру системы — это значить изменить состав
ее элементов или связи между элементами.
Системой с переменной структурой (СПС) называют систему,
в которой структура в процессе ее функционирования изменяется на
основе текущей информации для достижения определенной цели —
обеспечения устойчивости, улучшения качества и т. п.
Использование принципов построения СПС при синтезе систем
управления позволяет достичь устойчивости и приемлемого качества
в тех случаях, когда параметры объекта изменяются в широких
пределах или отсутствует информация, необходимая для реализации
обычных алгоритмов управления с фиксированной структурой, обес-
обеспечивающих заданные требования к системе.
Принципы построения СПС. Построение СПС [26] основа-
основано на формировании различных структур, обеспечивающих желае-
9 = 0
УУ
мое протекание заданных ре-
¦ жимов.
Пусть в системе управ-
управления (рис. 2.12) передаточ-
Рис. 2.12. Структурная схема системы Ная функция объекта равна
управления Wq^ = 1/(Г2р2), и при фор-
2.6. Метод фазовой плоскости анализа и синтеза систем
63
мировании закона управления можно воспользоваться информацией
о выходной переменной у и знаке ее производной у. Следовательно,
при синтезе линейной системы мы можем воспользоваться только
пропорциональным законом управления
и = —ку, к = const. B.8)
Тогда характеристическое уравнение замкнутой системы имеет вид
Т2Л2 + к = О,
и его корни при к > 0 будут чисто мнимыми, а при к < 0 —
действительными и разных знаков. Следовательно, в первом случае
система маргинально устойчива или устойчива по Ляпунову, а во
втором случае неустойчива. Таким образом, в рамках фиксированной
структуры не удается синтезировать асимптотически устойчивую
систему.
СПС с двумя маргинально устойчивыми структурами.
Уравнения рассматриваемой системы в нормальной форме имеют вид
к
Х\ = Х2, Х2 = — 7^2" Xi,
где х\ — у. Разделив второе уравнение на первое, получим
dx2 к х\ , к ,
dx\ Т^ Х2' Т^
Проинтегрировав последнее уравнение, получим уравнение эллипса
Большая ось эллипса при к — к\ <Т2 располагается на оси абсцисс
(рис. 2.13, а), а при к = къ > Т2 — на оси ординат (рис. 2.13, б).
Если принять закон управления
и =
кг,
Х\Х2 < О,
> О,
B.9)
то во второй и четвертой четвертях изображающая точка будет дви-
двигаться по фазовым траекториям, представленным на рис. 2.13, а,
Х2
Рис. 2.13. Фазовые траектории маргинально устойчивых структур и СПС
с такими структурами
64 Гл. 2. Нелинейные системы. Метод фазовой плоскости
в первой и третьей четвертях — по фазовым траекториям, пред-
представленным на рис 2.13, б. Следовательно, фазовые траектории СПС
с алгоритмом управления B.9) будут иметь вид, представленный
на рис. 2.13,6 (сплошная линия). Изображающая точка по такой
траектории будет двигаться к положению равновесия (началу коор-
координат), и поэтому рассматриваемая система с переменной структу-
структурой асимптотически устойчива.
СПС с двумя неустойчивыми структурами. Пусть пере-
передаточная функция системы управления (см. рис. 2.12) равна
Wo(p) = (Ъ > 0, аг> 0, а2 > 0)
р2 - aip - a2
и при формировании закона управления можно использовать инфор-
информацию о выходной переменой и знаке линейной формы s = у + осу. В
данном случае опять при синтезе линейной системы можно восполь-
воспользоваться только пропорциональным законом управления B.8). При
этом законе управления характеристическое уравнение имеет вид
Л2 - aiX - а2 + kb = 0.
Рассмотрим две структуры, соответствующие значениям к = к\
и к — к2, при которых корни характеристического уравнения в
первом случае (к — к\) являются комплексными с положительной ве-
вещественной частью, а во втором случае (к = к2) — вещественными
и разных знаков. Так как корнями приведенного уравнения являются
то такие значения к существуют. Фазовый портрет первой структуры
представлен на рис. 2.14, а, а фазовый портрет второй структуры —
на рис. 2.14, б. На этих рисунках, как обычно, приняты обозначения
Xi = У И Х2 = у.
Пусть в случае к = к2 корнями являются Ai = — а± и \2 = (%2
(«1, а2 > 0). Этим корням на фазовом портрете рис. 2.14, # соот-
соответствуют две прямые фазовые траектории, которые описываются
уравнениями х2 + а.\Х\ — 0 и х2 — а2х\ = 0. Отрицательному корню
соответствует фазовая траектория, по которой изображающая точка
движется к началу координат, а положительному корню — фазовая
траектория, по которой изображающая точка удаляется от начала
координат.
СПС построим так, чтобы переключение с одной структуры на
другую происходило на оси ординат и прямой фазовой траектории
х2 + qliXi = 0, по которой изображающая точка движется к началу
координат. Такое переключение будет происходит при алгоритме
управления .
и = фу, ф=^ xis<^ B.10)
где s = х2 +
2.6. Метод фазовой плоскости анализа и синтеза систем 65
Х2 '
У'*7* i
II
Рис. 2.14. Фазовые портреты неустойчивых структур и СПС с такими
структурами
При таком алгоритме управления фазовая плоскость делится на
две области: область J, которая расположена в углах, образованных
прямой s = Х2 + ol\X\ — 0 и осью ординат, и область JJ, которая
расположена вне указанных углов (рис. 2.14, в). В области / изоб-
изображающая точка СПС движется по фазовым траекториям второй
структуры (см. рис. 2.14, 6), в области //— по фазовым траекториям
первой структуры (см. рис. 2.14, а). На фазовых портретах отдельных
структур участки траекторий, которые не присутствуют на фазовом
портрете СПС, изображены штриховыми линиями.
У систем второго порядка, как правило, все фазовые траектории
не являются прямыми. Прямые траектории называются вырожден-
вырожденными. В рассмотренном примере одна из структур имеет две вырож-
вырожденные траектории, а СПС — одну.
СПС со скользящим режимом. Теоретически в СПС с алго-
алгоритмом управления B.10) переходный процесс является апериодичес-
апериодическим. Действительно, если изображающая точка в начальный момент
не находится на вырожденной траектории, то она будет двигаться по
одной из кривых фазовых траекторий, пока не дойдет до вырожденной
траектории, а затем будет двигаться по этой прямой траектории (см.
рис. 2.14, в). Однако в действительности из-за наличия ошибок и за-
запаздывания изображающая точка будет перескакивать вырожденную
траекторию и все время будет двигаться по кривым фазовым траекто-
траекториям (рис. 2.15), и переходный процесс будет колебательным. Аперио-
Апериодический переходный процесс может быть достигнут, если в системе
5 Д.П. Ким
66
Гл. 2. Нелинейные системы. Метод фазовой плоскости
Рис. 2.15. Реальная фазовая
траектория СПС с неустойчи-
неустойчивыми структурами
Рис. 2.16. Фазовый портрет СПС
со скользящим режимом
создать скользящий процесс. В только что рассмотренной системе
можно получить скользящий процесс, если переключение производить
не на прямой s = Х2 + а.\Х\ = 0, которая является вырожденной траек-
траекторией одной из структур, а на прямой Х2 + /3xi = 0, где [3 < а\.
Если в законе управления B.10) вместо s = Х2 + а.\Х\ подставить
sp = Х2 + Cxi, то получим СПС, у которой фазовый портрет будет
иметь вид, представленный на рис. 2.16. Как следует из этого ри-
рисунка, фазовые траектории в окрестности прямой sp = X2 + /3#i = 0
направлены навстречу, и поэтому как только изображающая точка,
оказавшись на этой прямой, сойдет с нее, она попадет на одну из фазо-
фазовых траекторий, которая снова ведет к ней. Поэтому когда изображаю-
изображающая точка попадает на эту прямую, начинается скользящий процесс.
Задачи
1. По фазовым траекториям качественно построить временную
характеристику:
а)
2.6. Метод фазовой плоскости анализа и синтеза систем 67
2. По временной характеристике качественно построить фазовую
траекторию:
У
а)
в)
3. Построить фазовый портрет системы
= 0.
/(е)
а
Wo(p)
а
с
-Ь-а
Г\
а ъ
— с
при Wo(p) = 2/р2 и следующих значениях параметров нелинейной
характеристики:
а) а = О, Ъ = 0,5, с = 1; б) а = Ъ = 0,5, с = 1; в) а = 6 = 0, с = 1.
4. Синтезировать асимптотически устойчивую систему с пере-
переменной структурой из следующих двух линейных структур 2-го
порядка:
а) корни характеристического уравнения первой структуры чисто
мнимые, а второй структуры — вещественные разных знаков;
б) корни характеристического уравнения первой структуры комп-
комплексные с отрицательно вещественной частью, а второй структуры —
вещественные разных знаков.
Глава 3
МЕТОД ГАРМОНИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
Метод гармонической линеаризации, или метод гармонического
баланса, первоначально был разработан для исследования периоди-
периодического режима. Однако в дальнейшем он стал использоваться также
для анализа устойчивости и синтеза нелинейных систем [53].
Основная идея метода состоит в следующем. Управляемые сис-
системы (объекты), как правило, обладают свойством фильтра низких
частот: при возникновении периодических режимов они не пропус-
пропускают или пропускают с большим ослаблением вторые и более высокие
гармоники. И суть метода гармонической линеаризации состоит в
описании нелинейного звена линейным уравнением, которое получа-
получается при пренебрежении (отбрасывании) указанными гармониками в
разложении нелинейной функции в ряд Фурье.
Метод гармонической линеаризации является приближенным ме-
методом. Однако его достоинством является то, что он применим для
систем любого порядка, в отличие от метода фазовой плоскости,
который может быть эффективно применен только к системам 2-го
порядка.
/(в)
У
3.1. Гармоническая линеаризация
Структурную схему замкнутой нелинейной системы, состоящей из
нелинейного звена (НЗ) и линейной части (ЛЧ) — линейного звена,
будем называть типовой струк-
структурной схемой нелинейной сис-
системы (рис. 3.1). В этой главе
будут рассматриваться нелиней-
Рис. 3.1. Типовая структурная схема ные системы, структурные схе-
нелинейной САУ мы которых могут быть преоб-
преобразованы к типовой.
Пока примем, что задающее воздействие д = 0 (потом это ограни-
ограничение снимем). Уравнения системы имеют вид
y = Wn(p)<r, сг = /(е), е = -у. C.1)
3.1. Гармоническая линеаризация 69
Допустим, что в системе возникает периодический режим. Тогда
нелинейная функция a(t) = f[e(t)] будет периодической функцией вре-
времени, и ее можно будет разложить в ряд Фурье:
a(t) = - ао + Ъ\ svnuot + a\ cos cot + ..., C.2)
где а0, Ь\, а\ — коэффициенты Фурье; ш = 2тг/Т; Т — период;
многоточием обозначены высшие (вторые и более высокие) гармо-
гармоники.
Коэффициенты Фурье определяются следующим образом [14]:
Т t*+T
2 Г 2 /
I f(()) к d
+
2 Г 2 /
ак = - I f(e(r)) cos к ujrdr = - / / (e (r)) cos к uordr, к = 0,1, 2,...,
о t*
T t*+T
2 Г 2 Г
Ьк = -J f(e(r))smkujTdT = - J /(e(r)) sin к uordr, k = 1,2,...,
о t*
ak = 0, fe = 0,1,2,...,
T/2 t*+T/2
4 /* 4 /*
bk = T J f(e(T))sinujTdr = f J f (e(r)) sin к lot dr, к = 0,1, 2,...
Здесь ?* — произвольная константа, или (если /(е) — однозначная
нечетная функция, т.е. /(—е) = —/(е)).
Предположим, что линейная часть обладает свойством фильтра
низких частот, т.е. выполняется условие
\Wn(jcj)\2>\Wn(jkw)\, ш=Ц, к = 2,3,... C.3)
Проверить это условие, пока не определена частота периодическо-
периодического процесса, нельзя, и его перед началом исследования принимают как
гипотезу. Поэтому это условие называют гипотезой фильтра.
При условии C.3) высшие гармоники не оказывают существенно-
существенного влияния на выходную величину у линейной части. Поэтому при
определении у высшими гармониками можно пренебречь, и уравнение
системы C.1) представить в виде
y = Wn(p)cf, a = do + bismcu t + ai cos cut, e = —y. C.4)
Если постоянное слагаемое в ряде Фурье а® = 0, то, учитывая тож-
тождество
Ъ\ sina;? + a\ cos cut = A\ sin (cut + </?i),
где А\ = л/clI + Ь\, (pi = arcsin (ai/^4i), из уравнений C.4) при уста-
установившемся режиме можно получить
у = Asm(ujt + ф).
Здесь А = А11 Wn (juo) \, ср = срг + arg Wn 0'
70 Гл. 3. Метод гармонической линеаризации
Таким образом, если в системе (см. рис. 3.1) возникает периоди-
периодический режим и линейная часть является фильтром низких частот,
т.е. справедлива гипотеза фильтра, то колебания на выходе линейной
части и соответственно на входе нелинейного звена являются гармо-
гармоническими.
Выберем начало отсчета так, чтобы на входе нелинейного звена
е = A sin uj t. Тогда имеем
, е , р sin uj t e
sinwt= -, cosujt = =p—-.
A uj ujA
Подставив эти выражения в C.4), при по = 0 получим
L uj 1
где 1 2ж
q(A) = -j = —- f(Asmip) smipdip, C.6a)
0
2тг
q'(A) = —p = —- М(Аътф) cosфо!ф, C.66)
A. ttA J
0
или, если /(е) — однозначная нечетная функция,
7Г
q(A) = -j- = —j f (A sin ф) sin ф dip, q'(A) = 0. C.6b)
0
Формулы C.6) получены из формул для коэффициентов Фурье
путем замены переменной ф = ujt.
Система C.5) при фиксированных амплитуде А и частоте и явля-
является линейной. Переход от исходной системы C.1) к линеаризованной
системе C.5) называется гармонической линеаризацией. Коэффициен-
Коэффициенты q(A) и q'(A) называют коэффициентами гармонической линеари-
линеаризации. Передаточную функцию (см. второе уравнение C.5))
-?-±-)-р C.7а)
называют передаточной функцией НЗ (нелинейного звена) и соот-
соответственно выражение
WH(A)=q(A)+jq'(A), C.76)
которое получается при подстановке в передаточную функцию НЗ
р = juj, называют частотной передаточной функцией НЗ. В соотно-
соотношении C.76) коэффициенты q(A) и q'(A) представляют вещественную
и мнимую части. Поэтому q(A) будем называть вещественным, а
q'{A) — мнимым коэффициентами гармонической линеаризации.
Нелинейное звено после гармонической линеаризации представ-
представляется в виде линейного звена с передаточной функцией C.7а),
3.2. Вычисление коэффициентов гармонической линеаризации 71
и структурная схема гармони-
гармонически линеаризованной системы
принимает вид, представленный
на рис. 3.2.
Гармонически линеаризо- рис< 3.2. Структурная схема гармони-
ванные уравнения C.5) были по- чески линеаризованной системы
лучены при условии, что посто-
постоянное слагаемое в разложении Фурье по = 0 и задающее воздействие
д = 0. При этом, как отмечалось, колебания на входе нелинейно-
нелинейного звена имеют вид е = Asmcut, и они являются симметричными.
Указанные колебания будут симметричными и приведенные выклад-
выкладки справедливыми, если характеристика нелинейного звена будет
симметричной относительно начала координат и установившаяся
ошибка будет равна нулю. Как известно из теории линейных систем,
при постоянном задающем воздействии установившая ошибка будет
равна нулю, если система является астатической, т. е. линейная часть
содержит интегрирующее звено. Иначе говоря, при симметричной
относительно начала координат нелинейной характеристике условие
симметричности колебаний совпадает с условием равенства нулю
установившейся ошибки в системе без нелинейного звена.
3.2. Вычисление коэффициентов гармонической
линеаризации при симметричных колебаниях
Колебания называются симметричными, если на входе нелиней-
нелинейного звена сигнал имеет вид е = A sin и t.
Вычисление коэффициентов гармонической линеаризации основы-
основывается на построении графика выходного сигнала нелинейного звена,
когда на его вход подается гармонический сигнал е = A sin uj t.
3.2.1. Коэффициенты гармонической линеаризации нели-
нелинейных звеньев с однозначной характеристикой. Если харак-
характеристика нелинейного звена является однозначной и симметричной
относительно начала координат, то функция /(е) будет нечетной.
И в этом случае согласно формулам (З.бв) мнимый коэффициент
гармонической линеаризации qf(A) = 0.
Кусочно линейная характеристика с зоной нечувстви-
нечувствительности и насыщением. График выходного сигнала нелиней-
нелинейного звена с такой характеристикой, когда на его вход подается
гармонический сигнал е = A sin uo t, представлен на рис. 3.3.
Как следует из рис 3.3, б, пока входной сигнал НЗ не достигает
величины а или переменная ф — величины ф\ (е = A sin ф\ = а),
выходной сигнал НЗ будет равен нулю. Когда входной сигнал из-
изменяется на интервале [а, Ь] или переменная ф — на интерва-
интервале [/01, V^], где фъ определяется из соотношения A sin фъ — Ъ, на вы-
72
Гл. 3. Метод гармонической линеаризации
а'
с
—b — а
\ /
/-с
ф\
Ф<2
.а
b e
^-
- out
ходе НЗ имеем а = к(Аътф — а). Здесь
k = с/(Ъ — а) — тангенс угла наклона
характеристики НЗ на интервале [а, Ъ].
И наконец, на интервале [-02, тг/2] вы-
а = f(A
гр = uot
фг
г/2
Рис. 3.3. Графики сигналов на входе и на выходе НЗ с кусочно линейной
характеристикой с зоной нечувствительности и насыщением
ходной сигнал НЗ принимает постоянное значение с.
График выходного сигнала на интервале [0, тг] симметричен от-
относительно прямой ф = тг/2. Поэтому выходной сигнал на интерва-
интервале [тг/2, тг — Ф2] равен постоянной величине с, на интервале [тг — -02,
7т — ф\] описывается функцией а = к(A sin ф — а) и на интерва-
интервале [тг — -01, тг] равен нулю.
Таким образом, вещественный коэффициент гармонической ли-
линеаризации определяется следующим образом (см. C.6в)):
тг г гр2
q(A) = -j- = —- f(Asin-0) sinфd\b = —- I ЫАътф — а) 8тфс1ф +
А тгА J тгА J
0 LVi
7Г —1/>2 7Г —t/>l -1
+ / с sin ф Aф + j к (A sin-0 — а) 8тфс1ф .
ф2 1г-ф2
Используя тригонометрическое тождество sin2 ф = A — с
находим
/ sin2 ф Aф = / - A — cos 2ф) Aф = - ф sin 2ф.
J J ^ z 4
Поэтому, проинтегрировав выражение для вещественного коэффи-
коэффициента гармонической линеаризации, получим
q(A) = ^Ыа(^Ф-^ ып2ф^ + a cos ф\ *-
— с cos ф
7Г-ф2
[( \ 1 \ "I 7Г —^1 1
А ( - ф — - sin 2ф ) + a cos -0 >.
V2 4 / J 7Г—Ф2 J
3.2. Вычисление коэффициентов гармонической линеаризации 73
Подставив пределы интегрирования, найдем
{Ф2-ф1)-\ (sin 2^2 - sin 2^i) +
1 4с
+ a(cos ф2 - cos Ф1) Н cos ^2 •
Учитывая, что справедливы соотношения
A sin ipi = а, Л sin 7/^ = fr,
. a
= arcsm —,
тт.
b -. с
= arcsin —, к = ,
А Ь-а
для вещественного коэффициента гармонической линеаризации не-
нелинейного звена с зоной нечувствительности и насыщением, по-
получаем
2с
т(Ь-а)
. Ъ . а ,
arcsm — — arcsin — +
А
А
. C.8)
Эта формула справедлива при А ^ Ъ.
Кусочно линейная характеристика с насыщением. Эта
характеристика (см. рис. 2.2, а) является частным случаем только
что рассмотренной характеристики, когда параметр а = 0. Поэтому
формулу для коэффициента гармонической линеаризации НЗ с та-
такой характеристикой получим, если в соотношение C.8) подставим
а = 0:
2с
arcsm— + -7 \/1 - \-Л ,
А А У \А)
A + ±«/i-fAV
А>Ъ.
Кусочно линейная характеристика с зоной нечувстви-
нечувствительности. Эта характеристика (см. рис. 2.2, в) является частным
случаем кусочно линейной характеристики с зоной нечувствитель-
нечувствительности и насыщением, когда параметр Ь = А (см. рис. 3.3). Поэтому
формулу для коэффициента гармонической линеаризации НЗ с та-
такой характеристикой получим, если в соотношение C.8) подставим
Ъ = А:
q{A) = f
тг а а
arcsm —
-(-У
А>а.
Релейная характеристика с зоной нечувствительности.
В этом случае пока входной сигнал не достигнет значения а
(рис. 3.4, а) или переменная ф — значения ipi (e = Asin^i = a),
на выходе НЗ сигнал равен нулю. Выходной сигнал на интерва-
74
Гл. 3. Метод гармонической линеаризации
ле [-01, тг — -0i] равен постоянному
значению, на интервале [тг — -01, тг] —
нулю. На основании графика выход-
выходного сигнала (рис. 3.4, б) веществен-
а = f(Asmip)
ф = ujt
ф\ тг -
Рис. 3.4. Графики входного и выходного сигналов НЗ с релейной характе-
характеристикой с зоной нечувствительности
ный коэффициент гармонической линеаризации определяется следую-
следующим образом:
мЛ-Ы
= —- /
7ГJ\. J
= а,
Фг
или
Учитывая, что
= л/l — (a/ЛJ, из последнего соотношения получаем
= —-(— cosyj)
= а/А
Характеристика идеального реле. Эта характеристика яв-
является частным случаем предыдущей характеристики при а = 0. По-
Поэтому для получения вещественного коэффициента гармонической
линеаризации в этом случае достаточно в предыдущее соотношение
подставить а = 0. Тогда получим
4с
Все полученные выше формулы для коэффициентов гармонической
линеаризации представлены в табл. 3.1.
3.2.2. Коэффициенты гармонической линеаризации нели-
нелинейных звеньев с неоднозначной характеристикой. В случае,
когда характеристики НЗ являются симметричными, но не однознач-
однозначными, мнимый коэффициент гармонической линеаризации не равен
нулю. Поэтому нужно вычислить оба коэффициента.
3.2. Вычисление коэффициентов гармонической линеаризации 75
Таблица 3.1. Коэффициенты гармонической линеаризации НЗ с одноз-
однозначной характеристикой
№
1
2
3
4
5
Нелинейные харак-
характеристики
а*
с
—Ъ — а
1
с
-Ь
— а
~г
а*
с
— а
а>
с
Г
a b e
— с
w
b е
— с
arctg к
а е
а е
— с
е
— с
Коэффициенты гармонической линеаризации
гл\ 2с \ . Ъ . а
тг(Ь- а) \ А А
Ъ 1 / Ь \ 2 а 1 /а\21 . ,
2с Г b Ъ 1 (Ь \2 1
_ 2к Гтг arcgin а а 1 (аJ}
q{A) = ^A\ll-\A) ' А^п
4с
пА
76
Гл. 3. Метод гармонической линеаризации
Кусочно линейная характеристика с гистерезисом и на-
насыщением (см. рис. 2.2, е). Сама характеристика и графики входного
и выходного сигналов представлены на рис 3.5. Кривую выходно-
выходного сигнала НЗ на интервале [тг, 2тг]
можно получить из той же кривой на
интервале [0, тг] зеркальным отобра-
vcr = /(Аътф)
Рис. 3.5. Графики входного и выходного сигналов НЗ с кусочно линейной
характеристикой с гистеризисом и насыщением
жением относительно оси абсцисс и сдвигом вправо на тг. Точно таким
же свойством обладают кривые функций синуса и косинуса, на кото-
которые умножается выходной сигнал НЗ при вычислении коэффициентов
гармонической линеаризации. Поэтому в данном случае в формулах
(З.ба) и (З.бб) значения интегралов на указанных интервалах будут
совпадать и в них интегралы можно удвоить, заменив верхний предел
интегрирования 2тг на тг, т.е. записать эти формулы следующим
образом:
q(A) = -\
7ГД
C.9а)
2 }
q'(A) = — f (A sin ф) cos ф dip,
C.96)
Выходной сигнал НЗ (рис. 3.5,6) на интервале [0,t/>i] описыва-
описывается функцией а = к(A sinф — а), на интервале [ф\,ф2\ принимает
постоянное значение с и на интервале [ф2, тг] описывается функцией
а = к (А 8тф + а). Поэтому формулы C.9а) и C.96) принимают вид
_ г Фг Ф2
2 \ Г С
q(A) = —т / к(А sin ф — a) sin ф dф + с sin
a)smф
Ф2
C.10а)
3.2. Вычисление коэффициентов гармонической линеаризации 77
п г^1 VI
о \ г г
qf(A) = —- / k(A sin ф — а) cosф йф + / ccosф йф +
тгЛ J J
7 1
/ k(A sin г/; + a) cos ф йф . C.106)
J
+
Проинтегрировав C.10а), получим
q(A) = —- — (ф\ sin 2ф\ j + ka(cos ф\ — 1) — c(cos ф2 — cos ф\) +
+ ^-(тг - -02 + - sin 2-02 ) + fca(l + cos ^2) •
2 V 2 У J
Учитывая соотношения (см. рис. 3.5, а)
с = &(&! — а), Ь2 = bi — 2а, ^sin^i = Ь]_, A sin ^2 = &2,
фх = arcsin -J-, ф2 = тг — arcsin -j-;
тт. тт.
последнее выражение можно преобразовать к виду
А^Ьь C.11а)
Проинтегрировав C.106), получим
q'(A) = —- \к ( - A sin2 ф\ — a sin ф\ ) + c(sin ф2 — sin ^1) —
— fc f -Л sin2 ф2 + a sin ф2 ) .
Подставив сюда с = fc(bi - a), sin^i = bi/A и sinф2 = Ьг/А, получим
fc(^b'), A^h. C.116)
Люфт. Эта характеристика (см. рис. 2.2, г) является частным
случаем предыдущей характеристики при выполнении неравенст-
неравенства А ^ Ъ\. Поэтому, положив Ъ\ = А и Ь2 — А — 2а, из C.11а)
и C.116) получим
Релейная характеристика с гистерезисом. Характерис-
Характеристика, а также входные и выходные сигналы НЗ представлены на
рис. 3.6. Как и при вычислении гармонических коэффициентов ли-
линеаризации НЗ с неоднозначными кусочно линейными характеристи-
78
Гл. 3. Метод гармонической линеаризации
-b
a >
"
¦
7Г -
Ф
b e
\~Ф1
= Out
ками, в данном случае можно поль-
пользоваться формулами C.9а) и C.96).
Как следует из рис. 3.6, б, выходной
сигнал НЗ на интервале [0,t/>i] равен
ф\ 7Г
ф =
Рис. 3.6. Графики входного и выходного сигналов НЗ с релейной характе-
характеристикой с гистеризисом
постоянной величине —с, а на интервале [т/>1,7г] — постоянной вели-
величине с. Поэтому из C.9а) и C.96) получаем
/ р1 \
2 Г 2 ( Г Г \
q(A) = —- / f(A sin ф) sin ф Aф = —- I — / с sin ф Aф + с sin ф Aф I =
it A. J тгА \ J J I
/ Ф1
2 Г 2 / Г Г \
q'(A) = —- П(Аш1ф) соъфйф = —- — / с cosфйф + / ссоъфйф =
тгЛ У тгЛ V У У у
о о
2с
4с
Из рис. 3.6, а имеем Аътф1=Ь, или sin^i = b/A и
= у 1 — (b/AJ. Подставив эти выражения для тригонометрических
функций в полученные выше соотношения для коэффициентов гармо-
гармонической линеаризации, найдем
Ь
Релейная характеристика с зоной нечувствительности
и гистерезисом. И в этом случае для вычисления коэффициентов
гармонической линеаризации можно пользоваться формулами C.9а)
и C.96).
3.2. Вычисление коэффициентов гармонической линеаризации 79
a *
— b — a
ф -
a
= UJ
b e
)
t
Сигнал на выходе НЗ на интер-
интервалах [0,-01] и [г/>2??г] равен нулю,
а на интервале [/01, ^2 ] принимает
а = f(Asmф)
ф = (tit
Ф\
а б
Рис. 3.7. Графики входного и выходного сигналов НЗ с зоной нечувст-
нечувствительности и гистерезисом
постоянное значение с (рис. 3.7, б). Поэтому из формул C.9а) и C.96)
имеем
2С 2 Г
q(A) = —- / f(A sin ф) sin ф йф — —- / с sin ^ йф —
тгЛ J тгЛ J
Фг
2с
2 } 2 *?
q'(A) = —- / f(Asmip) соъфйф = —т I с соъфйф =
0 Ф1 2с
= —т (sin ф2 - sin^i).
Из рис. 3.7, а следует Аътф1=Ь и Л8т^2=а, или sin^i =
= b/A, sinф2 = а/Л и cos^i = д/l ~ (^МJ^ cos-02 = -^1 — (а/АJ.
Подставив эти выражения для тригонометрических функций в
полученные выше соотношения для коэффициентов гармонической
линеаризации, найдем
2с
1- -г-
Полученные формулы для коэффициентов гармонической линеа-
линеаризации НЗ с неоднозначной характеристикой сведены в табл. 3.2.
80
Гл. 3. Метод гармонической линеаризации
Таблица 3.2. Коэффициенты гармонической линеаризации НЗ с неод-
неоднозначной характеристикой
№
1
2
3
4
Нелинейные характе-
характеристики
а
с
/
-л
г
а >
— а/
b
fb2 bi e
- с
М—у\ arctg к
/ 1 ,
Уа е
— с
-ъ -
с
b
е
а /
с
а
Mr
>
a b e
— с
Коэффициенты гармонической линеаризации
/ лч А; Г . 6i . 62
д(Л) = — arcsm — + arcsin — +
+ Ui A) +lr A) \>
*A>
к 7Г / 2B \
~\ ^ 1 -I- — 1 4 / — 1 -I- — — 1
3.3. Исследование симметричных автоколебаний 81
3.3. Исследование симметричных автоколебаний
При использовании метода гармонической линеаризации, естест-
естественно, принимается, что гипотеза фильтра выполняется. Тогда, как
было показано, если в системе возникает периодический процесс,
то на выходе линейной части и на входе нелинейного звена он яв-
является гармоническим: е = Asmuit. Поэтому периодический режим
однозначно определяется частотой и и амплитудой Л, и исследование
периодического процесса сводится к определению этих параметров.
Основное условие возникновения периодического про-
процесса. В линейной системе (см. рис. 3.2) могут возникнуть гармони-
гармонические колебания, если ее характеристическое уравнение имеет чисто
мнимые корни, или, что то же, если амплитудно-фазовая характерис-
характеристика разомкнутой системы проходит через точку (—l,jO), т.е. если
выполняется равенство
WH(A)Wn(ju>) = -1. C.12)
Это соотношение является уравнением относительно неизвестных па-
параметров, частоты ио и амплитуды А и определяет основное условие
возникновения периодических процессов в рассматриваемой системе.
Автоколебания в системе возможны, если это уравнение имеет дейст-
действительные положительные корни.
3.3.1. Аналитический способ исследования автоколебаний.
Подставив выражения для передаточных функций и освободившись
от дроби, основное условие C.12) можно представить в виде
или
Х(А,и) =0, Y(A,u) =0. C.13)
Если последняя система уравнений имеет решение Л*, о;* (Л* >
> 0, си* > 0), то это значит, что гармонически линеаризованное урав-
уравнение имеет решение е = A* sin uj*t, которое описывает периодичес-
периодический процесс. Этот процесс реально можно наблюдать, если указан-
указанное решение орбитально устойчиво или асимптотически орбитально
устойчиво. Решение е = A* smuj*t описывает автоколебания, если оно
асимптотически орбитально устойчиво. Таким образом, исследование
автоколебаний сводится к решению уравнений C.13) и определению
асимптотической орбитальной устойчивости.
В случае НЗ с однозначной характеристикой его передаточная
функция имеет вид WH(A) = q(A), а передаточная функция разомк-
разомкнутой системы — вид W(A,p) = Wn(p)q(A).
Пусть передаточная функция линейной части имеет вид Wn(p) =
= Q(p)/R(p). Тогда основное условие возникновения периодического
6 Д.П. Ким
82 Гл. 3. Метод гармонической линеаризации
процесса примет вид
q(A)Q(jcv) + R(jcv) = 0,
q(A)XQ(u})+XR(u}) = 0,
q(A)YQ(w)+YR(aj) = 0,
где Xq(lj), Xr(lu) — вещественные части, Yq(lu), Yr(lj) — мнимые
части Q(juj) и R(juj) соответственно. Разрешив первое уравнение
последней системы уравнений относительно q(A) и подставив его во
второе уравнение, получим
-XR(w)YQ(w) + XQ(w)YR(w) = 0.
Частота определяется из второго уравнения и не зависит от характе-
характеристики НЗ. Таким образом, в случае нелинейного звена с однозначной
характеристикой частота периодических процессов зависит только от
свойства линейной части.
Рассмотрим вопрос асимптотически орбитальной устойчивости
периодического процесса. Пусть в результате возмущения амплитуда
колебаний е = A* sina;*? изменится и примет значение А = А* + АЛ.
Колебания будут асимптотически орбитально устойчивы, если со
временем амплитуда примет первоначальное значение, т.е. АЛ —у 0
при t —У оо.
Начнем исследование этого вопроса со случая, когда характе-
характеристика НЗ является однозначной, и воспользуемся эвристическим
приемом. Для того чтобы после возмущения амплитуда стремилась
к первоначальному значению, колебания должны затухать при увели-
увеличении амплитуды (АЛ > 0) и расходиться при ее уменьшении (АЛ <
< 0). А это возможно, если при изменении амплитуды коэффи-
коэффициент гармонической линеаризации q(A) изменяется таким образом,
что линеаризованная система устойчива при увеличении амплитуды
и неустойчива при ее уменьшении.
Пусть разомкнутая система (линейная часть) устойчива или мар-
маргинально устойчива, т. е. ее характеристическое уравнение кроме
левых корней имеет корни на мнимой оси. Тогда замкнутая систе-
система будет устойчива при увеличении амплитуды, если в соответст-
соответствии с критерием Найквиста годограф частотной передаточной функ-
функции разомкнутой системы W(ju) = q(A)Wn(joj) не охватывает
точку (—1, jO); замкнутая система будет неустойчивой при уменьше-
уменьшении амплитуды, если указанный годограф охватывает точку (—1, jO).
3.3. Исследование симметричных автоколебаний
83
А эти условия будут выполнены, если коэффициент гармонической
линеаризации q(A) будет убывающей функцией в окрестности точ-
точки А = А*, т.е. если выполняется неравенство
dq{A) < 0_
А=А*
dA
C.14)
В случае, когда НЗ имеет неоднозначную характеристику, для
получения условия асимптотической орбитальной устойчивости вос-
воспользуемся критерием устойчивости Михайлова. Основное условие
возникновения периодического процесса соответствует прохождению
кривой Михайлова через начало координат. В условии C.13) левые
части Х(А,и) и Y(A,u) представляют собой вещественные и мни-
мнимые части характеристического векто-
вектора. Поэтому уравнение кривой Михайло- Y'
ва гармонически линеаризованной систе-
системы можно записать в виде
= Х(А,и)
= Y(A,u).
Рис. 3.8. Кривая Михайло-
Михайлова гармонически линеари-
линеаризованной нелинейной сис-
системы
Пусть о;*, Л* — соответственно часто-
частота и амплитуда периодического процесса.
Если по приведенным уравнениям при А =
= Л* построить кривую Михайлова, то она
при uj = о;* пройдет через начало коор-
координат (рис. 3.8). И чтобы периодический
процесс был асимптотически орбитально
устойчив, нужно, чтобы при увеличении
амплитуды кривая Михайлова деформи-
деформировалась так, чтобы выполнялся критерий Михайлова, т.е. чтобы
она охватывала п квадрантов. А это произойдет, если при увеличе-
увеличении амплитуды кривая Михайлова в окрестности начала координат
сместится вправо относительно направления касательной. Вектор
касательной в начале координат имеет вид
^ (дХУ. , (дУУ.
где
\дш)
Уди/
ди;
и 1, j — орты координатных осей, т.е. единичные векторы, направ-
направления которых совпадают с положительными направлениями осей
абсцисс и ординат соответственно.
Направление деформации кривой Михайлова при возрастании ам-
амплитуды определяется вектором
84
Гл. 3. Метод гармонической линеаризации
Звездочка при частных производных, как и выше, означает, что
производные вычисляются в начале координат. Чтобы при возрас-
возрастании амплитуды линеаризованная система стала устойчивой, век-
вектор N должен быть направлен по отношению к вектору К вправо
(см. рис. 3.8). А это будет иметь место, если векторы N, К и их
векторное произведение Z = N х К образуют правую тройку (т.е.
если смотреть с конца вектора Z, то кратчайший поворот вектора N
до совмещения с вектором К происходит против часовой стрелки).
Вектор Z как векторное произведение векторов N и К можно
определить следующим образом:
Z =
,аху
гдху
Уди;)
j
(8YV
\дА)
(ELY
Уди;)
,дху
,дху
гогу
\дА)
дгу
dujJ
к =
~ 1\дА) \дш) \дш) \дА) \
Здесь к — орт вертикальной оси координат, причем орты i, j и к
образуют правую тройку.
Тройка векторов N, К и Z будет образовывать правую тройку,
если вектор Z будет направлен параллельно вектору к. Поэтому
чтобы линеаризованная система при увеличении амплитуды была
устойчива, множитель при орте к должен быть больше нуля. Таким
образом, условие асимптотической орбитальной устойчивости при
неоднозначной характеристике нелинейного звена принимает вид
ТГТ ^Ч -^ ТГ7 >0.
ЗА) \dujJ \dujJ \дА)
Пример 3.1. В типовой структурной схеме нелинейной системы
нелинейное звено имеет релейную характеристику с зоной нечувстви-
нечувствительности с параметрами а = 0,45 и с = тг, передаточная функция
линейной части имеет вид Wn = 4,1/@,5р + 1Jр и задающее воз-
воздействие # = const. Требуется исследовать автоколебания.
Решение. Передаточная функция нелинейного звена имеет вид
(см. табл. 3.1, № 4)
4с
Условие возникновения периодического процесса C.13) можно запи-
записать в виде
-Lv'jT: / -j I V7,t:U \ ^
3.3. Исследование симметричных автоколебаний 85
или
1« л I /п /|р;\ 2
= 0, -0,25 а;3 + ш = 0.
Второе уравнение имеет положительное решение и = 2. Подставив это
значение частоты, первое уравнение можно преобразовать в биквад-
биквадратное уравнение
Л4-4,12Л2+4,12-0,452 = 0.
Это уравнение имеет следующие два положительных решения: А\ =
= 4,08 и А = 0,454. Проверим условие устойчивости C.14). Произ-
В°ДНаЯ dq(A)_ = 4 @,405 -А2)
dA А3 V'А2 - 0,452
при Ai = 4,08 принимает отрицательное значение, а при А = 0,454 —
положительное значение. Следовательно, колебания с первой ампли-
амплитудой являются асимптотически орбитально устойчивыми, а со вто-
второй амплитудой таковыми не являются. Таким образом, в рассматри-
рассматриваемой системе будут совершаться автоколебания с частотой ш = 2
и амплитудой А\ = 4,08.
3.3.2. Графический (частотный) метод исследования авто-
автоколебаний. Уравнение C.12), определяющее условие возникновения
периодического процесса, можно решить графически. Для этого пред-
представим его следующим образом:
Строим амплитудно-фазовую характеристику линейной части,
т.е. годограф функции Wn(ju), и обратную амплитудно-фазовую ха-
характеристику нелинейного звена с обратным знаком, т.е. годограф
функции —1/WH(A). При построении годографа Wn{juo) изменяется
частота, при построении годографа —1/WH(A) изменяется амплитуда.
Если рассматриваемое уравнение имеет решение, то указанные
характеристики пересекаются (рис. 3.9). В точке пересечения по годо-
годографу Wn(ju) находим частоту, а по годографу —1/WH(A) — ампли-
амплитуду периодического процесса.
Устойчивость периодического процесса устанавливается следую-
следующим образом. Как уже отмечалось, если линейная часть устойчива
или маргинально устойчива, периодический процесс будет асимп-
асимптотически орбитально устойчив, если при увеличении амплитуды
амплитудно-фазовая характеристика гармонически линеаризованной
системы не охватывает точку (—1, j0). В случае нелинейного звена с
однозначной характеристикой это условие будет выполнено, если пе-
передаточная функция нелинейного звена WH (А) или обратная с отрица-
отрицательным знаком функция —1/WH(A) является убывающей функцией.
86
Гл. 3. Метод гармонической линеаризации
/
~W{A)
Г
L
АА
^—
J
\J / v
Рис. 3.9. К графическому методу исследования автоколебаний
Это значит, что в окрестности точки пересечения двух характерис-
характеристик амплитуда должна возрастать в направлении, указанном стрел-
стрелкой, или точка на годографе —1/WH(A), соответствующая амплиту-
амплитуде Л* + АЛ (АЛ > 0), должна находиться слева от годографа Wn(jui)
при движении по нему в сторону возрастания частоты (рис. 3.9, а).
Данное утверждение остается справедливым и в том случае, когда
нелинейное звено имеет неоднозначную характеристику (рис.3.9, б).
Итак, если линейная часть устойчива или маргинально устойчи-
устойчива, то периодический процесс будет асимптотически орбитально
устойчив, когда точка на годографе -1/WH(A), соответствующая
амплитуде А* + АА (АА > 0), находится слева от амплитудно-
фазовой частотной характеристики при движении по ней в сторону
возрастания частоты.
Рассмотренный графический (частотный) метод был предложен
Л. С. Гольдфарбом и называется методом Голъдфарба [47].
Уравнение, определяющее условие возникновения периодического
процесса, можно также представить в виде
W-\juj) = -WB(A),
и при графическом его решении можно строить обратную ампли-
амплитудно-фазовую частотную характеристику линейной части и с обрат-
обратным знаком амплитудно-фазовую характеристику нелинейного звена.
По точке пересечения этих характеристик можно определить частоту
и амплитуду периодического процесса.
Асимптотическая орбитальная устойчивость определяется точно
так же, как и при методе Гольдфарба: если линейная часть устойчива
или маргинально устойчива, то периодический процесс будет асимп-
асимптотически орбиталъно устойчив, когда точка на годографе —W(A),
соответствующая амплитуде А* + АЛ (АЛ > 0), находится слева
от обратной амплитудно-фазовой частотной характеристики при
движении по ней в сторону возрастания частоты.
3.4- Несимметричные колебания 87
3.4. Несимметричные колебания
Колебания на входе нелинейного звена (НЗ) будут несимметрич-
несимметричными, если установившаяся ошибка отлична от нуля или характерис-
характеристика НЗ является несимметричной относительно начала координат.
Здесь мы ограничимся случаем, когда характеристики НЗ являются
симметричными относительно начала координат и несимметричность
колебаний обуславливается только наличием ненулевой установив-
установившейся ошибки. При этом принимается, что установившаяся ошибка
является постоянной.
В этом случае на входе НЗ (см. рис. 3.1) имеем е = е° + A sin uj t.
Отсюда находим
sincut = — (е — е°),
cos cut = — р sin cut = —- р(е — е°).
На выходе НЗ после гармонической линеаризации имеем
~ 1
а — - а0 + cli cos cut + Ъ\ sina;?.
Положив сг° = ао/2 и подставив сюда выражения для синуса и коси-
косинуса, получим
\q(A, е°) + q'(A, e°) Ц (е - е°),
L U) А
где
q = q(A,e°) = ^, q' = q'(A, e°) = ^.
Сделав замену переменных ф = cut в формулах для коэффициен-
коэффициентов Фурье и подставив их в последние выражения, найдем
2тг
<т° = у = ± //(е° + A sin V) Aф, C.15а)
О
2тг
= ^ = -L //(e° + ^sin^)sin^ #, C.156)
о
2?г
= ^ = -L [f(e° + А$тф) cos^d^. C.15в)
3.4.1. Вычисление коэффициентов гармонической линеа-
линеаризации. В этом случае коэффициенты гармонической линеаризации
вычисляются так же, как и при симметричных колебаниях.
Гл. 3. Метод гармонической линеаризации
Кусочно линейная характеристика с насыщением. Вы-
Выходной сигнал НЗ на интервалах [0,t/>i], [/02,^з] и [^4?2тг] опи-
описывается функцией k(e° + Л sin г/;), а
на интервалах [/01, ^2 ] и [Фз^Ф^] при-
принимает постоянные значения си —с
соответственно (рис. 3.10). Поэтому
ф = oot
Рис. 3.10. Несимметричные колебания на входе и выходе НЗ с кусочно
линейной характеристикой с насыщением
формулы C.15) для коэффициентов гармонической линеаризации при-
принимают вид
Фг
а° = ±- Гк(е° + Л sin ф) йф + ГсAф+ Гк(е° + A sin ф) йф -
о фг ф2
гр4 2тг
- (сAф+ Гк(е°
Фз Фа
Ф\ Фч
q = — к(е° + A sin ф) sin ф dip + с sin ф dф +
о Vi
^з Фа 2?г
+ / /i;(e0 + A sin г/;) sin ф dф — с sin ф а^ф -\- к(е° + Л sin г/;) sin
Ф1 Фз Фа
Ф\ Ф1 Фз
q' = —г I k(e° + A sin ф) cos фа^ф -\- с cos фа^ф -\- к(е° +
^4 2тт
+ Л sin г/;) cos ф dф — с cos г/; dф + / ^(е° + Л sin г/;) cos г/; с?^.
Фз Фа
Из рис. 3.10, а имеем
е° + Л sin фх—Ь, е° + Л sin г/;2 = ^,
е° + Л sin г/;3 = -Ь, е° + Л sin ^4 = -Ь.
3.4- Несимметричные колебания
89
Отсюда получаем
. Ъ-е°
= arcsin —-—,
/л.
J — тг - arcsin
Ъ-е°
-—,
/л.
= тг + arcsin
, щ = 2тг — arcsm
Проинтегрировав полученные выше выражения для коэффици-
коэффициентов гармонической линеаризации, с учетом последних выражений
получим
= _ arcsm
тг
+
+ (b + e°) arcsin —-^ F - e°) arcsin —-^- >,
¦ arcsin — h
Ъ-е*
e°\2
Релейная характеристика с зоной нечувствительнос-
нечувствительности и гистерезисом. На рис. 3.11 представлены кривые входно-
входного и выходного сигналов НЗ. Из
рис. 3.11, б следует, что выходной
сигнал НЗ на интервалах [0,^i],
[/02,^з] и |/04,27г] равен нулю, а на
интервалах [V'bV^] и [фз^Ф*] при-
и
ф =
а б
Рис. 3.11. Несимметричные колебания на входе и выходе НЗ с релейной
характеристикой с зоной нечувствительности и гистерезисом
90 Гл. 3. Метод гармонической линеаризации
нимает постоянные значения с и —с соответственно. Поэтому форму-
формулы для коэффициентов гармонической линеаризации принимают вид
Фа
/
Фг Фз
Ф1 Фа
а 2 WA \
с sin ф йф — с sin ф йф ).
J I
грг ф3 7
/ Ф2 Фа \
q' = —- I / с cos ф dijj — с cos ф йф 1.
тг^4 \ J J I
Фг Фз
Для пределов интегрирования (см. рис. 3.11, а) имеем
. Ъ-е° , . а-е°
ф\ — arcsm —-—, ф2 = ж — arcsm
= тг + arcsin —-—, -04 = 2тг — arcsin ¦
Проинтегрировав полученные выше выражения для коэффициентов
гармонической линеаризации, с учетом последних выражений по-
получим
/ iO т . О 0 l 0 \
о с ( . а + е . о + е . а — е . о —е \
о = — arcsm — \- arcsm — arcsin — arcsin —-— ,
2тг V А А А А У'
C.16а)
\. C.16b)
Релейная характеристика с гистерезисом. Эту характе-
характеристику (см. рис. 2.1, в) можно рассматривать как релейную харак-
характеристику с зоной нечувствительности и гистерезисом при а = —Ъ.
Поэтому, сделав подстановку а = — Ъ в формулы C.16), получим
о с/ .6 + е° .6-е°\
сг = — arcsm — arcsin —-— ,
тг V А А )
Релейная характеристика с зоной нечувствитель-
нечувствительности. Эта характеристика (см. рис. 2.1, б) является частным слу-
случаем релейной характеристики с зоной нечувствительности и гис-
3.4- Несимметричные колебания
91
терезисом при Ъ = а. Поэтому, сделав подстановку Ъ = а в форму-
формулы C.16а)—C.1бв), получим
о с ( . а + е° . а- е°\
о = — arcsm — arcsm —-— ,
тг V А А )
2с
Q =
71 1\ у
д' = 0, Л^ |е°|.
Идеальная релейная характеристика. Эта характеристика
(см. рис. 2.1, а) является частным случае релейной характеристики
с зоной нечувствительности при а = 0. Поэтому, сделав подстановку
а = 0 в предыдущие формулы, получим
2с
-
-,
°\2
)
,' = 0,
Люфт. Характеристика и кривые входных и выходных сигна-
сигналов НЗ представлены на рис. 3.12. Из рис. 3.12, ?Г следует, что выход-
выходной сигнал НЗ на интервалах [0, тг/2]
и [-02 j 2тг] описывается функцией
к(е° + А8'тф — а), на интервале [ipi,
Зтг/2] — функцией к(е° + Лsin^ + a),
на интервалах [тг/2, ^i] и [Зтг/2, fa]
принимает постоянные значения
к(е°
k(eQ—i
тг/2 фг
ф = ujt
Рис. 3.12. Несимметричные колебания на входе и выходе НЗ с люфтом
к(е° + А — а) и к(е° — А + а) соответственно. Поэтому форму-
формулы C.15) для коэффициентов гармонической линеаризации принима-
принимают вид
2тт
тг/2
/ (е° + Л sin^ - а) ^ + j (е° + А - а) Aф
- О тг/2
+
92
Гл. 3. Метод гармонической линеаризации
Зтг/2
Зтг/2
тг/2
L о
Зтт
Г (е° + Asinil> + a)dil>+ Г (е° - Л + а
2тг
/"(е0 + ^sin^ - а)
Ф2
(е° + A sin г/; - а) sin ф dijj + (е° + А - a) sin ф dijj +
О тг/2
тг/2 ^2
+ (е° + Asinip + a) sinфdijj + (е° - А + a) sinфdijj +
/2
2тг
(е° + A sin ф — a) sin
^2
(е° + A sin ф — a) cos фdф + (е° + А — a) cos ф dф +
О тг/2
/2 ^2
Г (е° + A sin ^ + а) cos ^ б?^ + / (е° - ^ + а) cos ф dф +
2
2тг
(е° + A sin ф - a) cos
Зтг/2
2тг
А
^А
Гтг/2
L о
Зтг/2
Зтг/2
Справедливы следующие равенства (см. рис. 3.12, а):
е° + А — 2а = е° + A sin ф\, е° - Л + 2а = е° + Л sin ф2.
Отсюда получаем
. , л 2а . . Л 2а\
sin -01 = 1 ——, -01 = тг - arcsm A —— 1,
cos-01 =
smu>o =
H-f)'
= 2тг - arcsin
in I 1 —— ),
Проинтегрировав полученные выше выражения для коэффициентов
гармонической линеаризации, с учетом этих выражений получим
а° = ке°,
,(Л) = ^
_ 2?Wi - ^1 -^
3.4- Несимметричные колебания
93
Таблица 3.3. Коэффициенты гармонической линеаризации для НЗ с
однозначной характеристикой при несимметричных колебаниях
Нелинейные характе-
характеристики
Коэффициенты гармонической линеаризации
-\ /1-
с
-Ь
+ (b + е°) arcsin —
— (b — e°) arcsin ¦
. Ь + е° . Ь-е°
— arcsin
тг А
\- arcsin
h
b-e°
A
1-
о с/ ,а + е° ,а-е°\
сг = — arcsm arcsin — ,
тг V А А )
Q =
а
— с
q =0, А^ |е°
o 2c . e°
cr = — arcsin —-,
7Г Л
q=0,
94
Гл. 3. Метод гармонической линеаризации
Таблица 3.4. Коэффициенты гармонической линеаризации для НЗ с
неоднозначной характеристикой при несимметричных колебаниях
№
Нелинейные харак-
характеристики
Коэффициенты гармонической линеаризации
о с /
2тг V
. +
arcsm
2тг V А
\- arcsm
— b — а
. а-е° . Ь-е°
— arcsm — arcsm —-—
1,
a b e
— с
-b
—>
с
— с
>
«
b e
о с/ .
— — arcs
arcsm
А
arcsm
^IV1 ( А )
+
-а/у
0 7 0
а = ке ,
Полученные выше коэффициенты гармонической линеаризации
при несимметричных колебаниях для нелинейных звеньев с одно-
однозначной характеристикой сведены в табл. 3.3, а с неоднозначной
характеристикой — в табл. 3.4.
3.4- Несимметричные колебания 95
3.4.2. Исследование несимметричных колебаний. Рассмот-
Рассмотрим систему с двумя внешними воздействиями (рис. 3.13). Уравнения
этой системы имеют вид
у = W1(p)W2(p)(T + W2(p)h, о- = /(е), е = д-у.
Введем обозначения
W, (р) = fli (p) /Q, (р), W2 (p) = R2 (p) /Q2 (p),
Д(р) = R1(p)R2(P), Q{p) = Qi(p)Q2(p), S(P) = R2{p)Qi{P).
Тогда, исключив переменные у и о, уравнения системы можно запи-
записать следующим образом:
Q(p)e + Д(р)/(е) = Q(p)g - S(p)h.
Пусть внешние воздействия являются константами. Тогда рд = О,
ph = 0 , и правая часть принимает вид Q(O)g — 5@)h. Поэтому в этом
случае уравнение можно записать в виде
Q(p)e + R(p)f(e) = Q@)g-S@)h.
Правая часть этого уравнения является константой. И если она от-
отлична от нуля, то в системе с нелинейным звеном с симметричной
[h
9
/(в)
w2
Рис. 3.13. Структурная схема нелинейной системы с двумя входами
относительно начала координат характеристикой могут возникнут
несимметричные колебания
е = е° + е*, е* = A smut.
Произведя гармоническую линеаризацию, на выходе нелинейного зве-
звена получим
Де° + Asinujt) =a°+ \q(A,e°) + q'(A,e°) Це*.
L UJ J
С учетом этого и предыдущего соотношений уравнение системы мож-
можно представить в виде
[Q(p) + R(p)(q(A,e°) + q'(A,e°) ?)]е* + Q(p)e° + R(p)a° =
= Q(O)g - S@)h.
Выделив отсюда уравнения для постоянных и переменных состав-
составляющих, получим
<9@)е° + R@)a° = Q(O)g - S@)h, C.17a)
[Q(p)+R(p)(q(A,e°) + q'(A,e°) ?
= 0.
96 Гл. 3. Метод гармонической линеаризации
Подставим в последнее уравнение
е* = As'mujt = ^ (ejujt - e~jujt).
Тогда, так как pe^ut = juje^ut и pe~iut = — jujeiut, получим
R(ju)(q(A,e°)+jq'(A,e0))] e^ -
{[Q(J) + R(j)((Ae°)+jq'(Ae0)
Это тождество будет выполнено, если множители при экспонентах
будут равны нулю:
Q(jw) + R(ju)(q(A, e°) + jq'(A, e0)) = 0, C.176)
Q(-jco) + R(-ju,)(q(A,e°) - jq'(A,e0)) = 0.
У этих уравнений различаются только мнимые части, причем только
знаком. Поэтому они эквивалентны, и можно ограничится рассмотре-
рассмотрением одного уравнения C.176).
В случае несимметричных колебаний неизвестными являются три
параметра: постоянная составляющая (смещение) е°, частота и и
амплитуда А. Смещение е° находится из уравнения C.17а). Поста-
Поставив найденное значение смещения, из уравнения C.176) определим
частоту и амплитуду. После подстановки выражения для смещения
уравнение C.176) решается так же, как и в случае определения сим-
симметричных колебаний.
Пример 3.2. В нелинейной системе (см. рис. 3.13) нелинейное зве-
звено имеет идеальную релейную характеристику с параметром с = тг,
передаточные функции линейных звеньев равны W\ = 1/@,5р+1)
и И^2 = 1/@,5р+ 1)р, внешние воздействия равны g = l(t) и h =
= 0,5 • l(t). Требуется исследовать автоколебания.
Решение. В данном случае
R^p) = R2(p) = 1, Qi(p) = 0,5p + l, Q2(p) = @,5p+l)p,
Qip) = Qi(p)Q2(p) = @,5p + lJp, S(p) = R2(p)Qi(p) = 0,5p+ 1.
Коэффициенты гармонической линеаризации для идеальной релей-
релейной характеристики при несимметричных колебаниях имеют вид
(см. табл. 3.3, № 3)
о 2с . е° 4с Г /е°\2
-, ,= _^1(_), ,=0,
Так как Q@) = 0, Д@) = 1 и 5@) = 1, уравнение C.17а) прини-
принимает вид
е° е°
arcsin — = -0,25, или — = - sin 0,25 = -0,25.
Уравнение C.176), после подстановки в него выражений для
коэффициентов гармонической линеаризации и выражений Q(juj) =
3.5. Вынужденные колебания и вибрационная линеаризация 97
= -0,25ja;3 - со2 + juj, R(Juj) = 1 и е° = -0,25Л, принимает вид
-0,25 jw3 - ш2 + jw + j y/1 - @,25J = 0,
ИЛИ
-0,25w3 + w = 0, -w2 + - y/\ - @,25J = 0.
Отсюда находим uj = 2 и Л = 0,97. Смещение равно е° = -0,25 А =
= —0,24. Проверим асимптотическую орбитальную устойчивость.
После исключения е° для q(A) имеем q = 4 ^/1 — @,25J/А Так
как д'7 = 0, то можно воспользоваться условием устойчивости C.14).
Это условие в данном случае выполняется:
dq(A)
dA
_ 4л/1-0,252
т~ А~2
Следовательно, в рассматриваемой системе возникнут несиммет-
несимметричные автоколебания с частотой со = 2 и амплитудой Л = 0,97.
Автоколебания смещены на е° = —0,24.
3.5. Вынужденные колебания и вибрационная
линеаризация
Рассмотрим опять нелинейную систему, структурная схема кото-
которой может быть представлена в виде соединения нелинейного зве-
звена и двух линейных звеньев с двумя внешними воздействиями (см.
рис. 3.13). Как было показано, уравнение такой системы можно при-
привести к виду
Q(p)e + R(p)f(e) = Q(p)g - S(p)h. C.18)
Здесь g = g(t) — задающее воздействие, h = h(i) — возмущение.
Пусть возмущение имеет вид h = В sin и*t и задающее воздействие
по сравнению с возмущением изменяется медленно: g = g(t) за период
Т = 2тг/о;* почти не меняется. И пусть в системе возникает вынужден-
вынужденные колебания с частотой, равной частоте внешнего колебания. Тогда
сигнал на входе нелинейного звена будет иметь вид
е = е° + е*, е* = A sin(o;*? + </?),
где А и ip — амплитуда и сдвиг фазы, которые необходимо найти.
Нелинейная функция после гармонической линеаризации примет вид
*t) = а0 + \q(A, e°) + q'(A, e°) —1е*.
Здесь a0, q(A,e°) и q'(A,e°) — коэффициенты гармонической ли-
линеаризации, которые определяются так же, как и при рассмотрении
несимметричных автоколебаний, т.е. по формулам C.15). Для типо-
типовых нелинейных характеристик они были получены в предыдущем
параграфе.
7 Д.П. Ким
98 Гл. 3. Метод гармонической линеаризации
Подставив выражения для е и /(е) из последних двух соотношений
в C.18), получим
[Q(p)+R(p)(q(A,eo)+q'(A,e°)^)]e* +
+ Q(p)e° + R(p)a° = Q(p)g - S(p)h.
Выделив отсюда уравнения для медленно меняющих и быстро ме-
меняющих составляющих, получим
Q(p)e° + R(p)a° = Q(p)g, C.19a)
\Q(p) + R(p)(q(A,eo)+q'(A,e°)^)}e* = -S(p)h. C.196)
Учитывая, что
е* = Asm(w*t + <р) = ^ (е
последнее уравнение можно преобразовать к виду
^ R(ju>*)(q(A,e°) +jq'(A,e0))] e
,e°) - jq'(A,e0))]
Это тождество будет выполнено, если множители при экспонен-
экспонентах eja; l и e~ja; l в левой и правой частях будут равны между собой:
A[Q(jw*) + R(jw*)(q(A,е°) + jq'(A,е0))] J* = -BS(jw*), C.19в)
A[Q{-jw*) +R(-ju*)(q(A,e°) -jq'(A,e0))} e~^ = -BS(-jw*).
Эти два уравнения эквивалентны. Поэтому при исследовании процес-
процесса управления, сопровождающего колебаниями, достаточно рассмот-
рассмотреть уравнения C.19в) совместно с уравнением C.19а), описывающим
медленные процессы (процессы управления).
3.5.1. Вынужденные колебания. Пусть задающее воздействие
равно нулю. Тогда медленно изменяющая составляющая будет равна
нулю, а колебания будут симметричными. И в этом случае для опреде-
определения амплитуды и сдвига фазы вынужденных колебаний достаточно
рассмотреть только уравнение C.19в), которое при графическом ме-
методе решения удобно представить в виде [53]
Z(A) =Be~j(f, C.20a)
z(A) = _m^) + RU^n)]_ C.20б)
Здесь коэффициенты гармонической линеаризации определяются по
формулам, которые были получены при рассмотрении симметричных
3.5. Вынужденные колебания и вибрационная линеаризация 99
автоколебаний. Заметим, что Z(A) является функцией только неиз-
неизвестной амплитуды, так как частота известна.
При графическом методе определения амплитуды и сдвига фазы
на комплексной плоскости строится окружность радиуса В и годограф
JV\
jV\
Z{A)
а б в
Рис. 3.14. К определению одночастотных вынужденных колебаний
вектора (комплексной функции) Z(A) (рис. 3.14, а). В точке пресече-
пресечения с окружностью по годографу находится амплитуда. Сдвиг фазы </?
равен углу, который образует с осью абсцисс вектор, проведенный из
начала координат в точку пересечения.
Годограф Z(A) пересекает окружность, если радиус окружнос-
окружности В превышает некоторое пороговое значение Вп (рис. 3.14, б). Если
радиус окружности меньше порогового значения, то в системе бу-
будут происходить не одночастотные колебания, а сложные движения,
включающие в себя и собственные колебания системы [53].
Построив годографы Z(A) при различных значениях частоты
внешнего воздействия (рис. 3.14, в) и определив пороговые значения,
можно на координатной плоскости (и, В) построить область, в ко-
которой существуют одночастотные вынужденные колебания. Эта об-
область называется областью захвата [53].
Пример 3.3. В нелинейной системе (см. рис. 3.13) нелинейное зве-
звено имеет идеальную релейную характеристику с параметром с = тг/2,
передаточные функции линейных звеньев равны W± = @filp +
+ 1)/@,8р + 1)р и И^2 = 1/@,2р + 1), внешние воздействия равны
g = 0 и h = —В sin 101. Требуется найти пороговое значение ампли-
амплитуды внешнего воздействия.
Решение. В данном случае
Q(jw) = -0,
- w*2+jw*
R(jw) = 0,01 jw* + 1,
коэффициенты гармонической линеаризации (см. табл. 3.1) q(A) =
= 4с/(тгЛ) = 2/Л, q'(A) = 0 и формула C.19в) принимает вид
Л [-0,16 jo;*3- о;*2 +V + @,01 jo;* + 1) -|1 = ?(-0,8о;*2 + j^)e~j(p.
L -A J
7*
100 Гл. 3. Метод гармонической линеаризации
Подставив сюда о;* = 10 и e~Jip = cosy? — jsinip, затем выделив ве-
вещественную и мнимую части, получим
-100 А + 2 + 80 В cos <р - 10 В sin у? = 0,
-150 Л + 0,2 - 10 Б cos (р - 80 Б sin у? = 0.
Разрешив эту систему уравнений относительно синуса и косинуса,
найдем
Л-0,024 . -2 Л+ 0,0055
^siny>= ^
Отсюда, возвысив в квадрат и сложив, получим квадратное уравнение
А2 - 0,014 А + 0,00012 - 0,2 В2 = 0.
Это уравнение имеет положительный корень, если В ^ 0,0188. Следо-
Следовательно, пороговое значение амплитуды Вп = 0,0188.
3.5.2. Вибрационная линеаризация. Пусть теперь задающее
воздействие отлично от нуля и изменяется медленно по сравнению
с колебательным процессом. В этом случае управляемый процесс
и вынужденные колебания будут описываться уравнениями C.19а)-
C.19в):
A[Q{ju*) + Я(зи*)Ш,е°) + 3Q'(A,e0))] j* = -BS{ju*).
Здесь, как известно, а0 является функцией амплитуды А и ошибки
управляемого процесса е°: а0 = а°(А,е°).
Для исследования управляемого процесса можно поступить сле-
следующим образом: из второго уравнения найти амплитуду А как
функцию от е° и подставить в первое уравнение. При этом получим
Q(p)e° + ДЫФ(е°) = Q(p)g, C.21)
ГДе Ф(е°) = а°(А(е°), е°). C.22)
Затем исследовать полученное уравнение, зависящее только от неиз-
неизвестной ошибки е°.
Независимо от характеристики нелинейного звена функция Ф(е°)
оказывается гладкой, и ее можно линеаризовать в окрестности начала
координат:
Ф(е°) =/се°, C.23)
где кн = —г
называют коэффициентом вибрационной линеа-
з°=0
de°
ризации.
После подстановки выражения C.23) в C.21) получим линейное
уравнение
[Q(p) + kR(p)] e° = Q(p)g. C.24)
Как видим, при создании колебательного процесса в системе раз-
разрывные нелинейные характеристики для медленных процессов стано-
становятся гладкими. Процесс, при котором за счет колебания разрывные
3.5. Вынужденные колебания и вибрационная линеаризация 101
характеристики нелинейных звеньев становятся гладкими, называют
вибрационным сглаживанием, а процесс линеаризации, который про-
производится в результате вибрационного сглаживания, — вибрационной
линеаризацией.
Вычисление коэффициентов вибрационной линеаризации.
В соответствии с формулами C.22) и C.23) для коэффициента виб-
вибрационной линеаризации имеем
_ d<5>(e°) _ (да0 да0 dA\
de°
°=о \де° дА de°J
з°=0
Используя формулу C.15а), находим
„О
ОСТ
27Г __ , п . . . ч „ 2тг
df (A sin ф)
Г\ Л л I 7 Г\ Л ^V л I 7 ЫП
оА
1 fdf(e° + A sin ф) де , , 1 Г
о=о 2тг У с?е ^Л е°=0 2тг У
Если нелинейная функция /(е) является нечетной, то производ-
производная df(e)/de будет четной, а произведение 6?/(e)/c?esm'0 — нечетным.
Поэтому для однозначных и симметричных относительно начала ко-
координат характеристик последний интеграл равен нулю:
1 f df (A sin ф) . , 7/ 1 } df( A sin ф) . , 7/
— / т—— smibdib = — / ——-—— sm ф dip = О,
2тг J de 2тг J de
О -7Г
и формула для коэффициента вибрационной линеаризации принимает
ВИД " Я„о
9G C.25)
/ън —
de°
Эта формула справедлива для всех нелинейных, однозначных и
неоднозначных характеристик, симметричных относительно начала
координат [10]. Из нее следует, что для вычисления коэффициен-
коэффициента вибрационной линеаризации нет необходимости вычислять функ-
функцию Ф(е°).
Для большинства рассматриваемых нелинейных характеристик
функция /(е) не имеет производных в обычном смысле. Поэтому при-
приведенные выше выкладки нельзя рассматривать как математически
строгое обоснование формулы C.25).
Вибрационную линеаризацию можно осуществить как вынужден-
вынужденными колебаниями, так и автоколебаниями. В обоих случаях коэф-
коэффициент вибрационной линеаризации, который определяется по фор-
формуле C.25), зависит от амплитуды колебаний на входе нелинейного
звена. Поэтому чтобы вычислить коэффициент &н, нужно знать эту
амплитуду. Как увидим ниже, она равна при вибрационной линеари-
линеаризации вынужденными колебаниями амплитуде внешнего колебания,
а при вибрационной линеаризации автоколебаниями — амплитуде
автоколебаний.
102
Гл. 3. Метод гармонической линеаризации
Вибрационная линеаризация вынужденными колебания-
колебаниями. Пусть на вход нелинейного звена системы (рис. 3.15) подается
Рис. 3.15. Структурная схема нелинейной системы (к вибрационной ли-
линеаризации вынужденными колебаниями)
гармонический сигнал h = Bsinu)*t. При этом частота колебания
намного выше полосы пропускания линейного звена с передаточной
функцией W2'-
/
На входе нелинейного звена имеем
е = еи + е*
е° =
е* =
Таким образом, в системе на входе нелинейного звена возникают
вынужденные колебания с амплитудой, равной амплитуде внешнего
колебания (А = В), и сдвигом фазы <р = 0. И в этом случае при
вычислении коэффициента вибрационной линеаризации в качестве
амплитуды вынужденного колебания берется амплитуда внешнего
колебания В. Поэтому величину коэффициента вибрационной линеа-
линеаризации можно изменять за счет выбора этой амплитуды. Однако
амплитуду внешнего воздействия нельзя брать произвольной. С одной
стороны, она не должна быть слишком большой, чтобы возмущение
не оказывало заметного влияния на процесс управления. С другой
стороны, амплитуда В должна быть во всяком случае не меньше мак-
максимального значения сигнала е°, до которого необходимо обеспечить
линейность характеристики. Например, в случае нелинейного звена с
релейной характеристикой с зоной нечувствительности (см. рис. 2.1,6)
должно выполняться неравенство В ^ а + sup |e°|
Вибрационная линеаризация автоколебаниями. Вибра-
Вибрационную линеаризацию можно реализовать, создав вокруг нелиней-
9
-^ х
J >
1
Не)
а
Wo
w3
х:
У
Рис. 3.16. Структурная схема нелинейной системы (к вибрационной ли-
линеаризации автоколебаниями)
ного звена внутренний автоколебательный контур (рис. 3.16). Пере-
Передаточные функции И^2 и И^з выбираются так, чтобы частота авто-
автоколебаний была достаточно высокой и автоколебания не пропуска-
3.5. Вынужденные колебания и вибрационная линеаризация 103
лись остальными звеньями, находящимися за пределами внутреннего
контура, и амплитуда автоколебаний была не меньше максимального
значения медленно меняющегося составляющего сигнала е на входе
нелинейного звена.
Исследование такой системы производится следующим образом.
Рассматривая внутренний контур, определяем амплитуду А симмет-
симметричных автоколебаний. Затем, используя найденное значение ампли-
амплитуды, определяем коэффициент вибрационной линеаризации кн и не-
нелинейное звено заменяем линейным звеном с передаточной функцией,
равной кн.
Пример 3.4. Пусть в нелинейной системе (см. рис. 3.16) нелиней-
нелинейное звено имеет идеальную релейную характеристику (см. рис. 2.1, а)
с параметром с = тг, а линейные звенья имеют передаточные функции
вида
W1 = fci(l + 0,1р), W2 =
W3 = k3/(T3p+l), W4
Требуется определить параметры к% и Тз такие, при которых
на входе нелинейного звена амплитуда автоколебаний А = 4 и звено
с передаточной функцией W^ ослабляет амплитуду автоколебаний
в 100 раз.
Решение. Так как автоколебания через звено с передаточной
функцией W± практически не проходят (амплитуда на его выходе
в 100 раз меньше, чем на его входе), при исследовании автоколебаний
можно ограничится рассмотрением только внутреннего контура.
Передаточная функция линейной части этого контура и коэффици-
коэффициенты гармонической линеаризации нелинейного звена (см. табл. 3.1)
соответственно имеют вид
W = W2W3 = k3/@,lp2+p)(T3p+l), q = 4с/(тгА) = 4/Л, q' = 0.
Условие возникновения периодического процесса принимает вид
-0,1 T3juj3 - @,1 + Т3) и>2 + ju + 4 к3/А = 0,
ИЛИ
-@,1 + Г3) ио2 + 4 к3/А = 0, -0,1 Т3си3 + ш = 0.
Отсюда для амплитуды и частоты получаем
А = 4feT3/(l + 10 Т3), о;* = у/10/Т3.
Так как звено с передаточной функцией W^ ослабляет амплитуду
автоколебаний в 100 раз и его амплитудная частотная функция имеет
вид А^ио) = 1/л/1 = k;2, то имеем
Л4(о;*) = 1 = 0,01, или Г3 = 0,0001 Г3 + 0,001.
д/1 + A0/Тз)
Отсюда находим Тз = 0,001. Подставив это значение для Тз в
раннее полученное выражение для амплитуды и учитывая, что по
104
Гл. 3. Метод гармонической линеаризации
условию амплитуда на входе нелинейного звена равна 4, получаем
4feT3 _ 4 fa 0,001
А =
= 4.
ЮГз 1 + 0,01
Отсюда находим к% = 1010. Таким образом, искомыми параметрами
являются к3 = 1010 и Г3 ^ 0,001.
Теперь убедимся, что в системе действительно возникнут автоко-
автоколебания. Для этого проверим устойчивость найденного периодическо-
периодического процесса. Так как q' = 0, условие устойчивости имеет вид
dq(A)
dA
А=4
Условие устойчивости выполняется. Следовательно, колебания асимп-
асимптотически орбитально устойчивы, и в системе возникнут автоколе-
автоколебания.
Пример 3.5. При каких положительных значениях параметра к\
система, рассмотренная в примере 3.4, будет устойчива? Парамет-
Параметры к% и Тз принимают значения, найденные в указанном примере.
Решение. Так как в системе происходит вибрационная линеа-
линеаризация автоколебаниями, нелинейное звено заменим линейным
-v X
J >
T
fcH
a
W2
X2
1
У
Рис. 3.17. Структурная схема вибрационно линеаризованной системы
(рис. 3.17) и найдем его передаточную функцию, равную кн. Из
табл. 3.3 имеем
о¦ = — arcsin — = 2 arcsin —.
тг А А
В соответствии с формулой C.25) кн находится следующим образом:
к -да°
= 2
?°=о А'
Учитывая, что амплитуда симметричных колебаний А = 4, получаем
кн = 0,5.
Преобразуем структурную схему вибрационно линеаризованной
системы (см. рис. 3.17) в одноконтурную, заменив внутренний контур
звеном с передаточной функцией
w = kHW2 = 0,5@,001^+1)
2'3 1 + kHW2W3 0,0001 р3 + 0,101 р2 + р + 505 '
Передаточная функция разомкнутой системы имеет вид
0,0001р4 + 0,101 р3
505'
Задачи 105
Складывая числитель и знаменатель и полагая р = А, получим харак-
характеристическое уравнение замкнутой системы
0,0001 Л4 + 0Д01Л3 + A,10 + 0,00005 h)X2 + E06 + 0,0505 кг)Х +
0,5&i =0.
При положительном к\ необходимое условие устойчивости выполняет-
выполняется. Поэтому по критерию Льенара-Шипара система будет устойчива,
если определитель Гурвица 3-го порядка будет положительным:
Аз =
a\ q
a0 q
0 a
^ о
>0.
Здесь
а0 = 0,0001, а,! = 0,101, а2 = 1,10 + 0,00005 къ
а3 = 506 + 0,0505 къ а4 = 505 + 0,5 кг.
Подставив эти выражения в предыдущее неравенство, получим
0,0025 кг - 3,08 > 0.
Отсюда следует, что система будет устойчива при к\ > 5200.
Задачи
1. Определить коэффициенты гармонической линеаризации при
симметричных колебаниях для нелинейного звена, которое описыва-
описывается функцией /(е) = е3.
2. Определить коэффициенты гармонической линеаризации при
несимметричных колебаниях для нелинейного звена, которое описы-
описывается функцией /(е) = е3.
3. Определить коэффициенты гармонической линеаризации для
« *( \ Г^е, е ^ 0,
нелинейного звена, описываемого функцией / (е) = <
4. В типовой структурной схеме нелинейной системы (см. рис. 3.1)
нелинейное звено имеет идеальную релейную характеристику /(е) =
= Gr/2)signe и линейная часть имеет передаточную функцию
Wn(p) = 5/@,\р+ 1)(р+ 1)р. Исследовать автоколебания.
5. В типовой структурной схеме нелинейной системы (см. рис. 3.1)
нелинейное звено имеет релейную характеристику с зоной нечувстви-
нечувствительности:
/00 =
о,
(?r/2)signe,
е| ^ 0,5,
е| > 0,5,
и линейная часть имеет передаточную функцию Wn{p) = 5/(р+ 1Jр.
Исследовать автоколебания.
106 Гл. 3. Метод гармонической линеаризации
6. В типовой структурной схеме нелинейной системы (см. рис. 3.1)
нелинейное звено описывается функцией
fee, е^О,
, е<0,
и линейная часть имеет передаточную функцию Wn(p) = 5/(р+ 1Jр.
Исследовать автоколебания.
7. В нелинейной системе (см. рис. 3.15) нелинейное звено имеет
идеальную релейную характеристику /(е) = Gr/2)signe и линейные
звенья имеют следующие передаточные функции:
Wx = 10A + 0,1 р), W2 = —±—, W3= 5
Тр + 1-
На вход сумматора перед нелинейным звеном подается гармоничес-
гармонический сигнал h = б sin 101. Произвести вибрационную линеаризацию и
исследовать устойчивость системы.
8. В нелинейной системе (см. рис. 3.16) нелинейное звено имеет
идеальную релейную характеристику /(е) = Gr/2)signe, и линейные
звенья имеют следующие передаточные функции:
Wi = 10A + ОДр), W2 = Х ,
W3 = , Wa = .
Исследовать возможность вибрационной линеаризации и опреде-
определить устойчивость системы.
Глава 4
МЕТОД ФУНКЦИЙ ЛЯПУНОВА
Основы общей теории устойчивости были заложены A.M. Ля-
Ляпуновым в его книге «Общая задача об устойчивости движения»,
которая вышла в 1892 г. В этой книге им был предложен общий метод
исследования устойчивости движения, который называется вторым
или прямым методом Ляпунова. Этот метод основан на построении
специальной функции, которая получила название функции Ляпуно-
Ляпунова. Прямой метод Ляпунова получил дальнейшее развитие в трудах
российских и зарубежных авторов. Метод исследований, основанный
на построении функции Ляпунова, включая прямой метод Ляпунова,
стали называть методом функций Ляпунова.
4.1. Знакопостоянные и знакоопределенные
функции
В большинстве случаев функции Ляпунова являются знакоопреде-
ленными, а их производные — знакоопреде ленными или знакопосто-
знакопостоянными функциями. Познакомимся с этими функциями.
4.1.1. Определение знакопостоянных и знакоопределенных
функций. Рассмотрим функцию V(x), определенную в некоторой
области D С Rn и функцию V(x, ?), определенную на прямом произве-
произведении D х [0, оо), т.е. при xG D и 0 ^ ? < оо. Область D содержит
начало координат: О Е D. Функции V(x) и V(x.,i) являются непре-
непрерывными и обладают непрерывными производными по всем своим
аргументам.
Функция V(x) называется знакоположительной или положи-
положительно полуопределенной в области D, если V@) = 0 и V(x) ^ О
всюду на D, и называется знакоотрицательной или отрицательно
полу определенной в области D, если V@) = 0 и V(x) ^ 0 всюду на D.
Функция V(x.,t) называется знакоположительной или положи-
положительно полуопределенной в области D, если при всех t ^ to (to ^ 0)
V(O,t) = 0 и У(х,?)^0 всюду на D, и знако отрицательной или
отрицательно полу определенной в области D, если при всех t ^ to
(t0 ^ 0) 1/@, t) = 0m У(х, t) ^ 0 всюду на D.
108 Гл. 4- Метод функций Ляпунова
Знакоположительные и знакоотрицательные функции в области D
называются знакопостоянными функциями области D.
Функция V(x) называется положительно определенной в облас-
области D, если 1/@) = 0 и V(x) > 0 всюду на D, кроме точки х = 0, и
называется отрицательно определенной в области D, если V@) =0
и V(x) < 0 всюду на D, кроме точки х = 0.
Функция V(x.,t) называется положительно определенной в облас-
области D, если при всех t ^ to (to ^ 0) V(O,t) = 0 и найдется такая поло-
положительно определенная в области D функция V+ (х), что при всех t ^
^ to ^(х^) > ^+(х) всюду на D, кроме точки х = 0, и называется
отрицательно определенной в области D, если — V(x.,t) является
положительно определенной в области D.
Положительно определенные и отрицательно определенные функ-
функции в области D называются знакоопределенными функциями в об-
области D. Очевидно, знакоопределенные функции являются частным
случаем знакопостоянных функций.
Функции, которые не являются знакопостоянными функциями в
области D, называются знакопеременными функциями в области D.
В качестве примера рассмотрим следующие функции:
Vi(x) =х\ + х22, У2(х) = ~[х\ + (х2 +^iJ],
Среди этих функций в пространстве R3 функция T^i(x) являет-
является положительно полу определенной, функция Vb(x) — отрицательно
полу определенной, функция Уз(х) — положительно определенной и
функция V4(x) — отрицательно определенной. Функции Vi(x) и Т^(х)
являются знакопостоянными, а функции Уз(х) и V^(x) — знакоопреде-
ленными. В пространстве R2 функция Vi(x) является положительно
определенной, а функция Vb(x) — отрицательно определенной.
Если V(x) является знакоопределенной функцией, то существует
такое положительное число rj, что все поверхности V(x) = с, где \с\ <
< rj, являются замкнутыми относительно точки х = 0 поверхностями;
если является знакоопределенной функцией и |V(x)| —У оо при |х| —У
—у оо, то все поверхности V(x) = с при любом с являются замкнутыми
относительно точки х = 0 поверхностями [7].
Покажем на примере, что не при всех знакоопреде ленных функци-
функциях V(x) все поверхности V(x) = с при любом с являются замкнутыми
относительно точки х = 0 поверхностями. В качестве примера рас-
рассмотрим в пространстве R2 положительно определенную функцию
у(х) ^Ц + ^.
В этом случае при с — г2 уравнение поверхности V(x) = с принимает
вид 2 2
^ ^ г2)х2+х2=г2
или A-г2)х2+х2=г2.
v у 1 2
4-1. Знакопостоянные и знакоопределенные функции 109
Это уравнение при г < 1 представ-
представляет уравнение эллипса
при г = 1 — уравнение прямой
х\ — 1, или Х2 = =Ы,
и при г > 1 — уравнение гиперболы / /^
Г2_2у' Рис. 4.1. Кривые уравнения
г- * A-г2)ж?+ж1 =г2
Таким образом, в данном случае по-
поверхности (кривые) уровня V(x) = с являются замкнутыми только
при г < 1 (рис. 4.1).
4.1.2. Положительно определенные квадратичные формы.
При построении функции Ляпунова широко используются квадратич-
квадратичные формы п
У(х) = ^ qikXiXk, qik = q^,
г,А;=1
или, в матричной форме,
У(х) = xTQx.
Любую квадратичную форму в матричной записи можно предста-
представить так, чтобы в ней матрица была симметрической. Поэтому всегда
предполагается, что матрица, используемая при записи квадратичной
формы, по определению является симметрической матрицей. Так как
симметрические матрицы в методе функций Ляпунова играют важ-
важную роль, то кратко остановимся на их свойствах.
Симметрическая матрица Q называется положительно (отрица-
(отрицательно) определенной матрицей, если квадратичная форма V(x) =
= xTQx является положительно (отрицательно) определенной функ-
функцией, и положительно (отрицательно) полу определенной матрицей,
если квадратичная форма V(x) = xTQx является положительно (от-
(отрицательно) полу определенной функцией.
Симметрическая матрица Q обладает следующими свойства-
свойствами [21]:
1) все ее собственные значения (характеристические числа),
т.е. корни Xi (г = 1, 2,... ,п) ее характеристического уравнения
det(Q — IX) = 0 являются вещественными числами;
2) если она положительно (отрицательно) определена, то все ее
собственные значения являются положительными (отрицательными):
Xi > 0 (Xi < 0); если она положительно (отрицательно) полуопреде-
полуопределена, то все ее собственные значения являются неотрицательными
(неположительными): Xi ^ 0 (Xi ^ 0);
110 Гл. 4- Метод функций Ляпунова
3) определитель от симметрической матрицы равен произведению
ее собственных значений: det Q = Л1Л2 ... Ап.
Дальше часто будет использоваться одно свойство квадратичной
формы. Сформулируем его в виде леммы.
Лемма 4.1 [7]. Квадратичная форма V(x) = xTQx удовлетво-
удовлетворяет неравенству
Am|x|2 ^xTQx^AM|x|2, D.1)
где Хт — минимальное, а Хм — максимальное собственное значение
матрицы Q.
Доказательство. Для доказательства рассмотрим задачу о
минимальном и максимальном значениях квадратичной формы
V(x) = xTQx на сфере |х|2 = г2. Согласно известным правилам опре-
определения условного экстремума составим функцию Лагранжа:
L = xTQx-A(|x|2-r2).
Здесь А — неопределенный множитель Лагранжа. Представим |х|2 в
виде скалярного произведения векторов:
|х|2 = хтх.
Необходимое условие экстремума принимает вид
^ = 2xTQ - 2Ахт = 0, или Qx - Ах = 0.
Последнее уравнение представляет систему однородных скалярных
уравнений, и оно имеет ненулевое решение, если определитель этой
системы равен нулю:
|<2-А/|=0.
Таким образом, квадратичная форма V(x) = xTQx принимает эк-
экстремальные значения на сфере |х|2 = г2, если х удовлетворяет урав-
уравнению
Qx = Ах,
когда А принимает собственные значения матрицы Q. Так как мат-
матрица является симметричной, то ее собственные значения являются
вещественными.
Умножив последнее равенство слева на хт, получим
xTQx = A|x|2, или У(х)=Аг2.
Отсюда, если Хт — минимальное собственное значение и Хм —
максимальное собственное значение матрицы Q, то
Amr2 ^ У(х) ^ Амг2, или Ат|х|2 ^ У(х) ^ Ам|х|2,
что и требовалось доказать.
Если квадратичная форма V(x) = xTQx положительно определе-
определена, то, как следует из неравенства D.1) и свойства положительно
определенной матрицы, она неограниченно возрастает при стремле-
4-2. Устойчивость неавтономных систем
111
нии точки х к бесконечности:
V(x) = xTQx ->• оо при |х| ->• оо.
Выясним, когда квадратичная форма является положительно
определенной функцией, или симметрическая матрица является поло-
положительно определенной.
Критерий Сильвестра [21]. Для того чтобы квадратичная
форма V(x) = xTQx была положительно определенной функцией,
необходимо и достаточно, чтобы все определители
А2 =
#11 #12
#21 #22
Ai = #n,
были положительны.
Пример 4.1. Дана квадратичная форма
detQ
x e R3.
Исследовать, является ли эта форма положительно определенной
функцией.
Решение. Если записать данную квадратичную форму в мат-
матричной форме, то элементами соответствующей матрицы Q будут
Qn = 1, qi2 = Ял = 2, qi3 = Яз1 = О,
#22 = 5, #23 = #32 = —1, #33 = 3.
Определители
Ai = #ц
A3 =
= 1,
#n
#21
#31
A2
#12
#22
#32
#13
#23
#33
#11
#21
=
#12
#22
1
2
0 -
2
5
-1
1 2
2 5
= 1,
О
-1
= 2
все положительны. Следовательно, по критерию Сильвестра данная
квадратичная форма является положительно определенной функцией.
4.2. Устойчивость неавтономных систем
Пусть система описывается уравнениями
Xi = Xi(xi,X2,- ..,xn,t), i = 1,2,.. .,n, D.2a)
или, в векторной форме,
х = Х(х,?). D.26)
Начало координат, т.е. точка х = 0, является положением равно-
равновесия: X(O,t) = 0 при всех t ^ to. Правая часть приведенных уравне-
уравнений зависит явно от времени. Система, которая описывается такими
уравнениями, и сами эти уравнения называются неавтономными сис-
системами.
112 Гл. 4- Метод функций Ляпунова
Решение уравнения D.2) при начальном условии x(to) — х° будем
обозначать x(x°,t). Следовательно, справедливо равенство x(x°,t0) =
= х°.
Рассмотрим функцию V(x, t). Производная этой функции по вре-
времени, вычисленная на траекториях системы D.2), имеет вид
A t) у ( v dV(x,t) _ dV(x,t) „, v
- x**> v + ~ж~ ~ ~^r~ X(x' *}
Про эту производную говорят, что она является (полной) производной
по времени функции V(x, t) в силу уравнения D.2) или производной
по времени функции V(x), вычисленной в силу уравнения D.2).
4.2.1. Теоремы об устойчивости. Рассмотрим устойчивость
положения равновесия, или невозмущенного движения х = 0 систе-
системы D.2).
Теорема 4.1 (теорема Ляпунова об устойчивости). Положение
равновесия х = 0 неавтономной системы D.2) устойчиво по Ляпу-
Ляпунову, если существует положительно определенная функция V(x, t)
такая, что ее производная по времени в силу уравнения этой сис-
системы D.2) является отрицательно полуопределенной функцией.
Доказательство. В соответствии с определением 2.3 устойчи-
устойчивости по Ляпунову положения равновесия х = 0 нужно показать, что,
каково бы ни было положительное число г, найдется такое положи-
положительное число й, что возмущенное движение х(х°,?) удовлетворяет
условию:
х(х°,?)| < е при всех t ^ to, если только |х°| < S.
Обозначим S? и S$ сферы радиусов е и S соответственно:
5, = {х: |х|=г}, S*{x: |х| = 6}.
Пусть функция V(x.,t) удовлетворяет условию теоремы и принимает
на сфере S? в начальный момент ?о минимальное значение т:
т = min V(x, to).
xes?
Выберем число S так, чтобы внутри сферы S$ выполнялось нера-
неравенство V(x, to) < тп. Такая сфера существует, так как функ-
функция V(x, to) непрерывна и 1/@, to) = 0. Так как по условию У(х, t) ^
^ 0, то
l/(x,t) ^ y(x°,t0) < m, если |x(to)| < 6.
Следовательно, траектория x(x°,t) никогда на достигнет сфе-
сферы S?, на которой V(x, t) ^ m, если только |х|°| < S. Теорема дока-
доказана.
Функции, которые удовлетворяют теоремам устойчивости или не-
неустойчивости, т.е. по которым можно судить об устойчивости или
неустойчивости системы, называются функциями Ляпунова.
4-2. Устойчивость неавтономных систем 113
Рассмотрим два новых понятия, которые потребуются при форму-
формулировке следующих двух теорем.
Функция V(x.,t) называется функцией, допускающей бесконечно
малый верхний предел, если как бы мало ни было положительное
число е', найдется такое положительное число S'', что |V(x, t)\ < e' при
всех t ^ to, если |х| < S'.
Функция V(x.,t) называется функцией, допускающей бесконечно
большой нижний предел, если как бы велико ни было положительное
число Е, найдется такое положительное число А, что | V(x, t) \ > Е при
всех t ^ to, если |х| > А. Иначе говоря, функция V(~x,t) называется
функцией, допускающей бесконечно большой нижний предел, если при
любых t ^ to
|V(x, оо)| —У оо при |х| —У оо.
Например, функции
У (х, t) = [x\ +xj+ x\) sin2 t, У(х, t) = [х\ +xj+ х\)е~1
являются функциями, допускающими бесконечно малый верхний пре-
предел, а функции
таковыми не являются.
В пространстве R3 функция
V(x,t) = [х\ +xj +^)(sin2^ + l)
является функцией, допускающей бесконечно большой нижний предел,
а функции о о о
V(*,t) = (х2 + x22)(sm2 t + 1),
таковыми не являются.
Теорема 4.2 (теорема Ляпунова об асимптотической устойчи-
устойчивости). Положение равновесия неавтономной системы D.2) асимп-
асимптотически устойчиво, если существует такая положительно опре-
определенная функция У(х,?), допускающая бесконечно малый верхний
предел, что ее производная по времени в силу уравнения этой сис-
системы D.2) является отрицательно определенной функцией.
Доказательство. Так как выполняется условие теоремы 4.1,
положение равновесия х = 0 устойчиво по Ляпунову. Поэтому в соот-
соответствии с определением 2.4 достаточно показать, что при выполне-
выполнении условия теоремы существует такое положительное число г\, что
х(х°,?) —У 0 при t —> оо, если |х°| < г].
По условию теоремы существует функция У(х, i), которая облада-
обладает следующими свойствами:
V(-x,t)>0, V(-x,t)<0 при х^О, при всех t ^ to.
8 Д.П. Ким
114 Гл. 4- Метод функций Ляпунова
Так как функция V(x, ?) в силу указанного выше свойства моно-
монотонно убывает и ограничена снизу нулем, то существует придел
l/(x(xV),f) -> Vk ^ 0 при t^oo.
Если Vk = 0, то и х(х°, t) ->• 0 при t ->• оо, так как функция 1/(х, ?)
обращается в нуль только при х = 0, т. е. в этом случае теорема верна.
Допустим противное: V^ ^ 0, х. е. V^ > 0. Так как положение рав-
равновесия х = 0 устойчиво по Ляпунову, то для любого положительного
числа е найдется такое положительное число 5, что при всех t ^ to
|х(х°,*)|<е, если |х°|<E. D.3)
Так как функция V(x.,t) допускает бесконечно малый верхний
предел, то для любого положительного числа е', в частности, е' = 14,
найдется такое положительное число S'', что при всех t ^ to
|У(М)| <e' = Vk, если |х| < б1.
Но так как У(х(х0, t), t) ^ 14, то в силу последнего условия |x(xq, t)\ ^
^ 8'. С учетом D.3) получаем
(*Ч|х(х°,«)|^е. D.4)
Так как производная V(x.,t) является отрицательно определенной
функцией, то существует положительно определенная функция w(x),
удовлетворяющая неравенству
V(x,t) < -гу(х). D.5)
Пусть /3 — минимальное значение функции w(x) на интерва-
интервале D.4):
в = min w(x).
Тогда на этом интервале справедливо неравенство w(x) ^ /3, или
—w(x) ^ —/3. Из последнего неравенства и неравенства D.5) следует
V(x(x°,t),t)<-p.
Проинтегрировав это неравенство от ?о ДО t, получим
V(X(X°,t),t)<V(x°,t0)-{3(t-t0).
При больших t правая часть последнего неравенства будет отрица-
отрицательной, что противоречит тому, что V(x, i) — положительно опреде-
определенная функция. Это противоречие получилось из-за предположения,
что 14 ф 0. Следовательно, справедливо равенство 14 = 0. Теорема
доказана.
Пример 4.2. Исследовать устойчивость положения равновесия
системы _ _
х\ — —е 1х\ + е х2,
х2 = -2e~2t?i - х\.
Решение. Функцию Ляпунова будем искать в виде
У(х) =х\ +ах22 (а>0).
4-2. Устойчивость неавтономных систем 115
Производная по времени от этой функции в силу заданных уравнений
имеет вид
V(x) = 2#iXi + 2ах2х2 = —2х\е~1 + 2x\x2e~2t - 4ax2xie~2t - 2ах\.
Если положить а = 1/2, то производная принимает вид
У(х) = -2х\е~1 - х\
и становится отрицательно определенной функцией. Следовательно,
положение равновесия заданной системы асимптотически устойчиво.
Теорема 4.3 (теорема об асимптотической устойчивости в це-
целом). Положение равновесия х = 0 неавтономной системы D.2)
асимптотически устойчиво в целом (глобально асимптотически
устойчиво), если существует такая положительно определенная
функция V(x, ?), допускающая бесконечно малый верхний предел и
бесконечно большой нижний предел, что ее производная по времени в
силу уравнения этой системы является отрицательно определенной
функцией.
Здесь, естественно, предполагается, что функция V(x.,t) является
положительно определенной функцией, а ее производная — отрица-
отрицательно определенной функцией на всем фазовом пространстве Rn.
Доказательство. Так как выполняется условие теоремы 4.2,
положение равновесия асимптотически устойчиво. Поэтому достаточ-
достаточно показать, что при любом начальном условии х(?о) = х° возмущен-
возмущенное движение х(х°,?) —у 0 при t —У оо.
Функция V(х, t) на траекториях возмущенного движения является
монотонно убывающей функцией времени и ограничена снизу нулем.
Поэтому существует предел
V(x(x°,t))^Vk при t^oo.
Если Vk = 0, то х(х°,?) -у 0 при t -У оо, так как V(x,t) обраща-
обращается в нуль только при х = 0. Поэтому достаточно показать, что
предел Vk = 0 на любых возмущенных траекториях.
Допустим противное: 14 ^ 0, т.е. Vk > 0. В связи с тем, что
функция V(x.,i) допускает бесконечно малый верхний предел, для
s' = Vk найдется такое положительное число 5'', что
V(x,?) < е' = Vk при всех t ^ to, если |х| < S'.
И так как У(х(хо,?) ^ 14, то справедливо неравенство
|x(x°,f)| ^ 8' при любых t^t0. D.6)
В силу того, что функция V(x, ?) допускает бесконечно большой
нижний предел, для любого положительного числа Е найдется такое
положительное число А,
V(x,t) > Е при любых t ^ t0, если \х\ > А. D.7)
Так как V(x,t) < 0 при всех х ф 0 и t^ to, то
V(x(x°,t),t) < l/(xVo) = Vo при всех t ^ t0.
116 Гл. 4- Метод функций Ляпунова
Поэтому если принять Е = Vo, то в силу условия D.7) последнее
возможно, если
|х(х°,*)Ю-
Из этого неравенства и неравенства D.6), получаем
В связи с тем, что У(х,?) является отрицательно определенной
функцией, существует положительно определенная функция w(x) та-
такая, что У(х,?) < — и?(х). Пусть C — минимальное значение функ-
функции и?(х) на указанном выше интервале:
в = min w(x).
s><:\x\<:a
Тогда так как на этом интервале справедливо неравенство
w(x) ^ /3 или — w(x) ^ —/3, то
Проинтегрировав последнее неравенство от tg до t, получим
Правая часть этого неравенства при больших t принимает отрица-
отрицательное значение, что противоречит тому, что V(x.,t) положительно
определенная функция. Противоречие получилось из-за предположе-
предположения, что предел Vk ^ 0. Следовательно, указанный предел должен
быть равен нулю, что доказывает теорему.
Пример 4.3. Исследовать устойчивость положения равновесия
системы
х\ = — A + sin2 t)xi + Х2 — х\,
Х2 = —х\ — Х2 — е~1х\.
Решение. Функцию Ляпунова будем искать в виде
У(х) =х\ +ах22 (а > 0).
Производная по времени от этой функции в силу заданных уравнений
имеет вид
У(х) = 2a;ii;i + 2ах2х2 = 2^i[-(l + sin2 t)xi + х2 - х\] +
+ 2ах2{—х\ — х2 — е~гх\).
Если положить а = 1, то кандидат на функцию Ляпунова стано-
становится положительно определенной функцией, а производная принима-
принимает вид
V(х) = -2[A + sin2 t)x\ +х*+х22+ е~гх62]
и становится отрицательно определенной функцией. Кроме того, эта
функция допускает бесконечно большой нижний предел. Следователь-
Следовательно, положение равновесия рассматриваемой системы асимптотически
устойчиво в целом.
4-2. Устойчивость неавтономных систем 117
4.2.2. Теоремы о неустойчивости. Из того, что не удается
найти функцию Ляпунова, позволяющую говорить об устойчивости
положения равновесия системы, не следует, что оно неустойчиво.
Поэтому важную роль при исследовании нелинейных систем могут
сыграть теоремы о неустойчивости.
Теорема 4.4 (первая теорема Ляпунова о неустойчивости). По-
Положение равновесия х = 0 неавтономной системы D.2) неустой-
неустойчиво, если существует функция V(x, ?), допускающая бесконечно
малый верхний предел, такая, что ее производная V(x.,i) в силу
уравнения этой системы является положительно определенной
функцией и при всех t ^ to в любой малой окрестности начала
координат найдется точка х = х°, в которой функция V(x,t) при-
принимает положительное значение.
И здесь, хотя функция V(x.,t) не является знакоопределенной,
предполагается, что она обладает всеми свойствами, которыми бы-
были наделены знакоопреде ленные функции при их определении: функ-
функция V(x, ?) непрерывна, обладает непрерывными частными производ-
производными по всем своим аргументам и в начале координат обращается в
нуль.
Доказательство. Согласно определению 2.7 неустойчивости
положения равновесия нужно показать, что найдется такое положи-
положительное число г, что в любой малой ^-окрестности начала координат
найдется такая точка, что возмущенное движение, которое начинается
в этой точке, в какой-то момент t' достигает границы е-окрестности.
Так как функция V(x.,t) допускает бесконечно малый верхний
предел, то для любого положительного числа е' найдется такое по-
положительное число S', что
\V(-x,t)\ < е' при t ^ t0, если |х| < S'. D.8)
Покажем, что если положить е = 5', то в любой малой окрестности
начала координат существует точка х = х° такая, что |х(х°,?)| ^ е
в какой-либо момент t = tf. Допустим противное: положение рав-
равновесия х = 0 устойчиво и для заданного е = S' найдется такое
положительно число 5, что
|х(х°,?)| < е = 5' при всех t ^ to, если |ж°| < 5. D.9)
Так как V(x.,t) — положительно определенная функция, то при
любом х = х° и, в частности, при |х°| < S
V(x(x°,t),t)^V(x°,t) = Vo при всех t ^ t0. D.10)
По условию теоремы в любой малой окрестности начала координат
найдется точка х = х;, в которой V(x',t) > 0. Если положить х° =
= х;, то Vo > 0. Так как функция V(x.,t) допускает бесконечно малый
верхний предел, то для данного положительного Vo найдется такое /г,
что
|y(x,?)|<Vo при всех t^to, если |х| < h.
118 Гл. 4- Метод функций Ляпунова
Отсюда и из D.10) следует, что |х(х°,?)| ^ ft, и с учетом D.9) полу-
получаем , , / о л| г/
ft ^ |x(x,f)| < е = 5 .
Так как V(~x,t) — положительно определенная функция, то сущест-
существует такая положительно определенная функция и?(х), что V(x.,t) >
> w(x) при всех t ^ to. Пусть /3 — минимум функции w(x) на полу-
полученном выше интервале:
3— min w(x).
h^\x\^S'
Тогда на этом интервале w(x) ^ C и из последнего неравенства имеем
У(х(х°,?),?) > w(x) ^ C. Проинтегрировав это неравенство, получим
V(x(x°,t),t)>Vo+f3(t-to).
Правая часть и соответственно функция У(х(хо,?)?) с увеличением
времени неограниченно возрастают, что противоречит условию D.8)
и показывает неправомерность предположения об устойчивости. Тео-
Теорема доказана.
Теорема 4.5 (вторая теорема Ляпунова о неустойчивости). По-
Положение равновесия х = 0 неавтономной системы D.2) неустой-
неустойчиво, если существует функция V(x, ?), допускающая бесконечно
малый верхний предел, такая, что ее производная V(x.,t) в силу
уравнения этой системы имеет вид
У(х,?) =аУ(х,*) +Цх,?),
где w(x,t) — положительно полуопределенная функция, и при всех
t ^ to в любой малой окрестности начала координат найдется точ-
точка х = х°, в которой функция V(~x,t) принимает положительное
значение.
Доказательство. Так как функция V(x.,t) допускает беско-
бесконечно малый верхний предел, то для любого положительного числа е'
найдется такое положительное число 8', что
|V(x,?)| < е' при всех t ^ to, если |х| < 6'. D.11)
Покажем, что если положить е = 8', то в любой малой окрестности
начала координат существует точка х = х° такая, что |х(х°,?)| ^ е в
какой-либо момент t = t'. Действительно, по условию теоремы
jtV(x(x°,t), t) = aV(x(x°,t), t)+w(x(x°,t), t),
ИЛИ 7
I [e-atV(x(x°,t), t)] = e-atw(x(x°,t), t) > 0.
Отсюда получаем
F(x(xV), i) ^ e"V(xVo).
Если выбрать начальную точку х = х° там, где У(х°,?о) > 0, то
из последнего равенства следует, что У(х(хо,?), t) неограниченно
возрастает. А это противоречит условию D.11), если допустить, что
х(х°,?)| < г = 5'. Теорема доказана.
4-3. Устойчивость автономных систем 119
4.3. Устойчивость автономных систем
Пусть система описывается уравнениями
Xi = Xi(xi,X2, • • • ,хп), ъ = 1,2,... , п, D.12а)
или, в векторной форме,
х = Х(х). D.126)
Начало координат, т.е. точка х = 0, является положением равнове-
равновесия: Х@) = 0. Правая часть приведенных уравнений не зависит явно
от времени. Система, которая описывается такими уравнениями, и
сами эти уравнения называются автономными системами.
4.3.1. Теоремы об устойчивости. При исследовании устойчи-
устойчивости автономных систем в качестве функций Ляпунова используются
функции V(x), не зависящие явно от времени. Производная по време-
времени функции V(x) в силу уравнений D.12) определяется следующим
образом:
dt *-^ dxi дх
г=1
Теорема 4.6 (теорема Ляпунова об устойчивости). Положение
равновесия х = 0 автономной системы D.12) устойчиво по Ляпуно-
Ляпунову, если существует, положительно определенная функция V'(х) та-
такая, что ее производная по времени в силу уравнения этой системы
является отрицательно полу определенной функцией.
Эта теорема непосредственно вытекает из теоремы 4.1.
Пример 4.4. Исследовать устойчивость систему, которая описы-
описывается уравнениями
Х\ — Ж2, Х2 = —Xi.
Решение. Функцию Ляпунова будем искать в виде квадратич-
квадратичной формы
V(x) = х\ + 2 ах\х2 + /3#2,
где а и C — неизвестные параметры. Согласно критерию Сильвестра
эта форма будет положительно определенной функцией, если выпол-
выполняется неравенство
А2 = C - а2 > 0.
Производная по времени квадратичной формы в силу заданных урав-
уравнений имеет вид
V(x) = 2#iXi + 2 axix2 + 2 axix2 + 2 /Зх2х2 =
= 2 xix2 + 2 ax\ — 2 ax\ — 2 fix2x\.
Если принять а = 0 и /3 = 1, то квадратичная форма будет по-
положительно определенной, а ее производная будет равна нулю, т.е.
120 Гл. 4- Метод функций Ляпунова
функция удовлетворяет условиям теоремы Ляпунова. Следовательно,
положение равновесия х = 0 устойчиво по Ляпунову.
Пример 4.5. На тело с массой т действует сила F, обладающая
следующими свойствами:
F = -f(y), Д0) = 0, f(y)y>0 при уфО.
Движение тела описывается уравнением ту = F, или, в нормальной
форме, уравнениями
XI = Ж2, Х2 = /Ol).
т
Исследовать устойчивость положения равновесия х = 0.
Решение. В качестве кандидата на функцию Ляпунова рас-
рассмотрим полную энергию. Кинетическая и потенциальная энергии
соответственно имеют вид
Кандидат на функцию Ляпунова принимает вид
„2
= W + U = ^р + ff(Xl) chu.
Эта функция является положительно определенной. Ее производ-
производную по времени в силу уравнения движения
VCx) = тх2х2 + f(xi)xi = -тх2 — f(xi) + f(xi)x2 = 0
т
можно считать отрицательно полу определенной. Следовательно, не-
невозмущенное движение х = 0 устойчиво.
Теорема 4.7 (теорема Ляпунова об асимптотической устойчи-
устойчивости). Положение равновесия х = 0 автономной системы D.12)
асимптотически устойчиво, если существует такая положительно
определенная функция V(x), что ее производная по времени в си-
силу уравнения этой системы является отрицательно определенной
функцией.
Так как функция V(x) непрерывна и равна нулю в начале коор-
координат, то она допускает бесконечно малый верхний предел. Поэтому
эта теорема непосредственно вытекает из теоремы 4.2.
Пример 4.6. Исследовать устойчивость положения равновесия
х = 0 системы
Х\ = — х\ + 2^2, Х2 = —Х\ — Ъх\.
Решение. Для решения этой задачи воспользуемся методом
разделения переменных, предложенный Е. А. Барбашиным [7]. Метод
состоит в том, что функция Ляпунова ищется в виде функции, ко-
которая вместе со своей производной представляет сумму функций,
4-3. Устойчивость автономных систем 121
каждая из которых зависит только от одной фазовой переменной:
В соответствии с этим методом в качестве кандидата на функцию
Ляпунова принимаем функцию
V(x)=F1(x1) + F2(x2).
Производная по времени от функции в силу уравнений заданной
системы имеет вид
т>/ ч dFi . dF2 . dFi 3 dFi o dF2 dF2 o 3
dx\ dx<2 dx\ dx\ dx2 dx2
И чтобы она представляла сумму функций, каждая из которых зави-
зависит только от одной переменной, разность средних членов справа в
последнем соотношении должна быть равна нулю:
dFx o dF2 п
-— 2ж2 - -1-Х! = О,
dx\ dx2
или
Так как левая часть зависит от xi, а правая часть от Х2, то последнее
равенство возможно, если обе части являются константами и равны,
например, единице. Тогда имеем
dFx dF2 o
-— = хи -— = 2х2.
dx\ dx2
Отсюда после интегрирования получаем
Fx = \х\, F2=xl У(х) = F^xx) + F2(x2) = \х\+х\.
Производная по времени от функции кандидата на функцию Ляпунова
имеет вид
1>(Х) = -dJ± х\ -А11Ъх\ = _(Ж4 + 6a,4}_
dx\ dx2
Итак, полученная методом разделения переменных функция явля-
является положительно определенной, а ее производная в силу уравнений
рассматриваемой системы — отрицательно определенной. Следова-
Следовательно, положение равновесия х = 0 асимптотически устойчиво.
Теорема 4.8. (обобщенная теорема об асимптотической устой-
устойчивости). Положение равновесия х = 0 автономной системы D.12)
асимптотически устойчиво, если существует такая положительно
определенная функция У(х), что ее производная по времени в силу
уравнения этой системы является отрицательно полуопределенной
функцией, и она обращается в нуль вне начала координат на мно-
множестве М С D, не содержащим целых траекторий.
122 Гл. 4- Метод функций Ляпунова
Целой траекторией (или полутраекторией) системы называется
фазовая траектория в пространстве Rn, соответствующая решению
уравнения этой системы х(х°, t) (x° = x(?q)) на всем интервале време-
времени to ^ t ^ оо. Так как при х° = 0 решение х@, t) = 0 при всех t ^ to,
то начало координат х = 0 соответствует целой траектории.
Если множество М задается уравнением </?(х) =0: М = {х:
</?(х) = 0}, </?(х) — гладкая (т.е. с непрерывными частными произ-
производными по всем своим аргументам) функция, то условие отсутствия
в М целых траекторий можно записать следующим образом:
п
¦7Г— Xi = — Х(х) = grady?(x)X(x) ф 0. D.13)
Это неравенство должно выполнятся на множестве М, т.е. при усло-
условии </?(х) = 0.
Множество М — {х: </?(х) = 0} представляет собой поверхность,
и последнее условие означает, что вектор скорости изображающей
точки не лежит на ее касательной плоскости. И, следовательно, если
изображающая точка попадает на поверхность (множество М), где
производная функции Ляпунова V(x) = 0, то она сразу же ее покидает
и оказывается в области, где V(x) < 0.
Доказательство теоремы 4.8 основывается теореме об инвариант-
инвариантных множествах из теории множеств и здесь не рассматривается.
Пример 4.7. Исследовать устойчивость положения равновесия
х = 0 системы
3
Х\ — Х2, Х2 — Х\ *^2 *
Решение. Воспользуемся методом разделения переменных. Со-
Согласно этому методу имеем
У(х) =F1(x1) + F2(x2).
Производная по времени от этой функции в силу уравнений заданной
системы имеет вид
т>/ ч dFx . dF2 . dFi dF2 dF2 3
Vix.) = -— xi + -— x2 = -— x2 — xi — x%.
dx\ dx2 dx\ dx2 dx2
И чтобы она представляла сумму функций, каждая из которых за-
зависит только от одной переменной, необходимо, чтобы выполнялось
равенство
dFx dF2 n dFx I dF2 I
-—x2 - -—xi = 0 или -—/ xi = -— x2.
ax\ ax2 ax\ I ax21
Так как левая часть зависит от х\, а правая часть от х2, то последнее
равенство возможно, если обе части являются константами и равны,
например, единице. Тогда имеем
dFi dF2
-,— = xi, -— = х2.
dx\ dx2
4-3. Устойчивость автономных систем 123
Отсюда после интегрирования получаем
Fi \4, F2xl V{s)
Производная по времени от функции кандидата на функцию Ляпунова
имеет вид
Она отрицательно полуопределена и обращается в нуль вне начала
координат на множестве, определяемом уравнением </?(х) = ж 2 = 0.
Условие D.13) принимает вид
В этом соотношении правая часть обращается в нуль на пря-
прямой Х2 = 0 только в начале координат. Следовательно, по обобщен-
обобщенной теореме об асимптотической устойчивости положение равновесия
рассматриваемой системы асимптотически устойчиво.
Теорема 4.9 (теорема об асимптотической устойчивости в це-
целом). Положение равновесия х = 0 автономной системы D.12)
асимптотически устойчиво в целом (глобально асимптотически
устойчиво), если существует такая положительно определенная
функция V(x), допускающая бесконечно большой нижний предел,
что ее производная по времени в силу уравнения этой системы яв-
является отрицательно определенной функцией.
Так как функция непрерывна и обращается в нуль в начале коор-
координат, то она допускает бесконечно малый верхний придел. Поэтому
теорема 4.9 вытекает из теоремы 4.3.
Теорема 4.10 (теорема Барабашина-Красовского об асимпто-
асимптотической устойчивости в целом). Положение равновесия х = 0 авто-
автономной системы D.12) асимптотически устойчиво в целом (гло-
(глобально асимптотически устойчиво), если существует такая по-
положительно определенная функция V(x), допускающая бесконечно
большой нижний предел, что ее производная по времени в силу
уравнения этой системы является отрицательно полу определенной
функцией, и она обращается в нуль вне начала координат на мно-
множестве М, не содержащем целых траекторий.
В качестве примера рассмотрим систему из примера 4.7. Бы-
Было показано, что функцией Ляпунова для этой системы является
V(x) = х\/2 + х%/2, которая стремится к бесконечности при |х| —у оо.
То есть эта функция и, как было показано, ее производная удовлет-
удовлетворяют условию теоремы Барбашина-Красовского. Следовательно,
положение равновесия рассмотренной в примере 4.7 системы является
асимптотически устойчивым в целом.
4.3.2. Теоремы о неустойчивости. Теоремы о неустойчивости
положения равновесия автономных систем вытекают из аналогичных
теорем о неустойчивости положения равновесия неавтономных систем.
124 Гл. 4- Метод функций Ляпунова
Теорема 4.11 (первая теорема Ляпунова о неустойчивости). По-
Положение равновесия х = 0 автономной системы D.12) неустойчиво,
если существует функция V(x) такая, что ее производная V(x) в
силу уравнения этой системы является положительно определенной
функцией и в любой малой окрестности начала координат найдется
точка х = х°; в которой функция V(x) принимает положительное
значение.
Пример 4.8. Исследовать устойчивость положения равновесия
х = 0 системы
Х\ — Ъх\ + Х2, Х2 = 2( —#1 + х\).
Решение. В качестве кандидата на функцию Ляпунова рассмот-
рассмотрим квадратичную форму
У(х) =х\ +ах22 (а>0).
Производная от этой функции по времени в силу заданных уравнений
имеет вид
V(x) = 2#iXi + 2ах2х2 = 6xf
Если положить а = 1/2, то получим
Выбранная функция V(x) в любой малой окрестности принимает
положительное значение, ее производная V{x) является положительно
определенной функцией. Следовательно, по теореме 4.11 положение
равновесия рассматриваемой системы неустойчиво.
Теорема 4.12 (вторая теорема Ляпунова о неустойчивости). По-
Положение равновесия х = 0 автономной системы D.12) неустойчи-
неустойчиво, если существует функция V(х) такая, что ее производная V(x)
в силу уравнений этой системы имеет вид
где а > 0, и?(х) — положительно полу определенная функция, и в
любой малой окрестности начала координат найдется точка х =
= х°, в которой функция V{х) принимает положительное значение.
4.4. Устойчивость при постоянно действующих
возмущениях
Выше мы рассматривали устойчивость невозмущенного движе-
движения, когда возмущенные движения были обусловлены ненулевыми
начальными условиями. В этом параграфе рассмотрим случай, когда
на систему постоянно действуют возмущения.
Наряду с неавтономной системой
) = 0 \/t^t0 D.14)
4-4- Устойчивость при постоянно действующих возмущениях 125
рассмотрим неавтономную систему
х = Х(х,*)+Д(х,*), D.15)
где Д(х, ?) — неизвестная функция, характеризующая постоянно
действующие возмущения. В общем случае R(O,t) ^0 и невозму-
невозмущенное движение х = 0 не является решением уравнения D.15).
Определение 4.1. Положение равновесия х = 0 системы D.14)
называется устойчивым при постоянно действующих возмущениях,
если для любого малого положительного числа е найдутся такие
положительные числа So и Si, что при выполнении неравенства
|Д(х, ?)| < Si при всех |х| ^ е и t ^ to возмущенное движение систе-
системы D.15) подчиняется неравенству |х(х°,?)| < е при любых |х°| < So
и t ^ to-
Нестрого говоря, устойчивость при постоянно действующих воз-
возмущениях означает, что при малых возмущениях отклонения возму-
возмущенного движения от невозмущенного движения малы.
Теорема 4.13 (теорема Малкина об устойчивости при постоян-
постоянно действующих возмущениях). Положение равновесия х = 0 неав-
неавтономной системы D.14) устойчиво при постоянно действующих
возмущениях, если существует такая положительно определенная
функция V(~x,t), допускающая бесконечно малый верхний предел, что
ее производная по времени в силу уравнения этой системы является
отрицательно определенной функцией, и ее градиент удовлетворяет
неравенству
г=1
где N — положительная константа.
Доказательство. Так как V(x.,t) является положительно
определенной функцией, то существует положительно определенная
функция u?i(x), удовлетворяющая неравенству V(x.,t) ^ u?i(x). Обо-
Обозначим через т минимальное значение этой функции на сфере S?
радиуса е:
т = mm гицх).
На сфере S? при всех t ^ to
V(x,t) ^гух(х) ^ т. D.17)
Так как V(~x,t) допускает бесконечно малый верхний предел, то
существует такое положительное число йо, что при |х| ^ So
V(x,t)<m Mt^to. D.18)
Пусть V(i4) — производная по времени функции V(~x,t) в силу
уравнения D.14). В связи с тем, что производная V(i4) является от-
отрицательно определенной функцией, существует положительно опре-
126
Гл. 4- Метод функций Ляпунова
деленная функция и?2(х) такая, что
-гу2(х)
при всех t ^ to.B силу положительной определенности функции W2(x)
существует положительное число h такое, что u?2(x) > h или
-w2(x) < —h при |х| > й0. Поэтому имеем
V(i4)(x,f) ^ -гу2(х) < -h.
Если обозначить V(i5) производную по времени функции V(x.,t) в
силу уравнения D.15), то получим
Согласно неравенству Коши-Шварца [32]
2 п п
г=1
г=1 г=1
ИЛИ
имеем
D.19)
Используя это соотношение, а также соотношение D.16) и полу-
полученное выше неравенство для V(i4)(x,?), находим
г=1
Пусть |Д(х,?)| < Si = h/BN) при |х| ^ е и всех t ^ to. Тогда из
последнего неравенства имеем
VA5)(x,t)<-h/2. D.20)
Решение х(х0,^) уравнения D.15) при |х°| < <5о удовлетворяет
неравенству 0
Действительно, в силу D.18) имеем
Если допустить, что x(x°,^i) —e в какой-то момент t = ti, то в
силу D.17) п
^(х(хо,^),^)^ш.
А это означает, что функция У(х(хо,?),?) в некоторой окрестнос-
окрестности t\ возрастает, что противоречит условию D.20). Теорема доказана.
4.5. Исследование нелинейных систем по линейному приближению 127
4.5. Исследование нелинейных систем
по линейному приближению
Проблему исследования нелинейных систем по их линейному приб-
приближению впервые поставил и разрешил А. М. Ляпунов [42, 34]. Судить
об устойчивости исходной нелинейной системы по линейному прибли-
приближению можно не всегда.
В качестве примера рассмотрим систему
х\ — Х2 + ах\, Х2 = —х\ + ах\.
Функцию Ляпунова будем искать в виде положительно определенной
квадратичной формы V(x) = х\ + х\. Производная по времени от этой
функции в силу заданных уравнений имеет вид
V (х) = 2х1х1 + 2х2х2 = 2а {х\ + ж|),
она является положительно определенной функцией при а > 0 и
отрицательно определенной функцией при а < 0. Следовательно, по-
положение равновесия х = 0 рассматриваемой системы неустойчиво
при а > 0 и асимптотически устойчиво при а < 0.
Линеаризованная система описывается уравнениями
Х\ = Х2, Х2 = —Х\.
Ее характеристическое уравнение Л + 1 = 0 имеет два чисто мни-
мнимых корня. Поэтому, как было показано в гл. 2, начало координат
является особой точкой типа центр, и оно соответствует устойчивому
по Ляпунову положению равновесия. Таким образом, в рассматри-
рассматриваемом случае устойчивость линеаризованной системы не имеет ниче-
ничего общего с устойчивостью исходной нелинейной системы: по линейно-
линейному приближению нельзя делать какие-либо выводы об устойчивости
исходной нелинейной системы как при а > 0, так и при а < 0.
4.5.1. Уравнение Ляпунова и критерий Ляпунова устойчи-
устойчивости линейных систем. Рассмотрим линейную систему
х = Лх, D.21)
где х — вектор (х G Rn), А — квадратная матрица n-го поряд-
порядка. Пусть задана квадратичная форма w(x) = хтGх. Для того что-
чтобы эта квадратичная форма была равна производной по времени
от квадратичной формы V(x) =хтЛх в силу системы D.21), т.е.
V(x) = w(x), матрица В должна удовлетворять матричному урав-
уравнению
АТВ + ВА = С. D.22)
Действительно, производная по времени от квадратичной формы
V(x) = хт5х в силу уравнения D.21) имеет вид
128 Гл. 4- Метод функций Ляпунова
Отсюда следует, что равенство V(x) = u?(x) возможно в том и только
том случае, если матрицы В и С удовлетворяют уравнению D.22),
которое называется уравнением Ляпунова. Таким образом, чтобы по
заданной квадратичной форме w(x) = хтСх найти соответствую-
соответствующую ей квадратичную форму V(x) = хтЛх, нужно решить уравнение
Ляпунова.
Исследование уравнения Ляпунова представляет большой интерес,
так как это уравнение позволяет найти функцию Ляпунова в виде
квадратичной формы по заданной ее производной. Естественно воз-
возникает вопрос: когда уравнение Ляпунова имеет решение? Ответ на
этот вопрос зависит от того, какие корни имеет характеристическое
уравнение системы D.21)
аи - Л а12 ... а1п
&21 &22 ~ А ... U2n
det(A - IX) =
ап2 • • • Unn — X
= 0. D.23)
Теорема 4.14 (теорема о существовании решения уравнения
Ляпунова). Если среди корней характеристического уравнения D.23)
нет пары корней, сумма которых равна нулю, т. е. сумма корней
А^ + Х3¦, ф 0 при всех г, j = 1, 2,..., п, то при любой симметрической
матрице С уравнение Ляпунова имеет единственное решение для
неизвестной матрицы В.
Эта теорема может быть доказана с помощью теории операто-
операторов [7], и ее доказательство здесь не рассматривается.
Теорема 4.15 (критерий устойчивости Ляпунова линейных сис-
систем). Для того чтобы линейная стационарная система D.21) бы-
была асимптотически устойчива, необходимо и достаточно, чтобы
для любой отрицательно определенной квадратичной формы w(x) =
= хтGх существовала положительно определенная квадратичная
форма V(x) = хтЛх такая, что производная по времени от этой
функции в силу уравнения системы D.21) была равна заданной квад-
квадратичной форме w(x): V(x) = w(x).
Доказательство. Необходимость. Существование неко-
некоторой квадратичной формы V(x) = хтЛх, производная от которой
по времени равна заданной квадратичной форме, следует из теоре-
теоремы 4.14. Поэтому достаточно показать, что эта квадратичная форма
является положительно определенной функцией.
Пусть система D.21) устойчива. Тогда ее решение, которое при
начальном условии х@) = х° имеет вид (см. A.10)) х(?) = емур,
стремится к нулю при t —> оо. Следовательно, и квадратичная фор-
форма V(x.(t)) —> 0 при t —> оо. Покажем, что квадратичная функция,
удовлетворяющая условиям теоремы, является положительно опреде-
определенной функцией. Допустим противное: в некоторой точке х = х° ф О
4.5. Исследование нелинейных систем по линейному приближению 129
квадратичная форма У(х0) ^ 0. Тогда в силу того, что
F(x(i)) = Цх(«)) < 0,
где х(?) = е^х°, функция V(x.(t)) при t > 0 отрицательна и убывает
с ростом ?. А это противоречит тому, что V(x.(i)) —У 0 при ? —У оо.
Достаточность непосредственно следует из теоремы Ляпунова об
асимптотической устойчивости.
Теорема 4.16 (теорема о существовании положительно опреде-
определенного решения уравнения Ляпунова). Если матрица А устойчива,
т. е. все ее собственные значения имеют отрицательные вещест-
вещественные части, то какова бы ни была отрицательно определенная
матрица С, уравнение Ляпунова D.22) имеет единственное реше-
решение В, которое является положительно определенной матрицей.
Эта теорема непосредственно вытекает из теорем 4.14 и 4.15.
Теорема 4.17. Если среди корней характеристического уравне-
уравнения системы D.21) имеется хотя бы один корень с положительной
вещественной частью и сумма никаких пар этих корней не обра-
обращается в нуль, то какова бы ни была положительно определен-
определенная функция w(x), найдется квадратичная форма V(x), у которой
производная по времени в силу указанного уравнения системы удов-
удовлетворяет уравнению V(x) = w(x), и в любой окрестности начала
координат имеется точка, в которой V(x) принимает положитель-
положительное значение.
Доказательство. Существование квадратичной формы V(х),
удовлетворяющей указанному в теореме уравнению, следует из тео-
теоремы 4.14. Покажем, что в любой окрестности начала координат су-
существует точка, в которой V(x) принимает положительное значение.
Квадратичная форма V(x) не может быть отрицательно опреде-
определенной, так как в противном случае функция — V(x) удовлетворяла
бы условию теоремы Ляпунова об асимптотической устойчивости.
В силу указанной причины в любой окрестности начала координат
существует точка, где V(x) по крайней мере обращается в нуль.
Но так как V{x) = w{x) > 0, то в любой окрестности такой точки
существует точка, где V(x) > 0.
Теорема 4.18. Если среди корней характеристического уравне-
уравнения системы D.21) имеется хотя бы один корень с положительной
вещественной частью, то какова бы ни была положительно опре-
определенная квадратичная форма w(x), всегда найдутся квадратичная
форма V(x) и положительное число а такие, что производная V{x)
в силу указанного уравнения системы удовлетворяет соотношению
и в любой окрестности начала координат найдется точка, в кото-
которой квадратичная форма V(x) принимает положительное значение.
9 Д.П. Ким
130 Гл. 4- Метод функций Ляпунова
Доказательство. Рассмотрим наряду с D.21) систему
D.24)
Характеристическое уравнение этой системы имеет вид
= о,
и его корни Xi связаны с корнем Л^ характеристического уравнения
системы D.21) соотношением Л^ = Л^ + а/2.
Пусть Af0 — корень с положительной вещественной частью. Вы-
Выберем а таким, чтобы выполнялись условия:
1) из ReAi0 > 0 следует ReAi0 > 0;
2) Ai + Xk ф 0 при всех г и к.
Условие 1) всегда можно выполнить, выбрав а достаточно малым.
Учитывая, что А^ + Xk = А^ + Xk — а, можно выбрать а, не совпа-
совпадающим ни с одной суммой Xi + Xk.
Согласно теореме 4.17 для положительно определенной функции
найдется квадратичная форма 1^(х), принимающая в какой-либо точке
любой окрестности начала координат положительное значение, и про-
производная по времени этой формы в силу уравнения D.24) равна и?(х):
rj, dVhc) A
Так как —-^-- Лх — производная по времени квадратичной фор-
форах
мы V(x) в силу уравнения D.21) и в случае квадратичной формы
то из последнего соотношения получаем
У(х) =аУ(х)+гу(х).
Теорема доказана.
4.5.2. Критерий устойчивости Ляпунова по линейному
приближению. Пусть уравнения нелинейной системы представлены
в виде
1,x2,... ,хп), Ri(Q,Q,.. .,0) = 0, г = 1,2,.. .,п,
или, в векторной форме,
D.25)
¦ D-26)
г=1 ^ г=1
4.5. Исследование нелинейных систем по линейному приближению 131
Здесь а — малое положительное число, с — положительная конс-
константа. Условие D.26) означает, что разложение нелинейного члена
Д(х) в D.25) в ряд Тейлора в начале координат начинается с членов,
содержащих квадраты или более высокие степени фазовых координат
и их произведения.
Теорема 4.19 (критерий устойчивости Ляпунова нелинейной
системы). Положение равновесия х = 0 нелинейной системы D.25)
асимптотически устойчиво, если все корни характеристического
уравнения линеаризованной системы х = Лх имеют отрицатель-
отрицательную вещественную часть, и неустойчиво, если среди указанных кор-
корней имеется хотя бы один корень с положительной вещественной
частью.
Доказательство этой теоремы опирается на следующую лемму [7].
Лемма 4.2. Пусть w(x) — знакоопределенная квадратичная
форма, V(x) — произвольная квадратичная форма.
Тогда функция „
гщх)
г=1
будет знако определенной, совпадающей по знаку с w(x) в некоторой
окрестности начала координат.
Доказательство. Согласно неравенству D.1) имеем
Ат|х|2 ^
где Ат — минимальное, Хм
Ам|х
D.27)
максимальное собственные числа
о
Х- .
х|2 =
соответствующей матрицы квадратичной формы и?(х),
(dV\2 Ъ=1
Так как ^2 ( я— ) — квадратичная форма, то, аналогично, имеем
71 (dV\2
^2 ( я— )
D.28)
г=1
где А^ — минимальное, \'м — максимальное собственные числа
соответствующей матрицы указанной квадратичной формы. Из не-
неравенства Коши-Шварца D.19) и неравенств D.26) и D.28) имеем
ду
\
(dvy
\
г=1
или
dV 7? < IV г
.\2+а
Пусть для определенности w(x) — положительно определенная
функция. Тогда Хт и Хм в D.27) являются положительными чис-
9*
132
Гл. 4- Метод функций Ляпунова
лами. Поэтому из D.27) и последнего неравенства имеем
п
w
Iх
Если
.1/а
х|а > О, ИЛИ |х| < \^т/ \]><'мС)
то из последнего неравенства следует
w
+ Е^7-
г=1
т. е. в окрестности |х| < [Хт/^/\'Mc^j начала координат знак левой
части в последнем неравенстве совпадает со знаком w(x), что и
требовалось доказать.
Доказательство теоремы 4.19. Пусть линеаризованная сис-
система х = Лх асимптотически устойчива, т. е. вещественные части
всех корней ее характеристического уравнения отрицательны. Пока-
Покажем, что исходная нелинейная система D.25) также асимптотически
устойчива.
На основании критерия устойчивости Ляпунова линейных систем
(теорема 4.15) существует такая положительно определенная квадра-
квадратичная форма V(x), что производная по времени от этой функции в
силу уравнения линеаризованной системы, т. е.
т>/ \ V^ dv V^
равна отрицательно определенной квадратичной форме w{x) =
г=1
г=1 1 3 = 1
Производная от указанной квадратичной формы в силу исходной
нелинейной системы D.25) имеет вид
и она в силу леммы 4.2 в некоторой окрестности начала координат
является отрицательно определенной функцией. Поэтому положение
равновесия х = 0 нелинейной системы D.25) асимптотически устой-
устойчиво.
Пусть среди корней характеристического уравнения линеаризо-
линеаризованной системы х = Лх имеется хотя бы один корень с положитель-
4.5. Исследование нелинейных систем по линейному приближению 133
ной вещественной частью. Покажем, что нелинейная система D.25)
неустойчива.
По теореме 4.18 для w(x) = |x2| существует квадратичная форма,
принимающая в какой-либо точке в любой окрестности начала коор-
координат положительное значение и производная которой по времени в
силу уравнения линеаризованной системы D.21) удовлетворяет соот-
соотношению
У(х) =аУ(х) + |х|2, а > 0.
Производная V(x) по времени в силу уравнения D.25) принимает вид
i=i
По лемме 4.2 сумма
i=i
является положительно определенной функцией в некоторой окрест-
окрестности начала координат. Следовательно, согласно второй теореме
Ляпунова о неустойчивости (теорема 4.12) система D.25) неустойчива.
Теорема доказана.
Критический случай. Итак, если линеаризованная система
устойчива, т. е. все корни ее характеристического уравнения име-
имеют отрицательные вещественные части, то и исходная нелинейная
система асимптотически устойчива. Если линеаризованная система
неустойчива и хотя бы один корень ее характеристического уравнения
имеет положительную вещественную часть, то и исходная нелинейная
система неустойчива. И наконец, если характеристическое уравнение
линеаризованной системы имеет корни на мнимой оси и не имеет
корней в правой полуплоскости, т.е. она маргинально устойчива, то
говорят, что имеет место критический случай. В критическом случае
по линеаризованной модели нельзя судить об устойчивости исходной
нелинейной системы. В примере, который был рассмотрен в начале
параграфа, был критический случай.
Пример 4.9. Исследовать устойчивость положения равновесия
системы .. . .
у + 2у + 3sin2/ = 0.
Решение. Разложение в ряд Тейлора синуса имеет вид
У3
sin2/ = у - ду + ...
Поэтому для линеаризованного уравнения имеем
у + 2у + Зу = 0.
Линеаризованная модель (асимптотически) устойчива, так как все
коэффициенты уравнения положительны, т.е. выполняется необход и-
134 Гл. 4- Метод функций Ляпунова
мое условие устойчивости, а для систем 2-го порядка необходимое
условие устойчивости является и достаточным. Поэтому и исходная
нелинейная система асимптотически устойчива.
Пример 4.10. Исследовать устойчивость положения равновесия
системы , с •• , /I • , о 1/ о
у + Ъу + Ау + Зеу = 3.
Решение. Разложение в ряд Тейлора функции еу имеет вид
еУ = 1 + у+? + ...
Поэтому для линеаризованного уравнения имеем
у + Ъу + Ц + Зу = 0.
Характеристическое уравнение имеет вид
А3 + 5А + 4А + 3 = 0.
Определитель Гурвица 2-го порядка положителен:
Д2 =5-4-1-3 = 17.
Так как выполняется необходимое условие устойчивости и единст-
единственный определитель Гурвица с четным индексом положителен,
то по критерию Льенара—Шипара линеаризованная система устой-
устойчива. Следовательно, и исходная нелинейная система асимптотически
устойчива.
Пример 4.11. Исследовать устойчивость положения равновесия
системы . о з • л о з
х\—х2 — Lx\, Х2 = ~4ж1 — 3^2-
Решение. Уравнения первого приближения имеют вид
Характеристическое уравнение
О 1
-4 О
-IX
= Л2 + 4 = О
имеет два чисто мнимых корня. Поэтому имеет место критический
случай, и по линеаризованной модели нельзя исследовать устойчи-
устойчивость исходной нелинейной системы.
Исследуем устойчивость нелинейной системы методом функций
Ляпунова. В качестве кандидата на функцию Ляпунова примем квад-
квадратичную форму
V(x) = х\ + ах\.
Производная по времени в силу заданных уравнений имеет вид
У(х) = 2хххх + 2ах2х2 = 2^i(x2 - 2х\) \
Если принять а = 1/4, то получим
4-6. Оценка времени регулирования 135
Таким образом, выбранная квадратичная форма является положи-
положительно определенной, а ее производная по времени в силу заданных
уравнений системы — отрицательно определенной. Следовательно, по
теореме Ляпунова об асимптотической устойчивости положение рав-
равновесия рассматриваемой системы является асимптотически устой-
устойчивым.
4.6. Оценка времени регулирования
Рассмотрим задачу оценки времени регулирования устойчивой
линейной системы
х = Лх. D.29)
Пусть х(?)=х(х°,?) — решение уравнения D.29) при начальном
условии х@) = х° и tp — минимальное время, по истечении которого
(?)| не превышает некоторой заданной величины А:
Заметим, что ?р и при соответствующем выборе начального усло-
условия не совпадает со временем регулирования ?р, принятым в теории
управления линейных систем. Тем не менее ?р также будем назы-
называть временем регулирования систем D.29) при начальном условии
х@) =х°.
Теорема 4.20. Пусть матрица В является решением уравнения
Ляпунова
АТВ + В А = —I (I — единичная матрица), D.30)
Хт и Хм — минимальное и максимальное собственные значения этой
матрицы. Решение х(?)=х(х°,?) уравнения D.29) при начальном
условии х@) = х° удовлетворяет условию
^е-*/л^|х|2^е-*/А-, D.31)
где Vo = x° 5х°, и время регулирования tp определяется соотно-
соотношением
tp = XM\n-^-. D.32)
Доказательство. В силу теоремы о существовании решения
уравнения Ляпунова (теорема 4.14) и критерия Ляпунова устойчи-
устойчивости линейных систем (теорема 4.15) решение В уравнения Ляпу-
Ляпунова D.30) существует и квадратичная форма V(x) = хтЛх явля-
является функцией Ляпунова для системы D.29). При этом имеет место
равенство
У(х) = -хтх = -|х|2. D.33)
Используя свойство квадратичной формы (см. D.1))
136 Гл. 4- Метод функций Ляпунова
получаем . , . ,
-Щ < -|х|2 < -Шл D.34)
или, учитывая равенство D.33),
Am dt Хм
Последнее неравенство можно записать в виде
_dt_ dV(x) dt
Хт ^ F(x) ^ Am'
Проинтегрировав это неравенство, получим
Voe~t/Xm <С У(х) ^ Voe~t/XM. D.35)
Неравенство D.34) можно представить в виде
Хм
Используя D.35), из последнего неравенства получим D.31).
Теперь, подставив в правую часть полученного неравенства D.31)
t = tp, приравняв ее А2 и прологарифмировав, получим форму-
формулу D.32). Теорема доказана.
Очевидно, время tp само по себе может служить показателем
быстродействия. Однако его можно использовать также и для оцен-
оценки «классического» времени регулирования. Как известно, в теории
управления линейных систем временем регулирования называется
минимальное время tp, по истечении которого отклонение переходной
характеристики от установившегося значения не превышает некото-
некоторой заданной величины А. Если время tp определить при начальных
условиях, соответствующих начальным условиям при снятии пере-
переходной характеристики, его можно использовать как оценку сверху
времени регулирования tp:
Следует заметить, что tp может оказаться значительно больше
?р, так как tp определяет как время, по истечении которого модуль
вектора состояния (а не модуль выходной переменной) не превышает
заданной величины А.
Пример 4.12. Получите верхнюю оценку времени регулирования
методом функций Ляпунова для системы
У + У + У = 0.
Решение. Запишем уравнение в нормальной форме:
Х\ = Х2, Х2 = —Х\ — X2j
ИЛИ , . v г
хЛ Г 0 1
±2 -1 -1
4.7. Методы построения функций Ляпунова 137
Уравнение D.30) принимает вид
0 -1] Г&п Ь12] ГЬП Ь12] ГО 1] [1 0
1 -lj [Ь21 Ъ22\+ [Ъ21 Ъ22\ [-1 -lj [о 1
После перемножения матриц получим
1 |" 0
— ^22 J [— ^22 ^21 — ^22 J |_ 0
Учитывая равенство b±2 = 62 ъ из последнего уравнения получаем
систему уравнений
— 26i2 = -1, -^22 + Ьц - 6i2 = 0, 2^12 - 2622 = ~1.
Эта система имеет следующее решение:
bl2 = Ь21 = °'5' ^22 = 1, Ьц = 1,5.
Характеристическое уравнение
В-1Х\ =
1,5-Л 0,5
= A,5 - Л)A - Л) -0,25 =
0,5 1-А
= Л2 -2,5Л + 1,25 =
имеет корни Ai = Am = 0,69 и А2 = Хм = 1,81.
Положим х@) = A 0)т и А = 0,05. Тогда получим
Vn
= Ам1п —^ = 1,81 In 869,565 « 12.
4.7. Методы построения функций Ляпунова
Общего метода построения функции Ляпунова нет. Разработаны
различные методы, которые позволяют находить функции Ляпунова
для определенного типа систем [7]. Здесь мы рассмотрим некоторые
из них.
1. Энергетический подход. При таком подходе в качестве канди-
кандидата на функцию Ляпунова принимают полную энергию, представ-
представляющую сумму потенциальной и кинетической энергий.
2. Метод разделения переменных. Этот метод предложен Е. А. Бар-
башиным и состоит в следующем. Кандидата на функцию Ляпунова
ищут среди функций, которые сами, как и их производные по времени,
в силу заданных уравнений системы представляют сумму функций,
каждая из которых зависит только от одной фазовой переменной:
г=1 г=1
138 Гл. 4- Метод функций Ляпунова
3. Метод Лурье-Постникова. А. И. Лурье и В.Н. Постников, рас-
рассматривая задачу об устойчивости нелинейной системы, содержащей
одну нелинейность а = /(е), использовали в качестве кандидата на
функцию Ляпунова сумму из квадратичной формы и интеграла от
нелинейной функции, т.е. функцию вида [41]
е
V(x) = хтВх + /Де) de,
О
где в общем случае е = стх. Более детально этот метод был разрабо-
разработан А. И. Лурье [40]. Он широко используется при рассмотрении зада-
задачи об абсолютной устойчивости, о которой речь пойдет в следующей
главе.
4. Метод Красовского. Этот метод состоит в том, что при рас-
рассмотрении устойчивости автономной системы
х = Х(х), Х@) = 0, х G Дп,
в качестве кандидата на функцию Ляпунова рассматривают квадра-
квадратичную форму
Т
Симметричную матрицу В нужно выбрать так, чтобы сама квад-
квадратичная форма была положительно определенной, а ее производная
по времени в силу заданного уравнения системы — отрицательно
определенной.
В качестве примера рассмотрим систему
х\ — х2, х2 = —Ьх\ — р(х2), Ь > 0, </?@) = 0.
Матрицу В выберем диагональной:
в-[о ь22_
Тогда кандидат на функцию Ляпунова примет вид
V(x) = Ь\\х\ + b22[—bxi — (f(x2)]2.
Производная по времени в силу заданных уравнений имеет вид
V(x) = 2Ьцх2х2 + 2Ь22\—Ьх\ — (f(x2)](-bxi - -^-х2 ) =
V ОХ2 /
= 2\bxi + (f(x2)](b22b - Ьц)х2 - 2b22 -^- \bxi + (р(х2)]2.
ОХ<2
Положив Ьц = b и Ь22 = 1, получим
у(х) = Ьх\ + [&Ж1 + у?(ж2)] , ^(х) = ~2 ¦
4.7. Методы построения функций Ляпунова 139
Как нетрудно убедится, V(x) является положительно опреде-
определенной функцией и V(x) —> оо при |х| —> оо. Если д(р/дх2 > 0 при
Х2 ф О, то производная V(x) является отрицательно полуопределенной
и обращается в нуль на многообразии сг^) = Ьх\ + <р(х2) = 0, т.е. на
множестве, определяемом указанным уравнением. Это множество не
содержит целых траекторий, так как
gradcr(x)X(x)|a(x)=0 = Ьх2 ф О
вне начала координат на указанном многообразии. Поэтому по теоре-
теореме Барбашина-Красовского положение равновесия рассматриваемой
системы будет асимптотически устойчиво в целом.
5. Метод Вокера-Кларка (Woker-Klark). Пусть система описыва-
описывается уравнением
или, в нормальной форме,
хп = -
В качестве кандидата на функцию Ляпунова при этом методе рас-
рассматривается функция
V
У(х) = I f(x1,x2,...,xn)dxn-1 + -у + F(x1,x2,...,xn),
о
где неизвестная функция F(x\, х2,..., хп) выбирается так, чтобы про-
производная V(x) в силу заданных уравнений системы была отрицатель-
отрицательно полу определенной.
Исследуем этим методом систему
,о) = о,
ИЛИ
Xl =X2, X2 = -f(x!,X2).
В соответствии с методом Вокера-Кларка в качестве кандидата
на функцию Ляпунова принимаем
х\ 2
= J f{xux2)dx1 + Ц-
Производная от этой функции по времени в силу заданных урав-
уравнений имеет вид
140 Гл. 4- Метод функций Ляпунова
т>/ ч */ n • / ? df л "\ • • dF . dF .
Vix.) = j(xiJx2)xi + / т-^- ажх )х2 + ж2ж2 + -— х\ + -— х2 =
VJ с/ж2 / охг 0x2
4 о 7
?/ , dF dF
о
Если положить F(xi,x2) = 0, то получим
Х1 2 Ж1 о/»
У(х) = JfixxjX^dx! + у, У(х) = -f(x!,x2) J — dxx.
о о
Отсюда следует, что положение равновесия х = 0 асимптотически
устойчиво в целом, если выполняется условие
x1f(xux2) > 0, /Ох,ж2) / -Q^-dx! > 0 при х^О.
о
Задачи
1. Исследуйте, являются ли положительно определенными в
пространстве R3 следующие квадратичные формы:
а) У(х) =х\ + 2x1 + Зжз
б) У(х) = ж? - 2ж| + Зж§
в) V(x) — х\ — 2х\ — Ъх\
г) V(x) — х\— 2х\ — х\
д) У(х) = х\ + Зж|
е) У(х) = -ж? + 2ж
2. Исследуйте методом функций Ляпунова устойчивость положе-
положения равновесия следующих систем:
а) х\ — 0,5#i — х2 + 2х2 — Xi, х2 = — 2#i — ж2;
б) Ж1 = —xi + 2ж|, ж2 = —2#i — Ж2 — ж|;
в) жх = 2ж2 - xf, х2 = —2жх — Жз + жз, ж3 = -ж2 - ж|;
г) жх = 2ж3 - ж?, х2 — —х\ + жз, ж3 = 2жх — х2 — х\\
д) жх = —х2 + 0,5^x
е) жх = — х2 + 0,5^x^2, х2 — —жх —
ж) х/ + у - уъ = °;
з) У - У3 + У - УЪ = 0.
Задачи 141
3. Исследуйте по линейной модели устойчивость положения рав-
равновесия следующих систем:
а) у' + 3y + 2y + smy = 0;
б) У' + Зу + by + 3(еУ - 1) = 0;
в) у' + Зу + у + Зу + cos у - 1 = 0;
г) #' + Зг/ + 2у + 42/ + е^ - cos у = 0;
д) 'у + 2у + 2у + 4у + siny - 2cosy + 2 = 0;
е) х\ — — 2 sin х\ + ^2, ^2 = —2^i — ж|;
ж) х\ — — 2sinх\ — еХ2 + cosХ2, Х2 = — 2xi — 3^2;
з) Ж1 = —х\ + х\+ Х2-, Х2 = — sin^i + 1 — cos^2;
и) х\ — 2х\ - 2 sin х\ + еЖ2 - cos х2, ^2 = —2xi + ж2 + ж|.
4. Исследуйте устойчивость положения равновесия следующих
систем:
а) х\ = —х\ + #2, ^2 = — 2#i — ж|;
б) Ж1 = —х\ - х\ + ж2, ^2 = —2xi - х2;
в) жх = B + smt)xi + х2, Х2 = —2жх - ж2 - ж|;
г) жх = @, 5 + sin2 ^)жх + жг, х2 = —2жх - х\\
д) х\ = 0,5жх + @, 5 + sin ?)ж2,
Ж2 = —A + 0,2 sin2 t)x\ + (cos^ — 2)^2;
е) жх = жх + @, 5 + sin2 t)x2 — х\,
х2 = -B + 4sin2^)xx - 2ж2 - х\.
5. Определите, при каких значениях параметров устойчиво поло-
положение равновесия следующих систем:
а) х\ — —Ьх\ + ах2, Х2 = —2х\ — 2х\\
б) х\ = — х\ + ах2-> Х2 — —2cxi — 2х\\
в) жх = —Жх + ах2, х2 = —сжх - 2ж|;
г) х\ — —Ьх\ + ах2, Х2 = — сх\ — 2dx\.
Глава 5
АБСОЛЮТНАЯ УСТОЙЧИВОСТЬ
Впервые задача об абсолютной устойчивости была рассмотре-
рассмотрена А. И. Лурье, и ее иногда называют задачей Лурье [37]. Им был
разработан метод решения этой задачи, основанный на построении
функции Ляпунова. В 1961г. румынский ученый В.М. Попов опуб-
опубликовал работу, в которой изложил частотный метод решения этой
проблемы. Это повлекло за собой появление большого потока работ в
этом направлении.
Рассмотрим систему с одной нелинейностью (рис. 5.1, а). Та-
Такую систему всегда можно преобразовать к «стандартному» виду
W?
У
-Т
f(n
и
У
Рис. 5.1. Структурная схема нелинейной системы (к исследованию абсолют-
абсолютной устойчивости: а — исходная структурная схема; б — преобразованная
структурная схема
(рис. 5.1, б). В нормальной форме такие системы описываются урав-
уравнениями вида
где х — n-вектор; и, ? — скалярные переменные; нелинейная функ-
функция /(?) удовлетворяет следующим условиям:
^ /(О г- 1
/@) = 0,
7
при ? ф 0.
E.2)
Уравнения E.1) представляют собой уравнения в отклонениях, и
на структурной схеме (рис. 5.1) задающее воздействие равно нулю:
д = 0 (д = 0).
Определение 5.1. Система E.1), или положение равновесия
х = 0 системы E.1) называется абсолютно устойчивым в угле (сек-
(секторе) [кт,км], если нулевое решение х = 0 системы E.1) асимп-
асимптотически устойчиво в целом при любой нелинейной функции /(?),
удовлетворяющей условию E.2).
5.1. Необходимое условие абсолютной устойчивости 143
Абсолютная устойчивость, как и робастная устойчивость, озна-
означает устойчивость не одной конкретной системы, а некоторого мно-
множества систем, определяемых заданным множеством S нелинейных
звеньев. В определении 5.1 в качестве множества S принято мно-
множество E.2), которое обычно рассматривается при рассмотрении аб-
абсолютной устойчивости. Естественно, множество S может быть за-
задано иначе. Поэтому в общем случае будем говорить об абсолютной
устойчивости на множестве (классе) ?, которое в общем случае
отличается от множества, задаваемого соотношением E.2).
5.1. Система сравнения. Необходимое условие
абсолютной устойчивости
Дальше будем рассматривать структурную схему нелинейной сис-
системы, представленную в стандартном виде (см. рис. 5.1,6). Передаточ-
Передаточную функцию Wn в операторной форме, если система задана уравне-
уравнениями E.1), можно найти следующим образом. Запишем уравнения
линейной части в операторной форме:
Aр - Л)х = tm, ? = -стх,
х = (/р-Л)-1Ьи, ? = -стх.
Отсюда, исключая х и учитывая у = —?, получим
]?л(р) = сТAР-А)-1Ъ.
Используя эту передаточную функцию, уравнения E.1) можно
записать (см. рис. 5.1, б) в виде
y = Wn(p)u, u = №, ? = -у. E.3)
Наряду с нелинейной системой E.1) или E.3) рассмотрим линей-
линейную систему . . .
y = Wn(p)u, u = k?, ? = -y. E.4)
Эту систему при любом k Е [кш,км] называют системой сравнения
системы E.3), E.2). «Нелинейность» /(?) = fc? принадлежит мно-
множеству E.2) при любом к € [кт,км]- Поэтому если система E.3)
абсолютно устойчива в угле [кт, км], то ее система сравнения, т. е. ли-
линейная система E.4), устойчива (асимптотически устойчива в целом)
при любом к Е [km, км]- И если система сравнения при каком-либо
к G [km, км] неустойчива, то система E.3) не может быть абсолютно
устойчивой в угле [кт,км]- Будем говорить, что система сравнения
робастно устойчива в угле или на интервале [кт,км], если она
устойчива при любом к G [кт,км]- Из изложенного выше вытекает
следующее необходимое условие абсолютной устойчивости: для того
чтобы положение равновесия системы E.3) было абсолютно устой-
устойчиво в угле [кт,км], необходимо, чтобы ее система сравнения была
робастно устойчива в угле [кт,км]-
144 Гл. 5. Абсолютная устойчивость
Возникает вопрос, не является ли необходимое условие абсолютной
устойчивости и достаточным. Эту проблему впервые в 1949 г. рас-
рассмотрел М. А. Айзерман. Поэтому ее называют проблемой Айзермана.
Проблема Айзермана вскоре была решена. Н. Н. Красовский в
1952 г. и В. А. Плисе в 1958 г. показали, что приведенное выше не-
необходимое условие не является достаточным: они построили системы
(модели), которые не были абсолютно устойчивы, в то время как их
системы сравнения были робастно устойчивы в заданном угле.
Пример 5.1. Пусть передаточная функция линейной части
имеет вид Wn = 1/(р+1K. Исследовать, является ли система (см.
рис. 5.1, б) абсолютно устойчивой в угле [0,10].
Решение. Проверим, выполняется ли необходимое условие абсо-
абсолютной устойчивости. Для этого достаточно проверить устойчивость
системы сравнения E.4) при к = 10. Характеристическое уравнение
системы сравнения при таком коэффициенте имеет вид
А3 + ЗА2 + ЗА+ 11 = 0.
Определитель Гурвица 2-го порядка отрицателен: А2 =3-3 — 11 =
= — 2. Необходимое условие абсолютной устойчивости не выполня-
выполняется. Следовательно, нелинейная система не является абсолютно
устойчивой.
5.2. Прямой метод Ляпунова исследования
абсолютной устойчивости
А. И. Лурье предложил метод решения задачи абсолютной устой-
устойчивости, основанный на прямом методе Ляпунова. Идея его метода
заключается в том, что для системы E.1), E.2) функция Ляпунова
ищется в виде квадратичной формы плюс интеграл от нелинейной
функции [23, 40]: ^
/
о
где В — положительно определенная матрица, q — произвольное
положительное число. Нелинейности из класса, определяемого соот-
соотношением E.2), удовлетворяют условию /(?)? ^ 0. Поэтому интеграл
в рассматриваемой функции является неотрицательной функцией, а
сама функция положительно определенной. И задача сводится к опре-
определению такой положительно определенной матрицы В и такой поло-
положительной константы д, при которых производная по времени У(х)
в силу уравнений системы была бы отрицательно определенной и
функция V (х) неограниченно возрастала бы при неограниченном уве-
увеличении |х|: У(х) —У оо при |х| —У оо. В соответствии с теоремой
Барбашина-Красовского в случае стационарной системы достаточно,
5.1. Необходимое условие абсолютной устойчивости 145
чтобы производная V(x) была отрицательно полуопределена и обра-
обращалась в нуль вне начала координат на множестве, не содержащем
целых траекторий.
Здесь мы не будем рассматривать способ решения задачи абсо-
абсолютной устойчивости прямым методом Ляпунова в общем случае. Для
иллюстрации метода ограничимся решением частной задачи.
Пусть система описывается уравнениями
к
У =
Р \ CL±p ~г B2
где к, ai, a2 — положительные постоянные, а нелинейная функция
удовлетворяет условию
/@) = 0, а ^ Щ1 ^ /3, 0 <а< /3 < оо.
Запишем уравнение системы в нормальной форме, исключив пере-
переменные у и и:
х\ = Х2ч х2 = — а2х\ — а,\х2 —
Функцию Ляпунова будем искать в виде
V(x) = х\ + 2Ьх\х2 + сх\ + q ]
о
где 6, с — произвольные постоянные, q — произвольная положи-
положительная постоянная. Для того чтобы квадратичная форма в функции
Ляпунова была положительно определена, постоянные Ь, с по крите-
критерию Сильвестра должны удовлетворять условию с — Ь2 > 0. Найдем
производную по времени V(x) в силу уравнения системы:
= 2(xi + Ьх2)х2 — 2{Ьх\ + сх2У\а2х\ + а\х2 + kj[x\)\ + qj[x\)x2 =
= 2A — ba\ — са2)х\х2 — 2{са\ — Ь)х\ — 2Ьа2х\ —
— 2bx\kf{x\) — 2ckx2f(xi) + qf[x\)x2.
Если положить 1 — ba\ — са2 = 0, или с = A — Ьа\)/а2 и q = 2ск,
то производная примет вид
V(x) = —2(cai - b)x\ — 2ba2x\ — 2bkxif(xi),
и она будет отрицательно определенной, если b > 0, са\ — b > 0, или
0 < b < са\. Подставив сюда выражение для с, получим 0 < b <
< ai/(a\ + а2). Функция V(x) будет положительно определенной, если
с — Ь2 > 0. Это условие всегда можно выполнить, выбрав b достаточно
малым. Так как функция Ляпунова включает положительно опреде-
определенную квадратичную форму, то она будет неограниченно возрастать
при стремлении |х| к бесконечности. Следовательно, положение рав-
равновесия системы абсолютно устойчиво.
10 Д.П. Ким
146 Гл. 5. Абсолютная устойчивость
5.3. Частотные методы исследования
абсолютной устойчивости
Проблема абсолютной устойчивости сначала исследовалась пря-
прямым методом Ляпунова. Однако с начала 60-х годов прошлого века
стал широко использоваться частотный метод.
5.3.1. Линейная часть устойчива. Рассмотрим сначала слу-
случай, когда линейная часть нелинейной системы (см. рис. 5.1, б) устой-
устойчива. Представим ее частотную передаточную функцию в виде
Критерий Попова. Для того чтобы положение равновесия
системы E.3) с устойчивой линейной частью было абсолютно ус-
устойчиво в угле [0, к], достаточно, чтобы существовало такое ве-
вещественное число q, что при всех со ^ 0 выполняется неравенство
Re(l+jqu)Wn(jv) + \ > О, E.5а)
или
U(и) - qujV(uj) > ~. E.56)
Доказательство будет приведено дальше. Здесь пока рассмотрим
пример.
Пример 5.2. Передаточная функция линейной части имеет вид
Wn(p) = 2 " (^о, «о, «1, а2 > 0).
Определить, при каких значениях к система (см. рис. 5.1, б) будет
абсолютно устойчива в угле [0, к].
Решение. Частотная передаточная функция линейной части
имеет вид h
Отсюда для вещественной и мнимой частей получаем
уа,2 — аооо2J + (агооJ уа,2 — аооо2J + уагооJ
Условие E.56) принимает вид
Ьо(п2 — аооо ) + qboaiuj I ^
(п2 — clou;2J + (aicvJ к
Если положить q = ao/fti, то получим
Последнее неравенство выполняется при любом ш ^ 0 и любом к > 0.
Поэтому рассматриваемая система абсолютно устойчива в угле [0, к]
при любом конечном к > 0.
5.3. Частотные методы
147
В приведенной выше формулировке теоремы Попова не просмат-
просматривается частотная сущность. Рассмотрим другую, частотную фор-
формулировку теоремы Попова. Для этого введем в рассмотрение сле-
следующие частотные функции:
Um(uj) = U(uj), VM(to)=toV(uj), WM(jw) = UM(uj)+jVM(uj). E.6)
Последняя функция называется модифицированной частотой переда-
передаточной функцией (линейной части). Используя первые две функции,
неравенство E.56) можно представить виде
UM{u>) - qVM(w) >-±.
E.7)
Если построить на плоскости (UM,VM) так называемую прямую
Попова, которая описывается уравнением
UM-qVM = ~,
где q — произвольное вещественное число, то правее прямой Попова
выполняется неравенство E.7). Поэтому если построить частотную
характеристику — кривую, которая описывается уравнением в пара-
параметрической форме
^Прямая Попова
при 0 ^ и < оо, то она полностью располагается правее прямой По-
Попова в том и только том случае, когда выполняется условие E.7).
Точно так же, если построить на комплексной плоскости (UM,jVM)
прямую Попова (прямую, пересе-
пересекающую вещественную ось в точ-
точке — 1/к) под наклоном 1/q и го-
годограф модифицированной частот-
частотной передаточной функции WM(ju)
при 0 ^ ио < оо, который называ-
называется модифицированной частотной
характеристикой (линейной части)
(рис. 5.2), то условие E.7) будет вы-
выполнено в том и только том случае,
когда модифицированная частотная
характеристика располагается пра-
правее прямой Попова. Следовательно, Рис- 5-2- Модифицированная час-
теорему Попова еще можно сформу- тотная характеристика и прямая
лировать следующим образом.
им
Попова
Частотная формулировка критерия Попова. Для
того чтобы положение равновесия системы E.3) с устойчивой ли-
линейной частью было абсолютно устойчиво в угле [0, к], достаточ-
достаточно, чтобы можно было провести прямую, проходящую через точ-
ю*
148
Гл. 5. Абсолютная устойчивость
ку (—l/&,jO), т.е. прямую Попова такую, что модифицированная
частотная характеристика полностью располагается правее этой
прямой.
Модифицированная частотная характеристика отличается от
обычной (не модифицированной) частотной характеристики только
ординатами (см. E.6)).
Пример 5.3. Пусть передаточная функция линейной части имеет
вид Wn = 1/(р + IK. Исследовать, является ли система (см. рис. 5.1, б)
абсолютно устойчивой в угле [0,3].
Решение. Легко проверить, что необходимое условие абсолют-
абсолютной устойчивости выполняется (см. пример 5.1). На рис. 5.3 представ-
представлена амплитудно-фазовая частотная характеристика линейной части.
-0,33
jV\
-0,4..-: :
-0,6
-0,8-; I
-0,4-0,2 0 0,2 0,4 0,6 0,8 1,0
Рис. 5.3. Амплитудно-фазовая частотная характеристика (к примеру 5.3)
Она расположена правее прямой Попова — прямой, пересекающей ось
абсцисс в точке —0,33 и параллельной оси ординат. Так как моди-
модифицированная частотная характеристика отличается от приведенной
только по оси ординат, то и она будет располагаться правее этой
прямой. Следовательно, система абсолютно устойчива в угле [0,3].
5.3.2. Линейная часть неустойчива. Пусть линейная часть
нелинейной системы (рис. 5.4, а) неустойчива. Преобразуем ее еле-
/@
-к
и \
V
У i
Рис. 5.4. Преобразование структурной схемы с неустойчивой линейной
частью: а — исходная схема; б — преобразованная схема
5.3. Частотные методы 149
дующим образом. Охватим линейную часть отрицательной обратной
связью звеном с передаточной функцией г, а к нелинейному звену
подключим параллельно звено также с передаточной функцией г,
выход которого подключен к сумматору по отрицательному входу
(рис. 5.4,6). Преобразованная схема эквивалентна исходной схеме.
Действительно, учитывая g = 0, на входе линейного звена преобра-
преобразованной схемы имеем
и = /(?) + гу -гу = /(?),
т.е. тот же сигнал, что и на входе линейного звена исходной схемы.
В преобразованной схеме передаточная функция линейной части
имеет вид
а нелинейность выражается равенством
ш = ш - гц
(см. рис. 5.4,6). Так как при ? ф 0 имеем /п(?)/? — /(?)/? ~ г? т0
неравенство г ^ /(?)/? ^ ^ равносильно неравенству 0 ^ /п(?)/? ^
^ к — г. Поэтому положение равновесия исходной системы (см.
рис. 5.4, а) абсолютно устойчиво в угле [г, к], если положение равно-
равновесия преобразованной системы (см. рис. 5.4, б) абсолютно устойчиво
в угле [0, к — г].
Пусть преобразованная линейная часть устойчива, т. е. все полюса
передаточной функции Wn имеют отрицательные вещественные час-
части. Тогда по теореме Попова положение равновесия преобразованной
системы абсолютно устойчиво в угле [0, к — г], если выполняются
неравенства
ИЛИ -I
ВД-«уВД>-г^, E.8)
/ъ — Т
где Un(cu) = ReWn(juj) и Vn(u>) = ImWn(jcu).
Из изложенного выше получаем следующий критерий абсолютной
устойчивости в случае неустойчивой линейной части.
Критерий Попова. Положение равновесия нелинейной систе-
системы E.3) с неустойчивой линейной частью абсолютно устойчиво
в угле [г, к], если все полюса преобразованной передаточной функ-
функции Wn = \?л/A + гИ/л) имеют отрицательные вещественные час-
части и существует такое вещественное число q, что при всех uj ^ О
выполняется неравенство E.8).
Пример 5.4. Пусть передаточная функция линейной части имеет
вид Wn = 10/(р — 1). Исследовать, является ли система (см. рис. 5.3, б)
абсолютно устойчивой в угле [0,2; 200].
Решение. Преобразованная передаточная функция имеет вид
Wu = Wn/A + rWn) = 10/(р+ 1). Отсюда для частотной передаточ-
150 Гл. 5. Абсолютная устойчивость
ной функции, а также для вещественной и мнимой частотных функ-
функций имеем
10 10A-jw) ТТ , ч 10 лт ( \ Юо;
Условие E.8) принимает вид
10 10 о;
и;2 + 1 ^ о;2 + 1 ~ о;2 + 1 200 - 0,2 '
и оно выполняется при любом q ^ 0. Следовательно, рассматривае-
рассматриваемая система абсолютно устойчива в угле [0,2; 200].
Как и в случае с устойчивой линейной частью, можно сформули-
сформулировать частотный вариант критерия устойчивости. Для этого введем
следующие частотные функции:
f/пм (и) = Un (ш), VnM И = wVn И, WnM (jo;) = UnM И + jVm (ш).
Функцию WnM(j(j) будем называть модифицированной преобразован-
преобразованной частотной передаточной функцией, а ее годограф при измене-
изменении 0 ^ uj < оо — модифицированной преобразованной частотной
характеристикой. Используя вещественную и мнимую части функ-
функции WnM(ju), условие E.8) можно записать в виде
^пм(^) - qVnM(uj) > .
В случае неустойчивой линейной части прямая Попова — эта прямая,
которая пересекает вещественную ось в точке —1/{к — г) и имеет
наклон 1/q.
Частотная формулировка критерия Попова. Поло-
Положение равновесия нелинейной системы E.3) с неустойчивой линей-
линейной частью абсолютно устойчиво в угле [г, fc], если можно провес-
провести такую прямую Попова, что модифицированная преобразованная
частотная характеристика полностью располагается правее этой
прямой.
5.4. Доказательство критерия Попова
Нужно показать, что положение равновесия х = 0 системы E.1)
х = Ах + bm, u = f(?), ? = — стх,
или
где Wn{p) = cT(Ip — А)~1Ъ, абсолютно устойчиво в угле [0, fc], если
выполняется неравенство E.5а):
Доказательство проведем в два этапа. Сначала покажем, что по-
положение равновесия системы E.1) абсолютно устойчиво в угле [0, fc],
5.4- Доказательство критерия Попова 151
если выполняется неравенство
t о
O, E.9)
где wn(t) — весовая функция линейной части, q — вещественное
число, е — бесконечно малое положительное число, 5(t) — дельта-
функция (функция Дирака).
1. По формуле Коши (см. A.9)) решение уравнения линейной части
при начальном условии х(?о) = х° можно представить в виде
t
х(*) = X(t - to)x° + fx(t - т)Ъи(т) dr. E.10)
о
Здесь учтено, что в стационарном случае фундаментальная матрица
решений однородного уравнения линейной части зависит от одного
аргумента: X(t,to) =X(t — to). Умножим обе части последнего ра-
равенства на ст. Тогда, учитывая ? = —стх и у = —?, получим
t
y(t) = cTX(t - ?0)x° + cT fx(t - т)Ъи(т) dr.
о
Как известно, в линейных системах выход y(t) связан с входной
переменой u(t) и весовой функцией w(t) при нулевых начальных
условиях соотношением
t
y(t) = Jw(t-T)u(r)dT.
о
Поэтому формулу E.10) можно записать в виде
t
y(t) = cTX(t - io)x° + fwn{t - т)и{т) dr,
0
где wn(t) = cTX(t)h — весовая функция линейной части. Отсюда,
учитывая ?(?) = —y(t) и u(t) = /(?(t)), получаем
^(t) = - \cTX(t - *о)х° + Jwn(t - r)/(?(r)) dr 1. E.11)
^ о J
Производная по времени от этой функции имеет вид
№ = - \cTX(t - to)x° + wa@)№t)) +/«л(* - T)f(ar)) dr].
^ о J
E.12)
Введем в рассмотрение интеграл
Щ = - [ / (m - i /(№)) f(№) dO + q f№f{№) dO ] • E.13)
152 Гл. 5. Абсолютная устойчивость
Подставим сюда выражения для ?(?) и ?(?) из E.11) и E.12):
Л о
сТХ(в - ^о)х° + jwn{0 - т)/(?(т)) dr +
и О
qj \cTX{6 - *0)х° + w
°
Используя тождество
t
-j[% + qw0\
и обозначение
t
I0(t) = Г [стХ(в - ^о)х° + qcTX@ - ?0)x°] /(?F>)) dO, E.14)
о
последнее соотношение можно представить следующим образом:
t в
= I0(t) + ff[wn@ - r) + qwn{0 - т) +
о о
Если выполняется неравенство E.9), то при к G [0, fc + е] име-
имеем /(?) — /о(^) ^ 0, или — /(t) ^ —Io(t). Подставив в последнее нера-
неравенство выражение для I(t) из E.13), получим
-io(t). E.15)
Так как рассматривается абсолютная устойчивость в угле [0, к],
то 0 ^ /(С)/С ^ к при ? т^ 0. Поэтому справедливы следующие нера-
неравенства:
^ (^)o. E.16)
Если условие E.15) выполняется при к = к + е:
t t
то в силу последнего неравенства E.16) оно будет выполнятся при лю-
любом к G [0, к + е\. На основании второго неравенства из E.16) имеем
5.4- Доказательство критерия Попова
153
f{m))f{m) de = ?o
где 6q = s/(k(k + e)). Используя это соотношение и равенство
из неравенства E.15) получаем
E.17)
о о о
Используя неравенство Коши—Буняковского [55]
\
ftf(x)dx
а \
lfi(x)f2(x)dx
из соотношения E.14) получаем
t
- I0(t) = J[cTX{9 - io)x° + qcTX@ - to)x°][-
0
Jfl(x)dx, E.18)
d$
\
t
J[cTX@ - io)x° + qcTXF - io)x°]2 dB ,
о \
0
С учетом этого соотношения неравенство E.17) можно представить в
виде
t at) ш
A
t
J[cTX@ - io)x° + qcTXF - io)x°]2 dB
\
Используя обозначения
= J[cTX@ - ^o)x° + qcTX@ -
E.19a)
E.196)
154 Гл. 5. Абсолютная устойчивость
Ч№)= /№<% E.19в)
о
и принимая во внимание неравенство Ix(t) ^ /х(оо), последнее нера-
неравенство можно записать в виде
1} + j- I(?(t)) <: ^ П№) + ^ IX@0)If(t),
ИЛИ
(if --^ЬЫJ + ±i№) ^fonm) + Ь/х{<Х))- E-20)
Так как линейная часть устойчива, то фундаментальная матри-
матрица X(t) и ее производная по времени X(t) удовлетворяют условиям
оо оо
f\X(t)\dt < оо, f\X(t)\2 dt < оо,
о о
оо оо
f\X(t)\dt < оо, f\X(t)\2 dt < оо.
о о
Поэтому (см. E.196)) 1х(оо) < оо, и из неравенства E.20) получаем
(/ х()) №)) ^ со < оо,
где
1
Второе слагаемое слева в последнем неравенстве при q > 0 явля-
является положительным. Поэтому при q ^ 0 также можем записать
^с0<оо. E.21)
Из E.196) и E.19в) следует, что при |х°| —у 0 имеют место пре-
предельные соотношения
и соответственно
со
Поэтому из E.21) следует, что для любого Е\ > 0 существует такое
Si > 0, что (см. также E.19а))
как только |х°| < Si. В силу этого неравенства, непрерывности /(?)
и /@) = 0 для любого ?2 > 0 существует такое #2 > 0, что |?(?)| <
< ?2 при любом ? ^ 0, как только |х°| < #2. Таким образом, положение
5.4- Доказательство критерия Попова 155
равновесия устойчиво по Ляпунову. Остается показать, что при любом
начальном условии ?(?) —у 0 при t —У оо.
При любом начальном условии (см. E.21)) имеем
О
Поэтому /(?(?)) -У 0 при t -У оо, и так как /@) = 0, то и ?(?) ->• О
при ? —У оо.
Итак, мы показали, что если выполняется условие E.9), то поло-
положение равновесия абсолютно устойчиво в угле [0, fc]. При этом мы
предположили, что параметр q является неотрицательным: q ^ 0.
Это ограничение дальше будет снято.
2. Теперь докажем условие E.5а). Неравенство E.9), используя
функцию
s(t) = wn(t) + qwn(t) + (^ + qwn(O))S(t), E.22)
можно представить в виде
О О
или, учитывая, что wnF — г) = 0 и wnF — т) = 0 при г > в, — в
виде
t t
I fs{9 - т)/(?(т)) f(№) drdO > 0.
0 0
Интеграл слева не изменится, если s@ — г) заменить на s(r — 9).
Поэтому, положив
Щ ~т) = \ W - г) + 8(т - в)} E.23)
и используя обозначения f(t) = f (?(?)), последнее неравенство запи-
запишем в виде
t t
Ifs{e-T)J{r)J{e)drde^O. E.24)
О О
Заметим, что !$(t) в отличие от s(t) является четной функцией.
Рассмотрим двухстороннее прямое преобразование Фурье
оо
S(u) = Г s(t)e~ju;t dt E.25)
— оо
и обратное преобразование Фурье
s(t) = 77- / S(w)e>ut duj. E.26)
156 Гл. 5. Абсолютная устойчивость
Подставим выражение E.26) в E.24) и поменяем порядок интегриро-
интегрирования:
ОО / t t \
-oo ^00 '
Интегралы
t t
F(ju>, t) = J](e)e-i"e d$, F(-jw, t) = J
0 0
являются комплексно-сопряженными функциями. Поэтому имеем
t t t t
///W 1(в)е-эш{в-^ drde = Jf(e)e-ju0 deJf(T)e-j"T dr =
0 0 0 0 _
= \F(jaj,t)\2,
и последнее неравенство можно представить в виде
ОО
^ jS(w)\F(jw,t)\2duj^0. E.27)
— оо
Положив в E.23) г = 0, получим
Подставив это выражение в E.25) и учитывая s(t) =0 при t < О,
находим
¦ 0 —oo
0 -|
f s(-0)e-j^ dr .
Произведя замену переменных г = — в во втором интеграле, получим
г ОО ОО -|
S(w) = I [sF)e-jwl) d6 + fs(T)ej"T dr\ =
'-о о J
где
ОО
S(juj) = js(O)e-jujd dO.
0
Условие абсолютной устойчивости E.27) будет выполнено, если
S(cj) ^ 0, или
S(u) =ReS(juj) ^0. E.28)
В силу E.22) имеем
ОО
S(jw) = I [wn(t) + qwn(t) + (-^ + <№@))<5(i)]e-^* dt. E.29)
5.4- Доказательство критерия Попова 157
Как известно, передаточная функция равна изображению Лапласа
от весовой функции:
Wn(s) = L{wn(t)}.
Кроме того, по правилу дифференцирования оригинала имеем
Записав эти соотношения в явном виде и сделав постановку s = jo;,
получим
оо оо
О О
Используя эти соотношения, из E.29) находим
1
к + Е'
При подстановке этого выражения в условие E.28) последнее прини-
принимает вид
Re (A + qju)Wa(Jw)) + -г^— > О-
К ~т Е
Устремив е к нулю и заменив знак нестрого неравенства на строгий,
получим условие абсолютной устойчивости в виде следующего нера-
неравенства:
к
Теперь осталось показать, что при выполнении последнего не-
неравенства система будет абсолютно устойчива и при любых отри-
отрицательных значениях параметра q, т.е. снять ограничение, которое
было введено при получении неравенства E.21). Для этого преобра-
преобразуем уравнения рассматриваемой системы E.3), положив и = к^ — и.
Исключив из системы E.3) переменную и, получим
y = W(p)u, й=№, ?=-у, E.30)
где
Как нетрудно проверить, если 0 ^ /(?)/? ^ ^ то и 0 (О/
Поэтому если исходная система абсолютно устойчива в угле [0, fc],
то и преобразованная система E.30) абсолютно устойчива в том же
угле [0, /с]. И соответственно, как было показано, должно выполняться
неравенство
Re (A + qjw)W{jw)) + \ > 0 E.31)
при q ^ 0. Преобразуем левую часть последнего неравенства, подста-
подставив в него выражение для W(p):
158 Гл. 5. Абсолютная устойчивость
Re
_ [1 - кушУГ^шЩ + kWn(-ju)] _
fc[l
Re(Ь «wWil0"
Учитывая KeWn(j(j) =KeWn(—j(j) и отбрасывая последнее, мнимое
слагаемое, получаем
+ \
не l^i'i ^j^/ " \j*~ j ' 7
Следовательно, условие абсолютной устойчивости E.31) можно
записать в виде
Г 1 1
>0.
Это условие должно выполнятся при q ^ 0. Если это неравенство
записать в виде E.5а):
А; '
то оно должно выполнятся при q ^ 0. Критерий Попова полностью
доказан.
5.5. Квадратичный критерий
абсолютной устойчивости
При рассмотрении абсолютной устойчивости класс нелинейных
звеньев можно задавать с помощью квадратичной формы. Например,
класс нелинейных звеньев, определяемых соотношением
/@)=0, а^?^^{3 (а</3), E.32)
с помощью квадратичной формы можно определить следующим об-
образом:
F(u,0 = №-u)(u-aO>0, u = f(O- E.33)
Действительно, разделив обе части последнего неравенства на ?2,
получим
("-?)(? -)>»¦
Это условие выполняется тогда и только тогда, когда выполняются
неравенства
ИЛИ
("-!)« (?-)<»¦
5.5. Квадратичный критерий абсолютной устойчивости 159
Первая система неравенств равносильна условию E.32). Вторая сис-
система неравенств невозможна, так как а < /3.
Задавая класс нелинейных и нестационарных звеньев с помощью
квадратичных форм, В.А.Якубович разработал так называемый
квадратичный критерий абсолютной устойчивости [63].
5.5.1. Эрмитова матрица и эрмитова форма. Дальше при
рассмотрении квадратичного критерия используются эрмитовы фор-
формы. Поэтому здесь вкратце излагаются основные понятия, связанные
с этой формой.
Пусть Zi (г = 1, 2,..., п) — комплексные числа и ^ (г = 1, 2,...
..., п) — комплексно-сопряженные с ними числа. Вектор z =
— C^i ^2 • • • ~Zn)T является комплексно-сопряженным вектором с
вектором z = (z\ Z2 zn)T. Если элементы Н = [hik] являются комп-
комплексными числами, то матрица Н* = [hki], которая получится из
матрицы Н = [hik] путем транспонирования и замены элементов на
комплексно-сопряженные с ними числа, называется эрмитово сопря-
сопряженной с Н = [hik] матрицей. Операция эрмитова сопряжения об-
обладает теми же свойствами, что и операция транспонирования [32]:
(Л + ВУ = Л* + В\ (аА)* = аА\ (АВ)* = В* А\
(Л*)* = Л, (Л)* = (Л*).
Если к вектору-столбцу z = (z\ Z2 ... zn)T применить опе-
операцию эрмитова сопряжения, то получим вектор-строку z* =
— C^i ^2 ••• гп). В частности, если z — скалярное комплексное
число, то в результате применения операции эрмитова сопряжения
получим комплексно-сопряженное число: z* = ~z.
Матрица Н = [hik] называется эрмитовой матрицей, если Н =
= Н*, т. е. если hik = hki- Так как ha = /г^, то диагональные элементы
эрмитовой матрицы являются вещественными числами. В частном
случае, когда все элементы матрицы являются вещественными, эр-
эрмитова матрица является симметрической матрицей.
Квадратичная форма
п
H(z) = z*Hz = J2 hikZiZt, E.34)
i,k=l
где Н — эрмитова матрица (hik = hki), называется эрмитовой фор-
формой. Переменные Zi (i = 1, 2,... ,п) и элементы матрицы Н могут
быть вещественными числами. В частном случае, когда и переменные,
и элементы матрицы являются вещественными, эрмитова форма ста-
становится вещественной квадратичной формой. Эрмитова форма всегда
принимает вещественное значение.
Если квадратичная форма E.34) не является эрмитовой (hik Ф
Ф hki), то она может принять комплексные значения. В этом случае на
160
Гл. 5. Абсолютная устойчивость
ее основе можно определить эрмитову форму следующим образом [63]:
Rez*Hz = Re
i,k=l
Эрмитову форму, заданную в таком виде, всегда можно преобразовать
и представить с помощью эрмитовой матрицы:
= I (Я
Я
*)У
Действительно, имеем
НлЫ) =Rez*Яz = I
Я*-Я*)г} =
так как
\
яг = 1 (я + я*)* = \ (я* + я) =
Re {[г*(Я - Я*)г]*} = - Re {[г*(Я - Я*)г]} = 0.
Для эрмитовой матрицы и эрмитовой формы знакоопределенность
и знакопостоянство определяются точно так же, как и для симметри-
симметрической матрицы и вещественной квадратичной формы. В частности,
эрмитова матрица Я и эрмитова форма г*Яг называются положи-
положительно определенными, если г*Яг > 0 при всех z / 0.
Критерий положительной определенности эрмитовой
матрицы. Для того чтобы эрмитова матрица Я была положительно
определенной, необходимо и достаточно, чтобы выполнялись следую-
следующие условия:
/in
Ai = /in > 0, А2 =
^
22
An = det Я =
/i
n
/^22
hni
Расширение вещественной квадратичной формы до эр-
эрмитовой. Всякая вещественная квадратичная форма
п
^К*-) — / \jik'LidJk
i,k=l
может быть расширена до эрмитовой следующим образом:
п п
G(z) = Re ^2 9ikZiZk = Re ^ Qikz\zk.
i,k=l i,k=l
По определению эрмитова форма G{z) должна принимать те же зна-
значения, что и вещественная квадратичная форма G(x), если Zi (i =
= 1, 2,..., п) принимают вещественные значения: zi — Х{. Например,
5.5. Квадратичный критерий абсолютной устойчивости 161
вещественным квадратичным формам
Gi(x) = xix2, G2(x) — х\ — х\х2 + х\, G3(x) = х\[х2 — 2xi)
соответствуют следующие расширенные до эрмитовых формы:
Gi(z) = Re ^1^2, G2(z) = |^i|2 -Re {г
z2\2,
Если заданы два вещественных вектора х^1) и х^2\ то веществен-
вещественные квадратичные формы от этих двух векторов G(x^\ x^2)) опре-
определяются как вещественные квадратичные формы от векторного пе-
ГхAI
ременного х = /2ч . Если заданы два комплексных вектора z'1)
Lx J
и тУ2>, то эрмитовы формы от этих векторных переменных G(z^\ z^)
определяется как эрмитовы формы от векторного переменного z =
zwi .
^2^ . Аналогично определяются вещественные квадратичные
формы и эрмитовы формы от трех и более векторных переменных.
5.5.2. Локальная связь. Минимальная устойчивость. Рас-
Рассмотрим многомерную систему, которая описывается уравнением
хеЛп, уеГ, uG iT, E.35а)
или
y = Wn(p)u, u = f(O, $ = -y, E.356)
где Wn(p) = С(/р — Л) В — (т х г)-матричная передаточная функ-
функция. Система содержит г нелинейностей f(?). Переменные ^ и и яв-
являются векторными функциями времени: ? = ?(?), u = f (?(?)) = u(t).
Пусть задана вещественная квадратичная форма F(?, u, й) и мно-
множество нелинейных звеньев задается условием
F(t(t),t(t),u(t)) 2 0 Vi^O. E.36)
В квадратичной форме F(?,?,u) переменные ?, ?, и рассматриваются
как независимые. В частном случае какие-либо переменные в квадра-
квадратичную форму могут не входить. Тогда соответствующие переменные
будем опускать. Соотношение E.36) называют локальной связью [63].
Определение 5.1. Если выполняется условие E.36), то говорят,
что функции ?(t) и u(t) удовлетворяют локальной связи с фор-
формой F(?,?,u).
Локальную связь E.36) также будем записывать в виде
F(?,?,u)^0 или F(t,t,f(?) > 0.
11 Д.П. Ким
162 Гл. 5. Абсолютная устойчивость
Определение 5.2. Система E.35а), или E.356) называется ми-
минимально устойчивой в заданном классе нелинейностей (нелинейных
звеньев), если она асимптотически устойчива в целом при какой-либо
нелинейности f (?) из указанного класса.
Рассмотрим локальную связь E.33):
в случае одномерной системы, т. е. при г = т = 1. Как было показано,
эта локальная связь определяет тот же класс нелинейных звеньев, что
и соотношение E.32). Этому классу нелинейных звеньев принадлежат
линейные звенья
и = 7f > а ^ 7 ^ Р.
Поэтому если система
устойчива при каком-нибудь j Е [се,/3], то нелинейная система E.356)
минимально устойчива в классе нелинейных звеньев, определяемых
локальной связью E.33).
Нелинейность, при которой будет устанавливаться минимальная
устойчивость, будем называть нелинейностью сравнения, а саму сис-
систему при этой нелинейности — системой сравнения.
Часто нелинейность сравнения берется в виде ? = 0. В этом случае
система E.356) минимально устойчива в класе функций с локальной
связью E.36), если F(?(?), ?(?), 0)^0 при любых х и линейная часть
устойчива.
5.5.3. Квадратичный критерий. Для формулировки квадра-
квадратичного критерия потребуется следующее преобразование квадратич-
квадратичной формы, определяющей локальную связь:
1) квадратичная форма F(?,?,u) расширяется до эрмитовой фор-
формы заменой переменных ?, ?, и их изображениями ?(s), ?(s), U;
2) производится постановка ?(s) = —H/JT(s)U и ?(s) = -sH^^U:
F(s,V) = F(-W(s)V, -sW(s)V, U).
Таким образом, преобразование квадратичной формы сводится
к расширению ее до эрмитовой и последующей замене переменных
их изображениями Лапласа, найденными при нулевых начальных
условиях. При этом изображение выходной переменной нелинейного
звена U(s) рассматривается как независимая комплексная переменная,
и его записывают без аргумента, т. е. в виде U.
Рассмотрим в качестве примера локальную связь E.33) в случае
одномерной системы. Расширенная до эрмитовой ее квадратичная
форма принимает вид
F(s,XJ) = F(t(s),XJ(s)) = Re{[/3|(s) - U]*[U - a?(s)]}.
5.5. Квадратичный критерий абсолютной устойчивости 163
Подставив сюда выражение для изображения ?(s), которое определя-
определяется исходя из заданных уравнений системы при нулевых начальных
условиях, получим
= -Re{[pW»(s) + 1]*[1 + aWn(s)}} |U|2.
Квадратичный критерий (В. А. Якубович [63]). Пусть
нелинейная система E.35а) или E.356) минимально устойчива
в классе нелинейных звеньев, заданных локальной связью с фор-
формой F(?,?,u), и матрица А не имеет собственных значений на
мнимой оси, или, что то же, характеристическое уравнение ее
линейной части не имеет корней на мнимой оси.
Тогда ее положение равновесия абсолютно устойчиво в ука-
указанном классе нелинейных звеньев, если эрмитова форма F(jlj,XJ)
отрицательно определена при — оо ^ и ^ оо, т. е. выполнено условие
F(juj, U) < 0 при - оо ^ со ^ оо и любом U ф 0. E.37)
При этом имеет место экспоненциальная сходимость {устойчи-
{устойчивость), т. е. существуют постоянные С > 0 и е > 0 такие, что при
любом t ^ to выполняется неравенство
|x(*)KC|x(io)|e-e(*-4 E.38)
Условие E.37) называется частотным условием.
Если эрмитову форму F(ju>,XJ) представить в виде
F(jw,JJ) = -JJ*H(jw)JJ,
то частотное условие равносильно тому, что матрица H(juj) является
положительно определенной при — оо ^ и ^ оо.
Эрмитова матрица H(juj) положительно определена при —оо ^
^ ио ^ оо в том и только том случае, если она положительно опре-
определена при ио = оо и детерминант от нее не обращается в нуль
при —оо ^ a; ^ оо;
H(joo) > 0, det H(juj) фО при - оо ^ ио ^ оо. E.39)
Докажем это утверждение. Заметим, что первое неравенство E.39)
означает, что матрица H(joo) = lim H(jlj) является положительно
определенной. ш °°
Положительная определенность матрицы H(jlj) для всех — оо ^
^ ио ^ оо равносильна положительности ее собственных значе-
значений Xi(juj) (i = 1,2,... ,п). Поэтому условие
detH(ju) = \1(ju)\2(ju>)...\n(juj) фО
является необходимым, чтобы матрица H{juo) была положительно
определенной для всех — оо ^ ио ^ оо. Достаточность условия E.39)
следует из того, что Ai(joo) > 0 и Xi(juj) ф 0 (г = 1, 2,... ,п). И
11*
164 Гл. 5. Абсолютная устойчивость
поскольку Xi(juj) — непрерывные функции о;, то все Xi(joo) > 0 для
всех — оо ^ о; ^ оо. Следовательно, H(jlj) — положительно опреде-
определенная матрица.
Квадратичный критерий можно использовать для исследования
глобальной асимптотической устойчивости отдельных нестационар-
нестационарных и нелинейных систем. Для этого нужно задать локальную связь
так, чтобы класс нелинейностей, который она определяет, включал
данную нелинейность. При этом желательно локальную связь (или,
что то же, квадратичную форму) выбирать так, чтобы класс нели-
нелинейностей, который она определяет, был как можно менее объемным.
Пример 5.5. Исследовать устойчивость системы
y + 4y + B + cost)y = 0.
Решение. Представим уравнение системы в виде
у + Ау + 2у + и = 0, и = у cos t,
или
y = -Wn(p)u, Wn(p) = 2 + 4 +2, u = ycost.
Здесь входом «нелинейного» звена является у, выходом — и. В
качестве локальной связи примем соотношение
F(y, и) =у2 -и2 =у2 - у2 cos2 t = у2 sin2 t ^ 0.
Система минимально устойчива в рассматриваемом классе, так как
линейная часть устойчива и F(y,O) ^ 0 при любом у. Эрмитово
расширение квадратичной формы этой локальной связи имеет вид
F(s,U) = F(Y(s),U) = Y*(s)Y(s) - U*U = \Y(s)\2 - \U\2.
Подставив сюда выражение для Y(s) и положив s = ju, для частот-
частотного условия получим
F(ju,U) = (\Wa(jw)\2-l)\U\2<0.
Так как это неравенство должно выполняться при U Ф 0, то обе
части неравенства можно разделить на |?/|2. Квадрат амплитудной
частотной функции линейной части имеет вид
B-й2J + 16 и2'
Подставив это выражение в частотное условие, его можно представить
в виде
1 - B - о;2J - 16а;2 < 0, или - 3 - 12а;2 - о;4 < 0.
Очевидно, последнее неравенство выполняется при — оо ^ ш ^ оо.
Следовательно, положение равновесия рассматриваемой системы
асимптотически устойчиво в целом.
5.5. Квадратичный критерий абсолютной устойчивости 165
5.5.4. Методы построения квадратичной формы локаль-
локальной связи. Чтобы воспользоваться квадратичным критерием при
исследовании устойчивости каких-либо систем, нужно по заданным
уравнениям системы строить локальную связь, т.е. определять класс
систем, в который можно было бы включить данную систему. В за-
зависимости от конкретного вида нелинейностей возможны различные
способы задания локальной связи [63].
1) Как уже было показано, если нелинейность и = /(?) принад-
принадлежит к классу, определяемому неравенством а ^ /(С)/С ^ /3, то ло-
локальная связь может быть задана в виде
Если а = 0 и 0 < /3 < оо, то эта связь принимает вид
, и) = и(/3? - и) ^ 0 или F(?, и) = и(? - р~ги) ^ 0.
2) Если система содержит две нелинейности вида и\ = ?2, U2 =
= ?3 или и\ = ?3, U2 = ?5, то локальную связь можно задать в виде
равенства
F(?,u) =?u2-u\ = 0.
3) Система содержит две одинаковые нелинейности щ = f(?i,i)
(г = 1,2), и f(?i,i) является неубывающей функцией переменной ^
при всех t ^ 0: /(^, ?) ^ /(^', ?) при ^ < ^'. В этом случае локальную
связь можно задать в виде
4) Система содержит две одинаковые нелинейности щ = f(^ijt)
(г = 1,2), и функция f(^ijt) удовлетворяет следующему условию:
а ^ df(?i,i)/d?i ^ /3 при всех t ^ 0. В этом случае локальная связь
может быть задана в виде
F(?, u) = [/3F - &) - («1 - u2)][(«i - и2) - «F - 6)] ^ 0.
Покажем, что эта локальная связь имеет место, если исходное
условие, которое можно представить в виде
выполняется. При ?i ^ ^2 локальная связь справедлива, так как
j( ^§f) = /3F - 6) - (U2 - tii) «S 0,
1
166 Гл. 5. Абсолютная устойчивость
При ?1 ^ ^2 она справедлива, так как
/( ^) о,
p=(ui- u2) - a(fi - f2) ^ 0.
5) Иногда локальная связь может быть задана несколькими соот-
соотношениями в виде равенств и неравенств:
,u)>0, fc = r + l, r + 2, ..., р.
Такую локальную связь можно преобразовать в локальную связь с
одной формой, свернув все квадратичные формы в одну:
Здесь Tj (j = 1, 2,..., г) — произвольные постоянные, Tj (j = r + 1,
г + 2, ..., р) — произвольные положительные постоянные. Локальная
связь р
с одной формой эквивалентна исходной локальной связи с р формами.
6) Если система содержит нелинейность, которая имеет вид
и = (acos? + bsint)!;,
то ее можно представить как систему, содержащую две нелинейности
вида
При этом локальную связь можно определить равенством
F = Z2-ul-ul = 0.
Пример 5.6. Система описывается уравнениями
Т ё\+е\ — —к\и\ + &2^2,
Тё2 + е2 = fe^i - ^1^2,
Tii = /(ei,t), г = 1,2,
где Т, ^1,^2 — положительные постоянные, /(e«,t) — неубывающая
по переменной е« функция, удовлетворяющая при всех ? ^ 0 условию
/@,*)=0, 0 ^?^1^/3 при е^О.
Определить значения постоянных Т, fci, fe, при которых положе-
положение равновесия системы асимптотически устойчиво в целом.
5.5. Квадратичный критерий абсолютной устойчивости 167
Решение. Найдем матричную передаточную функцию линейной
части W = [Wik] , где Wik = Ei(s)/Uk(s) (г, к = 1, 2). Для этого про-
произведем преобразование Лапласа исходных уравнений, описывающих
линейную часть, при нулевых начальных условиях:
TsE^s) + E^s) = -k1U1(s) + k2U2(s).
TsE2 (s)+E2(s)=k2U1(s)-k1U2(s).
Отсюда, положив U2(s) = 0 при определении Wn и Ui(s) =0 при
определении Wi2, находим
#l(s) fex ^(?) ?2
11 Ui(s) Тз + V 21 t/i(s) Ts + 1'
12 t/2(s) Ts + 1' C72(s) Ts + 1'
Если использовать обозначение И^ = ki/(Ts + 1), то матричную
передаточную функцию можно записать в виде
-Wi и
С помощью передаточных функций уравнение системы в изобра-
изображениях Лапласа можно записать в виде
'#i(s)\_ [-Wi(a) W2(s)](U1(s)
¦2(s))~ [ W2(s) -W1{s)\ \U2(s)
ИЛИ
Ei(s) = -Wi(s)E7i(s) + W2(s)U2(s), E.40a)
S2(s) = W2{s)U1{s) - W^U^s). E.406)
Нелинейности удовлетворяют локальной связи
0, F2 = ( е2 — — щ ) U2 ^ 0,
^0,
или
F(e, u) = nFi + r2F2 + r3F3 =
2 + r3(ei - e2)(ni - u2) ^0, n > 0, г = 1,2,3.
Здесь е = (ei е2)т и u = (ui u2)T. «Нелинейность» u = 0 удовле-
удовлетворяет локальной связи: F(e, 0) = 0 . Примем эту нелинейность в
качестве нелинейности сравнения. В этом случае система сравнения
принимает вид
Тёх +ei =0, Тё2 + е2 = 0
и представляет собой две не связанные между собой линейные сис-
системы. Эти системы устойчивы (асимптотически устойчивы в целом).
Поэтому рассматриваемая система минимально устойчива.
168 Гл. 5. Абсолютная устойчивость
Так как квадратичные формы F\ и F2 похожи, дальше примем
Т\ — т2 —т. Эрмитово расширение квадратичной формы F(e, и) имеет
вид
F(E(s),U) = Re{r(Ei(s) - ± V^)V{ + t(e2{s) - ^U2)lJ* +
+ tz[E1(s)-E2(s)](U1+U2)*}.
Подставив сюда выражения для E\(s) и E2(s) из E.40а), E.406) и
положив s = juj, получим
F(juj,U) = Re {t[Wi(jw)Ci + W2(iw)C/2
+ W2(jw)U2(s) - W2(jw)U1
или, после перемножения и приведения подобных членов,
F(jw, U) = - Re { [(r + 7^)Wi(jw) + r3W2(jaj) + I
+ [(г + 7*)Wi(jw) + T3W2(jco) + I
(r3 + t)W2(jcj)]
Подставив выражения для передаточных функций, найдем
-п Г/ I мят/- \ i и/ / • \ i Г1 (т + гз)А;1 + гзА;2 . т
Re (т + г)И^0а;)+гИ^ 0а;) + ^у +
+
Используя эти обозначения, частотное условие можно записать в виде
или _
Fi(jo;,U) = -Re{U*H!(juj)U} = -U*H(ju)U,
где
Hi(juj) = д , H(juj) = - [Hi(juj) + Hl(juj)},
U = (Z7i U2)T.
Элементы h^ (г, A; = 1,2) матрицы Н определяются следующим
образом: , , Ч7 ,
7 7/1 (Т + Гз)/С1 + Гз/С2 Т
/in = Л22 = А = —{ТшJ + г— + -,
5.6. Круговой критерий абсолютной устойчивости 169
h h 1(
л12 = л21 = -.(
П*\ [r3A;i + (т3 + r)k2]
Частотное условие будет выполнено, если эрмитова матрица
будет положительно определенной. Согласно критерию положитель-
положительной определенности эрмитова матрица H(juj) будет положительно
определенной, если ее главные угловые миноры будут положительны:
Л h (т + rs)ki + т3к2 , т
_ \ (г + r3)fei + т3к2 г]2 _ Г [тзкг + (г3 +
ту Г r3fei + (т3 + т)к2"Г ^ п
в\ 'I—Щч1—J >0-
Так как все параметры положительны, первое неравенство вы-
выполняется при —оо ^ uj ^ оо. Чтобы определить, при каких значениях
параметров будет выполнятся второе неравенство, представим его в
виде
(г + т3)кг + т3к2
Г (г + тз)к\ + тзк2 т 1 z Г [r3A;i + (тз + т
I (TujJ + 1 ^^J L (To;J + 1
Так как в обеих частях выражения в скобках положительны, то
последнее неравенство можем записать в виде
(г + тз)кг + т3к2 т_ [r3fei + (т3 + т)к2]
(TooJ + 1 f3 (TooJ + 1
Если обе части приведенного неравенства умножить на (TljJ + 1 и
положить г = 1/&2 и т"з ^ 1/Л^1, то получим
? + 1[(Та,) + 1]>1.
Это неравенство будет выполнено при — оо ^ и ^ оо, если оно будет
выполнено при ш = 0. А при о; = 0 последнее неравенство будет
выполнено и соответственно рассматриваемая система будет асимп-
асимптотически устойчива в целом,если
к2 ^ f3k2 ^
5.6. Круговой критерий абсолютной устойчивости
Рассмотрим опять задачу об абсолютной устойчивости в угле [а, [3]
нелинейной системы с одной нелинейностью (рис. 5.5, а). Как было
показано, в этом случае класс нелинейностей (нелинейность в общем
случае является нестационарной) может быть определен локальной
связью
F{e,u) = (ре-и)(и-ае) > О V* ^ 0.
170
Гл. 5. Абсолютная устойчивость
Лгу-
v
-Т
f(e)
и
У У /-n e
V
-Т
А*
и
J
а б
Рис. 5.5. Нелинейная система (а) и система сравнения б
Наряду с данной системой рассмотрим систему сравнения
(рис.5.5, 6), в которой нелинейное звено заменено линейным звеном с
передаточной функцией Wc(p) = /i, /i E [а,/3]. Пусть передаточная
функция линейной части имеет I полюсов в правой полуплоскости
и не содержит полюсов на мнимой оси. Тогда по критерию Найквиста
для того чтобы система сравнения была устойчива, необходимо и
достаточно, чтобы амплитудно-фазовая частотная характеристика
разомкнутой системы (т.е. годограф частотной передаточной функ-
функции W(juj) = /jWn(juj) при 0 ^ lj ^ оо) охватывала точку (—1, jO)
1/2 раз против часовой стрелки. Или, что то же, для того чтобы
система сравнения была устойчива, необходимо и достаточно, чтобы
годограф частотной передаточной функции линейной части Wn{juo)
при 0 ^ и ^ оо охватывал точку (—l//i, jO) 1/2 раз против часовой
стрелки. Очевидно, для того чтобы система сравнения была робастно
устойчива в интервале [а,/3] (т.е. при всех \i E [а,/3]), необходимо и
достаточно, чтобы годограф частотной передаточной функции линей-
линейной части Wn{juo) охватывал отрезок [—1//3, — 1/а] на действительной
оси 1/2 раз против часовой стрелки. В частности, если линейная
часть устойчива, для того чтобы система сравнения была робастно
устойчива в интервале [а,/3], необходимо и достаточно, чтобы годо-
годограф частотной передаточной функции линейной части Wn(joj) не
охватывал указанный отрезок (рис. 5.6, а).
Круговой критерий абсолютной устойчивости в угле [а,/3] явля-
является общением критерия Найквиста робастной устойчивости на ин-
интервале линейных систем на нелинейные системы. При этом роль
отрезка [—1//3, —1/а] на вещественной оси играет окружность с
центром на вещественной оси, пересекающая вещественную ось в
ImWn(jw) '
а б
Рис. 5.6. Иллюстрации к робастной (а) и абсолютной (б) устойчивости
5.6. Круговой критерий абсолютной устойчивости 171
точках —1//3 и — 1/а (см. рис. 5.6, б). Эту окружность называют
[а, /3]- окружностью.
Круговой критерий абсолютной устойчивости. Пусть
система сравнения устойчива при каком-либо ц Е [а,/3], 0 < а <
< C < оо, передаточная функция линейной части имеет I полюсов
в правой полуплоскости и не имеет полюсов на мнимой оси.
Тогда для того чтобы нелинейная система была абсолютно
устойчива в угле [а,/3], достаточно, чтобы амплиту дно-фазовая
характеристика линейной части охватывала [а,/3]-окружность
1/2 раз против часовой стрелки.
Если 1 = 0 (линейная часть устойчива), то для того чтобы нели-
нелинейная система бала абсолютно устойчива в угле [а,C], достаточ-
достаточно, чтобы амплиту дно-фазовая характеристика линейной части не
пересекала [а,/3]-окружность (см. рис. 5.6,6).
Докажем круговой критерий, пользуясь квадратичным критерием.
Эрмитово расширение квадратичной формы
F(e,u) = (/3 е - и) (и - а е)
имеет вид
F(E(s), U) = Re[f3E(s) - U][U -aE(s)]*.
При g = 0 имеем (см. рис. 5.5, a) E(s) = —Wn(s)U. Подставив
это выражение для E(s) в последнее равенство и положив s = juo,
частотное условие можно записать в виде
F(jw,U) = -Re[CWn(ju>) + 1][1 + aWn(ju>)}* \U\2 < 0.
Так как аC > 0 и строгое неравенство должно выполнятся при
JJ фО, то частное условие можно представить в виде
Re[wn(jw) + I] [i + Wn(jaj)]* > 0.
Представив частотную передаточную функцию в виде W(ju) =
= U(и) + jV(uj), левую часть частотного условия можно преобразо-
преобразовать следующим образом:
Re [и(ш) + jV(u>) + i] [ i + Щш) - jV(w)] =
172 Гл. 5. Абсолютная устойчивость
Обозначим полученное выражение для левой части частотного
условия G[U(lj),V(uj)] и приравняем его нулю:
Это уравнение [а, C]-окружности — уравнение окружности, пере-
пересекающей вещественную ось в точках —1/а и —1//3, имеющей ра-
радиус A/2)(I/a — 1//3) и центр, расположенный на вещественной оси.
На вещественной плоскости (U,V) вне [а, C]-окружности G[U(u),
V(u)] > 0. И частотное условие будет выполнено, если на комплекс-
комплексной плоскости (U,jV) амплитудно-фазовая частотная характерис-
характеристика линейной части располагается вне [а, C]-окружности. Так как
система сравнения устойчива и \i принадлежит интервалу [а,/3], то
амплитудно-фазовая частотная характеристика линейной части охва-
охватывает точку — l//i, расположенную на вещественной оси внутри
[а, Р]-окружности, 1/2 раз в положительном направлении (против ча-
часовой стрелки). Поэтому нелинейная система будет абсолютно устой-
устойчива в угле [а,/3], если амплитудно-фазовая частотная характеристи-
характеристика линейной части охватывает [а, C]-окружность 1/2 раз в положи-
положительном направлении.
Задачи
1. Передаточная функция линейной части имеет вид Wn(p) =
= - —. Определить, будет ли система абсолютно устойчива в
3
I)
угле [0,1, 10].
2. Передаточная функция линейной части имеет вид Wn(p) =
— 777";—'—тт^г- Определить, будет ли система абсолютно устойчива в
@,1р + 1Jр
угле [0,1, 10].
3. Определить, при каких значениях параметров а и Ъ положение
равновесия системы
у + ау + A + bcost)y = 0 (а > 0, Ъ > 0)
асимптотически устойчиво в целом.
4. Определить, при каких значениях параметров а и Ъ положение
равновесия системы
у + ау + A + bsmt)y = 0 (а > 0, Ъ > 0)
асимптотически устойчиво в целом.
5. Определить, при каких значениях параметров а и Ъ положение
равновесия системы
у + ау + ЬB + cos t + sin t)y = 0 (a > 0, b > 0)
асимптотически устойчиво в целом.
5.6. Круговой критерий абсолютной устойчивости 173
6. Передаточная функция линейной части системы (см. рис. 5.5, а)
к
имеет вид Wn (р) = г- г, нелинейное звено описывается урав-
(р + 2)(р1)
( )()
нением и = е sin?. Определить, при каких значениях к система асимп-
асимптотически устойчива в целом.
7. Система описывается уравнениями
Т2у2
Ui = f(y»t), г = 1,2,
где Т, fci, fe — положительные постоянные, щ = f(yi,t) является
неубывающей функцией yi при любом t ^ 0 и удовлетворяет усло-
условию 0 ^ 1{УгIуг ^ /3 при ^ ф 0, /@,^) = 0. Определить, при каких
значениях параметров Т\ к\ и к2 система асимптотически устойчива
в целом.
Глава 6
ЛИНЕАРИЗАЦИЯ ОБРАТНОЙ СВЯЗЬЮ
Пусть система описывается уравнением
x = /(x,u), xG^n, ueR, F.1)
где /(х,и) — гладкая функция в некоторой окрестности 0@) нача-
начала координат. Начало координат является положением равновесия:
/@,0) = 0. Здесь х — вектор состояния, и — управление.
Напомним, что функция называется гладкой в некоторой области,
если она сама и ее производная по всем своим аргументам являются
непрерывными в этой области.
6.1. Обычная линеаризация и ее недостатки
Самым распространенным методом анализа и синтеза систем в
рассматриваемом случае является «обычная» линеаризация — линеа-
линеаризация, основанная на разложении нелинейной функции в окрестнос-
окрестности точки (функции), определяющей заданный режим, в ряд Тейлора
и отбрасывании нелинейных членов. Обычная линеаризация заме-
заменяет исходную нелинейную модель приближенной линейной моделью
и обладает рядом недостатков. Эти недостатки состоят в следующем:
1) устойчивость и требуемое качество системы управления, син-
синтезированной на основе обычной линейной модели, гарантируется
лишь в малой окрестности заданного режима. При этом размеры
этой окрестности не известны. При больших отклонениях требования
к качеству системы могут быть не выполнены. Боле того, система
может быть неустойчива;
2) если заданный режим является функцией времени, то линеари-
линеаризованная модель становится нестационарной, а анализ и синтез систем
упрощаются ненамного;
3) способы синтеза линейных систем управления, основанные на
обычной линеаризации, позволяют получать только линейные законы
управления. В то же время известно, что нелинейные законы управ-
управления во многих случаях обеспечивают лучшее качество управления.
6.2. Линеаризация обратной связью 175
Рассмотрим в качестве примера объект, который описывается
уравнением .о _.
х = ах + и, х, и Е R, а > 0.
Заданному режиму соответствует х = 0. На основе обычной линейной
модели х = и получаем закон управления и = —кх (к > 0), который
обеспечивает асимптотическую устойчивость в целом линейной мо-
модели. Однако синтезированная на основе обычной линеаризованной
модели исходная нелинейная система
х = ах3 - кх
имеет три положения равновесия: х = 0, х = ±у/к/а. Исследуем ус-
устойчивость этих положений равновесия. Функцию Ляпунова будем
искать в виде V(x) = х2. Производная по времени этой функции в силу
уравнения системы имеет вид
У(х) = 2хх = 2х(ах3 - кх) = -2х2(к - ах2),
она отрицательна (отрицательно определена) при —^/к/а < х <
< л/к/а и положительна при \х\ > л/к/а Следовательно, по теореме
Ляпунова об асимптотической устойчивости положение равновесия
х = 0 асимптотически устойчиво на интервале —у/к/а < х < у/к/а.
Вне этого интервала процесс расходится. Два других положения рав-
равновесия неустойчивы.
Итак, в рассмотренном примере замкнутая система, синтезиро-
синтезированная на основе обычной линеаризованной модели, асимптотически
устойчива лишь на конечном интервале, тогда как синтезированная
линейная система асимптотически устойчива в целом.
6.2. Линеаризация обратной связью
Функция и = Ф(х,г>), где u, v — входы (управления), х — вектор
состояния, называется преобразованием обратной связью, если она
разрешима относительно v. Переход от нелинейной системы F.1) к
линейной системе путем преобразования, включающего преобразова-
преобразование обратной связью, называется линеаризацией обратной связью.
Линеаризация обратной связью (ЛОС) является не приближенным,
а эквивалентным преобразованием: в результате ЛОС получается
система, эквивалентная исходной системе. При ЛОС управление и
заменяется новым управлением v. Функция преобразования, кроме
нового управления, включает вектор состояния (в частном случае
только выходную переменную). Поэтому при этом преобразовании
объект охватывается обратной связью. Отсюда и название этого пре-
преобразования — преобразование обратной связью.
Пример 6.1. Задан объект, который описывается уравнением
х = ах3 + и, ж, и G R, а > 0.
Требуется определить закон управления, при котором замкнутая
система асимптотически устойчива в целом.
176 Гл. 6. Линеаризация обратной связью
Решение. Как было показано в предыдущем параграфе, син-
синтез замкнутой системы, основанный на обычной линеаризации, не
обеспечивает асимптотическую устойчивость в целом. Воспользуемся
линеаризацией обратной связью
и = —ах3 + v.
При этом преобразовании уравнение объекта примет вид х = v.
При таком уравнении единственным разумным линейным законом
управления является v = — кх (к > 0). Подставив это выражение для
управления в уравнение преобразования, получим
и = —ах3 — кх.
Уравнение замкнутой системы имеет вид х = — кх. Замкнутая систе-
система асимптотически устойчива в целом.
Рассмотрим еще один простой пример.
Пример 6.2. Задан объект, который описывается уравнениями
Xl = Х2 + Cxf, Х2 = U.
Требуется определить закон управления, при котором замкнутая
система асимптотически устойчива в целом.
Решение. Воспользуемся преобразованием обратной связью
zi = xi, z2 = х2 + сх\, и — -3cxl(x2 + сх\) + v.
В новых переменных уравнения объекта примут вид
Zl = 22, Z2 = V.
Приняв закон управления
v = —kizi - k2z2, fci, k2 > 0,
для замкнутой системы получим
zx — z2, z2 — —k\Z\ — k2z2.
Замкнутая система асимптотически устойчива в целом. В исходных
переменных уравнения замкнутой системы принимает вид
Х\—Х2-\- СХ3,
х2 = —Ъсх\х2 — Ъ(?х\ — к\Х\ — к2х2 — к2сх\.
В примере 6.2 преобразование обратной связью включает, помимо
преобразования управления, преобразование фазовых координат. При
этом, если в примере 6.1 было более или менее понятно, как выбирать
преобразование, то в примере 6.2 выбор преобразования не очень
понятен. Кроме того, в общем случае возникает вопрос: существует ли
преобразование обратной связью, обеспечивающее линеаризацию той
или иной системы? Таким образом, в теоретическом плане при рас-
рассмотрении линеаризации обратной связью возникают два основных
вопроса:
1) для каких систем линеаризация обратной связью возможна?
2) как найти соответствующее преобразование?
6.3. Некоторые сведения из дифференциальной геометрии 177
Но прежде чем непосредственно переходить к рассмотрению этих
вопросов, познакомимся с необходимыми для этого математическими
понятиями.
6.3. Некоторые сведения из дифференциальной
геометрии
При дальнейшем рассмотрении вопросов линеаризации обратной
связью потребуются следующие понятия: производные и скобки Ли,
диффеоморфизмы, инвалютивность, интегрируемость системы ли-
линейно независимых векторов. В этом параграфе будут рассмотрены
необходимые сведения, связанные с этими и некоторыми другими
понятиями.
6.3.1. Производные и скобки Ли. Пусть а(х) — гладкая ска-
скалярная функция векторного переменного (а: Rn —У R) и f (х) — глад-
гладкая векторная функция /: Rn —У Rn.
( д д д \ гл
Ниже используется оператор V = —— —— ... —— . Он равно-
\дхг дх2 дхп/
силен оператору — — оператору дифференцирования по векторному
аргументу. При применении этого оператора к скалярной функции
а = а(х) получим вектор-строку
--, da f да да да
У а = -— =
_ da _ / да да да \
dx \дхг дх2 дхп)
А при применении этого оператора к векторной функции f = f (x)
получим матрицу
Vf=f =
dx
дхх
dh_
df2
дхп
df2
дхп
dfn
. дх\
dfnl
dfn
dxn -
Определение 6.1. Производной Ли скалярной функции а =
= а(х) по векторной функции f = f (x) называется скалярная функ-
функция (обозначается L/a), определяемая соотношением
c? dxi
г=1
Старшие производные Ли рекурсивно определяются следующим
образом:
L)ol = Lf[Lkfxa) = V(L^~1a)f, г = 1, 2,..., п.
Нулевая производная Ли функции а = a(x) no f = f (x) есть сама
функция а = а(х): Ща = а.
12 Д.П. Ким
178
Гл. 6. Линеаризация обратной связью
Высшие производные по другой векторной функции g(x) опреде-
определяется аналогично:
LgLfa = Lg(Lfo) = V(L/a)g.
Пусть система задана уравнениями
x = f(x), 2/ = a(x).
Первая и высшие производные по времени выходной перемен-
переменной у равны соответственно первой и высшим производным Ли функ-
функции а(х) по функции /(х):
да . да с( ч г , ч
y x f(x) La(x)
*=itf(x) = J;
)] f(x)=
Точно так же, если задана скалярная функция V(x), то ее производная
в силу уравнения системы х = f (х) будет равна производной Ли этой
функции по f(x):
n) f()
Пусть f(x) и g(x) — две гладкие векторные функции: f: Rn —У
—У Rn, g: Rn —У Rn. Производная Ли от векторной функции g(x) по
векторной функции f (х) является векторной функцией и определяется
аналогично производной Ли от скалярной функции:
Скобки Ли функций f(x) и g(x), к определению которых сейчас
переходим, обозначают [f, g] или adfg (второе обозначение особенно
удобно при записи скобок Ли второго и более высоких порядков).
Определение 6.2. Векторная функция, определяемая соотно-
соотношением , [п 1 т-7 п Т-7П г Г Г
adjg= [f,g] = Vgf- Vfg = L/g-Lpf,
называется скобками Ли функций f(x) и g(x). Скобки Ли высокого
порядка рекурсивно определяются следующим образом:
adkfg = adf{adkf-1g) = [f, adj^g], k = 1, 2,...
Скобки Ли нулевого порядка функций f(x) и g(x) равны g(x):
ad°fg = g.
Пример 6.3. Пусть функции f(x) и g(x) имеют вид
f(x) =
g(x) =
Определить скобки Ли первого и второго порядков этих функций.
Решение. Производные функций f(x) и g(x) no x равны
>/i dh
df
dxi
df2
дх2
dg =
dxi
l~dx~i
dx2
~dx~2 J
°
6.3. Некоторые сведения из дифференциальной геометрии 179
Поэтому скобка Ли первого порядка имеет вид
Производная скобки Ли по х равна
О
и соответственно для скобки Ли второго порядка имеем
ad2fg = adf(adfg) = V(adfg)f — Vfadfg =
0 Oj \xl) [3x1 Oj V 0) \3xl
Лемма 6.1. Пусть f(x), fi(x), f2(x); g(x), gi(x), g2(x) — гладкие
векторные функции, а(х) — гладкая скалярная функция, а\, а2 —
скалярные постоянные.
Скобки Ли обладают следующими свойствами:
1) билинейность —
+a2f2,g] = ai[fi,g] +a2[f2,g],
[f,aigi +«2g2] = ai[f,gi] + a2[f,g2];
2) асимметрическая коммутативность —
[f,g] = -[g,f];
3) тождество Якоби —
Доказательство. Свойства 1), 2) легко получаются непосред-
непосредственно из определения скобок Ли. Остановимся на доказательстве
тождества Якоби. Исходя из определения производной и скобок Ли
левую часть тождества (обозначим ее L) можно представить в виде
Т Т da , da (d&: n df
L = LadfnOi = -г- adfg = — -pi —— g
c/x c/x V c/x c/x
Правую часть (обозначим ее Р), основываясь на определении произ-
производной Ли, можно записать в виде
Р = LfLga - LgLfa = — (Lga)f - — (Lfa)g =
= d(da\f_d(daf
По правилу дифференцирования скалярного произведения по вектор-
векторному аргументу дальше получаем
^ [da dg , т d (da\ 1 п [da df , nT d (da\ 1
r "=¦ — + g — I I I — h I — I I g.
12*
180 Гл. 6. Линеаризация обратной связью
Так как слагаемые являются скалярными выражениями, а матри-
d (da\T
ца — — является симметрической, имеем
dx V dx /
Т d fda\T~ _ / т d fda\TЛт _ fT d /da\T
g dxVdx/ ~ Vg dxVdx/ ) ~ djcKdjc) g'
Таким образом, в выражении для Р второе и четвертое слагаемые
равны по абсолютной величине и противоположны по знаку. Поэтому
их можно сократить. После сокращения, получим
р _ (fa (fg р da df
dx dx dx dx
Сравнивая выражения для L и Р, убеждаемся, что они равны.
Лемма 6.2. Пусть f(x), g(x) (x G i^n) — гладкие векторные
функции (f, g G it!n); a(x) — гладкая скалярная функция. Тогда если
LpL}a(x)=0, г = 0,1,...,ш-1, LgLJa(x) ф 0, F.2)
yf a(x) ^ 0, j + к = m.
Доказательство. Воспользуемся методом математической ин-
индукции по j. При j = 0 формула F.3) принимает вид
и она справедлива в силу F.2). Допустим теперь, что формула F.3)
справедлива при j = I:
Покажем, что она справедлива при j = I -\- 1.
Из тождества Якоби (см. лемму 6.1) имеем
Заменив /3 на ad^g и Л на L^a(x), получим
В силу F.4) первое слагаемое для любого к, удовлетворяющего усло-
условию O^Z + fc^m — 1, равно нулю, а второе слагаемое принимает вид
к+1 j 0, (KZ + fc + l^m-1,
LadlfgLf «(x) = |(_1)/L^a(x)_,05 / + А; + 1 = Ш<
Лемма доказана.
6.3. Некоторые сведения из дифференциальной геометрии 181
Следствие. Пусть f(x), g(x) (x Е Rn) — гладкие векторные
функции (f, g G Rn), ^i(x) — гладкая скалярная функция и
LfT1=T2j LfT2=T3j ..., L/Tn_i = Tn.
Тогда если
LgTl = ЬдТ2 = • • • = LgTn_l = 0, Lg ТП ф О,
то
Lad^=^ i = 0,l,...,n-2; L^-i^T! # О.
Это следствие получается из леммы 6.2, если принять а(х) =
= Ti(x), & = 0 и m = n- 1.
Лемма 6.3. Пусть f(x), g(x) (x Е i?n) — гладкие векторные
функции (f, g G i^n), a(x) — гладкая скалярная функция. Тогда если
Ladkga(x)=0, А; = 0,1,...,ш, F.5)
то
LgLkfa(x)=0, k = 0,1,...,ш. (б.б)
Доказательство. При & = 0 равенство F.5) принимает вид
Lga = 0 и совпадает с (б.б). При к = 1, используя тождество Якоби,
из F.5) находим
LadfgOL = LfLga - LgLfQ> = 0.
Первое слагаемое равно нулю, так как в силу F.5) Lga = 0. Поэтому
получаем
LgLfa = -Ladf9a = 0.
При к = 2 равенство F.5), используя тождество Якоби, можно запи-
записать в виде
Lad2fga — Ladf(adfg)a = LfLadf9a - Ladf9Lfa = 0.
Первое слагаемое обращается в нуль, так как в силу F.5) Ladf9a = 0.
Второе слагаемое с учетом тождества Якоби преобразуется следую-
следующим образом:
-Ladf9Lfa = -(LfL9(Lfa) - LgLf(Lfa)) = LgLf(Lfa) = LgL2fa = 0.
Продолжая эту процедуру при к = 3,4,..., т получим (б.б).
6.3.2. Диффеоморфизмы и преобразование нелинейных
систем.
Определение б. 3. Гладкая векторная функция z = Ф(х) (х, z G
G Rn), определенная в области О, называется диффеоморфизмом в об-
области О, если существует однозначная обратная функция х = Ф~ (z)
и эта функция является гладкой. Если функции Ф(х) и Ф-1(г) опре-
определены и являются гладкими на всем пространстве Rn, то Ф(х)
называют глобальным диффеоморфизмом.
Диффеоморфизм может использоваться для преобразования нели-
нелинейных систем.
182 Гл. 6. Линеаризация обратной связью
Пусть система описывается уравнением
х = f (х) + g(x)u
и z = Ф(х) — диффеоморфизм. Так как
то, учитывая, что существует обратное преобразование Т 1(z), по-
получим ~
где
Теорема 6.1. Пусть z = Ф(х) = (</?i(x) ^г(х) ... </?п(х))т —
гладкая функция, определенная в области О С i?n. Если якобиан
с?Ф(х) Г^^г! ^ ^
—^^- = т^— является неособым, т. е. не обращается в нуль
ах loxki
в точке х° Е О; то функция Ф(х) является диффеоморфизмом в
некоторой окрестности О(х°) этой точки (О(х°) С О).
Пример 6.4. Определить, является ли векторная функция
z = Ф(х) = (
диффеоморфизмом.
Решение. Якобиан имеет вид
^Ф(х) _ Г1 2ж2
dx ~ [о 1
он отличен от нуля при всех х G R2. Следовательно, данная функция
является глобальным диффеоморфизмом.
6.3.3. Теорема Фробениуса. Теорема Фробениуса устанавли-
устанавливает связь между инвалютивностью и интегрируемостью системы
линейно независимых векторов. Поэтому прежде всего познакомимся
с этими понятиями.
Определение 6.4. Множество линейно независимых векторных
функций {fi(x), f2(x),..., fr(x)} называется инвалютивным, если
скобки Ли любых двух функций fi(x) и fj(x) из этого множества (не
обязательно разных) равны линейной комбинации функций из этого
множества, т. е. существуют функции oiijk (к = 1, 2,..., г) такие, что
к=1
Множество линейно независимых постоянных векторов всегда ин-
валютивно. Действительно, скобки Ли двух постоянных векторов
6.3. Некоторые сведения из дифференциальной геометрии 183
являются нулевыми и тривиально представляются комбинациями ис-
исходных векторов.
Множество, состоящее из одного вектора, является инвалютив-
ным, так как скобки Ли двух одинаковых функций равны нулю:
[f(x),f(x)] = (Vf)f-(Vf)f = 0.
Определение 6.5. Множество г (г < п) линейно независимых
n-мерных векторных функций {fi(x), f2(x),... , fr(x)} называется ин-
интегрируемым, если существуют п — г независимых скалярных функ-
функций ai(x), аг(х),..., an_r(x), удовлетворяющих системе дифферен-
дифференциальных уравнений
Vai(x)fj (х) = 0, г = 1, 2,..., п - г; j = 1, 2,..., г.
Скалярные функции ai(x),a2(x),... ,an_r(x) независимы в неко-
некоторой области D (т.е. при xGD), если векторы Va^(x) (г = 1,2,...
..., п — г) линейно независимы в этой области. Заметим, что при г =
= п — 1 независимость одного единственного вектора Vai (x) означает
неравенство этого вектора нулю: Vai(x) 7^ 0.
Теорема 6.2 (Frobenius [68]). Множество г (г < п) линейно не-
независимых п-мерных векторных функций {fi(x), f2(x),..., fr(x)} ин-
интегрируемо в том и только том случае, когда оно инвалютивно.
Пример 6.5. Задана система дифференциальных уравнений
да да
2х3 — = 0,
dxi дх2
да о да , да ^
хх- 2х2 ^ Ь х3 J— = 0,
дхг дх2 дхз
где а = a(xi,X2,xs) — неизвестная функция. Требуется определить
разрешимость это системы уравнений.
Решение. Эту систему уравнений можно записать в виде
где
"I 0)
-2x2 х3)
Чтобы ответить на вопрос, имеет ли данная система уравне-
уравнений решение, согласно теореме Фробениуса достаточно проверить
инвалютивность множества {fi,f2J. Скобки Ли двух функций этого
множества имеют вид
0
0"
-2 0
0 1
—
0
0
/
\
0
0
0
2х3
-1
0
2"
0
0
184
Гл. 6. Линеаризация обратной связью
Как легко проверить, скобки Ли каждой пары функций из множест-
множества {fi,f2J могут быть представлены как линейные комбинации функ-
функций этого множества следующим образом:
[fi, f2] = -2fi + 0f2, [f2, fi] = -[fb f2] = 2fi - 0f2,
[fl,fl] = [f2,f2]=0fi+0f2.
Таким образом, множество {/i, /2} инвалютивно и, следовательно,
по теореме Фробениуса рассматриваемая система интегрируема.
6.4. Линеаризация обратной связью по состоянию
Рассмотрим нелинейную систему
х = f (х) + g(x)u, х е Rn, ue R, F.7а)
где f(x), g(x) — гладкие векторные функции. Начало координат при
нулевом управлении является положением равновесия: /@) = 0.
Уравнение вида
х = f (х) + g(x)w(> + </?(х)),
если существует обратное преобразование w~1, можно подстановкой
v = w(u + </?(х)) привести к виду F.7а).
Определение 6.6. Система F.7а) называется линеаризуемой
обратной связью по состоянию, если существуют диффеоморфизм
z = Т(х) и преобразование обратной связью
и = а(х) + /3(х)г?
такие, что уравнение F.7а) принимает вид
z = Аъ + Ьг>,
где
А =
0
0
0
0
1
0
0
0
0
1
0
0
... 0"
... 1
... 0_
/ о \
о
ь =
о
\
F.76)
F.7в)
Линеаризованная система имеет специальный вид (см. (б.7в)) —
форму управления Бруновского (Brunovsky controller form) [68]. Од-
Однако это не нарушает общности, так как любая вполне управляемая
линейная стационарная система может быть преобразована к такому
виду.
Составим для системы F.7а) матрицу
y = [g adfg ... ad^g]. F.8)
В случае линейной стационарной системы, когда
f (х) = Лх, g(x) = b,
6.4- Линеаризация обратной связью по состоянию 185
где А и b — постоянные (п х п)- и (п х 1)-матрицы, для скобок Ли
имеем
g = b>
ady.g = adf(adfg) = -— g = ~-^r aa/g = Л b,
Матрица F.8) принимает вид
У=[Ъ -АЪ А2Ъ ... (-l)"^!)].
Если отбросить перед четными столбцами матрицы У знаки минус,
которые не влияют на ее ранг, то получим матрицу управляемости
для пары (А,Ъ). Поэтому матрицу F.8) также называют матрицей
управляемости для системы F.7а).
Теорема 6.3 (о линеаризации обратной связью по состоянию).
Нелинейная система F.7а) линеаризуема обратной связью по состоя-
состоянию в некоторой окрестности О начала координат в том и только
том случае, когда в этой окрестности ее матрица управляемости
имеет ранг п, т. е. det Уф 0 всюду на О (в начале координат det У
может обратиться в нуль) и множество {g adfg ... ad7l~2g}J
составленное из п — 1 столбцов матрицы управляемости У, инва-
лютивно.
Доказательство. Необходимость. Допустим, что сущест-
существуют преобразования состояния z = Т(х) и управления и = а(х) +
+ /3(х)г? такие, что переменные z и v удовлетворяют системе линей-
линейных дифференциальных уравнений в форме Бруновского
• • 10 1
Подставляя сюда Zi = Tj(x), получим
ii = ^ [f (x) + g(x)«] = Tj+i, i = 1,2,..., n - 1,
Так как функции Xi,T2,... ,Tn не зависят от управления и, из этой
системы уравнений следует
9х g " Эх g " • • • " Эх g " U' 9x S ^ U'
и соответственно из первых п — 1 уравнения получаем
дТ\ « ^ дТ2 о, rp dTn-i ^
5x-f = T2' 5x"f = T3' •••' ^x-g = T-
Используя производные Ли, полученные соотношения можно запи-
записать в виде
LgTi = LgT2 = ... = LgTn_x = 0, LgTn ф О,
186 Гл. 6. Линеаризация обратной связью
..., LfTn_i = Тп.
Отсюда в силу следствия леммы 6.2 имеем
k = 0,1,...,п-2, F.9)
}^ ф 0. F.10)
Из этих соотношений можно сделать вывод о том, что система
векторов {g, adfg, ..., ad7^~1g} линейно независима и инвалютивна.
Инвалютивность следует из того, что существует скалярная функ-
функция Т\ (х), удовлетворяющая п — 1 уравнениям в частных производ-
производных F.9). Независимость этих векторов можно показать, допустив
противное. Действительно, предположим, что эти векторы линейно
зависимы. В этом случае скобки Ли более высокого порядка выража-
выражаются через скобки Ли более низкого порядка, и для некоторого числа г
{г ^ п — 1) существуют скалярные функции ао(х), ai(x),..., a^-i(x)
такие, что справедливо равенство
г-1
к=0
Используя это равенство, вычислим скобки Ли ad^g:
г-1
к=0
Продолжая эту процедуру вычисления скобок Ли до (п — 1)-го поряд-
порядка, получим i_1
к=0
где I = п — г — 1 (г — 1 + I = п — 2). Умножив обе части этого ра-
равенства слева на VTi и учитывая F.9), получим равенство
г-1
VT.ad^g = Y, akVTiadk+lbfg = 0,
к=0
которое противоречит F.10).
Достаточность. Так как система векторов {g, adfg, ...
..., ad7l~1g} инвалютивна, существует скалярная функция Т\ =
= Т\ (х), удовлетворяющая системе уравнений
ЬдТг = LadfgTx = ... = Ladn-*gTx = 0. F.11)
Отсюда в силу леммы 6.3 имеем
ЬдТг = LgLfTx = ... = LgLnf-2Tx = 0. F.12)
В качестве искомого преобразования состояния примем
Ti=Ti(x), T2 = LfTu ..., Tn = Lnf1T1, F.13)
6.4- Линеаризация обратной связью по состоянию 187
где Т\ — решение системы F.11). Тогда, учитывая F.12), получим
f2 = -^ (f + gu) = LfT2 + LgT2u = T3+ LgLfTlU = T3,
- n-
LgTn_lU = Tn + LgLnf2TlU = Tn,
Lrp T WP _i_ T TTl—lrp
glnU — Lfll + LgLf 1\U.
Таким образом, при преобразовании F.13) система F.7а) прини-
принимает вид
Zi = Zi+i, г = 1,2,.. .,п - 1,
zn = ЩТ\ + LgL^~ T\ и.
Покажем, что LgU\~xT\ ф 0. Допустим противное: LgU\~xT\ — 0.
Тогда в силу F.11) и леммы 6.3 имеем
Объединяя это равенство с F.11), получим
VTi(g
или \/ТгУ=0.
Так как det Уф 0, то данная система имеет только нулевое реше-
решение VTi = 0. Но в силу теоремы Фробениуса инвалютивное множест-
множество векторов {g adfg ... a^~1g} интегрируемо. Поэтому система
уравнений F.11) имеет решение Ti, причем VTi линейно независимо,
т.е. VTi ф 0. Полученное противоречие доказывает, что Ъд~Щ~хТ\ ф
#0.
Воспользовавшись преобразованием управления
LgLf
получим zn = v. Таким образом, искомое преобразование найдено:
исходное нелинейное уравнение преобразовано в систему линейных
уравнений в форме Бруновского. Достаточность доказана.
Доказательство достаточности является конструктивным, и на
его основе можно сформулировать правило линеаризации обратной
связью (ЛОС) по состоянию:
1) для заданной системы определить матрицу управляемости У =
= {g adfg ... a^~2g};
2) вычислить det У и проверить инвалютивность множества век-
векторов, составленного из первых п — 1 столбцов матрицы управляе-
управляемости, т. е. множества {g adf 2
188
Гл. 6. Линеаризация обратной связью
3) если dety^O и множество {g adfg ... adf 2g} инвалю-
тивно то определить функцию Т\ (х) из соотношений
d}g = О, г = 0,1,..., п - 2; ^
4) определить преобразование состояния
z = T(x) = [Ti(x) Г2(х) ... Тп(х)]т,
где (см. F.13)) Г2 = L/Ti, Г3 =
ф 0;
F.14)
разование управления имеет вид
1
и =
гс-1
Тг
Гп = LnfxTx и преоб-
преобF.15)
Пример 6.6. Задана система
• _ • _ з , • _ , з
Требуется произвести линеаризацию обратной связью по состоя-
состоянию.
Решение. В данном случае п = 3 и функции f(x) и g(x) имеют
f (х) = (х2 х\ Ж1+с^)т, g(x) = @ 1 0)т.
1) Найдем матрицу управляемости У = (g adfg
0
О 1
0 0 3x1
1 0 Зсх\ j
lzfg = adf(adfg) = d^ d^ /g =
1 0
= 0 0 3x23
_1 0 3cx\ _
Матрица управляемости имеет вид У =
0-10
1 0 0
0 0 1
2) Детерминант матрицы управляемости отличен от нуля: det У =
= 1. Первые два столбца матрицы управляемости являются постоян-
постоянными и поэтому образуют инвалютивное множество.
3) Соотношения F.14) принимают вид
6.5. Линеаризация обратной связью по выходу 189
(dTl dTl dTl\ ( Л dTl П
= - -— -— -— 0 = --— = О,
\dxi дх2 дх/ \ I dx
Отсюда следует, что Т\ зависит только от жз, и в качестве решения
этих соотношений примем Т\ = х%.
4) Найдем остальные два компонента преобразования состояния
Т2 и Г3:
(
Т2 = L/Ti = VTi/ = @ 0 1) х\ = х1 +
Г3 = L^Ti = LfT2 = A0 Зсж^) ^ = х2
+ СЖз
Итак, преобразование состояния имеет вид
Z\ — Т\{х) — Жз, ^2=^2=^1+ СХ%, Z% = Т3 = Х2
Для определения преобразования управления нужно опреде-
определить ЬдЦТг и L^Ti:
LgL)Tx = LPT3 = VT3 g = (Зсж^ 1 6cx3Xl + 15c2^) I 1 I = 1,
% ^ = L/T3 = VT3 / =
Ж3
Подставив эти выражения в F.15), получим
и = —[?>сх\х2 + х\ + FСХ3Х1 + 1Ъ(?х\
В новых переменных уравнения системы примут вид
zi = z2, z2 = z3, i3 = у-
6.5. Линеаризация обратной связью по выходу
Пусть система описывается уравнениями
х = f(х,и), у = /г(х), х е Rn, ue R, у G R. F.16)
Рассмотрим задачу слежения за траекторией уж(г), которая со-
состоит в определении такого закона управления, при котором ошибка
190 Гл. 6. Линеаризация обратной связью
слежения e(t) = y(t) — уж{Ь) со временем стремится к нулю: e(t) —У 0
при t —у оо, а остальные переменные ограничены.
Трудность решения данной задачи заключается в том, перемен-
переменная у не связана с управлением и. Однако может оказаться, что
она будет легко разрешимой, если путем преобразования исходной
системы удастся получить прямую и простую зависимость между
выходом у и входом (управлением) и.
Определение 6.7. Линеаризацией обратной связью по выходу
называется такое преобразование нелинейной системы F.16), вклю-
включающее преобразование обратной связью, при котором в преобра-
преобразованной системе связь между выходом у и входом и получается
линейной.
Пример 6.7. Система описывается уравнениями
Х\ — Ж2, Х2 = Xs(xi + 1), Х3 = Х\Х2 + U, у — Х\.
Требуется определить алгоритм управления, обеспечивающий сле-
слежение за траекторией уж(?) (остальные переменные ограничены).
Решение. Продифференцируем у столько раз, сколько потребу-
потребуется для получения прямой зависимости между выходом и входом:
у = Х!=Х2, У = Х2 = Х3(Х! + 1),
У = Xs(xi + 1) + Х3Х1 = Ж1Ж2(Ж1 + 1) + (Xi + 1)и + Ж2Ж3.
Из последнего соотношения на основе преобразования
и = (Ж1 + 1) [~ж1ж2(ж1 + 1) - х2х3 + г;]
получим у = v. Точка х\ = — 1 для этого преобразования является
особой: оно в этой точке не определено.
Для определения требуемого закона управления воспользуемся ме-
методом обратной задачи динамики. Если потребовать, чтобы ошибка
слежения е = у — уж изменялась в соответствии с уравнением
"ё + к\ё + к2ё + fee = О,
то, найдя отсюда
'У = У'ж - he - к2ё - к3е
и подставив в преобразованное уравнение для выхода, получаем
у = Уж - к\ё - к2ё — к3е.
Подставив это выражение в преобразование для управления, находим
искомый закон управления
и = , . [-х1х2(х1 + 1) - х2х3 + у'ж -
- кх{у - г/ж) - к2(у - уж) - к3(у - уж)],
или, после подстановки выражений для выходной переменной и ее
6.5. Линеаризация обратной связью по выходу 191
производных,
и = --, —¦ [(xi + l)(xi#2 + kix$) + х2х3 + к2х2
X + 1)
- У'ж - кхуж - к2уж -
В данном примере число дифференцирований для получения явной
зависимости между выходом и входом равно порядку системы. Воз-
Возникают дополнительные проблемы, когда это число меньше порядка
системы.
Рассмотрим пример.
Пример 6.8. Пусть система описывается уравнениями
Х\ — Х2 + (Х2 + 2)ж3, Х2 = х\ + Ж3, Х3 = х\ + U, у — Х\.
Требуется определить алгоритм управления, обеспечивающий сле-
слежение за траекторией уж{Ь) (остальные переменные ограничены).
Решение. Продифференцируем у столько раз, сколько потребу-
потребуется для получения прямой зависимости между выходом и входом:
у = х\ — х2 + (х2 + 2)жз,
г/ = A + ж3)ж2 + (х2 + 2)ж3 =
= A + х3)(х1 + ж3) + (ж2 + 2)х\ + (ж2 + 2)и,
или
г/ = A + ж3)(ж? + х3) + (ж2 + 2)ж^ + (х2 + 2)и.
Из последнего соотношения на основе преобразования
и = -^—- [-A + хъ){х\ + ягз) - (ж2 + 2)х\ + и]
получим
2/ = г;.
Как в предыдущем примере, воспользуемся методом обратной
задачи динамики. Задав желаемый закон изменения ошибки е =
= У ~ Уж в виде
ё + feieH- fe2e = 0, F.17)
получим
v = Уж - he - к2е = уж - к\\х2 + (х2 + 2)х3] - к2хх + кхуж + ^22/ж.
Подставив это выражение в преобразование для управления, получим
и = 1—- [A + хъ)(х\ + х3) + (ж2 + 2)ж^ +
Х2 + ^
+ Ыжг + (Ж2 + 2)ж3] + к2хх -Уж- кхуж - к2уж].
При таком управлении ошибка слежения описывается уравне-
уравнением F.17). В силу устойчивости этого уравнения ошибка e(t) —> О
при t —> оо. Однако пока нельзя делать вывод о том, что полученный
алгоритм управления решает поставленную задачу. Это связано со
следующим обстоятельством.
Порядок синтезированной системы совпадает с порядком исходной
системы и равен 3, так как найденный алгоритм управления не вносит
192 Гл. 6. Линеаризация обратной связью
дополнительный порядок. В то же время уравнение ошибки F.17)
имеет порядок 2 и описывает часть динамики. Для получения полного
описания синтезированной системы необходимо к уравнению F.17)
добавить еще одно уравнение первого порядка, которое описывает так
называемую внутреннюю (скрытую) динамику.
Полученный алгоритм управления применим, если внутренняя
динамика устойчива. В противном случае координата, характеризую-
характеризующая внутреннюю динамику, и управление могут принимать недопус-
недопустимо большие значения, что может сопровождаться перегревом двига-
двигателей или возникновением сильных вибраций механической части [69].
6.5.1. Относительный порядок. Основным методом получения
прямой зависимости между выходом и входом (управлением) является
повторное дифференцирование выхода, пока не получится явная за-
зависимость выхода от входа, и последующее преобразование обратной
связью.
Число дифференцирований выхода, необходимых для получения
явной зависимости между выходом и входом, называется относитель-
относительной степенью или относительным порядком. Для вполне управляе-
управляемой системы относительная степень г не превышает порядка систе-
системы п: г ^ п.
Пусть система описывается уравнениями
х = f(х) + g(x)u, у = Л(х), х G Rn, ueR, у Е R, F.18)
где f (x), g(x) и h(x) — гладкие функции в некоторой области О С Rn.
Продифференцируем выход у по t:
у = — х = — [f (x) + g(x)u] = Lfh + (Lgh)u.
Если Lgh = 0 для всех х G О, то дифференцируем выход еще раз:
у = A (Lfh)i = ^ (Lfh)(f + gu) = L)h + (L9Lfh)u.
Если LgLfh = 0, дифференцирование продолжаем, пока не полу-
получим LgLrrxh ф 0. Затем, применяя преобразование обратной связью
(г)
получим линейное уравнение у = v.
Как отмечалось, число г дифференцирований выхода, необходи-
необходимых для появления управления и, называется относительной степе-
степенью (или относительным порядком) системы. Для системы F.18) это
понятие определяется следующим образом.
Определение 6.8. Одномерная система F.18) имеет относи-
относительную степень г в области О, если для любых х G О
ЬдЬЩх) =0, г = 0,1,..., г - 2, F.19а)
6.5. Линеаризация обратной связью по выходу 193
LgL^hix) ф 0. F.196)
Приведенное определение согласуется с интуитивным определением,
связанным с числом дифференцирования, и с определением относи-
относительной степени (или относительного порядка) линейной системы как
разности между степенями знаменателя и числителя ее передаточной
функции.
В силу леммы 6.2, если система F.18) имеет относительную сте-
степень г, то в силу F.19а) и F.196)
Г 0, 0 ^ j + к ^ г - 2,
М#"<*> = | irifc(x) ф 0, j + k = r _ L F-20)
Пример 6.9. Линейная система описывается уравнением
Ьор + Ъ\ си _l п г, / с\\
р3 + aip2 + а2р + а3
Определить относительную степень этой системы в соответствии
с определением 6.8.
Решение. В нормальной форме уравнение данной системы имеет
вид
¦ CL2X2 + a1^3j + ui У = 0\X\ + OqX2.
Если эти уравнения записать в векторной форме в виде F.18), то
'(Г
f(x)= ( х3 ), g(x)= '
¦ CL2X2
h(x) =
Отсюда имеем
Lgh = Vhg = (
Lfh = Vhf = (h b2 0)
а2х2
= V(Lfh)g=@ Ьг bo)g = bo^0.
Следовательно, в соответствии с определением 6.8 относительная
степень г = 2, и она совпадает с относительным порядком переда-
передаточной функции, равным разности ее степени знаменателя и степени
числителя.
6.5.2. Внешняя и внутренняя динамика. Если относительная
степень г меньше порядка системы п (г < п), линеаризация обрат-
обратной связью разбивает уравнение системы на уравнения внешней и
13 Д.П. Ким
194
Гл. 6. Линеаризация обратной связью
внутренней динамики. При этом внешняя динамика имеет порядок г
и характеризуется г независимыми переменными, а внутренняя ди-
динамика имеет порядок п — г и характеризуется п — г независимыми
переменными.
Обозначим вектор переменных внешней динамики
zW = (Zl z2 ... zr)T,
а вектор переменных внутренней динамики
ZB) = (zr+1 Zr+2 ... Zn)T.
Рассмотрим, как можно выбрать эти векторы.
Согласно теоремы 6.1 для того чтобы переменные zi (г = 1, 2,...
..., п), связанные с исходным вектором состояния х соотношениями
zi = ipi(x) (г = 1, 2,..., п), могли служить новыми переменными со-
состояния, нужно, чтобы градиенты V</?i(x) (г = 1, 2,... , п) были ли-
линейно независимыми, или якобиан был отличен от нуля:
дхк
dxi
дх±
дхп
дхп
#0.
xi 0x2 ''' dxn
Если система F.18) имеет относительную степень г < п, то она
может быть преобразована в нормальную форму вида
r-i = Zr
F.21a)
тУ*> — w(z^
j), у = z\.
F.216)
Как легко убедиться, уравнение внешней динамики примет
вид F.21а), если в качестве переменных ее состояния принять выход
и его производные у, у,
(г)
У :
zr=
у
ТГ-1
=Lf
Покажем, что градиенты этих преобразований линейно незави-
независимы. Допустим противное: существуют функции q = q(x) (г = 1,
= 2,..., г) такие, что
crVzr = 0,
6.5. Линеаризация обратной связью по выходу 195
или
d Vh + c2VLfh + ... + cr\JUfxh = 0. F.22)
Умножим справа обе части последнего равенства на g. Тогда
получим
cxLgh + c2LgLfh + ... + crLgUfxh = 0.
В соответствии с соотношениями F.19а) и F.196) в этом равенстве
все слагаемые, кроме последнего, равны нулю. Поэтому оно прини-
принимает вид crLgL7f~1h = 0. Так как ЬдЬг,~1Н ф 0, то сг = 0.
Умножим F.22) справа на adfg. Тогда, учитывая, что сг = 0,
получим
ciLadf9h + c2LadfgLfh + ... + cr-iLadfgLrf~2h = 0.
В соответствии с F.20) в этом равенстве все слагаемые, кроме пос-
последнего, равны нулю. Поэтому имеем cr-iLadfgL\~2h = 0. Так как
LadfgLrf~2h ф 0, то отсюда получаем cr_i = 0. Продолжая эту про-
процедуру с acf^g, ..., adrjT1g, получим, что все q = 0. Следовательно,
градиенты V zi (г = 1, 2,..., г) линейно независимы.
Так как система из одного вектора g инвалютивна, то по теоре-
теореме Фробениуса существуют п — 1 независимых функций А^ (к = 1,
2,..., п — 1), удовлетворяющих системе уравнений
LpAfe(x)=0, k = l,2,...,n-l, Vxeft. F.23)
Напомним, что скалярные функции А/, (к = 1, 2,..., п — 1) незави-
независимы, если их градиенты линейно независимы.
Так как функции Z{ — ЬгГ1/г(х) (г = 1,2,...,п — 1) удовлетворяют
этому уравнению (см. F.19а)) и их градиенты линейно независимы,
то они могут быть использованы как функции А^ (г = 1, 2,..., г — 1).
Другие п — г функций, удовлетворяющих F.23), примем за перемен-
переменные 2r+i, ..., Zn.
Итак, все переменные выбраны. Однако нужно показать, что гра-
градиент функции zr, которая не удовлетворяет уравнению F.23), ли-
линейно не зависит от градиентов остальных переменных. Допустим
противное: градиент V'zr линейно выражается через градиенты
остальных переменных, т.е. существуют функции a?i(x) (i = 1,...
...,r — 1, r + l,...,n) такие, что
V'zr = aiVzi + ... + ar-{4zr-i + ar+iVzr+i + ... + Vzn.
Умножая справа обе части этого равенства на g, получим
Lgzr = aiLgzi + ... + ar-iLgzr-i + ar+iLgzr+i + ... + Lgzn.
Все слагаемые в правой части полученного равенства равны нулю,
так как все они удовлетворяют уравнению F.23). Поэтому Lgzr = 0,
что противоречит условию (см. F.196))
LgZr = ЬдЬ^Цх) ф 0.
13*
196 Гл. 6. Линеаризация обратной связью
После нахождения п — г решений уравнения F.23), для того чтобы
использовать их в качестве переменных внутренней динамики, нужно
убедиться, что их градиенты линейно независимы между собой и с
градиентами остальных переменных, т. е. выполняется неравенство
Если полученное преобразование представить в виде z = Ф(х), то
оно, являясь диффеоморфизмом, преобразует систему F.18) в нор-
нормальную форму вида F.21) с
a(zW,zB)) = LJft(x) = LJft^-^z)], F.24a)
&(zA),z^) = LglSf1^*) = LgL^h^-^z)}. F.246)
Пример 6.10. Система описывается уравнениями
/-*?\ /о\
х = ххх2 I + 1 \ и, у = h(x) = х3.
Произвести линеаризацию обратной связью по выходу.
Решение. Так как у = х% = х2, у = х2 = х\х2 + и, то относи-
относительная степень г = 2. Поэтому в качестве первых двух новых пере-
переменных примем выходную переменную и ее производную: z\ — у — х%,
z2 = у = х2. Третью переменную найдем из уравнения
3X2
Этому уравнению, в частности, удовлетворяет функция Л = х\. При-
Примем эту функцию в качестве третьей переменной: z3 = x\. Убедимся,
что выбранные переменные являются независимыми:
'О 0 1\
;^)= |о 1 о U-1/o.
.1 о о/
Итак, найденное преобразование имеет вид z = (х3 х2 х\)т, а
обратное преобразование — вид х = (z$ z2 z\)T.
В соответствии с формулой F.24) имеем
a(z) = L2fh = Lf(Lfh) = LfX2 = @ 1 0) f = x±x2 = z3z2,
Так как z$ = x\ — —x\ — —z\, уравнение в новых переменных в нор-
нормальной форме (см. F.21а) и F.216)) принимает вид
2l = Z2, Z2 = Z%Z2 -\- U, Z% = —^з, У = 2i.
Используя преобразование обратной связью и = —z%z2 + г?, получим
2
2i = 22, ^2 — ^5 ^3 = ~Z3'
6.6. Нуль-динамика и синтез алгоритмов управления 197
6.6. Нуль-динамика и синтез алгоритмов
управления
Линеаризация обратной связью по выходу разбивает уравнения
нелинейной системы на уравнения внешней и внутренней динамики.
При этом внешняя динамика описывается дифференциальными урав-
уравнениями, содержащими управление г?, линейно связанное с выходом у.
Поэтому легко синтезировать управление v так, чтобы у изменял-
изменялся нужным образом. Однако синтезированный таким образом закон
управления представляет интерес, если внутренняя динамика будет
устойчива и соответственно ее координаты ограничены.
6.6.1. Нуль-динамика. Внутренняя динамика описывается пос-
последними п — г уравнениями в нормальной форме F.216): т№ —
— w^1), z^2)). В общем случае эти уравнения зависят от внешнего
состояния тУ^. Однако когда управление таково, что выход тож-
тождественно равено нулю (у = 0), внутренняя динамика не зависит от
переменных внешнего состояния.
Определение 6.9. Нуль-динамикой нелинейной системы назы-
называют ее динамику при условии, что выход тождественно равно нулю
(у = о).
Так как при у = 0 все производные по времени выхода равны
нулю, уравнение нуль-динамики в нормальной форме F.21) имеет вид
z«=0, zB>=w@,z<2)).
Управление, требующееся для подержания условия z^ = 0, получа-
получается из соотношения
и имеет вид , B)ч
U 6@, ZB))'
Рассмотрение нуль-динамики связано с тем, что в общем слу-
случае нуль-динамика описывается более простыми уравнениями, чем
внутренняя динамика, и в то же время исследование нуль-динамики
позволяет судить об устойчивости внутренней динамики.
Как увидим дальше, для задачи слежения локальная (неглобаль-
(неглобальная) экспоненциальная устойчивость нуль-динамики гарантирует
устойчивость внутренней динамики, если желаемая траектория и ее
производная до (г — 1)-го порядка принимают малые значения. В
случае стабилизации локальная асимптотическая устойчивость нуль-
динамики гарантирует асимптотическую устойчивость внутренней
динамики.
Нуль-динамика является внутренним свойством нелинейной сис-
системы, а ее устойчивость не зависит от выбора закона управления
v = ^(zt1),^) и желаемой траектории.
198 Гл. 6. Линеаризация обратной связью
Исследование устойчивости нуль-динмики намного проще иссле-
исследования устойчивости внутренней динамики, так как нуль-динамика
включает только внутренние координаты, в то время как внутрен-
внутренняя динамика связана с внешней динамикой и желаемой траекторией.
Если относительная степень нелинейной системы равна ее поряд-
порядку, то линеаризация обратной связью по выходу полностью линеари-
линеаризует систему, и нелинейная задача синтеза сводится к линейной. Если
же относительная степень меньше порядка системы, то линеаризация
обратной связью по выходу только частично линеаризует систему,
и пригодность синтезированного на основе линейной модели закона
управления зависит от устойчивости внутренней динамики. Изуче-
Изучение внутренней динамики может быть упрощено, если его заменить
изучением нуль-динамики.
6.6.2. Синтез алгоритма стабилизации. Пусть точка х = О
является положением равновесия системы F.18): f@) = 0. Следую-
Следующая теорема указывает на то, что если нуль-динамика асимптоти-
асимптотически устойчива, то регулятор, синтезированный на основе линейной
части, может стабилизировать систему в целом.
Теорема 6.4. Пусть система F.18) имеет относительную сте-
степень г < п и линеаризованная (путем разложения в ряд Тейлора)
модель ее нуль-динамики асимптотически устойчива.
Тогда если полином
Q(X) = Аг + аг-гХ7*-1 + ... + агХ + а0 F.25)
устойчив, то закон управления
и = r_1 {Vfh + ar-iLre~1h + ... + a\Lfh + a^h) F.26)
обеспечивает локальную асимптотическую устойчивость замкну-
замкнутой системы.
Доказательство. В новых координатах замкнутая система
управления может быть представлена в виде
лA) А ~A) (а 97о^
где
О 1 0 ... О
О 0 1 ... О
О 0 0 ... 1
Уравнение внутренней динамики после линеаризации путем раз-
разложения его правой части в ряд Тейлора можно преобразовать к виду
z<2) = Aziz*1* + A22z^. F.276)
6.6. Нуль-динамика и синтез алгоритмов управления 199
Отсюда для линеаризованной модели нуль-динамики имеем
Линеаризованная модель всей системы описывается уравнением
'iw\ _ Un О
[А21 А22
Характеристический полином уравнения F.27а), описывающего
внешнюю динамику, или, что то же, матрицы Лц, совпадает с устой-
устойчивым полиномом F.25). Характеристический полином линеаризован-
линеаризованной модели всей системы имеет вид
det i^U ? \ = det Ли det Л22
[А21 Л22]
и будет устойчив, если устойчивым будет характеристический поли-
полином det Л22 линеаризованной модели нуль-динамики. Но тогда исход-
исходная нелинейная система в соответствии с теоремой Ляпунова об устой-
устойчивости по линеаризованной модели будет асимптотически устойчива.
Теорема доказана.
6.6.3. Синтез алгоритма управления в задаче слежения.
Управление F.26) легко можно распространить на задачу слежения,
включив в него величину, определяющую желаемое движение.
Пусть уж(г) определяет желаемую траекторию. Для ошибки сле-
слежения и ее производных по времени введем обозначения
ei = У - Уж, е = ео = У ~ Уж (г = 0,1,2,.. .,г).
При законе управления
и = r_1 (L^h — уж + ar-ier-i + ... + aiei + с^ово) F.28)
J^g-L' f h
уравнение замкнутой системы примет вид
е: = Лпё, zB) = w(e + уж, zB)), F.29)
где ё = (е0 ei ... er_i)T, уж = (уж уж ... уж )т.
Теорема 6.5. Пусть система F.18) имеет относительную
степень г < п и нуль-динамика экспоненциально устойчива.
Тогда если полином F.25) устойчив и желаемая траекто-
траектория уж(г) и ее г — 1 производных достаточно малы, то управле-
управление F.28) обеспечивает сходимость к нулю ошибки слежения при
неограниченном увеличении времени и ограниченность переменных
внутренней динамики:
/j-\ к г» 4- I B) | ^ г /г ^ п\
6[t) —У U, t —У 00; |ZV J\ < О [О > UJ.
200 Гл. 6. Линеаризация обратной связью
Доказательство. Так как внешняя динамика системы F.29),
представляющая устойчивую линейную систему, экспоненциально ус-
устойчива, то ошибка слежения e(t) сходится к нулю экспоненциально.
Поэтому достаточно показать, что внутреннее состояние z^2) остается
ограниченным, когда e(t) —У 0 при t —У оо.
Для этого воспользуемся прямым методом Ляпунова. Но прежде
всего отметим следующее.
а) Так как по условию уж^) и ее г — 1 производных достаточно
малы (ограничены), то существует положительное число 5± такое,
чт0 \Уж\ < si-
б) Так как w(z^1^,z^2^) — гладкая функция, то выполняется усло-
условие Липшица
в) Так как нуль-динамика экспоненциально устойчива, то согласно
теореме Красовского (см. гл. 7) для нее существуют функция Ляпу-
Ляпунова и положительные числа ci, с2, сз, с^ такие, что справедливы
неравенства
dV2
Функцию Ляпунова для системы F.29) будем искать в виде
где Р — положительно определенная матрица, удовлетворяющая
уравнению Ляпунова
\i — положительная постоянная. Как было установлено выше, мат-
матрица Ац является устойчивой. Поэтому положительно определен-
определенная матрица Р, удовлетворяющая уравнению Ляпунова, существует.
Производная искомой функции Ляпунова по времени в силу уравне-
уравнения F.29) имеет вид
и с учетом уравнения Ляпунова может быть преобразована к виду
Используя приведенные выше неравенства, для производной V
Задачи
201
получаем следующую оценку сверху:
V ^ -|ё|2 + сФ\ъ^\lw(\e\ + ёг) - с^\ъ^
3 ' _ 3 пг\„{2) 2 _
Положив \i =
\ ~4 'е'
получим
2_ /И Сз | B)|Г
\2 4c4lJZ Ч
^B)
Исключив два отрицательных слагаемых (третий и четвертый), по-
последнее неравенство можно представить в виде
¦^l2-
2 I ^1
4 '
Отсюда следует, что производная V < 0, когда |е| и \ъ^\ принимают
большие значения. Следовательно, переменные внутреннего состояния
ограничены.
В общем случае устойчивость нуль-динамики гарантирует только
локальную устойчивость (устойчивость в малом) системы управле-
управления, синтезированной на основе линеаризации обратной связью по
выходу.
Задачи
1. Вычислить производные Ли 1-го и 2-го порядков функции h(x)
по векторной функции /(х), если h(x) и /(х) имеют следующий вид:
а) /г(х) = х\ + х\, f(х) = (х2 х\ + ж2)т;
б) h(x) = х\ + х\х2 + ж|, f(х) = (х2 +х\ xi- х\)т]
в) h(x) = х\+ х\+ х\, f(х) = (ж2 ж3 xi - 2ж2 - х\)т'.
2. Вычислить скобки Ли 1-го и 2-го порядков функций g(x)
и f(x), имеющих следующий вид:
a)g(x) = @ l)T,
6)g(x) = @ 2)T,
в)8(х) = A 0)т,
г) g(x) = @ 0 1
f(x) = (x| Xl)T;
f(x) = (a:l ж?)т;
f(x) = (x2 x\)T;
, f(x) = (х2+е-х'х3
0)
3. Показать линеаризуемость обратной связью по состоянию и
определить соответствующие линеаризующие преобразования еле-
202 Гл. 6. Линеаризация обратной связью
дующих систем:
a) ±i = х2, х2 = х\ + щ б) х\ — х2, х2 = х\ + 2
в) Ж1 = ж2, х2 = х\х2 + 2и; г) х\ = ж|, ^2 = х\
д) xi = х2 + и, х2 = ж^; е) х\ — х2 + п, ж2
4. Показать, что система
х\ — х2 + е~Ж2ж3, ^2 = ж3, жз = ^
линеаризуема обратной связью по состоянию.
5. Показать, что система
х\ — х2 + е~Хзх2, х2 = ж3, х3 = и
не линеаризуема обратной связью по состоянию.
Глава 7
СИСТЕМЫ БОЛЬШОЙ РАЗМЕРНОСТИ.
ВЕКТОРНАЯ ФУНКЦИЯ ЛЯПУНОВА
При рассмотрении систем управления большой размерности ши-
широко используются методы, сводящие исследование исходной системы
к исследованию более простых моделей. Такими методами являются
принцип (метод) сравнения, метод декомпозиции и др.
Метод сравнения состоит в том, что вместо исходной системы рас-
рассматривается более простая система, или модель сравнения. Система
сравнения определяется следующим образом. Пусть задан некоторый
показатель J, который характеризует качество или устойчивость
системы и который будем называть показателем сравнения. Этот
показатель может быть числом или функцией. Если Jm обозначает
выбранный показатель исходной системы и Jc —- показатель системы
сравнения, то систему сравнения выбирают так, чтобы выполнялось
условие т ^ т т ^ т
jh ^ J или <УИ ^ J
при любом t ^ t* (t* — фиксированное число). Естественно, система
сравнения тем лучше отражает свойство исходной системы по за-
заданному показателю, чем меньше по абсолютной величине разность
между показателями исходной системы и системы сравнения при
соблюдении заданного выше неравенства. Однако главным критерием
при выборе системы сравнения является ее простота, возможность ее
исследования доступными средствами.
В качестве показателя сравнения можно принять показатель ка-
качества систем управления, в частности им может быть время регули-
регулирования. А. А. Фельдбаум для оценки времени регулирования исполь-
использовал миноранту и мажоранту. Напомним, что для функции /(?), если
она удовлетворяет условию
fm(t) называется минорантой, /м(?) — мажорантой.
Рассмотрим дифференциальное уравнение
а0 у +ах у +... + ап2/ = 0, G.1)
204 Гл. 7. Системы большой размерности.
у которого все корни характеристического уравнения являются дейст-
действительными. Как показал А. А. Фельдбаум, для решения такого диф-
дифференциального уравнения при начальных условиях у@) = Уо, 2/@) =
= 0, ..., у @) = 0 функция ym(t) = yoe~vt, где т\ — степень ус-
устойчивости, является минорантой, а функция
— мажорантой. Пользуясь указанными минорантой и мажорантой,
можно получить нижнюю и верхнюю оценки для времени регулиро-
регулирования системы управления, которая описывается уравнением G.1).
7.1. Дифференциальные неравенства
Принцип сравнения основывается на дифференциальных нера-
неравенствах. В этом параграфе рассмотрим две теоремы, связанные с
дифференциальными неравенствами.
Теорема 7.1. Если непрерывная и дифференцируемая функ-
функция v = v(t) подчиняется неравенству
v(t)^f(v,t), G.2)
где f(v,t) удовлетворяет условию Липшица
\f(v',t)-f(v",t)\^L\v'-v"\ G.3)
(L — константа), то решение w(t) уравнения
w = f(w,t), G.4)
для которого в начальный момент выполняется условие v(to) ^
^ w(to), удовлетворяет неравенству
v(t) ^ w(t) Ш ^ t0. G.5)
Доказательство. Докажем от противного. Допустим при не-
некотором t' > to выполняется неравенство
v(t') >w(t'),
или
Д(*') = v(tf) - w(tf) > 0.
Так как функции v(t) и w(t) непрерывны и в начальный момент
времени Д(?о) ^ 05 то наступит такой момент времени t\ G [?о,?'],
когда A(ti) = 0, и при t\ < t ^ t'
A(t) > 0. G.6)
Вычитая из неравенства G.2) уравнение G.4) и учитывая усло-
условие G.3), на интервале t\ < t ^ t' получим
v(t) - w(t) <: f(v,t) - f(w,t)
7.1. Дифференциальные неравенства 205
at
Проинтегрировав последнее неравенство от t\ до t, получим
или
A(t) ^ A^e^-^ = О,
что противоречит неравенству G.6). Теорема доказана.
Теорема 7.2. Пусть элементы матрицы А = (а^-) (г, j = 1,
2,... ,п) на главной диагонали произвольны, а вне главной диагонали
неотрицательны:
ctij ^ и, % т= j [г, j — 1, z,... ,nj. V'-'J
Тогда если функция х = х(х°,?) (х(х°,0)=х°) удовлетворяет
неравенству „ ,^ .
х ^ Ах, х G i^n, G.8)
mo решение у = у(х°,?) уравнения
у = Ау, у G iT\ G.9)
прг/ начальном условии у(х°,О) = х° подчиняется неравенству
х(х° t) ^ y(x° ^) t ^ 0. G.10)
Матрицы, у которых элементы вне главной диагонали неотри-
неотрицательны, т.е. удовлетворяют условию G.7), детально изучались
Л. А. Метцлером и называются М-матрицами [16].
Доказательство. Введем в рассмотрение уравнение
х = Ax + <p(f),
где (p(t) ^ 0 при t ^ 0. Решения этого уравнения и уравнения G.9)
согласно формуле Коши имеют соответственно вид
x(xV) = eAtx° + y>(*-TV(T) dr,
y(x°,t)=eAtx°.
Для доказательства неравенства G.10) достаточно показать,
t
что / eA^~T^(p(r) dr ^ 0 или что eAs ^ 0 при s = t — т ^ 0, так
о
как </?(?) ^ 0.
Сначала покажем это для случая, когда в G.7) выполняется стро-
строгое неравенство
flij>0, %Ф5 (г, j = l,2,...,n). G.11)
В соответствии с определением матричной экспоненты имеем
206 Гл. 7. Системы большой размерности.
Если N достаточно велико, знаки элементов главной диагона-
диагонали будут определятся первым членом разложения, т.е. единичной
матрицей /, а знаки остальных элементов — вторым членом раз-
разложения. Следовательно, все элементы матрицы eAs/N и соответст-
соответственно матрицы eAs = (eAs/N^N будут положительны: eAs > 0. Так
как матричная экспонента является непрерывной функцией элементов
матрицы А, то при замене условия G.11) на условие G.7) получим
eAs ^ 0, что и требовалось доказать.
7.2. Экспоненциальная устойчивость.
Теорема Красовского
Пусть система описывается уравнением
X. — -Л. IX, I ), -Л.1 U, 6) — U V 6 ^ 6(), X tl -it , I I . 1Z J
где правая часть является гладкой функцией: она непрерывно диффе-
дифференцируема в области
|х| < р, 0 < t < оо (р = const или р = оо), G.13)
частные производные dXi/dxj удовлетворяют условию
< L, г, j = 1,2,.. .,n (L = const). G.14)
Решение уравнения G.12) при начальном условии x(?q) = x°, как
обычно, будем обозначать х(х°,?): х(х°,?о) = х°«
Определение 7.1. Положение равновесия (или невозмущенное
движение) х(?) = 0 системы G.12) называется экспоненциально ус-
устойчивым, если существуют положительные постоянные а и М
такие, что при |х°| < р/М возмущенное движение х(х°,?) удовлетво-
удовлетворяет условию
|x(xV)| ^ М|х°| е~а^-^ \/t ^ t0. G.15)
Если условие G.15) выполняется при любых начальных условиях,
то положение равновесия системы G.12) называется глобально экспо-
экспоненциально устойчивым или экспоненциально устойчивым в целом.
Если линейная стационарная система устойчива, то она экспонен-
экспоненциально устойчива в целом.
Теорема 7.3 (теорема Красовского). Если положение равнове-
равновесия системы G.12) экспоненциально устойчиво, то существуют
функция Ляпунова V(~x,t) и положительные постоянные q (i =
= 1,2,3,4) такие, что выполняются неравенства
ci|x|2 ^ V(x,t) ^ с2|х|2, G.16а)
V(x,t) = w(x,t) ^ -с3|х|2, G.166)
-^-i)|^C4|x|. G.16в)
7.2. Экспоненциальная устойчивость. Теорема Красовского 207
В случае экспоненциально устойчивой линейной стационарной или
нестационарной системы существует квадратичная форма V(x) =
= хт5х или V(x.,t) = хт5(?)х, удовлетворяющая условию теоремы
Красовского. В случае экспоненциально устойчивой нелинейной систе-
системы соответствующая функция Ляпунова может быть неквадратичной
формой.
При доказательстве теоремы Красовского используются две лем-
леммы, которые сейчас рассмотрим.
Лемма 7.1. Решение х(х°,?) уравнения G.12) удовлетворяет
условию
|xO|2e-2i(t-*o) <; |x(x°,t)| sC |х°|2е2Ь<*-Ч t 2 to, G.17)
где L — постоянная, которая входит в G.14).
Доказательство. По теореме о среднем значении Х^(х,?) =
= ( -д-А ) xi, где звездочка сбоку производной обозначает ее значение в
средней точке (xi, ..., ж^_15 ж*, а^+ъ • • • •> хп) (х* G [0,ж^]). Поэтому
имеем
х& = XiXi(x,t) = xJ^Yxi (i = l,2,...,n).
Используя условие G.14), получаем
Ьх\, г = 1,2,...,п.
Суммируя это соотношение от 1 до п, получим
\XiXi\ =
x\
Используя это неравенство, находим
= |хтх| =
г=1
L|x|2.
г=1
Это неравенство можем записать в виде
-2L|x|2 И
2L|x|2.
Интегрируя это неравенство от ?о ДО t, получаем G.17).
Лемма 7.2. Решение х(х0,^) уравнения G.12) удовлетворяет
условию
N — положительная постоянная.
208
Гл. 7. Системы большой размерности.
Доказательство. Подставив в уравнение G.12) его реше-
решение х(х°,?), получим тождество
?<(х°,*)=^(х(х°, *),*), г = 1,2,..., п.
Продифференцировав это тождество по х®, получим
^
или
dXj_
dxk
dt dx°j
Из последнего равенства получаем
d
dt
Если е
dxi
Щ
О) OX i
di Щ
k=l
oXi
~dx~k~
дхк
дх°3
\ какой-либо точке t' функция f(t) =
A 1
1 — *
dxi
Щ
^-o недифференци-
руема, то в этой точке под производной понимается
dfit) ,. fit' + At) - fit')
1± Л.Л.Л.Л.Л.
dt At-^+0 A^
Просуммировав последнее неравенство от г = 1 до г = п, получим
dXj\\
дхк II
dt ^
г=1 1У""Э ' г=1к=1
п
Введя обозначение ifj(t) =
Щ
^, i,j = l,2,...,n.
и используя условие G.14), пос-
леднее неравенство можем представить в виде
dt
или
дхк
дх
г=1
nLdt.
дх°3
Проинтегрировав последнее неравенство от ^ до t, получим
ipj{t) ^ NenL{t-^ (N =
Используя это неравенство, находим
г=1
Щ
Лемма доказана.
Доказательство теоремы 7.3. Введем обозначение Т —
= — In (Му2), где а, М — постоянные, которые входят в G.15).
7.2. Экспоненциальная устойчивость. Теорема Красовского 209
Рассмотрим функцию V(x, ?), которая определяется следующим об-
образом: to+T
/ x(x°,r)|2^r. G.19)
Функция V(x.,t) получается из функции У(хо,?о) подстановкой
х° = х и to = t. Покажем, что эта функция удовлетворяет условиям
теоремы. Используя G.15) и G.19), получаем
Г(х°,*о) =
to
6 — 1V1 |Х | Л A 6 ] — С2 X
2а
Используя неравенство G.17), находим
|х°|2е2^^^г=|х°|2
J
to
to+T
/ |х°
J
t
Из полученных неравенств следует, что функция У(х°, to) удовлет-
воряет условию ^2 ^ V(x°,t0)^ c2|x°|2.
Подставив сюда х° = х, получим G.16а).
Для получения соотношения G.166) вычислим производную по
времени функции V(x°,to) в силу G.12), подставив вместо х° реше-
решение х = х(х°,?) и to = t:
/
t+T
x(x(x°,t), t + T)\2 - |x(x(xV), t)\2 + I I |x(x(xV), r)\2dr.
t
Функция х(х(х°,?),т) представляет траекторию изображающей
точки, которая в момент г = t стартует из точки х(х°,?), а функ-
функция х(х(х°, t + At), r) — траекторию изображающей точки, которая
в момент т = t + At стартует из точки х(х°, t + At). И так как эти
траектории при т ^ t + At должны совпадать, то х(х(х°,?), г) =
= х(х(х°, t + Д?), г) и соответственно
||x(x(x°,i),r)|2=0.
Поэтому производная функции Ляпунова принимает вид
) = |x(x(xV), t + T)\2 - |x(x(xV), t)\2. G.20)
В силу G.15) имеем
|х(х(х°, t),t
14 Д.П. Ким
210
Гл. 7. Системы большой размерности.
Используя тождество ellnz — z1 и полагая аТ = In (My/2), находим
е = е =
Мл/2'
С учетом этого равенства последнее неравенство можно преобразо-
преобразовать к виду
И так как х(х(х°,?), t) = х(х°,?), то из соотношения G.20), получаем
= -I |x(xV)|2.
Поскольку x(x,?) = x(t), то, положив в последнем неравенстве х° =
= х и сз = 1/2, получим неравенств G.166).
Для доказательства справедливости последнего неравенст-
неравенства G.1бв) продифференцируем соотношение G.19) по х®\
dV(x°,t0) _ f д
= 7 —
( о
1 '
to
3 to i=l
х?-(ж°,г)
Отсюда, используя неравенства G.15) и G.18), получим
^-dr <
dx°j
to i=l
(nL-a)(r-t0) Лп. _ 2nMJV|x°|
nL — a
to
Если возвести обе части неравенства в квадрат и просуммировать,
изменяя j от 1 до п, то получим
dV(x°,t0)
или
Подставив в это неравенство х° = х и to = t, получим G.1бв).
Функция G.19) является положительно определенной функцией, и
ее производная по времени в силу уравнения G.12) является отрица-
отрицательно определенной (см. G.166)). Теорема доказана.
7.2. Экспоненциальная устойчивость. Теорема Красовского 211
Лемма 7.3. Производная квадратичной формы V(x) =
по х удовлетворяет условию
2Xi
dV(x)
где А^, А^ — минимальное и максимальное собственные значения
матрицы В.
Доказательство. Найдем производную квадратичной формы
по х: „ Т
Бх)
= 2-х1 В.
Отсюда получаем
ГВ)Т = 4хт?>х,
где D = ВВТ. Если минимальное и максимальное собственные зна-
значения матрицы D обозначить А^ и А^ соответственно, то согласно
лемме 4.1 (см. D.1)) имеем
Следовательно, справедливо неравенство
i 2
или
Теперь достаточно показать, что собственные значения \j мат-
матрицы D равны квадрату собственных значений \f матрицы В: Xf* =
= (AfJ (» = l,2,...,n).
Так как В является симметрической матрицей, существует неосо-
неособая матрица Т такая, что произведение Т~ХВТ представляет собой
диагональную матрицу
diag(Af, Af, ..., \*)=Т-гВТ,
где Af (г = 1, 2,..., п) — собственные значения матрицы В. Возведя
в квадрат это равенство, получим
diag(Af, Af, ..., Af)]2 = diag[(AfJ, (A2)*, ... 2
Отсюда следует, что собственные значения матрицы D равны квад-
квадратам собственных значений матрицы В, что и требовалось доказать.
Теорема 7.3а. Если линейная стационарная система х = Лх
устойчива, а положительно определенная квадратичная фор-
форма V(x) = хтЛх является ее функцией Ляпунова и производная от
нее по времени в силу уравнения системы принимает вид
У(х) = Цх) = -хтСх,
14*
212 Гл. 7. Системы большой размерности.
то в качестве констант С{ (г = 1,2,3,4) в соотношениях G.16)
можно принять
т. е. функция Ляпунова удовлетворяет следующим соотношениям:
G.21а)
G.216)
G.21в)
где Л^, Л^ —минимальное и максимальное собственные значения
матрицы 5, Л^ — минимальное собственное значение матрицы С.
Доказательство. Неравенство G.21а) непосредственно следу-
следует из леммы 4.1 (см. D.1)). С помощью этой леммы также получаем
неравенство G.216): Л^|х2| ^ жтСх, или Цх) = -хтСх ^ -А^|х2 .
Неравенство G.21в) следует из леммы 7.3.
7.3. Декомпозиция и децентрализация
Обычно системы большой размерности состоят из нескольких
подсистем или их условно можно разбить на несколько искусственных
подсистем. Поэтому основным методом исследования систем большой
размерности является метод декомпозиции — метод, при котором
исходная система разбивается на несколько более простых естест-
естественных или искусственных подсистем. Эти подсистемы получаются
зависимыми. Далее, пренебрегая взаимосвязями, получают независи-
независимые подсистемы. После этого каждая из подсистем анализируется от-
отдельно и для каждой из них строится регулятор. Затем производится
агрегирование — объединение подсистем в одну систему с учетом
отброшенных связей и последующее исследование.
7.3.1. Декомпозиция. Рассмотрим декомпозицию, состоящую в
разбиении системы большой размерности на подсистемы меньшей
размерности. Такую декомпозицию называют объектной или струк-
структурной декомпозицией [45].
Пусть исходная система S описывается уравнением
х = Х(х, u, t), х е Rn, ueR1. G.22)
И пусть она разбивается на г подсистем Sk (к = 1, 2,..., г): уравне-
уравнение G.22) представляется в виде
х(*0 е Rnk^ u(k) eRlK
Здесь х.(к) — вектор состояния и и^^ — вектор управления подсисте-
подсистемы Sk- В правой части уравнения G.23) первое слагаемое описывает
7.3. Декомпозиция и децентрализация
213
динамику к-й подсистемы, а второе слагаемое — взаимосвязь между
системами. Если пренебречь взаимосвязью, то получим г независимых
подсистем:
• (к) ~\7~к( (к) ,,(&) -/Л Ь. 10 1г> A о/|Л
л. — -Л. ул. ,11 , IJ, гъ — 1, Z, ...,/. yt.Zi^Lj
Для того чтобы можно было пренебречь слагаемым hk, оно должно
оказывать слабое влияние на решение уравнения G.23), т.е. оно
должно быть мало по сравнению первым слагаемым Х*\
Возможны два способа декомпозиции: физический и математичес-
математический. Физический способ используется, когда система S получена из
подсистем Sk путем их объединения. В этом случае уравнения G.23)
представляют собой уравнения подсистем, составленные с учетом их
взаимосвязи. Математический способ используется, когда система S
не содержит в явном виде подсистемы Sk- В этом случае чтобы
уменьшить слагаемое hfc, которым на первом этапе пренебрегают, пе-
перед декомпозицией целесообразно произвести преобразование фазовых
координат.
Пример 7.1. Выделить две подсистемы в системе, которая опи-
описывается уравнением
х = Лх, А =
Решение. Чтобы уменьшить в уравнениях подсистем слагае-
слагаемые, определяющие взаимосвязь, произведем преобразование вектора
состояния: х = Ту. В новых переменных уравнение системы примет
вид
у = Л'у, Л' = Т~ХАТ.
Пусть преобразование Т состоит в последовательной перемене
мест первой и третьей строк, а затем первого и третьего столбцов:
5
0
0
6
,2
,2
0,3
5
5
0,4
0
4
7
0
,2
,5
8
0
0
9
,5
,1
5
0
0
б
,2
,2
0
5
5
0
,3
,4
0,2
4
7
0,5
8
0
0
9
,5
,1
=>
0
0
5
б
,2
,2
5
5
0,3
0,4
7
4
0,2
0,5
0
0
8
9
,1
,5
7
4
0
0
,2
,5
0,3
0,4
0
0
5
б
,2
,2
0
0
8
9
Д
А1 =
Представим матрицу А' в виде блочной матрицы, разбив ее на
четыре блока так, как это показано пунктирными линиями:
ц А12
2i А22
А' =
214
Гл. 7. Системы большой размерности.
Используя элементы этой блочной матрицы, уравнение в новых
переменных можно представить в виде
уа)=л11УA)+л12УB),
где
уB) =
Уз
А12 =
0,2 0,1
0,2 0,5
Mi =
0,2 0,3 Г 5
0,5 0,4_|' 22 [б
Чтобы закончить решение, нужно найти преобразование х = Ту.
Перестановка местами любых двух строк (п х п)-матрицы С
(например, г-й и j-й строк) равносильна умножению этой матрицы
слева на матрицу
@ Ш
1 о
@
о 1
а перестановка любых двух столбцов (п х п)-матрицы С (например,
г-го и j-ro столбцов) равносильна умножению этой матрицы справа на
матрицу E™j [21]. Если дважды умножить матрицу С слева на мат-
матрицу E™j, то получим матрицу С. Следовательно, имеем Е^-Е]1- = /,
или E?j = (Е^-).
Из изложенного следует, что матрица А' получается из матри-
матрицы А умножением ее слева и справа на матрицу
0 10"
0 10 0
10 0 0
0 0 0 1
Поэтому можем записать А' = Е\ЪАЕ\Ъ — (Е\ з) АЕ\ 3- И так как
А' = Т~ХАТ, то получаем
' Уз\
У2
0 0 10
0 10 0
10 0 0
0 0 11
х = Ту =
0 0 10
0 10 0
10 0 0
0 0 11
У\
У4/
7.3. Декомпозиция и децентрализация
215
7.3.2. Преобразование Луенбергера. Ниже при рассмотрении
децентрализации по управлению используется преобразование Лу-
Луенбергера (Luenberger). Это преобразование позволяет представить
уравнения системы в таком виде, при котором каждое уравнение
включает не более одной управляющей координаты.
Пусть система описывается уравнением
х = Лх + Ви, х е Rn, и е R1.
Заданы / (/ — размерность вектора управления) целых чисел щ
i
(ъ = 1,2,...,/), сумма которых равна п: ^2 пг — п- Преобразование
х = Tz называется преобразованием Луенбергера, если матрица пре-
преобразования Т имеет вид
... В® АВ® ... АЩ~1В^], G.25)
где В(г' {г = 1, 2,...,/) — г-й столбец матрицы В. При таком преоб-
преобразовании в преобразованном уравнении
z = Az + Ви А = Т~^АТ В = Т~^ В
матрица В имеет вид
Ъ^ Oi ... Oi 1 / 1 \
02 &B) ... 02 ,т О
в=
О/
V о У
где Of (г = 1, 2,...,/) — столбец из нулей размерности щ.
Пример 7.2. Дана система уравнений
Произвести преобразование, при котором каждое уравнение содер-
содержит не более одной управляющей координаты.
Решение. Воспользуемся преобразованием Луенбергера. В дан-
данном случае матрицы А и В имеют вид
А =
Примем п\ — 2 и П2 = 1. Тогда имеем
0
0
1
0
1
0"
1
1
2
3
2"
1
1
1 2 2
2 3 1
3 5 1
216
Гл. 7. Системы большой размерности.
'-2 8 -4"
1 -5 3
1 1-1
Для матриц преобразованного уравнения получаем
А = Т~1АТ =
О 1 -1
11 1
0 0 0
В = Т~гВ = i
0
0
0"
0
2
Уравнения в новых переменных в скалярной форме принимают вид
Z\ — Z2 — Z3 + U\,
%2 — Z\ + Z2 + Zs,
7.3.3. Децентрализация по входу. Пусть система после деком-
декомпозиции описывается уравнением
В данном случае подсистема Sk (к = 1, 2,... ,г) зависит не от ло-
локального векторного управления и^\ а от вектора управления всей
системы. В таких случаях говорят, что система управления является
системой централизованного управления. В системе, которая описы-
описывается уравнением G.23), подсистема Sk (к = 1, 2,..., г) зависит толь-
только от локального векторного управления ик. Такие системы называют
системами децентрализованного управления.
Для того чтобы можно было синтезировать локальные регуляторы
для каждой подсистемы отдельно, нужно произвести децентрализа-
децентрализацию по управлению (входу). Рассмотрим порядок децентрализации
по входу линейной системы, которая в общем случае описывается
уравнением
х = Лх + Би, xeiT, ueR1. G.26)
Децентрализация по управлению производится поэтапно следую-
следующим образом.
1. Производится декомпозиция, и уравнение G.26) представляется
в виде
A; = 1,2,..., г,
№
G.27)
где Ak — (rik х п/.)-матрица, A^j — (n^ x rij)-матрица, В^ —
(nk x /)-матрица. Эта декомпозиция может быть произведена произ-
произвольно. Однако должны быть соблюдены следующие два условия:
во-первых, размерность вектора х^ не должна быть меньше раз-
размерности вектора управления /: п^ ^ /; во-вторых, пара (A
7.3. Декомпозиция и децентрализация
217
должна быть вполне управляема, т.е. ранг матрицы управляемости
Ук = [Вк AkBk ... (A^-^Bk], k = 1,2,...,г, G.28)
должен быть равен пк. С другой стороны, чтобы иметь дело с более
простыми подсистемами, числа пк должны быть примерно одинако-
одинаковыми.
2. Подсистему Sk разбивают на / подсистем S\. (г = 1, 2,...,/) так,
чтобы каждая подсистема Sk включала не более одной управляющей
координаты щ. Для того чтобы такая декомпозиция подсистемы Sk
была возможна, используют преобразование Луенбергера. Если раз-
размерность подсистемы Slk обозначить Пкг (г = 1,2,...,/), то матри-
матрица Тк преобразования Луенбергера xfe = Ткък имеет вид (см. G.25))
Тк=[Вк1) ^ ^
Акв[1
[1)
G.29)
где Вк — г-й столбец матрицы Вк.
3. Подсистемы S\, содержащие одну и ту же управляющую коор-
координату щ, объединяют и получают подсистему Si.
Пример 7.3. Система описывается уравнением
где
А =
-1
0
to!
1
2
2
-4
1
0
1
3
1
1
r\
r\
2
0
1
-2
0
3
2
2
1
-1
в =
1 1
0 4
2 2
1 0
2 3
Требуется произвести декомпозицию и децентрализацию.
Решение. 1. Произведем декомпозицию. Разобьем матрицы А
и В на блоки так, как это показано пунктирной линией. Используя
блочные матрицы
" Ах АуЛ \ВХ
Mi My [B2
уравнения системы можно записать в виде уравнений двух подсистем:
где
вид
Ж2)т,
~1 2
0 -4
х$)т. Блочные матрицы имеют
3 2 3
10 2
1 Х
0 4
218
Гл. 7. Системы большой размерности.
2 11 Г1 1 21 |~2 2
А21 = 1 0 , А2 = 2 -2 1 , Я2 = 1 О
2 1J [2 0 -lj [2 3
Проверим управляемость подсистем. Для этого вычислим их мат-
матрицы управляемости
Уг = [Вг АгВг], У2 = [В2 А2В2 (А2JВ2].
Размерности первой и второй подсистем соответственно равны п\ = 2
и П2 = 3. Поэтому они будут вполне управляемы, если ранг матрицы
управляемости У\ равен 2, а ранг матрицы управляемости У2 ра-
равен 3. Ранг матрицы управляемости У\ равен 2, так как уже ранг
матрицы В\ равен 2. Для произведений матриц, входящих в матрицу
управляемости У2, имеем
А2В2 =
(А2JВ2 = А2(А2В2) =
Матрица управляемости У2 имеет вид
2 7 8 15
2
2
h)
;
L
-2
(
=
)
2
2
2"
1
-1_
1
-2
0
1
2
2"
0
3
2"
1
-1
=
4
2
4
2
8"
7
1
8"
7
1_
=
5
8
12
17"
3
15
У2 =
17
10 4 7 8 3
2 3 2 1 12 15
Определитель, составленный из первых трех столбцов, отличен
от нуля. Следовательно, ранг матрицы управляемости У2 равен 3, и
вторая подсистема вполне управляема.
2. Произведем преобразование Луенбергера. Так как размерность
первой подсистемы совпадает с размерностью вектора управления,
то пц = п\2 — 1, и матрица Т\ преобразования Луенбергера х^1) =
= Tiz^1) для нее совпадает с матрицей В\ (см. G.29)):
Т1=В1= \ Т
О
4 0
Размерность второй подсистемы равна п2 = 3. Положим п2
и П22 = 1- Тогда матрица Т2 преобразования Луенбергера х
^ имеет вид (см. G.29))
= 2
где
?(!)
И 1
"
1
2
т2
= [
32 — первый
?B) _
"
0
3
Я<1} А2Я<1} ,
г>BI
D2 J ?
и второй столбцы матрицы
А2В^ =
1 2"
2-2 1
2 0-1
[ В2
"
1
2
. Так как
=
"
4
2
7.3. Декомпозиция и децентрализация
219
то
2 7 2
1 4 О
2 2 3
9
12
-3
Матрицы преобразованных уравнений
-17 -8
2 2
-6 10
имеют вид
Вг =
-1 1]
0 -<
= Т^А12Т2 =
= Т~ХА2Т2 =
12,5 32,25 13"
1,5 2,75 2
1
0
2 j
5,78
0,56
-0,22
0
0
3,44 "
0,89
-2,5 _
0"
0
1
1 -0,78
А2Л = Т'1 А2ЛТЛ = 0 0,44 , В2 = Ъ
О 2,22
В скалярной форме уравнения в новых переменных принимают вид
Z\ — Z\ ~г -L-L Z2 ~г 1^,0 -Зз ~Г OZ,OO Z4 ~Г -LO -З5 ~Г t/l,
22 = —4^2 + 1,5 2з + 2,75^4 + 2^5+^2,
z3 = Zl- 0,78z2 + 5,78z4 + 3,44z^ + щ,
i4 = 0,44^2 + ^з +0,56^4 + 0,89^5,
25 = 2,22 z2 - 0,22 z4 - 2,5 z5 + u2.
3. Объединим уравнения, содержащие одинаковые управления, в
одну подсистему. При этом уравнение, не содержащее управление,
включим в подсистему, содержащую управление щ:
' 2i = -21 + 11 z2 + 12,5 z3 + 32,35 z4
z3 = Zl- 0,78 z2 + 5,78 z4 + 3,44 z5 +
= 0,44 z2 + z3+ 0,56 z4 + 0,89 z5;
вание:
z' \i5 = 2,22^-0,22^4-2,56^5 + ^2.
Для упорядочения переменных произведем еще одно преобразо-
1 = ~3, 2^5 = ^5 •
___
Z\ = 2i, Z2 = 24, ^3 = 22,
Тогда уравнения подсистем примут вид
1 = -2i + 12,5 22 + 32,35 "з + 1124 + 13^5
2 = 2i + 5,78 - 0,78 + 3,44 + ии
3 = -2 + 0,56 "з - 0,44 + 0,89 ;
Г 24 = 1,5 22 + 2,75 "з - 4 + 2~5 + ^2,
2' \% = -0,22 2з + 2,22 -2,5625 +и2.
220 Гл. 7. Системы большой размерности.
7.4. Векторные функции Ляпунова
После анализа и синтеза подсистем их объединяют в одну систему
с учетом отброшенных взаимосвязей. При этом возникает задача
исследования устойчивости объединенной системы. При решении этой
задачи используется метод векторной функции Ляпунова. Согласно
этому методу на основе векторной функции Ляпунова, которая фор-
формируется из функций Ляпунова подсистем, строится система срав-
сравнения, с помощью которой исследуется устойчивость агрегированной
(объединенной) системы.
Впервые векторные функции Ляпунова для исследования устойчи-
устойчивости рассмотрели Р. Беллман [66] и В. М. Матросов [44]. Р. Беллман
исследовал систему, состоящую из двух подсистем. Ф. Н. Беилей [65]
обобщил предложенный Р. Беллманом метод на более сложные сис-
системы.
7.4.1. Норма матрицы. Дальше в этой параграфе используется
норма матрицы. Вкратце остановимся на этом понятии.
Пусть А — произвольная прямоугольная (т х п)-матрица и зада-
задано преобразование
у = Ах, xei?n, у G Rm.
В пространствах Rn и Rm определены нормы ||х|| и ||у|| соответст-
соответственно. Норма матрицы А определяется следующим образом [21]:
||А=|| = sup ЛМ. G.30)
НХН
Здесь || Ах || — норма вектора Ах в пространстве Rm.
Норма матрицы А определяется как самой матрицей А, так и
теми векторными нормами, которые введены в пространствах Rn
и Rm. При изменении норм в этих пространствах изменяется норма
матрицы. Если в пространствах Rn и Rm введены евклидовы нормы
х = х =
\
г=1
\
г=1
то норму матрицы А будем называть евклидовой.
Из определения нормы следует неравенство
|. G-31)
Для (т х п)-матриц А и В при одном и том же определении
векторных норм справедливо неравенство
\\А + в\\<:\\А\\ + \\в\\.
Пусть Л — число. Справедливо равенство
\\xa\\ = |;
7.4- Векторные функции Ляпунова 221
Если определены нормы (т х /)-матрицы Л, (/ х п)-матрицы В и
их произведения АВ, то справедливо соотношение
\\АВ\\^\\А\\\\В\\.
Утверждение 7.1. Евклидова норма матрицы А равна квад-
квадратному корню из максимального собственного значения Ам произ-
произведения матриц АТА: ,
\\A\\ = ч/А^- G.32)
Доказательство. В соответствии с определением евклидовой
нормы матрицы А имеем
и/,,, ||Ах|| уДЩА^
\\A\\ = sup L/ = max ^-^ = max
систему, которая после декомпозиции описывается уравнениями
г
Согласно леммы 4.1 квадратичная форма хтЛтЛх принимает
максимальное значение Ам|х|2. Подставив это значение в последнее
равенство, получим G.32).
7.4.2. Устойчивость агрегированной системы. Рассмотрим
G.33)
где iifjfej — числовая (n^ x nj)-матрица. Если пренебречь взаимосвязя-
взаимосвязями, то получим г независимых подсистем Sk (& = l,2,...,r), которые
описываются уравнениями
x(*'=X*(x(*',t) (Xk(O,t) = O Vt^to), fc = l,2,...,r. G.34)
Пусть каждая из этих подсистем обладает функцией Ляпуно-
Ляпунова Т4(х^),?), которая удовлетворяет следующим соотношениям:
c*i|x(*>|2 ^ Vfc(x(fc),t) ^ сА2|х«|2, G.35а)
(*)(*)|2, G.356)
^Н*>|. G.35в)
В G.356) Vk(x.(k',t) являются производными по времени в силу
уравнений G.34). Так как эти производные отрицательно определе-
определены, подсистемы Sk (к = 1, 2,..., г) асимптотически устойчивы. Кроме
того, в силу условия G.35а) функция V& (х.^, t) имеет бесконечно боль-
большой нижний предел. Поэтому подсистемы Sk (к = 1, 2,..., г) асимп-
асимптотически устойчивы в целом. В случае когда подсистемы являются
линейными стационарными, имеет место экспоненциальная устойчи-
устойчивость. Согласно теореме 7.3, если подсистемы экспоненциально устой-
устойчивы, то выполняется соотношения G.35). Однако в общем случае
выполнение соотношений G.35) не гарантирует экспоненциальную
устойчивость.
222 Гл. 7. Системы большой размерности.
Теорема 7.4. Пусть подсистемы G.34) обладают функциями
Ляпунова Vk(x.(k\t), удовлетворяющими соотношениям G.35), и
элементы матрицы D = (dki) (k, г = 1, 2,... , г), составленные из
констант cki, входящих в соотношения G.35), и евклидовых норм
матриц взаимосвязи Hki из G.33), имеют вид
СкЗ ^ _ ^
^4J У \\Нк-\\2 / Bсшсл) кф% G<36)
Тогда если положение равновесия z = 0 системы
z = Dz, z G iT, G.37)
асимптотически устойчиво, то положение равновесия
х={(х«)т(хB))т... (х«)т)т}=0
агрегированной системы G.33) асимптотически устойчиво.
Система G.37) является системой сравнения для агрегирован-
агрегированной системы G.33). С ее помощью исследование устойчивости сие-
темы G.33) n-го порядка I п = J^ п^ ) сводится к исследованию
V k=i )
устойчивости линейной стационарной системы r-го порядка.
Ниже при доказательстве теоремы 7.4 используется неравенство
-az2 + bz^-^-z2 + ^- (а > О, Ъ > 0, z > 0), G.38)
которое доказывается следующим образом. Умножим обе части нера-
неравенства на —1 и перенесем многочлен из правой части в левую. Тогда
получим 2
или
Доказательство теоремы 7.4. Производная по времени
функции 14 (х, t) в силу уравнений G.34) имеет вид
Производная по времени функции Ук (х, t) в силу уравнений G.33)
имеет вид
j
7.4- Векторные функции Ляпунова
223
Используя соотношения G.356), G.35в) и G.31), получим
dVk
kill X
Лэ)
Далее, используя неравенство G.38), полагая в нем
а также неравенство Коши—Шварца D.19), найдем
Из G.35а) получаем
Поэтому последнее соотношение можем записать в виде
Используя векторную функцию Ляпунова
эти неравенства при к = 1, 2,..., г можно представить в векторном
виде:
или
V(t) ^ DV(t),
224 Гл. 7. Системы большой размерности.
где V(t) = V(x(?),?), x(?) — решение системы уравнений G.33).
Пусть z(?) — решение уравнения G.37) при начальном условии
z(to) = V(x(to),to). Тогда согласно теореме 7.2 выполняется нера-
неравенство
Так как положение равновесия z = 0 системы G.37) асимптоти-
асимптотически устойчиво, то z(t) —У 0 при ? —>¦ оо. И в силу того, что все
компоненты векторной функции Ляпунова являются положительно
определенными функциями, V(?) = V(x(?),?) —>¦ 0 и соответственно
х(?) —>¦ 0 при t —у оо. Теорема доказана.
7.4.3. Критерий устойчивости М-матриц. Матрица D урав-
уравнения системы сравнения обладает специфическим свойством: все ее
элементы, расположенные вне ее главной диагонали, являются неот-
неотрицательными. Такие матрицы, как отмечалось, называются
М-матрицами.
Критерий Севастьянова-Котелянского [16]. Если
(п х п)-матрица С = (qj) является М-матрицещ т. е. сц ^0 (г, j =
= 1,2,...,п; г ф j), то для того чтобы вещественные части всех
ее собственных значений были отрицательны, необходимо и доста-
достаточно, чтобы выполнялось условие
= (-1)"
Си Ci2
С21 С22
Ckl
О, Jb = 1,2,..., п. G.39)
Если вещественные части всех собственных значений квадрат-
квадратной матрицы отрицательны, то такая матрица называется устой-
устойчивой. Поэтому критерий Севастьянова-Котелянского является
критерием устойчивости М-матриц. Соотношение G.39) называют
условием Севастьянова-Котелянского [16].
Необходимое условие устойчивости М-матриц. Для
того чтобы Ш-матрица С = (cij) была устойчива, необходимо,
чтобы все ее элементы главной диагонали были отрицательны:
сп<0 (i = 1,2, ..., п).
Пример 7.4. Исследовать устойчивость системы, состоящей из
следующих трех подсистем:
(х^ = -&хр - м 41» + о,2 42) + од43\
5: W
Г ^2) = - D + sin2 *)а;B) + 42) + °^2 Ж23)»
\ 42) = -2 xf} - B + е-^L2) + 0,2 ж^1};
S3 : ж^ = —4 4 ^ — sin ж^ ' + 0,2 ж2 ^.
7.4- Векторные функции Ляпунова 225
Решение. В векторной форме приведенная система уравнений
принимает следующий вид:
Sn x^1) =Л1хA)+Я12хB)
52: х^2) = Л2хB) +Я21хA)
с . ~(з) _ L
Здесь
A) [ I л \~8 -101 и Г° °>2
x^=i ;.ь ^=i_j _-, я12= 0
0,1 0 1
0 0,2 '
B) _
Я21 - 0,2 0 ' Я23 - I 0 0
@ 0,2).
Если пренебречь взаимосвязями, то получим
Для подсистемы 5i функцию Ляпунова будем искать в виде квад-
квадратичной формы
Vi = (х^^Б^1), Б1= [J a°J, ai>0.
Производная по времени функции Vi в силу уравнения подсистемы Si
имеет вид
где
~1 0 1Г-8 -101 „ Г8 10
Преобразуем и выразим производную Vi с помощью симметричес-
симметрической матрицы:
Vi = -(xA)
= -I
15 Д.П. Ким
226
Гл. 7. Системы большой размерности.
Второе слагаемое в полученном выражении равно нулю, так как
Поэтому имеем
где
10
16
20 ai
Для того чтобы производная Vi была отрицательно определен-
определенной, согласно критерию Сильвестра необходимо и достаточно, чтобы
detCi =
16
20 ai
= 220ai -100 -25 a2 > 0.
Это неравенство будет выполнено, в частности, при а\ = 1. При этом
имеем
[] [16 15]
[0 lj' Cl [ j
Так как матрица i?i является диагональной, то ее собственные
значения совпадают с диагональными элементами. И, следовательно,
ее минимальное и максимальное собственные значения равны еди-
нице: А? = Л^1 = 1.
Найдем собственные значения матрицы С\. Ее характеристичес-
характеристическое уравнение имеет вид
16-Л 15
det
- IX) =
15 20 - А
= А2 -36 А+ 95 = 0.
Корнями этого уравнения являются Ai = 2,9 и Аг = 33,1. Следова-
Следовательно, минимальное и максимальное собственные значения матри-
матрицы d равны А^1 = тг = 2,9 и А^1 = А2 = 33,1.
Согласно теореме 7.3а имеем
= 2,9,
= 2.
Для подсистемы 52 функцию Ляпунова будем искать в виде квадра-
квадратичной формы
B2=
J
, a2>0.
Производная по времени функции V2 в силу уравнения подсисте-
7.4- Векторные функции Ляпунова 227
имеет вид
|ХB) _
О а2\[ -2 -B + е^I
Zi I т: \^ Dili и I \ Jb л I \^ \?iKX2 л. ) Jb л Jbr\ ^^ I Zi \^ о JLJl2 \*Jbr\ I
Если положить а2 = 1/2, то производная V2 принимает вид
V2 = _2 [D + sin2 t){x{^f + \{2 + e"*)D2)J].
и является отрицательно определенной. При этом матрица В2 при-
принимает вид
О
О 1/2 I'
В2 =
и ее минимальное и максимальное собственные значения равны
А?* = 1/2 и А*2 = 1.
Так как
2[D + sin2t)(^2)J + \ B + в-*)D2)J] ? 2[(х«J + D2)J],
то V2 ^ -2|ж^|2. Поэтому имеем (см. G.21а), G.21в) и G.166))
C2i = А^2 = 1/2, с22 = А^2 = 1, с23 = 2, с24 = 2Л^2 = 2.
Для подсистемы 5з функцией Ляпунова является Уз = (х^J =
= (ж^ J. Действительно, производная от этой функции по времени в
силу уравнения подсистемы 5з имеет вид
и отрицательно определена. Функцию Ляпунова можно представить
виде Уз = х^В^х^\ где В% = 1. Собственное значение матрицы В%
равно единице, поэтому А^3 = 1, Ам3 = 1. И так как производная Уз
удовлетворяет неравенству
то имеем
с31=А^ = 1, с32=Х^ = 1, сзз=6, Сз4
Согласно формуле G.36), чтобы определить элементы матрицы D
системы сравнения, необходимо найти нормы матриц взаимосвя-
взаимосвязи Hij. В соответствии с утверждением 7.1 (см. G.32)) евклидова
норма матрицы Н^ равна корню квадратному из максимального
собственного значения произведения Н^ = (Hij)TИц. Определим мак-
15*
228 Гл. 7. Системы большой размерности.
симальные собственные значения матриц Hij (г, j = 1,2,3, г ф j):
~ Т ГО 0] ГО 0,21 ГО 0 1 й12
Я12 = (Я12) Я12 = = , Ам = 0,04,
0 0,2j[0 0,2j [0 0,04j'
S = 0,04;
Нзг = (HS1)THS1 = [»2][0 0,2] =[" "J, Л*» =0,04;
Яга = (Я,2I-Я,2 = [°][0 0]= [U U], ЛЯ-=О.
Отсюда имеем
||Я12||2 = Л|12=О,О4, ||Я13||2 = Л^3=0,04, ||Я21||2
||Я23||2 = Л^3 = 0,04, ||Яз1||2 = Л^1 = 0,04, ||Я32||2 = Л^2 = 0.
По формуле G.36) для элементов матрицы D находим:
j С13 2,9 1 /it: л С23 2 1
Z С12 ^ ^ С22 ^
Л сзз 6
ЦЯ12||2 + ||Я13||2) = ± 0,08 - 0,11,
2,9
|Я12||2 + ||Я13||2) = Д 0,08 - 0,055,
5,8
||Я23||2) = \ 0,08 - 0,08,
4
(||Я21|| + ||Я23||) \
21||2 + ||Я23||2) = \ 0,08 - 0,08,
4
(||21||
2зсз1
A|Я31||2 + ||Я32||2) = ± 0,04 - 0,013,
(||Я31||2 + ||Я32||2) = | 0,04 - 0,027.
7.4- Векторные функции Ляпунова
229
Матрица D принимает следующий вид:
"-1,45 0,11 0,055
D = 0,08 -1 0,08
0,013 0,027 -3
Матрица D является М-матрицей. Проверим выполнение крите-
критерия устойчивости, т. е. условия G.39) для этой матрицы:
= 1,45>0, А2 =
-1,45
0,08
0,11
-1
S* 1,44 > 0,
Аз = (-1K
-1,45
0,11
^ 4,32 > 0.
0,055
0,08 -1 0,08
0,013 0,027 -3
Критерий устойчивости выполняется. Следовательно, матрица D,
или, что то же, система сравнения, устойчива. По теореме 7.4 агреги-
агрегированная система устойчива.
7.4.4. Устойчивость агрегированной системы с нелиней-
нелинейными взаимосвязями. Рассмотрим агрегированную систему, кото-
которая описывается уравнениями
G.40)
х^ eRnk, /c = l,2,...,r.
Здесь h^^(O,O,... ,0) = 0, т.е. начало координат х = ((х^1^)т(хB^)т...
... (х.(г))т)т = 0 является положением равновесия. В данном случае
взаимосвязи между подсистемами описываются нелинейными функ-
функциями. Эти функции удовлетворяют соотношениям
к = 1,2,...,г.
G.41)
г=1
гфк
Если пренебречь взаимосвязями, то получим г независимых под-
подсистем Sk, которые описываются уравнениями
к = 1, 2,...,
G.42)
Пусть положение равновесия х.^ = 0 подсистем Sk устойчиво.
Тогда при любой положительно определенной (пк x п/^-матрице Ск
существует матрица Bk, удовлетворяющая уравнению Ляпунова
АТВк + ВкАк = -Ск. G.43)
Квадратичная форма Т4(х^) = (x^^)T5^x^^ является функцией
Ляпунова для подсистемы Sk- Она в соответствии с теоремой 7.3а
удовлетворяет соотношениям
»|2 ^(х) ^ Afhx^|2, G.44а)
230
Гл. 7. Системы большой размерности.
< 2Л
м
cW|,
G.446)
G.44в)
где А^1, Амх — минимальное и максимальное собственные значения
матрицы В\, A^fc — минимальное собственное значение матрицы Си •
Теперь рассмотрим теорему, которая позволит определить, как
строить систему сравнения для агрегированной системы G.40) с не-
нелинейными взаимосвязами, удовлетворяющими условию G.41).
Теорема 7.5. Пусть квадратичная форма Vk (х^) = (х^ )TBkX^
является функцией Ляпунова для подсистемы G.42) и элементы
матрицы D = (dki) имеют вид
7~rT "> к = I,
J E
G.45)
Тогда, если нулевое решение системы
z = Dz, ze Rr, G.46)
устойчиво, то и положение равновесия х = 0 агрегированной сис-
системы G.40) асимптотически устойчиво.
Доказательство. Производная по времени функции Ляпуно-
Ляпунова Vk(x^) в силу уравнения G.42) подсистемы Sk имеет вид
Производная по времени той же функции в силу уравнений G.40)
агрегированной системы имеет вид
Учитывая неравенство G.446), из последнего равенства получаем
Используя G.44в) и G.41), полученное неравенство можно предста-
представить в виде
(V*)D0) < -
Далее, используя неравенство G.38), полагая в нем
7.4- Векторные функции Ляпунова 231
а также неравенство Коши—Шварца D.19), получим
Из неравенства G.44а) имеем
Iх I ^ ,вк ' A
Поэтому последнее соотношение можно преобразовать к виду
(Vfc)D0) ^-ГГвГУ*+ 2ЛС* ^ kj
Используя векторную функцию Ляпунова V = (Vi V2 ... Т^.)т, послед-
последнее неравенство при к = 1, 2,..., г можно записать в виде V ^ DY.
Если z(t) — решение уравнения G.46) при начальном условии z(to) =
= V(^o), то в соответствии с теоремой 7.2
V(t) ^ z(t) Vt ^ t0.
Так как нулевое решение уравнения G.46) устойчиво, то z(t) —>¦
—У 0 при t —У оо. И так как все компоненты вектора V(?) являются
положительно определенными функциями, из последнего неравенства
следует, что V(?) —У 0 и соответственно х(?) —>¦ 0 при t —> 00. Теоре-
Теорема доказана.
Пример 7.5. Исследовать устойчивость системы, состоящей из
следующих трех подсистем:
(х{1] = -х{1] +41} +0,05 sin xf\
\ x^ = -5 xf} - 6x^ + 0,05 sin 2x^.
Решение. Запишем приведенные уравнения в векторной форме:
5ц xW =Л1хA)+ЬA)(хB),хC)),
232
Гл. 7. Системы большой размерности.
Здесь
Если не учитывать взаимосвязи, то получим три независимых
подсистемы:
Функции Ляпунова будем искать в виде квадратичной формы Vk =
— (x(fc))TBftx(ft) (к = 1,2,3), где матрица Ви определяется из уравне-
уравнения Ляпунова
Ч-
при условии, что
А\Вк + ВкАк = -Ск
О 10
Определим матрицы В к (к = 1, 2, 3).
При к = 1 уравнение Ляпунова принимает вид
-1 1
0 -2
1) оаA)
или, после перемножения матриц,
o21
12
^22 J
1
^22 J
10
0
Г10
0
о
ioj
0
10
Учитывая равенство b\2 = b21 , это уравнение в скалярной форме
можно записать в виде
ГO A) -I (Л
-2Ьг1 = -10,
Отсюда находим
Собственные значения
det (Вг - XI) =
Ъ$ -
A) = 5
3bia} = 0> 2Ь$ -
ьA) _ Ю в
матрицы Bi, или корни
5-А
5/3
5/3
10/3 - А
- 465
=
>2} = -10'
5 5/3 1
5/3 10/з]'
уравнения
ч>
. 125 п
7.4- Векторные функции Ляпунова
233
равны Ai = 2,3 и Л2 — 6. Поэтому для минимального и максималь-
максимального собственных значений матрицы В\ имеем Л^1 = 2,3 и Лмх = 6.
При к = 2 уравнение Ляпунова принимает вид
-2 1
О -4
"ll
bB)
2
2 .
ъ{2)
1
ЬB)
10
о
или, после перемножения матриц,
712
1,B)
^22
~^2
-441
0
10 0
0 101'
В скалярной форме это уравнение принимает вид
B) B) B) B) B)
Отсюда получаем
ьB) _ 125 ,B) _ ,B) _ _5_ B) _ 5 „ Г125/48 5/241
11 ~ 48 ' i2-2i-24' 22 ~ 4' 2 ~ [ 5/24 5/4 \'
Составив характеристическое уравнение и решив его, для минималь-
минимального и максимального собственных значений матрицы В2 получаем
^ 1,23 и А^2 = 2,61.
При к = 3 уравнение Ляпунова принимает вид
0 -5
1 -6
1,C)
D22 .
1,C)
или, после перемножения матриц,
к 1,C)
-5 6,
C)
'22
1,C)
7 C)
П 7 1
- б о.
C)
'22 .
h
2
2
0 1
-5 -6
10 0
0 10
10 0
0 10
В скалярной форме это уравнение принимает вид
-Ю Ь$ = -10, -5 4
Отсюда получаем
^
- б Ь$ =0, 2 Ь
- 12 4
П
D12
D22
-
3 ~
Составив характеристическое уравнение и решив его, для мини-
минимального и максимального собственных значений матрицы В% полу-
получаем А^3 ^ 0,9 и А^3 ^ 11.
Так как матрица Ci—
0
(г = 1,2,3) является диагональ-
ной, то ее собственные значения совпадают с ее диагональными эле-
элементами, поэтому имеем
А? = Ю, г = 1,2,3.
234 Гл. 7. Системы большой размерности.
Чтобы определить элементы матрицы D, согласно формуле G.45)
нужно определить постоянные (hkjJ (к, j = 1,2,3, к ф j). Евклидо-
Евклидовы нормы векторных функции h^ (г = 1,2,3) удовлетворяют соот-
соотношениям
= 0,0025 (sin42)J +0,01(e-l*i2)l - IJ <C
^ 0,0025 (x{2)J + 0,01 D2)J ^ 0,013 D2)J ^ 0,013 |BJ
= 0,0025 A - cos243)J + 0,01 (e^'l - IJ =
= 0,0025 -4 sin4 xf] + 0,01 (е4^1 -IJ ^
^ 0,01 D3)J + 0,01 D3)J ^ 0,02 D3)J ^ 0,02 |
= 0,01 D1}Je-2|41)| +0,0025 (sm241}J ^
^ 0,01 D1}J + o,oi D1}J ^ 0,01
В соответствии с неравенством Коши-Шварца имеем
о о о
)
г=1 il il
гфк гфк гфк
Поэтому из приведенных выше соотношений находим
h212 = 0,013, h213 = 0, h221 = 0, h223 = 0,02, h231 = 0,01, h\2 = 0.
Для удобства выпишем здесь полученные выше собственные значения
матриц Вк и Ck (к = 1, 2, 3):
А^ = 2,3, Л^1 = б, А?2 - 1,23, Л^2 = 2,61,
Л?3 - 0,9, Л^3 = И, А? =10, г = 1, 2,3.
Теперь определим элементы матрицы D:
0,013 - 0,104,
Задачи
235
°'02 - °'012'
= Щ? 0,02 - 0,03,
d32 = ±^_ ^ + /4) =
Матрица D имеет вид
-0,84
10-1,23
0,01 =* 0,20.
0,076 0,104
0,012 -1,91 0,03
0,01 0,20 -0,45
Она является М-матрицей, и необходимое условие ее устойчивости вы-
выполняется. Проверим условие устойчивости Севастьянова-Котелянс-
кого G.39):
А1 = (-1)(-0,84)=0,84>0, Д2=[~?о12 J^6] = 1,6 > 0,
Аз ={-If
-0,84 0,076 0,104
0,012 -1,91
0,03
= 1,33 > 0.
0,01 0,20 -0,45
Условие устойчивости выполняется. Следовательно, система срав-
сравнения и агрегированная система устойчивы.
Задачи
1. Произвести децентрализацию по входу (управлению) системы,
которая описывается уравнениями
xi = —х\ + х2 + 2 х3 + 2 ж4 + и\ + U2,
Х2 = —4 Х2 + Жз + Х4 + 2 ^2,
хз = —х\ + 2 х2 - 3 х3 + ж4 + 2 ui + u2.
Ж4 = Ж1 + 2 Х2 — 2 Ж4 + U\.
2. Произвести децентрализацию по входу (управлению) системы,
которая описывается уравнениями
х\ = -2xi + х2 + 2ж3 + 2ж4 + 0,3 ж5 + щ + п2,
ж2 = -2 ж2 + ж3 + 0,1 ж5 + 2п2,
ж3 = —2xi + х2 - Зхз + Х4 + 0,2ж5 + 2^1 + и2,
Х4 = Xi + 2 Х2 — 2 Х4 + Х$ + Ui,
хъ = -0,2 xi + 0,5 ж2 + 2 ж3 + 2 ж4 - 3 хъ + 3 щ + 2 и2.
236 Гл. 7. Системы большой размерности.
3. Исследовать устойчивость системы, состоящей из двух под-
подсистем
\ 42) = -2 ж<2) - A + е"*L2) + 0,05 41' ¦
4. Исследовать устойчивость системы, состоящей из двух под-
подсистем
Г 41) = - C + sin2 *)аг^1) + 0,5 4Х) + 0,1ж12),
51: [#) = -ж« _ A + е"*)^' + 0,05 42);
S2: ж!2) = -2 ж^2) - sin жр) + 0,05 х^.
5. Исследовать устойчивость системы, состоящей из трех под-
подсистем
(х^ = -(З + sin2*)^ +0,б41} +ОД43),
\ 41} 1} 41} 42)
|4 445 4 + o,i4,
I Хъ — <J 2 2 "^ ^5 2 5
53 : ж^2) = -2 xf} - sin x^ + 0,05 х^.
6. Исследовать устойчивость системы, состоящей из двух под-
подсистем
J41} = -2 41} +41} +0,05 sin 42),
5:
42) = -442) +0,l(l-cos241}),
7. Исследовать устойчивость системы, состоящей из двух под-
подсистем
J41} = -441}+0,1A-cos242)),
= -5 xf] - б 42) + 0,05 sin 2 41} •
Задачи 237
8. Исследовать устойчивость системы, состоящей из трех под-
подсистем
5i: I ^ -х2 + 0,1ж2 е 1 ,
[ ж2 = —5 ж^ — 6 а4 + 0?05 sin 2 ж^ ;
[ff) = -4^2) +0,05A-cos 2 41}),
*^2 * 1 m
Глава 8
МЕТОДЫ СИНТЕЗА СИСТЕМ УПРАВЛЕНИЯ
В данной главе рассматриваются различные методы синтеза сис-
систем управления: метод обратной задачи динамики, метод синтеза
систем с переменной структурой, метод синтеза, основанный на пост-
построении функции Ляпунова, и метод синтеза, основанный на деком-
декомпозиции. Методы синтеза оптимальных и адаптивных систем будут
рассмотрены в следующих главах.
8.1. Метод обратной задачи динамики
Как известно, прямая задача механики (динамики) состоит в том,
чтобы по заданным силам, действующим на механическую систему,
определить свойства движения этой системы. Обратными задачами
динамики называют задачи определения сил, действующих на механи-
механическую систему, при которых движение с заданными свойствами яв-
является одним из возможных движений рассматриваемой системы [20].
Если распространить это определение и на немеханические системы,
понимая под силой всякое воздействие, вызывающее изменения в ее
движениях, то задачу синтеза можно рассматривать как обратную
задачу динамики.
Применительно к задачам управления методом обратной задачи
динамики будем называть метод синтеза систем, когда по заданным
уравнениям объекта и требованиям к качеству системы управле-
управления определяется желаемое дифференциальное уравнение, решение
которого удовлетворяет заданным требованиям, а затем из найден-
найденного уравнения выражается старшая производная и подстановкой ее
вместо старшей производной в уравнение объекта находится требуе-
требуемый закон управления. Такой метод был предложен Л. М. Бойчуком
для определения структуры при синтезе нелинейных систем управ-
управления [11]. Широкому распространению этого метода способствовали
работы Д. П. Крутько [35].
Дифференциальное уравнение, которое задается или определяется
по заданным уравнениям объекта и требованиям к качеству синтези-
8.1. Метод обратной задачи динамики 239
руемой системы управления и решение которого удовлетворяет задан-
заданным требованиям, будем называть эталонным {дифференциальным)
уравнением.
Пример 8.1. Объект описывается уравнением
х + f(x,x,t) = b(t)u, b(t) ^0.
Требуется определить закон управления, при котором синтезиро-
синтезированная система описывается уравнением
х + а\х + а2х = 0.
Решение. Из эталонного уравнения имеем
х = —
Подставив это выражение для второй производной в уравнение объек-
объекта, получим
и = Ш) ^~aiX ~ а2Х + f(x>х->*)]•
Как легко проверить, при таком законе управления уравнение
синтезированной системы совпадает с эталонным.
В рассмотренном примере управление входит в уравнение объекта
линейно. В таких случаях, если эталонное уравнение задано или опре-
определено по заданным требования к качеству системы, закон управления
определяется просто. Если управление входит в уравнение объекта
нелинейно, то для нахождения требуемого закона управления по за-
заданному эталонному уравнению требуются определенные ухищрения.
Пример 8.2. Объект описывается уравнением
Требуется определить закон управления, при котором синтезиро-
синтезированная система описывается уравнением
= g{t).
Решение. В данном случае имеем задачу слежения. Функция g(t)
является задающим воздействием. Если разрешим эталонное урав-
уравнение относительно старшей производной и подставим в уравнение
объекта, то получим
g(t) - аху - а2у - f(y, у, и) = 0. (8.1)
Если это уравнение неразрешимо относительно управления, то
требуемое управление находится путем построения следящей системы
на основе уравнения [35]
и = q[g(t) - агу - а2у - f(y, у, и)],
где g — положительная константа. Очевидно, что при й —> 0 управле-
управление удовлетворяет уравнению (8.1). На рис. 8.1 представлена струк-
240
Гл. 8. Методы синтеза систем управления
-J ¦—
I—
T
p
01
a2
и
/(»
i Уч ^)
У
> t
Объект
1
1
P
У
Рис. 8.1. Структурная схема системы
турная схема системы, синтезированной на основе последнего уравне-
уравнения. На этой схеме
е = g(t) - аху - а2у - f{y, у, и).
Эталонное уравнение будет реализовано, если будет выполнено
соотношение е = e(t) —> 0. Последнее, в частности, возможно, когда
g[t) = const и система асимптотически устойчива.
Рассмотрим еще один пример, в котором эталонное уравнение не
задано, а заданы требования к качеству системы. В этом случае,
чтобы воспользоваться методом обратной задачи динамики, нужно
сначала на основе требований к качеству системы определить эталон-
эталонное уравнение.
Пример 8.3. Объект описывается уравнениями
Требуется определить закон управления, при котором «скорость»
v = \/х\ + х\ и фазовая координата х2 изменяются в соответствии с
функциями ъ/.\ */.\
v = v (t), х2— x2(t).
Решение. Точное выполнение заданных требований невозмож-
невозможно, так как оно зависит не только от выбранного закона управления,
но и от начальных условий. Поэтому потребуем, чтобы ошибки
ei = v*(t) - v(t), e2 = x*(t) - x2(t) (8.2)
стремились к нулю в соответствии с решениями уравнений
ё\ + аце\ = 0, ё2 + а2\ё2 + а22е2 = 0. (8.3)
Чтобы воспользоваться методом обратной задачи динамики, нуж-
нужно определить желаемый закон изменения вторых производных фазо-
фазовых координат. Для этого найдем из (8.2) производные:
.,,.ч 1
ё2 =
ё2 =
— x2(t).
8.2. Синтез систем с переменной структурой 241
Подставив эти выражения, а также выражения для ошибок в
уравнения (8.3), получим
x\Xi + х2'х2 = \jx\ + х\ \v*(t) + an (v* - Jx\ + x\ J ,
^2 - Ж2 + «21 (^2 - Ж2) + «22(^2 - X2) = 0.
Отсюда находим
On
- — [x*2 + a2i(,x*2 - x2) + a22(x2 - x2)].
X\
Подставив эти выражения в уравнения объекта, получим искомый
закон управления:
8.2. Синтез систем с переменной структурой
Системы с переменной структурой (СПС) второго порядка были
рассмотрены в гл. 2, где было продемонстрировано, как методом
фазовой плоскости синтезировать СПС. Там, в частности, было пока-
показано, что в некоторых случаях можно получить скользящий режим —
движение по вырожденной траектории. За счет организации скользя-
скользящего режима можно обеспечить системе управления нужные свойства
в условиях неполной информации — в условиях, когда не известна
точная модель объекта управления или его свойства непредвиденным
образом изменяются в широких пределах в процессе функционирова-
функционирования системы. В данной главе рассматриваются задачи синтеза СПС
произвольного порядка, функционирующего в скользящем режиме.
В общем случае для того чтобы СПС, в которой создается сколь-
скользящий режим, была устойчива, необходимо и достаточно, чтобы вы-
выполнялись следующие три условия: 1) условия попадания; 2) условия
скольжения; 3) условия устойчивости скользящего движения. Рас-
Рассмотрим эти условия.
8.2.1. Условия скольжения и попадания. Пусть система с
переменной структурой описывается уравнениями
х = f(x,u,t), х G iT, и G R, (8.4а)
16 Д.П. Ким
242
Гл. 8. Методы синтеза систем управления
U+(x,t) *(х)>0,
\и (x,f), s(x) < О,
Здесь f (x, u, t) — непрерывная функция, удовлетворяющая условию
Липщица; u+(x,?), u~(x.,t) — непрерывные функции и и+(х,?)^
Ф u~(x, t); s(x) — непрерывная функция, определяющая поверхность
переключения.
Поверхность S, определяемая уравнением s(x) = 0, делит прост-
пространство состояний i?n на два подпространства: подпространст-
подпространство Д™ = {х: s(x) < 0} и подпространство Д^ = {х: s(x) > 0}.
Правая часть уравнения (8.4а) f(х, и, ?) в силу уравнения (8.46) на
поверхности S терпит разрыв. Однако существуют левые и правые
пределы:
f ~ = lim f(x,u,?), f+ = lim f(x,u,?).
s(x)->—0 s(x)^+0
Производная по времени функции s(x) в силу уравнения (8.4а)
имеет вид
s(x) = ^X^ f(x, u, t) = grad s(x) • f(x, u, ?).
Градиент grad s(x), как известно, направлен по нормали к поверх-
поверхности S в сторону возрастания функции переключения s(x), т.е. в
сторону, где s(x) > 0 (рис. 8.2, а). Поэтому если предел
s~ = lim s(x) = grad s(x) • f~, f~ = f(x,u~,t),
s(x)^~0
больше нуля (s~ > 0), т.е. угол между векторами grad s(x) и f~
острый, то вектор f~ направлен в сторону подпространства R7]
х)>0
va(x)>0
grad s(x)
s(x) > О
grads(x)
Rl I Rn+ Rl/ Rn+ Rl I Rn+
а б в
Рис. 8.2. Поверхность переключения
(рис. 8.2,6). Если указанный предел меньше нуля (s~ < 0), то век-
вектор f~ направлен в сторону подпространства Д™ (рис. 8.2, в). Анало-
Аналогично, если предел
i+= lim s(x) = grad s(x) • f+, f+= f(x,u+,^),
больше нуля (i+ > 0), то вектор f+ направлен в сторону подпрост-
подпространства R+, если меньше нуля (i+ < 0), то вектор f+ направлен в
сторону подпространства Д™.
Точки на поверхности переключения S можно разделить на три
типа [7].
8.2. Синтез систем с переменной структурой
243
Рис. 8.З. Три типа
точек на поверхнос-
поверхности переключения
К первому типу относят точки, в которых произведение s • s+
положительно: s~ • s+ > 0. В этих точках векторы f~ и f+ направлены
в одну сторону (рис. 8.3, отрезок ВС).
Ко второму типу относят те точки, в которых s~ < 0 и s+ >0.
В этих точках вектор f~ направлен в сторону подпространства Д™,
а вектор /+ — в сторону подпространства Д™,
т.е. они направлены в разные стороны от по-
поверхности переключения (рис. 8.3, отрезок АВ).
Третий тип составляют точки, в которых вы-
выполняются условия
ё~ = grad s(x) • f- > 0,
s+ = grad s(x) • f+ < 0. [ ' }
В этом случае векторы f~ и f+ направлены к
поверхности переключения, т.е. фазовые траек-
траектории у поверхности S направлены встречно. В
случае попадания изображающей точки в эту
группу точек на поверхности S начинается про-
процесс скольжения (рис. 8.3, отрезок CD). Условие (8.5) называется
условием существования скольжения или просто условием скольже-
скольжения] поверхность переключения, состоящая из точек третьего типа,
называется поверхностью скольжения.
Указанные три типа точек в общем случае отделяются друг от
друга многообразием, в точках которых или ё~ = 0, или s+ = 0, или
выполняются оба эти равенства.
На поверхности переключения правая часть уравнения (8.4а) тер-
терпит разрыв. Однако в точках первого и второго типов этой поверхнос-
поверхности описание движения изображающей точки вопросов не вызывает,
так как в непосредственной близости от этой поверхности она движет-
движется с фазовой скоростью f~ или f+, а на самой поверхности значение
ее скорости не играет роли, так как изображающая точка при попа-
попадании на одну из точек первого или второго типа мгновенно сходит с
поверхности. Проблема возникает при описании скользящего режима,
т.е. при попадании изображающей точки на одну из точек третьего
типа на поверхности S. Это связано с тем,
что при скользящем движении фазовая ско-
скорость изображающей точки не равна ни f ~,
HHf+.
Рассмотрим, с какой фазовой скоростью
происходит движение изображающей точки
в процессе скольжения, т.е. чему должна
быть равна правая часть уравнения (8.4а)
при описании движения в скользящем режи-
режиме. Пусть точка L лежит на поверхности 5,
через которую проходит траектория сколь-
скольжения (рис. 8.4). Проведем векторы f~ и f+,
выходящие из этой точки. Соединим концы
М
Рис. 8.4. Определение фа-
фазовой скорости на участ-
участке скольжения
16*
244 Гл. 8. Методы синтеза систем управления
этих векторов прямой и найдем точку М пересечения этой прямой с
касательной плоскостью к поверхности S в точке L. Считается, что в
точке L скорость скольжения совпадает с вектором LM [7, 2].
Для того чтобы изображающая точка, находящаяся в состоянии х
(s(x) ф 0), двигалась в сторону поверхности скольжения, необходимо
и достаточно, чтобы при s(x) > 0 производная по времени s(x) в силу
уравнений (8.4) была отрицательна, а при s(x) < 0 — положительна.
Таким образом, условие попадания изображающей точки на поверх-
поверхность скольжения имеет вид
s(x)s(x) < 0. (8.6)
Это условие называют условием попадания.
8.2.2. Уравнение движения в скользящем режиме. Как от-
отмечалось выше, возникает проблема описания системы с переменной
структурой при ее движении в режиме скольжения. Был рассмотрен
один из возможных способов описания такого движения. Здесь эту
проблему рассмотрим более подробно.
Возможны два подхода к решению проблемы описания идеального
скользящего движения: аксиоматический подход и подход, основанный
на предельном переходе [56]. Рассмотренный выше способ определения
фазовой скорости при скользящем режиме основан на аксиоматичес-
аксиоматическом подходе.
Под идеальным скользящим режимом понимается такое движе-
движение, при котором изображающая точка совершает относительно по-
поверхности скольжения колебания с бесконечно большой частотой и
бесконечно малой амплитудой. Реальное скользящее движение из-за
различного рода запаздываний, гистерезиса и других «неидеальнос-
тей» переключающего устройства совершается с конечной частотой
и конечной амплитудой. И это движение может быть описано, так
как при реальном скользящем движении изображающая точка в ос-
основном совершает движение вне поверхности скольжения. Подход,
основанный на предельном переходе, состоит в том, что, имея описание
реального скользящего движения и совершая предельный переход при
устремлении запаздывания или других «неидеальностей» к нулю,
получаем описание идеального скользящего движения.
В последнее время наибольшее распространение получило аксио-
аксиоматическое описание скользящего движения, предложенное А. Ф. Фи-
Филипповым [56]:
х = f°(x,t), f° = /if+ + A - /i)f- ((К /i ^ 1). (8.7)
Параметр \i определяется из условия, что вектор f° располагается
на касательной к поверхности скольжения плоскости. В случае ска-
скалярного управления это условие можно записать в виде
grad s(x) • f° = 0.
Подставив сюда выражение для f° из (8.7), получим
grad s(x) • f° = grad s(x) [/if+ + A - /x)f"] = 0.
8.2. Синтез систем с переменной структурой 245
Отсюда находим , , ч __
_ grad s(x) • i
^~ grads(x)(f--f+)"
При подстановке этого выражения в уравнение (8.7) последнее
принимает вид
grads(x)-f- + grads(x)-f+ ( ()) _ ( ,
~ grad S(x)(f" - f+) grad S(x)(f" - f+) ' [ [ )} ~ [ j
Метод эквивалентного управления [56]. Согласно этому
методу уравнение скользящего движения определяется следующим
образом.
1) Вычисляется производная по времени функции переключе-
переключения s(x) в силу уравнения (8.4а) и приравнивается к нулю:
s(x) = ^^ х = grad s(x) • f (x, w, t) = 0. (8.9)
2) Из уравнения (8.9) определяется управление. Полученное при
этом управление называют эквивалентным управлением.
3) Подстановкой эквивалентного управления в уравнение (8.4а)
находится уравнение скользящего движения.
Пусть в уравнение объекта управление входит линейно:
x = g(x,f) +b(x,t)w, xeiT, ueR. (8.10)
В этом случае уравнение (8.9) принимает вид
e(x) = ^ [g(x, t) + b(x, *)«] = J2 §ti [№(X'
г=1
Отсюда находим эквивалентное управление
и* = -
Подставив это выражение для управления в уравнение объекта (8.10),
получим
(8.11)
Это уравнение при условии s(x) = 0 является уравнением скользящего
движения. Выразив из уравнения s(x) = 0 переменную жп и подставив
в (8.11), получим уравнение скольжения (п — 1)-го порядка.
Для сравнения получим уравнение скользящего движения для
объекта (8.10) методом Филиппова. В этом случае имеем
f- = g + bm~, f+ = g + bm+.
246 Гл. 8. Методы синтеза систем управления
Уравнение (8.8) при подстановке этих выражений принимает вид
X =
Е о? (9i + 6*«-)J (g + Ъи+) " [ Е ^7 (* + biU+^\ (8
или, в скалярной форме,
? лг: (# + b*u~U @* +bfen+) I Е ^г- (рг + м+) I (pfe + ьки~)
хк = ^zzL
Раскрыв скобки, после преобразования получим
L ds
7 j -p.— Щ
Эти уравнения описывают скользящее движение при условии
в(х@)) = 0.
Если последние уравнения записать в векторной форме, то они
принимают вид (8.11). Таким образом, в случае, когда объект описы-
описывается уравнением (8.10), уравнения скользящего движения, которые
получаются методом эквивалентного управления и методом Филиппо-
Филиппова, совпадают.
8.2.3. Стабилизация линейного стационарного объекта.
Рассмотри задачу стабилизации в случае, когда объект описывается
уравнением
х = Лх + Ьт, х е Rn, и G R. (8.12)
Пусть поверхность переключения является плоскостью и задается
уравнением
п
~/v\ _ СТ _ \ Л г.т. _ Q (о 1 о\
Здесь элементы (п х п)-матрицы А и (п х 1)-матриц (векторов-столб-
(векторов-столбцов) b и с являются постоянными. Производная по времени функции
переключения в силу уравнения (8.12) имеет вид
s(x) = стх = ст(Лх + Ъи).
Если выбрать закон управления вида (8.46), то
s+ = ст(Лх + bu+), s~ = ст(Лх + Ъи'1).
При этом условие скольжения (8.5) принимает вид
s+ = ст(Лх + Ы/+) < 0, s~ = ст(Лх + Ъи~) > 0,
8.2. Синтез систем с переменной структурой 247
или
П x П П
/ Ci^i )U ^> — у Cj у CLif^Xf^. (8.146)
г=1 ^ г=1 j=l
Как будет показано дальше, это условие остается в силе, если
выбрать закон управления вида
x-s > О
(8-15)
XiS < 0.
Функция фг терпит разрыв не только на плоскости переключения,
но и на координатных плоскостях х\ = 0 (г = 1, 2,... ,п). Однако
управление на координатных плоскостях не терпит разрыва, так как
на этих плоскостях управление обращается в нуль.
Условия скольжения. Для того чтобы в системе (8.12), (8.15)
возникло скользящее движение, необходимо и достаточно, чтобы
выполнялись неравенства
п
>^2ciCLik, k = l,2,...,n, (8.16a)
г=1 ' г=1
п
~ (8.166)
Доказательство. Условия (8.16) получается из условий (8.14).
Введем обозначения: ф^ = ф^~ при s(x) > 0; ф% — ф^ при s(x) < 0.
В соответствии с алгоритмом (8.15) имеем
Если, как в алгоритме управления (8.46), положить и = и^ при
) > 0 и и — и~ при s(x) < 0, то
п п
^+ = - V Ф+Xi, и~ = - V ?/>ГЖ;. (8.18)
г=1
Достаточность. Подставим выражение для и^ из (8.18) в
условие скольжения (8.14а):
П П
г=1
248 Гл. 8. Методы синтеза систем управления
Поменяв порядок суммирования и умножив на —1, находим
П / П х П / П
Последнее неравенство будет выполнено, если при Xk > О
П х П
• г=1 ' г=1
и при Xk < О
г=1 ^ г=1
Подставив в эти неравенства значение ^^ из (8.17а), получим
=1 ^ г=1
n
< ^Cidik, к = 1,2,. . . , П.
г=1
Эти неравенства совпадают с неравенствами (8.16). Итак, если
выполняются неравенства (8.16), то выполняется неравенство (8.14а).
Аналогично можно показать, что если выполняются неравенст-
неравенства (8.16), то выполняется и второе условие скольжения (8.146). Таким
образом, выполнение неравенств (8.16) является достаточным условие
существования скользящего режима.
Необходимость. Допустим, что при каком-либо к = г усло-
условие (8.16) не выполняется. Тогда в точке с координатами х\ = О
(г = 1, 2,... ,п; % ф т) и хг > 0 при s(x) > О
^2/ ^^ibiOLr \xr ^ 0
^ i=l i=l '
и при s(x) > 0
, П П x
Т f ^ ^ )r ^ 0,
1 г=1
т. е. условие скольжения (8.5) не выполняется. Необходимость дока-
доказана.
Если выполняется условие скольжения (8.16), то s(x)s(x) < 0.
Следовательно, условие скольжения (8.16) является одновременно и
условием достижимости.
Условие скольжения при частичном измерении фазо-
фазовых координат. Рассмотрим случай, когда в законе управления
используются не все, а к первых фазовых координат с разрывными
8.2. Синтез систем с переменной структурой 249
коэффициентами:
V^ / * / (а^ XiS >0,
и = -уФм-ёи, ^i = \R_ _^n (8-19а)
г=1 v
<*« = { _^°' 5) < J 5° = Ы sign(cTb). (8.196)
Здесь So — сколь угодно малое отличное от нуля число, знак кото-
которого совпадает со знаком cTb. Цель введения слагаемого 5и в закон
управления будет пояснено дальше.
Условие скольжения. Для того чтобы плоскость s = стх =
= 0 (сп = 1) была плоскостью скольжения для системы (8.12), (8.19),
необходимо и достаточно, чтобы выполнялись соотношения
(cTh)aj ^cTa(i) -Cj-(cTa(n)), j = 1, 2,..., k, (8.20a)
(cTh)pj <: cTa^ - с,-(ста^), j = 1, 2,..., k, (8.206)
cTa(i) — c-(cTsSn^) j = k -\- 1 n — 1 (8 20b)
где a(J) (j = 1, 2,..., n) — j-й столбец матрицы А [56].
При k = n — 1 равенств (8.20в) не будет, и необходимое и доста-
достаточное условие скольжения принимает вид
Доказательство. Производную по времени функции переклю-
переключения s(x) в силу уравнений (8.12), (8.19) можно представить в виде
• / \ ds . т / л
s(x) = -rz х = с (Ах ¦
Учитывая, что из уравнения плоскости переключения имеем хп =
п-1
= — ^2 c%xii последнее соотношение можно преобразовать к виду
г=1
к
п-1
3=к+1
Достаточность. При выполнении равенств (8.20в) вторая сум-
сумма в последнем соотношении обращается в нуль, и оно принимает вид
250 Гл. 8. Методы синтеза систем управления
к
s(x) = Y; tcTa(j) - (cTb)^j - с,-(ста(п))]ж,- - (cThMu. (8.21)
При s(x) > 0 и Xj > 0 из соотношений (8.19) имеем г/jj = <х,- и 8и =
= |Eq| sign (cTb). Поэтому в этом случае последнее соотношение при-
примет вид
к
Отсюда находим
к
s+ = lim s(x) = У [ста^ - (стЪ)а, - ^(ста^)]^ - \(стЪ)80\.
()^+0 f^
Из этого равенства следует, что для того чтобы выполнялось нера-
неравенство s+ < 0 в условии скольжения (8.5), достаточно, чтобы имело
место неравенство
ста^ - (cTh)aj -Cj(cT3.^) ^0, j = 1, 2,..., к,
т.е. выполнялось условие (8.20а).
При s(x) > 0 и Xj < 0 из соотношений (8.19) имеем г/jj = /3j и
^w = |^o| sign (cTb). Поэтому в этом случае имеем
к
8+ = lim s(x)
И для того чтобы выполнялось неравенство s+ < 0 в условии сколь-
скольжения (8.5), достаточно, чтобы имело место неравенство
ста«) - (стЬ)& - Ci(cTaH) ^ 0, j = 1,2,..., к,
т.е. выполнялось условие (8.206).
Таким образом, выполнение соотношений (8.20) является доста-
достаточным условием для выполнения неравенства s+ < 0 в условии
скольжения (8.5). Аналогично доказывается, что выполнение соотно-
соотношений (8.20) является достаточным условием для выполнения не-
неравенства s~ > 0 в условии скольжения (8.5).
Необходимость. Допустим, что соотношения (8.20) при j = г
не выполняются. Тогда условие скольжения (8.5) в точке с коорди-
координатами Xi = 0 (г = 1,2,... ,п, г ф г) и хг ф 0 (\xr\ > \8q\) не будет
выполнено. Действительно, в этой точке имеем: при г ^ к
ё = [ста<г) - (cTb)W - cr(cTa^)]xr - (стЪNи (8.22а)
и при г > к (г ^ п — 1)
s = [ста(г> - Сг(ста.М)]хг - {стЪNи. (8.226)
8.2. Синтез систем с переменной структурой 251
И если при г ^ к r-е неравенство в условии (8.20а) не выполняется,
т. е. имеет место неравенство
f»To0) _ (гТУЛг\ — Г (гТл(П)\ ^> П
то при xr > 0 и \xr\ > IJoI из (8.22а) и (8.19) получаем
s+ = lim s = [cTa^r^ — (cTh)ar — сг(ста^п^)]жг — (cTh)S > 0.
Если при г ^ к r-е неравенство в условии (8.206) не выполняется,
т. е. имеет место неравенство
ста« - (стЪ)(Зг - сг(ста(")) < 0,
то при хг > 0 и |жг| ^> So\ из (8.22а) и (8.19) получаем
Г = lim s = [ста^ - (cTb)/Зг - сг(стъ^)]хг - (cTh)S < 0.
s(x)^~0
Следовательно, при г ^ к условие скольжения (s+ < 0, s~ > 0)
не выполняется, если не выполняются соотношения (8.20).
При г > к не выполняется r-е неравенство в условии (8.20в), т.е.
имеет место неравенство
ста^ -сг(ста^) >0 (8.23а)
или
cTa^-cr(cTa(n)) <0. (8.236)
При xr > \So\ из (8.226) и (8.19) находим
s+ = lim s = [ста^ - сг(ста^)]жг - |(стЬ)й0| > 0,
s(x)^+0
если имеет место неравенство (8.23а), и
Г = lim s = [ста(г) - сг(ста(п))]жг - \(стЪM0\ < 0,
s(x)—>—О
если имеет место неравенство (8.236). Следовательно, и при г > к
условие скольжения (s+ < 0, s~ > 0) не выполняется, если не вы-
выполняются соотношения (8.20). Таким образом, необходимость вы-
выполнения соотношений (8.20) для возникновения режима скольжения
доказана.
Теперь поясним, чем вызвано включение в закон управления (8.19)
малого слагаемого 5и. При к < п — 1 на поверхности переключения
s(x) = 0 в точках, в которых Х{ = 0 (г = 1, 2,..., к), имеют место
равенства s+ = 0 и s~ = 0. Поэтому если принять 8и = 0, то при
попадании в одну из таких точек, не являющуюся началом координат,
изображающая точка может не устремиться к положению равновесия
или при попадании в начало координат по указанным точкам может
удалиться из положения равновесия.
При к = п — 1 можно принять 8и = 0, так как в этом случае
на поверхности переключения s(x) = 0 равенства i+=0 и s~ = 0
252
Гл. 8. Методы синтеза систем управления
имеют место только в начале координат. Действительно, в этом
случае s+ = 0 и s~ = 0 в точках Х{ = 0 (г = 1, 2,..., п — 1). Но такая
точка одна, так как в этом случае из s(x) = 0 следует, что и хп = 0.
При синтезе СПС (8.12), (8.19) в случае к < п — 1 постоянные q
(г = 1,2,...,п — 1) нельзя назначать произвольно, так как они должны
удовлетворять условию (8.20в). При к = п — 1 эти постоянные можно
назначать произвольно, так как в этом случае условие (8.20в) от-
отсутствует. Выполнение условий (8.20а) и (8.206) обеспечиваются вы-
выбором констант aj и Cj (j = 1, 2, ...,&).
Пример 8.4. Система с переменной структурой (СПС) описыва-
описывается уравнениями
(a, s>0,
— 0u, Ц) = < Q S = С\Х\ + С2Х2 + Жз,
Л
s(x) > 0,
0,
йо = |E0|sign(cTb).
Требуется определить параметры а, /3, ci и С2, при которых СПС
совершает скользящее движение, а степень устойчивости при этом
движении принимает максимальное значение.
Решение. В данном случае к = 1, п = 3 и условия скольже-
скольжения (8.20) принимают вид
ГТ B) _ / Т C)\
с av — C2^c av yj.
Матрица А и векторы-столбцы b и с имеют соответственно вид
А =
Отсюда получаем
cTb = 1.
0
0
0
с
1
0
0
т (
а1
0
1
0_
0 =
, ъ =
- П гТя
0
0
1
B)
c =
Условия скольжения принимают вид
а ^ — С1С2, /3 ^ — С1С2, С\ = С2,
ИЛИ 3 2
Методом эквивалентного управления получим уравнение скользя-
скользящего движения. Однако в данном случае нет необходимости непос-
непосредственно вычислять эквивалентное управление. Это связано с тем,
что в первые два уравнения не входит управление, а переменную жз
при скользящем движении можно найти из уравнения плоскости
скольжения. Исключив из первых двух уравнений переменную жз,
8.2. Синтез систем с переменной структурой 253
получим уравнения скользящего движения. Из уравнения s(x) =
— с\Х\ + с2ж2 + хз =0 находим хз = —с\Х\ — с2ж2. Подставив это
выражение во второе уравнение объекта, получим следующие урав-
уравнения для скользящего движения:
Х\ = Ж2, Х2 — —С\Х\ — С2Ж2.
Характеристическое уравнение имеет вид
= Л2 + с2Л + а = 0.
— С\ —С2 — А
Его корнями являются
-4С1 С2 , • л/3
При вычислении этих корней учтена зависимость с\ — с| в условиях
скольжения. Как следует из условий скольжения, степень устойчивос-
устойчивости r\ = C2/2 принимает максимальное значение при с2 = \/—C- Если
значение параметра [3 {[3 < 0) из каких-либо соображений установле-
установлено, параметры с\ и с2 определяются однозначно:
с2 = ^9, С1 = с2
В соответствии с условиями скольжения значение параметра а
выбирается так, чтобы выполнялось неравенство а ^ /3.
Условие устойчивости скользящего движения. Свойство
(устойчивость и качество) скользящего движения в значительной
степени зависит от плоскости скольжения s(x) = 0. При ее выбо-
выборе нужно прежде всего позаботиться об устойчивости скользяще-
скользящего движения. Как уже отмечалось, в случае системы с переменной
структурой (8.12), (8.19) в силу необходимости выполнения соотно-
соотношения (8.20в) плоскость скольжения произвольно выбрать нельзя.
Рассмотрим, при каких условиях скользящее движение указанной
системы будет асимптотически устойчиво.
Теорема 8.1 ([56]). Для того чтобы скользящее движение сис-
системы (8.12), (8.19) на плоскости s(x) = стх = 0 (сп = 1) было
асимптотически устойчиво, необходимо и достаточно, чтобы все
корни характеристического уравнения системы (8.12) при эквива-
эквивалентном управлении, кроме корня сТа.(п\ имели отрицательную ве-
вещественную часть.
Доказательство. Пусть уравнение, которое получается при
подстановке в (8.12) эквивалентного управления, имеет вид
х = Dx. (8.24)
Если в этом уравнении исключить переменную хп, выразив ее че-
через остальные фазовые переменные из уравнения s(x) = стх = 0, то
получим уравнение скользящего движения. Поэтому чтобы доказать
теорему, достаточно показать, что характеристическое уравнение
254 Гл. 8. Методы синтеза систем управления
системы (8.24) имеет один корень cTa^n), а остальные его корни сов-
совпадают с корнями характеристического уравнения скользящего дви-
движения.
Производная по времени функции s(x) в силу уравнения (8.12)
имеет вид
s = стх = ст(Лх + Ъи) = ^2 (cTsSj^)xj + (cTh)u.
3 = 1
Уравнение (8.12) в скалярной форме примет вид
п
Xi = 2^ aiJXJ + ^iU-> ^ = 1, 2, . . . , П.
3 = 1
В этих уравнениях заменим переменную хп на s. Для этого последнее
уравнение этой системы заменим на приведенное уравнение для s
п-1
и исключим переменную хп, сделав подстановку хп = s — ^2 сзхз-
Тогда получим 3~
Xi = ^2 ачхз + агп ( s ~ ^2 cixi ) + ^iU' « = 1j 2,..., га - 1,
3=1 ^ 3=1 '
3=1 Ч 3=1
или
п-1
Xi = 22 (aiJ ~ ainCj)xj + dins + biU, i = l,2,...,n — 1, (8.25a)
3 = 1
n-1
s = Y^ tcTa(j) - (cTa(n))cj>i + (cT3L(n))s + (cTb)u. (8.256)
3 = 1
Найдем эквивалентное управление. Для этого в уравнении (8.256)
положим i = 0, s = 0 и разрешим его относительно управления:
Подставив это выражение для управления в (8.25), получим
п-1
Xi = 5^{а^ ~ ainCJ ~ ^Ь [сТа0) ~ ^Т^П))Сз]\Х3 + а^5,
г = 1, 2,... ,п — 1,
s = (cTa("))s.
Введя обозначения
х^ = (гц2... ж„_1)т, а<"> = (о1п а2п ... а„_1п)т, А^ = (а}Л,
8.2. Синтез систем с переменной структурой 255
п1 —п--п- г- - -^—\гТя^"> - (rT^nhr-] 7^ — 19 п - 1
aij — aij ainCj ^T^ I- V a JcJ.b г5 «/ — J-? Z5 • • • ->n v->
последнюю систему можно записать в виде
s = (cTa^)s, (8.276)
Z = Cz, z=( s ), 0=1^ сГа(в)]. (8.28)
Здесь 0n_i — вектор-строка, состоящая из n — 1 нулей.
Характеристическое уравнение последней системы имеет вид
\С - XIп\ - п „тп(п) _ х
где /n-i — единичная матрица порядка п — 1. Один корень этого
уравнения равен ста^п), а остальные корни находятся из уравнения
При s = 0 уравнение (8.27а) является уравнением скользящего
движения, и его характеристическое уравнение совпадает с приведен-
приведенным выше уравнением. Таким образом, характеристическое уравне-
уравнение системы (8.27) имеет один корень Л = ста(п) и остальные корни,
равные корням характеристического уравнения скользящего движе-
движения. Поэтому для доказательства теоремы достаточно показать, корни
характеристического уравнения системы (8.24) совпадают с корнями
характеристического уравнения системы (8.28).
Уравнение (8.28) получается из уравнения (8.24) путем преобразо-
преобразования
Xi—zi, г — 1,2,... , п - 1, хп = zn — (cizi + c2z2 + ... + cn_izn_i),
или
x_Tz т_ Г J»-i о"-
где 0п-1 — нулевой вектор-столбец (п — 1)-го порядка. Матрица Т
является неособой (detT = l) и собственные значения матриц D
и С = T~XDT совпадают. Теорема доказана.
Синтез устойчивого скользящего движения. Рассмотрим,
как на основе доказанной теоремы синтезировать закон управления
СПС (8.12), (8.19), при котором обеспечивается асимптотически ус-
устойчивое скользящее движение. Так как условия скольжения рас-
рассматриваемой системы включает равенство (8.20в), то эквивалентное
управление (8.26) принимает вид
256 Гл. 8. Методы синтеза систем управления
Этот закон управления зависит от первых к фазовых координат Xj
(j = 1, 2,..., к). Рассмотрим закон управления
к
и = — 2_. ljxj (lj = const, 1 ^ к ^ п — 1).
Допустим, что в этом законе выбраны такие коэффициенты 7j?
что характеристическое уравнение системы (8.12) при таком законе
управления имеет один произвольный корень Л°, а остальные корни
имеют отрицательную вещественную часть. Тогда, положив Л° =
_ стаО) и приравняв 7j коэффициенту при х3- в эквивалентном уп-
управлении (8.29), с учетом условия (8.20в) получим
1 ГТп^ (сТ п^\гЛ — Л'- 1-19 h
а ^с a )Cj\ — 7j5 J — ^ z? • • • •> &•>
ста(Л - Cj{cT^) =0, i = к + 1,..., n - 1,
A0=cTa<").
Эту систему можно преобразовать к виду
[ста^ - A°Cj-] = (cTbOj, j = 1, 2,..., к, (8.30а)
cTa(j) - Cj\° = 0, j = /с + 1,..., n - 1, (8.306)
A°=cTaK (8.30в)
Очевидно, если из этой системы определить постоянные Cj (j =
= l,2,...,n — 1), то получим поверхность скольжения.
Итак, из изложенного выше вытекает следующий порядок синтеза
асимптотически устойчивого скользящего движения.
1) На основе заданного уравнения объекта выбрать закон управ-
к-1
ления и = — ^2 1зхз'-> ПРИ котором все корни характеристического
j=i
уравнения замкнутой системы, кроме одного, имеют отрицательную
вещественную часть.
2) Решив систему уравнений (8.30), найти коэффициенты с3- (j =
= l,2,...,n-l).
3) Постоянные а3- и [3j {j = 1, 2, ...,&) в законе управления (8.19)
установить такими, чтобы выполнялись соотношения (8.20а) и (8.206)
в условии скольжения.
Решение задачи первого этапа тем проще, чем больше к. Однако
чем больше к, тем сложнее реализация закона управления (8.19).
Сложность решения задачи первого этапа при малых к обусловлена
тем, что при выборе эквивалентного управления, кроме обеспечения
требований к устойчивости и качеству скользящего движения, нужно
позаботиться о том, чтобы система уравнений (8.30) была разрешима.
Как отмечалось, при к = п — 1 на Cj (j = 1, 2,..., п — 1) никаких
ограничений не накладывается. Поэтому в этом случае при синтезе
8.2. Синтез систем с переменной структурой
257
эквивалентного управления нужно исходить только из требований к
устойчивости и качеству скользящего режима.
Пример 8.5. СПС описывается уравнениями
Х\ —
a,
> О,
где EW определяется соотношением (8.196). Требуется установить,
существует ли плоскость скольжения
S = С\Х\ + С2Х2 + С3Ж3 + Ж4 = О,
на которой скользящее движение является асимптотически устойчи-
устойчивым.
Решение. В данном случае в качестве эквивалентного управ-
управления можно принять и =
принимает вид
и уравнение замкнутой системы
Хз = Х4, Х4 = ~
• _ I
х~Лх'
ИЛИ
100
0 0 10
0 0 0 1
-7 0 0 0
Корнями характеристического уравнения
\A-I\\ =Л4+7 = 0
являются
Выбором 7 нельзя обеспечить требования, чтобы три корня имели
отрицательную вещественную часть. Следовательно, не существует
плоскости скольжения, по которой скользящее движение было асимп-
асимптотически устойчиво.
Пример 8.6. СПС описывается уравнениями
Х\ — Х2-> Х2 —
а,
> 0,
где EW определяется соотношением (8.196). Требуется установить,
существует ли плоскость скольжения
S = С\Х\ + С2Ж2 + Х3 = 0,
на которой скользящее движение является асимптотически устойчи-
устойчивым, и определить эту плоскость, если она существует.
17 Д.П. Ким
258
Гл. 8. Методы синтеза систем управления
Решение. В качестве эквивалентного управления принимаем
и = —7#i. Уравнение замкнутой системы имеет вид
или
Х1 = #2,
х = Лх, А =
О 1 О
О 0 1
-7 0 0
Характеристическое уравнение
имеет корни
0
0
0
1
0
0
0
1
0
, ь =
/°
о
ll
Если 7 принимает отрицательное значение, то один вещественный
корень будет положительным, два комплексно сопряженных корня
будут иметь отрицательную вещественную часть. Так что в данном
случае можно выбрать плоскость скольжения, на которой скользящее
движение будет асимптотически устойчивым. Найдем эту плоскость.
Если уравнение объекта записать в векторной форме, то матри-
матрица А и вектор b имеют вид
А =
Система (8.30) принимает вид
сТ(^ - Ъ7) - А°С1 = 0, стаB> - с2Л° =0, Л° = ста<3).
Так как столбцы матрицы А имеют вид
^=@ 0 0)т, аB>=A 0 0)т, а<3)=@ 1 0)т,
то из последних соотношений получаем
-7 - С1Л° = 0, С1- с2Л° =0, Л° = с2.
Отсюда находим
Ао = - ^7, ci = \Ji*, c2 = - ^7.
Напомним, что коэффициент j должен быть отрицательным. Па-
Параметры а и /3 должны удовлетворять неравенствам (см. (8.20а)
и (8.206)) а ^ — С\С2 = 7 и Р ^ ~cic2 — 7-
Условия попадания. Если выполняются условия скольжения и
скользящее движение асимптотически устойчиво, то для того чтобы
система с переменной структурой была асимптотически устойчива,
необходимо и достаточно, чтобы изображающая точка из произволь-
произвольной точки фазового пространства попала на плоскость скольжения.
Условия, при выполнении которых изображающая точка из произ-
произвольной точки попадает на плоскость скольжения, называются усло-
условиями попадания [56].
8.2. Синтез систем с переменной структурой 259
Пусть скользящее движение системы с переменной структу-
структурой (8.12), (8.19) асимптотически устойчиво. Так как на плоскости
s = стх = 0 возникает скользящее движение, выполняются условия
скольжения (8.20). Если изображающая точка не находится на плос-
плоскости переключения, то до попадания изображающей точки на эту
плоскость знак функции переключения s = cTx не изменяется, и
функция 8и в законе управления (8.19) остается постоянной и прини-
принимает значение So или —S. Рассматриваемая СПС включает 2к линей-
линейных структур, которые описываются уравнениями
х = Л|Х±Ы0, (8.31)
где А\ (I = 1, 2,..., 2к) — матрицы, которые описывают структуры
замкнутой системы, получающейся при подстановке управления (8.19)
в уравнение объекта (8.12). При этом ф^ принимает определенные
значения: а\ или /%.
Каждая из структур определяется одной из матриц А\ (/ = 1,2,...
..., 2fe), и ее движения описываются уравнением (8.31). Фазовое прост-
пространство Rn разбивается на 2к областей, в каждой из которых дви-
движение СПС описывается уравнением одной из структур. Область, в
которой движение СПС описывается уравнением данной структуры,
называют областью определения этой структуры.
Теорема 8.2 (достаточное условие попадания [56]). Если выпол-
выполняется условие скольжения (8.20), то для того чтобы изображаю-
изображающая точка СПС (8.12), (8.19) попала на плоскость скольжения s =
стх = 0 (сп = 1), достаточно, чтобы выполнялось условие
ста^ <С 0, (8.32)
где а(п) — п-й столбец матрицы А.
Доказательство. Производная по времени функции переклю-
переключения s = стх в силу уравнений (8.12), (8.19) при подстановке
п-1
хп = s — ^2 cjxj принимает вид
s = (cTaW)s J2 [ i(
i=1 n-i
+ Y, [cTa«) - cji^^xj - (cTh)Su.
j=k+i
Допустим, что имеет место неравенство s(x@)) > 0. Тогда до
попадания изображающей точки на поверхность переключения s(x) >
> 0. И так как выполняются условия (8.20), (8.32) и в силу (8.196)
имеет место равенство (cTb)?o = |(стЬ)йо|, то производная отрица-
отрицательна и удовлетворяет неравенству s < —\(cTh)So\. Следовательно,
изображающая точка попадет на плоскость скольжения за конечное
время. Теорема доказана.
17*
260 Гл. 8. Методы синтеза систем управления
Рассмотрим СПС, которая описывается уравнениями
г = 1,...,п- 1,
aiXi-u-f(t), (
г=1
(8.336)
Здесь /(?) — возмущение.
Приведем без доказательства достаточное условие попадания
изображающей точки системы (8.33) на плоскость скольжения.
Теорема 8.3 [56]. Если коэффициенты с\ (г = 1, 2,... ,п — 1)
функции переключения s = стх (сп = 1) положительны, то для то-
того чтобы изображающая точка попала на плоскость s = 0, доста-
достаточно, чтобы характеристическое уравнение системы при фг = щ
(г = 1, 2,..., п — 1) ке имело положительных вещественных корней и
выполнялись условия
OLi ^ —О!г? Pi ^ ~аг5 г = 1, 2, . . . , П — 1.
8.3. Синтез систем, основанный на методе
функций Ляпунова
Как отмечалось, одним из основных требований к системе управ-
управления является устойчивость. Поэтому задача синтеза закона управ-
управления, обеспечивающего устойчивость системы управления, являет-
является очень важной. В данном параграфе рассмотрим способы синтеза
устойчивых систем с помощью функций Ляпунова.
Напомним: управляемая система (объект)
x = f(x,u,f), xeiT, ueiT,
называется вполне управляемой, если существует кусочно непрерыв-
непрерывное управление и = и(?), переводящее систему из произвольного на-
начального состояния в произвольное конечное состояние за конечное
время, и стабилизируемой, если существует закон управления и =
= u(x,t), при котором замкнутая система
х = /(x,u(x,f), t)
устойчива. Управление u = u(x,?), которое обеспечивает устойчи-
устойчивость замкнутой системы, называют стабилизирующим управлени-
управлением. В гл. 1 были рассмотрены необходимые и достаточные условия
управляемости и стабилизируемости линейных стационарных уп-
управляемых систем.
8.3. Синтез систем, основанный на методе функций Ляпунова 261
8.3.1. Синтез параметров регулятора. Рассмотрим сначала
задачу синтеза системы управления, когда структура задана и требу-
требуется определить параметры, при которых она устойчива. Сделаем это
на примере решения упрощенной задачи управления курсом самолета.
В упрощенном виде движение самолета по курсу (боковое движе-
движение) может быть описано следующими уравнениями [10]:
Тф + ф = -Ъ6, 6 = f(u), и = кфф + кфф - кд6.
Здесь ф — курсовой угол самолета; S — отклонение руля; и —
управление; Т, Ь — фиксированные положительные постоянные; кф,
к a, ks — параметры регулятора; нелинейная функция f(u) обладает
следующими свойствами:
/@) = 0, f(u)u > 0 при w/0.
Пусть требуется определить множество значений параметров ре-
регулятора, при которых положение равновесия является асимптоти-
асимптотически устойчивым.
Запишем уравнения движения самолета в нормальной форме. Для
этого введем новые переменные:
х\ = ф + Ь5, х2 = S, х3 = и.
В этих переменных уравнения бокового движения самолета примут
вид
х3 = -агхг - а2х2 - a3f(x3),
где ai = к^/Т - кф, а2 = кфЬ, а3=к$.
В качестве «кандидата» на функцию Ляпунова примем
х3
У(х) = - {х\ + ах\) + qff(x3) dx3.
о
При положительных а и q эта форма является положительно
определенной функцией. Производная по времени в силу уравнений
движения самолета имеет вид
У(х) = хх (-- хх + bf(x3)j + ax2f(x3) -
- qf(x3)(o>ixi + а2х2 + a3f(x3).
Если положить q = Ь/ai, a = ba2/ai, то производная примет вид
Параметры q и а будут положительны, а производная V(x) будет
отрицательно полу определенной, если а^ > 0 (г = 1,2,3), или к а >
> Ткф, кф > 0, к6> 0.
262 Гл. 8. Методы синтеза систем управления
Производная V(x) обращается в нуль вне начала координат на
многообразии ^
-xl+qa3f2(x3) =0,
или
Xl — q^ x3 = 0
На этом многообразии компоненты фазовой скорости имеют вид
xi =0, Х2 = 0, хз = — ах2- Поэтому если изображающая точка по-
попадает на это многообразие, то она сразу его покидает при х ф 0.
Следовательно, в соответствии с обобщенной теоремой об асимпто-
асимптотической устойчивости (теорема 4.8) положение равновесия самолета
асимптотически устойчиво при к а > Ткф, кф > 0, к$ > 0.
8.3.2. Достаточное условие стабилизируемости и синтез
законов управления. Рассмотрим управляемую систему, которая
описывается уравнением
х = g(x,?) + f?(x,?)u, x e Rn, ueRr, t^to, (8.34a)
и закон управления
u = u(x,t). (8.346)
Начало координат х = 0 является положением равновесия замкнутой
системы (8.34):
Согласно теореме Ляпунова об асимптотической устойчивости
система (8.34) асимптотически устойчива, если существует положи-
положительно определенная функция V(x, ?), допускающая бесконечно малый
верхний предел, такая, что ее производная по времени в силу урав-
уравнений (8.34) является отрицательно определенной, т.е. существует
положительно определенная функция w(x.,t) такая, что выполняется
неравенство
(8.35)
Если положительно определенные функции V(x.,i) и w(x.,i) зада-
заданы, то соотношение (8.35) определяет достаточное условие стабили-
стабилизируемости. На множестве
,?: ^B(x,t) =0 Vt^to} (8.36)
условие (8.35) принимает вид
y(x,t) = ^g(x,t) + ^^-u;(x,t) Vt^t0. (8.37)
Представим закон управления в виде [59]
u = k(x,*)+l(x,*), (8.38)
где k(x, t) — функция, которая обращается в нуль на множест-
на множестве Оси 1(х^) — произвольно назначаемая функция. При подстановке
8.3. Синтез систем, основанный на методе функций Ляпунова 263
этого выражения в неравенство (8.35) оно принимает вид (для крат-
краткости записи аргументы функций опускаем)
??-(g + Bl) + ^Bk+^^-w Vt^t0. (8.39)
Функцию k(x, t) можно представить в виде
+ p(x,0- (8-40)
Здесь Л — скалярная функция: Л = А(х,?); р(х,?) — функция, удов-
удовлетворяющая тождеству
^t)=0. (8.41)
Следует заметить, что это равенство может быть выполнено и
вне области Oq- Например, пусть Р — кососимметрическая матрица
(РТ = —Р). Тогда если положить
(8.42)
Дейст-
Действительно, при подстановке последнего выражения в (8.41), получим
dV
то равенство (8.41) имеет место не только при -^— В = 0. Дейст-
ДейстУсловие (8.39) при подстановке k(x, i) из (8.40) принимает вид
В области Оо условие (8.43) совпадает с условием (8.37). При под-
подстановке выражения для k(x, t) из (8.40) в закон управления (8.38)
получим Л в
K^ (8.44)
Как было указано выше, здесь 1(х, t) — произвольно выбираемая
функция, р(х, i) — функция, обращающаяся в нуль на множестве Оо
и удовлетворяющая условию (8.41).
Из соотношения (8.43), заменив знак неравенства на знак равенст-
равенства, получим
Если w — произвольная положительно определенная функция и реше-
решение V уравнения (8.45) является положительно определенной и допус-
допускающей бесконечно малый верхний предел функцией, то замкнутая
система (8.34а), (8.44) асимптотически устойчива.
Возможны два подхода к синтезу алгоритма управления, осно-
основанного на соотношении (8.44). При первом подходе задаются поло-
264
Гл. 8. Методы синтеза систем управления
жительно определенная функция w(x.,t) и функции Л = А(х,?) и 1 =
= 1(х,?), а затем находится положительно определенная функ-
функция V(x, ?), удовлетворяющая уравнению (8.45). Второй подход со-
состоит в том, что задается положительно определенная функция V(x),
а затем делается попытка подбора функций Л = Л(х, t) и 1 = 1(х, t)
таких, чтобы левая часть равенства (8.45) была отрицательно опреде-
определенной функцией. В качестве примера рассмотрим задачу о гашении
вращений твердого тела, закрепленного в одной точке [59].
Пример 8.9. Твердое тело, закрепленное в центре инерции, опи-
описывается уравнениями
Х\ — пцХ2Х3 + biUi,
Х2 = СЛ2\Х\Х3 + b2U2j
х3 =
где
аи =
Jy-Jz
Jz-Jx
1,1
= -г j 02 = -г-
U x *J у
,1
b3 = —;
Xi (i = 1,2,3) — проекции угловой скорости на оси связанной сис-
системы координат; JXJ Jyj Jz — главные центральные моменты инерции
тела; щ (г = 1,2,3) — проекции главного момента сил на оси свя-
связанной системы координат. Требуется определить стабилизирующие
законы управления.
Решение. В данном случае имеем
а2\х1х3 , В =
а31х1х2 )
Ъг О О
О Ъ2 О
О О Ъ3
Воспользуемся вторым подходом и зададимся в качестве функции
Ляпунова квадратичной формой V = - [х\ + х\ + х\). Имеем
dV
dv
x2 x3), BBT = diag(bf,
b\ 0 0
0 b\ 0
0 0
bh
= b{x{ + b\x\ + b\x\,
dv
х2
ч
х3)
ацх2х3
— (an + a2i
8.3. Синтез систем, основанный на методе функций Ляпунова 265
х2 х3)
h о о
о ъ2 о
О О
+ Ъ212х2 + b3l3x3j — = О.
Подставив эти выражения в уравнение (8.45), получим
(аи + a2i + а31)х1х2х3 + Mi^i + Ы2Ж2
Ъ1Х1) = ~^«
Левая часть будет отрицательно определенной, если положить Л =
= const > 0 и векторную функцию 1 подобрать так, чтобы в левой
части осталась только квадратичная форма. Для этого достаточно
принять
= -^г~ х2х3, h = -^р-
Ь
h =
h =
Х2 =
Определим выражения, которые входят в алгоритм управле-
управления (8.44):
~bi 0 0 "
О Ъ2 О
О О Ъ3_
В соответствии с (8.42) имеем
О
-Pi
-Р2 -1
Pi
О
О
Ь2х2 =
Р\Ъ2х2
+Рз^з^з
-рзЬ2х2 J
Теперь, подставив найденные выражения в (8.44), получим
+pib2x2 +p2b3x3 - ^-
-\-p3b3x3 - ^-х
— р3Ъ2х2 —-—
и2 = --\Ь2х2 -
и3 = — - ХЬ3х3 —
2
Здесь pi (г = 1, 2, 3) — произвольные функции.
Таким образом, мы нашли целый класс стабилизирующих алго-
алгоритмов управления. Произвольные функции pi (г = 1,2,3) и поло-
положительную константу Л можно выбирать исходя из требований к
качеству системы.
266 Гл. 8. Методы синтеза систем управления
8.3.3. Синтез стабилизирующего закона управления при
линейном относительно состояния уравнении объекта. Чтобы
воспользоваться алгоритмом управления (8.44), необходимо задать
одну из двух положительно определенных функций, u?(x, i) или V(х, ?),
а вторую определить исходя из уравнения (8.45). Однако в общем
случае, когда объект описывается уравнением (8.34а), каких-либо
рекомендаций по выбору этих функций нет. Задача синтеза намного
упрощается, когда управляемая система описывается линейным отно-
относительно вектора состояния уравнением
х = Лх + Б<р(и,?), xEiT, ueiT. (8.46)
Здесь А, В — постоянные (п х п)-матрица и (n x г)-матрица,
пара (Л, В) управляема, т. е. ранг матрицы управляемости равен п:
гапкУ=гапк[Б АВ ... Ап~1В] = щ (8.47)
нелинейная функция y>(u, t) удовлетворяет условию
cp(O,t) = O, uTu^uT(p(u,t) yt^t0. (8.48)
Линейный объект. Функция (p(u,t) = u удовлетворяет послед-
последнему условию (8.48). Следовательно, стабилизирующий закон управ-
управления объекта (8.46) будет стабилизирующим законом управления и
для объекта, который описывается линейным уравнением
х = Лх + Би, х G if\ ueiT, t^O. (8.49)
Поэтому сначала найдем стабилизирующие законы управления для
более простого объекта (8.49), а затем вернемся к исходному объек-
ту (8.46).
В случае объекта (8.49) g(x, t) = Лх , и уравнение (8.45) принима-
Если принять
Л = const, w = xTQx, I = Lx,
то последнему уравнению будет удовлетворять квадратичная форма
V = хтГх. Действительно, так как
то оно принимает вид
2хтГ(Л + ?L)x - 2АхтГББтГх + xTQx = 0.
Преобразуя первое слагаемое в соответствии с тождеством
2хтСх = хт(С + Ст)х, последнее равенство можно представить в
виде
хт[(ГЛ + YBL) + (ТА + ТВЬ)Т - 2ХТВВТТ + Q]x = 0.
8.3. Синтез систем, основанный на методе функций Ляпунова 267
Это равенство будет выполнено тождественно, если имеет место ра-
равенство
ТА + YBL + {ТА + TBL)T - 2\ТВВТТ + Q = 0. (8.50)
Если пара (Л, В) вполне управляема и Л > 0, то это матричное урав-
уравнение разрешимо, и его решением будет положительно определенная
матрица Г.
Закон управления (8.44) при выборе функции h(x, i) в соответст-
соответствии с (8.42) принимает вид
и = (-ХВТГ + РВТТ + L)x. (8.51)
Здесь Р — произвольная кососимметрическая матрица.
При 1 = 0, р = 0 закон управления (8.51) и уравнение (8.50)
принимают вид _,
и = -АБтГх, (8.52а)
YA + АТТ - 2ХГВВТГ + Q = 0. (8.526)
Нелинейный объект. Закон управления (8.52), стабилизирую-
стабилизирующий линейный объект (8.49), является стабилизирующим законом
управления, и для нелинейного объекта (8.46)
х = A*
т.е. замкнутая система (8.46), (8.52) асимптотически устойчива.
Чтобы доказать это, достаточно показать, что положительно опре-
определенная квадратичная форма V = хтГх является функцией Ляпуно-
Ляпунова для системы (8.46), (8.52), удовлетворяющей теореме об асимпто-
асимптотической устойчивости.
Производная по времени этой квадратичной формы в силу урав-
уравнения (8.46) имеет вид
V = 2хтГ[Лх + B<p(u,t)] = хт(ГЛ + ЛтГ)х т
Прибавив и вычтя хт2АГ55тГх, получим
V = хт(ГЛ + АТТ - 2\ТВВТТ + 2АГББтГ)х
Используя (8.526), это соотношение можно преобразовать к виду
V = xT(-Q т т
ИЛИ . 9
V = -xTQx + I (-А?тГх)т(-А?тГх - ip).
Л
Отсюда, учитывая закон управления (8.52а), получаем
V = -xTQx + \ (uTu - итср). (8.53)
Л
В силу условия (8.48) второе слагаемое в правой части является
неположительным. Следовательно, производная V является отрица-
отрицательно определенной функцией.
268 Гл. 8. Методы синтеза систем управления
Пример 8.10. Определить стабилизирующий закон управления
для объекта
x-b(l + e-at)u = 0, Ъ>0, а>0.
Решение. В нормальной форме уравнение объекта принимает
вид хг =х2, х2 = ЪA + e~at)u.
В данном случае имеем (см. (8.46))
Функция ср удовлетворяет условию (8.48). Примем Л = 1/2 и матри-
матрицы Q и Г представим следующим образом:
Q- \qi °1
Найдем произведения матриц, необходимые для записи соотноше-
соотношений (8.52): , ,, ,
ГА = I 71 7 11 0 1 | _ | 0 71
7 72JLO 0J [0 7 f
^Т=|° Ч[71 7] ГО О
0J [т 72 J [7i 7
7i 7 ' '
7 72
ГВВтТ= (lb\
Уравнение (8.526) принимает вид
711 , [0 0] _ Гб272 &2772] __Г?1 0
0 7 J + [71 7J [&2772 Ь2722 J " [о q2
В скалярной форме оно записывается в виде
-6272 = -Я.и 7i - &2772 = 0, 27 - &272 = -Q2-
Чтобы матрица Г была положительно определенной, по критерию
Сильвестра решение этой системы должно удовлетворять условию
7i > 0, 7i72 — 72 > 0- Таким решением является
Закон управления (8.52а) принимает вид
Ь
^ = X G*^1 ~г 72^2/ -- X 1 V Я.1 Х\ Л~ \/ j Х2
8.4- Синтез систем методом линеаризации обратной связью 269
8.4. Синтез систем методом линеаризации
обратной связью
Основная идея метода синтеза нелинейных систем, основанного на
линеаризации обратной связью, состоит в том, чтобы преобразовать
нелинейную систему в линейную алгебраическим способом и синте-
синтезировать систему, используя методы синтеза линейных систем. Этот
метод применялся при решении практических задач. В частности, он
был успешно использован при разработке систем управления верто-
вертолета, промышленных роботов, современных самолетов и биомедицин-
биомедицинской аппаратуры [69].
Здесь мы на конкретном примере рассмотрим процедуру синтеза
систем управления, основанную на линеаризации обратной связью.
В качестве объекта управления примем
двухзвенный робот (рис. 8.5). Уравнения
такого робота в общем виде можно запи-
записать в виде
¦?(q,q)q + C(q)=u, (8.54)
где q = (qi qz)T — вектор обобщенных
координат (рис. 8.5); A(q), 5(q, q) —
B x 2)-матрицы, C(q) — B x ^-матри-
^-матрица (вектор-столбец); u = (щ U2)T —
вектор управлений. Матрица A(q) яв-
является невырожденной (неособой). В
качестве управлений ui, 112 обычно
принимаются моменты вращения, разви-
развиваемые исполнительными двигателями.
Рис. 8.5. Двухзвенный робот
Рассмотрим задачу слежения — задачу перемещения схвата по
заданной траектории. Эта задача сводится к задаче изменения обоб-
обобщенных координат по определенным законам:
Произведем преобразование обратной связью
u = 5(q, q)q + C(q) + A(q)v, (8.55)
где v = (i?i V2)T —- новый вектор управления. Так как матрица A(q)
является невырожденной, то, подставив последнее выражение для
управления в уравнение (8.54), получим
q = v.
Чтобы найти алгоритм управления для полученной линейной сис-
системы, обеспечивающий изменение обобщенных координат по задан-
заданному закону q = q* (t), воспользуемся методом обратной задачи ди-
динамики. Для этого зададимся следующим эталонным (желаемым)
270 Гл. 8. Методы синтеза систем управления
уравнением для ошибки слежения е = q(?) — q* (t):
ё + аё + /3е (а, C > 0).
Отсюда имеем
q = q*-«(q-q*)+/3(q-q*).
Подставив это выражение в (8.56), получим
v = q*-a(q-q*)+/3(q-q*).
Отсюда и из соотношения (8.55) находим
u = B(q, q)q + C(q) + A(q) [q* - a(q - q*) - /J(q - q*)].
Обычно алгоритм управления, который получается методом ли-
линеаризации обратной связью, является довольно сложным, и его реа-
реализация требует большого объема информации. И это естественно,
так как высококачественное управление требует максимального ис-
использования информации об объекте. Однако необходимая информа-
информация об объекте может отсутствовать. В этом случае потребуется
использование принципа адаптивного управления.
8.5. Синтез стабилизирующих законов управления
методом декомпозиции
Рассмотрим задачу синтеза стабилизирующих законов управления
для управляемой системы, которую можно представить в виде г
взаимосвязанных подсистем
u(*) ^ t) + h(*) (x(i) ^^^ x(k-i) ^ x(*+i) ^^^ х(г)} ^
х^ЕГ, u^eRT\ к = 1,2,..., г. (8<5Г)
Начало координат х = 0 является положением равновесия:
(р^к) @, t) = 0, h(fe) @, 0, ..., 0) = 0. (8.58а)
Функции (р(к^ и Ъ.^ удовлетворяют следующим условиям:
(и(*0 )Ти(к) _ (и(*) )Т^(Л) ^q^ к = 1,2,..., г, (8.586)
|h(*)|^5Zftfci|xW|, ftfci^0, к = 1,2,...,г. (8.58в)
г=1
Для решения этой задачи воспользуемся методом декомпозиции.
Этот метод состоит в том, что без учета взаимосвязей строятся
законы управления для каждой независимой подсистемы, а затем
исследуется устойчивость агрегированной синтезированной системы
с учетом взаимосвзей, как это делалось в гл. 7.
8.5. Синтез стабилизирующих законов управления 271
Если отбросить слагаемые h^, то получим г независимых под-
подсистем
х<*> =Л*х(*>+?*?>(*> (u(*\t)), Л = 1,2,...,г. (8.59)
Эти подсистемы имеют такой же вид, что и система (8.46). Поэтому в
качестве стабилизирующих законов управления можно использовать
раннее полученные для этой управляемой системы стабилизирующие
законы управления (8.52). В соответствии с этими законами управле-
управления имеем гр AЛ
ик = -A*Bjf ГЛх<*), к = 1, 2,..., г, (8.60а)
ТкАк + АткТк - 2\кТкВкв1тк + Qk = 0, к = 1,2,...,г, (8.606)
где А/. — произвольные положительные числа, Qk — произвольные
положительно определенные матрицы, Г& — положительно опреде-
определенные матрицы, являющиеся решениями уравнений (8.606). Теперь
нужно исследовать устойчивость агрегированной замкнутой систе-
системы (8.57), (8.60) и при необходимости изменить некоторые параметры,
которые можно варьировать.
Для замкнутых систем (8.59), (8.60) квадратичные формы
являются функциями Ляпунова. В соответствии с теоремой 7.3а эти
формы удовлетворяют условиям (см. G.21а) и G.21в))
2, Л = 1,2,..., г, (8.61а)
|, * = 1,2,...,г, (8.616)
где А^ и AMfc — минимальные и максимальные собственные значения
матриц Ffc.
Согласно формуле (8.53) имеем
Vk = -(x(*))TQ*xW + A [(uW)V - (u(*))Vfc))].
Учитывая условие (8.586) и неравенства вида (8.61а) для квадратич-
квадратичной формы (x^^QfcX^, находим
14 ^ -(x«)TQfex« < -Ag*|x*|2, (8.61в)
где A^fc — минимальное собственное значение матрицы Q&.
Используя параметры, входящие в соотношения (8.58в) и (8.61), за-
запишем выражения для элементов матрицы D = (dij) (г, j = 1, 2,..., г)
(см G.36)): Qk
d** = -j5v * = 1.2,...,r, (8.62a)
2Л
Q?Ti ' *,* = !, 2,..., г, г^А;. (8.626)
Am Am
272
Гл. 8. Методы синтеза систем управления
Х7
6 6 6 6
Рис. 8.6. Система из четырех маятников
Согласно критерию Севастьянова—Котелянского, для того чтобы
система (8.57), (8.60) была асимптотически устойчива, достаточно,
чтобы выполнялись следующие неравенства (см. G.39)):
d
12
> 0, к = 1,2,...,г.
(8.63)
В качестве примера рассмотрим задачу о демпфировании четырех
маятников, связанных между собой пружиной (рис. 8.6).
Пример 8.11. Колебания системы из четырех маятников при
определенных допущениях могут быть описаны уравнениями [59]
Jb ]_ — Jb
Х3 = X
ХЪ = X
Х7 = X
2, Х2
4, Х4
6, Х6
8, Х8
— —а\Х\
= а2хх -
— а2хз —
— а2х$ —
а2х3
а2х7
где xi, Ж3, Жб, ^7 — углы отклонения маятников, функции (fi(ui,i)
(i = 1, 2, 3,4) удовлетворяют условиям
/ г\. (j J т 1 — j J УУ т ^^ JJ II. 7 / ' (Г)' ^^ () 7 — x1 4
Требуется определить стабилизирующие законы управления, т.е.
законы управления, обеспечивающие гашение колебаний данной сис-
системы.
Решение. Данную систему естественно рассматривать как сис-
систему, состоящую из четырех подсистем, которые описываются урав-
уравнениями
= 1,2,3,4,
где
8.5. Синтез стабилизирующих законов управления 273
О 11 / О \
, Bk =(-,), </? = РкЫк, ?)? к = 1, 2,3,4,
—ai U VI/
hW = ^fffx«, А; = 1,2,3,4,
Я?
я?
я1 -
2 -
= [°
|_&2
= 0,
г=1
[°
|_а2
°1
oj'
я| =
з1 = 0, Hi = 0,
О
TTZ (Л
а2 0 1' ^-U'
О 0] з ГО
а2 oj' Я4 [а
.«2 0|'
О
fi — 0, Нг, — 0, .tJ-q — | _ | .
1 2 6 ' а2 О J
На основании свойства нормы матрицы (см. G.31))
||Л|| ||х|| можем записать
г=1
В последнем соотношении нормы матриц и векторов являются ев-
евклидовыми. В соответствии с принятыми в условии (8.58в) обозна-
обозначениями hki = \\Н%||. Согласно утверждению 7.1 евклидова норма
матрицы А равна у/\м, где Лм — максимальное собственное значе-
значение произведения АТА. Поэтому чтобы определить \\Н%||, вычислим
произведения соответствующих матриц:
= (H3) h3=
Для выписанных произведений матриц максимальные собствен-
собственные значения равны Лм = а|, а для остальных произведений {Hf)THf
равны нулю. Поэтому имеем
Ли = \\Щ\\ = а2, /из = ЦЯд1!! = 0, Л14 = ||Я||| = 0,
/i2i = \\Щ\\ = а2, h2Z = \\Щ\\ = а2, h2i = \\Щ\\ = 0,
/i3i = \\Щ\\ = 0, h32 = \\Щ\\ = а2, /134 = \\Щ\\ = о2,
/141 = \\Hf\\ = 0, Л42 = ||Я24|| = 0, /143 = ||Я4|| = О2.
Согласно соотношениям (8.60) имеем
ик = -\кв1ткх{к\ Л = 1,2,3,4,
ТкАк + AlTk - 2\кТкВкв1тк + Qk = 0, к = 1,2,3,4.
18 Д.П. Ким
274
Гл. 8. Методы синтеза систем управления
Положим
1
= ^, Qk =
Подставив эти выражения и выражения для
уравнения, получим
в последние
7i
7
7i
7
7 772
772 72
0
О
q2
= 0.
В скалярной форме это уравнение принимает вид
-27ai-72 + gi =0,
7i - «172 - 772 = 0,
27-72+92=0.
Чтобы матрица Г^ была положительно определенной, решение
должно удовлетворять критерию Сильвестра ji > 0, 7172 ~ 72 > 0-
Этому условию удовлетворяет следующее решение:
7i = у ai + ^1 у Q2 ~ 2ai + 2y af
Согласно приведенным выше формулам для управлений имеем
( + )
Для определения устойчивости агрегированной системы нужно
вычислить элементы матрицы D = (dik) (г, fc = 1, 2, 3,4). А для этого
необходимо знать минимальное собственное значение матриц Q& и
минимальное и максимальное собственные значения матрицы Г^.
Так как q\ > q2, то минимальное собственное значение для всех мат-
матриц Qk равно Х^к = q2. Положив A
лам (8.62) находим (см. теорему 7.3а)
42
= 7m
dkk = -
27м'
= 2,3,4,
к = 1,2,3,4,
<?2 7m
2 7м«1
= 7м, по форму-
форму= 1,3,4,
= 1,2,3.
По критерию Севастьянова-Котелянского агрегированная сис-
система будет устойчива, если будут выполнены неравенства
= -du > 0, А2 =
Задачи
275
dii
Аз = -
di3
d23
d33
> О, А4 =
isi
Чтобы исследовать устойчивость агрегированной системы, нужно
выбрать параметры q\ и ^2, вычислить элементы матриц Г^, найти
минимальное и максимальное собственные значения этих матриц.
После этого можно определить элементы матрицы D и проверить
устойчивость.
Задачи
1. Управляемая система описывается уравнением
у + ау + у2 = и.
Определить закон управления, при котором ошибка слежения х =
= у — y*(t) за задающим воздействием y*(i) подчиняется уравнению
х + 4ж + 4 = 0.
2. Управляемая система описывается уравнением
у + ау + у2 + B + sin 2t)u = 0.
Определить закон управления, при котором изменение ошибки
слежения x = y — y*(t) за задающим движением y*(i) описывается
функцией x=(Cl+C2t)e-*
(Ci, C2 — постоянные интегрирования).
3. Система с переменой структурой описывается уравнениями
Х\ — Х2-> Х2 = Жз, Хз = U,
= -<фХ1 - ди,
> О,
ди =
> О,
s < 0,
до > О,
a,
-a,
S = С\Х\ + С2^2 + Жз-
Требуется определить параметры a, ci и С2, при которых система
асимптотически устойчива и степень устойчивости при скользящем
режиме принимает максимальное значение.
4. Система с переменой структурой описывается уравнениями
X\ — X2, X2 —
• = —Ф1Х1 — Ф2Х2 — Ф3Х3,
= #4,
> О,
< О,
г = 1,2,3,
S = C\X\ + С2Ж2 + С3Ж3 + Ж4.
Определить параметры ai (i = 1,2), Cj (j = 1,2,3), при кото-
которых система асимптотически устойчива и степень устойчивости при
скользящем движении принимает максимальное значение.
18*
276 Гл. 8. Методы синтеза систем управления
5. Управляемая система описывается уравнением
у + ay + b(l + sin2 t)u = 0.
Требуется определить стабилизирующие алгоритмы управления.
6. Управляемая система описывается уравнением
у + ay + bB + sin t + e~2t)u = 0.
Определить стабилизирующие алгоритмы управления.
7. Управляемая система описывается уравнением
Найти алгоритм управления, при котором ошибка слежения е =
= y(t) — y*(t) подчиняется уравнению
"ё + Зё + Зё + е = 0.
8. Управляемая система описывается уравнением
§ + A + sin2 t) |f + A + е~*)у + Зу + в* = и.
Найти алгоритм управления, при котором ошибка слежения е =
= y(t) — y*(t) подчиняется уравнению
е' + Зё + Зё + е = 0.
9. Синтезировать алгоритм управления, при котором корни ха-
характеристического уравнения синтезированной линеаризованной об-
обратной связью системы равны —1 и —2, для следующих систем:
а) х\ — Х2ч %2 = х\ + щ б) х\ — Х2ч %2 = х\ + 2щ
в) х\ — х2 + п, ж2 = ж2.
10. Синтезировать алгоритм управления, при котором корни ха-
характеристического уравнения синтезированной линеаризованной об-
обратной связью системы равны —1, —2 и —3, для следующей системы:
Х\ — Х2, Х2 = х\ + U, Х3 = Х\ + 2^2-
11. Пусть колебания двух связанных маятников описываются
уравнениями
xi = ж2, х2 = - + +(t)
Методом декомпозиции определить стабилизирующий закон уп-
управления При УСЛОВИИ U? — Щ(рг ^0, 2 = 1,2.
12. Пусть колебания трех связанных маятников описываются
уравнениями
Х\ = Х2, Х2 = —CLlXi + CL2X3 + (fi(ui,t),
Х3 = Ж4, Ж4 = CL2X1 ~
ж5 = ж6, ж6 = а2х3 -
Методом декомпозиции определить стабилизирующий закон уп-
упц
равления при условии и? — Ui^pi ^0, г = 1, 2, 3, 4.
\
п
р
\f
ОУ
Глава 9
МЕТОДЫ ТЕОРИИ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
9.1. Общие положения и постановка задачи
В общем случае система автоматического управления состоит
из объекта управления (управляемой системы) ОУ, регулятора Р
и программатора (задающего устройства) П, вырабатывающего
программу движения (задающее воздействие) (рис. 9.1). Здесь И
обозначает совокупность внешней
информации, которая поступает на
программатор, / — возмущение. В
простейших случаях (система ста- * f |
билизации, система программного ^ '
управления, следящие системы) про- Рис* 9<1- ОбЩая блок-схема сис-
грамматор представляет собой за- темы управления
датчик, вырабатывающий постоянное воздействие или априори из-
известную или неизвестную функцию времени. В более сложных случаях
(системы самонаведения, системы управления автономными подвиж-
подвижными объектами) программатор определяет программу (траекторию)
движения. Задача синтеза оптимальной системы управления состоит
в том, чтобы синтезировать регулятор и программатор, которые
в определенном смысле наилучшим образом решают поставленную
задачу управления. В соответствии с этим рассматриваются две
родственные задачи: синтез оптимального программатора и синтез
оптимального регулятора. Математически эти задачи могут быть
сформулированы единообразно и решаться одними и теми же метода-
методами. Но в то же время эти задачи имеют специфические особенности,
которые делают целесообразным на определенном этапе их раздель-
раздельное рассмотрение. Особенности обуславливаются тем, что решение
первой задачи связано, как правило, с определением программного
управления, а решение второй задачи — с определением управления
с обратной связью. Программным управлением называют управление
в виде функции от времени, управлением с обратной связью —
управление в виде функции от фазовых координат.
Системы с оптимальным программатором называют оптималь-
оптимальными по режиму управления, а системы с оптимальным регулято-
278 Гл. 9. Методы теории оптимального управления
ром — оптимальными по переходному режиму. Системы управления,
оптимальные по режиму управления и/или по переходному режиму,
называют оптимальными системами управления.
9.1.1. Общая постановка задачи оптимального управле-
управления. Задача синтеза оптимальных систем управления относится к
классу задач оптимального управления и формулируется как вариаци-
вариационная задача. При этом кроме уравнения объекта управления должны
быть заданы ограничения на управление и фазовый вектор, краевые
(граничные) условия и критерий оптимальности.
Пусть уравнение объекта задается в нормальной форме:
x = f(x,u,t), (9-1)
или в скалярной форме:
Xi = /i(x,u,f), г = 1,2,...,п,
где х = (xi Х2 ... хп)Т — фазовый вектор, и = (щ U2 ... иг)т — уп-
управление или вектор управления.
На вектор управления и фазовый вектор могут быть наложены
ограничения в виде конечных соотношений — равенств и неравенств.
Эти ограничения определяют допустимые множества значений, кото-
которые могут принимать эти вектора. Поэтому указанные ограничения
в общем виде могут быть записаны в виде
u(t) e uu x(t) e xt. (9.2)
Здесь Ut, Xt — некоторые заданные множества, зависящие, вообще
говоря, от времени, причем Щ С Rr и Xt С Rn, т.е. Ur — под-
подмножество r-мерного пространства, Xt — подмножество п-мерного
пространства.
В (9.2) первое соотношение называется ограничением на управ-
управление, второе соотношение — ограничением на фазовый вектор или
фазовым ограничением. Ограничения на управление и фазовый вектор
в (9.2) представлены отдельно, т. е. они разделены. Однако они могут
быть и не разделены. Поэтому в общем случае эти ограничения
записываются в виде
(u(t),x(())eyt, vtcRn+r.
Краевые (граничные) условия — ограничения на фазовый вектор
в начальный и конечный tf моменты времени — также могут быть
представлены в виде включения
х(«о) е Хо, x(t,) G Xf, (9.3)
когда эти ограничения разделены, и в виде
если они не разделены. Вектор х(?о) называют левым, а вектор х(?/) —
правым концом траектории.
9.1. Общие положения и постановка задачи 279
Критерий оптимальности, который является числовым показате-
показателем качества системы, задается в виде функционала
J = J[x(^o),x(^); u(*),x(*)]. (9.4)
Задача оптимального управления формулируется следующим об-
образом: при заданных уравнении объекта (9.1), ограничениях на управ-
управление и фазовый вектор (9.2) и краевых условиях (9.3) определить
такие программное управление u*(t) или управление с обратной
связью u*(x(?), t) и фазовую траекторию х*(?), при которых критерий
оптимальности (9.4) принимает минимальное (или максимальное)
значение.
Дальше для определенности примем, что функционал (9.4) мини-
минимизируется. Задачу максимизации введением нового критерия JH =
= — J всегда можно свести к задаче минимизации. Управления и*(?)
и и*(х(?),?) называются оптимальными управлениями, траекто-
траектория x*(t) — оптимальной траекторией.
9.1.2. Примеры постановки задач оптимального управ-
управления.
1. Задачи оптимального управления летательным аппаратом (ЛА).
Рассмотрим упрощенное уравнение движения ЛА в вертикальной
плоскости (рис. 9.2) г]>
mv = р + q,
или, в проекциях на горизонтальную ? и верти-
вертикальную г] оси неподвижной системы координат,
тя = Pi + q\ •> mri = P2 + #2,
где 771 = 771/ + mp(?) — масса ЛА; mp(f) — реак- Рис. 9.2. К выводу
тивная масса; v = (?т))т — скорость ЛА; р = уравнений ЛА
= (pi Р2)Т — реактивная сила; q = (qi q2)T — равнодействующая
сила всех остальных сил (сила тяжести, сила сопротивления воздуха
и др.).
Реактивная сила имеет вид
р = 771W, |w| = COnst,
где w = (wi w2)T — относительная скорость отделяющихся частиц,
w| = \Jw\ + w\ — евклидова норма, |tti| = |?7ip| — секундный расход
реактивной массы.
Введя обозначения
Х\ = ?, х2 = ?7, Хз = С, Х4 = т), и\ = pi/m, u2 = р2/т,
~qx = qi/m, q2 = q2/m,
уравнения движения Л А можно записать в нормальной форме:
280
Гл. 9. Методы теории оптимального управления
или в векторном виде:
х = Лх + B\i + q.
(9.5)
Здесь
х =
'хЛ
0
0
0
0
0
0
0
0
1
0
0
0
0
1
0
0
J B =
0
0
1
0
0
0
0
1
j q =
0
0
U
w
(9.6)
Отношение реактивной силы к массе ЛА принимается за управ-
управление. Траектория Л А не должна пересекать земную поверхность.
Поэтому должно выполнятся ограничение на фазовый вектор
х2 ^ 0. (9.7)
Теперь рассмотрим различные постановки задачи, связанные с Л А.
Задача 1 (вывод Л А в заданную точку фазового пространства
за минимальное время). Пусть реактивная сила ограничена: |р| ^ рт.
Требуется вывести Л А из фиксированной начальной точки х(?о) = х°
в фиксированную конечную точку х(?/) = х^ за минимальное время.
Эта задача является задачей оптимального управления с уравнением
объекта (9.5), (9.6), фазовым ограничением (9.7), ограничением на
управление
|u| ^ ит, иш = рт/т, (9.8)
краевыми условиями х(?о) = х°, х(?у) = х-' и критерием оптималь-
оптимальности J = tf — to- Здесь to — начальный момент (будем его считать
фиксированным, т.е. заданным); tf — конечный момент (момент
достижения Л А точки х^), который заранее не известен, т. е. является
нефиксированным.
Задача 2 (вывод Л А в заданную точку геометрического прост-
пространства за минимальное время). При ограничении на управление (9.8)
требуется вывести Л А из заданной точки х(?о) = х° фазового прост-
пространства в заданную точку (xi(tf),X2(tf)) = (#{,#2) на вертикальной
плоскости «геометрического» пространства за минимальное время.
В данной задаче левый конец x(to) фиксирован (т.е. положение и
скорость Л А в момент to заданы), правый конец x(tf) не фиксирован:
в конечный момент tf положение ЛА на вертикальной плоскости
задано, на его скорость никаких ограничений не наложено.
Задача 2 оптимального управления отличается от задачи 1 только
условием на правом конце траектории. В задаче 1 каждое из мно-
множеств Хо и Xf состоит из одной точки, а в задаче 2 множество Xq
состоит из одной точки, а множество Xf — из точек двухмерной
плоскости фазового пространства, определяемой уравнениями х\ =
— JL-\ , Jb2i — **^2 '
Задача 3 (перевод Л А на максимальную дальность). В данном
случае важно учесть конечность реактивной массы, так как дальность
9.1. Общие положения и постановка задачи 281
полета зависит прежде всего от количества реактивной массы (топ-
(топлива). В силу того, что
|и| = \р\/т = (\т
t
конечность топлива накладывает на управление следующее ограни-
ограничение: t
J\u\dt = Bu Bx = |w|ln(^). (9.9)
to mf
Здесь m0 = m(to) и m/ = m(tf).
Ограничение такого типа называется изопериметрическим. Ко-
Конечный момент tf определяется из условия X2(tf) = 0 (высота равна
нулю). Задача перевода Л А на максимальную дальность формулиру-
формулируется следующим образом: при заданном уравнении объекта (9.5), (9.6),
фазовом ограничении (9.7) и краевых условиях х(?о) = х°, жг(?/) — О
определить управление, при котором функционал J = —x\{tf) прини-
принимает минимальное значение. В этом случае множество Xq состоит из
одной точки, а множество Xf — из точек многообразия, определяемого
уравнением Х2 = 0.
Задача 4 (вывод Л А на максимальную высоту). В данном случае
также важно учитывать ограниченность топлива. Кроме того, ко-
конечный момент tf определяется условием x^itf) = 0 (вертикальная
составляющая скорости равна нулю). Задача оптимального управле-
управления формулируется точно так же, как и задача 3, но при краевых усло-
условиях х(?о) = х°, x±(tf) = 0, и критерий оптимальности J = —X2(tf).
Сделаем ряд общих замечаний. Естественно, реактивная масса
всегда ограничена, но тем не менее это ограничение не учитывалось
при формулировке задач 1 и 2. Принималось, что топлива достаточно
для достижения целей, рассматриваемых в этих задачах. При фор-
формулировке задач 3 и 4 считалось несущественным и не учитывалось
ограничение на величину управления, хотя оно всегда имеет место.
В то же время в задачах 1 и 2 его нельзя не учитывать, так как
это привело бы к нереализуемому оптимальному управлению и*(?):
при иш —у оо максимальное значение |и*(?)| стремилось бы к беско-
бесконечности, а критерий оптимальности J —у 0. Точно так же нельзя не
учитывать ограничение на топливо при формулировке задач 3 и 4,
так как в противном случае, как это ясно из физических соображений,
существует бесчисленное множество управлений, при которых J =
= —оо.
2. Задачи оптимального управления двигателем. Уравнение дви-
двигателя постоянного тока можно записать в виде
1ф = гя&фФ — Мс,
где / — момент инерции вращающейся части двигателя, ip — угол
поворота вала двигателя, гя — ток в якорной цепи, кф — конструк-
конструктивная постоянная, Ф — магнитный поток, Мс — момент сопротив-
282 Гл. 9. Методы теории оптимального управления
ления. Используя обозначения
Ъ = кфФ/I, х\ — </?, Х2 — ф-> и = гя, ис = Мс//,
приведенное выше уравнение двигателя можно записать в нормальной
форме:
Х\ = #2, Х2 = bit — UCJ
или в векторной форме:
х = Лх + Би + 5, (9.10)
где
Здесь для получения простой модели объекта, которая дальше часто
используется, за управление принимается ток в якорной цепи.
Задача 5 (поворот двигателя на заданный угол без остановки
за минимальное время). Сила тока в якорной цепи ограничена. По-
Поэтому на управление накладывается ограничение |u| ^ иш. Задача
оптимального управления формулируется следующим образом: при
заданных уравнении объекта (9.10), (9.11), ограничении на управле-
управление |u| ^ ит, краевых условиях
х(*о)=х°, x1(tf)=x{ (9.12)
найти управление, при котором функционал J = tf — to принимает
минимальное значение. Здесь х{ — заданный угол, на который нужно
повернуть вал двигателя. На угловую скорость в конечный момент
никаких ограничений не накладывается.
Задача б (поворот вала двигателя на заданный угол с останов-
остановкой за минимальное время). Задача оптимального управления фор-
формулируется точно так же, как и задача 5, но при краевых условиях
х(*о) = х°, Xl(tf) = x{, x2(tf) = 0. (9.13)
Задача 7 (поворот вала двигателя на заданный угол за вре-
время Т при минимальном расходе энергии). Энергия пропорциональна
интегралу от квадрата управления (силы тока). Так как постоянный
множитель перед функционалом не влияет на решение вариационной
задачи, за критерий оптимальности примем интеграл
*/
J = Г и2 dt,
to
где t0, tf — фиксированы и tf — to = Т. Ограничения на управление
не накладываются. Краевые условия совпадают: а) с условием (9.12),
если после поворота вала двигателя на заданный угол его не нужно
останавливать; б) с условием (9.13), если после поворота вала двига-
двигателя на заданный угол его нужно остановить.
9.1. Общие положения и постановка задачи 283
9.1.3. Классификация задач оптимального управления и
их преобразования.
1. По виду ограничений оптимального управления разли-
различают:
а) задачу классического типа, когда ограничения задаются в виде
равенств
ipk(x,u,t) = О, к = 1,2,..., т;
б) задачу неклассического типа, когда среди ограничений имеются
ограничения в виде неравенств
<р*(х,М) ^0, к = 1,2,...,т. (9.14)
К классическому типу относятся также задачи с ограничениями
вида tf
7n+J-(x,iM)<ft = bj, j = l,2,...,l. (9.15)
0
Такие ограничения называют изопериметрическими ограничениями,
а вариационные задачи с такими ограничениями называют изопери-
изопериметрическими задачами.
Введением дополнительных переменных от изопериметрических
ограничений всегда можно избавиться. Достаточно вместо изопери-
изопериметрических ограничений (9.15) в условие задачи ввести следующие
уравнения и краевые условия:
Xn+j = /n+j(x,u,f); xn+j(t0) = 0, xn+j(tf) = bj, j = 1,2,...,/.
Формально задачи неклассического типа введением дополнитель-
дополнительных переменных можно преобразовать к задачам классического типа.
Действительно, ограничения (9.14) можно заменить ограничениями
вида
<Pfc(x,u,*) + и2г+к =0, k = l,2,...,m.
Задачи оптимального управления неклассического типа могут
иметь ограничения вида
*/
Jfn+8(x,u,t)dt ^ C8, s = 1,2,...,р.
Введением дополнительных переменных эти ограничения могут быть
заменены соотношениями
Xn+s = /n+s(x,u,?); xn+s(t0) = 0, xn+8(tf) ^ C8, s = 1,2,...,р.
Как нетрудно заметить, при преобразованиях изопериметрических
ограничений вводимые дополнительные переменные представляют со-
собой фазовые координаты, а при преобразованиях неизопериметричес-
ких ограничений вводимые переменные играют роль дополнительных
координат векторного управления.
Среди рассмотренных выше задач задачами оптимального управ-
управления классического типа являются задачи 3, 4 и 7, неклассического
типа — задачи 1, 2, 5 и 6.
284 Гл. 9. Методы теории оптимального управления
2. По виду краевых условий различают:
а) задачи с фиксированными (закрепленными) концами, когда
каждое из множеств Xq и Xf состоит из одной точки (все фазовые
координаты в начальный и конечный моменты заданы, т.е. фиксиро-
фиксированы) ;
б) задачи с подвижным правым концом (когда Xf состоит более
чем из одной точки), с подвижным левым концом (Xq состоит более
чем из одной точки), с подвижными концами (оба конца подвижны).
Среди рассмотренных выше задач задачами с фиксированными
концами являются задачи 1, б и 7, б), с подвижным правым концом —
задачи 2, 3, 4, 5 и 7,а).
3. По времени начала и окончания процесса разли-
различают:
а) задачи с фиксированным временем, когда начальный to и конеч-
конечный tf моменты фиксированы;
б) задачи с нефиксированным временем, когда хотя бы один из
моментов времени to или tf не фиксирован.
Среди рассмотренных выше задач только задача 7 является за-
задачей с фиксированным временем. Все остальные задачи являются
задачами с нефиксированным временем.
4. По критерию оптимальности различают:
а) задачу Больца — критерий оптимальности имеет вид
*/
J = go[x.(to),x(tf),to,tf] + у /0(х, u, t) dt;
to
б) задачу Лагранжа — критерий оптимальности имеет вид
J =
to
в) задачу Майера — критерий оптимальности имеет вид
J = g
Задача Майера в частном случае, когда функционал имеет вид
J = go[x(t f), t f] (т.е. зависит только от конечного состояния и, быть
может, от конечного момента времени), называется задачей терми-
терминального управления, а когда функционал имеет вид J = (tf — to) —
называется задачей максимального быстродействия. Среди рассмот-
рассмотренных выше задач задача 7 является задачей Лагранжа, остальные
задачи являются задачами Майера, причем задачи 1, 2, 5 и б являют-
являются задачами максимального быстродействия.
Задачи Больца, Лагранжа и Майера эквивалентны в том смысле,
что путем преобразования переменных каждую из задач можно пре-
преобразовать в любую другую задачу.
9.2. Метод множителей Лагранжа 285
9.2. Метод множителей Лагранжа
(методы классического вариационного исчисления)
Если концы закреплены и время фиксировано, то задачу оптималь-
оптимального управления классического типа можно сформулировать как сле-
следующую задачу Лагранжа классического вариационного исчисления:
Xi = /;(x,u,f), г = 1,2,..., га;
Xi(t0) = ж?, Xi(tf) = ж{, г = 1,2,..., га;
*/
J — I /o(x5 U5 ?) ^ —> min.
Предполагается, что функции /i(x, и, ?) (г = 0,1,..., га) и у?А;(х,
u, ?) (fc = 1, 2,...,/) являются непрерывными и дифференцируемыми
по всем своим аргументам, управление и(?) принадлежит классу ку-
кусочно непрерывных функций, а траектории х(?) — классу кусочно
гладких функций.
Напомним, что функция u(t) называется кусочно непрерывной на
интервале [to,tf], если она (т.е. каждая его координата) непрерывна
всюду на [tojtf], за исключением конечного числа точек, где она имеет
разрыв первого рода (существуют конечные пределы слева и справа).
Функция х(?) называется кусочно гладкой на [to,tf], если на [to,tf]
она сама непрерывна, а ее производная кусочно непрерывна.
Управление u(t) из класса кусочно непрерывных функций назы-
называют допустимым управлением, а траекторию х(?) из класса кусоч-
кусочно гладких функций — допустимой траекторией. Пару (и(?),х(?))
называют допустимой, если допустимыми являются u(t) и х(?). В
каждой конкретной задаче на допустимые управления и траектории
могут быть наложены дополнительные ограничения. Поэтому при
рассмотрении определенного класса задач эти понятия могут уточ-
уточняться.
9.2.1. Уравнения Эйлера. Рассмотрим сначала простейшую
задачу классического вариационного исчисления
*/
= ffo(y,y,t)dt -> extr, (9.16)
y(to)=y°, y(tf)=yf. (9.17)
Пока для простоты будем считать, что y(t) является скалярной
функцией и принадлежит классу С'1([^о,^/]) непрерывно дифферен-
дифференцируемых функций на интервале [to,tf]. Экстремум ищется среди
функций указанного класса, удовлетворяющих заданным краевым
условиям. Такие функции будем называть допустимыми.
286 Гл. 9. Методы теории оптимального управления
Пусть экстремум достигается на допустимой функции y*(t). Функ-
Функция y(t) = y*(t) + sy(i) (e — число) будет допустимой, если y(t) Е
Е С1 ([to,tf]) и выполняются краевые условия
y(to) = 0, y(tf) = O. (9.18)
При каждом фиксированной y(t) получаем функцию от числового
аргумента
*/
Ф(е) = J(y* +sy)= Jfo(y* + еу, у* + s& t) dt,
to
которая достигает экстремума при е = 0. Поэтому согласно необхо-
необходимому условию экстремума производная этой функции по г в точ-
точке е = 0 обращается в нуль:
а!Ф(е) tf
de
to
Интегрируя второе слагаемое по частям и учитывая краевые усло-
условия (9.18), получим
Ч д
-- 0. (9.19)
Согласно основной лемме вариационного исчисления, при про-
произвольной функции у{t) G С1 ([tojtf]) последнее равенство возможно,
если только
foy(y*,V*,t)-jtfoy(y*,y*,t)=0. (9.20)
Это уравнение называется уравнением Эйлера.
Таким образом, если функция y*(i) доставляет экстремум функ-
функционалу (9.16), она удовлетворяет уравнению Эйлера.
Допустимая функция, удовлетворяющая уравнению Эйлера, назы-
называется экстремалью или стационарной точкой задачи (9.16), (9.17).
Следовательно, решения задачи (9.16), (9.17) являются экстремалями.
В общем случае обратное неверно: не всякая экстремаль будет реше-
решением рассматриваемой задачи.
Выкладки при выводе уравнения (9.19) не изменятся и в случае,
когда y(t) — векторная функция. Покажем, как в случае вектор-
векторной функции y(t) из уравнения (9.19) получить векторное уравнение
Эйлера (9.20).
По определению производные скалярной функции /о по вектор-
векторным переменным у = (у1 у2 ... ур)Т и у = {у\ у2 ... ур)т являются
вектор-строками (см. параграф 1.9):
/Оу = UOj/i /Oj/2 ' ' ' JOyp)' Л)у = {jOyt J0y2 ' ' ' JOyP)'
9.2. Метод множителей Лагранжа 287
Умножив эти вектор-строки на вектор-столбец у = (у± у2 ... Ур)Т •>
соотношение (9.19) можно представить в виде
tf
- 0.
e=0 J Ъ УК* Jt /oyj 2/.
t0 г=1
Это равенство должно выполнятся при произвольной функции y(t) Е
Е С1([^о5^/]M и, в частности, когда все ее компоненты, кроме одной,
равны нулю: yj^0myi = 0 при всех г ф j. Полагая, что j пробегает
все значения от 1 до р, из последнего уравнения получим
/о* - ^/о* = 0, j = \,2,...,р. (9.21)
Эта система представляет собой скалярную форму записи векторного
уравнения (9.20).
9.2.2. Уравнения Эйлера—Лагранжа. Рассмотрим задачу Лаг-
раНЖа Ф<(М,*) = 0, г = 1,2,...,р; (9.22а)
<pk(z,t)=O, к = 1,2,...,/; (9.226)
z(^o) = z°, z(tf)=z*; (9.22в)
*/
J = /фо(г, z, t) dt ->> extr, (9.22r)
Здесь z — вектор-столбец размера s; Ф^ (г = 0,1,... ,р), (/?^ (fc =
= 1,2,...,/) — дифференцируемые по всем своим аргументам функции.
Эта задача отличается от простейшей вариационной задачи тем,
что на аргументы функционала помимо краевых условий наложены
дополнительные ограничения (связи (9.22а) и (9.226)). Для получения
необходимого условия воспользуемся приемом Лагранжа, который
преобразует задачу на условный экстремум в задачу на безусловный
экстремум.
Составим функцию
i
L(z,z,f/),X,t) =
г=1 к=1
где фг (г = 1, 2,... ,р) — функции времени, А/, (к = 1, 2,..., /) и фо —
константы. Функция L(z, z,-0, X,i) называется функцией Лагранжа,
функции фг (г = 1, 2,... ,р) и константы А^ (fc = 1, 2,..., /) и фо —
(неопределенными) множителями Лагранжа.
Прием Лагранжа состоит в том, что он преобразует задачу (9.22)
в простейшую задачу вариационного исчисления
Ч
J= [L(z,z,tl>,X,t)dt->extT, z(t0) = z°, z(tf)=zf.
to
Здесь ф = (фоф1 ... фр)Т, А = (Ai A2 ... A/)T.
288 Гл. 9. Методы теории оптимального управления
Последняя задача имеет смысл, если множители Лагранжа не
равны одновременно нулю. Под равенством нулю множителей ф{ (i =
= 1, 2,... ,р), являющихся функциями, понимается их тождественное
обращение в нуль. Кроме того, если фо = 0, то функционал J и
соответственно решение не зависят от исходного функционала. Это
возможно, если задача физически поставлена не совсем корректно, т.е.
не имеет физического смысла. Этот случай назовем особым. Интерес
представляет неособый случай фо ф 0.
В преобразованной задаче роль независимого аргумента играет
вектор у = (z ф А ) , а роль подынтегральной функции — функ-
функция Лагранжа. С учетом того, что функция Лагранжа не зависит от
производных ф и А, уравнения Эйлера принимают вид (см. (9.21))
L'z. -^L'-. =0, г = 1,2,...,з; (9.23а)
Ь'ф]=0, j = l,2,...,p; L'Xk=0, j = l,2,...,l. (9.236)
Уравнения (9.236) совпадают с уравнениями (9.22а) и (9.226). Поэ-
Поэтому достаточно ограничиться уравнениями (9.23а) и решать их сов-
совместно с уравнениями (9.22а) и (9.226) при краевых условиях (9.22в).
Уравнения (9.23а) называют уравнениями Эйлера-Лагранжа.
9.2.3. Правило множителей Лагранжа для задач опти-
оптимального управления с фиксированными концами. Вернемся
теперь к задаче оптимального управления с фиксированными конца-
концами и фиксированным временем. Приведем ее, видоизменив несколько
запись уравнений объекта:
/i(x, u,t)-ii = 0, i = 1, 2,..., n; (9.24a)
^(x,u,t) = 0, к = 1,2,...,/; (9.246)
Xi(t0) = ж°, Xi(tf) =x{, i = 1, 2,..., n; (9.24b)
J = / /o(x, u, t) dt ->• min.
to
Эта задача оптимального управления представляет собой рассмот-
рассмотренную выше задачу Лагранжа. Составим функцию Лагранжа:
г=1 к=1
Здесь роль аргумента z играет вектор (х,и). И так как в функцию
Лагранжа не входит производная й, уравнения Эйлера-Лагранжа
имеют вид
^4-|^=0, t = l,2,...,n; (9.25а)
L'u.=0, j = l,2,...,r. (9.256)
9.2. Метод множителей Лагранжа 289
Уравнения Эйлера—Лагранжа записывают также с помощью функции
п I
# = Е^/* + Ел^' (9-26)
г=0 к=1
которая называется функцией Гамильтона или гамильтонианом. Так
как гамильтониан связан с функцией Лагранжа соотношением
г=1
то уравнения Эйлера-Лагранжа (9.25) принимают вид
^ = ~И' * = 1'2'•••'п; (9-27а)
Р-=0, s = l,2,...,г. (9.276)
OUS
Уравнения (9.276) называют условием стационарности, так как
они представляют собой условие экстремума гамильтониана при каж-
каждом фиксированном t Е [to,tj]. Как увидим дальше при рассмотрении
принципа максимума, оказывается, что действительно на оптималь-
оптимальной траектории гамильтониан как функция от управления достигает
максимума при оптимальном управлении. Сформулируем основной
результат.
Правило множителей Лагранжа (с закрепленными кон-
концами и фиксированным временем). Если допустимая пара (и(?),х(?))
является решением задачи оптимального управления (9.24), то
найдутся такие не равные одновременно нулю множители Лагран-
Лагранжа, что эта пара удовлетворяет уравнениям Эйлера-Лагран-
Эйлера-Лагранжа (9.25), (9.27).
В соответствии с этим правилом, чтобы найти оптимальное управ-
управление и оптимальную траекторию, надо решить совместно уравнения
(9.24а), (9.246) и (9.27) при краевых условиях (9.24в).
Условия Вейерштрасса-Эрдмана. Уравнения Эйлера-Лаг-
Эйлера-Лагранжа получены при предположении, что управление u(i) является
непрерывной функцией, а траектория х(?) гладкая на интерва-
интервале [?o,?j]. Однако правило множителей Лагранжа остается справед-
справедливым и в том случае, когда и(?) принадлежит классу кусочно непре-
непрерывных функций, ax(t) — классу кусочно гладких функций. Если
оптимальное управление u(t) имеет разрыв первого рода в каких-
либо точках, то оно само и соответствующая ему траектория х(?)
должны удовлетворять указанным выше уравнениям лишь в точках
непрерывности управления. В точках разрыва управления, которые
называются угловыми, должны выполняться условия [3]
<ф-=<ф+, Н~=Н+, (9.28)
19 Д.П. Ким
290 Гл. 9. Методы теории оптимального управления
где индексы — и + обозначают левый и правый пределы соответст-
соответствующих функций. Условия (9.28) называются условиями Вейершт-
расса-Эрдмана.
Множители Лагранжа определяются с точностью до постоянного
множителя. Действительно, они входят в уравнения Эйлера-Лагран-
жа линейно и однородно, и эти уравнения не изменятся, если все
множители умножить на одно и то же постоянное число. Условимся
в неособом случае (фо ф 0) принимать фо = — 1. Дальше, если особо
не оговаривается, будет подразумеваться, что имеет место неособый
случай.
Как отмечалось, уравнения Эйлер-Лагранжа являются необхо-
необходимым условием: любое решение задачи оптимального управле-
управления (9.24) является экстремалью, т. е. удовлетворяет уравнениям
Эйлера-Лагранжа, но не любая экстремаль, удовлетворяющая гра-
граничным условиям, является решением задачи (9.24). Но если решение
задачи существует и экстремаль, удовлетворяющая граничным усло-
условиям, единственна, то, очевидно, эта экстремаль и будет решением.
Пример 9.1. Решить задачу поворота вала двигателя на угол
1 рад. с последующей остановкой за 10 с при минимальном расходе
энергии без учета момента сопротивления (ис = 0). Эта задача мате-
математически формулируется следующим образом:
х\ = ж2, х2 = и, #i@) = ж2@) = 0,
ю
ж2A0) = 0; J = f
Решение. Ясно, что задача имеет физический смысл, т.е. имеет
место неособый случай. Поэтому, как мы условились, полагаем фо =
= — 1. Составим гамильтониан (см. (9.26)):
Н = — и2 -У ф\х2 + ф2^-
Уравнения Эйлера-Лагранжа (9.27) принимают вид
Эта система имеет решение
V>i = Ci fh = -Cit + C2, u=~Clt2+C2.
Подставив полученное выражение для управления в уравнения объек-
объекта и решив их, получим
it Crf п С it C^t
+ ^ Х
it Crf п С it
Г -у + ^3, Х\ — — Л
Х2 ТГ у + ^3, Х\
Из краевых условий имеем
ж2@) = С3 =0, хг@) = С4 = 0, х2(Щ = -25Ci+5C2 =0,
яп A0) = -^2Ci+25C2 = l.
о
9.2. Метод множителей Лагранжа 291
Отсюда находим С\ — 3/125, С2 = 3/25, С3 =0, С± = 0. Оптималь-
Оптимальное управление и оптимальная траектория имеют вид
Если требуется, чтобы после поворота вала двигателя на угол
1 рад. он не вращался, нужно положить и = 0 при t ^ 10.
9.2.4. Правило множителей Лагранжа для задач опти-
оптимального управления с подвижными концами. Рассмотрим за-
задачу оптимального управления с подвижными концами и фиксиро-
фиксированным временем классического типа. Эта задача отличается от
рассмотренной выше задачи (9.24) тем, что изменяются краевые усло-
условия, и критерий оптимальности может иметь любой из указанных
при классификации видов, т.е. в этом случае задача оптимального
управления может быть вариационной задачей Лагранжа, Больца
и Майера. Когда концы закреплены и время фиксировано, задача
оптимального управления может быть только задачей Лагранжа.
Получим необходимое условие. Начнем с простейшей вариацион-
вариационной задачи с подвижными концами и фиксированным временем
*/
J = 9o[y(to),y(tf)] + Jfo(y,y,t)dt -+ extr-
Функции go и /о непрерывны и дифференцируемы по всем своим
аргументам.
Порядок вывода необходимых условий такой же, как и в случае
задачи с закрепленными концами. Некоторые особенности появляются
из-за того, что в силу подвижности граничных точек их также нужно
варьировать, чтобы найти оптимальные граничные точки. Опять все
выкладки будем выполнять, предполагая, что y(t) принадлежит к
классу гладких функций.
Пусть экстремум достигается на функции y*(t). При произвольной
фиксированной функции y(t) функционал
J = go[y*(to)+ey(to), y*(tf) + ey(tf)} +
Ч
+ ffo(y* +ey(t), у + ey(t), t) dt = Ф(е)
to
является функцией от числового аргумента е. Эта функция достигает
экстремума при е = 0. Поэтому согласно необходимому условию эк-
экстремума функции имеем
de s=o~ dy(to) У[0) + dy(tf)
to
19*
292 Гл. 9. Методы теории оптимального управления
Интегрируя второе слагаемое под интегралом по частям, получим
de
Пусть оптимальные граничные точки у*(to) и y*(tf) найдены.
Функция у* (t) должна доставлять экстремум функционалу при фикси-
фиксированных граничных точках у (to) = у* (to) и y(tf) = y*(tf). Поэтому
она должна удовлетворять уравнению Эйлера
С учетом этого уравнения имеем
d$(e)
е=0
de
В силу произвольности и независимости у (to) и y(tf) отсюда получаем
|
7°у l*=*o ~ dy(t0)' 7°у t=tf ~ dy(tf)'
Эти соотношения называются условиями трансверсальности. В слу-
случае, когда у является вектором: у = (уг у2 ... ур)Т', условия транс-
трансверсальности принимают вид
ft I _ dgo ft I _ __dgo_ • _ -, о _
Уравнения Эйлера в скалярной форме имеют вид (9.21).
Итак, решение вариационной задачи с подвижными концами, кро-
кроме уравнений Эйлера, должно удовлетворять условиям трансверсаль-
трансверсальности. Уравнения Эйлера-Лагранжа имеют такой же вид, что и в
случае задачи с закрепленными концами.
Заметим, что дифференциальные уравнения объекта (9.24а) и
уравнения Эйлера—Лагранжа (9.27а) имеют порядок п. Поэтому при
их решении будем иметь In постоянных интегрирования. При закреп-
закрепленных концах граничные условия представляют собой In соотноше-
соотношений, которые позволяют определить все постоянные интегрирования.
Однако при подвижных концах траектории граничных условий не-
недостаточно, чтобы можно было их определить. Недостающие соот-
соотношения как раз и доставляют условия трансверсальности.
Получим необходимые условия оптимальности для задачи опти-
оптимального управления с подвижными концами:
?i = /i(x,iM), г = 1,2,...,п; (9.29а)
у>*(х,М) = 0, * = 1,2,...,/; (9.296)
gj[x(t0)Mtf)] = 0. 3 = 1,2, • • • ,q < 2п; (9.29в)
9.2. Метод множителей Лагранжа 293
J =
+ y7o(x,u,t) dt -> min. (9.29r)
Граничные условия (9.29в) предполагаются независимыми, функ-
функции [/j[x(?o), x(?/)] (j = 1, 2,..., g) — непрерывными и дифференци-
дифференцируемыми по всем своим аргументам. На остальные функции наклады-
накладываются такие же требования, как и в случае задачи с закрепленными
концами.
Используя прием Лагранжа, преобразуем задачу (9.29) в простей-
простейшую задачу Больца
Ч
J = С[х(*о),х(*/),1/] + jL(x(t),?(t),u(t),ip(t),\,t)dt -+ min,
где q
г=0
п I
г=1 k=l i=l
Функцию G называют терминантом [3]. На основании получен-
полученных выше результатов можно показать, что уравнения Эйлера-Лаг-
ранжа совпадает с уравнениями (9.25) и (9.27). Продифференциро-
Продифференцировав функцию Лагранжа по х^ получим Ь%. = —фг. Поэтому условия
трансверсальности можно записать в виде
Отдельные координаты граничных точек могут быть фиксированы.
Соотношения, определяющие эти координаты, в выражение для тер-
минанта G не включаются, и так как при определении необходимых
условий они не варьируются, в условия трансверсальности не нужно
включать соотношения, содержащие частные производные по этим
координатам. В частности, если начальная точка закреплена, т.е.
заданы все координаты точки х(?о), то в условии (9.30) все первые
соотношения с частными производными по х^(?о) должны быть ис-
исключены.
Правило множителей Лагранжа (с подвижными конца-
концами и фиксированным временем). Если допустимая пара (и(?),х(?))
является решением задачи оптимального управления (9.29), то най-
найдутся такие не равные одновременно нулю множители Лагранжа,
что эта пара удовлетворяет уравнениям Эйлера-Лагранжа (9.25),
(9.27) и условиям трансверсальности (9.30).
Если управление терпит разрыв, то решение (и(?),х(?)) должно
удовлетворять уравнениям Эйлера-Лагранжа в точках непрерывнос-
непрерывности управления. В угловых точках (в точках разрыва управления)
должны выполнятся условия Вейерштрасса-Эрдмана.
294 Гл. 9. Методы теории оптимального управления
Чтобы получить решение задачи (9.29), нужно решить уравне-
уравнения (9.29а), (9.296) совместно с уравнениями Эйлера-Лагранжа (9.27)
при краевых условиях (9.29в) и условиях трансверсальности (9.30).
Пример 9.2. Решить задачу поворота вала двигателя на угол
1 рад. без последующей остановки за 10 с при минимальном расходе
энергии без учета момента сопротивления (ис = 0):
х\ = ж2, х2 = щ ян@) = ж2@) = 0,
ю
xiA0) = 1, J = и2 dt ->• min.
о
Решение. Эта задача отличается от задачи, рассмотренной в
примере 9.1, только краевым условием на правом конце траектории.
Как было получено, гамильтониан и уравнения Эйлера-Лагранжа
имеют вид
Н = -U2 + 1plX2 + 1p2U,
Решением уравнений Эйлера—Лагранжа является
В данном случае G = 0 и нефиксированным является только коор-
координата #2A0). Поэтому условие трансверсальности принимает вид
Исходя из этого условия находим ^2A0) = —CilO + С2 = 0, или С2 =
= 10Ci. Соответственно для управления получаем u = CiA0 — t)/2.
Подставив это выражение в уравнение объекта и проинтегрировав,
получим
Х2 = 9± BЫ - t2) + С3, xi = Щ- (Ю*2 - у) + Сз^ + С4.
Учитывая краевые условия
ari(O) = С4 = 0, ж2@) = Сз = 0, яп A0) = 522 Ci = 1,
о
находим
u*(t) = 0,003A0-t),
arj(t) = 0,0005C0^2 - t3), x${t) = 0,0015B0^ - ^2).
9.2.5. Правило множителей Лагранжа для задач опти-
оптимального управления с нефиксированным временем. Задача
оптимального управления с подвижными концами и нефиксированным
временем формулируется следующим образом:
?i = /i(x,iM), г = 1,2,...,п; (9.31а)
у>*(х,М)=0, * = 1,2,...,/; (9.316)
9.2. Метод множителей Лагранжа 295
j = l,2,...,g<2n + 2; (9.31в)
*/
J = go[x(to),x(tf),to,tf] + [fo(x,u,t)dt -> min. (9.31r)
Очевидно, если допустимая пара (и*(?),х*(?)) является решением
задачи (9.31) при t Е [^о,^], т0 она будет решением этой же задачи
при фиксированном времени: to = Q и ^/ = Щ • Поэтому решение
задачи (9.31) должно удовлетворять уравнениям Эйлера-Лагранжа
и условиям трансверсальности, причем условия трансверсальности
дополняются соотношениями, обусловленными вариацией начального
или конечного моментов времени или того и другого и принимают вид
riC1 rlC
*«Щ i=l,2,...,n; (9.32a)
Условия (9.32а) совпадают с условиями (9.30). Дополнительными
являются соотношения (9.326). Если начальный момент to или ко-
конечный момент tf фиксирован, то соответственно первое или второе
условие из (9.326) исключается.
Задачи с подвижными концами и нефиксированным временем яв-
являются наиболее общими. Из них как частные случаи получаются
задачи с фиксированным временем и закрепленными концами.
Правило множителей Лагранжа (для задачи с подвиж-
подвижными концами и нефиксированным временем). Для того чтобы допус-
допустимая пара (и(?),х(?)) была решением задачи оптимального управ-
управления (9.31), необходимо, чтобы существовали такие не равные
одновременно нулю множители Лагранжа, что эта пара удовлет-
удовлетворяет уравнениям Эйлера-Лагранжа (9.25), (9.27) во всех точках
непрерывности управления и условиям трансверсальности (9.32).
В точках разрыва управления (если таковые существуют) выпол-
выполняются условия Вейерштрасса-Эрдмана.
Пример 9.3. Определить оптимальное управление в задаче мак-
максимального быстродействия
J
x\ — Ж2, X2 = щ u2dt = 6,
Xl@) =х2@) =0, x1(tf) = d, x2(tf) = 0, J = tf^> min.
Решение. Преобразуем изопериметрическое ограничение:
х3 = и2, жз@) = 0, x3(tf) = Ъ.
В данном случае имеем go = tf и G = щд® = —tf. Так как граничные
точки траектории закреплены и начальный момент задан (фиксиро-
296 Гл. 9. Методы теории оптимального управления
ван), то условия трансверсальности принимают вид
dG
н
Гамильтониан и уравнения Эйлера-Лагранжа имеют вид
Н = Ф1Х2 + fau + фзи2',
дхг ОХ2 дхз
ди
Из последних уравнений имеем
ИЛИ
Подставив последнее выражение для управления в уравнение объекта
и в дополнительное уравнение, получим
х2 = | Cii2 - C2i + С4, ал = | Cii3 - | C2t2 + C4t + Съ,
х3 = \ (%t3 - CiC2t2 + C$t + C6.
О
Из граничных условий имеем
xi(tf) = \ Сг1) - \ C2t) = d, x2(tf) = \ Cxt) - C2tf = 0,
xz(tf) = I G\t) - CxC2t2f + G\tf = b.
Отсюда находим
Оптимальное управление имеет вид
и =Clt-C2 = —dt
Здесь, как и в примерах 9.1 и 9.2, из физических соображений
предполагается, что решение задачи существует. Поэтому единст-
единственное управление, удовлетворяющее правилу множителей Лагранжа,
будет оптимальным. В данном примере условия трансверсальности
при нахождении оптимального управления не использовались. Они
потребовались бы, если бы было нужно определить множители Лаг-
Лагранжа.
9.3. Принцип максимума Понтрягина 297
9.3. Принцип максимума Понтрягина
Во многих прикладных задачах на управление накладывается
ограничение типа неравенства. Часто оптимальное управление в та-
таких задачах имеет разрыв. Метод множителей Лагранжа не позволяет
определить число и местоположения точек разрыва, и поэтому в этих
случаях он неэффективен. Такие задачи легче решаются с помощью
принципа максимума Понтрягина.
Принцип максимума, сформулированный Л. С. Понтрягиным
в 1953 г. как необходимое условие экстремума для задач оптималь-
оптимального управления, был доказан и развит им, его учениками и сотруд-
сотрудниками [3, 12, 51].
9.3.1. Задача с закрепленными концами и фиксированным
временем. При отсутствии фазового ограничения задачу оптималь-
оптимального управления с закрепленными концами и фиксированным вре-
временем в общем виде можно сформулировать как следующую задачу
Лагранжа:
Xi = /i(x,u,f), г = 1,2,..., га, ueUCRr; (9.33a)
Xi(to)=x?, Xi(tf)=x{, г = 1,2,..., га; (9.336)
*/
J = /7q(x, u, t) dt -> min (inf). (9.33b)
Функции fi (i = 0,1,..., n) непрерывны по совокупности пере-
переменных x\,..., xn, u\,..., ur, t и непрерывно дифференцируемы
по х\,..., xn, t. Эта задача отличается от задачи оптимального управ-
управления классического типа (9.24) тем, что ограничение задается только
на управление и в виде включения u Е U, где U — допустимое мно-
множество значений управления. Кроме того, здесь не требуется глад-
гладкость (непрерывная дифференцируемость) функций fi (i = 0,1,..., n)
по u.
В данной задаче допустимыми управлениями считаются управ-
управления и(?), принадлежащие к классу кусочно непрерывных функ-
функций и принимающие значения из допустимого множества U. Фазовая
траектория х(?) называется допустимой, если она является кусоч-
кусочно гладкой. При допустимом управлении фазовая траектория зада-
задачи (9.33) является кусочно гладкой: координаты Xi(t) (ъ = 1, 2,..., п)
непрерывны всюду на интервале to,tf], их производные могут иметь
разрывы 1-го рода в точках разрыва управления. Пара (и(?),х(?))
называется допустимой для задачи (9.33), если u(t) и х(?) являются
допустимыми управлением и траекторией и х(?) при и = u(t) удов-
удовлетворяет уравнениям объекта и краевым условиям этой задачи.
Применим к задаче (9.33) прием Лагранжа [3]. Составим функцию
г=1 г=1
298
Гл. 9. Методы теории оптимального управления
где
(9.34)
г=0
Здесь функции L и Н также называют функцией Лагранжа и гамиль-
гамильтонианом. Но они отличаются от одноименных функций классичес-
классического вариационного исчисления тем, что в них не входит ограничение
на управление, имеющее в данном случае вид включения u Е U.
В конкретных задачах ограничение на управление может быть задано
в виде неравенства или равенства. Гамильтониан (9.34), который не
включает ограничение на управление, в отличие от гамильтониана,
включающего ограничение на управление, называют также функцией
Понтрягина.
В соответствии с приемом Лагранжа задача (9.33) сводится к
задаче
J— / L(x,x,u,-0,?) dt ->• max; (9.35a)
xi(tQ)=xQi, Xi(tf)=x{, г = 1,2,...,п. (9.356)
Функционал J максимизируется, хотя функционал J в исходной
задаче требуется минимизировать, так как множитель фо при /о в
неособом случае принимается отрицательным (фо = — 1). В особом
случае (фо = 0) функционал J не зависит от J.
Пусть тройка (x*(t),u*(t),tl)*(t)) есть решение задачи (9.35). За-
Задача (9.35) равносильна следующим двум задачам:
Ч
Jx— /l(x,x,u*,-0,^) dt ->• max,
J х,ф
=x{, i =
J2 — I L(x.*, x*, u, ф*, t) dt —> max,
~ tf Г n 1
J: = / i?(x, u*, -05 ^) — /_^ -0i^i cfa —>- max,
to L «=1 J
или
tf
J2 = I Я(х*,и, VV) -
г=1
(9.36а)
(9.366)
Естественно, задачи (9.35) и (9.36), как и исходная задача, рас-
рассматриваются в классе допустимых функций, причем функция ij)(t)
называется допустимой, если она, как и х(?), принадлежит к классу
кусочно гладких функций.
9.3. Принцип максимума Понтрягина 299
Задача (9.3ба) является простейшей задачей вариационного ис-
исчисления. Для нее необходимое условия максимума (уравнения Эйле-
Эйлера) (9.25) принимает вид
V>i = -^-, * = l,2,...,n; (9.37а)
?< = -?-, г = 1,2,...,п. (9.376)
В задаче (9.366), очевидно, интеграл примет максимальное зна-
значение при таком управлении, при котором подынтегральное выраже-
выражение как функция от управления и примет максимальное значение.
Следовательно, управление u*(t) будет решением задачи (9.366), если
оно доставляет максимум гамильтониану, или если всюду на интер-
интервале [to, ^/], кроме точек разрыва и*(?), будет выполнено равенство
тахЯ(х*,и, ф* ,t) = Я(х*,и*,^*,*). (9.38)
Необходимое условие (9.37) совместно с соотношением (9.38) обра-
образует необходимые условия оптимальности исходной задачи (9.33), на-
называемые принципом максимума или принципом максимума Понтря-
гина. Уравнения (9.376) совпадают с уравнениями объекта, и поэтому
их можно не рассматривать. Уравнения (9.37а) называют сопряжен-
сопряженными уравнениями или сопряженной системой.
Принцип максимума (при закрепленных концах и фиксиро-
фиксированном времени). Для того чтобы допустимая для задачи (9.33) па-
пара (х*(?), и*(?)) была ее решением, необходимо, чтобы существовали
такие не обращающиеся одновременно в нуль константа ф$ ^ 0 и ре-
решение ф* = (ф{ .. .фп)Т сопряженной системы (9.37а) при х = x*(t)
и и = u*(t), что при любом t Е [to,tf], кроме точек разрыва u*(t),
функцияН(и) = i?(x*,u, ф*,t) при u = u*(i) достигает максимума,
т. е. выполняется соотношение (9.38).
9.3.2. Задача с подвижными концами и нефиксированным
временем. Рассмотрим задачу Больца
г- - f-fy и /1 7 — 19 п 11 а ТТ С Rr- (Q ЧОя"!
Jbl — J гуЛ., И, ij, L — Л., Zi, . . . , It, УХ KZ U ^— -LL , yc/.Oc/diJ
J = go[x(to),x(tf),to,tf] + / /о(х, u, t) dt —у min. (9.39в)
Используя прием Лагранжа, эту задачу можно свести к следующей
простейшей вариационной задаче:
~ tf ( п \
J = G + / [Н - У^ ф^г ) dt -у max,
300 Гл. 9. Методы теории оптимального управления
где q п
3=0 г=О
Дальше, как и в случае задачи с закрепленными концами, послед-
последняя задача разбивается на две, и получаются необходимые условия в
форме принципа максимума. Допустимая пара (и(?),х(?)) для зада-
задачи (9.39) определяется так же, как и для задачи (9.33).
Принцип максимума (при подвижных концах и нефиксиро-
нефиксированном времени). Для того чтобы допустимая для задачи (9.39)
пара (х*(?), и*(?)) была ее решением, необходимо:
1) существование таких не обращающихся одновременно в нуль
константы ф$ ^ 0 и решения ф* = (ф± .. .ф^)Т сопряженной систе-
системы (9.37а) при х = x*(t) uu = u*(?), что при любом t Е [to,tf], кроме
точек разрыва и*(?), функция Н(и) = i?(x*,u, ip*,t) при и = u*(t)
достигает максимума, т. е. выполняется соотношение (9.38)
тахЯ(х*,и, ф*,t) = Н(х*,и*,ф*,*);
uEU
2) выполнение условия трансверсальности (9.32):
н
dG
dG
-to OlQ t = tf Otf
Рассмотрим, какова связь между принципом максимума и методом
множителей Лагранжа. Как отмечалось, функция Понтрягина отли-
отличается от гамильтониана, рассматриваемого в методе множителей
Лагранжа, тем, что в нее не включено ограничение на управление.
Сопряженные уравнения (9.37а) совпадают с уравнениями Эйлера-
Лагранжа (9.27а), если отсутствует фазовое ограничение: функция ip^,
определяющая ограничение на управление, не зависит от фазовых ко-
координат. Но они не включают условия стационарности гамильтониана
(уравнения (9.276)). Их заменяет условие максимума (9.38). Если огра-
ограничение на управление задается в виде равенств, то, используя метод
неопределенных множителей Лагранжа нахождения экстремума функ-
функции, из (9.38) получим недостающие уравнения Эйлера—Лагранжа.
Пример 9.4. Определить оптимальное управление в следующей
задаче оптимального управления:
Х\ = Х2, %2 — Щ \u\ ^ &J
Xl@) = х2@) = 0, х2(Щ = 0, J = -ari(lO) -> min.
Решение. Функция Понтрягина и сопряженные уравнения име-
имеют вид
Н = ф\Х2 + Ф2Щ
ОН „ ; дН
9.3. Принцип максимума Понтрягина 301
Терминант и условия трансверсальности имеют вид
G = родо = Х1(Щ, ^
Решив сопряженные уравнения и учитывая условия трансверсаль-
трансверсальности, находим
фх — -1, ф2—С2— t.
В условии max Н = ф\х2 + max ф2и максимум достигается, когда
управление принимает граничные значения и его знак совпадает со
знаком функции ф2, т.е. при и = а8'щпф2. Так как знак линейной
функции может измениться только один раз, то оптимальным может
быть управление
а, 0 ^ t < t\,
U \-а, h^t^lO,
или
_(-а, O^t<h,
\ a, t\ ^ t ^ 10,
где t\ — момент изменения знака функции ф2. В частности, если
t\ — 10, то это значит, что функция ф2 на интервале [0,10] не меняет
знака, и управление не переключается. Выбор из двух управлений
можно сделать исходя из того, какое из этих управлений обеспечивает
выполнение граничных условий. Но в данном примере этот выбор
можно сделать на оснований физических соображений. По условию
задачи нужно повернуть вал двигателя на максимальный угол и
остановить его за заданное время. Поэтому оптимальным может быть
только первое из двух приведенных управлений. Остается определить
только момент t\ переключения управления.
Проинтегрируем уравнения объекта при первом управлении с уче-
учетом начальных условий:
at, 0 ^ t <С t\,
С2 —at, t\ ^ t ^ 10.
Используя непрерывность x2{t), т. е. равенство ati = С2 — at\,
находим С2 = 2at\. Поэтому последнее соотношение можно записать
в виде
at, 0 ^ t
х2 '
И
-t), h ^t^ 10.
Из краевого условия на правом конце траектории имеем х2{1$) =
= aBti — 10) = 0. Отсюда для момента переключения находим t\ = 5.
Таким образом, оптимальное управление имеет вид
а, 0 ^ t < 5,
-a, 5^t^ 10.
302 Гл. 9. Методы теории оптимального управления
9.3.3. Задача максимального быстродействия. Теорема
об п интервалах. Рассмотрим задачу максимального быстродейст-
быстродействия, когда объект является линейным:
^2jUj, г = 1,2,...,п; (9.40а)
к=1 j=l
a3-<:uj<:Cj, а,<0, 0j>O, j = l,2,...,r; (9.406)
Xi(to)=x4, Xi(tf) = O, г = 1,2,...,п; (9.40в)
j = tf-t0^> min. (9.40r)
Эта задача называется линейной задачей максимального быст-
быстродействия. В векторной форме уравнения объекта принимают вид
х = Ах + Вм.
Предполагается, что эти уравнения являются уравнениями в откло-
отклонениях и поэтому конечное состояние, в которое нужно перевести
объект, есть начало координат (х(?/) = 0).
Функция Понтрягина имеет вид
П , П
Н = фТ(Ак + Ви) = J2 & ( YlaikXk
г=1 4=1
где ф = (ф\ ф2 • • • Фп) подчиняется сопряженному уравнению
%т дн
Согласно принципу максимума оптимальное управление опреде-
определяется из условия
ИЛИ
где
г=1 k=l U
max У^ Uj У^ b^i = У^ max ( ш У^
3 = 1 j=l 3 = 1 V г=1
Если выполняется так называемое условие нормальности (см. ни-
п
же), то сумма ^2 ^гзФг обращается в нуль только в изолированных
г=1
точках. В этом случае из последнего тождества следует, что ко-
координаты u* (j = l,...,r) оптимального управления u*(i) кусочно
9.3. Принцип максимума Понтрягина 303
постоянны и принимают крайние значения aj или
п
г=1 А — 1 О г
г=1
В частном случае, когда Pj = —<х/, имеем
п
u* = pj sign ^2 biji/>i, j = 1, 2,..., г.
Для линейных задач максимального быстродействия при выпол-
выполнении так называемого условия нормальности принцип максимума
является не только необходимым, но и достаточным условием оп-
оптимальности. Для определения этого понятия введем в рассмотре-
рассмотрение (п х п)-матрицы
где В*, (АВУ, ..., (АП-1ВУ —j-e столбцы матриц В, АВ, ..., АП~1В
соответственно.
Условие нормальности. Говорят, что для объекта х =
= Лх + В\х выполнено условие нормальности или условие общнос-
общности положения, если матрицы N[j] невырождены: det N[j] ^0 (j =
= 1,2,...,г) [12,39].
Очевидно, в случае скалярного управления условие нормальности
совпадает с условием управляемости. Так как линейный объект всегда
может быть представлен в приведенном выше нормальной форме, то
о выполнимости или невыполнимости условия нормальности можно
говорить для любой линейной стационарной системы. Объект, для ко-
которого выполнено условие нормальности, будем называть нормальным
объектом или нормальной управляемой системой.
Согласно утверждению 1.2 одномерная управляемая система, опи-
описываемая уравнением
ЪърГП+Ъ1рГП-1 + ...+Ът
v — — и,
аорп +aipn-1 + ... +ап
или
(аорп + сир71'1 + ... + ап)у = (Ъорт + Ьхрш~х + ... + Ьт)щ
0 ^ т < п,
где не все коэффициенты hi [г — 0,1,... ,т) равны нулю, вполне
управляема. Следовательно, эта управляемая система является нор-
нормальной.
Пример 9.5. Определить, выполнено ли условие нормальности
для объекта
Х\ — Х2 + U\, Х2 = Ui +U2.
304 Гл. 9. Методы теории оптимального управления
Решение. В данном примере имеем
Матрицы N[j] имеют вид
и обе они навырождены. Следовательно, условие нормальности вы-
выполняется.
Необходимое и достаточное условие оптимальнос-
оптимальности [12]. Если в линейной задаче максимального быстродействия
объект является нормальным, то для того чтобы пара (и*(?),х*(?))
была ее решением, необходимо и достаточно, чтобы она удовлетво-
удовлетворяла принципу максимума.
В оптимальном по быстродействию управлении линейным объ-
объектом функции u*(t) принимают только граничные значения при
любых собственных значениях матрицы А, если объект является
нормальным. В общем случае эти функции имеют произвольное число
переключений — точек перехода из одного граничного значения на
другое. В частном случае справедлива следующая теорема [12].
Теорема об п интервалах. Если в линейной задаче макси-
максимального быстродействия объект является нормальным и характе-
характеристическое уравнение
det (A -Is) = 0
имеет только действительные корни, то компоненты оптимально-
оптимального управления u*(t) (j = 1,2,... ,г) кусочно постоянны, принимают
только граничные значения и имеют не более п интервалов пос-
постоянства, или не более п — 1 переключений.
Впервые теорему об п интервалах для объекта, который описыва-
описывается уравнением вида
аоуМ + cny^-V + ... + апу = Ъои (а0 ^ 0, Ъо ф 0),
сформулировал и доказал А. А. Фельдбаум. Как было отмечено, усло-
условие нормальности для такого объекта всегда выполняется, поэтому
для справедливости теоремы об п интервалах необходимо и доста-
достаточно, чтобы все корни его характеристического уравнения были
действительными.
Если характеристическое уравнение объекта имеет комплексные
корни, то число переключений зависит от начальных условий. В
каждом конкретном случае оно возрастает при удалении начальной
точки от начала координат и может быть сколь угодно большим, но
всегда конечным при любом начальном условии.
9.3. Принцип максимума Понтрягина 305
9.3.4. Вырожденные задачи. Методы классического вариаци-
вариационного исчисления и принцип максимума не всегда позволяют найти
оптимальное управление. Существуют задачи, в которых необходи-
необходимые условия оптимальности, даваемые этими методами, выполняются
тривиальным образом и им, помимо одного оптимального управления,
удовлетворяет множество других управлений, среди которых могут
быть как оптимальные, так и неоптимальные управления. Задачи
такого типа называют вырожденными. К числу вырожденных задач
относятся линейные задачи максимального быстродействия для кото-
которого не выполняется условие нормальности.
Если обнаружится, что внутри интервала [?g5 tf] имеется конечный
отрезок времени [^1,^2] такой, что на нем вдоль соответствующих
управлению и*(?) траектории х*(?) и сопряженной функции ф*(г)
выполняются тождества
М) д2Н(ф'х*и,У _ ( ,
-и' 1У &)
ди -и'
ИЛИ
Е(ф*,к*,и*,и,г)=Н(ф*,к*,и*,г)-Н(ф*,к*,и,г)=О, (9.416)
то оптимальное управление называют вырожденным в классическом
смысле в случае (9.41а) или вырожденным в смысле принципа мак-
максимума в случае (9.416). Вообще говоря, условия (9.41а) и (9.416) не
всегда выполняются одновременно.
В случае вырожденных задач оптимальное управление нельзя
найти только из условий (9.41а) или (9.416). Требуются дополнитель-
дополнительные условия. Одним из необходимых дополнительных условий для
вырожденных скалярных управлений являются неравенства
, )к д rd» днл
При использовании этого условия производится последовательное
дифференцирование производной дН /ди по времени, пока в одной из
производных не появится и, что и даст возможность найти оптималь-
оптимальное управление. Доказано, что при s последовательных дифферен-
дифференцированиях управление может появиться лишь при четном s = 2к.
Такого рода вырожденные задачи встречаются, в частности, когда
гамильтониан линейно зависит от и.
Пример 9.6. Определить оптимальное управление и оптималь-
оптимальную траекторию в следующей задаче оптимального управления:
ю
х = и, \и\ ^ 1, х@) = 4, жA0) = 0, J — x2dt ->• min .
о
Решение. Гамильтониан, сопряженное уравнение и условие ста-
стационарности гамильтониана имеют вид
И - I - 2 I - -дН -2 дН - - 0
' дх ' ди
20 Д.П. Ким
306 Гл. 9. Методы теории оптимального управления
В соответствии с принципом максимума u* = sign^. Если на
каком-либо отрезке времени интервала [0,10] функция ip(t) обраща-
обращается в нуль, то управление будет вырожденным. Допустим, что такой
отрезок существует. Для такого отрезка справедливы соотношения
ди dt ди dt2 ди
откуда для вырожденного управления получаем и* = 0.
Таким образом, оптимальное управление может принимать только
граничные значения: —1 или 1, когда ф ф 0, и нуль, когда ф = 0.
Одним из управлений, удовлетворяющих этому условию, является
управление
и = { о, h
Проинтегрировав уравнение объекта при этом управлении с учетом
граничных условий, получим
х - л о, h <с t^ ю.
Из условия непрерывности траектории следует x{t\) = 4 — t\ = 0,
откуда t\ — 4. Таким образом, решением рассматриваемой задачи
является
U \ 0, 4 ^ ^ 10, Ж \ 0, 4 ^ ^ 10.
То, что среди различных вариантов сразу удалось «угадать»
оптимальное управление, объясняется тем, что при его выборе неявно
использовалась физическая сущность задачи (граничные условия).
9.3.5. Особые задачи. Как отмечалось, в функции Понтрягина
п
(гамильтониане) Н = ^2 Фг/г сопряженную координату фо обычно
г=0
выбирают равной фо = —1. Однако встречаются задачи, в которых
оптимальным управлению и траектории соответствует фо = 0. Такие
задачи называются особыми.
Примером особых задач могут быть некорректно сформулирован-
сформулированные задачи оптимального управления, например, такие, у которых
решения не зависят от критерия оптимальности или имеется только
одно возможное допустимое управление. Для последних задач не су-
существует возможности выбора наилучшего решения, и сама постанов-
постановка задачи оптимального управления становится бессодержательной.
Пример 9.7. Найти решение следующей задачи оптимального
управления:
х — и,
1, х@) = 0, хA) = 1, J = - / лД - и2 dt -> min.
9.4- Метод динамического программирования 307
Решение. Функция Понтрягина и сопряженное уравнение имеют
вид
Н = -
Из последнего уравнения находим ф\ = С.
В соответствии с принципом максимума если и* (t) — оптимальное
управление и x*(t) — оптимальная траектория, то
причем фо = const ^ 0.
Возможное допустимое управление — это кусочно непрерывная
функция, удовлетворяющая ограничению \и\ ^ 1 и переводящая
изображающую точку из начального положения х@) =0 в конечное
положение хA) = 1 за время tf = 1. Такое управление единственно, и
оно равно u(t) = 1. Так как других допустимых управлений нет, то оно
и должно быть решением задачи: u*(t) = 1. При этом #(ж*,и*,?/>*) =
= ф1 = С, и по принципу максимума должно выполнятся неравенство
: + Си
при допустимом управлении, т.е. при \u(t)\ ^ 1. При ф0 = 0 это нера-
неравенство выполняется. Однако при ф0 = —1 нельзя подобрать такое С,
при котором данное неравенство выполняется. Следовательно, в дан-
данной задаче оптимальному решению соответствует ф$ = 0.
9.4. Метод динамического программирования
Динамическим программированием называют разработанный
Р. Беллманом в начале 50-х годов прошлого столетия метод оптимиза-
оптимизации многошаговых процессов различной природы. Основу динамичес-
динамического программирования как метода оптимизации составляют [8, 19]:
1) принцип оптимальности; 2) инвариантное погружение, т. е. вклю-
включение исходной задачи в семейство аналогичных задач; 3) функцио-
функциональное уравнение, получаемое на основе принципа оптимальности и
инвариантного погружения.
9.4.1. Инвариантное погружение и функциональное урав-
уравнение. Основная идея метода динамического программирования зак-
заключается в следующем. Вместо того чтобы решать исходную задачу,
ее включают в некоторое семейство задач оптимизации (инвариантное
погружение). При этом может оказаться, что между отдельными
задачами существуют простые соотношения и среди задач семейства
найдется такая, которая легко решается. Тогда, используя решение
последней и соотношение, связывающее отдельные задачи семейства,
т.е. функциональное уравнение, получают решение исходной задачи.
20*
308 Гл. 9. Методы теории оптимального управления
Проиллюстрируем сказанное на простейшем примере [19]. Пусть
требуется найти минимум функции /(х) специального вида:
г=1
Здесь Gn — прямое произведение областей (множеств) Gi определения
функций fi(xi):
Gn = Gi x G2 x ... x Gn; Xi e Gi, i = 1,2,..., n.
Рассмотрим семейство задач
m
/"(m)(V(mh — V^ f(r) —у min m — 1 2 (Q 42^
где x(m) = (xi x2 ... жт)т и Gm = Gi x G2 x ... x Gm. Исходная за-
задача погружена (инвариантное погружение) в построенное семейство
задач в том смысле, что она входит в это семейство как частный
случай при т = п. В задаче (9.42) параметр т можно рассматривать
как дискретное время. Введем в рассмотрение функцию
Bm=
Эту функцию называют функцией Беллмана.
Очевидно, справедливо следующее соотношение:
Г ш
Bm+1 = min \fm+l(Zm+l)+J2fi(Z
x(m + l)eGm + l L ~f
min
Но второе слагаемое в последнем выражении есть Вт, поэтому полу-
получаем следующее функциональное уравнение:
Вт+1 = min [fm+i(xm+i) + Вт],
Xm + l^Gm + 1
или, так как в данном случае Вш не зависит от xm+i,
5m+i = min /m+i(^m+i)+ 5m, (9.43)
причем
Вх = min /i(^i).
xiEGi
Уравнение (9.43) называют уравнением Беллмана. Решая его с
учетом последнего условия, получим В\, В2,..., Вп и х\, х\,..., х^.
Решением исходной задачи являются Вп и х* = {х\ х\ ... х^)Т.
9.4- Метод динамического программирования 309
Как видно, метод динамического программирования сводит зада-
задачу минимизации скалярной функции от п переменных к п задачам
минимизации скалярных функций от одной переменной. В результа-
результате при числовом решении задачи существенно сокращается объем
вычислении. Действительно, пусть Gi (г = 1, 2,... ,п) — конечные
множества и каждое из них состоит из / точек. Тогда при решении
исходной задачи методом перебора без использования метода дина-
динамического программирования потребуется рассмотреть 1п вариантов,
а с использованием метода динамического программирования — все-
всего / • п вариантов.
При использовании уравнения (9.43) вычисление Вт происходит
в направлении возрастания аргумента, т. е. в прямом «времени»,
поэтому это уравнение называют прямым уравнением Беллмана в от-
отличие от обратного уравнения Беллмана, при использовании которого
вычисление Вт производится в направлении убывания времени.
Для получения обратного уравнения Беллмана произведем инва-
инвариантное погружение исходной задачи в семейство задач
где
~(m) _ / Tii т )Т Пт — П X П , 1 X X ^7
л — Vx^ хт-\-1 - - - хп) •> ^* — ^т А ^m+l A • • • А ^п-
При ?n = l имеем /(х) =/^^(х). Введем функцию Беллмана
п
От =
Очевидно, имеем
5m_i = min |/m-i(^m_i)
ИЛИ
Sm-i = П1Ш [fm-l(Xm-l) + Sm].
Xm-l GGm-l
Последнее уравнение есть обратное уравнение Беллмана.
9.4.2. Принцип оптимальности. В рассмотренном простейшем
примере вывод уравнения Беллмана основывался на очевидных соот-
соотношениях. В более сложных случаях при выводе уравнения Беллмана
используется принцип оптимальности. В общем виде этот принцип
формулируется следующим образом.
Оптимальная стратегия (поведение) обладает тем свойством,
что, каковы бы ни были начальное состояние и решения на началь-
начальном этапе, решения на последующем этапе должны составлять
оптимальную стратегию относительно состояния, которое полу-
получается в результате принятия решений на начальном этапе.
310 Гл. 9. Методы теории оптимального управления
В задачах оптимального управления оптимальность определяется
функционалом (критерием оптимальности) J(u(?),x(?)), состояние —
фазовым вектором х(?), стратегия — это управление u(t) на всем
интервале [to,tf], решение — это выбор конкретного управления.
Для задачи оптимального управления справедлив принцип опти-
оптимальности, если она обладает марковским свойством. По определению
задача оптимального управления обладает марковским свойством,
если после выбора управления на начальном интервале [?о,?'], каково
бы оно ни было, на величину критерия J(u(t), x(?)) на конечном интер-
интервале [tf,tf] оказывают влияние выбор управления на этом интервале
и значение фазового вектора в конце начального интервала, т. е. x(t').
Чтобы сформулировать принцип оптимальности применительно к
задачам оптимального управления, рассмотрим задачу
x = f(x,u,?), u(t)eUt; (9.44a)
х(*о)=х°, xfejGl/; (9.446)
*/
J = go(x(tf),tf) + /7о(х, u, t) dt -> min. (9.44в)
Условимся управление u(t) на интервале [а, Ь] обозначать и [а, Ь]:
и[а, b] = (и(?), a ^t ^b). Если интервал слева или справа является
открытым, то соответственно слева или справа будем писать круглые
скобки: и(а, Ь] = (и(?), а < t ^ Ь) и и[а, b) = (u(?), а ^ t < b).
Для задачи (9.44) справедлив принцип оптимальности, и он может
быть сформулирован следующим образом.
Для оптимальности допустимой для задачи (9.44) пары (и*(?),
х*(?)) необходимо, чтобы при любом t' G [to, t/] управление u*[?',?/]
^ыло оптимальным относительно состояния х*(?'), в котором ока-
окажется объект в момент t' при выборе на начальном отрезке вре-
MeHu[to,t') управления и*[to, t').
Это утверждение легко доказывается от противного. Допустим,
что оно неверно и существует допустимое управление и0[?',??), пере-
переводящее объект из точки х*(?') в точку х°(^) G Х^ в момент t®, при
котором функционал
принимает меньшее значение, чем при управлении и*[^,^Л:
J(uo[t',t°f})<J(u*[t',t*f}).
Тогда критерий оптимальности в задаче (9.44) при управлении
9.4- Метод динамического программирования 311
принимает меньшее значение, чем при управлении и*[?о,?^], & это
противоречит оптимальности управления и*[?о,??].
Принцип оптимальности для задачи оптимального управления
является частным случаем следующего более общего утверждения.
Если допустимая для задачи (9.44) пара (и*(?),х*(?)) оптималь-
оптимальна, то, каков бы ни был подынтервал [^ъ^] С [?о,?/], управле-
управление u*(i) на этом подынтервале является оптимальным относи-
относительно граничных точек x*(?i) и х*(^).
Это утверждение доказывается точно так же, как и принцип
оптимальности. В частном случае, когда t\ — to, приведенное утверж-
утверждение называют обратным принципом оптимальности [19]. Приведем
несколько иную формулировку этого принципа.
Обратный принцип оптимальности. Для оптималь-
оптимальности допустимой для задачи (9.44) пары (и*(?),х*(?)) необходи-
необходимо, чтобы при любом t' Е [to,t/] управление u*[?o,?'] было опти-
оптимальным относительно конечного для интервала [to,t'\ состояния
х(*') =х*(*').
9.4.3. Функции и уравнения Беллмана. Произведем инва-
инвариантное погружение задачи (9.44) в семейство задач, которое по-
получается из задачи (9.44) при замене начального условия х(?о) =
= х° параметрическим условием x(t') = х', t' Е [to, t/]. Здесь t' и х'
рассматриваются как параметры. В частном случае, когда t' = to
их' =х°, из введенного семейства выделяется исходная задача.
Минимальное значение критерия оптимальности при параметри-
параметрическом начальном условии зависит от выбранных значений t' и х':
5(х@,0= mm \go(x(tf),tf)+ [
u(t)eu I
причем S(x(tf),tf) = go(x(tf),tf). Функция S(x(tf),t') называется
функцией Беллмана.
Получим уравнение Беллмана. Очевидно, имеем
5(х(*' - At), t1 - At) = min \go(x(tf),tf) + [ fodt+ f f0 dt ,
Для краткости записи аргументы функции /о(х, u, t) опущены. В силу
принципа оптимальности можем записать
S(x(t' -At),t' -At) =
min f fodt+ min ( go(x(tf),tf) + ff0 dt) \,
312 Гл. 9. Методы теории оптимального управления
или
At),t' -At) = min
u(t)eu
В последнем соотношении в правой части функцию Беллмана
нельзя вынести за операцию min, так как x(t') и соответственно
функция Беллмана зависят от управления на интервале [t' — At, t'].
В то же время х(?' — At) и соответственно функция Беллмана S(x.(t' —
— At), t' — At) не зависят от управления на указанном интервале.
Поэтому эту функцию можно перенести в правую часть и внести под
знак минимума:
О = min Г fodt + S(x(t'),tf) - S(x(tf - At), t1 - At) .
u(t)eu [ J J
В полученном уравнении интеграл представим в виде
t' -At
Затем, разделив обе части на At, устремим At к нулю. Тогда, поло-
положив t' = t, в пределе получим уравнение
mm
u(t)eu
/0(x,u,t) + — у' =°^ (9-45)
L at J
или
которое называется уравнением Беллмана.
Так как функция Беллмана S(x.(i),t) не зависит от управле-
управления u(t), последнее слагаемое в правой части можно вынести за скобки
и уравнение Беллмана записать в виде
mm /o(x,u,^)+ > — fi(x,u,t) = -—-,
или, в векторной форме,
g]-M. (9.46)
Сформулируем основной результат.
Если функция Беллмана дифференцируема, то для того чтобы
допустимая пара (и(?),х(?)) для задачи (9.44) была ее решением,
необходимо, чтобы она удовлетворяла уравнению Беллмана (9.46)
при граничном условии
S(x(tf),tf)=go(x(tf),tf). (9.47)
9.4- Метод динамического программирования 313
Если минимум в левой части уравнения (9.46) достигается во
внутренней точке множества Щ, то его можно записать в виде
fn(x u t) + —— f(x u t) = — ——- (9 48a)
= 0, j = l,2,...,r. (9.486)
Уравнения (9.486) выражают необходимое условие минимума ле-
левой части (9.46) и заменяет опущенную в уравнении (9.48а) операцию
минимизации по управлению.
Если правые части уравнений объекта и подынтегральное выра-
выражение в критерии оптимальности, т.е. функции fi (г = 0,1,... , п),
явно не зависят от времени и конечный момент не фиксирован, то
функция Беллмана не зависит явно от времени и dS/dt = 0.
Оптимальное управление методом динамического программирова-
программирования находим так:
1) из уравнений (9.486) определяем управление как функцию от S:
u*=u*(S);
2) подставив и* = и* (S) в уравнение (9.48а) и решив его при
краевом условии (9.47), находим функцию Беллмана;
3) подставив найденную функцию Беллмана в выражение и* =
= u*(*S), получаем оптимальное управление как функцию фазовых
координат.
Пример 9.8. Определить оптимальное управление с обратной
связью в следующей задаче:
Х\ = Х2, %2 — Щ #l@) = х\-> #2@) = X2i
Xl(tf) = 0, X2(tf)=0; J = f(xl-\-u2)dt.
0
Здесь х® и х\ — заданные числа, момент tf не фиксирован.
Решение. Воспользуемся методом динамического программиро-
программирования и выпишем уравнения (9.48):
1 дх\ дх2 ' дх2
т/г 1 dS тт
Из второго уравнения находим и — —- ——. Подставим это выражение
в первое уравнение:
2 1
Xl ~ J
Нужно решить это уравнение при граничном условии S(x.(tf)) = 0.
Будем искать решение в виде квадратичной формы
314 Гл. 9. Методы теории оптимального управления
которая в силу краевых условий удовлетворяет указанному гранич-
граничному условию. Подставив это выражение в уравнение Беллмана, по-
получим
х\ — - Bai2xi + 2а22^2J + BацЖ1 + 2а\2х2)х2 = О,
или
A - а\2)х\ + Bац - 2ai2a22)xix2 + Bai2 - а\2)х\ = О-
Последнее равенство будет выполняться тождественно, если
1 - а\2 = 0, 2ац - 2а\2а22 — О, 2ai2 - а\2 = 0.
Эта система имеет следующие решения:
ai2 = 1, a22 = ±л/2, an = ±л/2.
Так как по определению функция Беллмана имеет вид
S(x(f)) = min f(x\ + и2) dt,
u(t)
то S > 0 при всех t < tf. Поэтому квадратичная форма, удовлетво-
удовлетворяющая уравнению Беллмана, будет функцией Беллмана, если она
является положительно определенной. Критерию Сильвестра положи-
положительной определенности квадратичной формы удовлетворяет реше-
решение а\2 — 1, а22 = л/2, оц = у/2. Поэтому функция Беллмана и оп-
оптимальное управление имеют вид
S = y/2xj + 2хгх2 + л/2^,
Методы классического вариационного исчисления и принцип мак-
максимума, как правило, позволяют находить оптимальное управление
как функцию времени. В то же время, как следует из рассмотренного
примера, метод динамического программирования позволяет нахо-
находить оптимальное управление с обратной связью. Недостатком метода
динамического программирования при решении задач оптимального
управления является то, что он исходную задачу сводит к решению
нелинейного уравнения в частных производных.
9.4.4. Достаточные условия оптимальности. Уравнение
Беллмана как необходимое условие оптимальности получено в пред-
предположении, что функция Беллмана является гладкой (непрерывно
дифференцируемой). Однако это допущение не вытекает из условия
задачи оптимального управления и часто не выполняется. Поэтому
применительно к задачам оптимального управления метод динами-
динамического программирования требует обоснования. В тех случаях, ког-
когда нет обоснования, он может быть использован как эвристический
9.4- Метод динамического программирования 315
прием. При определенных условиях метод динамического программи-
программирования дает достаточное условие оптимальности.
Достаточное условие оптимальности. Пусть 5(х,t) —
гладкое решение уравнения Беллмана (9.46) при граничном усло-
условии (9.47) и управление и*(х,?), найденное из условия
/o(x,u,i) + -/(x,u,i) + -
порождает единственную траекторию х*(?), удовлетворяющую
уравнениям и граничным условиям задачи (9.44), вдоль которой
функция и*(t) = u* (x* (?),?) кусочно непрерывна.
Тогда функция и*(х,?) является оптимальным управлением за-
задачи (9.44).
Докажем это утверждение. В силу определения функции и*(х,?) в
каждой точке ее непрерывности справедливо равенство
fo(x*(t),u*(t),t) + dSi^t) =0.
Проинтегрируем обе части по t от ?о ДО tf.
откуда с учетом граничного условия (9.47) и равенства x*(?q) — х°
находим
*/
/(x*W,u*(^)^)^. (9.49)
Рассмотрим допустимую пару (и(?),х(?)), где u(t) — произволь-
произвольное допустимое управление. В силу определения функции u*(t) =
= u*(x*(t),t) справедливо неравенство
/o(x(t),u(t),t) + z /0(x(t),u(t),t)
Интегрируя обе части по t от ?о ДО tf, получим
Ш = 0.
(х(*), u(t),t) dt + 5(х(*/), tf) - 5(х(*о),*о) ^ 0,
или, с учетом граничного условия (9.47) и равенства х(?о) = х°,
Из этого неравенства и соотношения (9.49) следует, что при и =
= и*(х,?) критерий оптимальности принимает минимальное значе-
значение, т.е. это управление является оптимальным.
316 Гл. 9. Методы теории оптимального управления
9.5. Наблюдаемость и восстанавливаемость
При синтезе оптимальных систем с обратной связью управле-
управления получаются как функции от фазовых координат. В общем слу-
случае фазовые координаты не могут быть измерены непосредствен-
непосредственно. Доступны измерению (наблюдению) координаты вектора у =
= (?/1 У2 • • • Ур)Т, который называется выходным вектором, выходом
или вектором выходных переменных, а сами координаты — выходны-
выходными переменными или выходными величинами.
Выходные переменные функционально связаны с фазовыми коор-
координатами, и для реализации управлений с обратной связью необходи-
необходимо определить фазовые координаты по измеренным значениям выход-
выходных переменных. В связи с этим возникают проблемы наблюдаемости
и восстанавливаемости, заключающиеся в установлении возможности
определения состояния объекта (фазового вектора) по измеренным
значениям выходного вектора на некотором интервале времени.
Пусть объект описывается уравнением
х = /(х, u, t), xGi?n, u e Rr, (9.50а)
и выходной вектор связан с фазовым вектором соотношением
у = g(x,u,t), yeRp, (9.506)
которое называется уравнением наблюдения или уравнением выхода.
Управляемая система (9.50) называется наблюдаемой или вполне
наблюдаемой, если существует такое t\ (t <t\ < оо), что по данным
измерения выходного вектора у(т) и управления и (г) на интерва-
интервале t ^ г ^ t\ можно определить состояние х(?).
Наблюдаемость или полная наблюдаемость означает, что имеется
возможность определить фазовый вектор х(?) по будущим значениям
выходного вектора. Однако в задачах управления текущее состояние
объекта должно определяться по прошлым значениям выходного век-
вектора, так как по текущим значениям фазового вектора формируется
управление с обратной связью. Поэтому более важным с точки зре-
зрения управления является понятие восстанавливаемости определяемое
следующим образом [29].
Управляемая система (9.50) называется восстанавливаемой или
вполне восстанавливаемой, если существует такое t\ (—оо <t\ < t),
что по данным измерения выходного вектора у (г) и управления и (г)
на интервале t\ ^ г ^ t можно определить состояние х(?).
Для стационарных систем из полной наблюдаемости следует пол-
полная восстанавливаемость и наоборот, поэтому в таких случаях эти
понятия можно не различать.
9.5.1. Наблюдаемость линейных стационарных систем.
Рассмотрим линейную стационарную управляемую систему
х = Лх + Би, xeiT, ueiT, (9.51a)
yeRp. (9.516)
9.5. Наблюдаемость и восстанавливаемость 317
Введем в рассмотрение матрицу
Н = [СТ АТСТ ... (Ат)п~1Ст], (9.52а)
которая называется матрицей наблюдаемости. Эта матрица состоит
из столбцов матрицы СТ и столбцов произведений матриц АТСТ,
(АТJСТ, ..., (Ат)п~1Ст и имеет размерность пхрп. Наряду с
матрицей наблюдаемости рассмотрим транспонированную матрицу
наблюдаемости
о
Нт= СА , (9.526)
_САп-\
которая имеет такой же ранг, что и исходная матрица Н.
Критерий наблюдаемости. Управляемая система (9.51)
вполне наблюдаема (восстанавливаема) тогда и только тогда, ког-
когда ранг матрицы наблюдаемости (9.52а), или, что то же, ранг
транспонированной матрицы (9.526), равен п.
Необходимость. Пусть ранг матрицы НТ меньше п. Тогда
размерность пространства Rh, порожденного строками матрицы Нт,
меньше п, т.е. Rh является собственным подпространством прост-
пространства Rn. Поэтому существует ненулевой вектор х^ Е Rn, ортого-
ортогональный всем вектор-строкам матрицы Нт (таким вектором явля-
является любой вектор из Rn, не принадлежащий подпространству Rh)'-
Сх±=0, СЛх±=0, ..., СЛп-1х±=О. (9.53)
Как было показано, основываясь на теореме Гамильтона—Кели
(см. A.15)), матрицы Ак при к ^ п можно линейно выразить че-
через 1,А,...,Ап~1, поэтому из (9.53) получаем, что СА1х± = 0 при
всех / = 0,1, 2,... Следовательно, имеем
CeAtx± = C(l + At + i АН2 + .. .)x± = 0. (9.54)
Пусть некоторому начальному условию x(?q) = х^1) соответству-
соответствует выходной вектор у^ (t). В силу соотношения (9.54) всем начальным
значениям фазового вектора вида х^1) + х^ соответствует один и тот
же выходной вектор у^1^):
t
y(t) = Cx(t) + Dm = CeAt(^1) + x±) + CJeA^~T)В(т)и(т) dr + Dm =
{)M{r) dr + Dm =
to
Это и доказывает невозможность определения состояния х(?о) по
значениям выходного вектора, если ранг матрицы наблюдаемости
меньше п.
318
Гл. 9. Методы теории оптимального управления
Достаточность. Пусть ранг матрицы наблюдаемости равен п.
В силу стационарности управляемой системы достаточно показать
возможность определения состояния х@) по известным значениям
выходного вектора и управления на некотором интервале [0, t{[. Имеем
y(t) =
C
dr + ?>u,
или
г
Ay(t) = y(t) -С [
dr-Du =
to
Так как y(t) и u(t) доступны измерению, а матрицы С, В, D и А
заданы, то функция Ду(?) и ее производные любого порядка явля-
являются известными функциями времени. Из последнего соотношения
при t = 0 находим
Ду@) = Сх@), Ду(О) = СЛх(О),
ИЛИ
( Ду(О)
Ду(о)
С
СА
СА
п-1
х@) = Ятх@).
Полученное векторное уравнение с п неизвестными Xi@) (г =
= 1,2,...,п) равносильно системе из пр уравнений. Так как ранг
матрицы Нт равен п, то среди уравнений этой системы имеется
ровно п независимых уравнений. Выделив эти уравнения и решив их,
определим искомый вектор х@). Критерий полностью доказан.
Наблюдаемость (восстанавливаемость) управляемой системы (9.51)
полностью определяется матрицами А и С. Наряду с наблюдаемос-
наблюдаемостью управляемой системы используется понятие наблюдаемости па-
ры(ДС).
Пара (А, С), где А — (п х п)-матрица и С — (р х п)-матрица,
называется наблюдаемой или полностью наблюдаемой (восстанавли-
(восстанавливаемой), если матрица наблюдаемости, составленная из этой пары,
имеет ранг п, или, что то же, управляемая система (9.51) вполне
наблюдаема.
Наблюдаемость управляемой системы, как и управляемость, яв-
является внутренним свойством системы: она не зависит от того, в
какой системе координат записаны уравнения управляемой системы.
Покажем это.
При неособом преобразовании
х = Гх,
9.5. Наблюдаемость и восстанавливаемость
319
уравнения управляемой системы (9.51) принимают вид
х = Лх + Въ, у = Сх + Dm,
где ~ ~ 1 ~
л = г-^г, б = т~хв, с = ст.
Как легко проверить, транспонированная матрица наблюдаемости
преобразованной системы имеет вид
н1 =
с
СА
СА11-1
—
С
СА
САп~г
т = н1т.
Так как матрица Т неособая и ее ранг равен п, ранг матрицы наблю-
наблюдаемости Нт совпадает с рангом матрицы Нт.
Пример 9.9. Исследовать наблюдаемость управляемой системы
Решение. Преобразуем данное уравнение в нормальную форму:
1
или
откуда получаем
¦у =
2р2 + р)Х1 =и,
2/ = Ж1 +ж3.
Матрицы Л, С и их произведения имеют вид
А =
О 1 О
О 0 1
О -1 -2
С= [1 0 1],
= [0 0 -2], СА2 =[0 2 4].
Отсюда для транспонированной матрицы наблюдаемости получаем
нт =
1
0
0
0
0
2
1
-2
4
Ранг этой матрицы равен 3, так как det HT = 4^0. Следовательно,
рассматриваемая система вполне наблюдаема.
320
Гл. 9. Методы теории оптимального управления
9.5.2. Каноническая форма наблюдаемости. Обнаружи-
ваемость. Пусть ранг матрицы наблюдаемости управляемой сис-
системы (8.51) равен I (/ ^ п). Если ранг I не равен нулю, но мень-
меньше п @ < / < п), то будем говорить, что управляемая система (9.51)
частично наблюдаема. Подпространство, порождаемое I независимы-
независимыми строками транспонированной матрицы наблюдаемости, обозна-
обозначим Rn и будем называть подпространством наблюдаемости. Если
управляемая система частично наблюдаема, то ее подпространство
наблюдаемости будет собственным подпространством пространст-
пространства Rn.
Сформируем матрицу Т преобразования х = Тх в виде
Т =
где строки матрицы Т\ образуют базис /-мерного подпространства
наблюдаемости, а строки матрицы Т2 подбираются так, чтобы матри-
матрица Т была неособой (det T ф 0). В частности, в качестве строк матри-
матрицы Т\ можно взять / независимых строк транспонированной матрицы
наблюдаемости. При таком преобразовании уравнения управляемой
системы примут вид так называемой канонической формы наблюдае-
наблюдаемости [29]
0
х =
421
22
х ¦
u,
ИЛИ
х =
(9.55)
— /-вектор, х^2)— (п — /)-вектор,
21,
, С\)
где
С\ — матрицы соответствующей размерности, причем пара
вполне наблюдаема.
Из структуры системы уравнений (9.55) видно, что вектор 5с2
никакого влияния на выходной вектор ни непосредственно, ни через
фазовый вектор х^1) не оказывает. Поэтому его координаты не могут
быть определены по наблюдениям выходного вектора y(t). Эти коор-
координаты называются ненаблюдаемыми или нее останавливаемыми.
Проекция фазового вектора на подпространство наблюдения Ru,
определяемая равенством х^2) = 0 и имеющая вид х = col (х^1), 0),
вполне наблюдаема. Другими словами, если система движется в под-
подпространстве it!H, то она вполне наблюдаема. Отсюда и название
подпространства RH: подпространство наблюдаемости. Полностью
невосстанавливаемый вектор имеет вид х = col @,xB)).
По канонической форме наблюдаемости можно судить о наблю-
наблюдаемости управляемой системы: управляемая система вполне наблю-
наблюдаема, если в канонической форме наблюдаемости отсутствует век-
вектор хB).
9.5. Наблюдаемость и восстанавливаемость 321
Обнаруживаемость. Если управляемая система частично
наблюдаема, то фазовый вектор можно представить в виде суммы:
х(?) = хн(?) + xj_(?), где хн — вектор из подпространства наблюдае-
наблюдаемости, х^ — полностью ненаблюдаемый вектор. Вектор х(?) восста-
восстанавливается по наблюдениям у (г) и и(т) на интервале to ^ r ^ t с
точностью до невосстанавливаемого вектора xj_. Он в асимптотике
становится восстанавливаемым, если х^ —у 0 при t —У оо.
Частично наблюдаемая управляемая система (9.51) называется
обнаруживаемой, если ^восстанавливаемые координаты при нуле-
нулевых остальных координатах и нулевом управлении стремятся к ну-
нулю при t —у оо. Непосредственно из определения следует, что вполне
наблюдаемая система является обнаруживаемой. Также является об-
обнаруживаемой любая асимптотически устойчивая система.
Из канонической формы наблюдаемости вытекает следующий
критерий обнаруживаемости.
Частично наблюдаемая управляемая система обнаруживаема в
том и только том случае, если в канонической форме наблюдаемос-
наблюдаемости матрица А22 является (асимптотически) устойчивой.
Пример 9.10. Исследовать наблюдаемость и обнаруживаемость
управляемой системы
Х1 = #2, Х2 = U, у = СХ\ + Х2
в зависимости от параметра с.
Решение. В данном случае имеем
С=[с 1], СА=[О с], НТ=
Система вполне наблюдаема при с ф 0. При с = 0 система час-
частично наблюдаема и не обнаруживаема. Действительно, при с = О
уравнения принимают вид канонической формы наблюдаемости, если
принять х^ = Х2, х^ = х\. При этом матрица А22 — 0 и не явля-
является устойчивой.
9.5.3. Принцип двойственности управляемости и наблю-
наблюдаемости. Рассмотрим наряду с системой
х = Лх + Би, у = Сх (9.56)
так называемую двойственную ей систему
х = Лтх + Сти, у = ?тх. (9.57)
Здесь принято D = 0, так как эта матрица не влияет на управ-
управляемость и наблюдаемость. Как легко проверить, матрица управ-
управляемости системы (9.56) совпадает с матрицей наблюдаемости сис-
системы (9.57), а матрица наблюдаемости системы (9.56) совпадает с
матрицей управляемости системы (9.57).
21 Д.П. Ким
322 Гл. 9. Методы теории оптимального управления
Поэтому справедлив следующий принцип двойственности
(дуальности).
Система (9.56) вполне управляема тогда и только тогда, когда
двойственная ей система (9.57) вполне наблюдаема, и система (9.56)
вполне наблюдаема тогда и только тогда, когда двойственная ей
система (9.57) вполне управляема.
9.5.4. Наблюдатели полного порядка. Перейдем от задачи
возможности восстановления к задаче синтеза устройства, восста-
восстанавливающего текущие значения фазового вектора. Восстановлен-
Восстановленные значения называются оценками, а устройства, обеспечивающие
получение оценок по измерениям (наблюдениям) управления и (г) и
выходного вектора у (г) на интервале to ^ т ^ t, называются наблю-
наблюдателями [29]. В частности, устройство, описываемое уравнением
х = Fx + Ку + Ни, (9.58)
называется наблюдателем полного порядка для управляемой системы
х = Лх + Ви, у = Сх, (9.59)
если при х(?о) = х(?о) выполняется равенство х(?) = х(?) при
всех u(t), t ^ to.
Наблюдатель (9.58) называется наблюдателем полного порядка,
так как оценка х имеет такую же размерность, что и вектор состоя-
состояния х.
Теорема 9.1 [29]. Наблюдатель полного порядка для управляе-
управляемой системы (9.59) имеет вид
х = Лх + Ви + К(у - Сх), (9.60)
где К — произвольная матрица, которая может быть функцией
времени и которая называется матрицей коэффициентов усиления.
Доказательство. Вычтем из первого уравнения (9.59) уравне-
уравнение (9.58) и подставим в полученное соотношение выражение для у
из (9.59):
х - х = (А - КС)х - Fx + (В - Н)и. (9.61)
Из этого уравнения следует, что при начальном условии x(?q) — x(?q)
равенство х(?) = х(?) будет выполнено при всех u(t), t ^ to, если
имеют место равенства
А - КС = F, В = Н.
Так как в первое уравнение входят две неизвестные матрицы, одну
из них, например, матрицу К, можно задать произвольно. Подставив
выражения для матриц F и Н из последних соотношений в уравне-
уравнение (9.58), получим (9.60). Теорема доказана.
Из уравнения (9.60) следует, что наблюдатель системы (9.59)
включает саму эту систему и дополнительное слагаемое, пропор-
9.5. Наблюдаемость и восстанавливаемость
323
Рис. 9.3. Структурная схема наблюдателя
циональное разности у — у выходного вектора и его оценки у = Сх
(рис. 9.3).
Устойчивость наблюдателя (9.60) зависит от матрицы А — КС.
Уравнение для ошибки е = х — х имеет вид (см. (9.61))
ё = (А- КС) е.
Отсюда следует, что ошибка e(t) —> 0 при t —> оо независимо от
начальной ошибки тогда и только тогда, когда наблюдатель яв-
является асимптотически устойчивым. Поэтому при выборе матрицы
коэффициентов усиления К необходимо прежде всего позаботиться
о том, чтобы наблюдатель был асимптотически устойчивым. Но от
матрицы А — КС и соответственно матрицы К зависит еще и качест-
качество наблюдателя. Поэтому выбор матрицы К, к которому сводится
синтез наблюдателя вида (9.60), должен производиться из условия
устойчивости и заданных требований к его качеству. В том случае,
когда все матрицы системы и матрица коэффициентов усиления пос-
постоянны, т. е. наблюдатель является стационарным, его устойчивость
и качество зависят от расположения корней его характеристического
уравнения, т.е. от собственных значений матрицы А — КС на комп-
комплексной плоскости. Собственные значения матрицы А — КС могут
быть произвольно размещены на комплексной плоскости путем вы-
выбора матрицы коэффициентов усиления в том и только том случае,
если исходная система, т.е. пара (Л, С), вполне наблюдаема. Если
система частично наблюдаема, можно найти постоянную матрицу К,
при котором наблюдатель асимптотически устойчив, в том и только
том случае, если система обнаруживаема [29].
В случае стационарного наблюдателя ошибка е(?) тем быстрее
сходится к нулю, чем дальше от мнимой оси расположены корни
характеристического уравнения наблюдателя на комплексной плос-
плоскости. Этого можно достичь при больших элементах матрицы коэф-
коэффициентов усиления. Однако с увеличением коэффициентов усиления
наблюдатель становится чувствительным к шумам измерения. Поэто-
Поэтому оптимальная матрица К может быть определена только с учетом
реальных помех.
9.5.5. Наблюдатели пониженного порядка. Рассмотрим ста-
стационарную систему
х = Лх + Би, у = Сх, (9.62)
21*
324 Гл. 9. Методы теории оптимального управления
где х — n-вектор, у — р-вектор, причем п > р, А, В, С — матрицы
соответствующей размерности. Пусть матрица С имеет максималь-
максимальный ранг, т. е. р. Тогда уравнение наблюдения дает р независимых
линейных уравнений для неизвестного вектора состояния х(?). Чтобы
определить х(?), необходимо получить дополнительно п — р уравне-
уравнений для координат этого вектора.
Введем в рассмотрение (п — р)-вектор p(t), определяемый соотно-
соотношением .
р = С'х, (9.63)
где матрица С такова, что матрица „, является невырожденной
[О J
(неособой). Из уравнения
находим
X =
Используя представление
\с>\ = [Ll L2]' (9-64)
где L\ и L2 — (п х р)- и [n x (п — р)]-матрица соответственно,
получаем
(9.65)
Если получить оценку р для введенного вектора, то для оценки
фазового вектора имеем
? = Li2/ + L2p. (9.66)
Таким образом, задача восстановления фазового вектора свелась
к задаче восстановления вектора р меньшей размерности. Используя
определенные выше матрицы С;, Ь\ и L2, можно определить искомый
наблюдатель.
Теорема 9.2 [29]. Наблюдатель пониженного порядка для уп-
управляемой системы (9.59) имеет вид
? = L2q + (Li + L2K)y, (9.67)
q = {C'AL2 - KCAL2)q + {CAL2K + СALX - KCALX -
- KCAL2K)y + (C'B - KCB)u, (9.68)
где К — произвольная матрица.
Наблюдатель пониженного порядка (9.67), (9.68) называют наблю-
наблюдателем Луенбергера.
Доказательство. Сначала найдем наблюдатель, который в
качестве одного из уравнений включает уравнение (9.66). Для этого
9.5. Наблюдаемость и восстанавливаемость 325
достаточно построить наблюдатель для переменной р. Найдем для
этой переменной дифференциальное уравнение. Дифференцируя (9.63)
и используя (9.62), получим
р = С'Лх + С'Ви,
или, с учетом (9.65),
р = C'AL2p + С'АЬгу + С'Ви. (9.69)
Чтобы построить наблюдатель для р, основываясь на теореме 9.1,
необходимо добавить к уравнению (9.69) уравнение наблюдения. При-
Примем в качестве такого уравнения уравнение, которое получается диф-
дифференцированием исходного уравнения наблюдения у = Сх с уче-
учетом (9.65):
у = Сх = СЛх + СВи = CAL2p + CALiy + CBu.
При таком уравнении наблюдения наблюдатель для объекта (9.69)
по аналогии с наблюдателем (9.60) для системы (9.59) можно предста-
представить в виде
р = C'AL2p + С'АЬгу + С'Ви + К (у - CAL2p - CALxy - СВи).
(9.70)
В это уравнение входит производная у. Чтобы избавиться от нее,
введем новую переменную q = р — Ку. Продифференцировав это соот-
соотношение, затем подставив выражение для р из (9.70) и р = q + Ку,
получим уравнение (9.68). Исключив из (9.66) переменную р, получим
соотношение (9.67). Начальное условие
q(to) = C'x(to) - Ky(t0)
определяется исходя из соотношения (9.63) и равенства q = р — Ку.
Теорема доказана.
Пример 9.11. Построить наблюдатели полного и пониженного
порядков для управляемой системы
Х\ — #2, Х2 = U, у = Х\.
Решение. В данном случае имеем
Как следует из (9.60), наблюдатель полного порядка имеет вид
или, в скалярной форме,
xi = х2 + ki(y - Si), x2 = и + к2(у - xi).
Для построения наблюдателя пониженного порядка необходимо
определить матрицы С", Li, L2. Матрица С должна быть такой,
326 Гл. 9. Методы теории оптимального управления
[С 1
~, была невырожденной. В остальном
G J
она может быть произвольной. Условию невырожденности указанной
выше квадратной матрицы удовлетворяет матрица С" — @ 1). Из
соотношения (9.64), которое в данном случае принимает вид
находим
Li = A 0)т, L2 = (О 1)т.
Подставив выражения для А, В, С, С", L\ и L2 в (9.67) и (9.68),
получим
g = — kq — к2 + и, ? = ( j g + ( 7 ) у.
Напомним, что матрица К или, в случае наблюдателя понижен-
пониженного порядка, скалярная величина к выбирается из условия устойчи-
устойчивости и требований к качеству наблюдателя.
9.6. Синтез оптимальных систем управления
Как отмечалось, методы множителей Лагранжа и принцип мак-
максимума, как правило, позволяют находить программное оптимальное
управление, т.е. оптимальное управление как функцию времени. Ме-
Метод динамического программирования позволяет находить оптималь-
оптимальное управление с обратной связью, но при этом приходится решать не-
нелинейные уравнения в частных производных. В этом параграфе будут
рассмотрены методы решения некоторых задач синтеза оптимальных
систем управления с обратной связью.
9.6.1. Метод фазовой плоскости синтеза оптимальной по
быстродействию системы. Пусть задана вполне управляемая ли-
линейная стационарная система
х = Лх + Би, \и\ ^ 1, х е Rn, и е R,
все корни характеристического уравнения которой действительны.
Заметим, что ограничения более общего вида а ^ и ^ /3, где а < О
и /3 > 0, введением нового переменного v = 2и — (а + /3)/(а/3) всегда
приводится к приведенному выше виду \и\ ^ 1. Рассмотрим задачу
синтеза оптимального по быстродействию регулятора, обеспечиваю-
обеспечивающего перевод системы из произвольной начальной точки в начало
координат.
Так как управление скалярное, условие нормальности совпадает с
условием управляемости, поэтому выполняются все условия теоремы
об п интервалах. В соответствии с этой теоремой оптимальное управ-
управление, имея не более п интервалов постоянства, принимает только
крайние значения: —1 или 1. Если представить его как функцию
9.6. Синтез оптимальных систем управления 327
фазовых координат и* = п*(х), то ясно, что все фазовое пространство
разбивается на два подпространства: подпространство, в котором
и* = — 1, и подпространство, в котором и* = 1. Гиперповерхность
(при п = 2 — кривая, при п = 3 — поверхность), которая делит
фазовое пространство на указанные подпространства, называют ги-
гиперповерхностью (кривой, поверхностью) переключения. Если запи-
записать уравнение гиперповерхности crfe) = 0, то (при соответствующем
выборе cri'x.)) сг(х) > 0 по одну сторону от гиперповерхности и а^) < О
по другую. Всегда можно выбрать функцию cri'x.) так, чтобы она
была отрицательна в подпространстве, где и* = —1, и положитель-
положительна в подпространстве, где и* = 1. Тогда, очевидно, оптимальным
управлением будет u* = sign сг(х). Поэтому нахождение оптимального
управления с обратной связью сводится к определению функции <т(х),
которая называется функцией переключения.
При п = 2 для нахождения функции переключения можно вос-
воспользоваться методом фазовой плоскости. На фазовой плоскости стро-
строятся семейства фазовых траекторий, соответствующих управлени-
управлениям и* = — 1 и и* = 1. Оптимальная траектория представляет собой
часть траектории или соединение частей двух траекторий из постро-
построенных семейств. В силу граничного условия на правом конце траек-
траектории х(?/) = 0 она должна оканчиваться в начале координат. Ис-
Используя эти свойства оптимальных траекторий, нетрудно определить
кривую переключения. Проиллюстрируем изложенное на простейшем
примере.
Пример 9.12. Определить оптимальный по быстродействию за-
закон управления двигателем, описываемым уравнениями
х\ — ж2, х2 = и, \и\ ^ 1, х@) = х°, х(?/) = 0.
Решение. Характеристическое уравнение имеет кратный нуле-
нулевой корень. Выполняются все условия теоремы об п интервалах. Оп-
Оптимальное управление может принимать значения —1 или 1. Найдем
соответствующие им фазовые траектории. Разделив второе уравнение
на первое, получим
d,X2 _ U
d,X\ X2 '
или
х2 dx2 = и dx\.
Проинтегрировав последнее уравнение при и — — 1 и и = 1, соот-
соответственно получим
-х\ — —х\ + С\, - х\ — х\ + С2.
На рис. 9.4, а представлены оба семейства траекторий. Опти-
Оптимальная траектория должна состоять из участка траектории одного
семейства, проходящей через начальную точку, и участка траектории
другого семейства, проходящей через начало координат. Из сказанно-
сказанного следует, что переключение должно происходить на полутраектори-
328
Гл. 9. Методы теории оптимального управления
и* =1
и* =-1
Рис. 9.4. Построение фазового портрета оптимальной системы
ях АО и ОВ (рис. 9.4, а). Если вначале изображающая точка движется
по траектории, соответствующей и* = —1, то переключение должно
произойти на полутраектории ВО, которая описывается уравнением
х\ -
= 0.
И если вначале изображающая точка движется по траектории, со-
соответствующей и* = 1, то переключение должно произойти на полу-
полутраектории ОЛ, которая описывается уравнением
х\ + 2ж1 = 0.
Фазовый портрет оптимальной системы представлен на рис. 9.4, б.
Уравнение линии переключения АО В, основываясь на уравнениях
полутраекторий АО и ОВ, можно записать так:
crfe) = —[х\ + 2х\ signal) signal = 0.
Функция <т(х) отрицательна справа от линии переключения, где
и* = —1, и положительна слева, где и* = 1. Поэтому имеем
и* = signсг(х) = — sign [{х\ + 2х\ signal) signal].
Заметим, что кривая АО В может быть описана уравнением
5(х) = — [х\ + 2х\ signal) = 0.
Однако знак функции 5(х) слева и справа от кривой АО В меняется
при переходе с верхней полуплоскости в нижнюю полуплоскость.
Поэтому эта функция не может быть функцией переключения.
Как следует из фазового портрета, переходный процесс оптималь-
оптимальной системы является апериодическим. Однако из-за неидеальнос-
неидеальности переключающего устройства, неточности математической модели
объекта и других возмущений реальный переходный процесс может
оказаться колебательным.
9.6.2 Синтез оптимальной по интегральному квадратич-
квадратичному критерию нестационарной линейной системы управ-
управления.
Постановка задачи. Пусть объект описывается уравнением
х = A(t)x + B(t)u + h(t) (9.71a)
9.6. Синтез оптимальных систем управления 329
и критерий оптимальности имеет вид
J = x.T(tf)Fx(tf) + J [xT(t)Q(t)x(t)+uT(t)R(t)u(t)} dt. (9.716)
Здесь h.(t) — известная функция времени; F — положительно полу-
полуопределенная матрица; Q(t), R(t) — положительно определенные мат-
матрицы (xTFx ^ 0, x.TQx > 0 и xTi?x > 0 и xTRx > 0 при всех х ф О
и t Е [to,tf]); функции A(t), B(t), h(t), Q(t) и R(t) являются непре-
непрерывными на интервале [to,tf]; начальный и конечный моменты вре-
времени ?о и tf фиксированы.
Требуется найти управление с обратной связью, при котором при
произвольном начальном условии x(?q) = x° критерий оптимальнос-
оптимальности принимает минимальное значение.
Эту задачу называют задачей синтеза нестационарного линей-
линейного регулятора состояния.
В критерии оптимальности (9.716) первое слагаемое, представ-
представляющее терминальную квадратичную ошибку, включается, если не-
необходимо обеспечить максимальную близость состояния системы в
конечный момент времени к желаемому состоянию. Слагаемое
х(*) dt
является интегральной квадратической ошибкой и характеризует ка-
качество управления на всем интервале [to,tf]. Последнее слагаемое
f
uT(t)R(t)u(t)dt
to
есть взвешенная «энергия» управления, и оно ограничивает управле-
управление. Требуемое ограничение на управление, которое в явной форме
не учтено в постановке задачи, может быть обеспечено соответствую-
соответствующим выбором матричной функции R(t).
Утверждение 9.1. Решение задачи (9.71) синтеза оптималь-
оптимального нестационарного линейного регулятора существует, единст-
единственно и оптимальное управление имеет вид
и* = - {r~1BtK^ + i R~1BTp^, (9.72а)
где симметрическая (п х п)-матрица К и п-вектор р определяются
из уравнений
К = -КА - АТК + KBR~1BTK - Q, (9.726)
р = KBR~1BTp - Атр - 2Kb (9.72в)
при граничных условиях
K(tf)=F, p(t,)=O. (9.72r)
330 Гл. 9. Методы теории оптимального управления
Для любого t G [to,t/] справедливо равенство
= xT(tf)Fx(tf) + J [x*T(t)Q(t)x*(t) + u*T(t)R(t)u*(t)} dt, (9.73a)
t
где q(t) — скалярная функция, которая определяется из уравнения
q=lpTBR~1BTp-pTh, q(tf) = Q. (9.736)
4
При h(t) = 0 оптимальное управление имеет вид
u* = -R~1BTKxJ (9.74)
где симметрическая (п х п)-матрица К определяется из уравнения
К = -КА - АТК + KBR~1BTK - Q, K(tf) = F. (9.75)
Для любого t G [to, t/] справедливо равенство
xT(t)K(t)x(t) = xT(tf)Fx(tf) + | [x*T(t)Q(t)x*(t) +
*(t)]dt. (9.76)
Уравнение (9.726) (и соответственно (9.75)) называют матричным
уравнением Риккати.
Доказательство. Воспользуемся методом динамического прог-
программирования. Уравнение Беллмана (9.46) и граничное условие (9.47)
принимают вид
min[xTQx + uTRu + ^ (Ах + Вп
и I OX
S(x(tf),tf)=xTFx(tf). (9.77)
В уравнении Беллмана выражение в квадратных скобках предс-
представляет квадратный трехчлен относительно векторного управления,
и так как нет ограничения на управление, то минимум достигается
в стационарной точке. Поэтому уравнение Беллмана можно предста-
представить в виде системы
xTQx + uTRu + Ц (Ах + Ви + h) = -^, (9.78)
Из последнего уравнения имеем
т 1 OS
U =fe
или, после транспонирования,
9.6. Синтез оптимальных систем управления 331
Подставим эти выражения для управления в (9.78):
Решение последнего уравнения будем искать в виде квадратичного
трехчлена
5(х, t) = xTif(?)x + рт(?)х + gf(t), (9.81)
где K(i) — симметрическая (п х п)-матрица, p(t) — вектор-функция
размерности n, q(t) — скалярная функция.
После подстановки (9.81) в уравнение (9.80) его можно преобразо-
преобразовать к виду
АТК - KBR~1BTK + Q)x -
1BTp - Атр - 2Kh) - i PTBR-1BTp + pTh =
Приравняв в обеих частях полученного соотношения выражения при
одинаковых степенях ж, получим уравнения (9.726), (9.72в) и (9.736).
Подставив квадратный трехчлен (9.81) в (9.79), получим оптималь-
оптимальный закон управления (9.72а); подставив его в (9.77), получим гра-
граничные условия (9.72г) и q(tf) = 0.
Квадратный трехчлен (9.81), если функции K(t), p(t) и q(t) опре-
определяются из уравнений (9.726), (9.72в), (9.736) при граничных усло-
условиях (9.72г) и q(tf) = 0, является функцией Беллмана, причем эта
функция является гладкой. Как легко проверить, выполняются все
условия, при которых уравнение Беллмана является достаточным
условием оптимальности. Поэтому соотношения (9.72) действительно
определяют оптимальный закон управления. Существование и единст-
единственность решения задачи синтеза оптимального нестационарного ли-
линейного регулятора следуют из существования и единственности ре-
решения уравнений (9.726), (9.72в) при граничных условиях (9.72г).
При этом в этой задаче не требуется, чтобы объект был вполне уп-
управляем. Решение существует и единственно и в том случае, когда
объект является частично (не полностью) управляемым. Это обуслов-
обусловлено тем, что управляемый процесс рассматривается на конечном
интервале времени и вклад неуправляемых фазовых координат в
значение критерия оптимальности является конечным, даже если они
расходятся.
Равенство (9.73а) получается из определения функции Беллмана
, t) = min
()t^^tf { J
+ uT(t)R(t)u(t)]dt\. (9.82)
332 Гл. 9. Методы теории оптимального управления
При h(t) = 0 уравнения (9.72в) и (9.736) становятся однородными,
и их решениями при нулевых начальных условиях являются p(t) = О
и q(t) = 0. Поэтому в этом случае оптимальное управление опреде-
определяется соотношениями (9.74) и (9.75), равенство (9.73а) принимает
вид (9.76).
Решение матричного уравнения Риккати. Матричное уравнение
Риккати является нелинейным. Его можно решить на аналоговой
или цифровой машине в обратном времени, начиная с момента tf.
При этом вводится новая переменная (обратное время) г = tf — t, и
уравнение и граничное условие (9.75) преобразуются к виду
If fr" /I _i_ /I -* fr" I^RI?~lR^ I^± Л C\ <^ ^ <^ + + If(C\\ T?
J\ — J\ /i -\- /i J\ — J\ JD it .В J\ -г Цг 5 U^T^6^ — бо? i\^UJ — .г,
(9.83)
Где К(т) = K(tf - т), A(r)=A(tf-r), ...
9.6.3. Синтез оптимальной по интегральному квадратич-
квадратичному критерию стационарной линейной системы управления.
Постановка задачи. Пусть объект описывается уравнением
х = Лх + Ви (9.84а)
и критерий оптимальности имеет вид
оо
J = I [xT(t)Qx(t) + uT(f)ifri(f)] dt. (9.846)
о
Здесь Q и R — положительно определенные матрицы; все матрицы
Л, В, Q и R являются постоянными, объект стабилизируем.
Требуется найти оптимальное управление с обратной связью, пе-
переводящее систему из произвольной начальной точки х@) = х° в
конечную точку х(оо) = 0 и обеспечивающее минимум функциона-
функционалу (9.846).
Эту задачу называют задачей синтеза стационарного линейного
регулятора состояния.
Утверждение 9.2. Задача (9.84) имеет решение тогда и толь-
только тогда, когда объект (9.84а) стабилизируем и оптимальное уп-
управление имеет вид . Л Т—
u* = -R-1BTKx, (9.85а)
где К — постоянная положительно определенная симметрическая
(п х п) -матрица, определяемая из уравнения
-Т1А - АТЖ + TCBR-1BTK -Q = 0, (9.856)
называемого алгебраическим уравнением Риккати. Для любого t ^ О
справедливо равенство
оо
~~ » =/[хт(т)дх(т)+и*т(т)Ди*(т)]Л-. (9.86)
t
9.6. Синтез оптимальных систем управления 333
Доказательство. Соотношения (9.85) и (9.86) получаются точ-
точно так же, как и аналогичные соотношения при решении нестационар-
нестационарной задачи. Только в данном случае функция Беллмана отыскивается
в виде квадратичной формы 5(х) = хтКх, где К — постоянная
положительно определенная симметрическая (п х п)-матрица.
Следует иметь в виду, что если tf является конечным фиксирован-
фиксированным числом, то и в том случае, когда матрицы А, В, Q и R являются
постоянными, матрица К в оптимальном законе управления зависит
от времени и находится из дифференциального уравнения Риккати.
Покажем, что стабилизируемость является необходимым и доста-
достаточным условием существования решения задачи синтеза оптималь-
оптимального стационарного линейного регулятора. Необходимость очевидна.
Действительно, стабилизируемость означает, что неуправляемая со-
составляющая х^ —У 0 при t —> оо. Если это условие не выполняется, то
фазовый вектор замкнутой системы при х^ ф 0 не будет с течением
времени стремиться к нулю, так как управление и соответственно
присоединение регулятора к объекту никакого влияния на неуправ-
неуправляемую составляющую х^ не оказывают.
Чтобы доказать достаточность, нужно показать, что существует
положительно определенная матрица, удовлетворяющая алгебраичес-
алгебраическому уравнению Риккати и что замкнутая система асимптотически
устойчива. Представим критерий оптимальности в виде
J = lim f [xT(*)Qx(*) + uT(t)Ru(t)} dt.
tf-HX> J
0
При конечном tf и F = 0 из (9.76) и (9.82) имеем
5(х, t\ tf) = xT(?)if(?)x(?) = / [xTQx + u*Ti?u*] dt =
t
= min \ [ \x.TQx + uTRu]dt\. (9.87)
t
Функция Беллмана *S(x,^; tf) при фиксированных х и t является
функцией от tf, причем функцией монотонно неубывающей. Дейст-
Действительно, если t'f ^ t'j, то
t'f t'j
5(х, t] t"f) = Г [xTQx + u*TRu*] dt + AxTQx + u*TRu*] dt ^
*'t
f [xTQx + u*Ti^u*] dt = 5(x, t; t'f),
t
так как под интегралом стоит неотрицательное выражение.
334 Гл. 9. Методы теории оптимального управления
Покажем, что эта функция ограничена сверху. Так как объект ста-
стабилизируем, существует управление с обратной связью, при котором
замкнутая система асимптотически устойчива. При таком управле-
управлении выражение под знаком минимума в (9.87) сходится к конечному
пределу при tf —У оо. Этот предел является верхней границей функ-
функции S(x,?; tf). Таким образом, S(x,?; tf) как функция от tf является
монотонно неубывающей и ограниченной сверху. Следовательно, су-
существует предел этой функции при tf —> оо. Из равенства
S(x,?; tf) =x
где справа от tf зависит только K(t), следует, что существует предел
функции K(t) при tf —>¦ оо, и этот предел, который обозначим КП,
не зависит от F, т.е. от граничного условия K{tf) = F. Действи-
Действительно, имеем
tf-HX>
= lim / [xT(*)Qx(*) + u*T(t)Ru*(t)} dt =
tfHX> J
4
= lim {
tf^OC
/ [xT(?)Qx(?) + u*T(?)ifri*(?)] dt \ =
J J
oo
= [ [x.T(t)Qx(t) + u*T(?)ifri*(?)] dt, (9.88)
t
так как ~x.(tf) —> 0 при tf —У оо. Из этого равенства также следует,
что матрица Кп, являющаяся единственным установившимся реше-
решением дифференциального уравнения Риккати, положительно опреде-
определена, так как матрицы Q и R положительно определены. Из (9.86)
и (9.88) имеем
T T
откуда К = Кп. Таким образом, К является единственной положи-
положительно определенной матрицей, удовлетворяющей алгебраическому
уравнению Риккати.
Подставив управление (9.85а) в уравнение объекта, получим урав-
уравнение замкнутой системы
х = (А - BR^B^)^. (9.89)
Покажем, что функция Беллмана является функцией Ляпунова для
синтезированной оптимальной системы (9.89). Функция S{x) = xTKx,
как было показано, является положительно определенной функцией.
Ее полная производная по времени в силу уравнения (9.89) имеет вид
^ хКх + хКх хт(ЛтК + КА -
at
или, с учетом алгебраического уравнения Риккати,
9.6. Синтез оптимальных систем управления 335
Квадратичная форма хтКВ Вт1 ВтКх положительно полуопределе-
полуопределена, так как матрица R и соответственно обратная матрица R~1 поло-
положительно определены и, следовательно, zTR~1z ^ 0, где z = ВтКх.
Матрица Q положительно определена по условию. Следовательно,
производная dS/dt отрицательно определена.
Метод решения алгебраического уравнения Риккати.
Алгебраическое уравнение Риккати является нелинейным, и в об-
общем случае аналитически решить его не удается. Как было показано
выше, искомое решение этого уравнения совпадает с установившимся
решением дифференциального матричного уравнения Риккати. Поэ-
Поэтому один из возможных способов его решения основан на нахожде-
нахождении установившегося решения матричного уравнения Риккати (9.83),
записанного в обратном времени, при начальном условии К@) = F,
где F — произвольная положительно полуопределенная симметричес-
симметрическая матрица.
Пример 9.13. Определить оптимальное управление с обратной
связью в следующей задаче оптимального управления:
оо
±i = х2, х2 = и, J = / (х\ + qx\ + та2) dt ->• min, q ^ 0, г > 0.
о
Решение. В данной задаче имеем
Го 1] „ /о
В соответствии с (9.85а) и (9.856) оптимальный закон управления
имеет вид
и* = -1 @ 1) I"*11 ^{хА 1
г v y [k2i к22
где fc^j определяются из уравнения
li к12]\0 1] [0 01 [fcu k12
hi к22\[0 0
1 Г feu ^12]^°Vo l^l"*11 kl2}- I1 °1- I °"
r \_k2± k22 \ \1/ |_^2i k22 \ |_0 g'J |_0 0
или из равносильной ему системы
г
Эта система имеет решения
fei2 = ±лЛ% fe2 =
336 Гл. 9. Методы теории оптимального управления
Критерию Сильвестра положительной определенности матри-
матрицы К удовлетворяет решение
&12 = hi = y/r, к22 = у r(q + 2 y/r), feu = yq + 2y/r.
Оптимальный закон управления имеет вид
и* = — (y/rxi + у r(g +
Пример 9.14. Определить, при каких значениях параметра а
задача оптимального управления
оо
х\ — х\ + и Х2 = OLX2-, J = / [х\ + х\ + и2) dt —У min
имеет решение.
Решение. В данной задаче имеем
;
В соответствии с (9.85а) и (9.856) оптимальный закон управления
имеет вид
где fefj определяются из уравнения
Ляг 1Г1 0] [1 0] [fen к12
J[ j [О j[
Jkn k12] Г1 01 _ ГО 0
j[fci к22\ [О lj" [О 0
или из системы
-2feu + fei! - 1 = 0, -2ак12 + feufei2 = 0, -2fe22 + kf2 - 1 = 0.
Эта система имеет решения
fell = 1 ± л/2, fcl2 = fe21 =0, ^22 — —-^-
2а
Критерий Сильвестра положительной определенности матри-
матрицы К будет выполнен, если кц > 0 и &22 > 0. Второе неравенст-
неравенство будет выполнено и задача будет иметь решение, если а < 0.
При а > 0 задача не имеет решения. Это обусловлено тем, при этих
значениях параметра объект не стабилизуем.
9.6.4. Синтез оптимального линейного регулятора выхода.
Пусть задана управляемая система
х = Лх + Ви + h, у = Сх (9.90а)
9.6. Синтез оптимальных систем управления 337
и критерий оптимальности
Ч
J = xT(tf)Fx(tf) + J(yTQy + uTRu) dt. (9.906)
Здесь h — известная функция времени, F — положительно по-
полуопределенная матрица, Q и R — положительно определенные
матрицы, зависящие в общем случае от времени. Матрицы А, В,
С, Q, R как функции от времени предполагаются непрерывными на
интервале [to,^/]-
Требуется определить управление с обратной связью, при котором
критерий оптимальности при произвольной фиксированной начальной
точке принимает минимальное значение.
Эту задачу называют задачей синтеза оптимального линейного
регулятора выхода. Если объект или критерий нестационарен (хотя
бы одна из матриц Л, В, С, Q, R зависит от времени) или tf конечен,
задачу называют нестационарной, а если объект и критерий стацио-
стационарны и tf = оо, задачу называют стационарной задачей синтеза
линейного регулятора выхода.
Задача синтеза оптимального линейного регулятора выхода от-
отличается от рассмотренной задачи синтеза оптимального регулятора
состояния только тем, что в критерий оптимальности вместо вектора
состояния входит выходной вектор и условие задачи дополняется
уравнением наблюдения.
Подставив выражение для выходного вектора из (9.90а) в критерий
оптимальности (9.906), получим
Ч
J = x.T(tf)Fx(tf) + |(xTCTQCx + uTRu) dt. (9.91)
Таким образом, задача синтеза оптимального линейного регулятора
выхода свелась к рассмотренной задаче синтеза оптимального линей-
линейного регулятора состояния. Отличие задачи синтеза (9.90а), (9.91)
от задачи синтеза (9.71) состоит в том, что здесь роль матрицы Q
играет произведение CTQC. При этом может оказаться, что, хотя
матрица Q является положительно определенной, произведение этим
свойством не обладает: оно может быть положительно полуопре-
полуопределенным. Произведение CTQC будет положительно определенным,
если у = 0 в том и только том случае, когда х = 0.
Пример 9.15. Определить оптимальный закон управления в сле-
следующей задаче оптимального управления:
оо
х\ — Х2 Х2 = и, у = х\ J — I {у2 + и2) dt —у min .
о
Решение. В данной задаче имеем
22 Д.П. Ким
338 Гл. 9. Методы теории оптимального управления
1 О
В соответствии с (9.85а) и (9.856) оптимальный закон управления
имеет вид
1"^ lV^ x2)=-(k2lx1+k22x2),
где kij определяются из уравнения
Го о]\кп к12
k2i k22\[0 O
к21 k22\{l)^ l\k21 к22\ [О
или из равносильной ему системы
к\2-1= 0, -feu + &12&22 = 0, -2fei2 + ^22 = 0.
Эта система имеет решения
fe12 = fe21 = 1, к22 = ±V2, fen = ±л/2.
Критерию Сильвестра положительной определенности матри-
матрицы К удовлетворяет решение
fel2 = fe21 — 1? ^22 = v2, fell = V2.
Следовательно, оптимальный закон управления имеет вид
9.6.5. Синтез оптимальной системы по критерию обоб-
обобщенной работы. Как мы видели выше, при решении задач синтеза
оптимальных систем управления по интегральному квадратичному
критерию мы сталкиваемся с необходимостью решать нелинейные
дифференциальные уравнения Риккати в случае нестационарной зада-
задачи и нелинейные алгебраические уравнения Риккати в случае стацио-
стационарной задачи. А. А. Красовский ввел критерий оптимальности, кото-
который он назвал критерием (функционалом) обобщенной работы, при
котором удается избавиться от необходимости решать нелинейные
уравнения. Суть метода синтеза оптимальной системы по критерию
обобщенной работы состоит в том, что интегральный квадратичный
критерий выбирают так, чтобы уравнение Беллмана получилось ли-
линейным.
Пусть объект описывается уравнением
х = Л(х, t) + ?(x, t)u (9.92а)
9.6. Синтез оптимальных систем управления 339
и критерий оптимальности имеет вид
*/
J = go(x(tf),tf)+ [[Q(x,t)+uTRu + uTRudt, (9.926)
где u = u(x, t) — функция, которую выбирают так, чтобы уравнение
Беллмана получилось линейным. Так как ограничений на управления
нет, то уравнение Беллмана в данной задаче можно представить в
виде (см. (9.48))
0(х,*)) + uTRu + uTRu + ^ [А(х, t) + B(x,*)u] = ~, (9.93а)
2uTR + ^ Б(х, *) = 0. (9.936)
ох
Из уравнения (9.936) находим
u* = -iiJ-1Br(x,t)(g)T (9.94)
Подставив это выражение для управления в уравнение (9.93а), по-
получим
гл/ i\ 1 ^«5* т-,/ .\ т-»—1 т->т/ ,\fdS\ ~т тъ~ oS Л/ ,\ OS
Q(*,t)--4-B(x,t)R 1BT(x,t)(^) +и^и+-Л(х,*) = --.
Нелинейным относительно функции Беллмана является второе сла-
слагаемое. Чтобы избавится от него, нужно выбрать
При подстановке этого выражения в последнее уравнение получим
^ ^ /). (9.95)
Синтез линейной оптимальной системы по критерию
обобщенной работы. Рассмотрим задачу синтеза оптимальной
линейной системы, когда уравнения управляемой системы и критерий
оптимальности имеют вид
х = Ах + Въ, (9.96а)
J =
/*(xTQx + uTifri + STi2S) eft, (9.966)
где F — постоянная положительно полуопределенная матрица, Q,
R — положительно определенные матрицы, которые могут зависеть
от времени.
Утверждение 9.3. В задаче (9.96) оптимальный закон управ-
управления имеет вид
u* = -R~1BTKxJ (9.97а)
22*
340 Гл. 9. Методы теории оптимального управления
где положительно определенная симметрическая матрица К опре-
определяется из линейного дифференциального уравнения
К = -КА - АТК - Q, K(tf) = F, (9.976)
если система является нестационарной.
Оптимальный закон управления имеет вид
и* = -Д-^Дх, (9.98а)
где положительно определенная симметрическая матрица К опре-
определяется из линейного алгебраического уравнения
~КА + АТЖ + Q = 0, (9.986)
если система является стационарной (все матрицы являются пос-
постоянными и tf = оо).
Доказательство. В случае задачи (9.96) уравнение Беллмана
и граничное условие (9.95) принимают вид
x-Qx+f ^x = -f, K(tf)=F.
Решение уравнения будем искать в виде квадратичной формы S =
= хтКх. Подставив ее в уравнение Беллмана, получим
xT(Q
Учитывая тождество хт2ХЛх = х.Т(КА + ЛтХ)х, последнее уравне-
уравнение можно записать в виде
xT(Q + К А + АтК)х = -хтКх.
Отсюда получаем уравнение (9.976). То, что матрица К должна быть
положительно определенной, следует из определения функции Беллма-
Беллмана. Подставив функцию Беллмана (квадратичную форму) в (9.94),
получим (9.97а).
Оптимальный закон управления (9.98) в случае стационарной за-
задачи получается точно так же, как и в случае нестационарной задачи.
Только в этом случае в квадратичной форме S = хтКх матрица К
принимается постоянной.
Пример 9.16. Определить оптимальный закон управления по
критерию обобщенной работы при условии, что уравнения объекта и
критерий оптимальности имеют вид
оо
Х\ — Х2 Х2 = —Х\ — Х2 + U, J = / (х\ + х\ + U2 + У?) dt.
О
Решение. В данной задаче имеем
, Г о 1] „ /о\ ^ Г1 о "I D ,
А= I 1 _i I В= [Л Q= о 1 ' R=1'
9.6. Синтез оптимальных систем управления 341
В соответствии с (9.98) оптимальный закон управления имеет вид
121 «22
где kij определяются из уравнения
"«и к12]\ О 1] ГО -1]Г«11 к12] [1 01
«2i «22J[-1 -lj [l -lj[«2i «22J+ [О lJ~U
или из системы
— ki2 — 1ь21 +1 = 0, fen — fei2 — fe22 = 0,
Эта система имеет следующее решение:
1 3
Это решение удовлетворяет критерию Сильвестра. Оптимальный за-
закон управления имеет вид
= ~\2
Xl
9.6.6. Метод прогонки решения задачи синтеза оптималь-
оптимальной линейной системы. Выше задача синтеза оптимальной линей-
линейной системы методом динамического программирования была сведена
к решению матричного уравнения Риккати. Здесь рассматривается
еще один метод решения этой задачи, основанный на вариационном
методе и прогонке (переносе) граничных условий из одного конца
на другой. Этот метод иногда позволяет получить аналитическое
выражение для оптимального закона управления и в том случае, когда
матричное уравнение Риккати аналитически не удается решить.
Рассмотрим следующую задачу оптимального управления:
х = Лх + Би, х(*0) = х°,
V
V 1
/ (xTQx + uTRu) dt
1 Г V 1
J = _ x.T(tf)Fx(tf) + / (xTQx + uTRu) dt -+ min .
Здесь для удобства в качестве критерия оптимальности принят ин-
интегральный квадратичный функционал, поделенный на 2. Это не
скажется на решении задачи.
Составим гамильтониан (принимаем фо = —1):
Н = ~ (xTQx + uTRu) + фТ(Ах + Ви).
Запишем уравнения Эйлера-Лагранжа:
342 Гл. 9. Методы теории оптимального управления
Из последнего уравнения имеем
и = ВГхВТф. (9.99)
Подставим это выражение в уравнение объекта:
х = Ах-\-ВК~1Втф.
Запишем это уравнение совместно с первым уравнением Эйлера-
Лагранжа:
Q -ат JW
ИЛИ
z = Dz, (9.100)
где
Z=(*Y D=\An BR-\f
Условие трансверсальности принимает вид
if)(tf) = -Fx(tf). (9.101)
Запишем решение уравнения (9.100), используя нормированную
фундаментальную матрицу Z(t,to): Z(t,i) = / при любом t из рас-
рассматриваемого интервала времени. Согласно формуле A.9) решение
однородного уравнения (9.100), если за начальный момент принять
t1 Е [to,tf], примет вид
z(t) = Z(t,t')z(tf). (9.102)
Представим фундаментальную матрицу в соответствии со структу-
структурой уравнения (9.100) в виде
' [z2l(t,t') z22(t,t')Y
где Zij — матрицы размерности п х п. Используя это представление
и положив t' = tf, решение (9.102) можно записать в виде
x(t) = Zu(t,tf)x(tf) + Z12(t,tf)iP(tf),
ip{t) = Z2i(t,tf)x(tf) + Z22{t,tf)ip{tf),
или, после подстановки (9.101),
x(f) = [Zn(t,tf) - Z12(t,tf)F]x(tf),
ф{1) = [Z2i(t,tf) - Z22(t,tf)Ff\x(tf).
Исключим из полученной системы уравнений х(?/):
В результате проведенного преобразования по существу граничное
условие из точки tf на временной оси переносится в точку t G [to,^/]-
9.6. Синтез оптимальных систем управления 343
Подставив выражение для ф из последнего соотношения в (9.99),
получим оптимальный закон управления
u* = R-1BT[Z21(t,tf) - Z22(t,tf)f][Z11(t,tf) -
- Zufat^F]-1^). (9.103)
Решая ту же самую задачу методом динамического программирова-
программирования, получили (см. (9.74))
u = -К h
Сравнивая это соотношение с (9.103), получаем
К = -[Z21(t,tf) - ^(М/^Н^пСМ/) - Z12{i,tf)F\-x. (9.104)
При F — 0 формулы (9.103) и (9.104) принимают соответственно вид
u* = R~1BTZ21(t,tf)Z^11(t,tf)x(t), (9.105)
К = -Z21(t,tf)Z^(t,tf). (9.106)
Соотношения (9.104) и (9.106) определяют решение уравнения Рикка-
ти (9.75а) при F ф 0 и F = 0 соответственно через фундаменталь-
фундаментальную матрицу системы, состоящей из уравнения объекта и уравнения
Эйлера-Лагранжа для сопряженных координат.
Простейшая задача перехвата. Решим изложенным методом
прогонки задачу перехвата, несколько отличную от задачи, рассмот-
рассмотренной в [13].
Пусть цель движется равномерно и прямолинейно на постоян-
постоянной высоте со скоростью г?ц. Перехватчик движется с постоянной
скоростью г?п. Курсовые углы цели дц и пе-
перехватчика qu (рис. 9.5) достаточно малы:
Ы < 1, Ш < 1. (9.107)
При указанных допущениях в первом приб-
приближении уравнения движения перехватчика
можно записать в виде
Рис. 9.5. К задаче пе-
Х1 — ~vnQm Qn — ^п5 рехвата
где х\ — текущее расстояние от перехватчика до траектории движе-
движения цели; uju — угловая скорость перехватчика. Принимая угловую
скорость перехватчика за его управление и вводя обозначения qu = х2,
сип = и, уравнения перехватчика можно записать в векторной форме
х = Лх + Ви,
где
Примем за начальное время ?о = 0- Время перехвата tf = ro/vCj
vc — скорость сближения перехватчика и цели. В силу условия (9.107)
344
Гл. 9. Методы теории оптимального управления
в первом приближении можем положить
vc =
г = |ЯД|;
промахом будет x\{tf). Потребуем, чтобы промах был равен нулю.
Тогда граничные условия примут вид
х(го)=х°, Xl(tf) = 0.
Рассмотрим задачу синтеза оптимального управления с обратной
связью при критерии оптимальности
J = ±J(e2x2+u2)dt.
О ГЛ Г0 0 1 D 1 Т^
В данном случае имеем Q = \ 2 , it = 1. 1 амильтониан и урав-
уравнения Эйлера—Лагранжа имеют вид
2\ и2) -
Н = -- [е2х\
+
дН
дН
—
Если записать уравнения объекта совместно с уравнениями Эйле-
ра-Лагранжа в виде (9.100), то для матрицы D получим
D =
0 -vn
О О
О О
О е2
Условия трансверсальности имеет вид
нения Эйлера-Лагранжа находим
= 0. Из последнего урав-
урави = ф2. (9.108)
Поэтому задача сводится к определению ф2 как функцию х.
Так как матрица D постоянна, то фундаментальная матрица
зависит от одного аргумента:
Z(t, t1) = Z(t - t1) = Z{t) = [zik(T)], r = t-t'.
С учетом граничных условий решение объединенной системы можно
записать в виде
Xl(t) = Z12(t - tf)x2(tf) + Z13(t -
x2(t) = z22(t - tf)x2(tf) + z23(t -
fo(t) = Z42(t - tf)x2(tf) + Z43(t -
Найдем из первых двух уравнений x2(tf) и ipi(tf), а затем подста-
подставим их в последнее уравнение. Тогда получим
9.6. Синтез оптимальных систем управления
345
~ Z13(t ~ tf)x2(t)]
z43(t - tf)[z12(t - tf)x2(t) - z22(t -
где
А = Z12(t - tf)z23(t - tf) - Z22(t ~ tf)z13(t - tf).
(9.109)
(9.110)
Z(r)=eDT=I + Dr+^D2r2
(9.111)
Найдем фундаментальную матрицу Z(r). Так как матрица D
постоянна, то имеем
п!
Вычислим степени матрицы D:
-Vn 0 "
О е2
О О
^пг2 О
D2 =
О 0 0 -vn
О е2 vn О
0 0 0 О
0 0 0 е2
о о
о о
_0 е4
jj2k _ ?2(к-1) jj2 -Q2k+l _ ?2(к-1) рЗ
Подставив эти степени в (9.111), получим
2
—
¦ е Ь е —
2! 4!
Z42(r) =
5!
Подставив эти выражения в (9.109) и (9.110), а затем найденное
выражение для ф2 в (9.108), получим оптимальный закон управления
е?Т e~?r)
v ; vn е?Т -е~?Т -ет(е?Т +е~?Т)'
При е2 <^ 1, разложив экспоненциальные функции в ряд и отбросив
члены, содержащие множитель е выше пятой степени, находим
346 Гл. 9. Методы теории оптимального управления
В исходных переменных это соотношение принимает вид
С учетом (9.107) можно записать (см. рис. 9.5)
дц~ г - Vn{tf-ty
или, после дифференцирования,
Используя это соотношение, оптимальный закон управления можно
представить в виде
Это соотношение определяет закон пропорционального сближения с
переменным коэффициентом навигации [30].
Задачи
1. Сформулировать задачу вывода летательного аппарата (ЛА)
на заданную высоту за минимальное время при ограничении на мак-
максимальную перегрузку.
2. Сформулировать задачу вывода Л А в заданную точку «гео-
«геометрического» пространства при минимальном расходе топлива и
ограничении максимальной перегрузки.
3. Сформулировать задачу поворота вала двигателя на макси-
максимальный угол за время Т при ограничении на максимальный ток в
цепи якоря:
а) с остановкой; б) без остановки.
4. Сформулировать задачу поворота вала двигателя на заданный
угол при минимальной затрате энергии и ограничении максимального
тока в якорной цепи:
а) с остановкой; б) без остановки.
5. Сформулировать задачу поворота вала на максимальный угол
с остановкой за время Т при заданном расходе энергии.
6. Записать уравнения Эйлера-Лагранжа и условия трансверсаль-
трансверсальности при условии, что объект описывается уравнениями
а краевые условия и критерий оптимальности имеют вид
Xl @) = х3 @) = 0, х\ @) + х\ @) = v2 (v = const),
= a (a = const),
J = t{u\ +ul)dt.
9.6. Синтез оптимальных систем управления 347
7. Записать уравнения Эйлера—Лагранжа и условия трансверсаль-
трансверсальности при условии, что объект описывается уравнениями
±i = Х2ч Х2 = 1*1, Жз = Ж45 Х4 — ^2 5
на управление наложено ограничение
*/
/"(и? + u|) dt = V (V = const),
о
а краевые условия и критерий оптимальности имеют вид:
а) Х1@) = х2@) = ж3@) = ж4@) = 0, ж4(*/) = 0, J = -x3(tf);
б) яп@) = ж2@) = яг3@) = яг4(О) = 0, яг3(*/) = 0, J = -яп(*/).
8. Записать уравнения Эйлера-Лагранжа и условия трансверсаль-
трансверсальности в следующей задаче оптимального управления:
Х\ — Ж2, Х2 = U\, Х3 = Ж4, Ж4 = П2,
*/
|u|^um, J(u\+ul)dt = V (um, 1/ = const),
о
^i(O) = ж2@) = ж3@) = ж4@) = 0, ж3(*/) = 0,
J = — х\ (tf) —>¦ min .
9. Определить оптимальное программное управление и оптималь-
оптимальную траекторию в следующих задачах оптимального управления:
а) хг =
б) Хг =
в) х\ —
Т\ Тл —
L 1 Jb\ —
д) Х\ —
x2j х2 = и,
Х2, X2=U,
х@) = 0,
Х2-> Х2 = U —
х2, х2=и-
х@) = 0,
х2, х2 = и,
\и
^ ит,
х@) = 0,
1«
X1(tf)=X°1,
1, «К 2,
х@) = 0,
[ |u| < 2
Xl(tf) =Ж?,
Xi(tf) = X
X2(tf) =
Xi(tf) = X
X2(tf) =
li J = tf -
0, J = tf-
li J = tf -
0, J = tf-
¦> min;
¦> min;
¦> min;
¦> min;
^2 d^ —у min;
X(O) = 0, X!(tf) =Ж?, J= /"'
о
e) xi = ж2, ^2 = u,
x@) = 0, xi(tf) = X®, x2(tf) = 0, J= u2 dt —>-min.
348 Гл. 9. Методы теории оптимального управления
10. Исследовать наблюдаемость и обнаруживаемость следующих
управляемых систем:
а) X! = х2 - 2ж3, х2 = жз, х3 = и, у = х\ + ж2;
б)ж1=ж2-2ж3, ж2=ж3, х3=и, у = ж2;
в) жх = ж2 - 2ж3, ж2 = жз, жз = ^, У = хз;
г) жх — жх — 2ж2, ж2 = жх, Хз = и, у = Жх + ж2.
11. Записать уравнения объекта в нормальной форме и исследо-
исследовать наблюдаемость и обнаруживаемость:
) 6) X ) 2У
12. Определить, при каких значениях параметров управляемая
система вполне наблюдаема, обнаруживаема:
а) жх = жх, х2 = жх + х2 + м, ?/ = ажх + &ж2;
б) жх = жх, х2 = ажх + ж2 + и, ^/ = ажх + &ж2.
13. Определить оптимальный закон управления (управление с
обратной связью) в следующих задачах оптимального управления:
±и
а) х = Bе~* - 1)х + и, х@) = ж0, J = Г(х2 + и2) dt ->
о
10
б) х = ж + и, х@) = ж0, J = Г(х2 + u2) dt ->•
mm;
mm.
14. Определить оптимальный закон управления (управление с
обратной связью) в следующих задачах оптимального управления:
а) х\ — х\ + и, х2 = ах2, ж@) = ж0,
б) Х\ — Жх, Ж2 = U, х@) = Ж°,
ю
J = / (х\ + ж| + п2) dt ->• min;
о
10
J = /"(я;2 + 2Ъххх2 + ажз + ^2) dt -»> min, a2 - b2 > 0.
о
15. Определить оптимальный закон управления (управление с
обратной связью) в следующих задачах оптимального управления:
ю
1 г
а) 2/ = 2 , , 1 Ц, J = (у2-\-ru2) dt ^ min, г > 0;
9.6. Синтез оптимальных систем управления 349
б) у = -?¦ и, J = Г (у2 + та2) ей -»> min, г > 0.
о
16. Определить оптимальный закон управления (управление с об-
обратной связью) по критерию обобщенной работы в следующих задачах
оптимального управления:
ю
а) у = ОР + 1— u, J = /(V + та2 + та*2) eft ->> min, r > 0;
р2 +Р+1 J
о
о
ю
б) у = -j^- u, J = / (^/2 + та2 + та*2) cfa —У min, г > 0.
Глава 10
АНАЛИЗ СИСТЕМ И СИНТЕЗ
ОПТИМАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ
ПРИ СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ
В предыдущих главах при анализе и синтезе систем управления
случайные возмущающие воздействия никак не учитывались. В то
же время во многих случаях (например, при управлении различными
технологическими процессами, летательными аппаратами и другими
объектами) они оказывают существенные влияния на процесс управ-
управления, и их нужно учитывать. Данная глава посвящена анализу сис-
систем управления, а также синтезу оптимальных систем управления при
случайных возмущающих воздействиях (случайных возмущениях).
10.1. Случайные величины и процессы
Кратко изложим основные сведения из теории вероятностей, кото-
которые потребуются при изложении материала этой главы. Цель этого
изложения состоит в том, чтобы напомнить понятия и характеристи-
характеристики, связанные со случайными величинами и случайными функциями.
10.1.1. Случайные величины и их характеристики. Пере-
Переменная величина X называется случайной величиной, если то, что
она при проведении эксперимента (при реализации заданного комп-
комплекса условий) примет значение, меньшее заданного числа ж, т.е.
х < X, является случайным событием. Вероятность этого события
Р(х < X) называется функцией распределения и обозначается F(x):
F(x) = Р(х < X). Если функция F(x) дифференцируема, то ее произ-
производная dF(x)/dx называется плотностью распределения или плот-
плотностью вероятностей и обозначается f(x): f(x) = dF(x)/dx. Иногда
функцию распределения F(x) называют также интегральной функ-
функцией распределения или интегральным законом распределения, а
плотность распределения f(x) — дифференциальной функцией рас-
распределения или дифференциальным законом распределения. Функ-
Функция распределения и плотность распределения обладают следующими
10.1. Случайные величины и процессы 351
свойствами:
X ОО
a) F(-oo) = 0; б) F(oo) = 1; в) F(x) = Г f(x) dx; г) Г f(x) dx = 1.
— оо —оо
Функции распределения F(x) и f(x) являются исчерпывающи-
исчерпывающими характеристиками случайных величин. Однако наряду с ними
используются числовые характеристики: начальные и центральные
моменты.
Начальным моментом s-го порядка случайной величины X назы-
называется интеграл
оо оо
as = M[Xs}= fxsf(x)dx = fxsdF(x),
— оо —оо
где М обозначает операцию математического ожидания. Наиболее
часто используется начальный момент первого порядка
оо оо
тх=М[Х]= fxf(x)dx = fxdF(x),
— оо —оо
который называется математическим ожиданием или средним зна-
значением. _
Разность X — X — тх называют центрированной случайной ве-
величиной. Центральным моментом s-го порядка случайной величи-
величины X называют математическое ожидание s-й степени центрирован-
центрированной случайной величины
ц8 = M[XS] = I (x - mxYf(x) dx= I (x- mx)' dF(x).
— оо —оо
Наиболее часто используется центральный момент второго порядка
оо
li2 = Dx= D[X] = M[X2} = Г (х- mxff(x) dx =
— оо оо
= I (x -mxJ dF(x),
— оо
который называется дисперсией.
Корень квадратный из дисперсии ах = л/АЁ называется средним
квадратическим отклонением.
Случайная величина X подчиняется нормальному закону, или
закону Гаусса, если ее плотность распределения имеет вид
f(r) - 1 22
где т — математическое ожидание, а — среднее квадратическое
отклонение.
Вектор X = (Xi X2 ... Хп)Т\ компоненты Xi (ъ = 1, 2,..., п) ко-
которого являются случайными величинами, называют случайным век-
352 Гл. 10. Анализ систем и синтез оптимальных систем управления
тором. Исчерпывающими характеристиками случайного вектора X
являются n-мерные законы распределения: n-мерная функция рас-
распределения и n-мерная плотность распределения, п-мерной функ-
функцией распределения называется вероятность совместного выполне-
выполнения п неравенств Х\ < xi, Х2 < x2j ..., Хп < хп
< жь Х2 < х2, ..., Хп < хп),
а п-мерной плотностью распределения — производная
dnF
fn(xUX2, . . . , ХП) = dxid^ дхп.
Функция распределения Fn(xi,x2,... ,хп) и плотность распреде-
распределения f(xi,X2, • • •,хп) обладают следующими свойствами:
1) F1(x) = Fn(xi,oo,... ,00),
Fk(xu...,xk) = Fn(xi,...,xfe,oo,...,oo);
2) /1(^1) = J ... J f(x1,...,xn)dx2 ...dxn,
—00 —00
fk(xu...,xk) = J ... J f(x1,...,xn)dxk+1 ...dxn.
—00 —00
При рассмотрении системы случайных величин для характерис-
характеристики зависимости между различными случайными величинами, вхо-
входящими в эту систему, используются условные законы распределения.
Условным законом распределения случайной величины X, входящей,
например, в систему из двух случайных величин (X, У), называется ее
закон распределения, вычисленный при условии, что другая случайная
величина Y приняла определенное значение: Y = у.
Условный закон распределения можно задавать как функцией рас-
распределения (обозначение F(x/у)), так и плотностью распределения
(обозначение f(x/у)). Согласно теореме умножения
f2(x,y) = fi(x)f(y/x).
Случайные величины Хи Y называются независимыми, если их
совместная плотность распределения равна произведению их плотнос-
плотностей распределения:
Числовыми характеристиками случайного вектора X = (Xi Х2 ...
... Хп)т, являются:
1) математическое ожидание М[Х] = (mi т2 ... тп)Т, где rrii =
2) дисперсия D[X] = (Dx D2 ... Dn)T, где А = D[Xt];
3) корреляционная матрица
10.1. Случайные величины и процессы 353
К =
где Kij = M[(Xi — rrii)(Xj — rrij)] — корреляционный момент случай-
случайных величин Xi и Xj.
Из определения корреляционного момента ясно, что корреляцион-
корреляционная матрица является симметрической. Корреляционная матрица К
является корреляционным моментом векторной случайной величины
и определяется следующим образом: К = М[ХХТ].
10.1.2. Случайные процессы и их характеристики. Случай-
Случайную функцию X(t) можно определить как семейство случайных вели-
величин, зависящих от параметра t. Если параметр t является временем,
функция X(t) называется случайным (вероятностным, стохастичес-
стохастическим) процессом. При каждом эксперименте случайная функция X(t)
принимает конкретный вид x(t). Функция x(t) является детермини-
детерминированной и называется реализацией случайного процесса X(i). Слу-
Случайная функция X(i) при фиксированном параметре t является слу-
случайной величиной, которая обладает законами распределения Fi(x,t)
и fi(x,t), зависящими от времени.
Функции Fi(x,i) и fi(x,t) называются одномерными законами
распределения, причем Fi(x,t) называется одномерной функцией рас-
распределения, a fi(x,t) — одномерной плотностью распределения. Од-
Одномерные законы распределения не являются исчерпывающей харак-
характеристикой случайного процесса X(t). Они, например, не позволяют
определить, как зависят между собой случайные величины, которые
получаются при различных фиксированных значениях t. Более полной
характеристикой случайного процесса является двумерные законы
распределения: функция распределения i^O^i^i; ^2,^2) и плотность
распределения /2(^1, ^ь жг?^)- Но и они, как любые конечные законы
распределения, не могут служить исчерпывающими характеристиками.
Для описания случайных процессов наряду с функцией распреде-
распределения и плотностью распределения используют моментные характе-
характеристики: начальные моменты
M[X(h)X(t2) ... X(tn)} =
00 00
= j ... j xi ...xnfn(xi,ti]... ]xn,tn)dxi ...dxn]
— 00 —00
центральные моменты
M[X{h) ... X(tn)} =
= J ... J Oi -mx) ...(xn -mn)fn(x1,t1]... \xn,tn)dxx ...dxn,
23 Д.П. Ким
354 Гл. 10. Анализ систем и синтез оптимальных систем управления
где X(ti) = X(ti) — M[X(ti)] — центрированная случайная величина,
mi = M[X(ti)] — математическое ожидание (среднее значение) слу-
случайной величины X(ti).
Наибольшее применение находят:
начальный момент первого порядка
mx(t) = M[X(t)], A0.1)
который называется математическим ожиданием или средним зна-
значением случайного процесса X(t);
центральный момент второго порядка
Kx(t1,t2) = M[X(t1)X(t2)},
который называется корреляционной или автокорреляционной функ-
функцией]
начальный момент второго порядка
Bx(t1,t2) = M[X(t1)X(t2)},
который называется ковариационной функцией. (Ковариационную
функцию также записывают в виде cov[X(ti),X(t2)].)
Ясно, что если математическое ожидание M[X(t)] = 0, то кор-
корреляционная и ковариационная функции равны между собой. При
ti = ^2 = t корреляционная функция равна дисперсии (дисперсионной
функции): D[X(t)] = K(t,t).
В переводной литературе ковариационной функцией или ковариа-
цией, называют корреляционную функцию (см., например, [48]).
Если Х(?) nY(t) — две случайные процессы, то функция
Kxy(t1,t2) = M[X(t1),Y(t2)]
называется взаимной корреляционной функцией. Если Kxy(ti,t2) — 0,
то случайные процессы X(i) и Y(i) называются некоррелированными,
а если Kxy(ti,t2) ф 0, то называются коррелированными.
Если Х(?) — векторный случайный процесс, то корреляционная
функция K(ti,t2) = M[X(ti) Хт(^)] представляет собой симметри-
симметрическую матрицу, и ее также называют корреляционной матрицей.
Математическое ожидание, корреляционная функция и ковариаци-
ковариационная функция обладают следующими свойствами:
1) K(tut2) = #(*2,*i), B(tut2) = B(*2,*i);
2) если Y(t) = X(t) + <p(t), где ip(t) — детерминированная функ-
функция, то
Kx(h,t2) = Kv{tut2);
3) если Y(t) = ip(t)X(t), где ip(t) — детерминированная функ-
функция, то
my(t) = <p(t)mx(t), Ky(tut2) = <p(
10.1. Случайные величины и процессы 355
10.1.3. Некоторые типы случайных процессов.
Гауссов процесс. Случайный процесс называется гауссовым или
нормальным, если каковы бы ни были число п и моменты време-
времени ti,t2,... ,tn, случайный вектор [X{ti) X{t2) ••• X(tn)]T имеет
плотность распределения
{-[I
exp
где x = (xi,x2,... ,xn)T; mx = (mi,m2, • • • ,^n)T — вектор матема-
математических ожиданий; К = [Kik] (г, fc = 1, 2,..., п) — корреляционная
матрица. При п = 1 имеем
ж = Х1, т = M[X(t)], К = Кц= D[X(t)] = a2{t),
и гауссова плотность распределения принимает вид
Л (*,*) =
Как видно, гауссов закон распределения однозначно определяется ма-
математическим ожиданием и корреляционной матрицей.
Стационарные процессы. Случайный процесс X(t) называется
строго стационарным или стационарным в узком смысле, если при
любом п его n-мерная функция распределения не зависит от сдвига
времени, т.е. обладает следующим свойством:
h + f; ... ; хп, tn + ^) = F(xu tx\ ..., xn, tn)
при любом ^. Если случайный процесс является строго стационарным,
то его математическое ожидание не зависит от времени и корреляци-
корреляционная функция зависит от одного параметра. Действительно, имеем
оо оо
mx(t) = I x(t) dF(x, t)= I x(t + 0 dF(x, t + 0=mx{t + 0,
— oo —oo
откуда следует тх = const. Аналогично можно показать, что
Kx(tut2) = Kx(t1+^t2 + O'
Отсюда, положив ? = —ti, получим
Kx(tut2) = Kx(t2 - h) = Kx(r) (r = t2- h).
В силу свойства Kx(ti,t2) = Kx(t2,ti) корреляционная функция К{т)
является четной функцией: К{т) = К(—т).
Случайный процесс X(t) называется слабо стационарным или
стационарным в широком смысле, если его математическое ожидание
не зависит от времени и корреляционная функция зависит от одной
переменной:
1) тх = const; 2) Kx(tut2) = Kx(r).
23*
356 Гл. 10. Анализ систем и синтез оптимальных систем управления
Если моменты тх и Кх(т) существуют, то строго стационарный
случайный процесс является и слабо стационарным. Однако не всякий
слабо стационарный процесс является строго стационарным.
Стационарные процессы X(t) и Y(t) называются стационарно
связанными, если их взаимная корреляционная функция зависит от
одного параметра: Kxy(ti,t2) = Kxy(i\ -t2).
Стационарные процессы, помимо законов распределения и момен-
моментов, характеризуются еще спектральной плотностью.
Спектральной плотностью стационарного в широком смысле
случайного процесса X(i) называется двустороннее преобразование
Фурье от его корреляционной функции:
оо
Sx(w)= J' Кх(т)е-*ШТ<1т. A0.2)
— оо
Корреляционная функция выражается с помощью спектральной
плотности обратным преобразованием Фурье:
оо
Кх{т) = ±- f Sx{w)ei«Tdio. A0.3)
— оо
Аналогично определяется взаимная спектральная плотность двух
стационарных и стационарно связанных случайных процессов X(t)
и Y(t):
Sxy(u;)=
Эргодический процесс. Стационарный случайный процесс X(i)
называется эргодическим, если выполняются следующее соотношение:
x(t)dt = mx, A0.4)
о
где x(i) — (произвольная) реализация случайного процесса X(i).
Соотношение A0.1), определяющее математическое ожидание,
можно трактовать как среднее по множеству реализаций, а соотно-
соотношение A0.4) — как среднее по времени одной реализации. Поэтому
эргодический процесс можно определить как такой процесс, для ко-
которого среднее по множеству реализаций равно среднему по времени
одной реализации.
Стационарный процесс X(t) является эргодическим, если его кор-
корреляционная функция удовлетворяет соотношению
тт
lim — Г [Kx(u,v)dudv = 0.
10.1. Случайные величины и процессы 357
Процессы с независимыми и ортогональными прираще-
приращениями. Случайный процесс X(t) называется процессом с независи-
независимыми приращениями, если случайные величины
X(t0),
при любых to < ti < ... < tn (из области определения случайного про-
процесса) взаимно независимы [48]. Если эти величины только некорре-
лированы, процесс X(t) называется процессом с некоррелированными
или ортогональными приращениями.
Процесс с независимыми приращениями полностью определяется
распределением X(to) и распределением приращений X(t) — X(s) для
произвольных t и s. Если распределение X(t) — X(s) зависит от t — s,
то процесс X(t) называется процессом с независимыми стационар-
стационарными приращениями; если X(t) — X(s) имеет нормальное распреде-
распределение — процессом с независимыми нормальными приращениями.
Векторный процесс с нулевым средним значением и независимыми
нормальными приращениями называют винеровским процессом.
Корреляционная функция для случайного процесса X(t) с ортого-
ортогональными приращениями имеет следующий вид:
Действительно, имеем: при t\ ^ ^2
M[X(h)X(t2)] = M{X(h)[X(t2) - X(h) + X(h)]} = M[X(ti)X(ti)];
При ^2 ^ t\
Ь)\ = M{[X(h) -X(t2) +X(t2)]X(t2)} = M[X(t2)X(t2)}.
Белый шум. Стационарный случайный процесс X(i) называется
белым шумом, если его спектральная плотность постоянна: Sx(lj) =
= G (G = const). Постоянная G называется интенсивностью белого
шума. Если исходить из определения спектральной плотности A0.2),
то спектральная плотность будет постоянна, когда корреляционная
функция имеет вид К(т) = G8(r). Здесь 8(т) — функция Дирака
(й-функция).
Более общее определение белого шума основано на корреляционной
функции. Случайный процесс X(i) называется белым шумом, если
его корреляционная функция имеет вид Kx(t, г) = G(t)8(t — г). Белый
шум называется стационарным, если его интенсивность является
постоянной.
Процесс V(t) является белым шумом, если процесс X(t), связан-
связанный с V(t) уравнением
X(t) = Q(t)V(t),
где Q(i) — детерминированная функция (матрица), является про-
процессом с ортогональными приращениями. Если X(i) является ви-
винеровским процессом, то белый шум V(i) называется нормальным
(гауссовым) белым шумом.
358 Гл. 10. Анализ систем и синтез оптимальных систем управления
10.2. Анализ линейных систем и синтез
оптимальных параметров при случайных
воздействиях
Если на систему управления действует случайное воздействие,
то его выходная переменная Y(i) и ошибка E(i) будут случайными
процессами. И в этом случае для оценки качества системы управления
используют вероятностные характеристики ошибки: математическое
ожидание те = M[E(t)] и среднее квадратическое отклонение ае =
/ТГ
Математическое ожидание ошибки называется систематической
ошибкой, ее среднее квадратическое отклонение — среднеквадра-
тической ошибкой. Анализ качества систем управления сводится к
определению указанных ошибок по вероятностным характеристикам
случайных внешних воздействий.
10.2.1. Преобразование случайных процессов линейными
системами. Пусть на вход линейной системы с весовой функ-
функцией w(t,r) подается случайный процесс X(t)
Y(t) (рис. 10.1). По заданным математическому
w(t,r)
y(t) ожиданию mx(t) и корреляционной функ-
Рис. 10.1. Прохожде- ции КЛЪ*') входного сигнала найдем мате-
ние случайного про- матическое ожидание my(t) и корреляцион-
цесса через линейную НУЮ Функцию Ky(t, t') выходного сигнала Y(t).
систему Переходный режим. Пусть когда на вход
подается реализация x(i), на выходе имеем y(t) — реализацию слу-
случайного процесса Y(i). Как известно из теории линейных систем, эти
функции связаны соотношением
t
y(t) = fw(t,T)x(r)dr.
о
Точно так же связаны сами процессы X(i) и Y(i):
t
Y(t) = fw(t, t)X{t) dr. A0.6)
о
Математическое ожидание Tny(t) и корреляционная функ-
функция Ky(t,t') выходного сигнала связаны с математическим ожида-
ожиданием mx(t) и корреляционной функцией Kx(t,t') входного сигнала
соотношениями
t
(t) = /
r) dr, A0.7a)
t t'
Ky(t,t') = JJw(t,T1)w(f,T2)Kx(T1,T2)dT1 dr2. A0.76)
10.2. Анализ линейных систем и синтез оптимальных параметров 359
В случае стационарной системы весовая функция зависит от одно-
одного аргумента, и формулы A0.7) принимают вид
t
my(t) = fw(t - r)mx{r) dr, A0.8a)
о
t t
Ky(t,t') = JJw(t - Ti)tw(t' - t2)Kx(t1,t1) dn dr2. A0.86)
0 0
Эти формулы легко выводятся. Действительно, учитывая, что
операции математического ожидания и интегрирования можно пере-
переставлять местами, из A0.6) получаем
г t -. t
my(t) = M[Y(t)] = М fw(t, т)Х(т) dr = fw(t, т)М[Х(т)] dr =
0 ° t
= Jw{t,T)mx{r)dT.
о
Вычитая A0.7а) из A0.6), находим
t
Y(t) = fw(t, t)X(t) dr, A0.9)
о
где Y(t) =Y(t) — my(t), X(t) = X(t) — mx(t) — центрированные слу-
случайные процессы. Используя A0.9), получаем
Г 1 „ 1'
Ky(t,t') = M[Y(t)Y(t')] = M\ fw(t,r)X(r)dT [w(t',T)X(T)
Lo о
t V
= ffw(t,T1)w(t,T2)M[X(T1)X(T2)]dT1dT2 =
о о
11'
= JJw(t, T1)w(t',T2)Kx(T1, n) dn dr2.
о о
Справедливость формулы A0.7) доказана. Формулы A0.8) не-
непосредственно получаются из A0.7).
Пример 10.1. На вход линейного звена с передаточной функ-
функцией W(p) = 5/(р+ 1) приложен случайный процесс с математичес-
математическим ожиданием тпх = 2 и корреляционной функцией Кх(т) = е~'г'.
Требуется определить математическое ожидание и корреляционную
функцию выходного сигнала.
Решение. Записав уравнение звена и решив его при единичном
входном воздействии и нулевых начальных условиях, найдем пере-
переходную функцию h(t) = 5A — е~г). Продифференцировав ее, получим
весовую функцию w(t) = dh/dt = Ъе~1. По формуле A0.8а) получим
t
my(t) = fbe~^~Thdr = 10A -
о
360 Гл. 10. Анализ систем и синтез оптимальных систем управления
По формуле A0.86) получаем
11'
о о
-\Т1-Т2\+Т2 ^Г2
t'
dr2 +
ri
t' -I
Je~^-T^+T2 dr2
= ^ [(l + t1 - t)
Установившийся режим. При рассмотрении установившегося
режима полагают, что входное воздействие подается при to = — оо, и
формулу A0.6) записывают в виде
t
Y(t)= Jw(t,T)X(T)dT. A0.10)
— оо
Формулы A0.8) для математического ожидания и корреляционной
функции в случае стационарной системы в установившемся режиме
принимают вид t
my(t) = [ w{t-r)mx{r)dT, A0.11)
— oo
t t'
Ky(t,t')= Г Г w(t-T!)w(t'-T2)Kx(T1,T2)dT1dT2. A0.12)
— oo —oo
Если на вход устойчивой линейной стационарной системы пода-
подается стационарный случайный процесс в широком смысле, то на ее
выходе в установившемся режиме устанавливается стационарный
случайный процесс в широком смысле. Иначе говоря, в этом случае
математическое ожидание выходного сигнала в установившемся ре-
режиме является постоянным, а корреляционная функция зависит от
одного аргумента. Покажем это.
По условию имеем
тх = const, Kx(t,t') =Kx(t- t') = Kx(r).
В формуле A0.11) сделаем замену переменных т' = t — т. Тогда по-
получим
оо
my{t) = mx w(rf) drf.
Так как линейная система устойчива, интеграл сходится и принимает
конечное значение.
10.2. Анализ линейных систем и синтез оптимальных параметров 361
Формула A0.12) в данном случае принимает вид
t t'
Ky(t, t')= I I w(t - 7iM«' - T2)Kx(Tl - t2) dn dr2.
— oo —oo
Сделаем замену переменных r[ = t — т\ и т^ = t — т2. Тогда последнее
соотношение примет вид
оо оо
Ky(t, t')= J J w(r[)w(r^)Kx(t -т[+т'2- t') dr[ dr'2 = Ky{t - t'),
о о
или, если положить t — t' = г и опустить штрих, вид
оо оо
J Jwir^w^K^r-n +T2)dT1dT2 =Ку(т). A0.13)
о о
Зависимость между спектральными плотностями вы-
выходного и входного сигналов в установившемся режиме.
Если на вход устойчивой стационарной линейной системы с пере-
передаточной функцией W(p) подается стационарный случайный сиг-
сигнал с спектральной плотностью Sx(uj), то спектральная плот-
плотность Sy(uS) выходного сигнала в установившемся режиме связана
со спектральной плотностью Sx(lj) соотношением
Sv(uj) = \W(ju)\2Sx(w). A0.14)
В соответствии с формулой A0.3) для корреляционной функции
выходного сигнала можем записать
оо оо
Ку(т) = i- I Sy(u)e>WTdu> = ± j IWWfSsHe^dw. A0.15)
— оо —оо
Так как Dy = Ky@), из последнего соотношения находим
оо оо
D» = h I Sy{u)) dw = h I \W(M2SA") duj. A0.16)
— oo —oo
Получим формулу A0.14). В формулу A0.13) подставим выраже-
выражение для корреляционной функции входного сигнала (см. A0.3))
Кх(т - п + т2) = i-
Тогда получим
Ку(т) = ±-
оо оо оо
О 0 -оо
ОО г ОО ОО -|
= — Г Sx(uj)e-juJT [w(r1)e^Tl dn [w(r2)eju;T2 dr2 duo =
2тг J \J J
362 Гл. 10. Анализ систем и синтез оптимальных систем управления
T dw.
Согласно формуле A0.3) имеем
oo
du,.
Сравнив правую часть этой формулы с правой частью предыдущего
соотношения, получим формулу A0.14).
10.2.2. Анализ линейных систем в переходном режиме.
Выше были получены все расчетные формулы, которые необходимы
для вычисления вероятностных характеристик случайных процессов,
прошедших через линейную систему. Рассмотрим систему управле-
управления, представленную на рис. 10.2. Пусть задающее воздействие G(i)
F{t)
Wi(p)
W2(p)
Y(t)
Рис. 10.2. К анализу систем при случайных воздействиях
и возмущение являются случайными процессами с известными мате-
математическими ожиданиями и корреляционными функциями. Опреде-
Определим систематическую и среднеквадратическую ошибки в переходном
режиме. Учитывая, что среднеквадратическая ошибка равна корню
квадратному из дисперсии, ограничимся вычислением последней.
Передаточные функции ошибки от задающего воздействия и от
возмущения имеют соответственно вид
w / ч 1 w / ч _ -УУ2(р)
We9[P) ~ l + Wi(p)W2(p)' Wef[P) - l + Wi(p)W2(p)'
По передаточной функции можно определить весовую функцию weg (t)
ошибки от задающего воздействия и весовую функцию wef(i) от
возмущения. В соответствии с формулой A0.6) можем записать
t t
Ед (t) = Jweg (t - t)G{t) dr, Ef (t) = Jwef (t - t)F{t) dr,
о о
где Eg(t) — ошибка от задающего воздействия (F(t) = 0), Ef(t) —
ошибка от возмущения (G(t) = 0). Здесь принимается, что система
стационарна. Согласно принципу суперпозиции имеем
t t
E(t) = Eg(t) + Ef(t) = Jweg(t - t)G(t) dr + Jwef(t - t)F(t) dr.
0 0
A0.17)
10.2. Анализ линейных систем и синтез оптимальных параметров 363
Отсюда для систематической ошибки получаем
fw(t - t)M[G(t)} dr + fw(t - t)M[F(t)] dr. A0.18)
о о
Если внешние воздействия не коррелированны, то дисперсия
ошибки равна сумме дисперсий ошибок от задающего воздействия
и от возмущения: ^ ^ ^
Ve = Veg + Def,
где De = D[E(t)], Deg = D[Eg(t)], Def = D[Ef(t)].
Действительно, из A0.17) имеем
t t
E(t) = Eg(t) + Ef(t) = fw(t - t)G(t) dr + fw(t - t)F(t) dr.
о о
Отсюда находим
= M[(Eg(t)+Ef(t)J} =
= M[E2g(t)} + 2M[Eg(t)Ef(t)} + М[ЁЩ] = M[E2g(t)} + M[E2(t)},
так как
M[Eg(t)Ef(t)] = M\ (w{t - t)G{t) dr (w{t-T)F{T)dr\ =
Ц о J
t t
= JJw(t - n)w(t - t2)M[G(t1)F(t1)] dn dr2 = 0
0 0
0 0
в силу M[G(ti)F(t2)] = 0.
10.2.3. Анализ линейных систем в установившемся режи-
режиме. В соответствии с формулой A0.11) систематическая ошибка от
задающего воздействия meg(i) и систематическая ошибка от возму-
возмущения mef(i) в установившемся режиме определяются следующим
образом:
t t
meg(t) = / weg(t — т)тд(т) dr, mef(t) = / wef(t — r)mf(r) dr.
— oo —oo
A0.19)
Систематическая ошибка me (t), когда к системе приложены оба внеш-
внешних воздействия, равна сумме этих ошибок:
me(t) = meg(t) + mef(t).
Как следует из формул A0.19), при вычислении систематичес-
систематических ошибок можно считать, что к системе приложены не случай-
случайные процессы, а детерминированные воздействия — их математи-
математические ожидания. Поэтому здесь, как и при рассмотрении детерми-
364 Гл. 10. Анализ систем и синтез оптимальных систем управления
нированных систем, для вычисления систематических ошибок meg(t)
и mef(t) можно воспользоваться коэффициентами ошибок. С по-
помощью коэффициентов ошибок эти ошибки определяются следующим
образом:
meg(t) = CgOmg(t) + Сд1 ^Ф + Сд2 d2™°2{t) + ..., A0.20а)
mef(t) = Cfomf(t) + Cfl ^^ + Сп ^g^ + ..., A0.206)
где коэффициенты ошибок от задающего воздействия Cgi и коэффи-
коэффициенты ошибок от возмущения Cf\ определяются так [31]:
= Weg@),
s=0
Г ЛАТ (С\\ Г l
С/о = We/@), Cfi = ~
г = 1,2,...,
г = 1,2,...
Sl s=0
Если система астатическая, то коэффициенты ошибок до первого
отличного от нуля коэффициента включительно можно определять по
более простым формулам [31]
_ Wef(s)
s=0
s=0
г = 1,2,... A0.21)
Пример 10.2. Дана система (см. рис. 10.2) с передаточными
функциями
одер+2) щ=2
р р+1
Задающее воздействие g(t) = 0,1^, возмущение является стационар-
стационарным случайным процессом с математическим ожиданием ш/ = 2.
Требуется определить систематическую ошибку в установившемся
режиме.
Решение. Так как вторая и более высокие производные от за-
задающего воздействия и все производные от математического ожи-
ожидания возмущения равны нулю, то формулы A0.20) принимают вид
тед = CgOg(t) + Сд1 -|, mef = Cfomf.
Так как W\ содержит одно интегрирующее звено (множитель 1/р),
система является астатической с астатизмом первого порядка как
относительно задающего воздействия, так и относительно возмуще-
возмущения. Поэтому первые коэффициенты ошибок равны нулю: Сдо = 0,
G/о = 0. Осталось вычислить коэффициент Cgi. Передаточная функ-
функция ошибки относительно задающего воздействия имеет вид
W (с)- Х s(s + 1)
Wi(s)W2(s) s(s + l)+0,5Bs
10.2. Анализ линейных систем и синтез оптимальных параметров 365
Так как Сдо = 0, коэффициент Сд\ можно вычислять по форму-
ле A0.21):
Cgl
= 2.
HS + lJ+U,!)t2S + lJ s=0
Таким образом, находим
тед = 2 • 0,1 = 0,2, mef = 0, те = тед + т2/ = 0,2.
Среднеквадраттическая ошибка. Ограничимся случаем, когда
внешние воздействия стационарны и не коррелированы, а линейная
система стационарна. Согласно формуле A0.16) дисперсии ошибок от
задающего воздействия Deg и возмущения Def принимают вид
Dea = h I \WeaU«>)\2Sg(u>)du>, Def = ± I \Wef(juj)\2Sf{uj)duj,
— оо —оо
или, в силу четности подынтегрального выражения,
Deg = lf\Weg(ju;)\2Sg(u;)du;, Def = ±f\Wef(ju;)\2Sf(u;)du;.
0 ° A0.22)
Если внешние воздействия не коррелированы, то дисперсия ошиб-
ошибки, как было показано выше, равна сумме дисперсий Deg и Def\
De=Deg+Def.
И соответственно формула для вычисления среднеквадратической
ошибки принимает вид
(Уе =
Если передаточные функции и спектральные плотности внешних
воздействий представляют дробно-рациональные функции, то каж-
каждый из интегралов A0.22) можно представить в виде
2
duo.
_ I aoiiuj)u + ал[Цх)У1~^ + ... + ап
о
Как известно, такие интегралы выражаются через коэффициенты
полиномов подынтегрального выражения и для п — 1,2,3 имеют
ВИМ31] Ы hlnn±nj2
h =
20003@102 — <
Пример 10.3. Дана система (см. рис. 10.2) с передаточными
функциями
Wx =
р р + I
Задающее воздействие g(t) = 0,1 ?, возмущение является стационар-
стационарным случайным процессом с математическим ожиданием rrif — 2
366 Гл. 10. Анализ систем и синтез оптимальных систем управления
и корреляционной функцией Kf(r) = /Зе а\Т\. Требуется определить
среднеквадратическую ошибку в установившемся режиме.
Решение. Так как задающее воздействие является детермини-
детерминированной функцией, то дисперсия ошибки от задающего воздействия
равна нулю: Deg = 0. Поэтому дисперсия ошибки De определяется из
соотношения De = Def. Чтобы воспользоваться формулой
необходимо определить спектральную плотность возмущения Sf(u).
Так как спектральная плотность получается двусторонним преобра-
преобразования Фурье корреляционной функции, то имеем (см. A0.2))
оо оо
5/И = f Kf(r)e-j"T dr = f pe-aWe-ju>T dr =
— оо
О
dr
dr =
a-ju
0-(ol+ju)t
О
— сю
a +
= 3 ¦
2a
или
Sf(w)=f3-
jut + a
Определим передаточную функцию ошибки относительно возму-
возмущения:
Wef{s) = l + w!{s)W2{s) = 8> + з1+1-
Подставив выражения для Wef{juo) и Sf{uo) в формулу для дисперсии,
найдем
De = Def = ^
оо
=ч
7Г J
jooK + C + a) (jooJ + (За + l)joo + a
duo.
При дальнейших расчетах примем /3 = 2 и а = 1. Подставив эти
значения, получим
2
duo.
Справа мы имеем интеграл /з с коэффициентами подынтегральных
полиномов
fro = 0, bi = 4, b2 = 0, а0 = 1, а\ =4, а2 = 4, а3 = 1.
10.2. Анализ линейных систем и синтез оптимальных параметров 367
По формуле A0.236) находим
Т Ь1а2аз + аоаз(Ь1 — 2bob2) + aoaibl 8
1Q —— —— .
2аоаз(а±а2 — аоаз) 15
Следовательно, среднеквадратическая ошибка равна ^/8/15.
10.2.4. Синтез параметров системы по минимуму сред-
неквадратической ошибки. Рассмотрим линейную стационарную
систему, у которой не все параметры фиксированы, внешние случай-
случайные воздействия стационарны, а на параметры могут быть наложены
ограничения. Пусть требуется определить варьируемые (нефиксиро-
(нефиксированные) параметры, доставляющие минимум среднеквадратической
ошибке в установившемся режиме. В этом случае среднеквадрати-
среднеквадратическая ошибка будет функцией варьируемых параметров, и задача
синтеза в общем случае сводится к задаче на условный минимум этой
функции — к определению ее минимума при наличии ограничений на
варьируемые параметры.
Пример 10.4. Дана система (см. рис. 10.2) с передаточными
функциями г, Л
1 Ts + 1' s
Задающее воздействие представляет собой смесь полезного сигнала и
помехи и имеет вид
G(t)=g(t)+N(t),
где помеха N(i) — белый шум с нулевым средним значением и с
интенсивностью Щ (Кп(т) = Щ5(т)); g(t) = 0,1 ? — полезный сиг-
сигнал, который нужно воспроизводить; возмущение F(t) отсутствует
(F(t)=0).
Требуется определить параметры к и Т, при которых система-
систематическая ошибка не превышает 0,01 (\тпе\ ^ 0,01) и среднеквадра-
среднеквадратическая ошибка в установившемся режиме принимает минимальное
значение.
Решение. Найдем систематическую ошибку т?. Для этого сна-
сначала определим среднее значение (математическое ожидание) входно-
входного сигнала:
mg(t) = M[G(t)] = g(t) = 0,1*.
Передаточная функция ошибки имеет вид
Отсюда для первых двух коэффициентов ошибки находим
\
Сдо = Weg@) = 0, Сд1 =
= 0 гь
S
Систематическая ошибка в данном случае вычисляется следующим
образом:
368 Гл. 10. Анализ систем и синтез оптимальных систем управления
Параметр к должен удовлетворять условию
или к ^ 10.
Найдем теперь дисперсию ошибки. Спектральная плотность внеш-
внешнего воздействия равна спектральной плотности помехи N(i):
Sn(w) = No.
Так как помеха приложена в одной точке с задающим воздействием,
то передаточная функция ошибки по помехе равна —Wyg(s) [31]. Здесь
WygW- i + Wl(s)Wb(s) " s{Ts + l) + k'
Согласно формулам A0.22) для искомой дисперсии De имеем
о о
где 12 определяется согласно второй формуле из A0.23а) со следую-
следующими коэффициентами:
bo = 0, Ь\ = к, clq = Т, а\ = 1, а2 = к.
Подставив эти коэффициенты в указанную формулу, получим
т ¦*¦ "> ^
2 ~ 2Тк ~ 2 '
Следовательно, среднеквадратическая ошибка принимает вид
и достигает минимума при полученном выше ограничении на к при
к = 10. От параметра Т среднеквадратическая ошибка не зависит, и
он может быть выбран произвольно.
10.3. Винеровская задача оптимальной фильтрации
Как следует из предыдущей главы, для управления с обратной
связи необходимо прежде всего получить оценку фазовых координат,
которые входят в закон управления. В системах управления, подвер-
подверженных случайным воздействиям, получение такой оценки связано с
решением задачи фильтрации. В этом параграфе рассмотрим став-
ставшую классической теорию оптимальной фильтрации Н. Винера.
10.3.1. Постановка винеровской задачи оптимальной
фильтрации. Пусть наблюдается случайный процесс X(t), предс-
представляющий сумму полезного сигнала S(t) и помехи (шума) N(t):
X(t) = S(t) + N(t).
10.3. Винеровская задача оптимальной фильтрации 369
По данным его наблюдения на интервале времени [to, t] нужно полу-
получить оценку полезного сигнала в момент tf. При этом возможны три
случая: 1) t0 < t' < t; 2) t' = t; 3) t' > t.
В соответствии с этими тремя случаями могут быть рассмотрены
три различные задачи.
Задача получения оценки S(t') полезного сигнала в момент t' в слу-
случае 1) называется задачей интерполяции или задачей сглаживания,
в случае 2) — задачей фильтрации и в случае 3)— задачей экстра-
экстраполяции или задачей упреждения.
Здесь рассматривается только задача фильтрации.
Рассмотрим точную формулировку винеровской задачи оптималь-
оптимальной фильтрации. Пусть случайный процесс X(i) = S(i) + N(i) наб-
наблюдается на интервале (—оо,?], a S(t), N(i) — стационарные и ста-
стационарно связанные случайные процессы. Известны корреляционная
функция наблюдаемого (входного) сигнала Кх(т) и взаимная корре-
корреляционная функция входного и полезного сигналов КХ8(т). Требуется
определить линейную систему, выдающую на выходе оценку S(t),
оптимальную в смысле минимума среднеквадратической ошибки, или,
что то же, минимума дисперсии:
J = М[Ё2} ^min.
Здесь Е — центрированная ошибка оценки E(i) = S(i) — S(i).
Линейная система, которая получается в результате решения этой
задачи, называется фильтром Винера или оптимальным фильтром
Винера.
10.3.2. Уравнение Винера—Хопфа.
Теорема 10.1. Для того чтобы w(t) была весовой функцией
оптимального фильтра, необходимо и достаточно, чтобы она удов-
удовлетворяла уравнению
оо
Jkx(t - X)w(X) dX = Kxs(t), A0.24)
О
которое называется уравнением Винера-Хопфа.
Доказательство. Так как среднеквадратическая ошибка и
дисперсия не зависят от математического ожидания, то, не нару-
нарушая общности, положим M[S(t)] = 0 и M[N(t)] = 0. Оценку S(t)
на выходе линейного фильтра представим с помощью его весовой
функции w(i):
t оо
S(t) = fw(t- Х)Х(Х) dX = Jw(X)X(t - X) dX.
-оо О
Так как ошибка оценки при этом принимает вид
оо
E(t) = S(t) - S(t) = S(t) - fw(X)X(t - A) dX,
0
24 Д.П. Ким
370 Гл. 10. Анализ систем и синтез оптимальных систем управления
то для критерия оптимальности получаем
[оо
S2(t) - 2 fw(X)S(t)X(t -X)dX +
о
оо оо -|
+ Г fw(X)w(Xf)X(t - X)X(t - Xf)dXdXf =
0 0 ^
oo oo oo
= K8@) - 2 fw(X)Ksx(X)dX + Г fw(X)w(Xf)Kx(X - Xf)dXdXf.
0 0 0
Необходимость. Введем в рассмотрение весовую функцию
wa(t) = w*(t) +ar(t),
где w*(t) — весовая функция оптимального фильтра (оптимальная
весовая функция), а — параметр, r(t)—произвольная непрерывная
функция. Подставим это выражение для весовой функции в получен-
полученное выше выражение для критерия оптимальности:
оо
J(a) = K.@) -2J[w*{X) + ar(X)]Ksx(X) dX +
о
v*(A) + ох(А)]К(А') + ar(X')]Kx(X - X')]dXdX'. A0.25)
о о
Критерий является функцией от скалярного параметра и достига-
достигает минимума при а = 0. Поэтому необходимо, чтобы его производная
по этому параметру обращалась в нуль в точке а = 0:
dJ(a)
da
= -2 [r(X)Ksx(X)dX+ f fr(X)w"(Xt)Kx(X-Xt)]dXdXt
a=0 J J J
0 0
oo oo
+ JJw* (X)r(X')Kx (A - A')] dX dX1 = 0.
0 0
Два последних интеграла равны. Поэтому полученное соотношение
можно преобразовать к виду
dJ(a)
da
ОО г ОО -|
= 2|r(A) -Ktx(X) + Jw*(X')Kx(X - X') dX'\dX = O.
0 L 0
При произвольной функции r(t) последнее равенство возможно, если
выражение в квадратных скобках обращается в нуль, т.е. если вы-
выполняется уравнение Винера-Хопфа. Необходимость доказана.
Достаточность. Положив в A0.25) а = 0, находим
оо
J* = ./(о) = Ks@) -2Jw*{X)Ksx{X)dX +
0
+ JI[w*(X)w*(X')Kx(X - X')]dXdX'. A0.26)
10.3. Винеровская задача оптимальной фильтрации 371
Раскрыв в A0.25) квадратные скобки, получим
оо оо
J(a) = Kt@) -2Jw*(\)Ksx{\) d\ - 2a Jr(\)Ksx(\) dX +
0 0
oo oo
+ J J [w* (\)w* (X')KX (A - A')] dX d\' +
о о
oo oo
+ 2аГ Г[т*(Х)г(Х')]Кх(Х - A') dXdX! +
о о
oo oo
+ a2 f f[r(X)r(Xf)Kx(X-Xf)]dXdXf.
о о
Учитывая A0.26), последнее соотношение можно преобразовать к
виду
оо оо
J(a) = J* + 2а Гг(Х)[-К8Х (А) + /V (Х)КХ (А - A')] dX dX( +
о о
[оо -| 2
a fr(X)X(X)dX\ .
о J
Второе слагаемое в правой части в силу уравнения Винера—Хопфа об-
обращается в нуль. Поэтому последнее соотношение можно представить
в виде
[оо -. 2
aJr(\)X(\)d\\ .
О
Отсюда следует неравенство J* ^ J(a). Достаточность доказана.
Дальше при решении уравнения Винера-Хопфа потребуется поня-
понятие формирующего фильтра.
10.3.3. Формирующий фильтр. Формирующим фильтром
называется звено, формирующее из белого шума случайный про-
процесс с заданной спектральной плотностью.
Пусть на вход устойчивого линейного стаци- V(t)
онарного звена (фильтра) подается белый шум ^ ф
X(t)
V(t) с единичной интенсивностью (рис. 10.3): рис. 10.3. Формирую-
ts ( \ Г/\ О ( \ л ЩИЙ фильтр
Kv(t)=S(t), Sv(u) = 1. v p
В установившемся режиме выходной сигнал X(t) будет стационар-
стационарным, и его спектральная плотность будет связана с спектральной
плотностью входного сигнала соотношением
Sx(w) = iw^MfSA") = |^ф(.И|2.
Отсюда следует: чтобы сформировать стационарный случайный
процесс с заданной спектральной плотностью Sx(u), которую можно
24*
372 Гл. 10. Анализ систем и синтез оптимальных систем управления
представить в виде
Sx(w) = tl>(ju)il>(-ju) = IVOMI2, (Ю.27)
где все полюсы функции ip(s) расположены в левой полуплоскости,
достаточно принять передаточную функцию фильтра H^(s), рав-
равной ib(s):
Как мы увидим далее, важно, чтобы не только полюсы, но и нули
функции ip(s) располагались в левой полуплоскости.
Представление функции Sx(ou) в виде A0.27) называется ее фак-
факторизацией.
Факторизация спектральной плотности. В простейших
случаях факторизация спектральной плотности и нахождение пере-
передаточной функции формирующего фильтра не представляет труда.
Например, случайный процесс с корреляционной функцией Кх{т) =
= /Зе~а'г', как было показано в примере 10.3, имеет спектральную
плотность 0
которая может быть представлена в виде
2
J x 7 juj + a
Поэтому передаточная функция формирующего фильтра такого про-
процесса будет иметь вид
s + a
В более сложных случаях можно воспользоваться общим методом
факторизации.
Пусть спектральная плотность Sx (со) является дробно-рациональ-
дробно-рациональной функцией:
где Н{ио), G{uo) — полиномы от и, а дисперсия конечна:
оо
Dx = - (Sx(u)) duo < оо. A0.28)
7Г J
0
Спектральная плотность Sx(lj) обладает следующими свойствами:
1) Sx(lj) — четная функция, причем полиномы Н{ио), G{uo) содер-
содержат только четные степени си;
2) в силу условия A0.28) (Sx(u) —У 0 при и —у оо) степень полино-
полинома H(uS) строго меньше степени полинома G(uj)\
3) в силу A0.28) уравнение G(uS) = 0 не имеет действительных
корней;
4) корни уравнений Н{ио) = 0 и G{uo) = 0 расположены симмет-
симметрично относительно обеих осей системы координат.
10.3. Винеровская задача оптимальной фильтрации 373
Пусть полиномы H(uS) и G(uS) имеют вид
H(w) = /Зои2т + fto;2*) +...+0m,
G(w) = a0uJ2n + aiuj2(n-V + ... + an.
Разложим их на элементарные множители и представим спектраль-
спектральную плотность в виде
где i?+, G+ — произведения элементарных множителей, соответст-
соответствующих корням уравнений Н(и) = 0 и G(u) = 0, расположенным в
верхней полуплоскости; Н-, G- - произведения элементарных мно-
множителей, соответствующих корням уравнений Н(и) = 0 и G(u) = О,
расположенным в нижней полуплоскости.
Положим
P(jw) = (j)m л/&>Н+, Q(jw) = (i)" x/^G+- A0.30a)
Тогда имеют место следующие равенства:
P(-jw) = (-j)m ^MH-, Q(-jw) = (-j)n V^G_. A0.306)
Действительно, пусть а + j/З (а ^ 0, /3 > 0) — один из корней
уравнения H(uS) = 0. Тогда его корнями будут также —а — j/З, а — ЦЗ
и —а + j/З. Этим корням будут соответствовать следующие множи-
множители в полиномах Н+ и Н-\
Я_: [Ш-(а-№][<»-(-<*-№]•
Этим множителям в выражениях (j)mH+ и (—j)mH- соответствуют
следующие множители:
- (-а
-(a- i/3)](-i)k " {-a -
Правые части приведенных двух соотношений являются комплексно-
сопряженными выражениями.
Итак, используя обозначения A0.30), соотношение A0.29) можно
представить в виде
Отсюда для передаточной функции формирующего звена получаем
374 Гл. 10. Анализ систем и синтез оптимальных систем управления
Заметим, что корням уравнений H(uS) = 0 и G(uS) = 0, располо-
расположенным в верхней полуплоскости на плоскости корней и, на плоскос-
плоскости s = ju соответствуют левые корни. Поэтому в соответствии с
построением полиномов P(s) и Q(s) все нули и полюсы передаточной
функции формирующего фильтра располагаются в левой полуплос-
полуплоскости.
Пример 10.5. Определить передаточную функцию формирующе-
формирующего фильтра для стационарного случайного процесса со спектральной
плотностью
Решение. В данном случае нулями спектральной плотности яв-
являются uj\ = jb, LJ2 = —jb; полюсами являются uj\ = j, 002 — —j,
cj3 = j5 (jj4 = —j. Поэтому имеем
Я+ =и - jb, P(juj) =j(v- jb) = juj + b,
G+ = (u-jJ, Q(ju)=j2(u;-jJ = (ju + IJ.
Передаточная функция формирующего фильтра есть W(s) =
2
10.3.4. Фильтр Винера. Передаточная функция оптимального
фильтра (фильтра Винера) имеет вид
где Wfy(jui) — частотная передаточная функция формирующего фильт-
фильтра входного сигнала X(t) = S(t) + N(t); Sxs(u>) — взаимная спек-
спектральная плотность входного и полезного сигналов; [...]+ — выра-
выражение, которое получается, если в разложении на простые дроби
дробно-рациональной функции, заключенной в квадратных скобках,
исключить те слагаемые, полюсы которых расположены в нижней по-
полуплоскости на комплексной плоскости ш или в правой полуплоскости
на комплексной плоскости s = juo.
Прежде чем доказать формулу A0.31), рассмотрим пример.
Пример 10.6. Принимаемый сигнал X(t) представляет сумму
полезного сигнала S(t) и помехи N(t):
X(t) = S(t) + N(t).
Корреляционные функции полезного сигнала и помехи имеют вид
Ks(t) = а2е-аИ, Кп{т) = лго<5(т),
полезный сигнал и шум не коррелированы.
Определить передаточную функцию фильтра Винера.
Решение. В соответствии с формулой A0.31) для определения
искомой передаточной функции необходимо знать передаточную функ-
функцию формирующего фильтра принимаемого (входного) сигнала W<j)(s)
10.3. Винеровская задача оптимальной фильтрации 375
и взаимную спектральную плотность входного и полезного сигна-
сигналов Sxs(lj). Так как полезный сигнал и помеха не коррелированы,
имеем
Кх (г) = Ks (г) + Кп (г), Sx(u) = St(u) + Sn{w).
Спектральные плотности полезного сигнала и помехи имеют вид
Ss(uj)=a2^T^> Sn(u)=N0.
Подставив эти выражения в приведенную выше формулу для Sx(u),
получим
или
а ¦
где /З2 = 2а2 а/Щ + а2. Из последнего соотношения находим
W<b{ju)) =
Найдем взаимную корреляционную функцию входного и полезного
сигналов:
КХ8(т) = M[X(t)S(t + т)} = M[(S(t) + N(t))S(t + т)} = Кв(т).
Отсюда следует
Теперь найдем выражение, заключенное в квадратные скобки в
формуле для оптимального фильтра A0.31):
^2
2aa2
Далее, разложив правую часть методом неопределенных коэффи-
коэффициентов на элементарные дроби, находим
Sxx(u>) = 2аа2 ( 1 1 \
Отбросив вторую элементарную дробь, полюс которой расположен в
нижней полуплоскости на плоскости и, получим
2аа21
Подставив это выражение и выражение для передаточной функции
формирующего фильтра в A0.31), найдем искомую передаточную
функцию h
где
-?• " =
376 Гл. 10. Анализ систем и синтез оптимальных систем управления
Вывод формулы A0.31). Представим оптимальный фильтр в
виде соединения двух звеньев (рис. 10.4): обратного фильтра W^1(p),
преобразующего входной сигнал X(i) = S(i) + N(i) в белый шум V(i)
_ с единичной интенсивностью:
W?
Рис. 10.4. Структурное пред- и звена с передаточной функцией И^(р),
ставление оптимального которую предстоит определить.
фильтра Пусть входной сигнал представляет
собой белый шум: X(t) = V(t). Тогда,
так как Кх(т) = 8(т) и весовая функция фильтра Винера w(t) =
= wi(t), уравнение Винера-Хопфа A0.24)
принимает вид
или
Wl(r) = Kvs(t).
В связи с тем, что передаточная функция связана с весовой функ-
функцией преобразованием Лапласа, из последнего равенства получаем
оо
W^s) = JKvs{r)e-STdr. A0.32)
о
Таким образом, W\{s) есть передаточная функция фильтра Вине-
Винера, когда входной сигнал является белым шумом с единичной интен-
интенсивностью. Как следует из структурной схемы (см. рис. 10.4), в общем
случае, когда входной сигнал не является белым шумом, передаточная
функция оптимального фильтра определяется по формуле
s). A0.33)
Следовательно, решение уравнения Винера—Хопфа сводится к
определению передаточной функции формирующего звена входного
сигнала и вычислению интеграла A0.32).
В соотношение A0.32) входит корреляционная функция KV8(r),
которая не задана. Найдем ее, основываясь на корреляционной функ-
функции КХ8(г). Положим W(s) = W^1(s). Тогда имеем (см. рис. 10.4)
оо
V(t) = [w(\)X(t-\)d\.
о
Умножим обе части на S(t + г) и выполним операцию математичес-
математического ожидания: ^
К„,(т) = I
О
10.4' Фильтры Калмана-Бъюси 377
Подставив в это равенство взаимную корреляционную функцию
Кх.(т + А) = ±
— оо
и поменяв порядок интегрирования, получим
оо оо
Kvs(t) = i- I Sxs(aj)e^T Jw(X)ejuX dXdaj =
Учитывая W(juj) = W^1 (jw), последнее соотношение можно записать
в виде ^
2тг
— оо
Подставим это выражение в A0.32):
оо оо
s) = — / e~ST f Jxpw\ е?шт duj dr.
2n J J W<b{-3w)
Таким образом, передаточная функция оптимального фильтра
имеет вид (см. A0.33))
'°-К ejuJT duo dr.
W(s) = 1—г- Г e~ST f
v ' 2тгИ^ф(в) J J
0
Если Sxs{uj)/W${—juj) — дробно-рациональная функция, то двой-
двойной интеграл вычисляется (с помощью теории вычетов) в конеч-
конечном виде, и передаточная функция оптимального фильтра принимает
вид A0.31).
10.4. Фильтры Калмана-Бьюси
При получении фильтра Винера предполагалось, что оценка по-
получается на основе наблюдения на бесконечном отрезке времени, что
является ограничительным условием применительно к задачам управ-
управления. Фильтр Калмана—Бьюси, который будет рассмотрен в этом
параграфе, позволяет получать оценку фазовых координат на основе
наблюдения выхода системы на конечном интервале времени [to, t].
10.4.1. Задача оптимальной фильтрации при белых шу-
шумах.
Постановка задачи. Дана управляемая система
х = Лх + Ви + Vo(?), x(?0)=x°, A0.34а)
у = Cx + VH(?), A0.346)
378 Гл. 10. Анализ систем и синтез оптимальных систем управления
где А, В, С в общем случае являются функциями времени, х° —
случайная величина и Vo(?), VH(?) — белые шумы с вероятностными
характеристиками
М[х°] = х°, М[(х° - х°)(х° - х°)т = Ро,
M\yo(t)] = 0, M[V0(*)Vjf (*')] = Qo(t)S(t - t'),
M[VH(t)} = 0, M\yH(t)V*(t')] = Ro(t)S(t - t'),
Qo, Po — положительно полуопределенные матрицы; Rq — положи-
положительно определенная матрица; случайная величина х° не коррелиро-
вана с шумами Vo(?) и VH(?).
Требуется на основе наблюдения выхода y(t) на интервале [t$,i\
определить несмещенную линейную оценку х(?) фазового вектора х(?),
обеспечивающую минимум среднего квадрата ошибки:
J = М[(х(*) - x(t))T(x(t) - х(*))] -* min. A0.34в)
(t)
Напомним: оценка x(t) называется несмещенной, если М[х(?)] =
= М[х(*)].
Условие положительной определенности матрицы Rq (матрицы
интенсивности шума наблюдения) означает, что ни одна компонента
выхода y(t) не измеряется точно. И в этом случае задача оценивания
называется несингулярной (невырожденной) [29]. Таким образом, за-
задача A0.34) является несингулярной задачей оптимального оценива-
оценивания (фильтрации).
Уравнение A0.34а) называют уравнением объекта, уравне-
уравнение A0.346) — уравнением наблюдения. Шум Vo(t) называют шумом
объекта, шум VH(t) — шумом наблюдения.
Теорема 10.2. Если шумы объекта и наблюдения не коррелиро-
ваны (So(i) = 0), то оценка х(?) является несмещенной и оптималь-
оптимальной в том случае, когда она находится из уравнения
х = Лх + Ви + К°(у - Сх), х(*0) = х°, A0.35а)
с матрицей коэффициентов усиления
К0 = PCtRq\ A0.356)
где Р определяется из уравнения
Р = АР + РАТ - PCTR^CP + Qo, P(to) = Ро. (Ю.35в)
Матрица Р является дисперсионной матрицей ошибки е = х(?) —
~i(t): P = M[e(t)eT(t)};
уравнение A0.35в), которому она удовлетворяет, называется диспер-
дисперсионным уравнением.
10.4' Фильтры Калмана-Бъюси 379
Теорема 10.3. Если шумы объекта и наблюдения коррелирова-
ны (So(t) ф 0), то оценка х(?) является несмещенной и оптимальной
в том случае, когда она находится из уравнения A0.35а) с матрицей
коэффициентов усиления
К0 = (РСТ + S0)Rq\ A0.36a)
где дисперсионная матрица Р определяется из уравнения
Р=(А- SoR^^P + Р(А - SoR^Cf -
T^ Qo - SoR^S*, P(t0) = Po. A0.366)
Несингулярная задача оптимальной фильтрации A0.34) при некор-
некоррелированных шумах впервые была решена Р. Калманом и Р. Бьюси.
Поэтому фильтры A0.35) и A0.35а), A0.36), а также другие фильтры,
которые будут рассмотрены в этом параграфе, называют фильтрами
(наблюдателями) Калмана-Бъюси.
Сравнивая уравнения фильтра Кальмана-Бьюси A0.35а) и урав-
уравнение объекта A0.34а), замечаем, что они отличаются последними
слагаемыми: в уравнении фильтра вместо шума объекта появляется
слагаемое, пропорциональное разности у — Сх. Эта разность меж-
между текущим значением выхода и его оценкой у = Сх называется
невязкой. Структурная схема фильтра Калмана-Бьюси полностью
включает структурную схему объекта. Заметим, фильтр Калмана-
Бьюси имеет такую же структуру, что и наблюдатель полного по-
порядка (9.60) в детерминированном случае. Отличие состоит только
в том, что, когда случайные воздействия не учитываются (т.е. в
детерминированном случае), матрица коэффициентов усиления выби-
выбирается произвольно, а когда случайные воздействия учитываются, эта
матрица определяется однозначно.
Доказательство теоремы 10.2 приведем после рассмотрения при-
примера.
Пример 10.7. Определить оптимальную оценку постоянной ве-
величины х по наблюдениям за у = х + VH (t), где VH (t) — белый шум с
интенсивностью го, математическим ожиданием М[х] = т и диспер-
дисперсией М[(х — тJ] = ро-
Решение. В данном случае уравнение объекта имеет вид х = 0,
и поэтому
у А = 0, В = 0, Qo = 0.
Фильтр Калмана-Бьюси описывается уравнением
х = К0 (у — 2), x(to) = m,
где k° = р/го; р определяется из уравнения
р= -p2/r, p(t0) =р0.
Последнее уравнение имеет решение р = ро^о/(^о + Pot)- Поэтому для
коэффициента усиления получаем к0 = ро/(^о + Pot)-
Доказательство теоремы 10.2 основывается на следующей лемме.
380 Гл. 10. Анализ систем и синтез оптимальных систем управления
Лемма 10.1 [29]. Пусть дано матричное уравнение
-Р=(А- К°С)Р + Р(А - К°С)Т + Qo + K°RK0T,
где А, С, Qo, Rq — известные матричные функции, причем Qo —
положительно полуопределенная матрица, Ro — положительно
определенная функция, Pq — известная симметрическая постоян-
постоянная матрица. При произвольно заданной матрице К0 = K°(t) (со-
(соответствующей размерности) решение Р = P(t) уравнения A0.37)
удовлетворяет неравенству
хтРх ^ хтРх V^ e [to,tf], A0.38)
где Р — решение уравнения Риккати
-Р = АР + РАТ - PCtRq1CP + Qo, P(tf) = Д). (Ю.39)
Неравенство A0.38) обращается в равенство, если положить
К0 = PCtRq1. A0.40)
Следствие. Диагональные элементы матриц Р и Р удовлет-
удовлетворяют следующим условиям:
Ра ^Рн, г = 1,2,...,п, A0.41)
п п
J2ph > 5>«- A0-42)
г=1 г=1
Неравенство A0.41) получается из A0.38), если положить
Xi = 1 и Xj = 0 при j фг (г = 1, 2,... ,п). Неравенство A0.42) непос-
непосредственно следует из A0.41).
Доказательство леммы 10.1. Рассмотрим следующую за-
задачу оптимального управления:
х = 1тх + СТи, х(*0) = х°, A0.43а)
J = xT(t/)Pox(t/) + /(xTQox + uTi20u) dr -> min. A0.436)
Как известно, оптимальное управление имеет вид (см. (9.74))
и = Д^СРх, A0.44)
где Р — решение уравнения A0.39) (см. (9.75)). При этом (см. (9.76))
"(xTQox + uTi20u) dr + хт(*/)Рох(*/) \. A0.45)
10.4' Фильтры Калмана-Бъюси 381
При управлении и = — К0Тх. уравнение замкнутой системы при-
х = (Ат - СтК0Т)ъ, A0.46)
и на решениях этого уравнения интеграл (критерий оптимальнос-
оптимальности) A0.436) на интервале [t,tf] примет значение хтРх:
tf
хтРх = |(xTQox + uTRou) dr + xT(t/)Pox(t/), A0.47)
t
где Р — решение уравнения A0.37).
Действительно, подставим в A0.47) выражение и = — Котх. и про-
продифференцируем по t:
хтРх + хтРх + хтРх = -[xTQx + xTK°R{)K0Tx].
Подставим сюда производную х из A0.46):
кт[(А - К°С)Р + Р + Р(АТ - СтК0Т)]к = -xT(Q + k°RokOT)*.
Это равенство будет выполнено тождественно, если
(А - К°С)Р + Р + Р(АТ - СТКОТ) = -(Q + k°RokOT),
ИЛИ х^ ~~~~~~~~ ~ ~ ~
-Р = (А- К°С)Р + Р(А - К°С)Т + Q + K°R0K0T.
Последнее уравнение совпадает с уравнением A0.37). Из A0.47)
при t = tf получаем граничное условие в соотношении A0.37).
Из A0.45) и A0.47) вытекает неравенство A0.38). Если в уравне-
уравнение A0.37) подставить A0.40), получим уравнение A0.39), т.е. ког-
когда К0 определяется соотношением A0.40), имеет место равенство
Р = Р, и неравенство A0.38) обращается в равенство. Лемма дока-
доказана.
Доказательство теоремы 10.2. Сначала рассмотрим слу-
случай u(t) = 0. При этом уравнение объекта примет вид
х = Лх + У0(?), х(^о)=х°. A0.48)
Так как входом фильтра является наблюдаемая переменная у и оп-
оптимальный фильтр ищется в классе линейных систем, то уравнение
фильтра можно представить в виде
i = Dx + K°y, A0.49)
где D, К0 — матричные функции времени соответствующих разме-
размеров. При таком представлении фильтра задача сводится к определе-
определению матриц D и К0.
Продифференцировав соотношение для ошибки e(t) = х(?) — х(?),
с учетом A0.48) и A0.49) находим
e(t) = х(*) - х(*) = Лх + Vo - Dx - К°у.
382 Гл. 10. Анализ систем и синтез оптимальных систем управления
Подставим сюда выражение для у из A0.346):
e(t) = Лх + Vo - Dx - К°(Сх + VH).
Используя соотношения для ошибки, исключим отсюда оценку х:
e(t) = (А- К°С - ?>)х + De + Vo - K°VH. A0.50)
Оценка будет несмещенной, если при любом t ^ to имеет место ра-
равенство
М[х(*)] = M[x(i)].
Поэтому при любом t ^ to должны выполняться равенства
M[e(t)} = 0, M[e(t)} = 0 W ^ t0, A0.51)
и из A0.50) получаем А - К°С - D = 0, или
D = A- K°C.
Подставив это выражение в A0.49), получим
х = Ах + К°(у - Сх). A0.52)
Это уравнение совпадает с уравнением A0.35а) (напомним, что и = 0).
Из A0.51) имеем также
Так что осталось показать, что матрица К0, доставляющая мини-
минимум среднему квадрату ошибки, определяется соотношением A0.356).
Получим уравнение для дисперсионной матрицы
Используя уравнения объекта A0.48), оценки A0.52) и наблюде-
наблюдения A0.346), равенство ё = х — х можно преобразовать к виду
e = (A-K°C)e + V0-K°VH. A0.53)
Подставив это выражение в уравнение
Р = M[e(t)eT(t)} + M[e(t)eT(t)},
найдем
Р=(А- К°С)Р + M[V0(t)eT(t)] - K°M[VH(t)eT(t)] +
+ Р(А - К°С)Т + M[e(t)V%(t)] - M[e(t)Vl(t)}K0T. A0.54)
Так как е(?о) = х(?о) — х° и начальное значение х(?о) не коррелиро-
коррелированно с шумами, то
M[V0(t)eT(t0)} = 0, M[VH(t)eT(t0)} = 0,
A0.55)
M[e(io)VJT(t)] = 0, M[e(to)VT(t)] = 0.
10.4' Фильтры Калмана-Бъюси 383
Запишем решение уравнения A0.53) по формуле Коши:
e(t)=X(t,to)e(to)+ X(t,r)Yo(r)dr - X(t,r)K0VH(r) dr,
to t0
A0.56)
где X(t,to) = Ф(?)Ф—1(?о); Ф(^) — фундаментальная матрица реше-
решений однородного уравнения
ё=(А- К°С)е.
Очевидно, имеем X(t,i) = /. Используя A0.56) и учитывая усло-
условия A0.55), находим
M[V0(t)eT(t)} = M[V0(t)eT(t0)]XT(t,t0) +
t t
jM[Vo(t)VT(T)]XT(t,T)dT-jM[Vo(t)VT(T)}KOTXT(t,T)dT =
to t0
t t
= fQo(t)S(t - т)Хт(г,т) dr - Jso(t)S(t - T)K0TXT(t,T) dr =
= \[Qo(t)-S0(t)KOT(t)].
Здесь коэффициент 1/2 появляется при вычислении интеграла с
й-функцией из-за того, что точка t находится на границе интегри-
интегрирования. Аналогично получим
M[VH(t)eT(t)] = \ [5ОГ(«) - До
-|
2
M[e(t)V*(t)] = I [S0(t) - K°(t)R0(t)}.
2
Подставим полученные выражения для моментов в уравнение A0.54):
Р=(А- К°С)Р + Р(А - К°С)Т + Qo - S0K0T -
— К о0 + К KqK . AU.57J
Так как e(to) = x(to) — х(?о) = х° — х° , то имеем
P(t0) = М[е(^о)ет(^о)] = М[(х° - х°)(х° - х°)т] = Ро. A0.58)
Когда шумы объекта и наблюдения не коррелированы между собой
(So = 0), из A0.57) получаем
Р = (А- К°С)Р + Р(А - К°С)Т + Qo + K°R0K0T. A0.59)
Введем новую переменную (обратное время) г = tf — t. Тогда если
положить
P(t)=P(tf-T)=P(T), A(t)=A(tf-T)=A(r), ...,
384 Гл. 10. Анализ систем и синтез оптимальных систем управления
то уравнение A0.59) и начальное условие A0.58) примут вид
-Р = (А- К°С)Р + Р(А - К°С)Т + Q + K°R0K0T,
P(t0) = P(rf) = Ро.
Это уравнение совпадает с A0.37). Из леммы 10.1 и следствия
вытекает, что диагональные элементы дисперсионной матрицы Р
принимают минимальные значения, когда (см. A0.40))
К0 = PCTR0~1. A0.60a)
Подставив это выражение в последнее уравнение, получим
-Р = АР + РАТ - РСТЩХСР + Qo, P(to) = P(rf) = Ро. A0.606)
Если вернуться к исходной переменной (времени), то соотноше-
соотношения A0.60) примут вид A0.35)
РАТ - РСТЩХСР + Qo,
Так что теорема 10.2 в случае, когда управление отсутствует (u(t) =
= 0), доказана.
Рассмотрим теперь случай и ^ 0:
х = Лх + Ви + Vo, у = Сх + VH.
Представим вектор состояния в виде х = х^1) + х^2\ где х^1^ и х^2)
подчиняются уравнениям
xW=AxW+V0, x«(io)=x°,
х<2> = Ах.™ + Ви, x<2)(i0)=0.
Наблюдаемый вектор у также представим в виде суммы двух век-
векторов: A\ B)
y = y(j+y(j,
где
уB) = С^2\ у^ = у - у<2) = Сх + VH - Ск^ = С^ + VH.
Оценку х можно представить в виде
х = х«+х<2).
Очевидно, для оценки х^1) имеем (случай и = 0)
Поэтому для оценки фазового вектора имеем
х = х« + хB> = Ах« + ^(у*1) - С^) + Ах<2) + Ви
Добавив в правую часть равное нулю слагаемое К°
получим . п
х = Лх + Ви + К°(у - Сх).
10.4' Фильтры Калмана-Бъюси 385
Начальное условие имеет вид
Теорема 10.2 доказана.
Теорема 10.3 может быть доказана аналогично, но здесь ее дока-
доказательство не рассматривается.
10.4.2. Фильтр Калмана—Бьюси при цветном шуме объ-
объекта. Рассмотрим задачу линейного оптимального оценивания при
условии, что шум объекта не является белым. Небелый шум называют
цветным шумом.
Постановка задачи. Пусть управляемая система описывается
уравнениями
+Вщ + хB), х{1) (t0) = х^, A0.61а)
Vo, x<2)(*0) = x<2), A0.616)
y = Crix<1)+VH, A0.61в)
где Xq и Xq — случайные величины и Vo(?), VH(?) — белые шумы
с вероятностными характеристиками
М [Хо J — Хо , М ЦХ0 - Хо J^X0 - Хо ) J — /"oij
М [Хо J — Хо , М [^Хо - Хо J^X0 - Хо ) J — /02,
M[V0] = 0, M[V0(t)V^(t')} = Q0(t)S(t - О,
M[VH] = 0, M\yH(t)V*(t')] = Ro(tN(t - tf),
Qo5 Pq — положительно полуопределенные матрицы, Rq — положи-
A) B)
тельно определенная матрица, случайные величины х0 и х0 не
коррелированы с шумами Vo(?) и VH(t).
Требуется на основе наблюдения выхода y(t) на интервале [to,t]
определить несмещенную линейную оценку х^^(^) фазового вектора
), обеспечивающую минимум среднего квадрата ошибки:
J = M[(^1\t)-^1\t))T(^1)(t)-i^)]^ min . A0.61г)
X (!)(*)
Здесь A0.61а) является уравнением объекта, в котором х^2) —
цветной шум объекта; A0.616) — уравнение формирователя, форми-
формирующего из белого шума Vo шум объекта х^2); A0.61в) — уравнение
наблюдения.
Преобразуем данную задачу в рассмотренную выше задачу фильт-
фильтрации с белыми шумами. С этой целью введем следующие переменные
25 Д.П. Ким
386 Гл. 10. Анализ систем и синтез оптимальных систем управления
и матрицы:
/ х^ \ / хо \ _0
[o A2J' *" [o
C=[d O],
Используя их, сформулированную выше задачу можно переформу-
переформулировать следующим образом:
х = Ах + Ви + V0(t), x(^o)=x°, A0.62а)
y = Cx + VH(^), A0.626)
J = М[х(*) - x(t))T(x(t) - x(t))] -)> min, A0.62в)
(f)
где Vo(t) = GVo, а фазовый вектор в начальный момент и шумы
не коррелированы между собой и имеют следующие вероятностные
характеристики:
М[х°]=х°, М[х°-хо)(хо-х°)т]=Ро,
М\у0] = 0, M\yo(t)\%(t)] = Q0(t)S(t - f),
M[VH] = 0, M[VH(t)Vj(t')] = Ro(t)S(t - t').
Переформулированная задача является задачей оптимального оце-
оценивания с некоррелированными между собой белыми шумами объекта
и наблюдения. Поэтому согласно теореме 10.2 для оптимальной оцен-
оценки имеем (см. A0.35))
х = Лх + Ви + К°(у - Сх), х(*0) = х°,
г Л -ги /ъ0 Ьг -\- Ц/о 5
Представим дисперсионную матрицу в виде блочной матрицы:
р_ \Pl Pl2
[Р21 P.
Тогда, принимая во внимание введенные обозначения, матрицу коэф-
коэффициентов усиления К0 и уравнения для оценки можно представить
так:
K2(y -
10.4' Фильтры Калмана-Бъюси
387
Модель форми- :
; рователя ;
Рис. 10.5. Структурная схема фильтра Калмана-Бьюси при цветном шуме
объекта
Фильтр Калмана-Бьюси при цветном шуме объекта помимо моде-
модели объекта включает еще модель формирователя (рис. 10.5).
Пример 10.8. Пусть уравнения объекта и наблюдения имеют вид
где Х2 — стационарный случайный процесс (шум объекта) с характе-
характеристиками
М[х2]=0, КХ2(т) = M[x2(t)x2(t + т)] = ie-H;
начальное значение х\ и шум наблюдения не коррелированы ни меж-
между собой, ни с шумом объекта и имеют следующие характеристики:
М[х°1}=0, М[(х?J]=р0, M[VB] = 0, M[VH(t)VH(t + r)]=ro6(T).
Требуется определить оптимальную оценку.
Решение. Спектральная функция шума объекта может быть вы-
вычислена путем двухстороннего преобразования Фурье и представлена
в виде 1 1
Отсюда для передаточной функции формирователя получаем
1
Уравнение формирователя имеет вид
х2 = -х2 + Vb,
где Vo — белый шум с нулевым средним и единичной интенсивностью:
В данном случае
ГО 1] [0] 1
lj' Qo = GQoGT= ^ XJ, Ро = ^° 1/2J.
25*
388 Гл. 10. Анализ систем и синтез оптимальных систем управления
Фильтр Калмана—Бьюси описывается уравнениями
?i = 22 + ki(y - Si), Si (to) = О,
x2 = -S2 + h(y - Si), S2(*o) = 0,
fei =Pn/ro, k2 =P2i/r0.
Дисперсионное уравнение имеет следующий вид:
Pll P12 1 _ [0 l]\pil P12 1 , \pil P12
Р21 P22J L0 -iJL^21 ^22 J [P21 P22
+
го [Р21 P22
](;)<i »)
0 0
1 -1
Pii P12I , [0 0
P21 P22] |0 1
или, в скалярной форме,
Pll = 2р21 - — Pii, P21 =Р22 -Р21 - — Р21Р11,
Р22 = -2р22 - — Р21 +1.
При записи скалярных уравнений учтена симметричность диспер-
дисперсионной матрицы (pi2 = P21). Начальные условия имеют вид
Рп(*о) =Ро, P2i(*o) = 0, Р22(?о) = 1/2.
10.4.3. Фильтр Калмана—Бьюси при цветном шуме наблю-
наблюдения. Рассмотрим задачу линейного оптимального оценивания при
условии, что шум объекта является белым, шум наблюдения — цвет-
цветным.
Постановка задачи. Пусть управляемая система описывается
уравнениями п
х = Лх + Би + У0, х(^о)=х°, A0.63а)
у = Сх + z, A0.636)
z = Dz + VH, (Ю.бЗв)
где х° — случайная величина и Vo, VH — белые шумы с вероятност-
вероятностными характеристиками
М[х°]=х°, М[(х°-хо)(хо-х°)т = Ро,
М\у0] = 0, M[V0(t)VZ(t')} = Q0(tN(t - t'),
M[VH] = 0, M[VH(t)V^(f)] = Ro(t)S(t - t1),
M[Vo(t)Vj(t')] = S(t)S(t - t');
Qo? Pq ~ положительно полуопределенные матрицы; Rq — положи-
положительно определенная матрица; случайная величина х° не коррелиро-
вана с шумами Vo(?) и VH(t).
Требуется на основе наблюдения выхода y(t) на интервале [to,t]
определить несмещенную линейную оценку х(?) фазового вектора x(t),
10.4' Фильтры Калмана-Бъюси 389
обеспечивающую минимум среднему квадрату ошибки:
J = М[(х(*) - х(?))т(х(?) - х(*))] -* min. (Ю.бЗг)
(г)
Здесь A0.63а) является уравнением объекта, A0.636) — уравнени-
уравнением наблюдения, в котором z — цветной шум наблюдения, (Ю.бЗв) —
уравнение формирователя, формирующего из белого шума VH шум
наблюдения.
Данную задачу преобразуем в задачу фильтрации с белыми шу-
шумами. Из уравнений A0.63) находим
f = Сх + <5х + z = (С + СЛ)х + СВи + Dz + CV0 + VH.
Введем новый вектор наблюдения
у = р - СВи - Dy. A0.64)
После подстановки сюда выражений для у и у получим
y = Cx + VH, A0.65)
гле
С = С + С А - DC, VH = CV0 + VH. A0.66)
В преобразованном уравнении наблюдения A0.65) шум VH явля-
является белым, а его интенсивность Rq и интенсивность взаимной корре-
корреляционной функции его и шума объекта So определяются следующим
образом:
Ro = СА0СТ + STCT + CS + R0, So = QoC + S. A0.67)
Из последнего равенства следует, что шум объекта Vo и шум VH
преобразованного уравнения наблюдения будут коррелированы, хотя
шум объекта Vo и шум VH на входе формирователя не коррелированы
E = 0).
Итак, если матрица Ro положительно определена, то оптимальный
фильтр, согласно теореме 10.3, описывается уравнениями
х = Лх + Ви + К°(у - Сх), х(*о) = х°, A0.68а)
К0 = (РСТ + So)Ro\ A0.686)
Р ' Р(А - SoRo'Cf -
^CP + Qo - SoRo'S^ P(t0) = Po- (Ю.68в)
Новый вектор наблюдения определяется соотношением A0.64).
Однако в это соотношение входит производная у; это делает необ-
необходимым дифференцирование наблюдаемой переменной, что нежела-
нежелательно.
Рассмотрим другой способ получения оптимальной оценки, ис-
исключающий необходимость дифференцирования. Введем вектор ж,
определяемый соотношением
х = х + К°у. A0.69)
390 Гл. 10. Анализ систем и синтез оптимальных систем управления
Продифференцируем это равенство по времени и подставим в него
выражения для х и у из A0.68а) и A0.64) соответственно. Тогда
получим
5 = (А - К°С)х + (В- К°СВ)и - (К0 + K°D)y,
или, принимая во внимание A0.69),
5 = (А - К°С)х + (В - К°СВ)и + [(А - К°С)К° - К0 - K°D]y,
В последнее уравнение производная у не входит. Из него опреде-
определяется х, а затем из A0.69) находится искомая оценка.
Пример 10.9. Объект и наблюдение описываются уравнениями
х = 0, y = x + z; Мж@) = 0, М[х2@)]=р0.
Шум наблюдения является стационарным случайным процессом с
характеристиками
M[z] = 0, M[z(t)z(t + r)] = \e~\T\.
Уравнение формирователя имеет вид (см. пример 10.8)
z = -z + VH, M[VH] = 0, M[VH(t)VH(t')} = S(t - t').
В данном случае
Л = 0, 5 = 0, C = l, Qo = 0, D = -l, До = 1, 5 = 0.
Поэтому из A0.66) и A0.67) получаем
С = 1, До = 1, So = 0.
Из A0.70) и A0.69) находим
J = -k°x + (-к02 -к° + к°)у, 2@) = -к°у(О),
х = х + А;0^.
Так как 50 = 0, то ^° и р определяются, согласно теореме 10.2, по
формулам A0.356) и A0.35в):
к°=р, р=-р2, р@)=ро.
Как легко проверить,
V =
к0 =
к
1 + pot' 1
Выше были рассмотрены задачи оценивания, когда цветными яв-
являются или шум объекта, или шум наблюдения. Ясно, что, используя
оба рассмотренных способа, можно решить задачу оценивания, когда
цветными являются как шум объекта, так и шум наблюдения.
10.4' Фильтры Калмана-Бъюси 391
10.4.4. Вырожденная задача оптимального оценивания.
Напомним: задача оптимального оценивания называется вырожден-
вырожденной или сингулярной, если матрица интенсивности шума наблюдения
является вырожденной (не является положительно определенной). Вы-
Вырожденные задачи возникают, когда часть компонент выходного век-
вектора измеряются точно или когда шум наблюдения является цветным
и матрица интенсивности преобразованного шума наблюдения явля-
является вырожденной. Если задача оценивания является вырожденной, то
приведенные выше оптимальные фильтры использовать нельзя. Если
шумы являются цветными, то, согласно описанным выше процедурам,
исходная задача может быть преобразована в задачу с белыми шума-
шумами. Поэтому ограничимся рассмотрением только сингулярной задачи
с белыми шумами.
Сингулярную задачу оптимального оценивания можно сформули-
сформулировать следующим образом:
х(^о)=х°, A0.71а)
VH, A0.716)
УB) = С2х, A0.71в)
J = М[(х(*) - 2(?))т(х(?) - х(*))] -* min, A0.71г)
(г)
где фазовый вектор в начальный момент х° не коррелирован с шумами
объекта Vo и наблюдения VH, и они имеют следующие вероятностные
характеристики:
М[х°]=х°, М[(х°-хо)(хо-х°)т = Ро,
M[V0] = 0, M\yo(t)V%A?)] = Q0(tN(t - t'),
M\VB] = 0, M[VH(i)V^(i')] = Ro(t)S(t - t'),
Здесь, как обычно, принимается, что Ро5 Qo — положительно полу-
полуопределенные матрицы, Rq — положительно определенная матрица.
Эта задача отличается от несингулярной задачи оценивания тем,
что в ней уравнение наблюдения представлено двумя уравнения-
уравнениями: A0.716) — уравнением, определяющим неточно измеряемые вы-
выходные переменные, A0.71 в) — уравнением, определяющим точно
измеряемые выходные переменные.
Оптимальная оценка определяется следующим образом:
^ A0.72а)
q = 2q + S + К°(у - Cq), q(t0) = С2х°, A0.726)
K° = (PCT + S0)?0-\ A0.72в)
392 Гл. 10. Анализ систем и синтез оптимальных систем управления
f\ Q T) — 1 qT TDD- \ /^il TD /~ч/Т (л г\ 7Г) \
Ц/0 — ^0-^n 0 5 v 0/ — ^2 0^2 * I 1U. iZl I
Здесь приняты следующие обозначения: L\ и L2 определяются из
соотношения
(Ьг L2)= (СС2Л~\ A0.73)
где матрица С2 выбирается так, чтобы (п х п)-матрица в A0.73)
справа была невырождена;
А = (С2 + С'2А)Ь2, и = (С2 + С'2А)Ь1У^ + С^Би, A0.74а)
где
y(D=y(i)-C1L1yB),
W CB
A0.756)
вероятностные характеристики преобразованных шумов имеют вид
[d STCT 1 ~
0200 02Ц/о02 J
A0.76)
Получим алгоритм A0.72). Компоненты вектора уB) измеряются
точно. Пусть размер этого вектора равен pi и матрица С2 имеет
ранг р\. Тогда A0.71в) представляет собой р\ линейных независимых
уравнений для неизвестного фазового вектора. Поэтому достаточно
получить еще п — pi уравнений, которые совместно с A0.71в) позво-
позволят определить оценку х.
Введем (п — ^1)-вектор д, определяемый соотношением q = С2х.
Из этого соотношения и уравнения наблюдения A0.71в) имеем
или, учитывая A0.73),
x = LiyB) +L2q. A0.77)
Очевидно, если найдем оптимальную оценку q, то, подставив
ее в A0.77), получим формулу A0.72), определяющую оптимальную
оценку х. Поэтому задача свелась к определению оптимальной оценки
для q. Продифференцировав тождество q = С^х и учтя соотноше-
соотношения A0.71а) и A0.77), получим
q = (С2 + C'2A)L2<i + (С2 + С^А)Ь1У^ + С'2Въ + С2 Vo.
10.4' Фильтры Калмана-Бъюси 393
Воспользовавшись обозначениями A0.74а) и положив Vo = C2V0,
последнее уравнение можно записать в виде
q = 2q + 2 + V0. A0.78)
Преобразуем уравнение наблюдения A0.716): нужно получить
уравнение, связывающее выходную переменную с q. Подставив выра-
выражение для х из A0.77) в A0.716), получим
где у^1) и С\ определены в A0.75). Продифференцировав второе урав-
уравнение наблюдения A0.71в) и использовав уравнение объекта A0.71а)
и представление A0.77), находим
где уB) и С2 определены в A0.75). И если воспользоваться представ-
лением A0.746) и положить VH = I n JI ), то уравнение наблюдения
\^2 Vo )
\ )
можно записать в виде _ _
y = Cq + VH. A0.79)
Таким образом, чтобы найти оптимальную оценку q, нужно най-
найти фильтр Калмана-Бьюси для системы A0.78), A0.79). Вычислив
корреляционные функции преобразованного шума объекта Vo = C2 Vo
и преобразованного шума наблюдения VH = ( ^ лнг ), а также их
\G2V0/
взаимную корреляционную функцию для интенсивности Qo шума Vo,
интенсивности Rq шума VH и их взаимной интенсивности So, по-
получим формулы, приведенные в A0.76). Так как взаимная корреля-
корреляционная функция шумов объекта и наблюдения отлична от нуля,
то оптимальная оценка q определяется, согласно теореме 10.3, по
формулам A0.726), A0.72в), A0.72г). Начальные условия q(?0) и P(t0)
определяется исходя из соотношения q = С^х.
Пример 10.10. Объект и наблюдение описываются уравнениями
X = Х2, Х2 = U + У02,
Vl=Xi+ Ун, 2/2 = Х2.
Фазовые координаты в начальный момент не коррелированы с шума-
шумами объекта и наблюдения и имеют следующие вероятностные харак-
характеристики:
MXi@)=0, M[s?(O)]=po<, * = 1,2,
M[Xl@)x2@)} = 0, M[V02(t)} = 0, M[V02(t)V02(t')} = q226(t - t1),
M[VH(t)} = 0, M[VH(t)VH(t')} = rilS(t - t'); M[V02(t)VH(t')} = 0.
Требуется определить оптимальную оценку.
394 Гл. 10. Анализ систем и синтез оптимальных систем управления
Решение.
»«> =
Примем Со =
Задача является
1
, в = (°Л,
S0 = 0, ^ = 0
A
0). Тогда q
сингулярной
' 0
= С2ж = жь
. В данном случае имеем
)), С2=@ 1),
1
, Rq —ТЦу
2 ч
P02J
Из равенства
получаем Lx = К I, Ь2 = I „
Из формул A0.74)—A0.76) находим
2=0, 2 = ^/2, УA)=Уи
Гп
Из A0.726), A0.72в), A0.72г) имеем
1 Гц' 2 Гц '
Для искомой оценки из A0.72а) получаем xi = ^, ?2 = 2/2-
10.4.5. Линеаризованный фильтр Калмана—Бьюси. Рас-
Рассмотрим алгоритмы оценивания фазового вектора нелинейных систем,
основанные на линеаризации. Пусть объект и наблюдение описывают-
описываются уравнениями вида
x = /(x,u,t)+V0, x(to)=x°,
y = g(x,i)+VH.
Случайный вектор х° и шумы объекта Vo и наблюдения VH не корре-
лированы между собой и обладают следующими характеристиками:
Мх° = х°, М[(х° - х°)(х° - х°)т] = Ро,
M[V0(t)} = 0, M\yo(t)VZ(t)] = Q0(tN(t - t1),
M[VH(t)] = 0, M[VH(t)V^(t')] = Ro(t)S(t - t');
10.4' Фильтры Калмана-Бъюси 395
матрицы ДM Qo положительно по л у определены, матрица Rq положи-
положительно определена.
Произведем линеаризацию относительно некоторой траекто-
траектории х*(?):
x = f(x*,u,i)+(g)*(x-x*)+V0,
y = g(x*,i)+(||)*(x-x*)+VH,
где звездочка сверху производной означает, что она вычисляется в
точках х = х*.
Учитывая, что фильтр Калмана—Бьюси состоит из модели систе-
системы и обратной связи по невязке, можно записать
x = f(x>,*)+K°[y-g(x\i)], x(to)=x°, A0.80a)
ДО-1, A0.806)
A0.80в)
Здесь в уравнении для оценки используется точная модель систе-
системы. Линеаризованная модель используется при вычислении матрицы
коэффициентов усиления.
Теперь остановимся на выборе траектории х*(?), относительно
которой производиться линеаризация. В качестве такой траектории
можно принять номинальную траекторию, которая выбирается до
начала процесса получения оценки на основе априорной информации о
реальной траектории. Такой способ удобен тем, что производные и со-
соответственно матрицу коэффициентов усиления можно вычислить за-
заранее. Это важно, когда оценку нужно получить в реальном масштабе
времени. Его недостаток состоит в том, что при неудачном выборе
номинальной траектории (траектории х*(?) и х(?) сильно отличаются)
возможны большие погрешности в оценке. А чтобы выбрать траекто-
траекторию х*(?), близкую х(?), нужна большая априорная информация. Ука-
Указанного недостатка лишен расширенный фильтр Калмана-Бъюси [57].
Так называется фильтр A0.80), если линеаризация производится от-
относительно точек оценки х(?). Недостатком этого фильтра является
то, что матрицу коэффициентов заранее вычислить нельзя, и возни-
возникают трудности получения оценки в реальном масштабе времени из-
за увеличения объема вычисления в процессе получения оценки. Еще
большей точности можно добиться, если использовать итерационный
фильтр Калмана-Бъюси [57]. Так называется фильтр A0.80), если
после линеаризации относительно номинальной траектории и получе-
получения оценки х(?) вновь производится линеаризация относительно х(?)
и получается уточненная оценка х^1). Эта процедура продолжается
до тех пор, пока изменение оценки не станет допустимым. Очевидно,
396 Гл. 10. Анализ систем и синтез оптимальных систем управления
такой фильтр потребует большого объема вычис-
вычислений, что является его недостатком.
Пример 10.11. Самолет летит на постоянной
высоте с постоянной скоростью v. Измеряется
угол в направления на маяк (рис. 10.6) с помехой,
xi представляющий собой белый шум с интенсив-
тз in* v НОСТЬЮ Г0.
Рис. 10.6. К приме- m с-
iq-1-i 1ребуется определить дальность х\ и высо-
высоту Х2 в текущий момент времени.
Решение. Составим уравнения объекта (движения самолета) и
наблюдения и выпишем необходимые вероятностные характеристики:
х1 = и X2 = 0, у = в = arctg — + VH,
Xi
M[xi@)] = Jo, М[ж2@)] = Л0,
M[x@)xT@)] = Ро, х@) = х@) - М[х@)],
M[VH(t)] = 0, M[VH(t)VH(t')] = r0S(t - t1).
Расширенный фильтр Калмана-Бьюси описывается следующими
уравнениями:
xi = v + ki (в — arctg т^— ), xi@) = lo,
x2 = k2[0 - arctg t^-), ?2@) = h0,
х\+х\)'
10.5. Стохастические оптимальные системы
Для строго детерминированных систем управления не имеет зна-
значения, какое управление — программное или с обратной связью —
используется, так как знание управления и начального состояния
позволяет однозначно определять состояние системы в любой момент
времени. Наблюдение за текущим состоянием системы не дает новой
информации. В стохастических системах управления, т. е. в системах,
подверженных случайным воздействиям, по известным управлению и
начальному состоянию предсказать ход протекания процесса невоз-
невозможно. И возможности качественного управления такими системами
существенно зависят от той информации, которая может быть получе-
получена путем измерения (наблюдения) и обработки выходными (наблюдае-
10.5. Стохастические оптимальные системы 397
мыми) переменными. Поэтому стохастические системы управления
должны быть замкнутыми.
При рассмотрении детерминированных систем управления основ-
основное внимание также уделяется замкнутым системам, так как практи-
практически все системы управления подвержены случайным или неслучай-
неслучайным, но заранее не прогнозируемым воздействиям, т.е. строго детер-
детерминированных систем управления не бывает. Однако при анализе и
синтезе рассматриваются детерминированные модели ввиду их прос-
простоты по сравнению со стохастическими моделями, когда случайные
воздействия не оказывают существенного влияния.
10.5.1. Стохастическое оптимальное управление и урав-
уравнение Беллмана. Уравнение объекта и критерий оптимальности
имеют вид п
x = f(x,u,?)+V0(?), х(*0) =х°, A0.81а)
|J A0.816)
где х° — гауссова случайная величина, Vo(?) — гауссов белый
шум, х° и Vo(?) не коррелированы; белый шум имеет следующие
характеристики:
M[V0(t)} = 0, M[V0(t)V^(t')} = Q0(tN(t - f).
Пусть требуется определить управление объекта A0.81а) с обрат-
обратной связью, доставляющее минимум критерию оптимальнос-
оптимальности A0.816).
Такое управление называется стохастическим оптимальным
управлением.
Итак, рассматривается задача стохастического оптимального уп-
управления, в которой шум объекта является гауссовым белым шумом
и входит в уравнение аддитивно; ограничение на правый конец тра-
траектории отсутствует, фазовый вектор наблюдается полностью и без
помех. В этой задаче х(?) является марковским процессом (так как
случайное воздействие является белым шумом), и вся информация,
которая может быть использована при определении характеристики
будущего состояния, содержится в х(?). Поэтому оптимальное управ-
управление должно быть функцией только от текущего состояния и, быть
может, текущего времени.
Управление u = u(x(?),?) считается допустимым, если функция
u(t) = u(x(?),?) кусочно непрерывна и принимает значения из допус-
допустимого множества Щ. Кроме того, предполагается, что при допусти-
допустимом управлении уравнение
x = f(x, u(x,t),t)
при каждом фиксированном х(?о) = х° имеет единственное решение
на интервале [to,tf]. Функции /o(x,u, t), f(x, u, t) и Qo(t) предполага-
предполагаются непрерывными.
398 Гл. 10. Анализ систем и синтез оптимальных систем управления
Достаточное условие оптимальности [54]. Если су-
существует скалярная функция S(x,i), обладающая непрерывными
частными производными dS/dt, dS/dx, <92S/<9x2, и допустимое
управление и*(х,?) удовлетворяет уравнению
(х u t) + — ffx u t) + - V °2S I ~ dS
A0.82a)
lij — элементы матрицы Qo5 при граничном условии
S(x(tf),tf) = go(x(tf),tf), A0.826)
то это управление является стохастическим оптимальным управ-
управлением (для задачи A0.81)).
Уравнение A0.82а) называется уравнением Беллмана (для зада-
задачи стохастическго оптимального управления), а функция S(x.,i) —
функцией Беллмана.
Если множество Щ открыто и минимум в левой части уравне-
уравнения A0.82а) достигается в стационарной точке, уравнение Беллмана
можно представить в виде
/o(x,u,t) + ^f(x,u,t) + - J2 ЯП д^Щ = -^ (Ю.83а)
^}0. A0.836)
Обычно уравнение Беллмана записывают, используя след мат-
матрицы.
Следом (шпуром) матрицы называют сумму элементов ее глав-
главной диагонали. Например, след (п х п)-матрицы А = [а^] (обозначе-
п
ние tr А или Sp А) определяется так: tr A = У^ ац.
г=1
Непосредственным вычислением можно убедиться, что имеет мес-
место равенство
A d2S . (п d2S \
t(Q)
Поэтому уравнение Беллмана A0.82а) обычно записывают в виде
^ /,п d2S \\ OS
2 tr(Qo )}
Вывод уравнения Беллмана можно найти в [54]. Здесь он не рас-
рассматривается.
10.5.2. Стохастическая оптимальная линейная система
при полной информации о состоянии. Пусть уравнение объекта
и критерий оптимальности имеют вид
х = Лх + Би + У0, х(го)=х°, A0.84а)
10.5. Стохастические оптимальные системы 399
Г 1
J = М\ xT(tf)Fx(tf) + Г [xT(t)Qx(t) + uT(t)Ru(t)} dt . A0.846)
L /о J
Здесь Vo — гауссов белый шум, х° — гауссова случайная величи-
величина; Vo и х° не коррелированы и имеют следующие характеристики:
Мх° = х°, М[(х° - х°)(х° - х°)т] = Ро,
M\yo(t)] = о, M[Vo(*)Vjf(*')] = Qo(W - О;
матрицы А, В, Q и R, вообще говоря, являются функциями време-
времени, R — положительно определенная матрица, Q, Д), Qo — положи-
положительно полуопределенные матрицы, объект стабилизируем.
Требуется найти оптимальное управление объекта A0.84а) с об-
обратной связью, обеспечивающее минимум функционалу A0.846), при
условии, что фазовый вектор доступен точному измерению.
Теорема 10.4. Стохастическое оптимальное управление с об-
обратной связью для объекта A0.84а) при критерии оптимальнос-
оптимальности A0.846) имеет вид
и = -R~1BTKxJ A0.85а)
где К — симметрическая матрица, которая определяется из мат-
матричного уравнения Риккати
К = -КА - АТК + KBR~1BTK - Q A0.856)
при граничном условии
K(tf) = F. A0.85в)
Оптимальный закон управления A0.85) совпадает с оптимальным
законом управления (9.74), (9.75) в детерминированном случае. Таким
образом, случайное воздействие на объект и случайное начальное
условие не влияют на оптимальный закон управления, если имеется
полная информация о фазовом векторе.
Доказательство. Уравнение Беллмана A0.83) в данном слу-
случае принимает вид
ж'вж + .'Я. + Щ(Л* + Во) + 1 «г («о ?
Из второго уравнения полученной системы находим
)T A0-86)
Подставив это выражение в первое уравнение, получим
u dxdxJ dt'
Решение этого уравнения будем искать в виде функции
S = xTif(f)x + ko(t), A0.87)
400 Гл. 10. Анализ систем и синтез оптимальных систем управления
где K(t) — симметрическая матричная функция, ko(t) — скалярная
функция. Подставим A0.87) в указанное уравнение:
xT(Q - KBR~1BTK + К А + АТК)х + tr (Q0K) = -хт& - k0.
Это равенство возможно, если
Q - KBR~1BTK + К А + АТК = -К, tT(Q0K) = -k0.
Первое уравнение совпадает с уравнением Риккати A0.856). Подста-
Подставив A0.87) в A0.86), получим оптимальное управление A0.85а).
Граничное условие A0.826) принимает вид
xT(tf)K(tf)x(tf) + k(tf) = xT(tf)Fx(tf).
Это равенство возможно, если
K(tf)=F, fto(*/)=O.
Таким образом, и граничное условие A0.85в) получено. Теорема
доказана.
10.5.3. Стохастическая оптимальная линейная система
при неполной информации о состоянии. Принцип разделения.
Постановка задачи. Пусть уравнения объекта и наблюдения и
критерий оптимальности имеют вид
х = Лх + Би + У0, x(?0)=x°, A0.88а)
у = Cx + VH, A0.886)
Г tf 1
J = M\xT(tf)Fx(tf) + f [xT(t)Qx(t)+uT(t)Ru(t)} dt\. A0.88в)
Здесь Vo, VH — гауссовы белые шумы, х° — гауссова случайная
величина; Vo, VH и х° не коррелированы и имеют следующие харак-
характеристики:
Мх° = х°, М[(х° - х°)(х° - х°)т] = Ро,
M\V0(t)] = 0, M[V0(*)VJf (*')] = Qo(t)S(t - f),
M[VH(t)} = 0, M[VH(t)Vl(t')} = R0(tN(t - t1);
матрицы Л, В, Q и R, вообще говоря, являются функциями време-
времени, R, Rq — положительно определенные матрицы, Q, Ро, Qo —
положительно полу определенные матрицы.
Требуется найти управление
u = u{y(r), t0 ^т ^t}, to ^t^ tf,
при котором критерий оптимальности A0.88в) принимает минималь-
минимальное значение.
Эта задача отличается от задачи стохастического оптимального
управления с полной информацией тем, что в данном случае управле-
10.5. Стохастические оптимальные системы
401
ние формируется на основе информации, получаемой путем обработки
измеряемой с помехой выходной переменной.
Теорема 10.5. Стохастическое оптимальное управление с об-
обратной связью для объекта A0.88а), A0.886) при критерии опти-
оптимальности A0.88в) имеет вид
и = R~1BTKx, A0.89а)
где К — симметрическая матрица, которая определяется из мат-
матричного уравнения Риккати
К = -КА - АТК + KBR~1BTK - Q A0.896)
при граничном условии
K(tf) = F; A0.89в)
х — оптимальная оценка, которая определяется с помощью фильт-
фильтра Калмана-Бъюси:
х = Лх + Ви + К0 (у - Сх), х(?о) = х°, A0.90а)
К0 = PCtRq\ A0.906)
р = АР + РАТ - PCTR^CP + Qo, P(t0) = Д). (Ю.90в)
Оптимальный закон управления A0.89) совпадает с оптимальным
законом управления (9.74), (9.75) в детерминированном случае и со
стохастическим оптимальным управлением A0.85) при полной ин-
информации лишь с тем отличием, что в законе управления A0.89а)
используется не сам фазовый вектор, а его оценка, которая получается
на выходе фильтра Калмана-Бьюси.
Таким образом, при неполной информации стохастически опти-
оптимальный регулятор состоит из оптимального фильтра (фильтра
Калмана—Бьюси) и детерминированного оптимального регулятора
Vo
VH
Модель системы
Объект
Измеритель
Стохастический оптимальный регуляЬор
Детерминированный
оптимальный
регулятор
Фильтр
Калмана-
Бьюси
Рис. 10.7. Стохастическая оптимальная система при неполной информации
(рис. 10.7). Этот результат известен как принцип разделения [29], или
принцип стохастической эквивалентности [13]. В соответствии с
этим принципом задача синтеза стохастической оптимальной системы
26 Д.П. Ким
402 Гл. 10. Анализ систем и синтез оптимальных систем управления
управления при неполной информации сводится к двум задачам: к
задаче синтеза фильтра Калмана—Бьюси и задаче синтеза детермини-
детерминированной оптимальной системы. Если шумы и начальное состояние
подчиняются нормальному закону распределения, то в результате
такого синтеза получим стохастическую оптимальную систему, в
противном случае (когда шумы и начальное состояние подчиняются
другим законам) можно гарантировать только, что полученная таким
путем система будет оптимальной в классе линейных систем.
Доказательство. Докажем прежде всего, что ошибка е = х —
— х и оценка х не коррелированы. Подставим в уравнение A0.90а)
выражения для у из A0.886) и и из A0.89а):
х = (А - M*)J + К°Се + K°VH. A0.91)
Здесь
К* = R~1BTK.
Вычитая из уравнения объекта A0.88а) уравнение для оцен-
оценки A0.90а), с учетом A0.886) получим
ё = (А- К°С)е + Vo - K°VH. A0.92)
Запишем это уравнение совместно с уравнением для оценки A0.91)
в виде одного уравнения
z = Gz + Я V, A0.93а)
где
К°С А - ВК* \'
-К0'
?]¦ Ч?> <«•¦««
Найдем корреляционную функцию Kz{t\,t2) и дисперсию Dz(t)
для рассматриваемого процесса. По формуле Коши решение уравне-
уравнения A0.93а) имеет вид
t
z = Z(t, to)z(to) + fz(t, t)H(t)V(t) dr,
to
где Z(t,to) — нормированная фундаментальная матрица (см. A.7)).
Фундаментальная матрица удовлетворяет однородному уравне-
уравнению A0.93а):
Z(Mo) = GZ(Mo). (Ю.94)
Так как
z = M[z] = Z(t,to)M[z(to)] = Z(Mo)z°,
то
t
ъ = z - z = Z(t, to)z(to) + jZ(t, t)H(t)Y(t) dr.
10.5. Стохастические оптимальные системы 403
Поэтому для корреляционной функции в силу A0.55) имеем
Kz{tut2) = M[z(?i)zT(?2)] = Z(tljt0)Dz(t0)ZT(t2jt0) +
Г и
¦ м\
до-
довыполнив операцию математического ожидания под интегралом, по-
получим
Kz(h,t2) =
I Z(tur)H(T)S(T)HT(r)ZT(t2jT)dTJ
to
где S(i) — интенсивность шума V(i). Отсюда, положив t\ = t2 = t,
для дисперсии получим
t
Dz(t) = Z(t,to)Dz(to)ZT(t,to) + f Z(t,T)H(T)S(T)HT(r)ZT(t,T) dr.
*° A0.95)
Используя тождество Z(t2,T) = Z(t2,ti)Z(ti,T) (см. A.8а)), при t2 ^
^ t\ формулу для корреляционной функции можно преобразовать
следующим образом:
Kz(h,t2) = Z(t1,t0)Dz(t0)ZT(t1,t0)ZT(t2,t1) +
+ J
¦ Jz{t1,T)H(T)S{T)HT{T)ZT(t1,T) dr ZT(t2,U
= \z(t1,t0)Dz(t0)ZT(t1,t0) +
+ j Z(t1,T)H(T)S(T)HT(T)ZT(t1,T)dT\ZT(t2,t1),
to
или, учитывая A0.95),
Аналогично, используя тождество Z(ti,r) = Z(ti,t2)Z(t2,r), при
t\ ^ t2 получим
Kz(tut2) = Z(tut2)Dz(t2), h ^ t2.
Запишем полученные выражения для корреляционной функции в
виде одной формулы:
26*
404 Гл. 10. Анализ систем и синтез оптимальных систем управления
Продифференцируем обе части равенства A0.95) по t:
Dz{t) = Z(t,to)Dz(to)ZT(t,to) + Z(t,to)Dz(to)ZT(t,to) +
t
+ H(t)S(t)HT(t) + Jz(t, T)H(r)S(T)HT(r)ZT(t, t) dr +
Z(t,r)H(T)S(T)HT(r)ZT(t,T)dT.
to
Подставив сюда выражение для производной фундаментальной мат-
матрицы из A0.94) и учитывая соотношение A0.95), получим
Dz = GDZ + DZG + HSHT. A0.97)
Найдем интенсивность S шума V (см. A0.936):
т-
о
_ \Qo(t) о
- [ 0
Представим дисперсионную матрицу Dz в виде блочной матрицы:
Dz =
_D2i D;
Используя это представление и соотношения A0.936) и A0.98), урав-
уравнение A0.97) можно записать следующим образом:
'I>ii Di2]_\A-K°C 0 ]\DU Dl2
A-BK*\[D21 i
. ,-- D12]\A-K°C 0
+ ' D21 D22 11 K°C A - BK* _
/ -K°]\Q0 0]\l -K°f
0 K°\[ 0 i?oJ[0 K°\ •
Так как нас интересует корреляция между оценкой и ошибкой,
выпишем уравнение для взаимной дисперсионной матрицы:
D12 = (A- K°C)D12 + D12(A - ВК*)Т + DnCTK0T - K°RoKOT.
Так как Du = Р и К0 = PC7Rq1 , то последние два слагаемых
сокращаются, и уравнение становится линейным и однородным. И
силу начального условия ^12(^0) = M[e(to)x.T(to)] = 0 оно имеет един-
единственное решение Di2(t) = 0. Следовательно, оценка и ошибка не
корре л ированы.
10.5. Стохастические оптимальные системы 405
Теперь преобразуем критерий оптимальности. Как легко про-
проверить, если а и b являются произвольными векторами (столбца-
(столбцами) одинакового размера, то имеет место равенство aTb = tr(baT).
Используя это равенство, получаем
M[eTQe] = trM[eeTQ] = tr(PQ),
M[eTQx] = tr M [xeTQ] = tr (D12Q) = 0.
В силу этих соотношений имеем
M[xTQx] = М[(х - х + x)TQ(x - х + х)] =
= M[eTQe] + 2M[eTQx] + M[xQx] = tr (PQ) + M[xTQx],
M[xT(tf)Fx(tf)] = tr (P(tf)F) + M[xT(tf)Fx(tf)].
Поэтому критерий оптимальности можно преобразовать к виду
[tf 1 Г tf
1 Г tf 1
uTRu) dt\ + tT\P(tf)F + [PQ dt\.
Второе слагаемое не зависит от управления, и его можно отбросить.
Таким образом, исходная задача свелась к задаче стохастического
оптимального управления с полной информацией A0.84)
х = Лх + Ви + К°(у - Сх), х(*0) = х°;
г tf 1
J = М xT(t/)Fx(t/) + [(xTQx + uTRu)dt\ ->> min.
L *o J u
Здесь слагаемое К0(у — Сх) соответствует шуму объекта Vo- И
если это слагаемое или у — Сх является белым шумом, то
решение этой задачи, как следует из теоремы 10.4, определяется со-
соотношениями A0.89). Так что осталось показать, что невязка у — Сх
является белым шумом.
Невязка будет белым шумом, если интеграл от нее, или стохасти-
стохастический процесс f)(i), определяемый уравнением
9) = у - Сх, r](t0) = 0,
является процессом с ортогональными приращениями, т.е. его корре-
корреляционная функция имеет вид A0.5). Чтобы доказать это, рассмотрим
совместно процессы rj(t) и e(t). Подставив выражение для у, последнее
уравнение можно преобразовать к виду rj = Се + VH. Это уравнение
совместно с уравнением A0.92) для ошибки можно опять записать в
виде
где
( \1 \°
«=\. -
406 Гл. 10. Анализ систем и синтез оптимальных систем управления
Дисперсионное уравнение A0.97) в данном случае примет вид
П ПП _1_ П Пт _i_ UQTJT
U^ = {jUh, ~г U^z^j -\- iioii .
Если дисперсионную матрицу представить в виде
hi D12]
D
2I
то последнее уравнение можно записать следующим образом:
Dn D12
D21 D22
0 С
0 А-Х°С
?>11 Dl2
D21 D22
0 /
1 -К0
о
Ат - СТКОТ
<2о о
0 До
0 /
1 -Кот
Dn(t0) D12(t0)
D2i(t0) D22(to)
0 0
0 Po
A0.99)
Здесь Dn — дисперсионная матрица случайного процесса rj(t),
D22 — дисперсионная матрица ошибки {D22 — Р)] ^ii(^o) = ^12(^0) =
= ^21(^0) = 0, так как f)(to) = 0. Из уравнения A0.99) имеем
Dn = CD12 + Di2CT + До, Dn(t0) = 0,
= CD22 + Di2(AT - СТКОТ) - 0T
В силу равенств D22 — Р и К0 = РС
ТR1
, D12(t0) = 0.
в правой части второго
уравнения первое и последнее слагаемые сокращаются. Поэтому оно
становится однородным и в силу нулевого начального условия имеет
единственное решение Di2(t) = 0. Уравнение для Dn принимает вид
Dn = До, Dn(t0) =0.
Решение этого уравнение имеет вид
t
«о
Для корреляционной матрицы имеем (см. A0.96))
> , t-\ ), to ^ ii ,
" У A0.100)
Здесь Z(t,to) — нормированная фундаментальная матрица уравнения
z = Gz,
10.5. Стохастические оптимальные системы 407
или
Зин
Представим фундаментальную матрицу Z(t,to) в виде блочной
матрицы:
Г7 (Л- Л- \ Г7 (Л. Л. \ \
Z [t, to) — ~ ~
Z2i(t,to) Z22(t,to)
j
Тогда решение однородного уравнения A0.101) можно представить в
виде ^ ^
ч(<) = ~
С другой стороны, из уравнений (см. A0.101))
ё = (А- К°С)е, г) = Се
находим
t
e(t) =E22(t,to)e(to), ф) = ф0) + f Е22(т
to
где Е22(t, to) — нормированная фундаментальная матрица первого из
двух приведенных уравнений. Поэтому имеем
t
Zn(t,to)=I, Z12(t,t0) = jE22(T,t0)dT,
to
Z2i(t,to) = 0, Z22(t,t0) = E22(t,t0).
Представим корреляционную матрицу K^(ti,t2) в виде блочной
матрицы:
K-(t \= \Кп^'*^ K^{h,t2)
~Ли 2> [K21(tut2) K22(tut2)
Используя также блочное представление матриц Dz(t) и
из A0.100) для корреляционной матрицы Ku(t,to) находим:
при t\ ^ t2
^ll(*l,*2)=5ii(ti)ZS(t2,tl)+5i2(tl)Zj1(t2,tl);
при t2 ^ t\
Так как Di2(t) = D2i(t) = 0 и Zu(t, to) = /, то, объединяя полученные
соотношения для корреляционной функции Ku(t,to), получаем
и +\ J() ()
11(tli t2) = < ~
I Dn(t2) = Kn(t2,t2),
408 Гл. 10. Анализ систем и синтез оптимальных систем управления
Матрица Kn(ti,t2) является корреляционной функцией для процес-
процесса r)(t) и имеет вид корреляционной функции для процесса с орто-
ортогональными приращениями A0.5). Следовательно, разность у — Сх
является белым шумом, что и требовалось доказать.
Задачи
1. Определить систематическую и среднеквадратическую ошибки
системы (рис. 10.8) в установившемся режиме при следующих исход-
исходных данных (G(t) и F(t) не коррелированны):
= 2, W2(P)=
@1Д1)р
)
. G(t)=0,2t, M[F} = 0,5,
= 0,2t,
в)
r)
= 2, W2(p) =
= 2 + I,
@>lp+1)p.
= 0,21,
, Kf(t,r)=0,5S(t-T);
i)] = 0,21,
= 0,5 + Я(г) (Я(*) — помеха), M[H(t)] = 0,5,
Kft(r) =0,5e-°'1lrl, M[F] = 2, Kf(t,r) = 0,55(t - r).
2. Дана система (см. рис. 10.8) с передаточными функциями
* * ^
Задающее воздействие G(t) является детерминированной функцией,
возмущение F(t) — белым шумом с интенсивностью А^о-
Определить параметр к, при котором переходный процесс являет-
является апериодическим и среднеквадратическая ошибка в установившемся
режиме принимает минимальное значение.
F(t)
G(t)
Wi(p)
W2(P)
Y(t)
Рис. 10.8. Структурная схема к задачам
Задачи 409
3. Дана система (см. рис. 10.8) с передаточными функциями
W±=k, W2= ,П1 * .
@,1р + 1)р
Задающее воздействие G(i) является детерминированной функцией,
возмущение F(i) — случайным процессом с корреляционной функ-
функцией Kf(r) = O,le~lrL
Определить параметр к, при котором переходный процесс являет-
является апериодическим и среднеквадратическая ошибка в установившемся
режиме принимает минимальное значение.
4. Определить передаточную функцию формирователя, предназна-
предназначенного для получения из белого шума с единичной интенсивностью
случайного процесса со следующими спектральными плотностями:
\ as \ - 4 *\ or \ - 4 (о;2+ 9)
5. Принимается сигнал X(t) = 5(t) + N(t), где 5(t) — полезный
сигнал, N(t) — помеха. Синтезировать (определить передаточную
функцию) фильтр Винера при следующих характеристиках (спект-
(спектральных плотностях) сигнала и помехи:
а) 5.@;) = ^, 5ВН = ^> 5.„Н = ^;
6. Принимается сигнал X(t) = S(t) + N(t), где S(t) — полезный
сигнал, N(i) — помеха. Синтезировать фильтр Винера при следую-
следующих характеристиках (корреляционных функциях) сигнала и помехи:
а) Кв(т) = е-М, Кп(т) = еМ, К8П(т) = 0;
б) Кв(т) = 4е-°'11-1, Кп(т) = е-°'41-1, К8П(т) = 0;
в) Кв(т) = е-0'4'-', Кп(т) = 4е-°'11-1, К8П(т) = 0.
7. Синтезировать фильтр Калмана-Бьюси при следующих ис-
исходных данных:
а) x = x + V0, М[хЩ = х0, М[(х@) - х0J] = ро, у = x + VH;
Vo и VH — белые шумы с интенсивностями q и г соответственно;
ж@), Vo и Ун между собой не коррелированны;
б) х = ж + и + Vo, М[ж@)] = жо, М[(ж@) - ж0J] = р0, у = х + Ун;
Vo и 1/н — белые шумы с интенсивностями q и г соответственно, их
взаимная интенсивность равна S; начальное значение х@) с шума-
шумами Vo и 1/н не коррелировано;
410 Гл. 10. Анализ систем и синтез оптимальных систем управления
в) x = x + z, М[х@)]=хо, М[(х@) -х0J} =ро, y = x + Vu;
z — случайный процесс с корреляционной функцией Kz(r) = 2e~°'2lrl
и Vh — белый шум с интенсивностью г; ж@), z и VH между собой не
корре л ированы;
г) х = x + u + Vo, М[х@)]=хо, М[(х@) - х0J] = Ро, У = х + z\
Vo — белый шум с интенсивностью q и z — случайный процесс с
корреляционной функцией Kz(r) = 2e~°'2lrl; ж@), Vo и z между собой
не корре л ированы;
д) &! =х2, х2=и + У02, М[х@)] = х°, М[(х@) - х°)(х@) -
-х°)т] = Ро, 2/1 = ^1 + Vh, 2/2 = xi + ж2; У02 и Vh — белые шумы
с интенсивностями рг соответственно; ж@), Vo и VH между собой не
коррелированны.
8. Синтезировать стохастически оптимальный линейный регуля-
регулятор при следующих исходных данных:
а) хг=х2, x2=u + Vo2, М[х@)]=х°, М[(х@) - ж°)(х@)-
—х°)т] = Ро; V02 — белый шум с интенсивностью q; x@) и V02 меж-
между собой не корре л ированы; фазовые координаты полностью наблю-
наблюдаемы (без помех); критерий оптимальности имеет вид
Г 10 1
J = М ж?A0)+ f(xl+u2)dtU
L о J
б) Х!=Х2, X2=U + V02, М[х@)]=Х°, М[(х@) -Х°)(х@) -
—х°)т] = Ро, yi = xi + VH; V02 и Vh — белые шумы с интенсив-
интенсивностями q2 и г соответственно; ж@), V02 и VH между собой не
коррелированны; критерий оптимальности имеет вид
[10 -|
х2A0) + J(x2+u2)dt ;
о -I
R\ j, —То То — 1J 4- Vno М\тс@)] — Х° М\(тс@) — 7С°)GС(()) —
—х°)т] = Ро, 2/1 = ^1 + 1/н; V02 и Vh — белые шумы с интенсивнос-
интенсивностями q2 и г соответственно, их взаимная интенсивность равна s;
начальное значение х@) с шумами V02 и VH не коррелированно; кри-
критерий оптимальности имеет вид
10
[ 1
ж? (Ю)+ Г (xl+u2)dt .
j
n J
Глава 11
АДАПТИВНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
11.1. Общие положения. Постановка задачи
Система управления называется адаптивной, если в ней текущая
информация, помимо выработки управляющего воздействия, исполь-
используется также для изменения алгоритма управления. В обычных (не-
(неадаптивных) системах управления текущая информация используется
только для формирования управляющего воздействия.
Адаптивная система, если структура алгоритма не изменяется, а
изменяются только его параметры, называется самонастраивающей-
самонастраивающейся системой (СНС); если изменяется структура, адаптивная система
называется самоорганизующейся системой.
Адаптивные системы управления используются, когда с помощью
обычных систем не удается справиться с поставленной задачей. А это
обычно происходит, когда начальной (априорной) информации об
объекте недостаточно или характеристика объекта в процессе функ-
функционирования системы изменяется непредвиденным образом в широ-
широких пределах.
Исследования по построению адаптивных систем управления на-
начались в начале 50-х годов прошлого столетия в связи с построением
автопилотов для новых самолетов, высота и скорости которых изме-
изменяются в широких пределах [69]. Однако первые попытки применения
принципов адаптивного управления при построении автопилота за-
закончились неудачей, что привело к снижению интереса к адаптивному
управлению на какое-то время. После небольшого перерыва исследова-
исследования по адаптивному управлению продолжились. Особенно интенсивно
теория адаптивного управления развивалась в конце прошлого века, и
тогда были достигнуты большие успехи в этом направлении. Снача-
Сначала практическое применение разработанных алгоритмов адаптивного
управления сдерживалось из-за их сложности. Однако в последнее вре-
время в связи с большими возможностями современных вычислительных
устройств (при их сравнительной дешевизне) методы адаптивного
управления нашли практические применения в таких областях, как
робототехника, управление самолетами и ракетами, энергетическая
система, управление сложными технологическими процессами [62, 69].
412 Гл. 11. Адаптивные системы управления
11.1.1. Назначение адаптивных систем управления. Как
отмечалось выше, необходимость адаптивного управления возникает,
когда недостаточна априорная информация или динамические харак-
характеристики объекта в процессе функционирования системы управления
изменяется в широких пределах. Такая ситуация возникают во многих
производствах.
Аэродинамические характеристики самолетов зависят от скорости
и высоты полета, от атмосферных условий, в которых происходит
полет. И во время полета отдельные параметры, определяющие дина-
динамические свойства самолета, могут изменяться в десятки раз. В этих
условиях с задачей качественного управления самолетом обычные
автопилоты могут не справиться.
Модели технологических процессов в металлургии, химии, неф-
нефтехимии являются сложными. Их параметры и, возможно, структу-
структуры из-за недостаточной априорной информации не всегда известны.
Кроме того, эти параметры могут изменяться во время протекания
технологического процесса в указанных отраслях. Поэтому обыч-
обычные системы управления во многих случаях не могут обеспечить
качественного, а иногда и просто устойчивого управления такими
технологическими процессами [62].
При разработке унифицированных регуляторов для широкого клас-
класса объектов параметры регуляторов заранее не могут быть точно
рассчитаны и установлены. Поэтому если эти регуляторы являются
неадаптивными, то при их использовании в каждом конкретном слу-
случае они требуют настройки. Использование адаптивных регуляторов
избавит пользователей от этой процедуры, что позволит сэкономить
их время и «силы».
В большинстве случаев адаптивное управление преследует цель
нейтрализации параметрической неопределенности или неизбежных
изменений параметров объекта. Однако в некоторых случаях, в осо-
особенности при управлении технологическим процессами, где могут
присутствовать сотни управляющих контуров, адаптивное управле-
управление также используется, чтобы уменьшить число конструктивных
параметров ручной настройки и тем самым увеличить эффективность
и практичность системы управления.
Резюмируя изложенное, можно утверждать, что применение прин-
принципов адаптивного управления позволит [49, 4]:
— обеспечить оптимальный режим работы системы управления в
условиях неполной информации;
— обеспечить работоспособность системы управления в условиях
изменения динамических свойств объекта в широких пределах;
— создать унифицированные регуляторы для широкого класса
объектов;
— снизить технологические требования к изготовлению отельных
узлов и элементов;
— сократить сроки разработки и наладки систем.
11.1. Общие положения. Постановка задачи
413
Основной
контур
Рис. 11.1. Блок-схема самонаст-
самонастраивающейся системы
11.1.2. Структура и типы адаптивных систем управления.
В этой книге рассматриваются только самонастраивающиеся системы
управления. И дальше под адаптивными системами управления будем
подразумевать именно такие системы управления.
Адаптивные системы управления включают объект, регулятор и
адаптор (рис. 11.1). Объект О и регулятор Р, вырабатывающий уп-
управляющее воздействие на объект, об-
образуют основной контур. Регулятор
содержит варьируемые параметры.
Адаптор А на основе обработки дос-
доступной ему информации вырабаты-
вырабатывает управляющее воздействие, про-
производящее подстройку варьируемых
параметров регулятора. Регулятор
совместно с адаптором образуют
адаптивный регулятор.
Как видим, адаптивная система управления имеет иерархическую
структуру: она имеет два уровня. Основной контур образует первый
(низший) уровень, а контур, содержащий адаптор и называемый кон-
контуром адаптации, — второй уровень. В общем случае возможны три
и больше уровней.
В частности, если для синтеза адаптора в завершенном виде
априорной информации недостаточно и, допустим, какие-либо его
параметры должны уточнятся в процессе функционирования системы,
потребуется третий уровень — контур адаптации адаптора. Адаптор
выполняет двоякую функцию: изучение объекта и настройку регуля-
регулятора. По способу изучения объекта адаптивные системы делятся на
поисковые и беспоисковые.
Адаптивная система управления называется поисковой, если в
нее для изучения объекта подаются специальные (поисковые) сиг-
сигналы, и беспоисковой, если в систему никаких поисковых сигналов
для изучения объекта не подается. Среди поисковых систем широко
распространены экстремальные системы. Отличительным призна-
признаком таких систем является наличие у статических характеристик
их объектов управления явно выраженного экстремума. При этом
положение экстремума под влиянием различных факторов может ме-
меняться. Целью управления в экстремальных системах управления
является подержание экстремума на их выходе. И для определения
управляющих воздействий, обеспечивающих движение к экстремуму,
к управляющему сигналу добавляется поисковый сигнал.
Беспоисковые адаптивные системы управления по способу получе-
получения информации для подстройки параметров регулятора делятся на
адаптивные системы управления (или самонастраивающиеся систе-
системы (СНС)) с эталонной моделью и идентификатором. Адаптивные
системы управления с эталонной моделью содержат динамическую
модель системы, обладающую требуемым качеством и называемую
414
Гл. 11. Адаптивные системы управления
4 и
0
Рис. 11.2. СНС с эталонной Рис. 11.3. СНС с идентифика-
моделью тором
эталонной моделью (рис. 11.2). Адаптивная система управления с эта-
эталонной моделью (ЭМ), кроме основного контура, содержащего регу-
регулятор (Р) и объект (О), включает контур с ЭМ и преобразовательно-
исполнительное устройство (ПИУ). Эталонная модель вырабатывает
желаемый (эталонный) выходной сигнал.
Преобразовательно-исполнительное устройство (его также на-
называют механизмом адаптации) обрабатывает разностный сигнал
(разность между фактическим и эталонным сигналами) и производит
подстройку параметров регулятора. Выбор эталонной модели являет-
является частью процесса синтеза адаптивной системы управления.
Эталонная модель должна удовлетворять двум требованиям: с
одной стороны, она должна отражать все требования к качеству
синтезируемой системы, с другой стороны, эталонная реакция должна
быть достижима для основного контура. Последнее требование накла-
накладывает ограничения на структуру эталонной модели, определяемой
предполагаемой структурой основного контура.
Регулятор должен обладать идеальной следящей способностью.
Другими словами, закон (алгоритм) управления должен быть таким,
чтобы существовали такие значения его параметров, называемые
идеальными, при которых передаточная функция основного контура
относительно задающего воздействия и выхода равна передаточной
функции эталонной модели. Принцип работы адаптивной системы с
ЭМ состоит в том, чтобы адаптор обеспечивал сходимость к нулю
ошибки слежения — разность между выходными сигналами основного
контура и эталонной модели.
Адаптивные системы управления с идентификатором в контуре
адаптации содержат идентификатор И (рис. 11.3), который служит
для идентификации (определения) неизвестных параметров объекта
на основе изучения входного и выходного сигналов объекта. Получен-
Полученная идентификатором информация затем используется для определе-
определения нужных значений параметров регулятора и их подстройки.
Возможны два способа адаптивного управления с идентифика-
идентификатором: прямой и непрямой. При непрямом адаптивном управлении
сначала получается оценка параметров объекта, а затем на основе
полученных оценок определяются требуемые значения параметров
регулятора и производится их подстройка. При прямом адаптивном
управлении исключается этап идентификации параметров объекта.
11.1. Общие положения. Постановка задачи 415
В этом случае, учитывая, что между параметрами регулятора и
объекта имеется связь, определяемая выбранным законом управления,
производится непосредственная оценка и прямая подстройка парамет-
параметров регулятора.
11.1.3. Общая постановка задачи адаптивного управления.
Пусть объект с неопределенными параметрами описывается уравне-
уравнениями . ,, А ,ч
х = /(x,u,f,f),
у = h(x,u,f),
где х — вектор состояния, и — управление, ? — вектор неизвестных
параметров, у — выход. При синтезе адаптивной системы цель управ-
управления обычно задается в виде достижения экстремума некоторого
критерия (функционала) [49], обеспечения неравенства [45, 58]
или предельного соотношения
Q(x,u,0,f) -»> 0 при t->oo.
Здесь Q(x,u,0,?) — функция или функционал, в — вектор варьи-
варьируемых (подстраиваемых) параметров регулятора.
Приведенные соотношения называются целевыми условиями,
a Q(x,u,0,?) — целевой функцией.
Целевое условие, заданное в виде неравенства, должно выполнятся
по прошествии определенного времени. Минимальное время ?, по
прошествии которого указанное условие выполняется при любом t ^ ?,
называется временем адаптации.
В зависимости от того, какие переменные доступны измерению
(наблюдению) и могут быть использованы в алгоритмах управления и
адаптации, различают задачи адаптивного управления по состоянию
и по выходу.
Задача адаптивного управления по состоянию ставится следую-
следующим образом: при заданных уравнений объекта и целевом условии
определить алгоритм адаптивного управления
u = U(x,0,f),
0 = 0(х,<М),
при котором адаптивная система глобально устойчива (т. е. устойчива
по Ляпунову и все переменные ограничены при любом начальном
условии) и выполняется целевое условие.
Первое из приведенных соотношений называется алгоритмом
управления и является алгоритмом управления основного контура,
а второе — алгоритмом адаптации.
Название «адаптивное управление по состоянию» обусловлено
тем, что в алгоритме управления и алгоритме адаптации использу-
используются фазовые координаты. Предполагается, что они доступны изме-
измерению или вычислению.
416 Гл. 11. Адаптивные системы управления
Задача адаптивного управления по выходу ставится следующим
образом: при заданных уравнений объекта и целевом условии опреде-
определить алгоритм адаптивного управления
u = U(y,<M),
при котором адаптивная система управления глобально устойчива и
выполняется целевое условие. (В данном случае в алгоритм адаптив-
адаптивного управления вместо вектора состояния входит выходной вектор.)
11.1.4. Общая характеристика методов синтеза адаптив-
адаптивных систем управления. Прежде чем перейти к конкретным мето-
методам синтеза адаптивных систем управления с ЭМ, рассмотрим общие
принципы построения алгоритмов адаптивного управления.
Процедуру построения алгоритмов адаптивного управления ус-
условно можно разбить на следующие три этапа:
1) определение закона (алгоритма) управления, включающего
варьируемые параметры;
2) определение алгоритма адаптации, обеспечивающего нужную
настройку варьируемых параметров регулятора;
3) исследование синтезированной адаптивной системы управления.
Решение задачи синтеза алгоритма управления основного кон-
контура (этап 1)) адаптивной системы с ЭМ ничем не отличается от
решения задачи синтеза обычных систем управления лишь за од-
одним исключением. Синтез алгоритма управления адаптивной системы
управления с ЭМ имеет одну особенность, обусловленную необходи-
необходимостью обеспечения регулятором идеального слежения за выходом
эталонной модели, когда параметры регулятора идеально настроены.
Возможность синтеза такого регулятора зависит от эталонной модели.
Идеальное слежение за выходом эталонной модели в принципе воз-
возможно, если относительный порядок гт ее передаточной функции WM
не меньше относительного порядка г о передаточной функции объек-
объекта Wo(p) (rm ^ го). Действительно, если при заданной передаточной
функции объекта Wo(p) произведен синтез регулятора (рис. 11.4)
и синтезированная система идентична
У эталонной модели с передаточной функ-
функцией WM (p), то должно выполнятся ра-
равенство
Рис. 11.4. Структурная схема w ( \ _ Wp(p)Wo(p) _ w ( \
основного контура vvyg\P) ~ ^ _|_ ц ~~ " п
Wo
Разрешив это равенство относительно передаточной функции регу-
регулятора, получим
Отсюда относительный порядок регулятора г может быть предс-
представлен в виде г = гт — го. Из условия физической осуществимости
11.2. Алгоритмы адаптивного управления с ЭМ 417
относительный порядок регулятора не должен быть отрицательным:
гР = тш - г0 ^ О,
или
Адаптивные системы управления являются нелинейными, и поэ-
поэтому основным методом исследования является метод функций Ля-
Ляпунова. Более того, этот метод используется уже в процессе синтеза.
Многие алгоритмы адаптивного управления были получены исходя из
того, что некоторая выбранная функция является функцией Ляпунова
для синтезируемой системы.
Заметим, что при исследовании систем управления методом функ-
функции Ляпунова уравнения системы должны быть записаны в «отк-
«отклонениях», т.е. в переменных, при которых положению равновесия
соответствует начало координат. Поэтому если уравнения системы
представлены в других переменных, то эти уравнения нужно предва-
предварительно преобразовать, чтобы можно было использовать этот метод.
11.2. Алгоритмы адаптивного управления с ЭМ
Задачу синтеза адаптивной системы управления с ЭМ содержа-
содержательно можно сформулировать следующим образом. Заданы уравне-
уравнения объекта и эталонной модели. Требуется синтезировать алгоритм
адаптивного управления, т.е. алгоритм управления (основного конту-
контура) и алгоритм адаптации, при которых система глобально устойчива
и ошибка слежения — разность между выходными сигналами основ-
основного контура и эталонной модели — сходится к нулю при стремлении
времени к бесконечности.
Здесь предполагается, что эталонная модель задана, хотя она
должна быть определена исходя из заданных требований к синте-
синтезируемой системе управления. Это связано с тем, что определение
эталонной модели по заданным требованиям к системе управления
является обычной задачей управления и не связано со спецификой
адаптивного управления.
11.2.1. Алгоритм адаптивного управления линейным объ-
объектом 1-го порядка. Начнем изучение метода синтеза адаптивных
систем управления с ЭМ со случая, когда объект описывается линей-
линейным уравнением 1-го порядка
у + аоу = Ьои. A1.1)
Здесь у — выход, и — вход (управление), ао, bo — неизвестные па-
параметры, знак параметра bo известен.
Пусть на основании заданных требований к синтезируемой систе-
системе выбрана эталонная модель, которая описывается уравнением
Утп + О1оуш = /30g(t) (а0, Ро > 0), A1.2)
27 Д.П. Ким
418 Гл. 11. Адаптивные системы управления
где ут — выход эталонной модели, g(t) — задающее воздействие,
которое предполагается ограниченным.
Требуется найти алгоритм адаптивного управления, при котором
ошибка слежения
e(t)=y(t)-ym(t)^O при *^ос A1.3)
и система глобально устойчива.
Утверждение 11.1. Алгоритмом адаптивного управления с
ЭМ A1.2) объектом A1.1), обеспечивающим глобальную устойчи-
устойчивость и выполнение целевого условия A1.3), является алгоритм
управления и = kyy + k9g A1.4а)
совместно с алгоритмом адаптации
ку = - sign (bo)jye, kg = - sign (bo)jge, A1.46)
где ky, kg — варьируемые параметры, 7 — произвольная положи-
положительная константа.
Доказательство. Как отмечалось, при адаптивном управле-
управлении с ЭМ одним из основных требований является возможность при-
принятия варьируемыми параметрами регулятора идеальных значений,
т.е. таких значений, при которых уравнение основного контура совпа-
совпадает с уравнением эталонной модели. Покажем, что алгоритм A1.4а)
удовлетворяет этому условию.
Подставив выражение для управления A1.4а) в уравнение объек-
объекта A1.1), получим уравнение основного контура
у + (а0- boky)y = bokgg. A1.5)
Это уравнение совпадает с уравнением эталонной модели A1.2), когда
Дальше, чтобы можно было использовать метод функций Ляпунова,
преобразуем уравнения синтезированной системы управления в урав-
уравнения в отклонениях — переменных е, Aky, Akgj где
Аку = ку~ к"у, Акд =кд~ fc*. (П.7)
Так как к* и к* являются константами, алгоритм адапта-
адаптации A1.46) можно записать в виде
ДА^ = - sign (bo)jye, Akg = - sign (bo)jge. (П.8)
Для получения уравнения для переменной е вычтем из уравнения
основного контура A1.5) уравнение эталонной модели A1.2):
ё + (а0 + Ьоку)у - аоут = Ьокдд -
Прибавив и вычитая из левой части а^у, получим
7 Л ао — ао\ , (, /Зо
аое-Ьо[ку —)у = bo[kg - ^-
11.2. Алгоритмы адаптивного управления с ЭМ 419
Учитывая обозначения A1.6) и A1.7), последнее уравнение можно
представить в виде
ё = -аое + bo(Akyy + Akgg). A1.9)
Итак, адаптивная система управления в новых переменных опи-
описывается уравнениями A1.8) и A1.9).
В качестве кандидата на функцию Ляпунова рассмотрим квадра-
квадратичную форму
V(e, Ak) = I [e2 + М (Akl + Aty], A1.10)
где Ak = (Аку Akg)T. Производная от этой функции по времени
имеет вид ., .
V = её + ^ (Аку Аку + AkgAkg).
Подставив в правую часть выражения для производных из уравнений
адаптивной системы управления A1.8) и A1.9), получим
V = -а0е2 ^ 0.
Таким образом, квадратичная форма A1.10) является функцией
Ляпунова для синтезированной системы, и эта система устойчива по
Ляпунову. Так как V(e, Ak) > 0 (положительно определена) и V ^ 0,
функция V(e, Ak) и соответственно переменные е, Аку(ку) и Akg(kg)
(см. A1.10)) являются ограниченными. Кроме того, квадратичная
форма V(e, Ak) как функция времени стремится к конечному пределу
при t —У оо.
Так как по условию задачи задающее воздействие g(t) ограничено,
то, как следует из A1.9), производная ё и соответственно вторая
производная V = 2аоеё ограничены. Следовательно, первая производ-
производная V равномерно непрерывна, по лемме Барбалата V —> 0 и, как
следствие, e(t) —> 0 при t —> оо.
Из приведенного анализа следует, что ограниченность переменных
и сходимость ошибки слежения e(t) к нулю гарантируется при любых
положительных 7, «о и А)-
Параметрическая сходимость. При адаптивном управлении
с ЭМ основное целевое условие — это обеспечение сходимости к ну-
нулю ошибки слежения e(i) = y(i) — ym(i). Если параметры регулятора
принимают идеальные значения, то, естественно, это условие будет
выполнено. Однако, как покажем ниже, из сходимости к нулю ошиб-
ошибки слежения не следует параметрическая сходимость — сходимость
варьируемых параметров к идеальным значениям.
Параметрическая сходимость зависит от структуры задающего
воздействия. Если задающее воздействие простое, например, констан-
константа, то по окончании процесса адаптации варьируемые параметры в
зависимости от начальных условий могут принять различные значе-
значения. Проанализируем этот вопрос на примере рассмотренной выше
адаптивной системы управления.
27*
420 Гл. 11. Адаптивные системы управления
Как было показано, ошибка слежения e(t) —> 0 при t —> оо. Сле-
Следовательно, можно принять, что при достаточно большом времени
e(t) = 0 и e(t) = 0. Тогда из уравнения A1.9) следует
Акуу + Akgg = 0.
Если задающее воздействие является константой (g(t) = go), то по
окончании переходного процесса, т.е. при достаточно большом време-
времени (см. A1.2)), я
y(t) = ym(t) = — #о.
Подставив это выражение в предыдущее равенство, получим
— Аку + Акд = 0.
Отсюда видно, что параметры регулятора сходятся не к определенной
точке, а к любой точке прямой. Однако когда задающее воздейст-
воздействие g(t) обладает таким свойством, что вектор сигналов v = (у д)Т
удовлетворяет так называемому условию постоянного возбуждения,
сходимость к нулю ошибки слежения влечет за собой параметричес-
параметрическую сходимость [69].
Определение 11.1. Условие постоянного возбуждения п-век-
торного сигнала v(t) выполняется, если существуют положительные
константы Гиа такие, что при любом t > 0
t+T
v(r)vT(r) ^aln, A1.11)
t
где In — единичная матрица порядка п.
Покажем, что в случае адаптивной системы с объектом 1-го поряд-
порядка, которую мы рассмотрели, при выполнении условия A1.11) имеется
параметрическая сходимость.
Используя векторные обозначения Ak = (Aky Akg)T и v =
— (У 9)J\ уравнение, которое получается из A1.9) при e(t) = e(t) =
= 0, можно записать в виде
AkTv = 0.
Умножив последнее равенство справа на vT и проинтегрировав от t
до t + T, получим
t+T
AkT(r)v(r)vT(r)^r = 0.
По окончании процесса адаптации, т.е. при достаточно большом t,
вектор Ak становится постоянным, и его можно вывести за знак
интеграла: t T
AkT I y{t)yt{t)o]t = 0.
t
11.2. Алгоритмы адаптивного управления с ЭМ 421
Отсюда следует, что если выполняется условие постоянного возбуж-
возбуждения сигнала A1.11), то
Акт = О,
или
Kg = Kg.
11.2.2. Адаптивное управление по состоянию линейным
объектом.
Постановка задачи. Пусть линейный объект описывается уравне-
уравнением (п) (n-i)
аоу +п! у + ... + апу = и, Щ.12)
где у — выход, и — управление, а^ (г = 0,1,..., Ь) — неизвестные
параметры; знак а$ известен. Эталонная модель задается уравнением
ут-\-а1 ут + ... + апут= /30g(t). A1.13)
Здесь ут — выход эталонной модели, щ (г = 1, 2,... , п) и /3q —
известные положительные постоянные, g(t) — задающее воздействие.
Требуется определить алгоритм адаптивного управления, при ко-
котором система глобально устойчива и ошибка слежения
e(t) = y(t) - ym(t) ->> 0 при t -> оо.
Ниже при записи решения используется п-матрица
В= (О О ... 1)т A1.14)
и (п х п)-матрица Р, которая является решением уравнения Ляпунова
РА + АТР = -Q, A1.15)
где Q — положительно определенная матрица, А — (п х п)-матрица
0 1 0 ... О
0 0 1 ... О
А = 0 0 0 ... О , A.16)
0 0 0 ... 1
_-ап -an-i -ап-2 ... -c*
в которой элементами последней строки являются коэффициенты
уравнения эталонной модели.
Утверждение 11.2. Алгоритмом адаптивного управления
с ЭМ A1.13) линейным объектом A1.12), обеспечивающим глобаль-
глобальную устойчивость и сходимость ошибки e(t) = y(t) — ym(t) к нулю
при t —у оо, является
и = kog(t) + ki^y^ + ... + kny = kTv, A1.17a)
к = - sign (ао)ГуБтРх, A1.176)
422 Гл. 11. Адаптивные системы управления
где к = (ко к\ ... кп)Т — (п + 1)-вектор варьируемых параметров
регулятора, v = (g у ... у) — вектор сигналов, 1 — произ-
произвольная положительно определенная (п + 1) х (п + 1)-матрица, х =
. (п-1) т
= (е е ... е ) — вектор состояния.
Если в качестве Q принимается матрица qln (q > О, /n — еди-
единичная матрица n-го порядка), то, не нарушая общности, можно при
записи уравнения Ляпунова A1.15) принять q = 1, т.е. рассмотреть
уравнение
а значение g учесть при выборе матрицы Г.
Доказательство. Алгоритм управления A1.17а) можно по-
получить методом обратной задачи динамики. Для этого зададимся
желаемым законом изменения ошибки в виде следующего уравнения:
(e) + ai(ne1) + ... + ane = 0, A1.18)
где ai (г = 1, 2,... ,п) являются коэффициентами уравнения эталон-
эталонной модели. Так как эталонная модель устойчива, то нулевое реше-
решение A1.18) также (глобально асимптотически) устойчиво, и ошибка
будет стремиться к нулю при любых начальных условиях. Так как
М (п) (п)
е = У — У га •> то из A1.18) находим
(п) (п) (п-1)
У = Ут- («1 е + . .. + апе).
Подставив это выражение для у в уравнение объекта A1.12), полу-
получим алгоритм управления основного контура
(п-1) (п-1)
е + ... + апе) + ах у + ... + апу.
лг W (*) (*)
Учитывая равенство е = у — уш, его можно преобразовать к виду
in) (п-1)
и = ао( 2/т + ai 2/ т + • • • + «п2/т) +
+ (ai-aoc*i) ?/ + ... + (ап - аоап)у,
или, учитывая уравнение эталонной модели, к виду
и = aof3og(t) + (ai - aoai) \ + ... + (an - аоап)у.
Так как во все коэффициенты входят неизвестные параметры, заме-
заменим их варьируемыми параметрами ki (г = 0,1,... ,п). Тогда полу-
получим алгоритм управления A1.17а).
Подставив выражение для управления A1.17а) в уравнение объек-
объекта A1.12), получим уравнение основного контура
а0 у = kTv - (ai ny + ... + any). A1.19)
11.2. Алгоритмы адаптивного управления с ЭМ 423
Как легко проверить, это уравнение совпадает с уравнением эталон-
эталонной модели, когда
ki = к* =CLi-aoai, г = 1,2,..., п. A1.20)
Таким образом, алгоритм управления удовлетворяет требованию
принятия варьируемыми коэффициентами регулятора идеальных
значений.
Теперь, чтобы доказать глобальную устойчивость и сходимость
ошибки e(i) = y(i) — ym(i) к нулю, получим для синтезированной сис-
системы уравнения в отклонениях. Вычтем из обоих частей уравне-
уравнения A1.19) выражения
ао[ Ут- («1 е + ... + апе)].
Тогда получим
An) (п-1) ?Т (п-1)
ао( е + «1 е + ... + апе) = к v - (ai у + ... + апу) -
г(п) / (п-1} , , м
-а^[ут-{а1 е +... + ane)J.
Учитывая уравнения эталонной модели A1.13) и обозначения A1.20),
последнее уравнение можно преобразовать к виду
(п) (п-1) с^Т т
ао( е + ai е + ... + апе) = к v - k v,
или
ty + aiine1] + ... + апе = 1- AkTv. A1.21)
ао
Здесь „ -
к* = (к*к*г ... к*п)т, Ак = к-к*.
Если записать уравнение A1.21) в нормальной форме, то оно
примет вид
х = Лх + В ( — AkTv), A1.22)
чао /
где А и В — ранее введенные матрицы A1.16) и A1.14) соответст-
венно, х = (е е ... е у .
Так как к* является вектором постоянных параметров, алгоритм
адаптации A1.176) можно записать в виде
Ак = - sign (ao)rv5TPx. A1.23)
Таким образом, адаптивная система управления в новых перемен-
переменных описывается уравнениями A1.22) и A1.23). В качестве кандидата
на функцию Ляпунова рассмотрим квадратичную форму
V(х, Ак) = (хтРх + -^- Ак1^-1 Ак). A1.24)
V |ао| /
Здесь Г — произвольная положительно определенная матрица, Р —
решение уравнения Ляпунова A1.15). Так как матрица А устойчива,
решение указанного уравнения существует.
424 Гл. 11. Адаптивные системы управления
Производная по времени от функции A1.24) имеет вид
У = 2хтРх+ЛлктГ-1Дк.
|о0|
После подстановки выражений производных из A1.22) и A1.23)
последнее соотношение можно преобразовать к виду
V = 2хтРЛх = хт т
Принимая во внимание то, что Р является решением уравнения Ля-
Ляпунова A1.15), можем записать
V = -xTQx <С 0. A1.25)
Отсюда следует, что квадратичная форма A1.24) является функцией
Ляпунова для синтезированной адаптивной системы управления, и
эта система устойчива по Ляпунову. В соотношении A1.25) стоит знак
нестрогого неравенства, хотя матрица Q положительно определена,
так как функция Ляпунова V зависит не только от фазового вектора,
но и от вектора параметрических ошибок Ак.
Так как У(х,Ак)>0 и У(х,Ак)^0, то функция У(х,Ак) и
соответственно переменные х и Ак ограничены. Так как по условию
вектор сигналов v ограничен, то из A1.22) следует, что производная х
и соответственно вторая производная V = — 2xTQx ограничены. По-
Поэтому производная У(х,Ак) равномерно непрерывна, и по лемме
Барбалата У(х,Ак) и соответственно (как следует из A1.25)) х и
е = х\ стремятся к нулю при t —> оо.
Пример 11.1. Объект описывается уравнением
аоу + агу + а2у = и,
где ао, ai, п2 — неизвестные параметры; уравнение эталонной модели
имеет вид
Ут + 2Ут + Ут =9{t)-
Определить алгоритм адаптивного управления, обеспечивающего
ограниченность всех переменных и сходимость ошибки е = у — уш к
нулю при t —у оо.
Решение. В данном случае а± = 2 и а,2 = 1, матрицы А и В
имеют вид
Уравнение Ляпунова
Р11 Р12]\ 0 1] ГО -llbll P12 1 = _ Г 1 О
Р21 Р22\[-1 -2\ [I -2\[Р21 Р22\ [О 1
после перемножения матриц, принимает вид
-Pl2 Pll ~ 2pi2j Г -Р21 -Р22 1 _ _ [ О
-Р22 Р21 ~ 2р22 \Pll- 2Р21 Р12 ~ %Р22 \~ 0 1
11.2. Алгоритмы адаптивного управления с ЭМ 425
Это уравнение, учитывая равенство р\2 = Р2Ъ можно записать в виде
системы
-2pi2 = -1,
Pll - 2pi2 -Р22 = О,
2pi2 -4p22 = -1.
Эта система имеет следующее решение:
1 1 3
Pi2 = 2' ^22 = 2' Pn = 2'
Поэтому матрица Р имеет вид
р= [3/2 1/2] _ 1 [3 1
[1/2 1/2J 2 [1 1
В данном случае v = (д у у)т и х = (е ё)т. Для алгоритма адап-
адаптивного управления в соответствии с A1.14) получаем
и = &о#+ kiy + к2у,
/
11.2.3. Адаптивное управление по выходу линейным объ-
объектом с единичным относительным порядком. Выше был рас-
рассмотрен случай, когда в уравнение объекта не входили производные
управления, или, что то же, когда относительный порядок передаточ-
передаточной функции объекта был равен ее порядку и все фазовые координаты
были доступны измерению. Однако обычно не все фазовые координа-
координаты доступны измерению. И чтобы получить их, нужно дифференци-
дифференцировать выходную переменную, что нежелательно из-за помех, которые
при этом возникают.
Ниже рассматривается адаптивное управление по выходу, т.е.
такое управление, при котором в алгоритмах управления и адаптации
используются только входной и выходной сигналы объекта и сигналы,
получаемые путем их фильтрации.
Постановка задачи. Пусть задан объект с передаточной функцией
Wo{p) = кощ = ко р"-1+ь1р"-;+-+ь-1 AL26)
и выбрана эталонная модель с передаточной функцией
ед = kM ^м = км рИ"„1Г*С!1:*1
R(p) pn
ко, bi (г = 1, 2,..., п — 1), аи (к = 1, 2,..., п) — неизвестные парамет-
параметры объекта, знак ко известен; Рт(р), Rm(p) — устойчивые полиномы
426
Гл. 11. Адаптивные системы управления
и передаточная функция WM (p) является строго вещественно положи-
положительной.
Требуется определить алгоритм адаптивного управления, при
котором система глобально устойчива и ошибка e(t) = y(t) — ym(t)
стремится к нулю при t —У оо. При этом в алгоритмах управления
и адаптации должны быть использованы только доступные измере-
измерению сигналы (задающее воздействие, входной и выходной сигналы
объекта) и сигналы, которые получаются путем их фильтрации, т. е.
сигналы на выходе фильтров, на вход которых подается указанные
сигналы. Принимается, что уравнения фильтров в нормальной форме
Коши имеют вид
v = Ev + Fu, A1.28а)
z = Ez-\-Fy. A1.286)
Здесь v = (г?1 г>2 ... vn-i)T — (п — 1)-вектор переменных, полу-
получаемых путем фильтрации входного сигнала (управления) объекта;
z = (zi5 Z2 ... zn-i)T — (п — 1)-вектор переменных, получаемых
путем фильтрации выходного сигнала объекта; Е — ((п — 1) х
х (п — 1))-матрица, F — ((п — 1) х 1)-матрица, и они имеют следую-
следующий вид:
О 1 0 ... О 1 / 0 \
О 0 1 ... О О
Е= , F= ... , A1.29)
О 0 0 ... 1 О
ш-0п-1 -0п-2 Рп-3 ... -01 \ \ 1
где в последней строке матрицы Е стоят коэффициенты полинома
числителя передаточной функции эталонной модели.
Утверждение 11.3. Алгоритмом адаптивного управления с
ЭМ A1.27) линейным объектом A1.26), обеспечивающим глобальную
устойчивость и сходимость ошибки e(t) = y(t) — ym(i) к нулю при
t —у оо, является
и =
+ kjz + kyy + kgg,
kv = -sign(&0Ove,
kz = -sign(&0Oze,
у —
9 —
где kv = (kvl kv2 ... kvn-i)T и kz = (kzl
vz2
kZn-i)T — векторы
варьируемых параметров регулятора, ку и к9 — скалярные варьи-
варьируемые параметры регулятора; v = (v\ V2 ... vn-i)T u z —
— (zi, %2 • • • Zn-i)T — выходы фильтров A1.28а) и A1.286) соот-
соответственно.
Используя обозначения
— \ v z У 9/
(vTzT
У 9?
11.2. Алгоритмы адаптивного управления с ЭМ
427
алгоритмы управления и адаптации можно представить в следующем
ВИДе: u = krw, A1.30a)
к = - sign(/coOwe. A1.306)
Далее при доказательстве будем пользоваться этой более компактной
формой записи.
Структурная схема основного контура в данном случае содержит
обратную связь по выходу и обратную связь по управлению (рис. 11.5).
Если записать уравнение A1.28а) в скалярной форме, то оно при-
примет вид
n_1 =u- f3n-lVl - Pn-2V2 - ... -
Отсюда следует, что структурная схема обратной связи регулятора
по управлению имеет вид, представленный на рис. 11.6. Такую же
kv
Wo(p)
Рис. 11.5. Упрощенная структурная схема основного контура
П-П
Рис. 11.6. Структурная схема обратной связи по управлению
структуру имеет внутренняя обратная связь по выходной переменной.
Из последней системы, исключая последовательно г?2, ^з? • • • •> ^п-ъ
получим
VI =
¦ и =
1
¦ и.
Рт{р)
Для остальных переменных, учитывая их связь с v\, находим
, г = 2, 3,... ,п — 1.
428
Гл. 11. Адаптивные системы управления
Следовательно, имеем
kvn-ipn
¦ U.
Аналогично можно получить
У\ = kz z =
у.
A1.32а)
A1.326)
Прежде всего покажем, что при законе управления A1.30а)
варьируемые параметры могут принимать идеальные значения. Вве-
Введем для передаточных функций обратной связи основного контура
(см. рис. 11.5) относительно входа и и выхода щ обозначение Wu,
h
ГЬп
? V
Ml |_
Wu
\
\
3/1
иг-
/Су ¦"
У
Wi
Wo
w2
Рис. 11.7. Структурная схема основного контура: а — исходная схема;
б — преобразованная схема
а относительно входа у и выхода ух обозначение Wy. Тогда струк-
структурную схему основного контура можно представить так, как это
показано на рис. 11.7, а.
Из уравнений A1.32) для передаточных функций Wu и Wy находим
Pv(p)
wu(P) =
PmipY
Pv(p) = kvl + kv2p
Wy = ру , Ру(р) = kzi + kz2p + ... + kzn-ipn 2.
Передаточные функции W\ и W2 на преобразованной схеме (рис. 11.7, б)
имеют вид
W 1 = Рт{р)
1 l-Wu Pm(p)-Pv(pY
Prnip)
Найдем передаточную основного контура Wyg относительно вхо-
входа д и выхода у:
w _ kgWiWp _ kgPrn(p)koPo(p)
У9 - 1 _ тллтллллл. - [Рт(р) _ Pv(p)]Ro(p) - koPo(p)[kyPm(p) + Ру(р)}'
11.2. Алгоритмы адаптивного управления с ЭМ
429
Если положить
r^vl — гъу1 — Ип — 1 un — li ">v2 — fXjv2 — Нп — 2 un — 2i • • •
. . . , K"vti — 1 — vTi 1 — i^- 1'
то Pm (p) — Pv (p) = Po (p) •> и в знаменателе полином Pq (p) можно вы-
вынести за скобки и сократить с подобным членом в числителе. Тогда
после подстановки в знаменателе выражений для Pv (р), Рш (р) и Rz (p)
получим
Ш — .
W™ - R(P) '
где
R(p) = pn + (ai — коку)рп~1 + [а,2 — ko(kyf3i + kzn-i)\
... + ап - Ko{Kypn-i -г kzi)
Отсюда следует, что имеет место равенство Wyg = WM, если
7 _ 7 * _ Km
9 — Кд — 7Г'
/ъО
fco '
— OL<2
-Щп-1. (Ц.ЗЗ)
Таким образом, при законе управления A1.30а) его параметры мо-
могут принять идеальные значения. Для доказательства устойчивости
системы при алгоритме A1.30) получим уравнения в отклонениях.
Пусть к* — вектор идеальных параметров и Ак = к — к*. Ал-
Алгоритм A1.30а) при подстановке к = Ак + к* принимает вид
u = k*Tw + AkTw.
При таком представлении алгоритма управления структурную схему
основного контура с переменными параметрами можно представить
9
>^ыИ-
AkTw/k*g
к
E,F
E,F
Рис. 11.8. Эквивалентная структурная схема основного контура
в виде эквивалентной схемы (рис. 11.8), рассматривая AkTw/k* как
внешнее воздействие.
Так как при идеальных значениях параметров регулятора пере-
передаточная функция основного контура идентична передаточной функ-
430 Гл. 11. Адаптивные системы управления
ции эталонной модели, из эквивалентной структурной схемы находим
У = WM(p)g(t) + WM(p) ^^, A1.34)
Kg
или, учитывая (см. A1.33)) равенство к* = км/ко,
у = wM(p)g(t) + wM(P) (^ AkT
Из последнего уравнения, принимая во внимание равенство ут =
= WM(p)g(t), получим
Запишем это уравнение в нормальной форме Коши:
х = Лх + Bk0AkTw, A1.35а)
е = стх. A1.356)
Здесь х = (xi X2 ... хп)Т — вектор состояния системы, с = (/3n-i ...
.../3i 1)т, А и В — ранее введенные матрицы A1.16) и A.14). Так
как к* является постоянным вектором, то имеем к = Ак. Поэтому
алгоритм адаптации A1.306) можно записать в виде
Ак = - sign (ko)jwe. A1.35в)
Так как WM(p) по условию является строго вещественно поло-
положительной передаточной функцией, по теореме Калмана-Якубовича
существуют положительно определенные матрицы Р и Q такие, что
выполняются равенства
ATP + PA = -Q, PB = c. A1.36)
В качестве кандидата на функцию Ляпунова выберем квадратич-
квадратичную форму
У(х,Дк) =хтРх+|/с0|Дкт7-1Ак,
где 7 — произвольное положительное число. Производная по времени
от этой функции в силу A1.35а) и A1.35в) имеет вид
V = хт(ЛтР + РЛ)х + 2xTPBk0AkTw - 2k0AkTwe.
Учитывая A1.36) и A1.356), ее можно представить в виде
Следовательно, система управления при адаптивном управле-
управлении A1.30) устойчива по Ляпунову. Так как V ^ 0 и V ^ 0, функ-
функция Ляпунова и соответственно переменные х и Ак ограничены.
При ограниченном g{t) производная х и соответственно V = — 2xTQx
ограничены. Поэтому по лемме Барбалата V —> 0 и соответственно
стремятся к нулю фазовый вектор х и ошибка е = стх при t —У оо.
Так как матрица Е в A1.28) устойчива, то и остальные переменные
ограничены.
11.2. Алгоритмы адаптивного управления с ЭМ 431
Пример 11.2. Пусть объект и эталонная модель задаются пере-
передаточными функциями
ТТ7- 7 Р ~Т~ О\ ТТ7" 1 Р "Г
ууо — ко 2 , кКм = km 2 -,
где fco, Ьъ ai? a2 — неизвестные параметры; знак ко известен: ко > 0.
Требуется определить алгоритм адаптивного управления, обеспе-
обеспечивающего глобальную устойчивость системы и сходимость к нулю
разности между выходами системы и эталонной модели.
Решение. Передаточная функция эталонной модели является
строго вещественно положительной, так как она устойчива и ве-
вещественная часть частотной передаточной функции при любой часто-
частоте ио > 0 положительна:
В данном случае п = 2, /3i = 1, и уравнения A1.28) принимают вид
v = —V + и, z — —z + у.
Алгоритмы управления и адаптации A1.30) принимают вид
и = kvv + kzz + куу + fcpg,
kz = -7^е, ку = ~72/е, ^ = -jge.
11.2.4. Адаптивное управление по выходу линейным объ-
объектом с относительным порядком, превышающим единицу.
Постановка задачи. Пусть задан объект с передаточной функцией
^ + ...+Ьт
pn + aipn-1 +... + an
и выбрана эталонная модель с передаточной функцией
где ко, hi (г = 1, 2,..., т), а^ (к = 1, 2,..., п) — неизвестные парамет-
параметры объекта, знак ко известен; Рт(р), Rm(p) — устойчивые полиномы;
передаточные функции объекта и эталонной модели имеют один и тот
же относительный порядок, который больше единицы.
Требуется определить алгоритм адаптивного управления, при
котором система глобально устойчива и ошибка e(t) = y(t) — ym(t)
стремится к нулю при t —> оо. При этом в алгоритмах управления
и адаптации должны быть использованы только доступные измере-
измерению сигналы (задающее воздействие, входной и выходной сигналы
объекта) и сигналы, которые получаются путем их фильтрации, т. е.
сигналы на выходе фильтров, на вход которых подаются указанные
сигналы.
432
Гл. 11. Адаптивные системы управления
Введем в рассмотрение полином
о) =рп~1 +р[рп~2 + ...+^_ь A1.39)
где Р\{р) — устойчивый полином порядка п — 1 — т.
Уравнения фильтров в нормальной форме Коши имеют вид
v = Ev + Fu, A1.40а)
z = Ez + Fy. A1.40а)
Здесь v = (i>i г>2 ... vn-i)T — (п — 1)-мерный вектор переменных,
получаемых путем фильтрации входного сигнала (управления) объ-
объекта; z = (zi? Z2 ... zn-i)T — (п — 1)-вектор переменных, получае-
получаемых путем фильтрации выходного сигнала объекта; Е — ((п — 1) х
х (п — 1))-матрица, F — ((п — 1) х 1)-матрица, и они имеют следую-
следующий вид:
0 1 0 ... 0 1 / 0 \
0 0 1 ... 0 0
Е =
0
0
0
F =
0
где в последней строке матрицы Е стоят коэффициенты полино-
полинома A1.39), а не числителя передаточной функции эталонной модели,
как это было при единичном относительном порядке.
В данном случае в алгоритме адаптивного управления помимо
вектора сигналов
w = (v
Т Т
z
yg)
используется преобразованный вектор сигналов
w = WM(p)w.
Утверждение 11.4. Алгоритмом адаптивного управления с
ЭМ A1.38) линейным объектом A1.37), обеспечивающим глобальную
устойчивость и сходимость ошибки e(t) = y(t) — ym(t) к нулю при
t —у оо, является
и = kTw, A1.41а)
A1.416)
1 + w
w = WM(p)w,
г] = kTWM(p)w -WM(p)(kTw),
(П.41д)
е = е
где 7 — произвольная положительная константа; к — вектор
варьируемых параметров регулятора; ц — дополнительный перемен-
переменный параметр, который вычисляется в процессе адаптации; г\ —
вспомогательная ошибка; е — комбинированная ошибка.
11.2. Алгоритмы адаптивного управления с ЭМ 433
Комбинированную ошибку также называют расширенной ошиб-
ошибкой [45].
Структурные схемы основного контура и обратной связи регуля-
регулятора имеют вид, представленный на рис. 11.5 и рис. 11.6.
Доказательство. Прежде всего покажем, что варьируемые па-
параметры алгоритма управления A1.41а) могут принимать идеальные
значения. Как было показано, структурная схема основного контура
может быть преобразована к виду, показанному на рис. 11.7. И так
как роль полинома Рт(р) в данном случае играет полином Р^(р), то
передаточная функция Wyg принимает вид
w =
yg [p
- Pv(p)]Ro(p) -
Так как (см. A1.39)) P'm{p) = Pm(p)Pi(p), то для того чтобы пере-
передаточная функция основного контура Wyg была равна передаточной
функции эталонной модели WM, нужно, чтобы существовали такие
значения варьируемых параметров kvi (ъ = 1, 2,..., п — 1), kzi (ъ =
= 1,2,...,п — 1) и ку, при которых имеет место равенство
{Р'т - PV)RO - коРо(куР^ + Ру) = RmP!P0.
Такие значения параметров существуют и однозначно определя-
определяются из этого соотношения [69]. Так как относительный порядок пе-
передаточной функции эталонной модели, как и относительный порядок
передаточной функции объекта, должен быть больше единицы, то
эталонная модель не может быть выбрана так, чтобы ее передаточная
функция была вещественно положительной. Поэтому функцию Ляпу-
Ляпунова нельзя строить так, как это делалось при единичном относитель-
относительном порядке.
Так как алгоритм управления и структура основного контура
совпадает с алгоритмом управления и структурой основного контура
адаптивной системы управления с объектом, имеющим передаточную
функцию с единичным относительным порядком, то снова можно по-
получить для выходной переменной у уравнение в виде A1.34). Поэтому
для ошибки слежения опять получим
(^T) A1.42)
Алгоритм адаптации в данном случае не может быть выбран в
виде A1.306), так как передаточная функция эталонной модели не
является строго вещественно положительной. Поэтому для получения
алгоритма адаптации используется так называемый метод комби-
комбинирования ошибки (error augmentation) [69]. Основная идея метода
состоит в введении новой ошибки, представляющей собой линейную
комбинацию ошибки слежения и некоторой вспомогательной ошибки.
Вспомогательная ошибка (auxiliary error) rj(t) строится следующим
7?(i)=kTWM(p)w-WM(p)(kTw). A1.43)
28 Д.П. Ким
434 Гл. 11. Адаптивные системы управления
Эта ошибка может быть вычислена в процессе функционирования
системы (так как вектор варьируемых параметров к и вектор сиг-
сигналов w доступны измерению) и использована для управления. Она
обращается в нуль, когда к = к*:
k*TWM(p)w - WM(p)k*Tw = 0.
Последнее равенство возможно, так как постоянный вектор к* во вто-
втором слагаемом можно вынести из-под действия оператора WM (р). Та-
Таким образом, rj(t) косвенно характеризует параметрическую ошибку.
Вычитая из правой части A1.43) левую часть последнего равенства,
получим
w)_ (П44)
Комбинированная ошибка определяется следующим образом:
e(t)=e(t)+fA(t)ri(t),
где fi(t) — дополнительный параметр, определяемый в процессе адап-
адаптации. Положив A/i = \i — ko/kM, последнее равенство можно запи-
записать в виде
Подставив сюда выражения для e(t) из A1.42) и для rj(t) из A1.44),
получим 7
e(t) = ^- AkTw(?) + AfAri(t), A1.45)
где ^
w = WM(p)w.
Итак, адаптивная система управления может быть описана соот-
соотношениями A1.41а), A1.446), A1.44в), A1.42), A1.44) и A1.45).
Выберем в качестве кандидата на функцию Ляпунова квадратич-
квадратичную форму .
Здесь 7 — произвольное положительное число. Продифференцировав
по времени, получим
7 ^м 7
Так как Ак = к и A/i = /i, подставим сюда выражения для к
из A1.416) и /i из A1.41в) вместо Ак и A/i. Тогда с учетом A1.45)
получим
Следовательно, адаптивная система устойчива по Ляпунову.
Из неравенств V ^ 0 и V ^ 0 следует, что функция У(Ак,
и соответственно переменные к и \i ограничены. Доказательство
ограниченности других переменных и выполнения целевого условия
11.2. Алгоритмы адаптивного управления с ЭМ
435
(e(t) —У оо при t —У оо) несколько сложнее, и здесь оно не рассматри-
рассматривается (см., например, [45]).
Пример 11.3. Объект и эталонная модель описываются уравне-
уравнениями 7
кп
У =
г
Ут =
¦сыр-
1
р2 + Зр + 2 *
где ко, ai, a2 — неизвестные параметры; знак ко известен (ко > 0).
Определить алгоритм адаптивного управления, обеспечивающего
ограниченность всех переменных и сходимость ошибки е = у — ут к
нулю при t —у оо.
Решение. В данном случае имеем п = 2 и Рт(р) = 1. Поэтому
Р'т(р) = Р\(р), и в качестве полинома Pi(p) в соотношении A1.39)
можно принять любой устойчивый полином 1-го порядка. Выберем в
качестве Pi (p) полином
В этом случае /3[ = 2, и матрицы Е и F представляют скалярные
величины: Е = — 2 и F = l. Поэтому уравнения A1.40) и алгоритм
управления A1.41а) принимают вид
и =
kzlzi
Так как k = (kvi kz\ ky kg)
() ()
и w =
мы A1.416) и A1.41в) принимают вид
1 + w
\w4/
у,
vx z\ y g)T, то алгорит-
алгоритjerj
1 +
где
w|2
w|2 =w
w\ +wj +w2 +w
j +w23
)^!, W73 = WM(p)y, w
= kTw-WM(p)(kTw),
/иг], e = y-ym.
= /a - k0
11.2.5. Адаптивное управление по состоянию нелинейным
объектом. Методы синтеза алгоритмов адаптивного управления раз-
разработаны и для определенного класса нелинейных объектов. Обычно
такой класс объектов характеризуется тем, что неизвестные парамет-
параметры входят в уравнение объекта линейно, вектор состояния доступен
измерению и от нелинейности можно избавиться путем соответству-
соответствующего выбора закона управления, если параметры известны.
28*
436 Гл. 11. Адаптивные системы управления
Постановка задачи. Пусть объект описывается уравнением
а0 У + / ai/i(X5^j = и-> A1.45)
г=1
где х = (у у ... у )Т — вектор состояния; /i(x, t) (г = 1, 2,...
..., п) — известные нелинейные функции, ограниченные при огра-
ограниченном векторе состояния и любом t ^ to; ai (i = 0,1,... , n) —
неизвестные постоянные параметры, знак ао известен; все фазовые
переменные доступны измерению. Эталонная модель задается урав-
уравнением , . ( -и
Vm + a1(nyi + ... + anym = f3og(t). A1.47)
Здесь g(t) — задающее воздействие. Естественно, предполагается, что
характеристический полином этого уравнения устойчив.
Требуется определить алгоритм адаптивного управления, при ко-
котором все переменные ограничены и ошибка слежения сходится к
нулю: e(t) = y(t) — ym(t) —У 0 при t —У оо.
Ниже при записи алгоритма адаптивного управления используется
(п х 1)-матрица
В= @ 0 ... 1)т
и (п х п)-матрица Р, которая является решением уравнения Ляпунова
РА + АТР = 1п,
где матрица А имеет вид
1 0 ... О "
О 1 ... О
А= A.48)
Элементами последней строки матрицы А являются коэффициенты
уравнения эталонной модели с обратными знаками.
Утверждение 11.5. Алгоритмом адаптивного управления с
ЭМ A1.47) нелинейным объектом A1.46), обеспечивающим глобаль-
глобальную устойчивость и сходимость ошибки e(t) = y(t) — ym(t) к нулю
при t —> оо, является
и = aTv, A1.49а)
а = - sign (ao)rv?TPx. A1.496)
Здесь а = (So Si ... Sn)T — вектор варьируемых параметров ре-
регулятора; Г — положительно определенная ((п + 1) х (п + 1))-мат-
1))-матрица; v = (z /i /2 ... /n)T — вектор сигналов, где z = /3og(t) —
-{аг у +а2 у +... + an).
0
0
0
-ап
1
0
0
-OLn-l
0
1
0
-OLn-2
0
0
1
— Qi
11.2. Алгоритмы адаптивного управления с ЭМ 437
Доказательство. В данном случае варьируемыми парамет-
параметрами регулятора являются оценки неизвестных параметров, и их
идеальные значения а* совпадают с истинными значениями: а* = а^
(г = 0,1,...,п).
Получим уравнение в отклонениях — переменных е = у — уш и
cti = Si — cti (i = 0,1,..., n). Алгоритм управления A1.49а) в скаляр-
скалярной форме имеет вид
и=а0 [/30g(t) - (c*i у + ... + апу)] + ^ S;/;.
Подставим сюда вместо Pog(i) левую часть уравнения эталонной
модели:
~ гМ (п-1) М , V^~ /
и=ао[ут-{а1 е + ... + апе)\ + 2^ агП-
i=i
Подставив это выражение для управления в уравнение A1.46), полу-
получим уравнение основного контура
У = ао[ ут ~ («1 е + ... + Qne)J + 7 ^i
Если из обеих частей вычесть выражение а® [ у т — \а\ е + ...
... + апе)], то последнее соотношение можно преобразовать к виду
(п) (п-1) 1 / п \ 1
е + ai е + ... + апе = — ( йо? + /^ a^/г ) = — STv,
где а = (йо Й1 ... йп)т. Это уравнение, записанное в нормальной фор-
форме, примет вид
х = Лх + — ?(STv). A1.50а)
Здесь х = (е ё ... е )т. Так как а = а, то алгоритм адапта-
адаптации A1.496) можно записать в виде
а = - sign (ao)rv?TPx. A1.506)
Таким образом, адаптивная система управления в переменных е
и й описывается уравнениями A1.50).
В качестве кандидата на функцию Ляпунова примем квадратич-
квадратичную форму
V(х, S) = хтРх + -L атГа,
|оо|
где Р — решение уравнения Ляпунова РА + АТР = —I. Производная
по времени от этой функции в силу A1.50) имеет вид
V = -хтх ^ 0.
Следовательно, адаптивная система управления устойчива по Ляпу-
Ляпунову. Так как V ^ 0 и У^0, то функция Ляпунова ограничена и
438 Гл. 11. Адаптивные системы управления
имеет конечный предел при t —> оо. В силу ограниченности функции
Ляпунова переменные ж, аи соответственно у , а^ (г = 0,1,...,п — 1)
ограничены. При ограниченном g(t) ограничены производная х и
вторая производная V = —2хтх. Поэтому по лемме Барбалата V(t)
и соответственно e(t) стремятся к нулю при t —> оо.
11.2.6. Адаптивное управление и робастность. Выше алго-
алгоритмы адаптивного управления получены при условии, что имеется
только параметрическая неопределенность. Другими словами, при-
принималось, что неопределенность обуславливается наличием только
неизвестных постоянных параметров. В действительности неопре-
неопределенность может быть обусловлена множеством других факторов,
например:
— неточностью используемой модели объекта;
— наличием шума измерения;
— внешними возмущающими воздействиями;
— ошибками округления и запаздыванием, возникающими при
использовании цифровых устройств;
— изменениями параметров во времени.
Все неучтенные факторы, обуславливающие неопределенность,
выступают как возмущения. Выводы об устойчивости, ограниченнос-
ограниченности переменных и сходимости к нулю ошибки слежения были сделаны
при идеальных условиях, т. е. при условии, что возмущения отсут-
отсутствуют. Однако в действительности любая система функционирует
в условиях действия всех или части указанных выше возмущаю-
возмущающих факторов. Поэтому пригодные на практике системы управления
должны обладать свойством робастности (грубости), т. е. их свойства
не должны качественно изменяться при наличии не очень больших
возмущений.
Алгоритмы адаптивного управления, при которых адаптивная
система управления обладает свойством робастности, называют ро-
бастными. Для того чтобы обеспечить ограниченность всех пере-
переменных и избежать потери устойчивости при нарушении идеальных
условий, необходимо, чтобы алгоритмы адаптивного управления были
робастными.
Как показывают исследования, проведенные путем моделирования
на частных примерах [69], полученные выше алгоритмы адаптивно-
адаптивного управления обладают определенной робастностью по отношению
к некоторым возмущениям, когда сигнал v удовлетворяет условию
постоянного возбуждения A1.11). Если сигнал v является простым
(например, задающее воздействие является постоянным), то малое
возмущение может привести к неустойчивости. По этой причине син-
синтез адаптивной системы управления, как, впрочем, и обычной систе-
системы, должен сопровождаться моделированием. И при необходимости
алгоритм адаптивного управления должен модифицироваться.
Простейшим методом модификации является так называемый ме-
метод мертвой зоны. Так как этот метод прост и эффективен, то он
11.2. Алгоритмы адаптивного управления с ЭМ 439
чаще всего используется. Метод мертвой зоны заключается в том, что,
когда ошибка слежения мала и на результат адаптации преобладаю-
преобладающее влияние оказывает возмущающее воздействие, процесс адаптации
приостанавливается. Это достигается заменой алгоритма адаптации
а = —
на алгоритм вида
¦{¦
-7ve, |e| > А,
О, |е|^А,
где А — размер мертвой зоны.
Другой метод — это метод замены регрессора [69]. Под регрессо-
ром понимается вектор сигналов v (в формуле A1.30) вектор w). Этот
метод основан на следующей идее. Вектор сигналов находится путем
обработки измеренных значений выхода у. Поэтому он подвержен вли-
влиянию шума измерения n(t). Но так как алгоритм адаптации включает
произведение v(t) и e(i), скорость обновления параметров зависит от
квадрата шума наблюдения (измерения), что может стать причиной
неустойчивости. Например, в присутствии шума измерения n(t) в
алгоритм адаптации ^
ку = - sign (bo)jye
вместо у нужно подставить у + n(i):
ку = - sign F0O [у + п(Щу + n(t) ~ Ут] =
= - Sign F0O [У(У ~ Ут) + ПШУ ~ Ут) + n2{t)].
В правой части последнего равенства первый член содержит ин-
информацию о параметрах, второй член определяет усредненную вели-
величину полезного сигнала и шума, третий член включает только шум,
он является основной причиной дрейфа параметра ку и соответственно
неустойчивости адаптивной системы управления. Метод замены ре-
регрессора состоит в том, что при малой ошибке слежения переменную у,
зависящую от шума, заменяют на переменную ут, не зависящую от
шума.
В заключение остановимся на выборе параметра j и положи-
положительно определенной матрицы Г. Для простоты примем Г = j 1п и
ограничимся анализом влияния j на качество адаптивной системы
управления.
Адаптивная система управления является негрубой по отношению
к различным возмущениям по следующей причине. Как отмечалось,
при невыполнении условия постоянного возбуждения полезного сигна-
сигнала по мере сходимости ошибки слежения к нулю на процесс адаптации
все большее влияние оказывают возмущающие факторы. Вследствие
этого при малых ошибках слежения изменение варьируемых пара-
параметров под влиянием возмущений происходит случайным образом.
Другими словами, по мере уменьшения ошибки слежения наступает
момент, когда начинается дрейф варьируемых параметров. В про-
440 Гл. 11. Адаптивные системы управления
цессе этого дрейфа параметры принимают такие значения, при ко-
которых система управления становится неустойчивой.
Скорость дрейфа зависит от величины гу: чем больше 7? тем
больше скорость дрейфа. Поэтому с точки зрения робастности чем
меньше 7, тем лучше. Однако чем меньше 7, тем медленнее протекает
процесс адаптации и соответственно тем дольше качество адаптивной
системы управления будет плохим. С увеличением j процесс адапта-
адаптации может стать колебательным, и амплитуда колебаний увеличива-
увеличивается, а затем может наступить такой момент, когда процесс начнет
расходиться, и система станет неустойчивой.
11.3. Адаптивное управление с идентификатором
При синтезе адаптивных систем управления с идентификатором
алгоритм управления основного контура строится так же, как и в
случае, когда параметры объекта известны. Но в данном случае
алгоритм управления и соответственно параметры построенного на
его основе регулятора зависят от неизвестных параметров объекта.
И чтобы подстроить параметры регулятора нужно определить значе-
значения неизвестных параметров объекта в процессе функционирования
системы управления. Для этой цели и предназначен идентификатор.
11.3.1. Идентификация и модель для получения оценки.
Идентификацией системы называется построение (получение) ма-
математической модели системы в результате обработки ее входных
и выходных сигналов в процессе эксперимента. Эксперимент может
быть активным, т.е. проводится специально для решения задачи
идентификации, или пассивным: идентификация осуществляется в
процессе нормального функционирования системы. Если структура
системы определена или задана, то задача идентификации сводится к
определению (идентификации) ее параметров. Идентификация, кото-
которую выполняет идентификатор, состоит в получении оценки неизвест-
неизвестных параметров объекта в реальном времени и в процессе нормаль-
нормального функционирования адаптивной системы управления. Поэтому
ее называют адаптивной идентификацией. Сложность адаптивной
идентификации заключается в том, что она происходит одновремен-
одновременно с процессами адаптации (подстройки параметров регулятора) и
управления; в этих условиях необходимо обеспечить работоспособ-
работоспособность и прежде всего устойчивость системы управления.
Модель для получения оценки. Сущность оценки парамет-
параметров — это выделение информации о параметрах из доступных данных,
получаемых путем измерения. Для получения оценки используется
модель для получения оценки, или идентификационная модель, ко-
которая связывает возможные данные с неизвестными параметрами.
Довольно общей идентификационной моделью является линейная па-
параметрическая форма [69]
W() A1.51)
11.3. Адаптивное управление с идентификатором 441
где у — выходной вектор, а — вектор неизвестных парамет-
параметров, W(i) — матричная функция, которая называется сигнальной
матрицей. Выходной вектор и сигнальная матрица должны быть
известны из данных, получаемых путем измерения сигналов системы.
В каждый момент времени идентификационная модель A1.51)
представляет собой линейную систему уравнений относительно не-
неизвестных параметров. Если даны измерения y(t) и W(i) на неко-
некотором интервале времени, то имеем бесконечное число уравнений
вида A1.51). Если даны значения y(t) и W(t) в I дискретных точках,
то имеем систему из I уравнений. Получение оценки неизвестных
параметров сводится к решению этих избыточных уравнений для г
неизвестных параметров. Для получения оценки для г параметров
необходимо иметь по меньшей мере г уравнений. Однако чтобы полу-
получить хорошую оценку параметров при присутствии шумов и ошибки
в модели, желательно иметь данные в большем количестве точек.
При определении оценки в реальном масштабе времени уравнения
решаются рекурретно, так как данные об y(t) и W(t) обновляются
с течением времени. Быстрота и точность оценки зависят от двух
факторов: идентификационной модели и метода решения.
Модель A1.51) является достаточно общей. Любая линейная сис-
система может быть представлена в такой форме после надлежащего
преобразования. Преобразование сводится к пропусканию измеряемых
сигналов через фильтры, на выходе которых получаем преобразован-
преобразованные сигналы. Поэтому преобразование линейных систем в идентифи-
идентификационную модель называют фильтрацией.
Идентификационная модель линейного объекта 1-го по-
порядка. Рассмотрим объект, который описывается уравнением
y + aiy = bou.
Здесь параметры а\ и bo неизвестны; доступны измерению выход у
и управление и. Данное уравнение не может быть использовано в
качестве идентификационной модели, так как в него входит про-
производная у и дифференцирование у нежелательно из-за появления
дополнительных шумов.
Чтобы исключить у, произведем формальное преобразование дан-
данного уравнения с помощью оператора 1/(р + А):
ру а\ 7 1
+ y = bou
Далее это уравнение можно преобразовать к виду
А — а\ , , 1
У = ——г У + ^о —гт и-
р+А р+Л
Введем новые переменные:
442 Гл. 11. Адаптивные системы управления
Эти переменные получаются путем пропускания исходных перемен-
переменных через фильтр с передаточной функцией 1/(р + Л). Используя
новые переменные, последнее уравнение можно записать в виде
у = (Л - аг)у + Ьой.
Здесь в качестве неизвестных параметров можно принять А — а\
и bo: определив Л — ai, легко найдем а\. Если положить W(i) = (у и)
и а = (Л — а\ Ьо)Т, то последнее уравнение примет вид A1.51).
Идентификационная модель линейного объекта п-го по-
порядка. В общем случае линейный одномерный объект с относитель-
относительным порядком го ^ 1 может быть задан уравнением
А(р)у = В(р)щ A1.52)
где
А(р) =рп + ахрп~х + ... + ап, В(р) = Ьхрп-Х + Ъ2рп~2 + ... + Ъп.
Разделив обе части на операторный полином
А)(р) = Рп + ^р71'1 + ... + anj
уравнение A1.52) можно преобразовать к виду
у=Ло(р)-А(Р) ВЫ
Имеем
А0(р) - А(р) = (ai - а^р71-1 + (а2 - а2)рп~2 + ... + ап - ап
Введем новые переменные:
Уравнение A1.53) примет вид оценочной модели A1.51), если
положить
а = (ai - ai ... ап - ап Ьг ... Ъп)Т.
11.3.2. Градиентный идентификатор. Пусть а(?) является
оценкой в момент t вектора неизвестных параметров а в A1.51).
Оценка выхода
(t)> A1.54)
которая получается при подстановке в A1.51) вместо а его оценки,
называется прогнозируемым выходом, а разность
en(t) = y(t)-y(t) A1.55)
— прогнозируемой ошибкой. Очевидно, прогнозируемая ошибка есть
не что иное, как невязка (этот термин был определен при рассмотре-
рассмотрении фильтра Калмана-Бьюси). Подставив в A1.55) выражения для y(t)
из A1.51) и y(t) из A1.54), получим
е„(*) = W(t)a(t) - W(t)a(t). A1.56)
11.3. Адаптивное управление с идентификатором 443
Рассмотрим алгоритм для получения оценки (алгоритм иденти-
идентификации), использующий невязку,
S = -jWTen. A1.57)
Здесь 7 — положительная константа.
Алгоритм A1.57) является градиентным: его правая часть про-
пропорциональна градиенту квадрата модуля невязки |еп|2 = е^еп по
вектору параметров а. Действительно, для указанного градиента
имеем _ я m m я^
или, учитывая A1.56),
Отсюда следует, что в правой части ( 11.57) стоит векторная вели-
величина, пропорциональная указанному градиенту (с обратным знаком).
Исследуем, обеспечивает ли градиентный алгоритм идентифика-
идентификации A1.57) сходимость параметрической ошибки к нулю при t —> оо.
Как следует из A1.56), невязка еп(?) связана с параметрической
ошибкой (ошибкой оценки) а = а — а соотношением
en(t) = W(t)a(t). A1.58)
Подставив это выражение для еп(?) в алгоритм идентифика-
идентификации A1.57) и учитывая равенство а = а, получим
5= -
Выберем в качестве кандидата на функцию Ляпунова квадрат
модуля ошибки оценки
У (а) = |а|2 = ата.
Ее производная по времени в силу приведенного выше уравнения
для а(?) имеет вид
V = 2STa = -2jaTWTWa = -2j\Wa\2 ^ 0.
Следовательно, градиентный идентификатор, т. е. идентифика-
идентификатор, использующий градиентный алгоритм идентификации, устойчив
по Ляпунову. И так как функция Ляпунова равна квадрату моду-
модуля параметрической ошибки, то эта ошибка будет убывать. Одна-
Однако, будет ли она стремится к нулю, зависит от сигнальной матри-
матрицы W(i), которая в свою очередь зависит от внешних воздействий.
Чтобы исследовать зависимость оценки от сигнальной матрицы,
рассмотрим оценку параметров, когда в идентификационной модели
у = Wa все величины являются скалярными. Согласно градиентному
алгоритму
а = —jWen.
В этом случае уравнение для ошибки оценки принимает вид
а = —jW2a,
444 Гл. 11. Адаптивные системы управления
или da TTr2 1±
— = -jW dt.
а
Проинтегрировав последнее уравнение от 0 до ?, получим
2 = 2@) ехр ( -7 / W2(t) dr j.
^ о '
Отсюда следует, что ошибка а сходится к нулю, если
t
limGJw2(r)dT = oo.
о
Последнее условие будет выполнено, и параметрическая ошибка
будет экспоненциально сходится к нулю, если существуют положи-
положительные постоянные Тиа такие, что при любых t ^ 0 имеет место
неравенство t+т
[ W2{r)dr ^a,
t
т.е. выполняется условие постоянного возбуждения сигнала W(i).
Ясно, что если W(i) является константой, то гарантируется экспо-
экспоненциальная сходимость.
Полученный выше результат для одного параметра можно рас-
распространить на случай многих параметров [69]: если матрица сиг-
сигналов W(t) удовлетворяет условию постоянного возбуждения, т.е.
существуют положительные константы Т и а такие, что при лю-
любых t ^ 0 имеет место неравенство
t+T
[ Wt(t)W(t) dr ^ al, A1.59)
t
то параметрическая ошибка экспоненциально сходится к нулю при
t ->• оо.
Выше в алгоритме оценивания A1.57) был использован скалярный
коэффициент 7- Несколько более общий алгоритм идентификации
получим, если вместо скалярного коэффициента усиления принять
положительно определенную матрицу Г, называемую матрицей ко-
коэффициентов усиления:
S = -ГИ^теп.
Устойчивость этого алгоритма можно доказать, приняв в качест-
качестве кандидата на функцию Ляпунова квадратичную форму V(a) =
Коэффициент усиления 7 (матрица коэффициентов усиления Г)
оказывают сильное влияние на характер сходимости алгоритма иден-
идентификации. В случае одного параметра легко видеть, что чем боль-
больше 7, тем скорость сходимости больше. В случае многих параметров
связь между j и скоростью сходимости не такая простая. Как пока-
показывают исследования [69], на некотором малом интервале увеличение
11.3. Адаптивное управление с идентификатором 445
оценочного коэффициента усиления может привести к увеличению
скорости сходимости. Но вне указанного интервала дальнейшее уве-
увеличение этого коэффициента может привести к колебаниям и более
медленной сходимости.
Кроме влияния на скорость сходимости, выбор j оказывает также
влияние на способность идентификатора следить за изменяющимися
параметрами и противостоять возмущениям.
Свойство робастности. Чтобы идентификатор имел прак-
практическое значение, он должен обладать робастностью (грубостью),
т.е. он должен выдавать удовлетворительную оценку при изменении
параметров, при наличии шума измерения и других возмущений.
Качество градиентного идентификатора зависит от нескольких
факторов, главными из которых являются:
— уровень постоянного возбуждения матрицы сигналов W(t);
— скорости изменения параметров и уровня непараметрической
неопределенности;
— величины оценочного коэффициента усиления j.
Уровень постоянного возбуждения W(t) определяется задачей уп-
управления. Постоянное возбуждение существенно для робастности
идентификатора. Если сигнал постоянно не возбуждается, параметры
не будут сходиться к точному значению даже при отсутствии не-
непараметрической неопределенности. При наличии непараметрической
неопределенности идентификатор может стать неустойчивым. Может
оказаться, что нужно добавлять некоторое возмущающее воздействие
к управлению, чтобы получить качественную оценку параметров.
Если оцениваемые параметры изменяются, то чем быстрее проис-
происходят эти изменения, тем больше непараметрические неопределеннос-
неопределенности влияют на качество оценки параметров. Очевидно, чем быстрее
изменяются параметры, тем труднее получить точную оценку. Кроме
того, чем выше уровень шума и больше неучтенных возмущений и
динамики, тем идентификатор функционирует хуже.
Пример 11.4. Задан объект
y + aiy = bou,
где а\, bo — неизвестные параметры.
Требуется определить алгоритм адаптивного управления, при ко-
котором по окончании процесса адаптации свободное движение основно-
основного контура будет описываться функцией
y = Ce-at (a>0).
Решение. Свободное движение будет описываться указанной
функцией, если уравнение основного контура при отсутствии внеш-
внешнего воздействия будет иметь вид
у + ау = 0.
Пусть алгоритм управления основного контура имеет вид
и = -ky.
446 Гл. 11. Адаптивные системы управления
Подставив это выражение в уравнение объекта, получим
у + (ai + bok)y = 0.
Это уравнение примет требуемый вид, если имеет место равенство
а\ + Ъок = а,
или
a-ai
к
Но так как параметры а\ и bo не известны, воспользуемся их оцен-
оценками. Тогда для алгоритма управления получим
ol — а±
и = = у.
bo
Найдем алгоритм идентификации. Идентификационная модель имеет
вид
у = Wa,
где
лит (~ ~\ /л г. \Т - 1 ~ 1
W = (у и), а = (А - а\ bo) , у — -у, и— -и.
Градиентный алгоритм идентификации A1.57) принимает вид
A:ЬAЬ
или
где
/л — \ _
еп = Wa -у = (у й)( Z ai ) - у = уХ - yai +ubo-y.
Ьо
Подставив это выражение в алгоритм идентификации, получим
2i = 1У{уХ - yai + и &о - У),
60 = -7UB/A-2/2i +й60 -2/).
Уравнения фильтров, на выходах которых получаем уий, имеют вид
у = -\у + у, й= —\й + и.
11.3.3. МНК-идентификатор. Для получения оценки парамет-
параметров широкое применение находит метод наименьших квадратов. При
этом методе оценка получается путем минимизации интегральной
прогнозируемой ошибки (невязки)
J=\J\y{T)-W{r)*(T)\2dT. A1.60)
О
Алгоритм идентификации, получаемый методом наименьших
квадратов, будем называть МЯК-алгоритмом или МЯК-алгоритмом
11.3. Адаптивное управление с идентификатором 447
идентификации, а идентификатор, построенный на основе такого
алгоритма, — МНК-идентификатором.
Интегральная невязка A1.60) учитывает все измерения, которые
производится до текущего момента. Поэтому оценки, получаемые
методом наименьших квадратов, имеют то преимущество, что они
меньше зависят от шумов измерения, так как в процессе измерения
и интегрирования они сглаживаются. МНК-алгоритмы хорошо про-
противостоят не только шумам измерения, но и другим возмущающим
воздействиям.
Утверждение 11.6. МНК-алгоритм идентификации имеет
вид
a(t) = -P(t)WT(t)en(t), A1.61)
где en(t) — прогнозируемая ошибка (невязка), P(i) — матрица
коэффициентов усиления, которая определяется из уравнения
p(t) = -P(t)WT(t)W(t)P(t). A1.62)
Алгоритм A1.61), A1.62) обеспечивает параметрическую сходи-
сходимость (а(?) —У 0 при t —У оо), если выполняется условие постоянного
возбуждения сигнала A1.59).
Доказательство. Запишем интегральную невязку в виде
t
J=\ f[y(r) - W(r)^(t)]T[y(r) ~ W(r)Z(t)} dr.
0
При дифференцировании этого соотношения по времени следует обра-
обратить внимание на то, что интегрирование производится по т, и оно на
оценку a (t) не распространяется, так как она зависит от t. Это связано
с тем, что неизвестные параметры считаются постоянными, и при
получении оценки в момент t для определения невязки используются
значения неизвестных параметров в момент t.
Необходимое условие минимума cU/da = 0, которое в данном слу-
случае является и достаточным, принимает вид
t
f[y(T)-W(T)*(t)}TW(r)dT = 0.
О
Произведя транспонирование подынтегрального выражения, послед-
последнее равенство можно записать в виде
t t
fwT(t)W(t)a(t) dr = fwT(r)y(r) dr.
о о
Продифференцируем обе части по t:
t
WT(t)W(t)a(t) + fwT(r)W(r) dr • a(t) = WT(t)y(t).
о
448 Гл. 11. Адаптивные системы управления
Отсюда, если положить
р-1^) = fwT(r)W(r)dr A1.63)
о
и учесть, что en(t) = y(t) - y(t) и y(t) = W(t)si(t), получим МНК-
алгоритм A1.61).
Теперь покажем, что матрица коэффициентов усиления P(t) опре-
определяется из уравнения A1.62). Из очевидного равенства
имеем . л
Р = -Р^-(Р~1)Р. A1.64)
at
Подставив в это равенство выражение
dP ^ = WT(t)W(t), A1.65а)
которое находится путем дифференцирования A1.63), получим A1.62).
Докажем параметрическую сходимость при МНК-алгоритме. Про-
Проинтегрировав A1.65а) от 0 до ?, будем иметь
t
Р'1^) =Р-1(О)+ fwT(r)W(r)dr. A1.656)
о
~1{
Умножив обе части соотношения A1.61) слева на P~1{t) и подставив
выражение для невязки из A1.58), получим
р-^аф = -WT(t)W(t)a(t).
Так как а = а, то последнее равенство можно записать в виде
Р-1^*) = -WT(t)W(t)a(t).
Подставив сюда выражение для WT(t)W(t) из A1.65а), получим
ИЛИ
Отсюда
р-1^)*^) -р-^ощо) = 0,
или
a(t) = РфР @)а@). A1.66)
Из этого равенства следует, что параметрическая ошибка a(t) будет
сходиться к нулю, если будет выполнено предельное соотношение
P(t) ->• 0 при t ->• оо,
или
Р~1(^)^оо при ^^оо.
11.3. Адаптивное управление с идентификатором 449
t
Как следует из A1.656), это соотношение будет выполнено, если
t
fWT(r)W(r) dr -> оо при t -> оо.
о
А это условие будет выполнено, если будет выполнено условие по-
постоянного возбуждения A1.59). Действительно, для любого целого
числа N
NT+T N iT+T
Г Wt(t)W(t) dr = Y; f Wt(t)W(t) dr > Nal.
О г=0 iT
Следовательно, если выполняется условие постоянного возбуж-
возбуждения, то P(t) -УО и a(t) —> 0 при t —> оо. Утверждение 11.6 пол-
полностью доказано.
Кратко рассмотрим, как влияют начальные значения а@) и Р@)
на оценку. Положив Р@) = р®1 и подставив выражение для P(t)
из A1.656) в A1.66), получим
t -| -1
/ Wt(t)W(t) dr\ a@).
о J
Отсюда видно, что малая ошибка при выборе й@) приводит к малым
ошибкам в течение всего процесса оценивания. Кроме того, чем боль-
больше ро, тем меньше ошибка. Поэтому ро нужно выбирать настолько
большим, насколько позволяет чувствительность к шумам.
11.3.4. МНК-идентификатор с экспоненциальной потерей
памяти. До сих пор предполагалось, что неизвестные параметры
вовсе не изменяются или изменяются очень медленно: за время адап-
адаптации они практически не меняются. Однако если эти параметры
в действительности, хотя и медленно, изменяются, старые данные
при оценке текущих значений неизвестных параметров обесценива-
обесцениваются, так как они отражают старые значения параметров. Поэтому
представляется разумным, чтобы старые данные оказывали меньшее
влияние на оценку, чем новые данные. Эти соображения привели к
методу наименьших квадратов, при котором вклад старых данных
на значение оценки экспоненциально убывает. Экспоненциальное «за-
«забывание» достигается за счет того, что в этом случае в качестве
минимизируемого функционала принимается интеграл
J = 11 ехр(^- у Л(г) dr) |у(я) - W(s)a(t)\2ds, A1.67)
где Л (г) ^ 0 — переменный коэффициент потери памяти. Алго-
Алгоритм идентификации, получаемый путем минимизации функциона-
функционала A1.67), будем называть МЯК-алгоритмом идентификации с
экспоненциальной потерей памяти, а идентификатор, построенный
на основе такого алгоритма, — МНК-идентификатор ом с экспонен-
экспоненциальной потерей памяти.
29 Д.П. Ким
450 Гл. 11. Адаптивные системы управления
Утверждение 11.7. МНК-алгоритм идентификации с экспо-
экспоненциальной потерей памяти имеет вид
;п(*), A1.68а)
P(t) = X(t)P(t) - P(t)WT(t)W(t)P(t), A1.686)
и он обеспечивает параметрическую сходимость (а(?) —> а(?) при
t —У оо), если выполняется условие постоянного возбуждения A1.59).
Как видим, уравнение для а(?) остается таким же, как и при
обычном МНК-алгоритме, изменяется только уравнение для матрицы
коэффициентов усиления.
Доказательство. Условие минимума функционала A1.67)
имеет вид
dr J [y(s) - W(s)*(t)]TW(s) ds = 0.
После транспонирования это равенство можно представить в виде
t / t
Г exp ( - Г\(т) dr J WT(s)y(s) ds =
° ' t
= / exp ( - /a(t) dr J Wt(sI^(s)S^) ds. A1.69)
о
Продифференцируем обе части по времени. Тогда получим
t / t
-\(t) exp [ -
О
t , t X
= f-X(t) exp I - fx(r) dr I WT(s)l^(s)S^) ds + W
о ^ , ^
t , t X
+ /exp( - [X(r)dr )WT(s)W(s)8i(t)ds.
J \ J J
0 X s 7
В первых интегралах обоих частях последнего равенства функ-
функцию —X(t) можно вынести за знак интеграла, и в силу равенст-
равенства A1.69) их можно сократить. После сокращения из последнего
равенства получим A1.68а):
где
Р-1^) = /ехр(- (X{r)dr )WT(s)W(s)ds. A1.70)
о W '
одифференцируем обе части последнего равенства по времени:
dP 1(^ = f-X(t) exp( - (Х{т) dr) WT(s)W(s) ds + WT(t)W(t).
^ 5 /
dt
11.3. Адаптивное управление с идентификатором 451
Отсюда, используя A1.70), находим
^^ = -X(t)P-\t) + WT(t)W(t). A1.71)
Подставив это выражение в A1.64), получим A1.686).
Осталось доказать параметрическую сходимость. Чтобы сделать
это, найдем в явном виде параметрическую ошибку и выражение
для обратной матрицы коэффициентов усиления. Умножив обе час-
части A1.68а) слева на P~1(t) и произведя подстановку а = а и
en(t) = W(t)si, получим
р-1^)^) = -WT(t)W(t)a(t).
Это равенство, подставив в него выражение для WT(t)W(t), которое
получается из A1.71), можно представить в виде
ИЛИ
Решение этого уравнения имеет вид
*(t) = exp(-/Mr) dr\P-1 @)а@).
Отсюда имеем
/ t ч
f|I@)S@). A1.72)
Непосредственной проверкой можно убедиться, что функция
, t
/г \
+ /ехр ( - / Л(г) dr j WT(s)W(s) ds A1.73)
является решением уравнения A1.71). Подставив это выражение
в A1.72), получим
ехр( IX(T)dr)WT(s)W(s)ds
о
\
-1(
Так как ехр ( / Л (г) dr) J ^ 1, то Р 1(t) в последней формуле воз-
4 о 7
растает быстрее, чем P~1(t) в A1.656). Следовательно, МНК-алго-
ритм идентификации с экспоненциальной потерей памяти улучшает
29*
452 Гл. 11. Адаптивные системы управления
параметрическую сходимость по сравнению с обычным МНК-алго-
ритмом идентификации. Кроме того, из последней формулы также
следует, что условие бесконечности интеграла в A1.656) по-прежнему
гарантирует экспоненциальную сходимость оцениваемых параметров.
А это значит, что условие постоянного возбуждения сигнальной мат-
матрицы W(t) может гарантировать параметрическую сходимость при
МНК-алгоритме с экспоненциальной памятью.
Рассмотрим идентификацию одного параметра с постоянным ко-
коэффициентом потери памяти. В этом случае минимизируемым функ-
функционалом будет
t
J = I е-М*-%(т) - w(r)a (t)]2 dr,
и МНК-алгоритм с экспоненциальной потерей памяти A1.68) примет
вид
a(t) = -p(t)w(t)en(t),
p(t) = \0p(t)-p2(t)w2(t).
Уравнение A1.71) принимает вид
и его решением будет
t
p-^t) = р-г{<д)е-Хог + ye-A°(*-TV(T) dr.
О
Параметрическая ошибка A1.72) принимает вид
a(t)=e-Ao*p(t)p-1 @I@).
Если w(t) подчиняется условию постоянного возбуждения, то функ-
функция p~1(t) ограничена снизу положительным числом, а функ-
функция pit) — сверху, и ошибка a(t) сходится к нулю со скоростью Ао-
11.3.5. Выбор коэффициента потери памяти. При выборе
коэффициента потери памяти нужно проявлять осторожность. Если
коэффициент потери памяти выбрать равным нулю (обычный МНК-
идентификатор), то матрица коэффициентов усиления стремится к
нулю; в этом случае невозможно слежение за изменяющимися пара-
параметрами и при наличии постоянного возбуждения. Если коэффициент
потери памяти выбрать постоянным, то это может привести к рез-
резкому росту коэффициентов усиления, а при отсутствии постоянного
возбуждения — к возникновению сильных колебаний оцениваемых
параметров. Так как сигнал может иметь различные уровни возбуж-
возбуждения, то желательно иметь подстраиваемый коэффициент потери
памяти. Значение нормы матрицы коэффициентов усиления зависит
от уровня возбуждения матрицы сигналов. Поэтому коэффициент
11.3. Адаптивное управление с идентификатором 453
потери памяти естественно связать с величиной ||Р(?)||. Одним из
возможных алгоритмов изменения коэффициента потери памяти в
зависимости от ||Р(?)|| определяется соотношением [69]
, A1.74)
где Ло — константа, определяющая максимальный коэффициент по-
потери памяти; ко — константа, определяющая максимальное значение
нормы матрицы коэффициентов усиления и удовлетворяющая нера-
неравенству к0 > \\Р@)\\.
Если коэффициент потери памяти выбирается в соответствии с
формулой A1.74), то параметрическая ошибка и норма матрицы ко-
коэффициентов усиления всегда ограничены сверху [69]. Если матри-
матрица сигналов W(i) удовлетворяет условию постоянного возбуждения,
то оценка параметров сходится экспоненциально, и матрица P(i)
ограничена снизу и сверху положительно определенными матрицами.
Из соотношения A1.74) следует, что при малом ||Р(?)|| коэффи-
коэффициент потери памяти приблизительно равен Ло, и с ростом
коэффициент потери памяти убывает, обращаясь в нуль, когда
принимает максимальное значение.
Большое значение Ло означает большую скорость забывания и
лучшее отслеживания изменяющихся параметров. Однако чем боль-
больше Ло, тем больше колебания параметров. Поэтому при выборе Ло
приходится исходить из противоположных требований — хорошее
отслеживание изменяющихся параметров и низкий уровень их коле-
колебаний.
Константа ко должна быть больше ||Р@)||. При этом норма матри-
матрицы P(i) не превышает ко независимо от уровня постоянного возбужде-
возбуждения. Это связано с тем, что, когда норма \P(t)\ становится равной ко,
коэффициент потери памяти становится равным нулю, и матрица P(t)
начинает убывать.
Константа ко влияет на скорость обновления данных и на ко-
колебания оцениваемых параметров из-за возмущения так же, как и
константа Ло. Поэтому выбор ко приходится производить при таких
же противоречивых требованиях, что и при выборе Ло.
11.3.6. Сравнительная характеристика различных мето-
методов получения оценки. В этом параграфе были рассмотрены раз-
различные методы построения идентификатора: градиентный метод,
метод наименьших квадратов и метод наименьших квадратов с экс-
экспоненциальной потерей памяти. Важным условием получения качест-
качественной оценки является условие постоянного возбуждения сигналов.
Большинство рассмотренных идентификаторов не обладают одновре-
одновременно хорошим качеством сходимости и высокой робастностью.
Градиентный идентификатор является простым, но обладает мед-
медленной сходимостью. Обычный МНК-идентификатор хорошо проти-
454 Гл. 11. Адаптивные системы управления
востоит шумам, но не позволяет получить оценку изменяющихся па-
параметров. МНК-идентификатор с экспоненциальной потерей памяти
обладает способностью отслеживать переменные параметры, но эле-
элементы его матрицы коэффициентов усиления могут резко возрастать
при отсутствии постоянного возбуждения сигналов, что приводит к
большим колебаниям оценки. МНК-идентификатор с автоматической
настройкой коэффициента потери памяти позволяет сохранить дос-
достоинство МНК-идентификатора с экспоненциальной потерей памяти
и исключить резкий рост коэффициентов усиления при отсутствии
постоянного возбуждения, т.е. этот идентификатор обеспечивает хо-
хорошую сходимость и высокую робастность.
Чтобы МНК-идентификатор с автоматической настройкой коэф-
коэффициента потери памяти обладал хорошей характеристикой, нужно
соответствующим образом сделать выбор:
— полосы пропускания фильтра при построении идентификацион-
идентификационной модели;
— начальных значений параметров и матрицы коэффициентов
усиления;
— констант, определяющих максимальный коэффициент потери
памяти и максимальное значение нормы матрицы коэффициентов
усиления.
При выборе указанных выше величин нужно исходить из ком-
компромисса: полосу пропускания фильтра нужно выбрать больше, чем
полоса пропускания объекта, для того, чтобы сигналы системы могли
проходить через него без искажения; но в то же время она должна
быть меньше ширины частотного спектра шума.
Начальные значения оцениваемых параметров, естественно,
должны быть заданы как можно точнее. Начальные значения коэф-
коэффициентов усиления должны быть выбраны так, чтобы обеспечить
определенную скорость сходимости и необходимую робастность.
Константы Ло и ко в соотношении A1.74), определяющие ко-
коэффициент потери памяти, должны быть выбраны довольно боль-
большими, чтобы как можно точнее отслеживать изменяющиеся пара-
параметры. Однако они не должны быть слишком большими, чтобы не
вызвать недопустимо большие колебания оцениваемых параметров.
Параметр &о, определяющий максимальное значение нормы матрицы
коэффициентов усиления, выбирается исходя из допустимого уровня
колебаний оценки. Чем выше уровень шума, тем меньше должно быть
значение этой константы.
Возбуждающие сигналы должны содержать достаточное коли-
количество спектров для того, чтобы имело место сходимость парамет-
параметров. И частоты должны находиться в пределах полосы пропускания
объекта.
Все выводы получены при предположении, что, хотя неизвестные
параметры могут изменяться, скорость их изменения намного меньше
скорости протекания процессов в системе.
Задачи 455
Задачи
1. Объект и эталонная модель описываются уравнениями
«о2/ + «12/ + а2у = bou,
Ут + 2Ут +У = g(t),
Определить алгоритм адаптивного управления по состоянию при
следующих коэффициентах уравнения объекта:
а) по = bo = 1, ai, п2 — неизвестные параметры;
б) п2 = 1, bo = 2, ao, ai — неизвестные параметры;
в) ai = 1, 6о = 2, ao, a2 — неизвестные параметры.
2. Объект описывается уравнением
У + «12/ + а22/ = бо'м,
где ai, a2, bo — неизвестные параметры. Построить модель для
получения оценки.
3. Объект описывается уравнением
У + сцу + «22/ + аз2/ = fro^ + hu,
где ai, a2, аз, &о5 ^i — неизвестные параметры. Построить модель для
получения оценки.
4. Объект описывается уравнением
У + сцу + «22/ = ^о^,
где ai, a2, &o — неизвестные параметры.
Определить:
а) градиентный алгоритм идентификации;
б) МНК-алгоритм идентификации;
в) МНК-алгоритм идентификации с экспоненциальной потерей
памяти.
5. Объект описывается уравнением
У + сцу + «22/ + аз2/ = fro^ + hu,
где ai, a2, аз, &о5 ^i — неизвестные параметры.
Определить:
а) градиентный алгоритм идентификации;
б) МНК-алгоритм идентификации;
в) МНК-алгоритм идентификации с экспоненциальной потерей
памяти.
Список литературы
1. Автоматизация производства и промышленная электроника. В 4-х
т. Т. 1 / Под ред. А. И. Берга и В. А. Трапезникова. — М.: Сов. эн-
энциклопедия, 1962.
2. Айзерман М. А., Гантмахер Ф. Р. Некоторые вопросы теории нелиней-
нелинейных систем автоматического регулирования с разрывными характерис-
характеристиками // Тр. Первого Международного конгресса международной феде-
федерации по автоматическому управлению. Теория непрерывных систем. —
М.: АНСССР, 1961.
3. Алексеев В.М., Тихомиров В. М., Фомин СВ. Оптимальное управле-
управление. — М.: Наука, 1979. — 430 с.
4. Андриевский Б. Р., Фрадков А. Л. Избранные главы теории автомати-
автоматического управления. — СПб: Наука, 1999. — 466 с.
5. Анхимюк В. Л, Опейко О. Ф., Михеев Н.Н. Теория автоматического
управления. — Минск: ДизайнПРО, 2002. — 352 с.
6. Атанс М., Фалб П. Оптимальное управление. — М.: Машиностроение,
1968. — 764 с.
7. Барбашин Е. А. Введение в теорию устойчивости. — М.: Наука, 1967. —
224 с.
8. Беллман Р. Процессы регулирования с адаптацией. — М.: Наука,
1964. - 360 с.
9. Беллман Р. Введение в теорию матриц. — М.: Наука, 1969. — 368 с.
10. Бесекерский В. А., Попов Е.П. Теория систем автоматического регу-
регулирования. — М.: Наука, 1966. - 992 с.
11. Бойчук Л. М. Метод структурного синтеза нелинейных систем автома-
автоматического управления. — М.: Энергия, 1971.
12. Болтянский В. Г. Математические методы оптимального управле-
управления. — М.: Наука, 1969. — 408 с.
13. Брайсон А., Хо Ю-Ши. Прикладная теория оптимального управления:
Пер. с англ. — М.: Мир, 1972. — 544 с.
14. Бронштейн И. Н. и Семендяев К. А. Справочник по математике. — М.:
ГИТТЛ, 1955. — 608 с.
15. Воронов А. А. Устойчивость, управляемость, наблюдаемость. — М.:
Наука, 1979.
Список литературы 457
16. Воронов А. А. Введение в динамику сложных управляемых систем. —
М.: Наука, 1985. — 352 с.
17. Воронов А. А., Ким Д. П., Лохин В.М. и др. Теория автоматического
управления. Ч.П. Теория нелинейных и специальных систем автомати-
автоматического управления. — 2-е изд., перераб. и доп. — М.: Высшая школа,
1986. — 504 с.
18. Воронов А. А., Матросов В.М. Метод векторных функций Ляпунова в
теории устойчивости. — М.: Наука, 1987.
19. Габасов Р., Кириллова Ф.М. Основы динамического программирова-
программирования. — Минск: Изд-во БГУ, 1975. — 204 с.
20. Галиуллин А. С. Методы решения обратных задач динамики. — М.:
Наука, 1986. - 224 с.
21. Гантмахер Ф. Р. Теория матриц. — М.: Наука, 1988. — 548 с.
22. Гелъфанд И. М., Фомин СВ. Вариационное исчисление. — М.: Физмат-
лит, 1961. — 228 с.
23. Гноенский Л. С, Каменский Г. А., Элъсголъц Л.Э. Математические ос-
основы теории управляемых систем. — М.: Наука, 1969. — 512 с.
24. Гришанин Ю. С, Лебедев Г. #., Липатов А. В., Степанъянц Г. А. Тео-
Теория оптимальных систем. Учеб. пособие. — М.: Изд-во МАИ, 1999. —
318 с.
25. Демидович Б. П. Лекции по математической теории устойчивости. —
М.: Наука, 1967. — 472 с.
26. Емельянов С. В., Уткин В. И., Таран В. А. и др. Теория систем с пере-
переменной структурой. — М.: Наука, 1970. — 592 с.
27. Иванов В. A.j Фалдин Н. В. Теория оптимальных систем автоматичес-
автоматического управления. — М. Наука, 1981. — 331 с.
28. Казаков И. Е. Статистическая теория систем управления в прост-
пространстве состояний. — М.: Наука, 1975. — 432 с.
29. Квакернак X, Сиван Р. Линейные оптимальные системы управления:
Пер. с англ. — М.: Мир, 1977. — 650 с.
30. Ким Д. П. Методы поиска и преследования подвижных объектов. — М:
Наука, 1989. — 336 с.
31. Ким Д. П. Теория автоматического управления. Линейные системы. —
М.: Физматлит, 2003. — 288 с.
32. Корн Г., Корн Т. Справочник по математике для научных работников
и инженеров. — М.: Наука, 1968. — 720 с.
33. Красовский А. А., Буков В. #., Шендрик В. С. Универсальные алго-
алгоритмы оптимального управления непрерывными процессами. — М.:
Наука, 1977. — 272 с.
34. Красовский Н. Н. Некоторые задачи теории устойчивости движения. —
М.: Физматлит, 1959.
458 Список литературы
35. Крутъко П. Д. Обратные задачи динамики управляемых систем. Ли-
Линейные модели. — М.: Наука, 1987. — 304 с.
36. Ла-Саллъ Ж., Лефшец С. Исследование устойчивости прямым методом
Ляпунова: Пер. с англ. — М.: Мир, 1964. — 168 с.
37. Лефшец С. Устойчивость нелинейных систем. — М.: Мир, 1987. —
183 с.
38. Летов A.M. Динамика полета и управление. — М.: Наука, 1969. —
359 с.
39. Ли Э. Б., Маркус Л. Основы теории оптимального управления. — М.:
Наука, 1972. — 574 с.
40. Лурье А.И Некоторые нелинейные задачи теории автоматического ре-
регулирования. — M.-JL: ГИТТЛ, 1951. — 216 с.
41. Лурье А. И., Постников В.П. К теории устойчивости регулируемых
систем // Прикладная математика и механика. — 1944. — Т. 8.
Вып. 3. — С. 246-248.
42. Ляпунов А. М. Общая задача об устойчивости движения. — М.-Л.:
Гостехиздат, 1950.
43. Макаров И. М., Дмитриева Н.Д., Ким Д. П. и др. Основы автоматиза-
автоматизации управления производством. — М.: Высшая школа: 1983. — 504 с.
44. Матросов В. М. К теории устойчивости движения // Прикладная ма-
математика и механика. — 1962. — Т. 26. — С. 992-1002.
45. Мирошник И. В., Никифоров В. О., Фрадков А. Л. Нелинейное и адап-
адаптивное управление сложными динамическими системами. — СПб:
Наука, 2000. — 550 с.
46. Моисеев Н. Н. Элементы теории оптимальных систем. — М.: Наука,
1975. — 526 с.
47. Нетушил А. В., Гольдфарб Л. С, Александровский И.М. и др. Теория
автоматического управления. Ч. П. — М.: Высшая школа, 1972. — 430 с.
48. О стрем К. Введение в стохастическую теорию управления. — М.: Мир,
1973. — 322 с.
49. Петров Б.Н., Рутковский В.Ю., Крутова И. Н., Земляков С. Д. Прин-
Принципы построения и проектирования самонастраивающихся систем уп-
управления. — М.: Машиностроение, 1972. — 260 с.
50. Понтрягин Л. С. Обыкновенные дифференциальные уравнения. — М.:
Наука, 1965. — 332 с.
51. Понтрягин Л. С, Болтянский В. Г., Гамкрелидзе Р. В., Мищенко Е. Ф.
Математическая теория оптимальных процессов. — М.: Физматлит,
1961. — 392 с.
52. Попов В. М. Гиперустойчивость автоматических систем. — М.: Наука,
1970. — 454 с.
53. Попов Е. П. Теория нелинейных систем автоматического регулирова-
регулирования и управления. — М.: Наука, 1979. — 256 с.
Список литературы 459
54. Ройтенберг Я. Н. Автоматическое управление. — М.: Наука, 1978. —
552 с.
55. Справочник по теории автоматического управления / Под ред. А. А. Кра-
совского. — М.: Наука, 1987. — 712 с.
56. Уткин В. И. Скользящие режимы и их применение в системах с пере-
переменной структурой. — М.: Наука, 1974. — 272 с.
57. Фильтрация и стохастическое управление в динамических системах /
Под ред. Е. Т. Леондеса. — М.: Наука, 1980.
58. Фомин В. Н., Фрадков А. Л., Якубович В. А. Адаптивное управление
динамическими объектами. — М.: Наука, 1981. — 448 с.
59. Фурасов В. Д. Устойчивость движения, оценки и стабилизация. — М.:
Наука, 1977. — 248 с.
60. Чураков Е. П. Оптимальные и адаптивные системы. — М.: Энергоиз-
дат, 1987. — 256 с.
61. Цыпкин Я. 3. Основы теории автоматических систем. — М.: Наука,
1977. — 560 с.
62. Ядыкин И. В., Шумский В. М., Осепян Ф.А. Адаптивное управление
непрерывными технологическими процессами. — М.: Энергоиздат,
1986. — 240 с.
63. Якубович В. А., Барабанов А. Т., Катковник В. Я. и др. Методы ис-
исследования нелинейных систем автоматического управления. — М.:
Наука, 1975. — 448 с.
64. Янг Л. Лекции по вариационному исчислению и теории оптимального
управления. — М.: Мир, 1974. — 488 с.
65. Bailey F. N. The Aplication of Lyapunov Second Method to Interconnected
Systems // SIAM Journal of Control. — 1966. — №. 3. — P. 443-462.
66. Bellman R. Vector Lyapunov Functions // SIAM Journal of Control. —
1962. — №. 1. — P. 32-34.
67. Kim D. P. Automatic Control. Theory Nonlinear and Multivariable Sys-
System. — Seol: Harnol, 2000. — 558 p.
68. Marino R., Tomei P. Nonlinear Control Design. — Prentice Hall Europe,
1995. — 396 p.
69. Slotine J. J. E., Li W. Applied Nonlinear Control. — Prentice Hall Interna-
International Editions, 1991.
Предметный указатель
Автоколебания 52
Адаптивная система 411
беспоисковая 413
поисковая 413
с идентификатором 413
эталонной моделью 413
Алгоритм робастный 438
Вектор состояний 12
— управления 12
— фазовый 12
Вибрационное сглаживание 101
Винеровский процесс 357
Восстанавливаемость 316
Вполне управляемая пара 21
Время адаптации 415
Выход 304
Гамильтониан 289, 298
Гипотеза фильтра 69
Движение возмущенное 47
— невозмущенное 47
Декомпозиция 212
Децентрализация 216
Динамика внешняя 192, 193
— внутренняя 188
Динамическое программирование
307
Диффеоморфизм 181
Задача Больца 284
— вырожденная 305, 391
— динамики обратная 238
прямая 238
— изопериметрическая 283
Задача Лагранжа 284
— Майера 284
— максимального быстродействия
284, 302
— несингулярная 378
— особая 306
— сингулярная 369
— терминального управления 284
Идентификатор 414
— градиентный 442
Идентификация адаптивная 440
— системы 440
Инвариатность свойства управляе-
управляемости 25
Каноническая форма наблюдаемос-
наблюдаемости 320
управляемости 26
Колебания несимметричные 86
симметричные 71
Контур основной 413
Коэффициент вибрационной линеа-
линеаризации 99
— гармонической линеаризации 70
Критерий абсолютной устойчивос-
устойчивости круговой 169
— квадратичный 162, 163
— наблюдаемости 317
— обнаруживаемости 321
— обобщенной работы 338, 339
— оптимальности 279
— положительной определенности
эрмитовой матрицы 161
— Попова 147, 148, 150, 151
Предметный указатель
461
Критерий Севастьянова—Котелянс-
кого 224
— Сильвестра 112
— стабилизируемости 36
— управляемости 21
— устойчивости Ляпунова линей-
линейных систем 127
— устойчивости Ляпунова по ли-
линейному приближению 131
Критический случай 133
Лемма Барбалата 37
— Калмана-Якубовича 39
Линеаризация гармоническая 70
— вибрационная 101
— обратной связью 174
по выходу 190
состоянию 184, 185
Линия переключения 60
Локальная связь 161
Матричная экспонента 18
Матричный экспоненциал 18
Матрица коэффициентов усиления
418
— наблюдаемости 317
— отрицательно определенная 109
полу определенная 109
— положительно определенная 109
полу определенная 109
— сигнальная 441
— управляемости 21, 185
— фундаментальная 17, 18
нормированная 18
— эрмитова 159
Метод Гольдфарба 86
— декомпозиции 212
— Красовского 138
— Лурье-Постникова 138
— разделения переменных 137
— фазовой плоскости 60
— эквивалентного управления 245
— Филиппова 236, 237
— функций Ляпунова 107
М-матрица 205
МНК-идентификатор 446, 447
Множество инвалютивное 182
— интегрируемое 18
Модель эталонная 413, 414
Моменты начальные 351, 353
— центральные 351, 353
Наблюдаемость 316
Наблюдатели 322
— полного порядка 322
— пониженного порядка (Луенбер-
гера) 324
Невязка 379
Неустойчивость 50, 51
Норма матрицы 220
эвклидова 220
Нуль-динамика 197
Область захвата 99
— управляемости 25
Обнаруживаемость 321
Объект линейный стабилизируе-
стабилизируемый 34
— нормальный 303
Относительная степень 192
Относительный порядок 192
Оценка несмещенная 378
Ошибка систематическая 358
— среднеквадратическая 358
Пара наблюдаемая 318
— управляемая 21
Поверхность переключения 327
— скольжения 243
Погружение инвариантное 307
Подпространство управляемости 26
Правило множителей Лагранжа
293, 295
Предельный цикл 58, 59
Преобразование Луенбергера 208
— обратной связью 175
Принцип двойственности 322
— максимума Понтрягина 299, 300
462
Предметный указатель
Принцип разделения 380
Производная Ли 177
Пространство состояний 12
— фазовое 12
Процессы с независимыми прира-
приращениями 357
Прямая Попова 147
Прямой метод Ляпунова 107
Регулятор адаптивный 413
Сепаратриса 58
Система автономная 119
— адаптивная 411
— вполне управляемая 19
— децентрализованного управле-
управления 216
Система многомерная 13
— неавтономная 111
— одномерная 13
— оптимальная 277, 278
— самонастраивающаяся 411
— самоорганизующаяся 411
— сопряженная 29
— с переменной структурой 62
— сравнения 142, 159
— централизованного управления
216
Скобки Ли 178
Скользящий режим 62
идеальный 244
Слабо стационарные процессы 353
След матрицы 398
Спектральная плотность 356
Среднее квадратическое отклоне-
отклонение 351
Стабилизируемость 34
Стационарные процессы 355
Строго стационарные процессы 357
Строго вещественно-положительная
передаточная функция 39
Сходимость параметрическая 419
Теорема Барбашина-Красовского
123
Теорема Кели-Гамильтона 21
— Красовского 206
— Ляпунова о неустойчивости вто-
вторая 118, 124
первая 117, 124
— Ляпунова об асимптотической
устойчивости 113, 120
— Ляпунова об устойчивости
112,119
— Малкина об устойчивости 125
— о линеаризации обратной связью
185
— о существовании решения урав-
уравнения Ляпунова 129, 130
— об асимптотической устойчивос-
устойчивости в целом 115, 123
п интервалах 304
— Фробениуса 183
Терминант 293
Тождество Якоби 179
Точка изображающая 53
— особая 54
Траектория вырожденная 65
— оптимальная 279
— фазовая 53
— целая 122
Управление допустимое 285, 297
— модальное 31
— оптимальное 279, 397
— программное 277
— с обратной связью 277
— стабилизирующее 260
— эквивалентное 239
Управляемая система
вполне восстанавливаемая 316
наблюдаемая 316
управляемая 19, 260
стабилизируемая 260
Управляемая форма Луенбергера
28, 29
Управляемость 19, 20, 21
Уравнение Беллмана 309, 311
Предметный указатель
463
Уравнение Винера-Хопфа 369
— выхода 12, 316
— Ляпунова 128
— наблюдения 12, 316, 378
— объекта 378
— Риккати 330
алгебраическое 332
— состояния 12
— Эйлера 286
— Эйлера-Лагранжа 288
— эталонное 239
Уравнения в нормальной форме 12
Коши 12
— сопряженные 299
Условие нормальности 303
— попадания 244, 258
— постоянного возбуждения 420
— скольжения 243, 249
— стационарности 289
— частотное 163
— устойчивости скользящего дви-
движения 253
Условия Вейерштрасса-Эрдмана
289
— краевые 272
— трансверсальности 292, 295
Устойчивость абсолютная 142, 244
— асимптотическая 50, 51
в целом 50
глобальная 50
орбитальная 51
— глобальная 50
— минимальная 161
— орбитальная
— по Лагранжу 50
Ляпунову 48, 49
— при постоянно действующих воз-
возмущениях 125
— равномерная 48
— экспоненциальная 206
в целом 206
Фазовая плоскость 53
Фазовый портрет 53
Факторизация 372
Фильтр Винера 369, 374
— Калмана-Бьюси 379, 385, 388
— формирующий 371
Формула Коши 18
Форма нормальная 12
— управляемая Бруновского 12
Луенбергера 29
Функции знакоопределенные 108
— знакопеременные 108
— знакопостоянные 108
Функция автокорреляционная 339
— Беллмана 308, 311, 398
Функция Гамильтона 289
—, допускающая бесконечно боль-
большой нижний предел 113
—, малый верхний предел 113
— знакоотрицательная 107
— знакоположительная 107
— ковариационная 354
— корреляционная 354
взаимная 354
— Лагранжа 287, 298
— Ляпунова 107, 112
векторная 215, 217
— отрицательно определенная 108
полу определенная 107
— положительно определенная 108
полу определенная 107
— переключения 326
— Понтрягина 298
— целевая 415
Шум белый 357
— наблюдения 378
— объекта 378
Экстремаль 286
Эргодический процесс 356
Эрмитова форма 159
Учебное издание
Дмитрий Петрович КИМ
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Том 2
МНОГОМЕРНЫЕ, НЕЛИНЕЙНЫЕ, ОПТИМАЛЬНЫЕ
И АДАПТИВНЫЕ СИСТЕМЫ
Редактор Е.Ю. Ходан
Компьютерная верстка и иллюстрации Е.А. Королевой
Оформление обложки А.Ю. Алехиной
ЛР №071930 от 06.07.99. Подписано в печать 09.09.04.
Формат 60x90/16. Бумага офсетная. Печать офсетная.
Усл. печ. л. 29. Уч.-изд. л. 31,9. Заказ №
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997, Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru, fmlsale@maik.ru; http://www.fml.ru
Отпечатано с диапозитивов
в ОАО «Чебоксарская типография № 1»
428019, г. Чебоксары, пр. И. Яковлева, 15
ISBN 5-9221-0534-5
78592205347