/
































































































































Автор: Ким Д.П.
Теги: математическая кибернетика автоматика математика теория автоматического управления
ISBN: 5-9221-0379-2
Год: 2003
Похожие




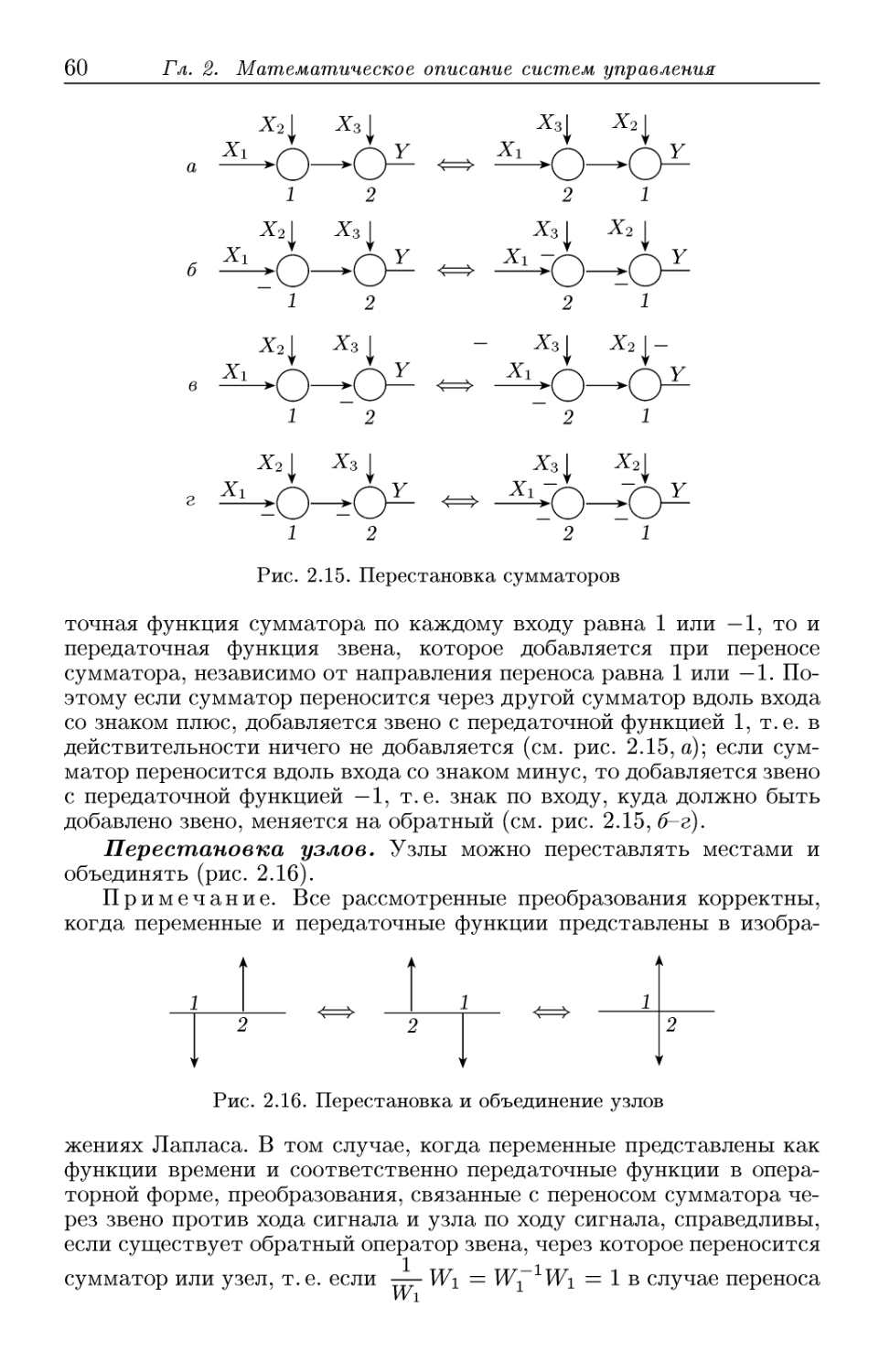
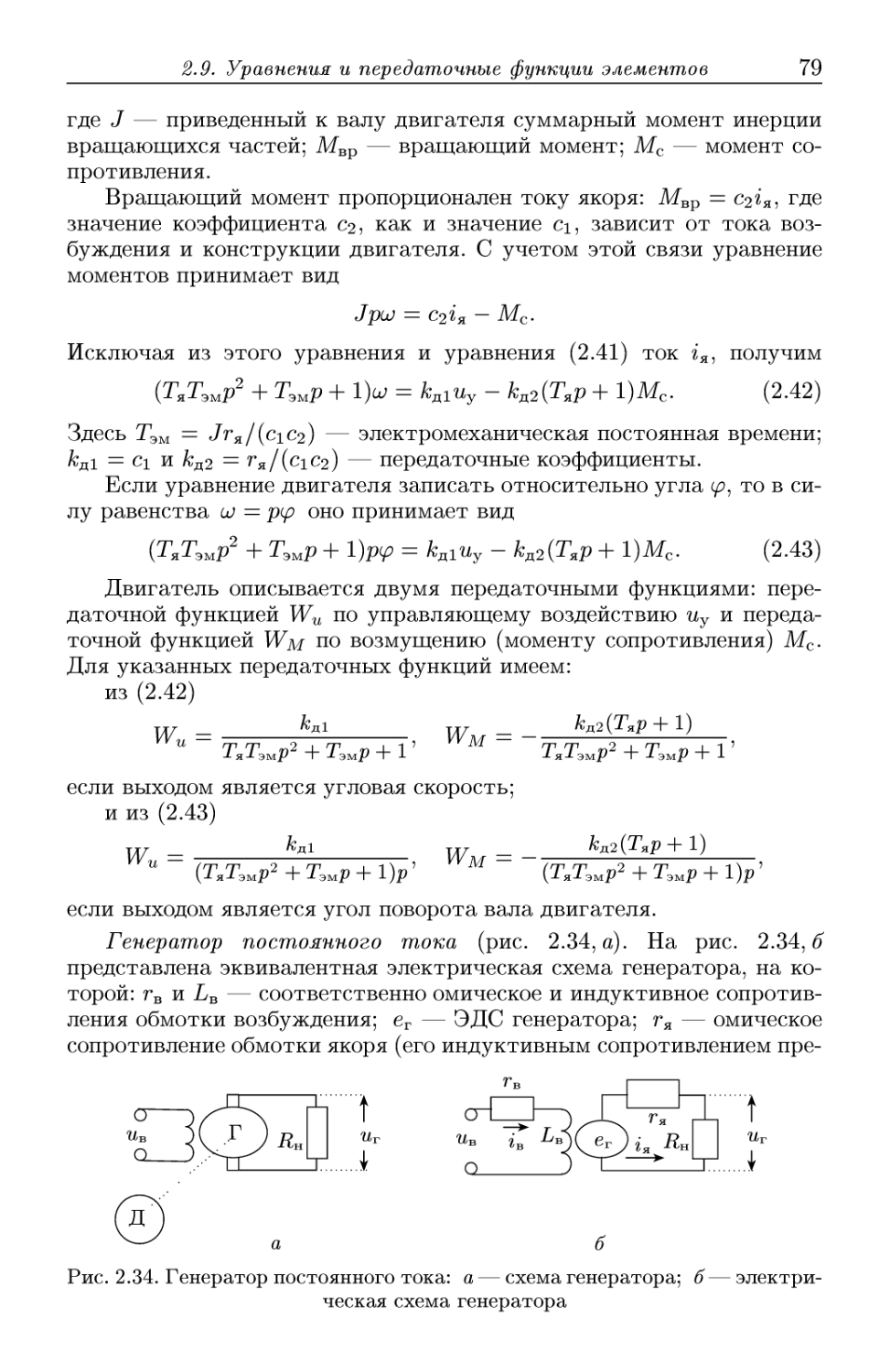
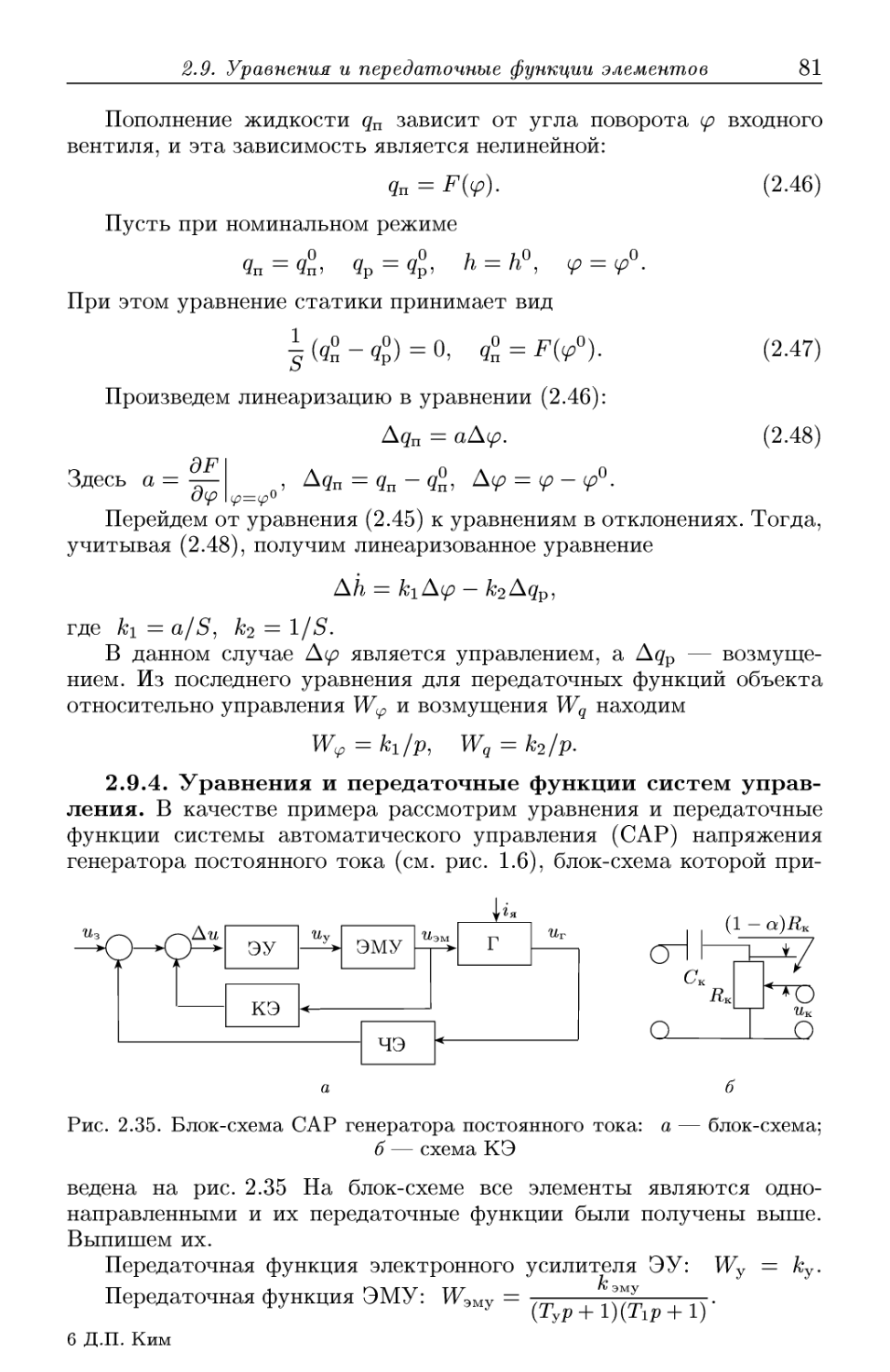
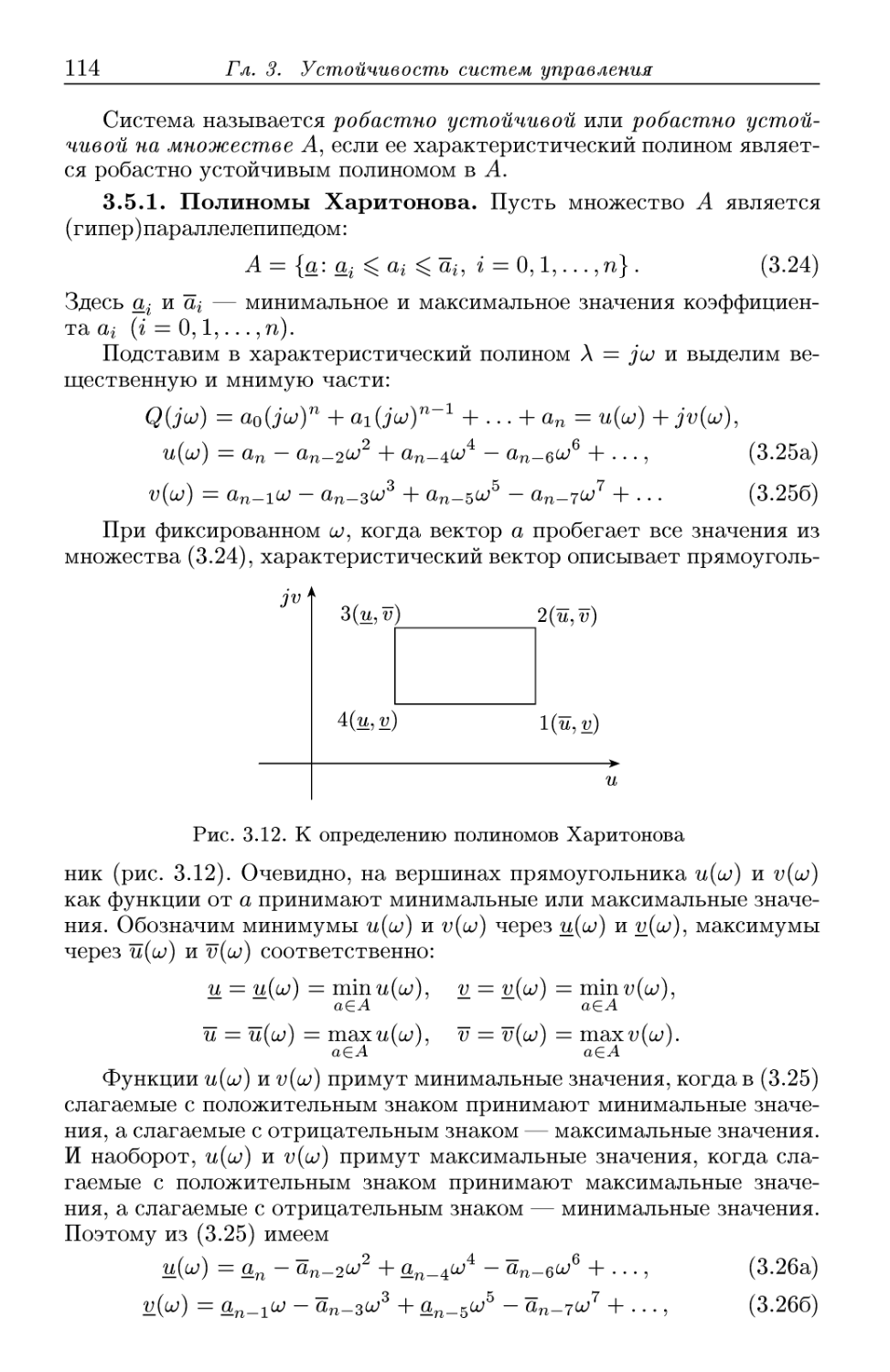
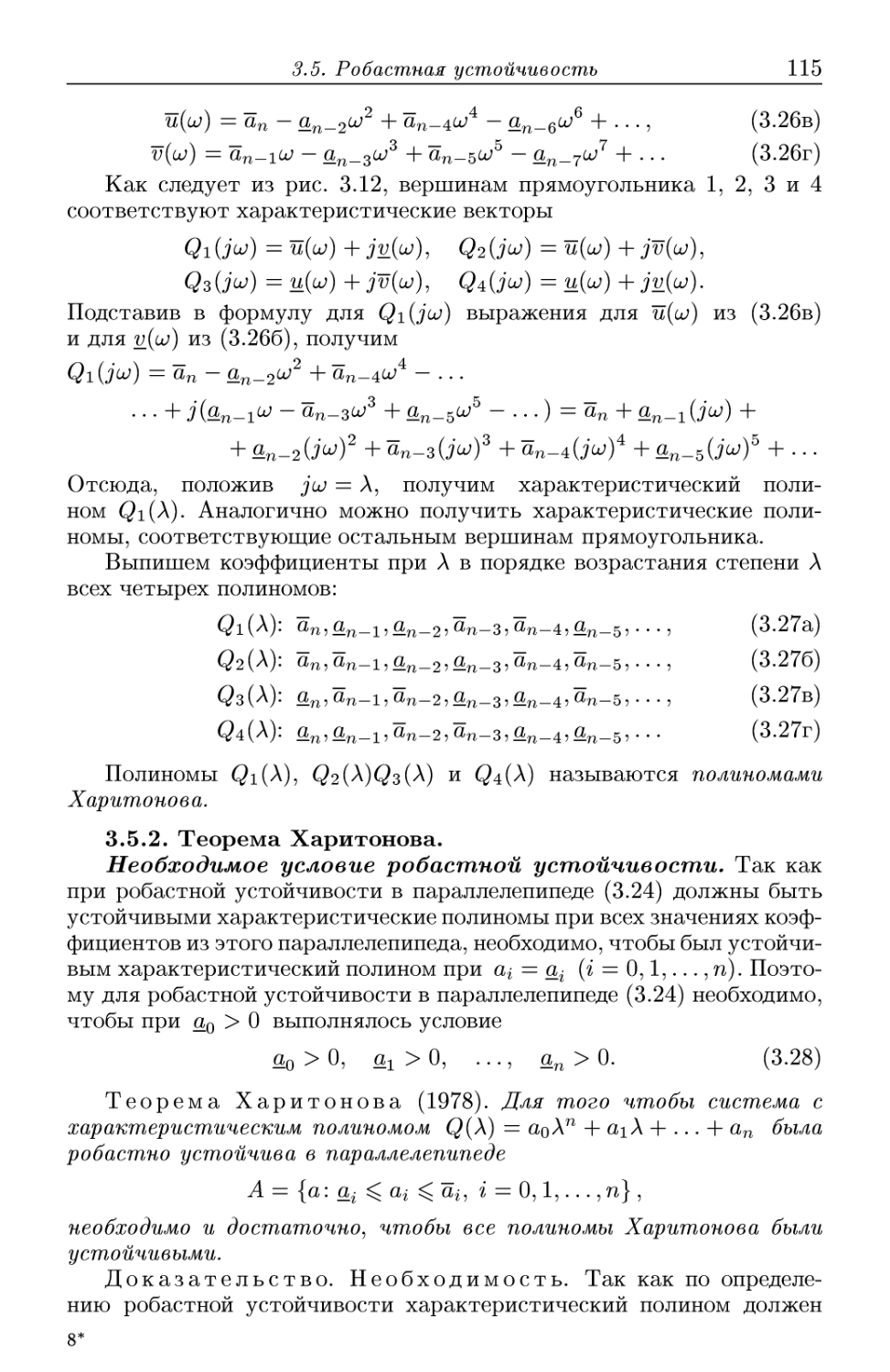
Текст
УДК 519.711
ББК 32.965
К40
Ким Д. П. Теория автоматического управления. Т. 1. Линей-
Линейные системы. - М.: ФИЗМАТЛИТ, 2003. - 288 с. - ISBN 5-9221-0379-2.
Книга посвящена теории автоматического управления линейных стаци-
стационарных систем. В ней даются основные понятия и принципы управления,
математическое описание и методы анализа и синтеза непрерывных и дис-
дискретных систем управления.
Для студентов технических вузов, изучающих дисциплины «Теория ав-
автоматического управления» и «Основы теории управления». Может быть
рекомендована инженерно-техническим и научным работникам, желающим
изучить основы теории автоматического управления.
Табл. 13. Ил. 148. Библиогр. 19 назв.
Рецензенты:
кафедра «Системы автоматического и интеллектуального управления»
Московского авиационного института (зав. кафедрой — доктор технических
наук, профессор Г.Н. Лебедев)',
доктор технических наук, профессор О. С. Колосов (Московский энерге-
энергетический институт).
© ФИЗМАТЛИТ, 2003
ISBN 5-9221-0379-2 (Т. 1) © д. п. Ким, 2003
Оглавление
Предисловие 7
Глава 1. Основные понятия и принципы управления 9
1.1. Исходные понятия 9
1.2. Принципы управления 12
1.2.1. Принцип программного управления A2). 1.2.2. Прин-
Принцип компенсации A2). 1.2.3. Принцип обратной связи A4).
1.2.4. Принцип комбинированного управления A6).
1.3. Структура системы управления 17
1.4. Законы управления 18
1.5. Классификация систем управления 19
Глава 2. Математическое описание систем управления ... 21
2.1. Уравнения динамики и статики 21
2.2. Линеаризация. Формы записи дифференциальных уравнений 22
2.3. Преобразование Лапласа 25
2.4. Передаточные и временные функции 31
2.4.1. Передаточные функции C2). 2.4.2. Временные функ-
функции C5). 2.4.3. Связь между передаточной функцией и вре-
временными функциями C6).
2.5. Частотные функции и характеристики 37
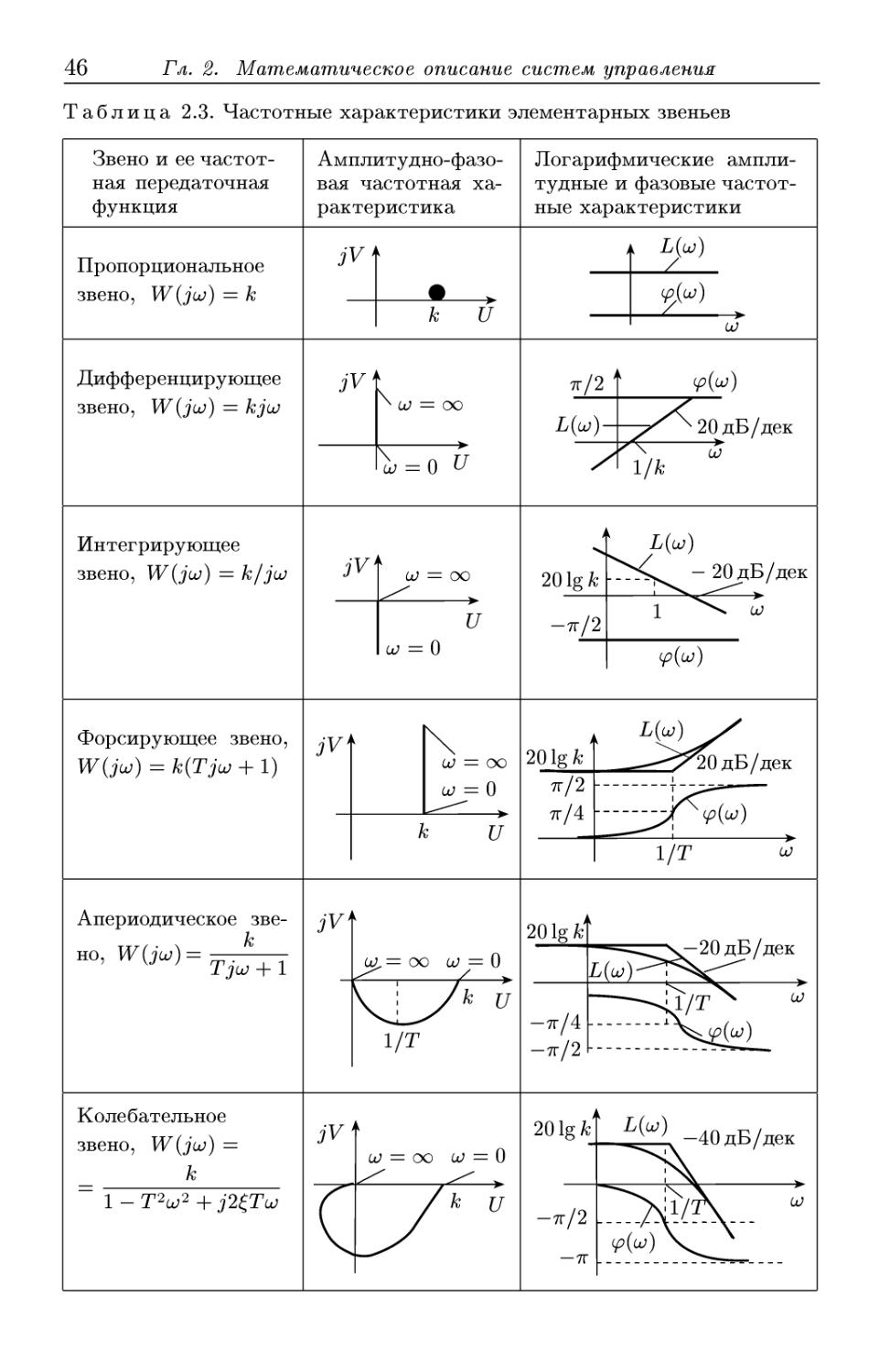
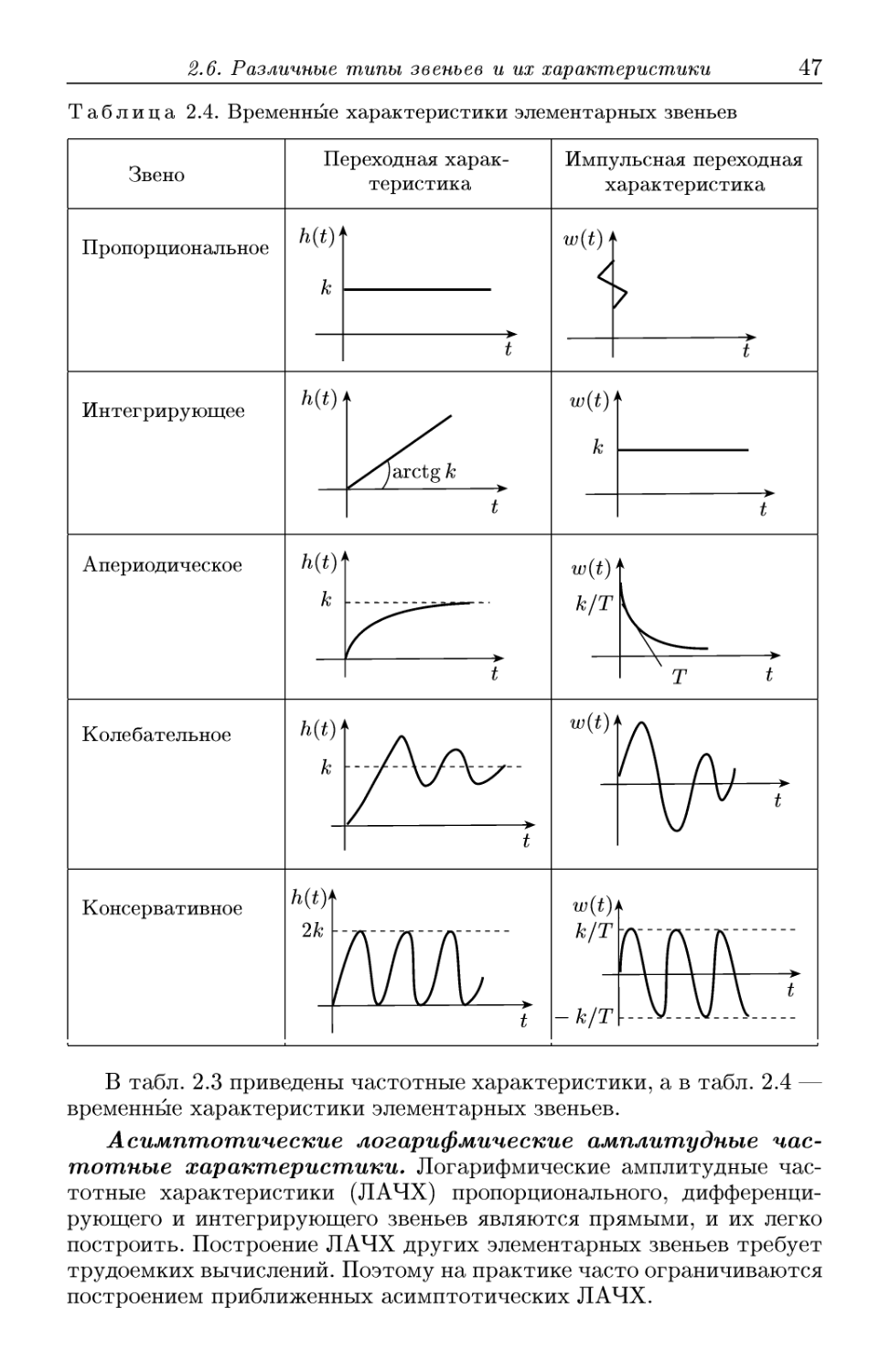
2.6. Различные типы звеньев и их характеристики 42
2.6.1. Типы элементарных звеньев D3). 2.6.2. Неминимально-
фазовые элементарные звенья D9). 2.6.3. Звено чистого запаз-
запаздывания E1). 2.6.4. Построение логарифмических частотных
характеристик E1)
2.7. Структурные схемы и дифференциальные уравнения систем
управления 56
2.7.1. Преобразование структурных схем E6). 2.7.2. Вычис-
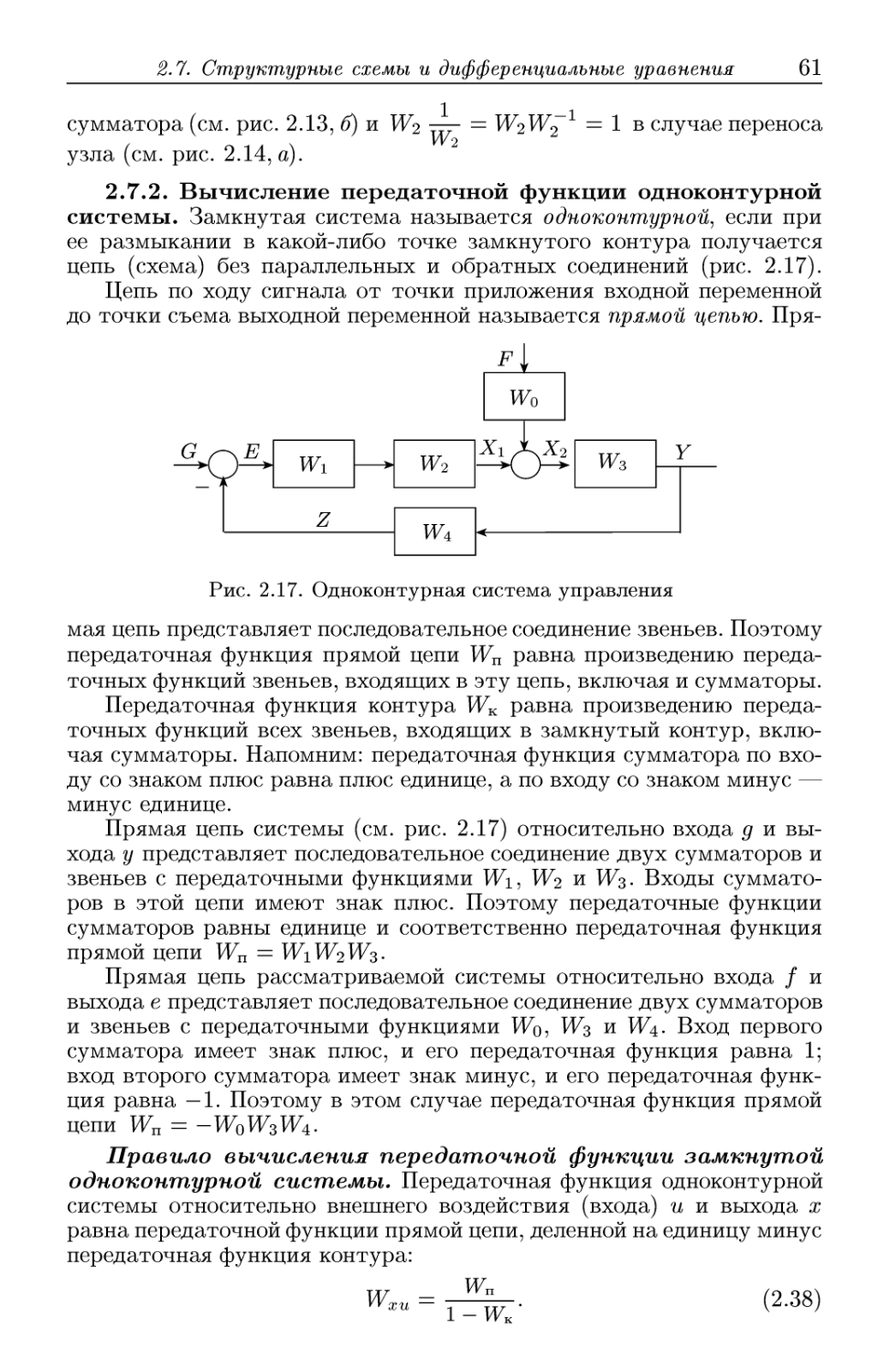
Вычисление передаточной функции одноконтурной системы F1).
2.7.3. Вычисление передаточной функции многоконтурной
системы F2).
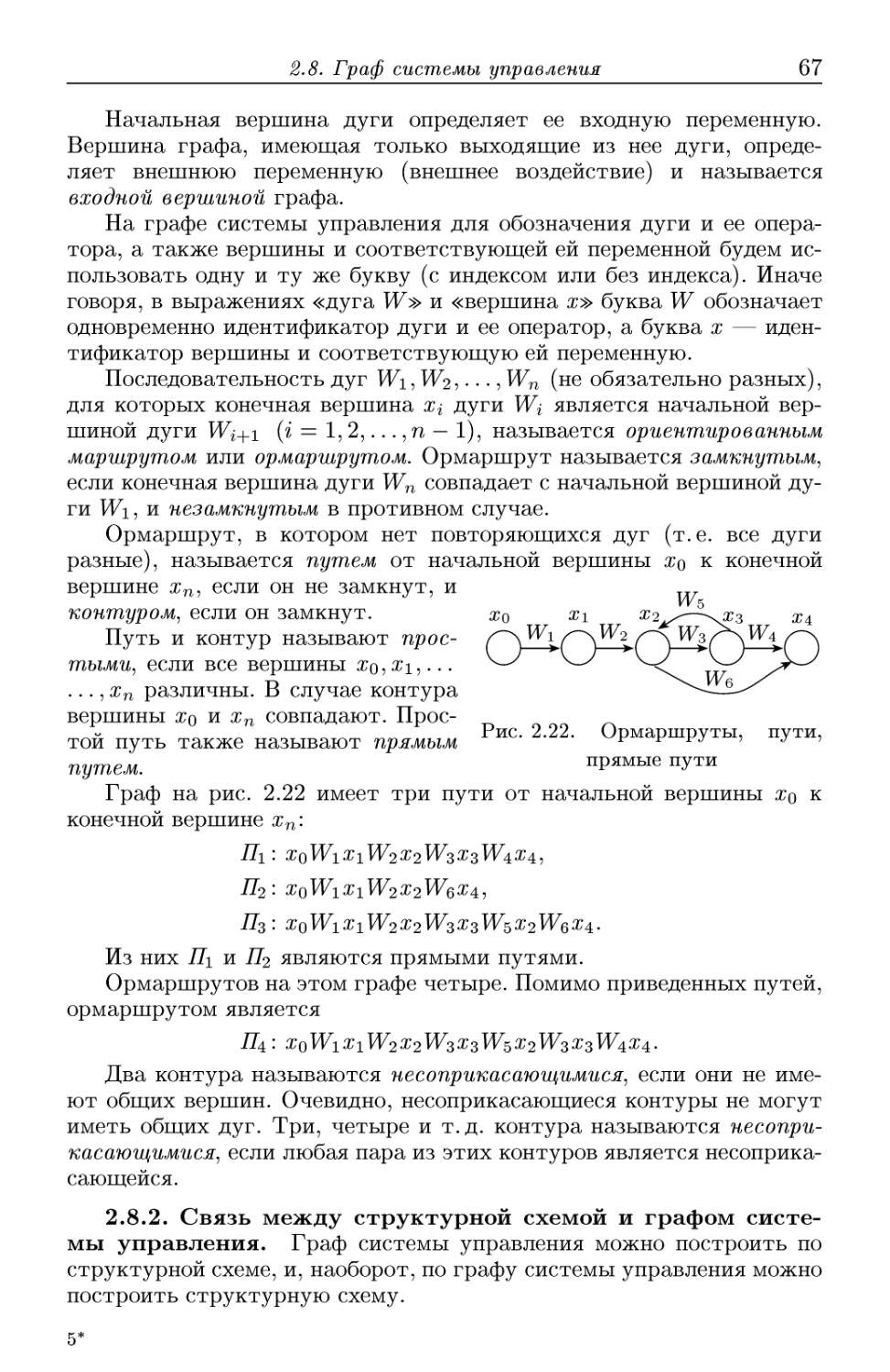
2.8. Граф системы управления 66
2.8.1. Компоненты графа системы управления F6). 2.8.2. Связь
между структурной схемой и графом системы управления F7).
Оглавление
2.8.3. Преобразование графа системы управления. Формула
Мейсона F8).
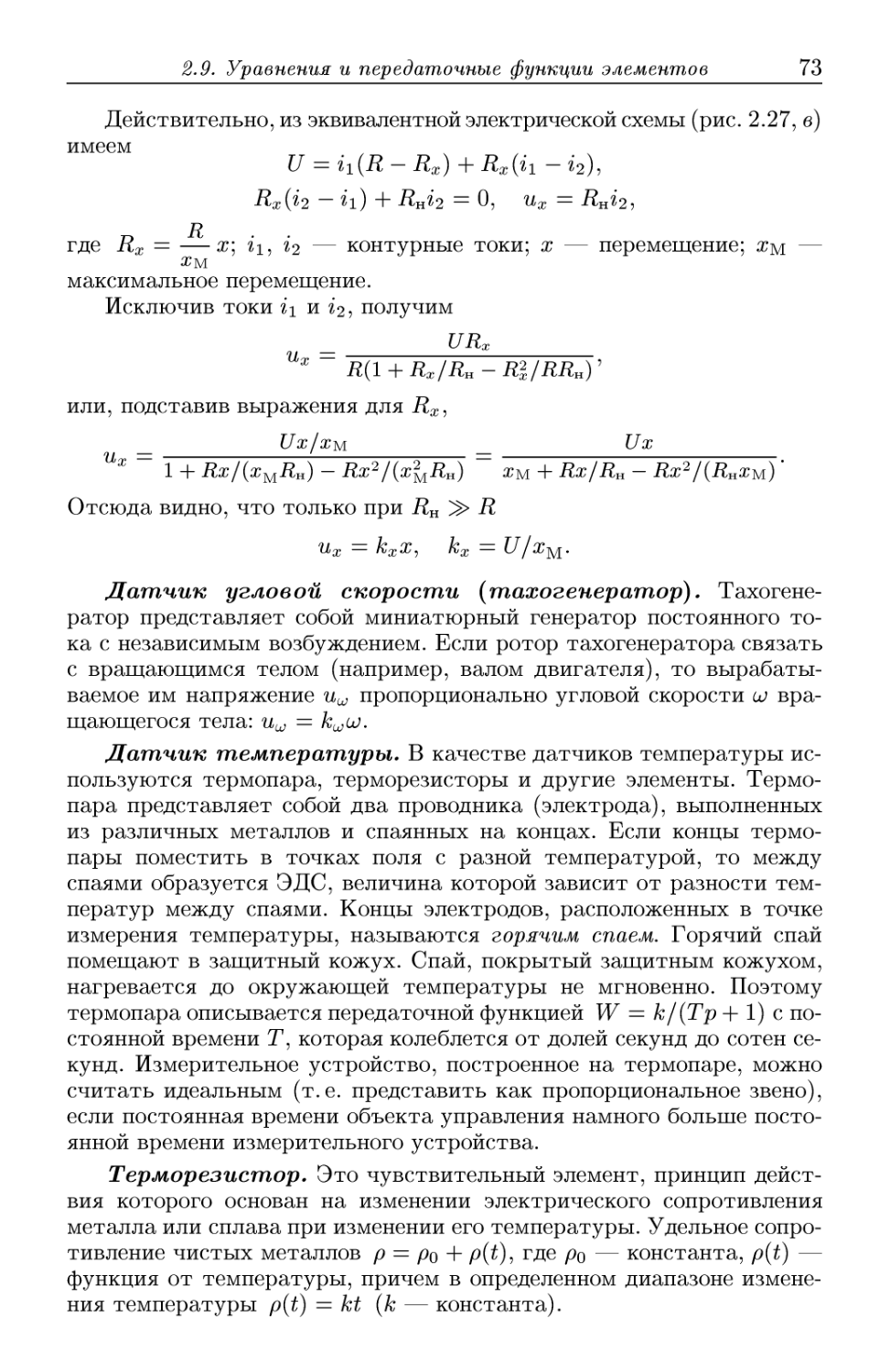
2.9. Уравнения и передаточные функции элементов и систем
управления 72
2.9.1. Датчики и преобразователи G2). 2.9.2. Усилители и кор-
корректирующие элементы G4). 2.9.3. Исполнительные устройст-
устройства и объекты управления G8). 2.9.4. Уравнения и передаточ-
передаточные функции систем управления (81).
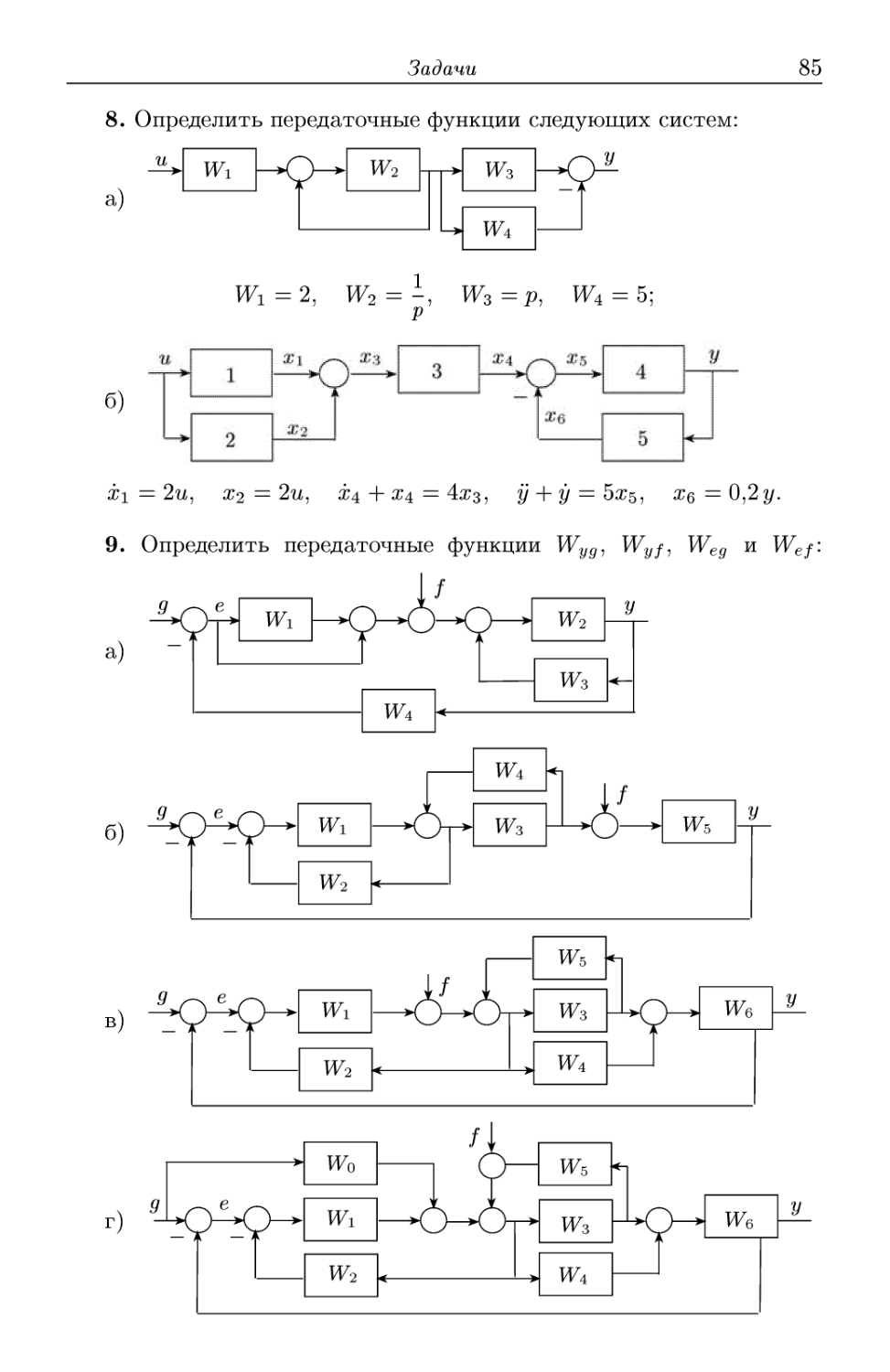
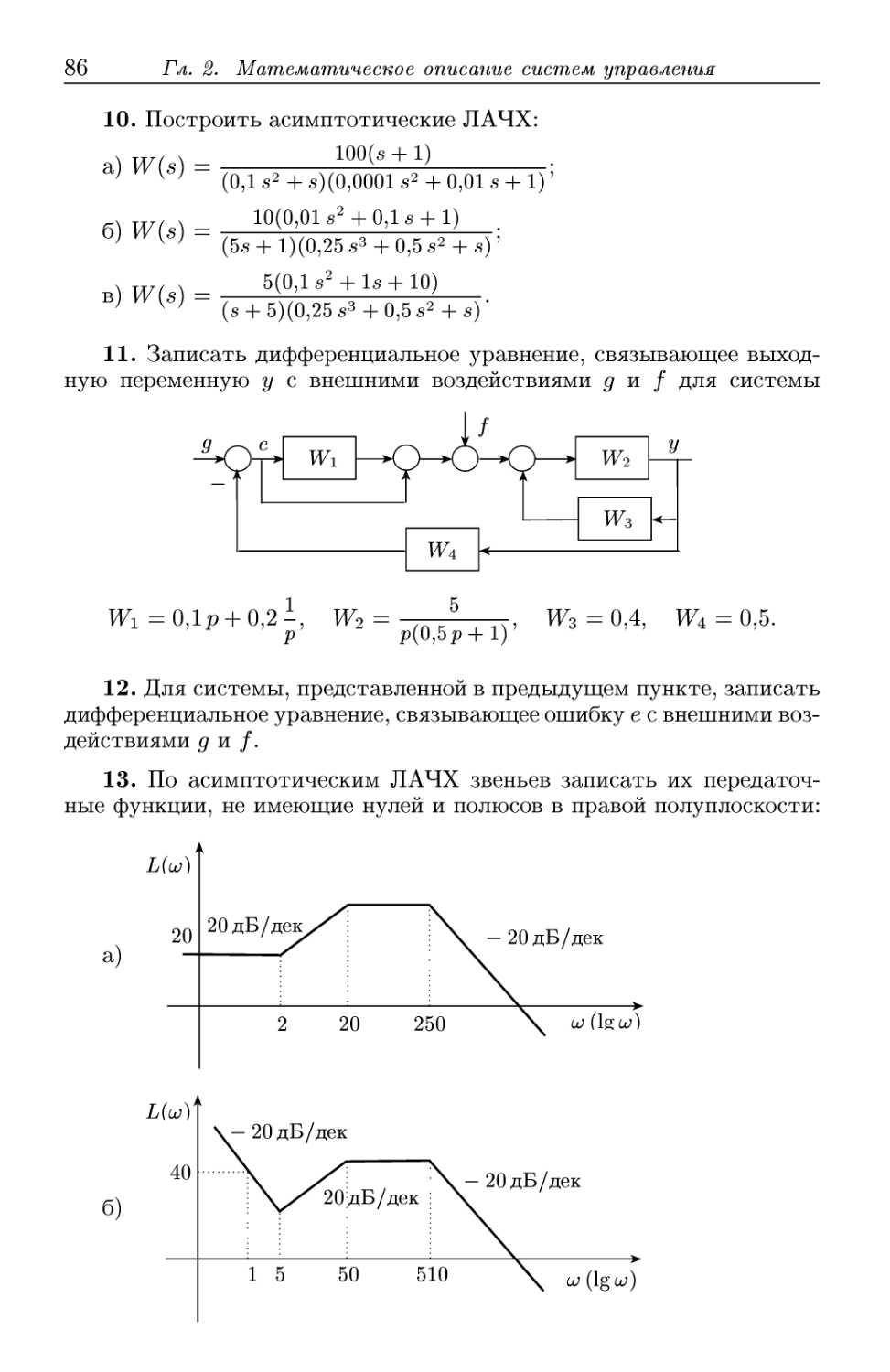
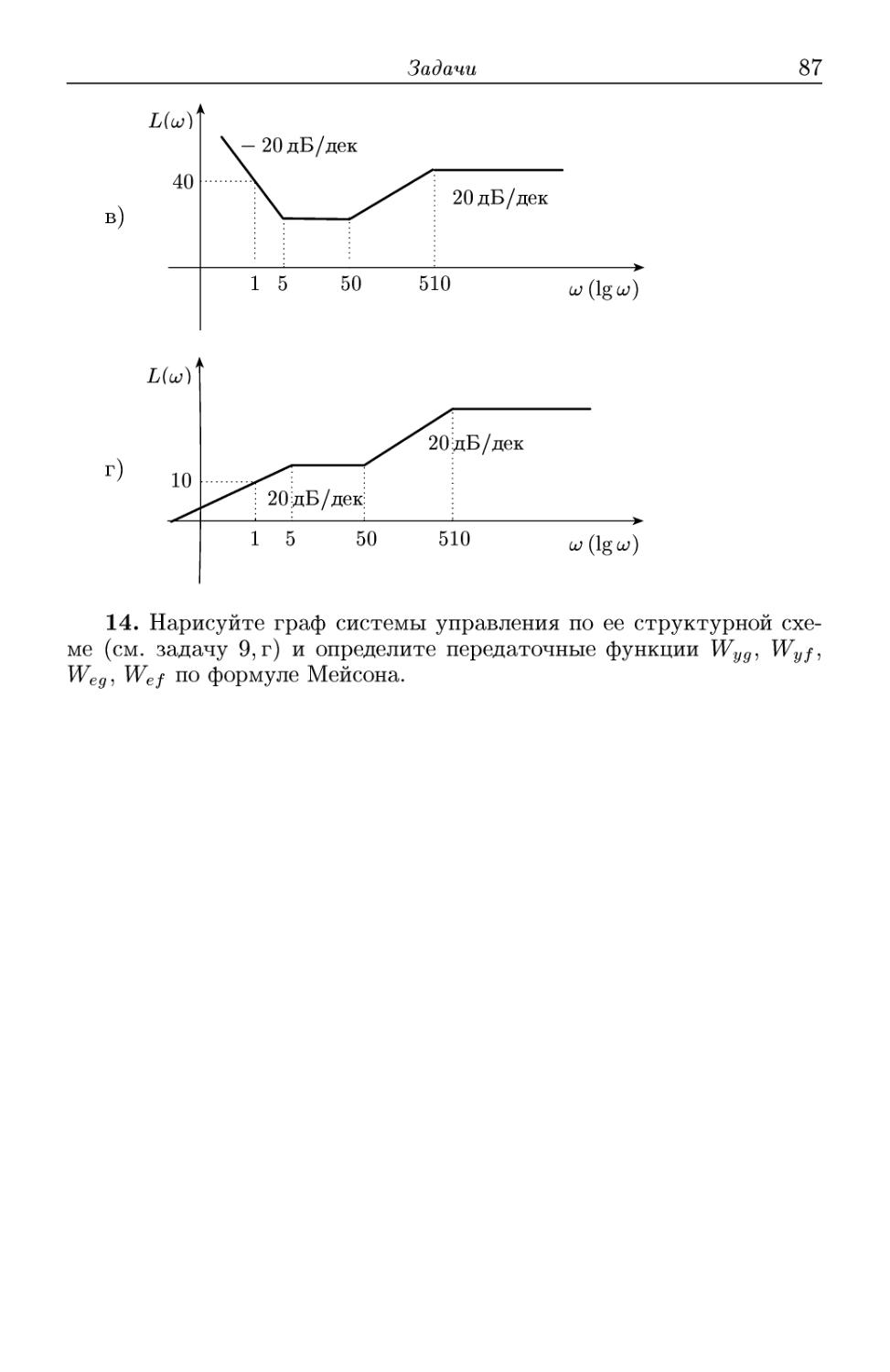
Задачи 83
Глава 3. Устойчивость систем управления 88
3.1. Определение и условия устойчивости 88
3.1.1. Определение устойчивости (88). 3.1.2. Основное усло-
условие устойчивости (89). 3.1.3. Необходимое условие устойчи-
устойчивости (91). 3.1.4. Теоремы Ляпунова об устойчивости по ли-
линейному приближению (91).
3.2. Алгебраические критерии устойчивости 92
3.2.1. Характеристическое уравнение (92). 3.2.2. Крите-
Критерий Гурвица (93). 3.2.3. Критерий Льенара-Шипара (93).
3.2.4. Критерий Рауса (95).
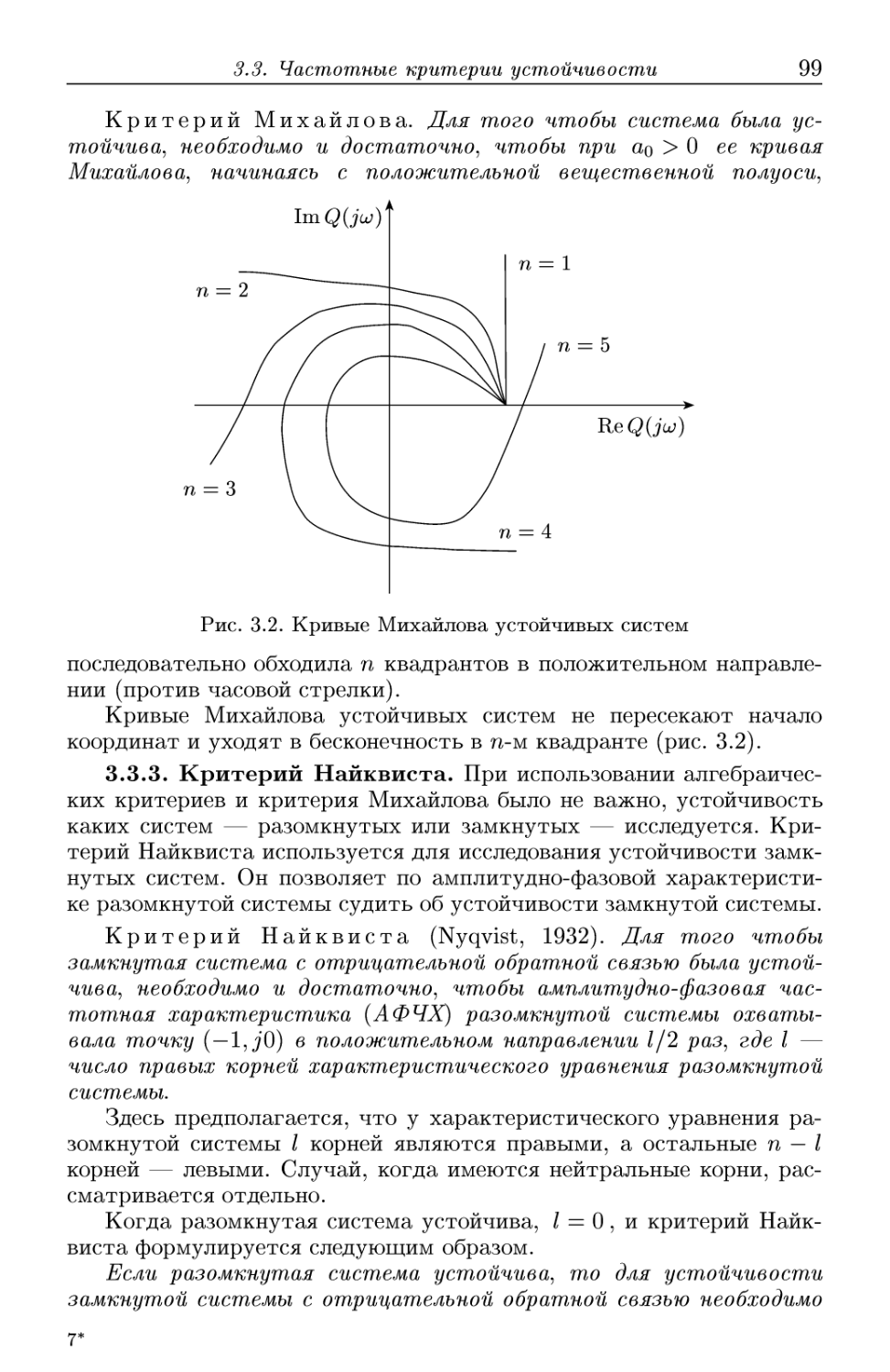
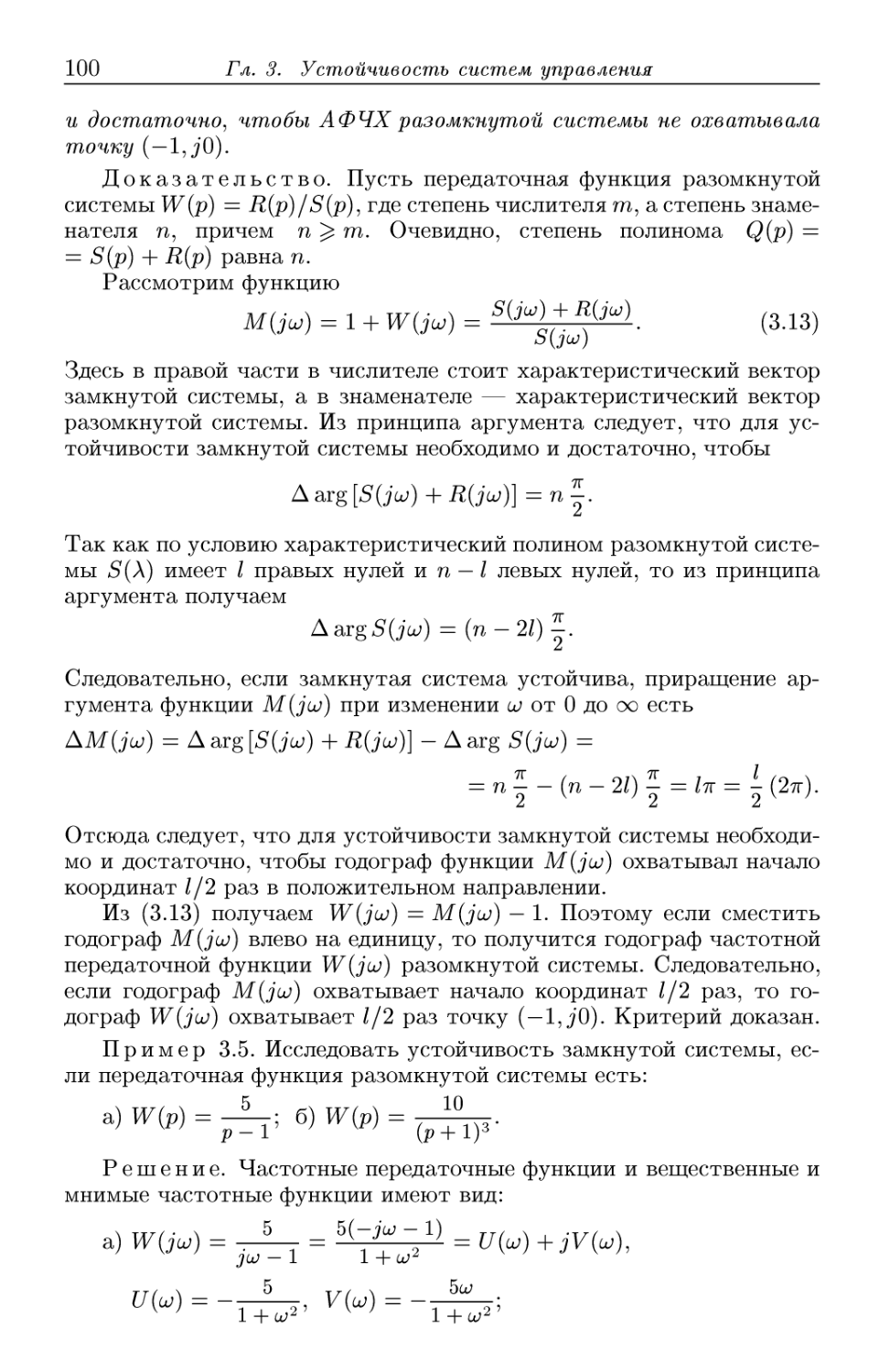
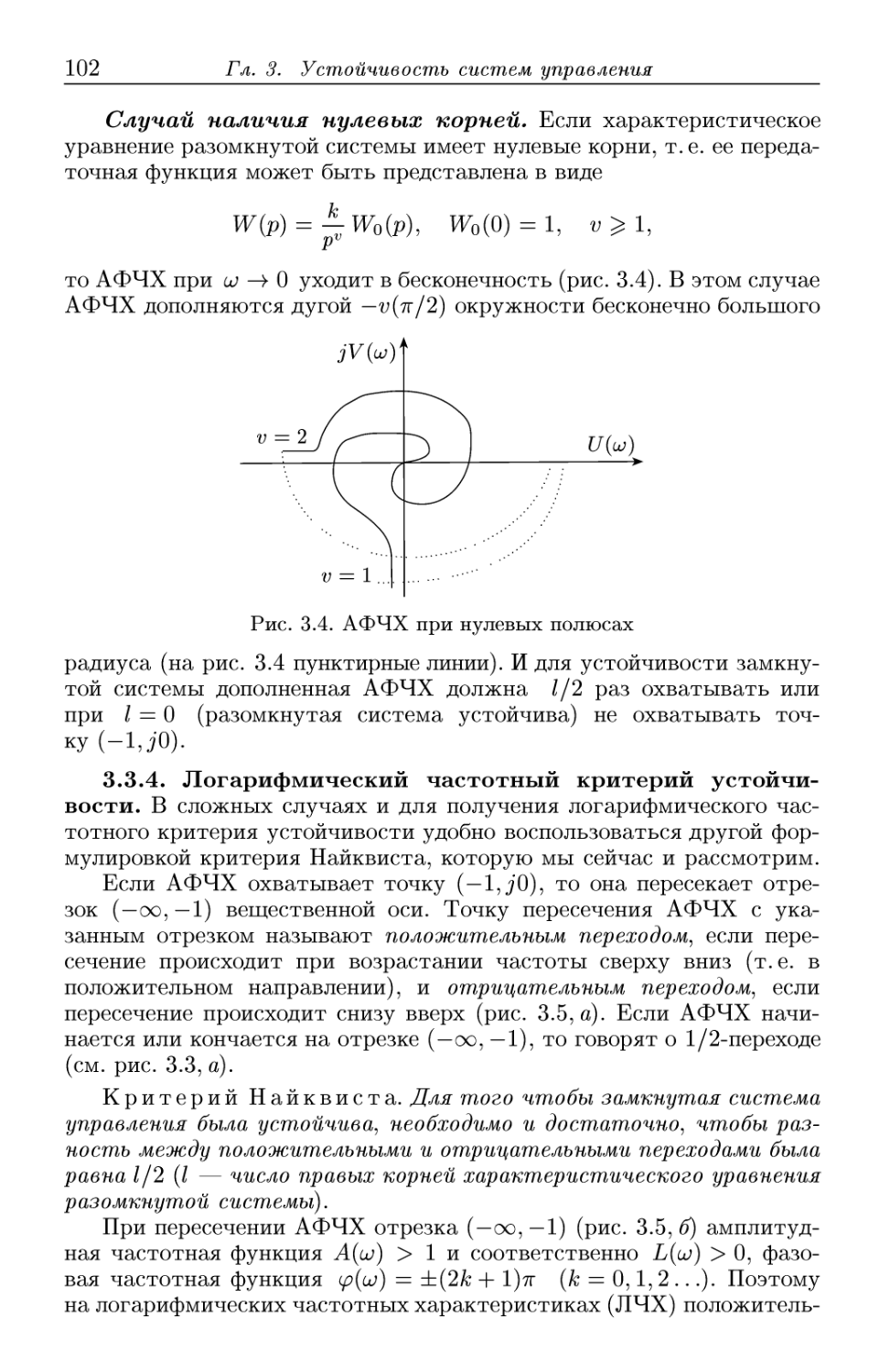
3.3. Частотные критерии устойчивости 97
3.3.1. Принцип аргумента (97). 3.3.2. Критерий устой-
устойчивости Михайлова (98). 3.3.3. Критерий Найквиста (99).
3.3.4. Логарифмический частотный критерий устойчивос-
устойчивости A02). 3.3.5. Устойчивость систем с чистым запаздыва-
запаздыванием A03).
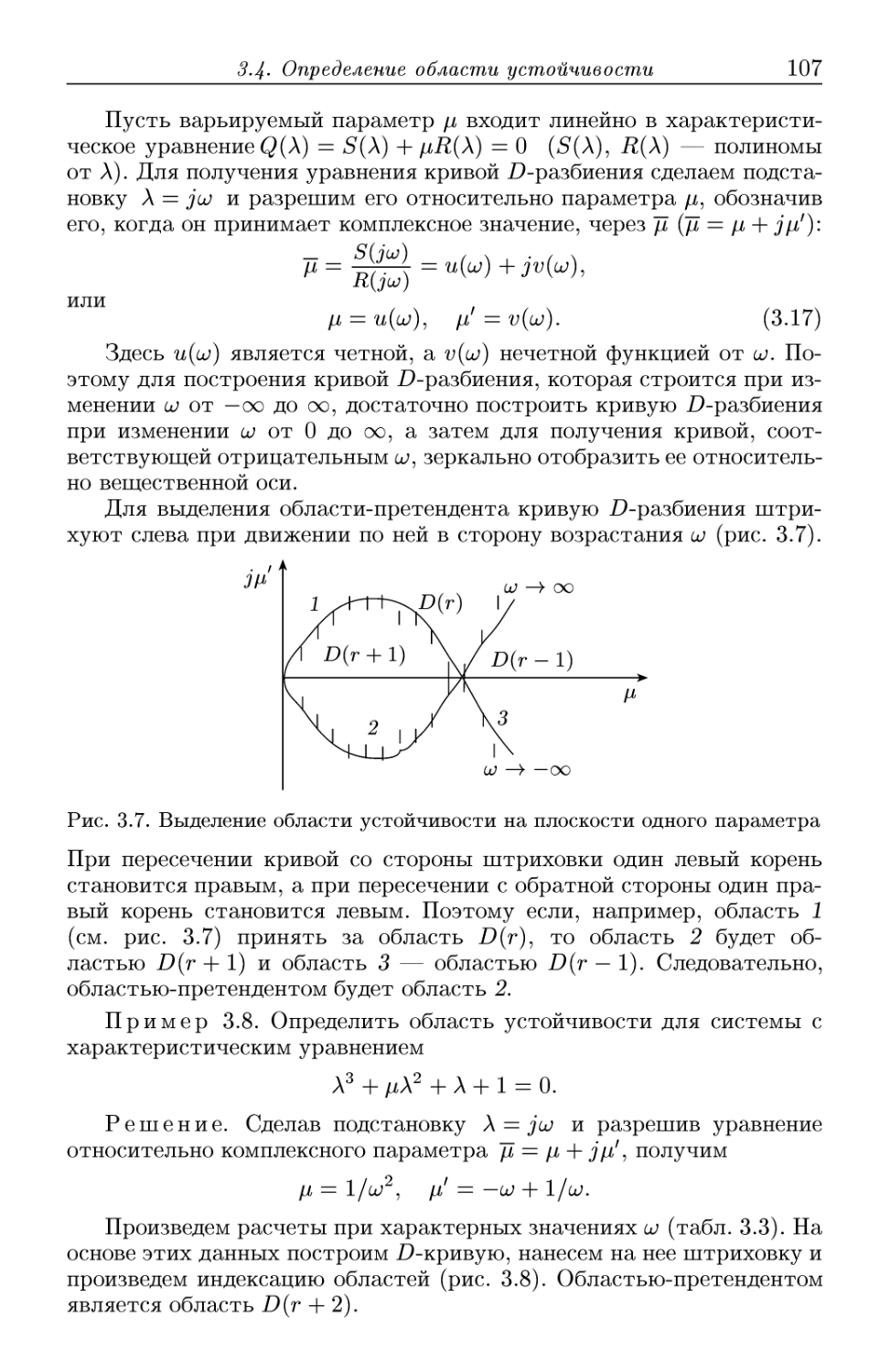
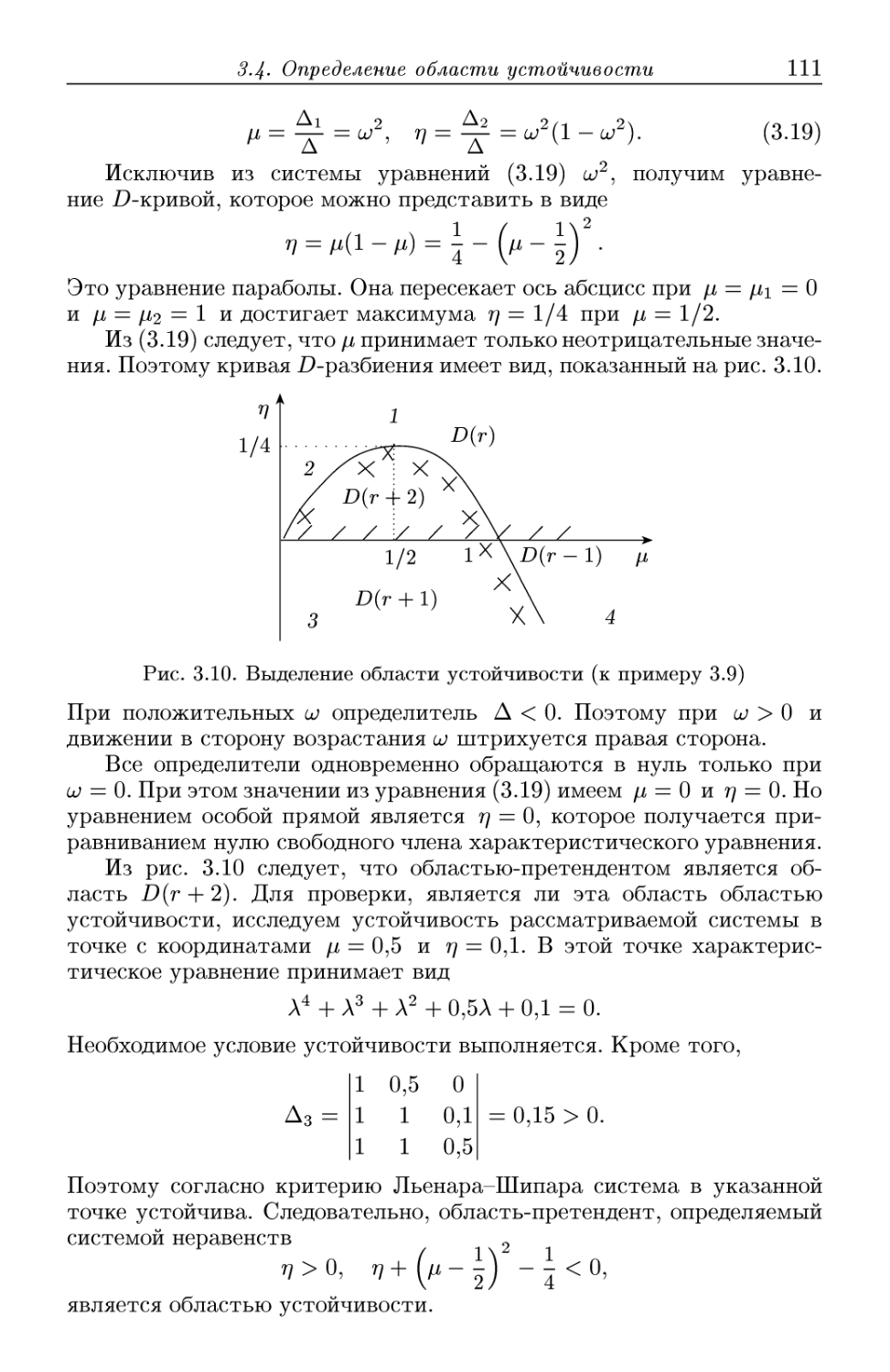
3.4. Определение области устойчивости 105
3.4.1. Метод D-разбиения A05). 3.4.2. Граничный коэффи-
коэффициент и условие граничной устойчивости A12).
3.5. Робастная устойчивость 113
3.5.1. Полиномы Харитонова A14). 3.5.2. Теорема Харито-
Харитонова A15).
Задачи 120
Глава 4. Качество систем управления 123
4.1. Показатели качества и типовые воздействия 123
4.2. Показатели качества в переходном режиме 124
4.2.1. Прямые показатели качества A25). 4.2.2. Корневые по-
показатели качества A27). 4.2.3. Интегральные показатели ка-
качества A30). 4.2.4. Частотные показатели качества A34).
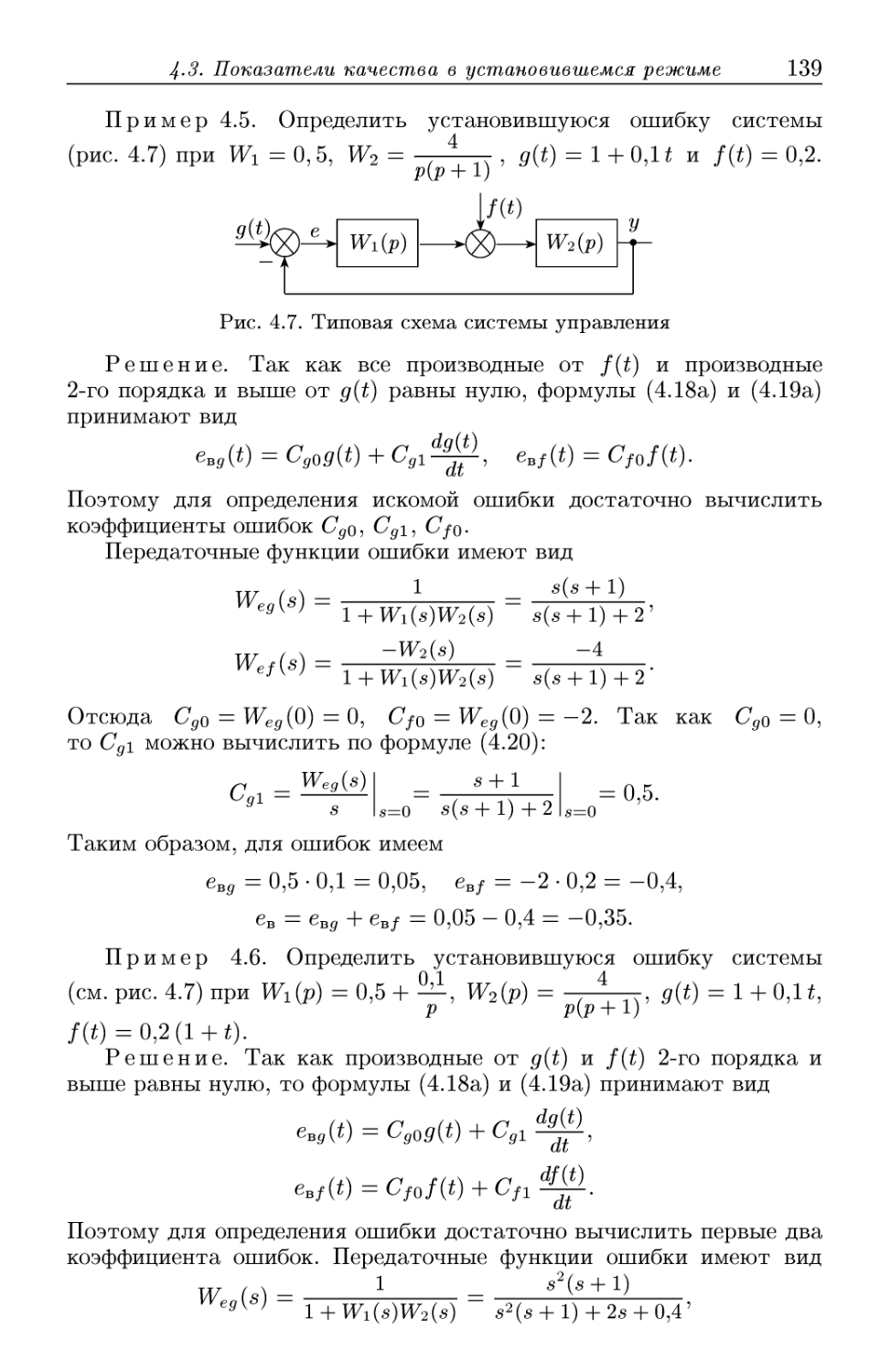
4.3. Показатели качества в установившемся режиме 135
4.4. Структура астатической системы управления 140
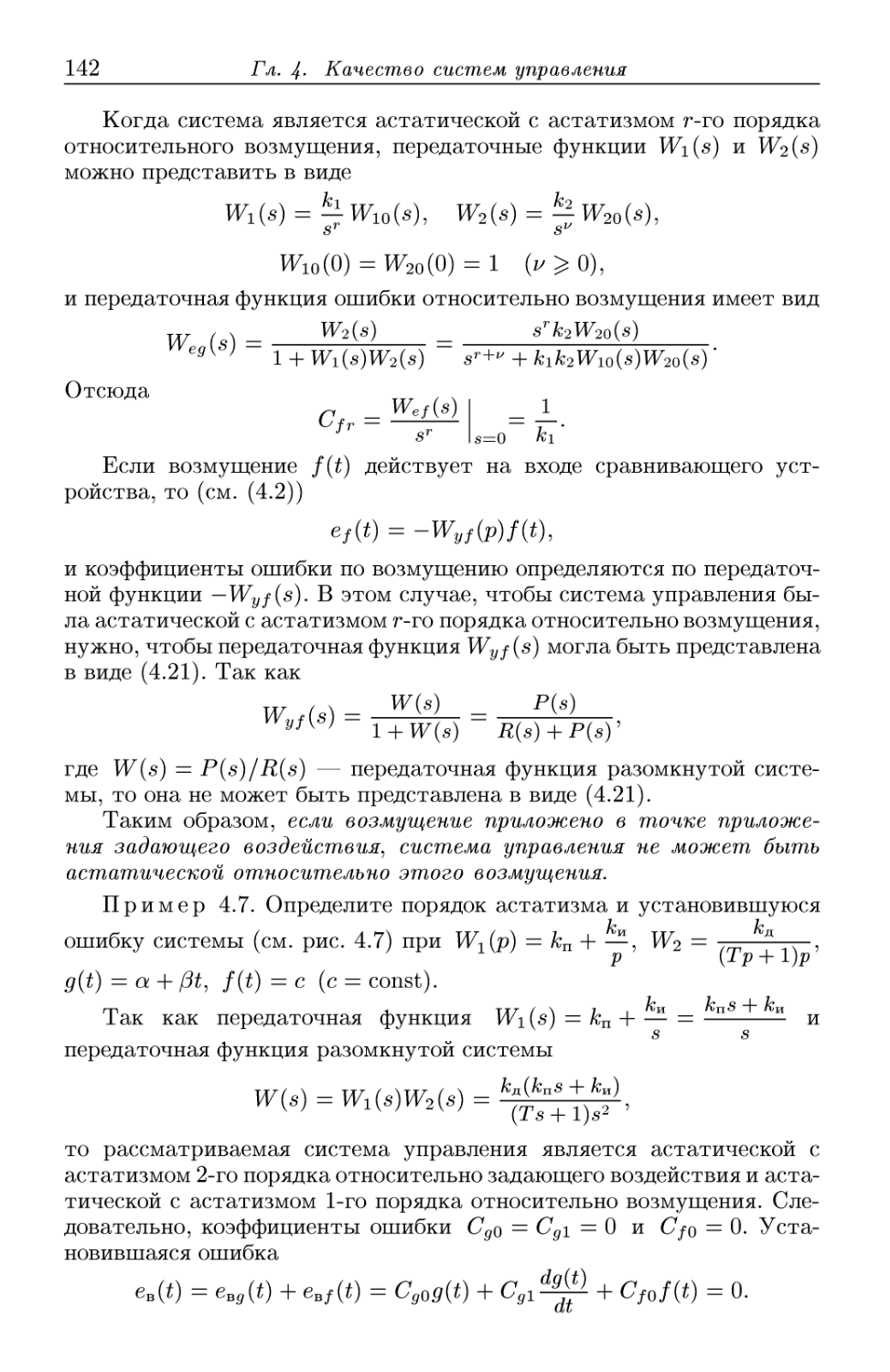
4.5. Инвариантность и принцип двухканальности 143
Задачи 144
Оглавление
Глава 5. Синтез систем управления 146
5.1. Исследование типовых законов управления 146
5.2. Синтез параметров регулятора по минимуму интегральных
оценок 151
5.3. Условие граничной устойчивости и синтез систем управ-
управления максимальной степени устойчивости 154
5.3.1. Условие граничной устойчивости A54). 5.3.2. Метод
синтеза систем управления максимальной степени устойчи-
устойчивости A57). 5.3.3. Синтез оптимальных по степени устой-
устойчивости параметров типовых регуляторов для объекта 2-го
порядка A59). 5.3.4. Синтез оптимальных по степени устой-
устойчивости параметров типовых регуляторов для объекта 3-го
порядка A62).
5.4. Синтез системы управления по желаемой передаточной функ-
функции 171
5.4.1. Физическая осуществимость и грубость A71). 5.4.2. Син-
Синтез передаточной функции регулятора A72). 5.4.3. Определе-
Определение желаемой передаточной функции A76).
5.5. Метод обратной задачи динамики 180
5.5.1. Объект 2-го порядка A81). 5.5.2. Объект 3-го поряд-
порядка A83).
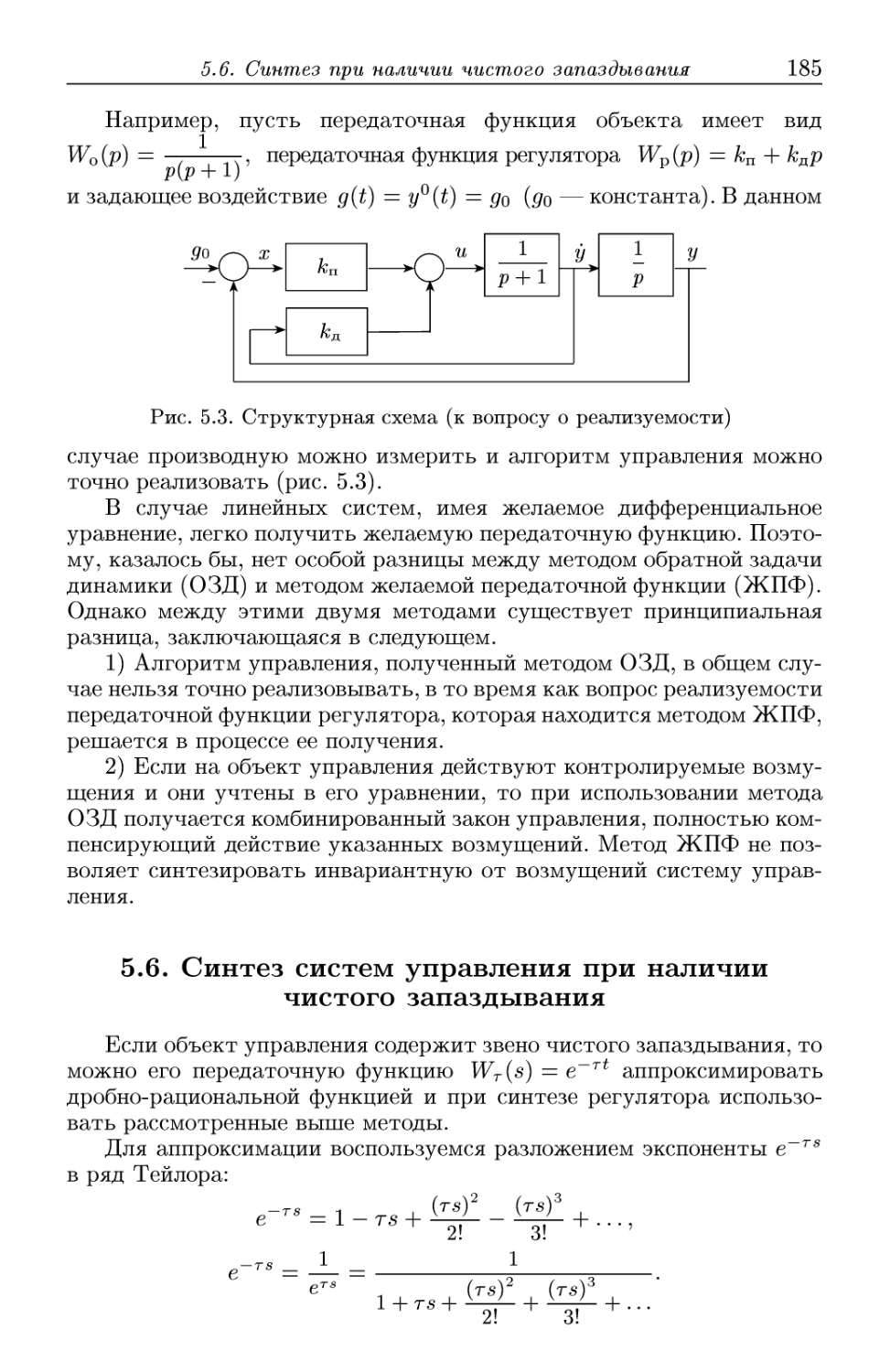
5.6. Синтез систем управления при наличии чистого запазды-
запаздывания 185
Задачи 188
Глава 6. Математическое описание дискретных систем ... 190
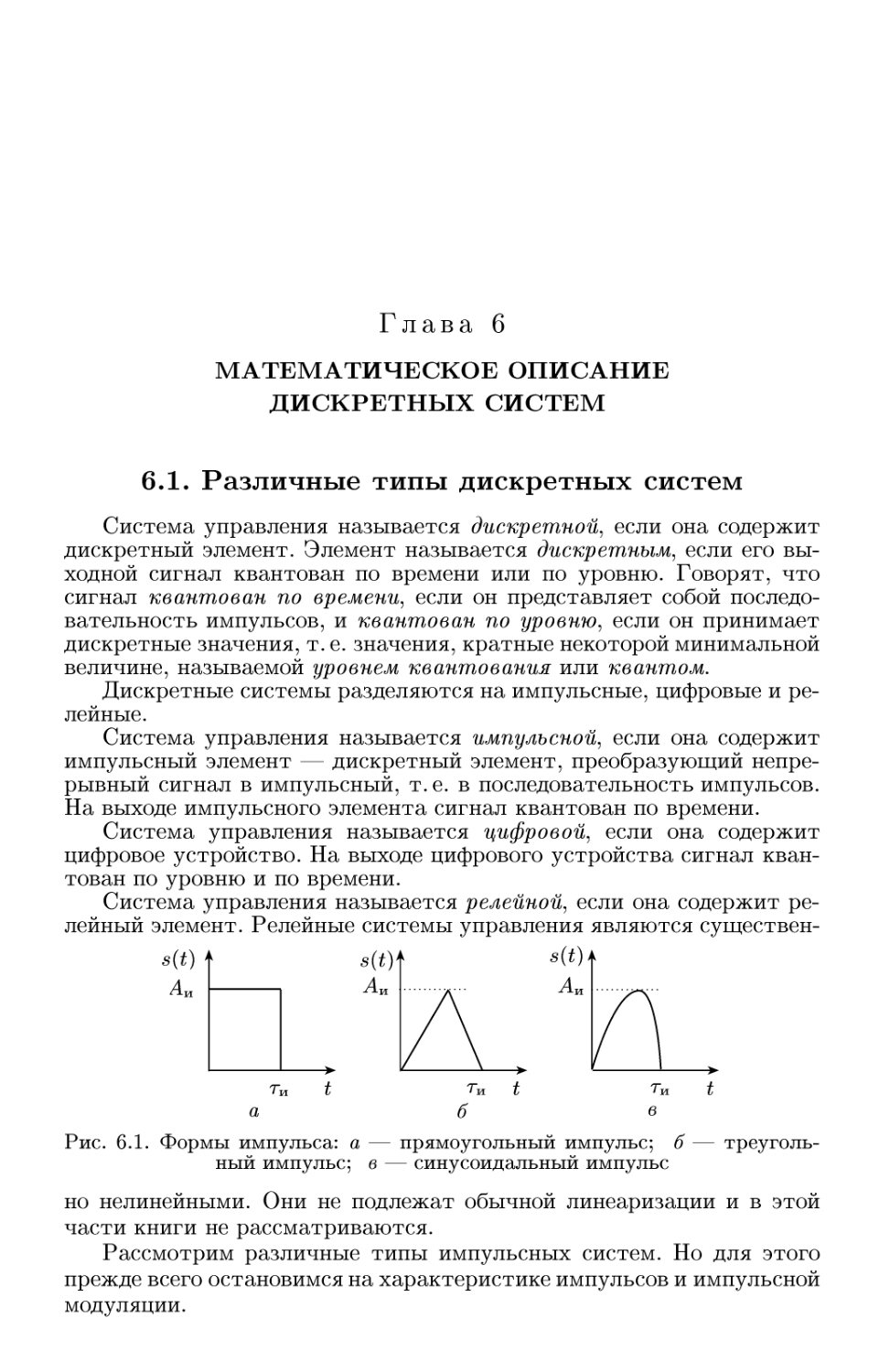
6.1. Различные типы дискретных систем 190
6.2. Линейные разностные уравнения 192
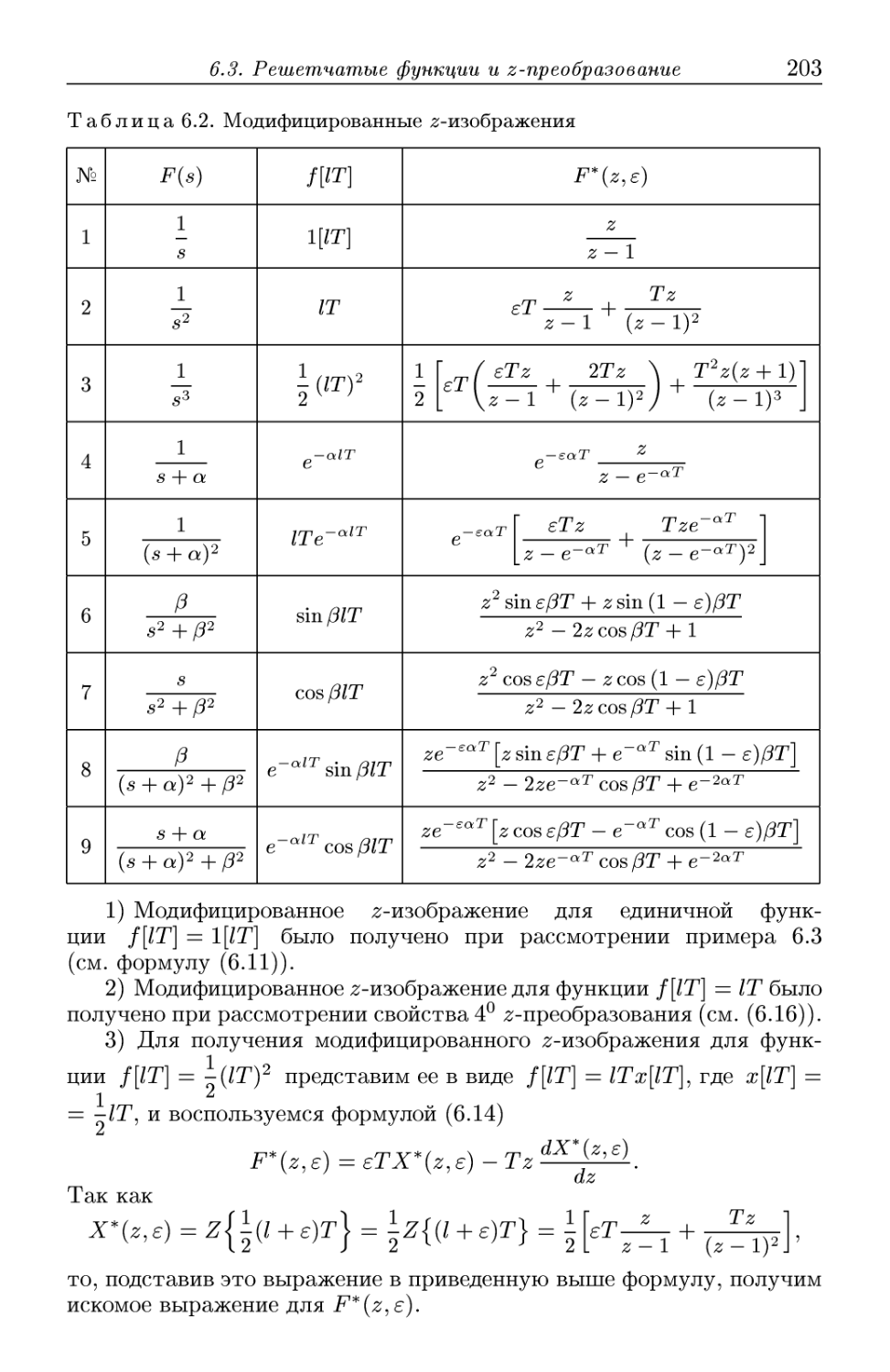
6.3. Решетчатые функции и ^-преобразование 195
6.3.1. Решетчатые функции A95). 6.3.2. Определение ^-пре-
^-преобразования A96). 6.3.3. Основные свойства ^-преобра-
^-преобразования A97). 6.3.4. ^-изображения основных функций B02).
6.4. Уравнения и передаточные функции дискретных систем .... 205
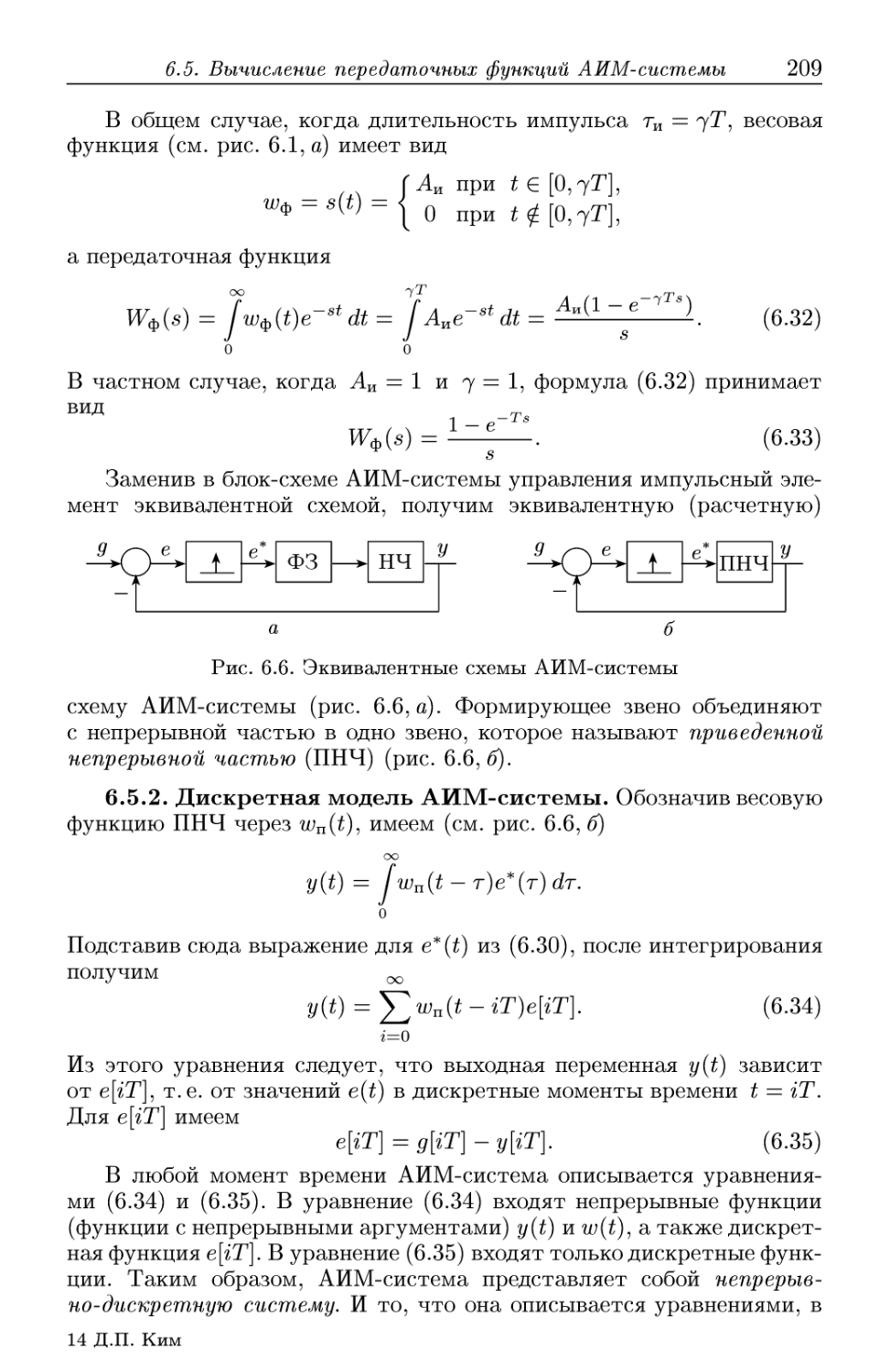
6.5. Вычисление передаточных функций АИМ-системы 207
6.5.1. Эквивалентная схема АИМ-системы B07). 6.5.2. Дис-
Дискретная модель АИМ-системы B09). 6.5.3. Вычисление
Zt-изображения и Z^-изображения B11).
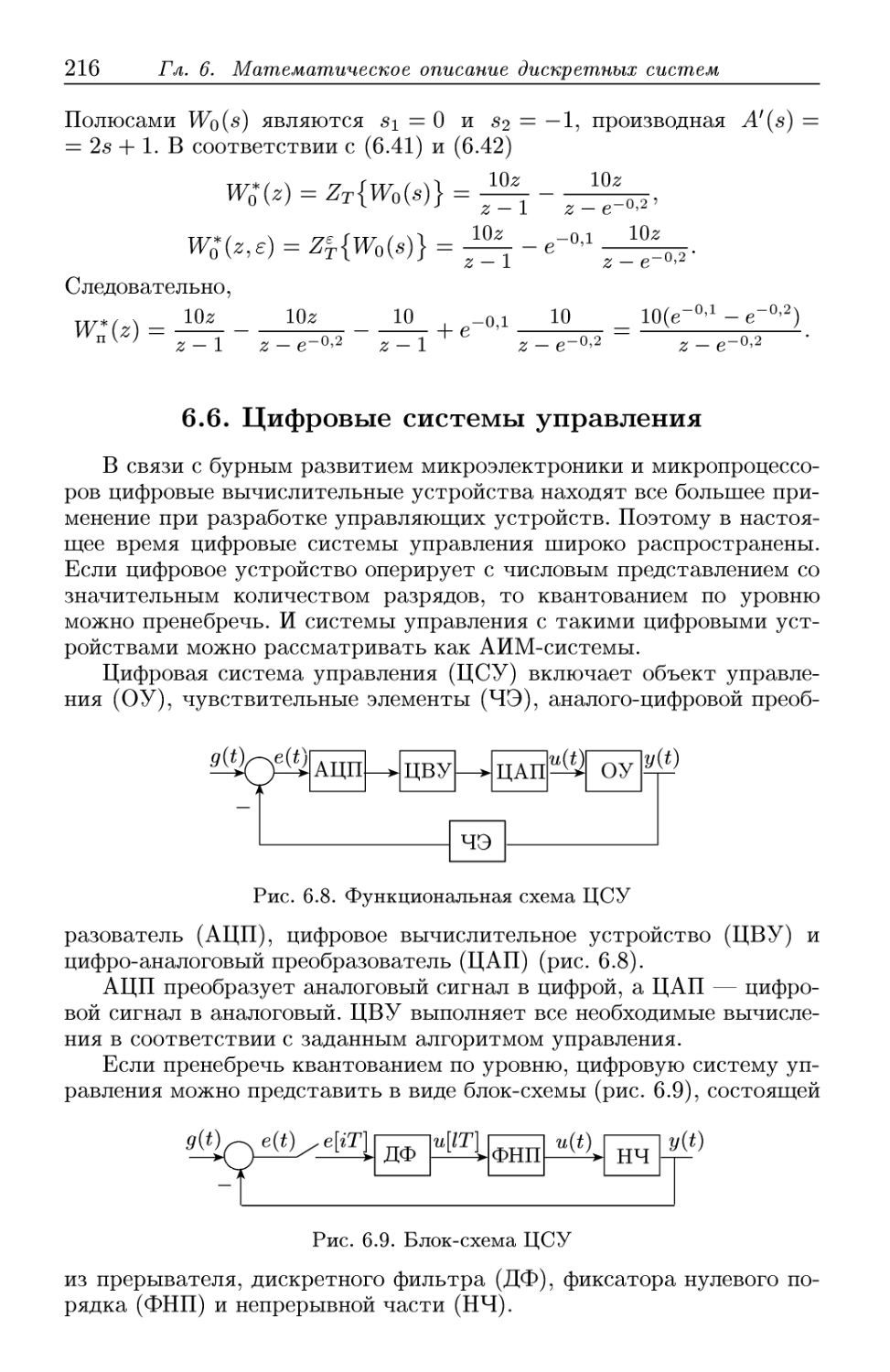
6.6. Цифровые системы управления 216
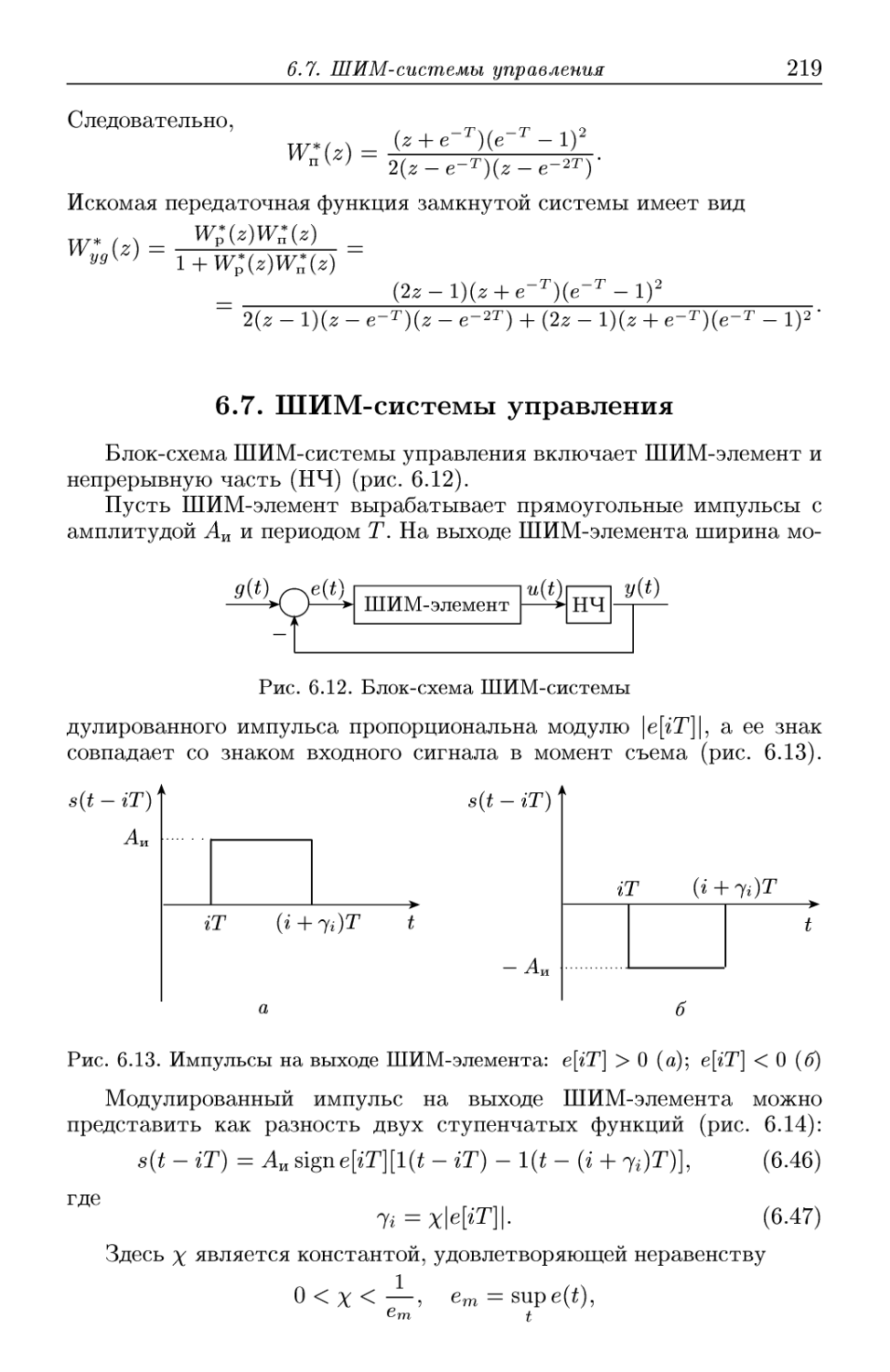
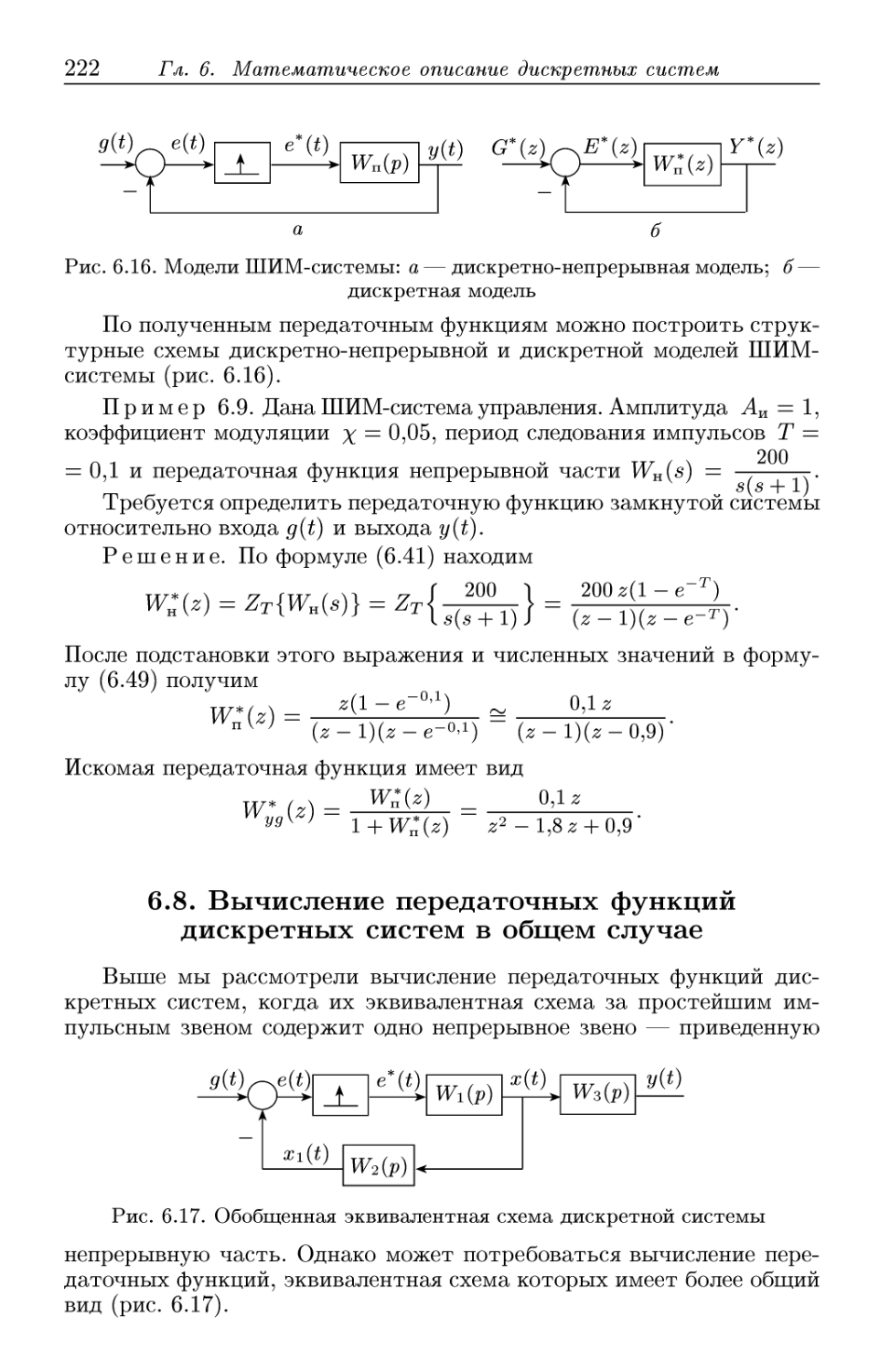
6.7. ШИМ-системы управления 219
6.8. Вычисление передаточных функций дискретных систем в
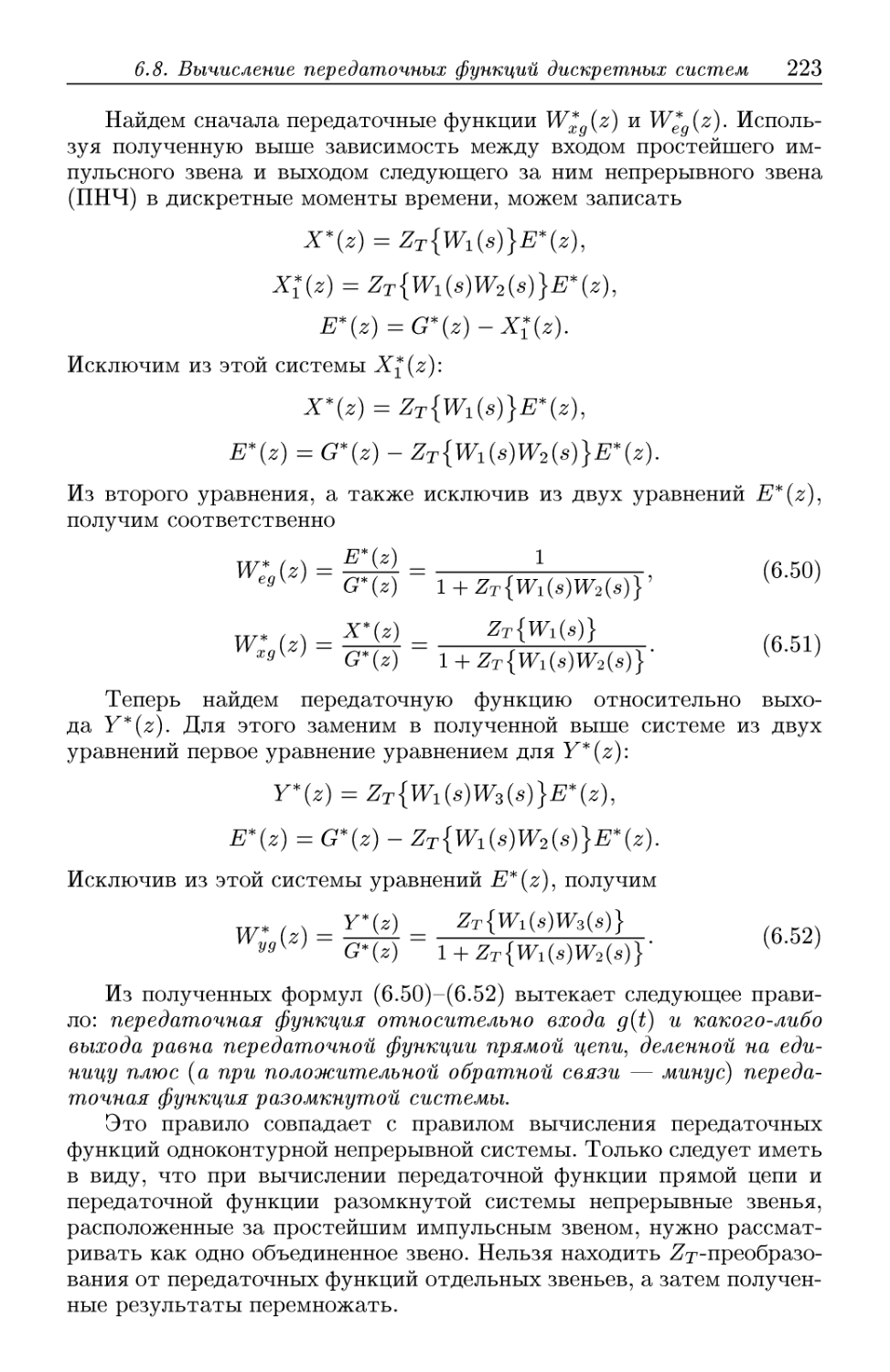
общем случае 222
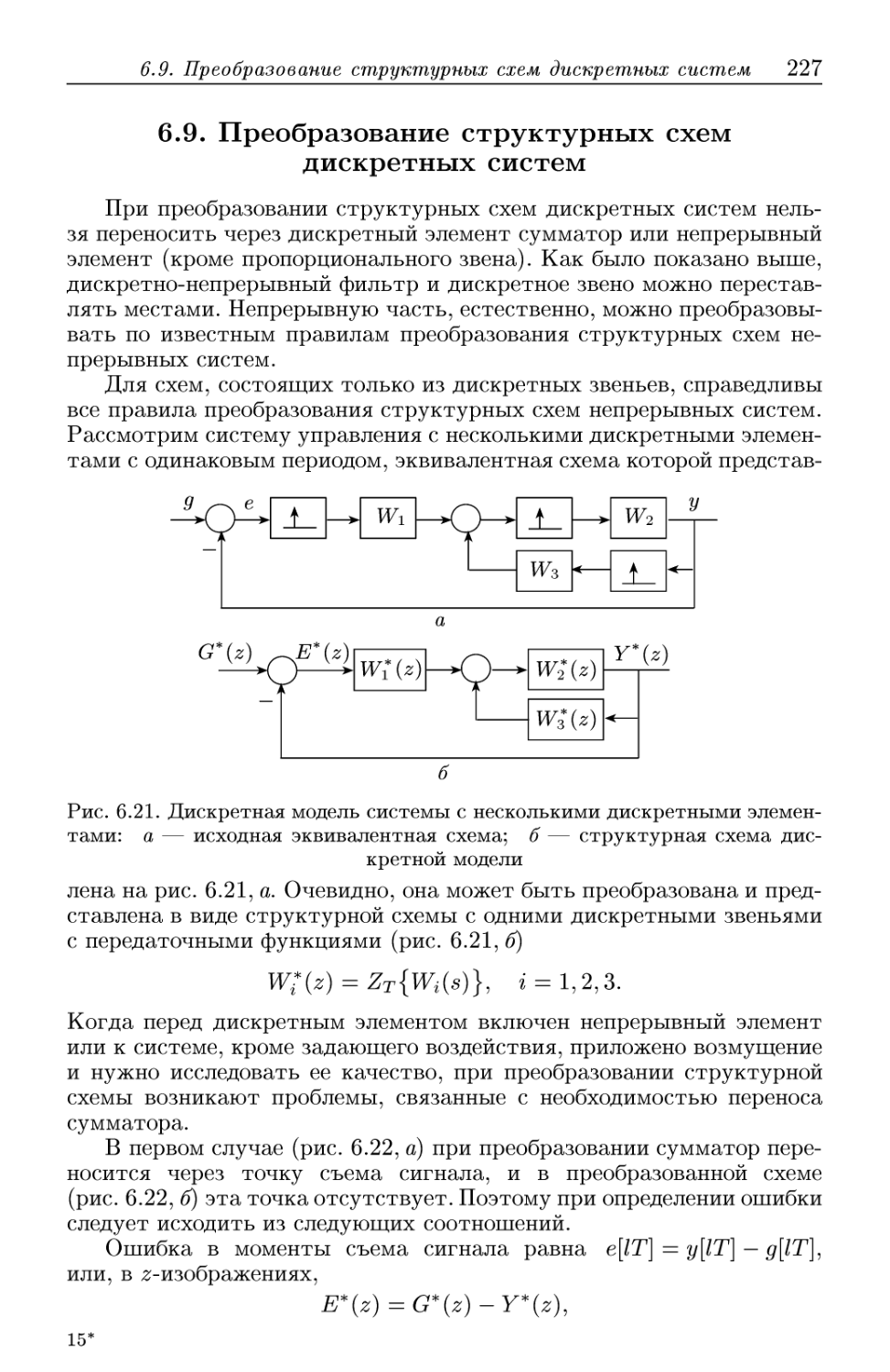
6.9. Преобразование структурных схем дискретных систем 227
6.10. Дискретное преобразование Лапласа и частотные характе-
характеристики 229
6 Оглавление
6.11. Связь между дискретным и непрерывным преобразованиями
Лапласа и непрерывная модель дискретной системы 230
6.11.1. Связь между дискретным и непрерывным преобразо-
преобразованиями Лапласа B31). 6.11.2. Непрерывная модель дискрет-
дискретной системы B31).
Задачи 233
Глава 7. Устойчивость дискретных систем 236
7.1. Характеристическое уравнение и основное условие устойчи-
устойчивости 236
7.2. Алгебраические критерии устойчивости 237
7.2.1. Необходимое условие устойчивости B37). 7.2.2. Исследо-
Исследование устойчивости, основанное на преобразовании единично-
единичного круга в левую полуплоскость B38). 7.2.3. Критерий устой-
устойчивости Джури B40).
7.3. Частотный критерий устойчивости 242
7.3.1. Принцип аргумента B43). 7.3.2. Критерий Найквис-
та B44). 7.3.3. Псевдочастотный критерий B47).
7.4. Влияние квантования по времени на устойчивость 248
Задачи 250
Глава 8. Оценка качества дискретных систем 252
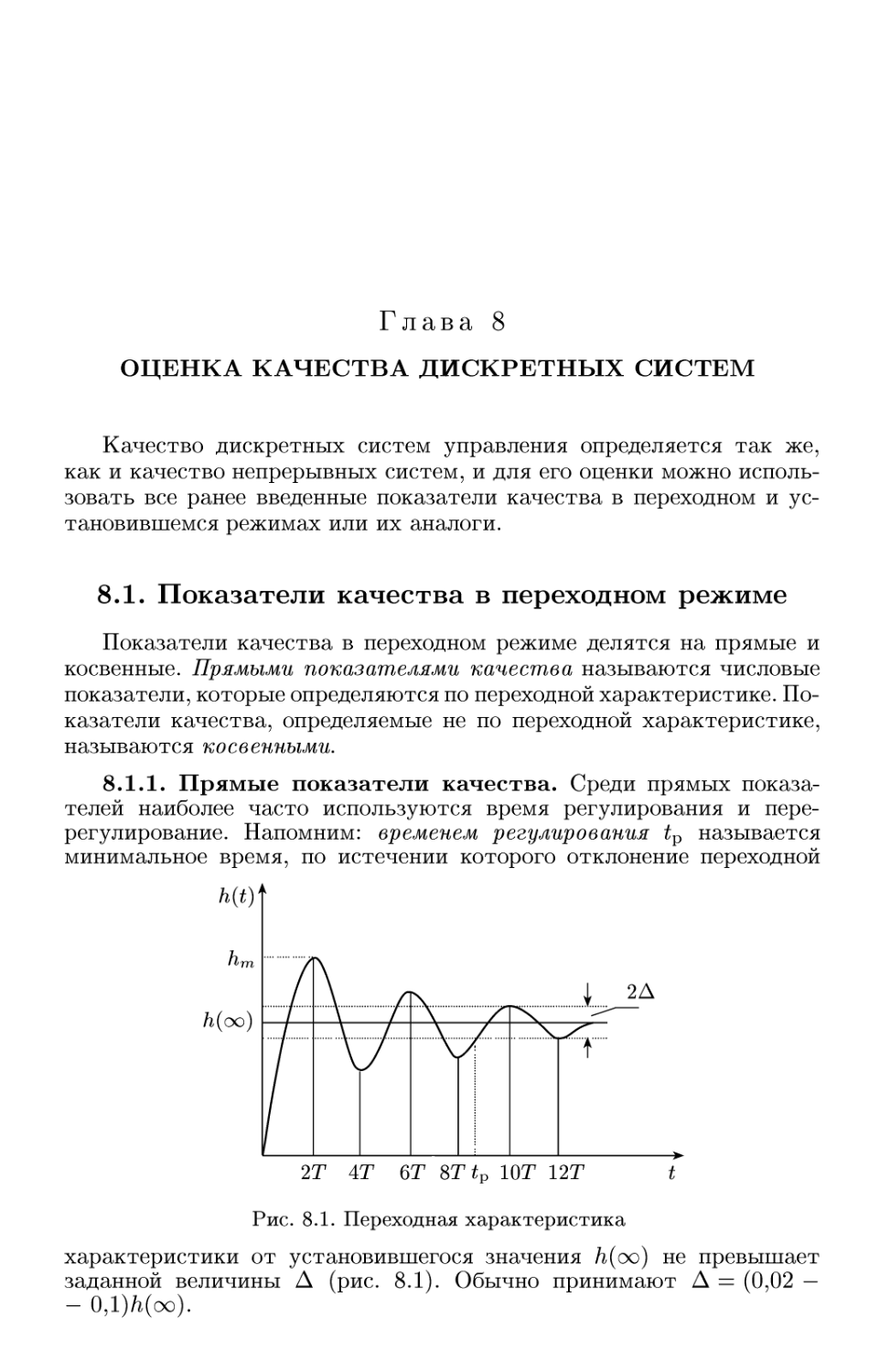
8.1. Показатели качества в переходном режиме 252
8.1.1. Прямые показатели качества B52). 8.1.2. Косвенные по-
показатели качества B56). 8.1.3. Особенности переходного про-
процесса дискретных систем B57).
8.2. Показатели качества в установившемся режиме 258
8.2.1. Коэффициенты ошибки B58). 8.2.2. Вычисление коэф-
коэффициентов ошибок B59).
8.3. Статические и астатические системы 261
8.3.1. Вычисление коэффициентов ошибки астатических сис-
систем B61). 8.3.2. Структура астатических систем B63).
Задачи 265
Глава 9. Синтез дискретных систем 268
9.1. Постановка задачи. Типовые законы управления 268
9.2. Синтез систем с фиксированной структурой 270
9.3. Метод полиномиальных уравнений 272
9.4. Синтез дискретной системы по непрерывной модели 276
Задачи 278
Список литературы 280
Предметный указатель 282
ПРЕДИСЛОВИЕ
Данное учебное пособие написано на основе лекций, читавшихся
автором в Московском государственном институте радиотехники,
электроники и автоматики (МИРЭА) в течение тридцати лет (с 1967 г.)
студентам специальности «Автоматика и телемеханика» и других
специальностей. Пособие посвящено теории линейных непрерывных
и дискретных систем управления и включает первую часть прог-
программного материала курса «Теория автоматического управления»,
предназначенного студентам, обучающимся по направлению «Авто-
«Автоматизация и управление».
Учебное пособие состоит из девяти глав. Глава 1 знакомит с ос-
основными понятиями, фундаментальными принципами управления и
структурами систем управления. Остальные главы можно разбить
на две группы. Первую группу составляют главы 2-5, посвященные
линейным непрерывным системам управления, вторую группу —
главы 6-9, посвященные линейным дискретным системам управле-
управления. Обе эти группы изложены по единой методике.
В главе 2 рассмотрено математическое описание систем управ-
управления с помощью дифференциальных уравнений, передаточных функ-
функций, временных и частотных функций и характеристик, структурных
схем и графов.
Глава 3 посвящена математическому определению устойчивости,
основному и необходимому условиям устойчивости, методам исследо-
исследования асимптотической и робастной устойчивости, выделению облас-
области устойчивости в пространстве параметров.
Глава 4 знакомит с методикой оценки качества в переходном и
установившемся режимах и со структурой астатических систем.
В главе 5 излагаются методы синтеза систем управления: синтез
параметров регулятора по минимуму интегральных квадратических
оценок и по максимуму степени устойчивости; синтез систем управ-
управления по желаемой передаточной функции (метод полиномиальных
уравнений). Здесь также рассмотрены условия граничной (маргиналь-
(маргинальной) устойчивости, на которых основан метод синтеза параметров
регулятора по максимуму степени устойчивости.
В главе б рассмотрено получение и математическое описание дис-
дискретных моделей импульсных систем управления с амплитудно-им-
амплитудно-импульсной и широтно-импульсной модуляцией 1-го рода, а также циф-
цифровых систем управления.
Предисловие
Главы 7-9 посвящены соответственно устойчивости, оценке ка-
качества и синтезу линейных дискретных систем управления.
Автор выражает искреннюю благодарность профессору В.М. Ло-
хину за поддержку и помощь при работе над рукописью, доцентам
В. В. Веселовскому, Н. Д. Дмитриевой и О. А. Тягунову, прочитавшим
рукопись и сделавшим ряд полезных замечаний.
Автор также благодарен заведующему кафедрой «Управление и
информатика» МЭИ профессору О. С. Колосову и заведующему ка-
кафедрой «Системы автоматического и интеллектуального управле-
управления» МАИ профессору Г. Н. Лебедеву за рецензирование рукописи.
Глава 1
ОСНОВНЫЕ ПОНЯТИЯ И ПРИНЦИПЫ УПРАВЛЕНИЯ
Процесс управления происходит в живой и неживой природе: в
живых организмах, обществе, технике и т.д. Естественный отбор,
благодаря которому одни особи исчезают, другие выживают и воспро-
воспроизводятся, также является своего рода процессом управления, проте-
протекающим в природе.
Общим для всех процессов управления, где бы они ни протекали,
является прием (получение), хранение, преобразование информации
и выработка (организация) на ее основе управления. Осознание этой
общности послужило предпосылкой к возникновению в конце сороко-
сороковых годов XX века научного направления, названного его основателем
Н. Винером кибернетикой. Хотя управление человеческим коллекти-
коллективом, экономикой, с одной стороны, и техническими объектами — с
другой, имеет много общего, но коренные различия, которые сущест-
существуют между этими объектами, делают необходимым их раздельное
рассмотрение.
В теории (автоматического) управления рассматриваются методы
исследования и построения систем управления в технике.
1.1. Исходные положения
В технике управлением называют целенаправленное воздейст-
воздействие на какое-либо устройство, объект. Если управление осуществ-
осуществляет человек, то управление называют ручным, неавтоматическим.
Управление называют автоматическим, если оно осуществляется без
непосредственного участия человека.
Устройство (машина, агрегат, технологический процесс), состоя-
состоянием которого можно и нужно управлять, называется объектом
управления (ОУ) или управляемым объектом. Целью управления
управляемым объектом является поддержание заданного режима.
Под заданным режимом понимают изменение какого-либо пара-
параметра, характеризующего состояние объекта управления, по опреде-
определенному закону. Указанный параметр, который может быть вектор-
векторной величиной, называется управляемой или выходной переменной
10
Гл. 1. Основные понятия и принципы управления
(величиной) объекта управления. В частном случае заданным режи-
режимом может быть поддержание выходной переменной неизменной и рав-
равной некоторой заданной величине.
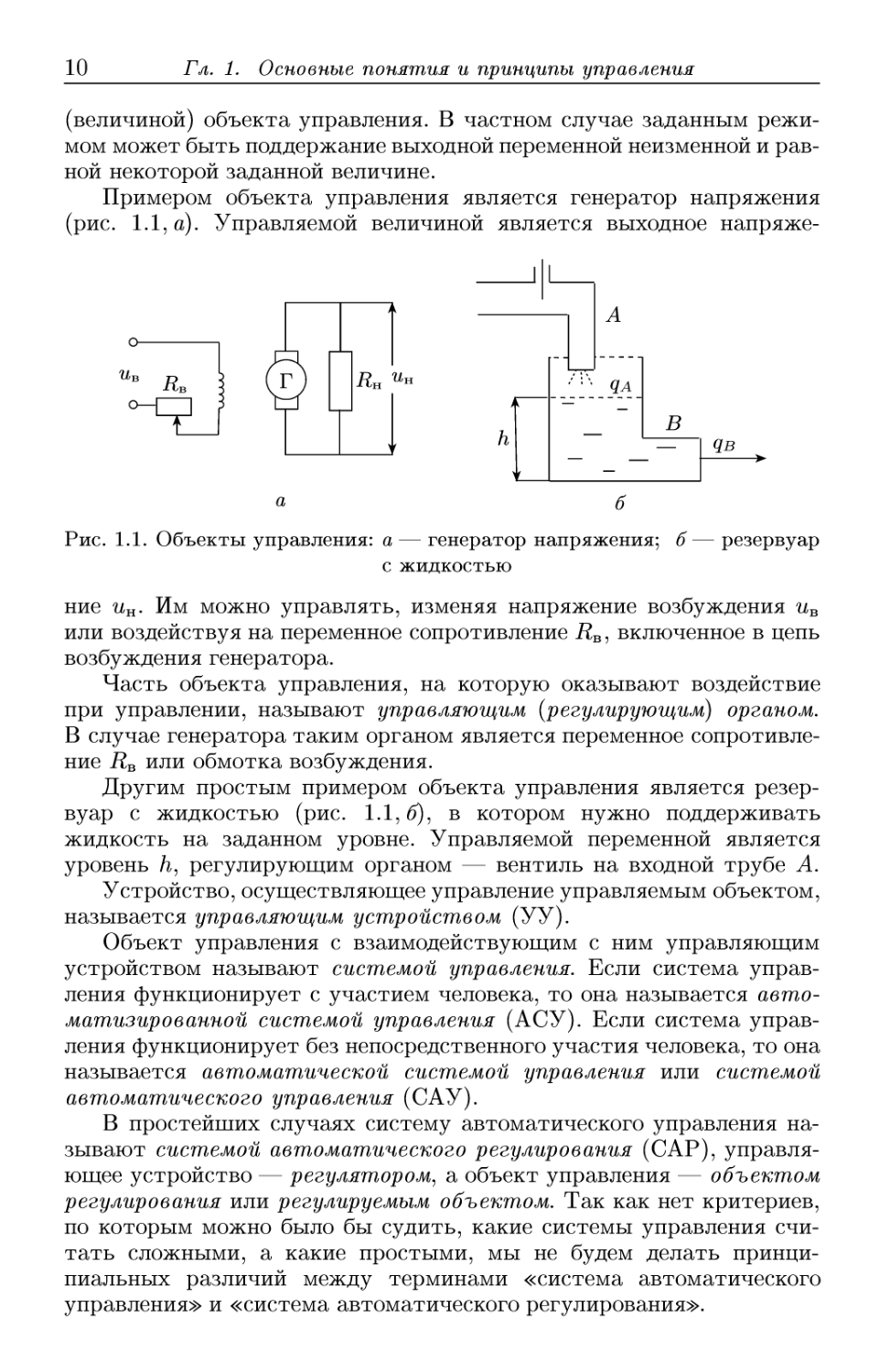
Примером объекта управления является генератор напряжения
(рис. 1.1, а). Управляемой величиной является выходное напряже-
I
в
Рис. 1.1. Объекты управления: а — генератор напряжения; б— резервуар
с жидкостью
ние ин. Им можно управлять, изменяя напряжение возбуждения ив
или воздействуя на переменное сопротивление RB, включенное в цепь
возбуждения генератора.
Часть объекта управления, на которую оказывают воздействие
при управлении, называют управляющим (регулирующим) органом.
В случае генератора таким органом является переменное сопротивле-
сопротивление RB или обмотка возбуждения.
Другим простым примером объекта управления является резер-
резервуар с жидкостью (рис. 1.1,6), в котором нужно поддерживать
жидкость на заданном уровне. Управляемой переменной является
уровень h, регулирующим органом — вентиль на входной трубе А.
Устройство, осуществляющее управление управляемым объектом,
называется управляющим устройством (УУ).
Объект управления с взаимодействующим с ним управляющим
устройством называют системой управления. Если система управ-
управления функционирует с участием человека, то она называется авто-
автоматизированной системой управления (АСУ). Если система управ-
управления функционирует без непосредственного участия человека, то она
называется автоматической системой управления или системой
автоматического управления (САУ).
В простейших случаях систему автоматического управления на-
называют системой автоматического регулирования (САР), управля-
управляющее устройство — регулятором, а объект управления — объектом
регулирования или регулируемым объектом. Так как нет критериев,
по которым можно было бы судить, какие системы управления счи-
считать сложными, а какие простыми, мы не будем делать принци-
принципиальных различий между терминами «система автоматического
управления» и «система автоматического регулирования».
1.1. Исходные положения
11
9
УУ
ОУ
У
Обратная связь
Рис. 1.2. Общая блок-схема САУ
Блок-схему системы (автоматического) управления в общем слу-
случае можно представить так, как на рис. 1.2. Выходная переменная
объекта управления у является вы- .
ходной (управляемой) переменной Г у
системы управления.
Канал связи, по которому ин-
информация о текущем состоянии объ-
объекта управления (ОУ) поступает
в управляющее устройство (УУ),
называется обратной связью.
Внешнее воздействие д, которое
определяет требуемый (заданный) закон изменения выходной пере-
переменной, называется задающим воздействием. Здесь, как это часто
делают, задающее воздействие выведено за пределы управляющего
устройства, в то время как задающее воздействие вырабатывается
задатчиком, входящим в состав УУ.
Как правило, на объект управления действует возмущение /, ко-
которое приводит к отклонению управляемой переменной от требуемого
значения. Такое воздействие называется возмущением и возмущаю-
возмущающим воздействием. Возмущение может действовать и на УУ. В част-
частном случае в зависимости от принципа управления обратная связь
или канал связи, по которому информация о возмущении поступает
на УУ, может отсутствовать.
Выходная переменная УУ и, являющаяся входной переменной ОУ,
называется управляющим воздействием или управлением. В случае
генератора основным возмущающим воздействием является изме-
изменение (отклонение) нагрузки, а в случае резервуара с жидкостью —
отклонение расхода жидкости от номинального значения (из-за под-
подключения или отключения потребителей).
Объекты управления в зависимости от реакции на входные воз-
воздействия делятся на устойчивые, нейтральные и неустойчивые.
Допустим, что при входных воздействиях и = и0 и / = /° выход-
выходная переменная у = у0. И пусть на какое-то время Т хотя бы одно
из входных воздействий изменяется (и = и0 + Аи или / = /° + А/),
а затем принимает первоначальное значение (Аи = 0 и А/ = О
при t > to + T). Если при этом выходная переменная со временем при-
принимает первоначальное значение (y(t) —> у0 при t —у оо), объект
управления называется устойчивым] если переменная принимает но-
новое постоянное значение (y(t) —У у* ф у0 при t —у оо), объект управ-
управления называется нейтральным] если переменная не стремится к пер-
первоначальному или новому постоянному значению, объект называется
неустойчивым.
Если нагрузка генератора на какое-то время изменится, а затем
примет первоначальное номинальное значение, то и выходное напря-
напряжение генератора со временем примет номинальное значение, т.е. ге-
генератор является устойчивым объектом управления.
12
Гл. 1. Основные понятия и принципы управления
Резервуар с жидкостью является нейтральным объектом управ-
управления. Действительно, пусть, например, расход жидкости увеличи-
увеличивается, тогда уровень жидкости будет падать. И если затем расход
жидкости восстановится до первоначального значения, то установит-
установится такой уровень, какой достигается в момент восстановления расхода,
т.е. h примет новое значение.
1.2. Принципы управления
Рассмотрим основные принципы управления, которые использу-
используются в настоящее время при разработке систем управления.
1.2.1. Принцип программного управления. Если об объекте
управления все известно, то, точно зная, как зависит выходная пе-
переменная объекта управления от управляющего воздействия, управ-
управление можно формировать как известную функцию времени и = u*(t).
Такой способ организации управления можно назвать принципом
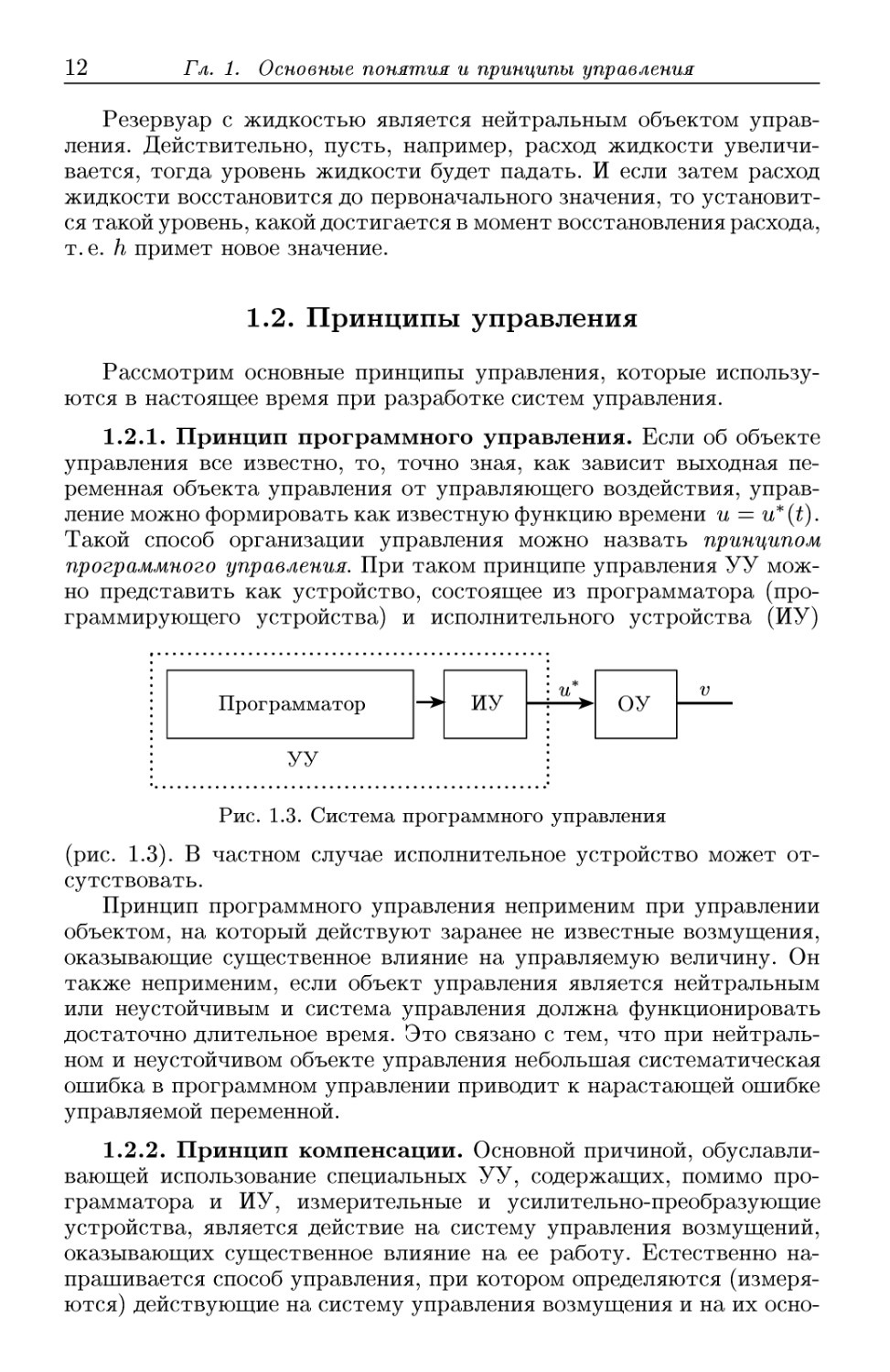
программного управления. При таком принципе управления УУ мож-
можно представить как устройство, состоящее из программатора (про-
(программирующего устройства) и исполнительного устройства (ИУ)
Программатор
ИУ -
j УУ
• и*
ОУ
V
Рис. 1.3. Система программного управления
(рис. 1.3). В частном случае исполнительное устройство может от-
отсутствовать.
Принцип программного управления неприменим при управлении
объектом, на который действуют заранее не известные возмущения,
оказывающие существенное влияние на управляемую величину. Он
также неприменим, если объект управления является нейтральным
или неустойчивым и система управления должна функционировать
достаточно длительное время. Это связано с тем, что при нейтраль-
нейтральном и неустойчивом объекте управления небольшая систематическая
ошибка в программном управлении приводит к нарастающей ошибке
управляемой переменной.
1.2.2. Принцип компенсации. Основной причиной, обуславли-
обуславливающей использование специальных УУ, содержащих, помимо про-
программатора и ИУ, измерительные и усилительно-преобразующие
устройства, является действие на систему управления возмущений,
оказывающих существенное влияние на ее работу. Естественно на-
напрашивается способ управления, при котором определяются (измеря-
(измеряются) действующие на систему управления возмущения и на их осно-
1.2. Принципы управления
13
ве вырабатывается управляющее воздействие, которое полностью или
частично компенсирует влияние возмущений на процесс управления.
Способ управления, при котором управляющее воздействие выра-
вырабатывается на основе действующих возмущений, называется способом
управления по возмущению или принципом компенсации.
Принцип компенсации иногда также называют принципом Понселе
(по имени французского инженера Ж. Понселе (Ponselet), предложив-
предложившего принцип регулирования паровой машины по моменту сопротив-
сопротивления на ее валу, т.е. по возмущению).
Достоинством способа управления по воз-
возмущению является принципиальная возмож-
возможность полной компенсации возмущающего воз-
воздействия.
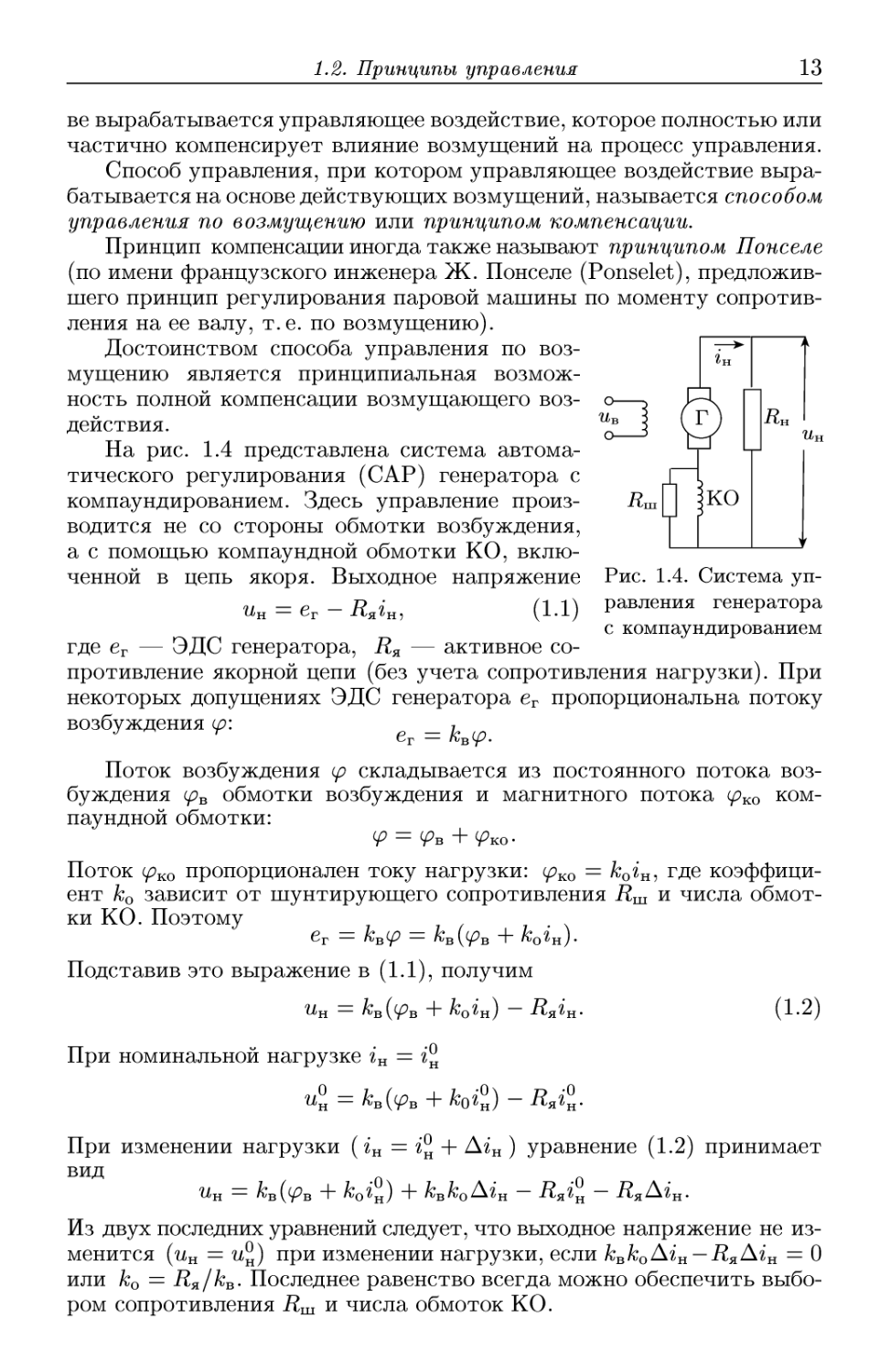
На рис. 1.4 представлена система автома-
автоматического регулирования (САР) генератора с
компаундированием. Здесь управление произ-
производится не со стороны обмотки возбуждения,
а с помощью компаундной обмотки КО, вклю-
включенной в цепь якоря. Выходное напряжение
ии = ег - Яягн, A.1)
где ег — ЭДС генератора, Ля — активное со-
сопротивление якорной цепи (без учета сопротивления нагрузки). При
некоторых допущениях ЭДС генератора ег пропорциональна потоку
возбуждения ip: _ 7
ег — кв(р.
Поток возбуждения ip складывается из постоянного потока воз-
возбуждения <рв обмотки возбуждения и магнитного потока <рко ком-
компаундной обмотки:
Ч> = </?в + </W
Поток ipKO пропорционален току нагрузки: ipKO = koinj где коэффици-
коэффициент ко зависит от шунтирующего сопротивления Дш и числа обмот-
обмотки КО. Поэтому
ег = кв(р = кв((рв + koiH).
Подставив это выражение в A.1), получим
ин = кв((рв + koiH) - RJH. A.2)
При номинальной нагрузке гн = г?
Рис. 1.4. Система уп-
управления генератора
с компаундированием
При изменении нагрузки
вид
ин = кв((рв +
гн = г? + Агн ) уравнение A.2) принимает
oil) + kBkoAiH - R^l - R*AiH.
Из двух последних уравнений следует, что выходное напряжение не из-
изменится (ин = и^) при изменении нагрузки, если kBkoAiH — ДяДгн = О
или ко = Кя/кв. Последнее равенство всегда можно обеспечить выбо-
выбором сопротивления Дш и числа обмоток КО.
14 Гл. 1. Основные понятия и принципы управления
Таким образом, в САР генератора с компаундированием можно
полностью компенсировать возмущение, представляющее собой изме-
изменение нагрузки. Данная система является системой управления по
возмущению, так как управление, которым является изменение
потока возбуждения, пропорционально возмущению AiH.
В САР генератора компаундная обмотка является чувствитель-
чувствительным элементом, и она без промежуточных элементов (усилительно-
преобразовательного и исполнительного устройств) непосредственно
воздействует на объект регулирования. Такие системы регулирования
называются системами прямого регулирования. Системы управления
(регулирования), в которых между измерительным элементом и регу-
регулирующим органом имеются усилительно-преобразовательные и ис-
исполнительные устройства, называются системами непрямого управ-
управления (регулирования).
Недостатком метода компенсации является то, что он не всегда
применим. Его нельзя применять, если возмущение нельзя измерить
(из-за того, что его существование не известно или по другой причи-
причине). Его нецелесообразно использовать, когда на систему действует
много различных возмущений, так как в этом случае У У получает-
получается сложным. Кроме того, принцип компенсации нельзя использовать,
если объект управления является нейтральным или неустойчивым.
Действительно, рассмотрим в качестве примера резервуар с
жидкостью (см. рис. 1.1, 6), который является нейтральным объек-
объектом управления. Пусть qA — приток жидкости (объем жидкости,
поступающей в резервуар за единицу времени), qs — расход (объем
жидкости, вытекающей из резервуара за единицу времени), и пусть
в начальный момент времени to уровень жидкости равен требуемо-
требуемому значению. Чтобы сохранить этот уровень, нужно обеспечить ра-
равенство qA — qB- При управлении по возмущению измеряется расход
жидкости и обеспечивается равенство qA = q_B-> где Qb — измеряемое
значение расхода. На практике измерение всегда производится с ошиб-
ошибкой Aq = qB — Qb- Поэтому возникает разница между притоком и рас-
расходом qA — Qb = Qb — (qb + Aq) = —Aq. И если, например, ошибка
измерения Aq = const, то в момент t количество жидкости увеличится
(при Aq < 0) или уменьшится (при Aq > 0) на \Aq\ (t — to) и соот-
соответственно уровень жидкости поднимется или опустится до значения,
пропорционального времени.
1.2.3. Принцип обратной связи. Управлением по отклонению
называется такой способ управления, при котором определяется от-
отклонение текущего значения выходной переменной от требуемого зна-
значения и на его основе формируется управляющее воздействие.
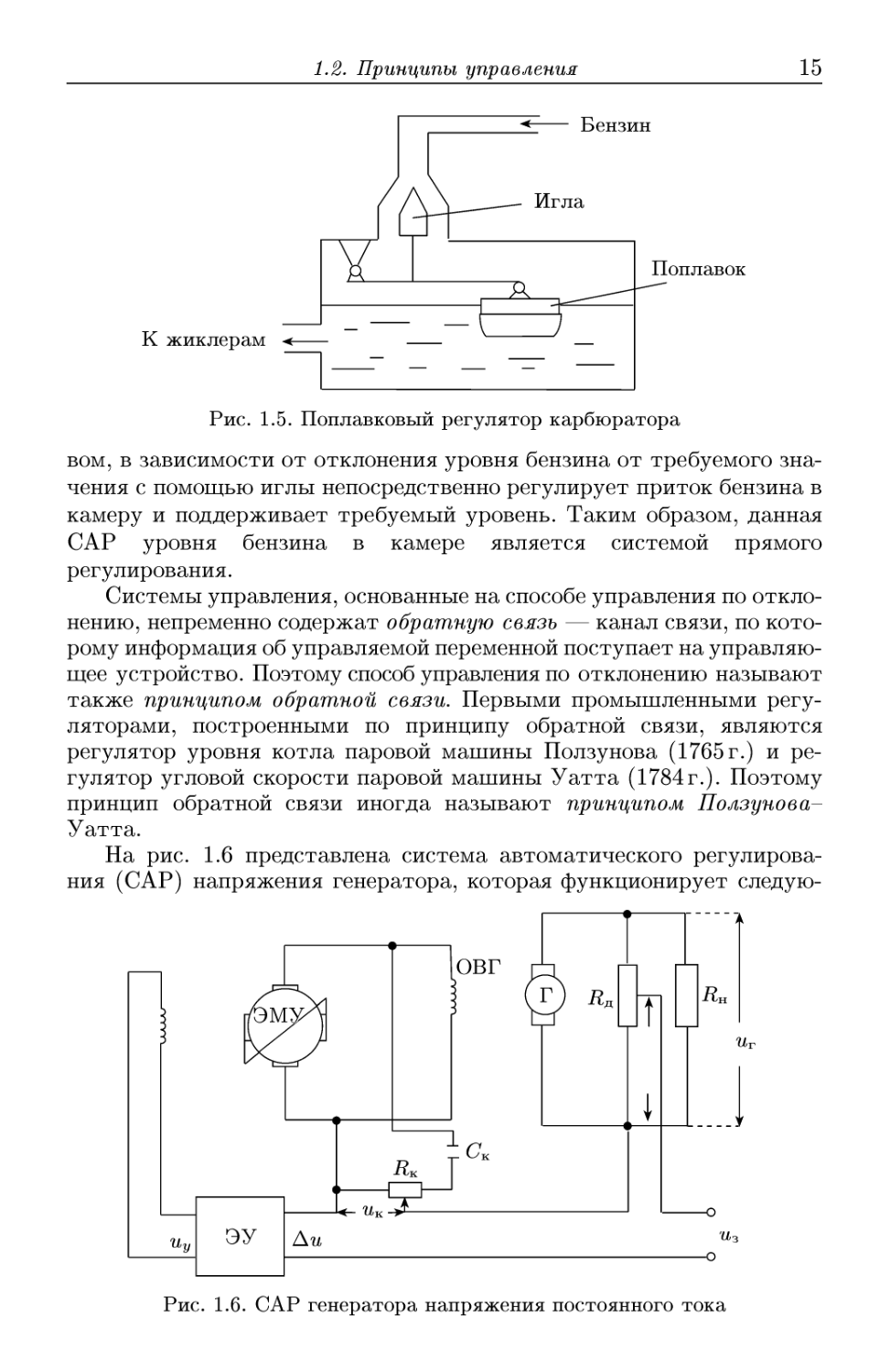
На рис. 1.5 представлен поплавковый регулятор уровня бензина,
устанавливаемый в карбюраторе автомобильных двигателей. В нем
реализован способ управления по отклонению. Поплавок, который яв-
является одновременно измерителем уровня и сравнивающим устройст-
1.2. Принципы управления
15
Бензин
Поплавок
К жиклерам
Рис. 1.5. Поплавковый регулятор карбюратора
вом, в зависимости от отклонения уровня бензина от требуемого зна-
значения с помощью иглы непосредственно регулирует приток бензина в
камеру и поддерживает требуемый уровень. Таким образом, данная
САР уровня бензина в камере является системой прямого
регулирования.
Системы управления, основанные на способе управления по откло-
отклонению, непременно содержат обратную связь — канал связи, по кото-
которому информация об управляемой переменной поступает на управляю-
управляющее устройство. Поэтому способ управления по отклонению называют
также принципом обратной связи. Первыми промышленными регу-
регуляторами, построенными по принципу обратной связи, являются
регулятор уровня котла паровой машины Ползунова A765 г.) и ре-
регулятор угловой скорости паровой машины Уатта A784г.). Поэтому
принцип обратной связи иногда называют принципом Ползунова-
Уатта.
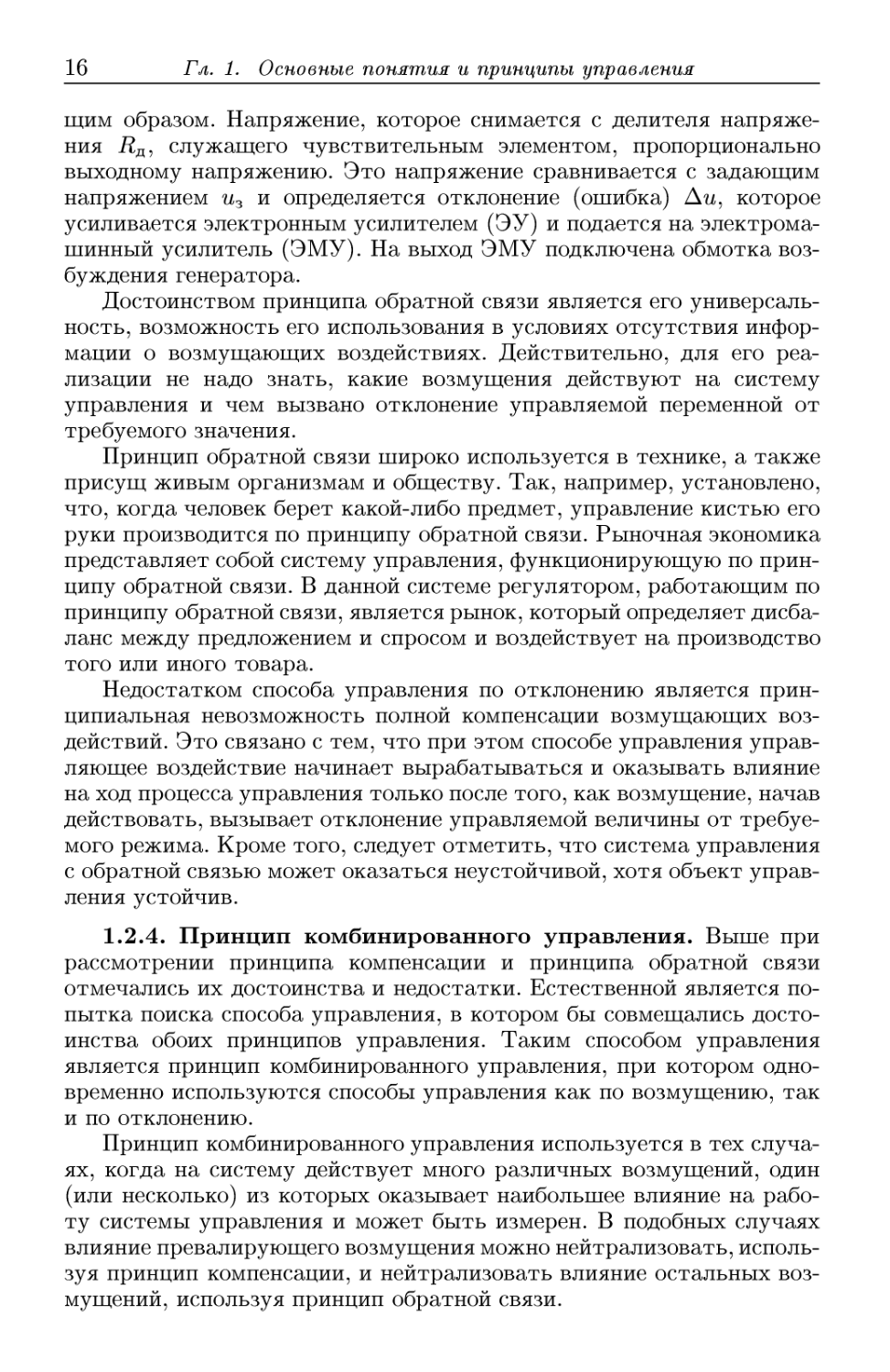
На рис. 1.6 представлена система автоматического регулирова-
регулирования (САР) напряжения генератора, которая функционирует следую-
Рис. 1.6. САР генератора напряжения постоянного тока
16 Гл. 1. Основные понятия и принципы управления
щим образом. Напряжение, которое снимается с делителя напряже-
напряжения Дд, служащего чувствительным элементом, пропорционально
выходному напряжению. Это напряжение сравнивается с задающим
напряжением и3 и определяется отклонение (ошибка) Аи, которое
усиливается электронным усилителем (ЭУ) и подается на электрома-
электромашинный усилитель (ЭМУ). На выход ЭМУ подключена обмотка воз-
возбуждения генератора.
Достоинством принципа обратной связи является его универсаль-
универсальность, возможность его использования в условиях отсутствия инфор-
информации о возмущающих воздействиях. Действительно, для его реа-
реализации не надо знать, какие возмущения действуют на систему
управления и чем вызвано отклонение управляемой переменной от
требуемого значения.
Принцип обратной связи широко используется в технике, а также
присущ живым организмам и обществу. Так, например, установлено,
что, когда человек берет какой-либо предмет, управление кистью его
руки производится по принципу обратной связи. Рыночная экономика
представляет собой систему управления, функционирующую по прин-
принципу обратной связи. В данной системе регулятором, работающим по
принципу обратной связи, является рынок, который определяет дисба-
дисбаланс между предложением и спросом и воздействует на производство
того или иного товара.
Недостатком способа управления по отклонению является прин-
принципиальная невозможность полной компенсации возмущающих воз-
воздействий. Это связано с тем, что при этом способе управления управ-
управляющее воздействие начинает вырабатываться и оказывать влияние
на ход процесса управления только после того, как возмущение, начав
действовать, вызывает отклонение управляемой величины от требуе-
требуемого режима. Кроме того, следует отметить, что система управления
с обратной связью может оказаться неустойчивой, хотя объект управ-
управления устойчив.
1.2.4. Принцип комбинированного управления. Выше при
рассмотрении принципа компенсации и принципа обратной связи
отмечались их достоинства и недостатки. Естественной является по-
попытка поиска способа управления, в котором бы совмещались досто-
достоинства обоих принципов управления. Таким способом управления
является принцип комбинированного управления, при котором одно-
одновременно используются способы управления как по возмущению, так
и по отклонению.
Принцип комбинированного управления используется в тех случа-
случаях, когда на систему действует много различных возмущений, один
(или несколько) из которых оказывает наибольшее влияние на рабо-
работу системы управления и может быть измерен. В подобных случаях
влияние превалирующего возмущения можно нейтрализовать, исполь-
используя принцип компенсации, и нейтрализовать влияние остальных воз-
возмущений, используя принцип обратной связи.
1.3. Структура системы управления
17
1.3. Структура системы управления
Система управления включает управляющее устройство (УУ) и
объект управления. Структура УУ зависит от используемого прин-
принципа управления. При использовании принципа программного управ-
управления УУ включает программатор и исполнительное устройство
(см. рис. 1.3).
Управляющее устройство, построенное на основе принципа ком-
компенсации (рис. 1.7, а), включает: задатчик или задающее устройст-
Рис. 1.7. Функциональная схема системы управления: а — по возму-
возмущению; б — с обратной связью
во (ЗУ), которое вырабатывает задающее воздействие; чувствитель-
чувствительный элемент (ЧЭ), предназначенный для измерения возмущения;
усилительно-преобразовательное устройство (УПУ), которое на ос-
основе задающего воздействия и измеренных значений возмущения
вырабатывает управляющее воздействие; исполнительное устройст-
устройство (ИУ), которое непосредственно воздействует на объект управ-
управления.
Управляющее устройство системы управления по отклонению
(рис. 1.7, # без штриховой линии), помимо задающего устройства,
усилительно-преобразующего устройства и исполнительного уст-
устройства, содержит сравнивающее устройство (СУ), которое определя-
2 Д.П. Ким
18
Гл. 1. Основные понятия и принципы управления
ет ошибку е, равную или пропорциональную отклонению управляемой
переменной от требуемого значения, и чувствительный элемент (ЧЭ),
предназначенный для измерения управляемой переменной.
Управляющее устройство системы комбинированного управления
(рис. 1.7, б со штриховой линией) по сравнению с управляющим
устройством системы управления по отклонению включает дополни-
дополнительно чувствительный элемент, предназначенный для измерения
возмущения.
1.4. Законы управления
Как было установлено выше, управляющее устройство состоит из
различных элементов. Однако при разработке и исследовании алго-
алгоритмов управления обычно исполнительное устройство и другие эле-
элементы, обладающие инерционностью, объединяют с объектом управ-
Регулятор
УУ
Объект регулирования
(управления)
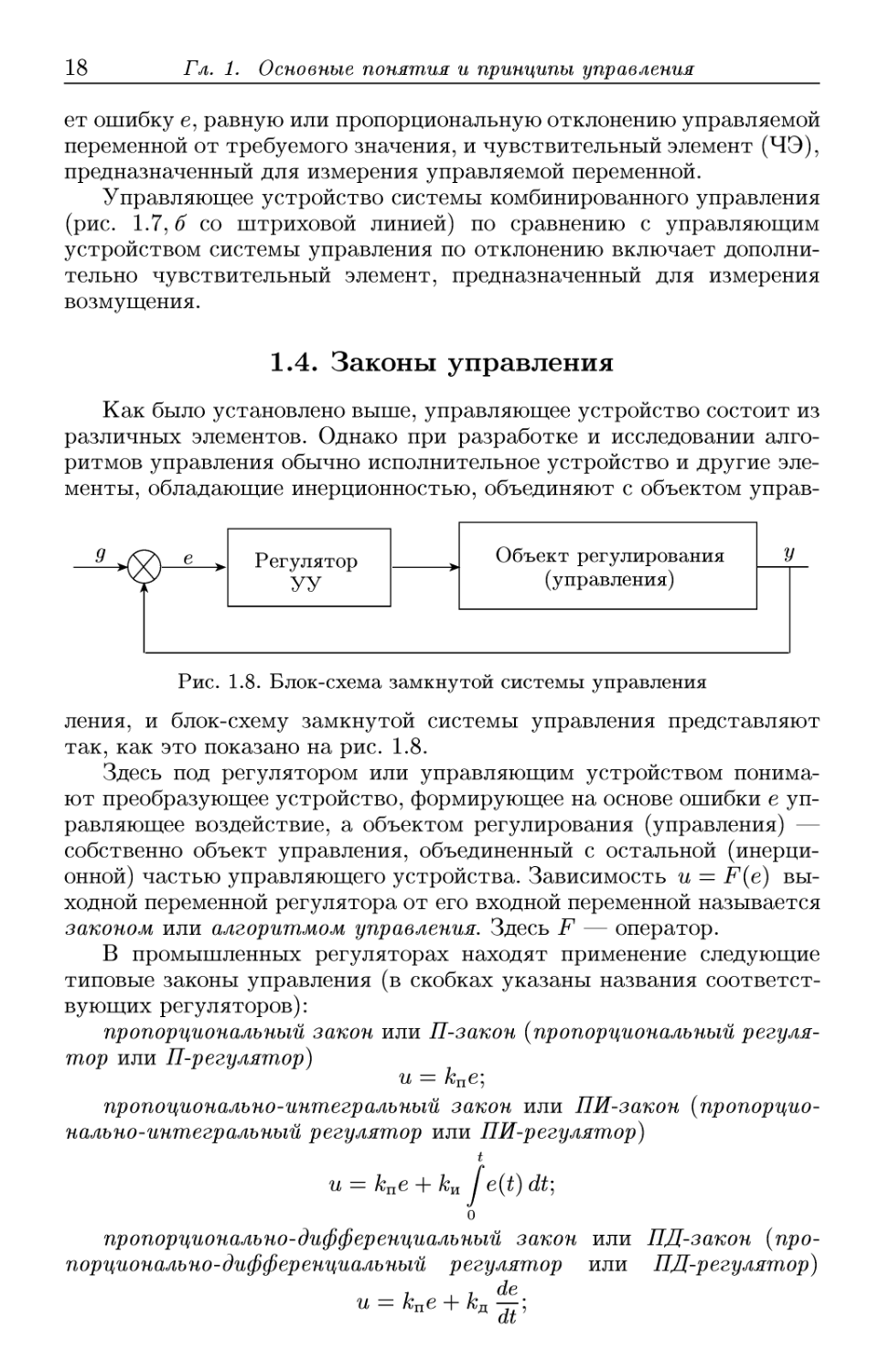
Рис. 1.8. Блок-схема замкнутой системы управления
ления, и блок-схему замкнутой системы управления представляют
так, как это показано на рис. 1.8.
Здесь под регулятором или управляющим устройством понима-
понимают преобразующее устройство, формирующее на основе ошибки е уп-
управляющее воздействие, а объектом регулирования (управления) —
собственно объект управления, объединенный с остальной (инерци-
(инерционной) частью управляющего устройства. Зависимость и = F{e) вы-
выходной переменной регулятора от его входной переменной называется
законом или алгоритмом управления. Здесь F — оператор.
В промышленных регуляторах находят применение следующие
типовые законы управления (в скобках указаны названия соответст-
соответствующих регуляторов):
пропорциональный закон или П-закон {пропорциональный регуля-
регулятор или П-регулятор)
и = kne;
пропоционально-интегральный закон или ПИ-закон {пропорцио-
{пропорционально-интегральный регулятор или ПИ-регулятор)
t
u = kne + km I e{t) dt;
о
пропорционально-дифференциальный закон или ПД-закон {про-
{пропорционально-дифференциальный регулятор или ПД-регулятор)
у , 7 de
и = кпе + кд —;
1.5. Классификация систем управления 19
пропоционалъно-интегро-дифференциалъный закон или ПИД-за-
кон (пропорционалъно-интегро-дифференциальный регулятор или
ПИ Д-р е г улят ор)
/dc
e(t) dt + кД—.
о
Здесь ки, кш и кд — константы (передаточные коэффициенты).
Как влияет каждое слагаемое в законе управления на управляе-
управляемый процесс, как выбирается закон управления и определяются пере-
передаточные коэффициенты, будет рассмотрено в гл. 5, посвященной
синтезу алгоритмов управления.
1.5. Классификация систем управления
Системы управления классифицируют по различным признакам.
Выше по наличию или отсутствию обратной связи были определены
замкнутые и разомкнутые системы управления.
По виду задающего воздействия g различают:
системы стабилизации: g = const;
системы программного управления: g = g(t), т.е. задающее воз-
воздействие — заданная функция времени;
следящие системы: задающее воздействие заранее не известно и
определяется внешними факторами (например, в радиолокационной
станции слежения за самолетом задающее воздействие определяется
движением наблюдаемого самолета).
В зависимости от использования текущей информации
системы управления делятся на обычные (неадаптивные) и адаптив-
адаптивные. Система управления называется неадаптивной, если текущая
информация используется только для выработки управляющего воз-
воздействия при неизменном алгоритме управления. Система называ-
называется адаптивной, если текущая информация используется также для
изменения алгоритма управления и/или задающего воздействия.
В зависимости от вида сигнала на выходе элементов систе-
системы управления делят на непрерывные и дискретные. Если сигнал
на выходе какого-либо элемента квантован по уровню (т.е. прини-
принимает дискретные значения) и/или по времени (т. е. представляет по-
последовательность импульсов), то система управления называется дис-
дискретной] в противном случае, т.е. когда выходные переменные всех
элементов системы управления являются непрерывными функциями,
система называется непрерывной.
По тому, зависит характеристика (свойство) системы управ-
управления от времени или нет, различают стационарные и неста-
нестационарные системы управления. Систему управления называют
стационарной, если ее характеристика не зависит от времени, и
нестационарной, если ее характеристика зависит от времени.
2*
20
Гл. 1. Основные понятия и принципы управления
По уравнениям, которыми описываются системы управления,
они делятся на линейные и нелинейные. Система управления назы-
называется линейной, если она описывается линейными уравнениями, и
нелинейной, если она описывается нелинейными уравнениями.
По характеру внешних (задающих и возмущающих) и внут-
внутренних (возмущающих) воздействий различают детерминирован-
детерминированные и стохастические системы управления. Система управления
называется детерминированной, если все воздействия являются
Система автоматического управления (САУ)
Неадаптивные САУ
Адаптивные САУ
Непрерывные САУ
Дискретные САУ
Стационарные САУ
Нестационарные САУ
Линейные САУ
Нелинейные САУ
Детерминированные
САУ
Стохастические САУ
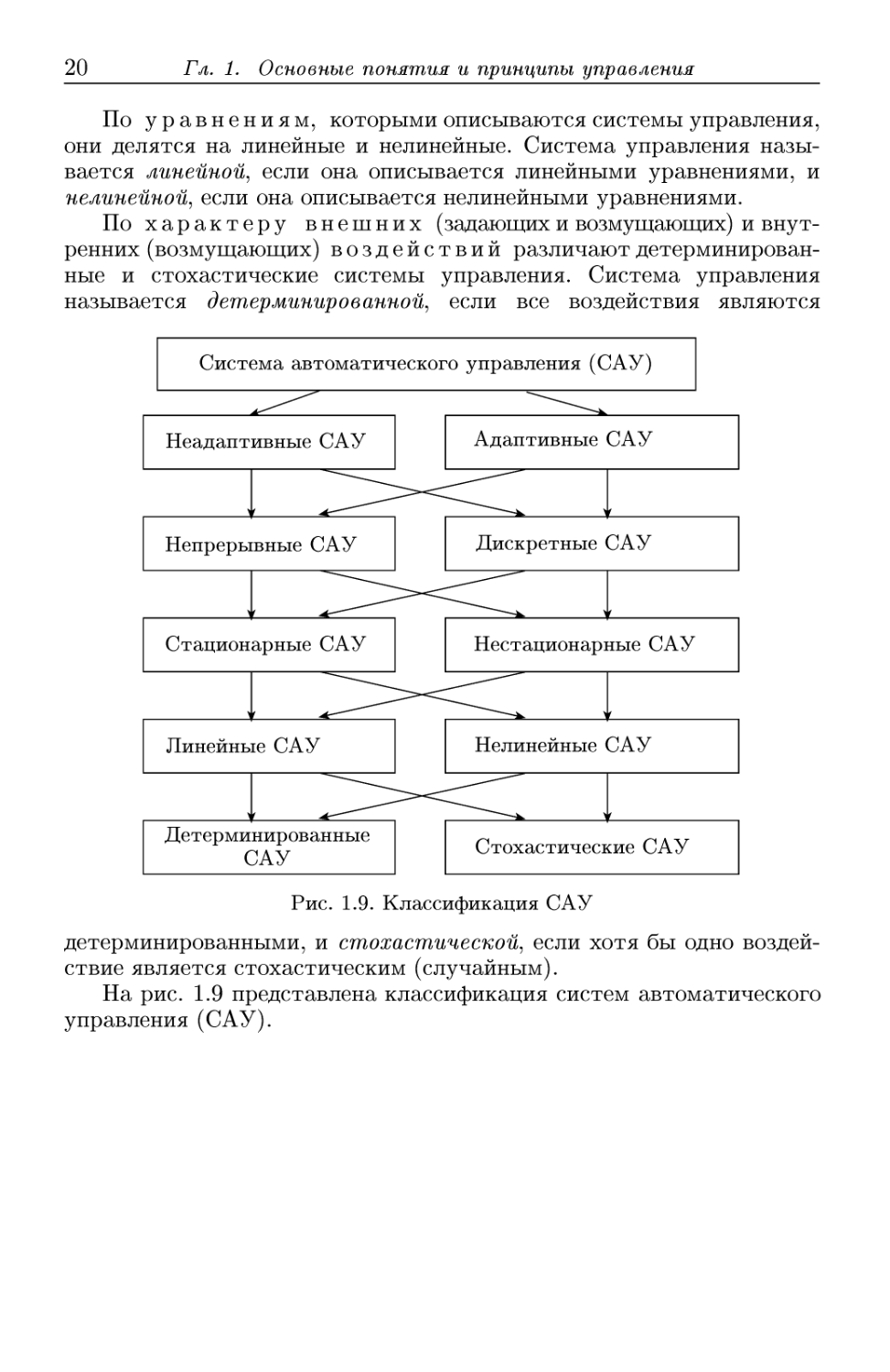
Рис. 1.9. Классификация САУ
детерминированными, и стохастической, если хотя бы одно воздей-
воздействие является стохастическим (случайным).
На рис. 1.9 представлена классификация систем автоматического
управления (САУ).
Глава 2
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
СИСТЕМ УПРАВЛЕНИЯ
В теории управления при анализе и синтезе систем управления
имеют дело с их математической моделью. Математическая модель
представляет собой уравнения, передаточные или временные функ-
функции, которые описывают процессы, протекающие в системе управле-
управления. Математическая модель может быть получена аналитически (те-
(теоретически) на основе физических (химических и др.) законов,
которым подчиняются процессы в системе управления, или экспери-
экспериментально.
При математическом описании исходят из противоречивых требо-
требований. С одной стороны, математическая модель должна как можно
полнее отражать свойства оригинала (исходной системы), а с другой
стороны — быть по возможности простой, чтобы не усложнять иссле-
исследование. Часто полезно на начальном этапе исследования принимать
более простую модель, а затем при необходимости усложнять ее, при-
принимая во внимание дополнительные факторы, которые на начальном
этапе не учитывались.
2.1. Уравнения динамики и статики
Система уравнения и любой ее элемент производят преобразова-
преобразование входного сигнала x(t) в выходной сигнал y(t). С математической
точкой зрения они осуществляют отображение
согласно которому каждому элементу х (t) из множества входных
сигналов ставится в соответствие некоторый вполне определенный
элемент y(t) из множества выходных сигналов. В приведенном соот-
соотношении А называется оператором. Оператор, определяющий отоб-
отображение между входным и выходным сигналами системы управле-
управления (элемента), называется оператором этой системы (элемента).
Задать оператор системы — это значит задать правило определения
выходного сигнала этой системы по ее входному сигналу. В данной
книге будем рассматривать системы, операторы которых могут быть
22 Гл. 2. Математическое описание систем управления
заданы с помощью обыкновенных дифференциальных уравнений. Ма-
Математическая модель системы управления может быть представлена
в виде соединения звеньев. Звено — это математическая модель сис-
системы или любой ее части, определяемой некоторым оператором. В
частном случае звено может быть математической моделью элемента.
Для примера рассмотрим звено, которое задается уравнением
F(y,y,y,u,u,v) = 0, B.1)
где у — выходная переменная; и и v — входные переменные; точки
над переменными обозначают дифференцирование по времени:
dy «А
V~dt' У~ dt*'
Пусть при постоянных входных воздействиях и = и0 и v = v°
процесс в звене установится: выходная переменная со временем при-
принимает постоянное значение у = у0. Тогда производные обращаются
в нуль и уравнение B.1) принимает вид
F° = F(y°, 0,0, и0,0, v°) = 0. B.2)
Уравнение B.1), описывающее процессы в звене при произволь-
произвольных входных воздействиях, называется уравнением динамики. Урав-
Уравнение B.2) описывает статический режим, т.е. процесс в звене при
постоянных входных воздействиях, и называется уравнением статики.
В общем случае, когда звено описывается дифференциальным
уравнением, значение его выходной величины в момент t зависит от
предыстории, т.е. от значений входной переменной до момента t. В
этом случае говорят, что звено обладает динамическим запаздыванием.
Если звено описывается функцией, т.е. значения его выходной пе-
переменной в любой момент времени зависят только от значений вход-
входной переменной в тот же самый момент времени, то уравнение статики
совпадает с уравнением динамики.
Статический режим можно описать графически с помощью ста-
статических характеристик. Статической характеристикой звена (эле-
(элемента) называют кривую зависимости выходной переменной от вход-
входной в статическом режиме. Статическую характеристику элемента
можно построить экспериментально, подавая на вход элемента посто-
постоянные воздействия и измеряя значения выходной переменной после
окончания переходного процесса или вычисляя с использованием урав-
уравнения статики.
2.2. Линеаризация. Формы записи
дифференциальных уравнений
Большинство систем управления описываются нелинейными диф-
дифференциальными уравнениями. Но во многих случаях их можно линеа-
линеаризовать, т.е. заменить исходные нелинейные уравнения линейными.
Процесс преобразования нелинейных уравнений в линейные называют
линеаризацией.
2.2. Линеаризация. Формы записи дифференциальных уравнений 23
Назначение систем управления — это поддержание некоторого за-
заданного режима. При этом режиме входные и выходные переменные
звеньев системы изменяются по определенному закону. В частности,
в системах стабилизации они принимают определенные постоянные
значения. Но из-за различных возмущающих факторов фактический
режим отличается от требуемого, и текущие значения входных и вы-
выходных переменных не равны значениям, соответствующим заданно-
заданному режиму. Обычно систему управления проектируют таким обра-
образом, чтобы реальный процесс мало отличался от требуемого режима,
т.е. чтобы отклонения от заданного режима были малы. Это позво-
позволяет производить линеаризацию, разлагая нелинейные функции, вхо-
входящие в уравнения, в ряд Тейлора в точке, соответствующей задан-
заданному режиму, и отбрасывая нелинейные относительно отклонений и
их производных слагаемые. Проиллюстрируем сказанное на примере
звена B.1).
Пусть заданному режиму соответствуют значения
у = у°, у = 0, у = 0, и = и°, й = 0, v = v°. B.3)
Обозначим отклонения реальных значений у, и и v от требуемых
через Ау, Аи и Av. Тогда получим у = у0 + Аи, у = Ау, у = Ау,
и = и0 + Аи, и = Аи, v = v° + Дг?. Подставив эти выражения в ис-
исходное уравнение и рассматривая F(y, у, у, и, и, г?) как функцию от не-
независимых переменных у, у, у, и, и и v, разложим ее в ряд Тейлора в
точке B.3):
ди J \ди ) V dv
Здесь многоточие обозначает слагаемые, содержащие произведения
приращений и их производных. Пренебрегая этими слагаемыми как
бесконечно малыми величинами более высокого порядка, чем сами
приращения и их производные, а также учитывая, что F0 = 0 в си-
силу B.2), последнее уравнение можно представить в виде
а0Ау + ахАу + а2Ау - Ь0Ап - hiAu - c0Av = 0, B.4)
fdF\° fdF\° fdF\° , fdF\° ,
dF\° fdF°
Уравнение B.4) получено при следующих предположениях:
1) отклонения выходной величины Ау и входных величин Аи
и Дг? достаточно малы;
2) функция F обладает непрерывными частными производными по
всем аргументам в окрестности точки, соответствующей заданному
режиму.
Если хотя бы одно из этих условий не выполняется, то, строго
говоря, линеаризацию проводить нельзя. По поводу условия 1) необ-
24
Гл. 2. Математическое описание систем управления
У
А'
Ау>
Аи
ходимо отметить следующее: нельзя раз и навсегда установить,
какие отклонения считать малыми; это зависит от вида нелиней-
нелинейности.
Иногда нелинейную зависимость
между отдельными переменными, вхо-
входящими в уравнение звена, задают в
виде графика (кривой). В этих случаях
линеаризацию можно проводить гра-
графически. Геометрически линеаризация
нелинейной зависимости между двумя
переменными означает замену исход-
исходной кривой АВ отрезком касатель-
касательной А'В' в точке О' (рис. 2.1), соот-
ветствующей заданному режиму, и па-
раллельный перенос начала системы
координат в эту точку.
Символическая форма записи дифференциальных уравне-
уравнений. При описании систем управления удобно использовать символи-
символическую форму записи линейных дифференциальных уравнений. Рас-
Рассмотрим ее на примере уравнения B.4). Перепишем его, опустив для
сокращения записи знак А и оставив в левой части только члены,
содержащие выходную переменную и ее производные:
а>оУ + сцу + а2у = Ьоп + biu + cov. B.5)
Введем для операции дифференцирования по времени обозначе-
т
Рис. 2.1. Линеаризация
р=л' р =W
Здесь знак тождества обозначает равенство по определению.
Используя введенное обозначение, уравнения B.5) можно записать
в виде
а>оР У + а>1РУ + &2У — Ьори + Ь\и + cov. B.6a)
Рассматривая оператор дифференцирования р как сомножитель, а вы-
выражение ру как произведение, не обладающее свойством коммутатив-
коммутативности (ру ф ур), уравнение B.6а) можно записать в виде
(а0р2 + aip + а2)у = (bop + bi)u + cov. B.66)
Введем обозначения Q(p) = а0р2 + а\р + а2, R\ (р) = Ьор + Ь\,
R2(p) = со- Используя эти обозначения, последнее уравнение можно
записать в виде
Q(p)y = Ri(p)u + R2(p)v. B.6в)
Следует иметь в виду, что уравнения B.6а)-B.бв) представляют дру-
другую, символическую (операторную) форму записи уравнения B.5).
Иного смысла они не имеют.
Дифференциальный оператор при выходной переменной называют
собственным оператором, дифференциальный оператор при входной
переменной — оператором воздействия. В последнем уравнении
2.3. Преобразование Лапласа 25
собственным оператором является Q(p), а операторами воздейст-
воздействия R\{p) и R2(p).
Стандартная форма записи уравнения звена. При исследо-
исследовании систем управления удобно, если уравнение звена, описываемого
дифференциальными уравнениями не выше 2-го порядка, представле-
представлено в стандартной форме. При стандартной форме записи члены урав-
уравнения, содержащие выходную величину и ее производные, располага-
располагают в левой части, а все остальные члены — в правой; коэффициент
при выходной переменной делают равным единице. В правой части
члены, содержащие одну и ту же входную переменную и ее производ-
производные, объединяют в одну группу и коэффициент при соответствующей
входной переменной выносят за скобки.
Уравнение B.5) в стандартной форме принимает вид
оу + 1\у + у — k\\±2U + и) + k2v
или
Tly + 2(Тоу + у = fei (Т2п + и) + k2v, B.7)
2 _ а^ _О]_ l_^1 71— — к — — С — "^ — ai
Здесь постоянные То, Т\ и Т2 имеют размерность времени, и их
называют постоянными времени, коэффициенты к\ и к2 — переда-
передаточными коэффициентами и безразмерный коэффициент ? (при 0 <
< ( < 1) — коэффициентом демпфирования. Если исходное уравне-
уравнение B.5) не содержит у (а2 = 0), то в стандартной форме коэффициент
при у должен быть равен единице: обе части уравнения делят на а\.
В символической форме уравнение B.7) принимает вид
(T0V + 2(Тор + 1)у = Ы^р + 1)и + k2v.
2.3. Преобразование Лапласа
При рассмотрении линейных дифференциальных уравнений с
постоянными коэффициентами удобно использовать преобразование
Лапласа, так как оно решение дифференциальных уравнений сводит
к алгебраическим операциям.
Преобразованием Лапласа называют соотношение
оо
X(s) = fx(t)e-stdt, B.8)
о
ставящее функции x(t) вещественного переменного в соответствие
функцию X(s) комплексного переменного s (s = а + jlj). При этом x(t)
называют оригиналом, X(s) — изображением или изображением
по Лапласу и s — переменной преобразования Лапласа. Оригинал
обозначают строчной, а его изображение — одноименной прописной
буквой.
26 Гл. 2. Математическое описание систем управления
Предполагается, что функция x(t), подвергающаяся преобразова-
преобразованию Лапласа, обладает следующими свойствами:
1) функция x(t) определена и кусочно дифференцируема на интер-
интервале [0, оо);
2) x(t) = 0 при t < 0;
3) существуют такие положительные числа с и М, что \x(t)\ <
< Mect при 0 ^ t < оо.
Функцию, обладающую указанными свойствами, называют функ-
функцией-оригиналом.
Соотношение a+j^
определяющее по известному изображению его оригинал, называют
обратным преобразованием Лапласа. В нем интеграл берется вдоль
любой прямой Re s = a > с.
Условно прямое и обратное преобразования Лапласа записывают
соответственно в виде
X(s) = L{x(t)}, x(t)=L-1{X(s)},
где L — оператор Лапласа, a L — обратный оператор Лапласа.
Основные свойства преобразования Лапласа.
1°. Свойство линейности. Для любых постоянных а и /3
L{aXl(t) + Px2(t)} = aL{Xl(t)} + CL{x2(t)},
т.е. преобразование Лапласа от суммы функций равно сумме преоб-
преобразований слагаемых, и постоянные множители можно выносить за
знак преобразования.
2°. Дифференцирование оригинала. Если производная х(t) является
функцией-оригиналом, то
= sX(s)-x(Q),
где X(s) = L{x(t)}, x@) = lim x(t). Здесь запись ?—)>+() обозна-
обозначает, что t стремится к нулю, оставаясь положительным (предел
справа).
Если п-я производная х (t) является функцией-оригиналом, то
L{(x\t)} = snX(s) - 8п~1х@) - sn-2x@) - ... - (Пж1}@).
Здесь х @) = lim x (t), k = 0,1,... ,n — 1.
При х@) = x@) = ... = x @) = 0 последняя формула прини-
принимает вид (п)
L{x
Таким образом, при нулевых начальных условиях дифференциро-
дифференцированию оригинала соответствует умножение изображения на s.
2.3. Преобразование Лапласа 27
3°. Интегрирование оригинала. Интегрирование оригинала сво-
сводится к делению изображения на s:
о
4°. Теорема запаздывания. Для любого т > О
L{x(t - т)} = e-TSL{x(t)} = e-TSX(s).
5°. Теорема о свертке (умножении изображении). Если x\(t)
и x2(t) — оригиналы, a X\(s) и X2(s) — их изображения, то
\ = LJ Jx2(T)Xl{t - t) dr\.
Xi(s) • X2(s) = b{ JXl(T)x2{t - t) dr J
Интеграл в правой части называют сверткой функций x\(t) и x2(t),
его обозначают xi(t) * x2(t):
t t
xi (t) * x2 (t) = / xi (t)x2 (t — r)dr = / x2 (r)xi (t — t) dr.
о о
Поэтому ^ (g) Х (g) =
6°. Теоремы о предельных значениях. Если x(i) — оригинал,
a X(s) — его изображение, то
х@) = lim sX(s);
и если существует предел ж(оо) = lim ж(^), то
ж(оо) = lim sX(s).
7°. Теорема разложения. Если X(s) = B(s)/A(s) является дробно-
рациональной функцией (A(s), B(s) — полиномы от s) и степень по-
полинома числителя меньше полинома знаменателя, то ее оригиналом
является функция
з . 7™, -1
где Sk — корни уравнения A(s) =0, п^ — их кратности и q — число
различных корней. Если указанные корни простые, то
п
x(t) =
к=1
= —-7
=Sk
Здесь п — степень полинома A(s) и A'(sk) = 7
as
Формулы B.10) и B.11) справедливы при t ^ 0. При ? < 0 по опре-
определению функции-оригинала x(t) = 0.
28 Гл. 2. Математическое описание систем управления
Пример 2.1. Определить функцию x(t), изображение которой
имеет вид X(s) = —, -г-.
s(s + 1)
Решение. В данном случае
Полюсами функции X(s) являются si = 0, ^2 = — 1, и они являются
простыми. Поэтому согласно формуле B.11) x(t) = 1 — e~f.
Пример 2.2. Определить функцию x(t), изображение которой
w ч 4(s + l)
имеет вид X(s) = ^^
s(s + 2J
Решение. В данном случае
?(s) = 4(s + 1), A(s) = s(s + 2J, A'(s) = 3s2 + Ss + 4.
Полюсами функции -X"(s) являются si = 0 и ^2 = —2. Первый полюс
является простым, а второй — кратным кратности П2 = 2. Слагае-
Слагаемое, соответствующее простому полюсу, можно вычислить по форму-
формуле B.11): B(Sl)/Af(Sl) = D/4)е° = 1.
Кратному полюсу согласно B.10) соответствует слагаемое
lim ±[X(s)(s-s2Jest] = lim A f^i + li e«*l = B?-1)е
*
Поэтому ж(*) = 1 4- Bt — l)e~2t.
Изображения Лапласа. В табл. 2.1 приведены изображения
Лапласа для часто используемых функций. Рассмотрим их вывод.
1) Дельта-функция (й-функция). Дельта-функция S(t) является
обобщенной функцией, и ее можно определить следующим образом:
для любой непрерывной функции tp(t) и бесконечно малого положи-
положительного числа е выполняется равенство
[ 5(t)<p(t) dt = [5(t)<p(t) dt = y>@). B.12)
— oo — г
Производные от ^-функции определяются следующим образом:
7
j
(™) (т)
S (t)ip(t) dt = (-1)™ V @), т = 1, 2,...,
оо
(m)
где 8 {t) — ттг-я производная по времени от ^-функции, ip(t) — обыч-
обычная функция, обладающая т-й производной.
Если представить преобразование Лапласа B.8) в виде
оо
X(s) = lim fx(t)e-stdt,
— г
то согласно определению дельта-функции B.12) имеем
оо
L{6(t)} = Дто J6(t)e-Stdt = е~° = 1.
2.3. Преобразование Лапласа
29
Таблица
№
1
2
3
4
5
6
7
8
9
10
11
12
2.1. Изображения Лапласа
Оригинал x(t)
S(t)
щ
l(t-r)
е-
te~at
tne~at
sinoot
cos oot
e-atsinoot
e~at cosoot
Изображение X(s)
1
1
s
s
1
n!
1
s -\- a
1
n!
a;
s2+a;2
s
S2+OO2
00
s + a
(s + aJ+oo2
2) Единичная функция. Единичная функция l(i) определяется сле-
следующим образом (рис. 2.2, а):
!(*) =
-{i
при t ^ 0,
при ^ < 0.
0
l(t-r)
0
Рис. 2.2. Графики единичных функций: а — единичная функция; б— еди-
единичная функция с запаздывающим аргументом
30 Гл. 2. Математическое описание систем управления
Ее изображение согласно B.8) имеет вид
X{s) = L{l(t)} = fe-stdt = -.
J s
0
3) Единичная функция с запаздывающим аргументом. Согласно
теореме запаздывания (свойство 4° преобразования Лапласа)
X(s) = L{l(t - г)} = е-"L(l(t)} = е-" \.
4) Изображение X(s) функции x(t) —t определяется интегриро-
интегрированием по частям:
оо оо
te-stdt = --te~st +- e~stdt= 4-
s о s J s2
о о
n!
To, что изображением функции x(t) = tn является X(s) = —^-r,
докажем методом математической индукции.
При п = 1 эта формула принимает вид L{t} = —, и она верна.
s
Предположим, что она справедлива при п = к — 1: Ь{Ьк~х} = -—^-^-?
s
и покажем, что она справедлива при п = к.
Так как t
x(t) =tk = kjr*-1 dr,
о
то согласно интегрированию оригинала (свойство 3° преобразования
Лапласа) t
L{tk} = bi кГт*-1 dr\ = * Lj^-1}.
Отсюда, учитывая принятую выше формулу для Lj^}, получаем
искомое соотношение
_ к (fe-1)! _ Л!
6) Изображение функции ж(?) = e~at определяется непосредствен-
непосредственно из формулы преобразования Лапласа
L{e~at}= fe-ate-stdt= [е~^+^ dt = -^—.
1 S J J s+a
о о
7) Изображение функции x(t) = te~at получается интегрировани-
интегрированием по частям:
оо оо
L{te~at} = [te-(a+8»dt = — ftde
1 J J s + aj
8) Формула для изображения функции x(t) =tne~at доказывается
методом математической индукции так же, как это было сделано при
выводе формулы для изображения функции tn.
2.4- Передаточные и временные функции 31
9) Из формулы Эйлера е^х = cos ж + j sin ж следует, что smcut
равен мнимой части е^1: sin cut = Im e^1. Поэтому
L{smujt} = J(lmeju;t)e-Stdt.
о
Если рассматривать s как действительный параметр, то это ра-
равенство можно записать в виде
L{smu)t} = Im
о
Отсюда, проинтегрировав и выделив мнимую часть, получим
10) Из формулы Эйлера получаем, что cos cut равен действитель-
действительной части eja;t: cos cot = Reeja;t. Поэтому
L{coscut} = Re Jejujte-St dt =
о
11) Учитывая, что
= e-atImeju;t =
получаем
12) Так как е~а
it} Im
)t} Re
oo
0
oo
0
K~stdt-
(s-
baJ-
faJ
TO
получаем
Таким образом, справедливость формул в табл. 2.1 доказана.
2.4. Передаточные и временные функции
Система или звено с одним выходом и двумя входами в общем
случае описывается уравнением
М (п-1) (ш) (ш-1)
^о 2/ + ai 2/ + ... + апу = Ьо и + bi и + ...
• • • + Ьши + со v + ci г? + ... + c\v. B.13)
В символической форме это уравнение принимает вид
(аорп + игр71'1 + ... + ап)у = (Ьорт + Ьхрш~х + ... + 6m)u +
+ (copl + ci^ + ... + ci)v, B.14а)
или
Q() Pi(p)« + P2(p)«, B.146)
32 Гл. 2. Математическое описание систем управления
где
Q(p) = аорп + сир71'1 + ... + ап,
Pi(p) = ЬоРт + Ьхрш~х + ... + Ьго, B.15)
Наряду с дифференциальными уравнениями при описании ли-
линейных систем широко используются передаточные и временные
функции.
2.4.1. Передаточные функции. Для описания линейных систем
используются передаточные функции в операторной форме и переда-
передаточные функции в изображениях Лапласа.
Передаточной функцией в операторной форме называется отно-
отношение оператора воздействия к собственному оператору.
Напомним, что собственным оператором называют дифференци-
дифференциальный оператор при выходной переменной, а оператором воздейст-
воздействия — дифференциальный оператор при входной переменной.
Степень полинома знаменателя называют порядком, а разность
между степенями знаменателя и числителя — относительным по-
порядком передаточной функции и соответствующей системы.
Нулями и полюсами передаточной функции W{p) = Р{р)/Q{p)
называют нули ее числителя и знаменателя соответственно, т.е.
корни уравнений Р(р) = 0 и Q(p) = 0, где р рассматривается как
переменная, а не как оператор.
В случае системы управления, которая описывается уравнени-
уравнением B.13) или B.14), собственным оператором является Q(p), а опе-
операторами воздействия — оператор воздействия Р\{р) по входу и и
оператор воздействия Р2(р) по входу v.
Поэтому в этом случае система определяется двумя передаточ-
передаточными функциями — передаточной функцией
w (о) - Мр) _ ьоРт ьт-1 + ь
и{Р) ~Ш~ вр
относительно входа и и передаточной функцией
Wv{p) = t?ZL = ^ ^^ J----r" B.166)
CJip) CLQpn -\~ Qj\pn -\- . . . -\- CLn
относительно входа v. Порядок этих передаточных функций равен n, a
относительный порядок равен п — т для передаточной функции Wu (p)
и п — I для передаточной функции Wv (p).
С помощью передаточной функции уравнение рассматриваемой
системы управления можно записать в виде
У = Wu(p)u + Wv(p)v = oP lPn_i, "' m и +
о>орп + а\рп 1 + ... + ап
аорп + сцр™-1 + ... + ап
2.4- Передаточные и временные функции 33
Это уравнение следует рассматривать как еще одну символичес-
символическую форму записи уравнения B.13). Формально его можно получить
из уравнений B.14), разделив обе части на собственный оператор.
Передаточная функция в операторной форме является оператором.
Ее нельзя рассматривать как обычную дробь. В частности, нельзя
числитель и знаменатель сокращать на общий множитель, содержа-
содержащий оператор дифференцирования.
Пример 2.3. Определить передаточную функцию звеньев, опи-
описываемых уравнениями:
а) О,1у + у = 2и; б) 0,1 у + 1,1 f/ + у = 2(« + «).
Решение. В символической форме эти уравнения записываются
в виде:
а) @,1р+1)у = 2щ б) @,1р2 + 1,1р + 1)у = 2(р + 1)«.
Их передаточные функции равны соответственно
Передаточной функцией системы (звена) в изображениях Лап-
Лапласа называют имеющее наименьший порядок отношение изобра-
изображений ее выходной и входной переменных при нулевых начальных
условиях. Согласно определению передаточная функция в изображе-
изображениях Лапласа не может иметь равные между собой нули и полюсы,
так как в этом случае ее порядок можно было бы понизить, сократив
числитель и знаменатель на общий делитель.
Если система (звено) имеет несколько входов, то при определении
передаточной функции относительно какой-либо одной входной пере-
переменной остальные входные переменные полагают равными нулю.
Найдем передаточные функции (в изображениях Лапласа) для
системы, которая описывается уравнением B.13). Применим к обеим
частям этого уравнения преобразование Лапласа. Тогда, используя
свойство линейности преобразования Лапласа, получим
a0L{ у} + (цЬ{ Пу } + ...+ anL{y} = Ъ0Ь{ и } + hL{ Ши } + ...
... + ЪтЬ{и} + c0L{ v } + ciL{ v } + ... + ciL{v}.
Последнее уравнение, учитывая свойство 2° преобразования Лап-
Лапласа (дифференцирование оригинала при нулевых начальных услови-
условиях), можно записать в виде
(aosn + а18п-г + ... + an)Y(s) = (bosm + hs771'1 + ... + bm)U(s) +
+ (cos1 + as1'1 + ... + ci)V(s), B.18)
где Y(s) = L{y(t)}, U(s) = L{u(t)}, V(s) = L{v(t)}.
3 Д.П. Ким
34 Гл. 2. Математическое описание систем управления
Отсюда, положив V(s) = 0 , находим передаточную функцию от-
относительно входа u(t):
(s) =
=
U(s) aosn
Аналогично, положив U(s) = 0 , находим передаточную функцию от-
относительно входа v(i):
(s) =
V(s) aosn + a\sn~1 + ... + an
Как легко заметить, уравнение в изображениях Лапласа B.18)
получается из дифференциального уравнения B.14а), т.е. диффе-
дифференциального уравнения, записанного в символической форме, при
подстановке р = s и замене переменных их изображениями. Поэто-
Поэтому передаточная функция 1/F(s) произвольной стационарной линей-
линейной системы связана с ее передаточной функцией (в операторной фор-
форме) W(p) соотношением
W(s) = W(p)\p=s. B.19)
В тех случаях, когда W(p) имеет равные между собой нули и полюсы,
предполагается, что в правой части B.19) после подстановки р = s
производится сокращение, и передаточная функция W(s) не имеет
равных между собой нулей и полюсов.
Обратное соотношение
W(p)=W(s)\s=p B.20)
справедливо, если передаточная функция W(p) не имеет одинаковых
нулей и полюсов.
Пример 2.4. Определить передаточные функции звеньев, опи-
описываемых уравнениями:
ъ)у + У = Щ б) у - у = и - и.
Ре ш е н и е . В символической форме эти уравнения записываются
в виде:
а) (р + 1)у = Щ б) (р2 - 1)у = (р - 1)и.
Их передаточные функции в операторной форме соответственно
равны 1 -л — 1
W1(p) = -4т. W2(p) = ?rJT.
р -\- 1 р — 1
Передаточные функции в изображениях Лапласа имеют вид
Как видим, они совпадают, хотя рассматриваемые звенья описыва-
описываются разными дифференциальными уравнениями и общие решения
однородных уравнений, описывающие свободные движения систем,
различаются между собой:
у = Се~\ у = Схе-1 + C2ef.
2.4- Передаточные и временные функции 35
При t —> оо первое решение при произвольных начальных условиях
стремится к нулю, в то время как второе решение при С2 ф 0 стре-
стремится к бесконечности.
Таким образом, передаточная функция второго звена в изобра-
изображениях Лапласа не может служить его описанием при произволь-
произвольных начальных условиях. Это связано с тем, что его передаточная
функция в операторной форме имеет равные между собой нули и
полюсы.
2.4.2. Временные функции. Помимо дифференциальных урав-
уравнений и передаточных функций при описании и исследовании линей-
линейных систем используют переходные и импульсные переходные функ-
функции и их графики — временные характеристики.
Для линейных систем справедлив принцип суперпозиции,
который можно сформулировать следующим образом: реакция сис-
системы на несколько одновременно действующих воздействий равна
сумме реакций на каждое воздействие в отдельности.
Принцип суперпозиции позволяет сводить исследование систем
при нескольких одновременно действующих входных воздействиях к
исследованию системы с одним входным воздействием. Например,
пусть требуется найти реакцию системы при двух одновременно
действующих входных воздействиях: и = u(t) и v = v(t). При этом
эти воздействия могут быть приложены в одной точке или в разных
точках системы. Находим сначала реакцию системы yu(t) при дейст-
действии одного входа и = u(i) (v = 0), затем реакцию системы yv(i) при
действии другого входа v = v(t) (и = 0). Реакция системы при од-
одновременном действии обоих воздействий (и = u(t) и v = v(t)) равна
сумме найденных реакций: у = yu(t) + yv(t)-
Принцип суперпозиции позволяет во многих случаях ограничиться
изучением систем только с одним входом.
Переходной функцией системы (звена) называют функцию, описы-
описывающую реакцию системы на единичное ступенчатое воздействие при
нулевых начальных условиях.
Переходную функцию будем обозначать h(t). График переходной
функции — кривую зависимости h(t) от времени t — называют пере-
переходной или разгонной характеристикой.
Импульсной переходной или весовой функцией (функцией веса)
называют функцию, описывающую реакцию системы (звена) на еди-
единичное импульсное воздействие при нулевых начальных условиях.
Физически единичный импульс можно представить как очень уз-
узкий импульс, ограничивающий единичную площадь. Математически
он описывается дельта-функцией S(t).
Весовую функцию будем обозначать w(t). График импульсной пе-
переходной функции — кривую зависимости функций w(t) от време-
времени t — называют импульсной переходной характеристикой.
Переходную и импульсную переходную функции называют вре-
временными функциями, а их графики — временными характерис-
характеристиками.
3*
36 Гл. 2. Математическое описание систем управления
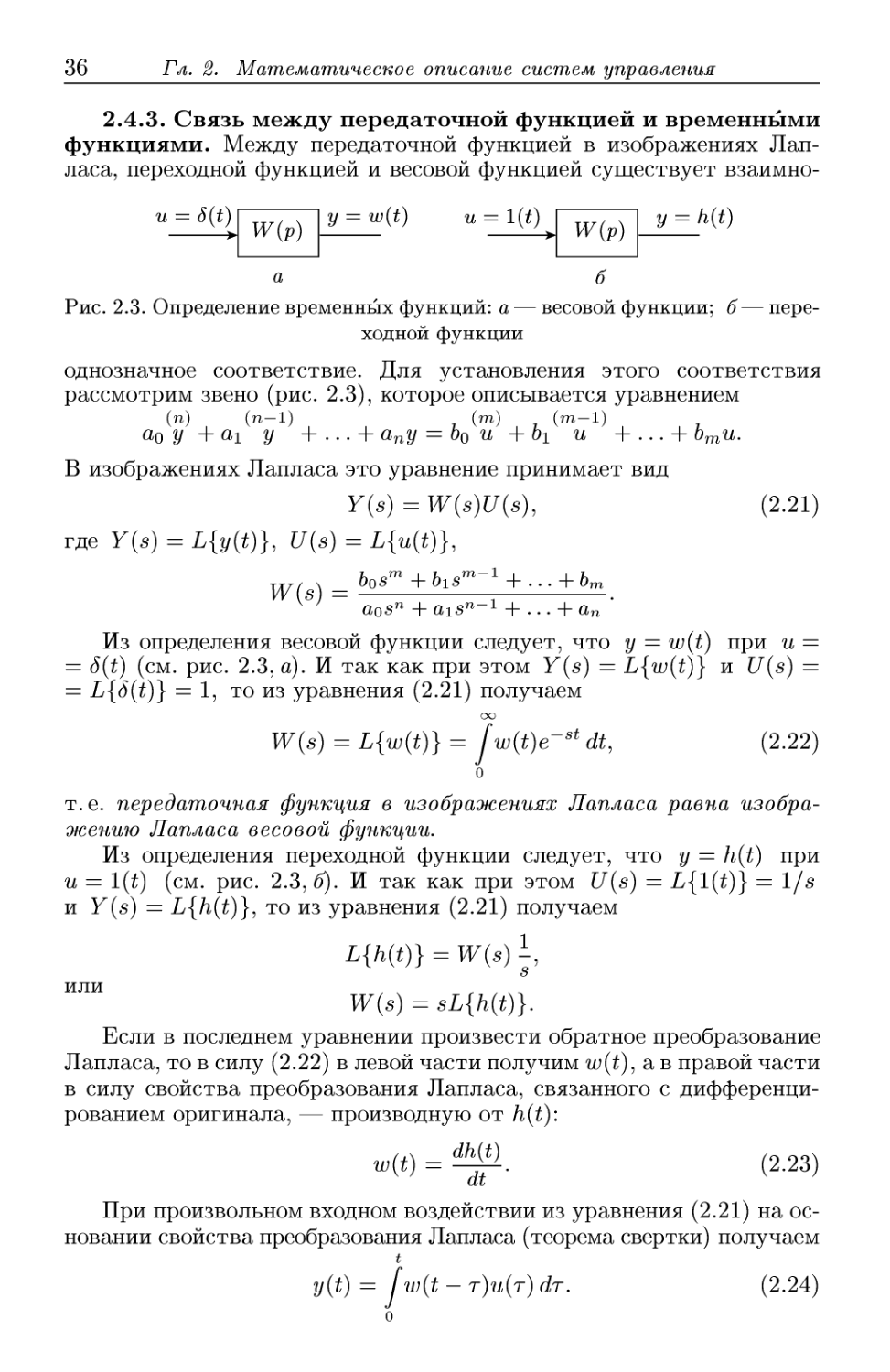
2.4.3. Связь между передаточной функцией и временными
функциями. Между передаточной функцией в изображениях Лап-
Лапласа, переходной функцией и весовой функцией существует взаимно-
и = S(t)
W(p)
= w(t) u=l(t)
W(p)
У = h(t)
а б
Рис. 2.3. Определение временных функций: а — весовой функции; б— пере-
переходной функции
однозначное соответствие. Для установления этого соответствия
рассмотрим звено (рис. 2.3), которое описывается уравнением
(п) (п-1) (ш) (ш-1)
ао у + а\ у + ... + апу = bo и + Ь\ и + ... + оши.
В изображениях Лапласа это уравнение принимает вид
Y(s)=W(s)U(s), B.21)
где Y(s) = L{y(t)}, U(s) = L{u(t)},
W(s) = l "m ' l "m x '
aosn + a\sn 1 + ... + an
Из определения весовой функции следует, что у = w(t) при и =
= S(t) (см. рис. 2.3, а). И так как при этом Y(s) = L{w(t)} и C/(s) =
= L{S(t)} = 1, то из уравнения B.21) получаем
оо
W(s) = L{w(t)} = jw{t)e~st dt, B.22)
о
т. е. передаточная функция в изображениях Лапласа равна изобра-
изображению Лапласа весовой функции.
Из определения переходной функции следует, что у = h(i) при
и = l(t) (см. рис. 2.3, б). И так как при этом U(s) = L{l(t)} = 1/s
и F(s) = L{ft(t)}, то из уравнения B.21) получаем
L{h(t)} = W(s) i,
Если в последнем уравнении произвести обратное преобразование
Лапласа, то в силу B.22) в левой части получим w(t), а в правой части
в силу свойства преобразования Лапласа, связанного с дифференци-
дифференцированием оригинала, — производную от h(t):
w(t) = **&. B.23)
При произвольном входном воздействии из уравнения B.21) на ос-
основании свойства преобразования Лапласа (теорема свертки) получаем
t
y(t) = fw(t - t)u{t) dr. B.24)
2.5. Частотные функции и характеристики 37
Если известна одна из функций W(s), w(t) и h(t), то две другие
могут быть определены с помощью формул B.22), B.23).
Пример 2.5. Определить переходную и весовую функции звена с
2
передаточной функцией W(p) = — -.
0,Э?> + 1
Решение. В соответствии с определением передаточной функции
дифференциальное уравнение рассматриваемой системы имеет вид
@,5р + 1J/ = 2и или 0,5у + у = 2и.
По определению переходная функция есть решение этого уравнения
при и = 1(?), т.е. уравнения
при нулевом начальном условии: у@) = 0.
Характеристическое уравнение имеет вид
0,5А + 1 = 0.
Его корень Ai = —2. Общее решение однородного уравнения yc(t) =
= Ce~2t и частное решение неоднородного уравнения yB(t) = 2. По-
Поэтому общее решение неоднородного уравнения
Из начального условия у@) = С + 2 = 0 имеем С = — 2. Следова-
Следовательно, переходная функция
h(t) = -2e~2t + 2 = 2A - e~2t).
Весовая функция w(t) = = 4e~2t.
Итак, линейная система (звено) может быть задана (описана)
с помощью дифференциальных уравнений, передаточных функций в
операторной форме и в изображениях Лапласа, переходной и весовой
функциями. При этом в общем случае дифференциальные уравнения
и передаточные функции в операторной форме описывают систе-
систему при произвольных начальных условиях, а передаточные функции в
изображениях Лапласа и временные (переходные и весовые) функ-
функции — только при нулевых начальных условиях.
2.5. Частотные функции и характеристики
Важную роль при исследовании линейных стационарных систем
играют частотные характеристики. Они представляют собой еще
один способ описания систем.
В общем случае уравнение линейной системы с одним входом мож-
можно записать в виде
ао(? + <Л1} + ... + апу = М(т) + Ь^'^и + ... + Ьти. B.25)
38
Гл. 2. Математическое описание систем управления
Ее передаточная функция
W(p) =
аорп
...+ ап
B.26)
Функцию W(ju>), которая получается из передаточной функции в
изображениях Лапласа при подстановке s = ju):
. . . +
W(M = , • л / • л 1
ao(juj)n + ai(juj)n~l + ... + ап
называют частотной передаточной функцией. Она является комп-
лекснозначной функцией от действительной переменной и, называе-
называемой частотой.
Частотную передаточную функцию можно представить в виде
где
А(ш) =
Если | <MgW(juj)\ ^-,то ч>(ш) = aigW(ju) = arctg-^.
Z U [00)
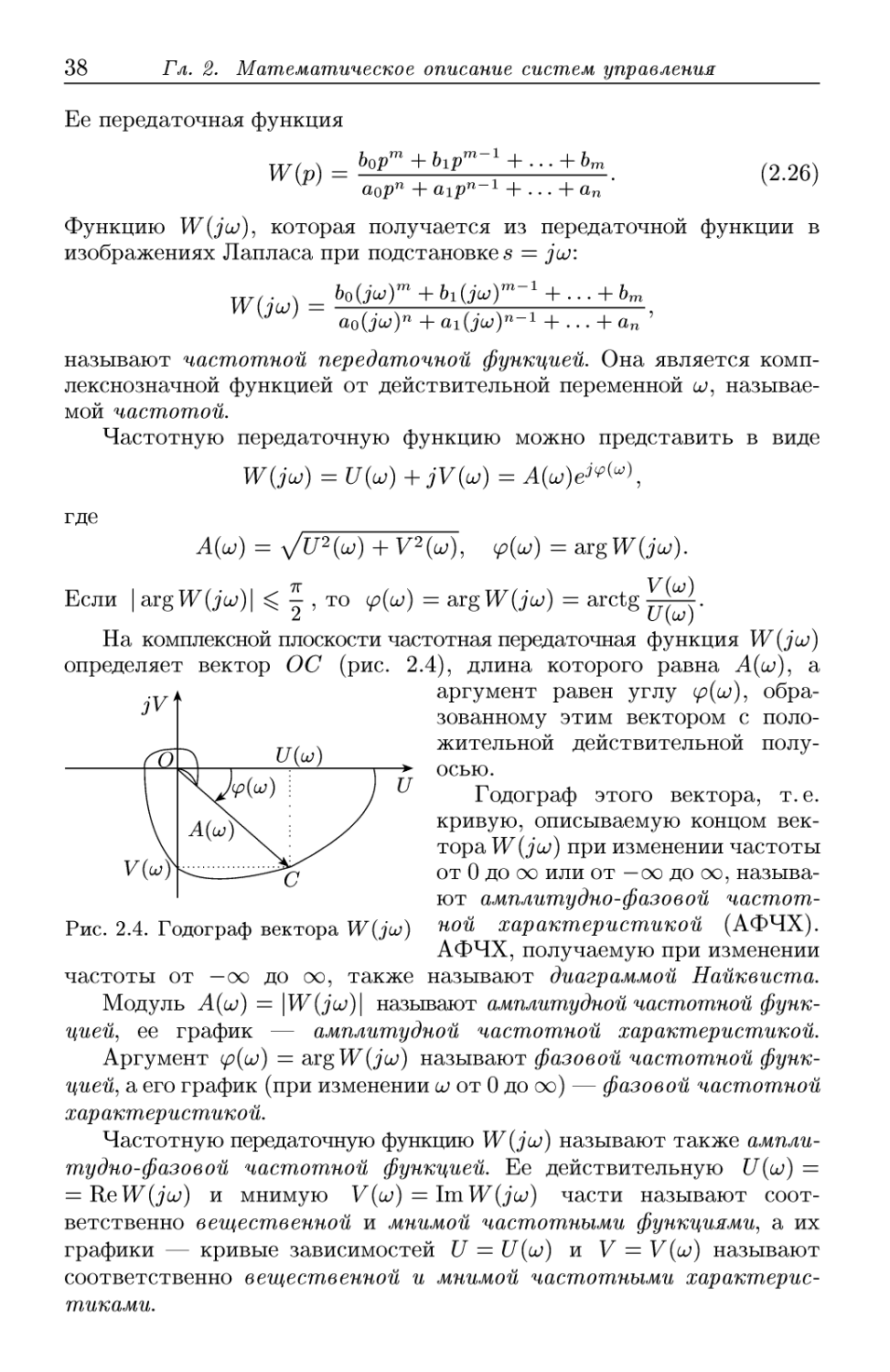
На комплексной плоскости частотная передаточная функция
определяет вектор ОС (рис. 2.4), длина которого равна A(uj), a
аргумент равен углу <р(ш), обра-
образованному этим вектором с поло-
положительной действительной полу-
полуосью.
Годограф этого вектора, т.е.
кривую, описываемую концом век-
вектора W(juj) при изменении частоты
от 0 до оо или от —оо до оо, называ-
называют амплитудно-фазовой частот-
частотной характеристикой (АФЧХ).
АФЧХ, получаемую при изменении
Рис. 2.4. Годограф вектора W(juj)
частоты от —оо до оо, также называют диаграммой Найквиста.
Модуль А(и) = |W(jo;)| называют амплитудной частотной функ-
функцией, ее график — амплитудной частотной характеристикой.
Аргумент ip(<jj) = argH^(jo;) называют фазовой частотной функ-
функцией, а его график (при изменении о; от 0 до оо) — фазовой частотной
характеристикой.
Частотную передаточную функцию W(jlj) называют также ампли-
амплитудно-фазовой частотной функцией. Ее действительную U{uo) =
= KeW(j(j) и мнимую V(u) = ImW(juj) части называют соот-
соответственно вещественной и мнимой частотными функциями, а их
графики — кривые зависимостей U = U(u) и V = V(u) называют
соответственно вещественной и мнимой частотными характерис-
характеристиками.
2.5. Частотные функции и характеристики 39
Кроме перечисленных частотных характеристик, имеются лога-
логарифмические частотные характеристики (ЛЧХ) — логарифмические
амплитудные частотные характеристики и логарифмические фазо-
фазовые частотные характеристики.
Функцию L{(jj) = 201g^(o;) = 20lg |H^(jo;)| называют логарифми-
логарифмической амплитудной {частотной) функцией, а график зависимости
функции L(uS) от логарифма частоты lgo; называют логарифмичес-
логарифмической амплитудной частотной характеристикой (ЛАЧХ).
При построении ЛАЧХ по оси абсцисс откладывают значение час-
частоты в логарифмическом масштабе, при этом на отметке, соответст-
соответствующей значению lgo;, записывают значение и; по оси ординат
откладывают и записывают значение Ь(ш) = 201gA(o;).
Логарифмической фазовой частотной характеристикой (ЛФЧХ)
называют график зависимости функции (р(и) от логарифма часто-
частоты lgo;. При ее построении по оси абсцисс, как и при построении
ЛАЧХ, на отметке, соответствующей значению lgo;, записывают зна-
значение UJ.
В ЛЧХ единицей L(uS) является децибел, а единицей lgo; — декада.
Декадой называют интервал, на котором частота изменяется в 10 раз.
При изменении частоты в 10 раз говорят, что частота изменилась на
одну декаду.
Правило вычисления модуля и аргумента. В дальнейшем
при вычислении амплитудной и фазовой частотной функций полезно
следующее правило вычисления модуля и аргумента произведения и
дроби комплексных чисел (функций).
1) Модуль произведения Z = z\z2 ... zn комплексных чисел равен
произведению модулей сомножителей:
\Z\ = \Zl\\z2\...\zn\, B.27а)
а аргумент — сумме аргументов сомножителей:
arg Z = argz\ + argz2 + ... + argzn. B.276)
2) Модуль дроби комплексных чисел (функций) Z = Z\jZ2 равен
дроби модулей:
\2\ = Щ, B.28а)
а аргумент — разности аргументов числителя и знаменателя:
argZ = argZx - argZ2. B.286)
Действительно, представив zi = \zi\ e^argZi, имеем
Z — Z\| z2\ ... \zn\ e '" .
Отсюда получаем формулы B.27а), B.276).
Аналогично находим Z = j—4 ei(argZi-argZ2)^ откуда получаем
\Z2\
формулы B.28а), B.286).
40 Гл. 2. Математическое описание систем управления
Если комплексная функция представляет отношение произведений
комплексных чисел (функций) Z = ( Y\ z%) / ( П zk ) •> т0 на основа-
4=1 '' 4=1 '
нии приведенных выше формул получаем
т п
aigZ = У] arg Zi — У] argz^. B.29)
k=l 7 г=1 k=l
Физический смысл частотных характеристик. При гар-
гармоническом входном воздействии в устойчивых системах после окон-
окончания переходного процесса выходная переменная также изменяется
по гармоническому закону с той же частотой, но с другими ампли-
амплитудой и фазой; амплитуда равна амплитуде входного сигнала, умно-
умноженной на модуль частотной передаточной функции, а сдвиг фазы
равен ее аргументу.
Иными словами, амплитудная частотная функция показывает
изменение отношения амплитуд выходного и входного сигналов, а
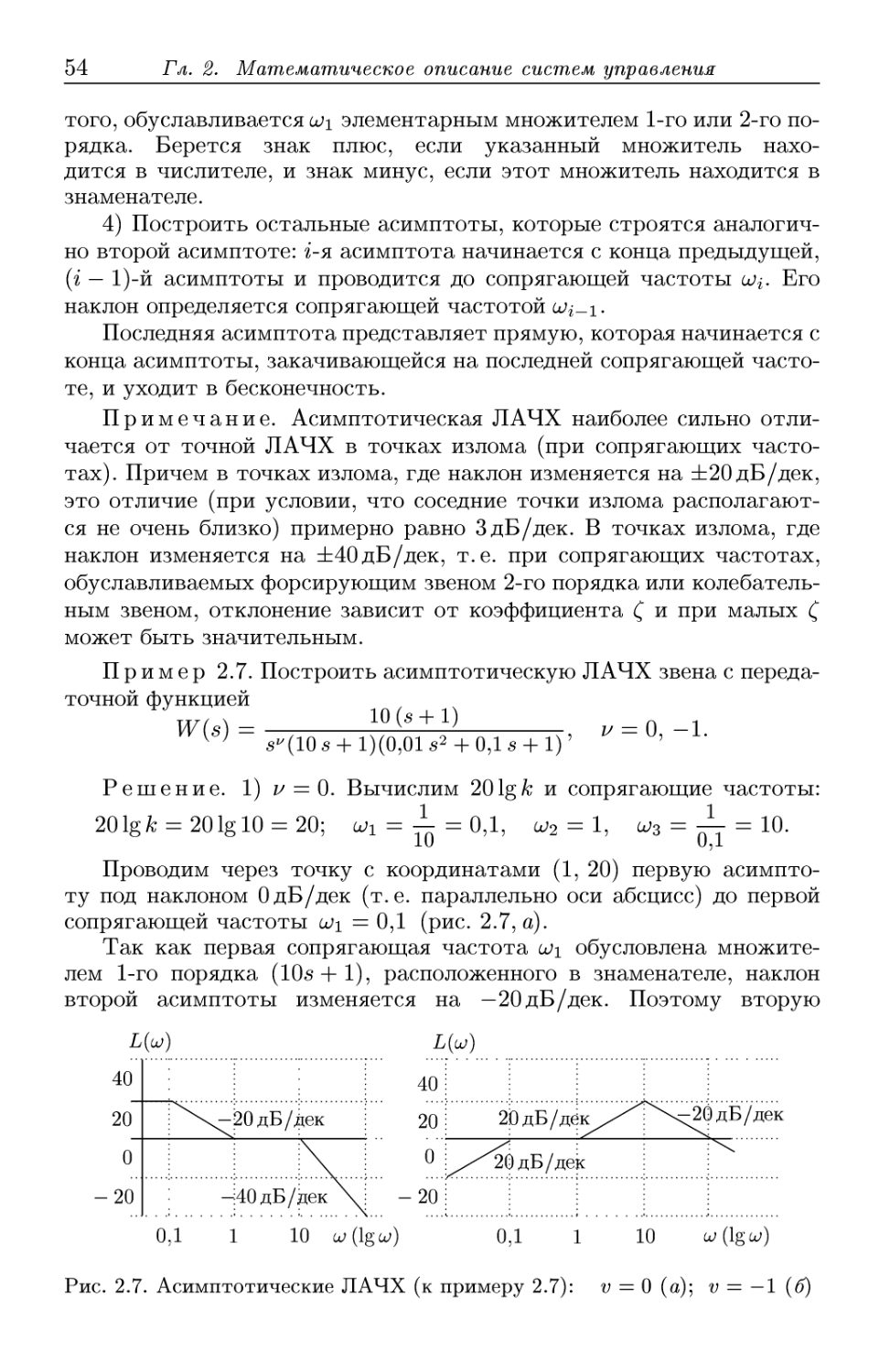
фазовая частотная функция — сдвиг фазы между ними в зависи-
зависимости от частоты.
Таким образом, если система B.25) устойчива, то при входном
воздействии
и = иш cos (ш t + а);
после окончания переходного процесса выходной сигнал имеет вид
Здесь иш — постоянная амплитуда входного сигнала; а — начальный
сдвиг фазы; W(ju>) — частотная передаточная функция рассматри-
рассматриваемой системы; (р(и) = a,rgW(juj). Покажем справедливость приве-
приведенной формулы, положив для простоты записи а = 0.
Общее решение уравнения B.25) имеет вид
где yc(t) — общее решение однородного уравнения, yB(t) — частное
решение неоднородного уравнения B.25). Общее решение yc{t) опи-
описывает свободное движение, т.е. движение, определяемое начальным
условием. В устойчивых системах оно со временем стремится к нулю:
yc(t) —У 0 при t —у оо. Частное решение yB(i) описывает вынужден-
вынужденное (установившееся) движение, определяемое внешним воздействием.
Чтобы найти частное решение при и = иш cos ut, используя ра-
равенство cosa;? = (eja;t + e~^ujt)/2, представим входное воздействие в
виде и = ui(t) + u2{i), где
На основе принципа суперпозиции частное решение рассматривае-
рассматриваемого уравнения можно представить в виде суммы
2.5. Частотные функции и характеристики 41
где у\(t) — частное решение уравнения B.25) при и = u\(t) и y2(t) —
частное решение того же уравнения при и = u2{t). Найдем эти ре-
решения.
Так как
P«i(t) = ^fpejut = Щ
) =p(j?U1(t)) =
pmu1(t)=p(pm-1u1(t)) = (ja;)m«i(t),
то при подстановке в уравнение B.25) вместо и выражения для ui(i),
получим
(аорп + aip" + ... + ап)У1 = [bo(jw)m + Ы^Г + • • • + Ът] «i(«).
Частное решение этого уравнения будем искать в виде
При его подстановке в B.25) указанное уравнение принимает вид
[ao(jw)n + ai(jw)"-1 + ... + an] AlUl(t) =
= [bo(jtj)m + bitiw)™ + ... + Ьт] «i(t).
1 + ... + an '
Очевидно, это выражение совпадает с частотной передаточной функ-
функцией рассматриваемой системы. Поэтому
А1 = W(juj) =
и соответственно
^ Я(I. B.30)
Теперь найдем решение 2/2(^)? подставив в B.25) вместо и выраже-
выражение и2 = ^е~^К Так как
pu2(t) = ^ре-*** = ^ (
p2u2(t) =p(pu2(t)) = (-jujJu2(t),
имеем
(aopn + aipn-x + ... + an)y2 = М-^Г + Ы
Частное решение этого уравнения будем искать в виде
42 Гл. 2. Математическое описание систем управления
Проделав те же выкладки, что и при нахождении частного ре-
решения yi(t), и учитывая, что |W(—juo)\ = |W(jo;)| и argH^(—juo) =
= — axgW(joj), получим
A2 = W(-juj) = \W(-juj)\e-j^ = \W(jw)\e-j(p(w)
и соответственно
Следовательно,
2/в(*) = Vi(t) +2/2W
что и требовалось показать.
2.6. Различные типы звеньев и их характеристики
Так как произвольный полином можно разложить на простые
множители, то передаточную функцию системы (звена)
всегда можно представить в виде произведения простых множителей
и дробей вида
h q _ ТчЧ-1 Т2ч2 + 9ЛТч-1-1 - (9 ^"П
Напомним, что к называется передаточным коэффициентом, Т —
постоянной времени и ? @ < ? < 1) — коэффициентом демпфиро-
демпфирования.
Звенья, передаточные функции которых имеют вид простых мно-
множителей или дробей, называют элементарными звеньями. Их также
называют типовыми. Однако типовыми называют и другие звенья,
которые не являются элементарными.
Системы и звенья и их передаточные функции делятся на мини-
минимально-фазовые и неминимально-фазовые.
Передаточная функция W(s) = P(s)/Q(s) называется минималь-
минимально-фазовой, если все ее нули (корни уравнения) P(s) = 0 и полюсы
(корни уравнения Q(s) = 0 ) располагаются в левой полуплоскости, и
называется неминимально-фазовой, если хотя бы один нуль или полюс
располагается в правой полуплоскости.
Система и звено называются минимально-фазовыми, если их пе-
передаточные функции являются минимально-фазовыми, и называют-
называются неминимально-фазовыми, если их передаточные функции являются
неминимально-фазовыми.
Передаточные функции и системы (звенья), не являющиеся ни
минимально-фазовыми, ни неминимально-фазовыми, будем называть
маргинальными. Иначе говоря, передаточная функция будет называть-
2.6. Различные типы звеньев и их характеристики 43
ся маргинальной, если она имеет нуль или полюс на мнимой оси, но
не имеет их в правой полуплоскости.
2.6.1. Типы элементарных звеньев. Тип звена определяется
видом его передаточной функции. При этом если передаточные функ-
функции звеньев отличаются только на постоянный множитель, то
их относят к одному типу. Поэтому при определении типа элементар-
элементарных звеньев будем исходить из передаточных функций, получаемых
из B.31) умножением на константу к (кроме первой).
Пропорциональное звено. Так называют звено с передаточной
функцией W(s) = к. Его частотные и временные функции имеют сле-
следующий вид:
W(juj) = к, U (и) = к, V(u) = 0, А(и) = к, <р(и) = О,
Ь(и) = 201g/c, h(t) = kl(t), w(t) = kS(t).
Дифференцирующее звено. Так называют звено с передаточной
функцией W(s) = ks. Его частотные и временные функции имеют
следующий вид:
W(juj) = jku, U (и) = 0, V(u) = ки, А(и) = ки, <р(и) = тг/2,
Ь(и) = 201g/c + 201go;, h(t) = kS(t), w(t) = kS(t).
Интегрирующее звено. Так называют звено с передаточной функ-
функцией W(s) = к/s. Его частотные и временные функции имеют сле-
следующий вид:
W(juj) = -jk/uj, U (и) = 0, V(u) = -к/и, А(и) = к/си,
ф(ш) = -тг/2, Ь(ш) = 20 lg Л; — 201go;, h(t) = kt, w(t) = к.
Форсирующее звено 1-го порядка. Так называют звено с переда-
передаточной функцией W(s) = k(Ts + 1). Его частотные и временные
функции имеют следующий вид:
W(jlj) = k(Tjcj + 1), U (и) = Jb, V(u) = kTuo,
А(ш) = кл/(ТсиJ + 1, ч>(ш) = arctg (Tu),
L[lj) = 20lgЛ; + 20lg \/(TwJ + 1, h(t) = k[S(t) + l(t)],
w(t) = k[T6(t)
Апериодическое звено. Так называют звено с передаточной функ-
функцией W(s) = k/(Ts + 1). Его частотные и временные функции имеют
следующий вид:
А;
о;) = —. ш(ио) = —arctg (Го;),
44
Гл. 2. Математическое описание систем управления
- 20 lg у/(ТшJ + 1, hit) = k[l -
В рассмотренных выше элементарных звеньях фазовая частотная
функция по модулю не превышает тг/2. Поэтому она определяется
как arctg —)—!-. Кроме того, в случае интегрирующего и апериоди-
и(ш)
ческого звеньев амплитудную и фазовую функции можно определить
по правилу вычисления модуля и аргумента дроби.
Форсирующее звено 2-го порядка. Так называют звено с переда-
передаточной функцией W(s) = k(T2s2 + 2(Ts + 1) @ < С < 1). Его частот-
частотные функции имеют следующий вид:
W(jlj) = k[l - (TljJ + j2?Tlj], U(и) = k[l - (Га;J],
А(и) = к
arctg ¦
1 - (ТЫ)*
тг + arctg ¦
при о; ^ -,
L{u) = 20 lg fe + 20 lg v/[l-
Временные функции не приведены, так как они практически не ис-
используются.
Фазовая частотная функция <p(uj) не удовлетворяет условию
|(/?(а;)| ^ тг/2 на всем диапазоне частот. Поэтому для ее определения
рассмотрим амплитудно-фазовую частотную характеристику.
Таблица 2.2. Данные для построения АФЧХ
ш
Щш)
0
к
0
0 < ш < 1/Т
>0
>0
1/Т
0
2к(
1/Т < и; < оо
<0
>0
оо
—оо
оо
В табл. 2.2 приведены значения U(u) и V(u) в характерных точ-
точках, а на рис. 2.5 показан примерный вид АФЧХ. Из этого рисунка
jV\
0 к U
Рис. 2.5. АФЧХ форсирующего звена 2-го порядка
2.6. Различные типы звеньев и их характеристики 45
видно, что 0 ^ </?(^) ^ тг/2 при 0 ^ и ^ 1/Т. Поэтому на этом ин-
интервале
4>{и>) - arctg щ^ arctg
При о; > 1/Т (см. рис. 2.5) <р(ш) = тг — а , где
Поэтому на этом диапазоне частот
4>{ш) = тг + arctg 1
_ 2,
что и доказывает справедливость приведенной выше формулы
для ip(w).
Колебательное звено. Так называют звено с передаточной функ-
k
цией W(s) = 2 @ < С < 1). К такому виду приводит-
приводится передаточная функция W(s) = , если ее полюсы яв-
a0s2 +ais + a2
ляются комплексно сопряженными числами с отрицательной вещест-
вещественной частью.
Частотные и временные функции колебательного звена имеют сле-
следующий вид:
fc fc [1 - (Га;J]
2к(Тш
[1 - (Га;J]2 + BСГа;J ' v ; ^/[1 _ (Га;J]2 + BСГа,J '
-тг- arctg 1_{ТшJ при ш>-,
= 201gfc
) - fc [l -
w(t)
л/w2"
-201g4/[r
^a2 + /92
/3
fe(a2+/32
/Пгл ЯГО"СГ
//г», Л212 _i_ (OfT, Л2
e~at sin (fit + (fo) •>
- e~at sin/3^,
где а = -, /3 = ^, у?0 argtg .
Здесь фазовую частотную функцию можно получить, используя
правило вычисления аргумента дроби и основываясь на фазовой функ-
функции форсирующего звена 2-го порядка.
46
Гл. 2. Математическое описание систем управления
Таблица 2.3. Частотные характеристики элементарных звеньев
Звено и ее частот-
частотная передаточная
функция
Пропорциональное
звено, W(juj) = к
Дифференцирующее
звено, W(juj) = kjuj
Интегрирующее
звено, W(juj) = k/juj
Форсирующее звено,
W(juj) - k(Tjuj + 1)
Апериодическое зве-
k
Колебательное
звено, W(juj) =
к
1-Т ш +j2^Tuj
Амплитудно-фазо-
Амплитудно-фазовая частотная ха-
характеристика
m
jv-
A; t/
\ о; — oo
CJ = OO
ш = 0
,v
с
\
UJ = OO
к U
jj,= oo uj = 0
1/Т
uj = oo uj = 0
/к и
Логарифмические ампли-
амплитудные и фазовые частот-
частотные характеристики
У
201gA;
-тг/2
тг/2 -
тг/4 -
201g^
I
тг/4 -
-тг/2 ¦¦
201gfe
-тг/2
— 7Г
/
о;
! t ^(-)
—^^20дБ/дек
\ uj
1/к
^<1 -20дБ/дек
1 \ о;
^^2ПлБ/лек
1/Т w
—-s>/^x ^
- / \
^L -40дБ/дек
2.6. Различные типы звеньев и их характеристики
47
Таблица 2.4. Временные характеристики элементарных звеньев
Звено
Переходная харак-
характеристика
Импульсная переходная
характеристика
Пропорциональное
w(t)
Интегрирующее
•w(ty
к
Апериодическое
w(t)
к/Т
Колебательное
h(t)
к
Консервативное
2к
w ,
-к/Т
В табл. 2.3 приведены частотные характеристики, а в табл. 2.4 —
временные характеристики элементарных звеньев.
Асимптотические логарифмические амплитудные час-
частотные характеристики. Логарифмические амплитудные час-
частотные характеристики (ЛАЧХ) пропорционального, дифференци-
дифференцирующего и интегрирующего звеньев являются прямыми, и их легко
построить. Построение ЛАЧХ других элементарных звеньев требует
трудоемких вычислений. Поэтому на практике часто ограничиваются
построением приближенных асимптотических ЛАЧХ.
48 Гл. 2. Математическое описание систем управления
При построении асимптотической ЛАЧХ апериодического звена в
выражении L{uj) = 201gfc - 20 lgy^Ta;J + 1 при uj ^ 1/Т под кор-
корнем пренебрегают слагаемым (То;J, меньшим единицы, а при ио >
> 1/Т — единицей. Поэтому уравнение асимптотической ЛАЧХ
имеет вид
^ B0\gk при и ^ 1/Т,
LH- |201g/c-201g(Ta;) при и > 1/Т.
При построении асимптотической ЛАЧХ колебательного звена в
выражении
L(w) = 20\gk - 20\gy/[l - (TluJ}2 + B(TluJ
при lj ^ 1/Т под корнем оставляют только единицу, а при о; > 1/Т —
только наибольшее слагаемое (Та;L. Поэтому уравнение асимптоти-
асимптотической ЛАЧХ имеет вид
[201g& при о; ^ 1/Т,
| 20 lg ^ - 40 lg (To;) при си > 1/Т.
Аналогично поступают при построении асимптотических ЛАЧХ фор-
форсирующих звеньев. Частоты, на которых асимптотические ЛАЧХ
претерпевают излом, называются сопрягающими частотами.
Переходная и весовая функции. Вычисление временных функ-
функций проиллюстрируем на примере колебательного звена.
Пример 2.6. Определить переходную и весовую функции коле-
колебательного звена.
Решение. По определению передаточная функция колебательно-
колебательного звена
и соответственно дифференциальное уравнение имеет вид
Для определения переходной функции нужно решить это уравнение
при входном воздействии и = l(t) и нулевых начальных условиях
(TV + 2(Тр + l)i/ = kl(t), i/@) = 1/@) = 0.
Характеристическое уравнение имеет вид
и его корнями являются
или
Положив а = С/Т и /3 = ^1 — B/Т, общее решение однородного
дифференциального уравнения можно записать в виде
2.6. Различные типы звеньев и их характеристики 49
Частное решение неоднородного уравнения есть ув = к. Поэтому об-
общее решение имеет вид
У = Ус + Ув = (Ci sin/% + С2 cospt)e~at + к.
Производная от этого решения —
у = \р(Сг cos /3t - С2 sin/%) - a(d sin fit + C2 cos f3t)]e~at.
Начальные условия принимают вид
1,@) = С2 + к = 0, 2/@) = Cd - аС2 = 0.
Отсюда С2 = — к, С\ — —ак//3. Поэтому переходная функция есть
h(t) =
или, после элементарных преобразований,
h(t) = k\l- ^а+Р e~at sin (fit +
где (ро = arctg(/3/a). Весовая функция принимает вид
или, после преобразований,
w(t) = —— у е atsmf3t.
2.6.2. Неминимально-фазовые элементарные звенья. Рас-
Рассмотренные выше дифференцирующее и интегрирующее звенья явля-
являются маргинальными, а остальные — минимально-фазовыми. Здесь
мы остановимся на неминимально-фазовых и двух других маргиналь-
маргинальных элементарных звеньях. При этом ограничимся рассмотрением
только фазовых частотных функций, так как их вычисление вызы-
вызывает определенные сложности.
Так как формула tgip(u;) = V(u)/U(u) справедлива при произ-
произвольном (р(и), в общем случае фазовая частотная функция имеет вид
(p(w) = arctg P4 + /7Г> ' = °> ±!> ±2> • • • B-32)
U{LO)
Неустойчивое форсирующее звено. Так называется звено с
передаточной функцией W(s) = k(Ts — 1). Фазовая частотная функ-
функция имеет вид , . /лтл . , .
ф{ш) = тг - arctg (Tlj). B.33)
Для получения этой и последующих формул для фазовой частот-
частотной функции неминимально-фазовых элементарных звеньев рас-
рассмотрим пределы их частотных передаточных и фазовых частотных
функций при uj —У 0 и uj —У оо.
Для частотной передаточной функции неустойчивого форсирую-
форсирующего звена W(juj) = k(Tju> — 1) имеем:
4 Д.П. Ким
50 Гл. 2. Математическое описание систем управления
при uj —У 0 W(juj) —>-—&, и соответственно фазовая частотная
функция у? (и;) —> 1^ (= =1=1? =1=3, ...);
при и —У оо W(jo;) —У kTjui, и соответственно у? (и;) —У тг/2.
В силу того, что arctg —^ = - arctg (Го;), формула B.32) бу-
дет удовлетворять полученным предельным соотношениям при 1 = 1.
А при этом значении I формула B.32) совпадает с B.33).
Неустойчивое апериодическое звено. Так называется звено
с передаточной функцией W(s) = k/(Ts — 1). Так как частотная пе-
передаточная функция W(juj) = k/(Tjuj — 1), фазовая частотная функ-
функция по правилу вычисления аргумента дроби имеет вид <р(ш) =
= — arg (Tjuj — 1), т. е. она равна фазовой частотной функции неустой-
неустойчивого форсирующего звена с противоположным знаком:
ф{ш) = — тг + arctg (To;).
Неустойчивое форсирующее звено 2-го порядка. Так на-
называется звено с передаточной функцией
W(s) = k(T2s2 - 2(Ts + 1) @ < С < 1).
Частотная передаточная функция W(ju) = k(l — T2uj2 — j2(Tu>) и
arctg = — arctg -— . В данном случае при ш —> 0 W(ju>) —>
U уОй) 1 — 1 L0
—У к, и соответственно фазовая частотная функция <р(ш) —У 0, а
при uj -у оо H^(jo;) ->• (—lJ^T2(ja;J , и соответственно ip(cj) -у =Ьтг.
Формула B.32), которая принимает вид (р(си) = — arctg — 2 + /тг,
/ = 0, =Ы, ±2, ..., удовлетворяет приведенным предельным соотноше-
соотношениям, и у?(о;) не терпит разрыва при и = 1/Т, если / = 0 при и ^ 1/Т
и / = -1 при и > 1/Т:
2СТо; . 1
при ^^т'
B.34)
-тг - arctg г_{ТшJ при о;>-.
Неустойчивое колебательное звено. Так называется звено
к
с передаточной функцией W(s) = 2 — @ < ( < 1). Час-
J. S ^^^ ^ ^
тотная передаточная функция W(ju) = -— 2 , и фазовая
частотная функция, определяемая как разность между аргументами
числителя и знаменателя, равна фазовой частотной функции неустой-
неустойчивого форсирующего звена 2-го порядка с отрицательным знаком:
, 2(Ти
arctg i {Тиу при
^ 2(Ти 1
тг + arctg -—s при о; > -.
1 — (^i cjj l
2.6. Различные типы звеньев и их характеристики 51
Консервативное звено. Так называется звено с передаточной
функцией W(s) = 2—-, которая получается из передаточной
функции колебательного звена при ( = 0. Поэтому, положив ( = 0
в фазовой частотной функции колебательного звена, получим
0 при и «С 1/Т,
тг при ш
Это звено является маргинальным.
Еще одно маргинальное элементарное звено с передаточной функ-
функцией W(s) = k(T2s2 + 1) получим, если положим ( = 0 в передаточ-
передаточной функции форсирующего звена 2-го порядка. Из фазовой частотной
функции указанного звена при ? = 0 имеем
0 при w
7Г ПРИ и>
2.6.3. Звено чистого запаздывания. Некоторые объекты мо-
могут обладать запаздыванием. Запаздывание проявляется в том, что
при изменении входного воздействия выходная переменная начинает
изменяться не сразу, а спустя некоторый промежуток времени т, на-
называемый временем чистого или транспортного запаздывания. К
такому роду объектам относятся объекты, содержащие трубопро-
трубопроводы, длинные линии, транспортеры. Математические модели таких
объектов включают звено, которое описывается передаточной функ-
функцией W(s) = ke~TS. Такое звено называется звеном чистого запазды-
запаздывания. Его частотные и временные функции имеют следующий вид:
W(juj) = ke~JTUJ = &(cosro; — j sin та;), U{uj) = k cos та;,
V(u) = —k sin та;, A(u) = fc, </?(^) = —та;, L(uj) = 201g&,
h(t) = fel(t - t), w(t) = Ы(* - т).
2.6.4. Построение логарифмических частотных характе-
характеристик. Для построения логарифмической амплитудной (ЛАЧХ) и
фазовой (ЛФЧХ) частотной характеристик звена с произвольной
дробно-рациональной передаточной функцией W(s) нужно ее чис-
числитель и знаменатель разложить на элементарные множители и
представить W(s) в виде произведения передаточных функций эле-
элементарных звеньев:
W(s) = UWi(s) B.35)
i
или в виде
W(s) = ^W°(s), B.36)
где W°(s) представляет собой отношение произведений элементарных
множителей 1-го и 2-го порядков с единичным передаточным коэффи-
коэффициентом, т. е. множителей вида Ts ± 1 и as2 ± bs + 1 (b2 — 4а < 0).
4*
52 Гл. 2. Математическое описание систем управления
Из B.35) получаем
L(u) = 201g|H^(jo;)| = y^lg|H^(o;)|, B.37a)
(f(uj) = aigW(juj) = ^JargW^'a;). B.376)
i
Из B.37а) следует, что для построения ЛАЧХ произвольного
звена достаточно построить ЛАЧХ элементарных звеньев, на которые
оно разлагается, а затем их геометрически сложить. Однако для пост-
построения асимптотических ЛАЧХ можно использовать несколько иное,
более простое правило. Проиллюстрируем это сначала на частном
примере.
Пусть W(s) = пППп , 1 ^ ^ П1 п , 1V Логарифмическая ам-
амплитудная частотная функция имеет вид
L(u) = 40 + 20 lg л/^2 + 1 - 201go; - 20 lg
- 20lg л/A- 0,01а;2J + @,1a;J.
Вычислим сопрягающие частоты и пронумеруем их в порядке воз-
возрастания:
uj\ — — — и,!, о;2 — J- •) о;з — — — iu.
Здесь u>i, UJ2 и и>з — сопрягающие частоты апериодического, форси-
форсирующего и колебательного звеньев соответственно.
Напомним, что при построении асимптотических ЛАЧХ при час-
частотах, меньших сопрягающей частоты, под корнем оставляют только
единицу (остальными членами пренебрегают); при частотах, боль-
больших сопрягающей частоты, оставляют член с наивысшей степенью и.
Поэтому в рассматриваемом примере при со < uj\
Это уравнение прямой, которая проходит через точку с координа-
координатами uj = 1 и L = 40 с наклоном —20дБ/дек. Прямая имеет нак-
наклон —20дБ/дек B0дБ/дек); это означает, что при увеличении час-
частоты на декаду (т.е. в 10 раз) L(uS) уменьшается (увеличивается)
на20дБ (рис. 2.6, а).
Первая асимптота заканчивается на первой сопрягающей частоте
(рис. 2.6,6).
При uji ^ uj < UJ2 аналогично имеем
) = 20-401go;.
Это уравнение второй асимптоты. Ее наклон по отношению к первой
асимптоте изменяется на — 20дБ/дек и обуславливается апериодичес-
апериодическим звеном, т. е. множителем 1-го порядка в знаменателе рассматри-
рассматриваемой передаточной функции. Вторую асимптоту проводят от конца
2.6. Различные типы звеньев и их характеристики
53
!бо"
:20
\ 0
-120
\^-20дБ/дек ;
j _\|-40дБ)дек_
:0,1 : 10 \
100
-бОдБ/дек
бОдБ/дек
40дБ/дек
20дБ/дек
-20дБ/дек
-40дБ/дек
-бОдБ/дек
Рис. 2.6. К построению асимптотических ЛАЧХ: а — наклоны асимптот;
б — асимптотическая ЛАЧХ
первой асимптоты до второй сопрягающей частоты согласно ее урав-
уравнению под наклоном — 40дБ/дек.
При UJ2 ^ Ш < ^3
Ь(и) ^ 20 - 401go; + 201go; = 20 - 201go;.
Это уравнение третьей асимптоты. Ее наклон по отношению ко вто-
второй асимптоте изменяется на 20 дБ/дек и обуславливается форсирую-
форсирующим звеном, т. е. множителем 1-го порядка в числителе. Третью
асимптоту проводят от конца второй асимптоты до третьей сопря-
сопрягающей частоты под наклоном —20дБ/дек.
При uj ^ сиз
L(uj) ^20-201go;-201g@,la;J = 60-601go;.
Это уравнение последней, четвертой асимптоты. Ее наклон изменяет-
изменяется по отношению к третьей асимптоте на —40дБ/дек и обуславлива-
обуславливается колебательным звеном, т.е. множителем 2-го порядка в знамена-
знаменателе.
Теперь нетрудно сформулировать правило построения асимп-
асимптотических ЛАЧХ в общем случае.
Правило построения асимптотических Л А ЧХ.
1) Пользуясь представлением B.36), вычислить 201g/c и сопря-
сопрягающие частоты LJi = 1/Ti, которые следует пронумеровать в по-
порядке возрастания: uj\ < и>2 < • • •
2) На оси абсцисс отметить сопрягающие частоты, а на координат-
координатной плоскости — точку A, 20\gk). Построить первую асимптоту —
прямую под наклоном — г/20дБ/дек, проходящую через отмеченную
точку на координатной плоскости. Первая асимптота заканчивается
на первой сопрягающей частоте uj\.
3) Построить вторую асимптоту, которая начинается с конца пер-
первой асимптоты и проводится до второй сопрягающей частоты ui2. Его
наклон изменяется на =Ь20дБ/дек или =Ь40дБ/дек в зависимости от
54
Гл. 2. Математическое описание систем управления
того, обуславливается uj\ элементарным множителем 1-го или 2-го по-
порядка. Берется знак плюс, если указанный множитель нахо-
находится в числителе, и знак минус, если этот множитель находится в
знаменателе.
4) Построить остальные асимптоты, которые строятся аналогич-
аналогично второй асимптоте: г-я асимптота начинается с конца предыдущей,
(г — 1)-й асимптоты и проводится до сопрягающей частоты а^. Его
наклон определяется сопрягающей частотой uJi-\.
Последняя асимптота представляет прямую, которая начинается с
конца асимптоты, закачивающейся на последней сопрягающей часто-
частоте, и уходит в бесконечность.
Примечание. Асимптотическая ЛАЧХ наиболее сильно отли-
отличается от точной ЛАЧХ в точках излома (при сопрягающих часто-
частотах). Причем в точках излома, где наклон изменяется на =Ь20дБ/дек,
это отличие (при условии, что соседние точки излома располагают-
располагаются не очень близко) примерно равно ЗдБ/дек. В точках излома, где
наклон изменяется на =Ь40дБ/дек, т.е. при сопрягающих частотах,
обуславливаемых форсирующим звеном 2-го порядка или колебатель-
колебательным звеном, отклонение зависит от коэффициента ( и при малых (
может быть значительным.
Пример 2.7. Построить асимптотическую ЛАЧХ звена с переда-
передаточной функцией
W(s) = ——-^l±4^ ^, и = 0,-1.
Решение. 1) v — 0. Вычислим 20lg/с и сопрягающие частоты:
201g& = 201gl0 = 20; "i = « ОД, w2 = 1, ^з = ^ = Ю.
Проводим через точку с координатами A, 20) первую асимпто-
асимптоту под наклоном ОдБ/дек (т.е. параллельно оси абсцисс) до первой
сопрягающей частоты uj\ = 0,1 (рис. 2.7, а).
Так как первая сопрягающая частота uj\ обусловлена множите-
множителем 1-го порядка A0s + 1), расположенного в знаменателе, наклон
второй асимптоты изменяется на —20дБ/дек. Поэтому вторую
Ци
-20
ОД
0,1
10
o;(lga;)
Рис. 2.7. Асимптотические ЛАЧХ (к примеру 2.7): v = 0 (a); v = —1 (б)
2.6. Различные типы звеньев и их характеристики 55
асимптоту проводим от конца первой асимптоты до сопрягающей
частоты UJ2 = 1 под наклоном —20дБ/дек.
Сопрягающая частота ui2 обусловлена элементарным множите-
множителем s + 1, расположенным в числителе. Поэтому наклон третьей
асимптоты отличается от наклона второй на 20дБ/дек и состав-
составляет ОдБ/дек. Третью асимптоту проводим от конца второй асимп-
асимптоты до сопрягающей частоты oj% = 10.
Сопрягающая частота и>з обусловлена элементарным множи-
множителем 0,01 s2 + 0,1 s + 1, расположенным в знаменателе. Поэтому
наклон последней, четвертой асимптоты отличается от наклона
третьей асимптоты на —40дБ/дек и составляет —40дБ/дек. Пос-
Последнюю асимптоту проводим от конца третьей асимптоты до бес-
бесконечности.
2) v = — 1. Значения 201g/c и сопрягающих частот те же, что и в
предыдущем случае. Первую асимптоту проводим через точку с ко-
координатами A, 20) под наклоном — г/20 дБ/дек = 20дБ/дек до первой
сопрягающей частоты (рис. 2.7, б). Все последующие асимптоты стро-
строятся так же, как и в предыдущем случае.
Построение ЛФЧХ. Напомним: при построении ЛФЧХ по оси
ординат откладываются значения фазовой функции ip(u;), а по оси
абсцисс, как и при построении ЛАЧХ, — частота в логарифмическом
масштабе, т.е. наносятся деления, соответствующие значениям lgo;,
а указываются значения и.
ЛФЧХ системы (звена) можно построить следующим образом: раз-
разложить числитель и знаменатель передаточной функции на элемен-
элементарные множители и представить ее в виде произведения передаточ-
передаточных функций элементарных звеньев, затем построить ЛФЧХ
элементарных звеньев и в соответствии с формулой B.376) их гео-
геометрически сложить.
ЛФЧХ пропорционального, дифференцирующего и интегрирую-
интегрирующего звеньев представляют собой прямые (см. табл. 2.3) и строятся
легко.
Форма ЛФЧХ апериодического и форсирующего звеньев не зави-
зависит от значений параметров и для их построения можно восполь-
воспользоваться шаблоном, причем одним шаблоном, так как ЛФЧХ апе-
апериодического звена получается из ЛФЧХ форсирующего звена
зеркальным отображением относительно оси частот (рис. 2.8, а).
В зависимости от постоянной времени Т они перемещаются вдоль
оси абсцисс: при и = 1/Т фазовая частотная функция форсирующе-
форсирующего звена принимает значение тг/4, а апериодического звена — зна-
значение —тг/4.
Форма ЛФЧХ форсирующего звена 2-го порядка и колебательного
звена зависит от коэффициента демпфирования ?. Положение вдоль
оси частот зависит от постоянной времени Т: при и = 1/Т фазовая
частотная функция форсирующего звена 2-го порядка принимает зна-
значение тг/2, а колебательного звена — значение — тг/2. ЛФЧХ колеба
тельного звена получается из ЛФЧХ форсирующего звена 2-го поряд-
56
Гл. 2. Математическое описание систем управления
тг/4
-тг/4
-7Г/2
-N 1/Г
7Г
тг/2
-к 11
— 7Г
/Г
--Ni/T
w(lgw)
2
Рис. 2.8. Шаблоны ЛФЧХ элементарных звеньев: а — форсирующего
(кривая 1) и апериодического B) звеньев; б — форсирующего 2-го по-
порядка A) и колебательного B) звеньев
ка зеркальным отображением относительно оси частот (рис. 2.8, 6), и
для их построения можно воспользоваться одним шаблоном. Однако в
данном случае нужны шаблоны для различных значений параметра (.
Раньше при построении ЛФЧХ довольно часто использовались
шаблоны. В настоящее время в связи с компьютеризацией необходи-
необходимость использования шаблонов отпадает.
2.7. Структурные схемы и дифференциальные
уравнения систем управления
Структурной схемой системы управления называют графическое
представление ее математической модели в виде соединений звень-
звеньев, изображаемых в виде прямоугольников или кругов (для суммато-
сумматора), с указанием входных и выходных переменных. Обычно внутри
прямоугольника указывается условное обозначение оператора изоб-
изображаемого им звена, а сам оператор в виде передаточной функции
или дифференциального уравнения задается вне структурной схемы.
О
G + X
G
X
О
G-X
X
Рис. 2.9. Изображение сумматоров: а — суммирование; б— вычитание
В сумматоре входные переменные складываются (рис. 2.9, а). Од-
Однако если перед каким-либо входом стоит знак минус, переменная по
этому входу вычитается (складывается со знаком минус) (рис. 2.9, б).
2.7.1. Преобразование структурных схем. Рассмотрим ос-
основные типы соединений и правила их преобразования. Звенья будем
описывать передаточной функцией в изображениях Лапласа. При этом
2.7. Структурные схемы и дифференциальные уравнения
57
для краткости записи аргументы передаточных функций и перемен-
переменных будем опускать.
Последовательное соединение. Так называется соединение,
при котором выходная переменная предшествующего звена является
Хп X
w2
Wn
w
xn
а б
Рис. 2.10. Последовательное соединение
входной переменной последующего звена (рис. 2.10, а). При последо-
последовательном соединении передаточные функции отдельных звеньев пе-
перемножаются, и при преобразовании структурных схем цепочку из
последовательно соединенных звеньев можно заменить одним звеном
с передаточной функцией W(s) = Wi(s)W2(s)... Wn(s) (рис. 2.10, б).
Параллельное соединение. Так называется соединение, при ко-
котором на входы всех звеньев подается одно и то же воздействие, а их
выходные переменные складываются (рис. 2.11, а). При параллельном
G
>
w2
Wn
Xi
х2;
хп
G
W
X
а б
Рис. 2.11. Параллельное соединение звеньев
соединении звеньев передаточные функции складываются, и при пре-
преобразовании их можно заменить одним звеном с передаточной функ-
п
цией W(s) = ^2 Wi(s) (рис. 2.11,6). Если выход какого-либо звена
поступает на сумматор с отрицательным знаком, то передаточная
функция этого звена складывается с отрицательным знаком, т.е. вы-
вычитается.
Обратное соединение, или звено, охваченное обратной
связью. Так называется соединение двух звеньев, при котором вы-
выход звена прямой цепи подается на вход звена обратной связи, вы-
выход которого складывается с входом первого звена (рис. 2.12, а). Если
сигнал обратной связи (выход звена обратной связи) вычитается
(т.е. складывается с отрицательным знаком), то обратная связь
называется отрицательной, в противном случае — положительной.
Когда передаточная функция звена обратной связи равна едини-
единице (Woc(s) = 1), обратное соединение изображается так, как показано
на рис. 2.12, б.
58
Гл. 2. Математическое описание систем управления
дг,
w»
Woe
У
G
(+)
w
Y
а б в
Рис. 2.12. Обратное соединение
При размыкании обратной связи перед сумматором получаем
последовательное соединение, передаточная функция которого равна
Wp(s) = Wn(s)Woc(s). Эта передаточная функция называется переда-
передаточной функцией разомкнутой цепи.
Передаточную функцию WK(s) = Wn(s)Woc(s)W^(s), в которой
учитывается передаточная функция сумматора по входу обратной свя-
связи, будем называть передаточной функцией контура. Здесь Ws(s) —
передаточная функция сумматора по входу обратной связи, и она рав-
равна —1 (минус единице) при отрицательной обратной связи (перед со-
соответствующим входом стоит знак минус) и 1 (плюс единице) при
положительной обратной связи.
Передаточная функция при обратном соединении равна W(s) =
—, и при преобразовании обратное соединение заменяется
1 - V()
одним звеном с указанной передаточной функцией (рис. 2.12, в).
Передаточные функции при последовательном, параллельном и об-
обратном соединениях выводятся следующим образом: выписываются
уравнения всех звеньев, входящих в соединение, и исключаются все
промежуточные переменные.
Для примера получим передаточную функцию обратного соедине-
соединения. Обратное соединение (см. рис. 2.12, а) описывается следующими
уравнениями:
Исключим переменные Е и Х\. Для этого выражение для Х\ из по-
последнего уравнения подставим в первое уравнение и полученное вы-
выражение для Е подставим во второе уравнение. Тогда получим
или
= WnG.
X
Отсюда передаточная функция обратного соединения есть W = — =
1
что и требовалось получить.
Перепое сумматора. При переносе сумматора по ходу сигна-
сигнала добавляется звено с передаточной функцией, равной передаточной
функции звена, через которое переносится звено (рис. 2.13, а). При
переносе сумматора против хода сигнала добавляется звено с пере-
2.7. Структурные схемы и дифференциальные уравнения
59
G
Wi
1*'
w2
w2
1
—
F
w2
1
Wi
l/Wi
G
Wi
w2
w2
X
X
Рис. 2.13. Перенос сумматора: а — по ходу сигнала;
сигнала
б — против хода
даточной функцией, равной обратной передаточной функции звена,
через которое переносится сумматор (рис. 2.13, б).
При переносе сумматора участок цепи, через который переносится
сумматор, становится неэквивалентным. Поэтому при преобра-
преобразовании структурных схем нельзя переносить сумматор через точку
съема сигнала.
Перенос узла. При переносе узла по ходу сигнала добавляется
звено с передаточной функцией, равной обратной передаточной функ-
функции звена, через которое переносится узел (рис. 2.14, а). При переносе
узла против хода сигнала добавляется звено с передаточной функ-
G
Хг
W2
Wi
w2
Y
г
L
1/W2
G
L
Wi
¦U-
Wi
> Л1
T^2 "
У
У
Рис. 2.14. Перенос узла: а — по ходу сигнала; б — против хода сигнала
цией, равной передаточной функции звена, через которое переносится
узел (рис. 2.14, б).
Перестановка сумматоров. Сумматоры можно переставлять
местами и объединять. Перестановка двух сумматоров соответствует
переносу одного сумматора через другой и подчиняется правилу
переноса сумматора через звено.
Сумматор 1 (рис. 2.15) переносится через сумматор 2 по направ-
направлению распространения сигнала, а сумматор 2 — через сумматор 1
против направления распространения сигнала. Но так как переда-
60 Гл. 2. Математическое описание систем управления
12 2 1
Рис. 2.15. Перестановка сумматоров
точная функция сумматора по каждому входу равна 1 или —1, то и
передаточная функция звена, которое добавляется при переносе
сумматора, независимо от направления переноса равна 1 или — 1. По-
Поэтому если сумматор переносится через другой сумматор вдоль входа
со знаком плюс, добавляется звено с передаточной функцией 1, т.е. в
действительности ничего не добавляется (см. рис. 2.15, а); если сум-
сумматор переносится вдоль входа со знаком минус, то добавляется звено
с передаточной функцией —1, т.е. знак по входу, куда должно быть
добавлено звено, меняется на обратный (см. рис. 2.15, б-г).
Перестановка узлов. Узлы можно переставлять местами и
объединять (рис. 2.16).
Примечание. Все рассмотренные преобразования корректны,
когда переменные и передаточные функции представлены в изобра-
Рис. 2.16. Перестановка и объединение узлов
жениях Лапласа. В том случае, когда переменные представлены как
функции времени и соответственно передаточные функции в опера-
операторной форме, преобразования, связанные с переносом сумматора че-
через звено против хода сигнала и узла по ходу сигнала, справедливы,
если существует обратный оператор звена, через которое переносится
сумматор или узел, т. е. если —— W\ — W^XW\ — 1 в случае переноса
2.7. Структурные схемы и дифференциальные уравнения
61
сумматора (см. рис. 2.13, б) и W2 ттт" — W2W2 г = 1 в случае переноса
узла (см. рис. 2.14, а).
2.7.2. Вычисление передаточной функции одноконтурной
системы. Замкнутая система называется одноконтурной, если при
ее размыкании в какой-либо точке замкнутого контура получается
цепь (схема) без параллельных и обратных соединений (рис. 2.17).
Цепь по ходу сигнала от точки приложения входной переменной
до точки съема выходной переменной называется прямой цепью. Пря-
Рис. 2.17. Одноконтурная система управления
мая цепь представляет последовательное соединение звеньев. Поэтому
передаточная функция прямой цепи Wn равна произведению переда-
передаточных функций звеньев, входящих в эту цепь, включая и сумматоры.
Передаточная функция контура WK равна произведению переда-
передаточных функций всех звеньев, входящих в замкнутый контур, вклю-
включая сумматоры. Напомним: передаточная функция сумматора по вхо-
входу со знаком плюс равна плюс единице, а по входу со знаком минус —
минус единице.
Прямая цепь системы (см. рис. 2.17) относительно входа g и вы-
выхода у представляет последовательное соединение двух сумматоров и
звеньев с передаточными функциями W\, W2 и W%. Входы суммато-
сумматоров в этой цепи имеют знак плюс. Поэтому передаточные функции
сумматоров равны единице и соответственно передаточная функция
прямой цепи Wu = W1W2W3.
Прямая цепь рассматриваемой системы относительно входа / и
выхода е представляет последовательное соединение двух сумматоров
и звеньев с передаточными функциями Wo, W3 и W\. Вход первого
сумматора имеет знак плюс, и его передаточная функция равна 1;
вход второго сумматора имеет знак минус, и его передаточная функ-
функция равна — 1. Поэтому в этом случае передаточная функция прямой
цепи Wn = -W0W3W4.
Правило вычисления передаточной функции замкнутой
одноконтурной системы. Передаточная функция одноконтурной
системы относительно внешнего воздействия (входа) и и выхода х
равна передаточной функции прямой цепи, деленной на единицу минус
передаточная функция контура:
Wxu =
B.38)
62 Гл. 2. Математическое описание систем управления
Согласно этой формуле передаточная функция рассматриваемой
системы (см. рис. 2.17) относительно входа д и выхода у равна
Wyg = Х 2 3 ,
относительно входа / и выхода е равна
-WoWsWa
ej I + W1W2W3W4'
Покажем справедливость формулы B.38) на примере вывода пе-
передаточной функции Wef. Так как вычисляется передаточная функ-
функция относительно внешнего воздействия /, полагаем д = 0. При этом
уравнения системы можно записать в виде
Е = -Z, Хх = WXW2E, Х2=Хг+ W0F, Z = W3W4X2.
Для получения искомой передаточной функции нужно из этой системы
уравнений исключить все переменные, кроме Е и F. Подставив выра-
выражение для Х\ из второго уравнения в третье, а найденное выражение
для Х2 в четвертое, получим
Z = W3W4(W1W2E + W0F) = W3W4WXW2E + W3W4W0F.
Подставим это выражение в первое уравнение приведенной системы
уравнений:
Е = -W3W4W1W2E - W3W4W0F.
Отсюда для искомой передаточной функции находим
Wef = F = I + W1W2W3W4'
Очевидно, эта передаточная функция совпадает с передаточной
функцией, полученной выше по формуле B.38).
2.7.3. Вычисление передаточной функции многоконтурной
системы. Замкнутая система называется многоконтурной, если при
ее размыкании в какой-либо точке замкнутого контура получается
цепь, содержащая параллельное или обратное или то и другое соеди-
соединение.
Многоконтурная система не имеет перекрестных связей, если лю-
любые два контура, образованные параллельными или обратными соеди-
соединениями, не имеют общих участков (рис. 2.18, а) или если какие-либо
два контура имеют общий участок, то один из них вложен внутрь
другого (рис. 2.18, б).
Многоконтурная система имеет перекрестные связи, если она со-
содержит два контура, которые имеют общий участок, и при этом ни
один из них не вложен внутрь другого (рис. 2.18, в).
Порядок вычисления передаточной функции многоконтурной сис-
системы следующий:
1) путем переноса узлов и сумматоров освободиться от перекрест-
перекрестных связей;
2.7. Структурные схемы и дифференциальные уравнения 63
G ГЛЕ\
а —>( j—>—>
W5
Wi
w2
Wq
Ws
Y
Y
G
r S
1
• w2
W3
Y
Рис. 2.18. Многоконтурные системы управления
2) используя правила преобразования параллельных и обратных
соединений, преобразовать многоконтурную систему в одноконтур-
одноконтурную;
3) по правилу вычисления передаточной функции одноконтурной
системы определить искомую передаточную функцию.
При преобразовании структурной схемы нужно позаботится о том,
чтобы не исчезли точки съема переменных, относительно которых
ищутся передаточные функции, или чтобы эти точки не оказались на
неэквивалентном участке (т.е. не следует переносить сумматор через
эти точки).
Пример 2.8. Определить передаточные функции Wyg и Wyf
системы управления, представленной на рис. 2.19, а.
Решение. Сначала освободимся от перекрестных связей. Для
этого перенесем сумматор 3 против хода сигнала через звено с пе-
передаточной функцией И^2 и сумматор 2. То же самое проделаем с сум-
сумматором 4 (рис. 2.19, б).
Далее, заменив параллельное соединение звеном с передаточной
функцией
w2
w2
64
Гл. 2. Математическое описание систем управления
Y
G
W
w"
W3
Y
Рис. 2.19. Преобразование структурной схемы (к примеру 2.8)
и обратное соединение звеном с передаточной функцией
ТТ7"
W" = -
получим одноконтурную систему (рис. 2.19, в). Из последней схемы по
правилу вычисления передаточной функции одноконтурной системы
находим w,w,,W3
При вычислении передаточных функций многоконтурных систем
с перекрестными связями во многих случаях целесообразно, а иног-
иногда и необходимо, если возможно, предварительно упростить схему,
используя правила преобразования параллельных и обратных соеди-
соединений, затем следовать приведенному выше порядку вычисления пе-
передаточных функций многоконтурных систем.
Пример 2.9. Определить передаточные функции Wyg и Weg
системы управления, представленной на рис. 2.20, а.
Решение. Чтобы избавится от перекрестных связей, нужно вы-
вынести сумматор 3 из основного контура. Но для этого сначала упрос-
упростим схему, заменив местное обратное и параллельное соединения экви-
2.7. Структурные схемы и дифференциальные уравнения 65
G
Е
Wo
G
W
w"
G
W5
l/W'
1
•о-
w'
w"
Y
W>
W"
E
w"
w1
w"
G
W6
E
W'
w"
Рис. 2.20. Преобразование структурной схемы (к примеру 2.9)
ТТЛ/
валентными звеньями с передаточными функциями W =
и W" = W2+W4 (рис. 2.20, 6). l + WlWs
Для вычисления передаточной функции Wyg перенесем сумматор 3
против хода сигнала через звено с передаточной функцией W' и сум-
сумматор 1 (рис. 2.20, в). Затем заменим параллельное соединение звеном
Wb
с передаточной функцией W$ = 1 + — (рис. 2.20, г). Далее по правилу
5 Д.П. Ким
66 Гл. 2. Математическое описание систем управления
вычисления передаточной функции одноконтурной системы находим
w _ WpW'W"
У9 ~ 1 + WW" '
Схема на рис. 2.20, г не имеет точки съема переменной е. Поэтому
по ней нельзя определить передаточную функцию Weg.
Вернемся к схеме на рис. 2.20, б. Перенесем сумматор 3 по ходу
сигнала через звено с передаточной функцией W" и сумматор 1. Тог-
Тогда получим схему на рис. 2.20, д. Заменим параллельное соединение
звеном с передаточной функцией Wq = 1 - W^W" (рис. 2.20, е).
Из последней схемы находим Weg = .
2.8. Граф системы управления
Граф прохождения сигнала, или сигнальный граф, разработал
Мейсон (S.J. Mason, 1953) для наглядного представления и описа-
описания связи между переменными устройств, описываемых системой ли-
линейных алгебраических уравнений. Так как стационарная линейная
система управления в изображениях Лапласа также описывается
системой линейных алгебраических уравнений, сигнальный граф
стал использоваться для описания систем управления и называть-
называться графом системы управления.
Граф системы управления удобен тем, что он позволяет вычислять
передаточные функции сложных многоконтурных систем без предва-
предварительного преобразования их структурных схем.
2.8.1. Компоненты графа системы управления. Граф систе-
системы управления состоит из дуг и вершин. Дуга на схеме изображается
отрезком прямой или кривой со стрелкой, указывающей направление
распространения сигнала. Дуга соответствует звену и характеризует-
характеризуется оператором (передаточной функцией). Дуга начинается и кончается
в вершине.
Вершина на схеме изображается точкой или кругом и представля-
представляет переменную. Если к вершине подходит (входит в нее) одна дуга, то
соответствующая ей переменная является выходной величиной дуги
(рис. 2.21, а). Если же в вершину входят несколько дуг, то соот-
соответствующая ей переменная равна сумме выходных переменных
этих дуг (рис. 2.21,6). Если из вершины исходят несколько дуг, то
входная переменная всех этих дуг одна и та же (рис. 2.21, в).
= Wx
n О уп = Wnxo
б в
Рис. 2.21. Типы соединений дуг и вершин
2.8. Граф системы управления 67
Начальная вершина дуги определяет ее входную переменную.
Вершина графа, имеющая только выходящие из нее дуги, опреде-
определяет внешнюю переменную (внешнее воздействие) и называется
входной вершиной графа.
На графе системы управления для обозначения дуги и ее опера-
оператора, а также вершины и соответствующей ей переменной будем ис-
использовать одну и ту же букву (с индексом или без индекса). Иначе
говоря, в выражениях «дуга W» и «вершина ж» буква W обозначает
одновременно идентификатор дуги и ее оператор, а буква х — иден-
идентификатор вершины и соответствующую ей переменную.
Последовательность дуг W\, W2,..., Wn (не обязательно разных),
для которых конечная вершина Х{ дуги Wi является начальной вер-
вершиной дуги Wi+i (i = 1,2,... ,п — 1), называется ориентированным
маршрутом или ормаршрутом. Ормаршрут называется замкнутым,
если конечная вершина дуги Wn совпадает с начальной вершиной ду-
дуги W\, и незамкнутым в противном случае.
Ормаршрут, в котором нет повторяющихся дуг (т. е. все дуги
разные), называется путем от начальной вершины xq к конечной
вершине хп, если он не замкнут, и
контуром, если он замкнут. жо х±
Путь и контур называют про с- Г~\—
тыми, если все вершины х§,х\,... ^-^ ^
... ,хп различны. В случае контура ^—?-
вершины хо и хп совпадают. Прос-
той путь также называют прямым Рис' 2'22' Ормаршруты, пути,
путем. прямые пути
Граф на рис. 2.22 имеет три пути от начальной вершины xq к
конечной вершине хп:
ill: X0W1X1W2X2W3X3W4X4J
II2'. X0W1X1W2X2WQX4,
П3: X0W1X1W2X2W3X3W5X2WQX4.
Из них III и П-2 являются прямыми путями.
Ормаршрутов на этом графе четыре. Помимо приведенных путей,
ормаршрутом является
Два контура называются несоприкасающимися, если они не име-
имеют общих вершин. Очевидно, несоприкасающиеся контуры не могут
иметь общих дуг. Три, четыре и т.д. контура называются несопри-
несоприкасающимися, если любая пара из этих контуров является несоприка-
несоприкасающейся.
2.8.2. Связь между структурной схемой и графом систе-
системы управления. Граф системы управления можно построить по
структурной схеме, и, наоборот, по графу системы управления можно
построить структурную схему.
5*
68
Гл. 2. Математическое описание систем управления
f
Xi
W2
- 1
Рис. 2.23. Преобразование структурной схемы в граф системы управления:
а — структурная схема; б — граф системы управления
Для построения графа системы управления по ее структурной схе-
схеме нужно произвести следующее (рис. 2.23):
1) сумматор с выходной переменной х заменить вершиной х;
2) звено с передаточной функцией W заменить дугой W; если вы-
выходная переменная подается на сумматор по отрицательному входу,
то указанное звено заменить дугой —W (т. е. оператор принимает об-
обратный знак);
3) каждой переменной, в том числе переменной, соответствующей
внешнему воздействию, сопоставить свою вершину; при этом внеш-
внешнему воздействию соответствует входная вершина, т. е. вершина, ко-
которая не имеет входящих в нее дуг.
Если нужно изобразить выход одной из дуг, входящих в общую
вершину (например, дуги W\ на рис. 2.24, а), то следует ввести допол-
Рис. 2.24. Преобразование графа для получения дополнительных вершин
нительную, конечную для этой дуги вершину и соединить эту верши-
вершину с исходной вершиной дугой с единичным оператором (рис. 2.24, б).
2.8.3. Преобразование графа системы управления. Форму-
Формула Мейсона. Параллельные дуги, т.е. дуги, имеющие общие на-
начальные и конечные вершины, можно заменить одной дугой с пере-
передаточной функцией, равной сумме передаточных функций исходных
дуг (рис. 2.25, а).
Простой путь, если нет не принадлежащих ему дуг, входящих или
выходящих из промежуточных вершин этого пути, можно заменить
одной дугой с передаточной функцией, равной произведению переда-
передаточных функций дуг этого пути (рис. 2.25, б).
Для преобразования графа и вычисления передаточной функции
системы управления по ее графу можно воспользоваться теоремой
2.8. Граф системы управления
69
О **—
О
-О -п
Рис. 2.25. Преобразование графов: а — параллельное соединение; б— пря-
прямой путь
(формулой) Мейсона. Но для ее формулировки необходимо познако-
познакомиться с дополнительными понятиями.
Определителем графа называется передаточная функция А, кото-
которая определяется следующим образом:
Л = ! "
B.39)
Здесь в первой сумме Wqj — передаточная функция j-ro простого кон-
контура, равная произведению передаточных функций дуг, входящих в
этот контур, и суммирование производится по всем простым конту-
контурам; во второй сумме WojWofc произведение передаточных функций
j-ro и к-то простых контуров и суммирование производится по всем
несоприкасающимся парам контуров; в третьей сумме H^ojH^ofcWoz —
произведение передаточных функций j-ro, к-то и 1-го простых конту-
контуров, и суммирование производится по всем несоприкасающимся трой-
тройкам контуров и т.д.
Граф на рис. 2.26, а имеет пять простых контуров с передаточны-
передаточными функциями:
Wvi = W12W14, W02 = ^11^12^13^33^34^35^31,
^05=^32^34^35,
и три несоприкасающихся пары контуров с передаточными функ-
функциями Woi и И^оз, Woi и Wo4? W01 и Wo5- Несоприкасающихся троек
и большего числа контуров этот граф не содержит. Поэтому в соот-
соответствии с формулой B.39) его определитель есть
А = 1 - (Wbi + W02 + И^оз + W04 + W^) +
+ №^03 + W01W04 + ^01^05).
Подграф, получающийся при удалении дуг и вершин г-го прямо-
прямого пути, а также всех дуг, выходящих и входящих в удаляющиеся
вершины, называется подграфом %-го прямого пути.
70 Гл. 2. Математическое описание систем управления
Указанный граф имеет два прямых пути от вершины д к верши-
вершине у с передаточными функциями
Wnl = WoWuWuWu, Wn2 = W0W21W22,
представляющими произведение передаточных функций дуг, входя-
входящих в эти пути. Подграфы этих путей представлены на рис. 2.26, б, в.
Формула Мейсона. Передаточная функция системы управле-
управления относительно каких-либо входа х и выхода z определяется следую-
следующим образом:
Wzx = SL_ , B.40)
где А — определитель графа системы управления; Wui — передаточ-
передаточная функция г-го прямого пути от начальной вершины х к конечной
вершине z; т — общее число таких прямых путей; Д^ — определи-
определитель подграфа г-го прямого пути.
Пример 2.10. Определить передаточные функции Wyg и Weg сис-
системы управления, представленной на рис. 2.26, а.
Решение. Найдем сначала передаточную функцию Wyg. Как
отмечалось выше, от начальной вершины д к конечной вершине у
имеются два прямых пути с передаточными функциями Wni и Wn2-
Поэтому по формуле Мейсона получим
Определитель графа Д и передаточные функции Wni и WU2 были по-
получены выше. Так что достаточно вычислить определители Ai и А2
подграфов прямых путей.
Подграф первого прямого пути (рис. 2.26, б) имеет только один
простой контур с передаточной функцией Wo5 — И/з2И/з4И/з5- Поэ-
Поэтому по формуле B.39) получаем Д]_ = 1 — Wos = 1 — W32W34W35.
Подграф второго прямого пути (рис. 2.26, в) имеет два прос-
простых контура с передаточными функциями: Woi = W12 W14 и Wos =
= W32W34W35. Эти контуры являются несоприкасающимися. Поэ-
Поэтому определитель этого подграфа есть
Д2 = 1 - (Woi + W05) + WoiW05.
Перейдем к определению передаточной функции Weg. От началь-
начальной вершины д к конечной вершине е имеется один прямой путь с
передаточной функцией W^ = Wo. Подграф этого пути (рис. 2.26, г)
имеет три простых контура с передаточными функциями: Woi, W04,
Wos- Из них две пары контуров с передаточными функциями Woi
и W04, W01 и Wos являются несоприкасающимися. Тройки несопри-
несоприкасающихся контуров нет. Поэтому определитель этого подграфа
д; = 1 - (Woi + W04 + W05) + (WoiW04 + W01W05).
2.8. Граф системы управления
71
W32
W-
W12
W32
W12
W13
Рис. 2.26. Граф и подграфы прямых путей: а — искомый граф; б— подграф
1-го прямого пути от д к у; в — подграф 2-го прямого пути от д к у;
г — подграф прямого пути от д к е
Теперь по формуле B.40) нетрудно записать передаточные функ-
функции Wyg и Weg. Например, для Weg имеем
Weg = ^1 = ^г [1 - (Woi + W04 + W05) + (W01W04 +
72
Гл. 2. Математическое описание систем управления
2.9. Уравнения и передаточные функции элементов
и систем управления
В этом параграфе рассмотрим уравнения и передаточные функ-
функции некоторых элементов (датчиков, усилителей, корректирующих
звеньев) и систем управления.
2.9.1. Датчики и преобразователи. Как отмечалось в гл. 1,
для получения информации, необходимой для управления, использу-
используются датчики или, как их еще называют, чувствительные элементы.
Датчики служат для измерения различных физических величин: пере-
перемещения, угла поворота, температуры, напряжения, давления и т.д.
Датчик называется идеальным, если вырабатываемый им сигнал
пропорционален измеряемой величине. Строго говоря, все реальные
датчики являются неидеальными. Отличие реальных датчиков от
идеальных зависит от различных факторов: диапазона изменения из-
измеряемой величины, относительной быстроты протекания измеряемо-
измеряемого процесса, условий, в которых происходит измерение. Однако при
определенных условиях во многих случаях датчики можно считать
идеальными.
Потенциометрические датчики относительного пере-
перемещения. Напряжение их, снимаемое движком потенциометра, про-
пропорционально перемещению х движка относительно средней точки
(рис. 2.27, а). Если связать движок с вращающим телом, то полу-
получим датчик углового перемещения (рис. 2.27, б). В данном случае
идеальность датчика существенно зависит от входного сопротивле-
сопротивления элемента, подключаемого на выход датчика (нагрузки Дн).
и
+ U
-и ^
п
R
_ R
1
1
+и
¦ f
1
R
R-Rx Rx = х
Рис. 2.27. Потенциометрические датчики перемещения: а — поступатель-
поступательного перемещения; б — углового перемещения; в — эквивалентная
электрическая схема
2.9. Уравнения и передаточные функции элементов 73
Действительно, из эквивалентной электрической схемы (рис. 2.27, в)
имеем
U = i1{R-Rx) + Rx{i1-i2\
Rx(i2 - ч) + Rui2 = 0, их = Rui2,
D R
где Rx = —x\ zi, %2 — контурные токи; x — перемещение; хм —
хм
максимальное перемещение.
Исключив токи %\ и г2, получим
URX
их =
или, подставив выражения для Rx,
Ux/xm _ Ux
их =
Rx/(xMRH) - Rx2/(xl/[RH) хм + Rx/RH - Rx2/(RHxM)'
Отсюда видно, что только при RH ^> R
их = кхх, гьх —
Датчик угловой скорости (тахогенератор). Тахогене-
ратор представляет собой миниатюрный генератор постоянного то-
тока с независимым возбуждением. Если ротор тахогенератора связать
с вращающимся телом (например, валом двигателя), то вырабаты-
вырабатываемое им напряжение и^ пропорционально угловой скорости и вра-
вращающегося тела: ии = кши.
Датчик температуры. В качестве датчиков температуры ис-
используются термопара, терморезисторы и другие элементы. Термо-
Термопара представляет собой два проводника (электрода), выполненных
из различных металлов и спаянных на концах. Если концы термо-
термопары поместить в точках поля с разной температурой, то между
спаями образуется ЭДС, величина которой зависит от разности тем-
температур между спаями. Концы электродов, расположенных в точке
измерения температуры, называются горячим спаем. Горячий спай
помещают в защитный кожух. Спай, покрытый защитным кожухом,
нагревается до окружающей температуры не мгновенно. Поэтому
термопара описывается передаточной функцией W = к/(Тр + 1) с по-
постоянной времени Т, которая колеблется от долей секунд до сотен се-
секунд. Измерительное устройство, построенное на термопаре, можно
считать идеальным (т.е. представить как пропорциональное звено),
если постоянная времени объекта управления намного больше посто-
постоянной времени измерительного устройства.
Терморезистор. Это чувствительный элемент, принцип дейст-
действия которого основан на изменении электрического сопротивления
металла или сплава при изменении его температуры. Удельное сопро-
сопротивление чистых металлов р = р0 + p(t), где ро — константа, p(t) —
функция от температуры, причем в определенном диапазоне измене-
изменения температуры p(t) = kt (к — константа).
74
Гл. 2. Математическое описание систем управления
Многие датчики являются одновременно преобразователями: они
преобразуют величины одной физической природы в другие. Напри-
Например, потенциометрические датчики преобразуют механическую вели-
величину (перемещение, поворот) в электрическую; термопара — термо-
термодинамическую величину в электрическую.
2.9.2. Усилители и корректирующие элементы. Выходные
сигналы датчиков являются слабыми. Поэтому их обычно усиливают,
используя различные типы усилителей: электрические (электронные,
магнитные, электромашинные), гидравлические и пневматические.
Математическая модель электронных ненагруженных усилителей
при изменении входного напряжения в определенном диапазоне
представляет пропорциональное звено. Нагружая и охватывая его от-
отрицательной обратной связью из различных схем, можно получить
звено с передаточными функциями, необходимыми для формирова-
формирования того или иного закона управления. Звенья, предназначенные для
получения нужного закона управления, называются корректирующи-
корректирующими звеньями. Часто в качестве корректирующих звеньев используют
схемы (четырехполюсники), составленные из омического сопротивле-
сопротивления, емкости и индуктивности и подключаемые на вход и в обратную
связь усилителей.
Передаточные функции четырехполюсников. При вычислении пе-
передаточных функций четырехполюсников удобно воспользоваться
операторными сопротивлениями (рис. 2.28): омическим оператор-
R
J
ZR=R
ZL =Lp
1
J
Zc = 1/Cp
Рис. 2.28. Операторные сопротивления
ным сопротивлением Zr = R, индуктивным операторным сопро-
сопротивлением Zl = Lp и емкостным операторным сопротивлени-
сопротивлением Zc = 1/(Ср). Здесь р — оператор дифференцирования.
При использовании операторных сопротивлений RLC-схемы мож-
можно рассчитывать как Д-схемы, т. е. схемы, составленные из одних оми-
омических сопротивлений. Как и в случае Д-схемы, при последователь-
последовательном соединении операторных сопротивлений (рис. 2.29, а) операторное
Z!
О
z2
z2
Рис. 2.29. Соединения операторных сопротивлений: а — последовательное;
б — параллельное
2.9. Уравнения и передаточные функции элементов
75
сопротивление равно сумме: Znc = Zi + Z2, а при параллельном
соединении (рис. 2.29, б) проводимость равна сумме проводимостей:
11,
1
ИЛИ
Получим передаточную функцию и дифференциальное уравнение
RLC-цепочки (рис. 2.30). Рассматривая данный четырехполюсник
R L
О
I
О
112
О
Рис. 2.30. ЯЬС-схема
как схему, состоящую из одних сопротивлений, можем записать
и\ щ Ср
г =
Zr
и2 = Zci = -рт
Ср
LCp2 +
1
+ 1
Ср LCp2 +.
где Го = л/Щ Ti = RC.
Из последнего уравнения получаем передаточную функцию
W-
и дифференциальное уравнение
В табл. 2.5 приведены передаточные функции и асимптотические
ЛАЧХ некоторых ДС-схем.
Четырехполюсники сами по себе не являются направленными эле-
элементами. Поэтому при их последовательном соединении передаточная
функция не равна произведению передаточных функций отдельных
четырехполюсников.
Например, передаточная функция Wnc двух одинаковых пос-
последовательно соединенных четырехполюсников с передаточной функ-
функцией W = 1/(Тр+ 1) (рис. 2.31, а) не равна произведению W • W.
R
С
X
_о
Рис. 2.31. К выводу передаточных функций двух ДС-схем: а — ЛС-схема;
б — последовательное соединение двух ДС-схем
76
Гл. 2. Математическое описание систем управления
Таблица 2.5. Передаточные функции и асимптотические ЛАЧХ пассив-
пассивных четырехполюстников
№
1
2
3
4
5
ЯС-схема
ст\ 1 j^ с)
О ^~Г О
оН 1 ,111, D
Ях Пя2
о То
с
1 1
о М 2о
о То
Передаточные
функции
Ттт ' Т2 — ^2 С,
Т7 ( Е? _1_ Е? ^/^
fc(TlP + l)
R1R2C
R1 + R2'
R2
~ R1 + R2
(Tip+ 1) (T2p+ 1)
Ti = R\C, T2 = R2O,
2T!T2
T - л/Т2 - 4TiT2 У
T-Ti +T2+T3,
^ T-VT2- 4TiT2
2
Асимптотические
ЛАЧХ
>
>
>
T1 cj (lg cj)
^^^20дБ/дек
[ад i
T1 cj (lg cj)
^^ 20дБ/дек
' i(«) Jl
T2 o;(lga;)
1 :
Ti ^4j
Ti T2
^^20дБ/дек
ад ^ ^ ^
To 20дБ/дек
-20дБ/дек
2.9. Уравнения и передаточные функции элементов 77
Действительно, методом контурных токов для схемы на рис. 2.31,6
можем записать
щ = Rh + — (н -i2),
Up
Исключив из этой системы уравнений контурные токи, получим
(Т2р2 + ЗТр+1)и2 =щ.
Отсюда получаем передаточную функцию Wnc = 2 2—— -, в то
1 р ~г о! р ~г J-
время как произведение передаточных функций есть
W -W = - = -
G>+1J Т2р2 + 2Тр + 1'
В качестве корректирующих устройств в последнее время все ча-
чаще используют микропроцессоры. С их помощью можно реализовать
самые сложные алгоритмы управления.
Электр о машинный усилитель (ЭМУ). Это электрический агрегат
постоянного тока, предназначенный для усиления мощности. По чис-
числу каскадов различают одно-, двух- и трехкаскадные ЭМУ. По ори-
ориентации управляющего магнитного потока второй степени двухкас-
кадные делятся на ЭМУ с поперечным и продольным полем. В ЭМУ
с поперечным полем магнитный поток второй ступени ориентирован
перпендикулярно относительно потока управления первой ступени.
Рассмотрим двухкаскадный ЭМУ с поперечным полем (рис. 2.32, а).
Рис. 2.32. Электромашинный усилитель: а — схема ЭМУ; б — электри-
электрическая схема ЭМУ
В режиме холостого хода (на выходе ничего не подключено) он опи-
описывается уравнениями (рис. 2.32, б)
ЭДС ei и е2 пропорциональны току управления iy и току первого кас-
каскада %\ соответственно:
d = miZy, e2 = m2n.
С учетом этих зависимостей имеем
гтл mi m<2
TyPiex + ei = — %, T1pe2 + e2 = — еь
JrCy JrCi
где Ty = Ly/Ry, Ti =LxjRx.
78
Гл. 2. Математическое описание систем управления
Исключив из приведенных уравнений е\, получим уравнения ЭМУ
холостого хода
(ТуР + 1)(Т1Р + 1)е2 = Ьму%, &эму = ^^.
ЛуЛ1
При холостом ходе иэм = е2- Поэтому передаточная функция ЭМУ
ттт _ А; эму
эму ~
2.9.3. Исполнительные устройства и объекты управления.
В качестве примера исполнительного устройства рассмотрим двига-
двигатель постоянного тока, а в качестве объектов управления — резервуар
с жидкостью и генератор постоянного тока.
Двигатель постоянного тока (рис. 2.33, а). Составим урав-
уравнение двигателя без учета влияния гистерезиса, вихревых токов и дру-
других факторов, оказывающих несущественное влияние на его работу.
и = const
Рис. 2.33. Двигатель постоянного тока: а — схема двигателя; б — элек-
электрическая схема цепи якоря
При управлении со стороны якорной цепи напряжение возбуждения и
остается постоянным. Математическое описание двигателя, являю-
являющегося электромеханическим устройством, включает уравнения элек-
электрической цепи и механической части.
На рис. 2.33, 6" приведена эквивалентная электрическая схема цепи
якоря, где гя и Ья — омическое и индуктивное сопротивления обмотки
якоря, гя — ток якоря, ед — ЭДС, наводимая в обмотке якоря при
его вращении. Из этой схемы имеем
% = гягя + Ьяргя + ед.
ЭДС ед пропорциональна угловой скорости со = ф вала двигате-
двигателя: е = c\uj. Значение коэффициента с\ зависит от тока возбуждения и
конструкции двигателя. Учитывая эту связь, приведенное выше урав-
уравнение можно представить в виде
(Tsp+l)is + ^w=-uy, B.41)
где Тя = Ья/гя — электрическая постоянная времени цепи якоря.
Уравнение механической части имеет вид
Jpuo = Мвр - Мс,
2.9. Уравнения и передаточные функции элементов 79
где J — приведенный к валу двигателя суммарный момент инерции
вращающихся частей; Мвр — вращающий момент; Мс — момент со-
сопротивления.
Вращающий момент пропорционален току якоря: Мвр = с2гя, где
значение коэффициента с2, как и значение ci, зависит от тока воз-
возбуждения и конструкции двигателя. С учетом этой связи уравнение
моментов принимает вид
Jpui = с2гя - Мс.
Исключая из этого уравнения и уравнения B.41) ток %я^ получим
(ТяТэмр2 + Тэмр + 1)и = кд1иу - кд2(Тяр + 1)МС. B.42)
Здесь Тэм = Jrsl/(cic2) — электромеханическая постоянная времени;
кд1 = с\ и кд2 = тя_1[с\с2) — передаточные коэффициенты.
Если уравнение двигателя записать относительно угла ip, то в си-
силу равенства и = рср оно принимает вид
(ТяТэмр2 + Тэмр + 1)р<р = кд1иу - кд2(Тяр + 1)МС. B.43)
Двигатель описывается двумя передаточными функциями: пере-
передаточной функцией Wu по управляющему воздействию иу и переда-
передаточной функцией Wm п0 возмущению (моменту сопротивления) Мс.
Для указанных передаточных функций имеем:
из B.42)
цт _ кп\ цт _ кп2(Тяр+ 1)
и ТяТэмр2 + Тэмр + 1' М ТяТэмр2 + Тэмр + 1'
если выходом является угловая скорость;
и из B.43)
если выходом является угол поворота вала двигателя.
Генератор постоянного тока (рис. 2.34, а). На рис. 2.34,6"
представлена эквивалентная электрическая схема генератора, на ко-
которой: гв и LB — соответственно омическое и индуктивное сопротив-
сопротивления обмотки возбуждения; ег — ЭДС генератора; гя — омическое
сопротивление обмотки якоря (его индуктивным сопротивлением пре-
1 _1... 1
Д у
б
Рис. 2.34. Генератор постоянного тока: а — схема генератора; б— электри-
электрическая схема генератора
80 Гл. 2. Математическое описание систем управления
небрегаем); RH — сопротивление нагрузки (нагрузка предполагает-
предполагается активной); иг — выходное напряжение генератора. Параллельно
нагрузке включают делитель Rn (см. рис. 1.6) для измерения выход-
выходного напряжения. Однако сопротивление RR выбирают намного боль-
большим Rn (Дд ^> RH), и током, протекающим через него, можно пре-
пренебречь. Поэтому сопротивление Rn на схеме рис. 2.34 не показано.
Исходя из электрической схемы генератора можем записать урав-
уравнения:
для цепи возбуждения
^в =rBiB + LBpiB;
и для якорной цепи
ег = (гя + Ru)i*, иг = RJ*.
ЭДС генератора ег связана с током возбуждения iB нелинейной
зависимостью, которую можно линеаризовать и представить в виде
ег = mriB.
Учитывая эту зависимость, уравнения якорной цепи можно преобра-
преобразовать к виду
mriB = гягя + иГ.
Исключив из этого уравнения и уравнения цепи возбуждения
ток гв, получим
к
Ur = Т Г+1^в - гягя, B.44)
где кг = тпг/гв — передаточный коэффициент по управляющему воз-
воздействию; Тв = LB/rB — постоянная времени генератора.
Ток якоря можно рассматривать как возмущение. Поэтому из
уравнения B.44) для передаточных функций генератора по управле-
управлению Wu и по возмущению Wi имеем
^ W = r
Резервуар с жидкостью (см. рис. 1.1,6). Изменение Ah уров-
уровня жидкости h в резервуаре за короткий промежуток времени Д?
определяется соотношением
Ah=At,
где qn — пополнение жидкости (объем жидкости, поступающий в
резервуар за единицу времени); qp — расход жидкости (объем
жидкости, расходуемый за единицу времени); S — площадь попе-
поперечного сечения резервуара.
Здесь предполагается, что резервуар имеет цилиндрическую фор-
форму и площадь его поперечного сечения не зависит от высоты.
Разделив в приведенном соотношении обе части на Д? и переходя
к пределу при Д? —у 0, получим
Л=|(вп-дР). B-45)
2.9. Уравнения и передаточные функции элементов
81
Пополнение жидкости qn зависит от угла поворота ip входного
вентиля, и эта зависимость является нелинейной:
B.46)
Пусть при номинальном режиме
qn = q°n, qp = q°p, h = h°,
При этом уравнение статики принимает вид
B.47)
Произведем линеаризацию в уравнении B.46):
Aqu = аА(р. B.48)
Q OF
Здесь а = т—
дер
Перейдем от уравнения B.45) к уравнениям в отклонениях. Тогда,
учитывая B.48), получим линеаризованное уравнение
Ah = к\А(р — k2Aq^^
где fci = а/5, к2 = 1/5.
В данном случае Atp является управлением, а Aqp — возмуще-
возмущением. Из последнего уравнения для передаточных функций объекта
относительно управления W^ и возмущения Wq находим
Wp = ki/p, Wq = к2/р.
2.9.4. Уравнения и передаточные функции систем управ-
управления. В качестве примера рассмотрим уравнения и передаточные
функции системы автоматического управления (САР) напряжения
генератора постоянного тока (см. рис. 1.6), блок-схема которой при-
] >( ) >
ЭУ
кэ
ЭМУ
иэ
' чэ
м^ Г
иг
Рис. 2.35. Блок-схема САР генератора постоянного тока: а — блок-схема;
б — схема КЭ
ведена на рис. 2.35 На блок-схеме все элементы являются одно-
однонаправленными и их передаточные функции были получены выше.
Выпишем их.
Передаточная функция электронного усилителя ЭУ:
/by .
Передаточная функция ЭМУ: W3My =
6 Д.П. Ким
82
Гл. 2. Математическое описание систем управления
Корректирующий элемент КЭ представляет ДС-цепочку (рис. 2.35, 6),
и ее передаточная функция WK = аТкр/(Ткр + 1). Здесь а — коэф-
коэффициент деления, Тк = RKCK.
Передаточные функции генератора: Wu = kr/(TBp+ 1), W\ = — гя.
Чувствительный элемент ЧЭ представляет делитель напряжения,
и передаточная функция WR = кд.
Теперь можем построить структурную схему (рис. 2.36, а). Для
вычисления передаточных функций преобразуем ее в одноконтурную
Wu
W' =
Wy
w'
Wu
Рис. 2.36. Структурная схема САР генератора постоянного тока: а — ис-
исходная схема; б — преобразованная схема
схему (рис. 2.36,6). Передаточная функция преобразованного звена
W' = * ТТ?МУ ттг = -—5 т~^> г- г •>
1 + Wy Ту эму И/к dop6 + dip2 + d^p + «з
где
7 / 7 7 7 ГТ~\ ГТ~\ ГТ~\ 7 ГТ~\ //Т1 i /Tl \ i ГТЛ ГТ~\
к = %/с эму, do = lKlyli, di = 1к{±у-\-±i)-\-ly±i,
Из преобразованной структурной схемы для передаточных функ-
функций WUrU3 и WUriii относительно выхода иг и внешних воздействий и3
и гя имеем
1
а4 '
_ Сор4 + Cip3 + С2^2 + СзР + С4
Задачи 83
Здесь
b0 = к'кгТк = кукэмукгТк, Ь\ = k'kT = кук
а0 = d0TB = TKTyTiTB,
ai = do + diTB = ГКГУГ! + ТВ[ТК(ТУ + Тг) + TyTi],
аз = с?2 + ^з^в — ТК + Ту + Ti + кукэмуыТк + Тв,
а4 = d3 + к'кгкДТк = 1 + кукэмукгкдТк,
с0 = ridoTB = пГкГуГ1Гв,
ci = r^do + di Гв) = п[ГкГуГ1 + ТВГК(ГУ + Гх)],
с2 = ri(di + ^2ГВ) = п[Гк(Гу + Ti) + TyTi) +
+ ТВ(ТК + Гу + Тх +
сз = тч (d2 + ^зГв) = п(Гк + Ту + Ti + кукЭмуаТк + Гв),
Уравнение САР генератора постоянного тока имеет вид
^г = WUrU3U3 + WUriJz.
Подставив выражения для передаточных функций, можем записать
(а0р4 + dip3 + а2р2 + а3р + а^)ит = F0р + bi)u3 +
+ (соР4 + cip3 + с2р2 + с3р + с4)гя,
или
с? пг с? пг с? иг duT -. du3 -.
с?^4 с?^3 dt2 dt dt
Задачи
1. Даны звенья, которые описываются уравнениями:
а) у + 2у = Ющ б) у + 2у = Ъп + Юи; в) г/ + 2^ + Зу = 4й + Юи;
г) Зу + 2^ + 6у = 5й + Юи + 2,5 г;; д) 2?/ = Ъй + 10u + 2v.
Здесь у — выходная переменная, и и v — входные переменные.
Для каждого звена определить:
1) постоянные времени и передаточные коэффициенты;
2) собственные операторы и операторы воздействия;
3) передаточные функции.
6*
84 Гл. 2. Математическое описание систем управления
2. Записать дифференциальные уравнения звеньев, заданных пе-
передаточными функциями:
в) W(p) =
3. Определить переходную и весовую функции следующих звеньев:
a)W(e) = f; 6)^) = ^; в) W(s) = ^ g2 ^ д + t;
a@,le
е) W(s)
е) W(S)~ a(a + 2J(s + 3J-
4. Определить реакцию в установившемся режиме на входное воз-
воздействие и = 3sin0, It для следующих звеньев:
а) 0,1 у + у = 2и; б) 0,01 у + 0,1?/ + у = 2щ
5. Построить амплитудно-фазовую частотную характеристику
для следующих звеньев:
"' f'^-(s + l)@,01S2+0,lS + l)' l> "w" s(Si + s + iy
6. Выяснить, последовательным соединением каких элементарных
звеньев можно представить следующие системы:
\ jxrr \ — 20 + !) . х\ тхгг \ — 5(s2+0,4s + l)
2(aa+0,4a)
7. Определить значения фазовой частотной функции при часто-
частотах ш = 0,1 и w = 10 для следующих звеньев:
2(s + 1) _ч „., ч 2(s2 + 4s + 4)
^7Ti; б) Ж(§) = 0,25,3 + 0,5,2 + ,;
Ы' r)Tnj)- 5(s2+0,4S + l)
Задачи
85
8. Определить передаточные функции следующих систем:
У
w,
-О-
I
W, -
III
W3
-<
1
p'
-i
•¦•I
xi = 2u, ж2 = 2u, ж4 + ж4 = 4ж3, у + у = 5ж5, ж6 = 0,2 2/.
9. Определить передаточные функции Wyg, Wyf, Weg и Wef.
j
9 r~\e
W2
У
Г
ж2
w2
>fS >(
л ,
J
86
Гл. 2. Математическое описание систем управления
10. Построить асимптотические ЛАЧХ:
ч w( ч 100(s + l) я
^ W ~ @,1 s2 + s)@,0001 s2 + 0,01 s + 1)'
6)^) = -1O(°'Ols2 + O'ls + 1) •
в) W(s) = —
11. Записать дифференциальное уравнение, связывающее выход-
выходную переменную у с внешними воздействиями д и / для системы
=0,1^
,
, Жз=0,4,
12. Для системы, представленной в предыдущем пункте, записать
дифференциальное уравнение, связывающее ошибку е с внешними воз-
воздействиями д и /.
13. По асимптотическим ЛАЧХ звеньев записать их передаточ-
передаточные функции, не имеющие нулей и полюсов в правой полуплоскости:
Ь(ш)
20
20дБ/де^
2
А
20
250
-20дБ/дек
\ uj fig о;)
б)
40
\-20дБ/дек
1 5 50
510
\ *¦.
\ «Og-)
Задачи
87
40
-20дБ/дек
\ 20дБ/дек
1 5 50 510
L(w)'
10
^i 20дБ/дек|
1 5 50
20 л Б/дек
J1U UJ (Ig CJ )
14. Нарисуйте граф системы управления по ее структурной схе-
схеме (см. задачу 9, г) и определите передаточные функции Wyg, Wyf,
Weg, Wef no формуле Мейсона.
Глава 3
УСТОЙЧИВОСТЬ СИСТЕМ УПРАВЛЕНИЯ
Устойчивость является одним из основных требований к систе-
системам автоматического управления (САУ). Поэтому важно уметь оп-
определять (исследовать) и соответствующим выбором структуры и
параметров системы управления обеспечивать ее устойчивость.
В данной главе будут рассмотрены определение устойчивости,
условия и различные критерии устойчивости.
3.1 Определение и условия устойчивости
Если на систему управления действуют два внешних воздейст-
воздействия — задающее воздействие д и возмущение /, — то в общем случае
она описывается уравнением
(n) (n-1) (m) (т-1)
а0 у + а,! у + ... + апу = о0 д + bi д + ... + Ътд +
(О (*-i)
+ с0/ +ci / +... + Q/, C.1а)
или, в символической форме,
(aopn + alVn-x + ... + ап)у = (Ъорт + Ьц» + ... + &то)«? +
+ (coPl+clPl-l + ... + cl)f. C.16)
Учитывая, что g и / — некоторые функции времени, выполнив необ-
необходимые операции в правой части, получим
(аорп + сир71'1 + ... + апр)з/ = <pg(t) + у?/(*), C.2а)
где <fg(t) и (ff(i) — функции, получаемые соответственно из первого
и второго слагаемого в правой части уравнения C.16).
Из уравнения C.16) при д = 0 и / = 0 получаем однородное диф-
дифференциальное уравнение
(аорп + aip71-1 + ... + ап)у = 0. C.26)
3.1.1. Определение устойчивости. Назначением систем управ-
управления является поддержание некоторого заданного режима, называе-
называемого невозмущенным движением. Если на систему действует возму-
3.1. Определение и условия устойчивости 89
щение, то фактическое движение (которое называется возмущенным
движением) будет отличаться от невозмущенного движения. Невоз-
Невозмущенное движение называется асимптотически устойчивым, если
после окончания действия возмущения возмущенное движение y(t)
с течением времени стремится к невозмущенному движению yH(t)'-
y(t) -У yH(t) при t -> оо.
Линейная система управления называется устойчивой или асимп-
асимптотически устойчивой, если любое ее невозмущенное движение,
определяемое задающим воздействием, асимптотически устойчиво.
Общее решение уравнения C.2а) имеет вид
y(t)=yB(t)+yc(t), C.3)
где yB(t) — частное решение уравнения C.2а), yc{t) — общее решение
однородного уравнения C.26).
Частное решение yB(i) можно представить (в силу принципа су-
суперпозиции) в виде
yB(t)=yg(t)+yf(t),
где yg(t) — частное решение уравнения C.2а) при iff(t) = 0, yf(t) —
частное решение этого уравнения при ipg(t) = 0.
Общее решение yc(t) однородного уравнения описывает свободное
движение системы управления (т. е. движение при отсутствии внеш-
внешних воздействий), определяемое только начальными условиями. Част-
Частное решение yB(t) описывает вынужденное движение, определяемое
внешними воздействиями. В частности, при отсутствии возмущаю-
возмущающего воздействия (/ = 0) частное решение yB(t) = yg(t) описыва-
описывает невозмущенное движение: yB(t) = yH(t). Таким образом, если пос-
после начального момента to возмущение перестает действовать, реше-
решение C.3) можно записать в виде
y(t)=yB(t)+yc(t) (t^to).
Возмущение, которое действует до начального момента to, влияет на
начальные условия, от которых зависит только свободное движение.
Поэтому для того чтобы возмущенное движение было асимптотически
устойчиво (т.е. для y(t) —у yH(t) при t —у оо), необходимо и достаточ-
достаточно, чтобы
limyc(t) = 0. C.4)
t—^оо
Это соотношение можно принять за математическое определение ус-
устойчивости (асимптотической устойчивости) линейных стационар-
стационарных систем управления.
3.1.2. Основное условие устойчивости. Характеристическое
уравнение системы управления, которая описывается уравнением C.1),
совпадает с характеристическим уравнением дифференциальных
уравнений C.2) и имеет вид
Q(A) = ао\п + сцХ71-1 + ... + ап = 0. C.5)
90 Гл. 3. Устойчивость систем управления
Левая часть этого уравнения (Q(X) = аоХп + аХп~1 + ... + ап) назы-
называется характеристическим полиномом. Характеристический поли-
полином получается из собственного оператора системы
Q(p) = аорп + сир71'1 + ... + ап
при подстановке р = Л: Q(X) = Q(p)\p=x-
Если Xi (i = 1, 2,..., q) — корни характеристического уравнения
кратности ki {k\ + &2 + ... + kq = п), то общее решение однородного
уравнения ус имеет вид
yc{t) = Y,m)eXi\ C.6)
г=1
где Pi(t) = С^ + С^}* + ... + С^**--1; С?\с?\..., С^} — посто-
постоянные интегрирования. В частном случае, когда все корни простые,
г=1
По правилу Лопиталя можно показать, что Pi{t)eXit —> 0 при
t —у оо тогда и только тогда, когда действительная часть корня А^ от-
отрицательна: Re Xi < 0. Поэтому правая часть в C.6) будет стремиться
к нулю при t —У оо, т. е. будет выполнено (необходимое и достаточное)
условие устойчивости C.4), если
ReAi<0, г = 1,2,...,^. C.7)
Это условие является основным условием устойчивости. Оно
непосредственно вытекает из математического определения устой-
устойчивости.
Основное условие устойчивости. Для того чтобы сис-
система управления была устойчива, необходимо и достаточно, чтобы
все корни ее характеристического уравнения имели отрицательную
вещественную часть.
На комплексной плоскости корни, имеющие отрицательную ве-
вещественную часть, располагаются в левой полуплоскости и поэтому
называются левыми] корни, имеющие положительную вещественную
часть, располагаются в правой полуплоскости и называются правыми]
а корни, расположенные на мнимой оси, называются нейтральными.
Таким образом, основное условие устойчивости можно также сфор-
сформулировать следующим образом: для того чтобы система была
устойчива, необходимо и достаточно, чтобы все корни характе-
характеристического уравнения [нули характеристического полинома) были
левыми.
Согласно основному условию устойчивости определение устойчи-
устойчивости сводится к исследованию корней характеристического уравне-
уравнения. Однако для этого нет необходимости вычислять эти корни.
Существуют различные критерии устойчивости, которые позволяют
судить о том, находятся ли корни полинома в левой полуплоскости,
не вычисляя их.
3.1. Определение и условия устойчивости 91
3.1.3. Необходимое условие устойчивости. Для того чтобы
система была устойчива, необходимо, чтобы все коэффициенты ее
характеристического уравнения были строго одного знака:
а0 > О, (ц > О, ..., ап > 0 C.8а)
или
а0 < 0, ai < О, ..., ап < 0. C.86)
Если условие C.8а) или C.86) не выполняется, то система не-
неустойчива; если оно выполняется, система может быть устойчивой.
Так как коэффициент а® (ао ф 0) всегда можно сделать положи-
положительным, дальше, если не оговаривается противное, в качестве необ-
необходимого условия устойчивости будем рассматривать условие C.8а)
и критерий устойчивости будем формулировать для случая ао > 0.
Покажем справедливость необходимого условия устойчивости.
Для этого представим характеристический полином в виде разложения
Q(A) = ао(Л - AO(A - А2)... (А - А„), C.9)
где Xi (г = 1, 2,..., п) — корни характеристического уравнения (нули
характеристического полинома).
Действительному отрицательному корню А/. = — a,k (оси > 0) в
разложении C.9) соответствует множитель Л —Л^ = Л + а^. Паре
комплексно-сопряженных корней с отрицательной вещественной частью
Л/ = -щ + jfit и А/+1 = -щ - jfit (ah /3i > 0)
соответствует множитель
(А - А«)(А - A,+i) = (А + а{ - jfa)(\ + at + jfa) = (A + atJ + 0f,
представляющий собой полином второй степени с положительными
коэффициентами. Следовательно, если все корни характеристического
уравнения имеют отрицательные вещественные части, то характерис-
характеристический полином может быть представлен как произведение полино-
полиномов первой и второй степени с положительными коэффициентами, и
соответственно все его коэффициенты при ао > 0 будут положитель-
положительными и при ао < 0 — отрицательными.
3.1.4. Теоремы Ляпунова об устойчивости по линейному
приближению. Как отмечалось в гл. 2, практически все системы
управления являются нелинейными, а линейные системы управления
следует рассматривать как приближенные, линеаризованные модели
нелинейных систем.
Линеаризация производится относительно заданного номинально-
номинального режима y°(t), называемого в теории устойчивости невозмущен-
невозмущенным движением. Невозмущенное движение y°(t) нелинейной систе-
системы называется асимптотически устойчивым, если существует неко-
некоторая окрестность вокруг невозмущенного движения такая, что лю-
любое возмущенное движение y(t), начинающееся в момент ?о окончания
действия возмущения в этой окрестности, в дальнейшем не выходит
из этой окрестности и y(t) —>¦ y°(t) при t —У оо.
92 Гл. 3. Устойчивость систем управления
Возникает вопрос: можно ли судить об асимптотической устой-
устойчивости невозмущенного движения нелинейной системы на основа-
основании исследования устойчивости ее линеаризованной модели? Впервые
этот вопрос был поставлен и решен A.M. Ляпуновым в 1892 г. в
его диссертационной работе.
Теоремы Ляпунова. 1. Если все корни характеристического
уравнения линеаризованной модели являются левыми, то невозму-
невозмущенное движение соответствующей нелинейной системы асимпто-
асимптотически устойчиво.
2. Если среди корней характеристического уравнения линеаризо-
линеаризованной модели имеется правый корень, то невозмущенное движение
соответствующей нелинейной системы неустойчиво.
3. Случай, когда среди корней характеристического уравнения
линеаризованной модели имеются нейтральные корни (корни на мни-
мнимой оси), но нет правых корней, называют критическим. В крити-
критическом случае по линеаризованной модели нельзя судить об устой-
устойчивости невозмущенного движения нелинейной системы.
3.2. Алгебраические критерии устойчивости
Алгебраическими критериями устойчивости называются такие
условия, составленные из коэффициентов характеристического урав-
уравнения, при выполнении которых система устойчива, а при невыпол-
невыполнении — неустойчива.
При проведении исследования устойчивости с помощью алгебраи-
алгебраических критериев следует прежде всего проверить выполнение не-
необходимого условия устойчивости, так как его проверка не требует
никаких вычислений, и в то же время при его невыполнении не надо
проводить дальнейших исследований, так как становится известным,
что система неустойчива.
3.2.1. Характеристическое уравнение. Для того чтобы иссле-
исследовать устойчивость с помощью алгебраических критериев, необхо-
необходимо иметь характеристический полином. Рассмотрим, как он опре-
определяется.
Как отмечалось выше, характеристический полином Q(X) получа-
получается из собственного оператора Q(p) простой заменой оператора р на
комплексную переменную Л. Поэтому достаточно найти собственный
оператор.
Если дано уравнение системы управления, и оно записано в сим-
символической форме, то дифференциальный оператор при выходной пе-
переменной и будет собственным оператором. Если дана передаточная
функция, то можно принять, что собственный оператор совпадает с
ее знаменателем.
При исследовании замкнутой системы (рис. 3.1, а) нет необходи-
необходимости находить ее передаточную функцию, если известна передаточ-
3.2. Алгебраические критерии устойчивости
93
W
Рис. 3.1. Замкнутая (а) и разомкнутая F) системы
ная функция W(p) = R(p)/S(p) разомкнутой системы (рис. 3.1, б). Ее
собственный оператор Q{p) равен сумме полиномов числителя и зна-
знаменателя передаточной функции разомкнутой системы:
3.2.2. Критерий Гурвица. Из коэффициентов характеристичес-
характеристического полинома
Q(\) = ао\п + сцУ1-1 + ... + ап
составляется определитель n-го порядка
А„ =
0,1
а0
0
0
аз
а2
аг
0
а$ ..
CL4
а3 ..
. 0
. 0
. 0
а.
C.10)
Ai=ab A2 =
аз
который строится следующим образом. На главной диагонали выпи-
выписываются элементы а\, а2,..., ап. Затем при движении от этих эле-
элементов вверх размещаются коэффициенты в порядке возрастания ин-
индексов, при движении вниз — в порядке убывания. Например, при
построении г-го столбца, двигаясь от элемента а\ вверх, записыва-
записывают коэффициенты a^+i, &i+2, • • • ? двигаясь вниз, записывают коэффи-
коэффициенты CLi—i, &г-25 • • • При этом, если индекс превышает п или при-
принимает отрицательное значение, соответствующий коэффициент
принимают равным нулю.
Главные миноры определителя Ап
а\ аз as
Аз = ао а2 а^ , ...,
О ai а3
включая сам определитель Ап, называют определителями Гурвица.
Критерий Гурвица (Hurwitz, 1895). Для того чтобы систе-
система была устойчива, необходимо и достаточно, чтобы определители
Гурвица, составленные из коэффициентов ее характеристического
уравнения, при ао > 0 были больше нуля:
а0 > 0, Ai > О, А2 > 0, ..., Ап > 0.
3.2.3. Критерий Льенара—Шипара. Как отмечалось выше,
при исследовании устойчивости с помощью алгебраических крите-
критериев нужно прежде всего проверить необходимое условие устойчи-
а0
94 Гл. 3. Устойчивость систем управления
вости. Если необходимое условие устойчивости выполняется, то ока-
оказывается, что для определения устойчивости, нет необходимости
вычислять все определители Гурвица.
Критерий Льенара-Шипара (Lienard, Chipard, 1914). При
выполнении необходимого условия устойчивости (по > 0, а\ > 0, ...
..., ап > 0) для устойчивости системы управления необходимо и
достаточно, чтобы все ее определители Гурвица с четными индек-
индексами или все ее определители Гурвица с нечетными индексами были
положительными:
А2 > 0, А4>0, А4 > 0, ... C.11а)
или
А3>0, А5>0, А5>0, ... C.116)
Для уменьшения вычислений целесообразно при нечетном п ис-
использовать условие C.11а), а при четном п — условие C.116).
Здесь приведена несколько упрощенная формулировка критерия Лье-
Льенара-Шипара. При выполнении одного из условий C.11а) или C.116)
не все неравенства в необходимом условии устойчивости оказывают-
оказываются независимыми. Поэтому часть неравенств можно опустить. Но так
как проверка необходимого условия устойчивости не связана с вычис-
вычислением, на этом мы останавливаться не будем.
Выпишем необходимые и достаточные условия устойчивости
для п = 1, 2, 3. Из критерия Льенара и Шипара получаем:
п = 1 : ао > 0, а\ > 0;
п = 2 : а0 > 0, ах > 0, а2 > 0;
п = 3 : ао > 0, ai > 0, а2 > 0, аз > 0, А2 = а\а2 — ао&з > 0.
Отсюда следует, что при п = 1 и п = 2 необходимое условие
устойчивости является и достаточным. Однако уже при п = 3 для
устойчивости, кроме выполнения необходимого условия устойчивос-
устойчивости, нужно, чтобы была положительной разность между произведения-
произведениями средних и крайних коэффициентов.
Пример 3.1. Передаточная функция разомкнутой системы
к
W(p) = — — , к = 0,5; 2. Исследовать устойчивость ра-
разомкнутой и замкнутой систем.
Решение. Характеристический полином разомкнутой системы
Л3 + 0,5 Л2 + 4Л + 1. Все коэффициенты больше нуля и определи-
определитель А2 = 0,5 -4 — 1-1 = 1>0. Поэтому разомкнутая система ус-
устойчива.
Характеристический полином замкнутой системы
Q(A) = А3+0,5А2+4А + 1 + /с.
Все коэффициенты этого полинома при обоих значениях к положи-
положительны, а определитель А2 при к = 0,5 равен
0,5-4-1-1,5 = 0,5 > 0,
3.2. Алгебраические критерии устойчивости 95
а при к = 2
Д2 =0,5-4-1-3 = -КО.
Следовательно, замкнутая система при к = 0,5 устойчива, а
при к = 2 неустойчива.
Пример 3.2. Передаточная функция разомкнутой системы
к
W(p) = -r—z г—, к = 0,5:2. Исследовать устойчивость разомк-
{р2+Р+1)р
ну той и замкнутой систем.
Решение. Характеристический полином разомкнутой системы
А3 + А2 + Л. Его коэффициенты а0 = 1, а\ — 1, а2 = 1 и а3 = 0.
Необходимое условие устойчивости не выполняется, и поэтому разо-
разомкнутая система неустойчива.
Характеристический полином замкнутой системы
Все коэффициенты при обоих значениях к положительны, определи-
определитель Д2 при к — 0,5 равен
Д2 = 1 . 1 - 1 . 1,5 = 0,5 > 0,
а при к = 2
Д2 = 1-1-1-2 = -КО.
Следовательно, замкнутая система при к = 0,5 устойчива, а
при к — 2 неустойчива.
Из рассмотренных примеров следует, что разомкнутая система мо-
может быть устойчивой, а замкнутая система неустойчивой, и наоборот.
Кроме того, устойчивость замкнутых систем зависит от передаточно-
передаточного коэффициента разомкнутой системы.
Пример 3.3. Исследовать устойчивость системы, у которой ха-
характеристический полином имеет вид
Q(\) = 0,5 Л4 + ЗА3 + 2А2 + 2А + 1.
Решение. В данном случае п = 4 — четное число. Поэтому це-
целесообразно воспользоваться условием C.116). Необходимое условие
устойчивости выполняется: все коэффициенты а$ = 0,5, а\ = 3, а2 =
= 2, аз = 2, а,4 = 1 положительны. В соответствии с условием C.116)
достаточно вычислить определитель Дз:
Аз =
ai аз О
uq а2 a^
О а,\ аз
3 2 0
0,5 2 1
0 3 2
= 1 >0.
Система устойчива.
3.2.4. Критерий Рауса. Для формулировки этого критерия со-
составляется так называемая таблица Рауса. По числу перемен знаков
элементов первого столбца этой таблицы определяется количество ле-
левых и правых корней рассматриваемого полинома.
96
Гл. 3. Устойчивость систем управления
Таблица Рауса составляется следующим образом. В первой строке
выписываются коэффициенты характеристического полинома с чет-
четными индексами, а во второй строке — коэффициенты с нечетными
Таблица 3.1. Таблица Рауса (г к = Ck-2,i/ck-i,i)
№
1
2
3
4
n + 1
C31
C41
Cn + 1,1 =
1
СП = 6
C21 = G
= C12 -
= C22 —
: Cn-1,2
Ы
ГЗС22
Г4С32
+ ГП+1СП2
C32
C42
2
C12 =
C22 =
= C13
= C23
a2
a3
- Г3С23
— Г4С33
C33
C43
3
Cl3 = ^4
С23 = a>5
= C14 — Г3С24
= C24 — T4C34
индексами в порядке их возрастания (табл. 3.1). Элементы последую-
последующих строк вычисляются по формуле
— — С/г~2'1 и — q д • / — 19
Ск-1,1 '
Здесь Гк равен отношению элементов предыдущих двух (т. е. (к — 2)-й
и (к — 1)-й) строк первого столбца. Элемент с\а равен разности эле-
элементов предыдущих двух (т. е. (к — 2)-й и (к — 1)-й) строк следующе-
следующего, (/ + 1)-го столбца. При этом последний элемент (т. е. вычитаемое)
умножается на г к.
Критерий Рауса (Routh, 1877). Для того чтобы система
была устойчива, необходимо и достаточно, чтобы все элементы
первого столбца таблицы Рауса при а$ > 0 были положительны:
Cki > 0, к = 1,2,.. .,п + 1.
Таблица Рауса содержит п + 1 строку. Число столбцов по мере
роста номера строки убывает. Элементы второго и последующих
столбцов следует вычислять по мере надобности при вычислении эле-
элементов первого столбца. При этом вычисление можно прекратить, как
только какой-либо элемент первого столбца принимает нулевое или
отрицательное значение.
Пример 3.4. Исследовать устойчивость системы управления с
характеристическим полиномом
Q(A) = А5 + 2А4 + ЗА3 + 4А2 + 5А + б.
Решение. Необходимое условие устойчивости выполняется. Для
определения устойчивости воспользуемся критерием Рауса. Вычис-
Вычислим элементы таблицы Рауса:
Сц = CLq = 1, С12 = 0,2 = 3, Ci3 = CL4 = 5,
С21 = оь\ — 2, С22 = аз = 4, С2з = as = б,
С31 = Ci2 - — С22 = 3 - - • 4 = 1, С32 = Ci3 - — С23 = 5 - - • б = 2,
С21 2 С21 2
С21 Л 2 о Л
С41 = С22 С32 = 4 - - • 2 = 0.
С31 1
3.3. Частотные критерии устойчивости 97
Так как элемент первого столбца c^i = О, система неустойчива. В
данном примере п = 5, и если бы система была устойчива, пришлось
бы продолжить вычисление до определения cq\.
3.3. Частотные критерии устойчивости
Частотными критериями устойчивости называются условия
устойчивости, основанные на построении частотных характеристик
и так называемой кривой Михайлова.
Выражение
Q(ju>) = ao(ju>)n + ai(iw)"-1 + ... + ап,
которое получается при подстановке Л = ju в характеристический
полином, называется характеристическим вектором; переменная и
называется частотой.
Частотные критерии получаются из принципа аргумента. Поэто-
Поэтому сначала рассмотрим этот принцип.
3.3.1. Принцип аргумента. Если I нулей полинома Q(X) =
= ao(A)n + ai(A)n~1 + ... + an расположены в правой полуплоскос-
полуплоскости, а остальные п — I нулей — в левой полуплоскости, то при изме-
изменении частоты и от 0 до оо аргумент вектора Q(ju) изменяется
на (п - 2/)тг/2:
AargQ(ja;) = (n-20|. C.12)
Здесь Aarg Q(ju) — приращение аргумента Q(ju) при изменении
частоты со от 0 до оо.
Доказательство. Если разложить полином Q(X) на элемен-
элементарные множители и сделать постановку Л = joj, то получим
Q(juj) = ao(jw - \i)(jw - А2)... (jw - An),
где Xi (i = 1, 2,..., n) — нули полинома Q(X). Из этого соотношения
п
получим arg Q(juj) = J^ arg (ju — Xi) и соответственно
г=1
n
Aarg Q(jlu) = ^аФг-
i=l
Здесь Aipi — приращение аргумента множителя ju; — Xi при измене-
изменении частоты uj от 0 до оо.
Найдем Ai^i отдельно для случаев, когда А^ является веществен-
вещественным числом и когда А^ — комплексное число.
a) Xi = щ, OLi — вещественное число. В этом случае
фг(ш) = arg (ju -оц) = - arctg ^-,
7г/2 При OLi < 05
= -arctg0 = 0, Фг(ж) = \
l —7Г
Г/2 При OLi >
7 Д.П. Ким
98 Гл. 3. Устойчивость систем управления
7г/2 При CLi < О,
-тг/2 при щ > О.
Таким образом, если вещественный нуль является левым (сц < 0),
приращение Афг = тг/2 ; если правым (аг > 0), приращение Афг =
= -тг/2.
б) Af = а« + jPi, OLi, Pi — вещественные числа. В этом случае су-
существует комплексно-сопряженный нуль A^+i = оц — 2Pi- Прираще-
Приращения множителей, соответствующих этим нулям, определяются сле-
следующим образом:
i/>i(u) = arg (ju -<Xi- jPi) = - arctg \
7г/2 При CLi < 0?
-тг/2 при oli > 0,
тг/2 - arctg (Pi/щ) при c^ < 0,
—тг/2 — arctg (Pi/ai) при а« > 0.
-{
Аналогично получаем
тг/2 + arctg (Pi/ai) при а« < 0,
г/2 + arctg (A/«i) при оц > 0.
Д*« = {-ж/
Отсюда получаем суммарное приращение Aфi + A^i+i = 2 • (тг/2),
если комплексно-сопряженные нули левые (а« < 0), и Д^ + Д^г+i =
= —2 • (тг/2), если указанные нули правые (с^ > 0).
Так как комплексно-сопряженные числа отличаются только мни-
мнимой частью, они оба являются левыми или оба являются правыми.
Поэтому и в случае комплексных нулей «в среднем» на каждый ле-
левый нуль приходится приращение тг/2, на каждый правый корень —
приращение — тг/2.
Таким образом, если полином имеет / правых нулей и п — I левых
нулей при изменении частоты от 0 до оо, приращение есть
A arg Q(Jw) = I ¦ (-|) + (n - 0 | = (n - 21) |,
что и требовалось доказать.
3.3.2. Критерий устойчивости Михайлова. Годограф харак-
характеристического вектора, т.е. кривую, которую описывает характерис-
характеристический вектор при изменении частоты от 0 до оо, называют кривой
Михайлова. При ап > 0 кривая Михайлова начинается в положитель-
положительной вещественной полуоси.
Из принципа аргумента следует, что если все нули характеристи-
характеристического полинома левые, то приращение аргумента характеристичес-
характеристического вектора есть A arg Q(juj) = птг/2. Отсюда вытекает следующий
критерий устойчивости.
3.3. Частотные критерии устойчивости
99
Критерий Михайлова. Для того чтобы система была ус-
устойчива, необходимо и достаточно, чтобы при по > 0 ее кривая
Михайлова, начинаясь с положительной вещественной полуоси,
п = 3
Рис. 3.2. Кривые Михайлова устойчивых систем
последовательно обходила п квадрантов в положительном направле-
направлении (против часовой стрелки).
Кривые Михайлова устойчивых систем не пересекают начало
координат и уходят в бесконечность в п-м квадранте (рис. 3.2).
3.3.3. Критерий Найквиста. При использовании алгебраичес-
алгебраических критериев и критерия Михайлова было не важно, устойчивость
каких систем — разомкнутых или замкнутых — исследуется. Кри-
Критерий Найквиста используется для исследования устойчивости замк-
замкнутых систем. Он позволяет по амплитудно-фазовой характеристи-
характеристике разомкнутой системы судить об устойчивости замкнутой системы.
Критерий Найквиста (Nyqvist, 1932). Для того чтобы
замкнутая система с отрицательной обратной связью была устой-
устойчива, необходимо и достаточно, чтобы амплиту дно-фазовая час-
частотная характеристика (АФЧХ) разомкнутой системы охваты-
охватывала точку (—l,j'O) в положительном направлении 1/2 раз, где I —
число правых корней характеристического уравнения разомкнутой
системы.
Здесь предполагается, что у характеристического уравнения ра-
разомкнутой системы I корней являются правыми, а остальные п — I
корней — левыми. Случай, когда имеются нейтральные корни, рас-
рассматривается отдельно.
Когда разомкнутая система устойчива, / = 0 , и критерий Найк-
Найквиста формулируется следующим образом.
Если разомкнутая система устойчива, то для устойчивости
замкнутой системы с отрицательной обратной связью необходимо
7*
100 Гл. 3. Устойчивость систем управления
и достаточно, чтобы А ФЧХ разомкнутой системы не охватывала
точку (-1, J0).
Доказательство. Пусть передаточная функция разомкнутой
системы W(p) = R(p)/S(p), где степень числителя т, а степень знаме-
знаменателя п, причем п ^ т. Очевидно, степень полинома Q(p) =
= S(p) + R(p) равна п.
Рассмотрим функцию
SM + W»). Cлз)
Здесь в правой части в числителе стоит характеристический вектор
замкнутой системы, а в знаменателе — характеристический вектор
разомкнутой системы. Из принципа аргумента следует, что для ус-
устойчивости замкнутой системы необходимо и достаточно, чтобы
Так как по условию характеристический полином разомкнутой систе-
системы S(X) имеет / правых нулей и п — I левых нулей, то из принципа
аргумента получаем
Следовательно, если замкнутая система устойчива, приращение ар-
аргумента функции M(ju)) при изменении ш от 0 до оо есть
) = Aavg[S(ju>) + R{jw)} - Aarg S(ju>) =
Отсюда следует, что для устойчивости замкнутой системы необходи-
необходимо и достаточно, чтобы годограф функции M(jlj) охватывал начало
координат 1/2 раз в положительном направлении.
Из C.13) получаем W(jlo) = M(jco) — 1. Поэтому если сместить
годограф M(juj) влево на единицу, то получится годограф частотной
передаточной функции W(ju) разомкнутой системы. Следовательно,
если годограф M(jlj) охватывает начало координат 1/2 раз, то го-
годограф W(juj) охватывает 1/2 раз точку (—1, jO). Критерий доказан.
Пример 3.5. Исследовать устойчивость замкнутой системы, ес-
если передаточная функция разомкнутой системы есть:
*) W(p) = ^; б) W(p) = ^.
Решение. Частотные передаточные функции и вещественные и
мнимые частотные функции имеют вид:
a) ^ Hj1}
2
3.3. Частотные критерии устойчивости
101
б) W(JLU) =
Щи) = -
10
-jw3 - За;2 +
10A-За;2)
_ 10[1 -За;2 - jCuj-uj3)]
+ 1 ~ A - За;2J + (За; - а;3J '
A-За;2J + (За;-а;3J
, V{u>) = -
10а;C-а;2
A-За;2J + (За;-а;3J'
Для исследования устойчивости АФЧХ можно построить качест-
качественно (приближенно), достаточно точно определив только точки ее
пересечения с осями координат. Необходимые расчетные данные при-
Таблица 3
и{ш)
V(w)
Щш)
V(u>)
.2.
0
10
0
0
Расчетные )
0
-5
0
< ш
>
<
<
0
0
1
данные
W(p
С
W(p)
1
7!
0
-6,6
(к примеру
) 5
} р-1
) < о; < оо
<0
<0
10
(р+1K
—= <ио <
л/3
<0
<0
3.5)
л/3
л/3
-1,25
0
оо
0
0
ш >
<
>
л/3
0
0
оо
0
0
ведены в табл. 3.2. На основе этих данных построена АФЧХ (рис. 3.3).
В случае а) характеристический полином разомкнутой системы
имеет один правый нуль и АФЧХ (рис. 3.3, а) 1/2 раз охватывает
точку (—l,j'0) в положительном направлении (вектор АВ описывает
-5
-1
Щш)
-1,25
-6,6
Рис. 3.3. АФЧХ разомкнутых систем (к примеру 3.5): а — годограф
5 10
W(juj) = _ ; ?— годограф W(juj) =
угол тг). Следовательно, в этом случае согласно критерию Найквиста
замкнутая система устойчива.
В случае б) разомкнутая система устойчива, а ее АФЧХ (рис. 3.3, б)
охватывает точку (—l,j'0). Следовательно, в этом случае замкнутая
система неустойчива.
102
Гл. 3. Устойчивость систем управления
Случай наличия нулевых корней. Если характеристическое
уравнение разомкнутой системы имеет нулевые корни, т.е. ее переда-
передаточная функция может быть представлена в виде
), W0@) = 1,
то АФЧХ при uj —У 0 уходит в бесконечность (рис. 3.4). В этом случае
АФЧХ дополняются дугой — г?(тг/2) окружности бесконечно большого
Щш)
v = 1.1
Рис. 3.4. АФЧХ при нулевых полюсах
радиуса (на рис. 3.4 пунктирные линии). И для устойчивости замкну-
замкнутой системы дополненная АФЧХ должна 1/2 раз охватывать или
при I = 0 (разомкнутая система устойчива) не охватывать точ-
ку (-1, J0).
3.3.4. Логарифмический частотный критерий устойчи-
устойчивости. В сложных случаях и для получения логарифмического час-
частотного критерия устойчивости удобно воспользоваться другой фор-
формулировкой критерия Найквиста, которую мы сейчас и рассмотрим.
Если АФЧХ охватывает точку (—1, jO), то она пересекает отре-
отрезок (—оо,—1) вещественной оси. Точку пересечения АФЧХ с ука-
указанным отрезком называют положительным переходом, если пере-
пересечение происходит при возрастании частоты сверху вниз (т.е. в
положительном направлении), и отрицательным переходом, если
пересечение происходит снизу вверх (рис. 3.5, а). Если АФЧХ начи-
начинается или кончается на отрезке (—оо, — 1), то говорят о 1/2-переходе
(см. рис. 3.3, а).
Критерий Найквиста. Для того чтобы замкнутая система
управления была устойчива, необходимо и достаточно, чтобы раз-
разность между положительными и отрицательными переходами была
равна 1/2 (I — число правых корней характеристического уравнения
разомкнутой системы).
При пересечении АФЧХ отрезка (—оо, —1) (рис. 3.5, б) амплитуд-
амплитудная частотная функция А(и) > 1 и соответственно L(lj) > 0, фазо-
фазовая частотная функция (р(ш) = ±Bfc + 1)тг (к = 0,1, 2 ...). Поэтому
на логарифмических частотных характеристиках (ЛЧХ) положитель-
3.3. Частотные критерии устойчивости
103
U
Рис. 3.5. Положительные и отрицательные переходы: а — АФЧХ; б —
ЛАЧХ и ЛФЧХ
ным переходам соответствуют точки пересечения логарифмической
фазовой частотной характеристики (ЛФЧХ) прямой ip(w) = ±Bfc + 1)
(& = 0,1,2...) снизу вверх (в сторону возрастания <р(ш)), отрица-
отрицательным переходам — сверху вниз при частотах, когда L(uS) > 0
(рис. 3.5, б). Поэтому на основании критерия Найквиста получаем сле-
следующий критерий устойчивости.
Логарифмический частотный критерий устойчи-
устойчивости. Для того чтобы замкнутая система была устойчива,
необходимо и достаточно, чтобы разность между положительны-
положительными и отрицательными переходами ЛФЧХ прямой (р(и) = =ЬB/с + 1)тг
[k = 0,1, 2 ...) при частотах, когда L(uS) > 0 (логарифмическая ам-
амплитудная частотная характеристика положительна), была рав-
равна 1/2 (I — число правых корней характеристического уравнения ра-
разомкнутой системы).
3.3.5. Устойчивость систем с чистым запаздыванием.
Системы управления прокатным станом, различные системы уп-
управления, содержащие ленточные конвейеры, обладают чистым (или
транспортным) запаздыванием. Передаточная функция в изобра-
изображениях Лапласа звена чистого запаздывания, как отмечалось, имеет
вид W(s) = ke~TS.
Рассмотрим замкнутую систему управления, передаточная функ-
функция разомкнутой системы которой имеет вид
WT(s) = W(s)e~TS, W(s) = R(s)/S(s), C.14)
где R(s), S(s) — полиномы степени тип соответственно (т ^ п).
Для исследования устойчивости такой системы может быть использо-
использован критерий Найквиста, формулировка которого практически оста-
остается без изменения.
Для того чтобы замкнутая система, передаточная функция ко-
которой в разомкнутом состоянии имеет вид C.14), была устойчи-
устойчива, необходимо и достаточно, чтобы АФЧХ разомкнутой системы
охватывала точку (—1, jO) в положительном направлении 1/2 раз,
где I — число правых нулей характеристического полинома разомк-
разомкнутой системы S(s).
104
Гл. 3. Устойчивость систем управления
Замкнутая система без звена чистого запаздывания (в C.14) г = 0)
может быть устойчивой, а с возникновением транспортного запазды-
запаздывания может стать неустойчивой. В этом случае с ростом запазды-
запаздывания г АФЧХ будет приближаться к точке (—1, J0), и при некото-
некотором значении запаздывания тк она пересечет эту точку и окажется на
границе устойчивости. Значение тк называют критическим. Рас-
Рассмотрим, как можно определить критическое запаздывание.
Частотная передаточная функция, амплитудная и фазовая частот-
частотные функции разомкнутой системы имеют вид
i™, W{jw) =
\WT(jb>)\ = \W(jcu)\, ipT(w) = <р(ш) - тш,
где (pT(w) = arg WT(ju), Ц)(ш) = arg W(ju). Отсюда видно, что появ-
появление транспортного запаздывания не меняет модуль, а только вносит
7 \/ '
/ : U
W(juj)//
Рис. 3.6. АФЧХ системы с чистым запаздыванием
дополнительный отрицательный фазовый сдвиг — ит, что приводит к
закручиванию АФЧХ (рис. 3.6).
Критическое запаздывание находится из условия
\W(jw)\ = 1, (р(и) - tklo = -тг. C.15)
Решив эту систему, найдем критическое запаздывание и частоту ик,
которая называется критической частотой.
Пример 3.6. Определить критическое запаздывание и критичес-
критическую частоту для системы, у которой передаточная функция в разомк-
/2
нутом состоянии WT(s) = e~ST.
S ~~г 1
Решение. Без запаздывания замкнутая система устойчива.
Условие C.15) принимает вид
л/2 1
—j^=^= = 1, — arctg uj — ujt = — тг.
Из первого уравнения получаем ljk = 1. Подставив это значение час-
частоты во второе уравнение и решив его, найдем
тк = тг — arctg 1 = Зтг/4.
3.4- Определение области устойчивости 105
3.4. Определение области устойчивости
Структура системы определяется составом элементов звеньев и
связями между ними. Поэтому изменить структуру системы — это
значит изменить состав ее элементов или связи между ними.
При заданной структуре какие-либо параметры могут быть не
фиксированными, т.е. их можно изменять. Такие параметры называ-
называют варьируемыми. При наличии варьируемых параметров возникает
проблема определения области устойчивости.
Областью устойчивости в пространстве параметров называют
множество всех значений варьируемых параметров, при которых
система устойчива.
Если существует область устойчивости в пространстве парамет-
параметров, т.е. существуют такие значения варьируемых параметров, при
которых система устойчива, то она называется структурно устойчи-
устойчивой или структурно устойчивой относительно заданных варьируе-
варьируемых параметров. В противном случае, т.е. если нет таких значений
варьируемых параметров, при которых система устойчива, она на-
называется структурно неустойчивой или структурно неустойчивой
относительно заданных варьируемых параметров.
Область устойчивости можно определить с помощью алгебраичес-
алгебраических критериев устойчивости. Рассмотрим это на примере.
Пример 3.7. Передаточная функция разомкнутой системы
W(p) = rg-. Определить область устойчивости замкнутой сис-
системы на плоскости параметров (fc,T).
Решение. Характеристический полином замкнутой системы
имеет вид
Q(\) = Г3Л3 + ЗГ2Л2 + ЗГЛ + 1 + к.
По критерию Льенара-Шипара имеем
Г3 > 0, ЗГ2 > 0, ЗГ > 0, 1 + к > 0,
А2 = ЗГ2 • ЗГ - Г3 • A + к) = Г3(8 - к) > 0.
Очевидно, эти неравенства будут выполнены, если
Г>0, -1<к<8.
Эта система неравенств определяет область устойчивости.
Разработан специальный метод определения области устойчивос-
устойчивости, названный методом .D-разбиения.
3.4.1. Метод D-разбиения. Если имеются варьируемые пара-
параметры, то корни характеристического уравнения зависят от этих па-
параметров, и пространство параметров можно разбить на области,
которым соответствует фиксированное количество левых корней. Об-
Область, которой соответствует к левых корней характеристического
уравнения, обозначим D{k). В общем случае все пространство пара-
106 Гл. 3. Устойчивость систем управления
метров можно разбить на области D@),D(l),..., D(n). Область D(n)
является областью устойчивости, так как при значениях параметров
из этой области п корней (т.е. все корни) являются левыми.
В частном случае какие-либо области могут отсутствовать. Ес-
Если система структурно неустойчива, то будет отсутствовать область
устойчивости D(n).
Разбиение пространства параметров на все возможные облас-
области D(k) называется D-разбиением. Кривая, разделяющая облас-
области D(k) с различными индексами к, называется кривой D-разбиения.
Так как во время движения в пространстве параметров при пересе-
пересечении кривой .D-разбиения происходит переход из области D(kf) с
числом левых корней к = к' в область D{k") с числом левых кор-
корней к = к", то часть левых корней становятся правыми (к' > к") или
часть правых корней становятся левыми (к1 < к"). Но так как пере-
переход корней на комплексной плоскости из одной полуплоскости в дру-
другую происходит только через мнимую ось (включающую и бесконеч-
бесконечно удаленную точку), то уравнение кривой ?)-разбиения получается
из характеристического уравнения Q(X) =0 при подстановке в него
X = JUJ: QCH = o. C.16)
Метод D-разбиения (Ю.И. Неймарк, 1948). Методом D-раз-
D-разбиения называется метод выделения области устойчивости, основан-
основанный на ?)-разбиении, и он включает следующие три операции:
1) D-разбиение пространства параметров;
2) определение среди областей D(k) области, имеющей наиболь-
наибольший индекс. Эта область называется областью-претендентом, так
как только эта область может быть областью устойчивости;
3) проверка, является ли область-претендент областью устойчи-
устойчивости. Для этого фиксируется какая-либо точка внутри области-
претендента и при значении варьируемых параметров, соответствую-
соответствующих фиксированной точке, проверяется устойчивость системы. Если
система устойчива, область-претендент является областью устойчи-
устойчивости.
Очевидно, если заранее известно, что система структурно устой-
устойчива, то указанную проверку устойчивости можно не выполнять.
Порядок .D-разбиения и выделения области-претендента зависит
от числа варьируемых параметров. Поэтому отдельно рассмотрим
случаи одного и двух варьируемых параметров.
Выделение области устойчивости на плоскости одно-
одного параметра. Параметры системы могут принимать только дей-
действительные значения, и пространство параметров в случае одно-
одного варьируемого параметра представляет собой прямую, а область
устойчивости — интервал. Однако при выделении интервала устой-
устойчивости методом .D-разбиения, предполагая, что параметр принима-
принимает комплексные значения, сначала находят область устойчивости на
комплексной плоскости. Затем, выделяя вещественную часть, находят
интервал устойчивости.
3.4- Определение области устойчивости
107
Пусть варьируемый параметр \i входит линейно в характеристи-
характеристическое уравнение Q(А) = 5(А) + /jlR(X) = 0 E(А), Д(А) — полиномы
от А). Для получения уравнения кривой .D-разбиения сделаем подста-
подстановку А = juj и разрешим его относительно параметра /i, обозначив
его, когда он принимает комплексное значение, через ~р (/J = ц + 311')'-
или
fjL = u(u), /j,' = v(oj). C.17)
Здесь и (и) является четной, a г? (о;) нечетной функцией от и. По-
Поэтому для построения кривой .D-разбиения, которая строится при из-
изменении uj от —оо до оо, достаточно построить кривую ?)-разбиения
при изменении о; от 0 до оо, а затем для получения кривой, соот-
соответствующей отрицательным и, зеркально отобразить ее относитель-
относительно вещественной оси.
Для выделения области-претендента кривую D-разбиения штри-
штрихуют слева при движении по ней в сторону возрастания uj (рис. 3.7).
1
/
/
\
/г
D(r
V
П
+
2
i_|
1)
1
D(r)
X
UJ
\/
/
\
UJ -Л
-* oo
-1)
A*
—oo
Рис. 3.7. Выделение области устойчивости на плоскости одного параметра
При пересечении кривой со стороны штриховки один левый корень
становится правым, а при пересечении с обратной стороны один пра-
правый корень становится левым. Поэтому если, например, область 1
(см. рис. 3.7) принять за область D(r), то область 2 будет об-
областью D(r + 1) и область 3 — областью D(r — 1). Следовательно,
областью-претендентом будет область 2.
Пример 3.8. Определить область устойчивости для системы с
характеристическим уравнением
А3 + /iA2 + А + 1 = 0.
Решение. Сделав подстановку А = jcu и разрешив уравнение
относительно комплексного параметра ~р = \i + jfif, получим
\i — 1/си , \jl — —со + I/a;.
Произведем расчеты при характерных значениях uj (табл. 3.3). На
основе этих данных построим .D-кривую, нанесем на нее штриховку и
произведем индексацию областей (рис. 3.8). Областью-претендентом
является область D{r + 2).
108
Гл. 3. Устойчивость систем управления
Таблица 3.3. Расчетные данные (к примеру 3.8)
0
оо
оо
0 <uj < 1
>0
>0
1
1
0
1 < U) < ОО
>0
<0
оо
0
—оо
Как легко проверить, система при \i = 2 и \л! = 0 (точка внутри
этой области) устойчива. Следовательно, область D(r + 2) являет-
. /1
UJ —У
D(r)
i 4
г
UJ ->•
—oo
D(r + 1)
к
оо D(r4
4 ш '
2
D(r -\
-2)
uj —? 0
Рис. 3.8. Определение области устойчивости (к примеру 3.8)
ся областью устойчивости на комплексной плоскости, и множеством
значений параметра, при котором система устойчива, является полу-
полуинтервал \i > 1.
Выделение области устойчивости на плоскости двух
параметров. Пусть характеристическое уравнение имеет вид
- 7?Д(Л) + Т(Л) = О,
где 5(А), Д(А), Т(А) — полиномы от A; /i, 77 — вещественные пара-
параметры. Подставив А = juo и обозначив через Si (a;), Ri{oj) и Ti(o;) ве-
вещественные части, а через S^t^)? -йг^) и ^2(^) мнимые части S(jlj),
R(Juj) и T(juj) соответственно, получим
11 [Si (w) + jS2 (и)] + ту [i?i (о;) + jR2 (и)] + Гх (и) + jT2 (о;) = 0.
Приравняем отдельно вещественную и мнимую части нулю:
Решив эту систему, получим
Ai A2
C.18)
где
Д =
3.4- Определение области устойчивости 109
-T2{uj) R2{v)
A2 =
Так как Si (и), Ri(uS) и Ti(uS) являются четными функциями,
а 52(о;), Дг(^) и ^М^О — нечетными функциями, то A, Ai и А2 как
разности произведений четной функции и нечетной функции являются
нечетными функциями.
Функции C.18) как отношения нечетных функций будут четными
функциями. Поэтому кривую ?)-разбиения, построенную с по-
помощью этих функций, будем обходить дважды: при изменении и
от —оо до 0 в одном направлении и при изменении со от 0 до оо
в обратном направлении.
При построении кривой D-разбиения возможны следующие три
случая:
1) А ф 0. В этом случае уравнения C.18) определяют по одному
значению \i и rj для каждого значения и, и, изменяя и, по точкам
можно построить кривую ?)-разбиения;
2) А = 0, Ai ф О, А2 Ф 0. Частоте, удовлетворяющей этому
условию, не соответствуют никакие значения параметров, и та-
такую частоту можно не рассматривать;
3) A = Ai=A2 = 0. При частоте, удовлетворяющей этому усло-
условию, одно из уравнений C.18) является следствием другого, и эти
уравнения определяют прямую, которая называется особой.
Если коэффициент при старшей степени и свободный член харак-
характеристического уравнения зависят от параметров, то, приравняв их
нулю, получим особые прямые, отвечающие и = оо и со = 0 соот-
соответственно.
Штриховка на кривую D-разбиения наносится следующим обра-
образом. При движении в сторону возрастания со штриховка наносится
слева при А > 0 и справа при А < 0 . И так как кривую .D-разбиения
проходим дважды при изменении и от — оо до оо (в одном направлении
при отрицательных и в обратном направлении при положительных и)
и знак функции А в силу ее нечетности при изменении направления
движения меняется, на нее наносится двойная штриховка. На особые
прямые, соответствующие о; = =Ьоо и о; = 0, наносится одинарная
штриховка. На особые прямые, соответствующие ненулевой конечной
частоте и>к @ < и>к < оо), такой, что знак А при переходе через эту
частоту меняется, наносится двойная штриховка. Штриховки на осо-
особые прямые наносятся так, чтобы вблизи точки сопряжения особой
прямой и кривой (там, где А меняет знак) заштрихованные и неза-
штрихованные стороны были направлены друг к другу (рис. 3.9, а-в).
Особые прямые, соответствующие конечной частоте, при переходе
которой определитель А не меняет знака, не штрихуются (рис. 3.9, г).
Такие особые прямые можно исключить из рассмотрения.
по
Гл. 3. Устойчивость систем управления
D(r)
А <О
А
>
XI
>0
D(r)
А = 0
D(r-
/
X
2)
Д
X
0
Рис. 3.9. Штриховка особых прямых: а — о; = 0; б — ш = =Ьоо; в —
uj = о;к; г — ш = о;к
При переходе через границу с двумя штриховками два левых корня
становятся правыми, если переход осуществляется против штрихов-
штриховки, и два правых корня становятся левыми, если переход осуществля-
осуществляется в сторону штриховки.
Пример 3.9. Характеристическое уравнение имеет вид
Л4 + Л3 + Л2 + ц\ + г] = 0.
Определить область устойчивости на плоскости параметров.
Решение. При подстановке Л = juj уравнение принимает вид
о;4 — JLJ3 — uj2 + fijuj + r\ = 0.
Приравняв нулю вещественную и мнимую части, получим
0 • II + г] + со4 - uj2 = 0,
Отсюда
Д =
0
UJ
1
0
= —о;,
А2
0
w
+
;3
-W4
и
W2
+ ш2
;3
5
о; - с
1
0
з
3-4- Определение области устойчивости
111
Al
—
C.19)
Исключив из системы уравнений C.19) о;2, получим уравне-
уравнение ?)-кривой, которое можно представить в виде
Г] = /хA - /х) = - - (jj, - -) .
Это уравнение параболы. Она пересекает ось абсцисс при \i — \i\ — 0
и /i = /i2 = 1 и достигает максимума ?? = 1/4 при /i = 1/2.
Из C.19) следует, что \i принимает только неотрицательные значе-
значения. Поэтому кривая .D-разбиения имеет вид, показанный на рис. 3.10.
Г]
1/4
D(r)
Рис. 3.10. Выделение области устойчивости (к примеру 3.9)
При положительных ш определитель А < 0. Поэтому при ио > 0 и
движении в сторону возрастания и штрихуется правая сторона.
Все определители одновременно обращаются в нуль только при
ио = 0. При этом значении из уравнения C.19) имеем ц = 0 и г\ = 0. Но
уравнением особой прямой является rj = 0, которое получается при-
приравниванием нулю свободного члена характеристического уравнения.
Из рис. 3.10 следует, что областью-претендентом является об-
область D(r + 2). Для проверки, является ли эта область областью
устойчивости, исследуем устойчивость рассматриваемой системы в
точке с координатами /i = 0,5 и 7у = 0,1. В этой точке характерис-
характеристическое уравнение принимает вид
Л4 + Л3 + Л2 + 0,5Л + 0,1 = 0.
Необходимое условие устойчивости выполняется. Кроме того,
1 0,5 0
А3 = 1 1 0,1 = 0,15 > 0.
1 1 0,5
Поэтому согласно критерию Льенара-Шипара система в указанной
точке устойчива. Следовательно, область-претендент, определяемый
системой неравенств
является областью устойчивости.
112 Гл. 3. Устойчивость систем управления
3.4.2. Граничный коэффициент и условие граничной ус-
устойчивости. Говорят, что система находится на границе устойчи-
устойчивости или имеет место граничная или маргинальная устойчивость,
если среди корней характеристического уравнения имеются нейтраль-
нейтральные (т.е. расположенные на мнимой оси) корни и нет правых корней.
Если все нейтральные корни являются нулевыми (т.е. расположе-
расположены в начале координат), то говорят, что система находится на грани-
границе апериодической устойчивости, если корни являются мнимыми —
система находится на границе колебательной устойчивости.
Граничный коэффициент. Представим передаточную функ-
функцию разомкнутой систем в виде
W(p) = ±W°(p), W°@) = l.
Если при малых значениях передаточного коэффициента к замк-
замкнутая система устойчива, а с его ростом она становится неустойчи-
неустойчивой, то значение к = /сг, при котором замкнутая система находится на
границе устойчивости, называется граничным или предельным (пере-
(передаточным) коэффициентом.
Условия граничной устойчивости. Граничный коэффициент
можно определить с помощью условий граничной устойчивости, кото-
которые мы здесь рассмотрим вкратце. Более подробно эти условия бу-
будут рассмотрены в гл. 5, где они используются при решении задач
синтеза.
Алгебраическое условие граничной колебательной ус-
устойчивости. Система управления находится на границе колеба-
колебательной устойчивости (два корня характеристического уравнения
мнимые, а остальные левые), если при а® > 0 предпоследний опре-
определитель Гурвица равен нулю, а все определители Гурвица более
низкого порядка и свободный член положительны:
An_i = О, АП_2 > 0, ..., Ai > 0, ап > 0. C.20)
Условие граничной устойчивости Михайлова. Система
находится на границе устойчивости (колебательной), если ее кривая
Михайлова при а® > 0, начинаясь с положительной вещественной
полуоси, проходит через начало координат и при малой ее деформации
в окрестности начала координат удовлетворяет критерию устойчи-
устойчивости Михайлова.
Так как, когда система находится на границе устойчивости, го-
годограф ее характеристического вектора Q(ju) проходит через начало
координат, то
Q(jcj) = и{ш) + jv(w) = 0, или и{ш) = 0, v{u) = 0. C.21)
Это условие является только необходимым условием граничной
устойчивости.
Условие граничной устойчивости Найквиста. Замкнутая
система находится на границе устойчивости, если АФЧХ разомкнутой
системы проходит через точку (—1, jO) и при малой ее деформации
выполняется критерий устойчивости Найквиста.
3.5. Робастная устойчивость
113
Граничный коэффициент легко определяется с помощью условия
граничной устойчивости Найквиста, если построен годограф харак-
jV\
-1
и
Рис. 3.11. Годограф W(juj) = -—— W°(juj) (у = 0)
теристического вектора (т. е. АФЧХ) разомкнутой системы при неко-
некотором значении к = к'.
Пусть АФЧХ пересекает отрицательную вещественную полуось
при частоте и = и)п в точке А (рис. 3.11). Тогда
= -n^W°U^) = -\OA\. C.22)
Из условия граничной устойчивости Найквиста имеем
Разделив это равенство на C.22), получим кг = к'/\ОА\.
3.5. Робастная устойчивость
Параметры стационарных систем с течением времени в силу ста-
старения или других причин могут меняться. Кроме того, при разработке
регуляторов параметры объекта могут быть точно не известны. В по-
подобных случаях возникает необходимость построения систем управле-
управления таким образом, чтобы она была устойчива не при одних фиксиро-
фиксированных значениях параметров, а при всех возможных их значениях.
В последнем случае говорят, что система робастно устойчива. Бо-
Более строго робастная устойчивость определяется следующим образом.
Рассмотрим характеристический полином
СДА) = аоА + а\\ + ... + ап. {6.26)
Полином называется устойчивым полином или полином Гурвица,
если все его нули являются левыми.
Введем в рассмотрение (п + 1)-вектор а = (ао, ai,..., ап). Пусть
в (п + 1)-мерном пространстве коэффициентов задано множество А
Полином C.23) называется робастно устойчивым или робастно
устойчивым в Л, если он является устойчивым при любых значениях
коэффициентов а^ (г = 0,1,..., п) из множества A (a G А).
8 Д.П. Ким
114
Гл. 3. Устойчивость систем управления
Система называется робастно устойчивой или робастно устой-
устойчивой на множестве Л, если ее характеристический полином являет-
является робастно устойчивым полиномом в А.
3.5.1. Полиномы Харитонова. Пусть множество А является
(гипер) параллелепипедом:
Л = {а: аг ^ аг <^аи г = 0,1,... ,п} . C.24)
Здесь аг и ^ — минимальное и максимальное значения коэффициен-
коэффициента cti (г = 0,1,... , п).
Подставим в характеристический полином Л = juo и выделим ве-
вещественную и мнимую части:
Q(jcj) = ao(juj)n + aiijuoO1-1 + ... + ап = и{ио) + jv(u),
u(ui) = ап — an-2uj2 + ап_4о;4 - ап_6а;6 + ..., C.25a)
v(u) = an_io; - ап-3и;3 + an_5a;5 - an_7a;7 + ... C.256)
При фиксированном и, когда вектор а пробегает все значения из
множества C.24), характеристический вектор описывает прямоуголь-
JV*
3(u,v)
2№ г;)
Рис. 3.12. К определению полиномов Харитонова
ник (рис. 3.12). Очевидно, на вершинах прямоугольника и (и) и v(uS)
как функции от а принимают минимальные или максимальные значе-
значения. Обозначим минимумы и (и) и v{uo) через и{ио) и v{uj), максимумы
через u(lj) и v(uj) соответственно:
и =
п =
(),
= maxn(w),
аеА
y_ =
()
а?А
= maxima;)
аеА
Функции и (и) и v(lj) примут минимальные значения, когда в C.25)
слагаемые с положительным знаком принимают минимальные значе-
значения, а слагаемые с отрицательным знаком — максимальные значения.
И наоборот, и (и) и v{uo) примут максимальные значения, когда сла-
слагаемые с положительным знаком принимают максимальные значе-
значения, а слагаемые с отрицательным знаком — минимальные значения.
Поэтому из C.25) имеем
и(и) = an - an-2uj2 + an_4a;4 - an_6a;6 + ..., C.26а)
v_(uj) = an_1uj - an-3(j3 + an_5a;5 - an-7uj7 + ..., C.266)
3.5. Робастная устойчивость 115
п(и) =ап- ап_2и;2 + ап_4о;4 - ап_6и;6 + ..., C.26в)
v(ui) = an-iuj - an_3uj3 + ап_5а;5 - ап_7со7 + ... C.26г)
Как следует из рис. 3.12, вершинам прямоугольника 1, 2, 3 и 4
соответствуют характеристические векторы
Qi (
Подставив в формулу для Qi(juj) выражения для п{ио) из C.2бв)
и для v_(uS) из C.266), получим
+ an_2(ja/J +an_3(ja;K +an_4(J4L + an_5(ja;M + ...
Отсюда, положив juj = Л, получим характеристический поли-
полином Qi(A). Аналогично можно получить характеристические поли-
полиномы, соответствующие остальным вершинам прямоугольника.
Выпишем коэффициенты при Л в порядке возрастания степени Л
всех четырех полиномов:
Qi(A): an,an_1,an_2,an_3,an_4,an_5,..., C.27а)
Q2(A): an,an_i,an_2,an_3,an_4,an_5,..., C.276)
<2з(А): an,an_i,an_2,an_3,an_4,an_5,..., C.27в)
Q4(A): an,an_i,an-2,an_3,an_4,an_5,... C.27r)
Полиномы Qi(A), ^2(А)(Эз(А) и Q4(A) называются полиномами
Харитонова.
3.5.2. Теорема Харитонова.
Необходимое условие робастной устойчивости. Так как
при робастной устойчивости в параллелепипеде C.24) должны быть
устойчивыми характеристические полиномы при всех значениях коэф-
коэффициентов из этого параллелепипеда, необходимо, чтобы был устойчи-
устойчивым характеристический полином при а^ = аг {г = 0,1,..., п). Поэто-
Поэтому для робастной устойчивости в параллелепипеде C.24) необходимо,
чтобы при а0 > 0 выполнялось условие
а0 > 0, а1>0, ..., ап > 0. C.28)
Теорема Харитонова A978). Для того чтобы система с
характеристическим полиномом Q(X) = aoAn + a\\ + ... + ап была
робастно устойчива в параллелепипеде
А = {а: а{ ^ a,i ^ai, г = 0,1,... ,п} ,
необходимо и достаточно, чтобы все полиномы Харитонова были
устойчивыми.
Доказательство. Необходимость. Так как по определе-
определению робастной устойчивости характеристический полином должен
116
Гл. 3. Устойчивость систем управления
быть устойчивым при всех значениях a Е А, то должны быть устой-
устойчивыми и полиномы Харитонова как характеристические полиномы,
соответствующие четырем различным значениям а из множества А.
Достаточность. По критерию Михайлова для робастной ус-
устойчивости при ао > 0 достаточно, чтобы годограф характеристи-
характеристического вектора при всевозможных a Е А, начавшись на положитель-
положительной вещественной полуоси, последовательно охватывал п квадрантов.
Иначе говоря, прямоугольник на рис. 3.12 должен последовательно
охватывать п квадрантов. Вещественная и мнимая части характерис-
характеристического вектора Q'(juo) = и1 (и) + jv'(u), соответствующего произ-
произвольному a' Gi, удовлетворяет неравенствам
и(и) ^ и'(и) ^ п(и), v_((jS) ^ v'(u) ^ v(uj).
Поэтому если вершины прямоугольника последовательно охватыва-
охватывают п квадрантов, то и все точки прямоугольника будут последова-
последовательно охватывать п квадрантов. Теорема доказана.
Случай п — 1,2,3,4,5. Как известно, для полиномов первого и
второго порядков положительность его коэффициентов является дос-
достаточным условием устойчивости. Поэтому в случае п = 1, 2, оче-
очевидно, для робастной устойчивости в параллелепипеде необходимо и
достаточно, чтобы выполнялось необходимое условие робастной ус-
устойчивости C.28).
Следствие. Для того чтобы система с характеристическим
полиномом Q(X) = ао\п + aiAn-1 + ... + ап была робастио устойчи-
устойчива в параллелепипеде при выполнении необходимого условия робаст-
робастной устойчивости C.28), необходимо и достаточно, чтобы были
устойчивыми:
а) в случае п = 3 полином Харитонова Qi(X);
б) в случае п = 4 полиномы Харитонова Qi(X) и Q2(X);
в) в случае п = 5 полиномы Харитонова Qi(X), Q2W uQs(X).
Доказательство. Необходимость очевидна. Поэтому докажем
достаточность. Вершины прямоугольника 1, 2, 3, 4 в 1-м квадранте
преобразуется при переходе во 2-й квадрант в 1', 2', 3', 4;, при переходе
3'
jv *
2'
4' 1'
о" 9/;
4"
1"
3
2
4 1
и
3'" 9'"
4'"
1'"
Рис. 3.13. К выводу следствия
в 3-й квадрант в 1", 2", 3", 4" и при переходе в 4-й квадрант в V",
2Ш, 3"', 4"' соответственно (рис. 3.13).
3.5. Робастная устойчивость 117
а) Если при увеличении и вершина 1 прямоугольника переходит
во 2-й квадрант, то и все остальные вершины также перейдут во 2-й
квадрант. Далее, если вершина V при дальнейшем увеличении ио не
пересекает мнимую ось, то остальные вершины также ее не пересекут.
И так как характеристический вектор 3-го порядка с положитель-
положительными коэффициентами при ио —У оо располагается в 3-м квадранте,
при п = 3 годографы характеристических векторов фгО'^О? Qz{ju)
и Яз(зш) будут последовательно охватывать три квадранта, если го-
годограф характеристического вектора Qi (juj) последовательно охватит
три квадранта. Следовательно, при п = 3 для робастной устойчивос-
устойчивости достаточно, чтобы годограф характеристического вектора Qi(joo)
последовательно охватывал три квадранта, т. е. чтобы полином Qi (A)
был устойчивым.
б) Если с ростом и вершины 1 и 2 прямоугольника, последова-
последовательно охватывая 1-й и 2-й квадранты, окажутся в 3-м квадранте, то
то же самое произойдет с вершинами 3 и 4. И если при дальнейшем
росте и вершина 2" не пересечет действительную ось, то и верши-
вершины 3" и 4" не пересекут эту ось. И так как характеристический вектор
4-го порядка с положительными коэффициентами при и —У оо распо-
располагается в 4-м квадранте, при п = 4 годографы характеристических
векторов Qz{juo) и Q±(ju) будут последовательно охватывать четы-
четыре квадранта, если годографы характеристических векторов Qi(jlj)
и ФгО'^О последовательно охватят четыре квадранта. Следовательно,
при п = 4 для робастной устойчивости достаточно, чтобы годографы
характеристических векторов Qi(jlj) и фгО'^О последовательно охва-
охватывали четыре квадранта, т.е. чтобы полиномы Qi(X) и Q2(A) были
устойчивыми.
в) Если вершины 1, 2 и 3 с ростом и, последовательно пройдя
1-й, 2-й и 3-й квадранты, окажутся в 4-м квадранте, то то же самое
произойдет с вершиной 4. И если при дальнейшем росте ш верши-
вершина 3"' не пересекает мнимую ось, то и вершина А!" не пересечет эту
ось. И так как годограф характеристического вектора 5-го порядка с
положительными коэффициентами при ио —У оо заканчивается в 1-м
квадранте, годограф характеристического вектора Q^ju) при п = 5
последовательно охватит пять квадрантов, если годографы характе-
характеристических векторов Qi(Juj), Q2(ju) и Qz{juo) последовательно охва-
охватят пять квадрантов.
Таким образом, при п = 5 для робастной устойчивости достаточ-
достаточно, чтобы полиномы Qi(A), Q2W и Bз(А) были устойчивыми поли-
полиномами.
Пример 3.10. Исследовать робастную устойчивость системы,
характеристический полином которой имеет вид
Q(\) =
Решение. В данном случае
А = {а: а0 = 1, ах = 3, 4 ^ а2 ^ 5, 2 ^ а3 ^ 3, 1 ^ а4 ^ 2},
118
Гл. 3. Устойчивость систем управления
а0 = а0 = 1, ах — а\ — 3, а2 =4, а2 = 5,
а3 = 2, аз = 3, а4 = 1, сц — 2.
Так как п = 4, то достаточно рассмотреть полиномы Qi(A) и Q2(A).
Из C.27а) и C.276) имеем
Qi(A):a4, a3, a2, ab a0,
Q2(A):a4, a3, a2, al5 a0,
или
Qi(A) = a0A4 + aiA3 +a2A2 +a3A + a4 = A4 + ЗА3 + 4A2 + 2A + 2,
Q2(A) = a0A4 + аг\3 + a2A2 + a3A + a4 = A4 + ЗА3 + 4A2 + ЗА + 2.
Необходимое условие устойчивости для обоих полиномов выпол-
выполняется.
Для полинома Qi(A) определитель Гурвица
0
из
Ql2
пг
0
а4
Ql3
=
3
1
0
2
4
3
0
2
2
Дя =
а для полинома С
а-, аз О
= 3D • 2 - 3 • 2) -1B ¦ 2 - 3 • 0) = 2 > О,
Аз =
ш
0
а2 а4 =
=
3
1
0
3
4
3
0
2
3
= 3D • 3 - 3 • 2) - 1B • 2 - 3 • 0) = 2 > 0.
На основе критерия Льенара-Шипара Qi(A) и Q2(A) являются
устойчивыми полиномами. Следовательно, в силу следствия система
робастно устойчива.
Пример 3.11. Исследовать устойчивость замкнутой системы,
если передаточная функция разомкнутой системы имеет вид
к
W(p) =
0,1 ^ к ^ 1, 0,1
0,5,
Решение. Характеристический полином замкнутой системы име-
имеет вид
Q(X) = аоА + aiA +а2А + аз,
где
ао = Т2, а\ — 2?, а2 = 1, аз = к.
Коэффициенты характеристического полинома удовлетворяют следу-
следующим условиям:
0,01 ^ а0 ^ 0,25, 0,2 ^ аг ^ 1, а2 = 1, 0,1 ^ а3 ^ 1.
Следовательно, в принятых выше обозначениях имеем
а0 = 0,01, а0 = 0,25, аг = 0,2, аг = 1,
а2 = а2 = 1, а3 = 0,1, аз = 1.
3.5. Робастная устойчивость 119
Необходимое условие робастной устойчивости выполняется. Так как
п = 3, то для робастной устойчивости достаточно, чтобы поли-
полином Qi(X) был устойчивым.
Из C.27а) получаем
Q1(\) =а3 +а2\ + а1\2 +а0Л3 = 1 + А + 0,2А2 +0,25А3.
Определитель Гурвица
Д2 = 1-0,2-0,25 <0.
Поэтому замкнутая система не будет робастно устойчива (т. е. устой-
устойчива при всевозможных значениях параметров).
Теорема Харитонова справедлива при условии, что коэффициенты
характеристического полинома изменяются на заданных интервалах
независимо друг от друга. Однако когда множества возможных значе-
значений коэффициентов характеристического полинома определяются за-
заданными множествами возможных значений параметров системы и
при этом одни и те же параметры входят в выражение для разных
коэффициентов, эти коэффициенты уже не являются независимыми.
В таких случаях условия робастной устойчивости, вытекающие из
теоремы Харитонова, являются только достаточными. Из того, что
они не выполняются, не следует, что система не может быть робаст-
робастно устойчива.
Пример 3.12. Исследовать устойчивость замкнутой системы
при всевозможных заданных значениях параметров при условии, что
передаточная функция разомкнутой системы имеет вид
W{P)= (Гр + 1)з> 0,5 ^ Л; ^ 2, 1^Г^2.
Решение. Характеристический полином замкнутой системы
имеет вид
<2(А) = а0Л3 + aiA2 + а2Л + а3,
где
ао = Г3, ai=3T2, а2=ЗГ, а3 = 1 + к.
Для граничных значений коэффициентов характеристического
полинома имеем
а0 = 1, ао = 8, Огу =3, Ъ\ = 12, а2 = 3,
п2 = 6, а3 = 1,5, аз = 3.
В данном случае коэффициенты характеристического полинома
не являются независимыми. Но, тем не менее, воспользуемся сначала
теоремой Харитонова.
Так как п = 3, достаточно рассмотреть полином (см. C.27а))
Q1(\) = а3 + а2Л + ах\2 +а0Л3 = 3 + ЗА + ЗА2 + 8Л3.
Все коэффициенты больше нуля, но определитель Гурвица
А2 = а2ах - а3а0 =3-3-3-8<0.
120 Гл. 3. Устойчивость систем управления
Следовательно, условие робастной устойчивости не выполняется. Од-
Однако, как покажем, замкнутая система устойчива при всевозможных
заданных значениях параметров.
Действительно, при положительных значениях параметров необ-
необходимое условие устойчивости выполняется, и определитель Гурви-
ца 2-го порядка
А2 = п1а2 - а0а2 = ЗГ2ЗГ - Г3A + к) = Г3(8 - к)
будет положительным при к < 8.
Таким образом, система устойчива при любых значениях пара-
параметров из области, определяемой неравенствами
Т > 0, 0 < к < 8.
Очевидно, заданные значения параметров принадлежат этой об-
области.
Задачи
1. По заданным характеристическим уравнениям исследовать
устойчивость системы:
а) Л6 + 2Л5 + ЗА4 + 4А2 + А + 1 = 0; б) Л4 + ЗА3 + ЗА2 + 2А = 0;
в) А3 + ЗА2 + 2А + 1 = 0; г) А4 + 4А3 + 2А2 + А + 1 = 0;
д) А4 + 4А3 + 6А2 + 5А + 2 = 0.
2. По заданным передаточным функциям разомкнутой системы
исследовать устойчивость замкнутой системы с помощью критерия
Найквиста:
^ = -^-; в) W(s) = °f+^
s 1 s(
;-1' ^ " V°;~ 8-1' ¦ ¦ ' 8(8- ,
O(s + 1) ,„„,_, 10e-°-ls ч„г/ч lOe"
3. По заданным передаточным функциям разомкнутой системы
определить критическое значение запаздывания:
в) W(s) =
8(8 + 1У
4. По заданным передаточным функциям разомкнутой системы
определить область устойчивости замкнутой системы:
г; б) w(s) = —^—r,
@,1s
(Ts +1K'
Задачи
121
5. Заданы передаточные функции разомкнутых систем. Опреде-
Определить граничное значение передаточных коэффициентов:
ГЬ
a) W(s) =
в) W(s) =
г; 6)W(s) =
lJ@,ls
г; r)w(s) =
к
6. Исследовать устойчивость системы
J
р
Х4
1
f
Хз
W2
1*3
<
,21, W2=
= 0,5;
6) xi = 0,1 e, у
= 0,1 ^/, ж4 = 0,52/.
7. При заданных ниже характеристических уравнениях систем
управления и множествах возможных значений их коэффициентов
исследовать робастную устойчивость:
а) Л3 + aiA2 + а2\ + 0,5 = 0, 1 ^
+ a2A + a3 = 0, 1 ^ а
б) Л3 +
в) Л4 +
г) А4 +
^ 2, 0,5 ^ а2 ^ 1,5;
^ 2, 0,5 ^ a2 ^ 1,5,
0,2 ^ а3 ^ 0,5;
+ 2Л2 + ЗА + а3 = 0, 1 ^ ах ^ 2, 0,2 ^ а3 ^ 0,5;
+ 2А2 + а3А + 1 = 0, 1 ^ ах ^ 2, 0,2 ^ а3 ^ 0,5.
8. Исследовать устойчивость системы управления, приведенной в
задаче б данного задания, при следующих передаточных функциях и
множествах значений параметров:
Wl(p) = ?, W2(p) = ^
W4(p) = 0,5, 0,2 ^ к
-p, W3(p) = 0,2,
, 0,1 ^T^ 0,5.
9. Задана структурная схема замкнутой системы (с отрицатель-
отрицательной обратной связью), состоящая из регулятора и объекта с переда-
передаточными функциями Wp(s) и Wo(s) соответственно. Передаточная
функция объекта равна Wo(s) = —; —-. Исследовать устойчивость
S S | X J
S yS —|— X J
системы при типовых законах управления:
а) l^p(s) =
б) Wp(s) =
и
122 Гл. 3. Устойчивость систем управления
b)Wp(s) = 2 + ^ и Wp(s)=0,2 + -;
S S
г) Wp(s) =2 + 0,2s + ^ и Wp(s) = 2 + 2s + -.
s s
10. Задана структурная схема замкнутой системы (с отрицатель-
отрицательной обратной связью), состоящая из регулятора и объекта с пере-
передаточными функциями Wp(s) и Wo(s) соответственно. Передаточная
функция объекта равна Wo(s) = ^-7 г. Исследовать, при каких
S2{S + 1)
типовых законах управления (передаточных функциях Wp(s)) система
структурно устойчива.
Глава 4
КАЧЕСТВО СИСТЕМ УПРАВЛЕНИЯ
Помимо требования устойчивости, к системе управления предъ-
предъявляются определенные требования по ее качеству. Под качеством
системы управления понимается совокупность требований, которые
прямо или косвенно характеризуют точность ее работы.
В данной главе рассматриваются различные показатели качества.
Кроме того, вводятся понятия статических и астатических систем и
определяется структура астатических систем.
4.1. Показатели качества и типовые воздействия
Наиболее полной характеристикой качества системы управления
является ошибка (рис. 4.1, а)
e(t)=g(t)-y(t).
Так как y(t) = Wyg(p)g(t) + Wyf(p)f(t), где Wyg(p) и Wyf(p) — переда-
точные функции относительно выхода у и входов д и / соответствен-
соответственно, то
e(t) = g(t) - y(t) = Weg(p)g(t) - Wyf(p)f(t). D.1a)
Здесь Weg (p) = 1 — Wyg (p) — передаточная функция относительно вы-
выхода е и входа д, которая называется передаточной функцией ошибки
по задающему воздействию.
W(p)
Рис. 4.1. Схемы приложения возмущений; возмущение приложено не на
входе (а) и на входе F) сравнивающего устройства
124 Гл. 4- Качество систем управления
Используя передаточную функцию Wef (р) относительно выхода е
и входа /, называемую передаточной функцией ошибки по возмуще-
возмущению, формулу D.1а) можно записать в виде
e(t) = Weg{p)g(i) + Wef(p)f(t). D.16)
Эта формула совпадает с D.1а) и определяет ошибку только в том
случае, когда возмущение / приложено не на входе сравнивающего
устройства, как это показано на рис. 4.1, а. Только в этом случае
Wef(p) = —Wyf(p). Если возмущение приложено на входе сравниваю-
сравнивающего устройства (рис. 4.1, б), то для определения ошибки нужно поль-
пользоваться формулой D.1а).
Как видно из D.1а)-D.1в), ошибку можно представить в виде
суммы
e(t)=eg(t)+ef(t), D.1в)
где
eg(t) = Weg(p)g(t), ef(t) = Wef(p)f(t),
или, если возмущение приложено на входе сравнивающего устройства
(в точке приложения задающего воздействия),
Ч = -WyfW- D-2)
Первая составляющая eg(t) называется ошибкой от задающего
воздействия, вторая составляющая— ошибкой от возмущения. Если
на систему действует несколько возмущений, то ошибка от возмуще-
возмущений будет равна сумме ошибок от каждого возмущения.
Ошибка e(t), являясь функцией от времени, не очень удобна для
оценки качества систем управления. Поэтому на практике при оценке
качества чаще используют числовые показатели, которые прямо или
косвенно характеризуют точность воспроизведения заданного дви-
движения. Показатели качества делятся на показатели качества в пере-
переходном режиме и показатели качества в установившемся режиме.
О качестве системы управления имеет смысл говорить, если она
устойчива. Поэтому показатели качества определяют при предполо-
предположении, что система устойчива.
Ошибка e(t) зависит как от свойства системы управления (т. е. от
уравнения), так и от внешнего воздействия. По этой причине показа-
показатели качества как характеристики свойства системы определяют при
определенных внешних воздействиях, называемых типовыми.
При оценке качества в переходном режиме в качестве типового
воздействия используют ступенчатую функцию АЛ{Ь) (А — констан-
константа), а при оценке качества в установившемся режиме — полиномы
времени t: At, At2, ...
4.2. Показатели качества в переходном режиме
Показатели качества в переходном режиме делятся на прямые и
косвенные показатели. Последние делятся на корневые, частотные
и интегральные.
4-2. Показатели качества в переходном режиме
125
4.2.1. Прямые показатели качества. Как отмечалось, при
определении показателей качества в переходном режиме в качестве
типового воздействия используется ступенчатое воздействие А • l(t).
Характер переходного процесса не зависит от величины А. Реакция
системы y(t) на входное воздействие А • l(t) пропорциональна пере-
переходной функции h(t), являющейся реакцией системы на единичное
ступенчатое воздействие l(i): y(t) = Ah(i). Поэтому обычно принима-
принимают А = 1.
При ступенчатом воздействии ошибка
e(t) =
отличается от переходной функции на постоянную величину. Поэто-
Поэтому при оценке качества в переходном режиме вместо ошибки также
используют переходную функцию.
Прямыми показателями качества называются показатели, кото-
которые получаются непосредственно по переходной характеристике. Из
прямых показателей качества наиболее часто используют время регу-
регулирования и перерегулирование.
Временем регулирования tp называется минимальное время, по
истечении которого (с момента подачи ступенчатого воздействия)
отклонение выходной величины от установившегося значения /г(оо)
не превышает некоторой заданной величины А.
Математически это определение можно записать следующим об-
образом:
tp =min{Tp: \h(t) - h(oo)\ ^ A, t^ Гр}.
Обычно принимают А = @,05 -^ 0,1)/г(оо).
Для определения времени регулирования по переходной характе-
характеристике нужно провести по обе стороны от прямой h(t) = ft(oo) на
расстоянии А параллельные ей прямые (рис. 4.2). И время регули-
h(oo
Рис. 4.2. Переходная характеристика
126
Гл. 4- Качество систем управления
рования определяется как время tp, когда переходная характеристика
в последний раз пересекает любую из проведенных прямых.
Перерегулирование обозначают через а и определяют следующим
образом:
g — т1 /—^— • юо %,
/г(оо)
где hm — максимальное значение переходной функции.
Иначе говоря, перерегулированием называется максимальное от-
отклонение переходной функции от установившегося значения /г(оо), вы-
выраженное в процентах по отношению к /г(оо).
Если ступенчатое воздействие подать на вход, где действует воз-
возмущение (f(t) = Aq • 1(?)), то установившееся значение выходной пе-
Vf >
Рис. 4.3. Кривая переходного процесса (по возмущению)
ременной может быть малым или равным нулю, и кривая переходного
процесса будет иметь вид, показанный на рис. 4.3.
В этом случае перерегулирование определяется как максимальное
отклонение, выраженное в процентах по отношению к величине вход-
входного воздействия:
Кроме времени регулирования и перерегулирования, иногда также
рассматривают число колебаний за время регулирования tp и время
нарастания tH — время первого достижения установившегося значе-
значения (см. рис. 4.2).
Число колебаний за время регулирования NK можно рассматри-
рассматривать как прямой численный показатель интуитивного понятия «коле-
«колебательность» системы. Когда говорят, что колебательность системы
повышается, как правило, имеют в виду, что увеличивается ампли-
амплитуда или частота колебаний, колебания медленнее затухают. Во всех
этих случаях NK увеличивается.
Переходную характеристику проще всего построить с помощью
компьютера, решив дифференциальное уравнение при единичной
входной функции и нулевых начальных условиях.
(.2. Показатели качества в переходном режиме
127
4.2.2. Корневые показатели качества. В качестве корневых
показателей используют степень устойчивости и колебательность
(степень колебательности).
Степенью устойчивости г) системы управления (или харак-
характеристического полинома) называют расстояние от мнимой оси до
j Im A
j Im A
Re A
Re A
Рис. 4.4. К определению корневых показателей качества. Определение сте-
степени устойчивости (а) и степени колебательности F)
ближайшего корня ее характеристического уравнения (рис. 4.4, а).
Иначе ее можно определить следующим образом:
г) = min |Re A^| = min(— Re A^) = — max Re A^.
D.3)
Степень устойчивости характеризует быстродействие системы.
Это связано с тем, что быстрота затухания переходного процесса в
значительной мере определяется вещественной частью корня, наибо-
наиболее близко расположенного к мнимой оси.
Обозначим через ipu угол, образованный отрицательной вещест-
вещественной полуосью и прямой, проведенной из начала координат к г/-му
корню (рис. 4.4,6). Тогда степень колебательности системы (или
ее характеристического полинома) можно определить следующим об-
образом:
tv = tg</?max, D.4a)
или, что то же,
/л = max
Im Xu
Re A*,
D.46)
Степень колебательности, называемая также колебательностью,
косвенно характеризует колебательность системы. Если степень ко-
колебательности равна нулю, то переходный процесс будет апериоди-
апериодическим. В общем случае можно ожидать, что при одинаковой степени
устойчивости число колебаний за время регулирования будет больше
у той системы, у которой больше степень колебательности.
128
Гл. 4- Качество систем управления
При исследовании степени устойчивости удобно воспользоваться
следующим преобразованием. Исходный характеристический полином
Q(A) = а0Хп + сцХ1-1 + ... + ап
преобразуем, сделав подстановку Л = q — с. Тогда получим
Qn(q) =
x=q_c
= aOnqn
где
dn~kQ{\)
(n - Jfc)! д\п~к
Л=-с
А; = 0,1, 2,..., п.
D.5)
D.6)
Преобразование А = q — с соответствует сдвигу мнимой оси
влево на с, и преобразованный полином Qn(q) будет устойчивым
полиномом, если с < rj (rj — степень устойчивости исходного поли-
полинома), и неустойчивым полиномом, если с> rj. Поэтому исследование
степени устойчивости полинома Q(X) сводится к исследованию устой-
устойчивости преобразованного полинома Qn(q)-
Вывод формулы D.6). В силу равенства Qn(q) = Q(X)\X=
имеем
_ dQ(X)
dq2
Из D.5) и D.7) следует
q=0
"" dq
_ d2Q(\)
д\2
q=0
X=-c
OX
\=-c
D.7)
dq
dQ(X)
Oq*
,=о дХ
_ d2Q(X)
\=-c
X=-c
г!а„_ш =
dqi
q=0
\=-c
При подстановке п — i = к последняя формула принимает вид
(п - к)\акп =
d"-kQJ
dq
n — k
dn~kQ(X)
q=0 0Xn~k
Л=-с
Отсюда получаем D.6).
Пример 4.1. Задан характеристический полином
Q(X) =A4 + 2A3 + 5A2+3A + 1.
Исследовать, превышает ли степень устойчивости заданного поли-
полинома 1.
(.2. Показатели качества в переходном режиме
129
Решение. Убедимся сначала, что рассматриваемый полином яв-
является устойчивым полиномом, для чего вычислим определитель Гур-
вица 3-го порядка, составленный из его коэффициентов:
Д =
0
аз
а2
ах
0
аз
—
2
1
0
3
5
2
0
1
3
= 2A5 - 2) - 9 = 17 > 0.
Полином Q(X) является устойчивым. Сделаем подстановку А = q — 1 и
вычислим коэффициенты преобразованного полинома. В данном слу-
случае п = 4 и с = 1. Поэтому из D.6) получаем
Л=-1 = А4 + 2А3 + 5А2 + ЗА + 1|л=_х = 2,
dQ(X)
Л=-1
= 4Л3 + 6А2 + 10А + 3
Л=-1
= -5.
Без дальнейших вычислений ясно, что необходимое условие устой-
устойчивости преобразованного полинома не выполняется, и он является не-
неустойчивым полиномом. Следовательно, степень устойчивости т\ < 1.
Пример 4.2. Определить, превышает ли 1 степень устойчивости
характеристического полинома
Q(A) = А3+ЗА2+4А + 2.
Решение. Сначала проверим устойчивость заданного полинома.
Для этого достаточно проверить знак определителя Гурвица 2-го по-
порядка:
Д2 = 3-4-1.2>0.
Полином Q(X) устойчив.
Произведем подставку А = q — 1 и найдем коэффициенты преобра-
преобразованного полинома. В данном случае п = 3 и с = 1. Поэтому
из D.6) получаем
апз = <5(А)|А=_1 = Л3 + ЗА2 + 4Л + 2|л=-1 = О,
„ _ 9Q(\)
А=-1
аП1 = 2
d2Q{\)
d3Q(\)
л=-Гб-6 = 1-
Преобразованное характеристическое уравнение имеет вид
Все корни этого уравнения (qi = 0, #2,з = =bj) располагаются на мни-
мнимой оси. Следовательно, степень устойчивости рассматриваемой сис-
системы Г) = 1.
9 Д.П. Ким
130 Гл. 4- Качество систем управления
4.2.3. Интегральные показатели качества. Ошибку системы
можно представить в виде суммы:
e(t) = en(t) + eoo,
где en(i) — переходная составляющая ошибки, е^ — установившаяся
ошибка.
В качестве интегральных оценок наиболее часто используют
интегральную квадратическую ошибку
оо
J20 = fe2n(t)dt D.8)
О
(которую также называют интегральной квадратической оценкой) и
обобщенные интегральные квадратические оценки
Л 2 -|
el{t)+Tlel{t) + ... + T2k {Z(t) \dt, k = l,2,...,m, D.9)
и "I
где Ti (г = 1, 2,...,&) — весовые константы.
Смысл показателя J20 ясен из его названия, и J20 —> 0 при
тах|еп(?)| —У 0. Однако возможны случаи, когда при малых J20 сис-
система становится сильно колебательной. Это послужило одной из
причин использования обобщенных интегральных квадратических
оценок.
Рассмотрим, в чем смысл этих показателей. Сделаем это сначала
на примере показателя J21, представив его в виде
оо оо
J21 = /[е„(«) + Ten(t)]2dt - 2TJen(t)en(t) dt.
О О
Учитывая, что еп(оо) = 0 и
оо оо
fen(t)en(t)dt = fen(t)den(t) = ~е2П@),
О О
имеем оо
J21 = f[en(t) + ren(t)]2dt + те* @).
о
Отсюда следует, что J21 достигает минимума, если en(t) удовлетво-
удовлетворяет дифференциальному уравнению
тёп(*)+еп(*)=0. D.10)
Таким образом, минимизация J21 соответствует приближению пе-
переходной составляющей ошибки к решению уравнения D.10).
Аналогично можно показать, что интегральный показатель J2k
достигает минимума, если en(t) удовлетворяет дифференциальному
уравнению (к) (к_±)
nen(t) + Tk_i еп \t) + ... + en(t) = 0. D.11)
(.2. Показатели качества в переходном режиме
131
Равенство Парсеваля. Рассмотрим равенство Парсеваля, которое
используется при вычислении интегральных квадратических оценок.
Если X(s) является изображением Лапласа функции x(t) и его по-
полюсы расположены в левой полуплоскости, то справедливо равенство
Парсеваля оо оо
Jx2{t)dt=±- j\X(juj)\2du. D.12)
О -оо
Вывод формулы D.12). Равенство
оо оо
Jx2(t)dt = Jx2(t)e-Stdt
s=0
используя обратное преобразование Лапласа
c+joo
I
c-joo
можно преобразовать следующим образом:
C+JOO
/z~8tdt
c-joo
c+joo
оо оо • c-rjoo ч
fx2(t)dt= [x(t)(— f X(q)eqtdq)e
О О Ч c-joo 7
c+joo , оо ч
= ^- j X(q)(jx(t)e-(s-q)tdtjdq
s=0
s=0
c-joo x0
C+JOO
= ^~ f X(q)X(s-q)dq
c—j oo
Так как по условию все полюсы X(q) находятся в левой полуплос-
полуплоскости, можно положить с = 0 и q = juo. Проделав это, из последнего
равенства получим D.12).
Вычисление интегральных квадратных оценок. На основе ра-
равенства Парсеваля D.12) имеем
оо
J20 = ± f \En(juj)\2 duj,
D.13)
(к) 2
, D.14)
где
(к)
En(s) = L{en(t)}, En(s) = L{en(t)}, ... En(s) =
Так как
En(s) = L{en(t)} = sEn(s) - en@),
9*
132 Гл. 4- Качество систем управления
то формулу для J21 можно записать в виде
|2du> + t
Аналогичным образом можно представить формулы и для J2k (к =
= 2,3,...,т).
Определение интегральных показателей по формулам D.13), D.14)
и D.15) сводится к вычислению интеграла вида
/ = -1 7
п 2тг J
... + ап
Этот интеграл вычисляется с помощью теории вычетов и для п =
= 1,2,3 имеет следующий вид:
^ D.17а)
п = 2: I2 = %L±M^?; D.176)
2а^а\а2
_ о. т _ Ь0а2аз + (Ьг — 2ЬрЬ2)аоаз + b2aoai ,* -. ^ ч
2аоаз(а1п2 аоаз)
Пример 4.3. Вычислить интегральные показатели J20 и J21
системы (см. рис. 4.1, а, / = 0), когда передаточная функция W(p) =
_ 3
~ 0,1 р+1'
Решение. Вычислим ЕП (s) и еп @), необходимые для вычисления
указанных показателей. Но прежде всего найдем E(s). Учитывая, что
g(t) = l(t) и G(s) = L{g(t)} = 1/s, можно записать
E(s) = Weg
Установившееся значение
воо = lim sE(s) = - = 0,25.
Так как en(t) = e(t) — e^, то
En(s) = L{e(t)} - L{eoo} = E(s) - 0,25 i = ^^p-
Ha основании свойства преобразования Лапласа получаем
en@) = AmSEn(S) = slim^I=0,75.
В соответствии с D.13) имеем
т _ 1 7\ (W5
^20 — 7Г~
2тг У lOjlja; +4
4-2. Показатели качества в переходном режиме 133
В данном случае (см. D.16)) п = 1, Ьо = 0,075, а0 = 0,1, а\ — 4.
Поэтому согласно D.17а)
Ло = -^- = 0,007.
2аоа±
Теперь найдем J2i. Учитывая D.13), из D.15) получаем
J21 = j20 + r2 i. у \jwEn(jw) - еп@)|2 dw.
— оо
Так как
m / \ /п\ 0,075 s п _к 3
s?n(s) - еп@) = ^-^ - 0,75 = -^Т7Т1,
имеем
= ^20 + Т —
2тг У I 0,1 jo; + 4
du = J20 + r2h = 0,007 + 11,25 r2.
Ответ: J20 = 0,007, J2i = 0,007 + 11,25т2.
Пример 4.4. Определить интегральные показатели J2o и J2i
системы (см. рис. 4.1, а, / = 0) при условии, что передаточная функ-
ция w()
Решение. Найдем сначала изображение ошибки E(s) и устано-
установившуюся ошибку е^:
т гп/ \ v (TS + l)s ^
= hm sE(s) = hm v ^ = 0.
Отсюда получаем
p (f\ _ p(f\ _ p _ p(f\ Z? ( q\ _ fT( q) —
en@) = Hm sEn(s) = Hm ^ 2 ^ f, = 1,
^n(s) - en(o) = \ ; -1 =
Поэтому
Tjw + l 2
du: —
В данном случае n = 2, 60 = T, 6i = 1, ao = T, ai = 1, CL2 = k и со-
соответственно (см. D.176))
_ froa2 + biao _ T2A; + 1 - T _ Tk + 1
20 ~ 2aoaia2 ~ 2TA; ~ 2A; '
134
Гл. 4- Качество систем управления
Для J21 имеем
J21 = J20 + г2 -L
- еп@)|2
2тг
Tjuj2
duo = J2o + т2
Здесь 60 = 0, bi = к, а0 = Г, ai = 1 и а2 = fc. Поэтому
Тк + 1 2 к2Т т2к2 +Тк + 1
_
21
2 кТ
2Тк 2Тк
2к
Ответ:
, J2i =
т2к2
2k ' "^ 2/с
4.2.4. Частотные показатели качества. В качестве частотных
показателей качества используют резонансный пик, полосу пропуска-
пропускания, запас устойчивости по фазе и запас устойчивости по амплитуде.
Резонансный пик и полосы пропускания определяются по ампли-
амплитудной частотной характеристике (рис. 4.5). Резонансным пиком или
Рис. 4.5. Амплитудная частотная характеристика
показателем колебательности называется отношение максимально-
максимального значения Ат к начальному значению А@): М — Ат/А@). В
большинстве систем управления считается желательным, чтобы ре-
резонансный пик находится в пределах от 1,1 до 1,5. Частота о;р, при
которой A(uS) достигает максимального значения (Ат = А(ир)), назы-
называется резонансной частотой.
Полосой пропускания называют диапазон частот @, о;п),
где uju — частота, при которой А(и>П) принимает значение 0,707Л@).
Запасы устойчивости по фазе и амплитуде характеризуют бли-
близость системы к границе устойчивости и определяются по амплитуд-
амплитудно-фазовой частотной характеристике (АФЧХ) и логарифмическим
частотным характеристикам (ЛЧХ) разомкнутой системы.
4.3. Показатели качества в установившемся режиме
135
По АФЧХ запас устойчивости по амплитуде Ly и запас устойчи-
устойчивости по фазе (fy определяются следующим образом. Пусть АФЧХ пе-
пересекает окружность единичного радиуса при частоте ис, а от-
отрицательную вещественную полуось при частоте шп (рис. 4.6, а).
Рис. 4.6. Частотные характеристики разомкнутой системы: а — АФЧХ;
б — ЛАЧХ и ЛФЧХ
Запас устойчивости по амплитуде Ly = 20lg — (Un = ([/(о;^)!) и за-
пас устойчивости по фазе ipy = тг + ip(wc)- Определение запасов устой-
устойчивости по ЛЧХ показано на рис. 4.6, б.
4.3. Показатели качества в установившемся
режиме
Наиболее полной характеристикой качества системы в установив-
установившемся режиме является установившаяся ошибка. Когда внешние воз-
воздействия являются функциями времени, установившаяся ошибка как
вынужденная составляющая ошибки также является функцией вре-
времени. Поэтому в общем случае установившуюся ошибку будем обоз-
обозначать eB(t). Установившаяся ошибка определяется следующим об-
образом:
eB(t) = lim e(t).
Если на систему действуют два внешних воздействия — задаю-
задающие воздействия g(t) и возмущения /(?), то установившуюся ошибку
можно представить в виде суммы:
eB(t) = eBg(t)+eBf(t),
где евд (t) и eBf (t) — установившиеся ошибки от задающего воздейст-
воздействия g(t) и возмущения f(t) соответственно.
136 Гл. 4- Качество систем управления
Коэффициенты ошибок. Числовыми показателями качества в
установившемся режиме являются коэффициенты ошибок, которые
определяются следующим образом.
Как покажем ниже, установившуюся ошибку eBg(t) можно пред-
представить в виде ряда
евд (t) = CgOg(t) +Cgl^+ Cg2 ^ + ..., D.18a)
где
dsl
, г = 1,2,... D.186)
s=0
Здесь Weg(s) — передаточная функция относительно входа g(i) и вы-
выхода e(t). Коэффициенты Cgk (к = 0,1, 2,...) называются коэффици-
коэффициентами ошибки по задающему воздействию.
Аналогично можно представить установившуюся ошибку eBf(i):
eBf(t) = Cfo№ + Cfl^+ С/г ^^ + - - -, D.19a)
Cfo = Wef@), Cfi = \dlW^}S)\s=0' * = l,2,... D.196)
Здесь Wef(s) — передаточная функция относительно входа f(t) и вы-
выхода e(i). Предполагается, что возмущение не приложено в одной точ-
точке с задающим устройством. Коэффициенты Cfk (к = 0,1, 2,...) на-
называются коэффициентами ошибки по возмущению.
Первые три коэффициента ошибок имеют специальные названия:
С9о и G/о — коэффициенты позиционной ошибки; Сд\ и G/i — коэф-
коэффициенты скоростной ошибки; Сд2 и G/2 — коэффициенты ошибки
по ускорению.
Вывод формул D.18). Если воздействие g(t) начинает дейст-
действовать в момент ?о ^ 0, то ошибка eg(t) определяется по формуле:
t
eg(t) = Jweg(t-r)g(r)dT,
о
где weg(t) — весовая функция относительно входа g(t) и выхода e(t).
Если воздействие g(t) начинает действовать в момент ^о = — оо, то
к моменту t ошибка eg (t) установится и станет равной евд (t). Поэтому
имеем t
eBg(t) = J weg(t - r)g(r) dr.
— оо
Сделав замену переменных ? = t — г, получим
eBg(t) =
f
о
Разложим функцию g(t — ?) в ряд Тейлора в точке t:
4.3. Показатели качества в установившемся режиме 137
Подставив это выражение, верхнюю формулу для eBg(t) можно
представить в виде
„ и\ - г п(+\ -и Г dg^ -u Г ^9^ -и
e*g\P) - Lo9(t) + Oi —jj- + G2 -^2 Ь ...,
где
оо оо
f ±11)<?<%, г = 1,2,...
Остается показать, что Ck = C^, fc = 0,1, 2,...
Передаточная функция Weg(s) связана с весовой функцией преоб-
преобразованием Лапласа:
оо
оо
Weg(s) = jweg{t)e-stdt.
j
о
Дифференцируя обе части этого равенства % раз по s, получим
f
О
Следовательно,
оо
= f(-iyfweg(t)e-stdt, i = 1,2,...
О
Co = fweg (t) dt = fweg (t)e~st dt = Weg @) = Co,
J J s=0
0 0
oo oo
= ^7 f(-l)itiweq(t)dt = -t [(-1уётери)е~8Ыг
i\ J y г! J y
= 1 dlWeg(s)
i\ dsi
s=0
Статические и астатические системы. Установившаяся
ошибка при постоянном внешнем воздействии называется статичес-
статической ошибкой.
Система называется статической, если статическая ошибка
отлична от нуля, и астатической, если статическая ошибка равна
нулю.
Можно говорить о статической и астатической системах относи-
относительно того или иного внешнего воздействия.
Система называется статической относительно задающего воз-
воздействия (возмущения), если статическая ошибка от задающего воз-
воздействия (возмущения) отлична от нуля, и астатической относи-
относительно задающего воздействия (возмущения), если статическая
ошибка от задающего воздействия (возмущения) равна нулю.
Формулы D.18) и D.19) при постоянных g и / принимают вид
eBg(t) = egoo = CgOg, Cg0 = Weg@),
eBf(t) = e/oo = C/o/, Cf0 = Wef@).
Отсюда следует, что система будет статической относительно воз-
воздействия g (возмущения /), если Сдо ф 0 (С/о Ф 0), и астатической
138 Гл. 4- Качество систем управления
относительно задающего воздействия д (возмущения /), если Сдо = О
(С/о = 0).
Говорят, что астатическая система относительно задающего воз-
воздействия обладает астатизмом r-го порядка, если
СдО = Сд\ — . . . — СдГ-1 = 0, СдГ ф 0.
Аналогично определяется астатическая система с астатизмом
r-го порядка относительно возмущения.
Если система обладает астатизмом r-го порядка, то коэффициенты
ошибок Cgi (Cfi) при г = 1,2,...,г можно определить следующим
образом:
С -
Сдг-
дг
- Wef("s)
-12 г
Иначе говоря, этими более простыми, чем D.186) и D.196), формулами
можно пользоваться при вычислении до первого отличного от нуля
коэффициента включительно.
Вывод формул D.20). Первые г коэффициентов ошибки по за-
задающему воздействию равны нулю, если
Weg@) = 0,
г = 1,2,...,г-1.
Последнее имеет место, если s = 0 является r-кратным нулем пе-
передаточной функции Weg(s), т.е. если Weg(s) можно представить в
виде
Weg(s) = srW0(s), Wo@) ф 0. D.21)
Отсюда видно, что формулы D.20) при г — 1,2,..., г — 1 справедливы.
Остается показать, что они справедливы и при i = г.
Продифференцируем Weg(s) г раз по s:
=rsr wo(s) + srWi(s), Wi(g)
as
^|M = r(r - l)sr-2W0(s)
dWo(s)
= r
+rWi(s) + s;
ds ds
= r(r - l)(r - 2)er-3W0(e) + sr-2W3(s),
W3(s) = r(r - 1) —-7-^ + (r -
7 + (r l)H^(s) + s
drWeg(s) I ТТЛ / \ i ТТЛ / \
—-1±-L = r\ W0(s) + sWr(s),
dsr
dsr
Wr(s)r(rl)...2^ + 2Wr-1(s)+s
ds ds
Из последнего соотношения получаем
0 uwls=o sr
i
г!
что и требовалось показать.
4-3. Показатели качества в установившемся режиме
139
Пример 4.5. Определить установившуюся ошибку системы
(рис. 4.7) при Wi = 0, 5, W2 = , 4 ч , g(t) = 1 + 0,11 и f(t) = 0,2.
9D
W2(p)
Рис. 4.7. Типовая схема системы управления
Решение. Так как все производные от f(t) и производные
2-го порядка и выше от g(t) равны нулю, формулы D.18а) и D.19а)
принимают вид
dg{t)
eBg(t) = CgOg(t)
dt
eBf(t) = Cfof(t).
Поэтому для определения искомой ошибки достаточно вычислить
коэффициенты ошибок Сдо, Сд±, С/о-
Передаточные функции ошибки имеют вид
-4
w / ч _
Отсюда Cg0 = Weg@) = 0, C/o = И^ер@) = -2. Так как Сд0 = О,
то Cpi можно вычислить по формуле D.20):
= 0,5.
Таким образом, для ошибок имеем
евд = 0,5 • 0,1 = 0,05, ев/ = -2 • 0,2 = -0,4,
ев = евд + ев/ = 0,05 - 0,4 = -0,35.
Пример 4.6. Определить установившуюся ошибку системы
(см. рис. 4.7) при Wi(p) = 0,5 + М, ^2(р) = ^^у, 5(«) = 1 + 0,1*,
/(*) = 0,2 A + *).
Решение. Так как производные от g(t) и f(t) 2-го порядка и
выше равны нулю, то формулы D.18а) и D.19а) принимают вид
dg(t)
eBg(t) = CgOg(t) + Сд1
dt
J1 dt '
Поэтому для определения ошибки достаточно вычислить первые два
коэффициента ошибок. Передаточные функции ошибки имеют вид
W (s) = l
едК } 1 + Wi(
s)W2(s)
2s + 0,4'
140 Гл. 4- Качество систем управления
w / ч _ -W2(s) _ -4s
Отсюда
Сд0 = Weg @) = 0, С/о = We/ @) = 0.
Так как коэффициенты позиционной ошибки равны нулю, коэф-
коэффициенты скоростной ошибки можно вычислить по формуле D.20):
_ Weg(s) = s(s + l) = 0^
s S + 1+2S + 0A ^^
s=0
s=0
Таким образом, для ошибок имеем
евд = 0, ев/ = -10 • 0,2 = -2, ев = евд + ев/ = -2.
4.4. Структура астатической системы управления
Рассмотрим систему управления с двумя входами (см. рис. 4.7).
Пусть передаточные функции W\ и И^2 имеют вид
Передаточная функция разомкнутой системы имеет вид
где P(s) = P1(s)P2(s), R(s) = R1(s)R2(s).
Передаточная функция ошибки по задающему воздействию име-
ет вид 1 R(s)
Для того чтобы система управления была астатической с астатизмом
r-го порядка относительно задающего воздействия, как было пока-
показано, передаточная функция Weg(s) должна иметь вид D.21). А это
возможно, если передаточную функцию разомкнутой системы можно
представить в виде
W(8) = ±W0(s), Wo@) = gg| = l. D.22)
Передаточная функция разомкнутой системы имеет такой вид, ес-
если система содержит г последовательно соединенных интегрирующих
звеньев.
Интегрирующие звенья должны быть включены в основной кон-
контур, а не в контур, образованный местной обратной связью. При этом
они могут быть включены параллельно с какими-либо другими эле-
элементами. Например, предположим, что Wi(s) — передаточная функ-
функция ПИД-регулятора:
W!(s) =кП + кДз + —.
S
4-4- Структура астатической системы управления 141
В данном случае интегрирующее звено включено параллельно с про-
пропорциональным и дифференцирующим звеньями. После приведения к
общему знаменателю получим
I/I/ / Q \ / I/» Q I [/» О I §/* \
У У ]_ \О J V^n*^ *^ *Ь11^ *^ ^И / 5
s
что соответствует последовательному соединению форсирующего зве-
звена 2-го порядка и интегрирующего звена.
Таким образом, для того чтобы система управления была ас-
астатической с астатизмом r-го порядка относительно задающего
воздействия, нужно чтобы она содержала г последовательно сое-
соединенных интегрирующих звеньев. При этом не важно, в какой точке
замкнутого контура они включены.
Передаточная функция ошибки по возмущению имеет вид
"Ke/W i + W-(e) Rl(s)R2(s) + P1(s)P2(s)'
Передаточная функция W(s) разомкнутой системы и соответствен-
соответственно передаточные функции Wi(s) и W2(s) не могут содержать мно-
множитель s, так как, если W(s) имеет множитель s, через такую сис-
систему не передается постоянная составляющая. Поэтому для того
чтобы передаточная функция Wef(s) могла быть представлена в виде
Wef(s) = srWo(s), W@) Ф 0, нужно, чтобы Ri(s), т.е. знаменатель
передаточной функции W\(s), содержал множитель sr.
Таким образом, для того чтобы система управления была ас-
астатической с астатизмом r-го порядка относительно возмущения,
нужно, чтобы она содержала г последовательно соединенных ин-
интегрирующих звеньев, включенных между точкой съема ошибки е
и точкой приложения возмущения /.
Если система управления является астатической с астатизмом г-го
порядка, то
С=0 i = 01 т — 1* С = — D 23а)
когда система является астатической относительно задающего воз-
воздействия, и
Cfi = 0, г = 0,1.....Г- 1; Cfr = —, D.236)
когда система является астатической относительно возмущения.
Здесь к — передаточный коэффициент разомкнутой системы, к\ —
передаточный коэффициент звена, включенного между точкой съема
ошибки и точкой приложения возмущения.
Первые г равенств в D.23) следуют из определения астатической
системы с астатизмом r-го порядка. Последнее равенство в D.23а)
получается следующим образом.
В силу D.22)
w - 1
69 1 + W(s)
s=0- к'
142 Гл. 4- Качество систем управления
Когда система является астатической с астатизмом r-го порядка
относительного возмущения, передаточные функции Wi(s) и W2(s)
можно представить в виде
Wio(O) = W20@) = 1 (i/^O),
и передаточная функция ошибки относительно возмущения имеет вид
Т/Г/' ( q\ — ^ ^ — 20 V /
epV J l^W1(s)W2(s)
Отсюда
_ Wef(8)
sr
1
3=0 к
Если возмущение f(t) действует на входе сравнивающего уст-
устройства, то (см. D.2))
е/(*) = -Wyf(p)f(t),
и коэффициенты ошибки по возмущению определяются по передаточ-
передаточной функции —Wyf(s). В этом случае, чтобы система управления бы-
была астатической с астатизмом r-го порядка относительно возмущения,
нужно, чтобы передаточная функция Wyf(s) могла быть представлена
в виде D.21). Так как
где W(s) = P(s)/R(s) — передаточная функция разомкнутой систе-
системы, то она не может быть представлена в виде D.21).
Таким образом, если возмущение приложено в точке приложе-
приложения задающего воздействия, система управления не может быть
астатической относительно этого возмущения.
Пример 4.7. Определите порядок астатизма и установившуюся
ошибку системы (см. рис. 4.7) при W1{p) = kn -\—-, W2 = -, —г—,
g(t) = a + Ct, f{t) =c (c = const).
k k s + k
Так как передаточная функция W\ (s) = kn-\—- = — и
s s
передаточная функция разомкнутой системы
w(s) = w1(s)w2(s) = kiKst+k;\
то рассматриваемая система управления является астатической с
астатизмом 2-го порядка относительно задающего воздействия и аста-
астатической с астатизмом 1-го порядка относительно возмущения. Сле-
Следовательно, коэффициенты ошибки С9о = С9\ — 0 и G/о — 0- Уста-
Установившаяся ошибка
eB(t) = eBg(t) + eBf(t) = CgOg(t) + Cgl^- + Cfof(t) = 0.
4-5. Инвариантность и принцип двухканалъности
143
4.5. Инвариантность и принцип двухканальности
Как отмечалось при рассмотрении принципов управления, спо-
способ управления по возмущению позволяет полностью компенсировать
влияние возмущающего воздействия на выходную (управляемую) пе-
переменную. При полной компенсации возмущения f(t) выходная
переменная y(t) при действии f(t) остается такой же, как и при его
отсутствии, т.е. остается неизменной (инвариантной). Поэтому если
выходная переменная системы не зависит от какого-либо воздейст-
воздействия, то такую систему (выходную переменную) называют инвариант-
инвариантной от этого воздействия. Таким образом, инвариантность системы
от воздействия f(t) означает независимость ее выходной переменной
от f(t). Рассмотрим условия инвариантности.
Пусть на систему действуют два внешних воздействия, g(t) и f(i).
Тогда выходную переменную y(t) можно представить в виде
где yg(i) — реакция системы на g(t) при f(t) = 0; yf(i) — реакция
системы на f(t) при g(t) = 0.
Если Wyf(p) — передаточная функция относительно входа f(t) и
выхода y(t) и, следовательно,
то yf (t) = 0 только при
Wyf(p) = 0. D.24a)
Рассмотрим, как можно реализовать это условие инвариант-
инвариантности.
Пусть в системе используется принцип управления по возму-
возмущению f(t) и Wyf(p) — передаточная функция канала возмуще-
возмущения, Wyf(p) — передаточная функция канала компенсации (рис. 4.8).
Канал возмущения
Рис. 4.8. Принцип двухканальности
Так как канал возмущения и канал компенсации соединены па-
параллельно, то Wyf(p) = Wyf(p) + Wyf(p), и условие инвариантнос-
инвариантности D.24) можно представить в виде
= -W:f(p). D.246)
144
Гл. 4- Качество систем управления
Необходимость наличия по меньшей мере двух каналов для реали-
реализуемости условия инвариантности Б.Н. Петров сформулировал в виде
следующего принципа.
Принцип двухканальности. В динамической системе
должно быть по меньшей мере два канала прохождения возмущаю-
возмущающего воздействия к переменной, инвариантность которой от этого
воздействия должна быть обеспечена.
Задачи
1. Определить, обладают ли заданные системы управления степе-
степенью устойчивости г] ^ 0,5:
a) W(s) =
4—-, 6)W{s) = -^-
100
2. По заданным передаточным функциям разомкнутой системы
определить интегральные квадратическую оценку J20 и обобщенную
квадратическую оценку J21 замкнутой системы:
в) W(s) =
0,2
-; r)W(s) =
0,2(s
3. Определить установившуюся ошибку системы
1/@
для следующих данных:
а) (?(*) = 0,11, /(*) = 0,2, W(p) = l + 0,lp, W(p) =
б) (?(*) = 0,11, f(t) =0,2,
в) (?(*) = 0,1, /(t)=0,2t,
rM(i) = 0,l, /(*) =0,2*,
10
4. Какая из систем, приведенных в задаче 3, является астатичес-
астатической относительно задающего воздействия, относительно возмущения,
относительно задающего воздействия и возмущения и почему?
Задачи 145
5. В системе управления, приведенной в задаче 3, передаточная
функция объекта Wo(s) = . Выяснить, каким порядком астатиз-
s ~т~ 1
ма обладает система относительно задающего воздействия и относи-
относительно возмущения при следующих законах управления:
a) Wp(s) = 1 + 0,1 я; б) Wp(s) = 1 + М;
в) Wp(s) = 1 + 0,2s+^.
s
6. В системе управления, приведенной в задаче 3, передаточная
функция объекта Wo(s) = —, г. Каким порядком астатизма обла-
s(s + 1)
дает система относительно задающего воздействия и относительно
возмущения при следующих законах управления:
a) Wp(s) = 1 + 0,1 s; б) Wp(s) = 1 + ^;
s
10 Д.П. Ким
Глава 5
СИНТЕЗ СИСТЕМ УПРАВЛЕНИЯ
В теории управления основными задачами, которые в ней рас-
рассматриваются, являются задачи анализа и синтеза. Задача анализа
сводится к исследованию устойчивости и качества системы управле-
управления. Методы ее решения были рассмотрены в предыдущих главах.
Настоящая глава посвящена методам решения задачи синтеза, кото-
которая формируется следующим образом:
— задана структура системы управления и по заданным показа-
показателям качества требуется определить ее параметры;
— задан объект управления и требуется по заданным показателям
качества определить алгоритм управления.
5.1. Исследование типовых законов управления
В гл. 1 были рассмотрены типовые законы управления. Для вы-
выбора того или иного закона управления необходимо знать, какое
влияние оказывает каждое из слагаемых, входящее в закон управле-
управления, на устойчивость и качество системы управления. Для выяснения
f
У
Рис. 5.1. Типовая схема системы управления
этого вопроса рассмотрим систему управления (рис. 5.1) при типовых
законах управления, когда передаточная функция объекта имеет вид
П-з а к о н. При П-законе передаточная функция регулятора Wp (p) =
fcn, и передаточная функция разомкнутой системы имеет вид
W(p) = Wp(p)Wo(p) =
2(Тр +
5.1. Исследование типовых законов управления 147
Характеристическое уравнение
Г2Л2 + 2(Т\ + 1 + кп = О
имеет корни .
_ -с ± л/С - A + faQ
Л1,2 — jl •
Отсюда видно, что если объект управления является колебательным
звеном @ < С < 1), то замкнутая система при любом кп > 0 явля-
является также колебательным звеном, и степень колебательности \i =
кп + 1 - С2 7
= —— с ростом кП возрастает.
Когда объект является апериодическим звеном 2-го порядка
(С ^ 0), замкнутая система также является апериодическим звеном
2-го порядка при кп ^ B — 1 и колебательным звеном при кп >
> с2 -1.
Передаточные функции ошибки по задающему воздействию и по
возмущению имеют вид
W М- У
ер W 1
и для коэффициентов позиционной ошибки имеем
Отсюда видно, что при П-регуляторе рассматриваемая система яв-
является статической, и статическая ошибка убывает с ростом ки. Одна-
Однако начиная с кп = B — 1 с ростом кп увеличивается степень
колебательности.
Таким образом, можно сделать вывод: с увеличением ки качество
системы в установившемся режиме улучшается, а в переходном режи-
режиме ухудшается.
к
ПИ-закон. В этом случае Wp(p) = кп + —, передаточная функ-
функция разомкнутой системы имеет вид
и характеристическое уравнение имеет вид
Т2А3 + 2СТА2 + A + кп)Х + кш = 0.
Коэффициенты этого уравнения положительны, определитель
Гурвица 2-го порядка
А2 = 2СГA + *„) - Т2кш
2С
при кш < -^ A + кп) больше нуля и система устойчива, а при кш
2С
-^ A + кп) меньше или равен нулю и система неустойчива. Следо-
10*
148 Гл. 5. Синтез систем управления
вательно, увеличение коэффициента при интегральном члене приво-
приводит к неустойчивости системы. Естественно ожидать, что с увели-
увеличением кш в области устойчивости запасы устойчивости убывают, а
степень колебательности увеличивается.
Так как передаточные функции ошибки имеют вид
W Ы- 1 -
69 КР) 1 + W(p) р(Т2р2 + 2(Тр
W
e
¦ W(p) p(T2p2 + 2(Tp + 1) + кпр + К '
то коэффициенты ошибок имеют вид
_ 1
р=о кт
Р
p
p=o
Таким образом, при включении интегрального слагаемого в закон
управления система становится астатической, и с увеличением /си
уменьшается скоростная ошибка. Однако при этом ухудшается ка-
качество системы в переходном режиме, и с определенного кш система
становится неустойчивой.
ПД-закон. При этом законе Wp(р) = кП + кДр, а передаточная
функция разомкнутой системы
и характеристическое уравнение имеет вид
Г2 Л2 + B(Т + кд)Х + 1 + кп = 0.
Корнями этого уравнения являются
2СГ) ± ^/{К + 2СГJ - 4Г2A
Когда подкоренное выражение неотрицательно, т.е.
или .
кд^2Т(^кп + 1-О, E-1)
система управления является апериодическим звеном 2-го порядка.
Если выполняется противоположное неравенство, т.е.
кд<2Т(^кп + 1-С), E.2)
то система является колебательным звеном, а степень устойчивос-
устойчивости г/ и степень колебательности \х соответственно принимают вид
_ кд + 2СГ _ /4T2(fcn + l) 7
_
v-
Следовательно, при выполнении условия E.2) с ростом кд степень
устойчивости возрастает, а степень колебательности убывает.
5.1. Исследование типовых законов управления 149
При выполнении условия E.1) степень устойчивости имеет вид
_ К + КТ - У(кД + 2СГJ - 4Г2(/сп + 1)
и, продифференцировав это выражение по кд, получим
1
\1_ К + 2СГ
f 2CTJ - '
Следовательно, в этом случае степень устойчивости с ростом кд
убывает.
Передаточные функции ошибки имеют вид
W ( ) - 1 - ТУ + 2С,Тр + 1
в9^ ~ 1 + W(p) ~ Т2р2 + BСТ + кд)р + 1 + кп '
Т V + BСТ
и для коэффициентов позиционной ошибки имеем
Таким образом, введение в закон управления дифференцирующего
члена улучшает качество системы в переходном режиме. На качест-
качество системы в установившемся режиме (при постоянных внешних воз-
воздействиях) он никакого влияния не оказывает. Но следует иметь в ви-
виду, что при чрезмерном увеличении кд качество системы в переходном
режиме может ухудшиться.
ПИД-закон. В этом случае Wp(p) = ки + кдр -\—-, передаточная
функция разомкнутой системы имеет вид
w(P) = wp(p)wo(P) = (г*у^
и характеристическое уравнение имеет вид
Т2Л3 + BСТ + кд)Х2 + A + кп)Х
Определитель Гурвица 2-го порядка
выбором кд всегда можно сделать положительным.
Таким образом, введение в закон управления интегрирующего
члена может сделать устойчивую систему неустойчивой, а введение
дифференцирующего члена может сделать неустойчивую систему
устойчивой.
Для коэффициентов ошибки имеем
we
1
J J J р Р=о
150 Гл. 5. Синтез систем управления
Все основные выводы о влиянии дифференцирующего и интег-
интегрирующего членов на качество системы, полученные на основе рас-
рассмотрения ПИ-закона и ПД-закона управления, сохранятся и при
рассмотрении ПИД-закона.
Итак, основные выводы таковы:
1) введение в закон управления интегрирующего члена делает
систему астатической и улучшает качество системы в устано-
установившемся режиме, но оказывает дестабилизирующее влияние (т. е.
может сделать систему неустойчивой) и ухудшает качество сис-
системы в переходном режиме;
2) введение в закон управления дифференцирующего члена оказы-
оказывает стабилизирующее влияние (может сделать неустойчивую сис-
систему устойчивой) и улучшает качество системы в переходном ре-
режиме, не оказывая влияния на качество системы в установившемся
режиме.
Хотя эти выводы получены на основе исследования системы с
объектом 2-го порядка, есть основания считать, что они в основном
справедливы и в более общем случае.
Пример 5.1. Определить, при каких типовых законах управ-
управления статическая ошибка системы (см. рис. 5.1) будет равна нулю,
когда передаточная функция объекта Wo (р) = .
Решение. Статическая ошибка будет равна нулю, если систе-
система будет астатической относительно задающего воздействия и возму-
возмущения. А для этого нужно, чтобы регулятор содержал интегрирую-
интегрирующее звено. Поэтому искомыми законами управления будут ПИ-закон
и ПИД-закон.
Пример 5.2. Определить, при каких типовых законах управ-
управления установившаяся ошибка системы (см. рис. 5.1) будет равна
нулю при условии, что Wo(p) = —, ttj g(t) = at и f(t) = b
(a, b — константы).
Решение. Так как установившаяся ошибка от задающего воз-
воздействия и возмущения имеет вид
egOo(t) = Cgoat + Cgia, efoo = С fob,
то установившаяся ошибка будет равна нулю, если Cgo = Cg\ = О
и Cfo = 0. Следовательно, система должна быть астатической с
астатизмом 2-го порядка относительно задающего воздействия и с
астатизмом 1-го порядка относительно возмущения. Так как объект
включает два последовательно соединенных интегрирующих звена,
система будет астатической с астатизмом не менее 2-го порядка отно-
относительно задающего воздействия при любом типовом законе управле-
управления. Однако она будет астатической относительно возмущения только
при ПИ-законе и ПИД-законе. При ПИ-законе передаточная функция
5.2. Синтез по минимуму интегральных оценок 151
разомкнутой системы есть
и характеристическое уравнение имеет вид
А4 + А3 + кП\ + /си = 0.
В этом уравнении коэффициент при Л2 равен нулю, и необходи-
необходимое условие устойчивости не выполняется. Поэтому система при
ПИ-законе структурно неустойчива.
При ПИД законе передаточная функция разомкнутой системы есть
= wp(p)w0(p) = кдр2^^к
и характеристическое уравнение имеет вид
Л4 + Л3 + кд\2 + кп\ + к
Определитель Гурвица 3-го порядка
1
1
0
К
1
0
— h h — h — h2
соответствующим выбором параметров регулятора можно сделать по-
положительным. Следовательно, при ПИД-законе система структурно
устойчива, и искомым законом управления является ПИД-закон.
5.2. Синтез параметров регулятора
по минимуму интегральных оценок
Рассмотрим задачу синтеза в следующей постановке. Структура
системы задана, и нужно определить ее параметры так, чтобы какая-
либо заданная интегральная оценка J2k приняла минимальное зна-
значение. После вычисления интеграла с помощью формулы Парсеваля
получим некоторую функцию от параметров
Здесь а обозначает вектор, компонентами которого являются пара-
параметры системы.
На параметры системы могут быть наложены ограничения в виде
равенств и неравенств:
Fi(a)=0, г = 1,2,...,ш; Gk(a) ^ 0, к = т + 1,т + 2,..., М.
Поэтому в общем случае рассматриваемая задача синтеза сводится к
следующей задаче на условный минимум:
J2v{ol) ->• min, Fi(a)=O, i = 1, 2,... ,m;
^O, & = m + l,m + 2,...,M. E.3)
152 Гл. 5. Синтез систем управления
Эта задача может быть решена разными способами. В частнос-
частности, заменив введением дополнительных неизвестных параметров 0^
неравенства равенствами
Fk(a,0)=Gk(a)+0l=O, к = т + 1, т + 2,..., М,
преобразуем задачу E.3) к виду
J2l/(a)-unin, Ft(a,0)=O, / = 1,2,...,М, E.4)
где 0 = @т+1,0т+2,---,0м), Ft(a, 0) = Ft(a) при I = 1, 2,... ,m.
Задача E.4) в принципе может быть решена методом неопреде-
неопределенных множителей Лагранжа. Согласно этому методу составляется
функция Лагранжа
1=1
и задача E.4) сводится к задаче на безусловный экстремум
L(a,/3,/i) —>¦ min .
Здесь ц — (/ii,/i2, • • • ,/^м) и /io = 1 в неособом случае (т.е. когда
постановка задачи имеет смысл).
Пример 5.3. При условии, что Wp(s) = fcn, Wo(s) = —-— —¦
s(^U,l s ~r 1J
и f(t) = O определить параметр fcn, при котором переходный процесс
системы (см. рис. 5.1) является апериодическим и интегральная квад-
ратическая ошибка J20 принимает минимальное значение.
Решение. Переходный процесс будет апериодическим, если кор-
корни характеристического уравнения рассматриваемой системы
0,1А2 + А + /сп = 0
будут вещественными, т.е. если детерминант этого уравнения
А = 1 — 4 - 0,1 fen ^ 0, или fen ^ 2,5.
Так как f(t)=O, то ошибка e(t) = eg(t). Объект включает ин-
интегрирующее звено. Поэтому система является астатической относи-
относительно задающего воздействия и статическая ошибка egoo(t) = 0. Пе-
Переходная составляющая ошибки
en(t) = eg(t) - egoo(t) = eg(t).
Переходя к изображениям Лапласа, получим
Следовательно,
оо оо
J20 = fe2n(t) dt = ± f \En(j
0
^ / |„„."::гтх,,. i du = h.
5.2. Синтез по минимуму интегральных оценок 153
В данном случае (см. D.16)) п = 2, Ьо = 0,1, Ъ\ = 1, а0 = 0,1, ai = 1,
а2 = fcn. Поэтому (см. D.176))
_ bga2 + frjap _ 0,01 fen + 0,1 _ п пк , 0,5
J20 " 2аоаха2 " 2 • 0,1 fen " °'U5 + fen"'
Очевидно, что J20 принимает минимальное значение при усло-
условии fen ^ 2,5, когда fen = 2,5.
Пример 5.4. При условии, что Wp(s) = fen, Wo(s) = —— —
Sy\J,X S "T" -Lу
и /(t) = 0 (см. рис. 5.1), определить значение параметра fcn, при кото-
котором обобщенная интегральная квадратическая оценка J21 при г = 0,5
принимает минимальное значение.
Решение. Согласно формуле D.15)
?w + г2 I \jwEntiw) - еп@)|2 dcv =
= J20 + 0,52^ | Ijw^O'w) - еп@)|
Как было вычислено (см. пример 5.3),
тр ( \ - 0,1s+ 1 7 0,01 /сп + 0,1
AnW-O,lS2 + S + lfen' J2°- 0,2 fcn '
Для еп@) имеем
/п\ т т^ / \ т s@,l s +1) 1
еп@) = hm sEn(s) = hm v ' -^- = 1.
Поэтому
t^ / \ /n\ s@,l s +1) 1 A;n
S^(s) 6@) '
^21 = ^20 + 0,5 —
= J20 + 0,25/2.
2тг
В данном случае п = 2, &о = 0, Ъ\ = — fen, ао = 0,1, ai = 1, п2 = fen и
r _ 6pa2 + bjao _ 0,1 feg
2~
2-0,1 fen
Подставив это выражение и выражение для J20 в полученную выше
формулу для J21, найдем
^ _ 0,01 fen + ОД 005 -Q5fc _ 0,01 fen+ 0,1 +0,025 feg
Из условия
dJ2i _ 0,025 fen-0,1 _
~SF ~ 0,2 fen ~
154 Гл. 5. Синтез систем управления
следует, что J21 достигает экстремума при кП = w ' = 2. Чтобы
У UU25
установить, чему (минимуму или максимуму) соответствует это зна-
значение, найдем вторую производную:
d2J2i = 1_
dkl kg'
В точке экстремума эта производная положительна. Следова-
Следовательно, в ней достигается минимум, и соответственно решением
будет к = 2.
5.3. Условие граничной устойчивости
и синтез систем управления
по максимальной степени устойчивости
Задача синтеза систем управления максимальной степени устой-
устойчивости ставится следующим образом. Задана структура системы
управления и требуется определить параметры регулятора, достав-
доставляющие максимум степени устойчивости.
Коэффициенты характеристического уравнения и соответствен-
соответственно степень устойчивости г) будут функциями от указанных парамет-
параметров. Рассматриваемую задачу синтеза можно сформулировать как
следующую задачу на экстремум: определить а (а — вектор пара-
параметров регулятора) из условия
г]* = г](а*) = тах?7(а).
Значение 77* называется оптимальной степенью устойчивости
и а* — оптимальным (векторным) параметром.
Число параметров регулятора (размерность вектора а) т не
должно превышать п — 1 (п — степень характеристического урав-
уравнения): т ^ п — 1. Если т ^ п и с помощью параметров можно
произвольно изменять п коэффициентов характеристического урав-
уравнения, то в этом случае корни характеристического уравнения и
соответственно степень устойчивости можно сделать равными произ-
произвольно заданным числам.
Метод решения сформулированной задачи основан на условиях
граничной устойчивости. Поэтому прежде всего рассмотрим эти ус-
условия.
5.3.1. Условия граничной устойчивости. Напомним, что сис-
система находится на границе устойчивости, или имеет место граничная
(маргинальная) устойчивость, если ее характеристический полином
имеет нейтральные (т.е. расположенные на мнимой оси) нули и не
имеет правых нулей. Такой полином называют маргинально устой-
устойчивым.
Следует заметить, что условие, которое получается при замене в
критерии Гурвица знака строгого неравенства на нестрогий, не яв-
5.3. Синтез по максимальной степени устойчивости 155
ляется условием граничной устойчивости. Действительно, например,
полином
/О) = zA + a2z2 + a4,
где
а2 = 2(C2 - а2), а4 = (а2 + /З2J, C > а > О,
удовлетворяет полученному таким путем условию: а$ > 0 и все опре-
определители Гурвица данного полинома равны нулю. Тем не менее среди
его нулей Zi52 = —ol ± j/3, 2:3,4 — ol^i jf3 два нуля являются правыми.
Рассмотрим полином с вещественными коэффициентами
/О) = aozn + ai^ + ... + ап (a0 > 0). E.5)
Утверждение 5.1 (необходимое условие маргинальной устой-
устойчивости). Если полином E.5) маргинально устойчив, то все его
коэффициенты неотрицательны:
a; ^ 0, г = 1,2,..., га. E.6)
Доказательство. Если полином E.5) маргинально устойчив и
имеет I нейтральных нулей, его можно представить в виде
f{z) = f,{z)fn-,(z),
где fi(z) — полином 1-й степени, все нули которого расположены на
мнимой оси, fn-i(z) — устойчивый полином (п — 1)-й степени.
При разложении полинома fi(z) на элементарные множители нуле-
нулевому корню соответствует множитель z, а мнимым корням jC
и —j/3 — множитель (z - j/3)(z + j/3) = z2 + /З2. Поэтому его коэффи-
коэффициенты будут положительны или равны нулю. В силу необходимого
условия устойчивости все коэффициенты полинома fn-i{z) положи-
положительны. Следовательно, коэффициенты полинома f(z) будут положи-
положительны или равны нулю.
Нуль z' полинома E.5) называют особым, если — z' также являет-
является нулем этого полинома. В частности, все нули, расположенные на
мнимой оси, являются особыми.
Полином E.5) имеет / особых нулей в том и только том случае,
когда / старших определителей Гурвица равны нулю, а (п — /)-й оп-
определитель отличен от нуля [5]:
An = An_i = ... = An_/+i = 0, Ап_/ ф 0. E.7)
При наличии s нейтральных нулей число правых нулей к опреде-
определяется по формуле [5]
к = h + \ - |, E.8)
где / — число особых нулей, к\ — число неособых правых нулей, опре-
определяемое соотношением
h = V(l, Д1, Аз, - - -) + V(l, Д2, А4, ¦ ¦ ¦ )¦ E.9)
В E.9) исключены / старших определителей, которые входят в
условие E.7); 1/A, А^, Aj,...) обозначает число перемен знаков в ря-
ряду l,Af,Aj,... Число неособых правых нулей к\ равно нулю тогда
156 Гл. 5. Синтез систем управления
и только тогда, когда все определители, входящие в E.9), положи-
положительны.
Если имеются особые нули, расположенные вне мнимой оси, то,
как следует из их определения, среди них обязательно будет правый
нуль.
Из изложенного выше вытекает следующее утверждение.
Утверждение 5.2. Полином E.5) маргинально устойчив и I ну-
нулей располагаются на мнимой оси в том и только том случае, если
выполняются следующие два условия.
1°. / старших определителей Гурвица равны нулю, а осталь-
остальные п — I определителей положительны:
Ап = Ап_! = ... = An_/+i, Дп-/>0, ..., Ai>0. E.10)
2°. Полином E.5) не имеет особых нулей, расположенных не на
мнимой оси.
При использовании данного утверждения и установлении усло-
условия 2° важную роль играет следующее утверждение.
Утверждение 5.3. При выполнении необходимого условия E.6)
особый нуль не может быть вещественным числом, и если имеются
особые нули, расположенные не на мнимой оси, то их количество
равно числу, кратному 4.
Доказательство. Представим полином E.5) в виде
f(z) = g(z2) + zh(z2),
где
g(z2) = ап + an-2z2 + an_4?4 + ...,
h(z2) = an_i + an-3z2 + an_5z4 + ...
Если вещественное число a (a/0) является особым нулем полино-
полинома f(z), то
f(a) = g(a2) + ah(a2) = 0,
/(-a) = g(a2) - ah(a2) = 0.
Складывая и вычитая приведенные выражения, получим
д(а2) = 0, h(a2) = 0.
А эти равенства при выполнении условия E.6) невозможны.
Пусть комплексное число z' = а + jC (af3 ф 0) является особым
нулем полинома f(z). Тогда нулями будут число z" = — z' и числа,
комплексно-сопряженные zf и zff: 1? = а — ЦЗ и ?" = — а + j/3.
Таким образом, мы доказали, что при выполнении условия E.6)
вещественное число не может быть особым нулем и количество осо-
особых нулей, расположенных вне мнимой оси, равно числу, кратному 4.
Утверждение 5.4. Если выполняются необходимое условие
маргинальной устойчивости E.6) и условие E.10) при 1 ^ / ^ 3, то
полином E.5) маргинально устойчив.
Это утверждение непосредственно вытекает из утверждений 5.2
и 5.3.
5.3. Синтез по максимальной степени устойчивости 157
Утверждение 5.5. Если все коэффициенты полинома E.5) с
нечетными индексами равны нулю:
а1 = аз = ... = ап = 0 при нечетном п, E.11a)
а>1 — аз = • • • = О"п-1 — О ПР^ четном п, E.116)
то все определители Гурвица равны нулю (Ai = A2 = ... = An =
= О). И наоборот, если все определители Гурвица равны нулю, то все
коэффициенты полинома E.5) с нечетными индексами равны нулю.
В справедливости этого утверждения можно убедиться, после-
последовательно вычисляя определители Гурвица, начиная с определите-
определителя 1-го порядка.
В силу утверждения 5.5, когда все нули полинома f(z) являются
особыми, вместо условия E.10) можно рассматривать условие E.11).
Нейтральные нули полинома f(z) являются нулями функции f(juj),
и их число совпадает с числом действительных корней системы урав-
уравнений
и (и) = Re f(juj) = ап — an-2Uj + an—±uj — ... = 0, E.12a)
v(u) = Im f(juj) = dn-xuj - an-3uj3 + an_5o;5 - ... = 0. E.126)
Поэтому, в силу утверждения 5.3, если при выполнении усло-
условий E.6) и E.10) будет установлено, что система E.12) имеет по мень-
меньшей мере / — 3 вещественных корней, то полином f(z) будет мар-
маргинально устойчив.
Пусть все нули полинома f(z) являются особыми. Тогда в си-
силу E.11) при п = 4 v(u) = 0, и система E.12) вырождается в урав-
уравнение
поси4 — а2Ш2 + а4 = 0, E.13)
а при п = 5 и (и) = 0, и система A.8) вырождается в уравнение
{clqlj — CL200 + cl^)uj = 0. E.14)
Уравнение E.13) имеет по меньшей мере два, а уравнение E.14)
три действительных корня, если
А = а\ -4a0a4 > 0. E.15)
Поэтому, в силу утверждения 5.3, при п = 4 и п = 5 все нули по-
полинома f(z) будут нейтральными, если выполняются условия E.6),
E.11) и E.15).
5.3.2. Метод синтеза систем управления максимальной
степени устойчивости. Метод решения этой задачи основан
на преобразовании характеристического полинома Q(X) = аоХп +
+ а\Хп~1 + ... + ап путем подстановки Л = q — 77. При этой подста-
подстановке преобразованный полином
Qn(q) = Q(q ~ rj) = coqn + cxqn~x + ... + cn, E.16)
где
d"-k^ - = 0,1,..,», E.17)
(w-fc)! a\™-
x=-v
158 Гл. 5. Синтез систем управления
становится маргинально устойчивым полиномом. И для Qn(o) вы-
выписываются условия маргинальной устойчивости, включающие усло-
условия E.6), E.10) и E.12):
q^O, г = 1,2,..., га (со>0), E.18а)
Д* = Д^ = ... = Д*_/+1 = 0, Д;и>0, ..., А?>0, E.186)
ип(си) = ReQn(juj) = 0, vn(cj) = lmQn(juj) = 0. E.18в)
Здесь Af (i = 1, 2,..., п) — определители Гурвица преобразованного
полинома Qn(o)-
Коэффициенты исходного характеристического полинома зависят
от параметров регулятора, а коэффициенты преобразованного поли-
полинома зависят еще и от степени устойчивости rj. Рассматриваемый
метод состоит в следующем: решается система E.18а)-E.18в)
относительно неизвестных параметров регулятора и степени устой-
устойчивости г] и находятся решения, у которых г\ имеет наибольшее зна-
значение.
При использовании этого метода важно знать максимально воз-
возможное значение rjm, которое может принять степень устойчивости.
Утверждение 5.6. При фиксированных по и а\ степень устой-
устойчивости г] устойчивого полинома Q(X) принимает максимально воз-
возможное значение, равное
Чт = --, E-19)
п ао
когда вещественные части всех нулей Q(X) равны между собой.
Максимально возможное значение г\ш будем также называть гра-
граничным значением @ < г) ^ rjm).
Доказательство. Разложим полином Q(X) на элементарные
множители:
Q(A) = oo(A-Ai)(A-A2)...(A-An).
Перемножив выражения в правой части, получим, что коэффициент
при Хп~1 равен ao(Ai + Л2 + ... + Лп). Учитывая, что тот же коэффи-
коэффициент равен ai, получаем
Ai+A2 + ... + An = —.
ао
Пусть нули Af имеют вид А^ = — щ + jfii, щ > 0, г = 1, 2,..., п.
В силу того, что Q(X) является полиномом с вещественными ко-
коэффициентами, если какой-либо корень А& является комплекс-
комплексным (/3fc ф 0), существует комплексно-сопряженный корень A^+i =
= —ai—jPi. Поэтому мнимые части сокращаются, и полученное
выше равенство принимает вид
ai + а2 + ... + ап = —.
ао
Отсюда следует, что степень устойчивости принимает максималь-
максимально возможное значение, определяемое равенством E.19), когда все ai
равны между собой. Действительно, если а\ не равны между собой
5.3. Синтез по максимальной степени устойчивости 159
и какое-либо с^п > г\ш = -, то существует другое с^, которое
п ао
меньше г)ш. И так как rj = minRe|Af| = mina^, то степень устойчи-
i i
вости в этом случае будет меньше т\ш.
Поиск решения задачи синтеза максимальной степени устойчи-
устойчивости следует начинать со случая, когда степень устойчивости при-
принимает граничное (максимально возможное) значение. Так как это
возможно, когда все нули исходного полинома имеют одинаковые
вещественные части или все нули преобразованного полинома Qn(o)
располагаются на мнимой оси, в силу утверждения 5.5 условие мар-
маргинальной устойчивости E.18) можно представить в виде
Cl = 0, с2 ^ 0, с3 = 0, с4 ^ 0, ..., E.20а)
соип - с2сип-2 + c4a;n - ... = 0. E.206)
Если система E.20а), E.206) не имеет решения, то нужно перейти к
системе E.18а)-E.18в) и решить ее при I ^ n — 1.
В общем случае E.18а)-E.18в) и E.20а), E.206) являются необ-
необходимыми, но не достаточными условиями граничной устойчивости
полинома Qn(o)- Поэтому, решив систему E.18а)-E.18в) или E.20а),
E.206), нужно убедится, что при найденных значениях параметров
среди особых нулей полинома Qn{o) нет правых нулей.
При решении систем E.18а)-E.18в) и E.20а), E.206) ш рассмат-
рассматривается как (вещественный) параметр. Если удается найти требуе-
требуемое решение указанных систем при и ф 0, то это значит, что уравне-
уравнение Qu{juo) = 0 имеет по меньшей мере два вещественных корня. И в
этом случае указанную дополнительную проверку нужно производить
только при / ^ б или п ^ б, когда / = п.
5.3.3. Синтез оптимальных по степени устойчивости пара-
параметров типовых регуляторов для объекта 2-го порядка. Пусть
передаточная функция объекта имеет вид
W0(s) = Ь° , Ьо > 0, oi > 0. E.21)
S2 + CL\8 + CL2
Найдем оптимальные параметры П-регулятора и ПИ-регулятора.
В случае ПД-регулятора и ПИД-регулятора число параметров равно
степени характеристического уравнения и степень устойчивости мо-
может быть сделана равным произвольному заданному числу.
П-регулятор.
Утверждение 5.7. Оптимальный параметр П-регулятора
(Wp(s) = fcn) определяется следующим образом:
l(W^) E.22а)
где и — свободный параметр, пропорциональный степени колеба-
телъностщ и оптимальная степень устойчивости равна макси-
максимально возможному значению:
160 Гл. 5. Синтез систем управления
2
При -j- — п2 > 0 степень колебательности можно сделать равной
нулю, положив ш = 0. Если при —!- — 0,2 ^ 0 принять ш = 0, то fc*
4
получается отрицательным или равным нулю.
Доказательство. Передаточная функция разомкнутой систе-
системы есть
W(s) = Wp(s)Wo(s) = g2+Q°ign+Q2,
и характеристический полином принимает вид
/О/ \ \ \ 2 i Л i 7 7
Ц\Л) = Л + BiA + OL2 ~г OqKu.
Для коэффициентов преобразованного полинома
г\ 2 ,
Уп — CoQ + Ciq + С2
в соответствии с E.17) имеем
х=-, = (Л2 -
= dQ(X)
СО = 7Т
x=-v
= 1.
2
В данном случае условия граничной устойчивости E.20) принима-
принимают следующий вид:
с\ — —2г] + di =0,
С2 = TJ — О,\Г\ + 0,2 + fro^n ^ 05
ип\Ш) = —cquj -\- г] — а\г\ + 0,2 + Оо^п = U.
Решив эту систему, получим
„ _ ai 7. _ ! (. .2 о?
Так как степень устойчивости принимает граничное значение,
найденное решение является искомым. Это решение совпадет с E.22).
Подставив выражение для ки в характеристическое уравнение, по-
получим уравнение 2
4
корнями которого будут Ai52 = — -^-±juj. Отсюда степень колеба-
тельности \i — l —, и она пропорциональна и.
а±
ПИ-регулятор.
Утверждение 5.8. Оптимальные параметры ПИ-регулятор а
(W^s) = кп-\—- J и оптимальная степень устойчивости определя-
определяются следующим образом:
lW|) E.23а)
5.3. Синтез по максимальной степени устойчивости
161
где uj — свободный параметр, пропорциональный степени колеба-
колебательности.
Доказательство. Передаточная функция разомкнутой сис-
системы имеет вид
и характеристический полином принимает вид
Q(\) = А3 + aiA2 + (a2 + bokn)X + bokm.
Коэффициенты преобразованного полинома
Qn(q) = c0q3 + cxq2 + c2q + c3
определяются следующим образом (см. E.17)):
=_^ = [А3 + aiA2 + (a2 + bokn)X +
__
dQ(X)
\=-n
= (ЗЛ2
= -rf
a2
2 - (a2
= З772 -
a2
_ 1 d2Q(X)
x=-r]
\=-n
1
0 3!
= 1.
Условия граничной устойчивости E.20) принимают вид
— -Ът\
— 0,
с3 = -ту3
с2 = 3?
- (a2
a2 + 60^п
^о&и = 0,
0,
= 0.
^
Из первого уравнения получаем т\ — —^. Подставив выражения для
коэффициентов в последнее уравнение, его можно записать в виде
Зг]2 - 2air] + a2 + bokn = со2.
Решив это уравнение совместно со вторым уравнением относитель-
относительно /си и fcn, затем подставив найденное значение для степени устой-
устойчивости, получим E.23а) и E.236). Из последнего уравнения получим
с2 = и;2 ^ 0.
Таким образом, параметры, определяемые соотношениями E.23а)-
E.23в), являются решением приведенной выше системы неравенств и
уравнений, определяющих условие граничной устойчивости. В связи
с тем, что в решении rj принимает максимально возможное значение,
параметры являются оптимальными.
11 Д.П. Ким
162 Гл. 5. Синтез систем управления
Так как при синтезированных параметрах регулятора со = 1, с\ —
= 0, С2 = оо2 и сз = 0, преобразованный полином имеет вид
Q{q) = q -\- uj q.
Его нулями являются qi = 0, ^2,3 = =bj^- В силу преобразова-
преобразования Л = q — г] нулями характеристического полинома синтезирован-
синтезированной системы будут
Ai = -f, A2j3 = -^±jW.
Следовательно, степень колебательности \i — — пропорциональ-
пропорциональна о; и обращается в нуль при uj = 0.
Пример 5.5. Определить оптимальные параметры П-регуля-
П-регулятора и ПИ-регулятора в случае, когда передаточная функция объек-
объекта есть -.
ш (s) - t
Решение. Передаточную функцию объекта можно представить в
виде Wo(s) = — . Отсюда в принятых выше обозначениях bo =
s2 + 10 s
= 10, а\ — 10, а,2 = 0. И в случае П-регулятора в соответствии с
равенствами E.22а), E.226) имеем
1
^ - а2) = 0,1(а,2 + 25),
= ?7т = у = 5.
В случае ПИ-регулятора в соответствии с E.23а)-E.23в) получаем
* ai 10
5.3.4. Синтез оптимальных по степени устойчивости па-
параметров типовых регуляторов для объекта 3-го порядка. В
случае объекта 3-го порядка с передаточной функцией
^&о>0, oi > 0, E.24)
s6 + a\sz + CL2S + аз
найдем оптимальные по степени устойчивости параметры типовых
регуляторов.
П-регулятор.
Утверждение 5.9. Оптимальный параметр П-регулятора
(Wp(s) = fcn) и оптимальная степень устойчивости определяются
следующим образом:
5.3. Синтез по максимальной степени устойчивости
163
а) при условии а2 —^- ^ О
о
О>1
E.25)
E.26а)
E.266)
E.27)
E.28а)
E.286)
Доказательство. Передаточная функция разомкнутой систе-
системы есть ^ 7
W(s) =Wp(s)Wo(s) = -
условии а2 —^- < О
1
* - a3),
и характеристический полином имеет вид
Q(A) = Л3 + aiA2 + a2A + a3 +
Для коэффициентов преобразованного полинома
cxq2 + c2q + с3
имеем
\=-r)
Qn(q) =
= [A3
= -rf
dQ(X)
x=-v
= (ЗА2
x=-v
? - a2rj + а3
= 3г>2-:
a2,
_ 1
1 2
1
0 3!
= 1.
Условия граничной устойчивости E.20) принимают вид
С\ = —З77 + cli = 0, с2 = 3rj — 2airj -\- a2 ^0,
с3 = -г/3
а3 + bokn = U,
= 0.
Из первого уравнения получаем г) — г)ш — -^-. Подставив это выра-
жение во второе уравнение и решив его, получим E.26а). Неравенство
выполняется при условии E.25). И последнее равенство будет выпол-
выполнено при соответствующем ш.
11*
164 Гл. 5. Синтез систем управления
Следовательно, при выполнении условия E.25) пара (&*,77*), опре-
определяемая формулами E.26а), E.266), удовлетворяет условию гранич-
граничной устойчивости, и так как 77* равна граничному значению, она
является искомым решением.
Если выполняется условие E.27), то степень устойчивости не мо-
может принять граничное значение, так как при этом с2 < 0. Поэтому
будем искать оптимальную степень устойчивости из условия
с2 = Зг]2 — 2air] + а2 = 0.
При выполнении условия E.27) это уравнение имеет вещественные
корни
3 ' >и~ 3
Коэффициент С2 < 0 в интервале г}\ < г) < щ и с2 ^ 0 вне этого
интервала. Корень т?2 не может быть степенью устойчивости, так как
гJ > г\ш = —. Поэтому рассмотрим, может ли корень 771, совпадаю-
о
ищи со значением E.286), быть оптимальной степенью устойчивости.
Так как с\ > 0 и с2 = 0 при 77 = 771, пара G71, fcn) будет удовлетво-
удовлетворять условию граничной устойчивости, если Д2 = cic2 — С3 = —сз = 0
и сз ^ 0. Последнее возможно только в том случае, когда сз | _ =
= -ту3 + aiT?2 - a27? + a3 + bokn = 0, или
&п = — G7? - ai77i + a2m ~ аз)-
Подставив сюда 77* вместо 771, получим E.28а). Таким образом,
пара (fc*,77*), определяемая формулами E.28а), E.286), удовлетворя-
удовлетворяет условиям граничной устойчивости, и так как при условии E.27)
степень устойчивости не может быть больше 771 (иначе с2 < 0), fc*
является оптимальным параметром, а 77* = rji — оптимальной сте-
степенью устойчивости.
ПД-регулятор.
Утверждение 5.10. Оптимальные параметры ПД-регулятор а
и оптимальная степень устойчивости определяются следующим об-
образом:
V*=Vm = у, E.29в)
где и — свободный параметр, пропорциональный степени колеба-
колебательности.
Доказательство. Передаточная функция разомкнутой систе-
системы есть
W{s) = Wp(s)Wo(s) =
^ s3 + a\s2 + u2S + аз
5.3. Синтез по максимальной степени устойчивости 165
и характеристичекий полином замкнутой системы имеет вид
Q(X) = А3 + aiA2 + (a2 + Ьокд)Х + аз + ЬокП.
Для коэффициентов преобразованного полинома
Qn(q) = q3 + ciq2 + c2q + c3
имеем
c3 = Q(X) = [A3 + aiA2 + (a2 + Ьокд)Х + a3 + <
= —ry3 + ai?72 — (a2 + 60-
_ ар(л) = (зд2 + 2aiA + a2 + ^
a2
A=-ry
— Qon2
Cl = 2
A=-ry 2>
= 1.
u 3! dA3
Условия граничной устойчивости E.20) принимают вид
С\ = —3?7 + сц = 0, с2 = 3?7 — 2ai?7 + ^2 + ^о^д ^ 05
с3 = -г]3 + ai7?2 - (a2 + Ьокд)г] + a3 + &о^п ^ 0,
v(u>) = —a;3 + C20J = 0.
Из первого уравнения получаем г) — г)ш — —. Подставив выражение
для с2 в последнее уравнение, представим его в виде
3?7 — 1а\г\ -\- а,2 -\- Ьокд = си .
Решив это уравнение совместно со вторым уравнением относитель-
относительно кП и &д, а затем подставив найденное выражение для 77, полу-
получим E.29а) и E.296).
Из последнего уравнения системы получаем с2 = a;2 ^ 0.
Следовательно, тройка (к^,к^,г]*), определяемая формулами
E.29а)-E.29в), удовлетворяет условию граничной устойчивости, и
так как степень устойчивости принимает максимально возможное
значение, эта тройка и будет искомым решением.
При полученных значениях параметров регулятора с\ = 0, с2 =
= uj2 и сз = 0. Поэтому преобразованный полином имеет вид
QD)=43+a;24 = 0,
и его нулями являются q\ — 0 и ^2,з = =bj^- Соответственно для ну-
нулей исходного характеристического полинома имеем
Ai = -f, A2,3 = -y±jw.
166
Гл. 5. Синтез систем управления
Таким образом, степень колебательности \i — — пропорциональ-
на свободному параметру.
ПИ-р е г улят ор.
Утверждение 5.11. Оптимальные параметры ПИ-регулятора
и оптимальная степень устойчивости определяются следующим
образом:
о
а) при условии а2 - - а\ ^ 0 E.30)
о
1 / 3
1 (а±п2 о,\ ^
* di
V =Vm = "j;
= т f ai — \/a? a'
4 у у 3
D?7*3 — 3ai?7*2 + 2a2?
2 -|
7* -аз),
E.31a)
E.31b)
E.32)
E.33a)
E.336)
*2
А;* = 5— (Зту*2 - 2axrf + a2).
E.33в)
Здесь uj — свободный параметр, подчиненный условию ио2 ^
3 2
Доказательство. Передаточная функция разомкнутой систе-
системы есть
W{s) = WJs)Wo(s) =
и характеристичекий полином замкнутой системы имеет вид
4 + aA3 + a2A2 +
Q(A) = А4
Для коэффициентов преобразованного полинома
Qn(q) =q4
имеем
c4 = Q(A)
ал
C2=2!
Я ~\- c2q + c3q
a2r]2 - (a3 + b0'
- 2a2r] + a3
= -4ry + ai.
c4
5.3. Синтез по максимальной степени устойчивости 167
Условия граничной устойчивости E.20) принимают вид
с\ — —4?7 + а\ — 0, с2 = 6г]2 — Ъа\г\ + а2 ^ 0,
с3 = —4?73 + Зад2 - 2a2r? + a3 + &о&п = 0,
с4 = Г74 — ад3 + a2ry2 - (a3 + бо&пO? + Ь0К ^ 0,
^п(^) = сИ — c2a;2 + С4 = 0.
Из первого уравнения получаем г) — г)ш — —^. Подставив выражения
4
для коэффициентов в последнее уравнение, можно представить его в
виде
о;4 - Fг]2 — Sair] + а2)со2 + ту4 - ai^3 + a2ry2 - (a3 + bokn)r] + 60^и = 0.
Решив это уравнение совместно со вторым уравнением относительно
неизвестных кП и &и и подставив найденное ?? = —Ц получим форму-
формулы E.31а) и E.316).
Для выполнения условия граничной устойчивости достаточно,
чтобы с2 ^ 0 и С4 ^ 0. Из последнего равенства приведенной выше
системы получаем с^ = съио2 —о;4. Поэтому указанные неравенства
будут выполнены, если
С2 ^ си2 или б?72 — 3ai?7 + a2 ^ a;2.
Подставив сюда ?? = —^-, получаем неравенство а2 af ^ а;2. В силу
условия E.30) это неравенство может быть выполнено. При его вы-
выполнении тройка (&*, к^,г]*), определяемая формулами E.31а)-E.31в),
будет удовлетворять условиям граничной устойчивости, и &* и &*
будут оптимальными параметрами, а 77* — оптимальной степенью
устойчивости.
При выполнении условия E.32) нельзя обеспечить, чтобы опти-
оптимальная степень устойчивости была равна максимально возможному
значению ?7т, так как коэффициент с2 становится отрицательным.
Попытаемся найти оптимальную степень устойчивости из условия
с2 = 6г]2 — 3ai?7 + a2 = 0.
При выполнении условия E.32) корни этого уравнения являются ве-
вещественными и равны
1
- \/ai - ъа* )' Ъ = l[ai + у о2 - - а2
Коэффициент с2 < 0 при 771 < т\ < щ и с2 ^ О вне этого интервала.
Корень г]2 не может быть степенью устойчивости, так как он больше
граничного значения т\ш. Ясно, что оптимальная степень устойчивос-
устойчивости rf не может быть больше г}\. Покажем, что она равна г}\.
Когда г] = r/i, с\ > 0 и с2 = 0. При со = 0 из необходимого условия
граничной устойчивости Михайлова
ип(си) = о;4 — с2о;2 + с^ = 0, ^(^) = —cio;3 + с3о; = 0
168
Гл. 5. Синтез систем управления
имеем С4 = 0 и сз = О или
г]4 - airf + а2г]2 - (а3 + bokn)r] + Ь^кш = О,
—4?73 + 3air]2 — 2а2?7 + аз + Ьокп = О.
Решив эту систему уравнений относительно кп и кш и подставив ?7 =
= 77ь получим fc* и fc*, определяемые формулами E.33а)-E.33в). При
таких параметрах Аз = 0. Следовательно, при выполнении усло-
условия E.32) тройка (fc*,fc*,77*), определяемая формулами E.33а)-E.33в),
удовлетворяет условиям граничной устойчивости, и 77* является оп-
оптимальной степенью устойчивости, а /с* и /с* — оптимальными пара-
параметрами.
ПИ Д-р е г улят ор.
Утверждение 5.12. Оптимальные параметры ПИД-регулято-
ра и оптимальная степень устойчивости определяются следующим
образом:
E.34а)
E.346)
E.34в)
Г7* =77m = ^, E.34r)
где свободные параметры со и /3 являются мнимыми частями корней
характеристического уравнения (Ai?2 = — —- ± jo;, A3,4 = —-r- ±jPj-
Доказательство. Характеристический полином синтезируемой
системы и преобразованный полином имеют соответственно вид
Q(z) = А + aiA + (a2 + ЬокД)Х + (аз + Ьокп)Х + Ъокш,
Qn(q) = Q4
c2q2
c4,
где
= 0(А)
2!
_ 1
1 ~ 3!
A=-»j
(a2 + Ь0кд)г]2 - (a3
- 2(a2 + Ьокд)г] + a3
a2 + Ьокд,
\=-v
= -4r] + a\.
5.3. Синтез по максимальной степени устойчивости 169
Условие маргинальной устойчивости E.20а), E.206) принимает вид
ci =0, с2 ^ 0, с3 = 0, с4 ^ 0,
о;4 — с2а;2 + С4 = 0.
Из последнего равенства получаем
са = (сг - о;2)о;2.
Неравенства С4 ^ 0 и с2 ^ 0 будут выполнены, если с2 — а;2 ^ 0.
Вводя дополнительный параметр /3, последнее неравенство преобра-
преобразуем в равенство
и условие граничной устойчивости можно записать в виде
ci = —4?7 + ai = 0,
с2 = 6г]2 - 3air] + a2 + Ъокд = a;
2
с3 = —4?73 + 3ai7y2 - 2(a2 + Ьокд)г] + a3 + bokn = 0,
с4 = г]4 - airf + (a2 + Ь0кд)г]2 - (a3 + bokn)r] + 60^и = ^
Решив эту систему уравнений, получим
а\
где и и /3 — произвольные параметры, которые могут быть зада-
заданы исходя из дополнительных требований к качеству системы. Они
представляют мнимые части корней характеристического уравнения
синтезированной системы, и поэтому отношение max (и>,/3)/г] соот-
соответствует степени колебательности системы. Действительно, под-
подставив выражения для коэффициентов q (i = 0,1, 2, 3,4) из получен-
полученной выше системы уравнений в полином Qn(q)j получим
Нулями этого полинома являются q\^ — ±j& и g3,4 = ±jP и соот-
соответственно нулями исходного полинома Ai 2 = — г) =Ь juj и Л3 4 =
= -ч±зр.
В полученных решениях степень устойчивости принимает макси-
максимально возможное значение. Следовательно, они являются искомыми
решениями и совпадают с E.34а)-E.34г).
Пример 5.6. Определить оптимальные параметры П-регулятора,
ПД-регулятора, ПИ-регулятора и ПИД-регулятора в случае объекта,
у которого передаточная функция равна
ТЛ7 (<Л — I
оУ } s@5s2 + l5s + l)'
170 Гл. 5. Синтез систем управления
Решение. Преобразовав передаточную функцию объекта к виду
получаем bo = 2, а\ — 3, а2 = 2 и аз = 0.
П-регулятор. Проверим, какое из условий, E.25) или E.27), вы-
выполняется: 2
Выполняется условие E.27). Поэтому согласно формулам E.28а),
E.286) имеем
* _ «1 — у/о>\ ~ 3ft2 _ 3 — у/9 — 6 ^ п .о
*7 - § " 3 " ' '
к*и = 1 (гу*3 _ а1ту*2 - а2ту* - а3) = \ @,433 - 3 • 0,432 + 2 • 0,43) ^ 0,19,
ПД-регулятор. Согласно формулам E.29а) и E.196)
Напомним, что и является произвольным параметром, который
можно задать исходя из дополнительных требований.
ПИ-регулятор. Проверим, какое их условий, E.30) или E.32), вы-
выполняется:
а2-|а? = 2-|.9<0.
Выполняется условие E.32). Поэтому в соответствии с форму-
формулами E.33) имеем
- °'27'
k*u = 1 Dгу*3 - Зад*2 + 2а2г]* - а3) = 0,25,
к^ = ^- (Зту*2 - 2airy* + a2) = 0,022.
ПИД-регулятор. Согласно формулам E.34а), E.346) и E.34в)
имеем
К = уо (V + /З2) у + ^ - «з) = 0,5 [1,5(с2 + /З2) + 1,69],
fc* = 1 (w2 + /З2 + | a2 - a2) = 0,5 (ы2 + /З2 + 1,375),
= 0,5 [0,32 + 0,56 (со2 + (З2) + о;2/?2].
5.4- Синтез по желаемой передаточной функции 171
5.4. Синтез системы управления по желаемой
передаточной функции
Пусть задана передаточная функция объекта Wo(s) и желаемая пе-
передаточная функция Wx(s) замкнутой системы. Тогда передаточная
функция регулятора Wp(s) может быть получена из равенства пере-
передаточной функции Wyg(s) замкнутой системы (см. рис. 5.1) желаемой
передаточной функции:
( . _ Wp(s)Wo(s) _ ( ,
Разрешив это равенство относительно передаточной функции регуля-
регулятора, получим
ЛИТ ( \
или, если принять Wo(s) =
R(s)
= ЩгЩгу E-35)
При задании желаемой передаточной функции Wx(s) и опреде-
определении передаточной функции регулятора Wp(s) необходимо учиты-
учитывать физическую осуществимость определяемого регулятора и гру-
грубость синтезируемой системы. Поэтому прежде всего рассмотрим эти
понятия.
5.4.1. Физическая осуществимость и грубость.
Под физической осуществимостью или реализуемостью пере-
передаточной функции или системы, заданной этой передаточной функ-
функцией, понимают принципиальную возможность построения такой
системы.
Передаточная функция физически осуществима, если ее относи-
относительный порядок, равный разности степени знаменателя и степени
числителя, неотрицателен. Условие физической осуществимости пе-
передаточной функции
^ ) aosn +а15п-х + ... + ап
имеет вид
п - т ^ 0. E.36)
Если система определяется весовой функцией w(i), то условие ее
физической осуществимости имеет вид
w(t) = 0 при t < 0 или w(t — г) < 0 при t < т.
Это условие выражает тот факт, что реакция системы не может
возникнуть до начала приложения воздействия, вызывающего эту
реакцию, или следствие не может предшествовать причине.
172 Гл. 5. Синтез систем управления
Система называется грубой или робастной, если при малом из-
изменении ее параметров свойство системы качественно не меняется. В
случае линейной системы негрубость означает, что устойчивая систе-
система при малом изменении параметров становится неустойчивой.
При синтезе систем по желаемой передаточной функции грубость
может быть нарушена, если правый полюс передаточной функции объ-
объекта компенсируется правым нулем передаточной функции регулято-
регулятора, а правый нуль объекта — правым полюсом регулятора.
Например, если передаточная функция объекта Wo(s) = — и
желаемая передаточная функция Wo(s) = , то по формуле E.35)
s ~\~ ?
Ts — 1
передаточная функция регулятора Wp(s) = —. Передаточная
S —|— л.
функция разомкнутой системы есть
и синтезированная система в разомкнутом и замкнутом состоянии
устойчива. Однако допустим, что постоянная времени принимает зна-
значение Т + 8Т (ST — малая величина). Тогда
лит / \ (T + 6T)s-l
^pW = —TTi—'
w^ = -——ri т^зт'
о \^ ± -L О ±
и характеристическое уравнение замкнутой системы имеет вид
Таким образом, при малом изменении параметра система (в замк-
замкнутом и разомкнутом состоянии) неустойчива и, следовательно, синте-
синтезированная система не обладает свойством грубости. В данном случае
это происходит из-за того, что правый полюс объекта компенсируется
правым нулем регулятора.
Итак, при использовании метода синтеза системы по желаемой пе-
передаточной функции нельзя допускать компенсации правых полюсов
и нулей передаточной функции объекта соответственно правыми ну-
нулями и полюсами передаточной функции регулятора.
5.4.2. Синтез передаточной функции регулятора. Предста-
Представим передаточную функцию объекта следующим образом:
() _ Р(8) _ P-(S)P+(S) ( ,
Wo{S> " Щ " R-(8)R+(8)> E-37)
где P~(s), R~ (s) — полиномы с левыми нулями; P+(s), R^~(s) — по-
полиномы с правыми и нейтральными нулями.
Если полиномы P(s) и R(s) не содержат левых нулей, то P~(s)
и R~(s) равны константе; если они не содержат правых нулей,
то P~^(s) и R~^(s) равны константе.
5.4- Синтез по желаемой передаточной функции 173
Подставив E.37) в E.35), получим
() _ R-(s)R+(s) \УЖ
Wp{S) ~ P-(a)P+(s) T^WZ¦ (Ь-6Ь)
Для того чтобы правые полюсы и нули передаточной функции
объекта E.37) не компенсировались соответственно правыми нуля-
нулями и полюсами передаточной функции регулятора E.38), последняя
не должна содержать полиномы P+(s) и R+(s). Это возможно, если
в E.38) Wx(s) содержит множитель P+(s), а 1 - Wx(s) — множи-
множитель R+(s), т.е. если желаемая передаточная функция удовлетворяет
условиям
Wm(s) = P у\ E.39)
где G(s) — знаменатель желаемой передаточной функции, опреде-
определяемый требованиями к качеству синтезируемой системы в переход-
переходном режиме; M(s) и N(s) — неопределенные полиномы, которые нахо-
находятся из полиномиального уравнения, получаемого ниже.
Если объект управления содержит щ интегрирующих звеньев, то
для того, чтобы синтезируемая система была астатической и обла-
обладала астатизмом г/-го порядка относительно задающего воздействия
и (у — г/о)-го порядка относительно возмущения, передаточная функ-
функция регулятора должна содержать в знаменателе множитель sr
(г = v — щ). А это возможно, если этот множитель будет включен
. E.40)
Подставив E.39) и E.40) в E.38), получим
Исключив Wxl(s) из E.39) и E.40), найдем полиномиальное урав-
уравнение
P+(s)M(s) + R+(s)N(s)sr = G(s). E.42)
Рассмотрим, каким условиям должны удовлетворять степени не-
неопределенных полиномов, чтобы регулятор был физически реализу-
реализуем и полиномиальное уравнение было разрешимо. При этом условим-
условимся степень полинома обозначать буквой п с индексом, обозначающим
сам полином. Например, пт будет обозначать степень полинома T(s).
Условие разрешимости. Коэффициенты полиномов M(s) и N(s)
определяются из системы уравнений, которые получаются путем при-
приравнивания коэффициентов при одинаковых степенях обеих частей
полиномиального уравнения E.42). Число уравнений равно uq + 1,
а число неизвестных равно пм + ^tv + 2. И чтобы система была раз-
174 Гл. 5. Синтез систем управления
решима, число уравнений не должно превышать числа неизвестных:
по + 1 ^ пм + пту + 2, или по ^ пм + плг + 1- E.43)
Условие физической осуществимости. Очевидно, относи-
относительный порядок передаточной функции регулятора E.41) будет
неотрицательным, если
nR- + пм ^ пр- +un + г. E.44)
Относительный порядок передаточной функции в левой части со-
соотношения E.40) равен нулю. И так как относительный порядок пе-
передаточной функции в правой части также должен быть равен нулю,
получаем еще одно условие
kg = nR+ +nN + г, E.45)
которое нужно учитывать при определении степеней неопределенных
полиномов.
Метод синтеза регулятора по желаемой передаточной
функции состоит в следующем. Исходя из условий E.43), E.44)
и E.45) определяют степени неопределенных полиномов пм и пдг.
Чтобы не усложнять регулятор, находят наименьшие возможные зна-
значения. Затем составляют полиномы M(s) и N(s) с неопределенны-
неопределенными коэффициентами, подставляют их в полиномиальное уравнение и
определяют неизвестные коэффициенты. Найденные полиномы M(s)
и N(s) подставляют в E.41) и получают искомую передаточную функ-
функцию регулятора.
Пример 5.7. Передаточная функция объекта имеет вид Wo(s) =
= — —. Определить передаточную функцию регулятора, при ко-
s{s + 1)
торой переходная составляющая ошибки x(i) изменяется в соот-
соответствии с
x(t) = (Ci + C2t + С3*2)е-*
и установившаяся ошибка равна нулю при:
а) постоянном задающем воздействии (g(i) = const) и отсутствии
возмущения (f(t) = 0);
б) постоянных внешних воздействиях (g(i) = const, f(t) = const).
Решение. Переходная составляющая ошибки будет изменяться
в соответствии с заданной функцией, если характеристический по-
полином синтезируемой системы имеет трехкратный нуль, равный —1
(Ai = Л2 = A3 = — 1). Поэтому знаменатель желаемой передаточной
функции G(s), равный с точностью до обозначений аргумента харак-
характеристическому полиному, имеет вид
Числитель и знаменатель передаточной функции объекта раскла-
раскладываются на множители P~(s) = P+(s) = P(s) = 1, R~(s) = s + 1,
R+(s) = s.
Степени полиномов равны uq = 3, nP- = nP+ = 0, nR- = nR+ = 1.
5.4- Синтез по желаемой передаточной функции 175
а) Статическая ошибка едоо = 0, если система обладает астатиз-
мом 1-го порядка {у = 1) относительно задающего воздействия. Так
как объект содержит одно интегрирующее звено {щ = 1), г =
= v — щ = 0.
Условия E.43), E.44) и E.45) принимают соответственно вид
3 ^ пм + плг + 1, 1 + пм ^ rtN, 3 = 1 + un-
Из последнего равенства получаем пдг = 2. Наименьшим пм,
удовлетворяющим приведенным условиям, является пм — 0. Поэто-
Поэтому M(s) = bo и N(s) = clos2 + ctis + 0,2- Подставив эти полиномы в
полиномиальное уравнение E.42), получим
Ьо + s(a0s2 + ais + а2) = s3 + 3s2 + 3s + 1.
Отсюда, приравнивая коэффициенты при одинаковых степенях,
получим
ао = 1, ai = 3, а,2 = 3, &о — 1
и iV(s) = s2 + 3s + 3, Af (s) = 1. Подставляя эти полиномы, а также
выражения для P~(s) и R~(s) в E.41), получим искомую передаточ-
s + 1
ную функцию регулятора Wp(s) = —— -.
S ~г oS ~г о
б) Чтобы статическая ошибка была равна нулю при действии воз-
возмущения, регулятор должен включать одно интегрирующее звено.
Поэтому в данном случае г = 1. И условия E.43), E.44) и E.45) при-
принимают соответственно вид
3 ^ пм + плг + 1, 1 + пм ^ плг + 1, 3 = 1 + un + 1.
Отсюда пдг = 1, пм = 1 и iV(s) = aos + ai, M(s) = bos + bi.
Подставив найденные полиномы в полиномиальное уравнение E.42),
получим
bos + bi + s(aos + ai)s = s3 + 3s2 + 3s + 1.
Из этого уравнения находим по = 1, ai = 3, 6o = 3, bi = 1. Следова-
Следовательно, N(s) = s + 3, M(s) = 3s + 1.
Подставив эти полиномы и выражения для P~(s) и R~(s) в E.41),
получим искомую передаточную функцию
Пример 5.8. Передаточная функция объекта имеет вид Wo(s) =
- — —. Синтезировать регулятор, при котором ошибка x(i)
()( )
в переходном режиме (ее переходная составляющая) изменяется в со-
соответствии с
x(t) = (C1+C2t + C3t2)e-t,
а в установившемся режиме при постоянных внешних воздействиях
(статическая ошибка) равна нулю.
176 Гл. 5. Синтез систем управления
Решение. Переходная составляющая ошибки будет изменяться
в соответствии с приведенной выше функцией, если знаменатель же-
желаемой передаточной функции имеет вид G(s) = (s + IK.
Статическая ошибка будет равна нулю, если порядок астатиз-
ма v = 1. В данном случае г = v = 1.
Числитель и знаменатель передаточной функции объекта раскла-
раскладываются на множители P~(s) = P+(s) = P(s) = 1, R~(s) = s + 1,
R+(s) = s-l.
Степени полиномов равны uq = 3, nP- = nP+ = 0, nR- = nR+ =
= 1. Условия E.43), E.44) и E.45) принимают соответственно вид
3 ^ пм + плг + 1, 1 + пм ^ плг + 1, 3 = 1 + un + 1.
Отсюда пдг = 1, пм = 1. Поэтому N(s) = ао^ + ai, M(s) = бо^ + Ь\.
При подстановке этих полиномов полиномиальное уравнение E.42)
принимает вид
bos + bi + (s - l)(aos + ai)s = s3 + 3s2 + 3s + 1.
Из этого уравнения находим ao = 1, ai = 4, 6o = 7, &i = 1. И соот-
соответственно iV(s) = s + 4, M(s) = 7s + 1. Подставляя их и выражения
для P~(s) и R~(s) в E.41), найдем искомую передаточную функ-
0 + l)Gs + 1)
5.4.3. Определение желаемой передаточной функции. Же-
Желаемая передаточная функция должна быть определена исходя из за-
заданных требований к качеству синтезируемой системы. На ее выбор
определенные ограничения накладывают условия грубости и физи-
физической осуществимости. В силу этих ограничений желаемая пере-
передаточная функция имеет вид (см. E.39))
_ P+QQMQ0
УУж ~ G(s) '
где P~^(s) — полином с правыми нулями передаточной функции объ-
объекта E.37); M(s) — полином, определяемый в процессе синтеза. Поэ-
Поэтому определение желаемой передаточной функции сводится к выбору
полинома G(s).
Здесь мы рассмотрим определение желаемой передаточной функ-
функции, основанное на использовании типовых нормированных переда-
передаточных функций.
А. Нормированная передаточная функция. Пусть задана
передаточная функция
bm+frm~1 + - + 4 E.4б)
Ф(*) =
w aosn -\-a1sn~1
Произведем замену переменных
5.4- Синтез по желаемой передаточной функции 177
Тогда получим _ _ _
Ф(^) = - п-1 ~ 1' E<47)
где
1^ 0% '~~г fJik ' О 1 «7 1 О 1
E.48)
называется нормированной передаточной функцией или
передаточной функцией в форме Вышнеградского. Нормированная
передаточная функция характеризуется тем, что в знаменателе ко-
коэффициент при старшей степени и свободный член равны единице.
Рассмотрим преобразования Лапласа функций x(t) и х( — ):
оо
X(s) = fx(t)e-stdt,
оо
-8tdt= fx(r)e-qT dr = X(q).
о о
Отсюда следует, что преобразование q = as для переменной преобра-
преобразования Лапласа равносильно преобразованию г = t/a для перемен-
переменной оригинала и умножению оригинала на 1/а. И так как умножение
переходной функции на константу не влияет на время регулирования,
то время регулирования tp исходной системы E.46) и время регулиро-
регулирования тр для системы с нормированной передаточной функцией E.47)
связаны соотношением
?р = сггр, или а = —. E.49)
гр
На последнем равенстве основано определение желаемой переда-
передаточной функции, когда, наряду с другими требованиями, нужно обес-
обеспечить заданное время регулирования.
По заданным требованиям к качеству синтезируемой системы,
кроме требования к времени регулирования, находится стандартная
нормированная передаточная функция
w/ s^ + ais^-1 + ... + an_ig + 1'
и для нее определяется тр. По полученному тр и заданному т;р нахо-
находится а = tp/тр. Учитывая равенство а = л/ао/ап и формулы E.48),
положив an = 1, для коэффициентов желаемой передаточной функции
находим _
о^ = (цех , z = и, 1,..., ?п, (o.oUaj
ао = ап, ак = акап~к, ап = 1, А; = 1, 2,... ,п - 1. E.506)
Б. Стандартные нормированные передаточные функции.
Сначала рассмотрим стандартные передаточные функции, которые
не имеют нулей: числители являются константами [10]. Так как зна-
12 Д.П. Ким
178 Гл. 5. Синтез систем управления
чения этих констант не влияют на характер переходного процесса,
примем их равными единице.
1. Передаточная функция с одинаковыми полюсами
WM = STIF
обладает монотонной переходной характеристикой, неплохим быстро-
быстродействием и среди передаточных функций n-го порядка с одинаковыми
коэффициентами при sn~1 имеет наибольшую степень устойчивости.
Ее знаменатель при п = 4, 5, б принимает следующий вид:
п = 4: G4(s) = q4 + 4<?3 + 6q2 + 4g + 1;
п = 5: G5(s) = <75 + 5<?4 + 10<?3 + 10q2 + 5g + 1;
п = 6: G6(s) = ^6 + б^5 + 15^4 + 20^3 + 15^2 + 6д + 1.
2. Передаточная функция с полюсами, имеющими одинаковые
действительные части rj и мнимые части, образующие арифмети-
арифметические прогрессии с разностью и первым членом, равными j. Су-
Существует оптимальное \i = j/rj, которому соответствует наименьшее
время регулирования.
Приведем полиномы знаменателя для шести значений степеней
при оптимальных fi:
n = l: Gi(s) = q+ 1;
n = 2: G2(s) = ^2 +1,38^ + 1;
n = 3: G3(s) = q3 + 2fibq2 + 2,3^ + 1;
n = 4: G4(s) = q4 + 2fiq3 + 3,8^2 + 2,8^ + 1;
n = 5: G5(s) = ^5 + 2,5^4 + 5,3^3 + 5,46<?2 + 3,64<? +1;
n = 6: G6(s) = <76 + 3,73 ^5 + 8<?4 + 10,3 q3 + 8,56 q2 + 4,18^ + 1.
Передаточные функции с рассмотренными полиномами в знаме-
знаменателе оказываются неудовлетворительными при наличии у них ну-
нулей из-за больших перерегулирований. Разработаны рекомендаций по
расположению полюсов на действительной оси, обеспечивающие при-
приемлемые величины перерегулирования, для астатических систем 2-го
и 3-го порядков с передаточными функциями, имеющими один и два
нуля соответственно.
3. Для астатической системы с астатизмом 2-го порядка при пере-
передаточной функции с одним нулем [10]
W (а) = Qn-ig + 1
н w qn + aig™-1 + ... + an-iq + 1
рекомендуют располагать полюсы на вещественной полуоси по ариф-
арифметической прогрессии. При этом перерегулирование не превыша-
превышает 10%.
Приведем полиномы знаменателя для этого случая (в конце каж-
каждого полинома в скобках укажем разность прогрессии):
n = 2: G2(s) = q2 + 2,5^ + 1 (d = 1,5);
5.4- Синтез по желаемой передаточной функции
179
n = 3: G3(s) = ?3 + 5,1 ?2 + 6,35? + 1 (d = 1,517);
n = 4: G4(s) = ?4 + 7,22?3 + 16,3?2 + 11,83? + 1 (d = 1,138);
n = 5: G5(s) = ?5 + 9?4 + 29?3 + 38?2 + 18? + 1 (d = 0,86685);
n = 6: G6(s) = ?6 + II?5 + 45,8?4 + 93,3?3 + 82,3?2 + 27,7? + 1
(d = 0,039).
4. Для астатической системы с астатизмом 3-го порядка при пере-
передаточной функции с двумя нулями [10]
ТЛТ /„\ _ ап-2Ч + °>г
рекомендуют располагать корни на вещественной полуоси по геомет-
геометрической прогрессии. Полиномы знаменателя в этом случае имеют
следующий вид (в скобках приводятся первый член Ai и знаменатель р
прогрессии):
п = 3: G3(s) = ?3 + 6,7?2 + 6,7? + 1 (Ai = 0,182; р = 5,5);
n = 4 G4(s) =?4 + 7,9?3 + 15?2 + 7,9? + l (Ai =0,185; р = 3,08);
п = 5: G5(s) = ?5 + 18?4 + 69?3 + 69?2 + 18? + 1
(Ai =0,0755; р = 3,63);
п = 6: G6(s) = ?6 + 36?5 + 251?4 + 485?3 + 251?2 + 26? + 1
(Ai =0,038; /о = 3,7).
В табл. 5.1 представлены время регулирования и перерегули-
перерегулирование для приведенных стандартных нормированных передаточ-
передаточных функций. Время регулирования определено при А = 0,05 ft(oo).
Таблица 5.1. Время регулирования и перерегулирование для стандарт-
стандартных нормированных передаточных функций
ПФ с одинаковыми полю-
полюсами
ПФ с одинаковой вещест-
вещественной частью полюсов
Астатическая система с ас-
астатизмом 2-го порядка
Астатическая система с ас-
астатизмом 3-го порядка
ПФ с одинаковой вещест-
вещественной частью полюсов
Астатическая система с ас-
астатизмом 2-го порядка
Астатическая система с ас-
астатизмом 3-го порядка
Время регулирования
п
тр
тР
тр
Тр
1
3
3
—
2
4,6
3,2
3,7
3
6,2
4
7,2
1,5
4
7,6
4,5
12
4,3
5
9
5,7
18
8,5
6
10,3
6,2
24
19
Перерегулирование
п
а
а
а
1
0
—
2
5
10
3
0
10
10
4
5
10
20,2
5
0
10
20
6
5
10
16
12*
180 Гл. 5. Синтез систем управления
Пример 5.9. Пусть передаточная функция объекта имеет вид
°^ ~ (s + l)@,5s + l)@,2s + l) ~ 0,1s3 + 0,8s2 + 1,7s + 1'
Синтезировать регулятор, при котором переходный процесс яв-
является монотонным, время регулирования tp ^ 3,15 и статическая
ошибка равна нулю.
Решение. Статическая ошибка будет равна нулю, если система
будет астатической. Примем степень астатизма г = 1.
В качестве стандартной передаточной функции выберем нормиро-
нормированную передаточную функцию с одинаковыми полюсами
3 = <?3 + 3q2
Для нее тр = 6,2 и а = 3,15/6,2 = 0,5. Учитывая равенство а =
— \/«о/ап и формулы E.506), положив аз = 1, для коэффициентов
полинома знаменателя G(s) желаемой передаточной функции получаем
а0 = а3 = 0,125, ai = a2ai = 0,75, п2 = aa2 = 1,5, аз = 1.
Отсюда G(s) = 0,125 s3 + 0,75 s2 + 1,5 s + 1.
Числитель и знаменатель передаточной функции объекта раскла-
раскладываются на множители P~(s) = P~^(s) = 1, R~^(s) — 1, R~(s) —
= 0,ls3 + 0,8s2 + l,7s + l.
Степени полиномов равны п<з = 3, пР- = Пр+ = 0, nR- = 3,
пд+ = 0. Условия E.43), E.44) и E.45) принимают вид
3 ^ пм + плг + 1, 3 + пм ^ плг + 1, 3 = пту + 1.
Этим условиям удовлетворяют пдг — 2, пм = 0 и соответственно
N(s) = dos2 + ais = CL2, М(s) = Ьо- При подстановке этих полиномов
полиномиальное уравнение E.42) принимает вид
= 0,125 s3 + 0,75 s2 + 1,5 s + 1.
Отсюда ao = 0,25, a\ — 0,75, a2 = 1,5, bo — 1 и соответственно
N(s) = 0,25 s2 + 0,75 s + 1,5, M{s) = 1. Подставляя их и выражения
для Р~ (s) и R~ (s) в E.41), найдем искомую передаточную функцию:
0,1 s3 + 0,8 s2 + 1,7 s + 1
@,25 s2+ 0,75 s + l,5)s '
5.5. Метод обратной задачи динамики
В механике обратной называют задачу, когда по заданному урав-
уравнению движений или его свойствам требуется определить силы, вы-
вызывающие такое движение. Поэтому с точки зрения механики зада-
задача синтеза, когда по заданным свойствам движения системы нужно
определить закон управления (по существу силу), является обратной
задачей механики, или, конкретнее, обратной задачей динамики.
5.5. Метод обратной задачи динамики 181
Методом обратной задачи динамики будем называть метод син-
синтеза систем, когда по заданным уравнению объекта и требованиям
к качеству системы управления определяется желаемое дифференци-
дифференциальное уравнение, решение которого удовлетворяет заданным требо-
требованиям, а затем из найденного уравнения выражается старшая произ-
производная и подстановкой ее вместо старшего производного в уравнение
объекта находится требуемый закон управления.
Данный метод был предложен Л.М. Бойчуком прежде всего для
синтеза структуры нелинейных систем управления [3].
5.5.1. Объект 2-го порядка. Пусть объект управления описы-
описывается уравнением
,t) = bou, а0 > О, Ьо ф 0. E.51)
Задан требуемый закон изменения y°(t) выходной переменной у.
Требуется найти алгоритм управления, при котором ошибка
x(t)=y°(t)-y(t)
изменяется следующим образом:
x(t) = de-Xlt + C2e-X2t. E.52)
Здесь Ci, С2 — произвольные постоянные; Ai, A2 — заданные поло-
положительные постоянные. Решим эту задачу методом обратной задачи
динамики. Для этого найдем желаемое дифференциальное уравнение.
Функция E.52) является решением дифференциального уравнения
ж + Л1Ж + Л2ж = 0, Ai=Ai+A2, Л2 = AiA2. E.53)
Учитывая, что у = y°(t) — x(t), имеем у = y°(t) — x(t). Из уравне-
уравнения E.53) получаем —х = К\х + Л2ж. Поэтому желаемый закон изме-
изменения высшей производной имеет вид
Подставив это выражение в E.51) и исключив переменную у, по-
получим
U=V0 М# °(*) + Л1* + Л2Ж) + /(У°(*) - *> !/°(*) - х' *)] • E-54)
Линейный стационарный объект 2-го порядка
о>оУ + o-iy + о>2У = ^о^, «о > 0, Ьо ф О,
является частным случаем уравнения E.51), когда f(y,y,i) = а\у +
-\- о>2У- Поэтому в этом случае E.54) принимает вид
+ aoy°(t) + aiy°(t) + a2y°(t)}. E.55)
182
Гл. 5. Синтез систем управления
Пример 5.10. Передаточная функция объекта управления есть
Wo(s) = — , задающее воздействие g(t) = y°(t) = А (А —
s2 + 3s + 2
константа). Определить алгоритм управления, при котором ошиб-
ошибка x(i) = y°(i) — y(t) изменяется следующим образом:
+ C2t)e~2t.
x(t) = (Ci
Решение. В данном случае
ние объекта имеет вид
= Л2 = 2, Л1 = Л2 = 4, уравне-
уравнеСледовательно, а® = 1, а\ — 3, а2 = 2, 6о = 1 и согласно E.55)
и = х + 2ж + 2А = (р + 2)ж + 2g(t) (g(t) = Л).
Используя передаточные функции относительно входов х и д, полу-
полуS~\ X
-V
I
w,,q
Wux
-К
4 U
wo
У
Рис. 5.2. Структурная схема (к примеру 5.10)
ченный алгоритм управления можно записать в следующем виде:
и = Wux (р)х + Wug (p)g, Wux (р) = р + 2, Wug (p) = 2.
На рис. 5.2 представлена структурная схема синтезированной сис-
системы.
Астатический закон управления. В примере 5.10 синтези-
синтезированный регулятор определяется двумя передаточными функциями.
Хотя система не является астатической, статическая ошибка от за-
задающего воздействия равна нулю. Это обусловлено наличием звена с
передаточной функцией Wug (p). Однако при неточном знании модели
объекта или действии неконтролируемых (не учтенных в уравнениях)
возмущений статическая ошибка не будет равна нулю. Поэтому жела-
желательно, чтобы закон управления E.55) включал интегральный член.
Такой закон управления будем называть астатическим.
Астатический закон управления можно получить следующим об-
образом. В уравнении E.52) и равенстве, которое получается дифферен-
дифференцированием E.52), сделаем подстановку de~Xlt = z\ и C2e~X2t = z2.
Тогда получим
X[t) = Z\ + Z2,
x(t) = — X±zi — X2z2-
Разрешим эту систему равенств относительно z\ и z2:
\ix(t)+x(t)
_ \2x(t)
Zl — 7
Ai — A2
Z2 =
— A2
5.5. Метод обратной задачи динамики 183
Проинтегрировав E.52) по ?, получим
Гх(т) dr = -— z1 - — z2.
J Al Л2
0
Подставив сюда найденные выше выражения для z\ и ^, умножим
обе части на а (а — константа):
t
а (х{т) dr = --?- [(Л! + A2)ar(i) + x(t)].
J AlA2
О
Учитывая обозначения Ai = Ai + Л2 и А2 = X±X2 (см. E.53)), это
равенство можно представить в виде
t
ak2 Гх(т) dr = -аАгхф - ax(t). E.56)
о
Прибавляя и вычитая — {о.К\х + ах), закон управления E.55) преоб-
оо
разуем к виду
и = — \ao\\Ai — — )х + (А2 — — )х + (ах + aAix) —
bo I LV aoJ V aoJ
- {ax + aAia;)l + aijj0 + aiy° + a2y°\.
Отсюда с учетом E.56) получим астатический закон управления
и = 1{а0 IYAi - - + а)х + (а2 - ^ + аАЛх +
6о I LV ао / V ао /
t
+ aA2Jx{r) б?г] + сыу0
о
Здесь а можно задать исходя из дополнительных требований.
5.5.2. Объект 3-го порядка. Пусть объект управления описы-
описывается уравнением
ao'y+f(y,y,y,t)=bou, ао>0, Ъо ф 0. E.57)
Задан требуемый закон изменения y°(t) выходной переменной у. Тре-
Требуется найти алгоритм управления, при котором ошибка
x(t)=y°(t)-y(t)
изменяется следующим образом:
x(t) = Cie-Xlt + C2e~X2t + C3e~X3t.
Здесь Ci, C2, Cz — произвольные постоянные, Ai, A2, A3 — заданные
положительные постоянные.
Эта функция является решением дифференциального уравнения
'х + А\х + А2х + А3х = О,
Ai = Ai + А2 + A3, Л2 = А1А2 + А1А3 + А2А3, Л3 = А1А2А3.
184 Гл. 5. Синтез систем управления
Поэтому в рассматриваемом случае
'у ='у°- 'х ='у° + Kix + А2х
у = у° -х, у = у° -х, у = у° -х.
Подставив эти выражения в E.57), получим
и = — \aoy'°(t) + ao(Aix + А2х + А3х) +
+ f(f(t) - х, y°(t) - х, y°(t) - х, t)]. E.58)
Линейный стационарный объект 3-го порядка
' + aijj + а2у + а3у = bou, а0 > О, Ьо ф О,
является частным случаем нелинейного объекта E.57), когда
/(г/, з/, у, t) = aijj + a2y + а3у. Поэтому из E.58) имеем
bo
+ ao'y°(t) + aiy°(t) + a2y°(t) + a3y°(t)}. E.59)
Пример 5.11. Пусть передаточная функция объекта имеет вид
Wo(s) = ——— —¦ и задающее воздействие g(t) = А (А — коне-
SyS ~r oS ~г Л)
танта). Определить алгоритм управления, при котором ошибка x(t) =
= А — y(t) изменяется в соответствии с
x(t) = (Ci + C2t + C3t3)e~2t.
Решение. В данном случае Ai = А2 = A3 = 2, Л1 =6, А2 = 12
и Аз = 8, уравнение объекта имеет вид
У' + Зу + 2у = и.
Поэтому ао = 1, di= 3, а2 = 2, аз = 0, Ьо = 1 и из E.59) получаем
и = Зх + Юж + 8ж.
Передаточная функция регулятора имеет вид
Физическая осуществимость. Алгоритм управления, опреде-
определяемый методом обратной задачи динамики, как правило, не удовле-
удовлетворяет условию физической осуществимости: относительная степень
передаточной функции синтезированного регулятора отрицательна.
Поэтому его точно осуществить (реализовать) не удается. Это связано
с тем, что нельзя реализовать точный (идеальный) дифференциатор.
Однако при решении вопроса о реализуемости алгоритма управления
его нужно рассматривать с учетом заданного объекта управления.
Может оказаться, что требуемые производные можно определить пу-
путем измерения.
5.6. Синтез при наличии чистого запаздывания
185
Например, пусть передаточная функция объекта имеет вид
Wo (р) = ^^ | ^ , передаточная функция регулятора Wp (р) = кп + кДр
и задающее воздействие g(t) = y°(t) = до (до — константа). В данном
9о
-\ X
кп >
У 1 1
"^ р
Рис. 5.3. Структурная схема (к вопросу о реализуемости)
случае производную можно измерить и алгоритм управления можно
точно реализовать (рис. 5.3).
В случае линейных систем, имея желаемое дифференциальное
уравнение, легко получить желаемую передаточную функцию. Поэто-
Поэтому, казалось бы, нет особой разницы между методом обратной задачи
динамики (ОЗД) и методом желаемой передаточной функции (ЖПФ).
Однако между этими двумя методами существует принципиальная
разница, заключающаяся в следующем.
1) Алгоритм управления, полученный методом ОЗД, в общем слу-
случае нельзя точно реализовывать, в то время как вопрос реализуемости
передаточной функции регулятора, которая находится методом ЖПФ,
решается в процессе ее получения.
2) Если на объект управления действуют контролируемые возму-
возмущения и они учтены в его уравнении, то при использовании метода
ОЗД получается комбинированный закон управления, полностью ком-
компенсирующий действие указанных возмущений. Метод ЖПФ не поз-
позволяет синтезировать инвариантную от возмущений систему управ-
управления.
5.6. Синтез систем управления при наличии
чистого запаздывания
Если объект управления содержит звено чистого запаздывания, то
можно его передаточную функцию WT(s) = e~Tt аппроксимировать
дробно-рациональной функцией и при синтезе регулятора использо-
использовать рассмотренные выше методы.
Для аппроксимации воспользуемся разложением экспоненты e~TS
в ряд Тейлора:
е =
= 1 - rs +
1
(tsJ
2!
3!
2!
(rsf
3!
186 Гл. 5. Синтез систем управления
Если ограничиться первыми тремя слагаемыми разложения, то по-
получим
W~(s) = 1-T8 + ^f- = T2s2 - 2(Ts + 1, E.60а)
где T = -!=, С = А=-
n/2 л/2
Амплитудные и фазовые частотные функции имеют вид
2™ . л/2
4^ при "^V'
—тг - arctg -—-—— при ш ^ —.
Представив передаточную функцию звена чистого запаздывания
в виде WT(s) = e~Tt = e~rS//2/erS//2, разложим числитель и знамена-
знаменатель в ряд Тейлора. Тогда, ограничиваясь двумя и тремя членами
разложения, получим соответственно
Eб1б)
Амплитудные частотные функции обеих передаточных функций
совпадают с амплитудной частной функцией исходной передаточной
функцией звена чистого запаздывания:
\w!?>{jw)\ = \w!&{jw)\ = \WT(jw)\ = 1.
Фазовые частотные функции имеют вид
= -2 arctg ^,
о . 4™ .у/8
—2 arctg —— при uj < —,
4™ . V8
ПРИ Ш>
5.6. Синтез при наличии чистого запаздывания
187
Фазовая частотная функция ср\-' (си) по модулю превышает частот-
частотную функцию (f\- (uj):
\ipW(uj)\ ^ \(f^(cu)\. E.62)
Равенство имеет место только при uj = 0.
Действительно, при uj ^ л/8/т неравенство E.62) принимает вид
tlo 4га;
"У ^ 8 - (tloJ '
. tlo
arctg—
ИЛИ
Справедливость последнего неравенства очевидна, если его пред-
представить в виде 8 — (tuj) ^ 8. Равенство имеет место только при uj = 0.
При uj ^ л/S/t неравенство E.62) имеет вид
, tuj . , . 4га;
arctg-^Tr + arctg^-^-^.
Справедливость этого неравенства, причем строгого, следует из оче-
очевидных неравенств
. tuj тг . 4га; тг
arctgT<- и ^ + arctgg-T7^>-.
В табл. 5.2 приведены отклонения (разности) фазовых частотных
функций (р+(и>), (f~(uj), (f\-' (uj) и (f\-' (uj) от фазовой частотной функ-
функции звена чистого запаздывания ipT(uj),
А± = (рт(си) - ч>+(и) = (рт(со) - ч>~(и),
А^ =рт(и;)-^(и;), г = 1,2,
при частотах uj ^ 1,4/г, г ^ 1.
Сравнивая частотные функции передаточных функций E.60) и
E.61), можно заметить, что формулы E.61) более точно аппроксими-
Таблица 5.2. Фазовые погрешности звеньев, аппроксимирующих звено
чистого запаздывания
LOT
А±
ДA)
ДB)
LOT
А±
ДA)
ДB)
0
0,0000
0,0000
0,0000
(
0
-0
0
0,8
0,0663
-0,0390
0,0203
0002
0001
0000
0
0,
-о,
0,
0,9
0,0866
-0,0543
0,0284
,2
0013
0007
0003
0,3
0,0044
-0,0022
0,0011
1
0,
-о,
о,
1071
0727
0383
0,4
0,0101
-0,0052
0,0026
1,1
0
-0
0
,1260
,0943
,0500
0,5
0,0191
-0,0100
0,0051
1,2
0,1416
-0,1192
0, 0634
0,6
0,0317
-0,0171
0,0087
1,3
0,1521
-0,1472
0,0785
0,7
0,0667
-0,0267
0,0137
1,4
0,1565
-0,1785
0,0952
руют передаточную функцию звена чистого запаздывания, чем фор-
формулы E.60), по крайней мере при малых tuj.
188 Гл. 5. Синтез систем управления
Действительно, амплитудные частотные функции аппроксими-
аппроксимирующих звеньев E.61) и звена чистого запаздывания совпадают. И,
как следует из табл. 5.2, при малых тио фазовые частотные функции
этих звеньев отличаются от фазовой частотной функции звена чис-
чистого запаздывания меньше, чем фазовая частотная функция звень-
звеньев E.60).
Задачи
1. Заданы передаточные функции регулятора Wp(s) = кП и объек-
объекта Wo(s) = —; -г системы управления (рис. 5.4). Определить пара-
S yS —|— л. J
9'-' л~- wp
У
Рис. 5.4. Схема системы управления
метр регулятора кп по минимуму интегральной квадратической ошиб-
ошибки J20 при условии кп ^ 50.
2. Заданы передаточные функции регулятора Wp(s) = 2-\—- и
1 s
объекта Wo(s) = системы управления (см. рис. 5.4). Определить
S —|— л.
параметр регулятора /си по минимуму интегральной квадратической
ошибки J20 при условии кИ ^ 1.
3. Заданы задающее воздействие g(t) = 0,5^ и передаточные функ-
ции регулятора Wp(s) = 2-\—- и объекта Wo(s) = системы
S S —|— ±
управления (см. рис. 5.4). Определить параметр регулятора кИ по
минимуму интегральной квадратической ошибки J20 при условии,
что установившаяся ошибка \едоо\ ^ 0,1.
4. Заданы передаточные функции регулятора Wp(s) = 2 -\—- и
1 s
объекта Wo(s) = системы управления (см. рис. 5.4). Опреде-
s + 1
лить параметр регулятора &и по минимуму обобщенной интегральной
квадратической ошибки J21.
2
5. Задана передаточная функция объекта Wo(s) = , —-. Син-
s@,5 s + 1)
тезировать оптимальные по степени устойчивости П-регулятор и
ПИ-регулятор.
2
6. Задана передаточная функция объекта Wo(s) = —7 г.
s@,5 s2 + 4s + 1)
Синтезировать оптимальные по степени устойчивости П-регулятор,
ПД-регулятор, ПИ-регулятор и ПИД-регулятор.
5.6. Синтез при наличии чистого запаздывания 189
7. Задана передаточная функция объекта Wo(s) =
(s-l)@,5s + l)'
Синтезировать регулятор, при котором переходный процесс описы-
описывается функцией x(t) = (Ci + C2t + C^t2)e~2t и статическая ошибка
равна нулю.
8. Задана передаточная функция объекта Wo(s) = \- -.
(s + 1)@,5 s + 1)
Синтезировать регулятор, при котором переходный процесс описы-
описывается функцией x(i) = (С\ + C2t + C^t2)e~2t и статическая ошибка
равна нулю.
2
9. Задана передаточная функция объекта Wo(s) = —t^-z тт-
Синтезировать регулятор, при котором получается монотонный пере-
переходный процесс, статическая ошибка от задающего воздействия равна
нулю и время регулирования tp ^ 0,8.
2
10. Задана передаточная функция объекта Wo(s) = —-.
S (U,О S ~г 1J
Синтезировать регулятор, при котором время регулирования tp ^ 0,8
и перерегулирование сг ^ 15 %.
11. Задана передаточная функция объекта Wo(s) = ^- -.
(s + l)@,5s + l)
Синтезировать регулятор, при котором характеристический полином
синтезированной системы имеет вид G(s) = (s + IK.
2
12. Задана передаточная функция объекта Wo(s) = , —-.
s@,5 s + 1)
Синтезировать регулятор, при котором характеристический полином
синтезированной системы имеет вид G(s) = (s + l)(s + 2)(s + 3).
Глава 6
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
ДИСКРЕТНЫХ СИСТЕМ
6.1. Различные типы дискретных систем
Система управления называется дискретной, если она содержит
дискретный элемент. Элемент называется дискретным, если его вы-
выходной сигнал квантован по времени или по уровню. Говорят, что
сигнал квантован по времени, если он представляет собой последо-
последовательность импульсов, и квантован по уровню, если он принимает
дискретные значения, т.е. значения, кратные некоторой минимальной
величине, называемой уровнем квантования или квантом.
Дискретные системы разделяются на импульсные, цифровые и ре-
релейные.
Система управления называется импульсной, если она содержит
импульсный элемент — дискретный элемент, преобразующий непре-
непрерывный сигнал в импульсный, т. е. в последовательность импульсов.
На выходе импульсного элемента сигнал квантован по времени.
Система управления называется цифровой, если она содержит
цифровое устройство. На выходе цифрового устройства сигнал кван-
квантован по уровню и по времени.
Система управления называется релейной, если она содержит ре-
релейный элемент. Релейные системы управления являются существен-
существенен s(':
Аи
Рис. 6.1. Формы импульса: а — прямоугольный импульс; б — треуголь-
треугольный импульс; в — синусоидальный импульс
но нелинейными. Они не подлежат обычной линеаризации и в этой
части книги не рассматриваются.
Рассмотрим различные типы импульсных систем. Но для этого
прежде всего остановимся на характеристике импульсов и импульсной
модуляции.
6.1. Различные типы дискретных систем
191
Импульсом длительности ти называется сигнал (физическая ве-
величина), который описывается функцией, не обращающейся в нуль
только на некотором конечном интервале времени длительности ти.
По форме различают прямоугольные, треугольные, синусоидаль-
синусоидальные (рис. 6.1) и другие импульсы. Они характеризуются шириной
(длительностью) ти и амплитудой
(высотой) Аш. Последовательность u(t)t
импульсов, помимо указанных пара-
параметров, еще характеризуется перио-
периодом следования импульсов Т и отно-
относительной длительностью j = тт/Т
(рис. 6.2). ти т 2Т i
В импульсном элементе происхо-
происходит модуляция, т. е. в соответствии ^ИСф ^-2. Последовательность
с входным сигналом изменяется один импульсов
из параметров последовательности импульсов на выходе. В зависи-
зависимости от того, какой параметр изменяется, различают амплитудно-
импульсную модуляцию (АИМ), широтно-импульсную модуляцию
(ШИМ) и другие.
При АИМ изменяется амплитуда Ли, а при ШИМ — ширина
(длительность) импульса. Импульсный элемент, осуществляющий
амплитудно-импульсную модуляцию, называют АИМ-элементом, а
импульсный элемент, осуществляющий широтно-импульсную моду-
модуляцию, называют ШИМ-элементом.
Импульсную систему управления, содержащую АИМ-элемент,
называют АИМ-системой управления, а импульсную систему уп-
управления, содержащую ШИМ-элемент, называют ШИМ-системой
управления.
Различают импульсную модуляцию 1-го и 2-го родов. При им-
импульсной модуляции 1-го рода модулируемый параметр изменяется
в соответствии со значениями входного (модулирующего) сигнала
e(t)>
«(*)'
«(*)
2Г
Т 2Т
t
Рис. 6.3. Модуляции 1-го и 2-го родов: а — модулирующий сигнал; б —
АИМ 1-го рода; в — АИМ 2-го рода
(рис. 6.3, а) в дискретные моменты времени, называемые моментами
съема сигнала (рис. 6.3,6).
При модуляции 2-го рода модулируемый параметр изменяется в
соответствии со значениями модулирующего сигнала в течение всего
времени существования импульса (рис. 6.3, в).
192 Гл. 6. Математическое описание дискретных систем
6.2. Линейные разностные уравнения
Линейные дискретные системы описываются линейными разност-
разностными уравнениями. Поэтому кратко рассмотрим теорию таких урав-
уравнений.
Пусть дана дискретная функция, т.е. функция x(t), у которой
аргумент принимает дискретные значения, кратные Т: t = пТ, п =
= 0,1,2,...
Функция Ax(t), определяемая формулой
Ax(t) =x(t + T) -x(t),
называется первой (конечной) разностью. Рекуррентно п-я (конеч-
(конечная) разность определяется следующим образом:
A°x(t) = x(t), Anx(t) = An~1x{t + T) - An~1x(t), n = 1,2,...
Введем в рассмотрение оператор смещения Е, который определя-
определяется соотношением
Ex(t) =x(t + T).
Используя этот оператор, конечные разности можно представить сле-
следующим образом:
Ax(t) = Ex(t) - x(t) = (Е - l)x(t),
A2x(t) = EAx(t) - Ax(t) = (E- l)Ax(t) = (E - lJx(t),
Anx(t) = EAn-1x{t) - An-Ix{t) = (E- l)An-1x{t) = (E - l)nx(t).
По формуле бинома Ньютона имеем
п
1) СЕ С
) =
(Е1) =2^A) СпЕ , Сп =
к=0 v J
Поэтому
п п
Anx(t) = Y,(-l)n~kCnEkx(t) = ^2(-l)n-kC^x(t + кТ). F.1)
к=0 fc=0
Уравнение
c0Any(t) + c1An-1y(t) + ... + cny(t)=ip(t) (соф0), F.2)
где y(t) — неизвестная дискретная функция, называется (конечным)
разностным уравнением п-го порядка. Используя формулу F.1),
уравнение F.2) всегда можно преобразовать к виду
aoy(t + пТ) + aiy(t + (п - 1)Г) + ... + any(t) = ф). F.3)
Если ао ф 0 и ап ф 0, то уравнение F.3) также называют (конечным)
разностным уравнением n-го порядка.
Здесь всюду коэффициенты уравнения предполагаются вещест-
вещественными и постоянными.
6.2. Линейные разностные уравнения 193
Уравнение
aoy(t + пТ) + aiy(t + (п - 1)Г) + ... + any(t) = 0, F.4)
которое получается из уравнения F.3) приравниванием нулю правой
части, называется однородным (конечным) разностным уравнением,
соответствующим неоднородному разностному уравнению F.3).
Используя оператор смещения Е, уравнение F.3) можно записать
в операторной (символической) форме
a0Eny(t) + сцЯ"^*) + ... + any(t) =
(a0En + а1Еп-г + ... + an)y(t) = <p(t). F.5)
Соответствующее однородное уравнение в операторной форме при-
принимает вид
(а0Еп + ахЕп~х + ... + an)y(t) = 0. (б.б)
Общее решение неоднородного разностного уравнения F.3) име-
имеет вид
y(t)=yB(t) + yc(t),
где yB(t) — частное решение этого уравнения, определяющее вынуж-
вынужденное движение, и yc(t) — общее решение соответствующего одно-
однородного уравнения F.4), определяющее свободное движение.
Решение однородного уравнения ищется в виде y(t) = А*. Подста-
Подставив это выражение в F.4), получим
(a0AnT + aiX^-^T + ... + an)A* = 0.
Это равенство будет выполнено тождественно относительно ?, если
a0AnT + aiA(n~1)T + ... + ап = 0.
Положив Ат = z, получим алгебраическое уравнение
aozn + axzn~x + ... + ап = 0, F.7)
которое называется характеристическим уравнением. Левая часть
этого уравнения получается из разностного оператора при неизвест-
неизвестной функции в уравнениях F.5) и (б.б) при замене Е на z.
Таким образом, решением однородного разностного уравне-
уравнения F.4) будет
у = К = 4/Т,
где Zi — корень характеристического уравнения F.7).
Если все корни zi (г = 1, 2,..., п) характеристического уравнения
простые (т. е. различные), то общее решение однородного разностного
уравнения F.4) имеет вид
п
yc(i) = Y,CiZt/T, F.8)
где Сi — произвольные постоянные. Если среди корней характерис-
характеристического уравнения имеется кратный корень Zj кратности kj, то
13 Д.П. Ким
194 Гл. 6. Математическое описание дискретных систем
ему в F.8) соответствует слагаемое
^-1)^. F.9)
Если имеются простые комплексно-сопряженные корни Zk,k+i =
= а ± j/З, то соответствующие им два слагаемых можно заменить на
pt/T / д cog _ ^ _|_ g gnl _ {
i 0
где о = у а2 +/32, Ф = arctg—, А, В — произвольные константы.
а
Пример 6.1. Найти общее решение разностного уравнения
y(t + 2Г) - by{t + Т) + 6y(t) = At.
Решение. Частное решение будем искать в виде
yB(t) =at + b.
Подставив это выражение в данное уравнение, получим
a(t + 2Г) + Ъ - 5 [a(t + Т) + Ъ] + 6(at + Ъ) = U,
или, после приведения подобных членов,
2at - ЗаТ + 2Ъ = 4*.
Отсюда, приравняв коэффициенты при одинаковых степенях t, по-
получаем
2а = 4, -ЗаТ+ 26 = 0 => а = 2, 6 = ЗГ.
Следовательно, частное решение есть
yB = 2t + ЗТ.
Характеристическое уравнение имеет вид
z — bz + 6 = 0.
Корнями этого уравнения являются
5 , /25 " 5 , 1
2 ^ V 4 - 2~2 ^ Zl~S> Z2~2'
Поэтому общее решение однородного разностного уравнения имеет
вид
а общее решение неоднородного разностного уравнения есть
yit) = yB(t) + yc(t) =2t + 3T + Ci3*/r + C22*/T.
Пример 6.2. Определить решение разностного уравнения
при нулевых начальных условиях B/@) = 2/ (Г) = 0).
6.3. Решетчатые функции и z-преобразование 195
Решение. Частное решение будем искать в виде констан-
константы yB(t) = а. Подставив это выражение в данное уравнение, получим
, 1 => а = |.
Характеристическое уравнение
z2 + z + 0,25 = О
имеет двукратный корень z±^ = —0,5. Общее решение однородного
разностного уравнения —
и общее решение неоднородного уравнения —
!/(*) = ife(i) + 1/с(«) = | + (Ci + C2 A)(-0,5)*/T.
Из начальных условий имеем
+ (С1+С2)@,Ь) 0.
Решив эту систему уравнений, получим Ci = —4/9, С2 = 4/3.
Следовательно, искомое решение имеет вид
6.3. Решетчатые функции и z-преобразование
При рассмотрении разностных уравнений важную роль играет
^-преобразование. Но прежде чем приступить к изучению этого пре-
преобразования, познакомимся с классом дискретных функций, назы-
называемых решетчатыми функциями.
6.3.1. Решетчатые функции. Дискретная функция x(t) по опре-
определению есть функция, которая определена в дискретные моменты
времени t — IT (I = 0,1, 2,...). Далее дискретную функцию будем за-
записывать в виде ж[/Т], используя t как непрерывную переменную. В
теории дискретных систем рассматривают особый тип дискретных
функций, называемых решетчатыми функциями. Решетчатая функ-
функция ж[/Т] характеризуется тем, что она определяется непрерывной
функцией (функцией непрерывного аргумента) x(t) и принимает ее
значения в моменты t — IT (I = 0,1, 2, ...). Кроме того, использует-
используется смещенная решетчатая функция х[A + е)Т] @ < е < 1), которая
принимает значения непрерывной функции в моменты t = (I + е)Т
(/ = 0,1,2,...). Поэтому когда говорят о решетчатой и смещенной
решетчатой функциях, предполагают, что существует непрерывная
функция, которая определяет эти функции.
13*
196 Гл. 6. Математическое описание дискретных систем
6.3.2. Определение z-преобразования. z-преобразованием,
или преобразованием Лорана, называется соотношение
сю
~l, F.10)
z=o
ставящее в соответствие дискретной функции х[1Т] функцию комп-
комплексного переменного X*(z). При этом х[1Т] называют оригиналом,
a X*(z) — изображением или z-изображением. Оригинал и его изоб-
изображение обозначают одноименными буквами: оригинал — строчной
буквой, а изображение — прописной буквой со звездочкой,
^-преобразование также условно записывают в виде
X*(z) = Z{x[lT}},
а обратное ^-преобразование — в виде
x[lT] = Z-1{X*(z)}.
Предполагается, что в ^-преобразовании F.10) дискретная функ-
функция обладает следующими свойствами:
1°) существуют положительные числа М и q такие, что
\х[1Т]\ < Mql при любых I ^ 0;
2°) х[1Т] = 0 при всех I < 0.
Свойство 1°) необходимо для существования области сходимости
ряда в правой части F.10), а свойство 2°) используется при выво-
выводе некоторых свойств ^-преобразования. Функции, удовлетворяющие
указанным двум свойствам, называют функциями-оригиналами.
^-преобразование от смещенной решетчатой функции х[A + е)Т],
т.е. соотношение
сю
называют модифицированным z-преобразованием. Модифицирован-
Модифицированное ^-преобразование также записывают в виде
X*(z,e) = Z{x[(l + e)T}} = Ze{x[lT}}.
Функцию X*(z,e) называют z-изображением смещенной решетча-
решетчатой функции х[{1 + е)Т] или модифицированным z-изображением
решетчатой функции х[1Т].
Пример 6.3. Определить ^-изображение единичной решетчатой
функции х[1Т] = 1[1Т] и смещенной решетчатой функции х[A + е)Т] =
= Щ + е)Т].
Решение. Так как при всех /^0 1[1Т] = 1[A + е)Т] = 1, то
СЮ
X*(z)=X*(z,e)=J2z~'-
1=0
По формуле суммы бесконечно убывающей геометрической прогрес-
прогрессии имеем
T-L=T = 7?r[ (И>1). F.11)
6.3. Решетчатые функции и z-преобразование 197
6.3.3. Основные свойства z-преобразования. Так как z-upe-
образование от ж[/Т] можно рассматривать как частный случай моди-
модифицированного ^-преобразования при е = 0, то рассмотрим свойства
модифицированного ^-преобразования. Доказательства приводятся в
конце, после рассмотрения всех свойств.
1°. Линейность. Модифицированное ^-преобразование от линей-
линейной комбинации дискретных функций равно линейной комбинации их
модифицированных ^-преобразований:
г=1
Здесь cti (i = 1, 2,..., п) — константы.
2°. Теорема запаздывания. Модифицированное ^-преобразование
от функции с запаздывающим аргументом х[A — т)Т] определяется
следующим образом:
Z?{x[(l - m)T]} = z-mZ?{x[lT}} = z-mX\z,e). F.12)
3°. Теорема опережения. Модифицированное ^-преобразование от
функции с опережающим аргументом х[A + гп)Т] определяется сле-
следующим образом:
Г т~1 1
Z?{x[(l + т)Т}} = zm \X*(z,е)-^2 х[(к + e)T\z~k .
I- к=о -I
Если х[еТ] = х[A + е)Т] = ... = х[(гп - 1 + е)Т] = 0 (начальные ус-
условия нулевые), то
Z?{x[(l + m)T]} = zmX*(z,e). F.13)
4°. Умножение оригинала на A + е)Т. ^-преобразование от произ-
произведения x[(l + m)T](l + е)Т определяется следующим образом:
= eTX*(z,e)-TzdX^e). F.14)
При е = 0 имеем
Z{x[lT]lT} = -Tz dX'd{zZ) ¦ F-15)
Пользуясь полученным свойством, найдем обычное и модифициро-
модифицированное ^-изображения функции у[1Т] = IT.
Модифицированное ^-изображение для единичной функции (см.
формулу F.11)) имеет вид
z-1
Поэтому если в F.14) положим х[A + е)Т] = 1[(/ + е)Т], то получим
. е)Т} = Z{l[(l + е)Т]A + е)Т} = еТ ^— + T_z F.16)
198 Гл. 6. Математическое описание дискретных систем
Отсюда при е = 0 имеем
j^. F.17)
5°. Умножение оригинала на а A+?)аТ. ^-преобразование от про-
произведения х[A + т)Т}а~A+?Л)аТ определяется следующим образом:
При е = 0 имеем
Z{x[lT}a~laT} = X*(aaTz). F.19)
Найдем обычное и модифицированное ^-изображения функ-
функции у[1Т] = е~а1Т. Положив в F.18) х[A + е)Т] = 1[(/ + е)Т] и а = е,
получим
„осТ
гу$ — A+е)аТ\ ю—еаТ с z „—eaT z (п с\г\\
Z^i с г — о — — — о ———. yyj.^yjj
При е = 0 имеем
z_e-ai
6°. Теорема о свертке. Произведение изображений X^(z^e)
и Х|(^,е) равно ^-преобразованию от свертки их оригиналов
>. F.22)
При е = 0 имеем
. F.23)
7°. Теоремы о граничных значениях. Начальное значение решет-
решетчатой функции х[1Т] по ее обычному и модифицированному z-изобра-
жению определяется следующим образом:
х[еТ] = lim X*(z,e), x[0] = lim X*(z). F.24)
Предел ж(оо) = lim ж[/Т] при условии, что он существует, определя-
/—>-схэ
ется следующим образом:
ж(оо) = limB? - 1)Х*(^,г) = lim(z - l)X*(z). F.25)
6.3. Решетчатые функции и z-преобразование 199
Доказательство свойств z-преобразований.
1°. Линейность. Согласно определению модифицированного z-upe-
образования
е)Т] =
ОО , П
Е
оо
<[(г+?)Г^"' = Е «
г=1 /=0 г=1
2°. Теорема запаздывания. В ^-преобразовании
- m
в правой части сделаем подстановку I — m = к:
х[(к + e)T
l=-m
Так как функция-оригинал обращается в нуль при отрицательных
аргументах, из последнего равенства получаем
сю
Z{x[(l -m + e)T]} = z~m ^ х[(к + e)T]z~k = ^-mX*(z,г).
3°. Теорема опережения. Эта теорема доказывается так же, как и
теорема запаздывания.
4°. Умножение оригинала на A + е)Т. Продифференцируем обе
части ^-преобразования
1=0
по z и умножим на Tz:
dz
1=0
Вычтем это выражение из предыдущего равенства, предварительно
умножив его на еТ:
* / \ ГТЛ (л-Л- yZ , С J fjl '\ "^ Г/7 , \ ГГ\Л / |
[ZjSj -L Z " — & л. У Х\[1 ~\~ S ) -L \Z ~\
dz ^—'
сю сю
+ lTz
1=0 1=0
¦е)Тх[A
200 Гл. 6. Математическое описание дискретных систем
5°. Умножение оригинала на а~A+?")аТ. Согласно определению
^-преобразования
сю
(l + е)Т}} = Y, a~il+?)aTx[(l + e)T]Z-1 =
1=0
сю
1=0
6°. Теорема о свертке. Воспользовавшись определением z-upe-
образования, можем записать
k=0
По теореме запаздывания (см. F.12))
сю
z~kXZ(z,e) = ^х2Щ -k + e)T]z-1.
1=0
Подставив это выражение в предыдущее равенство, находим
сю сю
z,e) = ^Xl[(k + е)Т]^х2[{1 - к + e)T]z~l =
к=0 1=0
сю сю
1=0 к=0
Отсюда, учитывая, что х2[A — к + е)Т] = 0 при I — к < 0, получаем
ос I
1=0 k=0
( L
~~ к + e)T]x2[(l - к + е)Т]
Аналогично, используя равенство
к=0
получим
7°. Теоремы о граничных значениях. Представим z-преобразова-
ние от функции х[{1 + s)T) в виде
сю
X*(z,e) =x[eT] + S, S = '?x[(l + e)T}z~l.
6.3. Решетчатые функции и z-преобразование 201
По определению функции-оригинала существуют положительные
числа М и q такие, что \x[(l + s)T]\ < Mql. Поэтому
При \z\ > q no формуле суммы бесконечно убывающей геометричес-
геометрической прогрессии имеем
СЮ j
_ q/\z\ _ q
l=1 , , 1~q/\z\ \z\ -q.
И так как lim —f-— = 0, то lim S = lim 151 = 0 и
l^l^oo \z\-q \z\^oo ' '
lim X*(z,e) = lim (x[eT] + S) = x[eT].
Отсюда при г = 0 имеем
х[0] = lim X*(z).
z^-oo
Итак, формулы F.24) доказаны.
Теперь докажем формулу F.25). Используя свойство линейности
z-преобразования и теорему опережения, можем записать
lim Z{x[(l + е)Т] - х[A + 1 + е)Т}} =
= lim [X*(z,e) - (zX*(z,e) - х[еТ])] =
= - lim(z - 1)Х*(х,е) + х[еТ].
Левую часть верхнего равенства можно также преобразовать сле-
следующим образом:
lim Z{x[(l + e)T] - х[{1 + 1 + е)Т]} =
Z—У1
ОО СЮ
/ ОО СЮ ч
= lim ( Y, х[{1 + e)T]z~l - Y, х[{1 + 1 + e)T]z~l ) =
z^ ^i=o i=o '
L L \
Y, z[(l + e)T]z~l - ^ x[(l + 1 + e)T]z~l J =
= lim lim
z^ ^o
= lim lim (x[eT] - x[(l + 1 + e)T]z~L) =
z^rl L—^сю
= lim (x[eT] - x[(l + 1 + e)T\) = x[eT] -
Приравняем правые части полученных равенств:
х[еТ] -ж[оо] = -ИтB-1)Х*B,е)+фГ].
Отсюда получаем
ж[оо] = lim(z-l)X*(z,e)
и при г = 0 Г п ... .ч л^^. ч
ж[оо] = limB? - l)X*(z).
202
Гл. 6. Математическое описание дискретных систем
6.3.4. z-изображения основных функций. В табл. 6.1 и
табл. 6.2 представлены соответственно обычные и модифицированные
^-изображения основных решетчатых функций. Как отмечалось,
решетчатая функция х[1Т] получается путем квантования (дискре-
(дискретизации) по времени непрерывной функции x(t). В дальнейшем пот-
потребуется вычислять ^-изображение решетчатой функции по извест-
известному изображению Лапласа X(s) непрерывной функции x(i). И
при этом чтобы избежать этапов вычисления x(t) путем обратного
преобразования Лапласа и дискретизации, в указанных таблицах
в первом столбце приведены изображения Лапласа соответствую-
соответствующих непрерывных функций.
Рассмотрим вывод формул, приведенных в табл. 6.1 и табл. 6.2.
И так как формулы для обычных ^-изображений получаются из фор-
формул для модифицированных ^-изображений при е = 0, ограничимся
выводом формул, приведенных в табл. 6.2.
Таблица
№
1
2
3
4
5
6
7
8
9
6.1. ^-изображения
F(s)
1
s
1
s2
1
s3
1
s + a
1
/^
S2+/32
s
S2+/32
/5
s + aJ+/32
s + a
^ + aJ+/32
IT
-alT
lTe~alT
sin/31T
cos PIT
e~alT sin plT
e~alT cos/31T
z2
z2
F-(z,e)
z
z-l
Tz
(z-lJ
1Т2ф + 1)
2 (^-lK
z
z-e~aT
Tze~aT
z sin PT
z2-2zcosf3T + l
z2 - z cos PT
z2 -2zcos/3T + l
ze~aT sin PT
- 2ze~aT cos CT + e~2aT
z(z - e"aT cos PT)
- 2ze-<*T cos/3T + e-2aT
6.3. Решетчатые функции и z-преобразование
203
Таблица 6.2. Модифицированные ^-изображения
№
1
2
3
4
5
6
7
8
Q
F(s)
1
s
1
S2
1
1
s + a
1
р
s2+p2
S
s2+P2
Р
{s + аУ+р?
s + a
(s + aJ+p2
ЩТ]
ЩТ]
IT
\ (itJ
e-alT
1Те~а1Т
sin PIT
cos PIT
e~alT sin PIT
^—оЛТ ^^^ Q\T
z
z-l
~т z i Tz
^ z-l (z-lJ
"T[ I ) I ^ ^
еаТГ eTz Tze~aT 1
6" i—~F^ + 7S—e~aTJ
z2 sin s/3T + z sin A - s)/3T
z2 -2zcospT + l
z2 cos s/3T - z cos A - e)PT
z2 -2zcospT + l
ze~?aT [z sin epT + e~aT sin A - e)pT]
z2 - 2ze-<*T cospT + e-2aT
ze~?aT [z cos s/3T - e~aT cos A - e)^T]
z2 — 2ze~aT cos ВТ + е~2аТ
1) Модифицированное ^-изображение для единичной функ-
функции f[lT] = 1[IT] было получено при рассмотрении примера 6.3
(см. формулу F.11)).
2) Модифицированное ^-изображение для функции f[lT] = IT было
получено при рассмотрении свойства 4° ^-преобразования (см. F.16)).
3) Для получения модифицированного ^-изображения для функ-
функции f[lT] = 1AТJ представим ее в виде f[lT] = 1Тх[1Т\, где х[IT] =
1
= „IT, и воспользуемся формулой F.14)
F*(z,e) = eTX*{z,e) - Tz
Так как
то, подставив это выражение в приведенную выше формулу, получим
искомое выражение для F*(z,e).
204 Гл. 6. Математическое описание дискретных систем
4) Модифицированное z-изображение для функции f[lT] = e~alT
было получено при рассмотрении свойства 5° ^-преобразования (см.
выражение F.20)).
5) Для получения модифицированного ^-изображения функции
f[lT] = 1Те~а1Т представим ее в виде f[lT] = e~alTx[lT], где х[1Т] =
= IT, и воспользуемся формулой F.18)
F*(z,e) = e-?aTX*(eaTz,e).
Так как
X*(z,e) = Z{A + e)T} = еТ -^_ + _Il_,
ТО
F4z ?) _ е-еат \?Т e«Tz Te«Tz 1 _
Л [z, в) - е \е± eaTz _ г + ^Tz _ 1J J -
При получении формул 6-9 из табл. 6.2 используется модифи-
модифицированное ^-изображение G*(z,e) функции g[lT] = e-(a-Jf3)lT. для
нахождения G*(z,e) представим последнюю функцию в виде д[1Т] =
= e~^~j^lTx[lT], где х[1Т] = 1[1Т], и воспользуемся формулой F.18):
G*{z,e) = e-<
Учитывая, что модифицированное ^-изображение единичной функции
имеет вид
находим
Q*(z ?) — e~^{oi-jl3)T
Умножим числитель и знаменатель на комплексно-сопряженное зна-
знаменателю число:
Используя формулу Эйлера е^х = cos ж + j sin ж, последнее выраже-
выражение можно преобразовать к виду
G#, ч _ ze~?aT(z cos epT - е~аТ cos A - e)f3T)
. ze~?aT(z sin e[3T + e~aT sin A - е)[ЗТ) , ,
^ z2 - 2ze~aT cos/ЗТ + е~2аТ • \ • )
6) Функция f[lT] = sin/31T связана с функцией д[1Т] =
соотношением
f[lT]=Img[lT]\a=0.
Поэтому (см. F.26))
¦(^е)|а=0 =
6.4- Уравнения и передаточные функции 205
7) Функция f[lT] = cos/3/Г связана с функцией д[1Т] = еЛ<
соотношением
f[lT]=Reg[lT]\a=0.
Поэтому
z,e)\
' Jl(*=o Z2 -2zcosf3T + l
8) Функция f[lT] = e~alT sinC1T связана с функцией д[1Т] =
_ e-(a-jp)iT соотношением
/[/Г] =Im 5[ZT].
Поэтому (см. F.26))
F*(z e) - ImG*(z e) - ze~°"Т(*™*РГ + e-°Tsin(l - e)/3T)
* (z,e)-imt, (z,e)- ^ _ 2ze-aTcospT + е-2ат
9) Функция /|7T] = e~alT cosf3lT связана с функцией д[1Т] =
= e~(a~:>^lT соотношением
f[lT]=Reg[lT].
Поэтому
6.4. Уравнения и передаточные функции
дискретных систем
Если дискретная система задается разностным уравнением, то
ее передаточные функции определяются аналогично передаточным
функциям непрерывных систем. Отличие состоит только в том, что
в случае дискретных систем вместо оператора дифференцирования р
используется оператор смещения Е, а вместо преобразования Лапла-
Лапласа — ^-преобразование.
Пусть дискретная система управления описывается разностным
уравнением
аоу[A + п)Т] + а1У[A + п - 1)Г] + ... + апу[1Т] =
= bou[(l + m)T] + Ьги[A + m- 1)Г] + ... + bmu[lT], F.27)
где у [IT] — выходная переменная, и[1Т] — входная переменная, ai
(i = 1, 2,..., п) и hi (ъ = 1, 2,..., ш) — константы. В операторной
форме это уравнение принимает вид
(а0Еп + ахЕп~х + ... + ап)у[1Т] = (Ъ0Ет + ЬХЕШ~Х + ... + Ьш)и[1Т].
Разностный оператор при выходной переменной
Q*{E) = а0Еп + ахЕп~х + ... + ап
206 Гл. 6. Математическое описание дискретных систем
называется собственным {разностным) оператором, а разностный
оператор при входной переменной
Р*(Е) = Ъ0Ет + ЪХЕШ~Х + ... + Ът
— {разностным) оператором воздействия.
Отношение оператора воздействия к собственному оператору на-
называется передаточной функцией в операторной форме.
В соответствии с этим определением передаточная функция (в опе-
операторной форме) системы управления F.27) равна
Имеющее наименьший порядок отношение ^-изображений (при ну-
нулевых начальных условиях) выходной и входной переменных называ-
называется передаточной функцией в z-изображениях.
Для вычисления передаточной функции в ^-изображениях систе-
системы управления F.27) применим к обеим частям этого уравнения
^-преобразование. Используя свойство линейности ^-преобразования,
можем записать
a0Z{y[(l + п)Т}] + aiZ{y[(l + п- 1)Т]} + ... + anZ{y[lT}} =
= b0Z{u[(l + m)T}} + hZ{u[(l + m- 1)T]} + ... + bmZ{u[lT]}.
В соответствии с теоремой опережения при нулевых начальных усло-
условиях (уЩ = у[Т] = ... = у[(п - 1)Г] = 0, и[0] = и[Т] = ...= и[(т -
- 1)Т] = 0) имеем
Z{y[(l + г)]} = z*Y*(z), Z{u[(l + »)]} = гЮ*{г).
Поэтому
{aozn + axzn~x + ... + an)Y*{z) = {bozm + M™ + ... + bm)U*{z).
Отсюда для передаточной функции в ^-изображениях W* (z) получаем
w4z) = rM = b0z- + blZ^ + ... + bm_
vy U*(z) aQzn+a1zn-1 + ... + о„ v У
Сравнивая передаточные функции в операторной форме F.28) и в
^-изображениях, нетрудно заметить, что
W*(z)=W*(E)\E=z.
Передаточная функция W*(z) является функцией комплексной
переменной z, ипо определению она не содержит одинаковых нулей
и полюсов. Поэтому если передаточная функция в операторной фор-
форме W*{E) имеет одинаковые нули и полюсы, обратное равенство
W*(E)=W*(z)\z=E
не имеет места.
Передаточная функция W*{E) является оператором и уравнение
= W*(E)u[lT],
6.5. Вычисление передаточных функций АИМ-системы
207
где W*(E) определяется соотношением F.28), представляет собой опе-
операторную (символическую) форму записи уравнения F.27). В правой
части нельзя переставлять местами оператор и входную переменную.
Итак, если дискретная система управления задана разностным
уравнением, то процесс вычисления передаточных функций ничем не
отличается от процесса вычисления передаточных функций непрерыв-
непрерывных систем. Однако, как правило, приходится вычислять передаточ-
передаточные функции, когда известны характеристики дискретных элементов
и передаточная функция непрерывной части. И в этом случае возника-
возникают особенности, которые делают вычисление передаточных функций
дискретных систем более сложным.
6.5. Вычисление передаточных функций
АИМ-системы
Импульсные системы управления, кроме импульсных систем с
амплитудно-импульсной модуляцией (АИМ-системы), являются нели-
нелинейными. Однако цифровые системы управления и системы управле-
управления с широтно-импульсной модуляцией (ШИМ-системы) при опреде-
определенных условиях могут рассматриваться как АИМ-системы. Поэтому
начнем рассмотрение с АИМ-систем.
Заметим, что здесь речь идет только об импульсных системах
управления с импульсной модуляцией 1-го рода.
6.5.1. Эквивалентная схема АИМ-системы. АИМ-система
включает АИМ-элемент и непрерывную часть (рис. 6.4). Для получе-
АИМ-элемент
Непрерывная
часть
Рис. 6.4. Блок-схема АИМ-системы управления
ния математического описания АИМ-системы управления АИМ-эле-
АИМ-элемент представим в виде эквивалентной схемы, состоящей из прос-
простейшего импульсного звена 1 и формирующего звена 2 (рис. 6.5,6).
1
e(t)
ФЗ
ui(t)
а б
Рис. 6.5. АИМ-элемент (а) и его эквивалентная схема F)
Простейшее импульсное звено (звено 1 на рис. 6.5, б) представ-
представляет собой звено, которое преобразует входную функцию e(t) в обоб-
208 Гл. 6. Математическое описание дискретных систем
щенную решетчатую функцию^
e*(t) = ^2e(t)S(t-iT), F.30)
г=О
где Т — период выходного сигнала АИМ-элемента. В действительнос-
действительности элемента, преобразующего входной сигнал в последовательность
модулированных ^-функций, естественно, не существует. Поэтому
представление АИМ-элемента в виде указанной эквивалентной схемы
следует рассматривать как математический прием.
Формирующее звено (ФЗ) формирует из обобщенной решетчатой
функции e*(i) сигнал, тождественно равный выходному сигналу АИМ-
элемента (условие эквивалентности).
Найдем весовую и передаточную функции формирующего звена.
Если и)ф (t) — весовая функция формирующего звена, то на ее выходе
оо оо сю
Щ (t) = Г>Шф (t - т)е* (г) dr = Г>Шф(t-r)^2 е(тЩт - iT) dr.
О 0 г=0
Поменяв порядки интегрирования и суммирования и произведя ин-
интегрирование, получим
сю
/ I \ ^ Г 'гт~\~\ / I "T"i\ (О 01 \
ui (t) = у е\г1 \УОфус — г! ). (o.olj
г=0
Теперь найдем описание сигнала на выходе АИМ-элемента. Пусть не-
модулированный импульс описывается функцией s(t) (см. рис. 6.5, а).
При амплитудно-импульсной модуляции амплитуда импульса умно-
умножается на значение входного сигнала в моменты съема сигнала t = iT.
Поэтому на выходе АИМ-элемента имеем
«(«) =
г=0
где / — целая часть дроби t/T. Но так как s(t — iT) = 0 при t < iT,
последнее равенство можно записать в виде
сю
г=0
В силу условия эквивалентности u\{t) = u(t). Это тождество возмож-
возможно только тогда (при произвольном e[iT]), когда и)ф(г) = s(t).
Таким образом, весовая функция формирующего звена равна
функции, которая описывает немо дулир о ванный импульс, выраба-
вырабатываемый импульсным элементом.
Так как передаточная функция равна изображению Лапласа от ве-
весовой функции, то передаточная функция формирующего звена име-
имеет вид
В качестве примера найдем передаточную функцию формирую-
формирующего звена эквивалентной схемы АИМ-элемента, вырабатывающего
прямоугольные импульсы.
6.5. Вычисление передаточных функций АИМ-системы
209
В общем случае, когда длительность импульса ти = jT, весовая
функция (см. рис. 6.1, а) имеет вид
1И при t е [I
а передаточная функция
~st dt = [Ame~8t dt = и^ ~е Ч F.32)
J s v y
о о
В частном случае, когда Аш = 1 и 7 — 1? формула F.32) принимает
вид
1-е
-Ts
F.33)
S
Заменив в блок-схеме АИМ-системы управления импульсный эле-
элемент эквивалентной схемой, получим эквивалентную (расчетную)
-Т
е
нч
пнч
У
Рис. 6.6. Эквивалентные схемы АИМ-системы
схему АИМ-системы (рис. 6.6, а). Формирующее звено объединяют
с непрерывной частью в одно звено, которое называют приведенной
непрерывной частью (ПНЧ) (рис. 6.6,6).
6.5.2. Дискретная модель АИМ-системы. Обозначив весовую
функцию ПНЧ через wn(t), имеем (см. рис. 6.6, б)
оо
y(t) = Jwn(t-r)e*(r)dT.
Подставив сюда выражение для e*(i) из F.30), после интегрирования
получим qq
г=0
Из этого уравнения следует, что выходная переменная y(t) зависит
от е[гТ], т.е. от значений e(i) в дискретные моменты времени t = iT.
Для е[гТ] имеем
е[гГ] = g[iT] - y[iT]. F.35)
В любой момент времени АИМ-система описывается уравнения-
уравнениями F.34) и F.35). В уравнение F.34) входят непрерывные функции
(функции с непрерывными аргументами) y(t) nw(t), а также дискрет-
дискретная функция e[iT]. В уравнение F.35) входят только дискретные функ-
функции. Таким образом, АИМ-система представляет собой непрерыв-
непрерывно-дискретную систему. И то, что она описывается уравнениями, в
14 Д.П. Ким
210 Гл. 6. Математическое описание дискретных систем
которые входят дискретные и непрерывные функции, доставляет не-
неудобство. От этого неудобства можно избавится, если ограничиться
исследованием АИМ-системы только в дискретные моменты време-
времени t = IT.
Действительно, подставив в F.34) t = /Т, получим
г=0
или, учитывая, что wn[(l — г)Т] = 0 при I — г < О,
i
Г 7Т~П ^V Г / 7 " \ Т~П Г "Т~П (С^. О ?ч \
г=0
Уравнения F.35) и F.36) описывают процессы в АИМ-системе в
дискретные моменты времени и представляют ее дискретную модель.
Как увидим дальше, по дискретной модели при необходимости мож-
можно определить значения выходной переменной y(t) не только в мо-
моменты времени t — IT', но и в произвольные моменты t = (/ + е)Т
(О < б: < 1, / = 0,1,2,...).
Произведя ^-преобразование, из уравнений F.35) и F.36) получим
E*(z) = G*(z) - Y*(z), F.37a)
Y*(z) = W*(z)E*(z), F.376)
где
W*(z) = Z{wn[lT]}. F.38)
Уравнение F.376) получено с использованием теоремы о свертке (см.
выражение F.23)).
Y*(z)
Из уравнения F.376) имеем W*(z) = , т.е. И7"^^) есть пере-
передаточная функция (в ^-изображениях) прямой цепи с входом е[1Т] и
выходом у [IT].
На основании уравнений F.37а), F.376) можно построить струк-
структурную схему дискретной модели АИМ-системы (рис. 6.7). Переда-
G'(z)
у
Y
Рис. 6.7. Дискретная модель АИМ-системы
точная функция замкнутой дискретной системы по этой структурной
схеме определяется так же, как и в случае непрерывных систем. Так,
например, передаточная функция относительно входа G*(z) и выхо-
выхода Y*(z) имеет вид
6.5. Вычисление передаточных функций АИМ-системы 211
а относительно входа G* (z) и выхода Е* (z)
Основная особенность расчета АИМ-системы состоит в вычис-
вычислении передаточной функции W* (z) по известной передаточной функ-
функции ПНЧ Wn(s), равной произведению передаточных функций фор-
формирующего звена и непрерывной части.
Согласно формуле F.38) W* (z) есть ^-изображение весовой функ-
функции ПНЧ wu[lT]. Весовую функцию wu[lT] можно получить путем
дискретизации по времени непрерывной весовой функции wn(i),
которая получается из передаточной функции Wn(s).
Зная связь между изображением Лапласа непрерывной функции и
^-изображением соответствующей решетчатой функции (см. табл. 6.1),
можно непосредственно по Wn(s) определить W*(z).
Введем в рассмотрение оператор Zt-, который каждой функции
X(s) = L{x(t)} ставит в соответствие функцию X*(z) = Z{x[/T]}:
X*(z) = ZT{X(s)}.
Оператор Zt соответствует трем последовательным операциям:
обратному преобразованию Лапласа, квантованию по времени и z-upe-
образованию. Так как все три указанные операции являются линей-
линейными, то оператор Zt является линейным. Используя этот опера-
оператор, передаточную функцию W*(z) можно определить следующим
образом:
W:(z) = ZT{Wn(s)}. F.39)
Далее также будем использовать оператор ZT, который функции
X(s) = L{x(t)} ставит в соответствие модифицированное z-изображе-
ние X*(z,e) = Z{x[(l + e)T]}:
X*(z,s) = ZT{X(s)}. F.40)
6.5.3. Вычисление ^т-изображения и ^|,-изображ:ения.
Для получения дискретной модели (см. рис. 6.7) по эквивалентной
схеме АИМ-системы (см. рис. 6.6, б) необходимо определить диск-
дискретную передаточную функцию W*(z), для чего в соответствии с
формулой F.39) нужно произвести Zx-преобразование передаточ-
передаточной ПНЧ.
По аналогии с ^-преобразованием в Zx-преобразовании
X*(z) = ZT{X(s)}
и в ^-преобразовании
X*(z,e) = ZeT{X(s)}
X(s) будем называть оригиналом, X*(z) — ZT-изображением и
X*(z,s)-u3o6paotceHueM или модифицированным ZT-изображением.
^^-изображение и Z^-изображение от основных функций можно
найти соответственно в табл. 6.1 и табл. 6.2.
14*
212 Гл. 6. Математическое описание дискретных систем
Вычисление ZT-изображения и Z^-изобраэюения от
дробно-рациональной функции. Пусть оригинал имеет вид
где B(s) и A(s) — полиномы от s степени тип соответственно,
причем т < п. Если все полюсы Si (г = 1, 2,..., п) данной функции
(т. е. корни уравнения A(s) = 0) различны, то
-t
|$^
Формула F.41) получается из F.42) как частный случай при е = 0.
А формула F.42) получается следующим образом.
По формуле разложения имеем
^W A(s) ^ (si) ssi
Учитывая свойство линейности оператора Z^, имеем
По табл. 6.2 (строка 4) находим
I s — Si ) z — е8*1
Подставив это выражение в предыдущее соотношение, получим F.42).
Пример 6.4. Передаточная функция ПНЧ имеет вид Wn(s) =
= — -. Требуется найти дискретную передаточную функ-
s(s + а)
цию W*(z).
Решение. Полюсами данной передаточной функции (т.е. корня-
корнями уравнения A(s) = s(s + a) = 0) являются si =0, ^2 = —а. Произ-
Производная A'(s) = 2s + а. Поэтому по формуле F.41) имеем
п az — 1 a z — е~аТ a(z — l)(z — е~аТ)'
Если X(s) = B(s)/A(s) содержит кратные полюсы, то изображе-
изображения X*(z) и X*(z,e) можно получить, разложив X(s) на элементар-
элементарные дроби. В простых случаях можно введением малых параметров
видоизменить функцию X(s) так, чтобы она не содержала кратных
6.5. Вычисление передаточных функций АИМ-системы 213
полюсов, и воспользоваться формулами F.41) и F.42), а затем произ-
произвести предельный переход, устремив малые параметры к нулю.
Пример 6.5. Передаточная функция ПНЧ имеет вид Wn(s) =
= k/s2. Требуется определить дискретную передаточную функ-
функцию W*(z).
Решение. Данная передаточная функция ПНЧ имеет двукрат-
двукратный полюс Si52 = 0. Введя малый параметр /3, преобразуем ее к виду
Преобразованная передаточная функция имеет простые полюсы si =
= 0 и s2 = -/3. Производная A'(s) = 2s + /3. По формуле F.41) по-
получаем
ттл*/ о\ _ kz(l-e )
Используя разложение е~@Т = 1 — /ЗТ + о(/3), где о(/3) — бесконеч-
бесконечно малая величина более высокого порядка, чем /3 (т.е. lim —^—— = 0),
V /3-й) /3 /
получаем
W*(z 0) =
Отсюда, устремив [3 к нулю, находим
114 ' /3^0 11V ;' ' (z-lJ
Если среди простых полюсов функции X(s) имеются комплекс-
комплексные корни, то может оказаться нецелесообразным использование фор-
формул F.41) и F.42). Это связано с необходимостью преобразования
полученного результата для исключения мнимого числа.
Во всех случаях, когда использование формул F.41) и F.42) не-
невозможно или нецелесообразно, можно определить X*(z) и X*(z,e),
разложив X(s) на элементарные дроби.
Пример 6.6. Определить Zx-изображение и Zf,-изображение
функции X(s) = 2 -.
Решение. Функция имеет один кратный (кратности 2) по-
полюс Si52 = 0 и два комплексных полюса. Найдем X*(z) и X*(z,e),
разложив X(s) на элементарные дроби методом неопределенных ко-
коэффициентов:
10 _ А В Cs + D _
_ (В + C)s3 + (А + В + D)s2 + (А + B)s + A
Приравняв коэффициенты при одинаковых степенях слева и справа, а
затем решив полученную систему уравнений, найдем А = 10, В = —10,
214 Гл. 6. Математическое описание дискретных систем
С = 10, D = 0. Следовательно,
__io__ = ю(^-1 + -^
Преобразуем правую часть к табличному виду:
1 _ s + a a P _!/э_л/3
Подставив это выражение в предыдущее равенство, произведем
^-преобразование:
После подстановки соответствующих изображений из табл. 6.2 и пре-
преобразований, получим
10^е"?аТ [z cos epT - е~аТ cos A - е)рТ]
z2 -2ze~aT cos рТ + е~2аТ
10ze~?aT ^ [z sin epT - е~аТ sin (I - е)рТ]
z2 - 2ze~aT
Положив e = 0, находим
- i (*- 1)]
Вычисление ZT-изображения и Z^-изобраэюения от
оригинала, включающего множитель e~TS. Пусть оригинал
имеет вид
Y(s) = e-TSX(s),
где X(s) — дробно-рациональная функция: X(s) = B(s)/A(s). В этом
случае для Y*(z) имеем:
а) при (А; - 1)Г < г ^ кТ
Y*(z) = ZT{e-TSX(s)} = z-kZ?T{X{s)} = z~kX*(z,e), F.43)
где е = к-т/Т;
б) при т = кТ
Y(z) = ZT{e-kTX(s)} = z-kZT{X(s)} = z~kX*(z). F.44)
6.5. Вычисление передаточных функций АИМ-системы 215
Формула F.43) получается следующим образом. По определению
оператора Zt его применение соответствует последовательному вы-
выполнению трех следующих операций: обратное преобразование Лап-
Лапласа, квантование по времени с периодом Т и ^-преобразование.
Выполним сначала обратное преобразование Лапласа. Тогда по
теореме запаздывания (свойство преобразования Лапласа) получим
L-1{e-T8X{s)} =x(t-r).
Далее, выполним квантование по времени с периодом Т, т. е. сдела-
сделаем подстановку t = IT. Полученную таким образом функцию х[1Т — т]
представим в виде
х[1Т -т]= х[1Т -кТ + кТ-т]= х[A -к + е)Т], е = к - ^.
И, наконец, произведем ^-преобразование. При этом по теореме запаз-
запаздывания (свойство ^-преобразования) получим
Z{x[(l - к + е)Т]} = z-kX*(z,e).
Это и есть Zx-изображение функции Y(s), что доказывает форму-
лу F.43).
Формула F.44) получается как частный случай из F.43) при е = 0.
Пример 6.7. АИМ-элемент вырабатывает прямоугольные им-
импульсы длительности ти = 0,1 с периодом Т = 0,2 и амплитудой (вы-
(высотой) Ли = 1. Передаточная функция непрерывной части WH(s) =
- 10
~ 7+Т
Требуется определить дискретную передаточную функцию W*(z).
Решение. Найдем сначала передаточную функцию приведенной
непрерывной части. Так как передаточная функция формирующего
звена пЛ
передаточная функция ПНЧ имеет вид
или
„т , . B(s) 10
где W0(s) = -Г7—f = —( тт-
v J A(s) s(s +1)
Дискретная передаточная функция
W*(z) = ZT{Wn(s)} = ZT{W0(s)} - ZT{e-°'lsW0(s)}.
0<т<Т), fc = 1 и е = 1 — — = 1
л.
= 0,5. Поэтому (см. F.43))
В данном случае г = 0,1 @<т<Т), fc = 1 и е = 1 — — = 1 —
л. U,^
216 Гл. 6. Математическое описание дискретных систем
Полюсами Wo(s) являются si = 0 и ^2 = — 1, производная Af(s) =
= 2s + 1. В соответствии с F.41) и F.42)
*. ч г ( ч1 10z 10z
Wo (z) = ZT{W0(s)} = —{- z_e-0,2>
WS(z,e) = 2?T{W0(8)} = f^-
Z л.
Следовательно,
ттг*, ч 10 z 10z 10 , _n.i 10
-0,1
lOz
z-1
z-\
6.6. Цифровые системы управления
В связи с бурным развитием микроэлектроники и микропроцессо-
микропроцессоров цифровые вычислительные устройства находят все большее при-
применение при разработке управляющих устройств. Поэтому в настоя-
настоящее время цифровые системы управления широко распространены.
Если цифровое устройство оперирует с числовым представлением со
значительным количеством разрядов, то квантованием по уровню
можно пренебречь. И системы управления с такими цифровыми уст-
устройствами можно рассматривать как АИМ-системы.
Цифровая система управления (ЦСУ) включает объект управле-
управления (ОУ), чувствительные элементы (ЧЭ), аналого-цифровой преоб-
Рис. 6.8. Функциональная схема ЦСУ
разователь (АЦП), цифровое вычислительное устройство (ЦВУ) и
цифро-аналоговый преобразователь (ЦАП) (рис. 6.8).
АЦП преобразует аналоговый сигнал в цифрой, а ЦАП — цифро-
цифровой сигнал в аналоговый. ЦВУ выполняет все необходимые вычисле-
вычисления в соответствии с заданным алгоритмом управления.
Если пренебречь квантованием по уровню, цифровую систему уп-
управления можно представить в виде блок-схемы (рис. 6.9), состоящей
Рис. 6.9. Блок-схема ЦСУ
из прерывателя, дискретного фильтра (ДФ), фиксатора нулевого по-
порядка (ФНП) и непрерывной части (НЧ).
6.6. Цифровые системы управления
217
Прерыватель является моделью АЦП и преобразует непрерывный
сигнал e(t) в дискретный сигнал е[/Т]. В дальнейшем прерыватель в
явном виде на схеме не будем указывать, принимая, что он входит в
состав ДФ.
Дискретный фильтр представляет собой модель ЦВУ и характери-
характеризуется дискретной передаточной функцией — передаточной функцией
регулятора.
В качестве ЦАП чаще всего используется фиксатор нулевого по-
порядка — элемент, который запоминает входной дискретный сигнал на
один период — до прихода следующего дискретного сигнала. Таким
образом, он преобразует входной сигнал, представляющий решетча-
решетчатую функцию, в ступенчатый сигнал.
Фиксатор нулевого порядка можно рассматривать как АИМ-эле-
мент, вырабатывающий прямоугольные импульсы длительности Т
(относительная длительность j = 1) и с амплитудой Аш = 1.
Представив ФНП в виде эквивалентной схемы, состоящей из прос-
простейшего импульсного элемента и формирующего звена, получим
эквивалентную схему цифровой системы управления (рис. 6.10). На
и[1Т]
u(t)
y(t)
Рис. 6.10. Эквивалентная структурная схема ЦСУ
этой схеме W*(E) — передаточная функция (в операторной форме)
дискретного фильтра (регулятора), Wn(p) — передаточная функ-
функция ПНЧ. Передаточная функция (в изображениях Лапласа) форми-
формирующего звена (см. F.33)) имеет вид
1 „~Ts
Поэтому передаточная функция (в изображениях Лапласа) ПНЧ есть
1 -е
-Ts
-Wh(s).
Wn(s) = Wb(s)W
о
Дискретная передаточная функция ПНЧ имеет вид
W:(z) = ZT{Wn(s)} = Z
или, учитывая формулу F.44),
F.45)
Используя эту передаточную функцию, можно построить струк-
структурную схему дискретной модели цифровой системы управления
(рис. 6.11).
218 Гл. 6. Математическое описание дискретных систем
Рис. 6.11. Дискретная модель ЦСУ
По этой структурной схеме передаточные функции замкнутой сис-
системы определяются по известным из теории непрерывных систем пра-
правилам. Передаточные функции относительно входа G*(z) и выхо-
выходов Y*(z) и E*(z) равны
Пример 6.8. Дана цифровая система управления, у которой пере-
передаточная функция непрерывной части WH(s) = — и цифровое
s2 + 3s + 2
вычислительное устройство реализует алгоритм управления, опреде-
определяемый разностным уравнением
и[A + 1)Г] - и[1Т\ = 2е[(/ + 1)Г] - е[1Т].
Требуется определить передаточную функцию данной системы
относительно входа g(t) и выхода y(t) (см. рис. 6.10).
Решение. Запишем уравнение регулятора в операторной форме.
(Е - 1)и[1Т\ = BЕ - 1)е[1Т\.
Отсюда передаточная функция регулятора в операторной форме име-
имеет вид
§
и, в ^-изображениях,
2z-l
E=z
Передаточная функция приведенной непрерывной части есть
1 e~Ts
Дискретная передаточная функция ПНЧ —
W:(z) = ZT{Wn(s)} = ^±ZT\-
Z К. .
г}-
Корнями полинома A(s) = s(s2 + 3s + 2) являются si = 0, S2 = — 1,
s3 = -2 , и A'(s) = 3s2 + 6s + 2. По формуле F.41)
г* Г 1
¦ — е~т 2 z — е~2
-IJ
6.7. ШИМ-системы управления
219
Следовательно,
W*iz)-
2(z-e-T)(z-e~2T)'
Искомая передаточная функция замкнутой системы имеет вид
w;(z)w;(z)
yyyg\^J I + W* (z)W* (z)
2(z - l)(z - e~T)(z - e-2T) + Bz -
e~T - IJ '
6.7. ШИМ-системы управления
Блок-схема ШИМ-системы управления включает ШИМ-элемент и
непрерывную часть (НЧ) (рис. 6.12).
Пусть ШИМ-элемент вырабатывает прямоугольные импульсы с
амплитудой Аш и периодом Т. На выходе ШИМ-элемента ширина мо-
g(t)
ШИМ-элемент
y(t)
Рис. 6.12. Блок-схема ШИМ-системы
дулированного импульса пропорциональна модулю |е[гТ]|, а ее знак
совпадает со знаком входного сигнала в момент съема (рис. 6.13).
s(t- iT)
s(t-iT)li
iT
iT И
-7i)T
t
Рис. 6.13. Импульсы на выходе ШИМ-элемента: e[iT] > 0 (а); е[гТ] < 0 (б)
Модулированный импульс на выходе ШИМ-элемента можно
представить как разность двух ступенчатых функций (рис. 6.14):
s(t - iT) = Ли signe[zT][l(? - iT) - l(t - (г + 7i)T)], F.46)
где
7i=x\e[iT}\. F.47)
Здесь x является константой, удовлетворяющей неравенству
О < X < —, ет = supe(^),
220 Гл. 6. Математическое описание дискретных систем
-iT)'
-Аш
iT
Аш
l(t-tT)
t
Aml(t- (i + ji)T)
Рис. 6.14. К описанию импульса на выходе ШИМ-элемента
и называется коэффициентом модуляции. Приведенное выше усло-
условие необходимо, чтобы модулированные импульсы не перекрывались.
Выходной сигнал ШИМ-элемента при t ^ 0 описывается суммой
г=0
Найдем реакцию непрерывной части на воздействие г-ro импульса.
Пусть hH(t) обозначает переходную функцию непрерывной час-
части. При входной переменной u(t) = l(t — iT) ее выходная перемен-
переменная y(t) = hH(t - iT), а при входной переменной u(t) = l[t - (i + ъ)Т]
выходная переменная y(t) = hH[t — (г + ji)T] (рис. 6.15). В силу прин-
u(t) = l(t-i
нч
= K(t-iT)
Рис. 6.15. К описанию реакции на ступенчатые воздействия
ципа суперпозиции, если на входе непрерывной части действует им-
импульс u(t) = s(t — iT) (см. F.46)), то на ее выходе
y(t) = Ли signе[гГ][Лн(* - iT) - hH(t - (i + Ъ)Т};
если на входе непрерывной части действует сигнал u(t) = N. s(t — iT),
то на ее выходе г=о
y(t) =
iT][hu(t - iT) - K{t - (г + Ъ)Т)].
F.48)
Итак, мы получили описание разомкнутой ШИМ-системы. Оно
зависит от нелинейных функций signefiT] и |е[гТ]|.
Линеаризация, Если выполняется условие
или Г<1
1),
то можно произвести линеаризацию и избавиться от указанных нели-
нейностей.
6.7. ШИМ-системы управления 221
Разложим функцию hH[t — (i + ъ)Т] в ряд Тейлора в точке t — iT
и отбросим члены, содержащие квадрат и более высокие степени jiT:
K[t - (i + ъ)Т] = K(t- iT) -Kit- гТ)ЪТ.
Учитывая, что производная от переходной функции равна весовой
функции (hH(t - iT) = wH(t - гТ)), можем записать
K[t - {% + Ъ)Т] = hH(t- iT) -wH(t- i
Подставив это выражение в F.48), получим
y(t) = "}ГА„ signe[iT]wn(t-iT)jiT.
И так как (см. F.47)) л = х|е[гГ]| и |е[гГ]| signefiT] = e[iT], то
y(t) =xAK
г=0
Если ограничиться рассмотрением процессов в дискретные мо-
моменты времени, положив t — IT', то получим
у[1Т] = ХЛИГ
г=0
Отсюда, учитывая, что весовая функция при отрицательных аргумен-
аргументах равна нулю, находим
i=0
Произведем ^-преобразование. По теореме о свертке получим
Y*(z)=XAnTW:(z)E*(z),
где
W:(z) = Z{wH[lT]} = ZT{WH(s)}.
В соответствии с определением дискретная передаточная функция
разомкнутой системы имеет вид
W*(z) = W*{z) = Щ = XAaTW*(z). F.49)
В случае ШИМ-системы приведенную непрерывную часть можно
определить как звено с передаточной функцией
Wn(s) = XAnTWH(s).
Тогда, очевидно, как и в случае АИМ-системы,
W*(z) = W:(z) = ZT{Wn(s)}.
222
Гл. 6. Математическое описание дискретных систем
e(t)
e\t)
Wn(p)
V(t)
Рис. 6.16. Модели ШИМ-системы: а — дискретно-непрерывная модель; б —
дискретная модель
По полученным передаточным функциям можно построить струк-
структурные схемы дискретно-непрерывной и дискретной моделей ШИМ-
системы (рис. 6.16).
Пример 6.9. Дана ШИМ-системауправления. Амплитуда Аш = 1,
коэффициент модуляции х = 0,05, период следования импульсов Т =
= 0,1 и передаточная функция непрерывной части WH(s) = —; г-.
Требуется определить передаточную функцию замкнутой системы
относительно входа g(t) и выхода y(t).
Решение. По формуле F.41) находим
После подстановки этого выражения и численных значений в форму-
формулу F.49) получим
Искомая передаточная функция имеет вид
од
6.8. Вычисление передаточных функций
дискретных систем в общем случае
Выше мы рассмотрели вычисление передаточных функций дис-
дискретных систем, когда их эквивалентная схема за простейшим им-
импульсным звеном содержит одно непрерывное звено — приведенную
Xl(t)
W2(p) ¦
. Wi(p)
x(t)
W3(p)
y(t)
Рис. 6.17. Обобщенная эквивалентная схема дискретной системы
непрерывную часть. Однако может потребоваться вычисление пере-
передаточных функций, эквивалентная схема которых имеет более общий
вид (рис. 6.17).
6.8. Вычисление передаточных функций дискретных систем 223
Найдем сначала передаточные функции W*g(z) и W*g(z). Исполь-
Используя полученную выше зависимость между входом простейшего им-
импульсного звена и выходом следующего за ним непрерывного звена
(ПНЧ) в дискретные моменты времени, можем записать
X*(z) = ZT{W1(s)}E*(z),
X*(z) = ZT{W1(s)W2(s)}E*(z),
E*(z)=G*(z)-X*1(z).
Исключим из этой системы X±(z):
X*(z) = ZT{W1(s)}E*(z),
E*(z) = G*(z) - ZT{W1(s)W2(s)}E*(z).
Из второго уравнения, а также исключив из двух уравнений E*(z),
получим соответственно
W^ = W) = i + zT{w\{s)w2{s)y F-50)
w* {z) _ *'(*) _ ZT{Wl(s)}
Теперь найдем передаточную функцию относительно выхо-
выхода Y*(z). Для этого заменим в полученной выше системе из двух
уравнений первое уравнение уравнением для Y*(z):
Y*(z) = ZT{W1(8)W3(s)}E*(z),
E*{z) = G*(z) - ZT{W1(s)W2(s)}E*(z).
Исключив из этой системы уравнений E*(z), получим
W(Z)
G*(z)
( '
Из полученных формул F.50)-F.52) вытекает следующее прави-
правило: передаточная функция относительно входа g(t) и какого-либо
выхода равна передаточной функции прямой цепи, деленной на еди-
единицу плюс (а при положительной обратной связи — минус) переда-
передаточная функция разомкнутой системы.
Это правило совпадает с правилом вычисления передаточных
функций одноконтурной непрерывной системы. Только следует иметь
в виду, что при вычислении передаточной функции прямой цепи и
передаточной функции разомкнутой системы непрерывные звенья,
расположенные за простейшим импульсным звеном, нужно рассмат-
рассматривать как одно объединенное звено. Нельзя находить Zx-преобразо-
вания от передаточных функций отдельных звеньев, а затем получен-
полученные результаты перемножать.
224
Гл. 6. Математическое описание дискретных систем
Вычисление передаточной функций системы, содер-
содержащий дискретно-непрерывный фильтр. Звено, которое опи-
описывается уравнением
aox(t) + a-\_x(t — Т) + ... + anx(t — пТ) =
= bou(t) + bxu{t - Г) + ... + bmu(t - mT),
называют дискретно-непрерывным фильтром.
Переходя к изображениям Лапласа, для дискретно-непрерывного
фильтра, получим передаточную функцию
' а + --- + 6"е т * F.53)
U(s)
а0
Пусть дискретно-непрерывный фильтр (ДНФ) включен за диск-
дискретным (импульсным или цифровым) элементом. В этом случае по
\y(t)
пнч
Рис. 6.18. Эквивалентная схема дискретной системы с ДНФ
эквивалентной схеме (рис. 6.18) для дискретной передаточной функ-
функции разомкнутой системы имеем
W*{z) = ZT{Wn(s)} = ZT{Wi,(s)WaH(s)W1(s)}.
Здесь WRli(s) является дробно-рациональной функцией от е~Тв (см.
выражение F.53)). И, как покажем ниже, в этом случае
W*(z) = ZT{Wn(s)} = W;H020ZT^(s)Wi(s)}, F.54)
где у у _ i 7 — m
Дискретная передаточная функция W*H(z) получается из переда-
передаточной функции WRH(s) при подстановке eTs = z:
Для вывода формулы F.54) соотношение для передаточной функ-
функции ПНЧ, которое имеет вид
подставив сюда выражение для WRli(s) из F.53), представим в виде
г=0
г=0
6.8. Вычисление передаточных функций дискретных систем 225
Произведем в обеих частях ^-преобразование. Используя свойство
линейности ^^-преобразования и формулу (см. F.44))
ZT{e-iTsX(s)}=z-iZT{X1{s)},
находим
г=0
г=0
Отсюда, разделив обе части на сумму ^2 aiz '\ получим F.54).
г=0
Итак, мы установили следующее свойство ^-преобразования:
если оригинал в Zt-преобразовании содержит множитель, пред-
представляющий дробно-рациональную функцию от e~Ts, то этот мно-
множитель можно вынести за знак оператора Zt, произведя подста-
подстановку eTs = z.
Если ДНФ включен перед дискретным элементом, то, учитывая,
что на работу последнего влияют значения его входной переменной
только в дискретные моменты, в уравнении для ДНФ можно поло-
положить t = IT. Тогда получим дискретный фильтр, передаточная функ-
функция W^(z) которого совпадает с полученной выше дискретной пе-
передаточной функцией дискретно-непрерывного фильтра W*H(z). Из
9
Рис. 6.19. Эквивалентная схема дискретной системы с ДНФ перед дискрет-
дискретным элементом
эквивалентной схемы (рис. 6.19) следует, что дискретная передаточ-
передаточная функция разомкнутой системы получается такой же, как и в пре-
предыдущем случае (см. F.54)).
Таким образом, получаем, что при преобразовании структурных
схем дискретный элемент и дискретно-непрерывный фильтр можно
переставлять друг с другом.
Теперь рассмотрим более общую схему с дискретным фильтром
(рис. 6.20). Установленное выше правило вычисления дискретной
V
XI
А.
w2
Wi
X
У
Рис. 6.20. Обобщенная эквивалентная схема дискретной системы с дис-
дискретным фильтром
передаточной функции замкнутой системы остается в силе и в дан-
данном случае.
15 Д.П. Ким
226 Гл. 6. Математическое описание дискретных систем
При вычислении передаточной функции разомкнутой системы
простейший импульсный элемент с последующими непрерывными
звеньями можно заменить дискретным элементом и представить ее
дискретную модель в виде последовательного соединения двух дис-
дискретных звеньев. Аналогично можно поступить при вычислении пе-
передаточной функции прямой цепи. Поэтому передаточные функции
прямой цепи и разомкнутой системы равны произведению передаточ-
передаточных функций указанных двух дискретных звеньев. Таким образом,
имеем
W^{z) ~ i + w;(z)z{W(s)w(s)y F-55a)
Пример 6.9. Пусть в дискретной системе, представленной на
рис. 6.20, W^(z) = 2, \?г(8) = Щ^~^'\ W2(s) = ^L_,
Ws(s) = e-°'05s и период следования импульсов Т = 0,1.
Требуется определить передаточные функции W*g(z) и W*g(z).
Решение. Найдем необходимые для определения требуемых пе-
передаточных функций Zx-изображения. Учитывая, что полином 1 —
— е~Тв как частный случай дробно-рациональной функции от е~Тв
можно вынести за знак оператора Zt-, сделав подстановку eTs = z,
получим
( ) z — 0,9
zT{wl{s)w2(s)} = Mf_zll Z{^
Wz2 -15,7-г+ 9,2
Т 1 / _|_
Подставив полученные выражения и выражение для И7^ в F.55а)
и F.556), получим
w* ы = 4z ~0;6)
ж»^ ; 21г2-32,9 г+ 18,9'
= 2(^-1)^-0,6)
^V ; BЬ2329 + 189)"
6.9. Преобразование структурных схем дискретных систем 227
6.9. Преобразование структурных схем
дискретных систем
При преобразовании структурных схем дискретных систем нель-
нельзя переносить через дискретный элемент сумматор или непрерывный
элемент (кроме пропорционального звена). Как было показано выше,
дискретно-непрерывный фильтр и дискретное звено можно перестав-
переставлять местами. Непрерывную часть, естественно, можно преобразовы-
преобразовывать по известным правилам преобразования структурных схем не-
непрерывных систем.
Для схем, состоящих только из дискретных звеньев, справедливы
все правила преобразования структурных схем непрерывных систем.
Рассмотрим систему управления с несколькими дискретными элемен-
элементами с одинаковым периодом, эквивалентная схема которой представ-
9s-
-ч е
t
У-
J_
w3
—>
J_
У
*-
G'{z)
WS(z)
Y'{z)
Рис. 6.21. Дискретная модель системы с несколькими дискретными элемен-
элементами: а — исходная эквивалентная схема; б — структурная схема дис-
дискретной модели
лена на рис. 6.21, а. Очевидно, она может быть преобразована и пред-
представлена в виде структурной схемы с одними дискретными звеньями
с передаточными функциями (рис. 6.21, б)
W*(z) = ZT{Wi(s)}, i = 1,2,3.
Когда перед дискретным элементом включен непрерывный элемент
или к системе, кроме задающего воздействия, приложено возмущение
и нужно исследовать ее качество, при преобразовании структурной
схемы возникают проблемы, связанные с необходимостью переноса
сумматора.
В первом случае (рис. 6.22, а) при преобразовании сумматор пере-
переносится через точку съема сигнала, и в преобразованной схеме
(рис. 6.22, б) эта точка отсутствует. Поэтому при определении ошибки
следует исходить из следующих соотношений.
Ошибка в моменты съема сигнала равна е[1Т] = у [IT] — g[lT],
или, в ^-изображениях,
E*(z)=G*(z)-Y*(z),
15*
228 Гл. 6. Математическое описание дискретных систем
Wo
9i г
a
Wo
У
«
Рис. 6.22. Преобразование структурной схемы с непрерывным звеном пе-
перед дискретным элементом: а — исходная схема; б — преобразованная
схема
Во втором случае (рис. 6.23, а) для определения реакции на вы-
выходе и ошибки системы от возмущения перенесем сумматор, к ко-
t
Wi
w2
w2
11
w2
Рис. 6.23. Преобразование с переносом возмущения: а — исходная схема;
б — преобразованная схема
торому приложено возмущение, через звено с передаточной функ-
функцией W2 (рис. 6.23,6).
Реакция системы на возмущающее воздействие определяется из
следующих соотношений:
w ™ K{)
Ошибки от задающего воздействия и возмущения равны соответст-
соответственно
ед = w:a(z)G4z) = 1 + Z™
И наконец, рассмотрим преобразование структурной схемы сис-
системы управления, в которой дискретный элемент охвачен обратной
связью с непрерывным звеном (рис. 6.24, а). Заменим дискретный
6.10. Дискретное преобразование Лапласа
229
W,
w[
7771 Y*(z)
Рис. 6.24. Преобразование дискретного элемента, охваченного обратной
связью: а — исходная схема; б — преобразованная эквивалентная схема;
в — дискретная модель
элемент эквивалентной схемой и перенесем узел (рис. 6.24,6). Из
последней схемы получаем дискретную модель системы управления
(рис. 6.24, в). В этой модели
s)W[{s)}, W*(z) =
6.10. Дискретное преобразование Лапласа
и частотные характеристики
Дискретным преобразованием Лапласа называют соотношение
-slT
1=0
ставящее решетчатой функции f[lT] в соответствие функцию F(s)
комплексного переменного s. Функцию f[lT] называют оригиналом,
a F(s) — изображением или D-изображением. Дискретное преоб-
преобразование получается из ^-преобразования при подстановке в не-
него z = esT:
= Z{f[lT]}\z=e_sT=F*{e
sT)
Обратное дискретное преобразование Лапласа имеет вид
F.56)
230 Гл. 6. Математическое описание дискретных систем
Передаточную функцию в дискретных преобразованиях Лапласа
или в ^-изображениях W(s) можно определить как дискретное пре-
преобразование Лапласа от весовой функции w[lT\.
оо
W(s) = D{w[lT}} = ^w[lT]e~slT.
1=0
Она связана с передаточной функцией в ^-изображениях соотно-
соотношением ~ */ \|
Частотной передаточной функцией (дискретной) называется
функция, которая получается при подстановке в передаточную функ-
функцию в ?)-изображениях s = ju:
На основе этой функции точно так же, как и в случае непрерывных
систем, определяются амплитудно-фазовые, амплитудные, фазовые и
другие частотные функции и их характеристики.
Так как eiO+27r/T)T — е^Т, то частотная передаточная функция
W(juj) = W*(e^T) является периодической функцией с перио-
2тг „
дом ojm = —. Поэтому при построении частотных характеристик дис-
Г ujm ujm I
кретных систем ограничиваются частотами из интервала , —
или [0,т].
Дискретные частотные функции имеют такой же физический
смысл, что и непрерывные: если на вход дискретной системы пода-
подается гармонический сигнал g = sina;?, то на ее выходе в устано-
установившемся режиме в дискретные моменты времени t — IT будем иметь
у[1Т] = A sin [uolT + ф\. Амплитуда и фаза этого процесса соответст-
соответственно равны модулю и аргументу частотной передаточной функции.
6.11. Связь между дискретным и непрерывным
преобразованиями Лапласа и непрерывная
модель дискретной системы
Между дискретным и непрерывным преобразованиями Лапласа
существует связь, которая позволяет выразить частотную передаточ-
передаточную функцию разомкнутой дискретной системы через частотную пе-
передаточную функцию приведенной непрерывной части. Пользуясь со-
соотношением, связывающим две указанные функции, можно получить
непрерывную модель дискретной системы.
6.11. Дискретное и непрерывное преобразования Лапласа 231
6.11.1. Связь между дискретным и непрерывным преоб-
преобразованиями Лапласа. Пусть функция f(t) непрерывна на интер-
интервале [0, оо) и /@) = 0. Тогда ^-изображение F(s) = D{f[lT]} решет-
решетчатой функции /[/Т], соответствующей непрерывной функции /(?),
связано с изображением Лапласа F(s) = L{/(?)} функции f(t) соот-
соотношением оо
F(s) = ^ E F(s+jm2-f). F.57)
га= —оо
Для получения этой формулы в обратном преобразовании Лапласа
интервал интегрирования разобьем на подынтервалы \gq + jBm —
— 1) —, его + jBm + l)—\ и представим интеграл справа в виде
суммы:
^ ao+jBm+l)n/T
2тг
Произведем замену переменных s = s' + jm — и положим t = /Т.
Тогда
m=-ooao-J
ao-J7T/T
Отсюда, заменив переменную интегрирования sf на s и учитывая,
что ejm/27r = 0, находим
m=-ooao-J7T/T
Поменяв порядок суммирования и интегрирования, последнее ра-
равенство можно представить в виде
O'O+i71' /Т ОО
1
Приравняв правую часть последнего равенства и правую часть F.56),
получим F.57).
6.11.2. Непрерывная модель дискретной системы. Пусть
дискретная система состоит из дискретного элемента (ДЭ) и непре-
непрерывной части (НЧ) (рис. 6.25, а). Дискретный элемент вырабатывает
232
Гл. 6. Математическое описание дискретных систем
ДЭ
НЧ
у
Рис. 6.25. Дискретная система (а) и ее непрерывная модель F)
прямоугольные импульсы с периодом Т, относительной длитель-
длительностью 7 и амплитудой Аш = 1. Тогда передаточная функция при-
приведенной непрерывной части имеет вид
wn(s) = I^iIIIIwh(s),
где WH(s) — передаточная функция непрерывной части.
Учитывая, что Wn(s) есть изображение Лапласа весовой функ-
функции ПНЧ wn(t), а передаточная функция в ^-изображениях разомк-
разомкнутой дискретной системы — ^-изображение wn[lT], согласно фор-
формуле F.57) имеем
/=-оо
2тг
Положив ojm = —-, для частотной передаточной функции ра-
разомкнутой дискретной системы получаем
F.58)
Как отмечалось выше, частотная передаточная функция Wn(ju)
является периодической функцией с периодом о;и, и при построе-
построении частотных характеристик достаточно ограничиться интерва-
F.59)
лом | , — .И если выполняется условие
\Wn(ju;)\ <& 1 при о;и >
то в формуле F.58) справа можно ограничиться одним слагаемым,
соответствующим / = 0. Остальные члены при указанном условии не
будут оказывать существенного влияния на частотную характерис-
характеристику. Поэтому при условии F.59) можем принять
и исходную дискретную систему можно представить непрерывной
моделью (рис. 6.25, б). При малых
Tjuj
_ -jutT/2
~7
Sin
Задачи 233
и передаточная функция разомкнутой системы непрерывной модели
имеет вид
W(s) = 7
или, когда относительная длительность j = 1,
W(s) =e-sT/2WH(s). F.60)
Таким образом, дискретизация по времени соответствует введе-
введению чистого запаздывания на полпериода. При малых Т наличие дис-
дискретного элемента не учитывают и принимают
W(s) = WH(s). F.61)
Однако следует иметь в виду, что непрерывная модель, основанная на
последнем соотношении, может приводить к неправильным выводам.
Например, когда непрерывная часть представляет собой аперио-
апериодическое или колебательное звено, замкнутая система получается
устойчивой при любом передаточном коэффициенте, если исходить
из соотношения F.61). Однако в действительности из-за того, что
дискретный элемент вносит запаздывание, существует максималь-
максимальное значение передаточного коэффициента, выше которого замкну-
замкнутая система будет неустойчивой.
Задачи
1. Определить ^-преобразование и ^-преобразование от сле-
следующих функций при периоде Т = 0,1:
a) x(s) = "<' + !?'5> ; б)
5@,2 s + 1)
= .(. + !)»'
\ vt \ 2@,5 s
2. Определить ^-преобразования от следующих функций при
периоде Т = 0,1:
9
-0,25з
3. Дана АИМ-система (см. рис. 6.4). АИМ-элемент вырабаты-
вырабатывает прямоугольные импульсы длительности ти = 0,05 с амплиту-
амплитудой Аш = 1 и периодом Т = 0,1.
234 Гл. 6. Математическое описание дискретных систем
Определить передаточные функции W*g(z) и W*g(z) при следую-
следующих передаточных функциях непрерывной части:
а)
4. Дана цифровая система управления (см. рис. 6.8). Цифровое
вычислительное устройство реализует алгоритм управления
и[1Т\ - и[A - 1)Г] = 2,5е[/Г] - 2е[(/ - 1)Г];
цифро-аналоговый преобразователь — фиксатор нулевого порядка;
период Т = 0,1.
Определить передаточные функции W*g(z) и W*g(z) при следую-
следующих передаточных функциях непрерывной части:
О *-() б) W{)
b)Wb(8) = \; t)Wh(s) = ——j—
5. Дана ШИМ-система (см. рис. 6.12). ШИМ-элемент выраба-
вырабатывает прямоугольные импульсы с амплитудой Аш = 1 и перио-
периодом Т = 0,1. Коэффициент модуляции х = 0,01.
Определить передаточные функции W*g(z) и We*p(^) при следую-
следующих передаточных функциях непрерывной части:
-0,15s
6. Дана обобщенная схема дискретной системы (см. рис. 6.17). Пе-
Период следования импульсов Т = 0,1.
Определить передаточные функции W*g(z), W*g(z) и W*g(z) при
следующих передаточных функциях непрерывных звеньев:
&)W1(s)=1~e~°'.1S, W2(s)=0,2s + l, W3(s)=e-°'05s;
\S ~r i-)S
Задачи 235
6)W1(s)= 1^+ц8', W2(s) =0,2s + l, W3(s)=e-°'05s;
*)W1(s)= \2,e,u 2, W2(s) =0,18
^S ~\~ i- J S
7. Дана дискретная система управления (см. рис. 6.23, а). Пе-
Период следования импульсов Т = 0,05. Определить изображения
ошибки E*(z) и выходной переменной Y*(z) при д = l(t) и сле-
следующих передаточных функциях непрерывных звеньев:
a) Wi(s) =0,2s + l, W2(s) =
s(q,ii
6) W!(s)= 0,2s + l, W2(s) = —-±
b) W^s) = 0,2, + 1, И^2(.) = \,e~T°
8. Дана дискретная система управления (см. рис. 6.22, а). Пе-
Период следования импульсов Т = 0,05. Определить изображения
ошибки E*(z) и выходной переменной Y*(z) при g = 0, f = l(t)
и следующих передаточных функциях непрерывных звеньев:
s
Глава 7
УСТОЙЧИВОСТЬ ДИСКРЕТНЫХ СИСТЕМ
7.1. Характеристическое уравнение
и основное условие устойчивости
Если внешние воздействия заданы, то уравнения дискретной сис-
системы управления можно записать в виде
aoy(t + пТ) + aiy(t + (п - 1)Г) + ... + any(t) = <p(t), G.1)
или, в операторной форме,
(а0Еп + п1Еп-г + ... + an)y{t) = <p(t).
Характеристическое уравнение имеет вид (см. F.7))
Q*(z) = aozn + axzn~x + ... + ап = 0. G.2)
Характеристический полином (левая часть характеристического
уравнения) получается при подстановке в собственный оператор
Q*(E) = а0Еп + сцЕ71-1 + ... + ап
вместо оператора смещения Е переменной z.
Если задана передаточная функция системы управления, то при
определении характеристического полинома нужно исходить из
следующих положений: по определению передаточной функции в
операторной форме ее знаменатель есть собственный оператор, а зна-
знаменатель передаточной функции в ^-изображениях совпадает с ха-
характеристическим полиномом (при условии, что передаточная функ-
функция в операторной форме не содержит одинаковых нулей и полюсов).
Как отмечалось в гл. 6, общее решение неоднородного разностного
уравнения G.1) имеет вид
!/(*) =!/»(*)+i/c(i),
где ув (t) — частное решение этого уравнения и ус (t) — общее решение
соответствующего однородного уравнения.
Линейная дискретная система управления называется устойчивой,
если общее решение однородного разностного уравнения при t —у оо
стремится к нулю:
lim ус[1Т] = 0. G.3)
t—>-оо
7.2. Алгебраические критерии устойчивости 237
Если все корни Zi (i = 1, 2,..., п) характеристического уравнения
простые (т.е. различные), то общее решение однородного разност-
разностного уравнения имеет вид
yc{t) = J2cizt/T'> G-4)
г=1
где Сi — произвольные постоянные. Если среди корней характерис-
характеристического уравнения имеется кратный корень Zj кратности kj, то ему
в G.4) соответствует слагаемое
Из G.4) и последнего выражения следует, что условие G.3) будет вы-
выполнено в том и только том случае, когда \zi\ < 1 при всех 1, 2,..., п.
Основное условие устойчивости. Для того чтобы ли-
линейная дискретная система управления была устойчива, необходимо
и достаточно, чтобы все корни ее характеристического уравнения
были по модулю меньше единицы, или, что то же, находились внут-
внутри единичного круга на z-плоскости корней.
Пример 7.1. Передаточная функция системы W*(z) = —т-± — •
z — z -\- U,о
Требуется исследовать ее устойчивость.
Решение. Характеристическое уравнение имеет вид
z2 -z + 0,5 = 0.
Его корнями являются Zi52 = 0,5 ± j 0,5. Их модули \zi\ = \z2\ =
< 1- Система устойчива.
7.2. Алгебраические критерии устойчивости
Здесь мы рассмотрим необходимое условие устойчивости, опре-
определение устойчивости, основанное на преобразовании внутренности
единичного круга в левую полуплоскость, и критерии устойчивости
Джури.
7.2.1. Необходимое условие устойчивости. Для того чтобы
все нули (корни) характеристического полинома
A*(z) = aozn + axzn~x + ... + ап
были по модулю меньше единицы (\zi\ < 1, г = 1,2,... ,п), необходи-
необходимо, чтобы при по > 0 выполнялись неравенства
Q*(l)>0, (-l)"Q*(-l) >0. G.5)
Чтобы доказать это утверждение, разложим полином Q*(z) на эле-
элементарные множители:
Q*(z) = ao(z - Zl)(z -z2)...(z- zn). G.6)
238 Гл. 7. Устойчивость дискретных систем
Если корень zi является вещественным и по модулю меньше едини-
единицы, то множитель (z — Zi) при z = 1 и множитель (—l)(z — Zi) при
z = — 1 будут положительными. Если корень z\ является комплекс-
комплексным, т. е. Zi — oci + jPi (щ, Pj — вещественные числа), то существует
комплексно-сопряженный корень 2^+i = oti — jfy. Произведение
(z - Zi)(z - zi+1) = (z - atf + 01
при z — 1 и произведение
при z = — 1 будут положительными. Следовательно, из G.6) следует,
что если все корни характеристического полинома по модулю меньше
единицы, то будут выполняться неравенства G.5).
Пример 7.2. Характеристический полином дискретной сис-
системы имеет вид
Q*(z) = z3 + 2,3 z2 + 0,5z - 0,2.
Требуется определить устойчивость системы.
Решение. Проверим необходимое условие устойчивости. В дан-
данном случае а^ = 1 > 0 и
Q*(l) = 1 + 2,3 + 0,5 - 0,2 = 3,6 > 0,
(-1KQ*(-1) = -(-1 + 2,3 - 0,5 - 0,2) = -0,6 < 0.
Необходимое условие устойчивости не выполняется. Следовательно,
система неустойчива.
7.2.2. Исследование устойчивости, основанное на преоб-
преобразовании единичного круга в левую полуплоскость. Крите-
Критерии Гурвица, Льенара-Шипара и другие критерии устойчивости
непрерывных систем позволяют судить, находятся все корни харак-
характеристического уравнения в левой полуплоскости или нет. Поэтому
их нельзя непосредственно использовать для исследования устойчи-
устойчивости дискретных систем. Однако, очевидно, ими можно воспользо-
воспользоваться, если произвести преобразование переменной характеристи-
характеристического уравнения, при котором единичный круг преобразуется в
левую полуплоскость.
Утверждение 7.1. При преобразовании
v = !тт G-7)
внутренность единичного круга на z-плоскости преобразуется в ле-
левую полуплоскость, его внешность — в правую полуплоскость и
окружность (единичного радиуса) — в мнимую ось на v-плоскости.
Доказательство. Представим комплексную переменную z в
тригонометрической форме и подставим в G.7):
\z\(cos (р + j sin (р) — 1 , ч
v = ^ — —^ (ш = argz).
\z\(cos<p + jsm(p) + 1 x^ ь J
7.2. Алгебраические критерии устойчивости 239
Преобразовав и разделив выражение справа на вещественную и мни-
мнимую части, получим
V ~ \z\2 + 2\z\ cos (p + 1 3 \z\2 + 2|г| cos ip + 1'
Так как |z|2 + 2|я| cos</? + 1 ^ |z|2 - 2|z| + 1 = (\z\ - IJ > 0 при \z\ Ф 1,
то вещественная часть
отрицательна при \z\ < 1, положительна при \z\ > 1 и равна нулю
при \z\ = 1. Следовательно, при преобразовании G.7) внутренность
единичного круга ^-плоскости переходит в левую полуплоскость, а
его внешняя часть — в правую полуплоскость ^-плоскости. Окруж-
Окружность единичного радиуса \z\ = 1 переходит в мнимую ось. Действи-
2 sin ш . k ш
=jtg
тельно, при
и при изменении (р от — тг до тг переменная v пробегает значения
от —joo до joo. Утверждение доказано.
Разрешим равенство G.7) относительно z и подставим полученное
выражение в характеристическое уравнение G.2):
= аоA + v)" + ai(l + v)"-1^ -«) + ... + а„A - w)n = 0. G.8)
Представим это преобразованное характеристическое уравнение
в стандартной форме:
G* (z) = covn + ci^-1 + ... + сп = 0. G.9)
Выражения для коэффициентов этого уравнения через коэффициен-
коэффициенты исходного характеристического уравнения получим, если в G.8)
раскроем скобки и произведем приведение подобных членов, а затем
приравняем коэффициенты при одинаковых степенях в G.8) и G.9).
Для п — 1,2,3 имеем:
п = 1: с0 = а0 - ai, с\ — а0 + а\\ G.10а)
п = 2: с0 = а0 - ai + а2, ci = 2(а0 - а2), с2 = а0 + а\ + а2; G.106)
п = 3: с0 = а0 - ai + а2 - а3, с\ — 3(а0 + а3) — а\ - а2,
с2 = 3(а0 - аз) + ai — а2, с3 = а0 + ai + а2 + а3. G.10в)
В силу утверждения 7.1, если корни исходного характеристичес-
характеристического уравнения располагаются внутри единичного круга, то корни
преобразованного характеристического уравнения G.9) располага-
располагаются в левой полуплоскости.
Таким образом, для того чтобы дискретная система была устой-
устойчива, необходимо и достаточно, чтобы все корни преобразованно-
240
Гл. 7. Устойчивость дискретных систем
го характеристического уравнения G.9) располагались в левой по-
полуплоскости {имели отрицательную вещественную часть).
Пример 7.3. Характеристический полином дискретной системы
управления имеет вид
Q*(z) = z3 - 0,1 z2 - 0,46 z - 0,08.
Определить ее устойчивость.
Решение. В данном случае
а0 = 1, а1 = -0,1, а2 = -0,46, а3 = -0,08
и в соответствии с G.10в) коэффициенты преобразованного уравне-
уравнения равны
с0 = а0 - ах + а2 - а3 = 1 + 0,1 - 0,46 + 0,08 = 0,72,
Cl = 3(а0 + а3) -а,!-а2= 3A - 0,08) + 0,1 + 0,46 = 3,32,
с2 = 3(а0 - а3) + ^ - а2 = 3A + 0,08) - 0,1 + 0,46 = 3,6,
с3 = а0 + ai + а2 + а3 = 1 - 0,1 - 0,46 - 0,08 = 0,36.
Необходимое условие устойчивости выполняется: все коэффици-
коэффициенты преобразованного характеристического уравнения больше нуля.
Определитель Гурвица 2-го порядка есть
А2 = cic2 - с0с3 = 3,32 • 3,6 - 0,72 • 0,36 ^ 11,69 > 0.
Следовательно, система устойчива.
7.2.3. Критерий устойчивости Джури. Составим таблицу
Джури, которая содержит п + 1 строк и столько же столбцов.
При этом заполненные клетки имеют треугольную форму: нулевая
строка содержит п + 1 заполненных клеток, а все последующие стро-
строки имеют на единицу меньше заполненных клеток, чем предыдущая
строка (табл. 7.1).
Таблица 7.1.
d00 = а0
dio
dn-1,0
dno
Таблица Джури
doi — ai
du
[
do,
4,-1.1
a-l =
di,n-
fln-l
1
don = a>n
Клетки нулевой строки заполняются коэффициентами характерис-
характеристического уравнения в порядке возрастания нижних индексов: dok —
= ctk (к = 0,1,..., п). Элементы первой строки d\k (к = 0,1,..., п — 1)
вычисляются следующим образом.
Выписываются элементы нулевой строки и под ними те же элемен-
элементы в обратном порядке. Из элементов верхней строки вычитаются со-
7.2. Алгебраические критерии устойчивости 241
ответствующие элементы нижней строки, умноженные на отношение
последних элементов двух выписанных строк а± = d
а0 а\ ... an_i ап
— ап
ап an-i ... а\ а0 «i = —
а
dio = «о - OLian, dn = ai - aian_i, ..., di,n-i — an_i -
Последняя разность обращается в нуль, и она отбрасывается. По-
Поэтому первая строка содержит п элементов: на один элемент меньше,
чем нулевая строка.
Элементы всех последующих строк определяются аналогично эле-
элементам первой строки. Так, например, для вычисления k-й строки
выписываются элементы (к — 1)-й строки и под ними те же элементы
в обратном порядке. Из элементов верхней строки вычитаются со-
соответствующие элементы нижней строки, умноженные на отношение
последних элементов выписанных двух строк a^ = Ck-i,n-k+i/ck-w-
Последняя разность, обращающаяся в нуль, отбрасывается. Формула
для вычисления г-го элемента к-й строки (к = 1, 2,... ,п) имеет вид
1n-k-i+i, & = l,2,...,n, г = 0,1,...,п-к. G.11)
Критерий Джури (E.I. Jury [19]). Для того чтобы все нули
(корни) характеристического полинома
находились внутри единичного круга, необходимо и достаточно,
чтобы при ао > 0 все элементы нулевого столбца таблицы Джу-
Джури были положительны: doi > 0, г = 1, 2,..., п.
Если все элементы нулевого столбца, кроме последнего, положи-
положительны: doi > 0, г = 1, 2,..., п — 1, то положительность последнего
элемента, т.е. условие don > 0, эквивалентно необходимому условию
устойчивости G.5). Поэтому если необходимое условие выполняется,
то последний элемент d$n можно не вычислять.
Пример 7.4. Характеристический полином дискретной систе-
системы управления имеет вид
Q*(z) = zA - 0,7z3 - 0,4z2 + 0,05z + 0,1.
Исследовать устойчивость данной системы.
Решение. Сначала проверим необходимое условие устойчи-
устойчивости:
Q*(l) = 1-0,7- 0,4 + 0,05 + 0,1 = 0,05 > 0,
(-1LQ*(-!) = 1 + 0,7 - 0,4 - 0,05 + 0,1 = 1,35 > 0.
Необходимое условие устойчивости выполняется. Вычислим элементы
таблицы Джури.
Для нулевой строки имеем
соо = 1, coi = -0,7, сО2 = -0,4, соз = 0,05, сО4 = 0,1.
16 Д.П. Ким
242 Гл. 7. Устойчивость дискретных систем
Ниже приводится вычисление элементов таблицы Джури для ос-
остальных строк, кроме последней:
1 -0,7 -0,4 0,05 0,1
0,1 0,05 -0,4 -0,7 1
=0,1
0,99 -0,705 -0,36 0,12
0,12 -0,36 -0,705 0,99
= 0,121
0,975 -0,69 -0,275
-0,275 -0,69 0,975
•a3 = -0,282
0,897 -0,883
Элементы нулевого столбца (кроме последнего) равны соответст-
соответственно
с00 = а0 = 1, с10 = 0,99, с20 = 0,975, с30 = 0,897,
и они положительны. Так как выполняется необходимое условие ус-
устойчивости, последний элемент нулевого столбца также будет поло-
положительным. Следовательно, система устойчива.
7.3. Частотный критерий устойчивости
Рассмотрим полином, который получается из характеристическо-
характеристического полинома Q*(z) при подстановке в него z = esT:
Q(s) = Q*(z)\z=e,T = aoenTs + aie^-^Ts + ... + an. G.12)
Этот полином является характеристическим полиномом в D-изоб-
ражениях. Установим, какими должны быть нули Q(s) (т.е. корни
характеристического уравнения Q(s) = 0 в .D-изображаниях), чтобы
система была устойчива.
Представим переменную z в виде z = \z\ejargz. Подставив это вы-
выражение в z = esT и прологарифмировав, получим
s=±(\n\z\+j<iTgz). G.13)
Так как ln|z| < 0 при \z\ < 1, то условие устойчивости дискретных
систем \zi\ < 1 (г = 1, 2,..., п) принимает вид
Resi = i ln|^| <0, г = 1,2,...,п. G.14)
Таким образом, для того чтобы дискретная система была ус-
устойчива, необходимо и достаточно, чтобы все корни ее характерис-
характеристического уравнения в D-изображаниях расположились в левой
s-полуплоскости.
В силу равенства z = \z\ejar%z = \z\eJ(^z+k2n) ^ = о, =Ы, ±2,...),
если Zi является корнем характеристического уравнения Q*(z) = 0,
7.3. Частотный критерий устойчивости 243
то число
1 17 I Ч \Л
будет корнем характеристического уравнения в ^-изображениях при
любых /с = 0,=Ы,±2,... Иначе говоря, характеристическое уравнение
в ^-изображениях имеет бесконечное множество решений.
Корни Si, у которых мнимая часть ImSi Е [—тг/Т, тг/Т], будем
называть основными корнями характеристического уравнения в
12-изображениях. Число основных корней равно степени характерис-
характеристического уравнения. Так как неосновные корни отличаются от со-
соответствующих основных только мнимой частью, для исследования
устойчивости достаточно рассмотреть только основные корни.
7.3.1. Принцип аргумента.
Если к основных нулей характеристического полинома
Q(s) = aoenTs + aie(n~1)Ts + ... + ап
расположены в левой полуплоскости, а остальные п — к основных
нулей — в правой полуплоскости, то приращение aigQ(ju;) при
изменении си от —о;и/2 до о;и/2 (иИ = 2тг/Т) равно 2ктг:
A 3igQ(juj) = 2&тг, G.15)
а при изменении и от 0 до о;и/2 равно ктг:
A argQ(jV) = ктг. G.16)
Доказательство. Пусть z\, Z2,..., zn — нули характеристи-
характеристического полинома Q*(z), a si, S2,..., sn — нули характеристического
полинома Q(s). Тогда эти полиномы можно представить в виде про-
произведения
Q*(z) = ao(z - Zl)(z -z2)...(z- zn), G.17)
Q(ju) = ao(e^T - е'1Т)(е*шТ- es*T)... (е>шТ - es"T). G.18)
При |z| = 1, положив в G.13) s = ju, получим argz = ujT, и соот-
соответственно z можем представить в виде
z= \z\ej^z =eju;T.
Этот вектор при изменении и от —о;и/2 до о;и/2 делает на z-плос-
кости полный оборот в положительном направлении (против движе-
движения часовой стрелки), и его конец описывает окружность единичного
радиуса. При этом вектор z — zi (z = eja;T) делает полный оборот
относительно конца вектора zi в положительном направлении, и из-
изменение его аргумента равно 2тг (рис. 7.1, а), если \zi\ < 1, и изменение
16*
244
Гл. 7. Устойчивость дискретных систем
Imz
Re*
Rez
а б
Рис. 7.1. К доказательству принципа аргумента: \zi\ < 1 (а) и \zi\ > 0 F)
аргумента этого вектора равно нулю, если \zi\ > 1 (рис. 7.1, б). Поэ-
Поэтому (см. G.17))
A argQ*(e^T) = ^ A arg (eju;T - Zi) = 2 for,
если к нулей полинома Q*(z) находятся внутри единичного круга, а
остальные п — к — вне единичного круга.
И так как Kesi < 0 при \zi\ < 1 и Kesi > 0 при \zi\ > 1, изме-
изменение аргумента Q(ju) (см. G.18)) определяется следующим образом:
если/с основных нулей характеристического полинома Q(s) = Q*(esT)
расположены в левой, а остальные п — к основных нулей — в правой
s-полуплоскости.
Теперь покажем справедливость формулы G.16). Так как е^~х' =
= cos ж — jsinx, функция Q(—Juj) = Q*(e~Ja;T) является комплексно-
сопряженной функции Q(joo) = Q^(e^ujT). Аргументы комплексно-соп-
комплексно-сопряженных функций отличаются только знаком:
arg Q (jcj) = -axgQ(-jv).
Отсюда следует, что
A &YgQ(JLu) = A argQ(jo;,)
и из G.15) получаем G.16).
7.3.2. Критерий Найквиста. Для исследования устойчивости
дискретных систем можно использовать также критерий Найквиста
(точнее, его аналог). Как и в случае непрерывных систем, он использу-
используется для определения устойчивости замкнутой системы по амплитуд-
амплитудно-фазовой частотной характеристике ее разомкнутой системы.
7.3. Частотный критерий устойчивости 245
Пусть передаточная функция дискретной системы управления в
разомкнутом состоянии имеет вид
W(s) W(e) S^
R(s)
где P(s), R(s) — полиномы от esT.
Критерий Найквиста. Если разомкнутая система неус-
неустойчива и ее характеристическое уравнение R(s) = 0 имеет к ос-
основных корней в правой полуплоскости и не содержит корней на
мнимой оси, то для того чтобы замкнутая система была устой-
устойчива, необходимо и достаточно, чтобы амплиту дно-фазовая час-
частотная характеристика разомкнутой системы (годограф частот-
частотной передаточной функции W(ju)) при изменении частоты ио от О
до иош/2 охватывала точку (—1, jO) k/2 раз.
Если разомкнутая система устойчива, то для того чтобы замк-
замкнутая система была устойчива, необходимо и достаточно, чтобы
амплиту дно-фазовая частотная характеристика разомкнутой сис-
системы не охватывала точку (—1, jO).
Доказательство. Рассмотрим функцию
M(s) = 1 + W(s) = S^, Q(s) = R(s) + P(s).
R(s)
В числителе имеем характеристический полином замкнутой системы,
а в знаменателе — характеристический полином разомкнутой систе-
системы. Для того чтобы замкнутая система была устойчива, необходимо
и достаточно, чтобы все нули характеристического полинома замкну-
замкнутой системы Q(s) = R(s) + P(s) располагались в левой полуплоскос-
полуплоскости или в соответствии с принципом аргумента (см. G.16)) выполня-
выполнялось равенство _
A aigQ(jw) = птг.
0^с^и;и/2
По условию характеристическое уравнение R(s) = 0 имеет к основ-
основных корней в правой и остальные п — к основных корней в левой по-
полуплоскости. Поэтому в соответствии с принципом аргумента
A axgR(joj) = (п - к)тг.
И так как argM(jo;) = argQ(jo;) — a,rg R(jlu), то
A zxgM(juj) = A zxgQ(juj) - A zxgR(juj) = ктг.
0^с^и;и/2 0^с^и;и/2 0^с^и;и/2
Отсюда следует: для того чтобы замкнутая система была устойчива,
необходимо и достаточно, чтобы годограф вектора M(juj) охватывал
начало координат к/2 раз.
В силу равенства W(juo) = M(juo) — 1 годограф W(juo) получает-
получается из годографа M(juo) путем сдвига последнего влево на единицу
246
Гл. 7. Устойчивость дискретных систем
(рис. 7.2). Поэтому для того чтобы замкнутая система была устой-
устойчива, необходимо и достаточно, чтобы годограф вектора W(ju)
ReM(juj)
ImW(jw)'
-1
ReW(juj)
Рис. 7.2. К доказательству критерия Найквиста: а — годограф M(jw);
б— годограф W(juj)
при изменении частоты и от 0 до о;и/2 охватывал точку (—1, jO)
k/2 раз.
Если разомкнутая система устойчива, то к = 0, и для устой-
устойчивости замкнутой системы необходимо и достаточно, чтобы годо-
годограф W(jcj) не охватывал точку (—1, jO).
Пример 7.5. Передаточная функция разомкнутой системы
W*(Z)-
1,2*+ 0,35'
период следования импульсов Т = 0,1. Исследовать устойчивость
замкнутой системы.
Решение. Определим устойчивость по критерию Найквиста.
Частотная передаточная функция разомкнутой системы определя-
определяется следующим образом:
ЪГтс \ ™т*( \\ 0,5(eio'la;+0,7)
W{ju) = W (z)\z=eiOtlu = ^-0,2. ¦1>2бУ-од.+0,35 =
_ 0,5(cos 0, la; + 0,7 + j sin 0,1a;)
~ cos 0,2a; - 1,2 cos 0,1 ш + 0,35 + j(sin 0,2 ш - 1,2 sin 0,1 a;)'
Введя обозначения
щ = cos 0,1a; + 0, 7, vi = sin 0,1 a;,
u2 = cos 0,2 и - 1,2 cos 0,1 a; + 0,35,
^2 = (sin 0,2 a; — 1,2 sin 0,1 a;),
выпишем отдельно вещественную и мнимую части:
0,5 (u\U2 + V1V2)
imW(juj) =
о,
U1V2)
7.3. Частотный критерий устойчивости
247
Амплитудно-фазовая частотная характеристика (рис. 7.3) не ох-
охватывает точку (—1, jO). Разомкнутая система устойчива, так как
imW(juj)
ReW(jw)
-2 -1
12 3 4
Рис. 7.3. АФЧХ
нули z\ =0,7 и Z2 = 0,5 характеристического полинома разомкнутой
системы Q*(z) = z2 — 1,2 z + 0,35 по модулю меньше единицы. Следо-
Следовательно, замкнутая система устойчива.
7.3.3. Псевдочастотный критерий. Как было показано, при-
применив преобразование z = , при определении устойчивости дис-
дискретных систем можно воспользоваться всеми методами исследования
устойчивости непрерывных систем. Подставим это выражение в пе-
передаточную функцию разомкнутой дискретной системы W*(z):
W*(v) = V
1 — v
Положив v = juj* (иногда делают подстановку v = jTuj*/2), получим
функцию
Переменная о;* не имеет физического смысла частоты, функ-
функция W*(j(j*) — физического смысла частотных передаточных функ-
функций непрерывных и дискретных систем. Переменную о;* называют
псевдочастотощ функцию W*(ju>*) — псевдочастотной передаточ-
передаточной функцией, а характеристики (амплитудно-фазовые, логарифми-
логарифмические и другие), которые строятся на основе H^*(jo;*), называют
псевдочастотными характеристиками.
С использованием псевдочастотной характеристики (т.е. годогра-
годографа W*(ju*) при изменении о;* от 0 до оо) критерий устойчивости Най-
квиста формулируется так же, как и в случае непрерывных систем.
Точно так же совпадают формулировки логарифмического псевдочас-
псевдочастотного критерия устойчивости дискретных систем и логарифмичес-
логарифмического частотного критерия устойчивости непрерывных систем.
248 Гл. 7. Устойчивость дискретных систем
7.4. Влияние квантования по времени
на устойчивость
Рассмотрим влияние дискретизации по времени на устойчивость
на примере АИМ-системы, состоящей из фиксатора нулевого поряд-
порядка и непрерывной части сначала с передаточной функцией WH(s) =
= гъТТГ а затем с w«(s) = (Ts + i)(TS + iy Система без дискрет"
( )
ного элемента, т.е. непрерывная система, устойчива при любом поло-
положительном к в обоих случаях.
В первом случае передаточная функция приведенной непрерывной
части есть
Т
и дискретная передаточная функция разомкнутой системы имеет вид
W(z) = W:(z) = ZT{Wn(s)} = Mi^ll Z
_ k(z-l)( z z x _ кA-ет/т°)
Отсюда для характеристического уравнения замкнутой системы
имеем
/
Коэффициенты преобразованного характеристического уравнения
(см. G.10а)) равны
~т/То - кA -
с0 = а0 - сц = 1 + е
С1 = а0 + аг = 1 - е~т/То + кA - е~т/То),
и условие устойчивости принимает вид
с0 = 1 + е-т/То - кA - е~т/То) > 0,
Второе неравенство выполняется при любом положительном к, а пер-
первое — только при к < кг, где кг — граничный передаточный коэффи-
коэффициент системы, определяемый из условия со = 0:
_ 1 +
г ~ 1 -
При малом периоде (Т/То < 1), положив е~Т//т° = 1 - Т/То, получим
кг = ^ - 1. G.19)
Из этого равенства следует: кг —> оо при Т —> 0. Однако при конеч-
конечном периоде, как бы он ни был мал, дискретная система устойчива не
при любом передаточном коэффициенте системы.
7.4- Влияние квантования по времени на устойчивость 249
Теперь рассмотрим случай, когда передаточная функция непре-
k
рывной части имеет вид WH(s) = g + 1)(T s + l)'
Передаточная функция приведенной непрерывной части есть
_ Ц1е-Т°)
и дискретная передаточная функция разомкнутой системы имеет вид
= k
где doz2 + d\z + do '
^ - Tl
= „-(Т/Тг+Т/Тг) ,
2
Г2-Г1 Г2-Г1
При малом периоде (T/Tk ^ 1, fc = 1,2), воспользовавшись пред-
представлением е~ж = 1 — x + ж2/2, получим
/t-j2 /t-j2
1 ~ 2TT ' 2 ~
2TiT2 ' 2 ~ 2TiT2 '
л о | Т(Г1+Г2) Т2{П
1 "^ TT 2
1 _ T(Ti+T2) T2(Ti+T2J
TiT2 |
Характеристическое уравнение замкнутой системы имеет вид
аО?2 + a\z + а2 = 0.
Здесь
ао = А;6о + ао = 1,
,, , , и Т2 о , T(Ti+T2)
ах =kb1+d1=k -—- - 2 + v —^
2iii2 ii
Т(Г!+Г2) , Г2(Г!+Г2J
+
Коэффициенты преобразованного характеристического уравнения
(см. G.106)) и условие устойчивости имеют вид
^ — п п _L п — Л 9 T(Tl +Т2) Г (?! -г ^.^^ -г J.2 ;
с0 - а0 - ах + а2 - 4 - 1 ——— 1 т^т^ > и>
г -О(п п\-<>( кТ" I Г(Г1+Г2)
ci - Z{a0 - а2) - Z(- н ——
с2 = а0 + ai + а2 = (А; + 1) =7^г > 0.
ili2
250 Гл. 7. Устойчивость дискретных систем
Первое и третье неравенства выполняются при любом положитель-
положительном передаточном коэффициенте /с, второе — только при к < /сг, где
граничный передаточный коэффициент
_ 2(Г1+Г2) Т} + Т?
к f ^^. G.20)
Из формулы G.20) следует: кг —> оо при Т —> 0.
Итак, дискретизация по времени может привести к неустойчивос-
неустойчивости даже системы 1-го и 2-го порядка. При этом, как и следовало ожи-
ожидать, граничный передаточный коэффициент с уменьшением периода
квантования увеличивается и стремится к бесконечности с приближе-
приближением периода к нулю.
Задачи
1. Исследовать устойчивость системы, у которой характеристи-
характеристическое уравнение имеет следующий вид:
а) z3 + 0,6 z2 + 0,11 z + 0,006 = 0; б) z3 - 0,6 z2 + 0,11 z - 0,006 = 0;
в) z3 - 0,9 z2 + 0,26 z - 0,024 = 0; г) z3 - 3z2 + 2,81 z - 0,84 = 0;
д) z3 -2,3z2 + 0,62^ + 0,04 = 0; e) z3 - 1,2 z2 + 0,47 z + 0,06 = 0;
ж) z4 + z3 + 0,35 z2 + 0,05 z + 0,0024 = 0;
з) z4 + 1,4z3 + 0,71 z2 + 0,154z + 0,012 = 0;
и) z4 + 2,4z3 + 1,61 z2 + 0,414z + 0,036 = 0;
к) z4 + 1,8 z3 + 1,19 z2 + 0,342 z + 0,036 = 0.
2. Исследовать устойчивость разомкнутой и замкнутой систем при
условии, что передаточная функция разомкнутой системы имеет сле-
следующий вид:
а)и,*(,)= 0,01 ? + 0,003 .
б) W*(z) =
в) W*(z) =
0,13 ?
0,14 ?
?3 -1,б?2 +
?3 — 2 3 ?2 +
0,1 ? + 0,003'
-0,012
-0,1
0,6 ?-
0,31 ?
?3-3,7?2 + 2?-1
0,07 ?-0,01
-0,012'
-0,02'
-0,02'
0,06'
6' ^« = ,3-^^-0,2-
7.4- Влияние квантования по времени на устойчивость 251
3. Исследовать устойчивость цифровой системы управления, у
которой период следования Г = 0,05 и передаточные функции регуля-
регулятора (дискретного фильтра) и непрерывной части имеют следующий
вид:
W?(z) = ——, wH(s) = ——l—;
s2+3s + 2'
г / ч Ю
1Q
4. Исследовать устойчивость ШИМ-системы управления, у кото-
которой период следования импульсов Т = 0,05, амплитуда Аш = 1, коэф-
коэффициент модуляции х = 0,05 и передаточная функция непрерывной
части имеет следующий вид:
5. Дискретный элемент АИМ-системы вырабатывает прямоуголь-
прямоугольные импульсы с периодом Т = 0,1, амплитудой Аш = 1 и относи-
относительной длительностью 7- Передаточная функция непрерывной части
Определить граничное значение передаточного коэффициента к
при следующих значениях параметров Го и j:
а) Го = 0,5; 7 = 0,2; 0,4; 0,6; 0,8; 1;
б) 7 = 0,5; Го = 0, 2; 0,4; 0,6; 0,8; 1.
6. Определить граничное значение передаточного коэффициента
цифровой системы, у которой период квантования Г = 0,05 и пере-
передаточные функции регулятора (дискретного фильтра) и непрерывной
части имеют следующий вид:
\ w*( \ _ 1z-l , ч _ к
Оу 1 h
F\\ ТЛ7* (?\ — ТЛ7 (q\ — •
b)Wp(z) 2+, WH(S) .
7. Определить граничное значение передаточного коэффициен-
коэффициента ШИМ-системы, у которой период квантования Г = 0,05, амплиту-
амплитуда Аш = 1, коэффициент модуляции х = 0,05 и передаточная функция
непрерывной части имеет следующий вид:
а)Жн(,) = 7А_; 6)^) = -^; в) ВД = -.JL-.
Глава 8
ОЦЕНКА КАЧЕСТВА ДИСКРЕТНЫХ СИСТЕМ
Качество дискретных систем управления определяется так же,
как и качество непрерывных систем, и для его оценки можно исполь-
использовать все ранее введенные показатели качества в переходном и ус-
установившемся режимах или их аналоги.
8.1. Показатели качества в переходном режиме
Показатели качества в переходном режиме делятся на прямые и
косвенные. Прямыми показателями качества называются числовые
показатели, которые определяются по переходной характеристике. По-
Показатели качества, определяемые не по переходной характеристике,
называются косвенными.
8.1.1. Прямые показатели качества. Среди прямых показа-
показателей наиболее часто используются время регулирования и пере-
перерегулирование. Напомним: временем регулирования tp называется
минимальное время, по истечении которого отклонение переходной
h(t)\
А 2А
2Т AT
Рис. 8.1. Переходная характеристика
характеристики от установившегося значения ft(oo) не превышает
заданной величины А (рис. 8.1). Обычно принимают А = @,02 —
- 0,1)Л(оо).
8.1. Показатели качества в переходном режиме 253
Перерегулированием а называют максимальное отклонение пере-
переходной характеристики от установившегося значения, выражен-
выраженное в процентах к установившемуся значению:
_ hm - h(oo)
h(oo)
Для графического определения прямых показателей качества не-
необходимо иметь переходную характеристику. Ее можно построить по
дискретной переходной функции ft[/T], соединяя дискретные точки
плавной кривой.
Рассмотрим вычисление переходной функции. По определению пе-
переходная функция h[lT] есть функция, которая описывает реакцию
системы на единичное воздействие д[1Т] = 1[/Т] при нулевых началь-
начальных условиях. И так как ^-изображение от единичной решетчатой
функции имеет вид G*(z) = Z{l[/T]} = z/(z - 1), ^-изображение
переходной функции равно
h*(z) = w;g(z)G*{z) = w;g{z) ^,
где W*g(z) — передаточная функция относительно входа д[1Т] и вы-
выхода у [IT].
Изображение переходной функции есть отношение полиномов:
H (z) = . ; ( = (m < n).
vy A*(z) aQzn+a1zn-1 + ... + о„ v y
С другой стороны, по определению ^-преобразования
1=0
Поэтому значения переходной функции h[lT] можно найти, разло-
разложив H*(z) в ряд Лорана путем деления числителя B*(z) на зна-
знаменатель A*(z) по правилу деления многочленов. При этом в мно-
многочленах B*(z) и A*(z) слагаемые должны располагаться
в порядке убывания степени z.
Пример 8.1. Определить значения переходной функции h[lT]
(/ = 0,1,..., 5) дискретной системы с передаточной функцией
Решение, ^-изображение переходной функции имеет вид
Произведя деление числителя на знаменатель по правилу деления
многочленов, для первых пяти слагаемых получим
H*(z) = 0,1 z-1 + 0,1 z~2 + 0,07z~3 + 0,04z~4 + 0,061 z~b + ...
Отсюда имеем ft@) = 0, h(T) = 0,1, hBT) = 0,1, hCT) = 0,07,
hDT) = 0,04, hET) = 0,061.
254 Гл. 8. Оценка качества дискретных систем
Если разность между степенями знаменателя и числителя рав-
равна г, то первый член разложения H*(z) в ряд Лорана будет иметь
степень z~r. Поэтому первые г значений h[lT] будут равны нулю:
Л[0] = h[T] = ... = h[(r - 1)Г] = 0.
Другой способ вычисления переходной функции основан на форму-
формуле разложения, которая определяется следующим образом: если все по-
полюсы zi (г = 1, 2,..., п) функции H*(z) (т. е. корни уравнения A* (z) =
= 0) простые и не равны нулю, то [6]
—- zi , / = l,z,..., (o.lj
г=1
где A*'(zi) = ——^
Начальные значения: h[0] = 0 при т < п и h[0] = — при т = п.
Пример 8.2. Определить переходную функцию h[lT], если z-изоб-
ражение имеет вид
Решение. В данном случае В*(z) = 3z + 1 и A*(z) = z2 + 5z +
+ 6. Производная есть A*'(z) = 2^ + 5, полюсами являются z\ — —2
и Z2 = —3. И в соответствии с формулой (8.1)
h[lT] = -5(-2)/-1 + 8(-3)/-1, / = 1,2,...
Начальное значение h[0] = 0, так как степень числителя меньше сте-
степени знаменателя.
Если H*(z) имеет кратные полюсы, то полюсу Zj кратности kj в
формуле разложения соответствует слагаемое, определяемое предель-
предельным соотношением [6]
Если среди полюсов H*(z) имеется нулевой полюс (zj = 0), то при вы-
вычислении соответствующего этому полюсу слагаемого следует поль-
пользоваться формулой (8.2) и в том случае, когда этот полюс является
простым.
Пример 8.3. Определить переходную функцию h[lT], если ее
^-изображение имеет вид
Решение. В данном случае B*(z) = z2 + 2,5z + 1 и A*(z) =
= z(z - lJ(z + 1). Производная есть A*'(z) = 4z3 - 3z2 -2z + l, по-
полюсами являются z\ — 0, Z2 — 1 и ^з = — 1. Слагаемое, соответст-
соответствующее нулевому полюсу (zi = 0), в соответствии с формулой (8.2)
8.1. Показатели качества в переходном режиме
255
определяется следующим образом:
г Г
lim z
! + 2,5* + 1 /_!! Г1
—¦— ! z = <
-1J(^ + 1) J \0
при / = 1,
)L z(z-l)z(z + l) J |0 при />1.
Полюс Z2 = 1 имеет кратность 2, и ему соответствует слагаемое
lim 4- \(z - 1)
2->i dz L
2 г2+ 2,5 г+ 1
= lim *
z^i dz
= 2,25/ _ з,375.
Полюс ^з = — 1 является простым, и ему соответствует слагаемое
(см. (8.1))
!^ll(-l)'-i = 0,125 (-I)'"*.
Таким образом, имеем
ft[T] = 1 + 2,25 - 3,375 + 0,125 = 0,
h[lT] = 2,251 - 3,375 + 0,125 (-I)*, / = 2,3,...
Начальное значение: h[0] = 0.
Вычисление переходной функции между точками съема сигна-
сигналов. Функция h[lT] определяет значения переходной функции в мо-
моменты съема сигнала t = IT (Z = 0,1,2,...). При необходимости
можно получить функцию hT[lT], которая определяет значения пере-
переходной функции в промежуточные моменты времени t = (/ — г/Т)
@<т <Г, / = 1,2,...).
Для этого рассмотрим структурную схему (рис. 8.2,6), которая
Wi(s)
Y(s) G(s)
W2(s) *
"Л >
W1(s)
V^2(s)
1 {8)
e~TS
Рис. 8.2. Структурные схемы (к определению переходной функции hT[lT]):
а — исходная схема; б — преобразованная схема
получается из исходной (рис. 8.2, а) подключением на выходе звена
чистого запаздывания. Из этих схем имеем
w:
} ~ l + ZT{Wi(s)W2(s)}'
Так как yT(t) = y(t — г) и при единичном входном воздействии и
нулевых начальных условиях y(t) = /i(?) и 2/r(?) = hT(t), то ftr(t) =
= h(t — r). Соответственно для ^-изображений переходных функ-
256 Гл. 8. Оценка качества дискретных систем
ций h[lT] и hT[lT] имеем
H-(z) = Z{h[lT}} =
" l + ZT{W1(s)W2(s)} z-1
_ z-1Z?T{Wi(s)} z , ,
l + ZT{W1{s)W2{s)} z-V K ' }
где e = 1 - т/Т.
Пример 8.4. Пусть в дискретной системе (см. рис. 8.2, a) W\ (s) =
1 - e~Ts
= —; -, W2{s) = 1 и период следования импульсов Т = 0,2. Тре-
s(s + 1)
буется определить решетчатую функцию, которая принимает значе-
значения переходной функции h(i) в моменты t = (/ — S)T, где 5 = 0,25,
/ = 1,2,...
Решение. Искомой функцией будет ftr[/T], где г = ST = 0,05. В
данном случае е = 1 — й = 0,75и
Подставив эти выражения в (8.3), получим
0,15z +0,03
Отсюда в соответствии с формулой (8.1)
hT[lT] = 0,9 - 0,75 @,8)г-\ / = 1,2,...
8.1.2. Косвенные показатели качества. Как и в случае непре-
непрерывных систем, для оценки качества дискретных систем используют-
используются следующие косвенные показатели качества: корневые, частотные и
суммарные (аналог интегральных).
Корневым показателем качества является степень устойчивос-
устойчивости ?7*, которая определяется следующим образом:
где zv — корни характеристического уравнения. Степень устойчивос-
устойчивости является косвенной мерой быстродействия системы.
Суммарной квадратической ошибкой называется ряд
*]> еп[*Г] = е[1Т] - еоо[/Т].
Здесь еп[/Т] — переходная составляющая ошибки, е[1Т] — ошибка
и воо [ZT] — установившаяся ошибка (вынужденная составляющая
ошибки).
8.1. Показатели качества в переходном режиме 257
Частотные показатели — запас устойчивости по амплитуде и за-
запас устойчивости по фазе — определяются точно так же, как и в слу-
случае непрерывных систем. Но в случае дискретных систем указанные
показатели можно определить как по частотным, так и по псевдочас-
псевдочастотным характеристикам. Однако псевдочастотные характеристики
не находят широкого применения.
8.1.3. Особенности переходного процесса дискретных сис-
систем. В непрерывных линейных системах переходная функция всег-
всегда принимает установившееся значение при t = oo. Однако возмож-
возможны линейные дискретные системы, в которых переходный процесс за-
заканчивается за конечное число шагов, т. е. существует такое поло-
положительное число /о, что
h[lT] = h[l0T] = h[oo] V/ ^ /0. (8.4)
Если выполняется условие (8.4), то переходный процесс называ-
называется оптимальным, а система, в которой происходит такой процесс,
называется оптимальной (по переходному процессу) системой.
Условие оптимальности системы (по переходному процессу). Пе-
Переходя к оригиналам, из равенства
Y*(z) = W;g(z)G*(z)
по теореме о свертке получим
i
y[lT\ = Y,wV9[kT]g[(l-k)T]. (8.5)
k=0
По определению переходной функции при g[lT] = 1[IT] из (8.5) имеем
i
h[lT] = Y,wvg[kT]. (8.6)
k=0
Отсюда следует, что система будет оптимальной по переходному про-
процессу, т.е. будет выполнено условие (8.4), если
wyg[lT} = 0 при /О/о- (8.7)
При выполнении этого условия передаточная функция, связанная с
весовой функцией ^-преобразованием, принимает вид
сю /о
Wyg(z) = Z>™№~* = Y,wyg[kT]z-k. (8.8)
k=0 k=0
В общем случае передаточная функция W*g(z) представляет собой от-
отношение полиномов:
bozm+bizm~11t---lbm (пг^п), (8.9)
1 + + а
и она при разложении в ряд Лорана примет вид (8.8), если
сы =а2 = ... = ап = 0. (8.10)
17 Д.П. Ким
258 Гл. 8. Оценка качества дискретных систем
Действительно, в этом случае имеем
W* (z) ~ — zm-n + — z™-71-1 + + — z~n
yi) ao ao ao
Таким образом, система (8.9) является оптимальной (переход-
(переходный процесс в ней заканчивается за конечное число шагов), если вы-
выполняется условие (8.10).
Пример 8.5. Замкнутая дискретная система состоит из фикса-
фиксатора нулевого порядка и непрерывной части с передаточной функ-
k
цией WH(s) = -, период Т = 0,1. Определить параметр к, при ко-
2s + 1
тором переходный процесс будет оптимальным.
Решение. При фиксаторе нулевого порядка передаточная функ-
l-eTs
ция формирующего звена имеет вид W<j)(s) = . Поэтому пере-
передаточная функция приведенной непрерывной части имеет вид
Wn(s) = W<b(s)WH(s) = \ в )
и передаточная функция разомкнутой дискретной модели равна
Передаточная функция замкнутой системы имеет вид
W* (z) = W^z) = 0fi
ygK } l + Wn*(z) ^-0,95 + 0,05 k'
Отсюда в соответствии с формулой (8.10) для оптимального к полу-
8.2. Показатели качества в установившемся
режиме
Наиболее полной характеристикой качества в установившемся ре-
режиме является установившаяся ошибка e^lT]. Ее можно найти по
^-изображению Е* (z) на основе теоремы о граничных значениях:
Другим показателем качества в установившемся режиме являют-
являются коэффициенты ошибки, которые определяются ниже.
8.2.1. Коэффициенты ошибки. Переходя к оригиналам, из ра-
равенства
8.2. Показатели качества в установившемся режиме 259
по теореме о свертке получим
I
k=0
Процесс считается установившимся в текущий момент времени, ес-
если входное воздействие начало действовать при to = — оо. Поэтому,
положив в предыдущей формуле начальное к = — оо, получим
i
еоо[Щ= Y, weg[(l-k)T\g[kT\,
к= — оо
или, положив I — к = г, получим
сю
Yi)T]. (8.11)
г=0
Разложим функцию g(t — т) в ряд Тейлора в окрестности точки t:
к=0
Произведем дискретизацию по времени, для чего в полученном разло-
разложении положим t — IT и т — гТ:
к=0
Подставим это выражение в (8.11) и поменяем порядок суммирования.
Тогда получим
сю сю (к)
к=0 i=0
- > О& g [Ll J, yo.A-Zj
к=0
гДе _
— , к = 0,1, 2,... (8.13)
г=0
Коэффициенты С^ характеризуют качество системы в установив-
установившемся режиме и называются коэффициентами ошибки. При этом Со
называют коэффициентом позиционной ошибки, С\ — коэффициен-
коэффициентом скоростной ошибки и С2 — коэффициентом ошибки по уско-
ускорению.
8.2.2. Вычисление коэффициентов ошибок. Вычислять ко-
коэффициенты ошибки по формуле (8.13) неудобно. Поэтому обычно
используют формулы, связывающие коэффициенты ошибки с пере-
17*
260 Гл. 8. Оценка качества дискретных систем
даточной функцией ошибки W*g(z) и имеющие следующий вид:
Ck = ^W^k(z)\z=v k = 0,1,2,... (8.14)
Здесь W0*k (z) определяется по рекуррентной формуле
= W*(z), W^(z)=TzdW°'k-l{z\ к = 1,2,... (8.15)
Из приведенных формул следует, что коэффициент позиционной
ошибки Со = W*g A), и для нахождения остальных коэффициентов не-
необходимо вычислять производные от передаточной функции W*g(z).
Однако, как увидим в следующем параграфе, если коэффициенты
ошибки Со = С\ — ... = Cr_i = 0 и Сг ф 0, то все эти коэффициен-
коэффициенты, включая первый отличный от нуля коэффициент, можно вычис-
вычислить, не находя производные.
Докажем справедливость приведенных формул.
Формула (8.14) будет справедлива, т.е. будет иметь вид (8.13),
если оо
WJk(z) = (-l)k ^Tweg [iT] (iT)k z~\ (8.16)
г=0
Справедливость этой формулы покажем методом математической
индукции.
Учитывая, что передаточная функция W*g(z) и весовая функ-
функция weg [iT] ошибки связаны соотношением
г=0
в соответствии с (8.15) при к = 0 имеем
г=0
Отсюда следует, что формула (8.16) при к = 0 справедлива. Допус-
Допустим, что она справедлива при к = т — 1:
г=0
Покажем, что она справедлива и при к — т.
В соответствии с формулой (8.15)
Отсюда, учитывая принятую выше формулу для Wo* m_1(z) и свойст-
свойство ^-преобразования об умножении оригинала на iT (см. F.15)),
получаем
8.3. Статические и астатические системы 261
= (-l)mZ{weg[iT}(iT)m} = (-ir'
г=0
что и доказывает справедливость формулы (8.16) при к = т.
Пример 8.6. Передаточная функция ошибки W*g(z) = ——,
период Т = 0,1. Определить коэффициенты ошибки Со, С\ и G2.
Решение. Согласно формулам (8.14) и (8.15) имеем
^-0,5
z=l
= 2,
ТХ7-* /„Л гр ™rr eg\z) гл -I d ( 1 \ 0,1 Z
W Hi [Z) — 1 Z — U,l Z —
U1V J dz й
П — ТЛ"/* („\ I _ ^Д ^
= -0,4,
z=l
W-* /^\ _ ti-v U/ry oiv^y _ n i -v " / ОД ^ ^ — 0,01 ^(^ + 0,5)
ПО \ & I — -L Z — vJi-L
0,01 ф + 0,5) =
8.3. Статические и астатические системы
Система называется статической, если статическая ошибка
отлична от нуля, и астатической, если статическая ошибка равна
нулю. Статическая ошибка — это установившаяся ошибка при
постоянных внешних воздействиях.
Система является астатической и обладает астатизмом r-го по-
порядка, если первые г коэффициентов равны нулю, а (г + 1)-й коэффи-
коэффициент ошибки отличен от нуля:
Со = d = ... = Cr-i =0, Cr = 0.
8.3.1. Вычисление коэффициентов ошибки астатических
систем. Для астатической системы с астатизмом r-го порядка пер-
первые г + 1 коэффициентов можно определить по формуле
Cfc =
(z -
z=l
/с = 0,1,2,..., г. (8.17)
Иначе говоря, этой формулой можно пользоваться при вычислении до
первого отличного от нуля коэффициента ошибки.
Докажем формулу (8.17).
В соответствии с соотношением (8.15)
—, (8.18а)
OLZ
262
Гл. 8. Оценка качества дискретных систем
- Tz dWSl{z) - Tz (T
~ Z dz -1г{2 dz
Tz
dz2
-т^
dz
W*3(z)=Tzd^^l=T3(z
dz
dz2
5м)' (8Л86)
5^)' <8Л8в)
dz
Из этих формул следует, что первые г коэффициентов будут равны
нулю
фру у, р фф уу р
[Си = ту ^оа;^) = ^' г = 0,1,...,г - 1J, а r-й коэффициент
ошибки не равен нулю (Сг ф 0) при условии
dz
dzr
Последнее возможно, если z = 1 является нулем кратности г переда-
передаточной функции W*g(z), т.е. возможно представление
w
;g (
о.
Подставим это выражение в (8.17):
_ Tkw;g(z) _ t\z - iyw;g°(z)
(8.20)
{z-iy U=0' k = ^--r.
При к < г выражение справа обращается в нуль. Следовательно, эта
формула при & = 0,1,...,г — 1 справедлива. Покажем, что она спра-
справедлива и при к = г.
Из (8.18г) и (8.19) получаем
z=l
dzr
z=l
dzr
z=l
(8.21)
Продифференцируем (8.20) г раз:
dz ~ eg \ ) \ )
rI2W* (у\
dz
dz2
(8.22)
dz
dz2
8.3. Статические и астатические системы
263
где R*(z)\z=1 = 0. Используя (8.21) и (8.22), из (8.14) имеем
— — w* (
- г| VVOr\
\
\z=i
Veg
z=1
— тг
- 1
z=l
Справедливость формулы (8.17) полностью доказана.
Пример 8.7. Задающее воздействие д = 0,5?, передаточная
функция ошибки относительно задающего воздействия имеет вид
(
(z -l)(z- 0,9) + 0,1 z - 0,95 '
период Т = 0,05. Определить установившуюся ошибку.
Решение. Так как
то
д[1Т] = 0,5 IT, д[1Т] = 0,5, д[1Т] = g[lT] = ... = 0,
и установившаяся ошибка
eoo[lT\ = Cog[lT] + Cl9[lT] = C00,51T + Cx 0,5.
Найдем коэффициенты ошибки Со и С\. В соответствии с формула-
формулами (8.14) и (8.15)
= 0.
— - "e9X~J\z=1- {z_1){z_0j9)+0j1z_0j95
Так как Со = 0, то С\ можно определить по формуле (8.17):
tw;9(z)
z-1
T(z-0,9)
z=l
^ -0,118.
z=i (z - l)(z - 0,9) + 0,1 z - 0,95
Установившаяся ошибка есть е^ЦТ] = —0,118 • 0,5 = —0,059.
8.3.2. Структура астатических систем. Как было показано
выше, система обладает астатизмом r-го порядка, если передаточная
функция ошибки W*g (z) может быть представлена в виде
vveg\z) — \z L) vveg\z)i ууед\^)Т^-
Так как передаточная функция ошибки имеет вид
w:g(z) = 1+w.{z),
где W* (z) — передаточная функция разомкнутой системы, то она мо-
может быть представлена в указанном выше виде, если передаточная
функция W*(z) имеет вид
W*(z) = W*°{z)
У ' (z-lV
W*°(l)^0, W*°(l)<oo.
(8.23)
264
Гл. 8. Оценка качества дискретных систем
w;(E)
! ПНЧ
—
W»(P)
\y(t)
Рис. 8.3. Структурная схема дискретной системы
Пусть дискретная система состоит из дискретного фильтра (ре-
(регулятора) и приведенной непрерывной части (рис. 8.3) Передаточная
функция разомкнутой системы имеет вид
где
W*(z) =
Система будет астатической, если W*(z) или W*(z) включает
множитель . Так как Zt\ - ? = , передаточная функ-
z — 1 V s ) z — 1
ция W*(z) будет содержать указанный множитель, если непрерыв-
непрерывная часть (т.е. WH(s)) включает интегрирующее звено. Здесь важно,
чтобы непрерывная часть, а не приведенная непрерывная часть, вклю-
включала интегрирующее звено. Это связано с тем, что множитель z — 1 в
знаменателе W*(z), который появляется из-за интегрирующего звена
в формирователе, сокращается с аналогичным множителем, появляю-
появляющимся в числителе.
Например, при фиксаторе нулевого порядка передаточная функция
1 - e~Ts
формирователя имеет вид W<j)(s) = , и
s
W*(z) = ZT\l ~ e~TS WH(s)\ = — ZT\-WH(s)\.
К S ) Z к S )
Как видим, в этом случае появляется множитель z — 1 в числителе,
который сокращается с таким же множителем в знаменателе, появ-
появляющимся из-за множителя 1/sb передаточной функции приведенной
непрерывной части.
Как увидим дальше на примере, то же самое происходит, когда
передаточная функция формирующего звена имеет вид ()
Итак, дискретная система (см. рис. 8.3) будет астатической, если
передаточная функция дискретного фильтра (регулятора) включает
множитель l/(z — 1) или непрерывная часть содержит интегрирую-
интегрирующее звено. Порядок астатизма системы равен сумме числа интегри-
интегрирующих звеньев в непрерывной части и показателю степени z — 1 в
знаменателе дискретного фильтра.
Пример 8.8. Пусть (см. рис. 8.3)
1 - е~7Т
WH(s) =
s + 1
Показать, что данная система является статической.
Задачи 265
Решение. Найдем передаточную функцию разомкнутой диск-
дискретной системы. Положим Wo(s) = —t г. Передаточная функция
s(s + 1)
разомкнутой дискретной системы
w*(z) = w;(z) ¦ zT{^0^-} = k(zT{w0{s)} - z~xz
где е = 1 — 7 и
Zt{W0(s)} = *(!~е~Т>
Подставив эти выражения, для передаточной функции разомкнутой
системы получим
Передаточная функция разомкнутой системы не содержит в зна-
знаменателе множитель z — 1. Следовательно, данная система является
статической.
Пример 8.9. Пусть в дискретной системе (см. рис. 8.3)
Задающее воздействие g(t) = at + b. Определить установившуюся
ошибку.
Решение. В данном случае установившаяся ошибка определяет-
определяется по формуле
Передаточная функция регулятора содержит в знаменателе множи-
множитель z — 1 в первой степени, и непрерывная часть содержит одно ин-
интегрирующее звено. Поэтому система обладает астатизмом второго
порядка и Со = С\ — 0. Следовательно, е^ЦТ] = 0.
Задачи
1. Определить переходную функцию h[lT] по ее ^-изображению:
»> " V' - B _ i)B + 0,5)(г - 0,2)' ^ " ^ - 2B _ 0M)(г + 0,1)'
266 Гл. 8. Оценка качества дискретных систем
2. Определить переходную функцию h[lT] дискретной системы, у
которой передаточная функция имеет следующий вид:
^ 6)W*(z)= + 1
ф-0,5)' ^ "»»^"ф-0,1)'
*~0'5
"'"^'-B-0,2)(s-0,l)' ^"»^-ф_0,8)(г-0,9)-
3. Задана дискретная система (см. рис. 8.3), у которой период
квантования Т = 0,2, а формирующее звено — фиксатор нулевого
порядка. Определить функцию hT[lT], принимающую значения пере-
переходной функции h(t) в моменты t = (/ — 0,7)Т при следующих
передаточных функциях W*(Е) и WH(p):
, WH(p)=
E
^±, WH(p)=
4. Определить параметры регулятора дискретной системы (см.
рис. 8.3), при которых переходный процесс заканчивается за конечное
число шагов. Передаточные функции W* (z) и W* (z) = {}
имеют следующий вид:
, w*(z) =
w*(z) =
д) w;(z) = K + Minil + *=? ^*(z) = 0Д
'Pv~y~'"nl z ' ^-1' nV J~ (z-0,7)(z-0,sy
ллт*(„\- 0,lz(z-l)
Задачи 267
5. Определить установившуюся ошибку дискретной системы (см.
рис. 8.3) при следующих задающем воздействии g(t) и передаточных
функциях W;(z) и W*(z) = ZT{W^s)WK{s)}:
&)W;(z) = 5, W*(z) = ^^, g(t)= 0,5;
W*(z)= z g(t)= 0,5;
Z Z ~\~ UjO
0,1 z
L ) vy p \^J — ^ i i -,5 ^ п V^y — ^2 1 7 ~ i П 70 '
Z Z л. Z л., / Z "T" U, i Z
^(t) = 0,5*.
6. Определить, при каких из приведенных ниже передаточных
функциях регулятора W* (Е) и приведенной непрерывной части Wn(s)
дискретная система (см. рис. 8.3) является астатической:
в) W;(E) = 5 + ±i±L_i), wn(s) = l?ll
Hi S \ S "t" -L j
Глава 9
СИНТЕЗ ДИСКРЕТНЫХ СИСТЕМ
9.1. Постановка задачи.
Типовые законы управления
Как и в непрерывном случае, возможны две различные постановки
задачи синтеза дискретных систем управления:
1) синтез параметров при фиксированной структуре;
2) синтез управляющего устройства при произвольной структуре.
В данной главе предполагается, что регулятор реализуется с по-
помощью цифровых устройств и эквивалентная структурная схема
y(t)
Рис. 9.1. Эквивалентная схема системы управления с дискретным регуля-
регулятором
включает дискретный фильтр (регулятор), реализующий требуемый
закон управления (рис. 9.1).
Типовые законы управления в дискретном случае определяются
следующим образом.
Пропорциональный закон, или П-закон (П-регулятор):
7/Г/Т^1 — h р\1Т\ W*(?) — h
Пропорционально-суммарный закон (аналог ПИ-закона), или
ПС-закон (ПС-регулятор):
u[it] = (кп
W;(z) = кп
где Е г — обратный оператор сдвига: Е 1е[1Т] = е[A - 1)Т].
Пропорционально-разностный закон (аналог ПД-закона), или
ПР-закон (ПР-регулятор):
и[1Т] = {К + fcp(l - Е))[/Т] W;() k + k
9.1. Постановка задачи. Типовые законы управления 269
Пропорционально-суммарно-разностный закон (аналог ПИД-за-
кона), или ПСР-закон (ПСР-регулятор):
и[1Т] = (fen + kc 5__ + fe(l - ?;~1))е[/Г],
Здесь слагаемое S = кс ——г е[1Т] может быть представлено в виде
1-Е i
суммы
S = kc(e[lT\ + e[(l - 1)Г] + ... = kc J2 еШ ~ i)T\- (9.1)
г=0
Действительно, перейдя к ^-изображениям, имеем
S* = kc —L-^ E*(z) = кс -?- Е*(z),
± Z Z ±
и, разложив в ряд Лорана
2 — 1
находим
S* = fec(l + г+*+ ...)?*(*) =
/ / 771 * / \ ¦ — 1 Z71 * Z' <v A _i_ -v — 2 771 * / ~ \ _| \
— АСС^11/ (^J +Z Hj [Z) -\- Z Hj [Z) -\- . . .).
Отсюда, произведя обратное ^-преобразование, получим (9.1).
Суммарный член в дискретном законе управления соответствует
интегральному члену в непрерывном случае и аналогично последнему
его введение делает систему астатической или повышает порядок ее
астатизма. Разностный член fcp(l — E~1)e[lT] соответствует диффе-
дифференциальному члену.
Раньше при рассмотрении разностных уравнений первая разность
от дискретной функции x(t) была определена следующим образом:
Ax(t) = x(t + Г) - x(t) = (Е - l)x(t).
Однако существует и другое определение разности:
Vx(t) = x(t) - x(t - Т) = A - Е)^).
Разность Ax(t) называют нисходящей или прямой разностью,
a Vx(t) — восходящей или обратной разностью.
Приведенные выше дискретные типовые законы управления по-
получаются из непрерывных типовых законов управления при замене
оператора дифференцирования р обратным разностным операто-
оператором A — Е~1). Другие разновидности типовых законов могут быть
получены при замене оператора дифференцирования р прямым раз-
разностным оператором (Е-1), ав ПИД-законе тем и другим: в диффе-
дифференциальном члене прямым, а в интегральном члене обратным раз-
разностным оператором, или наоборот.
270 Гл. 9. Синтез дискретных систем
9.2. Синтез систем с фиксированной структурой
Задача синтеза систем с фиксированной структурой ставится сле-
следующим образом: задан объект и выбрана структура регулятора;
требуется определить параметры регулятора, обеспечивающие за-
заданные требования к качеству синтезируемой системы.
Структура регулятора (системы) определяется в основном из
требований к структурной устойчивости и качеству синтезируемой
системы в установившемся режиме. Параметры регулятора опреде-
определяются исходя из требований к качеству системы в переходном режи-
режиме. На параметры могут быть наложены ограничения, вытекающие
из требований допустимой ошибки в установившемся режиме или
каких-либо других требований.
Рассмотрим постановку и решение задачи синтеза параметров на
конкретных примерах.
Пример 9.1. Дискретный элемент есть фиксатор нулевого по-
порядка, период квантования Т = 0,1 и передаточная функция непре-
непрерывной части имеет вид WH(s) = 1/s.
Определить тип и параметры регулятора исходя из следующих
требований к системе:
Со = 0, |Ci | ^ 1, J2*0 ->• min .
Решение. Так как коэффициент позиционной ошибки равен ну-
нулю, а коэффициент скоростной ошибки не равен нулю, система долж-
должна быть астатической и обладать астатизмом первого порядка. Но
в связи с тем, что непрерывная часть включает интегратор, можно
выбрать П-регулятор (W* (z) = kn).
При фиксаторе нулевого порядка передаточная функция форми-
1 - e~Ts
рующего звена имеет вид W<j)(s) = . Поэтому передаточная
s
функция приведенной непрерывной части (ПНЧ) имеет вид
Wn(s) = Wb(s)WH(s) = Х ~ e~TS.
S
Передаточная функция разомкнутой дискретной модели равна
w*(z) = w;(z)zT{wn(s)} = k
Z к S
и передаточная функция ошибки (замкнутой системы) —
W* (z) =
УУедУ )
0,1 fcn '
Так как Со = 0, коэффициент скоростной ошибки можно опреде-
определить по формуле (см. (8.17))
_ 0,1 1
z-\~ ~
9.2. Синтез систем с фиксированной структурой 271
Условие \С\\ ^ 1 будет выполнено, если \ки\ ^ 1. Характеристичес-
Характеристическое уравнение имеет вид
z- 1 + 0,1&п =0.
Его корень z\ = 1 — 0,1 kn по модулю будет меньше единицы, если
0 < кп < 20.
Таким образом, система будет устойчива и будут выполнены тре-
требования к качеству в установившемся режиме, если
1 < кп < 20.
Найдем выражение для ошибки при д[1Т] = 1[/Т]:
z — 1 z z
= W*(z)G*(z) =
1 + 0,1 kn z — 1 z — 1 + 0,1 &п
Так как система астатическая, установившаяся ошибка есть
воо[ZT] = 0 и переходная составляющая ошибки en[ZT] = е[1Т]. По-
Поэтому
По формуле разложения (8.1) имеем
еп[1Т] = 1-^1ка A - 0,1 КI-1 = A - 0,1 кпI, 1 = 1,2,
Как легко проверить, эта формула справедлива и при / = 0.
Суммарная квадратичная ошибка имеет вид
z=o z=o
По формуле суммы бесконечно убывающей прогрессии имеем
Отсюда следует, что J|o достигает минимума при полученных выше
ограничениях на fcn, когда 1 — 0,1 кп = 0 или кп = 10. Таким образом,
решением данной задачи является кп = 10.
Пример 9.2. Дискретный элемент представляет фиксатор ну-
нулевого порядка, период квантования равен Т = 0,1 и передаточная
функция непрерывной части есть WH(s) = .
s + 1
Определить тип и параметры регулятора, при котором статичес-
статическая ошибка равна нулю и переходный процесс заканчивается за ко-
конечное число шагов.
Решение. Чтобы статическая ошибка была равна нулю, выберем
пропорционально-суммарный закон управления:
w;(z) = kn + kc^-.
z ±
272 Гл. 9. Синтез дискретных систем
Передаточная функция формирующего звена имеет вид
1 „~Ts
s
передаточная функция приведенной непрерывной части
1 -е
-Ts
и передаточная функция разомкнутой дискретной модели
w*(z) = w;(z)zT{wn(s)} = [kn{z~l_}^zcZ}{^T)e~
Приняв е~Т = е'1 = 0,9, получим
{ } z2- 1,9 ? + 0,9 '
Передаточная функция замкнутой системы (см. рис. 9.1) имеет вид
W* Ы = w*(z) = boZ + bl
ууудУ*> l + W*(z) a1z2+a1z + a2J
где
Ьо = 0,1 (fen + Агс), bi = -0,lfenj ao = 1,
ai = 0,1 (кп + кс) - 1,9, а2 = 0,9 - 0,lfen.
Условие окончания переходного процесса за конечное число ша-
шагов (8.10) принимает вид
а1 = 0,1 (fen + кс) - 1,9 = 0, а2 = 0,9 - 0,1 ки = 0.
Отсюда кп = 9 и кс = 10.
9.3. Метод полиномиальных уравнений
Рассматривается задача синтеза при произвольной (нефиксиро-
(нефиксированной) структуре в следующей постановке. Задана передаточная
функция приведенной непрерывной части Wn(s) и известна диск-
дискретная передаточная функция неизменяемой части
W:(z) = ZT{Wn(s)}.
Известна также желаемая передаточная функция W^(z). Требуется
синтезировать регулятор, при котором передаточная функция W*g(z)
синтезированной системы (см. рис. 9.1) была бы равна желаемой:
W*(z)W*(z)
W* (z) - рК } К } - W* (z) (9 2)
Разрешив это тождество относительно передаточной функции регу-
регулятора, получим
9.3. Метод полиномиальных уравнений 273
При синтезе регулятора нужно позаботится о том, чтобы он был фи-
физически осуществим и синтезированная система была грубой.
Условие физической осуществимости регулятора, состоящее в
том, что следствие не может предшествовать причине, может быть
сформулировано следующим образом: весовая функция регулятора
равна нулю при отрицательных аргументах или степень числителя
его передаточной функции не превышает степень ее знаменателя.
При определении передаточной функции регулятора по форму-
формуле (9.3) синтезированная система будет негрубой, если передаточная
функция неизменяемой части содержит нули или полюсы вне единич-
единичного круга, и они входят в передаточную функцию регулятора. В этом
случае при вычислении передаточной функции разомкнутой системы
указанные нули и полюсы сокращаются, если регулятор реализуется
точно в соответствии с (9.3). Однако при малом изменении параметров
регулятора указанные нули и полюсы могут не сократиться. Тогда
разомкнутая система становится неустойчивой, что может привести
к неустойчивости и замкнутой системы.
Разложим числитель и знаменатель передаточной функции неиз-
неизменяемой части на два множителя, один из которых содержит нули
внутри единичной окружности, другой — на и вне единичной окруж-
окружности:
W(z) = =
VV«[Z) Q'{z) Ql{z)Ql{zY
Здесь P*(z), Ql(z) — полиномы, нули которых расположены внут-
внутри единичной окружности; Р*(z), Q^(z) — полиномы, нули которых
расположены на и вне единичной окружности.
Подставим полученное выражение для W*(z) в (9.3):
Как отмечалось, для того чтобы синтезированная система была гру-
грубой, передаточная функция регулятора (9.4) не должна содержать по-
полиномы P*(z) и Q^(z), содержащие нули вне единичной окружности.
Но, как это следует из (9.4), для этого нужно, чтобы W^(z) вклю-
включало полином P*(z), а 1 — W^(z) — полином Q^(z), т.е. желаемая
передаточная функция должна удовлетворять соотношениям
WIW = Р;'сУ, 0-5.)
где M*(z) и N*(z) — неопределенные полиномы; G*(z) — знамена-
знаменатель желаемой передаточной функции, т.е. характеристический поли-
полином синтезируемой системы; множитель (z — 1)Т вводится для обес-
обеспечения требуемого порядка астатизма.
18 Д.П. Ким
274 Гл. 9. Синтез дискретных систем
Исключив W^(z) из (9.5), получим полиномиальное уравнение
P*(z)M*(z) + Q*H(z)N*(z)(z - l)r = G*(z), (9.6)
откуда определяются полиномы M*(z) и N*(z).
Подставив (9.5а), (9.56) в (9.4), находим
w*{ \ _ Ql{z)M'{z) .
Wv(Z)- P;(z)N-(z)(z-iy (У-7)
Обозначим степень произвольного полинома R* (z) через пщ. Тог-
Тогда условие физической осуществимости регулятора из (9.7) можно
записать в виде
riQB +nM ^ прв +nN + г. (9.8)
Полиномиальное уравнение (9.6) разрешимо, если число неизвест-
неизвестных (коэффициентов полиномов M*(z) и N*(z)) не меньше числа урав-
уравнений, получаемых приравниванием коэффициентов при одинако-
одинаковых степенях в уравнении (9.6). И так как число неизвестных равно
(р>м + 1) + (n>N + 1), а число уравнений по + 1, условие разрешимос-
разрешимости полиномиального уравнения принимает вид
пм + nN + 1 ^ nG. (9.9)
В (9.56) степени полиномов числителя и знаменателя равны. Поэ-
Поэтому из его правой части имеем
откуда
пм = nG - riQH - г. (9.10)
Объединяя условие физической осуществимости (9.8) и условие раз-
разрешимости (9.9), с учетом (9.10) получим
nQH + Т - 1 ^ пм ^ прв + nG - raQ, (9.11)
где tiq = riQ^ + uqu — степень знаменателя передаточной функции
неизменяемой части.
Таким образом, условия физической осуществимости регулято-
регулятора и разрешимости полиномиального уравнения будут выполнены,
если степени полиномов M*(z) и N*(z) удовлетворяют соотноше-
соотношениям (9.10) и (9.11).
Из условия (9.11) получаем, что степень характеристического по-
полинома синтезируемой системы должна удовлетворять неравенству
nG ^ n>QH + г + uq - 1 - пръ. (9.12)
Хотя вначале мы предполагали, что желаемая передаточная функ-
функция известна, в действительности она не может быть выбрана зара-
заранее (см. (9.5а)).
Порядок синтеза системы управления методом полиномиаль-
полиномиальных уравнений можно сформулировать следующим образом.
1. Разложить полиномы числителя и знаменателя передаточной
функции неизменяемой части на два множителя, один из которых име-
9.3. Метод полиномиальных уравнений 275
ет нули внутри единичной окружности, другой — на и вне единичной
окружности. Если указанные полиномы не имеют нулей на и вне еди-
единичной окружности, то положить P*(z) = 1 и Qn(z) — 1 5 если они
не имеют нулей внутри единичной окружности, то приравнять P*(z)
и Qb{z) постоянному множителю этих полиномов.
2. Исходя из требований к качеству синтезируемой системы в пе-
переходном режиме и порядку астатизма выбрать характеристический
полином синтезируемой системы G*(z) и число г. Степень полино-
полинома G*(z) должна удовлетворять условию (9.12).
3. Из соотношений (9.10) и (9.11) определить степени неопределен-
неопределенных полиномов M*(z) и N*(z) и записать их с неопределенными ко-
коэффициентами.
4. Подставить полученные неопределенные полиномы в полиноми-
полиномиальное уравнение и определить их коэффициенты.
5. Подставить найденные полиномы M*(z) и N*(z) в формулу для
передаточной функции регулятора (9.7).
Пример 9.3. Передаточная функция неизменяемой части W* (z) =
= ——. Требуется синтезировать регулятор, при котором статичес-
z — U,о
кая ошибка равна нулю и переходный процесс заканчивается за конеч-
конечное число шагов.
Решение. В данном случае P*(z) = 1, Q*(z) = z - 0,5 и соот-
соответственно P*(z) = P*(z) = 1, Ql(z) =2-0,5 и Q*B) = 1. Степени
ПОЛИНОМОВ Прв = Прн = 0, Uq = Пдв = 1 И Пдн = 0.
Так как статическая ошибка должна быть равна нулю, положим
г = 1. Условие (9.12) принимает вид по ^ 1. Положим по = 1. И что-
чтобы переходный процесс закончился за конечное число шагов, полагаем
характеристический полином G*(z) = z.
Условия (9.10) и (9.11) принимают вид
nN = 0, 0 ^ пм ^ 0.
Поэтому полагаем M*(z) = bo и N*(z) = glq. Подставив их в полино-
полиномиальное уравнение (9.6), получим
bo + ao(z - 1) = 2.
Приравняв коэффициенты при одинаковых степенях, находим
а0 = 1, Ьо = а0 = 1.
Следовательно, M*(z) = 1 и N*(z) = 1. Подставив эти выражения
для M*(z) и N*(z), а также выражения для P*(z) и Ql(z) в (9.7),
получим искомое решение
W*(z) = z~°>5
Пример 9.4. Передаточная функция неизменяемой части W* (z) =
. Требуется синтезировать регулятор, при котором
B-0,5)B-1,5)
18*
276 Гл. 9. Синтез дискретных систем
статическая ошибка равна нулю и переходный процесс заканчивается
за конечное число шагов.
Решение. В данном случае P*(z) = z + 2, Q*(z) = (z — 0,5)(z—
-1,5) и соответственно P*(z) = 1, P*(z) = z + 2, Q*(z) = z - 0,5
и Qh(^) = ^ ~~ 1?5- Степени полиномов: Пр = 0, Пр = 1, Пд = 2,
?t,qb = 1 и ?t,qh =1.
Так как статическая ошибка должна быть равна нулю, положим
г = 1. Условие (9.12) принимает вид по ^1 + 1 + 2 — 1 = 3. Положим
по = 3, и для того чтобы переходный процесс закончился за конечное
число шагов, полагаем характеристический полином G*(z) = z3.
Условия (9.10) и (9.11) принимают вид
nN = 1, 1 ^ пм ^ 1.
Поэтому полагаем M*(z) = boz + Ь\ и N*(z) = а0^ + ai. Подставив
их в полиномиальное уравнение (9.6), получим
(z + 2)(boz + bi) + (z - l,5)(aoz + ai)(z - 1) = z3,
или, после раскрытия скобок и приведения подобных членов,
a0z3 + (Ьо - 2,5а0 + ai)z2 + B6О + h - 2,5ax + 1,5ao)z +
+ 26i + 1,5 ai = z3.
Приравняв коэффициенты при одинаковых степенях, находим
а0 = 1, Ьо - 2,5 а0 + ai = 0,
2&о + bi - 2,5 ai + 1,5 а0 = 0, 2ЬХ + 1,5 ах = 0.
Решив эту систему, получим а0 = 1, ai = 1,24, b0 = 1,26, bi = -0,93.
Следовательно, M*(z) = 1,26 z — 0,93 и N*(z) = z + 1,24. Подставив
эти выражения для M*(z) и N*(z), а также выражения для PB*(z)
и Qb(z) b (9-7), получим искомое решение
9.4. Синтез дискретной системы
по непрерывной модели
Дискретный регулятор можно конструировать, используя методы
синтеза непрерывных систем. Для этого сначала нужно с помощью
указанных методов определить передаточную функцию Wp(s) анало-
аналогового (непрерывного) регулятора, а затем аппроксимировать Wp(s)
дискретной передаточной функцией W* (z). При этом, учитывая, что
дискретизация по времени с периодом Т вводит запаздывание Т/2
(см. F.60)), следует проводить синтез для объекта с передаточной
функцией e~Ts/2Wo(s), где Wo(s) — передаточная функция исходно-
9.4- Синтез по непрерывной модели
277
го объекта. При синтезе передаточную функцию введенного звена
чистого запаздывания можно аппроксимировать одним из следующих
способов (другие способы см. в параграфе 5.7):
о-(Т/2)8 ~ L
- 1 2 s, e
о-(Т/2)в ~
(T/2)s ' ~ 1 + (T/4)s '
При получении дискретной передаточной функции И7^^) можно
воспользоваться аппроксимацией производной конечными разностями
(метод Эйлера): прямой
pe(t) ^
- e(t) Е-
L2 = _
(,Л
e{t)
или обратной
На основе этих равенств при методе Эйлера s заменяется на
z — 1
или .
Другой метод аппроксимации — метод трапеции, или метод
Ту стена (Tustin) — состоит в том, что s заменяется на —^ ---.
Такая замена получается следующим образом.
Интеграл u(t) = /e(r) dr, положив t = IT, можно представить :
;е °
it (i-i)T it
[IT] = Ге(т) dr= [ e(r) dr + f e(r) dr =
виде
(Z-l)T
e(r)dr.
(Z-l)T
Последний интеграл представляет площадь под кривой е = e(t) на
отрезке [(/ — 1)Т, IT] (рис. 9.2). Заменив эту площадь площадью тра-
Рис. 9.2. Аппроксимация трапеций
278 Гл. 9. Синтез дискретных систем
пеции, получаемой при аппроксимации кривой е = e(i) отрезком пря-
прямой на указанном отрезке, находим
или, в операторной форме,
Это соотношение получено из равенства
t
/I
e(r)dr, или u(t) = -e(t).
/
о
Сравнивая последнее равенство с предыдущим соотношением,
получаем, что дифференциальному оператору р соответствует раз-
2(Е1) „
ностныи оператор -±——-4-. Поэтому при аппроксимации аналоговой
1 (Ь + 1)
передаточной функции дискретной методом трапеции s заменя-
2B-1)
ется на
Задачи
1. Передаточная функция приведенной непрерывной части имеет
вид
период квантования Т = 0,1. Определить тип и параметры регулято-
регулятора, при котором статическая ошибка равна нулю и переходный про-
процесс заканчивается за конечное число шагов.
2. Передаточная функция приведенной непрерывной части име-
Wn(s) =
ет вид
1 „-Т-
период квантования Т = 0,1. Определить тип и параметры регулято-
регулятора, при котором статическая ошибка равна нулю и переходный про-
процесс заканчивается за конечное число шагов.
3. Синтезировать регулятор, при котором статическая ошибка рав-
равна нулю и переходный процесс заканчивается за конечное число шагов.
Период квантования Т = 0,1 и передаточная функция неизменяемой
части имеет следующий вид:
а) *•« = б» ™ = ^
Задачи 279
4. Синтезировать регулятор, при котором характеристический
полином синтезированной системы имеет вид G*(z) = (z + 0,1K. Пе-
Период квантования Т = 0,05 и передаточная функция неизменяемой
части имеет вид:
\ тхг*( \ — 2(z + 0,5) < ^ч ЛАП( ч _ 5(z + 0,5)
ч т„#/ ч ? + 0,6 ч „т*( ч ?-0,8
в) И7^!^) — ¦—; г) И7^^) = —.
5. Синтезировать регулятор, при котором характеристический
полином синтезированной системы имеет вид G*(z) = z3. Период
квантования Т = 0,05 и передаточная функция неизменяемой части
имеет вид:
:-0,5 ч т„#/ ч ?-0,5
Список литературы
1. Айзерман М. А. Теория автоматического регулирования. — М.: Наука,
1966. — 452 с.
2. Бесекерский В. А., Попов Е.П. Теория систем автоматического регу-
регулирования. — М.: Наука, 1975.
3. Бойчук Л. М. Метод структурного синтеза нелинейных систем автома-
автоматического управления. — М.: Энергия, 1971.
4. Воронов А. А., Ким Д. П. и др. Теория автоматического управления.
Часть 1. Теория линейных систем автоматического управления. — М.:
Высшая школа, 1986. — 368 с.
5. Гантмахер Ф. Р. Теория матриц. — М.: Наука, 1988. — 548 с.
6. Гноенский Л. С, Каменский Г. А., Элъсголъц Л. Э. Математические
основы теории управляемых систем. — М.: Физмат лит, 1969. — 512 с.
7. Голъдфарб Л. С, Круг Г. К., Нетушил А. В. Теория автоматического
управления. Часть I. — М.: Высшая школа, 1968.— 424 с.
8. Иванов В. А., Ющенко А. С. Теория дискретных систем автоматичес-
автоматического управления. — М.: Наука, 1983. — 336 с.
9. Ким Д. П. Автоматическое управление. Теория линейных систем управ-
управления. — Сеул: Изд-во «Ханол», 1998. — 408 с.
10. Красовский А. А., Поспелов Г. С. Основы автоматики и технической
кибернетики. — М.: Госэнергоиздат, 1962.
11. Крутъко П. Д. Обратные задачи динамики управляемых систем. Ли-
Линейные модели. — М.: Наука, 1987. — 304 с.
12. Макаров И. М., Дмитриева Н.Д., Ким Д. П. и др. Основы автома-
автоматизации управления производством. — М.: Высшая школа, 1983. —
504 с.
13. Попов Е. П. Теория линейных систем автоматического регулирования
и управления. — М.: Наука, 1978.
14. Пугачев В. С, Казаков И. Е., Гладков Д. И. и др. Основы теории авто-
автоматического управления. — М.: Физматлит, 1963. — 646 с.
15. Солодовников В. В., Плотников В.Н., Яковлев А. В. Основы теории и
элементы систем автоматического регулирования. — М.: Машиностро-
Машиностроение, 1985. — 536 с.
16. Цыпкин Я. 3. Основы теории автоматических систем. — М.: Наука,
1977. — 560 с.
Список литературы 281
17. Цыпкин Я. 3.j Поляк Б. Г. Робастная утойчивость линейных систем //
Итоги науки и техники. Серия Техническая кибернетика. Вып. 2. — М.:
ВИНИТИ, 1991.
18. Шубладзе A.M. Способы синтеза систем управления максимальной сте-
степени устойчивости // Автоматика и телемеханика. — 1980. — № 1. —
С. 28-37.
19. Astro'm К. J., Wittenmark В. Computer Controlled Systems. Theory and
Design. — Prentice-Hall Inc., 1984. — 430 p.
Предметный указатель
АИМ-система управления 191
АИМ-элемент 191
Алгоритм управления 18
Астатизм r-го порядка 138, 261
Вершина 66, 67
Воздействие возмущающее 11
— задающее 11
— типовое 124
— управляющее 11
Возмущение 11
Время запаздывания 51
— нарастания 126
— регулирования 125, 252
Выделение области устойчивости
106, 108
Выходная величина 9, 10
— переменная 9
Генератор постоянного тока 79, 80
Граф системы управления 66, 67
Грубость 171, 172, 273
Датчик идеальный 72
— потенциометрический 72
— температурный 73
— угловой скорости 73
Двигатель постоянного тока 78
Движение вынужденное 89
— свободное 89
Декада 39
Дельта-функция 28
Диаграмма Найквиста 38
Дискретная модель АИМ-системы
209
цифровой системы 217
ШИМ-системы 221, 222
Дифференцирование оригинала 26
Дуга 66
Задатчик 17
Заданный режим 9
Задача анализа 146
— синтеза 146
Задающее устройство 17
Закон управления 18
астатический 182
— пропорционально-дифференци-
— пропорционально-дифференциальный 18
— пропорционально-интегро-диф-
ференциальный 19
— пропорционально-суммарно-
разностный 269
— пропорционально-суммарный
268
— пропорциональный 18, 268
Запаздывание динамическое 22
— критическое 104
— транспортное 51
— чистое 51
Запас устойчивости по амплитуде
134, 135
фазе 134, 135
Звено 22
— апериодическое 43, 46, 47
неустойчивое 50
— дифференцирующее 43, 46
— интегрирующее 43, 46, 47
— колебательное 45
неустойчивое 50
— консервативное 51
— корректирующее 74
— маргинальное 42
— минимально-фазовое 42
Предметный указатель
283
Звено неминимально-фазовое 42, 49
— пропорциональное 43, 46, 47
— простейшее импульсное 207
— формирующее 207-209
— форсирующее 1-го порядка 43
— форсирующее 2-го порядка 44
неустойчивое 50
неустойчивое 49
— чистого запаздывания 51
— элементарное 42
Изображение 25, 196, 229
— Лапласа 28, 29
Импульс 191
Импульсная модуляция 191
— 1-го рода 191
— 2-го рода 191
Инвариатность 143
Интегрирование оригинала 27
Качество системы управления 123,
252
Квантование по времени 190
уровню 190
Контур 67
Контуры несоприкасающиеся 67
Корни основные 243
Корень левый 90
— нейтральный 90
— правый 90
Коэффициент граничный 112
— демпфирования 25
— модуляции 220
— ошибки по ускорению 136, 259
— передаточный 25
— позиционной ошибки 136, 259
— предельный 112
— скоростной ошибки 136, 259
Коэффициенты ошибки 136, 258,
259
по возмущению 136
задающему воздействию 136
Кривая Михайлова 98
Критерии устойчивости алгебраи-
алгебраические 92
частотные 97, 242
Критерий Гурвица 93
— Джури 240, 241
Критерий логарифмический частот-
частотный 102, 103
— Льенара-Шипара 94
— Михайлова 98, 99
— Найквиста 99, 102, 244, 245
— псевдочастотный 247
— Рауса 95, 96
Линеаризация 22, 220
Линейность преобразования Лапла-
Лапласа 26
— ^-преобразования 197, 199
Метод обратной задачи динамики
180, 181
— полиномиальных уравнений 272
Модуляция 191
— амплитудно-импульская (АИМ)
191
— импульсная 1-го рода 191
2-го рода 191
— широтно-импульсная (ШИМ)
191
Момент съема сигнала 191
Непрерывная модель дискретной
системы 231, 232
Непрерывная часть 207
приведенная 209
Нули передаточной функции 32
Нуль полинома особый 155
Область устойчивости 105, 106, 108
Обратная связь 11
отрицательная 57
положительная 57
Обратное преобразование Лапласа
26
дискретное 229
Объект регулирования 10
— регулируемый 10
— управления 9
нейтральный 11
неустойчивый 11
устойчивый 11
— управляемый 9
Однонаправленность 81
Оператор 21
— воздействия 24, 206
284
Предметный указатель
Оператор Лапласа 26
обратный 26
— системы 21
— смещения 192
— собственный 24, 206
— элемента 21
Операторная форма записи диффе-
дифференциальных уравнений 24
разностных уравнений 193
Определители Гурвица 93
Определитель графа 70
Оригинал 25, 196, 229
Ориентированный маршрут 67
Ормаршрут 67
Относительный порядок передаточ-
передаточной функции 32
системы 32
Оценка интегральная квадратичес-
кая 130
обобщенная 130
Ошибка интегральная квадрати-
ческая 130
— от возмущения 124
задающего воздействия 124
— статическая 137, 261
— суммарная квадратическая 256
— установившаяся 135, 258
Параметр варьируемый 105
— оптимальный 154
ПД-закон 18, 118, 150
ПД-регулятор 18, 164
Передаточная функция 31
— — в изображениях Лапласа 33,
36
операторной форме 32, 206
^-изображениях 208
желаемая 176
контура 69
маргинальная 42
минимально-фазовая 42
неминимально-фазовая 42
нормированная 176
стандартная 177-179
ошибки по задающему воздей-
воздействию 123
возмущению 124
прямой цепи 61
псевдочастотная 247
Передаточная функция разомкнутой
цепи 58
частотная 38, 230
Передаточный коэффициент 25
Перекрестные связи 62
Переменная выходная 9
— управляемая 9
Перерегулирование 126, 253
П-закон 18, 147, 268
ПИД-закон 19, 149, 150
ПИД-регулятор 19, 168
ПИ-закон 18, 147, 150
ПИ-регулятор 18, 160, 166
Подграф 69
Показатели качества 123
в переходном режиме 124, 125,
252
— — — установившемся режиме
135, 258
интегральные 130
корневые 127, 256
косвенные 124, 252, 256
прямые 125, 252
частотные 134
Показатель колебательности 134
Полином Гурвица 113
— робастно устойчивый 113
— устойчивый 113
Полиномы Харитонова 114
Полоса пропускания 134
Полюс передаточной функции 32
Порядок передаточной функции 32
— системы 32
Постоянная времени 25
П-регулятор 18, 268
Преобразование Лапласа 25
дискретное 229, 231
— Лорана 196
Преобразователь аналого-цифровой
(АЦП) 216, 217
— цифро-аналоговый (ЦАП) 216,
217
Принцип аргумента 97, 243
— двухканальности 143
— комбинированного управления 16
— компенсации 12
Предметный указатель
285
Принцип обратной связи 14, 15
— программного управления 12
— суперпозиции 35
Принципы управления 12
ПС-закон 268
ПС-регулятор 268
Псевдочастота 247
ПСР-закон 269
ПСР-регулятор 269
Путь 67
— прямой 67
Равенство Парсеваля 131
Разность конечная 192
— восходящая (обратная) 269
— нисходящая (прямая) 269
Реализуемость 171
Регулятор 10
Режим заданный 9
— статический 22
Резонансный пик 134
Робастность 172
Свертка 27
Символическая форма записи диф-
дифференциальных уравнений 24
разностных уравнений 193
Синтез дискретных систем управ-
управления 268
— систем управления 146
— — — максимальной степени
устойчивости 154
по желаемой передаточной
функции 171, 174
при наличии чистого запаз-
запаздывания 185
Система автоматического регули-
регулирования 10
управления 10
— астатическая 137, 261
— дискретная 190
— маргинальная 42
— многоконтурная 62
— непрямого регулирования 14
— непрямого управления 14
— одноконтурная 61
Система программного управления
19
— прямого регулирования 14
— следящая 19
— стабилизации 19
— статическая 137, 261
— управления 10
автоматизированная 10
адаптивная 19
астатическая 137
грубая 172, 273
детерминированная 20
дискретная 19, 190
импульсная 190
инвариатная 143
линейная 20
нелинейная 20
непрерывная 19
непрерывно-дискретная 209
нестационарная 19
релейная 190
с дискретным фильтром 225
стационарная 19
стохастическая 20
цифровая 190, 218
Соединение обратное 57
— параллельное 57
— последовательное 57
Сопротивлние операторное 74
Способ управления по возмущению
13
Степень колебательности 127
— устойчивости 127, 256
максимальная 158
оптимальная 154
Структура астатических систем
140-142, 263, 264
— системы управления 17, 105
Структурная схема 56
Таблица Джури 240
— Рауса 95, 96
Тахогенератор 73
Теорема запаздывания 27, 197, 198
— опережения 197, 199
— о свертке 27, 198, 200
— разложения 27
286
Предметный указатель
Теорема Харитонова 115
Теоремы Ляпунова 91, 92
— о граничных значениях 198
предельных значениях 27
Терморезистор 73
Управление 9, 11
— автоматическое 9
— по возмущению 13
отклонению 14
— программное 12
— ручное 9
Управляемая величина 9
— переменная 9
Управляемый объект 9
Уравнение в операторной форме 24,
193
символической форме 24, 193
— динамики 22
— разностное 192
однородное 193
— полиномиальное 274
— статики 22
— характеристическое 92, 236
Усилитель электромашиный 74, 77
— электронный 74
Условие граничной устойчивости
112
— инвариатности 143
— оптимальности 257, 258
— разрешимости 173, 274
Условие устойчивости необходимое
91, 237
основное 89, 90, 237
— физической осуществимости 173,
273, 274
Устойчивость 88, 236
— асимптотическая 89, 91
— граничная 112
— маргинальная 112
— робастная 113
— систем с чистым запаздыванием
103
— структурная 105
Устройство задающее 17
— исполнительное 17, 78
— сравнивающее 17
Устройство управляющее 10, 17
— усилительно-преобразовательное
17
Физическая осуществимость 171
Фиксатор нулевого порядка 217
Фильтр дискретно-непрерывный
224
— дискретный 225
Формула Мейсона 68, 69
— разложения 254
Функциональная схема 17
Функция весовая 35, 36
— временная 35
— единичная 29, 30
— импульсная переходная 35
— переходная 35
— решетчатая 195
смещенная 195
— частотная 37
амплитудная 38
логарифмическая 39
амплитудно-фазовая 38
вещественная 38
мнимая 38
фазовая 38
логарифмическая 39
Функция-оригинал 26, 196
Характеристика временная 35
— импульсная переходная 35
— переходная 35
— псевдочастотная 247
— разгонная 35
— статическая 22
— частотная амплитудная 38
логарифмическая 39
асимптотическая 47, 53
амплитудно-фазовая 38
вещественная 38
мнимая 38
фазовая 38
логарифмическая 39, 55
Характеристический вектор 97
— полином 90, 236
Частота 38
— критическая 104
Предметный указатель
287
Частота сопрягающая 48
ШИМ-система 191
— управления 191, 219
ШИМ-элемент 191, 219
Эквивалентная схема 207
АИМ-системы 207
АИМ-элемента 207-209
— — дискретной системы с ДНФ
224, 225
цифровой системы управления
217
Элемент дискретный 190
— чувствительный 17
D-изображение 229
?>-разбиение 105, 106
^-изображение 196, 202
— модифицированное 203
^-преобразование 196
— модифицированное 196
^-изображение 211, 212, 214
^-преобразование 211, 212, 214
Учебное издание
Дмитрий Петрович КИМ
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Том 1
ЛИНЕЙНЫЕ СИСТЕМЫ
Редактор Е.Ю. Ходан
Корректор Л. Т. Варъяш
Компьютерная верстка и иллюстрации Е. А. Королевой
Оформление обложки А. Ю. Алехиной
ЛР №071930 от 06.07.99. Подписано в печать 22.05.03.
Формат 60x90/16. Бумага офсетная. Печать офсетная.
Усл. печ. л. 18. Уч.-изд. л. 19,8. Заказ №
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997 Москва, Профсоюзная, 90
E-mail: fizmat@maik.ru
Отпечатано с диапозитивов
i РГУП «Чебоксарская типография № 1»
428019 Чебоксары, пр. И. Яковлева, 15
ISBN 5-9221-0379-2
985922 103794