/



































































































































































































































































































Автор: Ким Д.П.
Теги: математическая кибернетика автоматика математика теория автоматического управления сборник задач
ISBN: 978-5-9221-0937-6
Год: 2008
Похожие




Текст
Д.П. Ким
СБОРНИК ЗАДАЧ
ПО ТЕОРИИ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Многомерные, нелинейные,
оптимальные и адаптивные системы
Рекомендовано УМО вузов по университетскому
политехническому образованию в качестве учебного
пособия для студентов высших учебных заведений,
обучающихся по направлению
220400 «Мехатроника и робототехника»
МОСКВА
ФИЗМАТЛИТ
2008
УДК 519.711
ББК 32.965
К 40
Ким Д.П. Сборник задач по теории автоматического управления.
Многомерные, нелинейные, оптимальные и адаптивные системы. —
М.: ФИЗМАТЛИТ, 2008. - 328 с. - ISBN 978-5-9221-0937-6.
Учебное пособие содержит задачи по теории многомерных, нелинейных,
оптимальных и адаптивных систем автоматического управления. Задачи по
каждой теме предваряются необходимыми теоретическими материалами и раз-
бором примеров. Сборник в основном ориентирован на учебник Д. П. Кима
«Теория автоматического управления, Том 2. Многомерные, нелинейные, опти-
мальные и адаптивные системы».
Рекомендовано Учебно-методическим объединением вузов по универси-
тетскому политехническому образованию в качестве учебного пособия для
студентов высших учебных заведений, обучающихся по направлению 220400
«Мехатроника и робототехника».
Учебное издание
КИМ Дмитрий Петрович
СБОРНИК ЗАДАЧ ПО ТЕОРИИ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
МНОГОМЕРНЫЕ, НЕЛИНЕЙНЫЕ, ОПТИМАЛЬНЫЕ И АДАПТИВНЫЕ СИСТЕМЫ
Редактор В.В. Панюхин
Оригинал-макет: Д.П Вакуленко
Оформление переплета: Н.В. Гришина
Подписано в печать 24.01.08. Формат 60 x 90/16. Бумага офсетная. Печать офсетная.
Усл. печ. л. 20,5. Уч.-изд. л. 25,2. Тираж 2000 экз. Заказ № 2992.
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997, Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru, fmlsale@maik.ru;
http://www.fml.ru
Отпечатано с готовых диапозитивов
в ОАО «Ивановская областная типография»
153008, г. Иваново, ул. Ти пограф£каЯ1-А^————
E-mail: 091-018@adminetip/ailOVO^Up й<.ыров
© ФИЗМАТЛИТ, 2008
©Д.П. Ким, 2008
I атындагы ПМУ-дЩ Я
академик С.БейсембаеН
ISBN 978-5-9221-09В7-6зтЫНДагы fb,nblMM |
ОГЛАВЛЕНИЕ
Предисловие........................................................ 6
Глава 1. Преобразования. Управляемость. Стабилизируемость.
Наблюдаемость. Модальное управление.......................... 7
1.1. Уравнение системы в нормальной форме...................... 7
Задачи.................................................... 10
1.2. Управляемость и стабилизируемость объекта управления... 12
Задачи.................................................... 17
1.3. Наблюдаемость и восстанавливаемость...................... 20
Задачи.................................................... 22
1.4. Канонические формы уравнения и модальное управление.... 23
Задачи.................................................... 27
Ответы.................................................... 28
Глава 2. Нелинейные системы. Метод фазовой плоскости............ 31
2.1. Особенности нелинейных систем. Определение устойчивости.
Изображение процессов на фазовой плоскости................ 31
Задачи.................................................... 38
2.2. Метод фазовой плоскости исследования систем.............. 42
Задачи.................................................... 45
Ответы.................................................... 49
Глава 3. Метод гармонической линеаризации......................... 53
3.1. Гармоническая линеаризация. Вычисление коэффициентов гар-
монической линеаризации..................................... 53
Задачи.................................................... 64
3.2. Автоколебания. Исследование симметричных автоколебаний... 65
Задачи.................................................... 72
3.3. Вынужденные колебания и вибрационная линеаризация...... 77
Задачи.................................................... 84
Ответы.................................................... 86
Глава 4. Метод функций Ляпунова................................... 89
4.1. Знакопостоянные и знакоопределенные функции.............. 89
Задачи.................................................... 93
4.2. Теоремы об устойчивости.................................. 94
Задачи.................................................. 108
Ответы................................................... 112
Глава 5. Абсолютная устойчивость................................. 114
5.1. Система сравнения. Необходимое условие и критерий Попова
абсолютной устойчивости................................. 115
Задачи................................................... 119
5.2. Квадратичный критерий абсолютной устойчивости........... 120
Задачи................................................... 130
Ответы................................................... 133
4
Оглавление
Глава 6. Линеаризация обратной связью.......................... 134
6.1. Некоторые сведения из дифференциальной геометрии...... 135
Задачи................................................. 139
6.2. Линеаризация обратной связью по состоянию............. 141
Задачи................................................. 146
6.3. Линеаризация обратной связью по выходу................ 149
Задачи................................................. 154
6.4. Нуль-динамика и синтез алгоритмов управления.......... 156
Задачи................................................. 158
Ответы................................................. 159
Глава 7. Системы большой размерности. Векторная функция Ля-
пунова ................................................... 161
7.1. Декомпозиция и децентрализация........................ 161
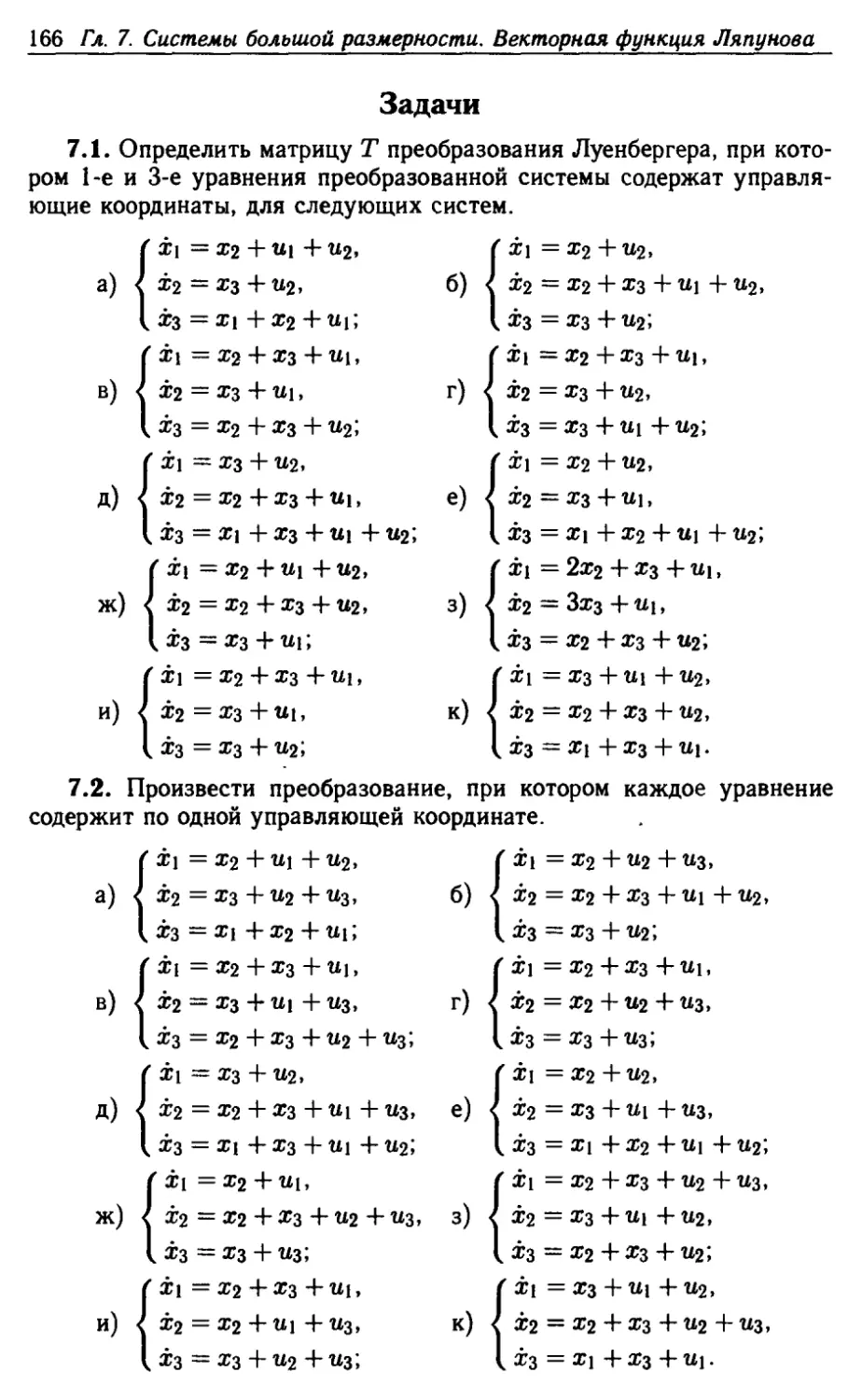
Задачи................................................. 166
7.2. Векторные функции Ляпунова. Устойчивость агрегированной си-
стемы ............................................... 167
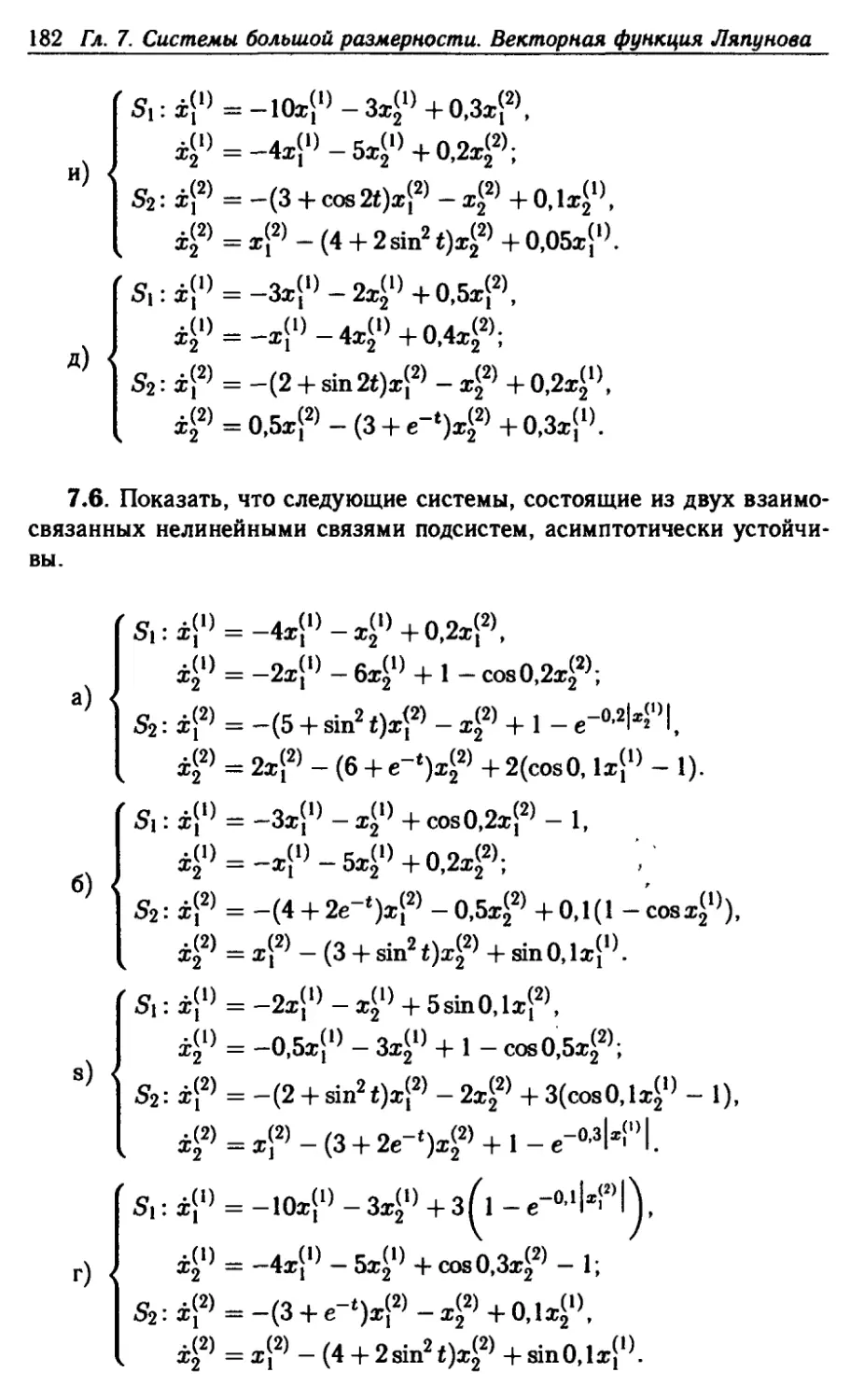
Задачи................................................. 180
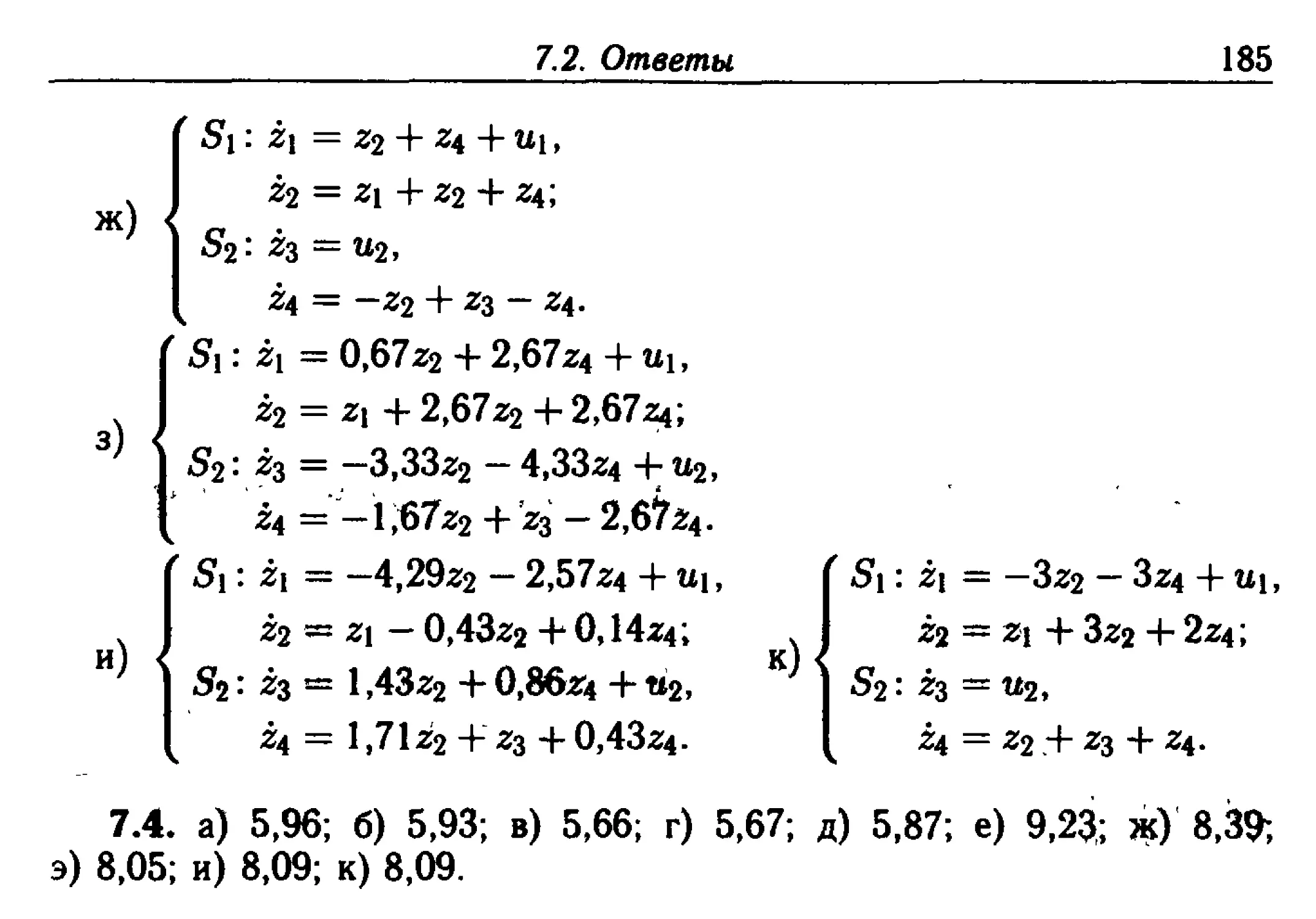
Ответы................................................. 183
Глава 8. Методы теории оптимального управления................. 186
8.1. Постановка и классификация задач оптимального управления. . 186
Задачи................................................. 193
8.2. Метод множителей Лагранжа (методы классического вариаци-
онного исчисления)........................................ 195
Задачи................................................. 201
8.3. Принцип максимума Понтрягина.......................... 203
Задачи................................................. 209
8.4. Метод динамического программирования.................. 210
Задачи................................................. 214
Ответы................................................. 215
Глава 9. Синтез оптимальных детерминированных систем управ-
ления .................................................... 220
9.1. Наблюдатели........................................... 220
Задачи................................................. 223
9.2. Метод фазовой плоскости синтеза оптимальной по быстродей-
ствию системы............................................. 224
Задачи................................................. 227
9.3. Синтез оптимальных по интегральному квадратичному крите-
рию систем управления..................................... 228
Задачи................................................. 236
Ответы................................................. 240
Глава 10. Синтез оптимальных систем управления при случайных
воздействиях.............................................. 243
10.1. Некоторые типы случайных процессов. Формирующий фильтр 243
Задачи................................................. 247
10.2. Фильтры Винера и Калмана-Бьюси........................ 248
Задачи................................................. 261
10.3. Стохастические оптимальные системы.................... 264
Задачи................................................. 268
Ответы................................................. 271
Оглавление 5
Глава 11. Адаптивные системы управления........................ 284
11.1. Алгоритмы адаптивного управления с ЭМ................. 286
Задачи................................................. 292
11.2. Адаптивное управление с идентификатором............... 298
Задачи................................................. 306
Ответы................................................. 311
Приложения..................................................... 320
П.1. Векторное дифференцирование............................ 320
П.2. Коэффициенты гармонической линеаризации................ 323
Список литературы.............................................. 327
Предисловие
Учебное пособие посвящено задачам теории многомерных, нелиней-
ных, оптимальных и адаптивных систем автоматического управления.
Задачи по каждой теме предваряются необходимыми теоретическими
материалами и разбором примеров. Сборник в основном ориентирован
на учебник [10], и он отличается от ранее изданных учебных посо-
бий [22, 24] назначением и соответствующим подбором задач, а также
включением новых разделов.
В главе 1 рассматриваются задачи по преобразованию уравнений
управляемых систем в нормальную форму, задачи управляемости и ста-
билизируемости, наблюдаемости (восстанавливаемости), преобразова-
ния в управляемую форму Луенбергера и синтеза алгоритмов модаль-
ного управления.
Глава 2 посвящена задачам исследования устойчивости и характера
переходных процессов методом фазовой плоскости.
В главе 3 представлены задачи, связанные с вычислением коэффи-
циентов гармонической линеаризации, исследованием автоколебаний,
вынужденных колебаний и вибрационной линеаризации.
Глава 4 посвящена задачам исследования устойчивости методом
функций Ляпунова, глава 5 — задачам исследования абсолютной устой-
чивости с помощью теоремы Попова и квадратичного критерия.
В главе 6 рассматриваются задачи, связанные с линеаризацией
обратной связью по состоянию и по выходу, в главе 7 —задачи по
декомпозиции и децентрализации и исследования устойчивости агре-
гированных систем с помощью векторных функций Ляпунова.
В главах 8 и 9 представлены задачи оптимального управления:
в главе 8— задачи, которые решаются методом множителей Лагранжа,
принципом максимума Понтрягина и динамическим программировани-
ем, в главе 9 — задачи синтеза систем максимального быстродействия
и систем, оптимальных по интегральному квадратичному критерию
оптимальности, в том числе оптимальных по обобщенной работе.
Глава 10 посвящена задачам синтеза оптимальных фильтров (филь-
тров Винера и Калмана-Бьюси) и стохастических оптимальных систем
управления при полной и неполной текущей информации, глава 11 —
задачам адаптивного управления с эталонной моделью и идентифика-
тором.
Автор выражает глубокую признательность проф. В. М. Лохину за
идею написания этого учебного пособия и помощь, а также доценту
Н.Д. Дмитриевой и проф. О. А. Тягунову за поддержку и помощь
в течение долгих лет совместной работы.
Глава 1
ПРЕОБРАЗОВАНИЯ. УПРАВЛЯЕМОСТЬ.
СТАБИЛИЗИРУЕМОСТЬ. НАБЛЮДАЕМОСТЬ.
МОДАЛЬНОЕ УПРАВЛЕНИЕ
1.1. Уравнение системы в нормальной форме
Если уравнения системы разрешены относительно старшей произ-
водной, то их всегда можно преобразовать к системе уравнений 1-го
порядка. Например, систему
М (n—1)
y=F(y,y...... У ,t)
можно преобразовать к виду
±1 = Х2,
х2 = Я3
хп = Г(Ж1,Ж2,
ГДе . (п-1)
XI = у, х2 = у,..., хп = У .
Аналогичное преобразование можно произвести, когда система описы-
вается несколькими уравнениями. Например, систему
У\ = F\(yi,y\,y\,y2,ih,t),
У2 = F2(y},yi,yi,y2,y2tt),
положив = T/ь х2 = у\9 хз = у\, х4 = у2, Х5 = у2, можно преобразо-
вать в следующую систему уравнений 1-го порядка:
±1 = х2,
Х2 = Хз,
Х3 = Fi(xi,X2tX3,X4fX5,t),
Х4 = х5,
Х5 = F2(xi,x2,x3fx4,x5,t),
У1 = Xif
У2 = х4.
8
Гл. 1, Преобразования. Управляемость. Стабилизируемость
В общем случае уравнения управляемой системы можно представить
в виде
±1 == /1(Я1,Я2> ,£n, ••• ,ur, t),
Z2 = Л(ЯЬ ^2»”' ,Zn,Ui,U2, ••• ,Ur,t),
— fn1 > *^2» * ’ ’ > *^n > » ^2 > ’ * * > , 0»
УI = h\ (zi, Z2, * * * , Zn> > W2, * * * , Wr> »
2/2 = ^2(^1»*^2» * * * »*^n> Tti > W2, * ’ * > ^)>
2/m —' ^m(*^l> *^2, ” * > ^n> Wi, U2, * * * , Wp» 0
или в векторной форме
х = f(x,u, £),
У = h(x, u,f).
(1.1а)
(1.16)
Здесь zi,х2, • •, хп называются фазовыми координатами или фа-
зовыми переменными, х — фазовым вектором или вектором состо-
яний', щ,и2, ..., иг — управляющими параметрами или управлени-
ями, и —вектором управления, управлением или просто входом;
у\,У2> • • • > Ут — выходными переменными, у — выходным вектором
или просто выходом; t — время.
Уравнение, записанное в виде системы дифференциальных уравне-
ний 1-го порядка, разрешенных относительно производной, называется
нормальной формой Коши или просто нормальной формой. Множе-
ство всех векторов состояний (фазовых векторов) называют простран-
ством состояний или фазовым пространством. Уравнение (1.1а)
называют уравнением состояния, а уравнение (1.16) —уравнением
выхода или уравнением наблюдений.
В этой книге всюду вектор рассматривается как вектор-стол-
бец. Так что имеем: х = (zjz2 •••zn)T, u = (щи2 ••• ur), у =
= (У1У2 " Ут)Т, где Т обозначает операцию транспонирования. Век-
тор также будем рассматривать как матрицу-столбец.
Преобразование уравнений линейных систем в нормальную
форму. В общем случае уравнение одномерной управляемой системы
(объекта) имеет вид
(п) (п-1) (тп) (т-1)
У +ai У + ... + апу = Ъъ и +61 и +... + bmu (тп п). (1.2)
Рассмотрим отдельно два случая: тп = ОиО<тп^п.
А) тп = 0. В этом случае, разрешив уравнение (1.2) относительно
(п-1)
старшей производной и положив у — х\, у = Х2, ••• , У = хп, по-
1.1, Уравнение системы в нормальной форме
9
лучим
±1 = Х2,
#2 = х3>
хп—\ — хп*
Xfi — btyU anXi Qfi—lx2 * * * GiXfi)
У = х\,
или в векторной форме
х = Ax + bu,
т
У == CJ X,
где
х = " Х1 Х2 . А= ’ 0 0 1 0 0 •• 1 • 0 • 0 , ь= ‘o' 0 0 , с= т 0
Хп—\ _ хп . 0 -”аП 0 “ап-1 0 —ап-2 • • • 1 • —«1. -S’" О 1 0 0.
Б) 0 < т п. В этом случае уравнение (1.2) можно преобразовать
к виду
ii = Х2 + kiu ' хг = хз + кги (1.3a)
где ^п—1 — хп 4" кп—\и Хп ” <Чхп ’ ^пх1 4~ knU y = xi+ M)U, i fco = bo, k>i — ajki—jf i — 11 2, • • • , n. (136) (1.3b)
В векторной форме эта система принимает вид
х — Ах 4- bu,
у = стх + fcou.
10 Гл. 1. Преобразования. Управляемость. Стабилизируемость
Здесь
х= Х1 Х2 , А= ' 0 0 1 0 0 1 0 ' • 0 , ь= 1 й- . NJ — _ | , с — 1 0
Хп—1 0 0 0 • 1 /ип—1 0
хп ~ап ~ tin— 1 ~~ап-2 ' ‘' -at_ кп 0
Соотношения (1 .Зв) получены при предположении, что т = п. Условие
0 < т < п нужно рассматривать как частный случай, когда коэффици-
енты при старших производных равны нулю.
Пример 1.1. Пусть управляемая система описывается уравнени-
еМ _ 0,1р+1
У~ O.Olp3 4-ОДр2+р + Iй’
Требуется преобразовать это уравнение в нормальную форму.
Решение. Запишем исходное уравнение в обычной форме:
0,01 У 4-0,1# + у 4- у = 0,1й 4- и.
Разделим обе части на 0,01. Тогда получим
У 4- 10# 4- 100т/ 4-100?/ = 10й 4- 100и.
В данном случае коэффициенты уравнения равны
Oj = 10, аг ~ 100, аз = 100, i>o = i>i == 0, i>2 ~ Ю, £>з = 100.
По формуле (1.3в) найдем коэффициенты ki (г = 0, 1, 2, 3):
fco = bo = 0, к\ ~ Ь[ — а^ко =0, &2 = - (ai^i + ^2^о) = Ю,
кз = £>з — (aikz 4* 02^1 4- аз&о) = 0.
В соответствии с формулами (1.3а) и (1.36) уравнение в нормальной
форме принимает вид
Х[ — %2,
Х2 = Хз 4- 10и,
Хз = - Юхз “ 100х2 - 100X1,
7/ = Хь
Задачи
1.1. Записать в нормальной форме уравнения систем, заданных
следующими передаточными функциями (у —выход, и —вход):
а) ^и(Р) = р(р2+р+1); б) Wvu(P) = P(^ + P+1):
1.1. Задачи
11
2°(р+1) в) Wyu(P) 2^+4^+8р+6’ — 2р4-4 д) Wv»{P)- 2^+4^+8р4-6’ . т„ f ч 2р3+р2+5р+3 ж) Wvu{P)~^+4^+2p+i’ \ W (п\ - 2Р3+3?2+5Р+1 . и) Wyu{p)-р4+2р3+р2+5р+3- \ пл 1 Зр24-5р4-1 г) W^(p)-p3+4p2+2p+l. е)иг (р) = Р3+3Р2+5Р+1. } WvuW РЗ+4Р2+2Р4-1’ з)И, (р)_Р3+3Р2+5Р+1. 2рЗ+р2+5р+з- K1IV (Р)- Р3+3Р2+5Р+1 J 2р44-2р34-4р24-6р4-2’
1.2. Преобразовать в нормальную форму следующие уравнения:
а) У 4-4у4-2у = й+4й+и; б) 2у 4-4у4-2у = й4-4й4-и;
в) У+4у+2у+у = 4й+и; г) 4у 4-4у4-2у4-у = 4й+и;
д) У4-4у4-2у = 2’й’+г1+4й+и; е) 2 у +4у+2у = 2и+г1+4й+и;
ж) 4У+2у+8у = 8г4+4й+16й+4и;
з) 2 у +4у+&у = 4« +2й+8и;
(4) ...
и) У+2У+4у+Ъу = 8’й+4й+16й+4и;
(4) ...
к) 2 У 44 У +2у+6у = ’й’4-4й4-бй4-4и.
1.3. Используя обозначения
Xi = у\, х2 = Vi, Xi = У\, Х4 = У2, Х5 = У2,Х6 = у2,
преобразовать в нормальную форму следующие системы уравнений:
а) У 1 + 2yi 4- 3yi 4- yi 4- Уг 4- 4уг + Зуг = О,
У1 + 5yi 4- 3yi 4- У 2 + 2уг + 4у2 + 2у2 = 0;
б) У1 4- 3yi 4- 2у। 4- 2у2 4- буг 4- 5уг = О,
6У1 + 7у 1 4- у\ 4- У 2 + 4уг 4- буг + Зуг = 0;
в) У1 4- Зуь 4- 2у 1 4- 4у2 4- 5уг 4- Зу2 = О,
4У1 4-2yi 4-’у г + 5уг + 7уг 4-Уг == 0;
г) У1 + 2yi 4- 3yi 4- yi 4- уг + 4у2 + Зу2 = О,
4yi 4- 2yi 4- у 2 4- 5у2 4- 7у2 4- уг = 0;
Д) У1 4- 3yi 4- 2у\ 4- У1 4- 5у2 4- 4у2 = О,
6yi 4- 7yi + yi 4- У г + 4уг 4- буг + Зуг = 0;
е) У ! 4- Зу] 4- 2у] 4- У1 4- 5у2 4- 4у2 = 0.
У1 + 3yi 4- yi 4- У 2 + 2уг + 4уг = 0;
ж) 3/14- 2yi 4- 3yi 4- yi 4- у 2 4- 4у2 4- Зуг = О,
У1 4- 5у! 4- 3yi 4- У г 4- 2у2 4- 4уг 4- 2у2 = 0;
12 Гл. 1. Преобразования. Управляемость. Стабилизируемость
з) 3/’i + 3£1 + 2£i + 2у2 + 61/2 + 51/2 = О,
У\ + 71/! 4- У\ + У 2 + 4j/2 + 61/2 + 3j/2 = О;
и) у 1 + 3yi 4- 2i/i + У 2 + 51/2 + Зт/2 — О,
У1 + 4$/1 4- 2i/i 4- 2 3/ 2 + 5j/2 + 7j/2 + 4i/2 = О;
к) 3/14- 2j/i 4-1/1 4- У 2 + 41/2 + Зт/2 == О»
У1 + 4j/i 4- 2yi 4- 2*3/*2 + 5у2 + 7i/2 + 4i/2 = О.
1.2. Управляемость и стабилизируемость объекта
управления
Рассмотрим управляемую систему (объект), которая описывается
уравнением
x = f(x, u,t), x€Bn, u €/Г, (1.4)
где х— вектор состояния, и — управление (вектор управления).
Управление u = u(t) = (iq(t) U2(t) ••• ur(t)y называется кусочно-
непрерывным, если все его компоненты щ(1) являются кусочно-
непрерывными. Кусочно-непрерывные управления называют допусти-
мыми.
Определение 1.1. Управляемая система (объект) (1.4) на-
зывается управляемой или вполне управляемой, если, каковы бы
не были точки х° и х? в фазовом пространстве RT, существует
допустимое управление, определенное на конечном интервале [to, tf]
и переводящее систему (1.4) из начальной точки x(to) = х° в конеч-
ную точку x(tf) = к?.
Другими словами, если объект вполне управляем, то он может
быть переведен допустимым управлением из произвольного начального
состояния в любое другое состояние за конечное время.
Управляемость линейных стационарных объектов. Пусть урав-
нение
x = Ax4-Bu, xeRn, ueRr (1.5)
описывает стационарную систему, т. е. матрицы А и В являются посто-
янными. Матрица
У = [В АВ А2В...Ап~'В], (1'6)
столбцы которой представляют собой столбцы матрицы В и произве-
дений матриц АВ, А2В, ..., АП-1В, называется матрицей управляе-
мости.
Критерий управляемости линейных стационарных
систем. Линейный стационарный объект вполне управляем тогда
и только тогда, когда матрица управляемости имеет максималь-
ный ранг, т. е. когда ее ранг равен п.
1.2. Управляемость и стабилизируемость объекта управления
13
Ранг матрицы равен числу независимых строк, числу независимых
столбцов и порядку отличного от нуля минора максимальной размер-
ности.
Определение 1.2. Пару (А, В) называют управляемой или
вполне управляемой, если ранг матрицы управляемости (1.6) ра-
вен п.
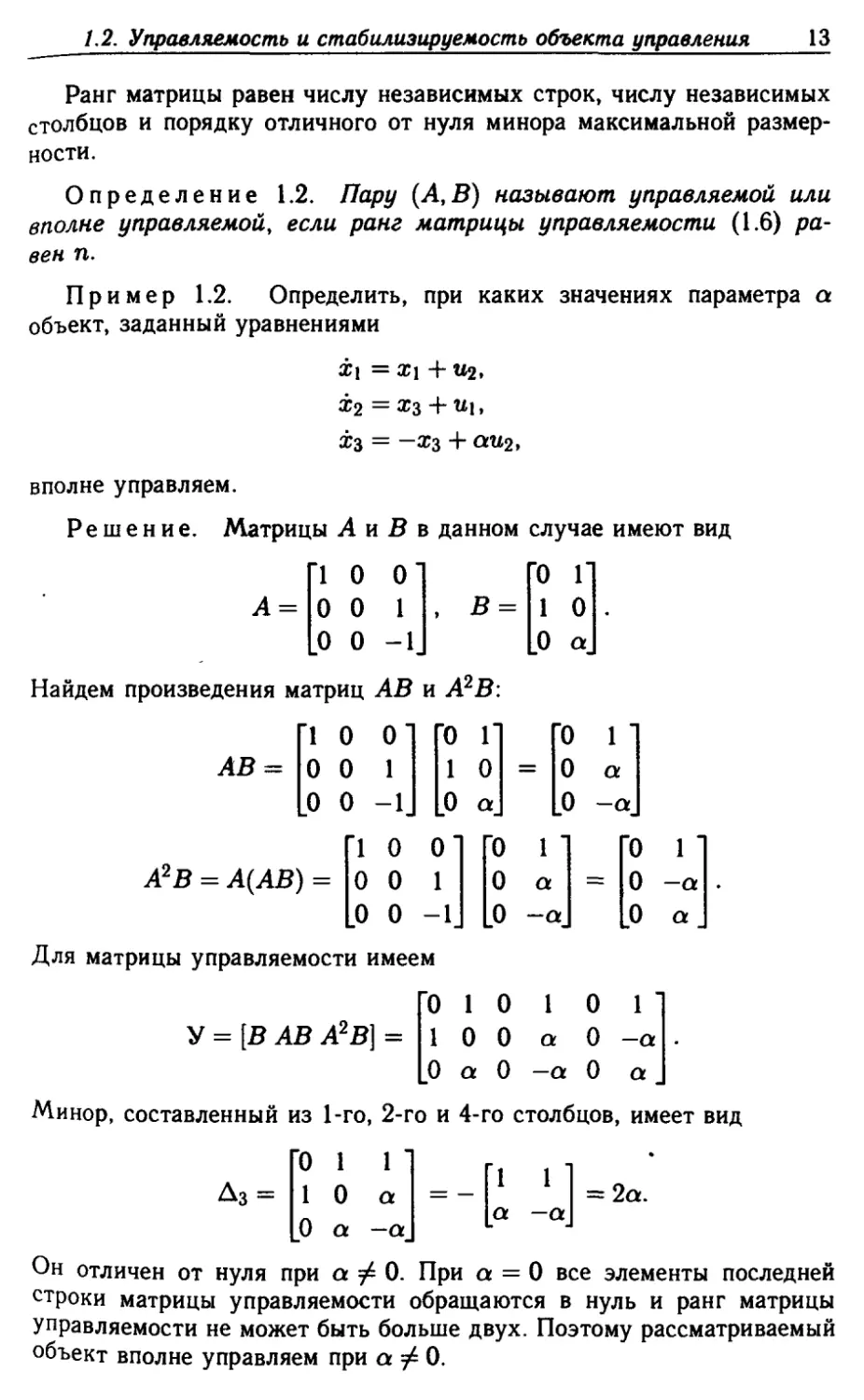
Пример 1.2. Определить, при каких значениях параметра а
объект, заданный уравнениями
±1 = Xi +U2»
х2 = яз4-иь
Хз = — ^3 + ап2»
вполне управляем.
Решение. Матрицы А и В в данном
О'
1
А =
'1 О
О О
О 0 -1
случае имеют вид
'О
1
О
Г
о
а
В =
Найдем произведения матриц АВ и А2 В:
Г
О
а
'О
О
'1
О
О
'О
1
'О
= О
О
1 '
а
—а
О 01
о
О -1J 10
О'
1
'1 о
о
О О -1J 10
Для матрицы управляемости имеем
'О
В] = 1
о
А2 В = А(АВ) =
У = [В АВ А2.
1
а
—а
1'
а
—а,
'О
= О
О
1 '
—а
а
1 '
—а
а
1-го, 2-го и 4-го столбцов, имеет вид
1 '
а
—а.
0. При а = 0 все элементы последней
1 1
а —а
= 2а.
АВ =
1
О
а
а
1
О
1
о
а
О
О
О
О
О
О
Минор, составленный из
'О
Дз = 1
О
Он отличен от нуля при
строки матрицы управляемости обращаются в нуль и ранг матрицы
управляемости не может быть больше двух. Поэтому рассматриваемый
объект вполне управляем при а 0.
14
Гл. 1. Преобразования. Управляемость, Стабилизируемость
Утверждение 1.1. Одномерная управляемая система, описы-
ваемая уравнением
У =
Ьорт + Ь{рт~'
flop” + flip”"1
Н---Ь Ьт
Н----F ап
<п),
и (0 < т
где не все коэффициенты bi (i = О, I,-*-, тп) равны нулю, вполне
управляема.
Инвариатность свойства управляемости к линейным преобразовани-
ям. Свойство управляемости при неособом линейном преобразований
не меняется.
Определение 1.3. Область, состоящую из всех точек про-
странства состояний, в которые может быть переведена управ-
ляемая система допустимым управлением из начала координат за
конечное время, называется ее областью управляемости.
Если управляемая система вполне управляема, то ее область управ-
ляемости совпадает со всем пространством. Если ранг матрицы управ-
ляемости управляемой системы не равен максимальному значению
(т. е. размерности пространства состояний), но больше нуля, то го-
ворят, что управляемая система не вполне управляема или частич-
но управляема. Если управляемая система частично управляема, то
область управляемости совпадает с подпространством, порождаемым
совокупностью независимых столбцов матрицы управляемости. Это
подпространство называют подпространством управляемости.
Каноническая форма управляемости. Пусть ранг матрицы
управляемости линейной стационарной управляемой системы (1.5)
равен I (I < п). Рассмотрим неособое преобразование х = Tz, где
матрица преобразования имеет вид Т = [Tj Тг] и строится следующим
образом: Tj является (п х /)-матрицей, и ее столбцами являются
I независимых столбцов матрицы управляемости, Тг является
(п х (п — /))-матрицей, и ее столбцы выбираются так, чтобы матрица Т
была неособой. При таком преобразовании преобразованное уравнение
z ~ Az + Ви,
где А — Т~1АТ, В = Т~[В, принимает вид так называемой канони-
ческой формы управляемости
Z(2)
Ац А12 Z^ Bl
О A22j |z(2)J L0
или
zO) = Anz^ 4- A12Z® 4- Biu
z(2) = A22z(2)
(1.7)
1.2. Управляемость и стабилизируемость объекта управления
15
Здесь — /-вектор, z^ — (п — /)-вектор, Ац — (Z х /)-матрица, А12 —
(I х (п — /))-матрица, А22 — ((п - I) х (п — /))-матрица, В\ — (I х г)-
матрица.
Из структуры уравнений (1.7) видно, что вектор z^ неуправляем,
т. е. на его изменение управление ни непосредственно, ни через другие
фазовые координаты, зависящие от управления, не оказывает никакого
влияния. Вектор z^ вполне управляем, т. е. его можно изменять нуж-
ным образом путем выбора соответствующего управления.
Пример 1.3. Преобразовать уравнения
£ 1 = Х2 + хз + w,
%2 — ^2»
Хз = Хь
£4 = — Х2 ~ Х4
в каноническую форму управляемости.
Решение. Матрицы А, В и их произведения АВ, А2В, А3В
имеют следующий вид:
’О 1
О 1
1 О
О -1
Составив из этих матриц матрицу управляемости, получим
Г1 О
У =[В АВ А2 В А3 В] =
Lo о о
О'
о
I
о
О
О
О
1
1
О
О
Матрица управляемости имеет два независимых столбца; и ее ранг
равен двум. Матрицы Ту, Т2 и Т выберем следующим образом:
'1 О' '0 О' '1 0 0 0'
Ту = 0 0 0 1 , т2 = 1 0 0 0 , Т = [ТуТ2] = 0 0 10 0 10 0
о о. .0 1. 0 0 0 1.
Тогда получим
(° 1 1 0\ /1\
А = Т~'АТ = 1 0 0 0 , в = т~'в = 0
0 0 1 0 0
\0 0 -1 -1) W
16
Гл. /. Преобразования. Управляемость. Стабилизируемость
Используя векторные обозначения z^) — (z\ гъ)Т и z^2) = (2:3 z±)T,
последнее уравнение можно записать в виде
1 о
о о
z0) =
z« +
u,
Z(2) =
1 О
-1 -1
z®.
Стабилизируемость линейных стационарных систем. Одним из
важных понятий при рассмотрении задач управления является стаби-
лизируемость. Управляемая система (объект) называется стабилизи-
руемой, если существует закон управления, при котором замкнутая
система асимптотически устойчива.
Определение 1.4. Линейный стационарный объект
х = Ах + Ви, х Е Я”, и Е Rr
называется стабилизируемым, если существует закон управле-
ния и = Кх, при котором замкнутая система х = (А + ВК)х
асимптотически устойчива.
Критерий стабилизируемое™. Для того чтобы линейная
стационарная управляемая система была стабилизируема, необ-
ходимо и достаточно, чтобы она была ^вполне управляема или,
если она не вполне управляема, матрица А22 в канонической форме
управляемости была устойчива.
Пример 1.4. Исследовать стабилизируемость управляемой си-
стемы, которая описывается уравнением
Х1 = X2 + X3 + U,
&2 ~ ^2,
ХЗ = Яь
= -Х2 “ Х4.
Решение. Эта система была рассмотрена в примере 1.3 и, как
там было показано, эти уравнения при преобразовании в каноническую
форму управляемости принимают вид
z(‘) = ’ 0 1 ' 1 ° z(1 > + ’ 1 0 0 ' 0 z(2) + 1 0 if u,
Z(2) = 1 -1 - 0 -1 Z<2)
Для того чтобы рассматриваемая система была стабилизируема, со-
гласно критерию стабилизируемости матрица в правой части второго
1.2. Задачи
17
уравнения должна быть устойчивой. Характеристическое уравнение
этой матрицы имеет вид
А- 1
1
О
А+1
= А2 - 1 = 0.
Корнями этого уравнения являются A>t2 = ±1, т. е. указанная матрица
неустойчива и, следовательно, система не стабилизируема.
Задачи
1.4. Исследовать управляемость системы, которая описывается
уравнением
х = Ах 4- Ви,
когда элементы матриц.
ап «12 О13\
021 022 а23 I >
оз1 аз2 азз/
(Ь{\
В = I bg I
V3/
принимают следующие значения:
а) оц = 1, 012 = 2, 013 — L а21 = 4, 022 = 3, 023 = 0, 031 = О,
032 = 0, 033 = 2, Ь\ = 0, t>2 = 0, 63 = 1;
б) Оц = 2, 012 = L 013 = 5, 021 — 022 = 2, 023 = 4, 031 — 3,
о32 = 0, азз = 8, Ь\ = 0, Ьг = 1, Ъ$ = 0;
в) Оц = 1, 012 = 2, 013 = 3, 021 = 0, а22 = 3, 023 ~ 4, 031 = О,
оз2 — 2, азз “5, b\ = 1, Ь% = 0, Ьз = 0;
г) Оц = 1, 012 = 2, 013 = 3, 021 — 1, 022 “ 2, 023 = 2, 031 = О,
аз2 — 3, азз — 4, bi = 1, i>2 = 0, Ьз = 0;
д) Оц = 1, 012 = 0, 013 =3, 021 = 1, 022 = 2, 023 = 3, 031 = 1,
Оз2 ~ 0, азз — 2, bi = 0, Ьг “ 1, — 0;
е) оц = 1, 012 = 1> 013 — 0, 021 “ 3, 022 = 2, О2з “0, аз1 = 1,
оз2 = 3, азз = 5, Ь\ = 0, bz — 0, 63 = 1;
ж) Оц = 1, 012 = 1» 013 — 3, 021 = 3, 022 = 2, 023 ”1» O31 = 1,
032 = 0, азз — 4, bi = 0, fc>2 = 1» &з
з) Оц = 3, 012 — 2, 013 = 1» 021 = О,
a3f = 2, 033 — 3, bi = 1, Ьг = 0, Ьз
22 = 49-Жй>айфред = О,
_ двтындагы ПМУ-д1ц*
академик С.Бейсембаее*
18
Гл. 1. Преобразования, Управляемость. Стабилизируемость
и) Оц — 3, О|2 = 1, 013 == 1> 021 = 1> 022 = 4, 023 = 5, Л31 = 2,
оз2 ~ 0, озз = 3, Ь\ = 0, 62 = 1, 63 = 0;
к) Оц = 3, 0)2 == 1> 013 =1» 021 = 1, 022 = 4, 023 = О, O31 = 2,
032 — 2, азз = 3, Ь{ = 0, Ьг = 0, 63 — 1.
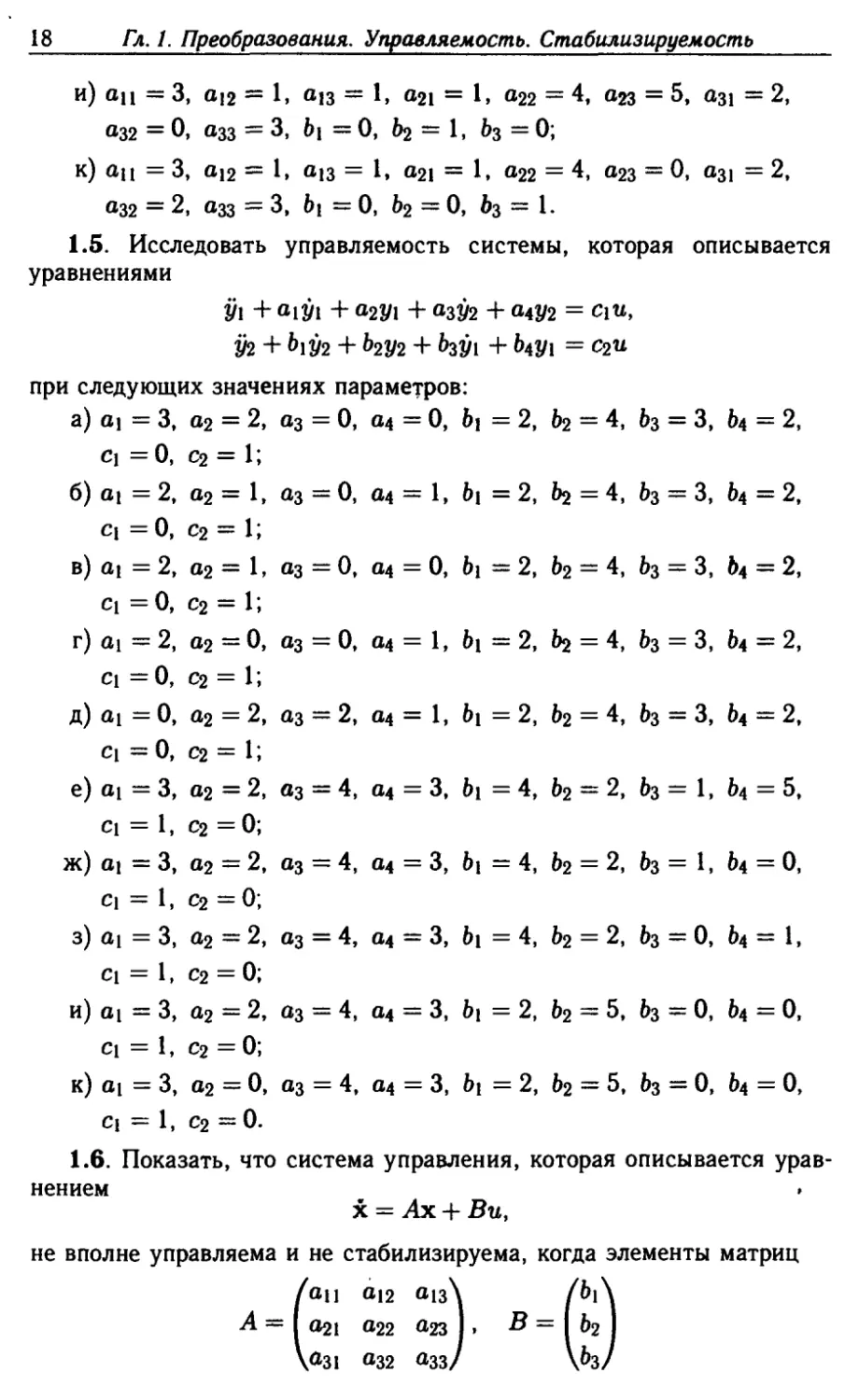
1.5. Исследовать управляемость системы, которая описывается
уравнениями
#1 + 011/1 + 022/1 + 032/2 + 042/2 = CjU,
У2 + &12/2 + Ь2у2 + i>32/l + &4?/1 = C2U
при следующих значениях параметров:
a) ai =3, а2 = 2, 03 = 0, С\ = 0, с2 = 1; 04 =0, 61 = 2, Ь2 — 4, Ьз = 3, 64 = 2,
б) ai = 2, а2 = 1, аз = 0, й =0, с2 = 1; 04 = 1, Ь\ = 2, &2 = 4, Ьз = 3, Ь4 = 2,
в) ai = 2, а2 — 1, оз = 0, ci =0, с2 — 1; 04 = 0, 61 = 2, 62 = 4, Ьз = 3, 64 = 2,
г) ai = 2, а2 = 0, аз = 0, ci =0, с2 = 1; 04 = 1, 61—2, 62 = 4, Ьз = 3, Ь4 = 2,
д) ai = 0, а2 = 2, аз = 2, ci == 0, С2 = 1; 04 = 1, 61 = 2, 62 = 4, Ьз = 3, Ь4 = 2,
е) oi — 3, а2 — 2, аз = 4, ci = 1, с2 = 0; 04 = 3, 61 = 4, 62 2, Ьз = 1, Ь4 = 5,
ж) ai — 3, а2 = 2, аз = 4, ci = 1, с2 = 0; 04 = 3, 61 — 4, 62 = 2, Ьз = 1, Ь4 = 0,
з) ai =3, а2 ~ 2, аз — 4, ci = 1, с2 = 0; 04 “3, 61 = 4, 62 = 2, Ьз = 0, Ь4 = 1,
и) ai =3, а2 = 2, аз = 4, ci = 1, с2 = 0; 04 = 3, 61 = 2, 62 = 5, Ьз = 0, Ь4 = 0,
к) ai =3, а2 = 0, аз = 4, с\ = 1, с2 ~ 0. 04 = 3, 61 = 2, 62 = 5, Ьз = 0, Ъ4 = 0,
1.6. Показать, что система управления, которая описывается урав- нением х = Ах 4- Ви,
не вполне управляема и не стабилизируема, когда элементы матриц /оц 012 О1з\ /ЬЛ А = 1 021 022 023 1 > В = 1 ь2 1 \0з1 оз2 азз/ \Ьз/
1.2. Задачи
19
принимают следующие значения:
а) ац = 1, а\2 = 2, ай = О, а21 ~ 4, 022 = 3, 023 = 0, 031 = О,
^32 — о, озз = 2, Ь\ — 0, 62 = о, t>3 — 1;
б) Оц = 2, 012 — 0» а13 = 5, 021 = 1, 022 = 2, 023 = 4, 031 = 3,
а32 = 0, озз = 8, Ь\ ~ 0, £>2 = 1, £>з = 0;
в) Он = 1, 012 = 2, 013 = 3, 021 = 0, ^22 = 3, 023 = 4, 031 = О,
032 = 2, озз = 5, £>i = l, £>2 = 0, £>з = 0;
г) Оц = 1, 012 = 2, 013 = 3, 021 = 0» а22 = 2, O23 = 2, 031 = О,
032 = 3, озз = 4, £>1 = 1, />2 = 0, Ь3 = 0;
д) Оц = 1, 012 = 0» 013 = 3, 021 = 1, 022 = 2, 023 = 3, 031 = 1,
032 = 0, озз = 2, Ь\ = 0, £>2 = 1, £*з ~ 0;
е) Оц = 1, О]2 = 1, 013 == 0, 021 = 3, 022 = 2, 023 = 0, 031 = 1,
оз2 = 3, озз — 5, £>1=0, £>2=0, = 1;
ж) Оц = 1, 012 = 0, 013 = 3, 021 = 3, 022 = 2, 023 = L 031 = 1,
озз = 0, озз =4, £>i=0, £>2 — 1, £*з = 0;
з) Оц = 3, 012 = 2, 013 = 1, 021 — 0, 022 = 4, 023 = 5, 031 = О,
оз2 = 0, озз = 3, £>i = l, £>2 = 0, £>з = 0;
и) Оц = 3, 012 = 0, 013 = 1» 021 = 1, 022 = 4, 023 = 5, 031 = 2,
оз2 = 0, озз = 3, £>i=0, £>2 = 1, £>з = 0;
к) Оц = 3, 012 = 1, 013 = 0, 021 — 1» 022 = 4, 023 ” 0, 031 = 2,
032 — 2, озз = 3, £>i=0, £>2=0, £>з = 1.
1.7. Показать, что система управления, которая описывается урав-
нением
х = Ах 4- Ви,
не вполне управляема, но стабилизируема, когда элементы матриц
ОЦ О]2 013
021 022 023
,031 032 О33
принимают следующие значения:
а) оц = 1, oi2 = 2, 013 = 0, 021 = — 4, 022 = ~3, 023 = 0, 031 = О,
032 = 0, озз = 2, £>i = 0, £>2 = 0, £>з = 1;
б) Оц = —2, 012 = 0, 013 = 5, 021 = 1, 022 = 2, 023 = 4, а31 = 3,
O32 = 0, озз = —8, £>i=0, £>2 = 1, £>з = 0;
20 Гл. /. Преобразования. Управляемость. Стабилизируемость
в) ац = 1, ai2 — 2, ai3 = 3, Л21 = 0, агг = ~3, агз = 4, лз1 = О,
Л32 = 2, азз = —5, bi — 1, = 0, Ьз ~ 0;
г) ац = 1, ai2 = 2, ai3 — 3, &2i — 0, агг = ~2, агз = 2, аз1 = О,
лзг — 3, азз — ~4, b\ — 1, Ьг = О, Ьз = 0;
д) ац = — 1, ai2 = 0, а^ = 3, &2i = 1, агг = 2, агз = 3, аз1 = 1,
а32 = 0» азз = ~2, bi = 0, Ьг ~ 1, Ьз = 0;
е) ац = — 1, а\2 — 1> а|з = 0, аг1 = —3, агг = —2, агз = 0, аз1 — 1»
азг = 3, азз — 5, bi = 0, Ьг = 0, Ьз = 1;
ж) ац = — 1, а\2 = 0, aj3 — 3, 021 = 3, агг = 2, агз = L аз1 = —1,
азг — 0, азз ~ ~4, Ь\ = 0, Ьг = 1, Ьз = 0;
з) ац = 3, а\2 — 2, ai3 = 1, &2i = О, агг — —4, агз ~ “5, аз1 = О,
азг — 2, азз ~ —3, b\ — 1, Ьг = 0, Ьз = 0;
и) ац = —3, а\2 — 0, а)з = 1, аг1 = 1, агг = 4, агз = 5, аз1 — 2,
Л32 = 0» лзз = “3, Ь\ = 0, Ьг = 1, Ьз = 0;
к) ац = —3, ai2 — 1, ai3 — 0, аг1 = 1, агг ~ ~4, агз = 0, аз1 = 2,
лзг = 2, азз = 3, bi = 0, Ьг = 0, Ьз = 1.
1.3. Наблюдаемость и восстанавливаемость
При синтезе систем с обратной связью управления получаются как
функции от фазовых координат. В общем случае фазовые координаты
не могут быть измерены непосредственно. Доступны измерению (на-
блюдению) координаты выходного вектора у = (у\ у2 ••• Ур)Т- Выход-
ные переменные функционально связаны с фазовыми координатами,
и для реализации управлений с обратной связью необходимо опреде-
лить фазовые координаты по измеренным значениям выходных пере-
менных. В связи с этим возникают проблемы наблюдаемости и восста-
навливаемости, заключающиеся в установлении возможности опреде-
ления состояния объекта (фазового вектора) по измеренным значениям
выходного вектора на некотором интервале времени.
Пусть объект описывается уравнением
x = f(x,u,t), хейп, (1.8а)
и выходной вектор связан с фазовым вектором соотношением
y = g(x,u,t), (1.86)
которое называется уравнением наблюдения или уравнением выхода.
Управляемая система (1.8) называется наблюдаемой или вполне
наблюдаемой, если существует такое t[ (t <t\ < 00), что по дан-
1.3. Наблюдаемость и восстанавливаемость
21
ным измерения выходного вектора у(т) и управления и(т) на ин-
тервале t г t\ можно определить состояние x(t).
Наблюдаемость, или полная наблюдаемость, означает, что имеется
возможность определить фазовый вектор x(t) по будущим значениям
выходного вектора. Однако в задачах управления текущее состояние
объекта должно определяться по прошлым значениям выходного век-
тора, так как по текущим значениям фазового вектора формируется
управление с обратной связью. Поэтому более важным с точки зрения
управления является понятие восстанавливаемости, определяемое сле-
дующим образом [7]:
Определение 1.5. Управляемая система (1.8) называется
восстанавливаемой, или вполне восстанавливаемой, если существу-
ет такое t\ (—оо < t\ < t), что по данным измерения выходного
вектора у(т) и управления и(т) на интервале t\ г t можно
определить состояние x(t).
Для стационарных систем из полной наблюдаемости следует полная
восстанавливаемость и наоборот, поэтому в таких случаях эти понятия
можно не различать.
Наблюдаемость линейных стационарных систем. Рассмотрим
линейную стационарную управляемую систему
x = Ax4-Bu, xeRn, u G Rr, (1.9a)
y = Cx + Pu, ytRp. (1.9b)
Введем в рассмотрение матрицу
Н = [Ст АТСТ ••• (АТ)П-1СТ], (1.10а)
которая называется матрицей наблюдаемости. Эта матрица со-
стоит из столбцов матрицы Ст и столбцов произведений матриц
АТСТ, (АТ)2СТ, ••• , (Ат)п~*Ст и имеет размерность (п х рп). На-
ряду с матрицей наблюдаемости рассмотрим транспонированную мат-
рицу наблюдаемости
Г С I
(1.106)
CAn"\
которая имеет такой же ранг, что и исходная матрица Н.
Критерий наблюдаемости. Управляемая система (1.9)
вполне наблюдаема (восстанавливаема) тогда и только тогда, ко-
гда ранг матрицы наблюдаемости (1.10а) или, что то же, ранг
Транспонированной матрицы (1.106) равен п.
22 Гл. /, Преобразования. Управляемость. Стабилизируемость
Задачи
1.8. Показать, что управляемые системы, которые приводятся ниже,
не вполне наблюдаемы:
a) i] = + 2x2, Х2 = ~2Х[ +Х2, б) ±1 = -2Х[ +Х2, Х2 = XI +2X2,
хз — Xi 4- 2x2 4- Зхз 4- и, хз = 2x2 4- Зхз,
у = ЯГ, в) Х1 = Х2, Х2 = 2X1 + 3X2, хз = Xi 4- 2x2 4- и, 2/ = яг д) Х1 = 2Xj 4-я2, Х2 = Х1 4- 2X2, я3 = “Я1 - 2х3 4-U, У = Я1; У = яг г) Xi = Х2, Х2 = “2X1 + Я2, Яз = -Я2 - Хз 4- и, У = яг е) Xi Х2, Х2 ~ Я1 4- 2X2, Яз = Я1 4-2x2 4-и, У = ЯЬ
1.9. Показать, что управляемые системы, которые приводятся ниже,
вполне наблюдаемы:
а) ±1 = + 2x2 + ®з> Х2 = —2X1 + Х2, хз = xi + 2x2 + Зхз + и, У = хи в) Х\ = Х2, Х2 = 2X1 + 3®2 + ®3> Хз = Х1 + 2X2 + и, У = Хь б) XI = —2X1 +Х2 + Хз, Х2 = Х1 + 2X2, хз = 2x2 + Зхз + и, У = Х\\ г) Х1 = Х2, Х2 = -2X1 +Х2 + х3, Хз = -Х2 - Хз + и, У = Х1\
д) xi = 2xi + Х2, Х2 = Х2 + Хз, хз = -Х| - 2хз + и, У = Xi; е) xi = Х2 + хз, х2 = xi + 2x2, Хз = -Х1 - 2X2 - Хз + и, У = Х1-
1.10. Определить значения параметра а, при которых приводимые
ниже управляемые системы не вполне наблюдаемы:
a) xi = xi + 2хг + а • хз, Х2 = -2X1 + Х2, Хз = XI + 2X2 + Зхз + «> У = xi; б) xi = —2x1 + Х2 + а • хз, Х2 = Xi + 2х2, хз = 2x2 + Зхз + и, У = хг,
1.4, Канонические формы уравнения и модальное управление
23
в) Х[ = Х2,
Х2 = 2x1 4- 3x2 4- а • хз,
Хз = Х1 + 2X2 + и,
У = Х\\
д) Х1 = 2X1 + Х2,
Х2 = %2 + Ct •
хз = -Xi - 2хз + и,
У = ЯГ,
г) Х1 = Х2,
Х2 = -2x1 4-а-хз,
Яз = -Я2 - Хз + U,
2/ = яг,
е) Xi =хг + а-хз,
Х2 = Х1 4- 2X2,
Яз = -Я1 - Х2 - Яз 4- и,
у — Я1.
1.11. Определить значения параметра а, при которых приводимые
ниже управляемые системы вполне наблюдаемы:
a) Xi =хг4-а-хз,
Я2 = Я1 4“ Х2,
Яз = Я2 4-Я4,
Х4 = —Х1 — 3X2 — 2хз — Х4 4- U,
У = яг,
в) Х1 = Х2,
Х2 — Я1 4" Ct • Хз,
Яз = Яз 4- ot • Х4,
Х4 = -Х1 ” 3X2 - 2хз - Я4 4- и,
2/ = яг
д) Х1 = Х2 4-Ct • хз,
Я2 = XI 4- Х2,
Яз = Я2 4-Я4,
х4 = -Х1 — 3X2 - 2хз - Х4 4- и,
г/ = яг
б) Xi = Xi 4-2x2,
Х2 — Х1 4- 3X2 4- Хз 4- а • Х4,
Хз = Х2 4-Хз,
Х4 = — Х1 — 3x2 — 2X4 4- и,
1/ = яг,
г) Х1 = Х2,
Я2 = Я1 4-Х2 4-Ct • Хз,
Яз = Я2 4-я4,
±4 = -Xi - Х2 - 2хз - Х4 4- и,
у = Яь
е) Xi = яг 4-ct-хз,
Х2 = Xi +Х2,
ЯЗ - Я2 4-Х4,
Х4 = -Х1 - 3X2 - 2хз - Х4 4- и,
?/ = Я1.
1.4. Канонические формы уравнения и модальное
управление
Ввиду того, что существует множество эквивалентных форм пред-
ставлений уравнений состояний, можно выбрать из них наиболее удоб-
ное для использования в данном конкретном случае. Такие формы
Уравнений называют каноническими. Поскольку возможны множество
различных приложений, известны несколько канонических форм. Здесь
рассмотрим преобразование уравнений состояний в каноническую фор-
му, называемую управляемой формой Луенбергера.
24
Гл. I. Преобразования. Управляемость. Стабилизируемость
Уравнение состояния вида 1 0 0 ~&п—\ 0 1 0 2 • • • • 0 ' 0 1 -«1. Z + 'О' 0 0 .1. и
z = Az 4- Ви = 0 0 0 ап ~
называется управляемой формой Луенбергера. уравнение матрицы А этого уравнения имеет вид Характеристическое
det(A/ - А) = А” + ai A”-1 + • • • + ап = 0.
Коэффициентами характеристического уравнения являются элементы
последней строки матрицы А.
Теорема 1.1. Для того чтобы уравнение состояния
х = Ах + Bu,xg Rn, и G R (1 11)
неособым преобразованием можно было преобразовать в управля-
емую форму Луенбергера, необходимо и достаточно, чтобы пара
(А, В) была вполне управляема.
Теорема 1.2. Управляемая система (1.11) преобразуется
в управляемую форму Луенбергера путем преобразования
hT '
hTA
, J
hTAn-,_
где векторная переменная h определяется из уравнений
hTB = 0, hTAB = 0, •••, hTAn-‘B = 1.
z = T-'x, T~l =
Пример 1.5. Преобразовать уравнение состояния
О'
о
1.
1
х = Ах + Ви — 0
.1
в управляемую форму Луенбергера.
Решение. Произведения АВ, А2В
имеют вид
О'
1
0.
и матрица управляемости
АВ =
Г21
А2 В = 1
1
Го 1 2'
У = (В АВ А2В)= 1 1 1
[.О 0 1.
Т
1
о
1
1
0
х +
и
1.4. Канонические формы уравнения и модальное управление
25
Так как det У = 1, пара (А, В) вполне управляема. Следовательно,
данное уравнение может быть преобразовано в управляемую форму
Луенбергера.
Характеристическое уравнение имеет вид
ГА-1
det (А/—Л) =
1
А-1
О
О
О
А-1
= (А-1)3 = А3-ЗА2+ЗА-1 =0.
Поэтому элементами последней строки матрицы А будут aj = —3, аг =
= 3, аз = — 1, и преобразованное уравнение имеет вид
1 О'
О 1
-3 з
'О’
О
1
u.
Модальное управление. Если линейный стационарный объект
вполне управляем, то существует такой линейный закон управления,
при котором корни характеристического уравнения замкнутой систе-
мы равны наперед заданным числам. Способ управления, основанный
на размещении корней характеристического управления определенным
образом, называют модальным управлением.
Утверждение 1.2. Пусть характеристическое ;уравнение
вполне управляемой системы
х = Ах 4- Ви, х G Яп, и G R,
имеет вид
Хп 4- а\ Ап * 4" * * * 4" ап — 0.
Для того чтобы характеристическое уравнение замкнутой систе-
мы обладало заданными корнями и имело вид
Xn + dXn~l + -+Сп = 0,
нужно выбрать закон управления вида
и = (a — cfz = (а — с)ТТ *х,
где
hTAn~\
векторная переменная hT в последней матрице определяется из
уравнений
hTB = 0, hTAB = 0, •••, hTAn~[B = 1.
О
1
i =
0
О
1
z +
26
Гл. 1. Преобразования. Управляемость. Стабилизируемость
Пример 1.6. Управляемая система описывается уравнением
х= О
.1
1 0‘
1 О
О 1
Го’
х+ 1 и.
1
О
Определить закон управления, при котором корни характеристического
уравнения замкнутой системы равны А],2 = — 1 ±3j, Аз = — 1.
Решение. Согласно утверждению 1.2, чтобы найти требуемый
закон управления, нужно знать коэффициенты характеристических
уравнений управляемой и замкнутой систем, а также обратную мат-
рицу преобразования уравнений управляемой системы в управляемую
форму Луенбергера. Характеристическое уравнение управляемой си-
стемы имеет вид (см. пример 1.4)
А3 — ЗА2 -Ь ЗА — 1 =0,
а характеристическое уравнение с заданными корнями замкнутой си-
стемы — вид
(А + 1 - 3j)(A + 1 + 3j )(А + 1) = А3 + ЗА2 + 12А + 10 = 0.
В принятых выше обозначениях ai = —3, a# — 3, аз = — 1, ci =
= 3, С2 — 12, сз = 10 и соответственно а = (аз аг ai)T = (—1 3 —3)
и с = (сз сг ci)T = (10 12 3). Чтобы определить матрицу Т_|, нужно
сначала составить и решить систему уравнений
hTB = 0, hT АВ = 0, hT А2 В = 1.
Входящие в эти уравнения матрицы имеют вид
'1 1 О' 'О' 'Г '2'
А = 0 1 0 , в = 1 , АВ = 1 , А2 В = 1
J 0 1. .0. .0. .1.
Поэтому указанные выше уравнения принимают вид
Лг — 0, hi + h% = 0, 2h\ 4- Лг Лз = 1 •
Отсюда для hT получаем hT = (о 0 1). Произведения hTA и hTA2
имеют вид
hTA=(l 0 1), hTA2 = (2 1 1).
Поэтому для матрицы Т 1 получаем соотношение
т-1 =
' hT '
hTA
hTA2
'О 0 1
1 0 1
2 1 1
1.4. Задачи
27
а искомый закон управления принимает вид
и — (а — с)тТ ’я =(-11 -9 -б)
*0
1
2
0
О
1
1
1
1
= —21X1 — 6X2 — 26хз-
Задачи
1.12. Определить обратную матрицу Т 1 преобразования z = Тх,
преобразующего систему
х = Ах + Ви,
(Лц G12 Л1з\ /*1
Я21 Л22 ^23 I > & — I &2
031 032 О33/ \&3
в управляемую форму Луенбергера при следующих значениях элемен-
тов матриц А и В:
а) ан = 1, а>12 = 2, ai3 — 1, 021 — 4, агг = 3, агз = 0, 031 = О,
032 = 0» 033 = 2, Ь[ = 0, &2 “ 0, &з = 1;
б) ац = 2, ai2 = 1, О1з — 5, 021 = 1, 022 = 2, агз = 4, 031 = 3,
032 = 6, азз = 8, Ь\ = 0, &г — 1» 63 = 0;
в) ац = 1, ai2 = 2, ai3 = 3, 021 = 6, агг = 3, агз = 4, 031 = О,
032 ~ 2, азз = 5, bi = 1, Ьг = 0, Ь$ = 0;
г) ац = 1, ai2 = 2, 013 = 3, 021 = 1, агг = 2, агз = 2, аз1 = О,
O32 = 3, азз — 4, bi = 1, &г = 0, 63 = 0;
д) ац = 1, ai2 = 5, aj3 = 3, 021 = 1, агг — 2, агз = 3, 031 = 1,
O32 “ 0, азз — 2, 61=0, 62 — 1» 63 — 6;
е) ац = 1, а\2 = 1, 013 = 7, аг1 = 3, агг = 2, агз == 0, 031 = 1,
032 = 3, азз = 5, bi = 0, 6г = 0, 63 = 1;
ж) ац = 1, ai2 = 1, 013 = 3, 021 = 3, агг = 2, агз == 1> 031 = 1,
O32 = 0, азз — 4, Ь\ = 0, 6г = 1» 63 =
з) ац = 3, ai2 = 2, 013 = 1, 021 = 1, агг — 4, агз 5, аз1 = О,
032 = 2, азз = 3, bi = 1, 62 = 0, 6з = 0;
и) ац = 3, aj2 = 1, ап = 1» 021 = 1, агг = 4, агз = 5, 031 = 2,
032 = 0, азз ~ 3, bi = 0, £>г “ 1» 63 = 6;
28
Гл. 1. Преобразования. Управляемость. Стабилизируемость
к) вц = 3, 012 = 1» а13 = ®21 = 1» а22 = 4, 023 = О, O31 = 2,
а32 = 2, азз = 3, Ь] = 0, t>2 = о, Ьз = 1.
1.13. Записать управляемой форме Луенбергера уравнения систем,
у которых характеристическое уравнение имеет следующие корни:
а)-1,-1,-2,-2; б)-1,-2,-3,-3;
в) —1 + г,-1 — г,— 2 + г,— 2 4-г, г) —1 + г,—1 — г,—2,-3;
д) —2, —3, —2 + i, —2 — t; е) -1,-1,-2,-3;
ж) -2, -2, -1,-3; з) -3 + i, -3 - i, -1, -2;
и) -3 + х; -3 - »; -2, -2; к) -2 + Зх, -2 - 3», -2, -3.
1.14. Для объекта управления
(1 2 1\ /0\
О 2 1 1 х+ | О 1 и
0 12/ \1/
определить алгоритмы управления, при которых характеристическое
уравнение синтезированной системы имеет следующие корни:
а)-1,-1,-1; б)-1,-2,-3;
в) -1,-1 +2х,-1 — 2х; г)-3,-2,-2;
д)-1,-2 +х,-2-х; е)-2,-2,-1;
ж) —2, —2 + Зх, —2 — 3i; з) —3, —2 + х, —2 — х;
и) —2, —4, —3; к) —2, —2 + i, — 2 — х.
Ответы
1.1. a) i\ = Х2, хг = хз, хз = —х3 — хг + 10и, у = xi;
б) Х1 = Х2, хг = х3 + 10и, хз = —хз — хг, у = хи
в) xi = хг, хг = хз + 10и, хз = -2хз — 4x2 - 3xi - 10и,
У = х\\
г) xi = хг, хг = хз — 7и, хз = —4хз — 2хг — xi + 23u, у = хц
д) xi = хг, хг = хз + и, хз = —2хз - 4x2 - Зхц у = хц
е) xi = хг — и, хг = хз + 7и, хз = —4хз - 2хг — ®i — 26u,
у = xi + и;
ж) xi = хг — 7и, хг = хз + 29и, хз == —4хз — 2хг — - 101u,
у = xi + 2и;
з) xi = хг + 1,25и, хг = хз + 0,62и,
хз = — 0,5хз — 2,5x2 — 1,5х] — 3,69и, у = xi + 0,5u;
И) X] = Х2 + 2u, Х2 = Хз — U, Хз = Х4 + 5и,
±4 = —2x4 — хз — 5x2 — 3xi — 18и, у = xi;
к) Х| = Х2 + 0,5u, Х2 = Хз + «, Хз = Х4 + 0,5и,
Х4 = -Х4 - 2хз - 3x2 - xi - 3,5и, у = xi;
1.4. Ответы
29
1.2. a) ii = Х2 4- и, ±2 = хз, хз — —4хз - 2x2 — и, у = жв
6) ii = Х2 + 0,5и, ±2 = хз 4- и, хз = —2и — 2хз — Х2, у = хц
в) £j = Х2, Х2 = яз + 4и, хз = 4хз — 2x2 — Я1 — 15и, у = х\\
г) £i = Х2, Х2 = хз 4- и, хз = 0,25и — хз — 0,5хг — 0,25xj,
У = яг
д) £i = Х2 — 7и, ±2 — хз 4- 28и, £3 = -4хз — 2x2 ~~ 97и,
у = х\ 4-2и;
е) £1 = Х2 — 1,5и, ±2 = хз 4- 4и, £3 = —2хз — Х2 — би,
у = Xi 4* и;
ж) £1 = Х2, Х2 = хз 4- 4и, £3 — —О,5хз — 2xj — 5и,
у = Xi 4- 2и;
з) xj _ Х2, Х2 = хз — Зи, £3 = —2^2 — 3^1 — 2и, у = xi 4- 2и;
и) £1 = Х2 4- 8и, Х2 s= хз — 12и, £3 = Х4 4- 8и,
£4 = Зби — 2x4 — 4хз “ бхь У ~ яг,
к) £i = Х2 4- 0,5и, ±2 = хз 4- и, £3 = Х4 4- 0,5и,
£4 = —2x4 — хз — 3xi * У — Я1 •
1.3. а) £1 = Х2, £2 — яз, £3 = —xi — 3x2 — 2хз — ЗХ4 — 4xs — Яб,
£4 = Х5, £5 = х6, £б = -3xi - 5x2 - яз - 2x4 - 4x5 - 2хб;
б) £i = Х2, £2 = яз, £3 = —2x2 — Зхз — 5x4 — 6x5 — 2хб,
Х4 — Х5, Я5 — Яб, Хб — Я} — 7x2 ~~~~ 6x3 ~ 3x4 6x5 ~~~ 4X6,
в) £1 = Х2, £2 = Яз, £3 = —2X1 - 3X2 — 2хз — 3X4 — 4X5 “ 4X6,
£4 = Я5, £5 = Хб, £б — —2X1 — 4X2 — Я4 — 7X5 — 5хв;
г) £1 = Х2, £2 = Яз, £3 = —Х1 — 3x2 “ 2хз — 3X4 — 4X5 “ Яб,
£4 = Я5, £5 = хе, £б = -2xi “ 4x2 — Я4 — 7x5 ~ 5хб;
д) £1 = Х2, Х2 = Яз, £3 = -Х1 — 2x2 — Зхз — 4X4 — 5x5,
£4 — Я5, £5 = Х6, £б = —Я1 — 7x2 — 6x3 — 3X4 ~ 6x5 — 4Хб*,
е) £1 = Х2, £2 = яз, £3 = —xi — 2x2 — Зхз — 4x4 ~ 6x5,
Я4 = я5, £5 = х6, £б = 2x2 4- 5х5 - 2x6',
ж) £1 = Х2, £2 = Яз, £3 = 2xi 4- 2x2 — Х3 — Х4 4- 2хб,
£4 = Я5, £5 = Х6, £б = —3X1 — 5X2 — Яз — 2X4 — 4X5 — 2X61
з) £1 = Х2, Х2 == Яз, £3 = -2яг - Зхз - 5X4 - 6x5 - 2X6,
£4 = xs, £5 = Хб, £б = —Я[ — 5x2 4- Зхз 4- 2x4 — 2хб’,
и) £1 = Х2, Х2 = Яз, £3 = —2X1 — 2x2 — 2x4 — 3X5 4- 5x6,
Я4 — Я5, Х5 — яб, Хб — Х2 Х4 2x5 5X6,
к) £1 = Х2, £2 = Яз, £3 = -2x4 — Я5 4- 5X6,
£4 = Х5, £5 — Хб, £б = —Я1 — 2хз — Я4 — 3X5 — 5X6.
1.4. а) вполне управляема, б) вполне управляема, в) не вполне
управляема, г) вполне управляема, д) не вполне управляема, е) не
вполне управляема, ж) вполне управляема, з) не вполне управляема,
и) вполне управляема, к) вполне управляема.
30 Гл, 1. Преобразования. Управляемость. Стабилизируемость
1.5. а) не вполне управляема, б) вполне управляема, в) не вполне
управляема, г) вполне управляема, д) вполне управляема, е) вполне
управляема, ж) вполне управляема, з) вполне управляема, и) не вполне
управляема, к) не вполне управляема,
1.10. а) а = 0, а — 2; б) а — 0, а = 0,5; в), г), д) а = 0; е) а =
= 0, а = 3.
1.11. а) при всех а, кроме а = 0 и а = -2; б), в), г), д) при всех
а, кроме а — 0; е) при всех а, кроме а — 0 и а = 1.
/ 0 0,25 0 \ / ' 0 0 0 \
1.12. а) 1 0,75 0 : б) 1 0 2,667 1;
< 4 4,25 1 ч 10 1 26,333 /
( 0 0 0,0833 \ 0 0 0,333
в) | 0 0,1667 0,4187 ; г) 0 1 1,333
< 1 1,333 2,75 ) 1 6 7,333
( 0 0 0,2 ( 0 0,0476 0
д) | 0,2 0 0,4 уе> 0,1429 0,0952 0
к 0,6 1 1,4 \ 0,4286 0,333 1
/ 0 0 1 \ / '0 0 0,5 \
ж) 1 0 1 г 3) 0 1 1,5 I;
\ 5 1 19 / \ < 1 7 9,5 /
/ 0 0 5 \ / 0 1 0 \
и) 1 0 1,5 ; к) 1 4 0.
\ 6 1 5,5 / \ 7 17 1 /
1.13. а) ±1 = ®2, Х2 = Хз, = Х4, ±4 = — 4xi — 12x2,- 13хз~ 16x4+11;
б) ±i хг=^з» £3=24, Х4 — -18xi-39x2-29x3-9x4+u;
в) ±1=Х2, ±2 = ^3» Х3 = Х4, Х4--10X1-18X2“ 15^3-6Х4+и;
г) XI =Х2, Х2 = Хз, Х3 = Х4, Х4 = — 12X1 — 22X2“ 18x3 — 7X4+11;
д) Х1=Х2, Х2 = ЯЗ> Х3 = Х4, Х4 = —30X1—49x2 —31хз-9х4+и;
е) Х1=Х2, Х2 = Хз, Хз=Х4, Х4 = —6X1-17X2—17X3 —7x4+и;
ж) Х1=хг, Х2=яз, ±3—х4, х4 = —12xi-28x2—23хз—8х4+и;
з) Х1=Х2, Х2 = Хз, Хз = Х4, Х4 = —20X1—42х2-30хз-9х4+и;
и) Х1=Х2, Х2 = ХЗ, Х3—Х4, Х4 = —40X1—64x2 —38хз—10х4+и;
к) Х1~Х2, Х2-Х3, х3=Х4, Х4 = -78х1-89х2-39хз-9х4+и.
1.14. a) и =-(8X1 + 12х2+ 8х3); б) u =-(24xj + 13х2 + 11х3);
в) и — -(16xi + 8x2 + 8x3); г) и = -(36x1 + 9x2 + 12хз);
д) и = -(20xi + 12х2); е) и = —(18xi + 13х2 + 10х3);
ж) и = —(54xi + 7x2 + 11яз)’» з) и = -(40x1 + 6x2 + 12х3);
и) и — -(60x1 + ^2 + 14хз); к) и = —(30xi + 9хг + 11х3).
Глава 2
НЕЛИНЕЙНЫЕ СИСТЕМЫ. МЕТОД ФАЗОВОЙ
ПЛОСКОСТИ
Практически все системы управления, строго говоря, являются
нелинейными, т. е. описываются нелинейными уравнениями. Линей-
ные системы управления являются их линейными моделями, которые
получаются путем обычной линеаризации — линеаризации, состоящей
в разложении нелинейных функций в ряд Тейлора и отбрасывании
нелинейных слагаемых. Однако такая линеаризация не всегда возмож-
на. Если нелинейность допускает обычную линеаризацию, то такая
нелинейность называется несущественной. В противном случае нели-
нейность называется существенной. Существенными нелинейностями,
в частности, обладают всякого рода релейные элементы. Даже и в тех
случаях, когда обычная линеаризация возможна, часто на конечном
этапе исследования может потребоваться рассмотрение исходной нели-
нейной модели.
2.1. Особенности нелинейных систем. Определение
устойчивости. Изображение процессов на фазовой
плоскости
Особенности нелинейных систем. Нелинейные системы по срав-
нению с линейными системами обладают рядом принципиальных осо-
бенностей. В частности, такими особенностями являются следующие:
— не выполняется принцип суперпозиции, и исследование нели-
нейной системы при нескольких воздействиях нельзя сводить к
исследованию при одном воздействии;
— устойчивость и характер переходного процесса зависят от вели-
чины начального отклонения от положения равновесия;
— при фиксированных внешних воздействиях возможны несколько,
а иногда и бесконечное множество положений равновесия;
— возникают свободные установившиеся процессы, которые в ли-
нейных системах невозможны (например, автоколебания):
Универсальных аналитических (математических) методов исследо-
вания нелинейных систем нет. В процессе развития теории автома-
32 Гл. 2. Нелинейные системы. Метод фазовой плоскости
тического управления были разработаны различные математические
методы анализа и синтеза нелинейных систем, каждый из которых
применим для определенного класса систем и задач. Наиболее широко
используемыми методами исследования нелинейных систем являются
метод фазовой плоскости; метод функций Ляпунова; метод гар-
монической линеаризации (метод гармонического баланса); методы
исследования абсолютной устойчивости и др.
Любое исследование более или менее сложных нелинейных систем,
как правило, заканчивается математическим моделированием. И в этом
отношении математическое моделирование является одним из универ-
сальных (неаналитических) Методов исследования.
Определение устойчивости. Линейная система называется устой-
чивой, если общее решение однородного описывающего ее диффе-
ренциального уравнения стремится к нулю при стремлении времени
к бесконечности. Очевидно, это определение нельзя распространить на
нелинейные системы. Поэтому в общем случае используются другие
определения устойчивости. Существует множество различных понятий
и определений устойчивости. В этой книге будут рассмотрены наиболее
широко используемые понятия устойчивости, основанные на определе-
ниях, данных А.М. Ляпуновым.
Пусть система управления описывается уравнениями
Vi = Yi(yi>V2. УпЛ), »=1, 2, ...,п
или в векторной форме
y = Y(y,t). (2.1)
Допустим, что y*(t) = (y*(t) у% W -У*М)Т ” частное решение урав-
нения (2.1), которое описывает интересующее нас движение. Это дви-
жение и само решение называют невозмущенным движением (тра-
екторией). Любое другое решение и движение, которое описывается
этим решением, называют возмущенным движением (траекторией).
Принимается, что в фазовом пространстве (пространстве состоя-
ний) Rn рассматриваемой системы введена эвклидова метрика (нор?
ма), т.е. длина (норма) вектора у и расстояние между точками у™
и у (^определяются следующим образом:
||у|| = 1x1 = a 5ZX2 ’ 1у(|) - у(2)1= \ 52 fa*0 ~ ^2)>2 •
N i=i i=i
Если y(t) = (yi(t) yz(t) •• ym(t))T — какая-либо траектория систе-
мы (2.1), то точка в фазовом пространстве, соответствующая этой
траекторий в текущий момент времени t, называется изображающей
точкой.
Определение 2.1. Невозмущенное движение y*(t) называ-
ется устойчивым по Ляпунову, если для любого положительного
2.L Особенности нелинейных систем. Определение устойчивости 33
числа е найдется такое положительное число 6, что расстояние
между изображающими точками невозмущенной и возмущенной
траекторий y*(t) и y(t) в любой момент времени t to меньше е,
если только расстояние между этими траекториями в начальный
момент t = to меньше 6, т. е. если выполняется следующее условие:
|y*(t) - у(*)1 < £, vt > to. если |y*(to) - у (to) I < S. (2.2)
Число 6, которое определяется по заданному числу е, в общем
случае зависит как от в, так и от начального момента to- В том случае,
если можно выбрать число 6, не зависящее от начального момента to,
говорят, что невозмущенное движение равномерно устойчиво.
Определение 2.2. Невозмущенное движение называется
асимптотически устойчивым, если оно устойчиво по Ляпунову и су-
ществует такое положительное число т/, что расстояние между
изображающими точками невозмущенной и возмущенной траекто-
рий стремится к нулю при стремлении времени к бесконечности,
если только расстояние между этими траекториями в начальный
момент меньше т/, т. е. выполняется следующее условие:
|y*(t) - y(t)| 0 при t-+ оо, если |y*(to) - y(to)| < (2.3)
Прежде чем переходить к другим понятиям устойчивости, преоб-
разуем исходное уравнение. Дело в том, что при исследовании устой-
чивости методом функций Ляпунова уравнения системы управления
должны быть записаны в отклонениях, т. е. так, чтобы невозмущенно-
му движению соответствовало нулевое решение.
Введем новые переменные, которые определяются следующим обра-
зом: х — у - у*. В новых переменных уравнение (2.1) примет вид
x = X(x,t), (2.4)
где X(x,t) = Y(x + y*,t) -y*(t). При этом невозмущенному движе-
нию системы (2.4) соответствует нулевое решение x*(t) = 0. Кроме то-
го, нулевое решение (начало координат) является положением равнове-
сия системы (2.4). Действительно, имеем: Х(0, t)=Y(y*, t)-y*(t)=O.
Таким образом, при таком преобразовании проблема устойчивости
невозмущенного движения сводится к проблеме устойчивости поло-
жения равновесия. Любое ненулевое решение является возмущенным
движением.
Определение 2.3. Положение равновесия х = 0 системы (2.4)
называется устойчивым по Ляпунову, если для любого положи-
тельного числа е найдется такое положительное число 6, что
в любой момент времени t to расстояние от изображающей точ-
ки возмущенного движения до начала координат |x(t)| меньше €,
34 Гл, 2, Нелинейные системы. Метод фазовой плоскости
если начальное отклонение |x(to)| меньше 6, т.е. если выполняется
следующее условие:
|x(t) | < £ Vt to» если |x(to) | < 5.
Определение 2.4. Положение равновесия х = 0 системы (2.4)
называется асимптотически устойчивым, если оно устойчиво по
Ляпунову и найдется такое положительное число г], что возмущен-
ное движение x(t) стремится к началу координат, если начальное
отклонение |x(to)| меньше ту, т.е. выполняется следующее условие:
x(t) —► 0 при t —► оо, если |x(to) | < ту.
Приведенным определениям устойчивости можно дать следующую
геометрическую интерпретацию. Устойчивость по Ляпунову означает,
что если задана сфера S£ радиуса е, то существует сфера S& ра-
диуса 6 такая, что если возмущенное движение начнется внутри
сферы S&, то изображающая точка никогда не достигнет сферы S£,
т. е. движение будет происходить внутри этой сферы (рис. 2.1, а).
Асимптотическая устойчивость означает, что выполняется условие
устойчивости по Ляпунову и существует сфера Sv радиуса Т} та-
кая, что если возмущенное движение начинается внутри сферы
Sv, то оно стремится к началу координат при стремлении времени
к бесконечности (рис. 2.1,6).
Рис. 2.1.
Если положение равновесия х = 0 асимптотически устойчиво, то
множество всех начальных точек х°, из которых возмущенное движе-
ние приходит в начало координат при стремлении времени к беско-
нечности, называется областью притяжения начала координат. Иначе
говоря, если точка х° принадлежит области притяжения начала коор-
динат, выполняется условие
limx(x°,t) —> 0 при t —► 00,
где x(x°,t) — решение уравнения (2.4) при начальном условии x(to) =
= х°(х(х°, to) — х°).
2.1. Особенности нелинейных систем. Определение устойчивости 35
Определение 2.5. Положение равновесия х = 0 системы (2.4)
называется глобально устойчивым, если оно устойчиво по Ляпу-
нову и при любых начальных условиях все ее фазовые координаты
ограничены при всех t to.
Это определение устойчивости тесно связано с определением
устойчивости по Лагранжу. Система (2.4) называется устойчивой
по Лагранжу, если все ее решения ограничены на всем интерва-
ле 0 t < оо. Очевидно, положение равновесия х = 0 системы (2.4)
будет глобально устойчиво, если оно устойчиво по Ляпунову
и устойчиво по Лагранжу.
Определение 2.6. Положение равновесия х = 0 системы (2.4)
называется асимптотически устойчивым в целом или глобально
асимптотически устойчивым, если оно устойчиво по Ляпунову
и возмущенное движение стремится в начало координат из любого
начального положения.г
Другими словами, положение равновесия называется глобально
асимптотически устойчивым, если его область притяжения совпадает
со всем фазовым пространством.
Теперь рассмотрим, как соотносится определение устойчивости ли-
нейных систем с рассмотренными здесь определениями устойчивости.
Если положение равновесия линейной системы устойчиво, то воз-
мущенное движение стремится к положению равновесия из любо-
го начального положения. Так что принятое в теории линейных си-
стем определение устойчивости совпадает с определением глобальной
асимптотической устойчивости. В случае линейных систем положе-
ние равновесия (система) считается неустойчивым, если не все корни
характеристического уравнения расположены в левой полуплоскости.
Однако в общем случае с понятием неустойчивости не так все просто.
Поэтому специально остановимся на его определении. При этом, как
и выше, сферу радиуса р с центром в начале координат обозначим Sp.
Определение 2.7. Положение равновесия х = 0 системы (2.4)
называется неустойчивым, если существует такое число е > 0, что
для любого числа 6 > 0 найдется такая точка внутри сферы S&,
что возмущенное движение, начинающееся в этой точке, достига-
ет сферы S£.
Или, другими словами, положение равновесия х = 0 системы (2.4)
называется неустойчивым, если существует такое число е > 0, что
не найдется сферы S&, которая не содержала бы внутри себя точ-
ки, начиная с которой возмущенное движение достигает сферы S£.
Это определение является логическим отрицанием определения
устойчивости по Ляпунову. Поэтому если положение равновесия не яв-
ляется устойчивым по Ляпунову, то оно неустойчиво.
Положение равновесия линейной системы, неустойчивое в том
смысле, как это принято в теории линейных систем, не обязательно
36
Гл. 2. Нелинейные системы. Метод фазовой плоскости
будет неустойчивым в выше определенном смысле. Если линейная
система неустойчива, но имеет место маргинальная устойчивость (ха-
рактеристическое уравнение не имеет правых корней, но имеет чисто
мнимые корни), то система может быть устойчива по Ляпунову.
Изображение процессов на фазовой плоскости. Если уравнения
системы управления представлены в нормальной форме, то ее вектор
состояния однозначно определяет состояние системы. Каждому состо-
янию системы в пространстве состояний соответствует точка. Точка,
соответствующая текущему состоянию системы, называется изобра-
жающей точкой. При изменении состояния изображающая точка опи-
сывает траекторию. Эта траектория называется фазовой траекторией.
Совокупность фазовых траекторий, соответствующая всевозможным
начальным условиям, называется фазовым портретом.
Наглядно фазовую траекторию и фазовый портрет можно предста-
вить в случае двухмерного фазового пространства. Двухмерное фазо-
вое пространство называется фазовой плоскостью.
Фазовая плоскость — это координатная плоскость, в которой по
осям координат откладываются две переменные (фазовые координаты),
однозначно определяющие состояние системы второго порядка. Метод
анализа и синтеза системы управления, основанный на построении
фазового портрета, называют методом фазовой плоскости.
Рассмотрим систему управления второго порядка, которая описыва-
ется уравнениями
XI =Х1(®1,ж2Ц
x2 = X2(xitx2).]
Решение этой системы дифференциальных уравнений
Xi = Xi(xQtt), i = 1, 2
при начальном условии x(to) — х° = (х^ х®)7 являются параметриче-
скими уравнениями фазовых траекторий. Параметром здесь выступает
время. Построив фазовые траектории по этим уравнениям при различ-
ных начальных условиях, получим фазовый портрет.
Уравнения (2.5) являются дифференциальными уравнениями фазо-
вых траекторий в параметрической форме. Разделив второе уравнение
на первое, получим дифференциальное уравнение
dx2 = Х2(х\,х2)
dx\ Xi (#1, Х2) *
решение которого непосредственно связывает фазовые координаты. Это
уравнение будем называть (непараметрическим) дифференциальным
уравнением фазовых траекторий.
Точки, в которых правая часть уравнения (2.6) равна отношению
нулей, называются особыми. Особые точки являются корнями системы
2.1. Особенности нелинейных систем. Определение устойчивости 37
уравнений
Х<(хьх2) = О, i=l, 2.
Как следует из уравнений (2.5), в особых точках фазовая скорость х
равна нулю. Следовательно, особые точки являются положениями рав-
новесия. Через особые точки может проходить более одной траектории
в то время, как через неособые точки проходит только одна траектория.
Часто при изображении процессов на фазовой плоскости за фазо-
вую координату Х2, которую откладывают по оси ординат, принимают
производную координаты Х|, откладываемой по оси абсцисс. В этом
случае уравнение (2.6) принимает вид
d%2 __ X2(xi, ^2)
dxi Х2
и фазовые траектории обладают следующими свойствами. В верхней
полуплоскости изображающая точка движется слева направо, так как
±1 = Х2 > 0 и х\ возрастает. В нижней полуплоскости, наоборот,
изображающая точка движется справа налево, так как xj = Х2 < О
и х\ убывает. На оси абсцисс (Х2 = 0) производная dx2/dx\ = 00
(за исключением точек равновесия), и поэтому фазовые траектории
пересекают ось абсцисс под прямым углом.
По фазовому портрету можно судить о характере переходных про-
цессов. В частности, по фазовой траектории можно построить без
особых расчетов качественно временную характеристику — кривую за-
висимости xi от времени, и, наоборот, по временной характеристике
можно качественно построить фазовую траекторию.
В качестве примера сначала по фазовой траектории построим вре-
менную характеристику, а затем по временной характеристике — фазо-
вую траекторию. Пусть задана фазовая траектория (рис. 2.2 а). Отме-
тив на ней характерные точки: начальную точку, точки пересечения
Рис. 2.2.
38 Гл. 2. Нелинейные системы. Метод фазовой плоскости
с осями координат, нанесем соответствующие им точки на временной
плоскости и соединим их плавной кривой (рис. 2.2,6).
Пусть теперь задана временная характеристика (рис. 2.3, а). От-
метив на ней характерные точки: начальную точку, точки экстрему-
ма и точки пересечения с временной осью, нанесем соответствую-
щие им точки на фазовую плоскость и соединим их плавной кривой
(рис. 2.3,6).
Задачи
2Л. По фазовым траекториям
характеристику.
качественно построить временную
б)
2.1. Задачи
39
е)
40
Гл. 2. Нелинейные системы. Метод фазовой плоскости
2.2. По временной характеристике качественно постройте фазовую
траекторию.
2.1. Задачи
41
d)
е)
*)
42
Гл. 2. Нелинейные системы. Метод фазовой плоскости
2.2. Метод фазовой плоскости исследования систем
По фазовому портрету системы можно судить об ее устойчивости
и характере переходных процессов. И методом фазовой плоскости
исследования систем называют метод, основанный на построении их
фазового портрета. Достоинством метода фазовой плоскости является
то, что он позволяет наглядно представить всевозможные процессы,
происходящие в системе, и что он является точным, а не прибли-
женным, как, например, метод гармонической линеаризации. Его недо-
статком является то, что он применим только для систем второго
порядка.
Процесс анализа нелинейных систем методом фазовой плоскости
рассмотрим на конкретных примерах.
Пример 2.1. Исследовать процессы в нелинейной системе с реле
с зоной нечувствительности (рис. 2.4, а).
Решение. Система описывается следующими уравнениями:
у = ut e — gQ — yt и = <
1,
О,
-1,
е > а,
|е| а,
е < —а.
Здесь задающее воздействие является постоянным. Введем новые пе-
ременные: х\ = е, Х2 — х\. В новых переменных уравнения системы
примут вид
' 1,
и — < О,
2С1 — Х% Х2 = ~Uf
-1.
xi > а,
|®1| а,
xi < —а.
Разобьем фазовую плоскость на три области I, II, III прямыми xi =
= а и х\ = —а (рис. 2.4,6). В пределах каждой области и — const.
Поэтому, разделив в последних уравнениях второе уравнение на первое
и проинтегрировав его, получим х% = —2их[ + С.
В области I (ж| < —а) и ~ — 1, и уравнение фазовых траекторий
имеет вид х% = 2xi + Ci и определяет семейство парабол, направ-
ленных вправо. В области II (|zi| а) и = 0, и уравнение фазовых
траекторий имеет вид х% = С2 и определяет семейство прямых, па-
раллельных оси абсцисс. В области III (х\ > а) и= 1, и уравнение
фазовых траекторий имеет вид х% = —2zi +С3 и определяет семейство
парабол, направленных влево.
Как видим, уравнения фазовых траекторий во всех трех областях
отличаются между собой, и при переходе через границу с одной обла-
сти на другую происходит переключение с одного вида траекторий на
другой. Линии, на которых происходят такие переключения, называ-
ются линиями переключения.
2.2. Метод фазовой плоскости исследования систем
43
Л В
I А1 II Д' III
а) 0
Рис. 2.4.
На основе полученных уравнений построен фазовый портрет си-
стемы и представлен на рис. 2.4,6. Как следует из этого рисунка,
при ненулевых начальных условий в системе возникают незатухаю-
щие колебания. Амплитуда колебаний зависит от начальных условий.
Положение равновесия (начало координат) неустойчиво, так как если
принять г < а, то какое бы малое положительное число S не выбрали,
возмущенное движение, начинающееся внутри сферы радиуса 6 и не
на оси абцисс, всегда достигнет сферы с радиусом е.
Пример 2.2. Построить фазовый портрет и исследовать систему,
представленную на рис. 2.5.
Рис. 2.5.
Решение. Система описывается уравнениями
y — k\at а = с signe, е = -(к^у + у).
Вводя новые переменные zi = у, эти уравнения можно преоб-
разовать к виду
±1 = Х2, Х2 = -к\С sign(fc2^2 + Ж1).
Разделив второе уравнение на первое, получим уравнение
dx2 _ —к\с sign(fc2^2 + Ж1)
dX[ Х2
Прямая АВ на рис. 2.6, которая описывается уравнением к2Х2 + х\ = О,
или Х2 = —(1/&2)яь делит фазовую плоскость на две области: область I
44 Гл. 2. Нелинейные системы. Метод фазовой плоскости
(£2^2 + xi > 0) и область II (k%X2 + < 0). Последнее уравнение
в области I принимает вид
^3*2 ~к\С _ > ,
_— =------- или Х2ОХ2 = — к[Сах\9
аХ\ Х%
в области II — вид
— = ----- ИЛИ X2<iX2 = k\cdx\.
dX[ Х2
Рис. 2.6.
Решив эти уравнения, получаем следующие уравнения для фазовых
траекторий:
в области I х% = — 2к[СХ\ + Сь
в области II х% = 2к\сх\ + Сг.
Эти уравнения являются уравнениями парабол, направленных навстре-
чу друг другу. На основе этих уравнений построен фазовый портрет
и представлен на рис. 2.6. Из этого рисунка следует, что если изоб-
ражающая точка не находится на линии переключения (прямая АВ),
то она до достижения этой прямой будет двигаться по одной из фа-
зовых траекторий. Как только изображающая точка пересечет линию
переключения, она попадает на одну из фазовых траекторий, направ-
ленных в сторону линии переключения. Поэтому изображающая точка
опять будет двигаться в сторону линии переключения, пока она ее
не пересечет. Как только изображающая точка снова пересечет линию
переключения, она опять окажется на фазовой траектории, направлен-
ной в сторону линии переключения. Поэтому изображающая точка по
достижении линии переключения будет двигаться по ней, теоретически
совершая колебания с бесконечно малой амплитудой и бесконечно
большой частотой. В действительности, так как реле обладает конеч-
ной скоростью переключения, частота не будет бесконечно большой,
а амплитуда — бесконечно малой.
Таким образом, когда изображающая точка достигнет линии пере-
ключения, она теоретически будет скользить по этой линии и двигаться
2.2. Задачи
45
к положению равновесия. Такой процесс называют скользящим режи-
мом.
Системы с переменной структурой. Структура системы опреде-
ляется составом элементов (звеньев) и связью между ними. Изменить
структуру системы — это значить изменить состав ее элементов или
связи между элементами.
Системой с переменной структурой (СПС) называют систему,
в которой структура в процессе ее функционирования изменяется на
основе текущей информации для достижения определенной цели —
обеспечения устойчивости, улучшения качества и т.п.
Использование принципов построения СПС при синтезе систем
управления позволяет достичь устойчивости и приемлемого качества
в тех случаях, когда параметры объекта изменяются в широких преде-
лах или отсутствует информация, необходимая для реализации обыч-
ных алгоритмов управления с фиксированной структурой, обеспечива-
ющих заданные требования к системе.
Задачи
2.3. Дана система (рис. 2.7), состоящая из линейного звена с пе-
редаточной функцией Й^(р) — Ъ/pL и нелинейного звена, имеющего
характеристику идеального звена (рис. 2.8, а) с параметром с = 2.
Рис. 2.7
Исследовать: а) устойчивость невозмущенного движения x(t) = 0;
б) характер переходного процесса.
Рис. 2.8
46
Гл. 2. Нелинейные системы. Метод фазовой плоскости
Рис. 2.9
2.4. Дана система (рис. 2.7), состоящая из линейного звена с пере-
даточной функцией Wi (р) = 5/р2 и нелинейного звена, имеющего ха-
рактеристику релейного звена с зоной нечувствительности (pic. 2.8, б)
и параметрами а = 1 и с = 2.
- Исследовать: а) устойчивость невозмущенного движения. x(t) = 0;
б) характер переходного процесса.
2.5. Дана система (рис. 2.7), состоящая из линейного звена с пе-
редаточной функцией И^(р) = 5/р2 и нелинейного звена, имеющего
линейную характеристику с насыщением (рис. 2.9, а) и параметрами
b = 1 и с = 2.
Исследовать: а) устойчивость невозмущенного движения x(t) = 0;
б) характер переходного процесса.
2.6. Дана система (рис. 2.7), состоящая из линейного звена с пе-
редаточной функцией 1У1(р) = 5/р2 и нелинейного звена, имеющего
линейную характеристику с зоной нечувствительности (рис. 2.9, в)
и параметром а = 1.
Исследовать: а) устойчивость невозмущенного движения x(t) = 0;
б) характер переходного процесса.
2.7. Дана система (рис. 2.7), состоящая из линейного звена с пе-
редаточной функцией И^(р) = 5/р2 и нелинейного звена, имеющего
линейную характеристику с зоной нечувствительности и насыщением
(рис. 2.9,6) и параметрами а = 1,Ь = 2, с=1.
Исследовать: а) устойчивость невозмущенного движения x(t) = 0;
б) характер переходного процесса.
2.8. Дана система (рис. 2.10), состоящая из линейных звеньев
с передаточными функциями 1У<(р) = 5/р2 и ^(р) = 0,5р + 1
и нелинейного звена, имеющего характеристику идеального реле с
параметром с = 2.
Исследовать: а) устойчивость невозмущенного движения. x(t) = 0;
б) характер переходного процесса.
2.9. Дана система (рис. 2.10), состоящая из линейных звеньев
с передаточными функциями W\ (р) = 5/р2 и ТУг(р) = 0,5р+ 1 и нели-
нейного звена, имеющего характеристику релейного звена с зоной
нечувствительности и параметрами а = 1 и с = 2.
2.2. Задачи
47
Рис. 2.10
Исследовать: а) устойчивость системы на интервале [—1,1]; б) ха-
рактер переходного процесса.
Примечание. Здесь под устойчивостью системы на интервале
[—1,1] понимается такое ее поведение, при котором у = 0, у G [— 1, 1]
при t —► 00.
2.10. Исследовать (а) устойчивость и (б) характер переходного
процесса системы
f 0,25, у • у > О,
у = и, и = -ф-у, = S . . Л
14, у • у < 0.
2.11. Исследовать (а) устойчивость и (б) характер переходного
процесса системы
f 4, у • у > О,
у = и, U = -^-y, 1
( 0,25, у • у < 0.
2.12. Исследовать (а) устойчивость и (б) характер переходного
процесса системы
( 5, у • s > О,
у-2у = и, и = -ф-у, ^=5 о ~ s = 2/ + O,5j/.
—3, у • 5 < О,
2.13. Исследовать устойчивость системы
( 5, у • s < О,
у-2у = и, и = -фу, = S о л 5 = У + У-
[ —3, у • s > О,
2.14. Исследовать (а) устойчивость и (б) характер переходного
процесса системы
( 5, у • s > О,
у - 2у = и, и = • У, Ф = < о Л s = у + 2у.
—3, у • s < О,
48
Гл. 2. Нелинейные системы. Метод фазовой плоскости
2.15. Исследовать устойчивость.
Гб,
у — 4у = U, и = —0 'У, 0 = < 1
2.16. Исследовать (а) устойчивость
процесса системы
s = у + 2у.
(б) характер переходного
f 4,
у - 2у + у = и, и = -ф-у, ф = {4
2.17. Исследовать устойчивость системы
•• о . л / I ( 2, уз>0,
у-2у + 4у = и, и = -ф-у, Ф = \ п „ e . п
(б) характер переходного
з = у + 0,5у.
з = у + 3у.
2.18. Исследовать (а) устойчивость и
процесса системы
Г 4,
У - 2у + у = и, и = -0 * у, 0 = { 4
2.19, Исследовать устойчивость системы
( 4,
У - 8у + У = V, и = -0 • у, ф = { 4
2.20, Исследовать устойчивость системы
s = y + 2y.
s = y + 2y.
( 2 у
у — 2у — 4у = и, и = -ф-у, ф = <
I У
2.21. Исследовать устойчивость системы
у - 2у - 2у = и,
U = —0 -у, 0 =
f 4,
|-6,
У 5 > О,
у • s < О,
з = У + 0,5 у.
и
У • 3 < О,
2.22. Исследовать (а) устойчивость и (б) характер переходного
процесса системы
( 4, у • s > 0,
1 —6, у • з < О,
у — 2у — 2у = и, и = —0 • у, 0 =
2.23. Исследовать устойчивость системы
f 2, у • s >
У “ 2у - 4у = и, и = -0 • у, 0 = < 2 у ф s <
s = У + Зу.
з = у + 3у.
2.24. Исследовать устойчивость системы
у-2у + 4у = и,
и = —0 ‘У, 0 =
( 2, у > О,
( -2, у < 0.
2.2. Ответы
49
Ответы
2.1.
в) г)
д) е)
50
Гл. 2, Нелинейные системы. Метод фазовой плоскости
2.2.
2.2. Ответы
51
в)
г)
0,15----------!---------!--------
-1 -0,5 0 0,5
е)
ж)
з)
52
Гл. 2. Нелинейные системы. Метод фазовой плоскости
2.3. а) устойчиво по Ляпунову; б) незатухающие колебания.
2.4. а) не устойчиво; б) незатухающие колебания. 2.5. а) устойчиво
по Ляпунову; б) незатухающие колебания. 2.6. а) не устойчиво;
б) незатухающие колебания. 2.7. а) не устойчиво; б) незатухающие
колебания. 2.8. а) асимптотически устойчиво; б) апериодический
(скользящий режим). 2.9. а) асимптотически устойчива на интер-*
вале [—1,1]; б) колебательный. 2.10. а) асимптотически устойчива;
б) колебательный. 2.11. а) не устойчива; б) колебательный.
2.12. а) асимптотически устойчива; б) апериодический (скользящий
режим). 2.13. Не устойчива. 2.14. а) асимптотически устойчива;
б) колебательный. 2.15. Не устойчива. 2.16. а) асимптотически
устойчива; б) апериодический (скользящий режим). 2.17. Не устой-
чива. 2.18. а) асимптотически устойчива; б) колебательный.
2.19. Не устойчива. 2.20. Не устойчива. 2.21. Асимптотически
устойчива. 2.22. а) асимптотически устойчива; б) колебательный.
2.23. Не устойчива. 2.24. Не устойчива.
Глава 3
МЕТОД ГАРМОНИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
Метод гармонической линеаризации или гармонического баланса
первоначально был разработан для исследования периодического режи-
ма. Однако в дальнейшем он стал использоваться также для анализа
устойчивости и синтеза нелинейных систем.
Основная идея метода состоит в следующем. Управляемые системы
(объекты), как правило, обладают свойством фильтра низких частот:
при возникновении периодических режимов они не пропускают или
пропускают с большим ослаблением вторые и более высокие гармони-
ки. И суть метода гармонической линеаризации состоит в описании
нелинейного звена линейным уравнением, которое получается при пре-
небрежении (отбрасывании) указанных гармоник в разложении нели-
нейной функции в ряд Фурье.
3.1. Гармоническая линеаризация. Вычисление
коэффициентов гармонической линеаризации
Структурную схему замкнутой нелинейной системы, состоящей из
нелинейного звена (НЗ) и линейной части (ЛЧ) — линейного звена
(рис. 3.1, а), будем называть типовой структурной схемой нелиней-
ной системы. Уравнения системы (рис. 3.1, а) при д = 0 имеют вид
y = WG,(p)<T, <т = /(е), е = -у (3.1)
в)
0
Рис. 3.1.
54
Гл, 3. Метод гармонической линеаризации,
Допустим, что в системе возникает периодический режим. Тогда
нелинейная функция a(t) = /[e(t)] будет периодической функцией вре-
мени и ее можно будет разложить в ряд Фурье
<т(£) = |од + sin art + ai cos art + (...), (3.2)
где во» Ьь — коэффициенты Фурье; a = 2тг/Т, Т — период, (...) —
высшие (вторые и более высокие) гармоники.
Предположим, что линейная часть обладает свойством фильтра
низких частот, т. е. выполняется условие
l^(»| « I№л(jku)|, и = 2тг/Т, k = 2, 3, .... (3.3)
Проверить это условие, пока не определена частота периодического
процесса, нельзя, и его перед началом исследования принимают как
гипотезу. Поэтому это условие называют гипотезой фильтра.
При условии (3.3) высшие гармоники на выходную величину у
линейной части не оказывают существенного влияния. Поэтому при
определении у высшими гармониками можно пренебречь и уравнение
системы (3.1) при од = О представить в виде
где
9(Л) = 4
Ут
9'(л) = 4
1
ТгА
2тг
f(A sin ф) sin ф d/ф,
1
ТгА
2тг
| /(Азтф) cos d/ф
или, если /(е) — однозначная нечетная функция, то
д( А) = -г = —т [ /(A sin ф) sin ф дф, qf(A) = 0.
А тгА J
о
(ЗА)
(3.5а)
(3.56)
(3.5в)
Здесь ф — uot.
Система (3.4) при фиксированных амплитуде А и частоте а явля-
ется линейной. Переход от исходной системы (3.1) к линеаризованной
системе (3.4) называется гармонической линеаризацией. Коэффициен-
ты q(A) и д'(А) называют коэффициентами гармонической линеари-
зации. Передаточную функцию (см. второе уравнение (ЗА))
ТУн(Др)=д(А) + ^р (3.6а)
a
3.1. Гармоническая линеаризация. Вычисление коэффициентов 55
называют передаточной функцией ИЗ (нелинейного звена) и соответ-
ственно выражение
WH(A)=q(A)+jq'(A), (3.66)
которое получается при подстановке в передаточную функцию НЗ
р = jw — частотной передаточной функцией НЗ. В соотношении
(3.66) коэффициенты q(A) и q’fA) составляют вещественную и мнимую
части частотной передаточной функции НЗ. Поэтому q(A) называют
вещественным, a q'(A) — мнимым коэффициентами гармонической
линеаризации.
Нелинейное звено после гармонической линеаризации представля-
ется в виде линейного звена с передаточной функцией (3.6а), и струк-
турная схема гармонически линеаризованной системы принимает вид,
представленный на рис. 3.1,6.
Гармонически линеаризованные уравнения (3.4) были получены при
условии, что постоянное слагаемое в разложении Фурье во = 0 и зада-
ющее воздействие g = 0. При этом колебания на входе нелинейного зве-
на имеют вид е = Л sin art, и они являются симметричными. Указанные
колебания будут симметричными и приведенные выкладки справед-
ливыми, если характеристика нелинейного звена будет симметричной
относительно начала координат и установившаяся ошибка будет равна
нулю. При постоянном задающем воздействии установившая ошибка
будет равна нулю, если система является астатической, т. е. линейная
часть содержит интегрирующее звено.
Вычисление коэффициентов гармонической линеаризации при
симметричных колебаниях. Рассмотрим на примерах вычисление
коэффициентов гармонической линеаризации для нелинейных звеньев
с однозначными и неоднозначными характеристиками.
Пример 3.1. Определить коэффициенты гармонической линеари-
зации нелинейного звена с кусочно-линейной характеристикой с зоной
нечувствительности и насыщением (рис. 3.2, а) при симметричных ко-
лебаниях.
Рис. 3.2.
56 Гл. 3. Метод гармонической линеаризации
Решение. Так как характеристика нелинейного звена явля-
ется однозначной и симметричной относительно начала координат,
то функция /(е) будет нечетной. Поэтому в этом случае согласно
формулам (3.5в) мнимый коэффициент гармонической линеаризации
q'(A) = 0, и необходимо вычислить только вещественный коэффициент
гармонической линеаризации q(A).
Рис. 3.3.
График выходного сигнала нелинейного звена с такой характери-
стикой, когда на его вход подается гармонический сигнал е = Asinwt,
представлен на рис. 3.3. Как следует из этого рисунка, пока входной
сигнал НЗ не достигает величины а, или переменная V величины
(е = Asin^i = а), выходной сигнал НЗ будет равен нулю. Когда вход-
ной сигнал изменяется на интервале [а, Ь], или переменная —на
интервале фъ], где ^2 определяется из соотношения Asin^ = Ь,
на выходе НЗ имеем
а = fc(Asin^ — а).
Здесь к = с/(Ъ — а) — тангенс угла наклона характеристики НЗ на
интервале [а, Ь]. И, наконец, на интервале [ф2> *72] выходной сигнал
НЗ принимает постоянное значение с. .
График выходного сигнала на интервале [0, тг] симметричен отно-
сительно прямой ф = тг/2. Поэтому выходной сигнал на интервале
[тг/2, тг—^2] равен постоянной величине с, на интервале [тг—тг—-01
описывается функцией a = fc(Asin^ — а) и на интервале [* —*;
равен нулю.
3.1. Гармоническая линеаризация. Вычисление коэффициентов
57
Следовательно, вещественный коэффициент гармонической линеа-
ризации определяется следующим образом (см (3.5в)):
Г^2
2 ‘
тгА
L^i
7Г-^2 *-^1
-I- | csintpdtp +
^2 7Г-^2
Проинтегрировав это выражение, используя тригонометрическое тож-
дество sin2 ip = (1 - cos 2^0/2, получим
1 \
- sin 2tp ) — atp +
4 / J*
q(A) = ~ j f(A sin tp) sin dtp =
о
к A
п--ф2
+ ccosV>
J к(А sini/> — a)sin^dVH-
j fc(Asin^ - •
v>2
Подставив пределы интегрирования, найдем
. .. 4Jtn z . . x 1_______ - - . . ,
Г /1 1 \
Al -tp - - sin2^ ) — atp
- X2 4 /
4Jt Г1 1 1 4c
q(A) —-- -(^2-^1)-7(8ш2^2-8Ш2^1)+а(сО8^2-СО5^1) H---tCOS^2-
7Г Z 4 7ГА
•' ' n |2vrz 4' . , . .
Учитывая соотношения (см. рис. 3.3, а)
Asin^i=a, Asintp2=b, tp\ —arcsin ^2=arcsin4» &=. C ,
A A b — a
окончательно для вещественного коэффициента гармонической линеа-
ризации нелинейного звена с зоной нечувствительности и насыщением,
получаем
’(Л>=?Д)
Эта формула справедлива при А Ь.
Пример 3.2. Определить коэффициенты гармонической линеа-
ризации нелинейного звена с кусочно-линейной характеристикой с ги-
стерезисом и насыщением (рис. 3.2,6) при симметричных колебаниях.
Решение. Графики входного и выходного сигналов НЗ представ-
лены на рис 3.4. Кривую выходного сигнала НЗ на интервале [тг, 2тг]
можно получить из той же кривой на интервале [0, тг] зеркальным
отображением относительно оси абсцисс и сдвигом вправо на тг. Точно
таким же свойством обладают кривые функций синуса и косинуса, на
которые умножаются выходной сигнал НЗ при вычислении коэффици-
ентов гармонической линеаризации. Поэтому в данном случае в фор-
мулах (3.5а) и (3.56) значения интегралов на указанных интервалах
6 . a b
arcsin ——arcsin — + —
A A A
58
Гл. 3. Метод гармонической линеаризации
Рис. 3.4.
будут совпадать, и в них интегралы можно удвоить, заменив верхний
предел интегрирования 2тг на тг, т. е. записать эти формулы следующим
образом:
7Г
2 Г
д(А) = —- /(A sin sin dip, (3.7а)
ТТЛ J
О
2 Г
q'(A) = —т /(Asin^) cos dip. (3.76)
ТГА J
О
Выходной сигнал НЗ (рис. 3.4,6) на интервале [O.V'i] описывается
функцией а = fc(AsinV’— а), на интервале [^1.^2] принимает по-
стоянное значение с и на интервале [V>2,71’] описывается функцией
а = fc(AsinV> + а). Поэтому формулы (3.7) принимают вид
V>2
д(А) =
g'(A) =
rV>l
2 Г Г
—-- fc(Asin^ — а)ып‘ф<1'ф + csin^d^+
тгА J J
L о
7Г
+ j fc(Asin^ + a)sin^d^ ,
^2
V>2
rV>l
2 Г Г
— fc(Asin^ - a) cos^d^-F ссов^^+
тгА J J
L О
7Г
+ | fc(Asin^ + а) cos^d^ .
^2
(3.8а)
(3.86)
3.1. Гармоническая линеаризация. Вычисление коэффициентов
59
Проинтегрировав (3.8а), получим
( a\ 2 kJ
’<Л> = SJ 7
i sin 2^1 j + fca(cos V’l — 1) ~ c(cos^2 — cos^i)+
Учитывая соотношения (см. рис. 3.4, а)
c = fc(6i—a), 62 = ^1— 2а, Asin ^1=61, Asin ^>2 = 62»
z .bi .62
tpi = arcsm —, ^2 = тг — arcsm
Jx Z1
последнее выражение можно преобразовать к виду
&2 , bi
A'AV \А/
/ A\ k • bl . t>2 bl
q(A) = - arcsm — + arcsm — + —
' 7Г A A A
&2 L _ /&2
21
Проинтегрировав (3.86), получим
Q\A) =
-A sin2 tyi — a sin ) + cl sin — sin ifa
-A sin2 ^2 + 0 sin ^2 ) •
Подставив сюда с = k(bi — a), sinip\ =b\/A и sin^>2 = Ьг/А, получим
= Л>61.
Вычисление коэффициентов гармонической линеаризации при
несимметричных колебаниях. Колебания на входе нелинейного зве-
на (НЗ) будут несимметричными, если установившаяся ошибка от-
лична от нуля или характеристика НЗ является несимметричной от-
носительно начала координат. Здесь мы ограничимся случаем, когда
характеристики НЗ являются симметричными относительно начала
координат и несимметричность колебаний обуславливается только на-
личием ненулевой установившейся ошибки. При этом принимается, что
установившаяся ошибка является постоянной.
В этом случае на входе НЗ (рис. 3.1, а) имеем е = е° + Asincvi.
Отсюда находим
sinotf — ~(е — е°), coscvi — “©smart — -^—р(е — е°).
A cv cvA
60
Гл. 3. Метод гармонической линеаризации
На выходе НЗ, после гармонической линеаризации, имеем
а = “do + oi coscut + bi sin cut.
Положив а0 = ао/2 и подставив сюда выражения для синуса и косину-
са, получим
а — а0 + |g(A, е°) + q'(At е°) (е - е°),
где
q~q(A,e°) = ^, q' = д'(А, е°) - %
Сделав замену переменных ip = wt в формулах для коэффициентов
Фурье и подставив их в последние выражения, найдем
2ir
ст°= Т = 9? Г ^е° + ^sin V')#-
о
✓(A) =
2ir
q(A) = -j = | /(е° + A sin ip) sin ip dip,
о
2я
= —r f(e° + A sin ip) cos dip.
тгА J
0
(3.9a)
(3.96)
(3.9b)
Пример 3.3. Определить коэффициенты гармонической линеа-
ризации нелинейного звена с кусочно-линейной характеристикой с на-
сыщением (рис. 3.5, а) при несимметричных колебаниях.
Решение. На рис. 3.6 показаны графики входного и выходного
сигналов нелинейного звена. Из этого рисунка видно, что выходной
сигнал нелинейного звена на интервалах [0, V*i]> [^2. ’/’з] и ^pt, 2тг] опи-
сывается функцией А(е° + AsinV*), а иа интервалах [V>i, 1Р2] и [ips, ipt]
принимает постоянные значения с и -с соответственно. Поэтому фор-
3.1. Гармоническая линеаризация. Вычисление коэффициентов
61
Рис. 3.6
мулы (3.9) для коэффициентов гармонической линеаризации принима-
ют вид
а0 | Ar(e°+Asin^)d^+| сЖф+1 fc(e°+Asin^)d^-
о
2ir
•J Ar(e°+Asin^)d^;
fa fa
^2
g=—- I Ar(ev+Asm^)sin^d^+ csin^d^+
тгА J J
0
fa ^4 2к
+ J fc(e°+Asin^)sin^d^—| csin^d^+| fc(e°+Asin^)sin^<ty;
^2 ^3
fa
q =~| j fc(e°+Asin^)cos^<ty>+| csin^cosd^+
0 fa
fa fa 2ir
+ J A:(e°+Asin^)cos^d^” j ccos^d^+ J A(e°+Asin^)cos^d^-
62
Гл. 3. Метод гармонической линеаризации
Из рис. 3.6, а имеем
e°+A sin = b, e°+A sin ^2=b, e°+A sin = — b, e°+A sin V>4 = —6.
Отсюда получаем (см. рис. 3.6, а)
. b — е° . b — е°
у>1 = arcsm ———, у>2 = тг — arcsm ———,
, . . Ь + е° . Ь + е°
V3 = тг + arcsm —щ = 2тг — arcsm ———.
Проинтегрировав полученные выше выражения для коэффициентов
гармонической линеаризации, с учетом последних выражений получим
<7°=-
7Г
21
Ь — е°
\ A J \ { А
/г 0\ . b 4~ е® Л, л.
+ (о + еи) arcsm —т-----------(о — еи) arcsii
b — е°
к
q=n
. b + е° . b — е° b 4- е® I /Ь + е®\
arcsm — ---f- arcsm —т--1---— а /1 — —-—
А А А и \ A J
Ь — е° / /Ь — е°\2
А V \ А /
q’=0, А>Ы-|е°|.
Пример 3.4. Определить коэффициенты гармонической линеа-
ризации нелинейного звена с релейной характеристикой с зоной нечув-
ствительности и гистерезисом (рис. 3.5, б) при несимметричных коле-
баниях.
Решение. На рис. 3.7 представлены кривые входного и выход-
ного сигналов НЗ. Из рис. 3.7,6 следует, что выходной сигнал НЗ
на интервалах [0, fa], [fa, fa] и [fa, 2тг] равен нулю, а на интервалах
[fat fa] и [fat fa] принимает постоянные значения с и —с соответствен-
но. Поэтому формулы для коэффициентов гармонической линеаризации
принимают вид
-° = —
2тг
1
l/>2 ^4 \
cd/ф — сЛф ];
$3 '
Vm v
csin^d^ I,
Фз '
V»4 v
с cosd^ — j c созЖф j •
сзт'фдф —
&
z $2
я^7а\
3.1. Гармоническая линеаризация. Вычисление коэффициентов
63
0
Рис. 3.7
Для пределов интегрирования имеем (см. рис. 3.7, а)
. . b — e° . . b — e°
ipi = arcsin ———, V2 = л ~ arcsin ———,
/ . . t> + e° . b + e°
= 7Г + arcsin —-—, ip4 = 27Г — arcsm —-—
Проинтегрировав полученные выше выражения для коэффициентов
гармонической линеаризации, с учетом последних выражений полу-
чим
0 с ( . а + е° . Ь + е° . а —е° . Ъ — е°
=— arcsm — ---------1- arcsm — -----arcsm —--------arcsin —:—
2тг \ A A A A
t р + е°\2
'"к A
21
2(b-a)c
4 nA2
=°|-
с
b — e° \ 2
1 _ (a + e°y
/ a — e°
64
Гл. 3. Метод гармонической линеаризации
Задачи
3.1. Определить коэффициенты гармонической линеаризации для
нелинейного звена с характеристикой идеального реле (рис. 3.8, а)
при симметричных колебаниях.
3.2. Определить коэффициенты гармонической линеаризации для
нелинейного звена с характеристикой реле с зоной нечувствительности
(рис. 3.8,6) при симметричных колебаниях.
Рис. 3.8
3.3. Определить коэффициенты гармонической линеаризации для
нелинейного звена с кусочно-линейной характеристикой с насыщением
(рис. 3.8, в) при симметричных колебаниях.
3.4. Определить коэффициенты гармонической линеаризации для
нелинейного звена с кусочно-линейной характеристикой с зоной нечув-
ствительности (рис. 3.8, г) при симметричных колебаниях.
3.5. Определить коэффициенты гармонической линеаризации для
нелинейного звена с характеристикой реле с зоной нечувствительности
и гистерезисом (рис. 3.9, а) при симметричных колебаниях.
Рис. 3.9
3.6. Определить коэффициенты гармонической линеаризации для
нелинейного звена с характеристикой реле с гистерезисом (рис. 3.9,6)
при симметричных колебаниях.
3.7. Определить коэффициенты гармонической линеаризации для
нелинейного звена с характеристикой люфта (рис. 3.9, г) при симмет-
ричных колебаниях.
3.2. Автоколебания. Исследование симметричных автоколебаний 65
3.8. Определить коэффициенты гармонической линеаризации для
нелинейного звена с характеристикой идеального реле (рис. 3.8, а) при
несимметричных колебаниях.
3.9. Определить коэффициенты гармонической линеаризации для
нелинейного звена с характеристикой реле с зоной нечувствительности
(рис. 3.8,6) при несимметричных колебаниях.
3.10. Определить коэффициенты гармонической линеаризации для
нелинейного звена с характеристикой реле с гистерезисом (рис. 3.9, б)
при несимметричных колебаниях.
3.11. Определить коэффициенты гармонической линеаризации для
нелинейного звена с характеристикой люфта (рис. 3.9, г) при несим-
метричных колебаниях.
3.2. Автоколебания. Исследование симметричных
автоколебаний
Орбитальная устойчивость. Пусть y*(t) и y(t) — невозмущенное
и возмущенное движение соответственно. Во второй главе при опре-
делении различных понятий устойчивости руководствовались тем, как
изменяется со временем расстояниер[у*(£),у(£)] = |y*(t) -y(t)| между
изображающими точками этих движений. Однако если невозмущенное
движение является периодическим и оно совершается по замкнутой
траектории (например, движение небесных тел), важным является то,
как ведет себя изображающая точка возмущенного движения отно-
сительно траектории невозмущенного движения, а не относительно
его изображающей точки. Поэтому при рассмотрении периодических
процессов используется другие понятия устойчивости — орбитальная
устойчивость и асимптотическая орбитальная устойчивость.
Введем следующие обозначения: L* — траектория невозмущенного
движения, т. е. L* ~ {у: у = y*(t), t > to}; р(у> L) — расстояние от точ-
ки у до траектории L, т. е. до ближайшей точки этой траектории.
Определение 3.1. Невозмущенное движение y*(t) называется
орбитально устойчивым, если для любого числа е > 0 найдется
такое число 5 > 0, что при всех to расстояние от изображаю-
щей точки возмущенного движения до траектории невозмущенного
движения меньше e(p(y(t), L*) < е), если в начальный момент это
расстояние меньше S(p(y(tQ),L*) < 5).
Определение 3.2. Невозмущенное движение у*(t) называет-
ся асимптотически орбитально устойчивым, если оно орбитально
устойчиво и найдется такое положительное число т/, что расстоя-
ние от изображающей точки возмущенного движения до траекто-
рии невозмущенного движения стремится к нулю (p(y(t),L*) —► 0)
при t —> оо, если это расстояние в начальный момент не превыша-
ет ’7(Р(У(<О),Ь*) < »?)•
66 Гл. 3. Метод гармонической линеаризации
Иначе говоря, невозмущенное движение y*{t) асимптотически ор-
битально устойчиво, если вокруг его траектории L* существует окрест-
ность такая, что если возмущенное движение начинается в этой
окрестности, то его траектория со временем сольется с траекторией
невозмущенного движения L*.
Из устойчивости по Ляпунову следует орбитальная устойчивость.
Из асимптотической устойчивости следует асимптотическая орбиталь-
ная устойчивость. Т.е. если невозмущенное движение устойчиво по
Ляпунову, то оно орбитально устойчиво, и если невозмущенное дви-
жение асимптотически устойчиво, то оно асимптотически орбитально
устойчиво. Обратное не верно: вообще говоря, из орбитальной устой-
чивости не следует устойчивость по Ляпунову, и из асимптотической
орбитальной устойчивости не следует асимптотическая устойчивость.
Более того, если невозмущенное движение является периодиче-
ским, то оно не может быть асимптотически устойчивым. Действи-
тельно, пусть невозмущенное движение y*{t) является периодической
функцией с периодом Т: y*{t) = y*(t + T). Рассмотрим возмущенное
движение y{t) = y*(t + а). Это возмущенное движение не стремится
к невозмущенному движению, как бы мало ни было расстояние между
изображающими точками возмущенного и невозмущенного движений
в начальный момент. Каким бы малым не было число т} в условии
1х/(^о) -#*(й))| < тъ если указанное расстояние отлично от нуля и оно
больше некоторого положительного числа то в силу периодично-
сти sup |г/(£) — ?/* (t)| > во» как бы велико t' не было. Следовательно;
t>t'
расстояние между изображающими точками не может стремится к ну-
лю.
В теории нелинейных систем важную роль играет понятие автоко-
лебаний, введенное в теорию колебаний А. А. Андроновым.
Определение 3.3. Автоколебаниями называются асимптоти-
чески орбитально устойчивые свободные колебания {периодические
движения).
Автоколебания являются незатухающими колебаниями, которые
устанавливаются и поддерживаются в системе за счет собственных
источников энергии, причем амплитуды этих колебаний определяются
свойствами системы, а не начальными условиями. Системы, в которых
возникают автоколебания, называются автоколебательными систе-
мами.
Автоколебания возможны только в нелинейных системах. Незату-
хающие свободные колебания возможны в маргинально устойчивых ли-
нейных системах. Однако эти колебания не являются автоколебаниями,
так как они не удовлетворяют условиям асимптотической орбитальной
устойчивости.
Если на выходе какой-либо системы возникают незатухающие ко-
лебания, то чтобы проверить, являются ли эти колебания автоколеба-
ниями, можно поступить следующим образом: подать на вход системы
3.2. Автоколебания. Исследование симметричных автоколебаний 67
возмущающее воздействие, которое приводит к незначительному из-
менению амплитуды. При этом если после устранения возмущающе-
го воздействия амплитуда колебаний со временем восстанавливается,
то эти колебания являются автоколебаниями, в противном случае они
не являются автоколебаниями.
При использовании метода гармонической линеаризации, естествен-
но, принимается, что гипотеза фильтра выполняется. Тогда, если в си-
стеме возникает периодический процесс, то на выходе линейной части
и на входе нелинейного звена он является гармоническим: е = A sin о»t.
Поэтому периодический режим однозначно определяется частотой о»
и амплитудой А, и исследование периодического процесса сводится
к определению этих параметров.
Основное условие возникновения периодического процесса.
В линейной системе (рис. 3.1, б) могут возникнуть гармонические коле-
бания, если ее характеристическое уравнение имеет чисто мнимые кор-
ни или, что то же, амплитудно-фазовая характеристика разомкнутой
системы проходит через точку (—1,0), т. е. если выполняется равенство
W^A)WM = -1. (3.10)
Это соотношение является уравнением относительно неизвестных па-
раметров: частоты ы и амплитуды А, и определяет основное условие
возникновения периодических процессов в рассматриваемой системе.
Автоколебания в системе возможны, если это уравнение имеет дей-
ствительные положительные корни.
Аналитический способ исследования автоколебаний. Подста-
вив выражения для передаточных функций и освободившись от дроби,
основное условие (3.10) можно представить в виде
Х(А,ц;)+;У(А,ц;)=0
или
Х(А,щ) = 0, У(А,щ) = 0. (3.11)
Если последняя система уравнений имеет решение А* и о»*(А* > 0,
ш* >0), то это значит, что гармонически линеаризованное уравнение
имеет решение е = A*sinu»*t, которое описывает периодический про-
цесс. Этот процесс реально можно наблюдать, если указанное решение
орбитально устойчиво или асимптотически орбитально устойчиво. Ре-
шение е = A*sinu»*t описывает автоколебания, если оно асимптотиче-
ски орбитально устойчиво. Таким образом, исследование автоколеба-
ний сводится к решению уравнений (3.11) и определению асимптоти-
ческой орбитальной устойчивости.
Пусть разомкнутая система (линейная часть) устойчива или марги-
нально устойчива, т. е. ее характеристическое уравнение, кроме левых
корней, имеет корни на мнимой оси. Тогда условие асимптотической
68
Гл. 3. Метод гармонической линеаризации
орбитальной устойчивости при однозначной характеристике нелиней-
ного звена принимает вид
ЩА)
dA
<0.
А=А*
(3.12а)
Условие асимптотической орбитальной устойчивости при неодно-
значной характеристике нелинейного звена принимает вид
дА ) уды ) у ди) у у дА)
(3.126)
Пример 3.5. В типовой структурной схеме (см. рис. 3.1,а)
нелинейной системы нелинейное звено имеет релейную характери-
стику с зоной нечувствительности (см. рис. 3.8,6) с параметрами
а = 0,45 и с = тг, передаточная функция линейной части имеет вид
И<п(р) = 4,1/(0,5р + 1)2р и задающее воздействие g = const. Требуется
исследовать автоколебания.
Решение. Передаточная функция НЗ имеет вид
^н=д(А) =
Условие возникновения периодического процесса (3.10) можно запи-
сать в виде
з. , . 16,4 /, /0,45\2 п
—0,25orj — or + jo; Ч-1 — [ —г~ ] = 0
А у \ A J
или -----------
_ш2 + А _ /0Д5\ = —0,25о>3 + ш = 0.
А V \ A J
Второе уравнение имеет положительное решение и) = 2. Подставив это
значение частоты, первое уравнение можно преобразовать в биквадрат-
ное уравнение
А4 - 4,12А2 + 4.12 • 0,452 = 0.
Это уравнение имеет следующие два положительных решения:
Ai = 4,08 и А = 0,454. Проверим условие устойчивости (3.12а).
Производная
dg(A) _ 4(0,405 - А2)
dA ~ А3 у/А2 - 0,452
при Ai = 4,08 принимает отрицательное значение, а при A SS 0,454 —
положительное значение. Следовательно, колебания с первой ампли-
тудой являются асимптотически орбитально устойчивыми, а со второй
амплитудой таковыми не являются. Таким образом, в рассматриваемой
3.2. Автоколебания. Исследование симметричных автоколебаний 69
системе будут совершаться автоколебания с частотой си — 2 и ампли-
тудой Ai = 4,08.
Графический (частотный) метод исследования автоколебаний.
Уравнение (3.10), определяющее условие возникновения периодическо-
го процесса, можно решить графически. Для этого представим его
следующим образом:
= -^4)-
Строим амплитудно-фазовую характеристику линейной части, т. е. го-
дограф функции Жп^'си), и обратную амплитудно-фазовую характери-
стику нелинейного звена с обратным знаком, т. е. годограф функции
-1/WhM)- Если рассматриваемое уравнение имеет решение, то ука-
занные характеристики пересекаются (рис. 3.10). И в точке пересече-
ния по годографу WSi(jcu) находим частоту, а по годографу - 1/Wh(A) —
амплитуду периодического процесса.
Если линейная часть устойчива или маргинально устойчива, то
периодический процесс будет асимптотически орбитально устой-
чив, если точка на годографе — 1/WH(A), соответствующая ампли-
туде А* 4- ДА (ДА > 0), находится слева от амплитудно-фазовой
частотной характеристики линейной части при движении по ней
в сторону возрастания частоты (рис. 3.10).
Рассмотренный графический (частотный) метод был предложен
Л. С. Гольдфарбом и называется методом Гольдфарба.
Уравнение, определяющее условие возникновения периодического
процесса, можно также представить в виде
W7’(jW) = -WH(A)
и при графическом его решении строить обратную амплитудно-фазо-
вую частотную характеристику линейной части и с обратным знаком
амплитудно-фазовую характеристику нелинейного звена. По точке пе-
70
Гл. 3. Метод гармонической линеаризации
ресечения этих характеристик можно определить частоту и амплитуду
периодического процесса.
Асимптотическая орбитальная устойчивость определяется точно так
же, как и при методе Гольдфарба: если линейная часть устойчива или
маргинально устойчива, то периодический процесс будет асимпто-
тически орбитально устойчив, если точка на годографе —WH(A),
соответствующая амплитуде А* + ДА (ДА > 0), находится сле-
ва от обратной амплитудно-фазовой частотной характеристики
линейной части при движении по ней в сторону возрастания ча-
стоты.
Исследование несимметричных колебаний. Уравнения системы
(рис. 3.11) имеют вид
У = Иг1(р)ИЛ2(р)<т + ИЛ2(р)/1, <т = /(е), е = д-у.
Если положить Wi(p) = Bi(p)/Qi(p), W2(p) = H2(p)/Q2(p) и Я(р) =
= Я1(р)Я2(р), Q(p) = Qi(p)Q2(p), S(p) = Я2(р)Ф1(р), то, исключив
переменные у и а, уравнения системы можно записать следующим
образом:
Q(p)e + Я(р)Ле) = Q(p)p - S(p)h.
При постоянных внешних воздействиях рд = 0, ph = 0, и правая часть
принимает вид Q(O)p + S(O)h:
Q(p)e + Я(р)/(е) = Q(O)p - S(0)h.
Если правая часть отлична от нуля, то в системе могут возникнуть
несимметричные колебания
е = е° + е*, е* = Asincut
Произведя гармоническую линеаризацию, на выходе нелинейного звена
получим
/(е° + Asincut) = а0 + g(A,e°)+g'(A, е0)— е*.
С учетом этого и предыдущего соотношений уравнение системы можно
представить в виде
Q(p)+/?(p)(g(A,e0)+9,(A>e0)^) e*+Q(p)e0+7?(p)<70=Q(0)ff-S(0)h.
Выделив отсюда уравнения для постоянных и переменных составляю-
щих, получим
Q(0)e° + Я(0)<т° = Q(O)p - (3.13а)
<?(» + е°) + jq'(A, е0)) = 0, (3.136)
Пример 3.6. В нелинейной системе (рис. 3.11) нелинейное зве-
но имеет идеальную релейную характеристику с параметром с = тг,
3.2. Автоколебания. Исследование симметричных автоколебаний 71
Рис. 3.11
передаточные функции линейных звеньев равны Wi = 1/(0,5р + 1) и
W2 = 1/(0,5р+ 1)р, внешние воздействия равны g = l(t) и h = 0,5 х
х 1(f). Требуется исследовать автоколебания.
Решение. В данном случае R\(p) = Rz(p) = 1, Q\(p) = 0,5p-h
+ 1. <?2(p) = (0,5p+ 1)p, Q(p) = Qi(p)Qi(p) = (0,5p+ lyp и S(p) =
= /?2(p)Qi(p) =0,5p+ 1. Коэффициенты гармонической линеаризации
для идеальной релейной характеристики при несимметричном колеба-
нии имеют вид
о 2с . е° 4с /е°\ , . 0.
сг = —arcsin —, q~—71/1— -7 , q = 0, е .
тг А 'к А у \ А / 11
Так как Q(0) = 0, Я(0) = 1 и S(0) = 1, то уравнение (3.13а) принимает
вид
gO g°
arcsin -7 = —0,25 или = — sin 0,25 —0,25.
А А
Уравнение (3.136), после подстановки выражений для коэффици-
ентов гармонической линеаризации и выражений Q(jw) = —0,25jo>3 —
— w2 + jw, = 1 и e° = —0,25A, принимает вид
-0,25.7w3 - w2 + jw + Jl - (0,25)2 = 0
ИЛИ 4 ---------
-0,25a;3 + и = 0, -a;2 + - yj 1 - (0,25)2 = 0.
Отсюда находим: w = 2 и A = 0,97. Смещение равно e° = —0,25A =
= —0,24. Проверим асимптотическую орбитальную устойчивость. По-
сле исключения е° для q(A) имеем q = byj 1 — (0,25)2 /А. Так как
q' = 0, то можно воспользоваться условием устойчивости (3.12а). Это
условие в данном случае выполняется:
dq(A)
dA
А=0,97
4/10,252
Л2
<0.
А=0,97
Следовательно, в рассматриваемой системе возникнут несимметричные
автоколебания с частотой си = 2 и амплитудой А = 0,97. Автоколебания
смещены на е° = —0,24.
72
Гл. 3. Метод гармонической линеаризации
Задачи
3.12. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет характеристику идеального реле
(рис. 3.8, а) с высотой с = тг, линейная часть имеет передаточную
функцию Жл(р) = 5/(р3 + 2р2 + р) и задающее воздействие g = 0.
Исследовать автоколебания.
3.13. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет характеристику идеального реле
(рис. 3.8, а) с высотой с — тг, линейная часть имеет передаточную
функцию WCi(p) = 16/(р3 + 4р2 + 4р) и задающее воздействие g = 1.
Исследовать автоколебания.
3.14. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет релейную характеристику
с зоной нечувствительности (рис. 3.8,6) с высотой с = тг и зоной
нечувствительности а = 1, линейная часть имеет передаточную
функцию И/п(р) = 0,5/(р3 + Зр2 + Зр + 1) и задающее воздействие
g = 0. Исследовать автоколебания.
3.15. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет релейную характеристику
с зоной нечувствительности (рис. 3.8,6) с высотой с = тг и зоной
нечувствительности а = 1, линейная часть имеет передаточную
функцию ИСп(р) = 0,5/(р3 + 2р2 4~р) и задающее воздействие g = 0.
Исследовать автоколебания.
3.16. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет релейную характеристику*
с зоной нечувствительности (рис. 3.8,6) с высотой с — тг и зоной
нечувствительности а — 1, линейная часть имеет передаточную
функцию ИСп(р) = 0,8/(р3 + 2Р2 +р) и задающее воздействие g = 1.
Исследовать автоколебания.
3.17. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет релейную характеристику
с зоной нечувствительности (рис. 3.8,6) с высотой с = тг и зоной
нечувствительности а = 1, линейная часть имеет передаточную
функцию Жп(р) = 10/(р3 + 2р2 + р) и задающее воздействие g = 0.
Исследовать автоколебания.
3.18. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет релейную характеристику
с зоной нечувствительности (рис. 3.8,6) с высотой с — тг и зоной
нечувствительности а = 1, линейная часть имеет передаточную
функцию WXp) = 10/(р3 4~4р2+ 4р) и задающее воздействие g = 1.
Исследовать автоколебания.
3.19. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет релейную характеристику
3.2. Задачи
73
с зоной нечувствительности (рис. 3.8, б) с высотой с = тг и зоной
нечувствительности а = 1, линейная часть имеет передаточную
функцию Wji(p) — 3/(р3 + Зр2 + Зр + 1) и задающее воздействие g = 0.
Исследовать автоколебания.
3.20, В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет релейную характеристику
с зоной нечувствительности (рис. 3.8, б) с высотой с = тг и зоной
нечувствительности а = 1, линейная часть имеет передаточную
функцию Wfl(р) = 8/(р3 + Зр2 + Зр 4- 1) и задающее воздействие g = 0.
Исследовать автоколебания.
3.21. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет характеристику идеального реле
(рис. 3.8, а) с высотой с = тг, линейная часть имеет передаточную
функцию И<п(р) = Ю/(р3 + Зр2 + Зр+ 1) и задающее воздействие
5=1. Исследовать автоколебания.
Указание. При решении воспользоваться приближенным выраже-
нием arcsin(e%4) = е°/А.
3.22. В нелинейной системе (рис. 3.11) нелинейное звено име-
ет характеристику идеального реле (рис. 3.8, а) -с высотой с — тг,
линейные звенья имеют передаточную функцию Wi(p) = 1/(р+1)р
и Wzfjp) = 5/(р+ 1), внешние воздействия g = 0 и h = 0. Исследовать
автоколебания.
3.23. В нелинейной системе (см. рис. 3.11) нелинейное звено
имеет характеристику идеального реле (рис. 3.8, а) с высотой с — тг,
линейные звенья имеют передаточную функцию И^(р) = 5/(р+ 1)р
и Жг(р) = 1/(р + 1), внешние воздействия g ~ 1 и h = 0. Исследовать
автоколебания.
3.24, В нелинейной системе (рис. 3.11) нелинейное звено име-
ет характеристику идеального реле (рис. 3.8, а) с высотой с = тг,
линейные звенья имеют передаточную функцию V7i(p) == 4/(р + 2)р
и 1У2(р) ~ 4/(р + 2), внешние воздействия g = 0 и h — 1. Исследовать
автоколебания.
3.25. В нелинейной системе (рис. 3.11) нелинейное звено име-
ет характеристику идеального реле (рис. 3.8, а) с высотой с = тг,
линейные звенья имеют передаточную функцию Wi(p) = 2/(р + 2)р
и И^р) = 8/(р + 2), внешние воздействия g = 1 и h — 1. Исследовать
автоколебания.
3.26. В нелинейной системе (рис. 3.11) нелинейное звено имеет
характеристику идеального реле (рис. 3.8, а) с высотой с = тг, линейные
звенья имеют передаточную функцию W\ (р) = 2/(р + 1) и ^(р) =
= 8/(р2 + 2р + 1), внешние воздействия g = 0 и h = 0. Исследовать
автоколебания.
3.27. В нелинейной системе (рис. 3.11) нелинейное звено име-
ет характеристику идеального реле (рис. 3.8а) с высотой с = тг,
74
Гл. 3. Метод гармонической линеаризации
линейные звенья имеют передаточную функцию W\(p) = 2/(р + 2)
и Жг(р) = 8/(р 4- 2)р, внешние воздействия g — 0 и h = 0. Исследовать
автоколебания,
3.28. В нелинейной системе (рис. 3.11) нелинейное звено име-
ет характеристику идеального реле (рис. 3.8, а) с высотой с = тг,
линейные звенья имеют передаточную функцию И^(р) = 2/(р4~2)
и Wz(p) = 8/(р -I- 2)р, внешние воздействия g = 0 и h = 1. Исследовать
автоколебания.
3.29. В нелинейной системе (рис. 3.11) нелинейное звено име-
ет характеристику идеального реле (рис. 3.8, а) с высотой с = тг,
линейные звенья имеют передаточную функцию Wj (р) = 5/(p-h 1)
и И^(р) = 1/(р+ 1)р, внешние воздействия g = 1 и h — 0. Исследовать
автоколебания.
3.30. В нелинейной системе (рис. 3.11) нелинейное звено име-
ет характеристику идеального реле (рис. 3.8, а) с высотой с = тг,
линейные звенья имеют передаточную функцию V7i(p) = 5/(р4~1)
и = 1/(р + 1)р> внешние воздействия g = 1 и h = 1. Исследовать
автоколебания.
3.31. В нелинейной системе (рис. 3.11) нелинейное звено имеет ре-
лейную характеристику с зоной нечувствительности (рис. 3.8, б) с вы-
сотой с = тг и зоной нечувствительности а = 1, линейные звенья име-
ют передаточную функцию И^(р) — 0,1/(р+ 1)р и И^(р) = 5/(р 4~ 1),
внешние воздействия g = 0 и h = 0. Исследовать автоколебания.
3.32. В нелинейной системе (рис. 3.11) нелинейное звено имеет ре-
лейную характеристику с зоной нечувствительности (рис. 3.8,6) с вы-
сотой с = тг и зоной нечувствительности а = 1, линейные звенья име-
ют передаточную функцию VHi(p) = 1/(р4- 1) и И^(р) = 0,8/(р4- 1)р,
внешние воздействия g == 1 и h = 0. Исследовать автоколебания.
3.33. В нелинейной системе (рис. 3.11) нелинейное звено имеет
релейную характеристику с зоной нечувствительности (рис. 3.8,6)
с высотой с = 7Г и зоной нечувствительности а = 1, линейные звенья
имеют передаточную функцию И^(р) — 2/(р 4-1) и Жг(р) = 4/(р 4- I)2,
внешние воздействия g = 0 и h = 0. Исследовать автоколебания.
3.34. В нелинейной системе (рис. 3.11) нелинейное звено имеет ре-
лейную характеристику с зоной нечувствительности (рис. 3.8,6) с вы-
сотой с — 7г и зоной нечувствительности а = 1, линейные звенья име-
ют передаточную функцию VH(p) = 10/(р4~ 1) и И^(р) = 4/(р4- I)2,
внешние воздействия g = 1 и h = 0. Исследовать автоколебания.
Указание. При решении воспользоваться приближенным выраже-
нием arcsin(e%4) = е%4.
3.35. В нелинейной системе (рис. 3.11) нелинейное звено имеет
релейную характеристику с зоной нечувствительности (рис. 3.8,6) с
высотой с = тг и зоной нечувствительности а = 1, линейные звенья име-
3,2. Задачи
75
ют передаточную функцию 1У1(р) = 1/(р4- 2) и W2(p) = Ю/(р + 2)р,
внешние воздействия g = 1 и h = 0. Исследовать автоколебания.
3.36. В нелинейной системе (рис. 3.11) нелинейное звено имеет
релейную характеристику с зоной нечувствительности (рис. 3.8,6)
с высотой с — тг и зоной нечувствительности а = 1, линейные звенья
имеют передаточную функцию И^(р) = 5/(р4~ 2)р и Жг(р) = 2/(р 4- 2),
внешние воздействия g = 1 и h = 1. Исследовать автоколебания.
3.37. В нелинейной системе (рис. 3.11) нелинейное звено имеет ре-
лейную характеристику с зоной нечувствительности (рис. 3.8,6) с вы-
сотой с = тг и зоной нечувствительности а = 1, линейные звенья име-
ют передаточную функцию Ж1(р) = 5/(р+ 1) и И^(р) = 0,4/(р+ I)2,
внешние воздействия g = 0 и h = 0. Исследовать автоколебания.
3.38. В нелинейной системе (рис. 3.11) нелинейное звено име-
ет характеристику идеального реле (рис. 3.8, а) с высотой с = тг,
линейные звенья имеют передаточную функцию P7i(p) = Ю/(р 4-1)
и ^(р) — 1/(р+ О2» внешние воздействия g = 1 и h = 1. Исследовать
автоколебания.
3.39. В нелинейной системе (рис. 3.11) нелинейное звено име-
ет характеристику идеального реле (рис. 3.8, а) с высотой с = тг,
линейные звенья имеют передаточную функцию 1У1(р) = 10/(р4-1)
и И^2(р) = 1 /(р + I)2, внешние воздействия g = 2 и h — 1. Исследовать
автоколебания.
Указание. При решении воспользоваться приближенным выраже-
нием arcsin(e%4) = е°/Л.
3.40. В нелинейной системе (рис. 3.11) нелинейное звено име-
ет характеристику идеального реле (рис. 3.8, а) с высотой с = тг,
линейные звенья имеют передаточную функцию И^(р) = 20/(р + 2)
MW2(p) = l/(^ + 2p), внешние воздействия g = 2 и h = 1. Исследовать
автоколебания.
3.41. В нелинейной системе (рис. 3.11) нелинейное звено имеет
релейную характеристику с зоной нечувствительности (рис. 3.8,6)
с высотой с = тг и зоной нечувствительности а = 1, линейные звенья
имеют передаточную функцию 1У1(р) = 20/(р4- 1) и Vy2(p) = l/G^+p),
внешние воздействия g — 0 и h = 1. Исследовать автоколебания.
3.42. В нелинейной системе (рис. 3.11) нелинейное звено имеет
релейную характеристику с зоной нечувствительности (рис. 3.8,6)
с высотой с = тг и зоной нечувствительности а = 1, линейные звенья
имеют передаточную функцию TVi(p) — 10/(р 4-1) и 1У2(р) = 1/(р2+р),
внешние воздействия g = 1 и h = 1. Исследовать автоколебания.
3.43. В нелинейной системе (рис. 3.11) нелинейное звено имеет ре-
лейную характеристику с зоной нечувствительности (рис. 3.8,6) с вы-
сотой с = тг и зоной нечувствительности а ~ 1, линейные звенья име-
ют передаточную функцию И^(р) = 10/(р4- 1) и И^(р) = 2/(р4- I)2,
внешние воздействия g = 1 и h = 0. Исследовать автоколебания.
76
Гл. 3. Метод гармонической линеаризации
3.44. В нелинейной системе (рис. 3.11) нелинейное звено имеет ре*
лейную характеристику с зоной нечувствительности (рис. 3.8,6) с вы-
сотой с = тг и зоной нечувствительности а = 1, линейные звенья име-
ют передаточную функцию И^(р) = 20/(р4- 1) и Жг(р) = 1/(р + I)2,
внешние воздействия g — 2 и h = 0. Исследовать автоколебания.
3.45. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет кусочно-линейную характеристику
с насыщением (рис. 3.8, в) с параметрами с — тг и b — 1, линейная часть
имеет передаточную функцию Жл(р) = 20/(р3 + 4р2 +4р) и задающее
воздействие g = 1. Исследовать автоколебания.
3.46. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет кусочно-линейную характеристику
с насыщением (рис. 3.8, в) с параметрами с = тг и b = 1, линейная
часть имеет передаточную функцию 1Ул(р) = 40/(р3 4- 6р2 + 12р 4- 8)
и задающее воздействие g = 0. Исследовать автоколебания.
3.47. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет кусочно-линейную характеристику
с зоной нечувствительности и насыщением (рис. 3.2, а) с параметрами
а = 0,5, b = 1 и с = тг, линейная часть имеет передаточную
функцию 1Ул(р) = 20/(р3 4-4/т2 + 4р) и задающее воздействие g = 1.
Исследовать автоколебания.
3.48. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет кусочно-линейную характеристику
с зоной нечувствительности и насыщением (рис. 3.2, а) с параметрами
а — 0,5, b = 1 и с = тг, линейная часть имеет передаточную функцию
^(р) = 40/(р3 4-6р2 4-12р 4-8) и задающее воздействие g = 0.
Исследовать автоколебания.
3.49. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет характеристику реле с гисте-
резисом (рис. 3.9,6) с высотой с == тг и шириной Ь = 1, линейная
часть имеет передаточную функцию И/п(р) = 10/(р2 4-2р) и задающее
воздействие g = 1. Исследовать автоколебания.
3.50. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет характеристику реле с гистерези-
сом (рис. 3.9,6) с высотой с = тг, линейная часть имеет передаточную
функцию WSi(p) = 10/(р2 4~ 4р 4~ 4)р и задающее воздействие g = 1.
Исследовать автоколебания.
3.51. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет характеристику реле с гистерези-
сом (рис. 3.9,6) с высотой с = тг шириной b = 1, линейная часть имеет
передаточную функцию И/п(р) = 10/(р3 4- бр2 4- 12р4-8) и задающее
воздействие g — 0. Исследовать автоколебания.
3.52. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет характеристику реле с зоной
3.3. Вынужденные колебания и вибрационная линеаризация
77
нечувствительности и гистерезисом (рис. 3.9, а) с параметрами
а = 0,5, b = 1 и с = тг, линейная часть имеет передаточную функцию
ИСп(р) = 20/(р3 + 4р2 + 4р) и задающее воздействие g = 1. Исследовать
автоколебания.
3.53. В типовой структурной схеме нелинейной системы
(рис. 3.1, а) нелинейное звено имеет характеристику реле с зоной
нечувствительности и гистерезисом (рис. 3.9, а) с параметрами
а = 0,5, Ь = 1 и с = 7г, линейная часть имеет передаточную функцию
WCn(p) = 20/(р3 + 6р2 4-12р 4-8) и задающее воздействие g = 0.
Исследовать автоколебания.
3.3. Вынужденные колебания и вибрационная
линеаризация
Пусть к системе (рис. 3.11), которая описывается уравнением
Q(p)e4-B(p)/(e) = Q(p)p-S(p)h,
приложены задающее воздействие g = g(t) и возмущение h = Bsino>*t
При этом задающее воздействие по сравнению с возмущением изме-
няется медленно: g = g(t) за период Т = 2тг/а>* почти не меняется.
Если в системе возникают вынужденные колебания с частотой, равной
частоте внешнего колебания, то сигнал на входе нелинейного звена
будет иметь вид
е = е° 4- е*, е* = Лзт(о>* 14- <р),
где А и <р — амплитуда и сдвиг фазы вынужденных колебаний. После
гармонической линеаризации, разделяя уравнение для описания мед-
ленно и быстро меняющихся составляющих, получим
Q(p)e° + R(p)a° = Q(p)g, (3.14а)
A[Q(ju*) + R(ju*) ^q(A,e°) + jq'(A,e°))] =-BS(ju*). (3.146)
Вынужденные колебания. Если задающее воздействие равно
нулю, то медленно изменяющаяся составляющая будет равна нулю,
а колебания будут симметричными. И в этом случае для определения
амплитуды и сдвига фазы вынужденных колебаний достаточно рас-
смотреть только уравнение (3.146), которое при графическом методе
решения удобно представить в виде
7(Л) - Ве"^,
где
7(л\= +
( ' S(jw*)
78
Гл. 3. Метод гармонической линеаризации
Здесь коэффициенты гармонической линеаризации определяются по
формулам, которые были получены при рассмотрении симметричных
автоколебаний. Заметим, что Z(A) является функцией только неиз*
вестной амплитуды, так как частота известна.
При графическом методе определения амплитуды и сдвига фазы на
комплексной плоскости строится окружность радиуса В и годограф
вектора (комплексной функции) 2’(Л) (рис. 3.12, а). В точке пересече-
ния с окружностью по годографу находится амплитуда. Сдвиг фазы
равен углу, который образует с осью абсцисс вектор, проведенный из
начала координат в точку пересечения.
Годограф Z(A) пересекает окружность, если радиус окружности В
превышает некоторое пороговое значение Вп (рис. 3.12,6). Если радиус
окружности меньше порогового значения, то в системе будут происхо-
дить не одночастотные колебания, а сложные движения, включающие
в себя и собственные колебания системы [21].
Рис. 3.12
Построив годографы Z(A) при различных значениях частоты внеш-
него воздействия (рис. 3.12, в) и определив пороговые значения, можно
на координатной плоскости (си, В) построить область, в которой суще?
ствуют одночастотные вынужденные колебания. Эта область называет-
ся областью захвата.
Пример 3.7. В нелинейной системе (рис. 3.11) нелинейное
звено имеет идеальную релейную характеристику с парамет-
ром с = тг/2, передаточные функции линейных звеньев равны
W] — (0,01р+1)/(0,8р+1)р и Wz = 1/(0,2p-h 1), внешние воздей*
ствия равны g = 0 и h = -BsinlOt. Требуется найти пороговое
значение амплитуды внешнего воздействия.
Решение. В данном случае Q(jv) = —0,16Jcu*3 — сс*2 + ju*t
R(juj) — 0,01jo>* + 1, S(jcu) = -(-0,8cu*2 4- jcu*), коэффициенты гар-
монической линеаризации q(A) = Ac/irA = 2/А, q'(A) = 0, и форму-
ла (3.146) принимает вид
A —0,16Jcu*3
9
-w*2+jw* + (0,01jw* + l)-
Л
=B(-0.8w*2 + jw*)e-J'*’.
3.3. Вынужденные колебания и вибрационная линеаризация
79
Подставив сюда си* = 10 и е = cosy? — jsiny?, затем выделив веще-
ственную и мнимую части, получим
-100Л 4- 2 - 80В cos у? 4- 10В sin у? = 0,
— 150А 4- 0,2 4- ЮВ cos у? 4- 80В sin у? = 0.
Разрешив эту систему уравнений относительно синуса и косинуса,
найдем -А + 0,024 . 24 - 0,0055
cos <р =----------, sin tp =-----.
Отсюда, возвысив в квадрат и сложив, получим квадратное уравнение
А2 - 0,0144 + 0,00012 - 0,2В2 = 0.
Это уравнение имеет положительный корень, если В > 0,0188. Следо-
вательно, пороговое значение амплитуды Вп = 0,0188.
Вибрационная линеаризация. Если в системе (рис. 3.11) задаю-
щее воздействие отлично от нуля и изменяется медленно по сравнению
с колебательным процессом, то в этом случае управляемый процесс
и вынужденные колебания будут описываться уравнениями (3.14)
Q(p)e° + R(p)o° = Q(p)g,
A[Q(ja/) + /?(jw*)(g(4, e°) + j?'(V))]^ = -BS(jw*).
Здесь <7° является функцией амплитуды А и ошибки управляемого
процесса е°: <т° = <т°(Л, е°).
Для исследования управляемого процесса можно поступить следу-
ющим образом: из второго уравнения найти амплитуду А как функцию
от е° и подставить в первое уравнение. При этом получим
Q(p)e0 + /?(p)$(e0) = Q(p)g, (3.15)
Ф(е°) — <т°(4(е°), е°).
Затем исследовать полученное уравнение, зависящее только от неиз-
вестной ошибки е°. Независимо от характеристики нелинейного зве-
на функция Ф(е°) оказывается гладкой и ее можно линеаризовать
в окрестности начала координат:
Ф(е°) = fcHe°, (3.16)
, ЙФ
™е = *0
Для всех
— коэффициент вибрационной линеаризации.
е°=0
однозначных и неоднозначных нелинейных характери-
стик, симметричных относительно начала координат [4],
_ йФ(е°) __ daQ
н - ~d^~ ео=о" ео=о
(3.17)
80
Гл. 3. Метод гармонической линеаризации
Из нее следует, что для вычисления коэффициента вибрационной ли-
неаризации нет необходимости вычислять функцию Ф(е°).
После подстановки выражения (3.16) в (3.15), получим линейное
уравнение , п
[Q(p) + fcH/?(p)]e° = Q(p)g-
При возникновении колебательного процесса в системе разрывные
нелинейные характеристики для медленных процессов становятся глад-»
кими. Процесс, при котором за счет колебания разрывные характери-
стики нелинейных звеньев становятся гладкими, называют вибраци-
онным сглаживанием, а процесс линеаризации, который происходит
в результате вибрационного сглаживания, — вибрационной линеариза-
цией.
Вибрационную линеаризацию можно осуществить как вынужден?
ными колебаниями, так и автоколебаниями. В обоих случаях коэффм^
циент вибрационной линеаризации, который определяется по форму-
ле (3.17), зависит от амплитуды колебаний на входе нелинейного звена.
Поэтому чтобы вычислить коэффициент fcH, нужно знать эту амплитуд
ду. При вибрационной линеаризации вынужденными колебаниями она
равна амплитуде внешнего колебания, а при вибрационной линеариза*
ции автоколебаниями — амплитуде симметричных автоколебаний.
Вибрационная линеаризация вынужденными колебаниями.
Пусть на вход нелинейного звена системы (рис. 3.13) подается
гармонический “
намного выше
функцией
сигнал h = В sin ui*t. При этом частота колебания
полосы пропускания линейного звена с передаточно^
^д2(Л) + д'2(Л)|ад^*)|«1.
Рис. 3.13
На входе нелинейного звена имеем
х = е° + е*, е* = h = В sin о?t.
Таким образом, в системе на входе нелинейного звена возникая^
вынужденные колебания с амплитудой, равной амплитуде внешнего
колебания (А ~ В), и сдвигом фазы <р = 0. И в этом случае прй
вычислении коэффициента вибрационной линеаризации в качестве ам-
плитуды вынужденного колебания подставляется амплитуда внешнего
колебания В. Поэтому величину коэффициента вибрационной лине-
3.3. Вынужденные колебания и вибрационная линеаризация
81
аризации можно изменять за счет выбора этой амплитуды. Однако
амплитуду внешнего воздействия нельзя брать произвольной. С одной
стороны, она не должна быть слишком большой, чтобы возмущение
не оказывало заметного влияния на процесс управления. С другой
стороны, амплитуда В должна быть, во всяком случае, не меньше мак-
симального значения сигнала е°, до которого необходимо обеспечить
линейность характеристики.
Вибрационная линеаризация автоколебаниями. Вибрационную
линеаризацию можно реализовать, создав вокруг нелинейного зве-
на внутренний автоколебательный контур (рис. 3.14). Передаточные
функции W2 и 1Уз выбираются так, чтобы частота автоколебаний была
достаточно высокой и автоколебания не пропускались остальными зве-
ньями, находящимися за пределами внутреннего контура, и амплитуда
автоколебаний была не меньше максимального значения медленно ме-
няющегося составляющего сигнала е на входе нелинейного звена.
На входе нелинейного звена имеем
е = е° 4-е*, е* = 4sinutf,
где е° — медленно меняющая составляющая; А, ш — амплитуда и ча-
стота автоколебаний. Исследование такой системы производится сле-
дующим образом. Рассматривая внутренний контур, определяется ам-
плитуда А симметричных автоколебаний. Затем, используя найденное
значение амплитуды, определяется коэффициент вибрационной линеа-
ризации /сн, и нелинейное звено заменяется линейным звеном с пере-
даточной функцией, равной fcH.
Рис. 3.14
Пример 3.8. Пусть в нелинейной системе (рис. 3.14) нелиней-
ное звено имеет идеальную релейную характеристику (см. рис. 3.8, а)
с параметром с = тг, а линейные звенья имеют передаточные функ-
ции вида Wi = fci(l + 0,Ip), W2 = 1/(0,1р + 1)р, Ж3 = 1),
^4 = 1/(р4-1). Требуется определить параметры к$ и Т$ такие, при
которых на входе нелинейного звена амплитуда автоколебаний А = 4
и звено с передаточной функцией Ж4 ослабляет амплитуду автоколе-
баний в 100 раз.
Решение. Так как автоколебания через звено с передаточной
функцией W4 практически не проходят — амплитуда на его выходе
82
Гл. 3. Метод гармонической линеаризации
в 100 раз меньше, чем на его входе, — при исследовании автоколебаний
можно ограничиться рассмотрением только внутреннего контура.
Передаточная функция линейной части этого контура и коэффици-
енты гармонической линеаризации нелинейного звена соответственно
имеют вид
w = W2W3 = fc3/(0,Ip2 + р)(Т3р + 1) и q = 4с/7гЛ = 4/А, q' = 0.
Условие возникновения периодического процесса принимает вид
-O.lTsjw3 - (0,1 + Т3)ш2 + ju) + k3~ = 0
/1
или 4
- (0,1 + Тз)шг + fc34 = °. -0,lT3w3+w = 0.
Л
Отсюда для амплитуды и частоты получаем: А = 4&зТз/( I + 10Тз),
и>* = у/Щ/Тз.
Так как звено с передаточной функцией W4 ослабляет амплитуду
автоколебаний в 100 раз и его амплитудная частотная функция имеет
вид A<(w) = 1/У1 +о/2, то имеем
Ai(w*) = г- 1 = 0,01 или Тз = 0,0001Т3 +0,001.
k ^1 + (10/Тз)
Отсюда находим Т3 0,001. Подставив это значение для Т3 в ранее
полученное выражение для амплитуды и учитывая, что по условию
амплитуда на входе нелинейного звена равна 4, получаем
л 4fc3T3/(l + 10Тз) 1+0,01
= 4.
Из этого соотношения находим к$ — 1010. Таким образом, искомыми
параметрами являются к$ = 1010 и 7з = 0,001.
Теперь убедимся, что в системе действительно возникнут автоколе-
бания. Для этого проверим устойчивость найденного периодического
процесса. Так как qf = 0, условие устойчивости имеет вид
<Ш) =_±
dA А=4 Л2 А=4 4 •
Условие устойчивости выполняется. Следовательно, колебания асимп-
тотически орбитально устойчивы, и в системе возникнут автоколеба-
ния.
Пример 3.9. При каких положительных значениях параметра к\
система, рассмотренная в примере 3.8, будет устойчива. Параметры к$
и 7з принимают значения, найденные в указанном примере.
Решение. Так как в системе происходит вибрационная ли-
неаризация автоколебаниями, нелинейное звено заменим линейным
3.3. Вынужденные колебания и вибрационная линеаризация 83
(рис. 3.15) и найдем его передаточную функцию, равную /сн. Для реле
с идеальной характеристикой имеем
О 2с . е° . е°
ст = — arcsin -т = 2 arcsin —г.
7Г А А
В соответствии с формулой (3.17) кИ находится следующим образом:
-о , » I Л
" Зе» 1е°=0 А^/1 - (е°/Л)! 1е»-0 Л
Учитывая, что амплитуда симметричных колебаний А = 4, получа-
ем fcH — 0,5.
Рис. 3.15
Преобразуем структурную схему вибрационно линеаризованной си-
стемы (рис. 3.15) в одноконтурную, заменив внутренний контур звеном
с передаточной функцией
= fcH^2 = 0,5(0,001р+1)
^2'3 l + fcHW"2^3 0.0001Р3 + O.lOlp2 +р + 505'
Передаточная функция разомкнутой системы имеет вид
UZ-U/IV и/ - fci(0,00005p2 + 0,0505p + 0,5)
W WiW2i3W4 0>0001p4 4-O.lOlp3 4-l.lOp2+ 506p + 505'
Складывая числитель и знаменатель и положив р = А, получим харак-
теристическое уравнение замкнутой системы
0,0001а4 + 0.101А3 + (1,10 + 0,00005fc,}A2+
+ (506 + 0.0505fc,)A + 505 + 0,5fci = 0.
При положительном к\ необходимое условие устойчивости выполняет-
ся. Поэтому по критерию Льенара-Шипара система будет устойчива,
если определитель Гурвица 3-го порядка будет положительным:
Дз =
ai аз 0
ао а>2 а4
0 ai аз
== ai(a2tt3 ~ а1О<) — аоа| > 0.
84
Гл. 3. Метод гармонической линеаризации
Здесь ао = 0,0001, ai = 0,101, аг = 1,10 + 0,00005fci, аз = 506 +
+ 0,0505fci, а4 = 505 + 0,5fci. Подставив эти выражения в верхнее
неравенство, получим
0,0025fci - 3,08 > 0.
Отсюда следует, что система будет устойчива при k\ > 5200.
Задачи
3.54. В нелинейной системе (рис. 3.13) нелинейное звено имеет ха-
рактеристику идеального реле (рис. 3.8, а) с высотой с = тг/2, линейные
звенья имеют передаточную функцию ИЛ (р) = 5 и ТУг(р) == 2/(р2 + р),
внешние воздействия g = 1 и h = 10 sin t. Исследовать: а) возникнут
ли в системе одночастотные вынужденные колебания; б) если да, то
определить амплитуду вынужденных колебаний на входе нелинейного
звена.
3.55. В нелинейной системе (рис. 3.13) нелинейное звено имеет
характеристику идеального реле (рис. 3.8, а) с высотой с = тг/2, ли-
нейные звенья имеют передаточную функцию ИЛ(р) — 5 и И^р) =
= 1/(р3 + 2р2 +р), внешние воздействия g = 1 и h = lOsint Исследо-
вать: а) возникнут ли в системе одночастотные вынужденные колеба-
ния; б) если да, то определить амплитуду вынужденных колебаний на
входе нелинейного звена.
3.56. В нелинейной системе (рис. 3.13) нелинейное звено имеет ха-
рактеристику идеального реле (рис. 3.8, а) с высотой с = тг/2, линейные
звенья имеют передаточную функцию ИЛ(р) = 5 и И^(р) = 1/(р + I)3,
внешние воздействия g = 1 и h — 10 sin t. Исследовать: а) возникнут
ли в системе одночастотные вынужденные колебания; б) если да, то
определить амплитуду вынужденных колебаний на входе нелинейного
звена.
3.57. В нелинейной системе (рис. 3.13) нелинейное звено имеет
релейную характеристику с зоной нечувствительности (рис. 3.8,6)
с высотой с = тг/2 и зоной нечувствительности а = 1, линейные зве-
нья имеют передаточную функцию TVi(p) = 5 и И^(р) = 2/(р2 + р),
внешние воздействия g = 0 и h = 10 sin t. Исследовать: а) возникнут
ли в системе одночастотные вынужденные колебания; б) если да, то
определить амплитуду вынужденных колебаний на входе нелинейного
звена.
3.58. В нелинейной системе (рис. 3.13) нелинейное звено имеет
релейную характеристику с зоной нечувствительности (рис. 3.8,6)
с высотой с = тг/2 и зоной нечувствительности а = 1, линейные зве-
нья имеют передаточную функцию Wj (р) = 5(1 + 0,2р) и ТУг(р) =
= 2/(р3 + 2р2 +р), внешние воздействия g = 0 и h = 10sint. Исследо-
вать: а) возникнут ли в системе одночастотные вынужденные колеба-
3.3. Задачи
85
ния; б) если да, то определить амплитуду вынужденных колебаний на
входе нелинейного звена.
3.59. В нелинейной системе (рис. 3.13) нелинейное звено имеет
релейную характеристику с зоной нечувствительности (рис. 3.8,6)
с высотой с = и зоной нечувствительности а — 1, линейные зве-
нья имеют передаточную функцию Wj(p) = 5(1 + 0,2р) и И4(р) =
= 2/(р^ + 2р + р), внешние воздействия g = 0 и h = 20 sin Л Исследо-
вать: а) возникнут ли в системе одночастотные вынужденные колеба-
ния; 6) если да, то определить амплитуду вынужденных колебаний на
входе нелинейного звена.
3.60. 6 нелинейной системе (рис. 3.13) нелинейное звено имеет
характеристику идеального реле (рис. 3.8, а) с высотой с = тг/2, ли-
нейные звенья имеют передаточную функцию Wi(p) = (р+ 1,5)/р и
Жг(р) = 3/(2р + I)2, задающее воздействие g — 1. Исследовать мето-
дом вибрационной линеаризации устойчивость системы при следующих
внешних колебаниях: a) h = 0,1 sin ЗОЛ, б) h = sin30t; в) h == lOsin ЗОЛ
3.61. В нелинейной системе (рис. 3.13) нелинейное звено имеет
характеристику идеального реле (рис. 3.8, а) с высотой с = тг/2, ли-
нейные звенья имеют передаточную функцию (р) = (р + 0,5)/р и
Жг(р) = 2/(2р+ I)2, задающее воздействие g = 1. Исследовать мето-
дом вибрационной линеаризации устойчивость системы при следующих
внешних колебаниях: a) h = 0,1 sin ЗОЛ 6) h — sin ЗОЛ, в) h= lOsin ЗОЛ
3.62. В нелинейной системе (рис. 3.13) нелинейное звено име-
ет характеристику идеального реле (рис. 3.8, а) с высотой с — тг/2,
линейные звенья имеют передаточную функцию Wi(p) = (р + 3)/р и
И^(р) = 1/(2р + I)2, задающее воздействие g ~ 1. Исследовать мето-
дом вибрационной линеаризации устойчивость системы при следующих
внешних колебаниях: a) h = 0,1 sin ЗОЛ б) h — lOsin ЗОЛ
3.63. В нелинейной системе (рис. 3.13) нелинейное звено имеет ре-
лейную характеристику с зоной нечувствительности (рис. 3.8,6) с вы-
сотой с = тг/2 и зоной нечувствительности а = 1, линейные звенья име-
ют передаточную функцию W^i(p) = (р + 3)/р и И^(р) = 1/(2р + I)2,
задающее воздействие g = 1. Исследовать методом вибрационной лине-
аризации устойчивость системы при следующих внешних колебаниях:
a) h = 1,2 sin 30t; 6) h = 5 sin ЗОЛ
3.64. В нелинейной системе (рис. 3.13) нелинейное звено имеет ре-
лейную характеристику с зоной нечувствительности (рис. 3.8,6) с вы-
сотой с = тг/2 и зоной нечувствительности а — 1, линейные звенья име-
ют передаточную функцию Wi(p) = (р+ 1,5)/р и И^(р) = 3/(2р+ I)2,
задающее воздействие g = 1. Исследовать методом вибрационной лине-
аризации устойчивость системы при следующих внешних колебаниях:
a) h = 1,01 sin ЗОЛ 6) h = 1,2 sin ЗОЛ в) h = 5 sin ЗОЛ
86 Гл. 3. Метод гармонической линеаризации
3.65. В нелинейной системе (рис. 3.13) нелинейное звено имеет ре-
лейную характеристику с зоной нечувствительности (рис. 3.8, б) с вы-
сотой с = тг/2 и зоной нечувствительности а = 1, линейные звенья име-
ют передаточную функцию Wi(p) = (р + 0,5)/р и И^(р) = 2/(2р+ I)2,
задающее воздействие g = 1. Исследовать методом вибрационной лине-
аризации устойчивость системы при следующих внешних колебаниях:
a) h = 1,2 sin 30t; б) h = 5sin30t.
Ответы
4c
3.1. q(A) = ^,q'(A)=0.
7ГЛ
4c
3.2. 9(Л) = 5
7ГЛ
q'(A) = О, A
7Г
a
b b
A ' A
, q’(A) =0, A a.
o'(A} —
’ q{A>~ nA2
„ „ ... 2c . b b
3.3. q(A) = — arcsm -r 4- —
v ’ тгЬ A A
a.
, q'(A) =0, A Z b.
_ _ , лч 2k » .
3.4. q(A) — — — — arcsm — -
7Г
2c
3.5. q(A) = —
7ГЛ
A Zb.
4c
3.6. q(A) = -^r
7ГА
k
„ „ . .. k 7Г . za
3.7. q(A) = - - + arcsm I 1---------—
' тг 2 \ A
‘ ' 7Г
«'(-4) =
« о o 2c . e° 4c
3.8. a = — arcsm —, q = —-
7Г А 7гЛ
Л Л n с/ .a + e° .a — e°\
3.9. au = - arcsm — ----arcsm —-— ,
тг \ A A j
/ a+e°\2 I" / a-e°\2
1 “ J + V1 ~ M )
2c
7ГЛ
, q' = 0, Л > |e°|.
3.3. Ответы
87
3.10.
о с / . 6 4- е° . 6 — е°
а = — I arcsin — ----------arcsin —-—
7г \ А А
f ЬЬс
’9
3.11.
сг° = fee0, q(A) = -
7Г
7Г . ( t
— 4- arcsin! 1 —
3.12. Симметричные автоколебания с частотой w = 1 и амплитудой
А = 10. 3.13. Симметричные автоколебания с частотой о; = 2 и ампли-
тудой А = 4. 3.14. Симметричные автоколебания с частотой о; = л/3
и амплитудой А = 5. 3.15. Автоколебаний нет. 4.16. Автоколебаний
нет. 3.17. Симметричные автоколебания с частотой о; = 1 и амплиту-
дой А 20. 3.18. Симметричные автоколебания с частотой о; = 2 и ам-
плитудой А = 2,24. 3.19. Автоколебаний нет. 3.20. Симметричные ав-
токолебания с частотой ы = л/3 и амплитудой А == 14,93. 3.21. Несим-
метричные автоколебания с частотой ы == \/3, амплитудой А = 5 и сме-
щением е° = 0,2. 3.22. Симметричные автоколебания с частотой о; = 1
и амплитудой А = 10. 3.23. Симметричные автоколебания с частотой
си = 1 и амплитудой А = 10. 3.24. Симметричные автоколебания с ча-
стотой w = 2 и амплитудой А = 4. 3.25. Симметричные автоколебания
с частотой w = 2 и амплитудой А = 4. 3.26. Симметричные автоколе-
бания с частотой w = УЗ и амплитудой А = 5. 3.27. Симметричные
автоколебания с частотой и ~ 2 и амплитудой А = 4. 3.28. Несиммет-
ричные автоколебания с частотой w = 2, амплитудой А = 3,51 и смеще-
нием е° = —1,68. 3.29. Симметричные автоколебания с частотой си = 1
и амплитудой А = 10. 3.30. Несимметричные автоколебания с частотой
cu = 1, амплитудой А = 10 и смещением е° = — 1. 3.31. Автоколебаний
нет. 3.32. Автоколебаний нет. 3.33. Симметричные автоколебания с
частотой си = %/3 и амплитудой А = 3,86. 3.34. Несимметричные авто-
колебания с частотой си = >/3, амплитудой А = 5 и смещением е° = 0,2.
3.35. Симметричные автоколебания с частотой w = 2, амплитудой
А = 2,24 и смещением е° = 0,2. 3.36. Симметричные автоколебания с
частотой си = 2 и амплитудой А = 2,24. 3.37. Автоколебаний нет. 3.38.
Симметричные автоколебания с частотой w = \/3 и амплитудой А = 5.
3.39. Несимметричные автоколебания с частотой си — л/З, амплитудой
А = 5 и смещением е° = 0,2. 3.40. Несимметричные автоколебания
с частотой w = 2, амплитудой А = 4,89 и смещением е° = —0,12.
3.41. Несимметричные автоколебания с частотой cu = 1, амплитудой
А ~ 40 и смещением е° = — 1. 3.42. Несимметричные автоколеба-
88
Гл. 3. Метод гармонической линеаризации
ния с частотой cu = 1, амплитудой А = 20 и смещением е° — — 1.
3.43. Несимметричные автоколебания с частотой си = л/3, амплитудой
А = 9,94 и смещением е° = 0,19. 3.44. Несимметричные автоколебания
с частотой си = л/З, амплитудой А = 9,94 и смещением е° — 0,19.
3.45. Симметричные автоколебания с частотой си = 2 и амплитудой
А = 4,97. 3.46. Симметричные автоколебания с частотой си = 3,47 и
амплитудой А 2,43. 3.47. Симметричные автоколебания с частотой
и = 2 и амплитудой А = 4,97. 3.48. Симметричные автоколебания с ча-
стотой щ — 3,47 и амплитудой А 2,36. 3.49. Симметричные автоко-
лебания с частотой си — 4 и амплитудой А 2,24. 3.50. Симметричные
автоколебания с частотой си = 1,55 и амплитудой А 4,03. 3.51. Сим-
метричные автоколебания с частотой cu S 2,15 и амплитудой А 1,59.
3.52. Симметричные автоколебания с частотой си = 1,91 и амплитудой
А 5,42. 3.53. Симметричные автоколебания с частотой си = 2,99
и амплитудой А 1,47. 3.54. а) Да; б) А — 10. 3.55. а) Да; б) А = 10.
3.56. а) Да; б) А = 5. 3.57. а) Нет. 3.58. а) Нет. 3.59. а) Да;
б) А = 9,9. 3.60. а) неустойчива; б) неустойчива; в) устойчива.
3.61. а) устойчива; б) устойчива; в) устойчива. 3.62. а) неустойчива;
б) устойчива. 3.63. а) неустойчива; б) устойчива. 3.64. а) неустойчива;
б) устойчива; в) устойчива. 3.65. а) устойчива; б) устойчива.
Глава 4
МЕТОД ФУНКЦИЙ ЛЯПУНОВА
Основы общей теории устойчивости были заложены А. М. Ляпуно-
вым в его книге «Общая задача об устойчивости движения», которая
вышла в свет в 1892 г. [16]. В этой книге им был предложен об-
щий метод исследования устойчивости движения, который называется
вторым или прямым методом Ляпунова. Этот метод основан на
построении специальной функции, которая получила название функ-
ции Ляпунова. Прямой метод Ляпунова получил дальнейшее развитие
в трудах российских и зарубежных авторов. И метод исследований,
основанный на построении функции Ляпунова, включая прямой метод
Ляпунова, стали называть методом функций Ляпунова.
4.1. Знакопостоянные и знакоопределенные функции
В большинстве случаев функции Ляпунова являются знакоопреде-
ленными, а их производные — знакоопределенными или знакопостоян-
ными функциями.
Рассмотрим функцию V(x), определенную в некоторой области
D С Rn, и функцию У(х, t), определенную на прямом произведении
D х [0, оо), т. е. при хеОи0^1<оо. Область D содержит начало
координат: О G D. Функции У(х) и V(x, t) являются непрерывными
и обладают непрерывными производными по всем своим аргументам.
Функция У(х) называется знакоположительной или положитель-
но полуопределенной в области D, если V(0) = 0 и V(x) 0 всюду
на D, и знакоотрицательной или отрицательно полуопределенной
в области D, если V(0) = 0 и V(x) ^0 всюду на D.
Функция V(x, t) называется знакоположительной или положи-
тельно полуопределенной в области D, если при всех t^to (to^O)
V(0, t) = 0 и V(x, t) 0 всюду на Dt и знакоотрицательной или
отрицательно полуопределенной в области £>, если при всех to
(to 0) V(0, t) = 0 и V(x,t) < 0 всюду на D.
Знакоположительные и знакоотрицательные функции в области D
называются знакопостоянными функциями области D.
Функция У(х) называется положительно определенной в обла-
сти £), если У(0) = 0 и V(x) > 0 всюду на D, кроме точки х = 0,
90
Гл. 4. Метод функций Ляпунова
и отрицательно определенной в области D, если У(0) = 0 и V(x) < 0
всюду на D, кроме точки х = 0.
Функция V(x,f) называется положительно определенной в обла-
сти D, если при всех t to (to 0) V(0,t) = 0 и найдется такая
положительно определенная в области D функция У+(х), что при
всех t to (to 0) V(x, t) > V+(x) всюду на D, кроме точки х = 0,
и отрицательно определенной в области D, если —У(х,£) является
положительно определенной в области D.
Положительно определенные и отрицательно определенные функ-
ции в области D называются знакоопределенными функциями в об-
ласти D. Очевидно, знакоопределенные функции являются частным
случаем знакопостоянных функций.
Функции, которые не являются знакопостоянными функциями в об-
ласти jD, называются знакопеременными функциями в области D.
В качестве примера рассмотрим следующие функции:
Vi(x) =x2i +xl,
У3(х) =x2i+xl + x2,
Среди этих функций в пространстве Л3 функция Vj(x) является поло-
жительно полуопределенной, функция Рг(х) — отрицательно полуопре-
деленной, функция Рз(х) — положительно определенной и функция
р4(х) —отрицательно определенной. Функции VJ(x) и Ц(х) являются
знакопостоянными, а функции Рз(х) и р4(х) — знакоопределенными.
В пространстве R2 функция Vi(x) является положительно определен-
ной, а функция Рз(х) — отрицательно определенной.
Функция V(x,t) называется функцией, допускающей бесконечно
малый верхний предел, если как бы мало ни было положительное
число е', найдется такое положительное число 5f, что |V(x, t)\ < ef при
всех t to, если |х| < 5'.
Функция V(x,t) называется функцией, допускающей бесконечно
большой нижний предел, если как бы велико ни было положительное
число Е, найдется такое положительное число Д, что |V(x, t)| > Е при
всех t to, если |х| > Д. Иначе говоря, функция V(x,t) называется
функцией, допускающей бесконечно большой нижний предел, если
при любых t to |V(x, t)| оо при |х| оо.
Например, функции V(x,t) = (х| + х% 4-x|)sin2t и V(x,t) = (xf+
+х2 + хз)е~* являются функциями, допускающими бесконечно малый
верхний предел, а функции V(x,t) = 10sin2[(xi + и V(x,t) =
= 10(а^ 4- таковыми не являются. В пространстве R3 функция
V(x,t) = (х\ + Ж2 + x2)(sin2f + 1) является функцией, допускающей
бесконечно большой нижний предел, а функции V(x, t) = (х| + ж^х
4.L Знакопостоянные и знакоопределенные функции 91
x(sin2f+l) и V{x,t) = [^i/(l + я2) +ж|/(1 +х|) +я2/(1 +ж|)]х
x(sin2i+ 1) таковыми не являются.
Если V(x) является знакоопределенной функцией, то существу-
ет такое положительное число ту, что все поверхности V(x) = с,
где |с| < т/, являются замкнутыми относительно точки х = 0 поверхно-
стями; если V(x) является знакоопределенной функцией и |V(x)| —> оо
при |х| -> оо, то все поверхности V(x) = с при любом с являются
замкнутыми относительно точки х = 0 поверхностями [3].
Покажем на примере, что не при всех знакоопределенных функ-
циях V(x) все поверхности V(x) = с при любом с являются замкну-
тыми относительно точки х = 0 поверхностями. В качестве примера
рассмотрим в пространстве R2 положительно определенную функ-
/р2 2»2
цию V(x) =------L- _|---в этом случае при с = г2 уравнение
1 + 1 + Xj
поверхности V(x) — с принимает вид
xi
.2
1
~2 т2
Это уравнение при г < 1 представляет уравнение эллипса
^1,^2 =
а2 Ь2
при г = 1 — уравнение прямой х2 = 1 или Х2 = ±1, и при г > 1 —
уравнение гиперболы
«.2 «.2
Х2 Х1
г2 \
Ъ2=г\ d2 = ~^\
rz — 1 /
Таким образом, в данном случае поверхности (кривые) уровня V(x) = с
являются замкнутыми только при т < 1 (рис. 4.1).
Рис. 4.1
92
Гл. 4. Метод функций Ляпунова
Положительно определенные квадратичные формы. При по-
строении функции Ляпунова широко используются квадратичные фор-
мы п
V(x) = ^2 QikXiXk, qik = Qki
»,fe=i
или в матричной форме
V(x) = xTQx.
Любую квадратичную форму в матричной записи можно представить
так, чтобы в ней матрица была симметрической. Поэтому, как правило,
всегда предполагается, что матрица, используемая при записи квад-
ратичной формы, является симметрической. Так как симметрические
матрицы в методе функций Ляпунова играют важную роль, то кратко
остановимся на их свойствах.
Симметрическая матрица Q называется положительно (отрица-
тельно) определенной матрицей, если квадратичная форма V(x) =
= xTQx является положительно (отрицательно) определенной функ-
цией, и положительно (отрицательно) полуопределенной матрицей,
если квадратичная форма V(x) = xTQx является положительно (отри-
цательно) полуопределенной функцией.
Симметрическая матрица Q обладает следующими свойствами.
1) все ее собственные значения, т.е. корни А$(г — 1,2, ..., п) ее ха-
рактеристического уравнения det(Q — /А) = 0 являются вещественны-
ми числами;
2) если она положительно (отрицательно) определена, то все ее
собственные значения являются положительными (отрицательными):
А» > О (А» < 0); если она положительно (отрицательно) полуопреде-
лена, то все ее собственные значения являются неотрицательными
(неположительными): Ai 0 (Ai < 0);
3) определитель от симметрической матрицы равен произведению
ее собственных значений: det Q = Ai Аг • • • An-
Дальше часто будет использоваться одно свойство квадратичной
формы. Сформулируем это свойство в виде леммы.
Лемма 4.1. Квадратичная форма V(x) = xTQx удовлетворяет
неравенству
Хт |х| < xTQx Хм |х|2,
где Хт — минимальное, а Хм — максимальное собственное значение
матрицы Q.
Если квадратичная форма V(x) = xTQx положительно определена,
то она неограниченно возрастает при стремлении точки х к бесконеч-
ности: V(x) = xTQx оо при |х| —> оо.
Рассмотрим условие, при выполнении которого квадратичная форма
является положительно определенной функцией, или симметрическая
матрица является положительно определенной.
4.1. Задачи
93
Критерий Сильвестра. Для того чтобы квадратичная фор-
ма V(х) = xTQx была положительно определенной функцией, необ-
ходимо и достаточно, чтобы все определители
Д1 = 9п.
Д2 =
911 912
921 922
detQ
были положительны.
Пример 4.1. Дана квадратичная форма
V(x) = xf + 5х| + Зх| + 4xjX2 — 2хгхз, х G Я3.
Исследовать, является эта форма положительной определенной функ-
цией.
Решение. Если записать данную квадратичную форму в матрич-
ной форме, то элементами соответствующей матрицы Q будут дц = 1,
912 = 921 = 2, 91з = 9з1 = 0, q22 = 5, дгз = дзг = — 1, дзз = 3. Определи-
тели
2
5
= 1.
Д1 = 911 = 1> Дг =
911
921
2
912 _ 1
922
911 912 913 1 2 0
Дз = 921 922 923 = 2 5 -1
931 932 9зз 0 -1 3
= 2
все положительны. Следовательно, по критерию Сильвестра данная
квадратичная форма является положительно определенной функци-
ей.
Задачи
4.1. Определить, являются ли положительно определенными, по-
ложительно полуопределенными, отрицательно определенными или от-
рицательно полуопределенными в пространстве Я3 следующие квадра-
тичные формы:
a) V(x) = Х1+х|+Зхз+2х]Х2; б) V(x) = xf+xl+Sx^—2x1X2;
в) V(x) = 5xi+2x| +%$ -4х2х3; г) V(x) = 5х1+2х|+хз+2х1Х2;
д) V(x) = -4х1-2х|-Хз+Х1Х2; е) V(x) = -4х1-2х|-хз+4хзх2;
ж) У(х) = —Xj—4х|+4х[Хг-х|; з) V(x) = —х|—4х2+4хзХ2—Хр
и) У(х) = 2х1+9х2+хз~6х1Х2-2х1Хз; к) V(x) = Xj+xf;
л) V(x) = —2х]—9х|—х|+6х1Х2+2х1Хз; м) V(x) = -Хз-х2.
94
Гл. 4. Метод функций Ляпунова
4.2. Определить, допускают ли бесконечно малый верхний предел
следующие функции:
a) v(x,t) = ^/х^ + х2 sint; б) v(x,t) = sin^^x^ 4-х2);
в) v(x,t) = e-t У®] + х| J г) v(x,t) = е‘(х2 4-х|);
д) v(x, t) = (х2 + x2)(sin21 + e-t); v(x, t) = x2 4- x| + sin2 4- e“‘;
ж) v(x,t) = (x2 4-x|) sin214- e-t; з) v(x,t) = (x2 4- x|) sin214-x2e-t;
и) v(x, t) = (x2 + x|) + sin21 + x2e-2t;
к) v(x, t) = (x2 + x|) + x| sin21 + x2e-2t.
4.3. Определить, допускают ли в пространстве R3 бесконечно боль-
шой нижний предел следующие функции:
a) v(x, t) = (х2 4- х| 4- х2)е‘ 4- (х2 + х|) sin2i;
б) v(x, t) = х2 + х| + x2 sin21 + (x2 + x|)e‘;
в) v(x, i) = (x2 + x| + x2)e-t + (x2 + x|) sin2i;
r) v(x, t) = (x2 + x2)e‘ + x| sin21;
д) v(x, i) = x2 4- x| 4- x2e‘ + x| sin2t;
e) v(x, t) = x2 + x| + x|e-t 4- x2 sin21;
ж) v(x, t) = (x2 + x|)e‘ + x2e-t 4- x2 sin21;
з) v(x, t) = (x2 + x|)e-t + x2e* + x2 sin21;
и) v(x, t) = (x2 4- х2)е‘ 4- x2 4- x2 sin21;
к) v(x, t) = (x2 4- x|)e-t 4- (x2 4- х|)е‘ 4- x2.
4.2. Теоремы об устойчивости
Теоремы об устойчивости неавтономных систем. Пусть система
описывается уравнениями
xi — Xj(xi,X2, ..., xn,t), г =1,2....п (4.1)
или в векторной форме
х = Х(х,«). (4.2)
Начало координат, т. е. точка х = 0, является положением равнове-
сия: X(0,t) = 0 при всех t to- Правая часть приведенных уравнений
зависит явно от времени. Система, которая описывается такими урав-
нениями, и сами эти уравнения называются неавтономными систе-
мами.
4,2, Теоремы об устойчивости
95
Решение уравнения (4.1) при начальном условии x(to) = х° будем
обозначать x(x°,t). Следовательно, справедливо равенство x(x°,to) =
= х°.
Рассмотрим функцию V(x,t). Производная этой функции по време-
ни, вычисленная на траекториях системы (4.1), имеет вид
—dT~ ~ \ ~o^TXi{ x f) + ~дГ~ - t} + —dt~-
Про эту производную говорят, что она является (полной) производной
по времени функции V(x, £) в силу уравнения (4,1) или производной
по времени функции V(x), вычисленной в силу уравнения (4,1).
Теорема 4.1 (Теорема Ляпунова об устойчивости).
Положение равновесия х = 0 неавтономной системы (4.1) устойчиво
по Ляпунову, если существует положительно определенная функ-
ция V(x,t) такая, что ее производная по времени в силу уравне-
ния этой системы (4.1) является отрицательно полуопределенной
функцией.
Функции, которые удовлетворяют теоремам устойчивости или
неустойчивости, т. е. по которым можно судить об устойчивости или
неустойчивости системы, называются функциями Ляпунова.
Теорема 4.2 (Теорема Ляпунова об асимптотиче-
ской устойчивости). Положение равновесия х = 0 неавтоном-
ной системы (4.1) асимптотически устойчиво, если существует
такая положительно определенная функция V(x,t), допускающая
бесконечно малый верхний предел, что ее производная по времени
в силу уравнения (4.1) является отрицательно определенной функ-
цией.
Пример 4.2. Исследовать устойчивость положения равновесия
системы
±1 = — e~lx\ + e~2tX2,
±2 = — 2e~2txi — х$-
Решение. Функцию Ляпунова будем искать в виде V(x) =х2 +
+ ах% (а > 0). Производная по времени от этой функции в силу
заданных уравнений имеет вид
V(x) = 2^i±i + 2&Х2Х2 = —2х2е~г 4- 2xiX2e~2t — 4ax2Xje~2t — 2ах^
Если положить а — 1/2, то производная принимает вид
V(x) = -2X1 е“* ~ х2
и становится отрицательно определенной функцией. Следовательно,
положение равновесия заданной системы асимптотически устойчиво.
96 Гл. 4, Метод функций Ляпунова
Теорема 4.3 (Теорема об асимптотической устой-
чивости в целом). Положение равновесия х = 0 неавтоном-
ной системы (4.1) асимптотически устойчиво в целом {глобально
асимптотически устойчиво), если существует такая положитель-
но определенная функция V(x,t), допускающая бесконечно малый
верхний предел и бесконечно большой нижний предел, что ее про-
изводная по времени в сйлу уравнения этой системы является
отрицательно определенной функцией.
Здесь, естественно, предполагается, что функция V(x, t) является
положительно определенной функцией, ее производная отрицательно
определенной функцией на всем фазовом пространстве
Пример 4.3. Исследовать устойчивость положения равновесия
системы
±1 = -(1 + sin2t)xi +Х2 -zf, Х2 = -Ж1 -Z2 ~ е^х^.
Решение. Функцию Ляпунова будем искать в виде V(x) = х2 +
+ axl {ot > 0). Производная по времени от этой функции в силу
заданных уравнений имеет вид
V(x) = 2xi±i + 2ах2х2 = 2xi [—(1 + sin2f)xi + х2 — £?]+
+ 2ая2(“Я1 — х2 — е-*^).
Если положить 1, то кандидат на функцию Ляпунова становится
положительно определенной функцией, а производная принимает вид
V(x) = — 21^(1 + sin2 t)x^ + xf + xl +
и становится отрицательно определенной функцией. Кроме того, эта
функция допускает бесконечно большой нижний предел. Следователь-
но, положение равновесия рассматриваемой системы асимптотически
устойчиво в целом.
Теоремы об устойчивости автономных систем. Пусть система
описывается уравнениями
Xi = Xi{x[,x2i .... хп), i = 1,2, ..., п (4.2а)
или в векторной форме
х = Х(х). (4.26)
Начало координат, т. е. точка х = 0, является положением равнове-
сия: Х(0) = 0. Правая часть приведенных уравнений не зависит явно
от времени. Система, которая описывается такими уравнениями, и сами
эти уравнения называются автономными системами.
4,2. Теоремы об устойчивости 97
При исследовании устойчивости автономных систем в качестве
функций Ляпунова используются функции У(х), не зависящие явно
от времени. Производная по времени функции V(x) в силу уравне-
ний (4.2) определяется следующим образом:
t—1
Теорема 4.4 (Теорема Ляпунова об устойчивости).
Положение равновесия х = 0 автономной системы (4.2) устойчиво
по Ляпунову, если существует положительно определенная функ-
ция V(x) такая, что ее производная по времени в силу уравне-
ния этой системы является отрицательно полуопределенной функ-
цией.
Пример 4.4. Исследовать устойчивость системы, которая описы-
вается уравнениями
£1 = Х%, Х2 — —хь
Решение. Функцию Ляпунова будем искать в виде квадратич-
ной формы
V(x) = x\ + 2axiX2 + /М»
где а и 0 — неизвестные параметры. Согласно критерию Сильвестра эта
форма будет положительно определенной функцией, если выполняется
неравенство Дг = 0 - а2 > 0- Производная по времени квадратичной
формы в силу заданных уравнений имеет вид
V(x) = 2xiii + 2q±iX2 + 2xi±2 4- 2Дх2хг =?
= 2xiX2 4- 2ах| - 2ах2 - 2/?хгХ1.
Если принять а = 0 и 0 = 1, то квадратичная форма будет положи-
тельно определенной, а ее производная будет равна нулю, т. е. функция
V(x) = Xj +х| удовлетворяет условиям теоремы Ляпунова. Следова-
тельно, положение равновесия х = 0 устойчиво по Ляпунову.
Пример 4.5. На тело с массой т действует сила F, обладающая
следующими свойствами: F = -/(у), /(0) == 0, f(y)y > 0 при у / 0.
Движение тела описывается уравнением my — F или в нормальной
форме уравнениями
. _ 1 „ .
Х1 — Х2, Х2 — /(Xi).
т
Исследовать устойчивость положения равновесия х = 0.
98
Гл, 4. Метод функций Ляпунова
Решение. В качестве кандидата на функцию Ляпунова рассмот-
рим полную энергию. Кинетическая и потенциальная энергии соответ-
ственно имеют вид
W = = CZ = -jr(I/)dI/ =
V° xf
Кандидат на функцию Ляпунова принимает вид
mxl 7
V(x) = W + U = -р + I /(xijdu.
*4
Эта функция является положительно определенной. Ее производную
по времени в силу уравнения движения
V(x) = тх2Х2 + /(xi)ii = -тх2~/(^1) + /(^1)^2 = О
ТП
можно рассматривать как отрицательно полуопределенную. Следова-
тельно, невозмущенное движение устойчиво.
Теорема 4.5 (Теорема Ляпунова об асимптотиче-
ской устойчивости). Положение равновесия х = 0 автономной
системы (4.2) асимптотически устойчиво, если существует такая
положительно определенная функция V(x), что ее производная по
времени в силу уравнения этой системы является отрицательно
определенной функцией.
Так как функция V(x) непрерывна и равна нулю в начале коорди-
нат, то она допускает бесконечно малый верхний предел. Поэтому эта
теорема непосредственно вытекает из теоремы 4.2.
Пример 4.6. Исследовать устойчивость положения равновесия
х = 0 системы
X! = —4- 2^2,
Х2 ~Х ] . 3^2 >
Решение. Для решения этой задачи воспользуемся методом
разделения переменных, предложенным Е. А. Барбашиным [3]. Метод
состоит в том, что функция Ляпунова ищется в виде функций, которая
сама и ее производная представляют собой сумму функций, каждая из
которых зависит только от одной фазовой переменной:
V(x) = ^Fi(a:<). V(x) = J2$i(a:<).
i i
4.2. Теоремы об устойчивости
99
В соответствии с этим методом в качестве кандидата на функцию
Ляпунова принимаем функцию
V(x) = Fi(xi) + F2(x2).
Производная по времени от функции в силу уравнений заданной си-
стемы имеет вид
V/ > dFz • з I о ^2 dF2« з
V(x) = —X! + — Х2 = Я + Т~2х2 - -Г~3X2-
dx\ dx2 d,X[ dx\ dx2 dx2
И чтобы она представляла сумму функций, каждая из которых зависит
только от одной переменной, разность средних членов справа в послед-
нем соотношении должна быть равна нулю:
dFi dF2 dFi / dF2 /
-—2x2 —-—xi — 0 или — / xi = — / 2x2.
dx\ dx2 dxi / dx2 /
Так как левая часть зависит от хь а правая часть от х2, то последнее
равенство возможно, если обе части являются константами и равны,
например, единице. Тогда имеем
dF\ _ dF2 __ 0
— #1, "j — 2X2-
dx i dx2
Отсюда, после интегрирования, получаем
Fi = ^xf, F2 = х|, V(x) =Fi(xi) + F2(x2) = + x|.
Производная по времени от функции кандидата на функцию Ляпунова
имеет вид
V(x) = --тЛг? - ^3x1 = -(х4 + 6х42).
Итак, полученная методом разделения переменных функция является
положительно определенной, а ее производная в силу уравнений рас-
сматриваемой системы - отрицательно определенной. Следовательно,
положение равновесия х = 0 асимптотически устойчиво.
Теорема 4.6. (Обобщен ная теорема об асимптотиче-
ской устойчивости). Положение равновесия х — 0 автономной
системы (4.2) асимптотически устойчиво, если существует такая
положительно определенная функция V(x), что ее производная по
времени в силу уравнения этой системы является отрицательно
полуопределенной функцией, и она обращается в нуль вне начала
координат на множестве М С D, не содержащем целых траекто-
рий [3].
Целой траекторией (или полутраекторией) системы называется
фазовая траектория в пространстве Яп, соответствующая решению
уравнения этой системы x(x°,t) (х° = x(to)) на всем интервале време-
ни fo < f оо. Так как при х° = 0 решение х(0, t) = 0 при всех t to,
100
Гл. 4. Метод функций Ляпунова
то начало координат х = 0 соответствует целой траектории. Если мно-
жество М задается уравнением <р(х) = 0: М = {х: = 0}, <р(х) —
гладкая (т. е. с непрерывными частными производными по всем своим
аргументам) функция, то условие отсутствия в М целых траекторий
можно записать следующим образом:
Ё = ^*(х) = grad^(x)X(x) 0. (4.3)
*=1 1
Это неравенство должно выполнятся на множестве М, т.е. при усло-
вии у>(х) = 0.
Множество М == {х: у>(х) — 0} представляет собой поверхность,
и последнее условие означает, что вектор скорости изображающей
точки не лежит на ее касательной плоскости. И, следовательно, если
изображающая точка попадает на поверхность (множество Л/), где
производная функции Ляпунова V(x) =0, то она сразу же ее покидает
и оказывается в области, где У(х) < 0.
Пример 4.7. Исследовать устойчивость положения равновесия
х = 0 системы
• • 3
X| *“ Х2^ 37 2 ~~' 371 37j•
Решение. Воспользуемся методом разделения переменных. Со-
гласно этому методу имеем
V(x) = Fl(xi) + F2(x2).
Производная по времени от функции в силу уравнений заданной си-
стемы имеет вид
• . . dF\ . dF2 . dF\ dF2
V(x) = — x{ + — x2 = Ж2 - xi
dxi dx2 dx\ dx2
—x3
dX2 2’
И чтобы она представляла сумму функций, каждая из которых зависит
только от одной переменной, необходимо, чтобы выполнялось равен-
ство
I 21
dF\ dF2 dF\
5—х2 - -z—xi = 0 или -z—
u371 dX2 (IX [
dF2
<1X2
! ®2-
Так как левая часть зависит от жь а правая часть от x2i то последнее
равенство возможно, если обе части являются константами и равны,
например, единице. Тогда имеем
dF\ dF2
dx\ Хь dx2 Х2‘
Отсюда, после интегрирования, получаем
= *2=^2- v(x) = Fi(xi) + F2(x2) = ^ + ^xj.
4.2. Теоремы об устойчивости
101-
Производная по времени от функции кандидата на функцию Ляпунова
имеет вид
У(х) = _^х3 = _х4
0X2
Она отрицательно полуопределена и обращается в нуль вне начала
координат на множестве, определяемом уравнением ^(х) = Х2 = 0.
Условие (11.6) принимает вид
В этом соотношении правая часть обращается в нуль на прямой Х2 = 0
только в начале координат. Следовательно, по обобщенной теореме об
асимптотической устойчивости положение равновесия рассматриваемой
системы асимптотически устойчиво.
Теорема 4.7 (Теорема об асимптотической устойчи-
вости в целом). Положение равновесия х = 0 автономной систе-
мы (4.2) асимптотически устойчиво в целом (глобально асимпто-
тически устойчиво), если существует такая положительно опре-
деленная функция У(х), допускающая бесконечно большой нижний
предел, что ее производная по времени в силу уравнения этой
системы является отрицательно определенной функцией.
Так как функция У(х) непрерывна и обращается в нуль в начале
координат, то она допускает бесконечно малый верхний придел. Поэто-
му теорема 4.7 вытекает из теоремы 4.3.
Теорема 4.8 (Теорема Барабашина-Красовского об
асимптотической устойчивости в целом). Положение рав-
новесия х — 0 автономной системы (4.2) асимптотически устойчи-
во в целом (глобально асимптотически устойчиво), если существу-
ет такая положительно определенная функция V(x), допускающая
бесконечно большой нижний предел, что ее производная по времени
в силу уравнения этой системы является отрицательно полуопре-
деленной функцией, и она обращается в нуль вне начала координат
на множестве М, не содержащих целых траекторий.
В качестве примера рассмотрим систему из примера 4.7. Бы-
ло показано, что функцией Ляпунова для этой системы является
V(x) = Xj/2 + ж|/2, которая стремится к бесконечности при |х| —> оо.
Т. е. эта функция и, как было показано, ее производная удовлетворяют
условию теоремы Барбашина-Красовского. Следовательно, положение
равновесия рассмотренной в примере 4.7 системы является асимптоти-
чески устойчивым в целом.
Исследование устойчивости нелинейных систем по линейному
приближению* Проблему исследования нелинейных систем по их
линейному приближению впервые поставил и разрешил А. М. Ляпунов.
102 Гл. 4. Метод функций Ляпунова
Не всегда по линейному приближению можно судить об устойчивости
исходной нелинейной системы.
В качестве примера рассмотрим систему
xi = Х2 + ая?,
. q
Х2 = ~Х\ + OtXl-
Функцию Ляпунова будем искать в виде положительно определенной
квадратичной формы V(x) = xj + я|- Производная по времени от этой
функции в силу заданных уравнений имеет вид
V(x) = 2xi±i + 2x2X2 = 2а(х* +
н она является положительно определенной функцией при а > 0 и от-
рицательно определенной функцией при а < 0. Следовательно, положе-
ние равновесия х = 0 рассматриваемой системы неустойчиво при а > 0
и асимптотически устойчиво при а < 0.
Линеаризованная система описывается уравнениями
±1 = Х2, Х2 = —х\.
Ее характеристическое уравнение А2 + 1 = 0 имеет два чисто мнимых
корня. Поэтому, как было показано во второй главе, начало координат
является особой точкой типа центр, и оно соответствует устойчивому
по Ляпунову положению равновесия. Таким образом, в рассматрива-
емом случае устойчивость линеаризованной системы не имеет ничего
общего с устойчивостью исходной нелинейной системы: по линейному
приближению нельзя делать какие-либо выводы об устойчивости ис-
ходной нелинейной системы как при а > 0, так и при а < 0.
Критерий устойчивости Ляпунова по линейному приближе-
нию. Пусть уравнения нелинейной системы представлены в виде
п
XI = gjjЖj +Яг(ж 1, Д?2> • • • » Яп)» Яг(0,0, ..., 0) — 0, i = 1,2, ..., п
J=1
нли в векторной форме
х = Ах + Я(х), Я(0) = 0, (4.4)
где
n / п \ 14-а
|л(х)|2 = ...хп)^с\ХухП . (4.5)
i=l '
Здесь а —малое положительное число, с — положительная константа.
Условие (4.5) означает, что разложение нелинейного члена Я(х) в (4.4)
в ряд Тейлора в начале координат начинается с членов, содержащих
квадраты или более высокие степени фазовых координат и их произве-
дения.
4.2. Теоремы об устойчивости 103
Теорема 4.9 (Критерий устойчивости Ляпунова по
линейному приближению). Положение равновесия х = 0 нели-
нейной системы (4.4) асимптотически устойчиво, если все корни
характеристического уравнения линеаризованной системы х = Ах
имеют отрицательную вещественную часть, и неустойчиво, если
среди указанных корней имеется хотя бы один корень с положи-
тельной вещественной частью.
Критический случай. Итак, если линеаризованная система устой-
чива, т. е. все корни ее характеристического уравнения имеют отри-
цательные вещественные части, то и исходная нелинейная система
асимптотически устойчива. Если линеаризованная система неустойчи-
ва и хотя бы один корень ее характеристического уравнения имеет
положительную вещественную часть, то и исходная нелинейная си-
стема неустойчива. И, наконец, если характеристическое уравнение
линеаризованной системы имеет корни на мнимой оси и не имеет
корней в правой полуплоскости, т. е. она маргинально устойчива, то
говорят, что имеет место критический случай. В критическом случае
по линеаризованной модели нельзя судить об устойчивости исходной
нелинейной системы. В примере, который был рассмотрен в начале
параграфа, был критический случай.
Пример 4.8. Исследовать устойчивость положения равновесия
системы
£ + 2£ + 3smy-0.
Решение. Разложение в ряд Тейлора синуса имеет вид sin у =
= у — у3/3! -I— . Поэтому для линеаризованного уравнения имеем
у + 2у + Зу = 0.
Линеаризованная модель (асимптотически) устойчива, так как все ко-
эффициенты уравнения положительны, т. е. выполняется необходимое
условие устойчивости, а для систем 2-го порядка необходимое условие
устойчивости является и достаточным. Поэтому и исходная нелинейная
система асимптотически устойчива.
Пример 4.9. Исследовать устойчивость положения равновесия
системы
У + 5у + 4у + Зеу = 3.
Решение. Разложение в ряд Тейлора функции еу имеет вид еу =
= 1 + у + у2/2! + .... Поэтому для линеаризованного уравнения имеем
У + 5у + 4у + Зу = 0.
Характеристическое уравнение имеет вид
А3 + 5А+4А + 3 = 0.
О f
—4 О
-IX
104 Гл. 4. Метод функций Ляпунова
Определитель Гурвица 2-го порядка положителен:
Д2 = 5 * 4 — 1 • 3 = 17.
Так как выполняется необходимое условие устойчивости и единствен-
ный определитель Гурвица с четным индексом положителен, то по
критерию Льенара-Шипара линеаризованная система устойчива. Сле-
довательно, и исходная нелинейная система асимптотически устойчива.
Пример 4.10. Исследовать устойчивость положения равновесия
системы
ii = Х2 — 2х|,
±2 =₽ —4x1 — Зх2.
Решение. Уравнения первого приближения имеют вид
Xj=X2, Х2 = -4x1.
Характеристическое уравнение
= А2 + 4 = О
имеет два чисто мнимых корня. Поэтому имеет место критический
случай, и по линеаризованной модели нельзя исследовать устойчивость
исходной нелинейной системы.
Исследуем устойчивость нелинейной системы методом функций
Ляпунова. В качестве кандидата на функцию Ляпунова примем квад-
ратичную форму
У(х) = х, + ах2.
Производная по времени в силу заданных уравнений имеет вид
V(x) = 2xjxi + 2ахгх2 = 2xi(2x2 — 2х?) + 2ахг(—4xi — Зх2).
Если принять а = 1/2, то получим
У(х) = -(4xf + Зх2).
Таким образом, выбранная квадратичная форма является положитель-
но определенной, а ее производная по времени в силу заданных урав-
нений системы отрицательно определенной. Следовательно, по теореме
Ляпунова об асимптотической устойчивости положение равновесия
рассматриваемой системы является асимптотически устойчивым.
Теорема 4.10 (Первая теорема Ляпунова о неустой-
чивости). Положение равновесия х = 0 автономной системы (4.2)
неустойчиво, если существует функция У(х) такая, что ее про-
изводная У(х) в силу уравнения этой системы является поло-
жительно определенной функцией и в любой малой окрестности
4.2. Теоремы об устойчивости 105
начала координат найдется точка х = х°, в которой функция У(х)
принимает положительное значение.
Пример 4.11. Исследовать устойчивость положения равновесия
х = 0 следующей системы:
х\ = —2x2 + Зж|,
±2 = яч — 5жз + Зж|,
. з
— Я?2 4" я*з*
Решение. Рассмотрим сначала линейную модель:
ii = —2x2,
Х2 ~ х\ — 5хз,
Жз — ^2-
Ее характеристическое уравнение имеет вид
А(А2 + 5) + 2А = 0.
Корнями этого уравнения являются Ai = 0, Аг,з = ±jy/7. Таким обра-
зом, имеет место критический случай, и по линейной модели нельзя
судить об устойчивости исходной системы. Поэтому воспользуемся
прямым методом Ляпунова.
Будем искать функцию Ляпунова в виде квадратичной формы
V(x) = +ах| + ^х|).
Производная по времени в силу заданных уравнений имеет вид
У(х) = Я1(—2x2 + Зя]) + аяг(я1 — 5яз + Зя|) + /?яз(яг + я|).
Положив а — 2 и = 10, получим
У(х) = ^х? + $2 + 5я|, V(x) = Зя] + 6я| + Юя*.
Согласно теореме 4.10 положение равновесия системы не устойчиво.
Методы построения функций Ляпунова. Общего метода по*
строения функции Ляпунова нет. Разработаны различные методы, ко-
торые позволяют находить функции Ляпунова для определенного типа
систем. Здесь мы рассмотрим некоторые из них.
1. Энергетический подход. При таком подходе в качестве
кандидата на функцию Ляпунова принимают полную энергию, пред-
ставляющую сумму потенциальной и кинетической энергий.
2. Метод разделения переменных. Этот метод предложен
Е.А. Барбашиным и состоит в следующем. Кандидат на функцию
Ляпунова ищут среди функций, которые сами и их производные по
времени в силу заданных уравнений системы представляют сумму
106
Гл. 4. Метод функций Ляпунова
функций, каждая из которых зависит только от одной фазовой пере*
менной: n п
У(х) = £>^), V(x) = £;$i(zi).
i=l t=l
3. Метод Лурье-Постникова. А.И. ЛурьеиВ.Н. Постни-
ков, рассматривая задачу об устойчивости нелинейной системы, содер-
жащей одну нелинейность а = /(е), использовали в качестве кандида-
та на функцию Ляпунова сумму из квадратичной формы и интеграла
от нелинейной функции, т. е. функцию вида
е
У(х) = хТВх +1 /(e)de,
о
где в общем случае е = (Рх. Более детально этот метод был разработан
А. И. Лурье [15]. Он широко используется при рассмотрении задачи об
абсолютной устойчивости, о которой речь пойдет в следующей главе.
4. Метод Красовского. Этот метод состоит в том, что при
рассмотрении устойчивости автономной системы
х = Х(х), Х(0)=0, xGff1
в качестве кандидата на функцию Ляпунова рассматривают квадратич-
ную форму
У(х) = ХТВХ.
Симметрическую матрицу В нужно выбрать так, чтобы сама квадра-
тичная форма была положительно определенной, а ее производная по
времени в силу заданного уравнения системы — отрицательно опреде-
ленной.
В качестве примера рассмотрим систему
= Х2,
±2 — —Ьх\ — <р(х2), Ь > 0, у?(0) = 0.
Матрицу В выберем диагональной: В ==
на функцию Ляпунова примет вид
О
О &22
. Тогда кандидат
V(x) = 611X2 + b22(-bxi - tp(x2))2.
Производная по времени в силу заданных уравнений имеет вид
У(х) = 2611X2X2 + 26гг(—6яг1 - ip(x2)(—b±i - ^-±2) =
= 2[б0!1 + <р(Х2)](622б - 6ц)я;2 - 2622^-[6X1 + <р(х2)]2.
0X2
4.2. Теоремы об устойчивости
107
Положив Ьп = Ъ И &22 = 1. получим
V(x) = bxl + [hri + <р(хг)]2,
V(x) = -2^-[tai 4- y>(rr2)]2-
Как нетрудно убедится, У(х) является положительно определенной
функцией и V(x) —► оо при |ж| —> оо. Если ду/дхъ > 0 при х% 0 О,
то производная V(х) является отрицательно полуопределенной и обра-
щается в нуль на многообразии а(х) = Ьх\ + (^(ягг) = О, т. е. на мно-
жестве, определяемом указанным уравнением. Это множество не со-
держит целых траекторий, так как grada(x)X(x)|<T(x)_0 = Ьх2 00 вне
начала координат на указанном многообразии. Поэтому по теореме
Барбашина-Красовского положение равновесия рассматриваемой си-
стемы будет асимптотически устойчиво в целом.
5. Метод Вокера-Кларка (Woker-Klark). Пусть система
описывается уравнением
<Гу _1_ f( dy _л
dtn+^\y’dt........ dtn J
или в нормальной форме
X ] — Х2)
±2 = Хз,
Хп = -f(xi,X2....Хп).
В качестве кандидата на функцию Ляпунова при этом методе рассмат-
ривается функция
У(х) =
ж2
f(xi,x2.......xn)dxn-i + -£+F(xi,x2, Хп),
о
где неизвестная функция F(x\,X2, ..., хп) выбирается так, чтобы про-
изводная У(х) в силу заданных уравнений системы была отрицательно
полуопределенной.
Исследуем этим методом систему
!/ + №.у) = 0, /(0,0)=0
или
Я* 1 — Я?2,
Х2 = -f(Xi,X2).
108
Гл. 4. Метод функций Ляпунова
В соответствии с методом Вокера-Кларка в качестве кандидата на
функцию Ляпунова принимаем
? х2
У(х)= f(xltx2)dxi + у + Г(хьх2).
о
Производная от этой функции по времени в силу заданных уравнений
имеет вид
ч ,, \ /7 df J I • &F dF .
V(х) = /(Х1.Х2)х, + I I I Ж2 +Х2Х2 + =
\о /
„ ч Г дf , . dF dF r,
о
Если ПОЛОЖИТЬ F(xj,X2) = 0, то получим
7 х2 • ? df
У(х)= /(xi,x2)dxi +-у, У(х) - -/(хьх2)
J 2 J 0X2
о о
Отсюда следует, что положение равновесия х = 0 асимптотически
устойчиво в целом, если выполняется условие
Z1
Г Л f
-—dx\ > 0 при х 0 0.
J 0X2
0
xi/(xi,i2) > о,
Задачи
4.4. Исследуйте устойчивость нулевого решения следующих урав-
нений:
a) V+3y+2y+siny = 0; б) У +3у+5у+3(еу - 1) = 0;
в) У+3£+3/+5з/+со8з/ -1=0; г) V+3j/+2^+4?/+e3/ — cos?/ = 0;
д) V+2£+2£+4y+sms/-2 cosу+2 = 0;
е) V+3i/+2^r+sin j/—j/3 = 0;
ж) V+3£+23/+7sm3/+3/5 = 0; з) V+3y+2y+tg у-у2 =0;
и) V4-3^4-2j/4-sin у = 0; к) V+2y+2£+6 arcsiny+j/3 = 0.
4.5. Определить и исследовать устойчивость положений равновесия
следующих систем:
а) Г = —xi(2 4~х2) — 3^2,
(±2 = 2xi +хг;
±1 = 2xi
±2 = -xi(2 4-х2) - Зхг;
4.2. Задачи
109
д) I
J ±1 = —Xi (1 + Х?) — 5^2,
| ±2 = 2xi + 2хг;
±1 = —Xj (3 + Xj) — 4X2,
±2 = 3xi + 2x2*,
Г ±1 = 2xi + 2x2,
|±2 = — xi(l + х?) — 5x2*,
Г Х\ = 3xi + Ж2,
I Х2 = -371(3 + Х1) — 4x2-
4.6. Исследовать устойчивость положения равновесия (хьхг) =
= (0,0) следующих систем:
Х\ =Х2 — Xi,
X2 = -xi— 2х|;
Х1=3хг+2х1,
X2 = -xi+2x|;
(±\ =2X2“Жр
[х2 = -Х1—5х|;
±1 =5x2—3xi,
Xi =X2+3Xi,
X2 = -xi+x|;
±1=4X2“ Хр
±2 = -Зх 1—2x2;
±1 =Х2+2Хр
±2 =—Х \ +Х21
±1 —Х2~ Ж|,
±1=2X2—Ж1,
±2 = -xi~Зх|;
±1 =4x2+2xj,
±2 = -Х|+2х|;
Xj — х% 5х 1,
±2 = —2x1 —Зхз;
f . Q *
|Х1=Х2—Хр
= -Х1—2sinx2*,
Х2 = -xi +2 tgX2*, (х2 = -Ж1 +21п(1 — хг).
4.7. Показать, что положение равновесия (хьхг) = (0,0) следую-
щих систем асимптотически устойчиво в целом:
( ±1 = Х2, f Ж1 — 2X2, ч f Ж) — Ж2,
а) < о б) < е в) < _ 7
( ±2 = —Ж1 — 2х2\ [ ±2 = —2ж1 — 5ж£; ( ±2 = —5xi — 2х2\
f±l=X2 —2ж?, ч (Ж1=Ж2 — ЗЖ1, ч ( ±1 = Зжг — 5ж{,
г) 1 • Л) s . Q . а
Х2 — — Х\, ^Х2 = —2X1, (Х2 = —4X1.
4.8. Показать, что положение равновесия системы (рис. 4.2) с пе-
редаточной функцией линейной части 1Гл(р) = ^/(р2 + ар + Ь) (к > 0,
а > 0, b > 0) асимптотически устойчиво в целом при следующих харак-
теристиках нелинейного звена (НЗ): а) кусочно-линейная характери-
стика с насыщением (рис. 4.3, а); б) кусочно-линейная характеристика
с зоной нечувствительности (рис. 4.3,6); в) кусочно-линейная характе-
ристика с зоной нечувствительности и насыщением (рис. 4.3, в).
Рис. 4.2
4.9. Показать, что положение равновесия системы (рис. 4.2) с пере-
даточной функцией линейной части Ил(р) = ^/(р2 + ар) (к > 0, а > 0)
асимптотически устойчиво в целом при НЗ с кусочно линейной харак-
теристикой с насыщением (рис. 4.3, а).
110
Гл. 4. Метод функций Ляпунова
4.10. Показать, что положение равновесия (хьхг) = (0,0) приво-
димых ниже систем асимптотически устойчиво в целом.
а)
в)
д)
Г Xj — Х2, < (
[ Х2 = ~Х\ — tyx2 ; 7 { Х2 = —2x1 — Х2 — ;
Г Х1 — Х2, ( ~ *^2>
[ ±2 = — XI— 2х| — ^21 1 х2 = —^Е2(1-Нс|) ;
{^1 — ^2. _______ (= x2t
i2 = —a?i—2^2 —yx2(l+xf); ' \±2 — —xi — tyx^ —arctgX2*,
( х\ = x2i
| x2 — “4xi — x2—2arctgX2*,
( ±i = x2,
( i2 = —4x1 —x|—2 arctgX2*,
( xi = x2t
( ±2 = —4xi —^хг —2arctgX2i
X\ = X2,
±2 - -xi -x!^ yZ2(l 4-xf)
4.11. Исследовать устойчивость положения равновесия (xi х2 хз) =
= (0 0 0) следующих систем:
а)
Xi = -Х1 + Х2 - Х1,
х2 = — Х\ — х2 + Хз — х|>
• 3
Хз — х2 — Хз х3,
б)
Г Х1 = —Х1 + 2x2 “ 3X1,
< х2 = — xi — 4x2 + 3хз — 2х|,
, хз = —3x2 — 5хз — х%;
в)
' XI = 11 4- х2 4- Xj,
< Х2 = “Xi + Х2 - Хз + X®,
k ±з = хг + хз + х|;
{х\ = “2xi + х2 — 3xJ,
х2 = —5x1 —х2 + 7хз “ ж2»
хз = — х2 — 4хз “ 2х|;
д)
' XI = 3xi + Х2 + Sip
< хг = — xi 4- 2хг — хз 4- 4х|,
k Хз = 7х2 4- Х3 4- х|;
е)
' Х1 = Х1 + 5x2 + Хр
Х2 = —Xj + х2 — Хз + х|,
хз = х2 + 2х3 + х|;
4,2. Задачи
111
' ±1 = —7xi + $2 ~ 3x?,
ж) 22 = —2X1 — 22 + 4^3 - X2,
з)
, хз — —хг - 2хз — 5x|;
f Xi = —2xi + X2 — 3xy *
< X2 = —5xi — X2 + 4хз — x|,
x3 = -2x2 — X3 - 3x|;
И)
л)
' ±i — 9xi +X2 + 2xi»
< ±2 = —Xi + 7x2 “ Зхз + x|»
u x3 = 4x2 + x3 + 3x|;
r ±i = 3xi +2X2 +2|,
< ±2 = -“2xi + 22 — 4хз + xf,
, Хз = x2 + 6x3 + 2x|;
h)
X1 = —1 Ixi + X2 — 7X|,
< ±2 = —Xi — 12X2 + X3 — 8x2,
, X3 = —5x2 — 9хз — x|;
к)
m)
0)
' X{ — —3X1 + 2x2 — Xp
< ±2 — —2xi - X2 + 4хз — x|,
X3 “ —X2 6x3 ~~ 2x3,
' Xi = — lOxi + X2 — 7xf,
< ±2 = —3xi — 4X2 + X3 — 5x2,
u X3 = X2 — Зхз Xg,
' Xi = 1 Ixi + X2 + 7X1»
< i2 = —2xi + 5x2 — X3 + 6x2,
u X3 = X2 + 3x3 + 8x|.
4.12. Исследовать устойчивость положения равновесия (xi Х2 Х3) =
= (0 0 0) следующих систем:
' Xi = Х2 ^Хр
• 5
Х2 “ Xi — Х2 “f” Х3 —' Х2,
Х3 — Х2 Х3»
б)
г * 3
Х1 — Х2 Х|,
< Х2 = -Х1 +хз +х2,
Хз = -Х2 + х|;
' Xi = Х2 — 2хр
Х2 — —xi — 4x2 +" Х3 ~~ 5х2,
, хз = —2x2 — Зх|;
Xj 2x2 Х|,
г) Х2 = —2x1 — 3x2 + Хз — 5х2,
х3 = -2X2 - х|;
{Xi = Х2 + 5X1»
±2 = -3X1 + Хз + х2,
хз = -2х2 + 4х|;
' Х1 = 2X2 “ Ху,
< ±2 = —3X1 — 5x2 + Хз — 4х2,
u Х3 = —Х2 — Зх|;
Xi 7x2 5х। г
Х2 = “3x1 — 2x2 + Хз — 8х2,
u Х3 — _~”Х2 ~~
r xi = 5x2 + 7xi *
< i2 = —2x1 + 7хз + х2,
, хз = —3x2 + 6х|;
л)
Xi “ Х2 Х|,
< ±2 = 2xi — 5x2 — Зхз — 4х2,
хз = 3x2 — 8х|;
Г Х1 = 4X2 “ 3X1,
< Х2 = —4X1 — 3X2 + Хз — 5х2,
, х$ = —10x2 — х|;
' Х1 = 3x2 +Х1,
< ±2 = Х1 + 2хз + х2,
Х3 = —5x2 + х|1
м)
' Xi = Х2 — Х1,
< Х2 = —Х1 — 3X2 + 2хз — х2,
u х3 = -х2 - 5х|;
112
Гл. 4. Метод функций Ляпунова
' Х1 = -5l2 - 1<М,
' X] = —6x2 + ЗХ],
н) ±2 = Х1 - 7®2 - ХЗ - х|,
о) < ±2 = XI — Хз + Зх|,
к хз = 8x2 - 7х|;
к Х3 = Х2 + х|.
4.13. Прямым методом Ляпунова показать, что положение равнове-
сия ниже следующих систем не устойчиво.
а)
' it = —2x1 + Х2 — 4xj,
< ±2 = + 3X2 + Хз + х|,
k Хз = Х2 6x3 X3J
б)
' it = X] 4- Зхг 4- X],
< Х2 = -xi 4- 2x2 4- хз 4- 7х|,
k хз = 5x2 - хз - 4х|;
в)
’ ±1 = —Х1 + Зхг - X],
< ±2 = 2xi + Х2 + 6x3 4- 8х|,
k хз = Х2 - 4хз - 2х|;
' xi = 12xi +Х2 4-4x1,
< ±2 = -3xi 4- х2 4- 4хз + 5х|,
k Х3 = 6x2 — 4хз — х|;
д)
' it = —7x1 + Х2 — 2x1,
< Х2 = XI + 9X2 + Хз + 8х|,
k Х3 = 5x2 ~ 4хз ~ х|;
е)
' xi = 2xi + Зхг 4- 5x1,
< ±2 = -xi 4- Зхг 4- хз 4- 6х|,
3*3 ““ 2*1*2 ^3 ^3»
ж)
' xi = —xi 4- 5x2 — Эх®,
< ±2 = 3xi + Х2 + 2хз -|- X®,
k Х3 = 2хг “ 5хз — 7х|;
' xi = xi 4-5x2 4- Юх®,
< х2 = -2xi 4- Зх2 4- хз 4- 6х|,
k Х3 = 2x2 - 4хз - х|;
и)
' Х1 = —X] + 2X2 — бХ),
< ±2 = Х1 + 2хг + 4хз + Зх|,
k Х3 = Х2 — 5хз ~ 9х|;
к)
' xi = 6x1 4- 8x2 4- Юх?,
< х2 = -xi 4- Зх2 4- 5хз 4- 9х|,
k хз = Зхг - 5хз - 2х|.
Ответы
4.1. а) положительно полуопределена; б) положительно полуопреде-
лена; в) положительно определена; г) положительно определена; д) от-
рицательно определена; е) отрицательно определена; ж) отрицатель-
но полуопределена; з) отрицательно полуопределена; и) положительно
полуопределена; к) положительно полуопределена;; л) отрицательно
полуопределена; м) отрицательно полуопределена.
4.2. а) допускает; б) не допускает; в) допускает; г) не допускает;
д) допускает; е) не допускает; ж) не допускает; з) допускает; и) не до-
пускает; к) допускает.
4.3. а) допускает; б) допускает; в) не допускает; г) не допускает;
д) допускает; е) не допускает; ж) не допускает; з) не допускает;
и) допускает; к) допускает.
4.2. Ответы
113
4.4. а) устойчиво; б) устойчиво; в) неустойчиво; г) устойчиво;
д) неустойчиво; е) устойчиво; ж) неустойчиво; з) устойчиво; и) устой-
чиво; к) неустойчиво.
4.5. а) (жьжг) = (0,0) асимптотически устойчиво; (яь^г) = (2, —4)
не устойчиво; (яьяг) = ("2,4) не устойчиво, б) (жь^г) = (0,0) не
устойчиво; (жь^г) = (2, —4) асимптотически устойчиво; (жь^г) =
== (—2,4) асимптотически устойчиво, в) (яьяг) = (0,0) не устой-
чиво; (жьжг) — (2,-2) не устойчиво; (яьяг) = (—2,2) не устойчи-
во. г) (ль^г) = (0,0) не устойчиво; (яьяг) — (2,-2) не устойчиво;
(яьяг) = (—2,2) не устойчиво, д) (яьяг) = (0,0) асимптотически
устойчиво; (хьяг) = (3,-9) не устойчиво; (яь^г) = (—3,9) не устой-
чиво. е) (яьхг) = (0,0) не устойчиво; (ягьхг) = (3,-9) асимптотиче-
ски устойчиво; (жьжг) = (—3,9) асимптотически устойчиво.
4.6. а) асимптотически устойчиво; б) не устойчиво; в) асимп-
тотически устойчиво; г) не устойчиво; д) асимптотически устойчи-
во; е) не устойчиво; ж) асимптотически устойчиво; з) не устой-
чиво; и) асимптотически устойчиво; к) асимптотически устойчиво;
л) не устойчив; м) асимптотически устойчиво.
4.11. а) асимптотически устойчиво в целом; б) асимптотически
устойчиво в целом; в) не устойчиво; г) асимптотически устойчиво
в целом; д) не устойчиво; е) не устойчиво; ж) асимптотически устой-
чиво в целом; з) асимптотически устойчиво в целом; и) не устойчиво;
к) асимптотически устойчиво в целом; л) не устойчиво; м) асимпто-
тически устойчиво в целом; н) асимптотически устойчиво в целом;
о) не устойчиво.
4.12. а) асимптотически устойчиво в целом; б) не устойчиво;
в) асимптотически устойчиво в целом; г) асимптотически устойчиво
в целом; д) не устойчиво; е) асимптотически устойчиво в целом;
ж) асимптотически устойчиво в целом; з) не устойчиво; и) асимпто-
тически устойчиво в целом; к) асимптотически устойчиво в целом;
л) не устойчиво; м) асимптотически устойчиво в целом; н) асимптоти-
чески устойчиво в целом; о) не устойчиво.
Глава 5
АБСОЛЮТНАЯ УСТОЙЧИВОСТЬ
Рассмотрим систему с одной нелинейностью (рис. 5.1, а). Такую си-
стему всегда можно преобразовать к «стандартному» виду (рис. 5.1, б).
В нормальной форме такие системы описываются уравнениями вида
х — Ax + bu, и = /(£), £ = —сгх, (5.1)
где х — n-вектор; и, £ — скалярные переменные, нелинейная функция
/(£) удовлетворяет следующим условиям:
/(0)=0, (5.2)
Уравнения (5.1) представляют собой уравнения в отклонениях,
и на структурной схеме (рис. 5.1) задающее воздействие равно ну-
лю: £= О (^ = 0).
а
Рис. 5.1.
Определение 5.1. Система (5.1), или ее положение рав-
новесия х — 0, называется абсолютно устойчивой в угле (секто-
ре) [fcm, fcjvf], если нулевое решение х(1) = 0 системы (5.1) асимпто-
тически устойчиво в целом при любой нелинейной функции f(g),
удовлетворяющей условию (5.2).
Абсолютная устойчивость, как и робастная устойчивость, означает
устойчивость не одной конкретной системы, а некоторого множества
систем, определяемых заданным множеством £ нелинейных звеньев.
В определении 5.1 в качестве множества £ принято множество (5.2),
которое обычно рассматривается при изучении абсолютной устойчи-
вости. Естественно множество S может быть задано иначе. Поэтому
в общем случае будем говорить об абсолютной устойчивости на
5.1. Система сравнения. Необходимое условие и критерий Попова 115
множестве (классе) S, которое может отличаться от множества, зада-
ваемого соотношением (5.2).
5.1. Система сравнения. Необходимое условие
и критерий Попова абсолютной устойчивости
Дальше будем рассматривать структурную схему нелинейной си-
стемы, представленную в стандартном виде (рис. 5.1,6). Передаточную
функцию WSi в операторной форме, если система задана уравнения-
ми (5.1), можно найти следующим образом. Запишем уравнения ли-
нейной части в операторной форме:
(Ip — А)х = bu, £ = —сгх, или х = (Ip — A)-1bu, £ = —сгх.
Отсюда, исключая х и учитывая у — —получим
W5>(p) = сТ(1р- А)~*Ь.
Используя эту передаточную функцию, уравнения (5.1) можно запи-
сать (см. также рис. 5.1, б) в виде
y = W„(p)u, и = /(£), £ = -у. (5.3)
Наряду с нелинейной системой (5.1) или (5.3) рассмотрим линейную
систему
У = Wn(p)ut и = k£, £ = -у. (5.4)
Эту систему при любом k 6 называют системой сравнения
системы (5.3), (5.2). «Нелинейность» /(£) = принадлежит мно-
жеству (5.2) при любом кЕ Поэтому если система (5.3)
абсолютно устойчива в угле то ее система сравнения, т. е.
линейная система (5.4), устойчива (асимптотически устойчива в целом)
при любом к € [кт, км]- И если система сравнения при каком-либо
к Е [Лт,&м] неустойчива, то система (11.2) не может быть абсолютно
устойчивой в угле [кт,Лм]- Будем говорить, что система сравнения
робастно устойчива в угле или на интервале [fcm,fcjvr], если она
устойчива при любом кЕ Из выше изложенного вытекает
следующее необходимое условие абсолютной устойчивости.
Необходимое условие абсолютной устойчивости.
Для того чтобы положение равновесия системы (5.3) было абсо-
лютно устойчиво в угле км], необходимо, чтобы ее система
сравнения была робастно устойчива в угле [fcm,fcjn]-
Пример 5.1. Пусть передаточная функция линейной части имеет
ВИД
1Ул= 1/(р+1)3.
Исследовать, является ли система (рис. 5.1,6) абсолютно устойчивой
в угле [0,10].
116
Гл. 5. Абсолютная устойчивость
Решение. Проверим, выполняется ли необходимое условие аб-
солютной устойчивости. Для этого достаточно проверить устойчивость
системы сравнения (5.4) при к = 10. Характеристическое уравнение
системы сравнения при таком коэффициенте имеет вид
А3 + ЗА2 + ЗА -Ь 11 =0.
Определитель Гурвица 2-го порядка отрицателен: Дг = 3 • 3 - 11 = —2.
Необходимое условие абсолютной устойчивости не выполняется. Сле-
довательно, нелинейная система не является абсолютно устойчивой.
Проблема абсолютной устойчивости сначала исследовалась прямым
методом Ляпунова. Однако с начала шестидесятых годов прошлого
века широко стал использоваться частотный метод.
Линейная часть устойчива. Рассмотрим сначала случай, когда
линейная часть нелинейной системы (рис. 5.1,6) устойчива. Предста-
вим ее частотную передаточную функцию в виде
^л(» - С/(и) + jV(u).
Критерий Попова. Для того чтобы положение равнове-
сия системы (5.3) с устойчивой линейной частью было абсолютно
устойчиво в угле [0, к], достаточно, чтобы существовало такое
вещественное число qt что при всех ш > 0 выполняется неравенство
Re( 1 + jqu)WJI(ju) + ^ > 0, (5.5а)
К
или i
C7(w) — qwV(w) > —-г. (5.56)
к
Пример 5.2. Передаточная функция линейной части имеет вид
Ьо
Wit(p) = о (Ьо. ао. ai, аг > 0).
аорт + а\р + а%
Определить, при каких значениях к система (рис. 5.1,6) будет абсо-
лютно устойчива в угле [0, к].
Решение. Частотная передаточная функция линейной части
имеет вид ,
оо
= -----2—^----—.
-oquj2 + ja\w + аг
Отсюда для вещественной и мнимой частей получаем
гг/ ч _ Ьо(в2 - aow2) _ -Miw
1 ~ (а2 - ао«2)2 + (oiш)2 ’ 1 " (а2 - Oow2)2 + (ojw)2 ’
Условие (5.56) принимает вид
Ьо(а2 - aow2) + gboaiw2 1
(a2-o0w2)2 + (a1w)2 +к
5.1. Система сравнения. Необходимое условие и критерий Попова 117
Если положить q = ао/аь то получим
ВД = з---------| > 0.
(аг — ooiv2)2 + (aiw)2 k
Последнее неравенство выполняется при любом w > 0 и любом к > 0.
Поэтому рассматриваемая система абсолютно устойчива в угле [0, к]
при любом конечном к > 0»
В приведенной выше формулировке теоремы Попова не просматри-
вается частотная сущность. Рассмотрим другую, частотную формули-
ровку теоремы Попова. Для этого введем в рассмотрение следующие
частотные функции:
= C/(cv), Vm(w) = cvV(cv), WJju) = C7m(w) + jVM(cv).
Последняя функция называется модифицированной частотой пере-
даточной функцией (линейной части), а ее годограф — модифициро-
ванной амплитудно-фазовой частотной характеристикой.
Частотная (геометрическая) формулировка крите-
рия Попова. Для того чтобы положение равновесия систе-
мы (5.3) с устойчивой линейной частью было абсолютно устойчиво
в угле [0, fc], достаточно, чтобы можно было провести прямую,
проходящую через точку (—l/fc,j0) и называемую прямой Попо-
ва, такую, что модифицированная амплитудно-фазовая частотная
характеристика полностью располагается правее этой прямой.
Модифицированная амплитудно-фазовая частотная характеристика
отличается от обычной (не модифицированной) только ординатами.
Линейная часть неустойчива. Пусть линейная часть нелиней-
ной системы (рис. 5.2, а) неустойчива. Преобразуем ее следующим
образом. Охватим линейную часть отрицательной обратной связью
звеном с передаточной функцией г, а к нелинейному звену подключим
параллельно звено также с передаточной функцией г, выход кото-
рого подключен к сумматору по отрицательному входу (рис. 5.2,6).
Преобразованная схема эквивалентна исходной схеме. Действительно,
учитывая g — 0, на входе линейного звена преобразованной схемы
имеем: и = /(£) 4- гу — гу = /(£), т. е. тот же сигнал, что и на входе
линейного звена исходной схемы.
В преобразованной схеме передаточная функция линейной части
имеет вид VKn = WSi/( 1 + гИ^), а нелинейность — /П(С) = /(С) — (см.
рис. 5.2,6). Так как при £ 0 0 имеем /П(С)/С = /(€)/€ — г» т0 неравен-
ство г /(£)/£ к равносильно неравенству 0 /п(С)/С к — г. По-
этому положение равновесия исходной системы (рис. 5.2, а) абсолютно
устойчиво в угле [г, fc], если положение равновесия преобразованной
системы (рис. 5.2,6) абсолютно устойчиво в угле [0, к — г].
Пусть преобразованная линейная часть устойчива, т.е. все полюса
передаточной функции VKn имеют отрицательные вещественные части.
118
Гл. 5. Абсолютная устойчивость
W WB
Рис. 5.2.
а
Тогда по теореме Попова положение равновесия преобразованной си-
стемы абсолютно устойчиво в угле [0, к —г], если выполняется нера-
венство <
Re(l +jqu)W„(ju) + —— > О,
К 1
ИЛИ I
C7„(w)-gwVn(w)>-T------. (5.6)
к — г
где
С7п(ол) = ReWnOM и Уп(о>) = Im Wjju).
Критерий Попова (линейная часть неустойчива).
Положение равновесия нелинейной системы (5.3) с неустойчивой
линейной частью абсолютно устойчиво в угле [г, к], если все по-
люса преобразованной передаточной функции Wn WA/(\ +rWA)
имеют отрицательные вещественные части и существует такое
вещественное число qt что при всех ш > 0 выполняется неравен-
ство (5.6).
Пример 5.3. Пусть передаточная функция линейной части имеет
вид Wji = 10/(р- 1). Исследовать, является ли система (рис. 5.2, а)
абсолютно устойчивой в угле [0,2,200].
Решение. Преобразованная передаточная функция имеет вид
Wn = Ил/(1 +НУЛ) — Ю/(р+ 1). Отсюда для частотной передаточной
функции, а также вещественной и мнимой частотных функций имеем
ТТ7/. ч Ю 10(1-jw) __ . . 10 . lOcv
“ w2 + l ’ и"^ ~ J7+T Vn(w) “ ~ш2 + г
Условие (5.6) принимает вид
10 10w 10 + gi0w2 1
w2 + 1+9Ww2 + 1 w2 + 1 > 200-0,2*
и оно выполняется при любых w > 0 и q > 0. Следовательно, рассмат-
риваемая система абсолютно устойчива в угле [0,2,200].
5.1. Задачи
119
Как и в случае с устойчивой линейной частью, можно сформули-
ровать частотный вариант критерия устойчивости. Для этого введем
следующие частотные функции:
ивн(ш) = Упм(^) = wVn(w), VynM(jw) = C/nM(w) + jVnM(w).
Последнюю функцию будем называть модифицированной
преобразованной частотной передаточной функцией, а ее годограф
при изменении 0 и) < оо — модифицированной преобразованной ам-
плитудно-фазовой частотной характеристикой. Используя веще-
ственную и мнимую части функции WnM(7L<j), условие (5.6) можно
записать в виде
С/пм(а>) ~ ^пм(^) > — г *
В случае неустойчивой линейной части прямая Попова — эта прямая,
которая пересекает вещественную ось в точке — l/(fc — r) и имеет
наклон —1/д.
Частотная формулировка критерия Попова (линей-
ная часть неустойчива). Положение равновесия нелинейной систе-
мы (5.3) с неустойчивой линейной частью абсолютно устойчиво
в угле [г, к], если можно провести такую прямую Попова, что мо-
дифицированная преобразованная частотная характеристика пол-
ностью располагается правее этой прямой.
Задачи
5.1. Определить, будет ли положение равновесия системы
(рис. 5.1,6) абсолютно устойчиво в угле [0,100] при следующих
передаточных функциях линейной части:
>и'-«=р!Д+г 6>^> = ^Jp + 3''
jr + 4р + 1
д) wn(p) = ; р2 + 4р е> л(р)~ рЗ _|_ Зр2 _|_ Зр ’
ж) И^-рЗ + Зрг + Зр-!.!- з) И"л(Р)-рЗ + 3р2 + 3р+1>
к) ад - -з-^^—г- р3 4-Зр2 + 3р- 1
5.2. Определить, будет ли положение равновесия системы
(рис. 5.1,6) абсолютно устойчиво в угле [2,100] при передаточных
функциях линейной части, приведенных в задаче 5.1.
120
Гл. 5. Абсолютная устойчивость
(рис. 5.1,6)
2р + 1
5.3. Покажите, что положение равновесия системы (рис. 5.1,6)
с передаточной функцией линейной части 1Ул(р) = —г-д— ---------г
р3 + Зр2 + Зр + 1
абсолютно устойчиво в угле [0,4] и не является абсолютно устойчивым
в угле [0,10].
5.4. Покажите, что положение равновесия системы
с передаточной функцией линейной части 1Ул(р) = -----
абсолютно устойчиво в угле [4,100] и не является абсолютно устойчи-
вым в угле [2,100].
5.5. Покажите, что положение равновесия системы (рис. 5.1,6)
с передаточной функцией линейной части 1Ул(р) = -я——------------
р* + Зр* + Зр — 1
абсолютно устойчиво в угле [2,6] и не является абсолютно устойчивым
в угле [1,6].
5.6. Покажите, что положение равновесия системы (рис. 5.1,6)
с передаточной функцией линеинои части 1Ул(р) = -=—«-----------г
р3 + 2р2+Зр+1
абсолютно устойчиво в угле [0,5] и не является абсолютно устойчивым
в угле [0,10].
5.2. Квадратичный критерий абсолютной
устойчивости
При рассмотрении абсолютной устойчивости класс нелинейных зве-
ньев можно задавать с помощью квадратичной формы. Например,
класс нелинейных звеньев, определяемых соотношением
/(0) =0, а < < 0 (а .< Д), (5.7а)
с помощью квадратичной формы можно определить следующим обра-
зом:
F(u,е) = (ДС -«)(«- «<) > 0, и = /(<). (5.76)
Задавая класс нелинейных и нестационарных звеньев с помощью квад-
ратичных форм, В. А. Якубович разработал так называемый квадратич-
ный критерий абсолютной устойчивости [26].
Эрмитова матрица и эрмитова форма. Дальше при рассмотре-
нии квадратичного критерия используются эрмитовы формы. Поэтому
здесь вкратце излагаются основные понятия, связанные с этой формой.
Пусть Zi (г — 1,2... п) — комплексные числа и z< (г = 1,2... п) —
комплексно-сопряженные с ними числа. Вектор z = (zj z^ ... zn)T яв-
ляется комплексно-сопряженным вектором с вектором z — (zi zg ...
... zn)T. Если элементы Н = [/i»fc] являются комплексными числами,
то матрица Н* — [Л^], которая получается из матрицы Н = [7ч&] путем
5.2. Квадратичный критерий абсолютной устойчивости 121
транспонирования и замены элементов на комплексно-сопряженные
с ними числа, называется эрмитово сопряженной с Н = [Л<*] матри-
цей. Операция эрмитова сопряжения обладает теми же свойствами, что
и операция транспонирования:
(Л + В)* = Л* + В*, (аЛ)* = аЛ*, (АВ)* = В* А*,
(А*Г = А, (А-1)* = (А*)-1.
Если к вектору-столбцу z = (zi za ... Zn)T применить операцию эрми-
това сопряжения, то получим вектор-строку z* = (zi z% ... zn). В част-
ности, если z — скалярное комплексное число, то в результате примене-
ния операции эрмитова сопряжения получим комплексно-сопряженное
число: z* = z.
Матрица Н = называется эрмитовой матрицей, если Н =
= Я*, т. е. hik = hki- Так как ha = ha, то диагональные элементы
эрмитовой матрицы являются вещественными числами. В частном слу-
чае, когда все элементы матрицы являются вещественными, эрмитова
матрица является симметрической матрицей.
Квадратичная форма
Я(г) = ъ*Нъ = £ hikziZk, (5.8)
где Я —эрмитова матрица (ftifc =/ifci), называется эрмитовой фор-
мой. Переменные z» (г = 1, 2, ..., п) и элементы матрицы Н могут
быть вещественными числами. В частном случае, когда и переменные,
и элементы матрицы являются вещественными, то эрмитова форма ста-
новится вещественной квадратичной формой. Эрмитова форма всегда
принимает вещественное значение. _
Если квадратичная форма (5.8) не является эрмитовой (hik Ф hki),
то она может принять комплексные значения. В этом случае на ее
основе можно определить эрмитову форму следующим образом:
п
Rez*Bz == Re 5л hikZiZk.
i,k=\
Эрмитову форму, заданную в таком виде, всегда можно преобразовать
и представить с помощью эрмитовой матрицы:
Я(г) = Rez’ffz = г*Я,г (Я = ^(Я + Я*)).
Для эрмитовой матрицы и эрмитовой формы знакоопределенность
и знакопостоянство определяются точно так же, как и для симмет-
рической матрицы и вещественной квадратичной формы. В частности,
эрмитова матрица Н и эрмитова форма z*tfz называются положитель-
но определенными, если z*Bz > 0 при всех z 0.
122
Гл. 5. Абсолютная устойчивость
Критерий положительной определенности эрмито-
вой матрицы. Для того чтобы эрмитова матрица Н была поло-
жительно определенной, необходимо и достаточно, чтобы выпол-
нялось следующее условие:
Д1 — h\\ >0, Д2 ~
hu h[2
Л21 ^22
>0,
Дп = det Н > 0.
Расширение вещественной квадратичной формы до эрмитовой.
Всякая вещественная квадратичная форма
G(x) = 52 SikXiXk
*Л==1
может быть расширена до эрмитовой следующим образом:
п п
G(z) = Re J2 9ikZiZk = Re
:Л=1
По определению эрмитова форма G(z) должна принимать те же зна-
чения, что и вещественная квадратичная форма G(x), если Zi (г =
= 1,2, ..., п) принимает вещественные значения: Zi = Xi. Например,
вещественным квадратичным формам
C?i(x) — Х1Х2, <2г(х) = х2 - Ж1Ж2 + С?з(х) = xi(x2 - 2xJ
соответствуют следующие расширенные до эрмитовых формы:
<34(z) = Re^izfc, G2(z) = |zi|2 - Re{ziZ2}'+ |^|2»
G3(z) = Ite{zi(z2 - 2zi)}.
Если заданы два вещественных вектора х^ и х^2\ то вещественные
квадратичные формы от этих двух векторов С?(х(1\х(2)) определяются
как вещественные квадратичные формы от векторного переменного х =
= Х(2) . Если заданы два комплексных вектора z^) и z^2\ то эрмитовы
формы от этих векторных переменных G(z^\z^) определяются как
эрмитовы формы от векторного переменного z —
определяются вещественные квадратичные формы и эрмитовы формы
от трех и более векторных переменных.
Локальная связь. Минимальная устойчивость. Рассмотрим
многомерную систему, которая описывается уравнением
x = Ax + Bu, u = f(^), £ = Сх, х€йп, и 6 Яг, (5.9а)
Z(2)
. Аналогично
или
у = |Ул(р)и, u=f«), £ = -у,
(5.96)
5.2. Квадратичный критерий абсолютной устойчивости 123
где ^(р) = С(1р - А)~1В~~ (т х г)-матричная передаточная функ-
ция. Система содержит г нелинейностей (f(£) — r-мерная векторная
функция). Переменные £ и и являются векторными функциями време-
ни: £ = $(t), u = f($(t)) = u(t).
Пусть задана вещественная квадратичная форма F(£, и, й), и мно-
жество нелинейных звеньев задается условием
> О Vt > 0. (5.10)
В квадратичной форме F(£,£, и) переменные £, £, и рассматриваются
как независимые. В частном случае какие-либо переменные в квадра-
тичную форму могут не входить. Тогда соответствующие переменные
будем опускать. Соотношение (5.10) называют локальной связью.
Определение 5.2. Если выполняется условие (5.10), то го-
ворят, что функции £(£) и u(t) удовлетворяет локальной связи
с формой F(£,£,u).
Локальную связь (5.10) также будем записывать в виде
F(£,£,u) > 0 или F(etf(€)>0.
Определение 5.3. Система (5.9а) или (5.96) называется мини-
мально устойчивой в заданном классе нелинейностей (нелинейных
звеньев), если она асимптотически устойчива в целом при какой-
либо нелинейности f(£)u3 указанного класса.
Рассмотрим локальную связь
= (ДС - «)(« - «О > о
в случае одномерной системы, т. е. при I = т = 1. Как было показано,
эта локальная связь определяет тот же класс нелинейных звеньев, что
и соотношение (5.7а). Этому классу нелинейных звеньев принадлежат
линейные звенья
и = 7^, а 7 (3.
Поэтому если система сравнения
У = №л(р)и, u = rt, £ = -у
устойчива при каком-нибудь 76 [а,/?], то нелинейная система (5.96)
минимально устойчива в классе нелинейных звеньев, определяемых
локальной связью (5.7а).
Нелинейность, при которой будет устанавливаться минимальная
устойчивость, будем называть нелинейностью сравнения, а саму си-
стему при этой нелинейности — системой сравнения.
Квадратичный критерий. Для формулировки квадратичного кри-
терия потребуется следующее преобразование квадратичной формы,
определяющей локальную связь:
124
Гл. 5. Абсолютная устойчивость
1) квадратичная форма F(£,£, и) расширяется до эрмитовой формы
заменой переменных £,£,и их изображениями £(s)>£(s)tU;
2) производится постановка £(s) = — Wji(s)U и £(э) = — sWx(e)U:
F(s, U) = F(—W(s)U, -sW(s)U,U).
Таким образом, преобразование квадратичной формы сводится
к расширению ее до эрмитовой и последующей замене переменных их
изображениями Лапласа, найденными при нулевых начальных услови-
ях. При этом изображение выходной переменной нелинейного звена
U(s) рассматривается как независимая комплексная переменная, и его
записывают без аргумента, т. е. в виде U.
Рассмотрим в качестве примера локальную связь (5.76) в случае од-
номерной системы. Расширенная до эрмитовой, ее квадратичная форма
принимает вид
F(s, U) = UW) = Refl/ВД - W " «€(«)]}-
Подставив сюда выражение для изображения £(э), которое определя-
ется исходя из заданных уравнений системы при нулевых начальных
условиях, получим
F(s, U) = - Ке{[/Жл(з)£7 + U]*[U + aW*(s)U]} =
= -Re{[W,(s) + 1]*[1 +аад]}|С7|2.
Квадратичный критерий (В.А. Якубович [26]). Пусть
нелинейная система (5.9а) или (5.96) минимально устойчива в
классе нелинейных звеньев, заданных локальной связью с фор-
мой F(£, и), и матрица А не имеет собственных значений
на мнимой оси или, что то же, характеристическое уравнение
ее линейной части не имеет корней на мнимой оси. Тогда ее
положение равновесия абсолютно устойчиво в указанном классе
нелинейных звеньев, если эрмитова форма F(jcj,U) отрицательно
определена при —оо си оо, т.е. выполнено условие
F(jw,U) <0 при - оо оо и при любом U ^0. (5.11)
При этом имеет место экспоненциальная сходимость (устойчи-
вость), т. е. существуют постоянные С >0 и е > 0 такие, что при
любом t to выполняется неравенство
|*(t)|^C|z(to)|e-£(‘-4
Условие (5.11) называется частотным условием.
Если эрмитову форму F(ju, U) представить в виде
F(>, U) = ~U*H(ju>)U,
5.2, Квадратичный критерий абсолютной устойчивости 125
то частотное условие равносильно тому, что матрица является
положительно определенной при —оо си оо.
Эрмитова матрица положительно определена при — оо си
< оо в том и только в том случае, если она положительно определена
при си = оо и детерминант от нее не обращается в нуль при —оо си
оо:
Я0‘оо) > 0, det 7?(jси) / 0 при - оо си оо.
Квадратичный критерий можно использовать для исследования
глобальной асимптотической устойчивости отдельных нестационарных
и нелинейных систем. Для этого нужно задать локальную связь так,
чтобы класс нелинейностей, который она определяет, включал данную
нелинейность. При этом желательно локальную связь или, что то
же, квадратичную форму выбирать так, чтобы класс нелинейностей,
который она определяет, был бы как можно менее объемным.
Пример 5.4. Исследовать устойчивость системы
У + 4£ + (2 + cost)i/ = 0.
Решение. Представим уравнение системы в виде
у + 4у + 2у + и = 0, и~у cos t
или ।
y = -WR{p)u, И^(р)= , u = ycost.
jr + 4р + 2.
Здесь входом «нелинейного» звена является у, выходом — и. В качестве
локальной связи примем соотношение
F(i/, и) = у2 — и2 = у2 — у2 cos21 = у2 sin21 0.
Эрмитово расширение квадратичной формы этой локальной связи име-
ет вид
F(s, U) = Г(У(з), U) = У*(з)У(з) - U*U = |У(з)|2 - |С7]2.
Подставив сюда выражение для У($) и положив з = jtu, для частотного
условия получим
F(ju,u) = (|ади)|2 - 1)И2 < °-
Так как это неравенство должно выполняться при U / 0, то обе части
неравенства можно разделить на |С7|2. Квадрат амплитудной частотной
функции линейной части имеет вид
= (2-0,2)2+160,2-
Подставив это выражение, частотное условие можно представить в ви-
1 — (2 — си2)2 — Iбеи2 < 0 или — 3 - 12cu2 ~ си4 < 0.
126
Гл. 5. Абсолютная устойчивость
Очевидно, последнее неравенство выполняется при —оо и
< сю. Следовательно, положение равновесия рассматриваемой системы
асимптотически устойчиво в целом.
Методы построения квадратичной формы локальной связи.
Чтобы воспользоваться квадратичным критерием при исследовании
устойчивости каких-либо систем, нужно по заданным уравнениям си-
стемы уметь строить локальную связь, т. е. определять класс систем,
куда можно было бы включить данную систему. В зависимости от кон-
кретного вида нелинейностей возможны различные способы задания
локальной связи [26].
1) Как уже было показано, если нелинейность и = /(£) принадле-
жит к классу, определяемому неравенством а /?, то локальная
связь может быть задана в виде
Если а = 0 и 0 < /3 < оо, то эта связь принимает вид
Г(£, ад) = - и) > О или F(£, и) = и(£ - (3 4)^0.
2) Если система содержит две нелинейности вида = £2, =
== £3 или = £3, U2 == С \ т0 локальную связь можно задать в виде
равенства
F (С «) = £«2 -«1=0.
3) Система содержит две одинаковые нелинейности щ = (* =
= 1,2), и /(&,£) является неубывающей функцией переменной & при
всех t > 0: /(£",£) ПРИ & < СГ- В этом случае локальную
связь можно задать следующим образом:
F(^,u) = (£i - &)(^1 ~ 0.
4) Система содержит две одинаковые нелинейности щ = (г =
= 1,2k и функция удовлетворяет следующему условию: а
С р ПрИ всех f 0. В этом случае локальная связь может
быть задана в виде
= [/?(6 ” &) “ (wi - u2)][(^i - u2) - «(Ci - 6)] о.
5) Иногда локальная связь может быть задана несколькими соотно-
шениями в виде равенств и неравенств:
Fi(e,Cu)=0, г = 1,2______г; Ffc(£,£u)^0, к = г + 1,г + 2, ..., р.
Такую локальную связь можно преобразовать в локальную связь с од-
ной формой, свернув все квадратичные формы в одну:
р
j=l
5.2. Квадратичный критерий абсолютной устойчивости 127
Здесь Tj (J — 1,2, ...» г) — произвольные постоянные, Tj (j = г +
+ 1, г + 2, ..., р) — произвольные положительные постоянные. Локаль-
ная связь р
ле.ё.«) = Ет,^(е,ё,и)>о
j=l
с одной формой эквивалентна исходной локальной связи с р формами.
6) Если система содержит нелинейность, которая имеет вид
и = (acost + 5sint)£,
то ее можно представить как систему, содержащую две нелинейности
вида
щ = £ cos £, U2 = С s*n
При этом локальную связь можно определить равенством
F = С2 - и? - = 0.
Пример 5.5. Система описывается уравнениями
Т ei + ci = — к\и\ + &2«2»
Г 62 +62 = &2^1 - &1«2»
щ = /(е<, t), i = 1, 2,
где Т, к[, &2 — положительные постоянные, /(е,, t) — неубывающая
по переменной е» функция, удовлетворяющая при всех t 0 условию
/(О, £) = 0, 0 р при d ф 0. Определить значения
постоянных Т,к[,к2, при которых положение равновесия системы
асимптотически устойчиво в целом.
Решение. Найдем матричную передаточную функцию линейной
части W = [Wife], где = Ei(s)/Uk(s) (г, к — 1, 2). Для этого про-
изведем преобразование Лапласа исходных уравнений, описывающих
линейную часть, при нулевых начальных условиях:
TsEi(s) + E^s) = —fcitZi (s) + A^172(s),
TsE2(s) + E2(s) = fc2^i(s) “ *1ВД.
Отсюда, положив U2(s) =0 при определении Wii и U\(s) =0 при
определении W#, находим
= Ei(s) = к\_ 11 t/,(s) Ts+Г jy]2 = = —^2 Ц, 12 t/2(s) Ts + r r __ Ei(s) _ 21 Ui(s)~Ts+l' r _ E2(s) _ ki 22 t/2(s) Тз + Г
128
Гл. 5. Абсолютная устойчивость
ki
Ts+l*
Если использовать обозначение Wi =
ную функцию можно записать в виде
W =
то матричную передаточ-
Wn
W2l
Wi2l = Г- Wi
w22\ [ w2
w2
-Wi
С помощью передаточных функций уравнение системы в изображениях
Лапласа можно записать в виде
E2(s)J [ 1У2(з)
иэдШ(зА
-W)j Ы
или
E\(s) = —W\(s)U\(s) + Ty2(s)t/2(s), (5.12a)
E^s) = TT2(s)L7i(s) - TTi(s)C72(s). (5.126)
Нелинейности удовлетворяют локальной связи
F1 = fei - °.
г2 = (e2 - ^u2^u2 0,
F3 = (ei - е2) (ui - u2) > О,
или
F(e, u) = r\F\ + t2F2 + T3F3 = т*1
«1 +
+ т2
«2 + r3(ei - е2) (uj - и2) > О,
Ti > 0, i = 1,2,3.
Здесь е = (ei е2)т и и = (ui и2)Т. «Нелинейность» и = 0 удовлетворяет
локальной связи: F(e,0) =0. Примем эту нелинейность в качестве
нелинейности сравнения. В этом случае система сравнения принимает
Тё[ + ei = 0, Т ё2 + е2 = 0
и представляет собой две несвязанные между собой линейные системы.
Эти системы устойчивы (асимптотически устойчивы в целом). Поэтому
рассматриваемая система минимально устойчива.
Так как квадратичные формы F\ и F2 похожи, дальше примем л =
= Т2 = г. Эрмитово расширение квадратичной формы F(e, и) имеет вид
Г(Е(з),С7) = ReJr^(S) - + rf^s) - ^U2}u2*+
+ ^[E1(s)-E2(s)](Ui-[J2)* >
5.2. Квадратичный критерий абсолютной устойчивости
129
Подставив сюда выражения для E\(s) и £?2(«) из (5.12) и положив
s = jwt получим
F(jw,U) = Re|r +W2(ju>)U2 - jjUt U?+
+ t W2(j<j)Ui - W2(ju>)U2 - ^U2 Щ+
тз[-ад^)СЛ + W2(ju)U2 - W2(j^Ui + W^U^Ui - U2)
или, после перемножения и приведения подобных членов,
F(jw, U) = — Re<
(т + T3)Wi(ju) + rsWjCjw) + -х UlUi +
(т + T3)Wi(jaj) + T3W2(jw) + U2U^-
T3Wi(ju) + (73 + r)W2(ju) U1U2-
- [гзWj(jw) + (r3 + -r)W2(jw)] и2Щ V.
Подставив выражения для передаточных функций, найдем
Re (т + r3)IVi(jw) + t3W20w) + ~ = (Т +(т1\2 + {3к2' + 5 = А>
р + 1 Р
тзТОи) + (т3 + r)W2(ju>) = lT3fcl-+ Й W = в.
(Тш)2 + 1
Используя эти обозначения, частотное условие можно записать в виде
F(ju,и) = -(auiu; + au2u; - Щвщи; + ви2и;}) < о
или
Fi(>, U) = -Re{U*Hi(ju)U} = —U*H(ju)U,
где
Н10Ч = Г Л-
г, а]’ я0и) = |[ад") + Я1Ъ< и = (и1и2)т.
—х? А ] Л
Элементы hik (г, к = 1, 2) матрицы Н определяются следующим обра-
зом:
. k A (T + T3)fcl + T3fc2 . Г
Ли-Ли = Л= (Ги)!+1 +?.
te-A2l = -j(B + B-) =
(Ты)2 + 1
130
Гл. 5. Абсолютная устойчивость
Частотное условие будет выполнено, если эрмитова матрица
будет положительно определенной. Согласно критерию положительной
определенности эрмитова матрица будет положительно опреде-
ленной, если ее главные угловые миноры будут положительны:
Л h - (Т + T^kl +тзк2 . Т П
Л|='‘11-------(Го.р+1 F'
Л U К U _ Г(т + + тзкг , т]2
Д2 = Л11Л22 - Л1?Л21 = I--t----------+ 0~
’fofci + (тз + r)fc2]l2 Л
(Tw)2+1 ] >U-
Так как все параметры положительны, первое неравенство выполняется
при —сю w оо. Чтобы определить, при каких значениях параметров
будет выполняться второе неравенство, представим его в виде
(т + т3)&1 +r3kz
(Tw)2 + 1
, rl2 r[r3fci + (т3 + r)fc2] 12
Д] (Tw)2 + 1
Так как в левой части выражение под квадратом положительно, то по-
следнее неравенство можем записать в виде
(т + 73)fci + тзк2 Т [тз&! + (тз + r)fc2]
(7Ъ)2 + 1 + 0 (Ты)2 + 1
Если обе части приведенного неравенства умножить на (Тш)2 + 1
и положить т = 1/к2 и та = 1/fc], то получим
Это неравенство будет выполнено при —сю w оо, если оно будет
выполнено при и> = 0. А при и> = 0 последнее неравенство будет выпол-
нено, и соответственно рассматриваемая система будет асимптотически
устойчива в целом, если > 1.
«2 Р«2
Задачи
5.7. Показать, что положение равновесия y(t) = 0 следующих си-
стем
а) У + + 2у + и = 0; б) у + Зу + Зу + 2и = О
абсолютно устойчиво в классе нелинейностей и — f(y9 £), определяемых
локальной связью
F(y, и) =у2 — и2 0.
5,2. Задачи
131
5.8. Показать, что положение равновесия y(t) = 0 следующих си-
стем
а) у + 4у + Зу + 2и = 0; б) у + 5у + 4у + Зи = О
абсолютно устойчиво в классе нелинейностей и = определяемых
локальной связью n п
F(y,u)=y2-u2>Q.
5.9. Показать, что положение равновесия y(t) = 0 следующих си-
стем
а) у + 2у + щ + Зи2; б) у + Зу + 2«i + 4u2
абсолютно устойчиво в классе нелинейностей и = f(y, £), определяемых
локальной связью
F(y, ui, u2) = У«2 - и? = 0.
5.10. Показать, что положение равновесия y(t) = 0 следующих
систем
а) у + 2у + щ + Зи2; б) у + Зу + 2«i + 4u2
абсолютно устойчиво в классе нелинейностей и = f(y,t), определяемых
локальной связью
F(y, щ, и2) = уи2 - и? = 0.
5.11. Показать, что положение равновесия y(t) = 0 следующей
системы f , о
J 2xi + = -3«i + «2,
[ 2х2 + х2 = щ — Зи2
абсолютно устойчиво в классе нелинейностей и = f(y, £), определяемых
локальной связью
Fi(xi,^i) = (xi — tq)«i > О,
^г(х2, «г) = («2 - «2)^2 > О,
F3(x,u) = (xi - «2)(^1 - ^г) 0.
5.12. Показать, что положение равновесия y(t) = 0 системы
( 3ii + £1 = —3«i + 2«2>
[ Зх2 + х2 = 2ui — Зи2
абсолютно устойчиво в классе нелинейностей и = f(y,t), определяемых
локальной связью
Fi(xi,«i) = (xi -щ)и\ ^0,
^2(^2, ^2) = ~ U2)U2 О,
F3(x,u) = (xi - x2)(ui - u2) 0.
5.13. Показать, что положение равновесия y(t) = 0 системы
( Xi + 2X1 — ”3U1 + U2,
1 х2 + 2х2 = U1 — 3U2
132
Гл, 5. Абсолютная устойчивость
абсолютно устойчиво в классе нелинейностей и — f(y> t), определяемых
локальной связью
= (si >0,
F2(x2, и2) = (а?2 - «2)^2 > 0,
Рз(х,и) = (xi - X2)(uj - U2) 0-
5.14. Показать, что положение равновесия y(t) = 0 следующих систем
а) у + Зу 4- 2у 4- ui + u2; б) у 4- 4у 4- Зу 4- txi 4- 2u2;
в) у 4- 2,5у + у + 0,5t*i 4- 0,5иг
абсолютно устойчиво в классе нелинейностей и = f(y, t), определяемых
локальной связью
F(y, 0.
5.15. Показать, что нулевое решение y(t) 0 следующих уравне-
ний:
а) у 4- Зу 4- 2у 4- sint = 0; б) у 4- 4у 4- Зу 4- 2sint = 0;
в) у 4- Зу 4- 2у 4- 0,5cost = 0; г) у 4- Зу 4- Зу 4- 2cost = 0;
д) У 4- 2у 4- у2 + Зу3; е) у 4- 4у 4- 2у2 4- Зу3;
ж) у 4- 2у 4- у3 4- Зу5; з) у 4- 2у 4- 4^ 4- 2у5;
и) у 4- Зу 4- Зу 4- 2ycost 4- ysint = 0;
к) у 4-Зу 4-Зу 4-ycost 4-2ysint = 0;
л) у 4- Зу 4- 2у 4- y(cos 14- 0,5sint) =0
асимптотически устойчиво в целом.
5.16. Показать, что положение равновесия (хьхг) = (0,0) следую-
щих систем
х ( xi 4- Xi = —2x1 sin214- х2 sin219
а) <
( хг 4- х2 = xi sin21 — 2x2 sin2
f xi 4- xi = —2xi cos2 * 4- X2 cos21,
6) < 9 9
I X2 4- X2 = Xi COS t — 2X2 COS t;
f xi 4-xi = -2xi(l - е“*) 4-хг(1 - e-t),
1 хг 4- хг — xi(l - e^*) - 2x2(1 - e-t);
f 2ii + xi = —3xi sin214- X2 sin21,
r) \ 9 2
12x2 4- X2 = xi sin t — 3x2 sin t;
f 2±i + = — 3ii cos21 + 2i2 cos2
( 2x2 4-12 — 2®i cos21 — 3i2 cos21;
5.2. Ответы
133
f2ii+®i =-3®i(l-е *)+хг(1-е *),
12±г + ®2 = ®i(l - e-t) - 3®2(1 ~ e-t);
| ±1 +®i = — 2xi(l -e-2t) + хг(1 -e-2t),
t ±г + ®2 = ®i(l-e-2t)-2®2(1-e-2t);
. (2i| + xi = -3®i sin2 3t + ®2 sin2 3t,
3] 2
12x2 + x2 — xi sin2 3t - 3®2 sin2 3t;
. f 3ii + ®i = —2x1 sin2 2t + ®2 sin2 2t,
и) < , ,
( 3±2 + ®2 = sin 2t — 2x2 sin 2t;
. (3ii + ®i = — 4xi cos2 5t + 2x2 cos2 5t,
К 1 <
13±2 + ®2 = 2xi cos2 5t — 4x2 cos2 5t
асимптотически устойчиво в целом.
Ответы
Ответ: 5.1. а) будет; б) будет; в) будет; г) не будет; д) не будет;
е) будет; ж) не будет; з) не будет; и) будет; к) не будет. 5.2. а) будет;
б) будет; в) будет; г) будет; д) будет; е) будет; ж) не будет; з) не будет;
и) будет; к) будет.
Глава 6
ЛИНЕАРИЗАЦИЯ ОБРАТНОЙ СВЯЗЬЮ
Пусть система описывается уравнением
x = f(x,u), хеЯп, и G R, (6.1)
где f(x, и) — гладкая функция в некоторой окрестности 0(0) на-
чала координат. Начало координат является положением равнове-
сия: f(0,0) = 0. Здесь х —вектор состояния, и — управление.
Напомним, что функция называется гладкой в некоторой области,
если она сама и ее производная по всем своим аргументам являются
непрерывными в этой области.
Самым распространенным методом анализа и синтеза систем в рас-
сматриваемом случае является «обычная» линеаризация — линеариза-
ция, основанная на разложении нелинейной функции в окрестности
точки (функции), определяющей заданный режим, в ряд Тейлора и от-
брасывании нелинейных членов. Обычная линеаризация заменяет ис-
ходную нелинейную модель приближенной линейной моделью, и она
обладает рядом недостатков. Эти недостатки состоят в следующем.
1) Устойчивость и требуемое качество системы управления, синте-
зированной на основе обычной линейной модели, гарантируется лишь
в малой окрестности заданного режима. При этом размеры этой окрест-
ности не известны. При больших отклонениях требования к качеству
системы могут не выполнены. Более того, система может быть неустой-
чива.
2) Если заданный режим является функцией времени, то линеари-
зованная модель становится нестационарной, и анализ и синтез систем
не намного упрощается.
3) Способы синтеза линейных систем управления, основанные на
обычной линеаризации, позволяют получать только линейные законы
управления. В то же время известно, что нелинейные законы управле-
ния во многих случаях обеспечивают лучшее качество управления.
6.1. Некоторые сведения из дифференциальной геометрии
135
6.1. Некоторые сведения из дифференциальной
геометрии
При последующем рассмотрении вопросов линеаризации обратной
связью потребуются следующие понятия: производные и скобки Ли,
диффеоморфизмы, инвалютивность, интегрируемость системы линейно
независимых векторов. В этом параграфе будут рассмотрены необходи-
мые сведения, связанные с этими и некоторыми другими понятиями.
Производные и скобки Ли. Пусть а(х) — гладкая скалярная
функция векторного переменного (а: Яп —> R) и f(x) —гладкая век-
торная функция (f: Я” -* Я”).
(д д д \
-— л— ’ * * Д- ) • Ои РаВ'
(уХ[ UX2 ОХп 1
d t t
носилен дифференциальному оператору — — оператору дифференци-
рования по векторному аргументу. При применении этого оператора
к скалярной функции а == а(х) получим вектор-строку
_ da / да да да
Vа — — = I---------- • • -
dx \ dxi дх2 дхп
А при применении этого оператора к векторной функции f = f(x)
получим матрицу
'd/i dfi 9fi_' dxi 9x2 dxn
vf=? = dx dfi dfi dfi dxi 9x2 9xn dfn dfn 9fn _9xt 9x2 9xn.
Определение 6.1. Производной Ли скалярной функции а =
— а(х) по векторной функции f = f(x) называется скалярная функ-
ция (обозначается Lfa), определяемая соотношением
Lfa = ^-t = Vaf =
1 dx 4-f dxi
Старшие производные Ли рекурсивно определяются следующим об-
разом:
Lka = Lf(Lkf-'a) = V(Lj-1a)f, i = 1,2___n.
136
Гл. 6. Линеаризация обратной связью
Нулевая производная Ли функции а = а(х) по f = f(x) есть сама
функция а = а(х):
L°a(x) = а(х).
Высшие производные по другой векторной функции g(x) определя-
ются аналогично:
LgL}a = Lg(Lfa) = V(L/a)g.
Пусть задана система уравнениями состояния и выхода
x = f(x), j/ = a(x).
Первая и высшие производные по времени выходной переменной у
равны соответственно первой и высшим производным Ли функции а(х)
по функции /(х):
• • до i \
’ - а*х = aif(x) = L'a(x)'
V = Цг(х) ~ ....
Точно так же, если задана скалярная функция V(x), то ее производная
в силу уравнения системы будет равна производной Ли этой функции
nof(x): av av
Пусть f(x) и g(x) —две гладкие векторные функции: f: В™ -»/Г1,
g: Rn -» ГС1. Производная Ли от векторной функции g(x) по векторной
функции f(x) является векторной функцией и определяется аналогично
производной Ли от скалярной функции: Lf% = ~f.
Скобки Ли функций f(x) и g(x), к определению которых сейчас
переходим, обозначают [f,g] или ad/g. Второе обозначение особенно
удобно при записи скобок Ли второго и более высокого порядка.
Определение 6.2. Векторная функция, определяемая соотно-
шением
odf^ = [f, g] = Vg f - Vf g = L/g - Lgf,
называется скобками Ли функций f(x) и g(x). Скобки Ли высокого
порядка рекурсивно определяются следующим образом:
adkfz = adf(adk~l%) = [f, adjj_|g], k = 1,2,...
Скобки Ли нулевого порядка функций f(x) и g(x) равны g(x):
ad^g(x) = g(x).
Пример 6.1. Пусть функции f(x) и g(x) имеют вид
=(:?) eW“C)-
6,1, Некоторые сведения из дифференциальной геометрии
137
Определить скобки Ли первого и второго порядков этих функций.
Решение. Производные функций f(x) и g(x) по х равны
г ДА
df_ dxi
dx ~ df2
.dxi
ДА'
дх2
dfi
дх2.
г agi
о 11 dg = a®i
3®, 0 ’ dx dgz
.dxi
dffi I
9хг _ ГО О
9дг Р 0.
дх2 J
Поэтому скобки Ли первого порядка имеют вид
, _ с ГО 01 (х2\ ГО 11 /0\ /-1\
ad,g-Vgf-Vfg-[0
Производные скобок Ли по х равны
^(ad,g) -
0 О'
-° °.
и соответственно для скобок Ли второго порядка имеем
adjg = adf(adfg) = V(adfg)f - Vfadfg =
0 O'
.° °.
хг\ _ 0 1
x^J 3xf О
—1\ ( 0 \
О 7 \3х?/
Диффеоморфизмы и преобразование нелинейных систем.
Определение 6.3. Гладкая векторная функция z = Ф(х)(х,z €
G Я"), определенная в области Q, называется диффеоморфизмом
в области Q, если существует однозначная обратная функция
х = Ф-1(г), и эта функция является гладкой. Если функции Ф(х)
и Ф-1(г) определены и являются гладкими на всем простран-
стве RJ1, то Ф(х) называют глобальным диффеоморфизмом.
Диффеоморфизм может использоваться для преобразования нели-
нейных систем.
Пусть система описывается уравнением
х = f(x) + g(x)u,
и z = Ф(х) — диффеоморфизм. Так как
. 9Ф(х). 9Ф(х)... . ...
z=-srx=-sr|f(x) + g(xM,
то, учитывая, что существует обратное преобразование Ф-1(х), полу-
чим ~
z == f(z) + g(z)u,
где f(z) = —f(x) , g(z) = —l-2g(x)
x=*-'(z) х=ф->(г)
138
Гл. 6. Линеаризация обратной связью
Теорема 6.1. Пусть z = Ф(х) = (<£i(x) ^(х) ... у>п(х))т
гладкая функш
ан dx
\ия^ определенная в области О С Я”. Если якоби-
является неособым, т.е. не обращается в нуль
Vi
dxk
в точке х° € П, то функция Ф(х) является диффеоморфизмом
в некоторой окрестности О(х°) этой точки (О(х°) с П).
Пример 6.2. Определить, является ли векторная функция z =
= Ф(х) = | Xl +12 ) диффеоморфизмом.
\ ®2 /
Решение.
Якобиан имеет вид
d$(x) _ [1
О
dx
2X2
1
и он отличен
от нуля при всех х € Я2. Следовательно, данная функция является
глобальным диффеоморфизмом.
Определение 6.4. Множество линейно независимых век-
торных функций {/1(х),/г(х), ...,/г(х)} называется инволютив-
ным, если скобки Ли любых двух функций fi(x) и fj(x) из этого
множества (не обязательно разных) равны линейной комбинации
функций из этого множества, т.е. существуют функции otijk(x)
(к = 1,2, ..., г)такие, что
fc=l
Множество линейно независимых постоянных векторов всегда ин-
валютивно. Действительно, скобки Ли двух постоянных векторов яв-
ляются нулевыми и они тривиально представляются комбинациями
исходных векторов.
Множество, состоящее из одного вектора, является инвалютив-
ным, так как скобки Ли двух одинаковых функций равны нулю:
[f(x),f(x)] = (Vf)f-(Vf)f = O.
Определение 6.5. Множество г (г < п) линейно независи-
мых п-мерных векторных функций {fi (х), /г(х)... /г(х)} называется
интегрируемым, если существует п — г независимых скалярных
функций а1(х),аг(х), ..., ctn_r(x), удовлетворяющих системе диф-
ференциальных уравнений
Vai(x)/j(x) =0, г = 1,2, ..., n-r; j = 1,2, ..., г.
Скалярные функции а1(х),аг(х), ...» ctn_r(x) независимы в неко-
торой области D (т.е. при х G D), если векторы Vai(x), (г = 1,2, ...
..., п — г) линейно независимы в этой области. Заметим, при г = п — 1
независимость одного единственного вектора Х7а1(х)означает неравен-
ство этого вектора нулю: Vai(x) /0.
6.1. Задачи
139
Теорема 6.2. (Frobenius [29]). Множество г (г < п) линей-
но независимых п-мерных векторных функций {/1(х),/г(х) ••/г(х)}
интегрируемо в том и только в том случае, если оно инвалютивно.
Пример 6.3. Задана система дифференциальных уравнений
~= °.
ОХ\ 0X2
да п да да Л
----2х2— =0,
dxi дх2 дхз
где а = а(хь Х2, х3) — неизвестная функция. Требуется определить раз-
решимость этой системы уравнений.
Решение. Эту систему уравнений можно записать в виде
^f,=0. £гг = о.
ах dx
где
fi = fi(x) = (2х3 -1 0)т, f2 = f2(x) = (-11 -2х2 х3)Т.
Чтобы ответить на вопрос, имеет ли данная система уравнений
решение, согласно теоремы Фробениуса достаточно проверить инвалю-
тивность множества {fj, Гг}. Скобки Ли двух функций этого множества
имеют вид
2х3\
-1 ]
k 0 /
0 0 2'
ООО
0 0 0.
-Х1 \
—2x2 1
*3 /
(-4х3\
2 Г
0 /
Как легко проверить, скобки Ли каждой пары функций из множе-
ства {fj,£2} могут представлены как линейные комбинации функций
этого множества следующим образом:
[f,,f2] = -2fi +0f2,
[f2.fi] = = 2f, -0f2,
[fi. fi] = [f2.f2] =0fi + 0f2.
Таким образом, множество {fi,f2} инвалютивно, и следовательно
по теореме Фробениуса рассматриваемая система интегрируема.
Задачи
6.1. Определить производные Ли 2-го порядка функции а(х) = х\ +
+ х| по следующим векторным функциям:
a) f(x) = М; 6)f(x)=P\ B)f(x)=M;
\ 1 J \^2/ \^2/
140
Гл. 6. Линеаризация обратной связью
Г) f(х) = ; д) f (х) = ( ’ Y е) f(х) = Г***2);
ж) f(x) = ( Xl \ з) f(x) = ; и) f(x) = М;
\XjX2/ \Х2/ \х2/
/~2\
к) f(x) = (3).
\х2/
6.2. Определить скобки Ли следующих векторных функций:
a)f(x)=^J и g(x) = б) f(x) = ( 1 ) \ж2/ и g(x) = о
в) f(x) = (З) \ж2/ И g(x) = (12 \ V/’ Лг2\ Г) f(x) = И g(x) = /яА \х2/
д) f(x)=СО \Х2/ и g(x) = /ХЛ- е) - fe) \Х2/ И g(x) = С)
/ж?\ ж) f(x) = ( 1 ) \Ж2/ И g(x) = 0- 3)f(x)-(y2 \ х2 ) И g(x) =с.
И) f(x) = ( Xl ^Х | Xq ) и g(x) 1 / & к) f(x) = (2) \Х2/ И g(x) = 0-
6.3. Определить скобки Ли 2-го порядка векторных функций, при-
веденных в задании 6.2.
6.4. Показать, что множество из двух векторов {g(x), adyg(x)}
инвалютивно при следующих функциях g(x) и f(x):
(Х2 \ /0\
xl I и g(x) = I О I;
— х\+ху \1/
(Х2 \ /0\
x3t + х|) и g(x) = I О ];
х| / \1/
Сх2 \ /0\
- xi + х21 и g(x) = 11],
х| / \®/
(—xi + х|\ /0\
Х2 ] И g(x) = I 1 ) ,
— xi+x|/ \0/
6.2. Линеаризация обратной связью по состоянию
141
(—xi + Xj\ /0\
х2 I и g(x) = I 1 I;
-х, 4- х2/ \0/
(х2 \ /1\
- х? - х2 I и g(x) = I О I;
-х^ / \О/
(х2 \ /О\
х2х3 I и g(x) = I ОI;
—Х1 — х2/ \1/
(х2 \ /1\
и 8(х) = I о);
-Х,/ V/
(х, 4- х2 \ /О\
1 и 8(х) = [ ° I;
-Х1-х3/ \1/
/ Х2 \ /О\
к) f(x) = I ®з + ®2 I и g(x) = 111.
\Х2 + Хз/ \О/
6.2. Линеаризация обратной связью по состоянию
Функция и = Ф(х, и), где и, v — входы (управления), х — вектор
состояния, называется преобразованием обратной связью, если она
разрешима относительно V. Переход от нелинейной системы к ли-
нейной путем преобразования, включающего преобразование обратной
связью, называется линеаризацией обратной связью.
Линеаризация обратной связью (ЛОС) является не приближен-
ным, а эквивалентным преобразованием: в результате ЛОС получается
система, эквивалентная исходной системе. При ЛОС управление и
заменяется новым управлением и. Функция преобразования, кроме
нового управления, включает вектор состояния (в частном случае толь-
ко выходную переменную). Поэтому при этом преобразовании объект
охватывается обратной связью. Отсюда и название, которое получило
это преобразование, — преобразование обратной связью.
Пример 6.4. Задан объект, который описывается уравнением
х = ах3 + и, х, u € R, а > 0.
Требуется определить закон управления, при котором замкнутая систе-
ма была бы асимптотически устойчива в целом.
142 Гл. 6. Линеаризация обратной связью
Решение. Синтез замкнутой системы, основанный на обычной
линеаризации, не обеспечивает асимптотическую устойчивость в це-
лом. Действительно, на основе обычной линейной модели х — и по-
лучаем закон управления и = —кх (к > 0), при котором линейная
модель асимптотически устойчива в целом. Однако при таком законе
управления исходная нелинейная система х = ах3 — кх асимптотиче-
ски устойчива только на интервале 1х| < у/к/а.
Воспользуемся линеаризацией обратной связью
з
и — —ах + V.
При этом преобразовании уравнение объекта примет вид х = v. При та-
ком уравнении единственным разумным линейным законом управления
является v = — кх (к > 0). Подставив это выражение для управления
в уравнение преобразования, получим
и = —ах3 — кх.
Уравнение замкнутой системы имеет вид х = — кх. Замкнутая система
асимптотически устойчива в целом.
Рассмотрим еще один простой пример.
Пример 6.5. Задан объект, который описывается уравнениями
X1 X2 СХ ।, Ж2 — U.
Требуется определить закон управления, при котором замкнутая систе-
ма была асимптотически устойчива в целом.
Решение. Воспользуемся преобразованием обратной связью
Z\ = Xi, Z2 — X2+CX3, и = — 3cxj(x2 + CX?) + V.
В новых переменных уравнения объекта примут вид
Z\ " Z2, Z2 = V.
Приняв закон управления
v — — kiz\ — k2Z2, к\,к2 > 0,
для замкнутой системы получим
— Z2, Z2 = — k[Z{ — &2^2-
Замкнутая система асимптотически устойчива в целом. В исходных
переменных уравнения замкнутой системы принимают вид
— Х2 CXlt
Аг = -Зсх]х2 - Зс?а% - к\Х\ - - кцсх^.
В примере 6.5 преобразование обратной связью включает, помимо
преобразования управления, преобразование фазовых координат. При
этом, если в примере 6.4 более или менее понятно, как выбрано преоб-
разование, то в примере 6.5 выбор преобразования не очень понятен.
6.2. Линеаризация обратной связью по состоянию
143
Кроме того, в общем случае возникает вопрос, существует ли преобра-
зование обратной связью, обеспечивающее линеаризацию той или иной
системы. Таким образом, в теоретическом плане при рассмотрении
линеаризации обратной связью возникают два основных вопроса:
1) для каких систем линеаризация обратной связью возможна;
2) как найти соответствующее преобразование.
Рассмотрим нелинейную систему
х = f(x) + g(x)u, х е Rn, ueR, (6.2)
где f(x), g(x) —гладкие векторные функции. Начало координат при
нулевом управлении является положением равновесия: f(0) =0.
Определение 6.6. Система (6.2) называется линеаризуемой
обратной связью по состоянию, если существует диффеоморфизм
z = Т(х) и преобразование обратной связью
и = а(х) + /3(x)v
такие, что уравнение (6.2) принимает вид
z = Az + bv,
где
0 1 0 ••• О’
0 0 1-
0 0 0 -1
0 0 0 ••• 0.
/°\
о
о
\1/
Данная линеаризованная система имеет специальный вид — форму
управления Бруновского (Brunovsky controller form) [29]. Однако это
не нарушает общности, так как любая вполне управляемая линей-
ная стационарная система может быть преобразована к такому
виду.
Составим для системы (6.2) матрицу
У = [g adfg orff 'gj.
В случае линейной стационарной системы, когда
(6.3)
f(x) = Ах, g(x) = Ъ
где А и Ь —постоянные (п х п)- и (п х 1)-матрицы, для скобок Ли
имеем
dg_ df dAx,
g = b, ad/g = —f - 3-g = —— b = -Ab,
J dx dx dx
adjg = adf(adfg) = -^g = ~^adfg = A2b,
ad^g = adf(a<r}-2g') = (-l)n-2^ad;-2g = (-l)n-*An-1b.
144 Гл. 6. Линеаризация обратной связью
Матрица (6.3) принимает вид
У = [b -ЛЬ Л2Ъ ••• (-1)п-‘лп-|ъ].
Если отбросить перед четными столбцами матрицы У знак минус,
который не влияет на ее ранг, то получим матрицу управляемости для
пары (Л, Ъ). Поэтому матрицу (6.3) называют матрицей управляемо-
сти для системы (6.1).
Теорема 6.3. (Теорема о линеаризации обратной связью по
состоянию). Нелинейная система (6.2) линеаризуема обратной свя-
зью по состоянию в некоторой окрестности П начала коорди-
нат в том и только в том случае, если в этой окрестности ее
матрица управляемости имеет ранг п, т. е. det У О всюду на Л
(в начале координат det У может обратиться в нуль) и множе-
ство {g, ad/g....ad^-2g}, составленное из п — I столбцов матри-
цы управляемости У, инвалютивно.
Правило линеаризации обратной связью (ЛОС) по состоянию мож-
но сформулировать следующим образом::
1) Для заданной системы определить матрицу управляемости У =
= {gad/g ••• adj~*g} и вычислить det У.
2) Если det У /0, то проверить инвалютивность множества векто-
ров, составленного из первых п — 1 столбца матрицы управляемости,
т.е. множества {g, ad/g..ady-2g}.
3) Если множество {g, ad/g..adj-2g} инвалютивно, то опреде-
лить функцию Ti(x) из соотношений .
VTiad’/g = 0, г = 0,1....n-2; VTad^T’g/O. (6.4)
4) Определить преобразование состояния z=T(x) = [Т](х) Тг(х)
••• Тп(х)]т, где Тг = L/Ti, Тз = LjTi, ••• , Тп = и преобразо-
вание управления
—, Д гт(-£;г'+») сел»
11
Пример 6.6. Задана система
«Tj) *С2 — ^3 ж3 ~ 1 <^3*
Требуется произвести линеаризацию обратной связью по состоянию.
Решение. В данном случае п = 3 и функции f(x) и g(x) имеют
вид т ~
f(x) = (х2 xf Х\ + сж|) , g(x) = (0 1 0) .
6.2. Линеаризация обратной связью по состоянию
145
1) Найдем матрицу управляемости У = (g ad/g adjg).
. dgf df
0
0
1
1
0
0
0
3®з
3cx?
О-
ad^g = adf(adfg) = d^g^f - ^ad/g =
1
0
0
0
0
1
Г0 -1
01
Матрица управляемости имеет вид У =
отличен от нуля: det У = 1.
О . и ее детерминант
1.
2) Первые два столбца матрицы управляемости являются постоян-
ными, и поэтому образуют инвалютивное множество.
3) Соотношения (6.4) принимают вид
1
О
О
О
= ^=П
,g \&Г! дх2 дхз) дх%
(ggg)(;]--g-“
(Ё Ё S) Я - -£' •
Отсюда следует, что Ti зависит только от хз, и в качестве решения
этих соотношений примем Т\ = хз.
3) Найдем остальные два компонента преобразования состояния Тг
и Т3:
T2 = L/Ti =VTi/ = (0 0 1) | 4 ]=а:1+са:з
\rci + сху
(Х2 \
хз I = + 3со:з(®1 4-ge3).
xi + сху
Итак, преобразование состояния имеет вид
zi = Т1 (ж) = хз, Z2 = Т2 = xi + cxl, z3 = Т3 = Х2 + Seaport 4- ся:3).
146
Гл. 6. Линеаризация обратной связью
Для определения преобразования управления нужно определить
LgL2fTi и L}Tf.
/0\
LgL2fTi = LgT3 = VT3g — (Заг3 1 6cx3xi + ISc2^) 111 =1,
w
L3fTi = Lf(L2fTi) = LtT3 = VT3f =
(x2 \
x3 I =
Xi + CX3J
= 3cx3x2 + xl + (6cx3xi + 15<^®3)(a;i + cx3).
Подставив эти выражения в (6.5), получим
и = — [Зсх|х2 4- х| 4- (6схзХ1 + 15<?®з)(я;1 + сх|)] + v.
В новых переменных уравнения системы примут вид
zi = Z2t Z2 \= гз, 2:3 = v.
Задачи
{£1 = Х2>
Х2 = -XI + и,
х3 = -х|;
f Xi = Х2 4- и,
е) *^2 ~
и х3 = -х3;
' Xl = х2 + х2,
и) < х2 =
Х3 — "-"Xi Х2 4“
г
< Х2 = ®2 — ЯЗ,
к ±3 = -®2 + и;
Г ±1 = -Х1 4-х|,
*^2 =
• 2
ж3 = -xf;
Х[ — Х2,
< Х2 — Х3,
к ±3 = -х? + и;
б)
д)
6.5. Определить ранг матрицы, управляемости следующих управля-
емых систем:
{X j = Х2 j
= Я3,
х3 = -х2 + и;
XI ~~ 3*1 I х^^
г) х2 = и,
к х3 = -х2 +ж3;
{X] = Х2,
х2 = Х2Х3,
хз = —xi —• Х2 + и;
{Xl = Х2,
х2 = х2х3,
Х3 —• 3?1Х2 Н- X^U*
6.6. Заданы управляемые системы
(±1—Х2+Х2, f Xi — Х2 +Х| 4-и,
' । • з б) । . з
[ Х2 — “Xl — Х2 + xf + u; I Х2 = —Xl — Х2 +
6.2. Задачи
147
Г Я*) Х2 I X1)
I Х2 = -Х2 + х% 4- и;
( Xi = Xi + Xj + U,
[ Х2 = —Х2 + #1X2;
{XI = X] + Х\Х2,
о
X2 = x2 + Xi+ и;
{• 3
X1 ~~ Х2 Г X ।,
Х2 = Х3 + Х2,
хз - —хз — х\ 4- и;
ж)
г • 3
X J — 3?2 4 3?2,
4 Х2 = Хз + х],
„ Хз = —х2 + и;
г * 3
Х1 ~X] 1 Х2 Г Хд,
< Х2 = Х3 + Xi + U,
хз = -Х2 - ®i;
и)
' ii = Х2 4- е-®1 4-Х],
4 Х2 = Хз + X] + х%,
к Хз == —Хз — 372 +
к)
/ . . .3
371 — Х1 "г Х2 4 Х3,
< Х2 = Хз + X1 + U,
X3 = X2 + xi + хз;
л)
• 3
371 — Х2 4"" 371,
Х2 = Хз + ®2>
Хз — #3 4 #4 4 1»
к Х4 = — %4 — хз 4 и;
' X] = Х2 4-Х],
Х2 — Х3 4~ Х2,
Х3 — Х3 4 Х4 + Х)Х2»
Х4 ~~~ Х4 #3 4" w*
Показать, что они линеаризуемы обратной связью по состоянию.
6.7. Заданы управляемые системы
/ • з
Г х 1 —“ х ] 4- х ।,
1 х2 = х2 + Xj + и;
X • 3
J xi = xi 4- Х2 4- Xj 4- и,
1 • 3 3
Х2 = —Х2 4“ Xj 4“ XjJ
в)
г • 3
#1 = #1 + %1>
Х2 = Х2 4" Х| 4" Х)Х2,
k Хз = -Хз - Xj + и;
г)
f л з
х 1 х ] 4“ Х2 4“ х 1,
< Х2 = 2xi +#2 4-Хр
• 2
#з — #3 ~~ #3 #1#2 4”
{Х\ — Xj 4“ Х2 4- Х1Х2,
±2 = 2xi + Х2 + Xj,
Х3 = —хз — xi + и;
е)
' xi = xi 4- Xj 4- х|хз 4- и,
4 Х2 = Х2 4-Х3,
k Хз = -Хз - Xj + Х2Х3;
ж)
' Х1 = Х2 + X] + х|хз + и,
< Х2 = Х2 +х| +Х3,
хз = х2 + 2х3 + х|;
з)
' xi — 2xi 4-хз 4-Хр
< Х2 = х\ 4- х|хз 4 х| + ut
k Х3 = —2хз — #1 4- Х1Х3;
и)
' xi = 2xi + ®1Хз + Х2Х3 + и,
< Х2 =Хз+х1 + Х2,
Х3 — Х2 Зхз 4“ х|хз,
к)
' Xi = Xi 4-Х3 4-Хз,
< ±2 = Зхг 4- х| 4- 2х]Хз 4- и,
k хз = 4xi 4- 2хз 4- х, 4- Х1Х3;
148
Гл. 6. Линеаризация обратной связью
{il — Х2 + xf 4- 2X1X2, Г Xl — 2xi + 3X2 + Х2.
Х2 — Х1 4" XjX2 4* Xj, I Х2 Х1 I Х1Х2 Г Х|,
Хз = Х4 + Хз 4 ЗХ1Хз + U, I Хз — Х4 4- Х3Х4 + Х4,
Х4 = —Х4 — хз 4- Х3Х4; t Х4 = Зхз 4- 4x4 4- и.
Показать, что они не линеаризуемы обратной связью по состоянию.
6.8. Исследовать линеаризуемость обратной связью по состоянию
следующих управляемых систем:
Г xi — 2X2 +^1,
| хг = -4x1 — 3x2 4- и;
б) {
Х| = Х1 4- Х2,
х2 = 3xi 4 2xiX2 4 и;
Г xi = за + х, +хр
I Х2 = Х1 + 2x2 + Х1Х2 + и;
{X] ~ Х2 ”I- Х^Х2 ”I- ЗЯ/j»
±2 = Xl + Х2 + 3X1X2.
хз = -хг + 2хз - Х2Х3 + и;
( Х1 = 2X1 + 3X2 + 4X1X2 + и,
\ Х2 = 3x2 + %2 + х2'
' Xl = Х2 4- Х]Х2,
4 Х2 = Х34-Х2Хз,
/ хз = -2xi — хг + Х1ХЗ + и;
{Xl = 5X1 + 3X2 + Х(Х2,
Х2 = 2X1 + 3X2 + XfX2, 3)
Х3 — ~~^2 3xj Х2Х3 4"
' xi = хг 4- 2хз 4- Х2Х3,
< Х2 = Х2 +Хз +Х2Х3,
k Х3 = 2xi — Х2 + х| + и;
xi = 2xi 4 3x2 4- и,
И) Х2 = 4X2 + Зхз 4- Х2Х3,
k хз — 5хз 4- 2х2хз 4- х*;
' xi = xi 4- 5хз +xj,
х2 х 1 4* х 1Х2 Г Xj
k Х3 = хг 4- хз 4 и.
6.9. Определить преобразование линеаризации обратной связью по
состоянию для следующих управляемых систем:
а) Х!=Х2 + х|, хг =-xi-хг+Xi 4и;
б) Xi=X2+u, Х2 — — Х1 -Х2 +х|;
в) xi = 2x2 4- Хр хг = хг 4- х| 4- и;
г) Xl = Xl +Xj Х2 = —Х2+Х1Х2;
д) xi = 2x2 4- хг = Зхз 4- xj, хз = —хг 4- и;
е) Х1=2хг + Х1, хг — Зхз+х|, Х3 = — xi — хз + и;
Ж) Х1=3хг+Х2, Х2 = Зхз + 2X1X2, хз = ““Я2 4и;
3) Xl = Х2 4- xf, Х2 = 2хз + и, ХЗ = -Х2 — х\;
и) Xl = Х2, Х2 = Хз, Хз = Х4 4- Х1Х2, Х4 =
к) Х1 = Х2, Х2 = Хз, Хз = и, Х4 = Хз + X?.
6.3. Линеаризация обратной связью по выходу
149
6.3. Линеаризация обратной связью по выходу
Пусть система описывается уравнениями состояния и выхода:
х = f(x,и), у = Л(х), х€ Rnt u€R, у е R. (6.6)
Рассмотрим задачу слежения за траекторией уж(1), которая состоит
в определении такого закона управления, при котором ошибка слеже-
ния e(t) = y(t) — уж(1) со временем стремится к нулю : e(t) —* 0 при
t —► оо, а остальные переменные ограничены.
Трудность решения данной задачи заключается в том, что перемен-
ная у не связана с управлением и. Однако может оказаться, что она
будет легко разрешимой, если путем преобразования исходной системы
удастся получить прямую и простую зависимость между выходом у
и входом (управлением) и.
Определение 6.7. Линеаризацией обратной связью по выходу
называется такое преобразование нелинейной системы (6.6), вклю-
чающее преобразование обратной связью, при котором в преобра-
зованной системе связь между выходом у и входом и получается
линейной.
Пример 6.7. Система описывается уравнениями
±1 = Х2, Х2 = хз(^1 + 1), Хз=Я1Х2+и, y = Xf.
Требуется определить алгоритм управления, обеспечивающий слеже-
ние за траекторией уж(1), а остальные переменные ограничены.
Решение. Продифференцируем у столько раз, сколько потребу-
ется для получения прямой зависимости между выходом и входом:
у = XI = х2, у = х2 = Хз(х\ 4-1),
У = х3(х1 4-1) 4-х3±1 = xix2(xi 4-1) 4- (х{ 4- 1)и4-х2хз-
Из последнего соотношения на основе преобразования
U = (ж, V1) [~Ж|Ж2(Ж1 + 0 ~ Ж2Х3 + и]
получим У = v. Точка = — 1 для этого преобразования является
особой: оно в этой точке не определено.
Для определения требуемого закона управления воспользуемся ме-
тодом обратной задачи динамики. Если потребовать, чтобы ошиб-
ка слежения е = у — уж изменялась в соответствии с уравнением
е 4- к\ё 4- к2ё 4- к$е = 0, то, найдя отсюда У = уж — к\ё — к2ё — к$е
и подставив в преобразованное уравнение для выхода, получаем
150 Гл. 6. Линеаризация обратной связью
v = У ж — к\ё — к2ё — к^е. Подставив это выражение в преобразование
для управления, находим искомый закон управления
и = (хТТТ) +-1213 + ж~
-ki(y- уж) -к2(у- уж) - к3(у - г/ж-)]
или, после подстановки выражений для выходной переменной и ее
производных,
и = + 1)(Х1Ж2 +&1Лз) + х2Хз + fc2X2 + &ЗЯ1-
(Х1 + 1)L
~~ У ж ~ к\уж — к2уж — J.
В данном примере число дифференцирований для получения явной
зависимости между выходом и входом равно порядку системы. Воз-
никают дополнительные проблемы, когда это число меньше порядка
системы. Рассмотрим пример.
Пример 6.8. Пусть система описывается уравнениями
£1 = + (х2 + 2)х3, x2 = Xi+x3, ±3 = xf + и, У = Х\.
Требуется определить алгоритм управления, обеспечивающий слеже-
ние за траекторией уж(1), а остальные переменные ограничены.
Решение. Продифференцируем у столько раз, сколько потребу-
ется для получения прямой зависимости между выходом и входом:
3/=£1=х2 + (х2 + 2)хз,
у = (Д + х3)х2 + (х2 + 2)±3 = (1 + х3)(х? + х3) + (х2 + 2)xf + (х2 + 2)u,
или
у = (1 + x3)(xf + хз) + (х2 + 2)х, + (х2 + 2)и.
Из последнего соотношения на основе преобразования
и = —^“5 [-(1 + Хз)(ж? + Жз) - (®2 + 2)®! + и]
Х2 + Z
получим
у =V.
Как в предыдущем примере, воспользуемся методом обратной задачи
динамики. Задав желаемый закон изменения ошибки е = у - уж в виде
ё + к[ё 4- к2е = 0, (6.7)
находим
V = Уж - kie - k2e = уж-к{ [жг + (х2 + 2)аг3] - /г2®1 + Ьуж + к2уж-
6.3. Линеаризация обратной связью по выходу
151
Подставив это выражение в преобразование для управления, получим
« = —j, 9 [(1 + ®з)(®1 + х3) 4- (х2 4- 2)л]+
+ к\ [ж2 + (х2 4- 2)ж3] 4- k2xi -уж-к\уж- *эдж] •
При таком управлении ошибка слежения описывается уравнени-
ем (6.7). В силу устойчивости этого уравнения ошибка e(t) -► 0 при
t —> оо. Однако пока нельзя делать вывод о том, что полученный
алгоритм управления решает поставленную задачу. Это связано со
следующим обстоятельством.
Порядок синтезированной системы совпадает с порядком исходной
системы и равен трем, так как найденный алгоритм управления не вно-
сит дополнительный порядок. В то же время уравнение ошибки (6.7)
имеет второй порядок, и оно описывает часть динамики. Для получе-
ния полного описания синтезированной системы необходимо к урав-
нению (6.7) добавить еще одно уравнение первого порядка, которое
описывает так называемую внутреннюю (скрытую) динамику.
Полученный алгоритм управления применим, если внутренняя ди-
намика устойчива. В противном случае координата, характеризующая
внутреннюю динамику, и управление могут принимать недопустимо
большие значения, что может сопровождаться перегревом двигателей
или возникновением сильных вибраций механической части [30].
Относительный порядок. Основным методом получения прямой
зависимости между выходом и входом (управлением) является повтор-
ное дифференцирование выхода, пока не получится явная зависимость
выхода от входа, и последующее преобразование обратной связью. Чис-
ло дифференцирования выхода, необходимое для получения явной за-
висимости между выходом и входом, называется относительной сте-
пенью или относительным порядком. Для вполне управляемой систе-
мы относительная степень г не превышает порядка системы п: г п.
Пусть система описывается уравнениями
х = f(x) + g(x)u, у = Л(х), х € йп, и € й, у € й, (6.8)
где f(x), g(x) и Л(х) — гладкие функции в некоторой области Q С й”.
Продифференцируем выход у по t:
. dh .
[f(x) 4- g(x)u] = Lfh 4- (Lgh)u.
Если Lgh — 0 для всех х 6 П, то дифференцируем выход еще раз:
у = ±(Lfh)x = ±(Lfh)(f + gu) = Ljh + (LgLfh)u.
ax llx.
152
Гл. 6. Линеаризация обратной связью
Если LgLfh = 0, дифференцирование продолжаем, пока LgLrj lh / 0.
Затем, применяя преобразование обратной связью
(г)
получим линейное уравнение у = v.
Как отмечалось, число г дифференцирования выхода, необходимое
для появления управления и, называется относительной степенью (или
относительным порядком) системы. Поэтому для системы (6.8) это
понятие можно определить следующим образом.
Определение 6.8. Одномерная система (6.8) имеет относи-
тельную степень г в области П, если для любых х 6 Я
LgL}h(x) = 0, i = 0,1,.... г - 2, (6.9а)
/ 0. (6.96)
/ Приведенное определение согласуется с интуитивным определени-
ем, связанным с числом дифференцирования, и с определением относи-
тельной степени (или относительного порядка) линейной системы как
разности между степенями знаменателя и числителя ее передаточной
функции.
Внешняя и внутренняя динамика. Если относительная степень г
меньше порядка системы п (г < п), линеаризация обратной связью
разбивает уравнение системы на уравнения внешней и внутренней
динамики. При этом внешняя динамика имеет порядок г и характе-
ризуется г независимыми переменными, а внутренняя динамика имеет
порядок п — г и характеризуется п — г независимыми переменными.
Обозначим вектор переменных внешней динамики z^ =
= (zi,Z2. •••» zr)т, а вектор переменных внутренней динамики
z(2) = (zr+i,Zr+2, ••• > zn)T. Рассмотрим, как можно выбрать эти
векторы.
Согласно теореме 6.1 для того чтобы переменные Zi (г — 1,2, ...
..., п), связанные с исходным вектором состояния х соотношениями
Zi = ¥><(х) (t = 1,2, ..., п), могли служить новыми переменными состо-
яния нужно, чтобы градиенты V^»(x) (t = 1,2, ..., п) были линейно
независимы, или якобиан был отличен от нуля:
dtpi dxk — dtp I dxi dtp2 dxi d<p\ dX2 d<P2 dX2 dtp\ din d'Pi dxn /0.
dtpn dxi dtpn 6X2 dtpn din
6.3. Линеаризация обратной связью по выходу 153
Если система (6.8) имеет относительную степень г < п, то она может
быть преобразована к нормальной форме вида
z\ =z%> И2 = гз, ..., zr_i =zrt zr =a(z^\z®)+b(z^\z®)u, (6.10a)
i®=w(z^,z®), y=z\. (6.106)
Как легко убедиться, уравнения внешней динамики примут вид (6.10а),
если в качестве переменных ее состояния принять выход и его произ-
(г-1)
водные у, yt ..., у :
Zt = у - /i(x) = L°fh(x.),
z2 = y- Lfh(x.),
(г—1) .
Zr = У = Lrf-'h(x).
Градиенты этих преобразований линейно независимы.
Так как система из одного вектора g инвалютивна, то по теореме
Фробениуса существуют n — 1 независимых функций А& (fc = 1,2, ...
..., п — 1), удовлетворяющих системе уравнений
L9Afe(x) = 0, = 1,2, ..., n-1, Vxefi. (6.11)
Напомним, что скалярные функции А& (к = 1,2, ...» п — 1) независи-
мы, если их градиенты линейно независимы.
Так как функции z* = 1у-1Л(х) (г = 1,2, ..., г — 1) удовлетворяют
этому уравнению (см. (6.9а)), и их градиенты линейно независимы,
то они могут быть использованы как функции А< (г — 1,2, ..., г — 1).
Другие п —г функций, удовлетворяющих (6.11), примем за перемен-
ные Zr+1, ..., zn.
После нахождения (п — г) решений уравнения (6.11), для того
чтобы использовать их в качестве переменных внутренней динамики,
нужно убедиться, что их градиенты линейно независимы между собой
и с градиентами остальных переменных, т. е. выполняется неравен-
ство det (= det (\ / 0 (г, к — 1,2, ..., п).
\ах/ \axfc /
Если полученное преобразование представить в виде z = Ф(х), то
оно, являясь диффеоморфизмом, преобразует систему (6.8) в нормаль-
ную форму вида (6.10) с
a(z^\z^) = Lrfh(x.) = Lrfh[& \z)],
b(Z(»>z(2)) = LgLrf~lh(x.) = LgLrf-lh[*~l(z)].
(6.12a)
(6.126)
154
Гл. 6. Линеаризация обратной связью
Пример 6.9. Система описывается уравнениями
/0\
X = I Х1Х2 I + | 1 I и, у = h(x) = х3.
\ х2 / \0/
Произвести линеаризацию обратной связью по выходу.
Решение. Так как у = хз = х2, у = х2 = ^1^2 + и» то относи-
тельная степень г — 2. Поэтому в качестве первых двух новых пере-
менных примем выходную переменную и ее производную: z\ = у = х3,
zz = У — х2. Третью переменную найдем из уравнения
L А = VXg = = 0.
0X2
Этому уравнению, в частности, удовлетворяет функция А = xj. Примем
эту функцию в качестве третьей переменной: Z3 — жь Убедимся, что
выбранные переменные являются независимыми:
0 0 1
0 1 0
1 0 О
= -1/0.
Итак, найденное преобразование имеет вид z = (х3 х2 xi)T, а обратное
преобразование - вид х — (Z3 z2 z\)T.
В соответствии с формулой (6.12) имеем
a(z) = Ljh — Lf(Lfh) = L/x2 = (0 1 0)/ = xix2 = г3г2,
b(z) — LgLfh = Vx2<? = (0 1 0)$ =1.
Так как z3 = xi = —x2 = -z|, уравнение в новых переменных в нор-
мальной форме принимает вид (см. (6.10))
z\ = Z2, Z2 = г3г2 + и, z3 = -z2, y = zi.
Используя преобразование обратной связью и = — z3z2 + v, получим
Z\ = Z2> Z2 = V, Z3 = -z2.
Задачи
6.10. Показать, что преобразование линеаризации обратной связью
по выходу управляемой системы
ij = Х2, Х2 — Х2Х3, Хз = Х2 + Хз + Ut У — Х\
имеет вид
Z\ — Х[, Z2 — Х2, Z3 — Х2Х3, U — [ х2х3 х2(х2 *4“ Х3) "|" t/l.
Х2
6.3. Задачи
155
6.11. Показать, что преобразование линеаризации обратной связью
по выходу управляемой системы
= Х2, £г = ^3 + Х2, Хз = ~^1^2 + U, у = Х1
имеет вид
zi=xi, г2 = х2, Z3 — X3 + X2, и = Х1Х2 - 2х2(хз +х|) + v.
6.12. Показать, что преобразование линеаризации обратной связью
по выходу управляемой системы
£l = Х2, Х2 = Х[Хз, £3 = xi + а?! + У=х1
имеет вид
zi=xi, г2 = х2, 2з = Х1Хз, и =—[-Х2Х3 - xi(xi+xl)+
Xi
6.13. Показать, что преобразование линеаризации обратной связью
по выходу управляемой системы
• • 2
Х1 = Х2, Х2 = Х]Хз, Хз = Х1Х2 + X3U, у = Xj
имеет вид
Z\ = Xl, Z2 — х2, Z3 = XjX3, и = ^~-(—2Х[Х2Хз ~ Х$Х2 + V).
6.14. Показать, что преобразование линеаризации обратной связью
по выходу управляемой системы
£1 — х2, £2 = x3(xi 4- х2), £3 = — xi — х2 4- и, у ~ Х[
имеет вид
21=хь z2 = x2, Z3 =x3(xi +х2),
и = —— [(xi + х2)2 - х2х3 - x|(xi + х2) + v].
Xi 4" х2
6.15. Показать, что преобразование линеаризации обратной связью
по выходу управляемой системы
ii=®2. =®2(®3 + 1). ±3=®2+и> У = х1
имеет вид
Z1 = Ж|,
Z2 = Х2,
z3 = х2(хз+ 1),
— [-ж? + l)2 + vl.
'Гл l j
и =
156
Гл. 6. Линеаризация обратной связью
6.16. Показать, что преобразование линеаризации обратной связью
по выходу управляемой системы
il = Х2, Х2 = Х?(хз + 1), Хз = Xj + U, у — Х\
имеет вид
Z1=X1, 22 = Х2, ^з=Х1(Хз+1), u =[-2xix2(x3 + 1) - xf
Xj J
6.17. Показать, что преобразование линеаризации обратной связью
по выходу управляемой системы
X1=X2, Х2 = (Х1 + Х2)х3, X3 = -Xj+u, У = Х1
имеет вид
z\ = xi, Z2 = х2, Z3 = (xi + х2)х3,
1
Х1 +Х2
и =
[—х2хз - (xi + х2)х| + (xi + x2)xj + v].
6.18. Показать, что преобразование линеаризации обратной связью
по выходу управляемой системы
X) — Х2, Х2 = (Xj + Хг)хз, Хз = -х% + и, У = Xj
имеет вид
Z\ = ХЬ Z2 = х2, Z3 = (Xj + Х2)х3,
и = — [-2Х1Х2ХЗ - (х? + х2)х| + (х? 4- х2)х| + и].
Х| 4~ х2
6.19. Показать, что преобразование линеаризации обратной связью
по выходу управляемой системы
Х]=Х2, Х2 = (Х\+1^)ХЗ, ±з = -Х1~Х2+и, У — Х\
имеет вид
/ 2\
Zl= Х1, 22 = Х2, Z3 — (Xi +Х2)Хз,
,1
Xj 4-Х2
U =
[-Х2Хз - 2x2(xi + х|)х* + (xi + Х2)(Х! + х2) + v].
6.4. Нуль-динамика и синтез алгоритмов управления
Линеаризация обратной связью по выходу разбивает уравнения
нелинейной системы на уравнения внешней и внутренней динамики.
При этом внешняя динамика описывается дифференциальными урав-
нениями, содержащими управление v, линейно связанное с выходом.
Поэтому легко синтезировать управление v так, чтобы у изменял-
ся нужным образом. Однако синтезированный таким образом закон
6.4. Нуль-динамика и синтез алгоритмов управления 157
управления представляет интерес, если внутренняя динамика будет
устойчива и соответственно ее координаты ограничены.
Внутренняя динамика описывается последними п — г уравнения-
ми в нормальной форме (6.106): z® = w(z(!\z®). В общем слу-
чае эти уравнения зависят от внешнего состояния z^. Однако, ко-
гда управление таково, что выход тождественно равен нулю; у = О,
внутренняя динамика не зависит от переменных внешнего состоя-
ния.
Определение 6.9. Нулъ-динамикой нелинейной системы на-
зывают ее динамику при условии, что выход тождественно равен
нулю (у = 0).
Так как при у = 0 все производные по времени выхода равны нулю,
уравнение нуль-динамики в нормальной форме (6.10) имеет вид
z^ = 0, z® = w(0,z^).
Управление, требуемое для поддержания z^) = 0, получается из соот-
ношения
Zr — a(z^\ z^) + b(z^\ z® )u — 0
a(0,z<2))
и имеет види = -^^.
Рассмотрение нуль-динамики связано с тем, что в общем случае
нуль-динамика описывается более простыми уравнениями, чем внут-
ренняя динамика, и в то же время исследование нуль-динамики позво-
ляет судить об устойчивости внутренней динамики.
В случае стабилизации локальная асимптотическая устойчивость
нуль-динамики гарантирует асимптотическую устойчивость внутрен-
ней динамики. Для задачи слежения локальная (неглобальная) экс-
поненциальная устойчивость нуль-динамики гарантирует устойчивость
внутренней динамики, если желаемая траектория и ее производная до
(г — 1)-го порядка принимает малые значения.
Нуль-динамика является внутренним свойством нелинейной си-
стемы, и ее устойчивость не зависит от выбора закона управления
v = v(z^,y^) и желаемой траектории.
Если относительная степень нелинейной системы равна ее порядку,
то линеаризация обратной связью по выходу полностью линеаризует
систему, и нелинейная задача синтеза сводится к линейной. Если
же относительная степень меньше порядка системы, то линеаризация
обратной связью по выходу только частично линеаризует систему,
и пригодность синтезированного на основе линейной модели закона
управления зависит от устойчивости внутренней динамики. Изучение
внутренней динамики может быть упрощена, если его заменить изуче-
нием нуль-динамики.
158
Гл. 6. Линеаризация обратной связью
Задачи
6.20. Определить устойчивость нуль-динамики следующих управ-
ляемых систем:
а)
il = Х2 +
Х2 = Хз,
Хз — X) х% 4 и,
Г Xl = X2 + X3,
6) < x2 = x3,
I X3 = -Xl +u;
{£l = Х2 4-Х3,
£2 — Хз,
хз = -Х2 + и;
• 4
Xl = x2,
г) < X2 = X3 + U,
X3 = —xi — x2 — X3 + u;
д)
• 3
X ] х^,
4 Х2 = х| + U,
k Х3 — Xl Х3 4"
» 3
x 1 — x2,
4 x2 = x| + u,
k X3 — x2 X3 4 ut
ж)
f il = х2,
< i2 = х| 4- u,
k X3 — —xi — хг 4- X3 4 u;
( • 3 ।
Xl = x2 + u,
< x2 = 2x2 4- x|,
X3 = —2xi — x2 — 2хз +
/ . 3 .
Xl = x2 + u,
< X2 = — 2X2+X3,
X3 = —2xi + 2хз + w;
к)
' Xl — x2 + u,
< X2 -2x2 + X3,
k хз = -x2 - 4x3 4- u.
6.21. Определить устойчивость нуль-динамики следующих управ-
ляемых систем:
X1 ~~ Х2, X1 Х2,
а) < £2 = а?з + я4> 2 6) < Х3 = Х|, Х2 — Х3 -l- Х4, • 2 Яз =xj,
Х^ ~^2 Х4 4~ Х4 = —xi — Х3 4- и;
' Xl = Х2+Х3, Х1 — х2 -|- Х3,
в) < Х2 = + Х4, , 2 , Г' * Х3 — Х4 + и, . з х2 = х2 4- Х4, 5 хз - Х4 4- и,
Х4 — —X1 “ 2x2 ~ 2x4» Х4 * 2х2 Х3 4* 2X4»
Х1 х2 -|- Х3, ' £1 = xl 4- х3,
д) . з Х2 - х2 Х4, \ 2 1 е' Хз = Х4 + U, н* н- со кэ II II R Н to w 4- 4- • >и
< Х4 = — 2х2 — Х4; t Х4 == Х2 — Х3 — 2x4’,
6.4. Ответы
159
{Xj — X2 Ч*х^,
X2 ~ X2 Ч" Хз Ч* и,
Хз = Х4,
Х4 — ^~*^2 ”” 2хз Х4,
' ij = х2 + х|,
X3 Х4»
X4 — “X3 2x4,
к)
ii = Х2 + х|,
Х2 = х% 4- хз + и,
Х$ = Х4>
х^ ~х] 2хз Ч** Х4 >
xj — Х2 Ч- х3,
Х2 = Х2+Х3+ U,
Хз = Х4,
Х4 — —X [ 4“ Хз 2x4*
Ответы
6.1. a) Ly«(x) = xi 4- 2; б) L*a(x) = 4х^; в) Lja(x) = xi 4- 4x|;
= xi 4- бх^; к) L*a(x.) = 2xf 4- 6xj.
6.2. a) adfg =
=
k 1
0 Y
-2x2 Г
1 у
-2X2/
з) adfg = ®2j; и) adfg =
6.3. a) adyg = (; б) ad^g =
2
= ( Ж2П+Ж2); и) adfg= ( ° 2)> к) ad/g= (о 2 0 Л з\
\ 0 ) 1 \xi- х\) 7 \2х^ - 4x2/
6.5. а) rangy = 3; б) rangY = 3; в) rang У = 2; г) rangY = 3
при хз 0 и rangY = 2 при хз = 0; д) rangY = 1; е) rangY = 3
при Х2 / 0 и rangY = 2 при хг = 0; ж) rangY = 3 при хг / О
и rangY = 1 при хг = 0; з) rangY = 3 при хз / 0 и rangY = 1
при хз = 0; и) rangY = 3 при 13 / 0 и rangY = 1 при Х3 = 0;
к) rangY = 3 при Х1Х3 /0, rangY = 0 при хз = 0, rangY = 1 при xj = О
и хз 0.
6.8. а) линеаризуема; б) линеаризуема; в) не линеаризуема; е) ли-
неаризуема; ж) не линеаризуема; з) линеаризуема; и) не линеаризуема;
к) линеаризуема.
6.9. a)zi=xi, Z2 = xi+xl,
и = -—[-xi - х» 4- 3xo(xi 4- хг - х?) 4- и].
3X2
160
Гл. 6. Линеаризация обратной связью
б)
в)
г)
д)
е)
ж)
з)
к)
Zi=X2, Z2 = —X] — Х2 4" х|,
и = ~[Х2 - (1 - 3x|)(xi +х2 - х|) 4-v];
Z\=X\, Z2=2l2+Xi,
и = i[-3xi(2x2 4- х,) - 2(х2 4- х|) 4- и];
Z1 = Х2, Z2 = —Х2 + Х\Х2,
и = ——-j-[-x2(xi 4-1?) - (xi - l)(xix2 - хг) 4- «];
Z\ = XI, Z2 = 2x2 + x|, z3 ~ 6x3 + 9х|хз + 2X] + 3x|oq,
и = -----—-x[—(6X| + 9x|x])(2x2 + x|) —(18x2X3 + 6хгХ1)х
6 4- 9x|
х(3хз 4- X,) 4- (6 4- 9x|)x2 4- v];
Z\ = Xl, Z2 = 2X2 + Xl, Z3 = 3X] (2X2 + Xl) + 2(3хз + zf)’
и = — ^[(12х1Х2+15х1)(2х2+Х1)+(6х1 + 10х2)(Зхз+х2)—
-6(xi 4-x3) - v];
Z1 = Xl, Z2 = 3x2 + x|, Z3 = Зхз + Зх|хз + 6x1X2 + 6xix|,
U = o7i--~Т[-6(Х2+Х2)(ЗХ2+Х2)-6(Х2ХЗ+Х1+ЗХ1Х2)Х
3(14- xj)
x(x3 4-2xix2) 4-3(1 4-x|)x24-v];
Z1=X14-X3, Z2=x5-Xi, Z3 = —X2 — x| — 5Хз(Х1 4-X2),
u = 1 4- 5x41"53^*2 + жз) - 2X3(1 4- 5x4) 4- 5x|(xi 4-x2)x
x(x34-4xi 4-4x2) -v];
и) Z1 = XI, Z2 = X2, Z3 — X3, Z4 = X4 4- X1X2,
и = ~(x| 4-X1X3) 4-v;
Zi = X2 — X4, Z2 = X], Z3 = 3X1X2, Z4 = 6xix| 4“ ЗХ[Хз,
и = + 18x1x2x3 - v).
6.20 а) асимптотически устойчива в целом; б) асимптотически
устойчива в целом; в) асимптотически устойчива в целом; г) асимп-
тотически устойчива в целом; д) асимптотически устойчива в целом;
е) асимптотически устойчива в целом; ж) не устойчива; з) не устойчи-
ва; и) не устойчива; к) асимптотически устойчива.
6.21. а) не устойчива; б) не устойчива; в) асимптотически устой-
чива; г) не устойчива; д) асимптотически устойчива; е) не устойчива;
ж) асимптотически устойчива; з) не устойчива; и) асимптотически
устойчива; к) ие устойчива.
Глава 7
СИСТЕМЫ БОЛЬШОЙ РАЗМЕРНОСТИ. ВЕКТОРНАЯ
ФУНКЦИЯ ЛЯПУНОВА
При рассмотрении систем управления большой размерности ши-
роко используется методы, сводящие исследование исходной системы
к исследованию более простых моделей. Одними из таких методов
являются метод сравнения и метод декомпозиции.
Метод сравнения состоит в построении и исследовании системы
сравнения, которая проще исходной системы. Метод декомпозиции
состоит в разбиении исходной системы на несколько подсистем и рас-
смотрении последних.
7.1. Декомпозиция и децентрализация
Обычно системы большой размерности состоят из нескольких под-
систем, или их условно можно разбить на искусственные подсистемы.
При этом основным методом исследования систем большой размер-
ности является метод декомпозиции — метод, при котором исходная
система разбивается на более простые естественные или искусственные
подсистемы. Эти подсистемы получаются зависимыми. Далее, путем
пренебрежения взаимосвязей получают независимые подсистемы. По-
сле этого каждая из подсистем анализируется отдельно и для каждой
из них строится регулятор. Затем производится агрегирование — объ-
единение подсистем в одну систему с учетом отброшенных связей —
и последующее исследование.
Преобразование Луенбергера. При рассмотрении децентрализа-
ции по управлению используется преобразование Луенбергера (Luen-
berger). Это преобразование позволяет представить уравнения системы
в таком виде, при котором каждое уравнение включает не более одной
управляющей координаты.
Пусть система описывается уравнением
х = Ах + Ви, х € Rn, ибй1. (7.1)
Заданы I (I — размерность вектора управления) целых чисел щ (г =
= 1,2, ..., Z), сумма которых равна п: щ = п. Преобразование
162 Гл. 7. Системы большой размерности. Векторная функция Ляпунова
х = Tz называется преобразованием Луенбергера, если матрица пре-
образования Т имеет вид
Т = [В(1) АВ(1) ••• АП1“1В(1)В<2) АВ(2) •••
А^-1^2) ... АВ® ••• АП1~'Вт], (7.2)
где ВЮ (г = 1,2, ..., I) — г-й столбец матрицы В. При таком преобра-
зовании в преобразованном уравнении
z = Az + Bu, А = Г"1 АТ, В = Т~1В,
матрица В имеет вид
ъ(‘) 01 •• 01' /л
в = 02 ь<2> • • 02 , ь« = 0
.Oi Of .. Ь(0 \oj
где 0$ (г = 1,2, — столбец из нулей размерности щ.
Пример 7.1. Дана система уравнений
£1 =Х2 +U] +2^2,
Х2 = + 2ui + иг,
±з = xi + х2 + 3ui + и2.
Произвести преобразование, при котором каждое уравнение содержит
не более одной управляющей координаты.
Решение. Воспользуемся преобразованием Луенбергера. В дан-
ном случае матрицы АиВ имеют вид
Примем щ = 2 и п2 = 1. Тогда имеем
Т = [В(1) ABW В(2)] =
‘1
2
3
2 2'
3 1
5 1
-2 8 —4'
1 -5 3
1 1 -1
7.1. Декомпозиция и децентрализация
163
Для матриц преобразованного уравнения получаем
А = Т~1АТ =
4
-2
1
7
-3,5
1,5
-3 '
2,5 ,
-0,5
Г1 О'
В = Т~'В =00
0 1
Уравнения в новых переменных в скалярной форме принимают вид
Z] = 4zi + 7z2 - З23 + щ,
г2 = —2^1 — 3,5^2 + 2,5гз,
Z3 = Z\ + 1,5^2 - 0,5гз + U2.
Децентрализация по входу. Для того чтобы можно было синтези-
ровать локальные регуляторы для каждой подсистемы отдельно, нужно
произвести децентрализацию по управлению (входу).
Если декомпозиция не произведена и система описывается урав-
нением (7.1), то к нему нужно применить преобразование Луенберге-
i
ра (7.2), представив п в виде суммы I целых чисел п&(п = £2 nt).
fc=i
Затем произвести декомпозицию, включая в подсистему Si только те
уравнения, которые содержат компоненты локального управления этой
подсистемы и, быть может, уравнения, не содержащие управление.
Последние с точки зрения децентрализации могут быть включены
в любую подсистему.
Если система состоит из г подсистем и задается уравнениями
x<fe> = Afex<fe> + Afcj-xW +Bfeu, x(fe)e7?nfc, ueR1, k = 1,2..r,
j = l
где Ak — (nt x пь)-матрица, Akj — (nk x п^)-матрица, Bk — (nk x /)-
матрица, то преобразование Луенбергера можно применить каждой
подсистеме в отдельности. В этом случае, представив размерность пк
k-к подсистемы в виде суммы I целых чисел (г = 1,2, ...,/),
для матрицы Тк преобразования Луенбергера = Tkz^ получаем
(см. (7.2))
Тк = [В<1} Акв['} ••• ••• В^АкВ(к1) ••• (Afc)^--1^^],
где В^ — г-й столбец матрицы Вк. После преобразования Луенбергера
каждой подсистемы, нужно произвести перегруппировку уравнений
так, чтобы в каждую подсистему были включены только те уравнения,
которые содержат компоненты локального управления соответствую-
щей подсистемы.
Пример 7.2. Система описывается уравнением
х = Ах + Ви, х€Я5, и€Я2,
164 Гл. 7. Системы большой размерности. Векторная функция Ляпунова
состоящая из двух подсистем
хО) = + Ai2X^ + Biu,
+ Агх^ + В211,
где х^1) = (xi xz)T, х® = (хз х< х^)Т и
Ai = -1 2 ' , Ai2 = r3 2 3 Bi = 1 f
0 -4 1 0 2 0 4
2 Г ’1 1 2 ‘ 2 2
A21 = 1 0 t A2 — 2 -2 1 , B2 = 1 0
2 1. 2 0 -1. 2 3
Требуется произвести децентрализацию.
Решение. Произведем преобразование Луенбергера каждой под-
системы. Так как размерность первой подсистемы совпадает с размер-
ностью вектора управления, то пц = П12 = 1 и матрица Т\ преобразо-
вания Луенбергера х^1) = Tiz^) для нее совпадает с матрицей В\.
Тх=Вх =
1 1
.° 4
,-i=J [4 -1
1 4 0 1
Размерность второй подсистемы равна пг — 3. Положим П21 = 2
и П22 = 1. Тогда матрица преобразования Луенбергера х(2) =
имеет вид
т2 = [в*0 а2в^ в2(2)] ,
где и В^ — первый и второй столбцы матрицы В2. Так как
o(0 — n2 — B(2) = 2' 0 3. , a2b^ = '1 2 2 1 2' —2 1 0 -1. 2' 1 2. = *7‘ 4 2.
TO
'2 7 2 Г 1 12 -17 -J 1'
T 2= 1 4 C ) , 71"1 — 2 q -3 2 2
2 2 3. -6 10 1
Матрицы преобразованных уравнений
= Aiz^ + Ai2Z^ + Bju,
Z® — A21z^1^ + + B2U.
7.1. Декомпозиция и децентрализация
165
имеют вид
At =ТГ1А1Т1 = -1 0 ' 11’ -4 . -412 = Т\ *41212 ~ 12,5 Л5 32,25 2,75 13' 2
Г° 5,78 -3,44'
Bi = тг'в, = 1 0 .° 1. Аг = 1А2Т2 = 1 [б - 0,56 -0,22 0,89 -2.5.
А21 — Т2 lA2l?2
’1 —0,78'
0 0,44
О 0,22 _
В скалярной форме уравнения в новых переменных принимают вид
z\ = —z\ + 11^2 + 12,623 4- 32,35^4 + 1З25 + ui,
22 = — 4^2 4-1,623 + 2,75z< 4- 225 + «2»
23 = z\ — 0,7822 + 5,78^4 — 3,44^5 + tq,
Z4 — 0,442:2 +Z3+ 0,5624 + 0,892:5,
25 = 0,222:2 + 62:3 — 0,2224 — 2,52:5 + U2-
Разобьем полученную систему на две подсистемы Si и 82- В подсисте-
му Si включим уравнения, содержащие управление гм, а в подсистему
S2 — все остальные уравнения. Тогда получим
Si: z\ = -z\ + 1 \Z2 + 12,62:3 + 32,3524 4-132:5 + ui,
гз = 2i - 0,7822 + 5,7824 — 3,4425 + «ь
S2: Z2 = -422 + 1 >52з + 2,7524 + 225 + u2,
Z4 = 0,4422 4- 23 + 0,5624 + 0,8925*,
25 = 0,2222 + 623 — 0,2224 — 2,5625 + «2-
Для упорядочения переменных произведем еще одно преобразование:
zi=zi, 22 = 23, 23 = 22, 24 = 24, 25 = 25.
Тогда уравнения подсистем примут вид
Si: 21 = -21 + 12,522 + 1123 4- 32,3524 + 1З25 4- «ь
22 = 21 — 0,7823 + 5,7824 — 3,4425 + Ui,
S2 . ^3 = 1,522 ~ 423 + 2,7524 + 225 + «2,
24 = 22 + 0,442з + 0,5624 + 0,8925’,
25 = 622 + 0,2223 “ 0,2224 — 2,5625 + ^2-
166 Гл. 7. Системы большой размерности. Векторная функция Ляпунова
Задачи
7.1. Определить матрицу Т преобразования Луенбергера, при кото-
ром 1-е и 3-е уравнения преобразованной системы содержат управля-
ющие координаты, для следующих систем.
f Xl = Х2 + «1 + U2,
а)
< ±2 = Хз +U2,
, Хз = Xl +Х2 +иг,
б)
' Xl = Х2 +U2,
< ±2 = Х2 + ХЗ + Щ + U2>
, ±з = хз 4- иг;
' XI = Х2 + хз +U1,
в)
4 Х2 = Хз + Щ,
^х3 = х2+хз + и2;
'XI =Х2 +1з +«!.
< Х2 = Хз + U2,
<х3=хз + щ +и2;
д)
' Х1 — Хз + U2,
4 Х2 = Х2 + Хз + U1,
. хз = xi + хз 4- ui 4- иг;
' xi = хг + иг,
< ±2 = Хз 4-U],
, хз = xi +Х2 4-uj + иг;
' Xl -x2 + ui +U2,
ж)
< Х2 = х2 + х3 + W2,
к ±з = хз + щ ;
' xi = 2хг +хз +U1,
з) Х2 — Зх3 4-tli,
, хз — хг 4- хз 4- иг;
f Xl = Х2 +ХЗ +U1,
и)
< Х2 = Хз + U1,
. Хз = Хз + U2 \
' Xl =Хз+щ +U2,
±2 = Х2 + Хз + U2,
, Хз — XI + Хз + Uj.
7.2. Произвести преобразование, при котором каждое уравнение
содержит по одной управляющей координате.
а)
'xi = хг + ui + иг,
< х2 = хз +и2 4-и3,
, хз = xi 4- хг 4- ui;
б)
' xi = хг 4- иг 4- из,
< хг = хг 4- хз 4- щ 4- иг,
k хз — Хз 4- иг;
в)
'xi =хг + хз + щ,
хг = хз 4- щ 4- из,
, ±3 = Хг 4- хз 4- иг 4- и3;
' it = хг+хз 4-ui,
хг = Хг 4- иг 4- из,
k ±з = Хз 4-из;
' ii = хз 4- иг,
д) хг = хг 4- хз 4- ui 4- из,
k хз = xi 4- хз 4- ui 4- иг;
' ii = хг +иг,
< хг = хз 4- ui 4- из,
k ±з = xi 4- хг 4- ui 4-иг;
ж)
f Х[ = Х2 + Щ,
Х2 = Х2 + Хз + U2 + U3,
. хз = хз + из;
' xi = хг +хз + иг + из,
з) хг = Хз 4- ui 4- иг,
, хз = хг 4- Хз 4- иг;
и)
' ±1 = Хг 4-хз 4-U1,
< хг = хг 4-ui 4- из,
^хз = хз + иг 4- из ;
к)
' xi = хз 4-ui 4-иг,
хг = хг 4- хз 4- иг 4- из,
„ Хз = Xl 4- Хз 4- U].
7.2. Векторные функции Ляпунова. Устойчивость системы
167
7.3. Произвести декомпозицию на две децентрализованные подси-
стемы 2-го порядка следующих систем.
Х1 = Х2 + U2>
в)
д)
ж)
#2 = #3 + U1,
< .
Хз = 14,
±4 = Щ + U2 ',
f Xi = X2,
j ±2 = Хз +U1 +«2,
I X3 — X4 4~ Щ,
X4 = —X2 — Хз + U2 \
f Xl = X2 + Ui + U2,
I ±2 = Хз + U2,
| Хз = I4 + U1 +U2,
I X4 = —X2 — хз — X4 + ui;
{Xl ~ X2 +X3 -hU2>
X2 = X3 + Uj,
X3 — X3 4~ X4,
X4 = —X4 + ui + U2;
f Xl = 2x2 + u2»
X2 = X3 + X4 + Ui + U2,
X3 =X4 + U1,
X4 = -2X2 — Хз + U\ + U2\
6)
3)
Xl — X2 4-^2,
X2 = X3 + Ui,
X3 — X4,
X4 = -X3 - X4 + Щ + U2 J
Xl - x2 4-«2,
X2 = X3 + Щ + U2,
X3 = X4 4-U1,
X4 = -Xl - X4 + Ui + U2;
Xj “ X2 +«2,
X2 = X3 + Ui,
X3 = X4,
±4 = —2xi — X4 4- ui + U2;
±1 — 2X2,
&2 = X3 4’Ul 4- «2,
X3 =x44-ui,
X4 = —3xi — ^3 4- U2\
a?i = 2x2 4- X4 + ui 4- иг»
X2 = X3 4-«2,
Хз = Зхз 4- X4 4- Ui 4- U2>
x4 = -x3 4-X4 4-ui.
7.2. Векторные функции Ляпунова.
Устойчивость агрегированной системы
После анализа и синтеза подсистем их объединяют в одну систе-
му с учетом отброшенных взаимосвязей. При этом возникает задача
исследования устойчивости объединенной системы. При решении этой
задачи используется метод векторной функции Ляпунова. Согласно
этому методу на основе векторной функции Ляпунова, которая форми-
руется из функций Ляпунова подсистем, строится система сравнения,
с помощью которой исследуется устойчивость агрегированной (объеди-
ненной) системы.
Экспоненциальная устойчивость. Теорема Красовского. Пусть
система описывается уравнением
x = X(x,t), X(O,t) =0 Vt t0, х€Яп. (7.3)
168 Гл. 7. Системы большой размерности. Векторная функция Ляпунова
Правая часть является гладкой функцией: она непрерывно дифферен-
цируема в области
|х| < р, 0 < t < оо (р = const или р = оо).
и дХ*
Частные производные —— удовлетворяют условию
ох j
дХ •
-д—- < L, i,j = 1,2, ..., п (L = const).
Решение уравнения (7.3) при начальном условии x(to) = х°, как
обычно, будем обозначать x(x°,t): x(x°,to) = х°).
Определение 7.1. Положение равновесия, или невозмущен-
ное движение x(t) = 0 системы (7.3) называется экспоненциально
устойчивым, если существуют положительные постоянные а и М
такие, что при |х°] < р/М возмущенное движение x(x°,t) удовле-
творяет условию
|x(x°,t)| М|х°|е“Vt to.
Если это условие выполняется при любых начальных условиях, то
положение равновесия системы называется глобально экспоненци-
ально устойчивым или экспоненциально устойчивым в целом.
Линейная стационарная система, если она устойчива, то она экспо-
ненциально устойчива в целом.
Теорема 7.1. (Н.Н. Красовский [13]). Если положение рав-
новесия системы (7.3) экспоненциально устойчиво^ то существу-
ет функция Ляпунова V(x,t) и положительные постоянные
(г = 1,2,3,4) такие, что выполняются неравенства
С1|х|2 V(x,t) С2|х|2,
v(x,t) = w(x, t) —Сз|х|2,
ЭУ(х, f)
дх
С4|х|.
В случае экспоненциально устойчивой линейной стационарной
или нестационарной системы существует квадратичная форма V(x) =
= хтВх или У(х, t) = xTB(t)x, удовлетворяющая условию теоремы
Красовского. В случае экспоненциально устойчивой нелинейной систе-
мы соответствующая функция Ляпунова может быть не квадратичной.
Теорема 7.2. Если положительно определенная квадратичная
форма V(x) = хтВх является функцией Ляпунова системы (7.3),
и производная от нее по времени в силу уравнения (7.3) принимает
7.2. Векторные функции Ляпунова. Устойчивость системы
169
вид V(х) = w(x) = —хтСх, то в качестве констант (\ (г = 1,2,3,4)
можно принять
С1 = А®, С2 = А^, с3 = А£ и С4 = 2А^,
где и Х^ — минимальное и максимальное собственные значения
матрицы Ви\^~ минимальное собственное значение матрицы С.
Норма матрицы. Пусть А — произвольная прямоугольная (тп х
х п)-матрица и задано преобразование
у = Ах, хеЯ”, у е Я™.
В пространствах /Г1 и Rm определены нормы ||х|| и ||у|| соответствен-
но. Норма матрицы А определяется следующим образом [7]:
ми =
sup
х е яп
ж
1|х||
х О
Здесь ||Ах|| — норма вектора Ах в пространстве Я171.
Норма матрицы А определяется как самой матрицей А, так и теми
векторными нормами, которые введены в пространствах Я71 и Я"1.
При изменении норм в этих пространствах изменяется норма мат-
рицы. Если в пространствах Я” и Rm введены эвклидовы нормы:
||х|| = |х| = Vx*x = . /£ I?, ||у|] = |уI = у/уТу = J Е З/i . то норму
у 1=1 у 1=1
матрицы А будем называть эвклидовой и обозначать также |А|.
Из определения нормы следует неравенство
||Лх||^||А||.||х||.
Для (тп х п)-матриц А и В при одном и том же определении векторных
норм справедливо неравенство
||А + ВК||А|| + ||В||.
Пусть А — число. Справедливо равенство
ЦАА1МА1 МИ-
Если определены нормы (тп х /)-матрицы А, (I х п)-матрицы В
и их произведения АВ, то справедливо соотношение
МВКМН М||.
Утверждение 7.1. Эвклидова норма матрицы А равна квадратному
корню из максимального собственного значения Ад/ произведения мат-
риц АТА:
И1 = у/Хм •
170 Гл. 7, Системы большой размерности. Векторная функция Ляпунова
Устойчивость агрегированной системы. Рассмотрим систему,
которая после декомпозиции описывается уравнениями
x<fc> = xfe(x(fe\t) 4-
i = i (7.4)
(Xfe(0,t) = 0 Vt>t0), k = 1,2, ...,r,
где Hkj — числовая (nt x п^-матрица. Если пренебречь взаимосвязя-
ми, то получим г независимых подсистем Sk (к = 1,2.......г), которые
описываются уравнениями
x<fc> = xk(x<k\t) (Xfe(0,t) = 0 Vt > to), к = 1,2.....г. (7.5)
Пусть каждая из этих подсистем обладает функцией Ляпунова
Vfc(x(feM), которая удовлетворяет следующим соотношениям:
Cfci |2 Vfe(x(fe),t) Ck2 |x(fc)|2,
Vfe(x(fe),t) -Cfc3|x(fe)|2,
avfe(x(fe),t)
Эх!*)
^cfe4|x(fe)|.
(7.6a)
(7.66)
(7.6b)
В (7.66) Vk(x{k\t) являются производными по времени в силу урав-
нений (7.5). Так как эти производные отрицательно определены, под-
системы Sk (fc = 1,2, ..., г) асимптотически устойчивы. Кроме того,
в силу условия (7.6а) функция Vk(x.^k\t) имеет бесконечно большой
нижний предел. Поэтому подсистемы Sk (к = 1,2, ... ’ г) асимптотиче-
ски устойчивы в целом.
Теорема 7.3. (Bailey F.N.). Пусть подсистемы (7.5) обладают
функциями Ляпунова Vfc(x(fe\t), удовлетворяющими соотношени-
ям (7.6), и элементы матрицы D = (dki) (fc,г = 1,2, ..., г), состав-
ленные из констант с^, входящих в соотношения (7.6), и эвклидо-
вых норм матриц взаимосвязи из (7.4), имеют вид
&ki — Г __£!± k = i 2Cfc2 ’
(сы)2 s lW i = i j / fc l / • « * fc г. k 2cfc3c<i (7.7)
Тогда, если положение равновесия z = 0 системы
z = Dz, ze Rr
7.2. Векторные функции Ляпунова. Устойчивость системы
171
асимптотически устойчиво, то положение равновесия х =
= {(х^^)т(х®)т ••• (х«)Т)Т = 0 агрегированной системы (7.4)
асимптотически устойчиво.
Матрица D уравнения системы сравнения обладает специфическим
свойством: все ее элементы, расположенные вне ее главной диагонали,
являются неотрицательными. Такие матрицы называются М-матрица-
ми.
Критерий Севастьянова-Котелянского. Если (п х п)-
матрица С — (cij) является М-матрицей, т.е. Cij 0 (i,j = 1,2, ...
..., n i / j), то для того чтобы вещественные части всех ее соб-
ственных значений были отрицательны, необходимо и достаточно,
чтобы выполнялось условие
Си
Afc = (-!)*
Cfcl
С12 Cifc
С22 * * ’ C2fc
Cfc2 * * * Cfcfc
k = 1,2, ..., n.
Если вещественные части всех собственных значений квадратной
матрицы отрицательны, то такая матрица называется устойчивой.
Поэтому критерий Севастьянова-Котелянского является критерием
устойчивости М-матриц. Последние неравенства называют условием
Севастьянова-Котелянского [5].
Необходимое условие устойчивости М-матриц.Для
того чтобы М-матрица С = (с,^) была устойчива, необходимо,
чтобы все ее элементы главной диагонали были отрицательны:
сц <0, (г = 1,2, ..., п).
Пример 7.3. Исследовать устойчивость системы, состоящей из
следующих двух подсистем:
J ij" = -8»!° - 104" +0.21?’,
— —(4 + sin2 4)4^ -
t i<2> = -2г® - (2 + <Г‘)4!> +0,24".
Решение. В векторной форме приведенная система уравнений
принимает следующий вид:
51:
5г: х^ = Лгх^ +
172 Гл. 7. Системы большой размерности. Векторная функция Ляпунова
Здесь
О 0,2
О О
„ = Г ° О'
21 [о,2 О’
Если пренебречь взаимосвязями, то получим
Si: х^ = Ajx^,
1?2 • = Агх®,
Для подсистемы S\ функцию Ляпунова будем искать в виде квадра-
тичной формы
Vi = (x<,))TBix(1), Bl =
at > 0.
Производная по времени функции Vi в силу уравнения подсистемы Hi
имеет вид
Vi = 2(х(*))т Bjx^ = 2(x^)TBiAiX^ = —(х^,))тС1х(,\
где
Ci = -2В1А1 = -2
1 О'
О «1
-8 -10
-5 -10
8
5а 1
10
lOai
= 2
Преобразуем и выразим производную Ц с помощью симметричной
матрицы:
Vi = -(xWfCtxW = -1(х<Ч)т(С| + <71 -cf)x™ =
= -5(х(1>)Т(С, + Cf )х<'> - l(x<'>f(c1 -СТ)Х<Ч.
£ £
Второе слагаемое в полученном выражении равно нулю, так как
(х(‘))Т(с1 -С})х<'> = [(х(‘))т(С1 -CTi )х(‘)]т = -(хС>)т(С1 - С})х(‘>.
Поэтому имеем
Vi = -(x(^)TCix^\
где
Ci = i(c1+cf)=r8
10
5ai 10ai
8 5а 1 _
10 10ai [10 + 5ai
16 10 + 5ai'
20a i
7.2. Векторные функции Ляпунова. Устойчивость системы
173
Для того чтобы производная V\ была отрицательно определенной,
согласно критерию Сильвестра необходимо и достаточно, чтобы
detCi =
16
10 + 5ai
10 4- 5ai
20ai
= 220a i - 100 - 25a? > 0.
Это неравенство будет выполнено, в частности, при cq = 1. При этом
имеем
Вх =
1 01 с = [16 15'
.0 1]’ 1 [15 20
Так как матрица В\ является диагональной, то ее собственные зна-
чения совпадают с диагональными элементами. И, следовательно,
ее минимальное и максимальное собственные значения равны едини-
це: А*=А* = 1.
Найдем собственные значения матрицы Сь Ее характеристическое
уравнение имеет вид
det (Ci — /А) а=
16 —А 15
15 20-А
= А2 - 36А + 95 = 0.
Корнями этого уравнения являются Ai = 2,9 и Аг = 33,1. Следователь-
но, минимальное и максимальное собственные значения матрицы С\
равны А£’ = Ai = 2,9 и А^ = Аг = 33,1.
Таким образом имеем
сц=А* = 1, ci2 = A§ = 1, с13 = а£>=2,9, с14 = 2А^=2.
Для подсистемы 5г функцию Ляпунова будем искать в виде квадра-
тичной формы
У2 = (х(2))тВ2х(2), В2 =
«2 > 0.
Производная по времени функции V2 в силу уравнения подсистемы S2
имеет вид
= 2(х®)т
х(2) =
У2 = 2(х®)т В^х.^ = 2(х^)тВ^А^х^ =
1 0 —(4 + sin21) 1
0 a2J —2 —(2 + e-t)
= -2^(4 + sin2 t)(X]2^)2 + (2a2 - + (2 + e^a^a;^)2] •
Если положить a2 = 1/2, то производная У2 принимает вид
Уг = —2 (4 + sin2 t)(x<2))2 + 1(2 + е-‘)(х<2))2 ,
174 Гл. 7. Системы большой размерности. Векторная функция Ляпунова
и ее минимальное и максимальное
и она является отрицательно определенной. При этом матрица В2
принимает вид В2 =
1 0
Р 1/2J’
собственные значения равны А^2 = 1/2 и А^2 = 1. Так как
то
2 [(4 + sin2 t)(s<2>)2 + |(2 + е-‘)(^2))2] > 2 [(х<2>)2 + (s<2>)2],
V2 —2 |х<2>|2.
Поэтому имеем
02!= А®2 = 1/2, с22 = А^ = 1, с23=2, C24 = 2A§=2.
Чтобы определить элементы матрицы D системы сравнения, необхо-
димо найти нормы матриц взаимосвязи Hij. Эвклидова норма мат-
рицы Hij равна корню ^квадратному из максимального собственного
значения произведения Hi j = (Hij')7'Н^. Так как
’ 0 0] [О 0,2] = [0 О'
[О 0,04]’
0] = [0,04 О'
О
Я12 = (Н12)ТН12 =
ТО
А§2 = 0,04;
А§’ =0,04;.
lW = A& =0,04.
0
0
0 0 ’
0,2 О
Я2( = (Я21)ТН2( = [° °’2] [ °
к/ и
J L
|Я12|2 = АЙ2=0,04,
По формуле (7.7) для элементов матрицы D находим:
. йз 2,9 _
= "2^ = “Г = -'Л5'
22 2с22 2
<*12 = ^7" 1Я1212 = Л0’04 " °’055’
d2i = ^Htf2i|210,04^0,04,
2с2зсц 4
Матрица D принимает следующий вид:
'-1,45 0,055'
0,04 -1 '
Матрица D является М-матрицей. Проверим выполнение критерия
устойчивости.
D =
=(-!)(-!,45) = 1,45 > О, Д2 =
-1,45 0,11
0,08 -1
* 1,44 >0.
7,2. Векторные функции Ляпунова. Устойчивость системы
175
Критерий устойчивости выполняется. Следовательно, система сравне-
ния и соответственно агрегированная система устойчивы.
Устойчивость агрегированной системы с нелинейными взаимо-
связями. Рассмотрим агрегированную систему, которая описывается
уравнениями
x(fc) = Ak'x.^ + h^(x^\ ..., x(fe+I\ ..., x^),
x(feWk, fc = l,2...................r. 7’
Здесь 0, •••, 0)=0, т.е. начало координат х=((х^))т(х^2))т •••
••• (х(г))т)г — 0 является положением равновесия. В данном случае
взаимосвязи между подсистемами описываются нелинейными функци-
ями. Эти функции удовлетворяют соотношениям
|h(fc)| £ bw|x(<)|, k=\,2,...,r. (7.9)
i= 1
i/fc
Если ^пренебречь взаимосвязями, то получим г независимых подси-
стем Sk, которые описываются уравнениями
x(fe) = AfcX(fe>, x<fe> е Rnk, k = 1, 2, ••• , г. (7.10)
Пусть положение равновесия x(fe) = 0 подсистем St устойчиво. Тогда
при любой положительно определенной (п& х п&)-матрице Ck суще-
ствует матрица Bk, удовлетворяющая уравнению Ляпунова
Квадратичная форма Vfc(x(fe)) = (x(fe))TВ^х^ является функцией Ля-
пунова для подсистемы Sk. Она в соответствии с теоремами 7.1 и 7.2
удовлетворяет соотношениям
A£fc|х“>|2 Vfe(x(fe)) А^|х^|2, (7.11а)
Й(х<*>) -A£*|x<fe>|2, (7.116)
где А#1, А^ — минимальное и максимальное собственные значения
матрицы Bi, A£fc — минимальное собственное значение матрицы Ck.
Теперь рассмотрим теорему, которая позволит определить, как стро-
ить систему сравнения для агрегированной системы (7.8) с нелинейны-
ми взаимосвязями, удовлетворяющими условию (7.9).
Теорема 7.4. Пусть квадратичная форма 14 (х^) = (х^)тх
xBfcx(fc) является функцией Ляпунова для подсистемы (7.10) и эле-
176 Гл. 7. Системы большой размерности. Векторная функция Ляпунова
менты матрицы D = (dki) имеют вид
dki — 4
(7.12)
k
Тогда, если нулевое решение системы
z = Dz, z е Rr
устойчиво, то и положение равновесия х = 0 агрегированной систе-
мы (7.8) асимптотически устойчиво в целом.
Пример 7.4. Исследовать устойчивость системы, состоящей из
следующих трех подсистем:
Si:
S2:
S3:
f ij1) = —+ O,O5sinxj2\
к = -2^° +0,1(е“1®'2)1 - 1);
' = — 2ж]2) + 0,05(1 — cos2a!|3)),
,±<2> =з:<2>-4^<г> +0.1(е-Ми1 - I);
р<3> = »и + о.11<1>е-М,’1.
к Xg3) — —— 6х^ + 0,05 sin
Решение. Запишем приведенные уравнения в векторной форме:
Si: х^ = Aix^) ^(х®, х®),
S2: х® = Агх^ +h2(x^l\x®),
S3:x(3)=A3x(3)+h3(x(l),x(2)).
Здесь
/ Л1 = -1 1 0 -2. h(1)=/ 0.05sinx<!> \ уО.Це-Н 1 _ 1)у
/ (2)\ хМ>)’ \«&2 / Аг = -2 0' 1 "4. h(2)=/0-05(1-cos2i<3) \ 0,1 (е"Н 1 - 1)
/ (3)\ х(3)=(>)’ \х2 / Аз = 0 Г -5 -6 ^(э) __ (O,l«2^e“lz2 Я 1 0,05 sin 2Ж|*)у
7.2, Векторные функции Ляпунова, Устойчивость системы
177
Если не учитывать взаимосвязи, то получим три независимых подси-
стемы:
Sr- х(,) = А1х0),
5г: х^ = Лгх12\
S3 : х(3) = Л3х(3).
Функции Ляпунова будем искать в виде квадратичной формы Vk =
= (x<fe))T(fc = 1,2,3), где матрица Вк определяется из уравне-
ния Ляпунова
АкВк + В^Ак = —Ск
10 О'
О 10
при условии, ЧТО Ск “
(Л = 1,2,3).
При к = 1 уравнение Ляпунова принимает
гь(о Ь(1)1 Г
°11 °12
Ь(») о
Lp21 °22 J L
или, после перемножения матриц,
г-1 0]№
1
-2 /><*) />0)
j |о21 о22 j
Г 1
[^-2^ b<$-2b%\
(к — 1,2,3). Определим матрицы Вк
вид
-1
1 '
—2
10 О'
О 10
10 О'
О 10 '
Учитывая равенство ~ эт0 УРавнение в скалярной форме мож-
но записать в виде
-2^р - -10, - ЗЬ^ = О, 2Ь$ - = -10.
Отсюда находим
5 5/3'
5/3 10/3
Собственные значения матрицы В\, или корни уравнения
х2 25 125 _
-тА+-г=0’
Ь*? = 5, 6$ = b2l = 5/3, ь22 = 10/3 и В1 =
5 - А 5/3
5/3 10/3 - А
равны Ai = 2,3 и Аг — 6. Поэтому для минимального и максимального
собственных значений матрицы В\ имеем А^1 = 2,3 и А^ = 6.
При к = 2 уравнение Ляпунова принимает вид
Г-2 1 1 И?
[о ь§>]
det(B, - А7) =
№ $4 Г-2 о ]
W ^Ч L1 -4
10 0
О 10
178 Гл. 7. Системы большой размерности. Векторная функция Ляпунова
или, после перемножения матриц,
[-»<?+ь<;> -26<»+^1 г-<>+-<1
10 О'
О 10
-2bg>+6g> -4ig>
В скалярной форме это уравнение принимает вид
- 4Ь(1Р + 2Ь$ = -10, -бЬ^ + Ьм = °> ~sb22 = -10-
Отсюда получаем
= = 6g) = |„Bl =
•125
48
5
-24
_5_-
24
5
4 -
Составив характеристическое уравнение и решив его, для мини-
мального и максимального собственных значений матрицы В% получа-
ем 1,23 и А^2 “ 2,61.
При к = 3 уравнение Ляпунова принимает вид
или, после перемножения матриц,
И?
_-5bg>
О —51 Rtf bW
1 -6J К $>]
О Г
-5 -6
10 0
О 10
10 О
О 10
В скалярной форме это уравнение принимает вид
1ОЬ™ = -10, -5b$ + Ь™ - = 0, 2b$ - 12Ъ$ = -10.
Отсюда получаем
^ = 11, $> = $> = !, Ь<32> = 1 иВ3 =
” К) ’(* = 1’2’3) является диагональной,
11 1
1 1/
Составив характеристическое уравнение и решив его, для мини-
мального и максимального собственных значений матрицы Вз получа-
ем А^3 = 0,9 и А^ = 11.
Так как матрица =
то ее собственные значения совпадают с ее диагональными элемента-
ми, Поэтому имеем
Л£‘ = 10, г = 1, 2, 3.
Чтобы определить элементы матрицы D, то согласно формуле (7.12)
нужно определить постоянные (/ifej)2 (k,j = 1,2,3,k j). Эвклидовы
7.2. Векторные функции Ляпунова. Устойчивость системы 179
нормы векторных функции h* (г = 1, 2, 3) удовлетворяют соотношени-
ям
|Ь(‘>|2 = 0,0025(sinx,2))2 + 0,01(e_lz'2>l - I)2
0,0025(х<2))2 + 0,01(х,2))2 0,013(^2))2 0,013|ж(2>|2,
|h^2>|2 = 0,0025(1 - cos2x,3))2 + 0,01(е_1®'3>1 - I)2 =
= 0,0025-4 sin4 х$3) + 0,01(е-М3>1 - I)2
< 0.01 (з7|3))2 +0,01 (х$3))2 < 0,02(Х]3))2 0,02|х(3)|2,
|h<3>|2 =О,О1(х^|))2е"2Н,)1 +0,0025(sin2^1))2
0,01 (я41})2 + 0,01 (х^)2 0,01 |х(,) |2 .
В соответствии с неравенством Коши-Шварца имеем
|h<fe)|2 <
(3 V
Е Мх(г)1
/
3 з 2
Е Л2н Е R •
г = 1 i = 1
г / k i / к
Поэтому из выше приведенных соотношений находим
/4 = 0,013, /1?3 = 0, Л2,=0, Л|3 = 0,02, = 0,01, = 0.
Для удобства выпишем здесь полученные выше собственные значения
матриц Вк и Ск {к = 1,2,3): А*' = 2,3, А$ = 6, А®2 1,23, А$ “ 2,61,
А*3 “ 0,9, А* “ 11, АЙ = 10, г = 1,2,3.
Теперь определим элементы матрицы D по формуле (7.12):
Л=-°'84'
10
= —0,45,
d _ _
П“_2А^_
ZAM
ас2
d22 = =
9\Bl
ллМ
АСз
~ 2Л^ = “2“П
л _ ^(А^)2 ., 2 , 2 \ _
d|3 “ 7ci<Вз '‘'112 + Л|3' —
Ащ Ащ
<ь. = -^(М,+Мз) =
Ащ Ат
2 • 62
пГТгз0,013 “ °'076,
2 -62
—О^З^О,!04,
^^0,02^0,012,
1U • ^,<5
180 Гл. 7, Системы большой размерности. Векторная функция Ляпунова
= ('‘21 + '‘’з) = To^J0,02 й °’03'
*’=<л°‘+/,’2> ’ йй0-01 “0'01,
*” = жЙ4 + = ЙЙз0'01 - °’20-
. Она является
-1,91 0,03
0,20 —0,45
-0,84 0,076 0,104'
Матрица D имеет вид D = 0,012
L 0,01
М-матрицей, и необходимое условие ее устойчивости выполняется.
Проверим условие устойчивости Севастьянова-Котелянского:
-0,84 0,0761 . Л Л
= 1,о > и,
0,012 -1,91]
Д1 = (_1)(—0,84) = 0,84 >0, Д2 =
-0,84 0,076 0,104
Дз = (~1)3 0,012 -1,91
0,01 0,20
0,03 = 1,33 > 0.
-0,45
Условие устойчивости выполняется. Следовательно, система сравнения
и агрегированная система устойчивы.
Задачи
7.4. Определить евклидову норму следующих матриц
а) ‘1 2 3‘ 2 1 4 ; б) '3 2 Г 2 1 4 ; в) 2 1 3’ 1 4 2 ; 0 '3 1 2 4 2' 1
д) 3 0 0. 2 1 4 1 2 3 ; е) 0 0 3 2 4 5' 5 2 4 ; ж) .0 2 0. ‘5 2 4' 0 3 0 ; з) .1 '2 5 1 4 3 0. 3' 2
и) 2 0 0. '0 2 Г 2 3 5 3 4 2 ; к) 0 3 0. '1 2 О' 5 3 2 2 4 3 2 4 3 0 2 1.
7.5. Показать, что следующие системы, состоящие из двух взаимо-
связанных подсистем, асимптотически устойчивы.
^x^^-x^+O^,
4° = -2х<1)- 6x^+0,1х<2);
S2: х,^ = — (5 + sin2 ~ + 0,2х^\
42) = 2х$2) - (6 + e“‘)xj2) + 0,1Х||}.
7.2. Задачи
181
[S1:x<’)=-3x<*)-x<*) + 0,lx<2),
[ x® = x<2) — (3 + sin2 t)x^ + 0,05X1*).
' Si: х(1° = + 0,5xf2),
x<*> =-0,5x<*> - 3x<*>+0,2x<2>;
S2: ®i2) =-(2 + sin2 t)x^2) - 2x^2) + 0,2x^,
k x<2) = x(i2) - (3 + 2e~‘)x® + 0,3xp.
'SI:x<,) = -10xP)-3x(,)+0,3x<2),
x^1) =—4X|*> — 5x^*> + 0,2x£2);
S2: i|2) = —(3 4- e~‘)xi2) — x^2) + O.lxj),
i£2) = x^2) — (4 + 2 sin2 t)x^ + О.Обх,1).
^гх^^-зх^-гх^+о^2),
x<*> = -x<*> - 4x<*> + 0,4xf>;
Д S2: x<2> = 42 + sin2t)x<2> -x<2> +0,2x<,),
k i<2) = 0,5x<2) - (3 + e“‘)x^2) + О.ЗХ]*),
'Si:x<,>=-4xP>-x£>+0,2x<2).
х(*) = -2х<’)-6х(,)+0,1х|2>;
e) S2: x<2> = -(5 + sint)x(2> -x<2) +0,2x(*),
k x<2)=2x(12)-(6 + e-t)42>+0,lxV).
'Sl:xV) = -3xP>-x(*>+0,lx(2>,
ж х(,)=-х|,)-Ц*)+0.2х®;
| S2: x$2) = -(4 + 2cosf)x<2) - 0,5x£° + O.lx^,
( ij2) = x{2) - (3 + sin2f)xj2) + 0,05X|*).
I Si: x^ = -2x^ - x^} + 0,5xf2),
i<*> = —0,5X1*) - 3x<*> +0,2x<2);
S2: X]2) = — (2 + sin t)x,2) — 2x^ +0,2x2*),
±22) = x<2> — (3 + 2 cos2 t)x22) + 0,3x^*).
182 Гл. 7. Системы большой размерности. Векторная функция Ляпунова
' Si: i<° - — Юх*0 - За® + 0,За®,
±2^ = — 5x® + 0,2x®;
St'. x® — — (3 + cos2t)x^ — x^ + O,lx®,
±2^ = — (4 + 2 sin2 t)x^ + 0,05®®.
4,) = -х{1)-4ж(,)+0,4ж(2>;
Si: i$2) = -(2 + sin2t)x<2) - xp + 0,2x|n,
x^ = 0,5Xj2) — (3 + е~*)х^ + 0,3®]^.
7.6. Показать, что следующие системы, состоящие из двух взаимо-
связанных нелинейными связями подсистем, асимптотически устойчи-
вы.
' S,: х<" = -4х<‘> - х™ + 0,2х®.
i® = —2я® — 6х® + 1 — cos0,2x®;
Я) S2: i® = —(5 + sin2£)x® -х® + 1
k = 2x® — (6 + е”*)я® + 2(cos0, lx® — 1).
Si: i® = —3x® — x^> + cos0,2x® — 1,
4<,> = -»<|>-54,’+0,2хги;
S2: i® = -(4 + 2e-t)x® -0,5x^ +0,1(1 — cosx^>),
x® — я® — (3 + sin2 t)x^ + sin0,lx®.
f Si: = — 2я^ — + 5sin0,lii2\
±2^ = —0,5i|^ — Зж^ + 1 — cos 0,5®®;
) S2: x® = — (2 + sin2 t)x® — 2x^ + 3(cos0,lx® — 1),
. i™ = x!11 - (3 + 2e-')x® + 1 - е-М-1'Ч.
Si: ij'1 = -lOx!11 -SxJ1’+ 3^1
r) 4 ±2*^ = -4xj^ — 5®^ + совО.Зх® — 1;
S2: i$2) = -(3 + e-‘)x$2) - x^ + О,!®*0,
k x^ = я,2) — (4 + 2 sin2 t)x^ + sinO.lXj1).
7.2. Ответы
183
' Si: х^ = —Зх® - 2x£° + 5(1 - cos0,lx}2)),
±2*) = “X® “ + sinO,5x®;
ft: i<!> = -(2 + sinM2> -x«> + I -e-M-S'4.
k x£2) = 0,5x$2) - (3 + e-t)®22) + О,3х{°.
Si: x® = -4x® — x® + 2sin0,lx®,
±2*) = —2x® — 6x® + 1 ~ cos 0,2x®;
S2: x® = -(5 + sint)x® - x® + 1 - e"0’2!^01,
k x® = 2x^ — (6 + e~‘)x® + 0,lx®.
' Si: = -3x® - x® + cos0,2x® - 1,
’ x® = -xP)-5x®+2(l-e-°’,M2,|);
S2: x® = -(4 + 2cost)x® - 0,5x® + 0,lx^,
,, x® = x® - (3 + sin2t)®^ + sin0,lx®.
' Si: x® = -2x^ - x® + 5 sin 0, lx®,
i® = -0,5х^ - 3x® + 0,5x®;
S2: x® = -(2 + sint)x,2) - 2x® + 3(cos0,lx® - 1),
k X® = x® - (3 + 2cos2 t)x® + 1 - e-°-3H,,l.
' Si: x® = - Юх® - Зх^° + 0,3x®,
x® = —4x® — 5x^ + cos 0,3x® — 1;
1 S2: x® = -(3 + cos2t)x® — x^ + 1 — cos0,lx®,
[ x^ = x® — (4 + 2sin2 t)x® + sinO.lx^.
' Si: x® = -3x® - 2xj° + 5(1 - cos0,lx^2)),
x^ = —x® — 4x® + sin0,5x®;
< Sr. = -(2 + sin2t)x® -x® + 1 -e-0'3H,,l,
k x® = 0,5x® - (3 + e‘‘)x® + cos0,3x® - 1.
Ответы
‘1 0 Г ‘0 1 Г ‘1 1 O'
7.1. a) T = 0 1 1 ; б) T = 1 1 1 ; в)Т = 1 0 0
.1 i o. 0 0 1. о 1 1.
184 Гл. 7. Системы большой размерности. Векторная функция Ляпунова
’1 1 0‘
r)T = 0 1 1 д)Т =
.1 1 1.
1 0 г
ж)Т = 0 1 1 ; з)Т =
.1 1 0.
'1 1 1'
к)Т = 0 1 1
1 2 0
' ii = ац +2x2 + хз + иь
а) < ®2 = ~Х1 ~ х2 + и2>
0 1 1' '0 1 Г
1 2 0 ; e)T = 1 1 0
1 1 1 1 1 1
*1 к*
1 2 O' Г 1 O'
1 0 0 ; и)Т = 1 0 0
P 1 1. P 0 1.
7.2.
к ®з = 2хI + Х2 + из;
{Х1 = Х| + хг + 2хз + Uj,
±2 = 2®1 + ®2 + З^з" U2,
хз = —Х\ — хз + из;
Х1 = щ,
Я2 = Я1 + ^2 + и2,
±з = 2x1 + Х2 4- яз + из*»
0)
' ±1 = Xl + X2 + Ui,
< X2 = X2 + U2,
, X3 — Xl + U3;
r Xl = X2 + 2x3 + U1F
X2 = X2 + U£,
хз = 2хз + из;
{Xl = X2 + Хз + UI,
X2 =X2 +X3 U2,
X3 = X3 + U3;
ж)
' Х1 = Х2 + Хз + U{;
< ±2 = х2 + х+U2,
к хз = хз + из;
r Xi =-Xi - X2 + U1,
< X2 = Xi + 2X2 + U2,
X3 = U3;
r Х| = Х| +х2 + 2хз + иь
и) ±2 = 2X2 + 2хз + U2,
„ Хз = -Х2 - Хз + и3;
' xi = 2xi +^2 + ui,
X2 = —X| '‘7X2 + U2,
, X3 = 2xi + 2x2 + X3 + «3-
7.3. а)
Г Si: Zi = Z2 + Z4 + ui,
J Z2 = Zi + Z2 + Z4;
| S2: 23 = -Z2 -Z4 + u2,
( 24 = -Z2 + 23 — 24.
' Sy: 21 = -222 + «1.
{Si: 21 = 22 + 24 + ui,
22 = 2i + 222 + 2z4;
S2: 23 = —222 — 2z4 + иг,
24 = -З22 + 23 - 2Z4.
' Si: 2i = —22 — 224 + ui,
в)
22 = 2| + 22 + 24;
S2: 23 = 22 + U2,
r)
22 = 21 + 2Z2 + З24;
S2: 23 = 0,522 + иг,
24 = 23 - 24.
д)
Si: 21 = —22г - 24 + uj,
22 = 21 — 222 — 224;
S2: 23 = 2z2 + 24 + U2,
Z4 = Z2 + Z3+Z4.
e)
24 = -1,522 + 23 - З24.
’ Si: 2i = 22 + Ui,
22 = 21 - 522 - 724;
82- Z3 = 5z2 + 724 + u2,
24 = 422 + 424-
7.2. Ответы
185
' Si: zi = z2 + z4 + ui,
ж) <
«2 = Zi + Z2 + 24;
f>2: 23 = U2,
24 = -22 + 23 - 24.
' Si: 2i = 0,6722 + 2,6724 + «1,
з) <
Z2 = z\ + 2,67z2 + 2,67^4;
$2 • £3 = —3,33^2 “ 4,33^4 + u2»
Z4 = — 1,67x2 + z3 — 2,6^4.
r S\: z\ = —4,29x2 ~ 2,57^4 + ui,
’ Si: 2i = —З22 — З24 + ui,
и) <
22 == 21 — 0,4322 + 0,14241
8^: Z3 = 1,4322 + 0,8624 + ®2>
22 = 21 + 322 +224;
S2: 23 = «2,
24 = 1,71212 + 23 + 0,4324.
24 = 22.+ 23 + 24.
7.4. a) 5,96; 6) 5,93; в) 5,66; r) 5,67; д) 5,87; e) 9,23; ж) 8,39;
э) 8,05; и) 8,09; к) 8,09.
Глава 8
МЕТОДЫ ТЕОРИИ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
Существуют различные методы решения задач оптимального управ-
ления: методы классического вариационного исчисления (метод мно-
жителей Лагранжа), принцип максимума, динамическое программи-
рование, методы функционального анализа и другие. Здесь будут
рассмотрены задачи, при решении которых используются первые три
из указанных методов.
8.1. Постановка и классификация задач оптимального
управления
Задача синтеза оптимальных систем управления относится к классу
задач оптимального управления и формулируется как вариационная
задача. При этом, кроме уравнения объекта управления, должны быть
заданы ограничения на управление и фазовый вектор, краевые (гра-
ничные) условия и критерий оптимальности.
Пусть уравнение объекта задается в нормальной форме
х = f(x, u, t)
или в скалярном виде
ii = u, t), i == 1,2, ..., n,
где x = (xi X2 • xn)T — фазовый вектор, u = (u\ U2 • • • ur)T — управ-
ление или вектор управления.
На вектор управления и фазовый вектор могут быть наложены
ограничения в виде конечных соотношений — равенств и неравенств.
Эти ограничения определяют допустимые множества значений, кото-
рые могут принимать эти вектора. Поэтому указанные ограничения
в общем виде могут быть записаны в виде
u(t) € Ut, x(t) € Xt.
Здесь Ut> Xt — некоторые заданные множества, зависящие, вообще
говоря, от времени, причем Ut С Rr и Xt С Я”, т. е. Ur — подмножество
r-мерного пространства, Xt — подмножество n-мерного пространства.
8.1. Постановка и классификация задач оптимального управления 187
Первое соотношение называется ограничением на управление, вто-
рое соотношение — ограничением на фазовый вектор или фазовым
ограничением. Выше ограничения на управление и фазовый вектор
представлены отдельно, т. е. они разделены. Однако они могут быть и
не разделены. Поэтому в общем случае эти ограничения записываются
в виде
(u(t),x(t))e К, VtQRn+r.
Краевые (граничные) условия — ограничения на фазовый вектор в на-
чальный io и конечный tf моменты времени — также могут быть пред-
ставлены в виде включения
x(tg) € Xq, x(ty) € Xf,
когда эти ограничения разделены, и в виде
(x(*o),x(tz)) G Vo,
если они не разделены. Вектор x(to) называют левым, а вектор x(ty) —
правым концом траектории.
Критерий оптимальности, который является числовым показате-
лем качества системы, задается в виде функционала
J = J[x(t0),x(t/);u(t),x(t)].
Задача оптимального управления формулируется следующим обра-
зом: при заданных уравнении объекта, ограничениях на управление
и фазовый вектор, краевых условиях и критерии оптимальности
определить такие программное управление u*(t) (или управление
с обратной связью u*(x(t),t)) и фазовую траекторию x*(t), при
которых критерий оптимальности принимает минимальное (или
максимальное) значение.
Для определенности примем, что функционал J минимизируется.
Задачу максимизации введением нового критерия JH = — J всегда мож-
но свести к задаче минимизации. Управления u*(t) и u*(x(t),t) называ-
ются оптимальными управлениями, траектория x*(t) — оптимальной
траекторией.
Рассмотрим примеры постановки задач
оптимального управления.
1. Задачи оптимального управления
летательным аппаратом (ЛА). Запи-
шем упрощенное уравнение движения ЛА
в вертикальной плоскости следующим об-
разом (см. рис. 8.1):
77ZV = р + q,
где т = т/ + mp(t) ~ масса ЛА; mp(t) —
«реактивная» масса; v = (£ ff)T ~ ско-
рость ЛА; р = (pi pi)T — реактивная сила;
188 Гл. 8. Методы теории оптимального управления
q = (qi q2)T — равнодействующая всех остальных сил (силы тяжести,
силы сопротивления воздуха и др.).
Реактивная сила имеет вид р = mw, |w| = const, где w =
= (w\ w2)T — относительная скорость отделяющихся частиц, |w| =
= , |m| = |тпр| — секундный расход реактивной массы.
Ь проекциях на горизонтальную £ и вертикальную ту оси неподвиж-
ной системы координат уравнение ЛА принимает вид
= +Я2'< mrj = p2-^q2.
Введя обозначения
Я1=£, ^2 = 5> х4=5, и2=р2/т
qx=q{/m, q2 = q2/m,
последние уравнения можно записать в нормальной форме
±1=Жз, ±2 =*4, ±3=^1 +51, ±4= «г + 5г
(8.1)
или в векторном виде
х = Ах + Bu + q.
(8.2а)
(8.26)
управ-
ление. Траектория ЛА не должна пересекать земную поверхность.
Поэтому должно выполнятся ограничение на фазовый вектор х2 > О,
которое на решение многих ниже рассматриваемых задач не влияет.
Теперь рассмотрим различные постановки задачи, связанные с ЛА.
Пример 8.1. Сформулируйте задачу 1 вывода ЛА из заданной
точки х° в заданную точку х-^ фазового пространства за минимальное
время при условии |р|
Решение. Уравнения объекта имеют вид (8.2), ограничение на
управление —
|и| ит;ит =рт/т,
краевые условия —
x(t0)=x0, x(t/) = x^
и критерий оптимальности
J — tf to,
8.L Постановка и классификация задач оптимального управления 189
где to — начальный момент (будем его считать фиксированным, т. е. за-
данным); t/ —конечный момент — момент достижения ЛА точки хЛ
который заранее не известен, т.е. является не фиксированным.
Требуется определить управление, при котором критерий оптималь-
ности принимает минимальное значение.
Заметим: так как (u| = yju\ + u|, ограничение на управление мож-
но представить также в виде (u? + u|)
Пример 8.2. Сформулировать задачу 2 перевода ЛА на макси-
мальную дальность.
Решение. В данном случае важно учесть конечность реактивной
массы, так как дальность полета зависит прежде всего от количества
реактивной массы (топлива). В силу того, что
|“| = |р|/ш= (н |w|)/m,
конечность топлива накладывает на управление следующее orpaHH4ie-
ние: tf
J |u|dt = Bi, Bi = |w|ln(mo/Tn/).
to
Здесь mo = m(to) и mf — m(tf). Ограничение такого типа называется
изопериметрическим, Конечный момент tf определяется из условия
xz(tf) — 0 (высота равна нулю), дальность равна — Xi(to). Так
как |u| = +uj, то последнее ограничение можно заменить на
более удобное t
J (и? + ufydt = С,
to
где С — положительная константа.
Задача перевода ЛА на максимальную дальность формулируется
следующим образом: при заданном уравнении объекта (8.2), фазовом
ограничении 0, ограничении на управление —
t/
(uf + u|)dt = С,
to
краевых условиях
x(to) = x°, x2(tf)=0
и критерии оптимальности
J = -[®l(t/) - я0]
определить управление, при котором заданный критерий принимает
минимальное значение.
190 Гл. 8. Методы теории оптимального управления
Здесь фазовое ограничение для облегчения решения можно ис-
ключить. При этом задача будет иметь дополнительное нереализуемое
решение, которое легко будет распознать.
Сделаем ряд общих замечаний. Естественно, реактивная масса все-
гда ограничена, но тем не менее это ограничение не учитывалось при
формулировке задачи 1. Принималось, что топлива достаточно для
достижения поставленной в этой задаче цели.
При формулировке задачи 2 принималось несущественным и не
учитывалось ограничение на величину управления, хотя оно всегда
имеет место. В то же время в задаче 1 его нельзя не учитывать, так
как это привело к нереализуемому оптимальному управлению u*(t):
при Um —> оо максимальное значение |u*(t)| стремилось бы к беско-
нечности, а критерий оптимальности J —> 0. Точно так же нельзя не
учитывать ограничение на топливо при формулировке задачи 2, так как
в противном случае, как это ясно из физических соображений, суще-
ствует бесчисленное множество управлений, при которых J = —оо.
2. Задачи оптимального управления двигателем. Уравнение
двигателя постоянного тока можно записать в виде
1<р = гякфФ — Мс,
где / — момент инерции вращающейся части двигателя, <р — угол по-
ворота вала двигателя, гя ~ ток в якорной цепи, кф — конструктивная
постоянная, Ф — магнитный поток, Мс — момент сопротивления. Ис- '
пользуя обозначения
b = кфФ/I, xi = (р, Х2 — ф, u = in, uc~Mz/I,
приведенное выше уравнение двигателя можно записать в нормальной
форме
±1 = Х2, Х2 = Ъи - Uc
или в векторном виде
х = Ах + Ви + q, (8.3а)
где
(хД А [0 11 D А)\ ~ ( 0 \ /о
х = Ч, А=лл, В = , , q ~ . (8.36)
W |0 W \~ucJ
Здесь для получения простой модели объекта за управление принима-
ется ток в якорной цепи.
Пример 8.3. Сформулировать задачу 3 поворота вала двигателя
на заданный угол с последующей остановкой за время Т при мини-
мальном расходе энергии.
Решение. Энергия пропорциональна интегралу от квадрата уп-
равления (силы тока). Так как постоянный множитель перед функ-
8.1. Постановка и классификация задач оптимального управления 191
ционалом не влияет на решение вариационной задачи, за критерий
оптимальности примем интеграл
J = J u2dt,
to
где to, t/— фиксированы и tf - to = Т. Ограничение на управление
не накладывается: оно косвенно учитывается выбранным критерием
оптимальности.
Задачу 3 можно сформулировать следующим образом: при уравне-
нии объекта (8.3), краевых условиях
x(t0) = х°, x(tf) = xf
определить управление, при котором приведенный выше критерий оп-
тимальности принимает минимальное значение.
Классификация задач оптимального управления. Задачи опти-
мального управления классифицируют по виду ограничений на управ-
ление и фазовые координаты, по краевым условиям и критерию опти-
мальности.
1. По виду ограничения задачи оптимального управления различа-
ют:
а) классического типа, когда ограничения задаются в виде равенств
y>fc(x,u,t) = О, к = 1,2, ..., т;
б) неклассического типа, когда среди ограничений имеются ограни-
чения в виде неравенств
y>fc(x,u,t) О, к = 1,2, ...,
К классическому типу относятся также задачи с ограничениями вида
tf
j /n+j(x,u,t)dt = bj, j = 1,2, ... J.
to
Такие ограничения называют изопериметрическими ограничениями,
а вариационные задачи с такими ограничениями — изопериметриче-
скими задачами.
Введением дополнительных переменных от изопериметрических
ограничений всегда можно избавиться. Достаточно вместо изоперимет-
рических ограничений в условие задачи ввести следующие уравнения
и краевые условия:
%n+j “ fn+j(х,u,t); xn+j(to) = O, = bj, j —
Формально задачи неклассического типа введением дополнительных
переменных можно преобразовать к задачам классического типа. Дей-
192 Гл. 8. Методы теории оптимального управления
ствительно, приведенные выше ограничения в виде неравенства можно
заменить ограничениями вида
u, t) + Ur+k = 0, к = 1,2, ..., т.
Задачи оптимального управления неклассического типа могут иметь
ограничения вида
V
j /n+s(x,u,t)dt CSt s = 1,2, ..., p.
to
Введением дополнительных переменных эти ограничения могут быть
заменены соотношениями
Я'п+з ”/п+з(х, U, Xn+5(to) = 0, Tn4.5(t/) $=1,2, ... , р.
Как не трудно заметить, при преобразовании изопериметрических
ограничений вводимые дополнительные переменные представляют со-
бой фазовые координаты, а при преобразовании неизопериметрических
ограничений вводимые переменные играют роль дополнительных коор-
динат векторного управления.
2. По виду краевых условий различают задачи:
а) с фиксированными (закрепленными) концами, когда каждое из
множеств Xq n Xf состоит из одной точки (все фазовые коорди;
наты в начальный и конечный моменты заданы, т.е. фиксирова-
ны);
б) с подвижным правым концом (Xf состоит более чем из одной
точки), с подвижным левым концом (Хо состоит более чем из
одной точки), с подвижными концами (оба корца подвижны);
3. По времени начала и окончания процесса различают задачи:
а) с фиксированным временем, когда начальный t$ и конечный tf
моменты фиксированы;
б) с нефиксированным временем, когда хотя бы один из моментов
времени to или tf не фиксирован.
4. По критерию оптимальности различают:
а) задачу Больца: критерий оптимальности имеет вид
V
J - 5o[x(to)>x(t/),to,t/) + j /о(х, u,t)dt;
б) задача Лагранжа: критерий оптимальности имеет вид
t/
J = j /о(х, u, t)dt\
to
8.1. Задачи
193
в) задача Майера: критерий оптимальности имеет вид
J = 5o[x(to).x(t/),to.^]-
Задача Майера в частном случае, когда функционал имеет вид
J = т.е. зависит только от конечного состояния и, быть
может, от конечного момента времени, называется задачей терминаль-
ного управления; когда имеет вид J = (tf — to) — задачей максималь-
ного быстродействия.
Задачи Больца, Лагранжа и Майера эквивалентны в том смысле,
что путем преобразования переменных каждую из задач можно преоб-
разовать в любую другую задачу.
В рассмотренных примерах задача 1 является задачей Майера,
неклассического типа, закрепленными концами и нефиксированным
временем; задача 2 — задачей Майера, классического типа, закреплен-
ным левым и подвижным правым концом и нефиксированным време-
нем; задача 3 — задачей Лагранжа, классического типа, закрепленными
концами и фиксированным временем.
Задачи
8.1. Сформулировать (записать краевые условия и критерий опти-
мальности) задачу вывода летательного аппарата (ЛА) из начала коор-
динат на заданную высоту h за минимальное время при ограничении
на управление < и2т.
8.2. Сформулировать (записать краевые условия и критерий оп-
тимальности) задачу вывода летательного аппарата (ЛА) на задан-
ную высоту h за минимальное время при ограничении на управление
(«I + u|) ит и условии, что запуск ЛА производится из другого ЛА,
летящего в вертикальной плоскости (£,т?) на высоте ho по направлению
оси £ со скоростью v. В момент запуска за = ж®.
8.3. Сформулировать (записать краевые условия и критерий оп-
тимальности) задачу вывода ЛА из начала координат в заданную
точку «геометрического» пространства (£,т/) при минимальном
расходе топлива и ограничении на управление (uf + u|) и^.
8.4. Сформулировать (записать краевые условия и критерий опти-
мальности) задачу вывода ЛА в заданную точку «геометриче-
ского» пространства (£,п) при минимальном расходе топлива и огра-
ничении на управление (uj + u|) и ПРИ условии, что запуск ЛА
производится из другого ЛА, летящего в вертикальной плоскости (£, ту)
под углом тг/2 к направлению оси £ со скоростью и, в точке (жрХ®).
8.5. Сформулировать (записать краевые условия и критерий опти-
мальности) задачу вывода ЛА из начала координат на максимальную
высоту при ограничении на управление (и^ + u|) и заданной
реактивной массе.
194 Гл. 8. Методы теории оптимального управления
8.6. Сформулировать (записать краевые условия и критерий опти-
мальности) задачу вывода ЛА на максимальную высоту при заданной
реактивной массе и условии, что запуск ЛА производится из другого
ЛА, летящего в вертикальной плоскости (С7/) под углом тг/2 к направ-
лению оси £ со скоростью v, в точке (ж®, ж®) •
8.7. Сформулировать (записать краевые условия и критерий оп-
тимальности) задачу перевода ЛА на максимальную дальность при
заданной реактивной массе и условии, что запуск ЛА производится из
другого ЛА, летящего в вертикальной плоскости (С7?) под углом тг/4
к направлению оси £ со скоростью v, в точке
8.8. Сформулировать (записать краевые условия и критерий оп-
тимальности) задачу перевода ЛА на максимальную дальность при
заданной реактивной массе и условии, что запуск ЛА производится из
другого ЛА, летящего в вертикальной плоскости (£, т/) по направлению
оси £ со скоростью v, в точке (х^,х%}.
8.9. Сформулировать (записать краевые условия и критерий опти-
мальности) задачу перевода летательного аппарата (ЛА) на заданную
дальность d за минимальное время при ограничении на управление
(uj + u|) < и условии, что запуск ЛА производится из другого ЛА,
летящего в вертикальной плоскости (£, т/) на высоте h по направлению
оси £ со скоростью v. В момент запуска х\ = х®.
8.10. Сформулировать (записать краевые условия и критерий опти-
мальности) задачу перевода летательного аппарата (ЛА) на заданную
дальность d за минимальное время при ограничении на управление
(uj + u|) um и условии, что запуск ЛА производится из другого ЛА,
летящего в вертикальной плоскости (£,т/) на высоте h под углом тг/4
направлению оси £ со скоростью v в точке (ж®, ж®)-
8.11. Записать ограничения, краевые условия и критерий опти-
мальности в задаче поворота вала двигателя на заданный угол а без
остановки за время Т при минимальном расходе энергии.
8.12. Записать ограничения, краевые условия и критерий оптималь-
ности в задаче поворота вала двигателя на заданный угол а с после-
дующей остановкой за время Т при минимальном расходе энергии.
8.13. Записать ограничения, краевые условия и критерий опти-
мальности в задаче поворота вала двигателя на заданный угол а
с последующей остановкой за минимальное время при максимальном
токе гя = ит.
8.14. Записать ограничения, краевые условия и критерий опти-
мальности в задаче поворота вала двигателя на заданный угол а без
остановки за минимальное время при максимальном токе гя = ит.
8.15. Записать ограничения, краевые условия и критерий оптималь-
ности в задаче поворота вала двигателя на максимальный угол без
остановки за время Т при максимальном токе гя = ит.
8.16. Записать ограничения, краевые условия и критерий опти-
мальности в задаче поворота вала двигателя на максимальный угол
с последующей остановкой за время Т при максимальном токе гя = ит.
8.2. Метод множителей Лагранжа
195
8.2. Метод множителей Лагранжа (методы
классического вариационного исчисления)
Правило множителей Лагранжа для задач оптимального уп-
равления с закрепленными концами и фиксированным време-
нем. Если концы закреплены и время фиксировано, то задачу опти-
мального управления классического типа можно сформулировать как
следующую задачу Лагранжа классического вариационного исчисле-
ния:
Xi = fi(x, u, t), г = 1,2, ...,n; (8.4a)
y>fc(x,u,t) = 0, k= 1,2, i; (8.46)
Xi(tQ) = x^t Xi(tf)=x{t г = 1,2, . ..,n; (8.4b)
V
J = j /0(x, u, t)dt —> min. (8.4r)
Предполагается, что функции /г(х, u,t) (г = 0,1, ..., п) и </7fc(x, u, t)
(к = 1,2,1) являются непрерывными и дифференцируемыми по всем
своим аргументам, управление u(t) принадлежит классу кусочно-
непрерывных функций, а траектории x(t) — классу кусочно-гладких
функций.
Функция u(t) называется кусочно-непрерывной на интерва-
ле [t0, tf], если она (т.е. каждая его координата) непрерывна всюду
на интервале [to, tf], за исключением конечного числа точек, где
она имеет разрыв первого рода (существуют конечные пределы слева
и справа). Функция x(t) называется кусочно-гладкой на интервале
[t0, tf], если на [t0, tf] она сама непрерывна, а ее производная кусочно-
непрерывна.
Управление u(t) из класса кусочно-непрерывных функций называют
допустимым управлением, а траекторию x(t) из класса кусочно-глад-
ких функций — допустимой траекторией. Пару (u(t), x(t)) называ-
ют допустимой, если допустимыми являются u(t) и x(t). В каждой
конкретной задаче на допустимые управления и траектории могут быть
наложены дополнительные ограничения. Поэтому при рассмотрении
определенного класса задач эти понятия могут уточняться.
Функция
п I
Н = ^2^ifi + ^2Xk<Pk
i=0 fc=l
называется функцией Гамильтона или гамильтонианом, (г =
= 0,1,2, ..., п) и Afc (fc = 1,2, ..., I) — множители Лагранжа.
196
Гл. 8. Методы теории оптимального управления
Уравнения
» i=l,2, ...,п; (8.5а)
иХ^
^ = 0, s=l,2......г (8.56)
dus
называются уравнением Эйлера-Лагранжа. Уравнения (8.56) пред-
ставляют собой условие экстремума гамильтониана при каждом фик-
сированном t € [to, tj], и их называют условием стационарности.
Правило множителей Лагранжа закрепленными
концами и фиксированным временем. Если допустимая
пара (u(t),x(t)) является решением задачи оптимального управ-
ления (8.4), то найдутся такие не равные одновременно нулю
множители Лагранжа, что эта пара удовлетворяет уравнениям
Эйлера-Лагранжа (8.5).
В соответствии с этим правилом, чтобы найти оптимальное управ-
ление и оптимальную траекторию, надо решить совместно уравнения
(8.4а), (8.46) и (8.5) при краевых условиях (8.4в).
Если оптимальное управление u(t) имеет разрыв первого рода в ка-
ких-либо точках, то оно само и соответствующая ему траектория x(t)
должны удовлетворять указанным выше уравнениям лишь в точках
непрерывности управления. В точках разрыва управления, которые
называются угловыми, должны выполняться условия
= я_=я+,
где индексы и «+» обозначают левый и правый пределы соответ-
ствующих функций.
Эти условия называются условиями Вейерштрасса-Эрдмана.
Множители Лагранжа определяются с точностью до постоянного
множителя. Действительно, они входят в уравнения Эйлера-Лагранжа
линейно и однородно, и эти уравнения не изменятся, если все множи-
тели умножить на одно и то же постоянное число. Поэтому в случае,
когда 'фо 0 (этот случай называют неособым), не нарушая общности,
будем принимать фо = — 1. Дальше, если особо не оговаривается, будет
подразумеваться, что имеет место неособый случай.
Как отмечалось, уравнения Эйлер-Лагранжа является необхо-
димым условием, т.е. любое решение задачи оптимального управ-
ления (8.4) является экстремалью, т.е. удовлетворяет уравнениям
Эйлера-Лагранжа, но не любая экстремаль, удовлетворяющая гра-
ничным условиям, является решением задачи (8.4). Но если реше-
ние задачи существует и экстремаль, удовлетворяющая граничным
условиям, единственна, то, очевидно, эта экстремаль и будет реше-
нием.
8.2, Метод множителей Лагранжа
197
Пример 8.4. Решить задачу поворота вала двигателя на угол 1
радиан с последующей остановкой за 10 сек при минимальном расходе
энергии без учета момента сопротивления (ис = 0). Эта задача матема-
тически формулируется следующим образом:
ii=x2, ±2 = и; xi(0) = х2(0) = 0,
ю
Xi(10) = l, х2(10) = 0; J = J u2dt —► min.
о
Решение. Ясно, что задача имеет физический смысл, т.е. имеет
место неособый случай. Поэтому, как условились, полагаем фъ —
Составим гамильтониан:
Н = -u2 + V>1*2 +
Уравнения Эйлера-Лагранжа принимают вид
; дн л ; дн , дн п / л
=0, = = -2u + ^2 = 0.
дх\ дх2 ди
Эта система имеет решение
/ ri I г i \ г —C\t + С2
V>2 = —C\t + С2, и=-------.
Подставив полученное выражение для управления в уравнения объекта
и решив их, получим
C^ C2t
Х2 = —4—~2—^3’ Х1 — —12~ —4—
Из краевых условий имеем:
я2(0) = Сз = 0, xi(0) = С4 = 0, х2(10) = -25С1 + 5С2 = 0,
®1(10) =-^(71 +25(72 = 1.
Отсюда находим С\ — 3/125, С2 = 3/25, Сз = 0, С4 = 0. Оптимальное
управление и оптимальная траектория имеют вид
“•« = К-155‘+Й)’ +
Q / 1 \
x^=^~y+t}
Если требуется, чтобы после поворота вала двигателя на угол 1 радиан,
он не вращался, нужно положить и = 0 при t 10.
198
Гл. 8. Методы теории оптимального управления
Правило множителей Лагранжа для задач оптимального уп-
равления с подвижными концами. Задача оптимального управления
классического типа с подвижными концами и фиксированным време-
нем формулируется следующим образом:
xi = fi(x,u,t), г =1,2, . ..,n; (8.6a)
u,t) = О, к = 1,2, ..., I; (8.66)
gj [x(to),x(t/),to,i/] = 0, j = 1....q < 2n\ (8.6b)
t/
J = 0o[x(to),x(*/Mo,£/] + j /o(x,u,t)tft -> min. (8.6г)
to
Граничные условия (8.6в) предполагаются независимыми, функ-
ции gj [x(to),x(ty),to^/] 0 = 1,2, ..., q) — непрерывными и диффе-
ренцируемыми по всем своим аргументам. На остальные функции
накладываются такие же требования, как и в случае задачи с закреп-
ленными концами.
Эта задача отличается от рассмотренной выше задачи тем, что изме-
няются краевые условия и критерий оптимальности может иметь любой
из указанных при классификации видов, т. е. в этом случае задача оп-
тимального управления может быть вариационной задачей Лагранжа,
Больца и Майера. Когда концы закреплены и время фиксировано, за-
дача оптимального управления может быть только задачей Лагранжа.
Дифференциальные уравнения объекта и уравнения Эйлера-Лаг-
ранжа имеют порядок п. Поэтому при их решении будем иметь 2п по-
стоянных интегрирования. При закрепленных концах граничные усло-
вия представляют собой 2п соотношений, которые позволяют опреде-
лить все постоянные интегрирования. Однако при подвижных концах
траектории граничных условий не достаточно, чтобы можно было их
определить. Недостающие соотношения доставляют условия трансвер-
сальности, которые имеют следующий вид:
^ = -^у *(i') = s^tyy i = 1’2..................." (87а)
= (8.76)
Здесь q
G = 52
г=0
где i/i(i = 0,1, ..., q) — постоянные неопределенные множители, при
этом из = V’o (Й — множитель Лагранжа, который входит в гамильто-
ниан). Функция G называется терминантом [1].
Отдельные координаты граничных точек могут быть фиксированы.
Соотношения, определяющие эти координаты, в выражение для тер-
8.2. Метод множителей Лагранжа
199
минанта G не включаются, и так как при определении необходимых
условий они не варьируются, в условия трансверсальности не нужно
включать соотношения, содержащие частные производные по этим ко-
ординатам. В частности, если начальная точка закреплена, т.е. заданы
все координаты точки x(to), то в условии (8.7а) все первые соотноше-
ния с частными производными по х*(^о) должны быть исключены; если
время фиксировано, то отпадают условия (8.76).
Правило множителей Лагранжа с подвижными
концами. Если допустимая пара (u(t),x(t)) является решением
задачи оптимального управления (8.6), то найдутся такие не
равные одновременно нулю множители Лагранжа, что эта пара
удовлетворяет уравнениям Эйлера-Лагранжа (8.5) и условиям
трансверсальности (8.7).
Если управление терпит разрыв, то решение (u(t),x(t)) должно
удовлетворять уравнениям Эйлера-Лагранжа в точках непрерывности
управления. В угловых точках (в точках разрыва управления) должны
выполнятся условия Вейерштрасса-Эрдмана.
Чтобы получить решение задачи (8.6), нужно решить уравне-
ния (8.6а), (8.66) совместно с уравнениями Эйлера-Лагранжа (8.5) при
краевых условиях (8.6в) и условиях трансверсальности (8.7).
Пример 8.5. Решить задачу поворота вала двигателя на угол 1
радиан без последующей остановки за 10 сек при минимальном расходе
энергии без учета момента сопротивления (ис = 0):
ii=Z2, i2 = u; xi(0) = хг(0) = 0,
ю
xi(10) = 1, J = j u2dt —> min.
о
Решение. Эта задача отличается от задачи, рассмотренной
в примере 8.4, только краевым условием на правом конце траектории.
Как было получено, гамильтониан и уравнения Эйлера-Лагранжа име-
ют вид
Н = —U2 + ^1^2 + ^2и-
; дН п / дН I дН О I п
^1 = -—=0, = = — “2и + ^2 = 0;
dxi 0X2 ди
решением уравнений Эйлера-Лагранжа является
Ф\~С\, Ф2 = —C\t + (?2, и= --------.
В данном случае G — 0, и нефиксированной является только коорди-
ната Х2( 10). Поэтому условие трансверсальности принимают вид
ЯР
«1О> = а5оГ°-
200
Гл. 8. Методы теории оптимального управления
Исходя из этого условия находим VbOO) = — С1Ю + С2 = 0, или
(?2 = 10Сь Соответственно для управления получаем и = 6*1(10 —1)/2.
Подставив это выражение в уравнение объекта и проинтегрировав,
получим
х2 = §-(20t -t2) +Сз, X! = Q-(lot2 - + C3t + С4.
4 4 \ 3 /
Учитывая краевые условия
Х1(0) = С’4 = 0, х2(0) = С’з = 0, z1(10) = ^C1 = l,
находим
и*(t) =0,003(10-t), arf(t)=0,0005(30t2-t3), xJ(t)=0,0015(20t-12).
Пример 8.6. Определить оптимальное управление в следующей
задаче максимального быстродействия:
ii = x%t Х2 = и; J u2dt = Ь,
о
xi(0) — хг(0) = 0,х\(tf) ~ d, xz(tf) =0, J = tf min.
Решение. Преобразуем изопериметрическое ограничение:
х3 = и2, х3(0) = 0, x3(tf) = b.
В данном случае имеем go = tf и G = i^go — —tf. И так как граничные
точки траектории закреплены и начальный момент задан (фиксирован),
то условия трансверсальности принимают вид
я| = -£ = •
I t—t f Ulf
Гамильтониан и уравнения Эйлера-Лагранжа имеют вид
Н = ^1^2 +
I дн П ; дн / ; дн п дн / ^о/ П
*, = -^=0. = -Л. Л = -^-0. ^.=Л+2Ли=0.
Из последних уравнений имеем
= С*ь ^2 ~ —C\t + С2, 'фз ~ С'Зу и =
CXt-C2
2Сз ’
или
“ = c2 = g.
8.2. Задачи
201
Подставив последнее выражение для управления в уравнение объекта
и в дополнительное уравнение, получим
х2 = |^2 - C2t + Ci, X! = |cit3 - ^C2t2 + Cit + C5,
z о z
x3 = |c?t3 - CiC2t2 + Clt + c6.
О
Из граничных условий имеем
Xl (0) = С5 = 0, х2(0) = Ci = 0, х3(0) = С6 = 0;
= ^,t3 - X-C2t} = d, X2(ty) = - C2tf = 0,
x3(tf) = - CiC2t} + Cltj = b.
о
Отсюда находим C\ — — 3, C% =
u
управление имеет вид
, з/12<₽
Ум’1/ = У_г
. Оптимальное
u* = Clt~C2 = ~t+i[^.
а V 2а
Здесь, как и в примерах 8.4 и 8.5, из физических соображений
предполагается, что решение задачи существует. Поэтому единствен-
ное управление, удовлетворяющее правилу множителей Лагранжа, бу-
дет оптимальным. В данном примере условия трансверсальности при
нахождении оптимального управления не использовались. Они по-
требовались бы, если нужно было бы определить множители Лаг-
ранжа.
Задачи
•8.17. Записать уравнения Эйлера-Лагранжа и условия трансвер-
сальности при условии, что объект описывается уравнениями
£1 = Хз, Х2 — #4» &3=щ, ^4 = ^2’,
ограничения на управление, краевые условия и критерий оптимально-
сти имеют следующий вид:
V
а) j* (ui + = Л (4 = const), х(0) =0, Х4 = (tf) = 0,
о
J = -X2(tf)-,
202
Гл. 8. Методы теории оптимального управления
б) j (u2 + = А (А = const), xi(0) = 0, х2(0) = h,
о
хз(О) + х2(0) - v2, X4(tf) =0, J = -x2(tf);
V
в) j(u2 + ul)dt = А (Л = const), х(0) = 0, x2(ty)=0,
о
J = —xi(t/);
v
г) j (tti + ifydt = A (A = const), xi(0) = 0, x2(0) = ht
о
x|(0) + x2(0) = v2, x2(tf) = 0, J = -xi(tf)',
д) U2+U2^um, ®(0)s0, x(tf) = xf, J~tf,
e) u2 + u| xi(0)=0, x2(0) = h, xj(O) + x2(0) = v2,
x(tf)=xf, J~tf,
V
ж) x(0)=0, zi(t/)=x{, x2(t/)=x(, J = j (u2 + ul)dt;
о
з) xi(0)=0, х2(0) = Л, x|(0)+x2(0) = v2, xi(tf)=x{t
, J = j (u2 + u^dt;
о
и) u2 4-u| x(0) = 0, zi(tf)=x{, X2(tf) = X2t
J = -Н(*/) + *4(*/)];
к) u24-U2^u^, zi(0) =0, x2(0) = h, x|(0) + x2(0) = v2,
xi(tz) =x{, x2(tf) =x{t J = -[x2(t/) + x^(t/)].
Примечание. x° = xJ)T, xf = (x{ x( x{)T, vt ht
um — const; if — var.
8.18. Определить оптимальное программное управление u*(t) и оп-
тимальную траекторию х*(t) в следующих задачах оптимального
управления:
a) ii=x2, х2 = и, х(0) = 0, 071(10) = 10, х2(10)=0,
ю
J = u2dt —> min;
о
8.3. Принцип максимума Понтрягина
203
ю
б) £1=х2» = х(0)=0, xi(10) = 10, J == j u2dt min;
о
ю
в) ii=z2, i2 = u, х(0) = 0, х2(10) = 10, J = j u2dt —> min;
О
г) ij = х2, х% 10 = и-1, ж(0) = 0, Ж!(10) = 10, ж2(10)=0,
J = u2dt 0 min;
д) £1 = х2, i2 10 J = J u2dt -н 0 = u-l, х(0)-0, Ж1(10) = 10, min;
е) Х\ = ж2, х% 10 J = | u2dt —। = u-l, z(0) = 0, х2(10) = 10, • min;
ж) 0 Х\ = #2, %2 я2(10) =0, = ut xi(0) = 5, x2(0) = 0, x\(10) = 10, 10 J = j u2dt min; 0
з) ii=x2, i2 = u, Х1(0) = 0, х2(0) = 5, Х1(10) = 10, 10 х2(0) — 0, J = j u2dt -+ min; 0
и) X] — ж2, х2 я2(10) =0, = u-i, xi(0) = 5, ®2(O) = o, zi(io) = io, 10 J = | u2dt —> min; 0
к) ±1 = Xi, Х2 12(10) =0, = u-l, xi(0) = 0, i2(0) = 5, a:i(10) = 10, 10 J = u2dt —> min.
о
8.3. Принцип максимума Понтрягина
Во многих прикладных задачах на управление накладывается огра-
ничение типа неравенства. Часто оптимальное управление в таких
задачах имеет разрыв. Метод множителей Лагранжа не позволяет
204 Гл. 8. Методы теории оптимального управления
определить число и местоположения точек разрыва, и поэтому в этих
случаях он не эффективен. Такие задачи легче решаются с помощью
принципа максимума Понтрягина.
Задача с закрепленными концами и фиксированным временем.
При отсутствии фазового ограничения задачу оптимального управле-
ния с закрепленными концами и фиксированным временем в общем
виде можно сформулировать как следующую задачу Лагранжа:
ii — г = 1,2, . ..,п; (8.8а)
u G J7 С Rr (8.86)
х;(*о)=ач, Xi(£/)=xf, г— 1,2, ...,n; (8.8в)
V
J = j* /o(x,u,t)dt -* min(inf). (8.8г)
to
Функции fi (г = 0,1, ..., n) непрерывны по совокупности перемен-
ных «j, ...,xn, ui,...,ur, t и непрерывно дифференцируемы по
xj, ..., хп, t. Эта задача отличается от задачи оптимального управле-
ния классического типа тем, что ограничение задается на управление
в виде включения u Е Ut где U — допустимое множество значений
управления. Кроме того, здесь не требуется гладкость (непрерывная
дифференцируемость) функций fi (г = 0,1, ..., п) по и.
В данной задаче допустимыми управлениями считаются управ-
ления u(t), принадлежащие к классу кусочно-непрерывных функций
и принимающие значения из допустимого множества U. Фазовая тра-
ектория х(£) называется допустимой, если она является кусочно-
гладкой. При допустимом управлении фазовая траектория задачи (8.8)
является кусочно-гладкой: координаты Xi(t) (г = 1,2, ..., п) непрерыв-
ны всюду на интервале их производные могут иметь разрывы
1-го рода в точках разрыва управления. Пара (й(£),х(£)) называется
допустимой для задачи (8.8), если u(t) и x(t) являются допустимыми
управлением и траекторией и x(t) при u = u(t) удовлетворяет уравне-
ниям объекта и краевым условиям этой задачи.
Рассмотрим функцию
п
Н = ^^. (8.9)
i=0
которую также называют функцией Гамильтона или гамильтониа-
ном. Но она отличается от одноименной функции классического ва-
риационного исчисления тем, что в них не входит ограничение на
управление, имеющее в данном случае вид включения и Е U. В кон-
кретных задачах ограничение на управление может быть задано в виде
неравенства или равенства. Гамильтониан (8.9), который не включает
8.3. Принцип максимума Понтрягина
205
ограничение на управление, в отличие от гамильтониана, включающего
ограничение на управление, называют также функцией Понтрягина,
Уравнения
= г = 1,2, ...,п (8.10а)
иХ{
называются сопряженной системой.
Принцип максимума при закрепленных концах
и фиксированном времени. Для того чтобы допустимая
для задачи (8.8) пара (x*(t),u*(t)) была ее решением, необходимо,
чтобы существовали такие не обращающиеся одновременно в нуль
константа ^^0 и решение ф* = (ф*, ..., Фп)Т сопряженной
системы (8.10а) при х = х*(£) и u = и*(£),~ч/по при любом t G [to, t/],
кроме точек разрыва u*(t), функция Я(и) = Я(х*,и,^*,£) при
и = u*(t) достигает максимума, т.е. выполняется соотношение
шахЯ(х*,и,^*, t) = Я(х*,и*,^*,£). (8.106)
u^U
Задача с подвижными концами и нефиксированным временем.
Рассмотрим задачу Больца
х» = Л(х,и,£), г =1,2, ...,п; и € U С Rr; (8.11а)
^[x(to),x(t/),to,t/] =0, j = 1,2..........q < 2n; (8.116)
J = 5o[x(to),x(t/),to,t/] + _fo(x, u, t)dt —> min. (8.11b)
to
Принцип максимума при подвижных концах
и нефиксированном времени. Для того чтобы допустимая
для задачи (8.11) пара (x*(t),u*(t)) была ее решением, необходимо:
1) существование таких не обращающиеся одновременно в нуль
константы ф£ 0 и решения ф* = (ф^, ..., ^>*)т сопряженной си-
стемы (8.10а) при х = x*(t) и u = u*(t), что при любом t е [to, </],
кроме точек разрыва u*(t), функция Я(и) = Я(х*,и,^*,£) при
u = u*(t) достигает максимума, т.е. выполняется соотноше-
ние (8.106);
2) выполнение условия трансверсальности (8.7)
9G 9G
w',) = w i=l’2..........n;
я| =», я|
It=to 9lq lt=t/ 9tj
Рассмотрим, какова связь между принципом максимума и мето-
дом множителей Лагранжа. Как отмечалось, функция Понтрягина
отличается от гамильтониана, рассматриваемого в методе множите-
206
Гл. 8. Методы теории оптимального управления
лей Лагранжа, тем, что в нее не включено ограничение на управ-
ление. Сопряженные уравнения (8.10а) совпадают с уравнениями
Эйлера-Лагранжа (8.5а), если отсутствует фазовое ограничение: функ-
ция определяющая ограничение на управление н фазовые координа-
ты, не зависит от фазовых координат. Но они не включают условия ста-
ционарности гамильтониана (уравнения (8.56)). Их заменяет условие
максимума (8.106). Если ограничение на управление задается в виде
равенств, то, используя метод неопределенных множителей Лагранжа
нахождения экстремума функции, из (8.106) получим недостающие
уравнения Эйлера-Лагранжа.
Пример 8.7. Определить оптимальное управление в следующей
задаче оптимального управления:
ii = Х2, Х2 = и; |и| а,
xi(0) = хг(0) ™ 0, хг(Ю) =0, J = —xi(10) —> min.
Решение. Запишем функцию Понтрягина н сопряженные урав-
нения.
Н = ф\Х2 + Vw
; вН л ; ЭЯ
л = -_=°.
Терминант и условия трансверсальности имеют вид
ЭС1
G = ^ = -.('0). «Г) = ВД.-1.
Решив сопряженные уравнения и учитывая условия трансверсальности,
находим
*ф\ = -1, ^2 = С*2 - t
В условии max Я = *ф1Х2 + тах^ги максимум достигается, когда
|и|^а |и|^а
управление принимает граничные значения и его знак совпадает со
знаком функции ^2» т. е. при и = a sign ^2- Так как знак линейной
функции может измениться только один раз, то оптимальным может
быть управление
( а, 0^ t < tj, f —а, 0 < fi,
( —л, t\ < t < 10, ( а, t\ < t < 10,
где t\ — момент изменения знака функции ^2- В частности, ес-
ли t\ = 10, то это значит, что функция на интервале [0,10] не меняет
знак и управление не переключается. Выбор из двух управлений можно
сделать исходя из того, какое из этих управлений обеспечивает вы-
полнение граничных условий. Но в данном примере этот выбор можно
сделать на основании физических соображений. По условию задачи
нужно повернуть вал двигателя на максимальный угол и остановить
8.3. Принцип максимума Понтрягина
207
за заданное время. Поэтому оптимальным может быть только первое из
двух приведенных управлений. Остается определить только момент t\
переключения управления.
Проинтегрируем уравнения объекта при первом управлении с уче-
том начальных условий:
(at, 0 < t <t\,
Х2 | СЬ - at, fi < t < 10.
Используя непрерывность X2(t), т.е. равенство at\ =0% — at\, находим
С*2 = 2at\. Поэтому последнее соотношение можно записать в виде
(at, Q^t<t\,
Х2 ( a(2t\ — t), t\ < t < 10.
Из краевого условия на правом конце траектории имеем: жг(10) —
= a(2ti — 10) = 0. Откуда для момента переключения находим t\ — 5.
Таким образом, оптимальное управление имеет вид
ф (а, 0 < t < 5,
U [ — а, 5 О Ю.
Задача максимального быстродействия. Теорема об п интер-
валах. Рассмотрим задачу максимального быстродействия, когда объ-
ект является линейным:
п г
Ж* — 5 4" 52 »
fc=l j=l
otj < Uj < (3j, aj < 0, flj > 0,
Xi(to) Xi(tf) = 0,
J = tf tg ~
1,2, ..., n; (8.12a)
j = 1,2, ...,r; (8.126)
г — 1,2, ..., n; (8.12b)
lin. (8.12r)
Эта задача называется линейной задачей максимального быстро-
действия. В векторной форме уравнения объекта принимают вид
х = Ах + Ви.
Предполагается, что эти уравнения являются уравнениями в откло-
нениях, и поэтому конечное состояние, в которое нужно перевести
объект, есть начало координат (x(ty) = 0).
Функция Понтрягина имеет вид
Н = фТ(Ах. + Ви) = 52 У'ч 52 aikXk + 52 bijuj )»
i=i \fc=i j=i /
где = (V>i Vm) подчиняется сопряженному уравнению
•т дН
* =-»?
208
Гл, 8. Методы теории оптимального управления
Согласно принципу максимума, оптимальное управление определяется
из условия
или
п п п г
н = £ Еа*х*+£bi^ -
i=l fc=l i=l j=l
r n r / n \
Z u> Sbi^ = Z Zbi^)
j=l i=l j=l i=l '
U = {u: a, Uj j = 1,2...........r}.
Если выполняется так называемое условие нормальности (см. ниже),
то сумма 527=1 обращается в нуль только в изолированных точ-
ках. В этом случае из последнего тождества следует, что координаты
uj (j = 1» • г) оптимального управления u*(t) кусочно-постоянны
и принимают крайние значения otj или fy:
В частном случае, когда (3j = —atj, имеем ,
п
u} = 0, sign 52 by V’i. j = 1.2, •, r,
1=1
Для линейных задач максимального быстродействия при выполнении
так называемого условия нормальности принцип максимума является
не только необходимым, но и достаточным условием оптимальности.
Для определения этого понятия введем в рассмотрение (п х п)-матри-
цы ....
ЛГ[?] = •••(А’-'ВУ],
где BJ,(AB)J, (Ап~1В)’ — j-e столбцы матриц В,АВ...........Ап~1В
соответственно.
Условие нормальности. Говорят, что для объекта х =
= Ах 4- Ви выполнено условие нормальности или условие общно-
сти положения, если матрицы не вырождены: det О
0 = 1.2..г).
Очевидно, в случае скалярного управления условие нормальности
совпадает с условием управляемости. Объект, для которой выполнено
условие нормальности, называют нормальным объектом или нормаль-
ной управляемой системой.
8.3. Задачи
209
Пример 8.8. Определить, выполнено ли условие нормальности
для объекта
#1 = Х2 + U1, Х2 ~ 4- U2-
Решение. В данном примере имеем
0 1
1 о
о о
АВ =
1 1
.° °.
Матрицы 2V[j] имеют вид
ЛГ[1] =
ЛГ[2] =
О 1‘
1 о
1 1
1 О
и обе они не вырождены. Следовательно, условие нормальности выпол-
няется.
Необходимое и достаточное условие оптимально-
сти. Если в линейной задаче максимального быстродействия объ-
ект является нормальным, то для того чтобы пара (u*(t),x*(t))
была ее решением, необходимо и достаточно, чтобы она удовле-
творяла принципу максимума.
В оптимальном по быстродействию управлении линейным объек-
том функции Uj(t) принимают только граничные значения при любых
собственных значениях матрицы А, если объект является нормальным.
В общем случае эти функции имеют произвольное число переклю-
чений-точек перехода из одного граничного значения на другое.
В частном случае справедлива следующая теорема.
Теорема об п и нт ер в а л ах. Если в линейной задаче макси-
мального быстродействия объект является нормальным и харак-
теристическое уравнение
det(4 — Is) — 0
имеет только действительные корни, то компоненты оптимально-
го управления Uj(t)(j = 1,2, ..., г) кусочно-постоянны, принимают
только граничные значения и имеют не более п интервалов посто-
янства, или не более п — 1 переключений.
Задачи
8.19. Определить оптимальное программное управление u*(t) и оп-
тимальную траекторию x*(t) в следующих задачах максимального
210
Гл. 8. Методы теории оптимального управления
быстродействия:
a) ii = хг, Х2 = и, |u| 1, х(0) — 0, x\(tf) = 10, хг(^/) = О,
J ~tf min.
6) £i=:e2> ^2 = w, |u| l,x(0) = 0, xi(tf) = 10, J = tf —>min.
B) £1 = X2, X2~U, |u| 1, x(0) = 0, X[(tf) = 10, X2(tf)=5,
J — tf min.
r) £1=^2, £2 — u, |u| 1, xi(0)=0, ^2(0) = 5, x\(tf) = 10,
x2^/) = 0, J = tf —> min.
д) £1 = X2, £2 = u, |u| 1, xi(0)=5, хг(0)=0, xi(£/) = 10,
x2^f) = 0, J = tf —> min.
e) £1 — X2, X2 — U—1, |u| 2, x(0) = 0, x\(tf) = 10, X2(tf)=Q,
J — tf —* min.
ж) £i=X2> £2 = t£“l, |u|^2, x(0) = 0, x\(tf) = 10,
J = tf —> min.
3) £1=^2, £г = п-1, |u| 2, x(0)=0, x\{tf) = 10, жг(^/) = 5,
J = tf —> min.
и) £i=X2, £2 — ^—1, |u| 2, xi(0)=0, ^(0) = 5, x\(tf) = 10,
X2(t/) =0, J ~tf min.
к) £1 = X2t X2 = u— 1, |u|^2, xi(0) = 5, хг(0)=0, xi(t/) = 10,
X2(t/) =0, J = tf min.
8.4. Метод динамического программирования
Основу динамического программирования как метода оптимизации
составляют: 1) принцип оптимальности; 2) инвариантное погруже-
ние, т.е. включение исходной задачи в семейство аналогичных задач;
3) функциональное уравнение, получаемое на основе принципа опти-
мальности и инвариантного погружения.
Инвариантное погружение и функциональное уравнение. Основ-
ная идея метода динамического программирования заключается в сле-
дующем. Вместо того чтобы решать исходную задачу, ее включают
в некоторое семейство задач оптимизации (инвариантное погружение).
При этом может оказаться, что между отдельными задачами суще-
ствуют простые соотношения, и среди задач семейства найдется такая,
которая легко решается. Тогда, используя решение последней и соотно-
шение, связывающее отдельные задачи семейства, т. е. функциональное
уравнение, получают решение исходной задачи.
Принцип оптимальности. Оптимальная стратегия
{поведение) обладает тем свойством, что, каковы бы ни были
8.4, Метод динамического программирования
211
начальное состояние и решения на начальном этапе, решения на
последующем этапе должны составлять оптимальную стратегию
относительно состояния, которое получается в результате
принятия решений на начальном этапе.
В задачах оптимального управления оптимальность определяется
функционалом (критерием оптимальности) J(u(£), x(t)), состояние —
фазовым вектором х(£), стратегия — это управление и(£) на всем ин-
тервале [to» tf], решение —это выбор конкретного управления.
Для задачи оптимального управления справедлив принцип опти-
мальности, если она обладает марковским свойством. По определению,
задача оптимального управления обладает марковским свойством,
если после выбора управления на начальном интервале [to, tf], каково
бы оно не было, вклад на величину критерия J(u(t), x(t)) на конеч-
ном интервале [f, tf] оказывают влияние выбор управления на этом
интервале и значение фазового вектора в конце начального интервала,
т.е. x(t').
Чтобы сформулировать принцип оптимальности применительно
к задачам оптимального управления, рассмотрим задачу
х = f(х, u, £), u(t) G Ut, (8.13a)
x(t0) = x°, x(t/)GX/; (8.136)
J = 0o(x(t/),t/) + j /b(x,u,t)dt —> min. (8.13b)
Условимся управление u(t) на интервале [а, Ь] обозначать
u[a,b]: u[a, Ь] = (u(t), a < f < b). Если интервал слева или справа
является открытым, то соответственно слева или справа будем писать
круглую скобку: u(a, b] — (u(t), а < t Ь)и u[a, b) = (u(t), а С t < b).
Для задачи (8.13) справедлив принцип оптимальности, и он мо-
жет быть сформулирован следующим образом: для оптимальности
допустимой для задачи (8.13) пары (u*(t),x*(t)) необходимо, что-
бы при любом tf G [to, tf] управление u* [£',£/] было оптимальным
относительно состояния x*(t'), в котором окажется объект в мо-
мент tf при выборе на начальном отрезке времени [to,tz) управле-
ния u*[£o,t')-
Функции и уравнения Беллмана. Уравнение
min
u(t)ec/t L
/o(x,u.i) +-----±1_L
= 0,
(8.14а)
или
п
min
г— 1 J
(8.146)
212
Гл. 8. Методы теории оптимального управления
называется уравнением Веллмана. Здесь S(x(t)rt)~ функция Веллма-
на, и она определяется следующим образом:
S(s(t),t) =
tf
min 5o(z(tf),£/) + fa(x,u,r)dr
и € U J
e c r c L t
Сформулируем основной результат: Если функция Веллмана диффе-
ренцируема, то для того, чтобы допустимая пара (u(£), x(t)) для
задачи (8.13) была ее решением, необходимо, чтобы она удовлетво-
ряла уравнению Веллмана (8.14) при граничном условии
S(x(t/),t/) = (8.15)
Если минимум в левой части уравнения (8.146) достигается во
внутренних точках множества Ut, то его можно записать в виде
/o(x,u,t) + ||f(x,u,f) = (8.16а)
-%— f0(x,u,t) + ^f(x,u,t) =0, j = 1,2........г. (8.166)
CrUj ах
Уравнения (8.166) выражают необходимое условие минимума левой
части (8.146) и заменяют опущенную в уравнении (8.16а) операцию
минимизации по управлению.
Если правые части уравнений объекта и подынтегральное выраже-*
ние в критерии оптимальности, т.е. функции (г = 0,1, ..., п), явно
не зависят от времени, и конечный момент не фиксирован, то функция
Веллмана не зависит явно от времени и dS/dt = 0.
Оптимальное управление методом динамического программирова-
ния находится следующим образом:
1) из уравнений (8.166) определяется управление как функция
от S: u* = u* (S');
2) подставив u* = u*(S) в уравнение (8.16а) и решив его при крае-
вом условии (8.15), находится функция Веллмана;
3) подставив найденную функцию Веллмана в выражение и* =
= u*(S), получают оптимальное управление как функцию фазо-
вых координат.
Пример 8.9. Определить оптимальное управление с обратной
связью в следующей задаче:
ii = ^2 = и; xi(0) = ж®, хг(0) =
V
^i(t/)=0, X2(tf)=0; J = | (xj 4-u2)dt.
о
Здесь if и ^2“ заданные числа, момент tf не фиксирован.
8.4. Метод динамического программирования
213
Решение. Воспользуемся методом динамического программиро-
вания и выпишем уравнения (8.16):
9 9 os as ~ л os л
х2 4- и2 4- -—х2 + -х—и = 0, 2и+ — = 0.
ОХ 1 ОХ% иХ2
„ 1 9S „
Из второго уравнения находим и = — 7> Подставим это выражение
в первое уравнение:
2 1 fas\2 as
х'-Цай) +&71г = 0'
Нужно решить это уравнение при граничном условии S(x(tf)) — 0.
Будем искать решение в виде квадратичной формы
S = ОцХ2 + 2012^1^2 +022^22»
которая в силу краевых условий удовлетворяет указанному граничному
условию. Подставив это выражение в уравнение Беллмана, получим
х? - |(2ai2Xi 4- 2аг2^г)2 + (2ацХ1 + 2а12Хг)х2 = О,
или
(1 — ^12^1 + (2ац — 2012^22)^1^2 + (2012 — 0>22)х2 = О-
Последнее равенство будет выполняться тождественно, если
1 — 012 = 0, 2ац — 2012^22 = 0» 2012 “ а22 = 0.
Эта система имеет следующие решения:
012 = 1» а22 = ±д/2, Оц = iV^2.
Так как, по определению, функция Беллмана имеет вид
V
S(x(i)) = min (x2 + u2)dr,
«W J
t < T C t/ t
to S' > 0 при всех t < tf. Поэтому квадратичная форма, удовлетворяю-
щая уравнению Беллмана, будет функцией Беллмана, если она являет-
ся положительно определенной. Критерию Сильвестра положительной
определенности квадратичной формы удовлетворяет решение а\2 = 1,
а 2 2 = V2, ап = V2. Поэтому функция Беллмана и оптимальное управ-
ление имеют вид
S = V^x2 4- 2xiX2 4- и* = = — (xi 4- \/2хг).
Методы классического вариационного исчисления и принцип макси-
мума, как правило, позволяют находить оптимальное управление как
функцию времени. В то же время, как следует из рассмотренного
214 Гл. 8. Методы теории оптимального управления
примера, метод динамического программирования позволяет находить
оптимальное управление с обратной связью. Недостатком метода дина-
мического программирования при решении задач оптимального управ-
ления является то, что он исходную задачу сводит к решению нели-
нейного уравнения в частных производных.
Уравнение Веллмана как необходимое условие оптимальности по-
лучено при предположении, что функция Веллмана является гладкой
(непрерывно дифференцируемой). Однако это допущение не вытекает
из условия задачи оптимального управления и часто не выполняется.
Поэтому применительно к задачам оптимального управления метод
динамического программирования требует обоснования. В тех случаях,
когда нет обоснования, он может быть использован как эвристический
прием. При определенных условиях метод динамического программи-
рования дает достаточное условие оптимальности.
Достаточное условие оптимальности. Пусть —
гладкое решение уравнения Беллмана (8.14а) при граничном усло-
вии (8.15), и управление u*(x,t), найденное из условия
/о(х, u*. t) + ^f(x, u‘, t) + ^ = imn(/o + ^).
ax at ugu' at'
порождает единственную траекторию x*(t), удовлетворяющую
уравнениям (8.13а) и краевым условиям (8.136), вдоль которой функ-,
ция u*(t) = u*(x*(t),t) кусочно-непрерывна. Тогда функция u*(x,t)
является оптимальным управлением задачи (8.13).
Задачи
8.20. Определить оптимальный закон управления (управление с об-
ратной связью) в следующих задачах оптимального управления:
оо
a) ii = хг, ^2 = и, z(0) = х°, J = J (и2 4- 4х2)сЙ;
о
оо
б) ii = Х2, Х2 = и, х(0) = х°, J = (и2 + 4®? + 5ж|)Л;
о
ОО
в) xi = хг, хг = и, x(0)=x°, J = | (и2 + х2 + 2х%)сИ;
о
ОО
г) i| = хг, хг = и — хг, х(0) = х°, J = (и2 + 16х2)<Й;
о
8.4. Ответы
215
оо
д) ii=X2, £2 = ^ —хг, х(0)=х°, J — (и2 4- х2 4- x|)dt;
о
оо
е) ±i = хг,
ж) Xl = Х2,
з) ±1 = Х2,
и) ±1 = Х2,
к) £1 = Х2,
Х2 = U — Х2, х(0) = Х°, J =
Х2 = и — Xl — Х2, х(0) — х°,
Х2 = U — Х\ “ Х2, х(0) = Х°,
Х2 = U — Х\ — Х2, х(0) = Х°,
Х2 = U — Xi — Х2, х(0) = X®,
(и2 4- 4х2 + 4x|)dt;
о
(и2 4- Зх2 4- x|)dt;
о
оо
(и2 4- 8х2 4- 4x2)dt;
о
оо
(и2 4- 15х2 + 2x|)dt;
о
оо
(и2 + 3x|)dt.
о
Ответы
8.1. x(to) = 0, x?(tf) = h, J = tf.
8.2. xi (to) = X2(to) = ho. ^з(й)) = v. ^(to) = 0, x2(tf) = h,
J = tf.
tf
8.3. x(to) = 0, x\(tf) = x{, x2(tf) = x£, J = j (u2 + u|)dt
to
8.4. Xi(to) = X?, Z2(*o) = Ло, ятз(£о) = v/2, x4(t0) = v/2, x\(tf) = x{,
V
x2(tf) = J = j (u2 +U2)dt.
to
8.5. x(fo) = 0, xi(tf) = 0, J = — X2(tf).
8.6. Xi(t0) = Xj, X2(to) = ^2, Яз(*о) = v/2,z4(t0) = v/2, X4(tf) = 0,
J = -x2(tf).
8.7. Xi(*o) = X?, X2(to) = x2> яз^о) = v/2, x4(t0) = v/2, x2(tf) = 0,
c7 = x\(tf).
8.8. Xl (to) = Xb X2(to) = X2> ^з(^о) = V, X4(t0) = 0, x2(tf) = 0,
J = Xi(ty).
216
Гл. 8. Методы теории оптимального управления
8.9. zi(fo) = x°lt ж2(*о) = h, z3(to) = v, ®4(to) = 0. ) = d.
®2(*/) = 0, J = tf.
8.10. xi(to) = x?, ®2(<o) = x2> ®з(*о) = v/2, Xi(to) = v/2, xi(tf) = d.
8.11
®2(t/) = 0, J — tf.
T
x(0) = 0, xi(T) = a, J = u2dt.
о
T
8.12. x(0) — 0, ®i(T) = a, xz(T) =0, J = |u2dt.
о
8.13.
8.14.
8.15.
8.16.
u
u
u
u
Um, x(0) = 0, Xi(tf) = a, X2(tf) = 0, J = tf.
<Um, x(0) = 0, xi(tf) = a, J = tf.
Um, x(0) = 0, J = -X1(T).
< Um, x(0) = 0, X2(T) = 0, J = -Xi(T').
8.17. a) 0i=O, 02=0, 0з = —0ь 04 = -02. 05=0; 03 + 20sui=O,
04 + 2^5112 = 0; i/>i(tf) = 0, iMtf) = 1. iMtf) = o,
H = (^1X3 + 02ЗД + 03^1 + 04«2 + 0s(ul + “2)) |t=t/ = °-
6) 01=0, 1p2=o, 03 = -01, 04 = ~02. 05 = 0; 0з+205«1=О,
ip4 + 205 «2 = 0; 0з(О) = -2ихз(О), 04(0) = -2vx4(Q),
0iG/) = 0, faltf) = 1, 03(t/) = 0.
Я = (0il3 + 02Я4 + faui + 04«2 + 0s(u? -F til)) lt=t,= °-
в) 0j=O, 02=0, 03 = _01. 04 = ~02. 05=0; 03 + 205111=0,
04 + 205u2 = 0; ipittf) = 1, fattf) = 0, iM,tf) = 0,
Я = (^>1X3 + 1P2X4 + ^3W1 + V4U2 + ^5(“1 + “!)) |t=t/= °-
r) ^i=0, ^>2=0, ^>з = -^1. ip4 = -^, ^5=0; tl>3 + 2^5111 =0,
V>4 + 2V>5U2 = 0; ^з(О) = -2ихз(0), ^ц(О) = -2vx4(Q),
^i(tf) = 1, ^>3(i/) = 0, iMtf) = 0,
Я = (^>1X3 + 1/)2X4 + ^>3Ul + ^2 + ^>5(U1 + U2)) |t=t/= 0.
д) Tpl =0, 1p2 = 0, 1p3 = —01, 04 = -02; 03 + 2Aui = 0,
^>4 + 2Au2 = 0; 2Аиз = 0,
Я = (011з+0214+03“1+04и2+А(и2+и2+“з-ит)) lt=t,=
e) 01 =0, 02 = 0, 03 = -01, 04 = -02! 03 + 2Aui = 0,
04 + 2Au2=O; 2Амз=0, 0з(О) = -21лгз(О), 04(0) = —2i/X4(0),
^ = (0lX3+02X4 + 03Ul+04U2+A(u2+U2+u3_um)) |t=t/= L
8.4. Ответы
217
ж) ф\ = О, У>2 = О, = --01 > ^4 = -'Й’. *Фз - 2щ = О,
V>4 - 2u2 =s= 0; ^з(*/) = 0. Vm(*/) = о,
н = (V>1Z3 + ^2*4 + V>3U1 + i>4u2 - («1 + «!)) |t=t/ = °-
з) V>1 =0, V>2 = 0, “фз = -^1. V>4 = -^2! V>3 ~ 2ui = 0,
ф4 — 2u2 = 0; V’s(O) = —2Ахз(0), Vm(O) = —2Ax4(0),
fait/) = 0, = 0,
Я = (ф\Х3 + $2X4 + фзщ + ^4U2 - (u, + U2)) |t=t/ = °-
и) v>i = 0, v>2 = 0, V>3 = —V’i. Vm = — Vs; V>3 + 2Aui = 0,
V>4+2Au2 = 0; 2Аиз = 0, V>3(*/) = 2x3(ty), ^(t/) = 2x4(tf),
Я=(^1Хз+^2а:4+^згч+^4и2+А(и?+и2+“з-ит)) lt=t,= °-
к) V>i =0, V>2 = 0, V>3 = —V’l. V4 = -^2; Фз + 2Aui = 0,
•ф4 + 2Au2 = 0; 2Аиз = 0, V’s(O) = -2рхз(0),
^>4(0) = -2px4(0), ^3(tf) = 2x3(tf),^4(tf) = 2x4(tf),
H=(^iX3+^2X4+^3Ul+^4U2+X(u2i+U2+ul^n)) |t=t/=0.
8.18. a) u*(t)=0,6-0,12t, xJ(t)=0,3t2-0,02t3, x$(t)=0,6t-0,06t2;
6) u*(t) = 0,3 - 0,03t, x*i(t) = 0,15t2 - 0,005t3,
x$(t) = 0,3f-0,015f2;
в) u*(t) = 0,1, Xi(t) = 0,5t2, x%(t) = t',
r) u*(t) = 5 - 25*. x*i(t) = jo*2 ~ gQ*3. x*2(t) = %t- —t2;
д) «*(t) = 5 - 5Q*. X*W = 5*2 - joo<3, = 5* - joo*2;
e) u*(t) = 2, x|(t) = 0,5f2, xffl) =
о о 4 1
ж) u*(t) = 5 - 5Q*. xi(t) = 20*2 - |Q0*3 + 5,
= jo* - joe*2;
Q 7 7 О
3) «ко»а--,. + -Л
1г(‘) = 5-5‘+156,г;
«‘> = П>‘-15б,2;
218
Гл. 8. Методы теории оптимального управления
л о 7 4
7 9
8.19. a) u*(t) = < 1, O<t<0O/3, - 1, л/10/З <t< 00/3,
X$(0 — < t, O<t<0O/3, 00/3 -1, 00/3 < t < 00/3,
x|(t) = < ' t2/2, 0 < i < 00/3, 00/31 -12/2 + 10/3, у/10/3 < t < 00/3;
t2
б) u*(t) = 1, %2(t) ~ t X1 W “ *2 ’
в) u*(t) = J 1, 0 < t < 2,25, -1, 2,25 < t < 4,49,
x5(t) = J t, 0 Ш 2,25, 9,49 -1, 2,25 sj t 4,49,
x*i (t) = •! t2/2, 0 «S t 2,25, k 9,49t -12/2 - 22,55, 2,25 s$ t sj 4,49;
r) u*(t) = < fl, 0 sj t < 6,58, (-1, 6,58 <f <8,16,
= j ' 5 -1, 0 < t < 6,58, t —8,16, 6,58 <t <8,16,
x*i(t) = j ' 5t -12/2, 0 < t < 6,58, 112/2 - 8,16t + 43,29, 6,58 < t < 8,16;
a) u*(t) = < f 1, O<t<0O/2, [ - 1, 00/2 <t< 00,
^2 (t) = < ' t, O<t<0O/2, 00 -t, 0O/2<t<0O,
*1 (0 = < ' t2/2 + 5, O<t<0O/2, 0Ot-t2/2 + 5, 0O/2<t<0O;
e) u*(t) = [ 2, O<t<0/3, [-2, 0/3 <t< 00/3,
*20 = f 3t, O<t<073, 1 26,67 -1, 0/3 < t < 00/3,
8.4. Ответы
219
*1 (*) = 3t2/2, 0<t<i/5/3, k 26,67t - t2/2 + 3,33, y/5/3 t < 780/3
ж) u*(t) = 2, xffl) x*(t) = ~п> 0 t < л/20;
з) u*(t) = ' —2, 0 < t < 0,65, k 2, 0,65 < t 7,58,
= •) ' - 3t, 0 < t < 0,65, Lt —2,58, 0,65 t 7,58,
xj(t) = ' -3t2/2, 0 sj t sj 0,65, L t2/2 - 2,58t + 0,83, 0,65 sj t sj 7,58;
и) u*(t) = < f2, 0sU<0,81, -2, 0,81 <t< 2,75,
*2 0) =± J ft+ 5, 0<t <0,81, f8,25-3t, 0,81 <t< 2,75,
ft2/2 + 5t, 0<t<0,81, I 8,25i — 3t2/2 — 1,34, 0,81 <t <2,75;
к) U*(t) = < 2, 0<t<v/15/2, -2, л/15/2 < * =£ л/40/3 •
X2 (t) = < ' t, O^t^y/15/2, 3(У40/3 -1), v/15/2 < t < У40/3.
8.20. а) u*(x) = — 2(х|+хг); б) u*(x) = — (2xj +3x2);
в) u*(x) = - (zi 4- 2x2); r) u*(x) = -(4xt + 2x2);
д) u*(x) = - (11+2:2); e) u*(x) =-2(j;i+x2);
ж) u*(x) = - (xi+x2); 3) u*(x) =—2(xi + x2);
и) u*(z) = - (3xi+2x2); к) u*(x) — — x2.
Глава 9
СИНТЕЗ ОПТИМАЛЬНЫХ ДЕТЕРМИНИРОВАННЫХ
СИСТЕМ УПРАВЛЕНИЯ
9.1. Наблюдатели
Для реализации управления с обратной связью необходимо иметь
оценку текущих значений фазового вектора. Устройства, обеспечиваю-
щие получение указанной оценки по измерениям (наблюдениям) управ-
ления и(т) и выходного вектора у(т) на интервале to т t, называют
наблюдателями, В частности, устройство, описываемое уравнением
х = Fx + Ку + Яи,
называется наблюдателем полного порядка для управляемой систе-
мы
х = Ах + Ви, у == Сх, (9.1)
если при x(to) = x(to) выполняется равенство x(t) = x(t) при всех u(t),
t^tQ.
Наблюдатель полного порядка. Наблюдатель указанного выше
типа называется наблюдателем полного порядка, так как оценка х
имеет такую же размерность, что и вектор состояния х.
Теорема 9.1. Наблюдатель полного порядка для управляемой
системы (9.1) имеет вид
х — Ах + Ви + К(у — Сх), (9.2)
где К — произвольная матрица, которая может быть функцией
времени и которая называется матрицей коэффициентов усиления.
Устойчивость наблюдателя (9.2) зависит от матрицы А — КС. Урав-
нение для ошибки е = х — х имеет вид
ё = (А - КС)е.
Отсюда следует, что ошибка e(t) —> 0 при t —> оо независимо от на-
чальной ошибки тогда и только тогда, когда наблюдатель является
9.1. Наблюдатели
221
асимптотически устойчивым. Поэтому при выборе матрицы коэффици-
ентов усиления К необходимо прежде всего позаботиться о том, чтобы
наблюдатель был асимптотически устойчивым. Но от матрицы А — КС
и соответственно матрицы К зависит еще и качество наблюдателя.
Устойчивость и качество наблюдателя зависит от расположения корней
его характеристического уравнения, т.е. собственных значений матри-
цы А — КС на комплексной плоскости. Собственные значения матрицы
А — КС могут быть произвольно размещены на комплексной плоскости
путем выбора матрицы коэффициентов усиления в том и только в том
случае, если исходная система, т.е. пара (Л,С), вполне наблюдаема.
Если система частично наблюдаема, можно найти постоянную мат-
рицу К, при которой наблюдатель асимптотически устойчив, в том
и только в том случае, если система обнаруживаема.
В случае стационарного наблюдателя ошибка e(t) тем быстрее схо-
дится к нулю, чем больше значения элементов матрицы К. Однако
с увеличением коэффициентов усиления наблюдатель становится чув-
ствительным к шумам измерения. Поэтому оптимальная матрица К
может быть определена только с учетом реальных помех.
Наблюдатели пониженного порядка. Рассмотрим систему (9.1)
х = Ах + Ви, у = Сх,
где х — n-вектор, у-р-вектор, причем п> р, А, В, (7 — постоянные
матрицы соответствующей размерности. Пусть матрица С имеет макси-
мальный ранг, т. е. равен р. Тогда уравнение наблюдения дает р незави-
симых линейных уравнений для неизвестного вектора состояния х(£).
Чтобы определить х(£), необходимо получить дополнительно п — р
уравнений для координат этого вектора. Наблюдатель, построенный на
таком принципе, называется наблюдателем пониженного порядка.
Теорема 9.2. Наблюдатель пониженного порядка для управля-
емой системы (9.1) имеет вид
х = L2q+(Li+L2K)y,
(9.3а)
q = (C'A^-KCAL^q+^'A^K+CALi-KCAh-
— KCAL2K)y+(C'B—KCB)u, q(ta)=C'x(tQ)-Ky(tQ), (9.36)
где К — произвольная матрица, матрица С такова, что матри-
С
С"
является невырожденной (неособой), L\ и Ь2 — (п х р)-
и [п х (п — р)]-матрицы соответственно и определяются из соот-
Наблюдатель пониженного порядка (9.3) называют наблюдателем
Луенбергера.
222 Гл. 9. Синтез оптимальных детерминированных систем управления
Пример 9.1. Построить наблюдатели полного и пониженного
порядков для управляемой системы
±1 = Х2> %2 = U, у = Х\.
Решение. В данном случае имеем
о Л в = (?)' с=(> °)-
Наблюдатель полного порядка принимает вид
или в скалярной форме
21 = $2 + - 21), 2г = и + к%(у -х\).
Для построения наблюдателя пониженного порядка необходимо опре-
делить матрицы С", L\, L2. Матрица С" должна быть такой, чтобы
С
С"
квадратная матрица
была невырожденной. В остальном она может
быть произвольной. Условию невырожденности указанной выше квад-
ратной матрицы удовлетворяет матрица С" = (0 1). Поэтому имеем
С"
1 О'
О 1
1 0‘
О 1
- (Ь|
L2) >
откуда Li = L2 = J.
Подставив выражения для Л, В, (7, С", L\ и L2 в (9.3), получим
• » »9
q = — kq — к+и,
Напомним, что матрица К, или в случае наблюдателя пониженного по-
рядка в данном примере скалярная величина fc, выбирается из условия
устойчивости и требований к качеству наблюдателя.
9.1. Задачи
223
Задачи
9.1. Синтезировать наблюдатель Луенбергера для следующих
управляемых систем (см. в конце задания указание):
xi — xi “I- 2x2 I
±2 = -2х] +Х2,
Хз — XI + 2X2 + Зхз + и,
y = xi;
Xl = -2xi + Х2 + Хз
Хг = XI + 2X2,
Хз = 2X2 + Зхз + и,
у = Х\\
— Д?2 ,
в)
Х2 = 2xi + 3x2 + Х$,
Хз = Z1 + 2X2 + и,
y = xi;
XI = 2х] +Х2,
д)
Х2 = Х2 + Х3,
хз = - 2хз + w;
X1 — Х2»
±2 — “2x1 + Я2 +Х3,
Хз = —Х2 ~Хз+и,
У = Х\\
Xl = Х2 + Хз,
Х2 = Z1 + 2X2,
ХЗ = -Z1 “ 2X2 - Хз + U,
у = ;
У = xi;
х\ = -2х[ + хг + 2 • хз, Xl = Х2,
х Х2 = Х1 + 2x2, Х2 = 2xi + 3x2 + а • яз,
ж) . Яз = 2x2 + Зхз + и, 3) ХЗ = Х1 + 2x2 + U,
У = xi; У = яг,
Х\ = х2. £1 “ 2xi + Я2,
х *2 - -2xi +хз, Х2 = Я2 + Хз,
и) . ХЗ = -Х2 - Хз + U, к) яз = —xi — 2хз + и,
У = хг, У = яг
X1 — Х2 “1“ Я3,
. Х2 = Х1 + 2X2,
л) .
Хз = -Xl - Х2 - Хз + U,
t/ = Xb
Указание. Для упрощения расчетов элементы матрицы коэффи-
циентов усиления К примите равным единице, а матрицу С'выберите
такой, чтобы матрица
С
С"
была единичной.
9.2. Определить матрицу коэффициентов усиления наблюдателя
полного порядка, при котором корни характеристического уравнения
дифференциального уравнения ошибки е = х — х были равны —3 ± j2
224 Гл, 9. Синтез оптимальных детерминированных систем управления
и —3, для следующих управляемых систем:
— Х2» — ^2»
а) ^2 ^2 ^3, Хз — —Xl — Х2 — Хз + U, Хз = —2X1 “ 4x2 — 5хз + W, t/ = xi; = Х[ Х2, Х1 ~~ Х2,
в) Х2 ~ Х3, Х2 = Хз, Г] хз = —3x1 — 2x2 — хз + 2и, хз = —2xi — 5хг + и, t/ = xr, t/ = xi; Xi = X2, Xl = X2,
д) X2 — X3, X2 ~~ X3, Q 1 X3 = —2xi — Зхз + 3u, f X3 = —5xi — 2x2 — X3 4- 2u, t/ = хг, у = xi; Xj = X2, Xi = X2,
ж) X2 = X3, X2 = X3, 3j X3 = —2xi — Зхз + 2u, X3 = —4xi — 2x2 — X3 + u, y = X\‘, У = X[’, Xl = X2, Xl = X2,
и) X2 = Хз, X2 = X3, n к) . Л X3 = —xi — Зхг ~ 5хз + w, X3 = —4xj ~ 2x2 + u, y^xi’, y = x\.
9.2. Метод фазовой плоскости синтеза оптимальной
по быстродействию системы
Пусть задана вполне управляемая линейная стационарная система
x = Ax + Bu, |u| 1, х € Rn, ueR,
все корни характеристического уравнения которого действительны.
Заметим, что ограничения более общего вида а и /3, где а < О
и Д > О, введением нового переменного v = 2и — (а + /?)/(а - Д) всегда
приводится к приведенному выше виду |u| 1. Рассмотрим задачу син-
теза оптимального по быстродействию регулятора, обеспечивающего
перевод системы из произвольной начальной точки в начало координат.
Так как управление скалярное, условие нормальности совпадает
с условием управляемости, поэтому выполняются все условия теоремы
об п интервалах. В соответствии с этой теоремой оптимальное управле-
ние, имея не более п интервалов постоянства, принимает только край-
9.2, Метод фазовой плоскости синтеза 225
ние значения: —1 или 1. Если представить его как функцию фазовых
координат и* = и*(х), то ясно, что все фазовое пространство разби-
вается на два подпространства: подпространство, в котором и* = — 1,
и подпространство, в котором и* = 1. Гиперповерхность (при п = 2 —
кривая, при п = 3 — поверхность), которая делит фазовое пространство
на указанные подпространства, называют гиперповерхностью (кри-
вой, поверхностью) переключения. Если записать уравнение гипер-
поверхности а(х) = 0, то, как известно, а(х) > 0 по одну сторону от
гиперповерхности и а(х) < 0 по другую. Всегда (при необходимости
умножением на -1) можно выбрать функцию а(х) так, чтобы она была
отрицательна в подпространстве, где u* = -1, и положительна в под-
пространстве, где u* = 1. Тогда, очевидно, оптимальным управлением
будет u* = signa(x). Поэтому нахождение оптимального управления
с обратной связью сводится к определению функции а(х), которая
называется функцией переключения.
При п — 2 для нахождения функции переключения можно восполь-
зоваться методом фазовой плоскости. На фазовой плоскости строятся
семейства фазовых траекторий, соответствующих управлениям и* = — 1
и и* = 1. Оптимальная траектория представляет собой часть траекто-
рии или соединение частей двух траекторий из построенных семейств.
В силу граничного условия на правом конце траектории x(t/) = О
она должна оканчиваться в начале координат. Используя эти свойства
оптимальных траекторий, нетрудно определить кривую переключения.
Проиллюстрируем изложенное на простейшем примере.
Пример 9.2. Определить оптимальный по быстродействию закон
управления двигателем, описываемым уравнениями
±1 — Х2, Х2 = и, |и|^1, х(0) = х°, x(f/)=0.
Решение. Характеристическое уравнение имеет кратный нуле-
вой корень. Выполняются все условия теоремы об п интервалах. Оп-
тимальное управление может принимать значения —1 или 1. Найдем
соответствующие им фазовые траектории. Разделив второе уравнение
на первое, получим
dx2 и j j
-— = —, ИЛИ X2UX2 = иах\.
dxi х2
Проинтегрировав последнее уравнение при и = — 1 и и = 1, соот-
ветственно находим
1 Л 1 п
%Х2 = -Х1 + Сь -х$ = X! + С2.
На рис. 9.1, а представлены оба семейства траекторий. Оптимальная
траектория должна состоять из участка траектории одного семейства,
проходящей через начальную точку, и участка траектории другого
семейства, проходящей через начало координат. Из сказанного следует,
226 Гл. 9. Синтез оптимальных детерминированных систем управления
что переключение должно происходить на полутраекториях АО и ОВ
(рис. 9.1, а). Если вначале изображающая точка движется по траекто-
рии, соответствующей u* = —1, то переключение должно произойти на
полутраектории ВО, которая описывается уравнением
х2 ~ 2x1 = 0.
И если вначале изображающая точка движется по траектории, соот-
ветствующей u* = 1, то переключение должно произойти на полутра-
ектории О А, которая описывается уравнением
х2 + 2xi = 0.
Фазовый портрет оптимальной системы представлен на рис. 9.1,6.
Уравнение линии переключения АОВ, основываясь на уравнениях по-
лутраекторий АО и ОВ, можно записать так:
а(х) = — (х| + 2xi signx2) sign х2 = 0.
Функция а(х) отрицательна справа от линии переключения, где и* =
= —1, и положительна слева, где и* = 1. Поэтому имеем
u* = signa(x) = - sign[(x| + 2xi sign x2) sign x2].
Заметим, что кривая АОВ может быть описана уравнением
а(х) = — (х2 + 2xi signx2) = 0.
Однако знак функции <т(х) слева и справа от кривой АОВ меняемся
при переходе с верхней полуплоскости в нижнюю полуплоскость. По-
этому эта функция не может быть функцией переключения.
и*=— 1
Рис. 9.1.
9.2. Задачи
227
Как следует из фазового портрета, переходный процесс оптималь-
ной системы является апериодическим. Однако из-за неидеальности пе-
реключающего устройства, неточности математической модели объекта
и других возмущений* реальный переходный процесс может оказаться
колебательным.
Задачи
9.3. Определить оптимальное управление с обратной связью и* (х)
в задаче максимального быстродействия при условиях, что в начальный
момент х(0) = х° (х° — произвольный вектор), в конечный момент
x(t/) = 0 и объект описывается следующими уравнениями:
а)
б)
в)
г)
д)
е)
ж)
з)
и)
к)
it = Х2, Х2 = и— 1, |и| < 2;
ii
±1
ii
xi
XI
±1
XI
±1
XI
= Х2, Х2 ~ 2u — 1,
= Х2, ±2 = — 2,
= х2, Х2^2и — 2,
= Х2, Х2 — 4и — 4,
“ х2, ^2 = ~х2 + и,
1;
и 1;
и 2;
и 2;
М 1;
— Я2, ^2 = ~х2 + 2и, |и| 1;
“ х2> х2 = —2x2 + 4и,
= х2> х2 = —2x2 + 2и,
— х2> х2 = “4x2 + 4и,
и| 1;
и| 2;
и\ ^2.
и
9.4. Определить оптимальное управление с обратной связью и*(х)
в задаче максимального быстродействия при условиях, что в началь-
ный момент х(0) = х° (х° — произвольный вектор), в конечный момент
x(tf) - 0 и объект описывается следующими уравнениями:
а) ±1 = хг, Х2 = и — 1, —1,5 и 2,5;
б) xi = хг, Х2 = 2и — 1, — 1 и С 2;
в) ±1 = х2, Х2 = 4и — 2, — 1 и 2;
г) xj = Х2, Х2 = 2и — 2, — 1 и 2;
д) xi = хг, х2 = 4и — 4, — 2 и 4;
е) ±1 = хг, Х2 — — Х2 + и + 0,5, — 2 и 1;
ж) xj — хг, Х2 — —Х2 + 2и + 2, — 3 и 1;
з) xj = хг, Х2 — —2x2 + 4и + 4, — 4 и 2;
и) xj = хг, Х2 = —2x2 + 2и + 2, — 3 и 1;
к) ±1 = Х2, Х2 = —4x2 + 4и + 2, — 2 и 1.
228 Гл. 9, Синтез оптимальных детерминированных систем управления
9.3. Синтез оптимальных по интегральному
квадратичному критерию систем управления
Постановка задачи. Пусть объект описывается уравнением
х = Л(£)х + B(t)u + h(t), x(to) == х° (9.4а)
и критерий оптимальности имеет вид
V
J = xT(t/)Fx(tj) + j [хт(t)Q(t)x(t)+uT(t)R(t)u(t)]dt. (9.46)
Здесь h(t) — известная функция времени, F — положительно полуопре-
деленная матрица, Q(t), /?(£) —положительно определенные матрицы
(xTFx > 0, xTQx > 0 и хЛйх > 0 при всех х / 0 и t G
функции A(t), B(t), h(t), Q(t) и F(t) являются непрерывными на
интервале начальный и конечный моменты времени to и tf
фиксированы.
Требуется найти управление с обратной связью, при котором при
произвольном начальном условии x(to) = х° критерий оптимальности
принимает минимальное значение. Эту задачу называют задачей син-
теза нестационарного линейного регулятора состояния.
Теорема 9.3. Решение задачи (9.4) синтеза оптимального
нестационарного линейного регулятора существует, единственно
и оптимальное управление имеет вид
и* = - (r~'BtKx + (9.5а)
где симметрическая (п х п)-матрица К и п-вектор р определяются
из уравнений
К =-КА - АТК + KBR~lBTK — Q, (9.56)
р = KBR-1 Втр - Атр - 2Kh (9.5в)
при граничных условиях
K(tf) = F, p(tz) = 0; (9.5г)
для любого t е [to. t/] справедливо равенство
xT(t)K(t)x(t) + pT(t)x(t) + q(t) =
tf
= xT(tf)Fx.(tf) + j [x*T(t)Q(t)x*(i)+u*T(t)7?(t)u*(i)]dt,
t
9.3. Синтез оптимальных систем управления 229
где q(t) — скалярная функция, которая определяется из уравнения
q = |ртВД_|Втр - pTh, g(t/)=O.
Теорема 9.3а. При h(t) = 0 оптимальное управление имеет вид
u* = -R~lBTKx, (9.6а)
где симметрическая (п х п)-матрица К определяется из уравнения
К =-КА-АТК + KBR~lBTK-Q, K(tf) = F; (9.66)
для любого t е справедливо равенство
xT(t)A?(t)x(t) =
= xT(t/)Fx(t/) + j (x*T(t)Q(t)x*(t) + u*T(t)F(t)u*(t)]dt. (9.6b)
t
Уравнение (9.56) называют матричным уравнением Риккати.
Решение матричного уравнения Риккати. Матричное уравнение
Риккати является нелинейным. Его можно решить на аналоговой или
цифровой машине в обратном времени начиная с момента tf. При
этом вводится новая переменная (обратное время) т = tf -1 и уравне-
ние^.56) и граничное условие (9.5г) преобразуются к виду
K = KA + ATK-KBR~lBTK + Q, O^r^tf-to, К(0) = F,
где ~ ~
К(т) = K(tf - т), Л(т) = A(tf - г), ••• .
Синтез оптимальной по интегральному квадратичному крите-
рию стационарной линейной системы управления. Постановка
задачи. Пусть объект описывается уравнением
х = Ах + Ви (9.7а)
и критерий оптимальности имеет вид
J = j [xT(f)Qx(t)+uT(t)Bu(f)]dt. (9.76)
о
Здесь Q и Я —положительно определенные матрицы, все матрицы Л,
В, Q и Л являются постоянными, объект стабилизируем. Требуется
найти оптимальное управление с обратной связью, переводящее си-
стему из произвольной начальной точки х(0) = х° в конечную точку
х(оо) = 0 и обеспечивающее минимум функционалу (9.76). Эту задачу
230 Гл. 9. Синтез оптимальных детерминированных систем управления
называют задачей синтеза стационарного линейного регулятора
состояния.
Теорема 9.4. Задача (9.7) имеет решение тогда и только то-
гда, когда объект (9.7а) стабилизируем, и оптимальное управление
имеет вид
и* = -R-'BtKk,
где К ~ постоянная положительно определенная симметриче-
ская (п х п)-матрица, определяемая из уравнения
-КА - АТК 4- КВ1Г1ВТК -Q = 0,
называемого алгебраическим уравнением Риккати; для любого t 0
справедливо равенство
xT(t)Kx(t) = j [хт(т)(?х(т)+и*т(т)Ли*(т)]с/т,
t
где слева стоит функция Ляпунова. Подставив управление в урав-
нение объекта, получим уравнение замкнутой системы
X = (А - BR~'BTK)x.
Функция Беллмана является функцией Ляпунова для этой системы
управления.
Метод решения алгебраического уравнения Риккати. Алгебра-
ическое уравнение Риккати является нелинейным, и. в общем случае
аналитически решить его не удается. Решение этого уравнения сов-
падает с установившимся решением дифференциального матричного
уравнения Риккати. Поэтому один из возможных способов его решения
основан на нахождении установившегося решения матричного уравне-
ния Риккати, записанного в обратном времени, при начальном усло-
вии К(0) = F, где F — произвольная положительно полуопределенная
симметричная матрица.
Пример 9.3. Определить оптимальное управление с обратной
связью в следующей задаче оптимального управления:
оо
±1 = хг, х% = и, J ~ | (ж? + qx^ + ru2)dt —> min, q 0, r > 0.
о
Решение. В данной задаче имеем
л=[° 11 Г1 о]
[о о] м/ L° d
9.3. Синтез оптимальных систем управления
231
Поэтому оптимальный закон управления имеет вид
U*=--(0 1) £12 = --(^21X1 +k22X2),
Г Lfc21 «22j \X2j Г ' '
где kij определяются из уравнения
fcn &12 0 1
&21 ^22. Р О
0 0 fcn
.1 0] [fc21
&12 + £ ^12
&22. r _&21 ^22.
(?)<° >)х
fell fc|2 _
fc2l к22_
1 01 = Го О'
.° d [о о]’
X
или равносильной ему системы
^-1=0, -fcll + ^=0, -2kl2 + ^-q = 0.
Т г г
Эта система имеет решения
fci2 = ±>/r, = ±\/r(g + 2^12), fcn = 12 22 <
Критерию Сильвестра положительной определенности матрицы К удо-
влетворяет решение
fci2 = k2i = y/r, к22 = Уг(д + 2-^/г), кп = -Jq + 2y/r .
Оптимальный закон управления имеет вид
и* = "(v^i + Уг(д + 2^/т)ж2у
Пример 9.4. Определить, при каких значениях параметра а
задача оптимального управления
оо
±1 — xi + и, ±2 = otX2, J = | (xi + + u2)<ft —> min
о
имеет решение.
Решение. В данной задаче имеем
Л_р °], е= f‘Y <?_[' °1.
[о а] \0) [о 1J
Поэтому оптимальный закон управления имеет вид
u* = -(! °) ft" ь21М =-(fciiXi+fc12x2),
|Л21 K22j V2/
232 Гл. 9. Синтез оптимальных детерминированных систем управления
где kij определяются из уравнения
а о ”
&12 _ 1 О
&22_ 0 I
X
О О'
.° о]’
или системы
—2&ц + — 1=0, —2cnki2 4“ 1 к\2 ” 0, —2&22 4“ &12 — 1—0.
Последние уравнения имеют решения
к\\ = 1 ± \/2, к\2 — &21 = 0, к22 = “г--•
Критерий Сильвестра положительной определенности матрицы К бу-
дет выполнен, если fcn > 0 и £22 > 0. Второе неравенство будет выпол-
нено и задача будет иметь решение, если а < 0. При а > 0 задача не
имеет решения. Это обусловлено тем, при этих значениях параметра
объект не стабилизуем.
Синтез оптимального линейного регулятора выхода. Пусть за-
дана управляемая система
х — Лх 4- Ви 4- h, у — Сх
и критерий оптимальности
tf
J = xT(t/)Fx(t/) + j (yTQy + uTRu)dt.
<0
Здесь h — известная функция времени, F — положительно полуопреде-
денная матрица, Q и R — положительно определенные матрицы, зави-
сящие в общем случае от времени. Матрицы Л, В, С, Q, R как функ-
ции от времени предполагаются непрерывными на интервале
Требуется определить управление с обратной связью, при котором
критерий оптимальности при произвольной фиксированной начальной
точке принимает минимальное значение.
Эту задачу называют задачей синтеза оптимального линейного
регулятора выхода, причем если объект или критерий нестационарен
(хотя бы одна из матриц Л, В, С, Q, R зависит от времени) или
tf кончен, — нестационарной и, если объект и критерий стационарны
и tf = 00, — стационарной задачей синтеза линейного регулятора
выхода.
Задача синтеза оптимального линейного регулятора выхода отлича-
ется от рассмотренной задачи синтеза оптимального регулятора состо-
яния только тем, что в критерий оптимальности вместо вектора состоя-
9.3. Синтез оптимальных систем управления
233
ния входит выходной вектор и условие задачи дополняется уравнением
наблюдения.
Подставив выражение для выходного вектора в критерий оптималь-
ности, получим
V
J — хТ(tf)Fx(tf) + J (xTCTQCx + uT7Ju)dt.
Таким образом, задача синтеза оптимального линейного регулятора вы-
хода свелась к рассмотренной задаче синтеза оптимального линейного
регулятора состояния. Отличие состоит в том, что здесь роль матрицы
Q играет произведение C^QC. При этом может оказаться, что, хотя
матрица Q является положительно определенной, произведение этим
свойством не обладает: оно может быть положительно полуопределен-
ным. Произведение C^QC будет положительно определенным, если
у = 0 в том и только в том случае, когда х = 0.
Пример 9.5. Определить оптимальный закон управления в сле-
дующей задаче оптимального управления:
оо
ii — Х2 X2 — ut у — х\ J = | (у2 4- u2)<ft —> min.
о
Решение. В данной задаче имеем
Поэтому для оптимального закона управления получаем
= -(0 1)
и
fell &12 (%\
&21 &22- \#2
= —+&22Я2),
где kij определяются из уравнения
&12 +
fell &12 0 1
&21 &22ч Р 0
0 0
1 0 fc2l
>
X
fcn к\2 __ 1 0 _ 0 0
&21 &22 0 0 0 0
или равносильной ему системы
к^2 ~ 1 — 0, “-&П “Ь &12&22 — 0, —2fci2 + fc22 =
234 Гл. 9. Синтез оптимальных детерминированных систем управления
Эта система имеет решения
&I2 = &21 — 1» ^22 — , fcy = ±72.
Критерию Сильвестра положительной определенности матрицы К удо-
влетворяет решение
&12 = &21 = 1» &22 — у/2, fell = у/2.
Следовательно, оптимальный закон управления имеет вид
u* = -(xi + 72 х2).
Синтез оптимальной системы по критерию обобщенной рабо-
ты. При решении задач синтеза оптимальных систем управления по
интегральному квадратичному критерию сталкиваемся с необходимо-
стью решать нелинейные дифференциальные уравнения Риккати в слу-
чае нестационарной задачи и нелинейные алгебраические уравнения
Риккати в случае стационарной задачи. А. А. Красовский предложил
критерий оптимальности, который он назвал критерием (функциона-
лом) обобщенной работы, при котором удается избавиться от необ-
ходимости решать нелинейные уравнения. Суть метода синтеза опти-
мальной системы по критерию обобщенной работы состоит в том, что
интегральный квадратичный критерий выбирают так, чтобы уравнение
Веллмана получилось линейным.
Рассмотрим задачу синтеза оптимальной линейной системы, когда >
уравнения управляемой системы и критерий оптимальности имеют вид
х = Ах + Ви, (9.8а)
J = xT(tf)Fx(tf) + j (xTQx + ит7?и + uT7?u}dt, (9.86)
to
где F — постоянная положительно полуопределенная матрица, Q — по-
ложительно полуопределенная, R положительно определенная мат-
рицы, которые могут зависеть от времени.
Теорема 9.5. В задаче (9.8) при условии, что объект устойчив
и в критерии оптимальности (9.86)
и - и* = -7?’1ВтКх,
1) оптимальный закон управления имеет вид
u* = -R~'BtKk,
где положительно определенная симметрическая матрица К опре-
деляется из линейного дифференциального уравнения
К = -КА - АТК - Q, K(tf) = F, (9.9а)
если она является нестационарной;
9.3. Синтез оптимальных систем управления
235
2) оптимальный закон управления имеет вид
u* = -R-'BTKx,
где положительно определенная симметрическая матрица К опре-
деляется из линейного алгебраического уравнения
КА + АТК + Q = 0, (9.96)
если она является стационарной (все матрицы являются постоян-
ными и tf — оо).
Уравнение (9.96) является уравнением Ляпунова, и оно имеет реше-
ние, если среди собственных значений матрицы А нет пары собствен-
ных значений, сумма которых равна нулю.
Если объект устойчив (все собственные значения матрицы А име-
ют отрицательную вещественную часть) и матрица Q положительно
определена, то уравнение (9.96) имёет единственное решение, которое
является положительно определенной матрицей.
Когда объект неустойчив, уравнение (9.96) может не иметь реше-
ний или иметь решения, при которых синтезированная система будет
неустойчива.
Пример D.6. Определить оптимальный закон управления по
критерию обобщенной работы при условии, что уравнения объекта
и критерий оптимальности имеют вид
оо
±1 = Х2 ±2 = -rcl - Х2 + u, J = j (х2 + + и2 + U2)^.
О
Решение. В данной задаче имеем
Оптимальный закон управления имеет вид
и
= -(0 1)
fell ^12
&21 ^22. \^2
= —(&21Я1 +^22^2)»
где kij определяются из уравнения
fcn
Л21
— 1 k\\ k\2 1 1 О
— 1 &21 ^22_ P 1
или системы
—k[2 “ &21 + 1 = 0, fell — fci2 — &22 = О»
&21 ““ &22 + ^11 “ &21 + 1 = 0, fc[2 = &21-
236 Гл. 9. Синтез оптимальных детерминированных систем управления
Эта система имеет следующее решение:
1 3
&12 = &21 = 2» ^22 = 1, =
Это решение удовлетворяет критерию Сильвестра. Оптимальный закон
управления имеет вид
и* = -Нж1+х2\
Задачи
9.5. Определить управленце с обратной связью (выражение для
и*(х) и дифференциальные уравнения для элементов матрицы К)
в следующих задачах оптимального управления:
ю
а) ±=(2е“*“1)ж+и, х(0)=ж°, J=J (ж2+2и2)сй) —> min;
о
ю
б) i=(l+sin2t)x+2uf х(0)=ж°, 7=j (2x2+4u2)df) nun;
о
ю
в) ±i =Х2, х(0)=х°, 7=j (x2+x2+u2)dt) —>nun;
о
ю
г) xi=X2, ±2=2u, x(0)=x°, 7=j (2x2+x2+2xiX2+u2)cK) —> min;
о
ю
д) ±i=X2, ±2 = —яг+u, x(0)=x°, 7=j (x2+u2)df) —> min;
о
ю
е) ±1=^2, Х2 = ”2ж2+п, х(0)=х°, 7=j (x2+2x2+u2)dt) —► min;
о
ю
ж) ±i =Х2, ±2 = —^1— ty+u, х(0)=х°, 7=| (ж2+и2)сй) —>min;
о
ю
з) ±i=x2, ±2==-2xi-X2+u, х(0)=х°, 7= (ж2+а^+2и2)сй) —> min;
о
9.3. Задачи
237
10
и) ±i=S2» ^2~~xi—2x2+2u, х(О)=х°, J=| (x2+4u2)dt) —> min;
о
К) Xj=X2, ±2 = — 2x1— 2хг+4и, х(О) = х°,
ю
J=| (2х2+х|+2и2)Л) —> min.
о
9.6. Определить управление с обратной связью в следующих зада-
чах оптимального управления:
оо
а) ±1=Х2» Х2 = — 2x2+и, х(0)=х°, J= J (x2+x2+u2)dt) —>min;
о
б) xj=X2, Х2 = —4x1—2хг+2и, х(0)=х4),
оо
J=| (2х, +2xi®2+®2+4u2)dt) —»min;
о
ОО
в) Х1=2хг, ±2 = —4х2+4и, х(0)=х°, J=| (2x2+x2+4u2)dt) —* min;
о
оо
г) Х1=2х2, Х2 = —2x1—X2+2u,x(0)=x°, J = j (2х2+2х|+2и2)^) -*
о
min;
u
д) X1= 2x2, X2 —““X 1—2x2+2u, x(0)=x°,
oo
J=| (2x2+2xiX2+2x2+2u2)ctt) —> min;
о
oo
e) xi=X2, X2 = —2xi — 2x2+2u, x(0)=x°, (x2+x2+4u2)dt) —>
о
—> min;
u
oo
ж) ±i=x2, X2 = —2xi—4хг+4и, x(0)=x°, J== j (3x2+3x|+u2)<ft) —>
0
—> min;
u
238 Гл. 9. Синтез оптимальных детерминированных систем управления
з) ii=2x2> Х2 = — 4x1— 4х2+8и, х(О)=х°,
ОО
J= j (4xi+4xiX2+2x2+4u2)dt) —> min;
о
и) xi=X2, ±2 = -5xi—4x24-11, x(0)=x°,
ОО
J= j (3x|4-4xix2+3x|4-u2)dt) —»min;
о
к) xi =X2, ±2 = —5xi 4-2x24-3u, x(0)=x°,
oo
J=| (2^1 +2x\X2+2x2+2u2)dt) —>min.
о
9.7. Определить управление с обратной связью и* = и(у,у) в сле-
дующих задачах оптимально управления:
оо
2 Г
а) у=^^и’ У(°)=У0’ У(.О)~У0’ J=j (y2+2y24-u2)dt) -> min;
о
ОО
2 г
б) У=р2+2рц’ У(°)=У°' У(Р)=У°, J=j (y2+2y2+u2)dt) —»min;
о
оо
в) у=р2^4ри’ У(0)=У°’ у(°)=Й°. J= | (2y2+2y2+2yy+2u2)dt) -►
о
—> min;'
u
о
Г) 2/=р2+2р4-1Ц’ у^=у°' у(°)=у°’
ОО
J= | (2у2+2у2+2yy+u2)dt) —> min;
о
ОО
2 Г
д) у=р2+4р+зц’ Vtty^y0’ У(О)=У°, J=j (4p24-2j/24-u2)dt) -> min;
о
е) у=р2Тёр+бц> у(®=у0’ У^=У°’
оо
J= j (4y2+2y2+2yy+2u2)dt) -> min;
о
9.3. Задачи
239
. 4
Ж) 1/=-д-----=U,
’ * р2+4р+5
2/(О)=2/°, у(О)=у°, J=j(y2+4y2+4u2)dt)-»пйп;
о
ОО
з) y='^~+2p+5U’ у^=у°’ У(°)=У°’ J= j (4J/2+y2+2yy+u2)dt)^
о
—> min;
u
"> !,= ^+6p+n>“' "(0)=:””'
oo
J= j (j/2+4y2+4j/y+u2)dt) ->min;
о
“> ^FTep+il"' "(0)=:““- s(0)='!'°’
OO
J= j (y2+y2+2yy+2u2)dt) —>min.
о
9.8. Определить управление с обратной связью, переводящее объ-
ект из произвольного начального положения х(0) =х° в начало коор-
динат, в следующих задачах оптимального управления с критерием
обобщенной работы:
а) ±1 = Х2, ±2 = х3> х3 = “Xi — 2^2 — Зхз + и,
оо
J = j (х2 + х| + х2 + и2 + u2)^ —> min;
о
б) Х1 = Х2, Х2 = х3> х3 — *“Х1 — 2x2 ~ Зх3 + U,
оо
J = | 2(х2 + х| + х| + и2 + ii2)^ —> min;
о
в) Xi = Х2, Х2 = %3> х3 — —2x1 — 2x2 — 2хз + U,
оо
J — 4(х2 + х2 + х| + и2 + u2)^ min;
о
г) a?i = Х2, Х2 = хз, хз = —2x1 — 2хг 2хз + w,
оо
J = j 2(i] + xi + х% + u2 + S2)dt —> min;
о
240 Гл, 9. Синтез оптимальных детерминированных систем управления
д) ij = Х2, Х2 — хз, £з = —xi — 3x2 “ 4хз + ti,
оо
J = j 3(х2 + х| + х| + u2 + u2)^ —> min;
о
е) ii = Х2, Х2 == хз, Хз = —Х[ — 3x2 “ 4хз + и,
оо
J “ | 6(х2 + х| + х| + u2 + u2)^ —> min;
о
ж) £1 = Х2, Х2 — Хз, ±3 — -Х1 - 3X2 - 2хз + и,
J = | 4(х2 + х2 + х2 + u2 + u2)^ -> min;
о
з) Х1 — Х2, Х2 = Хз, Хз — Х[ 3x2 2хз U,
оо
J = j 8(х2 + х| + х2 + u2 + и2)^ —► min;
о
и) Xl ~~ Х2, Х2 Хз> Х3 —~ Х1 3x2 ЗХ3 W,
оо
J = j (Зх2 + 2х| + х| + u2 + u2)^ -> min;
о
к) £1 = Х2, £2 = Хз, £3 = —Х1 — 3x2 — Зхз + и,
оо
J = | (xi + 2ж| + 3®з + u2 + S2)^ —» min.
о
Ответы
9.1. a) q\=-qi-q2-2y, q2=2q2+2y+u, xi=y, x2=qi+y, X3=q2+y;
6) 91=91-92. 92 = 9i+292+31/+u, xi=y, x2=qi+y, x3=q2+y;
в) 91=291+72+33/, q2=qi+y+u, x\=y, X2=qi+y, x3=q2+y,
r) 91=92+2/. 92 = -29i-92-33/+u, X\=y, x2=qi+y, x3=q2+y;
a) qi=qz+y, 92 = -91-292-Зз/+и, Xi=y, x2=qi+y, x3=q2+y;
e) 91=91-92. 92 = —З91 — 292—5j/+u, xi=y, x2=qi+y, x3=q2+y,
ж) 91=91-292-2/. 92 = 91+92 +21/+U, xi=y, x2=9i+2/. x3=q2+y;
3) 91=291+92+33/, 92=9i+2/+«. ®i=3/. ®2=9i+2/. x3=q2+y;
и) 9i = -9i+92 . 92 = —291 —92—Зз/+и, £1=3/, £2=91+2/. x3=q2+y;
к) 91=92 +2/. 92 = -9i-292-32/+u. ®i=2/. x2=qi+y, x3=q2+y,
л) 91=91+292. 92 = -291-292-4з/+и, £1=2/, £2=91+2/. x3=q2+y;
9.3. Ответы
241
9.2. а) К = (8 22 8)Т; б) К = (4 7 -14)Т; в) К = (8 21 -1)Т;
г) К = (9 26 -8)Т; д) К = (6 13 -2)Т; е) К = (8 21 -3)Т;
ж)/С = (б 11 -6)Т; з)К = (8 21 -2)Т; и)К=(4 8 - 14)Т;
к) К= (9 29 17)Т.
9.3. a) u*(x) = -2sign[sign(x2)(x2 + 2xi) + 4xi];
б) u*(x) = — sign [sign (х2)(х| + 2®i) + 4®i];
в) u*(x) = -sign[sign(x2)(x2 + 4xi) + 8xi];
r) u*(x)=—2sign[sign(x2)(x2+ 4xi) + 8xi];
д) u*(x)=-2sign[sign(x2)(x2 + 8xi) + 16xi];
e) u*(x) = -sign(xi + x2 + sign(x2) ln| 1 + x2sign(x2)|);
ж) u*(x) = -sign(xi + x2 + 2 sign(x2) ln| 1 + 0,5x2sign(x2)|);
з) u*(x) = -sign(xi +0,5x2 + sign(x2)ln| 1 +0,5x2sign(x2)|);
и) u*(x)=-2sign(xj +0,5x2 + sign(x2)ln|l +0,5x2sign(x2)|);
к) u*(x) = -2sign(xi +0,25x2 + 0,5sign(x2)ln| 1 +O,5x2sign(x2)|).
9.4. a) u*(x)^O,5 — 2sign[sign(x2)(x| + xi) + 4xi];
6) u*(x)=0,5 — 1,5 sign [sign(x2)x2 + 6xi];
в) u*(x)=0,5- 1,5sign[sign(x2)x2 + 12xi];
r) u*(x)=0,5— 1,5 sign [sign(x2)x| + 6xi];
д) u*(x) = 1 - 3sign[sign(x2)x| + 24xi];
e) u*(x) = —0,5 — l,5sign(xi +x2 + l,5sign(x2)x
2
xln|l + -x2sign(x2)|);
ж) u*(x) = -l -2sign(xi + x2 + 4sign(x2)In] 1 + 0,25x2sign(x2)|);
з) u*(x) = -l -3sign(xi +0,5x2 + 3sign(x2)ln|l + |x2sign(x2)|);
и) u*(x) = -1 -2sign(xi + 0,5x2 + sign(x2)In] 1 +0,5x2sign(x2)|);
3
к) u*(x)=—0,5 — l,5sign(xi +0,25x2 + -sign(x2)x
2
x ln| 1 +-x2sign(x2)|).
9.5. a) u*(x) = -0,5Лх, k = -2(2e~‘ - l)fc + 0,5fc2 - 1, fc(10) = 0;
6) u*(x) = —0,5Лх, k — —2(1 + sin2 t)k + k2 — 2, fc(10) = 0;
в) w*(x) = —(fci2xi + fc22x2), fcn = fc22 - 1, ki2 = — Ли + fci2fc22,
Ли = —2fci2 + Ли — 1, k(0) = 0;
242 Гл, 9. Синтез оптимальных детерминированных систем управления
г) u*(x) = -2(fci2Xi 4- ^22X2)» ^11 = 4fc22 - 2,
fcl2 = — &11 +4^12^22 — 1, &22 = — 2&12 4" 4fc22 “ h к(0) = О;
д) U*(x) = -(fcj2Xi + fc22X2), fell = fc?2 - 1,
&I2 = —feu -|“ &12 4- ^12^22» ^22 = —2&12 4" 2&22 4“ Л?22, k(0) = O’,
e) u*(x) - “(fci2xi 4- £22^2), fcn = fc?2 - 1,
fcl2 = “^11 4" 2fcj2 4“ &12&22» &22 = ~2k[2 4“ 4&22 4" &22 — 2,
k(0) = 0;
ж) U*(x) = — (fci2^1 4- k22^2)t fell = 2k[2 4- &12 — 1,
fcj2 = &22 — &11 4“ ki2 4~ ^12^22» ^22 — —2ki2 4" 2&22 4" fcf2,
k(0_) = 0;
3) u*(x) = —0,5(fci2£i 4- ^22^2), fcu — 4fcj2 4- 0,5fci2 — 1,
fci2 = 2fc22—k\\4~k{24~0,5&12&22» &22 = —2fcj24-2^224"0»5fc22 — 1,
k(0) = 0;
и) u*(x) = — 0,5(fci2XEi 4- £22^2), k\\ = 2fci2 4- fc?2 — 1,
fc|2 = &22 *“ k\\ 4- 2fci2 4- fcl2&22, &22 = —2&12 4" 4&22 4" k%2>
k(0) = 0;
к) u*(x) = “2(fcj2Xi 4- ^22^2), fcn = 4fcj2 4- 8fc[2 — 2,
k\2 =2Л?22 — k\i 4" 2fc12 4" 8^12^22» ^22 = —2k[2 4" 4Л?22 4~ 8fc22 — 1,
k(0) = 0.
9.6. a) u*(x) = —(xi 4-0,65x2); 6) u*(x) = — (0,12^i 4-0,17x2);
в) u*(x) = —(0,71xi 4-0,4хг); r) u*(x) = —(0,41X1 4-0,94хг);
д) u*(x) = —(0,62xi 4-0,8x2); e) u*(x) = —(0,12xi 4-0,17хг);
ж) u*(x) = —(l,32xi 4- 1,16x2); з) u*(x) = —(0,62xi 4-0,52хг);
и) u*(x) = —(0,29x1 4-0,42x2); к) u*(x) = —(0,27xi 4-0,62хг).
9.7. a) u* = -(2/4-1,32/); 6) u* = -(2/4-2/);
в) u* = -(y 4- 0,582/); r) u* = -(2/ 4- 2/):
д) u* = -(2/ 4- 0,642/); e) u* = -(0,562/ 4- 0,382/);
ж) и* = -(0,0962/4-0,42^); 3) u* = -(0,392/4-0,42/);
и) u* = — (0,052/ 4- 0,332/); K) w* = -(0,0192/4-0,045^).
9.8. a) u = —(0,5xi4-1,3x24-0,6x3); 6) u=—(х14-2,6хг4-1,2хз);
в) u = — (x 14-6x24-4хз); r) u=—(0,5xi4-3x2-l-2хз);
д) u=—(l,5xi4-2,86x24-1,09хз); e) u=—(3xi4-5,72хг4-2,18x3);
ж) u=—(2xi 4-2,8хг4-2,4хз); з) u=— (4x14-5,6x24-4,8x3);
и) u ——(l,5xi4-2,13x24-0,88x3); к) u=—(0,5x14-1,13x24-0,88x3).
Глава 10
СИНТЕЗ ОПТИМАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ
ПРИ СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ
Во многих случаях, например при управлении различными техно-
логическими процессами, летательными аппаратами и другими объек-
тами, на процесс управления существенные влияния оказывают слу-
чайные факторы, и важно их учитывать. И в данной главе будут
рассмотрены задачи по синтезу оптимальных систем управления при
случайных возмущающих воздействиях (случайных возмущениях).
ЮЛ. Некоторые типы случайных процессов.
Формирующий фильтр
Стационарный случайный процесс. Случайный процесс X(t) на-
зывается стационарным (слабо стационарным, стационарным в ши-
роком смысле), если его математическое ожидание не зависит от
времени и корреляционная функция зависит от одной переменной:
1) тх = const; 2) Kx(ti,t2) = Kx(r).
Стационарные процессы X(t) и Y(t) называются стационарно свя-
занными, если их взаимная корреляционная функция зависит от одно-
го параметра: Kxy(t\,t2) = Kxy(t2 - t\) = Kxy(r).
Стационарные процессы, помимо законов распределения и момен-
тов, характеризуются еще спектральной плотностью. Спектральной
плотностью стационарного случайного процесса X(t) называется дву-
стороннее преобразование Фурье от его корреляционной функции:
Sx(u) = j Kx(r)e^rdr.
—оо
Корреляционная функция выражается с помощью спектральной плот-
ности обратным преобразованием Фурье.
Кх(т) = ±- [ Sx(w)e?“Tto.
Z7T I
—оо
244 Гл. 10. Синтез оптимальных систем управления
Аналогично определяется взаимная спектральная плотность двух ста-
ционарных и стационарно связанных случайных процессов X(t) и Y(t):
оо
Sxy(u>) = j Kxy(r)e-’“TdT,
—оо
оо
= 2^ 1
—оо
Если на вход устойчивой линейной стационарной системы подается
стационарный случайный процесс, то на ее выходе в установившем-
ся режиме устанавливается стационарный случайный процесс. Спек-
тральная плотность Sy(uj) выходного сигнала связана со спектральной
плотностью Sx(cu) входного сигнала соотношением
= |ич^)|2ад, (10.1)
где ТУ(jcu) —частотная передаточная функция системы.
Корреляционная функция выходного сигнала имеет вид
оо оо
ВД = j Sv(u>)e^dw = ± j \W(j^x(u>)e^fo.
— оо —оо
Так как дисперсия Dy — Ky(Q), из последнего соотношения находим
оо оо
Dy = ^~ [ Sv(W)do; = ± [
Z7T J 27Г J ’
—оо —оо
Процессы с независимыми и ортогональными приращениями.
Случайный процесс X(t) называется процессом с независимыми при-
ращениями, если случайные величины
X(to), Х(Й)-Х(М, ...» X(tn) -X(in_i)
при любых < t\ < ... < tn (из области определения случайного
процесса) взаимно независимы [19]. Если эти величины только не
коррелированны, процесс X(t) называется процессом с некоррелиро-
ванными или ортогональными приращениями.
Процесс с независимыми приращениями полностью определяется
распределением X(to) и распределением приращений X(t) — X(s) для
произвольных t и в. Если распределение X(t) — X(s) зависит от t — s,
то процесс X(t) называется процессом со стационарными прираще-
ниями. Если X(t) — X(s) имеет нормальное распределение, то X(t)
называется процессом с независимыми нормальными приращениями.
Векторный процесс с нулевым средним значением и независимыми
нормальными приращениями называют винеровским процессом.
10.1. Некоторые типы случайных процессов 245
Белый шум. Стационарный случайный процесс X(t) называется
белым шумом, если его спектральная плотность постоянна: Sx(cu) = G
(G = const). Постоянная G называется интенсивностью белого шума.
Если исходить из определения спектральной плотности, то спектраль-
ная плотность будет постоянна, когда корреляционная функция имеет
вид К(т) = G8(r). Здесь <$(т) —функция Дирака (дельта-функция).
Более общее определение белого шума основано на виде кор-
реляционной функции. А именно, случайный процесс X(t) называ-
ется белым шумом, если его корреляционная функция имеет вид
Kx(t,r) = G(t)6(t — т). Белый шум называется стационарным, если
его интенсивность является постоянной.
Процесс V(t) является белым шумом, если процесс X(t), связанный
с V(t) уравнением
X(t) = Q(t)V(t),
где Q(t) — детерминированная функция (матрица), является процессом
с ортогональными приращениями. Если X(t) является винеровским
процессом, то белый шум V(t) называется нормальным (гауссовым)
белым шумом.
Формирующий фильтр. Формирующим фильтром называется
звено, формирующее из белого шума случайный процесс с заданной
спектральной плотностью.
Если на вход устойчивой линейной стационарной системы (филь-
тра) с передаточной функцией 1Уф(з) подается белый шум V(t) с еди-
ничной интенсивностью
К„(т) = 5(т), Sv(w) = l,
то в установившемся режиме выходной сигнал X(t) будет стационар-
ным, и его спектральная плотность связана со спектральной плотно-
стью входного сигнала соотношением
ад = ^ф^ад = |^ф0'ш)|2.
Отсюда следует: чтобы сформировать стационарный случайный про-
цесс с заданной спектральной плотностью Sx(cu), которую можно пред-
ставить в виде
Sx(w) = = |<№^)|2, (10.2)
где все полюса функции ф(в) расположены в левой полуплоскости,
достаточно принять передаточную функцию фильтра РУф(«), равной
'Ф(в): 1Уф(з) = ф(з). Как увидим дальше, важно, чтобы не только
полюса, но и нули функции ф(з) располагались в левой полуплоскости.
Представление функции Sx(a>) в виде (10.2) называется ее фактори-
зацией.
246
Гл. 10. Синтез оптимальных систем управления
Факторизация спектральной функции. Пусть спектральная плот-
ность Sx(a>) представляет дробно-рациональную функцию:
S'x(w) =
Н(ц)
ВД’
где Я (cu), G(w) — полиномы от си, дисперсия конечна:
оо
Dx = - Sx(w)dw < оо.
7Г J
о
Пусть полиномы Я(си) и G(cu) имеют вид
Н(и>) = &ш2т + + - + /Зт,
G(w) — аош2п + aiw2(n-I) Н----F ап.
Разложим их на элементарные множители и представим 5^ (си) в виде
х{ 1 ^G+^G_ (J)VadG+ (-j)^G_ ’
где Н+, G+— произведения элементарных множителей, соответствую-
щих корням уравнений Я(си) -0 и G(cu) = 0, расположенных в верх-
ней полуплоскости; Н_, G_ — произведения элементарных множите-'
лей, соответствующих корням уравнений Я(си) = 0 и G(cu) = 0, распо-
ложенных в нижней полуплоскости.
Если положить
Q(ju) = (»n^G+>
то имеют место следующие равенства:
Поэтому
P(ju)P{-ju) = P(juj) 2
’ Q(jw)Q(-jw) Q(ju>)
Отсюда для передаточной функции формирующего звена получаем
ад-®
Заметим, что корням уравнений Я(си) = 0 и G(cu) = 0, располо-
женным в верхней полуплоскости на плоскости корней си, на плос-
кости s = jui соответствуют левые корни. Поэтому в соответствии
с построением полиномов Р($) и Q(s) все нули и полюса передаточной
функции формирующего фильтра располагаются в левой полуплоско-
сти.
10Задачи
247
Пример 10.1. Определить передаточную функцию формирующе-
го фильтра для стационарного случайного процесса со спектральной
ПЛОТНОСТЬЮ 2 । 1,2
Решение. В данном случае нулями спектральной плотности
являются = jb, о>2 = — jb\ полюсами —cui = j, CU3 = j»
CU4 = — j. Поэтому имеем
#+ = tu - jb, P(ju) = j(w - jb) = jw + b;
G+ = (w - j)2, Q(jw) = j2{u - j)2 = (jw + I)2.
s -р b
Передаточная функция формирующего фильтра 1У($) = у------т^.
Задачи
10.1. Определить передаточную функцию формирователя, предна-
значенного для получения из белого шума с единичной интенсивно-
стью случайного процесса со следующими спектральными плотностя-
ми: а) = (^ + 4,25а;2+ 1) { ' (а;4 + 10а;2 + 9)(а;4 + 25,04о>2 + 1)’
б) UЛ = (а;4 + 10а;2+ 9) k ' (а;4 + 16,25а;2 + 4) (а? + 29а;2+ 100)’
в) а;4 + 16,25а;2+ 4 (а;4 + 5а;2 + 4)(а;4 + 1,36а>2 + 0,36) ’
г) а;4 + 1,36а;2+ 0,36 (а;4 + 4,25а;2 + 1)(а;4 + 13а;2 + 36)’
д) q( а? + 9,25а;2 + 2,25) ~ (а;4 + 5а;2 + 4)(а;4 + 17а;2 + 16) ’
е) , а;4 + 17а;2 + 16 . (а;4 + 13а;2 + 36)(а;4 + 4,25а;2 + 1) ’ а;4 + 4,25а;2 + 1
ж) “ (а;4 + 10а;2 + 9)(а;4 + 26а;2 + 25) ’
з) , а;4 + 26а;2 + 25 . (а;4 + 4,25а;2 + 1)(а;4 + 13а;2 + 36)’
и) а;4 + 13а;2 + 36 ~ (а;4 + 1,25а;2 + 0,25)(а;4 + 16,25а;2 + 4) ’
к) , а;4 + 16,25а;2 + 4 5 (а;4 + 26а;2 + 25) (а;4 + 1 За;2 + 36) ’
248 Гл. 10, Синтез оптимальных систем управления
10.2. На вход линейной системы подается стационарный случай-
ный процесс с корреляционной функцией К(т) = 0е”а1т1. Определить
спектральную плотность и построить формирующий фильтр выходного
сигнала указанной системы в установившемся режиме при следующих
ее передаточных функциях и значениях параметров а и (3:
а) 1^) = ?777г“=0Л<, = 5;
6> = “=<>.5.0 = 4;
в) И'<в> = ?Т^72'“ = 4-'’ = 2;
г> ^•>=;гпгй’“=2’/’=1;
д> и'« = ?ТЗ?+в’“ = ,^=8;
е> ww-?drr5-“-5^=M;
*>w<s> = jdrr3’“=4’',=“'5i
и'«-?Т5ГГ8-“-2-^=,;
10.2. Фильтры Винера и Калмана-Бьюси
Для управления с обратной связью необходимо прежде всего полу-
чить оценку фазовых координат, которые входят в закон управления.
В системах управления, подверженных случайным воздействиям, полу-
чение такой оценки связано с решением задачи фильтрации. Рассмот-
рим сначала ставшую классической теорию оптимальной фильтрации
Н. Винера.
Фильтр Винера. Постановка винеровской задачи оп-
тимальной фильтрации. Винеровская задача оптимальной филь-
трации формулируется следующим образом. Пусть случайный процесс
X(t) — S(t) + N(t) наблюдается на интервале (—oo,i], S(t) и N(t) —
стационарные и стационарно связанные случайные процессы, S(t) —
полезный сигнал, AT(t) — помеха. Известны корреляционная функция
наблюдаемого (входного) сигнала Кх(т) и взаимная корреляционная
функция входного и полезного сигналов Кхз(т). Требуется определить
10,2. Фильтры Винера и Калмана-Бьюси
249
линейную систему, выдающую на выходе оценку S(i), оптимальную
в смысле минимума среднеквадратической ошибки или, что то же,
минимума дисперсии:
J = М[Е2] —> min.
Здесь Е = E(t) — M[JS(i)], E(t) = S(t) — S(t) — ошибка оценки. Ли-
нейная система, которая получается в результате решения этой задачи,
называется фильтром Винера, или оптимальным фильтром Винера.
Передаточная функция оптимального фильтра (фильтра Винера)
имеет вид
W(ju) = тг/- ! « ч / , (10.3)
где 1Уф0’си) — частотная передаточная функция формирующего филь-
тра входного сигнала X(t) = S(t) + N(t), Sxs(си) — взаимная спек-
тральная плотность входного и полезного сигналов, [•••]+ — выра-
жение» которое получается, если в разложении на простые дроби
дробно-рациональной функции, заключенной в квадратных скобках,
исключить те слагаемые, полюса которых расположены в нижней по-
луплоскости на комплексной плоскости си, или в правой полуплоскости
на комплексной плоскости s =
При мер 10.2. Принимаемый сигнал X(t) представляет сумму по-
лезного сигнала S(t) и помехи N(t): X(t) = S(t) + 7V(f). Корреляцион-
ные функции полезного сигнала и помехи имеют вид Кх(т) = а2е~а^т^
и Кп(т) = полезный сигнал и шум не коррелированы. Опреде-
лить передаточную функцию фильтра Винера.
Решение. В соответствии с формулой (10.3) для определения
искомой передаточной функции необходимо знать передаточную функ-
цию формирующего фильтра принимаемого (входного) сигнала W^(s)
и взаимную спектральную плотность входного и полезного сигна-
лов Sxs(cu). Так как полезный сигнал и помеха не коррелированы,
имеем
Кх(т) - К8(т) + Кп(т), Sx(v) = S8(w) + Sn(v).
Спектральные плотности полезного сигнала и помехи имеют вид
Подставив эти выражения в приведенную выше формулу для S^cu),
получим
SxCtu) —
W2 W)
от2 4-си2
или Sx(w) —
yffii (/3 + jw)
а + jcu
2
250
Гл. 10. Синтез оптимальных систем управления
л2 2а2а о т_
где р = —г;---Fa . Из последнего соотношения находим
No
Ot + ju
Найдем взаимную корреляционную функцию входного и полезного
сигналов:
Kxs(r) = M[X(t)S(t + г)] = M[(S(t) + N(t))S(t + т)] = К8(г).
2a
Отсюда следует: Sxs(w) = S4(w) = °2 ш2 + а2‘
Теперь найдем выражение, заключенное в квадратные скобки в фор-
муле для оптимального фильтра (10.3):
5д4(о>)____________2ao-2(a- jcu)_____________2аод______
W^(-jw) (w2 + а2)\/Ж(/3- jw) (jw + a)>/No (/3 - jw) ’
Далее, разложив правую часть методом неопределенных коэффициен-
тов на элементарные дроби, находим
Sxs(u) = 2аа2 ( 1 1 \
v<No(a + /3) \a + ju>
Отбросив вторую элементарную дробь, полюс которой расположен,
в нижней полуплоскости на плоскости ш, получим
Sg4(cu)_______2ag2 1
J + “ (a + /3) a + jw.
Подставив это выражение в выражение для передаточной функции
формирующего фильтра в (10.3), найдем искомую передаточную функ-
цию ,
\ к т 1 . 2ас7
WM = T^-r’xT-0' к = Т^-
Фильтры Калмана-Бьюси. При получении фильтра Винера пред-
полагалось, что оценка получается на основе наблюдения на беско-
нечном отрезке времени, что является ограничительным условием при-
менительно к задачам управления. Фильтр Калмана-Бьюси позволяет
получать оценку фазовых координат на основе наблюдения выхода
системы на конечном интервале времени [<оЗ].
Оптимальная фильтрация при белых шумах. Постановка
задачи. Дана управляемая система
х — Ax + Bu + Vo(i); x(io) = х°; (10.4а)
y = Cx + VH(i), (10.46)
10.2. Фильтры Винера и Калмана-Бьюси 251
где А, В, С в общем случае являются функциями времени, х° —
случайная величина и Vo(t), VH(t) —белые шумы с вероятностными
характеристиками
М[х°] = х°, М[(х° — х°)(х° - х°)г = Pq;
M{V0(t)] = о, M[vo(t)vn*')] = Qo(t)6(t - f);
М{УИЩ] = 0, M[VH(t)(t')] = flo(t)6(t -1');
M[Vo(t)V2’(t')] = So(t)J(t-t');
Qo. Po “ положительно полуопределенные матрицы, Rq — положитель-
но определенная матрица, случайная величина хи не коррелирована
с шумами Vo(t) и VH(t). Требуется на основе наблюдения выхода y(t)
на интервале [to, t)] определить несмещенную линейную оценку x(t)
фазового вектора x(t), обеспечивающую минимум среднего квадрата
ошибки: „
J = M[(x(t) — x(t))T(x(t) — x(t))] —> min. (10.4в)
x(t)
Оценка x(t) называется несмещенной, если M[2(t)] = M[x(t)].
Условие положительной определенности матрицы Rq — матрицы ин-
тенсивности шума наблюдения — означает, что ни одна компонента
выхода y(t) не измеряется точно. И в этом случае задача оценивания
называется несингулярной (невырожденной). Таким образом, зада-
ча (10.4) является несингулярной задачей оптимального оценивания
(фильтрации).
Уравнение (10.4а) называют уравнением объекта, уравнение
(10.46) — уравнением наблюдения. Шум Vo(t) называют шумом
объекта, шум VH(t) — шумом наблюдения.
Теорема 10.1. Если шумы объекта и наблюдения не кор-
релированы (So(t) = 0), то оценка x(t) является несмещенной и
оптимальной, если она находится из уравнения
х = Ах + Ви + KQ(y — Сх), x(t0)=x° (10.5а)
с матрицей коэффициентов усиления
К° = РСТЛ^ , (10.56)
где Р определяется из уравнения
P = AP + PAt-PCtR^1CP + Qq, P(to) = Po- (10.5в)
Матрица Р является дисперсионной матрицей ошибки e(t) = x(t) —
— x(t): Р = M[e(t)eT(t)]; уравнение (10.5в), которому она удовле-
творяет, называется дисперсионным уравнением.
Теорема 10.2. Если шумы объекта и наблюдения коррели-
рованье (So(t) /0), то оценка x(t) является несмещенной и on-
252 Гл. 10. Синтез оптимальных систем управления
тимальной, если она находится из уравнения (10.5а) с матрицей
коэффициентов усиления
К° = (РСТ + Sq)R^1 , (10.6а)
где дисперсионная матрица Р определяется из уравнения
Р = (A- S0R^C)P + Р(А- So^'C'f-
-PCFltfCP + Qo-SoR^sZ, P(to) = Po- (Ю.бб)
Несингулярная задача оптимальной фильтрации (10.4) при некор-
релированных шумах впервые была решена Р. Калманом и Р. Бьюси.
Поэтому фильтры (10.5) и (10.6), а также другие фильтры, которые
будут рассмотрены в этом параграфе, называют фильтрами (наблюда-
телями) Калмана-Бьюси.
Пример 10.3. Определить оптимальную оценку постоянной ве-
личины х по наблюдениям за p = x + VH(t), где VH(0~ белый шум
с интенсивностью го; М[т] == m, М[(х — т)2] = ро-
Решение. В данном случае уравнение объекта имеет вид х = 0
и поэтому
А = 0, В = 0, Qo = 0.
Фильтр Калмана-Бьюси описывается уравнением
х = kQ(y - х), х(*о) = т,
где fc° = p/r& р определяется из уравнения
р = _р2/г> p(tO)=Po-
Последнее уравнение имеет решение р = Рого/(го+ Ро*)- Поэтому для
коэффициента усиления получаем fc° = ро/(го + РоО-
Оптимальная фильтрация при цветном шуме объекта. Рас-
смотрим задачу линейного оптимального оценивания при условии, что
шум объекта не является белым. Небелый шум называют цветным
шумом.
Постановка задачи. Пусть управляемая система описывается
уравнениями
х^ = Aix^ + Biu + х<2\ xW(to) = (10.7а)
х^ = Агх® + Vo; х® (t0) = х£2>; (10.76)
у = Cix<l> + VH. (10.7в)
10.2. Фильтры Винера и Калмана-Бьюси 253
где Xq1) и Xq2^ — случайные величины и Vo(i), VH(t) —белые шумы
с вероятностными характеристиками
Мхо0] = *0 ^[(Хо0 - Хо'^Хо0 - х^1))т] = Poi;
М[х<2)] = М[(х™ - -^)Т =
M[Vo] = О, М (Vo(t)Vo’(t')] = Со(*Ж* -1');
M[VH] = 0, M[vH(t)v^(t')] = Po(t)^(t - *');
W[Vo(t)V^(t')]=O;
Qo. Po — положительно полуопределенные матрицы, Rq — положитель-
но определенная матрица, случайные величины х£*> и х^ не корре-
лированы с шумами Vo(t) и VH(t). Требуется иа основе наблюдения
выхода на интервале £)] определить несмещенную линейную
оценку х 7(t) фазового вектора xW(t), обеспечивающую минимум
среднего квадрата ошибки:
J = M[(x^\t) — x^\t))T(x^^(t) — х(1))] —> min . (10.7г)
x(1)(t)
Здесь (10.7а) является уравнением объекта, в котором х® — цвет-
ной шум объекта; (10.76) — уравнение формирователя, формирующего
из белого шума Vo шум объекта х^2\ (10.7в) — уравнение наблюдения.
Преобразуем данную задачу в рассмотренную выше задачу филь-
трации с белыми шумами. С этой целью введем следующие переменные
и матрицы:
>10
0
А =
C=[Ci 0], G =
А, /1 в=|>1
.° 4г_Г [о
0 '
Рго. ’
Qo = GQGT.
Используя их, сформулированную выше задачу можно переформулиро-
вать следующим образом:
х = Ах + Bu + Vo(t); х(*о) = х°;
у = Сх + VH(t),
J = M[(x(t) — x(t))T(x(t) — x(t))] —> min,
x'x(t)
где Vo(t) = GVo, фазовый вектор в начальный момент и шумы не
коррелированы между собой и имеют следующие вероятностные ха-
254
Гл. 10. Синтез оптимальных систем управления
рактеристики:
М[х°] = х°, М[(х° — х°)(х° — х°)т] = Pq\
M{V0] = О, M[V0(t)V0T(t')] = Qo(t)6(t - ty,
M{VH] = 0, M[VH(t)V^(t')] = Ro(t)5(t -1');
Переформулированная задача является задачей оптимального оцени-
вания с некоррелированными между собой белыми шумами объекта
и наблюдения. Поэтому согласно теореме 10.1 для оптимальной оценки
имеем
х = Ах + Bu + Jf°(y - Сх), x(f0) = х°,
К° =PCTR^[,
P = AP + PAT-PCTR^lCP + Qo, P(M = PQ.
Пример 10.4. Пусть уравнения объекта и наблюдения имеют вид
Х1 = х2, Xi(t0) = х?;
У = zi + Ун.
где х2 — стационарный случайный процесс (шум объекта) с характери-
стиками
М[х2] = 0, КХ2(т) = M[x2(t)x2(t + т)] =
начальное значение х° и шум наблюдения не коррелированы ни между
собой, ни с шумом объекта и имеют следующие характеристики:
М[х?]=0, М[(х?)2]=ро, М[Ун]=0, М[К(ОК(Нт)] = го5(т).
Требуется определить оптимальную оценку.
Решение. Спектральная функция шума объекта может быть вы-
числена путем двухстороннего преобразования Фурье и представлена
в виде
S&) = —L- = —L__
!+w |1 +jw|
Отсюда для передаточной функции формирователя получаем
Уравнение формирователя имеет вид
Х2 = ” Х2 + Vq,
где Vo — белый шум с нулевым средним и единичной интенсивностью:
Qo-1.
10.2. Фильтры Винера и Калмана-Бьюси
255
В данном случае
О
О
Ro = го,
О'
1
О
о]’
Qo = GQoGf1, =
С=[1 О], Р2О = Я12(0) = 1
Ро О
.° 1/2.'
О О'
О 1 ’
Ро =
А =
1
-1 ’
В =
G =
Фильтр Калмана-Бьюси описывается уравнениями
21 = X2 + ki(y-xi), 2i(to)=O;
22 =-22 + fc2(y - 2i), 22(to) = O.
где
= к2 = ^-.
го г0
Дисперсионное уравнение имеет следующий вид:
Р11 Р12 _ О
Р21 Р22. Р “1J [Р21 Р22.
_J_ Р11 Р12 I
г0 [Р21 P22J '
или в скалярной форме
1
1......... Го
Р22 = -Зря -Р22+ 1.
Р11 Р12
Р11
_Р21
Р11 PI2 О О _
Р21 P22J [1 -1.
Р12
Р22.
О О'
О 1 ’
„ 1 2 . 1
Рп = 2рг1 - —Рц, Р21 =Р22 -Р21 - — Р2Ь
Г0 ГО
1
При записи скалярных уравнений учтена симметричность дисперсион-
ной матрицы (pi2 = Р21)- Начальные условия имеют вид
Рн(Й))=РО. Р21(Й))=0, Р22(*о) = 1/2*
Оптимальная фильтрация при цветном шуме наблюдения. Рас-
смотрим задачу линейного оптимального оценивания при условии, что
шум объекта является белым, шум наблюдения цветным.
Постановка задачи. Пусть управляемая система описывается
уравнениями
x = Ax + Bu + V0, x(i0)=x°; (10.8а)
у = (7x + z, (10.86)
z = £>z + VH, (10.8в)
256
Гл, 10. Синтез оптимальных систем управления
где х° — случайная величина и Vo, VH — белые шумы с вероятностны-
ми характеристиками
М[х°] = х°, М[(х° — х°)(х° — х°)г — р0;
M[V0] = 0, MtVoWVj(f')l = Qo(t)<J(i - i');
M[VH] = 0, M[VH(t)V^(£)] - Ro(t)6(t - ty,
M[V0(t)V^ty = S(t)6(t-ty
Qof Д) ~ положительно полуопределенные матрицы, Rq — положитель-
но определенная матрица, случайная величина х° не коррелирована
с шумами Vq(£) и VH(t). Требуется на основе наблюдения выхода y(t)
на интервале [io.^)] определить несмещенную оценку x(i) фазового
вектора x(i), обеспечивающую минимум среднему квадрату ошибки:
J = A/[(x(t) — x(i))T(x(i) — x(i))] —> min. (10.8г)
x(t)
Здесь (10.8a) является уравнением объекта, (10.86)— уравнением на-
блюдения, в котором z — цветной шум наблюдения, ^10.8в)— уравне-
ние формирователя, формирующего из белого шума VH шум наблюде-
ния.
И данная задача преобразуется в задачу фильтрации с белыми
шумами. Из уравнений (10.8а)~(10.8в) находим
у = Сх + Сх + z = (С + СА)х + C73u + Dz + CVq + VH.
Введем новый вектор наблюдения
у = у —CBu —Dy. (10.9а)
После подстановки сюда выражений для у и у, получим
у-Сх + Ун,
где ~
С = С + СА - DC, к = CV0 + ун. (10.96)
В преобразованном уравнении наблюдения шум Ун является белым,
и его интенсивность J?o и интенсивность взаимной корреляционной
функции его и шума объекта Sb определяются следующим образом:
Ro = CQ0CT + SP'C7 + CS + Ro, So = QoCT + S. (10.9b)
Из последнего равенства следует, что шум объекта Vq и шум VH
преобразованного уравнения наблюдения будут коррелированы, хотя
шум объекта Vo и шум VH на входе формирователя не коррелированы
(5 = 0).
10,2. Фильтры Винера и Калмана-Бъюси 257
Итак, если матрица Rq положительно определена, то оптимальный
фильтр согласно теореме 10.2 описывается уравнениями
х = Ах + Bu + tf°(y — (7х); x(io) = х°; (10.10а)
К° = (PCT + S0)R^, (10.106)
Р = (А - + Р(А - SaR^C)T-
-РСТ1%'СР + (Эо-8о1%18£, P(to) = Po- (Ю.Юв)
Новый вектор наблюдения определяется соотношением (10.9а).
В него входит производная у, что делает необходимым дифференциро-
вание наблюдаемой переменной, но что является нежелательным. Воз-
можен другой способ получения оптимальной оценки, исключающий
необходимость дифференцирования.
Введем вектор х, определяемый соотношением
х = х + Я°у. (10.11а)
Продифференцируем это равенство по времени и, подставив в него
выражения для х и у, получим
X = (А- К°С)х + (В - К°СВ)и -(К° + K°D)y,
или, подставив выражение для х,
х = (А - К°С)х + (В — 7f°CB)u+
+ [(А —К°С)К° — К° — K°D]y, х(<о) = х°-^°(«о)у(<о)- (10.116)
В последнее уравнение производная у не входит. Из него определя-
ется х, а затем из (10.11а) находится искомая оценка.
Пример 10.5. Объект и наблюдение описываются уравнениями
£ = 0, = ж + Мх(0) = 0, М[ж2(О)]=ро-
Шум наблюдения z является стационарным случайным процессом с ха-
рактеристиками
М[я] = 0, M[z(t)z(t + т)] =
Решение. Уравнение формирователя имеет вид (см. при-
мер 10.4)
* = -* + K, M[VH] = 0, M[VH(i)VH(r)]-J(^f).
В данном случае
А = 0, В = 0, C=l, Qo-0, Р = -1, Ло = 1, 5 = 0.
258 Гл. 10. Синтез оптимальных систем управления
Поэтому из (10.96) и (10.9в) получаем
<7=1, Яо = 1, S0 = O.
Из (10.11) находим
х = —к°х + (—к& — к° + к°)у-, ж(0) = —к°у(О);
х = х + к°у.
Так как Sb = 0, то к° и р определяются согласно теореме 10.1 по фор-
мулам (10.56) и (10.5в):
к° = Р, Р= -р2, р(0) = ро-
Как легко проверить,
р = -.#> . fco= Ро
1 + й)Р 1 + й)£
Вырожденная задача оптимального оценивания. Задача опти-
мального оценивания называется вырожденной или сингулярной, если
матрица интенсивности шума наблюдения является вырожденной (не
является положительно определенной). Вырожденные задачи возника-
ют, когда часть компонент выходного вектора измеряется точно или
когда шум наблюдения является цветным и матрица интенсивности
преобразованного шума наблюдения является вырожденной. Если за-
дача оценивания является вырожденной, то приведенные выше опти-
мальные фильтры использовать нельзя. Если шумы являются цветны-
ми, то согласно описанным выше процедурам исходная задача может
быть преобразована в задачу с белыми шумами. Поэтому ограничимся
рассмотрением только сингулярной задачи с белыми шумами.
Сингулярную задачу оптимального оценивания мо$кно сформулиро-
вать следующим образом:
х — Ах + Bu + Vo; х(*о) = х°; (10.12а)
yW = C!x + VH, (10.126)
у(2> = С'2х, (10.12в)
J = М[(x(t) — x(t))T(x(t) - x(t))] —» min, (10.12г)
x(t)
где фазовый вектор в начальный момент х° не коррелирован с шумами
объекта Vo и наблюдения VH, и они имеют следующие вероятностные
характеристики:
М[х°] = х°, М[(х° - х°)(х° — х°)т = Ро;
M(V0] = 0, M[V0(t)V0T(f)] = Q0(t)6(t -t');
M{VH] = 0, M[VH(t)V^(t')] = Ro(t)6(t - f);
М[УО(<М(4')] = 5Ь(4Ж«-С.
10.2. Фильтры Винера и Калмана-Бьюси
259
Здесь, как обычно, принимается, что Pq, Qq — положительно полуопре-
деленные матрицы, Rq — положительно определенная матрица. Эта за-
дача отличается от несингулярной задачи оценивания тем, что в ней
уравнение наблюдения представлено двумя уравнениями: (10.126) —
уравнение, определяющие неточно измеряемые выходные перемен-
ные, (10.12в) — уравнение, определяющие точно измеряемые выходные
переменные.
Оптимальная оценка определяется следующим образом::
X = 11У(2) + L2q, (10.13а)
q = Aq + u + №(y — Cq), q(t0) = С2х°, (10.136)
K° = (PCT + S0)R^1, (10.13b)
P = (A - S0R^'C)P + P(A - S^C)T -
- PCTR^CP + Qo - S0R^S%, P(t0) = C'2P0C’2. (10.13r)
Здесь приняты следующие обозначения: Lj и L% определяются из со-
отношения _j
(Li 12) = •
где матрица С2 выбирается так, чтобы (п х п)-матрица справа в по-
следнем соотношении была не вырождена;
A = (C£ + <^A)L2, u = (С2 + C$A)Liy<2> + С2Ви, (10.14а)
(10.146)
\У1 V XyzJ
где
у(‘) = у(1) - С1Ь1У(2), у(2) = у(2) - (С2 + С2А)Ь1у(2) - С2Ви;
(10.15а)
С! = CjL2, C2 = (C2 + C2A)L2; (10.156)
вероятностные характеристики преобразованных шумов:
Q^ = cwt2, -Ro=(c^o ^o = (C'So qQoCf).
2 0 2 2 (10.15в)
Следует иметь в виду, что не всегда рассмотренный подход позволя-
ет решить поставленную задачу. Очевидно, он не позволяет получить
оптимальную оценку, если матрица Rq интенсивности преобразованно-
го шума наблюдения является вырожденной.
Пример 10.6. Объект и наблюдение описываются уравнениями
— rr2, ^2=w4-Vo2»
У\ = £1 4- VH, ?/2 = ж2.
260
Гл. 10. Синтез оптимальных систем управления
Фазовые координаты в начальный момент не коррелированы с шумами
объекта и наблюдения, и они имеют следующие вероятностные харак-
теристики:
М®{(0) = О, М (®?(0)] = р«, * = 1,2; М [®, (0)®2(0)] = 0;
м [Vo2(t)] = о, M[VO2(t)Vo2(i')] = 922<5(t - ty,
M[VH(t)] = 0, = П1<5(* - ty W02WK (*')] = 0.
Требуется определить оптимальную оценку.
Решение. Задача является сингулярной. В данном случае имеем
А=[о о]' В=(1)1 С| = (1 0)’ °2 = (0 1):
Qo=l? °], Яо = пь So = O; г° = 0, Ро = fa1 °)
IP 922] \ О Р02/
Примем С2 = (1 О). Тогда q = С2х — х\. Из равенства
получаем Lt - , L2 = II.
Из формул (10.14) и (10.15) находим
А = 0,
С2 = О,
й = у2, ^=1/1, С\ = 1, у^ = У2~и,
Qo = О,
Яо =
Гц О
. О 922.
So = O.
Из (10.13) имеем
q = J/2 + fc?(|/i - 9) + fc°(y2-«), 9(0) = О,
fc? = -7-, $ = 0, ^=^~, р(0)=Рю-
Гц Гц
Для искомой оценки из (10.13а) получаем — q, £2 = 2/2-
10.2. Задачи
261
Задачи
10.3. Принимаемый сигнал X(t)представляет сумму полезного сиг-
нала S(t) и помехи N(t):
X(t) = S(t) + N(t).
Их корреляционные функции соответственно имеют вид
К3(т) = /Зе-а^, Кп(т) = Ье~а^.
Полезный сигнал и шум не коррелированы. Определить передаточную
функцию фильтра Винера при следующих значениях параметров а, (3,
а нЬ:
а) а = 2, /3 = 1, а = 1, b = 1; б) а = 4, /3 = 2, а = 2, b = 1;
в) а — 4, /3 = 4, а = 1, 6=1; г) а = 6, /3 = 4, а = 1, 6=1;
д) а = 4, /3=1, а = 1, b = 1; е) а = 1, /3 = 1, а = 2, 6=1;
ж) а = 1, /? = 1, а = 6, Ь — 2; з) а = 1, /3=1, а = 4, Ь = 4;
и) а = 6, /3 = 1, а = 2, Ь = 4; к) а = 1, /3 = 1, а = 4, b = 1.
10.4. Дана управляемая система
±1 = 372, ±2 = +32^2+ ^ +V&), 371(0)= 0, 372(0) = О,
У = + Ун-
Шумы объекта Уго и наблюдения Ун являются белыми с интенсивно-
стями q и г соответственно, и они не коррелированы.
Определить на основе наблюдения выхода у на интервале [0, t]
несмещенную оптимальную оценку при следующих значениях парамет-
ров аь аг» Ь, q и г:
а) а\ = 0, аг = 2, b = 2, q = 1, г = 1;
б) ai = —4, аг = 2, b = 1, q = 2, г = 1;
в) ai =0, аг = —4, b = 4, q = 2, г = 2;
г) ai = —1, аг = —4, Ь = 2, q = 4, г = 2;
д) а\ = -2, аг = —1, 6 = 2, q = 4, г = 1;
е) ai = —2, аг = 2, 6 = 8, q = 2, г = 4;
ж) ai = —2, аг = —4, Ь = 8, q = 2, г ~ 4;
з) ai = —4, аг = 4, 6 = 4, q = 1, г = 2;
и) ai = —5, аг = —4, b = 4, q = 1, г = 2;
к) ai = —5, аг = 2, 6=1, q = 1, г = 1.
10.5. Дана управляемая система
±1 = 01372 + Ъи, 371(0) = 0, 37г(0) = О,
У = 371 +VH,
262
Гл. 10. Синтез оптимальных систем управления
где хг, К — шумы объекта и наблюдения. Шум объекта х% подчиняется
уравнению _
±2 = 02^2 +с^20.
Здесь 14 и V20 являются белыми шумами с интенсивностями г и q = 1
соответственно, и они не коррелированы.
Определить на основе наблюдения выхода у на интервале [0, t]
несмещенную оптимальную оценку при следующих значениях парамет-
ров oj, аг, Ь, г и с:
a) ai = l, аг = — 1, 6=1, г = 1, с = 2;
б) ai = 2, аг = — 1, Ь = 2, г = 1, с = 2;
в) ai = 2, аг = —2, b = 2, г = 2, с = 1;
г) ai =4, 02 — —2, 6=1, г = 2, с = 1;
д) ai =4, аг = —4, b = 1, г = 4, с = 2;
е) ai = 2, аг — —4, 6 = 4, г = 4, с = 2;
ж) ai = 2, аг = —3, 6 = 4, г = 4, с = 3;
з) ai =5, аг = —3, 6 = 3, г = 2, с = 3;
и) ai =5, аг = —4, 6 = 3, г = 2, с = 5;
к) ai =3, аг — —4, 6 = 4, г = 2, с = 5.
10.6. Дана управляемая система
±1 = ах2 4- би, х\(0) = О,
У = *1 + К,
где Х2 и Ун — шумы объекта и наблюдения соответственно, и они не
коррелированы. Шум объекта х% является стационарным случайным
процессом с корреляционной функцией К(г) = /Зе~а^ и математиче-
ским ожиданием в начальный момент М{х2(0)} = 0, а шум наблюде-
ния Ун — белым с интенсивностью г.
Определить на основе наблюдения выхода у на интервале [0, t]
несмещенную оптимальную оценку при следующих значениях парамет-
ров:
а) а = 1, 6 = 2,
б) а = 2, 6= 1,
в) а = 2, 6 = 1,
г) а = 4, 6 = 2,
д) а ~ 4, 6 = 2,
е) а = 2, 6 = 3,
ж) а = 2, 6 = 3,
з) а = 5, 6 = 4,
/3 = 4, а = 1, г = 1;
/3 = 4, а = 1, г = 1;
/3= 1, а = 2, г = 2;
/3=1, а = 2, г = 2:
/3 = 2, а = 4, г = 4;
/3 = 2, а = 4, г = 4
/3 = 1, а = 3, г = 4
/3 = 1, а = 3, г = 2
10.2. Задачи
263
и) а = 5, b = 4, /3 = 3, а = 4, г = 2;
к) а = 3, b — 5, /3 = 3, а = 4, г = 2.
10.7. Дана управляемая система
±1 = Х2, Х2 = U\X\ + 02^2 + и + ^20»
Х1(0)=0, 272(0) = О, у = 271 + 2,
где V20 и z — шумы объекта и наблюдения соответственно. Шум объ-
екта V20 является белым с интенсивностью q, шум наблюдения z —
цветным и подчиняется уравнению
z = dz + 2УН.
Здесь Ун — белый шум с единичной интенсивностью, шумы V20 и Ун
не коррелированы.
Определить несмещенную оптимальную оценку фазового вектора,
принимая за наблюдаемый выход
y = y — CBu — dy (С= [1 0], В = [О 1]т)
при следующих значениях параметров ai, a^d и q\
а) ai = -1, O>2 = -l, d = -l, 9 = 1;
б) ai =-2, «2 = -l, d = -1, Я == 1;
в) ai = —2, «2 = -l, d = -2, Я 2;
г) aj = -1, 02 = -2, d = -2, Я = 2;
д) ai = —2, Q2 = -2, d = -4, Я = 2;
е) ai = -2, O>2 = -4, d = -2, Я = 2;
ж) ai = —2, O>2 = -3, d = -2, Я = 1;
з) ai = —5, «2 = -3, d=-l, Я — 1;
и) ai = -3, Q2 = —4, d = -4, Я = 3;
к) ai = -5, O>2 = -4, d = -1, Я = 3.
10.8. Дана управляемая система
±1 = 272, ^2 = а1х1 + 02^2 + + V20,
271 (0) = 0, 272 (0) =0, у = 271 +
где V20 и z- шумы объекта и наблюдения соответственно, и они
не коррелированы. Шум объекта V20 является белым с интенсивно-
стью д, шум наблюдения z —цветным с корреляционной функцией
Кг(т) = 2е~°М /а.
Определить несмещенную оптимальную оценку фазового вектора,
принимая за наблюдаемый выход
y = y — CBu — dy (С =[10], В=[0Ь]Т)
264 Гл. 10. Синтез оптимальных систем управления
при следующих значениях параметров аь а2, а, 6 и д:
a) ai = -1, а* = -1, а = -1, Ь = 2, q = 2;
б) at — -2, 02 = -1, b — 2, а = —1, q — 2;
в) ai = -2, а2 = —1, а — -2, b = 4, q = 1;
г) «1 = — 1, 02 = -2, а = -2, b = 4, q = Г,
д) «И — -2, Q2 = —2, а — —4, b = 3, q = 1;
е) ai = -2, 02 = —4, а = —2, 6 = 3, q = 1;
ж) ai = -2, 02 = ~3, а = -2, 6 = 5, q — 3;
з) о\ = -5, 02 = -3, а = -1, 6 = 5, q = 3;
и) а] — —3, 02 = -4, а = 4, 6 = 2, q = 4;
к) о\ = —5, 02 = —4, а = —1, 6 = 2, q = 4.
10.9. Дана управляемая система
£1 = %2 + Vio, Х2 = О\Х\ + 0.2X2 + би,
xi(0) = 0, х2(0) = О,
У1=Х2 + УК, У2=Х{,
где Ую и К — белые шумы объекта и наблюдения с интенсивностью q\
и соответственно, и они не коррелированы; yi, у2 — выходные (наблю-
даемые) переменные. Определить несмещенную оптимальную оценку
фазового вектора при следующих значениях параметров ai, a2, 6, q\
и г:
a) ai = 1, а2 = 2, 6 = 1, gi = 1, г = 2;
б) ai = 2, аг = 2, 6 = 1, gi = 2, г = 2;
в) а\ = 2, аг = 4, 6 = 2, q\ = 2, г = 4;
г) ai = 3, аг = 4, 6 = 2, gi = 4, г = 4;
д) ai = 3, а2 = 5, 6 = 3, q\ = 4, г = 2;
е) а\ = 4, а2 — 5, 6 = 3, q\ = 2, г = 2;
ж) ai = 4, а2 = 3, 6 = 5, q\ = 2, г = 1;
з) aj = 5, а2 = 3, 6 = 5, q\ = I, г = 4;
и) ai = 5, а2 = 4, 6 = 4, gi = 4, г = 1;
к) а\ = 6, а2 = 4, 6 = 4, q\ = 2, г = 2.
10.3. Стохастические оптимальные системы
Для строго детерминированных систем управления не имеет зна-
чения, какое управление — программное или с обратной связью — ис-
пользуется, так как знание управления и начального состояния поз-
воляет однозначно определять состояние системы в любой момент
времени. Наблюдение за текущим состоянием системы не дает новой
10.3, Стохастические оптимальные системы
265
информации. В стохастических системах управления, т.е. в системах,
подверженных случайным воздействиям, по известным управлению
и начальному состоянию предсказать ход протекания процесса невоз-
можно. И возможности качественного управления такими системами
существенно зависят от той информации, которая может быть полу-
чена путем измерения (наблюдения) и обработки выходными (наблю-
даемыми) переменными. Поэтому стохастические системы управления
должны быть замкнутыми.
При рассмотрении детерминированных систем управления также
основное внимание уделяется замкнутым системам, так как практиче-
ски все системы управления подвержены случайным или неслучайным,
но заранее не прогнозируемым, воздействиям. Т. е. строго детермини-
рованных систем управления не бывает. Однако при анализе и синтезе
рассматриваются детерминированные модели в виду их простоты по
сравнению со стохастическими моделями, когда случайные воздей-
ствия не оказывают существенных влияний.
Стохастическое оптимальное управление при полной информа-
ции. Уравнение объекта имеет вид
X = f (х, u, t) + V0(t), x(t0) = Х°,
где х° — гауссова случайная величина, Vo(f) — гауссов белый шум, х°
и Vo(t) не коррелированы; белый шум имеет следующие характеристи-
ки:
M[V0(t)] = О, M[Vo(t)V^(t')l = Qo(t)S(t -t').
Пусть требуется определить управление с обратной связью, доставля-
ющее минимум критерию оптимальности.
J~M +
fo(x, u, t)dt
to
Такое управление называется стохастическим оптимальным управ-
лением.
Итак, рассматривается задача стохастического оптимального управ-
ления, в которой шум объекта является гауссовым белым шумом и вхо-
дит в уравнение аддитивно; ограничение на правый конец траектории
отсутствует, фазовый вектор наблюдается полностью и без помех.
В этой задаче x(t) является марковским процессом (так как случайное
воздействие является белым шумом), и вся информация, которая может
быть использована при определении характеристики будущего состо-
яния, содержится в x(t). Поэтому оптимальное управление должно
быть функцией только от текущего состояния и, быть может, текущего
времени.
266
Гл. 10. Синтез оптимальных систем управления
Управление u = (x(t),t) считается допустимым, если функция
u(t) = (x(t),t) кусочно-непрерывна. Кроме того, предполагается, что
при допустимом управлении уравнение
х = f(x, u(x, t),t)
при каждом фиксированном x(to) = х° имеет единственное решение на
интервале [to,t/]. Функции fo(x,u,t), f(x, u,t) и Qo(t) предполагаются
непрерывными.
Стохастическая оптимальная линейная система при полной
информации о состоянии. Пусть уравнение объекта и критерий
оптимальности имеют вид
х = Ах + Ви + Vo, x(t0) = х°;
(10.16а)
J — M xT(t/)Fx(t/) + j [xT(t)Qx(t) + uT(t)/?u(t)]dt . (10.166)
4
Здесь Vo — гауссов белый шум, х° — гауссова случайная величина; Vo
и х° не коррелированы и имеют следующие характеристики:
Мх° = х°, М[(х° — х°)(х° - 3^)т] = Ро;
м[V0(i)] = 0, M[Vo(t)V^(tz)] = Q0(t)6(t - ty,
матрицы А, В, Q и R, вообще говоря, являются функциями времени,
R — положительно определенная матрица, Q, Ро, Qq — положительно
полуопределенные матрицы, объект стабилизируем. Требуется найти
оптимальное управление объекта с обратной связью, обеспечивающее
минимум заданному критерию оптимальности, при условии, что фазо-
вый вектор доступен точному измерению.
Теорема 10.3. Стохастическое оптимальное управление с об-
ратной связью для объекта (10.16а) при критерии оптимально-
сти (10.166) имеет вид
и = -1ГхВТКх,
(10.17а)
где К — симметрическая матрица, которая определяется из мат-
ричного уравнения Риккати
К = -КА-АТК + КВ1Г'ВТК (10.176)
при граничном условии
K(tf) = F. (10.17в)
Оптимальный закон управления (10.17) совпадает с оптимальным
законом управления в детерминированном случае. Таким образом,
случайное воздействие на объект и случайное начальное условие не
10.3. Стохастические оптимальные системы
267
влияют на оптимальный закон управления, если имеется полная ин-
формация о фазовом векторе.
Стохастическое оптимальное управление при неполной инфор-
мации о состоянии. Принцип разделения. Постановка задачи.
Пусть уравнения объекта и наблюдения и критерий оптимальности
имеют вид
х = Ах + Ви + Vo, x(to) = х°;
y = Cx + VH;
tf
xT(tf)Fx(tf) + | [xT(t)Qx(t) + uT(t)Pu(t)]dt
to
(10.18a)
(10.186)
(10.18b)
Здесь Vo, VH —гауссовы белые шумы, x0 —гауссова случайная
величина; Vo, VH и х° не коррелированы и имеют следующие харак-
теристики:
Мх° — х°, М [(х° — х°)(х° — х°)т = Ро;
M[V0(t)J = 0. M[V0(t)Vj(t')] = Q0(t)6(t - f');
M[VH(t)] = 0, M[VH(£)Vjf(f)] = Ro(t)6(t - t');
матрицы A, B, Q и R, вообще говоря, являются функциями времени, R,
Rq — положительно определенные матрицы, Q, Ро» Qo ~ положительно
полуопределенные матрицы. Требуется найти управление
u = и {у(т), to < г < t} , t0 < t < tf,
при котором критерий оптимальности (10.18а) принимает минимальное
значение.
Эта задача отличается от задачи стохастического оптимального
управления с полной информацией тем, что в данном случае управле-
ние формируется на основе информации, получаемой путем обработки
измеряемой с помехой выходной переменной.
Теорема 10.4. Стохастическое оптимальное управление с об-
ратной связью для объекта (10.18а), (10.186) при критерии опти-
мальности (10.18в) имеет вид
и = —R~lBTKx, (10.19а)
где К — симметрическая матрица, которая определяется из мат-
ричного уравнения Риккати
K = -KA-ATK + KBR~1BTK-Q (10.196)
при граничном условии
K(tf) = F,
(10.19в)
268 Гл. 10. Синтез оптимальных систем управления
х — оптимальная оценка, получаемая фильтром Калмана-Бьюси
х = Ax + Bu + K°(y-Cx), x(to)=x°; (10.20а)
K° = PCTR^', (10.206)
P = AP + PAT-PCTR^CP + Q0, P(fo) = Po- (10.20в)
Оптимальный закон управления (10.19) совпадает с оптимальным
законом управления в детерминированном случае и стохастическим оп-
тимальным управлением при полной информации лишь с тем отличием,
что в законе управления (10.19а) используется не сам фазовый вектор,
а его оценка, которая определяется фильтром Калмана-Бьюси. Таким
образом, при неполной информации стохастически оптимальный регу-
лятор состоит из оптимального фильтра (фильтра Калмана-Бьюси) и
детерминированного оптимального регулятора. Этот результат известен
как принцип разделения, или принцип стохастической эквивалент-
ности. В соответствии с этим принципом задача синтеза стохастиче-
ской оптимальной системы управления при неполной информации сво-
дится к двум задачам: задаче синтеза фильтра Калмана-Бьюси и зада-
че синтеза детерминированной оптимальной системы. Если шумы и на-
чальное состояние подчиняются нормальному закону распределения, то
в результате такого синтеза получим стохастическую оптимальную си-
стему, в противном случае (шумы и начальное состояние подчиняются
другим законам) можем только гарантировать, что полученная таким
путем система будет оптимальной в классе линейных систем.
Задачи
10.10. Определить стохастическое оптимальное управление при
полной информации в следующих задачах управления:
а) х = (2е~* — 1 )х + 2и + Vb, х(0) = х°,
г10 <]
J = M j
-о
б) х = (1 4- sin2 t)x 4- и 4- Vo, х(0) = х°,
гЮ
J = M (2x2+2u2
-о
в) = Х2, Х2 = 2и 4" V20, х(0) = х°,
Г10
)dt) —> min;
)dt) —> min;
—> min;
Lo
10.3. Задачи
269
д)
и)
Xl = x2, x2 = 4u + У20» x(0) = x°,
rlO -1
J = M (x2 + x| + 2xiX2 + 4u2)dt) —> min;
0
Xl = X2, X2 = -X2 + 2u + V2Of x(0) = X°,
rlO -1
J — M J (x2 + 4u2)dt) —> min;
-0
Xl - X2, x2 = -2x2 + « + V20, x(0) = x°,
г10 П
J = M j (2x2 + x| + u2)dt) —> min;
-o
Xl = X2, X2 = -Xl - X2 + 2u + Vzch x(0) = x°,
|-10
J — M j (x2 + x| + u2)dt)
“0
Xl = X2, X2 = “2X| - X2 + 2u + V20. x(0) = x°,
rlO
J = M I (x2 + x| + 4u2)dt)
—> min;
—> min;
L0 J
Xl = x2, x2 = -Xl - 2x2 + и + V20, x(0) = x°,
г10 -1
J = M J (x2 + 2x| + 2u2)dt) —> min;
-o
xi = хг, ±2 = -2xi - 2x2 + 2u + V20, x(0) — x°,
rlO -I
!х2 + 4х| + u2)d£)
—> min.
10.11. Определить стохастическое оптимальное управление и* —
= и(у, у) при условии, что на объект воздействует помеха — гауссов
белый шум V20, выходная переменная у и ее производная могут быть
измерены без ошибок, в следующих задачах оптимального управления:
о
а) У = Z2T7;(u + v2°)’ у(°) = У0’ у(°) = У0’
г + р
J = M
(у2 + 2у2 + 2u2)dt)
-о
—> min;
U
270 Гл. 10. Синтез оптимальных систем управления
б)
9
У = г2±<)Ли + У2о), = y°’ = y°’
p i лр
ГОО
J-M]
Lo
У = p? + 4p(U + V2o>h = y°’ y(0^ = y°’
min;
1-00
д)
(2y2 + 2y2 + 2yy + u2)dt)
Lo
2
У = 71%Ji 1 (ц + y2o), y(°) = У0’ *(°) = У0’
p । лр “Г 1
-оо
J = м j (2y2 + 2y2 + 2yy + 4u2)dt)
-o
4
У " р2+4р + 3(ц + y2o), y(0) = y°, y(0) = y°,
J = м
min;
—» min;
ГОО
(4y2 + 2y2 + 2u2)dt)
y = ^'+lp + ^u + V2°)’ y№ = y0' y^ = y0’
J = M | (2y2 + 2y2 + 2yy + u2)dt)
-0
J = м
min;
rOO
min;
2
ж) У = P2 +4р + 5(ц + у2о), у(0) = у°, у(0) = у°,
J-OO
—> min;
Lo J
У = + У2°)’ У^ = У°’ У^ = У°’
Р “г Лр □
rOO
’2 + У2 + 2уу + u2)dt)
—> min;
и)
L0 J
У = Р +6р+10(ц + V2o)1 у(0) = у°’ ^(0) = у°’
гОО
J = M
min;
10.3. Ответы
271
о
к) У = р2+бр+ 13(ц + V2o). 2/(0) = у°, у(0) = у°,
М
j (г/2 + У2 + %УУ + 2u2)dt)
-о
—> min.
U
10.12. Дана управляемая система
Xj = Х2, Х2 = Х\ + 0>2Х2 + Ьи + V20»
Х1 (0) = О, х2(0) = 0, у = XI + Ун-
Шумы объекта V20 и наблюдения К являются белыми с интенсивно-
стями q и г соответственно, и они не коррелированы.
Определить на основе наблюдения выхода у на интервале [0, t]
стохастическое оптимальное управление, минимизирующее критерий
оптимальности
J =
М
-оо
j («'ll®2 + 922®2 + 912®1®2 + ru2)dt)
-0
при следующих значениях параметров а\, 02, b, q, г, qi\, qa, qn и г:
a) ai=0, 02=2, Ь=2, <7=1, г = 1, 9п = 1, 922 = 1, 912 = 1. г=1;
б) 0] = —4, 02=2, Ь=1, 9=2, г=1; 911=2, 922 = 1, 912 = 1. г = 1;
в) ai=0, 02 = -4, Ь=4, 9=2, г=2, 9п=2, 922=2, 912=0, г=2;
г) oi = -l, 02 = -4, Ь=2, 9=4, г=2, 911 =4, 922=2, 912=0, г=2;
д) oi = -2, 02 = -1, Ь=2, 9=4, г = 1, 9п=4, 922=4, 912=2, г=4;
е) oi = -2, 02=2, Ь=8, 9=2, г=4, 911 = 1. 922=2, 912=0, г=4;
ж) oi = -2, 02 = -4, Ь=8, 9=2, г=4, 911 =4, 922 = 1, 912 = 1, г=2;
з) oi =-4, 02=4, Ь=4, 9=1, г = 2, 9п = 1, 922=4, 912=0, г=2;
н) ai = — 5, 02 = —4, Ь=4, 9=1, г=2, 911 =3, 922=4, 912 = 3, г=4;
к) ai = -5, 02=2, Ь=1, 9=1, г=1, 9п=5, 922=3, 912=5, г=4.
Ответы
10.1. а) ТГф(а) =
б) ад =
в) ад =
Г) 1Уф(з) =
s2 + 2,5s + 1
s4 + 9,2s3 + 24,8s2 + 19,6s + 3’
s2 + 4s + 3
s4 + 11,5s3 + 43,5s2 + 59s + 20’
s2 + 4,5s + 2
s4 + 4,6s3 + 7,4s2 + 5s +1,2’
s2 +1,6s+ 0,6
s4 + 7,5s3 + 19,5s2 + 20s+ 6:
272
Гл. 10. Синтез оптимальных систем управления
д)
е)
^ф(в) =
1Уф(з) =
s2 +3,5s+1,5
s4 + 8s3+ 21s2 + 22s + 8’
s2 + 5s + 4
s4 + 7,5s3 + 19,5s2 + 20s+ 6’
Ж) W^(s) =
s2 + 2,5s + 1
s4 + 10s3 + 32s2+ 38s +15’
з)
и)
к)
w ( Vs s2 + 2,5s + l
s4 + 10s3 + 32s2 + 38s + 15’
s2 + 5s + 6
= s4 + 6s3 + 9,25s2 + 5,25s + 1 ’
52 + 4,55 + 2
s4 + Ils3 + 41s2 + 61s+ 30’ '
4
10.2. a) S(w) = w6 _ 0 84u)4 + 0 84w2 + o, 16 ’
2
= s3 + 1,452 + 1,48 + 0,4’
4
® = w6 +'2,25w4 + l,5w2 +0,25’
2
= s3 + 2,5s2 + 2s+ 0,5’
16
B + 21w4 + 84w2 + 64 ’
4
. = s3 + 7s2 + 14s+ 8’
r). 5(w) = 6\.,
= s3 + 6s2 + 12s + 8:
16
Д) + i4w4 + 49й,2 + 36’
4
= s3 + 6s2 + 1 Is + 6 ’
4
e) шб + 43w4 + 531 w2 + 2025’
= s3+ lls2 + 39s + 45;
4
Ж) = ^ + 260?+ 169^2 +144’
IV*(S)= s3 + 8s2 + 19s + 12’
10.3. Ответы
273
3) о;6+22о>4 + 153w2 + 324’
= s3 + 8s2 + 21s + 18’
4
И) = w6 + 24w4 + 144а)2 + 256’
= s3 + 8s2 + 20s + 16’
4
К) = о;6 + 27о>4 + 51о>2 + 25’
W*(s) = s3 + 7s2 + Ils + 5‘
ч I 1 О 5ч |— 1
10.3. а) 1У(з) =0,414^7^; 6) И'(а) = 0.581™^;
С -I- 1 о_|_1
•> w(” - О,Ю9О7257ТТ г> и',4> = °'575<мй5ГП;
с I- 1 Л _|_ 1
A) W(s) = 0,333^; е) IF(s) - 0.586^^--;
\ uzr х п +1 х и// \ п 0,25s + 1
ж) W(,) - O,576 W—; з) 1V(.) = 0,362Q + ,;
и) >V(») = 0.136 °’|*+1Г = О'667оТ+Г
10.4. a) xi=X2+pu(y-xi), X2=2x2+2u+pi2(y-xi),
Pll =2pi2-Pn, Pl2 = 2pi2+P22~PllP12, P22 = 4p22~P12 + l;
6) Xi=X2+Pll(y-Xi), X2 = -4xi+2X2+u+pi2(y~Xi),
Pll =2pi2~Pu, Pl2 = -ipil+2p\2+P22~PuP12,
P22 = -8pi2+4?22 -Pi2+2;
в) xi =X2+0,5pii(y-Ji), X2 = -4x2+4u+0,5pi2(y-£i),
Pll =2pi2 -0,5pi!, P12 = -4p,2 +P22 -0,5pi 1P12,
P22 = -8p22 -0,5pf2 + 2;
r) xi =£2+0,5pn(y-£|), x2=xi +x2+u+pi2(y-xi),
Pll=2pi2-0,5p^t, P12 = -P11 -4pi2+P22-0,5pnP12.
P22 = ~2pi2 — 8p22 — 0,5pi2 +4;
д) Xi=X2+Pll(y—Xl), X2 = -2xi-X2+2u+pi2(y-Xi),
Pu^ip^-Pit’ P12 = -2P11-P12+P22-P11P12.
P22 — -4pi2 — 2p22 “P12 +4;
274 Гл. 10. Синтез оптимальных, систем, управления
е) £i=X2+0,25pii(y-xi), £2 = -2£i+2£2+8u+0,25p12(y-£i).
Pi i = 2pi2 -0,25pi ।, pi2 = —2pi i +2pi2 +P22 -0,25pi i pi2.
P22 = -4pi2 +4p22—0,25pi2+2;
ж) £i=£2+0,25pii (y-xi), x2 = -2xi-4x2 +8u+0,25pi2(y—xi),
Pi i = 2p12 -0,25p?|, pi2 = -2pi i — 4pi2 +P22 -0,25pi i pi 2.
P22 = ~4pi2—8p22—0,25pf2+2;
з) xi=x2+0,5pn(y-^i). x2 — -4xi+4x2+4u+0,5pi2(y-xi),
Pii = 2pi2-0,5pi!, pi2 = -4pii +4pi2+p22-0,5pnpi2,
P22 = -8pi2 +8p22 —0,5pi2 +1;
и) xi=x2+O,5pn(y-xi), x2 = -5xi-4x2+4u+Q,5pi2(y-xi),
Pn=2pi2-0,5pi1, pi2 = -5pii-4pi2+p22-0,5pnpi2,
P22 = -10pi2-8p22-0,5p|2+l;
к) xi=x2+pu(y-xi), x2 = -5xi+2x2+u+pl2(y-xi),
P11=2P12-P11. P12 = -5pil+2pi2+P22-!-P11P12.
P22 = - 10pi2 +4p22 -p?2 +1.
10.5 a) xi=x2+u+pu(y-xi), x2 = -x2+pi2(y-xi), xi(0)=0,
£2(0)=0, Pll=2pi2-ph, P12 = -P12+P22-P11P12.
P22 = -2p22-Pi2+4, p(0)=0;
6) xi=2x2+2u+pn(y-xi), x2 = -x2+pi2(y-xi), £i(0)=0,
X2(0)=0, Pll =4pi2-p?i, P12 = -P12+2p22-PllP12,
P22 = -2p22-Pi2+4, p(0) =0;
в) xi—2x2+2u+0,5pu(y-xi), x2 = -2x2+0,5pl2(y-xi),
Si(0)=0, £2(0)=0, pn=4p12-0,5pi1,
Pi2 = -2pi2+2p22 -0,5piipi2, P22 = -4p22 -0,5p?2+1, p(0)=0;
r) xi =4x2+u+0,5pii(y-xi), f2 = -2£2+0,5pi2(y-zi),
£1(0) =0, £2(0)=0, pi^Spm-O.Spi!,
Pi2 = -2p12+4p22-0,5pnpi2, P22 = -4P22-O,5pi2+1, p(0)=0;
д) £i=4£2+u+0,25pn(y-£i), £2 = -422+0,25pi2(p-xi),
£i(0) =0, £2(0)=0, pn=8pi2-0,25pii, pn = -4pl2+
+ 4p22—0,25pnpi2, p22 = —8p22—0,25pi2+4, p(0) —0;
10.3. Ответы
275
е) £i-2£2+4u+0,25pn(y-£i), x2 = -4x2+0,25pi2(y-xi),
a?i(O)=O, £2(0)=0, pu =4pi2-0,25pii, pi2 = -4pi?j-
+ 2p22-0,25pnpi2, P22 = -8p22-0,25pi2+4, p(0)=0;
ж) £i=2£24-4u+0,25pn(y-£i), £2 = -3£2+0,25pi2(y-£i),
£i(0)=0, £2(0)=0, pn=4pi2-0,25pi1, pi2 = -3pirl-
+ 2p22-0,25pnpi2, p22 = -6p22-0,25pf2+9, p(0)=0;
3) xi = 5£2+3u+0,5pn(y-£i), £2 = -3£2+0,5pi2(y-£i),
£i(0)=0, £2(0)=0, pii = 10pi2—0,5рц, pi2 = -3pi2l-
+ 5p22-0,5pnPi2. P22 = -6p22-0,5pf2+9, p(0)=0;
и) xi = 5x2+3u+0,5pn(y-£|), £2 = -4£2+0,5pi2(j/-£i),
£i(0)=0, £2(0)=0, pn = 10pi2-0,5p|1> pi2--4pi2+-
+ 5p22-0,5pnPi2, p22 = -8p22-0,5pf2+25, p(0)=0;
к) xi =3£2+4u+0,5pn(y-£i), £2 = -4£2+0,5pi2(y-£i),
£i(0)=0, £2(0)=0, pn=6pi2-0,5pii, pi2 = -4pi^
+ 3p22-0,5pnpi2, p22 = -8p22-0,5pf2+25, p(0)=0.
10.6. a) £i=£2+2u+pii(y-£1), x2 = -x2+pi2(y-xi), £i(0)=0,
£2(0)=0, P11=2P12-P11. P12 = -P12+P22-P11P12.
P22 = -2p22-P12 + 8. Pll(0)=P12(0)=0, P22(0)=4;
6) Xl =2x2+u+pu(y-xi), x2 = -x2+pi2(y-xi), £1(0) =0,
f2(0)=0, pn=4pi2-p|1, P12 = -P12+2P22-P11P12,
P22 = -2p22-P12+8. Pll(0)=P12(0)=0, P22(0)=4;
b) xi =2x2+u+0,5pii(y-xi), x2 = -2x2+0,5pi2(y-xi),
xi(0)=0, £2(0)=0, pn=4pi2-0,5pi1>
P12 = -2pi2+2p22 -0,5pnp12, p22 = —4p22—0,5pi2+4,
Pn(0)=pi2(0)=0, ргг(0) = 1;
r) £i=4£2+2u+0,5pn(y-xi), £2 = -2£2+0,5pi2(y-£i),
£i(0) =0, £2(0)=0, pu =8pi2-0,5p]1,
P12 = -2pi2 +4p22-0,5pnpi2, P22 = -4p22 -0,5pf2+4,
P11 (0) =Р1г(0) — 0, Ргг(0) = 1;
д) £i=4£2+2u+0,25pn(y-£i), £2 = -4£2+0,25pi2(y-£i),
£i(0)=0, £2(0)=0, pu =8pi2-0,25pii, .
P12 = —4pi2+4p22—0,25pi ipt2, p22 = -8p22 -0,25pf2 +16,
P11 (0) =Р1г(0)—0, P22(0) = 2;
276
Гл. 10. Синтез оптимальных систем управления
е) Ji =2J2+3u+0,25pn(j/-^i), z2 = -4z2+0,25pi2(y-£i),
£i(0)=0, £2(0)=0, pn=4pi2-0,25pf1>
Р12 = -4pi2 +2p22—O,25pi 1P12, P22 = -8ргг -0,25p?2+16,
Pn(0)=Pi2(0)=0, Р2г(0)=2;
ж) xi=2£2+3u+0,25pn(y—£i), £2 = —3x2+0,25pi2(y—£i),
£i(0)=0, £г(0)=0, pii=4pi2-0,25pi1>
P12 = -3p)2 +2p22 -0,25piipi2, P22 = -6P22—0,25pj2 +6,
Pll(0)=P12(0)=0, P22(0) = l;
3) £1 =5£2+4u+0,5pu(y-£i), £2 = -3£г+0,5pi2(y-£i),
£i(0)=0, £г(0)=0, pn = 10pi2-0,5pn,
P12 = —3pi2+5p22—0,5pnPi2, P22 = — 6p22 -0,5p]2 +6,
Pn(0)=pi2(0)=0, P22(0) = l;
и) £i=5£2+4u+0,5pn(p-£i), £2 = -4£2+0,5pi2(y-xi),
xi(0)=0, x2(0)=0, pn^lOp^-O.Sp?!,
P12 = ~4pi2+5p22—0,5pi 1P12, P22 = -8p22—0,5p|2+24,
Pn(0)=Pi2(0)=0, Р2г(0)=3;
к) £i=3£2+5u+0,5pIi(y-£i), £2 = -4£2+0,5pi2(y-£i),
£i(0)=0, £2(0) =0, pn=6pi2-0,5pi1,
P12 = —4pi2 +ЗР22—0,5pi 1P12, P22 = -8p22 ~0,5pj2+24,
P11(O)=P12(O)=O, P22(0) = 3.
10.7. a) £i=£2+0,25(pn+pi2)(y-xi-£2),
X2 = -Xl~X2+u+0, 25(P12+P22)(y-Xl-X2),
£i(0)=0, £г(0)=0, pii=2pi2-0,25p|2-0,25pii-0,5piipi2,
P12 = “Pl 1 —P12 +P22 -0,25(pi2P22 +P11P12 +Pi 1P22 +P12).
P22 = -2pi2 -2p22—0,25p22 —0,25p[2 -0,5pi2P22+1
Pn(0)=pi2(0)=0, ргг(О)=О;
6) Xl=X2+0,25(pii+pi2)(p-Xl-X2),
£2 — -2x\-X2+U +0,25(pi2+p22)(!/-zi-x2), £](0) =0,
£2(0) =0, pn=2pi2-0,25p?2-0,25p?1-0,5pnpi2,
P12 = -2pil-pi2+P22-0,25(pi2P22+PllP12+PllP22+Pi2)-
P22 ~ -4pi2 - 2p22 -0,25^2 —0,25p|2 -0,5pi2p22+1.
Pn(0)=pi2(0)=0, ргг(О)=О;
co
Qi
•<H
CQ
О
II
£
•<R
CM
<R
I
I
x-—ч
CM
JF
СЧ
o"
+
A
+
<R
II
•<R
•<R
•<R -<R <R
t=t
*
II
278
Гл, 10. Синтез оптимальных систем управления
з) Xi=X2+0,25(pil+pi2)(y-Xi-X2),
X2 = -5xi-3x2+u+0,25(pi2+p22)(y-Xl~X2),
iri(O) =0, £2(0)=0, pii=2pi2-0,25pi2-0,25pi1-0,5piipi2,
Р12 = -5рп -3pi2 +Р22 -О,25(Р12Р22 +Р11Р12 +Р11Р22 +Р12)•
Р22 = - 10pi2 - 6р22 -0,25^22 ~0,25pi2 -0,5pi2P22 +1,
Рн(0)=Р12(0)=0, Р2г(0)=0;
и) £1 =£2 + (рп+0,25р12)(у-4£1-£2),
£2 = -3£i-4£2+u+(pi2+0,25p22)(y-4£i-£2),
£i(0)=0, £2(0)=0, рн=2р12-0,25р?2-4р^-2рпр12,
Р12 = — 3pi 1 — 4pi2 +Р22 -0,25pi2P22 ~4pi 1Р12 ~Р11Р22 “Р12>
Р22 = -6Р12 -8р22 -0,25р|2 -4р?2 -2pi2P22 +3,
Рн(0)=Р12(0)—0, Р2г(0)=0;
к) £i=£2+0,25(pii+pi2)(y-£i-£2),
Х2 = -5£i -4£2+u+0,25(pi2+p22)(y-^i -£г)>
£1(0)=0, £2(0)=0, рц=2р12-0,25р12-0,25р11-0,5рцр12,
Р12 = — 5pi 1 - 4р 12 +Р22 -О,25(Р12Р22 +Р11Р12 +Р11Р22 +Р12 ).
Р22 = - 10pi2 - 8р22 -0,25р22 -0,25р]2 -0,5pi2P22 +3,
Р11(0)=Р12(0)=0, Р22(0)=0.
10.8. a) £i =£2+0,25(рц+pi2)(y-£i-£г),
£2 = -xi - х2 + 2и + 0,25(pi2 + ргг)(у - ^1 - £2).
£1 (0) =0, £2(0)=0, ph =2р12 - 0,25pi2 - 0,25рц - 0,5рпР12,
Р12 = —Р11 ~ Р12 +Р22 -0,25(р12Р22 + Р11Р12 + Р11Р22 +Р1г)'
Р22 = -2pi2 - 2Р22 - 0,25^22 - 0,25р?2 - 0,5pi2P22 + 2,
рп(О) = Р1г(0) — 0, ргг(О) = 0;
б) £1 = £2 + 0,25(pi 1'+ Р1г)(у -xi- £2),
£2 = -2xi - х2 + 2и + 0,25(pi2 +ргг)(р - xi - х2),
£i(0)=0, £2(0)=0, pu=2pi2-0,25р12-0,25рц-0,5рцр12,
Р12 = — 2pn — Р12 +Р22 — 0,25(pi2P22 +Р11Р12 +Р11Р22 +Р1г)>
Р22 = —4pi2 - 2Р22 - 0,25р|2 - 0,25р]2 - 0,5pi2P22 + 2,
Р11(0) = Р1г(0) = О, Р22(О) = 0;
10.3. Ответы
279
в) Xl = х2 + (0,5pi 1 + 0,25pi2)(y - 2xi - х2),
х2 = -2xi - х2 + 4u + (0,5pi2 4- Q,25p22)(y - 2xi - х2),
xi (0) = 0, х2(0) = 0, pi 1 = 2pi2 - 0,25р12 - pf, - рпР12,
Р12 = —2рц -pi2 +Р22 -O,25pi2p22 -Р11Р12 -О.брпри — O,5pi2,
Р22 = -4pi2 - 2р22 - О^бр^ - р?2 - pi2p22 + 1,
Pi 1(0) = Р1г(0) — 0, р22(0) = 0;
г) xi = х2 + (0,5рц + 0,25pi2)(y - 2xi - ®г).
х2 = -xi - 2х2 + 4u + (0,5pi2 + 0,25рг2)(у - 2xi - х2),
xi(O) =0, х2(0) =0, рп =2pI2-0,25p?2-pfi -рпР12,
Р12 = -Рп -2pi2 +Р22 ~0,25pi2P22 — Р11Р12 -О.брнргг -О,бр?2,
Р22 = —2pi2 - 4р22 - 0,25р22 - Р?2 - Р12Р22 + 1.
Ри(О) = Р1г(0) = 0, ргг(О) = 0;
д) Xl = х2 + (pi 1 + 0,25pi2)(y - 4xi - х2),
х2 = -2хт ~ 2x2 + 3u + (pi2 + 0,25р22)(у - 4xi - х2),
£1(0) = 0, х2(0) = 0, рп = 2pi2 - 0,25р?2 - 4р?, - 2pnPi2.
Р12 = -2рц - 2pi2 +р22 - 0,25р12р22 - 4рпР12 -Р11Р22 — Pi2>
Р22 — —4pi2 — 4р22 — 0,25р^ — 4р,2 — 2pi2p^ + 1,
Рп(О) = Р1г(0) — 0, ргг(О) = 0;
е) xi = х2 + (0,5pi 1 + 0,25р12)(у - 2xi - х2),
х2 = -2xi - 4х2 + Зи + (O,5pi2 + 0,25рг2)(у - 2xi — х2),
xi (0) = 0, х2(0) = 0, рн = 2pi2 - 0,25р?2 - р?| - рпР12.
Р12 = -2рц - 4pi2 +р22 - 0,25pi2p22 -piipi2 - 0,5рцр22 - 0,25pi2,
Р22 = -4pi2 - 8р22 - 0,25р22 - р?2 - pi2p22 + 1,
Ри(О) = Р1г(0) = 0, р22(0) = 0;
ж) xi = х2 + (0,5pi 1 + 0,25р12)(у - 2xi - х2),
х2 = -2xi - Зх2 + 5и + (0,5р12 + 0,25рг2)(у - 2xi - х2),
xi(O) = 0, х2(0) = 0, рп = 2pi2 - 0,25р?2 - р2ц - Р11Р12,
Р12 = -2рп — 3pi2 +Р22 — 0,25pi2P22 “Р11Р12 — 0,5рпР22 ~ 0,5pi2,
Р22 = —4pi2 - 6р22 - 0,25р22 - рЪ - Р12Р22 + 3,
рп(О) = Р1г(0) - 0, р22(0) = 0;
280 Гл. 10. Синтез оптимальных систем управления
з) XI = £2 + 0,25(рц + Р12)(у - Xi - £2),
х2 = -5xi - Зх2 + 5и + 0,25(pi2 + р2г)(2/ - £1 - х2),
£1(0) =0, £2(0)=0, рп =2pi2 - 0,25pi2 - 0,25p2i - O,5pnpi2>
P12 = —5рц — 3pi2 +P22 - 0,25(pi2P22 +P11P12 + P11P22 + P12).
P22 = - 10pi2 - 6P22 - 0,25p22 - 0,25pi2 - 0,5pi2P22 + 3,
Pi 1(0) =Pi2(0) = 0, ргг(0) = 0;
и) £i = £2 + (pii + 0,25pj2) (2/ - 4£i - £2),
£2 = -3£i - 4x2 + 2u + (pi2 + 0,25p22)(y — 4£i — £2),
£1(0) = 0, £2(0) = 0, ph = 2pi2 - 0,25pj2 - 4p?i - 2pnpi2,
P12 = — Зри - 4pt2 +P22 -O,25pi2P22 — 4pnP12 -P11P22 ~P12>
P22 = -6pi2 - 8p22 - 0,25p22 - 4p?2 - 2pi2P22 + 4,
pn(0) = Р1г(0) = 0, ргг(О) = 0;
к) £1 =X2 +0,25(pn +pi2)(j/-£i -£2),
£2 = -5£i - 4£2 + 2u + 0,25(pi2 + Р22Х2/ - £1 — £2),
£i(0)=0, £2(0)=0, pn=2pi2-0,25pi2-0,25pii-O,5pnpi2,
Pi2 = -5pn - 4pi2 +P22 -0,25(pi2P22 +Р11Р12 +P11P22 +Р1г)>
P22 = - 10pi2 - 8P22 - 0,25р|2 - 0,25p]2 - 0,5р1гр22 + 4,
pi i(0) = Р1г(0) = 0, ргг(О) = 0.
10.9. a) £1=2/2. X2 = q,
q=2q+y2+u+0,5p(yi-q)+p(y2-q), P=4p-l,5p2;
6) £1=2/2. £2=9.
q=2q+2y2+u+0,5p(yi-q)+0,5p(y2-q), p=4p-p2;
в) £1=2/2. x2=q,
q-4q+2y2+2u+0,25p(yi-q)+0,5p(y2-q), p=8p-0,75p2;
r) £1=2/2. x2 = q,
q=4q+^y2+2u+0,25p(yi-q)+0,25p(y2~q), p=8p-O,5p2;
д) £1=2/2, x2=q,
q=5q+3y2+3u+0,5p(yi-q)+0,25p(y2-q), p= 10p-0,75p2;
e) £1=2/2. £2=9.
q=5q+4y2+3u+0,5p(yi-q)+0,5p(ji2-g)> P= 10p-p2;
10.3. Ответы
281
ж) Xl =У2, X2=q,
q=3q+4j/2+5u+p(j/i-q)+0,5p(?/2-9), р=6р-0,75р2;
з) Х\ ~2/2» X2 = q,
q=3q+5j/2+5u+0,25p(2/i-q)+p(?/2-9). р=6р-1,25р2;
и) £1=2/2. x2=q,
q=4q+52/2+4u+p(2/i-q) +O,25p(2/2-q), p=8p-1,25p2;
к) £1=2/2. x2=q,
q=4q+&y2+4u+0,5p(yi-q)+0,5p(y2-q), p=8p-p2.
10.10. a) u‘ = -far, A=—2(26"* —1)A+2A2—2, A(10)=0;
6) u* = -Q,5kx, A=—2(l+sin2£)A+0,5A2-2, A(10)=0;
в) u* = -2(ki2xi+k22x2), Ац=4А22-1,
fci2 = —Ац +4fci2^22 — 1. k%2 = ~2ki2-\-4k22 — l, k(0)=0;
r) u* = -(ki2xi+k22x2), Ац=4А22-1,
ki2 = -kn+4ki2k22 — l, k22 = -2ki2+4J^2-l, k(0)=0;
д) u* = -Q,5(ki2xi+k22X2), Ац=А22-1,
ki2 = —kii+ki2+ki2k22, k22 = —2ki2+2k22+k^2, k(0)=0;
e) u* = -{ki2xi +А22Ж2), Ац=А?2-2,
fcl2 = —All +2^12 + ^12^22. A22 — -2A12 +4Агг + А22 — 1.
k(0)=0;
ж) и* = -2(к12Х1+к22х2), Ац=2А12+4А22-1,
fci2=k22—fc| 1 + ki2 +4ki2k22, k22 = —2k[2 +2k22 +4k^2 — 1,
k(0)=0;
3) u* = -O,5(ki2xi+k22x2), Ац =4fci2+fc22-l,
A12 —2k22—Ац+A12+A12A22, k22 = —2A12+2A22+A22 — 1,
k(0)=0;
и) u* = -O,5(ki2xi+k22x2), An =2Ai2+0,5A22-1,
A12=A22—Ai 1+2A12 +O,5Ai2A22, кц = —2Ai2+4A22+0,5A|2—2,
k(0)=0;
к) u* = -2(ki2xi+k22x2'), An =4Ai2+4A22-2,
A12=2A22—Ai 1 +2Ai2 +4A12A22, k22 = —2k[2 +4Агг +4A22 —4,
k(0)=0.
282 Гл, IO. Синтез оптимальных систем управления
10.11. а) и* = —(0,707^ + 0,9£); б) и* = — (0,707$/+ 0,645£);
в) и* = —(0,354$/ + 0,231$/); г) и* = —0,732($/ + $/);
д) и* = —(0,425$/ + 0,278$/); е) и* =-(0,14$/+ 0,157$/);
ж) и* = — (0,098$/ + 0,469$/); з) и* = — (0,385$/ + 0,402$/);
и) и* = — (0,05$/+ 0,339$/); к) и* = —(0,038$/ + 0,088$/).
10.12. а) и* = -(0,5xi + 1,72х2), =^2 + Рп (у - ),
х2=2х2+ 2и + р!г(у -$i), £1(0) =0, хг(0)=0,
Pn=2pi2 -Pll, P12 = 2pi2 + Р22 ~PllPl2,
Р22 =4р22 - Pl2 + 1. Р(0) =0;
б) и* = —(0,243xi +4,34x2), xi —$2 +рц(у — ^1),
X2 = -4xi +2X2 + u + pi2(j/-xi), xi(0)=0, хг(0)=0,
Pll=2pi2 “Pll, Р12 = -4рн + 2pi2 +Р22 — Р11Р12,
Р22 = -8pi2 + 4р22 - Р12 + 2, р(0) =0;
в) и* = -(0,5X1+0,291X2), xi =хг + 0,5рц(у — xi),
$2 = — 4x2 + 4u + O,5pi2(y — xi), xi(0)=0, х2(0)=0,
PH=2pi2 -0,5p?b pi2 = -4pi2 +Р22 — 0,5pnpi2,
Р22 = -8р22 - 0,5pi2 + 2, р(0)=0;
г) u* = -(xi+0,449хг), xi =$2 +0,5рц(р — xi),
X2=xi+Х2 + u+ pi2(y - xi), Х](0)=0, х2(0)=0,
Pll=2pi2-0,5pii, Р12 = -рп -4pi2+p22-0,5рцр12,
P22 = -2pi2-8p22-0,5pf2+4, р(0)=0;
д) и* = - (0,828x1 + 1 ,58х2) , xi = х2 + pi 1 (у - $\),
х2 = -2х1 -x2 + 2u + pi2(j/-xi), xi(0)=0,
Х2(0)=0, Pll=2pi2-Рц, Р12 = -2рп — Р12 +Р22-Р11Р12.
i>22 = -4pi2 - 2ргг - Р12 + 4, р(0) =0;
е) и* = -(0,1 55х1+0,525х2), xi =х2 + 0,25рц(у — xi),
х2 = —2xi + 2х2 + 8и + 0,25р1г(р - xi), ^1(0)=0, х2(0)=0,
Pii=2pi2 —0,25р2ц, pi2 = -2pii +2pi2 +Р22 — 0,25pnpi2,
Р22 = -4pi2 + 4р22 - 0,25pi2 + 2, р(0)=0;
ж) и* = — (0,297xi +0,131x2), xi =х2+0,25рц(р - xi),
Х2 = —2xi — 4х2 + 8it+ 0,25pi2(y — xi), ®1(0)=0, хг(0)=0,
Pii=2pi2 — 0,25pii, Р12 = -2рц -4pi2 +Р22 —0,25рцр12,
P22 = -4pi2-8p22 -0,25p?2 + 2, р(0)=0;
10.3. Ответы
283
з) u* = -(0,112xi + 1,38x2), =®2+ 0,5рц(у - xi),
X2 = -4xi+4x2+ 4u+ 0,5pi2(y-xi), Ji(0)=0, хг(0)=0,
Pn=2pi2 — 0,5pi1( pi2 = — 4рц +4pi2 +P22 — 0,5pnpi2,
P22 = —8pi2 + 8p22 - 0,5pi2 + 1, p(0) =0;
и) u* = -(0,271xi+0,461хг), =£2 + 0,5рц(у — xi),
X2 = -5xi - 4x2+ 4u + 0,5pi2(y - xi), xi(0)=0, хг(0)=0,
Pn=2pi2-0,5pii, pi2=-5pn -4pi2 +P22-O,5pnpi2,
P22 = ~ 10pi2 - 8P22 - O,5pj2 + 1, p(0) =0;
к) u* = — (0,494xi + 16,94x2), xi =£2 +pn(y — xi),
X2 = -5xi +2x2 + u + pi2(l/-®i), Xi(0)=0, хг(0) =0,
Ph =2pi2 -Рн» Pi2 = -5pn +2pi2 +P22 -рпР12»
P22 = -1QP12+4p22-Pifr+1» p(0)=0.
Глава 11
АДАПТИВНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Система управления называется адаптивной, если в ней теку-
щая информация, помимо выработки управляющего воздействия, ис-
пользуется также для изменения алгоритма управления. В обычных
(неадаптивных) системах управления текущая информация использует-
ся только для формирования управляющего воздействия. Адаптивную
систему, если структура алгоритма не изменяется, а изменяются только
его параметры, называют самонастраивающейся системой (СНС),
а если изменяется структура — самоорганизующейся системой.
Адаптивные системы управления включают объект, регулятор и
адаптор. Объект и регулятор, вырабатывающий управляющее воздей-
ствие на объект, образуют основной контур. Регулятор содержит ва-
рьируемые параметры. Адаптор на основе обработки доступной ему
информации вырабатывает управляющее воздействие, производящее
подстройку варьируемых параметров регулятора. Регулятор совместно
с адаптером образуют адаптивный регулятор. Адаптивная система
управления имеет иерархическую структуру: она имеет два уровня.
Основной контур образует первый (низший) уровень, а контур, содер-
жащий адаптор и называемый контуром адаптации, — второй уро-
вень. В общем случае возможны три и больше уровней. В частности,
если для синтеза адаптера в завершенном виде априорной информации
недостаточно и какие-либо его параметры должны уточняться в про-
цессе функционирования системы, потребуется третий контур — контур
адаптации адаптера.
Адаптор выполняет двоякую функцию: изучение объекта и на-
стройку регулятора. По способу изучения объекта адаптивные си-
стемы делятся на поисковые и беспоисковые. Адаптивная система
управления называется поисковой, если в нее для изучения объек-
та подаются специальные (поисковые) сигналы, и беспоисковой, ес-
ли в систему никаких поисковых сигналов для изучения объекта не
подается. Беспоисковые адаптивные системы управления по способу
получения информации для подстройки параметров регулятора делят-
ся на адаптивные системы управления или самонастраивающиеся
системы (СНС) с эталонной моделью и идентификатором. Адап-
тивные системы управления с эталонной моделью (рис. 11.1) содер-
Гл. 11. Адаптивные системы управления
285
Рис. 11.1
жат динамическую модель системы, обладающую требуемым качеством
и называемую эталонной моделью. Адаптивная система управления
с эталонной моделью (ЭМ), кроме основного контура, содержащего
регулятор (Р) и объект (О), включает контур с ЭМ и преобразователь-
но-исполнительным устройством (ПИУ). Эталонная модель выраба-
тывает желаемый (эталонный) выходной сигнал. Преобразовательно-
исполнительное устройство (его также называют механизмом адап-
тации) обрабатывает разностный сигнал (разность между фактическим
и эталонным сигналами) и производит подстройку параметров регу-
лятора. Выбор эталонной модели является частью процесса синтеза
адаптивной системы управления. Эталонная модель должна удовле-
творять двум требованиям: с одной стороны, она должна отражать
все требования к качеству синтезируемой системы, с другой стороны,
эталонная реакция должна быть достижима для основного контура.
Последнее требование накладывает ограничения на структуру эта-
лонной модели, определяемой предполагаемой структурой основного
контура.
Регулятор должен обладать идеальной следящей способностью.
Другими словами, закон (алгоритм) управления должен быть таким,
что существуют такие значения его параметров, называемые идеаль-
ными, при которых передаточная функция основного контура относи-
тельно задающего воздействия и выхода равна передаточной функции
эталонной модели. Принцип работы адаптивной системы с ЭМ состоит
в том, чтобы адаптор должен обеспечить сходимость к нулю ошибку
слежения — разность между выходными сигналами основного контура
и эталонной модели.
Адаптивные системы управления с идентификатором в контуре
адаптации содержат идентификатор И (рис. 11.2), который служит
для идентификации (определения) неизвестных параметров объекта на
основе изучения входного и выходного сигналов объекта. Полученная
идентификатором информация затем используется для определения
нужных значений параметров регулятора и их подстройки.
286
Гл. 11. Адаптивные системы управления
Рис. 11.2
Процедуру построения алгоритмов адаптивного управления условно
можно разбить на следующие три этапа:
1) определение закона (алгоритма) управления, включающего варьи-
руемые параметры;
2) определение алгоритма адаптации» обеспечивающего нужную на-
стройку варьируемых параметров регулятора;
3) исследование синтезированной адаптивной системы управления.
Адаптивные системы управления являются нелинейными, и поэто-
му основным методом исследования является метод функций Ляпу-
нова. Более того, этот метод используется уже в процессе синтеза.
Многие алгоритмы адаптивного управления были получены исходя из
того, что некоторая выбранная функция является функцией Ляпунова
для синтезируемой системы.
Заметим, что при исследовании систем управления методом функ-
ции Ляпунова уравнения системы должны быть записаны в «откло-
нениях» — в переменных, при которых положению равновесия соответ-
ствует начало координат. Поэтому если уравнения системы представ-
лены в других переменных, то эти уравнения нужна предварительно
преобразовать, чтобы можно было использовать этот метод.
11.1. Алгоритмы адаптивного управления с ЭМ
Задачу синтеза адаптивной системы управления с ЭМ содержа-
тельно можно сформулировать следующим образом. Заданы уравне-
ния объекта и эталонной модели. Требуется синтезировать алгоритм
адаптивного управления, т.е. алгоритм управления (основного конту-
ра) и алгоритм адаптации, при которых система глобально устойчива
и ошибка слежения — разность между выходными сигналами основного
контура и эталонной модели — сходится к нулю при стремлении време-
ни в бесконечность.
Здесь предполагается, что эталонная модель задана, хотя она долж-
на быть определена исходя из заданных требований к синтезируемой
системе управления. Это связано с тем, что определение эталонной
модели по заданным требованиям к системе управления является
ILL Алгоритмы адаптивного управления с ЭМ
287
обычной задачей управления и не связано спецификой адаптивного
управления.
Параметрическая сходимость. При адаптивном управлении с ЭМ
основное целевое условие— это обеспечение сходимости к нулю ошиб-
ки слежения e(t) = y(t) — Если параметры регулятора принима-
ют идеальные значения, то, естественно, это условие будет выполнено.
Однако из сходимости к нулю ошибки слежения не следует параметри-
ческая сходимость — сходимость варьируемых параметров к идеальным
значениям.
Параметрическая сходимость зависит от структуры («сложности»)
задающего воздействия. Если задающее воздействие простое, например
константа, то по окончании процесса адаптации варьируемые пара-
метры в зависимости от начальных условий могут принять различные
значения. Однако когда задающее воздействие g(t) обладает таким
свойством, что выполняется так называемое условие постоянного воз-
буждения, то сходимость к нулю ошибки слежения влечет за собой
параметрическую сходимость.
Определение 11.1. Условие постоянного возбуждения п —
векторного сигнала v(i) выполняется, если существуют положи-
тельные константы Тиа такие, что при любом t > О
t+T
v(t)vt(t) aln,
t
где In — единичная матрица порядка п.
Адаптивное управление по состоянию линейным объектом.
Постановка задачи. Пусть линейный объект описывается урав-
нением . . .
(п) (п-1)
ао У + ai у +------\-апу = и, (11.1)
где у — выход, и — управление, (i = 0,1, ..., п) — неизвестные пара-
метры; знак а0 известен. Эталонная модель задается уравнением
(п) (п— 1)
У +ai У +--- + апут = 0о9(1)- (11-2)
т т
Здесь ут — выход эталонной модели, оц (г = 1,2, ..., п) и /3q — извест-
ные положительные постоянные, g(t) — задающее воздействие. Требу-
ется определить алгоритм адаптивного управления, при котором систе-
ма глобально устойчива и ошибка слежения
e(t) = y(t) - ym(t) -> 0 при t -> оо.
Ниже при записи решения используется (п х 1)-матрица
В = (0 0 ••• О 1)Т (11.3)
288
Гл. 11. Адаптивные системы управления
и (п х п)-матрица Р, которая является решением уравнения Ляпунова
РА + АТР = -Q,
где Q — положительно определенная матрица, А — (п х п)-матрица
‘ 0 1 0 0 '
0 0 1 0
А = (11.4)
0 0 0 1
^п -Оп-1 -ап-2 • • -Q1
в которой элементами последней строки являются коэффициенты урав-
нения эталонной модели.
Утверждение 11.1. Алгоритмом адаптивного управления
с ЭМ (11.2) линейным объектом (11.1), обеспечивающим глобаль-
ную устойчивость и сходимость ошибки e(t) = y(t) — ym(t) к нулю
при £ —> оо, является
~ (п-1) - ~Т
и = kog(t) + k\ У -I----1- kny = k v, (11.5a)
k = — sigi^oo^vB^Px, (11.56)
где k = (ко k\ ••• kn)T — (n+ 1)~вектор варьируемых параметров
(п-1) (п-2)
регулятора, v — (g У У ••• у)Г — (п + \)-вектор сигналов,
Г-произвольная положительно определенная (п+ 1) х (п+ \}-мат-
, (п— 1) j.
рица, х = (ее ••• е )J -вектор состояния.
Если в качестве Q принимается матрица qln(q > 0, Jn — единичная
матрица п-го порядка), то, не нарушая общности, можно при записи
уравнения Ляпунова принять q = 1, т. е. рассмотреть уравнение
РА + АТР = -1п,
а значение q учесть при выборе матрицы Г.
Уравнение синтезируемой системы (11.1), (11.5а) совпадает с урав-
нением эталонной модели, когда
fc0 = fcg == аоДо, ki = k* = ai - ao«i- (11.6)
Коэффициенты k* (г = 0,1, ..., n) по определению являются идеаль-
ными. И если для каких-либо коэффициентов алгоритма управле-
ния (11.5а) априорная информация позволяет вычислить их идеальные
значения, то, естественно, нет необходимости для их определения
использовать алгоритм адаптации (11.56).
Пример 11.1. Объект описывается уравнением
у + Зу + аъу = и,
11.1. Алгоритмы адаптивного управления с ЭМ
289
где ад—неизвестный параметр; уравнение эталонной модели имеет вид
Ут 4" %Ут + Ут =
Определить алгоритм адаптивного управления, обеспечивающего огра-
ниченность всех переменных и сходимость ошибки е = у — ут к нулю
при t —> оо.
Решение,
имеют вид
В данном случае eq = 2 и ад “ 1» матрицы А и В
Уравнение Ляпунова
Рн Р12 О
J>21 P22J L-1
1
-2
О “1 рц Р12 = _ 1 О
1 —2 JP21 Р22. .0 1
после перемножения матриц принимает вид
“"Р12 Pll-2pi2 -Р21 • “Р22 __ _ 1 О
-Р22 P21 - 2ргг] [ри “ 2^21 Р12 - 2ргг] [О 1
Это уравнение, учитывая равенство р\2 = Ргь можно записать в виде
системы
—2pi2 — -1,
Р11 - 2pi2 “Р22 = О,
2pi2 “ 4р22 = “I-
Эта система имеет следующее решение:
1 1
Р12 = 2’ Р22 = 2’
Поэтому матрица Р имеет вид
р = ГЗ/2 1/2 =
[1/2 1/2
3
Рн = 2-
1 Г3
2 11*
Так как известны коэффициенты oq =1, ai=3, то по формуле (11.6)
находим л
ko = fcg = 1, к\ ~ к* = 3 — 2=1.
В данном случае v = (<7 у у)Т и х = (е ё)т (е = у — ут). Приняв Г = 7/3,
по формуле с (11.56) получаем
290
Гл. 11. Адаптивные системы управления
Отсюда и в соответствии с соотношением (11.5а) для адаптивного
алгоритма управления находим
W = 9 + У + hy, k2 = ~y(e + e)y.
Адаптивное управление по выходу линейным объектом с еди-
ничным относительным порядком. Выше был рассмотрен случай,
когда в уравнение объекта не входили производные управления или,
что то же, когда относительный порядок передаточной функции объ-
екта был равен ее порядку, и все фазовые координаты были доступны
измерению. Однако обычно не все фазовые координаты доступны из-
мерению. И чтобы получить их, нужно дифференцировать выходную
переменную, что не желательно из-за помех, которые при этом возни-
кают.
Ниже рассматривается адаптивное управление по выходу, т.е. та-
кое управление, при котором в алгоритмах управления и адаптации
используются только входной и выходной сигналы объекта и сигналы,
получаемые путем их фильтрации.
Постановка задачи. Пусть задан объект с передаточной функ-
цией
lV0(p) = = ^”-'+^ + - + *-1
°7?o(p) pn+aipn~l + --- + an
и выбрана эталонная модель с передаточной функцией
W (v\-k - k рП 2 + "- + /?n-i.
iym(P) pn+Qipn_l+...+drJ .
(11.7)
(Н-8)
fco, bi (z = 1, 2, ..., n — 1), a*; (fc = 1, 2, ..., n) — неизвестные парамет-
ры объекта, знак fco известен; Рт(р), В^пр) — устойчивые полиномы,
и передаточная функция Wm(p) является строго вещественно-положи-
тельной, т. е. она устойчива и Re > 0 при все 0.
Требуется определить алгоритм адаптивного управления, при кото-
ром система глобально устойчива и ошибка e(t) = y(t) — ym(t) стремит-
ся к нулю при t —► оо. При этом в алгоритмах управления и адаптации
должны быть использованы только доступные измерению сигналы (за-
дающее воздействие, входной и выходной сигналы объекта) и сигналы,
которые получаются путем их фильтрации, т.е. сигналы на выходе
фильтров, на вход которых подаются указанные сигналы. Принимается,
что уравнения фильтров в нормальной форме Коши имеют вид
v ~ Ev + Fu,
z = Ez + Fy.
(11.9a)
(11.96)
Здесь v = (vi V2 ... vn^i)T —(n- 1)-вектор переменных, получа-
емых путем фильтрации входного сигнала (управления) объекта;
11.1. Алгоритмы адаптивного управления с ЭМ 291
z = (^i, Z2 ... zn_i)T — (п- 1)-вектор переменных, получаемых путем
фильтрации выходного сигнала объекта; Е — (n - 1) х (п - 1)-матрица,
F — (п — 1) х 1 — матрица, и они имеют следующий вид:
' 0 1 0 •• • 0 '
0 0 1 • 0 0
Е = • , F =
0 0 0 1 0
Рп-1 Рп—2 0п—3 • -/31. V/
Здесь в последней строке матрицы Е стоят коэффициенты полинома
числителя передаточной функции эталонной модели.
Утверждение 11.2. Алгоритмом адаптивного управления
с ЭМ (11.8) линейным объектом (11.7), обеспечивающие глобаль-
ную устойчивость и сходимость ошибки e(t) = y(t) — ym(t) к нулю
при t —> оо, является
и = k£v + k^z + kyy + k9g,
kv = - sign(fc0)7ve,
kz = -sign(fc0)7ze,
ky = - sign(/co)7J/e,
kg = - sign(fc0)7$e,
где Icy ,=- (&yi kV2 • •• —i) n kz — (^*zi ^*z2 ••• k^n—i) —векторы
варьируемых параметров регулятора, ky и k9 — скалярные варьиру-
емые параметры регулятора, v = (vi V2 ... vn-i)T и z = (zit Z2 ...
... zn-i)T — выходы фильтров (11.9a) и (11.96) соответственно.
Пример 11.2. Пусть объект и эталонная модель задаются пере-
даточными функциями
— fa ?+_ £ _£+£_
^"V + aipW Wrn-fCm^ + 3p^2,
где fc0, b\, a\, аднеизвестные параметры, известен знак ко: fco > 0.
Требуется определить алгоритм адаптивного управления, обеспечиваю-
щего глобальную устойчивость системы и сходимость к нулю разности
между выходами системы и эталонной модели.
Решение. Передаточная функция эталонной модели является
строго вещественно-положительной, так как она устойчива, и веще-
ственная часть частотной передаточной функции при любой часто-
те ш > 0 положительна:
= кт (2 _^2 +^2 > 0.
292 Гл. 11. Адаптивные системы управления
В данном случае п = 2, (3\ = 1, и уравнения фильтров (11.9) принимают
вид
V = —V + и, Z = —Z 4- у.
Из утверждения 11.2 для адаптивного алгоритма управления получаем
и = kvv + kzz + куу + kgg,
kv = -yve, kz = -yze, ky = -yye, kg = yge.
Задачи
11.1. Объект описывается уравнением
У + а\У + орУ + а-зУ = и,
где аь аг, аз — неизвестные параметры. Определить адаптивный ал-
горитм управления с эталонной моделью (ЭМ) при условии, что ЭМ
задается следующими уравнениями:
в) У т 4" ЗУт 4" Зут 4" Ут =
6) Ут 4- бут 4- 12ут 4- бут = 8g(t);
в) У т + бут + Пут + бут = 2g(t\,
г) Ут 4- 5ут 4- 7ут 4- Зут = 3g(t);
д) Ут 4- 5ут 4- бут 4- 4ут = 4g(f);
е) Ут 4- 7ут 4- 16ут 4- 12ут = 12g(t);
ж) Ут 4- 7ут 4- 15ут 4" 9ут = 9g(t\,
з) У т 4- бУт 4- 21ут 4- \бут = 18ff(t)j
и) У т + бут + 27Ут + 27Ут =27g[ty
к) Ут 4- Ъут 4- 24ут 4- 1бут = I6g(t).
11.2. Объект описывается уравнением
У + 2# + 3£ + а3у = и,
где аз — неизвестный параметр. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
У т “Ь Зут 4“ Зут 4“ Ут = 9$)'
11.3. Объект описывается уравнением
2 У + 4# + бу + а3у = и,
ILL Алгоритмы адаптивного управления с ЭМ 293
где а3 — неизвестный параметр. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
Ут + &Ут + 12Ут + tym = 2g(t).
11.4. Объект описывается уравнением
У + Зу + а2у + 2у = и,
где а2 — неизвестный параметр. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
У т +6Ут + 11Ут+6ут= 3g(f).
11.5. Объект описывается уравнением
4 У + 2у + а2у + 6у = и,
где а2 — неизвестный параметр. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
_ . Ут + fyjm + 7ут + Зут = 3g(t).
11.6. Объект описывается уравнением
У + а1У + %У + &У = и,
где ai — неизвестный параметр. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
Ут + $Ут + &Ут + *Ут = 2g(t).
11.7. Объект описывается уравнением
2'У + а\У + 2у + 6у = и,
где а\ — неизвестный параметр. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
Ут + 7ут + 16j/m + 12ут =
11.8. Объект описывается уравнением
У +2у + а2у + а3у = и,
где а2, а3 — неизвестные параметры. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
Ут + 7ут + 15ут + 9ут - 4,5g(t).
294 Гл. 11. Адаптивные системы управления
11.9. Объект описывается уравнением
4 У + 2у + а2у + азу — и,
где а2, аз — неизвестные параметры. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
Ут + 8ут + 2\ут + 18ут = 9g(t).
11.10. Объект описывается уравнением
2 У + 4# + а2у + азу = и,
где ад, а>з — неизвестные параметры. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
Ут + 9ут + 27ут + 27 ут = 13,5g(t).
11.11. Объект описывается уравнением
У + 4у 4- а2у + а3у = и,
где а2, аз — неизвестные параметры. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
Ут + 9ут + 24ут + 16ут = 8p(t).
11.12. Объект описывается уравнением
У +o.iy + a2y + y = и,
где аь а2 — неизвестные параметры. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
Ут + Зут + Зут + Ут = g(t).
11.13. Объект описывается уравнением
2 У + а\у + а2у + 2у = и,
где ai, а2 — неизвестные параметры. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
Ут + &Ут + 12т/™ + 8ут = 2g(t).
11.14. Объект описывается уравнением
4 У + а^у 4- а2у 4-4?/ = и,
11.1. Алгоритмы адаптивного управления с ЭМ 295
где аь аг — неизвестные параметры. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
Ут + tyjm + 1 Him + fyjm = 2p(t).
11.15. Объект описывается уравнением
4 У + ai у + 5£ + а3у = и,
где аь аз — неизвестные параметры. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
Ут + fyjm + 7Ут + $Ут = l,5g(t).
11.16. Объект описывается уравнением
2У + а\У + б£ + а3у = и,
где аь аз — неизвестные параметры. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
- Ут + fyjm + &Ут + *Ут =
11.17. Объект описывается уравнением
У +а\у + 3у + азу = и,
где аь аз — неизвестные параметры. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
Ут + 7ут + 16уот + 12ут = 4g(t).
11.18. Объект описывается уравнением
У + а\У + 4у + азу - и,
где аь аз — неизвестные параметры. Определить адаптивный алгоритм
управления с эталонной моделью при условии, что уравнение эталон-
ной модели имеет вид
Ут + 7Ут + 15Ут + $Ут ~ 3g(t).
11.19. Объект описывается уравнением
2У + (НУ + а,2У + азУ = и,
где аь аг, аз — неизвестные параметры. Определить адаптивный ал-
горитм управления с эталонной моделью при условии, что уравнение
эталонной модели имеет вид
Ут + 8ут + 21 ут + 18ут = 5g(t).
296
Гл. 11. Адаптивные системы управления
11.20. Объект описывается уравнением
42/ + агу + а2у + а3у = и,
где аь а>2, аз — неизвестные параметры. Определить адаптивный ал-
горитм управления с эталонной моделью при условии, что уравнение
эталонной модели имеет вид
У т “Ь &Ут 4“ 27ут + 27ут =
11.21. Задан объект передаточной функцией
w -? pl + 2p + b2
° ^+Зр* + 2р + 2’
где Ьз ~~ неизвестный параметр.
Определить адаптивный алгоритм управления с эталонной моделью
при условии, что доступны измерению вход и и выход у объекта,
и передаточная функция эталонной модели имеет вид
W — 4 р2 + 2р + 0,5
т~ рЗ + 4р2 + 2р+Г
11.22. Задан объект передаточной функцией
W 9 Р2 + Ь1Р+1
~ + 3р?+ 2р + 2’
где ~ неизвестный параметр.
Определить адаптивный алгоритм управления с эталонной моделью
при условии, что доступны измерению вход и и выход у объекта,
и передаточная функция эталонной модели имеет вид
р2 + 2р + 0,5
т рЗ + 4р2 + 2р+Г
11.23. Задан объект передаточной функцией
Wq =4- -
° рЗ+р^ + 2р + а3'
где bg, аз — неизвестные параметры.
Определить адаптивный алгоритм управления с эталонной моделью
при условии, что доступны измерению вход и и выход у объекта,
и передаточная функция эталонной модели имеет вид
_ р2 + 2р+1
т р* + Зр> + 4р + 2'
11.24. Задан объект передаточной функцией
Wo=4-^^^—
° ^р3+р2 + 2р + а3’
где Ь\, аз — неизвестные параметры.
11.1. Алгоритмы адаптивного управления с ЭМ
297
Определить адаптивный алгоритм управления с эталонной моделью
при условии, что доступны измерению вход и и выход у объекта,
и передаточная функция эталонной модели имеет вид
— о р2 + 2р + 1
V + 3p2+4p + 2‘
11.25. Задан объект передаточной функцией
Wo = 4 ? + Ъ + Ъ
0 ^+рг + агР + 2'
где Ьг> а2 — неизвестные параметры.
Определить адаптивный алгоритм управления с эталонной моделью
при условии, что доступны измерению вход и и выход у объекта,
и передаточная функция эталонной модели имеет вид
цг _ 2 Р2 + 2Р + 1
т~ V + 3p2 + 4p + 2‘
11.26. Задан объект передаточной функцией
WO=4 ^ + Ь1Р + 2
р3 + р2 + CL2p + 2
где Ьь аг неизвестные параметры.
Определить адаптивный алгоритм управления с эталонной моделью
при условии, что доступны измерению вход и и выход у объекта,
и передаточная функция эталонной модели имеет вид
р> + 2р+1
Wm~^ + 3^ + 4P + 2-
11.27. Задан объект передаточной функцией
Wo = 2 Р2 + Ь1Р + Ь2
° 2рЗ + Зр2 + 2р + 2’
где b\, £>2 — неизвестные параметры.
Определить адаптивный алгоритм управления с эталонной моделью
при условии, что доступны измерению вход и и выход у объекта,
и передаточная функция эталонной модели имеет вид
W -6 Р2 + 2’5Р+2
m рЗ + Зр2 + 4р+Г
11.28. Задан объект передаточной функцией
wz P2 + biP + b2
УУо~^ + 3Р^ + 2Р + а3’
где Ьь &2, аз — неизвестные параметры.
298
Гл, 11. Адаптивные системы управления
Определить адаптивный алгоритм управления с эталонной моделью
при условии, что доступны измерению вход и и выход у объекта,
и передаточная функция эталонной модели имеет вид
р2 + 2,5р + 2
т & + Зр> + 4р+Г
11.29. Задан объект передаточной функцией
тГп-2- Р2 + Ь»Р + Ь2
р3 4-Зр2 + агР + 2’
где Ь\, Ьг, аг — неизвестные параметры.
Определить адаптивный алгоритм управления с эталонной моделью
при условии, что доступны измерению вход и и выход у объекта,
и передаточная функция эталонной модели имеет вид
_ р2 + 2,5р + 2
т рЗ + Зр2 + 4р+Г
11.30. Задан объект передаточной функцией
WO = ^^'Р + Ьг .
р3 + Зр2 + а2р + а3
где Ьь Ьг, аг, а3 — неизвестные параметры.
Определить адаптивный алгоритм управления с эталонной моделью
при условии, что доступны измерению вход и и выход у объекта,
и передаточная функция эталонной модели имеет вид
р2 + 2,5р + 2
т" рЗ + Зр2 + 4р+1’
11.2. Адаптивное управление с идентификатором
При синтезе адаптивных систем управления с идентификатором
алгоритм управления основного контура строится так же, как и в слу-
чае, когда параметры объекта известны. Но в данном случае алгоритм
управления и соответственно параметры построенного на его осно-
ве регулятора зависят от неизвестных параметров объекта. И чтобы
подстроить параметры регулятора, нужно определить значения неиз-
вестных параметров объекта в процессе функционирования системы
управления. Для этой цели и предназначен идентификатор.
Идентификация и модель для получения оценки. Идентифи-
кацией системы называется построение (получение) ее математиче-
ской модели путем обработки ее входных и выходных сигналов в про-
цессе эксперимента. Эксперимент может быть активным, т.е. прово-
дится специально для решения задачи идентификации, или пассивным:
идентификация осуществляется в процессе нормального функциони-
11.2. Адаптивное управление с идентификатором 299
рования системы. Если структура системы определена или задана, то
задача идентификации сводится к определению (идентификации) ее па-
раметров. Идентификация, которую выполняет идентификатор, состоит
в получении оценки неизвестных параметров объекта в реальном вре-
мени и в процессе нормального функционирования адаптивной системы
управления. И поэтому ее называют адаптивной идентификацией.
Сложность адаптивной идентификации заключается в том, что она
происходит одновременно с процессами адаптации (подстройки пара-
метров регулятора) и управления и необходимостью в этих условиях
обеспечить работоспособность и прежде всего устойчивость системы
управления.
Модель для получения оценки. Сущность оценки пара-
метров—это выделение информации о параметрах из доступных дан-
ных, получаемых путем измерения. Для получения оценки использу-
ется модель для получения оценки, или идентификационная модель,
которая связывает возможные данные с неизвестными параметрами.
Довольно общей идентификационной моделью является линейная па-
раметрическая форма
у = jy(*)a, (11.10)
где у —выходной вектор, а —вектор неизвестных параметров, VF(t) —
матричная функция, которая называется сигнальной матрицей. Вы-
ходной вектор и сигнальная матрица должны быть известны из данных,
получаемых путем измерения сигналов системы.
В каждый момент времени идентификационная модель (11.10) пред-
ставляет собой линейную систему уравнений относительно неизвест-
ных параметров. Если даны измерения y(i) и W(t) на некотором ин-
тервале времени, то имеем бесконечное число уравнений вида (11.10).
Если даны значения y(i) и IF(t) в I дискретных точках, то имеем
систему из I уравнений. Получение оценки неизвестных параметров
сводится к решению этих избыточных уравнений для т неизвестных
параметров. Для возможности получения оценки для г параметров
необходимо иметь, по меньшей мере, г уравнений. Однако, чтобы по-
лучить хорошую оценку параметров при присутствии шумов и ошибки
в модели желательно иметь данные в больших точках.
При определении оценки в реальном масштабе времени уравнения
решаются рекурретно, так как данные об y(t) и W(t) обновляются
с течением времени. Быстрота и точность оценки зависят от двух
факторов: идентификационной модели и метода решения.
Модель (11.10) является достаточно общей. Любая линейная си-
стема может быть представлена в такой форме после надлежащего
преобразования. Преобразование сводится к пропусканию измеряемых
сигналов через фильтры, на выходе которых получаем преобразованные
сигналы.
Идентификационная модель линейного объекта.
В общем случае линейный одномерный объект может быть задан
300
Гл. 11, Адаптивные системы управления
уравнением
А(р)У = В(р)и,
(11.11)
где
Л(р) = Рп + flip"-1 + • - • + On, В(р) = Ь1рп~' 4- Ь2РП~2
Разделив обе части на операторный полином
Л)(р) = р" + Оцрп~1 + ... + ап,
уравнение (11.11) можно преобразовать к виду
АИ-ЛЩ в(р)
* Ло(р) 9+Л(р)
Здесь
Ло(р) - А(р) = (оц - а|)р"-1 4- («2 - аг)рп~2 + -.. 4- ап - <*п-
Т-» ~ ~ Р*”1
Введем новые переменные: = т--, = т /~тц> i = 1,2,, ..., п.
А)(Р) А)(р)
Уравнение (11.11) примет вид оценочной модели (11.10), если поло-
жить
ИЧО 1Уп ••• У\ 2п ••• «1].
а = («j - ai ••• ап-ап Ь\ ••• Ьп)Т.
Здесь Ао(р) является собственным оператором фильтров. В нормальной
форме уравнения фильтров можно записать в виде
у = Ay + By, u = Au + Ви,
где у = (yi ..,уп)т, u = (ui ...ип)т, матрицы А и В определяются
соотношениями (11.4) и (11.3) соответственно.
Градиентный идентификатор. Пусть а(1) является оценкой в мо-
мент t вектора неизвестных параметров а в (11.10). Оценка выхода
y(t) = lV(f)a(i), (11.12)
которая получается при постановке в (11.10) вместо а его оценки,
называется прогнозируемым выходом, а разность
en(t) = У(0 - 3/(0 (11.13)
— прогнозируемой ошибкой. Очевидно, прогнозируемая ошибка есть
не что иное, как невязка — термин, который был определен при рас-
смотрении фильтра Калмана-Бьюси. Подставив в (11.13) выражения
для y(t) из (11.10) и y(f) из (11.12), получим
e„(t) = (11.14)
11.2. Адаптивное управление с идентификатором 301
Рассмотрим алгоритм для получения оценки (алгоритм идентифи-
кации), использующий невязку,
а = -71Угеп. (11.15)
Здесь 7 — положительная константа. Алгоритм (11.15) является гра-
диентным: при этом алгоритме невязка уменьшается путем изменения
оценок параметров, двигаясь в пространстве параметров в обратном
направлении градиенту квадрата невязки е„ по вектору параметров а.
Градиентный идентификатор, т. е. идентификатор, использующий
градиентный алгоритм идентификации, устойчив по Ляпунову, и пара-
метрическая ошибка при этом идентификаторе убывает. Однако будет
ли она стремится к нулю, зависит от сигнальной матрицы кото-
рая, в свою очередь, зависит от внешних воздействий.
Коэффициент 7 в (11.15) оказывает сильное влияние на характер
сходимости алгоритма оценивания. В случае одного параметра чем
больше 7, тем скорость сходимости больше. В случае многих па-
раметров связь между 7 и скоростью сходимости не такая простая.
На некотором малом интервале увеличение оценочного коэффициента
усиления может привести к увеличению скорости сходимости, но вне
указанного интервала дальнейшее увеличение этого коэффициента мо-
жет привести к колебаниям и более медленной сходимости.
Кроме влияния на скорость сходимости, выбор 7 оказывает также
влияние на способность идентификатора следить за изменяющимися
параметрами и противостоять возмущениям.
Свойство робастности* Чтобы идентификатор имел практическое
значение, он должен обладать робастностью (грубостью), т. е. он дол-
жен выдавать удовлетворительную оценку при изменении параметров,
при наличии шума измерения и других возмущений.
Качество градиентного идентификатора зависит от нескольких фак-
торов, главными из которых являются:
— уровень постоянного возбуждения матрицы сигналов PK(t);
— скорости изменения параметров и уровня непараметрической
неопределенности;
— величины оценочного коэффициента усиления 7.
Уровень постоянного возбуждения W(t) определяется задачей
управления. Постоянное возбуждение существенно для робастности
идентификатора. Если сигнал постоянно не возбуждается, параметры
не будут сходиться точному значению даже при отсутствии непа-
раметрической неопределенности. При наличии непараметрической
неопределенности идентификатор может стать неустойчивым. Может
оказаться, что нужно добавлять некоторое возмущающее воздействие
к управлению, чтобы получить качественную оценку параметров.
Если оцениваемые параметры изменяются, то чем быстрее происхо-
дят эти изменения, тем больше непараметрические неопределенности
влияют на качество оценки параметров. Очевидно, чем быстрее измени-
302 Гл. 1/. Адаптивные системы управления
ются параметры, тем труднее получить точную оценку. Кроме того, чем
выше уровень шума и больше неучтенных возмущений и динамики,
тем идентификатор функционирует хуже.
Пример 11.3. Задан объект передаточной функцией
2р2 + Ь2р+1
° р3 + Зр2 + 2р + 2 ’
где &2— неизвестный параметр. Определить градиентный алгоритм
идентификации неизвестного параметра при условии, что собственный
оператор фильтров имеет вид
Ао(р) = Р3 + 4р2 + 4р + 3.
Решение. В данном случае ai = 4, а2 = 4, а3 = 3, и уравнения
фильтров принимают вид
2/1 = 2/ь 2/2 =2/з> 2/з = ~32/1 - 4р2 - 4^ + 2/,
ui = и2, и2 = й3, й3 = -Зй1 - 4u2 - 4й3 4- и.
Так как ai - ai = 4 - 3 = 1, а2 — а2 = 4 — 2 = 2, а3 — а3 = 3 — 2=1,
Ь\ = 2, Ьз = 1, то для оценки вектора параметров имеем
^(*) = а = (1 2 1 2 Ь2 1)Г.
Оценка выходной переменной и градиентный алгоритм идентификации
принимают вид
2/ = 1У(^)а = уз + 2у2 + pi + 2й3 + £^й2 + гц,
b2 = -7и2(р-р).
МНК-идентификатор. Для получения оценки параметров ши-
рокое применение находит метод наименьших квадратов. При этом
методе оценка получается путем минимизации интегральной прогно-
зируемой ошибки (невязки)
t
J = 2 I |2/(т) - РУ(т)а(т)| dr. (11.16)
о
Алгоритм идентификации, получаемый методом наименьших квад-
ратов, будем называть МНК-алгоритмом или МНК-алгоритмом иден-
тификации, идентификатор, построенный на основе такого алгорит-
ма, — МНК-идентификатором.
Интегральная невязка (11.16) учитывает все измерения, которые
производятся до текущего момента. Поэтому оценки, получаемые мето-
дом наименьших квадратов, имеют то преимущество, что они меньше
зависят от шумов измерения, так как в процессе измерения и интегри-
11.2, Адаптивное управление с идентификатором 303
рования они сглаживаются. МНК-алгоритмы хорошо противостоят не
только шумам измерения, но и другим возмущающим воздействиям.
Утверждение 11.3. МНК-алгоритм идентификации имеет
вид
a(t) = -P(t')WT(t)en(t), (11.17а)
где en(t) — прогнозируемая ошибка (невязка), P(t) —матрица коэф-
фициентов усиления, которая определяется из уравнения
P(t) = -P(t}WT(t)W(t}P(t). (11.176)
Алгоритм (11.17) обеспечивает параметрическую сходимость
(a(t) —> 0 при t —* оо), если выполняется условие постоянного
возбуждения сигнала.
При выборе начальных значений а(0) и Р(0) = р$1 следует иметь
в виду, что малая ошибка в а(0) приводит к малым ошибкам в течение
всего процесса оценивания. Кроме того, чем больше р$, тем меньше
ошибка. Поэтому р$ нужно выбирать настолько большим, насколько
позволяет чувствительность к шумам.
МНК-идентификатор с экспоненциальной потерей памяти. До
сих пор предполагалось, что неизвестные параметры вовсе не изменя-
ются или изменяются очень медленно: за время адаптации практически
не меняются. Однако, если эти параметры в действительности, хотя
и медленно, изменяются, старые данные при оценке текущих значений
неизвестных параметров обесцениваются, так как они отражают ста-
рые значения параметров. Поэтому представляется разумным, чтобы
старые данные оказывали меньшее влияние на оценку, чем новые
данные. Эти соображения привели к методу наименьших квадратов,
при котором вклад старых данных на значение оценки экспоненциально
убывает. Экспоненциальное «забывание» достигается за счет того, что
в этом случае в качестве минимизируемого функционала принимается
интеграл
t / t х
J — expl A(r)drj |з/($) — iy(s)a(t)j ds, (11.18)
о ' s /
где А(т) > 0 —переменный коэффициент потери памяти. Алгоритм
идентификации, получаемый путем минимизации функционала (11.18),
будем называть МНК-алгоритмом идентификации с экспоненциаль-
ной потерей памяти, а идентификатор, построенный на основе такого
алгоритма — МНК-идентификатором с экспоненциальной потерей
памяти.
304 Гл, 1L Адаптивные системы управления
Утверждение 11.4. МНК-алгоритм идентификации с экспо-
ненциальной потерей памяти имеет вид
S(t) = —P(t)WT(t)en(t), (11.19а)
P(f) = A(t)P(t) - P(t)WT(t)W(t)P(t), (11.196)
и он обеспечивает параметрическую сходимость (a(t) a(i)
при t —> оо), если выполняется условие постоянного возбуждения.
Выбор коэффициента потери памяти. При выборе коэффициен-
та потери памяти нужно проявлять осторожность. Если коэффициент
потери памяти выбрать равным нулю (обычный МНК-идентификатор),
то в этом случае невозможно слежение за изменяющимися параметра-
ми и при наличии постоянного возбуждения. Если коэффициент потери
памяти выбрать постоянным, то это может привести к резкому росту
коэффициентов усиления и при отсутствии постоянного возбуждения
возникновению сильных колебаний оцениваемых параметров. Так как
сигнал может иметь различный уровень возбуждения, то желательно
иметь подстраиваемый коэффициент потери памяти. Значение нормы
матрицы коэффициентов усиления зависит от уровня возбуждения мат-
рицы сигналов. Поэтому, естественно, коэффициент потери памяти свя-
зать с величиной ||P(i)||. Одним из возможных алгоритмов изменения
коэффициента потери памяти в зависимости от ||P(t)|| определяется
соотношением
A(t) - Ао
где Ао — константа, определяющая максимальный коэффициент потери
памяти, /со “ константа, определяющая максимальное значение нормы
матрицы коэффициентов усиления и удовлетворяющая неравенству
*о > ||Р(0)||.
При малом ||P(t)|| коэффициент потери памяти приблизительно
равен Ао, и с ростом ||Р(£)|| коэффициент потери памяти убывает,
обращаясь в нуль, когда ||Р(£)|| принимает максимальное значение.
Большое значение Ао означает большую скорость забывания и лучшее
отслеживания изменяющихся параметров. Однако чем больше Ао, тем
больше колебания параметров. Поэтому при выборе Ао приходится
исходить из противоположных требований —хорошее отслеживание
изменяющихся параметров и низкий уровень их колебаний.
Константа fco должна быть больше ||Р(0) ||. При этом норма матрицы
P(t) не превышает fco независимо от уровня постоянного возбуждения.
Это связано с тем, что когда норма ||P(t)|| становится равной ко,
коэффициент потери памяти становится равным нулю и матрица P(t)
начинает убывать.
Константа ко влияет на скорость обновления данных и на колебания
оцениваемых параметров из-за возмущения так же, как и константа Ао-
ко J
11.2, Адаптивное управление с идентификатором 305
Поэтому выбор /со приходится производить при таких же противоречи-
вых требованиях, что и при выборе Ао.
Пример 11.4. Задан объект передаточной функцией
=_____________________________&3_______
р3 + Зр2 + 2р + а3 *
где Ьз, а3 — неизвестные параметры.
При условии, что собственный оператор фильтров имеет вид
Ло(р) = р3 + 4р2 + 4р + 3,
определить:
а) МНК — алгоритм идентификации неизвестных параметров;
б) МНК — алгоритм идентификации неизвестных параметров с экс-
поненциальной потерей памяти с коэффициентом потери памяти
А=1.
Решение. В данном случае ai = 4, аг = 4, а3 = 3, и уравнения
фильтров принимают вид
У\ = Уъ 2/2 = £з =-32/1 - - 4рз + р,
Ui = U2, «г = «3» «3 — ”3й1 - 4«2 “ 4й3 + и.
Так как ai — а\ = 4 — 3 = 1, аг — аг = 4 — 2 = 2, Ь\ = 0, Ьг = 0, то для
оценки вектора параметров имеем
а=(1 2а300Ьз)т.
Оценка выходной переменной и МНК-алгоритм идентификации прини-
мают вид _ _ _
у = py(t)a = pi + 2у2 + а3у{ + bxuit
аз = *з(2/-2/)> &з = -*б(2/~2/),
где к3, к$ “Элементы третьей и четвертой строк матрицы-столбца К =
— P(t)W(t)T (см. (11.17а) и (11.19а)), г —строка которой имеет вид
ki = Рг12/3 + Р12У2 + Pi32/1 + Pi4«3 + Р<5«2 + Рг6«1 (l = 1, ... , 6).
Уравнения (11.176) и (11.196) можно записать виде
P(t) - —ККТ, P(t) = A(t)P(t) - KKT.
В скалярной форме эти уравнения принимают вид
а) р^ = -kik^ij = 1, ..., 6); б) = Pij - kikj(itj = 1, ..., 6).
Здесь система уравнений а) относится к МНК-алгоритму идентифика-
ции, а система уравнений б) к МНК-алгоритму идентификации с экс-
поненциальной потерей памяти.
306
Гл. 1L Адаптивные системы управления
Задачи
11.31. Задан объект передаточной функцией
2р? + 2р + Ъз
° pi + 3p2 + 2p + 2'
где Ьз — неизвестный параметр.
Определить градиентный алгоритм идентификации неизвестного
параметра при условии, что собственный оператор фильтров имеет вид
Ао(р) = р3 + Зр2 + Зр + 1.
11.32. Задан объект передаточной функцией
= 2^ + bjp+1
° рЗ+Зр2 + 2р + 2’
где &2 — неизвестный параметр.
Определить градиентный алгоритм идентификации неизвестного
параметра при условии, что собственный оператор фильтров имеет вид
Ло(р) = р3 + Зр2 + Зр + 1.
11.33. Задай объект передаточной функцией
w = 4Р2 + Зр + Ьз
° р3 + р2 + 2р + а3 ’
где Ьз, аз — неизвестные параметры.
Определить градиентный алгоритм идентификации неизвестных па-
раметров при условии, что собственный оператор фильтров имеет вид
Ао(р) — р3 + 6р2 + 12р + 2.
11.34. Задан объект передаточной функцией
= гр2 + Ь2р + 2
° р3 + р2 + 2р + а3 ’
где Ьг, аз — неизвестные параметры.
Определить градиентный алгоритм идентификации неизвестных па-
раметров при условии, что собственный оператор фильтров имеет вид
Ао(р) = р3 + 6р2 + 12р + 2.
11.35. Задан объект передаточной функцией
= Зр2 + Зр + Ьз
° р3 + р2 + а2р + 2 ’
где Ьз, а2 — неизвестные параметры.
11.2. Адаптивное управление с идентификатором
307
Определить градиентный алгоритм идентификации неизвестных па-
раметров при условии, что собственный оператор фильтров имеет вид
Ао(р) = р3 + 2р2 + Зр + 2.
11.36. Задан объект передаточной функцией
= 2р2 + Ь2р + 2
° р3 + р2 + а2р + 2 ’
где а2 ~ неизвестные параметры.
Определить градиентный алгоритм идентификации неизвестных па-
раметров при условии, что собственный оператор фильтров имеет вид
Ао(р) = р3 + 2р2 + Зр + 2.
11.37. Задан объект передаточной функцией
= Зр2 + Ъ2р + Ьз
° р3 + Зр2 + 2р + 2’
где Ьг» Ьз — неизвестные параметры.
Определить градиентный алгоритм идентификации неизвестных па-
раметров при условии, что собственный оператор фильтров имеет вид
Ао(р) = р3 + 4р2 + Зр + 2.
11.38. Задан объект передаточной функцией
НЛ _ Р2 + ^2Р + Ьз
р3 + Зр2 + 2р + а3 *
где &2» Ьз, аз — неизвестные параметры.
Определить градиентный алгоритм идентификации неизвестных па-
раметров при условии, что собственный оператор фильтров имеет вид
Ао(р) = р3 + 4р2 + Зр + 2.
11.39. Задан объект передаточной функцией
= 4Р2 + Ь2р + Ь3
° р3 + Зр2 + а2р + 2 ’
где Ь2, Ьз, аг — неизвестные параметры.
Определить градиентный алгоритм идентификации неизвестных па-
раметров при условии, что собственный оператор фильтров имеет вид
А0(р) = Р3 + Зр2 + 4р + 3.
11.40. Задан объект передаточной функцией
= Ь1Р2 + Ь2р + з
° р3 + Зр2 + а2р + 1 ’
где Ь], Ьг> аг — неизвестные параметры.
308 Гл. 1L Адаптивные системы управления
Определить градиентный алгоритм идентификации неизвестных па-
раметров при условии, что собственный оператор фильтров имеет вид
Ао(р) = Р3 + Зр2 + 4р + 3.
11.41. Задан объект передаточной функцией
_ р2 + 2р + 1
р3 + flip2 + а2р + а3
где аь а2, а3 — неизвестные параметры.
Определить градиентный алгоритм идентификации неизвестных па-
раметров при условии, что собственный оператор фильтров имеет вид
Ао(р) = р3 + 5р2 + 4р + 2.
11.42. Задан объект передаточной функцией
w = bip2 + Ъ2р + Ьз
° р3 + 4р* + Зр + а3 ’
где Ьь Ьг» Ьз, а3 — неизвестные параметры.
Определить градиентный алгоритм идентификации неизвестных па-
раметров при условии, что собственный оператор фильтров имеет вид
Ао(р) = Р3 + 5р2 + 4р + 2.
11.43. Задан объект передаточной функцией
W 10
° р3 4-aip2 + Зр + 2*
где а\ — неизвестный параметр.
При условии, что собственный оператор фильтров имеет вид
Ао(р) = р3 + Зр2 + Зр + 1,
определить:
а) МНК-алгоритм идентификации неизвестного параметра;
б) МНК-алгоритм идентификации неизвестного параметра с экспо-
ненциальной потерей памяти с коэффициентом потери памяти А =1.
11.44. Задан объект передаточной функцией
W 10
° р3 + Зр2 + а2р + 2 *
где а2 — неизвестный параметр.
При условии, что собственный оператор фильтров имеет вид
Ао(р) = р3 + Зр2 + Зр + 2,
определить:
а) МНК-алгоритм идентификации неизвестного параметра;
11.2, Адаптивное управление с идентификатором 309
б) МНК-алгоритм идентификации неизвестного параметра с экспо-
ненциальной потерей памяти с коэффициентом потери памяти А = 1,5.
11.45. Задай объект передаточной функцией
Wo =---------—-------
р3 + Зр2 + 2р + а3 *
где а3 — неизвестный параметр.
При условии, что собственный оператор фильтров имеет вид
Ао(р) = р3 + 2р2 + Зр + 2,
определить:
а) МНК-алгоритм идентификации неизвестного параметра;
б) МНК-алгоритм идентификации неизвестного параметра с экспо-
ненциальной потерей памяти с коэффициентом потери памяти А = 2.
11.46. Задан объект передаточной функцией
Wn =_________—_______
р3 4-aip2 + Зр + 2’
где Ь3, а\ — неизвестные параметры.
При условии, что собственный оператор фильтров имеет вид
Ао(р) = Р3 + 2р2 + Зр + 3,
определить:
а) МНК-алгоритм идентификации неизвестных параметров;
б) МНК-алгоритм идентификации неизвестных параметров с экспо-
ненциальной потерей памяти с коэффициентом потери памяти А = 2,5.
11.47. Задан объект передаточной функцией
Wo —---------—-------
р3 4-Зр2 +О2Р + 2’
где Ь3, аг — неизвестные параметры.
При условии, что собственный оператор фильтров имеет вид
Ао(р) = р3 + Зр2 + 2р + 1,
определить:
а) МНК-алгоритм идентификации неизвестных параметров;
б) МНК-алгоритм идентификации неизвестных параметров с экспо-
ненциальной потерей памяти с коэффициентом потери памяти А = 3.
11.48. Задан объект передаточной функцией
Wo =---------—-------
р3 + Зр2 + 2р + a3 ’
где Ь3, а3 — неизвестные параметры.
При условии, что собственный оператор фильтров имеет вид
Ао(р) = р3 + 2р2 + Зр + 2,
310
Гл. 11. Адаптивные системы управления
определить:
а) МНК-алгоритм идентификации неизвестных параметров;
6) МНК-алгоритм идентификации неизвестных параметров с экспо-
ненциальной потерей памяти с коэффициентом потери памяти А ~ 1.
11.49. Задан объект передаточной функцией
WO = -5-------5“------Г.
р3 + «1Р2 + й2Р + 1
где ль а2 — неизвестные параметры.
При условии, что собственный оператор фильтров имеет вид
Л)(р) = Р3 + 6р2 + 12р + 8,
определить:
а) МНК-алгоритм идентификации неизвестных параметров;
б) МНК-алгоритм идентификаций неизвестных параметров с экспо-
ненциальной потерей памяти с коэффициентом потери памяти А = 1,5.
11.50. Задан объект передаточной функцией
р3 + aip2 + 2р + а3 ’
где аь а3 — неизвестные параметры.
При условии, что собственный оператор фильтров имеет вид
А0(р) = Р3 + 6р2 + 12р + 4,
определить:
а) МНК-алгоритм идентификации неизвестных параметров;
б) МНК-алгоритм идентификации неизвестных параметров с экспо-
ненциальной потерей памяти с коэффициентом потери памяти А = 2.
11.51. Задан объект передаточной функцией
W° р3 + 2р2 + агр + а3 ’
где аг, а3 — неизвестные параметры.
При условии, что собственный оператор фильтров имеет вид
Ао (р) = р3 + Зр2 + 2р + 1,
определить:
а) МНК-алгоритм идентификации неизвестных параметров;
б) МНК-алгоритм идентификации неизвестных параметров с экспо-
ненциальной потерей памяти с коэффициентом потери памяти А = 2,5.
11.52. Задан объект передаточной функцией
р3 + aip2 + a2p + a3 *
где ai, a2, a3 — неизвестные параметры.
Ответы
311
При условии, что собственный оператор фильтров имеет вид
Ао (р) = р3 4- 4р2 4- 2р 4- 2,
определить:
а) МНК-алгоритм идентификации неизвестных параметров;
б) МНК-алгоритм идентификации неизвестных параметров с экспо-
ненциальной потерей памяти с коэффициентом потери памяти А = 3.
11.53. Задан объект передаточной функцией
эдг __ ______Ьз_________
р3 4- dip2 4- а2р 4- аз ’
где Ьз, ai, а2, аз — неизвестные параметры.
При условии, что собственный оператор фильтров имеет вид
Ао(р) = р3 4- 4р2 4- Зр 4- 2,
определить:
а) МНК-алгоритм идентификации неизвестных параметров;
б) МНК-алгоритм идентификации неизвестных параметров с экспо-
ненциальной потерей памяти с коэффициентом потери памяти А = 4.
Ответы
11.1. а) и = g(t)+ к\у+ к2у+ кзу,
*1 = -«У[0,5(у - Ут) 4- 0,813(р - ут) 4- 0,438(у - Ут)],
^2 = -gj/[0,5(у - ут) 4- 0,813(у - ут) 4- 0,438(у - Ут)],
кз = -ду[0,5(у - ут) 4- 0,813(у - ут) 4- 0,438(у - Ут)];
б) и = 8y(t) 4- kiy 4- к2у 4- кзУ,
fci = -9у[0,063(у - ут) 4- 0,145(2/ — рт) 4- 0,107(2/ - Ут)],
*2 = -др[0,063(2/ ~ Ут) 4- 0,145(2/ - ут) 4- 0,107(у - ут)],
кз = -ду[0,063(у-ут) 4-0,145(у-ут) 4-0,107(у-ут)];
в) и = 2g(t) + kty + k2y + кзУ,
ki = -ду[0,083(у-ут)4-0,150(у-ут)4-0,108(у-ут)],
к2 = —qy[0,083(y ~ Ут) 4- 0,150(2/ - ут) 4- 0,108(2/ - Ут)],
*з = -ду[0,083(у - ут) 4- 0,150(2/ - ут) + 0,108(у - ут)];
312
Гл. 11. Адаптивные системы управления
г) и = 3g(t) + kly + к2у 4-&з2/>
ki = —92/(0,167$— 2/m)+ 0,255$ — 2/m) + 0,151$ -
^2 = -92/(0,167$ - ут) 4- 0,255$ - ут) 4- 0,151 (у -
кз = —92/(0,167$ -ут) 4-0,255(2/ -ут) 4- 0,151(у -
д) и = 4g(t) + kiy 4- к2у + кзУ,
ki = -92/(0,125$ - 2/m) + 0,212(2/ - ут) 4- 0,142$ - 2/m)],
= -92/(0,125(2/ - 2/m) + 0,212$ - 2/m) 4- 0,142$ - 2/m)],
кз = -92/(0,125(2/ “ Ут) + 0,212$ - ym) 4- 0,142$ - 2/m)]i
e) и = 12g(t) 4- fci у 4- k2у 4- кзУ,
ki = -92/(0,042(2/ - ym) 4- 0,115$ - ym) 4- 0,088$ - 2/m)].
k2 = -9^(0,042$ - 2/m) + 0,115$ - ym) 4- 0,088$ - 2/m)],
кз = -92/(0,042$ - 2/m) 4- 0,115$ - ym) 4- 0,088$ - 2/m)];
ж) и = 9g(t) + kiy + k2y + кзУ,
ki = -92/(0,056$ - 2/m) 4- 0,112$ - ym) 4- 0,087$ - 2/m)],
k2 = -92/(0,056$ - 2/m) + 0,112$ - ym) 4- 0,087$ - 2/m)],
кз = —92/(0,056$ - 2/m) + 0,112$ - ym) 4- 0,087$ - ym)];
3) u= 18g(t) 4-fc$ 4- k2y + k3y,
ki = -92/(0,028$ - 2/m) + 0,099$ - ym) 4- 0,075$ - j/m)],
k2 = -92/(0,028$ - 2/m) + 0,099$ - ym) 4- 0,075$ - 2/m)],
кз = -92/(0,028$ - 2/m) + 0,099$ - ym) 4- 0,075$ - j/m)];
и) и = 27g(t) + kiy + k2y + k3y,
ki = -92/(0,019$ - 2/m) + 0,090$ - ym) 4- 0,066$ - 2/m)],
k2 = -92/(0,019$ - 2/m) + 0,090$ - ym) 4- 0,066$ - 2/m)],
кз = —92/(0,019$ - 2/m) + 0,090$ - ym) 4- 0,066$ - 2/m)];
к) u = 16g(t) 4- k\y 4- k2y 4- &з2/,
k\ = -92/(0,031 $ - 2/m) + 0,075$ - ym) 4- 0,064$ - 2/m)],
k2 = —92/(0,031$ - 2/m) 4- 0,075$ - ym) 4- 0,064$ - 2/m)],
кз == -92/(0,031 $ - 2/m) + 0,075$ - ym) 4- 0,064$ - ym)].
Ответы
313
11.2. и = g(t) - у+ к3у,
&з = -91/1°,5(1/ - ут) 4- 0,813(у - ут) + 0,438(у - Ут)]-
11.3. и = 4g(t) -8у- 18у + кзу,
кз = -9У[°,063(2/ - ут) 4- 0,145(2/ - ут) 4- 0,107 (у “ Ут)]-
11.4. и = 3g(t) -Зу + к2у - 4у,
к2 = -9У[0,083(у ~ Ут) 4- 0,150(у - ут) + 0,108(у - ут)]-
11.5. и = 12y(t) - I82/ + к2у - бу,
к2 = —9у[0,167(у - ут) + 0,255(2/ - ут) + 0,151(2/ - Ут)]-
11.6. и = 2g(t) 4- к\у -бу + 2у,
ki = -92/(0.125(2/ - ут) + 0,212(£ - ут) 4- 0,142(2/ - Ут)]-
11.7. и = 12g(t) 4- kiy — 30j/ — 18у,
ki = -92/(0,042(2/ - ym) + 0,115(y - ym) 4- 0,088(2/ - Ут)]-
11.8. и = 4,59(t) - 5y + &2У 4- кзУ,
k2 = -92/(0,056(2/ - Ут) 4- 0,112(2/ — ym) + 0,087(2/ - 2/m)],
кз = -92/(0,056(2/ - ym) 4- 0,112(j> - ym) 4- 0,087(2/ - ym)]-
11.9. и = 369(f) ~ 30y 4- k2y 4- кзу,
k2 = -92/(0,028(2/ - ym) 4- 0,099(9 - ym) 4- 0,075(y - ym)],
кз = —92/(0,028(2/ - ym) 4- 0,099(y - ym) 4- 0,075(y - Ут)]-
11.10. и = 27g(t) - 14у 4- к2у 4- кзу,
к2 = —9у[0,019(2/ - Ут) 4- 0,090(9 - Ут) 4- 0,066(9 - 9т)],
кз = -99(0,019(9 - Ут) 4- 0,090(9 - Ут) 4- 0,066(у - 9т)1-
11.11. и = 89(f) - 5у 4- к2у 4- кзу,
к2 = -92/(0,031(9 - Ут) 4- 0,075(9 - ут) 4- 0,064(9 - Ут)].
кз = -9у[0,031(у - ут) 4- 0,075(2/ - Ут) 4- 0,064(у - ут)]-
11.12. и — g(t) 4- к\у 4- к2у,
к\ = -9У[О,5(у - Ут) 4- 0,813(2/ ~ Ут) 4- 0,438(у - ут)],
кг = -93/(0,5(у - ут) 4- 0,813(у - ут) 4- 0,438(у - ут)]-
11.13. и = 4g(t) 4- kiy 4- кцу - 14у,
ki = —9у[0,063(у - ут) 4-0,145(у - ут) 4-0,107(у - Ут)],
к2 = -9у[0,063(у - ут) 4- 0,145(у - ут) 4- 0,107(у - ут)]-
314 Гл. 11. Адаптивные системы управления
11.14. и = 8g(t) + kiy + к2у-20у,
£i = -gi/[0,083(1/ - ут) + 0,150(1/ - ут) 4- 0,108(у - i/TO)],
к2 = -ду[0,083(у - Ут) 4- 0,150(1/ - ут) 4- 0,108(i/ - i/m)].
11.15. и = 6g(t) + к\у - 23у+ кзу,
£1 = -gi/[0,167(i/-i/m) + 0,255(i/-ym) + 0,151(i/-i/m)],
кз = -gi/[0,167(1/ ~ Ут) + 0,255(1/ - ут) 4- 0,151 (у - j/m)].
11.16. u = 2g(t) + kiy—\Oy + k3y,
ki = -gi/[0,125(1/ - Ут) + 0,212(1/ - ym) 4- 0,142(у - i/m)],
кз = -gi/[0,125(1/ - Ут) 4- 0,212(1/ - ym) + 0,142(j/ - i/m)].
11.17. и = 4g(t)+ kiy - 13у+ кзу,
ki = -gi/[0,042(1/ - ym) + 0,115(1/ - Ут) + 0,088(j/ - i/m)],
кз = -gy[0,042(1/ - ym) + 0,115(1/ - Ут) + 0,088(1/ - ym)].
11.18. u = 3g(t) + kiy- 11у+кзу,
ki = -gi/[0,056(1/ ~ Ут) 4- 0,112(1/ - ym) + 0,087(y - i/m)],
кз = -gi/[0,056(1/ - Ут) + 0,112(j/ - ym) 4- 0,087(1/ - i/m)].
11.19. и = 10g(t) 4- kiy 4- k2y + кзУ,
kt = -gi/[0,028(1/ - Ут) 4- 0,099(y - ym) + 0,075(1/ —j/m)],
k2 = ~gy[0,028(1/ ~ Ут) + 0,099(1/ - ym) + 0,075(y - i/m)],
кз = -gi/[0,028(1/ - Ут) + 0,099(1/ - ym) + 0,075(i/ - i/m)].
11.20. и = 36g(f) 4- k\y + k2y 4- кзу,
ki = -gi/[0,019(1/ - Ут) 4- 0,090(y - ym) 4- 0,066(i/ - i/m)],
k2 = ~gy[0,019(1/ - Ут) 4- 0,090(y - ym) 4- 0,066(i/ - i/m)],
кз = -gi/[0,019(1/ ~ Ут) 4- 0,090(y - ym) 4- 0,066(i/ - i/m)J.
11.21. u = A:vivi 4-0,75^+22-0,51/+ 2p, i>i = v2,
tty = -0,5vi — 2v2 4- u, z\ = z2,
z2 = —0,5^1 - 2z2 4- y, kvi = -yvi(y - ym)-
11.22. и = -0,5vi 4- kv2v2 4- 0,75zi 4- £2 - 0,51/ + 2g, vi = V2,
i»2 = —0,5vi - 2v2 4- u, zi = z2, z2 = -0,521 - 2z2 4- y,
kv2 = -7^2(1/ - Ут)-
Ответы
315
11.23. и = kv\v\ - V2 + kt\Z\ +0,5^2 - 0,5y + 0,5p,
= V2, V2 ~ "“ul — 2v2 + u, Z\ = Z2,
z2 = -Z\ - 2z2 4- y, kvi = - ym), kzl = -^Z\{y - ym).
11.24. и = —i?i 4- kV2V2 + kzizi 4- 0,5z2 — 0,5g 4- 0,5g, i»i = v2,
V2 = —01 - 2v2 4- U, Z1 = Z2, Z2 = -z\ - 2z2 4- y,
kv2 = -yV2(y - ym), kzi = -7Zt (y - ym).
11.25. и = к„\vi — v2 4- 0,5zi 4- kZ2Z2 — 0,5g 4- 0,5g, v\ =V2,
V2 = ~O| — 2v2 4- U, Z\ = Z2, Z2 — — Z\ — 2z2 4- y,
kvi = -7Vi(y - Ут), kz2 = -7*2(1/- Ут)-
11.26. и — —vi 4- fcu2v2 4- 0,5zi 4- kz2z2 — 0,5g 4- 0,5g, гц = v2,
V2 = — V| - 2V2 4- U, Z\ = Z2, Z2 - — z\ — 2z2 4- y,
k>2 = -7V2(» - Ут), kz2 = ~7*2(1/ - Ут)-
11.27. и = fcvivi 4- fcv2u2 4- 0,5zi — z2 4- 3g, i>i = v2,
V2 = ~2vi — 2,5v2 4- u, z\ = z2, z2 -= —2zi — 2,5z2 4- y,
kvl = -7V1 (у - Ут), kv2 = -ТО2(у - ym)-
11.28. и = fcviVj -t kv2V2 4- fc2|Zi - z2 4- 1,5g, гц = иг,
V2 = -2vi - 2,5v2 4- u, zi = Z2, Z2 = ~2z\ — 2,5z2 4- y,
kvl = -7vi(y - Ут), kV2 = —7*>2(s/ - Ут), kzi = -7Zi(g - ym).
11.29. и = kV[Vi 4- kV2V2 4- z\ 4- kz2Z2 + g, v\= V2,
V2 = -2v\ - 2,5v2 4- u, z\ = Z2, z2 = -2zi - 2,5z2 4- y,
= -yvi(y - ym), kv2 = -7^(1/ - Ут), kz2 = ~7^(У ~ Ут)-
11.30. u = kv\Vi 4- k„2V2 4- kziZ\ 4- Лг2г2 4- g, Vi = v2,
v2 = —2t>i — 2,5«г 4- u, zi = z2, z2 = —2zi — 2,5z2 4- y,
kvl = -7«1 (у - Ут), kv2 = -уи2(у -Ут),
kzi = “7*1 (9 - Ут), kz2 = -7^г(у - Ут)-
11.31. У1=У\, у2 = УЗ, Уз = -yi - Зу2 - Зуз 4- у, й\= й2,
йг = «з, из — —й] — Зй2 — Зйз 4- и,
У = У2 - У1 4- из 4- 2й2 4-Ьзйь Ъз = -уй\{у - у).
11.32. yi=yi, у2 = уз. Уз = ~У\ - $У2 ~ Зуз + У,
ui = й2, й2 = из, из = —th — Зй2 — Зйз 4- и,
У = У2~У1 4-2й3 +62й2 4-йь = -^(у-у)-
11.33. ух = у\, у2 = уз, Уз = -2yi - 12у2 - буз 4- у,
щ =U2, и2 = из, из = —2й1 — 12й2 — бйз 4- и,
у = 5уз 4- 10g2 4- (2 - аз)ух 4- 4й3 4- Зй2 4- Ьзи\,
аз = iyi(y-y), Ьз = -уй^у-у).
316 Гл. 11. Адаптивные системы управления
11.34. yi = у\, у2 = уз, уз = -2yi - 12у2-6уз + у,
«1 = «2. «2 = «з> «з = ~2й1 — 12йг — 6й3 4- и,
У = 5уз 4- 10j/2 + (2 — 03)2/1 4- 2«з 4- Ьгйг + 2ui,
«з = 73/1 (з/~ у), Ь2 = ~7^(у - у)-
11.35. j/! = yi, у2 = уз, у3 = -2yi - Зуг -2уз+у,
щ = vq, й2 = йз, йз = ~2ui — Зй2 — 2из 4- и,
У = Уз + (3 - аг)й 4- Зйз 4- Зй2 4- Ьзщ,
а2 = уу2(у-у), Ьз = -уй^у-у).
11.36. 2/i =У1,У2 = Уз, Уз = ~^У1 ~33/2 - 2уз 4-у,
«1 = «2, «2 = йз, «з = — 2«i — 3«2 — 2й3 4- и,
у — уз 4- (3 — а2)уз 4- 2«з 4- 4- 2й],
«2 = 'т(.у-у), Ь2 = -^{у-у)-
11.37. 2/i =2/1- Уг = УЗ, Уз = ~2У1 - ЗЙ - 4?/з 4- у,
щ = й2, йг = йз, йз = —2й1 — Зй2 — 4йз 4- и,
У = Уз + У2 4- Зйз 4- Ьгйг 4- Ьз«1.
Ь2 - -уй^у-у), Ьз = -7й1(г/- у).
11.38. 2/1 = J/ь У2 - Уз, Уз ~ ~2У1 ~ 31/2 - 4уз 4- у,
fii = йг, йг = йз, йз = —2й] — Зи2 — 4йз 4-«,
У = Уз + У2 + $- «з)У1 + й3 4-^й2 4- Ьзй|, а3 = ущ(у - у),
= -7«г(у - У), Ьз = -тй1(2/- у).
11.39. 2/i =У\, У2=УЗ, Уз = -3F1 - *У2 ~ Зуз 4- у,
й1 = йг, йг = йз, йз = —Зй] — 4й2 - Зйз + «,
у = (4 - 02)2/2 4- 2/1 4- 4й3 4-^й2 4-Ьзйь а2 = 7Й(г/"!/).
Ь2 = -7йг(2/- у), Ьз = -7й1(у - 2/).
11.40. 2/1 = 3/1. 3/2 = Уз. Уз = -З3/1 -4у2- Зуз + у,
й1 = йг, йг = йз, йз = —3й1 — 4йг — Зйз + и-
у = (4 - а2)у2 4- 2j/i 4-Ь|й34-б2й2 4-Зй1, а2 = уу2(у~у),
bi = -тйз(з/- У), $2 = -7«2(з/- у)-
11.41. yi =2/1, у2 = уз, Уз = -2у1 -4у2-5уз + у,
t»i = йг, йг = йз, йз = —2й[ — 4йг — 5йз 4-«,
у = (5 — ai)уз 4- (4 — а2)у2 4- (2 - 03)2/1 4- йз 4- 2й2 4- «1,
ai =7УЗ(У-3/). а2=уу2(у-у), a3=^yi(y-y).
Ответы
317
11.42. г/j =?/i. У2 = Уз, Уз = ~2Ш ~^У2~5уз+у, щ = и2,
22 = «з, 23 = —221 — 42г — 52з 4- и,
У = Уз + У2 4- (2-a3)yi +Ь12з+^22 + Ьз21, о3 = ryi(y-y),
bi = -уйз(у-у), bi = -уй2{у-у), Ьз = ~'yui(y-y).
11.43. 2/i = 2/1, У2 =Уз, Уз = ~У1 ~^У2~^Уз+У.
U1 = и2, и2 = и3, и3 = — U1 — Зи2 — Зиз + 11,
у = (3-01)2/3-2/1 + 1021, 31 = ki(y -у),
ki = РНУЗ +Р12У2 + РаУ\ + Рй«3 +Р»5«2 + Pi6«l (» = 1....6),
a) Pij = ~kikj (i,j = 1..6);
б) Pij = Pij - kikj(i,j = 1.6).
11.44. 2/i = Pi, 2/2 = Уз. Уз = -22/i - З2/2 - Зрз 4- 2/, 2t = 2г, 22 = 23,
2з = -221 — 322 — 32з 4- и, у = (3 - а2)уг 4-1021,
а2 = к2(у — у), ki = рцуз 4- РаУ2 4- РОУ\ + Рй«з + Рй«2 4- р*б«1
(i = 1...........6),
a) Pij = -kikj{i,j = 1...6);
б) Pij = l,5pij - ktkj (t, j = 1, .... 6).
11.45. 2/i = yi, У2~ Уз, Уз = -22/1 - 3p2 - 2уз 4- у, 2i = 22, 22 = 23,
23 = -221 - 322 - 223 4- u, у = -уз 4- 2/2 4- (2 - 33)pj 4- 102i,
аз = k3(y - у), ki = рцуз 4- риУ2 4- Pi3Pi 4- рцй3 4-р»5«2 4- Pi6«i
(i = 1...........6),
а) Pij = ~kikj(i,j = 1...6);
6) pij = 2рь- - kikj (i, j = 1, 4) (i.j = 1.6).
11.46. 2/i = yi, У2 = Уз, 2/3 = -З2/1 - 3y2 - 2уз 4- у, 2i = 22, 22 = 23,
«3 = -«1 ~ 322 - 223 4- u, у = (2 - 01)2/3 4- 2/1 4-^2b
ai = ki(y - 2/), Ьз = -*б(2/ - у),
ki = РиУз 4- Pi2P*/ 4- Р132/1 + P«4U3 + Pi5«2 4- Pt6«l (i = 1, .... 6),
a) Pij = -kikj (i, j = 1..6);
6) Pij = 2,5pij kikj(i,j = 1, ..., 6).
11.47. 2/i = 2/b 2/2 = Уз> Уз = ~У\ ~^У2~^Уз + У, «1 = «2, «2 = «з,
йз = -21 - 222 - 32з 4- и, у == (2 - 32)у2 -2/14- Ьз2ь
32 = к2(у - у), Ьз = -к6(у- у),
ki = рцуз +Pi2V2 4-р»з2/1 +Рй«з +Р»5«2 4-P16U1 (i = 1..........6),
а) Pij = ~kikj(i,j = 1, .... 6);
б) Pij = $Pij - kikj(i,j = 1....6).
318
Гл. 11. Адаптивные системы управления
11.48. У1=У1, у2 = уз, Уз =-2yi - Зу2 - 2у3 + у, U] — Й2, Й2 = из.
йз = —2«1 - Зй2 - 2й3 + и, у = -Уз + У2 + (2 - a3)yi + Ьзщ,
аз = кз{у-у),Ьз = -къ(у-у),
ki = рнУз +РпУ2 +РИУ1 +рцй3 +рци2 +Pi6Ut (i = 1.............6),
a) Pij = -kikj (i, j = 1, ..., 6);
6) Pij = Pij - kikj{i,j = 1...6).
11.49. j/i = yi, У2 = Уз, Уз = Syi ~ 12у2 - 6y3 + y,
Щ = U2, U2 = U3, йз = —8Й1 — 12U2 — 6й3 + и,
у = (6-ai)y3 + (12-a2)y2 + 7p, + 5йь ai = ki(y-y},
а2 = fc2(y - у), ki = РиУз + Рг2У2 + Р.ЗУ1 + Рнйз + Р15Й2 + Р16Й1
a) Pij = -kikj (i,j = 1..6);
б) pij = l,5pij - kikj(i,j = 1.6).
11.50. У! = yi, y2 = уз, Уз = -4yi - 12р2 - 6р3 + у, щ = й2,
^2 = йз, из = —4ui — 12Й2 “ бйз + и,
у= (6 -21)уз + 10у2 + (4 —а3)у1 + 5гц, а( = Му~у),
аз = к3(у-у), кг= рцуз + pi2y2 + Pi3Vi + Рий3 + рцщ + Ра>Щ
(г=1,...,6),
a) Pij = ~kikj (г, j = 1, .... 6);
б) р^ = 2pij - kikj(i,j = 1...6).
11.51. y{ - yi, у2 = уз, у3 = -yi - 2у2 - Зуз+у, Щ = й2,
йг = йз, йз — -щ - 2и2 — Зйз + и,
У = Уз + (2 - а2)у2 + (1 - аз)У1 + 5йь а2 = fc2(y - у),
аз = к3(у-у), ki = рцу3 + pi2y2 + pi3yi + рцй3 + рг5й2 + pi6ui
(*=1............6),
а) Pij = ~kikj(i, j = 1..6);
б) р^ = 2,5pij - kikj (i, j = 1, ..., 6).
11.52. yi = yi, y2 = уз, Уз = “2yi -2y2 -4y3 + y, щ = й2,
U2 = из, йз ~ — 2й1 — 2йг — 4йз + и,
У = (4 - ai)y3 + (2 - а2)у2 + (2 - a3)yi + 5йь
«1 = МУ “У), а2 = к2(у-у), а3 = кз(у-у),
ki = РИУЗ + Рг2У2 + Р»ЗУ1 + Рий3 + Pi5%2 + Рг6«1 (г = 1..... 6),
а) Pij = -kikj (г, j = 1, .... 6);
б) Pij = 3pij - kikj (i,j = 1.6).
Ответы
319
11.53. ух - ух, у2 = уз, уз = -2ух - Зу2 -4уз+у, йх = й2,
«2 = из, йз = — 2йх — Зй2 — 4йз + и,
у = {4-ах')уз + (3-а2)у2 + {2-аз)у\ +b3wi. «1 = кх(у-у),
02 = к2(у-у), аз = кз(у-у), Ьз = -k6(y-y),
ki = РиУз + Pi2V2 + РИУ1 + Рийз + Pi5Wt + Pi6«l (г = 1.........6),
а) Pij = -kikj{i, j = 1, ..., 6);
б) Pij = 4pij - kikj (i,j = 1.6).
Приложения
ПЛ. Векторное дифференцирование
Ниже в определениях используется символ который обозначает
«равно по определению».
1) Производная вектора х = (х\ х2 ••• хп)т по скаляру t.
(dp \
I dxT def fdx
Г dt \ dt
dxn j x
~St f
2) Производная скалярной функции s = s(x) по вектору х =
= Си х2 ••• хп)т.
def / де А
dx дхп)*
3) Производная векторной функции f(x) (f = ••• /П)Т) по
вектору х = (xi ж2 ^п)т.
Используя приведенные определения и обычные правила дифферен-
цирования, можно получить следующие правила векторного дифферен-
цирования.
1°. Производная скалярного произведения по скаляру t.
хту) dxT Tdy __ Tdx Tdy
dt ~~dTy + x dt=y dt+x dt'
Если у = x, то имеем
d(xTx) ^dxT 'гdx
- - - = 2-r-x = 2x —.
П.1. Векторное дифференцирование
321
Вывод:
dyi
di
2°. Производная произведения матрицы и вектора по скаляру t.
d(Ax) dA .dx
_ v -' — — д* A -
dt dt dt'
где A — (m x п)-матрица, зависящая от t.
Вывод:
cE £ aUxj
7=1
j=i
d(Ax) _
dt
Tt Ё aVxi
7=1
7=1
7=1
dA Adx
=тх+Ай-
dt Ё anjxj
L 7=1
3°. Производная
= (®i x2 ••• xn)T.
7=1
скалярного произведения по
вектору x
d(yTz) ^dy Tdz
- , = z1 — + y-v-.
dx dx dx
Если у = z, то имеем „
d(yTy) 9rdy
-fa~=2y fa'
дп Л n
- э^Е^
1=1
П П
Вывод:
d(yTz) d
1=1
_ dzi ^dyi A dzi
S дх1^ + ^У'дх1 " 52 dxnZ' + f^y'dxn
dyT T dz dyT T dz 1 dyT ,
dxi dxi dxn dx-i
4°. Производная квадратичной формы по вектору х = (ii х% ••• хп)Т.
-^(xTQx) = 2xTQ,
dz
=rf72TB S'
где Q — симметрическая (п х п)-матрица, не зависящая от х.
322
Приложения
Вывод:
dx^®^ - ^Xi^qtjXj -
i=l ji=l
n n n n
Qljxj + * xiQi\ * * * Qnjxj + ^iQin
J=1 t=l j=l i=I
n n
252®»9«i •"2^2 Xiqin
. «=1 »=•
- 2xTQ.
5°. Производная сложной векторной функции по скаляру t.
dy _ ду dx
dt дх dt’
У = y(x(t)).
Вывод:
/dyi\
dt
dy2
dy _ dt
dt
dyn
\dt /
'dyi dx\
dxi dt
dy2 dx\
dx\ dt
dy\ dx2 dyi dxn-
dx2 dt dxn di
ду2^2 ду2 dxn
dx2 dt dxn dt
dyndxi dyndx2 dyndxn
.dxi dt dx2 dt dxn dt .
'dyt dyi
dx\ dx2
dy2 dy2
dx\ dx2
dy\ ~
dxn
dy2
dxn
dyn dyn
.dxi dx2
dyn
dxn.
'dxj'
dt
dx2
~di dy^dx
dx dt'
dxn
. dt .
П.2. Коэффициенты гармонической линеаризации
323
П.2. Коэффициенты гармонической линеаризации
Таблица П.1. Коэффициенты гармонической линеаризации НЗ с однознач-
ной характеристикой
№ Нелинейные характеристики Коэффициенты гармонической линеаризации
1 1 «е 1 сг 9(A) = WCSXa А аГСЗШ1 +
а Ь е —с +W'-<
2 С -Ь а
Ъ arcsin| + Я0_(£)2 ’
Z..... i е — С L А Ь.
3 с —а г ^X^arctgfc а е 9(A) = 2* ? - arcsin 1-1\/1-(1)2 , А > а.
4 с —а а 9(A) =
а е —с
5 с а е —с 9(A) = Л-
324
Приложения
Таблица П.2. Коэффициенты гармонической линеаризации для НЗ с неод-
нозначной характеристикой
П.2. Коэффициенты гармонической линеаризации
325
Таблица П.З. Коэффициенты гармонической линеаризации для НЗ с одно*
значной характеристикой при несимметричных колебаниях
Нелинейные
характеристики
Коэффициенты гармонической линеаризации
3
326
Приложения
Таблица П.4. Коэффициенты гармонической линеаризации для НЗ с неод-
нозначной характеристикой при несимметричных колебаниях
Нелинейные
характеристики
Коэффициенты гармонической линеаризации
о с/ ,а + е° . 6 + е°
а = — arcsm —3----------1- arcsin —-—
2тг \ А А
. а — е° . Ь~ е°\
— arcsm —;-------arcsin —-— ,
А А )
2(6 - а)с
тгА2
Список литературы
1. Алексеев В. М., Тихомиров В. М., Фомин С. В. Оптимальное управление. —
М.: Наука, 1979.-429 с.
2. Андриевский Б. Р., Фрадков А. Л. Избранные главы теории автоматическо-
го управления. —СПб: Наука, 1999.— 466 с.
3. Барбаишн Е.А. Введение в теорию устойчивости. — М.: Наука, 1967.—
-- 223 с.
4. Бесекерский В. Л., Попов Е. П. Теория систем автоматического регулиро-
вания. — М.: Наука, 1966. — 992 с.
5. Воронов Л. Л. Введение в динамику сложных управляемых систем. — М.:
Наука, 1985.-351 с.
6. Воронов А. А., Ким Д. П., Лохин В. М. и др. Теория автоматического управ-
ления. Ч. 2. Теория”нелинейных и специальных систем автоматического
управления. 2-е изд., перераб. и доп. — М.: Высшая школа, 1986.— 504 с.
7. Гонтмахер Ф. Р. Теория матриц. — М.: Наука, 1988. — 548 с.
8. Емельянов С. В., Уткин В. И., Таран В. А. и др. Теория систем с перемен-
ной структурой. — М.: Наука, 1970. — 592 с.
9. Квакернак X., Сиван Р. Линейные оптимальные системы управления: Пер.
с англ. — М.: Мир, 1977. — 650 с.
10. Ким Д.П. Теория автоматического управления. Том 2. Многомерные, нели-
нейные, оптимальные и адаптивные системы. — М.: Физматлит, 2007,—
440 с.
11. Корн Г., Корн Т. Справочник по математике для научных работников
и инженеров: Пер. с англ. — М.: Наука, 1968. — 720 с.
12. Красовский А. А., Буков В.Н., Шендрик В. С. Универсальные алгорит-
мы оптимального управления непрерывными процессами. — М.: Наука,
1977.-271 с.
13. Красовский Н.Н. Некоторые задачи теории устойчивости движения. — М.:
Физматлит, 1959.
14. Крутъко П.Д. Обратные задачи динамики управляемых систем. Линейные
модели. — М.: Наука, 1987. — 304 с.
15. Лурье А. И. Некоторые нелинейные задачи теории автоматического регу-
лирования. — М.-Л.: ГИТТЛ, 1951, —216 с.
16. Ляпунов А. М. Общая задача об устойчивости движения. — М.-Л.: Гостех-
издат, 1950.
17. Макаров И.М., Дмитриева Н.Д., Ким Д.П. и др. Основы автоматизации
управления производством. — М.: Высшая школа: 1983. —504 с.
328
Список литературы
18. Нету шил А. В., Гольдфарб Л. С., Александровский И.М. и др. Теория
автоматического управления. Ч. 2. —М.: Высшая школа, 1972.— 430 с.
19. Острем К. Введение в стохастическую теорию управления: Пер. с англ. —
М.: Мир, 1973.-321 с.
20. Понтрягин Л. С., Болтянский В. Г., Гамкрелидзе Р. В., Мищенко Е. Ф.
Математическая теория оптимальных процессов. — М.: Физматлит, 1961. —
391 с.
21. Попов Е.П Теория нелинейных систем автоматического регулирования и
управления. — М.: Наука, 1979.— 255 с.
22. Сборник задач по теории автоматического регулирования и управления.
Под редакцией В. А. Бесекрского. — М: Физматлит, 1969, — 587 с.
23. Справочник по теории автоматического управления/Под ред. А. А. Красов-
ского. — М.: Наука, 1987.— 712 с.
24. Топчеев Ю.И., Цыпляков А.П. Задачник по теории автоматического
управления. — М.: Машиностроение, 1977. — 592 с.
25. Уткин В. И. Скользящие режимы и их применение в системах с перемен-
ной структурой. — М.: Наука, 1974.— 272 с.
26. Якубович В. А., Барабанов A. Т., Катковник В. Я. и др. Методы исследова-
ния нелинейных систем автоматического управления. — М.: Наука, 1975. —
447 с.
27. Bailey F. N. The Aplication of Lyapunov Second Method to Interconnected
Systems // SIAM Journal of Control, 1966, N.3. P. 443-462.
28. Bellman R. Vector Lyapunov Functions // SIAM Journal of Control, 1962,
N. 1. P. 32-34.
29. Marino R., Tomei P. Nonlinear Control Design. Prentice Hall Europe, 1995.
396 p.
30. Slotine J. Z E., Li W. Applied Nonlinear Control. Prentice Hall International
Editions, 1991.