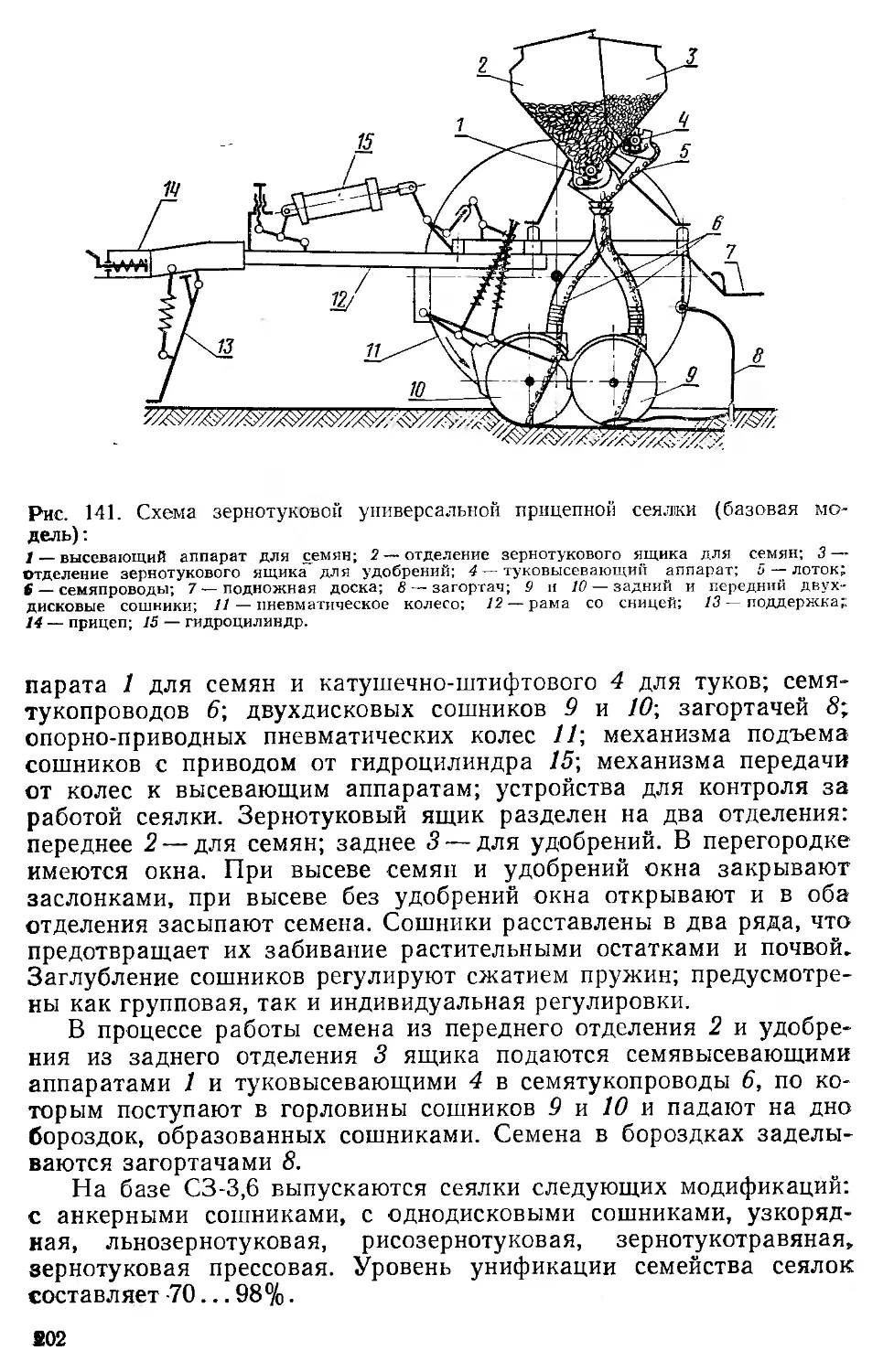
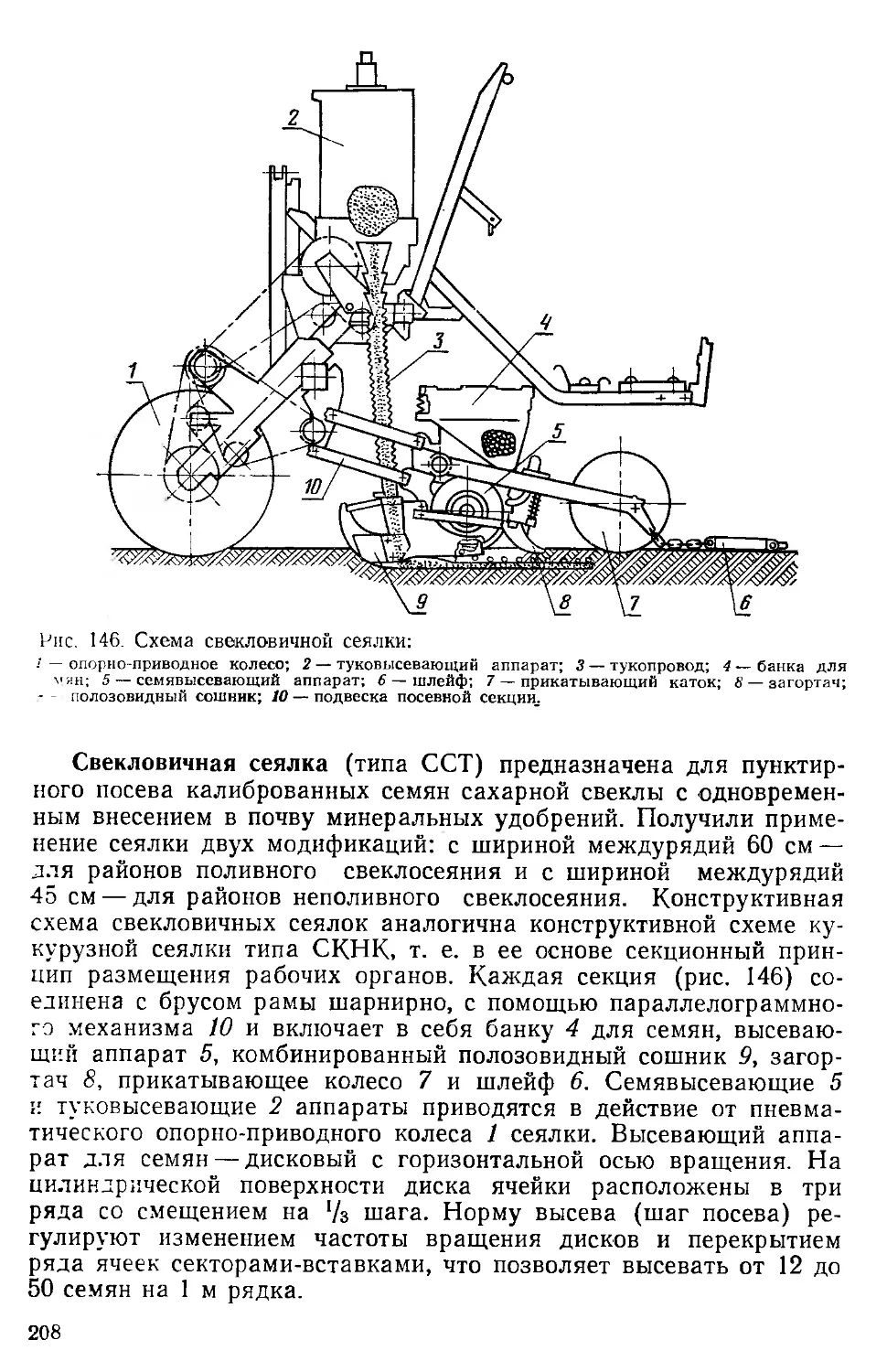
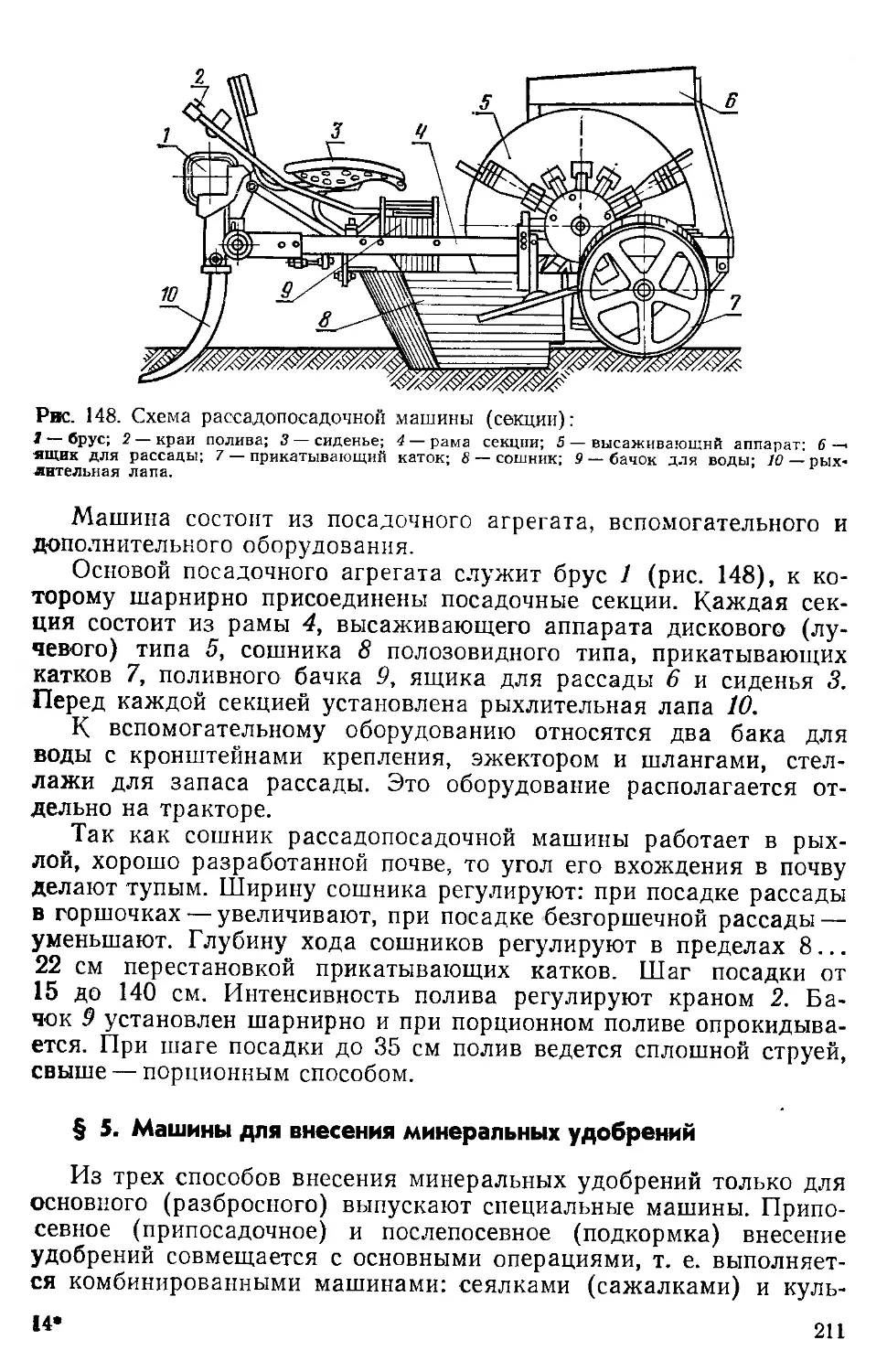
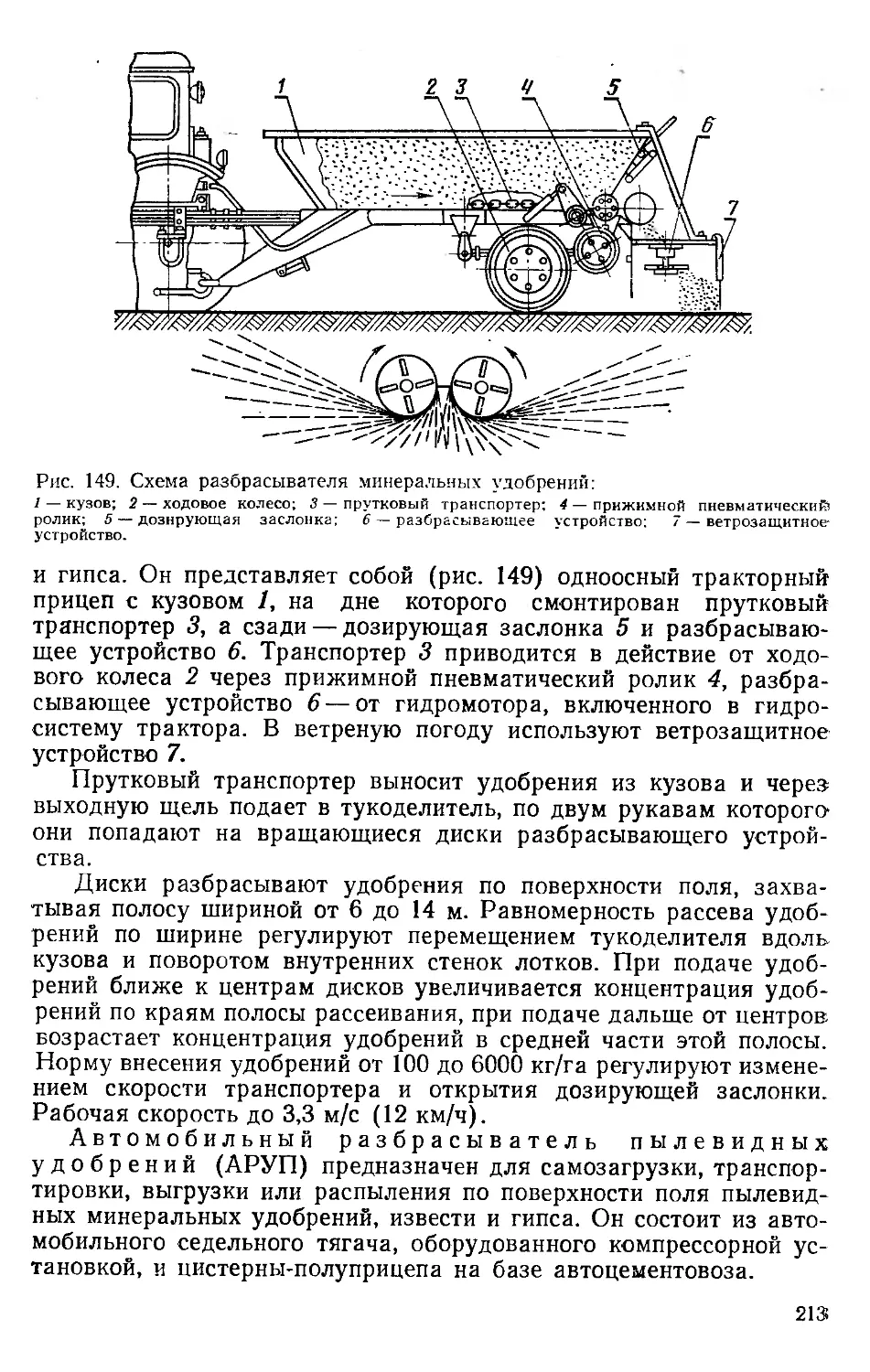
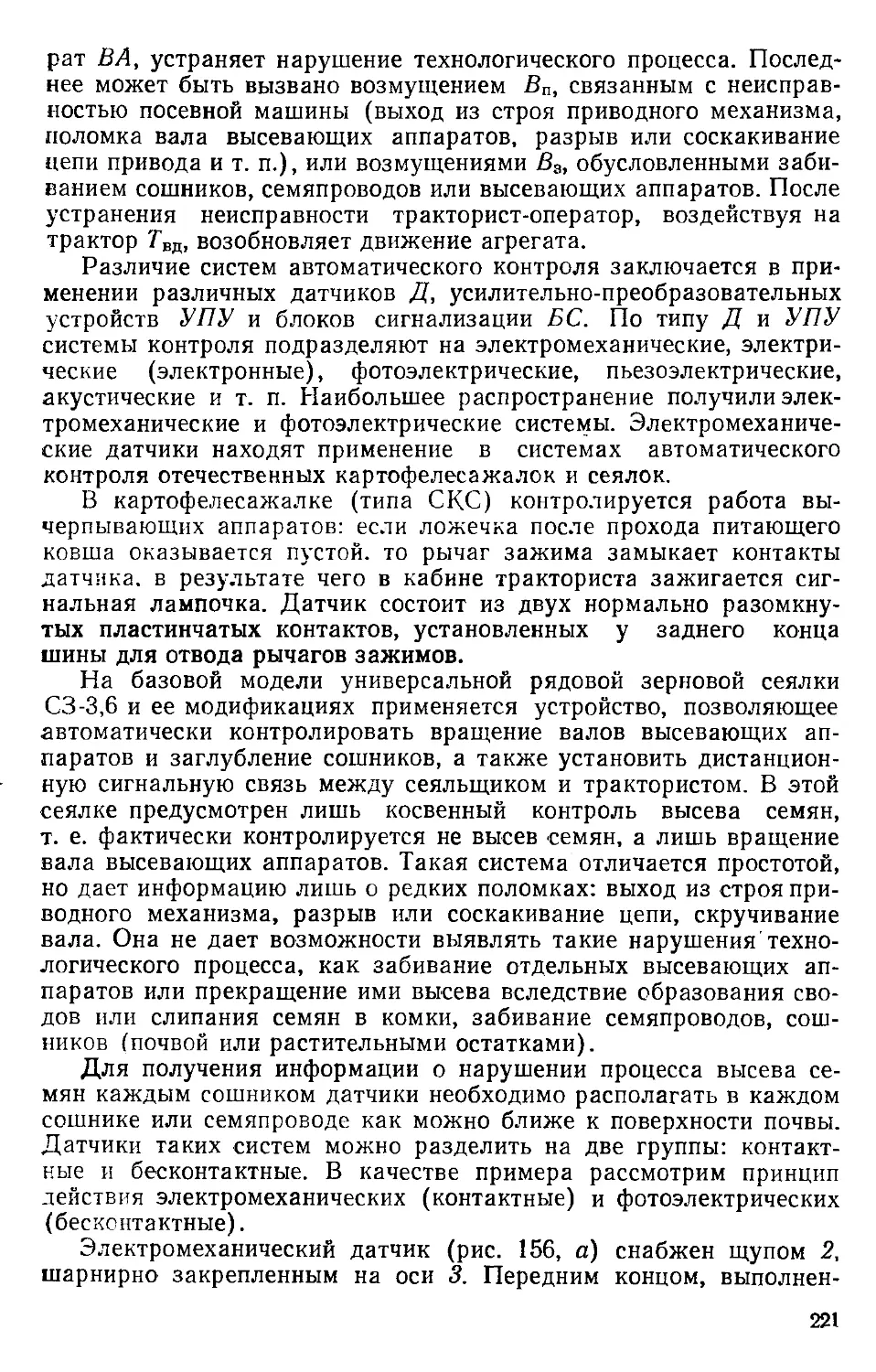
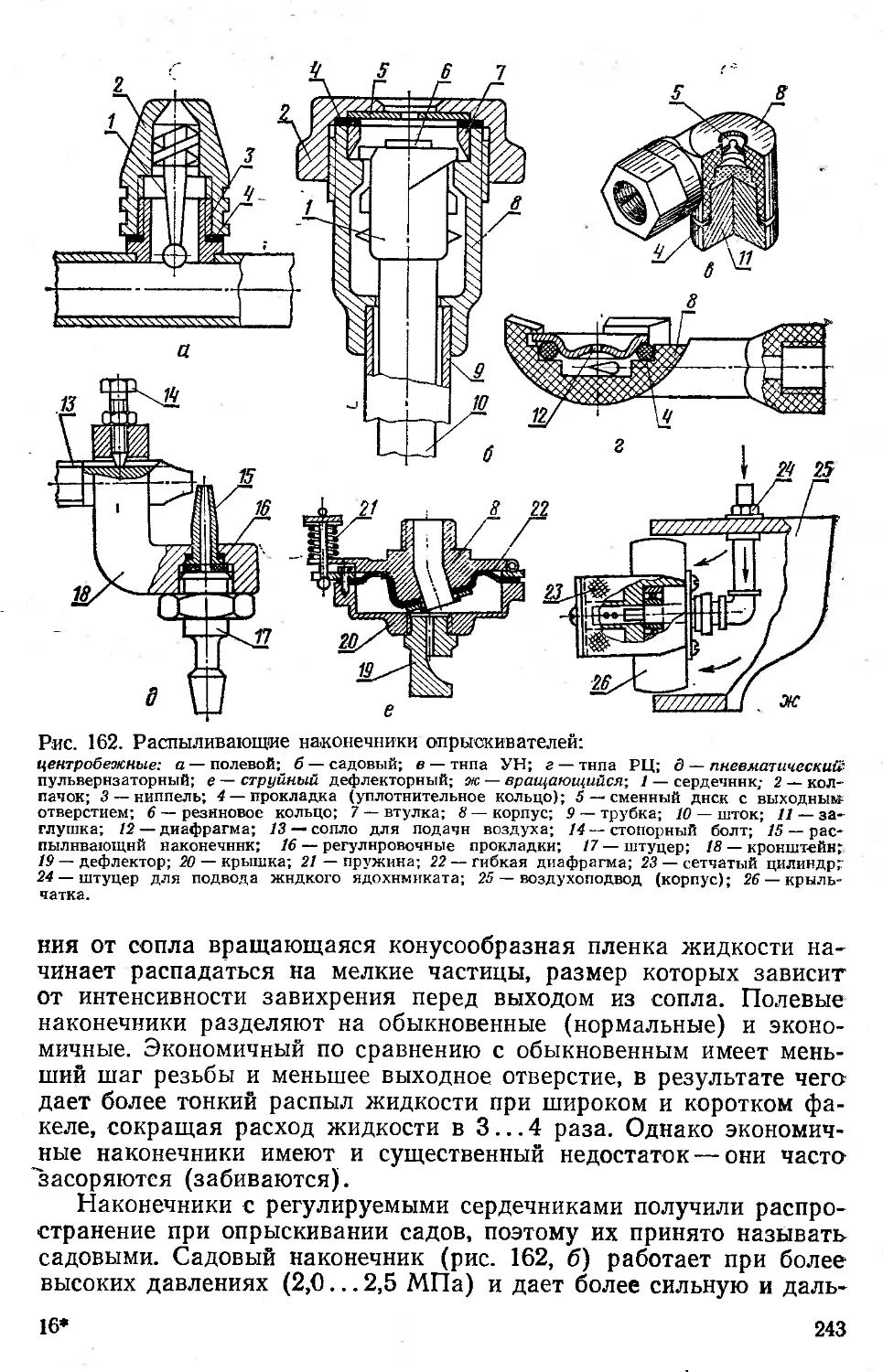
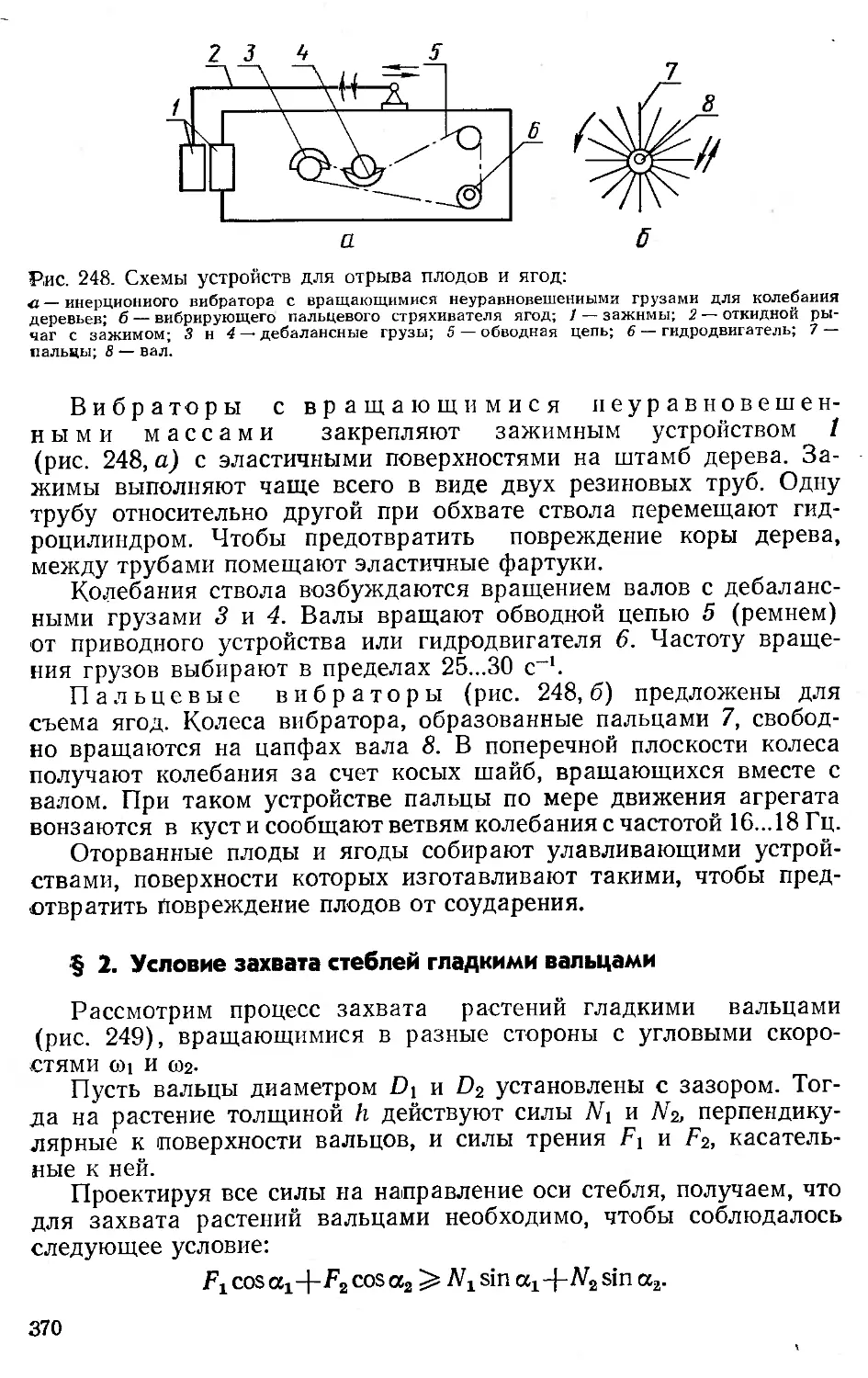
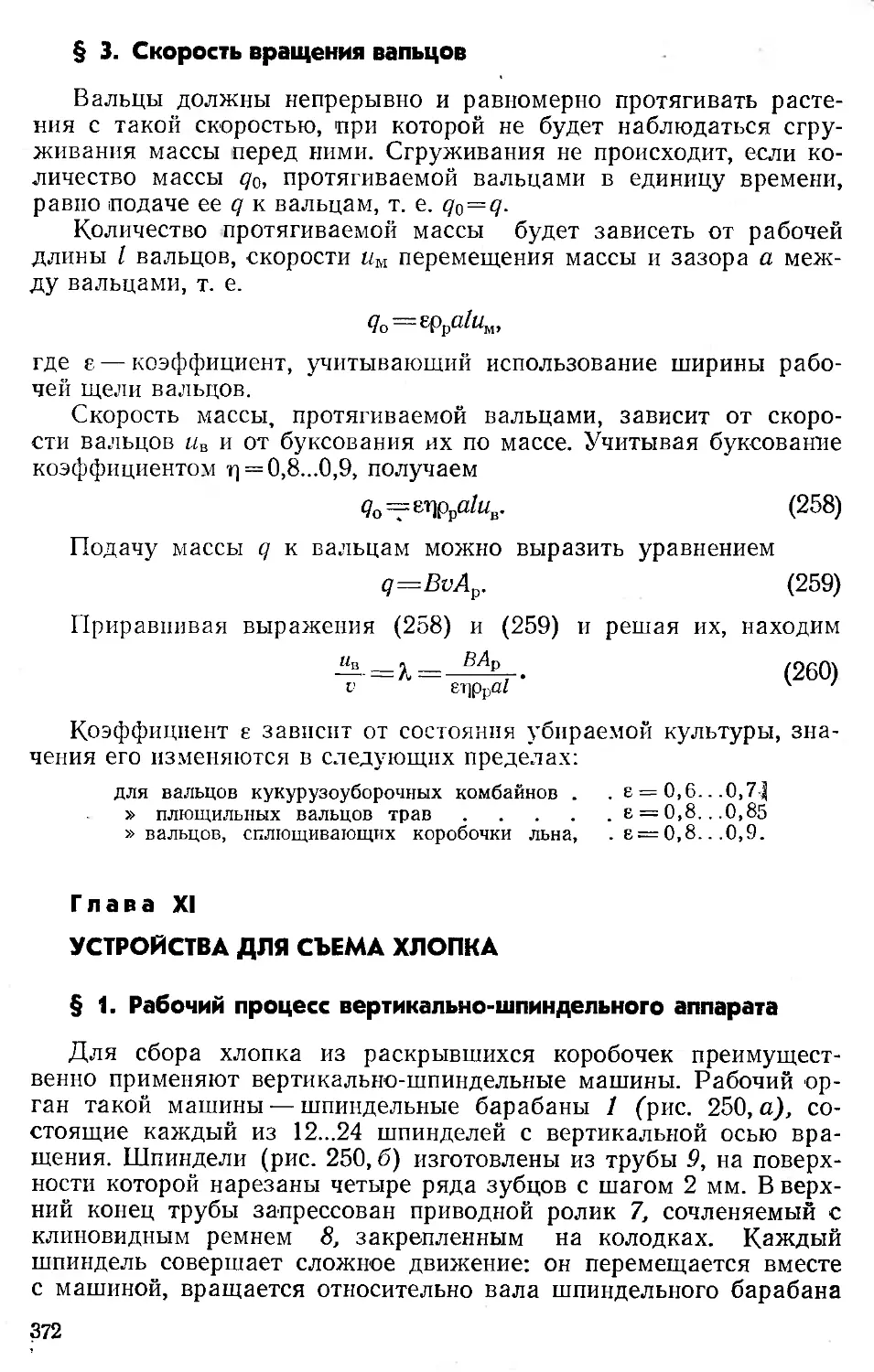
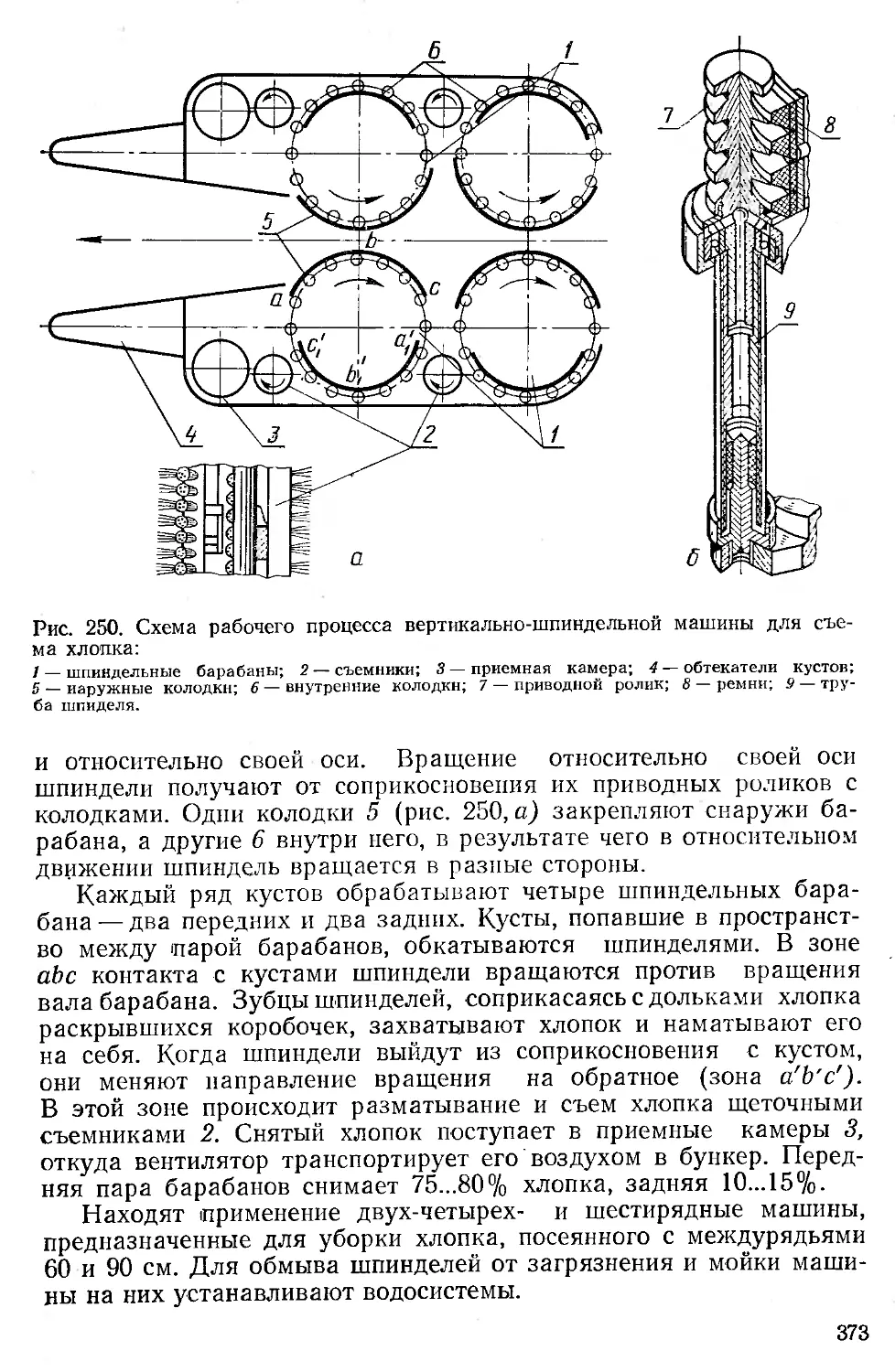
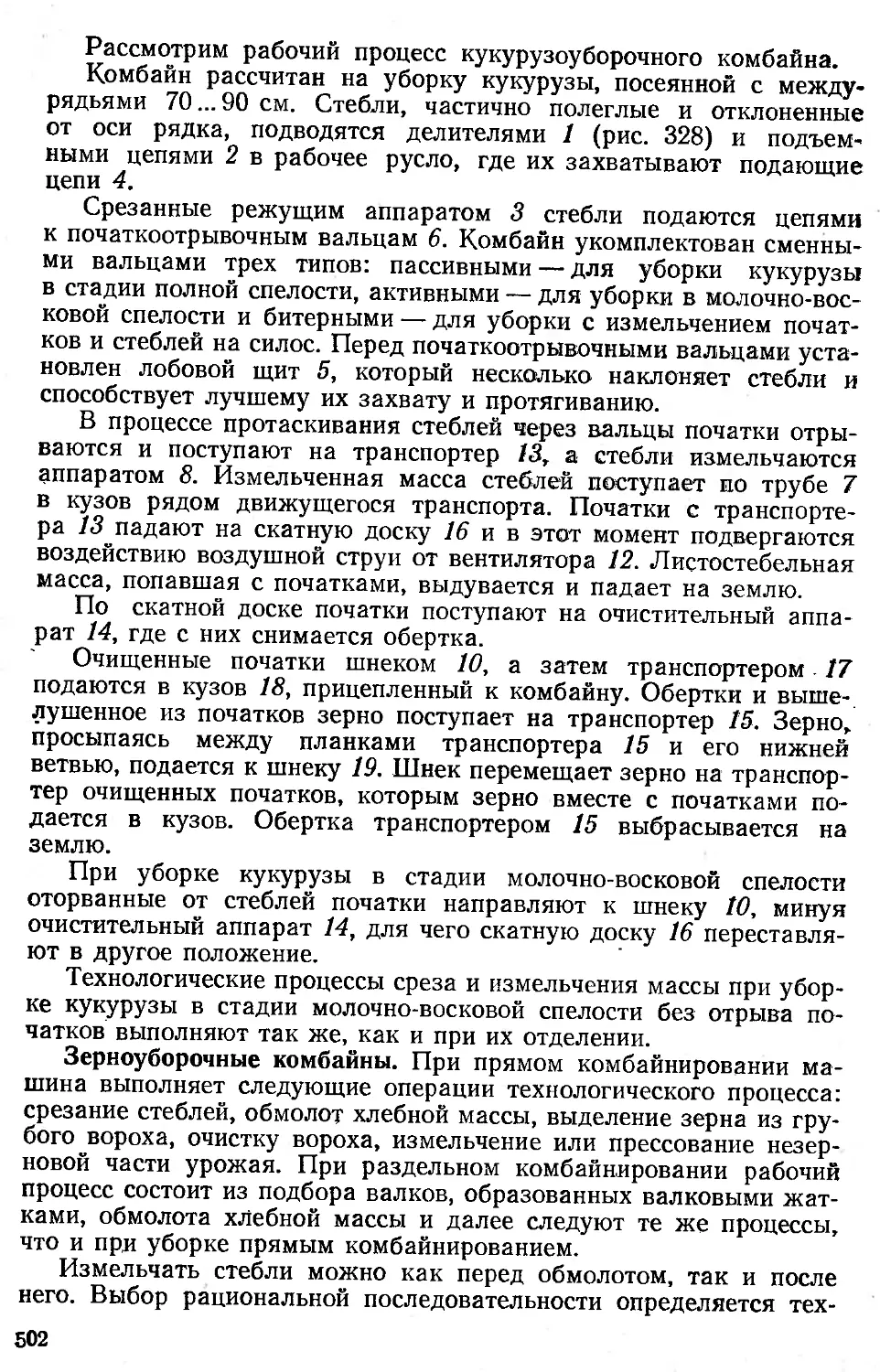
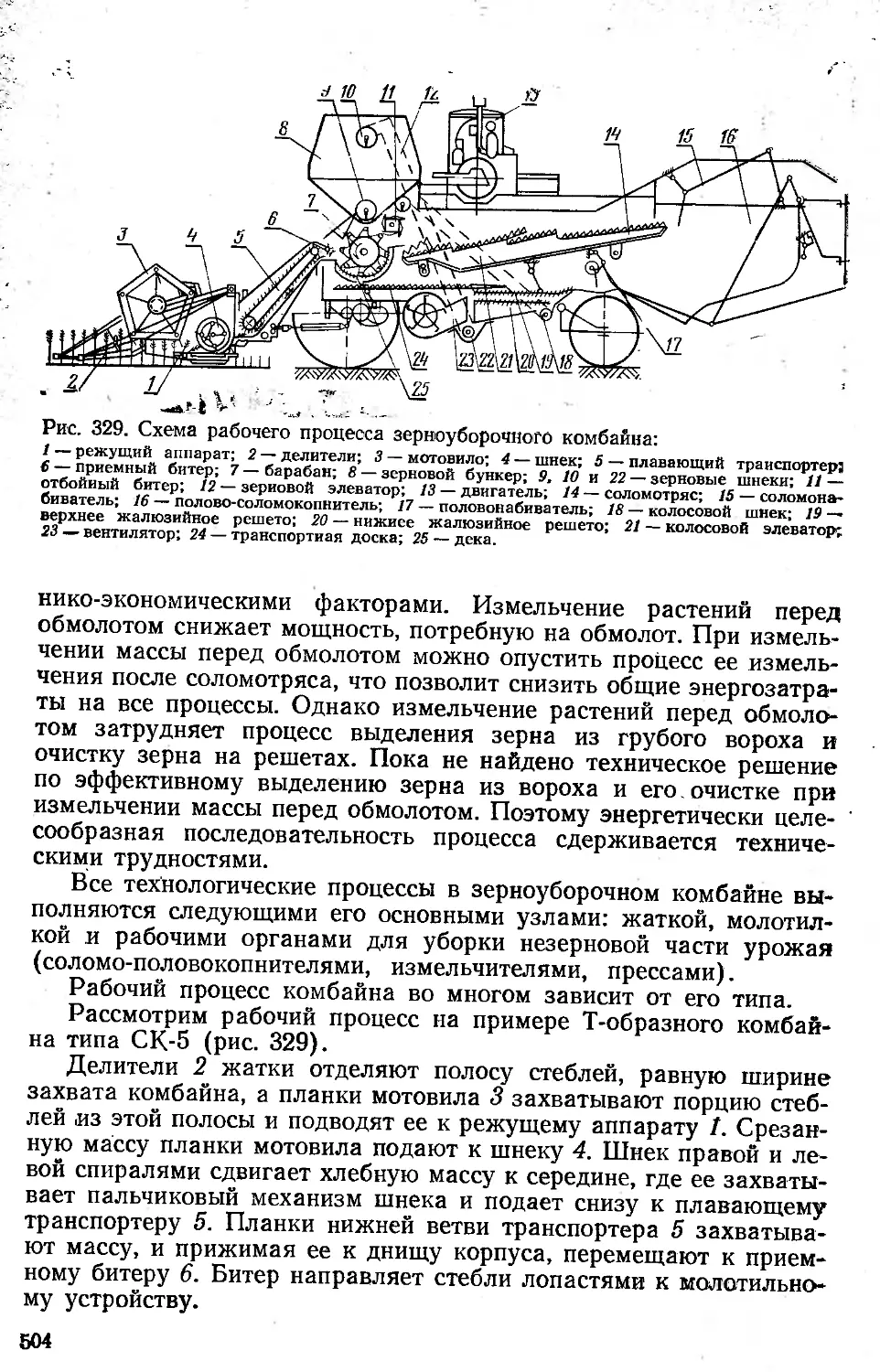
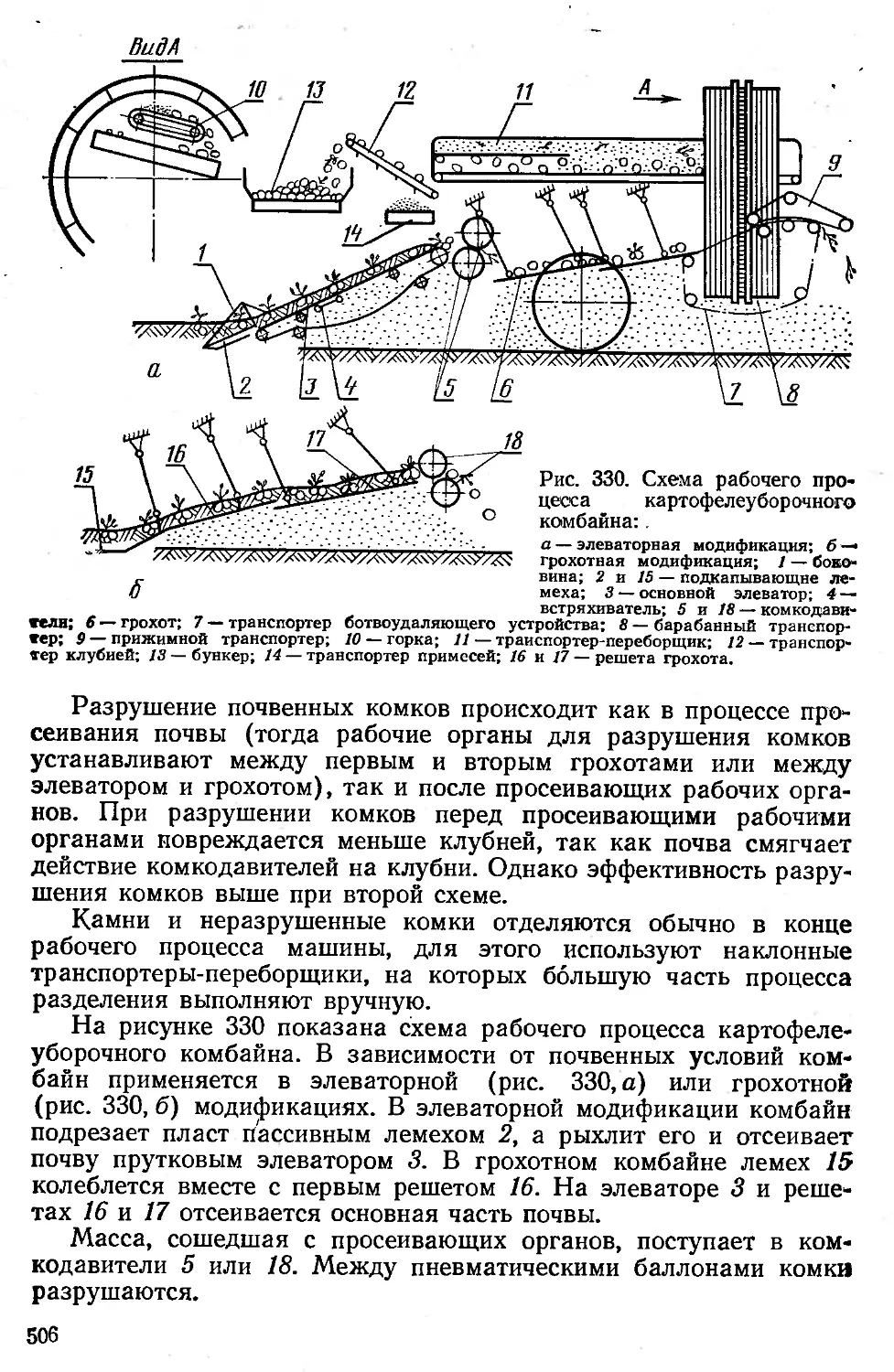
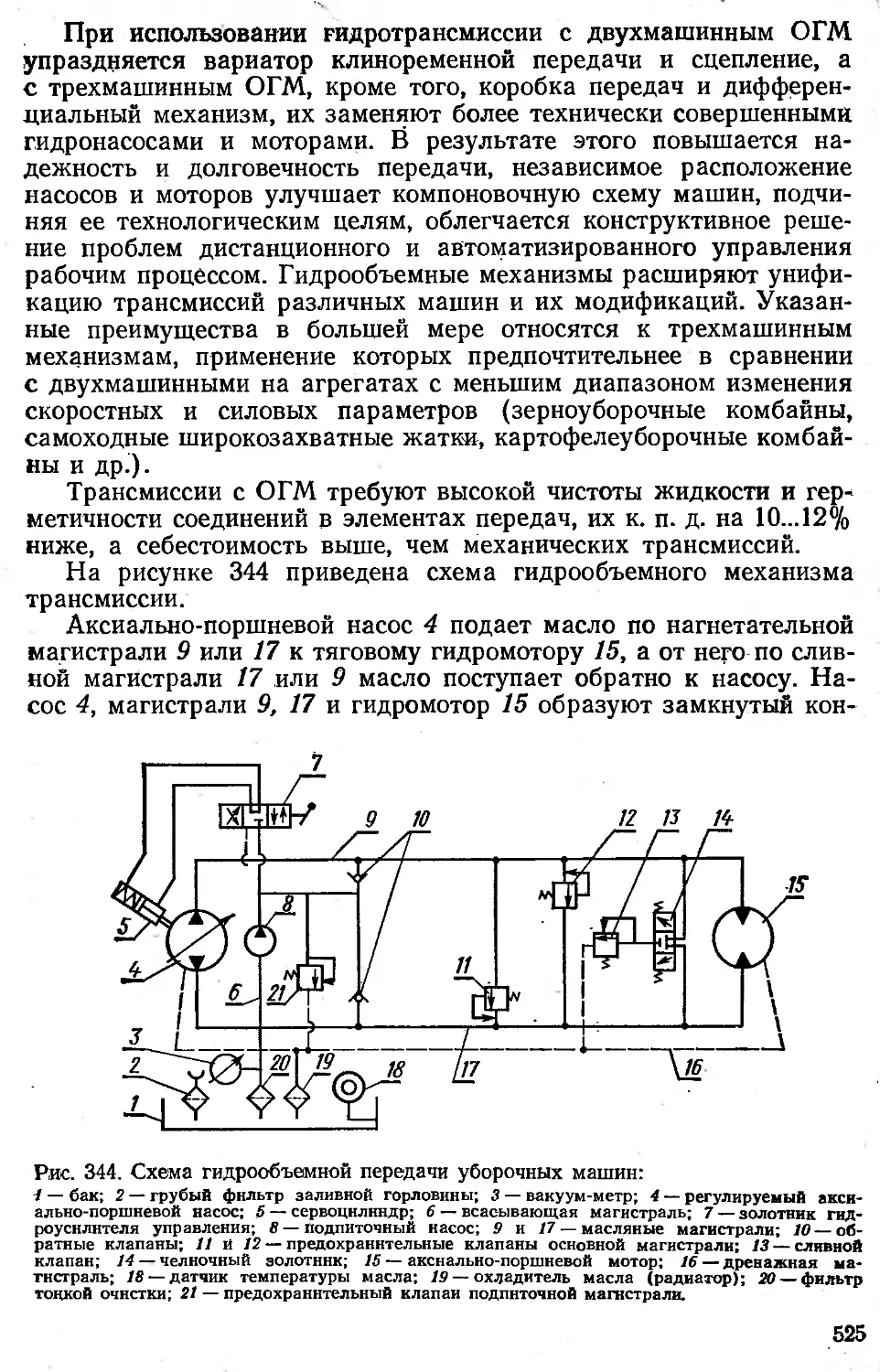
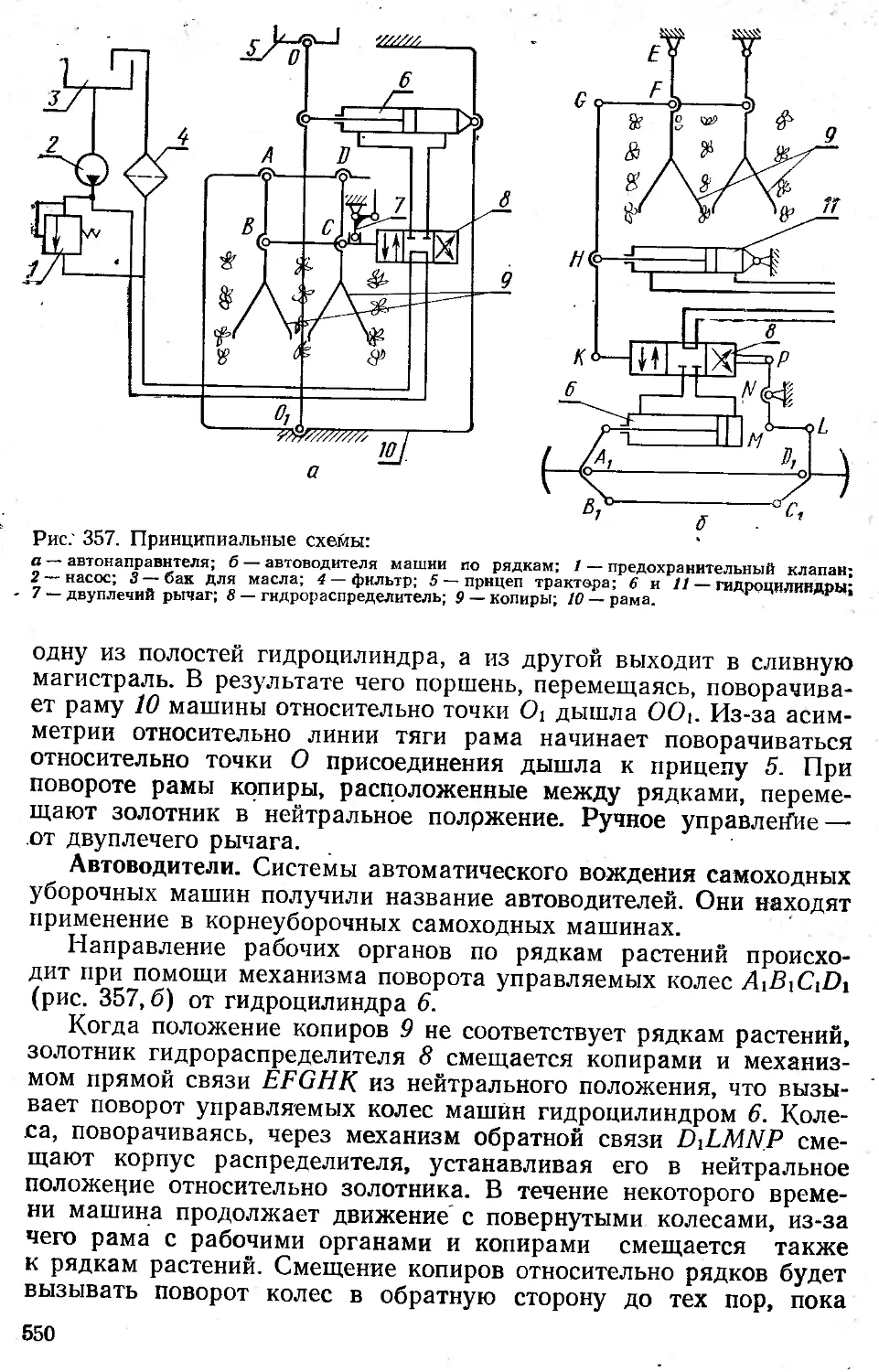
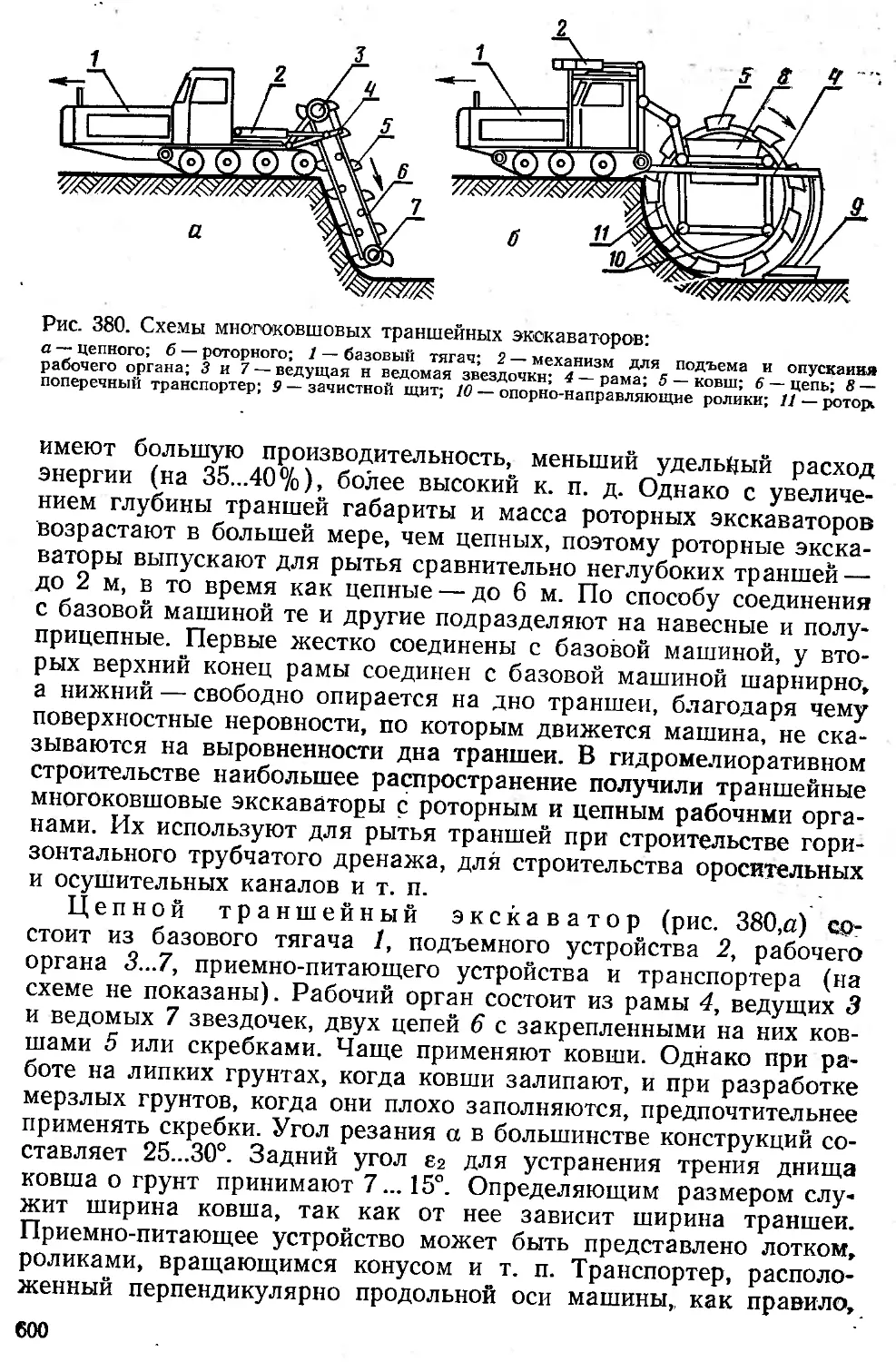
/






















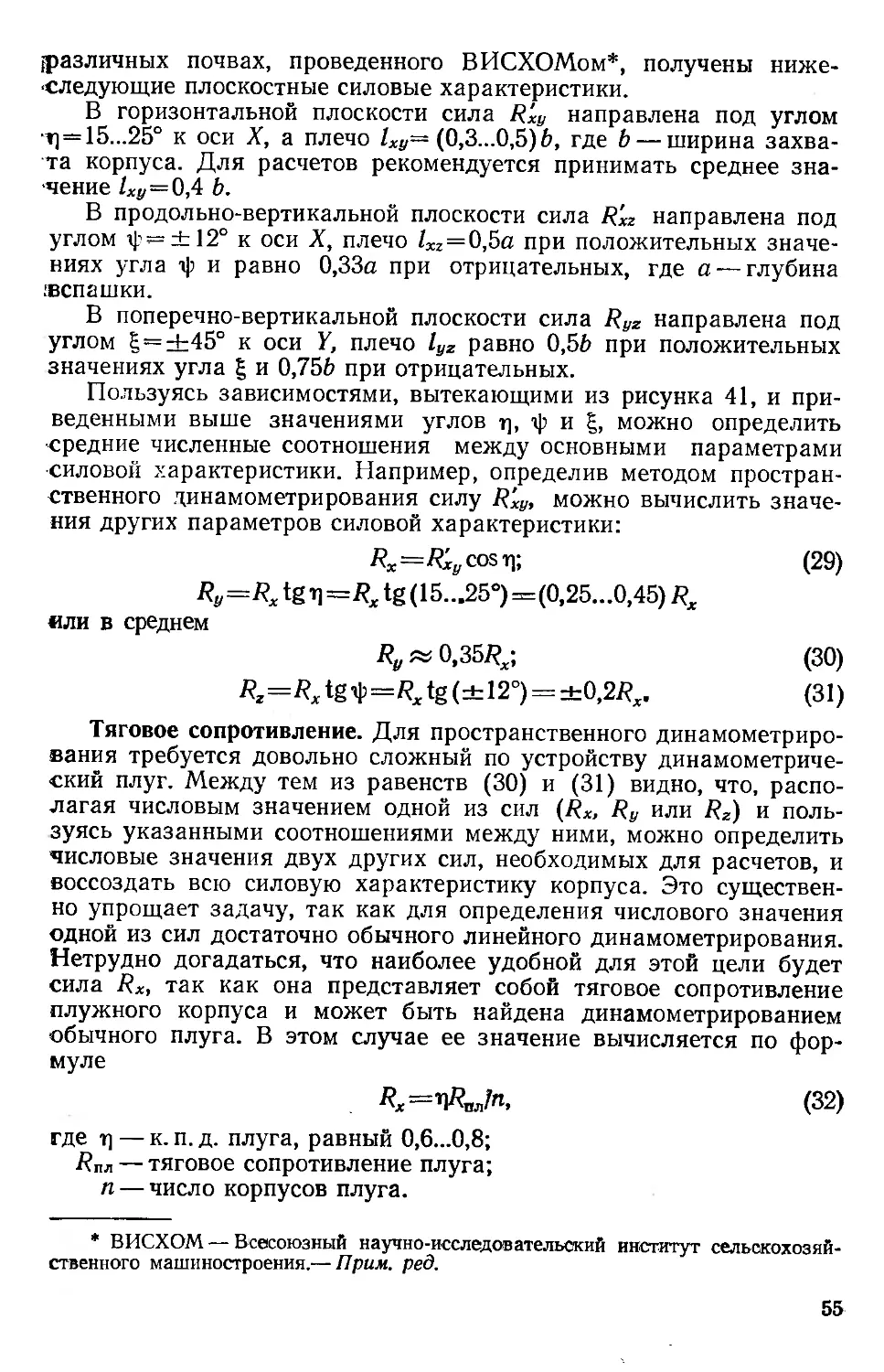


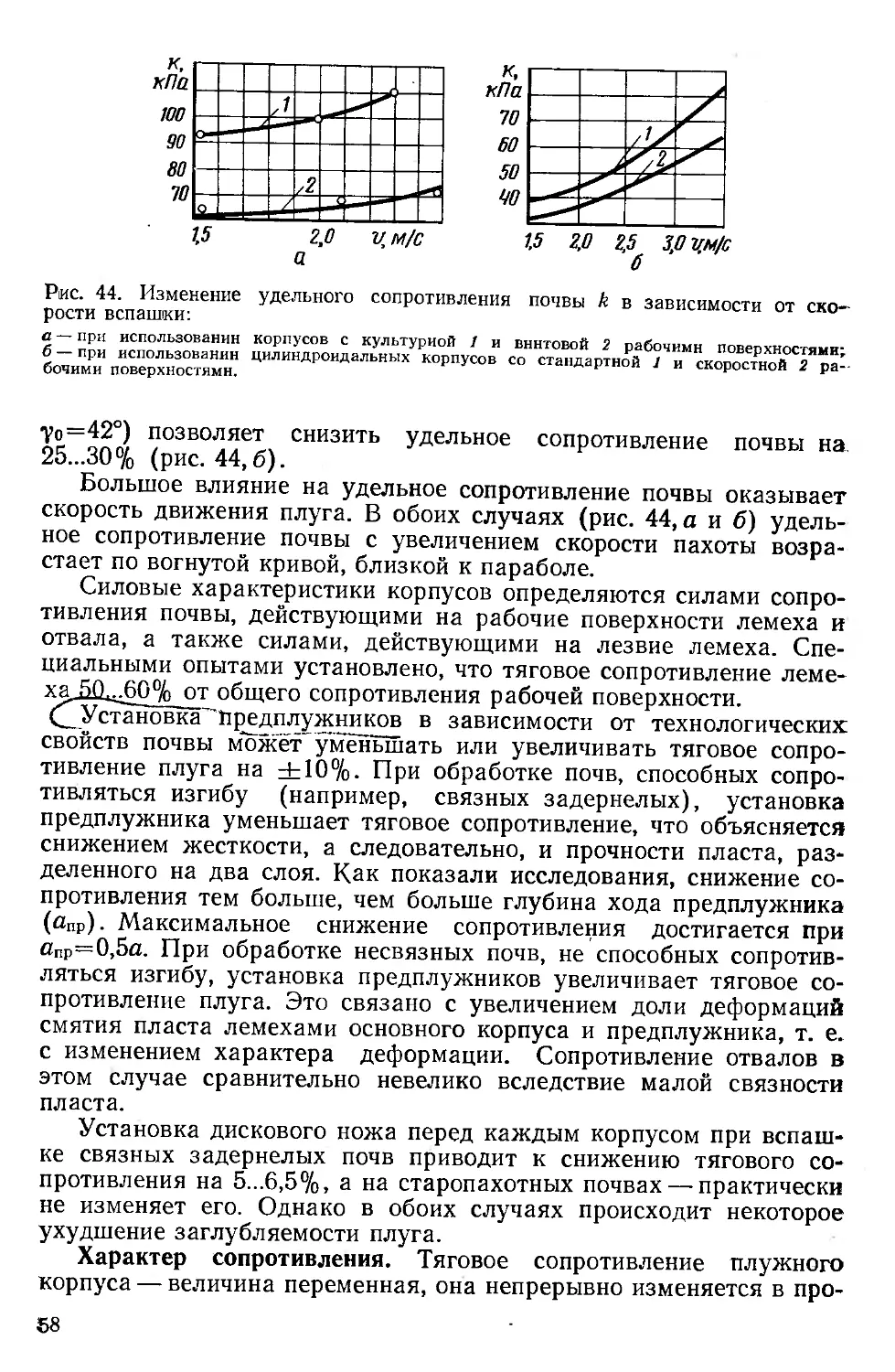



















































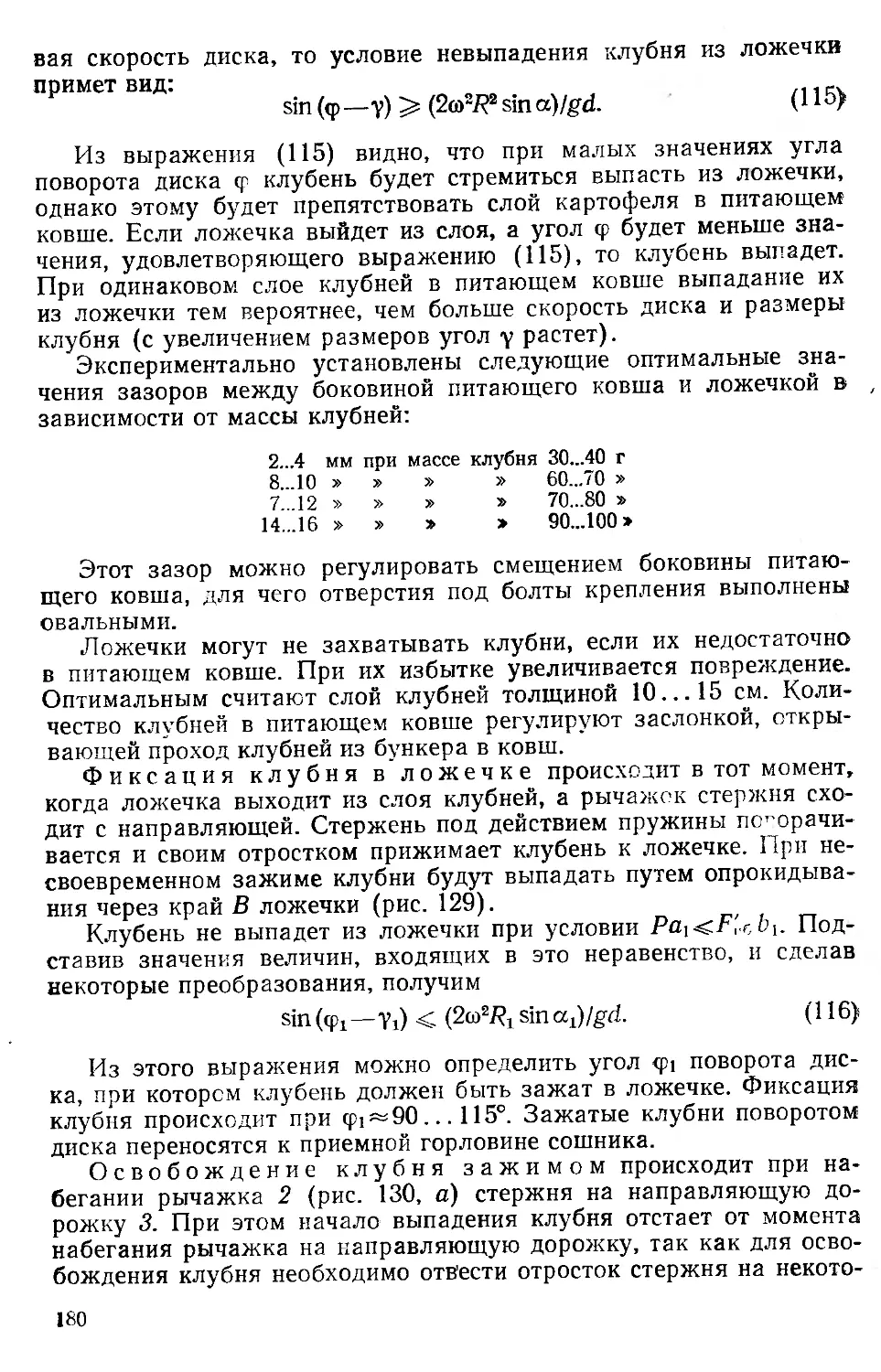



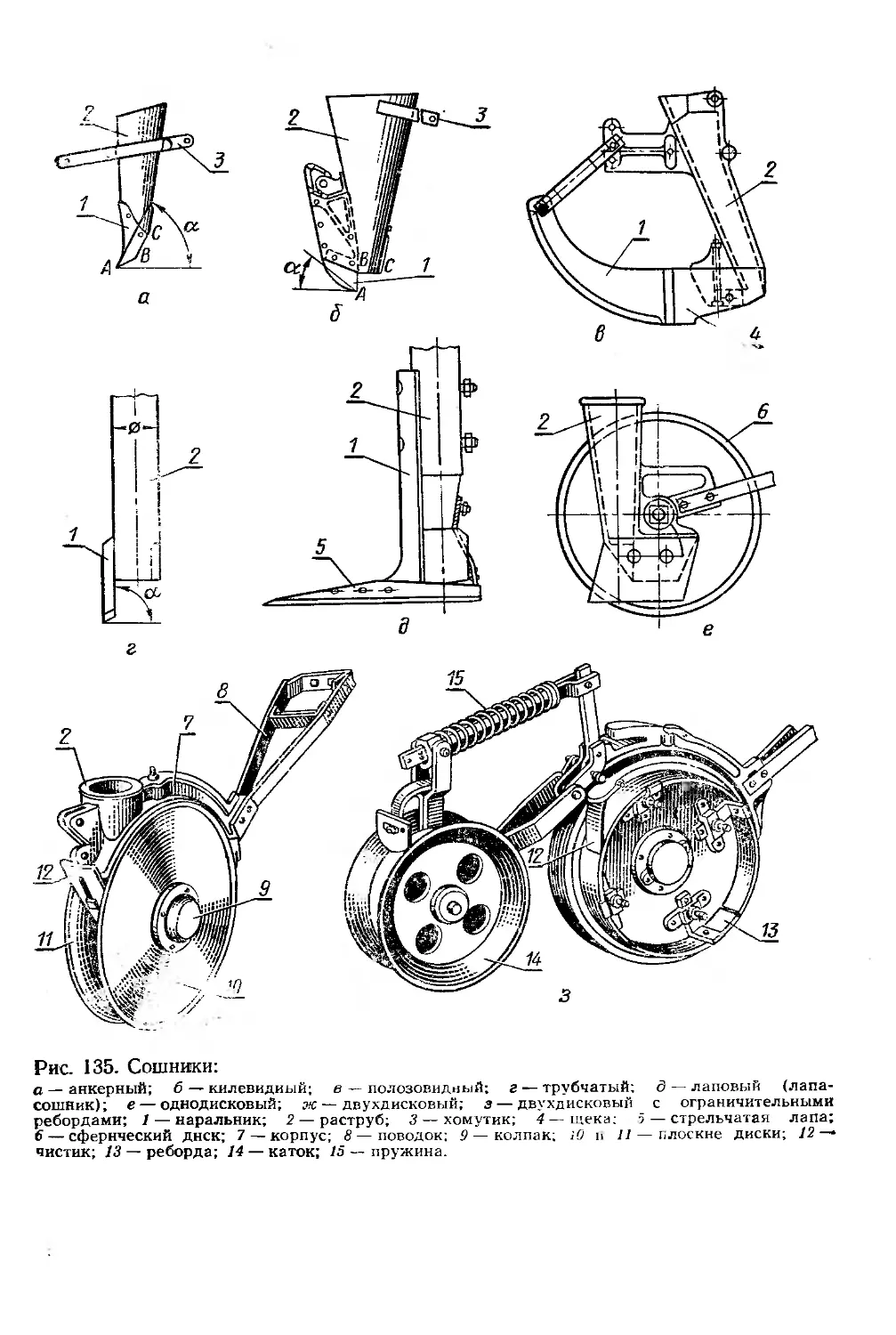













































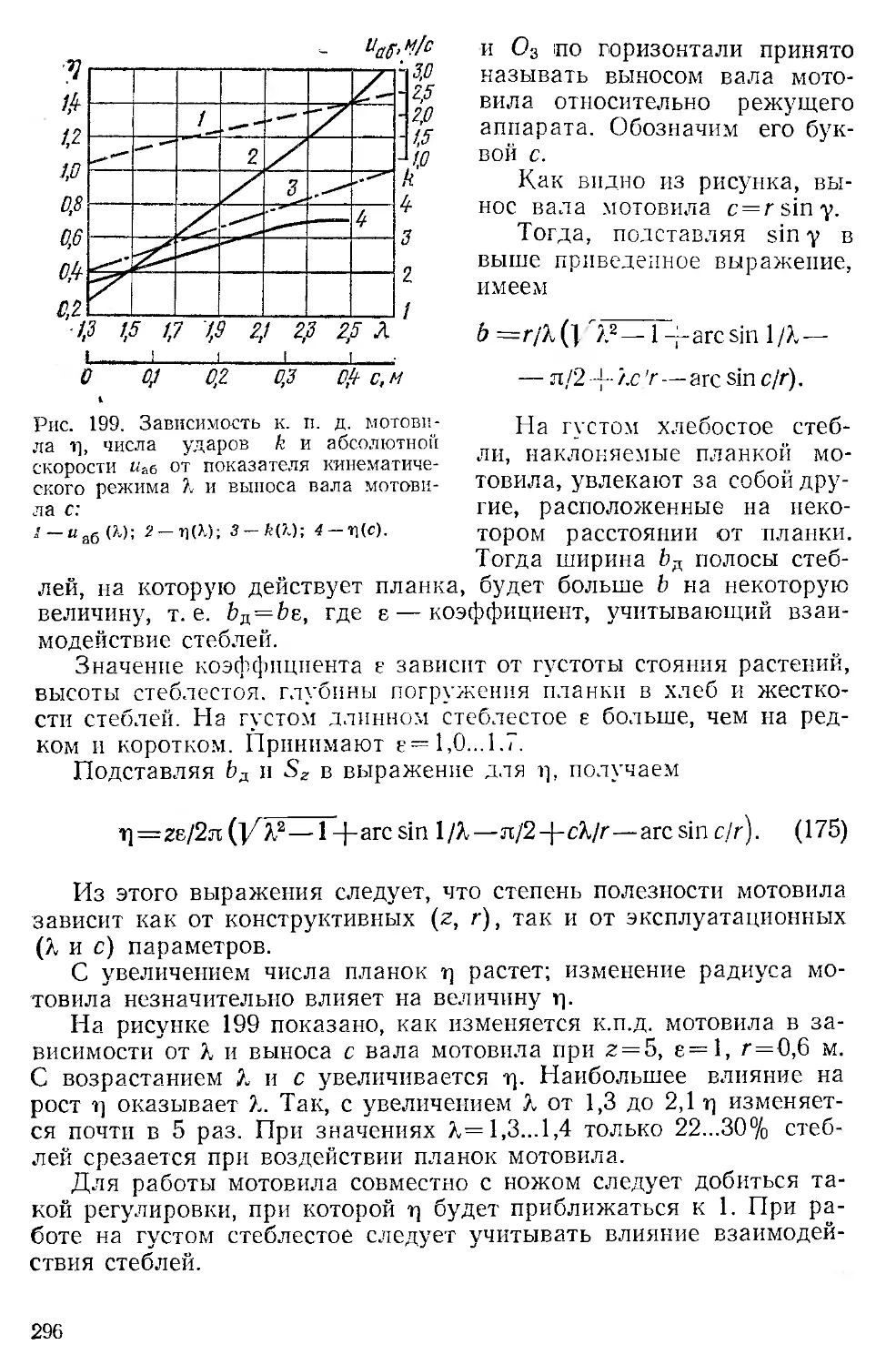






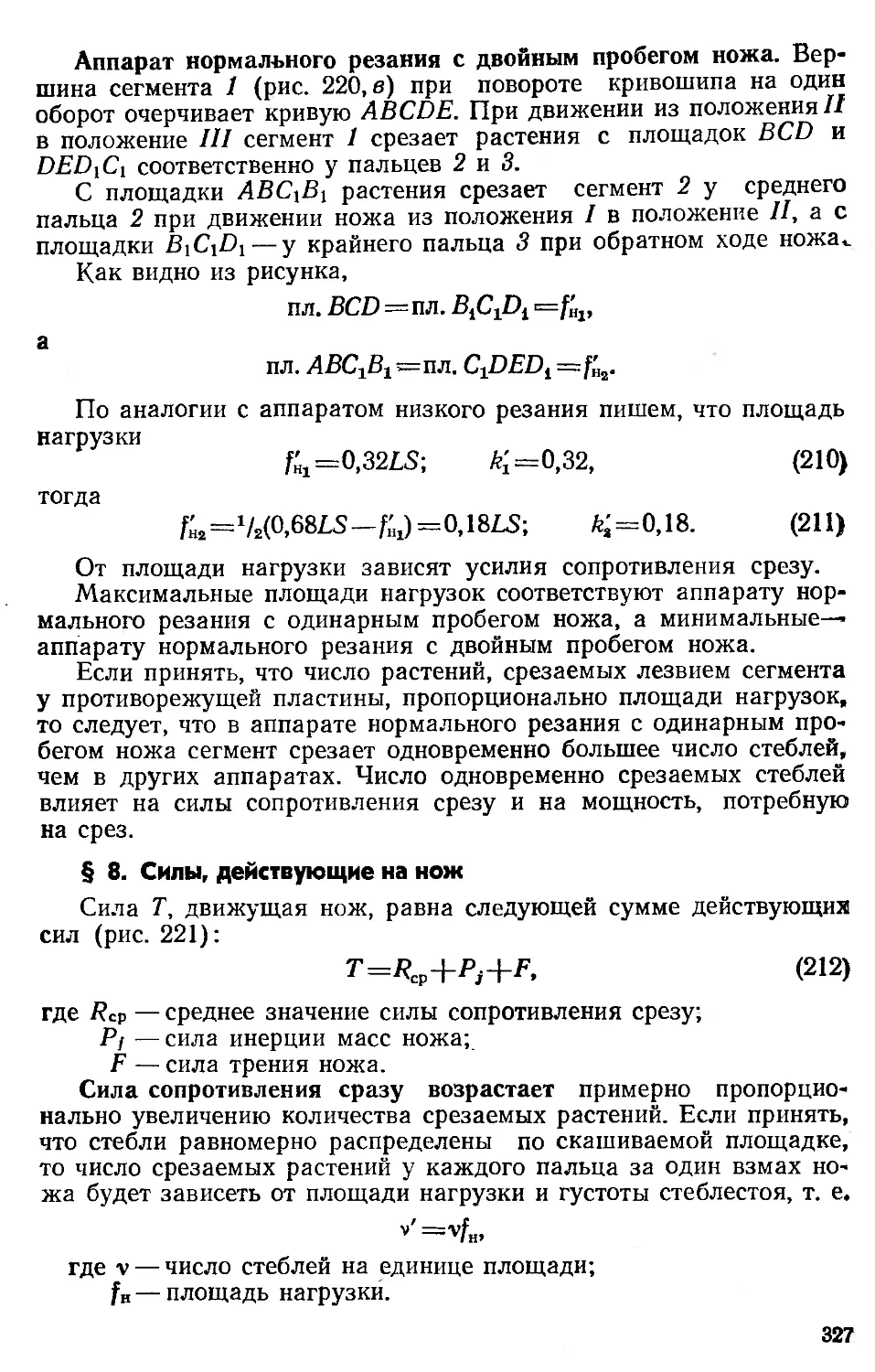























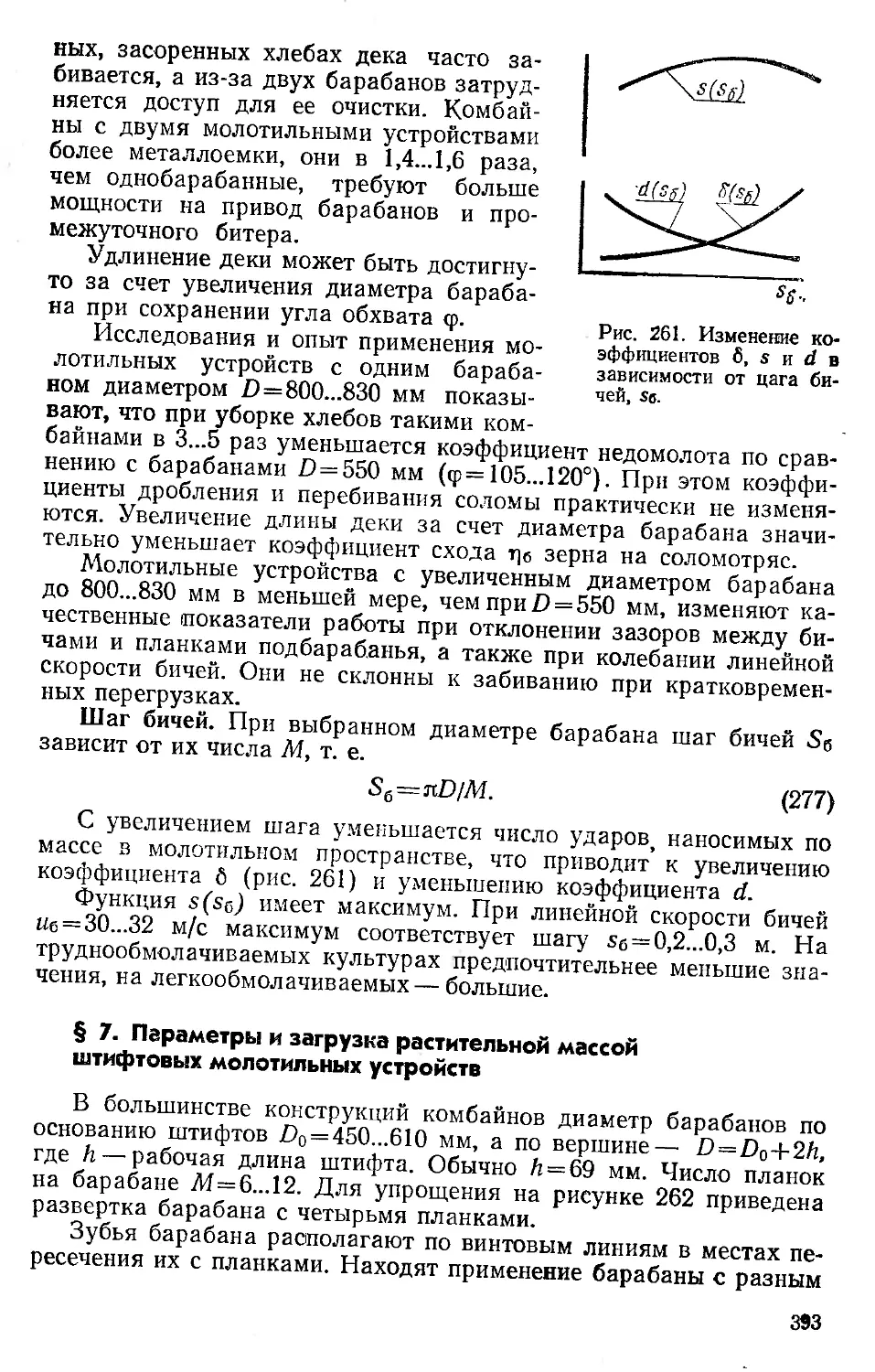
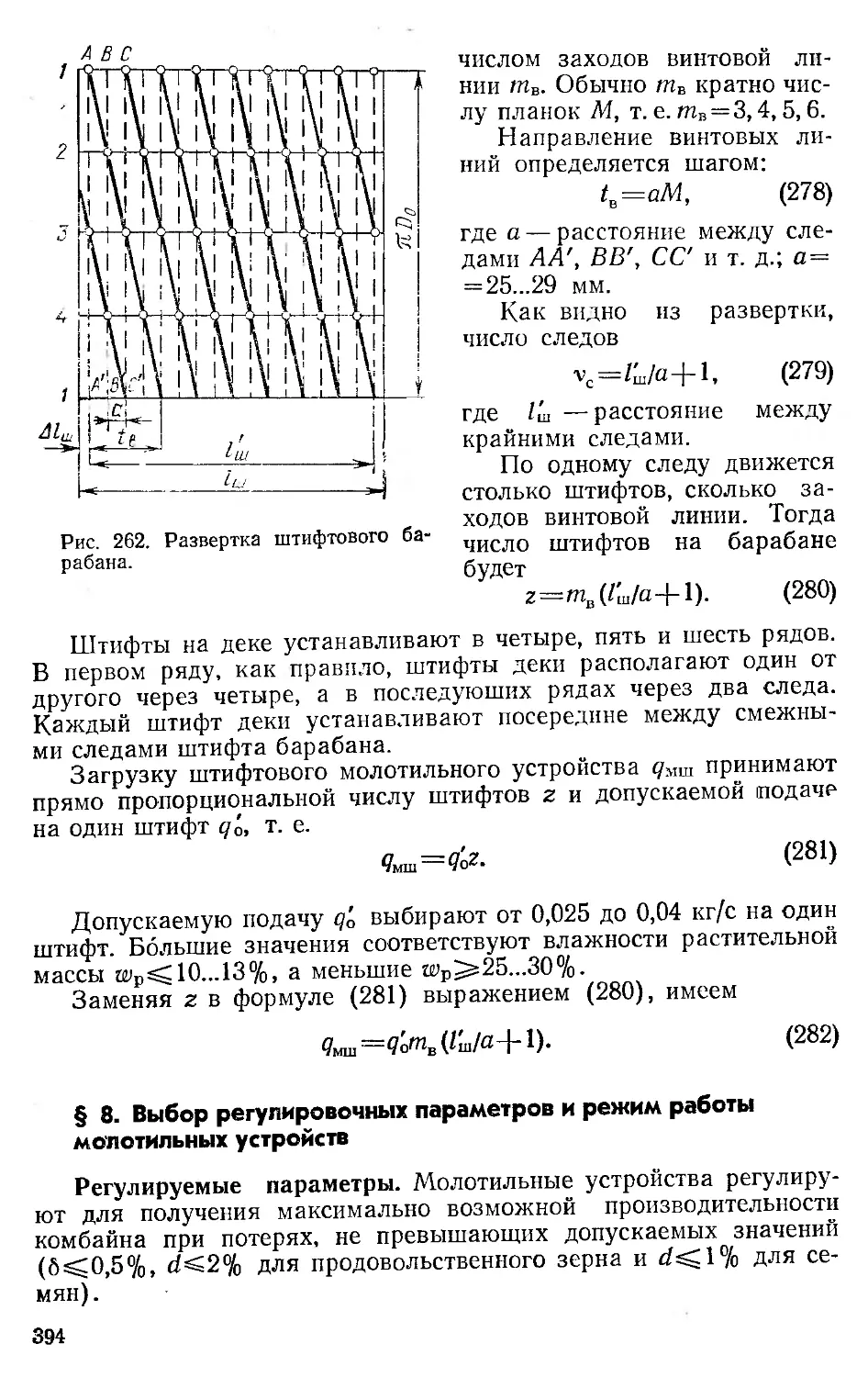
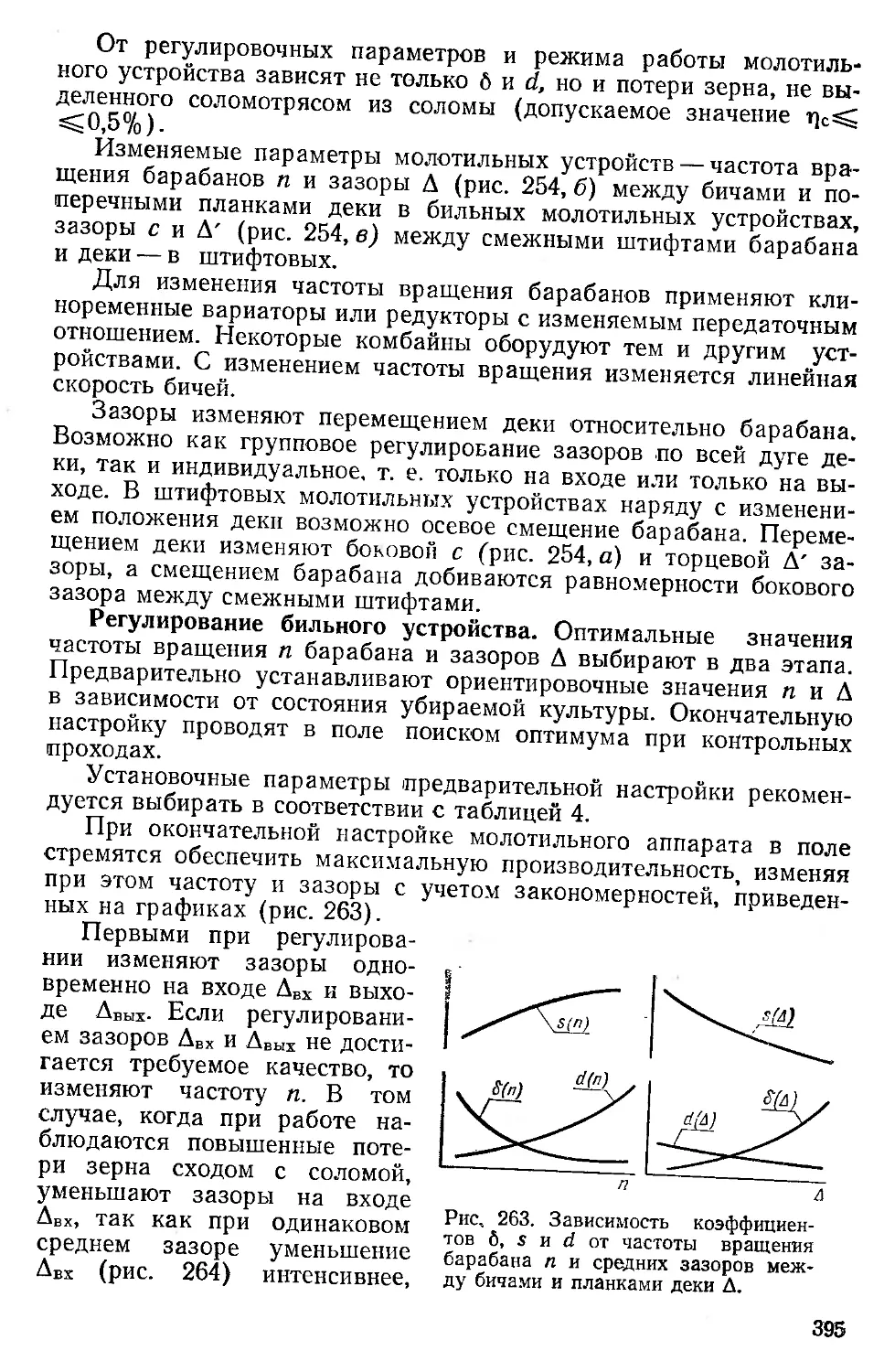

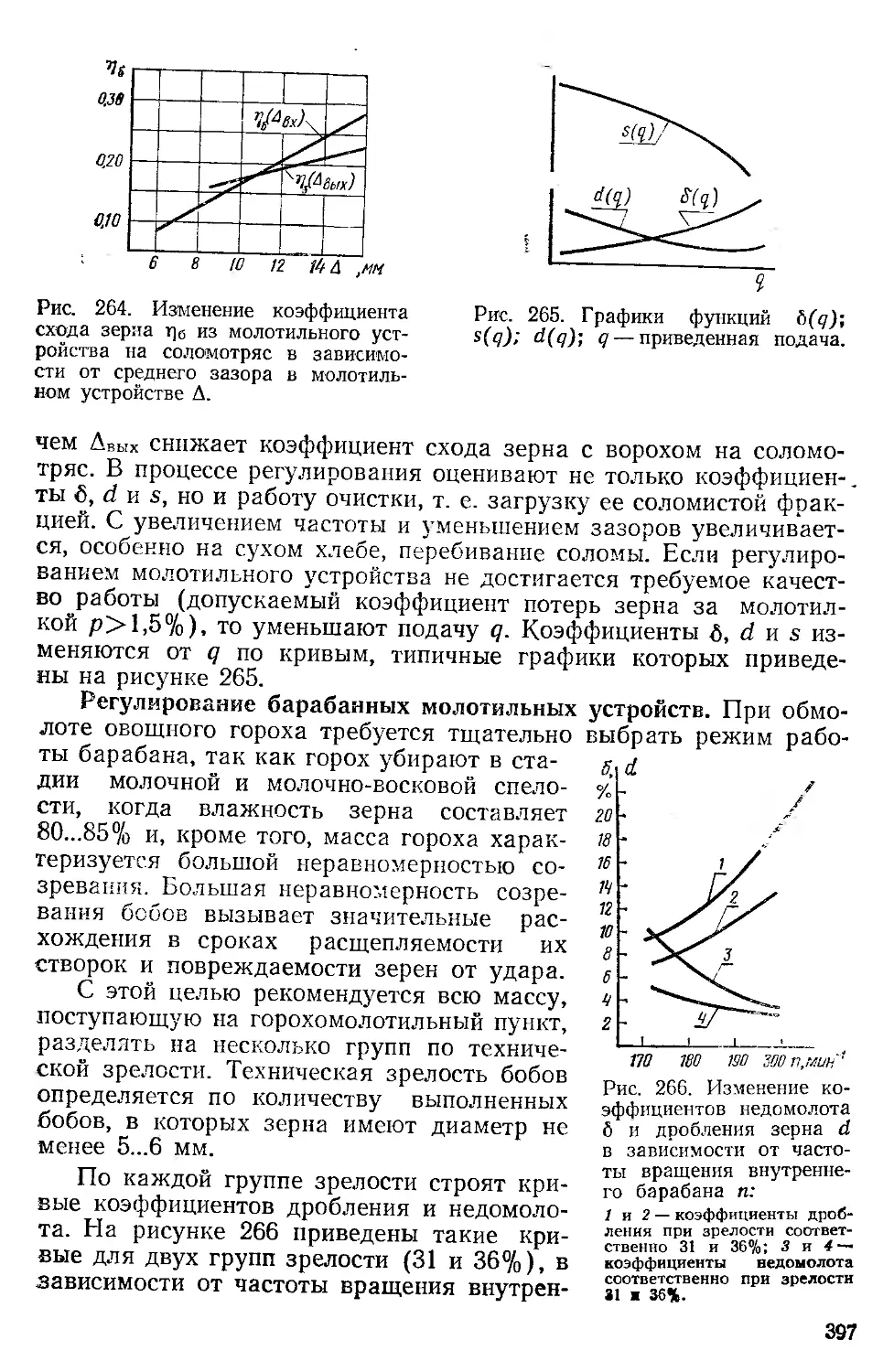




































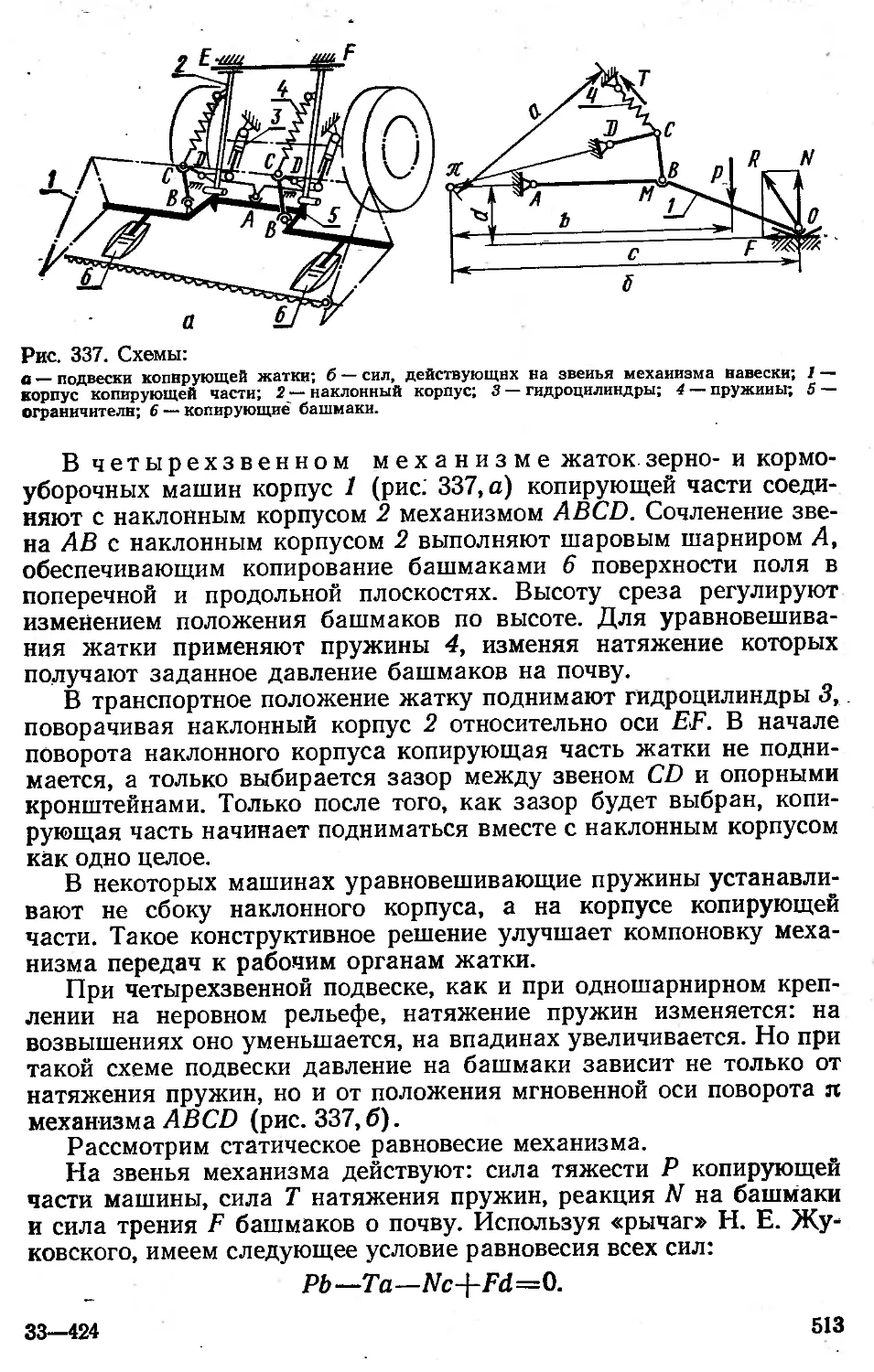






























































Текст
SEtHWKH И УЧЕБНЫЕ ПОСОБИЯ ДЛЯ ВЫСШИХ
СЕЛЬСКОХОЗЯЙСТВЕННЫХ учебных заведении
Н.И.КЛЕНИН, В.А.САКУН
СЕЛЬСКОХОЗЯЙСТВЕННЫЕ
И МЕЛИОРАТИВНЫЕ
МАШИНЫ
ЭЛЕМЕНТЫ ТЕОРИИ РАБОЧИХ ПРОЦЕССОВ,
РАСЧЕТ РЕГУЛИРОВОЧНЫХ ПАРАМЕТРОВ
И РЕЖИМОВ РАБОТЫ
ИЗДАНИЕ ВТОРОЕ, ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Допущено Главным управлением высшего и сред-
него сельскохозяйственного образования Мини-
стерства сельского хозяйства СССР в качестве
учебника для студентов высших сельскохозяйст-
венных учебных заведений по специальности
15W — Механизация сельского хозяйства».
Перейти к оглавлению
МОСКВА «КОЛОС» 1980
ББК 40.72
К48
УДК 631.3+631.311:631.6(075.8)
Авторы: сотрудники МИИСП — зав. кафедрой уборочных машин доктор тех-
нических наук профессор Н. И. Кленин (раздел IV), зав. кафедрой
почвообрабатывающих машин кандидат технических наук доцент
В. А. Сакун (разделы I, II, III и V).
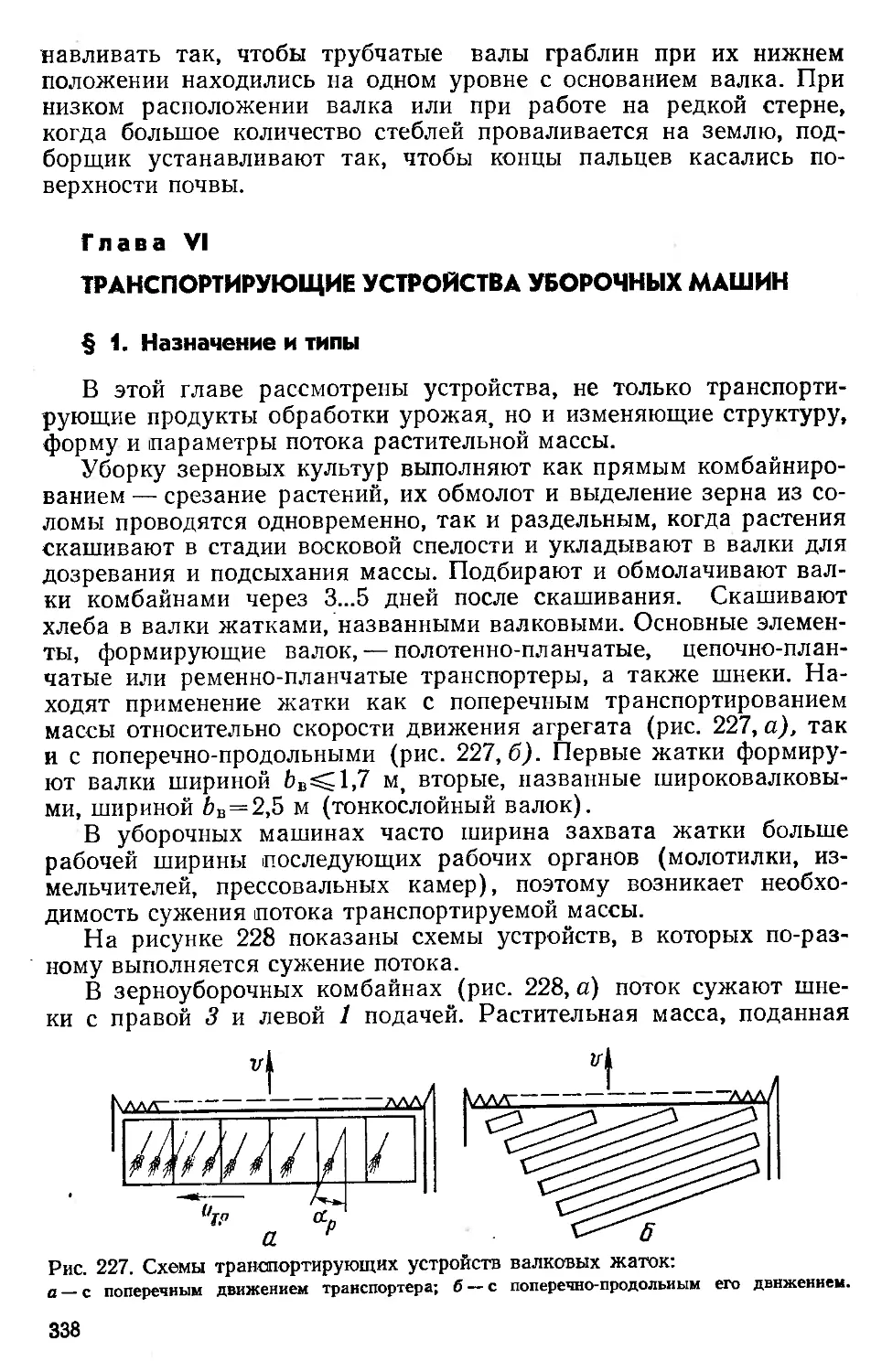
Рецензенты: кафедра сельскохозяйственных машин Кубанского СХИ — зав. ка-
федрой доктор технических наук профессор В. В. Деревенко; канди-
даты технических наук доценты В. Д. Северин, Ю. Ф. Ващенко,
кандидат технических наук старший преподаватель В. Г. Ивашков.
Редактор: инженер-механик Л. И. Чичёва.
Кленин Н. И., Сакун В. А.
К48 Сельскохозяйственные и мелиоративные машины: Эле-
менты теории рабочих процессов, расчет регулировочных
параметров и режимов работы.—2-е изд., перераб. и
доп, —М.: Колос, 1980. — 671 с., ил. — (Учебники и
учеб, пособия для высш. с.-х. учеб, заведений).
Во втором издании сохранен принцип построения материала, принятый
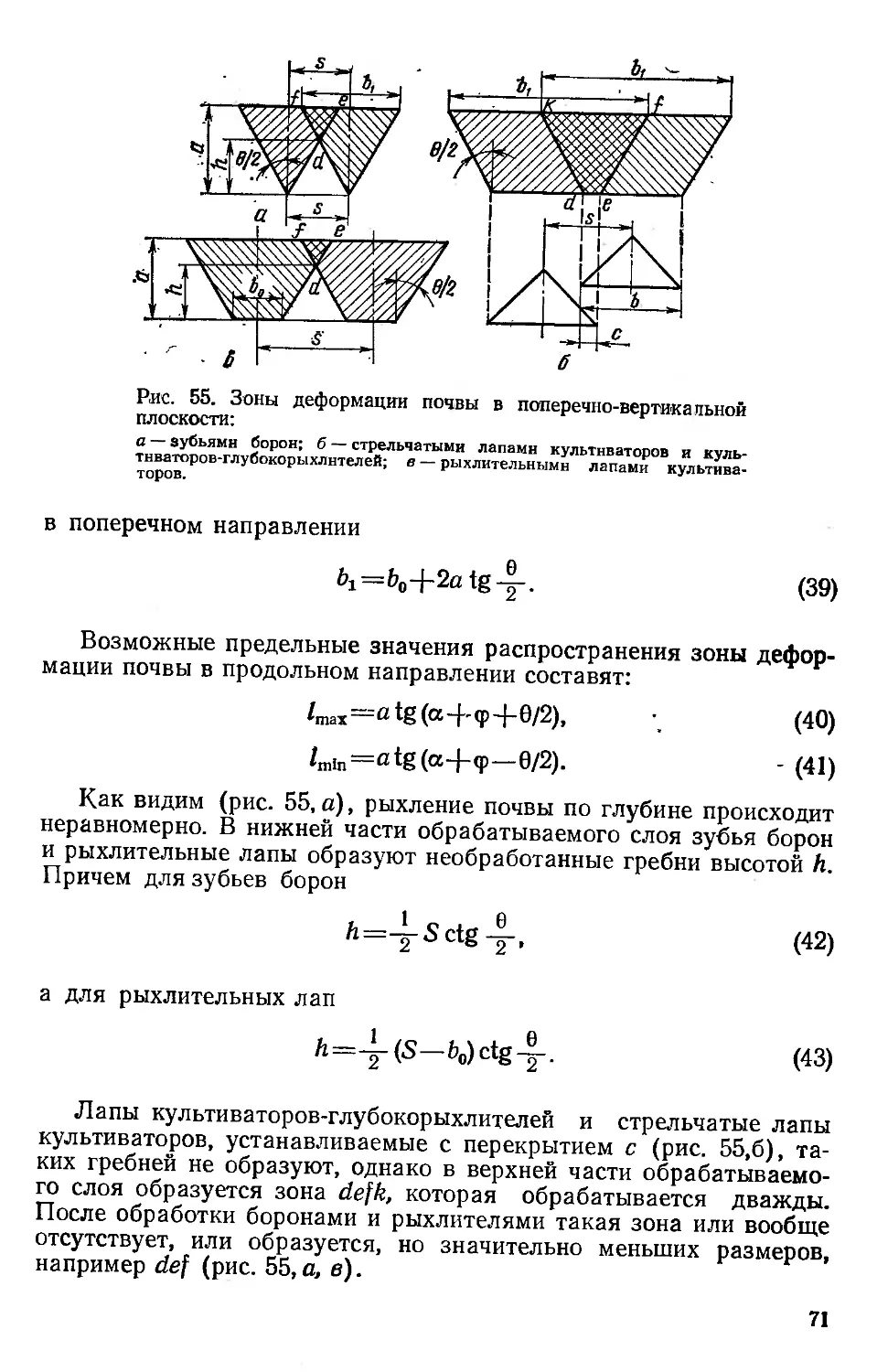
для первого издания (вышло в 1970 г. пол названием «Сельскохозяйствен-
ные машины»). Основное внимание уделено изучению рабочих органов сель-
скохозяйственных н мелиоративных машин с точки зрения их взаимодей-
ствия с обрабатываемым материалом. Новый текст отражает достижения
сельскохозяйственной науки н практики за последние годы.
40204—281 ББК 40.72
К 035(01)—8034~80 3802040400 • 631.303
© Издательство «Колос», 1980 ,
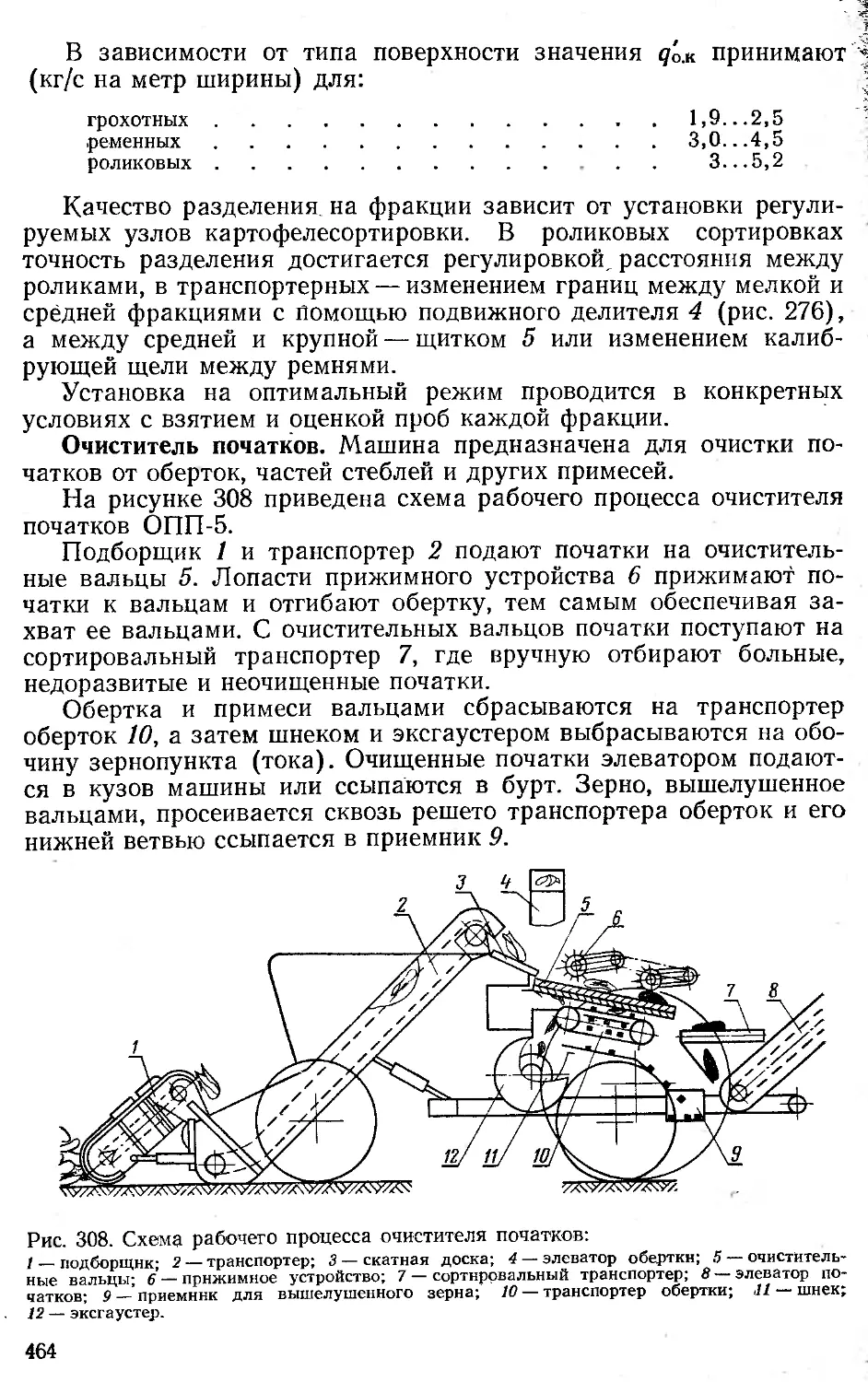
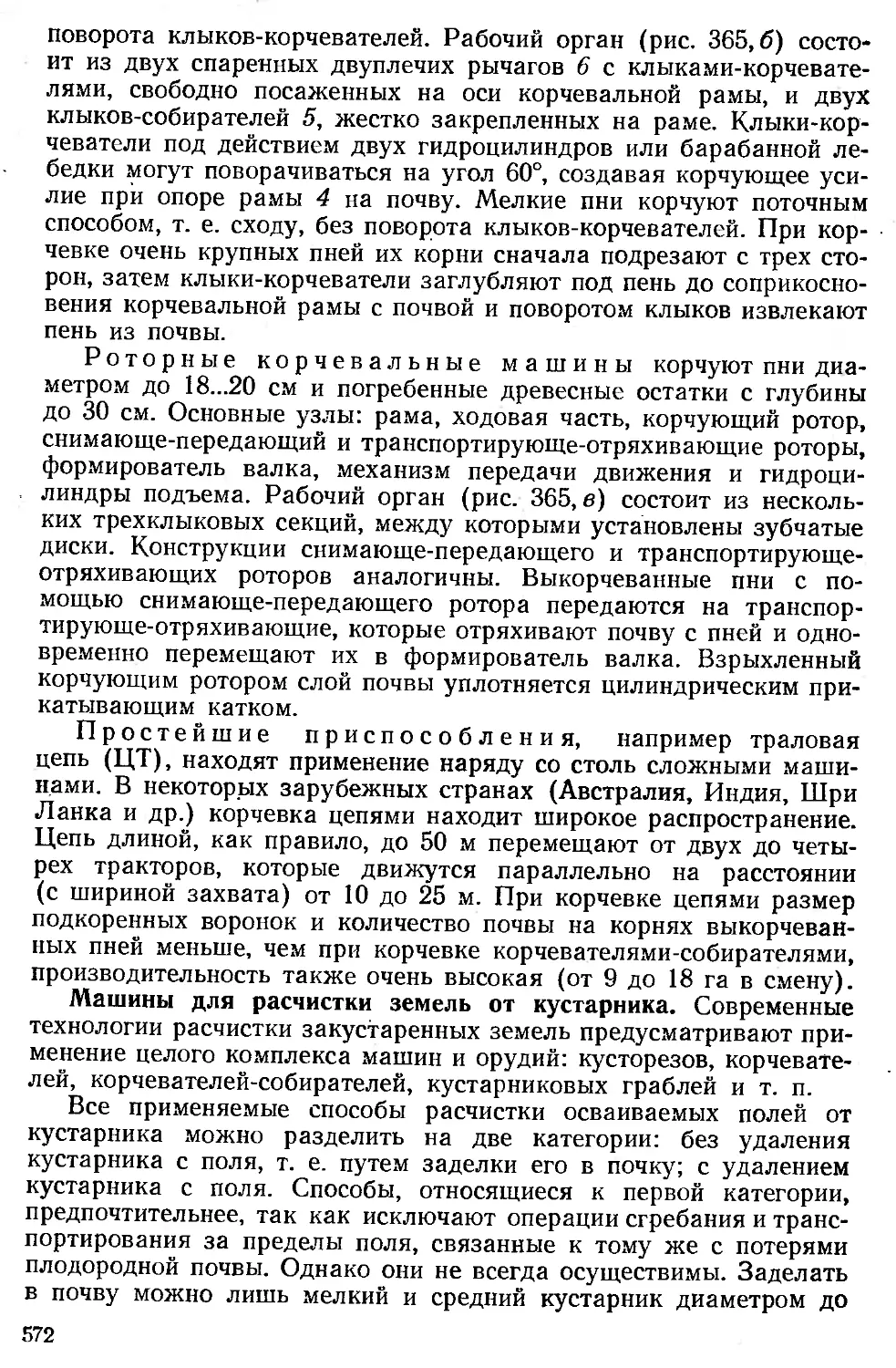
ВВЕДЕНИЕ
Земледелие — древнейшее занятие человечества. Связанные
с ним орудия труда имеют многовековую историю развития
и совершенствования, однако наука о сельскохозяйственных
машинах и орудиях зародилась сравнительно недавно. Воз-
никновение и развитие этой научной дисциплины связано с
именем выдающегося русского ученого академика Василия
Прохоровича Горячкина (1868...1935 гг.). До В. П. Горячкина
наука о сельскохозяйственных машинах носила описательный
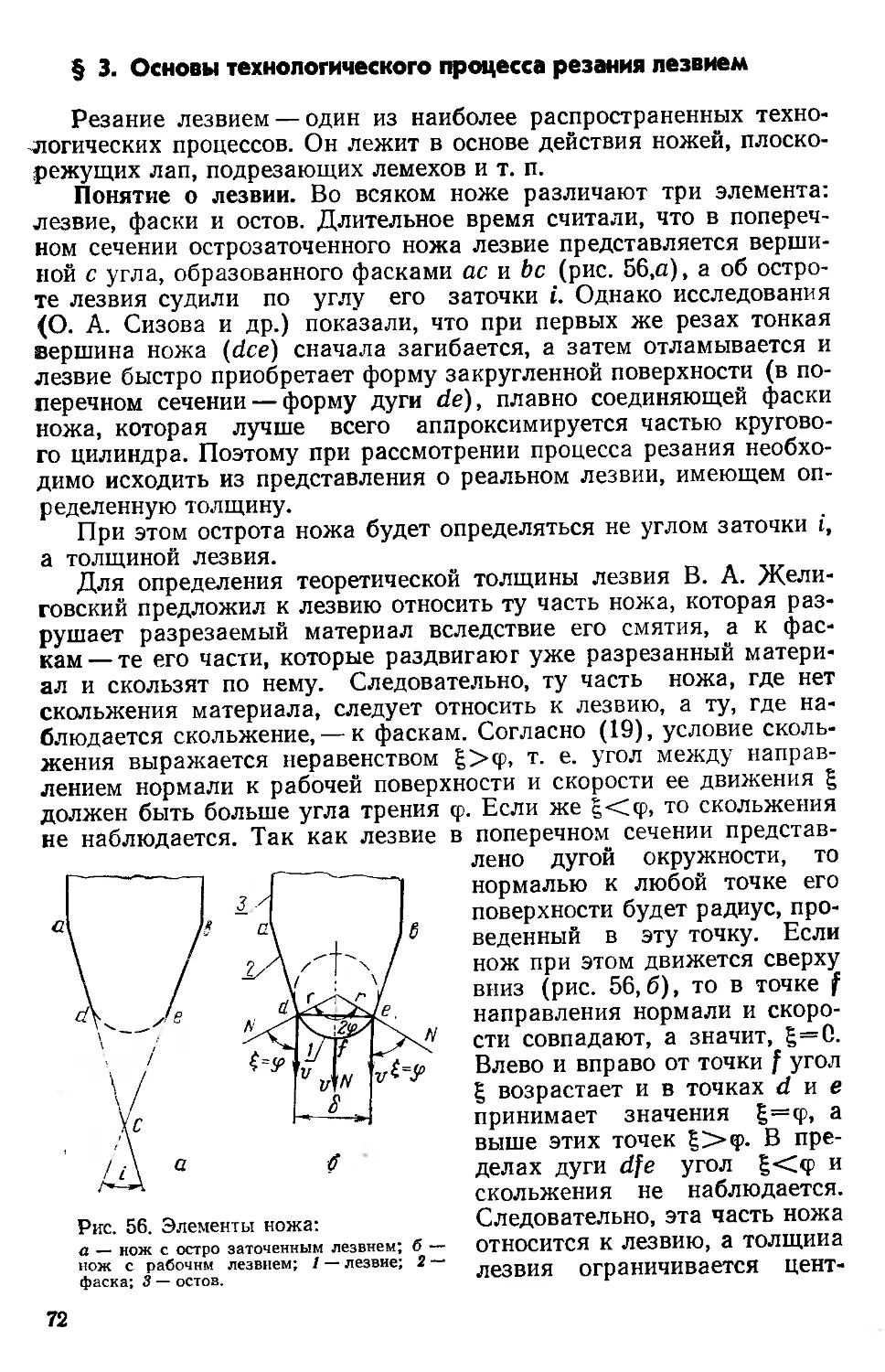
характер и сводилась к изучению устройства и конструктив-
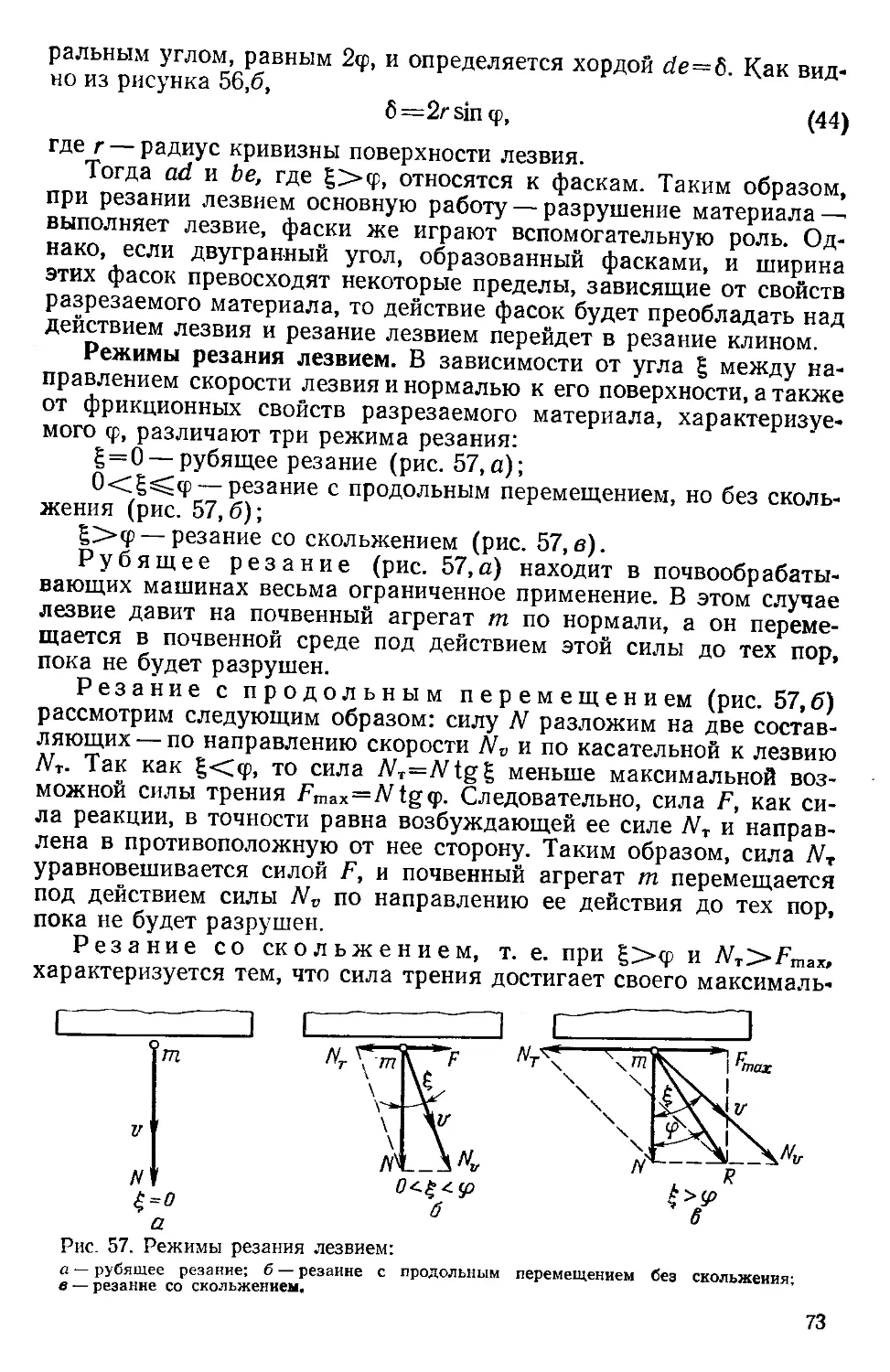
ных особенностей машин, выпускавшихся многочисленными
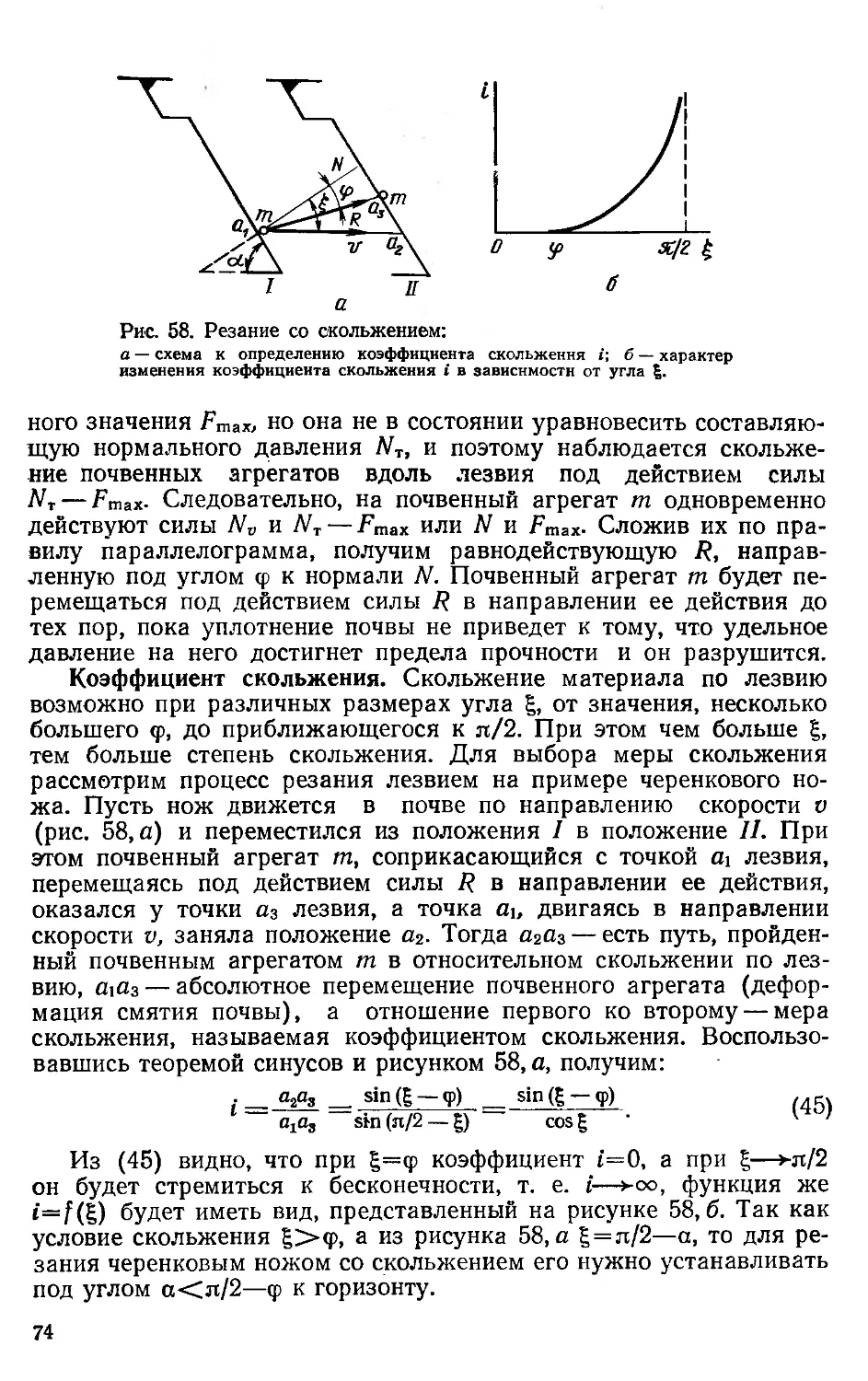
полукустарными заводами царской России. Конструирование
сельскохозяйственных машин, не имея под собой научной ос-
новы, велось в то время «на ощупь», интуитивно, методом
проб и ошибок, так как никаких предварительных расчетов
конструкторы еще делать не умели.
В своем классическом труде, вышедшем в 1919 г. под на-
званием «Земледельческая механика», академик В. П. Горяч-
кин впервые применил законы механики к анализу рабочих
процессов сельскохозяйственных машин. Эта и последующие
работы В. П. Горячкина послужили основой для создания
новой научной прикладной технической дисциплины, которую
он назвал земледельческой механикой и которая открыла
широкие возможности для исследования технологических и
рабочих процессов в целях создания рациональных конструк-
ций и обоснования оптимальных режимов работы сельскохо-
зяйственных машин.
В трудах академика В. П. Горячкина наряду с разработ-
кой частных вопросов теории рабочих органов отдельных
сельскохозяйственных машин (для обработки почвы, посева,
уборки и т. д.) нашли развитие и общие вопросы, явившиеся
определенным вкладом в такие фундаментальные науки, как
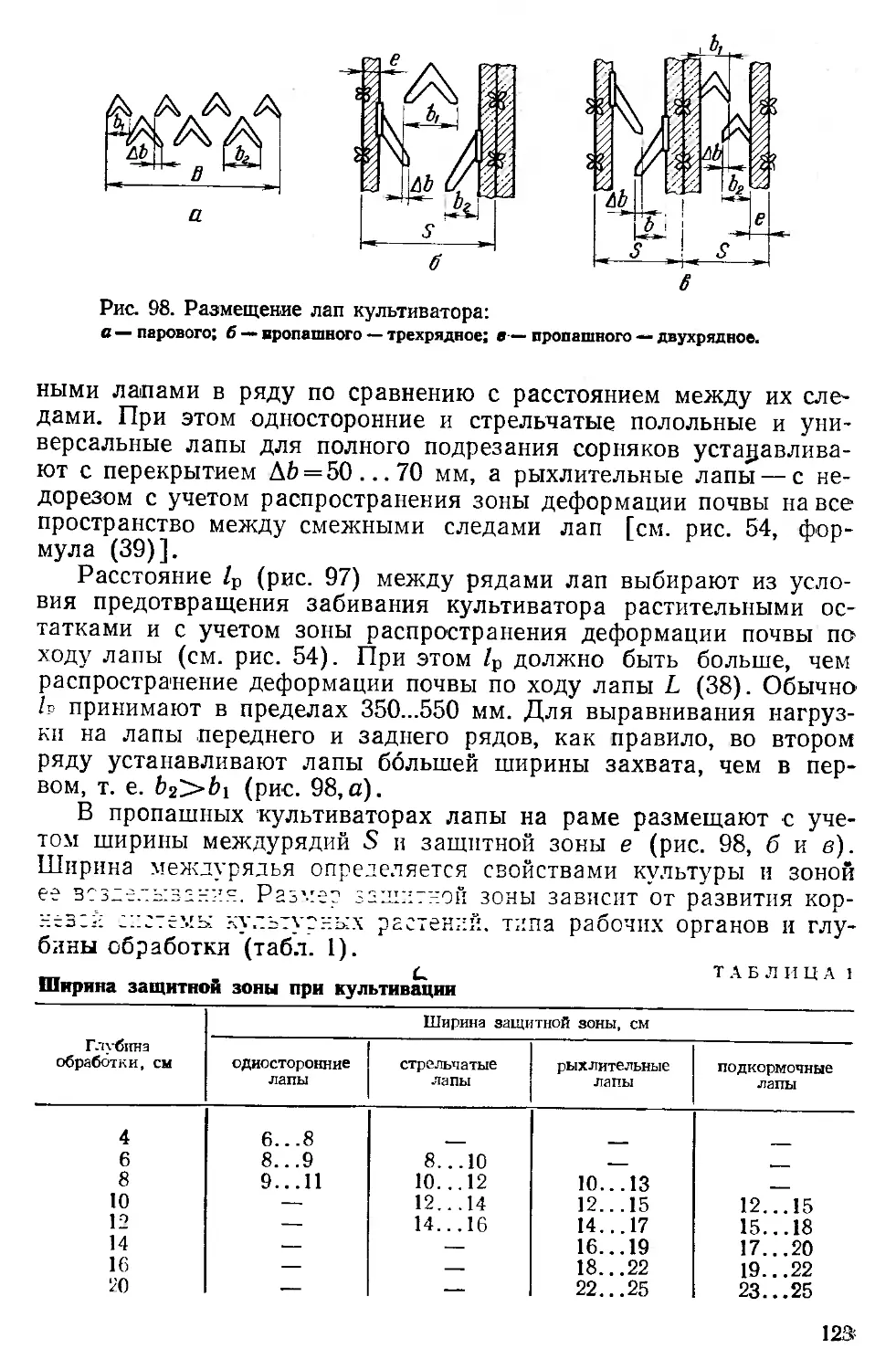
теоретическая и техническая механика и теория механизмов
машин. Широко известны, например, его теории плуга, моло-
тильного аппарата, вентиляторов, соломо- и силосорезок, сен-
ных прессов, зерноочистительных и других машин. Не менее
1
широко известны и такие фундаментальные общие теорети-
ческие исследования, как теория масс и скоростей, теория
удара и разрушения материалов, теория подобия, расчет сил
инерции и, наконец, разработанная им «общая схема» при-
родных явлений и процессов. Труды В. П. Горячкина и до
сих пор не потеряли своего огромного значения и являются
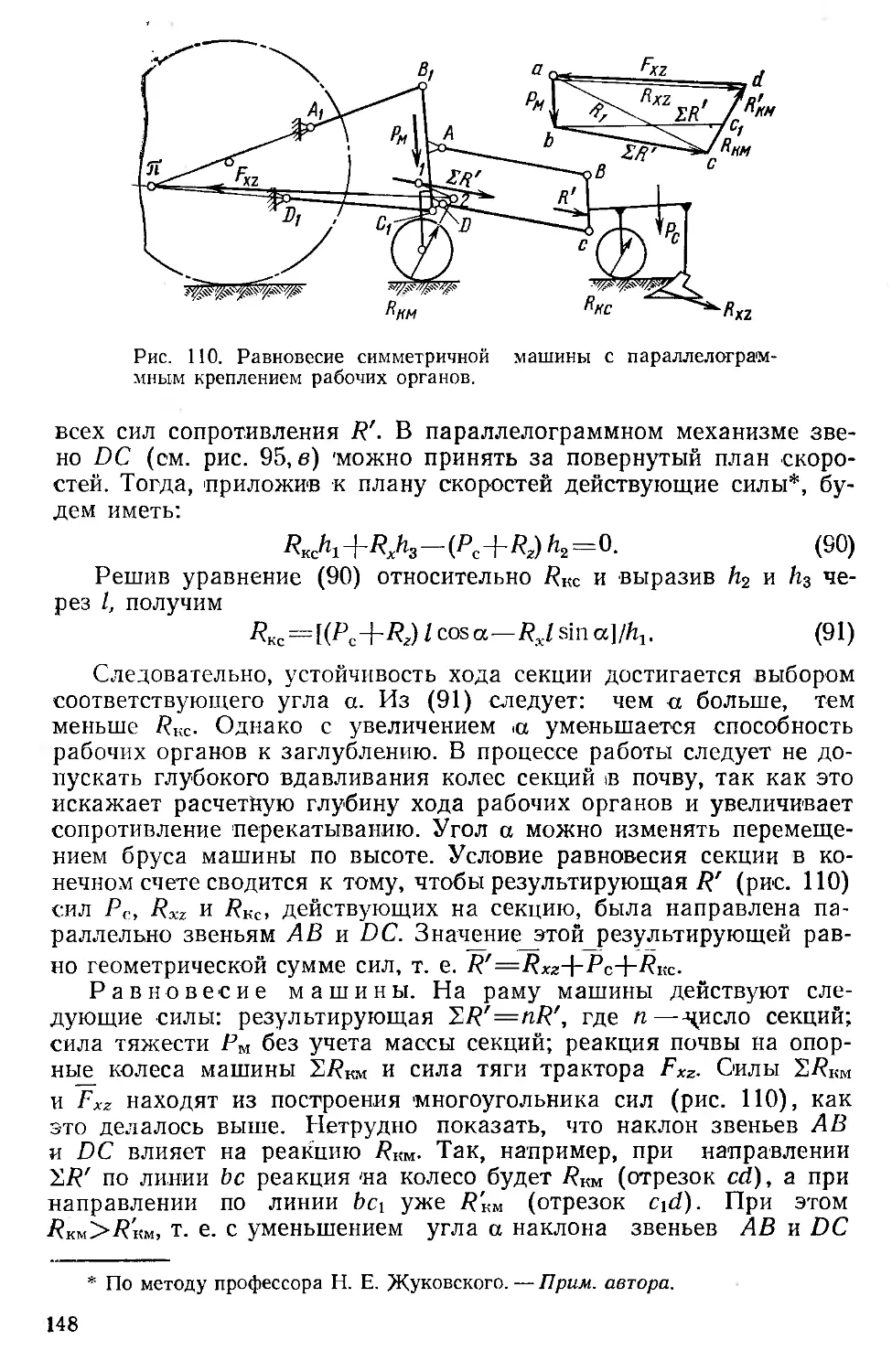
настольной книгой всякого современного ученого в области
теории сельскохозяйственных машин.
За годы Советской власти создана широкая сеть научно-
исследовательских учреждений, конструкторских бюро и ма-
шиноиспытательных станций, работающих по созданию и
совершенствованию сельскохозяйственных машин. Немалую
долю труда вкладывают в это и научные коллективы вузов.
Развивая и углубляя научное наследие В. П. Горячкина, на-
ши ученые, конструкторы и испытатели добились успешного
решения проблемных вопросов комплексной механизации
сельскохозяйственного производства.
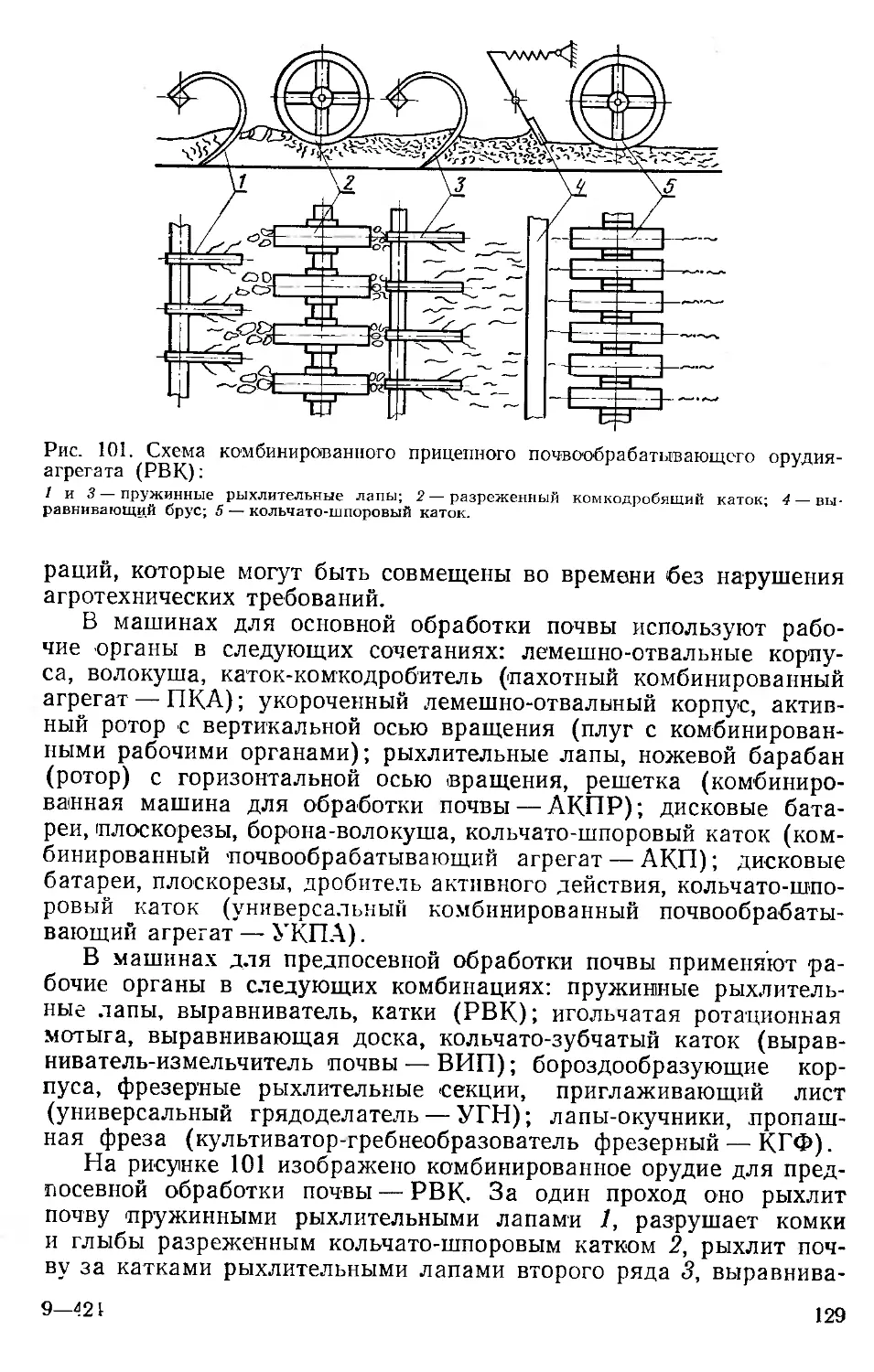
После Великой Октябрьской социалистической революции
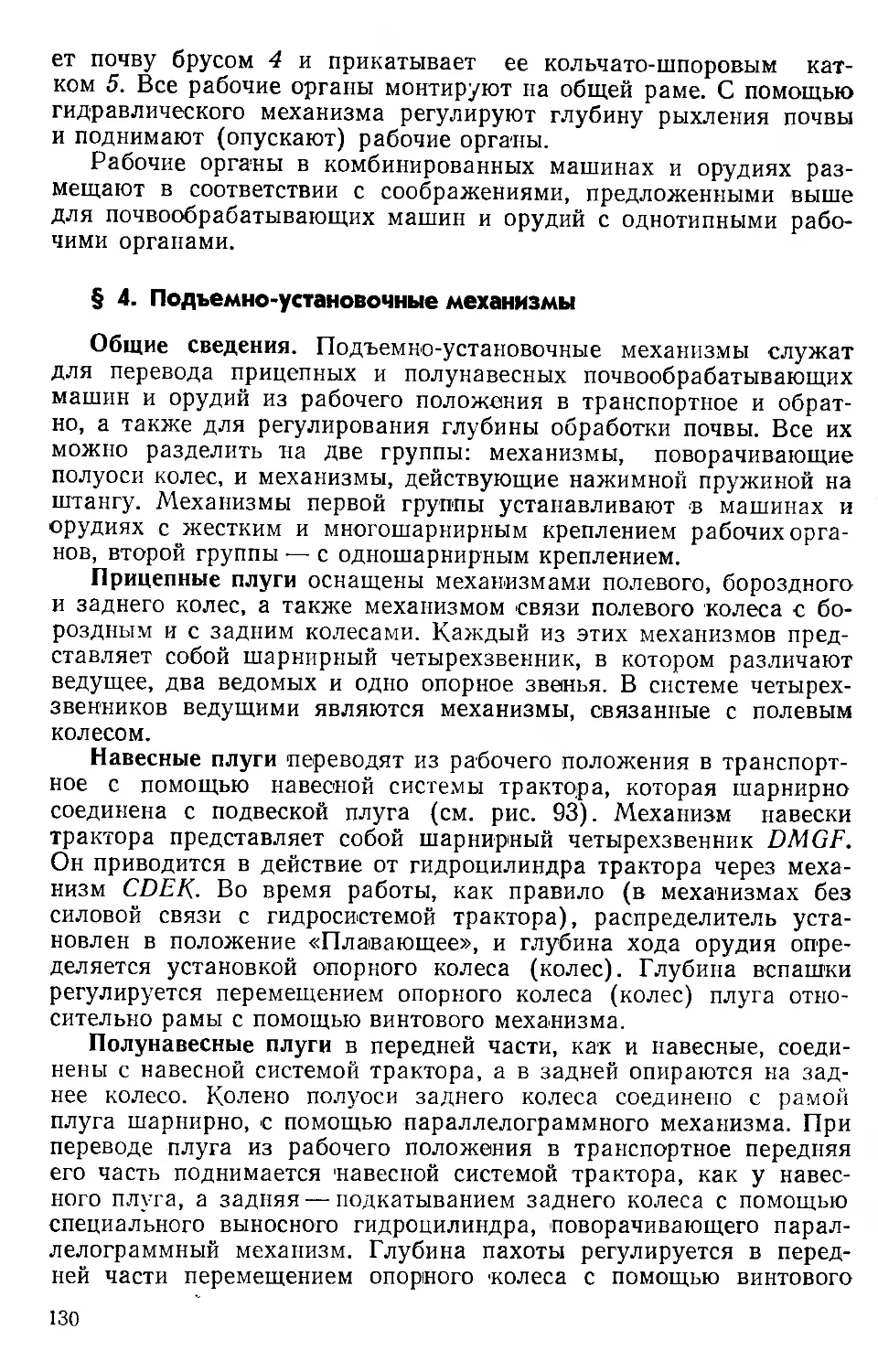
в нашей стране создана мощная индустрия, которая стала
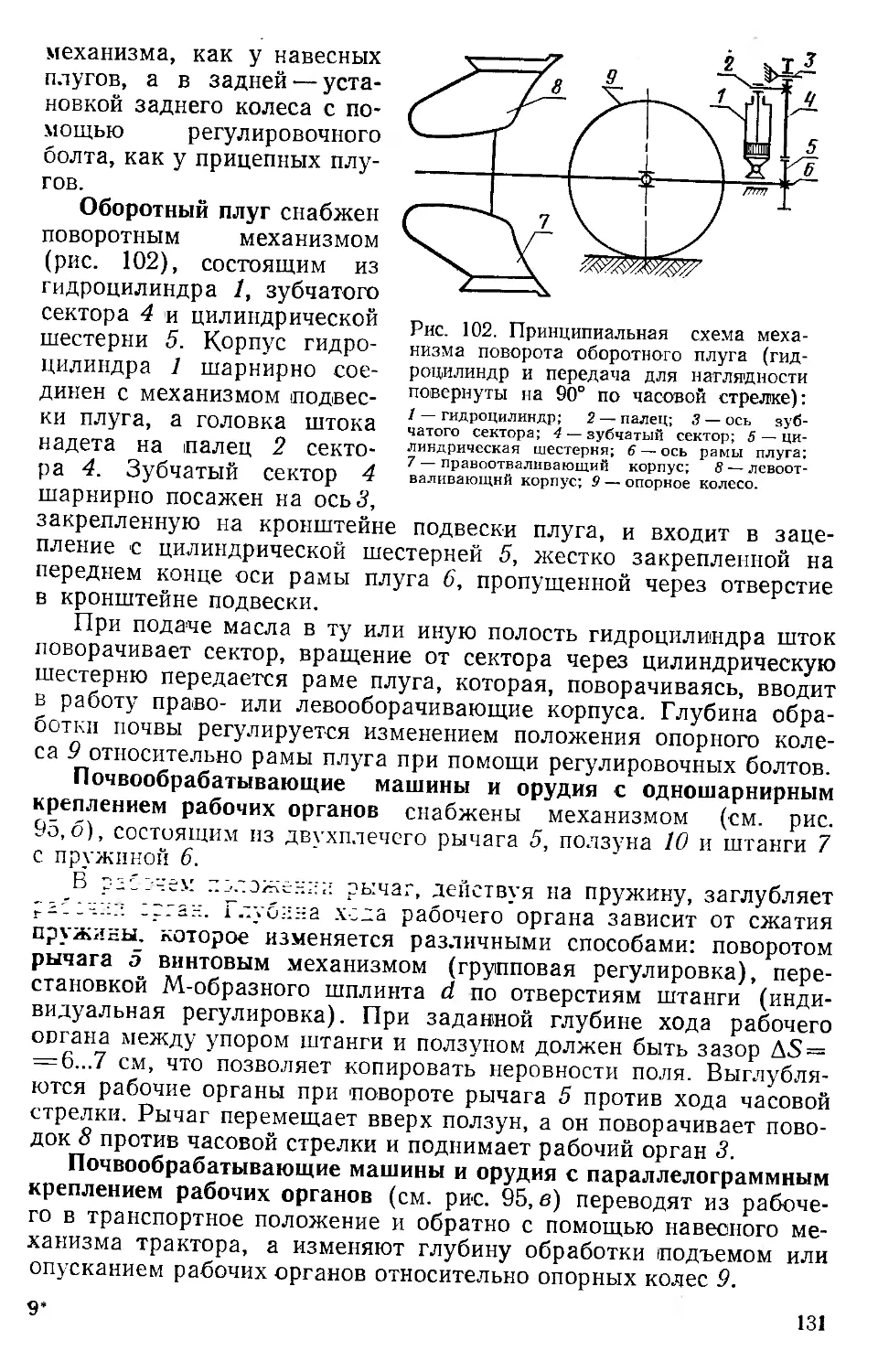
надежной базой бурного роста энерговооруженности социали-
стического сельского хозяйства.
Исторической вехой, определяющей начало крутого подъ-
ема производства сельскохозяйственной техники, явился де-
крет «О сельскохозяйственном машиностроении», подписан-
ный В. И. Лениным 1 апреля 1921 г.
В. И. Ленин придавал большое значение развитию сель-
ского хозяйства, считал, что без него невозможно гармоничное
развитие других отраслей народного хозяйства.
За годы Советской власти заново создана промышлен-
ность тракторного и сельскохозяйственного машиностроения
с большой сетью специализированных конструкторских бюро.
На каждую пятилетку составляется научцр обоснованная
система машин для комплексной механизации сельскохозяй-
ственного производства, учитывающая природно-климатиче-
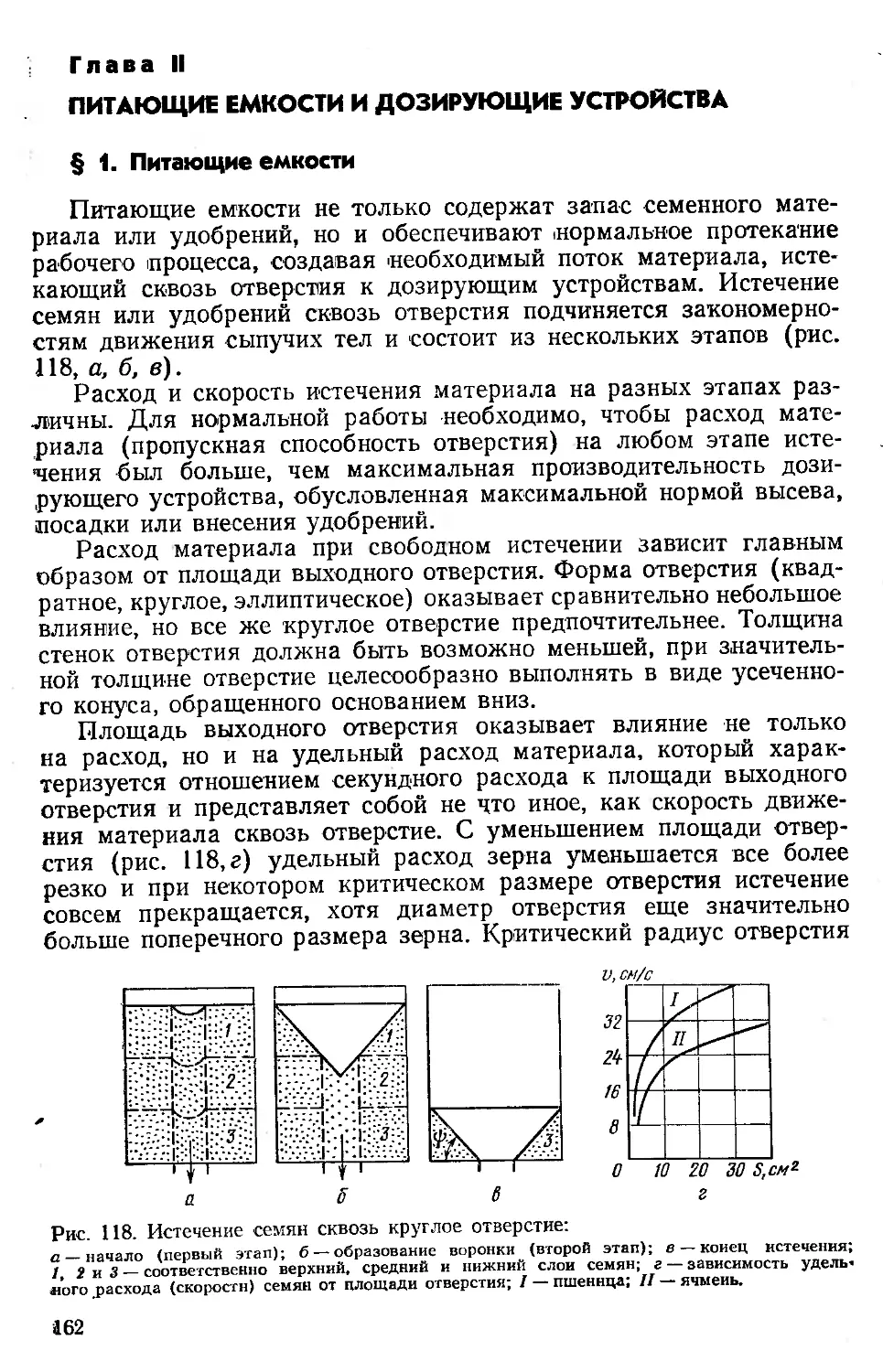
ские условия различных зон страны.
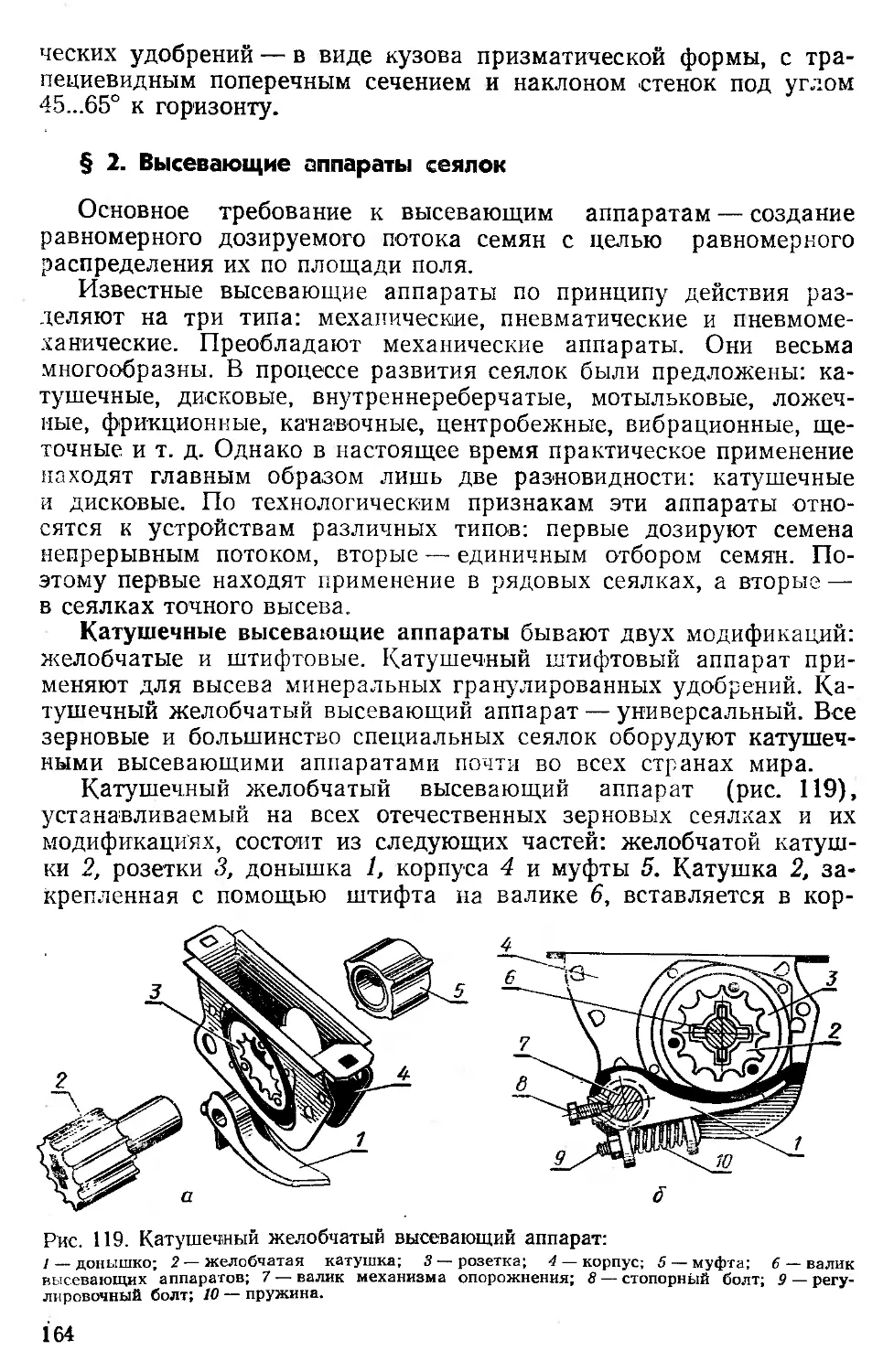
Современная система предусматривает широкое внедрение
более производительных широкозахватных универсальных и
комбинированных машин, выполняющих одновременно не-
сколько технологических процессов, например обработку поч-
вы, посев, внесение удобрений; увеличение парка машин, рас-
считанных на работу с энергонасыщенными тракторами на
скоростях 9...15 км/ч; расширение номенклатуры более манев-
ренных и производительных самоходных уборочных машин;
создание установок с автоматическими устройствами и опти-
мизаторами технологического процесса, а также дальнейшее
повышение надежности механизмов и сокращение времени
на их техническое обслуживание.
Одна из основных особенностей внедряемых машин — вы-
4
сокая степень унификации их узлов и деталей, достигающая
в некоторых случаях 80...90%. Особое внимание при проекти-
ровании машин уделяется их соответствию требованиям без-
опасности и гигиены труда, а также вопросам охраны окру-
жающей среды.
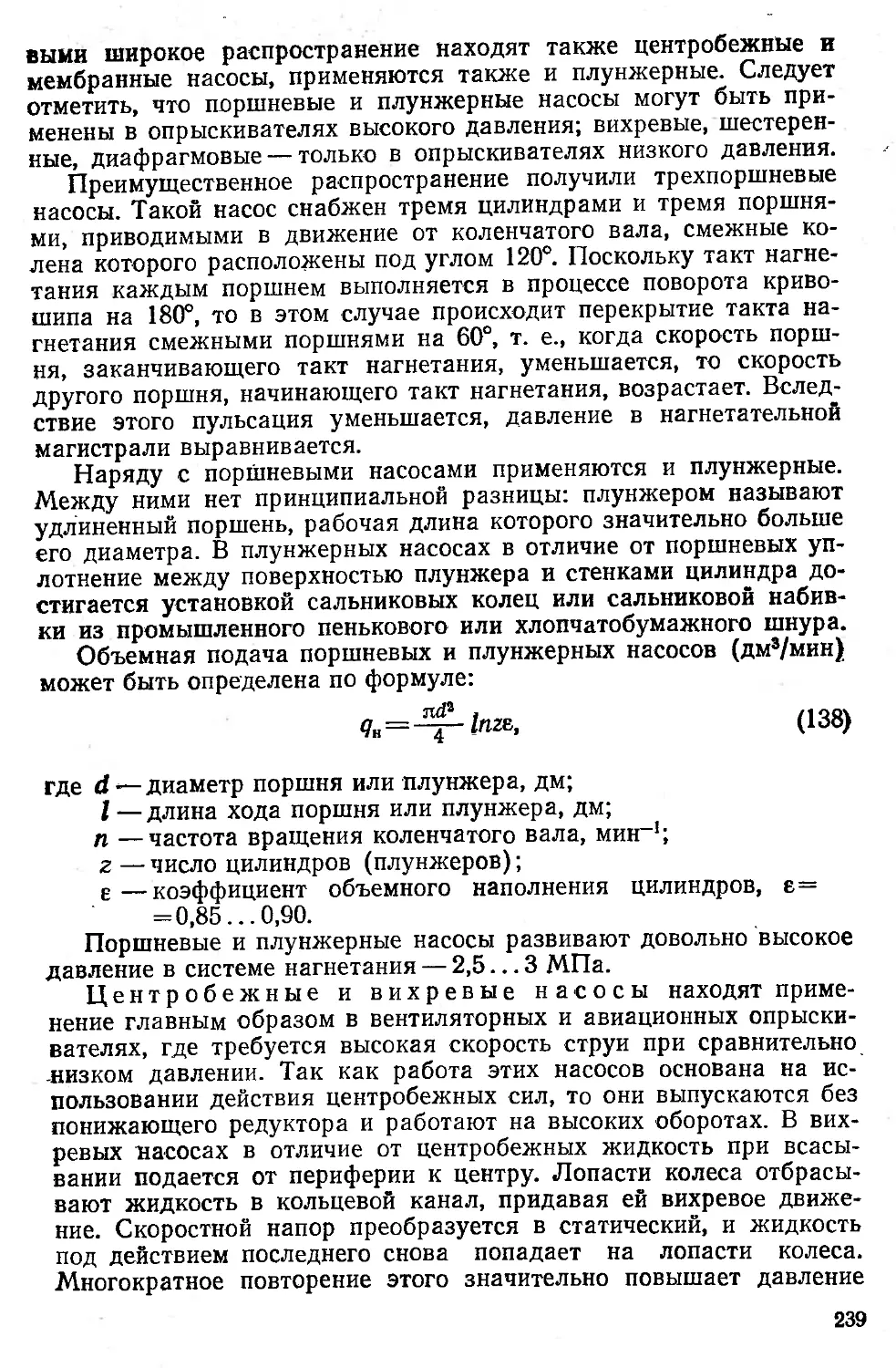
В докладе Генерального секретаря ЦК КПСС товарища
Л. И. Брежнева XXV съезду КПСС указано:
«Село насыщается машинами, сложным оборудованием.
А это значит, что актуальной становится также задача улуч-
шения инженерно-технической службы в сельском хозяйстве».
В свете этой задачи соответственно возрастает роль и
значение инженера по механизации процессов сельскохозяй-
ственного производства, как организатора использования
сельскохозяйственной техники. Для правильной, рациональ-
ной организации инженерно-технической службы в сельском
хозяйстве инженеру-механику нужны глубокие знания конст-
рукций и теории рабочих процессов сельскохозяйственных ма-
шин, умение настраивать эти машины на оптимальный режим
работы в зависимости от изменяющихся свойств и состояния
обрабатываемого материала. Учитывая это, авторы стреми-
лись осветить сущность технологических процессов, раскрыть
основные закономерности, связывающие качество работы и
расход энергии с технологическими свойствами обрабатывае-
мых материалов, регулировки рабочих органов в зависимо-
сти от свойств и состояния обрабатываемого материала и
другие вопросы, знание которых необходимо специалистам
эксплуатационного профиля для решения задач инженерной
практики.
Со времени выхода в свет первого издания учебного посо-
бия в науке и передовой практике сельскохозяйственного про-
изводства накопилось немало нового; расширилось содержа-
ние курса, в который наряду с сельскохозяйственными маши-
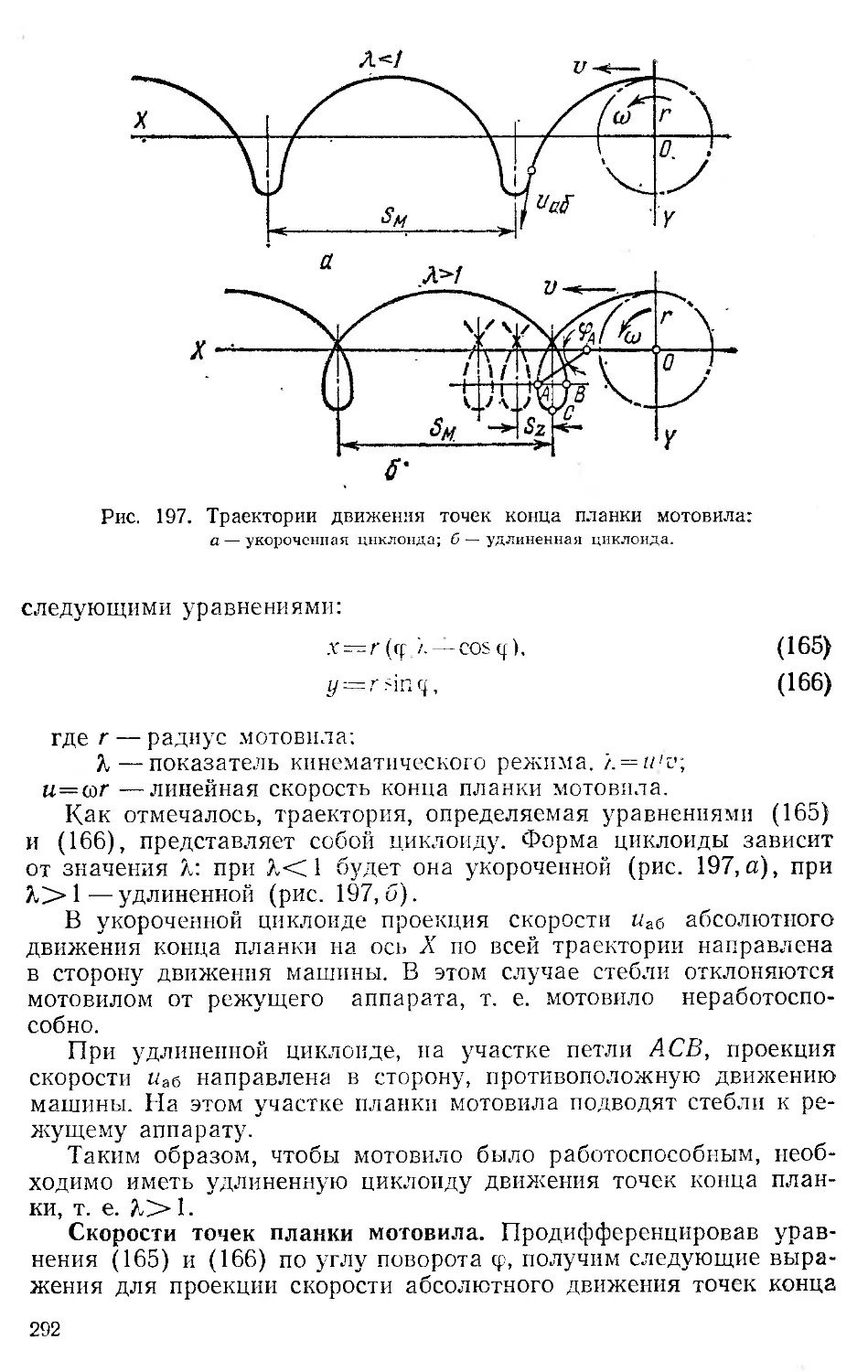
нами включены и мелиоративные. Все это нашло отражение
во втором издании учебника. Несмотря на то что учебное по-
собие переработано практически полностью, принцип, поло-
женный в основу построения первого издания, сохранился без
изменений. Каждый раздел охватывает группу машин,
объединенных общностью выполняемых ими технологических
процессов и операций. Технологические процессы и операции
изложены в духе традиций классической школы академика
В. П. Горячкина, заложенных в земледельческой механике.
Учитывая то, что марки машин часто меняются, а принципы
их действия многие годы остаются без существенных измене-
ний, авторы исключили описание конструкций машин по мар-
кам и систематизировали их по особенностям технологиче-
ских процессов, рассматривая главным образом лишь базовые
модели наиболее перспективных машин. При этом авторы
стремились к обобщению теории рабочих и технологических
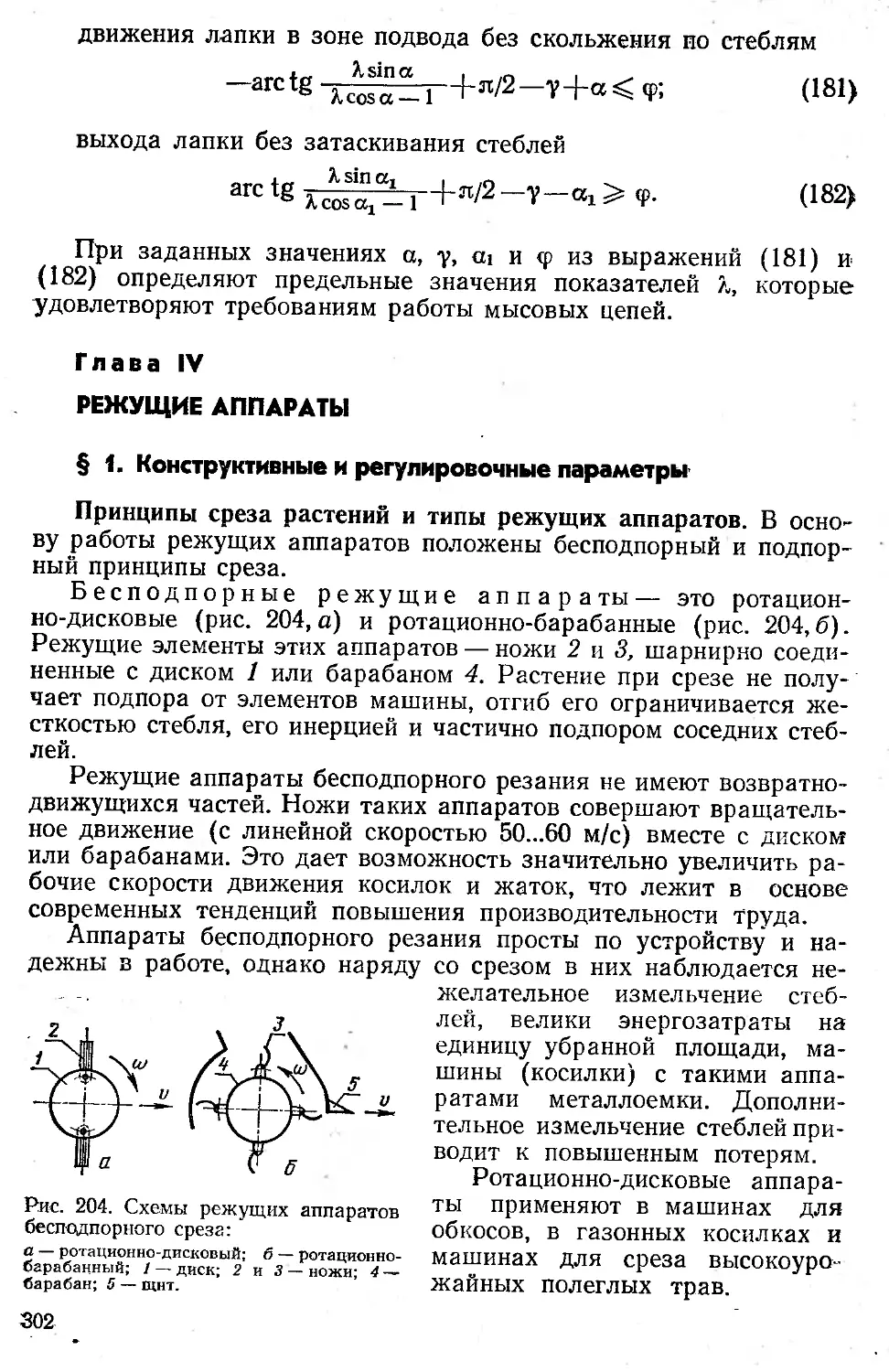
5
процессов сельскохозяйственных и мелиоративных машин,
т. е. к созданию учебника, рассматривающего общие методы
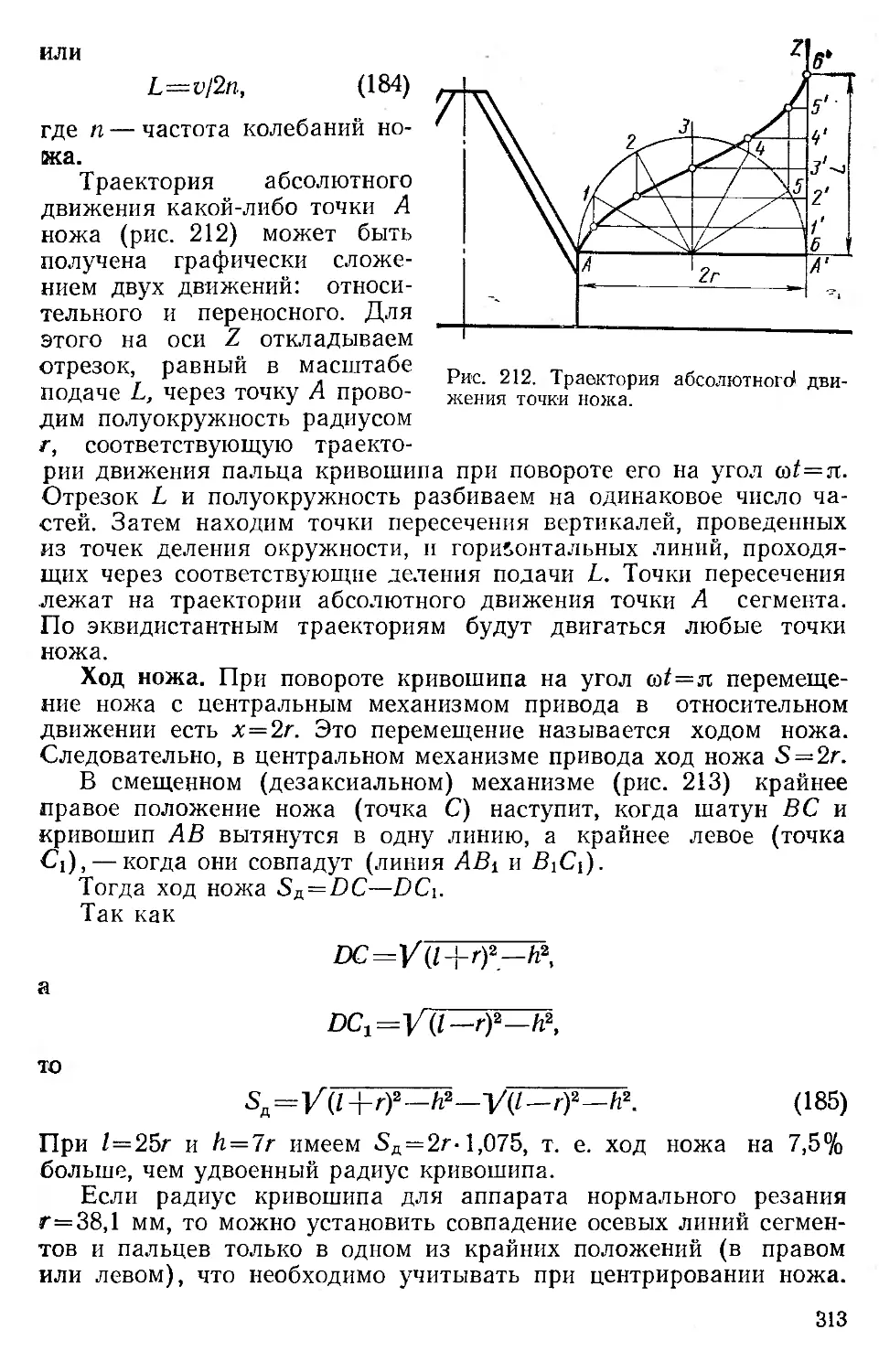
инженерного расчета рабочих и технологических процессов
сельскохозяйственных и мелиоративных машин, по уровню
обобщения, близкому к таким дисциплинам, как, например,
техническая механика.
Чрезвычайное многообразие технологических принципов,
заложенных в конструкции сельскохозяйственных и мелиора-
тивных машин, обуславливает многообразие методов и средств,
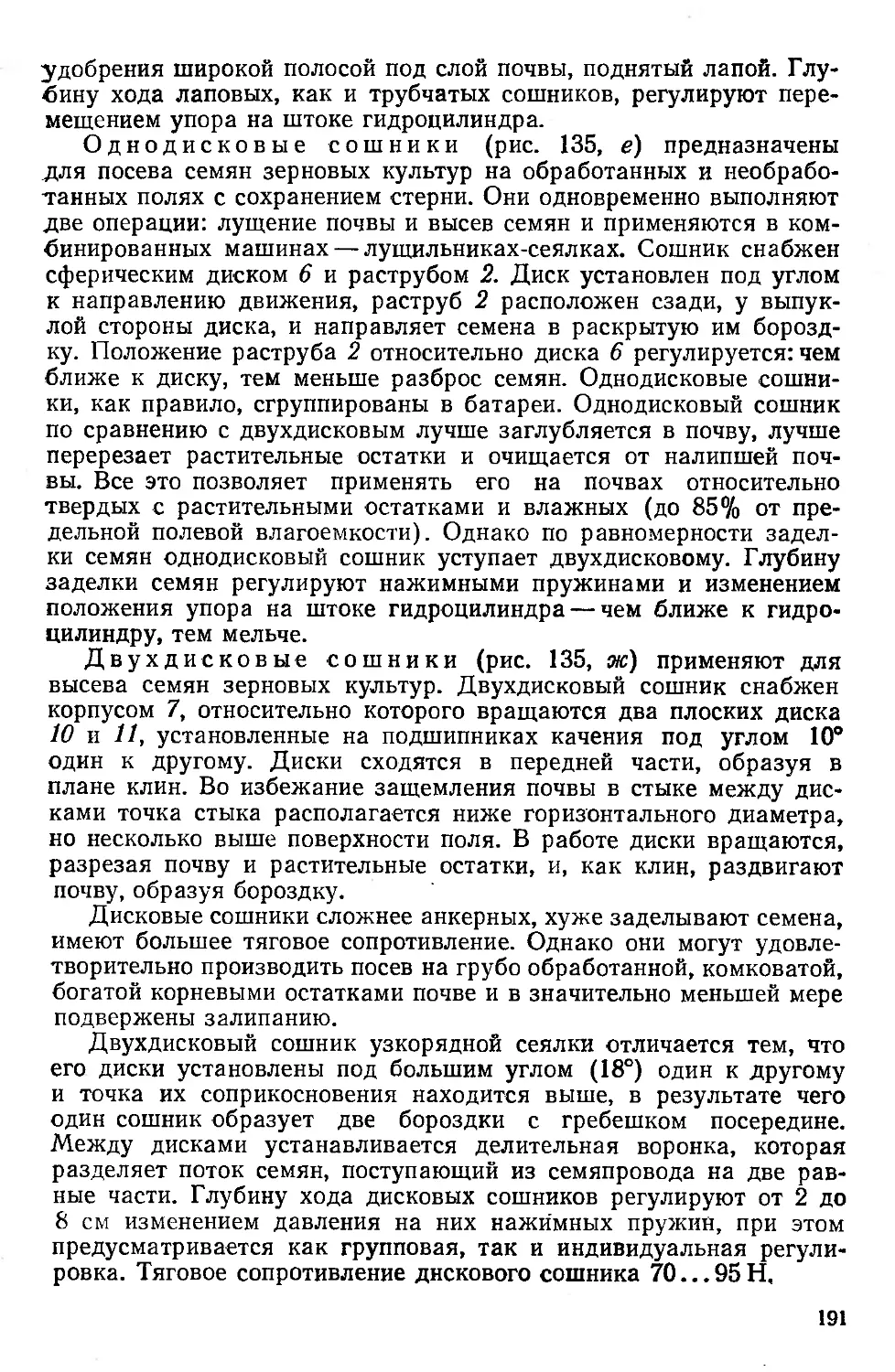
которые лежат в основе теории рабочих процессов, расчета
регулировочных параметров и режимов работы. В этой специ-
фичности предмета кроются определенные трудности при его
освоении студентами.
Опыт показывает, что эти трудности легче преодолеваются,
если параллельно с чтением лекций проводятся упражнения
в решении задач по расчету регулировочных параметров и
настройке машин на оптимальный режим работы в зависимо-
сти от свойств и состояния обрабатываемого материала. По-
этому во второе издание включены упражнения по важнейшим
разделам курса.
Второе издание снабжено также предметным указателем,
в котором нашли отражение лишь основные понятия и опре-
деления, приведенные в тексте учебника.
Новая характерная черта учебника — ярко выраженная
мировоззренческая направленность. Во всех его разделах на-
шли отражение марксистско-ленинская идеология, политика
КПСС и Советского правительства в аграрных вопросах. Это
будет способствовать укреплению марксистско-ленинского
мировоззрения, сочетанию глубокой профессиональной подго-
товки с расширением общенаучного и культурного кругозора,
повышением общественно-политической зрелости будущих
инженеров сельскохозяйственного производства.
При переиздании учтены все те полезные советы и ценные
замечания, которые были сделаны академиком АН СССР
И. И. Артоболевским и доктором технических наук профессо-
ром А. А. Дубровским*.
* Механизация и электрификация социалистического сельского хозяй-
ства, 1971, № 9, с. 58.
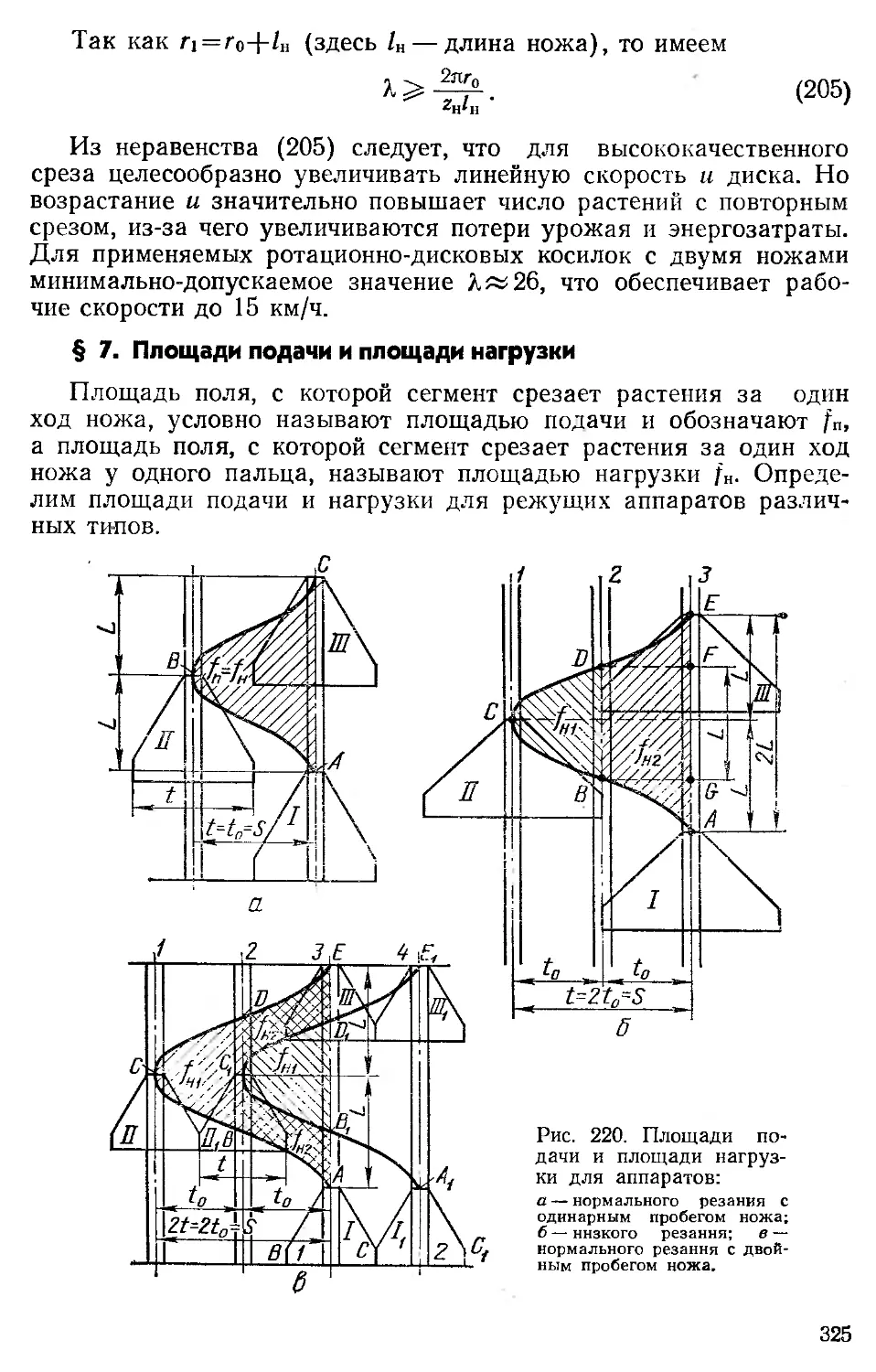
Раздел первый
МАШИНЫ И ОРУДИЯ ДЛЯ ОБРАБОТКИ ПОЧВЫ
Почва — поверхностный слой суши земной коры, обладающий
плодородием.
Почва — основное средство производства в сельском хозяйстве.
Поэтому чрезвычайно велика ответственность каждого поколения
людей за ее состояние. По словам К. Маркса: «Даже целое обще-
ство, нация и даже все одновременно существующие общества,
вместе взятые, не есть собственники земли. Они лишь ее владель-
цы, пользующиеся ею, и, как добрые отцы семейства, они должны
оставить ее улучшенной последующим поколениям»*. Однако
предшествующие поколения распоряжались ею так, что к настоя-
щему времени площадь почв, ранее плодородных, а теперь поте-
рянных для сельского хозяйства, составляет 20 млн. км2, что почти
в 1,5 раза больше, чем площадь пахотных земель в настоящее вре-
мя (14,34 млн. км2). Для того чтобы сохранить почву, нужно знать
ее физико-механические свойства и применять рациональные си-
стемы ее обработки, рациональные рабочие органы почвообраба-
тывающих орудий. Однако, как писал В. П. Горячкин**: «Совре-
менное учение о почве дает, к сожалению, совершенно недостаточ-
ные указания о физических свойствах почвы, имеющих громадное
значение для конструкции плуга. К таковым относятся величина
частиц, трение, прилипание, влажность и связность... Все эти вели-
чины имеют, конечно, вспомогательное значение, но вместе с тем
представляют основной фундамент, на котором должно покоиться,
построение плугов».
Глава I
СТРОЕНИЕ, ФАЗОВЫЙ СОСТАВ И ТЕХНОЛОГИЧЕСКИЕ
СВОЙСТВА ПОЧВЫ
§ 1. Строение и фазовый состав
Почва — не сплошная однородная масса, а трехфазная дисперс-
ная среда, состоящая из твердых, жидких и газообразных частиц,
раздробленных и перемешанных между собой. Кроме того, в почве
* Маркс К. и Энгельс Ф. Соч., изд. 2-е, т. 25, ч. II, с. 337.
** Г о р я ч к и н В. П. Собр. соч., т. 2, М.; Колос, 1968, с. 189.
7
содержатся растительные остатки (корни и стебли растений) и жи-
вые организмы растительного и животного происхождения. Поч-
венные микроорганизмы, разлагая органические остатки, не толь-
ко обеспечивают минеральное питание растений, но и участвуют в
почвообразовательном процессе, способствуя накоплению гумуса,
оказывающего положительное влияние на технологические свойст-
ва почвы.
В структурной почве твердые элементы объединены в агрегаты
(комочки), пронизанные капиллярными порами. Между комочка-
ми имеются более крупные некапиллярные промежутки (гравита-
ционные пустоты).
Так как промежутки между твердыми частицами заполнены во-
дой и воздухом, то чем больше в почве воды, тем меньше воздуха,
и наоборот.
От соотношения в почве жидкой и газообразной фаз в большой
степени зависят ее технологические свойства.
Основные общие характеристики строения почвы — скважность
(порозность, пористость) и плотность (объемная масса).
Скважность-—отношение объема пустот к общему объему
почвы, выраженное в процентах. Скважность зависит от структуры
почвы и изменяется от 40...50 % в песчаных до 80...90% в торфяных
почвах; суглинки и глины занимают промежуточное положение, их
скважность 50...60%.
Плотность — отношение массы т абсолютно сухой почвы к
объему V исследуемой пробы, взятой без нарушения ее естествен-
ного сложения:
pn=m/V. (1)
Плотность зависит от механического состава, содержания гуму-
са и скважности почвы. Плотность пахотного слоя почвы изменяет-
ся в широких пределах — от 0,9 до 1,6 г/см3. Подпахотные гори-
зонты почвы имеют более высокую плотность—1,6...1,8 г/см3.
Плотность влияет не только на развитие корней растений, но и
на водный, воздушный и пищевой режимы. Опыты показали, что
для различных видов растений и различных почв существуют оп-
тимальные плотности. При уплотнении почвы выше оптимальной
плотности урожай снижается, а при очень высоком уплотнении
вообще отсутствует. Поэтому плотность почвы считается важным
фактором плодородия.
Плотность почвы можно регулировать с помощью механической
обработки почвы в соответствии с требованиями для отдельных
видов растений.
Твердая фаза представлена в почве «скелетом» — каменистыми
включениями (частицы больше 1 мм) и мелкоземом (частицы
меньше 1 мм).
Отношение массы «скелета» к массе мелкозема позволяет опре-
делить каменистость, а анализ мелкозема — механический состав
почв.
8
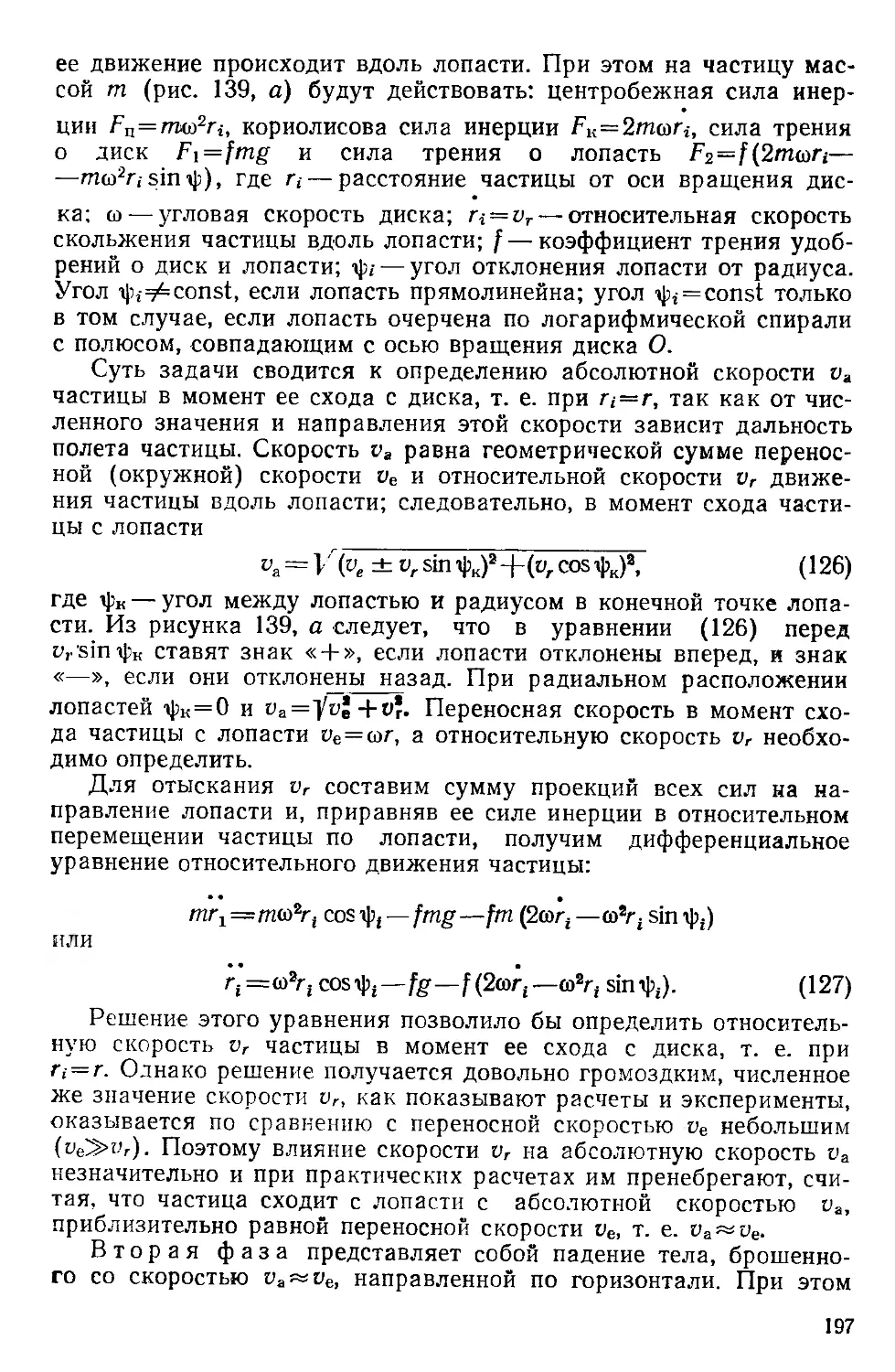
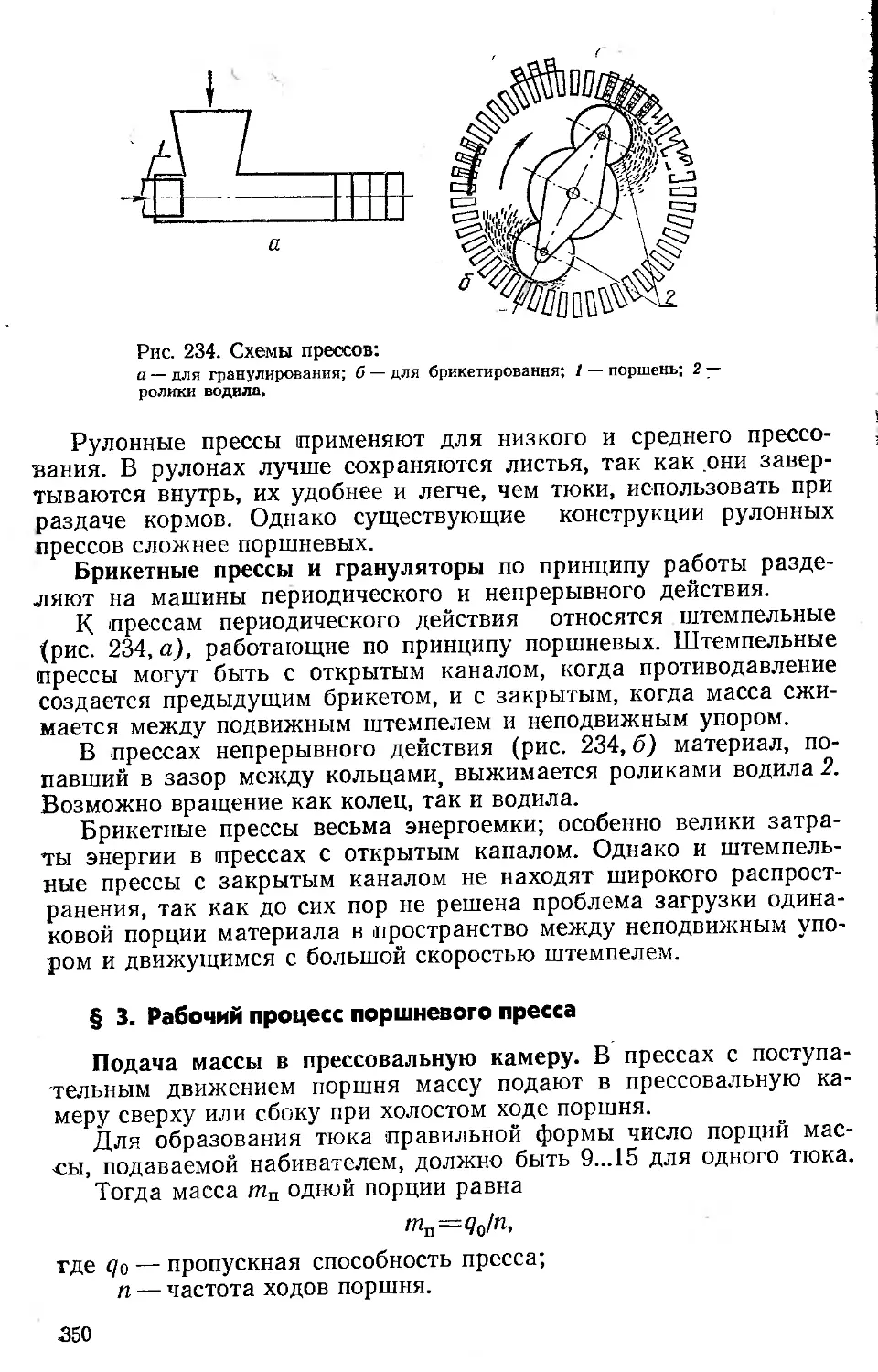
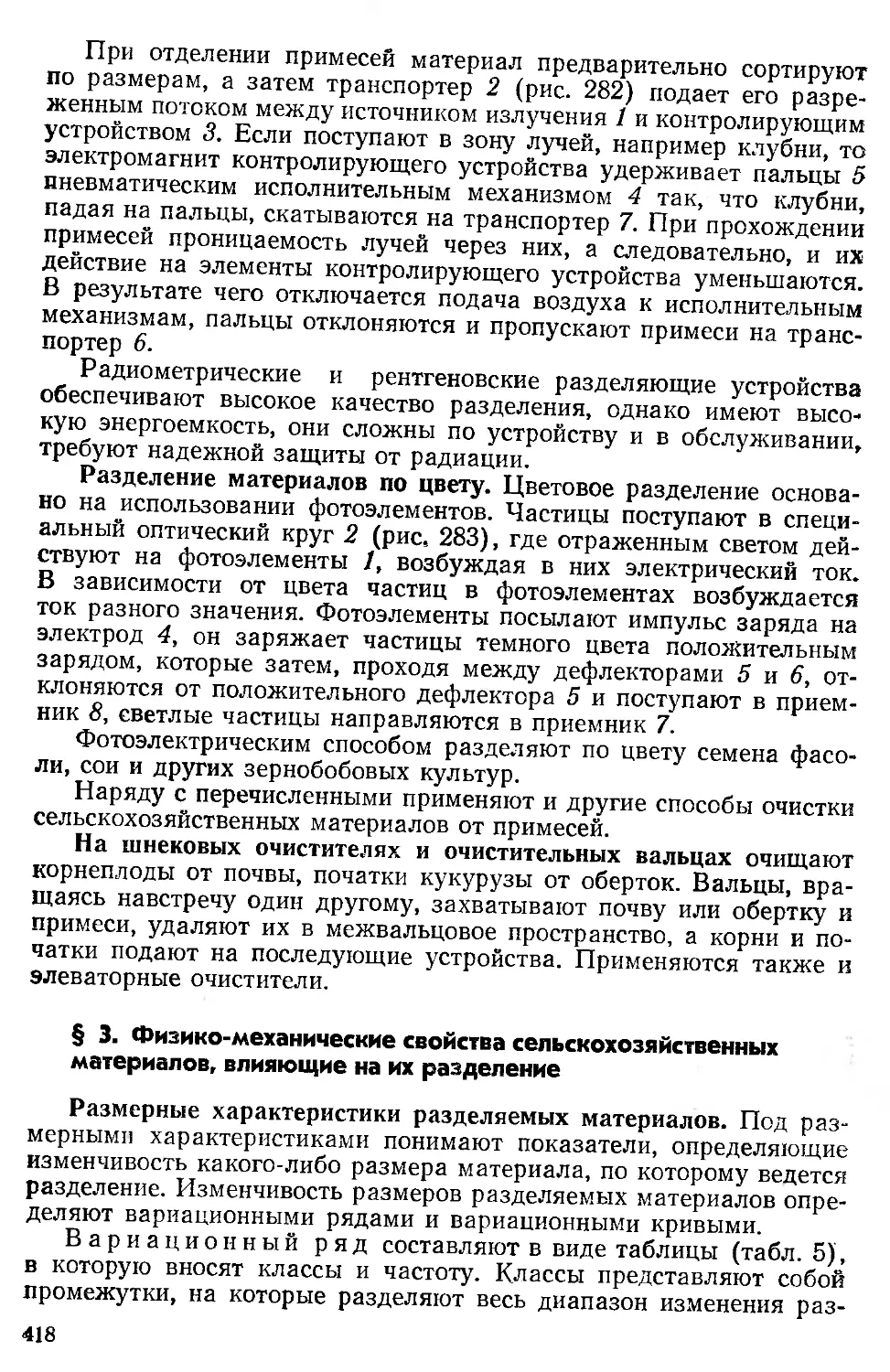
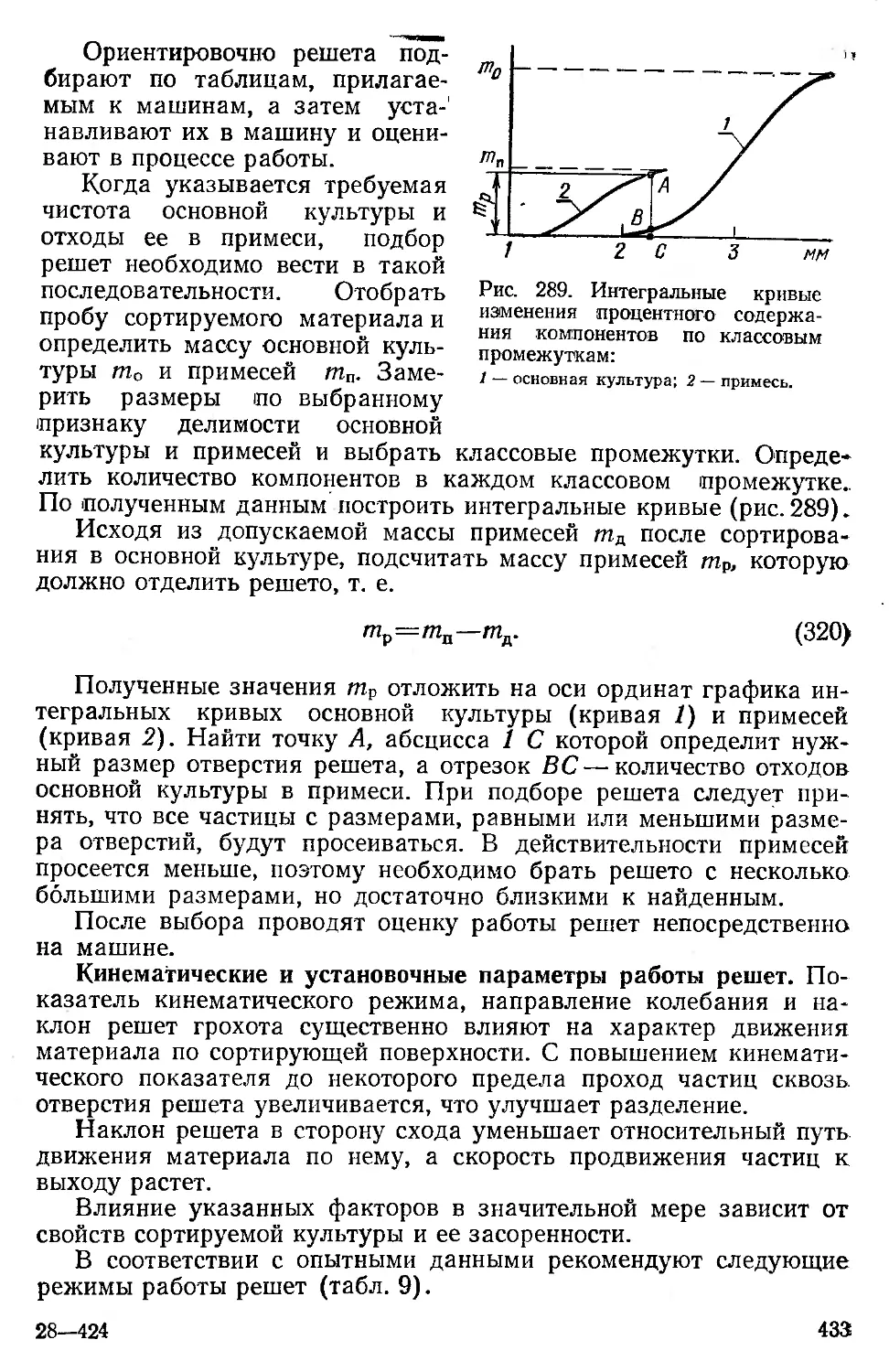
По
каменистости почвы подразделяются на следующие катего-
некаменистая — содержит
слабокаменистая — »
среднекаменистая — »
сильнокаменистая — »
камней меньше 0,5%;
» » 0.5...5 %;
» » 5...10%;
» » больше 10%.
При классификации почв по механическому составу мелкозем
условно разделяют на две фракции: «физическую глину» (частицы
меньше 10 мкм) и «физический песок» (частицы больше 10 мкм).
Почвы с различным соотношением этих фракций получили различ-
ные наименования:
Содержание «фнзн- Содержание «физи-
ческой глины», % ческого песка», %
Глина............................Более 50 Менее 50
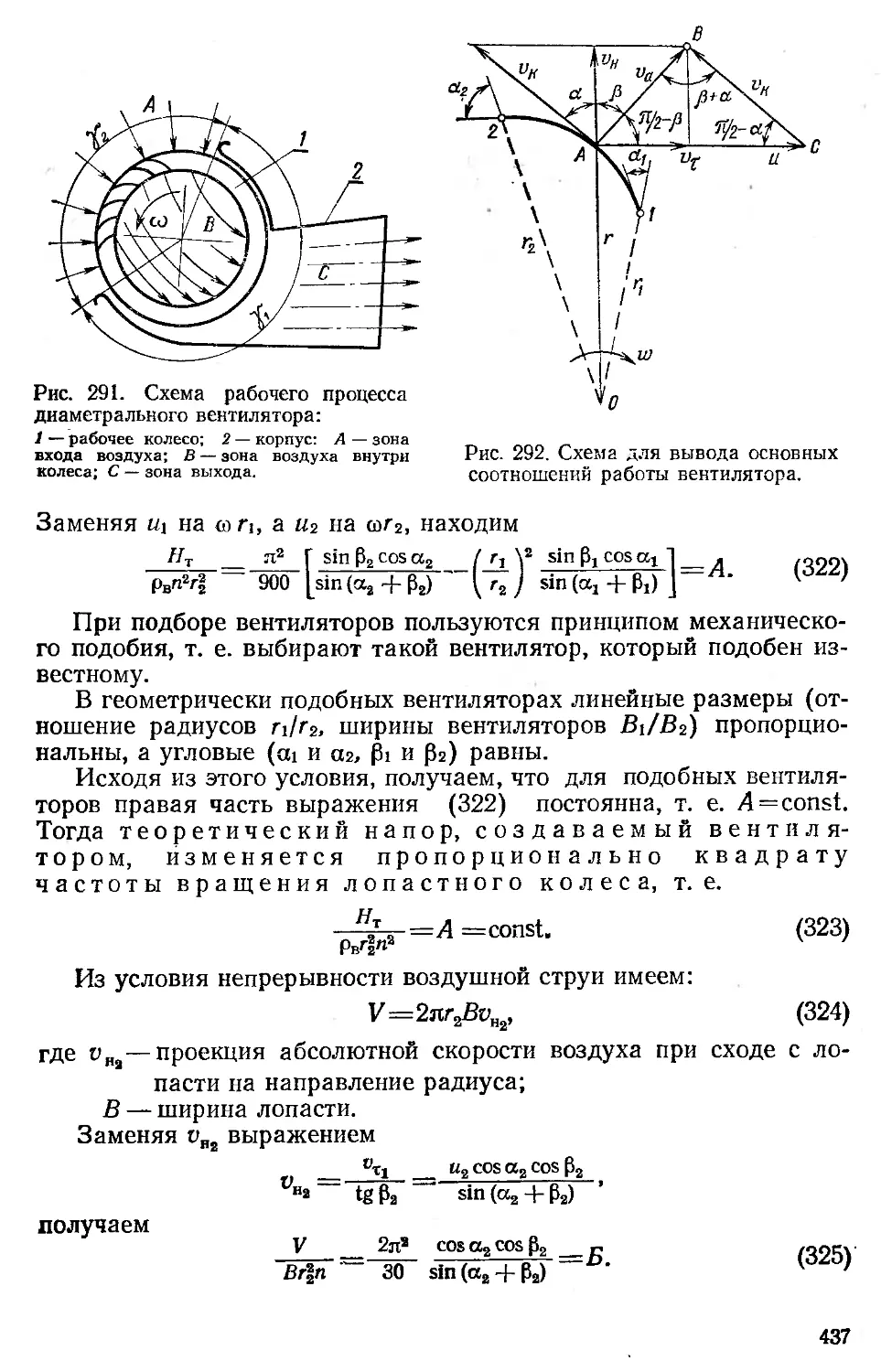
Суглинок....................... 50...20 50...80
Супесь......................... 20...10 80...90
Песок............................Менее 10 Более 90
Глинистые частицы содержат цементирующие вещества и обус-
лавливают связность почв, песчаные, напротив, нелипки и непла-
стичны.
Почвы с высоким содержанием глинистых частиц относят к
тяжелым. Во влажном состоянии при механической обработке они
налипают на рабочие органы, в сухом образуют крупные глыбы.
Такие почвы хорошо удерживают влагу, но плохо ее поглощают,
растительные остатки и органические удобрения разлагаются в
них медленно.
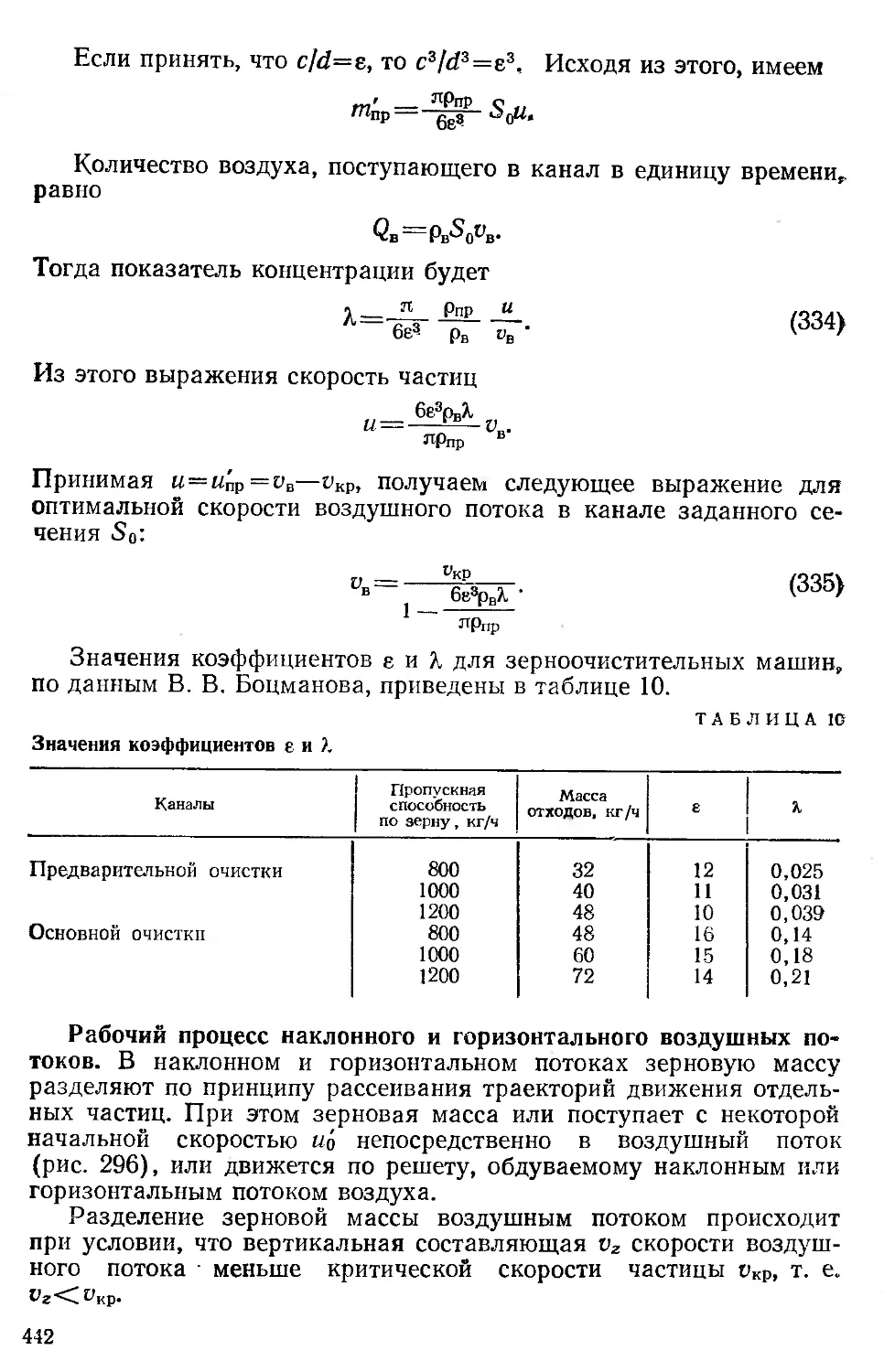
Почвы с высоким содержанием песчаных частиц относят к лег-
ким. Они легко крошатся, хорошо поглощают влагу, но плохо ее
удерживают, растительные остатки и удобрения разлагаются в них
быстро.
Суглинистые и супесчаные почвы по своим свойствам занима-
ют промежуточное положение. Они сравнительно легко крошатся,
хорошо поглощают и удерживают влагу, обладают большим пло-
дородием.
Твердая фаза почвы может быть структурной и бесструктурной.
Масса структурной почвы разделена на отдельные агрегаты; в
бесструктурной почве отдельные твердые элементы залегают
сплошной массой. Структурные агрегаты представляют собой ком-
ки почвы, состоящие из связанных между собой механических эле-
ментов (песка, пыли, ила и т. п.). Размер и форма агрегатов весьма
разнообразны.
В соответствии с ОСТ 70.2.15—73 структурные агрегаты по раз-
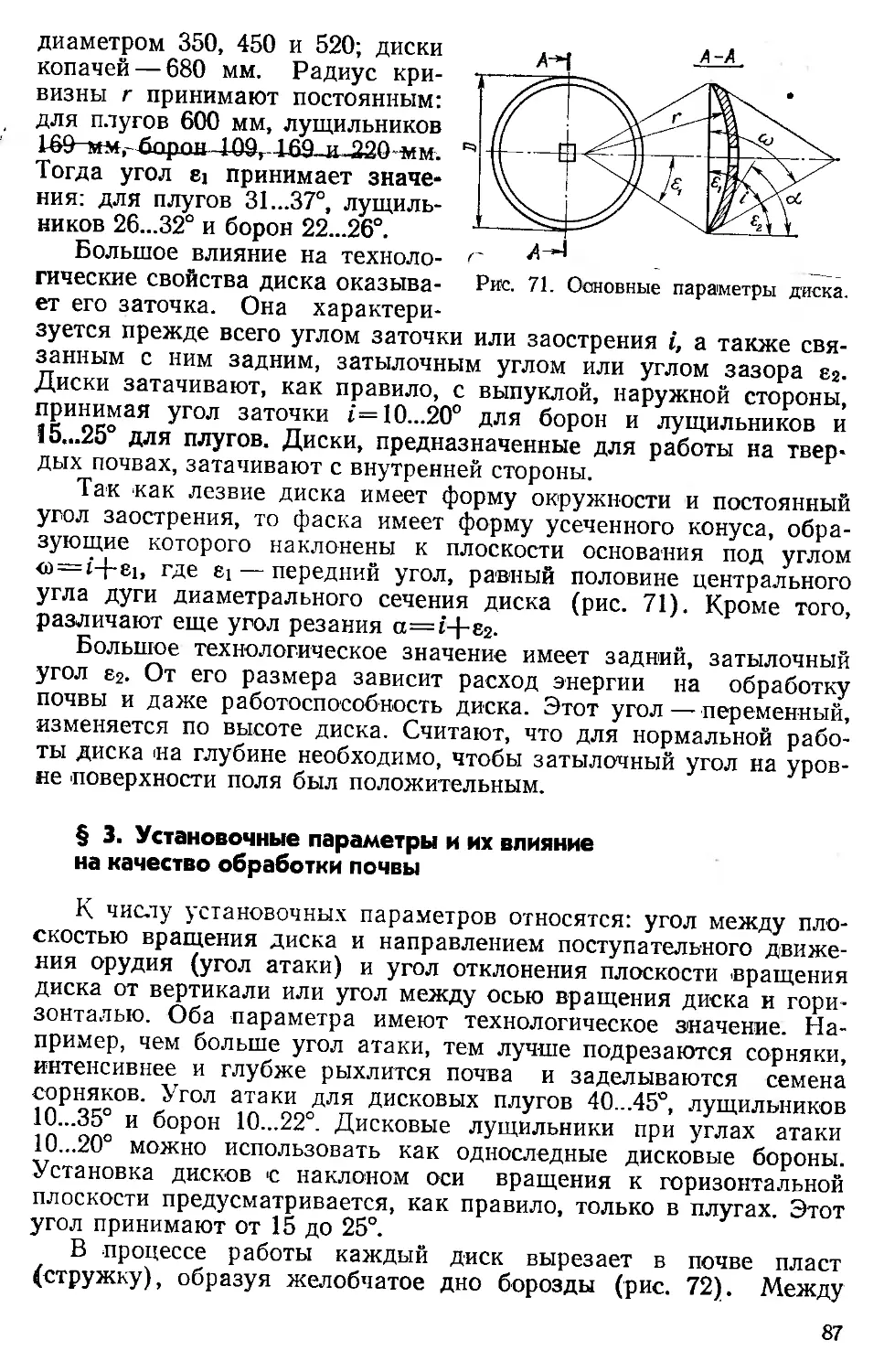
мерам подразделяются на следующие типы:
глыбистая структура — агрегаты размером более 10 мм;
комковатая » » » » 10...3 мм;
зернистая » » » » З...О,25 мм.
Агрегаты размером менее 0,25 мм относят к микроструктурным
называют пылеватыми. Наиболее ценными считают агрегаты
9
размером 1...3 мм, так как они отличаются наибольшей водопроч-
ностыо, т. е. устойчивостью против размывающего действия воды.
Однако и более крупные комочки размером свыше 3 и до 10 мм
считаются желательными.
Агрегаты размером менее 1 мм считаются эрозионно-опасными.
Наиболее опасными являются микроструктурные агрегаты и пес-
чинки размером от 0,5 до 0,1 мм. Если в верхнем слое почвы
(0—5 см) содержание агрегатов менее 1 мм превышает 50%, то
при отсутствии живой или мертвой растительности возникает вет-
ровая эрозия. Структурные агрегаты влияют не только на плодо-
родие почвы, но и на показатели работы почвообрабатывающих
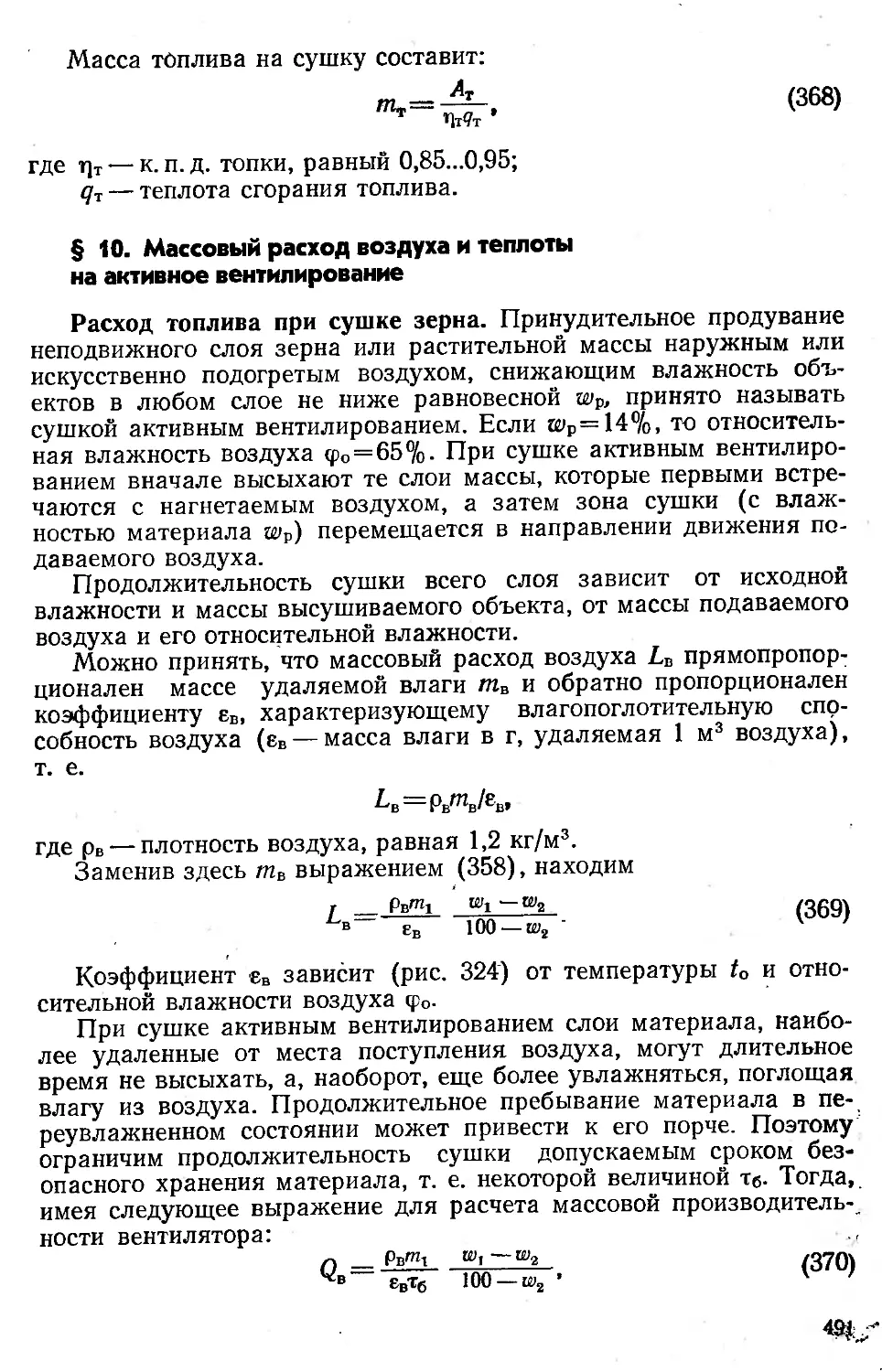
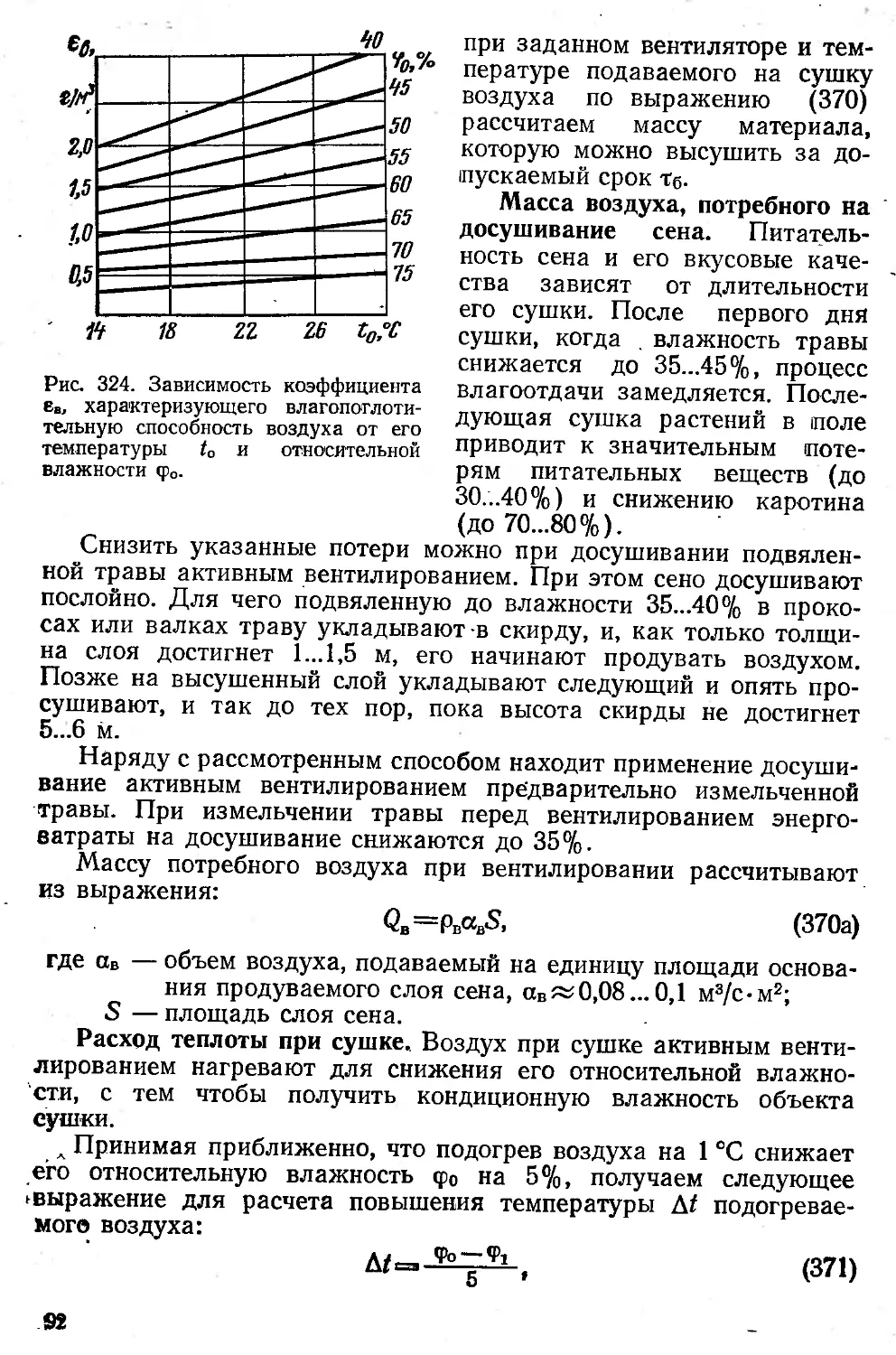
машин и орудий. При обработке структурных почв качество рых-
ления лучше, а тяговое сопротивление меньше. Частые обработки
почвы, а также многочисленные проходы по ней колес тракторов и
автомобилей могут привести к разрушению структуры и превраще-
нию почвы из структурной в бесструктурную.
Основная физическая характеристика твердой фазы — удельная
масса почвы (плотность или удельная масса твердой фазы). Удель-
ной массой почвы называют массу единицы объема твердой фазы
(без пор) в абсолютно сухом состоянии, которая определяется, как
отношение массы твердой фазы т к ее объему V, т. е. рт. $ = m/V.
Удельная масса твердой фазы зависит от соотношения входя-
щих в ее состав компонентов. Например, удельная масса глины 2,7,
песка 2,65, гумуса не более 1,4 г/см3. Удельная же масса почвы
находится, как правило, в указанном интервале, так как представ-
ляет собой средневзвешенную удельную массу компонентов. Так,
удельная масса дерново-подзолистой почвы 2,4...2,6, а торфяной —
1,4...1,7 г/см3.
Жидкая фаза представлена в- почве водой или растворами раз-
личных веществ в ней. В почве различают свободную и связанную
воду. Так как связанная вода в процессе механической обработки
почвы заметным образом себя не проявляет, а свободная оказы-
вает большое влияние на технологические свойства почвы (вяз-
кость, пластичность, липкость и т. п.), то ограничимся рассмотре-
нием последней.
Свободная вода подразделяется на гравитационную и капил-
лярную.
Гравитационной называют влагу, содержащуюся в крупных
пустотах. Сумма сил молекулярного притяжения гравитационной
влаги к стенкам пустот меньше, чем сила тяжести содержащейся
в них влаги, и, следовательно, такая влага под действием силы
тяжести стекает вниз.
Влага, содержащаяся в мелких, капиллярных пустотах, полу-
чила название капиллярной. Силы молекулярного притяжения
между твердыми элементами почвы и этой влагой больше, чем си-
лы тяжести содержащейся в капиллярах влаги. Поэтому влага в
капиллярных пустотах перемещается в любых направлениях и рас-
пространяется от более влажных слоев к менее влажным.
10
О количестве воды, содержащейся в почве, судят по ее абсо-
лютной влажности wa (%), которую определяют как отношение
кассы воды к массе сухой твердой фазы, содержащихся в иссле-
дуемой пробе:
wa = 100(mB—/пс)/тс, (2)
где тв и тс — массы соответственно влажной и сухой почвы.
О степени увлажнения почвы судят по значению относительной
влажности wo (%):
u»o —100u)a/wn, (3)
где шп — полевая влагоемкость почвы, %.
Влажность почвы оказывает большое влияние на ее техноло-
гические свойства, а следовательно, па качество обработки и рас-
ход энергии. При вспашке глинистых и суглинистых почв в пере-
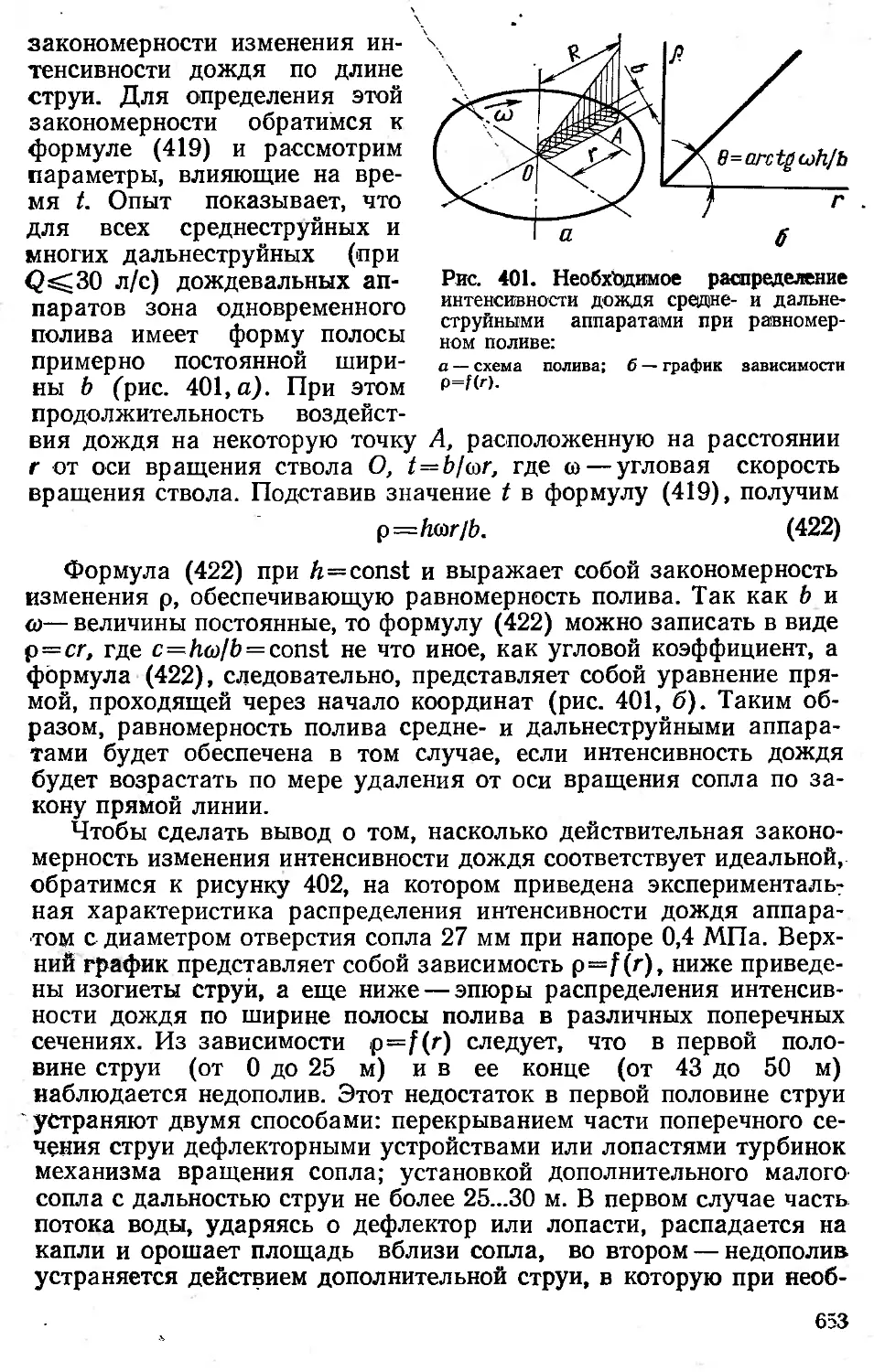
увлажненном состоянии происходит залипание рабочих органов,
разрушение (размазывание) структурных агрегатов, сгруживание
почвы; в пересохшем — образуются крупные глыбы и пылевидные
элементы, повреждаются структурные агрегаты.
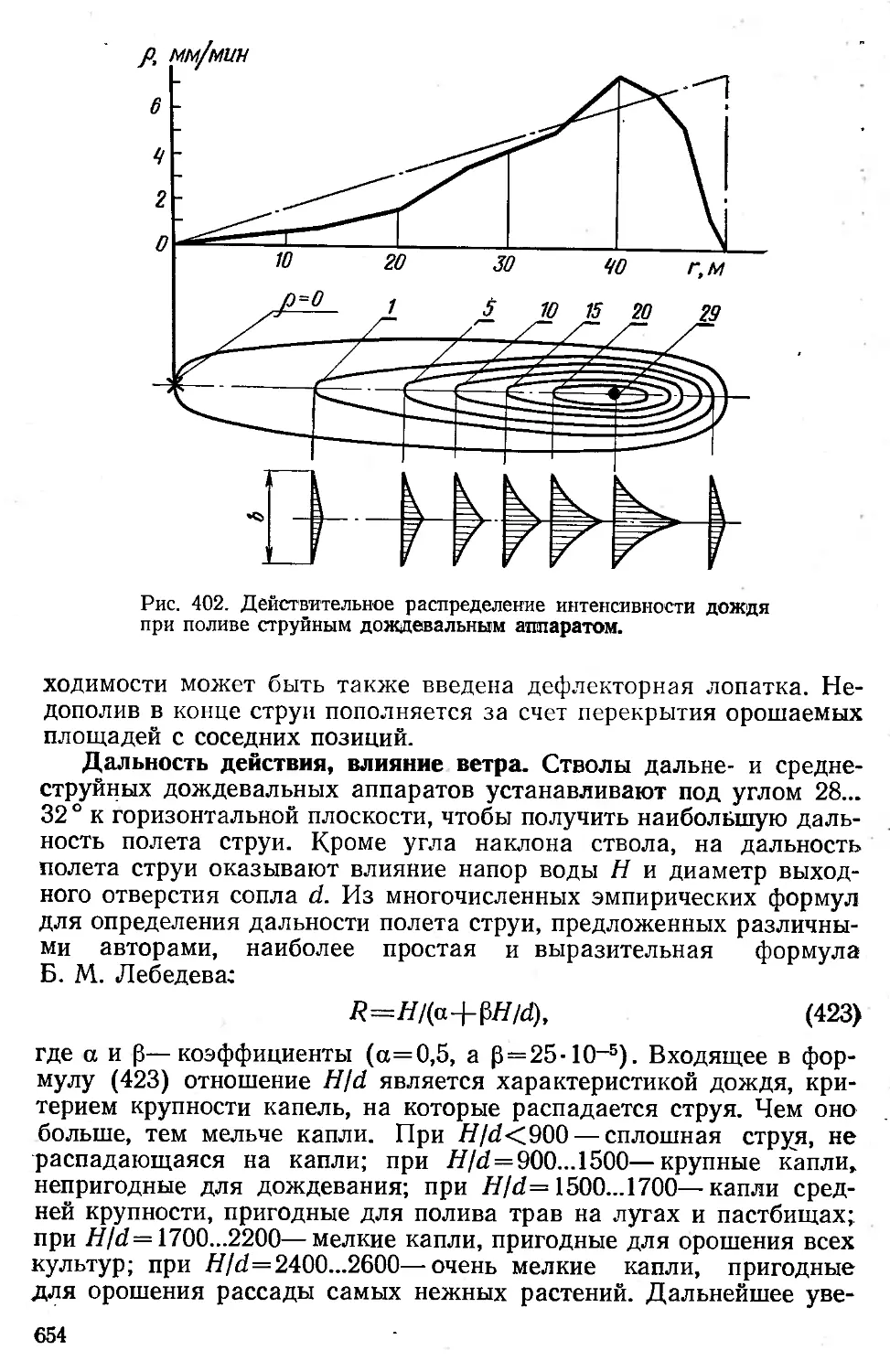
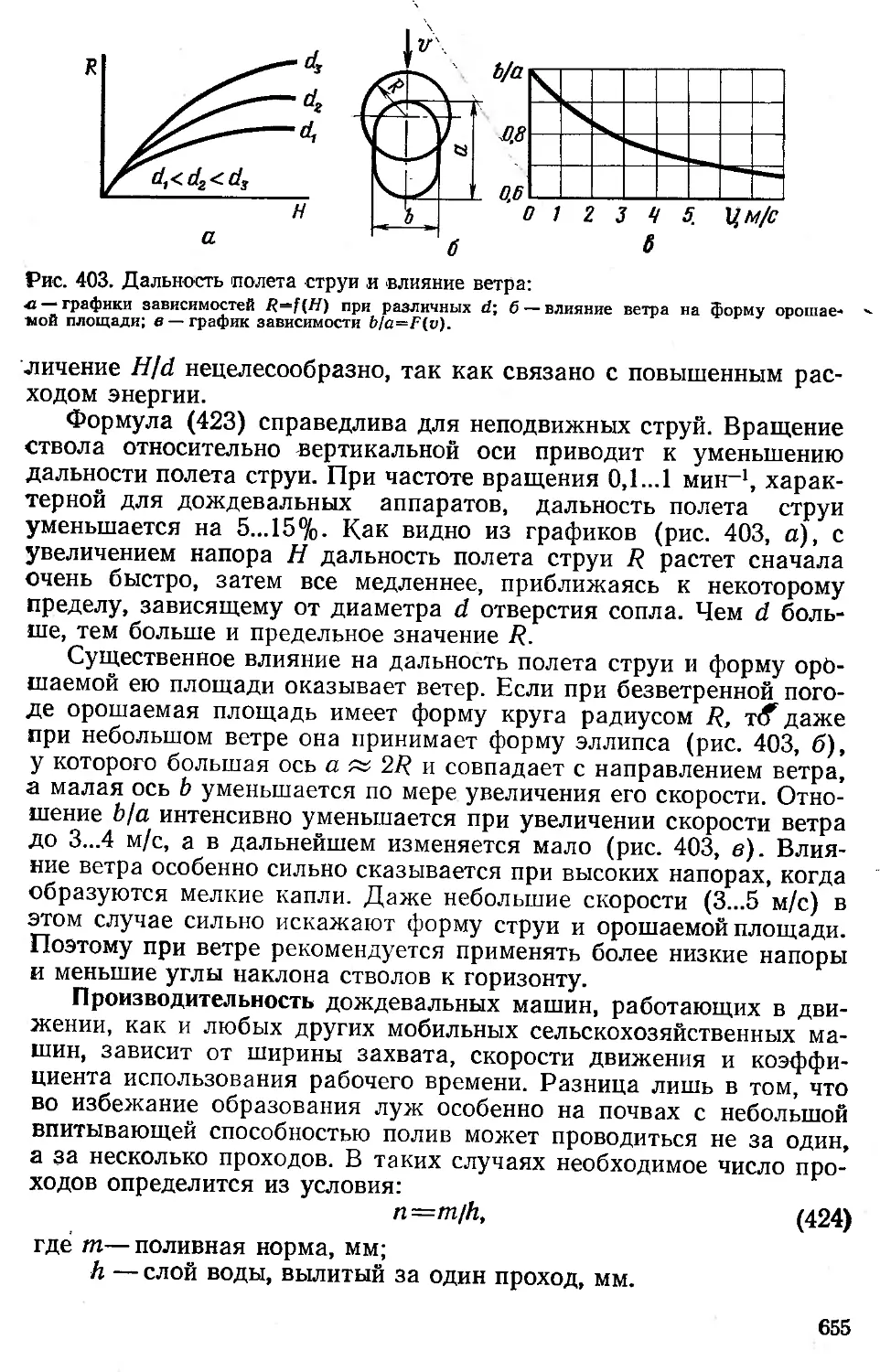
Однако при определенной влажности структурная почва легко
и хорошо крошится, на ее обработку расходуется минимальное ко-
личество энергии. Такое состояние почвы называется «спелостью».
В зависимости от механического состава почвы состояние ее «спе-
лости» наступает при относительной влажности 40...70%, что соот-
ветствует абсолютной влажности 15...30%. Исследования показа-
ли, что «спелость» почвы зависит и от скорости вспашки. С уве-
личением скорости она смещается в сторону большей влажности.
Установлено, что при механической обработке почвы в состоя-
нии «спелости» не только сохраняется целостность имеющихся
структурных агрегатов, но и образуются новые. Поэтому механи-
ческую обработку почвы в состоянии «спелости» считают одним
из способов улучшения ее структуры.
Газообразная фаза в почве представлена воздухом и другими
газами (аммиак, метан и т. п.). Воздух может находиться в почве
в свободном и «защемленном» состоянии. Воздух, расположенный
в крупных гравитационных пустотах, обычно свободно сообщается
с атмосферой. В результате ветра и вертикальных конвективных
токов этот воздух непрерывно обновляется, что приводит, как пра-
вило. к существенным потерям влаги из рыхлой почвы.
Воздух, расположенный в мелких капиллярных пустотах, часто
находится в защемленном состоянии,, т. е. оказывается герметиче-
ски закупоренным с помощью твердых частиц и воды. Защемлен-
ный воздух увеличивает упругость и уменьшает водопроницаемость
почвы. При сжатии почвы под действием рабочих органов почво-
обрабатывающих орудий значительная часть свободного почвен-
ного воздуха переходит в защемленное состояние* и накапливает
• По данным академика В. А. Желиговского — Прим, автора.
II
потенциальную энергию, которая, освобождаясь после прекраще-
ния сжатия, разрывает связи между почвенными комочками, спо-
собствуя хорошему крошению спелой структурной почвы.
§ 2. Технологические свойства почвы
Под технологическими следует понимать лишь те свойства поч-
вы, которые проявляются в процессе ее механической обработки и
оказывают существенное влияние на закономерности и характер
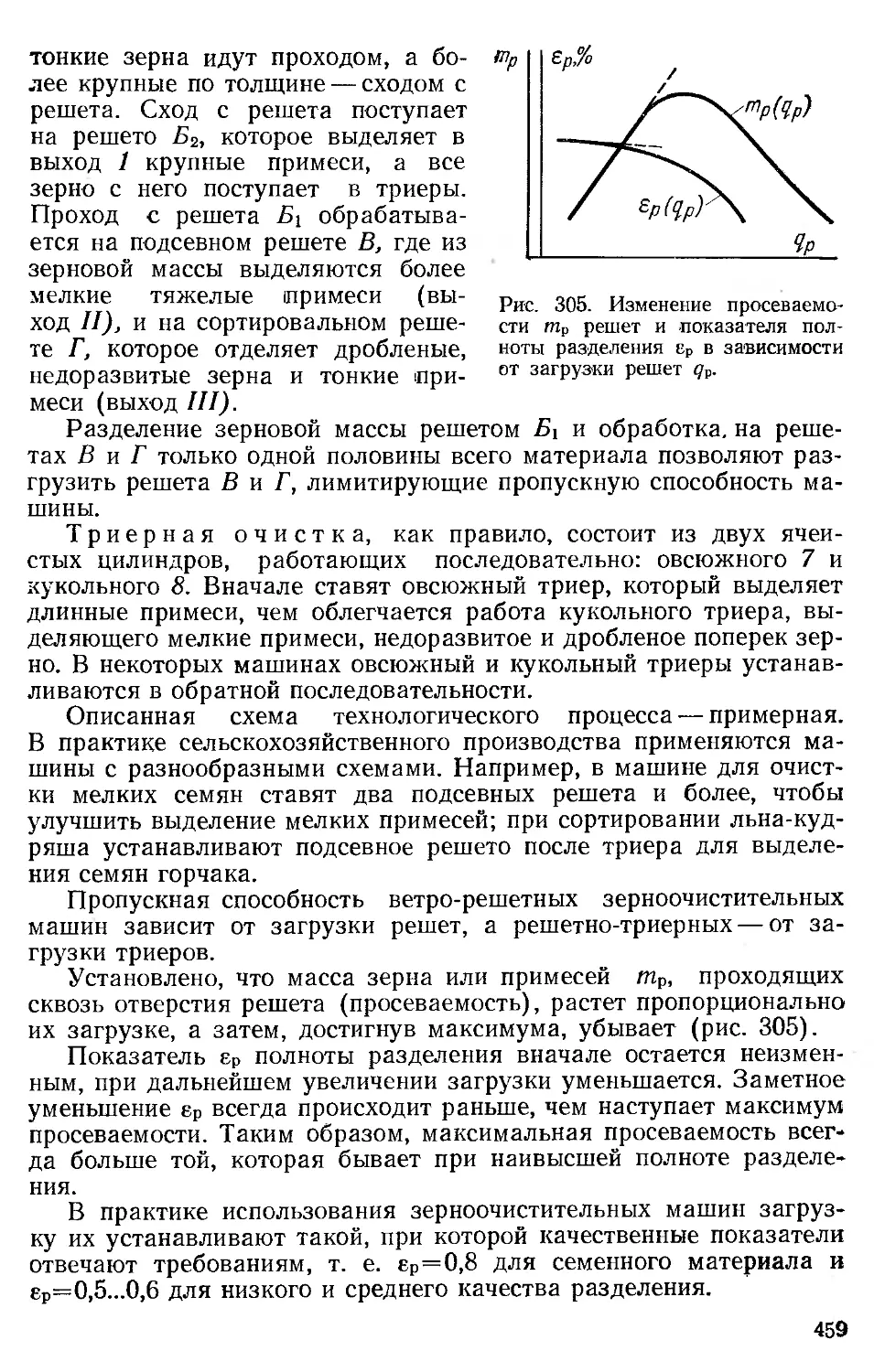
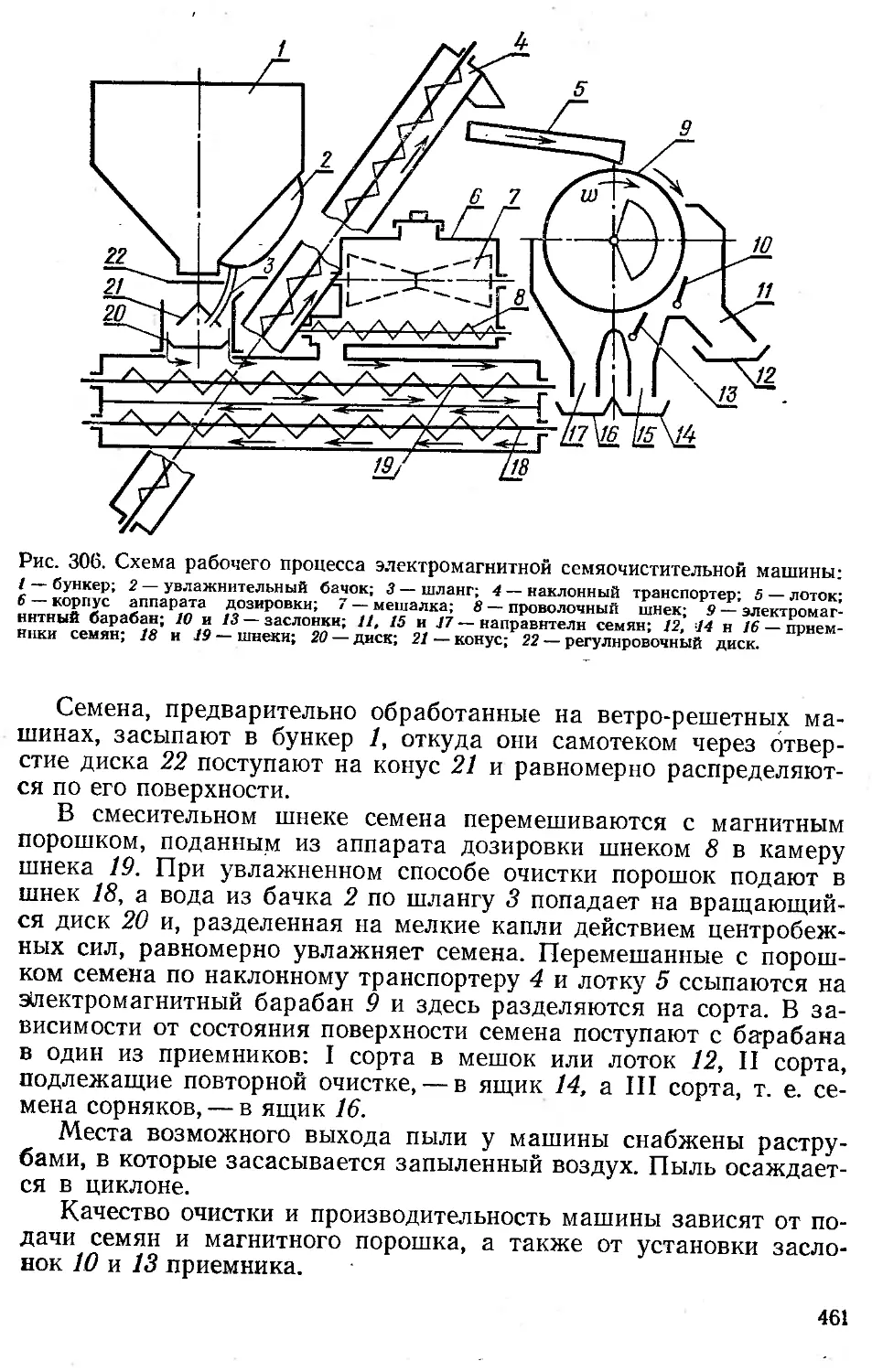
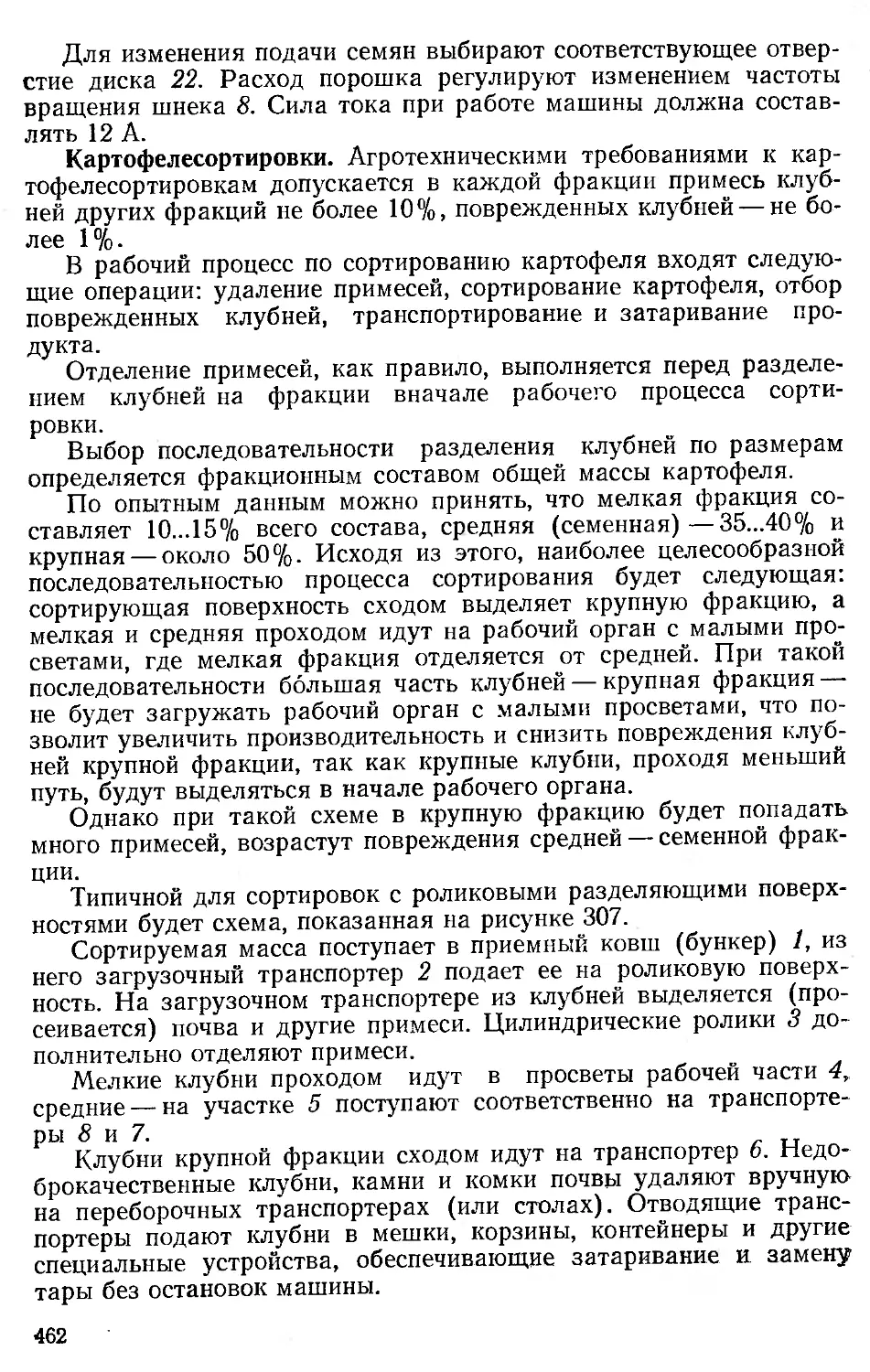
протекания технологического процесса. Следовательно, к техноло-
гическим свойствам почвы можно отнести сопротивление ее раз-
личным видам деформаций (прочность), трение о поверхности ра-
бочих органов и внутреннее трение, липкость, связность, упругость,
пластичность, абразивные свойства.
Сопротивление различным видам деформаций. Для разработки
путей и методов снижения расхода энергии на механическую обра-
ботку почвы необходимо знать пределы ее прочности при различ-
ных видах напряжений. Следует отметить, что сопротивление поч-
вы с ненарушенной структурой различным видам деформаций изу-
чено еще недостаточно. Однако для суглинистых почв установле-
ны, например, следующие прочностные характеристики:
предел прочности при деформации растяжения . . . 5...6кПа
» » » » сдвига . . . . 10... 12 »
» » » » сжатия .... 65. ..108 »
Таким образом, наименьший предел прочности отмечен при
растяжении, средний — при сдвиге и максимальный—-при сжатии.
Следовательно, рыхления почвы с минимальным расходом энергии
можно добиться путем разрушения связей между отдельными
структурными агрегатами с помощью деформаций растяжения.
Создание рабочих органов почвообрабатывающих машин и ору-
дий, основанных на этом принципе, связано с определенными тех-
ническими трудностями. Однако известны и отдельные удачные по-
пытки создания рыхлителей с активными и пассивными рабочими
органами, разрушающими почвенный пласт по линиям наименее
прочных связей между структурными агрегатами, т. е. преимуще-
ственно путем деформаций растяжения.
Сопротивление смятию (твердость почвы). Большинство рабо-
чих органов почвообрабатывающих машин и орудий, а также раз-
личные опорные поверхности (колеса, гусеницы и т. п.) энергети-
ческих, транспортных и рабочих машин при взаимодействии с поч-
вой сминают ее. Поэтому сопротивление почвы смятию служит од-
ной из основных ее характеристик при оценке условий работы не
только почвообрабатывающих, но и многих других сельскохозяйст-
венных машин.
Для определения показателей сопротивления почвы смятию
применяют приборы различных типов: ударного действия, со ста-
тической нагрузкой, с принудительным перемещением деформато-
12
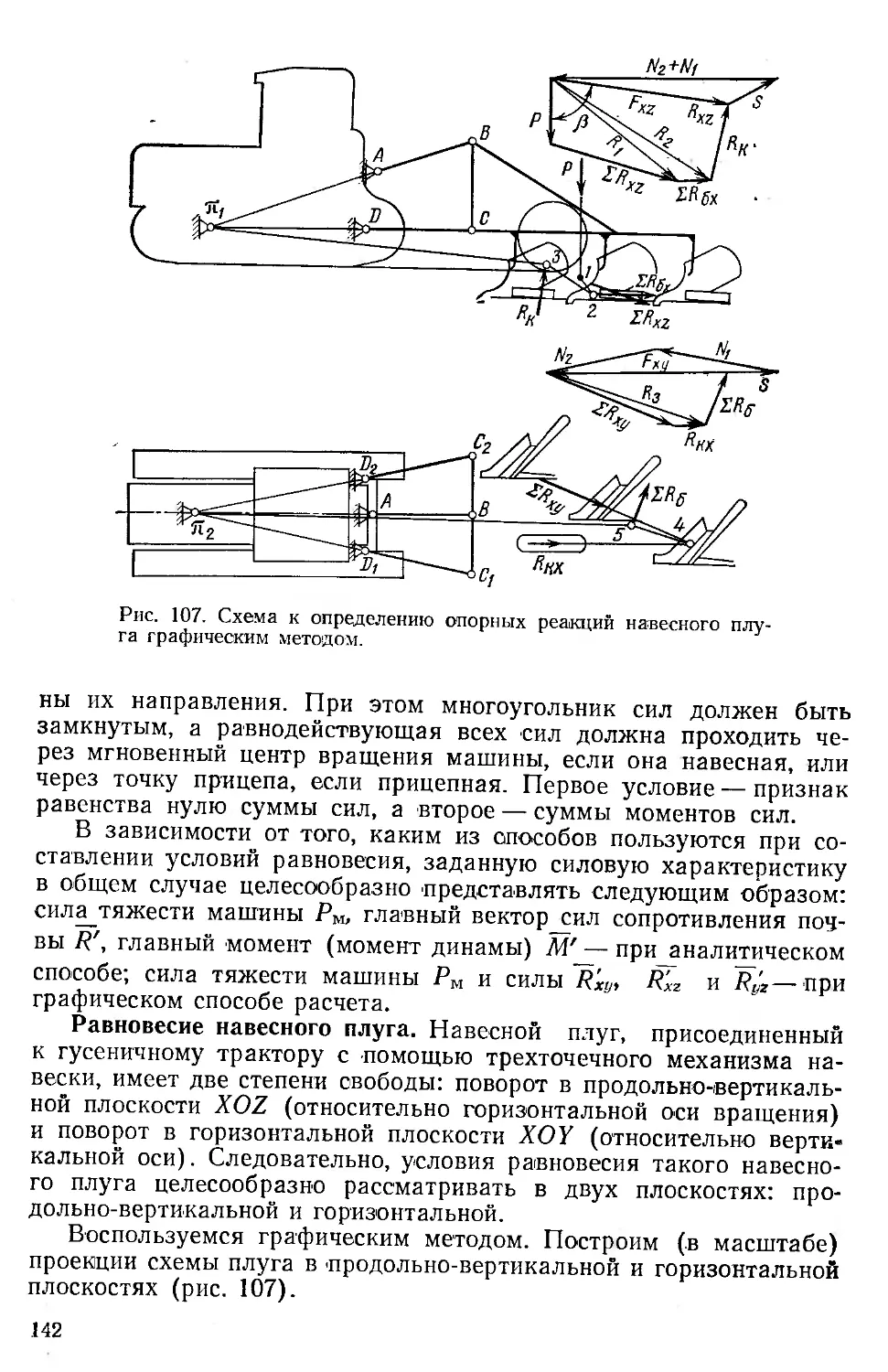
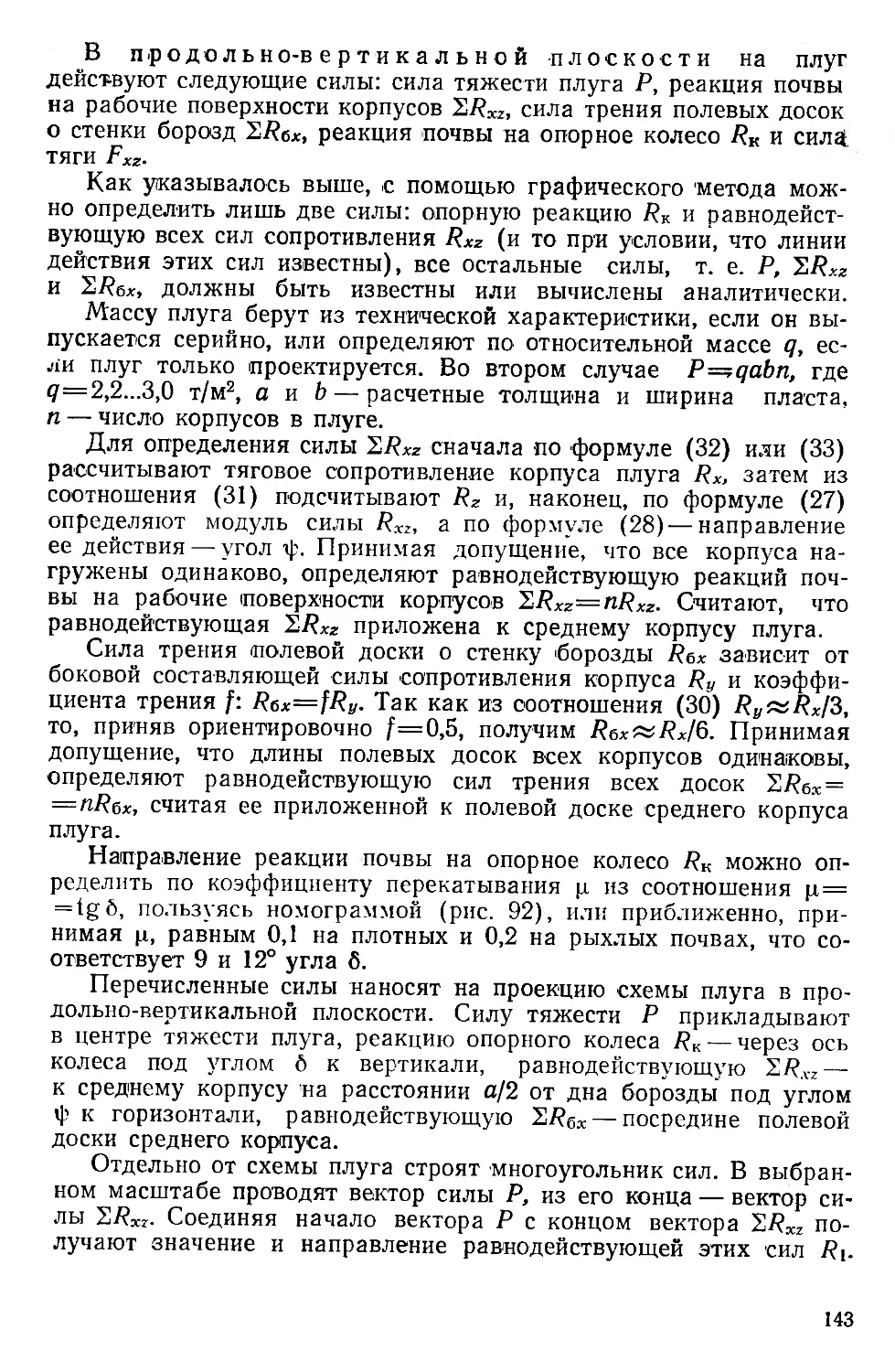
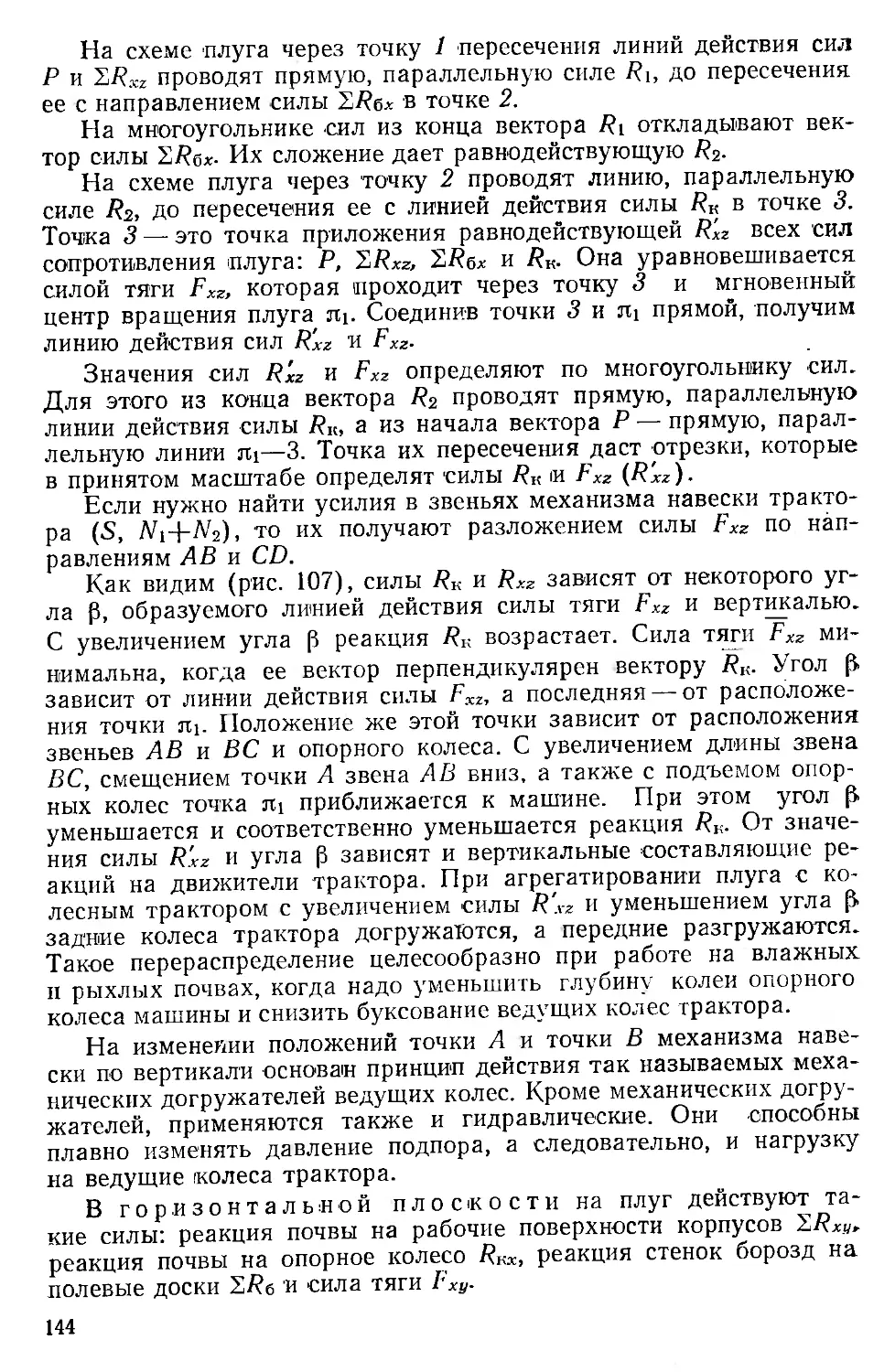
Рис. 1. Определение твердости
почвы:
а — схема твердомера; 1 — штанга; 2 —
пружина; 3 —рукоятка; 4 — плунжер (на-
конечник); б — диаграмма твердомера с
различными наконечниками: 1 — цилинд-
рическим; 2 — коническим.
ра. Последние получили наибольшее распространение в сельском
хозяйстве.
В соответствии с ОСТ 70.2.15—73 показателем сопротивления
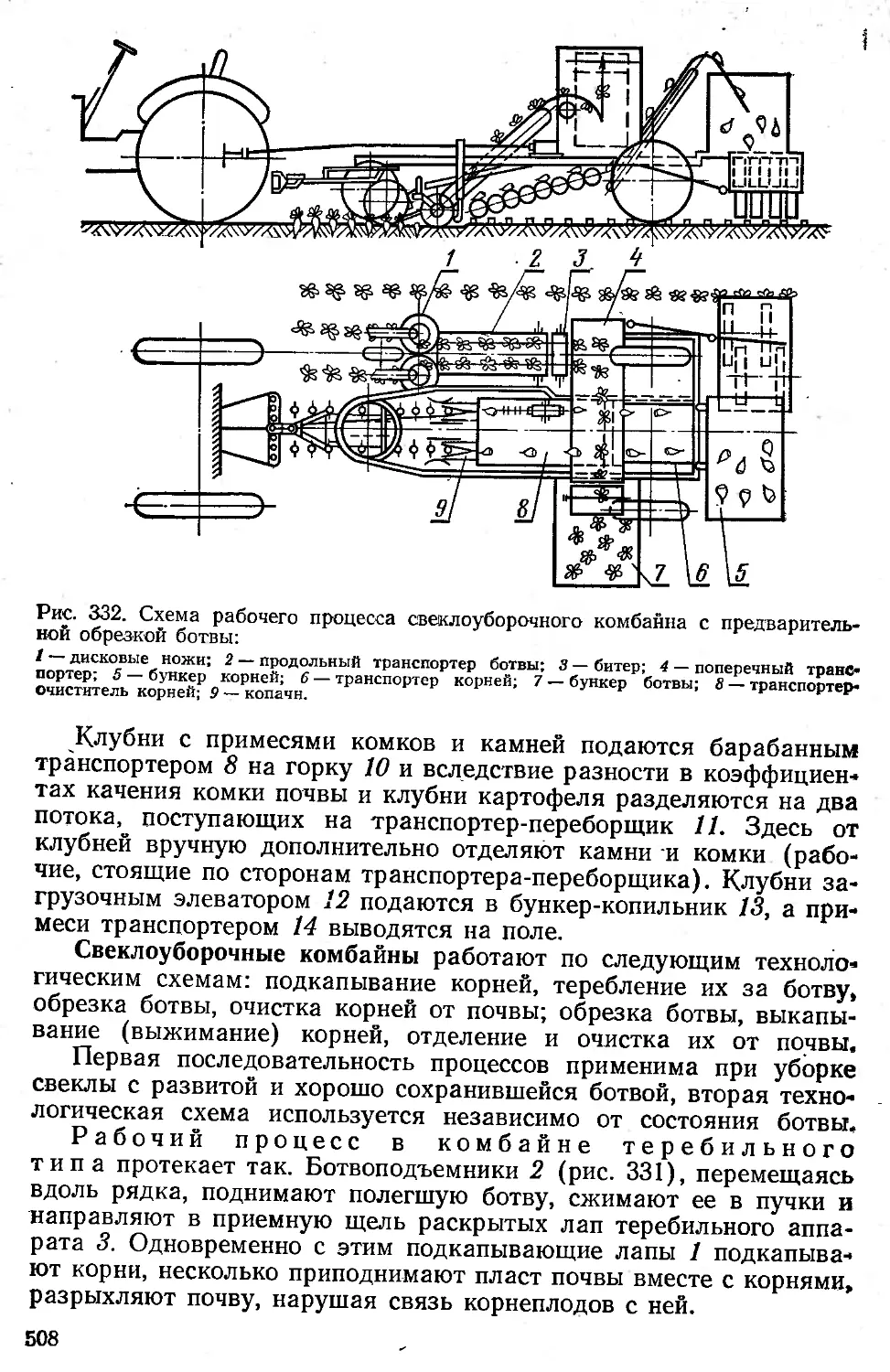
почвы смятию является «средняя твердость почвы», а приборы для
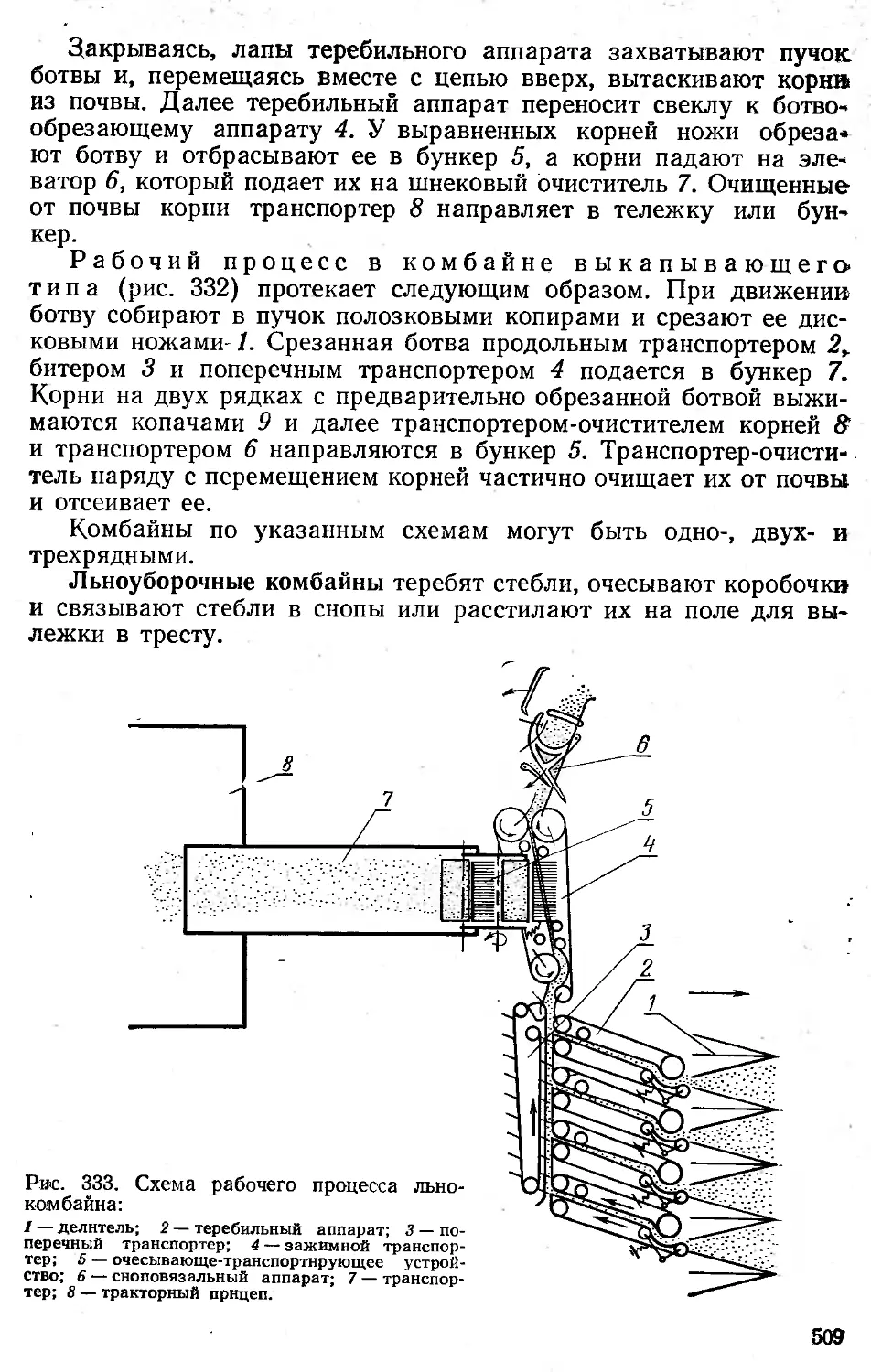
ее определения названы твердомерами*.
Твердомер (рис. 1,а) состоит из штанги /, пружины 2, рукоя-
ток 3, наконечника 4 (плунжера). При нажиме на рукоятки давле-
ние через пружину, штангу и наконечник передается почве. При
этом сила нажима равна силе сопротивления почвы вдавливанию
наконечника (при плавном нажиме) и измеряется по сжатию у
пружины, а линейная деформация X почвы — по глубине погруже-
ния наконечника в почву. Твердомер, оборудованный пишущим
устройством, записывает диаграмму y=f{k). Зная калибр (жест-
кость) пружины k, можно от ее деформации у перейти к силе
F=ky (рис. 1,6). Как видим, при использовании наконечников раз-
ной формы (но с одинаковой площадью поперечного сечения) раз-
личие в силе сопротивления почвы их вдавливанию наблюдается
лишь в начальной стадии погружения. После погружения наконеч-
ника на 5...6 см сила F становится практически одинаковой и по-
стоянной. Лишь после прохода наконечниками пахотного слоя си-
ла F снова возрастает, так как на их пути встречается более плот-
ная «плужная подошва».
Диаграмму твердомера в пределах пахотного слоя можно ап-
проксимировать двумя прямыми О А и АБ (рис. 2), характеризую-
щими две фазы деформации почвы. В течение первой фазы (уча-
сток О А) вследствие сначала упругого, а затем пластического уп-
лотнения почвы под наконечником сопротивление F растет про-
* До 1.01. 1974 г. эти же приборы в соответствии с ГОСТ 2911—54 назы-
вались плотномерами, а определяемая ими величина — средней плотностью поч-
вы.— Прим, автора.
13
Рис. 2. Зависимость силы F
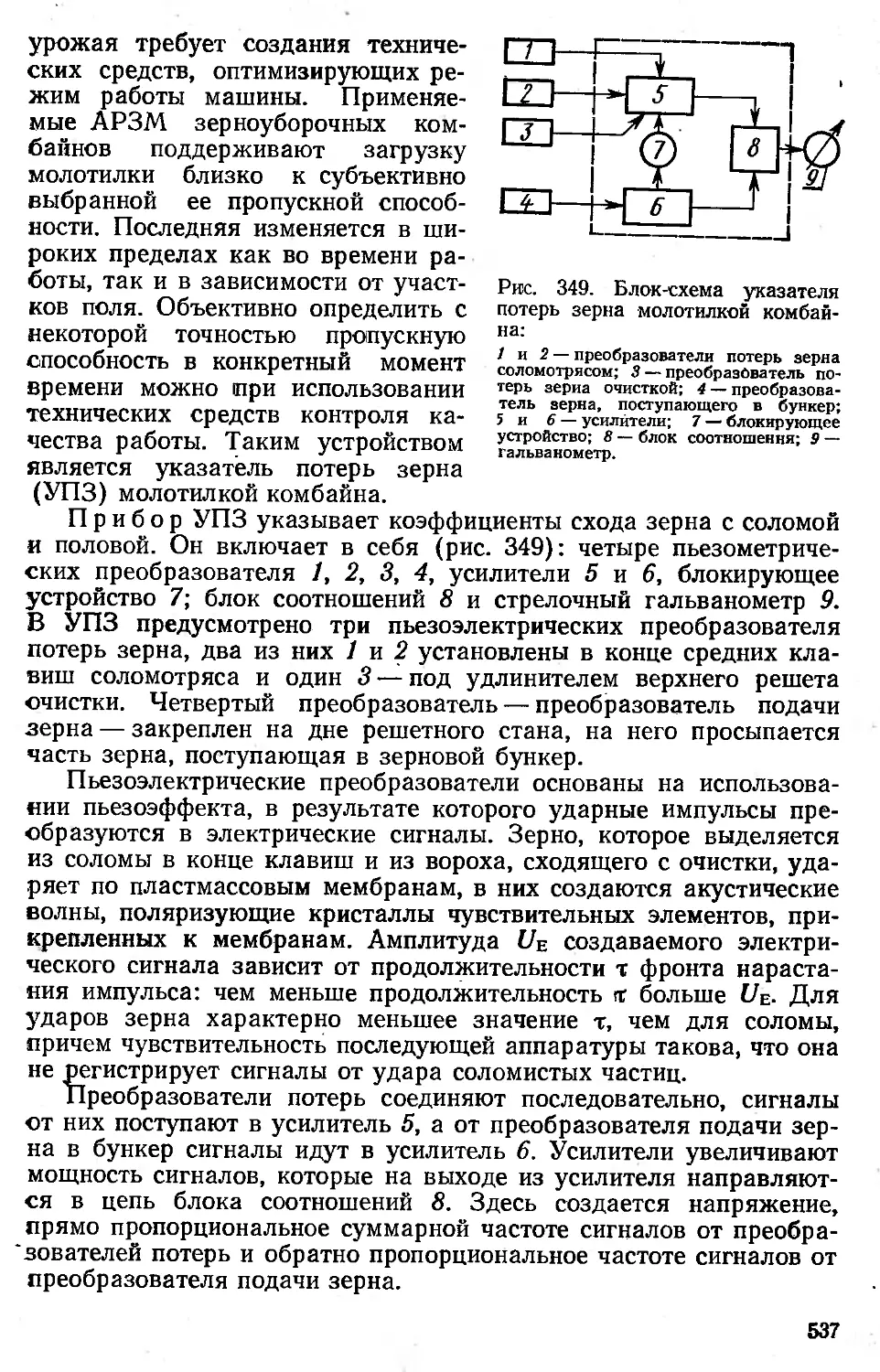
сопротивления почвы смятию
от ее линейной деформации Л.
порционально линейной деформа-
ции X. Конец первой и начало второй
фазы характеризуются небольшим пе-
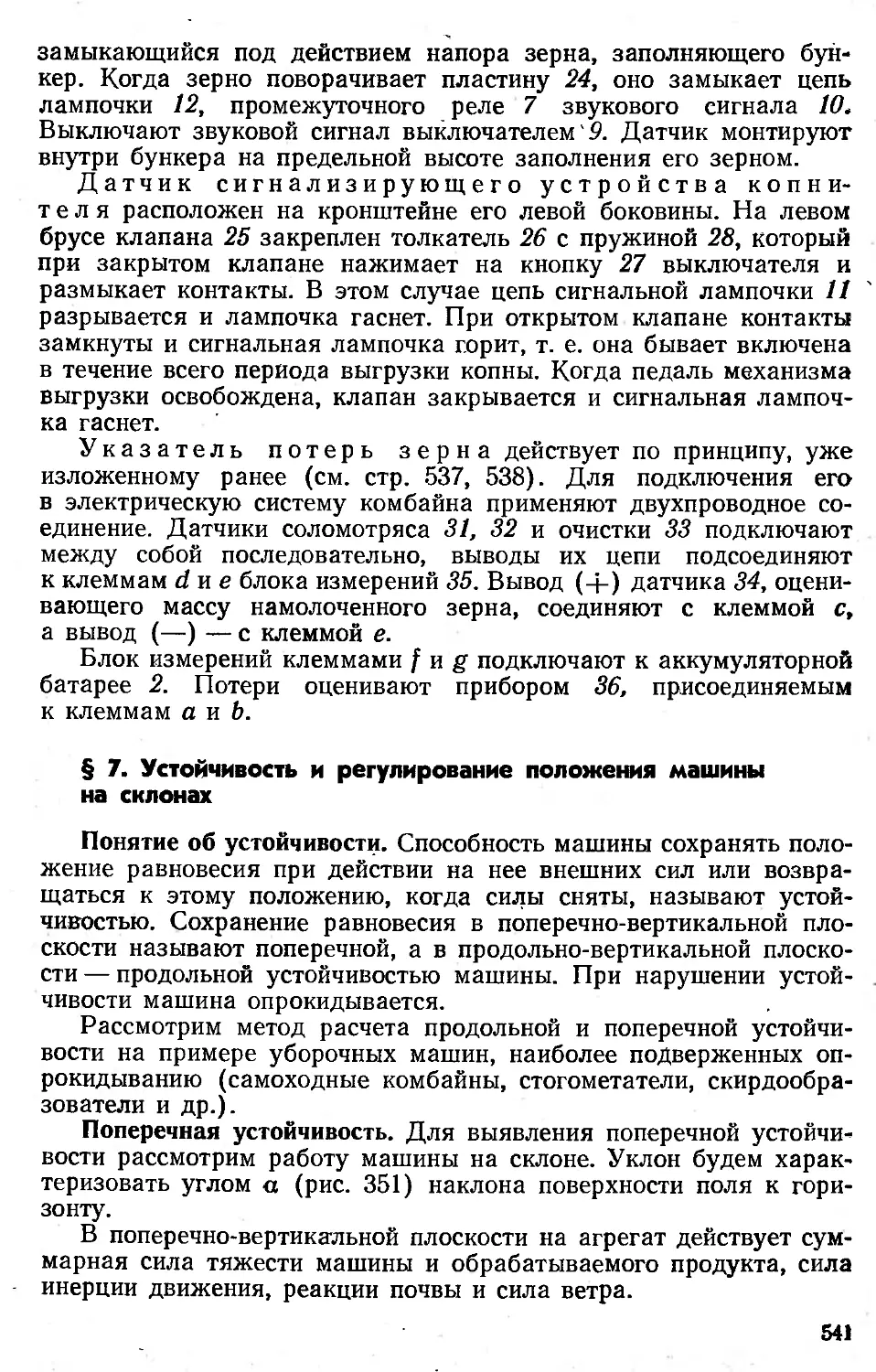
реходным периодом (на рис. 2 не по-
казан), в течение которого перед ос-
нованием наконечника образуется ко-
нусообразный нарост из сильно уплот-
ненной почвы (уплотненное ядро). Во
второй фазе (участок АБ) почва де-
формируется конусообразным наро-
стом, который расклинивает ее, сме-
щая в стороны и встречая поэтому по-
стоянное сопротивление. Во второй фазе возрастание деформации
К не вызывает увеличения сопротивления F и почва «течет», т. е.
продолжает деформироваться под действием постоянного давле-
ния на нее. Таким образом, деформация почвы становится функ-
цией не столько нагрузки, сколько времени ее действия.
Первая фаза в несколько раз короче второй, однако имеет
большое практическое значение, так как деформация почвы сель-
скохозяйственными машинами, как правило, не выходит за преде-
лы первого участка диаграммы (<Хпр). Путем обработки этого
участка диаграммы получают показатели, характеризующие спо-
собность почвы сопротивляться смятию. Согласно ОСТ 70.2.15—73,
твердость почвы р (Н/см2) определяют по формуле:
p—hkjS,
(4)
где h — средняя ордината диаграммы твердости, см;
k — масштаб (жесткость) пружины, Н/см;
S — площадь поперечного сечения плунжера, см2.
Однако более обоснованным теоретически, т. е. отражающим
физическую сущность процесса смятия почвы внедряемым в нее
наконечником, является другой показатель — коэффициент объем-
ного смятия почвы. На основе анализа диаграмм нетрудно устано-
вить, что сила сопротивления почвы смятию в пределах первой
фазы зависит как от линейной деформации почвы X, так и от сми-
наемой площади (площади поперечного сечения наконечника) S
и, следовательно пропорциональна объему смятой (вытесненной)
почвы V=SX. Кроме того, сила сопротивления почвы смятию F
зависит и от самой почвы (глинистая или песчаная, сухая или
влажная). Если способность почвы сопротивляться смятию выра-
зить коэффициентом пропорциональности q, то F=qV, откуда
q=F/V. (5)
Коэффициент q получил название коэффициента объемного
смятия почвы. Он имеет размерность Н/см3 и показывает, на
сколько единиц силы (Н) возрастает сопротивление почвы при смя-
тии каждой последующей единицы ее объема (см3). Коэффициент
14
объемного смятия имеет следующие значения: для свежевспахан-
нгй почвы 1...2 Н/см3; для жнивья, паров и лугов — 5...10 Н/см3,
для грунтовой дороги — 50...90 Н/см3.
Весьма важен для инженерных расчетов предел сопротивления
пэчзы смятию или предел несущей способности почвы (рис. 2, точ-
ке .4), который обычно характеризуют предельным напряжением
смятия рпр (Н/см2):
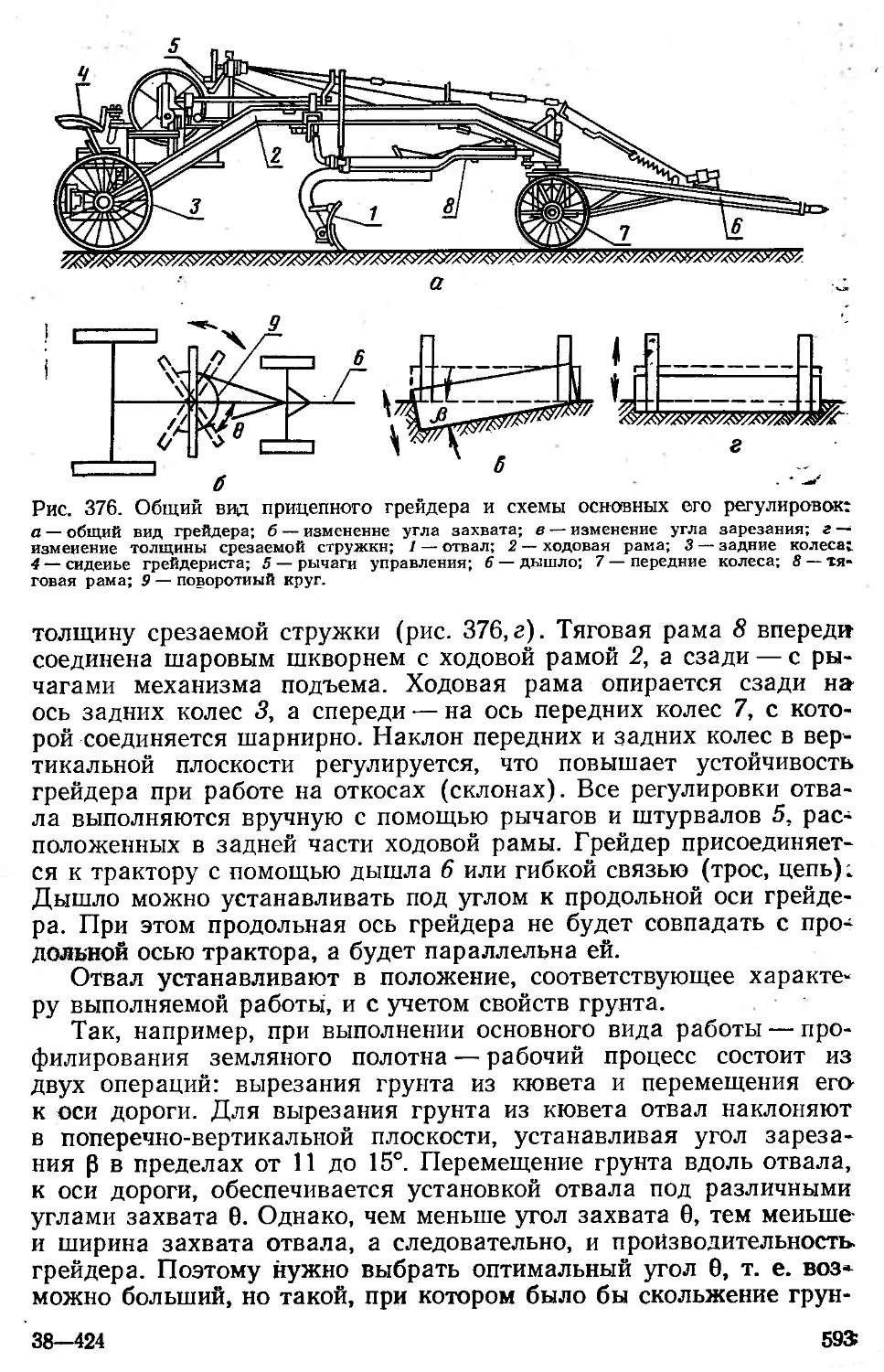
PnP=Fnp/S. (6)
Однако изменение площади плунжера изменяет предел несу-
щей способности почвы, т. е. отодвигает критическую точку (точ-
ку .4) в сторону больших или меньших предельных напряжений.
Таким образом, при использовании твердомеров с плунжерами
различного диаметра получаются несопоставимые результаты. Ха-
рактеристикой сопротивления почвы смятию, не зависящей от
диаметра плунжера, служит* некоторая величина Н (Н/см2), оп-
ределяемая по формуле:
H^Fjd^, (7)
где F.— сила сопротивления почвы смятию, Н;
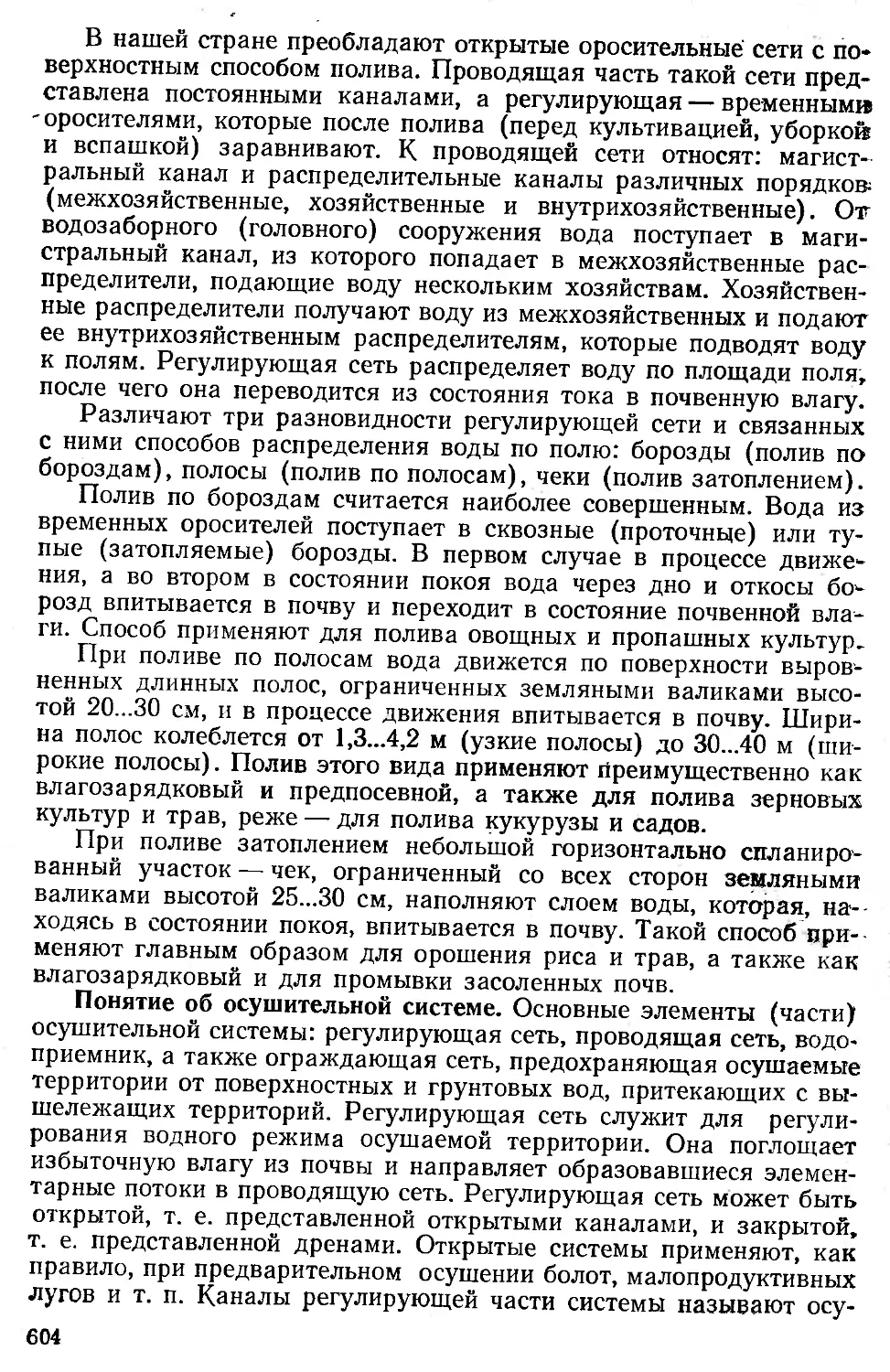
•.. — линейная деформация почвы в пределах пропорциональ-
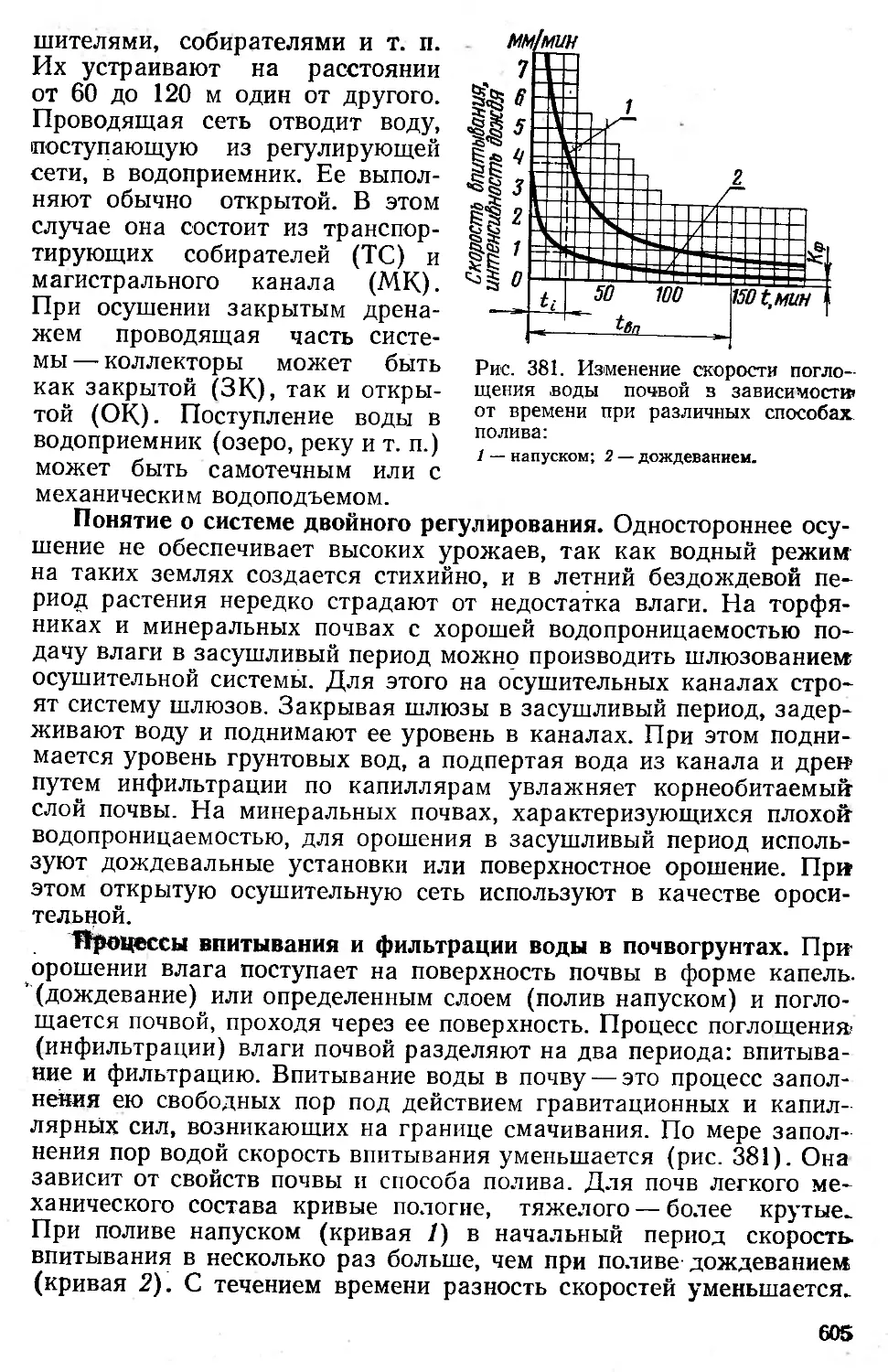
ности под действием силы см;
d; — диаметр плунжера, см.
Смятие почвы требует затрат механической энергии. Затраты
энергии на смятие почвы в пределах первой и второй фаз могут
быть определены геометрически (рис. 2); они соответственно
разны:
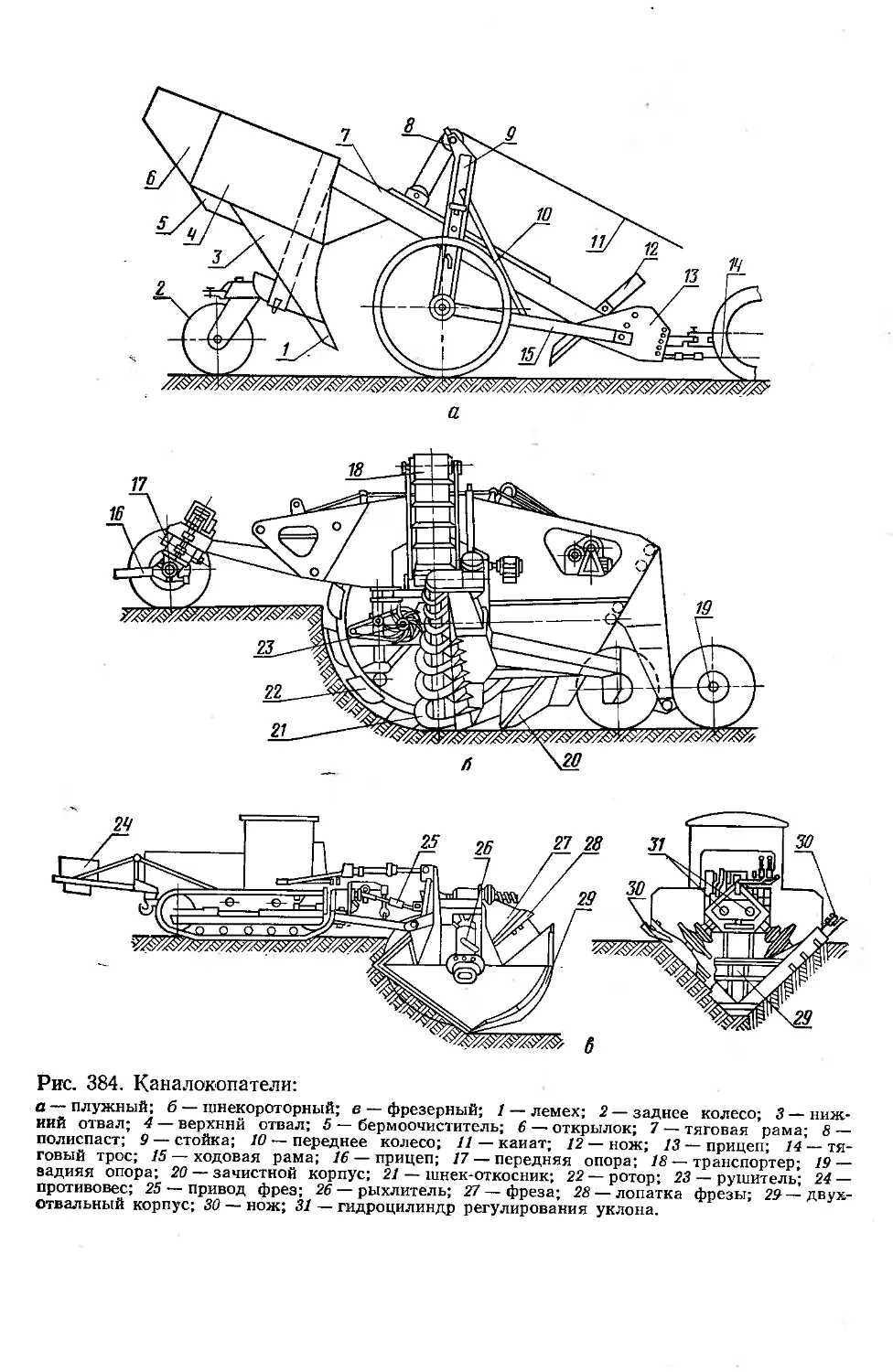
^=^пр/2. (8)
2 — ^пр --\11>)• (9)
Подстазив з (8) вместо Fnp его значение, выраженное через q,
S а получим
^ = «Р2. (10)
Из рисунка 2 н выражений (8), (9) и (10) следует, что удель-
ное давление на почву не должно достигать предельных напряже-
ний смятия, так как в противном случае почва будет «течь», т. е.
ее деформация станет функцией времени, а расход энергии на еди-
ницу линейной деформации возрастет вдвое.
Фрикционные свойства — трение проявляется как сопротивле-
ние скольжению одного тела относительно другого, с ним соприка-
сающегося (внешнее трение), или одних частиц одного и того же
тела относительно других (внутреннее трение). Таким образом,
сила трения — это сила сопротивления, или сила реакции, вызван-
ная действием другой, активной силы, стремящейся создать сколь-
жение поверхности одного тела относительно другого при нормаль-
* Гз данным канд. техн, наук Н. М. Шарова — Прим, автора.
15
ном давлении. Как и всякая сила реакции, сила трения равна той
силе, которая ее возбуждает, но имеет предельное значение, выше
которого не возрастает. При изменениях активной силы сила тре-
ния может изменяться от нуля до своего предельного значения
(О^г^тр^Лпах). Максимального значения сила трения достигает
при скольжении. В этом случае ее численное значение определяет-
ся по формуле Амонтона (1699 г.):
(11)
тде N — нормальное давление, Н;
f и <р — соответственно коэффициент и угол трения.
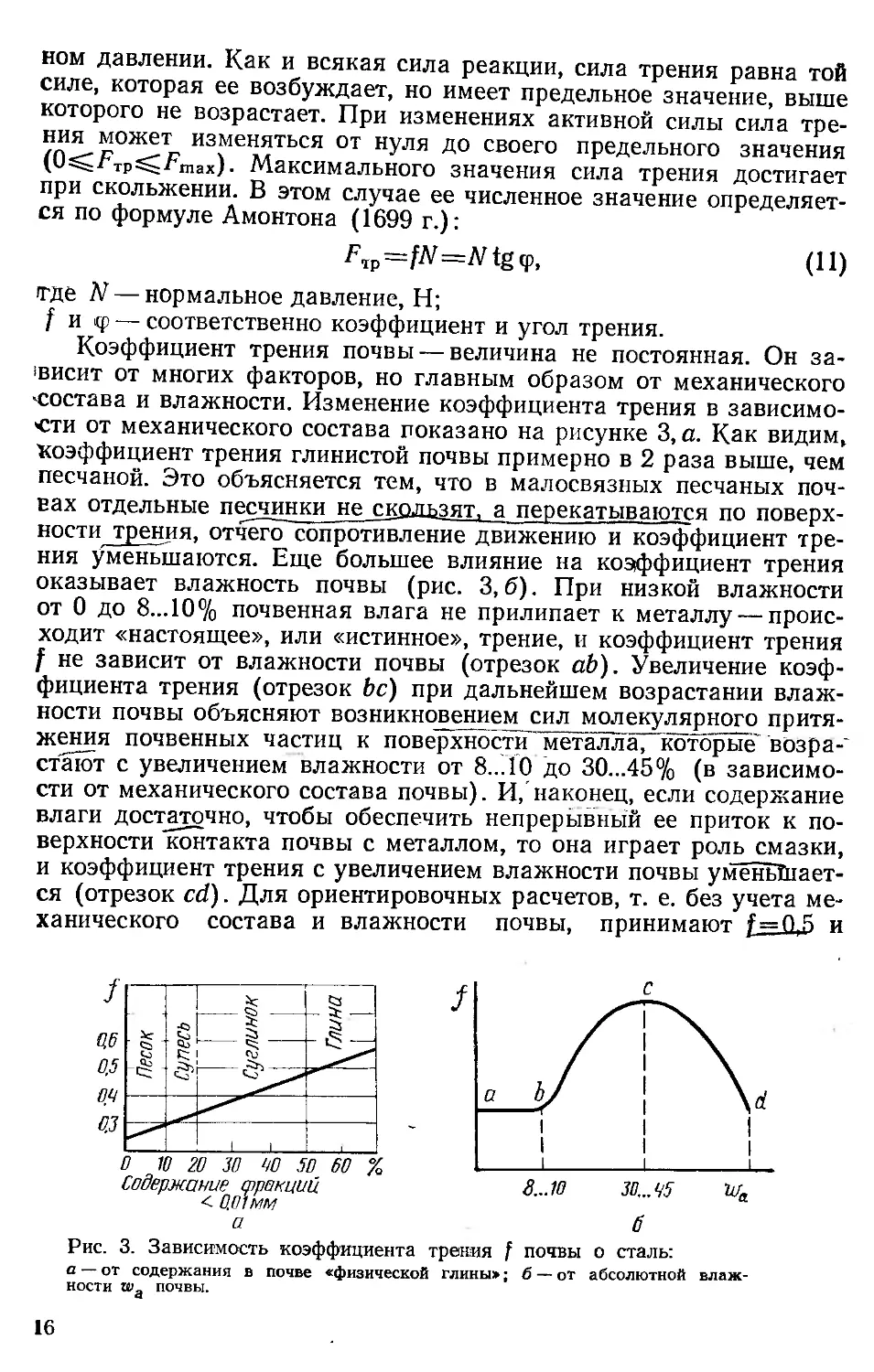
Коэффициент трения почвы — величина не постоянная. Он за-
висит от многих факторов, но главным образом от механического
'Состава и влажности. Изменение коэффициента трения в зависимо-
сти от механического состава показано на рисунке 3, а. Как видим,
коэффициент трения глинистой почвы примерно в 2 раза выше, чем
песчаной. Это объясняется тем, что в малосвязных песчаных поч-
вах отдельные песчинки не скользят, а перекатываются по поверх-
ности трения, отчего сопротивление движению и коэффициент тре-
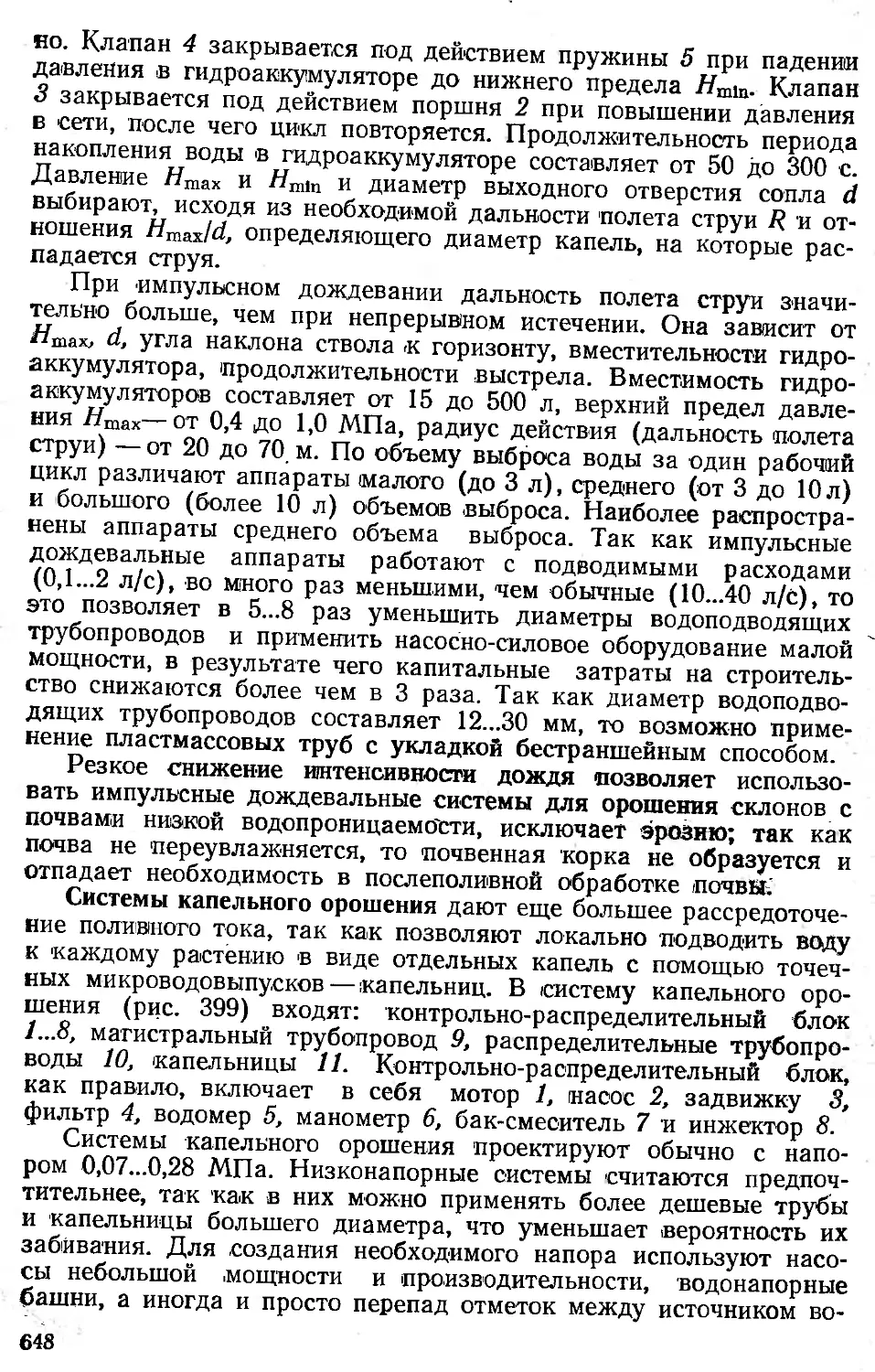
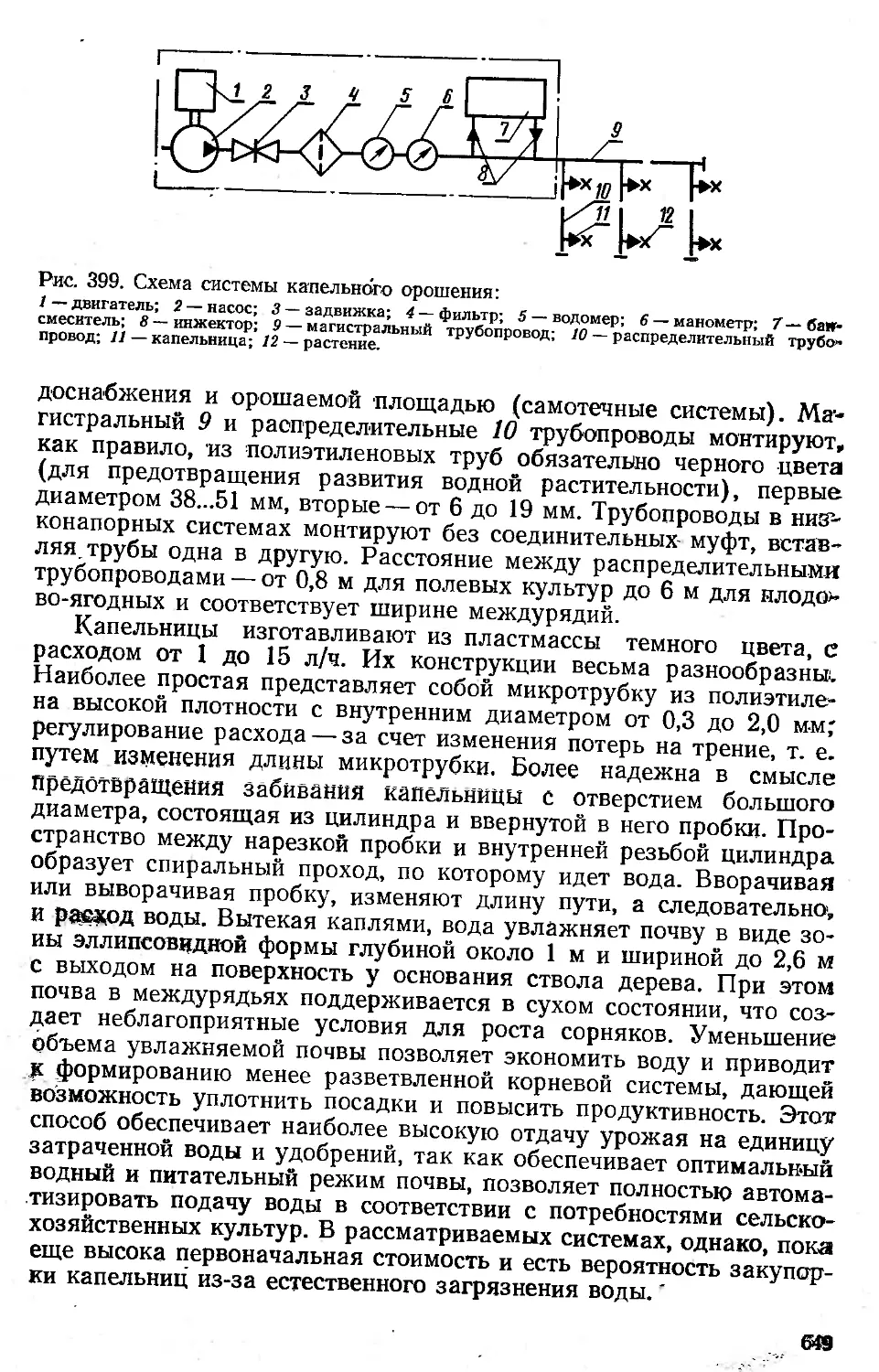
ния уменьшаются. Еще большее влияние на коэффициент трения
оказывает влажность почвы (рис. 3, б). При низкой влажности
от 0 до 8...10% почвенная влага не прилипает к металлу — проис-
ходит «настоящее», или «истинное», трение, и коэффициент трения
f не зависит от влажности почвы (отрезок ab). Увеличение коэф-
фициента трения (отрезок Ьс) при дальнейшем возрастании влаж-
ности почвы объясняют возникновением сил молекулярного притя-
жения почвенных частиц к поверхности металла7~которые'возра-
стают с увеличением влажности от 8...10 до 30...45% (в зависимо-
сти от механического состава почвы). И, наконец, если содержание
влаги достаточно, чтобы обеспечить непрерывный ее приток к по-
верхности контакта почвы с металлом, то она играет роль смазки,
и коэффициент трения с увеличением влажности почвы уменьшает-
ся (отрезок cd). Для ориентировочных расчетов, т. е. без учета ме-
ханического состава и влажности почвы, принимают f=0,5 и
Рис. 3. Зависимость коэффициента трения f почвы о сталь:
а — от содержания в почве «физической глины»; б — от абсолютной влаж-
ности Wa почвы.
16
<р=26°30'. Фрикционные свойства почвы оказывают большое влия-
ние на процессы ее механической обработки: от 30 до 5(1% энергии
затрачивается на преодоление вредных сопротивленией, связанных
с трением почвы о рабочие поверхности почвообрабатывающих
машин и орудий.
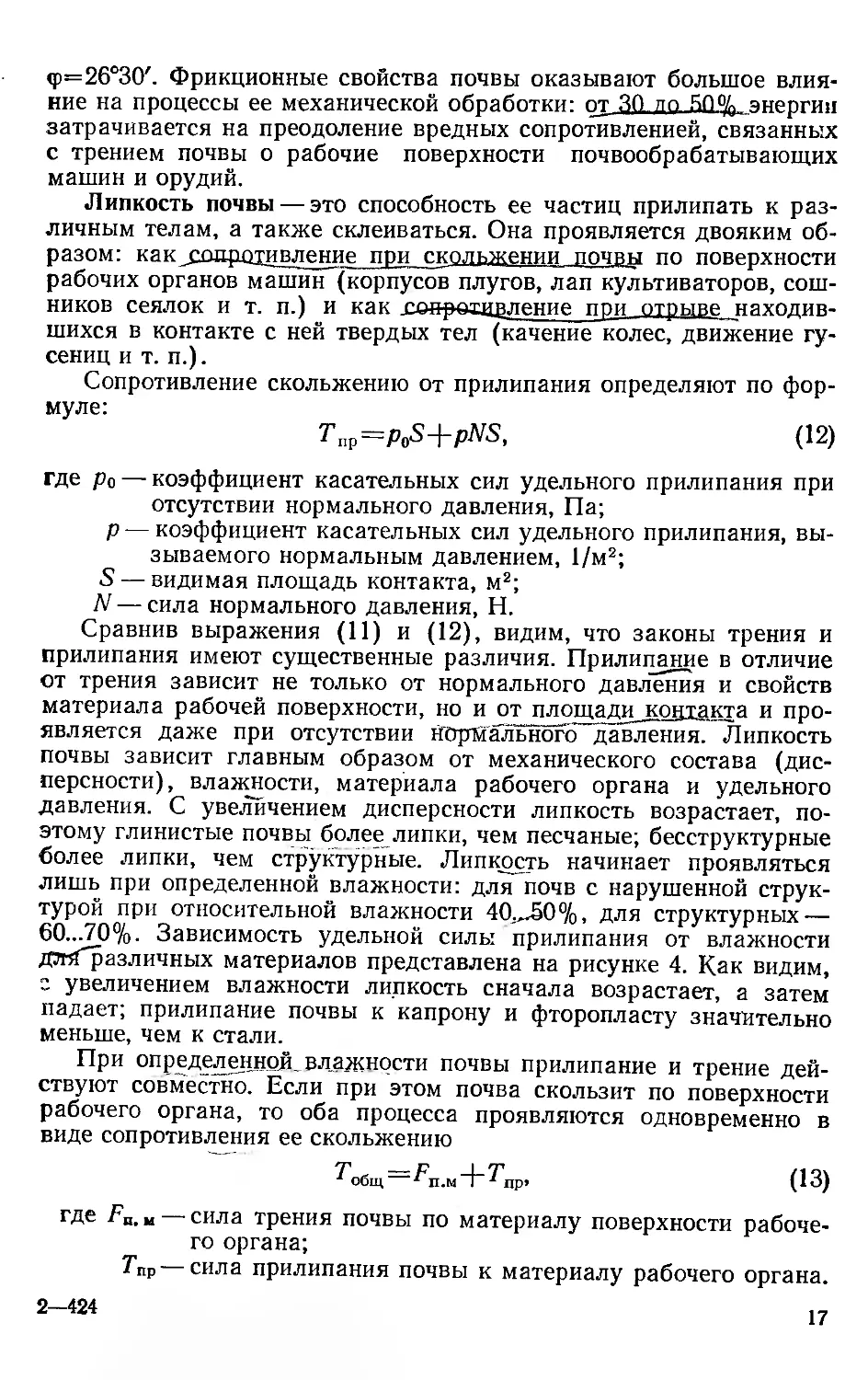
Липкость почвы — это способность ее частиц прилипать к раз-
личным телам, а также склеиваться. Она проявляется двояким об-
разом: как £оцро!ивление при скольжении почвы по поверхности
рабочих органов машин (корпусов плугов, лап культиваторов, сош-
ников сеялок и т. и.) и как дщфохщзление при отрыве находив-
шихся в контакте с ней твердых тел (качение колес, движение гу-
сениц и т. п.).
Сопротивление скольжению от прилипания определяют по фор-
муле:
Tnp=p0S+ptfS, (12)
где ро — коэффициент касательных сил удельного прилипания при
отсутствии нормального давления, Па;
р — коэффициент касательных сил удельного прилипания, вы-
зываемого нормальным давлением, 1/м2;
S — видимая площадь контакта, м2;
N — сила нормального давления, Н.
Сравнив выражения (11) и (12), видим, что законы трения и
прилипания имеют существенные различия. Прилипание в отличие
от трения зависит не только от нормального давления и свойств
материала рабочей поверхности, но и от площади контакта и про-
является даже при отсутствии нормального давления. Липкость
почвы зависит главным образом от механического состава (дис-
персности), влажности, материала рабочего органа и удельного
давления. С увеличением дисперсности липкость возрастает, по-
этому глинистые почвы более липки, чем песчаные; бесструктурные
более липки, чем структурные. Липкость начинает проявляться
лишь при определенной влажности: для почв с нарушенной струк-
турой при относительной влажности 40...50 %, для структурных —
60...70%. Зависимость удельной силы прилипания от влажности
джГразличных материалов представлена на рисунке 4. Как видим,
с увеличением влажности липкость сначала возрастает, а затем
падает; прилипание почвы к капрону и фторопласту значительно
меньше, чем к стали.
При определенной, влажности почвы прилипание и трение дей-
ствуют совместно. Если при этом почва скользит по поверхности
рабочего органа, то оба процесса проявляются одновременно в
виде сопротивления ее скольжению
^щ^п-м+^пр, (13)
где Fa. м — сила трения почвы по материалу поверхности рабоче-
го органа;
ТПр — сила прилипания почвы к материалу рабочего органа.
2—424
17
Рис. 4. Зависимость удель-
ной силы прилипания ро от
абсолютной влажности
почвы wa:
1 — сталь; 2 — капрон; 3 — фто-
ропласт.
Пластичность зависит в
Залипание рабочих органов происхо-
дит в том случае, когда сумма удельных
сил трения и прилипания почвы к их по-
верхности оказывается больше, чем пре-
дел прочности почвы на сдвиг. Самоочи-
щение наблюдается в том случае, когда
сумма сил прилипания и трения почвы о
почву (пласта о налипшие частицы) ста-
новится больше, чем общее сопротивле-
ние налипших частиц скольжению.
Пластичность и упругость, вязкость и
хрупкость — тоже важные технологиче-
ские свойства почвы.
Пластичность почвы — ее свой-
ство деформироваться под действием
внешней нагрузки (изменять свою форму
без распадения на части) и сохранять
эту деформацию после снятия нагрузки,
основном от механического состава и
влажности почвы и характеризуется числом пластичности:
wU=™m — Wp,
(14)
где wm — верхний предел пластичности, т. е. влажность почвы,
при которой она расплывается от малейшего сотрясения;
wp — нижний предел пластичности, т. е. влажность, при кото-
рой почва, раскатанная в стержень диаметром 3 мм, на-
чинает крошиться.
Песок непластичен, число пластичности для почв иного меха-
нического состава принимает следующие значения: супесь—1...7;
суглинок — свыше 7 и до 17; глина — более 17.
Упругость противопоставляют пластичности. Под упру-
гостью почвы понимают ее свойство восстанавливать свою форму
после снятия внешней нагрузки. Следовательно, упругая деформа-
ция существует лишь до тех пор, пока на тело продолжает дейст-
вовать внешняя сила, вызвавшая эту деформацию. Упругость поч-
вы зависит главным образом от механического состава, влажности
и задернелости. Относительное значение упругих деформаций поч-
вы может колебаться от 30 до 80%.
Вязксь-сть почвы — ее свойство медленно деформироваться
не только в функции нагрузки, нсгтт—в—функции времени. Таким
образом, деформация вязкого тела зависит не только от нагрузки,
но и от продолжительности ее действия. Чем больше продолжи-
тельность действия нагрузки, тем больше и деформация. Вязкость
почвы связана с явлением взаимного перемещения составляющих
ее фаз: твердых частиц, воды и воздуха. Например, при движении
трактора по болотистой почве (торфянику) глубина колеи тем
больше, чем меньше скорость трактора, и наоборот.
18
Хруп ft о с т ь обычно противопоставляют вязкости. Предел
прочностшфуиких тел не превышает предела упругости или совпа-
дает с ним. Таким образом, в хрупком теле пластические деформа-
ции отсутствуют. Так, например, пересохшие почвы тяжелого ме-
ханического состава обычно становятся хрупкими, т. е. при разру-
шении они практически не испытывают остаточных деформаций.
Только в отдельных частных случаях почва может обладать
лишь одним из перечисленных свойств, т. е. только упругостью
или только пластичностью и т. п. В общем же случае почва — это
упруго-вязкопластичное тело. Однако с изменением тех или иных
параметров почвы происходит изменение соотношения или утрата
тех или иных ее фундаментальных свойств. Например, при силь-
ном уменьшении влажности почва может утратить свойство вязко-
сти и приобрести свойство хрупкости.
Задернелость и ее влияние на технологические свойства. Почвы
целинных и залежных земель, лугов, пастбищ, осушенных болот,
торфяников, полей из-под многолетних трав пронизаны многочис-
ленными корнями растений. Мощные крупные корни концентри-
руются в верхней части пласта в слое от 6...8 до 16...18 см, ниже
располагаются, как правило, лишь тонкие мелкие корешки. Поч-
венный пласт в таких случаях разграничивается на два слоя, рез-
ко отличающихся по своим технологическим свойствам. Так, на-
пример, верхний задернелый слой зачастую ведет себя как упру-
гое тело, в то время как нижний обладает пластичностью, а иног-
да может рассматриваться как сыпучий материал.
Установлено, например, что предел прочности на сдвиг задер-
нелой почвы (многолетняя залежь) более чем в 3 раза превышает
предел прочности старопахотной почвы (стерня озимой пшеницы)
того же механического состава и при той же влажности.
Однако и верхний задернелый слой неоднороден по глубине.
Вследствие того, что задернелость почвы с увеличением глубины
расположения слоя уменьшается, изменяются и технологические
свойства. Так, например, предел прочности задернелой почвы на
Рис. 5. Влияние глубины расположения пробы h на показатели прочностей ха-
рактеристики связной задернелой почвы:
а— предел прочности на растяжение а; б— относительное удлинение 8, соответствующее
пределу прочности на растяжение.
2*
растяжение о существенно уменьшается с увеличением глубины h
взятия пробы (рис. 5,а), соответственно уменьшается и относи-
тельное удлинение пробы е, соответствующее пределу прочности
на растяжение (рис. 5,6), а следовательно, и упругость почвы.
Как видим, задернелость оказывает большое влияние на тех-
нологические свойства почвы, поэтому ее необходимо учитывать
при характеристике почвы как объекта механической обработки.
Характеристикой задернелости почвы могут служить толщина слоя
дернины, связность дернины и степень задернения пахотного слоя.
Толщина слоя дернины в зависимости от видового состава рас-
тений и продолжительности их произрастания колеблется от 6 до
18 см. Связность дернины определяется путем испытания ее на
разрыв. Под связностью дернины понимают отношение усилия,
при котором происходит разрыв, к площади поперечного сечения
пробы, т. е. максимальное напряжение, или предел прочности на
разрыв (Па).
Степень задернения пласта (пахотного слоя) определяют путем
взятия проб почвы на глубину пахотного слоя и выделения из них
подземной части растений (корней). Выделенные из почвы кореш-
ки отмывают, высушивают до воздушно-сухого состояния и взве-
шивают. Масса подземной части растений, отнесенная к объему
взятой пробы, показывает степень задернения пласта (г/дм3).
Степень задернения пласта колеблется в широких пределах в за-
висимости от видового состава и продолжительности произраста-
ния растений. По нашим данным степень задернения почвы со-
ставляет: на целине 18...39, залежи до 24, на полях многолетних
трав (клевера) двухлетнего пользования 4,5...8 г/дм3.
Абразивность проявляется в износе рабочих органов почвооб-
рабатывающих машин и орудий и зависит главным образом от
механического состава почвы.
Установлено, например, что износ лемеха при вспашке одного
гектара составляет: на глинистых и суглинистых почвах от 2 до
30 г, супесчаных и песчаных с небольшим количеством камней от
30 до 100 г, песчаных с большим количеством камней от 100 до
450 г.
Следовательно, общим критерием абразивности почвы можно
считать содержание в ней физического песка. Высокая абразив-
ность песчаных почв объясняется преобладанием в их составе
кварца — самого твердого из минералов, образующих почву.
Глава II
ТЕХНОЛОГИЧЕСКИЕ ОСНОВЫ МЕХАНИЧЕСКОЙ
ОБРАБОТКИ ПОЧВЫ
Основная цель механической обработки почвы — создание наи-
более благоприятных условий для роста и развития культурных
растений и повышение ее плодородия. В любом технологическом
20
процессе механической обработки, как указывал В. П. Горячкин,
необходимо участие трех элементов: энергии, рабочего органа и
объекта обработки — материала. В процессе механической обра-
ботки почвы рабочий орган машины или орудия (корпус плуга,
диск или зуб бороны, лапа культиватора и т. п.), получая энергию
от трактора или другого источника, воздействует на почву, в ре-
зультате чего изменяет ее свойства и состояние.
§ 1. Технологические операции и процессы
Технологические операции. Основная цель механической обра-
ботки почвы может быть достигнута выполнением следующих ос-
новных технологических операций: оборачивание, крошение (рых-
ление), резание, перемешивание, уплотнение, выравнивание по-
верхности, подрезание и выдергивание сорняков, поделка гребней,
борозд, лунок и т. п.
Оборачивание — изменение взаимного расположения верх-
них и нижних слоев почвы. При этом дернина, пожнивные остатки,
растения сорняков заделываются вглубь, где под действием мик-
роорганизмов разлагаются, повышая плодородие почвы. Путем
оборачивания почвы заделывают также навоз, органо-минеральные
и минеральные удобрения.
Рыхление (крошение)—разделение обрабатываемого слоя
почвы на отдельные структурные агрегаты (комочки), сопровож-
дающееся увеличением расстояния между ними и, следовательно,
уменьшением объемной массы (плотности) почвы. Показателем
степени рыхления почвы может служить отношение объемной мас-
сы (плотности) почвы до и после обработки.
Рыхление, как правило, сопровождается крошением почвы, т. е.
разрушением ее структурных агрегатов. Образование при этом
агрегатов размером менее 1 мм считается нежелательным, так как
такие агрегаты относят к эрозионно-опасным. Образование агре-
гатов размером менее 0,25 мм еще более нежелательно. Такие аг-
регаты называют пылеватыми, а процесс их образования —распы-
лением почвы. Отношение массы пылеватых частиц к массе всей
пробы характеризует степень распыления почвы.
Резание — процесс отделения обрабатываемого пласта или
тонкого слоя (стружки) от остального почвенного массива. Учиты-
вая анизотропность (неоднородность) почвы, различают вертикаль-
ное и горизонтальное резание.
Перемешивание-—изменение взаимного расположения
почвенных агрегатов, удобрений и т. п. Его выполняют для прида-
ния обрабатываемому слою большей однородности, а также для
равномерного распределения вносимых в почву органических и ми-
неральных удобрений.
Уплотнение — процесс обратный рыхлению. Его выполняют
перед посевом мелких семян для равномерной их заделки, перед
посевом озимых для предотвращения последующего разрыва их
21
.корней при оседании рыхлой почвы, после посева в целях создания
.лучшего контакта семян с почвой и обеспечения их капиллярной
влагой. В засушливой степной зоне уплотняют поверхность почвы,
'чтобы предупредить выдувание верхних ее слоев и уменьшить по-
тери влаги, а в лесостепной уплотняют прослойку почвы на неко-
торой глубине от поверхности для снижения потерь влаги за счет
конвекционно-диффузного тока парообразной воды.
Выравнивание поверхности — устранение неровностей
«а поле. В засушливых зонах поверхность выравнивают для того,
'чтобы уменьшить испарение влаги, в обычных условиях перед по-
севом это делают для более равномерной глубины заделки семян,
а на орошаемых землях—для создания условий равномерного по-
лива.
Подрезание и выдергивание сорняков — механи-
ческое уничтожение сорных растений путем подрезания корней
и корневищ, захвата и выдергивания корневищ и стеблей рас-
тений.
Поделка гребней, гряд, борозд, лунок выполняет-
ся для регулирования водного режима почвы.
Технологический процесс. Обычно один рабочий орган почво-
обрабатывающего орудия выполняет одновременно несколько тех-
нологических операций, объединенных в единый технологический
процесс. Например, технологический процесс вспашки включает в
►себя отрезание пласта от дна и стенки борозды, оборот, рыхление
(крошение) и перемешивание. Широкое применение нашли сле-
дующие технологические процессы: вспашка, глубокое рыхление,
лущение, культивация, боронование, прикатывание, фрезерование
и т. п.
Несколько технологических операций или процессов составляют
систему обработки почвы. Различают: основную (глубокую) и до-
полнительную (поверхностную) системы обработок. Основная
имеет две разновидности — отвальная и безотвальная, а дополни-
тельная подразделяется на предпосевную и послепосевную (по
'уходу за посевами). Соответственно системам обработки почвы
‘подразделяются и почвообрабатывающие машины и орудия.
§ 2. Взаимодействие клина с почвой
Характер явлений, протекающих в почве под воздействием ра-
бочего органа почвообрабатывающего орудия, зависит как от гео-
метрической формы рабочего органа, так и от технологических
свойств почвы.
Разновидности клиньев. Академик В. П. Горячкин показал, что,
несмотря на чрезвычайное разнообразие рабочих органов почво-
• обрабатывающих орудий, геометрическая форма рабочей поверх-
ности каждого из них сводится к клину, т. е. клин лежит в основе
и является прототипом как культиваторной лапы, так и плуж-
ного корпуса. Следовательно, действие на почву рабочих органов
:22
почвообрабатывающих машин в первом при- в/ /с
ближении можно представить как возденет- / /
вне на нее клина. //
По геометрической форме рабочей поверх-
ности клинья разделяют на плоские и криво-
линейные. К первым относятся лемеха плуж-
ных корпусов, лапы культиваторов, зубья бо-
рон, ножи рыхлителей; ко вторым — отвалы Рис. 6. Одногранный
плугов, подъемно-отвальные поверхности ка- плоский клин,
налокопателей, окучники и т. п.
Различают прямые (лобовое резание) и косые (скользящее
резание) клинья в зависимости от их установки по отношению к
направлению движения. В зависимости от числа граней, участвую-
щих в рабочем процессе, различают одно-, двух- и трехгранные-
плоские клинья.
Одногранный плоский клин (рис. 6) имеет только рабочую-
грань АВ, другая грань АС в рабочем процессе не участвует. Ха-
рактерный признак — отсутствие опорной грани и, следовательно,
реакции дна борозды. К одногранным можно отнести остро зато-
ченные зубья некоторых борон. Однако в процессе работы острие-
быстро затупляется — образуется опорная поверхность (подошва).
Поэтому практически одногранные клинья отсутствуют. Отсюда,
в пространстве трех измерений наиболее простым элементарным?
клином будет двугранный прямой плоский клин. Одна из граней’
этого клина (лицевая) рабочая, другая (нижняя) опорная. Зад-
няя грань играет роль стойки и в рабочем процессе не участвует.
В пространстве трех измерений можно представить три прямых,
плоских двугранных клина (рис. 7), обладающих различными тех-
нологическими свойствами.
Клин ABCDEF (рис. 7, а) имеет рабочую грань ABCD и опор-
ную BCEF. РеброВС, перпендикулярное к направлению движения,,
подрезает почвенный пласт в горизонтальной плоскости, а рабочая-
грань ABCD поднимает его на себя. При подъеме пласт изгибает-
ся и крошится (рис. 8, а). Основная характеристика этого клина —
Рис. 7. Разновидности плоских клиньев:
а — простой с углом крошения а; б — простой с углом наклона Р; в — простой с углоиг<
сдвига у; г — косой трехгранный с углами а, р, у.
23>
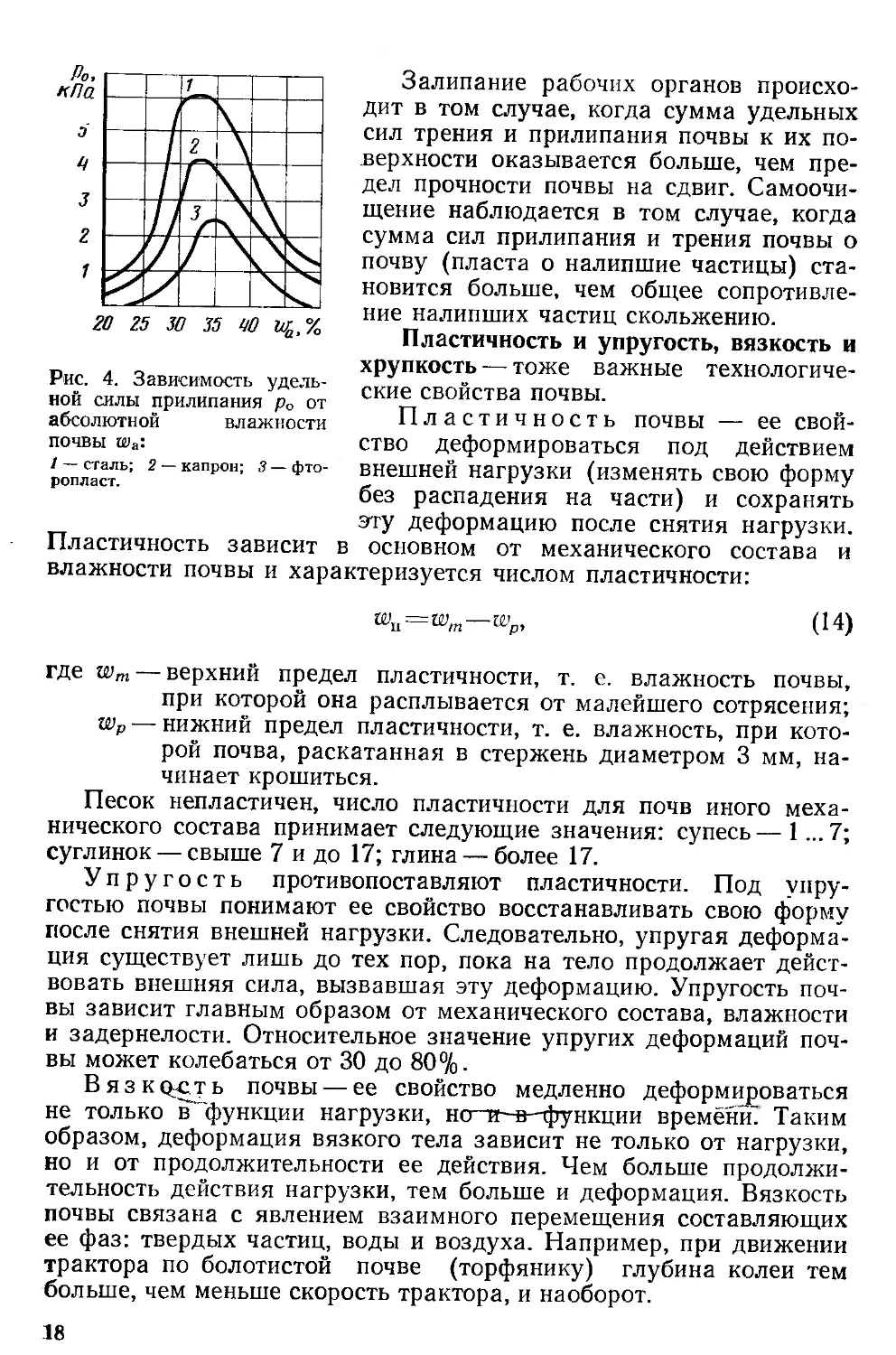
Рис. 8. Характер воздействия на почвенный пласт элемен-
тарных клиньев:
а —с углом а (вид справа); б —с углом Р (вид сзади); в —с уг-
лом р (вид сверху).
угол а, расположенный в продольно-вертикальной плоскости. Чем
он больше, тем больше изгиб и крошение пласта, поэтому угол а
и получил название угла крошения.
Другой элементарный клин AiBiCiDiEiFi (рис. 7,6) снабжен
рабочей гранью A1B1C1D1 и опорной гранью C1D1E1F1. Его рабочая
грань наклоняет пласт в направлении, перпендикулярном движе-
нию, что способствует оборачиванию пласта. Основная характери-
стика этого клина — угол р, расположенный в поперечно-верти-
кальной плоскости. Чем угол р больше, тем больше поворот пласта
в поперечно-вертикальной плоскости (рис. 8, б). Следовательно,
угол р характеризует способность рабочей поверхности оборачи-
вать пласт.
Третий элементарный клин A2B2C2D2E2F2 (рис. 7, в) имеет
рабочую грань A2B2C2D2 и опорную A2B2F2E2. Ребро А2В2 этого
клина отрезает почвенный пласт в вертикальной плоскости. Под
воздействием рабочей грани пласт сдвигается в сторону, одновре-
менно изгибаясь в горизонтальной плоскости (рис. 8, в). При изги-
бе пласт крошится. Характеристика этого клина — угол у, распо-
ложенный в горизонтальной плоскости.
Таким образом, клин с углом у оказывает в горизонтальной
плоскости такое же воздействие на пласт, как и клин с углом а
в вертикальной плоскости. Следовательно, совместное воздействие
двух клиньев с углами any способствует разрушению пласта в
двух разных плоскостях.
Однако воздействовать на почву тремя последовательно рас-
положенными элементарными клиньями с углами а, § и у было бы
непрактично. Еще академик В. П. Горячкин показал, что сущест-
вует такой клин, который один совмещает в себе все перечислен-
ные технологические свойства трех элементарных клиньев. Для
того чтобы убедиться в этом, клин ABCDEF переместим в начало
координат (рис. 7, г) и на его сторонах FA, FB и FE построим
клинья с углами р и у. Соединив точки А, В и Е сплошными ли-
ниями, получим клин ABEF. Это — косой трехгранный клин. Он
снабжен одной рабочей гранью АВЕ и двумя опорными гранями
ABF и BEF. Как видим, косой трехгранный клин характеризуется
теми же углами а, р и у и, следовательно, один обладает техноло-
гическими свойствами всех трех элементарных клиньев в совокуп-
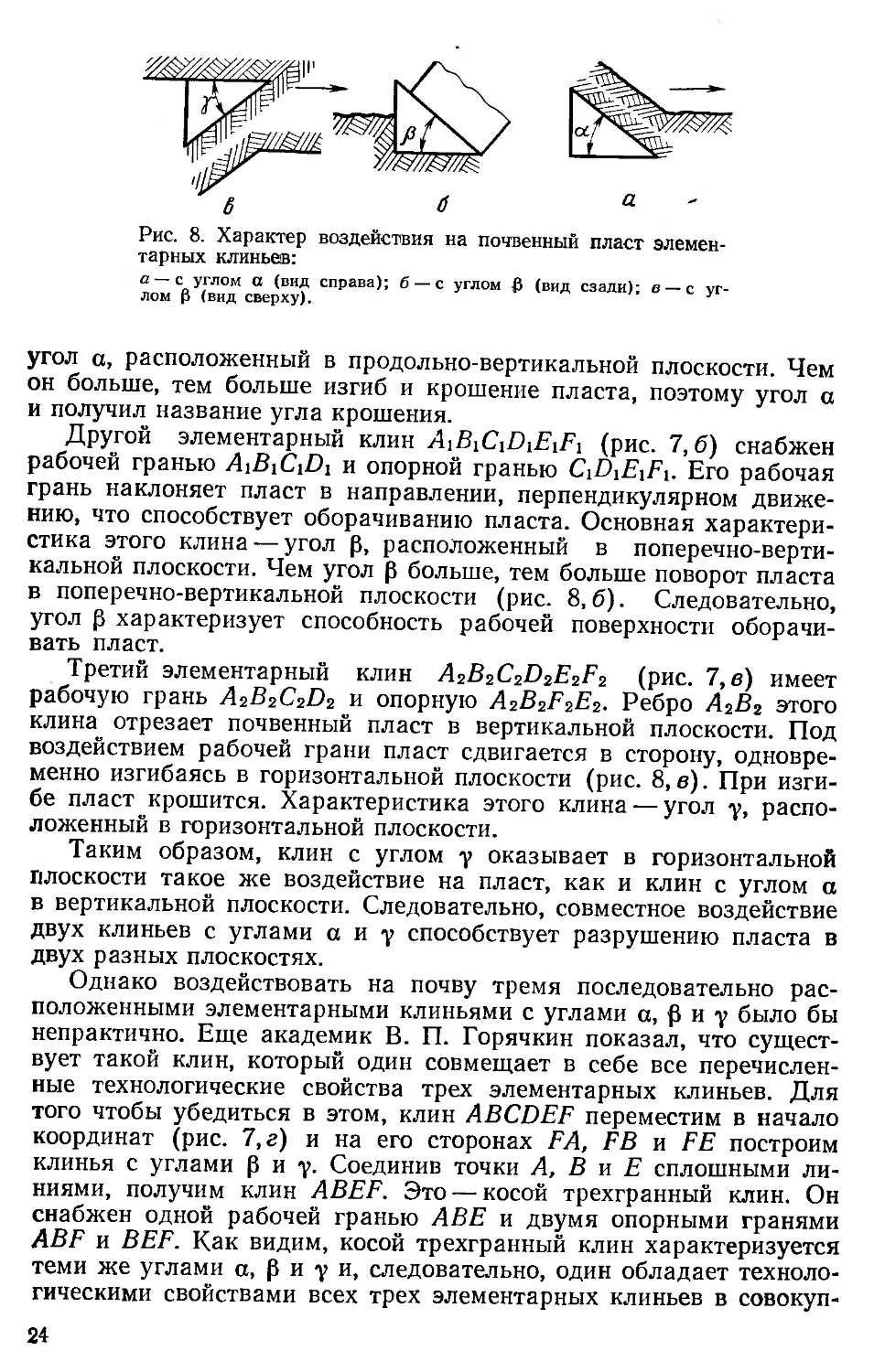
Рис. 9. Схема к определению за-
висимостей между основными пара-
метрами клина а, ₽, у и е.
Рис. 10. Взаимодействие пласта и
клина (а); силовой треугольник (б).
ности. Эти углы связаны между собой определенной зависимостью.
Как видно из рисунка 9,
OZ=OBtga=OCtg₽.
Но OC=OBtgy. Подставив его в формулу, получим:
ОА=ОВ tga=OBtgytgp,
откуда
tga=tgptgy. (15)
Следовательно, в трехгранном клине произвольно могут быть
изменены лишь два угла, третий определится по значениям первых
двух.
Кроме трех вышеприведенных углов, часто пользуются еще од-
ним— углом е, определяющим наклон рабочей грани клина к го-
ризонтальной плоскости (лемеха к дну борозды). Он также связан
с углами а, р и у. Из этого же рисунка видно, что
OA—ODtgs~OB tg а,
но
OD=OB sin у,
следовательно,
tga=tgesiny. (16)
Действуя аналогично, получим
tgp=tgecosy. (17)
Формулы (16) и (17) часто используют при расчете положе-
ния рабочей поверхности лемеха. При этом по заданным углам
8 и у определяют аир.
Характер деформации материала (почвы) зависит как от уста-
новки рабочей грани клина к горизонтальной и вертикальной пло-
скостям, так и от физико-механических свойств почвы.
25
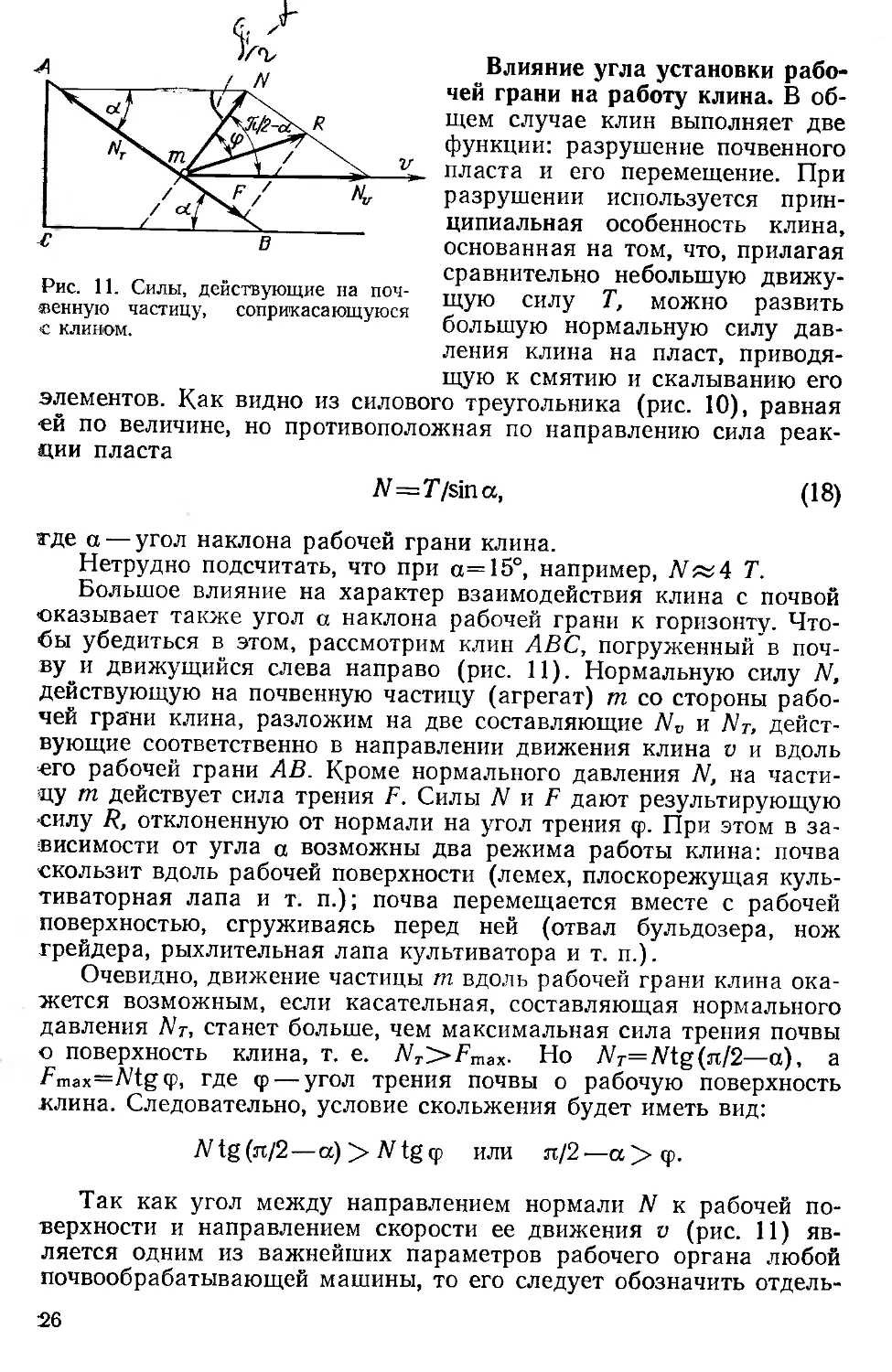
Рис. 11. Силы, действующие на поч-
венную частицу, соприкасающуюся
с клином.
Влияние угла установки рабо-
чей грани на работу клина. В об-
щем случае клин выполняет две
функции: разрушение почвенного
пласта и его перемещение. При
разрушении используется прин-
ципиальная особенность клина,
основанная на том, что, прилагая
сравнительно небольшую движу-
щую силу Т, можно развить
большую нормальную силу дав-
ления клина на пласт, приводя-
щую к смятию и скалыванию его
элементов. Как видно из силового треугольника (рис. 10), равная
ей по величине, но противоположная по направлению сила реак-
ции пласта
W = 77sina,
(18)
где а — угол наклона рабочей грани клина.
Нетрудно подсчитать, что при а=15°, например, Nm4 Т.
Большое влияние на характер взаимодействия клина с почвой
оказывает также угол а наклона рабочей грани к горизонту. Что-
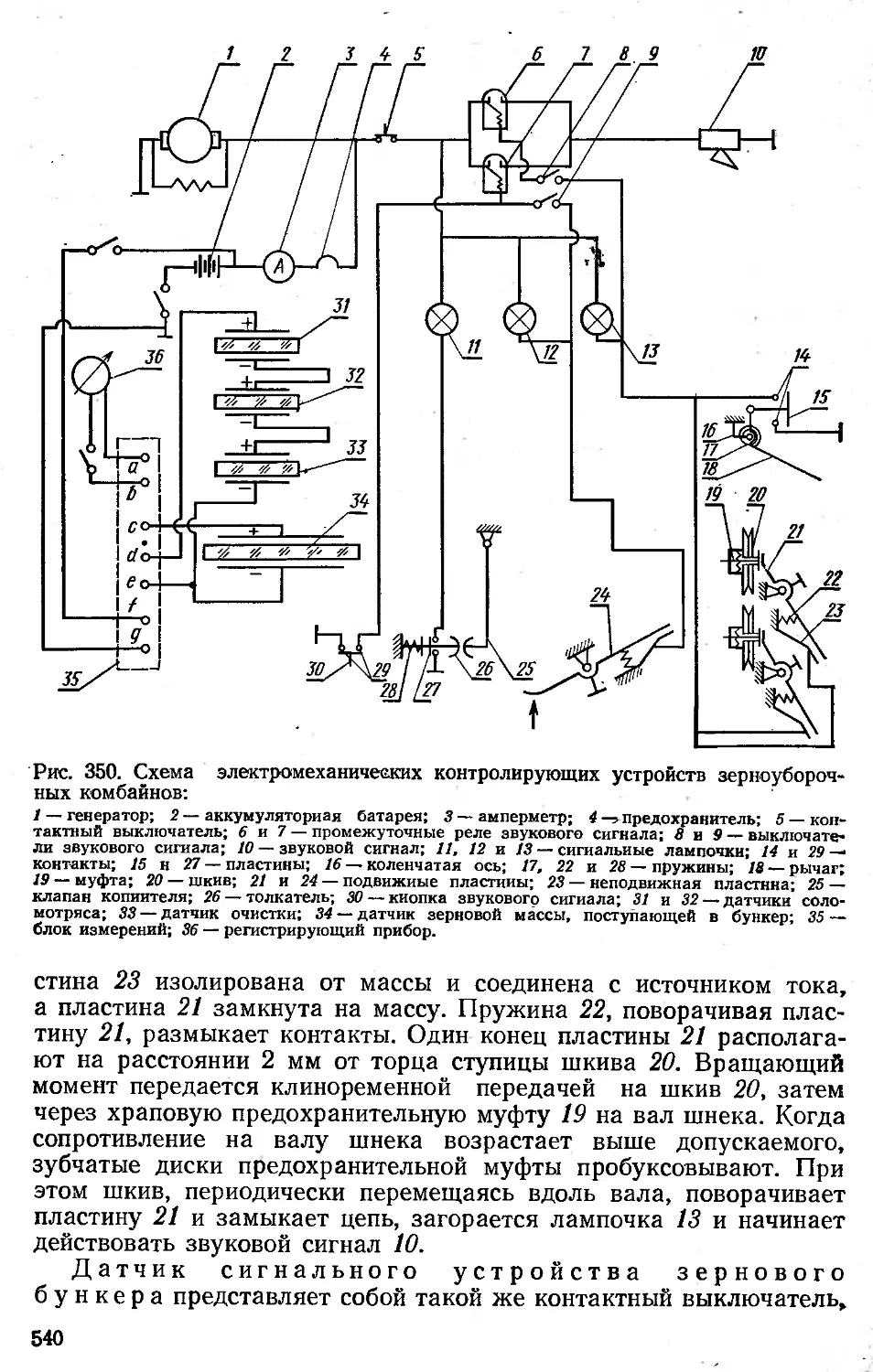
бы убедиться в этом, рассмотрим клин АВС, погруженный в поч-
ву и движущийся слева направо (рис. 11). Нормальную силу N,
действующую на почвенную частицу (агрегат) m со стороны рабо-
чей грани клина, разложим на две составляющие Nv и Nt, дейст-
вующие соответственно в направлении движения клина v и вдоль
«го рабочей грани АВ. Кроме нормального давления N, на части-
цу m действует сила трения F. Силы N и F ц.ак>т результирующую
«илу R, отклоненную от нормали на угол трения ф. При этом в за-
висимости от угла а возможны два режима работы клина: почва
скользит вдоль рабочей поверхности (лемех, плоскорежущая куль-
тиваторная лапа и т. п.); почва перемещается вместе с рабочей
поверхностью, сгруживаясь перед ней (отвал бульдозера, нож
грейдера, рыхлительная лапа культиватора и т. п.).
Очевидно, движение частицы m вдоль рабочей грани клина ока-
жется возможным, если касательная, составляющая нормального
давления Nt, станет больше, чем максимальная сила трения почвы
о поверхность клина, т. е. NT>Fmax. Но NT=Ntg(nl2—а), а
/7тах=М§ф, где ф — угол трения почвы о рабочую поверхность
клина. Следовательно, условие скольжения будет иметь вид:
TV tg (зт/2—а)>ЛЧ§ф или л/2—а>ф.
Так как угол между направлением нормали N к рабочей по-
верхности и направлением скорости ее движения v (рис. 11) яв-
ляется одним из важнейших параметров рабочего органа любой
почвообрабатывающей машины, то его следует обозначить отдель-
26
ным символом, например £. Тогда ус-
ловие скольжения материала по рабо-
чей поверхности упростится и будет
иметь вид:
£><р, (19)
где £=л/2—а.
Если же то силы Nt и F вза-
имно уравновешиваются, скольжения
почвы вдоль рабочей грани клина не
наблюдается и направление движения
частицы т совпадает с направлением
движения клина v, так как единствен-
ной движущей силой будет сила Nv.
В этом случае каждая частица пере-
мещается вместе с клином в направле-
нии его движения, клин толкает перед
собой всю массу находящейся перед
ним почвы, которая сгруживается пе-
ред ним.
Изложенные выше закономерности
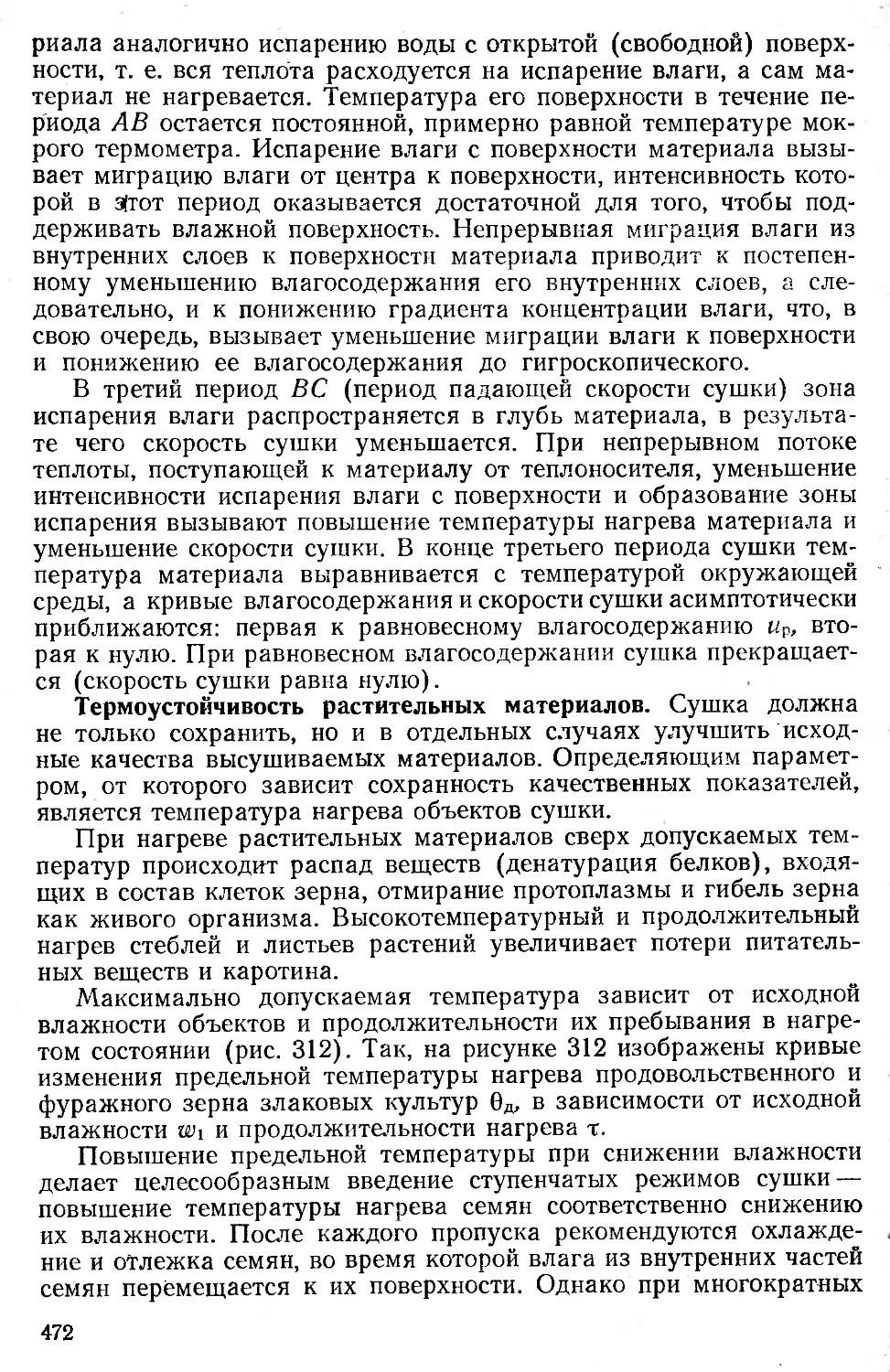
справедливы и для клина с углом у
(рис. 7 и 8).
В этом случае угол а следует за-
Рис. 12. Изменения составля-
ющих Rx и Rz сопротивления
почвы клину в зависимости от
угла крошения а (по данным
ВИСХОМа):
Суглинок влажностью 24%, глуби*
на обработки 16 см, ширина захва-
та 50 мм.
менить углом у. Тогда условие скольжения почвы вдоль рабочей
поверхности будет иметь вид: |
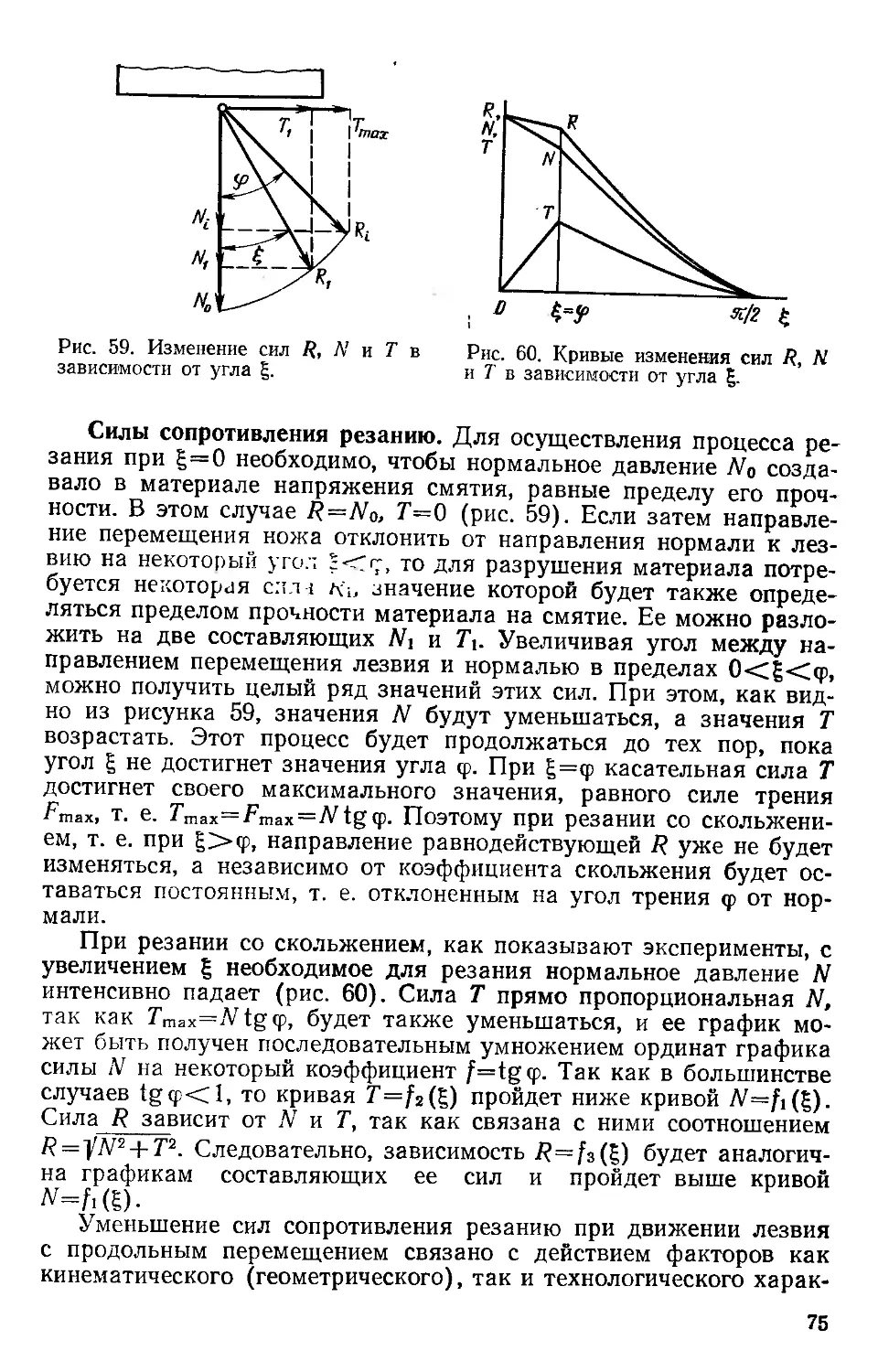
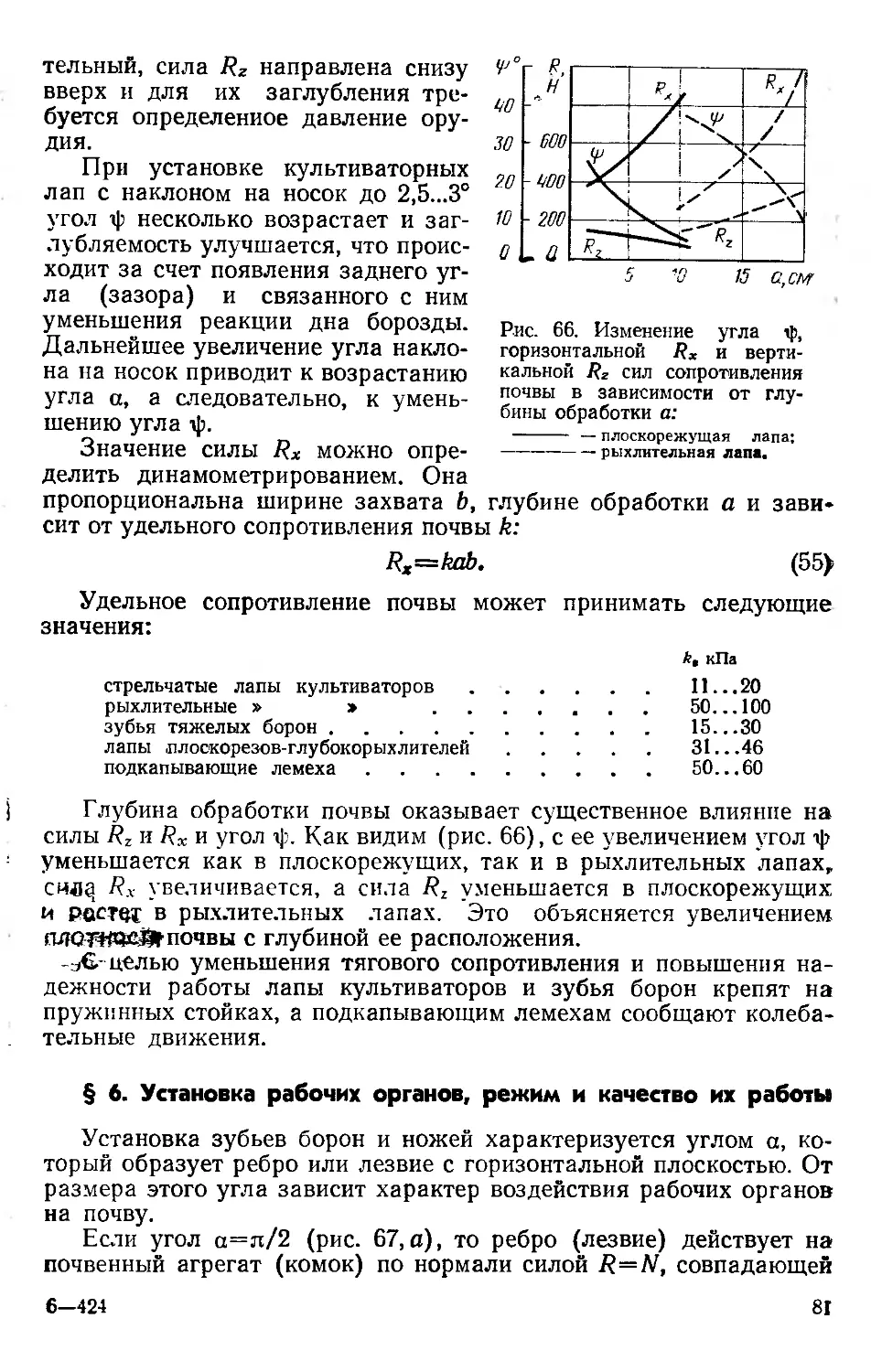
Угол а оказывает существенное влияние и на сопротивление
почвы движению клина (рис. 12). Как видим, по мере увеличения
угла а горизонтальная составляющая силы сопротивления почвы
Rx растет, а вертикальная Rz — уменьшается. Сила Rx характери-
зует энергозатраты на технологический процесс, а сила Rz — за-
глубляемость клина в почву. Из графиков видно, что минимальные
энергозатраты и хорошая заглубляемость наблюдаются при малых
значениях угла а.
Влияние технологических свойств почвы на характер ее дефор-
мации клином. Характер деформации почвы клином может быть
весьма разнообразным и зависит от свойств
Рис. 13. Смятие пласта
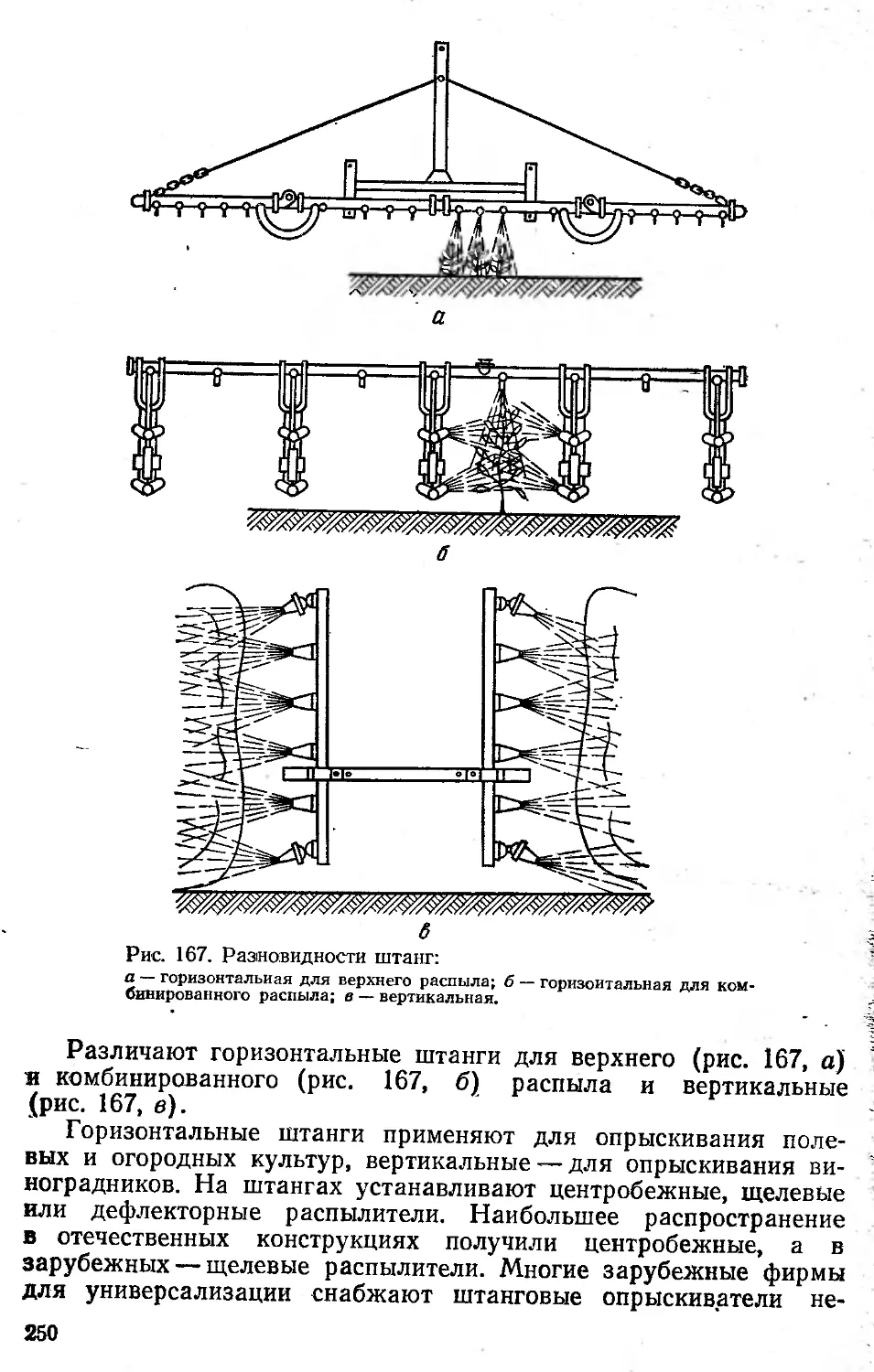
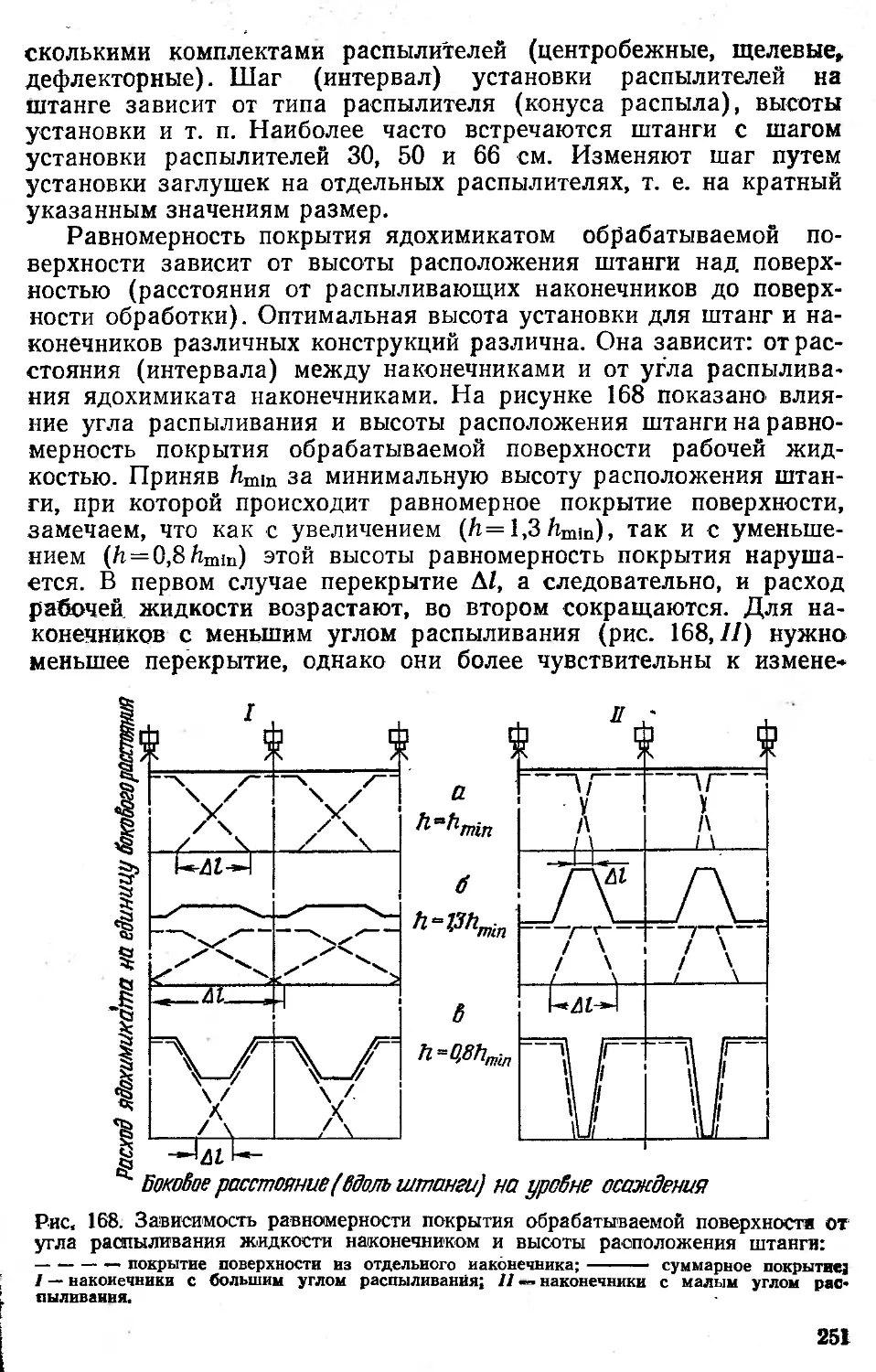
под действием клина.
и состояния почвенного пласта.
При воздействии клина на малосвязную
пластичную почву, пласты которой не спо-
собны оказывать значительное сопротивле-
ние изгибу, деформация почвы включает
две периодически повторяющиеся фазы:
уплотнение (смятие) почвы до некоторого
предела прочности; скалывание (сдвиг) уп-
27
Рис. 14. Деформация пластичной мало-
связной почвы клином (по В. А. Желигов-
скому):
а — схема, раскрывающая физико-механическую
сущность процесса: I — выделенный слой почвы
(заштрихован); 1, 2, 3, 4, 5 и 6 — частицы (струк-
турные агрегаты) почвы в выделенном слое; II —
эпюра касательных напряжений сдвига; б — об-
щий вид деформированного пласта.
Рис. 15. Воздействие клина на
связный сухой почвенный пласт
тяжелого механического состава
(по В. А. Желиговскому):
а — образование опережающей трещи-
ны; б — отрыв пласта вследствие косо-
го излома.
лотненной почвы в виде глыбы трапецеидальной формы. Например
(рис. 13), при переходе клина из положения I в положение II ча-
стицы почвы а, Ъ и т. п. перемещаются в направлении, нормальном
к его рабочей грани (при отсутствии скольжения) или под углом
трения <р к нормали (при скольжении) и занимают положения а'
и Ь'. При этом деформация смятия характеризуется их перемеще-
нием аа' и bb'. Так как aa'>bbf, то напряжение смятия в точке
а' больше, чем в точке Ь'. Нетрудно заметить, что деформация аа'
во столько раз больше деформации bb', во сколько раз высота ча-
стицы а' больше высоты частицы Ь' над дном борозды.
Рассмотрим, что же происходит в толще почвенного пласта,
перемещающегося по рабочей_грани клина. Двумя плоскостями,
параллельными силе R=N+F и перпендикулярными плоскости
чертежа, выделим тонкий слой почвы (рис. 14,а), а также распо-
ложенные в нем частицы (структурные агрегаты) 1...6. По мере
перемещения от лезвия вверх по рабочей грани клина смятие вы-
деленного слоя все больше возрастает и прекратится, по-видимо-
му, тогда, когда деформация смятия, распространяющаяся от ра-
бочей поверхности клина по направлению силы R, достигнет днев-
ной поверхности почвы. При этом прекратится дальнейшее уплот-
нение слоя, т. е. взаимное сближение составляющих его почвенных
частиц, и он превратится в монолит.
28
Допустим, что в верхней границе выделенного слоя смятие
прекратилось, и, следовательно, расстояние между частицами 1,
2 и 3 остается неизменным и все они перемещаются с одинаковой
скоростью в направлении действия силы 7?. В плоскости, ограни-
чивающей этот слой снизу, смятие еще продолжается, и, следо-
вательно, расстояние между частицами 6, 5 и 4 продолжает сокра-
щаться. При этом скорость частицы 5 меньше скорости частицы 6,
а скорость частицы 4 меньше скорости частицы 5, т. е., чем даль-
ше почвенная частица от рабочей грани клина, тем меньше ско-
рость ее движения по направлению силы R.
Вследствие разности скоростей между частицами 2 и 5 и 3 и 4,
связанными между собой силами сцепления и трения, возникнут
касательные напряжения сдвига. Когда напряжения сдвига достиг-
нут предела прочности, связи между частицами 3 и 4 и 2 и 5 бу-
дут разрушены, произойдет сдвиг верхней поверхности относитель-
но нижней. Трещина сдвига начнется у дневной поверхности и
распространится в глубь пласта к рабочей грани клина. Выше-
лежащий монолит по поверхности сдвига переместится вперед. Так
как этот процесс периодически повторяется, то почвенный пласт
последовательно распадается на трапецеидальные глыбы
(рис. 14,6).
При воздействии клина на связный сухой почвенный пласт тя-
желого механического состава (глина, тяжелый суглинок и т. п.)
картина разрушения коренным образом изменяется. При внедре-
нии клина в такую почву возникает сила R, которая является рав-
нодействующей нормального давления и сил трения и отклонена
от нормали на угол трения <р (рис. 15,с). Разложим силу R на
продольную (горизонтальную) Rr и поперечную (вертикальную)
RB составляющие. Продольная составляющая Rr действует, как
сжимающая сила. Однако пересохшая почва тяжелого механиче-
ского состава приобретает свойство хрупкости и под действием
сжимающей силы такого порядка практически не деформируется.
Действие же поперечной составляющей RB вызывает в плоскости
дна борозды нормальные напряжения растяжения, которые приво-
дят к отрыву пласта от дна борозды, т. е. образованию так назы-
ваемой «опережающей» трещины. Вершина опережающей трещи-
ны быстро уходит вперед от лезвия клина. Вследствие этого плечо
I поперечной силы RB возрастает, что приводит к увеличению из-
гибающего момента, вызывающего появление и последующее уве-
личение напряжений растяжения в нижней части пласта в плоско-
сти, перпендикулярной дну борозды (рис. 15,6). К нормальным
напряжениям растяжения в плоскости дна борозды присоединяют-
ся напряжения растяжения от изгиба. Их равнодействующие, до-
стигнув предела прочности на растяжение, вызывают поперечный
косой излом пласта, который начинается с образования трещины
в нижней его части в плоскости, перпендикулярной их действию.
Пласт отрывается глыбой неправильной формы, вследствие чего
дно борозды оказывается неровным, изрытым. После зачистки дна
29
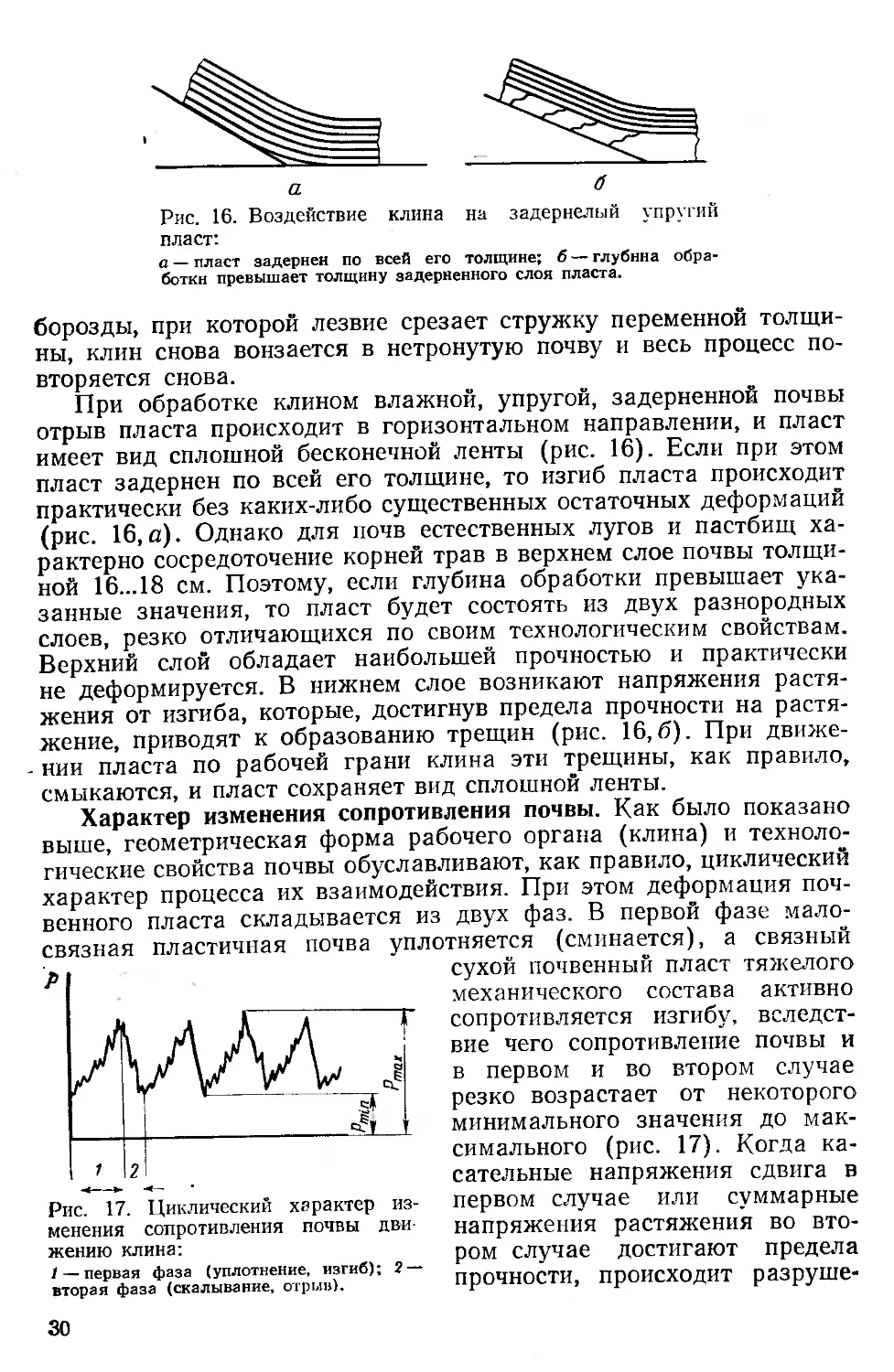
а б
Рис. 16. Воздействие клина на задернелый упругий
пласт:
а — пласт задерней по всей его толщине; б — глубина обра-
ботки превышает толщину задерненного слоя пласта.
борозды, при которой лезвие срезает стружку переменной толщи-
ны, клин снова вонзается в нетронутую почву и весь процесс по-
вторяется снова.
При обработке клином влажной, упругой, задерненной почвы
отрыв пласта происходит в горизонтальном направлении, и пласт
имеет вид сплошной бесконечной ленты (рис. 16). Если при этом
пласт задернен по всей его толщине, то изгиб пласта происходит
практически без каких-либо существенных остаточных деформаций
(рис. 16,а). Однако для почв естественных лугов и пастбищ ха-
рактерно сосредоточение корней трав в верхнем слое почвы толщи-
ной 16... 18 см. Поэтому, если глубина обработки превышает ука-
занные значения, то пласт будет состоять из двух разнородных
слоев, резко отличающихся по своим технологическим свойствам.
Верхний слой обладает наибольшей прочностью и практически
не деформируется. В нижнем слое возникают напряжения растя-
жения от изгиба, которые, достигнув предела прочности на растя-
жение, приводят к образованию трещин (рис. 16,6). При движе-
- нии пласта по рабочей грани клина эти трещины, как правило,
смыкаются, и пласт сохраняет вид сплошной ленты.
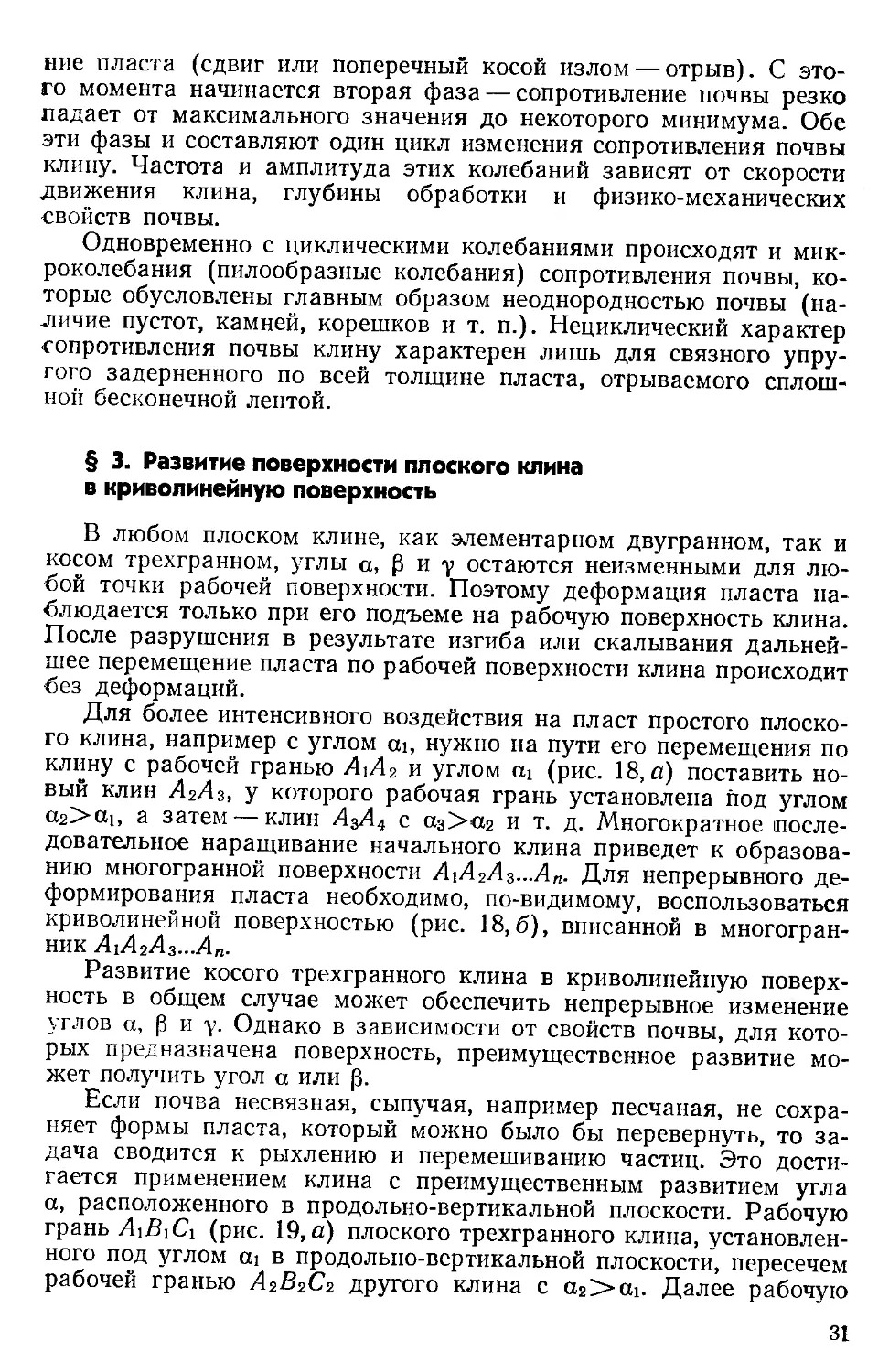
Характер изменения сопротивления почвы. Как было показано
выше, геометрическая форма рабочего органа (клина) и техноло-
гические свойства почвы обуславливают, как правило, циклический
характер процесса их взаимодействия. При этом деформация поч-
венного пласта складывается из двух фаз. В первой фазе мало-
связная пластичная почва уплотняется (сминается), а связный
сухой почвенный пласт тяжелого
механического состава активно
сопротивляется изгибу, вследст-
вие чего сопротивление почвы и
в первом и во втором случае
резко возрастает от некоторого
минимального значения до мак-
симального (рис. 17). Когда ка-
сательные напряжения сдвига в
первом случае или суммарные
напряжения растяжения во вто-
ром случае достигают предела
прочности, происходит разруше-
Рис. 17. Циклический характер из-
менения сопротивления почвы дви-
жению клина:
1— первая фаза (уплотнение, изгиб); 2—
вторая фаза (скалывание, отрыв).
30
ние пласта (сдвиг или поперечный косой излом — отрыв), С это-
го момента начинается вторая фаза — сопротивление почвы резко
падает от максимального значения до некоторого минимума. Обе
эти фазы и составляют один цикл изменения сопротивления почвы
клину. Частота и амплитуда этих колебаний зависят от скорости
движения клина, глубины обработки и физико-механических
свойств почвы.
Одновременно с циклическими колебаниями происходят и мик-
роколебания (пилообразные колебания) сопротивления почвы, ко-
торые обусловлены главным образом неоднородностью почвы (на-
личие пустот, камней, корешков и т. п.). Нециклический характер
сопротивления почвы клину характерен лишь для связного упру-
гого задерненного по всей толщине пласта, отрываемого сплош-
ной бесконечной лентой.
§ 3. Развитие поверхности плоского клина
в криволинейную поверхность
В любом плоском клине, как элементарном двугранном, так и
косом трехгранном, углы а, р и у остаются неизменными для лю-
бой точки рабочей поверхности. Поэтому деформация пласта на-
блюдается только при его подъеме на рабочую поверхность клина.
После разрушения в результате изгиба или скалывания дальней-
шее перемещение пласта по рабочей поверхности клина происходит
без деформаций.
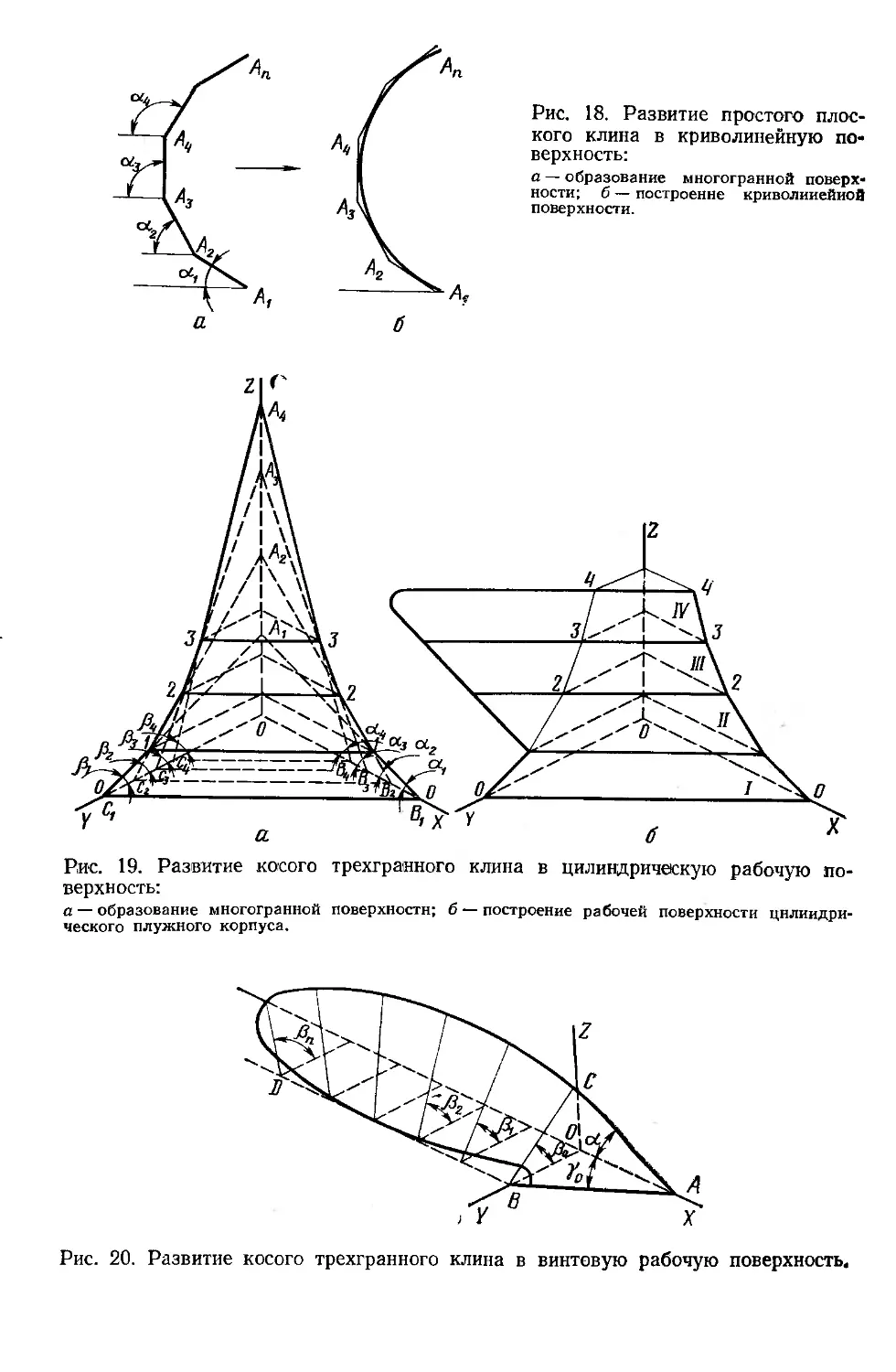
Для более интенсивного воздействия на пласт простого плоско-
го клина, например с углом си, нужно на пути его перемещения по
клину с рабочей гранью AtA2 и углом щ (рис. 18, й) поставить но-
вый клин Л2Л3, у которого рабочая грань установлена под углом
а2>сц, а затем — клин Д3Л4 с а3>а2 и т. д. Многократное после-
довательное наращивание начального клина приведет к образова-
нию многогранной поверхности А\А2А3...Ап- Для непрерывного де-
формирования пласта необходимо, по-видимому, воспользоваться
криволинейной поверхностью (рис. 18,6), вписанной в многогран-
ник А1А2А3...Ап.
Развитие косого трехгранного клина в криволинейную поверх-
ность в общем случае может обеспечить непрерывное изменение
углов а, р и у. Однако в зависимости от свойств почвы, для кото-
рых предназначена поверхность, преимущественное развитие мо-
жет получить угол а или р.
Если почва несвязная, сыпучая, например песчаная, не сохра-
няет формы пласта, который можно было бы перевернуть, то за-
дача сводится к рыхлению и перемешиванию частиц. Это дости-
гается применением клина с преимущественным развитием угла
а, расположенного в продольно-вертикальной плоскости. Рабочую
грань AiBiCi (рис. 19,с) плоского трехгранного клина, установлен-
ного под углом си в продольно-вертикальной плоскости, пересечем
рабочей гранью А2В2С2 другого клина с а2>аь Далее рабочую
31
Рис. 18. Развитие простого плос-
кого клина в криволинейную по-
верхность:
а — образование многогранной поверх-
ности; б — построение криволинейной
поверхности.
Рис. 19. Развитие косого трехгранного клина в цилиндрическую рабочую по-
верхность:
а — образование многогранной поверхности; б — построение рабочей поверхности цилиндри-
ческого плужного корпуса.
Рис. 20. Развитие косого трехгранного клина в винтовую рабочую поверхность.
грань А2В2С2 с углом аг пересечем рабочей гранью А3В3С3 с
а3>С2, а рабочую грань А3В3С3 с углом аз пересечем рабочей
гранью А4В4С4 с а4>аз. В результате получим ломаную рабочую
поверхность, состоящую из четырех плоских рабочих граней с уве-
личивающимися углами крошения: ai<a2<a3<a4, которая мо-
жет стать основой для построения рабочей поверхности плуж-
ного корпуса (рис. 19,6).
Ограничив рабочую поверхность клина Л4В4С4 сверху прямой
4—4, а также продлив плоскости рабочих граней II, III и IV в сто-
рону соседнего квадранта, получим ломаную рабочую поверхность
плужного корпуса (рис. 19,6).
Как видим, при каждом пересечении рабочих граней косых
трехгранных клиньев образуется прямая линия: 1—1, 2—2, 3—3.
При бесконечно большом количестве таких пересекающихся
клиньев в пределе получим криволинейную вогнутую рабочую по-
верхность. В данном примере это будет цилиндрическая поверх-
ность JysXQnsQ. При этом каждая линия пересечения рабочих
граней плоских косых трехгранных клиньев одновременно служит
и образующей цилиндра.
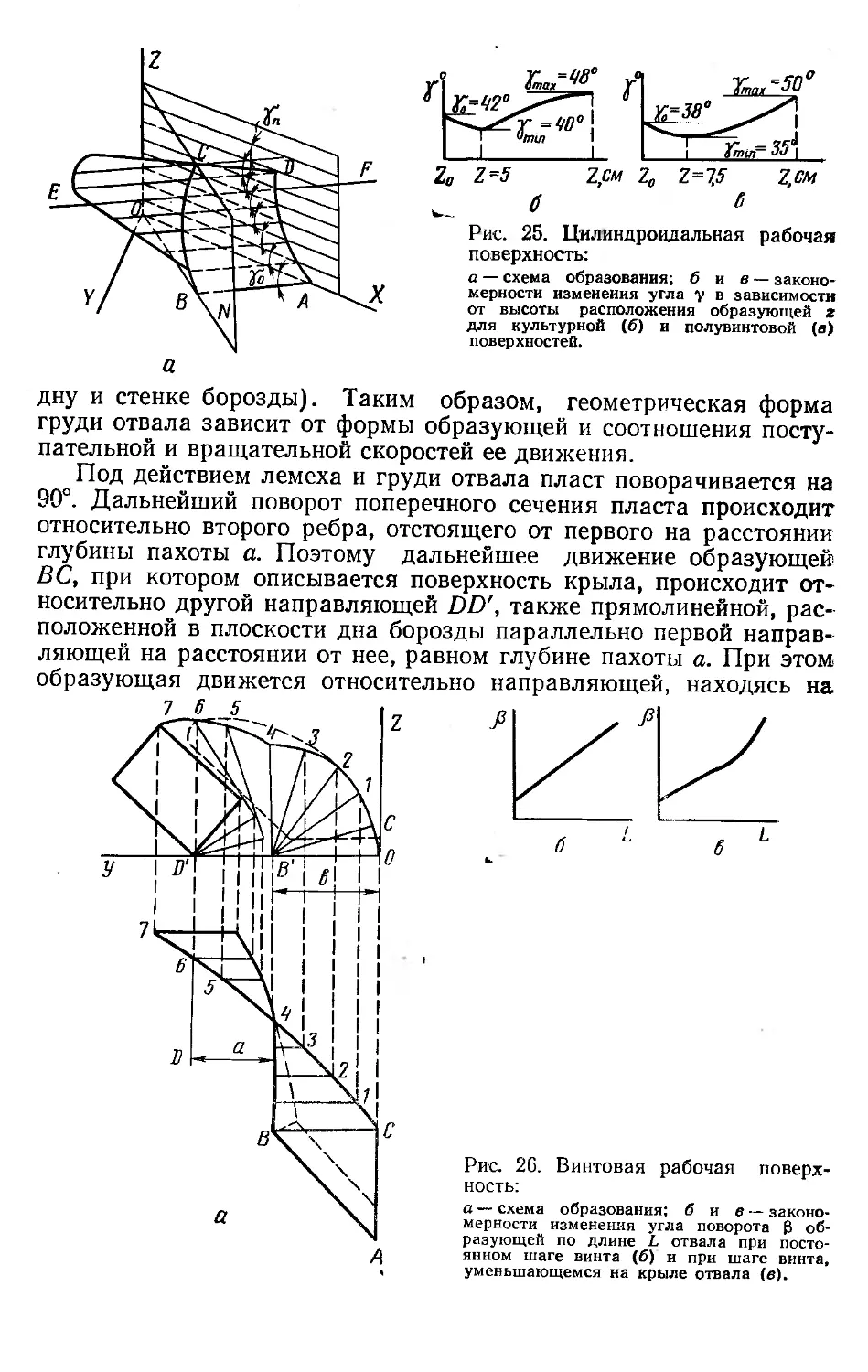
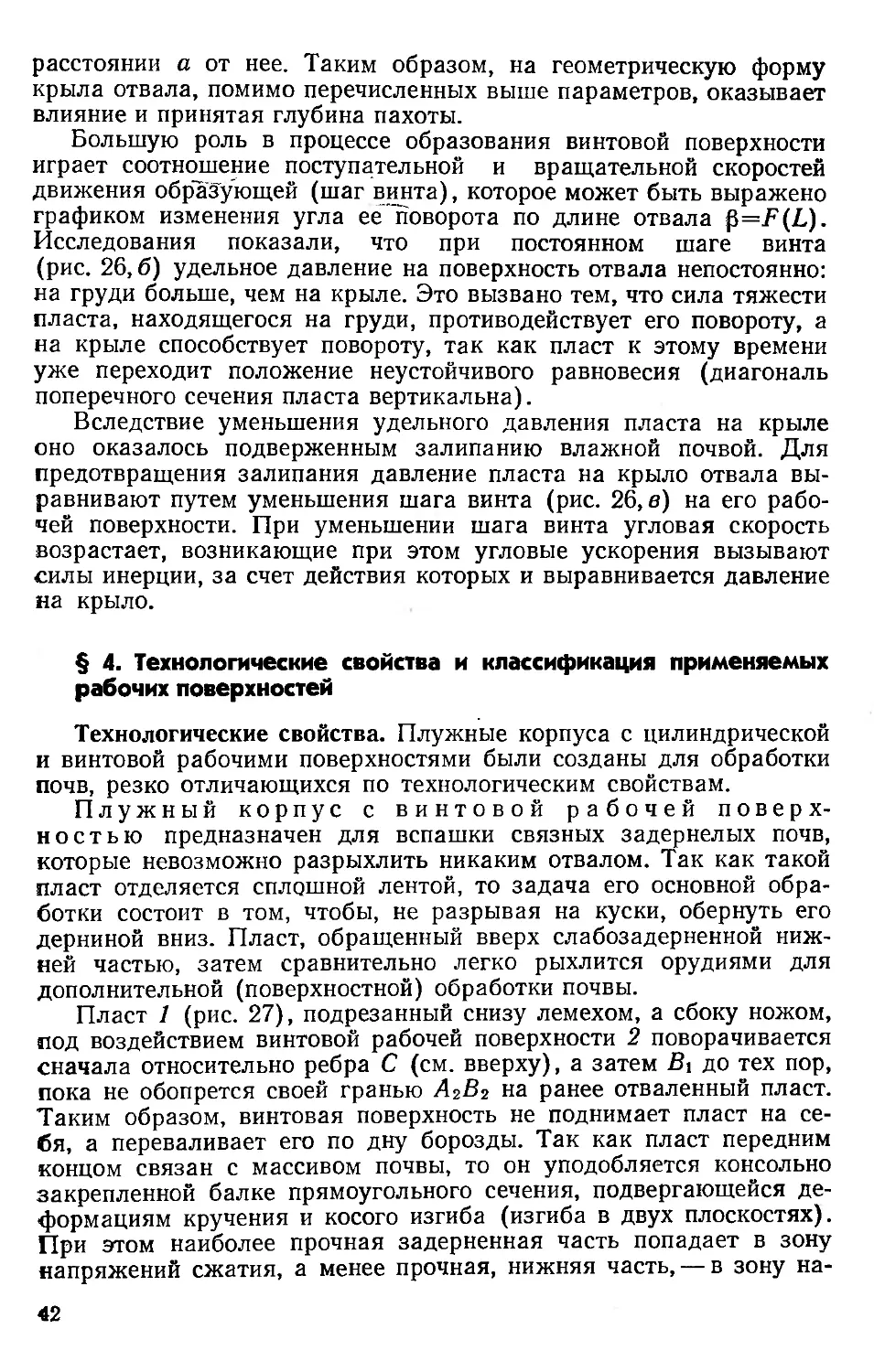
Обработка связных задернелых почв, которые разрыхлить с по-
мощью клина оказывается невозможно, сводится к обороту пласта
с последующим рыхлением другими орудиями незадерненной ча-
сти пласта, оказавшейся сверху. Такая задача может быть выпол-
нена клином с сильно развитым углом-fl,.расположенным в попе-
речно-вертикальной плоскости. При этом угол крошения а во избе-
жание разрывов пласта должен быть развит слабо. Как видим
(рис. 20), развитие угла р можно получить вращением ребра ВС
клина АВСО в поперечно-вертикальной плоскости и одновремен-
ным продольным перемещением его конца В вдоль прямой BD,
лежащей в горизонтальной плоскости (плоскости дна борозды) и
параллельной оси X (стенке борозды). В результате образуется
винтовая поверхность (геликоид).
Таким образом, поверхность плоского косого трехгранного кли-
на в зависимости от развития того или иного ее параметра может
быть развита в рабочую поверхность корпуса плуга того или ино-
го типа: цилиндрическую (при развитии угла а), цилиндроидаль-
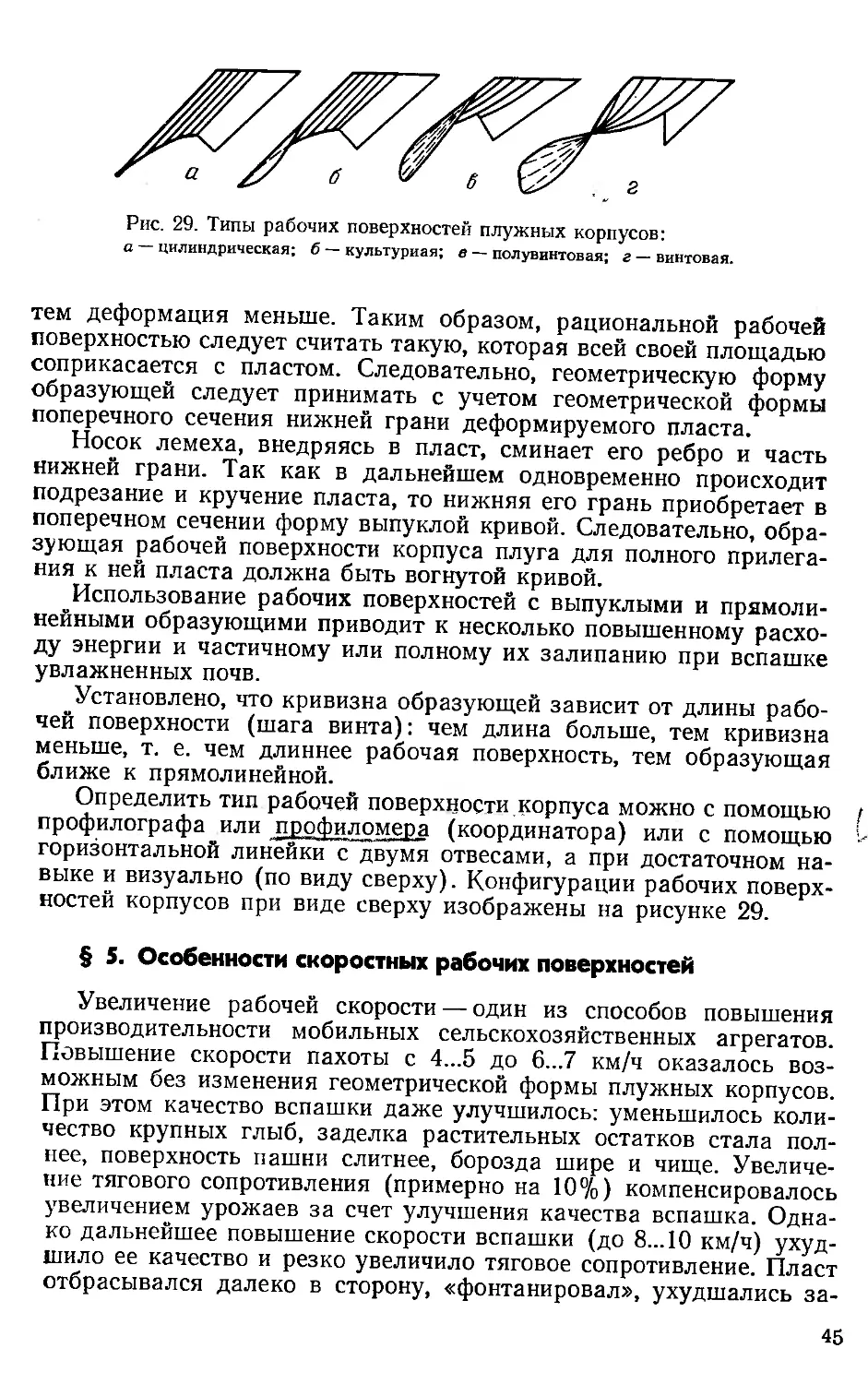
ную (при развитии'углов а и-у) и винтовую (при развитииугла^р).
Глава 111
ЛЕМЕШНО-ОТВАЛЬНЫЕ КОРПУСА
Лемешно-отвальные корпуса — главные рабочие органы плу-
гов, предназначенных для основной обработки почвы — вспашки.
Кроме того, лемешно-отвальные рабочие поверхности применяют-
ся в лущильниках, окучниках, бороздоделателях и каналокопа-
телях.
3—424
33
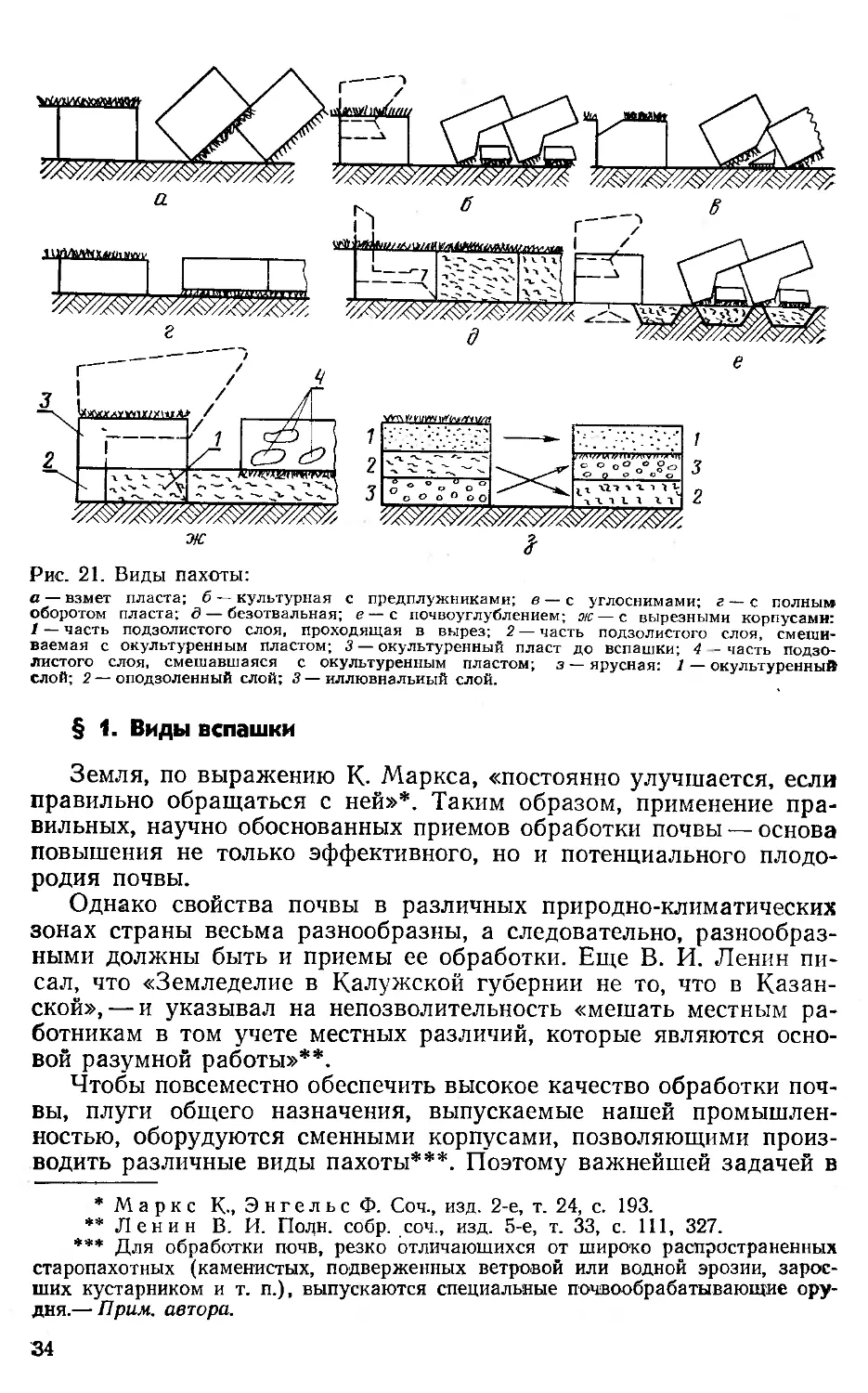
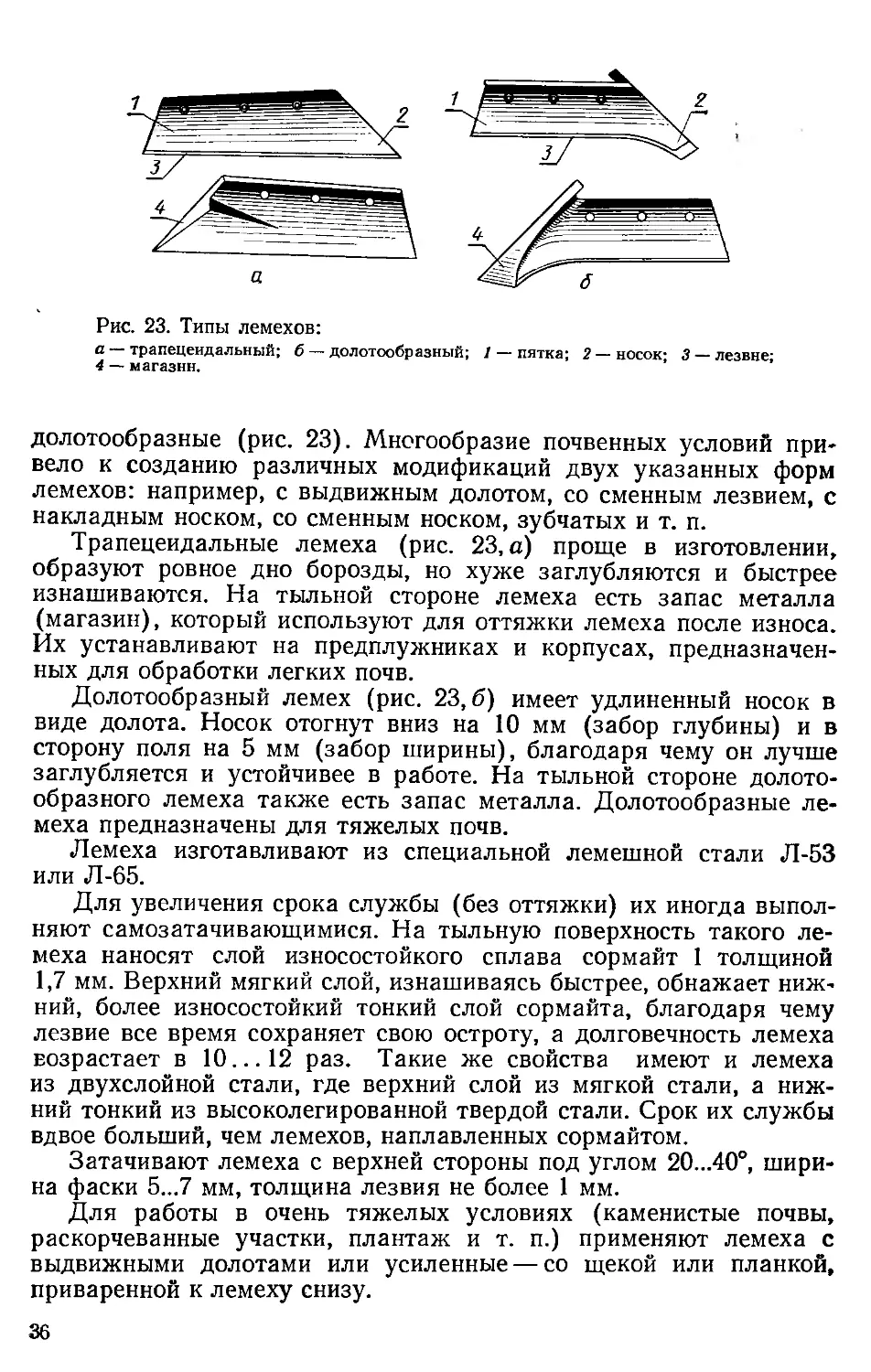
Рис. 21. Виды пахоты:
а. — взмет пласта; б — культурная с предплужниками; в — с углоснимами; г — с полным
оборотом пласта: д— безотвальная; е — с почвоуглублением; ж — с вырезными корпусами:
/ — часть подзолистого слоя, проходящая в вырез; 2 — часть подзолистого слоя, смеши-
ваемая с окультуренным пластом; 3 — окультуренный пласт до вспашки; 4 — часть подзо-
листого слоя, смешавшаяся с окультуренным пластом; з — ярусная: 1 — окультуренный
слой; 2 — оподзоленный слой; 5 — иллювиальный слой.
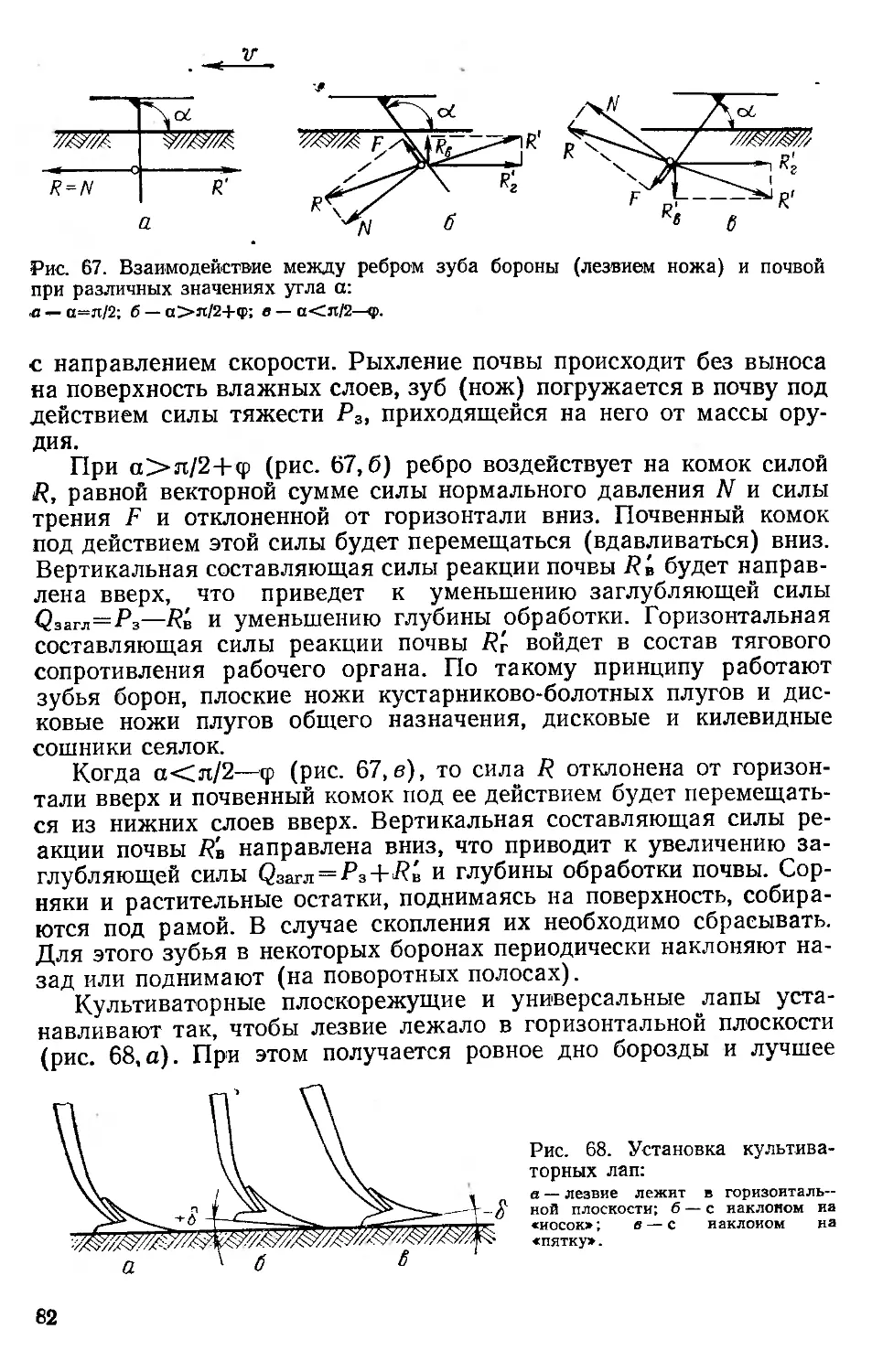
§ 1. Виды вспашки
Земля, по выражению К- Маркса, «постоянно улучшается, если
правильно обращаться с ней»*. Таким образом, применение пра-
вильных, научно обоснованных приемов обработки почвы — основа
повышения не только эффективного, но и потенциального плодо-
родия почвы.
Однако свойства почвы в различных природно-климатических
зонах страны весьма разнообразны, а следовательно, разнообраз-
ными должны быть и приемы ее обработки. Еще В. И. Ленин пи-
сал, что «Земледелие в Калужской губернии не то, что в Казан-
ской»,— и указывал на непозволительность «мешать местным ра-
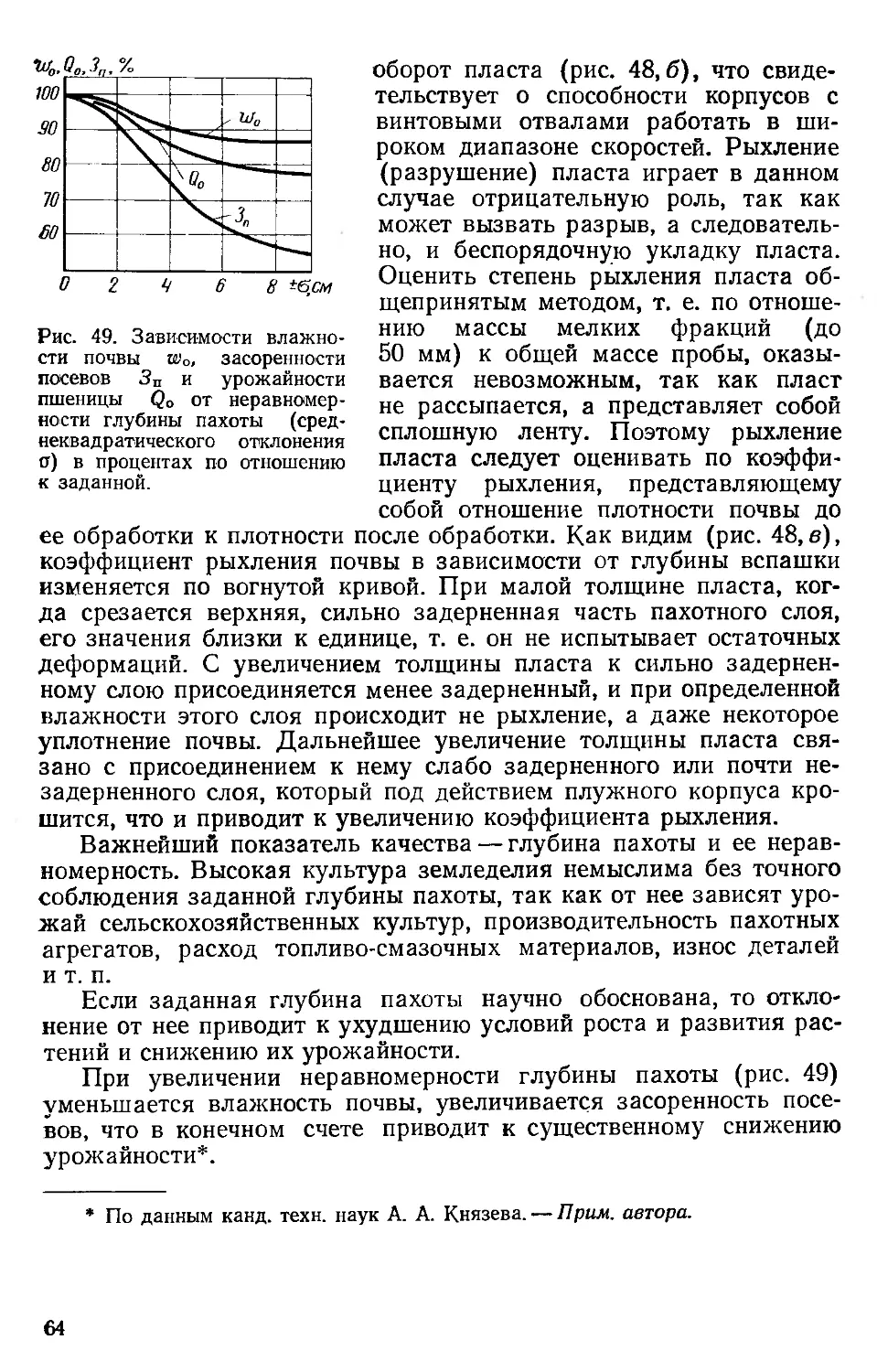
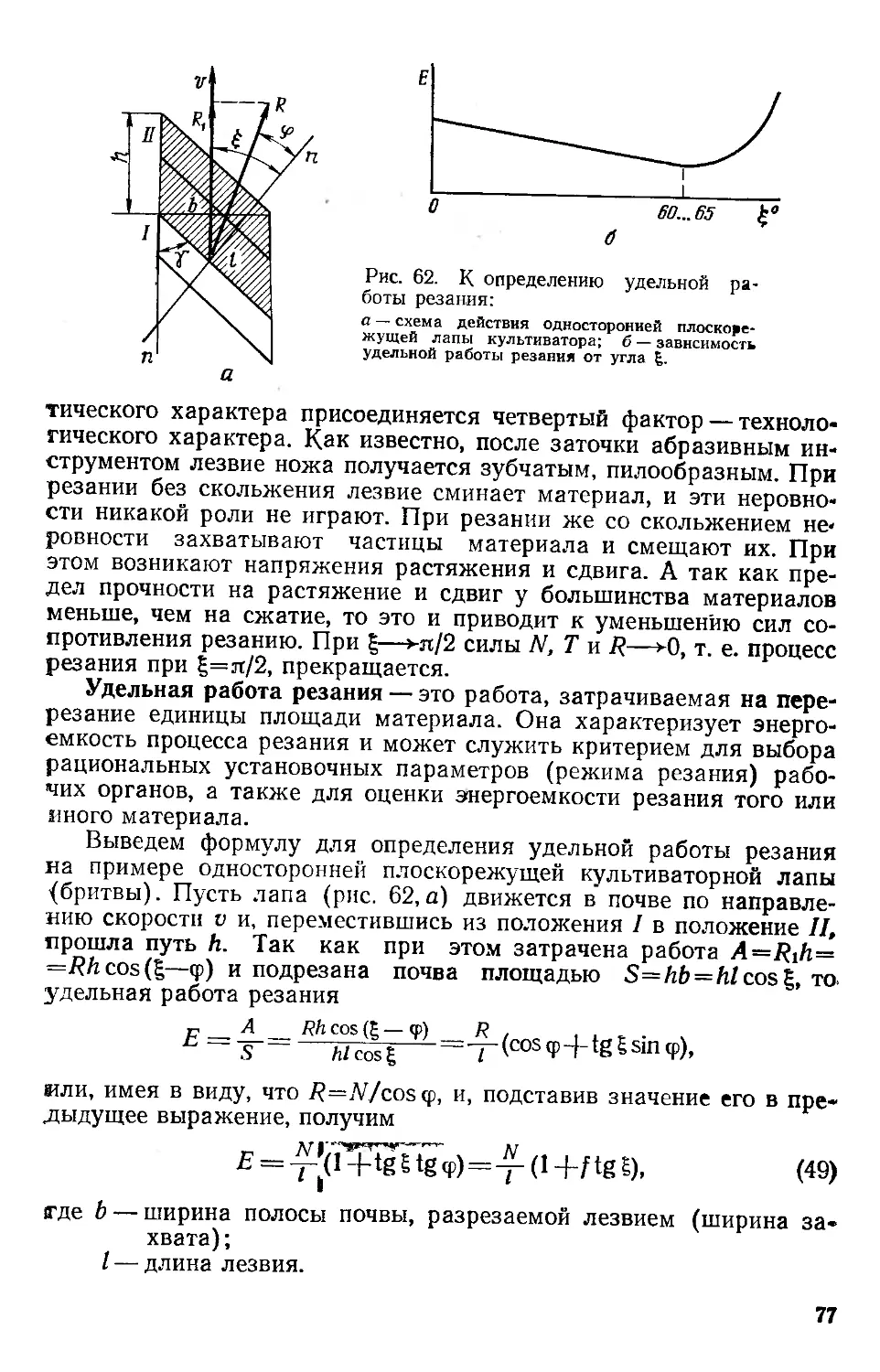
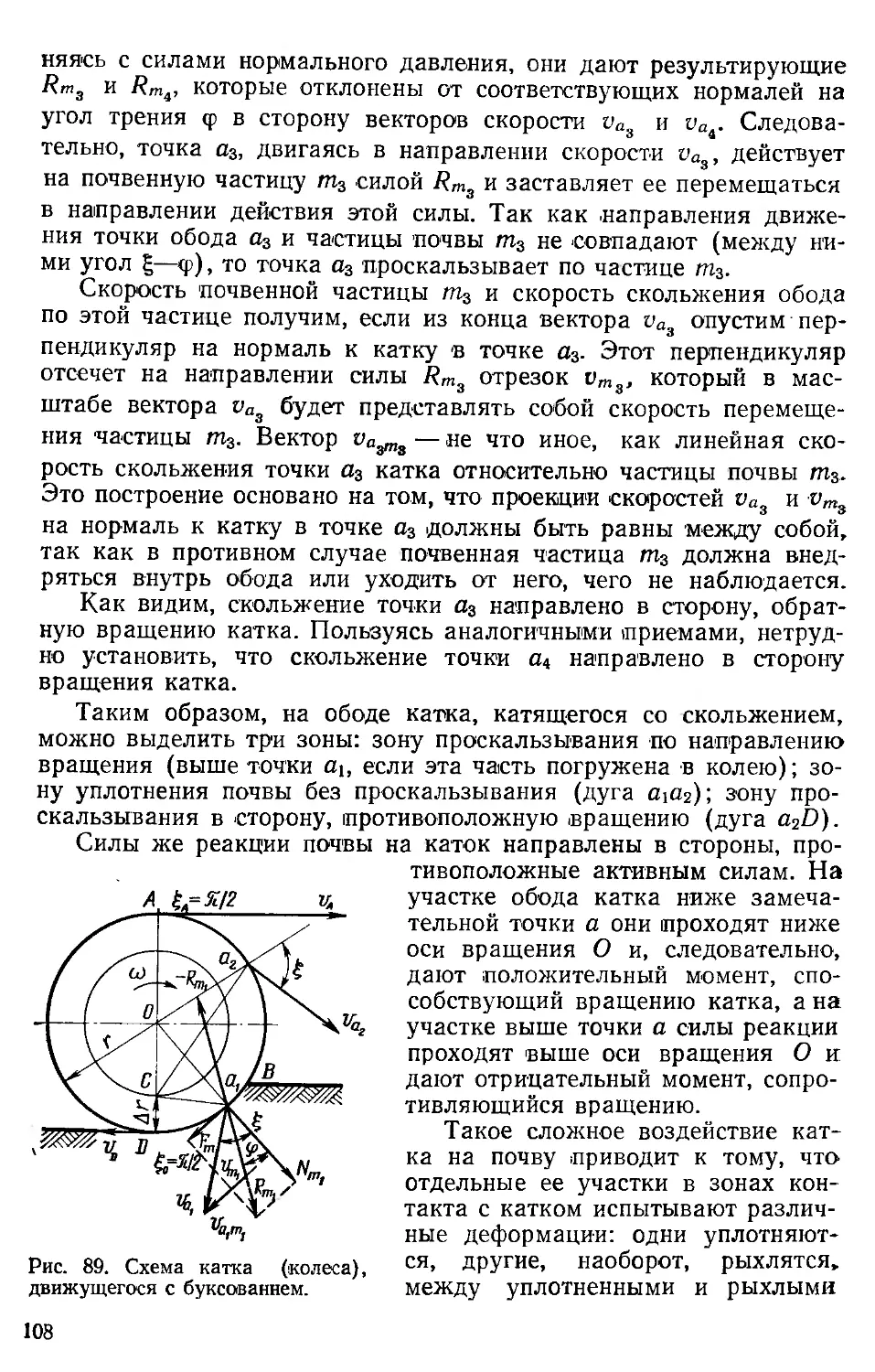
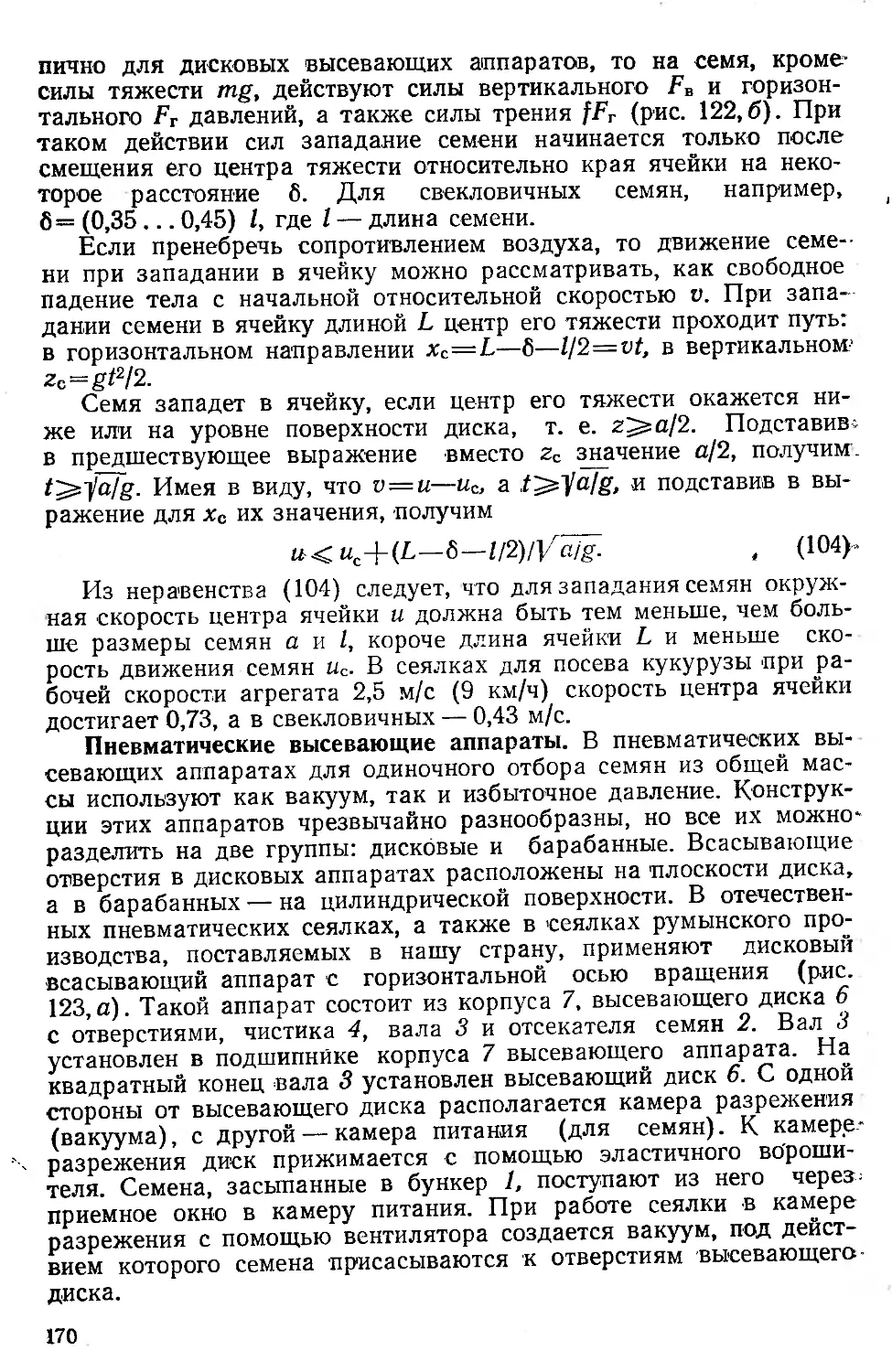
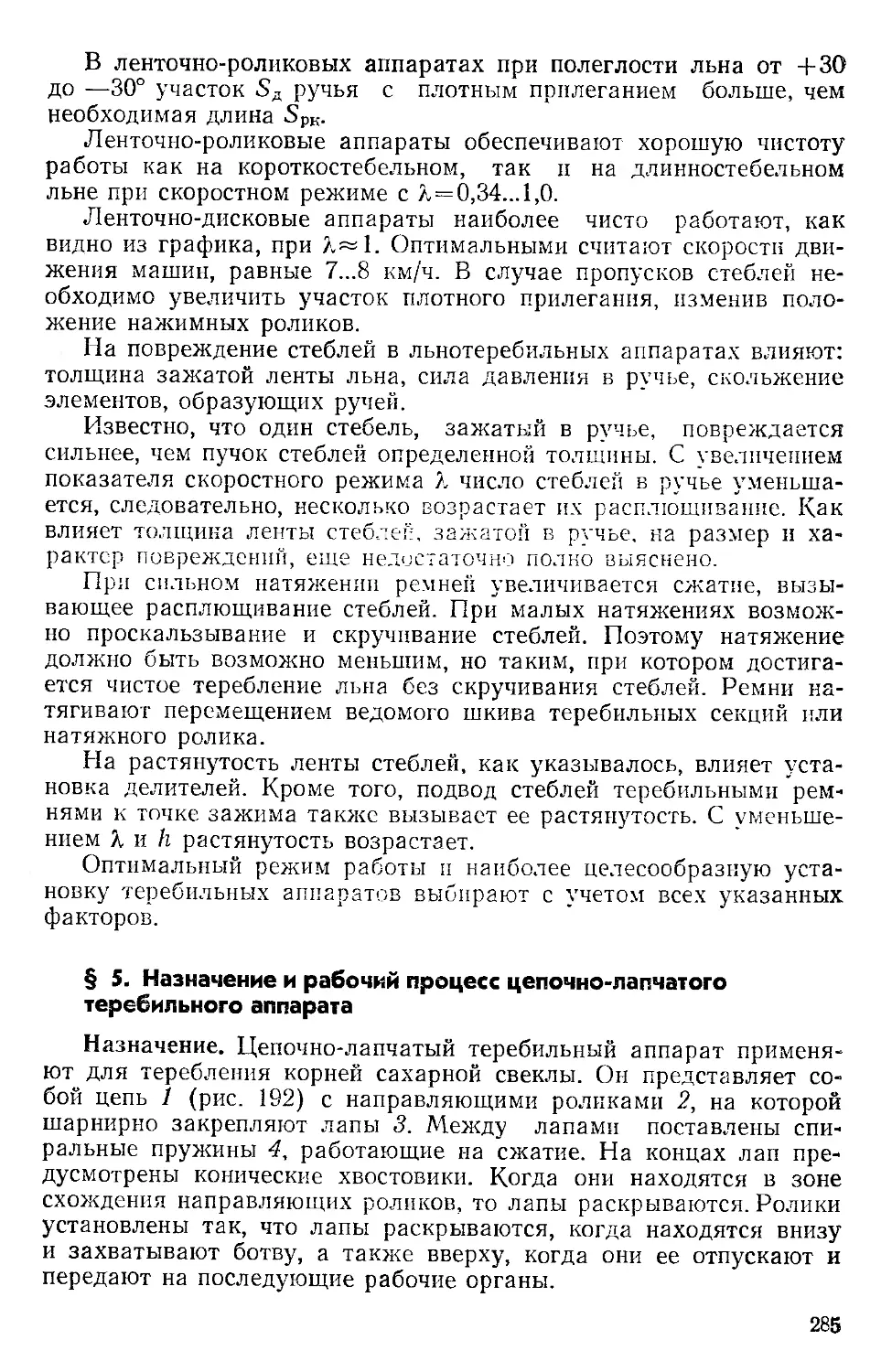
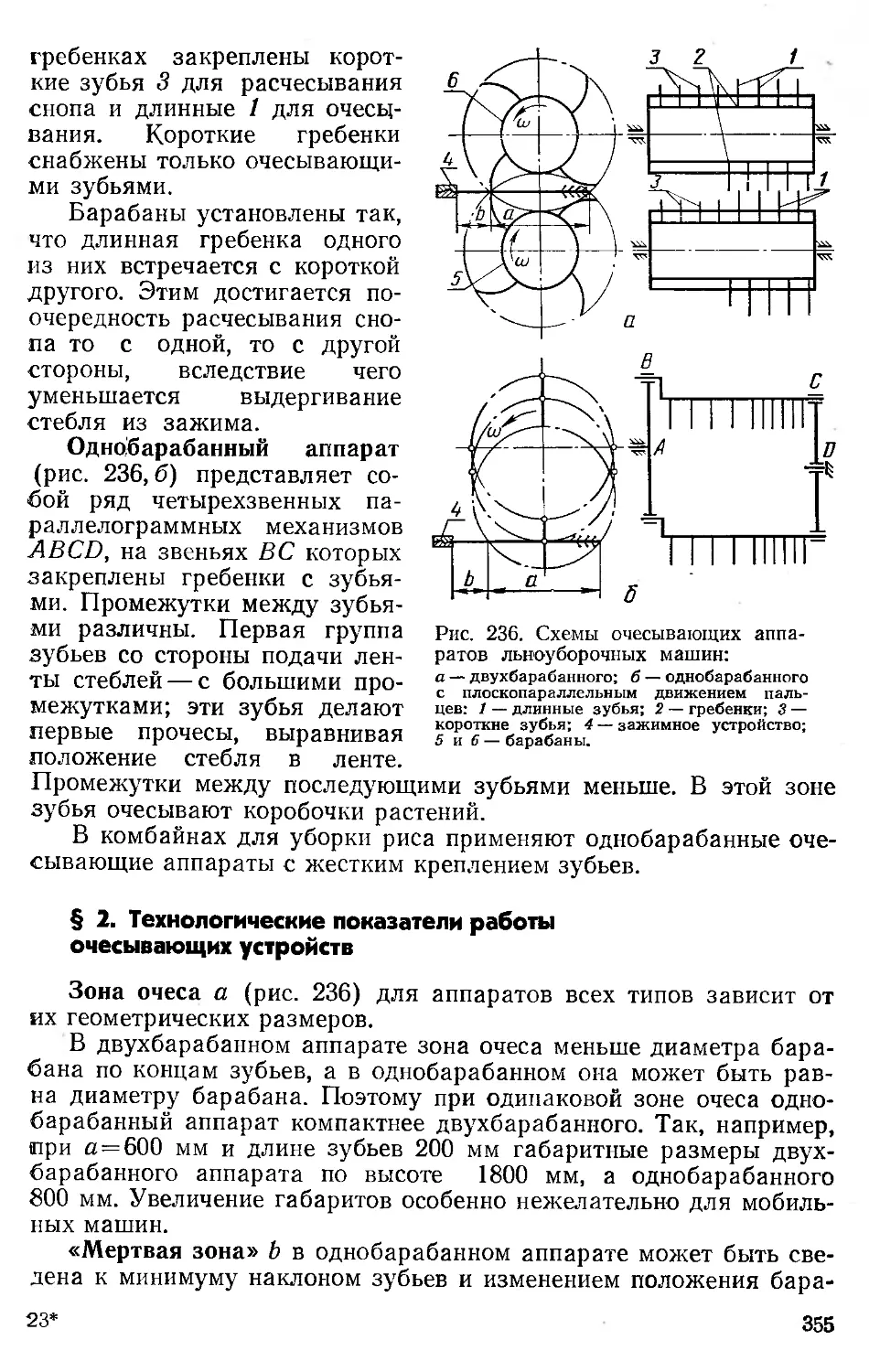
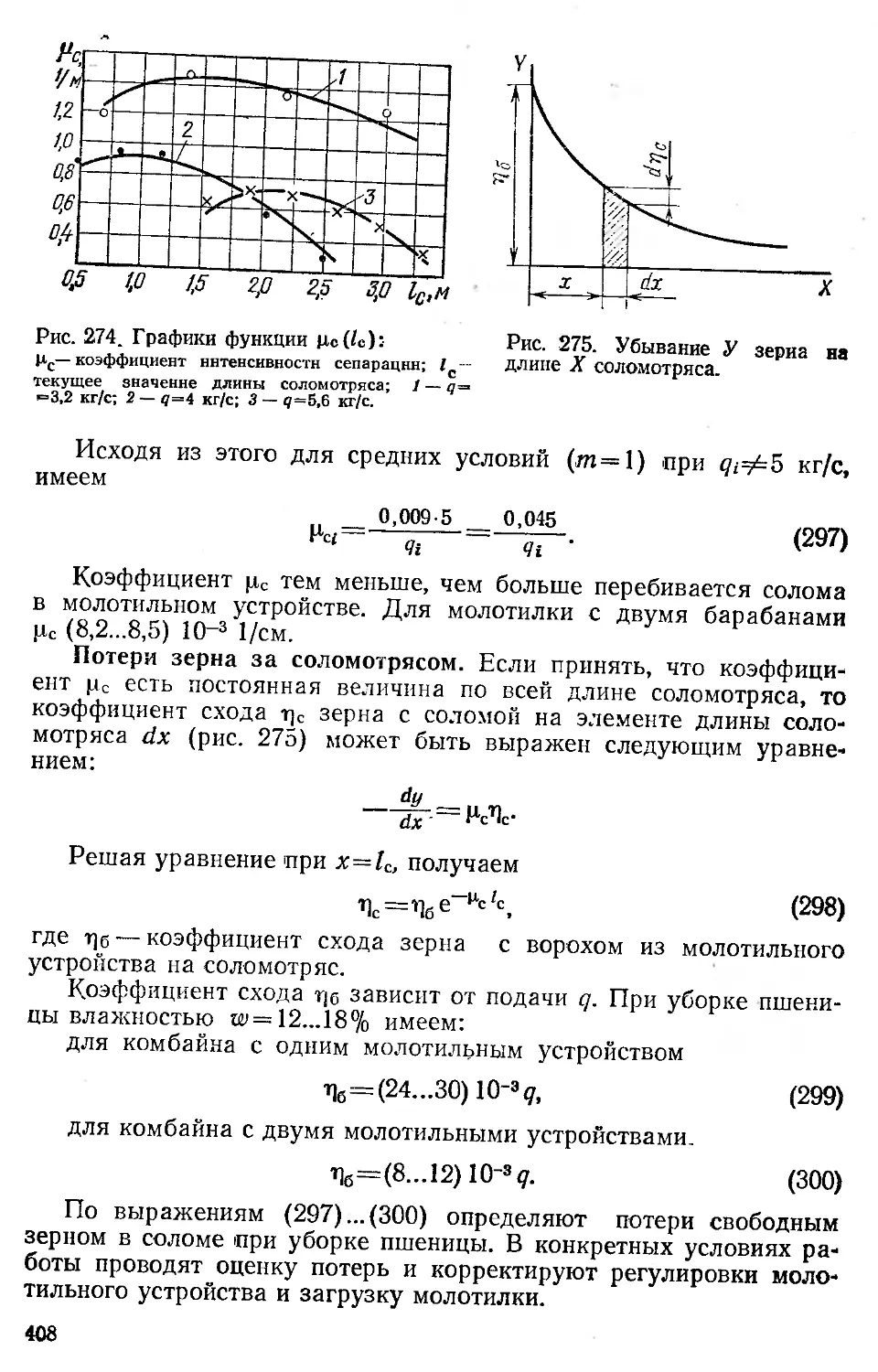
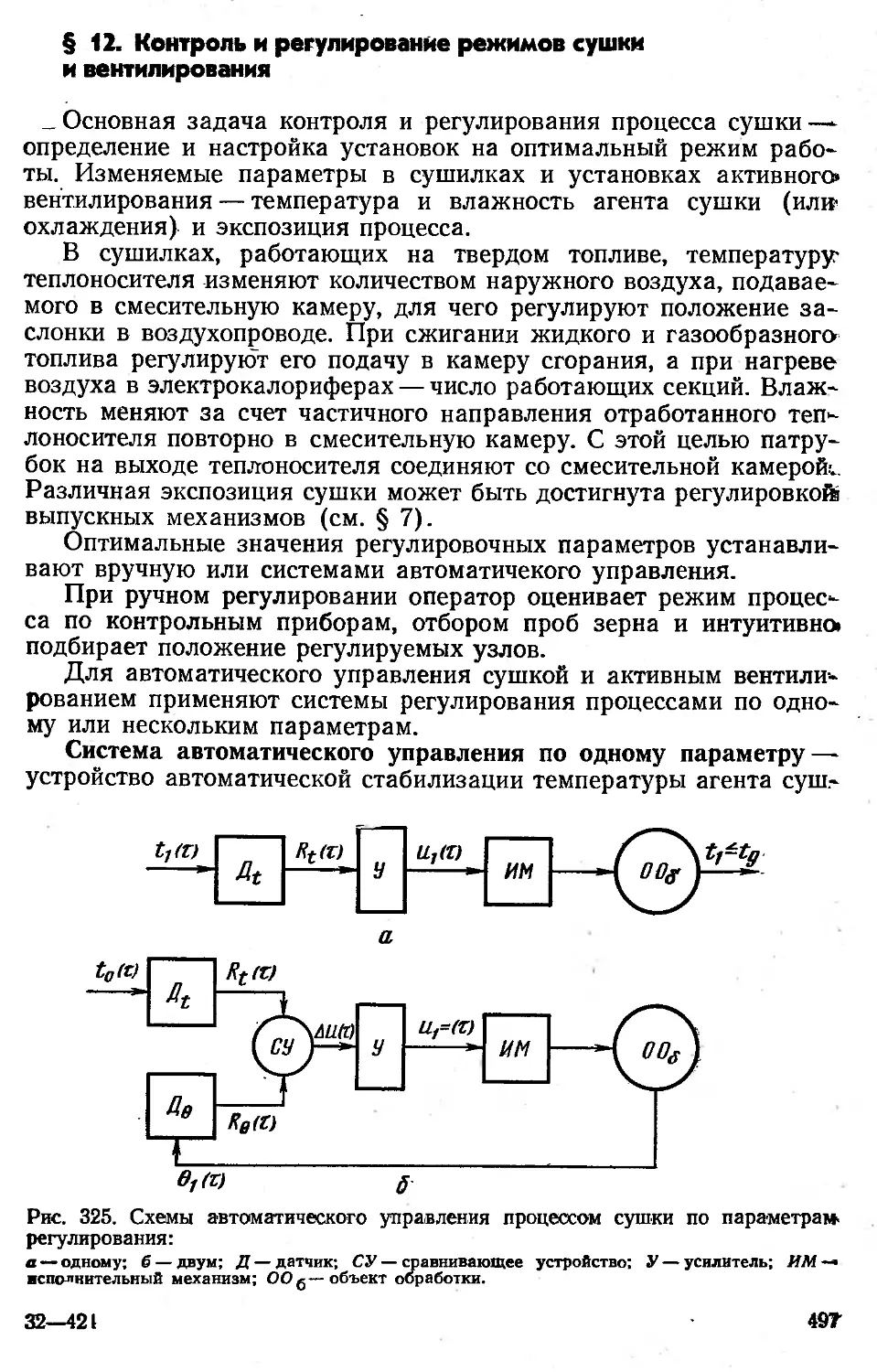
ботникам в том учете местных различий, которые являются осно-
вой разумной работы»**.
Чтобы повсеместно обеспечить высокое качество обработки поч-
вы, плуги общего назначения, выпускаемые нашей промышлен-
ностью, оборудуются сменными корпусами, позволяющими произ-
водить различные виды пахоты***. Поэтому важнейшей задачей в
* Маркс К., Энгельс Ф. Соч., изд. 2-е, т. 24, с. 193.
** Ленин В. И. Поли. собр. соч., изд. 5-е, т. 33, с. 111, 327.
*** Для обработки почв, резко отличающихся от широко распространенных
старопахотных (каменистых, подверженных ветровой или водной эрозии, зарос-
ших кустарником и т. п.), выпускаются специальные почвообрабатывающие ору-
дия.— Прим, автора.
34
подъеме культуры земледелия, повышении плодородия почвы и
увеличении урожайности сельскохозяйственных культур остается
правильный выбор рабочих органов плуга, обеспечивающих наи-
более эффективную обработку почвы, с учетом местных почвенно-
климатических условий и даже свойств почвы каждого отдельного
поля.
Широкое распространение в практике сельскохозяйственного
производства получили следующие виды пахоты: взмет,. культур-
ная, с углоснимом, с полным оборотом пласта, безотвальная (рых-
ление), с почвоуглублением, с вырезными корпусами, ярусная и
т. п. На рисунке 21 поперечные сечения пластов при различных ви-
дах пахоты показаны без учета их деформации.
§ 2. Разновидности корпусов, основные
конструктивные элементы
Лемешно-отвальный корпус — основной рабочий орган лемеш-
ного плуга, лущильника, бороздоделателя, плужного каналокопате-
ля, культиватора-окучника. Корпуса плугов и лущильников — не-
симметричны, корпуса плужных каналокопателей, бороздоделате-
лей и культиваторов-окучников — симметричные рабочие органы.
Основные части лемешно-отвального корпуса плуга и лущиль-
ника (рис. 22): лемех I, отвал II, полевая доска IV, стойка III.
В лемехе различают «носок» 1, лезвие 2 и «пятку» 3, в отвале —
«грудь» 7 и «крыло» 5. Лемех и отвал — рабочие, а полевая доска и
стойка — вспомогательные (служебные) части корпуса. Лемех и
отвал образуют рабочую поверхность корпуса, которая ограниче-
на со стороны непаханого поля полевым обрезом 8, со стороны
вспаханного поля (борозды) — бороздным обрезом 4, сверху —
верхним обрезом 6.
Лемех подрезает пласт снизу и вместе с отвалом отделяет его
сбоку (от стенки борозды). Перемещаясь по рабочей поверхности,
пласт крошится и оборачивается. Сте-
пень крошения пласта зависит от
формы «груди», а степень оборота —
от формы — «крыла» отвала. В конеч-
ном счете качество обработки зависит
от типа отвала, а также механическо-
го состава, задерненности и влажности
почвы. Пласт, раскрошенный на струк-
турные агрегаты размером 1...3 мм и
перевернутый на 180°, соответствует
представлениям об идеальной обработ-
ке почвы.
Лемех подрезает пласт снизу,
частично крошит его и передает на от-
вал. По геометрической форме лемеха
подразделяют на трапецеидальные и
22.
Лемешно-отвальный
корпус:
II — отвал; III — стойка;
носок ле-
Рис.
плужный
I — лемех; __ _ __, _
IV — полевая доска; 1
меха; 2 — лезвие; 3 —пятка; 4, 6 и
8 — бороздной, верхний и полевой
обрезы; 5 ~ крыло отвала; 7 — грудь
отвала.
з* 35
Рис. 23. Типы лемехов:
а — трапецеидальный; б — долотообразный; 1 — пятка; 2 — носок; 3 — лезвие;
4 — магазин.
долотообразные (рис. 23). Многообразие почвенных условий при-
вело к созданию различных модификаций двух указанных форм
лемехов: например, с выдвижным долотом, со сменным лезвием, с
накладным носком, со сменным носком, зубчатых и т. п.
Трапецеидальные лемеха (рис. 23, а) проще в изготовлении,
образуют ровное дно борозды, но хуже заглубляются и быстрее
изнашиваются. На тыльной стороне лемеха есть запас металла
(магазин), который используют для оттяжки лемеха после износа.
Их устанавливают на предплужниках и корпусах, предназначен-
ных для обработки легких почв.
Долотообразный лемех (рис. 23,6) имеет удлиненный носок в
виде долота. Носок отогнут вниз на 10 мм (забор глубины) и в
сторону поля на 5 мм (забор ширины), благодаря чему он лучше
заглубляется и устойчивее в работе. На тыльной стороне долото-
образного лемеха также есть запас металла. Долотообразные ле-
меха предназначены для тяжелых почв.
Лемеха изготавливают из специальной лемешной стали Л-53
или Л-65.
Для увеличения срока службы (без оттяжки) их иногда выпол-
няют самозатачивающимися. На тыльную поверхность такого ле-
меха наносят слой износостойкого сплава сормайт 1 толщиной
1,7 мм. Верхний мягкий слой, изнашиваясь быстрее, обнажает ниж-
ний, более износостойкий тонкий слой сормайта, благодаря чему
лезвие все время сохраняет свою остроту, а долговечность лемеха
возрастает в 10... 12 раз. Такие же свойства имеют и лемеха
из двухслойной стали, где верхний слой из мягкой стали, а ниж-
ний тонкий из высоколегированной твердой стали. Срок их службы
вдвое больший, чем лемехов, наплавленных сормайтом.
Затачивают лемеха с верхней стороны под углом 20...40°, шири-
на фаски 5...7 мм, толщина лезвия не более 1 мм.
Для работы в очень тяжелых условиях (каменистые почвы,
раскорчеванные участки, плантаж и т. п.) применяют лемеха с
выдвижными долотами или усиленные — со щекой или планкой,
приваренной к лемеху снизу.
36
Отвал оборачивает и крошит пласт (плужные корпуса) или
поднимает снизу вверх и отваливает его в сторону (окучник, бо-
роздоделатель, каналокопатель). Отвалы изготавливают из трех-
слойной стали или из мягкой стали Ст2. Рабочую поверхность по-
следних цементуют на глубину 1,5...2,2 мм. Цементация придает
рабочей поверхности высокую твердость и износоустойчивость, а
мягкий незакаленный слой делает отвал упругопластичным. Со-
вокупность указанных свойств придает рабочей поверхности отва-
ла износоустойчивость, а самому отвалу прочность. Грудь отвала
изнашивается быстрее, чем крыло, поэтому для корпусов, рабо-
тающих в очень тяжелых условиях, грудь отвала делают сменной.
Полевая доска препятствует смещению плуга в сторону.
Сминая стенку борозды, она возбуждает реакцию, которая уравно-
вешивает боковое давление пласта, вызванное несимметричностью
корпуса плуга. Кроме того, полевая доска составляет часть опор-
ной поверхности плуга в рабочем положении. Ее крепят под углом
2...3° к стенке и к дну борозды.
В многокорпусных плугах полевая доска заднего корпуса обыч-
но длиннее и снабжена сменной пяткой из отбеленного чугуна. По
мере износа пятку опускают. Полевые доски плантажных и ку-
старниково-болотных плугов делают более длинными и снабжают
уширителями. Для повышения жесткости между уширителем и
отвалом устанавливают распорки.
Стойка — несущий элемент, на котором смонтированы все
остальные части корпуса. Стойки бывают литыми, штампованными
и сварно-штампованными. Различают высокие и низкие стойки.
Высокие применяют на плугах с плоской рамой (плуг общего на-
значения) , низкие — на плугах с крючковой рамой (плуги для каме-
нистых почв, плантажные и т. п.).
Разновидности корпусов. Многообразие почв требует опреде-
ленного набора рабочих органов для их обработки. От правиль-
ного выбора рабочего органа, соответствующего конкретным усло-
виям поля, зависит качество обработки почвы, а следовательно, и
урожайность, плодородие почвы, культура земледелия. На рисун-
ке 24 представлены лемешно-отвальные корпуса, получившие ши-
рокое распространение.
Культурные корпуса (рис. 24,а) хорошо крошат, но пло-
хо оборачивают пласт и поэтому применяются в сочетании с пред-
плужниками для обработки старопахотных (культурных) почв.
Большинство отечественных плугов общего назначения укомплек-
товано культурными корпусами.
Полувинтовые корпуса (рис. 24,6/ лучше оборачива-
ют, но хуже рыхлят пласт. Их устанавливают на кустарниково-бо-
лотных плугах для обработки осушенных торфяных и болотистых
минеральных почв, а также на усиленных плугах общего назначе-
ния для обработки задернелых старопахотных почв. Для улучше-
ния оборота (доваливания) пласта корпуса снабжены регулируе-
мым пером 4.
37
Рис. 24. Разновидности лемешно-отвальных корпусов:
л — культурный; б — полувинтовой; в — винтовой; г — безотвальный (рыхлительный); д —
вырезной; е —с выдвижным долотом; ж — предплужник; з—окучник; 1— лемех; 2— отвал;
3 — стойка; 4 — перо; 5 — полевая доска; 6 — пятка полевой доски; 7 — дисковый нож; 8 —
уширитель; 9— щиток; 10—долото; // — лемех нижний; 12— лемех верхний; 13 — отвал
вырезной; 14—наральннк; 15— лемех окучника; 16 — отвал окучника; 17 — крыло окуч-
ника.
Винтовые корпуса (рис. 24,в) хорошо оборачивают
пласт. Так как рыхление и разрывы пласта затрудняют и ухудша-
ют его оборачивание, то рыхлящая способность корпусов сведена к
возможному минимуму. Эти корпуса предназначены для обработ-
ки связных сильно задернелых почв (целина, залежь, луг, пастби-
ще, осушенный торфяник и т. п.) и применяются обязательно в со-
четании с дисковыми ножами.
Безотвальный корпус (рис. 24,г) хорошо рыхлит почву.
Пласт, подрезанный и частично раскрошенный лемехом /, подни-
мается по уширителю 8 на определенную высоту, после чего па-
дает на дно борозды и от удара дополнительно крошится. Для
защиты от истирания стойка корпуса прикрыта щитком 9.
Вырезной корпус (рис. 24,д) предназначен для вспашки
подзолистых почв с небольшим пахотным горизонтом. Корпус не-
сет два лемеха 11 и 12, которые разделяют пласт на две части.
Нижняя подзолистая часть пласта, подрезанная лемехом 11, под-
нимается по нему, проходит в вырез между лемехами и, падая на
38
дно борозды без оборота, дополнительно крошится. Верхняя окуль-
туренная часть пласта, подрезанная лемехом 12, подается на от-
вал 13, которым оборачивается, крошится и отваливается на ниж-
ний пласт.
Корпус с выдвижным долотом (рис. 24, е) предна-
значен для вспашки твердых глинистых почв и почв, засоренных
камнями. Заостренный передний конец долота 10, выступая впе-
ред за лезвие лемеха на 20...30 мм, выполняет роль носка лемеха
и лома (при встрече с камнями), обеспечивает хорошее заглубле-
ние корпуса в почву. По мере износа долото выдвигают вперед.
Предплужник (рис. 24,да?) предназначен для подрезания
верхнего, пронизанного корнями слоя почвы толщиной 8...12 см
(зона расположения основной массы корневищ) и сбрасывания его
на дно борозды в перевернутом виде. Чтобы пласт, снимаемый
предплужником, укладывался на самое дно борозды, а не на от-
кос, ширину захвата предплужника принимают на ’/3 меньше ши-
рины захвата основного корпуса. Для лучшей заделки дернины и
исключения ее выхода на поверхность в стыках пластов срезают
левые (при правоотваливающем корпусе) 2/з пласта. Предплуж-
ник— это дополнительный к основному корпусу рабочий орган.
Он состоит из лемеха 1 трапецеидальной формы, отвала 2, как
правило, культурного типа и стойки 3. Полевой доски у предплуж-
ника нет, так как она затруднила бы оборот пласта основным
корпусом. Параметры рабочей поверхности предплужника выби-
рают такими, чтобы подрезанный им пласт отваливался раньше
пласта, подрезанного основным корпусом.
На плугах, предназначенных для каменистых почв, вместо пред-
плужников устанавливают углоснимы, состоящие из небольшого
отвала и короткой гнутой стойки.
Окучник (рис. 24,з) предназначен для окучивания культур-
ных и уничтожения сорных растений путем засыпания почвой и
подрезания. Окучник состоит из наральника 14, неразъемного
двухстороннего корпуса, включающего право- и левоотваливаю-
щие лемеха 15 и отвалы 16, крыльев 17 и стойки 3. Наральник-—
сменный, крылья снабжены пазами, позволяющими регулировать
высоту валика гребня почвы в зависимости от высоты растений.
Высота гребней достигает 25 см при глубине обработки до 16 см.
Технологически работа окучников сложнее, чем плужных кор-
пусов, так как они не имеют открытой борозды и должны подни-
мать почву снизу и перемещать ее на верх гребня. Поэтому и гео-
метрическая форма рабочей поверхности окучника сложнее, чем
плужного корпуса.
В корпусах для обработки липких почв отвал может быть вы-
полнен пластинчатым или прутковым. Это приводит к концентра-
ции сил нормального давления пласта на меньшей площади (уве-
личению удельного давления) и работе корпусов в режиме само-
очищения (прилипшие к отвалу почвенные комки срываются и
уносятся движущимся пластом).
39
§ 3. Общие принципы построения рабочих поверхностей
Проанализировав различные формы геометрических поверхно-
стей, используемых в качестве рабочих поверхностей отвалов, ака-
демик В. П. Горячкин пришел к выводу; «Каковы бы ни были
формы отвалов, их можно разделить на три типа: винтовые, ци-
линдрические и промежуточные»*.
В связи с этим целесообразно рассмотреть способы образова-
ния двух поверхностей — цилиндрической и винтовой, предназна-
ченных для обработки почв, резко отличающихся по своим свойст-
вам.
Однако чисто цилиндрические поверхности редко употребля-
ются и являются частным случаем широко применяемых в прак-
тике цилиндроидальных поверхностей.
Цилиндроидальная рабочая поверхность может быть образова-
на различными способами.
Наибольшее распространение получил способ, разработанный
профессором Н. В. Шучкиным, по которому цилиндроидальная по-
верхность описывается (рис. 25, а) движением прямолинейной го-
ризонтальной образующей EF по направляющей кривой ВС, рас-
положенной в плоскости N, перпендикулярной лезвию лемеха АВ,
с заданной закономерностью изменения угла у образующей EF со
стенкой борозды XOZ. Закономерность изменения угла у выра-
жается некоторой функцией y—f(z), где z— координата располо-
жения образующей над горизонтальной плоскостью XOY.
На рисунке 25 представлена закономерность y=f(z) для стан-
дартных корпусов: культурного (рис. 25,6) и полувинтового
(рис. 25, в). Углы у сначала уменьшаются от уо до ymin, что необ-
ходимо для облегчения подъема пласта на грудь отвала и устра-
нения задирания его бороздным обрезом. После перехода через
линию стыка лемеха с отвалом углы у возрастают: в культурных
отвалах по выпуклой (рис. 25,6), а в полувинтовых по вогнутой
(рис. 25, в) кривой. В результате рабочая поверхность культурно-
го отвала получает хорошо крошащую грудь с малой кривизной
(для уменьшения вероятности залипания), а рабочая поверхность
полувинтового отвала — больший подворот крыла, что обуславли-
вает большую оборачивающую способность.
Винтовая рабочая поверхность плужного корпуса фактиче-
ски состоит из двух плавно переходящих одна в другую поверхно-
стей: поверхности груди и поверхности крыла отвала. Поверхность
груди отвала образуется вращением и одновременно с ним посту-
пательным перемещением образующей ВС (рис. 26, о) относитель-
но направляющей ВВ', которая прямолинейна и лежит в плоскости
дна борозды, располагаясь параллельно стенке борозды на рас-
стоянии ширины захвата b от нее. При этом образующая распола-
гается в поперечно-вертикальных плоскостях (перпендикулярных
* Горячкин В. П. Собр. соч., т. II, М.: Колос, 1968, с. 179.
40
Zg Z-5 Zcm Zo Z~'l,5 ZtCM
6 e
Рис. 25. Цилиндроидальная рабочая
поверхность:
а — схема образования; бив — законо-
мерности изменения угла V в зависимости
от высоты расположения образующей z
для культурной (б) и полувинтовой (fl)
поверхностей.
дну и стенке борозды). Таким образом, геометрическая форма
груди отвала зависит от формы образующей и соотношения посту-
пательной и вращательной скоростей ее движения.
Под действием лемеха и груди отвала пласт поворачивается на
90°. Дальнейший поворот поперечного сечения пласта происходит
относительно второго ребра, отстоящего от первого на расстоянии
глубины пахоты а. Поэтому дальнейшее движение образующей
ВС, при котором описывается поверхность крыла, происходит от-
носительно другой направляющей DD', также прямолинейной, рас-
положенной в плоскости дна борозды параллельно первой направ-
ляющей на расстоянии от нее, равном глубине пахоты а. При этом>
образующая движется относительно направляющей, находясь на
Рис. 26. Винтовая рабочая поверх-
ность:
а — схема образования; б и б — законо-
мерности изменения угла поворота 0 об-
разующей по длине L отвала при посто-
янном шаге винта (б) и при шаге винта,
уменьшающемся на крыле отвала (в).
расстоянии а от нее. Таким образом, на геометрическую форму
крыла отвала, помимо перечисленных выше параметров, оказывает
влияние и принятая глубина пахоты.
Большую роль в процессе образования винтовой поверхности
играет соотношение поступательной и вращательной скоростей
движения образующей (шаг винта), которое может быть выражено
графиком изменения угла ее поворота по длине отвала $=F(L).
Исследования показали, что при постоянном шаге винта
(рис. 26, б) удельное давление на поверхность отвала непостоянно:
на груди больше, чем на крыле. Это вызвано тем, что сила тяжести
пласта, находящегося на груди, противодействует его повороту, а
на крыле способствует повороту, так как пласт к этому времени
уже переходит положение неустойчивого равновесия (диагональ
поперечного сечения пласта вертикальна).
Вследствие уменьшения удельного давления пласта на крыле
оно оказалось подверженным залипанию влажной почвой. Для
предотвращения залипания давление пласта на крыло отвала вы-
равнивают путем уменьшения шага винта (рис. 26, в) на его рабо-
чей поверхности. При уменьшении шага винта угловая скорость
возрастает, возникающие при этом угловые ускорения вызывают
силы инерции, за счет действия которых и выравнивается давление
на крыло.
§ 4. Технологические свойства и классификация применяемых
рабочих поверхностей
Технологические свойства. Плужные корпуса с цилиндрической
и винтовой рабочими поверхностями были созданы для обработки
почв, резко отличающихся по технологическим свойствам.
Плужный корпус с винтовой рабочей поверх-
ностью предназначен для вспашки связных задернелых почв,
которые невозможно разрыхлить никаким отвалом. Так как такой
пласт отделяется сплошной лентой, то задача его основной обра-
ботки состоит в том, чтобы, не разрывая на куски, обернуть его
дерниной вниз. Пласт, обращенный вверх слабозадерненной ниж-
ней частью, затем сравнительно легко рыхлится орудиями для
дополнительной (поверхностной) обработки почвы.
Пласт 1 (рис. 27), подрезанный снизу лемехом, а сбоку ножом,
под воздействием винтовой рабочей поверхности 2 поворачивается
сначала относительно ребра С (см. вверху), а затем Bi до тех пор,
пока не обопрется своей гранью AzBz на ранее отваленный пласт.
Таким образом, винтовая поверхность не поднимает пласт на се-
бя, а переваливает его по дну борозды. Так как пласт передним
концом связан с массивом почвы, то он уподобляется консольно
закрепленной балке прямоугольного сечения, подвергающейся де-
формациям кручения и косого изгиба (изгиба в двух плоскостях).
При этом наиболее прочная задерненная часть попадает в зону
напряжений сжатия, а менее прочная, нижняя часть, — в зону на-
42
Рис. 27. Оборот пласта под действи-
ем винтовой рабочей поверхности:
1 — пласт; 2 — плужный корпус.
Рис. 28. Оборот связного задернело-
го пласта под действием цилиндро-
идальной рабочей поверхности:
1 — пласт; 2 — плужный корпус.
пряжений растяжения. Наибольшие деформации растяжения (до
9%) испытывает ребро D2D\D (см. внизу), затем ребро С2С1С (от
4 до 6%), ребра Л2Л1Д и B2BiB могут испытывать как деформа-
ции сжатия, так и растяжения (до 2%). Так как предел прочности
почвы на растяжение в несколько раз ниже предела прочности
почвы на сжатие, то в процессе оборота в пласте могут образовы-
ваться трещины, начинающиеся у ребра D2DiD. Кроме того, под
действием сил трения о рабочую поверхность пласт сначала сжи-
мается (когда находится на поверхности), а затем растягивается
(когда сходит с поверхности без разрыва).
Распространено мнение, что плужные корпуса с винтовыми ра-
бочими поверхностями совершенно непригодны для обработки ста-
ропахотных почв. Однако опыты с мечеными шашками показали,,
что и на старопахотных почвах винтовые поверхности лучше, чем
цилиндроидальные оборачивают почву, т. е. перемещают верхние
частицы вниз, а нижние вверх, хотя уступают по степени крошения.
Плужный корпус с цилиндрической рабочей
поверхностью в отличие от винтовой поднимает пласт на
себя, скручивая его в косую трубку (рис. 28). Движение пласта в
этом случае можно считать состоящим из трех элементарных дви-
жений: вращения вокруг оси 00, поступательного перемещения в
направлении, перпендикулярном оси 00, скольжения вдоль обра-
зующих поверхности. При идеально упругом пласте он оказывает-
43
ся смещенным в сторону и повернутым дерниной вверх, что недо-
пустимо. Реальный пласт разрывается цилиндрической поверх-
ностью на куски, которые в зависимости от момента отрыва укла-
дываются дерниной как вверх, так и вниз, т. е. беспорядочно. На
цилиндроидальных поверхностях пласт сначала подвергается сжа-
тию (пока не отделен от дна борозды), а затем изгибу (после
отделения от дна борозды).
Старопахотные, легкие несвязные почвы не образуют пласта,
поэтому их обработка сводится к рыхлению и перемешиванию, чго
удовлетворительно выполняется цилиндрической рабочей поверх-
ностью. Так как большинство почв по своим механическим свой-
ствам занимает промежуточное положение между связными и не-
связными, то для их обработки применяют рабочие органы с по-
верхностями, занимающими по своим технологическим свойствам
промежуточное положение между цилиндрическими и винтовыми,
например с цилиндроидальными.
Классификация. В практике широкое распространение получи-
ли две группы рабочих поверхностей: цилиндроидальные и винто-
вые (геликоидальные).
Цилиндроидальные рабочие поверхности, в
свою очередь, принято подразделять по диапазону изменения угла
у(Д-р=утах—уо) на три типа:
Ду=0° — цилиндрические;
Ду=2...7° — культурные;
Ду—7... 15° — полувинтовые.
Цилиндрическая, или рухадловая, рабочая поверхность лучше
крошит пласт, но оборачивает его хуже других; культурная лучше,
чем цилиндрическая, оборачивает пласт, но хуже его крошит; полу-
винтовая лучше двух других оборачивает пласт, но хуже крошит.
Однако ее часто называют универсальной, имея в виду, что она в
достаточной мере для старопахотных почв крошит и оборачивает
пласт.
Корпуса с цилиндрическими поверхностями применяются край-
не редко. В хозяйствах нашей страны используются в большей
мере корпуса с культурными и полувинтовыми рабочими поверх-
ностями.
Винтовые рабочие поверхности по геометрической
форме образующей обычно подразделяют на три типа: с вогнутой,
с выпуклой и с прямолинейной образующей.
Выбор рациональной геометрической формы образующей осно-
ван на учете двух факторов: исключения или уменьшения вероят-
ности залипания рабочей поверхности, минимального расхода энер-
гии на деформацию пласта.
Установлено, что прилипание частиц почвы происходит там, где
пласт неплотно прилегает к рабочей поверхности и давление на
нее уменьшено. Деформация пласта также зависит от площади его
контакта с рабочей поверхностью: чем площадь контакта больше,
44
Рис. 29. Типы рабочих поверхностей плужных корпусов:
а — цилиндрическая; б — культурная; в — полувинтовая; г — винтовая.
тем деформация меньше. Таким образом, рациональной рабочей
поверхностью следует считать такую, которая всей своей площадью
соприкасается с пластом. Следовательно, геометрическую форму
образующей следует принимать с учетом геометрической формы
поперечного сечения нижней грани деформируемого пласта.
Носок лемеха, внедряясь в пласт, сминает его ребро и часть
нижней грани. Так как в дальнейшем одновременно происходит
подрезание и кручение пласта, то нижняя его грань приобретает в
поперечном сечении форму выпуклой кривой. Следовательно, обра-
зующая рабочей поверхности корпуса плуга для полного прилега-
ния к ней пласта должна быть вогнутой кривой.
Использование рабочих поверхностей с выпуклыми и прямоли-
нейными образующими приводит к несколько повышенному расхо-
ду энергии и частичному или полному их залипанию при вспашке
увлажненных почв.
Установлено, что кривизна образующей зависит от длины рабо-
чей поверхности (шага винта): чем длина больше, тем кривизна
меньше, т. е. чем длиннее рабочая поверхность, тем образующая
ближе к прямолинейной.
Определить тип рабочей поверхности корпуса можно с помощью /
профилографа или профиломера (координатора) или с помощью >
горизонтальной линейки с двумя отвесами, а при достаточном на-
выке и визуально (по виду сверху). Конфигурации рабочих поверх-
ностей корпусов при виде сверху изображены на рисунке 29.
§ 5. Особенности скоростных рабочих поверхностей
Увеличение рабочей скорости — один из способов повышения
производительности мобильных сельскохозяйственных агрегатов.
Повышение скорости пахоты с 4...5 до 6...7 км/ч оказалось воз-
можным без изменения геометрической формы плужных корпусов.
При этом качество вспашки даже улучшилось: уменьшилось коли-
чество крупных глыб, заделка растительных остатков стала пол-
нее, поверхность пашни слитнее, борозда шире и чище. Увеличе-
ние тягового сопротивления (примерно на 10%) компенсировалось
увеличением урожаев за счет улучшения качества вспашка. Одна-
ко дальнейшее повышение скорости вспашки (до 8... 10 км/ч) ухуд-
шило ее качество и резко увеличило тяговое сопротивление. Пласт
отбрасывался далеко в сторону, «фонтанировал», ухудшались за-
45
Рис. 30. Цилиндроидальные рабочие
поверхности плужных корпусов:
1 — для традиционной скорости вспашки; 2 —
для скоростной вспашки.
дедка пожнивных остатков и
оборот пласта. Для устранения
этих недостатков потребова-
лось изменение геометрических
параметров, а в некоторых
случаях и формы рабочих по-
верхностей. Задача состояла в
том, чтобы, увеличивая ско-
рость движения рабочих орга-
нов, сохранять неизменной ско-
рость, сообщаемую почве и
обеспечивающую правильную
укладку пласта. Для выполне-
ния этого требования в ци-
линдроидальных рабочих по-
верхностях необходимо умень-
шать: направляющий угол
Тшах конца крыла отвала и
соответственно угол лезвия лемеха со стенкой борозды у0 («угол
резания»), а также угол крошения ао-
При уменьшении углов у уменьшается интенсивность отбрасыва-
ния пласта в борозду, а при уменьшении угла а устраняется «фон-
танирование» почвы и облегчается подъем пласта на рабочую по-
верхность. Для скоростных экспериментальных корпусов уо =
=26...38° (для стандартных 42°) и утах=30...40° (для стандартных
48 и 50°). Чтобы улучшить вхождение пласта на поверхность, в
скоростных плугах выбирают а0=25° (в стандартных 30°), а
уо—ymin=7° (в стандартных 1...3°). На рисунке 30 изображены
проекции цилнндроидальных рабочих поверхностей.
Рассматривая движение пласта относительно рабочей поверх-
ности корпуса, можно считать, что корпус неподвижен, а пласт
движется. Тогда скорость движения пласта относительно корпуса
может быть разложена на два компонента: продольный и попереч-
ный, или боковой (рис. 31). При этом дальность отбрасывания
Рис 31. Развитие цилиндроидальной рабочей поверхности для традиционных
скоростей вспашки в скоростную; рабочие поверхности:
о — для традиционной; б — повышенной; в — скоростной вспашки; г — соотношения между
компонентами скоростей в процессе развития.
46
пласта в сторону зависит от значения направляющего угла утал-
на конце крыла отвала, который должен быть выбран таким, что-
бы боковой компонент скорости почвы при скоростной вспашке не
превышал бокового компонента при вспашке на традиционных
скоростях.
Как видно (рис. 31), между скоростью пахоты и боковой со-
ставляющей скорости пласта существует зависимость:
с-б=с-оыпт. (20)
При вспашке плужными корпусами, предназначенными для
традиционных скоростей, получают лучшее качество пахоты на
скоростях 6...7 км/ч. Для этих скоростей &б~1,4 м/с. Приняв
&б= 1,4 м/с за оптимальное значение и сохраняя его неизменным,
путем уменьшения угла у можно развить рабочую поверхность
для традиционных скоростей (рис. 31, о) в скоростную рабочую
поверхность (рис. 31, в). Расчет по формуле (20) показывает, что
при уменьшении угла утах до 32° (уо = 26°) скорость вспашки
можно повысить до 11...12 км/ч. Однако полученные таким обра-
зом корпуса имеют длину, примерно в 2 раза большую, чем корпу-
са для традиционных скоростей вспашки (4.;:5'км/ч), что вызывает
увеличение металлоемкости плуга.
Чтобы уменьшить металлоемкость скоростных корпусов, их ра-
бочие поверхности иногда делают комбинированными. На рисун-
ке 32 представлена рабочая поверхность скоростного плужного
корпуса, разработанная Всесоюзным научно-исследовательским
институтом механизации сельского хозяйства (ВИМ), состоящая
из нескольких геометрических поверхностей, плавно переходящих
одна в другую. Лемех и нижняя часть груди отвала имеют кониче-
скую поверхность с вершиной (Oi) у полевого обреза, верхняя часть
груди отвала выполнена в виде конической поверхности с вершиной
(О2) у бороздного обреза, а крыло — в виде поверхности цилинд-
роида с наклонными образующими.
Плужные корпуса с винтовой рабочей поверхностью в значи-
тельно меньшей степени, чем с цплиндроидальной, реагируют на
изменения скорости пахоты. Они нормально укладывают пласт, ес-
ли отсутствует полный отрыв пласта от дна борозды и заброс его
в сторону.
Чтобы рассмотреть условие отрыва
пласта от дна борозды, разобьем его
на отдельные равновеликие паралле-
лепипеды с поперечным сечением aXb
и длиной Д/. Это позволит свести дви-
жение параллелепипеда к движению
центра его массы (центра тяжести)
как материальной точки, обладающей
массой и подвергающейся действию
определенных сил. Наибольшая веро-
ятность отрыва элементарного парал-
Рис. 32. Комбинированная
скоростная рабочая поверх-
ность корпуса.
47
Отсюда
Рис. 33. Силы, действующие на пласт в процессе его
оборота:
N ~ нормальная реакция со стороны рабочей поверхности;
точ — центробежная сила инерции; тах — тангенциальная си-
ла инерции; Яоп— реакция диа борозды; mg — сила тяжести,
лелепипеда от дна борозды будет наблюдать-
ся в момент, когда направление центробежной
силы станет прямо противоположным направ-
лению силы тяжести. Так как в этот момент
ф=0, А/=0, то условие поворота пласта без
отрыва от дна борозды (рис. 33) примет вид:
т(и2г < mg
u<Vg/r,
(21)
где т — масса выделенного параллелепипеда;
со— угловая скорость поворота пласта;
г — расстояние от оси вращения до центра тяжести попереч-
ного сечения пласта;
g — ускорение свободного падения;
ф — угол между направлением центробежной силы и силы тя-
жести.
При движении плуга со скоростью v и длине рабочей поверхно-
сти корпуса плуга L любая точка пласта будет находиться в кон-
такте с рабочей поверхностью некоторое время t=Llv. За это же
время пласт повернется на угол р = со/. Решив последнее уравнение
относительно t и приравняв правые части двух уравнений, полу-
чим:
/ ~ Ртах/® ~ LlV,
откуда
o=pv/L. (22)
Подставив в неравенство (21) вместо со его выражение из фор-
мулы (22), получим
V < Отах) Vg/r<
(23)
где L/р может рассматриваться, как характеристика шага винта.
Из формулы (23) следует: чем больше шаг винта, тем меньше
вероятность отрыва пласта. Подставив в формулу (23) параметры
определенных винтовых поверхностей, получим, что о<2,4б...3,6 м/с,
т. е. 9,6... 13 км/ч. Однако расчеты проведены без учета связности
пласта, поэтому действительные критические скорости движения
плуга будут больше расчетных.
Исключение заброса пласта крылом отвала, как и в цилиндро-
идальных поверхностях, может быть гарантировано значением бо-
48
fi
Рис. 34. Компоненты относительной
скорости движения пласта на конце
крыла отвала:
Vn—продольный; Vg—боковой (попереч
ный).
Рис. 35. Закономерности поворота
пласта по длине отвала:
а. — угла поворота; б — скорости поворота.
нового компонента скорости, которое зависит от направляющего
угла у на крыле отвала (рис. 34).
Оба указанных условия реализуются в конструкции плужного
корпуса заданием определенной закономерности поворота обра-
зующей по длине отвала p=f(L). Теоретический анализ и опытные
данные приводят к выводу, что такая закономерность выражается
интегральной кривой (рис. 35,с). Продифференцировав ее, полу-
чим кривую скорости поворота образующей по длине отвала
(рис. 35,6). Скорость поворота образующей (а вместе с ней и
пласта) вначале невелика, что необходимо для плавного входа
пласта на рабочую поверхность, затем ускоренно возрастает, что
необходимо для уменьшения длины рабочей поверхности (а следо-
вательно, и металлоемкости корпуса плуга), а затем резко падает,
чтобы исключить вероятность заброса пласта.
§ 6. Теоретические основы технологического процесса вспашки
В процессе пахоты плужный корпус отделяет пласт от дна и
стенки борозды, а затем оборачивает и рыхлит его. Таким обра-
зом, технологический процесс вспашки включает в себя по мень-
шей мере три технологические операции: резание, оборот, рыхле-
ние. Рассмотрим теоретические основы каждой из них.
Резание. В сельскохозяйственном производстве вообще и в
почвообрабатывающих машинах .и орудиях в частности широко
применяются два вида резания: резание клином и резание лезвием.
При резании клином определяющее воздействие на ма-
териал оказывает рабочая грань, а ребро (лезвие) играет вспомо-
гательную роль. Как показано ранее (глава II), давление рабо-
чей грани клина на обрабатываемый материал приводит в малосвяз-
ных пластичных почвах сначала к смятию, а затем к скалыванию
пласта в виде кусков трапецеидальной формы, а в почвах связ-
ных, хорошо сопротивляющихся изгибу, сначала возникает опере-
жающая трещина, а затем косой поперечный излом.
При резании лезвием, наоборот, определяющее воздей-
ствие на материал оказывает лезвие, т. е. вершина двугранного
4—424
49
Рис. 36. Влияние толщины
лезвия лемеха на тяговое
сопротивление плуга.
угла, образованного фасками. Фаски иг-
рают вспомогательную роль. Однако
между процессами резания лезвием и
резания клином нет резкой границы, и
один процесс может трансформироваться
в другой в зависимости от параметров
рабочего органа и свойств обрабатывае-
мого материала. Так, например, если
двугранный угол образован фаска-
ми и ширина этих фасок превосходит
некоторые пределы, зависящие от свойств
разрезаемого материала, то влияние фа-
сок ножа будет преобладать над действи-
ем лезвия и резание лезвием перейдет в резание клином, и на-
оборот.
О том, что резание лезвием происходит и имеет существенное
значение, прежде всего в энергетике плуга, свидетельствует зависи-
мость (рис. 36), где Кх— тяговое сопротивление плуга;
6 — толщина лезвия лемеха.
Как видим, по мере затупления лезвий тяговое сопротивление
плуга существенно возрастает.
Однако процесс резания лезвием в более чистом виде наблю-
дается при работе ножей, плоскорежущих культиваторных лап и
т. п., поэтому теоретические основы этого процесса будут более
подробно изложены при их рассмотрении.
Оборот пласта. При рассмотрении оборота пласта условно при-
нимают, что пласт не деформируется и его размеры а и b не изме-
няются. Тогда поворот пласта происходит сначала относительно
.ребра А (рис. 37, а), а после того, как он примет вертикальное по-
.ложение, — относительно ребра D, занявшего положение Di, до тех
пор, пока грань CD не ляжет на ранее отваленный пласт.
На рисунке 37 видно, что расстояния между, одноименными
точками соседних пластов, например между ребрами D2, D2 и т. д.,
равны ширине пласта Ь, продолжение верхней грани А2В2 отва-
ленного пласта пересекает дно борозды на расстоянии толщины
.пласта а от стенки борозды. Нетрудно доказать, что точки стыков
Рис. 37. Схема оборота пласта плужным корпусом без предплужника:
а — устойчивое; б — неустойчивое положения пластов.
.‘50
отваленных пластов С2, С2 и т. д. лежат на уровне непаханого
поля. Заштрихованные прямоугольные треугольники А'2 DiD2 и
C2D2E (рис. 37, а) имеют равные гипотенузы DiD'2 = C2D'2 = b и
равные углы 6 и, следовательно, равны между собой. В равных
треугольниках против равных углов лежат равные стороны. Следо-
вательно, C'2E=A.2D'2, , а так как Д2^2=а, , то и С^Е=а, т. е. точки
стыков пластов расположены на расстоянии глубины пахоты от
дна борозды.
Пласты, отваливаемые корпусом, не должны располагаться
слишком круто, так как при этом получается «недовал», а в худ-
шем случае обратное падение пластов. Устойчивость уложенного-
пласта будет обеспечена, если линия действия силы тяжести Рп-
пласта пересечет дно борозды справа от точки его опоры D2. Не-
устойчивое равновесие (предельная устойчивость) соответствует
такому положению пласта, при котором его диагональ B2D2,
B^D’2 и т. д. (рис. 37, б) располагается вертикально. Из подобия
заштрихованных прямоугольных треугольников A2B2D2 и
следует, что B2D2/A2B2=D2D'2/A'2D2 или У a2-\-b2/b=b/a.
Приняв bja = k и произведя ряд преобразований, получим
k2—1=0. (24>
Решив биквадратное уравнение (24), получим его действитель-
ный корень /гпр^1,27. Следовательно, устойчивое положение пла-
ста обеспечивается при Ыа> 1,27. Из этого же условия может быть
определена максимальная глубина пахоты корпусом с заданной
шириной захвата Ь:
ama^b/knp=b/l,27^0,8b. (25)
Так как sin б=о/6=1//г, то предельный угол наклона пласта
(5np=arcsin l/&np=arcsin 1/1, 27^52°, что соответствует повороту
пласта на 128°. ‘
Для цилиндроидальных отвалов рекомендуют принимать k—
= 1,3...1,8, для винтовых k> 1,75. Полный оборот пласта (на 180°)
винтовой рабочей поверхностью может быть получен при
Л>2,0...2,3.
При работе на склонах kDV зависит
от угла наклона поля а. Зависимость
/гпр от а при оборачивании пласта вверх
по склону представлена на рисунке 38.
При работе с предплужником пре-
дельное отношение b/а меньше, чем
для корпуса без предплужника, так
как предплужник вырезает верхнюю
часть пласта и сбрасывает ее на дно "
борозды, отчего угол наклона пласта
б уменьшается. Как показывают рас-
четы, при работе с предплужником
Рис. 38. Зависимость кп₽
от угла наклона поля а
при пахоте поперек склона
и отваливании пластов
вверх.
41
51
Рис. 39. Характер силового воздействия
ных рабочих поверхностей:
а — плоской; б — выпуклой; в — вогнутой.
s?
на пласт различ-
^пр~1. Аналогичный результат получают и от применения угло-
снима.
Ломаная линия В2С2В2, представляющая собой контур попе-
речного сечения пашни, пропорциональна площади поверхности
пашни. Как видно на рисунке 37, а, ее длина /=a+actg6. Подста-
вив в это выражение a=b sin б, получим
I=b (sin б cos б). (26)
Очевидно, I достигнет максимума при 6=45°. При этом значение
k=bfa составит «1,4. Следовательно, максимальная площадь по-
верхности пашни соответствует отношению б/а=1,4. При этом дей-
ствие тепла, света и ветра на поверхность пашни и испарение вла-
ги с ее поверхности максимальны.
Рыхление пласта. Рыхление почвы зависит от геометрической
формы рабочей поверхности корпуса плуга, так как она опреде-
ляет характер силового воздействия на почву. Всякое тело, движу-
щееся в среде (почве), своей рабочей поверхностью оказывает на
нее давление, направленное по нормали. Необходимое условие ра-
боты плужного корпуса — скольжение почвы по его рабочей по-
верхности. Нормальное давление при условии скольжения почвы
вдоль рабочей поверхности возбуждает силы трения, которые до-
стигают максимальных значений и направлены в сторону, проти-
воположную движению пласта. Воздействие этих двух элементар-
ных сил на почвенный пласт может быть представлено одной рав-
нодействующей R, отклоненной от нормали к рабочей поверхности
в сторону, противоположную движению пласта.
Как видим (рис. 39, а), плоская поверхность давит на пласт
силами, параллельными между собой и направленными наклонно
снизу вверх. Выпуклая рабочая поверхность (рис. 39,6) дает си-
стему расходящихся элементарных сил давления на пласт. Ни та,
ни другая не способны сконцентрировать давление в какой-либо
ограниченной области пласта, а поэтому могут перемещать или
оборачивать пласт, но не способны к интенсивному его крошению.
Вогнутая же поверхность (рис. 39, в) дает систему сходящихся
элементарных сил, касательных к некоторой цилиндрической по-
52
верхности. Она позволяет сконцентрировать действие элементар-
ных сил давления в ограниченной области пласта, что при правиль-
ном выборе этой области способствует лучшему его крошению. При
этом существенную роль играет характер изменения кривизны ра-
бочей поверхности. При неизменной кривизне пласт, изогнувшись
при входе на рабочую поверхность, приобретает ее кривизну и при
дальнейшем движении сохраняет ее без изменений, т. е. движется
без деформаций изгиба. Наиболее благоприятной для интенсивного
крошения будет рабочая поверхность переменной кривизны, увели-
чивающейся по мере движения пласта от входа к выходу. Такие
свойства присущи цилиндроидальным поверхностям, где в каче-
стве направляющей кривой используются отрезки эллипсов или
парабол.
§ 7. Действующие силы
Силовая характеристика. Элементарные нормальные и каса-
тельные силы, действующие на корпус плуга, представляют собой
пространственную систему сил. Из теоретической механики извест-
но, что в общем случае пространственная система сил может быть
приведена к совокупности главного вектора У?, равного векторной
(геометрической) сумме данных сил, и главного момента М, рав-
ного векторной сумме моментов всех сил относительно центра при-
ведения, которые составляют между собой некоторый угол а, не
равный 90° (или л/2). После дальнейшего преобразования сово-
купность R и М приводится к динаме (динамическому, или_сило-
вому, винту), т. е. к силе R' (рис. 40) и паре с моментом М', на-
правленным по одной прямой пп, называемой центральной осью
данной системы сил и проходящей через центр приведения О'. Од-
нако представление силовой
характеристики плужного кор-
пуса в виде динамы оказывает-
ся неудобным при исследова-
нии условий равновесия плуга
графическими методами и вы-
полнении некоторых силовых
расчетов. В этих случаях си-
ловую характеристику, пред-
ставленную в виде динамы, за-
меняют тремя плоскостными
силовыми характеристиками.
Если силовая характеристи-
ка представлена динамой R' и
М' и на ее основе надо полу-
чить плоскостную силовую ха-
рактеристику, например в плос-
кости XO'Y, то для этого сле-
Рис. 40. Схема к преобразованию
динамы в плоскостную силовую ха-
рактеристику плужного корпуса.
53
Рис. 41. Силовая характеристика плужного корпуса в плоскостях:
а горизонтальной (ХОУ); б — продольно-вертикальной (XOZ); в — поперечно-вертикальной1
дует найти проекцию Rxy главного вектора на эту плоскость и про-
екцию Mz главного момента на перпендикулярную этой плоскости
ось Z. Точкой приложения силы R'xy будет проекция на плоскость
XO'Y точки пересечения центральной оси пп динамы с рабочей по-
верхностью корпуса. Далее систему R'xy и Mz приводят к одной
силе R'xy. Для этого точку приложения силы R'xy переносят на
расстояние l=MzIR'xy в направлении, перпендикулярном линии
действия этой силы, и прикладывают к ней силы R'xy и —R'xy,
результате получают силу_ Rxy и присоединенную к ней пару
(R'xy, —R'xy) с моментом —Мг. Так как моменты при этом взаим-
но уравновесятся, то силовая характеристика корпуса в плоскости
XO'Y окажется приведенной к одной силе R'xy, расположенной на
расстоянии /_от проекции центральной оси динамы на эту плос-
кость. Сила Rxy может быть разложена на две составляющие Rx
и Ry, действующие соответственно по осям х и у. Действуя анало-
гично, можно получить плоскостные силовые характеристики кор-
пуса и в других плоскостях координат (XOZ и YOZ). Трехплоско-
стная силовая характеристика корпуса будет определена (рис. 41)
значениями сил R’xy, R'xz и R'yz, направлениями их действия т],
ф и £ и плечами lxy, lxz и lyz относительно носка лемеха.
Значения этих сил могут быть найдены из зависимостей:
R'Xz=V^T^-, Ryz=V^+^. (27)
Направления действия сил определятся углами:
T]=arctg-^-; 4p=arctg-^-; £=arctg-j^-. (28)
Кх КХ Ку
Значения плеч lxy, lxz и lyz отыскивают графическим способом.
Все параметры как трехплоскостной силовой характеристики,
так и динамы могут быть определены путем пространственного
динамометрирования. В результате обработки данных пространст-
венного динамометрирования культурного плужного корпуса на
54
{различных почвах, проведенного ВИСХОМом*, получены ниже-
следующие плоскостные силовые характеристики.
В горизонтальной плоскости сила Rxy направлена под углом
•г] = 15...25° к оси X, а плечо 1ху— (0,3...0,5) Ь, где b — ширина захва-
та корпуса. Для расчетов рекомендуется принимать среднее зна-
чение Zx</=0,4 b.
В продольно-вертикальной плоскости сила R'xz направлена под
углом i|=±12° к оси X, плечо lxz=0,5a при положительных значе-
ниях угла ф и равно 0,33а при отрицательных, где а-—глубина
:вспашки.
В поперечно-вертикальной плоскости сила Ryz направлена под
углом g = ±45° к оси Y, плечо lyz равно 0,56 при положительных
значениях угла £ и 0,756 при отрицательных.
Пользуясь зависимостями, вытекающими из рисунка 41, и при-
веденными выше значениями углов ц, ф и можно определить
•средние численные соотношения между основными параметрами
силовой характеристики. Например, определив методом простран-
ственного динамометрирования силу R’xy, можно вычислить значе-
ния других параметров силовой характеристики:
/?x=/?xb.cosri; (29)
Ry=Rx tg (15...250)=(0,25...0,45) Rx
«ли в среднем
Ry « 0,357?x; (30)
R,=RX tg ф=RX tg (± 12°) = ±0,2^. (31)
Тяговое сопротивление. Для пространственного динамометриро-
вания требуется довольно сложный по устройству динамометриче-
ский плуг. Между тем из равенств (30) и (31) видно, что, распо-
лагая числовым значением одной из сил (Rx, Ry или Rz) и поль-
зуясь указанными соотношениями между ними, можно определить
числовые значения двух других сил, необходимых для расчетов, и
воссоздать всю силовую характеристику корпуса. Это существен-
но упрощает задачу, так как для определения числового значения
одной из сил достаточно обычного линейного динамометрпрования.
Нетрудно догадаться, что наиболее удобной для этой цели будет
сила Rx, так как она представляет собой тяговое сопротивление
плужного корпуса и может быть найдена динамометрированием
обычного плуга. В этом случае ее значение вычисляется по фор-
муле
(32)
где ц — к. п. д. плуга, равный 0,6...0,8;
RnjI — тяговое сопротивление плуга;
п — число корпусов плуга.
* ВИСХОМ — Всесоюзный научно-исследовательский институт сельскохозяй-
ственного машиностроения.— Прим. ред.
55
Таким образом, сила Rx лежит в основе всей силовой характе-
ристики корпуса. Ее значение зависит от технологических свойств
почвы, глубины пахоты, скорости движения плуга, типа и пара-
метров рабочей поверхности, остроты лезвия лемеха, установки
предплужника и ножа.
Удельное сопротивление. Совокупность технологических свойств
почвы может быть в какой-то мере выражена так называемым
удельным сопротивлением почвы, которое аналогично пределу
прочности в сопротивлении материалов. Тогда, согласно общим
законам сопротивления материалов, сила сопротивления почвы
разрушению пропорциональна ее удельному сопротивлению и пло-
щади поперечного сечения пласта:
Rx=kab, (33)
где k — удельное сопротивление почвы, Па;
а и b — толщина и ширина пласта, м.
Удельное сопротивление изменяется в широких пределах в за-
висимости от механического состава почвы, ее влажности, задер-
ненности и т. п.
Примерные значения удельного сопротивления почв k (кПа)
различного механического состава таковы:
легкие (песчаные и супесчаные).......................20... 35
средние (легкие и средние суглинки)..................35... 55
тяжелые (тяжелые суглинки)...........................55...80
весьма тяжелые (сильно задерненные и глинистые по-
вышенной влажности)................................80... 130
Влияние влажности на удельное сопротивление легкой глини-
стой почвы показано на рисунке 42. Как видим, зависимость удель-
ного сопротивления почвы от влажности имеет параболический
характер с явно выраженным минимумом при влажности 21...24%
и максимумом при влажности 31...33%. Падение удельного сопро-
тивления до минимума связано с понижением прочностных
свойств почвы по мере ее увлажнения. Возрастание от минимума
до максимума обуславливается прилипанием почвенных частиц к
рабочей поверхности корпуса, а падение после максимума — не-
прерывным притоком влаги к поверхности контакта и выполнени-
ем ею роли смазки, уменьшающей коэффициент трения.
Боковая и вертикальная состав-
ляющие. С учетом технологических
свойств почвы может быть определена
и боковая составляющая (рис. 43,а):
Рис. 42. Изменение удельного
сопротивления легкой глини-
стой почвы в зависимости от
ее влажности.
^=/?xctg(y0+<p), (34)
где уо — угол лезвия лемеха со стен-
кой борозды;
гр — угол трения почвы о рабочую
поверхность.
56
Рис. 43. Силовая характеристика плужного корпуса:
а — схема сил, действующих на корпус в горизонтальной плоскости; б — характер измене-
ния сил в зависимости от глубины вспашки.
Увеличение глубины пахоты на старопахотных почвах приво-
дит к ускоренному возрастанию силы Rx и связанной с ней Ru
(рис. 43,6). На связных задернелых почвах увеличение сил Rx и
Ry с увеличением глубины пахоты происходит замедленно. Это
объясняется падением прочностных свойств нижележащих слоев
почвы в связи с уменьшением их задерненности.
Вертикальная составляющая Rz может быть как положитель-
ной, так и отрицательной. Она зависит от соотношения сил: отри-
цательно направленного (снизу вверх) сопротивления дна бо-
розды, приложенного к затылку лезвия лемеха, и положительно
направленных (сверху вниз)—сопротивления и веса почвы, при-
ложенных к рабочей поверхности. При твердой почве и малой
глубине, когда вес и сопротивление пласта невелики, сила Rz мо-
жет быть направлена вверх. С ростом глубины происходит увели-
чение веса и сил сопротивления пласта, что приводит к изменению
знака и увеличению силы Rz. Отрицательное значение Rz при
большой глубине вспашки может появиться при встрече корпуса
с плужной подошвой — уплотненным слоем, образовавшимся в ре-
зультате многолетней вспашки почвы на одинаковую глубину.
Влияние конструктивных и кинематических параметров. При-
менение корпусов того или иного типа обуславливает преоблада-
ние определенного вида деформаций (напряжений) почвенного
пласта. А так как почва неодинаково сопротивляется различным
видам воздействий, то это приводит к снижению или увеличению
ее удельного сопротивления. Так, например, при вспашке поля
из-под многолетних трав замена культурных корпусов, сминаю-
щих и изгибающих пласт, плужными корпусами с винтовыми от-
валами, которые скручивают пласт, позволяет снизить удельное
сопротивление почвы примерно в 1,5 раза (рис. 44,а).
Немалую роль играют и параметры рабочей поверхности одно-
го и того же типа. Например, применение скоростного цилиндрои-
дального корпуса с более пологой постановкой рабочей поверхно-
сти к дну (<хо=25°) и стенке (у0=38°) борозды по сравнению со
стандартным цилиндроидальным (культурным) корпусом (cto=3O°,
57
Рис. 44. Изменение
рости вспашки:
а — при использовании
б — при использовании
бочими поверхностями.
удельного сопротивления почвы k в зависимости от ско**
корпусов с культурной / и винтовой 2 рабочими поверхностями;
цилиндроидальных корпусов со стандартной 1 и скоростной 2 ра-
То=42°) позволяет снизить удельное сопротивление почвы на
25...30% (рис. 44,б).
Большое влияние на удельное сопротивление почвы оказывает
скорость движения плуга. В обоих случаях (рис. 44, а и б) удель-
ное сопротивление почвы с увеличением скорости пахоты возра-
стает по вогнутой кривой, близкой к параболе.
Силовые характеристики корпусов определяются силами сопро-
тивления почвы, действующими на рабочие поверхности лемеха и
отвала, а также силами, действующими на лезвие лемеха. Спе-
циальными опытами установлено, что тяговое сопротивление леме-
хаЖ.60% от общего сопротивления рабочей поверхности.
(^Установка 'Предплужников в зависимости от технологических
свойств почвы может уменьшать или увеличивать тяговое сопро-
тивление плуга на ±10%. При обработке почв, способных сопро-
тивляться изгибу (например, связных задернелых), установка
предплужника уменьшает тяговое сопротивление, что объясняется
снижением жесткости, а следовательно, и прочности пласта, раз-
деленного на два слоя. Как показали исследования, снижение со-
противления тем больше, чем больше глубина хода предплужника
(йпр) • Максимальное снижение сопротивления достигается при
апр=0,5а. При обработке несвязных почв, не способных сопротив-
ляться изгибу, установка предплужников увеличивает тяговое со-
противление плуга. Это связано с увеличением доли деформаций
смятия пласта лемехами основного корпуса и предплужника, т. е.
с изменением характера деформации. Сопротивление отвалов в
этом случае сравнительно невелико вследствие малой связности
пласта.
Установка дискового ножа перед каждым корпусом при вспаш-
ке связных задернелых почв приводит к снижению тягового со-
противления на 5...6,5%, а на старопахотных почвах — практически
не изменяет его. Однако в обоих случаях происходит некоторое
ухудшение заглубляемости плуга.
Характер сопротивления. Тяговое сопротивление плужного
корпуса — величина переменная, она непрерывно изменяется в про-
бе
Рис. 45. Типичная дина"иограмма тягового со-
противления почвы плужному корпусу.
цессе работы. Динамограмма тягового сопротивления плужного
корпуса представляет собой кривую с периодически чередующими-
ся пиками и впадинами (рис. 45), в промежутках между которы-
ми заметны также небольшие колебания (микроколебания). Пики
и впадины обусловлены характером деформации почвы под воз-
действием корпуса (клина), а микроколебания — неоднородностью
состава почвы. При этом кратковременные пиковые значения могут
в 2...2,7 раза превышать средние значения, т. е. Ях(тах) =
= (2...2,7)7?х(те<1), а коэффициент вариации тягового сопротивления
составляет ±80...100%.
Таким образом, приведенные ранее графики и зависимости сил
сопротивления R и удельных сопротивлений k представлены лишь
их средними значениями для разных условий работы. Для более
полной характеристики изменения R (или k) пользуются средне-
квадратическим отклонением о> (или Ok)
(35)
i=i
где R — среднее значение сопротивления;
Ri — конкретное замеренное значение сопротивления;
п — количество конкретных значений сопротивления.
Иногда используют также дисперсию DR=oR (или £>ft=ol) или
коэффициент вариации (безразмерную величину)
ул=оя//?теа(или Vk = OA//smed).
В некоторых случаях для анализа изменчивости сопротивления
рабочих органов выделяют типичные для данного процесса коле-
бания и их период (в метрах или секундах), а для более полной
характеристики определяют степень неравномерности сопротивле-
ния б« (или бй) и частоту типичных колебаний nR (или nk):
X Rman— Rmin „ „ ________Rmax—Rmin zqc\
6«= Krned И
59
Иногда для более полной характеристики неравномерности со-
противления рабочих органов строят частотный график — плот-
ность распределения вероятностей, которая чаще всего прибли-
жается к закону нормального распределения. В этом случае
Kmax—-Rmin ~ 6од, 3 OR « &VR.
Рассматривая характер изменчивости сопротивления в вероят-
ностностатистическом смысле, определяют нормированные корре-
ляционные функции и спектральные плотности и на основе их ана-
лиза делают определенные выводы.
Расчетная нагрузка на корпус определяется при его расчете на
прочность. При этом учитывают максимально возможную нагруз-
ку, возникающую в том случае, когда один из корпусов плуга на-
толкнется на препятствие (пень, крупный камень и т. п.). В такой
ситуации усилие на корпусе резко возрастает, так как к тяговому
усилию присоединяются силы инерции трактора и плуга. Однако
вести расчет корпуса, взяв за основу это усилие, было бы неце-
лесообразно, так как это привело бы к созданию очень тяжелого,
дорогостоящего орудия с низким коэффициентом полезного дейст-
вия (к. п.д.). Чтобы не снижать технико-экономических показате-
лей плугов, их зачастую снабжают предохранителями. Отечествен-
ные прицепные плуги снабжаются, как правило, групповыми пре-
дохранителями, установленными на прицепах. Усилие срабатыва-
ния группового предохранителя должно быть несколько больше
часто возникающего при нормальной работе максимального тяго-
вого сопротивления (/?пред>^л:(тах)Л так как в ПрОТИВНОМ Случае
плуг будет часто выключаться из работы. Для многокорпусных
плугов обычно принимают Япред=2Дхп, где Rx— среднее сопро-
тивление одного корпуса, п — число корпусов в плуге. В этом слу-
чае весь плуг испытывает тяговое сопротивление 2Rxti, а те (л—1)
корпуса, которые не встречают перед собой препятствий, все вме-
сте имеют сопротивление (п—V)Rx. Тогда плужный корпус, столк-
нувшийся с препятствием, будет испытывать сопротивление, рав-
ное разности между двумя указанными, т. е.
Драсч=27?хп—(и—1) Rx=(n-]-1) Rx. (37)
Таким образом, чем больше корпусов в плуге, тем большей
прочностью должен обладать каждый корпус в отдельности и тем
больше, следовательно, металлоемкость плуга и ниже его к.п.д.
Например, для пятикорпусного плуга /?расч=67Д. Следовательно,
стойки и их крепления нужно рассчитывать на шестикратное сред-
нее усилие, хотя групповой предохранитель устанавливается на
двукратное среднее усилие.
§ 8. Качество работы
Критерии качества пахоты неразрывно связаны с особенностя-
ми той почвы, которую обрабатывают. Они зависят от природно-
климатических условий, в которых находятся почвы, и от их тех-
нологических свойств.
60
К примеру, в районах, где почвы подвержены ветровой эрозии,
основное требование — сохранение стерни на поверхности поля (до
75...90%), а при обработке почв, не подверженных ветровой эро-
зии, — полная заделка стерни и других растительных остатков.
Для почв, расположенных на склонах и подверженных водной
эрозии, считаются целесообразными ступенчатое дно борозды и
неровности на поверхности поля (валики, лунки и т. п.), задержи-
вающие сток воды, а для почв, не подверженных водной эрозии,
обязательное условие — ровное дно борозды и выровненная по-
верхность поля.
При обработке старопахотных почв, не подверженных эрозии,
одно из основных требований — крошение пласта, а при обработке
связных задернелых почв, раскрошить которые на отдельные
структурные элементы лемешно-отвальными корпусами оказывает-
ся невозможно, — оборот пласта без крошения, так как оно может
привести к разрыву и беспорядочному разбрасыванию кусков та-
кого пласта, что существенно затруднит его последующую обра-
ботку.
Качество обработки любой почвы зависит от типа и параметров
рабочих органов, режима их работы (скорость, глубина обработ-
ки), технического состояния (острота лезвия, сборка и т. п.).
Основная задача вспашки наиболее распространенных старо-
пахотных почв — оборот пласта, полная заделка пожнивных остат-
ков, рыхление пахотного слоя, выровненная слитная поверхность.
Наилучшее качество вспашки может быть достигнуто при обра-
ботке почвы, находящейся в состоянии спелости, т. е. при относи-
тельной влажности 40...70%. При идеальном качестве обработки
пласт повернут на 180° и раскрошен на структурные агрегаты раз-
мером 1...3 мм, все растительные остатки находятся на дне бороз-
ды, поверхность поля ровная. Однако идеального качества пахоты
из-за разнообразия и изменчивости свойств почвы и недостаточно-
го совершенства почвообрабатывающих машин и орудий достичь
не удается. Поэтому на качество вспашки устанавливаются агро-
технические требования, представляющие собой, как правило, до-
пуски на те или иные показатели качества. В соответствии с агро-
требованиями отклонение средней глубины от заданной допускает-
ся не более ±2 см, пожнивные остатки должны быть полностью
заделаны, пласт рыхлый, количество глыб крупнее 10 см не долж-
но превышать 15...20%, поверхность вспаханного поля должна
быть ровной, слитной, без огрехов, высота гребней и глубина бо-
розд не должна превышать 7 см.
Применение корпусов различных типов на вспашке полей
из-под многолетних трав (клеверища двухлетнего пользования)
показывает (рис. 46), что лучший оборот пласта и лучшее качест-
во заделки растительной массы дают корпуса с рабочей поверх-
ностью винтового типа. Они обеспечивают устойчивый угол накло-
на пласта во всем диапазоне изменения скоростей (от 1,5 до
2,5 м/с), а корпуса с цилиндроидальной поверхностью несколько
61
.улучшают оборот пласта с увеличением скорости вспашки
(рис. 46,а). Последнее объясняется тем, что вследствие слабой
задерненности пласта (4,5 г/дм3) нижняя незадерненная его часть
•с увеличением скорости от более сильного удара сильнее крошится
и засыпает задерненную часть, скрадывая недостатки ее оборота.
Качество заделки растительной массы, которое характеризуется
отношением глубины ее заделки к глубине вспашки, с увеличением
скорости вспашки для корпусов обоих типов несколько снижается
(рис. 46,6), но для корпуса с поверхностью винтового типа остает-
ся лучше во всем диапазоне изменения скорости.
Существенное влияние на качество обработки почвы оказывают
<и параметры рабочей поверхности одного и того же типа. Напри-
мер, стандартные цилиндроидальные (культурные) корпуса на ско-
ростях 1,4... 1,8 м/с (5...6,5 км/ч) лучше заделывают растительные
остатки, чем скоростные КСШ-35 (рис. 47, а, 6), в которых рабочая
поверхность установлена более полого к дну (ао = 25 и 30°) и к
стенке (уо=38 и 42°) борозды. Однако с увеличением скорости до
2...2,5 м/с (7...9 км/ч) лучшую заделку показывают скоростные кор-
пуса. С повышением скорости до 2,5 м/с (9 км/ч) и те и другие
улучшают рыхление почвы и дают более слитную поверхность паш-
ни. Количество мелких фракций (менее 50 мм) с ростом скорости
увеличивается как для стандартных, так и для скоростных корпу-
сов (рис. 47,в). Одновременно поверхность поля получается более
выровненной — высота гребней уменьшается (рис. 47,г), а выров-
.ценность пахоты — это основное условие высокопроизводительной
работы скоростных машинно-тракторных агрегатов на всех после-
дующих операциях (дополнительная обработка, посев, культива-
ция, уборка).
На связных задернелых почвах (при степени задернения
34 г/дм3 и выше) корпуса с цнлиндроидальными рабочими поверх-
ностями, поднимая пласт над дном борозды и сворачивая в спи-
раль, в конечном счете разрывают его на отдельные глыбы, кото-
рые беспорядочно разбрасываются по полю. В результате этого
пашня представляет собой нагромождение глыб различного раз-
мера с торчащей в разные стороны дерниной. Дать сколько-нибудь
точную количественную оценку такой пашни с хаотично разбросан-
ными пластами оказывается практически невозможным. Поэтому
плужные корпуса с цнлиндроидальными рабочими поверхностями
для обработки связных сильно задернелых почв следует считать
совершенно непригодными.
Главная цель вспашки таких почв — оборот пласта — достигает-
ся применением корпусов с рабочими поверхностями винтового
типа. При этом пласт отделяется и укладывается сплошной нераз-
рывной лентой, степень оборота (угол поворота) которой зависит
от соотношения между шириной захвата корпуса и глубиной пахо-
ты. Чем больше это отношение, тем более полого ложатся пласты
(рис. 48,а). При отношении Ь/п>2,3 достигается полный оборот
пласта. Скорость вспашки оказывает незначительное влияние на
€2
е
Рис. 46. Изменение угла наклона пласта к дну борозды 6 (а) и ко-
эффициента заделки растительной массы ka (б) в зависимости от
скорости вспашки плугом с цилиндроидальными 1 и винтовыми 2
корпусами на обработке поля из-под многолетних трав.
Рис. 47. Влияние скорости вспашки при работе плуга со стандарт-
ными 1 и скоростными 2 корпусами на:
с — глубину заделки h^; б — количество незаделанных растительных остат-
ков Ир', в — крошение почвы Пр; г — высоту гребней h.
Рис. 48. Показатели работы плуга, обо-
рудованного корпусами с рабочей по-
верхностью винтового типа на связных'
задернелых почвах:
а — зависимость угла поворота пласта от со-
отношения Ь[а; б — зависимость угла накло-
на пласта от скорости вспашкн; в — зави-
симость коэффициента рыхления пласта k
от глубины вспашки а.
Рис. 49. Зависимости влажно-
сти почвы Wo, засоренности
посевов Зп и урожайности
пшеницы Qo от неравномер-
ности глубины пахоты (сред-
неквадратического отклонения
а) в процентах по отношению
к заданной.
оборот пласта (рис. 48,6), что свиде-
тельствует о способности корпусов с
винтовыми отвалами работать в ши-
роком диапазоне скоростей. Рыхление
(разрушение) пласта играет в данном
случае отрицательную роль, так как
может вызвать разрыв, а следователь-
но, и беспорядочную укладку пласта.
Оценить степень рыхления пласта об-
щепринятым методом, т. е. по отноше-
нию массы мелких фракций (до
50 мм) к общей массе пробы, оказы-
вается невозможным, так как пласт
не рассыпается, а представляет собой
сплошную ленту. Поэтому рыхление
пласта следует оценивать по коэффи-
циенту рыхления, представляющему
собой отношение плотности почвы до
ее обработки к плотности после обработки. Как видим (рис. 48, в),
коэффициент рыхления почвы в зависимости от глубины вспашки
изменяется по вогнутой кривой. При малой толщине пласта, ког-
да срезается верхняя, сильно задерненная часть пахотного слоя,
его значения близки к единице, т. е. он не испытывает остаточных
деформаций. С увеличением толщины пласта к сильно задернен-
ному слою присоединяется менее задерненный, и при определенной
влажности этого слоя происходит не рыхление, а даже некоторое
уплотнение почвы. Дальнейшее увеличение толщины пласта свя-
зано с присоединением к нему слабо задерненного или почти не-
задерненного слоя, который под действием плужного корпуса кро-
шится, что и приводит к увеличению коэффициента рыхления.
Важнейший показатель качества — глубина пахоты и ее нерав-
номерность. Высокая культура земледелия немыслима без точного
соблюдения заданной глубины пахоты, так как от нее зависят уро-
жай сельскохозяйственных культур, производительность пахотных
агрегатов, расход топливо-смазочных материалов, износ деталей
и т. п.
Если заданная глубина пахоты научно обоснована, то откло-
нение от нее приводит к ухудшению условий роста и развития рас-
тений и снижению их урожайности.
При увеличении неравномерности глубины пахоты (рис. 49)
уменьшается влажность почвы, увеличивается засоренность посе-
вов, что в конечном счете приводит к существенному снижению
урожайности*.
* По данным канд. техн, наук А. А. Князева. — Прим, автора.
64
Глава IV
ЗУБЬЯ, ЛАПЫ, НОЖИ И ПОДРЕЗАЮЩИЕ ЛЕМЕХИ
§ 1. Назначение и разновидности
Характерная особенность этих рабочих органов состоит в том,
что в процессе работы они совершают только поступательное (пе-
реносное) движение вместе с машиной.
Зубья и лапы воздействуют на почву как клинья, углы р и у
которых не изменяют своего значения на всей рабочей поверхно-
сти, вследствие чего они не оборачивают почву; угол а может быть
значительно развит (рыхлительные лапы культиваторов). Воздей-
ствие на почву ножей, подрезающих лемехов, плоскорежущих и
универсальных лап сводится главным образом к процессу резания
лезвием.
Зубья (рис. 50) — рабочие органы зубовых борон. Их исполь-
зуют для рыхления и перемешивания поверхностного слоя почвы,
вычесывания сорняков, заделки семян и удобрений, выравнивания
поверхности поля. Зубья квадратного сечения (рис. 50, а) ставят
на тяжелых и средних боронах, круглого (рис. 50, б) — на легких
(посевных) боронах. Для тяжелых борон Л=16 мм, /=195 мм;
средних — А=16 мм, /=170 мм; легких — </=14 мм, /=100 мм.
Зубья сетчатых борон изготовляют из пружинной проволоки
</=8...1О мм и /=180...210 мм. Они бывают с заостренными
(рис. 50,в), ножевидными (рис. 50,г) и тупыми (рис. 50,д) кон-
цами. Благодаря шарнирному соединению они хорошо приспосаб-
ливаются к неровностям поля и поэтому применяются для бороно-
вания как гладких, так и гребневых посадок. Зубья прополочных
борон (рис. 50,е), имея высоту /=410 мм, применяются для рых-
ления почвы на посевах при высоте растений до 35 см. Ножевид-
ные зубья луговой бороны (рис. 50, ж) служат для прочесывания
дернины (скосом вперед), мелкого рыхления и прорезки дернины
а
Рис. 50. Зубья борон:
л — квадратного сечения; б — круглого сечения; в, г, д — зубья сетчатых борон; е — пру-
жинный зуб прополочной бороны; ж — ножевндный зуб луговой бороны.
5—424
65
Рис. 51. Лапы культиваторов, рыхлителей, свеклоуборочных комбайнов и свек-
лоподъемников:
а — односторонние; б — стрельчатые; в — долотообразные; г — оборотные; д — копьевидные;
е — подкапывающая лапа свеклоуборочного комбайна и свеклоподъемника; ж — плоскоре-
за -глубокорыхлителя; а — рыхлителя.
(скосом назад). Кроме того, в сочетании со скребками их применя-
ют для разравнивания кротовин и других неровностей поверхности
почвы, растаскивания навоза. Зуб работает, как двугранный клин.
Переднее его ребро раскалывает почву, а грани раздвигают ее в
стороны, сминая и перемешивая частицы. Зуб круглого сечения
работает, как сдвоенный клин, где угол у изменяется от 90° до 0.
66
Лапы — рабочие органы культиваторов, плоскорезов-глубоко-
рыхлителей, свеклокомбайнов, свеклоподъемников и т. п. На куль-
тиваторах устанавливают лапы трех типов: полольные (плоскоре-
жущие), универсальные и рыхлительные. Основными параметрами
лап, определяющими их форму и характер воздействия на почву,
являются углы: раствора у, крошения а, постановки к горизонту е
и заострения г; ширина захвата Ь. В зависимости от значений и
соотношения этих параметров в большей или меньшей мере прояв-
ляется полольная или рыхлительная функция лап.
Полольные, или плоскорежущие, лапы подразде-
ляются на односторонние, или бритвы (рис. 51,о), и стрельчатые
(рис. 51,6). Характерная их особенность — малый угол а=9...10°
(е=15...18°), вследствие чего крошение почвы практически сводит-
ся к нулю. Главная их функция — подрезание сорняков, т. е. реза-
ние лезвием, а основной параметр — угол у, так как от размера
этого угла зависит режим резания — со скольжением или без
скольжения. Значения параметров: для бритв — ширина захвата
6=85, 120, 150 и 165 мм, угол раствора у = 28...320; для стрельча-
тых—6=145, 150, 160, 220, 250, 270 и 330 мм; 2у=60...70°. Угол
заострения t=12...15°. Глубина обработки 4...6 см.
Универсальные лапы (стрельчатые по форме) имеют
значительно больший угол крошения (а=16...18°), (в=25...30°),
благодаря чему не только подрезают сорняки лезвием, но и кро-
шат почву. Ширина захвата 6=220, 270, 330 и 385 мм, глубина об-
работки до 12 см. Угол раствора 2у: для работы на песчаных поч-
вах 75...80°, липких черноземных и глинистых — 55...60°. Аналогич-
ны почвоуглубительные лапы плугов.
Рыхлительные лапы подразделяют на долотообразные
(рис. 51,в), оборотные (рис. 51,г) и копьевидные (рис. 51,3). Ха-
рактерная особенность — угол крошения не постоянный, а развит,
т. е. изменяется по высоте лапы: a=f(z).
В долотообразных лапах 6=20 мм, а=40°, глубина обработки
до 16 см, они служат для обработки междурядий без выноса
влажной почвы на поверхность.
Оборотные лапы закрепляют на жестких или пружинных стой-
ках. При установке на жестких стойках ао = 4О...45°, глубина об-
работки до 25 см; на пружинных ао=25...3О°, глубина обработки
до 12 см. Угол раствора 2у=60...70°, ширина захвата 6=35...65 мм.
При износе одного конца поворачивают другим.
Копьевидные лапы (рис. 51,3), имея аналогичные параметры,
лучше вычесывают сорняки.
Подкапывающие лапы (рис. 51,е) устанавливают на
свеклоуборочных комбайнах и свеклоподъемниках; они предназна-
чены для нарушения связи свекловичных корней с почвой и частич-
ного их подъема. Основной параметр — угол крошения а=8...20°
(зависит от глубины подкапывания), для увеличения крошения
почвы лапа снабжена рыхлительным пером; 6=143 мм, средняя
глубина подкапывания 20...25 см.
5
67
Лапа культиватор а-п лоскорез а-г лубокорыхлн-
<еля (рис. 51,ж) предназначена для глубокого рыхления почв,
подверженных ветровой эрозии. По форме — стрельчатая, состоит
из башмака и прикрепленных к нему долота и двух ножей (леме-
хов). Основные параметры: угол раствора 2у = 75, 100 и 120°; угол
постановки долота к дну борозды а=17, 20 и 25°, лемеха к дну бо-
розды е=25 и 26°; ширина захвата 110, 150, 160, 210, 220 и 250 см;
глубина обработки 7...30 см. Пласт, подрезанный лемехами, подни-
мается на их поверхность и крошится, после чего опускается на
прежнее место без перемешивания слоев. Одновременно с рыхле-
нием подрезаются сорные растения, а стерня сохраняется (не ме-
нее 80%), что защищает почву от ветров.
Лапа рыхлителя (рис. 51,з) предназначена для рыхления
почв, засоренных камнями и пнями. Она состоит из башмака, ножа,
долота и стойки. Древесные корни при встрече с долотом и вер-
тикальным ножом разрываются, а камни выворачиваются, в пла-
сте образуются трещины, и он теряет прочность. Глубина пред-
плантажной обработки до 80 см.
Ножи. Плужные ножи отрезают пласт, как правило, в вер-
тикальной плоскости для получения ровной стенки борозды. Че-
ренковые ножи бывают двух типов: консольные (рис. 52, а) и двух-
опорные (рис. 52,6). Их устанавливают на плантажных, кустарни-
ково-болотных и лесных плугах, а также на плугах для вспашки
каменистых почв.
Консольный нож устанавливают с наклоном назад под
углом а=70...75° к горизонту, угол заточки 10... 12°. Он отрезает
пласт, перерезает мелкие корни, а крупные выворачивает на по-
верхность.
Двухопорный нож 2 (рис. 52,6), использующий в каче-
стве второй опоры носок лемеха корпуса 1 плуга, имеет лезвие
криволинейной формы, способствующей выдавливанию на поверх-
ность погребенных в почве древесных остатков.
Плоский нож 2 (рис. 52,в) предназначен для работы на
почвах, поросших густым высоким (до 2 м) кустарником. Лыжи 3
прижимают кустарник к поверхности поля для лучшего его подре-
зания ножом 2, щит 4 предотвращает забивание корпуса кустарни-
ком. Лезвие ножа наклонено вперед под углом а = 35...40° к гори-
зонту. Нож несет два лезвия и после затупления одного может
быть повернут вперед другим.
П одкормочный нож (рис. 52,г) устанавливают на куль-
тиваторах. Он состоит из собственно ножа с долотообразным кон-
цом и воронки. Нож разрезает почву в вертикальной плоскости, в
образовавшуюся щель глубиной до 17 см через воронку сыплются
удобрения.
Выкопочные ножи подрезают пласт снизу и сбоку. Они
бывают двух типов: для сеянцев и для саженцев. Нож для выкоп-
ки сеянцев (рис. 53, а) представляет собой симметричную скобу
со сменным лемехом 1 и стойками 2.-Ширина захвата 105 см,
68
Рис. 52. Ножи:
Рис. 53. Выкопочные ножи и подкапывающий лемех:
а — выкопочный нож для сеянцев; б ~ выкопочный нож для саженцев;
в — подкапывающий лемех; 1 — лемех; 2 — стойка; 3 — рыхлитель.
глубина подкапывания до 30 см. Нож для выкопки саженцев
(рис. 53,6) снабжен лемехом 1, стойкой 2 и рыхлителями 3. Ши-
рина захвата 55 см. У выкопочных ножей е=5...10°, что обеспечи-
вает выкапывание саженцев и сеянцев без разрыва их корней.
Подкапывающие лемехи (рис. 53,е) подрезают пласт
снизу. Их устанавливают на машинах для уборки картофеля и
корнеплодов. Основные параметры: у=40...45°, а=10...24°,
^475 мм, глубина подкапывания 13...20 см.
§ 2. Зона деформирования почвы зубьями
и рыхлительными лапами
Эксперименты показывают, что зона деформации почвы, обла-
дающей свойством пластичности, не ограничивается зоной контак-
та с ней рабочего органа, а распространяется вперед и в стороны
на значительные расстояния.
Как известно, на почвенный пласт, скользящий по рабочей по-
верхности клина, действуют нормальные силы N и силы трения F,
которые в сумме дают равнодействующую R, отклоненную от нор-
мали на угол трения ср (рис. 54,а). Согласно теории наибольших
касательных напряжений направления Hi и Н2> по которым может
разрушаться пласт в результате скалывания, располагаются сим-
метрично к силе R под углом 0 одно к другому, где 0=40...50° для
почвы (по Т. М. Гологурскому). Это дает основание считать, что в
среднем направление скалывания почвы существенно не откло-
няется от направления силы R.
В поперечно-вертикальной плоскости (по В. С. Жегалову) зона
деформации почвы также ограничивается плоскостями, составляю-
щими угол 0 одна к другой или угол е/2 к вертикальной оси сим-
метрии. Тогда (согласно рис. 54,6) зона деформации почвы рых-
лительной лапой в среднем составит:
по ходу
^ = lo~h^i — lo~i~a tg(a4~<p)> (38)
Рис. 54. Схема деформации пласта лапой рыхлителя:
а — действующие силы и предельные направления трещин скалыва-
ния; б — зоны деформации в продольном н поперечном направлениях.
70
Р-ис. 55. Зоны деформации почвы в поперечно-вертикальной
плоскости:
а — зубьями борон; б — стрельчатыми лапами культиваторов и куль-
тнваторов-глубокорыхлнтелей; в ~ рыхлительнымн лапами культива-
торов.
в поперечном направлении
(39)
Возможные предельные значения распространения зоны дефор-
мации почвы в продольном направлении составят:
atg(a+<p+6/2), (40)
/mta=atg(a+<P—О/2)- ' (41)
Как видим (рис. 55, а), рыхление почвы по глубине происходит
неравномерно. В нижней части обрабатываемого слоя зубья борон
и рыхлительные лапы образуют необработанные гребни высотой ft.
Причем для зубьев борон
ft=4Sctg4’ (42)
а для рыхлительных лап
ft=4-(s-b0)ctg4.
(43)
Лапы культиваторов-глубокорыхлителей и стрельчатые лапы
культиваторов, устанавливаемые с перекрытием с (рис. 55,6), та-
ких гребней не образуют, однако в верхней части обрабатываемо-
го слоя образуется зона defk, которая обрабатывается дважды.
После обработки боронами и рыхлителями такая зона или вообще
отсутствует, или образуется, но значительно меньших размеров,
например def (рис. 55,а, в).
71
§ 3. Основы технологического процесса резания лезвием
Резание лезвием — один из наиболее распространенных техно-
логических процессов. Он лежит в основе действия ножей, плоско-
режущих лап, подрезающих лемехов и т. п.
Понятие о лезвии. Во всяком ноже различают три элемента:
лезвие, фаски и остов. Длительное время считали, что в попереч-
ном сечении острозаточенного ножа лезвие представляется верши-
ной с угла, образованного фасками ас и Ьс (рис. 56,а), а об остро-
те лезвия судили по углу его заточки i. Однако исследования
(О. А. Сизова и др.) показали, что при первых же резах тонкая
вершина ножа (dee) сначала загибается, а затем отламывается и
лезвие быстро приобретает форму закругленной поверхности (в по-
перечном сечении — форму дуги de), плавно соединяющей фаски
ножа, которая лучше всего аппроксимируется частью кругово-
го цилиндра. Поэтому при рассмотрении процесса резания необхо-
димо исходить из представления о реальном лезвии, имеющем оп-
ределенную толщину.
При этом острота ножа будет определяться не углом заточки i,
а толщиной лезвия.
Для определения теоретической толщины лезвия В. А. Жели-
говский предложил к лезвию относить ту часть ножа, которая раз-
рушает разрезаемый материал вследствие его смятия, а к фас-
кам— те его части, которые раздвигают уже разрезанный матери-
ал и скользят по нему. Следовательно, ту часть ножа, где нет
скольжения материала, следует относить к лезвию, а ту, где на-
блюдается скольжение, — к фаскам. Согласно (19), условие сколь-
жения выражается неравенством §><р, т. е. угол между направ-
лением нормали к рабочей поверхности и скорости ее движения g
должен быть больше угла трения <р. Если же g<<p, то скольжения
не наблюдается. Так как лезвие
Рис. 56. Элементы ножа:
а — нож с остро заточенным лезвием; б —
нож с рабочим лезвием; I — лезвие; 2 —
фаска; 3 — остов.
в поперечном сечении представ-
лено дугой окружности, то
нормалью к любой точке его
поверхности будет радиус, про-
веденный в эту точку. Если
нож при этом движется сверху
вниз (рис. 56, б), то в точке f
направления нормали и скоро-
сти совпадают, а значит, g = 0.
Влево и вправо от точки f угол
g возрастает и в точках d и е
принимает значения g=<p, а
выше этих точек g>q>. В пре-
делах дуги dfe угол g<<p и
скольжения не наблюдается.
Следовательно, эта часть ножа
относится к лезвию, а толщина
лезвия ограничивается цент-
72
ральным углом, равным 2<р, и определяется хордой с?е=б. Как вид-
но из рисунка 56,6,
б—2r sin ср, (44)
где г — радиус кривизны поверхности лезвия.
Тогда ad и be, где £><р, относятся к фаскам. Таким образом,
при резании лезвием основную работу — разрушение материала —
выполняет лезвие, фаски же играют вспомогательную роль. Од-
нако, если двугранный угол, образованный фасками, и ширина
этих фасок превосходят некоторые пределы, зависящие от свойств
разрезаемого материала, то действие фасок будет преобладать над
действием лезвия и резание лезвием перейдет в резание клином.
Режимы резания лезвием. В зависимости от угла g между на-
правлением скорости лезвия и нормалью к его поверхности, а также
от фрикционных свойств разрезаемого материала, характеризуе-
мого ср, различают три режима резания:
g = 0— рубящее резание (рис. 57,а);
0<g^cp— резание с продольным перемещением, но без сколь-
жения (рис. 57,6);
g><p— резание со скольжением (рис. 57,в).
Рубящее резание (рис. 57,а) находит в почвообрабаты-
вающих машинах весьма ограниченное применение. В этом случае
лезвие давит на почвенный агрегат т по нормали, а он переме-
щается в почвенной среде под действием этой силы до тех пор,
пока не будет разрушен.
Резание с продольным перемещением (рис. 57,6)
рассмотрим следующим образом: силу N разложим на две состав-
ляющих— по направлению скорости Nv и по касательной к лезвию
Nr. Так как g<cp, то сила /VT=/Vtg| меньше максимальной воз-
можной силы трения Fmax=Ntg<p. Следовательно, сила F, как си-
ла реакции, в точности равна возбуждающей ее силе NT и направ-
лена в противоположную от нее сторону. Таким образом, сила Nr
уравновешивается силой F, и почвенный агрегат т перемещается
под действием силы Nv по направлению ее действия до тех пор,
пока не будет разрушен.
Резание со скольжением, т. е. при g><p и Nr>Fmax,
характеризуется тем, что сила трения достигает своего максималь-
Рис. 57. Режимы резания лезвием:
а — рубящее резание; б — резание с продольным
в — резание со скольжением.
перемещением без скольжения;
73
Рис. 58. Резание со скольжением:
а — схема к определению коэффициента скольжения i; б — характер
изменения коэффициента скольжения i в зависимости от угла
ного значения Fmax, но она не в состоянии уравновесить составляю-
щую нормального давления NT, и поэтому наблюдается скольже-
ние почвенных агрегатов вдоль лезвия под действием силы
NT— Fmax- Следовательно, на почвенный агрегат т одновременно
действуют СИЛЫ Nv И Л\—Fmax или N И Fmax- Сложив их по пра-
вилу параллелограмма, получим равнодействующую R, направ-
ленную под углом <р к нормали N. Почвенный агрегат т будет пе-
ремещаться под действием силы R в направлении ее действия до
тех пор, пока уплотнение почвы не приведет к тому, что удельное
давление на него достигнет предела прочности и он разрушится.
Коэффициент скольжения. Скольжение материала по лезвию
возможно при различных размерах угла от значения, несколько
большего <р, до приближающегося к л/2. При этом чем больше
тем больше степень скольжения. Для выбора меры скольжения
рассмотрим процесс резания лезвием на примере черенкового но-
жа. Пусть нож движется в почве по направлению скорости v
(рис. 58, а) и переместился из положения I в положение II. При
этом почвенный агрегат т, соприкасающийся с точкой съ лезвия,
перемещаясь под действием силы R в направлении ее действия,
оказался у точки а3 лезвия, а точка а,\, двигаясь в направлении
скорости v, заняла положение а2. Тогда п2аз — есть путь, пройден-
ный почвенным агрегатом т в относительном скольжении по лез-
вию, а^аз — абсолютное перемещение почвенного агрегата (дефор-
мация смятия почвы), а отношение первого ко второму — мера
скольжения, называемая коэффициентом скольжения. Воспользо-
вавшись теоремой синусов и рисунком 58, а, получим:
. _ а2а3 _ sin (Е —<р) = sin (| — ф) дач
axas sin (л/2 — g) cos g v '
Из (45) видно, что при |=(р коэффициент i=0, а при £—>-л/2
он будет стремиться к бесконечности, т. е. i—>оо, функция же
i=f(g) будет иметь вид, представленный на рисунке 58,6. Так как
условие скольжения |><р, а из рисунка 58, а Е = л/2—а, то для ре-
зания черенковым ножом со скольжением его нужно устанавливать
под углом а<л/2—tp к горизонту.
74
Рис. 59. Изменение сил R, N и Т в
зависимости от угла с.
Силы сопротивления резанию. Для осуществления процесса ре-
зания при g=0 необходимо, чтобы нормальное давление No созда-
вало в материале напряжения смятия, равные пределу его проч-
ности. В этом случае R~N0> Т=0 (рис. 59). Если затем направле-
ние перемещения ножа отклонить от направления нормали к лез-
вию на некоторый угол то для разрушения материала потре-
буется некоторая сил » значение которой будет также опреде-
ляться пределом прочности материала на смятие. Ее можно разло-
жить на две составляющих /Vi и Тг. Увеличивая угол между на-
правлением перемещения лезвия и нормалью в пределах
можно получить целый ряд значений этих сил. При этом, как вид-
но из рисунка 59, значения N будут уменьшаться, а значения Т
возрастать. Этот процесс будет продолжаться до тех пор, пока
угол g не достигнет значения угла <р. При |=<р касательная сила Т
достигнет своего максимального значения, равного силе трения
Emax, т. е. Tmax=Fmax=Ntgq>. Поэтому при резании со скольжени-
ем, т. е. при £>ф, направление равнодействующей R уже не будет
изменяться, а независимо от коэффициента скольжения будет ос-
таваться постоянным, т. е. отклоненным на угол трения <р от нор-
мали.
При резании со скольжением, как показывают эксперименты, с
увеличением £ необходимое для резания нормальное давление У
интенсивно падает (рис. 60). Сила Т прямо пропорциональная N,
так как 7’max=jVtg<p, будет также уменьшаться, и ее график мо-
жет быть получен последовательным умножением ординат графика
силы /V на некоторый коэффициент f=tg<p. Так как в большинстве
случаев tgtpd, то кривая Т’=/2(^) пройдет ниже кривой /V=fi(£).
Сила R зависит от N и Т, так как связана с ними соотношением
R = \N2 + T2. Следовательно, зависимость Е = [з(£) будет аналогич-
на графикам составляющих ее сил и пройдет выше кривой
лм.ю-
Уменьшение сил сопротивления резанию при движении лезвия
с продольным перемещением связано с действием факторов как
кинематического (геометрического), так и технологического харак-
75
Рис. 61. Схема к объяснению процесса кинематической трансфор-
мации:
а —угла заточки ножа: б — ширины потока материала и действительной
толщины лезвия.
тера. Одной из возможных причин академик В. П. Горячкин счи-
тал уменьшение (кинематическую трансформацию) действительно-
го значения угла заточки ножа с увеличением угла g (рис. 61,а).
Так как de=ab, то defdc— (ab[dc) (ас/ас) или deldc= (abjac) (acfdc)
или tgtg=tgi0cos£, откуда
iE=arctg(tgivcosg). (46)
Как видим из (46), с увеличением g угол заточки в режущем
сечении уменьшается, т. е. лезвие оказывается как бы более остро
заточенным. Академик В. А. Желиговский обнаружил еще две при-
чины уменьшения сил сопротивления резанию при g=#0. Первая со-
стоит в уменьшении ширины потока материала, приходящегося на
единицу длины лезвия. Как видно из рисунка 61,6, /g=/0 cosg. Сле-
довательно, ширина потока материала, разрезаемого единицей дли-
ны лезвия, с увеличением g уменьшается. Вторая заключается в
кинематической трансформации действительной толщины лезвия.
Так, если при рубящем резании, т. е. когда g=0, поперечное сече-
ние лезвия в вертикальной плоскости движения будет дугой ок-
ружности радиуса Го, то при резании с продольным перемещени-
ем— дугой эллипса с радиусом кривизны rg<r0 (рис. 61,6).
Уменьшение радиуса кривизны, как следует из (44), приводит к
уменьшению толщины лезвия в режущем сечении. В результате
при рубящем резаиии лезвие сминает площадку
So=60/0=2/0г0 sin ф, (47)
а при резании с продольным перемещением, т. е. при g>0,
Sg=6£/5=2/0Tj cos Е sin ф. (48)
Так как /Ocosg</0, а rg<ro, то и Sg<S0, т. е. происходит ло-
кализация зоны разрушения материала возле лезвия. Как следует
из (48), при g—^л/2 площадка S?—>0.
При резании со скольжением, т. е. при g>^, происходит более
интенсивное уменьшение сил сопротивления резанию (см. рис. 60).
Это объясняется тем, что к трем рассмотренным факторам кинема-
76
Рис. 62. к определению удельной ра-
боты резания:
а — схема действия односторонней плоскоре-
жущей лапы культиватора; б — зависимость
удельной работы резания от угла
тического характера присоединяется четвертый фактор — техноло-
гического характера. Как известно, после заточки абразивным ин-
струментом лезвие ножа получается зубчатым, пилообразным. При
резании без скольжения лезвие сминает материал, и эти неровно-
сти никакой роли не играют. При резании же со скольжением не-
ровности захватывают частицы материала и смещают их. При
этом возникают напряжения растяжения и сдвига. А так как пре-
дел прочности на растяжение и сдвиг у большинства материалов
меньше, чем на сжатие, то это и приводит к уменьшению сил со-
противления резанию. При £—>-л/2 силы N, Т и R—>0, т. е. процесс
резания при ^=дт/2, прекращается.
Удельная работа резания — это работа, затрачиваемая на пере-
резание единицы площади материала. Она характеризует энерго-
емкость процесса резания и может служить критерием для выбора
рациональных установочных параметров (режима резания) рабо-
чих органов, а также для оценки энергоемкости резания того или
иного материала.
Выведем формулу для определения удельной работы резания
на примере односторонней плоскорежущей культиваторной лапы
(бритвы). Пусть лапа (рис. 62,а) движется в почве по направле-
нию скорости v и, переместившись из положения 1 в положение II,
прошла путь h. Так как при этом затрачена работа A=Rih=
=Rh cos(l—ф) и подрезана почва площадью S=hb = hlcosg, то
удельная работа резания
г A Rh cos (Е — <р) R . । . w t • х
Е = S"= -A/-coSf -=i-(cosy+tggsm ф),
или, имея в виду, что R=N/cosq>, и, подставив значение его в пре-
дыдущее выражение, получим
Е = (1 +tg g tg ф) = 4 (1 +f tg £), (49)
1где b — ширина полосы почвы, разрезаемой лезвием (ширина за-
хвата);
I — длина лезвия.
77
Для вычисления удельной работы определенных рабочих орга-
нов, например черенкового ножа, установленного под углом а к го-
ризонту, или культиваторной лапы, имеющей угол раствора у, вме-
сто угла g, подставим его значение, выраженное через а или у,
т. е. В=л/2—а или §=л/2—у.
График изменения удельной работы резания в зависимости от
угла Е имеет минимум* при g = 55...65° (рис. 62,6) или примени-
тельно к лапе культиватора при у=35...25°. В производстве ис-
пользуются культиваторные лапы с углом раствора 2у=55...80° или
60...650.
§ 4. Воздействие полольной лапы на корни сорняков
Полольные лапы, а также лемехи и ножи должны перерезать
корни растений, встречающиеся с лезвием в почве. Однако часть
растений, тем большая, чем больше затупилось лезвие, может
быть не перерезана, а вырвана с корнем и будет обволакивать лез-
вие.
Чтобы не произошло забивание, вырванные растения должны
скользить вдоль лапы и в результате сходить с нее, т. е. лапа долж-
на самоочищаться. Согласно (19), условие скольжения выражает-
ся неравенством Однако это условие справедливо лишь для
однородного материала. Корни же сорняков размещены в почве
и, если почва не будет скользить вдоль лезвия, то она не позволит
скользить и корням сорняков. Следовательно, условие скольжения
корней должно учитывать фрикционные свойства не только самих
корней, но и той почвы, в которой они размещены, и, очевидно,
будет иметь вид:
Е > max (<рк, <рп). (50)
Такая запись означает, что при определении условий скольже-
ния принимается во внимание как угол трения корней сорняков,
так и угол трения почвы, но учитывается лишь тот из них, который
больше.
Так как в полольной лапе культиватора (а также лемеха
плуга) |=л/2—у, то условие скольжения будет иметь вид:
у<л/2—<р, или с учетом свойств окружающей среды (почвы)
у<90°—max(<рк, <рп).
Однако это ограничение имеет односторонний характер. Оно
не раскрывает оптимального соотношения между углами
у и tp.
В качестве критерия оптимальности примем количество сорняков,
находящихся на лезвии в каждый данный момент его работы или
приходящихся на единицу ширины его захвата. Чем меньше сорня-
ков находится на лезвии, тем меньше вероятность забивания лапы
при его затуплении. Следовательно, задача сводится к отысканию
* По данным канд. техн, наук О. А. Сизова. — Прим, автора.
78
оптимального угла раствора у культиваторной
лапы, при котором на лезвии в каждый дан-
ный момент будет находиться минимальное
количество сорняков. Вероятность забивания
лапы в этом случае минимальна, а надеж-
ность технологического процесса достигает
максимума.
Пусть лезвие АВ односторонней плоскоре-
жущей лапы перемещается в направлении
скорости v (рис. 63). Корень сорняка, нахо-
дившийся первоначально в соприкосновении с
точкой А лезвия, будет двигаться в направле-
нии действующей на него силы R. Одновре-
менно он будет скользить вдоль лезвия до тех
пор, пока не сойдет с него в точке Bi (если не
будет перерезан). За это время лезвие прой-
дет путь I и все сорняки, находившиеся на
площади треугольника ABBi, встретившись с
лезвием, сойдут с него, а все сорняки, нахо-
дившиеся на площади треугольника AAiBt,
будут обволакивать лезвие, находящееся в по-
ложении AiBt. Так как эти треугольники рав-
ны между собой, то при равномерном разме-
Рис. 63. Схема к оп-
ределению оптималь-
ного угла раствора
культиваторной ла-
пы.
щении сорняков по площади поля их количе-
ство, обволакивающее лезвие лапы, Q—Sn,
где S —площадь треугольника ABBlt а п — число сорняков, при-
ходящееся на единицу площади. Как видно из рисунка 63,
8=1Ь/2\ 1=^-]-^; h^bctgy, /г2=6 tg (y-{-<p).
Тогда количество сорняков, обволакивающее лезвие лапы,
Q=-^-[tg(T+<p)+ctgYL (51)
Функция Q=f(y) имеет минимум (рис. 64). Причем чем больше
угол трения <р, тем больше минимальное количество сорняков, на-
ходящихся на лапе. Для отыскания минимума, как известно, не-
обходимо взять производную функции и приравнять ее нулю:
dQ __ Ьгп / 1________1—\=о
dy 2 ( cos2(у + <р) sin2? )
Очевидно, что нулю равен второй сомножитель, а, следователь-
но, cos (у+tp) = sin у или со5(у+ф)=со5(90°—у) или у+ф=л/2—у,
откуда
Топт=(л/2 — ф)/2- (52)
С учетом влияния почвы
Топт = [л/2—max (<Рк> Фп)]/2- (53)
79
Рис. 64. Характер изменения количест-
ва сорняков, находящихся на культи-
ваторной лапе, в зависимости от угла
ее раствора при различных углах тре-
ния фь Ч>2, фз, ГДе ф]>ф2>фз.
Рис. 65. Силовая характеристика
рабочего органа.
§ 5. Силовая характеристика
Рассматриваемые рабочие органы, как правило, симметричны,
поэтому элементарные составляющие сил реакции почвы, дейст-
вующие на их рабочую поверхность и лезвие, могут быть приведе-
ны к одной равнодействующей Rxz (рис. 65), расположенной в
продольно-вертикальной плоскости симметрии. Проекция силы
на ось Z (сила /?г) характеризует способность рабочего органа
к заглублению, а проекция на ось X (сила Rx) составляет тяговое
сопротивление рабочего органа. Направление и точка приложения
силы Rxz определяются углом ip и размерами h и I. Известно*, что
Л=(0,5...0,3)а (возрастает с увеличением ширины захвата лапы),
Z=0,56. Так как равнодействующая Rxz складывается из сил нор-
мального давления и сил трения почвы о рабочую поверхность и
лезвие, то ее направление (угол гр) зависит от утла крошения а и
угла трения <р. Как видно из рисунка 65,
тр=л/2—(сс—}—<р). (54)
Так как угол а зависит от типа и параметров рабочего органа,
а ф от свойств и состояния почвы, то, следовательно, и угол ip за-
висит от них. Угол трения ф, например, может изменяться в шире -
ких пределах (от 14 до 65°) в зависимости от механического ссс-
става почвы и ее влажности. При переходе от рыхлых пасчОшмк
почв к плотным суглинистым и глинистым коэффициент и угол тре -
ния существенно возрастают (см. рис. 3,о), отчего угол гр будет
уменьшаться. При увеличении влажности почвы до а>а=30...45°/о
коэффициент и угол трения резко возрастают (см. рис. 3,6), что
приводит к уменьшению угла гр.
При переходе от плоскорежущих лап к универсальным и рых-
лительным угол а увеличивается, а угол гр, следовательно, умень-
шается, отчего Rz и способность рабочего органа к заглублению
падают (см. рис. 12). Плоские ножи кустарниково-болотных плу-
гов (см. рис. 52,в), дисковые ножи плугов общего назначения,
зубья борон и т. п. имеют угол а^90°, отчего угол гр у них отрица-
• По данным профессора Г. Н. Синеокова. — Прим, автора.
80
тельный, сила Rz направлена снизу
вверх и для их заглубления тре-
буется определенное давление ору-
дия.
При установке культиваторных
лап с наклоном на носок до 2,5...3°
угол ip несколько возрастает и заг-
лубляемость улучшается, что проис-
ходит за счет появления заднего уг-
ла (зазора) и связанного с ним
уменьшения реакции дна борозды.
Дальнейшее увеличение угла накло-
на на носок приводит к возрастанию
угла а, а следовательно, к умень-
шению угла ip.
Значение силы Rx можно опре-
делить динамометрированием. Она
пропорциональна ширине захвата Ь, глубине обработки а и зави-
сит от удельного сопротивления почвы k:
Rx=kab,
Рис. 66. Изменение угла ip,
горизонтальной Rx и верти-
кальной Rz сил сопротивления
почвы в зависимости от глу-
бины обработки а:
------- — плоскорежущая лапа:
-------рыхлительная Лапа.
(55>
Удельное сопротивление почвы может принимать следующие
значения:
k, кПа
стрельчатые лапы культиваторов...................11...20
рыхлительные » » ....... 50. ..100
зубья тяжелых борон..............................15...30
лапы плоскорезов-глубокорыхли гелей..............31.. .46
подкапывающие лемеха.............................50...60
Глубина обработки почвы оказывает существенное влияние на
силы Rz и Rx и угол тр. Как видим (рис. 66), с ее увеличением угол ф
уменьшается как в плоскорежущих, так и в рыхлительных лапах,
сидд Rx увеличивается, а сила Rz уменьшается в плоскорежущих
и Ростед в рыхлительных лапах. Это объясняется увеличением
rutOTHOeJWпочвы с глубиной ее расположения.
целью уменьшения тягового сопротивления и повышения на-
дежности работы лапы культиваторов и зубья борон крепят на
пружинных стойках, а подкапывающим лемехам сообщают колеба-
тельные движения.
§ 6. Установка рабочих органов, режим и качество их работы
Установка зубьев борон и ножей характеризуется углом а, ко-
торый образует ребро или лезвие с горизонтальной плоскостью. От
размера этого угла зависит характер воздействия рабочих органов
на почву.
Если угол а=л/2 (рис. 67,а), то ребро (лезвие) действует на
почвенный агрегат (комок) по нормали силой R=N, совпадающей
6—424
81
V
Рис. 67. Взаимодействие между ребром зуба бороны (лезвием ножа) и почвой
при различных значениях утла а:
а — а=л/2; б — а>л/2+ф; е — а<л/2—ф.
с направлением скорости. Рыхление почвы происходит без выноса
на поверхность влажных слоев, зуб (нож) погружается в почву под
действием силы тяжести Р3, приходящейся на него от массы ору-
дия.
При а>л/2+ф (рис. 67,6) ребро воздействует на комок силой
R, равной векторной сумме силы нормального давления N и силы
трения F и отклоненной от горизонтали вниз. Почвенный комок
под действием этой силы будет перемещаться (вдавливаться) вниз.
Вертикальная составляющая силы реакции почвы R в будет направ-
лена вверх, что приведет к уменьшению заглубляющей силы
<2загл=Рз—Rb и уменьшению глубины обработки. Горизонтальная
составляющая силы реакции почвы R'r войдет в состав тягового
сопротивления рабочего органа. По такому принципу работают
зубья борон, плоские ножи кустарниково-болотных плугов и дис-
ковые ножи плугов общего назначения, дисковые и килевидные
сошники сеялок.
Когда а<л/2—<р (рис. 67,в), то сила R отклонена от горизон-
тали вверх и почвенный комок под ее действием будет перемещать-
ся из нижних слоев вверх. Вертикальная составляющая силы ре-
акции почвы Rb направлена вниз, что приводит к увеличению за-
глубляющей СИЛЫ Qsarn = Рз + Rb И Глубины обработки ПОЧВЫ. Сор-
няки и растительные остатки, поднимаясь на поверхность, собира-
ются под рамой. В случае скопления их необходимо сбрасывать.
Для этого зубья в некоторых боронах периодически наклоняют на-
зад или поднимают (на поворотных полосах).
Культиваторные плоскорежущие и универсальные лапы уста-
навливают так, чтобы лезвие лежало в горизонтальной плоскости
(рис. 68,а). При этом получается ровное дно борозды и лучшее
Рис. 68. Установка культива-
торных лап:
а — лезвие лежит в горизонталь-
ной плоскости; б — с наклоном на
«иосок»; в—с наклоном на
«пятку».
82
Рис. 69. Изменение качества работы культиватора с полольными лапами в
зависимости от скорости движения:
а —при сплошной обработке; б — при междурядной обработке; Яр — количество неподре-
занных растений сорняков, %; —отношение массы фракций менее 25 мм к общей массе
почвенной пробы; Зр— количество засыпанных культурных растений в рядке, %.
подрезание сорняков. При работе на тяжелых почвах допускается
установка с наклоном вперед на носок (рис. 68, б) не более чем
на 2...3°. Установка с наклоном на пятку не допускается, так как
приводит к выглублению лап.
Режим работы рабочих органов определяется глубиной обра-
ботки почвы и скоростью движения орудия. При увеличении ско-
рости качество рыхления kp (отношение массы фракций менее
25 мм к общей массе почвенной пробы) улучшается (рис. 69, а),
количество подрезанных, выдернутых и засыпанных почвой сорня-
ков увеличивается. Однако одновременно увеличивается и число
поврежденных и засыпанных почвой культурных растений при
междурядной обработке (рис. 69,6). Поэтому сплошную культи-
вацию рекомендуют проводить на высоких скоростях — 2,5...4,2 м/с
(9...15 км/ч), при междурядной же обработке целесообразно огра-
ничиться скоростью 2,1...2.2 м/с (7,5...8 км/ч). Чтобы не засыпать
культурные растения з рядках, нужно устанавливать защитные
щитки или диски.
Для большинства рабочих оргаиов увеличение скорости связа-
но с некоторым уменьшением глубины обработки, поэтому заведо-
мо рабочие органы нужно устанавливать на 1...2 см глубже.
Боронование посевов зерновых культур показывает, что с уве-
личением скорости от 1,7 до 2,8 м/с (от 6 до 10 км/ч) поврежде-
ние всходов несколько уменьшается. На скоростях свыше 2,8 м/с
ухудшается устойчивость хода зубьев. Однако установка их на
беззигзаговые рамы позволяет повысить рабочую скорость до
3,6 м/с (13 км/ч).
В соответствии с агротребованиями неравномерность глубины
обработки не должна превышать ±1 см, а высота гребней 3...4 см.
При плоскорезной обработке повреждение стерни не должно быть
более 15%.
6*
83
Глава V
ДИСКОВЫЕ РАБОЧИЕ ОРГАНЫ
§ 1. Разновидности и назначение
Характерная особенность дисковых рабочих органов состоит
в том, что в процессе работы они не только движутся поступатель-
но вместе с рамой машины или орудия, но и вращаются под дей-
ствием реакции почвы. В отличие от поступательно движущихся
рабочих органов они меньше забиваются растительными остат-
ками.
Плоские диски (рис. 70, а) применяют в качестве дисковых но-
жей на плугах, в лущильниках, предназначенных для обработки
почв, подверженных ветровой эрозии, в сеялках.
Установка дисковых ножей перед каждым корпусом плуга при
обработке старопахотных почв значительно улучшает качество па-
хоты и устойчивость хода; при обработке связных задернелых
почв (целина, луг, осушенный торфяник и т. п.) плужные корпуса
без ножей оказываются вообще неработоспособными. Однако в
том и другом случае несколько ухудшается заглубляемость плуга
(глубина вспашки уменьшается на 2...4см). Кроме дисков с глад-
ким лезвием, используют рифленые и вырезные диски. Их реко-
мендуют применять при обработке сильно засоренных и заросших
растительностью почв. Установка плоских дисков на лущильниках
позволяет обрабатывать почву без оборота пласта с сохранением
стерни.
Сферические диски (рис. 70, б) применяют в качестве рабочих
органов дисковых плугов, лущильников, борон, иногда сеялок (од-
нодисковый сошник). Дисковые плуги предназначены главным об-
разом для обработки тяжелых, сухих почв, а также почв, прони-
занных корнями древесных растений. В нашей стране их использу-
ют для вспашки рисовых полей на глубину 25...30 см. Дисковые
лущильники применяют на лущении стерни при глубине 6... 15 см,
Рис. 70. Дисковые рабочие органы:
а — плоский диск: б — сферический диск;
з — вырезной диск; г — лункообразова-
тель; в — крыльчатка; е — игольчаты!
диск; яс —дисковый копач.
84
бороны — для измельчения пластов и глыб на поверхности вспа-
ханного поля, весенней предпосевной обработки зяби.
Вырезные диски (рис. 70, в) устанавливают на тяжелых боро-
нах, которые применяются как для первичной обработки тяжелых
задернелых почв, так и для разделки связных пластов, поднятых
при вспашке болотных и кустарниково-болотных земель.
Лункообразователь (рис. 70, г) служит для обработки почв,
подверженных водной эрозии, и представляет собой парные диски,
установленные на валу эксцентрично, причем так, что один повер-
нут относительно другого на 180°. Поочередно погружаясь в поч-
ву, они образуют лунки овальной формы вместимостью 20...25 дм3
общим количеством 12...14 тыс. на 1 га, которые служат для за-
держания талых вод. Для почв, подверженных, кроме водной, еще
и ветровой эрозии, вместо сферических применяют плоские диски.
Они сдвигают почву без оборота пласта, оставляя большое коли-
чество стерни неповрежденной. Стерня предохраняет почву от вы-
ветривания и способствует сохранению влаги. Лункообразователи
могут быть установлены на лущильниках или использованы как
приспособления к плугам.
Крыльчатка (рис. 70,5) применяется совместно с плугом (трех-
лопастная) или культиватором (четырехлопастная) также для об-
работки почв, подверженных водной эрозии. Перемещаясь вместе
с орудием, она периодически то затормаживается и погруженной
в почву лопастью прорывает борозду, то освобождается для сво-
бодного вращения, прерывая образование борозды и сохраняя
таким образом перемычку. В результате этого образуются преры-
вистые борозды, необходимые для задержания талых и ливневых
вод.
Игольчатый диск (рис. 76, е) — рабочий орган ротационной мо-
тыги, игольчатой бороны, культиватора. Соответственно орудию
применяется для предпосевной обработки почвы, разрушения поч-
венной корки на посевах, для рыхления почвы и заделки семян
сорняков с сохранением стерни на почвах, подверженных ветровой
эрозии; для уничтожения сорняков в защитных зонах пропашных
культур. Если нужно минимальное воздействие на почву, например
разрушение почвенной корки с сохранением растений или стерни,
то диски устанавливают так, чтобы они работали «затылком», т. е.
во время погружения в почву были направлены вогнутостью
в сторону движения орудия (по стрелке Л). В этом случае они
делают примерно 150 уколов на 1 м2 и полностью разрушают кор-
ку. Если же требуется интенсивное рыхление почвы и полное унич-
тожение сорняков, то их устанавливают для работы «клювом»,
т. е. так, что во время погружения в почву они обращены выпук-
лостью вперед, в сторону движения орудия (по стрелке Б).
Дисковый копач (рис. 70, ж) применяется на свеклоуборочных
комбайнах, отделяющих ботву на корню. Он состоит из двух сво-
бодно вращающихся сферических дисков (с окнами), поставлен-
ных под углом к вертикальной плоскости и к направлению дви-
85
жения так, что передние кромки удалены одна от другой, а зад-
ние сближены. Почва, попавшая в пространство между дисками
при их вращении в сужающейся части, сжимается, интенсивно
крошится и частично просыпается сквозь окна, а корнеплод час-
тично освобождается от почвы и мелких корешков. Глубина хода
дисков 8...10 см. Зазор между нижними кромками дисков регули-
руют в зависимости от урожайности в пределах от 35 до 55 мм.
Кроме дисков с гладким лезвием, применяют вырезные и долото-
образные. Последние предназначены для работы на сухих твердых
почвах.
§ 2. Основные геометрические параметры
Все многообразие дисковых рабочих органов может быть сведе-
но к двум геометрическим формам: плоскому и сферическому ди-
скам. Плоский диск в принципе может рассматриваться так же,
как сферический, у которого радиус кривизны равен бесконечно-
сти (г—оо). Таким образом, основными геометрическими парамет-
рами дисков будут диаметр D и радиус кривизны г. С ними взаи-
мосвязан угол ев равный половине центрального угла дуги диа-
метрального сечения диска (рис. 71). Каждый из этих параметров
имеет технологическое значение. С увеличением диаметра диска
D резко возрастает вертикальная слагающая реакции почвы,
вследствие чего ухудшается заглубляемость его в почву. Поэтому
для заглубления дисков большого диаметра требуется дополни-
тельная нагрузка в виде массы орудия или балласта. Следова-
тельно, диаметр диска должен быть минимальным из допускаемых
по условиям работы. Диаметр диска зависит от заданной макси-
мальной глубины обработки почвы а и должен быть по крайней
мере больше удвоенного ее значения. Практикой выработаны оп-
ределенные соотношения между D и а-.
D=ka, (56)
где k — коэффициент, равный 3...3.5 для плугов, 4..6 для борон
и 5...6 для лущильников.
Радиус кривизны г определяет крошащую и оборачивающую
способности диска. Чем меньше радиус кривизны, тем интенсив-
нее крошится и оборачивается пласт. Как видно из рисунка 71,
между D и г существует определенная зависимость:
D=2rsine1. (57)
Следовательно, задавшись двумя параметрами, третий необхо-
димо определить по формуле (57). Основные параметры дисков
стандартизированы. Согласно ГОСТ 198—59, для плоских дисков
можно принимать диаметры 250, 300, 350, 400, 450, 510, 610, 660,
710, 760 и 800 мм. Дисковые плуги снабжают дисками диаметром
610...810 (прицепные) и 580...710 мм (навесные); лущильники —
450...610; бороны — 450...660 мм; игольчатые диски изготавливают
86
Рис. 71. Основные параметры диска.
диаметром 350, 450 и 520; диски
копачей — 680 мм. Радиус кри-
визны г принимают постоянным:
для плугов 600 мм, лущильников
1-69-ммборон U 09, 169_и-220 м м.
Тогда угол ci принимает значе-
ния: для плугов 31...37°, лущиль-
ников 26...320 и борон 22—26°.
Большое влияние на техноло-
гические свойства диска оказыва-
ет его заточка. Она характери-
зуется прежде всего углом заточки или заострения i, а также свя-
занным с ним задним, затылочным углом или углом зазора ег.
Диски затачивают, как правило, с выпуклой, наружной стороны,
принимая угол заточки i= 10—20° для борон и лущильников и
15...25° для плугов. Диски, предназначенные для работы на твер-
дых почвах, затачивают с внутренней стороны.
Так как лезвие диска имеет форму окружности и постоянный
угол заострения, то фаска имеет форму усеченного конуса, обра-
зующие которого наклонены к плоскости основания под углом
<o=i+ei, где ei — передний угол, равный половине центрального
угла дуги диаметрального сечения диска (рис. 71). Кроме того,
различают еще угол резания a=i-f-B2.
Большое технологическое значение имеет задний, затылочный
угол е2. От его размера зависит расход энергии на обработку
почвы и даже работоспособность диска. Этот угол —переменный,
изменяется по высоте диска. Считают, что для нормальной рабо-
ты диска на глубине необходимо, чтобы затылочный угол на уров-
не поверхности поля был положительным.
§ 3. Установочные параметры и их влияние
на качество обработки почвы
К числу установочных параметров относятся: угол между пло-
скостью вращения диска и направлением поступательного движе-
ния орудия (угол атаки) и угол отклонения плоскости вращения
диска от вертикали или угол между осью вращения диска и гори-
зонталью. Оба параметра имеют технологическое значение. На-
пример, чем больше угол атаки, тем лучше подрезаются сорняки,
интенсивнее и глубже рыхлится почва и заделываются семена
сорняков. Угол атаки для дисковых плугов 40...45°, лущильников
10—35° и борон 10—22°. Дисковые лущильники при углах атаки
10—20° можно использовать как односледные дисковые бороны.
Установка дисков с наклоном оси вращения к горизонтальной
плоскости предусматривается, как правило, только в плугах. Этот
угол принимают от 15 до 25°.
В процессе работы каждый диск вырезает в почве пласт
(стружку), образуя желобчатое дно борозды (рис. 72). Между
87
Рис. 72. Схема к определению
высоты гребней.
желобами образуются гребни высо-
той h. По высоте этих гребней судят
о качестве обработки почвы. Высота
гребней h зависит от диаметра диска
D, расстояния между дисками Ь и уг-
ла атаки 6. Так как из трех перечис-
ленных параметров регулируемый
лишь угол атаки 6, то целесообразно
рассмотреть, какое влияние оказывает
изменение его значения на высоту
гребней h. Из треугольника ОАВ
(рис. 72) следует, что
(D/2)2=(D/2—Л)2+(с/2)г
или после преобразований
й2—ПЛ+(с/2)2 = 0,
откуда
2—D/2 ±
±yD2/4—c2/4=D/2 ± 1/2/D2—с2.
Имея в виду, что условию задачи удовлетворяет только второй
корень, а также то, что из треугольника EFK сторона c=bctg6,
получим г
h=D/2 — 1 /2 /D2—fe2ctg20. (58)
Из выражения (58) следует, что с увеличением угла атаки высо-
та гребней уменьшается. Качество обработки считается нор-
мальным, если h 0,5 а для лущильников и /г< 0,4 о для плу-
гов.
Для определения угла атаки 0, обеспечивающего требуе-
мое качество работы дисковых орудий, можно пользоваться номо-
граммой* (рис. 73), представляющей собой геометрическое выра-
жение формулы (58).
Порядок определения 0 по заданным D, b и h на рисунке 73 по-
казан стрелками.
Помимо высоты гребней, другой важный показатель работы
дисков — полнота подрезания пожнивных остатков и сорняков.
Опытами установлено, что полнота подрезания, помимо угла ата-
ки, зависит еще и от скорости движения. Как видно из графика
(рис. 74), наименьшее количество неподрезанных пожнивных
остатков получается при максимальном угле атаки 35°. С увели-
чением скорости до 2 м/с (7,2 км/ч) число неподрезанных сорня-
Разработана Г. Н. Синеоковым. — Прим, автора.
88
Рис. 73. Номограмма для определения угла атаки дискового орудия.
ков уменьшается, а с дальнейшим увеличением скорости возра-
стает.
Глубина хода дисков с возрастанием скорости несколько
уменьшается, а с увеличением угла атаки растет. Из этого следу-
ет, что на уплотненной и засоренной почве угол атаки 6 должен
быть максимальным, а на рыхлых малозасоренных почвах его
можно уменьшить. Для работы на высоких скоростях дисковые
рабочие органы непригодны, так как с увеличением скорости рез-
ко возрастает дальность отбрасывания почвы. Целесообразно ра-
ботать на скорости не более 2 м/с (~7 км/ч). Качество пахоты
дисковыми плугами на обычных почвах хуже, чем лемешными,
так как они не полностью заделывают
растительные остатки, образуют боль-
шее количество глыб и гребнистое дно
борозды.
Однако при обработке сухих спе-
кающихся почв, характерных для
Рис. 74. Изменение количества неподрезанных
пожнивных остатков Н и глубины хода дисков
а в зависимости от скорости движения диско-
вого орудия v при разных углах атаки дис-
ков 0.
89
зон с тропическим климатом, они не образуют таких крупных
глыб, как лемешные, и поэтому преимущественно используются
в этих условиях.
§ 4. Силовые характеристики
Рассмотрим действие сил сопротивления почвы на плоский
и сферический диски.
Плоский диск обычно используют в качестве дискового ножа
для отрезания пласта в вертикальной плоскости. На нож действу-
ют силы сопротивления почвы смятию лезвием и силы трения
почвы о его боковые поверхности. Опыты* показали, что влияние
сил трения относительно невелико. Так как дисковый нож — сим-
метричный рабочий орган, то действие элементарных сил сопро-
тивления почвы может быть сведено к одной равнодействующей
R, приложенной примерно в середине рабочей дуги лезвия ножа
АВ (рис. 75, а) и проходящей через ось его вращения. Составляю-
щая Rx этой силы представляет собой тяговое сопротивление но-
жа и создает момент, способствующий вращению диска. Другая
составляющая Rz стремится вытолкнуть нож из почвы и создает
момент, препятствующий вращению диска. При изменении удель-
ного сопротивления почвы от 40 до 80 кПа сила Rx стандартного
ножа плуга общего назначения изменяется от 0,7 до 2,2 кН. При
этом Rz~ 1,2 Rx.
Для того чтобы нож перерезал стебли, расположенные на по-
верхности поля, а не волочил их, необходимо, чтобы угол защем-
ления 6 был меньше <pi+<p2, где ф1 — угол трения стебля о лезвие,
а ф2 — угол трения стебля о почву. Если диск ножа забивается
стеблями растений, необходимо уменьшить глубину его хода или
поставить нож большего диаметра. Применение вырезных ножей
исключает такое явление и уменьшает силу Rx на 18...25%. Опыты
показали, что Rx зависит от показателя кинематического режима
лезвия ножа X—<or/vM, где <о — угловая скорость, г — радиус ди-
ска, им — скорость движения машины (орудия). Чем больше А,
тем меньше Rx. При увеличении X от 0 до 1 значение Rx уменьша-
ется в 2,5 раза. Численные значения X зависят от конструкции
дискового ножа и состояния почвы: Х= 1,02... 1,098 для ножей
с ровным лезвием, 1,08... 1,31 —для рифленых и 1,045... 1,165 — для
вырезных дисков. Установка дисковых ножей перед каждым кор-
пусом плуга не только снижает его тяговое сопротивление на 3,8...
6,5%, но и значительно улучшает оборот пласта, заделку расти-
тельной массы и устойчивость хода, поэтому некоторые зарубеж-
ные фирмы снабжают дисковым ножом каждый корпус плуга.
Сферический диск в работе испытывает действие элементарных
сил сопротивления почвы, возникающих на лезвии, фасках и ра-
бочей поверхности. Элементарные силы могут быть приведены
Проведены канд. техн, наук Ф. М. Маматовым. — Прим, автора.
90
Рис. 75. Силовые характеристики:
а — плоского диска; б — сферического диск*.
к силе и моменту (динаме)
или к двум перекрещивающим-
ся силам. Одна из этих сил R'
лежит в вертикальной плоско-
сти и проходит примерно через
ось вращения диска (рис.
75,6). Другая R" параллельна
оси вращения дисков и нахо-
дится на расстоянии h от дна
борозды, равном примерно по-
ловине глубины хода дисков.
От двух перекрещивающихся
сил целесообразно перейти к
характеристике из трех сил Rx,
Ry и Rz (рис. 75,6), так как
сила Rx может быть определе-
на линейным динамометриро-
ванием или по справочным данным, а силы Ry и Rz— по экспери-
ментально установленным соотношениям с силой Rx-
Опыты показали, что удельные тяговые сопротивления диско-
вых и лемешных плугов, а также дисковых и лемешных лущиль-
ников практически одинаковы. Поэтому при определении Rx дис-
ковых плугов и лущильников можно пользоваться данными дина-
мометрирования лемешных плугов и формулой (33). Для опреде-
ления Ry и Rz могут быть использованы следующие соотношения:
Ry—nRx, a Rz=mRx, где п—0,76...1,24 для лущильников и 0,12...
1,2 для борон; т=0,37...0,76 для лущильников и 0,76...1,57 для
борон. Причем большие значения п соответствуют малой глубине
и большому углу атаки, а большие значения m — большей глу-
бине и меньшему углу атаки.
Глава VI
РОТАЦИОННЫЕ РАБОЧИЕ ОРГАНЫ АКТИВНОГО ДЕЙСТВИЯ
§ 1. Разновидности, назначение, основные параметры
Ротационные рабочие органы, как и рассмотренные ранее ди-
сковые, совершают сложное движение: поступательное (перенос-
ное) вместе с машиной и вращательное (относительное) относи-
тельно нее. Однако вращательное движение этих рабочих органов
возникает не вследствие действия на них реакции почвы, как пас-
сивных дисковых рабочих органов, а в результате сообщения им
вращающего момента от вала отбора мощности (ВОМ) трактора
или приводных колес машины. Это позволяет регулировать приток
энергии к рабочим органам и концентрировать его в большей или
меньшей мере в ограниченном объеме обрабатываемой почвы.
Благодаря этому появляется возможность направленно изменять
в довольно широких пределах степень крошения пласта и исполь-
91
Рис. 76. Основные типы рабочих органов
фрез и прореживателей, их крепление к
дискам:
а — прямой нож; б — изогнутый нож; в — пружинный крючок; г — рыхлящее долото и его
крепление к диску; д — изогнутый нож прореживатели и его крепление к диску.
зовать эти рабочие органы для обработки связных задернелых
почв.
К числу машин, оборудованных ротационными рабочими орга-
нами, относятся: ротационные плуги, фрезы, прореживатели, штан-
говые культиваторы. Ротационные плуги пока находят весьма ог-
раниченное применение и зачастую не имеют принципиальных от-
личий от фрез. Наибольшее распространение получили фрезы и
прореживатели.
Рабочие органы фрез — это ножи и долота, равномерно разме-
щаемые по окружности дисков. Ось вращения диска (барабана)
может быть вертикальной или горизонтальной. В последних,
в свою очередь, ось вращения может быть направлена перпендику-
лярно, вдоль или под острым углом к направлению движения.
Наибольшее распространение получили фрезы с осью вращения,
перпендикулярной направлению движения, и прореживатели
с осью, расположенной вдоль и под острым углом к направлению
движения. I
Фрезы бывают с прямым и обратным (противоположным на-
правлению вращения колес) вращением. Если первые создают
подталкивающее усилие, то вторые оказывают большое тяговое
сопротивление, очень энергоемки, хуже заделывают растительные
остатки, а поэтому имеют весьма ограниченное применение глав-
ным образом для работы на каменистых почвах и на полях после
раскорчевки леса.
Крепление рабочих органов к дискам может быть жестким,
пружинным и шарнирным. Наиболее распространено жесткое
крепление. Пружинное целесообразно при обработке почв, засо-
ренных мелкими камнями, а шарнирное — при добыче торфяной
крошки на быстроходных фрезах, рассчитанных на небольшую
глубину обработки.
Рабочими органами фрез могут быть прямые и изогнутые но-
жи, рыхлящие долота (рис. 76). Ограниченное применение нахо-
дят также лущильные крючки, рыхлящие мотыги, тарелочные но-
жи и т. п.
92
Прямые ножи (рис. 76, а) применяют для скарификации луго-
вой дернины и обработки новых земель на глубину до 15 см. Они
разрезают почву на отдельные ленты, а также скалывают ее по-
добно двугранному клину с углом у, их рыхлящая способность,
выражена слабо. Прямые ножи могут быть установлены на диске
радиально, или с отклонением по ходу, или против хода вращения,
дисков, а их лезвия могут быть прямолинейными или выполненны-
ми по радиусу.
Твердые минеральные почвы целесообразно обрабатывать ме-
тодом скалывания, которое более интенсивно при прямолинейных
лезвиях ножей, расположенных радиально или с отклонением па
ходу вращения диска; волокнистые почвы с растительными остат-
ками и корневищами целесообразно обрабатывать скользящим ре-
занием, поэтому лучше использовать ножи, установленные с от-
клонениями от радиуса диска в сторону, противоположную вра-
щению, с криволинейными лезвиями, выполненными по радиусу.
Заточка прямых ножей может быть как двухсторонней, так
и односторонней. Если ось фрезерного барабана устанавливается
перпендикулярно движению машины, то целесообразна симметрич-
ная заточка лезвий с двух сторон под углом 20...35°. Причем боль-
шие значения угла соответствуют работе на минеральных, а мень-
шие на дернистых почвах. Одностороннюю заточку ножей приме-
няют, как правило, в тех случаях, когда ось вращения фрезерно-
го барабана расположена под углом к направлению движения.
Изогнутые ножи (рис. 76,6) применяют для обработки болот-
ных и задернелых луговых почв. Они подрезают корневую систе-
му, более интенсивно рыхлят и частично перемешивают органиче-
ские и минеральные элементы почвы.
В изогнутом или Г-образном ноже различают стойку и крыло
(загнутая часть). При монтаже на диске чередуют ножи с правым
и левым загибом (крылом). Ширина захвата крыла 45...150 мм.
Для резания со скольжением лезвие стойки отклонено от радиуса
диска на угол не менее 30°, а лезвие крыла — от направления
движения на угол не более 60°.
Пружинные крючки (рис. 76, в) применяют для обработки почв
с большим содержанием мелких камней и корней, для обработки
твердых почв они непригодны.
Рыхлящие долота или полевые крючки (рис. 76, г) использу-
ют для рыхления минеральных, старопахотных, свободных от ра-
стительных остатков почв при основной и предпосевной их обра-
ботках. Они имеют развитый угол крошения а и интенсивно рых-
лят почву, на засоренных почвах легко забиваются растительны-
ми остатками. Ширина захвата режущей части 25...55 мм.
Аналогично долотам устроены рыхлящие мотыги, крылья ко-
торых с более развитой режущей частью и похожи на стрельчатые
лапы культиваторов. Для обработки торфяников с погребенной
древесиной применяют тарельчатые ножи. Они весьма энергоемки
и работают только на малых подачах (2...3 мм).
93
Рис. 77. Воздействие штанги на рас-
тение.
Ножи прореживателей (рис.
76, (3) предназначены для проре-
живания всходов сахарной свек-
лы вдоль рядков, а также одно-
временного уничтожения сорня-
ков и рыхления почвы. Они быва-
ют с право- и левосторонними
плоскорежущими крыльями, ко-
роткими с шириной захвата 25 и
длинными с шириной захвата
53 мм. Вращаясь в поперечной
плоскости (поперек рядков) или
под острым углом к ней, ножи
производят косые вырезы в ряд-
ке, глубина их хода 2...3 см.
Штанги культиваторов пред-
назначены для уничтожения сор-
няков и рыхления почвы с остав-
лением стерни на поверхности поля неповрежденной, а поэтому на-
ходят широкое применение для обработки почв, подверженных вет-
ловой эрозии. Штанга представляет собой вал, как правило, квад-
ратного сечения (22x22 или 25X25 мм), установленный перпен-
дикулярно направлению движения.
Штанга не подрезает, а вырывает сорняки из почвы. При воз-
действии штанги на корень сначала происходит изгиб и вырыва-
ние нижней, а затем верхней части корня, после чего вращающая-
ся штанга перемещает перегнувшийся на ней сорняк, постепенно
освобождаясь от него (рис. 77). При этом штанга уплотняет дно
•борозды, но рыхлит расположенный выше слой почвы. Штанга
круглого сечения более равномерно уплотняет дно борозды, а реб-
ристая штанга лучше захватывает и выдергивает сорняки. Штанга
приводится от колеса культиватора и вращается в направлении,
•обратном направлению вращения колеса. За рубежом находят при-
менение и бесприводные, самовращающиеся штанги.
§ 2. Траектория движения
Ножи фрез и штанги культиваторов вращаются, как правило,
в продольно-вертикальной плоскости, совпадающей с направлени-
<ем движения. Рассмотрим движение крайней точки ножа А
(рис. 78,а), находящейся в начальный момент в положении Ло.
Через некоторый промежуток времени t ось барабана переместит-
ся в положение О/, пройдя путь vt, а диск барабана повернется
на угол at, где v — поступательная, а <в — угловая скорости фре-
зы. В результате точка ножа А перейдет из положения Ло <в поло-
.жение At и ее координаты будут определяться уравнениями:
xt—vt-}-r cosfitf,
i/i—г sin at.
•94
Рис. 78. Траектория движения точки ротационного рабочего органа:
а — схема к определению уравнений движения; б — траектория при л<1 (укороченная'
циклоида); в — траектория при (удлиненная циклоида).
Уравнения (59) характеризуют траекторию абсолютного дви-
жения точки А в параметрической форме. Эта траектория пред-
ставляет собой циклоиду («трохоиду»).
Геометрическая форма циклоиды зависит от показателя кине-
матического режима ‘k—ulv, где и — окружная скорость точки А.
Приняв а^=ф, а u=<or, получим, что /=ф/ы или t=q>r/u.
Подставив в уравнения (59) вместо t и at выражения qr/u и ф
и заменив u/v через X, будем иметь
хг=г(фА+созФ), |
^ = Г51Пф. ) ' >
Если Z<1, то траектория точки имеет форму укороченной цик-
лоиды (рис. 78,6), т. е. без петли, если же к>1, то циклоида бу-
дет удлиненной (рис. 78,в). Так как \=arlv, то циклоида точки
ножа, находящейся у его основания, короче, чем циклоида точки,
находящейся у вершины. Однако для фрез для любой точки
ножа, имеющей контакт с почвой, так как в противном случае нож.
будет действовать на почву не лезвием, а своей затылочной*
частью. Для штанговых культиваторов Х<1, и, следовательно,
траектория ребер штанги представляет собой укороченную цик-
лоиду.
Ножи прореживателей в отличие от ножей фрез вращаются
обычно в плоскости, перпендикулярной направлению движения.
Пусть в начальный момент обойма прорёживателя находится'
в точке О, а точка А ножа занимает положение До (рис. 79). Че-
рез некоторый промежуток времени t обойма переместится из по-
ложения О в положение О,-, повернувшись при этом на угол at,.
95>
Рис. 79. Схема к опреде-
лению уравнений движения
точек ножа прореживателя.
в результате чего точка А ножа перей-
дет из положения До в положение Д,- и
ее координаты, как видно на рисунке 79,
будут определяться уравнениями:
xl~vt,
yt=r cosat,
zt=—г sin со/.
(61)
Для общего случая, когда обойма с
ножами прореживателей вращается в
плоскости, расположенной под острым
углом 6 к направлению движения (ось
вращения под углом 90°—0), заменив t
через срг/и, at через <р, a u/v через X, по-
лучим
%; = г (ф/А,—cos <р cos 0),
у.=rcos ф sin 0,
Zj=—г sin ф.
(62)
Уравнения (61) и (62) определяют траекторию абсолютного дви-
жения точки ножа А. Эта траектория представляет собой винто-
вую линию, шаг которой тем больше, чем меньше X.
§ 3. Основные показатели работы
Любая точка ножа фрезы в процессе работы описывает траек-
торию удлиненной циклоиды. Так как на одном диске фрезы за-
крепляют по нескольку ножей, то одноименные точки этих ножей
описывают одинаковые циклоиды, но смещенные вперед по ходу
машины. Так, если (предыдущий нож своей наиболее удаленной
от оси вращения точкой описывает траекторию 1 (рис. 80), то
траектория 2 последующего ножа будет смещена то горизонтали
на некоторое расстояние Sz, называемое подачей на нож. Подача
на нож Sz=vtz, где tz — время, за которое последующий нож
в относительном движении займет положение предыдущего, т. е.
повернется на угол, равный центральному углу между ними. Чем
больше ножей на диске, тем меньше это время. Следовательно,
tz=tot>lz, где /Об — время, за которое диск повернется на один обо-
рот, z — число ножей на одном диске. Время одного оборота оп-
ределится из условия (1)/об=2л, откуда /Об=2зт/<о, a Ze=2n/(oz.
Подставив вместо tz его значение в первоначальное выражение,
получим
=2jw/g»z
или, умножив числитель и знаменатель на г и заменив и/и через
"к, будем иметь
Sz=2jw/Az. (63)
96
Из формулы (63) следует, что изме-
нить подачу на нож можно, изменяя коли-
чество ножей на диске или показатель
кинематического режима (поступатель-
ную скорость, частоту вращения бара-
бана).
Как видно из рисунка 80, петли со-
седних циклоид пересекаются на неко-
торой высоте h. Это приводит к тому, что
на дне обработанного поля образуются
неровности (гребни). Нетрудно заметить,
что высота этих гребней зависит от пода-
чи на нож. Чем подача на нож меньше,
тем меньше и высота гребней. Следова-
тельно, высота гребней уменьшается с
увеличением л и г.
От подачи на нож зависит и толщина стружки 6, а следова-
тельно, и степень крошения почвы. Приближенно 6max='SzCOsq).
Из того же рисунка видно, что а=г—rsintpo, откуда sin<p= 1—а/г,
или, обозначив а/r через т, будем иметь sin<p0= 1—m, a cos<po=
=|'2m—т2. Подставив в первоначальное выражение вместо cosq>o
его значение, выраженное через т, получим
80. Схема
к опреде-
показате-
Рис.
лению основных
лей работы фрезы:
1 и 2 — траектории предыдущего
и последующего иожей.
6max=Sz)/'2rn— m2.
(64)
Из формулы (64) следует, что при неизменной подаче на нож
с уменьшением т (глубины обработки почвы) толщина стружки
уменьшается (степень рыхления возрастает). При расчетах при-
нимают /п = 0,7...0,8. Толщина стружки, как мы видим, — величи-
на переменная. В процессе отрезания стружки ножом фрезы ее
толщина непрерывно уменьшается от максимального значения до
нуля (теоретическое сечение стружки на рисунке 80 заштрихова-
но). Наибольшую толщину стружка имеет для каждого последую-
щего ножа в точке контакта предыдущего ножа с поверхностью
поля.
§ 4. Настройка
Качество работы фрез определяется как равномерностью об-
работки почвы по глубине (высотой гребней h), так и степенью ее
рыхления (толщиной стружки 6). В соответствии с агротребова-
ниями Л^0,2а, где а — максимальная глубина погружения ножа
в почву. Толщина стружки определяется конкретными условиями.
Оба показателя зависят от подачи на нож Sz, а последняя в соот-
ветствии с формулой (63) может быть изменена путем изменения
X (поступательной скорости или частоты вращения барабана) или
числа ножей z.
7—424
97
С увеличением X уменьшаются высота гребней h и толщина
стружки 6. Однако чрезмерное возрастание Z приводит к резком}'
увеличению расхода энергии.
Практикой установлено, что агротехнические требования вы-
держиваются при подачах 3...6 см для задернелых и 10... 15 см для
старопахотных почв. Следовательно, при заданном числе ножей на
диске фрезы задача сводится к определению значения X, которое
обеспечило бы указанные подачи на нож. Решив уравнение (63)
относительно л, получим
Z=2nr/Szz. (65)
Подставив в него значение Sz, соответствующее конкретным ус-
ловиям, будем иметь показатель кинематического режима Л, на ко-
торый нужно настроить агрегат, чтобы получить заданное качест-
во обработки почвы. При количестве ножей на диске фрезы z=
=3...8 показатель кинематического режима фрез Z может прини-
мать значения от 2 до 6 при обработке старопахотных почв и от 4
до 16 при обработке связных задернелых почв. Меньшему коли-
честву ножей соответствует больший показатель кинематического
режима. Поступательная скорость современных ротационных поч-
вообрабатывающих машин относительно невелика и составляет
1,1...1,7 м/с (4..6 км/ч).
Прореживатели удаляют растения вдоль рядка через равные
интервалы путем косых вырезов в рядке на глубину 2...3 см. Про-
цесс прореживания сводится к тому, что обойма прореживатели
с ножами, вращаясь в плоскости, перпендикулярной направлению
движения, вырезает каждым ножом растения с некоторой длины
SH рядка (рис. 81,а). Участки, вырезаемые двумя соседними ножа-
ми, смещены один относительно другого на подачу Sz. Тогда на
длине 5б растения окажутся несрезанными — образуется «букет».
Из схемы (рис. 81 а) видно, что S6=S2—5Н. Конечный резуль-
тат прореживания характеризуется некоторым коэффициентом е,
представляющим собой отношение числа растений, оставленных
на метре длины рядка после прореживания, к их числу до обра-
новки ножей в обойме: I — первое прореживание; II — второе прореживание; 1 — ножи е
короткими лезвиями (25 мм); 2 —ножи с длинными лезвиями (53 мм).
эд
ботки. Этот коэффициент может быть определен так же, как от-
ношение 8б/$г.
Подставив в это отношение вместо 8б разность 8г—а затем
вместо 8г его выражение из формулы (63), получим
Е1=(1-8н/8г)=(1-Хг8н/2ж). (66)
Решив уравнение (66) относительно Л, будем иметь
1=2лг(1-е1)/г8н. (67)
В формулу (67) входят параметры ei и z, которые необходимо
отыскать, исходя из конкретных условий. Для определения ei не-
обходимо знать оптимальную и действительную густоту растений
в рядках. Для средних условий оптимальной густотой можно счи-
тать такую, когда на одном метре длины рядка размещается 6...7
растений.
По найденному ei, выбранному z и длине 8Ш принимаемой рав-
ной длине лезвия ножа, определяют X.
При большой густоте растений рекомендуется прореживание
проводить за два прохода.
Штанга культиватора может работать только на относительно
рыхлых почвах, как правило, дважды обработанных культивато-
рами-плоскорезами, иначе ее не удается заглубить в почву на не-
обходимую глубину. Глубина обработки 5...12 см. Режим работы
штанги характеризуется длиной пути за один ее оборот, ко-
торая составляет 0,7...1,3 м/об, или обратной величиной — относи-
тельной частотой вращения, т. е. числом оборотов штанги на од-
ном метре пути, составляющей 0,77...1,43 об/м.
С ростом скорости движения до 2,8 м/с (10 км/ч) улучшается
крошение почвы, уменьшается гребнистость поверхности и степень
уплотнения дна борозды, но ухудшается заглубляемость. В соот-
ветствии с агротребованиями допускается: отклонение глубины об-
работки ±1 см, высота гребней и глубина борозд не более 4 см,
рабочая скорость до 2,8 м'с (10 км/ч).
§ 5. Действующие силы, энергоемкость
Ножи фрез, как правило, имеют продольную ось симметрии,
поэтому действующие на них элементарные силы реакции почвы
могут быть приведены к одной равнодействующей Rxz, располо-
женной в продольно-вертикальной плоскости (рис. 82, а) под не-
которым углом ф к направлению движения машины.
Угол ф и сила Rxz изменяются по значению в зависимости от
угла ф=со/ поворота барабана (рис.82,б). Вначале, при вхож-
дении ножа в почву, сила Rxz резко возрастает, происходит отре-
зание «стружки», а затем при движении снизу вверх сопротивле-
ние убывает по вогнутой кривой. Угол поворота барабана, соответ-
ствующий нарастанию силы Rxz, находится в пределах 15...250.
7’ 99
Рис. 82. Силовая и энергетическая характеристики фрез:
а — схема сил, действующих на иож; б — график изменения силы Rxz и угла ф от угла
поворота ножа; в — график изменения удельной работы, затрачиваемой на обработку
почвы плугом (при 0=20 см) и фрезой прн различных подачах на иож.
Сила Rxz может быть разложена на две составляющие Rx и Rz.
Горизонтальная составляющая Rx=RXicosty направлена по ходу
и, следовательно, уменьшает тяговое сопротивление машины или
подталкивает ее в направлении движения, что позволяет исполь-
зовать фрезу с легкими тракторами. Вертикальная составляющая
препятствует заглублению, когда направлена вверх,
и способствует ему, когда направлена вниз. Угол ф = arc tgRz/Rx
по некоторым данным изменяется от +12 до —15°. Он положи-
телен, когда сила Rz направлена вверх, и отрицателен, когда она
направлена вниз.
Удельное сопротивление резанию зависит от механического со-
става почвы и ее состояния, размеров стружки (подачи на нож)
и скорости резания. При меньшей подаче на нож удельное сопро-
тивление больше, увеличение подачи приводит к снижению удель-
ного сопротивления. Это объясняется тем, что при больших пода-
чах крошение почвы значительно меньше, чем при малых.
О расходе энергии на обработку почвы целесообразно судить
по удельной энергоемкости, т. е. по работе, затрачиваемой на еди-
ницу ее объема (например, дм3). Как видно из графиков
(рис. 82,в), удельная работа резко возрастает с уменьшением по-
дачи на нож и увеличением поступательной скорости, поэтому ра-
бочие скорости фрез относительно невелики—1,1...1,4 м/с (4...
5 км/ч). Затраты энергии на фрезерование почвы в несколько раз
выше, чем ее. затраты на плужную обработку.
Штанга культиватора всегда испытывает действие вертикаль-
ной силы Rz, направленной снизу вверх и стремящейся вытолкнуть
ее из почвы, поэтому для заглубления штанги, как правило, не-
обходим балластный груз. С увеличением глубины обработки поч-
вы происходит возрастание сил Rz и Rx, причем Rz возрастает бо-
лее интенсивно. При изменении глубины обработки от 6 до 10 см
удельное тяговое сопротивление машины возрастает от 0,8 до
2,8 кН на метр ширины захвата, а угол ф изменяется при этом от
100
18 до 32;. Усилие Rz при этом может быть вычислено по формуле
ij-. На привод штанги расходуется около 10% общего
расхода энергии.
Глава VII
УПЛОТНЯЮЩИЕ И ОПОРНЫЕ ОРГАНЫ МАШИН
§ 1. Назначение и разновидности
Катки относят к числу рабочих органов, так как они предна-
значены для выполнения технологической операции — уплотнения
почвы; колеса — к числу вспомогательных, служебных органов,
так как они выступают в роли опор или одновременно опор и дви-
жителей машины. Их объединяет единство геометрической формы
(в основе и тех и других лежит круговой цилиндр с горизонталь-
ной осью вращения) и аналогичный характер воздействия на
почву.
Катки могут быть использованы для обработки почвы как до,
так и после посева. До посева их применяют для выравнивания
поверхности поля, разрушения глыб и комьев, уплотнения неосев-
шей после основной обработки почвы; после посева — для улуч-
шения контакта семян с почвой и улучшения притока влаги к «им
из нижних слоев.
Катки могут быть гладкими цилиндрическими или же состоя-
щими из отдельных колец и дисков, снабженных различного рода
радиальными и осевыми выступами, предназначенными для более
интенсивного воздействия на почву.
Рис 83. Разновидности катков:
а — гладкий цилиндрический; б — гладко-рубчатый; в — кольчатый
г — кольчато-зубчатый; д — кольчато-шпоровый; е — борончатый.
(клиновидный);
Гладкий цилиндрический каток (рис. 83, а) общего
назначения представляет собой пустотелый барабан, внутреннюю
полость которого для увеличения давления на почву можно запол-
нять водой. Диаметр барабана, как правило, 700 мм, длина
1400 мм, вместимость 500 дм3, удельное давление в зависимости
от количества залитой воды изменяется от 23 до 60 Н на 1 см дли-
ны (ширины захвата) катка.
Гладкорубчатый каток (рис. 83,6) представляет собой
гладкий цилиндрический каток, на который надет кожух с реб-
ристой поверхностью, образованной из углового железа. В отли-
чие от гладкого катка, который, как правило, лишь вдавливает
комки в почву, он способен и дробить их.
Кольчатый каток (рис. 83,в) состоит из колец с клино-
видной рабочей поверхностью. Его острые узкие клинья, глубоко
врезаясь в почву, уплотняют ее нижний, т. е. подповерхностный
слой. Образовавшиеся после прохода гребешки очень непрочны
и быстро осыпаются в канавки, образуя рыхлый, мульчирующий
поверхностный слой почвы. Для очистки канавок колец от за-
стрявших комьев секции кольчатых катков выполняют сдвоенны-
ми, т. е. из двух батарей, расположенных одна за другой так, что
ребра (клинья) одного ряда располагаются между канавками
другого. Вращаясь навстречу одна другой, они раздавливают за-
стрявшие почвенные комки и удаляют налипшую почву. При од-
норядном расположении батарей применяют скребки.
Кольчато-зубчатый каток (рис. 83,г) состоит из набо-
ра чередующихся колец с клиновидной и зубчатой рабочими по-
верхностями. Такой каток уплотняет слой почвы на глубине да
7 см и рыхлит поверхностный слой толщиной до 4 см. Диаметр
клиновидных колец 350 мм, зубчатых 366 мм, длина 1 м, удель-
ное давление 23 Н на сантиметр длины. Очистка колец от налип-
шей почвы и растительных остатков происходит за счет их вра-
щения с различной скоростью. Для лучшей обработки почв с не-
ровным микрорельефом 'и лучшей их очистки конструкцией
предусмотрена возможность перемещения колец в радиальном на-
правлении (до 10 мм).
К о л ь ча то-шпо ров ый каток (рис. 83,<3) состоит из набо-
ра колец, снабженных шпорами (осевыми выступами). Шпоры,
углубляясь, уплотняют нижний подповерхностный слой почвы, а,
выходя из почвы, разрыхляют верхний поверхностный - ее слой.
Диаметр колец 545 и 520 мм, удельное давление в зависимости от
массы балласта от 27 до 47 Н на сантиметр длины.
Бороичатый каток (рис. 83,е) представляет собой ци-
линдр, снабженный размещенными по винтовой линии зубьями.
Под действием массы катка почва уплотняется, а зубья рыхлят
поверхностный ее слой и разрушают корку. Диаметр катка
160 мм, длина 650, диаметр зуба 16, длина зуба 30 мм.
Кроме перечисленных катков, представляющих собой отдель-
ные орудия для уплотнения почвы, широкое распространение на-
102
л неиэяьшие прикатывающие каточки, используемые в со-
ставе посевных и посадочных машин.
Колеса бывают ведущими и ведомыми, с жестким ободом и
пневматическими шинами. Колеса, выполняющие только лишь
рт.ть ст.эры при движении, называют ведомыми. Перекатывание
такзгэ колеса происходит под действием силы тяги или толкающей
силы, приложенных к оси колеса. Иногда ведомое колесо исполь-
зуется еще и для привода рабочих и вспомогательных органов
машины. Ведущее колесо получает вращающий момент от источ-
ника энергии (двигателя.).
Колеса с жестким ободом могут иметь обод выпуклой, вогну-
той и прямолинейной формы. Колеса с выпуклыми ободами воз-
действуют на почву подобно клину и вдавливаются в нее на
большую глубину. Наименьшая глубина колеи — при вогнутой
форме обода, но при этом не исключено залипание.
Все большее распространение получают колеса с пневмати-
ческими шинами, большей частью низкого давления — 85...
250 кПа. Их преимущество перед колесами с жестким ободом
в меньшем удельном давлении на почву и, следовательно, мень-
шем ее уплотнении, меньшем сопротивлении качению. Кроме того,
смягчая толчки и удары при движении, они выполняют роль амор-
тизаторов и позволяют повысить скорости движения.
§ 2. Обоснование основных параметров
Основные параметры катков (колес) — это диаметр и длина
(ширина) обода. Диаметр должен быть таким, чтобы при встре-
че с крупным комком каток легко перекатывался через него, а не
толкал (выдавливал) его вперед. При перекатывании через комок
давление катка концентрируется на нем и комок разрушается или
же вдавливается в почву. В противном случае каток будет тол-
кать почвенные комки перед собой, т. е. будет происходить сгру-
живание почвы. Следовательно, для нормальной работы катка
незсхздимэ защемление почвенных комков, т. е. должно соблю-
даться условие: б^цд-гЧд, где б— угол защемления, cpi—угол
трения комка о каток, ф2 — угол трения
комка о поверхность поля (почвы о поч-
ву) . Для получения зависимости меж-
ду радиусами комка гкм и катка гКт
(рис. 84) выразим высоту расположения
точки контакта катка и комка АВ через гКт
и Гкм- Как вытекает из рисунка 84, АВ =
= Гкм+гкм cos б = гкт—rKT cos б, или после
преобразований: rKM cos2 б/2 = гкт sin2 6/2.
Принимая во внимание предельный случай,
когда б=ф1+ф2, и решая уравнение отно-
сительно гкм, получим максимальный ра-
диус комка, который будет защемляться и
Рис. 84. Схема к опре-
делению минимального
радиуса катка.
103
вдавливаться катком радиуса гкт без протаскивания вперед,
Г ~r fg2 Ф1 + <Р2. (68)
кмтах'кт2 ’ ' '
а выразив гкт через гкм, 'получим минимальный радиус катка,
обеспечивающий защемление комка радиусом гкм:
rKTmin =гкм ctg2 4)1+ . (69)
Этот вывод подтверждается экспериментально: перед катком не-
большого диаметра всегда образуется высокий валик из почвен-
ных комков, перемещающийся в направлении движения агре-
гата.
Длину катка принимают из условий рельефа. Для равнинных
условий длина катка, как правило, до 2 м, для горных не превы-
шает 1 м.
§ 3. Режимы качения
Классификация. Различают следующие режимы качения колес
(катков): качение без скольжения и буксования; качение со сколь-
жением; качение с буксованием (рис. 85).
При качении без скольжения и буксования путь I, пройденный
колесом (катком), равен длине дуги окружности этого колеса,
умноженной на число его оборотов на пройденном пути, т. е. /=
=2лгп, где 2лг— длина дуги окружности колеса; п — число обо-
ротов, сделанных колесом на пройденном пути.
При качении со скольжением колесо (каток), сделав п оборо-
тов, пройдет путь /ск больший, чем длина дуги окружности этого
колеса, умноженная на число оборотов на данном пути, т. е. ZCK>
>2лгн. В этом случае часть пути (AZCK) колесо (каток) проходит
в результате скольжения. Такой режим характерен для большин-
ства катков и ведомых колес.
При качении с буксованием путь 1с, пройденный колесом (кат-
ком), оказывается меньше, чем длина дуги окружности колеса
(катка), умноженная на число его оборотов на пройденном пути,
т. е. 1б<.2лгп. В этом случае часть пути (AZe) оказывается поте-
рянной в результате буксования. Такой режим характерен
для ведущих колес (катков).
Рис. 85. Схема к объяснению режимов
качения колеса (катка).
Движение без скольжения
и буксования может происхо-
дить без образования и с об-
разованием колеи. Любая точ-
ка движущегося катка (коле-
са) участвует в двух движени-
ях: поступательном (перенос-
ном)— вместе со всем оруди-
104
ev вращательном (относитель-
ном । — относительно оси О. При
движении без скольжения и буксо-
вания относительная и переносная
скорости любой точки обода равны
по модулю, но относительная ско-
рость переменна по направлению
(рис. 86). Поэтому абсолютная ско-
рость любой точки катка, равная
геометрической сумме этих двух
скоростей, в процессе движения из-
меняется как по направлению, так
и по численному значению. В точ-
ке С векторы относительной и пе-
реносной скорости направлены по
одной прямой, но в разные стороны.
Рис. 86. Кинематика катка (коле-
са), катящегося без скольжения и
буксования.
'Следовательно, абсолютная
скорость точки С равна нулю, а точка носит название мгновенного
центра скоростей. Таким образом, мгновенный центр скоростей
совпадает с нижней точкой 'вертикального диаметра катка (коле-
са). Так как все остальные точки катка в каждый данный момент
в абсолютном движении поворачиваются относительно мгновен-
ного центра скоростей С, то их абсолютная скорость пропорцио-
нальна угловой скорости вращения и расстоянию этих точек от
точки С. Например, для точки В абсолютная скорость vB=G>pB. Ес-
ли в данную точку из мгновенного центра скоростей провести ради-
ус-вектор рв и восстановить к нему перпендикуляр в сторону враще-
ния, то он и укажет направление абсолютной скорости точки цв.
Качение с образованием колеи. Пусть каток катится
по полю с образованием 1колеи. Точка а (рис. 87,а), перемещаясь
Рис. 87. Схема катка, движущегося без скольжения и буксования, но с образо-
ванием колеи:
с — к определению действующих сил; б — к определению зоны касательных перемещений
«ючвы прн ее уплотнении.
105
в направлении скорости va, давит на соприкасающуюся с ней поч-
венную частицу т по нормали с силой N. Разложим силу N на
две составляющие: по направлению скорости точки а и по каса-
тельной к окружности (Nv и Nv).
Как видно из рисунка 87, а, A/T=/Vtgg. Сила N? стремится за-
ставить почвенную частицу т скользить по рабочей поверхности
катка. Ее скольжению сопротивляется сила трения F. Характер
движения почвенной частицы будет зависеть от соотношения меж-
ду углом g и углом трения ф.
Если то Л/т—7/tgg<Fmax==./Vtg<p и скольжения не бу-
дет, так как сила трения F, вызванная действием силы NT, не до-
стигнет своего максимального значения и, как сила реакции, будет
в точности равна возбудившей ее силе (Е=Д/Т). В этом случае
Лгт и F взаимно уравновешиваются, и почвенная частица т ока-
зывается под действием одной лишь силы No. При этом частица
т будет перемещаться вместе с точкой а катка в направлении ее
скорости va, т. е. будет происходить уплотнение почвы без про-
скальзывания.
Если £>ф, то Л/^£>Л/^ф и, следовательно, NF>Fm&x~
В этом случае сила трения, достигнув своего максимального зна-
чения Emax, не в состоянии уравновесить касательную составляю-
щую N?, и уплотнение почвы под действием силы No будет сопро-
вождаться скольжением почвенных частиц под действием силы
Лт—Emax=Ar(tgg—tgф).
Угол g изменяется от нуля в точке С до л/2 в точке Л. В про-
цессе возрастания от 0 до л/2 угол g принимает и значение угла
трения ф, так как 0<?Ф<л/2. Пусть в точке а угол g==<p
(рис. 87,6). Тогда выше точки а, на дуге аВ, угол и наблю-
дается скольжение (хотя 1=2лгп), а ниже точки а, на дуге аС,—
уплотнение почвы без скольжения. Как видно из рис 87,6:
h^=OC—OD=r—гсо5 2ф—2г£П12ф. (70)
Следовательно, на глубине от 0 до h—h9 от поверхности поля
будет скольжение, а от h — до h — уплотнение почвы без сколь-
жения. Скольжение, т. е. касательное перемещение почвенных ча-
стиц, вызывает возрастание трения между ними и разрушение поч-
венных агрегатов и поэтому нежелательно. Под действием силы
Nt, которая стремится выталкивать почвенные частицы вперед, на
рыхлых почвах перед катком образуется почвенный валик, размер
которого зависит от глубины колеи h и радиуса катка г. Чем тя-
желее каток и меньше его диаметр, тем больше высота валика.
Движение со скольжением. При рассмотрении катка (колеса),
катящегося со скольжением, академик В. П. Горячкин предложил-
упростить задачу путем введения воображаемого (условного) кат-
ка (колеса) большего радиуса, который катится без скольжения.
Условный каток, сделав то же число оборотов, пройдет тот же
путь, что и действительный, но только без скольжения и буксова-
ния, т. е. он как бы жестко связан с действительным и расположен
106
Рис. 88. Схема катка, движущегося со скольжением:
с — к определению зон уплотнения со скольжением и без скольжения: б — к определенжю
действующих сил и направлений скольжения.
концентрично по отношению к нему. Нетрудно догадаться, что
мгновенный центр скоростей находится в нижней точке вертикаль-
ного диаметра условного катка. При этом степень скольжения мо-
жет быть определена коэффициентом скольжения
__Д/ск __ /ск — 2лгп 2л (г + п — 2лгп Ьг .
8 /Ск А:к 2л(г4-Дг)п = r-f-Дг * ' '
Легко установить, что е изменяется в пределах от 0 до 1. Как вид-
но из выражения (71), для определения е необходимо замерить
фактически пройденный путь 1СК и подсчитать число оборотов кат-
ка п на этом пути.
Каток находится в контакте с почвой по дуге BD. Для рас-
смотрения процесса взаимодействия катка с почвой из точки С
проведем касательную к дуге BD (рис. 88,а). В точке а, через ко-
торую проведена касательная, направления скорости va и норма-
ли .V совпадают. Следовательно, угол g в этой точке равен нулю
н схсльженле отсутствует, так как условие скольжения £><р.
Академик В. А. Желиговский назвал эту точку «замечательной».
В верхней и нижней точках вертикального диаметра £=л/2. Сле-
довательно, на дугах между замечательной точкой а и верхней
и нижней точками вертикального диаметра угол g изменяется от
нуля до л/2 и принимает все численные значения этого интервала,
в том числе и значение угла трения ф, так как 0<ф<;л/2.
Пусть в точках at и а2 угол £=ф. Тогда выше точки at и ниже
точки Пг угол £><р и, следовательно, на дугах а\В и a2D происхо-
дит скольжение. Для рассмотрения процесса деформации почвы
катком выделим точки а3 и а4 (рис. 88, б), расположенные в зонах
скольжения. Пусть эти точки находятся в контакте соответственно
с частицами почвы т3 и т4 (на рис. не показаны).
В точках а3 и а4 углы £><р, и, следовательно, силы трения
достигают своих максимальных значений (Лпах=А^ 1ёф). Соеди-
107
же реакции почвы
Рис. 89. Схема катка (колеса),
движущегося с буксованием.
няясь с силами нормального давления, они дают результирующие
Rm3 и Rm4, которые отклонены от соответствующих нормалей на
угол трения ф в сторону векторов скорости Va3 и va. Следова-
тельно, точка а3, двигаясь в направлении скорости Va3, действует
на почвенную частицу т3 силой Rm3 и заставляет ее перемещаться
в направлении действия этой силы. Так как .направления движе-
ния точки обода а3 и частицы почвы т3 не совпадают (между ни-
ми угол £—ф), то точка а3 проскальзывает по частице т3.
Скорость почвенной частицы т3 и скорость скольжения обода
по этой частице получим, если из конца вектора va опустим пер-
пендикуляр на нормаль к катку в точке а3. Этот перпендикуляр
отсечет на направлении силы Rm3 отрезок vm3, который в мас-
штабе вектора пЯз будет представлять собой скорость перемеще-
ния 'частицы т3. Вектор ^сзШз — не что иное, как линейная ско-
рость скольжения точки а3 катка относительно частицы почвы т3.
Это построение основано на том, что проекции скоростей Па3 и пОТз
на нормаль к катку в точке а3 должны быть равны между собой,
так как в противном случае почвенная частица т3 должна внед-
ряться внутрь обода или уходить от него, чего не наблюдается.
Как видим, скольжение точки а3 направлено в сторону, обрат-
ную вращению катка. Пользуясь аналогичными приемами, нетруд-
но установить, что скольжение точки направлено в сторону
вращения катка.
Таким образом, на ободе катка, катящегося со скольжением,
можно выделить три зоны: зону проскальзывания по направлению
вращения (выше точки аь если эта часть погружена в колею); зо-
ну уплотнения почвы без проскальзывания (дуга 0102); зону про-
скальзывания в сторону, противоположную вращению (дуга а2Ь).
на каток направлены в стороны, про-
тивоположные активным силам. На
участке обода катка ниже замеча-
тельной точки а они проходят ниже
оси вращения О и, следовательно,
дают положительный момент, спо-
собствующий вращению катка, а на
участке выше точки а силы реакции
проходят выше оси вращения О и
дают отрицательный момент, сопро-
тивляющийся вращению.
Такое сложное воздействие кат-
ка на почву приводит к тому, что
отдельные ее участки в зонах кон-
такта с катком испытывают различ-
ные деформации: одни уплотняют-
ся, другие, наоборот, рыхлятся,
между уплотненными и рыхлыми
108
-эстками образуются трещины. Ширина трещин и глубина их про-
никновения зависят от диаметра, нагрузки и скорости движения
катка, а также от состава и состояния почвы.
В соответствии с агротребованиями катки должны создавать
уплотненную прослойку на глубине 4...8 см. В этом случае умень-
шаются потери влаги из нижних слоев почвы за счет конвекции.
При увеличении скорости катка выше 1,5...2 м/с наибольшее уп-
лотнение получают слои, расположенные ближе к поверхности.
Таким образом, глубина распространения уплотняющего дейст-
вия катка увеличивается с ростом нагрузки и уменьшается с уве-
личением скорости.
С увеличением диаметра катка наибольшее приращение плот-
ности перемещается в более глубокие слои.
Движение с буксованием. При качении с буксованием (рис. 89)
радиус условного катка (колеса) меньше, чем действительного;
мгновенный центр скоростей находится в нижней точке вертикаль-
ного диаметра условного катка (точка С). Коэффициент буксо-
вания
__ Л/б ____ — 1б _____ 2лт — 2л (г — кг) п _____ кг
1 /б /б 2л (г — кг) п г — кг ‘
(72)
Значение ц может изменяться от 0 до оо. Угол g для верхней
А и нижней D точек вертикального диаметра равен л/2. В проме-
жутке между этими точками угол g принимает значения меньшие
л/2, но нигде не равен нулю, а скорость касательного перемеще-
ния точек обода относительно почвы на всей дуге контакта с ко-
леей BD направлена в сторону вращения. Силы реакции колеи на
всей дуге контакта проходят выше оси вращения О и, следова-
тельно, дают отрицательный момент, для преодоления которого
необходимо от источника энергии подвести движущий момент. Ко-
лея в этом случае действует как тормозная колодка. Наряду
с уплотнением происходит сдвиг почвы в одну и ту же сторону,
в сторону вращения.
5 4. Сопротивление качению
Движущий момент и момент сопротивления. Пусть каток или
опорное (ведомое) колесо движется по полю с образованием ко-
леи (рис. 90,а). В этом случае к оси его вращения О приложена
вертикальная сила Р, складывающаяся из части веса машины
и веса самого катка (колеса), и горизонтальная сила тяги или
толкающая сила Т. Вместе эти силы дают равнодействующую, ко-
торая обязательно пересекает дно колеи в некоторой точке а.
Действие этой силы вызывает реакцию колеи R, приложенную
к катку в той же точке а, но направленную в противоположную
сторону. Эта реакция колеи R складывается из элементарных сил,
значения которых при относительно небольшой глубине колеи
пропорциональны линейной деформации почвы.
109
Рис. 90. Схема силового воздействия на каток (колесо):
а—с жестким ободом; б — с пневматической шиной.
Разложив силу R на две составляющих — горизонтальную Яг
и вертикальную RB, составим условие равновесия (равномерного
движения) катка, которое определится следующими уравнениями:
S Х=7-Яг=0;
2 Y=P-RB=0-,
2mAP) = Tya-Pxa=Q.
(73)
Из первого и второго уравнений этой системы следует, что Т—
=Rr, a P=RK. Следовательно, на каток действуют две пары сил
Т и Яг и Р и Яв- Первая пара Т и Яг с плечом уа образует дви-
жущий момент, а вторая пара сил Р и Яв с плечом ха — момент
сопротивления. Тогда из третьего уравнения системы (73)
T=PxJya. (74)
Из выражения (74) и рисунка 90, а видно, что чем меньше глу-
бина колеи h, тем меньше плечо ха и момент сопротивления Рха,
а, следовательно, и сила Т.
Из выражения (74) также следует, что с увеличением диамет-
ра катка сила Т уменьшается. Например, при увеличении диамет-
ра катка вдвое почти вдвое увеличится и плечо уа, а плечо ха
удлиняется в меньшей мере, так как при этом опорная площадь
растет, а глубина колеи уменьшается. Уменьшение силы Т про-
изойдет как вследствие увеличения плеча уа, так и вследствие
уменьшения глубины колеи h.
Из рисунка 90, а и б и выражения (74) следует, что для ка-
чения пневматического колеса (катка) при одинаковом диаметре
D и вертикальной нагрузке Я потребуется меньшее усилие Т. Во-
первых, вследствие деформации шины увеличивается опорная пло-
щадь пневматического колеса, что вызывает уменьшение удельного
ПО
дазлендя. а следовательно, и глу-
:дды кзлеи. При меньшей же глу-
баве колеи, как следует из форму-
лы (10), требуется меньшая энер-
гия на деформацию почвы, а сле-
довательно, и на качение колеса.
Бо-вторых, элементарные силы ре-
акции почвы при жестком ободе
располагаются лишь перед нижним
концом вертикального диаметра
(рис. 90,а), а при пневматической
шине — по обе стороны от нижнего
Рис. 91. Схема к определению тя-
гового сопротивления катка.
конца вертикального диаметра
(рис. 90,6). По этой причине равнодействующая элементарных сил
реакции колеи при пневматической шине расположится ближе к
нижнему концу вертикального диаметра (плечо х меньше), чем
при жестком ободе, а это, как следует из выражения (74), при-
ведет к снижению момента сопротивленца й уменьшению движу-
щей силы Т. (J , • • J) ' 1 I
Зависимость тягового сопротивления от параметров катка и
свойств почвы. Пусть каток катится по полю и образует колею.
Выбрав начало координат Oi в точке пересечения вертикального
диаметра с поверхностью поля, выделим на дуге окружности обо-
да катка, соприкасающейся с почвой, элементарный отрезок dl
(рис. 91). При длине катка b на его поверхности будет выделена
площадь dS—bdl (на рисунке 91 заштрихована), которую с до-
статочной точностью можно считать прямоугольником. Тогда эле-
ментарная сила реакции на эту площадь будет иметь вид dR=
— obdl, где о — напряжение смятия почвы. При относительно не-
большой глубине колеи, как следует из диаграммы твердомера
(см. рис. 1,6), сг= qy, где q — коэффициент объемного смятия поч-
вы, у — линейная деформация почвы.
Часть сегмента с элементарными сторонами dl, dy и dx (на ри-
сунке 91 дана в увеличенном виде) с точностью до малых высшего
порядка можно считать треугольником, в котором угол между
сторонами dl и dx равен центральному углу р (как углы с взаим-
но перпендикулярными сторонами). Тогда dl=dy/sm$. Подставив
в выражение для элементарной силы значения и и dl, получим
dR=bqydyls,\n$. В результате интегрирования имеем
h
D — ЬЯ СоЯ_______
sin р J УаУ— 2sinp
о
Как видно из рисунка 91, 7’=/?sinp (при условии равновесия),
следовательно,
T^bqh2!2.
(75)
111
Однако в уравнение (75) не входят такие важные параметры,
как D и Р. Чтобы включить их в это уравнение, проделаем сле-
дующее. Подставив в первоначальное выражение для элементар-
ной силы dR вместо dl его значение, выраженное через dx, т. е.
r/Z = dx/cos p, и, изменив пределы интегрирования, получим
R= —f ydx.
cosp J a
0
Далее определим верхний предел интегрирования по х, а пере-
менную у выразим через переменную х. Нетрудно установить, что
верхний предел x^^Dh, a y=h—x2ID. Подставив эти значения
в предыдущее выражение и проинтегрировав, получим
2bqh VDh
3cos₽
При условии равновесия P=/?sin p, а следовательно, и Р =
= 2l3bqh]]Dh найдем, что глубина колеи
3 /
/1=1,311/-;^. (76)
Подставив значение h в уравнение (75) и произведя необходи-
мые преобразования, получим
<77>
Зависимость (77) получила название формулы Грандвуане—
Горячкина, так как впервые была получена Грандвуане, как эмпи-
рическая, а затем на основе теоретических положений была выве-
дена академиком В. П. Горячкиным.
В практике чаще пользуются упрощенной формулой Г=цР,
где коэффициент ц—0,86 у/ получил название коэффициента
перекатывания. Как видим, р.=Т/Р.
Величину, обратную ц, т. е. \l\i=PIT, академик В. А. Жели-
говский применительно к колесам предложил называть транспор-
тирующей способностью, имея в виду, что отношение PIT показы-
вает, какое количество груза способно перевозить данное колесо
с помощью единицы приложенной к нему силы тяги.
Значения коэффициента перекатывания ц при заданных Р, q,
b и D могут быть определены из номограммы* (рис. 92). Штри-
ховой линией со стрелками показан порядок пользования номо-
граммой.
Для катков с негладкой рабочей поверхностью сопротивление
перекатыванию, как правило, несколько больше и может быть
определено из соотношения Тн.п=еТ, где е — коэффициент, учиты-
Предложена Г. Н. Синеоковым. — Прим, автора.
112
Рис. 92. Номограмма для определения коэффици-
ента перекатывания колеса ц с жестким цилин-
дрическим ободом.
вающий рост сопротивления за счет неровностей поверхности. Его
принимают равным 1,1...1,3.
Сопротивление перекатыванию колес с пневматическими шина-
ми, как правило, меньше, чем с жестким ободом. Оно 'может быть
определено из соотношения 7’П.Ш=^Л где k — коэффициент, учи-
тывающий снижение сопротивления. Он имеет следующие значе-
ния: для свежевспаханного поля 0,75...0,79, для стерни 0,65...0,68,
для луга 0,58—0,62, для укатанной дороги 0,60...0,65.
На сопротивление перекатыванию существенное влияние ока-
зывает внутреннее давление в шинах. Чтобы снизить энергозатра-
ты на перекатывание, внутреннее давление целесообразно изме-
нять в соответствии с состоянием поля. На свежевспаханном поле
оно должно соответствовать минимально допускаемому, которое
зависит от конструкции шины.
Глава VIII
ЭЛЕМЕНТЫ КОНСТРУКЦИЙ И СХЕМЫ
ПОЧВООБРАБАТЫВАЮЩИХ МАШИН И ОРУДИЙ
§ 1. Классификация
Почвообрабатывающие машины и орудия классифицируются
по способу соединения с трактором, по назначению, рабочей ско-
рости, типу рабочих органов и другим признакам.
8—424 113
Рис. 93. Схемы механизмов навески:
а — трехточечной; б — двухточечной; е — одноточечной.
По способу соединения с тракторами или самоходными шасси
почвообрабатывающие машины и орудия подразделяют на при-
цепные, навесные и полунавесные.
Прицепные машины присоединяют к трактору в одной точке,
а навесные и полунавесные в трех, двух или одной. Навесную
машину поднимают механизмом ABCDEKD' (рис. 93).
В рабочем положении она связана с трактором механизмом
F'G'M'D' (рис. 93,а). Заглубление рабочих органов ограничива-
ется опорным колесом. Если шарниры D'D' нижних тяг разъеди-
нены, то машина связана с трактором в трех точках: два шарнира-
D' и шарнир F'.
Применяется и двухточечное соединение, когда шарниры D'
сведены вместе (рис. 93,6). Такая система используется при агре-
гатировании плугов с гусеничными тракторами. Плуги, предна-
значенные для работы на каменистых почвах, не связаны с верх-
ней тягой. Тогда система имеет только одну точку D' (рис. 93, в)
присоединения к трактору.
По назначению почвообрабатывающие машины и орудия клас-
сифицируются следующим образом.
Плуги разделяют на две группы: общего назначения и специ-
альные. Плуги общего назначения применяются в полеводстве,
т. е. при возделывании зерновых, зернобобовых, технических
и других культур. Они вспахивают почву на глубину от 18 до
35 см и различаются по типу плужного корпуса: лемешные, дис-
ковые, ротационные активные, комбинированные (с вращающими-
ся отвалами). Наиболее 'распространены лемешные плуги. Пахо-
та лемешными плугами может быть свально-развальной или
гладкой (без свальных гребней и развальных борозд). Плуги для
свально-развальной пахоты оборудованы правоотваливающими
корпусами.
В зависимости от почвенно-климатических условий и агроно-
мических требований на плугах общего назначения устанавлива-
ют корпуса с культурной, полувинтовой и винтовой рабочими по-
114
верхностями, а также корпуса для безотвальной пахоты, с вырез-
ными отвалами, почвоуглубителями. Разработано и внедрено
в производство семейство унифицированных лемешных плугов.
Для обработки солонцовых почв применяют двух- и трехъ-
ярусные плуги. Вспашка этими плугами выполняется раз в 5...
6 лет.
Лемешными плугами общего назначения пашут, начиная с се-
редины или краев загона (всвал или вразвал), поэтому на поле
образуются свальные гребни или развальные борозды, которые
затрудняют работу машин, выполняющих последующие операции
(посев, культивацию и т. п_), снижают урожайность.
Для получения гладкой вспашки используют оборотные, сек-
ционные, клавишные и балансирные плуги. Наибольшее распро-
странение получили оборотные плуги (рис. 94,о). Они снабжены
право- и левооборачивающими корпусами, расположенными по-
парно, как правило, на противоположных концах общих стоек.
Право- и левооборачивающие корпуса включают в работу попе-
ременно, поворачивая их раму на 180°. При переводе в транспорт-
ное положение раму поворачивают на 90°.
Секционный (челночный) плуг (рис. 94,6) состоит из двух сек-
ций, одной с право- и другой с лерооборачивающими корпусами,
которые присоединяются спереди и сзади трактора. Трактор по-
переменно заглубляет то одну, то другую секции и движется то
передним, то задним ходом.
Клавишный плуг (рис. 94, в), как и секционный, имеет две
секции, одну с право-, другую с левооборачивающими корпуса-
ми. Секции присоединены к общей раме плуга, навешиваемой на
самоходное шасси.
Балансирный плуг (рис. 94, г) снабжен двумя жестко соеди-
ненными рамами, расположенными под углом одна к другой. На
одной установлены право-, а на другой — левооборачивающие
корпуса. Плуг приводится в действие установкой канатной тяги.
в’ 115
К плугам специального назначения относят болотные, кустар-
никово-болотные, садовые, плантажные, лесные и т. и.
Болотные и кустарниково-болотные плуги применяют для
вопашки осушенных болотных и заболоченных 'минеральных почв,
заросших кустарником.
Лесные плуги используют для вспашки почв на нераскорчеван-
ных вырубках с кустарником или древесной порослью высотой до
4...5 м. Они обычно имеют малое число корпусов (один или два)
с шириной захвата 45, 75, 100 и 120 см.
Плантажные плуги предназначены для глубокой пахоты — до
45...60 см. Выпускаются они, как правило, в однокорпусном ис-
полнении.
Садовые плуги при работе должны как можно ближе подхо-
дить к стволам деревьев, а трактор не должен повреждать крону
деревьев, поэтому их выполняют прицепными с секторными при-
цепами, позволяющими смещать плуг в сторону от продольной
оси симметрии трактора до 740 мм.
Культиваторы по назначению подразделяют на орудия
для сплошной обработки, орудия для междурядной обработки
(пропашные) и универсальные, а по способу соединения с тракто-
ром — на прицепные и навесные.
Особую группу орудий для сплошной обработки почвы пред-
ставляют культиваторы-плоскорезы и плоскорезы-глубокорыхли-
тели. Они предназначены для основной обработки почв, подвер-
женных ветровой эрозии; их рабочие органы отличаются большой
шириной захвата (1,1...2,5 м). Кроме того, для сплошной обработ-
ки почв в целях борьбы с сорняками применяют огневые культи-
ваторы шириной захвата 2,4...5,6 м, а для глубокого рыхления
глыбистых и заплывающих после полива почв — культиваторы
с активными рабочими органами — фрезерные (КФГ) шириной
захвата 3,6 м.
Пропашные культиваторы выпускают навесными и снабжают
набором рабочих органов для выполнения различных операций по
уходу за посевами и посадками. По высоте расположения рамы
они подразделяются на три типа: для низкостебельных неполив-
ных культур, для высокостебельных неполивных и низкостебель-
ных поливных, для высокостебельных поливных. К пропашным
относят также культиваторы-растениепитатели (КРН), т. е. куль-
тиваторы, оборудованные приспособлениями для подкормки рас-
тений. Для междурядной обработки низкостебельных пропашных
культур на тяжелых почвах применяют фрезерный культиватор
с активными рабочими органами — фрезами. Особое место среди
пропашных культиваторов занимают прореживатели посевов са-
харной свеклы. Они выпускаются навесными.
К универсальным относят культиваторы, которые пригодны как
для сплошной, так и для междурядной обработки почвы.
Зубовые бороны в зависимости от давления (веса), при-
ходящегося на один зуб, подразделяют на тяжелые, средние, лег-
116
кие и облегченные (райборонки). Каждая борона состоит, как
правило, из трех секций, которые шарнирно соединены между со-
бой вагой или цепями. Получили распространение скоростные без-
зигзаговые тяжелые бороны (БЗТС) с давлением на зуб 21 Н,
средние (БЗСС) с давлением на зуб 17,5 Н, работающие на ско-
ростях до 3,3...3,6 м/с (12...13 км/ч). Каждая 'Секция шириной за-
хвата 1 м обрабатывает почву на глубину соответственно до 8 и
6 см.
Применяются также легкие посевные бороны (БП) с давлени-
ем на зуб 8 Н и облегченные райборонки (ОР) с давлением на
зуб 4 Н. Каждая из них состоит также из трех секций с шириной
захвата соответственно 0,6 и 0,7 м и обрабатывает почву на глу-
бину 5...6 и 2...4 см. Их рамы типа «Зигзаг» позволяют работать
на скоростях 2...2,2 м/с (7...8 км/ч).
Сетчатые бороны (БС) и облегченные сетчатые бороны (БСО)
выпускают шириной захвата соответственно 2 и 4 м, рабочая ско-
рость до 1,7 м/с (6 км/ч), глубина обработки 4...8 см. Вследствие
шарнирного соединения между зубьями сетчатые бороны хорошо
приспосабливаются к рельефу поля и могут применяться даже на
гребневых посадках. При транспортировке на дальние расстояния
сетчатые бороны свертывают в рулон. Кроме того, находят приме-
нение пружинные бороны (БП), шлейф-бороны (ШБ), бороны
с лапчатыми зубьями (БЗЛ), луговые шарнирные бороны с но-
жевидными зубьями (БЛШ).
Дисковые бороны .и лущильники. Дисковые лущиль-
ники и бороны оборудуют сферическими и плоскими дисками.
Кроме того, находят применение бороны с игольчатыми диска-
ми— главным образом для почв, подверженных ветровой эрозии,
с эксцентричными сферическими дисками — лункообразователя-
ми — для почв, подверженных водной эрозии, и с вращающимися
ножевидными рабочими органами — для омоложения травостоя
лугов, с вырезными дисками — тяжелые бороны, их изготавлива-
ют прицепными и навесными: бороны, как правило, — двухслед-
ными с регулируемым углом атаки (12...25°), а лущильники —
односледными с углом атаки до 35°.
Разработано семейство дисковых гидрофицированных лущиль-
ников шириной захвата от 5 до 20 м и борон шириной захвата от
3 до 10 м. Глубина обработки регулируется углом атаки и бал-
ластным грузом, максимальная глубина обработки лущильниками
10... 12, боронами до 20 см. Кроме дисковых, выпускаются и ле-
мешные лущильники (плуги-лущильники), которые обрабатыва-
ют почву на глубину до 18 см. Максимальная рабочая скорость
дисковых орудий до 2,8 м/с (10 км/ч), лемешных лущильников —
до 3,3 м/с (12 км/ч).
По назначению дисковые орудия подразделяют на полевые
(общего назначения), садовые и болотные.
Фрезы по назначению подразделяются на полевые, болотные,
лесные и садовые; по способу соединения с трактором — на навес-
117
яые и прицепные. Фрезы бывают с горизонтальной и вертикальной
осями вращения.
Полевые фрезы, как правило, имеют горизонтальную ось вра-
щения, расположенную перпендикулярно направлению движения,
и прямое направление вращения барабана. Садовые фрезы быва-
ют как с горизонтальной, так и с вертикальной осями вращения.
Для ввода фрезы в ряд деревьев и вывода ее из ряда применяют
гидравлическое автоматическое устройство. Лесные фрезы выпол-
няют, как правило, навесными с горизонтальной осью вращения,
окружная скорость по концам ножей достигает 4,5...7,6 м/с. По-
ступательная скорость перечисленных фрез составляет 0,4...1,6 м/с
(1,5...5,6 км/ч). Для болотных фрез предусмотрены большая
окружная скорость — до 13 м/с и малая поступательная скорость
0,05...0,14 м/с (0,2...0,5 км/ч), для чего трактор снабжают ходо-
уменьшителем. Ширина захвата фрез от 0,6 до 2,6 м, глубина об-
работки садовых, полевых и лесных, как правило, до 12...16 см,
болотных до 20...45 см. Диаметры фрезерных барабанов от 225 до
800 мм, количество ножей на диске от 4 до 12.
Катки кольчато-шпоровые и водоналивные гладкие состоят
из трех секций каждый, кольчато-зубчатый выпускается в одно-,
двух- и трехсекционной модификациях, борончатый состоит из
пяти секций, по два барабана в каждой. Ширина захвата от 2,7
до 6 м, максимальная рабочая скорость кольчато-шпорового катка
до 3,3 м/с (12 км/ч), остальных — до 2,2 м/с (8 км/ч).
Комбинированные почвообрабатывающие ма-
ш и н ы (орудия) подразделяют на две группы: для основной и для
предпосевной обработки почвы. При этом за один проход в пер-
вом случае должно быть выполнено крошение почвы на всю глу-
бину обработки, а во втором —подготовка ее к посеву. Достига-
ется это набором определенных рабочих органов. Например, в
комбинированный почвообрабатывающий агрегат (АКП) для ос-
новной обработки почвы входят дисковые батареи, лапы-плоско-
резы, волокуша-борона и кольчато-шпоровый каток; комбиниро-
ванный агрегат для предпосевной подготовки почвы включает
в себя рыхлитель, выравниватель и каток (РВК). Для обработки
тяжелых почв применяют комбинированные агрегаты с активны-
ми рабочими органами.
§ 2. Способы крепления рабочих органов к раме
Рабочие органы почвообрабатывающих машин и орудий при-
крепляют к стойкам. Стойки связывают с рамой машины жестко
или шарнирно. Шарнирное соединение бывает одно- и многошар-
нирным (четырехзвенным).
Жесткое крепление заключается в том, что стойки 2
(рис. 95, а) вместе с рабочими органами <3 прикрепляют болтами
к брусу 1 рамы машины. Такое соединение применяется в маши-
нах с небольшой шириной захвата при большой глубине хода ра-
818
Рис. 95. Схемы крепления рабочих органов к раме:
а — жесткое; б — одношарнирное; в — четырехзвенное; 1 — брус рамы машины; 2 — стойка;
3—рабочий орган; 4 — колесо рамы; 5 — двуплечий рычаг; 6 — нажимная пружина; 7 —
штанга; 8 — поводок: 9 — опорное колесо секции; 10 — ползун рычага; 11 и 12 — звенья
параллелограммного механизма.
бочего органа (плуги, лемешные лущильники, чизель-культивато-
ры, бороны, фрезы и т. д.).
Заглубление рабочих органов определяется силой тяжести Р
машины и реакцией Rxz на рабочие органы. Ограничивается глу-
бина хода опорными колесами 4.
Система жесткого крепления отличается простотой конструк-
ции и малой массой. Копирование рельефа при таком соединении
зависит в продольном направлении от положения рамы, а в по-
перечном — от ширины захвата орудия. При жестком соединении
недостаточно копируется микрорельеф поля, не выдерживается
постоянной глубина хода рабочих органов по ширине захвата.
Одношарнирное крепление характеризуется тем, что стойки 2
(рис. 95,6) вместе с рабочими органами 3 и поводком 8 шарнирно
связаны с брусом 1 рамы машины.
Различают индивидуально-поводковую и секционную одношар-
нирную систему крепления. При индивидуально-поводковой си-
стеме к каждому поводку присоединяют по одному рабочему ор-
гану (лапы культиваторов для сплошной обработки почвы, а так-
же сошники зерновых и универсальных сеялок), а при секцион-
ной — несколько рабочих органов (навесные хлопковые культива-
торы, лущильники и т. д.).
Рабочий орган заглубляется под действием силы тяжести Рс
секции, реакции RXz на рабочие органы, а также при помощи на-
жимных пружин (сила Гп) или дополнительных грузов. Макси-
мальная глубина ограничивается упорами штанг 7, ребордами
(полозками) или каточками.
119
Одношарнирная система крепления позволяет лучше, чем
жесткое крепление, копировать рельеф поля как в продольном,
так и в поперечном направлении.
Четырехзвенная система крепления выглядит так (рис. 95,в):
•стойки 2 (звено ВС) вместе с рабочими органами 3 прикреплены
к брусу 1 (звено AD) рамы машины через поводки 11 и 12 (звенья
АВ и DC).
В основном применяется четырехзвенная система с параллело-
граммным механизмом, в котором звенья ЛВ||£)С и AD\\BC. Опор-
ное колесо 9 секции копирует микрорельеф поля. Движение коле-
са по неровностям приводит к относительному перемещению зве-
на ВС, входящего в параллелограммный механизм. При этом угол
установки рабочего органа к поверхности поля не меняет своего
значения.
Параллелограммная система применяется для крепления лап
в пропашных культиваторах, сошников в свекловичных и куку-
рузных сеялках, а также в посадочных машинах. При такой си-
стеме лучше копируется микрорельеф поля и рабочие органы вы-
держивают заданную глубину хода.
Заглубление рабочих органов определяется силой тяжести Рс
и реакций Rxz. Положение звеньев АВ и DC механизма оказывает
влияние как на заглубляемость, так и на силу реакции RKC, дейст-
вующей на колесо.
Плечи hi и h2 при наклоне звеньев АВ и CD изменяются не-
значительно. Тогда реакция 7?кс на опорное колесо секции тем
меньше, чем больше угол а. С увеличением угла а способность
рабочих органов к заглублению уменьшается.
Четырехзвенная система крепления рабочих органов более
громоздка, чем прежде рассмотренные, многошарнирность системы
снижает устойчивость хода рабочих органов в горизонтальной пло-
скости.
Требуемый угол установки рабочих органов во всех системах
крепления достигается поворотом стойки относительно поводка.
В параллелограммной системе может изменяться длина верхнего
.звена АВ, что позволяет влиять и на угол установки.
§ 3. Размещение рабочих органов и колес на раме
Лемешные плуги и лущильники. Для навесных, полунавесных
и прицепных плугов предусмотрена единая конструктивная схема
размещения рабочих органов. Корпуса плугов и лущильников
размещают па раме последовательно один за другим со смеще-
нием на ширину захвата b в сторону непаханого поля (рис. 96)
с некоторым перекрытием ЛЬ, равным 25...75 мм. Перекрытие спо-
собствует полному подрезанию пласта при некоторых колебаниях
плуга в горизонтальной плоскости (непрямолинейном движении).
Расстояние I между корпусами (по ходу плуга), от которого
зависит металлоемкость и поиспосабливаемость плуга к рельефу
120
Рис. 96. Схема навесного плуга:
I — рама; 2 — корпус; 3 — предплужник; 4 — дисковый нож; 5 — опор-
ное колесо; 6 — подвеска.
поля, принимают из условий незабиваемости почвой и раститель-
ными остатками и возможности установки предплужников и дис-
ковых ножей перед каждым корпусом плуга.
Некоторые ученые (профессора М. Н. Летошнев, С. С. Саакян
и др.) считают, что / необходимо определять из условий устойчи-
вости плуга, и рекомендуют пользоваться формулой:
/=6tg(y04-<p), (78)
где уо — угол лезвия лемеха со стенкой борозды, а <р — угол тре-
ния почвы о сталь.
Другая группа ученых (А. А. Князев и др.) рекомендует исхо-
дить из теории скалывания пласта, принимая I большим, чем зона
распространения скалывания по ходу плуга. Это, по их мнению,
предотвратит сгруживание почвы.
ГОСТ 66—64 рекомендует при 6=30 см принимать 1=70 см,
при 6 = 35 см — 1=75 см и при 6=40 см —/=80 см. Минималь-
ное удельное сопротивление плуга при /=600...650 мм*.
Расстояние li между носками лемехов предплужника и основ-
ного корпуса принимают из условий 'незабиваемости пространства
между ними (свободного прохода пласта). Минимальное сопротив-
ление плуга* наблюдается при /1=300 мм. В зависимости от глу-
бины пахоты рекомендуют принимать /1 = 300...350 мм. По высоте
предплужник рекомендуют устанавливать так, чтобы он подрезал
пласт ниже основной массы корней. Как правило, ai = 10...12 см.
По данным канд. техн, наук А. А. Князева. •— Прим, автора.
121
Полевой обрез предплужника выносят в сторону поля относитель-
но основного корпуса на расстоянии Cj—5...10 мм.
Дисковый нож размещают так, чтобы ось вращения диска на-
ходилась на одной вертикали с носком лемеха предплужника, пло-
скость диска была бы вынесена в сторону непаханого поля от
полевого обреза корпуса на расстояние Сг=15...3О мм, а глубина
подрезания пласта была бы на 2...3 см больше, чем у предплуж-
ника.
Опорным колесом регулируют глубину пахоты. Его положение
влияет на устойчивость хода и тяговое сопротивление плуга. Оп-
тимальной считают такую установку, при которой ось колеса
в продольной плоскости удалена от носка лемеха переднего кор-
пуса на >/з расстояния между носками лемехов переднего и зад-
него корпусов.
Полунавесные и прицепные плуги отличаются от навесных ко-
личеством и размещением колес. Прицепные плуги оборудованы
тремя колесами: полевым, бороздным и задним. Полевое и бо-
роздное колеса, как правило, одинакового диаметра 650...800 мм,
заднее диаметром 450...500 мм устанавливают с наклоном 70...80°
к горизонту.
Бороздное колесо устанавливают на расстоянии 3...4 см от
стенки борозды предыдущего прохода плуга, возможно ближе к
переднему корпусу, но с таким расчетом, чтобы оно не мешало
отваливанию пласта. Заднее колесо устанавливают за последним
корпусом плуга на таком расстоянии от него, чтобы при переводе
плуга в транспортное положение
вой доски. Полунавесные плуги
колесами: задним бороздным и
опорного колеса такое же, как и
Рис. 97. Схема культиватора:
7 — стойка с рабочим органом; 2 — нажим-
ные пружины; 3 — навесное устройство;
4 — винт для перемещения колес относи-
тельно рамы; 5 — колесо.
оно не задевало за конец поле-
снабжают, как правило, двумя
опорным полевым. Назначение
у навесного плуга, а заднего —
такое же, как у прицепного
плуга. В продольной плоско-
сти ось опорного колеса уста-
навливают между первым и
вторым корпусами.
Культиваторы. Если лапы
культиватора расположить на
небольшом расстоянии одна от
другой, то это приведет к за-
биванию промежутков между
ними растительными остатка-
ми и комками почвы. Для уве-
личения расстояния между
смежными лапами в ряду на
паровых культиваторах приня-
та двух- или трехрядная рас-
становка лап на раме. Это по-
зволяет в 2 ... 3 раза увели-
чить расстояние между смеж-
122
a
Рис. 98. Размещение лап культиватора:
а — парового; б — пропашного — трехрядное; в — пропашного — двухрядное.
ними лапами в ряду по сравнению с расстоянием между их сле-
дами. При этом односторонние и стрельчатые полольные и уни-
версальные лапы для полного подрезания сорняков устанавлива-
ют с перекрытием ЛЬ = 50... 70 мм, а рыхлительные лапы — с не-
дорезом с учетом распространения зоны деформации почвы на все
пространство между смежными следами лап [см. рис. 54, фор-
мула (39)].
Расстояние Zp (рис. 97) между рядами лап выбирают из усло-
вия предотвращения забивания культиватора растительными ос-
татками и с учетом зоны распространения деформации почвы по>
ходу лапы (см. рис. 54). При этом Zp должно быть больше, чем
распространение деформации почвы по ходу лапы L (38). Обычно
/р принимают в пределах 350...550 мм. Для выравнивания нагруз-
ки на лапы переднего и заднего рядов, как правило, во втором
ряду устанавливают лапы большей ширины захвата, чем в пер-
вом, т. е. b2>^i (рис. 98,а).
В пропашных культиваторах лапы на раме размещают с уче-
том ширины междурядий S и защитной зоны е (рис. 98, бив).
Ширина междурядья определяется свойствами культуры и зоной
ее зсзделыззния. Размер защитной зоны зависит от развития кор-
незсй системы культурных растений, типа рабочих органов и глу-
бины обработки (табл. 1).
ТАБЛИЦА!
Ширина защитной зоны при культивации
Глубина обработки, см Ширина защитной зоны, см
односторонние лапы стрельчатые лапы рыхлительные лапы подкормочные лапы
4 6...8
6 8...9 8. ..10 — —
8 9...И 10...12 10...13 —
10 — 12.. .14 12...15 12...15
12 — 14...16 14...17 15...18
14 — — 16...19 17...20
16 — — 18...22 19...22
20 — — 22...25 23...25
123<
Размещение лап может быть как двухрядным (рис. 98, в), так
и трехрядным (рис. 98,6). Когда <в одном междурядье располага-
ются стрельчатые лапы и бритвы, то стрельчатые лапы устанав-
ливают впереди бритв. Такое размещение дает более равномер-
ную глубину и ровную поверхность взрыхленного междурядья.
Подкормочные ножи устанавливают в первом ряду, а пололь-
ные лапы — во втором. Чтобы предотвратить засыпание растений
почвой, особенно на повышенных скоростях, устанавливают за-
щитные диски и щитки.
Ширина захвата лап (рис. 98) может быть выбрана, исходя из
следующих соображений:
при трехрядном размещении
61+26а=5+2(А&—е); (79)
при двухрядном размещении
61+62=S+(A&—2е). (8®)
Как правило, ширина захвата культиватора должна равняться
ширине захвата сеялки, используемой на посеве. Тогда на край-
них секциях, предназначенных для обработки стыковых междуря-
дий, монтируют 'неполный комплект (на одну лапу меньше).
Колеса размещают под рамой или впереди рамы. Установка
колес перед рамой отрицательно влияет на равномерность глу-
бины хода лап, особенно последнего ряда. При размещении под
рамой берут колеса малого диаметра, что приводит к образова-
нию глубокой колеи и увеличению тягового сопротивления куль-
тиватора. В пропашных культиваторах колеса размещают так,
чтобы продольные оси их симметрии совпадали с осями между-
рядий и расстояние от края обода до оси рядка было не меньше
15...17 см.
Зубовые бороны. Для равномерной обработки почвы зубья бо-
рон необходимо располагать так, чтобы каждый зуб проводил
свою самостоятельную бороздку и чтобы расстояние между сосед-
ними бороздками было одинаковым. Одновременно, чтобы умень-
шить вероятность забивания бороны глыбами и растительными
остатками, зубья должны располагаться возможно дальше один от
другого. Для устойчивого хода бороны необходимо, чтобы попе-
речные силы реакции почвы были одинаковыми с обеих сторон
каждого зуба. Это достигается тогда, когда с обеих сторон зуба
находится нетронутая почва или когда зуб проводит свою бороз-
ду между бороздами, расположенными на одинаковом расстоянии
от него.
Этим требованиям наиболее полно удовлетворяет размещение
зубьев по разверткам многоходового винта (рис. 99). Пусть АВ —
развертка винтовой линии на плоскость. Тогда шаг винта t—
=АВ cos а, где а — угол наклона винтовой линии к образующим
цилиндра. С другой стороны, в многоходовом винте t=kb, где k—
124
a
Рис. 99. Размещение зубьев на звене бороны:
а — в точках пересечения разверток винтовых линий с поперечными планками; б — в точ-
ках пересечения разверток винтовых линий прямого и обратного направлений.
число ходов, b — смещение развернутых винтовых линий одна от-
носительно другой.
Через точки пересечения 'разверток винтовых линий с образу-
ющими цилиндра, расположенными на равном расстоянии одна от
другой (рис. 99,а), можно провести наклонные линии CD и рас-
сматривать их как развертки винтовых линий обратного направ-
ления с числом ходов ki и шагом Л.
При построении зубового поля пользуются двумя различными
методами: зубья размещают в точках пересечения разверток вин-
товых линий с образующими цилиндра (поперечными планками),
расположенными на одинаковом расстоянии одна от другой; зубья
размещают в точках пересечения разверток винтовых линий пря-
мого и обратного направления.
В первом слччае получают широко распространенную борону
«Зигзаг», состоящую из продольных и поперечных планок, соеди-
ненных между собой зубьями, вставленными в отверстия в местах
их пересечения. Продольные планки намечают по разверткам ос-
новного и дополнительного (обратного) винтов, отчего они имеют
зигзагообразную форму; поперечные планки — прямолинейны.
Каждый зуб проделывает свою отдельную бороздку в том случае,
когда числа М и k взаимно простые, т. е. не имеют общего мно-
жителя. В существующих конструкциях, как правило, М—5, a k—
= 3. Так как M=k-^-klt то /ji=2.
Во втором случае планки прямолинейны и наложены одна на
другую по разверткам прямой и обратной винтовых линий. В пе-
редней и задней частях звена все планки связаны поперечными
полосами. По такой схеме изготавливают современные тяжелые
и средние скоростные зубовые бороны.
125
Практикой подтверждены следующие рациональные парамет-
ры зубового поля (табл. 2).
ТАБЛИЦА 2
Параметры размещения зубьев борон
Бороны Междурядье (а), мм Расстояние между зубьями в ряду (Ь), мм Расстояние между рядами зубьев (с), мм Глубина хода зубьев, мм
Легкие 25...35 150...200 200...300 25...35
Средние 40...55 200...250 250...350 40...55
Тяжелые 50...75 250...400 300...450 75...125
Число междурядий на отрезке b (рис. 99) равно числу попе-
речных планок (рядов зубьев), следовательно Ь—Ма.
Каждая зубовая борона состоит, как правило, из трех одина-
ковых звеньев, соединенных с общей вагой и между собой цепоч-
ками.
Дисковые плуги, бороны и лущильники. Особенность дисковых
плугов — индивидуальная система крепления дисков, которые
устанавливают под углом (углом атаки) 40...45° к направлению
движения и под углом 15...250 к вертикали на отдельных осях (ва-
лах), вращающихся в конических или шариковых подшипниках.
Такая установка позволяет добиться не только вращательного дви-
жения дисков, но и определенного оборота пласта. Расстояние
между дисками примерно такое же, как и между лемешными кор-
пусами, т. е. примерно 600 мм. Расстояние между дисками и углы
их установки, как правило, регулируют. Перед дисками зачастую
устанавливают стойки — рыхлители, которые не только рыхлят
почву, но и одновременно выполняют роль полевых досок и спо-
собствуют хорошему заглублению дисков даже на плотных поч-
вах. Некоторые зарубежные фирмы выпускают дисковые плуги
для гладкой вспашки. Для этого стойки дисков прикрепляют к ра-
ме шарнирно и поворачивают при изменении направления движе-
ния.
В лущильниках и боронах в отличие от плугов диски собирают
в батареи, т. е. насаживают на квадратную ось, чередуя с распор-
ными катушками, и стягивают гайкой. Расстояние b между сосед-
ними дисками определяют, исходя из двух условий: устранения
вероятности заклинивания пласта и отдельных глыб почвы между
дисками, что достигается при Ь^1,5а, где а — глубина обработки
почвы; обеспечения допускаемой высоты гребней h на дне бороз-
ды (для плугов Л=С0,4а, лущильников й 0,5 а).
На высоту гребней h, кроме расстояния Ь, влияет диаметр ди-
ска D и угол атаки 6 — см. формулу (58). Так как для борон угол
атаки 6 принимают меньше, чем для лущильников, то для соблю-
дения условия h<Za требуется чрезмерное сближение дисков, что
привело бы к нарушению первого условия. Поэтому бороны дела-
ют двухследными, смещая диски задних батарей по отношению
126
Рис. 100. Схемы соединения дисковых батарей:
а и б — лущильников; в и г —борон.
к передним на расстояние b/2 cos 6. В существующих орудиях рас-
стояния между дисками принимают: для лущильников 170...250 мм;
для полевых борон 165... 180 мм; для тяжелых болотных борон
230...280 мм; углы атаки: для лущильников 10...350 с регулировкой
через каждые 5°; для борон 10...250.
К основной раме батареи присоединяют шарнирно. Между со-
бой батареи соединяют по различным схемам (рис. 100). Лущиль-
ники, как правило, выполняют односледными (рис. 100, а и б), бо-
роны— двухследными (рис. 100, виг). Несимметричная двух-
следная схема (рис. 100, г) используется для соединения садовых
борон, так как позволяет смещать линию тяги в сторону и при-
ближать борону к деревьям.
Глубину хода дисков регулируют с помощью балластных гру-
зов, а в гидрофицированных орудиях — с помощью гидравличе-
ских пружинно-нажимных механизмов, а также изменением высо-
ты крепления рамок батарей на понизителях (чем ниже, тем
глубже). При изменении угла атаки изменяется не только глуби-
на обработки, но и степень крошения почвы и высота гребней.
Прицепные и полунавесные орудия опираются на колеса, пре-
имущественно пневматические. Различают колеса основной рамы
(транспортные) и колеса брусьев. Последние выполняют, как пра-
вило, самоустанавливающимися.
Фрезы и прореживатели. Рабочие органы фрез — ножи разме-
щают разномерно по окружности дисков. Количество ножей на ди-
ске з различных по назначению фрезах различно и колеблется от
4 до 16.
Диски с ножами собирают во фрезерные барабаны. Фрезерный
барабан обычно состоит из чередующихся ведущих и ведомых ди-
сков. сжатых пружинами. Ножи закрепляют на ведомых дисках.
Вращающий момент передается от ведущих дисков к ведомым че-
рез фрикционные накладки, благодаря чему при встрече ножей
с препятствиями (камни, пни и т. п.) происходит проскальзывание
дисков и исключается поломка рабочих органов.
Диаметры фрезерных барабанов колеблются от 350 до 1060 мм.
Наименьший удельный расход энергии на фрезерование получают
при диаметре барабана 380...480 мм. Крайние диски (секции) фре-
зерных барабанов потребляют энергии на 50...60% больше, чем
средние. Поэтому с увеличением числа секций расход энергии, от-
127
несенный к одной секции, уменьшается. При увеличении числа сек-
ций с трех до девяти* расход энергии, отнесенный к одной сек-
ции, уменьшается на 25%. Следовательно, с точки зрения расхода
энергии экономнее фрезы с большей шириной захвата.
Расстояние между секциями зависит от типа ножей. При боль-
шом расстоянии почва не полностью обрабатывается, а при малом
увеличивается число одновременно работающих ножей и удельный
расход энергии. Это расстояние обычно принимают для секций
с прямыми ножами 100...125 мм, изогнутыми — до 180 мм. Бара-
бан закрывают кожухом, сзади кожуха шарнирно присоединяют
грабли из прутьев, о которые ударяются и дополнительно измель-
чаются крупные комки почвы. Колеса располагают по бокам фре-
зерного барабана. Глубину обработки почвы регулируют, изменяя
положение опорных колес относительно фрезерного барабана, для
чего колеса располагают на коленчатой оси.
Ножи прореживателей размещают равномерно по окружности
в обоймах. Количество ножей в обойме можно изменять от 6 до 18.
Обойма с ножами диаметром 480 или 520 мм насаживается на
вал секции, который приводится от опорно-приводных колес через
конический редуктор. Каждая секция снабжена опорным пневма-
тическим колесом. Изменяя положение этого колеса, регулируют
глубину обработки почвы. Расстояние между соседними секциями
зависит от ширины междурядий посадок и составляет 450
и 600 мм. Опорно-приводные колеса устанавливают, как правило,
между двумя крайними секциями.
Катки. Гладкие, кольчатые и кольчато-зубчатые катки, как
правило, составляют из трех барабанов, один из которых — перед-
ний располагают по линии тяги, а два других — сбоку и сзади на
таком расстоянии, чтобы при поворотах не было наездов одного
барабана на другой. В некоторых случаях гладкий каток выпол-
няют двухсекционным, по три барабана в каждой. Одна из секций
такого катка имеет два барабана впереди и один сзади, а дру-
гая один впереди и два сзади.
Комбинированные машины (орудия). Многократные проходы
тракторов и сельскохозяйственных машин при выполнении не-
скольких операций неизбежно приводят к уплотнению и распыле-
нию почвы, разрушению ее естественного плодородия, особенно
в зонах недостаточного увлажнения и на легких почвах. Это вы-
звало необходимость применять комбинированные почвообраба-
тывающие машины, выполняющие за один проход несколько опе-
раций, что позволяет уменьшить вредное воздействие проходов
тракторов и сельскохозяйственных машин на почву, резко сокра-
тить сроки проведения операций, повысить производительность
труда и снизить производственные затраты.
Комбинированные почвообрабатывающие машины содержат
набор рабочих органов для одновременного выполнения тех опе-
* По данным кацд. техн, наук И. М. Панова.— Прим, автора.
128
Рис. 101. Схема комбинированного прицепного почвообрабатывающего орудия-
агрегата (РВК):
1 и 3 — пружинные рыхлительные лапы; 2— разреженный комкодробящий каток; 4 — вы-
равнивающий брус; 5 — кольчато-шпоровый каток.
раций, которые могут быть совмещены во времени без нарушения
агротехнических требований.
В машинах для основной обработки почвы используют рабо-
чие органы в следующих сочетаниях: лемешно-отвальные корпу-
са, волокуша, каток-комкодробитель (пахотный комбинированный
агрегат — ПКА); укороченный лемешно-отвальный корпус, актив-
ный ротор с вертикальной осью вращения (плуг с комбинирован-
ными рабочими органами); рыхлительные лапы, ножевой барабан
(ротор) с горизонтальной осью вращения, решетка (комбиниро-
ванная машина для обработки почвы — АК.ПР); дисковые бата-
реи, плоскорезы, борона-волокуша, кольчато-шпоровый каток (ком-
бинированный почвообрабатывающий агрегат — АКП); дисковые
батареи, плоскорезы, дробитель активного действия, кольчато-шпо-
ровый каток (универсальный комбинированный почвообрабаты-
вающий агрегат — УКПА).
В машинах для предпосевной обработки почвы применяют ра-
бочие органы в следующих комбинациях: пружинные рыхлитель-
ные лапы, выравниватель, катки (РВК); игольчатая ротационная
мотыга, выравнивающая доска, кольчато-зубчатый каток (вырав-
ниватель-измельчитель почвы — ВИП); бороздообразующие кор-
пуса, фрезерные рыхлительные секции, приглаживающий лист
(универсальный грядоделатель — УГН); лапы-окучники, пропаш-
ная фреза (культиватор-гребнеобразователь фрезерный — КГФ).
На рисунке 101 изображено комбинированное орудие для пред-
посевной обработки почвы — РВК- За один проход оно рыхлит
почву пружинными рыхлительными лапами /, разрушает комки
и глыбы разреженным кольчато-шпоровым катком 2, рыхлит поч-
ву за катками рыхлительными лапами второго ряда 3, выравнива-
9—421
129
ет почву брусом 4 и прикатывает ее кольчато-шпоровым кат-
ком 5. Все рабочие органы монтируют на общей раме. С помощью
гидравлического механизма регулируют глубину рыхления почвы
и поднимают (опускают) рабочие органы.
Рабочие органы в комбинированных машинах и орудиях раз-
мещают в соответствии с соображениями, предложенными выше
для почвообрабатывающих машин и орудий с однотипными рабо-
чими органами.
§ 4. Подъемно-установочные механизмы
Общие сведения. Подъемно-установочные механизмы служат
для перевода прицепных и полунавесных почвообрабатывающих
машин и орудий из рабочего положения в транспортное и обрат-
но, а также для регулирования глубины обработки почвы. Все их
можно разделить на две группы: механизмы, поворачивающие
полуоси колес, и механизмы, действующие нажимной пружиной на
штангу. Механизмы первой группы устанавливают в машинах и
орудиях с жестким и многошарнирным креплением рабочих орга-
нов, второй группы — с одношарннрным креплением.
Прицепные плуги оснащены механизмами полевого, бороздного
и заднего колес, а также механизмом связи полевого колеса с бо-
роздным и с задним колесами. Каждый из этих механизмов пред-
ставляет собой шарнирный четырехзвенник, в котором различают
ведущее, два ведомых и одно опорное звенья. В системе четырех-
звенников ведущими являются механизмы, связанные с полевым
колесом.
Навесные плуги переводят из рабочего положения в транспорт-
ное с помощью навесной системы трактора, которая шарнирно
соединена с подвеской плуга (см. рис. 93). Механизм навески
трактора представляет собой шарнирный четырехзвенник DMGF.
Он приводится в действие от гидроцилиндра трактора через меха-
низм CDEK.. Во время работы, как правило (в механизмах без
силовой связи с гидросистемой трактора), распределитель уста-
новлен в положение «Плавающее», и глубина хода орудия опре-
деляется установкой опорного колеса (колес). Глубина вспашки
регулируется перемещением опорного колеса (колес) плуга отно-
сительно рамы с помощью винтового механизма.
Полунавесные плуги в передней части, как и навесные, соеди-
нены с навесной системой трактора, а в задней опираются на зад-
нее колесо. Колено полуоси заднего колеса соединено с рамой
плуга шарнирно, с помощью параллелограммного механизма. При
переводе плуга из рабочего положения в транспортное передняя
его часть поднимается навесной системой трактора, как у навес-
ного плуга, а задняя — подкатыванием заднего колеса с помощью
специального выносного гидроцилиндра, поворачивающего парал-
лелограммный механизм. Глубина пахоты регулируется в перед-
ней части перемещением опорного нолеса с помощью винтового
130
механизма, как у навесных
плугов, а в задней — уста-
новкой заднего колеса с по-
мощью регулировочного
болта, как у прицепных плу-
гов.
Оборотный плуг снабжен
поворотным механизмом
(рис. 102), состоящим из
гидроцилиндра 1, зубчатого
сектора 4 и цилиндрической
шестерни 5. Корпус гидро-
цилиндра 1 шарнирно сое-
динен с механизмом подвес-
ки плуга, а головка штока
надета на палец 2 секто-
ра 4. Зубчатый сектор 4
шарнирно посажен на осьЗ,
Рис. 102. Принципиальная схема меха-
низма поворота оборотного плуга (гид-
роцилиндр и передача для наглядности
повернуты на 90° по часовой стрелке):
1 — гидроцилиндр; 2 — палец; 3 — ось зуб-
чатого сектора; 4 — зубчатый сектор; 5 — ци-
линдрическая шестерня; 6 — ось рамы плуга;
7 — правоотваливающий корпус; 8 — левоот-
валивающнй корпус; 9 — опорное колесо.
закрепленную на кронштейне подвески плуга, и входит в заце-
пление с цилиндрической шестерней 5, жестко закрепленной на
переднем конце оси рамы плуга 6, пропущенной через отверстие
в кронштейне подвески.
При подаче масла в ту или иную полость гидроцилиндра шток
поворачивает сектор, вращение от сектора через цилиндрическую
шестерню передается раме плуга, которая, поворачиваясь, вводит
в работу право- или левооборачнвающие корпуса. Глубина обра-
ботки почвы регулируется изменением положения опорного коле-
са 9 относительно рамы плуга при помощи регулировочных болтов.
Почвообрабатывающие машины и орудия с одношарнирным
креплением рабочих органов снабжены механизмом (см. рис.
95, б), состоящим из двухплечего рычага 5, ползуна 10 и штанги 7
с пружиной 6.
В рзбечем изложен::;: рычаг, действуя па пружину, заглубляет
ра';чи* :р.-=н. Глубина хода рабочего органа зависит от сжатия
пружины, которое изменяется различными способами: поворотом
рычага 5 винтовым механизмом (групповая регулировка), пере-
становкой М-образного шплинта d по отверстиям штанги (инди-
видуальная регулировка). При заданной глубине хода рабочего
органа между упором штанги и ползуном должен быть зазор AS =
= 6...7 см, что позволяет копировать неровности поля. Выглубля-
ются рабочие органы при повороте рычага 5 против хода часовой
стрелки. Рычаг перемещает вверх ползун, а он поворачивает пово-
док 8 против часовой стрелки и поднимает рабочий орган 3.
Почвообрабатывающие машины и орудия с параллелограммным
креплением рабочих органов (см. рис. 95,в) переводят из рабоче-
го в транспортное положение и обратно с помощью навесного ме-
ханизма трактора, а изменяют глубину обработки подъемом или
опусканием рабочих органов относительно опорных колес 9.
9
131
§ 5. Предохранительные механизмы и устройства
В целях предупреждения поломок рабочих органов почвообра-
батывающие машины и орудия снабжают предохранительными
устройствами,- Применяемые предохранители можно разделить на
две основные группы: одностороннего (неавтоматического) и дву-
стороннего (автоматического) действия.
Предохранители одностороннего действия, в свою очередь, мож-
но разделить на два типа: групповые, выключающие из работы
все рабочие органы (машину в целом) при встрече с препятстви-
ем одного из них, и индивидуальные, выключающие из работы
лишь один рабочий орган — тот, который встретился с препятст-
вием.
Групповые предохранители используют на машинах с неболь-
шим числом рабочих органов, когда возросшее сопротивление на
одном из них заметно влияет на тяговое сопротивление всей ма-
шины. Наибольшее распространение получили фрикционно-штиф-
товые, штифтовые и пружинные предохранители.
Фрикционно-штифтовой групповой предохрани-
тель (рис. 103, а) монтируют на прицепе машины или орудия.
Он состоит из планки 1, соединенной с прицепом трактора, пла-
нок 2 и 3, входящих в прицепное устройство почвообрабатываю-
щей машины, стяжных болтов 4 и штифта 5. Планку 1 вставля-
ют между планками 2 и 3 и затягивают болтами 4, одновременно
с этим все планки скрепляют штифтом 5. Предохранитель срабо-
тает в том случае, если сопротивление машины превысит силы
трения между планками и сопротивление срезу штифта. Недоста-
ток таких предохранителей — нестабильность усилия срабатыва-
ния, так как это усилие зависит от степени затяжки болтов, задан-
ное значение которой трудно получить, особенно в полевых усло-
виях.
Пр ужинный групповой предохранитель (рис.
103,6) состоит из крюка 6 с хвостовиком А, тягового стержня 9
Рис. 103. Предохранители одностороннего
действия:
а — групповой фрикционно-штифтовой; б — груп-
повой пружинный; в — индивидуальный штиф-
товой; 1, 2 и 3 —- планки; 4 — стяжные болты;
5 — штифт; 6 — крюк; 7— муфта; 8— скоба;
9 — стержень; 10 — пружина; 11 — предохрани-
тельный штифт; 12 — верхняя часть стойки; 13 —
штырь; 14 — нижняя часть стойки.
132
с г: ужиной 10 и направляющей муфты 7, установленной «а ско-
бе При опасном сопротивлении пружина сжимается и хвостовик
А крюка 6 выходит из муфты 7. В этот момент 'крюк поворачи-
вается относительно оси В, упряжная серьга выпадает из крюка
и машина отъединяется от трактора. Пружинные предохранители
срабатывают при более стабильном сопротивлении. Кроме своей
г-снэзной роли, они выполняют еще и роль амортизатора (в ра-
боте).
Штифтовой индивидуальный предохранитель
(рис. 103, в) представляет собой штифт 11, вставленный в совме-
щенные отверстия верхней 12 и нижней 14 частей стойки, соеди-
ненных между собой шарнирно штырем 13. При наезде па камень
штифт срезается, а рабочий орган, повернувшись относительно
штыря 13, отклоняется назад. После срабатывания предохраните-
ля агрегат останавливают, машину переводят в транспортное по-
ложение, поворачивают рабочий орган и вставляют другой штифт.
Таким образом, при срабатывании предохранителей односторон-
него действия затрачивается немало времени, прежде чем агре-
гат будет снова включен в работу, поэтому эти предохранители
целесообразно применять лишь на почвах, слабо засоренных кам-
нями.
Предохранители двухстороннего действия (автоматические) по
характеру действия подразделяют на групповые, индивидуально-
групповые и индивидуальные.
Групповые предохранители автоматического действия
основаны на разных принципах действия: выглубление всего плу-
га при возрастании тягового сопротивления с помощью гидроси-
стемы трактора при силовом способе регулирования глубины хода,
выключение муфты сцепления трактора, включение упругого эле-
мента в верхнюю тягу механизма навески и т. п. Эти предохрани-
тели не нашли широкого практического применения, так как плуги
с малым числом корпусов, имея относительно небольшую массу,
сами легко выглубляются при встрече с препятствием.
Индивидуально-групповые предохранители по
принципу действия подразделяют на вальковые (рычажные), валь-
ково-тросовые и гидравлические. Они выглубляют лишь один ра-
бочий орган — тот, который встретился с препятствием, но одно-
временно изменяют режим работы всех других рабочих органов
машины (например, кратковременно увеличивают поступательную
скорость — рычажные, глубину хода — тросовые предохранители).
Выглубленный рабочий орган после прохода над препятствием
возвращается в рабочее положение вследствие воздействия на не-
го через соответствующие механизмы связи тягового сопротивле-
ния остальных корпусов.
Наибольшее распространение из индивидуально-групповых пре-
дохранителей получили рычажные (рис. 104). Каждый корпус
плуга при таком предохранителе шарнирным многозвенником
связан с толкаюшей штангой FG. Шарнирный многозвенник кор-
133
пуса представляет собой ряд кинематических цепей. Так,
например, кинематическая цепь второго корпуса есть многозвен-
ник ABCDEFGR. Коленчатая ось КК этого многозвенника соеди-
няется с нижними тягами 1 и 2 механизма навески трактора.
Верхняя тяга 3 механизма навески связана с шарнирным трех-
звенником MNO. Звено MN этого трехзвенника составное, в рабо-
чем положении плуга оно провисает.
Принцип действия предохранителя сводится к следующему.
При наезде корпуса на препятствие его ось поворачивается отно-
сительно шарнира А. Поворот оси вызывает перемещение звеньев
всей кинематической цепи (направление перемещения звеньев на
рисунке показано стрелками). При этом ось КК поворачивается в
подшипниках по ходу часовой стрелки. Поворот оси приводит
к тому, что при движении трактора весь плуг перемещается впе-
ред, поворачиваясь относительно шарниров Р нижних тяг механиз-
ма навески. Звено MN при этом складывается в шарнире R. Таким
образом, корпус, наехавший на препятствие, поворачивается от-
носительно шарнира А рамы и перемещается вместе с рамой. При
срабатывании одного корпуса остальные продолжают работать
нормально, поэтому огрехи получаются минимальными.
Однако рычажные предохранительные механизмы усложняют
и утяжеляют машину. Применение их целесообразно только на
почвах с часто встречающимися препятствиями.
Индивидуальные предохранители основаны на
принципе накопления энергии при отклонении рабочего органа,
встретившегося с препятствием, и использования этой энергии для
возвращения рабочего органа в прежнее положение после прохода
препятствия. В качестве аккумуляторов энергии в предохраните-
лях этого типа служат пружина, газ, специальная сжимаемая
жидкость или избыток давления в гидросистеме трактора. Инди-
видуальные автоматические предохранители подразделяют на две
группы: автономные и с общим аккумулятором. Автономные в за-
Рис. 104. Схема автоматического рычажного (валькового) предохранителя плу-
-а для каменистых почв.
134
Рис. 105. Индивидуальные предо-
хранители двухстороннего дейст-
вия и их силовая характеристика:
а — автономный пружинный; б — с
общим гндропневматнческнм аккуму-
лятором: в —силовая характеристика.
висимости от типа аккумулятора могут быть пружинными, гидро-
пружинными, гидравлическими и гидропневматическими, а инди-
видуальные с общим аккумулятором — гидропружинными, гидро-
насосными и гидропневматическими. Наибольшее распространение
из автономных получили пружинные предохранители, а из предо-
хранителей с общим аккумулятором — гидропневматические.
Пружинные предохранители применяются на плугах и культи-
ваторах и могут иметь различное конструктивное исполнение. На
паровых культиваторах, например, применяются пружинные пре-
дохранители, в которых пружина соединена с четырехзвенным ме-
ханизмом ABCD (рис. 105,а). Когда лапа в рабочем положении,
звено (обойма) 3 прижимается к эксцентриковой муфте 4. При
наезде на препятствие сила сопротивления поворачивает стойку 1
относительно шарнира А. При этом пружина растягивается,
а обойма 3 отходит от муфты 4. Когда препятствие будет пройде-
но, пружина возвратит лапу в рабочее положение. Расстояние от
оси эксцентрика до обоймы при различных положениях эксцент-
рика различно, а от него зависит усилие срабатывания предохра-
нителя. При работе на тяжелых почвах эксцентрик должен быть
обращен к обойме гранью с одной или двумя метками, на сред-
них — с тремя или четырьмя и на легких — с пятью или шестью
метками.
Американские фирмы «Оливер» и «Джон-Дир», шведская «Ове-
румз Брук» и многие другие широко применяют на плугах инди-
видуальные предохранители с общим аккумулятором гидропнев-
матического действия (рис. 105,6). В таком устройстве гидро-
цилиндры одностороннего действия 1 маслопроводом 2 соединены
135
с гидропневматическим аккумулятором 4. Поршень -или диафрагма
5 отделяет в аккумуляторе масло от сжатого инертного газа (азот,
аргон), находящегося под давлением от 7,5 до 12 МПа. Давление
газа контролирует манометр 3. Через вентиль 6 и обратный кла-
пан 7 маслопровод 2 соединяется с гидросистемой трактора, что
необходимо для восстановления давления в системе в случае
утечки из нее масла. При встрече с препятствием корпус откло-
няется назад, при этом поршень выдавливает масло из цилиндра
и перегоняет по маслопроводу в аккумулятор, сжимая газ, рас-
положенный над диафрагмой. После прохода препятствия нахо-
дящийся под избыточным давлением газ перегоняет масло в тот
же цилиндр, возвращая его в рабочее положение.
К силовым характеристикам таких предохранителей предъяв-
ляются следующие требования: усилие по мере поворота корпуса
не должно возрастать, но .вместе с тем должно быть достаточным
для быстрого возвращения рабочего органа в рабочее положение;
поворот корпуса не должен изменять положение рамы, т. е. нару-
шать устойчивость хода машины по глубине обработки. Таким
образом, кривая 1 (рис. 105, в) представляет собой неудовлетво-
рительную характеристику, так как расчет деталей на прочность
придется вести не по начальному, а по конечному усилию сраба-
тывания, что утяжеляет конструкцию. Силовая характеристика по
прямой 2 приемлема в том случае, если усилие срабатывания
не превышает веса машины, так как в противном случае нару-
шится устойчивость ее хода по глубине. Наиболее рациональна си-
ловая характеристика, определяемая кривой 3, когда усилие по
мере поворота рабочего органа убывает, но все время остается вы-
ше, чем технологическое усилие при заглублении рабочего органа
(кривая 4).
Некоторые зарубежные фирмы производят плуги, на которые
можно устанавливать без дополнительных переделок предохрани-
тели различных типов в зависимости от степени засоренности
почвы камнями: наиболее дешевые неавтоматические — для слабо
засоренных почв, простые автоматические, например резиномеха-
нические, — для средне засоренных почв и наиболее дорогие, гид-
ропневматические — для сильно засоренных почв.
Г л а в а IX
СИЛЫ, ДЕЙСТВУЮЩИЕ НА ПОЧВООБРАБАТЫВАЮЩИЕ
МАШИНЫ И ОРУДИЯ, И УСЛОВИЯ ИХ РАВНОВЕСИЯ
Изучение условий равновесия почвообрабатывающих машин
и орудий имеет большое практическое значение, так как с усло-
виями равновесия непосредственно связана устойчивость их хода.
При нарушении устойчивости в вертикальной плоскости изме-
няется глубина обработки, а в горизонтальной — ширина захвата,
являющиеся важными критериями качества работы. Неравномер-
136
н:сть глубины обработки служит непосредственной 'причиной сни-
жения урожая (см. рис. 49). Непостоянство ширины захвата, свя-
занное с перекосами машин и орудий в горизонтальной плоскости,
искажает геометрические параметры их рабочих органов и, следо-
вательно, ухудшает показатели работы, что в конечном счете так-
же приводит к снижению урожая.
Устойчивость хода почвообрабатывающих машин и орудий за-
висит от соотношения численных значений и направлений действу-
ющих на них сил, к числу которых относятся: сила тяги, сила тя-
жести, сопротивление почвы воздействию на нее рабочих орга-
нов, силы трения и т. п. Среди этих сил особое место занимает
горизонтальная составляющая силы тяги, совпадающая с направ-
лением движения. Это связано с тем, что равная ей по значению
и противоположная по направлению сила, получившая название
тягового сопротивления машины (орудия), является обобщенным
показателем всех сопротивлений, действующих на машину (ору-
дие), служит критерием энергетической оценки машины (орудия),
может быть легко замерена при линейном динамометрировании
и является основой всей силовой характеристики, так как по ее
известному значению могут быть определены все остальные по-
казатели силовой характеристики (Ry, Rz или Rxy, Rxz, Ryz).
§ 1. Тяговое сопротивление
Тяговое сопротивление почвообрабатывающей машины или
орудия можно определять двумя способами: опытным путем (ди-
намометрированием); расчетным путем (аналитически).
Особый интерес представляет тяговое сопротивление плуга,
так как пахота — наиболее энергоемкий технологический процесс
в сельскохозяйственном производстве.
Рациональная формула для тягового сопротивления плугов.
Проанализировав работу плуга, академик В. П. Горячкин устано-
вил. что его тяговое сопротивление складывается из сопротивле-
ний трех различных категорий.
К первой категории он отнес сопротивления, пропорциональ-
ные нормальному давлению (силе тяжести): Rx=fP, где f — ко-
?; фициент пропорциональности (сопротивления протаскиванию
плуга в открытой борозде); Р — сила тяжести, Н. К этой кате-
гории сопротивлений В. П. Горячкин отнес: сопротивления трения
корпусов о дно борозды и втулок колес об оси, сопротивление пе-
рекатыванию колес по почве, а всю совокупность этих сопротив-
лений назвал «мертвым сопротивлением».
Ко второй категории были отнесены сопротивления, обуслов-
ленные деформацией почвенного пласта. Согласно общим законам
сопротивления материалов, они пропорциональны площади попе-
речного сечения деформируемого пласта Rz^kabn, где k — удель-
Еос сопротивление почвы (аналогично пределу прочности в со-
противлении материалов), Н/м2, или кПа; а и b — соответственно
137
толщина (глубина пахоты) и ширина пласта, м; п — число корпу-
сов в плуге.
К третьей категории отнесены сопротивления, связанные с со-
общением живой силы (кинетической энергии) частицам пластов.
Аналогично сопротивлению пластины, движущейся в жидкости или
газе, сопротивление корпуса плуга пропорционально площади по-
перечного сечения пласта и квадрату скорости /?3=еа&/ш2, где
v — скорость плуга, м/с; е — коэффициент скоростного сопротивле-
ния, зависящий от параметров (геометрической формы) корпуса
плуга и свойств почвы, Н-с2/м4. Итак, тяговое сопротивление
плуга
Rx=R1-\~R2-\-R3=fP-![-kabn-\~Eabm^. (81)
Эта формула названа рациональной, так как она представлена
рациональным алгебраическим выражением и смысл ее представ-
ляется рациональным с точки зрения механики. Для плуга, рабо-
тающего на традиционной скорости, третий член формулы неве-
лик; первый значительно больше третьего; наибольшее численное
значение имеет второй член.
Удельное сопротивление почвы и удельное сопротивление плу-
га. Трудность обработки оценивается по удельному сопротивле-
нию почвы, которое может быть определено из формулы В. П. Го-
рячкина:
, _ Rx—fP — eabnv2 Q
k~--------abn-----’ <82>
или, если пренебречь скоростным сопротивлением почвы (при ско-
рости до 4...5 км/ч), то
Удельное сопротивление почвы легко определить по формуле
(83), измерив динамометром сначала полное сопротивление плуга
Rx, а затем отдельно мертвое сопротивление fP — путем прота-
скивания плуга в открытой борозде. Удельное сопротивление раз-
личных почв изменяется в широких пределах: от 20 до 130 кПа.
Так как расчет коэффициентов f, k и е для конкретных условий
требует проведения довольно громоздких экспериментов, а ис-
пользование приближенно принятых значений может привести
к большим погрешностям, то в практике эксплуатационных расче-
тов широкое распространение получила упрощенная формула для
определения тягового сопротивления плуга:
Rx=Kabn, (84)
где К — удельное сопротивление плуга, кПа.
Сравнивать плуги по расходу энергии на пахоту можно по
удельному сопротивлению плуга:
K = Rx[abn. (85)
138
Его легко найти практически по формуле (85), измерив дина-
мометром полное сопротивление плуга Rx, а также глубину пахо-
ты а и ширину захвата Ь. Физический смысл удельного сопротив-
ления плуга раскрывается глубже, если числитель и знаменатель
в формуле (85) умножить на v
K==R,v]abnv. (86)
В формуле (86) в числителе — мощность, или секундная рабо-
та, а в знаменателе — секундный объем поднимаемой плугом поч-
вы. Следовательно, удельное сопротивление плуга можно рассмат-
ривать, как расход энергии на обработку (вспашку) единицы объ-
ема почвы.
Нетрудно убедиться, что K>k. Для этого в формулу (85) вме-
сто Rx подставим его значение из формулы (81):
<87>
Таким образом, удельное сопротивление плуга, кроме сопро-
тивления почвы, включает в себя еще мертвое сопротивление и со-
противление отбрасыванию почвы, отнесенные к поперечному се-
чению пласта.
Степень неравномерности сопротивления плуга в зависимости
от числа его корпусов. При расчете по формуле (81) определяют
осредненное значение тягового сопротивления. Фактическое сопро-
тивление ,в процессе работы плуга непрерывно изменяется и явля-
ется случайной функцией пути или времени. Обычно считают, что
в типичных условиях работы кратковременные максимальные пи-
ковые сопротивления примерно в 2 раза превышают средние зна-
чения ТЯГОВОГО сопротивления корпуса плуга, /?xfc(max)~2/?x/;(med)-
Так как пиковая нагрузка на корпус существует очень короткий
промежуток времени (доли секунды), то при нескольких корпусах
в одном плуге, как указывал В. А. Желиговский, вероятность точ-
ного совпадения моментов появления пик одновременно на двух
и более корпусах практически равна нулю. Поэтому при расчетах
следует исходить из того, что кратковременное возрастание со-
противления до двойного значения в каждый момент может воз-
никнуть лишь на каком-либо одном из корпусов плуга.
Бели это условие положить в основу построения графика, вы-
ражающего зависимость неравномерности сопротивления плуга
RXB„ тах^хпл. med 0Т Ч11сла ег0 КОрПуСОВ, ТО ПОЛуЧИМ раВНОСТО-
роннюю гиперболу (рис. 106). Как видим, чем больше корпусов
в плуге, тем меньше неравномерность тягового сопротивления при.
его работе.
Различают высокочастотные колебания тягового сопротивления
(7\^1...2 с) и низкочастотные (7\>1...2 с)*. При этом высоко-
частотные колебания, ка!к правило, преодолеваются инерцией масс
* По данным профессора С. А. Иофинова. — Прим, автора.
139
х пл. max
Рис. 106. Зависимость
неравномерности тя-
гового сопротивления
плуга от числа его
корпусов.
ния сопровождается
машины и на показатели работы трактора
практически не влияют, а низкочастотные
оказывают существенное влияние на пока-
затели работы трактора. При повышении
скорости вспашки происходит смещение
энергетического спектра в сторону высоких
частот, что благоприятно сказывается на
работе трактора, — она становится более
устойчивой.
На неравномерность тягового сопротив-
ления плуга влияют и технологические свой-
ства почвы. На легких и пластичных поч-
вах возрастание сопротивления будет более
плавным, чем на тяжелых, сухих почвах,
где можно ожидать резких возрастаний и
падений сопротивления. Всякое сколько-ни-
будь значительное возрастание сопротивле-
падением поступательной скорости, т. е. отри-
цательным ускорением. При этом масса трактора развивает силу
инерции, которая присоединяется к тяговому усилию. Эти сообра-
жения объясняют, почему для тяжелых почв требуются усиленные
плуги.
Тяговое сопротивление других почвообрабатывающих машин и
орудий. Энергоемкость процесса обработки почвы лущильниками,
боронами, культиваторами и т.п. значительно меньше, чем плу-
гами. Поэтому их тяговое сопротивление определяют, как правило,
ориентировочными расчетами по упрощенной формуле:
(88)
где К — удельное сопротивление машины, кН/м;
В — ширина захвата машины, м.
Удельные сопротивления машин зависят от многих факторов:
механического состава и состояния почвы, глубины обработки, ско-
рости движения и т. п.
Ориентировочные значения удельного сопротивления некото-
рых почвообрабатывающих машин и орудий приведены ниже.
К, кН/м
Бороны зубовые средние............................0,4...0,7
Бороны зубовые тяжелые.......................... . 0,6...0,9
Бороны сетчатые ..................................0,45...0,65
Бороны пружинные..................................1,5...4,0
Бороны луговые с ножевидными зубьями . . . . 1,5...2,3
Бороны дисковые....................................1,9...2,2
Бороны дисковые тяжелые............................4,0...8,0
Лущильники дисковые . . .............1,2...2,6
Лущильники лемешные...............................2,0...4,0
Культиваторы паровые с полольными лапами . . . 1,2...2,4
Культиваторы штанговые . ................1,6. ..2,6
Катки кольчато-шпоровые...........................0,5...0,7
Катки водоналивные гладкие ....................... 1,0...1,2
140
§ 2. Условия равновесия
Общие сведения. Рассмотрение условий равновесия почвообра-
батывающих машин и орудий, ио сути дела, сводится к определе-
нию их опорных реакций в вертикальной и горизонтальной плос-
костях, удовлетворяющих указанным условиям. При этом опорами
почвообрабатывающих машин считают: в вертикальной плоско-
сти •— опорные колеса, в горизонтальной (для несимметричных
машин и орудий)—полевые доски (лемешные плуги), плоские
стойки — ножи (дисковые плуги) и т. п. Так как колеса и полевые
доски имеют одностороннюю связь с почвой, то при соблюдении
условий равновесия реакции опор не должны равняться нулю.
В первом приближении ограничиваются рассмотрением стати-
ческих условий равновесия почвообрабатывающих машин, т. е.
условий их равномерного прямолинейного движения на заданной
глубине обработки. При этом все действующие на машину силы,
в том числе и распределенные силы сопротивления почвы рабочим
органам, представляют сосредоточенными и приложенными в оп-
ределенных точках машины.
Условия равновесия могут быть определены как аналитически,
так и графически. Условия равновесия почвообрабатывающих ма-
шин и орудий в аналитической форме в общем случае представля-
ют собой шесть уравнений действующих сил и моментов. Для рав-
новесия машины необходимо и достаточно, чтобы сумма проекций
действующих сил на каждую из трех координатных осей и сумма
моментов этих сил относительно каждой из этих же осей равня-
лись нулю, т. е.
2^=0, 2^=0, 2mx(F)=0,
2^,(^)=0, 2^(Л=0. (89)
После различного рода преобразований эти уравнения решают
обычными методами относительно опорных реакций. Хотя состав-
ление уравнений равновесия и не вызывает особых затруднений,
но .все же оно довольно трудоемко, а сами уравнения получаются
весьма громоздкими, так как, помимо действующих сил, в них учи-
тываются расстояния (плечи) и тригонометрические функции уг-
лов. Поэтому чаще пользуются графическим способом.
При графическом способе в определенном масштабе строят про-
екции конструктивной схемы машины в одной-двух, а иногда и
трех координатных плоскостях. На схему наносят векторы извест-
ных сил, после чего приступают к построению многоугольников сил
(по одному на каждую координатную плоскость), которое сво-
дится к геометрическому сложению векторов известных сил.
Складывать силы можно в любом порядке, однако последними
должны быть две силы — опорная реакция и равнодействующая
всех сил сопротивления, значения которых неизвестны, но извест-
141
Рис. 107. Схема к определению опорных реакций навесного плу-
га графическим методом.
ны их направления. При этом многоугольник сил должен быть
замкнутым, а равнодействующая всех сил должна проходить че-
рез мгновенный центр вращения машины, если она навесная, или
через точку прицепа, если прицепная. Первое условие — признак
равенства нулю суммы сил, а второе — суммы моментов сил.
В зависимости от того, каким из способов пользуются при со-
ставлении условий равновесия, заданную силовую характеристику
в общем случае целесообразно представлять следующим образом:
сила_тяжести машины Рм, главный вектор сил сопротивления поч-
вы R', главный момент (момент динамы) М' — при аналитическом
способе; сила тяжести машины Рм и силы R'xv, Rxz и Ri'z— при
графическом способе расчета.
Равновесие навесного плуга. Навесной плуг, присоединенный
к гусеничному трактору с помощью трехточечного механизма на-
вески, имеет две степени свободы: поворот в продольно-вертикаль-
ной плоскости XOZ (относительно горизонтальной оси вращения)
и поворот в горизонтальной плоскости XOY (относительно верти-
кальной оси). Следовательно, условия равновесия такого навесно-
го плуга целесообразно рассматривать в двух плоскостях: про-
дольно-вертикальной и горизонтальной.
Воспользуемся графическим методом. Построим (в масштабе)
проекции схемы плуга в продольно-вертикальной и горизонтальной
плоскостях (рис. 107).
142
В продольно-вертикальной плоскости на плуг
действуют следующие силы: сила тяжести плуга Р, реакция почвы
на рабочие поверхности корпусов 2/?Xz, сила трения полевых досок
о стенки борозд 2/?бх, реакция почвы на опорное колесо RK и сила!
тяги Fxz.
Как указывалось выше, с помощью графического 'метода мож-
но определить лишь две силы: опорную реакцию RK и равнодейст-
вующую всех СИЛ сопротивления Rxz (и то при условии, что линии
действия этих сил известны), все остальные силы, т. е. Р, 'LRxz
и должны быть известны или вычислены аналитически.
Массу плуга берут из технической характеристики, если он вы-
пускается серийно, или определяют по относительной массе q, ес-
ли плуг только проектируется. Во втором случае P=;qabn, где
<7=2,2...3,0 т/м2, а и b — расчетные толщина и ширина пласта,
п — число корпусов в плуге.
Для определения силы ~£Rxz сначала по формуле (32) или (33)
рассчитывают тяговое сопротивление корпуса плуга Rx, затем из
соотношения (31) подсчитывают Rz и, наконец, по формуле (27)
определяют модуль силы Rxz, а по формуле (28)— направление
ее действия — угол ф. Принимая допущение, что все корпуса на-
гружены одинаково, определяют равнодействующую реакций поч-
вы на рабочие поверхности корпусов Считают, что
равнодействующая ZRxz приложена к среднему корпусу плуга.
Сила трения полевой доски о стенку 'борозды R(,x зависит от
боковой составляющей силы сопротивления корпуса Ry и коэффи-
циента трения f: Rex=fRy. Так как из соотношения (30) RyfaRxl3,
то, приняв ориентировочно /=0,5, получим R6x~Rx/6. Принимая
допущение, что длины полевых досок всех корпусов одинаковы,
определяют равнодействующую сил трения всех досок S7?6X =
=nRex, считая ее приложенной к полевой доске среднего корпуса
плуга.
Направление реакции почвы на опорное колесо RK можно оп-
ределить по коэффициенту перекатывания ц из соотношения р=
= tgd, пользуясь номограммой (рис. 92), или приближенно, при-
нимая ц, равным 0,1 на плотных и 0,2 на рыхлых почвах, что со-
ответствует 9 и 12° угла б.
Перечисленные силы наносят на проекцию схемы плуга в про-
дольно-вертикальной плоскости. Силу тяжести Р прикладывают
в центре тяжести плуга, реакцию опорного колеса RK — через ось
колеса под углом 6 к вертикали, равнодействующую —
к среднему корпусу на расстоянии а/2 от дна борозды под углом
ф к горизонтали, равнодействующую 2/?бх— посредине полевой
доски среднего корпуса.
Отдельно от схемы плуга строят многоугольник сил. В выбран-
ном масштабе проводят вектор силы Р, из его конца — вектор си-
лы S/?X2. Соединяя начало вектора Р с концом вектора ~ZRxz по-
лучают значение и направление равнодействующей этих сил Ri.
143
На схеме плуга через точку 1 пересечения линий действия сил
Р и проводят прямую, параллельную силе R\, до пересечения
ее с направлением силы в точке 2.
На многоугольнике сил из конца вектора Ri откладывают век-
тор силы Их сложение дает равнодействующую /?2.
На схеме плуга через точку 2 проводят линию, параллельную
силе /?2, до пересечения ее с линией действия силы 7?к в точке 3.
Точка 3 — это точка приложения равнодействующей R'xz всех сил
сопротивления плуга: Р, 1RXZ, ~£Рбх и RK. Она уравновешивается
силой тяги Fxz, которая проходит через точку 3 и мгновенный
центр вращения плуга ль Соединив точки 3 и Л1 прямой, получим
ЛИНИЮ ДеЙСТВИЯ СИЛ Rxz И Fxz.
Значения сил R'xz и Fxz определяют по многоугольнику сил.
Для этого из конца вектора R2 проводят прямую, параллельную
линии действия силы RK, а из начала вектора Р — прямую, парал-
лельную линии Л1—3. Точка их пересечения даст отрезки, которые
в принятом масштабе определят силы и Fxz (Rxz).
Если нужно найти усилия в звеньях механизма навески тракто-
ра (S, то их получают разложением силы Fxz ПО НЗП~
равлениям АВ и CD.
Как видим (рис. 107), силы RK и Rxz зависят от некоторого уг-
ла ₽, образуемого линией действия силы тяги Fxz и вертикалью.
С увеличением угла р реакция /?к возрастает. Сила тяги Fxz ми-
нимальна, когда ее вектор перпендикулярен вектору 7?к. Угол р.
зависит от линии действия силы Fxz, а последняя — от расположе-
ния точки ль Положение же этой точки зависит от расположения
звеньев АВ и ВС и опорного колеса. С увеличением длины звена
ВС, смещением точки А звена АВ вниз, а также с подъемом опор-
ных колес точка Л1 приближается к машине. При этом угол р.
уменьшается и соответственно уменьшается реакция RK. От значе-
ния силы R'xz и угла р зависят и вертикальные составляющие ре-
акций на движители трактора. При агрегатировании плуга с ко-
лесным трактором с увеличением силы R'xz и уменьшением угла р
задние колеса трактора догружаются, а передние разгружаются.
Такое перераспределение целесообразно при работе на влажных
и рыхлых почвах, когда надо уменьшить глубину колеи опорного
колеса машины и снизить буксование ведущих колес трактора.
На изменении положений точки А и точки В механизма наве-
ски по вертикали основан принцип действия так называемых меха-
нических догружателей ведущих колес. Кроме механических догру-
жателей, применяются также и гидравлические. Они способны
плавно изменять давление подпора, а следовательно, и нагрузку
на ведущие колеса трактора.
В горизонтальной плоскости на плуг действуют та-
кие силы: реакция почвы на рабочие поверхности корпусов XRxy,
реакция почвы на опорное колесо RKX, реакция стенок борозд на
полевые доски и сила тяги Fxy.
144
Перечисленные силы наносят на проекцию схемы плуга в го-
ризонтальной плоскости. Силу ZRxy прикладывают к среднему
корпусу на расстоянии 0,5 b от носка и пятки лемеха под углом
т] к направлению движения, определяемым по формуле (28). Си-
ла Rvx представляет собой проекцию силы RK на горизонтальную
плоскость (7?Kx=7?Ksin 6), а сила 27? б— сумму реакций стенок
борозд на полевые доски и приложена к концу полевой доски
среднего корпуса под углом трения <р к нормали.
Построение многоугольника начинают сложением сил
и RKX. На схеме плуга из точки 4 пересечения сил l\RXy и Rкх, ПЭ"
раллельно их равнодействующей Rs, проводят прямую до пересе-
чения с линией действия силы 27?б в точке 5. Точку 5 соединяют
с яг, определяя таким образом линию действия силы тяги Fxy.
В многоугольнике сил через начало и конец силы Rs проводят
линии, параллельные направлениям л2 — 5 и 2/?е на схеме плуга.
Точка их пересечения определит значения сил £/?о и Fxy. Разло-
жив силу Fxy по направлениям АВ, CiD[ и C2D2, получим усилия
S, Ni и N2 в звеньях механизма навески.
Проекции сил Fxz и Fxy на ось X должны быть одинаковы.
В противном случае следует проделать корректировку за счет си-
лы которая была определена ориентировочно.
При агрегатировании навесного плуга с мощными колесными
тракторами (типа Т-150К и К-701), которые всеми колесами пере-
мещаются по поверхности поля, условия равновесия ничем не от-
личаются от рассмотренных. При агрегатировании же с колесны-
ми тракторами класса 9... 14 кН, правые колеса которых движутся
по дну борозды, отличие состоит в том, что нижние звенья меха-
низма навески проектируют на продольно-вертикальную плоскость
как два самостоятельных звена, которые в горизонтальной плоско-
сти образуют с осью X различные углы. В этом случае условия
равновесия рассматривают, как правило, в трех плоскостях, т. е.
к продольно-вертикальной и горизонтальной добавляется попереч-
но-вертикальная.
Равновесие полунавесного плуга. Полунавесные плуги, как
и навесные, соединены с навесной системой трактора, но опира-
ются, как правило, на два колеса, одно из которых (заднее) дви-
жется по дну борозды. Следовательно, они отличаются от навес-
ных дополнительным (задним) колесом. Поэтому условия их рав-
новесия аналогичны условиям равновесия навесных плугов. При
построении многоугольника сил реакции почвы на полевое и зад-
нее колеса представляются в виде суммы 2/?г, полученной по пра-
вилу сложения параллельных сил. Считается целесообразным ра-
венство реакций почвы на переднее (полевое) и заднее (борозд-
ное) колеса плуга.
Равновесие прицепного плуга. Поскольку произвольные переме-
щения прицепного плуга в вертикальной плоскости ограничены
тремя опорными колесами, то считают достаточным рассмотреть
условие его равновесия лишь ® горизонтальной плоскости.
10-424
145
Построим в масштабе схему плуга в горизонтальной плоскости
(рис. 108). Заданными силами являются: реакция почвы на рабо-
чие поверхности корпусов "£ЯхУ, приложенная к среднему корпусу
плуга; реакция почвы на опорные колеса значение и точка
приложения которой определяются по правилу сложения парал-
лельных сил (сопротивления перекатыванию полевого Як, борозд-
ного Як и заднего Як' колес). Подлежат определению: сила
Яху — проекция на плоскость XOY силы тяги F и реакция стенок
борозд на полевые доски 2/?б, приложенная к полевой доске сред-
него корпуса и отклоненная от нормали к ней на угол трения ф.
Сложив графически силы ’ХЯху и X/?кх/ находят их равнодей-
«ствугощую Я. На схеме плуга через точку 1 пересечения линий
действия сил ЪЯху и ^.Якх проводят прямую, параллельную силе
Я, до ее пересечения с направлением силы в точке 2, назы-
ваемой центром сопротивления плуга. На многоугольнике сил из
конца вектора Я проводят прямую, параллельную силе ~£Яб, а из
начала этого же вектора — прямую, параллельную направлению
2—0 на схеме плуга. Точка пересечения этих прямых даст отрез-
ки, которые в принятом масштабе определяют силы 2Яб и Fxy.
Так как положение, прицепа плуга можно регулировать, то не-
обходимо выяснить, как то или иное его положение влияет на си-
лу тяги Fxy. Перенесем на схеме плуга точку прицепа вправо: из
положения 0 в положение О'. В результате этого линия тяги 0'—2
составит с осью ОХ некоторый угол +6. В многоугольнике сил из
начала вектора Я проведем линию, параллельную 0'—2, до пере-
сечения с линией, проведенной из конца того же вектора Я и па-
раллельной силе ИЯб- Как видим, Fxy <Fxy, a S/?r, <S7?6, т. е.
произошло уменьшение силы тяги (тягового сопротивления плу-
га) за счет уменьшения реакции стенок борозд на полевые доски.
Увеличивая угол б до некоторой величины v, можно снизить ре-
акцию стенок борозд на полевые доски до нуля. Однако при этом
движение плуга станет неустойчивым, он будет совершать Змее-
вой ход. Минимальное значение тягового сопротивления будет
146
в том случае^ когда вектор силы Fxy будет перпендикулярен век-
тору силы ХЯб-' Нетрудно установить, что это произойдет тогда,
ногла линия тяги, проведенная из точки прицепа в центр сопро-
тивления плуга, отклонится от направления его движения вправо
на угол, равный углу трения <р.
При смещении точки прицепа влево от положения 0 в поло-
жение 0" линия тяги 0"—2 составляет с осью ОХ угол — 6. Обра-
тившись к многоугольнику сил (рис. 108), видим, что F'xy >Fxy,
a S7?6>S/?6, т. е. тяговое сопротивление увеличилось вследствие
возрастания реакций стенок борозд на полевые доски. Следова-
тельно, такая установка прицепа нерациональна.
Если аналогично проанализировать влияние направления силы
тяги на ее численное значение в продольно-вертикальной плоско-
сти, то окажется, что минимального значения она достигнет при
некотором угле наклона р к горизонту. Графики к выбору опти-
мальных направлений линии тяги в горизонтальной и продольно-
вертикальной плоскостях изображены на рисунке 109. Установка
прицепа плуга с учетом этих указаний позволит существенно сни-
зить расход энергии на пахоту.
Равновесие машин с одно- и многошарнирным креплением ра-
бочих органов. Эти машины имеют продольную ось симметрии, по-
этому их устойчивость в горизонтальной плоскости может быть
нарушена только при неправильной установке или неоднородности
поля. Условия их равновесия целесообразно рассматривать в про-
дольно-вертикальной плоскости. Так как принципиальные основы
рассмотрения одно- и многошарнирных систем одни и те же, но
одношарнирная представляет собой частный, а многошарнирная —
общий случай, то ограничимся анализом наиболее широко распро-
страненной многошарнирной параллелограммной системы. Равно-
весие такой системы складывается из двух частей: равновесия
секции и равновесия машины.
Условия равновесия секции сводятся к определению
реакции почвы на опорное колесо секции RKQ и равнодействующей
Рис. 109. Влияние установки прицепа на силу тяги (Fxy и Fxz) и реакцию
стенок борозды и на полевые доски (57?б):
я— в горизонтальной плоскости (к=50 кПа, с=25 см, п=4); б — в продольно-вертикаль-
ной плоскости (&=70 кПа, а=24 см, л=5).
10'
147
Рис. ПО. Равновесие симметричной машины с параллелограм-
мным креплением рабочих органов.
всех сил сопротивления R'. В параллелограммном механизме зве-
но DC (см. рис. 95, в) 'можно принять за повернутый план скоро-
стей. Тогда, приложив к плану скоростей действующие силы*, бу-
дем иметь:
/?кЛ+^Л-(^с+^) -0. (90)
Решив уравнение (90) относительно /?кс и выразив /г2 и h3 че-
рез I, получим
Якс^К^с+Яг) I cosa—Rxl sin aJ/Tij. (91)
Следовательно, устойчивость хода секции достигается выбором
соответствующего угла а. Из (91) следует: чем а больше, тем
меньше RKC. Однако с увеличением ,а уменьшается способность
рабочих органов к заглублению. В процессе работы следует не до-
пускать глубокого вдавливания колес секций >в почву, так как это
искажает расчетную глубину хода рабочих органов и увеличивает
сопротивление перекатыванию. Угол а можно изменять перемеще-
нием бруса машины по высоте. Условие равновесия секции в ко-
нечном счете сводится к тому, чтобы результирующая R' (рис. ПО)
сил Рс, Rxz и RKc, действующих на секцию, была направлена па-
раллельно звеньям АВ и DC. Значение_этой результирующей рав-
но геометрической сумме сил, т. е. R'=RxzA~PcA-Rkc.
Равновесие машины. На раму машины действуют сле-
дующие силы: результирующая 'ZR'=nR', где п—число секций;
сила тяжести Рм без учета массы секций; реакция почвы на опор-
ные колеса машины и сила тяги трактора Fxz- Силы
и Fxz находят из построения многоугольника сил (рис. ПО), как
это делалось выше. Нетрудно показать, что наклон звеньев АВ
и DC влияет на реакцию /?км. Так, например, при направлении
^R' по линии Ъс реакция «а колесо будет /?км (отрезок cd), а при
направлении по линии bci уже /?'км (отрезок Cid). При этом
Rkm>R'km, т. е. с уменьшением угла а наклона звеньев АВ и DC
* По методу профессора Н. Е. Жуковского. — Прим, автора.
148
Рис. 111. Условия равновесия дисковых орудий:
а — симметричного; б — несимметричного.
реакция на колеса машины уменьшается. Оптимальный угол на-
клона определяют при заданных показателях с учетом конкрет-
ных условий работы.
Равновесие дисковых орудий. При рассмотрении условий равно-
весия дисковых орудий, особенно прицепных, считают достаточным
ограничиться горизонтальной плоскостью, так как это связано
с определением рационального направления линии тяги.
При симметричном расположении дисковых батарей (рис.
111, а) и одинаковой глубине обработки равнодействующие левой
~^R'xy и правой YRxy батарей равны по значению, а точка их пе-
ресечения 1 лежит на продольной оси симметрии лущильника. Рав-
нодействующая ZRxy проходит через точку прицепа л, поэтому
лущильник должен двигаться прямолинейно. Однако непостоянст-
во технологических свойств почвы по ширине захвата вызывает
непрерывные изменения значений и направлений сил HR'xy и T,Rxy,
что приводит к смещению точки 1, изменению силы T.RXy и появ-
лению момента, стремящегося повернуть лущильник в горизон-
тальной плоскости. Повышению устойчивости хода способствуют
увеличение длины прицепа и нагрузки на ходовые колеса лущиль-
ника.
Равновесие несимметричной садовой бороны (рис. 111,6) мо-
жет быть достигнуто правильным выбором линии тяги без приме-
нения полевых досок и колес с ребордами. При определенных зна-
чениях углов атаки 6П и 63 направление линии тяги л — 1 может
совпадать с направлением равнодействующей "LRXy. При этом
Оз > Оп-
В вертикальной плоскости действующая на диски осевая си-
ла R" (см. рис. 75,6) расположена значительно ниже оси батареи,
вследствие чего создает момент, стремящийся заглубить тот ко-
нец батареи, к которому диски обращены своей вогнутой сторо-
ной, и выглубить тот, к которому они обращены выпуклой сто-
роной. Чтобы выровнять батарею в вертикальной плоскости, поль-
149
Рис. 112. Схема к определению условий
равновесия зубовой бороны.
зуются регулировкой рамки
батареи в отверстиях понизи-
телей. Для этого конец бата-
реи, к которому диски обра-
щены своей вогнутой стороной,
присоединяют к понизителям
выше, чем противоположный.
Равновесие зубовой бороны
целесообразно рассматривать
в продольно-вертикальной
плоскости, так как силы, действующие в горизонтальной плоско-
сти, взаимно уравновешиваются.
Действующие силы (рис. 112): вес Р&, приложенный в центре
тяжести; равнодействующая вертикальных реакций почвы на
зубья STVe, приложенная в центре тяжести; равнодействующая го-
ризонтальных сил сопротивления почвы (нормальных давле-
ний и сил трения); сила тяги F. Устойчивое движение бороны
возможно при прохождении линии тяги через след центра тяже-
сти, что при заданных параметрах бороны зависит от длины по-
водка /п, высоты точки прицепа на брусе сцепки hc.
Представим условия равновесия в аналитической форме, для
чего 'Необходимо и достаточно равенство нулю нижеследующих
уравнений:
2X = Fcosa—
5Z = P6-SyV6-Fsina=0;
2 ту (F) = Рб (16+/п cos а) —
(92)
—S Мз—й/2)+In sin а1 — N6 (If, + In cos a)=0.
Для большинства конструкций борон а=14...17°, /п~925 мм.
Устраняют неустойчивый ход бороны изменением угла а, регули-
руя высоту точки прицепа бороны на брусе секции hc.
§ 3. Автоматическое управление
В нашей стране ведутся работы по созданию и совершенство-
ванию автоматических систем управления процессом почвообра-
ботки в трех основных направлениях: автоматическое вождение
агрегата; поддержание постоянной глубины обработки почвы; под-
держание постоянной ширины защитной зоны при междурядной
обработке.
Автоматическое вождение. Системы автоматического регулиро-
вания (САР), предложенные для автоматического вождения поч-
вообрабатывающих агрегатов, относятся, как правило, к группе
следящих (копирующих) систем.
150
Ни одна из них пока не нашла практического применения, т. е.
не была внедрена в производство. Сейчас изучаются способы вож-
дения по радио, лучу, индукционные, фотоэлектрические и т. п.
Поддержание постоянной глубины обработки. Постоянство глу-
бины вспашки — важнейший агротехнический показатель, от него
зависит урожайность сельскохозяйственных культур (рис. 49). По-
этому для поддержания заданной глубины пахоты создано нема-
ло различных устройств. Различают следующие способы регули-
рования глубины вспашки: позиционный, высотный, силовой.
Кроме того, применяются различные варианты комбинированного
регулирования.
Позиционный способ основан на поддержании опреде-
ленного положения рамы плуга (механизма навески) относитель-
но остова трактора. Неплотности в элементах гидросистемы трак-
тора, особенно при их износе, вызывают перетечки масла из одной
полости в другую, вследствие чего приходится корректировать
положение машины относительно остова трактора. Эти перемеще-
ния передаются на золотник. Смещаясь, золотник открывает вход
маслу в подъемную полость гидроцилиндра или выход в сливную
магистраль, в результате чего происходит подъем или опускание
машины. Только после того, как машина возвратится в исходную
позицию, золотник займет нейтральное положение, заданное руко-
яткой настройки.
Неравномерность глубины обработки при этом способе обусло-
влена продольными и поперечными колебаниями трактора, вы-
званными неровностями поверхности поля. Неравномерность тем
больше, чем больше отношение продольного вылета рабочих ор-
ганов к продольной базе трактора, ширины захвата машины —
к ширине колеи трактора, а также, чем больше волнистость релье-
фа поля.
Высотный способ основан на применении опорного колеса
(колес), ограничивающего погружение рабочих органов в почву.
Система, однако, реагирует на изменения рельефа только под
опорным колесом. На неоднородном поле с участками различной
плотности глубина колеи, а следовательно и глубина обработки,
различны; на глубину обработки, кроме того, оказывают влияние
продольные угловые колебания трактора.
Силовой способ основан на стабилизации тягового усилия
трактора. Способ находит широкое распространение в связи с тем,
что выпускаемые тракторы не имеют, как правило, бесступенчатых
автоматических трансмиссий. Принцип действия силовых систем
заключается в том, что при изменении нагрузки датчик вырабаты-
вает сигнал рассогласования, равный разности между заданным
и действительным значениями нагрузки, который передается уси-
лителю и далее исполнительному механизму. Последний, воздей-
ствуя на объект регулирования, изменяет нагрузку в сторону
устранения рассогласования. В качестве управляемых параметров,
характеризующих тяговое сопротивление почвообрабатывающих
151
Рис. 113. Принципиальная схема дейст-
вия универсального регулятора нагруз-
ки:
Г — пружина; 2 — плуг; 3 — гидроцилиидр;
4 — распределитель с ручным управлением;
5 — фильтр; 6 — бак; 7 — иасос; 8 — распре-
делитель-регулятор.
машин, чаще всего принимают
усилия в верхней и нижней тя-
гах механизма навески трак-
тора.
В качестве примера рас-
смотрим принцип действия
(рис. 113) универсального
регулятора нагрузки (УРН).
При увеличении сопротивле-
ния почвы Rx возрастает уси-
лие в верхней центральной
тяге Fbt и деформация х пру-
жины 1, через которую это уси-
лие воздействует на остов
трактора. Деформация пру-
жины через систему тяг и ры-
чагов передается золотнику
распределителя-регулятора 8, который открывает проход маслу от
насоса 7 в правую полость гидроцилиндра 3. Перемещение штока
гидроцилиндра влево вызывает подъем плуга 2, уменьшение глу-
бины пахоты а и сопротивления почвы Rx. Подъем плуга остано-
вится лишь тогда, когда пружина 1 выпрямится до исходного по-
ложения и вернет золотник распределителя-регулятора 8 в ней-
тральное положение. При уменьшении усилия в верхней тяге за-
глубление плуга происходит под действием его массы. Настройка
САР на заданное усилие (косвенно—глубину пахоты) выполня-
ется предварительной установкой механизма настройки (привода
золотника) распределителя-регулятора.
Применение силового способа регулирования по сравнению
с высотным дает повышение производительности пахотных агрега-
тов на 9...15%, снижение расхода горючего на 10...12%. Однако
силовые регуляторы предназначены главным образом для стаби-
лизации загрузки трактора и уменьшения буксования его ведущих
колес, глубина же пахоты не замеряется и полностью зависит от
технологических свойств почвы. Постоянная глубина пахоты до-
стигается только на однородных почвах, при неоднородных почвах
глубина обработки тем больше, чем меньше ее удельное сопротив-
ление, и наоборот.
Наиболее совершенны системы .смешанного (комбинированного)
регулирования, например система с двумя параллельно работаю-
щими контурами: силовым и позиционным. В этом случае система
силового регулирования загрубляется введением дополнительной
жесткой обратной связи в виде контура позиционного регулирова-
ния.
Другая комбинированная система — следяще-силового типа,,
имеет два датчика: копир для измерения глубины вспашки и пру-
жину для измерения усилия в верхней тяге. В этом случае оба
контура работают совместно, стабилизируя глубину пахоты и тя-
152
говое сопротивление плуга одновре-
менно. Управляемым параметром
здесь служит глубина вспашки. Эта
система хорошо приспособлена к
различным почвенным условиям и
позволяет получать необходимое
качество процесса регулирования.
Рассмотренный выше универ-
сальный регулятор нагрузки (УРН)
рассчитан на три способа регули-
рования: силовой, позиционный и
комбинированный, а также коррек-
тирование вертикальных нагрузок
(догрузку ведущих колес).
Поддержание постоянной за-
щитной зоны. Действие такой си-
Рис. 114. Система управления ра-
бочими органами культиватора
для межкустовой обработки вино-
градников:
1 — щуп; 2 — куст винограда; 3 — ра-
бочий орган культиватора; 4 — золот-
ник; 5 — пружина; 6 — гидроци-
линдр.
стемы рассмотрим на примере ав-
тематического устройства для управления рабочими органами
культиваторов при междурядной обработке виноградников
(рис. 114). При встрече с кустом или шпалерным столбом 2 щуп/
отклоняется влево, растягивая пружину 5. Движение щупа / через
промежуточные звенья передается золотнику 4, который смеша-
ется при этом в крайнее левое положение и открывает путь для
прохода масла в правую полость гидроцилиндра 6. Перемещаю-
щийся под давлением масла шток отводит рабочий орган 3 вле-
во, создавая необходимую защитную зону (заштрихована). После
прохода куста под действием пружины 5 щуп 1 и рабочий орган 3
перемещаются вправо до тех пор, пока золотник не займет ней-
тральное положение. В садоводстве находят применение анало-
гичные механические системы. Ведутся работы и по применению
аналогичных систем в полеводстве при обработке пропашных
культур. В этих случаях вместо механических щупов применяют
электроконтактные, лазерные и т. п.
§ 4. Коэффициент полезного действия
Коэффициент полезного действия (к. п. д.) почвообрабатыва-
ющих машин рассмотрим на примере плуга. В общем случае
к. п. д. любого устройства есть отношение полезной работы ко всей
затраченной.
Для плуга к. п. д. может быть выражен отношением полезных
сопротивлений, т. е. связанных непосредственно с выполне-
нием технологического процесса, к полному тяговому сопротив-
лению.
Первый член рациональной формулы (81) fP является «мерт-
вым сопротивлением», так как на его преодоление непроизводитель-
но затрачивается энергия, а второй и третий члены kabn-\-
-\-eabnv2 — полезным, «живым сопротивлением» почвы. Поэтому
153
Рис. 115. Изменение ме-
таллоемкости плуга в
зависимости от числа его
корпусов.
формула для определения • к. п.д. плуга, по
В. П. Горячкину, имеет вид:
__ kabn + zabnv2
fP + kabn + eabnv2'
Эта же формула может быть представлена
в ином виде:
1 Rx Rx '
Полезность сопротивлений, входящих в
третий член рациональной формулы, усмат-
(93)
(94)
ривалась в том, что плуг в соответствии со
своей конструкцией должен перемещать
пласты в соседние борозды, а для этого
пластам необходимо сообщить определен-
ную скорость (кинетическую энергию), которая к тому же влияет
и на их крошение. В этом случае с увеличением скорости к. п. д.
плуга повышается.
Однако с переходом на высокие скорости вспашки скоростные
сопротивления, выраженные третьим членом формулы (81), резко
возрастают. В связи с этим конструкторы современных скорост-
ных плугов, борясь за уменьшение энергоемкости пахоты на высо-
ких скоростях, свою основную задачу видят в том, чтобы снизить
скоростные сопротивления, выраженные третьим членом формулы
(81). Эти сопротивления относят к вредным сопротивлениям, и
в связи с этим формула к. п. д. плуга приобретает вид:
_ kabn
fP -f- kabn -|~ eabnv2'
(95)
При расчетах по этой формуле увеличение третьего члена фор-
мулы (81) приводит к снижению к. п. д. плуга.
Как видно из формулы (94), к. п. д. прежде всего показывает,
насколько эффективно использован металл, затраченный на изго-
товление плуга. С увеличением массы плуга при прочих равных
параметрах его к. п. д. снижается. Установим связь между метал-
лоемкостью плуга и его к. п. д., для чего числитель и знаменатель
правой части формулы (95) разделим на Ьп:
л =__________________=______________ (96)
' (P/bri) f + ka--\- eav2 qf ka - [- eav2 ’ ' '
где q=Plbn— металлоемкость плуга, Н/м.
Обратившись к графику изменения металлоемкости (рис. 115),
видим, что минимальную металлоемкость имеют трехкорпусные
плуги. Так как металлоемкость q стоит в знаменателе формулы
(96), то из нее следует, что самый высокий к. п.д. имеют трехкор-
пусные плуги, к. п. д. плугов с большим и меньшим числом корпусов
ниже. По данным Г. Н. Синеокова, к.п.д. находится в пределах
0,6...0,8 для навесных и 0,55...0,75 для прицепных плугов.
Раздел второй
ПОСЕВНЫЕ, ПОСАДОЧНЫЕ МАШИНЫ И МАШИНЫ
ДЛЯ ВНЕСЕНИЯ УДОБРЕНИИ
Еще в прошлом столетии Ф. Энгельс писал «Производительная
сила, находящаяся в распоряжении человечества, беспредельна.
Урожайность земли может быть бесконечно повышена приложени-
ем капитала, труда и науки»*. Это гениальное положение под-
тверждается в настоящее время.
В комплексе мероприятий по интенсификации сельскохозяйст-
венного производства, намеченных мартовским (1965 г.) Плену-
мом ЦК КПСС, важнейшим составным элементом является рас-
ширенное внесение удобрений. Большое значение этому вопросу
придавал и В. И. Ленин. Он считал, что удобрения должны при-
равниваться к хлебу, и проявлял большую заботу об изыскании
новых сырьевых ресурсов- для производства минеральных удоб-
рений.
В настоящее время удобрения стали решающим фактором
расширенного воспроизводства сельскохозяйственных продуктов.
Примерно четвертую часть потреблямой пищи человечество полу-
чает за счет использования минеральных удобрений. Наукой и пе-
редовой практикой доказано, что до 60% прироста сельскохозяй-
ственной продукции можно получить в результате применения ми-
неральных удобрений.
Глава I
ОБЩИЕ СВЕДЕНИЯ
§ 1. Способы посева, посадки и внесения удобрений
Требования к посеву. Главная задача посева состоит в опти-
мальном размещении семян, обеспечивающем получение макси-
мального урожая. При этом к посеву как технологическому про-
цессу предъявляются три основных требования: высев заданного
количества семян на единицу площади поля; равномерное разме-
щение их по площади поля; заделка на определенную (одинако-
* Маркс К., Энгельс Ф., Соч., изд. 2-е, т. 1, с. 563.
155
Рис. 116. Профили днев-
ной поверхности поля
после посева или посад-
ки:
а — гладкий; б — гребневой
в один рядок; в — гребне-
вой в два рядка; г — бо-
роздной; д — по_ сте_рие.
вую) глубину. При высадке рассады до-
бавляется еше одно требование — верти-
кальное расположение стебля, а при по-
севе на почвах, подверженных ветровой
эрозии, — уплотнение почвы после по-
сева.
Равномерное размещение семян по
площади поля возможно в том случае,
если площадь питания вокруг каждого
из них будет иметь форму квадрата.
Форма площади питания есть функция
двух величин: ширины междурядья и
расстояния между семенами в рядке.
Причем расстояние между семенами в
рядке определяется нормой высева се-
мян, а ширина междурядья — способом
посева или посадки.
Способы посева и посадки классифи-
цируют по двум основным признакам:
размещению семян в вертикальной плос-
кости (профилю дневной поверхности
поля) и в горизонтальной плоскости (ши-
рине междурядий и размещению семян
в рядках).
По профилю дневной поверхности различают сле-
дующие виды посевов и посадок: посев на ровную (гладкую) по-
верхность, посев на гребни (гребневой), посев в борозды (борозд-
ной) и посев по стерне. Тот или иной способ посева или посадки
выбирают в зависимости от почвенно-климатических условий и
особенностей культуры.
Посев или посадку с гладким профилем поверхности (рис.
116, а) рекомендуется проводить в районах нормального и недо-
статочного увлажнения.
Гребневой способ посева (рис. 116, б и в) применяют в зонах
повышенного увлажнения и при орошении. На вершинах гребней
семена заделывают при избытке влаги и недостатке тепла. При
поливе сеют по ровной поверхности поля, располагая семена в один
или несколько рядков, но одновременно нарезают поливные бо-
розды.
Посев в 'борозды (рис. 116, г) применяют в засушливых и полу-
засушливых районах, в основном для пропашных культур, таких,
как хлопчатник, кукуруза, сорго и др. При расположении семян
в бороздках улучшается увлажнение растений, а также предотвра-
щается их вымерзание.
Посев по стерне (’рис. 116,(9) рекомендуется для почв, подвер-
женных ветровой эрозии. Стерня защищает посевы от выдувания.
По ширине междурядий и размещению семян
в рядках различают: рядовой, перекрестный, узкорядный, ши-
156
О О о
о О о
о о о
О о о
о Q о
о о о
о о о
о с о
о о о
ООО
ООО
- -о О о
1 о о о
12...15
ООО
о о О о о о О
о о о
ООО о о о о
ООО
ООО о о о о
о о о
0 0 О О О о о
о ° о
. о о О о о о о
ООо
—о о о о о о о
--О 0 о
- о О О О о о о
ООО
I..!«-»
5
О 0 о о о о о о о О 0 о о 0 о о 0 о 0 0 0 0
о о 0 о 0 0
о о о о 0 О О 0 О 0 0 0 tri О 0
<N 0 0 О 0 0 0 0 0 —О 0
sV^ о о 0 о , 0 0 О 0 -0 0 0 0 о о 0 0
1 0 О 0 о о о о о J О 0 \30"М0\
в г
о-
ъ
а
о
о
о
о
о
о
о
© ОО ООО
ООО 000
0 О
0 0
0 о
° 0
4 о о
t-S,
0 о
0 0
0 о
Lfe я\
So go
о So DO C OO о
о So Oo 0 go
<Po g° °0°
о So o°
о •о <N “cP O°o go
о 0 00’ о
-op oo o<?
о ?o °0°
о о qQ 1^ Oo 7Z7gj g®
ж
А V
S>°
оО
е
__Оо
°
оо
0/ ОО
0°0О о о
О о о С л
JO С) о о
0°%°°
о о Оо °
о
о
о
0z
0
J—Oo °°
\зо...юо\
о
о
о
о ,,
[ с 41... 110
<9
ДО
О 0
<3°.О
°°О
О
Рис. 117. Способы посева иг
посадки (размеры даны в
сантиметрах):
а — рядовой; б — перекрест-
ный; в - узкорядный; г — ши-
рокорядный; д — ленточный;
е — пунктирный; ж — гнездо-
вой; з — квадратно-гнездовой;
к — безрядковый.
3
К
рокорядный, ленточный, пунктирный!, гнездовой, квадратно-гнез-
довой, безрядковый и разбросной посевы (рис. 117).
Способы внесения удобрений. С помощью удобрений регулиру-
ют рост и развитие растений. Удобрения вносят: до посева (ос-
новное внесение), во время посева (припосевное внесение) и после
посева (подкормка).
По характеру распределения удобрений пр площади поля раз-
личают три способа внесения удобрений: сплошной (разбросной),
рядковый и гнездовой (локальный).
§ 2. Технологические свойства семян и удобрений
Под технологическими свойствами понимают лишь те свойства
семян и удобрений, которые оказывают существенное влияние на
закономерности и характер протекания процесса их высева.
Технологические свойства семян и клубней. К числу основных
технологических свойств семян следует отнести форму и линейные
размеры, характер поверхности (коэффициенты трения, сыпу-
честь), упругость, прочность.
Форма семян бывает эллипсоидная, шаровидная, пирами-
дальная, чечевицеобразная, бобовидная.
Линейные размер ы характеризуются: длиной I, шири-
ной b и толщиной а. Для семян указанных форм характерны сле-
дующие соотношения линейных размеров: эллипсоидные а < b < /;
шаровидные а = b = I; пирамидальные чечевицеобразные
•а<.Ь=1\ бобовидные а<_Ь<Л и a=b<J. Как видим, для боль-
шинства семян длина I — наибольший размер, ширина b — сред-
ний и толщина а — наименьший.
Форма и размер семян оказывают влияние на процесс просы-
пания семян сквозь отверстия питающих емкостей, от них зависит
выбор типа высевающего аппарата и размеры ячеек высевающих
дисков сеялок точного высева. При выборе формы и размеров яче-
ек высевающих дисков учитывают объем и соотношение линейных
размеров семян. Для каждой культуры они различны. Например,
если принять за единицу ширину семени (Ь = 1), то соотношение
между линейными размерами составляет: для семян кукурузы
1>5Х1Х0,6; хлопчатника 1\Ь\а= 1,7X1 ХОД; сои /X
Х&Ха= 1,2X1 ХОД.
Так как размеры семян изменяются в широких пределах, то
для улучшения работы высевающих аппаратов точного высева
предварительно их калибруют — разделяют на фракции. Семена
кукурузы, например, разделяют на шесть фракций, сахарной свек-
лы — на две фракции. Для улучшения технологических свойств
семян сахарной свеклы во многих зарубежных странах широко
применяют дражирование. Дражирование не только улучшает тех-
нологические свойства семян (выровненность по размерам, сыпу-
честь), но рассматривается и как средство защиты семян от внеш-
них воздействий и прием улучшения условий питания. Оно позво-
Й58
ляет снизить затраты труда на прореживание, в 2 раза уменьшить
расход семян на посев, существенно повысить урожайность.
Дражируют главным образом семена овощных и технических
культур.
Характер поверхности семян оказывает влияние на их
коэффициент трения и сыпучесть, она может быть гладкой или
шероховатой. Коэффициент трения семян о сталь при нормальной
влажности изменяется от 0,30 до 0,42, что 'соответствует углу тре-
ния 17...23°. Причем нижний предел соответствует семенам пше-
ницы, верхний — семенам хлопка. Трение семян в слое, их сыпу-
честь оцениваются углом естественного откоса, который для семян
различных культур изменяется от 25 до 40°. Для семян пшени-
цы и овса, например, он равен 34...36°. С повышением влажности
семян угол естественного откоса увеличивается.
Упругость семян характеризуют коэффициентом восстанов-
ления при ударе k=v2/vi, где щ и и2 — нормальные составляющие
скоростей семени соответственно до и после удара о поверхность.
Коэффициент восстановления изменяется в широких пределах
(например, для гороха 0,30...0,42). Соударения семян с различны-
ми телами наблюдаются, например, при работе отсекателей, вы-
талкивателей, в процессе гнездообразования, при движении семян
по семяпроводам и падении их на дно борозды.
Прочность семян характеризуется нагрузками, вызывающи-
ми их травмирование со снижением всхожести и урожайности.
Важно знать предельные нагрузки на семена, которые не приво-
дят к снижению всхожести. Для семян хлопчатника и сои они,
например, составляют 50 Н, для кукурузы 55 Н.
Виды удобрений и их свойства. По химическому составу удоб-
рения разделяют на две группы: минеральные и органические.
Кроме того, находят применение смеси органических и минераль-
ных удобрений — органоминеральные компосты.
Минеральные удобрения по назначению разделяют на
удобрения прямого действия, предназначенные непосредственно
для питания растений, и косвенного действия, применяемые для
улучшения физико-химических свойств почвы.
Минеральные удобрения прямого действия делятся на прос-
тые, содержащие один какой-либо питательный элемент, и смешан-
ные, представляющие собой механические смеси двух или трех
простых удобрений.
Минеральные удобрения косвенного действия (известь, гипс)
относятся к числу местных удобрений. Их применяют для нейт-
рализации кислой реакции переувлажненных почв (известкование)
или щелочной реакции солонцов (гипсование).
К технологическим свойствам минеральных удобрений следует
отнести плотность, размеры гранул, сыпучесть, рассеваемость,
вязкость, слеживаемость, гигроскопичность.
Плотность минеральных удобрений изменяется в довольно ши-
роких пределах — от 0,8 до 1,7 т/м3. Однако основные виды туков
159
характеризуются более узким диапазоном изменения плотности:
Ю,9...1,2 т/м3.
Размеры гранул обычно колеблются от 1 до 4 мм. С увеличе-
нием размеров свыше 4 мм прочность гранул уменьшается, что
.приводит к их разрушению и ухудшению высева.
Сыпучесть удобрений характеризуется их способностью прохо-
дить сквозь отверстия. Она измеряется количеством туков, просы-
пающихся сквозь единицу площади выпускного отверстия за едини-
цу времени. Косвенно сыпучесть можно характеризовать углом
«естественного откоса. Порошкообразные удобрения при угле есте-
ственного откоса до 35°, а гранулированные — до 40° свободно
просыпаются сквозь отверстия. При угле естественного откоса боль-
ше 55° удобрения не просыпаются сквозь отверстия, расположен-
ные внизу. Сыпучесть непосредственно связана со сводообразова-
нием, под которым понимают способность удобрений образовы-
вать свод над отверстиями, сквозь которые они вытекают, и пре-
кращают истечение.
Рассеваемость удобрений — это их способность проходить через
высевающие аппараты с узкими выходными щелями. Рассевае-
мость оценивается по 10-балльной шкале. С рассеваемостью не-
посредственно связана вязкость удобрений, под которой понима-
ют их свойства при механическом воздействии (например, меша-
лок, высевающих аппаратов) переходить из раздельночастичного
состояния в пластичное, тестообразное. В этом случае выходные
отверстия забиваются и рабочий процесс становится невозмож-
ным.
Слеживаемость — свойство удобрений образовывать прочные
глыбы в процессе хранения. Такие удобрения перед внесением
в почву необходимо измельчать в дробилках и просевать сквозь
решета с отверстиями 3...5 мм.
Гигроскопичность удобрений — это их способность поглощать
влагу из воздуха. Гигроскопичность удобрений оценивается по
12-балльной системе. Чем выше балл, тем выше гигроскопич-
ность. Повышение же влагосодержания резко ухудшает основные
технологические свойства удобрений — сыпучесть, рассеваемость,
слеживаемость и может привести к полной утрате возможности
их механизированного внесения.
Органические удобрения не только обогащают почву
всеми тремя основными элементами питания растений (азот, фос-
фор, калий), но и улучшают ее физико-механические свойства.
В группу органических удобрений входят: навоз, торф, навозная
жижа, торфонавозные компосты, фекалии, различные отбросы
растительного и животного происхождения. К этой же группе от-
носятся бактериальные удобрения и сидераты (зеленые удобре-
ния) .
К основным технологическим свойствам органических удобре-
ний следует отнести: плотность, липкость, коэффициент трения,
сопротивление сдвигу и разрыву.
160
Плотность органических удобрений изменяется в широких пре-
делах в зависимости от влажности и степени разложения. Напри-
мер, плотность свежего навоза 0,3...0,6 т/м3; полуперепревшего
0,6...0,7; перепревшего 0,7...0,8; перегноя 0,8 т/м3. Плотность торфа
при изменении влажности от 40 до 86% изменяется от 0,27 до
1,02 т/м3.
Липкость удобрений зависит от их плотности, влажности и при-
сутствия гумусовых частиц. С увеличением плотности и содержа-
ния гумусовых частиц липкость навоза возрастает. Наибольшая
липкость проявляется при влажности 80...84%.
Коэффициент трения навоза с увеличением соломистости рас-
тет, а с повышением влажности и удельного давления падает.
Среднее значение коэффициента трения навоза по металлическим
поверхностям находится в пределах 0,85...1,0. Угол естественного
откоса навоза уменьшается по мере увеличения степени его раз-
ложения, изменяясь от 50 до 38°.
Сопротивление сдвигу и разрыву в значительной мере зависит
от удельного давления и соломистости. Так, например, с увеличе-j
нием удельного давления от 2 то Ю кПа удельное сопротивление
сдвигу увеличилось от 4,5 до 10 кПа, а увеличение соломистости
от 10 до 50% привело к возрастанию удельного сопротивления
разрыву от 7,3 до 10 кПа
§ 3. Общая схема рабочего процесса
В общем виде рабочий процесс сводится к следующему. Семе-
на, клубни или удобрения, расположенные в питающих емкостях,
поступают самотеком или подаются принудительно к дозирую-
щим устройствам. Дозирующие устройства формируют поток се-
мян или удобрений, который распределяется по поверхности поля
или по направителям (семяпроводы, лотки и т. п.) и попадает
в бороздки, проделанные в почве сошниками. Заделывающие ра-
бочие органы, следующие за сошниками, засыпают почвой семе-
на, клубни или удобрения.
Таким образом, в основе рабочего процесса посева, посадки
или внесения удобрений лежит организованный поток семенного
(посадочного) материала или удобрений, который начинается
в питающей емкости и закапчивается на поверхности поля или дне
бороздки. От интенсивности и характера распределения этого по-
тока зависит норма высева и павномерность распределения
семян (посадочного материала) по площади поля. Следовательно;
на показатели рабочего процесса посевных, посадочных машин
и машин для внесения удобрений оказывают влияние конструк-
тивные особенности и режим работы питающих емкостей дози-
рующих устройств, направителей, сошников и заделывающих ра-
бочих органов.
Н—424 1Q1
Глава II
ПИТАЮЩИЕ ЕМКОСТИ И ДОЗИРУЮЩИЕ УСТРОЙСТВА
§ 1. Питающие емкости
Питающие емкости не только содержат запас семенного мате-
риала или удобрений, но и обеспечивают (нормальное протекание
рабочего (процесса, создавая 'необходимый поток материала, исте-
кающий сквозь отверстия к дозирующим устройствам. Истечение
семян или удобрений сквозь отверстия подчиняется закономерно-
стям движения сыпучих тел и состоит из нескольких этапов (рис.
118, а, б, в).
Расход и скорость истечения материала на разных этапах раз-
личны. Для нормальной работы необходимо, чтобы расход мате-
риала (пропускная способность отверстия) на любом этапе исте-
чения был больше, чем максимальная производительность дози-
рующего устройства, обусловленная максимальной нормой высева,
посадки или внесения удобрений.
Расход материала при свободном истечении зависит главным
образом от площади выходного отверстия. Форма отверстия (квад-
ратное, круглое, эллиптическое) оказывает сравнительно небольшое
влияние, но все же круглое отверстие предпочтительнее. Толщина
стенок отверстия должна быть возможно меньшей, при значитель-
ной толщине отверстие целесообразно выполнять в виде усеченно-
го конуса, обращенного основанием вниз.
Площадь выходного отверстия оказывает влияние не только
на расход, но и на удельный расход материала, который харак-
теризуется отношением секундного расхода к площади выходного
отверстия и представляет собой не что иное, как скорость движе-
ния материала сквозь отверстие. С уменьшением площади отвер-
стия (рис. 118, г) удельный расход зерна уменьшается все более
резко и при некотором критическом размере отверстия истечение
совсем прекращается, хотя диаметр отверстия еще значительно
больше поперечного размера зерна. Критический радиус отверстия
Рис. 118. Истечение семян сквозь круглое отверстие:
а — начало (первый этап); б — образование воронки (второй этап); в — конец истечения;
1, 2 и 3 — соответственно верхний, средний и нижний слои семян; г — зависимость удель-
ного расхода (скорости) семян от площади отверстия; I — пшеница; II — ячмень.
162
Гкр=^аЬ, где а и b — поперечные размеры семян; j/ab следует
принимать: для пшеницы 2,2, ячменя 2,4, кукурузы 3,2* мм. Сле-
довательно, условие истечения зерна будет таким: d>^ab. Круг-
лое отверстие* площадью 20 см2 (г «25 мм) рассчитано на бес-
перебойную подачу семян всех зерновых культур при максималь-
ных нормах их высева*.
Объем питающей емкости можно определить по формуле:
V=-LBQ- (97)
104уче ’ v '
где L — длина гона от заправки до заправки, м;
В — ширина захвата машины (или ширина междурядья), м;
Q — норма высева, кг/га;
у — плотность семян, кг/м3;
т]е — коэффициент использования вместимости емкости, рав-
ный 0,85—0,9.
Чем больше вместимость питающей емкости, тем реже оста-
навливают машину для заправки, но тем больше непроизводи-
тельные перевозки семян или удобрений по полю. Обычно совре-
менные посевные машины оборудованы емкостями для запаса се-
мян на 1,5—2 ч работы; посадочные, например, картофелесажалки
на 0,3...0,4 ч.
Сеялки, высевающие семена с небольшим междурядьем (от 5
до 15 см), снабжены питающими емкостями в виде семенного
ящика, общего для всех высевающих аппаратов; широкорядные,
гнездовые и квадратно-гнездовые сеялки, высевающие семена
с большими междурядьями (45, 60, 70 и более см), оснащены пи-
тающими емкостями в виде отдельной цилиндрической банки на
каждый высевающий аппарат.
Семенные ящики зерновых сеялок имеют прямоугольное сече-
ние в верхней части и трапецеидальное в нижней. Наклон стенок
в нижней части сделан под углом, большим угла трения зерна
о стенку, чтобы зерно ссыпалось самотеком. Семенные ящики
сеялок, предназначенных для посева малосыпучих семян (овес,
травы и т. п.), снабжают ворошилками, встряхпвателями и т. п.,
которые предотвращают образование сводов.
Питающие емкости картофелесажалок представляют собой
бункеры с наклонным дном. Клубни из бункера в питающие ков-
ши поступают самотеком. Для лучшей подачи дно бункера обору-
дуют встряхивателями. ’
Форма и размер питающих емкостей машин для внесения удоб-
рений зависят от вида удобрений и грузоподъемности машин. Для
сыпучих удобрений и навесных машин небольшой грузоподъемно-
сти применяют, как правило, бункеры в виде усеченной пирамиды
или конуса, обращенных основанием кверху; а для прицепных
машин большой грузоподъемности и машин для внесения органи-
* По данным профессора А. Н. Семенова. — Прим автора.
11* 163
ческих удобрений — в виде кузова призматической формы, с тра-
пециевидным поперечным сечением и наклоном стенок под углом
45...65° к горизонту.
§ 2. Высевающие аппараты сеялок
Основное требование к высевающим аппаратам — создание
равномерного дозируемого потока семян с целью равномерного
распределения их по площади поля.
Известные высевающие аппараты по принципу действия раз-
деляют на три типа: механические, пневматические и пневмоме-
ханические. Преобладают механические аппараты. Они весьма
многообразны. В процессе развития сеялок были предложены: ка-
тушечные, дисковые, внутреннереберчатые, мотыльковые, ложеч-
ные, фрикционные, канавочные, центробежные, вибрационные, ще-
точные и т. д. Однако в настоящее время практическое применение
находят главным образом лишь две разновидности: катушечные
и дисковые. По технологическим признакам эти аппараты отно-
сятся к устройствам различных типов: первые дозируют семена
непрерывным потоком, вторые — единичным отбором семян. По-
этому первые находят применение в рядовых сеялках, а вторые —
в сеялках точного высева.
Катушечные высевающие аппараты бывают двух модификаций:
желобчатые и штифтовые. Катушечный штифтовый аппарат при-
меняют для высева минеральных гранулированных удобрений. Ка-
тушечный желобчатый высевающий аппарат — универсальный. Все
зерновые и большинство специальных сеялок оборудуют катушеч-
ными высевающими аппаратами почти во всех странах мира.
Катушечный желобчатый высевающий аппарат (рис. 119),
устанавливаемый на всех отечественных зерновых сеялках и их
модификациях, состоит из следующих частей: желобчатой катуш-
ки 2, розетки 3, донышка 1, корпуса 4 и муфты 5. Катушка 2, за-
крепленная с помощью штифта на валике 6, вставляется в кор-
Рис. 119. Катушечный желобчатый высевающий аппарат:
/ — донышко; 2 —желобчатая катушка; 3 —розетка; 4 — корпус; 5 — муфта; 6 — валик
высевающих аппаратов; 7 — валик механизма опорожнения; 8 — стопорный болт; 9 — регу-
лировочный болт; 10 — пружина.
164
лус 4, который крепится к дну семенного ящика против выходно-
го отверстия. Отверстия в боковинах корпуса 4 закрыты слева
розеткой 3, справа муфтой 5. Розетка вставлена в обойму, закреп-
ленную на левой боковине корпуса, в прорези розетки входят реб-
ра катушки. Муфта надета на хвостовик катушки и своими высту-
пами проходит в вырезы на правой боковине корпуса, а от осевых
смещений относительно вала фиксируется шайбой и шплинтом.
Снизу корпус 4 закрывается донышком. 1, которое надето на ва-
лик 7 механизма опорожнения и зафиксировано болтом 8. Задний
край донышка скошен для непрерывности потока семян, так как
желобки катушки переходят край донышка не сразу по всей дли-
не, а постепенно. Когда один из желобков располагается у конца
заднего края донышка, то следующий за ним находится у начала.
Донышко 1 снабжено регулировочным болтом 9 с гайкой и пру-
жиной 10 и играет роль клапана. Между донышком и катушкой
имеется зазор для выхода семян. При высеве семян зерновых
культур зазор между донышком 1 и ребром муфты 5 должен быть
не более 1...2 мм. Его устанавливают с помощью регулировочного
болта 9, поджимая или ослабляя пружину 10. При высеве же
крупных семян, например зернобобовых, чтобы предотвратить их
дробление, зазор увеличивают до 8... 10 мм поворотом валика 7
с помощью рычага механизма опорожнения. В связи с этим в ап-
парате предусмотрен лишь нижний высев, т. е. катушка 2, враща-
ясь вместе с валом 6, выгребает семена из-под себя. Вместе с ка-
тушкой 2 вращается розетка <3; муфта 5 свободно посажена на
хвостовике катушки 2 и не вращается.
Количество высеваемых семян зависит от длины рабочей или
•активной части катушки, т. е. той ее части, которая находится
внутри корпуса и выгребает семена. Для увеличения количества
высеваемых семян катушку вдвигают в корпус, а для уменьше-
ния — выводят из корпуса. При осевом перемещении валика 6 од-
новременно и в равной мере изменяется количество семян, высе-
ваемых всеми его катушками. Если же нужно изменить высев
семян лишь одной катушкой, то это делают смещением корпу-
са 4. Для этого отпускают болты его крепления к семенному ящи-
ку и сдвигают корпус в нужную сторону за счет продолговатых
отверстий под болты.
Норма высева регулируется изменением рабочей длины кату-
шек и изменением частоты их вращения. При этом надо иметь
в виду, что длина рабочей части катушки должна соответствовать
размерам высеваемых семян. Если длина рабочей части катушки,
а следовательно, и ширина выходного канала недостаточны, то
зерно будет дробиться. Высокая частота вращения также способ-
ствует дроблению семян. Чтобы иметь минимальное дробление се-
мян, при установке на заданную норму высева следует исходить
из минимальной частоты вращения и максимальной длины рабо-
чей части катушек. Допускается дробление 0,3...1,5% семян. Мень-
шее значение — для семян зерновых культур, большее — для круп-
165
Рис. 120. Движение зерна в катушеч-
ном высевающем аппарате:
а — зоны движения; б — характер распреде-
ления скоростей движения в активном слое:
I — свободное движение; II — принудитель-
ное движение; III — движение в активном
слое.
не III, именуемой «активным ело
носемянных овощных. Корпус
аппарата опорожняют от се-
мян, опустив донышко 1 по-
воротом валика 7 с помощью
закрепленного на нем рычага.
Технологический процесс-
катушечного высевающего ап-
парата протекает следующим*
образом. В зоне I (рис. 120,с)
семена движутся свободно»
сверху вниз под действием
силы тяжести, в зоне II по-
павшие в желобки катушки-
семена движутся принудитель-
но вместе с катушкой, в зо-
», движение семян вызывается-
силами внутреннего трения, которые возбуждаются ребрами ка-
тушки и передаются от одного слоя семян к другому. По мере
углубления в массу зерна движение затухает и за активным мо-
жет располагаться «мертвый слой».
В массе зерна пшеницы практически движется всего четыре"
слоя* (т. е. с» 10 мм), проса—-пять слоев (с«7 мм). Толщина»
активного слоя для различных культур различна, она не превы-
шает четырех- шестикратной толщины семян. Следовательно, ско-
рость различных слоев семян в зоне III неодинакова: на границе
с ребрами катушки она близка к значению их окружной скорости,,
а у донышка — близка к нулю (рис. 120,б).
Для установления зависимости между конструктивными и экс-
плуатационными параметрами рабочего процесса воспользуемся»
обобщенной характеристикой высевающего аппарата — рабочим»
объемом катушки Уо, под которым понимают объем семян, высе-
ваемых катушкой за один оборот. Рабочий объем катушки скла-
дывается из объема семян, вынесенных желобками катушки VKr.
и объема семян, прошедших в активном слое Va, т. е. УО=УЖ+
+ Уа. Значение Уж изменяется пропорционально объему желобков
и может быть выражено следующей зависимостью: Уж—gzSZp,
где g—коэффициент заполнения желобков, равный 0,7...0,9 (боль-
шие значения — для мелких семян: клевер, люцерна -и т. п.); z —
число желобков (как правило, z=12); 5 — площадь поперечного
сечения желобка (для зерновых культур 5,8 см2); Zp — длина ра-
бочей части катушки (для зерновых 39 мм).
Скорость движения семян в активном слое переменна (рис.
120,6). Однако для упрощения расчетов ее условно принимают
постоянной и равной линейной скорости ребер катушки, а вместо
действительной толщины активного слоя вводят понятие приве-
денной толщины. Приведенная толщина активного слоя сп oifpe-
* По данным профессора А. Н. Семенова. — Прим, автора.
166
деляется из условия, что объем семян, высеваемых слоем приве-
денной толщины, равен объему семян, высеваемых в действитель-
ном активном слое за один оборот катушки. Следовательно, объем
семян активного слоя, высеваемых за один оборот катушки, мож-
но представить, как объем цилиндрической трубки длиной Zp,
.внутренним радиусом г и наружным радиусом г+сп, т. е. Уа=
= л [ (г+Сп)2—г2] 1р=л/рСп (d+Сп).
В аппарате для зерновых культур d=50 мм. Приведенная тол-
щина активного слоя сп зависит* от рабочей длины катушки
(с увеличением 1Р она уменьшается) и изменяется для пшеницы от
•5 до 3,2 мм, для кукурузы от 10,3 до 5,3 мм.
Подставив значения Уж и Va в первоначальное выражение, по-
лучим формулу для определения рабочего объема катушки через
конструктивные параметры:
У0=/р(Ь5 + л^п+лс2п). (98)
Рабочий объем катушки может быть выражен также через
другие параметры. Нетрудно установить, что при норме высева Q
(кг/га) и ширине междурядья а (см) объем семян, который дол-
жен высеять один высевающий аппарат за один оборот колеса
«сеялки, составит
Vok=10-W)kGQ/[t (1-е)],
где DK — диаметр колеса сеялки, м;
у — объемная масса семян, г/см3;
8 — коэффициент скольжения колес сеялки по почве.
Тогда объем семян, которые должны быть высеяны одним вы-
севающим аппаратом за один оборот катушки, т. е. рабочий объ-
ем катушки, составит
V0=V0K/i = (1 —8)], (99)
где i — передаточное отношение от приводного колеса к валику
высевающих аппаратов: 1=пъ1пк, здесь пв — частота вра-
щения катушки (валика) высевающего аппарата;
пи — частота вращения приводного колеса.
Зависимость между всеми вышеперечисленными параметрами
будем иметь, приравняв выражения (98) и (99) и решив получен-
ное уравнение относительно длины рабочей части катушки,
Zp= 10-3nDKRKaQ/[ynB (1 —е) (gzS4-jrdcn-|-n^)]. (100)
Эта формула связывает в единую зависимость все основные
конструктивные и технологические параметры и позволяет опреде-
лить необходимую длину рабочей части катушки для заданных
нормы высева и ширины междурядья.
Дисковые высевающие аппараты подразделяют на три основ-
ные группы: с горизонтальным диском (вертикальной осью вра-
щения), вертикальным диском (горизонтальной осью вращения}
* По данным профессора А. Н. Семенова. — Прим, автора.
167
Рис. 121. Дисковые высевающие аппараты:
а — с вертикальной осью вращения; б — с гори-
зонтальной осью вращения: 1 — ячеистый диск:
2 — отражатель; 3 — выталкиватель.
2
и наклонным диском (наклонной осью вращения). Преимущест-
венное распространение получили первые две группы: с верти-
кальной и горизонтальной осью вращения. Аппараты с вертикаль-
ной осью вращения могут быть снабжены тарельчатым или ячеи-
стым диском, а аппараты с горизонтальной осью вращения —
только ячеистым.
Ячеисто-дисковый высевающий аппарат (рис. 121) состоит из
следующих основных (активных) частей: ячеистого диска 1, отра-
жателя 2 и выталкивателя 3.
Работают дисковые аппараты следующим образом. Диск 1
с вертикальной осью вращения (рис. 121,а), установленный на
днище цилиндрической семенной банки, приводится во вращение
от опорно-приводных колес сеялки. Под действием силы тяжести
и давления вышележащих слоев семена западают в ячейки диска
и перемещаются им к отверстию в дне семенной банки. На пути
их движения находится подпружиненный отражатель 2, который
своим зубом счищает семена, не полностью уложившиеся в ячейки
диска. Когда ячейка с семенем окажется над отверстием дна се-
менной банки, то подпружиненный выталкиватель 3 вытолкнет
его в раструб сошника. Диск обычно снабжен 24 ячейками, каж-
дая из которых рассчитана на размещение только одного зерна.
Сеялка оборудована набором дисков для высева различных куль-
тур и фракций семян. Норму высева семян регулируют изменени-
ем частоты вращения дисков и установкой специальных накладок,
перекрывающих часть ячеек диска.
Диск 1 с горизонтальной осью вращения (рис. 121,6) установ-
лен под бункером с семенами и приводится в действие от опорно-
прикатывающего колеса сеялки. Семена из бункера заполняют
ячейки и перемещаются диском к отражателю 2, выполненному
в виде рифленого капронового ролика, который удаляет лишние
семена. В нижней части высевающего аппарата семена выбрасы-
ваются из ячеек пластинчатыми клиновидными выталкивателя-
ми 3, входящими в узкие канавки, проточенные по центрам ячеек.
168
Аппарат снабжен двумя комплектами дисков с отверстиями ячеек
диаметром 5 и 6 мм для высева семян сахарной свеклы разных
фракций.
Очевидно, что чем больше линейные размеры ячейки, тем боль-
ше вероятность ее заполнения. Однако в этом случае нет гаран-
тии, что в ячейку попадает только одно зерно. Поэтому при рас-
чете линейных размеров ячейки необходимо исходить из того, что
в нее должно укладываться одно самое большое семя, но не долж-
ны помещаться два самых маленьких семени фракции; например,
для круглой ячейки при заполнении ее в положении «стоя»
2amin> (101)
где amin — минимальная толщина семени;
Ьщах — максимальная ширина семени;
Ki — зазор между стенкой ячейки и семенем.
При определении толщины диска (глубины ячейки) h для по-
ложения «плашмя» необходимо соблюдать условие
2от1п>Л=атах+'<2. (102)
где .к?— зазор между верхней плоскостью диска и зерном.
Б лее общем случае, без учета положения семян в ячейках,
«ужно исходить из объемов семян 2Vcmin > VK> VCniax, или их
средних размеров:
2 T^lmin^mirAnin > LAB | Атх^пих^тах1 (ЮЗ)
где L, В, А — длина, ширина и высота ячейки;
I, b, a — длина, ширина и толщина семени.
Однако это необходимое, но недостаточное условие западания
семян в ячейки. Большое значение в связи с этим имеет относи-
тельная скорость движения семян по диску. Без перемещения се-
мян относительно диска процесс западания их в ячейки невозмо-
жен. Однако он становится невозможным и при чрезмерно боль-
шой относительной скорости.
При работе дискового высевающего аппарата вращающийся
диск силами трения увлекает соприкасающийся с ним слой семян,
сообщая ему некоторую абсо-
лютную скорость ис, меньшую
окружной скорости и центра
ячеек диска.
При единичном или не-
большом слое семян запада-
ние происходит в тот момент,
когда центр тяжести семени
оказывается у края ячейки
(рис. 122, с).
Если же высота слоя семян
в банке значительна, что ти-
Рис. 122. Схема процесса западания се-
мени в ячейку:
a — при единичном слое; б — при большом
слое семяи.
169
пично для дисковых высевающих аппаратов, то на семя, кроме-
силы тяжести mg, действуют силы вертикального FB и горизон-
тального Fr давлений, а также силы трения fFr (рис. 122,6). При
таком действии сил западание семени начинается только после
смещения его центра тяжести относительно края ячейки на неко-
торое расстояние 6. Для свекловичных семян, например,
6= (0,35... 0,45) I, где I — длина семени.
Если пренебречь сопротивлением воздуха, то движение семе-
ни при западании в ячейку можно рассматривать, как свободное
падение тела с начальной относительной скоростью V. При запа-
дании семени в ячейку длиной L центр его тяжести проходит путь:
в горизонтальном направлении xc—L—б—ll2=vt, в вертикальном1
zc=g/2/2.
Семя западет в ячейку, если центр его тяжести окажется ни-
же или на уровне поверхности диска, т. е. z^a)2. Подставив;
в предшествующее выражение вместо zc значение а/2, получим.
tZ^alg. Имея в виду, что v = u—ис, a t^^’afg, и подставив в вы-
ражение для хс их значения, получим
u < uc+(L—б—lltylVajg. , (104>*
Из неравенства (104) следует, что для западания семян окруж-
ная скорость центра ячейки и должна быть тем меньше, чем боль-
ше размеры семян а и I, короче длина ячейки L и меньше ско-
рость движения семян ис. В сеялках для посева кукурузы при ра-
бочей скорости агрегата 2,5 м/с (9 км/ч) скорость центра ячейки
достигает 0,73, а в свекловичных — 0,43 м/с.
Пневматические высевающие аппараты. В пневматических вы-
севающих аппаратах для одиночного отбора семян из общей мас-
сы используют как вакуум, так и избыточное давление. Конструк-
ции этих аппаратов чрезвычайно разнообразны, но все их можно‘
разделить на две группы: дисковые и барабанные. Всасывающие
отверстия в дисковых аппаратах расположены на плоскости диска,
а в барабанных — на цилиндрической поверхности. В отечествен-
ных пневматических сеялках, а также в сеялках румынского про-
изводства, поставляемых в нашу страну, применяют дисковый
всасывающий аппарат с горизонтальной осью вращения (рис.
123,а). Такой аппарат состоит из корпуса 7, высевающего диска 6
с отверстиями, чистика 4, вала 3 и отсекателя семян 2. Вал 3
установлен в подшипнике корпуса 7 высевающего аппарата. На
квадратный конец вала 3 установлен высевающий диск 6. С одной
стороны от высевающего диска располагается камера разрежения
(вакуума), с другой — камера питания (для семян). К камере-
разрежения диск прижимается с помощью эластичного вороши-
теля. Семена, засыпанные в бункер 1, поступают из него через;
приемное окно в камеру питания. При работе сеялки в камере
разрежения с помощью вентилятора создается вакуум, под дейст-
вием которого семена присасываются к отверстиям высевающего-
диска.
170
•рис. 123. Схемы пневматического и пневмомеханического высевающих аппара-
та»:
иЯ — пневматического дискового; б — центробежного с пневматическим транспортированием;
1 и 9 — бункера; 2 — отсекатель семян; 3 — валик; 4 — чистик; 5 — сошник; 6 — высеваю-
щий диск; 7 — корпус; 8— крышка; 10 — дозирующее устройство; 11 — распределительная
сголовка; 12 — направляющие лопатки; 13 — лопасти; 14 — конусный ротор; 15 — семятуко-
провод.
Отсекатель 2 счищает лишние семена, оставляя по одному на
каждое отверстие. Врашающийся диск выносит приставшие семе-
на в нижнюю часть аппарата, где вакуум снимается, и отпавшие
от диска семена под действием силы тяжести через окно корпу-
са 7 падают на дно борозды. Чистик 4 служит для очистки отвер-
стий или прорези диска.
Необходимую присасывающую силу определяют по формуле:
fnp=kAFS, (105)
где k — коэффициент пропорциональности, определяемый экспе-
риментально;
,ДГ — разрежение (вакуум), создаваемое в камере разрежения;
S — площадь отверстия.
Коэффициент k, учитывающий суммарное воздействие различ-
ных факторов, равен для сахарной свеклы 0,78, пшеницы 0,96,
ггороха 1,25, кукурузы 1,5. Разрежение AF подбирают опытным пу-
тем из условий выноса семян из слоя. Обычно исходят из отноше-
ния Кпр к силе тяжести P = mg, принимая его равным 27,5 для кле-
щевины, 32,2 — для кукурузы, 125 — для семян сахарной свеклы.
Пневмомеханические высевающие аппараты по конструкциям
весьма разнообразны, но наибольшее распространение получили
центробежные (рис. 123, б). Их применяют в зерновых и туковых
сеялках с централизованным дозированием семян (удобрений),
получивших широкое распространение во многих зарубежных
странах. Высевающий аппарат состоит из дозирующего устройст-
ва 10, крышки (колпака) 8, конусного ротора 14, оборудованного
лопастями 13 и направляющими лопатками 12, и распределитель-
ной головки 11. Из бункера 9 семена (гранулы) через дозирующее
устройство Ю поступают на дно конусного ротора 14. Под дейст-
вием центробежной силы семена (гранулы) перемещаются по
171
внутренней поверхности конусного ротора вдоль направляющих
лопаток 12 и, достигнув края ротора, поступают в каналы (мунд-
штуки) распределительной головки 11. Туда же подается воздуш-
ный поток, создаваемый лопастями 13 быстро вращающегося ко-
нусного ротора 14. Этим воздушным потоком семена (гранулы) и
транспортируются по семятукопроводам 15 к сошникам.
§ 3. Аппараты для дозирования удобрений
Классификация. Дозирующие устройства машин для внесения
удобрений весьма многообразны, что обусловлено большим разно-
образием технологических свойств применяемых удобрений. Удоб-
рения к тому же могут находиться в различных физических со-
стояниях: твердом крупночастичном, твердом пылевидном и жид-
ком. Для внесения первых применяют, как правило, механические
устройства, вторых — пневматические и третьих — гидравлические
или пневмо-гидравлические. ч
Наибольшее распространение получили механические устройст-
ва. Известны следующие разновидности механических аппаратов:
цепочно-пальчатые, барабанные (барабанно-планчатые), конвей-
ерные (гусеничные), тарельчатые, дисковые, звездчатые, мотыль-
ковые, шнековые, катушечно-штифтовые, терочные (с двойным ре-
шетчатым дном), центробежные, транспортерные и т. п. В совре-
менных конструкциях машин для внесения удобрений наибольшее
распространение получили: катушечно-штифтовые, тарельчатые,
дисковые и транспортерные аппараты, принцип действия которых
рассмотрен ниже.
Катушечно-штифтовые аппараты применяют для припосевного
рядового высева гранулированных минеральных удобрений. Их
монтируют на рядовых и узкорядных комбинированных сеялках.
Катушечно-штифтовый аппа-
рат (рис. 124) состоит из за-
движки 1, катушки 2, валика
туковысевдющих аппаратов 3,
корпуса 4, донышка 5 и валика
механизма опорожнения 6. Ка-
тушка 2 снабжена штифтами,
расположенными в два ряда
со сдвигом .на 0,5 шага один
относительно другого. Удобре-
ния самотеком поступают, из
ящика в корпус 4, откуда вы-
гребаются вращающейся ка-
тушкой 2 и направляются в
тукопроводы. Зазор между ка-
тушкой 2 и донышком 5 регу-
лируют поворотом валика 6 с
помощью закрепленной на нем
Рис. 124. Схема катушечно-штифтового
высевающего аппарата:
1 — задвижка; 2 — катушка; 3 — валик туко-
высевающих аппаратов; 4 — корпус; 5 — до-
нышко; 6 — вал механизма опорожнения-
172
Рис. 125. Схемы туковысевающих аппаратов:
а — тарельчатого; б — дискового; 1 — сводоразрушающая стенка; 2 — сбрасыватель; 3 — рас-
севной щит; 4 — тарелка; 5 — емкость (ящик, банка); 6 — банка; 7 — ворошитель; 8~ на-
правляющий скребок; 9 — приемная воронка; 10 — механизм привода; // — диск; 12 — ука-
затель уровня.
рукоятки. Зазор зависит от размера гранул. Норму внесения удо-
брений регулируют изменением частоты вращения катушек и из-
менением размера питающего окна с помощью задвижки 1. Тех-
нологический процесс катушечно-штифтового аппарата аналоги-
чен процессу катушечно-желобчатого.
Тарельчатые аппараты (рис. 125, а) применяют для сплош-
ного, а также широкорядного и гнездового' внесения гранулирован-
ных и порошкообразных минеральных удобрений. Их устанавлива-
ют на посевных и посадочных машинах, работающих с между-
рядьем 45 см и выше, а также на культиваторах-растениепита-
телях.
Тарелка 4 установлена так, что одна ее половина находится
под полукруглым отверстием тукового ящика (банки) 5, а другая
выходит за его пределы, наружу. Вращающаяся тарелка 4 за счет
сил трения увлекает удобрения и выносит их тонким слоем из
ящика (банки) наружу. Сбрасыватели 2 в виде вращающихся
лопастей (дисков) или неподвижных скребков сбрасывают туки с
тарелки 4 на рассевной щит 3 (сплошное внесение) или в тукопро-
воды (широкорядный или гнездовой способ внесения). Образова-
ние сводов из удобрений предотвращается колеблющейся стен-
кой 1. Норму внесения удобрений регулируют изменением частоты
вращения тарелок и высоты высевной щели (между дном тарелки
и заслонкой).
Дисковые аппараты (рис. 125, б) применяют для широкоряд-
ного и гнездового внесения гранулированных и порошкообразных
удобрений. Они унифицированы (под маркой АТД-2) и устанав-
ливаются на посевных и посадочных машинах, а также на культи-
ваторах-растениепитателях.
Дисковые аппараты, как и тарельчатые, относятся к аппаратам
фрикционного действия, но в отличие от тарельчатых, которые
173
Рис. 126. Вынос удобрений
тарелкой.
рассевают туки, предварительно выне-
сенные за пределы банки (ящика), они
высевают туки непосредственно из бан-
ки (это отличие не принципиальное).
Диск 11 и ворошитель 7 приводятся
в действие от приводных к-дтес. Вра-
щаясь, диск и ворошитель увлекают ниж-
ний слой удобрений и подводят его к.не-
подвижным скребкам-направителям 8,
которые через высевные окна направ-
ляют туки в приемные воронки 9. Воро-
шитель своими пружинными пальцами
очищает скребки и козырьки от нали-
пающих туков. «Плавающий» скребок —
указатель уровня 12 по мере уменьшения
количества удобрений опускается и сдви-
гает .туки от центра банки к периферии,
что обеспечивает равномерную их пода-
чу. Норму внесения удобрений регули-
руют изменением высоты вхождения
скребков-направителей в банку и измене-
нием частоты вращения диска.
Технологический процесс тарельчатых и дисковых аппаратов
основан на одних и тех же принципах и включает в себя две ос-
новных фазы: вынос слоя удобрений к высевному окну (сбрасыва-
телю), сбрасывание туков с тарелки или диска.
Вынос слоя удобрений к высевному окну проис-
ходит за счет сил трения, которые оказываются достаточными для
того, чтобы сообщить частицам вращательное движение вместе с
тарелкой (диском). При этом нельзя допускать самопроизволь-
ного схода туков с диска (тарелки), т. е. необходимо соблюдать
условие fmg^mRa2 или fg^a2R, где / — коэффициент трения,
т— масса частицы тука, g — ускорение свободного падения, R—
радиус диска (тарелки), ю — угловая скорость его вращения. Как
показывают расчеты, в применяемых аппаратах центростреми-
тельное ускорение a>2R составляет 0,01 ...0,04 м/с2, что в несколько
раз меньше, чем fg. Следовательно, самопроизвольный сход удоб-
рений исключен и необходимо принудительное сбрасывание.
Секундный вынос удобрений тарелкой из ящика (банки) будет
зависеть от площади S отверстия и средней линейной скорости иСр
движения туков, т. е. q=ySucp, где у — объемная масса (плот-
ность) удобрений, кг/м3.
Как можно заключить из рисунка 126, S=h(R—г), а «ср=
•= (u2+iii)/2 = w(/?+r)/2. Подставив в исходное выражение для q
вместо 5 и «ср их значения, получим
q—yuh (R2—г2)/2,
где h — высота щели (слоя удобрений).
(Ю6)
174
При заданной норме высева Q (кг/га) машина с числом высе-
вающих аппаратов k и шириной захвата В (м), движущаяся со
скоростью v (м/с), должна в единицу времени вносить количество
удобрений
q=10-*QBv/k. (107)
Приравняв правые части формул (106) и (107) и решив полу-
ченное уравнение относительно h, будем иметь
й=2.10-4QBu/[^w (/?*— г2)]. (108)
Это выражение связывает эксплуатационные р, о, Q и конст-
руктивные В, Р, г параметры. С его помощью можно устанавли-
вать для обеспечения заданной нормы внесения удобрений пра-
вильные соотношения высоты высевной щели h, угловой скорости
тарелки ко и скорости движения машины v.
Сбрасывание туков выполняется неподвижными скреб-
ками (пассивными сбрасывателями) или вращающимися диска-
ми, крыльчатками (активными сбрасывателями). Так как каждый
аппарат предназначен для высева удобрений в два рядка, то над
каждой тарелкой (диском) устанавливается по два сбрасывателя.
Основные требования к работе сбрасывателей таковы: туки не
должны сгруживаться и уплотняться; левый и правый сбрасыва-
тели должны сбрасывать одинаковое количество удобрений.
Сгруживание и уплотнение туков возможно перед пассивными
сбрасывателями. Туки не сгруживаются перед пассивным сбрасы-
вателем в том случае, если они непрерывно движутся вдоль него
к выходному отверстию.
Рассмотрим условие движения частиц по сбрасывателю
(скребку).
Пусть гранула массой т находится на поверхности вращаю-
щейся тарелки (рис. 127, а). Сила F\, сообщающая движение этой
Рис. 127. Схемы к расчету сбрасывателей тарельчатого (дис-
кового) туковысевающего аппарата:
а — пассивного; б — активного; 1 — тарелка (диск); 2 — сбрасыва-
тель; 3 — делитель.
175
грануле, есть сила трения, равная mgigcp, где т — масса грану-
лы; g— ускорение свободного падения; <р — угол трения. Направ-
ление силы Fi совпадает с направлением скорости и, т. е. перпен-
дикулярно радиусу, проведенному в точку т из центра вращения
О. Разложим силу Fx в момент встречи частицы т со сбрасы-
вателем по двум направлениям: по нормали и по касательной к
поверхности сбрасывателя в точке контакта с ней частицы tn.
Нормальная составляющая F\ sin а возбудит нормальную реак-
цию N, приложенную к частице со стороны сбрасывателя, а каса-
тельная составляющая F\ cos а будет стремиться вызвать скольже-
ние частицы т по поверхности сбрасывателя, которому будет со-
противляться сила трения частицы по сбрасывателю: F2 = Ntg<p=
=Ft sin atgtp. Частица m будет двигаться вдоль сбрасывателя к
выходной щели при условии Л cos «>Р2 = Л sin ct tg<p или cig «
>tg<p. Имея в виду, что ctga=tg(90°—а), условие скольжения
вдоль сбрасывателя перепишем в следующем виде: 90°—о^<р, или
окончательно
о: С 90—д>, (109)
Чтобы поверхность сбрасывателя на всем своем протяжении
удовлетворяла условию (109), угол а по мере удаления от центра
должен оставаться постоянным или уменьшаться. Это возможно
при криволинейном скребке, например, выполненном по логариф-
мической спирали (a=const).
Перед активными сбрасывателями сгруживание и уплотнение
туков исключено. Они, напротив, дополнительно интенсивно из-
мельчают и перемешивают туки. Поэтому качество их работы
обусловлено выполнением второго требования — каждый из них
должен сбрасывать одинаковое количество удобрений. От этого
зависит равномерность распределения удобрений по рядкам. Для
выполнения этого требования необходимо, чтобы к каждому из
сбрасывателей подводилось одинаковое количество удобрений,
равное половине подачи их тарелкой (диском). Это достигается
определенной установкой делителя 3 (рис. 127, б). Исходя из ра-
венства объемов удобрений, направляемых к левому и правому
сбрасывателям, unh(b—r)=unh(R—b), где ил и — средние ско-
рости движения слоя туков, подаваемых соответственно к левому
и правому сбрасывателям; h— высота слоя туков, вынесенных та-
релкой. Так как ил—&(г+Ь)/2, а иа=а> (R + Ь)/2, то заменив ил и
иа в исходном выражении их значениями и решив уравнение от-
носительно Ь, получим
(ПО)
Таким образом, установка делителя на расстоянии b от оси
тарелки обеспечит выброс одинакового количества туков каждым
сбрасывателем.
Транспортерные аппараты применяют для основного (сплош-
ного) внесения органических и минеральных удобрений и их сме-
176
сей, а также для рядкового внесения при посадке картофеля.
Конструктивно они представляют собой цепочно-планчатые (це-
почно-скребковые и цепочно-прутковые) транспортеры, смонтиро-
ванные на дне питающих емкостей (прицепов или полуприцепов).
Норму внесения органических удобрений регулируют изменением
скорости движения транспортера, а минеральных — не только из-
менением скорости транспортера, но и изменением высоты выно-
симого слоя удобрений с помощью заслонок, установленных над
транспортером. В машинах с приводом не от ходовых колес норма
внесения удобрений зависит от скорости ее движения.
Количество удобрений, подаваемых транспортером в единицу
времени q (кг/с), зависит от его скорости птр (м/с) и ширины Ь
(м), т. е.
<?=у«т1Ж (Ш)
где у — плотность удобрений, кг/м3;
Н — толщина слоя удобрений, подаваемых транспортером
(приведенная), м.
При заданных норме внесения удобрений Q (кг/га), скорости
движения машины (м/с) и ширине разбрасывания удобрений
В (м) требуемую подачу q (кг/с) можно подсчитать и по формуле:
9 = 10-^м. (112)
Приравняв правые части формулы (111) и (112) и решив урав-
нение относительно «тр, получим
uTp=10^QBvJ(ybH). (113)
Формула (113) позволяет определить необходимую скорость
транспортера в зависимости от скорости движения машины vM,
нормы внесения удобрений Q и толщины слоя Н.
Пневматические устройства применяются для сплошного (по-
верхностного) внесения пылевидных удобрений. Расход дозируе-
мых удобрений изменяют регулировкой площади выходного от-
верстия распиливающего наконечника при перемещении заслонки.
На норму внесения удобрений влияет также скорость машины.
Гидравлические и пневмо-гидравлические устройства приме-
няются для внесения жидких удобрений. Расход дозируемых удоб-
рений регулируют установкой распылителей (жиклеров) с отвер-
стиями различного диаметра, изменением давления жидкости или
газа в напорной магистрали.
§ 4. Высаживающие аппараты
Высаживающие аппараты картофелепосадочных машин под-
разделяют на ложечно-транспортерные (ленточно-транспортер-
ные) и ложечно-дисковые. Ложечно-транспортерные (ложечно-це-
почные) выполнены в виде бесконечной цепи, к звеньям которой
прикреплены ложечки. Эти аппараты находят ограниченное при-
177
12—424
Рис. 128. Схема ложечно-дискового аппарата для посадки
картофеля:
а — вычерпывающий аппарат; б — зажимное устройство; 1 — диск;
2 — ложечка; 3 — зажим; 4 — пружина.
менение — для посадки яровизированного картофеля. Наибольшее
распространение получили ложечно-дисковые аппараты (рис. 128),
работающие по принципу вычерпывания. Такой аппарат выпол-
нен в виде диска 1 с расположенными по окружности ложечка-
ми 2 (рис. 128, а). Каждая ложечка 2 снабжена зажимом 3
(рис. 128, б). Зажим представляет собой стержень, поворачиваю-
щийся в ушках, верхний конец которого загнут в виде отростка В,
а к нижнему приварен рычажок А. Пружина 4 стремится повер-
нуть стержень и прижать его отросток В к ложечке 2. С наружной
стороны диска /, на некотором расстоянии от него установлена
дугообразная направляющая дорожка (шина).
При вращении диска рычажок А стержня набегает на направ-
ляющую дорожку и, преодолевая сопротивление пружины 4, отво-
дит отросток В от ложечки 2. Ложечка входит в слой картофеля
и захватывает клубень. Когда она выйдет из слоя, то рычажок А
сойдет с направляющей дорожки, и стержень, повернутый пружи-
ной 4, своим отростком В прижмет к ней клубень. В зоне сбрасы-
вания клубней происходит набегание рычажка А на направляю-
щую дорожку, в результате чего отросток В освобождает клубень,
и он выпадает в приемную горловину сошника.
Таким образом, за один оборот диска происходит законченный
цикл работы вычерпывающего аппарата, который складывается
из трех фаз: захват клубня ложечкой при ее перемещении в слое;
фиксация его зажимом и перемещение к приемной горловине сош-
ника; освобождение клубня.
От ритмичности выполнения каждой фазы зависит равномер-
ность распределения клубней в рядках.
Захват клубня ложечкой зависит от многих факторов: раз-
мера клубней, частоты вращения диска, зазоров между боковиной
питающего ковша и ложечкой и между наружной кромкой ложеч-
ки и дном питающего ковша, толщины слоя клубней в питающем
178
ковше. Большое влияние на работу аппарата оказывают объем и
выровненность размеров клубней. Надежный захват (1...3°/о про-
пусков) клубней наблюдается при их массе 40... 100 г. Более
мелкие клубни захватываются лучше, чем крупные. Однако при
массе клубней менее 40 г ложечка может захватить два клубня.
Кроме того, возникает опасность защемления клубня. Возмож-
ность защемления исключается при условии а>2<р, где а — угол
между стенкой и касательной к ложечке в точке ее контакта с
клубнем; <р — угол трения. Так как <р=30... 35°, то а>60... 70°.
Частота вращения диска определяется схемой размещения
клубней и скоростью а машины, т. е.
п=60ym/(/Kz), (114)
где — расстояние между гнездами (клубнями) в рядке, м;
т —число клубней в гнезде; при рядовой посадке т = 1;
г — число ложечек на диске.
Частота вращения диска не должна превышать 35 мин-1, что
соответствует частоте подачи семи клубней в секунду. С увеличе-
нием частоты вращения диска количество пропусков, особенно на
крупных клубнях, резко возрастает. При этом возможно выпаде-
ние клубня путем его опрокидывания относительно наружного края
ложечки (рис. 129, точка А). Без учета влияния бокового щитка
на клубень, расположенный в ложечке, действуют следующие
силы: сила тяжести Р, центробежная сила ЕЦб, нормальная N и ка-
сательная F реакции ложечки. Клубень не выпадает из ложечки
при условии Pa>FjS!ob. Если принять, что клубень имеет форму
шара диаметром d, то a=0,5dsin (ф—у), a 6 = /?sina, где d — диа-
метр клубня; R — расстояние от оси вращения до края А ложеч-
ки. Так как P = mg, aFt^mwR, где т — масса клубня; со — угло-
Рис. 129. Схема к определению условий выпадения
клубня из ложечки.
12’ 179
вая скорость диска, то условие невыпадения клубня из ложечки
примет вид:
sin (<р—у) > (2со2/?2 sin a)/gd. (115>
Из выражения (115) видно, что при малых значениях угла
поворота диска ф клубень будет стремиться выпасть из ложечки,
однако этому будет препятствовать слой картофеля в питающем
ковше. Если ложечка выйдет из слоя, а угол ф будет меньше зна-
чения, удовлетворяющего выражению (115), то клубень выпадет.
При одинаковом слое клубней в питающем ковше выпадание их
из ложечки тем вероятнее, чем больше скорость диска и размеры
клубня (с увеличением размеров угол у растет).
Экспериментально установлены следующие оптимальные зна-
чения зазоров между боковиной питающего ковша и ложечкой в ,
зависимости от массы клубней:
2...4 мм при массе клубня 30...40 г
8... 10 » » » » 60...70 »
7... 12 » » » » 70...80 »
14. .16 » » » » 90...100»
Этот зазор можно регулировать смещением боковины питаю-
щего ковша, для чего отверстия под болты крепления выполнены
овальными.
Ложечки могут не захватывать клубни, если их недостаточно
в питающем ковше. При их избытке увеличивается повреждение.
Оптимальным считают слой клубней толщиной 10... 15 см. Коли-
чество клубней в питающем ковше регулируют заслонкой, откры-
вающей проход клубней из бункера в ковш.
Фиксация клубня в ложечке происходит в тот момент,
когда ложечка выходит из слоя клубней, а рычажок стержня схо-
дит с направляющей. Стержень под действием пружины по-орачи-
вается и своим отростком прижимает клубень к ложечке. При не-
своевременном зажиме клубни будут выпадать путем опрокидыва-
ния через край В ложечки (рис. 129).
Клубень не выпадет из ложечки при условии Pa^F'r.bi. Под-
ставив значения величин, входящих в это неравенство, и сделав
некоторые преобразования, получим
sin (ф!—Yj) < (2<в27?1 sin aj/gd. (116)
Из этого выражения можно определить угол ф1 поворота дис-
ка, при котором клубень должен быть зажат в ложечке. Фиксация
клубня происходит при ф1~90 ... 115°. Зажатые клубни поворотом
диска переносятся к приемной горловине сошника.
Освобождение клубня зажимом происходит при на-
бегании рычажка 2 (рис. 130, а) стержня на направляющую до-
рожку 3. При этом начало выпадения клубня отстает от момента
набегания рычажка на направляющую дорожку, так как для осво-
бождения клубня необходимо отвести отросток стержня на некото-
180
Рис. 130. Схема освобождения клубня из ложечки:
а — действие зажимного устройства: б — положения ложечки: 1 — ложечка;
2— рычажок; 3 — направляющая дорожка (шина).
рый угол Ар. Этот угол в зависимости от конструкции зажимного
устройства, а также размеров и формы клубней изменяется от
2 до 6°. Момент набегания рычажка на шину, в свою очередь, за-
висит от размеров клубней. Если в ложечке 1 находится мелкий
клубень, то рычажок 2 набегает на шину раньше (положение Z),
чем при крупном (положение III). Если принять, что клубни сред-
него размера выпадают в некотором положении ложечки А
(рис. 130, б), то мелкие клубни будут выпадать в положении В,
а крупные—в положении С. Следовательно, если момент выпаде-
ния средних клубней соответствует повороту диска на угол фг, то
мелких — на величину Дф? меньшую, а крупных — на величину
Лф2 большую. Как следует из рисунка 130, б, Афг^АЗ/л, где
AS — дуга направляющей дорожки, соответствующая углу Дфг;
Гу — радиус направляющей дорожки. Заменяя дугу хордой
(рис. 130, а), получаем
AS—c(tgp2 —tg PJ.
Тогда
A(p;=c(tgp2—tgpJ/Ti,
Aq>''=c(tgp3-tgp2)/r1. (117>
Следовательно, разные по размеру клубни будут падать с разной
высоты. На основании соотношений, выведенных из рисунка
130, б, имеем:
Нг=Н.г+7? sin А<р',
Z/3=Z/2—/?sin Аф". (118)
181
Из-за разницы в высоте, с которой падают клубни неодинако-
вого размера, получается неравномерное их распределение при
рядовой посадке. Эта неравномерность тем больше, чем больше
•отклонения в размерах высаживаемых клубней. При посадке
клубней массой 30... ПО г отклонение расстояний между клубня-
ми в рядках составляет ± (15... 18) %.
Следовательно, большая разница в размерах клубней резко
снижает равномерность посадки картофеля. Поэтому перед по-
садкой необходимо сортировать клубни. Обычно посадочный мате-
риал разделяют на следующие фракции: 30... 50, 50... 80 и
-80... 100 г.
От высаживающего аппарата зависит и предельно допускае-
мая скорость картофелесажалки. Опыты показали, что удовлетво-
рительная работа (пропуски не более 3%) наблюдается при ча-
стоте захвата клубней vmax=7 клубней в секунду. Работа при
-большей частоте недопустима, так как приводит к резкому возра-
станию числа пропусков. Следовательно, предельно допускаемая
скорость машины составит:
Цпах —\пах^к/^-
Как видно из (119), рядовую посадку (т = 1) можно проводить
с гораздо большей скоростью, чем гнездовую.
Аппараты для высадки рассады подразделяют на две группы:
аппараты с вращательным движением рассадодержателей и с по-
ступательным движением рассадодержателей в зоне высадки рас-
сады. К первой группе следует отнести дисковые и параллело-
траммные аппараты, ко второй — цепные (цепочно-конвейерные).
Из аппаратов первой группы наибольшее распространение в оте-
чественных и зарубежных конструкциях машин получили дисковые
аппараты.
Дисковый аппарат (рис. 131, а) выполнен в виде диска 1
< горизонтальной осью вращения, к которому прикреплены расса-
додержатели 2. Рассадодержатель (рис. 131, б) состоит из крон-
штейна 3, пружины 4 и двуплечего рычага 5. На одном конце ры-
чага закреплены резинки В, предохраняющие рассаду от повреж-
дения, а другой конец заканчивается роликом А. Пружина 4
стремится прижать рабочий конец рычага 5 к диску 1. Когда рас-
садодержатель 2 своим рабочим концом обращен кверху, то ролик
рычага А набегает на направляющую дорожку (раскрыватель) и
отводит рабочий конец рычага от диска. В зазор между диском /
и рассадодержателей 2 вкладывают рассаду по радиусу, корнем
наружу. Дальнейший поворот диска приводит к тому, что роликА
сбегает с дорожки малого раскрывателя, а рычаг 5 под действием
йружины 4 прижимает рассаду к диску 1. Когда рассада пере-
местится вниз и займет вертикальное положение, опустившись ко-
решками в борозду, ролик А набежит на дорожку второго раскры-
вателя. При этом рабочий конец рычага 5 отойдет от диска / и
«182
ля:
а — дискового аппарата; б — рассадодержателя; в — цепного (цепочно-кон-
вейерного); 1 — диск; 2 — рассадодержатель; 3 — кронштейн; 4—пружина;
5 — двуплечий рычаг; 6 — звездочка; 7 — рассадодержатель; 8 — цепь; 9 — на-
правляющие планки.
освободит рассаду, корешки которой окажутся заделанными в
почву прикатывающими катками.
Цепной аппарат (рис. 131, в) выполнен в виде цепи 8,
надетой на три звездочки 6, на которой расставлены рассадодер-
жателн 7, и снабжен направляющими планками 9. Рассаду закла-
дывают в раскрытый рассадодержатель 7 в зоне подхода к план-
кам 9. Попав в зазор между двумя направляющими планками 9,
рассадодержатель 7 закрывается и удерживает рассаду. На гори-
зонтальном участке цепи корень рассады попадает в бороздку и
заделывается в почву прикатывающими катками. После этого рас-
садодержатель 7 выходит из направляющих 9 и освобождает рас-
саду.
Таким образом, рабочий цикл высаживающих аппаратов скла-
дывается из трех фаз: вкладывания рассады в рассадодержатели,
перемещения рассады к бороздке, высадки ее в почву.
Первая фаза — вкладывание рассады в рассадодержатели
выполняется вручную. При скорости машины v и шаге посадки /р.
частота посадки v=v/lv. Так как рассаду закладывают вручную,
то частота закладки v ограничивается физическими возможностя-
ми сажалыциц. Опыт работы показывает, что средняя частота за-
кладки рассады одной сажальщицей vmed=35...4O шт./мин. Сле-
довательно, расчетная скорость движения машины (м/с)
o=-vrned/p/60. (120>
В применяемых машинах шаг посадки Zp можно изменять от 15
до 210 см. Необходимый шаг посадки /р получают изменением чис-
ла рассадодержателей z на диске. В отечественных машинах при1
z, равном ... 14 12 10 8 7 6 5 4 3
/р равно (см) . . 15 18 21 25 30 35 42 60 70
183-
Рис. 132. Схема к определению кинема-
тики рассады в процессе ее высадки.
Даже при шаге посадки
/р=0,7 м скорость машины
составит 0,4 ... 0,5 м/с, что
значительно ниже обычных
рабочих скоростей тракто-
ров. Поэтому для работы с
рассадопосадочными маши-
нами тракторы, как прави-
ло, оборудуют ходоумень-
шителями.
При частоте закладки
рассады vmed средний пе-
риод закладки Z = l/vme<! =
= lP/v. Этот же параметр,
т. е. период закладки рассады t, можно выразить и через конструк-
тивные параметры дискового высаживающего аппарата, в этом
случае /=2л7?/(их), где R— радиус окружности, по которой рас-
положены центры рассадодержателей; и — окружная скорость
центров рассадодержателей; z— число рассадодержателей на дис-
ке. Приравняв правые части двух приведенных выражений, заме-
нив u/v через Z и решив полученное уравнение относительно X,
получим
Х=2л/?/(г/р). (121)
Здесь Z— показатель кинематического режима работы рас-
садопосадочного аппарата. Таким образом, выражение (121) свя-
зывает в единую зависимость показатель кинематического режи-
ма X с конструктивными параметрами рассадопосадочного аппа-
рата R и z и шагом посадки /р. Пользуясь им, можно настроить
рассадопосадочную машину на заданный режим работы.
Вторая фаза — перемещение рассады к бородзке — может
быть описана уравнениями движения. Каждая точка рассадодер-
жателя (рассады) совершает сложное движение: относительное с
угловой скоростью си и переносное вместе с машиной со ско-
ростью V. Приняв за начало координат центр диска О (рис. 132)
и направив ось X в сторону движения машины, а ось Y по верти-
кали вниз, рассмотрим движение некоторой i-й точки рассадодер-
жателя (рассады).
Нетрудно догадаться, что уравнения абсолютного движения
i-й точки рассады будут иметь такой же вид, как уравнения (59)
для точки ножа фрезы, т. е. Xi—vt+Ri cos cot; yi-Rcsin cat. Эти
уравнения, как известно, определяют траекторию движения i-й
точки рассады, представляющую собой циклоиду.
Продифференцировав приведенные выше уравнения по време-
ни, получим уравнения абсолютной скорости i-й точки рассады:
vx—dx/dt=coRl sin cot,
vy = dy/dt=caRt cos cot.
184
Когда рассада переместит-
ся вниз и займет вертикальное
положение, опустившись кор-
нями в бороздку, закончится
вторая фаза и начнется
третья.
Третья фаза — высад-
ка рассады в почву — будет
проходить в крайнем нижнем
положении рассады, т. е. при
соГ = .т/2. Следовательно, в мо-
Рис. 133. Эпюры распределения скоро
стей различных точек рассады при раз-
личных режимах ее высадки.
мент высадки рассады
aRt, vy=0.
(123)
Если принять для z-й точки Z£= 1 ((о/?£ = о),тоеетраекторией дви-
жения будет обыкновенная циклоида, при этом абсолютная ско-
рость vRl=vX/ =0. В этом случае для точки 1 будут такие условия
Xi>l (<iiRi>v), траектория движения — удлиненная циклоида,
га1 = Щ. <0; для точки 2 соответственно Хг<1 (co/?2<v), траекто-
рия движения — укороченная циклоида, Оа2=^2>0. Таким обра-
зом, в аппарате дискового типа в момент посадки нулевую ско-
рость будет иметь лишь одна точка рассады, скорости других то-
чек будут отличны от нуля. При этом возможны различные ва-
рианты кинематических режимов работы аппарата (рис. 133).
Теоретически скорость корешка рассады в момент посадки
должна равняться нулю (рис. 133, в). Однако из-за скольжения
колес, приводящих в движение высаживающие аппараты, осущест-
вить это условие практически невозможно. Кроме того, замечено,
что в момент высадки за счет перемещения почвы прикатывающи-
ми каточками рассада несколько наклоняется вперед. Поэтому для
придания стеблям рассады вертикального положения следует при-
нимать для корешков Z> 1 (рис. 133,а и б). По опытным данным
оптимальное значение X в зависимости от длины высаживаемой
рассады лежит в диапазоне 1,23<Х,< 1,68, его определяют в поле
в зависимости от конкретных условий работы.
Глава III
УСТРОЙСТВА ДЛЯ РАЗМЕЩЕНИЯ СЕМЯН
И УДОБРЕНИЙ ПО ПОЛЮ
§ 1. Семяпроводы и тукопроводы
Назначение и разновидности. Семяпровод направляет поток се-
мян (удобрений) от высевающего аппарата к сошнику. В зависи-
мости от сыпучести семян (удобрений) и отклонения сошников от
высевающих аппаратов применяют различные семяпроводы
(рис. 134).
185
Рис. 134. Семя- и тукопроводы:
а — спирально-ленточный; б — трубчатый; в — во-
ронкообразный; г — гофрированный д — спираль-
но-проволочный; е — телескопический.
Спирально - лен-
точные семяпроводы
(рис. 134, а) применяют в
сеялках. Они изготовлены
из стальной ленты, хорошо
изгибаются, что позволяет
изменять положения сош-
ников, но относительно до-
роги и трудно восстанавли-
ваются после деформиро-
вания.
Трубчатые семяпро-
воды (рис. 134,6) изготав-
ливают из прорезиненной
ткани или пластмассы. Они
достаточно гибки, дешевы
в изготовлении и легки, но
быстро изнашиваются, а при
изгибах затрудняют проход
семян к сошнику, вызывая неравномерность высева.
Воронкообразные семяпроводы (рис. 134, в) состоят из
ряда воронок, подвешенных на цепочках. Их применяют для вы-
сева малосыпучих семян и минеральных удобрений. При работе
они сотрясаются, что способствует очистке от налипших удобре-
ний и семян. Они хорошо работают только в вертикальном поло-
жении, не допускают значительного изменения расстояния между
высевающими аппаратами и сошниками.
Г о ф р и р о в а н н ые семяпроводы (рис. 134, г) изготавливают
из резины и используют для высева как семян, так и удобрений.
Спирально-проволочные семяпроводы (рис. 134, д)
гибки и прочны, но тяжелы и при изгибах защемляют и повреж-
дают семена.
Телескопические семяпроводы (рис. 134, е) способству-
ют повышению равномерности высева семян, но недостаточно по-
движны в осевом направлении, так как зазоры между трубками
.забиваются, что приводит к их заклиниванию.
Движение семян в семяпроводе возможно в двух случаях:
семяпровод стоит вертикально или под небольшим углом к верти-
кали в направлении движения; семяпровод стоит под значитель-
ным углом к вертикали (>15°). В первом случае основная масса
семян (от 2/з до 4/s) при движении в семяпроводе находится в ус-
ловиях свободного падения, т. е. проходит, не ударяясь о его стен-
ки. Во втором случае движение семян можно рассматривать, как
движение по наклонной плоскости с трением, и для обеспечения
условий проходимости семяпровода необходимо, чтобы угол его
наклона в любой точке был больше угла трения семян. Рациональ-
ный угол наклона семяпровода в продольно-вертикальной плоско-
сти определяют из условия a=arctg(///x), где Н — высота паде-
186
ния семян; х — отклонение траектории падения от вертикали. Экс-
перименты показали, что этот угол составляет 80... 75° к горизон-
тали. При таком угле обеспечиваются условия свободного падения
для основной массы семян, так как наклон семяпровода соответ-
ствует траектории свободного полета семян, выброшенных высе-
вающим аппаратом.
В практических расчетах можно принять движение семян в се-
мяпроводе как свободное падение, а влияние сопротивления воз-
духа и соударений семян учесть некоторым коэффициентом. Исхо-
дя из этого, получим дифференциальное уравнение движения
зерна: md2zldt2 = mg. Проинтегрировав, получим: dz]dt=gt+C,.
где С — постоянная интегрирования, равная вертикальной состав-
ляющей цв скорости выбрасывания зерна (клубней) высевающим
(высаживающим) аппаратом. Заменив С через ив и проинтегриро-
вав полученное выражение, будем иметь z=gt2]2-\-uBt. Так как
z~HB, где Нс — длина семяпровода, то, заменив z через Нс и сде-
лав некоторые преобразования, получим квадратное уравнение:
t2+2uBt/g—2HJg=0, откуда
t=(-uB^Vul+2Hcg)/g. (124>
Для высевающих аппаратов сеялок ып~0, а для ложечно-диско-
вых высаживающих аппаратов картофелесажалок ив=ил, где
ил — окружная скорость ложечки. Для учета влияния факторов,
сопутствующих свободному падению зерна, принимаем где
tK—действительное время движения зерна в семяпроводе, у, — по-
правочный коэффициент; для рядовых сеялок р.= 1,05... 1,15„
квадратно-гнездовых р.= 1,3... 1,45. Исследования показывают,
что семяпроводы не только направляют к сошникам семена, но и
влияют на равномерность их распределения. Неравномерная по-
дача семян высевающими аппаратами под влиянием семяпроводов
несколько сглаживается.
§ 2. Гнездообразующие устройства
Гнездообразующие устройства применяют в сеялках и сажал-
ках для гнездового и квадратно-гнездового посева, посадки и вне-
сения удобрений. Они разделяют непрерывный поток семян или
удобрений, создаваемый высевающим (высаживающим) аппара-
том, на порции, которые затем через заданные интервалы выбра-
сываются в борозды, образуя гнезда.
По конструктивным признакам их разделяют на две группы:
возвратно-поступательного действия (клапанные); вращательного
действия (роторные). В каждой из групп различают гнездообра-
зующие устройства, работающие по принципу активного и пассив-
ного выбрасывания семян (клубней). Первые сообщают семенам
определенную начальную скорость, вторые используют принцип
свободного падения семян. Клапанные устройства пассивного и
активного действия находили применение преимущественно в ку-
187
курузных сеялках, роторные — в картофелесажалках (с горизон-
тальной осью вращения) и в хлопковых сеялках (с вертикальной
осью вращения). В современных конструкциях клапанные устрой-
ства применяются редко.
§ 3. Сошники
Разновидности и применение. В сошнике заканчивается движе-
ние семенного — зернового потока или потока посадочного мате-
риала (например, клубней), образовавшегося в семенном ящике
(бункере). Поэтому задача сошника состоит в том, чтобы образо-
вать бороздку определенной глубины, уложить в нее семена или
клубни и заделать их почвой.
По принципу действия сошники можно разделить на две груп-
пы: поступательного движения (наральниковые) и вращательного
движения (дисковые).
По технологическому принципу сошники разделяют на три
группы: с острым, прямым и тупым углами вхождения в почву.
Технология образования бороздки этими сошниками различна.
Сошник с острым углом вхождения образует бороздку, перемещая
почву снизу вверх, вследствие чего дно борозды получается рых-
лым. Сошник с тупым углом вхождения, наоборот, образуя бо-
роздку, вдавливает почву сверху вниз, поэтому дно бороздки ока-
зывается уплотненным. Сошник с прямым углом вхождения обра-
зует бороздку, раздвигая почву в стороны. Острый угол вхожде-
ния в почву имеют анкерные и лаповые сошники, прямой — труб-
чатый сошник и тупой угол вхождения — килевидный, полозовид-
ный и все дисковые. На рисунке 135 представлены основные раз-
новидности сошников, получивших широкое распространение:
в верхнем ряду (а, б, в, г, д)—поступательного движения (на-
ральниковые), в нижнем (е, ж, з)—вращательного (дисковые).
Анкерные сошники (рис. 135, а) устанавливают на зер-
новых и некоторых специальных сеялках. Их применяют на хоро-
шо разрыхленных, мелкокомковатых почвах, не содержащих круп-
ных растительных остатков. Анкерный сошник состоит из нараль-
ника /, воронки 2 и хомутика 3. Комбинированные анкерные сош-
ники снабжены двумя воронками: передней — для удобрений, зад-
ней— для семян. Так как анкерные сошники выносят на поверх-
ность нижние, более влажные слои почвы, то их применение в
районах с недостаточной влажностью считается нежелательным.
Глубину хода анкерных сошников регулируют от 4 до 7 см навеши-
ванием на хвостовик хомутика 3 специальных грузов и изменени-
ем угла вхождения в почву. Тяговое сопротивление сошника от
30 до 100 Н.
Килевидные сошники (рис. 135, б) применяют для
высева семян льна, трав и т. д. Килевидные сошники в меньшей
мере, чем анкерные, забиваются растительными остатками, но
при встрече с крупными комками почвы выглубляются, поэтому
188
Рис. 135. Сошники:
а — анкерный; б — килевидный; в — полозовидный; г — трубчатый; д — лаповый (лапа-
сошник); е — однодисковый; ж — двухдисковый; з — двухдисковый с ограничительными
ребордами; 1 — наральник; 2 — раструб; 3 — хомутик; 4 — щека; 5 — стрельчатая лапа;
6— сферический диск; 7 — корпус; 8 — поводок; 9— колпак; 10 и 11 — плоские диски; 12—*
чистик; 13 — реборда; 14 — каток; 15 — пружина.
при их применении требуется тщательно подготавливать поле-.
Сошник состоит из наральника (киля) 1 с заостренным ребром,
раструба 2 и хомутика 3. Прорезая бороздку, килевидный сошник
вдавливает почвенные агрегаты сверху вниз, в результате чего
образуется уплотненное дно бороздки, способствующее притоку
влаги и более быстрому прорастанию семян. Поэтому применение
килевидных сошников в зонах недостаточного увлажнения пред-
почтительнее. Глубину хода сошников регулируют от 1 до 6 см
навешиванием грузов на хвостовик хомутика 3 и нажимной пру-
жиной. Тяговое сопротивление килевидного сошника 30...40Н.
Полозовидные сошники (рис. 135, в) используют на
посеве семян кукурузы, хлопчатника, свеклы, овощных и других,
культур. Полозовидными сошниками снабжают гнездовые и квад-
ратно-гнездовые сеялки, поэтому в их корпусах устанавливают
гнездообразующие устройства. Полозовидный сошник имеет разви-
тый ножевидный наральник 1, переходящий сзади в параллельно-
расположенные удлиненные щеки 4. Так как полозовидные сошни-
ки высевают семена с большим коэффициентом трения и малой уп-
ругостью, то их щеки выполняют удлиненными. Удерживая стенки-
борозды от осыпания, удлиненные щеки способствуют укладке всех
семян на чистое дно борозды. Глубину хода регулируют от 1,5 до
12 см с помощью нажимной пружины штанги и перестановкой
прикатывающего колеса, расположенного за сошником (кукуруз-
ные и свекловичные сеялки), или перестановкой ограничительных
полозков (хлопковые сеялки).
Трубчатые сошники (рис. 135, г) применяют для высева
зерновых культур по предварительно обработанной стерне на поч-
вах, подверженных ветровой эрозии. Сошник несет вертикальный
наральник 1 и трубку 2. Шарнирно-упругое присоединение сош-
ника к раме сеялки приводит к его вибрации в процессе работы и
способствует самоочищению от налипшей почвы и растительных
остатков. Семена, внесенные в узкую бороздку, проделанную сош-
ником, заделываются за счет естественной осыпи почвы со стенок
борозды. Глубину хода сошников регулируют изменением положе-
ния упора (хомутика) на штоке гидроцилиндра. Перемещение
упора по штоку в сторону гидроцилиндра приводит к уменьшению
глубины хода сошников.
Лаповые сошники (рис. 135, д) применяют для высева
семян зерновых культур по необработанной стерне на легких по
механическому составу почвах, подверженных ветровой эрозии. Та-
кой сошник выполняет одновременно несколько технологических
операций: некоторое рыхление почвы, подрезание сорняков, высев
семян и внесение гранулированных удобрений. Сошник имеет на-
ральник 1, раструб (трубку) 2 и стрельчатую лапу 5. Выпускают
сошники двух модификаций: для рядкового и безрядкового. посе-
вов. Сошники для безрядкового посева снабжают разбрасывате-
лями, смонтированными в нижней части сошников. Разбрасыва-
тель, состоящий из стойки и полуконуса, распределяет семена и
190
удобрения широкой полосой под слой почвы, поднятый лапой. Глу-
бину хода лаповых, как и трубчатых сошников, регулируют пере-
мещением упора на штоке гидроцилиндра.
Однодисковые сошники (рис. 135, е) предназначены
для посева семян зерновых культур на обработанных и необрабо-
танных полях с сохранением стерни. Они одновременно выполняют
две операции: лущение почвы и высев семян и применяются в ком-
бинированных машинах — лущильниках-сеялках. Сошник снабжен
сферическим диском 6 и раструбом 2. Диск установлен под углом
к направлению движения, раструб 2 расположен сзади, у выпук-
лой стороны диска, и направляет семена в раскрытую им борозд-
ку. Положение раструба 2 относительно диска 6 регулируется: чем
ближе к диску, тем меньше разброс семян. Однодисковые сошни-
ки, как правило, сгруппированы в батареи. Однодисковый сошник
по сравнению с двухдисковым лучше заглубляется в почву, лучше
перерезает растительные остатки и очищается от налипшей поч-
вы. Все это позволяет применять его на почвах относительно
твердых с растительными остатками и влажных (до 85% от пре-
дельной полевой влагоемкости). Однако по равномерности задел-
ки семян однодисковый сошник уступает двухдисковому. Глубину
заделки семян регулируют нажимными пружинами и изменением
положения упора на штоке гидроцилиндра — чем ближе к гидро-
цилиндру, тем мельче.
Двухдисковые сошники (рис. 135, ж) применяют для
высева семян зерновых культур. Двухдисковый сошник снабжен
корпусом 7, относительно которого вращаются два плоских диска
10 и 11, установленные на подшипниках качения под углом 10°
один к другому. Диски сходятся в передней части, образуя в
плане клин. Во избежание защемления почвы в стыке между дис-
ками точка стыка располагается ниже горизонтального диаметра,
но несколько выше поверхности поля. В работе диски вращаются,
разрезая почву и растительные остатки, и, как клин, раздвигают
почву, образуя бороздку.
Дисковые сошники сложнее анкерных, хуже заделывают семена,
имеют большее тяговое сопротивление. Однако они могут удовле-
творительно производить посев на грубо обработанной, комковатой,
богатой корневыми остатками почве и в значительно меньшей мере
подвержены залипанию.
Двухдисковый сошник узкорядной сеялки отличается тем, что
его диски установлены под большим углом (18°) один к другому
и точка их соприкосновения находится выше, в результате чего
один сошник образует две бороздки с гребешком посередине.
Между дисками устанавливается делительная воронка, которая
разделяет поток семян, поступающий из семяпровода на две рав-
ные части. Глубину хода дисковых сошников регулируют от 2 до
8 см изменением давления на них нажимных пружин, при этом
предусматривается как групповая, так и индивидуальная регули-
ровка. Тяговое сопротивление дискового сошника 70...95Н.
191
Рис. 136. Схема к определению ши-
рины бороздки, образуемой сошни
ком.
Д в у х д и с к о в ы е сошни-
ки с ограничительными
ребордами (рис. 135, з) ис-
пользуют на высеве семян овощ-
ных культур. Реборды 13 при-
креплены к наружным плоско-
стям дисков и предназначены
для получения равномерной и бо-
лее точной глубины заделки се-
мян. Изменение диаметра реборд
позволяет регулировать глубину
заделки семян от 2 до 5 см. За
сошниками установлены прика-
тывающие каточхи 14, которые
уплотняют почву по сторонам засеянного ряда.
Рабочий процесс сошника складывается из трех фаз: образо-
вание бороздки, размещение семян в бороздке; частичная или пол-
ная заделка семян.
Образование бороздки. Форма и размеры бороздки за-
висят главным образом от параметров клина, образуемого нараль-
ником в поступательно движущихся сошниках, и взаимным распо-
ложением дисков в сошниках, вращающихся в процессе работы.
Один из основных размеров бороздки — ее ширина по дну: чем
она больше, тем выше вероятность укладки семян на заданную
глубину. Рассмотрим зависимость между шириной бороздки и па-
раметрами наиболее распространенного двухдискового сошника.
Пусть точка А (рис. 136) стыка дисков находится на высоте, оп-
ределяемой углом а наклона радиуса OA = R к вертикали, а угол
между дисками будет р. Тогда ширина бороздки, определяемая
расстоянием между нижними точками режущих кромок дисков,
b = BC—2AB sin(p/2). Так как АВ — ОА—OB=R—Pcosa—
=7?(1—cos а), то, подставив его значение в предшествующее выра-
жение, получим
£>=2#(1—cos a) sin (Р/2). (125)
Из формулы (125) следует, что с увеличением углов аир ши-
рина бороздки возрастает. У сошника для обычного рядового по-
сева а=50°, р=10° При а>50° диски работают раздельно, прово-
дя две самостоятельные бороздки. Например, в сошнике узкоряд-
ной сеялки при а=100°, р=18°, £> = 350 мм получаются две само-
стоятельные бороздки с расстоянием 65 мм одна от другой.
Размещение семян в бороздке показывает, что глу-
бина их заделки не всегда совпадает с глубиной хода сошника.
Причина состоит в том, что хорошо подготовленная к посеву поч-
ва представляет собой сыпучую среду. Во время движения сош-
ника его щеки подпирают почву. Однако сыпучая почвенная мас-
са, огибая шеки, просыпается во внутреннее пространство сошни-
ка и располагается там по некоторой наклонной поверхности
192
Рис. 137. Осыпание почвы при образовании бороздки’
а — анкерным; б — дисковым сошником.
(рис. 137, а). Наклон этой поверхности направлен в сторону носка
сошника. Следовательно, семена, поступающие из раструба, попа-
дают на наклонную поверхность подсошниковой полости и оказы-
ваются на разном расстоянии hi, h2, hs от дна бороздки, т. е. за-
деланными на разную глубину. Чтобы добиться равномерной за-
данной глубины заделки семян, необходимо направить их к перед-
ней части сошника, куда осыпь не достигает и где дно бороздки
горизонтально. Для этого пользуются двумя способами: либо уста-
навливают в нижней части сошника наклоненную вперед пластин-
ку, ударившись о которую, семена отбрасываются к носку сошни-
ка, либо снабжают сошник удлиненными щеками, которые удержи-
вают почву от осыпания до тех пор, пока все семена не упадут
на чистое дно борозды. Первым способом пользуются для высева
семян с достаточной упругостью, вторым — для высева семян с ма-
лой упругостью и большим коэффициентом трения.
Заделка семян происходит частично или полностью за
счет осыпания почвы со стенок борозды. После прохода сошника
почва осыпается со стенок борозды, располагаясь в конечном счете
под углом естественного откоса. В результате образуется поверх-
ность, имеющая в поперечном сечении вид опрокинутого конуса с
образующими, расположенными под углом естественного откоса к
горизонтали. При этом необходимо, чтобы сначала осыпалась бо-
лее влажная почва, т. е. из нижних слоев, а потом уже из верхних.
В этом случае семена будут иметь контакт с более влажной поч-
вой и скорее прорастут. Конструктивные формы сошников выпол-
нены с учетом этого условия. Так, в дисковом сошнике почва осы-
пается на семена поочередно, начиная с нижних слоев aibi и кон-
чая верхними йзЬз (рис. 137, б). В анкерных и килевидных сошни-
ках для этой же цели предусмотрены вырезы АВС (рис. 135, а
и б).
Хорошее качество бороздообразования и заделки семян наблю-
дается лишь при скоростях до 2,5 м/с (9 км/ч). С увеличением
скорости движения до 4 м/с (15 км/ч) равномерность заделки се-
мян по глубине существенно ухудшается.
Размещение сошников. Профессор М. X. Пигулевский устано-
вил, что при движении сошника в разрыхленном слое происходит
13—424
193
вспучивание почвы — образуется предсошниковый холм, который
распространяется на некоторое расстояние вперед и в стороны. Это
явление учитывается при относительном размещении сошников.
Расстояние между сошниками в одном ряду ас должно быть боль-
ше, чем ширина предсошникового холма Ьх, т. е. должно соблю-
даться условие ас>&х. При несоблюдении этого условия предсош-
никовые холмы смыкаются и образуется сплошной вал, в резуль-
тате чего сошники гребут почву, и процесс бороздообразования
нарушается. По опытным данным для анкерных сошников
20 см, килевидных ас 15 см, двухдисковых ас 25 см. Чтобы
получить необходимую ширину междурядий, приходится, как пра-
вило, расставлять сошники в два ряда.
В продольном направлении расстояние между сошниками при-
нимают: 22 см — для дисковых сошников рядовых сеялок, 47 см —
для дисковых сошников узкорядных сеялок, 35 см — для килевид-
ных сошников льняных сеялок.
§ 4. Устройства для заделки семян, клубней, рассады
Осыпавшаяся после прохода сошника почва закрывает борозд-
ку с семенами (клубнями) не полностью. Поэтому окончательная
их заделка, как правило, предусматривается принудительная —
специальными заделывающими устройствами (рис. 138): шлейфа-
ми, боронами, загортачами, каточками, дисками и т. п.
Рис. 138. Схемы устройств для заделки семян и клубней:
а — шлейф; б — борона; в каточки с коническим ободом; г — загортачи с каточком;
й —. спаренные каточки; е — диски; 1 — цепь; 2 — кольцо шлейфа; 3 кольцо бороны.
4 — зуб; 5 — каточек; 6 — вал; 7 —втулка; « —загортач; 9 — цилиндрический каточек; /О —
каточёк с' ободом в виде усеченного конуса; 11 — сферический диск.
194
Шлейфы (рис. 138, а) применяют для заделки семян зерновых,
высеянных на легких и средних почвах. Их устанавливают на зер-
новых, зерно-травяных и комбинированных сеялках. Шлейф со-
стоит из ряда колец 2, соединенных цепью 1 с сошником сеялки.
Он свободно волочится за сошником по поверхности поля и вы-
равнивает почву. Действие шлейфов оказывается достаточным
лишь для заделки узких, неглубоких бороздок.
Бороны (рис. 138, б) находят наибольшее распространение на
узкорядных сеялках. Борона представляет собой кольцо 3 с зубья-
ми 4. Совершая в процессе движения колебания в горизонтальной
плоскости, борона лучше, чем шлейф, разравнивает поверхность
поля и, кроме того, раздробляет почвенные комки.
Каточки (рис. 138, в, г, б) применяют на овощных, зерновых,
кукурузных, свекловичных и хлопковых сеялках, а также на рас-
садопосадочных машинах. Каточки могут иметь конический, ци-
линдрический или в виде усеченного конуса обод и горизонталь-
ную или наклонные оси вращения. Их устанавливают по одному,
а также комплектуют попарно или по нескольку штук — секциями
(батареями). Они не только заделывают бороздки, но выравнива-
ют и уплотняют почву.
Каточки с коническим ободом (рис. 138, в) собира-
ют в секции по шесть штук в каждой и устанавливают на зерно-
вых сеялках, предназначенных для работы в районах недостаточ-
ного увлажнения на почвах, подверженных ветровой эрозии. Сеял-
ки, оборудованные такими каточками, получили название прес-
совых.
Каточек в сочетании с загортачами 8
(рис. 138, г) используют в свекловичных сеялках. Такое сочетание
необходимо для заделки бороздок, имеющих относительно боль-
шую ширину и глубину. При этом загортачи засыпают бороздку
почвой, а цилиндрический обрезиненный каточек уплотняет ее.
Каточки с ободом в виде усеченного конуса
(рис. 138, д) применяют на рассадопосадочных и лесопосадочных
машинах. Перекатываясь в процессе работы по краям раскрытой
бороздки, они сдвигают ее стенки и заделывают рассаду (сажен-
цы). Аналогичное воздействие на почву оказывают каточки овощ-
ных и кукурузных сеялок.
Диски (рис. 138, е) предназначены для глубокой заделки семян
(клубней). Их устанавливают на картофелесажалках. Обычно
применяют сферические диски, смонтированные на наклонных
осях. Поворотом осей регулируют высоту образуемого дисками
гребня. При гладкой посадке за дисками устанавливают боронки.
§ 5. Разбрасывающие устройства
Для основного внесения минеральных и органических удобре-
ний, когда требуется внесение больших их доз, применяют раз-
брасыватели. Эта большая и разнообразная по конструктивному
13'
195
Рис. 139. Схемы к расчету рабочего процесса дискового аппарата для разбра-
сывания минеральных удобрений:
а — схема сил, действующих на частицу, движущуюся по лопасти горизонтального диска
с вертикальной осью вращения; б — схема к определению дальности полета частицы;
s — схема к определению зоны разбрасывания удобрений.
исполнению группа машин связана одним общим признаком: все
они вносят удобрения на поверхность поля вразброс, а для после-
дующей заделки удобрений используются почвообрабатывающие
машины (плуги, бороны и т. п.).
Разбрасывающие устройства работают по принципу сообщения
кинетической энергии частицам удобрений вращающимися рабочи-
ми органами. При этом наибольшее распространение получили:
для разбрасывания минеральных удобрений—устройства в виде
дисков с вертикальной осью вращения; для разбрасывания органи-
ческих удобрений — устройства в виде дисков и барабанов с го-
ризонтальной осью вращения. Рабочий процесс каждого из таких
аппаратов складывается из двух фаз: относительного перемеще-
ния частиц удобрений по диску (барабану); свободного полета ча-
стиц удобрений под действием сообщенной им кинетической энер-
гии и силы тяжести.
Аппараты для разбрасывания минеральных удобрений чаще
всего выполняют в виде одного или двух дисков с вертикальной
осью вращения, снабженных плоскими лопастями, расположенны-
ми радиально или с отклонением от радиального направления на
±(10...15)°.
Первая фаза, т. е. относительное перемещение частицы
удобрения по диску, начинается с момента ее падения на диск и
подразделяется на два периода: движение по диску до встречи с
лопастью и движение после встречи с лопастью. Как показали
эксперименты, упавшая на вращающийся диск частица первона-
чально движется по некоторой кривой, близкой к логарифмической
спирали, до тех пор, пока не встретится с лопастью. Дальнейшее
1-96
ее движение происходит вдоль лопасти. При этом на частицу мас-
сой т (рис. 139, а) будут действовать: центробежная сила инер-
ции Гп=то)2Гг, кориолисова сила инерции Гк=2т®г<, сила трения
о диск Fi=fmg и сила трения о лопасть —
—mci^r.sin ф), где г,— расстояние частицы от оси вращения дис-
ка; со — угловая скорость диска; г< = щ —относительная скорость
скольжения частицы вдоль лопасти; f — коэффициент трения удоб-
рений о диск и лопасти; ф,-— угол отклонения лопасти от радиуса.
Угол ipf#=const, если лопасть прямолинейна; угол ф, = соп51 только
в том случае, если лопасть очерчена по логарифмической спирали
с полюсом, совпадающим с осью вращения диска О.
Суть задачи сводится к определению абсолютной скорости щ
частицы в момент ее схода с диска, т. е. при г,=г, так как от чис-
ленного значения и направления этой скорости зависит дальность
полета частицы. Скорость щ равна геометрической сумме перенос-
ной (окружной) скорости ve и относительной скорости vr движе-
ния частицы вдоль лопасти; следовательно, в момент схода части-
цы с лопасти
ия = V' ± vr sin Фк)г+(ц- cos ф(,)а, (126)
где фк— угол между лопастью и радиусом в конечной точке лопа-
сти. Из рисунка 139, а следует, что в уравнении (126) перед
щ-вшфк ставят знак « + », если лопасти отклонены вперед, и знак
«—», если они отклонены назад. При радиальном расположении
лопастей фк=0 и va=~fv* + of. Переносная скорость в момент схо-
да частицы с лопасти ve=ur, а относительную скорость vr необхо-
димо определить.
Для отыскания vr составим сумму проекций всех сил на на-
правление лопасти и, приравняв ее силе инерции в относительном
перемещении частицы по лопасти, получим дифференциальное
уравнение относительного движения частицы:
mr1=m(o2ri cos ф; — fmg—fm (2(nrt—a>iri sin ф;)
или
г.=(02гг сОБф^—fg—f (2согг — а2г( апфг). (127)
Решение этого уравнения позволило бы определить относитель-
ную скорость vr частицы в момент ее схода с диска, т. е. при
ri = r. Однако решение получается довольно громоздким, численное
же значение скорости vr, как показывают расчеты и эксперименты,
оказывается по сравнению с переносной скоростью ое небольшим
(пе^г-’r). Поэтому влияние скорости vr на абсолютную скорость оа
незначительно и при практических расчетах им пренебрегают, счи-
тая, что частица сходит с лопасти с абсолютной скоростью иа,
приблизительно равной переносной скорости ое, т. е. Оа^Ое-
Вторая фаза представляет собой падение тела, брошенно-
го со скоростью направленной по горизонтали. При этом
197
на движущуюся частицу будут действовать сила тяжести P — mg
и сопротивление воздуха /?ад = , где kn — коэффициент парус-
ности частицы. При ориентировочных расчетах, без учета сопро-
тивления воздуха, движение частиц может быть определено пара-
метрическими уравнениями x=vat; y=gt2/2. Для определения тра-
ектории движения исключим время t. Решив второе уравнение от-
носительно t, получим t=^2ylg. Подставив это значение t в первое
уравнение, будем иметь уравнение траектории движения х=
= v&^2ylg. Это — уравнение параболы. Дальность полета частицы
получим, подставив в это уравнение значение у=Н, тогда
(128)
где Н — высота расположения диска над поверхностью поля.
Так как удобрения поступают на диск сплошным потоком, то
го Для различных частиц будет различным. Вследствие этого и
ряда других причин сход удобрений с диска происходит на неко-
торой дуге (рис. 139, в), а их распределение по поверхности
поля определяется некоторым пучком траекторий с этой дуги.
Расчеты и эксперимент показывают, что соответствующий этой
дуге центральный угол 6 = 72... 150°. Изменением места подачи
удобрений на диск г0 пользуются как регулировкой равномерности
распределения удобрений по ширине захвата. Подача удобрений
ближе к оси вращения диска (уменьшение г0) приводит к увели-
чению высева удобрений по краям захватываемой полосы, а пода-
ча дальше от оси вращения (увеличение г0) — к увеличению высе-
ва в средней части захватываемой полосы. Ширину рассева для
двухдискового аппарата определяют ориентировочно по формуле:
Вр « 2ыг V2H/g+A, (129)
где А — расстояние между центрами дисков, (2,4.... 2,6) г.
В существующих машинах 2г=0,35... 0,70 м, //=0,45... 0,65 м,
частота вращения дисков пд = 400...600 мин-1, угол наклона ло-
пастей к радиусу ф = 0...±15°. С увеличением частоты вращения
дисков удобрения распределяются равномернее, а с возрастанием
диаметра равномерность ухудшается. Наклон лопастей к радиусу
диска до 10...12° в сторону вращения способствует более равно-
мерному распределению удобрении.
Аппараты для разбрасывания органических удобрений выпол-
няют, как правило, в виде роторов, барабанов и битеров с гори-
зонтальной осью вращения, снабженных лопастями или лопат-
ками.
Первая фаза начинается с момента выхода лопасти (ло-
'патки) из общей массы удобрений и характеризуется движением
частиц в вертикальной плоскости вдоль лопасти. При этом на ча-
стицу массой т (рис. 140) будут действовать: сила тяжести
P—mg-, центробежная сила инерции f4=ma>2r,; кориолисова сила
инерции /?K = 2mwn; сила трения о лопасть (mg cos ©/+
198
Рис. 140. Схема к расчету рабоче-
го процесса роторного аппарата с
горизонтальной осью врашения
для разбрасывания органических
удобрений.
-Ь2гпсог;). Задача сводится к опре-
делению численного значения и на-
правления абсолютной скорости va
удобрений в момент схода с лопа-
сти, так как от нее зависит даль-
ность их разбрасывания. Так же,
как и в предыдущем случае (для
дискового аппарата), абсолютная
скорость 1>а в момент схода будет
равна геометрической сумме пере-
носной (окружной) скорости
ое = <ог и относительной скорости
вдоль лопасти vr, т. е. va = ar-j-vr.
Определение закона изменения от-
носительной скорости vr=ri и ее
конечного значения, т. е. значения
при ri = r, также связано с опреде-
ленными трудностями и к тому же
не может дать точного количественного результата, так как та-
кого рода расчеты требуют ряда допущений и предпосылок. По-
этому целесообразно рассмотреть лишь качественную картину про-
цесса.
Так как ve~^>vr, то можно принять, что в момент схода с лопа-
сти va^ve и, следовательно, направлена перпендикулярно радиусу
в сторону вращения ротора (барабана). Чтобы частицы удобре-
ний отбрасывались дальше, они должны сходить с лопасти уже в
первом квадранте, т. е. при со?<90°, что зависит от толщины слоя
удобрений h (высоты валка): чем выше валок /г, тем больше угол
<о/, при котором удобрения сходят с лопасти. Из-за влияния раз-
личных переменных факторов (коэффициента трения, парусности
и т. п.) и главным образом различного расположения удобрений
по длине лопасти они не сойдут с нее в одной точке, а будут схо-
дить в процессе поворота лопасти на некоторый угол 6. которому
соответствует дуга А1А2.
Вторая фаза представляет собой движение тела, брошен-
ного со скоростью va^ve=ii)r под углом р к горизонту. Уравнения,
движения частицы без учета сопротивления воздуха в параметриче-
ской форме с началом координат в точке /Ij имеют вид: x=ua^cosР;
i/ = c'a^sinp — g/2/2. Если начало координат расположить на вы-
соте h над поверхностью поля, то в момент падения частицы
удобрения на поле ее координата у = —h. Следовательно, время
полета tn определяется из условия — Л = vatn sin р — gt„/2. Откуда
tn= (Va sin р±Уо? sin2 p+2g/i)/g. Так как время не может быть
отрицательным, то условию задачи удовлетворяет лишь первое
значение корня, со знаком плюс. Подставив значение /п в первое
параметрическое уравнение, определим дальность полета частицы
lx =х—vjn cos р—(<4 sin 2р) /2g (о, cos р yrvl sina р -|- 2g h) /g. (130)
199
Для органических удобрений применяют разбрасывающие
устройства двух видов: с осью вращения, параллельной направле-
нию движения; с осью вращения, перпендикулярной направле-
нию движения машины. В первом случае основным рабочим орга-
ном является: при разбрасывании из куч — ротор, при разбрасы-
вании из кузова прицепа — барабан. Ротор, как правило, с че-
тырьмя лопастями, диаметром 700... 1200 мм, вращается с часто-
той 320...500 мин"1, частота вращения барабана 500 мин"1, даль-
ность полета удобрений до 12 м. Во втором случае в качестве ра-
бочего органа используется битер, состоящий из полой трубы с
лопатками, размещенными по винтовой линии. Лопатки разме-
щают, как правило, в четырех рядах под углом 45 и 135° к оси
вращения, чем обеспечивается разбрасывание удобрений вправо и
влево. Диаметр битера, как правило, 300 мм, длина L=l,6...
... 1,8 м, ширина захвата В — (2... 3) L.
Глава IV
РАБОЧИЕ ПРОЦЕССЫ, КОНСТРУКТИВНЫЕ СХЕМЫ
И ОЦЕНКА РАБОТЫ МАШИН
§ 1. Классификация
Посевные, посадочные машины и машины для внесения удоб-
рений классифицируют по следующим основным признакам: по
назначению (виду высеваемой культуры), способу посева, посад-
ки и внесения удобрений, способу соединения с трактором.
Сеялки иногда подразделяют на две группы: универсальные и
специальные. Универсальные предназначены для высева семян раз-
нородных сельскохозяйственных культур: зерновых колосовых, бо-
бовых, крупяных, прядильных и масличных, кормовых трав и др.
Специальные для высева семян одной или двух-трех однородных
культур, близких по размерам и нормам высева. Хозяйствам вы-
годнее иметь универсальные сеялки, так как это позволяет умень-
шить число применяемых машин, увеличить время и эффектив-
ность их использования.
По назначению (виду высеваемой культуры)
сеялки подразделяют на зерновые, кукурузные, свекловичные,
хлопковые, льняные, овощные, лесные и др. Однако такая клас-
сификация недостаточно строга, так как кукурузной сеялкой, на-
пример, можно высевать подсолнечник, бахчевые культуры, хлоп-
ковой— кукурузу, джугару и т. д. Практически все применяемые в
настоящее время сеялки комбинированные, так как одновременно
с высевом семян вносят минеральные удобрения.
По способу посева различают: рядовые, узкорядные,
гнездовые и квадратно-гнездовые, пунктирные и разбросные
сеялки.
200
По способу соединения с трактором сеялки под-
разделяют на прицепные и навесные. Зерновые сеялки выпускают,
как правило, прицепными, так как это позволяет легко составлять
широкозахватные агрегаты из трех-шести сеялок, что дает воз-
можность в короткие сроки засевать большие площади. Сеялки,
предназначенные для высева культур, возделываемых на относи-
тельно небольших площадях (свекловичные, овощные и т. п.), вы-
пускают, как правило, навесными.
Посадочные машины классифицируют по таким же признакам,
как и сеялки. Все посадочные машины, как правило, специальные.
По назначению различают: картофелепосадочные, расса-
допосадочные, лесопосадочные и др.
По способу посадки — рядовые, гнездовые и т. п.
По способу соединения с трактором — прицепные и
навесные.
Машины для внесения удобрений классифицируют по различ-
ным признакам.
По назначению различают машины для внесения органи-
ческих и для внесения минеральных удобрений.
По способу внесения различают машины: для основного
(разбросного) внесения, припосевного (припосадочного) внесения
и послепосевного внесения удобрений. Специальные машины при-
меняются, как правило, для основного (разбросного) внесения
удобрений. Припосевное и послепосевное внесение (подкормка)
выполняется обычно комбинированными машинами: в первом слу-
чае сеялками (сажалками), во втором — культиваторами-расте-
ниепитателями. В последнее время все более широкое применение
находит ранняя подкормка озимых с самолетов.
По виду вносимых удобрений (их физическому со-
стоянию) различают: тукоразбрасыватели, навозоразбрасыватели,
разбрасыватели пылевидных удобрений, жижеразбрасыватели,
машины для внесения жидких удобрений.
§ 2. Универсальные сеялки
Зерновые сеялки. В нашей стране проведена большая работа
по универсализации и унификации рядовых сеялок. В настоящее
время выпускается семейство унифицированных рядовых комбини-
рованных (зернотуковых) скоростных сеялок. Базовая модель это-
го семейства — сеялка С3-3,6.
Универсальная прицепная сеялка С3-3,6 (рис. 141)
предназначена для рядкового посева семян зерновых (пшеницы,
ржи, овса, ячменя) и зернобобовых (горох, фасоль, соя, чечевица,
бобы, люпин), а также некоторых крупяных культур (гречиха,
просо и т. п.) с одновременным внесением в рядки гранулирован-
ных минеральных удобрений.
Сеялка состоит из рамы со сницей 12, прицепного устройст-
ва 14, зернотукового ящика 2 и 3; катушечного высевающего ап-
201
Рис. 141. Схема зернотуковой универсальной прицепной сеялки (базовая мо-
дель):
/— высевающий аппарат для семян; 2 — отделение зернотукового ящика для семян; 3 —
отделение зернотукового ящика для удобрений; 4 — туковысевающий аппарат; 5 — лоток;
€ — семяпроводы; 7 — подножная доска; 8 — загортач; 9 и 10 — задний и передний двух-
дисковые сошники; 11— пневматическое колесо; 12— рама со сницей; 13 — поддержка;
14 — прицеп; 15 — гидроцилиндр.
парата 1 для семян и катушечно-штифтового 4 для туков; семя-
тукопроводов 6\ двухдисковых сошников 9 и 10\ загортачей 8;
опорно-приводных пневматических колес //; механизма подъема
сошников с приводом от гидроцилиндра /5; механизма передачи
от колес к высевающим аппаратам; устройства для контроля за
работой сеялки. Зернотуковый ящик разделен на два отделения:
переднее 2— для семян; заднее 3— для удобрений. В перегородке
имеются окна. При высеве семян и удобрений окна закрывают
заслонками, при высеве без удобрений окна открывают и в оба
отделения засыпают семена. Сошники расставлены в два ряда, что
предотвращает их забивание растительными остатками и почвой.
Заглубление сошников регулируют сжатием пружин; предусмотре-
ны как групповая, так и индивидуальная регулировки.
В процессе работы семена из переднего отделения 2 и удобре-
ния из заднего отделения 3 ящика подаются семявысевающими
аппаратами 1 и туковысевающими 4 в семятукопроводы 6, по ко-
торым поступают в горловины сошников 9 и 10 и падают на дно
бороздок, образованных сошниками. Семена в бороздках заделы-
ваются загортачами 8.
На базе С3-3,6 выпускаются сеялки следующих модификаций:
с анкерными сошниками, с однодисковыми сошниками, узкоряд-
ная, льнозернотуковая, рисозернотуковая, зернотукотравяная,
зернотуковая прессовая. Уровень унификации семейства сеялок
составляет -70... 98% •
802
Сеялка-культиватор зернотуковая, стерневая,
прессовая (рис. 142) одновременно выполняет следующие опе-
рации: предпосевную обработку (культивацию), посев с внесением
гранулированных удобрений, прикатывание почвы, сохраняя при
этом не менее 70% стерни.
Основные узлы сеялки: рама 5, опирающаяся спереди на пнев-
матическое опорное колесо 2 и сзади на прикатывающие катки 11,
зернотуковый ящик 7, катушечные высевающие аппараты для зер-
на и катушечно-штифтовые для удобрений, семяпроводы, лапы-
сошники 1, механизм привода высевающих аппаратов, механизм
подъема сошников с гидроцилиндром 8, прицепное устройство 3.
Сеялку выпускают в двух модификациях: для рядкового и для
безрядкового (подпочвенного разбросного) посевов. Последняя
отличается более широким захватом лапы-сошника и снабжена
полуконусом для распределения семян полосой. Между засеян-
ными полосами шириной 22... 25 см остаются незасеянные шири-
ной около 10 см. Глубину хода сошников регулируют перемеще-
нием упора на штоке гидропилиндра 8 и изменением длины тяги 6.
Сеялка с пневматической транспортировкой
семян в сошники. Наряду с рассмотренными в систему ма-
шин для посева зерновых и бобовых культур включено новое се-
мейство секционных широкозахватных (5... 15 м) сеялок с цент-
рализованным дозированием и пневматической транспортировкой
семян в сошники. Сеялка такого типа (рис. 143) состоит из сле-
дующих основных узлов: бункера 2, высевающего аппарата 4, вен-
тилятора 12, распределительной головки 1, семяпроводов 5 и 7,
Рис. 142. Сеялка-культиватор зернотуковая стерневая, прессовая, прицепная:
J — лапа-сошннк; 2 — пневматическое опорное колесо; 3 — прицеп; 4 — ось вилки опорного
колеса; 5 — рама; 6 — тяга; 7—семенной ящик; 8 — гидроцилиндр; 9 — фиксирующая план-
жа; 10 — кронштейн катков; 11 — прикатывающие катки; 12 — стяжиая гайка.
203
Рис. 143. Схема сеялки с центра-
лизованным дозированием и пнев-
мэтической транспортировкой се-
мян в сошники:
1 — распределительная головка; 2 —
бункер; 3 — ворошилка; 4 — катушеч-
ный высевающий аппарат; 5 — цент-
ральный семяпровод; 6 — сопло; 7 —
семяпровод; 8 — загортач; 9 — сошник;
10 — дроссельная заслонка; 11 — опор-
но-приводное колесо; 12 — вентилятор.
сошников 9, загортачей 8, опорно-
приводных колес 11. Бункер 2 раз-
мещен в центральной части сеялки,
оборудован ворошилкой 3 и сеткой
для предохранения высевающего
аппарата 4 от попадания крупных
предметов. Для централизованного
дозирования семян применен круп-
ногабаритный высевающий аппарат
4 катушечного типа. Распределитель-
ное устройство включает вентиля-
тор 12, центральный трубопровод 5
и распределительную головку 1 с
мундштуками для индивидуальных
(или групповых) семяпроводов 7.
При ширине захвата болееД м при-
меняют двухступенчатое распреде-
ление, т. е. от центральной распре-
делительной головки 1 семена по
групповым семяпроводам направ-
ляют в дополнительные распреде-
лительные головки, которые рас-
пределяют их по сошникам.
Рабочий процесс сеялки проте-
кает следующим образом. Семена
из бункера 2 при помощи ворошил-
ки 3 поступают в высевающий ап-
парат 4. Катушка 4 подает их в
центральный семяпровод 5. Воздуш-
ный поток, создаваемый вентилято-
ром 12, подхватывает семена и
транспортирует их по центральному
семяпроводу 5 к распределительной головке 1. На пути воздуш-
ного потока расположена дроссельная заслонка 10, с помощью
которой регулируют скорость воздушного потока (от 27 до
68 м/с), суживающееся сопло 6, с помощью которого создается раз-
режение под катушкой 4, способствующее лучшему истечению се-
мян. Проходя верхний, гофрированный участок центрального се-
мяпровода 5, семена многократно ударяются о его стенки, благо-
даря чему поток выравнивается, центрируется и поступает к рас-
пределительной головке 1. При ударе о конусную крышку головки
семена равномерно распределяются по семяпроводам 7 и со ско-
ростью 3... 5 м/с транспортируются в бороздки, проделанные
сошниками 9, и заделываются загортачами 8.
Ширина захвата таких сеялок до 18 м (без сцепок). Они уни-
версальны, так как позволяют высевать зерновые и овощные
культуры, хлопок, сорго, гранулированные удобрения, ядохими-
каты.
204
Овощные сеялки также относят к универсальным, так как они
способны высевать все овощные, а также бахчевые и кормовые
мелкосеменные культуры с одновременным внесением в рядки ми-
неральных удобрений. Посев ведется широкорядным и ленточным
способами на ровной, гребневой и грядковой поверхностях, при
необходимости с одновременной нарезкой поливных борозд. Кон-
структивно же овощные сеялки оформлены по схемам зерновых,
но с учетом особенностей семян овощных культур. Семена овощ-
ных культур, как правило, менее сыпучи, нормы высева их колеб-
лются от 2... 3 кг/га до нескольких десятков. При этом требуется
сравнительно мелкая заделка и плотный контакт с почвой. В связи
с этим в семенных ящиках устанавливают ворошилки, в механизме
передачи на вал высевающих аппаратов предусматривают более
широкий диапазон передаточных отношений, при высеве мелких
семян с малыми нормами высева в семенном ящике устанавлива-
ют дополнительные бункера. Кроме того, дисковые сошники обо-
рудуют ограничительными ребордами и прикатывающими каточ-
ками, позволяющими более точно выдерживать заданную неболь-
шую глубину (от 1,5 до 5 см) и обеспечивающими хороший кон-
такт высеянных семян с почвой.
Для нарезки поливных борозд в промежутках между сошника-
ми устанавливают бороздоделатели. При изменении схемы посева
отверстия в семенном ящике, расположенные над неработающими
аппаратами, перекрывают заслонками,
§ 3. Специальные сеялки
К специальным сеялкам обычно относят кукурузные, свекло-
вичные, хлопковые и др. Их выпускают, как правило, навесными.
Кукурузная сеялка (типа СКНК) предназначена для гнездово-
го, квадратно-гнездового и пунктирного посева калиброванных
семян кукурузы с одновременным внесением в гнезда удобрений.
К сеялке разработаны комплекты приспособления для высева
подсолнечника, клещевины, бахчевых культур, бобов арахиса и
т. д. Основная отличительная особенность машины этого типа —
секционное размещение рабочих органов с индивидуальным при-
водом к каждому высевающему аппарату (рис. 144). Это обеспе-
чивает хорошее копирование рельефа поля, равномерную по глу-
бине заделку семян в почву. Несущую часть сеялки составляет
брус 1 квадратного сечения, к которому с помощью параллело-
граммных механизмов ABCD присоединены секции рабочих орга-
нов. Каждая секция включает в себя банку 5 для семян, дисковый
высевающий аппарат 6 с вертикальной осью вращения, полозо-
видный сошник 8 и прикатывающее колесо 7. Брус сеялки снабжен
навесным устройством 2 и опирается на два опорных колеса (на
рисунке не указаны), от которых приводятся дисковые туковысе-
вающие аппараты — по одному на каждые две секции. Семявысе-
вающие аппараты приводятся в действие от опорных колес секций.
205
Рис. 144. Схема кукурузной сеялки типа
СКНК:
/ — брус; 2 — навесное устройство; 3 — туковысе-
вающий аппарат; 4 — тукопровод; 5 — банка для
семян; 6 — семявысевающий аппарат; 7 — колесо
секции; 8 — сошник.
Норма высева от 26 500 до
89 700 зерен на гектар регу-
лируется изменением часто-
ты вращения высевающих
дисков при замене звездо-
чек механизма привода.
Для квадратно-гнездо-
вого посева сеялка снабже-
на барабаном с мерной про-
волокой, двумя натяжными
станциями, узлоуловителя-
ми, гнездообразующими уст-
ройствами. Левый и правый
узлоуловители с двумя
вилками, расстояние между
которыми равно шагу посе-
ва, установлены на брусе,
у крайних секций. Однако
все большее распростране-
ние получает пунктирный
посев, например с шагом от
16 до 55 см. Для проведе-
ния пунктирного посева
вилки узлоуловителей от-
клоняют назад, клапан-делитель устанавливают в среднее поло-
жение, клапаны сошников открывают.
Пневматические сеялки (типа СУПН и СУПП) введены в си-
стему машин как сеялки для пунктирного посева кукурузы, но
фактически — это универсальные машины, так как они могут вы-
севать еще и подсолнечник, клещевину, сорго, бахчевые и овощ-
ные культуры. Основные узлы сеялки такого типа (рис. 145):
рама, вентилятор, опорно-приводные колеса, посевные секции, ав-
тосцепка, гидрофицированный маркер. Рама 14 представляет со-
бой сварной коробчатый брус, на котором смонтирована автосцеп-
ка 1, дисковые туковысевающие аппараты 2 и вентилятор 3. Рама
опирается на опорно-приводные пневматические колеса 13. К раме
с помощью параллелограммных механизмов 12 присоединены по-
севные секции. Автосцепка 1 состоит из двух основных частей:
замка, установленного на раме сеялки, и рамки, размещенной на
тракторе. Вентилятор 3 служит для создания разрежения (вакуу-
ма) в камерах разрежения высевающих аппаратов, с которыми он
соединяется воздухопроводами 4. Вентилятор приводится в дейст-
вие от гидромотора, установленного на сеялке, или от вала отбора
мощности (ВОМ) трактора. Пневматические опорно-приводные
колеса 13 служат опорой рамы 14 и при помощи цепных передач
приводят во вращение туко- и семявысевающие аппараты. Каждая
секция состоит из параллелограммного механизма 12, бункера 5,
высевающего аппарата 9, сошника 10, загортача 8, прикатываю-
206
щего катка 6 и шлейфа 7. Высевающий аппарат 9 пневматический
дисковый с горизонтальной осью вращения, снабжен набором вы-
севающих дисков с отверстиями различного диаметра и с про-
резью вместо отверстий для высева мелкосеменных культур. Се-
ялка оборудована прибором с фотоэлектрическими датчиками для
контроля высева семян.
Разрежение, создаваемое вентилятором 3, по воздухопрово-
дам 4 передается в камеры разрежения высевающих аппаратов 9.
Зерна, находящиеся в камере питания, присасываются к отверсти-
ям высевающего диска и выносятся им из зоны вакуума вниз,
в зону атмосферного давления, где отстают от диска и падают на
дно борозды, проделанной сошником 10. Одновременно с высевом
семян происходит внесение удобрений, поступающих из дискового
высевающего аппарата 2 по тукопроводу 11. Удобрения распола-
гаются ниже и сбоку семян. Семена и удобрения закрываются
почвой под воздействием заделывающих элементов 8, 6, 7.
Ширину междурядий регулируют перемещением посевных сек-
ций вдоль бруса рамы, норму высева — изменением частоты вра-
щения высевных дисков при перестановке сменных звездочек при-
вода, глубину заделки семян — изменением положения сошника
относительно прикатывающего катка.
Рис. 14'5. Схема пневматической сеялки:
1 — автосцепка; 2 — туковысевающий аппарат: 3 — вентилятор; 4 — воздухопровод; 5 — буи-
кер; 6 — прикатывающий каток; 7 — шлейф; 8 — загортач; 9— высевающий аппарат; 10 —
сошник; 11 — тукопровод; 12 — параллелограммный механизм; 13 — опорно-приводное коле-
лесо: 14 — рама.
207
Рис. 146. Схема свекловичной сеялки:
/ — опорно-приводное колесо; 2 — туковысевающий аппарат; 3 — тукопровод; 4 — банка для
м.ян; 5 — семявысевающий аппарат; 6 — шлейф; 7 — прикатывающий каток; 8— загортач;
- - полозовидный сошник; 10 — подвеска посевной секции.
Свекловичная сеялка (типа ССТ) предназначена для пунктир-
ного посева калиброванных семян сахарной свеклы с одновремен-
ным внесением в почву минеральных удобрений. Получили приме-
нение сеялки двух модификаций: с шириной междурядий 60 см —
для районов поливного свеклосеяния и с шириной междурядий
45 см — для районов неполивного свеклосеяния. Конструктивная
схема свекловичных сеялок аналогична конструктивной схеме ку-
курузной сеялки типа СКНК, т. е. в ее основе секционный прин-
цип размещения рабочих органов. Каждая секция (рис. 146) со-
единена с брусом рамы шарнирно, с помощью параллелограммно-
гэ механизма 10 и включает в себя банку 4 для семян, высеваю-
щий аппарат 5, комбинированный полозовидный сошник 9, загор-
тач 8, прикатывающее колесо 7 и шлейф 6. Семявысевающие 5
и туковысевающие 2 аппараты приводятся в действие от пневма-
тического опорно-приводного колеса 1 сеялки. Высевающий аппа-
рат для семян — дисковый с горизонтальной осью вращения. На
цилиндрической поверхности диска ячейки расположены в три
ряда со смещением на */з шага. Норму высева (шаг посева) ре-
гулируют изменением частоты вращения дисков и перекрытием
ряда ячеек секторами-вставками, что позволяет высевать от 12 до
50 семян на 1 м рядка.
208
§ 4. Посадочные машины
Из посадочных машин наибольшее распространение получили
картофелесажалки и рассадопосадочные машины.
Картофелесажалки выпускаются двух разновидностей; для не-
яровизированных и для яровизированных клубней картофеля. Наи-
большее распространение получили унифицированные картофеле-
сажалки (типа СКС и СКМ) для неяровизированных клубней
картофеля, работающие по единому принципу, имеющие практи-
чески одинаковые по конструкции рабочие органы и отличающиеся
в основном количеством секций рабочих органов, их компоновкой
и системой привода. Они предназначены для гребневой и гладкой
посадок картофеля рядовым способом с одновременным внесени-
ем удобрений. Ширина междурядий 70 см, расстояние между
клубнями регулируется и может составлять 22, 26, 30 и 35 см. Раз-
мещение. рабочих органов — секционное. Каждая секция картофеле-
сажалки (рис. 147) снабжена бункером 9, двумя ложечно-диско-
выми вычерпывающими аппаратами 3, двумя туковысевающими
аппаратами 2, двумя сошниками 15 с двумя парами заделываю-
щих дисков 12 и двумя боронками 11.
Бункер 9 изготовлен из листовой стали в виде коробки с на-
клонным дном. В дне бункера установлены встряхиватели 8, при-
водимые в движение роликами вала ворошителя 7, а в передней
стенке сделано окно, перекрываемое заслонкой 13 с регулировоч-
ным устройством 5. Дно бункера переходит в питающий ковш 6,
в котором установлены ворошители 7 и шнеки 4, обеспечивающие
активную подачу клубней к вычерпывающему аппарату 3. Вы-
Рпс. 147. Схема картофелепосадочной машины:
/ — рама; 2 — туковысевающий аппарат; 3 — вычерпывающий аппарат; 4 — шнек; 5 — регу-
лировочное устройство; 6 — питающий ковш; 7 — ворошитель; 8 — встряхиватель; 9 — бункер;
10 — рыхлитель следа движителей трактора; 11 — боронка; 12 — заделывающий диск; 13 —
заслонка; 14 — отражатель клубней; 15 — сошник; 16 — копирующее колесо; 17 — опорное
колесо.
14—424
209
черпывающие аппараты приводятся в действие от вала отбора
мощности трактора. Сошники 15 полозовидные, с острым углом
вхождения в почву. Сошник присоединяется к раме параллело-
граммным механизмом. Для заделки высаженных клубней при
гребневой посадке применяют заделывающие диски 12, а при
гладкой — диски 12 с боронками 11.
Клубни из бункера 9 через окно, размер которого регулируют
заслонкой 13 с помощью механизма 5, поступают в питающий
ковш. Шнеки 4 подают их к вычерпывающему аппарату 3, а он
захватывает клубни ложечками по одному, выносит вперед и
выбрасывает на отражатель 14, направляющий их в борозду, про-
деланную сошником 15. Сюда же, только к носку сошника, посту-
пают удобрения из туковысевающего аппарата 2. Щеки сошника
выполнены так, что позволяют рыхлой почве просыпаться внутрь
сошника и засыпать удобрения слоем 3... 4 см. Клубни картофеля
падают на эту рыхлую почву и не раскатываются. Борозды закры-
ваются заделывающими дисками 12 (и боронками //).
Расстояние между клубнями в рядке регулируют заменой
звездочек на приводе вычерпывающего аппарата 3, а глубину по-
садки — перестановкой копирующих колес 16. Высоту и форму
гребня при гребневой посадке изменяют заглублением, углом на-
клона и расстановкой дисков 12. Клубни заделывают на глубину
от 5 до 18 см, в зависимости от почвенно-климатических условий:
на легких почвах — на большую, на тяжелых — на меньшую глу-
бину. В зонах недостаточного увлажнения картофель высаживают
гладким способом, в зонах избыточного увлажнения — гребневым.
Для посадки яровизированного (пророщенного) картофеля
применяют автоматизированную картофелесажалку (типа САЯ),
снабженную ленточными транспортерами, периодически подающи-
ми клубни из бункеров в питательные ковши; автоматическими
устройствами, регулирующими подачу клубней в питательные
ковши; высаживающими аппаратами ложечно-цепочного (ложеч-
но-транспортерного) типа, ложечки которых прикреплены к цепи
в шахматном порядке. Автоматическое устройство поддерживает
определенный слой клубней в питательном ковше: при уменьшении
слоя датчик приподнимается, замыкает контакты и включает
электромагнитные муфты привода транспортера бункера; при уве-
личении — датчик опускается, размыкает контакты и выключает
муфты привода транспортеров.
Все выпускаемые в настоящее время картофелесажалки полу-
навесные, бункер размещен сзади, что позволяет загружать поса-
дочный материал непосредственно из транспортных средств.
Рассадопосадочные машины. Существующей системой машии
предусмотрен выпуск универсальной рассадопосадочной машины,
которая предназначена для рядовой посадки овощных и плодовых
культур, табака, эфироносов и т. п. Ширина междурядий 60, 70,
80, 90, 50 + 90 и 60+120 см, одновременно рассада высаживается в
4... 6 рядков.
210
Рис. 148. Схема рассадопосадочной машины (секции):
1— брус; 2— край полива; 3—сиденье; 4 — рама секции; 5— высаживающий аппарат; 6 —•
ящик для рассады; 7 — прикатывающий каток; 8 — сошник; 9 — бачок для воды; ]0 — рых-
лительная лапа.
Машина состоит из посадочного агрегата, вспомогательного и
дополнительного оборудования.
Основой посадочного агрегата служит брус 1 (рис. 148), к ко-
торому шарнирно присоединены посадочные секции. Каждая сек-
ция состоит из рамы 4, высаживающего аппарата дискового (лу-
чевого) типа 5, сошника 8 полозовидного типа, прикатывающих
катков 7, поливного бачка 9, ящика для рассады 6 и сиденья 3.
Перед каждой секцией установлена рыхлительная лапа 10.
К вспомогательному оборудованию относятся два бака для
воды с кронштейнами крепления, эжектором и шлангами, стел-
лажи для запаса рассады. Это оборудование располагается от-
дельно на тракторе.
Так как сошник рассадопосадочной машины работает в рых-
лой, хорошо разработанной почве, то угол его вхождения в почву
делают тупым. Ширину сошника регулируют: при посадке рассады
в горшочках — увеличивают, при посадке безгоршечной рассады —
уменьшают. Глубину хода сошников регулируют в пределах 8...
22 см перестановкой прикатывающих катков. Шаг посадки от
15 до 140 см. Интенсивность полива регулируют краном 2. Ба-
чок 9 установлен шарнирно и при порционном поливе опрокидыва-
ется. При шаге посадки до 35 см полив ведется сплошной струей,
свыше — порционным способом.
§ 5. Машины для внесения минеральных удобрений
Из трех способов внесения минеральных удобрений только для
основного (разбросного) выпускают специальные машины. Припо-
севное (припосадочное) и послепосевное (подкормка) внесение
удобрений совмещается с основными операциями, т. е. выполняет-
ся комбинированными машинами: сеялками (сажалками) и куль-
14*
211
тиваторами-растениепитателями. В настоящем разделе рассматри-
ваются главным образом машины для основного внесения удобре-
ний. С их помощью вносят большую часть минеральных удобрений,
примерно 2/з от их общего количества. Различают машины для
подготовки удобрений к внесению и для внесения удобрений.
Машины для подготовки удобрений к внесению. Многие удоб-
рения при хранении слеживаются, т. е. образуют крупные комки
и глыбы, поэтому их перед внесением требуется подвергать спе-
циальной обработке. Различают следующие виды подготовитель-
ных работ: измельчение, просеивание и смешивание. Измельче-
ние— основной технологический процесс подготовки слежавшихся
удобрений к внесению. Просеивание необходимо после их измель-
чения для того, чтобы отделить порошкообразные элементы, кото-
рые затрудняют работу туковысевающих аппаратов. Смешивание
необходимо в тех случаях, когда в почву вносят несколько ком-
понентов. Применяют как туковые, так и органо-минеральные
смеси.
Большое распространение получила универсальная машина —
измельчитель слежавшихся удобрений (ИСУ). Он же предназна-
чен и для последующих операций обработки, т. е. просеивания и
смешивания минеральных удобрений. Машина состоит из цилинд-
рического бункера, пилообразного дробителя крупных глыб (фре-
зы), четырехлопастной крестовины с ножами, сменных решет с
отверстиями 5, 6 и 10 мм, редуктора, шибера, ротора и рамы.
Четырехлопастная крестовина насажена на вертикальный вал ре-
дуктора и вместе с решетами образует дно бункера, шибер пре-
пятствует проворачиванию удобрений вместе с крестовиной. Из-
мельченные удобрения просеиваются сквозь решето и ротором вы-
брасываются в тару, бурт или на транспортер. При смешивании
удобрений шибер убирают, режущую часть ножей поворачивают
против направления вращения, устанавливают решета с мини-
мальным диаметром отверстий.
Машины для внесения удобрений. При всем многообразии
конструкций машины для внесения удобрений выполнены практи-
чески по единой принципиальной схеме, содержащей три основ-
ных узла: емкость для удобрений (кузов, бункер, туковый ящик
и т. п.); дозирующее устройство (тарельчатые диски, цепочно-
планчатые транспортеры и т. п.); разбрасывающее устройство
(диски с вертикальной осью вращения, эластичные кольцевые ме-
татели, шнеки и т. п.). Конструктивное оформление этих узлов мо-
жет быть различным. Оно зависит от вида удобрений, вида транс-
портно-энергетических средств и способа соединения с ними. Ши-
рокое применение получили высокопроизводительные разбрасыва-
тели удобрений кузовного типа с центробежными разбрасывающи-
ми устройствами.
Гидрофицированный разбрасыватель мине-
ральных удобрений (типа РМГ) предназначен для внесе-
ния минеральных удобрений всех видов и форм, а также извести
212
Рис. 149. Схема разбрасывателя минеральных удобрений:
I — кузов; 2 — ходовое колесо; 3 — прутковый транспортер; 4 — прижимной пневматический
ролик; 5 — дозирующая заслонка; 6 — разбрасывающее устройство: 7 — ветрозащитное-
устройство.
и гипса. Он представляет собой (рис. 149) одноосный тракторный
прицеп с кузовом 1, на дне которого смонтирован прутковый
транспортер 3, а сзади — дозирующая заслонка 5 и разбрасываю-
щее устройство 6. Транспортер 3 приводится в действие от ходо-
вого колеса 2 через прижимной пневматический ролик 4, разбра-
сывающее устройство 6 — от гидромотора, включенного в гидро-
систему трактора. В ветреную погоду используют ветрозащитное
устройство 7.
Прутковый транспортер выносит удобрения из кузова и через
выходную щель подает в тукоделитель, по двум рукавам которого-
они попадают на вращающиеся диски разбрасывающего устрой-
ства.
Диски разбрасывают удобрения по поверхности поля, захва-
тывая полосу шириной от 6 до 14 м. Равномерность рассева удоб-
рений по ширине регулируют перемещением тукоделителя вдоль
кузова и поворотом внутренних стенок лотков. При подаче удоб-
рений ближе к центрам дисков увеличивается концентрация удоб-
рений по краям полосы рассеивания, при подаче дальше от центров
возрастает концентрация удобрений в средней части этой полосы.
Норму внесения удобрений от 100 до 6000 кг/га регулируют измене-
нием скорости транспортера и открытия дозирующей заслонки.
Рабочая скорость до 3,3 м/с (12 км/ч).
Автомобильный разбрасыватель пылевидных
удобрений (АРУП) предназначен для самозагрузки, транспор-
тировки, выгрузки или распыления по поверхности поля пылевид-
ных минеральных удобрений, извести и гипса. Он состоит из авто-
мобильного седельного тягача, оборудованного компрессорной ус-
тановкой, и цистерны-полуприцепа на базе автоцементовоза.
213
Рис. 150. Принципиальная схе-
ма агрегата для внесения без-
При работе в режиме разбрасыва-
ния (распиливания) компрессор, при-
водимый от двигателя автомобиля,
нагнетает сжатый воздух под «аэро-
днище» цистерны. Воздух, проходя че-
рез пористую перегородку, аэрирует
материал, т. е. омывает его частицы,
придавая им свойства текучести. Бла-
годаря наклону цистерны (до 7 ... 8°)
материал под действием силы тяже-
сти стекает к разгрузочному патрубку
и поступает в распиливающее уст-
ройство. Там материал подхватывает-
водного аммиака:
1 и 7 — жидкостные вентили; 2 —
предохранительный клапан; 3 — га-
зовый вентиль; 4 — держатель ма-
нометра; 5 — манометр; 6 — резер-
вуар; 8 — теплообменник; 9 — дози-
рующий насос; 10 — коммуникации;
11 — распределитель; 12 — подкор-
мочная трубка.
ся дополнительным потоком воздуха,
подведенным по шлангу от компрессо-
ра, проходит через наконечник и рас-
пределяется по поверхности поля. Нор-
му внесения удобрений от 1 до 9 т/га
регулируют сменой распыливающего
наконечника (высота щели 50 и
ПО мм), открытием дозирующей заслонки наконечника и измене-
нием скорости движения. Ширина полосы распиливания от 12
до 14 м, рабочая скорость до 3,3 м/с (12 км/ч).
Имеется аналогичный тракторный разбрасыватель (РУП).
Агрегат для внесения в почву безводного ам-
миака (АБА) работает совместно с культиваторами (типа КРН).
Основные узлы (рис. 150): рама в сборе, резервуар 6 с армату-
рой, теплообменник 8, дозирующий насос 9, коммуникации 10, рас-
пределитель 11, подкормочные трубки 12 с жиклерами. Рама опи-
рается на два пневматических колеса и снабжена гидрофициро-
ванным механизмом для навешивания культиватора. Резервуар 6
оборудован жидкостными вентилями 1 и 7, предохранительным
клапаном 2, газовым вентилем 3, держателем 4 и манометром 5.
Предохранительный клапан отрегулирован на давление 1,6 МПа.
Теплообменник 8 предназначен для понижения температуры жид-
кого аммиака и позволяет свести к минимуму уменьшение его
плотности при подходе к насосу. Без теплообменника произошло
бы испарение аммиака в цилиндре дозирующего насоса и подача
была бы неточной. Дозирующий насос 9 поршневого типа с регу-
лируемым ходом поршня (перемещением шарнира соединения ша-
туна с кулисой). Насос приводится в действие от ходовых колес
через муфту. Подкормочные трубки 12 смонтированы на лапах
культиватора. При работе аммиак из резервуара 6 через вентиль 7
поступает в теплообменник 8, где охлаждается. Затем насосом 9
аммиак нагнетается в распределитель 11 и через подкормочные
трубки 12 вносится в почву на глубину до 14 см. Норма внесения
от 50 до 230 кг/га регулируется изменением хода поршня дози-
рующего насоса. Рабочая скорость до 3 м/с (—12 км/ч).
214
§ 6. Машины для внесения органических удобрений
Современной системой машин предусмотрены разбрасыватели
органических удобрений, которые можно разделить на две груп-
пы: разбрасыватели для твердых (сухих) удобрений и разбрасы-
ватели для жидких удобрений.
Машины для разбрасывания твердых удобрений выпускаются
двух типов: для разбрасывания удобрений из емкостей (кузовов
прицепов и полуприцепов) и из куч, заранее разложенных на по-
верхности поля самосвалами.
Первые весьма многообразны, но выполнены по единой кон-
структивной схеме, включающей в себя, как правило, три основ-
ных конструктивных элемента: кузов прицепа или полуприцепа,
выполняющий роль емкости для удобрений; цепочно-планчатый
или цепочно-скребковый транспортер, выполняющий роль дозато-
ра; разбрасыватель, распределяющий удобрения по поверхности
поля.
П о л у п р и ц е п - р а з б р а с ы в а т е л ь тракторный уни-
версальный (типа ПТУ) предназначен для транспортирования
и разбрасывания по полю органических удобрений: навоза, компо-
ста и торфа, а также для перевозки различных сельскохозяйст-
венных грузов (при снятом разбрасывающем механизме) с выгруз-
кой их назад при помощи транспортера. Машина состоит из
рамы 12 (рис. 151), кузова И, ходовой части 9, транспортера 10,
разбрасывающего устройства 3,
4 и механизма передач. В процес-
се работы удобрения, находя-
щиеся в кузове 11, подаются
транспортером 10 к разбрасыва-
ющему устройству 3, 4. При этом
нижний измельчающий
3 подает разрыхленные
Вид Л
барабан
удобре-
Рис. 151. Разбрасыватель органических удобрений:
/ — опора; 2 —карданный вал; 3 — измельчающий барабан; •/ — разбрасывающий барабан;
э натяжное устройство привода барабанов; 6 — ведущий вал транспортера; 7 — криво-
шипно-шатунный механизм; 8 — редуктор; 9 — колесо; 10— транспортер; 11 — кузов; 12—
рама; 13 вал привода редукторов; 14 — натяжное устройство транспортера.
215
5
Рис. 152. Схема валкователя-разбрасывателя органических удобрений из куч:
I — валкообразователь; II — разбрасыватель; 1 — левая боковина; 2 — активный проталки-
ватель удобрений; 3 — дозирующее устройство; 4 — правая боковина; 5 — опорный каток;
$ — гидроцилиндр; 7 — ротор; 8 — редуктор.
ния на верхний разбрасывающий барабан 4, который и распреде-
ляет их по поверхности поля. Норму внесения удобрений регули-
руют изменением скорости движения транспортера и поступатель-
ной скорости агрегата. Скорость движения транспортера регулиру-
ют изменением радиуса кривошипа его привода, перемещая палец
кулисы по направляющей. Ширина полосы разбрасывания удобре-
ний до 6 м, рабочая скорость до 2,8 м/с (10 км/ч).
Остальные разбрасыватели устроены аналогично, за исключе-
нием разбрасывателя прицепного низкорамного (типа РПН). От-
личительные его особенности — опускающийся кузов для загрузки
удобрений из автосамосвалов, ось вращения разбрасывающего би-
тера параллельна направлению движения, разбрасывание удобре-
ний вправо.
Производительность такого разбрасывателя при той же грузо-
подъемности и скорости движения примерно в 3 раза больше, чем
описанного выше.
Валкователь - разбрасыватель органических
удобрений (РУН) предназначен для разбрасывания удобре-
ний из куч, расположенных рядами с интервалами, обеспечиваю-
щими заданную норму внесения на гектар. Он (рис. 152) состоит
из двух основных конструктивных узлов: валкообразователя I и
разбрасывателя II. В валкообразователь входят левая 1 и пра-
вая 4 боковины, дозирующее устройство 3 и активный проталки-
ватель удобрений 2. Дозирующее устройство представляет собой
две боковых горизонтальных и две вертикальных заслонки, с по-
мощью которых изменяют размер дозирующего окна для прохода
удобрений. При правильной регулировке образуется непрерывный
216
валок до следующей кучи. Активный проталкиватель оборудован
гидроцилиндром и коромыслом с наконечником. Штоку гидроци-
линдра с помощью специального переключателя сообщают воз-
вратно-поступательное движение, в результате чего сообщается ко-
лебательное движение наконечнику проталкивателя, который про-
ходит в полость дозирующего окна, проталкивая в него удобрения
и разрушая крупные комки.
Разбрасыватель состоит из редуктора 8 и двух четырехлопаст-
ных роторов 7.
При движении агрегата по полю валкообразователь 7 захва-
тывает кучу и перемещает ее перед собой. Удобрения, проходя че-
рез дозирующее окно, вытягиваются в непрерывный валок, кото-
рый проходит под трактором, захватывается лопастями роторов,
измельчается и разбрасывается в обе стороны полосой шириной
30 м. Расстояние между рядами куч принимают с учетом двойного
перекрытия по ширине захвата, т. е. 15. ..20 м. Расстояние между
кучами в ряду в зависимости от нормы внесения и массы куч при-
нимают от 20 до 75 м. Рабочая скорость 1 ... 2 м/с.
Машины для разбрасывания жидких удобрений предназначе-
ны для откачки жижи из жижесборников животноводческих по-
мещений, перевозки ее в поле и поверхностного сплошного внесе-
ния в почву. Все они примерно выполнены по единой схеме, т. е.
каждый представляет собой одноосный тракторный полуприцеп,
на котором смонтирована горизонтальная цилиндрическая цистер-
на, оборудованная эжектором или вакуумным насосом для заправ-
ки; перемешивающей и напорной системами для перемешивания
и создания рабочего давления и распределительным устройством
.для разбрызгивания удобрений. В машинах вместимостью
1,8 и 3,6 м3 для создания ва-
куума при заправке применя-
ют эжектор, а в машинах вме-
стимостью 4... 16 м3 — спе-
циальный вакуумный насос.
В качестве примера рас-
смотрим принципиальную схе-
му машины, оборудованной
эжектором (рис. 153). Для за-
правки затвор 8 и задвижку 5
открывают, а задвижку 7 за-
крывают; гибкий заборный
шланг <3 с фильтром 2 опуска-
ют в жижесборник (жижехра-
нилище) 1. Выпускные газы,
поступающие от трактора,
проходя через эжектор 4, со-
здают разрежение в трубопро-
водах 15, 14, 13 и цистерне 11,
под действием которого жид-
Рис. 153. Принципиальная схема раз-
брасывателя жидких органических удоб-
рений:
1 — жижесборник; 2 — фильтр; 3 — гибкий
шланг; 4 — эжектор; 5 — задвижка за-
борного устройства; 6 — распределительное
(разливочное) устройство; 7 — задвижка рас-
пределительного устройства; 8 — двухсекцион-
ный затвор; 9 — предохранительный клапан;
10 — заливная горловина; 11 — цистерна; 12 —
колпачок; 13 и 15 — трубы; 14 — гибкий
шланг; 16 — воздушная мешалка.
217
кость заполняет цистерну. При перемешивании колпачок 12 вы-
вертывают, а в цистерне 11 при помощи эжектора 4 создают ва-
куум. При этом наружный воздух под действием атмосферного
давления входит сверху в трубу 16 и, выходя через отверстие го-
ризонтальной части этой трубы, перемешивает жидкость. При рас-
пределении по полю или выливе жидкости с помощью выпускных
газов, проходящих по трубам 15, 14 и 13, в цистерне 11 создают
избыточное давление. При этом задвижка 5 закрыта, а задвижка
7 открыта и жидкость через нее поступает к распределительному
устройству 6, которое веерообразным потоком разбрызгивает ее
по полю. Норму внесения удобрений от 10 до 40 т/га регулируют
сменой жиклера (диаметр 20, 30 и 38 мм), изменением скорости
движения агрегата, давления выпускных газов и положения рас-
пределительного лотка. Наибольшая ширина поливаемой полосы
или наименьшая норма внесения жидких удобрений получается
при угле наклона 30... 45°. Ширина разлива жидкости 3... 11 м,
рабочая скорость до 2,2 м/с (10 км/ч).
§ 7. Автоматизация процессов
Автоматизация — одно из важнейших средств повышения про-
изводительности труда и улучшения качества сельскохозяйствен-
ных работ. В нашей стране и за рубежом определилось три на-
правления по созданию автоматических систем: автоматическое
вождение агрегатов; автоматический контроль за технологически-
ми процессами и сигнализация; автоматическое управление техно-
логическими процессами.
Автоматическое вождение агрегатов. Работа систем автомати-
ческого вождения основывается, как правило, на принципе копи-
рования (слежения) заданной траектории движения агрегата. За-
данная траектория определяется первым проходом агрегата, когда
управление выполняется вручную, а маркер оставляет борозду, ко-
торая в дальнейшем служит ориентиром для автоматической си-
стемы.
При автоматическом вождении датчик-копир (чувствительный
элемент) движется по борозде и при отклонении от нее подает
сигнал рассогласования на золотник гидроусилителя, а тот с по-
мощью гидроцилиндра воздействует на тягу рулевого управления,
s результате чего агрегат выводится на заданную траекторию.
Так как траектория бороздки, проделываемой маркером, зависит
от траектории движения машины, на которую влияют трактор и
возмущения окружающей среды, то искривления траектории дви-
жения агрегата накапливаются с каждым последующим проходом.
Поэтому такие системы не получили широкого практического
применения. Ведутся работы по использованию электрических, оп-
тических, радиационных и других датчиков.
Автоматический контроль за технологическими процессами и
сигнализация. До недавнего времени контроль за работой сельско-
218
Рис. 154. Графики нарушения процесса высева семян:
/ — на обычном посевном агрегате с визуальным контролем; II— на агрегате, оборудован-
ном системой автоматического контроля; Н — нарушение; t — время; tG, t\, tz, /3 и f4— со-
ответственно время: появления нарушения; установления факта нарушения трактористом;
остановки агрегата; выяснения места и причины нарушения; возобновления движения.
хозяйственных машин в основном проводился визуально. Трак-
торист во время работы обычно не только ведет агрегат строго по
бороздке маркера, но и контролирует работу машины. Так как при
работе на высоких скоростях внимание тракториста поглощено
управлением трактора, то необходимо, чтобы он, не отвлекаясь от
процесса вождения, получал информацию о рабочем процессе
машин, например, в виде световых или звуковых сигналов. Это
позволит уменьшить огрехи и ускорить поиски причин, вызвавших
нарушение процесса, а следовательно, повысить урожай и под-
нять производительность труда. На рисунке 154 приведены две
кривые нарушения процесса высева семян: на обычном посевном
агрегате с визуальным контролем — кривая / и на агрегате, обору-
дованном системой автоматического контроля (САК),— кривая II.
Из графиков следует, что общие непроизводительные потери вре-
мени в первом и втором случаях составляют:
дг ==д/;+д/;+д^+д/;, (131>
где Д/1 = /1—to и Д/1 =t{—to — длительность проявления наруше-
ния от времени появления t0 до времени установления факта
нарушения трактористом t\ и t{ при визуальном и автомати-
ческом контроле;
Дг|2=^2—Л и Д^=^2—1\ —длительность реакции тракториста
и торможения агрегата;
Д/з=^з—^2 и Д/з=/3'—^2—длительность поиска трактористом
причины нарушения;
ДА=/4—/3 и Д£4 = г4—t'i — длительность устранения наруше-
ния и пуска агрегата (восстановления движения).
219
Как показывает опыт, длительность процесса проявления нару-
шения до получения об этом информации трактористом при авто-
матическом контроле А/! существенно меньше, чем при визуаль-
ном Д^1, т. е. А/1<;АЛ, так как это лишь время, затрачиваемое си-
стемой на сигнализацию; при автоматическом контроле, как пра-
вило, указывается объект нарушения процесса (сошник), поэтому
длительность поиска причины нарушения также сокращается, т. е.
Д?з <Д£з; длительность реакции тракториста и торможения агре-
гата, а также длительность устранения нарушения и пуска агрега-
та в том и в другом случае можно принять одинаковыми, т. е.
Д/г = А/2 и Д/4=Д^, так как в обоих случаях они выполняются
трактористом при помощи одних и тех же средств.
Опыт также подтверждает, что время движения агрегата с
технологическим нарушением при автоматическом контроле
Д/н = Д/i+Д^2 ~ 1,7... 2,3 с. При движении агрегата со скоростью
2 м/с (7,2 км/ч) длина незасеянного рядка в этом случае состав-
ляет 3,4... 4,6 м. При визуальном контроле, как показывает прак-
тика, длина незасеянного рядка составляет 150...200 м. Таким
образом, сокращение времени работы агрегата с технологическим
нарушением Д/н оказывает большое влияние на качество посева и
урожай, а сокращение общей непроизводительной потери време-
ни — на производительность агрегата.
Наглядное представление о функциях каждого из элементов
системы и взаимодействиях между ними дает структурная
(функциональная) схема (рис. 155). В этой замкнутой через
тракториста-оператора системе ведется непрерывный контроль вы-
ходного параметра ?(/). которым является технологический про-
цесс высева в почву. При этом представительная часть выходного
параметра — часть потока семян ?'(0=^вх поступает на вход
датчика (чувствительного элемента) и возбуждает в нем сигнал.
Этот сигнал подается на. вход усилительно-преобразовательного
устройства (У ПУ), которое преобразует и усиливает его до зна-
чения, достаточного для восприятия блоком сигнализации БС
Блок сигнализации в случае нарушения процесса подает сигнал
(световой, звуковой или оба од-
новременно), который информи-
рует тракториста-оператора Ок о
нарушении процесса. После вос-
приятия сигнала трактористом-
оператором, принятия решения п
его исполнения сигнал поступает
на трактор То и он останавлива-
ется. Тогда оператор О„ (тракто-
рист или сеяльщик), выполняю-
щий функции исполнительного
звена системы, воздействуя на
объект контроля — посевную ма-
шину ПМ или высевающий аппа-
Рис. 155. Структурная (функцио-
нальная) схема автоматического кон-
троля за технологическим процессом
посевного агрегата с человеком-опе-
220
рат ВА, устраняет нарушение технологического процесса. Послед-
нее может быть вызвано возмущением Вп, связанным с неисправ-
ностью посевной машины (выход из строя приводного механизма,
поломка вала высевающих аппаратов, разрыв или соскакивание
цепи привода и т. п.), или возмущениями В3, обусловленными заби-
ванием сошников, семяпроводов или высевающих аппаратов. После
устранения неисправности тракторист-оператор, воздействуя на
трактор Твд, возобновляет движение агрегата.
Различие систем автоматического контроля заключается в при-
менении различных датчиков Д, усилительно-преобразовательных
устройств УЛУ и блоков сигнализации ВС. По типу Д и УПУ
системы контроля подразделяют на электромеханические, электри-
ческие (электронные), фотоэлектрические, пьезоэлектрические,
акустические и т. п. Наибольшее распространение получили элек-
тромеханические и фотоэлектрические системы. Электромеханиче-
ские датчики находят применение в системах автоматического
контроля отечественных картофелесажалок и сеялок.
В картофелесажалке (типа СКС) контролируется работа вы-
черпывающих аппаратов: если ложечка после прохода питающего
ковша оказывается пустой, то рычаг зажима замыкает контакты
датчика, в результате чего в кабине тракториста зажигается сиг-
нальная лампочка. Датчик состоит из двух нормально разомкну-
тых пластинчатых контактов, установленных у заднего конца
шины для отвода рычагов зажимов.
На базовой модели универсальной рядовой зерновой сеялки
С3-3,6 и ее модификациях применяется устройство, позволяющее
автоматически контролировать вращение валов высевающих ап-
паратов и заглубление сошников, а также установить дистанцион-
ную сигнальную связь между сеяльщиком и трактористом. В этой
сеялке предусмотрен лишь косвенный контроль высева семян,
т. е. фактически контролируется не высев семян, а лишь вращение
вала высевающих аппаратов. Такая система отличается простотой,
но дает информацию лишь о редких поломках: выход из строя при-
водного механизма, разрыв или соскакивание цепи, скручивание
вала. Она не дает возможности выявлять такие нарушения техно-
логического процесса, как забивание отдельных высевающих ап-
паратов или прекращение ими высева вследствие образования сво-
дов или слипания семян в комки, забивание семяпроводов, сош-
ников (почвой или растительными остатками).
Для получения информации о нарушении процесса высева се-
мян каждым сошником датчики необходимо располагать в каждом
сошнике или семяпроводе как можно ближе к поверхности почвы.
Датчики таких систем можно разделить на две группы: контакт-
ные и бесконтактные. В качестве примера рассмотрим принцип
действия электромеханических (контактные) и фотоэлектрических
(бесконтактные).
Электромеханический датчик (рис. 156, а) снабжен щупом 2,
шарнирно закрепленным на оси 3. Передним концом, выполнен-
221
Рис. 156. Схемы датчиков:
а — контактного (электромеханического); б—бесконтактного (фотоэлектрического): 1 — се-
мяпровод (или сошник); 2 — рычажок (щуп); 3 — ось; 4 — монтажная пластина; 5 — мик-
ровыключатель; 6 — провод; 7 — выключатель; 8 — аккумуляторная батарея; 9 — сигнальная,
лампочка; 10 — источник света (лампа накаливания); // — линза; 12 — светофильтр; 13 —
светоприемник.
ным в форме ложечки, щуп через щель входит внутрь семяпровода
(или сошника) 1, а задним концом через систему рычажков дей-
ствует на один из контактов микровыключателя 5, включенного в
электрическую цепь последовательно с сигнальной лампочкой 9.
В процессе работы проходящие по семяпроводу 1 семена, ударяясь
о щуп датчика 2, поворачивают его и размыкают контакты микро-
выключателя 5 (в нерабочем состоянии они замкнуты). Это вы-
зывает мигание лампочки 9, что указывает на нормальную работу.
При нарушении высева контакты замыкаются и лампочка горит,
не мигая.
В фотоэлектрических датчиках (рис. 156, б) в качестве источ-
ника света 10 используют, как правило, лампу накаливания. Лин-
за // формирует луч в виде плоского прямоугольника, перекры-
вающего сечение семяпровода 1. Далее луч света проходит через
светофильтр 12 и попадает в светоприемник 13. В качестве свето-
приемника могут быть использованы: фотосопротивление, фотоэле-
мент, фотоумножитель. Обычно предпочтение отдается фотосопро-
тивлению, так как оно малогабаритно, высокочувствительно и ра-
ботает без ламповых схем. Зерна, падающие в сошник, перекры-
вают луч света, уменьшая освещенность светоприемника и изменяя
его сопротивление. Сигнал усиливается с помощью усилителя и
поступает в блок сигнализации, где проявляется, как правило,
в виде мигания контрольных лампочек.
На отечественных пневматических сеялках, а также на сеялках
«Джон Дир», «Аллис-Чалмерс», «Станхей» и других уже приме-
няются автоматические устройства контроля с фотоэлектрически-
ми датчиками.
Автоматическое управление технологическими процессами. В ка-
честве примера рассмотрим систему, применяемую в картофелеса-
жалке типа САЯ. Яровизированный картофель имеет ростки дли-
ной до 2 см, которые необходимо сохранить в процессе посадки.
Их сохранность в большой мере зависит от толщины слоя клубней
222
в питающем ковше. При толстом слое
обламываются ростки, при тонком —
возможны пропуски захвата клубней
ложечками. Оптимальная толщина
слоя поддерживается автоматически.
Структурная (функциональная)
схема такого устройства представлена
на рисунке 157. Регулируемым пара-
метром служит масса клубней q(t) в
питающем ковше ПК. Она измеряется
датчиком Д, который настраивают на
определенную толщину слоя клубней
Hq. Переключатель /7 включает и вы-
ключает электромагнитную муфту ЭМ
Рис. 157. Структурная (функ-
циональная) схема автомати-
ческого управления технологи-
ческим процессом картофелеса-
жалки (типа САЯ).
привода питающего транспортера 777', который подает клубни в
питающий ковш ПК- Таким образом достигается стабилизация
одного из основных параметров картофелесажалки.
§ 8. Оценка качества работы и тяговое сопротивление
Качество работы машин должно удовлетворять отечественным
агротехническим требованиям и требованиям международной си-
стемы машин (МСМ).
Оценка работы высевающих аппаратов в соответствии с
ОСТ 70.5.1—74 включает определения: дробления семян (гра-
нул), неустойчивости общего высева, неравномерности высева
между отдельными высевающими аппаратами, равномерности
распределения семян в рядке (для сеялок точного высева). Дроб-
ление семян не должно превышать и, как правило, не превышает
1%. Высев семян сеялкой должен быть достаточно устойчивым.
Отклонения от заданной нормы высева допускаются: для семян
не более ±3%, гранулированных минеральных удобрений — не бо-
лее ±10%- Неравномерность высева между отдельными высеваю-
щими аппаратами не должна превышать: для зерновых ±3%, зер-
нобобовых ±4%, трав ±8%, неравномерность высева каждым
аппаратом не должна быть более ±2%.
Вычерпывающие аппараты картофелесажалок не должны об-
ламывать более 8% ростков яровизированных клубней при длине
ростков не более 2 см. Допускается не больше 3% пропусков клуб-
ней и не больше 3% захвата одной ложечкой двух клубней.
Академик В. П. Горячкин при рассмотрении качества работы
высевающих аппаратов предлагал пользоваться методом наимень-
ших квадратов. При этом среднеквадратическое отклонение а=
Г п _
= ± 1 / (хг—х)2/(п—1), где Xi — высев семян (удобрений) каж-
’ /=1
дым высевающим аппаратом, х — средний арифметический высев
223
. 5
Рис. 158. К оценке качества рядового по-
сева семян:
а — схема размещения семян (растений) в ряд-
ках; б — характер распределения семян (расте-
ний).
одним аппаратом, п — коли-^
чество высевающих аппа-
ратов, он предлагал исполь-
зовать для оценки несовер-
шенства работы отдельных
высевающих аппаратов, а
ошибку среднеарифметичес-
кой величины т = <зЦп, всег-
да меньшую, чем о(т<о),—
для характеристики всей се-
ялки. Эти соображения В. П.
Горячкина широко исполь-
зуются в настоящее время,
они лежат в основе методик
испытаний посевных и поса-
дочных машин и машин для внесения удобрений.
Распределение семян по поверхности поля.
Считают, что при рядовом посеве требование равномерности раз-
мещения семян по площади поля практически сводится к равно-
мерному распределению их в рядках. Характеризуя рядовое раз-
мещение растений шириной междурядий и количеством растений
на единице длины рядка, исходят из того, что рядки—это прямые
линии, а междурядья — расстояния между ними. Однако, если
всходы растений в одном рядке последовательно соединить пря-
мыми линиями, то получится ломаная зигзагообразная кривая
(рис. 158, а). Поэтому некоторые ученые считают, что для харак-
теристики поперечного разброса (рассеивания) семян целесооб-
разно ввести понятие ширины рядка с. Если по оси симметрии
сошника (геометрической оси рядка) провести шнур и от этого
шнура промерить расстояния до каждого из растений соседнего
рядка, то эти расстояния будут отличаться одно от другого. Их
среднее значение можно принять за среднеарифметический шаг
п
рядка a — ^а^п, где п — число замеров. При достаточно боль-
шом числе замеров полученные численные значения будут подчи-
няться закону нормального распределения, т. е. располагаться по
кривой Гаусса (рис. 158, б), где по оси абсцисс — значения заме-
ров а, а по оси ординат — частота их повторений р. При этом ши-
рина полосы рассеивания семян или ширина рядка растений с
оказывается равной 6о (от —За до +3а). Она зависит от ширины
бороздки, образуемой сошником, разбрасывания семян в стороны
при их падении в борозду и устойчивости хода сошника в попе-
речном направлении. В эту полосу попадет 99,73% всех высеян-
ных семян. Среднеквадратическое же отклонение можно будет
определить по формуле о= ± —я)2/(п—1).
/=1
224
Точность соблюдений шага рядка может быть определена по
формуле гп = аЦп. Тогда шаг рядка составит а±т, т. е. т будет
допуском на выполнение шага рядка. Тогда ширина междурядья
Ь—а—6о—2t, (132)
где t — ширина защитной зоны.
Анализируя выражение (132), можно прийти к выводу, что
при посеве пропашных культур (широкорядном посеве) лучше,
когда о возможно меньшее, так как в этом случае увеличивается
ширина междурядья той полосы, которую можно обрабатывать
механически, т. е. культиваторами. При посеве же обычным рядо-
вым способом (пшеница, рожь, овес и т. п.), т. е. если междурядья
не обрабатываются, лучше, когда о возможно большее, так как в
этом случае площадь питания для каждого растения становится
более рациональной (ближе к квадрату).
Для оценки качества посева пунктирной сеялкой важнейшим
показателем служит равномерность распределения семян вдоль
рядка. В этом случае замеряют расстояние между соседними се-
менами (растениями) в рядке и за показатель равномерности про-
дольного распределения растений принимают коэффициент вариа-
ции, %:
ц=100ст/х, (133)
где х — среднеарифметическое расстояние между соседними расте-
ниями в рядке.
При пунктирном посеве свекловичными сеялками коэффициент
вариации, согласно агротехническим требованиям, не должен пре-
вышать 35% на 80% площади поля. При этом отклонения основ-
ных междурядий не должны превышать ±2 см, а стыковых
±5 см.
При рядовой посадке картофеля коэффициент вариации рас-
пределения клубней в рядке составляет 60...70%. При этом от-
клонения основных междурядий не должны быть больше ±2 см,
а стыковых больше ±10 см.
При высадке рассады допускаются отклонения: шага посадки
3... 4 см, основных междурядий 2... 4 см, стыковых до 6 см. Вы-
саженные растения должны располагаться вертикально. Посадка с
наклоном до 30% от вертикали допускается не бойее чем для
10% рассады.
Неравномерность внесения удобрений для туковых сеялок не
должна превышать ±15%, а для разбрасывателей минеральных
и органических удобрений, как правило, ±25% как по ширине
захвата, так и по ходу движения. Причем неравномерность высе-
ва по ходу движения определяется работой дозирующих, а по
ширине захвата — работой разбрасывающих устройств.
- Заделывающие рабочие органы должны заделы-
вать семена на одинаковую заданную глубину. При глубине за-
15—424
225
Рис. 159. К обобщенной оценке качества
посева:
а — общие закономерности роста растений; б —
критерий урожайности.
делки семян 3...4 см, 4...5, ;
6...8 и 12... 15 см среднее от- "
клонение от этих значений
не должно превышать соот-
ветственно ±0,5; ±0,7; ±1
и ±2 см. Для выполнения
таких условий поверхность
поля должна быть тщатель-
но разделана и выровнена.
Пружины всех сошников
должны быть сжаты одина-
ково. Поверхность засеян-
ного поля также должна
быть выровнена, высота гребней не должна превышать 3...4 см.
Отклонения глубины заделки клубней картофеля от среднего
значения не должны превышать ±2 см (от поверхности поля до
верхней точки клубня).
Обобщенная оценка. Конечная цель того или иного спо-
соба посева, той или иной обработки почвы — создать условия,
наиболее благоприятные для роста и развития культурных рас-
тений. Следовательно, о качестве посева или посадки судят по
реакции самих растений, используя их как своеобразные индика-
торы. Поэтому ОСТ 70.5.1—74 предусматривает обобщенную
оценку качества посева по урожайности посеянной культуры. Та-
кой критерий особенно эффективен при сравнительной оценке и
может быть использован не только для оценки эффективности от-
дельных машин, но и целого комплекса. Однако оценка до уро-
жайности может быть сделана лишь, после прохождения длитель-
ного времени (созревания растений) и требует больших затрат
труда. В некоторых же случаях, когда урожай полностью или час-
тично погибает, например при уничтожении градом и в других слу-
чаях, дать общую оценку оказывается вообще невозможно.
Однако, основываясь на положениях биологии о возможности
прогнозирования урожая на ранних стадиях развития растений,
можно сделать общую оценку, не ожидая сбора урожая. Такая
оценка вытекает из общей схемы развития растений, полученной
впервые В. П. Горячкиным. Ее построение начинают с интеграль-
ной кривой m=f(t) (рис. 159, а), представляющей собой график
изменения биологической массы (объема, длины) растения во вре-
мени. Эту кривую строят по данным непосредственных измерений.
По ней путем численного дифференцирования строят график ско-
рости dmldt—F(t), а затем ускорения d2m/df2=<f(t). Исследования
показали, что растения, более интенсивно растущие на первом,
ювенильном этапе онтогенеза (этапе молодости), дают и более вы-
сокий урожай, поэтому за критерий урожайности можно принять
разность максимальных значений ускорений роста в конце этапа
молодости (рис. 159, б) или отношение этих значений. Если при
этом максимальное ускорение роста ai (кривая /) при каком-либо
226
способе посева или какой-либо системе обработки почвы принять*
за эталон (контроль), а максимальное ускорение «2 (кривая 2) —
при оцениваемом способе посева или системе обработки почвы, то
их отношение и будет служить показателем интенсивности роста
или урожайности растений. Такое отношение называют коэффици-
ентом интенсивности вегетативного роста Линт- Он может быть оп-
ределен по формуле:
^инт == 34)
Использование этого показателя позволяет сделать обобщен-
ную оценку еще в начальной стадии развития растений, задолго до
сбора урожая. Он окажется незаменимым в тех случаях, когда
урожай вследствие каких-либо причин будет потерян полностью
или частично.
Тяговое сопротивление посевных и посадочных машин зависит
от технологических свойств почвы, ширины их захвата и глубины
посева (посадки). Так как глубина посева изменяется в очень уз-
ких пределах, то ее влияние остается практически постоянным и
его изменения при ориентировочных расчетах не учитывают, счи-
тая тяговое сопротивление пропорциональным ширине захвата:
RX=KB, (135)
где К — удельное сопротивление машины, кН/м;
В — ширина захвата машины, м.
Удельное сопротивление К зависит не только от сопротивления
сошников, но и от сопротивления колес сеялки перекатыванию,
которое, в свою очередь, зависит от типа и параметров колес, на-
грузки на них, сопротивления вращению высевающих аппаратов
и т. п.
Ориентировочные значения удельного сопротивления посев-
ных и посадочных машин при рабочей скорости до 2,8 м/с
<(11 км/ч) приведены ниже:
Сеялка зерновая прицепная .
Сеялка зерновая навесная ,
Сеялка овощная навесная ,
Сеялка свекловичная навесная
Сеялка кукурузная навесная
Сеялка туковая разбросная .
Картофелесажалка навесная .
К. кН/м
, 1,0...1,5
. 0,95...1,4
. 0,5...0,8 . 0,8...1,2
1,1...1,4 . 0,35...0,7
. 3,0...3,5
При увеличении рабочей скорости выше 2,8 м/с сопротивление
повышается, причем наиболее интенсивно для навесных сеялок.
Это вызывается ростом их колебаний в направлении, перпендику-
лярном движению.
Для разбрасывателей органических и минеральных удобрений,
рабочие органы (дозирующие и разбрасывающие устройства) ко-
торых приводятся в действие от ВОМ трактора, энергетический
расчет целесообразно вести по мощности. В этом случае потреб-
ная мощность
^М=^+^ВОМ, (136)
где Rx — тяговое сопротивление машины, Н;
v —скорость движения агрегата, м/с;
Л^вом — мощность на привод рабочих органов через ВОМ, Вт.
Величина /Увом составляет большую часть в энергетическом ба-
лансе разбрасывателей и зависит от свойств и состояния удобре-
ний (влажности, плотности, коэффициента трения и т. п.).С уве-
личением влажности необходимая мощность уменьшается, а с уве-
личением плотности и коэффициента трения увеличивается. Полу-
ченные по вышеприведенной формуле значения мощности для
энергетической характеристики машины приводят к единице ши-
рины захвата q~N.JB или же вычисляют приведенное удельное
сопротивление kn.y=NK/Bv. Для навозоразбрасывателей удельная
мощность колеблется от 3,1 до 7,1 кВт на 1 м ширины захвата.
Раздел третий
МАШИНЫ ДЛЯ ХИМИЧЕСКОЙ ЗАЩИТЫ РАСТЕНИЙ
«В числе мер по интенсификации сельскохозяйственного про-
изводства самого серьезного внимания заслуживает дальнейшее
развитие производства минеральных удобрений и средств защиты
растений. Без этого ныне невозможно вести сельскохозяйственное
производство по пути его быстрого подъема»,— сказал товарищ
Л. И. Брежнев на июльском (1978 г.) Пленуме ЦК КПСС.
Однако, применяя химические средства защиты растений, нель-
зя забывать и об обратном, отрицательном, эффекте — возможном
загрязнении окружающей среды ядовитыми химическими препара-
тами. Охрана природы в нашей стране — неотъемлемая часть про-
граммы коммунистического строительства; требование бережного
отношения к природе закреплено в Конституции СССР и в Про-
грамме КПСС.
«...Забота о земле, о лесе, о реках и чистом воздухе, о расти-
тельном и животном мире — все это наше кровное коммунистиче-
ское дело,— говорил товарищ Л. И. Брежнев.— Мы должны со-
хранить и украсить нашу землю для нынешних и будущих поко-
лений советских людей»*.
Глава I
ОБЩИЕ СВЕДЕНИЯ
§ 1. Методы защиты растений
Существующие методы защиты растений можно разделить на
несколько категорий: химические, биологические, агротехнические,
механические и биохимические.
Химические методы борьбы заключаются в уничтожении сорня-
ков, вредителей и болезней сельскохозяйственных растений с по-
мощью различных химических препаратов — ядохимикатов.
Биологические методы основаны на использовании против вре-
дителей растений, сорняков, болезнетворных микробов и бактерий
* Брежнев Л. И. Пятьдесят лет великих побед социализма. М.,
Политиздат, 1967, с. 33.
229
их естественных врагов (паразитов, хищников, микроорганизмов),
а также веществ, выделяемых из различных грибов и бактерий
(антибиотиков).
Агротехнические методы включают в себя целый комплекс аг-
ротехнических приемов (севообороты, обработка почвы, опти-
мальные сроки сева, подбор устойчивых к вредителям и болезням
сортов растений и др.), повышающих культуру земледелия и соз-
дающих благоприятные условия для роста и развития полезных
растений и неблагоприятные для вредителей, возбудителей болез-
ней и сорняков.
Механические методы заключаются в использовании различных
заграждений (канав, липких колец и пр.), препятствующих рас-
селению вредных организмов, или устройств, непосредственно их
уничтожающих (капканов, ловушек и др.).
Биофизические методы — использование против вредителей и
болезней растений ультразвука, токов высокой частоты, радиоак-
тивных препаратов, ионизирующих излучений, радиоволн микро-
волнового диапазона и т. п.
Из всех перечисленных методов защиты растений наибольшее
распространение получили химические. Они отличаются большой
универсальностью и высокой производительностью при относи-
тельно небольших затратах труда и средств.
Однако недостаточно обоснованное применение химических
средств, как показывает мировая практика защиты растений, мо-
жет не только не дать ожидаемого эффекта, но и привести к ряду
отрицательных последствий. Поэтому нельзя ориентироваться
только на один метод борьбы, необходимо применять интегриро-
ванную систему защиты растений, основанную на использовании
комплекса профилактических и истребительных мероприятий. Та-
кая система позволит снизить расход ядохимикатов и опасность
загрязнения окружающей среды. В некоторых же случаях, напри-
мер при массовом появлении какой-либо болезни или вредителя,
когда необходимо в короткий срок уничтожить вредителей иЛи воз-
будителей болезни на больших массивах, применение ядохимика-
тов оказывается практически единственной мерой спасения уро-
жая. Таким образом, по эффективности и пригодности для массо-
вого подавления вредителей и болезней химический метод является
основным, а в некоторых случаях и единственным средством за-
щиты растений.
§ 2. Ядохимикаты и способы их применения
Общие сведения о ядохимикатах. Все ядохимикаты, применяе-
мые для защиты растений, получили общее название — пестициды
(по латыни pestis — зараза, caedo — убивать), т. е. убивающие
заразное. Препараты, предназначенные для борьбы с сорняками,
называют гербицидами (herba — трава), для борьбы с болезнями
растений, вызываемыми грибными организмами,— фунгицидами
230
(fungus — гриб), для борьбы с бактериальными заболеваниями —
бактерицидами и т. д. Близки по своим свойствам к гербицидам
арборициды — вещества, уничтожающие древесную раститель-
ность; десиканты — вещества, высушивающие растения на корню;
дефолианты — вещества, ускоряющие старение и опадание листьев.
Кроме пестицидов, предназначенных для подавления вредных ор-
ганизмов, находят применение химические препараты, отпугиваю-
щие (репелленты) или привлекающие (аттрактанты) насекомых.
Большинство ядохимикатов, применяемых для борьбы с вред-
ными организмами и сорняками, опасны и для человека. Попадая
в организм через кожу, рот и дыхательные пути, оии могут вы-
звать тяжелые отравления или смерть. Некоторые препараты,
кроме того, являются еще и огнеопасными. Поэтому при работе
с ядохимикатами необходимо хорошо изучить и строго соблюдать
специальные правила техники безопасности и противопожарной
безопасности.
В зависимости от места развития болезни или вредителя, со-
стояния и фазы развития растений могут быть использованы сле-
дующие методы химической защиты растений: опрыскивание, опы-
ливание, обработка аэрозолями, фумигация, протравливание, раз-
брасывание отравленных приманок, хемотерапия (виутреиияя хи-
мическая терапия растений).
Опрыскивание — нанесение химических препаратов в капельно-
жидком состоянии на растения, тела насекомых и другие поверх-
ности. В зависимости от норм расхода рабочей жидкости разли-
чают высокообъемное или обыкновенное, малообъемное и ультра-
малообъемное опрыскивания.
Для обыкновенного опрыскивания применяют растворы, эмуль-
сии, суспензии. Чтобы уничтожить вредные организмы, часто тре-
буется несколько граммов, а иногда несколько миллиграммов яда
на 1 га. Равномерно распределить по площади такое количество
яда в чистом виде практически невозможно. Поэтому к действую-
щему веществу добавляют различные наполнители и растворители
(воду, минеральное масло и пр.). Для повышения стабильности
эмульсий и суспензий в их состав вводят вспомогательные веще-
ства— эмульгаторы и стабилизаторы. Для большей эффективно-
сти воздействия на вредные организмы жидкость, применяемая
для опрыскивания, должна хорошо смачивать обрабатываемые по-
верхности, хорошо растекаться на них, обладать хорошей прили-
паемостью и удерживаемостью. Для улучшения этих свойств в
состав жидкости вводят различные смачиватели, растекатели, за-
крепители, роль которых выполняют различные масла, жиры,
мыло, сульфитный щелок и др. Такие сложные химические пре-
параты изготавливает промышленность в виде смачивающихся
порошков и концентратов эмульсий. В процессе приготовления сус-
пензий и эмульсий их смешивают с необходимым количеством
воды. При этом расходуют от 400 до 2000 л воды на 1 га (в за-
висимости от обрабатываемой культуры).
231
В связи с этим заслуживает внимания малообъемное (мелко-
капельное) опрыскивание. Малообъемным называют такое опрыс-
кивание, при котором то же количество ядохимиката распределя-
ется в меньшем объеме жидкости, а образующиеся при распыле-
нии капли имеют меньший размер. В результате при той же норме
расхода действующего вещества расход воды на единицу площади
уменьшается в несколько раз, а ядохимикат за счет более полного
распыления равномернее распределяется по обрабатываемой по-
верхности.
Еще большие преимущества имеет ультрамалообъемное опрыс-
кивание (УМО)—опрыскивание небольшим количеством жидкого
концентрата пестицидов без разбавления водой. Для УМО исполь-
зуют специальные жидкие нелетучие технические препараты и их
концентраты, в их составе от 20 до 70% действующего вещества.
При этом исключается процесс приготовления рабочей жидкости,
упрощается технология проведения опрыскивания, за счет сниже-
ния в 10... 100 раз норм расхода рабочей жидкости существенно
повышается производительность опрыскивателей, снижается мате-
риалоемкость машин, увеличивается продолжительность остаточно-
го действия и стойкость к смыванию препарата дождем, но вместе
с этим возникает и ряд сложных проблем по дозированию, рас-
пылению и т. п.
Опыливание — нанесение химических препаратов в порошкооб-
разном состоянии на растения, тела насекомых и другие обрабаты-
ваемые поверхности.
В качестве наполнителей при опыливании используют нейтраль-
ные порошки: тальк, смесь талька с каолином или мелом, дорож-
ную пыль, известь-пушонку и др. Наилучшее распыливание дает
препарат с размерами частиц 15...25 мкм при наземном опылива-
нии и 25...40 мкм при авиационном. Для улучшения аэродинами-
ческих свойств, прилипаемости и удерживаемости на обрабаты-
ваемой поверхности проводят бонификацию пылевидных препара-
тов, т. е. вводят в их состав бонификаторы — минеральные масла
(соляровое, веретенное, таловое) в количестве 3...5%. Такие пре-
параты, изготовленные на заводах, называют дустами.
Процесс опыливания значительно проще опрыскивания и поз-
воляет достичь значительно большей производительности про-
цесса.
Кроме того, отпадает необходимость в приготовлении рабочей
жидкости. Однако на качество опыливания в большей мере оказы-
вают отрицательное влияние ветер и воздушные токи. Расход
ядохимиката при опыливании в несколько раз больше, чем при
опрыскивании.
Обработка аэрозолями — эффективный прием, позволяющий су-
щественно улучшить равномерность покрытия обрабатываемых
поверхностей ядохимикатами, снизить расход ядохимиката, значи-
тельно увеличить производительность процесса. Аэрозоли — мель-
чайшие частицы твердого (дымы) или жидкого (туманы) ядохи-
232
миката, взвешенные в воздухе. Туманы и дымы легко проникают
в щели строений, крону деревьев, равномерно распределяясь по
всей обрабатываемой поверхности. Благодаря этому токсическое
действие пестицида на вредные организмы значительно усилива-
ется. Обработка аэрозолями по сравнению с опрыскиванием в де-
сятки раз уменьшает расход ядохимиката, значительно увеличива-
ет производительность и повышает качество работ. Аэрозоли поз-
воляют уничтожать вредных насекомых не только на земле, но и в
воздухе. Однако применение аэрозолей в полевых условиях за-
трудняется тем, что они трудноуправляемы и под действием воз-
душных потоков легко сносятся в стороны и вверх.
Фумигация — насыщение ограниченного пространства ядохими-
катом, находящимся в парообразном или газообразном состоянии.
Способность паров и газов расширяться и проникать в трудно-
доступные места дает возможность использовать этот метод для
уничтожения вредных организмов, расположенных в щелях стен
складов, в почве и т. п. Однако, расширяясь, пары и газы не мо-
гут сохранять постоянный объем. Гибель же вредных организмов
наступает лишь в том случае, если они находились в отравленной
атмосфере более или менее продолжительное время. Поэтому фу-
мигацию применяют лишь в ограниченных пространствах: в склад-
ских помещениях или палатках, под брезентом, в оранжереях и
теплицах, в парниках и т. п. После внесения в почву твердых или
жидких фумигантов (на глубину 18...20 см) ее, как правило,
мульчируют, т. е. покрывают мульчбумагой, соломенными мата-
ми, синтетической пленкой.
Протравливание — обработка ядохимикатами посевного и поса-
дочного материалов с целью уничтожения возбудителей болезней
грибного и бактериального происхождения, находящихся на по-
верхности или внутри тканей зерен, клубней и пр. Существует три
способа протравливания: сухое, полусухое (с увлажнением) и
мокрое (влажное).
Сухое протравливание заключается в смешивании посевного
или посадочного материала с порошкообразным ядохимикатом,
в результате чего поверхность семян или клубней покрывается тон-
чайшей пленкой протравителя.
Полусухое протравливание представляет собой смачивание се-
мян 0,5%-ным раствором формалина, выдерживание (томление)
их в течение нескольких часов и затем проветривание для удале-
ния паров формалина.
Мокрое протравливание — смачивание семян раствором форма-
лина, но более низкой концентрации (одна часть 40%-ного фор-
малина на 300 частей воды). Семена обильно смачивают раство-
ром протравителя, томят и затем высушивают до нормальной
влажности.
Сухое протравливание проводят, как правило, заблаговремен-
но за 2...6 месяцев до посева, полусухое — за несколько дней,
а мокрое — непосредственно перед посевом.
233
Разбрасывание отравленных приманок применяют для уничто-
жения грызунов и вредных насекомых. Сущность этого способа
состоит в том, что кормовое вещество насыщают ядохимикатом и
разбрасывают в местах обитания вредителей.
Способ отравленных приманок весьма эффективен, расход ядо-
химиката при его использовании значительно меньше, чем при
других.
Хемотерапия — введение внутрь растения химического препара-
та, безвредного для него, но вредного для вредителей и возбуди-
телей болезней. В растения их вводят различными путями: опудри-
ванием или замачиванием семян и посадочного материала в рас-
творах и суспензиях хемотерапевтических веществ, нанесением их
на листья и стебли опрыскиванием или опыливанием, внесением в
гранулах или порошках в почву, инъекцией под давлением в ствол
или стебель и т. д.
Кроме перечисленных, некоторое применение находит способ
рассеивания пестицидов в гранулированном виде. Гранулы изготав-
ливают из специальных наполнителей (различных глин, удобре-
ний и др.), обладающих высокой пористостью и хорошими сорб-
ционными свойствами и пропитывают их жидкими пестицидами.
Применение пестицидов в гранулированном виде по сравнению с
опрыскиванием и опыливанием снижает потери ядохимиката (за
счет потерь от сноса ветром и воздушными потоками), увеличива-
ет продолжительность действия препарата, уменьшает ожигаю-
щее действие на растения.
§ 3. Влияние размера частиц ядохимиката
на эффективность обработки
Опрыскиватели и аэрозольные генераторы различных типов по-
зволяют получать разную степень дисперсности распыла рабочей
жидкости. При обыкновенном (высокообъемном, крупнокапель-
ном) опрыскивании капли имеют размер более 250 мкм; малообъ-
емиом (мелкокапельном)—от 250 до 100 мкм; ультрамалообъем-
ном — от 100 до 20 мкм. Аэрозольные генераторы позволяют по-
лучать туман низкой дисперсности, или редкий туман,— при раз-
мере капель 25... 100 мкм; туман средней дисперсности — при раз-
мере капель 5... 25 мкм и туман высокой дисперсности, или плот-
ный туман,— при размере капель 0,5... 5 мкм.
Многочисленные исследования показывают, что частицы одного
и того же препарата, но различных размеров обладают различной
токсичностью, причем чем выше дисперсность распыла, тем силь-
нее токсичность. Крупные капли имеют значительно меньшую ток-
сичность для вредных организмов, но в то же время могут повреж-
дать культурные растения, вызывая ожоги листьев. Мелкие части-
цы при одинаковом расходе ядохимиката на единицу площади
более полно и равномерно покрывают поверхность обрабатываемо-
го объекта.
234
Эффективность удерживания ядохимиката листьями растений
также в значительной степени зависит от размера частиц. Так,
мелкие частицы ядохимиката лучше удерживаются на поверхности
листьев растений, чем крупные, их стойкость к смыванию дождем
значительно выше.
Влияние размера частиц на потери ядохимиката связано со
способом его доставки от машины к объекту обработки. Машины,
работающие на принципе принудительной доставки ядохимиката
к растению с помощью турбулентных струй, дают минимальные
потери ядохимиката, при этом чем меньше частицы, тем меньше
потери. Распиливающие устройства обычных опрыскивателей дают
полидисперсную струю, т. е. неоднородную по размерам капель.
При встрече с препятствием (объектом обработки) крупные,
а значит, и более инерционные частицы, расположенные ближе к
центру струи, сталкиваются с препятствием и осаждаются на его
передней, лобовой, поверхности, а мелкие (менее инерционные)
частицы, расположенные ближе к краю струи, вместе с воздуш-
ным потоком огибают препятствие и, вследствие образующихся
завихрений и турбулентной диффузии, осаждаются на оборотной
его стороне. Таким образом, с помощью турбулентных струй мель-
чайшие частицы ядохимиката с минимальными потерями доносят-
ся до растения и осаждаются в самых труднодоступных его ме-
стах. В связи с этим наметилась тенденция к более широкому при-
менению малообъемного и ультрамалообъемного опрыскивания,
что дает большое снижение расхода рабочей жидкости (табл. 3).
ТАБЛИЦА 3
Зависимость расхода рабочей жидкости от способа опрыскивания
Объект обработки Расход рабочей жидкости при различных способах опрыскивания, кг/га
обыкновенное (крупнока- пельное) малообъемное (мелкокапель- ное) ультра мало- объемное аэрозольное
Плодовые насаждения Полевые культуры 1000...2000 4С0...600 200...400 25...100 До Ю 0,5...5 До 25 3...10
Машины и аппараты, работающие на принципе свободной до-
ставки (свободного падения) жидкости, характеризуются увели-
чением потерь ядохимиката с уменьшением размера его частиц.
Это объясняется тем, что скорость оседания капель с уменьшением
их размера резко уменьшается.
Размер капель, мкм . , . 500 250 100 50 10
Скорость оседания, м/с , . 2,08 0,94 0,27 0,07 0,003
При авиационном опрыскивании водными эмульсиями ядохими-
катов, например в южных более теплых районах, капли диаметром
100 мкм, падая на землю, уменьшаются до 50 мкм за счет испа-
рения и сносятся за пределы обрабатываемой площади. Капли же
235
диаметром 30...50 мкм, как газы, сносятся на расстояние 3...
... 5 км в сторону от самолета. Унос мелких частиц, обладающих
наибольшей токсичностью, за пределы поля, помимо неэффективно-
го использования химикатов, может послужить причиной серьез-
ных повреждений чувствительных растений на соседних полях. По-
этому воду нецелесообразно использовать в качестве растворителя
активного вещества, и для авиационного УМО следует применять
специальные слаболетучие растворители.
§ 4. Общая схема рабочего процесса
Несмотря на большое многообразие мобильных машин для
химической защиты растений, все они выполнены по единой принци-
пиальной схеме, предусматривающей последовательное выполне-
ние таких основных технологических операций: дозирование ядо-
химиката, распиливание его на мелкие частицы и транспортирова-
ние частиц ядохимиката на объект обработки. При этом дозирую-
щие устройства должны обеспечить заданный расход (норму внесе-
ния) ядохимиката на единицу обрабатываемой площади и сохра-
нять его неизменным в процессе работы, а распиливающие устрой-
ства — равномерное распределение ядохимиката по поверхности
обрабатываемого объекта.
Рабочий процесс мобильной машины для химической защиты
растений протекает следующим образом. При движении агрегата
в рабочем положении ядохимикат (рабочая жидкость, концентрат,
порошок), расположенный в емкости (резервуаре, бункере), с по-
мощью питающего устройства (насоса или питателя) подается к
распиливающему устройству. Распылители раздробляют ядохими-
кат на мелкие частицы (капельки, пылинки) и с помощью воздуш-
ной струи или сообщенной частицам кинетической энергии транс-
портируют их на объекты обработки (растения, деревья и т. п.).
Таким образом, мобильные машины для химической защиты ра-
стений имеют ряд одинаковых по назначению, но различных по
устройству конструктивных элементов. Основные из них: емкости
для ядохимиката, насосы и питатели, распиливающие устройства.
Глава II
ОСНОВНЫЕ КОНСТРУКТИВНЫЕ ЭЛЕМЕНТЫ
§ 1. Емкости, мешалки, эжекторы
Резервуары опрыскивателей или баки имеют, как правило,
форму горизонтального цилиндра с поперечным сечением в виде
окружности или эллипса с плоскими или сферическими передней и
задней стенками, реже — форму параллелепипеда с поперечным
сечением в виде прямоугольника с закругленными углами. Вмести-
мость баков зависит от типа опрыскивателя и его производитель-
236
ности. Несмотря на стремление к снижению расхода рабочей жид-
кости (малообъемному и ультрамалообъемному опрыскиванию),
наблюдается тенденция к увеличению вместимости баков. При
этом исходят из того, чтобы запаса рабочей жидкости в баке хва-.
тало на работу в течение от полусмены до полной смены.
Баки обычных опрыскивателей изготавливают из полиэтилена,
стеклопластика или листовой стали, покрытой изнутри антикорро-
зийным лаком или эмалью для предохранения от разъедающего
действия ядохимикатов; баки ультрамалообъемных опрыскивате-
лей— из нержавеющей стали или пластика. Резервуар в верхней
части имеет горловину с фильтром, в нижней — отстойник со
спускной пробкой, его, как правило, снабжают уровнемером по-
плавкового типа.
Эжекторы применяют для заправки баков обычных опрыскива-
телей рабочей жидкостью. Находят применение эжекторы двух
типов: жидкостные и газоструйные. Эжектор жидкостного типа
опускают в резервуар с рабочей жидкостью, а верхний конец
шланга вставляют в горловину бака. Работает эжектор от насоса
опрыскивателя, поэтому при заправке в баке должно находиться
некоторое количество рабочей жидкости. Газоструйный эжектор
устанавливают на выпускной трубе трактора. С помощью него
создается разрежение в баке опрыскивателя, под действием кото-
рого бак заполняется рабочей жидкостью из заправочной емко-
сти. Клапан поплавкового типа при заполнении резервуара пере-
крывает всасывающую трубку эжектора, чем препятствует попада-
нию ядохимиката в эжектор.
Мешалки опрыскивателей служат для перемешивания рабочей
жидкости в резервуаре, что способствует опрыскиванию растений
препаратом одинакового состава. Известны пневматические, гид-
равлические и механические мешалки. В первых двух используют
энергию воздушных или гидравлических струй, выходящих из на-
садок или сопл, расположенных у дна резервуара с рабочей жид-
костью.
Значительное распространение получили гидравлические ме-
шалки. Они бывают двух типов: в виде водоструйных насосов
(эжекторов) и в виде штанг с цельноструйными насадками или
соплами, расположенными на расстоянии 25... 50 мм над дном
бака. Водоструйный насос состоит из насадки и трубы, в которой
различают смесительную камеру, горловину и диффузор. Хорошее
качество перемешивания рабочей жидкости достигается при ее ско-
рости 2,5 м/с на выходе из диффузора и коэффициенте эжекции
(отношение массы подсасываемой жидкости к массе рабочей),
равном или большем 9. Неравномерность перемешивания жидкости
гидравлическими мешалками обычно не превышает 2%.
Механические мешалки — это вращающиеся крыльчатки, вин-
ты и другие приспособления, создающие потоки жидкости в резер-
вуаре. Лопасти механических мешалок создают потоки жидкости,
движущиеся с большой скоростью и перемешивающие всю массу
жидкости, находящуюся в резервуаре. Интенсивность перемеши-
вания оценивается коэффициентом циркуляции, под которым по-
нимают отношение производительности мешалки к объему резер-
вуара:
I=QJVP, (137)
где QM — производительность мешалки, м3/с;
Гр — объем резервуара, м3.
Чем длиннее резервуар, тем больше потери на трение жидкости
о стенки и хуже перемешивание. Оптимальная частота вращения
вала плосколопастных мешалок не превышает 200 мин-1. Винто-
вые (пропеллерные) мешалки вращаются с частотой до 1000 мин-1.
Бункера опыливателей изготовляют обычно в виде сочетания
двух геометрических фигур: в верхней части — параллелепипеда,
в нижней — треугольной призмы или в верхней части — вертикаль-
ного цилиндра, в нижней — опрокинутого усеченного конуса.
В верхней части размещается горловина, закрытая крышкой, в
нижней — питатель. Вместимость бункеров отечественных опыли-
вателей достигает 160 дм3, что позволяет проводить обработки на
длине гона от 3 до 6 км.
Мешалки опыливателей только механические, как правило,
в виде вала с лопастями. Перемешивая ядохимикаты, они пре-
дупреждают сводообразование.
§ 2. Насосы и питатели
Насосы опрыскивателей служат для подачи рабочей жидкости
к распиливающим наконечникам и создания давления, необходи-
мого для распиливания жидкости и сообщения ее частицам опре-
деленной скорости. Для опрыскивания полевых культур необходи-
мо давление от 0,2 до 1,0 МПа, для садовых от 2 до 2,5 МПа. На
опрыскивателях могут быть установлены как гидравлические, так
и пневматические насосы.
Пневматические насосы накачивают воздух в гермети-
ческий резервуар с рабочей жидкостью. Под действием давления
сжатого воздуха жидкость вытесняется из резервуара и подается
к распыливающему устройству. Пневматические насосы применя-
ются главным образом в ранцевых (ручных) опрыскивателях.
Гидравлические насосы получили наибольшее распро-
странение. Их детали непосредственно соприкасаются с раствора-
ми, эмульсиями и суспензиями ядохимикатов и поэтому должны
быть устойчивыми против кор'розии и абразивного износа. Гидрав-
лические насосы подразделяют на поршневые, плунжерные, цент-
робежные, вихревые, шестеренные, диафрагмовые, мембранные,
роликовые и пр. Наибольшее распространение в отечественных и
зарубежных опрыскивателях находят поршневые насосы, приме-
няются также плунжерные и очень редко — вихревые и диафраг-
мовые. В ультрамалообъемных опрыскивателях наряду с поршне-
238
выми широкое распространение находят также центробежные и
мембранные насосы, применяются также и плунжерные. Следует
отметить, что поршневые и плунжерные насосы могут быть при-
менены в опрыскивателях высокого давления; вихревые, шестерен-
ные, диафрагмовые — только в опрыскивателях низкого давления.
Преимущественное распространение получили трехпоршневые
насосы. Такой насос снабжен тремя цилиндрами и тремя поршня-
ми, приводимыми в движение от коленчатого вала, смежные ко-
лена которого расположены под углом 120°. Поскольку такт нагне-
тания каждым поршнем выполняется в процессе поворота криво-
шипа на 180°, то в этом случае происходит перекрытие такта на-
гнетания смежными поршнями на 60°, т. е., когда скорость порш-
ня, заканчивающего такт нагнетания, уменьшается, то скорость
другого поршня, начинающего такт нагнетания, возрастает. Вслед-
ствие этого пульсация уменьшается, давление в нагнетательной
магистрали выравнивается.
Наряду с поршневыми насосами применяются и плунжерные.
Между ними нет принципиальной разницы: плунжером называют
удлиненный поршень, рабочая длина которого значительно больше
его диаметра. В плунжерных насосах в отличие от поршневых уп-
лотнение между поверхностью плунжера и стенками цилиндра до-
стигается установкой сальниковых колец или сальниковой набив-
ки из промышленного пенькового или хлопчатобумажного шнура.
Объемная подача поршневых и плунжерных насосов (дм3/мин)
может быть определена по формуле:
qR = ^-lnzz, (138)
где d — диаметр поршня или плунжера, дм;
I —длина хода поршня или плунжера, дм;
п —частота вращения коленчатого вала, мин-1;
г — число цилиндров (плунжеров);
е —коэффициент объемного наполнения цилиндров, е =
=0,85... 0,90.
Поршневые и плунжерные насосы развивают довольно высокое
давление в системе нагнетания — 2,5... 3 МПа.
Центробежные и вихревые насосы находят приме-
нение главным образом в вентиляторных и авиационных опрыски-
вателях, где требуется высокая скорость струи при сравнительно
-низком давлении. Так как работа этих насосов основана на ис-
пользовании действия центробежных сил, то они выпускаются без
понижающего редуктора и работают на высоких оборотах. В вих-
ревых насосах в отличие от центробежных жидкость при всасы-
вании подается от периферии к центру. Лопасти колеса отбрасы-
вают жидкость в кольцевой канал, придавая ей вихревое движе-
ние. Скоростной напор преобразуется в статический, и жидкость
под действием последнего снова попадает на лопасти колеса.
Многократное повторение этого значительно повышает давление
239
жидкости у выхода в нагнетательную магистраль. Вихревой насос
создает напор, в 3... 5 раз больший, чем центробежный. Насосы
могут работать с суспензиями, содержащими абразивные частицы.
Шестеренные насосы устанавливают на опрыскивате-
лях и протравливателях, где в качестве рабочей жидкости исполь-
зуют растворы ядохимикатов. При работе с суспензиями шестерни
насоса быстро изнашиваются вследствие действия абразивных ча-
стиц. Шестеренчатые насосы подают раствор под небольшим дав-
лением 0,5... 0,6 МПа.
Диафрагмовые насосы получили распространение в ран-
цевых опрыскивателях с давлением до 0,5 МПа. Насос прост по
конструкции и надежен в эксплуатации.
Редукционный и предохранительный клапаны установлены па-
раллельно в корпусе, разделенном на две камеры—верхнюю А и
нижнюю Б (рис. 160, а). Верхняя камера соединена с резервуаром,
нижняя — с насосом и распыливающими наконечниками. Сообще-
ние между камерами перекрыто предохранительным и редукцион-
ным клапанами. Предохранительный клапан 1 служит для предо-
хранения системы нагнетания от механических повреждений при
выключении распыливающего устройства. Он отрегулирован, как
правило, на давление 2 МПа и запломбирован. Редукционным
клапаном 2 устанавливают необходимое рабочее давление, которое
определяют по манометру 4. Установить давление более 2 МПа
невозможно, так как при этом открывается предохранительный
клапан и часть жидкости перетекает в резервуар. Так как произ-
водительность насоса обычно принимают на 10... 15% больше
расхода жидкости через распиливающие наконечники, то часть
жидкости во время работы через редукционный клапан перепуска-
ется в резервуар. В опрыскивателях некоторых конструкций ре-
дукционный и предохранительный клапаны объединены в один —
редукционно-предохранительный клапан.
Рис. 160. Схемы клапанов:
а _ редукционного и предохранительного; б — дистанционного управления; А — верхняя ка-
мера- Б — нижняя камера; 1 — предохранительный клапан; 2 — редукционный клапан; 3 —
фильтр; 4 — манометр; 5 — рычаг; 6 — эксцентрик; 7 — шток; 8 — седло клапана; 9 — кла-
пан; 10 — пружина клапана; И — уплотнение.
240
Рис. 161. Схемы питателей:
а — шнеко-лопастного с теркой в середине шнека; б — шнеко-лопастного с теркой на кон*
це шнека; 1 — бункер; 2 — мешалка; 3 — шнек; 4 — терка; 5 — заслонка.
Клапан дистанционного гидроуправления (рис. 160, 6) служит
для выключения из кабины трактора подачи жидкости к распи-
ливающему устройству (при.поворотах агрегата в конце гона,
кратковременных остановках и пр.).
При повороте рычага 5 по ходу часовой стрелки эксцентрик 6
нажимает на шток 7, который, перемещаясь вправо, отводит кла-
пан 9 от седла 8, и жидкость поступает к распыливающему уст-
ройству. Для выключения подачи жидкости рычаг поворачивают
против хода часовой стрелки. При этом клапан 9 под действием
пружины 10 прижимается к седлу 8 и поступление жидкости к
распыливающему устройству прекращается.
Питатели опыливателей служат для подачи определенного ко-
личества порошкообразного ядохимиката к вентиляторам, т. е. од-
новременно выполняют функции питателей и дозаторов. Питатель
состоит из мешалки (рыхлителя), подающего и дозирующего уст-
ройств. Мешалки перемешивают порошкообразный ядохимикат,
устраняя сводообразование. Известны мешалки трех разновидно-
стей: лопастные (с пальцевыми или плоскими лопастями), скреб-
ковые и шнековые. В питателях современных опыливателей приме-
няют лопастные мешалки. Подающие устройства подразделяют на
шнеко-лопастные с теркой в середине и на конце шнека, верти-
кально-шнековые, плоскотерочные, радиальнотерочные, тарелоч-
ные, дисковые, пневматические. Преимущественно применяются
шнеколопастные подающие устройства. Функции дозатора выпол-
няет обычно заслонка, перекрывающая отверстие в дне бункера.
Шнеколопастной питатель (рис. 161, а и б) состоит из мешал-
ки 2, шнека 3, подающего ядохимикат к дозировочному окну, и ло-
пастной терки 4, выталкивающей его через дозировочное окно.
Шнек может иметь либо один сплошной виток (рис. 161, б), либо
два витка — правого и левого направления (рис. 161, а).
Производительность шнекового питателя можно определить по
формуле (м3/с):
Q = (ji£)2/4) (/пе/60), (139)
где D —диаметр витка шнека, м;
I — шаг витка, м;
16—424
241
п — частота вращения шнека, мин-1;
е — коэффициент наполнения.
Подачу ядохимиката регулируют заслонкой 5. Частоту враще-
ния шнека иногда устанавливают в пределах 45...60 мин-1. Пи-
татели такого типа значительно уплотняют ядохимикат и малопро-
изводительны при засоренном, слежавшемся или переувлажнен-
ном препарате. Этих недостатков лишен шнеколопастной питатель,
работающий с повышенной частотой вращения вала (300.,,
...500 мин-1). В витках шнека такого питателя предусмотрены
разрывы.
§ 3. Рабочие органы распиливающих устройств
Основные рабочие органы распиливающих устройств опрыски-
вателей и опыливателей — распиливающие наконечники и венти-
ляторы.
Распиливающие наконечники опрыскивателей (распылители,
форсунки) предназначены для дозирования и предварительного
или окончательного дробления ядохимиката. Следовательно, от их
работы зависит количество и качество нанесения ядохимиката на
объект обработки, а значит, и эффективность опрыскивания. Рас-
пылители классифицируют по принципу действия и по назна-
чению.
По принципу действия распылители подразделяют на четыре
типа: центробежные, струйные, пневматические и вращающиеся.
Они могут давать распыл в виде сплошного конуса, полого конуса,
веера, сплошной и отраженной струи.
Центробежные распылители получили наибольшее
распространение. Конструктивные формы этих распылителей чрез-
вычайно разнообразны. По способу подвода жидкости в камеру
завихрения их подразделяют на две разновидности: с сердечника-
ми и тангенциальные. Распылители с сердечниками более техно-
логичны и обеспечивают лучшее качество распыливания. Они,
в свою очередь, подразделяются на распылители со сменными и с
регулируемыми сердечниками. Первые широко известны под на-
званием полевых наконечников. Полевые наконечники (рис. 162, а)
работают при небольших давлениях (0,3...0,8 МПа) и дают ко-
нусообразную струю мелкораспыленной жидкости длиной 1...
...2 м с большим углом конуса распыла (80...98°). Полевой на-
конечник состоит из корпуса (ниппеля), сердечника с винтовой
ленточной нарезкой и колпачка с отверстием. Сердечник 1 плотно
вставлен в колпачок 2, а колпачок навинчен на ниппель 3. Между
торцом винтового конца сердечника и внутренней поверхностью
колпачка образуется пространство, называемое камерой завих-
рения.
Жидкость, двигаясь по винтовому каналу под давлением,
приобретает вращательное движение и выходит через отверстие
колпачка (сопло) в виде конусообразной пленки. По мере удале-
242
Рис. 162. Распиливающие наконечники опрыскивателей:
центробежные: а — полевой; б — садовый; в — типа УН; г — типа РЦ; д — пневматический
пульверизаторный; е — струйный дефлекторный; ж — вращающийся; 1 — сердечник; 2 — кол-
пачок; 3 —ниппель; 4 — прокладка (уплотнительное кольцо); 5 — сменный диск с выходным
отверстием; 6 — резиновое кольцо; 7 — втулка; 8 — корпус; 9 — трубка; 10 — шток; 11 — за-
глушка; 12 — диафрагма; 13 — сопло для подачн воздуха; 14 — стопорный болт; 15 — рас-
пиливающий наконечник; 16 — регулировочные прокладки; 17 — штуцер; 18 — кронштейн;
19 — дефлектор; 20 — крышка; 21 — пружина; 22 — гибкая диафрагма; 23 — сетчатый цилиндр?
24 — штуцер для подвода жидкого ядохимиката; 25 — воздухоподвод (корпус); 26— крыль-
чатка.
ния от сопла вращающаяся конусообразная пленка жидкости на-
чинает распадаться на мелкие частицы, размер которых зависит
от интенсивности завихрения перед выходом из сопла. Полевые
наконечники разделяют на обыкновенные (нормальные) и эконо-
мичные. Экономичный по сравнению с обыкновенным имеет мень-
ший шаг резьбы и меньшее выходное отверстие, в результате чего
дает более тонкий распыл жидкости при широком и коротком фа-
келе, сокращая расход жидкости в 3...4 раза. Однако экономич-
ные наконечники имеют и существенный недостаток — они часто
"засоряются (забиваются).
Наконечники с регулируемыми сердечниками получили распро-
странение при опрыскивании садов, поэтому их принято называть
садовыми. Садовый наконечник (рис. 162, б) работает при более
высоких давлениях (2,0... 2,5 МПа) и дает более сильную и даль-
16»
243
иобойную струю, чем полевой. В сердечнике 1 на цилиндрической
поверхности сделана винтовая нарезка, а на торце закреплено ре-
зиновое кольцо 6. Между корпусом 8 и колпачком 2 зажат смен-
ный диск 5 (диафрагма) с выходным отверстием. Выступы кор-
пуса 8 входят в винтовую нарезку сердечника, выполняя роль
своеобразной неподвижной гайки. Вращая сердечник, изменяют
глубину камеры завихрения, образуемой торцовой поверхностью
сердечника 1 и внутренними поверхностями сменного диска 5 и
втулки 7. Приближая сердечник к диску, уменьшают глубину ка-
меры завихрения, в результате чего конус распыла становится
шире и короче, расход жидкости сокращается, а дисперсность
распыла возрастает. Удаляя сердечник от диска, увеличивают глу-
бину камеры завихрения и получают длинный и узкий конус рас-
пыла, расход жидкости становится больше, а распыл — грубее.
Заменяя диск 5 с одним отверстием на подобный диск с тремя от-
верстиями (одним в центре под углом 90° и двумя по краям под
углом 45° к поверхности диска), получают широкозахватный рас-
пыливающий наконечник, который используют для опрыскивания
кустарников. Садовые наконечники снабжены сменными дисками
из нержавеющей стали с отверстиями диаметром 1; 1,5; 2; 2,5;
3 и 4 мм.
Тангенциальные распылители сложнее в изготовлении и хуже
распыливают ядохимикат, но реже забиваются. Унифицированный
центробежный распылитель (наконечник) типа УН (рис. 162, в)
представляет собой пластмассовый корпус 8, в который вставляют
металлокерамический сменный диск 5 с отверстием для выхода
ядохимиката, прокладку 4 и заглушку 11. Жидкость в распыли-
тель подается по касательной, в результате чего приобретает вра-
щательное движение в камере завихрения, расположенной между
сменным диском и заглушкой. Сменные диски выпускают с отвер-
стиями диаметром 1,5; 2 и 3 мм. Распылители УН находят широ-
кое применение как в гидравлических, так и в вентиляторных рас-
пыливающих устройствах опрыскивателей.
Центробежный распылитель РЦ (рис. 162, е) работает при ма-
лых давлениях жидкости в нагнетательной магистрали. Он состоит
.из корпуса 8, диафрагмы 12 и уплотнительного кольца 4. Подво-
дящий канал в корпусе расположен по касательной к цилиндриче-
ской камере завихрения, закрытой диафрагмой с выходным от-
верстием. Жидкость, попадая из канала в камеру завихрения, при-
ходит во вращательное движение и при выходе из отверстия диа-
фрагмы образует конус распыла. Выходное отверстие сменной
диафрагмы может быть диаметром 1,5; 2 и 3 мм. Распылители
РЦ применяются в распыливающих устройствах опрыскивателей
вентиляторного и гидравлического типа, а также в протравлива-
телях.
Струйные распылители подразделяют на щелевые и
дефлекторные. Щелевой распылитель очень прост по устройству и
состоит из корпуса (мундштука), фильтра и накидной гайки. Кор-
244
пус представляет собой опрокинутый колпачок, внутренняя по-
лость донышка которого выполнена в форме полусферы. Щелевое
отверстие, расположенное строго посередине, делит полусфериче-
ское донышко на две равные части. Жидкость под давлением по-
ступает в щель с двух сторон. Столкновение двух пленок жидко-
сти приводит к их распыливанию в форме веера (треугольной
призмы). Щелевые распылители дают грубую дисперсность рас-
пыла (—300 мкм), но обеспечивают высокую равномерность рас-
пределения по ширине захвата (±15%)-
Дефлекторный распылитель (рис. 162, е) состоит из корпуса 8,
крышки 20 и дефлектора 19. Выходя из отверстия под давлением,
струя ударяется о плоскость дефлектора и разбрызгивается под
большим углом. Толщина струи, сходящей с дефлекторного рас-
пылителя, меньше, чем со щелевого, но распыл ее также грубый:
300...400 мкм. Распылитель, изображенный на рисунке, снабжен
диафрагмой 22 и пружиной 21, которые позволяют при изменении
давления жидкости в нагнетательной магистрали изменять угол
наклона дефлектора, а вместе с ним и ширину захвата, сохраняя
неизменной норму внесения ядохимиката.
Пневматические распылители подразделяют на две
разновидности: с подачей ж'идкости соосно движению воздуха и
под углом к потоку воздуха. Последние обеспечивают более высо-
кую дисперсность распыла. На рисунке 162, д показан пневматиче-
ский распылитель пульверизаторного типа. Он состоит из распили-
вающего наконечника 15 и сопла 13 для подачи воздуха, располо-
женных под прямым углом. Выходящая из распиливающего на-
конечника рабочая жидкость под действием вырывающейся из
сопла воздушной струи дробится на мельчайшие частицы, которые
затем подхватываются мощным воздушным потоком от вентилято-
ра и транспортируются к объекту обработки. Качество распили-
вания рабочей жидкости зависит от взаимного расположения рас-
пиливающего наконечника и сопла. Положение распиливающего
наконечника регулируют прокладками 16. Сопло для подачи воз-
духа может перемещаться в отверстии кронштейна 18 и в опреде-
ленном положении фиксируется стопорннм болтом 14.
Вращающиеся распылители отличаются многообразием
конструктивннх форм. Наибольшее распространение получили вра-
щающиеся распылители в виде сетчатого барабана и диска. Они
могут приводиться в действие гидромотором, электродвигателем,
от общего привода, энергией воздушной струи, в которую поме-
щен распылитель, снабженный крыльчаткой.
Вращающийся распылитель (рис. 162, ж) в виде сетчатого ци-
линдра 23, снабженного крыльчаткой 26 с приводом от воздушной
струи, работает следующим образом. Воздух от центробежного
вентилятора по пневматической штанге подается к воздухоподво-
ду 25 распылителя. Жидкий ядохимикат по .напорной магистрали
через штуцер 24 поступает по трубке в центральную часть сетча-
того барабана, равномерно распределяясь вдоль его длины. Под
245
действием центробежной силы жидкость разбрасывается к перифе-
рии барабана, где дробится вращающейся сеткой. Раздробленная
жидкость подхватывается потоком воздуха и транспортируется на
объект обработки. При малых расходах жидкость дробится моно-
дисперсно, т. е. образуются капли приблизительно одинакового
диаметра. Дисперсность распыла зависит от подачи, диаметра ба-
рабана, размера отверстий в сетке, частоты вращения, плотности
жидкости. Чем больше диаметр барабана, частота его вращения
и плотность жидкости, тем меньше диаметр капель. При увеличе-
нии подачи и размера отверстий в сетке диаметр капель возра-
стает.
Находят применение сетчатые барабаны диаметром от 45 до
375 мм и диски диаметром от 80 до 216 мм, частота их вращения
в существующих за рубежом конструкциях колеблется от 4000 до
14 000 мин-1.
Из рассмотренных распылителей центробежные и струйные
могут быть использованы при обыкновенном опрыскивании с рас-
ходом рабочей жидкости не ниже 200 кг/га, для ультрамалообъем-
ного опрыскивания с расходом рабочей жидкости до 10 кг/га мо-
гут быть использованы лишь вращающиеся и некоторые из пневма-
тических распылителей.
Настройка распылителей на определенный режим ра-
боты ведется по заданной норме расхода ядохимиката с учетом
скорости движения и ширины захвата опрыскивателя. Подача
ядохимиката через распылитель (дм3/мин) с учетом этих парамет-
ров
q=QBv/600z, (140)
где Q —заданная норма расхода ядохимиката, дм3/га;
В — ширина захвата машины, м;
v — рабочая скорость движения, км/ч; «
z — число распылителей.
Расход рабочей жидкости через распылитель, подсчитанный по
формуле (МО), может быть получен подбором площади выходного
отверстия f (мм2) и напора рабочей жидкости в системе нагнета-
ния Н (м), исходя из соотношения:
?=0,0бр/У^Н, (141)
где ц— коэффициент расхода, зависящий от типа наконечника; его
средние значения: для центробежных наконечников с сердечника-
ми— 0,41, для центробежных тангенциальных (типа РЦ и
УН) —0,27.
Имея в виду, что f=nd2/4, где d — диаметр выходного отвер-
стия, и» задавшись определенным напором Н, можно определить
необходимый для данных условий диаметр выходного отверстия
распылителя.
Наконечники опыливателей служат для направления воздушно-
пылевой волны к объекту обработки, Наиболее широкое распро-
246
странение получили наконечники следующих типов (рис. 163): ци-
линдрические, ложкообразные (совкообразные), секирообразные,
плоские (щелевые), комбинированные.
Ложкообразные и секирообразные наконечники применяют для
опыливания полевых культур; цилиндрические — для садовых;
плоские щелевые в зависимости от размеров наконечника и выход-
ной щели — для опыливания полевых или садовых культур.
Вентиляторы в машинах для химической защиты растений при-
меняют для распиливания жидкого или порошкообразного ядохи-
миката на мельчайшие частицы; для транспортирования частиц
ядохимиката к объекту обработки. Для хорошего дробления
ядохимиката воздушный поток, создаваемый вентилятором, дол-
жен двигаться с большой скоростью на выходе из сопла, а для
транспортирования частиц ядохимиката — иметь большую дально-
бойность и высокую производительность (подачу воздуха). В оп-
рыскивателях и опыливателях используют вентиляторы двух ти-
пов: осевые и центробежные. Характеристики вентиляторов обоих
типов приведены на рисунке 164. Как видим, центробежный венти-
лятор хорошо дробит ядохимикат, но плохо транспортирует и на
небольшое расстояние; осевой, напротив, хорошо транспортирует,
но плохо дробит. Поскольку дробить ядохимикат могут и распы-
ливающие наконечники, то функции вентилятора чаще сводятся к
транспортированию уже раздробленных частиц ядохимиката, по-
этому осевые вентиляторы находят большее распространение, чем
центробежные.
Воздушный поток, вышедший из вентилятора, при отсутствии
ветра расширяется пропорционально расстоянию от выходного от-
верстия, вовлекая в движение также частицы окружающего воз-
духа. В вышедшей, из сопла турбулентной струе различают на-
чальный и основной участки (рис. 165). Начальный участок харак-
теризуется тем, что начальная скорость потока t’o остается неиз-
менной на всем протяжении в границах ядра потока (заштрихо-
вано). На основном участке осевая скорость vx по мере удаления
от сопла уменьшается. В любом поперечном сечении за пределами
ядра по мере удаления от оси струи скорость потока v уменьша-
ется, достигая нуля на границе. На расстоянии х от выходного от-
верстия осевая скорость воздушного потока может быть определе-
на по формуле:
vx—O,48vo/(ax/d -f-0,145), (142)
где а — коэффициент турбулентности струи, с = 0,07... 0,14.
Производительность вентилятора Q=Svcp, где S — площадь вы-
ходного отверстия сопла; цср— средняя скорость воздушного пото-
ка на выходе из сопла, равная (0,75... 1) t>o-
Сопло вентилятора в современных машинах для защиты расте-
ний устанавливают, как правило, под углом 90° к направлению
движения (боковое дутье), поэтому даже без ветра создаваемые
им струи носят характер «сносимых». Опытами установлено, что
247
Рис. 163. Распиливающие наконечники опыливателей:
а — цилиндрический; б — ложкообразный; в — секирообразиый;
д — комбинированный.
г — плоский (щелевой);
Рис. 164. Изменение скорости воздушного
потока в зависимости от расстояния до
сопла:
I — для центробежного вентилятора производи-
тельностью 6000 м3/ч; 2 — для осевого вентилятора
производительностью 33 000 м3/ч.
Рис. 165. Схема свободной затопленной струи:
/ — полюс струи; 2— ядро потока; 3— переходное сечение; d — диаметр выходного отвер-
стия сопла; vo—скорость потока на выходе из сопла; vx—скорость потока на расстоянии
х от сопла; а — боковой угол расширения; гх— радиус поперечного сечения струи на рас-
стоянии х от сопла; а — коэффициент турбулентности струи.
набегающий (сносящий) поток тормо-
зится на передней кромке струи, вслед-
ствие чего давление воздуха в этом
месте возрастает, а у тыльной части
струи уменьшается. Разность давле-
ний создает центростремительную си-
лу, искривляющую струю. Поперечное
сечение «сносимой» струи постепенно
переходит от круглого к подковообраз-
ному (рис. 166). В результате взаимо-
действия струи с набегающим потоком
внутри нее создается вихревая систе-
Рис. 166. Схема бокового
ма, оказывающая большое влияние на дутья:
1 — набегающий (сносящий) поток;
распределение частиц ядохимиката в 2 - сплошная струя; з-сопло,
«сносимой» струе. Турбулентная струя
способна доставлять к объекту обработки мельчайшие частицы
ядохимиката, обладающие большой токсичностью (вплоть до па-
ров и газов).
§ 4. Распиливающие устройства
Распиливающие устройства опрыскивателей предназначены для
дозирования, распыливания рабочей жидкости на отдельные части-
цы и транспортирования распыленного ядохимиката на объект об-
работки. От их работы зависят качество и экономичность опры-
скивания.
По принципу действия распиливающие устройства, а вместе с
ними и опрыскиватели, разделяют на два типа: гидравлические
и вентиляторные. В гидравлических устройствах рабочая жидкость
распыливается наконечниками под действием гидравлического дав-
ления. Дробление рабочей жидкости в вентиляторных распили-
вающих устройствах происходит либо под действием гидравличе-
ского давления, либо под действием воздушной струи, либо сов-
местно— под действием гидравлического давления и воздушной
струи. Распыленная рабочая жидкость к объекту обработки до-
ставляется: в гидравлических распиливающих устройствах за счет
кинетической энергии частиц жидкости, сообщаемой им в процес-
се распыления, а в вентиляторных — за счет энергии воздушного
потока, создаваемого вентилятором.
Гидравлические распиливающие устройства
по конструктивным особенностям подразделяют на штанги, бранд-
спойты, широкозахватные головки, шланговые барабаны, инжекто-
ры и т. п. Наибольшее распространение получили штанги для
сплошного опрыскивания; их подразделяют на полевые, виноград-
никовые, садовые, хмельниковые и универсальные. Наибольшее
распространение получили полевые штанги. Чаще всего они со-
стоят из несущего каркаса в виде отдельных трубчатых секций,
соединенных шарнирами; гидравлической коммуникации с распы-
лителями, системы навески и регулирования установки по высоте.
249
6
Рис. 167. Разновидности штанг:
а — горизонтальная для верхнего распыла; б — горизонтальная для ком-
бинированного распыла; в — вертикальная.
Различают горизонтальные штанги для верхнего (рис. 167, а)
и комбинированного (рис. 167, б) распыла и вертикальные
(рис. 167, в).
Горизонтальные штанги применяют для опрыскивания поле-
вых и огородных культур, вертикальные — для опрыскивания ви-
ноградников. На штангах устанавливают центробежные, щелевые
или дефлекторные распылители. Наибольшее распространение
в отечественных конструкциях получили центробежные, а в
зарубежных — щелевые распылители. Многие зарубежные фирмы
для универсализации снабжают штанговые опрыскиватели не-
250
сколькими комплектами распылителей (центробежные, щелевые,
дефлекторные). Шаг (интервал) установки распылителей на
Штанге зависит от типа распылителя (конуса распыла), высоты
установки и т. п. Наиболее часто встречаются штанги с шагом
установки распылителей 30, 50 и 66 см. Изменяют шаг путем
установки заглушек на отдельных распылителях, т. е. на кратный
указанным значениям размер.
Равномерность покрытия ядохимикатом обрабатываемой по-
верхности зависит от высоты расположения штанги над поверх-
ностью (расстояния от распыливающих наконечников до поверх-
ности обработки). Оптимальная высота установки для штанг и на-
конечников различных конструкций различна. Она зависит: от рас-
стояния (интервала) между наконечниками и от угла распылива-
ния ядохимиката наконечниками. На рисунке 168 показано влия-
ние угла распыливания и высоты расположения штанги на равно-
мерность покрытия обрабатываемой поверхности рабочей жид-
костью. Приняв /imin за минимальную высоту расположения штан-
ги, при которой происходит равномерное покрытие поверхности,
замечаем, что как с увеличением (й=1,ЗЛщ|п), так и с уменьше-
нием (h = 0,8 Zimin) этой высоты равномерность покрытия наруша-
ется. В первом случае перекрытие А/, а следовательно, и расход
рабочей жидкости возрастают, во втором сокращаются. Для на-
конечников с меньшим углом распыливания (рис. 168, II) нужно
меньшее перекрытие, однако они более чувствительны к измене-
Бокобое расстояние ('вдолыитанги) на уробне осаждения
Рис, 168. Зависимость равномерности покрытия обрабатываемой поверхности от
угла распыливания жидкости наконечником и высоты расположения штанги:
------— покрытие поверхности из отдельного наконечника; суммарное покрытие]
/ — наконечники с большим углом распыливания; 11 — наконечники с малым углом рас-
пыливания.
251
В 7
Шок.
Рис. 169. Брандспойты:
а — обычный садовый; б — дально-
бойный; 1 — наконечник; 2 — шток;
3 — трубка; 4 — сальник; 5 — накид-
ная гайка; 6 — втулка; 7 — рукоят-
ка; 8 — тройник; 9 — шланг; 10 —
колпачок; И — заглушка; 12 — за-
порный вентиль.
ниям высоты штанги. Нетрудно догадаться, что при высоте распо-
ложения штанги /i = 2/imiu обрабатываемая поверхность снова бу-
дет равномерно покрыта ядохимикатом, но двойной дозой (двой-
ное покрытие). Высоту установки штанги над поверхностью почвы
регулируют, как правило, в пределах от 400 до 800 мм. Наиболее
распространена ступенчатая регулировка высоты штанги, т. е. ее
креплением при помощи болтов и хомутов на отверстиях, располо-
женных через определенные интервалы. Основные недостатки
гидравлических штанговых распиливающих устройств следующие:
конструктивно громоздки, что не позволяет работать на повышен-
ных скоростях, не дают возможности уменьшить нормы расхода
рабочей жидкости ниже 400 дм3/га.
Брандспойты оборудуют единичными центробежными наконеч-
никами с регулируемыми сердечниками (рис. 162, б), которые по-
зволяют изменять глубину камеры завихрения и тем самым регули-
ровать дисперсность распыла и дальнобойность струи, что необхо-
димо для опрыскивания деревьев различной высоты. Различают
брандспойты двух видов: обычные садовые и дальнобойные
(рис. 169). Дальность полета частиц, распыленных садовым
брандспойтом, составляет 4... 8 м, а дальнобойным—12... 15 м.
Садовый брандспойт (рис. 169, а) состоит из наконечника 1, што-
ка 2, трубки 3, рукоятки 7, тройника 3 и шланга 9. В месте входа
в тройник на шток плотно насажена втулка 6, уплотненная саль-
ником 4 с поджимной втулкой и гайкой 5. При повороте рукоятки
252
штока по ходу часовой стрелки конус распыла становится шире
и короче, при повороте рукоятки до отказа подача жидкости
прекращается. Длина факела распыла изменяется рабочим в про-
цессе опрыскивания. При обработке высоких деревьев используют
дальнобойный брандспойт (рис. 169, б), который получают путем
переоборудования садового. Для этого удаляют колпачок, диск и
сердечник наконечника 1, а также шток 2 с рукояткой и уплотне-
нием. На тройник 8 навинчивают заглушку 11 и вентиль 12, а на
корпус наконечника — конусный колпачок 10 с калиброванным от-
верстием. Брандспойты укомплектовывают сменными распылитель-
ными дисками (с отверстиями диаметром от 1,2 до 4,8 мм), обес-
печивающими расход рабочей жидкости от 4 до 60 дм3/мин. Для
опрыскивания кустарников пользуются сменным диском с тремя
отверстиями, что делает брандспойт широкозахватным. Бранд-
спойты применяют главным образом на труднодоступных участках
и в небольших хозяйствах.
Вентиляторные распыливающие устройства
подразделяются на два типа: устройства на базе осевого вентиля-
тора; устройства на базе центробежного вентилятора. В соответ-
ствии с особенностями характеристик двух типов вентиляторов
применяют следующие способы распыливания рабочей жидкости
вентиляторными распыливающими устройствами: пневматический,
гидравлический и 'гидропневматический.
Пневматический способ распыливания по сравнению с гидрав-
лическим дает более высокую дисперсность распыла и состоит в
следующем. Рабочая жидкость подводится по трубке в самую уз-
кую часть сопла, где скорость воздуха максимальна. Вытекая из
трубки в виде тонкой струйки или пленки, она дробится потоком
воздуха на капли диаметром от 80 до 150 мкм. При этом чем
больше скорость движения воздуха и меньше количество подавае-
мой жидкости, тем лучше дисперсность распыла (ближе к 80 мкм).
Соотношение объемных расходов распыливаемой жидкости и воз-
духа должно быть не больше, чем 1 :6000. При этом рабочая жид-
кость подается по трубке от бака самотеком или насосом под
небольшим давлением (0,30... 0,35 МПа), что позволяет приме-
нять трубки с большим проходным сечением и, следовательно,
уменьшает вероятность их забивания. Этому способу более полно
отвечают центробежные вентиляторы, которые в зоне подачи жид-
кости обеспечивают значительно более высокую скорость движе-
ния воздуха (от 80 до 180 м/с), чем осевые (от 22 до 55 м/с).
Гидравлический способ распыливания основан на использова-
нии гидравлических распыливающих наконечников, как правило,
центробежного типа. Капли распыленного наконечниками ядохи-
миката подхватываются мощным потоком воздуха и транспорти-
руются к объекту обработки. При этом способе роль вентилятора
ограничивается транспортированием рабочей жидкости, предвари-
тельно распыленной с помощью наконечников. Дисперсность рас-
пыла жидкости гидравлическим способом оказывается грубее, чем
253
Рис. 170. Вентиляторные распиливающие устройства:
а — осевое; б — центробежное; 1 — лопасти вентилятора; 2 » диффу-
зор; 3 — цилиндр; 4 — колпак; 5 — наконечник.
пневматическим. Так как дисперсность распыла жидкости гидрав-
лическими центробежными наконечниками зависит от давления в
системе нагнетания, то ее подают к распыливающему устройству
иод давлением в 5...7 раз большим (1,8... 2,2 МПа), чем при
•пневматическом способе. Следовательно, при той же подаче диа-
метр выходного отверстия значительно меньше, чем при пневма-
тическом способе, что увеличивает вероятность забивания. Требо-
ваниям этого способа более полно отвечают осевые вентиляторы,
способные создавать необходимый для транспортирования значи-
тельно более мощный поток воздуха (от 18 до 160 тыс. м3/ч), чем
центробежные (от 4 до 15 тыс. м3/ч).
Гидропневматический способ распыливания рабочей жидкости
-основан на совместном ее дроблении гидравлическими наконечни-
ками и струей воздуха от вентилятора. В этом случае предвари-
тельное распыливание жидкости выполняется гидравлическими
наконечниками, а дополнительное — струей воздуха от вентилято-
ра. Распыленная жидкость транспортируется струей воздуха от
вентилятора.
Распиливающие устройства на базе осевого и центробежного
•вентиляторов, в свою очередь, подразделяют по геометрической
«форме выходного сопла. В отечественных конструкциях применяют,
как правило, два варианта выходных сопл: с круглым отверсти-
ем — коническое (рис. 170, а), с отверстием прямоугольного сече-
ния— щелевидное (рис. 170, б). Первые обычно предназначаются
для опрыскивания полевых культур, вторые — садовых. Некоторые
из отечественных машин снабжены двумя сменными соплами: ко-
ническим— полевой вариант и щелевидным — садовый вариант.
Одно из основных требований, предъявляемых к вентиляторным
распыливающим устройствам,— обеспечение необходимой дально-
бойности воздушно-жидкостной струи. Наибольшая дальнобой-
ность получается в том случае, когда угол между струей и набе-
тающим потоком равен 90°. Необходимую дальнобойность при оп-
рыскивании сада определяют по формуле:
x=/№4-(B/2)2, (143)
254
где Н — высота деревьев, м;
В— ширина междурядья, м.
Для того чтобы частицы ядохимиката проникали внутрь кроны
дерева и оседали на его листьях, воздушный поток должен иметь
определенный запас кинетической энергии, или, иными словами»
определенную скорость у входа в крону. На преодоление сопротив-
ления листьев и веток кроны расходуется значительная часть ки-
нетической энергии, и скорость воздушного потока падает пример-
но на 6 м/с. Опытами установлено, что при скорости воздушного
потока 5... 6 м/с листья, повернувшись вокруг черешка, полностью
отклоняются и занимают устойчивое положение, а при скорости
свыше 35 м/с повреждаются. Для того чтобы воздушный поток
проник внутрь кроны взрослого дерева и хорошо обработал
листья с обеих сторон, он должен иметь скорость у входа в гус-
тую крону не менее 20 м/с и не более 35 м/с; в разреженную
крону—10,,.20 м/с; в виноградные кусты и кусты хмеля —8...
... 15 м/с.
Для настройки вентиляторного распиливающего устройства на
рациональный режим работы решают уравнение (142) относи-
тельно Vo. В полученное выражение Vo = fx (ax/d-J-0,145)/0,48 под-
ставляют вышеприведенное значение скорости входа потока в кро-
ну vx и дальнобойность х, определенную по формуле (143). На
вычисленное значение v0 или соответствующую ему производи-
тельность Q=v0S, где S — площадь выходного отверстия сопла, и
настраивают вентилятор. При обработке полевых культур для по-
лучения максимальной дальнобойности (ширины захвата) сопло-
вентилятора направляют перпендикулярно направлению движения-
агрегата и под углом 28... 45° к горизонту.
Производительность любой мобильной машины, в том числе и
опрыскивателя, зависит от ширины захвата и рабочей скорости.
Для вентиляторных опрыскивателей, применяемых преимуществен-
но для обработки садов, ширина захвата свыше двух рядов де-
ревьев оказывается практически невозможной, поэтому повышения
производительности можно достичь лишь за счет увеличения рабо-
чей скорости, а для этого необходимо соответствующее увеличе-
ние производительности вентилятора. Недостаточная масса воз-
душно-жидкостного потока центробежных вентиляторов, характе-
ризующихся сравнительно небольшой производительностью (от 4
до 15 тыс. м3/ч), как правило, не позволяет увеличить скорость-
свыше 1,1... 1,4 м/с (4... 5 км/ч). Современные осевые вентилято-
ры, способные создать воздушно-жидкостной поток производитель-
ностью 80... 160 тыс. м3/ч, позволяют существенно повысить рабо-
чую скорость, а следовательно, и производительность опрыскивате-
лей. Поэтому распиливающие устройства с осевыми вентилятора-
ми нашли преимущественное распространение. Однако с внедрени-
ем и развитием опрыскивания малыми дозами рабочей жидкости:
(малообъемного) на первое место выдвигается качество распыли-
вания рабочей жидкости и плотность покрытия ею листовой по-
25S
Рис. 171. Распиливающие устройства опыливателей:
•а — горизонтальная штанга; б — вертикальная штанга; в — садовое устройство для опыли-
вания с увлажнением; 1 — средняя секция; 2 — распределительная коробка; 3 — крайняя
секция; 4 — шланг; 5 — плоский щелевой наконечник; 6 — стяжка; 7 — гидравлический на-
конечник; 8 — коробка трубы; 9 — рычаг; 10 — коленообразная труба; // — цилиндрический
наконечник.
верхности. Это привело к созданию распиливающих устройств
на базе центробежных вентиляторов, которые более полно отвеча-
ют этим требованиям.
Опрыскиватели с вентиляторными распиливающими устройст-
вами по сравнению с брандспойтами при одинаковой норме рас-
хода равномернее распределяют ядохимикат по листовой поверх-
ности, значительно повышают производительность, облегчают труд
обслуживающего персонала.
Распиливающие устройства опыливателей состоят из вентиля-
тора, трубопроводов (шлангов) и наконечников. В опыливателях
преимущественное распространение получили центробежные вен-
тиляторы. В некоторых конструкциях опыливателей наконечники
для опыливания полевых культур и виноградников устанавливают
на горизонтальных (рис. 171, а) или вертикальных штангах
(рис. 171, б) и с помощью гибких шлангов 4 соединяют их через
распределительную коробку 2 с вентилятором. Горизонтальные
штанги используют для верхнего и нижнего опыливания низко-
рослых полевых культур, вертикальные — для бокового опылива-
256
ний, главным образом виноградников. Наконечники для опылива-
ния садов и лесных полос (рис. 171, в) присоединяют к колено-
образной поворотной трубе 10, сообщающейся другим концом с
вентилятором. Трубу приводят в колебательное движение с по-
мощью гидравлического механизма, благодаря чему достигается
более равномерное опыливание. Аналогичные конструкции при-
меняют в хлопковых опрыскивателях-опыливателях.
В конструкции отечественных опыливателей садово-полевое
распыливающее устройство представляет собой щелевидный нако-
нечник, прикрепляемый к кожуху вентилятора. Виноградниковое
устройство состоит из вертикальной трубы и тройника с горизон-
тальными выходными коленами. Вертикальная труба нижним
концом крепится к кожуху вентилятора, а к верхнему ее концу
крепится тройник. С помощью вертикальной трубы с тройником
опыливаются вторые (дальние) ряды виноградника, ближние опы-
ливаются двумя щелевидными наконечниками, закрепленными по
боковым сторонам кожуха вентилятора.
Глава III
КОНСТРУКТИВНЫЕ СХЕМЫ И РАБОЧИЕ ПРОЦЕССЫ МАШИН
§ 1. Протравливатели
Классификация. Протравливатели классифицируют: по харак-
теру работы, по способу нанесения препарата на семена, по кон-
струкции основного рабочего органа. По характеру работы их раз-
деляют на порционные и непрерывного действия. Все современные
протравливатели, как правило, непрерывного действия. По спосо-
бу нанесения препаратов на семена протравливатели разделяют на
две группы: с перемешивающими устройствами и непосредственно-
го нанесения на семена. По конструкции основного рабочего орга-
на протравливатели с перемешивающими устройствами разделяют
на шнековые и барабанные, а протравливатели непосредственного
нанесения препаратов — на камерные и штанговые. Шнековые и
камерные протравливатели считаются перспективными и получили
широкое распространение: шнековые в связи с относительно не-
большой их- производительностью и простотой конструкции — в
хозяйствах с небольшими площадями посевов зерновых культур,
камерные — для поточных линий семенных заводов, пунктов и
крупных хозяйств.
Шнековый протравливатель (рис. 172) состоит из таких основ-
ных узлов: бункера, резервуара, смесительного шнека, электро-
двигателя, механизма передачи движения и рамы. Бункер разде-
лен перегородкой на две части: переднюю 5 для сухого ядохимика-
та и заднюю 8 для семян. В передней части расположены:
ворошилка 6, шнек-питатель 4 и дозатор 3. Резервуар 11 для жид-
кого ядохимиката герметически закрыт крышкой и снабжен урав-
17—424
257
Рис. 172. Схема шнекового протравливателя семян: -
1 — механизм передачи движения; 2 — электродвигатель; 3 — дозатор сухого ядохимиката?
4 — шнек-питатель; 5 — бункер для сухого ядохимиката; 6 — ворошилка; 7 — решетка; 5—»
бункер для семян; 9— заслонка; 10— запорный кран; 11— резервуар для жидкого ядохи*
миката; 12 — смесительный шнек; 13 — опора; 14 — колесо.
нительной трубкой, обеспечивающей равномерный расход ядохи-
миката независимо от его уровня в резервуаре. Для регулирова-
ния подачи служит кран 10. Смесительный шнек 12 состоит из
цилиндрического корпуса и вала с периферийной ленточной спи-
ралью и Т-образными лопатками.
Семена засыпают в бункер 8 через решетку 7, которая задер-
живает крупные примеси. Поступление зерна в смесительный шнек
12 регулируют заслонкой 9. Непрерывность поступления порошко-
образного ядохимиката (фунгицида) из бункера 5 обеспечивается
работой ворошилки 6, шнека-питателя 4 и дозатора 3. Жидкий
ядохимикат поступает из резервуара 11 через кран 10, которым ре-
гулируют его подачу. В смесительном шнеке 12 семена перемеши-
ваются с ядохимикатом и одновременно перемещаются к вы-
ходному раструбу, через который поступают в мешок или иную
тару. Процесс Протравливания продолжается несколько десятков
секунд.
Камерный протравливатель производительнее шнекового или
барабанного. Одна из наиболее совершенных зарубежных машин
этого типа — протравливатель «Гомпер» (ФРГ). В камере протрав-
ливания этой машины установлен конус для рассеивания семян,
под которым смонтирован дисковый центробежный распылитель
жидкого ядохимиката. Семена, поступая сверху под действием си-
лы тяжести, сначала скользят по рассеивающему конусу, затем
падают по всему периметру его основания. Жидкий ядохимикат
поступает к центру быстро вращающегося (с частотой до
5000 мин-1 и более) распыливающего диска и под действием цент-
258
робежной силы распиливается до туманообразного состояния. Па-
дающие семена, пролетая сквозь факел распыленного ядохимика-
та, покрываются им и падают на транспортер, который выносит их
из протравливателя.
В протравливателях камерного типа отечественных конструк-
ций семена рассеивает вращающийся диск, а жидкий ядохими-
кат — чашеобразный распылитель с прорезями, который по сравне-
нию с обычным дисковым распылителем обеспечивает более широ-
кий и монодисперсный факел распыла. При такой конструкции
семена падают не прямо сверху вниз, а по спиральной траекто-
рии, благодаря чему продолжительность нахождения в зоне факе-
ла распыла, а следовательно и контакта с ядохимикатом, увели-
чивается. И в том и в другом случае нанесение препарата на се-
мена исчисляется долями секунды.
§ 2. Опрыскиватели
Классификация. По принципу действия распыливающих уст-
ройств опрыскиватели классифицируют на гидравлические (штан-
говые) и вентиляторные; по расходу рабочей жидкости — на обыч-
ные, малообъемные и ультрамалообъемные; по способу агрегати-
рования— на прицепные, навесные, монтируемые (на самоходное
шасси) и самоходные; по назначению — на универсальные, садо-
вые, полевые и т. п. Для обыкновенного опрыскивания полевых
культур чаще применяют гидравлические (штанговые) опрыскива-
тели, для садов — вентиляторные.
Рабочий процесс. Все узлы опрыскивателя смонтированы на
раме, опирающейся на пневматические колеса (прицепной вари-
ант) или навешиваемой на трактор (навесной вариант).
Рабочая жидкость, непрерывно перемешиваемая гидравличе-
ской мешалкой 7 (рис. 173), засасывается из резервуара 4 насосом
19 через открытый трехходовой кран 3 и фильтр 20. В нагнетатель-
ной магистрали жидкость разделяется на три потока. Небольшая
часть через редукционный клапан (стабилизатор давления) 18
возвращается обратно в резервуар 4. Большая часть через проход-
ной вентиль 8 и гидравлическую мешалку 7 также поступает в
резервуар 4 и, наконец, значительная часть через отсечной кла-
пан 9 и регулируемый вентиль 16 (применяется не во всех конст-
рукциях) направляется к вентиляторному 10 и 11 или штанговому
13 и 14 распыливающему устройству. Под действием воздушной
струи (в вентиляторных опрыскивателях) или кинетической энер-
гии частиц (в штанговых опрыскивателях) распыленная наконеч-
никами 11 или 13 рабочая жидкость транспортируется на объект
обработки.
Для заправки резервуара рабочей жидкостью служит, как пра-
вило, газоструйный эжектор 5, устанавливаемый на выпускную
трубу трактора. С помощью редукционного клапана 18 устанавли-
вают необходимое давление в нагнетательной магистрали. Оно за-
17* 259
Рис. 173. Принципиальная схема опрыскивателя:
I / — заправочная емкость; 2 и 20 — фильтры; 3 — трехходовой кран; 4 — резервуар; 5 — га*
зоструйиый эжектор; 6 — заливная горловина; 7 — гидромешалка; 8 — проходкой вентиль?
| 9— отсечной клапан; 10 — вентилятор; 11 — распиливающий наконечник (трубка); 12—
гидроцилиндр; 13 — распиливающий наконечник; 14 — штанга; 15 — напорная магистраль;
16 — регулирующий вентиль (дозатор); 17 — манометр; 18 — редукционный клапан; /9 —
насос.
висит от типа насоса, типа распиливающего устройства и обраба-
тываемой культуры. При поршневом или плунжерном насосе и
распиливающем устройстве на базе осевого вентилятора давление
должно быть 1,5 ... 2,0 МПа — на обработке деревьев и 1,0 МПа—•
на обработке полевых культур; при насосе вихревого или центро-
бежного типа и распиливающем устройстве на базе центробежного
вентилятора или штанговом — 0,30 ... 0,35 МПа. Контролируют
рабочее давление манометром 17. Гидроцилиндр 12 с поршнем и
штоком служит для поворота вентилятора 10. Расход рабочей
жидкости регулируют с помощью дозатора 16 (регулирующего
вентиля), установкой распиливающих дисков с различными раз-
мерами выходных отверстий, установкой заглушек, т. е. измене-
нием количества работающих наконечников или изменением ра-
бочего давления в нагнетательной магистрали. Расход рабочей
жидкости на единицу обрабатываемой площади, кроме того, мож-
но регулировать изменением скорости движения машины.
§ 3. Аэрозольные генераторы
Классификация. Аэрозольные генераторы могут образовывать
аэрозоли термомеханическим и механическим способами. В термо-
механических генераторах рабочая жидкость нагревается, частич-
но испаряется и раздробляется на мельчайшие частицы струей го-
рячего газа, в механических — струей атмосферного воздуха.
Рабочий процесс. В качестве примера рассмотрим входящий в
систему машин аэрозольный генератор АГ-УД-2, способный обра-
зовывать аэрозоли как термомеханическим, так и механическим
способами. Он предназначен для борьбы с вредными насекомыми
и бактериями в садах, лесных насаждениях, на полях. Его приме-
няют также для обработки теплиц, амбаров и животноводческих
помещений. Генератор (рис. 174) состоит из: двигателя УД-2, на-
гнетателя воздуха — компрессора 21, бензиновой горелки 1, 2, 3, 4,
260
5 и 19, камеры сгорания 10 с жаровой трубой 11, распиливаю-
щего устройства 15, резервуара для ядохимиката 16 и топливного
бака 7.
При термомеханическом способе атмосферный
воздух, очищенный от механических примесей в фильтрах 18 и 22,
подается компрессором 21 по напорному воздухопроводу 20 в ка-
меру сгорания 10 и в диффузор 4 горелки. Бензин, поступающий
из топливного бака 7 к распылителю 2, дробится воздухом, про-
ходящим в диффузор горелки 4. Образовавшаяся из воздуха и
бензина горючая смесь воспламеняется искрой от запальной свечи
19 и сгорает в камере 10 и жаровой трубе 11 при температуре
выше 1000 °C. Здесь же продукты сгорания смешиваются с возду-
хом, поступающим через кольцевую щель между горловиной каме-
ры и диффузором горелки, отчего температура их снижается до
380 ... 580 °C. Проходя с большой скоростью (250 ... 300 м/с) через
горловину рабочего сопла 14, горячие газы раздробляют на мель-
чайшие частицы жидкий ядохимикат, поступающий в распылитель
15 из резервуара 16. В рабочем сопле мельчайшие частицы жид-
кости под действием высокой температуры газов быстро нагре-
ваются и частично испаряются. При выходе из сопла пары ядохи-
миката смешиваются с относительно холодным наружным возду-
хом, быстро конденсируются, образуя густой туман, который и
оседает на растениях и других обрабатываемых объектах.
При механическом способе распиливания жидкости
жаровую трубу 11 с соплом 14 снимают и вместо нее устанавли-
вают специальный угловой насадок с соплом и распылителем, ка-
меру сгорания выключают. Жидкость в этом случае распыливается
сжатым воздухом, поступающим от компрессора. Угловой насадок
можно поворачивать во фланце, что позволяет устанавливать его
Рис. 174. Принципиальная схема аэрозольного генератора:
1 — компенсатор; 2 — распылитель бензина; 3— регулятор температуры; 4 — диффузор го-
релки; 5 — винт; 6 — бензопровод; 7—бензобак; 8— фильтр для бензина; 9— кран; JO—
камера сгорания; 11 — жаровая труба; 12 — шланг подачи ядохимиката; 13 — кран ядохи-
миката; 14 — рабочее сопло; 15 — распылитель ядохимиката; 16 — резервуар для ядохимика-
та; 17 — фильтр-приемник ядохимиката; 18 и 22 — фильтры для очистки воздуха; 19 — за-
пальная свеча; 20— напорный воздухопровод; 21 — нагнетатель воздуха (компрессор); 23 —
край бензиновой горелки.
261
7
под различными углами к горизонту. Аэрозольный генератор дает
волну тумана шириной 50...100 м и высотой 7...10 м. Производи-
тельность при обработке садов составляет 15...20 га/ч, при обра-
ботке полевых культур—30...40 га/ч. При работе генератор уста-
навливают в кузов автомашины или на тракторную тележку. Сте-
пень дисперсности аэрозолей регулируют изменением подачи бен-
. зина или рабочей жидкости. Увеличение подачи бензина приво-
дит к повышению температуры газов в камере сгорания, в резуль-
тате чего дисперсность тумана и ширина захвата возрастают. Уве-
личение подачи рабочей жидкости снижает дисперсность тумана
и уменьшает ширину захвата. Подача бензина зависит от количе-
ства воздуха, проходящего в диффузор горелки сквозь отверстия,
регулируемые винтами 3. Открывая отверстия, увеличивают пода-
чу топлива, а следовательно, и температуру газов. Нижний винт 3
устанавливают в нужное положение до начала работы. Подачу
бензина в горелку прекращают поворотом крана 23, подачу ядо-
химиката — поворотом крана 13.
Работа генератора нарушается, если нет соосности между диф-
фузором 4 и горловиной камеры сгорания 10. Положение диффузо-
ра относительно горловины регулируют тремя винтами 5, а ради-
альный зазор между ними проверяют щупом при снятой камере
сгорания. Правильная регулировка дает ровное пламя, без язы-
ков при откинутой жаровой трубе.
§ 4. Опыливатели
Назначение. В связи с большим расходом порошкообразного
ядохимиката, плохой прилипаемостью его к листьям растений и
сильному влиянию ветра применение опыливателей как в нашей
стране, так и за рубежом значительно сократилось. Системой ма-
шин предусмотрено производство лишь одного тракторного уни-
версального широкозахватного опыливателя (ОШУ). Он предназ-
начен для борьбы с вредителями и болезнями садов, виноградни-
ков, кустарников, лесных полос, полевых, технических и овощных
культур.
Рабочий процесс. Все механизмы опыливателя смонтированы
на раме (рис. 175). Он снабжен также сменными садово-полевым
и виноградниковым распиливающими устройствами.
Порошкообразный ядохимикат, засыпанный в бункер 5, непре-
рывно разрыхляется вращающейся мешалкой 3 и затем с по-
мощью шнека 6 подается к выходному отверстию. Лопастная ка-
тушка 7 подающего устройства выталкивает ядохимикат через вы-
ходное отверстие на лоток 11, по которому он поступает к центро-
бежному вентилятору 10. Попав в кожух вентилятора, ядохимикат
подхватывается лопастями крыльчатки, смешивается с воздухом
и через распиливающий насадок 8 выбрасывается наружу в виде
мощной воздушно-пылевой волны. Направление потока, т. е. ши-
рину захвата и высоту подачи ядохимиката, регулируют поворо-
262
Рис. 175. Схема опыливателя:
/ — механизм передачи движения; 2 — рычаг заслонки; 3—мешалка; 4 — крышка горлови-
ны; 5 — бункер; 6 — шиек; 7 — лопастная катушка; 8 — распиливающий наконечник (наса-
док); 9 — гидроцилиидр; J0 — вентилятор; 11— лоток; /2 — регулировочная заслонка.
том вентилятора с помощью гидроцилиндра 9. Расход ядохимика-
та регулируют изменением размера выходного отверстия в дне
бункера, воздействуя на заслонку 12 рычагом 2.
Ширина захвата в полевом варианте достигает 100 м, в садо-
вом—1...2 ряда, виноградниковом — 3...4 ряда, рабочая скорость
2,2 м/с (8 км/ч), производительность: в поле до 25 га/ч, в саду и
винограднике до 5 га/ч.
§ 5. Фумигаторы
Классификация. Фумигаторы разделяют на два типа: почвен-
ные и наземно-палаточные. Системой машин предусмотрен выпуск
почвенных фумигаторов как в качестве приспособлений к специ-
альным плугам-рыхлителям для обработки виноградников и
хмельников, так и в виде отдельной машины; палаточные фуми-
гаторы выпускают как самостоятельные машины для обработки
чайных плантаций (монтируемые на самоходное шасси) и для об-
работки цитрусовых (на ручной тележке).
Рабочий процесс почвенного и палаточного фумигаторов нес-
колько различается.
Почвенный фумигатор вносит жидкий фумигант в поч-
ву, как правило, одновременно с ее рыхлением. Для фумигации
используют испаряющиеся сильнодействующие яды. Основные уз-
лы фумигатора: резервуар, дозатор, ядопроводы. Ядопроводы мон-
тируют на плужных черенковых ножах или рыхлительных лапах
263
Рис. 176. Схема палаточного фумигатора:
.1 — вентилятор; 2 — питатель; 3 — бункер; 4 — резервуар для воды; 5 — иасос; 6 — палатка;
7 — распиливающий иакоиечиик; 8 — ограничитель; 9 —кардаииая передача; 10 — редуктор.
плуга-рыхлителя. Ядохимикат из резервуара поступает в дозатор
и через распределительное устройство по ядопроводам попадает
на дно борозд, проделанных рабочими органами. Испаряясь, рабо-
чая жидкость насыщает почвенный воздух и, попадая в организ-
мы вредителей через дыхательные органы или поверхностные по-
кровы, поражает их.
Некоторые почвенные фумигаторы конструктивно выполне-
ны, как универсальные машины и, кроме фумигации, могут исполь-
зоваться для подкормки растений водным аммиаком и опрыскива-
ния гербицидами.
Палаточ ный фумигатор предназначен для обработки
фумигантом чайных шпалер с целью уничтожения вредных насе-
комых. Такой фумигатор (рис. 176) состоит из бункера 3 с питате-
лем 2, центробежного вентилятора 1, резервуара 4 для воды, ше-
стеренчатого насоса 5, распыливающих наконечников”/, ограничи-
теля 8, палатки 6 и механизма для ее намотки, редуктора 10, при-
способления для заправки ядохимикатом и рамы.
Разрыхленный ядохимикат из бункера 3 с помощью питателя 2
подается в кожух вентилятора 1 и далее по трубопроводу транс-
портируется к ограничителю 8, направляющему поток на чайные
шпалеры. В ограничителе циклона смесь из цианплава и воздуха
теряет свою скорость и смачивается водой, распыленной двойным
распыливающим наконечником 7. Под действием воды из цианпла-
ва выделяется цианистый водород, который заполняет пространст-
во, занимаемое двумя рядами шпалер и ограниченное палаткой 6.
Палатка длиной до 45 м создает необходимую экспозицию для ле-
тального воздействия ядохимиката на вредные организмы.
Концентрация цианистого водорода под палаткой зависит от
подачи цианплава и качества распыла воды. Подачу цианплава
регулируют изменением выходного отверстия с помощью заслонки.
264
Экспозиция воздействия цианистого водорода на вредные организ-
мы зависит от скорости движения агрегата и длины палатки. Ско-
рость движения 1,48 км/ч, ширина захвата — 2 ряда (до 4,1 м).
§ 6. Требования к качеству работы
Протравливатели следует настраивать на такую работу, чтобы
выдерживалось определенное, установленное соотношение между
количеством яда и семян в смесительной камере. Поверхность се-
мян после протравливания должна быть равномерно покрыта ядо-
химикатом и семена не повреждены рабочими органами. Дозирую-
щие устройства при протравливании должны обеспечивать равно-
мерную подачу ядохимиката, при этом отклонение от установленной
нормы не выше ±10%• Отклонение от равномерного распре-
деления ядохимиката в массе зерна не должно быть более ±20%.
Механические повреждения семян более 0,5% не допускаются.
Опрыскиватели должны обеспечивать равномерное по размеру
капель распыливание рабочей жидкости; равномерную концентра-
цию и расход рабочей жидкости в течение всего периода исполь-
зования машины независимо от количества ядохимиката в резер-
вуаре; заданную норму расхода ядохимиката на единицу обраба-
тываемой площади; равномерное покрытие всего или части растения
в зависимости от расположения вредителя или возбудителя
болезни. Например, при малообъемном опрыскивании дисперс-
ность распыла должна составлять 50...200 мкм, степень покрытия
поверхности листьев растения — 8... 10% при соотношении между
степенью покрытия верхней и нижней стороны листа 1.5...1. Нерав-
номерность состава рабочей жидкости не должна превышать ±5%.
Неравномерность покрытия растений каплями рабочей жидкости
не должна превышать: по ширине захвата машины 50%, по ходу
ее движения —20%. При опрыскивании садовых насаждений воз-
душный поток, транспортирующий распыленную рабочую жид-
кость, должен обладать запасом энергии, достаточным для до-
ставки ее на вершину дерева (до 8 м) и внутрь его кроны. Ско-
рость воздушного потока на входе внутрь кроны не должна превы-
шать 30 м/с.
Опыливатели должны тонко распыливать сухой ядохимикат,
создавать равномерную по всей ширине захвата пылевую волну и
обеспечивать равномерный и полный обхват растений этой вол-
ной, т. е. равномерное покрытие листьев ядохимикатом. При опы-
ливании неравномерность дозирования пылевидного ядохимиката
не должна превышать ±15%, а техническая эффективность опы-
ливания должна быть не ниже 90%.
Аналогичные требования предъявляются и к технологическим
процессам, выполняемым другими машинами. Все они в конечном
счете сводятся к одному — равномерному покрытию обрабатывае-
мого объекта ядохимикатом необходимой концентрации.
265
§ 7. Вопросы автоматизации
Автоматизация контроля, управления и регулирования процес-
сов в машинах для химической защиты растений обуславливается
двумя основными требованиями: с одной стороны —это интенси-
фикация технологических процессов (повышение производитель-
ности машин), а с другой — охрана окружающей среды от загряз-
нения ядохимикатами. При этом основное внимание уделяется во-
просам управления технологическими процессами.
Автоматизация управления технологическим процессом мобиль-
ной машины для химической защиты растений сводится к обеспе-
чению равномерности нанесения ядохимиката по ширине захвата
и по ходу агрегата.
Равномерность нанесения ядохимиката по ши-
рине захвата для штанговых опрыскивателей зависит от
расстояния между распылителями и зарабатываемыми растения-
ми. Колебания штанги в поперечной плоскости приводят к резким
колебаниям равномерности нанесения ядохимиката по ширине зах-
вата. Поэтому при ширине захвата свыше 15 м в зарубежных
конструкциях, как правило, применяют специальные устройства
для поддержания штанги на заданном расстоянии от поверхности
поля (в горизонтальном положении) независимо от микрорельефа
участка. Для этой цели применяют механические, гидравлические
и электромеханические стабилизирующие устройства. В этих кон-
струкциях штанга соединена с рамой машины не жестко, а шар-
нирно с применением амортизаторов, маятниковых и параллело-
граммных механизмов.
Равномерность нанесения ядохимиката по хо-
ду агрегата зависит от многих факторов, но главным образом
от рабочей скорости машины, так как она изменяется в зависимо-
сти от полевых условий. Поэтому многие зарубежные фирмы, что-
бы сохранять заданный расход ядохимиката на единицу площади
поля, оснащают опрыскиватели автоматическими дозирующими
Рис 177. Принципиальная схема автоматического регулирования подачи ядохи-
миката в зависимости от скорости движения:
/ — ходовое колесо- 2 — механизм передачи движения; 3 — диск; 4 — резервуар для ядохи-
миката; 5 — насос-дозатор; 6 -кран; 7 —резервуар для воды; 8 —иасос; 9 — смеситель;
/О— распиливающее устройство.
266
устройствами для подачи рабочей жидкости пропорционально по-
ступательной скорости машины. Для этой цели применяют гидрав-
лические, гидромеханические, электрические и другие системы ре-
гулирования. Фирма «Эврард» (Франция), например, разработала
дозирующее устройство, обеспечивающее постоянный расход ядо-
химиката на единицу площади поля путем изменения концентра-
ции рабочей жидкости практически без изменения ее подачи.
Основные узлы такой системы (рис. 177) — приводной диск 3, резер-
вуар для концентрированного ядохимиката 4, поршневой насос-до-
затор 5 двухстороннего действия малой производительности, ре-
зервуар 7 для воды, насос 8 высокой производительности, смеси-
тель 9. Насос 8 с приводом от ВОМ. или собственного двигателя
работает в режиме постоянной подачи, забирая воду из резервуа-
ра 7 и подавая ее в смеситель 9. Насос 5 с приводом от ходового
колеса 1 имеет подачу, пропорциональную скорости движения ма-
шины, и подает концентрированный ядохимикат в смеситель 9. Из
смесителя рабочая жидкость поступает к распы.тивающему уст-
ройству 10. При увеличении скорости движения подача концентри-
рованного ядохимиката возрастает, при уменьшении — снижается,
благодаря чему норма его расхода на единицу площади остается
неизменной. Установку на заданную норму расхода ядохимиката
выполняют изменением положения пальца шатуна в расположен-
ных концентрично отверстиях приводного диска 3. С изменением
установки изменяется эксцентриситет (радиус кривошипа), а сле-
довательно, и рабочий ход поршня и подача ядохимиката.
Автоматический контроль и сигнализация о нарушении работы
машин для химической защиты растений находят применение в
некоторых машинах отечественного производства. Так, например,
в одном из почвенных фумигаторов контрольно-сигнальное уст-
ройство выполнено в виде коромысла, на одном плече которого
находится приемная чаша дозированного ядохимиката, а на дру-
гом— противовес. Если по какой-либо причине прекращается пода-
ча ядохимиката в приемную чашу, то противовес поворачивает ко-
ромысло, в результате чего замыкаются контакты электрической
цепи с сигнальной лампочкой, расположенной на панели в кабине
тракториста, и лампочка загорается.
Раздел четвертый
УБОРОЧНЫЕ МАШИНЫ
Глава I
ДЕЛИТЕЛИ И СТЕБЛЕПОДЪЕМНИКИ
§ 1. Назначение и типы делителей
Режущие аппараты косилок, жатки зерноуборочных и специаль-
ных комбайнов, льнотеребильные, коноплеуборочные и другие ма-
шины оборудуют делителями, которые предназначены для отделе-
ния срезаемого или вытеребливаемого пучка растений от основного
массива, для разделения стеблестоя на полосы, а также для час-
тичного подвода стеблей к режущим или теребильным аппаратам.
Делители бывают пассивные, полуактивные и активные.
Пассивные делители жаток зерноуборочных комбайнов и льно-
уборочных машин схематично показаны на рисунке 178.
Делители жаток зерноуборочных комбайнов,
изображенные на рисунке 178, а, применяют при уборке длинносо-
ломистых и полеглых хлебов. Брус 1 установлен на боковине жат-
ки б, а к нему прикреплены наружный 3 и внутренний 2 стеблеот-
воды, корпус 4 и носок 5. Корпус 4 разделяет спутанные стебли,
наружный стеблеотвод 5 отделяет стебли нескашиваемого массива
от срезаемых и отводит их в сторону, а внутренний стеблеотвод 2
подводит стебли к режущему аппарату. Положение корпуса изме-
няют по высоте, а стеблеотводы устанавливают в требуемых поло-
жениях как в боковом направлении, так и по высоте.
Делители льнотеребильных машин — прутковые в
виде пятигранного клина. Носками А' и A'i (рис. 178,6) они вхо-
дят в стеблестой и рабочими кромками А'В' и A{B’i отклоняют
стебли к средней части, подавая их к теребильному ручью.
В процессе использования льнотеребильных машин возможна
различная установка делителей по высоте.
Полуактивные делители применяют для разделения спутанных
стеблей в кормоуборочных комбайнах. Корпус 2 (рис. 179, а) та-
кого делителя, воздействуя на стебли, разделяет их. Диск 1, жест-
ко посаженный на оси вала мотовила, вращаясь, разрезает спу-
танные растения.
Активные делители бывают с режущим аппаратом 3 (рис.
179,6), вращающимся шнеком 4 (рис. 179, в) или движущейся
цепью 5 (рис. 179,а). Делители с режущим аппаратом разрезают
спутанные растения, а шнековые и цепные, активно воздействуя
на стебли, разрывают их и подают на транспортирующие устрой-
ства.
268
Рис. 179. Схемы активных делителей:
а — полу активный с диском; б — активный ножевой; в — шнековый; г — цеп-
ной; 1 — разрезающий диск; 2 — корпус делителя; 3 — нож; 4 — шнек; 5 —
цепь.
§ 2. Отгиб растений делителями
Рассмотрим процесс отгиба прямостоящих стеблей рабочей по-
верхностью, кромка АВ (рис. 180) которой расположена в про-
странственной системе координат с осями OZ, OX, OY. Для упро-
щения примем, что стебли сохраняют свою прямолинейность при
наклоне и не взаимодействуют между собой.
Положение кромки АВ определяется ее проекциями ab на го-
ризонтальную плоскость YOX, АВ' — на вертикальную плоскость
XOZ, углами а и р и расстояниями h\ и h точек Л и В от плоско-
сти XOY. Примем, что рабочая кромка движется в направлении
оси X, а точка А кромки расположена в плоскости XOZ.
Кромка наклоняет стебли; наибольший наклон получают те из
них, которые совпадают с осью OZ. Если стебель ОА10 первона-
чально был расположен по оси OZ, то при перемещении делителя
он, скользя по кромке АВ, займет положение ОМ:, которое опре-
делится проекциями От и От'.
Кромка АВ воздействует на стебель нормальной силой N и си-
лой трения F. Сила N перпендикулярна как к стеблю OMit так и
к кромке АВ, а сила F направлена по АВ. Равнодействующая R
сил N и F вызывает наклон стебля в плоскости ОМ0т, след от ко-
торой с осью ОХ составляет угол у. Рассмотрим, чему он равен.
В начальный момент соприкосновения (точка К) кромки (по-
ложение AqBq) со стеблем ОЛ10 на стебель действуют силы No и
Fo. Так как сила No перпендикулярна и к прямой A0Bq и к ОМ0,
то она расположена в горизонтальной плоскости. Тогда в плоско-
сти УОА’ между линиями ОЬ0 и А'о будет прямой угол, а равнодей-
ствующая Ro сил No и Fo
будет отклонена от нормали
Рис. 180. Схема отгиба стеблей делителем.
А’о на угол трения tp стебля
о делитель. В соответствии
с этим из рисунка 180 име-
ем уо=9О°—(р+<р).
Угол у незначительно
(меньше чем на 1%) изме-
няется в зависимости от пе-
ремещения кромки, поэто-
му с достаточной точностью
можно принять; у=90°—
— (P+fp) •
Наибольшее отклонение
стебля делителем от верти-
кального положения будет
в тот момент, когда кромка
коснется стебля в точке В.
Из прямоугольного тре-
угольника ОВЬ имеем
0В=1=УЬ2+(0Ь)*
27о
Так как Ob = b/siny, то
I = V№ ~}-b2 Isw? у
или
I = W+b2/cos2 (Р+ф), (144)
где b — расстояние от оси делителя до его крайней кромки.
Из выражения (144) следует, что длина I тем больше, чем
больше угол <р трения стебля о делитель и угол р раствора дели-
теля. Отклонение стебля растет с увеличением ширины b и высо-
ты h установки делителя.
§ 3. Установка и режим работы делителей
Пассивные делители льнотеребильных машин разделяют стеб-
лестой на полоски и отгибают стебли к ручью. Стебли в полоске
шириной 2Ь (рис. 178, б) отклоняются по-разному: наибольший
наклон получают те, которые находятся на одной оси с делите-
лем, стебли средней части поступают в ручей без отгиба.
Захват стеблей теребильным ручьем на разной длине будет
влиять на растянутость вытеребленных пучков растений. Растяну-
тость А/, вызываемая делителем, равна Д/ = /—h. Относительную
растянутость е можно представить отношением е —100, гдеБ—
среднеарифметическая длина стеблей. Растянутость ленты значи-
тельно осложняет последующие операции: подбор лент, транспор-
тирование стеблей, очес головок и вязку снопов. Допускаемая
®=20...30%.
Используя зависимость (144), получаем следующее выражение
для определения относительной растянутости ленты:
е = ( 1Р __ Л_ ’ 100. (145)
Относительная растянутость лепты уменьшается с увеличением
высоты установки делителей. Большее влияние высота установки
делителей оказывает на относительную растянутость ленты при
короткостебельном льне. При длинностебельном льне высота уста-
новки мало изменяет е.
Следовательно, делители теребильных машин необходимо ус-
танавливать на такой высоте, при которой наклоненный стебель
сможет попасть в теребильный ручей и будет достигнута мини-
мальная растянутость ленты, вызываемая действием делителей.
Если принять, что минимальная техническая длина стебля
£т, а размер его участка, зажимаемый ремнями, /р, то без учета
криволинейности стебля, получим
I +
271
или
iT-/p > //i24-62/cos2 (р+ф).
Решая, имеем
А< У(LT-/p)*_^/cos2(|3-<F). (146)
Из выражения (146) определяют высоту установки делителей
на короткостебельном льне, при которой происходит теребление
без пропусков с минимальной растянутостью. В случае пропусков
или надрывов стеблей высота установки делителей должна быть
уменьшена.
На длинностебельном льне высота установки может быть выб-
рана значительно меньше высоты, определяемой из выраже-
ния (146).
Пассивные делители жаток зерноуборочных машин. Во-первых,
делители должны разделять стебли до подхода к ним лопасти мо-
товила и, во-вторых, укладывать крайние стебли, которые не за-
хватываются жаткой, так, чтобы колос располагался как можно
выше от земли на нескошенных растениях.
Первое условие достигается правильной установкой внутренне-
го стеблеотвода 2 (рис. 178, а) и корпуса 4, т. е. корпус должен
действовать на середину стеблей, а задний конец внутреннего
стеблеотвода смещать их в сторону центральной части жатки. Ес-
ли при этом стебли подминаются делителем, то внутренний стеб-
леотвод устанавливают ближе к боковине жатки.
Для выполнения второго условия наружный стеблеотвод 3 рас-
полагают так, чтобы крайние стебли хлебостоя укладывались коло-
сом на последующие. Укладка улучшается, если увеличить вынос
и подъем заднего конца наружного стеблеотвода. Однако слиш-
ком высокая установка стеблеотвода и большой вынос его могут
привести к вымолоту зерна из колоса ударами крыла делителя и
подминанию стеблей. Оптимальную установку делителя выбирают,
исходя из пробной установки в соответствии с состоянием хлебо-
стоя.
Активные делители шнекового и цепного типов разделяют
стебли вследствие принудительного перемещения или перерезания
спутанных растений.
Режим работы активного делителя должен быть таким, чтобы
его рабочая поверхность не сгруживала стебли, а активный орган
(шнек, цепь) воздействовал на растения с малым импульсом.
Для выполнения указанных условий необходимо, чтобы гори-
зонтальная составляющая скорости ист перемещения перепутан-
ных стеблей была равна скорости v машины, т. е.
uCTcosa= v,
где а — угол наклона делителя к горизонту.
27 2
Стебли по делителю проскальзывают. Принимая коэффициент
скольжения k = 0,90...0,99, получаем следующие уравнения для оп-
ределения:
скорости цепи делителя
цц=и/Лсоза (147)
и частоты вращения шнека
п « vltk cos а, (148)
где t — шаг витков шнека.
Из уравнений (147) и (148) находят оптимальный скоростной
режим работы активного делителя. Скорость движения цепи и ча-
стоту вращения шнека повышают с увеличением скорости движе-
ния машины.
§ 4. Назначение и типы стебле- и ботвоподъемников
Стебле- и ботвоподъемники устанавливают на режущих аппара-
тах жаток для уборки бобовых, риса, подсолнечника, полеглых
зерновых и других культур. Они поднимают растительную массу,
чем облегчают срез стеблей режущими аппаратами. Для уборки
подсолнечника жатки снабжены стеблеподъемниками, позволяю-
щими срезать стебли близко у корзинок. В свеклоуборочных ком-
байнах используют ботвоподъемники, которые поднимают полег-
шую ботву корнеплодов и собирают ее в пучок.
В уборочных машинах находят применение пассивные и актив-
ные стебле- и ботвоподъемники.
Пассивные стеблеподъемники бывают: жесткие, шарнирные и
шарнирно-телескопические.
Жесткий стеблеподъемни к (рис. 181, а) состоит из
корпуса 1, который закрепляют на пальце 3 режущего аппарата.
Болтом 4 корпус присоединяют к пальцевому брусу.
Шарнирный с т е б л е п о д ъ е м н и к (рис. 181,6) имеет
корпус 1, связанный осью 6 с кронштейном 8, который закреплен
на пальце режущего аппарата. Носок корпуса прижимается к
почве пружиной 5.
Давление растительной массы на хвостовик ВС корпуса, а так-
же действие пальцев мотовила могут вызвать поворот корпуса от-
носительно оси 6. Носок корпуса при этом поднимается и пропус-
кает полеглые стебли, что приводит к забиванию режущего аппа-
рата. Чтобы избежать этого, иногда стеблеподъемники делают без
хвостовика.
Шарнирно-телескопический (рис. 181, в) стеблеподъ-
емник снабжен подвижным штоком 10, который входит в корпус
9. Шток может перемещаться вдоль оси. Корпус, в свою очередь,
шарнирно соединен с державкой 12. Носок 11 штока пружиной 13
прижимается к почве.
273
18—424
G>
Рис. 181. Схемы пассивных стеблепйдъемнлхоз:
-а — жесткие; б — шарнирные; в — шарнирно-телескопические; 1 и 9 — корпуса; 2 — колпа-
чок; 3 — палец режущего аппарата; 4 и 7 — болты; 5 и 13 — пружины; 6 — ось; 8— крон-
штейн; 10 — шток; 1'1 — носок; 12 — державка.
Опыт применения пассивных стеблеподъемников разных типов
показывает, что при жестком креплении корпуса они плохо копи-
руют рельеф почвы. Шарнирные и шарнирно-телескопические стеб-
леподъемникп удовлетворительно работают на плотных почвах; на
почвах с малой плотностью и большой влажностью они плохо ко-
пируют неровности.
Все рассмотренные выше пассивные стеблеподъемники исполь-
зуют на жатках для уборки зерновых и зернобобовых культур.
Пассивные ботвоподъемники (рис. 182) по форме представляют
собой конический обтекатель 1, жестко закрепленный на держате-
ле 2. Лобовая часть обтекателя расположена под некоторым уг-
лом р к горизонту, отбортованные площадки 3 имеют угол подъе-
ма Pi. Обтекатели поднимают полеглые листья и формируют их в
пучок.
Активные стеблеподъемники поднимают полеглые растения
пальцами с принудительным движением. На жатках для уборки
полеглых и стелющихся культур устанавливают барабанный
стеблеподъемник (рис. 183, а) с убирающимися пальцами. Бара-
274
Рис. 182. Схема пассивного ботвоподъемники:
1 — конический обтекатель; 2 — держатель; 3 — отбортовка.
бан 1, вращаясь относительно оси 3, увлекает за собой пальцы 2,
и они, поворачиваясь вокруг оси 4, входят в нижней зоне в стебли
и поднимают их. Затем после среза пальцы передают стебли на
транспортирующие рабочие органы.
Активные ботвоподъемники (рис. 183, б) представляют собой
гибкие лопасти 5, вращающиеся относительно осей 6. Оси постав-
лены под определенным углом к горизонтальной плоскости и ли-
нии рядка. Вращаясь, лопасти действуют на ботву как вдоль, так
и поперек рядка, тем самым поднимают ее и подводят к теребиль-
ному аппарату. Такие ботвоподъемники устанавливают на маши-
нах для уборки корнеплодов.
Преимущество активных стебле- и ботвоподъемников перед
пассивными заключается в том, что они лучше копируют рельеф
поля и не только поднимают полеглые растения, но и передают их
на транспортирующие рабочие органы. Однако стеблеподъемники
с убирающимися пальцами, воздействуя на растительную массу,
очесывают стручки и вымолачивают зерно, увеличивая его потери.
Кроме того, они не обеспечивают подъема всех стеблей, вследствие
чего часть растений срезается без подъема, а некоторые стебли
вытер еб л иваются.
Рис. 183. Схемы активных:
а — стеблеподъемннка; б — ботвоподъемники; 1 — барабан; 2 — палец; 3 — ось барабана; 4 —
ось пальцев; 5 — лопасть; 6 — ось лопастного барабана.
18*
275
§ 5. Установка стебле- и ботвоподъемников
Растения должны перемещаться по рабочей поверхности подъ-
емников со скольжением. Этот процесс определяется условием 19,
где <р — угол трения растений по рабочей поверхности стебле- и
ботвоподъемника.
При движении со скольжением стебель перемещается поверх-
ностью стеблеподъемника 1 (рис. 184) по направлению силы R,
отклоненной от нормали на угол <р. Если поверхность переместится
из положения I в положение II, стебель расположится по линии
CD, наклоненной под углом а—ср к линии движения поверхности.
Найдем соотношение между перемещением поверхности и дли-
ной I стебля CD, на которую воздействует стеблеподъемник.
Из треугольника ADC имеем
sin Р sin (а — ср) '
Так как а=90°—р, то получаем
.___ ssinP
~ cos(P-t-cp) •
Длина I, на которую воздействует поверхность стеблеподъем-
ника при перемещении ее на одно и то же расстояние, растет с
увеличением углов р и ср. Из этого следует, что чем больше углы
Р и ср, тем больше растений скапливается на рабочей поверхности.
При большом количестве растений поверхность забивается и раз-
деление спутанных стеблей ухудшается. Поэтому рабочие поверх-
ности делителей и стеблеподъемников должны быть гладкими.
Стеблеподъемники должны поднимать стебли на такую высоту,
при которой срез будет с минимальными потерями, т. е. стебли
следует срезать ниже расположения бобов, метелок и колосьев.
Определим влияние параметров стеблеподъемников на установ-
ку режущего аппарата.
Без учета взаимодействия стеблей из треугольника ADC имеем
Рис. 184. Силовое воздействие стебле-
подъемника на растения:
1 — стеблеподъемник; 2 — режущий аппарат.
С tg (а — <р) + hy _ S
tg (а — ср) cos ср sin (а — ср) ’
где с — вынос носка стебле-
подъемника относи-
тельно режущего ап-
парата 2;
hy — установочная высота
среза;
s — длина рабочей по-
верхности стебле-
подъемника.
276
Решая это уравнение, получаем
sln(P + T> —cct8<p+<y). (150)
Из уравнения следует, что на /гу оказывают влияние такие па-
раметры стеблеподъемника, как s, с и 0. С увеличением сир вы-
соту /гу необходимо уменьшить. Устанавливать стеблеподъемники
следует в поле, принимая во внимание глубину колеи копирующих
колес или башмаков.
Глава II
ТЕРЕБИЛЬНЫЕ АППАРАТЫ
§ 1. Назначение и типы теребильных аппаратов
Теребильные аппараты применяются для теребления льна и вы-
дергивания корней свеклы с дальнейшей транспортировкой их к
другим рабочим органам. Применяют льнотеребильные аппараты
ленточно-роликовые (рис. 185, о) и ленточно-дисковые (рис. 185, в).
Ленточно-роликовый аппарат состоит из двух теребильных
ремней 2, охватывающих ведущие 1 и ведомые 4 шкивы, и роли-
ков 3, прижимающих ремни один к другому. Делители подводят
стебли к поверхности касания ремней (к теребильному ручью).
Выдергивание стеблей происходит в пределах зоны АВ, где ремни
плотно прилегают один к другому.
Подобное устройство имеют транспортирующие ручьи жаток
для уборки конопли, а также подающие цепи кукурузоуборочных
машин, где роль ремней выполняют втулочно-роликовые цепи.
Ленточно-дисковый аппарат состоит из теребильного ремня 2
и дисков 5, прижимных роликов 3 и направляющих щитков 6.
Стебли зажимаются между ремнем и диском; одновременно с те-
реблением стебли транспортируются в левую (по ходу машины)
сторону. Между дисками стебли транспортируются за счет при-
жатия их к направляющим щиткам.
Рис. 185. Схемы теребильных аппаратов:
а — ленточно-роликовый; б — ленточно-дисковый; 1 — ведущие шкивы; 2 — теребильные рем-
ни; 3 — прижимные ролики; 4— ведомый шкив; 5 — теребильные диски; 6—-направляющий
щиток.
277
§ 2. Рабочий процесс ленточно-роликовых аппаратов
Рабочий процесс ленточно-роликовых теребильных аппаратов
включает в себя следующие операции: подачу стеблей к зоне
плотного прилегания ремней, захват стеблей ремнями, теребление
и транспортирование растений. Такие же операции, кроме тере-
бления, выполняют ремни секционных транспортеров жаток для
уборки конопли и подающие цепи кукурузоуборочных комбайнов.
Подача стеблей. Пусть стебли, подведенные к теребильным или
транспортирующим ручьям, встречаются с ремнем (цепью) в точ-
ке С (рис. 186). Если скорость машины v, а скорость ремня (це-
пи) и, то точка С ремня в абсолютном движении будет иметь ско-
рость цаб, равную геометрической сумме и и V. Направление ско-
рости Наб отклонено от линии движения на угол р.
Под действием ремней (цепей) стебель отгибается в продоль-
ном направлении. Отгиб зависит от проскальзывания стеблей по
ремням (цепям). Чем больше проскальзывание, тем больше от-
гиб. Чтобы отгиб был меньше, необходимо добиться такого поло-
жения, при котором стебли не проскальзывали бы по ремням. Та-
кое условие определяется следующим неравенством:
е С ф,
где 8 —угол между нормалью Nn к ремню (цепи) и направле-
нием абсолютной скорости в точке С;
ф —угол трения стебля о ремень (цепь).
Если положение стебля в точке С определить углом уо, то из
рисунка 186 имеем:
или tgp^ tg(Y0H-<f)-
Принимая 1§ф=/, где f — коэффициент трения, получаем:
tg₽<
tg То + /
1 — f tg To ‘
(151)
Из треугольника CBD найдем:
Рис. 186. Подвод стеблей к рабо-
чему руслу.
tg R— tz cos То
® Р v — и sin То ’
Принимая ulv—K, где X — по-
казатель кинематического режи-
ма, и решая, получаем
tg₽=
X cos То
1 — X sin То
Заменив tg р этим выраже-
нием и решив уравнение, получим
где A=f cos то+sin то.
Тогда
X<fcosY0-|-sinY0
(152)
278
Рис. 187. Захват растений цепями.
Р::: 188 Теребление растений, рас-
точенных з полости ручья.
Из этого неравенства следует, что подача стеблей в рабочее
русло без проскальзывания по ремням или цепям зависит от по-
казателя кинематического режима X, угла у0, коэффициента тре-
ния f. Чем больше коэффициент трения, тем выше допускается по-
казатель X. Расчеты показывают, что подача стеблей будет про-
исходить без проскальзывания при следующих значениях:
Z.^0,9 — для льнотеребилок и коноплеуборочных комбайнов;
Z.^1,0— для кукурузоуборочного комбайна.
Отгиб стеблей по ремням (цепям) может быть уменьшен по-
вышением скорости движения агрегата, так как с ростом скорости
уменьшается К
Захват стеблей. Стебли, подведенные к зоне плотного прилега-
ния ремней (цепей), захватываются ими. Захват стеблей зависит
от конструктивных и регулировочных параметров ремней (цепей),
а также от свойств растений.
Рассмотрим захват стеблей (рис. 187), входящих в русло, на
примере подающих цепей кукурузоуборочного комбайна.
Пусть стебель диаметром d наклонен под углом 6 к линии дви-
жения.
На стебель со стороны цепей действуют нормальные силы N
и силы трения F.
Цепи будут захватывать стебли при условии:
2F cos у > 2N sin у.
Так как Fmax=fN, то
f cos у > sin у. (153)
279
Из треугольника О АС находим
cosy—-ОА/г и ОА=г-]-а/2—А'В'/2,
где г — радиус по контуру подающих цепей;
а — зазор между цепями на входе.
Пользуясь соотношениями на рисунке, находим
А’В' —-d/sin 6-J-/i/tg б,
где h — толщина звеньев цепи.
Заменяя ОА и А'В' в выражении для cos у, получаем
, । б/ h I
cosy=14- а—--------г-«— 2г.
• 1 [ sin о tg о j/
Подставляя выражения sin у и cosy в неравенство (153) и ре-
шая, имеем
(2'+“- йЛГ—i^)/1/WT) > !Ч- <154>
С увеличением диаметра d, уменьшением зазора а и угла б
поперечного наклона стеблей захватывающая способность цепей
уменьшается.
При уборке растений диаметром d=4 см зазор между цепями
на входе должен быть 4,5 мм.
Если при уборке толстостебельной кукурузы подающие цепи
забиваются, следует увеличить высоту среза (чем выше срез, тем
тоньше стебель).
Рабочий процесс, выполняемый ременными подводящими уст-
ройствами. аналогичен рассмотренному.
Теребление растений, расположенных в плоскости ручья. Пусть
стебель (рис. 188), наклоненный к поверхности земли под уг-
лом 6, расположен в плоскости теребильного ручья (центральный
стебель). Захватывается он ремнями в некоторой точке А, отстоя-
щей от земли на высоте h.
Скорость «аб абсолютного движения точки А ручья складыва-
ется из скорости v движения машины и скорости и ремней, на-
правленной под углом а к горизонту. Элементы стебля, зажатые
теребильными ремнями, перемещаются по направлению скорости
i/аб. Угол между направлением скорости «аб и горизонталью Pi.
Из треугольника ABD имеем
tg Pj =u sin a/(v—и cos a).
Принимая п/и=Х, получаем
tgPi = Xsina/(l—Xcosa). (155)
Теребление закончится в тот момент, когда корень растения
будет вытянут из земли. При длине стебля от точки О до А, рав-
ной I, и длине корня k процесс теребления будет закончен в точ-
ке С, определяемой равенством OC=l+k.
В момент окончания выдергивания растения угол наклона
стебля к горизонту будет у. Найдем этот угол.
280
Из треугольника АСО имеем
I _ l-\-k
sin (р± — у) ~ sin(P1 —0)
ИЛИ
sin (Pi—Т) sin (₽i—6).
Разложим вектор Л С по направлению скорости и и и. Отрезок
АЕ есть длина участка теребильного ручья, на которой происходит
теребление, а отрезок AF определяет путь машины, в процессе ко-
торого происходит выдергивание захваченного ремнями растения.
Определим отрезки АЕ и AF.
Из треугольника OCG имеем
CG=(/+k) sin у,
CG--AE sina-f-/i.
Заменяя CG, получаем
AE=SP =~-(l ' fe)£inv—-
p sin a
Так как Z=/i/sin6, то
S ____h (sin у — sin 6)
P ' sin Osin a
k sin у
sin a ’
(156)
(157)
Из треугольника АСЕ длина пути 3, проходимого машиной за
время выдергивания растения, будет равна:
др_гр__е__с s*n (Pi + ю)
Аг—о—ор sinpi
(158)
Теребление смещенных растений. Рассмотрим процесс теребле-
ния растений, корни которых не расположены в плоскости тере-
бильного ручья (рис. 189).
Пусть корень О] растения рас-
положен по оси симметрии де-
лителя. Стебель этого расте-
ния отстоит от плоскости тере-
бильного ручья на расстоянии
Ь. Пусть стебель наклонен в
направлении движения маши-
ны под углом 0 к оси ОХ. Если
начало теребления происходит
в точке А при расстоянии
OiA = lK, а направление ско-
рости абсолютного движения у
точки теребильного ручья
«аб, то растение будет выте-
реблено в точке С, т. е. при
О1С=/к+^. Рис.
189. Теребление крайних растений.
281
Из приведенной схемы видно, что
CB=/(ZK-P)2—62.
Так как /к = l/Tz2/sina 6 —fc>2, то, решая это уравнение, получаем
св=К/i2/sin2 е+2k | 7i2/sin2e—ft2—k2.
Заменяя в выражении (156) l+k на СВ, находим следующую за-
висимость для определения длины участка S-K теребильного
ручья, на которой происходит выдергивание растений, располо-
женных на оси делителя:
_P^/sin2 0 2/г ) ft^/sin2 е 4- fe2 ka- sin h /1Kn.
sin к '
За это время машина проходит длину пути
SK=SpK sin(pi + a) . (160)
К Рк sin рх ' '
Как видно из выражений (159) и (160), на величину Зрк и SK
влияют такие конструктивные параметры, как расстояние Ъ от
оси симметрии делителя до плоскости ручья, угол а наклона тере-
бильных аппаратов и скорость и теребильных ремней.
С увеличением расстояния Ь. на котором стебли захватывают-
ся ручьем, 5Рк и SK увеличиваются Наибольшее влияние на Зрк и
Зк оказывает расстояние Ь при малых значениях высоты установ-
ки теребильных аппаратов, т. е. при /1 = 10...25 см.
Если угол а увеличивается, Зрк и SK уменьшаются. Наиболь-
шее влияние угла а сказывается при большой полеглости льна,
т. е. при 6 = 25...35°. В применяемых льнотеребильных машинах
а = 60...70°, что обеспечивает уборку полеглого льна.
При постоянной скорости v машины значения Зрк и SK изменя-
ются с увеличением скорости и ремней. В существующих льноте-
ребильных машинах скорость ремней находится в пределах
2,5...3,3 м/с.
§ 3. Теребление растений ленточно-дисковым аппаратом
Схема процесса выдергивания льна в ручье ленточно-дискового
аппарата показана на рисунке 190. Рассмотрим растение, стебель
ОА которого отклонен делителем вправо от плоскости ZOX на
расстояние Ь. Это растение при тереблении будет находиться в
наименее выгодных условиях. Пусть теребильный ручей захваты-
вает стебель в точке А, удаленной на расстояние h от поверхности
земли. Проекции стебля ОА на плоскости ZOX и XOY соответст-
венно будут Оа' и Оа.
Точка А стебля, зажатая в ручье, будет перемешаться, совер-
шая сложное движение: переносное со скоростью v и относитель-
282
ное со скоростью и. Для упроще-
ния примем криволинейную
часть участка теребильного ручья
прямолинейной, а плоскости те-
ребильных ремней — вертикаль-
ными, тогда скорость и будет на-
правлена параллельно оси ОУ, а
скорость v машины параллельно
ОХ.
На плоскости XOY эти скоро-
сти проектируются в натураль-
ную величину.
Скорость Паб абсолютного дви-
жения точки А стебля направле-
на по линии АС. Стебель будет
вытереблен в точке Е (координа-
ты Е—е и е'). Расстояние от кор-
ня (точка О) растения до точ-
Рис. 190. Теребление растений лен-
точно-дисковым аппаратом.
ки Е равно lKA-k.
Тогда длина участка теребильного ручья, на которой происхо-
дит выдергивание, будет SPK. а за время выдергивания растения
машина пройдет длину пути SK.
Определим длину участка SpK и пути 5К.
Из предложенной схемы (рис. 190) видно, что
(0Л)а=/^=(0Й0)а+(м2+(^)2-
Так как Oa0=/i/tg6; aoa=b\ aA = h, то получим
/к=Д2/1 g2 0 -j- Ь2 + h2=/i2/sin2 0 Ь2.
Расстояние lK + k можно выразить так:
(/к+^)2=(Ое0)2+(^)2+(^Е)2.
Как вытекает из чертежа, Ое = /:/tg 0-i-SK; etje=b—SpK; eE=h,
тогда
(/к - W=(h/tg e -sK)2 -4 (b -sPK)2+h2.
Заменяя /к и SK = SpK/A и решая, получаем
(1Д-1 /X2) S2PK—(2fe—2ft/% tg 0) SpK — (2k ] 7i2/sin2©4-fc2 4- k2) = 0.
Корень этого квадратного уравнения будет следующим:
с ь — йд tg е + У (ь — лд tg е)2 + (1 + 1 А2) (2А y/i2/sin2 е + &2 + /г2
spk— - ГТТ/Р (161)
Корень со знаком (—) перед радикалом не принят, так как
SpK — положительная величина.
Длину пути, проходимого машиной за время выдергивания ра-
стения, можно выразить зависимостью:
5к=5рк1Д.
283
На величину SpK и SK влияют такие конструктивные парамет-
ры, как расстояние b и скорость и теребильных ремней.
С ростом b длины 5Рк и Зк увеличиваются. При тереблении
крайних растений (й = 15 см; Л = 20 см; л=1; k=5 см; 0 = 30°) уча-
сток 3Рк ручья, на котором происходит теребление, на 60% боль-
ше, чем при тереблении растений, расположенных в плоскости
ручья. Эта разница тем больше, чем меньше высота установки те-
ребильного аппарата над землей и чем больше угол 6 наклона
стеблей в плоскости ZOX движения машины. С увеличением скоро-
сти движения машины участок Зрк уменьшается.
§ 4. Режим работы и установка ленточно-роликовых
и дисковых теребильных аппаратов
Для чистого теребления как прямостоящего, так и полеглого
льна необходимо, чтобы длина Зрк участка теребильного ручья,на
которой происходит выдергивание крайних растений, была мень-
ше или равна длине Зд участка ручья с плотным прилеганием рем-
ней, т. е.
с --лс.’
В льнотеребилках и комбайнах длина теребильного ручья с
плотным прилеганием ремней равна 26...30 см.
На рисунке показано, как изменяется 5рк в зависимости от уг-
ла наклона стебля в плоскости движения машины для ленточно-
роликового (рис. 191, а) и ленточно-дискового (рис. 191,6) тере-
бильных аппаратов. Отрицательные значения углов 0 соответству-
ют стеблям, наклоненным навстречу движения машины, положи-
тельные— по движению. Из графика следует, что стебли, накло-
ненные по движению, машина выдергивает при меньших значени-
ях 5рК, чем стебли, наклоненные навстречу движения. Значительно
возрастает величина SPK при тереблении сильно полеглого льна,
когда 0=С —50°.
Рис. 191. Графики изменения длины участка теребильного ручья SpK, на кото-
ром происходит выдергивание растений, в зависимости от угла 6 наклона стеб-
лей:
а — ленточно-роликовый аппарат; б — ленточно-дисковый; 1 и 3 — /.=0,34; 2 и 4 — Х=1.
284
В ленточно-роликовых аппаратах при полеглости льна от +30
до —30° участок ручья с плотным прилеганием больше, чем
необходимая длина SPK.
Ленточно-роликовые аппараты обеспечивают хорошую чистоту
работы как на короткостебельном, так и на длинностебельном
льне при скоростном режиме с л = 0,34...1,0.
Ленточно-дисковые аппараты наиболее чисто работают, как
видно из графика, при Х~1. Оптимальными считают скорости дви-
жения машин, равные 7...8 км/ч. В случае пропусков стеблей не-
обходимо увеличить участок плотного прилегания, изменив поло-
жение нажимных роликов.
На повреждение стеблей в льнотеребильных аппаратах влияют:
толщина зажатой ленты льна, сила давления в ручье, скольжение
элементов, образующих ручей.
Известно, что один стебель, зажатый в ручье, повреждается
сильнее, чем пучок стеблей определенной толщины. С увеличением
показателя скоростного режима X число стеблей в ручье уменьша-
ется, следовательно, несколько возрастает их расплющивание. Как
влияет толщина ленты стеблей, зажатой в ручье, на размер и ха-
рактер повреждений, еще недостаточно полно выяснено.
При сильном натяжении ремней увеличивается сжатие, вызы-
вающее расплющивание стеблей. При малых натяжениях возмож-
но проскальзывание и скручивание стеблей. Поэтому натяжение
должно быть возможно меньшим, но таким, при котором достига-
ется чистое теребление льна без скручивания стеблей. Ремни на-
тягивают перемещением ведомого шкива теребильных секций пли
натяжного ролика.
На растянутость ленты стеблей, как указывалось, влияет уста-
новка делителей. Кроме того, подвод стеблей теребильными рем-
нями к точке зажима также вызывает ее растянутость. С уменьше-
нием % и h растянутость возрастает.
Оптимальный режим работы и наиболее целесообразную уста-
новку теребильных аппаратов выбирают с учетом всех указанных
факторов.
§ 5. Назначение и рабочий процесс цепочно-лапчатого
теребильного аппарата
Назначение. Цепочно-лапчатый теребильный аппарат применя-
ют для теребления корней сахарной свеклы. Он представляет со-
бой цепь 1 (рис. 192) с направляющими роликами 2, на которой
шарнирно закрепляют лапы 3. Между лапами поставлены спи-
ральные пружины 4, работающие на сжатие. На концах лап пре-
дусмотрены конические хвостовики. Когда они находятся в зоне
схождения направляющих роликов, то лапы раскрываются. Ролики
установлены так, что лапы раскрываются, когда находятся внизу
и захватывают ботву, а также вверху, когда они ее отпускают и
передают на последующие рабочие органы.
285
Рис. 192. Схема цепочно-лапчатого аппара-
та для теребления корней свеклы:
1 — цепь; 2 — направляющие ролики; 3 — лапа;
4 —пружина; 5 — поддерживающий ролик.
ляющего ролика переместится в О\,
нется на угол со/. Тогда координаты
щими уравнениями:
Лапа совершает слож-
ное движение: переносное и
относительное. Переносное
движение определяется ско-
ростью v машины, относи-
тельное зависит от положе-
ния лапы и скорости и цепи.
В пределах дуги АоАВ
(рис. 193), где цепь 1 каса;
ется окружности направляю-
щего ролика 2, точки лапы
движутся по окружностям
с центром в точке О. Прой-
дя точку В, лапа совершает
поступательное движение.
Найдем уравнение дви-
жения точки М конца лапы,
находящейся в начальный
момент в положении Л40(х =
= г\ У = 0).
За время t ось О направ-
а радиус-вектор Oi М повер-
точки М выразятся следую-
xu=vt-~г cos at.
г/м=г sin at.
(162)
Эти уравнения определяют траекторию Й1ОЛ12 движения точек
конца лапы при ее повороте по окружности направляющего ролика
от точки Ло до В. Захват ботвы и выдергивание корня может про-
исходить только после точки All траектории, так как на участке
M0Mi лапа не поднимает корень.
Рис. 193. Схема к определению кинематических показателей цепоч-
но-лапчатого теребильного аппарата:
1 — цепь; 2 — направляющий ролик.
286
Определим угол направления абсолютной скорости движения
лапы при тереблении свеклы в пределах участка ЛДЛД траекто-
рии. Дифференцируя уравнения (162) по t, получаем
хм=tix=v —т sin со/,
Ум = иу ~ COS
Тогда направление абсолютной скорости цаб определится углом
наклона касательной, т. е.
о__ у __ ГСО cos со/
ё ' * v — гео sin со/ ’
Так как г=г0+/, а г0со = и, здесь и— скорость цепи, то, принимая
ы/о=Л, находим
cos со/ — cos со/
tgP =-----j-----------------• (163)
-т- — sin со/—— sin со/
Л г0
Угол р характеризует направление абсолютной скорости тереб-
ления, когда лапы начинают выдергивать корень, двигаясь на
участке ЛДМ2.
После точки М2 лапа движется поступательно, точка М пере-
мещается по прямой Л12Л13. Если начало выдергивания корня на-
ступает после точки М2, то процесс теребления подчиняется таким
же закономерностям, какие получены для теребления стеблей льна
ленточно-роликовым аппаратом. Направление абсолютной скорос-
ти теребления на этом участке определяется углом значение
которого может быть найдено из выражения (155), где а— угол
наклона теребильной цепи к горизонтальной линии. Момент нача-
ла выдергивания корня зависит от кинематического режима рабо-
ты теребильного аппарата.
§ 6. Установка и режим работы цепочно-лапчатого аппарата
Кинематический режим работы. Цепочно-лапчатые теребиль-
ные аппараты работают совместно с подкапывающими лапами,
нарушающими связь корня с почвой. При этом осевая линия АС
корня (рис. 194) наклоняется под некоторым углом ат, значение
которого зависит от наклона рабочей поверхности подкапываю-
щей лапы к горизонту (ап~15°). Опытами установлено, что оп-
тимальный угол <хт теребления корня не должен превышать ±30°.
Исходя из изложенного, имеем, что оптимальный угол §Опт на-
правления абсолютной скорости теребления должен быть равен
сумме ат+ап, т. е. ропт=45... 105°.
Выберем наиболее целесообразный момент начала выдергива-
ния стебля и показатель кинематического режима работы.
287
Рис. 194. Направление вы- Рис. 195. Схема к определению высоты уста-
дергивания корня свеклы. новкн теребильных аппаратов:
1 — контуры конца лап; 2 — корень свеклы; 3 — под-
капывающая лапа.
Если начало выдергивания стебля происходит при положении
лапы на участке 7И17Й2 траектории (рис. 193), то угол рОпт, най-
денный из уравнения (163), соответствует показателю кинемати-
ческого режима 7=0,26...0,50. Тогда при скорости движения тере-
бильной цепи 1,2 м/с скорость движения машины должна быть
выше 8 км/ч.
Если процесс выдергивания происходит на участке Л12Л43 тра-
ектории, то из выражения (155) получаем более низкие значения
показателя /. = 0,88...1.25. Скорость движения машины в этом слу-
чае будет 3,7...5,2 км/ч.
Важным критерием, определяющим скорость движения маши-
ны, наряду с оптимальными углами теребления служит степень
развития ботвы и ее свойства.
Задавая скорость движения машины, необходимо установить
зону начала теребления (участки МгМ2 или ТИ2ТИ3), которая опре-
деляется моментом закрытия лап.
Натяжение теребильной цепи. В цепочно-лапчатых теребиль-
ных аппаратах натяжение цепи изменяют установкой нижнего
направляющего ролика 2 (рис. 192) в различных положениях.
Натяжение теребильной цепи влияет на силу, действующую на
цепь.
При провисании цепи (т. е. когда расстояние от нижнего поло-
жения ролика, соответствующего полному натяжению цепи, до
нормального а=60...80 мм) усилие почти в 3 раза меньше, чем
при полном натяжении (а = 0).
При указанном значении а нижняя ветвь цепи будет наклонена
к горизонтальной поверхности под углом а=15...18°.
Чтобы уменьшить энергозатраты на теребление и устранить
повышенный износ, натяжение цепей при работе ослабляют.
Установка теребильных аппаратов по высоте. Теребильные лапы
при работе не должны обрывать ботву, так как это приводит к
288
потере свеклы. Полнота сбора корней должна быть не менее 98%.
Опасность обрыва тем больше, чем выше лапы захватывают ботву.
Высота захвата ботвы влияет на работу выравнивающего ме-
ханизма. При малой высоте захвата корни повреждаются элемен-
тами выравнивающего аппарата и происходит негладкий срез (ко-
личество поврежденных корней нс должно быть больше 30%, а чи-
стота среза головок корней — не менее 75'-.,).
Наименьшая высота Amin (рис. 195) защемления ботвы зави-
сит от конструктивных параметров выравнивающих механизмов.
Для дисковых выравнивателей существующих конструкций наи-
меньшая высота защемления ботвы может быть принята 80...
...100 мм, а для винтовых — в пределах 100...120 мм
Исходя из этих условий, определим высоту установки конца
лап над поверхностью поля.
На рисунке 195 показана схема положения корня, подкопанно-
го лапой, в момент начала его теребления. При этом принято, что
захват корня 2 теребильной лапой (точка .4 > ответствует тако-
му положению подкапывающей лапы 3. при котором поднятый
пласт начинает (точка /31 падать с нее.
Такое сочетание соответствует наибольший скорости движения
корня относительно земли, чем вызывается наилучшая очистка
корней от почвы (по агротребованиям количество почвы с корнями
не должно быть больше 9%).
Как вытекает из чертежа, изображенного на рисунке 195,
/z — (/zmin + /) cos а -%/гл—/гт> (164)
где I — длина корня;
Лл — высота рыхлящего пера или края подкапывающей ла-
пы;
/:г— глубина подкапывания корней.
Значения I и hT зависят от состояния корней, а а и йл опреде-
лены конструкцией подкапывающей лапы.
Установку подкапывающих лап относительно теребильного ап-
парата целесообразно менять в зависимости от условий работы.
На почвах связных, с малой влажностью, лапы несколько смеща-
ют назад, на рыхлых — вперед.
Глава 111
МОТОВИЛА И ПОДВОДЯЩИЕ УСТРОЙСТВА
§ 1. Назначение и типы мотовил
Назначение. Мотовило подводит растения к режущему аппа-
рату, удерживает их в период среза и подает на транспортирую-
щие устройства или к рабочим органам.
По устройству и действию мотовила бывают: с жестким креп-
лением планок — жестко-планчатое, с шарнирным параллелограм-
19—424
289
Рис. 196. Схемы мотовил:
а — жестко-планчатое; б— параллелограммное; в — копирующее; 1 — планка: 2 — луч; 3 —
крестовина; 4 — вал; 5 — стяжки; 6 — шнек; 7 — режущий аппарат; ? — труба: 9 — пружин-
ные пальцы: 10— лучи кольцевой обоймы; 11— кольцевая обойма; 12 — повод эк.
иным механизмом — эксцентриковое, или параллелограммное, и с
движением поводков планок по направляющим дорожкам — копи-
рующее.
Жестко-планчатое мотовило (рис. 196, а) состоит из вала 4,
на котором закреплены крестовины 3, жестко соединенные луча-
ми 2 с планками 1. Для придания жесткости лучи соединены стя-
жками 5.
При вращении вала планки мотовила совершают вращатель-
ное движение относительно жатки.
Мотовило такого типа удовлетворительно работает только при
уборке прямостоящего хлеба. На полеглом и путаном стеблестое
планки мотовила не поднимают и не подводят стебли к режуще-
му аппарату, что влечет за собой потери. Такое мотовило неудов-
летворительно работает и на короткостебельных культурах. Это
вызвано тем, что концы планок мотовила, перемещаясь в относи-
тельном движении по траекториям I—1, отстоят далеко от режуще-
290
го аппарата 7 и не снимают с него срезанных растений, в резуль-
тате чего они падают на землю. Наряду с этим между траекто-
рией 1—I и шнеком 6 жатки образуется некоторая зона (заштри-
хованная на рисунке), в которой скапливаются растения. Это при-
водит к неравномерному питанию последующих рабочих органов,
вызывающему потери урожая, и пульсирующую нагрузку на ра-
бочие органы машины.
Параллелограммное мотовило (рис. 196,6) состоит из вала 4,
лучей 2, обоймы 11 и труб 8 с пружинными пальцами 9.
Трубы смонтированы в подшипниках лучей (шарнир В) и кри-
вошипом шарнирно (шарнир С) связаны с лучами 10 кольцевой
обоймы.
Лучи 2 вращаются относительно шарнира .4. лучи 10— относи-
тельно шарнира D.
Расстояние между шарнирами А и D разно длине части звена
ВС, а длина АВ равна расстоянию DC. Таким образом, лучи 2 и
10, кривошип ВС трубы и неподвижное звен AD образуют парал-
лелограммный механизм .1BCD При вращении зала 4 сохраняет-
ся параллельность звеньев: АВ DC i: AD ВС. Так как звено AD
не изменяет своего положения, то звено ВС в процессе движения
остается параллельным самому себе, т. е. совершает круговое по-
ступательное движение. Так же движутся пальцы и планки, жест-
ко соединенные со звеном ВС (с трубой).
Угол а наклона пальцев можно регулировать изменением по-
ложения оси D, чем достигается оптимальная настройка мотовила
в работе при разном состоянии стеблестоя.
Параллелограммное мотовило удовлетворительно работает как
на прямостоящем, так и на полеглом стеблестое. Однако при убор-
ке короткостебельных культур оно так же, как и жестко-планча-
тое мотовило, плохо подает стебли к шнеку.
Копирующее мотовило (рис. 196, в) снабжено лучами с повод-
ками 12.
Поводки перекатываются по беговой дорожке abc, за счет
чего точки планок, закрепленных на лучах, перемещаются по
траекториям, расположенным близко к режущему аппарату 7 и
шнеку 6. Этим создается равномерное питание последующих рабо-
чих органов машины.
Такими мотовилами оборудуют жатки для уборки короткосте-
бельных сортов зерновых-колосовых, бобовых, крупяных и других
культур.
§ 2. Кинематика мотовила
Уравнение движения и траектории точек планки мотовила.
Планка мотовила совершает сложное движение: переносное вместе
с машиной со скоростью и и относительное с угловой скоростью со.
Координаты крайней точки планки мотовила (по аналогии с рас-
смотренным в главе VI первого раздела) могут быть выражены
19’ 291
Рис. 197. Траектории движения точек конца планки мотовила:
а — укороченная циклоида; б — удлиненная циклоида.
следующими уравнениями:
,г—г (ср — cost;).
// = .'• Sin q,
(165)
(166)
где г — радиус мотовила;
X—показатель кинематического режима. 7. = п'й’;
и=ыг —линейная скорость конца планки мотовила.
Как отмечалось, траектория, определяемая уравнениями (165)
и (166), представляет собой циклоиду. Форма циклоиды зависит
от значения X: при Х< 1 будет она укороченной (рис. 197,а), при
Х> 1 — удлиненной (рис. 197, б).
В укороченной циклоиде проекция скорости Що абсолютного
движения конца планки на ось X по всей траектории направлена
в сторону движения машины. В этом случае стебли отклоняются
мотовилом от режущего аппарата, т. е. мотовило неработоспо-
собно.
При удлиненной циклоиде, на участке петли АСВ, проекция
скорости Паб направлена в сторону, противоположную движению
машины. На этом участке планки мотовила подводят стебли к ре-
жущему аппарату.
Таким образом, чтобы мотовило было работоспособным, необ-
ходимо иметь удлиненную циклоиду движения точек конца план-
ки, т. е. 1.
Скорости точек планки мотовила. Продифференцировав урав-
нения (165) и (166) по углу поворота ф, получим следующие выра-
жения для проекции скорости абсолютного движения точек конца
292
планки мотовила на оси X и Y:
их=г (1/X—sin (f) d<f/dt,
dtp
Заменяя dtp/dt на со и га на и, получаем
ux—v—«sin ср,
uy=uc.osq.
(167)
Тогда скорость uz6 абсолютного движения легко найти из сле-
дующего выражения: иаб~1
Заменяя их и иу их значениями (167) и преобразуя выражение,
имеем
ыаб=и] 1— 2Asincf-Z2. (168)
Определим скорость планки в точке .4 петли циклоиды. До точ-
ки А планки отклоняли стебли с-т режушег аппарата, а после
нее стали подводить к нему. Скорость абсолютного движения в
этой точке направлена вниз, а горизонтальная составляющая иХ\
абсолютной скорости равна нулю, т. е.
UXA ~V—« sin срл = 0 или и sin срл = V.
Выражая скорости через соотношения X, находим
sin срл = 1/X.
(169)
Как видно из выражения (168), в пределах рабочей части пет-
ли наибольшая абсолютная скорость соответствует точка)’
А и В.
Решая совместно уравнения (168) и • получаем следую-
щее. выражение для определения скорости и-. конца планки мото-
вила в точке ,4:
(/л=ДКД (170)
Если планка входит в хлеб в положении, соответствующем точ-
ке А петли, то она ударяет по колосу со скоростью ил. Эта ско-
рость не должна превосходить некоторое предельное значение ия,
чтобы устранить вымолот зерна мотовилом, и, следовательно, по-
тери свободным зерном, т. е.
Подставляя это неравенство в выражение (170) и решая, имеем
Х^] Пд/г2Н-1.
(171)
Из этого выражения следует, что если исходить из потерь сво-
бодным зерном за жаткой, то с увеличением скорости движения
машины соотношение скоростей 7. можно уменьшать.
293
Заменяя в зависимости (171) X на и/и, получаем
(172)
т. е. при постоянном значении ид скорость и конца планки мото-
вила в относительном движении может быть тем больше, чем вы-
ше скорость движения машины. Это говорит о том, что при рабо-
те машин на повышенных скоростях (раздельная уборка) скоро-
сти вращения планки мотовила могут быть увеличены.
На вымолот зерна из колоса оказывает влияние число ударов
планок о хлебостой на 1 м пути. Чем больше ударов, тем выше
потери. Количество ударов зависит от скорости и числа планок
мотовила. Так как на повышенных скоростях скорость планки
может быть принята большей, то при одинаковом количестве k
ударов число планок мотовила необходимо уменьшить.
Установлено, что потери свободным зерном при работе рядко-
вой жатки с трехпланчатым мотовилом на скоростях 10... 12 км/ч
в 1,5...2 раза меньше, чем при уборке хлеба машиной с пятиплан-
чатым мотовилом.
Следовательно, проблема повышения рабочих скоростей жат-
венных машин требует снижения числа планок мотовила или же
создания безмотовильной жатки, обеспечивающей высококачест-
венную работу на скоростях 0.8...3 м/с.
Шаг мотовила. Шаг есть расстояние Sz (рис. 197, б) между
одинаковыми точками двух соседних циклоид.
Величина S, может быть определена из выражения:
S2=SM/z,
где 5М —перемещение машины за время одного оборота вала мо-
товила;
z — число планок мотовила.
Так как SK = vt=v2n/a, то получим
5г = (2л/и) (у/а)
или
Sz=(2a/zl)r. (173)
Отсюда вытекает, что шаг мотовила изменяется прямо пропор-
ционально радиусу мотовила; с увеличением отношения скоростей
X и числа z планок шаг уменьшается.
От значения шага зависит число k ударов планкой по стеблям
на 1 м пути движения машины, т. е.
k = l/Sz=zK/2nr. (174)
§ 3. Коэффициент полезного действия мотовила с ножом
Под коэффициентом полезного действия (к. п. д.) взаимодейст-
вия мотовила с ножом понимается показатель щ характеризую-
щий ширину полосы стеблей, которые срезает нож при воздей-
ствии планки мотовила.
294
Показатель ц выражают от-
ношением ширины Ьа к шагу S2
мотовила, т. е. ц = йд/5г.
Определим ширину b полосы
стеблей, срезаемых ножом при
воздействии мотовила на редком
стеблестое. Пусть мотовило ра-
ботает на прямостоящем стебле-
стое длиной L (рис. 198). При-
мем, что конец планки мотовила
входит в стебли в точке А, для
которой «ХА = О.
При работе конец планки,
двигаясь по циклоиде АВС, за-
хватывает стебли и наклоняет
их. Первым встречается с план-
кой стебель А0А. Без учета де-
формации он будет находиться
под воздействием планки при
движении ее конца от точки А
до А5. Точка Ai определяется
пересечением дуги радиусом АА0,
равным длине растения L, с
ветвью ВС циклоиды.
Если стебли не будут срезаны при движении конца планки вы-
ше точки At, то они вернутся в исходное положение. Чтобы этого
не произошло, необходимо закончить срез раньше, чем конец
планки мотовила попадет в точку Аь Следовательно, режущий ап-
парат должен быть расположен по крайней мере в точке D. Если
не учитывать взаимодействия стеблей, то начало их среза ножом
с участием мотовила соответствует точке F, когда конец Е планки
и нож располагаются на одной вертикальной линии. Тогда шири-
ну Ъ полосы стеблей, срезаемых ножом при воздействии планки
мотовила, определим из выражения: Ь = лм.—х?.
Исходя из уравнений (165) и (166), координаты точек А и Е
по оси Л' будут следующими:
хЛ==г/со5фЛ Д-1 фЛ xE=r (coscp£4-J-gJ.
Так как sinq)4 —1/X, ф£=л/2Ду, то, решая, получаем
хл = гД (1za2— 1 -Larc sin IД), хЛ=~гД (—X sin у-+-я/2 Ду).
Подставляя значения x.t и хЕ в выражение для Ь, находим
й=гД(| л2—1 Дагсзпт l/Z-f-lsiny—л/2—у).
В тот момент, когда конец планки мотовила придет в точку Е,
ось вала мотовила будет в точке О3. Расстояние между точками F
295
0 Oj 0,2 0,3 Ofr С, M
и 03 по горизонтали принято
называть выносом вала мото-
вила относительно режущего
аппарата. Обозначим его бук-
вой с.
Как видно из рисунка, вы-
нос вала мотовила c = r sin у.
Тогда, подставляя sin у в
выше приведенное выражение,
имеем
6=г/л(| /,2—1 ---arc sin 1 /X—
— л/2 -L- 7.с 'г—arc sin с/г).
Рис. 199. Зависимость к. п. д. мотови-
ла т]> числа ударов k и абсолютной
скорости г.'аб от показателя кинематиче-
ского режима 7. и выноса вала мотови-
ла с:
На густом хлебостое стеб-
ли, наклоняемые планкой мо-
товила, увлекают за собой дру-
гие, расположенные на иеко-
ыаб W; 2 — П(Х); 3 —Л(Х); 4 —H(c). ТОрОМ рЭССТОЯНИИ ОТ ПЛЭНКИ.
Тогда ширина полосы стеб-
лей, на которую действует планка, будет больше b на некоторую
величину, т. е. Ьа=Ьк, где е — коэффициент, учитывающий взаи-
модействие стеблей.
Значение коэффициента е зависит от густоты стояния растений,
высоты стеблестоя, глубины погружения планки в хлеб и жестко-
сти стеблей. На густом длинном стеблестое е больше, чем на ред-
ком и коротком. Принимают е= 1,0...1.7.
Подставляя Ьл и S? в выражение для ц, получаем
i]=ze/2jT (]/Х2—1 -}-агс sin 1/Х—л/2-[-ск/г—arcsinc/r). (175)
Из этого выражения следует, что степень полезности мотовила
зависит как от конструктивных (z, г), так и от эксплуатационных
(X и с) параметров.
С увеличением числа планок т] растет; изменение радиуса мо-
товила незначительно влияет на величину тр
На рисунке 199 показано, как изменяется к.п.д. мотовила в за-
висимости от X и выноса с вала мотовила при z = 5, е=1, г=0,6 м.
С возрастанием Z и с увеличивается тр Наибольшее влияние на
рост 1] оказывает 2,. Так, с увеличением X от 1,3 до 2,1 т] изменяет-
ся почти в 5 раз. При значениях Х= 1,3...1,4 только 22...30% стеб-
лей срезается при воздействии планок мотовила.
Для работы мотовила совместно с ножом следует добиться та-
кой регулировки, при которой т] будет приближаться к 1. При ра-
боте на густом стеблестое следует учитывать влияние взаимодей-
ствия стеблей.
296
§ 4. Установка и режим работы мотовила
Высота установки вала мотовила. По высоте мотовило следует
устанавливать так, чтобы планки не отклоняли стебли в сторону
движения машины, а стебли не переваливались через планку и не
перебрасывались через ветровой щит жатки.
Первое требование выполняется в том случае, когда конец
планки мотовила входит в стеблестой (рис. 198) в точке А, для
которой sin срЛ = 1 /X.
Исходя из этого условия, имеет (рис. 200,а):
h=r/K-\-l, (176)
где h — высота установки вала над режущим аппаратом;
I — длина срезанной части растения.
Растение не будет переваливаться и перебрасываться планкой
при условии, если центр его тяжести (точка О-) в момент среза
будет находиться ниже внутренней кромки (точка Л')-
Из чертежа, изображенного на рисунке 200, имеем
h^r-bn~l-lv (177)
где Ьп — ширина планки мотовила;
/ц — расстояние от центра тяжести растения до его вершины.
Для стеблей с длиной 0,5...2 м
/ц=/2/1,б (1-ф/).
Высота /т установки вала мотовила должна удовлетворять ус-
ловиям (176) и (177).
В отдельных случаях планки мотовила уширяют, т. е. к их
внутренним кромкам прикрепляют легкие сетки или ткань.
Вынос вала мотовила. Расстояние с от режущего аппарата до
осп вала мотовила по горизонтали может быть разным. Этот раз-
мер оказывает влияние: на коэффициент полезного действия мото-
вила с ножом, на качество очистки режущего аппарата от срезан-
ных растений и на подачу их к шнеку.
Рис. 200. Схемы к расчету высоты установки а и
выноса б вала мотовила.
297
О влиянии с на коэффициент полезного действия мотовила с
ножом рассказано ранее. Как следует из рисунка 199, смещением
вала вперед по ходу машины на 0,4 м от режущего аппарата мож-
но увеличить коэффициент т] почти в 2 раза. Смещением вала на-
зад от линии ножа ?] уменьшают.
Очистка режущего аппарата от растений и подача их к шнеку
зависят от положения траектории 1 (рис. 200.6) относительного
движения конца планки мотовила. Чем ближе траектория к ножу
(расстояние а), тем эффективнее очистка. Сокращение расстоя-
ния е, определяющего положение мотовила относительно шнека,
улучшает подачу растений к нему.
Из чертежа видно, что
d = yhr±72—г, (178)
е-Гй2+(?±с-/-ш72 ~г, (179)
т. е. расстояния d и е тем меньше, чем меньше вынос с вала мо-
товила вперед от режущего аппарата и меньше высота h располо-
жения вала мотовила над ножом.
На короткостебельном хлебостое вал мотовила устанавливают
так, чтобы траектория движения конца планки была расположена
как можно ближе к режущему аппарату, чтобы режущий аппарат
лучше очищался и масса равномернее подавалась к шнеку. На
полеглом хлебе вал мотовила выносят вперед и опускают ниже.
При этом коэффициент р необходимо увеличить, повысив X.
В жатках некоторых комбайнов даже минимально возможные
c?min и emin не создают эффективную очистку ножа и подачу массы
к шнеку, что приводит к повышенным потерям срезанными расте-
ниями и к неравномерной подаче их в молотилку.
Кинематический режим работы мотовила. Планки мотовила,
воздействуя на растения, наносят удар по колосу. При большом
ударном импульсе часть зерен выбивается, что приводит к поте-
рям.
Потери зерна зависят от скорости uz& движения точек планки
мотовила и от числа k ударов планкой по стеблям на 1 м
пути.
Как видно из выражений (168) и (174), скорость иге и число k
зависят от показателя X. На рисунке 199 дана зависимость паб и k
от показателя X при z=5, г=0,6М и п=1 м/с. Так, при измене-
нии X от 1,3 до 2,1 скорость паб увеличилась в 2,3 раза, а число
ударов k — в 2 раза. В этом же диапазоне изменения X коэффи-
циент полезного действия мотовила с ножом может быть увели-
чен в 5 раз.
Для оптимальной работы мотовила с ножом показатель »] дол-
жен быть равен 1. В этом случае потери колосьев за жаткой будут
меньше, чем при т]< 1.
При работе показатель X выбирают с учетом конкретных усло-
вий, оценивая при этом влияние иаб и k на потери зерна. Измене-
298
ние показателя достигается вариатором
частоты вращения, действующим от гид-
равлического устройства.
Наклон пальцев параллелограммнсго
мотовила. На прямостоящем хлебе к
мотовилу присоединяют планки, а на
полеглом используют пальцы без пла-
нок.
Пальцы устанавливают под углом а
к вертикали (рис. 201), что способству-
ет подъему и подводу полеглых стеблей
к режущему аппарату.
Значение угла а выбирают таким,
чтобы растения скользили по пальцу
Рис. 201. Схема к опреде-
лснп:о делгтзся пальца мо-
товила на растения.
или планке при погружении их в хлебо-
стой, а не пригибались пальцами вниз.
Для скольжения необходимо, чтобы
угол р между нормалью N к зубу и направлением абсолютной ско-
рости Паб был больше угла трения стебля о палеи, т. е. Р^ср.
Как следует из рисунка 201. р = .т 2~ а—О. Угол 6 находим из
выражения:
cos Q=uy/ua6.
Принимая иу и «аб из выражений (167) и (168) при <р=оК по-
лучаем
cos 6
X cos at
/1 — 2Z sine»/Д-7.2'
Подставляя 6 в выражение для р, имеем
Р=л/2 4- ос—arc cos
11
X cos at
27. sintuZ -у 7.2’
Решая, находим следующее неравенство для определения уг-
ла а:
— л/2-у arc cos
7. cos at
! 1—2Xsin<M-j-7?
Когда планки входят в стебли в точке А (рис. 201), где sin of —
= 1/2., имеем
а ср, (180)
т. е. угол наклона пальцев должен быть больше угла трения рас-
тений о пальцы. Однако при больших значениях угла возможно
наматывание стеблей и перебрасывание их через борт жатки. Ес-
ли это явление наблюдается, угол уменьшают.
Часто длинные стебли, упираясь в задний борт жатки, зависа-
ют над шнеком. Для устранения этого мотовило устанавливают
так, чтобы планка прижимала стебли к шнеку. Тогда целесообраз-
299
но отклонить планку от вертикали в сторону, противоположную
вращению вала мотовила. Это делают при уборке длинностебель-
ных культур.
§ 5. Подвод стеблей цепями
Секционно-зажимные подводящие устройства применяются в
ручьевых жатках при уборке длинностебельных культур, напри-
мер кукурузы, конопли и др.
Зажимные подводящие устройства бывают цепочные и ремен-
ные.
На рисунке 202 показана схема секции подводящего устройст-
ва жатки кукурузоуборочного комбайна. Устройство подводит
стебли к режущему аппарату и удерживает их в период среза, а
затем транспортирует стебли вдоль ручья и подает их в отрывоч-
ный аппарат.
Каждая секция снабжена мысовыми 7 и подающими 4 цепями.
Мысовые цепи направляют к рабочему руслу стебли, отклоненные
от оси рядка, а подающие подводят их к режущему аппарату и
транспортируют к отрывочным вальцам. Рабочие ветви подающих
цепей прижаты одна к другой. Каждая цепь огибает ведомые 6
и ведущие 1 звездочки, натяжные 2 и амортизационные 3 ролики.
Цепи располагают в один, два или в три яруса с наклоном к
горизонту под углом 28...45°. Для упрощения и облегчения конст-
рукции в некоторых жатках один из контуров цепей заменяют
прутком или прижимной полосой.
В жатках для уборки : ол. к.щводяших и транспорти-
рующих устройств выполняют два влзтиих бесконечных ремня,
сопряженные ветви которых образуют ручей. Стебли, попавшие в
ручей, зажимаются между ремнями и подводятся к режущему ап-
парату. После среза растений ручей транспортирует их к последу-
ющим рабочим органам.
Рабочий процесс мысовых цепей. Рассмотрим процесс подачи
стеблей в рабочее русло на примере мысовых и подающих цепей
кукурузоуборочного ком-
байна.
Стебли, отклоненные
от линии аа (рис. 203)
рабочего русла, захваты-
ваются лапками мысовых
цепей. В зоне тт лапки
подводят их к рабочей
ветви подающих цепей.
Далее стебли соскальзы-
вают с лапок (зона тс)
и подающие цепи заводят
их в русло.
Параметры мысовых
цепей и их режим работы
Рис. 202. Схема секции подводящего уст-
ройства жатки кукурузоуборочного ком-
байна:
/ — ведущие звездочки; 2— натяжные ролики; 3 —
амортизационные ролики; 4 — подающие цепи;
5 — пружина; 6 — ведомые звездочки; 7 — мысо-
вые цепи.
300
Рис. 203. Схема подачи стеблей в рабочее русло
мысовыми цепями.
должны быть такими, при которых стебли не соскальзывают с
лапок в процессе подвода и не затаскиваются при выходе лапок
из рабочей зоны русла.
Рассмотрим взаимодействие лапок со стеблем в зоне ^подвода
стеблей (точка А) и в зоне выхода лапок (точка В).
Пусть рабочая ветвь мысовых цепей в зоне подвода стеблей
составляет угол а с линией движения машины, а в зоне выхода —
«ь Лапка совершает сложное движение с абсолютными скоростя-
ми има и имв. К линии движения машин эти скорости направле-
ны под углами р и рь
Тогда условие подвода без скольжения будет е^ф, а условие
выхода лапки без затаскивания стеблей — Ei^tp, где е и ei — уг-
лы между нормалью N к рабочей плоскости лапки соответственно
в точках А и В и направлением скоростей иМд и ими; ф— угол тре-
ния стебля о лапку.
Выражая е и ei через углы a, со, р, pi и у, получаем
е=л/2—у—р-|-а<; ф,
Е± = Л /2 — у + рг — О!1 > ф.
Из треугольников ADE и BFG соответственно имеем
tgP
им sin а
им cos а — v
tgpl
им sin аг
им cos ocj — v ’
Принимая uMlv=K, получаем зависимости между геометриче-
скими и кинематическими параметрами мысовых цепей, выражаю-
щие следующие условия:
301
движения лапки в зоне подвода без скольжения по стеблям
- arcts тДДг+^'2-т+«<ч>; (181>
выхода лапки без затаскивания стеблей
агс х^^г+я/2 -V-«i > Ф- <182>
При заданных значениях а, у, ai и <р из выражений (181) и
(182) определяют предельные значения показателей ь, которые
удовлетворяют требованиям работы мысовых цепей.
Глава IV
РЕЖУЩИЕ АППАРАТЫ
§ 1. Конструктивные и регулировочные параметры
Принципы среза растений и типы режущих аппаратов. В осно-
ву работы режущих аппаратов положены бесподпорный и подпор-
ный принципы среза.
Бесподпорные режущие аппараты— это ротацион-
но-дисковые (рис. 204, а) и ротационно-барабанные (рис. 204,6).
Режущие элементы этих аппаратов — ножи 2 и 3, шарнирно соеди-
ненные с диском 1 или барабаном 4. Растение при срезе не полу-
чает подпора от элементов машины, отгиб его ограничивается же-
сткостью стебля, его инерцией и частично подпором соседних стеб-
лей.
Режущие аппараты бесподпорного резания не имеют возвратно-
движущихся частей. Ножи таких аппаратов совершают вращатель-
ное движение (с линейной скоростью 50...60 м/с) вместе с диском
или барабанами. Это дает возможность значительно увеличить ра-
бочие скорости движения косилок и жаток, что лежит в основе
современных тенденций повышения производительности труда.
Аппараты бесподпорного резания просты по устройству и на-
дежны в работе, однако наряду
Рис. 204. Схемы режущих аппаратов
бесподпорного среза:
а — ротационно-дисковый; б — ротационно-
барабанный; 1 — диск; 2 и 3 — ножи; 4 —
барабан; 5 — щит.
со срезом в них наблюдается не-
желательное измельчение стеб-
лей, велики энергозатраты на
единицу убранной площади, ма-
шины (косилки) с такими аппа-
ратами металлоемки. Дополни-
тельное измельчение стеблей при-
водит к повышенным потерям.
Ротационно-дисковые аппара-
ты применяют в машинах для
обкосов, в газонных косилках и
машинах для среза высокоуро-
жайных полеглых трав.
302
Ротационно-барабан-
ные режущие аппараты
находят применение в ма-
шинах для уборки силос-
ных культур с измельче-
нием растений.
Режущие аппара-
ты подпорного ре-
зания бывают сегмент-
но-пальцевые и беспаль-
цевые (рис. 205). Стебель
при срезе опирается на
элементы машины.
В сегментно-пальце-
Рис. 205. Аппараты подпорного среза:
а — сегментно-пальцевый; б — беспальцевый; 1 — па-
лец; 2 — сегменты.
вых аппаратах режущая пара — сегмент 2 (рис. 205, а) и противо-
режущая пластина пальца 1. Сегмент подводит растение к проти-
ворежущей пластине и, защемляя его в растворе этих элементов
аппарата, срезает. В момент среза стебель опирается одновремен-
но о противорежущую пластину (точка Д) и о перовидный отро-
сток пальца (точка В), т. е. о две опоры. Это уменьшает опасность
изгиба стебля и тем самым повышает надежность среза, особенно
тонкостебельных растений, которые имеют малую жесткость.
При уборке толстостебельных культур (конопля, подсолнечник,
кукуруза) две опоры стебля при срезе отрицательно влияют на
срез.
Врезаясь в толстый стебель, сегменты защемляются надре-
занным стеблем. При двух опорах защемление значительно воз-
растает, что резко увеличивает усилия, действующие на сегмент
и палец. Это, в свою очередь, ослабляет крепления и вызывает по-
ломки пальцев и сегментов. Поэтому в режущих аппаратах для
уборки толстостебельных культур целесообразно применять паль-
цы без перовидных отростков.
Сегментно-пальцевые режущие аппараты срезают растения на
скоростях 1,5...3 м/с. Они не измельчают растения и менее энер-
гоемки, чем аппараты бесподпорного резания. Такие аппараты на-
ходят широкое применение в косилках и жатках. Однако возврат-
но-поступательное движение ножа вызывает знакопеременные
инерционные усилия, что ограничивает значительное повышение
рабочих скоростей косилок и жаток.
В беспальцевом аппарате (рис. 205,6) режущая пара — два
сегмента, срезающие растение с опорой в одной точке А. Такие
режущие пары меньше забиваются при уборке спутанных и полег-
лых растений. Однако из-за отгиба носков сегментов в процессе
работы такие аппараты также склонны к забиванию. В них за-
труднена замена поврежденного сегмента. Применяют одно- и
двухножевые аппараты: в одноножевом подвижен только один
нож, а в двух оба ножа совершают оппозитивное движение, бла-
годаря чему увеличивается равновесие всей машины. Перемеще-
303
Рис. 206. Типы сегментно-пальцевых режущих аппаратов:
а — нормального резания с одинарным пробегом ножа; б — нормального резания с двойным
пробегом ножа; в — низкого резания; г — среднего резания.
ние каждого ножа в таком аппарате в 2 раза меньше, чем в одно-
ножевом, за счет чего уменьшаются силы инерции, действующие
на нож. Однако косилки с двухножевым аппаратом имеют слож-
ную конструкцию привода ножей.
Типы сегментно-пальцевых аппаратов. Сегментно-пальцевые ре-
жущие аппараты характеризуются следующими геометрическими
и кинематическими параметрами (рис. 206): t — шаг режущей
части — расстояние между осевыми линиями сегментов; t0 — шаг
противорежущей части — расстояние между осевыми линиями
пальцев; S — ход ножа — перемещение ножа из одного крайнего
положения в другое.
В зависимости от соотношения указанных параметров разли-
чают аппараты нормального резания с одинарным пробегом ножа,
нормального резания с двойным пробегом ножа, низкого резания
и аппарат среднего резания.
Аппарат нормального резания с одинарным
пробегом ножа (рис. 206,а) имеет следующие соотношения
указанных параметров: Z=/o=S = 76,2 мм или 90 мм,.
304
Аппарат с шагом 76,2 мм применяют в косилках, в жатках для
среза трав, зерновых и технических культур, а с шагом 90 мм —
для среза кукурузы, подсолнечника и других толстостебельных
культур.
Аппарат нормального резания с двойным про-
бегом ножа (рис. 206,6) имеет такие соотношения парамет-
ров: 2t=2t0 = S = 152,4 мм или 101,6 мм.
Режущий аппарат с размером 152,4 мм находит применение как
в косилках, так и в жатках, аппарат с размером 101,6 мм — в ко-
силках для степных трав.
Аппараты нормального резания с некратным,
ходом ножа имеют kt = kt0—S, где 1</?<2.
В режущих аппаратах валковых жаток указанные параметры
имеют следующие значения: ^ = /0=76,2 мм, 5 = 140 мм, £=1,84.
Режущий аппарат низкого резания (рис. 206, в)
характеризуется таким соотношением: Z = 2/o=S = 76,2 мм или-
101,6 мм.
В первом варианте аппарат применяют в косилках, во втором—
в прицепных комбайнах.
Аппарат среднего резания (рис. 206, г) имеет соотно-
шение: t=kt0=S = 76,2 мм или 101,6 мм, где 1,2<£<1,4.
Режущий аппарат с параметрами первого варианта встречается
в зарубежных косилках.
Сравнительные показатели указанных режущих аппаратов при-
ведены ниже.
Конструкция режущего аппарата. На рисунке 207 показана'
конструкция режущего аппарата сегментно-пальцевого типа. Ре-
жущая часть — сегменты 7 — приклепаны к спинке ножа 6. Проти-
ворежущие пластины 8 закреплены на пальце 9. Пальцы болта-
ми 2 привертывают к пальцевому брусу 1. Для придания жестко-
сти креплению пальцы снабжены упорами 10.
В собранном виде нож передними основаниями сегментов опи-
рается на протпворежущне пластины, а задними— на пластины
трения 3.
Пластины <3 предохраняют пальцевый брус от износа. Отвер-
стия под болты крепления пластин трения сделаны увеличенного
диаметра. Это необходимо для их перемещения, чтобы до-
стичь прилегания каждой пластины трения к спинке ножа. Воз-
можное отставание (отход вверх) сегментов от противорежущих
пластин ограничивается прижимными лапками 4. Зазор между
лапками и сегментом не должен превышать 0,5 мм. Указанный за-
зор достигается отгибом лапок.
Сегменты, противорежущне пластины и пластины трения ре-
жущих аппаратов изготавливают из стали У9А. Лезвия сегментов
и противорежущих пластин подвергают закалке и отпуску до твер-
дости HRC 50...56 на ширину не более 40 мм у переднего основа-
ния и 10...15 мм по боковым сторонам. Твердость в незакаленной
части составляет HRC 35 (не более).
20—424
305
Рис. 207. Сегментно-пальцевый режущий аппарат:
1 — пальцевый брус; 2 — болт; 1 — пластина трения; 4 — прижимная лапка; 5 — заклепказ
6 — спинка ножа; 7 — сегмент; 8 — противорежущая пластина; 9 — палец; 10 — упоры.
Соприкасающиеся поверхности противорежущих пластин, сег-
ментов и пластин трения шлифуют (шероховатость поверхности
Ra 1,25...0,63 мкм). Спинку ножа изготавливают из стали 35; при-
жимные лапки — из ковкого чугуна марки КЧ 33-8; поверхность, в
которую может упираться сегмент, шлифуют.
Угол заточки и острота лезвия сегмента. Угол заточки и остро-
та лезвия сегментов влияют как на защемление и резание стеб-
лей, так и на износоустойчивость лезвия. Чем меньше угол заточ-
ки и больше острота лезвия, тем больше режущая способность
сегмента. Износоустойчивость выражает интенсивность, с которой
происходит затупление лезвия. Сегменты с малым углом заточки
и с острыми лезвиями затупляются быстрее. Оптимальный угол
составляет 19...25°, а острота лезвия сегмента — 25...30 мкм.
Допускается работа режущих аппаратов до тех пор, пока тол-
щина лезвия сегмента не возрастет до 80 мкм для трав и до
120...130 мкм для зерновых культур. Требуется затачивать сегмен-
ты через каждые 3...4 ч, закалка ТВЧ лезвия сегмента увеличи-
вает продолжительность его работы между заточками.
Насечки режущей грани сегмента. Режущие грани сегментов
бывают гладкими и насеченными сверху или снизу. Насечка пре-
дотвращает выскальзывание растений как при их подводе сегмен-
том к противорежущей пластине, так и при защемлении в режу-
щей паре. Если насечка сделана с шагом, близким к диаметру
стебля, то материал растения будет заклиниваться в промежутках
между зубьями насечки, что вызовет забивание режущих аппара-
тов и возрастание силы, потребной для среза. Чтобы этого не слу-
чилось, насечку делают с шагом, в 2...3 раза меньшим, чем диа-
306
Рис. 208. Зазоры в режущей паре:
а — сегмент меньшим основанием свободно опирается на противорежущую пластину; б
сегмент не опирается на противорежущую пластину и установлен с зазором.
метр стебля. У зерновых культур и сеяных трав диаметр стебля
достигает 2...4 мм, а у типчаково-ковыльных степных трав —
0,4 мм. Поэтому для сегментов жаток шаг насечки выбирают рав-
ным 1...1.2 мм, а для ножей косилок — 0,2...0,3 мм. Насечка с ша-
гом 0,2...0,3 мм получается при заточке сегментов на станках с
крупнозернистыми абразивными кругами.
Сегменты с нижней насечкой затаскивают частицы растений в
зазоры режущей пары. Это увеличивает трение и повышает энер-
гозатраты на срезание стеблей. Однако сегменты с нижней насеч-
кой можно восстанавливать путем заточки, что нельзя сделать при
верхней насечке.
Зазоры в режущей паре. От зазоров зависят качество среза,,
энергозатраты на срез и износ лезвий режущей пары.
Для высококачественной работы сопротивление ДСр срезу долж-
но быть меньше сопротивления Яиз изгибу, т. е. 7?ср<Лиз.
Сопротивление изгибу интенсивно уменьшается с ростом зазо-
ра в режущей паре. При большом зазоре сопротивление стеблей
изгибу может стать меньше сопротивления срезу, тогда стебель
будет не срезаться, а сгибаться и затягиваться между сегментом
и противорежущей пластиной. Опасность этого явления увеличи-
вается на более высоком срезе. Затаскивание стеблей в зазоры
режущей пары не только снижает качество среза, но и повышает
энергозатраты на привод ножа.
Возможны следующие варианты установки сегмента относи-
тельно противорежущей пластины. Сегмент под действием собст-
венной массы передним основанием (точка А, рис. 208, а) свобод-
но опирается на противорежущую пластину, а задним — на пласти-
ну трения (точка В), зазор а при этом находится в пределах.
0,3...1,0 мм. Так как нож лежит свободно, то при сбегании сегмен-
та он своим передним основанием свешивается ниже плоскости
противорежущей пластины, при этом лезвия сегмента и вкладыша
соприкасаются в одной точке и зазор при резании равен нулю.
Такая установка способствует высококачественному срезу, одна-
ко из-за трения в точке касания неизбежен износ лезвий режущей
пары. Следует отметить, что указанная установка сегмента воз-
можна только для лезвий и пластин без насечки.
Для сегментов и противорежущих пластин с насечкой целесо-
образно другое расположение (рис. 208,6), т. е. такое, при кото-
ром сегменты не опираются на противорежущие пластины, а уста-
20*
ЗОГ
мовлены относительно последних с зазором у меньшего основания
до 0,3 мм, а у большего основания противорежущей пластины —
до 1 мм.
§ 2. Механизмы привода ножа
Для привода ножа используют как плоские, так и пространст-
венные механизмы.
Кинематические схемы механизмов показаны на рисунках 209
« 210.
Кривошипно-ползунный механизм (рис. 209) применяют для
лривода ножа косилок и жаток. Ось А вала кривошипа 1 смещают
выше линии движения ножа 3 на некоторое расстояние h, назы-
ваемое смещением (дезаксиалом). Смещение зависит от конструк-
ции машины и условий ее эксплуатации.
В жатках и в режущих аппаратах комбайнов кривошипный вал
и нож расположены на одной жесткой раме. Все звенья в таком
механизме перемещаются в одной плоскости; механизм называ-
ется плоским (рис. 209,о). При этом смещение выбирают таким,
чтобы нижняя точка траектории шарнира В была выше линии дви-
жения ножа. В противном случае кривошип будет заходить в стер-
ню и наматывать на себя растения.
Для жаток и комбайнов й=(2...3)г, где г — радиус кривошипа.
В косилках (рис. 209,6) пальцевый брус в рабочем состоянии
башмаками опирается на поверхность поля. Чтобы он мог копиро-
вать рельеф поля, сто шарнирно соединяют тяговой штангой с
рамой косилки. Из-за упругих деформаций тяговой штанги и за-
зоров в шарнирах пальцевый брус (на рисунке 209,6 шарнир D)
•отходит назад (перпендикулярно плоскости чертежа). Движение
ножа и пальца кривошипа происходит в разных плоскостях, что
вызывает дополнительные усилия в звеньях механизма.
Чтобы устранить появление дополнительных сил, полевой конец
пальцевого бруса перед началом работы выдвигают вперед по хо-
ду машины на некоторое расстояние с, т. е. располагают пальце-
вый брус под углом к плоскости вращения кривошипа. Тогда при
движении машины полевой конец пальцевого бруса отойдет на-
зад; плоскости движения ножа и пальца кривошипа совпадут.
Изменение положения пальцевого бруса в горизонтальной плоско-
сти и вызывает необходимость иметь в механизме привода коси-
лок шаровые шарниры В и С. Это позволяет звеньям механизма
совершать перемещения в разных плоскостях, поэтому механизм
привода косилок не плоский, а пространственный.
В косилках кривошипный вал нельзя разместить на пальцевом
брусе, поэтому ось кривошипа располагают на раме машины. Сме-
щение h выбирают таким, чтобы выдержать необходимый дорож-
ный просвет между кривошипом и почвой. В косилках h= (7...8)г.
Смещение h влияет на выбор длины I шатуна. Чем больше сме-
щение, тем больше угол р шатуна с горизонталью. С увеличением
308
Рис. 209. Схемы кривошипно-ползунных механизмов привода ножа:
л — плоский; б — пространственный; / — кривошип; 2~ шатун; 3 — нож.
Рис. 210. Схемы пространственных механизмов привода ножа:
а — с коромыслом; б — с колебательным валом; в — качающаяся шайба; г — качающаяся
вилка; 1 — кривошипные валы; 2 — шатуны; 3 — коромысло; 4 — соединительное звено; 5 —
ножи; 6 — вилка; 7 — шайба; 8 — вилка; 9 — крестовина; 10 — уравновешивающий груз.
угла растут вертикальные составляющие сил, действующих на нож
и пальцевый брус, что увеличивает силы трения в режущем аппа-
рате.
Чтобы уменьшить указанные силы в механизмах привода с
большим смещением, выбирают более длинные шатуны.
В жатках и комбайнах длина шатуна I— (9...10)г, а в косилках
/=(15...25)г.
Шестизвенный пространственный механизм ABCDEFG (рис.
210, а) привода ножа применяют в комбайнах и валковых жатках.
Палец кривошипа 1 перемещается относительно оси вала. Шар-
ниры С и Е коромысла 3 совершают колебательное движение от-
носительно неподвижной оси вращения D в плоскости, перпенди-
кулярной этой оси. Шатун 2, соединяющий кривошип 1 и коромыс-
ло 3, совершает сложное движение в двух плоскостях, поэтому он
с коромыслом соединен шаровым шарниром С. Движение ножа и
колебания коромысла происходят также в разных плоскостях,
поэтому они связаны звеном 4 через шаровые шарниры.
Коромысло, действуя на нож, не только приводит его в коле-
бание, но и прижимает к направляющим. Сила прижатия зависит
от установки оси шарнира D. Когда ось оо симметрии сегмента
находится на одинаковом расстоянии от осевых линий пп и шт
пальцев, ось шарнира должна быть установлена в такое положе-
ние, при котором нож 5 и звено 4 располагаются на одной линии.
Такая установка уменьшает силу нормального действия на нож
при отклонении звена 4.
Длину шатуна в указанных механизмах привода принимают
(15...20)г. Плечи коромысла выбирают в зависимости от хода
ножа, а также исходя из конструктивных возможностей.
Рассмотренный механизм применяется для привода ножа фрон-
тальных жаток. Механизм привода размещают с правой стороны
машины. Применение таких жаток на обкосах и прокосах не реко-
мендуется, так как приводит к наматыванию растений на движу-
щиеся звенья механизма привода.
Механизм с водилом— ABCEFG (рис. 210,6)—нашел приме-
нение в жатках с фронтальным расположением ножа.
Такой механизм передает движение ножу не сбоку, а в цент-
ральной его части. Водило EF и другие звенья механизма могут
быть расположены между ведомой и ведущей ветвями транспор-
тера, что препятствует наматыванию растений на звенья меха-
низма.
Механизм «качающаяся шайба» (рис. 210, в) представляет со-
бой следующее. На коленчатую ось 1 насажена шайба 7. Ось шай-
бы расположена под углом а к оси звена 1. Шипами В шайба 7
шарнирно связана с вилкой 6. Поводок вилки шатуном 2 через
шаровые шарниры D и Е передает движение ножу 5. В этом ме-
ханизме оси звена 1, шайбы 7 и вал вилки 6 пересекаются в одной
точке, а звенья перемещаются в разных плоскостях. Такой меха-
низм— пространственный сферический.
310
При равномерном движении ведущего звена шайба колеблет-
ся относительно оси вилки 6 и поворачивает вал вилки на некото-
рый угол. Поворот вала вызывает перемещение звена 7 и через
него передает возвратно-поступательное движение ножу.
Качающаяся шайба — компактный механизм, основные части
которого могут быть вынесены из зоны среза. Такой механизм при-
меняется для привода фронтально расположенных режущих аппа-
ратов.
Механизм «качающаяся вилка» (рис. 210,а) представляет со-
бой пространственный пятпзвенник. Ведущее звено — криво-
шип 1 — шарнирно соединено с вилкой 8, которая противополож-
ным концом шарнирно связана с крестовиной 9. Крестовина совер-
шает колебательное движение вокруг оси D. С осью D жестко
скреплен кулак колебателя. Один конец кулака роликом входит в
упоры ножа, на другом насажен балансир с грузом 10. Оси кри-
вошипного вала 1, вала вилки 8 и крестовины 9 пересекаются в
одной точке.
При вращении кривошипного вала «качающаяся вилка» при-
водит в колебание крестовину 9 относительно оси D. Колеблю-
щийся кулак крестовины передает возвратно-поступательное дви-
жение ножу. Балансир кулака уравновешивает силы инерции, дей-
ствующие на машину.
Механизм «качающая вилка» компактен по устройству; с по-
мощью груза балансира можно уравновесить силы инерции, дей-
ствующие на раму машины.
§ 3. Кинематика ножа
Перемещение ножа. Кинематические характеристики движения
ножа — это зависимость перемещения х, скорости ин и ускорения
/н ножа от угла поворота кривошипа.
Определим х, ия, /н для центрального (аксиального) криво-
шипно-ползунного механизма.
Пусть кривошип вращается по ходу часовой стрелки с угловой
скоростью со, а угол со/ поворота кривошипа отсчитываем от осиХ
(рис. 211,а).
Если кривошип расположится на одной линии с шатуном, то
нож займет крайнее положение (точка С). Через промежуток
времени t кривошип повернется на некоторый угол со/, при этом
шатун займет положение B\Ci.
Перемещение ножа будет:
х=ДС—АС^
Так как
ACv=l cos р -ф-r cos mt,
то
x=r-\-l—Zcosp—г cos со/,
311
Рис. 211. Схема к определению перемещения ножа с центральным
кривошипно-ползунным механизмом привода.
ИЛИ
Х = Г(1 —COSCO/)-}-/(1 —COS0).
Как видно из схемы (рис. 211, а)
BJD=г sin со/—I sin р.
Тогда
sin P=r// sin со/,
а
cos р =]/1 — (г//)2 sin2 со/.
При г//=0,1...0,04 имеем cos р = 0,996...0,999.
Принимая с достаточной точностью cosp=l, получаем следую-
щую зависимость перемещения ножа в относительном движении
от угла поворота кривошипа:
х—г (1 —cos со/). (183)
Выражение (183) есть уравнение правильного гармонического
колебания.
Как видно из схемы (рис. 211,6), такое же уравнение имеет
проекция точки В\ пальца кривошипа на ось X с началом в точ-
ке О.
Траектория абсолютного движения точек ножа. Нож режущего
аппарата совершает сложное движение: во-первых, гармоническое
колебательное в относительном перемещении и, во-вторых, посту-
пательное в переносном движении. Переносное движение можно
принять, как перемещение с постоянной скоростью, и выразить
уравнением:
z~vt,
где и — скорость машины.
За время поворота кривошипа на 180° (и/ = л) сегмент из край-
него левого положения перейдет в крайнее правое, машина пере-
двинется в направлении оси Z на некоторое расстояние L, назы-
ваемое подачей.
Тогда
L-vx/v*
312
или
L—vftn, (184)
где п — частота колебаний но-
жа.
Траектория абсолютного
движения какой-либо точки А
ножа (рис. 212) может быть
получена графически сложе-
нием двух движений: относи-
тельного и переносного. Для
этого на оси Z откладываем
отрезок, равный в масштабе
подаче L, через точку А прово-
дим полуокружность радиусом
Рис. 212. Траектория абсолютного^ дви-
жения точки ножа.
г, соответствующую траекто-
рии движения пальца кривошипа при повороте его на угол со/=л.
Отрезок L и полуокружность разбиваем на одинаковое число ча-
стей. Затем находим точки пересечения вертикалей, проведенных
из точек деления окружности, и горизонтальных линий, проходя-
щих через соответствующие деления подачи L. Точки пересечения
лежат на траектории абсолютного движения точки А сегмента.
По эквидистантным траекториям будут двигаться любые точки
ножа.
Ход ножа. При повороте кривошипа на угол со^=л перемеще-
ние ножа с центральным механизмом привода в относительном
движении есть х=2г. Это перемещение называется ходом ножа.
Следовательно, в центральном механизме привода ход ножа S = 2r.
В смещенном (дезаксиальном) механизме (рис. 213) крайнее
правое положение ножа (точка С) наступит, когда шатун ВС и
кривошип АВ вытянутся в одну линию, а крайнее левое (точка
Ci), — когда они совпадут (линия ABi и BxCi).
Тогда ход ножа S^=DC—DCi.
Так как
а
DC=V(l-^r)\—h\
DCX=V (I—г)2—h2,
то
Зд=/(/+г)2—/г2—У(/—г)2—/г2. (185)
При Z=25r и h = lr имеем Зд = 2г-1,075, т. е. ход ножа на 7,5%
больше, чем удвоенный радиус кривошипа.
Если радиус кривошипа для аппарата нормального резания
г=38,1 мм, то можно установить совпадение осевых линий сегмен-
тов и пальцев только в одном из крайних положений (в правом
или левом), что необходимо учитывать при центрировании ножа.
313
Рис. 213. Схема к определению
хода ножа со смещенны-м меха-
низмом привода.
Скорости и ускорения движения
ножа. Дифференцируя выражение
(183) по t, получаем зависимости
изменения скорости ик и ускорения
/н ножа с центральным механизмом
привода в относительном движении:
fzH=ra> sin со/, (186)
/i,=rco2cosco/. (187)
Как видно из уравнений (186) и (187), скорость растет про-
порционально со и г. Ускорение, а следовательно, и инерционные
силы возрастают пропорционально квадрату угловой скорости.
Чтобы избежать больших сил инерции, скорость движения ножа
целесообразно увеличивать за счет удлинения радиуса кривошипа,
а не повышения частоты вращения. Максимальная скорость ножа
«нтах = гео соответствует углу поворота кривошипа cot = 90 и 270°,
когда нож проходит путь, равный г. Максимальное ускорение бу-
дет в крайних положениях ножа.
Максимальные скорости и ускорения ножа центрального и сме-
щенного (при r//=1/is—’/25) механизмов привода различаются на
5... 10 %.
Скорости и ускорения движения ножа в механизме «качаю-
щаяся шайба» мало (на 5%) отличаются от скоростей и ускоре-
ний при центральном кривошипно-ползунном механизме привода.
Для центрального механизма максимальное ускорение больше,
чем для механизмов «качающаяся шайба» и «качающаяся вилка».
Разница отклонений максимальных ускорений не превышает 7%
и соответствует углу поворота со/=0; 180 и 360°.
Так как различие в кинематических показателях хода ножа
практически несущественно, то расчет технологических и энергети-
ческих параметров работы режущих аппаратов с различными ме-
ханизмами привода ножа может быть сведен к таковому для цент-
рального механизма.
Выразим скорость ии движения ножа в функции перемещения.
Как видно из рисунка 211,6, ордината точки Bv (кривошип)
t/=rsincot (188}
Тогда из выражений (186.) и (188) имеем
нн—toy.
(189)
Так как точки кривошипа описывают окружность, то скорость
его определяется графически как произведение ординат у точек
окружности на масштаб to.
314
§ 4. Взаимодействие режущей пары с растением
Подвод стеблей сегментов к противорежущей пластине. Про-
цесс срезания растения складывается из двух моментов: подвода
их сегментом ножа к противорежущей пластине и срезания стеб-
лей, защемленных между лезвием и режущей кромкой противоре-
жущей пластины.
Для чистого среза необходимо, чтобы стебли не скользили по
лезвию к меньшему основанию сегмента в процессе подвода их к
противорежущей пластине.
Определим, какой кинематический режим работы машины
должен удовлетворять указанному требованию.
Пусть боковые стороны сегмента наклонены к оси его симмет-
рии под углом а (рис. 214).
Скорость Паб абсолютного движения любой точки сегмента пе-
ременна как по численному значению, так и по направлению.
В зависимости от ее направления угол у между линией этой ско-
рости и линией действия силы N, нормальной к лезвию сегмента,
может быть как меньше 0 (рис. 214,а), так и больше О
(рис. 214,б).
Чтобы выяснить, как движется стебель т, на который действу-
ет лезвие сегмента, разложим силу N по направлению скорости
паб (сила Q) и линии лезвия сегмента (сила Т). Сила Q стремится
перемещать стебель по направлению скорости паб, а сила Т — по
лезвию сегмента. Действию силы Т оказывает сопротивление си-
ла F трения стебля о лезвие сегмента. Так как сила F реактивна,
то она не может быть больше силы Т.
Исходя из этого, имеем: при у<0 возможно скольжение стебля
вдоль лезвия сегмента по направлению к большему его основанию,
но это не приведет к его выскальзыванию.
Когда у>0, сила Т направлена к меньшему основанию сег-
мента. Тогда T’=Aftgy, a Fmax = Artg<p, где ф— угол трения стебля
о лезвие сегмента.
ЕСЛИ Y><P, ТО 7’>Fmax,
т. е. стебель начнет сколь-
зить вдоль лезвия сегмента
по направлению к меньшему
основанию, и качество рабо-
ты будет неудовлетвори-
тельным.
Стебли не будут сколь-
зить при условии у^ф, т. е.
T=F.
Так как у = а—е, где е—
угол между линиями иаб и
Пн, то стебель не будет
скользить при условии а—
—или tge^tg(a—ф).
Рис. 214. Действие сегмента на стебли в
процессе подвода к противорежущей
пластине:
а — с возможным проскальзыванием к больше-
му основанию сегмента; б — с возможным про-
скальзыванием к меньшему основанию сег-
мента.
315
Рис. 215. Защемление стеблей в
растворе режущей пары.
Исходя из этого, имеем
Решая, получаем
ё 1 + tg <р tg а '
Как вытекает из чертежа (рис.
214, б),
tg е=v/un=c7(rco sin со/).
Подставляя это выражение в преды-
дущее неравенство, получаем
го sin ot (tg а — f)
1+ftga •
где f — коэффициент трения стеб-
лей о лезвие сегмента.
Левая часть неравенства имеет
максимальное значение при sinco7=
= 1. При этом значении находят
минимальную скорость, при кото-
рой стебли не выскальзывают.
> rco(tg«—7)
‘'min 1+ftga •
(190)
Из выражения находят минимальную скорость без учета взаимо-
действия стеблей.
Защемление стеблей режущей парой. Стебли, подведенные сег-
ментом к противорежущей пластине, должны быть защемлены в
растворе режущей пары. Определим условия их защемления.
Пусть стебель т (рис. 215) подведен лезвием сегмента к про-
тиворежущей пластине. На него действуют силы Ni и N2, нормаль-
ные к лезвиям сегмента и противорежущей пластины.
Если стебель будет выталкиваться из раствора режущей пары,
то на него действуют силы трения Fj и F2, максимальные значения
которых находим из выражений:
tgipi,
F2 — А^2 tg
где tg<pt и tg <f2 — коэффициенты трения стебля соответственно а
лезвие сегмента и о лезвие противорежущей пластины.
Примем направление оси ОХ по линии лезвия противорежущей
пластины, а оси OY — по линии действия силы No. Чтобы стебель,
не выталкивался из раствора режущей пары, сила F2 должна
быть больше или по крайней мере равна сумме проекций всех сил,
действующих на стебель по оси ОХ, т. е. должно соблюдаться ус-
ловие:
F2 > Л\ sin у—Fx cos у.
3'6
Заменяя силы Ft и Р2 из предыдущих выражений, получаем
М, tg Ф2 > Ni sin у—Л\ tg ф! cos у.
Из условия равенства нулю суммы проекций всех сил на ось F
имеем
Л',=Л'1 cos у -L Fj sin у
или
N2=cos У+tg Ф1 sin У •
Подставляя выражение для Nt, N2 в предыдущее неравенство»
находим
cos у tg ф2 -j- sin у tg ф! tg ф2 > sin у—tg ф! cos у.
Решая, имеем
tgv с tgTi+tgSP2
® v 1 — tg <pi tg <р2
или
tg Т < tg (ф! + ф2).
Отсюда
ф1+ф2-
Так как у=«+р, где р — угол наклона боковых сторон проти-
ворежущей пластины к оси его симметрии, то получим следующее-
уравнение, определяющее условие защемления стеблей в раство-
ре режущей пары:
«+₽^Ф1+ф2- (191)
При срезании трав лезвием с остротой 100 мкм сумма углов
Ф1 + ф2 = 25...35° при влажности аг=14...22% и Ф1 + ф2 = 40...60° при
ш = 55...70%, а при уборке хлебных злаков <f1 + q?2=20...35°.
Для лезвий с остротой 30 мкм значения углов ф1 + ф2 возра-
стают на 15...40%. Насечка лезвий сегментов увеличивает углы
на 30...50%.
Суммарное значение углов аир для различных машин сле-
дующее:
косилки......................................36°20'
зерновые комбайны . .........................30°30
силосоуборочные комбайны.....................45°50'
Сравнивая эти значения с суммой углов и исходя из условия
(191), можно отметить, что тупые лезвия неудовлетворительно ра-
ботают при влажности растений ниже 40%. Уборка высохших
степных трав требует поддержания лезвий с остротой до 30...
...60 мкм. Более удовлетворительно будут работать на степных
травах малой влажности режущие аппараты, в которых а+р<30°.
Скорость резания стеблей. Скорость резания стеблей влияет как
на качество среза, так и на затраты энергии. При малых скоро-
317-
Рис. 216. Скорости резания для аппаратов:
а — нормального резания с одинарным пробегом ножа; б — нормального резания с
двойным пробегом ножа.
стях (меньше 0,3 м/с) происходит сплющивание и разрыв стебля,
•срез сопровождается большими силами сопротивления. С увеличе-
нием скорости до 0,6...0,8 м/с срез получается без разрывов и
сплющивания, силы сопротивления срезу уменьшаются. Для режу-
щих аппаратов существующих конструкций скорости выбирают
«больше указанных. Это вызвано тем, что режущие аппараты ко-
силок и жаток работают обычно при больших зазорах в режущей
паре, а часто и с тупыми лезвиями. Кроме того, при низких скоро-
стях резания стебли отклоняются режущим аппаратом на больший
угол и срезаются с более длинной стерней. Опытами установлено,
что для высококачественного среза растений необходима скорость
резания для трав не менее 2,15 м/с, для зерновых— 1,5 м/с.
Определим скорость резания стеблей для режущих аппаратов
нормального резания с одинарным и двойным пробегом ножа с
центральным механизмом привода. Для этого нанесем контуры
противорежущих пластин, пальцев (рис. 216), а также контуры,
сегмента в одном из его крайних положений. Далее, имея в виду
выражение (189), строим диаграмму скорости движения какой-ли-
бо точки ножа. Для этого от выбранной точки А откладываем от-
резок АО —г и из точки О радиусом г проводим окружность.
Начало резания стебля соответствует такому положению лез-
вия сегмента, при котором точка Ло (начало рабочей части лезвия
на рисунке 216 выбрано произвольно) соприкасается с лезвием
противорежущей пластины.
Скорость «нн ножа в этот момент есть скорость начала реза-
ния, она равна произведению ординаты AiKi на масштаб и, т. е.
AiAi03- (192)
Конец резания соответствует положению АгВ2 сегмента, когда
его точка В2 соприкасается с лезвием противорежущей пластины.
•Скорость
(193)
318
На рисунке 216,6 построена диаграмма скоростей резания для
аппарата нормального резания с двойным пробегом ножа. В этом
аппарате, как и в аппарате низкого резания, за один ход ножа
сегмент срезает стебли у среднего и крайнего пальцев.
Скорости «нн и «нн начала резания в этих аппаратах у средне-
го и крайнего пальцев будут:
Пнн=Л1/(1со, Инн=Л3/С3(о, (194)
а скорости конца резания:
и^=Л2Лаи, «нк=Л4^<о. (195)
Из чертежа, изображенного на рисунке 216, видно, что резание
происходит с непостоянной скоростью, т. е. скорости в начале и в
конце резания не равны. Скорость начала резания у среднего паль-
ца в аппарате низкого резания мала (—0,5 м/с). Малые скорости
могут быть причиной неудовлетворительного среза и забивания
режущего аппарата. Для обеспечения необходимой работоспособ-
ности этих аппаратов требуется тщательная регулировка зазоров
в режущей паре и заточка лезвия. Скорость резания зависит от
того, как установлены сегменты в крайних положениях относитель-
но противорежущих пластин. Если осевые линии сегментов и паль-
цев в крайних положениях совпадают (аксиальный механизм при-
вода ножа) или смещены (дезаксиальный механизм) на одинако-
вое расстояние, то такой нож считается центрированным. Когда
смещение осевых линий сегмента и пальца в одном крайнем поло-
жении больше, чем в другом, такой нож не центрирован (смещен),
Прн смещенном ноже скорости начала резания снижаются, осо-
бенно значительно влияние смещения в аппаратах низкого резания
и с некратным ходом ножа.
Центрирование ножа проводят изменением длины шатуна или.
смещением пальцевого бруса.
§ 5. Отгиб стеблей и высота стерни
Сегментно-пальцевые аппараты. Для выяснения процесса отги-
ба стеблей и определения высоты стерни рассмотрим диаграмму
движения сегмента ножа в аппарате нормального резания.
Пусть сегмент находится в правом крайнем положении I
(рис. 217). Учитывая, что угол между режущими кромками проти-
ворежущих пластин н осевыми линиями (00 и OjOi) пальца неве-
лик, можно с целью упрощения принять их (линии /\К и KaKi)
параллельными осевым линиям.
Сегмент совершает сложное движение. При повороте кривоши-
па на угол со/=л сегмент придет в крайнее левое положение. Точ-
ки А и В, принадлежащие лезвию сегмента, будут двигаться по
траекториям АД1 и ВВ\. Движение точек С и D сегмента из поло-
жения II в положение III происходит по траекториям CCi и DDi.
319-
Рис. 217. Диаграмма отгиба стеблей и высоты стерни для сегмент-
но-пальцевого аппарата.
•Лезвие сегмента при своем движении захватывает стебли, подво-
дит их к противорежущей пластине и срезает. В процессе подвода
стебли отгибаются, из-за чего высота стерни получается больше,
чем расстояние от режущего аппарата до поверхности поля. Уве-
личение высоты стерни приводит к тому, что часть урожая трав
теряется, а при скашивании зерновых возможны потери колоса,
особенно при срезе низкорослых и пониклых хлебов.
Рассмотрим отгиб стеблей, расположенных на осевой линии
пальца 1. Стебли при движении будут отклоняться пальцем от
осевой линии в сторону. Такой отгиб будет называться попереч-
ным. Наибольший отгиб qi будет равен по значению половине ши-
рины противорежущей пластины. Отклоненные пальцем стебли
расположатся по линии КК лезвия противорежущей пластины.
Дальнейший отгиб стеблей будет зависеть от зоны их расположе-
ния. Стебли, расположенные в пределах линии ab, лезвие АВ сре-
зает с отгибом qi (зона I — боковой вид поля со стерни — на ри-
сунке справа). Высоту стерни hi для этих стеблей находят по высо-
320
те А-. установки режущего аппарата от поверхности поля и по от-
гибу стеблей пальцем qi, т. е.
^=1^+7:. (196)
Растения, расположенные в пределах линии Ьс, отклоняются
от линии КК пальца лезвием CD сегмента при движении ножа из
положения II в положение III (на рисунке слева). Эти стебли сре-
жет то же лезвие у линии КлК\ противорежущей пластины пальца
2. Так как в период подвода стебли не проскальзывают по лезвию,
то можно принять, что они движутся по таким же траекториям,
как и точки лезвия сегмента. Отгиб стеблей зоны II (на рисунке
справа) принято называть поперечным. Отгиб q2 — величина пос-
тоянная для всех стеблей, расположенных на линии Ьс. Пренебре-
гая кривизной отогнутого стебля, можно принять отгиб q2 равным
расстоянию от первоначального положения (точка с) стебля до
места его среза (точка п2). Высоту стерни h2 определим как гипо-
тенузу треугольника, в котором один катет равен hy, дру-
гой q2, т. е.
ft2=Vft2y+<?t (197)
Стебли, расположенные между точками ct и сь не захватыва-
ются сегментами при движении из положения II в III. Пальцевый
брус отклоняет их по направлению движения машины (на рисун-
ке в точку d). Сегмент срезает эти стебли в точке d, перемещаясь
из положения III в положение IV. Полученный отгиб стеблей на-
зывают продольным (зона III на рисунке справа). Максимальное
значение продольного отгиба </зтах равно расстоянию от первона-
чального положения стебля (точка с) до положения, в котором его
срежут (точка d). Другие стебли будут срезаны тоже в точке d,
но с меньшим отгибом. Для третьей зоны длина стерни Аз не будет
постоянной, так как 9з¥= const. Высота стерни для любого стебля
этой зоны может быть определена из выражения:
(198)
В зонах II и III стебли срезаются с отгибами. Из-за больших
отгибов они могут выскальзывать из раствора режущей пары и
подминаться под пальцевый брус, поэтому при оценке режущих
аппаратов находят предельные значения продольного и поперечно-
го отгибов. Но максимальные отгибы не являются определяющи-
ми критериями оценки работы режущих аппаратов. Качество ра-
боты режущего аппарата следует оценивать потерями урожая.
Потери же можно характеризовать средней высотой стерни йср по
всей площади среза.
Определим среднюю ftcp высоту стерни на примере аппарата
нормального резания с одинарным пробегом ножа. Из диаграммы
отгиба стеблей видно, что при движении из положения I в поло-
жение // сегмент срезает стебли с площадок fi, f2 и f3. В последу-
ющих ходах срезаются такие же площадки.
21—424
321
Суммарная площадь f, срезаемая сегментом за пол-оборота
кривошипа, будет
f=/i+/s+fa.
Средняя высота стерни для всех этих площадок может быть
найдена из выражения:
Ь Kfi + hif2 -|- h'3fs
ncp — f >
где hi, hi и hi — значения средней высоты стерни соответственно
для площадок fu f2, f3.
Размеры площадок flt f2 и f3 можно определить планиметриро-
ванием.
Среднюю высоту стерни в пределах каждой площадки подсчи-
тывают приближенно, исходя из следующего. Стебли площади ft
палец отгибает, и сегмент срезает на линии тп. Растения, распо-
ложенные на линии тп, срезаются без отгиба с установочной вы-
сотой hy. Стебли с линии аЪ отклоняются пальцем на половину его
ширины и срезаются на высоте
Тогда вся стерня на этой площадке будет косоусеченная четырех-
гранная призма, средняя высота которой
4
Все стебли с площадки f2 сегмент отгибает к линии тп и сре-
зает с поперечным отгибом. Принимаем, что отгиб любого расте-
ния этой площадки будет равен расстоянию от первоначального
положения стебля до точки его среза. Тогда место среза стебля
будет определяться пересечением линии тп с траекторией движе-
ния точки сегмента, проходящей через выбранный стебель.
Среднюю высоту стерни на площадке f2 подсчитаем следующим
образом. На площадке выделим геометрически правильные фигу-
ры, в пределах которых средняя высота стерни может быть найде-
на достаточно точно. Так, площадку f2 целесообразно представить
суммой следующих трех площадей:
=nn.jfgi -|- пл. njie -J- пл. eiptn,
где е — точка пересечения линии тп с кривой, проведенной из точ-
ки i эквидистантно кривой Bjn.
Затем отыщем среднюю высоту стерни в пределах фигур, выде-
ленных на площадке, и по ним найдем h2 для всей площади f2 по
выражению:
., _ h’cr>inn. jfgi 4- Л"р2пл.п;Те + h’^nn.eipm
flQ - £ •
12
где /icpa, hcp2, h'cp2—средние значения высоты стерни в пределах
фигур, выделенных на площадке.
322
С площадки f3 пальцевый брус отгибает все стебли в точку т.
Для определения высоты стерни на этой площадке целесообразно
выделить фигуры amrs и трг, т. е,
f3=nn.amrs -{- пллпрг.
В пределах каждой фигуры находим среднюю высоту стерни ftcps
и /icp3, а по этим значениям подсчитываем &з из выражения:
., _ h'c^ji.amrs+ h”cp™i.mpr
я~ h
Подобным способом находят hcp и для режущих аппаратов дру-
гих типов.
Средняя высота стерни увеличивается с ростом шага 4 проти-
ворежущей части, угла наклона а лезвия сегмента, ширины паль-
ца и подачи L. Зависимость hcp(L) близка к линейной.
Так как отгиб стеблей увеличивает среднюю высоту среза, то
hy принимают меньше, чем высота стерни Ла, предусмотренная аг-
ротехническими требованиями, т. е.
hy=f}hz, (199)
где т] — коэффициент пропорциональности.
Для косилок принимают ц = 0,55...0,9; большие значения соот-
ветствуют скоростям 4...6 км/ч, меньшие — 9... 12 км/ч.
Регулировка высоты среза достигается изменением положения
опорных башмаков или колес машин.
Беспальцевый двухножевой аппарат.
Лезвия сегментов 1 и 2 (рис. 218) двух-
ножевого аппарата (S = /), перемещаясь
из положения 1 по траекториям AAi, BBi
и CCi, DDi, отгибают стебли и начина-
ют их срезать в точке а. Окончание сре-
за соответствует точке Ь, в которой пере-
секаются траектории ВВ} и DD{. Расте-
ния, расположенные по линии ab, сег-
менты срезают без отгиба, все осталь-
ные, расположенные в пределах площад-
ки acbd — с поперечным отгибом. Про-
дольно отгибаются стебли площадки
bemf.
Продольный отгиб зависит от подачи
L, угла наклона сегментов, их высоты и
соотношения шага t и хода S. Двухно-
жевые аппараты меньше отгибают стеб-
ли и срезают их более низко, чем одно-
ножевые.
Допускаемые подачи для двухноже-
вого аппарата в 1,5...2,0 раза больше, чем
для сегментно-пальцевого аппарата нор-
мального резания.
s=t
Рис. 218. Диаграмма отги-
ба стеблей двухножевым
беспальцевым аппаратом.
21*
323
§ 6. Кинематический режим работы ротационно-дискового
аппарата
Уравнения и траектория движения точек ножа. В процессе ра-
боты ножи 1 и 2 (рис. 219) совершают сложное движение: враща-
ются вместе с дисками (угловая скорость и) и перемещаются со
скоростью v движения машины. Как следует из рисунка, уравне-
ния движения точек А и В ножа 1 будут следующими:
I УА=r0 cos tp.
[ sirup;
I yB=r1cos(p.
(200)
(201)
Этим уравнениям соответствуют траектории ЛД1Л2 и ВВ1В2,
между которыми лезвие ножа 1 срезает растения.
Нож 2 движется по траекториям СС{С2 и DDiD2. В зонах, где
траектории крайних точек соседних ножей перекрываются, проис-
ходит повторный пробег ножом срезанной площади (заштрихова-
но крестообразно).
Если траектория ССгС2 расположена впереди BBiB2, то на
площадке ECiE\ (на рисунке заштриховано) растения не будут
срезаны, что приведет к забиванию режущего аппарата. Для вы-
сококачественного среза необходимо, чтобы отклонение стеблей
диском было равным нулю, для чего ОД^ОС.. Определим, како-
му показателю кинематического режима (/. = or0/v) соответствует
это условие.
Показатель кинематического режима. Так как ОВ\ = хБ1\ ОС{ =
= Хс1, то, исходя из вышеприведенного условия, имеем
Хвх xCi- (202)
Точка Bi соответствует <р=л/2, тогда t—al2(n, а
X^=V^
Рис. 219. Схема к расчету пока-
зателя кинематического режима
ротационно-дискового аппарата.
ИЛИ
хв1=гп(!Х/2'/-^-г1'г<1)- (203)
Принимая число ножей равным
гн, из выражения 202 имеем сле-
дующее уравнение:
Заменяя в неравенстве (202) хв
и Хс, выражениями (203) и (204)
и решая, находим
X > 2я
ZH (Г1/Г0 — 1) '
324
Так как Г1 = Го+/н (здесь /н — длина ножа), то имеем
2лг0
гн^н
(205)
Из неравенства (205) следует, что для высококачественного
среза целесообразно увеличивать линейную скорость и диска. Но
возрастание и значительно повышает число растений с повторным
срезом, из-за чего увеличиваются потери урожая и энергозатраты.
Для применяемых ротационно-дисковых косилок с двумя ножами
минимально-допускаемое значение 7.» 26, что обеспечивает рабо-
чие скорости до 15 км/ч.
§ 7. Площади подачи и площади нагрузки
Площадь поля, с которой сегмент срезает растения за один
ход ножа, условно называют площадью подачи и обозначают fn,
а площадь поля, с которой сегмент срезает растения за один ход
ножа у одного пальца, называют площадью нагрузки /н. Опреде-
лим площади подачи и нагрузки для режущих аппаратов различ-
ных типов.
325
Аппарат нормального резания с одинарным пробегом ножа.
Вершина сегмента при повороте вала кривошипа на один оборот
очерчивает кривую АВС (рис. 220,а). Площадь, ограниченная этой
кривой и линией АС, будет площадью подачи f„, так как при дви-
жении из положения 1 в положение II сегмент не срезает растения
в пределах площади fn. Срез растений с этой площади происходит
только при ходе сегмента из положения II в положение 111. При-
чем все растения с площади fn срезаны только около одного паль-
ца, поэтому в аппарате нормального резания с одинарным пробе-
гом ножа площадь fn подачи равна площади fH нагрузки, т. е.
Тн = |н-
Как следует из рисунка 220,
fB=SL. (206)
Если принять, что
fIt=kLS, то k=l. (207)
Аппарат низкого резания. Площадь подачи fa (рис. 220,6),
равная площади фигуры ABCDE, в этом аппарате делится сред-
ним пальцем на две площади: fH1, равную площади фигуры BCD,
и f»2, равную площади фигуры ABDE. С площади fH1 сегмент сре-
зает растения у среднего пальца 2, а с площади /н2 —у крайнего
пальца 3. Площади fH1 и /н, —есть площади нагрузок на лезвие
сегмента соответственно у среднего и крайнего пальцев.
Определим размер этих площадей.
Как видно из рисунка 220,6, площадь нагрузки состоит из
двух площадок ABG и FDE (или двух ABG) и площадки' GBDE,
г, е.
/Нж=2 пл. ABG-J-пл. GBDF.
L'2
Площадь GBDF=LS/2, a fHjS=2^xdy-\-LS/2.
о
Так как х=г(1—cosq>), где <р=<о/, a y—L^/n, dy=Ldq>l:rt то, за-
меняя х, dy в подынтегральном выражении и пределы интегриро-
вания, получаем
Л/2
fH1=2jr(l— cos ср) -^-d(p+LS/2.
о
Решая, находим
t =0,68LS. (208)
Так как fn = LS, a fKt=k2LS, то £2=0,68. Тогда площадь нагрузки
у среднего пальца будет
=0.32“; *4-0,32. (209)
326
Аппарат нормального резания с двойным пробегом ножа. Вер-
шина сегмента 1 (рис. 220, в) при повороте кривошипа на один
оборот очерчивает кривую ABCDE. При движении из положения//
в положение /// сегмент 1 срезает растения с площадок BCD и
DEDXCV соответственно у пальцев 2 и 3.
С площадки АВС\ВХ растения срезает сегмент 2 у среднего
пальца 2 при движении ножа из положения / в положение 11, а с
площадки B\C\DX — у крайнего пальца 3 при обратном ходе ножа*.
Как видно из рисунка,
пл. BCD=пл. BiCLDi
а
пл. ABCJli=пл. CtDEDi —
По аналогии с аппаратом низкого резания пишем, что площадь
нагрузки
^=0,32£5; ^=0,32, (210)
тогда
/на=1/2(0,68Г5—/'1)=0,18Z-S; ^=0,18. (211)
От площади нагрузки зависят усилия сопротивления срезу.
Максимальные площади нагрузок соответствуют аппарату нор-
мального резания с одинарным пробегом ножа, а минимальные—
аппарату нормального резания с двойным пробегом ножа.
Если принять, что число растений, срезаемых лезвием сегмента
у противорежущей пластины, пропорционально площади нагрузок,
то следует, что в аппарате нормального резания с одинарным про-
бегом ножа сегмент срезает одновременно большее число стеблей,
чем в других аппаратах. Число одновременно срезаемых стеблей
влияет на силы сопротивления срезу и на мощность, потребную
на срез.
§ 8. Силы, действующие на нож
Сила Т, движущая нож, равна следующей сумме действующих
сил (рис. 221):
7=/?ср+Р>+Е, (212)
где Рср — среднее значение силы сопротивления срезу;
Р/ — сила инерции масс ножа;
F — сила трения ножа.
Сила сопротивления сразу возрастает примерно пропорцио-
нально увеличению количества срезаемых растений. Если принять,
что стебли равномерно распределены по скашиваемой площадке,
то число срезаемых растений у каждого пальца за один взмах но-
жа будет зависеть от площади нагрузки и густоты стеблестоя, т. е.
v' =Wh>
где v — число стеблей на единице площади;
fa — площадь нагрузки.
327
Рис. 221. Силы, действующие на
нож.
Число стеблей v — величина не-
постоянная, можно считать для
хлебных злаков v = 0,2...0,8 ст/см2, а
для трав — 1,2... 2,0 ст/см2. Сопро-
тивление срезу зависит не только
от количества срезаемых стеблей,
но и от биологического вида расте-
ния, развития стеблей, от морфоло-
гических особенностей и метеороло-
гических условий.
Опытами установлено, что работа, затрачиваемая на срез рас-
тений с 1 см2, может быть приближенно принята: е= (1...2) 10-2 Дж
для зерновых культур, е= (2...3) 10-2 Дж для трав. Коэффициент е
учитывает как количество стеблей на 1 см2, так и их особенности.
Принимая сопротивление срезу постоянным и пропорциональ-
ным площади нагрузки /н, коэффициенту в и числу сегментов г,
получим следующее выражение для определения среднего значе-
ния силы сопротивления срезу для аппарата нормального резания
с одинарным пробегом ножа:
П _____________________________ sfnZ
Кср~ Хр ’
(213)
где Хр — перемещение ножа от начала до конца резания (см. рис.
216, а).
Так как в аппаратах низкого и нормального резания с двой-
ным пробегом ножа площади нагрузок /Н1 и /Нз различны, то сред-
нее сопротивление срезу будет неодинаковым.
Для одних пальцев, где срез происходит с площади /И1, среднее
усилие будет равно
= (214)
*Pi
а для пальцев, около которых растения срезают с площади /н±,
Я’р—(215)
• хр2
где и хра — перемещение от начала до конца резания соответ-
ственно у среднего и крайнего пальцев (рис. 216,6).
На диаграмме (рис. 222) средняя сила сопротивления срезу
будет прямая линия 1, параллельная оси абсцисс.
Сила инерции определяется массой ти ножа и ускорением /н,
т. е. Р3 = тн/н.
Так как
/' =гю2 cos a>t—Г(Л2 { 1 ——),
н \ r I
то
Pj=mnr(i>2 ( 1—у-У (216)
328
График силы инерции в зависимо-
сти от перемещения ножа на рисун-
ке 222 будет в виде прямой линии 2,
причем максимумы абсолютного зна-
чения Р/max = тнга>2 соответствуют на-
чалу и концу хода ножа, а Ру=0 при
х=г.
Сила трения ножа об элементы
пальцевого бруса складывается из
силы трения Ft, вызываемой весом
ножа, и силы Fi от действия шатуна,
т. е. F—Fi+F2.
Сила трения от веса ножа равна
Рис. 222. График изменения
сил, действующих на нож, в
зависимости от его перемеще-
ния:
F^fP,
(217)
где f — коэффициент трения;
Р — вес ножа.
Z — сила среза; 2—сила инерция;
3 — сила трения от веса ножа; 4 —
сила трення от прижатия ножа ша-
туном; 5 — результирующая сила.
Вес ножа косилок и жаток на длине 1 м равен 20...22 Н.
Учитывая, что трущаяся пара нож — пальцевый брус работает
без смазки, в абразивной среде, коэффициент трения можно при-
нять f=0,25...0,3.
На диаграмме сила Fi изображена пунктирной прямой 3.
Сила F2 называется нормальной силой N действия шатуна на
нож.
Как видно из рисунка 221, 7V=7’tgp. Заменяя Т выражением
(212), получаем
или
Решая, получаем
V__ — Pj Т fP} tg Р
1 l-/tg₽
Тогда сила трения
р __ (#ср+ Pj + fP) tg Р £ /91
r2 ~ i-Ttip '• 1
На диаграмме сила F2 представлена кривой 4.
Силу Т (линия 5) определяют как алгебраическую сумму сле-
дующих сил:
T=R^+Pj+fP^Fv
Зная силу Т, можно построить диаграммы сил и крутящих мо-
ментов, действующих на палец кривошипа, рассчитать момент
инерции маховика, параметры звеньев механизма передач, а так-
же определить мощность, потребную на привод ножа.
329
Мощность, необходимую для преодоления сил сопротивления
ножа движению, определяют из выражения
N^TuK, (219)
где Т — сила сопротивления ножа движению;
ин — скорость ножа.
Мощность для привода ножа возрастает пропорционально уве-
личению подачи. При равной подаче аппарат нормального реза-
ния с двойным пробегом ножа на 30...40% менее энергоемок, чем
другие аппараты. Большая мощность требуется для аппарата низ-
кого резания, имеющего малые скорости резания у среднего паль-
ца, из-за чего увеличиваются силы сопротивления срезу. Кроме
того, чтобы избежать забивания аппарата, добиваются более точ-
ного прилегания сегмента к противорежущим пластинам и при-
жимным лапкам, что увеличивает трение в режущей паре. На зна-
чение мощности значительно влияет острота лезвия. При острых
лезвиях необходима меньшая мощность, чем при тупых. Так, за-
тупление гладких лезвий от 30 до 130 мкм вызывает возрастание
мощности на 20...50%.
Глава V
РАБОЧИЕ ОРГАНЫ ДЛЯ СГРЕБАНИЯ, ВОРОШЕНИЯ
И ПОДБОРА РАСТЕНИЙ
§ 1. Типы граблей
Свежескошенные и провяленные травы из прокоса в валки
сгребают поперечными и боковыми граблями. Боковые грабли
применяют также для ворошения травы в прокосах и оборачива-
ния валков.
Поперечные грабли формируют валки, условная ось которых
расположена поперек (перпендикулярно) направлению движения
агрегата.
Основной элемент конструкции поперечных граблей — зубья 1
(рис. 223), образующие короб, в котором формируется валок из
травы. Зубья штампованными зубодержателями соединяют с гра-
бельным брусом 2. При сгребании концы зубьев устанавливают на
расстоянии не больше 1 см от поверхности поля. Такая установка
достигается изменением длины звеньев механизма подъема.
После заполнения короба травой механизмы с ячеистыми ав-
томатами или гидроцилиндрами поворачивают грабельные брусья,
концы зубьев поднимаются и сгребенная масса травы остается на
поле. Для снятия травы с зубьев грабли снабжают очистительными
прутьями, устанавливаемыми между группой (5...10) зубьев. Пос-
ле подъема зубья возвращаются в рабочее положение.
Валки, сформированные граблями, должны быть прямолиней-
ными с шириной не более 1,3 м и равномерной плотностью по дли-
330
не. Прямолинейность валка
обеспечивается в том случае,
если подъем зубьев при следу-
ющих заездах начинается на
одной прямой линии с преды-
дущими. Ширина валка зави-
сит от траектории подъема ab
и опускания bci или Ьс2 зубь-
ев. Траектория ab — геометри-
ческое место точек от сложно-
Рис. 223. Зуб поперечных граблей и
траектории его движения при подъеме
(ab) и опускании (bci и Ьс2):
1 — зуб; 2 — грабельный брус; I — рабочее по*
ложенне зуба; // — транспортное положение
зуба.
го движения: переносного со
скоростью v и относительного
вокруг оси О.
Если грабельный брус по-
ворачивает механизм с приво-
дом от колес граблей, то тра-
ектория ab не зависит от скорости движения, а с приводом от гид-
роцилиндра изменяется при увеличении или уменьшении ско-
рости V.
Опускаются зубья под действием собственного веса. При этом
грабельный аппарат рассматривается как физический маятник.
Траектории bci, bc2 движения конца зуба зависят от момента инер-
ции, веса, положения центра тяжести грабельного аппарата, вы-
соты подъема зуба и скорости движения граблей. С ростом высо-
ты подъема и скорости перемещения граблей увеличивается про-
екция (S2>$i) траектории опускания на горизонталь, а следова-
тельно, и огрехи dc\ и dc2.
В связи с изложенным высоту подъема грабельного аппарата и
скорость движения агрегата следует выбирать из условия получе-
ния правильной формы валка — без растаскивания его и без боль-
ших огрехов. Высоту подъема грабельного аппарата изменяют пе-
рестановкой упорных элементов сбрасывателя (механический ав-
томат подъема) или ограничителя на штоке гидроцнлиндра (гид-
равлический механизм подъема).
Боковые грабли сдвигают растения при сгребании в сторону.
В отличие от поперечных граблей они формируют валки, располо-
женные вдоль направления движения агрегата.
Наибольшее распространение из боковых находят колесно-
пальцевые грабли. Основной их рабочий орган — пальцевые ко-
леса 6 (рис. 224). Каждое колесо состоит из обода 3, кольца 5,
соединенных между собой спицами 4, и пружинных пальцев 2.
Колеса свободно вращаются на осях. Все пальцы 2 расположе-
ны в одной плоскости вращения, для облегчения сбрасывания тра-
вы они загнуты против направления вращения. Каждое колесо
снабжено пружиной, с помощью которой обеспечивается оптималь-
ное давление на почву, достаточное для сцепления колеса. Кроме
перемещения со скоростью v, пальцы за счет сцепления с почвой
совершают вращательное движение. Грабли состоят из двух сек-
331
ций: правой и левой. В зависимости от положения секции паль-
цевых колес относительно направления скорости агрегата v они
сгребают растения (рис. 224, а) в валок или ворошат их в проко-
се (рис. 224, б). Для оборачивания валков одну секцию (правую
или левую) оставляют как и при сгребании, а другую поднимают
в транспортное положение.
Колесно-пальцевые грабли применяют при уборке сеяных трав.
Они формируют рыхлый однородный по размерам валок, хорошо
копируют рельеф местности, потери листовой части растений при
их применении меньше, чем при других граблях.
§ 2. Технологические параметры сгребания
травы колесно-пальцевыми граблями
Рассмотрим взаимодействие пальцев колес / и 2 (рис. 224, в)
с растительной массой. Колеса вращаются вокруг осей О] и О2 с
угловой скоростью со и перемещаются вместе с машиной по на-
правлению скорости V.
Концы пальцев, первоначально расположенные в точках и
Вц при повороте на угол л движутся по траекториям, следы кото-
рых в горизонтальной плоскости — а'^аза^ и bib^bi. , Концы
других пальцев колес 1 и 2 движутся по эквидистантным кривым.
332
Для сгребания травы без пропусков необходимо, чтобы тра-
ектория конца пальцев в вертикальной плоскости была не выше,
чем минимальная высота (Я) расположения травы в прокосе
(линия тт), т. е. h^H. Как видно из рисунка, этому условию со-
ответствуют участки «2йз и Ь'2Ьз горизонтальных траекторий. Тог-
да ширина полосы, с которой пальцы каждого колеса сгребают
растения без пропусков, — Ь.
Так как h = r (1—coscp/2), то имеем
Я > г(1 —coscp/2).
Откуда получаем'
cos ф/2 > 1 —Я/г.
(220)
Если число колес z,
ка О^А2С находим
то ширина захвата B = bz. Из треугольни-
sinq/2=B/2zr.
(221)
Решая совместно выражения (220) или (221), получаем
В < 2z 1 2Нг—Н2. (222)
С уменьшением высоты Я возможная ширина захвата В граб-
лей, при которой обеспечивается сгребание травы без потерь,
должна быть уменьшена. В конструкции граблей предусматрива-
ют изменение В поворотом штанг с пальцевыми колесами. При
этом необходимо, чтобы угол а не выходил за пределы 35...40°.
При этих значениях угла а и при работе на ровном рельефе на
скоростях до 12 км/ч валок формируется без растаскивания и раз-
рывов, стебли располагаются в валке не хаотически, а вдоль на-
правления движения машины, причем комли стеблей находятся
сверху, а верхушки — внутри валка, ширина и высота валка полу-
чаются равномерными. При таком формировании валка созда-
ются благоприятные условия для равномерной сушки, особенно в
районах с высокой температурой.
Пальцы перемещают траву вдоль действия скорости zza6, чис-
ленное значение и направление которой определяют сложением
скорости агрегата v и линейной скорости вращения пальцев и =
= v cos а.
Максимальное перемещение травы пальцами одного колеса
будет равно отрезку а2а2.
Длина а2а2 зависит от углов а и е. В применяемых граблях
е = 50...55°.
В процессе работы пальцы колес скользят по земле и как след-
ствие линейная скорость пальцев u = vcosa и угол е уменьшаются,
а перемещение травы увеличивается, что снижает качество форми-
рования валка.
Скольжение колеса зависит от силы его давления на почву,
которое можно регулировать пружинами. Недостаточное давление
как при сгребании, так и при оборачивании сопровождается раз-
333
рывами и разбрасыванием валка. При избыточном давлении паль-
цы рыхлят почву, загрязняя тем самым сено.
При ворошении плоскость вращения колес располагают (под
углом а к направлению скорости v движения граблей. В этом
случае трава укладывается в проходах между соседними коле-
сами. При угле а=40° и меньше каждое колесо образует отдель-
ные самостоятельные узкие валки, в которых комли стеблей на-
ходятся сверху валка, а метелки — внутри, в связи с чем сушка
протекает более равномерно. Кроме того, одновременно с травой
сохнут и находящиеся между валками полосы земли со стерней,
так что при обороте валки попадут на сухую часть почвы, что
способствует более быстрому (просыханию травы.
Скорость движения агрегата в процессе ворошения следует
выбирать такой, чтобы трава после прохода граблей представля-
ла собой ровный вспушенный слой без отдельных комьев и кучек
травы.
§ 3. Подбор растений
Назначение и типы подборщиков. Для подбора из валков рас-
тительной массы применяют подборщики: барабанные с пружин-
ными пальцами, барабанные с убирающимися пальцами и поло-
тенно-пальцевые или цепочно-пальцевые с шарнирным или жест-
ким креплением пальцев (рис. 225).
Барабанный подборщик с пружинными паль-
цами (рис. 225, а) состоит из вала 5 с дисками, в которых уста-
новлены концы трубчатых валов 4 с пальцами 3. На одном конце
трубчатых валов закреплены кривошипы 2 с роликами, которые
при вращении вала 5 перекатываются по направляющей беговой
дорожке 1. Благодаря этому пальцы вращаются вокруг оси ва-
ла 5 и одновременно поворачиваются вокруг осей трубчатых ва-
лов 4. В зоне подбора ролики кривошипов перекатываются по
окружности abc, а в зоне передачи массы на транспортер — по
направляющей дорожке cda. Профиль дорожки cda подобран так,
что пальцы в этой зоне выходят из массы, не прижимая ее к ко-
жуху барабана.
Подборщик с убирающимися пальцами (рис.
225, б) состоит из барабана 7 с шарнирно установленными на-
правляющими, в которые входят пальцы 6, посаженные на не-
подвижную ось 9, эксцентрично расположенную относительно
оси 8 барабана. При равномерном вращении барабана пальцы
вращаются на оси 9. В нижнем положении они выходят из-под
кожуха барабана, подбирают валок, поднимая его, и после пере-
дачи массы на последующие устройства входят за кожух бара-
бана.
В по л стен но-п а л ь це в о м подборщике (рис. 225, в}
пальцы 10 закреплены на планках транспортера 11. Такие пальцы
оказывают меньшее ударное воздействие на стебли, более чисто
подбирают валок, а полотно улавливает осыпавшиеся зерна.
334
Рис. 225. Схемы подборщиков:
а — барабанного с пружинными пальцами; б — барабанного с убирающимися пальцами; в —•
полотенио-пальцевого; г — цепочно-пальцевого; 1 — беговая дорожка; 2 — кривошип; 3, 10
и 14— пальцы; 4 — трубчатый вал; 5 — вал подборщика; 6 — убирающийся палец; 7 — ба-
рабан; 8 — ось барабана; 9 — ось пальцев; 11 — полотенно-пальцевый транспортер; 12
цепь; 13 — ролик; 15 — направляющая дорожка цепи.
Рис. 226. Схемы к расчету перемещения (а) и траекторий движения (б) паль-
ца подборщика:
1 и 2 —пальцы; I, II, /77 — траектории.
В цепочно-пальцевом подборщике (рис. 225,г)
пальцы 14 шарнирно связаны с цепью 12t они снабжены кривоши-
пами с роликами 13, перемещающимися по направляющей дорож-
ке 15, кривизна которой подобрана так, что создает необходимое
положение пальцев в периоды подгребания, подъема массы и вы-
хода их из массы с уходом под кожух барабана.
Режим работы подборщика. Качество работы подборщика оце-
нивают чистотой подбора валка, непрерывной и равномерной по-
дачей растительной массы на последующие рабочие органы, сво-
бодным выходом пальцев из слоя массы без затаскивания растений
под барабан и минимальным силовым воздействием па них при
подборе.
Чистота подбора растений зависит от параметров и режима ра-
боты подборщика, которые определяют взаимодействие пальцев
с растениями.
Рассмотрим кинематику пальцев на примере работы барабан-
ного подборщика с пружинными пальцами в зоне подбора валка.
При подборе кривошип пальца перекатывается по окружности
abc. Уравнение движения конца пальца (точка А, рис. 226, а) в
координатах XY будет следующим:
хА=vt-]-r sin со/, (223)
уА—г cos <£>t, (224)
где г — расстояние от центра барабана О до конца пальца.
Выражения (223) и (224) представляют собой уравнения тра-
хоиды, участок которой для конца рассматриваемого пальца — /
(рис. 226,6). Такие же трахоиды II и 111 описывают концы паль-
цев предыдущей и последующей штанг. Пусть указанные траек-
тории пересекаются в точках е и f.
Расстояние по вертикали h (h — высота гребешка) от нижней
точки трахоиды d до точек е и f пересечения трахоид определяет
чистоту подбора растений.
Для подбора без потерь необходимо соблюсти условие:
/г+йу-<7/, (225)
где hy — минимальное расстояние между поверхностью почвы и
трахоидой;
Н—расстояние от земли до нижнего уровня валка.
Найдем соотношение параметров и режим работы подборщи-
ка, при которых удовлетворяется условие (225).
Из рисунка 226, б имеем выражение для координаты конца
пальца 1, который перемещался по трахоиде I:
xA—vt1 -]-r sin <р. (226)
В ту же точку f приходит конец пальца 2, двигаять по трахо-
иде II, координата хА для него будет:
xA=vt2—rsintp, (227)
где t2— время поворота барабана на угол 0 между штангами.
336
Так как 2ср — ati, а р = (о/2, то, решая совместно уравнения (226J
и (227), находим
аг Р — 2<р
v 2sin<p ’
(228>
Как видно из рисунка 226, б,
Г — ft = rcOS(p.
Выражая отсюда sin <р и <р и заменяя 2л/₽ = г (здесь z — число
штанг), a ar/v=7., после подстановки и решения уравнений (225)
и (228) получаем
л/2 — arc sin а1
(229)
а
где принимаем
-if 2 (H-b) (Н-Ь)2
Г г г2
Из выражения (229) следует, что для получения меньшей вы-
соты h гребня необходимо увеличить показатель кинематического
режима работы Л. Однако увеличение X приводит к разрыву вал-
ка и к повышенному удару пальцами по массе. При малых X ва-
лок сгруживается перед барабаном подборщика. Чтобы валок не
разрывался и не сгруживался, горизонтальная составляющая аб-
солютной скорости середины пальца (точка с рис. 226, а) в верх-
нем его положении должна быть равна нулю. Из выражения (223)
dxjdt=v-j- юг cos art—0.
(230)
Найдем из этого уравнения соотношение скоростей Z = cor/v
для средней точки длины пальца, для которой радиус гс
(рис. 226, а).
Заменяя в (230) г на гс и выражая =У Z2/4-j-r2—lr0 cos у; при
7. = сог/ц имеем
Х=—
v
г
Уl2/4-\-r2~lr0cosy '
(231)
Для применяемых подборщиков выражения (229) и (231)
удовлетворяются при 7,= 1,5...2,5. Меньшие значения соответству-
ют подбору валков сена и уборке хлебных валков па скоростях
5...7 км/ч, а большие — при движении со скоростью до 5 км/ч. Оп-
тимальное значение Л получают изменением частоты вращения
вала подборщика. Если при выбранном значении Л удовлетворя-
ется условие (231), но H>h-\-hy, т. е. значение Л меньше, чем тре-
буется по условию (229), то следует уменьшить /гу. При выборе
hy следует руководствоваться следующим. Когда валок хлебной
массы лежит на густой высокой стерне, подборщик следует уста-
22—424
337
навливать так, чтобы трубчатые валы граблин при их нижнем
положении находились на одном уровне с основанием валка. При
низком расположении валка или при работе на редкой стерне,
когда большое количество стеблей проваливается на землю, под-
борщик устанавливают так, чтобы концы пальцев касались по-
верхности почвы.
Глава VI
ТРАНСПОРТИРУЮЩИЕ УСТРОЙСТВА УБОРОЧНЫХ МАШИН
§ 1. Назначение и типы
В этой главе рассмотрены устройства, не только транспорти-
рующие продукты обработки урожая, но и изменяющие структуру,
форму и параметры потока растительной массы.
Уборку зерновых культур выполняют как прямым комбайниро-
ванием — срезание растений, их обмолот и выделение зерна из со-
ломы проводятся одновременно, так и раздельным, когда растения
скашивают в стадии восковой спелости и укладывают в валки для
дозревания и подсыхания массы. Подбирают и обмолачивают вал-
ки комбайнами через 3...5 дней после скашивания. Скашивают
хлеба в валки жатками, названными валковыми. Основные элемен-
ты, формирующие валок, — полотенно-планчатые, цепочно-план-
чатые или ременно-планчатые транспортеры, а также шнеки. На-
ходят применение жатки как с поперечным транспортированием
массы относительно скорости движения агрегата (рис. 227, а), так
и с поперечно-продольными (рис. 227,6). Первые жатки формиру-
ют валки шириной feB^Cl,7 м, вторые, названные широковалковы-
ми, шириной 6б = 2,5 м (тонкослойный валок).
В уборочных машинах часто ширина захвата жатки больше
рабочей ширины последующих рабочих органов (молотилки, из-
мельчителей, прессовальных камер), поэтому возникает необхо-
димость сужения потока транспортируемой массы.
На рисунке 228 показаны схемы устройств, в которых по-раз-
ному выполняется сужение потока.
В зерноуборочных комбайнах (рис. 228, а) поток сужают шне-
ки с правой 3 и левой 1 подачей. Растительная масса, поданная
Рис. 227. Схемы транспортирующих устройств валковых жаток:
а — с поперечным движением транспортера; б — с поперечно-продольным его движением.
338
Рис. 228. Схемы транспортирующих устройств с сужением потока растительной
массы:
а — шнеком перед транспортером; б — шнеком после транспортера; в—двумя наклонными
транспортерами; г — грабельным механизмом; 1 и 3 — шнеки; 2 — пальчиковый механизм
шиека; 4 — транспортер (плавающий); 5 — приемный битер.
шнеками, захватывается пальчиковым механизмом 2, который не-
редает их цепочно-планчатому транспортеру 4, называемому пла-
вающим. Плавающий транспортер планками нижней ветви захва-
тывает стебли и подает их к приемному битеру 5. В некоторых
зарубежных зерноуборочных комбайнах вместо плавающего
транспортера сделан ряд битеров, которые, вращаясь, лопастями
транспортируют растения.
В кормоуборочных комбайнах поток массы сужает шнек
(рис. 228, б), расположенный после транспортера.
Возможны транспортирующие устройства, где сужение дости-
гается двумя цепочно-планчатыми транспортерами, движущимися
один к другому под углом (рис. 228, в).
В жатках для уборки трав и других тонкостебельных культур
применяют транспортирующие устройства грабельного типа
(рис. 228, г). Граблины с пальцами получают движение от колен-
чатого вала.
В приведенных схемах ширину потока растительной массы
уменьшают активные рабочие органы. Применяют машины, в ко-
торых поток сужается бортами жатки,, валкообразующими решет-
ками и коробами, т. е. пассивными частями машины.
22*
339
§ 2. Параметры валка
Дозревание зерна, подсыхание растительной массы в валке,
чистота подбора и показатели работы последующих рабочих ор-
ганов (молотильно-сепарирующих, очесывающих и других уст-
ройств) во многом зависят от структуры и параметров валка.
В большей мере этим требованиям отвечает валок, стебли кото-
рого располагаются вдоль его оси с отклонением в обе стороны
на угол ±15°.
Принято ширину валка выдерживать Ь,.< 1,6...1,7 для зерновых
культур и ЬВ=С 1,3...1,4 для трав.
Расположение стеблей в валке и его ширина существенно за-
висят от скоростей движения транспортера и машины.
Разворот стеблей на транспортере. Растения, срезанные режу-
щим аппаратом, укладываются на транспортер. Комли стеблей
при этом ложатся на пальцевый брус. Из-за торможения комле-
вой части стеблей об элементы пальцевого бруса и о еще несре-
занные растения, входящие в зону режущего аппарата, транспор-
тер поворачивает стебли на некоторый угол ар (рис. 227, а).
Разворот стеблей в плоскости транспортера способствует от-
клонению их от продольной оси валка. С увеличением длины тор-
мозящей части угол ар растет; чем короче стебли, тем больше угол
их разворота.
Отклонение стеблей от продольной линии валка усугубляется
при уборке полеглого хлеба, когда стебли ложатся на транспортер
с начальным углом разворота в сторону выбросного окна. Для
уменьшения влияния полеглости на структуру валка целесообраз-
но выбирать направление движения агрегата таким, при котором
стебли укладываются на транспортер с начальным разворотом в
сторону полевого делителя.
Последующий процесс формирования валка зависит от толщи-
ны слоя растительной массы на транспортере.
Толщина слоя растений на транспортере. Масса растений, по-
ступающих на транспортер в единицу времени (подача), опреде-
ляется шириной захвата жатки В, скоростью движения агрегата v
и урожайностью срезанной части растительной массы Лр, т. е.
q=^BvAp. (232)
Для непрерывности и равномерности валка необходимо, чтобы
подача q была равна секундной массе т' растений, сбрасываемых
транспортером. Масса т' может быть выражена следующим урав-
нением:
m' =^lhu^v, (233)
где рР —плотность слоя растений;
I — длина растений, поступивших на транспортер;
h —толщина слоя на сходе с транспортера;
ытр—скорость движения транспортера.
340
Рис. 229. Схема формирования валка:
а — рабочая ветвь транспортера горизонтальна; б — разворот стеблей при наклонном транс-
портере.
Приравнивая q и т' из уравнений (232) и (233), находим
ВуАр
PpluTp
(234)
При большой толщине h ухудшается укладка растений на транс-
портер. Часть их может теряться, особенно на короткостебельном
хлебостое (Z<40 см).
От h зависит формирование валка в процессе схода растений
с транспортера и его параметры: ширина, ориентирование стеб-
лей.
Ширина валка. Рассмотрим стебли, расположенные на транс-
портере без разворота (ар = 0). В точке А (рис. 229, а) касания
полотна с валиком на стебли действуют сила тяжести Р и центро-
бежная Pj. Так как P = mg, a Pj=mt&plr, то при Pj^P растения
отрываются от полотна и совершают свободное падение.
Условие отрыва будет следующим:
^>9,8,
г
где г — радиус-вектор от оси вращения валика до слоя растений.
Решая, получаем, что отрыв происходит при скорости транс-
портера
zzTp > |z9j7. (235)
Примем, что центры тяжести поперечных сечений слоя расте-
ний, оторвавшихся от транспортера, движутся как материальные
точки с начальными скоростями:
«д = К +«трд , ив=К +«ТРВ,
где цтрл=<ог; Ытрв=(о (г-|-й).
341
Пусть пространственная система координат X, Y, Z имеет нача-
ло в точке О, совпадающей с поверхностью стерни. Пренебрегая
сопротивлением воздуха движению растений и взаимодействием
их между собой, получаем следующую систему дифференциаль-
ных уравнений свободного падения любого слоя растений:
т ^L=o- т ^L=-P- т -^-=0
с dt2 ’ с dt2 ' с dt2
Для сечений, прилегающих к зонам касания стеблей с полот-
ном (точка А), начальные условия будут такими:
^о=0; xA(to)=O-, yA(t0)=hy, zA(to)=0,
а для верхних зон слоя (точка В) —
to=0-, xB(Q=0; yB(t0)^=hy-[-h; zB(/o)=0.
Интегрируя, получаем следующую систему алгебраических
уравнений, описывающих пространственное движение комлевых
сечений слоя растений:
zA(t)=vt,
xB(t)=u^Bt\ yB(t)=hy-[-h—^-, zB(t)=vt.
Траектории полета комлевых сечений, расположенные в точке
Д, будут AAlt а в точке В—ВВ\. Точки А{ и Bi соответствуют кон-
цу полета, когда комли укладываются на стерню.
Координаты хА1 и хВ1 можно выразить так:
Тогда ширина b валка по комлям будет:
-p6S]. (236)
Заменяя в (236) h выражением (234) и решая, получаем
»-/•(234
Из выражения (237) следует, что ширина b валка зависит от
скоростей транспортера нтр и движения машины и, высоты уста-
новки hy, а также от урожайности Др.
В валковых жатках скорость нтр= 1,5...2,5 м/с. Большие зна-
чения соответствуют жаткам, работающим на скоростях и —
= 10—12 км/ч.
342
С ростом скорости v и урожайности Ар ширина Ъ увеличи-
вается.
Для сужения валка ограничивают полет стеблей вдоль оси X
бортами или боковыми щитками жатки. Однако валок получается
с профилем неодинаковой толщины (со стороны бортов толщина
значительно больше, чем от транспортера). Такие валки плохо вы-
сыхают, а при подборе комбайном неравномерно загружают мо-
лотилку, вызывая повышенные потери зерна.
Разворот стеблей при сбрасывании слоя с транспортера. Если
транспортер установлен горизонтально, то все сечения сбрасывае-
мых растений одновременно укладываются на стерню и стебель не
получает дополнительного разворота. Положение стеблей отно-
сительно линии валка будет определяться только углом ар разво-
рота их транспортером.
В рабочем положении жатки транспортер устанавливают с на-
клоном к горизонтальной плоскости так, что край его у режущего
аппарата устанавливают ниже, чем с противоположной стороны.
Тогда при падении комли касаются стерни раньше колосьев.
В последующем происходит разворот растения относительно точки
соприкосновения комля со стерней (точки А\, В\, рис. 229,6). На
этом этапе формирования валка все сечения растений совершают
вращение относительно комлей до полной их укладки на стерню.
В результате такого движения стебли укладываются с дополни-
тельным разворотом (угол ар). С учетом разворота на транспорте-
ре полный угол а, под которым стебли укладываются в валок,
а=ар+ар. Из-за разворота ширина границы валка Ьв значительно
больше ширины валка по комлям.
Угол разворота стеблей и ширина bt. возрастают с увеличени-
ем скоростей нтр и v, т. е. повышение скорости движения жатвен-
ного агрегата значительно ухудшает валок. Для уменьшения раз-
ворота стеблей разработаны способы управления процессом фор-
мирования валка за счет изменения скорости движения транспор-
терных лент.
§ 3. Скорость транспортирования массы
От скорости подачи растительной массы к рабочим органам
зависят качественные показатели и надежность их работы, затра-
ты энергии и производительность машины.
В кормоуборочных комбайнах скорость движения транспортера
выбирают по пропускной способности питающих вальцов, подаю-
щих массу к измельчающим аппаратам. Пропускную способность
характеризуют высотой hT горловины измельчающего аппарата,
принимая допускаемую подачу слоя растительной массы
/гд=(1,2...1,5)/гг. (238)
Высота горловины бывает 110...150 мм.
343
Если сужающее устройство расположено после питающего
устройства комбайна, то высота слоя на нем
ppWTp
Приравнивая йд и h и решая совместно выражения (238) и
(239), получаем следующую формулу для определения скорости
транспортера:
и =______________
(1,2... 1,5) ЛгРр •
При заданных значениях итр, ЛР, hr и рР по выражению (240)
рассчитывают скорость движения агрегата.
В зерноуборочных комбайнах скорость птр выбирают с учетом
вымолота зерна из колосьев и выделения (сепарации) зерна из
соломистой части. С уменьшением скорости цтр возрастает число
ударов, наносимых по колосу, за счет чего снижаются потери
зерна недомолотом.
Установлено, что коэффициент недомолота 6 (6 — отношение
массы невымолоченных зерен к исходной их массе в обмолачивае-
мых колосьях) линейно увеличивается с ростом птр, т. е.
8=а-]-Ьитр, (241
где а и b — опытные коэффициенты при влажности 20...23% пше-
ницы (например, а = 2,7-10:!, Ъ = 1,8-10~3, м/с1).
Масса зерна, выделяемого из соломы при обмолоте, несколько
увеличивается с ростом скорости итр.
С увеличением скорости пТр мощность, потребная на работу
молотильных устройств, снижается. В отечественных комбайнах
изменение птр от 2,5 до 3,2 м/с уменьшает мощность на обмолот
массы на 12...16%.
Принимают скорость плавающего транспортера (3,1...3,5 м/с)
на 25...40% выше линейной скорости конца пальца шнека. Вслед-
ствие разницы в скоростях поток растений растаскивается плава-
ющим транспортером, и тем самым обеспечивается более равно-
мерная подача растительной массы к приемному битеру. Битер
направляет поток массы к молотильному устройству. Он предот-
вращает затаскивание массы планками транспортера на его не-
рабочую ветвь. Наибольшее распространение в комбайнах полу-
чили четырехлопастные битеры. Для лучшего схода растений с
лопастей их устанавливают под углом к радиусу битера. Угол вы-
бирают в пределах 23...35°. Линейная скорость конца лопастей
составляет 6...7,5 м/с.
§ 4. Параметры шнеков
Сужающие шнеки доводят ширину потока растений, располо-
женных на транспортере, до ширины горловины, образуемой рабо-
чими органами.
344
Рассмотрим процесс сужения потока растений, наиболее уда-
ленных от горловины (рис. 230). Если растение не скользит от-
носительно транспортера, то его вершина будет двигаться со ско-
ростью l/ст, равной результирующей скорости tzTp транспортера и
скорости мш осевой подачи растений шнеком. Чтобы стебли свои-
ми вершинами не упирались в задний борт, направление скорости
цст не должно пересекать линию АВ (рис. 230) заднего борта. Для
этого необходимо, чтобы соблюдалось следующее условие:
иш > В — Ь
Птр 21
Решая, получаем
в — ь
21 “ТР"
Так как цш=«/о. где п — частота вращения шнека; t0 — шаг спи-
ралей шнека, то, подставляя в предыдущее выражение иш, имеем
> в~
2lt0
(242)
Из выражения (242) находим частоту вращения шнека при
заданных конструктивных параметрах В, b и I платформы, /0 шне-
ка и скорости цТр транспортера.
В кормоуборочных комбайнах диаметр шнека по верхней кром-
ке равен 250...500 мм, а шаг — от 230 до 450 мм. Зерноуборочные
комбайны имеют наружный диаметр спиралей 460...525 мм, шаг
спирали 445...500 мм, линейную скорость витков 4,8...6,8 м/с, а
осевую скорость 1,1...1,8 м/с.
Иногда шаг шнека делают переменным: у бортов жатки мень-
ше, а ближе к горловине больше. На шнеке зерноуборочных ком-
байнов установлены съемные витки, которые при прямом комбай-
нировании прикрепляют к шнеку в
конце каждой ленты, а при подборе
валков снимают. Вследствие удлине-
ния спиральной ленты при прямом
комбайнировании и удалении съемных
витков при подборе валков раститель-
ная масса равномернее распределяет-
ся по ширине молотилки.
Шнек должен захватывать массу
и равномерно подавать ее в централь-
ную часть. Захватывающая способ-
ность шнека зависит от зазора меж-
ду его витками и обшивкой корпуса.
При большом зазоре возможно про-
скальзывание витков по массе, при
недостаточном — заклинивание. За-
зор можно изменять перестановкой
Рис. 230. Схема к расчету
режима работы сужающего
шнека.
345
Рис. 231. Схемы пальчикового механизма а и положение траектории конца
пальцев б шнека зерноуборочных комбайнов:
/ — пальцы; 2— коленчатая ось; 3 — кожух шнека; 4 — направляющая пальца.
оси шнека по вертикали. Для большинства работ зазор должен
быть 5... 15 мм.
Пальчиковый механизм шнека подает массу на плавающий
транспортер. Пальцы 1 (рис. 231, а) механизма свободно насаже-
ны на коленчатую ось 2. На оси установлены подшипники кожу-
ха 3 шнека. Внешние концы пальцев свободно проходят сквозь
отверстия кожуха.
При вращении кожух 3 увлекает пальцы, а они из-за коленча-
той оси выходят из кожуха и, захватив растения, перемещают их
к плавающему транспортеру.
Коленчатую ось можно установить в различные положения,
вследствие чего изменяется положение траектории а (рис. 231, б)
движения внешнего конца пальца механизма относительно траек-
тории Ь и с движения соответственно конца планок плавающего
транспортера и мотовила.
Из рисунка 231,6 видно, что пальцы могут захватывать расти-
тельную массу, подаваемую к шнеку, на расстоянии /гк от днища
корпуса жатки, которое находим из выражения:
йк =Лш+/—ecosa, (243)
Отсюда следует, что с подъемом оси шнека (с увеличением
Л1П) и с ростом угла а пальчиковый механизм может захватывать
растения, более удаленные от днища корпуса жатки. При длинно-
стебельном и высокоурожайном хлебе, а также при уборке раз-
дельным комбайнированием, когда высота слоя стеблей, подавае-
мых к пальчиковому механизму, растет, целесообразно, увеличи-
вать угол а и поднимать ось шнека. В большинстве существующих
конструкций зерноуборочных комбайнов коленчатую ось шнека
можно поднимать и поворачивать в нужное положение.
С увеличением угла а уменьшается расстояние между траекто-
риями а и с, что сокращает «мертвую зону» и улучшает равно-
мерность подачи растений. Однако с ростом угла а увеличивается
расстояние между траекториями а и Ъ, что может ухудшить за-
хват стеблей планками плавающего транспортера. Поэтому, из-
меняя положение оси, необходимо следить и за тем, чтобы была
нормальная подача стеблей к плавающему транспортеру.,
346
Установлено, что оптимальный зазор между концом пальца и
днищем корпуса жатки равен 5...15 мм, что соответствует удовлет-
ворительной работе пальчикового механизма для большинства ус-
ловий его использования.
Глава VII
РАБОЧИЕ ОРГАНЫ ДЛЯ ПРЕССОВАНИЯ, ГРАНУЛИРОВАНИЯ
И БРИКЕТИРОВАНИЯ
§ 1. Общие сведения
Травы, солому и кормовые смеси при уборке уплотняют, прес-
суют в тюки, рулоны, гранулы или в брикеты. Уплотнение кормов
уменьшает потребность в транспортных средствах, сокращает раз-
меры помещений для хранения, снижает механические потери наи-
более ценной листовой части при уборке и биологические потери
при хранении, вызываемые деятельностью грибков и бактерий.
Спрессованные корма удобнее для транспортировки и раздачи на
фермах.
Прессование — уплотнение грубых кормов в тюки и рулоны с
плотностью до 300 кг/м3. Различают низкую (до 100 кг/м3), сред-
нюю (100...200 кг/м3) и высокую (200...300 кг/м3) плотность прес-
сования.
Низкая плотность прессования сена и соломы рекомендована
для северных, северо-западных районов лесолуговой зоны и для
поливных участков степной и пустынной зон. При низкой плотно-
сти допускается прессование массы с влажностью до 40%.
Спрессованную массу в последующем досушивают в специаль-
ных установках. Уборка трав с досушиванием увеличивает пита-
тельную ценность сена: в нем возрастает содержание про-
теина.
Средняя плотность прессования сена и соломы применима для
центральных районов лесолуговой зоны, степной и пустынной зон,
допускаемая влажность при прессовании — до 25%.
Высокую плотность прессования допускают при влажности
массы не выше 22% в пустынно-степных и пустынных районах.
При высокой плотности прессования тюки можно транспортиро-
вать на дальние расстояния.
Гранулирование — уплотнение (плотность 900... 1300 кг/м3)
кормовых компонентов или смесей, измельченных в муку. По фор-
ме гранулы изготавливают цилиндрическими (диаметр до 20 мм)
или фигурными. Оптимальная влажность при гранулировании тра-
вяной муки и комбикормовых смесей— 14...16%.
Брикетирование — уплотнение (плотность 500...900 кг/м3) тра-
вяной или соломенной резки, кормовых смесей, включающих гру-
бые корма с размером частиц 20...70 мм, в цилиндрическую (диа-
метр 21...65 мм) или другую форму (наибольший размер 80 мм).
347
§ 2. Типы прессов
Прессуют сено и солому в прямоугольные тюки или в цилин-
дрические рулоны. Для формирования тюков применяют прессы
поршневые и с колеблющейся стенкой.
Поршневые прессы. Растительную массу уплотняет поршень
3 (рис. 232, а), совершающий возвратно-поступательное движение.
Поршень захватывает поданную набивателями 2 порцию растений
и сжимает их в прессовальной камере а, образованной металличе-
ским корпусом 1, торцом поршня и предыдущей спрессованной
массой растений. По мере формирования тюка поршень протал-
кивает его вдоль камеры, а \
Наряду с прямолинейным движением поршня. применялись
прессы с криволинейной камерой и качающимся порщнем.
Прессы с колеблющейся стенкой уплотняют сено? и солому в
тюки прямоугольного сечения больших размеров (масса сухого
сена в тюке до 500 кг).
Подборщик 4 (рис. 232,6) подает растения к избирателю 5.
Набиватель приводится в движение кривошипом АВ и Проталки-
вает порцию сена (соломы) в камеру прессования а. Колеблющая-
ся стенка 6 уплотняет тюк и проталкивает его. Как трлько тюк
сформирован (плотность тюка тракторист оценивает nd индикато-
ру), открывается задняя стенка 7 и тюк, обвязанный лппагатом в
трех продольных плоскостях, выталкивается на землю.
Сбор сена и соломы в тюки больших размеров экономически
выгоднее, чем уплотнение в мелкие тюки поршневыми прессами.
Рулонные прессы (рис. 233) закручивают сено/(солому) в ру-
лоны диаметром до 1,5 м. iMaccy подают в зону формирования ру-
лона транспортером 7. По мере продвижения слой массы уплот-
няется между транспортером и барабаном, а затем закручивается
в зоне петли А, образованной прессующими ремрями 1.
По мере формирования рулона размер пет^и увеличивается за
счет поворота (по часовой стрелке) рамки 19. Сопротивление по-
Рис. 232. Схемы прессов для уплотнения сена и соломы в тюки:
а — поршневой; б — с колеблющейся стенкой; 1 — корпус камеры прессования; 2 и 5 — на-
биватели; 3 — поршень; 4—подборщик; 6 — колеблющаяся стенка; 7 — задняя откидная
стенка; 8 — ограничители.
348
Рис. 233. Схема прессующей и гидравлической части рулонного пресса:
1 — прессующие ремни; 2 — штанга; 3 — пружина; 4 — рамка; 5 — защелка; 6 — отсекатель^
7 — транспортер; 8— барабан; 9 — манометр; 10 — сливной клапан; // — регулируемая пру-
жина сливного клапана; 12 — обратный клапан; 13 — пневмогидроаккумулятор; 14 — гидро-
цилиндр; 15 — сапун; 16 — пружина затвора; 17 — поршень затвора; 18 — магистраль пода-
чи масла от гидросистемы трактора; 19— рамка.
вороту рамки зависит от силы сжатия пружины 3 и сопротивлений
масла, выталкиваемого из полости а гидроцилиндра 14 в пневмо-
гидравлический аккумулятор 13. От значения этого сопротивления
зависит плотность прессования. Плотность регулируют пружи-
ной П, поджимающей сливной клапан 10, а контролируют мано-
метром 9. Максимальное давление должно быть не больше 5 МПа.
Когда рулон достигает заданного диаметра, упор рамки 19 раз-
мыкает соединение защелки 5 с клапаном 4. Клапан поворачива-
ется относительно оси О под действием сжатой пружины 3, осво-
бождая выход на землю сформированному рулону.
В исходное положение рамку возвращает шток гидроцилиндра,
перемещаемый действием масла, поступающего из аккумулятора
в гидроцилиндр. В случае необходимости клапан 4 поворачива-
ют, подавая масло от гидросистемы трактора по магистрали 18.
При этом масло, преодолевая сопротивление пружины 16 и пере-
мещая поршень 17, поступает в полость б гидроцилпндра. Когда не
пользуются гидросистемой трактора, золотник его гидрораспреде-
лителя устанавливают в «Плавающее» положение, тогда пружина
16 перемещает поршень 17 в левое положение (по рисунку), со-
общая полость б гидроцилпндра 14 через сапун 15 с атмосферой.
За счет этого уменьшается сопротивление штока перемещению при
опускании клапана.
349
Рис. 234. Схемы прессов:
а — для гранулирования; б — для брикетирования; / — поршень; 2 —
ролики водила.
Рулонные прессы применяют для низкого и среднего прессо-
вания. В рулонах лучше сохраняются листья, так как они завер-
тываются внутрь, их удобнее и легче, чем тюки, использовать при
раздаче кормов. Однако существующие конструкции рулонных
прессов сложнее поршневых.
Брикетные прессы и грануляторы по принципу работы разде-
ляют на машины периодического и непрерывного действия.
К прессам периодического действия относятся штемпельные
(рис. 234, а), работающие по принципу поршневых. Штемпельные
прессы могут быть с открытым каналом, когда противодавление
создается предыдущим брикетом, и с закрытым, когда масса сжи-
мается между подвижным штемпелем и неподвижным упором.
В прессах непрерывного действия (рис. 234, б) материал, по-
павший в зазор между кольцами, выжимается роликами водила 2.
Возможно вращение как колец, так и водила.
Брикетные прессы весьма энергоемки; особенно велики затра-
ты энергии в прессах с открытым каналом. Однако и штемпель-
ные прессы с закрытым каналом не находят широкого распрост-
ранения, так как до сих пор не решена проблема загрузки одина-
ковой порции материала в пространство между неподвижным упо-
ром и движущимся с большой скоростью штемпелем.
§ 3. Рабочий процесс поршневого пресса
Подача массы в прессовальную камеру. В прессах с поступа-
тельным движением поршня массу подают в прессовальную ка-
меру сверху или сбоку при холостом ходе поршня.
Для образования тюка правильной формы число порций мас-
сы, подаваемой набивателем, должно быть 9...15 для одного тюка.
Тогда масса /нп одной порции равна
mn=q0/n,
где qo — пропускная способность пресса;
п — частота ходов поршня.
550
Производительность пресса определяется его пропускной спо-
собностью q0, т. е.
0=4- <244>
Коэффициент k показывает соотношение производительности
и пропускной способности пресса. Значения k выбирают в преде-
лах 0,3...0,55, т. е. пресс работает не с полной загрузкой. Коэффи-
циент k зависит от соответствия скорости движения агрегата мас-
се валка, от равномерности массы валка по длине, от его формы.
Пропускная способность существующих прессов ^0=3...5 кг/с.
В прессах с боковой подачей растений нормальная работа со-
ответствует подаче одной порции массой 2,5...3 кг; максимально
допускаемая подача — 5 кг.
Если принять, что масса поступает в камеру равномерно по
всей площади F загрузочного окна, то толщина ее слоя в камере
до сжатия
/г0=тп/Ерр,
где рр — плотность массы до сжатия.
Набиватель погружается в камеру на 30...50% ее ширины Ь,
тогда толщина сжатого слоя массы
ft=(0,5...0,7)&.
Принимая обратную пропорциональность между плотностью и
толщиной, получаем следующую зависимость для определения
плотности сжатой массы:
Рр=РрЛо/л-
Заменяя /i0 и h их выражениями, находим
р^/пп/Е6(0,5...0,7). (245)
Сжатие и продвижение массы поршнем в камере. На массу,
поданную набивателем в камеру, действует рабочая поверхность
поршня, совершающего рабочий ход (рис. 235). Так как ход порш-
ня на 25...30 % больше длины загрузочного окна, то в начале дви-
жения от точки О (крайнее положение поршня) до точки А на
лобовую поверхность не действует никакое давление, перемещение
поршня на этом участке — Si. При дальнейшем движении пор-
шень начинает действовать на массу, и по мере его перемещения
масса, заложенная в камеру, сжимается, что сопровождается рос-
том давления по вогнутой кривой (линия АВ). К моменту при-
хода поршня в точку С (ход ZC=S2) давление достигает значе-
ния pi. Если плотность сжимаемой порции массы достигла плот-
ности массы, которая находится в прессовальной камере, то при
дальнейшем перемещении поршня от точки С до Е (ход CE=S3)
сжатие распространяется и на ранее спрессованную массу. Дав-
ление при этом растет по некоторой линии BD. Как только сжа-
тие массы достигнет наибольшего значения, спрессованное сено
351
(солома) начинает выталкивать-
ся из камеры. Давление р2 в период
выталкивания массы (ход EF=S4)
остается постоянным.
При обратном (нерабочем) ходе
поршня из-за упругих свойств спрес-
сованной массы часть деформации
(ход FN = S$) восстанавливается.
При этом давление на поршень па-
дает (линия GKN) и в конце хода
S5 становится равным нулю.
В конструкциях современных
прессов в камере прессования ста-
вят защелки, которые несколько ог-
раничивают обратное движение
спрессованной массы. Опытами
установлено, что восстанавливаю-
щаяся деформация составляет 40...
60 мм.
Рис. 235. График изменения дав-
ления на поршень пресса в зави-
симости от его перемещения.
Давления pi и р2 зависят от многих показателей массы: модуля
упругости, коэффициента Пуассона, коэффициента трения, а также
от конструктивных параметров и режима работы пресса.
Указанные показатели изменяются в большом диапазоне в за-
висимости от свойств и состояния сжимаемой массы (влажности,
длины стеблей, морфологических особенностей растений и т. д.).
Поэтому аналитические зависимости изменения давления от пе-
ремещения поршня очень условны и не могут дать желаемых ре-
зультатов при расчетах.
При расчетах целесообразнее использовать экспериментальные
зависимости. При прессовании сена и соломы поршневыми прес-
сами с площадью до 1800 см2 давление на поршень выражают сле-
дующей зависимостью:
р=с
ет (₽р-Рр)_1
(246)
где рр — плотность массы в конце сжатия на 7...10% выше плот-
ности массы, вышедшей из камеры, рр", т. е. рр =
= (1,07...1,1) Рр';
Рр — исходная плотность;
с и т — коэффициенты, с=330...600 кПа, т= (4,6...5,1) 10~3
(кг/м3)'1, меньшие значения соответствуют прессова-
нию сена, большие — соломы.
§ 4. Регулирование плотности прессования
Плотность прессования — основной показатель, определяющий
качество спрессованной массы, а также издержки на транспорти-
рование и хранение тюков.
352
Исходя из качества спрессованного сена, экспериментально вы-
явлена ориентировочная плотность прессования в зависимости от
содержания влаги в сене.
Влажность, % 30 25 28 Ниже 20
Плотность тюков, кг/м3 100... 140 150...200 225 Любая
Плотность тюков зависит от сопротивления прессуемого мате-
риала в прессовальной камере и его влажности.
Сопротивление в прессовальной камере определяется ее длиной
и сечением выходного канала. Длина камеры для разных пресс-
подборщиков разная и бывает от 1460 до 3550 мм, а площадь се-
чения— от 1280 до 1880 см2. Сечение выходного канала можно из-
менять наклоном стенок камеры или специальных уплотняющих
полос. Уплотняющие полосы размещают сверху и снизу или с бо-
ковых сторон и крепят к камере шарнирно. Сужение полос до-
стигается регулятором плотности, воздействующим на полосы пру-
жинами.
Регулирование плотности тюков изменением схождения уплот-
няющих полос имеет следующий недостаток. При схождении по-
лос сечение камеры постепенно уменьшается к выходу. Следова-
тельно, процесс прессования во времени происходит с нарастани-
ем плотности. Пресс, образующий тюки заданной плотности в дан-
ный момент, по истечении некоторого промежутка времени будет
давать большую плотность. Особенно это явление проявляется при
высоких плотностях прессования (свыше 250 кг/м3). Поэтому с те-
чением времени следует проверять плотность тюков и изменять
положение уплотняющих полос.
Разновидность прессуемого материала и его состояния значи-
тельно влияют на плотность тюков. Установлено, что с увеличе-
нием влажности массы и модуля упругости коэффициенты трения
растут. Поэтому при прессовании влажной массы уплотняющие по-
лосы следует сближать меньше, чем при прессовании сухой. Так
как влажность массы может значительно изменяться на одном уча-
стке поля, то одной из задач совершенствования процесса прессо-
вания является проблема автоматического регулирования плот-
ности.
§ 5. Мощность при уплотнении растительной массы
Уплотнение массы в тюки, брикеты и гранулы —энергоемкий
процесс. Мощность, потребная на прессование, зависит от подачи
массы в единицу времени, от ее влажности и плотности спрессо-
ванных тюков.
В зависимости от подачи q мощность на прессование сена и со-
ломы:
М=3,6е</, (247)
где е — коэффициент, выражающий энергозатраты в кВт-ч на 1 т
спрессованного сена.
23—424
353
Коэффициент е при влажности 18...25% изменяется от 4,0 до
8,5 при прессовании сена и от 2 до 3,5 кВт-ч/т при брикетирова-
нии. Меньшие значения соответствуют плотности спрессованного
тюка 150 кг/м3, а большие — 250 кг/м3. С увеличением влажности
прессуемой массы при одинаковой плотности энергозатраты умень-
шаются. Так, например, для сена влажностью 23% е на 50%
меньше, чем при влажности 13%. Поэтому для сокращения энер-
гозатрат важно проводить прессование при влажности сена 18...
25%.
Затраты энергии на прессование соломы на 20...35% выше,
чем на сено такой же влажности.
Так как подача зависит от массы тв валка на длине 1 м и ско-
рости v движения машины, т. е.
ТО
М=3,6ешвш (248)
Пресс-подборщики работают на валках массой 1,0...2,5 кг/м.
В зависимости от массы валка на 1 м длины подбирают опти-
мальную скорость, при которой максимально используется про-
пускная способность пресс-подборщика при устойчивой работе дви-
гателя трактора.
Глава VIII
ОЧЕСЫВАЮЩИЕ УСТРОЙСТВА ЛЬНОУБОРОЧНЫХ МАШИН
§ 1. Назначение и типы очесывающих устройств
Очесывающие устройства применяют для отрыва коробочек от
стеблей льна. Максимальный съем коробочек при минимальном
повреждении стеблей и семян выполняется при условии, если зо-
на действия зубьев очесывающих аппаратов на стебли льна (зо-
на очеса) не меньше зоны расположения коробочек на стеблях.
При этом зубья гребней должны насквозь пронизывать слой стеб-
лей, не отклоняя их. Для снижения повреждений стеблей прост-
ранство между зажимом и входом зубьев в слой стеблей («мерт-
вая зона»), а также число и скорость прочесов выбирают как мож-
но меньшими. Очесывающее устройство не должно наматывать
стебли.
В льноуборочных машинах применяют очесывающие аппараты
следующих типов: двухбарабанный с круговым и однобарабанный
с плоскопараллельным движением гребней.
Двухбарабанный аппарат (рис. 236, а) состоит из двух вра-
щающихся навстречу барабанов 5 и 6, расположенных один под
другим.
Каждый барабан по образующим несет четыре гребенки 2,
из которых две (через одну) длинные и две короткие. На длинных
354
гребенках закреплены корот-
кие зубья 3 для расчесывания
снопа и длинные 1 для очесы-
вания. Короткие гребенки
снабжены только очесывающи-
ми зубьями.
Барабаны установлены так,
что длинная гребенка одного
из них встречается с короткой
другого. Этим достигается по-
очередность расчесывания сно-
па то с одной, то с другой
стороны, вследствие чего
уменьшается выдергивание
стебля из зажима.
Однобарабанный аппарат
(рис. 236, б) представляет со-
бой ряд четырехзвенных па-
раллелограммных механизмов
ABCD, на звеньях ВС которых
закреплены гребенки с зубья-
ми. Промежутки между зубья-
ми различны. Первая группа
зубьев со стороны подачи лен-
ты стеблей — с большими про-
межутками; эти зубья делают
первые прочесы, выравнивая
положение стебля в ленте.
Рис. 236. Схемы очесывающих аппа-
ратов льноуборочных машин:
а — двухбарабанного; б — однобарабанного
с плоскопараллельным движением паль-
цев: 1 — длинные зубья; 2 — гребенки; 3 —
короткие зубья; 4 — зажимное устройство;
5 и 6 — барабаны.
Промежутки между последующими зубьями меньше. В этой зоне
зубья очесывают коробочки растений.
В комбайнах для уборки риса применяют однобарабанные оче-
сывающие аппараты с жестким креплением зубьев.
§ 2. Технологические показатели работы
очесывающих устройств
Зона очеса а (рис. 236) для аппаратов всех типов зависит от
их геометрических размеров.
В двухбарабаином аппарате зона очеса меньше диаметра бара-
бана по концам зубьев, а в однобарабанном она может быть рав-
на диаметру барабана. Поэтому при одинаковой зоне очеса одно-
барабанный аппарат компактнее двухбарабанного. Так, например,
при а = 600 мм и длине зубьев 200 мм габаритные размеры двух-
барабанного аппарата по высоте 1800 мм, а однобарабанного
800 мм. Увеличение габаритов особенно нежелательно для мобиль-
ных машин.
«Мертвая зона» b в однобарабанном аппарате может быть све-
дена к минимуму наклоном зубьев и изменением положения бара-
23*
355
бана относительно зажима, В двухбарабанном аппарате эта зона
значительных размеров (для предыдущего примера 20 см). С уве-
личением диаметра барабана «мертвая зона» увеличивается.
Вход зубьев в слой стеблей (пронизывание) определяется уг-
лом между осями стебля и зуба.
В однобарабанном аппарате оптимальный угол может быть по-
лучен установкой барабана и регулировкой положения гребней.
В двухбарабанном аппарате с круговым движением гребней
для лучшего входа зубьев в ленту концы зубьев приходится заги-
бать, что приводит к наматыванию растений на них.
Число прочесов — число проходов зубьев по одному и тому
же месту стебля; скорость прочеса — скорость движения зуба от-
носительно стебля.
Для очесывающих аппаратов указанных типов число прочесов
подсчитывают по выражению:
m=nz/r/uTp, (249)
где п — частота вращения вала барабана (кривошипа);
z — число зубьев на барабане или звене;
/г —длина гребня;
итр — скорость подачи стеблей транспортером.
При одинаковом числе прочесов в двухбарабанных аппаратах
скорость концов зубьев в 1,4...1,45 раза выше скорости зубьев од-
нобарабанного аппарата. Следовательно, в однобарабанном ап-
парате возможность повреждения стеблей и коробочек меньше,
чем в двухбарабанном.
Постепенность очеса коробочек достигается тем, что зубья не
сразу действуют на всю зону очеса. В двухбарабанных аппаратах
постепенность очеса достигается последовательным действием на
стебли коротких и длинных зубьев. При таком очесе короткие
зубья и зубья гребней, действующих ближе к зажиму, очищая
часть длины ленты, оставляют на ней продукты очеса. Оставшись
на ленте, продукт очеса увеличивает сопротивление прочесу сле-
дующими зубьями. Это повышает опасность обрыва и вытягива-
ния стеблей из зажимного устройства.
Для постепенности очеса в однобарабанных аппаратах ось ба-
рабана ставят под углом к направлению движения стеблей или
расставляют более редко зубья со стороны входа ленты, а ось
барабана ставят параллельно направлению движения стеблей.
В первом случае прочес начинается с верхушечной части стебля
и продукты очеса сбрасываются с ленты, во втором случае проче-
сывается вся длина зоны очеса, но на ленту в начале прочеса од-
новременно действует меньше зубьев.
Опыты показывают, что качество очеса однобарабанным аппа-
ратом, поставленным параллельно направлению движения стеб-
лей, но с разрядкой зубьев в сторону входа ленты, не хуже, чем
при наклонной установке барабана. Установка барабана под углом
356
приводит к значительному увеличению параметров очесывающего
аппарата и усложняет компановку других рабочих органов.
Однобарабанные аппараты находят наиболее широкое приме-
нение в современных машинах. Однако в указанных аппаратах
наблюдается наматывание стеблей на гребни. Для устранения на-
матывания применяют битеры или противонамоточные пластины.
§ 3. Режим очеса однобарабанным аппаратом
Подача стеблей. К очесывающему барабану растения подает
зажимное устройство — транспортер.
От числа растений, поступающих к барабану, значительно за-
висят чистота очеса, обрывы и выдергивание стеблей (отход в пу-
таницу) .
Чистота очеса в основном определяется толщиной ленты стеб-
лей. При малом количестве стеблей на единице длины ленты мно-
го коробочек остается на стеблях. Недочес наблюдается при
плотности ленты меньше 1500 растений на 1 м длины транспор-
тера.
Толщина ленты влияет также на отход стеблей в путанину, так
как изменяется сжатие слоя стеблей транспортером. При малом
сжатии возможно выдергивание стеблей, при большом — их обрыв.
Работа очесывающих аппаратов ухудшается при плотности лен-
ты 6000 растений на 1 м.
Число стеблей на 1 м длины ленты («плотность ленты») зави-
сит от числа v стеблей на 1 м2 поля, от ширины В захвата тере-
бильной части машины, от скорости v ее движения и скорости итр
транспортера.
«Плотность ленты» стеблей, зажатых в транспортере, находят
по формуле:
Pn=vBv/uTp. (250)
Принимая v = 500...2500 стеблей на 1 м2, В = 1,52 м, птр = 1,56 м/с
и рл = 1500 стеблей на 1 м, получим, что скорость движения ма-
шины может быть 0,62...3,1 м/с.
Транспортер должен подавать стебли в камеру так, чтобы все
коробочки попадали в зону очеса. В льнокомбайнах это достига-
ется установкой соответствующей высоты теребления.
Вход зубьев в ленту. Рассмотрим процесс входа зуба в ленту
для барабана, ось ОО (рис. 237) которого параллельна направле-
нию скорости движения зажимного транспортера. Если окруж-
ность барабана смещается от зажимного транспортера на величи-
ну с, а зубья наклонены к вертикали под углом у, то концы зубь-
ев перемещаются по окружности радиусом г с центром в точке О[.
На стебель т, подведенный транспортером в камеру очеса, дей-
ствуют зубья гребней. Пусть зуб входит в ленту в точке А. Поло-
жение точки А определяется размером «мертвой зоны» Ь.
357
Рис. 237. Схема действия зубьев очесывающего барабана на растение.
Как видно из рисунка, величину «мертвой зоны» можно выра-
зить формулой:
fe=c4~r-HsinY—/'2—^2» (251)
где I — длина зуба;
h— расстояние от линии стебля до оси Of окружности вра-
щения конца зуба (смещение).
При возрастании h «мертвая зона» b увеличивается. На корот-
костебельном льне увеличение b приводит к недочесу низко рас-
положенных коробочек. Для устранения этого следует уменьшить/г.
Вход зубьев в ленту зависит от угла а между направлением
скорости и зуба и нормалью N к нему. Если пренебречь упруго-
стью стеблей и их взаимодействием, при а>ср (где <р — угол тре-
ния стеблей о зуб) зуб не увлекает за собой стебли, когда а<<р,
стебли отклоняются зубом вниз.
Определим угол а. Как видно из рисунка 237, в момент входа
угол a=ip+y.
Так как |3=arc cos h/r, то a=arccos/2/r-| -y.
Увеличение угла у (отклонения зуба от вертикали) и радиуса
г барабана приводит к росту угла а. Чем больше смещение h,
тем меньше угол а.
Для лучшего входа зубьев в ленту следует уменьшать смеше-
ние, но это может привести к захлестыванию и обрыву стеблей.
Такая опасность возрастает на длинностебельном льне.
Прочес ленты. Зубья разделяют ленту стеблей на порции
(рис. 237), заключенные между соседними зубьями 1—2, 2—3,
3—4 и т. д. Проскальзывая по стеблям при своем движении, они
прочесывают порцию стеблей.
Поскольку зуб перемещается по траектории 1—1', а транспор-
тер — по направлению цтр, то стебли отклоняются от своего пер-
358
воначального положения на некоторый угол 9. Наклон стеблей
зависит от геометрических и кинематических параметров бараба-
на, скорости движения транспортера и длины стебля.
Определим влияние указанных параметров на значение угла 6.
Пусть стебель подошел к зубу в момент входа его в ленту. Зуб,
проскальзывая по стеблю, соприкасается с его элементами в
точках траектории 1—1'. К моменту выхода зуба из ленты (точка
В') транспортер переместит стебель на величину Д£. Тогда, как
видно из рисунка, угол 6 наклона стебля найдем из выражения:
tg 0=Д£/МВ', где расстояние МВ' —Ь-\-2 У г2—h2.
Подставляя значение b из выражения (251), получаем
tg 6 =---------—.......— .
с 4- г -J- I sin у 4- уО-2 — h2
Так как Д£ = птрД£ где Д/ — время, в течение которого проис-
ходит прочес, то
tg 0 =--------. (252)
с 4- г 4-1 sin у 4- У'г2 — h2
Прочес соответствует углу поворота 2(3, тогда при скорости
движения зуба и получим
Д t=2р/со-2 fir/и.
Заменяя 0=arc cos hfr, имеем
д 2г arc cos h/r
и
Подставляя выражение для Д/ в уравнение (252), находим
ig6 = --------------------2г arc cos ft/г , (253>
(с 4- г 4-1 sin у 4- Vг2 — ft2) X
где Х=п/птр.
Из второго выражения следует, что угол отклонения стеблей
тем больше, чем больше радиус г барабана и чем меньше расстоя-
ние h. С увеличением 7. угол 0 уменьшается, а число прочесов уве-
личивается. Установлено, что для получения чистоты очеса, отве-
чающей агротехническим требованиям, число прочесов должно
быть 5 или 6.
В льноуборочных комбайнах значение % принимают равным 4,5,
а угол 0 = 10°. Когда стебли короче зоны очеса, тогда угол 0 от-
клонения стеблей меньше значений, найденных по выражению
(253).
Глава IX
ВЯЗАЛЬНЫЕ АППАРАТЫ
§ 1. Процесс образования снопа
В снопы связывают стебли льна, конопли и зерновых культур
при уборке их жатками-сноповязалками. Для обвязки снопов ис-
пользуют шпагат.
359
Рис. 238. Схема образования снопа:
1 — рычаг; 2 — зажим; 3 — сбрасыватель;
4 — поток стеблей; 5 и 6 — транспортеры;
7 — игла; 8 — стол; 9 — упаковщики.
Процесс образования снопа
(рис. 238) происходит на вязаль-
ном столе 8, к которому стебли
подают транспортеры 5 и 6. На
столе уложена нить шпагата, про-
пущенная от клубка сквозь от-
верстия направляющих и иглу 7
и закрепленная в зажиме 2 вя-
зального аппарата.
Периодически сквозь прорези
стола выходят упаковщики 9,
захватывают порцию растений и
подают ее к рычагу 1 включения
вязального аппарата. За несколь-
ко ходов упаковщиков у рычага
-скапливается порция стеблей, вследствие чего усилие, действую-
щее на рычаг, растет. При некотором значении этого усилия ры-
чаг поворачивается на определенное расстояние и включается ме-
ханизм привода вязального аппарата. Сопротивление повороту
рычага зависит от натяжения пружины, удерживающей рычаг, и
от плотности снопа. Как только включится механизм привода, на-
чинает двигаться игла. Она выходит сквозь прорези стола, охва-
тывает сноп шпагатом и укладывает нить в зажим.
Растения, подаваемые в этот момент, не поступают к столу.
В машинах для уборки льна они задерживаются разделителем
снопов, а в жатках-сноповязалках — хвостовиком иглы.
Вязальный аппарат связывает узел. После того, как сноп сфор-
мирован и связан, поворачивается сбрасыватель 3 и выталкивает
сноп на снопонос или на поле. После этого игла возвращается в
нерабочее положение. Разделитель снопов поворачивается и осво-
бождает задержанные стебли, а упаковщики захватывают их и
начинают формировать следующий сноп.
Размеры снопов можно изменять передвижением рычага вклю-
чения вязального аппарата по кронштейну, а плотность связанных
снопов — натяжением пружины рычага включения. Положение пе-
ревясла на снопе регулируют перемещением вязального стола.
§ 2. Рабочий процесс аппарата шпагатной вязки
Вязальный аппарат шпагатной вязки состоит из иглы, зажи-
ма, клюва, сбрасывателя и механизма привода.
Игла (рис. 239, а) представляет собой дугообразный стержень
с каналом 1 и двумя отверстиями 2 для шпагата. В действие иглу
приводит четырехзвенный механизм.
Зажимы бывают дисковые и тарельчатые.
Дисковый зажим (рис. 239, б) выполнен в виде двух вра-
щающихся дисков 5 с шестью вырезами. Между дисками располо-
жен держатель 4 шпагата и кронштейн 6. Шпагат попадает в вы-
360
Рис. 239. Основные узлы вязального аппарата:
а — игла; б и в — дисковый и тарельчатый зажимы; г — клюв; д — стягиватель шпагата*
1 — канал; 2 — отверстие иглы; 3 ~ пружина; 4 — держатель; 5, 7 — диски; 6 — кронштейну
8 — тарелки; 9 — прорезь; 10 — крюк; 11 и 12 — ролики; 13 и 18 — оси; 14 — иож; 15 — и за-
правляющая; 16 и 17 — подвижная и неподвнжиая челюсти.
резы и при вращении дисков прижимается ими к держателю. Си-
лу зажатия шпагата изменяют плоской пружиной 3, удерживаю-
щей держатель между дисками.
Тарельчатый зажим (рис. 239, в) состоит из неподвиж-
ной тарелки 8 с прорезью 9 и вращающегося в ней диска 7. Диск
снабжен рядом выступов и выемок. Крюком 10 тарелка прижима-
ется к диску. Шпагат укладывается иглой в прорезь 9 тарелки и
при вращении диска затягивается и зажимается между тарелкой
и диском.
«Клюв» (рис. 239, г) аппарата шпагатной вязки имеет две
«челюсти»: неподвижную 17 и подвижную 16, шарнирно закреплен-
ную на оси 18. На хвостовике подвижной челюсти посажен ролик
11, который, перекатываясь по беговой дорожке рычага, закрыва-
ет или открывает челюсти. Степень зажатия шпагата в челюстях
клюва регулируют пружиной, которая прижимает дорожку к ро-
лику.
Двуплечий рычаг — стягиватель (рис. 239, д) предна-
значен для стягивания шпагата с клюва. Один конец рычага снаб-
жен роликом 12, который катится по специальной дорожке рас-
пределительного диска механизма передачи и поворачивает в нуж-
ный момент второй конец рычага относительно оси 13; другой
конец несет направляющую 15 и нож 14.
Работа вязального аппарата показана на рисунке 240. Пози-
ции I—V соответствуют последовательности действия всех узлов
аппарата.
Позиция 1 — игла совершает рабочий ход. Она охватывает
сноп шпагатом, укладывает его верхнюю ветвь между направляю-
365
щей стягивателя на челюсти клюва и подводит второй конец шпа-
гата к зажиму.
Позиция II — игла заканчивает рабочий ход. В работу вклю-
чаются зажим и клюв. Вращающиеся диски захватывают обе вет-
ви шпагата и зажимают их. Клюв поворачивается, его челюсти
охватываются шпагатом.
Позиция III — игла движется в обратную сторону. Диск, за-
жав обе ветви шпагата, останавливается. Открывается подвижная
челюсть клюва, и шпагат входит в открытый зев.
Позиция IV—игла продолжает двигаться в исходное поло-
жение. Клюв, сделав полный оборот, останавливается, его челюсти,
закрываясь, защемляют шпагат. Начинает двигаться стягиватель
петли. Нож стягивателя перерезает обе нити шпагата.
Позиция V — стягиватель снимает петлю с клюва, а защем-
. ленные нити шпагата протягивает сквозь петлю, образуя узел. Иг-
ла останавливается. Сбрасыватель (рис. 238) удаляет сноп с вя-
зального стола, при этом узел прочно затягивается, а зажатые ни-
ти шпагата вытягиваются из челюсти клюва.
Для связывания снопов применяют шпагат диаметром 1,8...
3,0 мм; разрывное усилие для связывания снопов льна не менее
250 Н.
Невязи узла возникают при недостаточной или избыточной
силе удерживания шпагата в зажиме, в челюстях клюва и в натя-
гивателе у коробки бабины шпагата. Когда зажим слабо удержи-
вает шпагат или натягиватель излишне затянут, то возможно вы-
дергивание шпагата из зажима. В таком случае узел будет обра-
зован только на одной ветви. Шпагат с ровно обрезанными края-
362
ми остается на клюве или выпадает вместе с рассыпанным снопом.
При излишнем удерживании шпагата в зажиме возможен прежде-
временный обрыв обеих ветвей во время поворота клюва, что при-
ведет к выбрасыванию шпагата с оборванными краями вместе с
несвязанным снопом. Если преждевременно отрывается одна ветвь,
то узел образуется только на одной линии.
Слабое удерживание шпагата в челюстях клюва может приве-
сти к тому, что шпагат выпадет из них раньше времени и узел не
будет связан. Наоборот, когда шпагат зажат челюстями излиш-
не, он разорвется и останется висеть на клюве.
Для устранения этих недостатков следует отрегулировать на-
тяжение пружин, поджимающих зажим и челюсти клюва.
§ 3. Формирование спрессованной массы в тюки
В прессовальной камере поршневых прессов массу разделяют
на тюки, которые обвязывают проволокой или шпагатом в одной,
двух или трех плоскостях.
Формирование в тюки сена или соломы происходит следующим
образом. При каждом рабочем ходе поршень 1 (рис. 241), захва-
тив порцию массы, подает ее вдоль камеры 4. Через камеру от
зажима (точка а) по направляющим роликам иглы 3 к кассете 2
проходит проволока. Масса, действуя на проволоку, выдергивает
ее из кассеты. По мере увеличения длины тюка проволока огибает
его с трех сторон (линия abed).
Как только образуется тюк определенной длины, мерительное
колесо 5 включает вязальный аппарат. Так как зубья меритель-
ного колеса входят в зацепление с прессуемой массой, то при про-
талкивании массы поршнем колесо поворачивается. Процесс фор-
мирования полной длины тюка соответствует повороту колеса на
один оборот.
После включения вязального аппарата начинает двигаться игла
и увлекает за собой проволоку.
Игла входит сквозь прорезь
дна или стенки АВ в прессоваль-
ную камеру и в паз поршня.
Проволока охватывает тюк со
стороны поршня. Затем игла вы-
ходит сквозь прорезь в стенке
DC или крыше камеры и укла-
дывает вторую ветвь проволоки
в зажим.
Вязальный аппарат закручи-
вает два конца проволоки. Фор-
мирование и связывание тюка
заканчиваются.
ка:
1 — поршень; 2 — кассета; 3 — игла:
4 — камера; 5 — мерительное колесо.
Затем поршень начинает прес-
совать последующие тюки, посте-
363
пенно выталкивая связанные из камеры. При выходе тюков из
камеры они поступают на лотки и разделяются по месту связки.
С лотков тюки падают на поле или в специальный прицеп.
В прессах с колеблющейся стенкой связывание и выталкива-
ние тюка происходят при остановке агрегата.
§ 4. Рабочий процесс аппарата проволочной вязки
Вязальный аппарат проволочной вязки имеет сходные по дей-
ствию устройства с аппаратом шпагатной вязки, такие как игла,
зажим, крючок-вязатель, нож, направляющая проволоки и меха-
низм привода вязального аппарата.
Кроме указанных устройств, аппарат проволочной вязки снаб-
жен предохранителем и прижимом.
Игла (рис. 242, а) подает проволоку от кассет к зажиму и к
крючку-вязателю. В корпусе иглы устанавливают ролики 1 и 2 для
направления проволоки.
Зажим (рис. 242,6) состоит из неподвижной челюсти 6 с вы-
резом 5, движущегося гребня 4 с ножом и упоров 3. Гребень за-
хватывает проволоку, укладывает ее в кольцевой паз и прижимает
к одному из упоров.
Нож обрезает проволоку, прижимая ее к противорежущим
кромкам выреза 5.
Крючок-вязатель 8 (рис. 242, в) не имеет подвижной че-
люсти. Его рабочая часть выполнена конусной, чем облегчается
съем с нее закрученной проволоки.
Рис. 242. Устройство основных узлов аппарата для связывания тюков прово-
локой:
а — игла; б — за5ким; в — крючок-вязатель и направляющая; г — предохранитель; 1 и 2 —
ролики иглы; 3 — упоры; 4 — гребень; 5 — вырез; 6 — неподвижная челюсть; 7 — палец; 8 —
крючок-вязатель; 9 — крыло; 10 — отросток; 11 — корпус.
364
Направляющая (рис. 242, в) способствует правильной
укладке проволоки в вырез зажима, ориентируя ее относительно
крючка-вязателя. Основные части направляющей — палец 7 и кры-
ло 9.
Предохранитель (рис. 242, г) препятствует попаданию в
крючок-вязатель при его вращении той части проволоки, которая
идет от зажима к игле и предназначается для связывания после-
дующего тюка. Основная часть предохранителя — это корпус 11
с отростком 10.
Прижим проволоки устраняет отклонение от крючка-вязате-
ля концов проволоки, освобожденных зажимом. Прижим представ-
ляет собой цилиндрический пруток, движение которого согласова-
но с движением иглы и крючка-вязателя.
Последовательность рабочего процесса вязального аппарата
проволочной вязки показана на рисунке 243. Рассмотрим каждую
позицию рисунка.
Позиция I — тюк сформирован, игла охватывает его прово-
локой и укладывает второй конец проволоки в прорезь крыла на-
правляющей. Крючок-вязатель, гребень зажима и предохранитель
не движутся.
Позиция II — игла укладывает проволоку в вырез зажима.
Крючок-вязатель поворачивается и захватывает оба конца про-
волоки.
365
Рис. 244. Схема обмоточного
аппарата рулонных прессов:
1 — шпагат; 2 — нож; 3 — противо-
режущая пластина.
Позиция III — гребень зажи-
ма начинает двигаться и освобож-
дает проволоку у верхнего упора, а
нижнюю ветвь проволоки разреза-
ет ножом. Один конец разрезанной
проволоки гребень зажимает у ниж-
него упора. Крючок-вязатель зама-
тывает проволоку, игла уходит на-
зад, а крючок предохранителя под-
нимается и принимает на себя про-
волоку, препятствуя попаданию ее
на вращающийся крючок-вязатель.
Позиция IV — крючок-вяза-
тель, продолжая вращение, заматы-
вает проволоку. Крючок предохранителя остается поднятым.
Позиция V — проволока закручена, крючок-вязатель остано-
вился, сделав два оборота, крючок предохранителя опустился.
Привод вязального аппарата выключен до следующего цикла.
При последующих рабочих ходах поршня прессуемая масса,
проталкивая тюк, стягивает с крючка-вязателя закрученную про-
волоку.
Для вязки применяют проволоку диаметром 2 мм с относитель-
ным удлинением не менее 20% и пределом прочности на растяже-
ние 300...450 Н/мм2.
Механизм для обмотки рулонов шпагатом. Сформированный
в машине рулон обматывается шпагатом, для чего рулонный пресс
оборудован механизмом ABCDE (рис. 244), перемещающим шпа-
гат 1 вдоль образующей рулона, и механизмом ABCDFGO, при-
водящим в движение нож 2. Вращаясь рулон захватывает шпагат
и обматывается им. Зажим Е, перемещаясь вдоль образующей,
способствует обматыванию рулона по всей его длине. В крайнем
левом положении шпагат подается между ножом 2 и противоре-
жущей пластиной 3, в этом положении нож перерезает шпагат.
За период обматывания тюк делает 5...6 оборотов, что обеспечива-
ет надежное обматывание.
§ 5. Циклограмма работы вязального аппарата
Последовательность работы механизмов пресса, образующих
тюк, и вязального аппарата изображается циклограммой. По ней
находят моменты начала и конца работы: поршня набивателей
(упаковщиков), иглы, крючка-вязателя (клюва), зажима, ножа
и стягивателя петли.
Циклограмму вязального аппарата пресса строят по углу по-
ворота кривошипного вала механизма привода поршня, а при свя-
зывании снопов — по углу поворота вала привода упаковщиков.
Начало отсчета принимают соответствующим крайнему положе-
нию поршня или упаковщиков, после которого начинается рабочий
ход.
366
Рис. 245. Циклограмма работы ап-
парата проволочной вязки:
1—2 — рабочий ход поршня; 2—1 — холо-
стой ход поршня; 5—3 — холостой ход на-
бивателя; 3—4—4—5 — рабочий ход набива-
теля; 6—7 — подача проволоки иглой к за-
жиму; 7—8—8—9 — движение иглы от за-
жима; 9—6 — неподвижное положение иг-
лы; 10—11—И—12 — закручивание проволо-
ки крюком-вязателем; 13—10 — крючок-вя-
затель неподвижен; 14—15 — перемещение
гребня зажима; пп — иачало резания про-
волоки; ss — конец резания проволоки;
16—17—17—14 — неподвижное положение
гребня зажима; 18—19 — подъем корпуса
предохранителя; 19—20—20—21 — корпус
предохранителя в поднятом положении;
21—22 — опускание корпуса предохраните-
ля; 22—18 — корпус предохранителя опу-
щен.
На рисунке 245 показана циклограмма аппарата проволочной
вязки пресс-подборщика.
Рабочий ход на циклограмме изображен восходящей линией,
холостой — нисходящей прямой, неподвижное положение — гори-
зонталью. Моменты начала и окончания движения, а также край-
ние положения рабочих органов, изображенных на циклограмме,
должны быть строго согласованы.
Циклограмма, построенная для регулируемого вязального ап-
парата, сравнивается с эталонной. При несовпадении отдельных
моментов циклограммы следует устранить причины неправильной
сборки и регулировки аппарата. Надежность работы аппарата за-
висит и от установочных параметров его узлов. Игла должна на-
дежно укладывать проволоку в вырез 5 (см. рис. 242) зажима.
С этой целью регулируют ход иглы изменением длины звена ме-
ханизма привода.
Захват проволоки крючком-вязателем 8 зависит от зазора меж-
ду пальцем 7 и торцевой поверхностью крючка. Оптимальный за-
зор —1,5...2,5 мм.
Проволока удерживается зажимом в том случае, когда между
гребнем 4 и упором 3 установлен зазор 2^А^1,0 мм.
Работу аппарата оценивают при установившемся режиме после
того, как сформируют не менее чем 3...5 тюков.
Глава X
РАБОЧИЕ ОРГАНЫ ДЛЯ ОТРЫВА И ПЛЮЩЕНИЯ
§ 1. Тилы и назначение отрывочных и плющильных устройств
Вальцовые устройства. Початки кукурузы, плоды огурцов,
клубни картофеля отделяют протягиванием стеблей в щели меж-
ду парой отрывочных вальцов.
В кукурузоуборочных комбайнах подающие цепи 4 (рис. 246, а)
подводят стебли в рабочую щель вальцов 3, а щит 2, расположен-
367
Рис. 246. Схема подачи стеблей в початко-
отрывающие вальцы кукурузоуборочного
комбайна:
а — схема подачи; б — сечеиие отрывочных валь-
цов кукурузоуборочных машин; в — сечение валь-
цов кормоуборочных машин; 1 — режущий аппа-
рат; 2 — щит; 3 — отрывочные вальцы; 4 — подаю-
щие цепи; 5 — пластины.
ный перед вальцами, накло-
няет их, чем достигается по-
дача стеблей комлем впе-
ред.
Машины для уборки
огурцов снабжают вентиля-
торами, воздушный поток
которых подает ботву к
вальцам.
Для лучшего захвата
стеблей поверхности отры-
вочных вальцов снабжают
ребрами (рис. 246,6 и в), а
для снижения повреждений
плодов овощных культур ра-
бочую поверхность изготав-
ливают из легкодеформируе-
мого материала (резина,
пластмасса и др.). Вышелу-
шивание зерна из початков
кукурузы уменьшают, уста-
навливая над вальцами пла-
стины 5, упираясь в кото-
рые, початки отрываются
без соприкосновения с валь-
цами.
С целью сокращения времени сушки трав предложено плюще-
ние стеблей. Расплющенные стебли высыхают почти одновременно
с листьями, чем устраняются потери наиболее ценной листовой ча-
сти растений в 1,5...2 раза, больше сохраняется каротина и про-
теина. В плющилках трав применяются как гладкие, так и риф-
леные вальцы. Их устанавливают один под другим. Подшипники
нижрего вальца относительно рамы машины неподвижны, а под-
шипники верхнего вальца поджимаются пружинами.
Семена льна извлекают из коробочек раздавливанием и пере-
тиранием их между вальцами. Вальцы, вращаясь навстречу один
другому с разными скоростями, захватывают коробочки, сплющи-
вают и перетирают их оболочки.
Транспортерно-вальцовое устройство. В картофелеуборочных
машинах находят применение ботвоудаляющие устройства, в ко-
торых клубни отрываются от столонов при протаскивании в щель,
образованную транспортером 2 (рис. 247, а) и клубнеотрывочными
вальцами 3.
К транспортеру и вальцам ботву с клубнями поднимает прут-
ковый элеватор 1. Оторванные клубни падают между прутками
элеватора и поступают на последующие рабочие органы, ботву
элеватор выносит из машины и укладывает на поле за комбай-
ном.
368
2 3
Рис. 247. Схемы отрывочных уст-
ройств:
а —- траиспортерно-вальцовых; б — клавиш-
ных; / — прутковый элеватор; 2 — при-
жимной транспортер; 3 — вальцы; 4 — ко-
ромысло; 5 — клавиши; 6 — коленчатый
вал.
в
U п п п д
о~~и и и U Ц,^ Ц
4
и
Л' и J
тпг
Д.. Л Л|
~о~ и ~и
л и и
л~ и и
Л~и -J
П О (Г
J и и и и и а и
□ и и и и иф 1Г
7 и и и и и Ж _1Г
тг
тг
тг
и и и и СПТ
U и и ,Ь~ и и и -д-ТГ
и и и и и 1^1 1
и и и и и а ~
б +
Клавишное плодоотделительное устройство. Такое устройство
применяется для отрыва плодов от ботвы в томатоуборочных ма-
шинах. Клавиша 5 (рис. 247, б) выполняет роль шатуна кривошип-
но-коромыслового механизма ABCD. При вращении коленчатого
вала (кривошипа) и качании коромысла 4 точки клавиши опи-
сывают замкнутую кривую, называемую шатунной кривой. Кри-
вошипы коленчатого вала двух соседних клавиш развернуты один
к другому под углом зт радиан. За счет этого группа клавиш (че-
рез одну) в каждый момент времени движется в противополож-
ную другой сторону, что вызывает отрыв плодов и перемещение
ботвы вдоль по клавишам к выходу.
Устройство для отрыва плодов и ягод вибрацией. При таком
способе отрыва плодов стволам или кустам сообщают гармониче-
ские колебания, и возникающие при этом инерционные силы раз-
рушают связи плодов с деревом. Для колебаний стволов приме-
няют: рычажно-шарнирные и кулачковые механизмы, эксцент-
риковые вибраторы с неуравновешенными массами, вращающими-
ся в противоположные стороны, а также пульсирующие воздушные,
потоки.
В рычажно-шарнирных и кулачковых меха-
низмах звенья вибратора располагают на раме трактора, а за-
хват исполнительного звена (штанги) закрепляют через упругие
прокладки на стволе дерева.
При такой системе амплитуда колебаний ствола зависит от ра-
диуса и частоты вращения кривошипа, от соотношения масс и соб-
ственных частот колебаний трактора и дерева.
Установлено, что в применяемых вибраторах амплитуда коле-
бания ствола в месте его обхвата зажимом равна 70...80% от ра-
диуса кривошипа.
24—424
369
Рис. 248. Схемы устройств для отрыва плодов и ягод:
л — инерционного вибратора с вращающимися неуравновешенными грузами для колебания
деревьев; б — вибрирующего пальцевого стряхивателя ягод; 1 — зажимы; 2 — откидной ры-
чаг с зажимом; 3 н 4 — дебалансные грузы; 5 — обводная цепь; 6 — гидродвигатель; 7—
пальцы; 8 — вал.
Вибраторы с вращающимися неуравновешен-
ными массами закрепляют зажимным устройством /
(рис. 248, а) с эластичными поверхностями на штамб дерева. За-
жимы выполняют чаще всего в виде двух резиновых труб. Одну
трубу относительно другой при обхвате ствола перемещают гид-
роцилиндром. Чтобы предотвратить повреждение коры дерева,
между трубами помещают эластичные фартуки.
Колебания ствола возбуждаются вращением валов с дебаланс-
ными грузами 3 и 4. Валы вращают обводной цепью 5 (ремнем)
от приводного устройства или гидродвигателя 6. Частоту враще-
ния грузов выбирают в пределах 25...30 с-1.
Пальцевые вибраторы (рис. 248,6) предложены для
съема ягод. Колеса вибратора, образованные пальцами 7, свобод-
но вращаются на цапфах вала 8. В поперечной плоскости колеса
получают колебания за счет косых шайб, вращающихся вместе с
валом. При таком устройстве пальцы по мере движения агрегата
вонзаются в кусти сообщают ветвям колебания с частотой 16... 18 Гц.
Оторванные плоды и ягоды собирают улавливающими устрой-
ствами, поверхности которых изготавливают такими, чтобы пред-
отвратить повреждение плодов от соударения.
§ 2. Условие захвата стеблей гладкими вальцами
Рассмотрим процесс захвата растений гладкими вальцами
(рис. 249), вращающимися в разные стороны с угловыми скоро-
стями (01 И (02-
Пусть вальцы диаметром и D2 установлены с зазором. Тог-
да на растение толщиной h действуют силы и N2, перпендику-
лярные к поверхности вальцов, и силы трения Fj и F2, касатель-
ные к ней.
Проектируя все силы на направление оси стебля, получаем, что
для захвата растений вальцами необходимо, чтобы соблюдалось
следующее условие:
Fj cos -К F2 cos а2 > A\ sin cq -ф- N2 si п а2.
370
Так как
3 ^2=^2
где <pi и q>2 — углы трения растений© вальцы,
то, подставляя их значения в предыдущее
выражение, имеем
Nr tg фх cos Фгcos
> sin «1+^2 sin <z2.
В существующих машинах разница диа-
метров Di и Ь2 невелика, поэтому с доста-
точной точностью можно принять: Ni = N2,
a ai=«2 = a.
Преобразуя вышеприведенное выраже-
ние, имеем следующее условие захвата эле-
ментов растения вальцами:
1бф1+1§ф2 2tga. (254)
Рис. 249. Схема к
обоснованию условий
захвата стеблей и от-
рыва плодов гладки-
ми вальцами.
Захват растений не будет происходить при
tgфl^-tgф2 < 2tga.
условии:
(255)
Для отрыва плодов от ботвы вальцы должны захватывать стеб-
ли или ботву, что определяется условием (254), а початки и клуб-
ни не должны попадать в щели, что возможно при условии (255).
Захват коробочек льна между вальцами терочного аппарата и стеб-
лей трав в плющилках возможен при соблюдении условия (254).
Работа вальцов зависит от размера углов фЬ ф2 и а. Углы ф! и
ф2, в свою очередь, зависят от фрикционных свойств поверхности
вальцов. Угол а изменяется от геометрических размеров вальцов
и стеблей, а также от зазора а между вальцами.
Как видно из рисунка 249, cos a =20AID.
Так как О A ~Dj2-\-a/2—h/2, то coscc=l-|-a/D — h/D.
Принимая для початкоотрывочных и плющильных вальцов
Ф1 = ф2, из выражения (254) и (255) получаем следующее:
захват стеблей толщиной h будет происходить при условии
а h—D (1 —cos ф);
(256)
початки и клубни диаметром d не будут затаскиваться, если
a^.d—D(1— cos ф). (257)
Из неравенства (256) и (257) следует, что необходимый зазор
определяется размерами h стеблей и d плодов. С увеличением за-
зора до определенного значения захватывающая способность валь-
цов увеличивается, однако при этом возникает опасность повреж-
дения плодов.
24*
37J
§ 3. Скорость вращения вальцов
Вальцы должны непрерывно и равномерно протягивать расте-
ния с такой скоростью, при которой не будет наблюдаться сгру-
живания массы перед ними. Сгруживания не происходит, если ко-
личество массы q0, протягиваемой вальцами в единицу времени,
равно подаче ее q к вальцам, т. е. <7о=<7-
Количество протягиваемой массы будет зависеть от рабочей
длины I вальцов, скорости tzM перемещения массы и зазора а меж-
ду вальцами, т. е.
<7о EPptZ/t/M,
где е — коэффициент, учитывающий использование ширины рабо-
чей щели вальцов.
Скорость массы, протягиваемой вальцами, зависит от скоро-
сти вальцов нв и от буксования их по массе. Учитывая буксование
коэффициентом ц = 0,8...0,9, получаем
90=ы]рра1ив. (258)
Подачу массы q к вальцам можно выразить уравнением
q=BvAp. (259)
Приравнивая выражения (258) и (259) и решая их, находим
= (260)
г ецрра/ 4 '
Коэффициент е зависит от состояния убираемой культуры, зна-
чения его изменяются в следующих пределах:
для вальцов кукурузоуборочных комбайнов .
» плющильных вальцов трав ....
» вальцов, сплющивающих коробочки льна,
. е = 0,6...0,71
е = 0,8...0,85
. е = 0,8.. .0,9.
Глава XI
УСТРОЙСТВА ДЛЯ СЪЕМА ХЛОПКА
§ 1. Рабочий процесс вертикально-шпиндельного аппарата
Для сбора хлопка из раскрывшихся коробочек преимущест-
венно применяют вертикально-шпиндельные машины. Рабочий ор-
ган такой машины — шпиндельные барабаны 1 (рис. 250, а), со-
стоящие каждый из 12...24 шпинделей с вертикальной осью вра-
щения. Шпиндели (рис. 250, б) изготовлены из трубы 9, на поверх-
ности которой нарезаны четыре ряда зубцов с шагом 2 мм. В верх-
ний конец трубы запрессован приводной ролик 7, сочленяемый с
клиновидным ремнем 8, закрепленным на колодках. Каждый
шпиндель совершает сложное движение: он перемещается вместе
с машиной, вращается относительно вала шпиндельного барабана
372
Рис. 250. Схема рабочего процесса вертикально-шпиндельной машины для съе-
ма хлопка:
/ — шпиндельные барабаны; 2 — съемники; 3 — приемная камера; 4 — обтекатели кустов;
5 — наружные колодкн; 6 — внутренние колодки; 7 — приводной ролик; 8 — ремни; 9 — тру-
ба шпиделя.
и относительно своей оси. Вращение относительно своей осп
шпиндели получают от соприкосновения их приводных роликов с
колодками. Одни колодки 5 (рис. 250, щ) закрепляют снаружи ба-
рабана, а другие 6 внутри него, в результате чего в относительном
движении шпиндель вращается в разные стороны.
Каждый ряд кустов обрабатывают четыре шпиндельных бара-
бана— два передних и два задних. Кусты, попавшие в пространст-
во между парой барабанов, обкатываются шпинделями. В зоне
abc контакта с кустами шпиндели вращаются против вращения
вала барабана. Зубцы шпинделей, соприкасаясь с дольками хлопка
раскрывшихся коробочек, захватывают хлопок и наматывают его
на себя. Когда шпиндели выйдут из соприкосновения с кустом,
они меняют направление вращения на обратное (зона а'Ь'с').
В этой зоне происходит разматывание и съем хлопка щеточными
съемниками 2. Снятый хлопок поступает в приемные камеры 3,
откуда вентилятор транспортирует его воздухом в бункер. Перед-
няя пара барабанов снимает 75...80% хлопка, задняя 10...15%.
Находят применение двух-четырех- и шестирядные машины,
предназначенные для уборки хлопка, посеянного с междурядьями
60 и 90 см. Для обмыва шпинделей от загрязнения и мойки маши-
ны на них устанавливают водосистемы.
373
§ 2. Захват и наматывание хлопка шпинделем
Вход зубцов в хлопок. Зубцы шпинделей при работе входят
между волокнами, захватывают их и наматывают на трубу. Взаи-
модействие зубцов с хлопком определяется их кинематикой.
Абсолютная скорость va6 (рис. 251, а) зубца (иаб — результи-
рующая скорость машины им, линейных скоростей га вращения
барабана и паи вращения шпинделя) изменяется по направлению
и численному значению. Если направление скорости паб отклонено
от нормалей Ni и N? к рабочим поверхностям зубца (рис. 251,6)
на угол, значение которого больше угла трения <р, то зубец вкалы-
вается между дольками хлопка со скольжением.
Исходя из этого условия (рис. 251,6), имеем следующее выра-
жение для определения угла р, характеризующего предел возмож-
ного направления скорости уаб-’
р=л—(2<р-)-а)" (261)
Чем больше угол р, тем больше зона захвата хлопка и высо-
кокачественнее работа аппарата. Угол р растет с увеличением уг-
ловой скорости вращения он и диаметра 2п шпинделя. В хлоп-
коуборочных машинах существующих конструкций наибольшее
применение находят шпиндели диаметром 2п=24 мм, с углом
40°. Наибольшее значение угла р соответствует соотношению
ra/v=X= 1,4...1,6. На первом сборе хлопка скорости машины v
выбирают от 0,9 до 1,25 м/с, а на втором — до 1,4 м/с. От а зависит
не только значение угла р, но и наклон куста шпиндельным бара-
баном: наклон тем больше, чем меньше 7.. При 1,4 куст накло-
няется так, что сбор хлопка заметно уменьшается. Когда Z>1,6,
барабаны сбивают с кустов зеленые коробочки.
Наматывание хлопка на
шпиндель. Волокно хлопка,
захваченное зубцами, шпин-
дель наматывает на свою по-
верхность. По мере наматыва-
ния сила натяжения волокна
растет, что приводит к удли-
нению наматываемой дольки
хлопка. При натяжении, соот-
ветствующем предельной силе
связи дольки со створками,
волокно отрывается из коро-
бочки. Из-за его упругости
длина дольки уменьшается и
волокно частично разматыва-
ется со шпинделя. Если сво-
бодный конец этого волокна
достанет до зубцов соседних
шпинделей, то возможно нама-
374
тывание волокна на смежные шпиндели и разрыв его. Для умень-
шения разрывов предпочтительнее увеличивать диаметр шпинде-
ля и расстояние между смежными шпинделями. В современных
машинах устанавливают на каждом барабане 12...16 шпинделей
диаметром 24 мм, при этом минимальное расстояние между сосед-
ними шпинделями составляет 30...40 мм. Ширину рабочей щели,
образуемой шпинделями первой пары барабанов, выбирают в пре-
делах 30...34 мм (первый сбор) и 24...28 мм (второй сбор). Для
последующих барабанов рабочую щель уменьшают на 3...4 мм.
Качество сбора хлопка во многом зависит от того, как намо-
тано волокно на шпиндель. Если волокно каждой дольки обма-
тывает шпиндель излишнее число раз, то затрудняется съем хлоп-
ка со шпинделя; при недостаточном угле обхвата шпинделя во-
локном возможно выпадение волокна и увеличение потерь.
Угол обхвата зависит от длины I волокна растянутой дольки
хлопка, частоты вращения п барабана и щ шпинделя, длины дуги
•окружности £)<р, соответствующей началу и концу вращения шпин-
деля в рабочей камере, а также от соотношения K=ra>lv. В самом
деле, максимальное число оборотов шпинделя пр за время t рабо-
чего движения по дуге Dtp будет np=tiit.
Так как t=Dql‘2.r(f>, то при rco = Zo имеем
п=^-. (262)
ZA/lp
В применяемых машинах диаметр барабана £>=292 мм, угол
<р = 2,1...2,5 рад. При расчете скорости агрегата v частоту враще-
ния Hi принимают равной 3...5 с-1.
§ 3. Съем хлопка со шпинделя
Волокно хлопка со шпинделя снимают щеточные съемники 2
(рис. 250, а). Возможен различный характер съема: разматывание,
сбивание и счесывание волокна. Указанные разновидности съема
определяются взаимодействием волокна со шпинделем в момент
действия на него щеток съемника.
После схода ролика шпинделя с ремня зоны наматывания во-
локна (abc) резко изменяется кинематический режим шпинделя.
Вначале снижается частота его вращения, а затем при входе ро-
лика на ремень зоны а'Ь'с' он получает противоположное направ-
ление вращения. В результате такого движения возникают боль-
шие ускорения (до 1000 рад/с2), способствующие наряду с сопро-
тивлением воздуха разматыванию волокна со шпинделя еще до
взаимодействия его со съемником.
Если волокно до подхода к съемнику утратило связь со шпин-
делем, то щетки в большей мере снимают хлопок сбиванием и сче-
сыванием. При таком съеме волокно разрывается, из-за чего сни-
жается его качество. Лучшее качество работы машин получается
при съеме волокна, закрепленного на шпинделе, постепенным раз-
матыванием щетками.
375
Рис. 252. Схема взаимодействия
съемников хлопка с волокном:
/ и 2 — траектории соответственно конца
ворса щетки и волокна; 3 — шпиндель; 4 -*
шпиндельный барабан.
Чистота съема при разматы-
вании волокна зависит от числа
оборотов шпинделя Пр, которое
он совершает за время взаимо-
действия со щетками.
Найдем зависимость пР от
параметров и кинематического
режима работы шпиндельного
устройства.
Начало взаимодействия ще-
ток с волокном происходит в тот
момент, когда траектория 1
(рис. 252) вращения концов вор-
са щетки касается (точкаД) тра-
ектории 2 волокна, вращающего-
ся со шпинделем 3.
Для обеспечения чистого съема щетки устанавливают так, что-
бы концы ворса касались поверхности шпинделя (допускаемое за-
глубление не более 1,5 мм). Тогда конец взаимодействия щеток со
шпинделем будет в точке В.
Из рисунка 252 находим следующее выражение для опреде-
ления угла cpi поворота шпиндельного барабана за время взаимо-
действия щеток с волокном:
COS фх =
т24 (r + ri + ^-^ + ri + A)2
2т (г + rj + г2)
где Г2 — радиус окружности по концам ворса;
А — толщина намотанного волокна.
Решая, имеем
ср2=arc cos 1
_ A Pi Ч~гг-р А/2)
Г (г + Г1 + Г2)
Если частота вращения шпинделя в зоне съема волокна состав-
ляет , то получаем
Г fll
nv= 75-!—arc cos
1 2лл
Д^+гз + Д/г) 1
r (r + rl + rz) J’
(263)
1
При расчете толщину намотки А принимают в пределах
6...20 мм.
Для применяемых машин, где 2г = 292, 2^=24, 2гг = 98 мм,
имеем
/г;=(0,2.. .0,35) n'jn. (264)
§ 4. Рабочий процесс устройств дпя сбора
и обработки курака
Назначение. Курак — высохшие, но не раскрывшиеся коробоч-
ки. Уборку курака проводят после второго машинного сбора,
хлопка.
376
Рис. 253. Схемы рабочего процесса устройств:
а — куракоотрывочного; б — обогатительно-лущильного; 1 — делители; 2 — отрывочные валь-
цы; 3 — продольные шнеки; 4 — ленточный транспортер; 5 — поперечный шнек; 6, 8, 14 и
17 — пильные барабаны; 7 и 16 — щеточные барабаны; 9 — щнток; 10 — колосниковая ре-
шетка; 11, 15, 18, 19 — щетки; 12 — шнек обогатителя; 13 и 20 — деки; 21 — лущильный ба-
рабан; 22 и 23 — направляющие щитки.
Находят применение устройства, которые открывают коробоч-
ки двумя вращающимися рифленными вальцами 2 (рис. 253, а).
При движении машины кусты, направляемые делителями 1, захо-
дят в щель между вальцами и протягиваются ими. Оторванные ко-
робочки поступают в желоба шнеков 3, которые подают их к по-
перечному шнеку 5, а оттуда к ленточному транспортеру 4.
377
Для очистки или лущения курака используют обогатительно-
лущильное устройство (рис. 253, б). В зависимости от состояния
курачных коробочек возможны различные схемы работы этого
устройства.
Схемы технологических процессов работы устройства для об-
работки курака следующие.
Первая схема (заслонка 24 установлена в положение а)
соответствует подаче оторванных коробочек в шнек обогатителя /2,
а оттуда в бункер.
Вторая схема (заслонка 24 занимает положение Ь) на-
ходит применение при уборке сухих коробочек. Здесь ворох про-
ходит обработку в такой последовательности: коробочки дробят-
ся между лущильным барабаном 21 и декой 20, большой пильный
барабан 8 разделяет ворох на хлопок-сырец и дробленый курак,
который вместе с частью попавшего в него хлопка дополнительно
обрабатывают малые пильные барабаны 14 и 17. С них хлопок
снимает щеточный барабан 16 и забрасывает повторно на пильный
барабан 8, а с него на барабан 6. Очищенный хлопок снимает
щеточный барабан 7 и направляет его к шнеку 12. Примеси выде-
ляются из вороха сквозь деку 20, колосниковую решетку 10, a
также сквозь решетки под нижними пильными барабанами.
Третья схема отличается от второй тем, что после малых
пильных барабанов 14 и 17 барабан 16 не забрасывает хлопок на
большой пильный барабан, а выводит его непосредственно в шнек
обогатителя. С этой целью под барабаном 16 устанавливают щи-
ток-направитель. Такую последовательность обработки применяют
при влажном волокне, когда наблюдается «заматывание» верхне-
го пильного барабана 6.
Четвертую схему применяют при лущении курака, ког-
да на кустах много зеленых коробочек. Ворох при такой настрой-
ке обрабатывает только лущильный барабан 21, а затем его боль-
шой 8 и малый 6 пильные барабаны и барабан 7 направляют к
шнеку-обогатителю. Для работы по этой схеме изменяют направ-
ление вращения барабанов 7 и 8. Лущеные коробочки затем быст-
рее высыхают.
Глава XII
МОЛОТИЛЬНЫЕ УСТРОЙСТВА
§ 1. Параметры растительной массы, определяющие
вымолот зерна
Обмолачиваемость зерновых культур. Зерно из колоса, мете-
лок, початков, бобов выделяют обмолотом. Обмолот — нанесение
ударов по растительной массе и протаскивание ее между поверх-
ностями. Вследствие удара и вытирания при протаскивании нару-
шаются связи плода (зерновки) с цветоложем и чешуями колоса..
378
Чешуи и связь с цветоложем по-разному влияют на обмола-
чиваемость зерновых культур. Роль каждого из этих факторов за-
висит от направления действия силового поля, спелости убирае-
мой культуры и ее влажности.
Если сила направлена вдоль большей оси зерновки, то связи
разрушаются отрывом, при отклонении линии действия силы от
указанной оси наряду с отрывом разрушение наступает и от от-
гиба. При отрыве определяющую роль при разрушении играет
приращение зерновки к цветоложу, а при отгибе — связь цветко-
вых и колосовых чешуй.
Экспериментальными исследованиями установлено, что зависи-
мости между силой Т и деформацией связей Л могут быть с до-
статочной точностью прямолинейными. Причем пределы пропор-
циональности и прочности практически одинаковы, т. е. прямоли-
нейность зависимости Т(Х) наблюдается до момента отрыва зер-
на и разрушения чешуй.
Установлено, что разрушение связей отгибом происходит при
меньшем значении силы Тиз, приложенной к центру зерновки пер-
пендикулярно ее большей оси, чем при отрыве силой 7Р. Так, для
ржи средние значения 7’нз = 0,34 и 7’р = 0,56 Н, а для пшеницы оди-
наковой с рожью влажности 7^3=0,70, 7'р = 0,9 Н. Л^ньшая раз-
ница Tv—Тиз для пшеницы объясняется более существенным влия-
нием на сопротивление отгиба чешуй, которые у пшеницы более
развиты и имеют жесткость большую, чем у ржи.
Силы и деформации, соответствующие разрушению связей,
распределены по нормальному закону. Причем предельные силы
и деформации при отрыве не имеют между собой корреляционной
связи, а между отгибающим усилием и предельной деформацией
наблюдается обратная корреляция, т. е. с ростом сопротивления
отгибу предельная деформация уменьшается. Из этого следует,
что критерии обмолачиваемости зерновых культур не могут быть
выражены только одним параметром — силой или деформацией,
причем в зависимости от состояния и спелости культуры опреде-
ляющее влияние на вымолот зерна в одних условиях оказывает
силовой фактор, в других — деформационный.
Как известно, на вымолот зерна влияет влажность массы. Воз-
никает вопрос: какой из параметров связей в большей мере изме-
няется с ростом влажности и какое влияние он оказывает на вы-
молот зерна?
Экспериментами установлено, что при отрыве предельные си-
лы и деформации практически не изменяются с увеличением влаж-
ности.
Предельная сила отгиба с ростом влажности уменьшается,
а деформация — увеличивается. Это указывает на нетождествен-
ность изменения предельной силы связей и обмолачиваемости зер-
новых культур. Отсюда вытекает, что определяющее влияние на
недомолот с ростом влажности оказывают предельные деформа-
ции, а не силы.
379
Наряду с деформационными и силовыми параметрами связей
на обмолачиваемость зерновых культур ударом существенное
влияние оказывает деформируемость стержня колоса и самой со-
ломины. С увеличением жесткости стержня обмолачиваемость при
ударе по колосу улучшается, при одинаковых прочностных харак-
теристиках связей она изменяется и от массы зерновки и соуда-
ряемого элемента колоса.
Таким образом, обмолачиваемость зерновых культур зависит
от большого многообразия факторов. Взаимозависимость и сте-
пень влияния каждого из них на вымолот зерна проявляются не-
однозначно и зависят не только от прочности связей и состояния
растительной массы, но и от режима работы молотильных уст-
ройств. Все это указывает на невозможность объективно оценить
обмолачиваемость культуры по одному из свойств. Наиболее це-
лесообразно вести оценку по вымолоту на устройствах, характер
и режим воздействия которых на колос аналогичны прототипам.
Соломистость растительной массы. Вымолот зерна хлебных
злаков зависит от соотношения масс зерна и соломистой части
растений, поданных на обмолот. Для оценки соотношения зерна
соломистой части растительной массы принимают коэффициент
соломистости р, определяемый из выражения:
p=mc/(m34-mc), (265)
где тс — масса соломистой части растений;
т3 — масса зерна.
Коэффициент соломистости убираемых хлебов изменяется в
широких пределах: он больше для длинностебельных малоурожай-
ных культур и меньше для короткостебельных хлебов с большой
урожайностью зерна. Средние значения р для пшеницы составля-
ют 0,5...0,6, а для ржи 0,65...0,75.
При проектировании молотилок зерноуборочных комбайнов и
при оценке их работы принимают р0=0,6, т. е.
m3//nc=1/1,5.
§ 2. Подача убираемой культуры
При расчете загрузки уборочной машины определяют массо-
вые подачи в 1 с: зерна, соломистой части растений, зерна и со-
ломы (фактическая подача) и приведенную подачу.
Подача зерна зависит от ширины захвата жатки В, скорости
ее движения v и урожайности зерна Аа, т. е.
q3=BvA3. (266)
Подача соломы может быть определена по подаче зерна, ис-
ходя из выражения:
380
Так как 1 — $=q3/(q3+qc), а ₽=<7с/(<73+<7с)> т0 имеем
(267)
Фактическая подача определяется, как сумма ^ф = 9з+?с- За-
меняя здесь q3 и qc выражениями (266) и (267), получаем
^==504-y-L-. (268)
Нетрудно представить, что массовая доля потерь зерна (коэф-
фициент потерь р) молотилкой комбайна не имеет выраженной
связи с подачей q3, а следовательно, и с с/ф. Коэффициент потерь
зерна зависит от подачи соломы в молотилку комбайна, значе-
ние которой при одинаковой подаче q3 определяется коэффициен-
том соломистости.
Приведенная подача — понятие, введенное для сравнительной
оценки работы комбайнов. Под ним понимают фактическую по-
дачу при ро = О,6.
Из выражений (267) и (268) имеем
<7ф=<7с/₽- (269)
Так как приведенная подача <7ф=<7с/₽о при 00=0,6, то имеем
<7=1,67<7с. (270)
Для определения приведенной подачи находят массу соломи-
стой части растений (по выходам из комбайна за фиксированный
промежуток времени) и затем рассчитывают q по формуле (270).
§ 3. Типы молотильных устройств
Молотильные устройства вымолачивают зерно из колоса и ча-
стично выделяют его из обмолоченного вороха. Они бывают ба-
рабанно-дековые и барабанные.
Барабанно-дековое устройство включает в себя вращающийся
барабан 1 (рис. 254) и неподвижную деку 2.
Барабаны бывают штифтовые и бильные. В штифтовых на
планках закреплены штифты (зубья), а в бильных — рифленые би-
ла (бичи), расположенные параллельно оси барабана или под уг-
лом к ней.
Дека штифтового молотильного устройства также снабжена
зубьями, подобными зубьям барабана. В большинстве случаев де-
ку делают секционной: крайние секции — зубовые, средняя — глу-
хая без зубьев или решетчатая, через отверстия которой проходит
часть зерна, выделенного при обмолоте.
Деку бильного устройства изготавливают сварной, к боковым
ее обоймам прикрепляют поперечные планки, параллельные оси ба-
рабана, сквозь планки пропускают продольные прутки или встав-
ляют решетки.
38*
1
Рис. 254. Схемы барабанно-деко-
вых молотильных устройств:
а — штифтового; б — бильного, попе-
речно-поточного; в — бильного, продоль-
но-поточного; J — барабаны; 2 — декн;
3 — штифт деки; 4 — штифт барабана;
5 — бич; 6 — поперечная планка; 7 —
лопастн.
В зависимости от направления потока массы в молотильном
пространстве, образованном барабаном и декой, молотильные уст-
ройства бывают поперечно- и продольнопоточные.
В поперечнопоточном устройстве (рис. 254, а, б) направление
потока растительной массы перпендикулярно оси барабана, а в
продольнопоточном (рис. 254, в) совпадает с осью. В первом
устройстве растительная масса, поданная к барабану, захваты-
вается его штифтами или бичами, а во втором — начальная часть
барабана имеет винтовые лопасти 7, которые принимают массу от
транспортирующих устройств и передают ее к молотильной части
барабана.
Вымолот зерна в молотильном устройстве происходит вследст-
вие ударов штифтов и бичей по колосьям и протаскивания колось-
ев между штифтами или между бичами и планками деки.
382
В пространстве между декой и барабаном растения движутся
со скоростью меньшей, чем скорость штифтов или бичей, поэтому
бичц. ударяют по колосьям неоднократно. Эффективность вымолота
зерна 'Тем выше, чем больше число ударов и меньше зазоры в мо-
лотильном аппарате. Число ударов изменяют частотой вращения
-'барабана. Для этого в его приводе предусмотрены вариатор ско-
рости или сменные, шкивы.
-/..Для изменения зазора деку устанавливают на разном расстоя-
ний' относительно оси барабана. С этой целью в конструкции мо-
лотильных устройств предусмотрена регулировка положения деки
по высоте. С изменением положения деки в штифтовом устройст-
ве изменяются боковой с и радиальный Д' зазоры, потому что зу-
бья имеют коническую форму. В бильном устройстве с подъемом
деки радиальный зазор Д между бичами 5 и планками деки 6
уменьшается, а при опускании увеличивается.
Изменение зазора в молотильном устройстве влияет не только
на вымолот зерна, но и на его повреждение, а также на деформи-
рование стеблей. Выбор оптимальной регулировки молотильного
устройства определяется обмолачиваемостыо культуры, повреж-
даемостью зерна при обмолоте и сепарируемостью его из вороха.
Штифтовые барабан и дека интенсивнее, чем бильные, вымо-
лачивают зерно, особенно при повышенной влажности раститель-
ной массы. Однако они менее универсальны, больше перебивают
солому, из-за чего увеличивают загрузку очистки сбойной (переби-
той) соломой. Бильное устройство больше выделяет зерна из во-
роха сквозь отверстие деки, снижая тем самым потери зерна в
соломе. Поэтому оно находит наиболее широкое применение в
комбайнах.
Бильные продольнопоточные молотильные устройства позволя-
ют значительно увеличить площадь деки и обеспечить высокую
эффективность вымолота и сепарации зерна. Наряду с этим про-
дольное направление потока упрощает компоновку машины.
Барабанное устройство (рис. 255) состоит из двух барабанов:
наружного 3 и внутреннего 2. Оба они вращаются в одну и ту
же сторону с разной частотой: внутренний делает 300...400 мин-1,
а наружный — до 32 мин-1. Наружный барабан представляет со-
бой сетчатую поверхность с билами 8, внутренний снабжен ло-
пастями, расположенными по винтовой линии.
Процесс работы барабана протекает так. Обмолачиваемая мас-
са подается транспортером 1 в наружный барабан. Вращаясь, он
захватывает порцию растений и поднимает их на некоторый угол.
Поднятая масса соскальзывает с била и начинает падать. В этот
момент лопасти внутреннего барабана наносят удар по массе и
отбрасывают ее на стенку наружного барабана.
Так как лопасти расположены под углом к оси барабана, то
масса получает перемещение не только в плоскости вращения ба-
рабана, но и в осевом направлении. Следовательно, масса в ба-
рабане совершает ряд циклов, в результате которых по ней нано-
383
Рис. 255. Схема барабанного молотильного устройства:
/ — транспортер; 2 — внутренний барабан; 3 — наружный барабан; 4 — кожух; 5 — транспор-
тер зерна; 6 — очистительные транспортеры; 7 — козырек; 8 — бнлы.
сятся удары. От ударов и от перемещения массы по поверхности
элементов барабана происходит вымолот зерна. Часть зерна и
мелкие примеси просыпаются сквозь отверстия наружного бара-
бана и поступают на скатный козырек 7, а затем на боковые очи-
стительные странспортеры 6. Зерно скатывается с них на транс-
портер 5, а вымолоченную растительную массу транспортеры вы-
носят наружу. Та часть зерна и примесей, которая не прошла
сквозь отверстия наружного барабана, поступает на ботвотряс, где
выделяется зерно.
Барабанные молотильные устройства применяются для обмо-
лота овощного гороха (зеленый горошек) и обеспечивают эффек-
тивный вымолот при малом повреждении зерна гороха.
§ 4. Рабочий процесс бильного
молотильного устройства
Кинематика растительной массы в молотильном пространстве.
Скорость и ускорение движения массы в молотильном простран-
стве— важнейшие параметры, влияющие как на технологические,
так и на энергетические показатели работы молотильных уст-
ройств.
На основании скоростной киносъемки (частота кадров до 5000
в секунду) установлено, что в начальной части длины дуги деки
(Zi~ 100...150 мм) движение колоса вдоль дуги равномерное. Ско-
рость Hi этого участка зависит от толщины подаваемого слоя, ре-
жима работы питающих устройств, от длины стеблей, их ориен-
тации и т. д. Применительно к существующим молотильным
устройствам Hi изменялась от 3 до 6 м/с. В последующей части
дуги колос движется равноускоренно.
Исходя из указанных закономерностей, получаем следующее
выражение для скорости движения растения в молотильном прост-
384
ранстве:
(271)
где / — ускорение движения растения вдоль дуги деки (для биль-
ного молотильного устройства с диаметром барабана
£> = 600 мм, ускорение j~ 175 м/с2);
ti — продолжительность равномерного движения выбранного
элемента растения на участке деки длиной
t — текущее значение времени, отсчитываемое от момента
входа растения в молотильное пространство.
Из зависимости (271) находим выражения для определения
скорости колоса uv и комля пкм для растений, поданных в моло-
тильное пространство колосом по ходу вперед:
Нк=/^+2/(/д,-/1); (272)
«км=/^+2/(/дг+/Р-0. (273)
где 1Ы—текущая длина дуги деки;
/р —длина растения.
Из уравнений (272) и (273) следует, что при подаче растений
к барабану колосом по ходу вперед скорость его в пределах мо-
лотильного пространства меньше скорости комля, т. е. пк<пкм-
Совокупность стеблей, движущихся в молотильном простран-
стве, образует поток, представляющий собой механическую систе-
му, составляющие которой в заданном сечении имеют различную
скорость перемещения: быстро движутся те стебли, начало кото-
рых дальше удалено от сечения. В соответствии с этим скорость
потока ип в любом сечении будет отлична от скорости колоса и
комля стебля. Значение пп изменяется в зависимости от приведен-
ной подачи и текущего значения угла <р, отсчитываемого от радиу-
са, соединяющего ось барабана с началом деки. Функция uu(q, <р)
имеет следующий вид:
un=a+^+(c-|-d<r)<p, (274)
где а, Ь, с и d — коэффициенты.
Для устройства с диаметром барабана £> = 600 мм при линей-
ной скорости бичей «6 = 30...31 м/с имеем а = 2,2 м/с; й = 0,21м/с-
• (кг/с)”1; с = 3 м/с-рад-1; d = 0,58 м/с (кг/с-рад)-1.
Для подачи <7 = 5 кг/с (ширина молотилки Вм=1,2 м) получе-
но, что скорость потока wn возрастает от входа к выходу моло-
тильного устройства с 7...8 м/с до 16...17 м/с. Средняя скорость
пп~11—12 м/с.
При такой скорости поток стеблевой массы в радиальном на-
правлении молотильного пространства представляет не мно-
гослойную систему, состоящую из ряда стеблей и сжимаемую в
молотильном пространстве по всей дуге подбарабанья, а совокуп-
ность с большой порозностью. Так, при подаче <? = 5 кг/с в на-
25-424
385
Рис. 256. Схема к расчету числа ударов бичами
по колосу:
1 — бич; 2 — дека.
чале дуги на 1 см ширины деки находится в среднем около двух
стеблей, а в конце — только один.
Скорость стеблевого потока увеличивается с повышением ли-
нейной скорости бичей и§. Но приращение ип меньше, чем прира-
щение t/б- Износ бичей уменьшает скорость ип, а износ попереч-
ных планок деки увеличивает ее. Ускорение потока вдоль дуги
деки тем выше, чем меньше диаметр барабана.
Число ударов бичами по колосу. Вымолот зерна в молотиль-
ном устройстве происходит прежде всего (как уже указывалось)
вследствие ударов штифтами или бичами по колосьям и частично
вследствие их протягивания между элементами барабана и деки.
Определим число ударов v бичами по колосу при движении его
по деке в плоскости, перпендикулярной оси вала барабана.
Пусть бич 1 (-рис. 256) встречает вершину колоса в начале ду-
ги деки (точка А). За некоторое время t колос переместится в по-
ложение С, двигаясь равномерно со скоростью щ на участке
АВ = Ц дуги деки и равноускоренно от В до С со средней скоростью
«ср. За это время бич 1 перейдет из положения I в положение II.
Тогда число бичей, воздействующих на колос, будет
'v=/0/S6-|-1, (275)
где /0 — путь, проходимый бичом 1 относительно движущегося
колоса;
Se — шаг бичей.
Так как 10=1б—1д;+1к (здесь 1К — длина колоса), то имеем
Заменяя 1(, = Иб1, а /д> = /1+щР(/—Л) и решая, получаем (при
/дг^Л)
_ /дне । (гдг —г1)цб _ 1щ~1к । . ,276>
V— S6«! + S6ucp S6 + 1' ( '
Из выражения (276) следует, что число ударов по колосу тем
больше, чем больше окружная скорость иъ бичей и длина деки.
С увеличением / число ударов уменьшается. Для молотильного
устройства с барабаном £> = 600 мм и /д=780 мм при изменении
386
частоты его вращения от 900 до 1000 мин-1 по колосу ударяют
13... 15 бичей.
В пределах первой планки деки колос получает около 30...40 %
от общего числа ударов в молотильном пространстве с подбара-
баньем длиной 78 см, в результате чего у первой планки происхо-
дит интенсивный вымолот зерна. Установлено, что на входе в мо-
лотильное пространство вымолачивается 85...95% всего зерна.
Число ударов по колосу тем больше, чем меньше нср. Как сле-
дует из выражения (272) и (273), скорость цср будет меньше при
подаче растений в молотильное пространство колосом вперед по
ходу движения. В этом случае потери зерна от недомолота ста-
новятся меньше, чем при подаче комлем вперед.
Удлинение деки свыше 0,5 м за счет угла обхвата ею бараба-
на мало изменяет число ударов. Так, увеличение /д от 0,5 до 0,7 м
повышает v на 10%.
Уменьшение скорости щ и ускорения / увеличивает число уда-
ров по колосу, наибольшее приращение функций v=f(tii) и v==
=f(j) соответствует малым значениям аргументов.
§ 5. Технологические показатели работы
молотильных устройств
Определение показателей. Качество работы молотильных
устройств оценивают коэффициентами: недомолота 6, сепарации s,
дробления d и засоренности ф зерна, поступающего на очистку.
Коэффициенты б, $ и d представляют собой массовую долю зер-
на соответственно невымолоченного из колосьев, выделенного из
обмолоченного вороха в пределах деки и дробленного в общей
массе зерна. Коэффициент засоренности — отношение массы половы
и сбоины и колосков к массе вороха, поступающего на очистку.
Коэффициент недомолота 6 определяют повторным
обмолотом соломистой части и половы, а также косвенно по поте-
рям в пределах учетной рамки.
Первый способ применяют при лабораторных исследованиях
молотильных устройств, при испытаниях и настройке молотилки
комбайна. Для определения коэффициента б продукцию обмоло-
та собирают в пробоотборники. После выделения свободного (вы-
молоченного) зерна из соломы и половы их повторно обмолачива-
ют и выделяют зерно из соломы на специальных молотильно-сепа-
рирующих устройствах.
Второй способ применяют при оценке работы комбайна в поле.
В этом случае полову и солому выгружают в валок на длине
10...15 м, предварительно открыв полово-соломокопнитель. На
валок в трех-пяти местах накладывают рамку площадью 0,2 м2
(0,4X0,5 м), и в ее пределах собирают необмолоченные колосья,
выделяют из них зерно и, пользуясь специальными таблицами или
пересчетом, находят б. Допускаемый коэффициент недомолота не
должен превышать 0,5%. Наряду с недомолотом в обоих случаях
25*
387
оценивают и потери свободным зерном в соломе и полове, собирая
одновременно не только необмолоченные колосья, но и вымоло-
ченные зерна, оставшиеся в соломе и полове.
Коэффициент дробления d определяют так: из общей
зерновой массы выбирают навеску массой 50 г для колосовых,
200 г для гороха, фасоли, кукурузы и 20 г для проса, сорго, ко-
нопли. Из навески отбирают нецелые, обрушенные и плющеные
зерновки. Коэффициент d находят по отношению массы указанных
зерен к массе навески. Допускаемое дробление семенного зерна
1%, продовольственного и фуражного 2%.
Коэффициенты сепарации s и засоренности ф
зерна определяют только при исследованиях или при специальных
испытаниях молотильных устройств. Для этого собирают проход
зерна сквозь отверстия деки и сход с нее, а также выход на очи-
стку из-под деки и с соломотряса массу соломистой фракции.
Определяющие факторы вымолота, сепарации и дробления
зерна. Указанные процессы зависят от свойств растительной мас-
сы, от конструктивных параметров и режима работы молотиль-
ных устройств.
Вымолот зерна в молотильных устройствах происходит от
взаимодействия бичей (штифтов) и деки с колосьями.
Установлено, что число ударов v — определяющий критерий
вымолота. С ростом v коэффициент недомолота 6 монотонно убы-
вает.
Сила ударного импульса зависит: от скорости удара, от зазо-
ров в молотильном пространстве и от защищенности колосьев
стеблями.
При уменьшении скорости удара и разреженности потока стеб-
лей коэффициент б увеличивается с нарастающей интенсивностью,
увеличение зазоров.также снижает б.
Сепарация зерна в молотильном пространстве происходит
за счет удара бичами по движущемуся потоку растительной массы.
На сепарирующую способность бильного молотильного устрой-
ства существенно влияют: масса зерновки, частота ударов по во-
роху в пределах одной и той же зоны деки, порозность потока
массы и подача соломы.
С увеличением массы зерновки коэффициент сепарации увели-
чивается, так как повышается скорость проникновения зерна пер-
пендикулярно направлению потока.
Установлено, чем продолжительнее промежуток между удара-
ми бичей по вороху в пределах одного и того же элемента деки,
тем больше вероятность выделения зерна за один удар, но при
этом уменьшается число воздействий на ворох, за счет чего сни-
жается сепарирующая способность молотильного устройства за
фиксированный промежуток времени. Поэтому функция изменения
коэффициента б в зависимости от частоты воздействий v имеет
максимум. Оптимальная частота удара бичами v находится в пре-
делах 100...120 в секунду.
388
Увеличение порозности потока стеблевой массы увеличивает
коэффициент сепарации. Но морозность может быть изменена ре-
гулировкой подачи и скорости потока. Увеличение подачи зерна
не изменяет коэффициент б, а увеличение подачи соломы снижа-
ет его.
От скорости потока ип коэффициент сепарации s находится в
сложной зависимости. С одной стороны, чем больше скорость ма,
тем порознее поток растительной массы в молотильном простран-
стве и выше сепарирующая способность, с другой стороны, при
больших скоростях ип уменьшается время на сепарацию вороха,
т. е. снижается сепарирующая способность. Найдено, что скорость
потока в применяемых молотильных устройствах выше оптималь-
ной на 2...3 м/с.
Дробление зерна в начале дуги деки зависит прежде все-
го от соударения зерна, невымолоченного из колоса, с бичом.
В этой зоне из-за большой массы колоса с зерновками значитель-
ная доля зерна повреждается. Она зависит от сопротивления зер-
новки разрушению, от жесткости и массы колосьев, от защищенно-
сти колосьев в потоке массы.
Чем больше предел прочности зерновки, тем меньше дробится
зерно, жесткость и масса колосьев увеличивают коэффициент
дробления. С ростом подачи q коэффициент d уменьшается, так
как снижается вероятность удара непосредственно по зерну.
В последующих зонах молотильного пространства зерно дро-
бится от соударения свободной зерновки с элементами молотиль-
ного устройства, причем вероятность разрушающего удара зависит
от разряженности стеблевого потока. Так как скорость потока ип
вдоль дуги деки растет, следовательно увеличивается не только
суммарное количество дробленного зерна в каждой зоне, но и
массовая доля зерна, разрушаемого в каждой зоне.
Несомненно, в этих зонах разрушение зерна зависит от проч-
ностных характеристик и массы зерновки, от числа ударов, а так-
же от конструктивных параметров и режимов работы молотиль-
ного устройства (кривизна граней бичей, их скорость движения,
зазоры между бичами и планками деки).
Оценив роль различных факторов, влияющих на вымолот, сепа-
рацию и дробление зерна, рассмотрим зависимость коэффициен-
тов б, s и d, характеризующих указанные процессы, от конструк-
ции и режимов работы применяемых молотильных устройств.
§ 6. Зависимость коэффициентов недомолота б, сепарации s
и дробления d зерна от конструктивных параметров бильных
молотильных устройств
Положение колосьев в слое и скорость подачи массы к моло-
тильному устройству. Коэффициент сепарации зависит от того,
как расположены колосья в слое, подаваемом к молотильному
устройству. Если колосья вверху слоя (рис. 257, а), то коэффи-
389
5
Рис. 257. Положение колосьев в слое массы, подаваемой к молотильному уст-
ройству:
а — колосья вверху слоя; б — колосья внизу слоя.
a
а
д
Рис. 258. Подача растений в молотилку колосом «ло ходу вперед» {а, б, в) и
«по ходу назад» (г, д):
1 — режущие аппараты; 2 — мотовила; 3 — подборщики.
Рис. 259. Графики изменения коэффициентов:
а — недомолота 6, сепарации s и дробления d зерна в зависимости от скорости подачи и тр
растительной массы к молотильному устройству; б — то же, в зависимости от длины деки.
Рис. 260. Схемы бильных молотильных устройств:
а — однобарабанного; б — двухбарабанного; / — барабаны; 2— отбойные битеры; 3—прут-
ковые решетки; 4— деки; 5 — приемные битеры; 6 — промежуточный битер; 7— кожух; # —
колосовой шнек; 9 — решетка промежуточного битера.
циенты сепарации ниже, чем в том случае, когда они внизу
(рис. 257,6). Это объясняется тем, что даже и при отсутствии
слоя, сжимаемого в молотильном пространстве, вероятность сно-
са зерна бичами и движущимися стеблями в первом случае боль-
ше, чем во втором.
Существующие жатки комбайнов формируют поток раститель-
ной массы, подаваемой к барабану, колосьями сверху слоя. На-
ряду с указанным колосья по-разному могут быть поданы в мо-
лотильное пространство. Так, возможно движение растения ко-
лосом «по ходу вперед» и, наоборот, колосом «по ходу назад».
Подача «по ходу вперед» соответствует работе на прямостоя-
щем стеблестое (рис. 258, с), при движении комбайна навстречу
полеглости (рис. 258, б) и при подборе валков, в которых коло-
сья расположены против направления движения машины
(рис. 258, в).
Подача колосом «по ходу назад» происходит при движении
комбайна по полеглости (рис. 258,6) и при подборе валка со сто-
роны комлей (рис. 258, г).
При подаче колосьев «по ходу назад» коэффициенты недомо-
лота б и дробления d значительно увеличиваются, а коэффициент
сепарации s уменьшается. Указанная закономерность обосновы-
вается тем, что при подаче «по ходу назад» колос входит в моло-
тильное пространство со скоростью значительно большей, чем ско-
рость при подаче «по ходу вперед». В результате снижается число
ударов по колосу, уменьшаются массы вымолоченного, а, следо-
вательно, и выделенного из вороха зерна в пределах деки. Низ-
кий коэффициент генерации s в начальных зонах деки увеличива-
ет массу зерна, на которую воздействуют бичи ударом, из-за этого
возрастает коэффициент дробления d зерна.
Графики изменения коэффициентов б, s и d в зависимости от
скорости подачи массы к молотильному устройству цтр приведе-
ны на рисунке 259,а. Увеличение коэффициента б с увеличением
скорости 1/Тр вызвано снижением числа ударов по колосьям, осо-
бенно в начальной зоне дуги деки.
Функция s fuTp) в начале графика увеличивается, что вызвано
более стабильной работой молотильного устройства с ростом ско-
рости. Нисходящая ветвь кривой s(t/Tp) вызывается существенным
увеличением коэффициента б в зависимости от скорости иТр. Мак-
симум функции s(wTp) соответствует различным значениям итр:
для 9 = 5...6 кг/с он получен при цтр, равной 5...5,5 м/с. Увеличение
подачи q смещает максимум в сторону меньших значений скоро-
сти нтр. В современных комбайнах скорость подачи массы к моло-
тильному устройству принимают в пределах 2,9...3,5 м/с. Коэффи-
циент дробления зерна практически не изменяется от скорости нтр.
Длина дуги деки. Удлинение деки увеличивает число ударов
бичами по колосьям и вороху, в результате чего коэффициент не-
домолота б уменьшается (рис. 259,6), а коэффициенты s и d уве-
личиваются.
391
Удлинить дугу деки можно за счет увеличения угла обхвата <р
барабана декой (рис. 260,а), диаметра барабана D, а также за
счет применения двух или более последовательно работающих
молотильных устройств.
Наибольшие распространения находят бильные молотильные
устройства с барабанами, диаметр которых £> = 550...610 мм, а угол
<р изменяется от 115 до 146°. В комбайне СК-5 угол <р=146°, дека
выполнена двухсекционной длиной /д=82 см. При таких парамет-
рах деки молотильное устройство обеспечивает высокие вымолот и
сепарацию зерна при допускаемом коэффициенте дробления. Так,
при уборке пшеницы (юр = 14...18%) с приведенной подачей около
5 кг/с коэффициенты недомолота 6=0,3—0,5%, коэффициент се-
парации s=88...92%.
Угол обхвата <р определяется углами входа массы pi и выхо-
да рг. Чем больше угол 01, тем меньше скорость потока массы в
молотильном пространстве, в связи с чем улучшаются вымолот
и сепарация зерна, но повышается его дробление и перебивание
соломы. Наряду с этим с увеличением угла pi ухудшается захва-
тывание массы бичами. Поэтому при pi >45° для направления по-
тока массы к барабану в комбайнах устанавливают приемный би-
тер 5.
Угол рг молотильного устройства комбайна СК-5 равен 90°, т. е.
барабан выбрасывает ворох близко к вертикальному направле-
нию. Для отражения выходящего вороха и направления его на на-
чало соломотряса под оптимальным углом служит отбойный би-
тер 2, лопасти которого, вращаясь с линейной скоростью 15...17м/с,
ударяют по вороху и выделяют из него часть зерна (до 3...5%)
в пределах прутковой решетки 3.
Как отмечалось выше, удлинение дуги деки улучшает каче-
ственные показатели работы молотильных устройств, но при диа-
метре барабана £) = 550...600 мм возможность дальнейшего удлине-
ния деки исчерпана. Увеличение угла свыше 146° приведет к на-
рушению технологического процесса из-за забивания массой. Угол
$2=90° также предельный: при дальнейшем его увеличении мас-
са будет перебрасываться барабаном обратно в зону входа.
Значительное удлинение дуги деки достигнуто в комбайнах с
двумя молотильными устройствами (рис. 260, б). В них угол вы-
хода р2 первого барабана уменьшен до 50...55°, а между первым
и вторым молотильными устройствами установлен промежуточ-
ный битер 6, принимающий массу от первого барабана и переда-
ющий ее ко второму.
Комбайны с двумя молотильными устройствами лучше вымола-
чивают зерно, больше зерна выделяется сквозь отверстия дек, в
результате чего уменьшается подача зерна на соломотряс и поте-
ри его в соломе. Однако при уборке хлебов малой влажности
(w = 8...12%) значительно увеличивается перебивание соломы дву-
мя молотильными устройствами, из-за чего перегружается очистка
и снижается сепарирующая способность соломотряса. На влаж-
392
Ss-
Рис. 261. Изменение ко-
эффициентов 6, s и d в
зависимости от цага би-
чей, S6.
ных, засоренных хлебах дека часто за-
бивается, а из-за двух барабанов затруд-
няется доступ для ее очистки. Комбай-
ны с двумя молотильными устройствами
более металлоемки, они в 1,4... 1,6 раза,
чем однобарабанные, требуют больше
мощности на привод барабанов и про-
межуточного битера.
Удлинение деки может быть достигну-
то за счет увеличения диаметра бараба-
на при сохранении угла обхвата <р.
Исследования и опыт применения мо-
лотильных устройств с одним бараба-
ном диаметром £>=800...830 мм показы-
вают, что при уборке хлебов такими ком-
байнами в 3...5 раз уменьшается коэффициент недомолота по срав-
нению с барабанами £> = 550 мм (<р= 105... 120°). При этом коэффи-
циенты дробления и перебивания соломы практически не изменя-
ются. Увеличение длины деки за счет диаметра барабана значи-
тельно уменьшает коэффициент схода це зерна на соломотряс.
Молотильные устройства с увеличенным диаметром барабана
до 800...830 мм в меньшей мере, чем при £> = 550 мм, изменяют ка-
чественные показатели работы при отклонении зазоров между би-
чами и планками подбарабанья, а также при колебании линейной
скорости бичей. Они не склонны к забиванию при кратковремен-
ных перегрузках.
Шаг бичей. При выбранном диаметре барабана шаг бичей Sp
зависит от их числа М, т. е.
5б=лП/Л1. (277)
С увеличением шага уменьшается число ударов, наносимых по
массе в молотильном пространстве, что приводит к увеличению
коэффициента б (рис. 261) и уменьшению коэффициента d.
Функция sfscj имеет максимум. При линейной скорости бичей
ii6 = 30...32 м/с максимум соответствует шагу $б = 0,2...0,3 м. На
труднообмолачиваемых культурах предпочтительнее меньшие зна-
чения, на легкообмолачиваемых— большие.
§ 7. Параметры и загрузка растительной массой
штифтовых молотильных устройств
В большинстве конструкций комбайнов диаметр барабанов по
основанию штифтов £>о=45О...61О мм, а по вершине— D=D0+2h,
где h — рабочая длина штифта. Обычно £ = 69 мм. Число планок
на барабане А1 = 6...12. Для упрощения на рисунке 262 приведена
развертка барабана с четырьмя планками.
Зубья барабана располагают по винтовым линиям в местах пе-
ресечения их с планками. Находят применение барабаны с разным
393
ABC
Рис. 262. Развертка штифтового ба-
рабана.
числом заходов винтовой ли-
нии тв. Обычно тв кратно чис-
лу планок М, т. е. тв = 3,4,5,6.
Направление винтовых ли-
ний определяется шагом:
tB=aM, (278)
где а — расстояние между сле-
дами АА', ВВ', СС и т. д.; а —
= 25...29 мм.
Как видно из развертки,
число следов
vc=Z^/cz-J-l, (279)
где Гш — расстояние между
крайними следами.
По одному следу движется
столько штифтов, сколько за-
ходов винтовой линии. Тогда
число штифтов на барабане
будет
г=тв(/'ш/а+1). (280)
Штифты на деке устанавливают в четыре, пять и шесть рядов.
В первом ряду, как правило, штифты деки располагают один от
другого через четыре, а в последуюших рядах через два следа.
Каждый штифт деки устанавливают посередине между смежны-
ми следами штифта барабана.
Загрузку штифтового молотильного устройства qiim принимают
прямо пропорциональной числу штифтов z и допускаемой подаче
на один штифт q'o, т. е.
<7мш=<7о?. (281)
Допускаемую подачу q'o выбирают от 0,025 до 0,04 кг/с на один
штифт. Большие значения соответствуют влажности растительной
массы ajp^10...13%, а меньшие wp^25...30%.
Заменяя z в формуле (281) выражением (280), имеем
7мш=?отв(^/а+1).
(282)
§ 8. Выбор регулировочных параметров и режим работы
молотильных устройств
Регулируемые параметры. Молотильные устройства регулиру-
ют для получения максимально возможной производительности
комбайна при потерях, не превышающих допускаемых значений
(6С0,5%, d=^2°/o для продовольственного зерна и d^l% для се-
мян).
394
От регулировочных параметров и режима работы молотиль-
ного устройства зависят не только 6 и d, но и потери зерна, не вы-
деленного соломотрясом из соломы (допускаемое значение г]с^
^0,5%).
Изменяемые параметры молотильных устройств — частота вра-
щения барабанов п и зазоры Д (рис. 254, б) между бичами и по-
перечными планками деки в бильных молотильных устройствах,
зазоры с и Д' (рис. 254, в) между смежными штифтами барабана
и деки — в штифтовых.
Для изменения частоты вращения барабанов применяют кли-
ноременные вариаторы или редукторы с изменяемым передаточным
отношением. Некоторые комбайны оборудуют тем и другим уст-
ройствами. С изменением частоты вращения изменяется линейная
скорость бичей.
Зазоры изменяют перемещением деки относительно барабана.
Возможно как групповое регулирование зазоров по всей дуге де-
ки, так и индивидуальное, т. е. только на входе или только на вы-
ходе. В штифтовых молотильных устройствах наряду с изменени-
ем положения деки возможно осевое смещение барабана. Переме-
щением деки изменяют боковой с (рис. 254, а) и торцевой Д' за-
зоры, а смещением барабана добиваются равномерности бокового
зазора между смежными штифтами.
Регулирование бильного устройства. Оптимальные значения
частоты вращения п барабана и зазоров Д выбирают в два этапа.
Предварительно устанавливают ориентировочные значения п и Д
в зависимости от состояния убираемой культуры. Окончательную
настройку проводят в поле поиском оптимума при контрольных
проходах.
Установочные параметры предварительной настройки рекомен-
дуется выбирать в соответствии с таблицей 4.
При окончательной настройке молотильного аппарата в поле
стремятся обеспечить максимальную производительность, изменяя
при этом частоту и зазоры с учетом закономерностей, приведен-
ных на графиках (рис. 263).
Первыми при регулирова-
нии изменяют зазоры одно-
временно на входе Двх и выхо-
де ДВых. Если регулировани-
ем зазоров Двх и Двых не дости-
гается требуемое качество, то
изменяют частоту п. В том
случае, когда при работе на-
блюдаются повышенные поте-
ри зерна сходом с соломой,
уменьшают зазоры на входе
Двх, так как при одинаковом
среднем зазоре уменьшение
Двх (рис. 264) интенсивнее,
Рис, 263. Зависимость коэффициен-
тов б, s и d от частоты вращения
барабана п и средних зазоров меж-
ду бичами и планками деки А.
395
396
ТАБЛИЦА 4
Параметры предварительной настройки бильного устройства
Культура Линейная скорость бнчей м/с Зазоры А, мм
одноба- рабанные моло- тилки двухбарабанные молотилки однобарабанные МОЛОТИЛКИ двухбарабанные молотилки
первый барабан второй барабан
первый барабан второй барабан ВХОД ВЫХОД вход выход вход середина выход
Пшеница, овес 30...32 28...30 30...32 16 4 20 8 20 16 4
Рожь, ячмень 28...30 27...29 30...31 16 4 20 8 20 18 6
Рис — 27...30 30...34 16 4 20 10 20 18 6
Просо, кориандр 21...24 18...20 22...24 18 6 20 10 22 18 6
Подсолнечник 13...15 10...12 13...15 18 6 — — — — —
Гречиха, соя, бобы 15...18 13...16 15...18 — — 22 10 20 18 6
Горох 12...15 10...И 11...13 18 7 22 10 22 18 8
Кукуруза 10...12 8...10 10...12 22 8 — — — — —-
Рис. 264. Изменение коэффициента
схода зерна т]б из молотильного уст-
ройства на соломотряс в зависимо-
сти от среднего зазора в молотиль-
HOiM устройстве Д.
Рис. 265. Графики функций b(q);
s(q); d(q); q — приведенная подача.
Рис. 266. Изменение ко-
эффициентов недомолота
д и дробления зерна d
в зависимости от часто-
ты вращения внутренне-
го барабана п:
1 и 2 — коэффициенты дроб-
ления при зрелости соответ-
ственно 31 и 36%; 3 и 4~•
коэффициенты недомолота
соответственно при зрелости
31 36%.
чем Двых снижает коэффициент схода зерна с ворохом на соломо-
тряс. В процессе регулирования оценивают не только коэффициент
ты ё, d и s, но и работу очистки, т. е. загрузку ее соломистой фрак-
цией. С увеличением частоты и уменьшением зазоров увеличивает-
ся, особенно на сухом хлебе, перебивание соломы. Если регулиро-
ванием молотильного устройства не достигается требуемое качест-
во работы (допускаемый коэффициент потерь зерна за молотил-
кой р>1,5%), то уменьшают подачу q. Коэффициенты ё, d и s из-
меняются от q по кривым, типичные графики которых приведе-
ны на рисунке 265.
Регулирование барабанных молотильных устройств. При обмо-
лоте овощного гороха требуется тщательно выбрать режим рабо-
ты барабана, так как горох убирают в ста-
дии молочной и молочно-восковой спело-
сти, когда влажность зерна составляет
80...85% и, кроме того, масса гороха харак-
теризуется большой неравномерностью со-
зревания. Большая неравномерность созре-
вания бобов вызывает значительные рас-
хождения в сроках расщепляемости их
створок и повреждаемости зерен от удара.
С этой целью рекомендуется всю массу,
поступающую на горохомолотильный пункт,
разделять на несколько групп по техниче-
ской зрелости. Техническая зрелость бобов
определяется по количеству выполненных
бобов, в которых зерна имеют диаметр не
менее 5...6 мм.
По каждой группе зрелости строят кри-
вые коэффициентов дробления и недомоло-
та. На рисунке 266 приведены такие кри-
вые для двух групп зрелости (31 и 36%), в
зависимости от частоты вращения внутрен-
397
него барабана. По указанным кривым определяют рациональную
частоту вращения барабана, при которой удовлетворяются агро-
требования.
В некоторых барабанных молотильных устройствах изменя-
ют не только частоту вращения, но и угол поворота лопастей ба-
рабана. Тогда при недомолоте целесообразнее повернуть лопасти
на больший угол, прежде чем увеличивать скорость барабана. Та-
кая регулировка может снизить повреждение зерна без существен-
ного изменения потерь.
§ 9. Силовые и энергетические параметры работы
молотильных устройств
Мощность холостого хода барабана. На холостом ходу бара-
бана энергия расходуется на преодоление трения в опорах и на
преодоление сопротивления воздуха.
В соответствии с этим мощность холостого хода барабана
Nx, х — сумма двух слагаемых, из которых первое прямо пропор-
ционально линейной скорости барабана ив, а второе имеет куби-
ческую зависимость от скорости wg, т. е.
Nx.x=a,u6+bjil, (283>
где Пх и Ьх—коэффициенты пропорциональности, характеризую-
щие соответственно трение и вентиляторное действие барабана.
Коэффициент йх представляет собой силу трения в опорах вала
барабана, приведенную к бичу (штифту). Для штифтового бара-
бана сх=5...5,5 Н, а для бильного Ох=0,85...0,9 Н на каждые 100 кг
массы барабана.
Значительная разница в коэффициентах ах для бильного и
штифтового барабанов объясняется тем, что к трению в опорах ва-
ла штифтового барабана прибавляется трение боковых граней и
планок о воздух, пропорциональное первой степени скорости.
Коэффициент Ьх определяет сопротивление воздуха, зависящее
от формы вращающихся частей барабана, их размеров, свойств и
плотности воздуха. Значение коэффициента Ьх на 1 м длины ба-
рабана диаметром 550...600 мм можно принять равным 0,045 Н-
• с2/м2 для штифтового и 0,065 Н-с2/м2 для бильного.
Мощность холостого хода одного барабана составляет
1,8...3 кВт.
Сопротивления и мощность при обмолоте. В соответствии с
общим законом сопротивления, предложенным В. П. Горячкиным,
сила R, действующая на бичи или штифты, равна следующей сум-
ме сил:
где Ri — результирующая сил сопротивления деформированию
элементов потока растительной массы (изгиб и разрыв
стеблей, разрушение колосьев, сжатие стеблевых трубок
398
и Др.), трению бича по растениям и изменению положения
растений относительно направления вектора скорости по-
тока;
— результирующая сил инерции элементов растений, кото-
рым сообщается ускорение.
Силы Rt и R2 увеличиваются в зависимости от роста массы
tn\, взаимодействующей с бичами.
Принимая прямую пропорциональность между силами R\ и
Rz и массой т', а последнюю, выражая через подачу q и скорость
потока имеем
#=(aR+<0)<7/«n.
где aR, а, — коэффициенты пропорциональности.
На численное значение коэффициентов aR и оказывают влия-
ние зазоры между бичами барабана и поверхностью деки: чем
меньше зазоры, тем больше aR и а_;, так как увеличивается число
растений, которые, отражаясь от деки, вводятся в зону деформи-
рования бичами. Коэффициент растет с увеличением скорости
удара, которая тем больше, чем выше линейная скорость бичей
«б. Однако с ростом повышается пп, что приводит к несущест-
венному изменению R от «б.
Многообразие факторов, влияющих на усиление R, и их слож-
ное взаимодействие затрудняют теоретическое обоснование функ-
циональной зависимости для силы R и окружного усилия Р.
Экспериментально установлена следующая зависимость для
среднего окружного усилия на бичах барабана:
P=apq+bpq*. (284)
Исходя из выражения (284), имеем следующую формулу для
мощности Nt. п, потребной на технологический процесс:
(285)
Коэффициенты ар и Ьр изменяются от состояния и сорта куль-
туры, а также от конструктивных параметров молотильного устрой-
ства.
С увеличением длины стеблей и влажности растительной мас-
сы они увеличиваются. Коэффициент Ьр уменьшается с увеличени-
ем скорости подачи массы к молотильному устройству и зазоров на
входе молотильного пространства, а также от радиуса кривизны
подбарабанья. Влияние коэффициента ар тем больше, чем мень-
ше зазоры на входе и больше угол обхвата <р барабана подбара-
баньем.
Для молотильных устройств с диаметрами барабанов D =
= 550—600 мм и <р = 2,4 рад при скорости подачи массы к бараба-
ну 3...3,5 м/с имеем: tzp=9O...12O Н (кг-с)-1; ЬР==7...1О Н (кг/с)-2.
Большие значения соответствуют длине барабана 70...90 см, а
меньшие— 150...180 см.
399
Общая мощность, потребная на привод барабана, будет равна
^=^х.х+^.п=ах«б+М+(аР9+М2) «б. (286)
Основное уравнение работы молотильного барабана. Уравне-
ния, выражающие соотношения масс и скоростей рабочих органов,
названы В. П. Горячкиным основными.
Принимая многомассовую систему зерноуборочного комбайна
упрощенно, как систему с одной степенью свободы, согласно прин-
ципу Даламбера, получаем следующее уравнение движения моло-
тильного барабана:
('6+4р)“+Ч=Мр, (287)
где /б — момент инерции барабана;
/пр — момент инерции вращающихся частей комбайна (кро-
ме барабана), приведенный к валу барабана;
<о — угловое ускорение барабана;
Мс, Мр — приведенные моменты сил сопротивления и движущих
сил.
Для комбайнов СК-5, например, 7б = 8 кг-м2; /пр=12 кг-м2.
Уравнение (287), называемое основным уравнением работы бара-
бана, устанавливает взаимосвязь между тремя элементами про-
цесса: растительной массой (Л1С), барабаном (/б, со), и двигате-
лем (7ИР).
Момент сил сопротивления Л1с может быть представлен следу-
ющим трехчленом:
(288)
где тс — момент, не зависящий от подачи.
Момент тс включает в себя сопротивления механизмов моло-
тилки, жатки, сопротивление перекатыванию комбайна. Так как
результирующий момент скоростных составляющих, вызванный
работой вентилятора и барабана (см. уравнение 283), — неболь-
шая доля ( — 5%) от общего приведенного момента, то с достаточ-
ной точностью можно принять
Рис. 267. Изменения загрузки бара-
бана q(t) и функции со (/).
тс не зависящим от скорости.
Значение второго слагаемого
a'Mq определяется не только со-
противлениями барабана, но и
ряда других рабочих органов мо-
лотилки и жатки, сопротивление
которых пропорционально за-
грузке. Третье слагаемое bMq2 вы-
звано сопротивлением барабана.
Загрузка молотилки q при
работе комбайна непрерывно из-
меняется во времени t.
Пусть q(t) — периодическая
функция (рис. 267), изменяе-
мо
мая по гармоническому закону:
q Sin (ft-j-a), (289)
где aq,bq, а —параметры изменения подачи;
f —частота возмущающего воздействия.
Подставляя (289) в (288) и решая, получаем
Мс=c-l-a sin (ft -f- <p) 4- b sin2 (ft-^a), (290)
где
с=^+<Ц4-М; а=щ^94-2^,оД; b=bubq.
Момент движущих сил Мп определяют по регуляторной харак-
теристике двигателя (рис. 268). Ввиду того, что функция ЛГд(сод) —
нелинейная, применяют спрямление регуляторной АВС и коррек-
торной CDE ветвей характеристики линиями А'В' и В'С', выра-
жая их линейными уравнениями:
для регуляторной ветви
МР1=а„—fy/o; (291)
для корректорной
Afpa=(4— b'Na. (292)
Заменив в уравнении (287) Л1С и Л1р выражениями (290) и
(291), получим
со 4-рсо = т 4-г sin (ft 4- а) 4- « sin2 (ft4~а). (293)
где
7б"Ь7Пр’ 7б + /Пр’ 7б~|-7п, ' Jnp *
Общий интеграл уравнения находим по формуле:
со=е_Рг Г [ ер‘ (т4-г8т(//4“а)+5 sin2 4“а)) dt 4“С1. (294)
Решение уравнения (294)
дает изменение частоты вращения ва-
ла барабана со во времени t. Изме-
нение со(О происходит с той же
частотой, что и внешней нагрузки
q(t), их максимумы сдвинуты по
фазе на At (рис. 267). Амплитуда
со зависит от момента инер-
Рис. 268. Изменение крутящего момента
двигателя Мя в зависимости от угловой
скорости коленчатого вала <оя.
26—424
401
ции барабана /б и частоты изменения нагрузки f: с ростом /б и
f изменение ы уменьшается.
В результате этого снижаются динамические нагрузки, дейст-
вующие в механизмах привода барабана.
Глава XIII
СОЛОМОТРЯСЫ
§ 1. Назначение и типы соломотрясов
Массу (солома, полова, сбоина, часть зерна), вышедшую из
молотильного устройства и поступившую на соломотряс, принято
называть грубым ворохом.
Соломотряс выделяет из соломы мелкий ворох (зерно, полову,
сбоину), направляет его на очистку и выводит солому из моло-
тилки.
В существующих зерноуборочных комбайнах наибольшее
применение находят клавишные соломотрясы. Известны комбай-
ны с платформенным, конвейерно-роторным соломотрясом и ротор-
ным соломоотделителем.
Клавишные соломотрясы бывают с тремя и более клавишами.
Каждая клавиша представляет собой корпус 4 (рис. 269, а) с ре-
шетчатой рабочей поверхностью 3, выполненной в виде каскадов.
Мелкий ворох, просыпавшийся сквозь отверстия решетки клавиш,
по желобу корпуса попадает на очистку. Клавиши с боков несут
выступающие над рабочей поверхностью гребенки 1, а некоторые
каскады снабжены граблинами 2. Борта и граблины препятству-
ют скольжению соломы назад, улучшают ее растаскивание и спо-
собствуют более равномерному перемещению соломы к выходу из
молотилки. На первом каскаде часто устанавливают более высо-
кие две боковые и одну среднюю гребенки, которые снижают ско-
рость потока соломы, чем достигается более интенсивный процесс
выделения зерна на первом каскаде. В некоторых комбайнах при-
меняют клавиши без днища, а для перемещения мелкого вороха
на очистку под соломотрясом устанавливают дополнительную
колеблющуюся транспортную доску, причем направление ее коле-
баний выбирают противоположным направлению колебаний кла-
виш.
В результате этого достигается уравновешивание сил инер-
ции, действующих на раму комбайна.
Корпус каждой клавиши соломотряса шарнирно соединяют с
двумя коленчатыми валами одинакового радиуса г колен. Колена
АВ и DC валов одной клавиши параллельны одна другой, а рас-
стояния AD = BC, т. е. валы и клавиша образуют четырехзвенный
параллелограммный механизм ABCD. В-таком механизме клави-
ша совершает плоско-параллельное движение, а каждая ее точка
движется по окружности радиусом г.
402
Рис. 269. Схемы соломотрясов:
а — клавишного двухвального; б — расположение колен четырехклавишного соломотряса;
в — конвейерно-роторного; г — роторного; 1 — гребенка; 2 — граблина; 3 — решетчатая по-
верхность; 4 — корпус клавиши; 5 — транспортер вороха; 6 и 7 — битеры; 8 — секционный
фартук; 9 — пиккеры; 10 — малый транспортер; //—двухпрутковый бнтер; 12 — отбойный
битер; 13 — большой транспортер; 14 — вентилятор; 15 — ротор; 16 — решетка.
Колена валов двух соседних клавиш смещены одно относи-
тельно другого на некоторый угол. Порядок расположения колен
четырехклавишных соломотрясов приведен на рисунке 269, б.
Клавишные соломотрясы работают по принципу подбрасыва-
ния и встряхивания грубого вороха. Они хорошо сепарируют мас-
су зерновых культур с безостым колосом при работе на ровном
рельефе. Показатели качества работы клавишных соломотрясов
снижаются при перегрузках, эти соломотрясы чувствительны к
продольным и поперечным уклонам, а решетка клавиш забивается
остями при уборке зерновых остистых культур.
Платформенные соломотрясы работают по тому же принципу,
что и клавишные. Вместо нескольких клавиш они оборудованы од-
ной платформой, приводимой в возвратно-поступательное движе-
ние рычажно-шарнирным механизмом. В настоящее время эти
соломотрясы не применяются.
Конвейерно-роторные соломотрясы (рис. 269, в) состоят из ря-
да транспортеров 5, 10 и 13, битеров 6, 7 и 12, пиккеров 9, вен-
тилятора 14 и т. д. Такие соломотрясы расчесывают, растаскивают
и вспушивают ворох. По сравнению с клавишными они менее
чувствительны к продольным и поперечным уклонам, сложнее по
26*
403
устройству, требуют повышенных энергозатрат, больше перебива-
ют солому, из-за чего перегружают очистку, особенно на сухом
хлебе.
Роторные соломоотделители (рис. 269, г) представляют собой
ряд вращающихся роторов (соломочесов) с присоединенными к
ним зубьями. Под каждым соломочесом есть решетка.
Роторный соломоотделитель основан на принципе расчесыва-
ния и растаскивания растительной массы. Он хорошо работает на
уклонах, лучше, чем другие соломотрясы, выделяет зерно при
уборке длинностебельных хлебов повышенной влажности, одна-
ко сильно перебивает солому, особенно на хлебах нормальной
влажности, вследствие чего на очистку поступает ворох с большим
количеством соломистых примесей.
Разновидность роторного соломоотделителя — устройство, изо-
браженное на рисунке 254, в, которое служит продолжением про-
дольно-поточного молотильного устройства. Массу в таком устрой-
стве перемещают вдоль оси барабана по неподвижной решетке
била, поставленные под углом к образующим ротора.
Решетки соломоотделителей на засоренном влажном хлебе за-
биваются растительными остатками и почвой, что значительно
ухудшает их работу.
§ 2. Кинематический режим работы соломотряса
Каждая точка клавиши совершает движение по окружности
радиусом г. Кинематику клавиш характеризуют отношением цент-
ростремительного ускорения га2 к ускорению свободного паде-
ния g. Такое отношение К названо показателем кинематического
режима: К = g.
От значения показателя зависит характер и скорость движе-
ния вороха на соломотрясе, а, следовательно, и качество его ра-
боты.
Распределение вероятностей выделения зерна из вороха. Ки-
нематографическими исследованиями установлено, что наиболь-
шая вероятность выделения зерна соломотрясом из вороха соот-
ветствует опусканию клавиши и начальному моменту ее подъема
(рис. 270). При опускании клавиша опережает солому, так как
она тормозится воздухом и задерживается соседними клавишами.
В результате такого движения слой вороха распушнвается и зер-
но проникает вниз. В период подъема клавиши ворох, отрываясь
от нее, подбрасывается вверх (К=2,2). В этот момент зерно под
действием сил инерции, наоборот, перемещается к верхним зонам
слоя.
Несомненно, что перемещение вниз преобладает над пере-
мещением вверх. Очевидно, что сепарация зерна из слоя одина-
ковой толщины будет тем больше, чем меньше зерно проникает
к верхним зонам слоя и чем продолжительнее оно движется при
опускании.
404
Рис. 271. Изменение коэффициента
сепарации зерна соломотрясом s3 в
разных зонах клавиши в зависимо-
сти от показателя К:
/, 2, 3, 4, 5 и 6 — зоны, отсчитанные от
начала соломотряса длиной 2,5 м.
Рис. 270. Распределение частоты вы-
деления зерна по углу поворота ва-
ла соломотряса (К=2,2):
а — приведенная подача <7=3,1 кг/с; б -*
q=AA кг/с.
Изменение коэффициента сепарации зерна из слоя постоянной
толщины в зависимости от показателя К. В соответствии с изло-
женным коэффициент зональной сепарации зерна s3 (s3 — массо-
вая доля зерна, выделенного в зоне от всего зерна, поступившего
в нее) будет увеличиваться при уменьшении К до некоторого пре-
дела. Так, исследованиями установлено, что при одинаковой тол-
щине слоя на соломотрясе наибольшее значение коэффициента s3
соответствует ^=0,93 (рис. 271) для всех шести зон, выделенных
по длине клавиши. При Л=0,36 слой не отрывается от поверхно-
сти клавиши и не растаскивается на соломотрясе, поэтому полу-
чено наименьшее значение s3 по всей длине соломотряса.
Когда /(= 1,8, коэффициент s3 ниже, чем его значение при К=
=0,93. Указанная закономерность объясняется тем, что уменьше-
ние К от 1,8 до 0,93 увеличивает продолжительность выделения
зерна при опускании слоя, а также зерно не возвращается в верх-
ние зоны слоя при движении клавиши вверх, как это происходит
при /<2^1,8.
Таким образом, при одинаковой толщине слоя, оптимальное
значение К~1. Однако при таких значениях показателя клавиш-
ные двухвальные соломотрясы не работоспособны из-за малой
скорости движения вороха вдоль клавиши.
Скорость движения вороха вдоль клавиш двухвального соло-
мотряса. Средняя скорость движения вороха ис практически оди-
накова по всей длине клавиши. График функции пс(К) близок к
линейному (рис. 272). При К—2,2 скорость цс=а0,34 м/с. Увели-
чение скорости ис с одной стороны уменьшает толщину слоя соло-
мы при одинаковой загрузке соломотряса, а с другой — сокраща-
ет время пребывания ее на соломотрясе. Снижение скорости при-
водит как к увеличению толщины слоя соломы, так и к увеличе-
нию продолжительности ее обработки на соломотрясе.
40S
Рис. 272. Зависимость скорости дви-
жения вороха «с вдоль клавиши от
показателя кинематического режи-
ма К.
Рис. 273. Изменение коэффициента
схода свободного зерна т)с с кла-
вишного двухвальцового соломотря-
са в зависимости от показателя ки-
нематического режима К.
При К=1 на клавишном двухвальном соломотрясе толщина
слоя возрастает до такого значения, при котором сепарирующая
способность становится низкой.
Для реализации показателя К~1, при котором достигается
наибольшее выделение зерна из соломы, необходимо обеспе-
чить разделение процессов встряхивания и транспортирования
вороха.
Оптимальный показатель кинематического режима двухва-
лентного соломотряса. Типичный график изменения потерь (ко-
эффициент схода зерна с соломой т]с) за четырехклавишным двух-
вальным соломотрясом приведен на рисунке 273.
Из графика следует, что отклонение показателя кинематиче-
ского режима от оптимального значения (К=2,2...2,6) увеличива-
ет потери свободным зерном.
В условиях эксплуатации комбайна необходимо соблюдать по-
стоянным заданный кинематический режим работы соломотряса.
Для создания указанного условия необходимо, чтобы срезанная
масса наиболее равномерно и непрерывным потоком подавалась
в молотилку.
Однако в действительности загрузка комбайна неравномерна
и, по данным ряда исследований, колеблется относительно средней
от 0,67 qcp до 1,33 qcp. Такой характер нагрузки обуславливается
прежде всего неравномерностью урожайности, непостоянной рабо-
чей шириной захвата комбайна, неточной регулировкой рабочих
органов, транспортирующих хлебную массу.
Колебание загрузки вызывает отклонение частоты вращения
вала соломотряса от заданной. Значение отклонения зависит от
подачи и от запаса мощности двигателя комбайна.
В процессе эксплуатации комбайнов нельзя допускать пере-
грузку двигателя, а также работу на заниженном скоростном ре-
жиме.
406
§ 3. Сепарация зерна клавишным двухвальным соломотрясом
Коэффициент интенсивности сепарации. Процесс воздействия
соломотряса на ворох сводится к периодическому встряхиванию
массы и перемещению ее к выходу из молотилки. При встряхива-
нии зерно выделяется сначала из соломы, представляющей со-
бой пространственную решетку толщиной h, а затем через решетку
соломотряса.
Сепарирующую способность единицы длины соломотряса ха-
рактеризуют коэффициентом интенсивности сепарации |ic, пред-
ставляющим собой массовую долю зерна, выделенного на 1 см
длины клавиш.
Установлено, что коэффициент цс изменяется по длине соло-
мотряса (рис. 274): вначале функция Цс(1с) возрастает, затем, до-
стигнув максимума, убывает. С увеличением подачи максимум j.ie
смещается от начала соломотряса к его концу.
Указанная закономерность изменения цс(1с) объясняется ве-
роятностным характером процесса сепарации, при котором зерно,
распределенное по слою, перемещается с некоторой скоростью пн
(ин — скорость проникновения зерна) вниз слоя. Скорость wH не-
одинакова для различных зерен и подчиняется закону нормально-
го распределения. Максимум функции цс(/с) соответствует такому
моменту, когда нижней границы достигают зерна, скорость про-
никновения которых соответствует математическому ожиданию.
Экспериментально найдено, что среднее значение ик «7,4...8,1 см/с
при коэффициенте вариации Хп=39...45%.
Исследования показывают, что при расчетах сепарирующей
способности приближенно можно принимать средние значения ко-
эффициента интенсивности сепарации цс(1с), т. е. функцию счи-
тать постоянной.
В зависимости от толщины слоя соломы коэффициент интен-
сивности сепарации изменяется по закону равносторонней гипер-
болы:
Цс
Ис;
(295)
где цс — коэффициент интенсивности сепарации при толщине
слоя h;
рС/— то же, при толщине слоя h,;
т— 0,8...1,2; большие значения относятся к тяжелым услови-
ям, меньшие к легким.
Так как толщина слоя пропорциональна приведенной подаче q,
то при работе в одинаковых условиях имеем
Рс/Всг=(?;/0т-
(296)
Для двухвального клавишного соломотряса (/(=2,2) на убор-
ке пшеницы влажностью 12...18% при подаче </ = 5 кг/с (ширина
молотилки 1,2 м) коэффициент цс«9-10~3 1/см.
407
Рис. 274. Графики функции UcUc):
Ис—коэффициент интенсивности сепарации; 1е~
текущее значение длины соломотряса; 1 — q=
=3.2 кг/с; 2 — 4=4 кг/с; 3 — 4=5,6 кг/с.
Рис. 275. Убывание У зерна на
длине X соломотряса.
Исходя из этого для средних условий (ш=1) при <7;#= 5 кг/с,
имеем
0,009-5 0,045 /пп—
Коэффициент цс тем меньше, чем больше перебивается солома
в молотильном устройстве. Для молотилки с двумя барабанами
цс (8,2...8,5) 10-3 1/см.
Потери зерна за соломотрясом. Если принять, что коэффици-
ент рс есть постоянная величина по всей длине соломотряса, то
коэффициент схода т]с зерна с соломой на элементе длины соло-
мотряса dx (рис. 275) может быть выражен следующим уравне-
нием:
dy
Решая уравнение при х=/с, получаем
T]c=T]6e-,iczci (298)
где т]б — коэффициент схода зерна с ворохом из молотильного
устройства на соломотряс.
Коэффициент схода цо зависит от подачи q. При уборке пшени-
цы влажностью w = 12...18°/o имеем:
для комбайна с одним молотильным устройством
т]б = (24...3О) 10-э<7, (299)
для комбайна с двумя молотильными устройствами.
т]б=(8...12)10-3<7. (300)
По выражениям (297) ...(300) определяют потери свободным
зерном в соломе при уборке пшеницы. В конкретных условиях ра-
боты проводят оценку потерь и корректируют регулировки моло-
тильного устройства и загрузку молотилки.
408
Глава XIV
РАБОЧИЕ ОРГАНЫ И ТЕХНОЛОГИЧЕСКИЕ ПРОЦЕССЫ
УСТРОЙСТВ ДЛЯ ОЧИСТКИ И СОРТИРОВАНИЯ
СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР
§ 1. Сущность очистки и сортирования
Очистке подвергают зерновой материал после уборки урожая,
корнеклубнеплоды для удаления из них почвы и других примесей,
а также початки кукурузы (от оберток).
Сортирование предусматривает разделение очищаемой культу-
ры на сорта. В зависимости от назначения ту или иную культуру
сортируют на семенной материал, продовольственный или сырьевой
и фуражный. Материалы, получаемые после очистки и сортирова-
ния, должны удовлетворять требованиям агротехники или зоотех-
нии, промышленности и торговли. Основными показателями, оп-
ределяющими качество очистки и сортированийя, являются чисто-
та материала, всхожесть семян, абсолютный или удельный вес и
выравненность по размерам. Семена зерновых, бобовых, зерно-
бобовых, масличных и других культур по чистоте и всхожести де-
лятся на три класса: I класс содержит не менее 99% семян основ-
ной культуры при всхожести не ниже 95%; И класс — 98,5% ос-
новной культуры при всхожести 90...95% и III класс — соответст-
венно 97 и 85...90%. По абсолютному или удельному весу зерна
и его выравненности определяют ценность как семенных .свойств
материала, так и продовольственных его качеств. Выравненные по
размерам семена с большим удельным весом дают дружные всхо-
ды и, как правило, повышенную урожайность. Рациональные ве-
совые и размерные границы материала устанавливаются агротех-
ническими требованниями, государственными общесоюзными стан-
дартами и базисными кондициями.
§ 2. Способы очистки и сортирования
Очистка и сортирование сельскохозяйственных материалов
основаны на различии каких-либо признаков, определяющих мате-
риал. 1\ таким признакам относятся: геометрические размеры час-
тиц, их аэродинамические свойства, форма и состояние поверх-
ности, плотность и удельный вес, электропроводность и цвет.
Разделение по размерам. По размерам различные культуры
разделяют на решетах, роликовых или ленточных поверхностях
и ячеистых триерах. Геометрические размеры частиц материала
определяются тремя размерами: толщиной, длиной и шириной.
Толщиной считается наименьший размер частицы, длиной — наи-
больший и шириной — средний.
По ширине частицы разделяют на решетах с круглыми от-
верстиями (рис. 276, а) и на роликовых поверхностях (рис. 276, б, в).
409
Рис. 276. Схемы устройств и их элементов, разделяющих материал по разме-
рам:
а — решета с круглыми отверстиями, разделяющие по ширине; б — роликовые поверхности
картофелесортировок; в — роликовые решета для зерна; г — решета с продолговатыми от-
верстиями, сортирующие по толщине; д — ленточная сортирующая поверхность; е — ячеи-
стые триеры, сортирующие по длине; 1 — фигурные ролики; 2 — гладкие ролики; 3 — рем-
ни; 4 — подвижный делитель; 5 — щиток; 6 — шкив; 7 — щель; 8 — лоток; 9 — барабан; 10 —*
шнек.
Частицы, по ширине меньшие, чем размер d отверстий, проходят
сквозь них. Более крупные компоненты смесей, которые не прошли
сквозь отверстия, сходят с решет. Все, что проходит сквозь отвер-
стия, называют проходом, а что идет поверх решет — сходом.
Эффективное разделение по ширине на решетах с круглыми от-
верстиями будет в том случае, если частицы расположатся про-
дольной осью перпендикулярно к поверхности решета. Для этого
решету необходимо сообщить вертикальные колебания. В тех
случаях, когда длина частиц не превышает ширину более чем в
410
2 раза, разделение хорошо происходит и на решетах с горизон-
тальными колебаниями.
В роликовых поверхностях используют фигурные 1 или глад-
кие 2 вращающиеся ролики, а иногда в сочетании фигурные и
гладкие. Ролики расставляют с постоянным или переменным за-
зором между ними. Частицы перемещаются роликами и, западая
' в Йейки, гГросеиваются, разделяясь на фракции; при этом выде-
^ются также и сорные примеси. Роликовые поверхности приме-
Лняют в зерноочистительных машинах для выделения крупных при-
’ Mecejt иЗ^-зерна, в картофелесортировках — для разделения клуб-
-гиёй ка сорта по ширине, а также в машинах для калибровки пло-
дрвч(а'Труйпы по размерам.
’ По толщине материал разделяют на решетах с продолго-
ватыми-отверстиями (рис. 276, г) и на ленточных поверхностях
2^6,5). Для разделения по толщине частица должна на ре-
чгетЬ повернуться на ребро и расположиться вдоль отверстия. Это
требование обеспечивается при горизонтальных колебаниях решет.
На машинах с ленточным рабочим органо-м сортирующая по-
верхность состоит из ремней 3, натянутых веерообразно па шки-
вы 6. Между ремнями образуется постепенно расширяющаяся
щель 7. При движении ремней частицы передвигаются вдоль щели
и в зависимости от размеров просыпаются: мелкие в лоток А,
средние-р лоток Б, а крупные идут сходом и попадают в лоток В.
Такие сортирующие поверхности применяются для сортирования
клубней и плодов.
По длине частицы разделяют на ячеистых триерах (рис. 276, е)
и решетах с круглыми отверстиями. Триер представляет собой ба-
рабан 9, на внутренней поверхности которого нанесены ячейки с
лотком 8 и шнеком 10. Барабан вращается относительно оси О.
Частицы, засыпанные внутрь барабана, попадают в ячейки и увле-
каются ими. Длинные частицы не захватываются ячейками, ко-
роткие западают в ячейки, поднимаются ими и сбрасываются в
лоток 8, а затем шнеком 10 выводятся из барабана.
В решетах для сортирования по длине делают круглые отвер-
стия. Над решетом, параллельно ему, устанавливают с зазором
глухую плоскость. Зазор принимают больше максимальной ши-
рины частицы. Плоскость не позволяет частицам располагаться
длинной осью перпендикулярно к поверхности решета, поэтому че-
рез отверстия не просыплются частицы по ширине, а пройдут
только те, у которых длина меньше длины отверстия. Длинные
компоненты смеси идут с решета сходом.
Роликовые решета и ленточные рабочие поверхности наряду с
шириной и толщиной разделяют материал частично и по длине,
особенно клубнеплоды и плоды.
Разделение по аэродинамическим свойствам. Разделение по
парусности происходит в воздушном потоке.
Для разделения применяют как нагнетательный воздушный
поток (рис. 277, а), так и всасывающий (рис. 277,6).
411
Рис. 277. Схемы разделения частиц по парусности:
а — в нагнетательном воздушном потоке; б — во всасывающем воздушном потоке; 1 — вен-
тилятор; 2—бункер; 3 н 4— лотки; 5 — сетка; 6 — камера.
При нагнетательном воздушном потоке воз-
дух относит частицу в различные положения в зависимости от ее
аэродинамических свойств и массы. Более тяжелые частицы и с
малым сопротивлением воздушному потоку поступают в лоток 3,
легкие и с большим сопротивлением — в лоток 4.
При очистке всасывающим воздушным пото-
ком материал движется по наклонной сетке 5; воздух, засасывае-
мый вентилятором 1, пронизывая материал, увлекает вверх легкие
частицы, часть из которых оседает в расширяющейся камере 6,
где напор воздушного потока снижается, а более легкие выносят-
ся за пределы машины вместе с воздухом.
Всасывающий воздушный поток продолжительнее воздействует
на частицы, чем нагнетательный, поэтому разделение зерновой
массы происходит эффективнее.
Разделение по форме и состоянию поверхности. Различие в
свойствах поверхности материалов широко используется при очист-
ке и сортировании зерновых смесей.
На решетах с треугольными отверстиями разде-
ляют зерновые смеси (рис. 278, а). По разнице в форме на таких
решетах из пшеницы можно выделить гречишку (кырлык), кото-
рая имеет треугольную форму, из тимофеевки— щавель мелкий
и др.
На винтовых сепараторах — змейках (рис. 278,6)
также разделяют частицы по форме. Округлые зерна и частицы
неправильной формы, поступающие на винтовую поверхность се-
паратора, движутся по ней по-разному. Округлые частицы, перека-
тываясь, получают большую скорость, а следовательно, высокую
центробежную силу. Они будут выбрасываться через борт поверх-
ности в лоток 1. Более плоские частицы будут меньше отходить от
оси плоскости и сойдут в лоток 2. Змейки могут применяться для
разделения вико-овсяной смеси на овес и вику и для выделения
гороха из овса.
412
г
Рис. 278. Схемы устройств, разделяющих материал по форме поверхности:
а —решета с треугольными отверстиями; б — винтовые сепараторы; в — продольные горки;.
г — поперечные горки; 1 — выход округлых частиц; 2 — выход более плоских частиц.
На горках с продольным и поперечным движением
полотна частицы разделяются по форме с учетом шероховатости
их поверхности. Гладкие частицы с округлой формой на горках с
продольным движением полотна (рис. 278, в) скатываются вниз
(лоток 1), а более плоские шероховатые увлекаются полотном и
ссыпаются в лоток 2. На этих горках хорошо очищать семена
свеклы.
При очистке на горках с поперечным движением полотна
(рис. 278, г) округлые и гладкие семена поступают к выходу 1, а
шероховатые, плоские — к выходу 2. Горки с поперечным движе-
нием полотна используют для выделения семян повилики из семян
льна и клевера.
Устройства для отделения клубней от почвен-
ных комков и камней, применяемые в картофелеуборочных
машинах, работают по такому же принципу. Здесь использован
принцип большей способности клубней к качению, чем камней и
комков.
На триерах с ворсистой поверхностью выделяют
семена овсюга из овса и пшеницы, используя шероховатость их
поверхности. Цепкие семена овсюга ворсистой поверхностью вра-
щающегося цилиндра 4 (рис. 279, а) затаскиваются вверх, а щет-
ка 1, поставленная неподвижно внутри цилиндра, сбрасывает их
в желоб 2, откуда шнек 3 выводит семена наружу. Гладкие семена
413-'
Рис. 279. Схемы устройств, разделяю-
щих зерновые смеси по состоянию по-
верхности:
а — триеры с ворсистой поверхностью; б —
электромагнитные сепараторы; / — щетка; 2 —
желоб; 3 — шнек; 4 — барабаны; 5 — возбуж-
дающая катушка; 6 — выход частиц, удержи-
вающих порошок; 7 — выход гладких семян.
идут сходом из цилиндра. По
такому же принципу работа-
ют вальцовые горки с внешней
рабочей поверхностью.
В электромагнитных
сепараторах (рис. 279, б)
использована способность ше-
роховатых семян некоторых
культур обволакиваться ме-
таллическим порошком.
В этих устройствах смесь
зерна с металлическим порош-
ком подают на цилиндр 4.
Часть этого цилиндра находит-
ся под действием магнитного
поля, возбуждаемого катуш-
кой 5. Шероховатые семена
таких культур, как повилика,
плевел, подорожник и другие,
а также поврежденные семена с приставшим порошком удержива-
ются на большей дуге цилиндра, чем гладкие, поэтому они посту-
пают в лоток 6, а гладкие (клевер, лен) —в лоток 7.
Разделение материала по плотности массы и удельному весу.
Такое разделение ведется на различных устройствах. Примером
могут служить следующие.
Игольчатый барабан (рис. 280,а). Здесь из здоровых
семян гороха выделяют зерна, пораженные брухусом, как имеющие
меньшую плотность, чем здоровые семена. На внутренней поверх-
ности барабана 2 в шахматном порядке жестко закреплены иглы.
Барабан, вращаясь, накалывает на иглы поврежденные зерна и
поднимает их. В верхней части поставлена металлическая щетка 1,
которая снимает с игл поврежденные зерна и сбрасывает их в ло-
ток 3, а оттуда шнек 4 выводит их наружу.
Пневматический сортировальный стол предна-
значен для разделения семян зерновых культур по удельному весу.
Такой отбор позволяет выделить семена с наиболее полной физио-
логической зрелостью, способствующей значительному повышению
урожайности. Принцип разделения сводится к следующему. Зер-
новой материал поступает на решетчатую деку 5 (рис. 280,6), ко-
торой сообщают поперечные или продольные колебания. Дека
снабжена рифами 6 и установлена с наклоном как вдоль колеба-
ний, так и поперек них. Слой зерновой массы, поступившей на де-
ку, снизу продувается воздушной струей от вентилятора 10. Под
действием колебаний и воздушного напора зерновой материал рас-
полагается слоями: тяжелые частицы — внизу, легкие — сверху.
Тяжелые зерна могут двигаться под действием колебаний деки
только вдоль риф, они сходят в лоток 9; легкие семена, «всплы-
вающие» поверх слоя, вследствие наклона и колебаний деки ссы-
414
паются в лоток 7. В лоток 8 поступают зерна со средним удельным
весом.
Рычажно-весовой механизм (рис. 280,в) предназна-
чен для калибровки плодов по весу.
Несущим элементом рычажно-весового механизма служит
цепь 11, к которой прикреплены опорные кронштейны 12. На оси
каждого кронштейна шарнирно установлен двуплечий рычаг 13.
Одно плечо рычага заканчивается воронкой 14, другое — стерж-
нем 16 со скользящим грузом 15. При движении цепи воронка с
плодом и груз перемещаются вместе с цепью; при этом груз дви-
жется вдоль копира 17, а копир постепенно перемещает груз по
стержню, приближая его к оси шарнира рычага. В определенном
положении груза равновесие нарушается и воронка опрокидывает-
ся, плод падает в соответствующее отделение. Изменяя массу гру-
за, можно приспособить машину для калибровки различных пло-
дов.
Воздушный поток используют для отделения клубней от
комков почвы и камней (по весу). Схема такого устройства пока-
зана на рисунке 280, г. Оно состоит из вентилятора 10, направляю-
щего щитка 18 и сопла 19. На пути падения клубней с примесями
Рис. 280. Схемы устройств и их элементов, разделяющих материал по плотности
массы и удельному весу:
a — игольчатый барабан; б — пневматический сортировальный стол; в — рычажно-весовой
механизм; г — воздуходувка для отделения камней от клубней; 1 — щетка; 2 — игольчатый
барабан; 3 — лоток; 4 — шиек; 5 — дека; 6 — рифы деки; 7 — лоток для легких семян; 8 —
лоток для семян со средним удельным весом; 9 — лоток для семян с большим удельным
весом; 10 — вентилятор; 11 — цепь; 12 — кронштейн; 13 — двуплечий рычаг; 14 — воронка;
15 — груз; 16 — стержень; 17 — копир; 18 — направляющий щиток; 19 — сопло; 20 — лоток
для камней; 21 — лоток для клубней.
415
Рис. 281. Схемы устройств для разделения материала по электрическим свой-
ствам:
д — в статическом поле; б — в поле коронного разряда; в — по диэлектрической проницае-
мости; 1— бункер; 2 — барабан; 3 — щетка; 4, 5 н 6 — лотки; 7 — отрицательно заряжен-
ный электрод; 8 — коронируюшнЙ электрод; 9 — перфорированный электрод; 10 — бифиляр-
ная обмотка; 11 — изолятор.
от вентилятора подается воздушный поток. Камни из-за большей
плотности падают быстрее, чем клубни, поэтому они меньше от-
клоняются воздушным потоком и поступают в лоток 20, а клуб-
ни — в лоток 21.
Электрические методы разделения основаны на различии элек-
тропроводности, диэлектрической проницаемости и других элект-
рических свойств компонентов разделяемых смесей. Используют
электростатический, коронный и диэлектрический методы разде-
ления.
Электростатический метод разделения заклю-
чается в следующем. Материал поступает из бункера 1
(рис. 281, а) на вращающийся барабан 2 с положительным заря-
дом.
Соприкасаясь с поверхностью барабана, частица заряжается;
заряд зависит от ее электропроводности. Далее, на поток материа-
ла воздействует электростатическое поле, образованное барабаном
и отрицательно заряженным электродом 7.
Неодинаково заряженные частицы по-разному ведут себя в
электростатическом поле: частицы с большей электропроводностью
поступают в приемный лоток 6, а с меньшей — в лоток 5. От при-
тянутых частиц барабан очищается щеткой 3.
Разделение в поле коронного разряда (рис. 281,б)
протекает в такой последовательности. Между коронирующим 8
и перфорированным 9 электродами при высоком напряжении воз-
никает электрический разряд, ионизирующий воздух. Частицы,
поступающие в ионизированную среду, получают различный заряд
и благодаря этому отклоняются на разный угол: частицы с мень-
шей электропроводностью поступают в приемный лоток 6, с боль-
шей — в лоток 5.
416
Диэлектрический метод разделения применяют
для зерновых смесей. Вращающийся барабан (рис. 281, в) пред-
ставляет собой изолятор 11, на который намотаны в один слой
перпендикулярно его оси вращения два изолированных проводни-
ка 10 с чередующейся полярностью (бифилярная обмотка). Меж-
ду этими проводниками образуется электрическое поле, поляри-
зующее расположенные между ними частицы.
Поляризованные частицы, взаимодействуя с внешним полем,
притягиваются к барабану. Сила взаимодействия зависит от ди-
электрической проницаемости частиц. При меньшей проницаемости
частица раньше отрывается от поверхности барабана, а при
большей — позже. Первые поступают в лоток 6, вторые — в лотки
4 и 5.
Электрическими методами можно очистить зерновой материал
от примесей, проросших и дефектных семян, выделить из пшеницы
куколь, овсюг, а из семян овощных культур карантинные и другие
сорняки.
Устройства, в которых используют электростатическое и корон-
ное поля, сложнее сепараторов с бифилярной обмоткой, для их
питания требуется более высокое
(30...70 кВ).
Радиометрические и рентгенов-
ские разделители. Эти методы раз-
деления основаны на различной про-
ницаемости у-лучей (радиометри-
ческий метод) или рентгеновских
лучей (рентгеновский метод).
Радиометрические и рентгенов-
ские методы используют в устрой-
ствах для отделения клубней кар-
тофеля от примесей и для разделе-
ния клубней, а также плодов на
фракции.
(в 3...7 раз) напряжение
Рис. 283. Схема фотоэлектри-
Рис. 282. Принципиальная схема рентге-
новского сепаратора:
1 — излучатель; 2 — дозирующий транспортер; 3 —
контролирующее устройство; 4 — исполнительный
механизм; 5 — палец; 6 и 7 — транспортеры.
ческого аппарата, разделяюще-
го частицы по цвету:
1 — фотоэлементы; 2 — оптический
круг; 3 — транспортер; 4 — заря-
жающий электрод; 5 и 6 — дефлек-
торы; 7 и 8 — приемники.
27—424
417
При отделении примесей материал предварительно сортируют
по размерам, а затем транспортер 2 (рис. 282) подает его разре-
женным потоком между источником излучения 1 и контролирующим
устройством 3. Если поступают в зону лучей, например клубни, то
электромагнит контролирующего устройства удерживает пальцы 5
пневматическим исполнительным механизмом 4 так, что клубни,
падая на пальцы, скатываются на транспортер 7. При прохождении
примесей проницаемость лучей через них, а следовательно, и их
действие на элементы контролирующего устройства уменьшаются.
В результате чего отключается подача воздуха к исполнительным
механизмам, пальцы отклоняются и пропускают примеси на транс-
портер 6.
Радиометрические и рентгеновские разделяющие устройства
обеспечивают высокое качество разделения, однако имеют высо-
кую энергоемкость, они сложны по устройству и в обслуживании,
требуют надежной защиты от радиации.
Разделение материалов по цвету. Цветовое разделение основа-
но на использовании фотоэлементов. Частицы поступают в специ-
альный оптический круг 2 (рис, 283), где отраженным светом дей-
ствуют на фотоэлементы 1, возбуждая в них электрический ток.
В зависимости от цвета частиц в фотоэлементах возбуждается
ток разного значения. Фотоэлементы посылают импульс заряда на
электрод 4, он заряжает частицы темного цвета положительным
зарядом, которые затем, проходя между дефлекторами 5 и 6, от-
клоняются от положительного дефлектора 5 и поступают в прием-
ник 8, светлые частицы направляются в приемник 7.
Фотоэлектрическим способом разделяют по цвету семена фасо-
ли, сои и других зернобобовых культур.
Наряду с перечисленными применяют и другие способы очистки
сельскохозяйственных материалов от примесей.
На шнековых очистителях и очистительных вальцах очищают
корнеплоды от почвы, початки кукурузы от оберток. Вальцы, вра-
щаясь навстречу один другому, захватывают почву или обертку и
примеси, удаляют их в межвальцовое пространство, а корни и по-
чатки подают на последующие устройства. Применяются также и
элеваторные очистители.
§ 3. Физико-механические свойства сельскохозяйственных
материалов, влияющие на их разделение
Размерные характеристики разделяемых материалов. Под раз-
мерными характеристиками понимают показатели, определяющие
изменчивость какого-либо размера материала, по которому ведется
разделение. Изменчивость размеров разделяемых материалов опре-
деляют вариационными рядами и вариационными кривыми.
Вариационный ряд составляют в виде таблицы (табл. 5),
в которую вносят классы и частоту. Классы представляют собой
промежутки, на которые разделяют весь диапазон изменения раз-
418
X, %2 *3
Рис. 284. Вариационные
кривые:
1 — первый компонент; 2 — вто-
рой компонент; а — возможно
полное разделение; б — возмож-
но частичное разделение;- в —
разделение невозможно.
мера. Каждый класс определяется крайними значениями размера
(граница класса) и средним значением границы. Частота — коли-
чество материала в каждом классе. Она оценивается абсолютными
значениями по массе или числу, а также процентами.
Вариационные кривые распределения выбранного раз-
мера (ширины, толщины, длины) представляют собой график
(рис. 284), по оси абсцисс которого отложены линейные размеры,
соответствующие среднему значению границы класса, а по оси
ординат — частота (т или р, %) материала в пределах каждого
класса.
С целью построения вариационного ряда или кривой замеряют
(для зерновых материалов 300...500 замеров) выбранный размер
частиц и распределяют полученные замеры по классам. Число
классов принимают не менее 5...10. Классовые промежутки берут
равными частному от деления разности между минимальными и
максимальными замеренными значениями на число классов. Для
зерновых культур классовые промежутки принимают равными 0,2;
0,3 и 0,4 мм соответственно по толщине, ширине и длине.
Вариационные ряды толщины и ширины зернового материала
с целью уменьшения трудоемкости строят не по замерам, а раз-
деляют зерна на классы при помощи решет: по толщине на реше-
тах с продолговатыми отверстиями, по ширине на решетах с круг-
ТАБЛИЦА S
Вариационный ряд
Классы 1-й 2-й 3-й п Всего
Границы классов Среднее значение грани- G 12 'з~Ч ^П-1— —
цы класса Чр2 Чр3 1<*П —
Частота, т «1 т2 ms тп
Р, % 27* Р1 Рг Рз Рп 100 419
лыми отверстиями. Для этого берут навеску зерен в 50... 100 г и
пропускают через решета с размерами отверстий, равными классо-
вому промежутку. Просеивают зерно на решетном классификаторе.
Длину зерен определяют замером, для этой цели может быть ис-
пользован специальный прибор.
Вариационные ряды и кривые можно сопоставить по средне-
арифметической величине 7Иср и среднеквадратическому отклоне-
нию о.
Среднеарифметическую вариационного ряда находят по фор-
муле:
__ тЛР1+т2/сР2+ ... +тп1сРп _ 2mil^i
л YL . :-----------=---------. (301»
а среднеквадратическое отклонение — по выражению:
Г (Л^ср — <сР1)2 т1 + — + (Мер-----------------<сР„)2 тп
у ’
(302)
Изменение размеров сортируемых материалов в большинстве
случаев подчиняется закону нормального распределения.
Из теории вероятности известно, что при нормальном распре-
делении размерных характеристик в пределах Л4ср±3о заключено
99,7% всего количества материала, т. е. можно принять, что раз-
меры материала изменяются от минимального МСР—Зо до макси-
мального Мср+3о.
По вариационным рядам и кривым, характеризующим измене-
ние замеренного размера сортируемого материала, устанавливают,
по какому признаку можно разделять смеси, и определяют после-
довательность операций, а также рассчитывают результаты
очистки.
Возможность разделения оценивается по расположению вариа-
ционных кривых основной культуры и примесей. При этом возмож-
ны следующие случаи.
1. Полное разделение смеси, когда кривые 1 и 2 двух компо-
нентов смеси не перекрывают одна другую (рис. 284,а).
2. Частичное разделение смеси, если нисходящая ветвь одной
кривой и восходящая другой пересекаются (рис. 284,6). Здесь, в
свою очередь, может быть несколько вариантов:
а) по значению Xi выделяют один компонент, которому соот-
ветствует кривая 1, часть этого компонента уходит в примеси;
б) по значению х2 смесь разделяют на две фракции, причем в
каждой из них есть компоненты другой фракции;
420
Рис. 285. Схемы:
а — корреляционные таблицы и вариаци-
онные кривые; б — очистки: 1 и 2 — реше-
та; 3 и 5 — емкости; 4 — триер.
в) по значениям xt и х2 будет получено три фракции, из ния
две, содержащие по одному компоненту, и третья с двумя компо-
нентами.
3. Разделение невозможно, если кривые (рис. 284, в) перекры-
вают одна другую.
Корреляционные таблицы используют для выбора
схемы разделения смеси по двум признакам, когда разделение по
одному признаку малоэффективно или невозможно.
Рассмотрим корреляционные таблицы для овса и ячменя по
ширине и длине зерен (рис. 285,а). Над таблицей располагают
вариационные кривые длины ячменя и длины овса, а слева — ва-
риационные кривые ширины этих культур. Как видно из этих кри-
вых, полное разделение ячменя и овса по длине или ширине не-
возможно. Найдем способ полного разделения, используя оба эти
признака. Для чего зерна, входящие в каждый класс длины ячме-
ня и овса, расположим в вертикальном ряду по ширине, т. е. най-
дем связь (корреляцию) между длиной и шириной зерна каждого
421
класса. Из полученной таблицы видно, что зерна овса, распреде-
ленные по длине и ширине, занимают одну часть таблицы (заштри-
хованная зона), а ячменя — другую (незаштрихованная зона).
Между обеими частями можно провести отчетливую границу (ли-
ния ABCD), показывающую возможность полного разделения.
Для разделения выбираем следующую схему технологического
процесса. Вначале подаем смесь на решето с диаметром отверстий
3,2 мм (рис. 285,6). В этом случае все зерна (чистый ячмень),
оказавшиеся ниже линии ECD, сходом с решета поступают в ем-
кость А, а те, которые выше ED, пройдут сквозь отверстия. Да-
лее проход направим на решето с отверстиями диаметром 2,8 мм,
где выделится часть овса (емкость В), зерна которого в таблице
расположены выше линии ABF. Сход с решета с отверстиями
2,8 мм затем пропустим через триер, который разделит полностью
по длине (линия ВС) смесь зерен, расположенных в таблице меж-
ду линиями ABF и ECD, выделив тем самым полностью ячмень и
овес. Следовательно, используя связь между двумя признаками
делимости, можно достичь более высокого разделения смеси (в
приведенном примере полное разделение), чем по одному признаку.
Из таблицы видно, что возможна и другая схема процесса пол-
ного разделения рассматриваемой смеси. Например, вначале раз-
делим триером (линия GK), а затем на решетах (линии АВ, CD).
Но так как триеры имеют меньшую пропускную способность в
сравнении с решетом, то предпочтительнее первая схема, при кото-
рой в триер поступает только часть зерновой массы.
Аэродинамические свойства компонентов разделяемых смесей.
Поведение частиц в воздушном потоке определяется аэродинами-
ческими свойствами. Показателями, характеризующими аэродина-
мические свойства частиц, являются: критическая скорость (ско-
рость витания) цкр, коэффициент сопротивления воздуха k и коэф-
фициент парусности kn.
Для усвоения материала рассмотрим поведение частицы в вер-
тикальном воздушном потоке.
На частицу будет влиять сила тяжести Р и сила Д действия
воздушного потока. Силу R найдем по формуле Ньютона:
R=kpES (vB—u)2, (303)
где рв — плотность воздуха;
S — площадь проекции тела на плоскость, перпендикулярную
направлению воздушного потока (миделево сечение тела);
vB—'скорость воздушного потока;
и — скорость движения тела.
При вертикальном воздушном потоке силы Р a R направлены
в противоположные стороны.
В зависимости от соотношения этих сил возможно движение ча-
стицы вниз P>R, движение вверх R>P и ее расположение во
взвешенном состоянии P=R при и=0. Скорость окр воздушного
потока, при которой тело находится во взвешенном состоянии, на-
зывают критической скоростью, или скоростью витания.
422
Исходя из условия P=R, имеем
(304)
Коэффициент сопротивления k зависит от формы
тела, его поверхности, от состояния и рода среды, в которой нахо-
дится частица, а также от скорости движения воздуха. С увеличе-
нием скорости воздушного потока k убывает.
Коэффициент парусности /гп выражают зависимостью:
ka= 9’8*рв?-. (305)
Решая совместно выражения (304) и (305), получаем
9,8
*
кр
(306)
Коэффициенты k и kn находятся в сложной зависимости как от
параметров, определяющих тело, так и от параметров воздушной
среды, которые трудно найти. Поэтому пользуются косвенным ме-
тодом подсчета коэффициентов k и kn по
критической скорости, которую отыски-
вают экспериментально.
Критическая скорость может
быть определена на парусных классифи-
каторах или в аэродинамической трубе.
Схема аэродинамической трубы показа-
на на рисунке 286.
Воздух вентилятором 1 всасывается
в трубу 5. Для выравнивания воздушно-
го потока служит коллектор 3 и сетка 2.
Частицы, скорость витания которых тре-
буется определить, располагают на сет-
ке 6 диффузора трубы.
Скорость витания замеряют при та-
ком положении частиц, когда они вита-
ют-в рабочей части трубы. Для наблю-
дения эту часть трубы делают прозрач-
ной. Значение скорости находят по дина-
мическому напору воздушного потока.
При этом исходят из того, что динамиче-
ский напор равен кинетической энергии
единицы объема воздуха, т. е.
и _ PbUb
па— 2 ~ 2 ’
Рис. 286. Схема аэродина-
мической трубы:
1 — вентилятор; 2 и 6 — сетки;
3 — коллектор; 4 — измеритель-
ная трубка; 5 — всасывающая
труба.
где т — масса 1 м3 воздуха, т=рв;
пв — скорость воздушного потока.
423
Решая, имеем
Принимая при температуре 20 °C и атмосферном давлении
10,3-104 Па плотность воздуха, равной 1,2 кг/м3, получаем
ив = 1,28У7^ (307)
Динамический напор замеряют трубками (Пито, Прандтля или
ЦАГИ) и микроманометром.
По критическим скоростям определяют коэффициенты k и kn
соответственно из выражений (304) и (306).
Примерные значения окр, ku и k для некоторых культур указа-
ны в таблице 6.
ТАБЛИЦА 6
Аэродинамические свойства различных культур
Культура Критическая скорость, °кр- «/с Коэффициент парусности» kn, 1/м Коэффициент сопротивления, k
Зерно:
пшеницы 8,9...11,5 0,075...0,12 0,184...0,265
ржи 8,36...9,89 0,1...0,14 0,16...0,22
овса 8,08...9,11 0,169...0,30 0,118...0,15
кукурузы 12,48...14 0,05...0,06 0,16...0,28
гречихи 7,2...9,5 0,132
Полова:
пшеничная 0,75...5,25 — —.
овсяная 0,74...3,86 — —
При выполнении технологических и эксплуатационных расчетов
критические скорости находят в каждом конкретном случае опы-
том, так как они изменяются в значительных пределах.
Параметры частиц, влияющие на разделение материалов. Рабо-
та горок, винтовых сепараторов и других устройств зависит от
сопротивления частиц трению по разделяющим поверхностям.
Коэффициент трения характеризует сопротивление тре-
нию, его значения изменяются от морфологических особенностей
частиц, состояния поверхности и влажности.
В таблице 7 даны средние значения коэффициентов трения ма-
териалов о металлические поверхности.
Коэффициент трения скольжения слоя зернового вороха рас-
тет с увеличением влажности.
Скорость относительного движения частиц по рабочим поверх-
ностям разделяющих устройств практически не изменяет коэффи-
циенты трения.
Шероховатость семян и их обволакиваемость
порошком оцениваются его внедряемостью. В практике при-
424
Коэффициенты трения
ТАБЛИЦА?
Культура Коэффициенты треиия о металл
качения скольжения
Зерно: 0,035
гороха 0,249
вики 0,05 0,466
овса 0,267 0,700
овсюга 0,466 0,84
Клубни картофеля 0,55 0,8
меняются порошки, различающиеся составом компонентов и тон-
костью помола.
Внедряемость порошка определяется коэффициентом внедряе-
мое™ /гви, который представляет собой отношение массы т„ при-
ставшего к семенам порошка к массе т3, взятой навески семян,
т. е.
k -
вн т3
(308)
Коэффициент внедряемое™ зависит от тонкости помола и от
компонентов заполнителя, от влажности порошка и свойств по-
верхности семян.
В таблице 8 приведены значения коэффициентов внедряемости
порошков.
ТАБЛИЦА 8
Значения коэффициентов внедряемости порошков для различных культур
Порошок Значения Авн для
клевера льна повилики плевела подорож- ника
ДХЗ-80 0,0137 0,0103 0,0395...0,1154 0,0567 0,16
ВХК-60 0,010 0,002 0,150...0,171 0,116 0,086
Трифолии 808 0,009 0 0,0503 0,0136 0
Гомпера 0,0 0 0,003 0,002 0
Порошок Гомпера, как видно из таблицы, имеет малую внед-
ряемость, но он очень хорошо удерживается магнитом. Для улуч-
шения внедряемости целесообразно порошок смачивать водой или
маслом.
Наибольшее применение находит порошок ДХЗ-80 с большой
внедряемостью и хорошими магнитными свойствами.
Порошок выбирают по таблице 8 в соответствии с сортируемой
культурой и разновидностью сорняков в ней. При этом учитывают
425
внедряемость порошка как в семена культурных растений, так и
сорняков.
Порошок следует хранить в сухом помещении с плюсовой тем-
пературой; рекомендуется использовать его не позже 8 месяцев
после изготовления.
Плотность. Семена ряда сорняков (василек, плевел, полевая
горчица, овсюг) значительно отличаются по плотности от семян
культурных растений. Различную плотность имеют клевер и его
сорняки (лебеда, дикая морковь, розовый осот); клубни картофе-
ля, комки почвы и камни.
Плотность зерновых смесей определяют в растворах или в
суспензиях. Для образования растворов применяют минеральные
удобрения, такие, как азотнокислый натрий (рм=1,2-103 кг/м3),
азотнокислый аммоний и азотнокислый калий (рм=1,15-103 кг/м3),
сернистый аммоний (рм=1,3-103 кг/м3).
§ 4. Плоские разделяющие поверхности
Рабочий процесс поверхностей. Плоские разделяющие поверх-
ности в виде колеблющихся решет применяют для выделения со-
ломистых примесей из вороха, для сортирования зерна по ширине,
толщине и удельному весу, а также для отделения почвы от клуб-
ней и корнеплодов.
Колебания решета вызывают перемещение вороха по его по-
верхности. Движение вороха должно быть таким, при котором до-
стигается оптимальное разделение.
В очистках комбайнов ворох должен равномерно распределять-
ся по поверхности решета и перемещаться к выходу. Чтобы воз-
душный поток проходил сквозь слой вороха и удалял из него мел-
кие примеси, ворох нужно встряхивать.
Движение частиц на решетах сортировальных машин зависит
от признака делимости. При разделении по ширине на решетах с
круглыми отверстиями необходимо подбрасывание обрабатываемо-
го материала, для того чтобы частицы устанавливались своей
длинной осью перпендикулярно к поверхности решета. Это улуч-
шает их проход через отверстия.
При разделении продолговатых семян по толщине на решетах
с прямоугольными отверстиями материал должен перемещаться
без подбрасывания, а зерно поворачиваться вокруг большой оси.
Отрыв материала от поверхности в этом случае уменьшает произ-
водительность решет.
Просеивание почвы и отделение ее от клубней картофеля луч-
ше происходит при движении материала с отрывом от поверхности
решета.
Решето приводится в движение (рис. 287, а) многозвенным ме-
ханизмом ABCDRGE.
Решето DE обычно служит звеном параллелограммного меха-
низма KDEG, в котором звенья KD\\GE и DE\\KG.
426
Рис. 287. Силы, действующие на частицу, движущуюся вместе с решетом:
а — движение частицы вниз; б — движение частицы вверх.
В параллелограммном механизме его звено DE (решето) совер-
шает круговое поступательное движение. Если принять, что длина
/1 звеньев KD и GE велика, а угол их отклонения мал, то переме-
щение любой точки решета можно считать прямолинейным.
Кинематические характеристики прямолинейного движения ве
домого звена в кривошипно-ползунном механизме при малом зна-
чении г/l выражаются следующими зависимостями:
х—г (1 —COSCO/),
x=wr=rcosinco/,
х = Е = гео2 cos со/.
Рассмотрим начало движения материала по колеблющемуся
решету.
Движение частиц по поверхности решета. На частицу т, дви-
жущуюся с колеблющимся решетом, действуют следующие силы.
Сила тяжести Р частицы, направленная вниз.
Сила и н е р ц и и Р/, направленная по линии перемещения в
сторону, обратную ускорению. Значение силы Р, находим из вы-
ражения:
Р}=m3jP=m3rcoa cos со/, (309)
где т3— масса частицы (зерна).
Сила действия воздушного потока R; ее находим
по формуле (303).
Сила трения F частицы по рабочей поверхности, направ-
ленная в сторону, обратную относительному движению.
427
Нормальная сила N (реакция) действия рабочей поверх-
ности на частицу (направленная по нормали к поверхности).
Решета ставят с наклоном к горизонтальной плоскости, а угол
а наклона выбирают из условия:
а < ф,
где ф — угол трения частиц материала по поверхности решета.
В соответствии с этим условием материал не скользит по ре-
шету, когда оно неподвижно. При колебании с определенной ча-
стотой и амплитудой частицы получают перемещение относитель-
но решета.
Возможно следующее движение частиц: скольжение по решету
только к выходу, скольжение к выходу и в обратную сторону; от-
рыв от поверхности решета.
Перемещение частиц по поверхности решета к
выходу. Начало движения по решету к выходу возможно в том
случае, если результирующая проекций всех сил, действующих на
частицу слева направо, больше силы трения, т. е.
Р sin a-J-Py cos (е ± а) -]-Р cos (у ± а) > F,
где сила трения F=Ntgq>.
Для определения силы N спроектируем все силы на направле-
ние нормали к решету и получим
N=Pcosa—P,-sin (е ± а) —Psin(у ± а). (310)
Тогда движение вороха к выходу выразится следующим неравен-
ством: Pj cos (ф а—в) > Р sin (ф а) —R cos (ф + а —у).
Заменив Pj в выражении (310), получим
m3rcoj cos cos (ф а—е) > Psin (ф а)—Рсо5(ф а—у).
Так как Р=9,8т3, то, решая, имеем
-^- cos^^cos^ > si” а) ' (311)
9,8 1 1 1 ' cos (Ф + а — е) Р cos (<р =F «— е) ' '
Отношение r<Oi/9,8=Ai принято называть показателем кинема-
тического режима для рассматриваемого перемещения.
Наряду с движением частицы к выходу она может переме-
щаться и в обратную сторону (справа налево), когда сила инерции
изменит знак (рис. 287,6).
Скольжение частиц вниз и вверх по поверхно-
сти. Начало перемещения справа налево возможно при условии:
Pjcos(e ± а) > Psina4-jRcos(? ± а)-|-ЛИёф,
где
W=Pcosa-J-P^sin(e ±а)—Psin(y ±а).
Решая совместно эти выражения, получим
гш1 „ . sin(<p±a) ] R cos(<p±a + y)
-g-g- COS (02/ —k2 COS a2t > cos ± a 4 e) + p cos (q) ± a 4. e) • I312)
428
Здесь kz — показатель кинематического режима при движении
зерна вверх и вниз.
Отрыв частиц. Отрыв вороха от решета наиболее вероятен
в том случае, когда сила инерции направлена слева направо
(рис. 287,а).
Тогда из выражения (310) при N=0 имеем
Й-cosgv^cos^=-.7° .. (3i3)
9,8 d з з sin(e±a) Gsm(e±a) ' '
Здесь А3 — показатель кинематического режима при отрыве
зерна.
Режимы работы поверхности. Как видно из выражений (311) и
(312), воздушный поток уменьшает ki и увеличивает А2. С увели-
чением коэффициента трения вороха по решету значения kt и А2
растут. Уменьшение направленности колебаний (угол е) при
а+е<<р увеличивает ki, k3 и уменьшает А2. Если а + е><р, то с
уменьшением е значение А3 растет, a k\ и А2 уменьшаются.
Когда на решета не направлен воздушный поток, из выраже-
ний (311), (312) и (313) имеем следующие значения показателей:
£ > sin (<р - а)
1 cos (ф Т а — е) cos ’
. > sin (Ф ± а)
cos (ф ± а + е) cos а>2/ ’
cos а
sin (е ± a) cos (Ogf
(314)
(315)
(316)
Для решет зерноочистительных машин показатель кинематиче-
ского режима kx 10, углы а=4...9° и е=0...10°. Принимая <р=15°,
по выражениям (314), (315) и (316) при cos coi/=cos со2/=
= cosco3^=l получаем Ai=0,122, А2=0,47, А3=3,2. Так как
А>А3>А2>А1, следовательно, элементы вороха на решетах, пере-
мещаясь, скользят вниз и вверх, но больше перемещаются вниз,
чем вверх. Кроме того,-происходит отрыв материала от поверхно-
сти решета.
В картофелеуборочном комбайне при 500 мин-1 вала кривоши-
па показатель кинематического режима А=3,6. При <р=35° и
cos со/ t=l Ai=0,40, A2 = l,l, A3=2,5. Из этих данных следует, что
масса клубней и почвы перемещается по решету как к выходу
(A>Ai), так и в обратную сторону (А>А2), наряду с этим частицы
отрываются от поверхности решета (А>А3).
Начало скольжения частиц по поверхности решета происходит
при различных значениях cos со t. Начало скольжения зависит как
от показателя кинематического режима работы, так и от коэффи-
циента трения.
Частицы скользят по поверхности решета с различными отно-
сительными -скоростями, значения которых зависят от соотноше-
ния k и kt, kz.
429
Рис. 288. Схема к определению пре-
дельной скорости «Пр частицы.
Величина k определяет
относительное перемещение
материала по поверхности
решет и его путь в абсолют-
ном движении за адин обо-
рот вала механизма приво-
да грохота. Чем больше
путь в относительном дви-
жении частицы по решету,
тем лучше процесс разделе-
ния. При больших значени-
ях абсолютного пути уве-
личивается производитель-
ность решет.
Предельная скорость частицы. При выборе кинематического ре-
жима работы решета скорость движения частиц по нему не долж-
на быть больше некоторой предельной. Под предельной понимают
такую скорость относительного движения частицы, начиная с кото-
рой она не успевает пройти сквозь отверстия решета.
Рассмотрим условие западания частицы в отверстие решета,
когда она движется в одном направлении, а решето в другом.
Пусть решето (рис. 288) движется под углом е к горизонтальной
линии. Большая ось I частицы расположилась по направлению
скольжения, а середина этой оси находится над краем отверстия.
Принимая, что скорость скольжения частицы, когда она находится
у края отверстия, равна ипр, а сопротивление воздуха — нулю. Ча-
стица пройдет сквозь отверстие решета в том случае, если центр
тяжести ее у другого края отверстия будет по крайней мере на
линии AiBi поверхности решета или ниже нее,. В противном случае
частица будет выброшена из отверстия. Чтобы этого не произошло,
должны быть соблюдены условия:
х L,
где х и у — координаты, определяющие положение частицы.
Как видно из рисунка 288,
L —(s---cos а —sin а—6 cos е,
h — (S-sin а-|—cos a-f-6 sin е,
где б — перемещение решета за время западания частицы.
Рассматривая движения частицы как свободное падение с на-
чальными скоростями Unpcosa по оси X и unpsina по оси У, полу-
чаем
L u№t cos a,
h •< 4- sin a,
где t — время западания частицы в отверстие решета.
430
Подставляя в эти неравенства выражения для L и h и прини-
мая наиболее опасный случай выбрасывания частиц из отверстий,
соответствующий максимальному перемещению решета — 6 = 2г,
имеем
ипр/ cos а < (s —cos а —sin а—2г cos е,
gi2 , , . - /е I \ . . b in-
sin а > f S g-) sin а-]—cos a-j-2r sin е.
Решая эти уравнения относительно ыпр, получаем выражение
для предельной скорости движения:
ы -д лГ g™“ ~ (317)
где
л о 1 Ь . _ n cos е
Д=8----------s-tga—2г------.
2 2 ° cos а ’
Значения предельной скорости могут быть увеличены, так как
верхний слой частиц давит на нижние и способствует их ускорен-
ному движению вниз.
Из этого уравнения следует, что предельно допускаемая ско-
рость тем выше, чем меньше радиус кривошипа вала механизма
привода решета. С увеличением угла наклона решета скорость мпр
уменьшается.
Для зерноочистительной машины при сортировании пшеницы
предельная скорость будет 0,38...0,45 м/с.
При выборе кинематического режима следует увеличивать ча-
стоту колебаний решета, но до таких размеров, при которых части-
цы еще успевают западать в отверстия.
Показатель полноты разделения зерна. Качество работы зерно-
очистительных машин обычно оценивают показателем полноты раз-
деления еР, который можно найти из выражения:
еР=^-, (318)
где тп — масса примесей, или фракций, не соответствующих тре-
бованиям, выделенных очисткой;
тп — масса примесей, или некондиционных фракций, содер-
жащихся в исходном материале.
Массу тк примесей, или некондиционных фракций, содержа-
щихся в исходном материале, оценивают следующим образом. От-
бирают из исходной смеси 3...5 проб массой 1,2...1,5 кг каждая.
Отобранный материал обрабатывают на классификаторе в течение
15 мин (не менее), выделяя из него примеси и некондиционные
фракции.
Для определения тп сортируемую смесь пропускают через ма-
шину, обеспечив ей заданные загрузку и режим работы. Из очи-
431
щенного материала выбирают пробы, как и для исходного мате-
риала, массой 1,2...1,5 кг; выделив примеси, находят тп.
Показатель полноты разделения для решет зерноочистительных
машин принимают равным 0,8 для семенного материала при вы-
соком качестве разделения, 0,65 для среднего качества разделения
и 0,5 для низкого.
Показатель полноты разделения ер зависит от правильного
подбора решет, от оптимальной их загрузки и выбранного кинема-
тического показателя работы.
Коэффициент точности сортирования. Качество работы карто-
фелесортировок и сортировальных устройств для плодов оценива-
ют коэффициентом точности сортирования, значение которого мож-
но отыскать по выражению:
(319)
где тТ — масса схода клубней (плодов) данной фракции, соответ-
ствующая требованиям;
ms—суммарная масса сортируемой культуры.
Разделение клубней и плодов на размерные фракции ведется
визуально и пробным взвешиванием.
Следует иметь в виду, что картофелесортировки отечественного
производства разделяют клубни на три фракции: мелкую с массой
клубней до 50 г, семенную с массой 50...80 г и продовольственную
с массой клубней 80... 100 г и выше.
Ниже приведены ориентировочные коэффициенты точности сор-
тирования еп в зависимости от типа сортирующей поверхности:
решетная (грохотная)............................... .0,45. ..0,55
ленточная.............................................0,65...0,70
роликовая.............................................0,70. ..0,75
Наибольшую точность сортирования получают на роликовых
машинах, но они больше повреждают в основном свежеубранные
клубни. Кроме того, на ролики налипает почва (особенно при
осеннем сортировании перед закладкой на хранение), что изменяет
форму щелей.
Ленточные поверхности практически не повреждают сортируе-
мые культуры, они хорошо выделяют примеси, их качество работы
мало зависит от неравномерности подачи.
Подбор решет. Решета подбирают в соответствии с их назна-
чением. Выпускают колосовые, выделяющие колосья и другие при-
меси из зерна; подсевные, отсевающие мелкие примеси, и сорти-
ровальные, разделяющие зерна на фракции разной толщины или
ширины.
В соответствии с типом решета рабочие размеры отверстий а
могут быть приближенно рассчитаны по выражениям:
o,<5sMcp+3g ... для колосовых решет;
anwAfcp—2о ... Мер—1,5а ...для подсевных решет;
Мер— о... для сортировальных решет, дающих второй сорт.
432
Ориентировочно решета под-
бирают по таблицам, прилагае-
мым к машинам, а затем уста-1
навливают их в машину и оцени-
вают в процессе работы.
Когда указывается требуемая
чистота основной культуры и
отходы ее в примеси, подбор
решет необходимо вести в такой
последовательности. Отобрать
пробу сортируемого материала и
определить массу основной куль-
туры /По и примесей т„. Заме-
рить размеры по выбранному
признаку делимости основной
культуры и примесей и выбрать
Рис. 289. Интегральные кривые
изменения процентного содержа-
ния компонентов по классовым
промежуткам:
1 — основная культура; 2 — примесь.
классовые промежутки. Опреде-
лить количество компонентов в каждом классовом промежутке..
По полученным данным построить интегральные кривые (рис. 289).
Исходя из допускаемой массы примесей та после сортирова-
ния в основной культуре, подсчитать массу примесей тр, которую
должно отделить решето, т. е.
тр=та—mR.
(320)
Полученные значения тр отложить на оси ординат графика ин-
тегральных кривых основной культуры (кривая 1) и примесей
(кривая 2). Найти точку А, абсцисса 1 С которой определит нуж-
ный размер отверстия решета, а отрезок ВС—количество отходов
основной культуры в примеси. При подборе решета следует при-
нять, что все частицы с размерами, равными или меньшими разме-
ра отверстий, будут просеиваться. В действительности примесей
просеется меньше, поэтому необходимо брать решето с несколько
большими размерами, но достаточно близкими к найденным.
После выбора проводят оценку работы решет непосредственно
на машине.
Кинематические и установочные параметры работы решет. По-
казатель кинематического режима, направление колебания и на-
клон решет грохота существенно влияют на характер движения
материала по сортирующей поверхности. С повышением кинемати-
ческого показателя до некоторого предела проход частиц сквозь
отверстия решета увеличивается, что улучшает разделение.
Наклон решета в сторону схода уменьшает относительный путь
движения материала по нему, а скорость продвижения частиц к
выходу растет.
Влияние указанных факторов в значительной мере зависит от
свойств сортируемой культуры и ее засоренности.
В соответствии с опытными данными рекомендуют следующие
режимы работы решет (табл. 9).
28—424
433
ТАБЛИЦА 9
Установка и режимы работы решет
Культура Показатель k кинема- тического режима работы Угол а наклона решета, град Угол е направления колебаний, град Показатель полноты ЕР
Пшеница, рожь 2,2...3,0 6...9 0...8 82...88
Горох 0,5...0,7 4...8 3...5 80...87
Лен 1,4...1,7 4...6 12 60...65
Травы 0,8...1,5 4...9 5 55...60
Вика 0,8...1,0 8 До 10 85
Приведенные значения ориентировочны, поэтому при выборе
режима работы машин, конструкции которых допускают измене-
ние кинематических или установочных параметров, следует опре-
делить оптимальные значения регулируемого параметра. Для это-
го нужно проверить работу машины на рекомендуемом режиме и с
отклонением от него до 25% в сторону уменьшения и в сторону
увеличения регулируемого параметра. Затем требуется оценить по-
казатели работы по количеству прохода массы сквозь отверстия ре-
шета и выбрать оптимальный режим.
§ 5. Воздушные системы
Основные элементы воздушных систем сельскохозяйственных
машин — это источники воздушного потока — вентиляторы; воз-
душные каналы, направляющие воздушный поток и примеси; оса-
дочные камеры и пылеуловители, очищающие воздушный поток от
примесей.
Вентиляторы. В уборочных машинах применяют центробежные,
диаметральные и осевые вентиляторы низкого (//^1 кПа), сред-
него (1<Я^З кПа) и высокого (3<//) давлений.
Основное звено вентилятора — рабочее колесо. В зависимости
от формы профиля бывают прямолинейные и криволинейные лопа-
сти рабочего колеса.
Центробежные вентиляторы бывают с прямолиней-
ными радиальными (рис. 290, о) и отогнутыми назад (рис. 290,6)
лопастями. В сельскохозяйственных машинах обычно ставят вен-
тиляторы с прямолинейными отогнутыми назад лопастями. Коле-
со с такими лопастями дает напоры низкого или среднего давле-
ния при больших расходах. Криволинейные лопасти бывают: ото-
гнутые назад (рис. 290, в), радиально оканчивающиеся (рис. 290, г)
и отогнутые вперед (рис. 290, д). Криволинейные лопасти, ото-
гнутые вперед, дают большее давление, чем другие. Вентиляторы
изготовляют с круглым или со спиральным сечением кожухов.
В зерноочистительных машинах, где в систему поступает запы-
ленный воздух, используют специальные пылевые вентиляторы.
Если через рабочее колесо идет незапыленный воздух, то применя-
434
Рис. 290. Формы профиля лопастного колеса:
с — прямолинейная радиальная: б — прямолинейная, отогнутая назад; в — криволинейная,
отогнутая назад; г — криволинейная радиально-оканчивающаяся; д — криволинейная, ото-
гнутая вперед.
ются вентиляторы общего назначения (в сушилках, в пневматиче-
ских стогометателях и хлопкоуборочных машинах).
Диаметральные вентиляторы состоят из рабочего
колеса 1 (рис. 291) с криволинейными, загнутыми в сторону вра-
щения, лопастями и корпуса 2, который охватывает колесо в зоне
угла yi = 100...140° и образует выходную горловину. В пределах уг-
ла у2 рабочее колесо открыто.
При вращении лопасти захватывают воздух в зоне открытой ча-
сти колеса (зона Л) и прогоняют его во внутрь колеса (зона В).
Из этой зоны воздух под действием центробежных сил нагнетается
в зону С выходного канала. Таким образом, лопасти колеса дваж-
ды воздействуют на воздух, сообщая потоку более высокие и рав-
номерные скорости в выходном канале по сравнению с центробеж-
ными вентиляторами. Диаметральные вентиляторы по габаритам
меньше центробежных. Но они более энергоемки и хуже работают
при большом сопротивлении сети. Их применяют в ветро-решет-
ных зерноочистительных машинах.
Осевые вентиляторы засасывают и нагнетают воздух в
направлении оси вращения лопастного колеса. Они создают мень-
шее давление, чем центробежные и диаметральные. Динамическое
давление осевых вентиляторов составляет основную долю полного
напора. При изготовлении их корпуса и колеса требуется высокая
точность, чтобы обеспечить минимальный зазор (0,2...0,3% от внеш-
него диаметра лопастного колеса) между лопастями и корпу-
сом.
Осевые вентиляторы в основном применяют для проветривания
зернохранилищ, складских и других помещений. В последнее вре-
мя их ставят в очистках некоторых зерноуборочных комбайнов.
Но наибольшее распространение в уборочных машинах получили
центробежные вентиляторы,
2§*
435
Основные соотношения параметров работы вентиляторов. На
рисунке 292 показана схема криволинейной лопасти с радиусами
Г1 на входе и гг на выходе.
Лопасть сообщает частице воздуха некоторую абсолютную ско-
рость va, направленную под углом р к радиусу-вектору г (ОА).
Теоретический напор воздуха, создаваемый вентилятором без
учета сопротивлений в нем, выражают уравнением Эйлера:
= -у- =рв («20г2 —Н1ПИ), (321)
где Nt — энергия, которую приобретает воздух под действием
лопаток вентилятора;
V—расход воздуха;
рв— плотность воздуха;
Ui, и2 — окружные скорости точек соответственно начала и
конца лопасти;
оТ1, —проекции абсолютной скорости частицы воздуха на
направления, перпендикулярные радиусам-векторам,
соединяющим ось вращения соответственно с началом
и концом лопасти.
Теоретический напор, определяемый по уравнению Эйлера,
больше действительного, так как в нем не учитывается конечное
число лопастей и потери в самом вентиляторе.
Заменим в уравнении (321) и оТ2 на окружные скорости Ui
и и2. Как видно из рисунка 292, для точки А имеем
I----sin а].
и Г
Из треугольника ABC — Sjn -ypj~> тогда, подставляя значе-
ние Ок в предыдущее выражение, получаем
sin a cos Р I
sin (а -|- Р) |
vx—u I
ИЛИ
sin Р cos а
sin (а + Р)
По аналогии для точек 1 и 2 соответственно начала и конца
лопасти имеем
sin Р, cos а,
sin Р, cos а,
sin «;+кг
Подставляя полученные выражения в уравнение Эйлера, полу-
чаем
гг Г.,2 Sin р2cos К; 2 sinp1cosa1 ~|
—Рв йп (£Ц + р2) «1 sin (И1 + Pj) ] •
436
Рис. 291. Схема рабочего процесса
диаметрального вентилятора:
1 — рабочее колесо; 2 — корпус: А — зона
входа воздуха; В — зона воздуха внутри
колеса; С — зона выхода.
Рис. 292. Схема для вывода основных
соотношений работы вентилятора.
Заменяя щ на «и, а «2 на сог2, находим
Нт л2 Г sin Р2 cos «2 I \2 sin Pt cos аг ~| . /Ч99\
pBn2r| — 900 [sin(a2+P2) sin (04 + PJ ]‘ '
При подборе вентиляторов пользуются принципом механическо-
го подобия, т. е. выбирают такой вентилятор, который подобен из-
вестному.
В геометрически подобных вентиляторах линейные размеры (от-
ношение радиусов Г1/г2, ширины вентиляторов В1/В2) пропорцио-
нальны, а угловые (щ и a?, ₽i и 02) равны.
Исходя из этого условия, получаем, что для подобных вентиля-
торов правая часть выражения (322) постоянна, т. е. А = const.
Тогда теоретический напор, создаваемый вентиля-
тором, изменяется пропорционально квадрату
частоты вращения лопастного колеса, т. е.
_^=А =const. (323)
рвф2
Из условия непрерывности воздушной струи имеем:
V=2^BvKi, (324)
где оНа—проекция абсолютной скорости воздуха при сходе с ло-
пасти на направление радиуса;
В — ширина лопасти.
Заменяя оЯ2 выражением
W2 cos <z2 COS P2
~ tg ₽2 sin(«2 + p2)
получаем
V ___ 2ng cos a2 cos p2 _ (325t
Brfn ~~ 30 sin(a2 + p2) ' ' ’
437
Для подобных вентиляторов правая часть Б=const, тогда
-fiir==5 = const’ <326)
т. е. расход воздуха пропорционален частоте вра-
щения лопастного колеса.
Из уравнения (321) находим
1VT=HTV.
Заменяя Нт и V выражениями (323) и (326), имеем
~p^BrirF==^~C~consi’ (32/)
т. е. энергия, приобретенная воздухом, изменяет-
ся пропорционально кубу частоты вращения ва-
ла вентилятора.
Характеристики вентиляторов. Строят количественные (размер-
ные и безразмерные) и качественные характеристики.
Размерной характеристикой (293, а) называют графи-
ческую зависимость от расхода воздуха V полного действитель-
ного Н, статического /гст и динамического hR напоров, мощности N,
статического т)ст и полного т] манометрического к. п. д.
Для построения размерной характеристики вентилятора заме-
ряют полный и динамический напоры при разных расходах, кото-
рые изменяют перекрытием выходного отверстия вентилятора.
Расход определяют по выражениям:
V=t-BS0; Св=ра«о. (328)
438
где vB — скорость воздушного потока в выходном отверстии вен*
тилятора, находят из выражения (307);
So — площадь выходного отверстия канала вентилятора.
Полный манометрический т] и статический т]ст к.п.д. подсчиты-
вают по формулам:
„ QJi „ Qb^ct /Q9Q\
PbW * Лст“ РЛ ‘ '
Каждому размеру вентилятора свойственна своя размерная ха-
рактеристика.
Безразмерную характеристику строят по размер-
ной. По оси ординат откладывают безразмерные коэффициенты А,
Б, С (рис. 293,6), определяемые из выражений (323), (326) и
(327), и к.п.д. т], а по оси абсцисс — показатель Кв, характери-
зующий сопротивление сети, т. е. потери на трение воздуха о
стенки каналов, потери на изменение направления движения воз-
духа в каналах и др.
Показатель Кв находят по замеренным И.л и Н из выражения:
ка=У^н. (330)
Всю серию геометрически подобных вентиляторов независимо
от их размеров выражает одна безразмерная характеристика.
По безразмерным характеристикам проводят расчеты при под-
боре вентиляторов.
Качественные характеристики определяют равно-
мерность воздушного потока по сечению выходного отверстия вен-
тиляторов. Равномерность оценивают изменением отношения ис-
тинного значения скоростей vBl в какой-либо точке к средней ско-
рости Овср воздушного потока в сечении выходного отверстия.
На рисунке 294 приведен график качественной характеристики
вентилятора очистки зерноуборочного комбайна. Из графика вид-
но, что на расстоянии 0,12 м от краев выходного отверстия ско-
рость на 20...30% выше, чем средняя.
По качественным характеристикам сравнивают различные вен-
тиляторы и дают заключение о равномерности создаваемого ими
потока.
Рабочий процесс вертикально-восходящего воздушного потока.
Такой поток разделяет зерновую массу на две фракции: легкую,
которая поднимается по каналу вверх, и тяжелую, поступающую к
выходу.
Как уже отмечалось, в вертикальном восходящем потоке на
частицу действуют сила Р тяжести и сила К сопротивления воз-
душного потока. Для удаления легких примесей необходимо, что-
бы К>Р.
Дифференциальное уравнение движения частицы с массой т3
в воздушном потоке будет следующим:
т3<-Я+Р=0.
439
Рис. 294. Качественная характерис-
тика вентилятора очистки зерноубо-
рочного комбайна.
Рис. 295. Изменение скорости дви-
жения частицы в вертикальном вос-
ходящем канале в зависимости от
времени полета.
Тогда, заменяя в дифференциальном уравнении Я и разделяя
переменные, получаем
9,8 (цв-ир-4 at-
Принимая vB=u=w, имеем’ du=—dw. Заменив du на —dw в пре*
дыдущем выражении, получим
ркр / dw
9,8 I — р2
Проинтегрировав это уравнение и заменив w, имеем
ркР 1 п Рв-Ц-ркр _I /->
19,6 рв-и + пКр'~Г+С’
где С — постоянная интегрирования.
При t—О, и=0 находим
с=—1п-^7Ркр.
19,6 гв+ркр
Принимая
। , 19,6’
»»+%=«» VB— vKP=b и ——=а,
икр
после замены имеем
Ь{Ь — и) а . (Ь — и)а
7---~=—ut пли 4----------- =е~в<.
(о — и) b (a — ti)b
Решая это уравнение, получаем
--------------------------^7-— (331)
а
440
По этому уравнению скорость и в зависимости от времени t
(рис. 295) растет по кривой АВ, асимптотически приближающейся
к линии DC, ордината которой b = vB—екр. Из этого следует, что
предельная скорость «пр движения частицы равна разности между
скоростью ов воздуха и критической скоростью окр частицы, т. е.
«иР=«Е—ц;р. (332)
В современных зерноочистительных машинах применяют боль-
шей частью два канала воздушной очистки: в первом канале уда-
ляют легкие сорняки, пленку, пыль, во втором — большинство сор-
няков и частично неполновесное зерно.
Скорость воздушного потока в первом канале при очистке пше-
ницы, ржи, ячменя, овса принимают в пределах 6...6,5 м/с, во вто-
ром — 7...8 м/с.
Значения критических скоростей для основных культур и при-
месей приведены в таблице 6.
Разделение зерновых смесей в воздушном потоке зависит не
только от соотношения скоростей воздушного потока и витания
частиц, но и от количества удаляемых частиц в единице объема
воздуха.
При большом количестве частиц, поступающих в воздушные си-
стемы, ухудшается качество очистки (разделения) материала, так
как частицы взаимно влияют одна на другую. Опытами установ-
лено, что взаимодействие частиц исключается, если расстояние с
между ними больше пятикратного их приведенного размера d.
Приведенный размер d—l]abl, где a, b, I — соответственно толщина,
ширина и длина частицы.
Концентрацию воздушной среды можно характеризовать коэф-
фициентом X, который находят из соотношения:
(333)
Чв
где тпр — масса примесей, выделяемых за одну секунду;
<2в — масса воздуха, подаваемого в канал за одну секунду.
Массу тпр — можно определить из формулы:
^np=mnp50U,
где тпр — масса частиц в 1- м3 воздуха;
So — площадь поперечного сечения капала.
Принимая, что частицы находятся на одинаковом расстоянии с
во всех направлениях, получаем, что в 1 м3 воздуха будет 1/с3
частиц.
Тогда в 1 м3 будет
тпр рпр ,
где рпр — плотность примесей.
441
Если принять, что c/d—e, то c3/d3=e3. Исходя из этого, имеем
, — лрпр „
Шпр— бе3 л°ы'
Количество воздуха, поступающего в канал в единицу времени^
равно
Qb Рв^О^В"
Тогда показатель концентрации будет
а___ я Рпр и
~ бе3 рв vB ’
(334)
Из этого выражения скорость частиц
u=^-Vb.
яРпр
Принимая u = tZnp=fB—»кр, получаем следующее выражение для
оптимальной скорости воздушного потока в канале заданного се-
чения So:
---------ц<р----
в t 6е3р,Л •
лрпр
(335)
Значения коэффициентов е и ?. для зерноочистительных машин,
по данным В. В. Боцманова, приведены в таблице 10.
ТАБЛИЦА 10
Значения коэффициентов ей?.
Каналы Пропускная способность по зерну, кг/ч Масса отходов, кг/ч е А
Предварительной очистки 800 32 12 0,025
1000 40 11 0,031
1200 48 10 0,039
Основной очистки 800 48 16 0,14
1000 60 15 0,18
1200 72 14 0,21
Рабочий процесс наклонного и горизонтального воздушных по-
токов. В наклонном и горизонтальном потоках зерновую массу
разделяют по принципу рассеивания траекторий движения отдель-
ных частиц. При этом зерновая масса или поступает с некоторой
начальной скоростью ыб непосредственно в воздушный поток
(рис. 296), или движется по решету, обдуваемому наклонным или
горизонтальным потоком воздуха.
Разделение зерновой массы воздушным потоком происходит
при условии, что вертикальная составляющая vz скорости воздуш-
ного потока меньше критической скорости частицы цкр, т. е.
^кр.
442
Рис. 296. Действие наклонного воздушного пото-
ка на частицу.
Поведение частицы в воздушном потоке зависит от многих
факторов: от свойств компонентов, значения и равномерности на-
пора воздушного потока, а также от скорости, с которой частица
входит в воздушный поток.
Если принять, что воздушный поток — ламинарный, постоянен
по численному значению и направлению скорости, то на частицу
действует сила тяжести Р и сила действия воздушного потока R,
направленная в сторону, противоположную относительной скоро-
сти движения частицы.
Под действием указанных сил частица движется в потоке по
некоторой траектории, причем полное движение складывается из
переносного движения вместе с потоком и относительно него.
Пусть Их и и г — составляющие скорости относительного движе-
ния в некоторой точке А траектории ОА. Тогда проекции скорости
абсолютного движения на оси неподвижных координат X и Z
будут
ur—vr—и'х; и.=и,—щ,
где vx и vz — проекции скорости воздушного потока на оси X и Z,
Значения проекций vx и иг соответственно равны:
ox=oBcosy; vz=vBsiny.
Отклонение скорости абсолютного движения от вертикали оп-
ределяется углом а, значение которого находят из выражения:
tg а _ и* _ t>Bcosv—
° и,, u'z — v& sin у ‘
По мере продвижения частицы относительная скорость и' ме-
няется по величине и направлению, стремясь к некоторому пре-
дельному значению. В пределе вертикальная составляющая uZat
443
достигает критической скорости пкр вертикального направления,
т. е.
znp КР*
и'х-------* 0.
Тогда, учитывая это и подставляя в последнее выражение, полу-
чаем
tg ^пр
VBCOSY
fKp — vBsiny‘
Для частиц, поступающих в воздушный поток, критическая ско-
рость изменяется от &KPlnin до t»Kpmax. В таком случае траектория
частиц одной и той же смеси будет представлять собой некоторый
пучок, определяемый углами tganPmin и tganPmax. Значения углов
находят из соотношения:
tgcv =________”bSos_Y____tea- =- t'BC0ST
6nPn,in скР(пах — uEsin у’ S«npmax t>KpmIn — t>Bsiny'
Рассеивание пучка траектории можно характеризовать раз-
ностью апРтах—anpmin, которую определяют из выражения:
\а (а _______гу \ tg Дпрщах ^8 gnpmin
К(«ПРтах «nPmin)- l+tganPin.ntganPn)ax
Заменяя tganPmin и tganPmax соответствующими соотношениями,
имеем
tgZfT ________г, __________Vb COS Т (°кртах PKPmin)_____________ zooc\
g(«npraax «nPmin) t>KPmaxPKPmin-PBsinY(vKp^l + OKPmlJ + vl-<33b)
Из этого выражения следует, что рассеивание траекторий дви-
жения частиц зависит: от разности критических скоростей и от уг-
ла у направления скорости ов воздушного потока. С увеличением
разности ^кРтах—Окрт!п предельных критических скоростей рассеи-
вание растет. Уменьшение угла у сокращает рассеивание. Горизон-
тальный поток (cosy=l) дает меньшее рассеивание, чем наклон-
ный (cosy<l).
На рисунке 297 показано, как изменяется tg(anPmax—aBPmin) в
зависимости от скорости ов воздушного потока при ^KPmin = 8,5 м/с,
окР1пах=11,5 м/с и различных значениях угла у=15, 20 и 25°.
Из графика следует, что с увеличением скорости ов рассеива-
ние возрастает до некоторого максимального значения, а потом
падает. Наибольшее рассеивание будет в том случае, когда произ-
водная по vB функции tg(anPmax—-anPn?in) равна нулю, т, е,
tg (кпртах Knptnin) _Q
dvB
444
*9(аПРп,ах-&ПРт1П)
0,23
0,21
0,19
0,17
0,15
0,13
Л В 8 10 12 Vg,n/c
Рис. 297. Изменение функции
tg(a^max~в зависимо-
сти от скорости воздушного
потока при угле его наклона:
7=25° (кривая У); у—20° (кривая
и 7=15° (кривая 3).
Дифференцируя выражение (336),
получаем, что максимальное рассеива-
ние траекторий движения частиц бу-
дет при следующей скорости:
&Bmax ~ j/^KPmax Чфтш • (337)
Таким образом, скорость наклонно-
го воздушного потока, при которой
зерновая масса получает наибольшее
рассеивание, равна средней геометри-
ческой из крайних значений критиче-
ских скоростей.
Следует отметить, что в сущест-
вующих машинах скорость относитель-
ного движения частиц в воздушном
потоке ниже критической скорости,
как это принято в условии вывода
уравнения, поэтому выбирать оптимальную скорость приходится
с учетом опытных данных.
По результатам эксперимента угол у принимают равным
18...300, а скорость воздушного потока в рабочем месте 4,5...6 м/с
для овса и 6...8 м/с для пшеницы и ржи.
Размеры воздушных каналов. Каналы зерноочистительных ма-
шин определяются шириной Вк, равной расстоянию между попе-
речными стенками прямоугольных каналов, высотой sK горловины
и длиной Нк (расстояние от места поступления зерна в канал до
поворота в осадочное устройство).
Ширину канала принимают в пределах 90... 100 % от ширины
решета очистки.
Размер $к пневмосепарирующих каналов оказывает влияние
как на показатель ер полноты разделения, так и на количество от-
ходов основной культуры в примеси. Установлено, что во всасы-
вающих каналах зерноочистительных машин ер с увеличением вы-
соты горловины сначала возрастает, а затем при некотором опти-
мальном значении $Копт он достигает максимума и при дальней-
шем увеличении высоты горловины снижается. Оптимальное зна-
чение sKonT достигает 100... 120 мм при загрузке канала примесями в
пределах 40...50 кг/ч-см на единицу высоты горловины и
130...160 мм при загрузке 100...150 кг/ч-см.
Указанный эффект очистки связан со временем воздействия
воздушного потока на движущиеся частицы зерна.
Чем ближе sK к sKonT, тем дольше воздушный поток действует
на частицы, что увеличивает период возможного выделения приме-
сей, а при значениях sK, больших оптимальных, растет процент по-
ступления зерна в отходы.
Опытами установлено, что наряду с примесями в канале вита-
ют некоторые зерна. При малой длине Нк часть зерна идет в от-
445
ходы. Поэтому длину канала не следует выбирать меньше 800 мм.
В очистках зерноуборочных комбайнов используют каналы с
прямоугольным сечением (рис. 298). При этом горловину канала
устанавливают так, чтобы воздушный поток обдувал зерно на всей
длине решета.
Исходя из наилучшего воздействия воздуха на массу, угол б
между направлением потока и плоскостью решета принимают рав-
ным 25...30°.
При установке учитывают, что поток, выходя из канала, рас-
ширяется и часть kosK решета обдувает отраженный поток. Угол р
расширения струи принимают равным 12...16°, а коэффициент ko
отклонения воздушного потока — от 0,5 до 0,6.
Подбор вентилятора. Исходными данными для подбора венти-
лятора служат скорость гв на выходе из горловины, необходимая
масса QB воздуха, подаваемого в канал, и полное давление Н, ко-
торое должен создать вентилятор.
Скорость на выходе из горловины вентилятора выдер-
живают такой, чтобы она превышала критическую скорость пкр
тех компонентов массы, которые необходимо удалять, т. е.
(338)
где ав — коэффициент превышения скорости.
Значения критических скоростей приведены в таблице 6.
Рекомендуются следующие значения ав:
для соломы длиной до Е00 мм. . . . , . . , 1,1... 1,7
» половы........................................ 1,9...3,7
» сбоины.................................... , 2,5...5
» обмолоченных колосьев 1,5...3,0
Массу QB подаваемого воздуха, или производительность вен-
тилятора, принимают, исходя из допускаемой массы примесей, уда-
ляемых единицей массы воздуха, по выражению:
QB=mnpA. (339)
Массу тпр рассчитывают по массе зерна т3, пропускаемого
очисткой в одну секунду, исходя из следующего выражения:
тар=е’т3, (340)
446
где е' — коэффициент, определяющий массовую долю половы и мя-
кины, которые необходимо удалить из смеси.
Коэффициент е' для комбайновой очистки принимают от 0,2 до-
0,25, для зерноочистительных машин предварительной очистки —
от 0,05 до 0,1, окончательной очистки — от 0,03 до 0,05.
Коэффициент концентрации X выбирают равным 0,2...0,3- для
вентилятора, не пропускающего транспортируемую массу через се-
бя (комбайны, веялки), и 0,14...0,15 для пылевых вентиляторов,
когда воздух с удаляемыми примесями проходит через лопастное
колесо.
Полное давление Н находят по динамическому и ста-
тическому йст давлению, т. е.
Я=Л4АТ- (341>
Динамическое давление рассчитывают по выражениям (307) и
(338).
Статическое давление складывается из потерь в вентиляторе^
потерь на трение потока о стенки каналов, на повороты каналов,
на сетки и заслонки внутри каналов, сопротивление решет и воро-
ха на них. Из-за сложности конструктивных форм и размеров вен-
тиляторов, воздушных каналов очисток, решет, массы и состояния
вороха на них затрудняются теоретические расчеты hCT, поэтому
при выборе вентилятора указанные сопротивления оценивают по
аналогии с воздушными системами существующих конструкций,
оборудованных подобными вентиляторами. Для очистки комбайнов
МОЖНО ПРИНЯТЬ /1ст~ (2...5)/1д.
Определив давления 1гл, йст и Н, находят показатель Кв по вы-
ражению (330). В тех случаях, когда невозможно по аналогии оце-
нить потери в системе, показатель Кв следует принимать по без-
размерной характеристике при максимальном значении к.п.д.
Зная Кв из безразмерной характеристики, находят коэффициен-
ты А, Б, С, а затем, пользуясь соотношениями (323), (326) и (327),
рассчитывают: радиус г2 по концам лопастного колеса, частоту его
вращения п и мощность N, потребную на привод. По найденным
г2, п и jV из таблиц подбирают номер вентилятора (2г2 в децимет-
рах—номер вентилятора), удовлетворяющий расчетным парамет-
рам.
Окончательную пригодность вентилятора с полученными рас-
четным путем параметрами оценивают опытным путем.
Регулирование воздушных систем. В воздушных системах сель-
скохозяйственных машин регулируют следующие параметры: раз-
меры входных окон вентилятора, частоту вращения лопастного
колеса и размеры каналов.
Размеры входных окон изменяют в очистках комбайнов, в веял-
ках и сортировках зерна. Размеры окон влияют как на количест-
венные характеристики вентилятора, так и на равномерность рас-
пределения потока воздуха по сечению канала. С уменьшением или
увеличением входных окон (рис. 299) расход и напор изменяются
447
расхода (кривая 1) и
напора (кривая 2) в за-
висимости от размера
сечения входных окон
вентилятора.
непропорционально площади s0 их сечения.
При уменьшении размера окон значитель-
но возрастает неравномерность распределе-
ния потока воздуха по сечению, особенно
это заметно при открытии окон на 60% и
меньше.
Оптимальный размер окон подбирают
на работающей машине методом взятия
проб с оценкой качества очистки или сор-
тирования.
Изменение частоты вращения лопастно-
го колеса влияет на количественную харак-
теристику вентилятора: расход воздуха и
скорость его потока растут пропорциональ-
но увеличению частоты вращения колеса.
Наряду с этим изменение частоты враще-
ния колеса, как показывают опыты, практически не влияет на рав-
номерность потока по сечению канала.
Регулирование воздушных систем изменением размера каналов
увеличивает сопротивление движению воздуха и неравномерность
воздушного потока. Повышенное сопротивление приводит к росту
энергозатрат на привод вала вентилятора.
§ 6. Цилиндрические триеры
Рабочий процесс. Триеры, отделяющие от основной культуры
мелкие примеси и дробленое зерно, принято называть кукольными,
а отделяющие длинные примеси — овсюжными.
Рабочий процесс цилиндрического триера включает в себя сле-
дующие операции: отбор ячейками мелких частиц из общей мас-
сы материала, подъем частиц и выбрасывание их в приемные лот-
ки. Эти элементы определяются кинематическим режимом работы
триера и его геометрическими параметрами.
Отбор мелких частиц происходит при вращении цилинд-
ра. Частицы, соприкасающиеся с ячеистой поверхностью, трением
увлекаются в направлении вращения.
Часть коротких частиц, непосредственно примыкающих к по-
верхности триера, попадает в ячейки, увлекается ими и выносится
из слоя. Другие зерна, не попавшие в ячейки, от действия сил тре-
ния получают некоторую скорость относительно поверхности ци-
линдра, но увлекаются на малую высоту. Наряду с этим зерновой
материал, поступивший в цилиндр с одного края, растекаясь сло-
ем, постепенно перемещается к другому концу.
Вследствие относительного движения слоев и осевого переме-
щения частиц происходит их перемешивание, что способствует от-
бору мелких частиц из общей массы.
Подъем частиц, попавших в ячейки, совершается с угло-
вой скоростью о цилиндра.
448
Определим угол at поворота цилинд-
ра (рис. 300), соответствующий пре-
дельному положению ячейки, при кото-
ром частица выпадает.
Примем следующее направление
осей координат: ось Xi направим по ка-
сательной к краю элемента ячейки,
а ось У] — по нормали к элементу в точ-
ке О].
На частицу, движущуюся вместе с
ячейкой, действуют следующие силы:
сила Р тяжести, нормальная реакция
ячейки N, сила трения F и сила Pj инер-
ции 1переносного движения.
Частица будет находиться в состоя-
нии относительного покоя, если сумма
проекций всех сил на оси Xi и У1 будет
равна нулю, т. е.
Рис. 300. Силы, действу-
ющие, на частицу, дви-
жущуюся вместе с ячей-
кой триера.
P;sinp — Р sin(co/—P)-|-F—0, — Pj cos р—Р cos (со/ — Р)4-ЛГ=0.(342)
Из второго уравнения найдем
y=P;cosp-LPcos(co/—Р). (343)
Так как P/=m3nco2, a F—fN, то, подставив эти выражения в пер-
вое уравнение, получаем
гео2 (si п р -|— f cos Р) —- 9,8 [sin (со/—р) — f cos (at—Р) ].
Известно, что f = sin <p/cos <р, a ra2/9,8=kT, тогда, решая, нахо-
дим:
, __sin (со/ — Р — <р)
т“ sin(p + <p)
Принимая во внимание, что со/=9О°+а, а для фрезерованных и
штампованных ячеек р«л/2, получаем
sin (а—ср) — /гт cos ср или а=arc sin (kr cos ср) -[-ср. (344)
Из этого выражения следует, что угол а, на который частица
поднимается ячейкой, не выпадая из нее, зависит от угла ср трения
и от показателя kT кинематического режима.
С уменьшением коэффициента трения между частицей и эле-
ментами ячейки угол а уменьшается. Значения углов ср трения для
культур, выделяемых ячейками триера, колеблются в значительных
пределах: так, для куколя <р=5...20°, для пшеницы ср=15...35°. Сле-
довательно, выпадать зерно из ячейки будет в некоторой зоне, раз-
мер которой определяется углом си, соответствующим минимально-
му значению угла cpmin и углом а2 для максимального значения уг-
ла ершах трения.
29—424
449
Для триеров зерноочистительных машин, когда ячейки выделя-
ют куколь, сил 39° и а2л50°, а при отборе пшеницы «1 — 48° и
а2 «62°.
Показатель kT оказывает влияние на характер движения зерна,
выпавшего из ячейки.
Выпадание частиц из ячейки происходит по-разному:
при условии N=0 частицы движутся как тело, брошенное под уг-
лом (п/2—<а), к горизонту, а при N>0 они, выскользнув из ячей-
ки, попадают на поверхность цилиндра и скользят по ней. Во вто-
ром случае частицы не будут попадать в лоток, поэтому необходи-
мо установить такой режим работы, при котором в момент выпа-
дания частицы нормальная реакция равнялась бы нулю.
Считая, что в момент выскальзывания частица переходит с по-
верхности ячейки на поверхность цилиндра, имеем р=0. Тогда из
условия (343) получаем
W=.Pcosco/-|--Pj-
Приняв Pj = m3a2r при со£=л/2+а и W = 0, получим
/?т — sin а. (345)
При Ат=1 (угол а=л/2) зерно достигает самого верхнего поло-
жения, где абсолютная скорость получает горизонтальное направ-
ление. В таком положении частица не может выскользнуть из
ячейки, так как траектория ее свободного движения выходит за
пределы цилиндра, поэтому £т должен быть меньше единицы. В су-
ществующих триерах £т=0,5...0,7.
Частицы, оторвавшиеся от ячейки, совершают свободное движе-
ние с начальной скоростью ы = сог, направленной под углом (л/2—а)
к горизонту.
В осях координат X и У (рис. 301) с началом в точке О проек-
ции скорости будут следующими:
их = ar sin ар, wi/=(orcosa1—gt.
Тогда перемещения по осям координат выразятся следующими
уравнениями:
x^or/sinaj и y=artcosa1— .
Решая совместно эти уравнения, получаем траекторию полета
зерна, выпавшего из ячейки, определяемую уравнением параболы:
v2
(346)
Регулирование и подбор триеров. Частицы, выпавшие из ячеек,
должны попасть в лоток, поэтому необходимо, чтобы они оказа-
лись в пределах между передней и задней стенками лотка.
Определим положение передней и задней стенок лотка, исходя
из условия, что траектория самой нижней точки выпадания, опре-
450
г
деляемои углом си, пересе-
кает переднюю стенку лот-
ка з конечной точке А
12?:с. 301) и траектория
самой верхней точки, опре-
деляемой углом а2, пересе-
кает заднюю стенку лотка
з точке В.
Положение точек А а В
может характеризоваться
углами у, и у2. Значения
указанных углов зависят от
коэффициента f трения ча-
стиц по ячейкам и от пока-
зателя кинематического
режима работы триера.
С увеличением f и угол
Y1 возрастает, а угол у2
Рис. 301. Схема к определению положе-
ния приемного лотка триера.
уменьшается.
Для триеров зерноочистительных машин значения углов и
у2 следующие:
кукольный триер . . . у1=41'; у2 = 88°;
овсюжный триер ...............Н = Е0°; т2 = 85'.
Если в кукольном триере установить лоток с углом -yi<41°,
отходы основной культуры увеличатся, с уменьшением угла у(
улучшится чистота выделения примесей. Уменьшение угла уч в
овсюжном триере, наоборот, снижает чистоту выделения длинных
примесей.
В зерноочистительных машинах положение лотков можно изме-
нять в широком диапазоне. Оптимальное положение лотка подби-
рают непосредственно в работе.
Указанные значения удельной нагрузки допустимы при пра-
вильном подборе размеров ячеек триерных цилиндров. Размеры
ячеек могут быть определены построением вариационных кривых
зерновой смеси или приближенно подобраны по таблице 11.
Диаметры ячеек триеров
ТАБЛИЦА 11
Культура Диаметр ячеек, мм
для длинных примесей для коротких примесей
Пшеница, овес, вико-овсяная смесь, жит- няк, эспарцет Рожь Ячмень Гречиха Клевер, тимофеевка, люцерна Лен 8; 8,5; 9,0 8,0; 9,5 11,2; 11,8; 12,5 8,5 2,8 5,0 4,5; 5,0 5,0; 5,6; 6,3 5,6; 6,3; 7,1 6,3 1,8 3,5; 4,0
29
451
§ 7. Рабочие процессы и режимы работы машин, разделяющих
материалы по свойствам поверхности и плотности
Полотенные горки. Разделяющая способность горок зависит от
движения частиц на поверхности наклонного полотна. Рассмот-
рим перемещение частиц по полотну, наклоненному под углом а
к горизонту (рис. 302) и движущемуся по направлению скорости
vn- На частицу, поступающую на полотно в точке О, действуют
силы: тяжести Р, нормальная N и трения F.
Движение частицы вдоль полотна выражается следующим диф-
ференциальным уравнением:
Z77 3du, ' г1
—=Р sin а—F,
где и — скорость движения частицы относительно решета;
т3 — масса зерна.
Принимая во внимание, что P = 9,8m3, a F = 9,8 m3 fcos а, где
f=isin qj/cos ф — коэффициент трения, получаем
d»=9,dt.
cos<p
После интегрирования выражение для скорости примет вид:
и = 9,8 i-c.
cos <р 1
Если частица поступает на полотно с нулевой скоростью, то в
^начальный момент она получает скорость i'n полотна, тогда посто-
янная С интегрирования прн t=Q будет C= v„.
Подставляя C=vn в выражение для скорости относительного
движения, имеем
. „ о sin (а — <р)
«=v„ 4-9,8-------i----22.
П 1 COS ф
t.
(347)
Если угол частица движется вверх вместе с полотном.
При аДэмр скорость относительного движения частицы непрерывно
Рис. 302. Схема движения частиц по
полотну продольной! горки.
возрастает.
Относительное переме-
щение х частицы по полот-
ну может быть выражено
следующим уравнением:
х=ц/-|-9,8 -g-
sin (а — <р)
cos<p
Абсолютное движение ха
частицы вдоль полотна
складывается из переносно-
го хп и относительного х, т. е.
Ха.
452
Так как xn = vnt, то, заменяя в этом уравнении хп и х соответст-
вующими выражениями для них, имеем
9,8 ,2 sin (а — <р)
2 cos <р
(348)
Таким образом, перемещение частицы при абсолютном движе-
нии во времени изменяется по закону параболы. Скорость полот-
на не влияет на перемещение скользящих частиц; частицы с а^ср
поднимаются со скоростью полотна.
Разделение частиц будет происходить в том случае, если они,
поступая на полотно, укладываются не больше, чем в один слой.
Для выполнения этого условия, как видно из рисунка 302, необхо-
димо, чтобы перемещение х'а частиц (за время ti), скользящих
вниз, было больше или равно длине I частицы, т. е. x'a^d.
Исходя из этого, имеем
v, ___ 9,8 ,2 sin (а — <р) . ,
2 1 cos<p
где Zi — время, в течение которого частица перемешается на дли-
ну I.
Решая это уравнение, получаем
t± V ,6 fc°S(p г • (349)
Из этого выражения видно, что чем больше угол а наклона
полотна, тем меньше время Л. С уменьшением времени увеличи-
вается производительность машины. Однако с ростом угла умень-
шается полнота разделения, шероховатые частицы (примеси) бу-
дут также скатываться вниз и поступать в бункер основной куль-
туры.
В полотенных горках для очистки семян свеклы скорость по-
лотна принимают 0,65...0,85 м/с, угол а регулируют в пределах
18...27°, оптимальную подачу на 1 м ширины полотна выбирают
0,028...0,03 кг/с.
Электромагнитные сепараторы. Магнитное поле сепараторов
должно удерживать частицы, покрытые порошком.
Сила Т магнитного поля должна быть больше или по крайней
мере равна сумме сил тяжести Р частицы и центробежной силы
Р: . действующих на частицу, удерживаемую внизу ба сабана, т. е.
т^р-р'
Силу Т выражают следующей зависимостью:
'г \
(350)
где ем—коэффициент магнитной проницаемости порошка;
Вм—магнитная индукция;
тп—масса приставшего порошка;
/с—расстояние от центра частицы до поверхности магнитно-
го сектора.
453
Так как центробежная сила
Pj=m3a>2T,
где т3 — масса зерна;
со-—угловая скорость барабана;
г — радиус барабана,
то, подставляя значение Pj в уравнение для Т, получаем
о 9-8(1 + feM) ,2
ph 1С
ьмквн
(351)
где Авн — коэффициент внедряемости (см*, табл. 8);
— коэффициент кинематического режима барабана.
Напряженность магнитного поля тем больше, чем меньше ко-
эффициент внедряемости. С увеличением коэффициента кинемати-
ческого режима барабана и расстояния 1С требуется большая на-
пряженность магнитного поля. Для существующих магнитных се-
параторов 6м=0,4...0,47, нормальное рабочее напряжение 40...50 В,
рабочий ток для намагничивания одного барабана — около 12 А.
Потребность в магнитном порошке составляет 1...2% от массы очи-
щаемых семян. Удельная подача зерна на 1 м рабочей длины ба-
рабана
q0=0,14...0,23 кг/(с-м).
Пневматический сортировальный стол. Перераспределение ча-
стиц по плотности на пневматических сортировальных столах про-
исходит в условиях стесненного движения, которое в зерновом
слое создается от действия воздушного потока и колебательного
движения деки.
Оптимальный процесс перераспределения достигается правиль-
ным сочетанием частоты колебаний деки со скоростью воздушного
потока.
Теоретического решения этого вопроса до сих пор нет. Опыта-
ми, проведенными рядом исследователей с использованием кнно-
съе^и, установлено влияние регулируемых параметров пневмати-
ческого сортировального стола на процесс перераспределения.
В таблице 12 приведены ориентировочные параметры для пра-
вильной установки сортировального стола.
ТАБЛИЦА 12
Установочные параметры пневматического сортировального стола
Культура Частота колебаний деки, кол/мии Полное давление в воздушной камере, Па Наклон стола, град
вдоль риф поперек риф
Пшеница 450...480 105...115 0,5...2 5
Кукуруза 475...500 80...90 2...3 4
Мелкие семена 350...425 45...50 3 3
454
На качество работы пневматического сортировального стола
влияют степень засоренности исходного материала и количество
массы, подаваемой на деку.
Опытами установлено, что на выравненном материале разделе-
ние по плотности происходит более четко. Поэтому работу пнев-
матических столов следует сочетать с воздушно-триерными зерно-
очистительными машинами.
Производительность стола оказывает существенное влияние на
качество сортирования. Оптимальное значение подачи выбирают в
зависимости от крупности зерен и степени засоренности массы.
При мелких зернах загрузку планируют меньшей, чем при круп-
яных. Загрузка стола должна быть 0,45...0,55 кг/с для зерновых и
0,045...0,15 для мелких семян трав.
При оптимальном режиме работы стола поверхность деки долж-
на быть покрыта ровным слоем зерна толщиной 2...4 см. При боль-
шей толщине воздушный поток не сможет расслаивать массу и
процесс разделения будет неудовлетворительным.
§ 8. Рабочие процессы устройств для очистки и сортирования
сельскохозяйственных материалов
Назначение устройств для очистки и сортирования зерна. Зер-
ноочистительные устройства предназначены для выполнения сле-
дующих операций.
1. Разделение вороха, поступающего из-под молотильного уст-
ройства и соломотряса комбайна, на зерно и незерновые примеси.
Ворох неодинаков по своему составу. В нем содержится 60...75%
зерна и 40...25 % сбоины, половы, неорганических и других приме-
сей. После обработки вороха на очистке комбайна засоренность
зерна соломистыми примесями должна быть не больше 1,5...3,0%.
2. Первичная очистка зерна, поступающего от комбайнов, с
целью выделения из него соломистых и неорганических примесей
и не менее 60% семян сорных растений.
3. Вторичная очистка зерна после первичной или после высуши-
вания. Машины вторичной очистки должны выделять из зерновой
массы все примеси как сорные, так и зерновые, которые по своим
физико-механическим свойствам поддаются отделению в воздуш-
ном потоке и на решетах.
4. Окончательная очистка зерна как для подготовки семенного
материала, так и продовольственного зерна с целью доведения его
до базисных кондиций. При окончательной очистке из зерна на
триерах выделяют овсюг, куколь, гречишку, дикий горошек
и т. д.
В некоторых случаях не удается воздушным потоком, решетами
и триерами довести семенной материал до нужного состояния.
Тогда после указанной системы очистки приходится применять
пневматические сортировальные столы, электромагнитные сепара-
торы и другие машины.
455
Рис. 303. Схема очистки зерноуборочного комбайна:
I — транспортная доска; 2 — пальцевая гребенка; 3 — верхнее решето; 4 — нижнее решето;
5 — удлинитель; б — щиток; 7 — лоток; 8 — откидная доска; 9 — колосовой шнек; 10 — ре'
шетный стан нижнего решета; И — зерновой шнек; 12 — вентилятор.
Зерноочистительные устройства комбайнов. Для разделения
вороха на зерно и примеси в комбайнах применяют ветро-решет-
ные очистки с нагнетательным воздушным потоком.
Работа очистки сводится к следующему. Из-под молотильных
устройств ворох поступает на транспортную доску 1 (рис. 303),
которая расслаивает его (зерно располагается внизу, а соломистые
примеси сверху) и перемещает к решету 3. В начале решета, в
пределах пальцевой гребенки 2 транспортной доски, к этому воро-
ху добавляют зерно и примеси, выделенные соломотрясом.
Зерно и мелкая фракция сходят с транспортной доски, прохо-
дят между пальцами гребенки на начало верхнего решета, крупная
фракция, поддерживаемая воздушным потоком и пальцевой гре-
бенкой, направляется на середину решета. Благодаря этому раз-
гружается передняя часть решета и обеспечивается выделение ос-
новной массы (8О...95% зерна) в пределах */з длины решета. Верх-
нее 3, нижнее 4 решета и вентилятор 12 удаляют из зерна примеси
по размерному признаку и парусности.
Колебания транспортной доски передаются от механизма
ABCEF (горизонтальная амплитуда колебания Аг=52...57 мм, а
вертикальная Ав=23...25 мм). Верхнее решето приводит в движе-
ние механизм ABCGHJ (колебание его заднего конца происходит
с амплитудами: Аг = 50...55, Лв = 28...32 мм). Точки нижнего решета
и решетный стан 10 движутся по вогнутым траекториям (Аг=
=32...35, Ав=7...8 мм).
Проход через решета поступает в шнек И и затем транспорти-
руется элеватором в бункер. Транспортная доска и решета снаб-
жены продольными гребнями, которые препятствуют смещению
вороха в сторону при поперечном наклоне молотилки комбайна.
Для улавливания колосьев на верхнем решете сделан удлини-
тель 5. Проход через удлинитель и более тяжелая часть схода со
второго решета поступают в колосовой шнек 9, откуда их подают
на домолот.
На комбайнах ставят оба решета регулируемые, жалюзийные.
Иногда нижнее решето заменяют плетеным или пробивным с круг-
лыми или продолговатыми отверстиями различных размеров.
456
В очистке изменяют следующие параметры: угол наклона решет
к горизонту (от 4 до 7°), раскрытие жалюзи (от 0 до 45°), угол
наклона удлинителя (от 8 до 30°), частоту вращения вала вентиля-
тора, размеры его входного окна и зазор между концом удлините-
ля и выдвижным щитком 6.
Рекомендуются следующие исходные значения регулируемых
параметров в средних условиях уборки зерновых: открытие жалю-
зи у верхнего решета 14...17 мм, у нижнего 8...10 мм, частота вра-
щения вала вентилятора 630...660 мин-1, угол наклона нижнего
решета 6°, удлинителя — 25°. Минимальный зазор между концом
удлинителя и выдвижным щитком — 15...20 мм.
Окончательную регулировку проводят в поле, изменяя указан-
ные параметры, добиваются чистоты зерна в бункере (примесей не
более 3%) при потерях свободным зерном в полове не более 0,3%.
Определяющее влияние на работу очистки оказывает масса со-
ломистых примесей, поступающих с зерном на решета..
Потери свободным зерном в полове зависят от подачи qc. в со-
ломистого вороха по экспоненциальной зависимости, т. е. при
<7с. в=0,4...1,5 кг/с,
11o=zO,35.10-3ewe.B, (352)
где цо — параметр, зависящий от убираемой культуры, ее влажно-
сти и засоренности.
Для средних условий влажность соломы щс=Ю—20%, при убор-
ке незасоренной пшеницы для решета площадью 1 м2 (ширина
1м) имеем цо = 2,6...2,8 с/кг.
Подачу соломистой массы вороха при уборке пшеницы комбай-
ном с однобарабанным молотильным устройством следует опреде-
лять приближенно по формуле:
.в
где kw — коэффициент, учитывающий влажность убираемой пше-
ницы;
q3 — подача зерна на очистку.
Заменяя q3 выражением (266), имеем
qc,B = kwBvA3. (353)
Коэффициент kw может принимать следующие значения:
^=0,40...0,48 при влажности соломы wc= 10%, kw=0,35—0,40 при
ьус=10— 18% и kw = 0,25—0,35 при ьус>18%-
Решетно-триерные зерноочистительные машины. Наиболее рас-
пространена такая последовательность технологического процесса
очистки и сортирования зерновых смесей.
I. Разделение по парусности воздушным потоком.
2. Разделение по ширине и толщине на решетах.
3. Разделение по длине на триерах.
4. Разделение по другим признакам (удельному весу, шерохо-
ватости и т. д.) на соответствующих устройствах. Часто разделяют
по парусности не только до решет, но и после них.
457
Рис. 304. Схема рабочего процесса решетно-триерной машины:
/ — выход крупных тяжелых примесей; II — выход мелких тяжелых примесей; III — выход
недоразвитых зерен и тонких примесей; IV — выход длинных примесей; V — выход корот-
ких примесей; VI — выход основной культуры; 1 — приемная камера; 2 — осадочная каме-
ра; з — вентилятор; 4 — отводной канал; 5 — каналу 6 — шиек; 7 — овсюжный триер; 8 —
кукольный триер; и В2 — фракционные решета; В — подсевное решето; Г — сортироваль-
ное решето.
На рисунке 304 приведена наиболее типичная схема технологи-
ческого процесса зерноочистительной машины с ветро-решетной
очисткой и триерными поверхностями.
Воздушная очистка зерновой смеси в этой схеме предус-
мотрена в канале а. Легкие примеси, выделенные воздушным по-
током, оседают в отстойной камере Ь.
Решета в зерноочистительных машинах устанавливают в оп-
ределенной последовательности. В начале располагают колосовые
решета для отделения крупных примесей, допускающие большие
удельные нагрузки, а затем подсевные В и сортировальные Г. Ко-
лосовые решета, как правило, устанавливают на машинах предва-
рительной очистки. Наряду с подсевными и сортировальными ре-
шетами применяют разгрузочные (фракционные) решета Bi и В2.
На решето Bi поступает зерно, очищенное от легких примесей. Это
решето разделяет зерновую массу на две примерно равные части:
458
тонкие зерна идут проходом, а бо-
лее крупные по толщине — сходом с
решета. Сход с решета поступает
на решето Б2, которое выделяет в
выход 1 крупные примеси, а все
зерно с него поступает в триеры.
Проход с решета обрабатыва-
ется на подсевном решете В, где из
зерновой массы выделяются более
мелкие тяжелые примеси (вы-
ход II), и на сортировальном реше-
те Г, которое отделяет дробленые,
недоразвитые зерна и тонкие при-
Рис. 305. Изменение просеваемо-
сти тр решет и показателя пол-
ноты разделения ер в зависимости
от загрузки решет qP.
меси (выход III).
Разделение зерновой массы решетом Бх и обработка, на реше-
тах В и Г только одной половины всего материала позволяют раз-
грузить решета В и Г, лимитирующие пропускную способность ма-
шины.
Триерная очистка, как правило, состоит из двух ячеи-
стых цилиндров, работающих последовательно: овсюжного 7 и
кукольного 8. Вначале ставят овсюжный триер, который выделяет
длинные примеси, чем облегчается работа кукольного триера, вы-
деляющего мелкие примеси, недоразвитое и дробленое поперек зер-
но. В некоторых машинах овсюжный и кукольный триеры устанав-
ливаются в обратной последовательности.
Описанная схема технологического процесса — примерная.
В практике сельскохозяйственного производства применяются ма-
шины с разнообразными схемами. Например, в машине для очист-
ки мелких семян ставят два подсевных решета и более, чтобы
улучшить выделение мелких примесей; при сортировании льна-куд-
ряша устанавливают подсевное решето после триера для выделе-
ния семян горчака.
Пропускная способность ветро-решетных зерноочистительных
машин зависит от загрузки решет, а решетно-триерных — от за-
грузки триеров.
Установлено, что масса зерна или примесей тр, проходящих
сквозь отверстия решета (просеваемость), растет пропорционально
их загрузке, а затем, достигнув максимума, убывает (рис. 305).
Показатель еР полноты разделения вначале остается неизмен-
ным, при дальнейшем увеличении загрузки уменьшается. Заметное
уменьшение еР всегда происходит раньше, чем наступает максимум
просеваемости. Таким образом, максимальная просеваемость всег-
да больше той, которая бывает при наивысшей полноте разделе-
ния.
В практике использования зерноочистительных машин загруз-
ку их устанавливают такой, при которой качественные показатели
отвечают требованиям, т. е. еР=0,8 для семенного материала и
ер=0,5...0,6 для низкого и среднего качества разделения.
459
На качественные показатели работы ветро-решетных машин су-
щественно влияют влажность и засоренность разделяемых смесей.
Пропускная способность ветро-решетной машины без триеров
можно приближенно рассчитать по следующей зависимости:
^о.р—(354)
где ^о.р — пропускная способность ветро-решетной машины при
обработке пшеницы влажностью ®э=15% и при коэф-
фициенте засоренности /гп^2,5%;
k3 — коэффициент эквивалентности, учитывающий обрабаты-
ваемую культуру.
Для предварительной очистки принимают <7о.р=1,6 кг/с на 1 м2
площади решета, а для окончательной очистки и сортирования со-
ответственно <7о.р = 0,8; <?о.р=0,5 кг/с-м2.
Коэффициент k3 для основных культур находят из следующих
данных:
рожь....................................................0,75
ячмень, горох, кукуруза, конопля.....................0,66...0,8
овес, рис............................................0,5...0,6
фасоль, гречиха.........................................0,55
просо, суданка, житняк..................................0,28
лен, рыжик, клевер, люцерна..........................0,15...0,2
тимофеевка.............................................. 0,1
При использовании триеров пропускную способность зерноочи-
стительной машины или комплекса приближенно рассчитывают по
исходным параметрам зернового материала, пользуясь формулой:
д0.е=2лк./1д'0Л, (355)
где г — внутренний радиус цилиндра;
I — длина рабочей части триера;
Уо.т— пропускная способность 1 м2 внутренней площади трие-
ра при выделении примесей из пшеницы.
При выделении длинных примесей с содержанием их в сорти-
руемой пшенице kn^7°/0 рекомендуется принимать ^.т= 0,16...0,18,
при выделении коротких примесей с ^п^1,5°/о—д'о.т—
=0,15...0,17 кг/с-м2.
Для триеров коэффициент эквивалентности k3 следует прини-
мать в зависимости от обрабатываемой культуры таким:
рожь....................................................0,75.. .0,9
ячмень..................................................0,65...0,8
лен . . . ........................................0,15.. .0,2
клевер ................................................. 0,1...0,12
Электромагнитные семяочистительные машины работают по
следующей технологической схеме: смешивание очищаемых семян
трав, проса или льна-кудряша с магнитным порошком, а затем
выделение из гладких семян шероховатых. Примером может слу-
жить схема машины, приведенной на рисунке 306.
460
/
If
Рис. 306. Схема рабочего процесса электромагнитной семяочистительной машины:
/ — бункер; 2 — увлажнительный бачок; 3 — шланг; 4 — наклонный транспортер; 5 — лоток;
6 — корпус аппарата дозировки; 7 — мешалка; 8 — проволочный шнек; 9 — электромаг-
нитный барабан; 10 и 13 — заслонки; 11, 15 и 17 — направители семян; 12, 14 и 16 — прием-
ники семян; 18 и 19 — шнеки; 20 — диск; 21 — конус; 22 — регулировочный диск.
Семена, предварительно обработанные на ветро-решетных ма-
шинах, засыпают в бункер 1, откуда они самотеком через отвер-
стие диска 22 поступают на конус 21 и равномерно распределяют-
ся по его поверхности.
В смесительном шнеке семена перемешиваются с магнитным
порошком, поданным из аппарата дозировки шнеком 8 в камеру
шнека 19. При увлажненном способе очистки порошок подают в
шнек 18, а вода из бачка 2 по шлангу 3 попадает на вращающий-
ся диск 20 и, разделенная на мелкие капли действием центробеж-
ных сил, равномерно увлажняет семена. Перемешанные с порош-
ком семена по наклонному транспортеру 4 и лотку 5 ссыпаются на
электромагнитный барабан 9 и здесь разделяются на сорта. В за-
висимости от состояния поверхности семена поступают с ба-рабана
в один из приемников: I сорта в мешок или лоток 12, II сорта,
подлежащие повторной очистке, — в ящик 14, а III сорта, т. е. се-
мена сорняков, — в ящик 16.
Места возможного выхода пыли у машины снабжены растру-
бами, в которые засасывается запыленный воздух. Пыль осаждает-
ся в циклоне.
Качество очистки и производительность машины зависят от по-
дачи семян и магнитного порошка, а также от установки засло-
нок 10 и 13 приемника.
461
Для изменения подачи семян выбирают соответствующее отвер-
стие диска 22. Расход порошка регулируют изменением частоты
вращения шнека 8. Сила тока при работе машины должна состав-
лять 12 Л.
Картофелесортировки. Агротехническими требованиями к кар-
тофелесортировкам допускается в каждой фракции примесь клуб-
ней других фракций не более 10%, поврежденных клубней — не бо-
лее 1%.
В рабочий процесс по сортированию картофеля входят следую-
щие операции: удаление примесей, сортирование картофеля, отбор
поврежденных клубней, транспортирование и затаривание про-
дукта.
Отделение примесей, как правило, выполняется перед разделе-
нием клубней на фракции вначале рабочего процесса сорти-
ровки.
Выбор последовательности разделения клубней по размерам
определяется фракционным составом общей массы картофеля.
По опытным данным можно принять, что мелкая фракция со-
ставляет 10...15% всего состава, средняя (семенная)—35...40% и
крупная — около 50%- Исходя нз этого, наиболее целесообразной
последовательностью процесса сортирования будет следующая:
сортирующая поверхность сходом выделяет крупную фракцию, а
мелкая и средняя проходом идут на рабочий орган с малыми про-
светами, где мелкая фракция отделяется от средней. При такой
последовательности большая часть клубней — крупная фракция —
не будет загружать рабочий орган с малыми просветами, что по-
зволит увеличить производительность и снизить повреждения клуб-
ней крупной фракции, так как крупные клубни, проходя меньший
путь, будут выделяться в начале рабочего органа.
Однако при такой схеме в крупную фракцию будет попадать
много примесей, возрастут повреждения средней — семенной фрак-
ции.
Типичной для сортировок с роликовыми разделяющими поверх-
ностями будет схема, показанная на рисунке 307.
Сортируемая масса поступает в приемный ковш (бункер) 1, из
него загрузочный транспортер 2 подает ее на роликовую поверх-
ность. На загрузочном транспортере из клубней выделяется (про-
сеивается) почва и другие примеси. Цилиндрические ролики 3 до-
полнительно отделяют примеси.
Мелкие клубни проходом идут в просветы рабочей части 4,
средние — на участке 5 поступают соответственно на транспорте-
ры 8 и 7.
Клубни крупной фракции сходом идут на транспортер 6. Недо-
брокачественные клубни, камни и комки почвы удаляют вручную
на переборочных транспортерах (или столах). Отводящие транс-
портеры подают клубни в мешки, корзины, контейнеры и другие
специальные устройства, обеспечивающие затаривание и замену
тары без остановок машины.
462
Рис. 307. Схема рабочего процесса роликовой картофелесортировки:
1 — приемный ковш; 2 — загрузочный транспортер; 3 — цилиндрические ролики; 4 — рабо-
чая часть поверхности для выделения мелких клубней; 5 — рабочая часть поверхности для
выделения средних (семенных) клубней; 6, 7 н 8 - транспортеры.
В сортировках с другой рабочей поверхностью примеси допол-
нительно отделяют на качающихся решетах (ременные картофеле-
сортировки) и грохотах (барабанные, грохотные сортировки).
При поточном методе уборки картофеля на участках поля или
недалеко от него устанавливают сортировальные пункты. Карто-
фель подвозят от комбайна самосвалами и выгружают в приемный
бункер пункта.
Пропускную способность картофелесортировок рассчитывают
по допускаемой подаче д'о.к и ширине сортирующей поверхности В,
т. е.
<7о к.—Яо.кВ. (356)
463
В зависимости от типа поверхности значения q'o.n принимают
(кг/с на метр ширины) для:
ГрОХОТНЫХ
ременных
роликовых
1,9...2,5
3,0...4,5
3...5.2
Качество разделения на фракции зависит от установки регули-
руемых узлов картофелесортировки. В роликовых сортировках
точность разделения достигается регулировкой, расстояния между
роликами, в транспортерных — изменением границ между мелкой и
средней фракциями с помощью подвижного делителя 4 (рис. 276),
а между средней и крупной — щитком 5 или изменением калиб-
рующей щели между ремнями.
Установка на оптимальный режим проводится в конкретных
условиях с взятием и оценкой проб каждой фракции.
Очиститель початков. Машина предназначена для очистки по-
чатков от оберток, частей стеблей и других примесей.
На рисунке 308 приведена схема рабочего процесса очистителя
початков ОПП-5.
Подборщик 1 и транспортер 2 подают початки на очиститель-
ные вальцы 5. Лопасти прижимного устройства 6 прижимают по-
чатки к вальцам и отгибают обертку, тем самым обеспечивая за-
хват ее вальцами. С очистительных вальцов початки поступают на
сортировальный транспортер 7, где вручную отбирают больные,
недоразвитые и неочищенные початки.
Обертка и примеси вальцами сбрасываются на транспортер
оберток 10, а затем шнеком и эксгаустером выбрасываются на обо-
чину зернопункта (тока). Очищенные початки элеватором подают-
ся в кузов машины или ссыпаются в бурт. Зерно, вышелушенное
вальцами, просеивается сквозь решето транспортера оберток и его
нижней ветвью ссыпается в приемник 9.
Рис. 308. Схема рабочего процесса очистителя початков:
1 _ Подборщик; 2 — транспортер; 3 — скатная доска; 4 — элеватор обертки; 5 — очиститель-
ные вальцы; 6 — прижимное устройство; 7 — сортировальный транспортер; в —элеватор по-
чатков; 9 — приемник для вышелушенного зерна; 10 — транспортер обертки; 11 — шнек;
12 — эксгаустер.
464
Глава XV
КОНСЕРВИРОВАНИЕ И СУШКА РАСТИТЕЛЬНЫХ МАТЕРИАЛОВ
§ 1. Значение консервирования и сушки
Влажные растительные материалы (стебли, листья, початки ку-
курузы, зерно) при хранении портятся в результате самосогрева-
ния, плесневения, прорастания и размножения насекомых. Для
сохранения урожая применяют процессы, снижающие жизнедея-
тельность растений, зерна, микроорганизмов и насекомых до без-
опасного уровня.
Угнетение жизнедеятельности растительных материалов и мпк--
роорганизмов возможно за счет резкого ограничения их такими
жизненно важными факторами, как теплота, кислород и влага.
Ограничивая первые два фактора, сохраняют растительные мате-
риалы во влажном состоянии. Далее процессы, связанные с подго-
товкой влажных материалов к хранению, будем называть консер-
вированием, а с удалением влаги — сушкой.
Консервирование растительных материалов без удаления влаги
сокращает потери урожая. Так, уборку зерна можно проводить
раньше обычных сроков, за счет чего уменьшатся потери от осыпа-
ния. При консервировании сокращаются трудовые затраты в на-
пряженный уборочный период, разгружается зерноочистительно-
сушильное оборудование.
Скармливание во влажном состоянии, например зерна, эффек-
тивнее, чем в сухом. Измельчение влажных материалов происхо-
дит без пыли, меньше требуется энергии.
Сушка — распространенный процесс, в результате которого не
только обеспечивается стойкость при хранении, но часто повыша-
ются качественные показатели самого материала. Так, сушкой се-
мян повышают энергию прорастания и их всхожесть, уничтожают
вредителей (клещей, долгоносиков) зерна. После сушки облегча-
ются последующие технологические процессы. Например, снижает-
ся засоренность при очистке высушенного зерна, облегчается при-
готовление брикетов и гранул из высушенных растений.
Немаловажное значение имеет и уменьшение массы сельско-
хозяйственных продуктов после сушки. Так, например, при высу-
шивании масса молока снижается на 80%, овощей — на 70...75,
фруктов — на 50, зерна —до 10...15% и т. д.
§ 2. Способы консервирования
В практике сельскохозяйственного производства находят при-
менение следующие способы консервирования растительных мате-
риалов во влажном состоянии: герметическое хранение, хранение
в охлажденном состоянии и химическое консервирование.
Герметическое хранение ограничивает поступление к материа-
лам кислорода, в результате чего угнетается жизнедеятельность
30—424
465
живых организмов (зерна, микробов, насекомых). Такой способ
консервирования требует сложного технологического оборудования
дорогостоящих емкостей.
Консервирование зерна охлаждением применяют при времен-
ном (до 15 суток) и длительном (до года) хранении влажного зер-
на, а также при аэрации сухого зерна в хранилищах с повышен-
ной влажностью воздуха и высушенного зерна после сушки.
Для охлаждения сквозь слой материала продувают наружный
воздух, без изменения его параметров или предварительно охлаж-
дая его до 7...10 °C в рефрижераторах. Искусственное охлаждение
наружным или охлажденным воздухом названо активным вентили-
рованием. Активным вентилированием пользуются и для небольшо-
го подсушивания материала обезвоженным (селикагелем, хлори-
стым кальцием и др.) или подогретым воздухом.
Химическое консервирование основано на смешивании массы
(зерна, комбикорма, зеленых кормов, травяной муки) с химически-
ми веществами (консервантами), угнетающими микрофлору и жиз-
неспособность в материале. В качестве консервантов используют
жидкие органические кислоты (пропионовую, муравьиную, уксус-
ную). Химическое консервирование сводится к процессу подачи в
материал точной дозы, равномерно распределенной по объему мас-
сы консерванта.
Консервирование кислотами требует меньше капиталовложений,
чем при хранении в герметических емкостях или в охлажденном
состоянии. Существенное преимущество химического способа —
простота, возможность хранения материалов с высокой влаж-
ностью (до 50%). Однако значительные расходы кислоты
(1...1,6%) увеличивают текущие затраты, и, кроме того, такой спо-
соб не применим для консервирования семенного и продовольст-
венного зерна.
§ 3. Способы сушки
Сушка влажных материалов базируется на двух основных прин-
ципах: удаление влаги из материала в виде жидкости и путем пре-
вращения жидкости в пар.
Первый принцип обезвоживания получил воплощение в механи-
ческом (фильтрация, прессование, центрифугирование) и сорбци-
онном (смешивание с влагопоглощающими веществами) способах
сушки.
Второй принцип обезвоживания (тепловая сушка) связан с
подводом потока теплоты к материалу для испарения влаги. В за-
висимости от способа передачи теплоты различают: конвективный,
кондуктпвный (контактный), радиационный, электрический (тока-
ми высокой частоты), молекулярный (сублимацией) способы теп-
ловой сушки.
Механический способ обезвоживания применяется в том слу-
чае, когда в веществе есть свободная влага. Удаление ее возможно
механическим действием (отжатием, фильтрпрессованием) или
466
действием на нее сил тяжести и центробежной силы (при центри-
фугировании).
Фильтрпрессование широко используют при выделении соков
из плодов и ягод, а центрифугирование — при сушке древесины,
зерна (намоченного дождем, после влажного обеззараживания
или сортирования по удельному весу в жидкости) и других мате-
риалов.
При удалении влаги механическим способом нужно преодо-
леть лишь гидравлическое сопротивление твердого скелета тела,
не расходуя при этом энергию на теплоту парообразования, как
при тепловой сушке. Поэтому механическое обезвоживание тре-
бует меньших затрат энергии, нежели тепловая сушка, следова-
тельно, его целесообразно применять только при удалении свобод-
ной влаги.
Сорбционный способ применяют главным образом при сушке
тех материалов, которые не переносят сушки или теряют ценные
свойства при нагревании. К таким материалам можно отнести се-
мена фасоли, сои, гороха, вики, чечевицы и др. Плоды таких куль-
тур начинают трескаться уже при нагреве до 27 °C. При сорбцион-
ной сушке влажный материал смешивают с влагопоглотителем
(силикагелем, хлористым кальцием, осиновыми плашками, опил-
ками и др.) и выдерживают в течение определенного времени, при
этом влажность всей зерновой массы выравнивается. Влагопогло-
титель выбирают с таким расчетом, чтобы его впоследствии мож-
но было легко отделить от высушенного материала. Этот же прин-
цип лежит в основе сушки влажного 'зерна смешиванием с более
сухим той же или другой культуры. Так, смешивают для сушки
одну часть массы семян бобовых с двумя-тремя частями массы ов-
са или ячменя.
При сорбционной сушке не требуется расхода теплоты на на-
грев и сохраняются качественные показатели зерна, что особенно
важно для семенного материала. Однако процесс сушки смешива-
нием протекает очень медленно (1...2 недели) и громоздок, так как
при этом требуются дополнительные складские помещения, выде-
ление и регенерация (высушивание) влагопоглотителя.
Конвективный способ сушки получил наиболее широкое рас-
пространение в сельскохозяйственном производстве при сушке зер-
на и растений. При этом способе теплота, необходимая для нагре-
ва материала и испарения из него влаги, передается ему конвек-
цией от движущегося газообразного теплоносителя (нагретого воз-
духа или его смеси с топочными газами), называемого агентом
сушки. Агент сушки не только передает теплоту материалу, но так-
же поглощает и уносит испаренную из него влагу. В качестве аген-
та сушки чаще используется не нагретый воздух, а его смесь с то-
почными газами, вследствие чего значительно повышается к.п.д.
сушильной установки.
Кондуктивный, или контактный, способ — это способ сушки, при
котором влажный материал (объект сушки) находится в непосред-
30
467
ственном соприкосновении (контакте) с нагретой поверхностью и
получает теплоту непосредственно от нее путем кондукции (тепло-
лроводности). Сушить влажные материалы кондуктивным спосо-
бом можно как при нормальном атмосферном давлении воздуха,
так и в вакууме. Такой способ сушки малоэффективен, так как
связан с большим расходом топлива, дает низкую скорость и не
обеспечивает необходимого качества сушки из-за неравномерного
.нагрева слоев зерновой массы, расположенных на разном уровне
от нагретой поверхности. Применение вакуума позволяет вести
кондуктивную сушку при более низких температурах и дает воз-
можность увеличить ее скорость. Однако сложность оборудования
и значительный расход электроэнергии ограничивают распростра-
нение этого способа.
К кондуктивному способу относят и сушку в жидких средах,
при которой теплота, необходимая для нагрева материала и пре-
вращения влаги в пар, берется от горячей жидкости, смачивающей
материал. В качестве жидкой среды используют химическую оли-
фу, петролатум, расплавленную серу.
При сушке влажных материалов в жидких средах вследствие
замены диффузионного переноса влаги молярным движением па-
ра, обусловленным градиентом давления, скорость сушки возра-
стает в 5... 10 раз по сравнению с конвективной, а поток теплоты на
1 кг испаренной влаги требуется несколько выше. Однако этот
способ используется главным образом для сушки древесины.
Радиационный способ сушки характеризуется тем, что поток
теплоты к влажному материалу подводится в виде лучистой энер-
гии. Радиационную сушку можно подразделить на естественную
(солнечными лучами) и искусственную (инфракрасными лучами).
Благоприятные условия для естественной сушки — ясная сол-
нечная погода и ветер. Сушку организуют вблизи от складских по-
мещений на уплотненных или с искусственным покрытием площад-
ках. Зерно рассыпают слоем 10... 15 см, на поверхности слоя делают
бороздки в направлении ветра.
Сушка инфракрасными лучами, излучаемыми генераторами ин-
фракрасного излучения (специальными электролампами, керами-
ческими и металлическими панелями, нагреваемыми электротоком
или газом), характеризуется высоким напряжением теплового по-
тока, возникающим на поверхности облучаемого материала
(в 30...70 раз большими, чем при конвективной сушке). Поэтому
ее применение ограничивается свойствами материалов, являющи-
мися объектами сушки. Наряду с этим сушилки, работающие по
такому принципу, имеют низкий к. п. д. и значительный расход
электрической энергии (1,5 кВт-ч на 1 кг испаренной влаги).
Сублимация — молекулярная сушка проводится в условиях глу-
бокого вакуума. Процесс протекает так, что вначале теплота, не-
обходимая для испарения влаги, отнимается от высушиваемого ма-
териала, вследствие чего его температура значительно снижается,
а оставшаяся в нем влага самозамораживается и выходит на по-
468
верхность в виде кристалликов льда; в дальнейшем, при подводе
теплоты извне, происходит испарение льда — непосредственное
превращение его в водяные пары, минуя жидкую фазу. Молекуляр-
ная структура материала при этом полностью сохраняется.
Сушку сублимацией применяют в тех случаях, когда требуется
сохранить первоначальные свойства продукта (объем, цвет, вкус,
запах). Резкое снижение гигроскопичности обеспечивает возмож-
ность длительного хранения, а почти полное сохранение объема
(усадка всего лишь 3...4%) и высокая пористость высушенного ма-
териала обуславливают восстановление его первоначальных
свойств при оводнении. Сублимационный способ находит примене-
ние при сушке фруктов, овощей, мяса, различных биологических
препаратов. Производительность сублимационных сушилок низкая,
сложность оборудования и высокая стоимость сушки сдерживают
распространение этого способа.
Электрический способ сушки, или сушка токами высокой часто-
ты (ТВЧ), заключается в следующем. Материал-диэлектрик поме-
щают в поле ТВЧ между двумя пластинами (обкладками конден-
сатора); его молекулы поляризуются и приводятся в колебатель-
ное движение, сопровождающееся трением частиц и нагревом ма-
териала; выделившаяся в результате нагрева и испарения влага
удаляется вместе с поглотившим ее воздухом. Несмотря на ряд
преимуществ (быстрый и равномерный нагрев материала, высокая
интенсивность сушки), сушка в поле ТВЧ не находит широкого
применения при сушке сельскохозяйственных материалов вследст-
вие большого расхода электрической энергии (свыше 3 кВт-ч на
1 кг испаренной влаги).
Применение комбинированных способов позволяет значительно
увеличить скорость сушки, сократить расход энергии, добиться бо-
лее гибкого управления процессом и в результате этого не только
сохранить все ценные качества высушиваемого материала, но за-
частую и улучшить их. Так, например, быстрый нагрев в поле ТВЧ
с испарением влаги потоком нагретого воздуха позволяет более
чем в 2 раза сократить расход электроэнергии (по сравнению с
высокочастотным), в 1,5...2 раза повысить скорость сушки (по
сравнению с конвективным).
§ 4. Свойства зерна и растений как объектов сушки
Влажность объектов. Материалы растительного происхождения
представляют собой капиллярно-пористые коллоидные среды, в ко-
торых влага покрывает (смачивает) поверхность материала, запол-
няет капилляры и проникает внутрь вещества.
Содержание влаги (воды и водяных паров) в материале оце-
нивают отношением ее массы тв к массе mi влажного материала
(относительная влажность* w=100 mB/mi, %) или к массе тс аб-
* Термины относительная влажность и влажность применяются как сино-
нимы.— Прим, автора.
469
солютно сухого материала (абсолютная влажность и)а = Ю0
%, влагосодержание — u=mB/mc).
В зависимости от влажности зерно злаковых и бобовых куль-
тур подразделяется на сухое 14), средней сухости (14<то^
=5^ 16), влажное (16<ю=С18) и сырое (ьа>18%). Для зерна мас-
личных культур указанные состояния соответствуют влажности на
3% ниже, чем злаковых и бобовых.
Зерно и другие растительные материалы в сухом состоянии на-
ходятся в стадии покоя, или анабиоза. Жизненные процессы в них
протекают замедленно. Такие материалы можно хранить в течение
длительного периода.
Недостаточно высушенная масса самосогревается, в ней усили-
ваются бактериальные процессы, развиваются микроорганизмы,
что снижает всхожесть семян и продовольственные качества зерна,
разрушает питательные вещества и витамины трав, используемых
на корм животным.
Продолжительность безопасного хранения зависит от влажно-
сти и температуры материала.
Как видно из зависимости, изображенной графически на рисун-
ке 309, подсушивание или охлаждение зерна существенно продле-
вают его сохранность.
В процессе взаимодействия с окружающей средой капиллярно-
пористые коллоидные материалы поглощают или отдают влагу.
Материал может поглощать водяные пары из окружающих газо-
вых сред или воздуха до наступления равновесного состояния, при
котором прекращается внешний обмен влагой между материалом
и газовой смесью. Влажность материала, соответствующая состоя-
нию равновесия, названа равновесной wP.
Рис. 309. Изменение сроков те без- .
опасного хранения зерна пшеницы и
риса в зависимости от его влажно-
сти w и температуры 6.
Рис. 310. Зависимость между отно-
сительной <ро влажностью воздуха и
равновесной шр влажностью зерна
злаковых (кривая /), масличных
культур (кривая 2) и трав (кри-
вая 3).
470
Равновесная влажность (рис. 310)
изменяется в зависимости от относи-
тельной влажности <ро окружающей
газовой среды (ф0— отношение мас-
сы содержащихся в воздухе водяных
паров к их массе при полном насыще-
нии) и его температуры. Зерна зла-
ков (кривая 1) с высоким содержани-
ем углеводов имеют большую равно-
весную влажность, чем масличных
культур (кривая 2), содержащих жи-
ры, не способные поглощать и удер-
живать влагу. Зная влажность объек-
Рис. 311. Кривые сушки расти-
тельных материалов.
та и относительную влажность окру-
жающих газов, с помощью кривых равновесной влажности можно
определить, будет зерно увлажняться или подсыхать. Так, напри-
мер, при относительной влажности 80% семена подсолнечника,
льна, конопли (кривая 2), имеющие влажность 12% (более 9),
будут подсыхать, а с влажностью 7% —увлажняться до наступле-
ния равновесного состояния, т. е. влажности 9%. Воздухом с от-
носительной влажностью фО>80% (при /0=25°С) невозможно
снизить влажность травы (кривая 3) до значений, допускающих
длительное ее хранение (w = 17...20%), так как для этого нужен
воздух с фо^80%.
Изменение влажности материала в зависимости от времени
сушки. Сушка — процесс, параметры которого изменяются во вре-
мени. Для оценки характера протекания процесса строят графики
(рис. 311) кривых: w=f(r), выражающей зависимость между вла-
госодержанием материала и
du!dx—f(%), характеризующей
6=f(-r), отражающей изменение
и длительностью процесса т;
скорость сушки материала, и
температуры 6 материала в про-
цессе сушки.
Установлено, что для капиллярно-пористых коллоидных мате-
риалов в процессе сушки наблюдаются три характерных периода.
В первый период ОА материал нагревается (период прогрева),
с его поверхности испаряется влага и диффундирует в окружаю-
щую среду. Температура материала быстро повышается до тем-
пературы мокрого термометра (температуры испаряющейся жид-
кости), а скорость сушки достигает максимального значения. При
сушке сравнительно тонких материалов период прогрева мал, по-
этому им в этих случаях пренебрегают.
Во второй период АВ (период постоянной скорости сушки) из-
менение влагосодержания и (или влажности w) материала проис-
ходит по прямой. Скорость сушки duldr — производная от влагосо-
держания и, определяемая в каждой точке как тангенс угла
наклона касательной к кривой сушки u=f(x), имеет макси-
мальное значение и в течение всего второго периода остается
постоянной. В этот период влага испаряется с поверхности мате-
471
риала аналогично испарению воды с открытой (свободной) поверх-
ности, т. е. вся теплота расходуется на испарение влаги, а сам ма-
териал не нагревается. Температура его поверхности в течение пе-
риода АВ остается постоянной, примерно равной температуре мок-
рого термометра. Испарение влаги с поверхности материала вызы-
вает миграцию влаги от центра к поверхности, интенсивность кото-
рой в з(тот период оказывается достаточной для того, чтобы под-
держивать влажной поверхность. Непрерывная миграция влаги из
внутренних слоев к поверхности материала приводит к постепен-
ному уменьшению влагосодержания его внутренних слоев, а сле-
довательно, и к понижению градиента концентрации влаги, что, в
свою очередь, вызывает уменьшение миграции влаги к поверхности
и понижению ее влагосодержания до гигроскопического.
В третий период ВС (период падающей скорости сушки) зона
испарения влаги распространяется в глубь материала, в результа-
те чего скорость сушки уменьшается. При непрерывном потоке
теплоты, поступающей к материалу от теплоносителя, уменьшение
интенсивности испарения влаги с поверхности и образование зоны
испарения вызывают повышение температуры нагрева материала и
уменьшение скорости сушки. В конце третьего периода сушки тем-
пература материала выравнивается с температурой окружающей
среды, а кривые влагосодержания и скорости сушки асимптотически
приближаются: первая к равновесному влагосодержанию иР, вто-
рая к нулю. При равновесном влагосодержании сушка прекращает-
ся (скорость сушки равна нулю).
Термоустойчивость растительных материалов. Сушка должна
не только сохранить, но и в отдельных случаях улучшить исход-
ные качества высушиваемых материалов. Определяющим парамет-
ром, от которого зависит сохранность качественных показателей,
является температура нагрева объектов сушки.
При нагреве растительных материалов сверх допускаемых тем-
ператур происходит распад веществ (денатурация белков), входя-
щих в состав клеток зерна, отмирание протоплазмы и гибель зерна
как живого организма. Высокотемпературный и продолжительный
нагрев стеблей и листьев растений увеличивает потери питатель-
ных веществ и каротина.
Максимально допускаемая температура зависит от исходной
влажности объектов и продолжительности их пребывания в нагре-
том состоянии (рис. 312). Так, на рисунке 312 изображены кривые
изменения предельной температуры нагрева продовольственного и
фуражного зерна злаковых культур 6Д, в зависимости от исходной
влажности wi и продолжительности нагрева т.
Повышение предельной температуры при снижении влажности
делает целесообразным введение ступенчатых режимов сушки —
повышение температуры нагрева семян соответственно снижению
их влажности. После каждого пропуска рекомендуются охлажде-
ние и отлежка семян, во время которой влага из внутренних частей
семян перемещается к их поверхности. Однако при многократных
472
пропусках через зерносушил-
ку увеличиваются поврежде-
ния семян транспортирующи-
ми устройствами и механиз-
мами.
Зерно крупяных и бобовых
культур более чувствительно
к температурному режиму,
чем зерно злаковых. Темпера-
тура нагрева зерна крупяных
должна быть на 4...9°, а бобо-
вых на 8...10 °C ниже значе-
ний, приведенных на рисун-
ке 312.
Наибольшей термоустойчи-
востью обладают семена мас-
личных культур. Воздушная
прослойка между оболочкой и
ядром зерна, а также боль-
Рис. 312. Предельные температуры нагре-
ва продовольственного зерна злаковых
культур.
шое содержание в ядре растительных жиров допускают более
высокие температуры нагрева, чем пшеница.
Для семенного зерна снижают температуры нагрева на 5...8 °C
в сравнении с предельными (рис. 312). В зависимости от влажно-
сти выбирают одно- двух- или трехступенчатые режимы сушки.
Нагрев зерна, зараженного зерновыми вредителями, проводят
при предельной температуре с длительностью 20...30 мин. При этом
особое внимание обращают на равномерность нагрева, так как в
зонах недостаточного нагрева зерна вредители могут сохраниться.
§ 5. Устройства для обработки материала кислотами
При химическом консервировании требуется равномерное рас-
пределение кислоты во всем объеме обрабатываемого материала.
Основные элементы устройств для обработки зерна кислота-
ми — дозаторы жидкости и смесители.
Дозаторы подают кислоту заданной порции к материалу и
представляют собой емкости 1 (рис. 313) с фильтром 2, насоса-
ми 3, ресиверами 4 и расходомерами 5.
Смесители тщательно перемешивают консервант с материалом.
Применяют шнековые, центробежные и камерные смесители с рас-
пылом кислоты форсунками.
Шнековые смесители перемешивают консервант с мате-
риалом в течение непродолжительного времени, из-за чего не до-
стигается нужной равномерности распределения кислоты по объ-
ему материала.
Центробежные смесители (рис. 313,а) разряжают
материал, поступающий на вращающийся диск 8, и он, падая, об-
рабатывается консервантом, диспергированным на диске 9. Допол-
473
|W 7
а 5
Рис. 313. Схемы смесителей:
а — центробежного; б — камерного; 1 — емкости для кислоты; 2 — фильтры; з — насосы; 4 —-
ресиверы; 5 — расходомеры; 6 — смесительная камера; 7 — воронка для поступающего мате-
риала; 8 и 9— диски; 10 н 15— шнеки; 11 — выгрузное устройство; 12— обрабатываемый
объект; 13 — датчик; 14 — форсунка; 16 — насос для подачи воздуха.
нительное перемешивание выполняет и разгрузочный шнек 10.
Полнота обработки зерна центробежными смесителями составляет
90%.
Как в шнековых, так и в центробежных смесителях испаряющая-
ся часть консерванта выходит в зону обслуживания установок,
из-за чего повышается стоимость консервирования и ухудшаются
санитарные условия для обслуживающего персонала.
Камерные смесители (рис. 313,6) оборудованы каме-
рой а, где материал перемешивается с кислотой, впрыскиваемой
форсункой 14, и отлеживается в течение заданного времени (до
30 мин). Предельный уровень зерна в камере а контролируется
датчиком 13. При подаче датчиком сигнала срабатывает механизм
выгрузного устройства 11 и часть обработанного зерна поступает
в камеру б, а оттуда — к шнеку 10. В этот момент зерно в камере
а опускается без перемешивания, благодаря чему обеспечивается
одинаковая продолжительность отлежки зерна.
Увеличение продолжительности пребывания материала в каме-
ре повышает диффузию консерванта во внутренние зоны обраба-
тываемых частиц, что сокращает расход кислоты и улучшает усло-
вия труда.
§ 6. Разновидности и принцип работы сушилок и установок
активного вентилирования
Наибольшее распространение в конструкциях сушилок и
устройств активного вентилирования получил конвективный способ
теплопередачи.
474
Одна из наиболее важных технологических характеристик
устройств конвективного действия — состояние слоя материала во
время сушки или охлаждения. Слой материала при воздействии
на него потока теплоносителя или воздуха может находиться: в не-
подвижном, в подвижном, «кипящем» (псевдосжиженном) и во
взвешенном состояниях.
Вентилирование и сушка в неподвижном состоянии характеризу-
зуются тем, что скорость материала vM равна нулю, а скорость по-
тока воздуха, или теплоносителя vT, значительно меньше скорости
витания частиц материала wKp (цт<С^кр). Такие устройства рабо-
тают периодически и просты в конструкции.‘Вследствие неравно-
мерного нагрева слоя материала, низкого к.п.д. и непригодности
к работе по принципу потока эти установки не получили широкого
распространения для сушки. По такому принципу работают стел-
лажные, лотковые, жалюзийные, ленточные сушилки и устройства
активного вентилирования материала подогретым или охлажден-
ным воздухом.
Стеллажные, лотковые и жалюзийные сушилки
(рис. 314, а, б, в) характеризуются тем, что влажный материал
помещают на сетках (стеллажах), на перфорированных металли-
ческих лотках (контейнерах), расположенных горизонтально, или
на наклонных полках (жалюзи). Сушильный агент пронизывает
слой материала, нагревая его, поглощает влагу и удаляется нару-
жу через вытяжные трубы.
Ленточные (конвейерные) сушилки (рис. 314,г)
отличаются тем, что влажный материал располагается слоем на
-бесконечной перфорированной ленте (сетке), которая периодически
Ри-с. 314. Схёмы сушилок и установок активного вентилирования:
а — стеллажной; б — лотковой; е — жалюзийной; г — ленточной; д — напольной установки
активного вентилирования; е — бункера с вертикальным потоком воздуха; ж — бункера с
радиальной подачей воздуха.
475
или непрерывно приводится в движение. Ленточные устройства на-
ходят применение при сушке льновороха. Сушильный агент, про-
ходя сквозь сетку в поперечном направлении, пронизывает слой
зерна и удаляется наружу. Высушенный материал выносится лен-
той за пределы сушильной камеры.
Зерносушилки с неподвижным слоем имеют следующие основ-
ные параметры: температура теплоносителя— не выше 35...40°,
снижение влажности — от 0,5 до 1,5% в 1 ч, расход теплоты — от
(8...20) -103 кДж на 1 кг испаренной влаги.
Напольные установки и вентилируемые б у н к е-
р ы (рис. 314, д, е, ж) предназначены для консервирования мате-
риалов охлаждением и подсушиванием. Напольные установки на-
ходят широкое применение при активном вентилировании сена,
льновороха, початков кукурузы, зерна, а бункеры — зерна, комби-
кормов, травяной муки, гранул.
В напольных установках и бункерах с вертикальным воздушным
потоком воздух подается вентилятором через перфорированное дно
или через системы воздухораспределительных коробов. Так как
расход энергии на привод вентилятора с увеличением толщины
слоя резко возрастает, то высота бункера ограничивается 2,5...3 м.
Находят применение вентилируемые бункеры с радиальной
подачей воздуха снизу (рис. 314, ж) или сверху. При подаче воз-
духа снизу в верхней части сетчатого центрального воздухопрово-
да устанавливают подвижный клапан — поршень, позволяющий
вести сушку при неполной загрузке бункера. Вследствие меньшей
толщины продуваемого слоя массы в бункерах с радиальной пода-
чей воздуха расход энергии на вентилирование и длительность
процесса уменьшаются.
Сушка в подвижном слое характеризуется тем, что скорость ма-
териала больше нуля (пм>0), а скорость теплоносителя меньше
скорости витания высушиваемых частиц (ит<пкр).
Наибольшее распространение получили шахтные и барабанные
установки сушки зерна, для небольших хозяйств применяют виб-
рационные сушилки.
Шахтные сушилки (рис. 315,а) сушат зерно, движущееся
слоем под действием силы тяжести сверху вниз между коробами.
Короба расположены в шахматном порядке. Один из торцов каж-
дого короба открыт, другой закрыт. Теплоноситель поступает из
смесительной камеры топки 1 по трубе 2 через диффузоры 3 и 4
в распределительные камеры 12 и 14 (на рис. 315, а приведена схе-
ма сушки с промежуточным охлаждением зерна), а из них в верх-
нюю 5 и нижнюю 7 сушильные камеры. Воздух для охлаждения
зерна засасывается в охладительные камеры 13 и 19 и вместе с
отработанным теплоносителем выбрасывается вентиляторами 18
наружу. Высушенное и охлажденное зерно удаляется из зерносу-
шилки разгрузочными устройствами.
Зерносушилки шахтного типа характеризуются следующими ос-
новными параметрами: температура теплоносителя — 70...150°C,
476
Сырэе зерно
26 “
ж Сухое зерно
, Подача
топлива
27
<= Наружный Воздух
<=== Отработанный Воздух
Топливо
Агент сушки
<=“=»= Отработанный агент сушки
<=.= Зерно
Рис. 315. Схемы сушилок:
а — шахтной: б — барабанной; 1 — топки: 2, 9 и 10 — трубопроводы: 3 и 4 —
диффузоры; 5 и 7 — верхняя и нижняя сушильные камеры; 6 и 8 — верхняя
и нижняя охладительные камеры; 11 и 15— диффузоры; 12, 13, 14 и 19— рас-
пределительные камеры; 16 и 17 — дроссель-клапаны; 18 и 25 — вентиляторы;
20 — нория; 21 — загрузочная камера; 22— сушильный барабан; 23— разгру-
зочная камера; 24 — загрузочный элеватор; 26 и 27 — наружный и внутрен-
ний охладительные барабаны.
снижение влажности за один пропуск — 6...12%, съем влаги с 1 м3
объема шахты — от 30 до 45 кг/ч.
Барабанные сушилки (рис. 315,6) сушат зерно в пу-
стотелых стальных цилиндрах 22 (барабанах), в средней части по
длине которых размещены лопасти, а по краям винтовые дорож-
ки. Материал (зерно) и теплоноситель поступают в барабан из за-
грузочной камеры 21. Медленно вращающийся, несколько накло-
ненный барабан лопастями захватывает, поднимает и сбрасывает
поступающий в него материал. Падая, частицы высушиваемой мас-
сы, пронизываемые потоком теплоносителя, перемещаются вдоль
барабана в сторону его наклона. Высушенное зерно поступает в
разгрузочную камеру 23, а затем в охладительную колонку; просы-
паясь между внутренним 27 и наружным 26 барабанами, оно ох-
лаждается воздухом, засасываемым вентилятором 25.
Такие сушилки применяют для сушки зерна, растений, брике-
тов и др.
Барабанные сушилки имеют следующие параметры, характери-
зующие процесс: температура теплоносителя—15О...25О°С, сниже-
ние влажности за один пропуск — 5...8%, расход теплоты — до
€,3-103 кДж на 1 кг испаренной влаги, съем влаги с 1 м3 объема
барабана — от 30 до 40 кг/ч.
Вибрационные зерносушилки состоят из ряда решет
(сит, перфорированных лотков), расположенных одно над другим
и приводимых в колебательное движение, способствующее пере-
мещению и перемешиванию зерна. Движущееся по лоткам зерно
продувается потоком теплоносителя, подаваемого снизу.
Сушка в «кипящем» слое протекает более равномерно, чем в
подвижном слое. Влажный материал в таких сушилках подают на
решето и продувают теплоносителем. Когда сила тяжести частиц
материала уравновесится их подъемной силой, давление частиц
друг на друга исчезнет и слой перейдет в псевдосжиженное со-
стояние, напоминающее по своим свойствам маловязкую жидкость.
В псевдосжиженном («кипящем») слое происходит перемешивание
материала; подсохшие более легкие частицы «всплывают» на по-
верхность и выходят из сушилки.
При сушке в «кипящем» слое создаются хорошие условия для
тепло- и массообмена, благодаря чему процесс сушки значительно
ускоряется. Так, чтобы снизить влажность зерна пшеницы на 6%
в сушилке с «кипящим» слоем при температуре теплоносителя
НО °C, требуется — 9... 10 мин. При этом расход теплоты состав-
ляет 4,6-103 кДж на 1 кг влаги, теплоносителя — 50,3 кг на 1 кг
влаги.
Сушка во взвешенном состоянии характеризуется тем, что ско-
рость теплоносителя значительно больше, чем скорость витания
частиц материала (от^>оКр). В зависимости от размера и плотно-
сти частиц от поддерживают в пределах от 10 до 30 м/с.
В сельскохозяйственном производстве применяют пневматиче-
ские трубовые и барабанные сушилки.
478
Рис. 316. Схемы сушилок:
а — пневмотрубовой; б — пневмобарабанной; 1 — топка; 2 — сушильные трубы; 3 — цикло-
ны; 4 — вентиляторы; 5 — сушильный барабан; 6 — разравнивающий битер; 7 — транспортер
массы.
Пневмотрубовые сушилки (рис. 316,а) состоят и»
топки 1 и сушильного тракта 2 (труб различного сечения). Сушка
материала происходит в трубах при его движении в потоке тепло-
носителя, создаваемого вентилятором 4. Отделяется материал от
теплоносителя в циклоне 3.
В таких сушилках теплоноситель с высокой температурой (до-
10000) кратковременно воздействует на материал, поэтому нет пор-
чи белка и каротина, что особенно важно при сушке измельченных
бобовых и злаковых трав, содержащих большое количество протеи-
на, минеральных веществ и витаминов.
Пневмобарабанные' сушилки (рис. 316,6) применя-
ют для сушки травы при изготовлении из нее муки.
Сушка массы происходит в концентрических цилиндрах (бара-
бане), вращающихся как одно целое. В барабан поступает агент
сушки из топки 1 и измельченная трава, подаваемая транспортером
7 с разравнивающим битером 6. Захватываемая теплоносителем
масса проходит последовательно внутренний, средний и наружный
цилиндры, где перемешивается лопастями и постепенно высыхает.
Кроме сушки трав для приготовления муки, пневмобарабанные
сушилки используют для сушки зерна, жома, ботвы сахарной свек-
лы, водорослей, хвои.
Пневмобарабанные сушилки производят высококачественную-
витаминную травяную муку. Для сохранения питательной ценно-
сти этой муки длительное время ее прессуют в брикеты или грану-
лы. Потери каротина в гранулированной муке в 2 раза меньше, чем
в обычной; благодаря увеличению плотности в 2...3 раза гранули-
рованная мука занимает меньший объем в складах и становится
более транспортабельной при использовании.
§ 7. Конструктивные элементы сушилок конвективного действия
Все узлы любой сушилки можно подразделить на основные и
вспомогательные. К основным узлам относят: топку, в которой
происходит сгорание топлива и образование агента сушки; сушиль-
47»
б
Рис. 317. Схемы топок:
а — твердого топлива; б — жидкого
топлива; в — газообразного топли-
ва; 1 — колосниковая решетка; 2 и
4 — воздуховоды; 3 — дымовая тру-
ба; 5 — насос; 6 — вентилятор; 7 —
форсунка; 8 — свеча; 9 — клапаны;
10 и 11 — внутренний и наружный
цилиндры; 12 — сопло; 13 — регули-
ровочная шайба; 14 — диффузор;
15 — заслонка; 16 — горелка.
ную камеру, в которой протекает сушка (тепло-влагообмен между
агентом сушки и материалом), и охладительную камеру; к вспо-
могательным — приводные и выпускные механизмы, нории, диф-
фузоры, трубопроводы, вентиляторы. Рассмотрим конструктивные
элементы лишь основных узлов, так как вспомогательные или
рассмотрены в других разделах, или же являются предметом изу-
чения смежных дисциплин.
Топки. Различают топки: прямого действия, в которых воздух
нагревается в результате непосредственного смешивания с топоч-
ными газами, и непрямого действия, с нагревом воздуха в калори-
фере. Так как первые примерно в 2 раза экономичнее вторых, то
они и получили преимущественное распространение. Топки суши-
лок оборудуют циклонами, дожигательными насадками и други-
ми устройствами для того, чтобы обеспечить чистоту газообраз-
ных продуктов сгорания, отсутствие дыма, копоти, золы, несгорев-
ших частиц топлива, так как попадание их в сушильную камеру
приводит к загрязнению материала.
Топка для сжигания твердого топлива состоит из
четырех камер (рис. 317,а): топочной Т, осадочной О, смеситель-
ной С и камеры догорания D. Топливо через отверстие b подают
на колосниковую решетку 1. Воздух, необходимый для сжигания
топлива, поступает через поддувальное отверстие а. Продукты сго-
рания, имеющие в своем составе и горючие летучие газы, подни-
маются, где к ним присоединяется поступающий по воздуховоду 2
предварительно подогретый добавочный воздух, необходимый для
сжигания горючих летучих газов. В осадочной камере О происхо-
дит резкое изменение направления и снижение скорости движе-
ния продуктов сгорания, в результате чего несгоревшие твердые
частицы топлива осаждаются, а топочные газы поступают в сме-
сительную камеру С, где и смешиваются с атмосферным воздухом,
480
входящим в камеру через воздуховод 4. Теплоноситель через от-
верстие с направляется в сушильную камеру. Температура тепло-
носителя зависит от количества атмосферного воздуха, подаваемо-
го в смесительную камеру. При растопке или прекращении сушки
дымовые газы выводят в дымовую трубу 3.
Топка для сжигания жидкого топлива (рис. 317,6)
состоит из двух цилиндров: наружного 11 с теплоизоляцией и
внутреннего 10 из жароупорной стали. Во внутреннем цилиндре
установлена форсунка 7, в которую одновременно подаются жидкое
топливо насосом 5 и воздух, нагнетаемый вентилятором 6. При
выходе из сопла форсунки распыленное топливо подхватывается
струями воздуха, смешивается с ним и зажигается от свечей 8.
Продукты сгорания, выходя из внутреннего цилиндра, перемеши-
ваются с поступающим туда наружным воздухом. Образовавший-
ся теплоноситель с помощью вентиляторов направляется в сушиль-
ные камеры. В качестве жидкого топлива используют тракторный
керосин, соляровое масло и дизельное топливо.
Топка для газообразного топлива (рис. 317, в)
устроена следующим образом. Газ поступает к соплу 12, куда за-
сасывается и первичный воздух. Смесь газа с воздухом проходит
через диффузор 14 и подается в горелку 16, снабженную двумя ря-
дами отверстий. Выходя через отверстия горелки в топку, смесь
сгорает. Вторичный воздух, необходимый для сгорания смеси, по-
ступает в топку через отверстие, регулируемое заслонкой 15. Ко-
личество газа, поступающего в горелку, регулируют вентилем, а
количество первичного воздуха — поворотом шайбы 13.
Для предохранения топок от разрушения на случай взрыва
мелкораспыленного жидкого или газообразного топлива в их стен-
ках устраивают противовзрывные люки, закрываемые клапана-
ми 9. Для предупреждения взрыва устанавливают фотореле, кото-
рое выключает подачу топлива, если факел погаснет.
Топки жидкого и газообразного топлива снижают затраты тру-
да, улучшают санитарно-гигиенические условия в топочном поме-
щении; уменьшают загрязнение зерна, расширяют возможность
автоматизировать процесс поддержания постоянной температуры
агента сушки путем регулирования количества сжигаемого топ-
лива.
Сушильные и охладительные камеры. Камеры сушки и охлаж-
дения материала шахтной сушилки имеют вид вертикальной шах-
ты прямоугольного сечения, пронизанной горизонтальными ряда-
ми коробов. Короб устроен в виде желоба, который установлен
открытой частью вниз, и своими торцами упирается в стенки шах-
ты (рис. 318). Против одного из торцов каждого короба в стенке
шахты сделано окно, с другого торца короб закрыт.
Короба разделяются на подводящие и отводящие-. Подводящие
короба имеют окна со стороны подачи теплоносителя (или возду-
ха), отводящие — с противоположной стороны. Верхняя часть шах-
ты, в которую подается теплоноситель, — сушильная, а нижняя, в
31—424
481
которую поступает воздух, служит для охлаждения материала.
Пространство между коробами заполняется объектом сушки. Сле-
довательно, теплоноситель или воздух, для того чтобы попасть из
подводящего ( + ) короба в отводящий (—), должен пройти через
слой материала, толщина и направление которого определяются
расположением коробов. Если короба расположены через один ряд
(рис. 318,о), то материал продувается вертикальным потоком теп-
лоносителя, а когда подводящие и отводящие короба размещены в
одном и том же ряду через один (рис. 318,6), теплоноситель дви-
жется как в вертикальном, так и в горизонтальном направлении,
благодаря чему толщина продуваемого слоя уменьшается, а интен-
сивность сушки увеличивается.
Между сушильной и охладительной камерами есть промежуток,
не заполненный коробами, где зерно располагается сплошным слоем
и не продувается.
Охладительная камера устроена так же, как и сушильная, но
в ней меньшее число коробов, через которые продувается не теп-
лоноситель, а атмосферный или охлажденный воздух.
Сушильные камеры барабанных зерносушилок различают по
расположению внутри барабана лопастей и полочек на подъемно-
лопастные (рис. 319,а), распределительные (рис. 319,6), подъем-
но-лопастные секторные (рис. 319, в), комбинированные
(рис. 319, г) и перевалочные с закрытыми ячейками (рис. 319, д)
системы. Для сушки зерна и трав наиболее рациональной призна-
на подъемно-лопастная секторная система. В барабанных сушил-
ках допускается более высокая (15О...25О°С) температура теплоно-
сителя, чем в шахтных. Повышенная температура допустима бла-
годаря хорошему перемешиванию материала и сокращению про-
должительности сушки (в 2...3 раза). Однако вследствие малой
заполняемости объема барабана растительной массой (не более
25...30%) съем влаги в единицу времени с 1 м3 сушильной камеры
в барабанных сушилках несколько ниже, чем в шахтных.
АА-Б5-ВВ-ГГ
Рис. 318. Короба сушильных камер конвективных сушилок:
(+) —подводящие, (—) —отводящие; а и б —варианты расположения.
А
а.
482
Рис. 319. Схемы сушильных камер барабанных сушилок:
с — подъемно-лопастной; б — распределительной; е — секторной; г — комбинированной; д —
перевалочной с закрытыми ячейками.
Охладительные камеры барабанных установок выполняют от-
дельно от сушильных в виде барабанов, подобных по конструкции,
но меньших размеров или в виде охладительных колонок (шахт).
Частоту вращения охладительных барабанов принимают значи-
тельно большей, чем сушильных (до 30 мин'1).
Выпускные механизмы. От их конструкции и регулировки зави-
сят скорость движения материалов в сушильной камере, равно-
мерность и качество сушки. Выпускные механизмы шахтных суши-
лок можно подразделить на устройства непрерывного действия —
с непрерывным выпуском материала (рис. 320, а, б, г, д, е), и
устройства периодического действия — с периодическим выпуском
материала (рис. 320, в).
Перемещающиеся полки 2 (рис. 320,а,в), скребки 6
(рис. 320, г, 5), поворачивающиеся лотки 3 (рис. 320,6) или риф-
леные валики 9 (рис. 320, е) ссыпают высушенный материал из
сушилки в бункер.
В механизмах периодического действия полки 2 (через
1...2 мин) перемещаются автоматом (на схеме не показан) за пре-
делы отверстий камеры сушилок и выпускают порцию зерна
(400...450 кг), после чего подвижная рама при помощи пружин
возвращается в прежнее положение и выпуск материала прекра-
щается. Так как выпускные отверстия открываются полностью, то
сор между рамами не накапливается и механизм не требуется
очищать.
Движение материала в устройствах с подвижной кареткой
(рис. 320,а), с качающимися лотками (рис. 320,6) и с периодиче-
ски открывающимися затворами (рис. 320, в) происходит под дей-
ствием силы тяжести. Основной недостаток этих механизмов—•
возможность засорения выпускных лотков соломистыми приме-
сями.
В механизмах со скребками (рис. 320, а и д) и рифлеными ва-
ликами (рис. 320, в) указанный недостаток устранен, но возможно
наматывание соломы на валик.
Скорость ссыпания материала регулируют изменением (рис. 320):
положения воронок 1, лотков 3, заслонок 8. Здесь возможны
подъем и опускание всех одновременно воронок, лотков и откры-
тие заслонок, а также каждого в отдельности, в первом случае из-
31*
483
Рис. 320. Схемы выпускных механизмов шахтиых сушилок:
а — с подвижной кареткой; б — с качающимися лотками; в — с перемещающимися полка-
ми; г — с колеблющимися скребками; д — с ленточным скребковым транспортером; е —
с вращающимися валиками; 1 — воронка; 2 и 5 — полки; 3 — лотки; 4 — пружина; 6 —
скребки; 7 — транспортер; 8 — заслонка; 9 — рифленый валик.
меняют пропускную способность всей сушилки, во втором — лишь
отдельных ее участков (регулировка равномерности сушки);
числа скребков 6;
частоты и амплитуды колебания ведущего вала механизмов
привода ABCD или ABCDE;
частоты вращения рифленых валиков 9 или скорости движения
ленты 7;
промежутка времени между открытиями (настройкой автома-
та) и размера выпускаемых отверстий (длиной тяги, соединяющей
автомат с рычагом АВ).
Применяют устройства и для комбинированного выпуска мате-
риала, в которых наряду с непрерывным выпуском массы периоди-
чески полностью открывают затвор; при этом примеси, скопившие-
ся между рамами, проваливаются вниз.
В барабанных сушилках скорость движения зерна по барабану
регулируют изменением угла его наклона и частоты вращения.
Кроме того, время пребывания зерна в барабане можно изменять,
устанавливая на выходе из барабана подпорные кольца разной
высоты.
484
§ 8. Устройства для контроля параметров сушки
Эффективность и качество сушки зависят от исходной и конеХ»
ной влажности, а также температуры объектов сушки и теплоно-
сителя.
Влагомеры. Влажность объектов сушки — один из важнейших
параметров, по которому выбирают режимы сушки и оценивают
технико-экономические показатели процесса.
Наибольшее распространение при оценке сушки зерна и других
сельскохозяйственных материалов получили метод высушивания
образца материала до постоянной массы в сушильных шкафах, а
также электрические методы измерения влажности.
Сушильные шкафы применяют при лабораторной оценке
влажности зерна, растений и других объектов. Перед сушкой стеб-
ли и листья растений предварительно измельчают до размеров
частиц около 5 мм. Зерно с исходной влажностью меньше 183G1
размалывают и сушат при температуре 130 °C в течение 40 мин,
Если исходная влажность выше 18%, зерно перед размолом под-
сушивают при температуре 105 °C, а затем размалывают и окон-
чательно высушивают при температуре 130 °C. I
Электрические влагомеры основаны на изменении
электрического сопротивления (кондуктометрические влагомеры)
или диэлектрической проницаемости (диэлькометрические влаго-
меры) материала в зависимости от влажности. Показания кондук-
тометрических влагомеров существенно зависят от равномерности
распределения влаги по объему исследуемого образца. Поэтому
для получения требуемой точности измерения исследуемые мате-
риалы приходится предварительно размалывать и тщательно пе-
ремешивать. Такие влагомеры применяют на хлебоприемных пунк-
тах.
Диэлькометрические влагомеры измеряют влажность неизмель-
ченного зерна в широком диапазоне (8...40%). Они менее чувстви-
тельны, чем кондуктометрические, к неравномерности распределе-
ния влаги по материалу.
Принцип действия диэлькометрического влагомера основан на
изменении в зависимости от влажности материала диэлектриче-
ской проницаемости. При различной диэлектрической проницаемо*
сти изменяются параметры тока, индуцируемого высокочастотным
генератором 1 (рис. 321) в колебательном контуре с рабочим дат-
чиком 2. Этот ток сравнивают с током другого, эталонного конту-
ра 3, и разность их подается на усилитель 4, а затем на показы-
вающий прибор 5 (индикатор).
Когда датчик не заполнен зерном, стрелку индикатора уста-
навливают на нулевую отметку. Зерно, засыпанное на поверхность
рабочего датчика, изменяет его емкость, и разбаланс в контурах
отклоняет стрелку от нулевого положения.
Диэлькометрические влагомеры применяют для внутрихозяйст-
венного контроля влажности зерна (полевые и лабораторные вла-
485
Рис. 321. Принципиальная схема ди-
элькометрического влагомера:
1 — высокочастотный генератор; 2 — рабочий
датчик; 3 — эталонный датчик; 4 — усили-
тель; 5 — индикатор.
гомеры) и в системах автома-1
тического контроля и регули-;
рования влажности в поточных
линиях послеуборочной обра-
ботки зерна и его сушки (по-
точный автоматический вла-
гомер).
Датчик полевого и лабора-
торного влагомеров — бункер,
выполненный из диэлектриче-
ских пластин. В поточном вла-
гомере пластины расположены на гранях клина и по ним движет-
ся материал, влажность которого оценивается.
Влажность воздуха и газовоздушных смесей измеряют гигро-
метрами, психрометрами или взвешиванием влагопоглотителей.
Гигрометры регистрируют влажность газов. При различ-
ной влажности изменяются линейные размеры чувствительного
элемента, которым служит человеческий волос или оболочка ки-
шок крупного рогатого скота. Изменение длины передается ры-
чажным механизмом стрелке прибора. Такие влагомеры обладают
высокой инерционностью, они малонадежны при вибрации машин
и агрегатов. s
Психрометры состоят из двух термометров: один распола-
гают в воздухе (сухой), другой смачивают водой (мокрый). Пока-
зания мокрого термометра вследствие испарения с его поверхности
влаги всегда ниже, чем сухого. Так как интенсивность испарения
влаги зависит от относительной влажности газов (отношение мас-
сы водяного пара, содержащегося в газе, к ее максимально воз-
можной массе при том же состоянии газа), то разность показаний
термометров зависит от влажности газовой среды. По разности
показаний термометров на основании специальных психрометри-
ческих таблиц или диаграмм находят относительную влажность
воздуха. На этом же принципе построены электропсихрометры,
применяемые для контроля и управления процессами сушки и ак-
тивного вентилирования материалов.
Термометры. Для измерения температуры объектов сушки при-
меняют жидкостные (ртутные), манометрические и электрические
(терморезисторные и термопарные) термометры.
Ртутные термометры используют для контроля темпера-
туры объекта и ее стабилизации при использовании в сушилках
систем автоматического регулирования. В этих устройствах тер-
мометры снабжают (рис. 322, а) стержнем 3 с гайкой 2, включен-
ными в электрическую цепь прерывателя (ПР), и магнитной голов-
кой 1. При повышении температуры столбик ртути, поднимаясь,
достигает стержня. Цепь прерывателя замыкается, на исполни-
тельный механизм подается сигнал уменьшения температуры аген-
та сушки. Температуру, при которой срабатывает реле, задают
поворотом магнитной головки, связанной индуктивно со стержнем.
486
Ртутные термометры просты по устройству, но недолговечны,
н не передают показания на расстоянии. При вибрации машины
они не обеспечивают необходимую точность.
Манометрические термометры (рис. 322,б) основа-
ны на тепловых изменениях объема жидкости, заключенной в по-
лости теплоприемника — баллона 7, они преобразуются в переме-
щение пружинной трубки 5 и связанной с ней стрелки регистра-
тора.
Расстояние, на которое передают показания манометрические
термометры, зависит от длины капилляра 6.
Терморезисторные электрические термометры
в основе содержат датчики, в которых электрическое сопротивле-
ние металлов (металлические терморезисторы) и полупроводников
(полупроводниковые терморезисторы) зависят от температуры их
нагрева. Металлические терморезисторы изготавливают (рис. 322, в)
из проволоки 9 (медь, платина, чистое железо и никель), намотан-
ной на изоляционный каркас 8 и закрытой оболочкой 10. В полу-
проводниковых терморезисторах преобразователь выполняют из
полупроводниковых порошков (медно-марганцевых, кадмиево-мар-
ганцевых, титано-бариевых) со специальными примесями. Такие
датчики резко изменяют электрическое сопротивление в зависимо-
сти от температуры. Терморезисторные преобразователи включают
в одну из плеч электрического моста или соединяют с потенцио-
метрами или лагометрами. Такие термометры применяют для ди-
станционного контроля и управления нагревом объектов сушки.
Они позволяют получать высокую надежность и точность измере-
ний.
Электрические термометры с термопарой
(рис. 322, г) основаны на изменении разности температур горяче-
Рис. 322. Принципиальные схемы термометров-
а — ртутного; б — манометрического; в — терморезисторного; г — электрического с термона-
рой, 1 магнитная головка; 2 гайка; 3 — стержень; 4 — шкала; 5 — манометрическая
пружина; 6 — капиллярная трубка; 7 —латунный баллон; 8—каркас; S— проволока- /О —
оболочка; 11 — холодный спай; 12 — горячий спай; 13 — регистратор.
487
го спая 12, помещенного в зону измеряемого объекта, и холодно-
го 11. Термопары могут быть изготовлены малой массы, что позво-
ляет определять температуру нагрева объекта в малых зонах.
§ 9. Определение основных показателей конвективной сушки
Общая схема процесса сушки. Рассмотрим схему процесса при
конвективном способе сушки материалов смесью воздуха с топоч-
ными газами (рис. 323).
Наружный воздух с температурой to, относительной влажностью
<р0, влагосодержанием do и энтальпией (теплосодержанием) 1О,
смешиваясь в топке 1 с топочными газами, образует сушильный
агент с параметрами ti, di и /ь
В сушильную камеру 2 одновременно с агентом сушки посту-
пает влажный материал, характеризуемый тремя основными па-
раметрами: массой mi, температурой 01 и относительной влаж-
ностью Wj. Взаимодействуя с влажным материалом, агент сушки
нагревает его и поглощает испарившуюся из него влагу, в резуль-
тате чего отработанный агент сушки выходит из сушильной каме-
ры с параметрами tz, q>2, di и h, а материал массой zn2 с темпера-
турой 02 и влажностью w2 переходит в охладительную камеру 3.
Поступающий в охладительную камеру атмосферный воздух с
параметрами to, <ро, do и /о на выходе из нее имеет параметры
/з, фз, d3 и 13. Просушенный и охлажденный материал массой т3
выходит из сушилки с температурой 03 и влажностью w3.
Масса удаляемой влаги. Согласно закону сохранения вещества,
масса испаренной влаги равна разности между массой материала
до и после сушки:
ma=m1—т2. (357)
Рис. 323. Схема процессов сушки и охлаждения материалов:
1 — топка; 2 — сушильная камера; 3 — охладительная камера.
488
Так как масса абсолютно сухого вещества т в процессе суш-
ки остается постоянной, то можно написать:
100 — w, 100—w~ ,
—ioo-^^^—ioo^-=const.
Отсюда масса высушенного зерна
Подставляя значение m2 в уравнение (357), получаем
_ 100 — w, u>i — w~
mB~mi—ггц --------— = tn, .
в 1 1 100 — w2 1 100 — w2
Проделав аналогичные действия, имеем
(358)
(359)
(360)
Относительная убыль массы зерна (усушка), %:
Г>= 100==m^ j pg
т± тг
Подставив значение тв из уравнения (358) в уравнение (360),
находим:
В 100. (361)
Расход агента сушки. В процессе сушки испарившаяся из ма-
териала влага поглощается агентом сушки, общее же ее количест-
во, участвующее в процессе, остается постоянным. Следовательно,
при установившемся режиме сушки количество влаги, поступившей
в сушильную камеру с материалом и агентом сушки, равно коли-
честву влаги, ушедшей из камеры: miWi/100+7.idi/1000=
=/^20’2/100+7.2^2/1000, где L] и L2 — соответственно масса сухой
газовоздушной смеси при входе в сушильную камеру и выходе из
иее.
Принимая во внимание, что масса сухой газовоздушной смеси
в процессе сушки остается постоянной (Z.i=L2=Z.=const), после
некоторых преобразований получаем
m wi т wa а ^2 —
mi |00 т2 10() д. 10W) .
Но так как
гИхЮд/100—ш<да2/1 00 =ma,
то
. _ 1000zzzB
d2-dj •
(362)
489
Массовый расход сухой газовоздушной смеси на 1 кг испарен-
ной влаги (удельный расход)
, L ~ 1000
tnB -
(363)
Следует заметить, что подача в сушильную камеру недостаточ-
ного количества сушильного агента приводит к снижению произ-
водительности сушилки; избыточное же его количество — одна из
причин перерасхода электроэнергии. Связанное с последним повы-
шение скорости агента сушки может привести к выносу из шахты
зерна (при и>6 м/с) и других сыпучих материалов, а иногда и к
снижению качества просушенного материала.
Расчет процесса охлаждения. По аналогии с ранее рассмотрен-
ным методом расчета параметров сушки имеем следующие выра-
жения для определения основных параметров процесса охлажде-
ния:
масса зерна после охладительной камеры
100 — И?, 100—W. /ос..
ГИ3 = ---— = /71» -77^-—, (364)
3 1 100 — w3 1 100 — w3 • ' 7
масса влаги, испарившейся в охладительной камере,
тъ=т2—т3=т2 1020-^-, (365)
удельный расход сухого воздуха, кг сух. возд/кг исп. влаги:
1000
d3 — d0
(366)
Формулы для определения расхода воздуха будут исходными
при выборе вентиляторов и при расчете основных параметров., су-
шильных и охладительных камер сушилок, а формулы для опреде-
ления потока теплоты, потребного для сушки, — исходными при
расчете параметров топок.
Количество теплоты и топлива. Поток теплоты, передаваемый
агентом сушки материалу, идет на нагрев материала, на испарение
влаги и частично теряется в окружающей среде.
При расчетах теплоту, потребную на сушку, можно считать
пропорциональной массе испаряемой влаги, т. е.
AT=kTmb, (367)
где kT — коэффициент пропорциональности, для шахтных и бара-
банных зерносушилок kr (5,0...6,3) • 103, а для сушилок трав k?
(4,2...8,4) -103 кДж на 1 кг испаряемой влаги.
* k-t — меньшие значения соответствуют исходной влажности материала
<01=80 ... 70%, большие — <0i < 70%. — Прим, автора.
490
Масса топлива на сушку составит:
(368)
* Пт<7т ’
где г]т — к. п. д. топки, равный 0,85...0,95;
q-t — теплота сгорания топлива.
§ 10. Массовый расход воздуха и теплоты
на активное вентилирование
Расход топлива при сушке зерна. Принудительное продувание
неподвижного слоя зерна или растительной массы наружным или
искусственно подогретым воздухом, снижающим влажность объ-
ектов в любом слое не ниже равновесной wp, принято называть
сушкой активным вентилированием. Если wp—14%, то относитель-
ная влажность воздуха <ро = 65%. При сушке активным вентилиро-
ванием вначале высыхают те слои массы, которые первыми встре-
чаются с нагнетаемым воздухом, а затем зона сушки (с влаж-
ностью материала дор) перемещается в направлении движения по-
даваемого воздуха.
Продолжительность сушки всего слоя зависит от исходной
влажности и массы высушиваемого объекта, от массы подаваемого
воздуха и его относительной влажности.
Можно принять, что массовый расход воздуха LB прямопропор-
ционален массе удаляемой влаги тв и обратно пропорционален
коэффициенту ев, характеризующему влагопоглотительную спо-
собность воздуха (ев — масса влаги в г, удаляемая 1 м3 воздуха),
т. е.
Ц=Рвтв/ев,
где рв — плотность воздуха, равная 1,2 кг/м3.
Заменив здесь тв выражением (358), находим
<369>
Коэффициент Ев зависит (рис. 324) от температуры t0 и отно-
сительной влажности воздуха <ро.
При сушке активным вентилированием слои материала, наибо-
лее удаленные от места поступления воздуха, могут длительное
время не высыхать, а, наоборот, еще более увлажняться, поглощая
влагу из воздуха. Продолжительное пребывание материала в пе-
реувлажненном состоянии может привести к его порче. Поэтому
ограничим продолжительность сушки допускаемым сроком без-
опасного хранения материала, т. е. некоторой величиной Тб- Тогда,
имея следующее выражение для расчета массовой производитель-
ности вентилятора:
п Рвт1 wi — w2 /Ч7П\
^в— Евтб ЮО — w2 ’
Рис. 324. Зависимость коэффициента
ев, характеризующего влагопоглоти-
тельную способность воздуха от его
температуры t0 и относительной
влажности <р0.
при заданном вентиляторе и тем-
пературе подаваемого на сушку
воздуха по выражению (370)
рассчитаем массу материала,
которую можно высушить за до-
пускаемый срок Тб-
Масса воздуха, потребного на
досушивание сена. Питатель-
ность сена и его вкусовые каче-
ства зависят от длительности
его сушки. После первого дня
сушки, когда , влажность травы
снижается до 35...45°/о, процесс
влагоотдачи замедляется. После-
дующая сушка растений в поле
приводит к значительным поте-
рям питательных веществ (до
30...40%) и снижению каротина
(до 70...80 %).
Снизить указанные потери можно при досушивании подвялен-
ной травы активным вентилированием. При этом сено досушивают
послойно. Для чего подвяленную до влажности 35...40% в проко-
сах или валках траву укладывают в скирду, и, как только толщи-
на слоя достигнет 1—1,5 м, его начинают продувать воздухом.
Позже на высушенный слой укладывают следующий и опять про-
сушивают, и так до тех пор, пока высота скирды не достигнет
5...6 м.
Наряду с рассмотренным способом находит применение досуши-
вание активным вентилированием предварительно измельченной
травы. При измельчении травы перед вентилированием энерго-
еатраты на досушивание снижаются до 35% •
Массу потребного воздуха при вентилировании рассчитывают
из выражения:
(370а)
где ав — объем воздуха, подаваемый на единицу площади основа-
ния продуваемого слоя сена, аЕ« 0,08 ...0,1 м3/с-м2;
S — площадь слоя сена.
Расход теплоты при сушке. Воздух при сушке активным венти-
лированием нагревают для снижения его относительной влажно-
сти, с тем чтобы получить кондиционную влажность объекта
сушки.
Л Принимая приближенно, что подогрев воздуха на 1 °C снижает
его относительную влажность <ро на 5%, получаем следующее
выражение для расчета повышения температуры Д/ подогревае-
мого воздуха:
Д^-У0—.^-, (371)
о
92
где <pi — относительная влажность подогретого воздуха, при кото*
рой достигается требуемая влажность материала.
Теплоту, переданную воздуху в калорифере без учета потерь
в газопроводе, можно определить по изменению энтальпии подо-
гретого /] и атмосферного Jo воздуха:
AT=LB(J1-/0). (372)
Энтальпию влажного воздуха можно представить следующей
суммой: /о=/с + 0,001 d Jn, где /с и /п — энтальпии соответственно
сухого воздуха и водяного пара.
Энтальпия сухого воздуха /с = СвЛ где св — удельная теплоем-
кость сухого воздуха, а водяного пара J„ — 2500 +1,84 t, где 2500—
скрытая теплота парообразования. Выражая Л и /о в соответствии
с вышеприведенными уравнениями, имеем
/0=^4-2,5^+1,84 -10~^о
и
+1,84-10-8^1.
Заменяя /о и Л в уравнении (372), получаем
Ат =ЕВ [свД/+2,5 (+-+)+1,84- IO’8 (d^-dA)]. (373)
Используя выражения 369, 370 и 372, по зависимости 373 мож-
но приближенно рассчитать расход теплоты при сушке сельскохо-
зяйственных материалов активным вентилированием.
Расход воздуха на охлаждение материалов. Активное вентили-
рование с целью консервации материала охлаждением — продол-
жительный процесс, в результате которого влажный материал вы-
деляет значительное количество теплоты. Чтобы предупредить
самосогревание и порчу материала, необходимо отвести из него
теплоту, активно выдувая воздух из пространств, образованных
частицами материала.
При расчете массы воздуха, потребной для охлаждения, нахо-
дят из объемов пространств между частицами материала — Уп и
необходимого числа — обмена воздуха в этих порах за сутки — пп.
Тогда потребная масса воздуха для охлаждения активным вен-
тилированием будет
__ РвИ1^П
Е— 24-3600 •
Выражая Vn через коэффициент пористости ku (ka — отноше-
ние объема пор между частицами Уп к общему объему вентили-
руемой массы материала VM), имеем
<373-а>
При охлаждении активным вентилированием зерна и початков
кукурузы влажностью Wi^l8°/o принимают пп= 1500... 1800 в сутки,
а при сс»1> 18% —пв=2000...2400 в сутки. Коэффициент пористости
для зерна + = 0,4, а для початков +=0,5,
49$
§ 11. Режим работы и производительность сушилок
и установок активного вентилирования
Режимы сушки и охлаждения зерна определяются двумя основ-
ными параметрами — температурой агента сушки (охлаждения) и
длительностью (экспозицией) ее воздействия на высушиваемый
материал.
От значения этих параметров зависит качество (сохранение или
улучшение семенных и питательных свойств объектов сушки) и
эффективность (расход энергии и затраты труда) сушки и активного
вентилирования.
Температура и экспозиция определяют скорость сушки, а, сле-
довательно, и производительность установок для сушки и активно-
го вентилирования.
Температурные режимы сушки. Предельная температура тепло-
носителя в шахтных и барабанных сушилках определяется
обрабатываемой культурой, ее назначением и исходной влаж-
ностью.
Значения предельной температуры теплоносителя и экспозиции
сушки семян хлебных злаков приведены в таблице 13.
ТАБЛИЦА 13
Режимы сушки семян хлебных злаков (пшеницы, ржи, ячменя, овса)
в шахтных сушилках
Исходная влажность семян и/j, % Число пропусков через сушилку Предельная температура теплоносителя °C Экспозиция сушки, мин
18 1 70 36...38
20 1 65 42...46
26 1 60 31...33
2 65 42...46
1 55 32...34
30 2 60 33...35
3 65 42...46
В зависимости от исходной влажности семена пропускают через
сушилку 1...3 раза. После каждого пропуска рекомендуется зерно
охлаждать и выдерживать его до очередного пропуска 5...6 ч.
В процессе отлежки влага внутри зерновки перераспределяется,
перемещаясь из внутренних зон к поверхности.
Для семян хлебных злаков за один пропуск удаляется 6% вла-
ги, для зернобобовых и кукурузы — 3%, для трав — 7...8%.
Предельная температура теплоносителя tRt при сушке семян
бобовых, крупяных, кукурузы и других культур может быть выра-
жена через температуру tR (табл. 13) следующей формулой:
/дг=Мд-ДГ, (374)
где ДГ — значение, на которое снижается температура теплоноси-
теля при сушке семян различных культур.
494
Рекомендуется принимать при сушке семян гречихи, проса и ку-
курузы ДГ = 5 °C, бобовых Af =10 °C. Слой семян трав из-за малой
скважности целесообразно сушить в смеси с овсом и ячменем
(30% семян трав и 70% овса или ячменя), для них температуру
теплоносителя принимают приблизительно равной 65 °C.
В барабанных зерносушилках при сушке семян температуру
теплоносителя устанавливают в пределах ПО...130 °C.
Температуру теплоносителя при сушке продовольственного и
фуражного зерна в сушилках шахтного типа увеличивают
в 1,7...2 раза по сравнению с температурой сушки семян.
В пневмобарабанных сушилках для приготовления травяной
муки температура теплоносителя составляет 400...600°С. Для по-
вышения производительности целесообразно пропускать траву
через сушилку 2 раза: при первом пропуске температура агента
должна быть 250...300°С, при втором— 18О...22О°С.
Температура воздуха, рекомендуемая для активного вентилиро-
вания, указана ранее (см. стр. 492). Когда продолжительность
высушивания материала активным вентилированием больше,- чем
срок безопасной сохранности Тб зерна, воздух подогревают для
семенного зерна до 30...35 °C, а фуражного — до 40...50 °C. Кукуру-
зу в початках сушат при 35...40°С, когда wi = 30...35%, а при Wi =
20%, чтобы ускорить сушку, температуру повышают до 50 °C. При
указанных температурах сушка активным вентилированием не отли-
чается от процесса сушки в зерносушилках конвективного действия:
влажность зерна в зонах входа воздуха в массу уменьшится зна-
чительно ниже равновесной, что может привести к пересушке зер-
на. Однако при таких режимах возрастает скорость сушки и сни-
жается опасность повреждения зерна от продолжительного пребы-
вания в состоянии повышенной влажности.
Пропускная способность сушилок. Пропускную способность су-
шилок принимают равной массе (в тоннах) материала, влажность
которого изменяется от Wi до Wz за 1 ч. Масса продовольственного
зерна (пшеницы, овса, ячменя, подсолнечника), высушенного за
1 ч от 20 до 14% влажности, равна пропускной способности qo.H,
указанной в марке зерносушилки, а при сушке трав для перера-
ботки в муку исходная влажность составляет 75%, а конечная —
8... 10%.
Так, для зерносушилки СЗС-8 имеем <7о.н=8 т/ч, а для агрегата
сушки трав АВМ-1,5 — <7о.н=1,5 т/ч.
С изменением вида культуры и исходной влажности пропуск-
ная способность может быть определена из выражения:
(374а>
где ki — коэффициент/ зависящий от вида культуры (см. ниже);
kw — коэффициент, учитывающий исходную и конечную влаж-
ность высушиваемой культуры.
495
Значения коэффициента kt для различных культур:
Рожь................................................. 1,1
Гречиха ............................................. 1,25
Просо, сорго............................................. 0,8
Кукуруза............................................ 0,6
Горох, вика, чечевица, рис..........................0,3...0,5
Фасоль, люпин.............................. 0,1...0,2
Значения коэффициента kw для продовольственного зерна
(сушка до равновесной влажности шР=14%) и трав на муку
(&Ур=8...1О°/о) приведены в таблице 14.
Значения коэффициента
Продовольственное зерно пшеницы
ТАБЛИЦА 14
Исходная влажность «Ч, % Диапазон съема влаги, % *и> Исходная влажность <Ч> % Диапазон съема влаги, % ки>
16 До 14 0,54 26 26...20 0,88
18 » 14 0,79 20...14 1,00
20 » 14 1,00 28 28...23 0,75
22 22...18 0,68 23...19 0,66
18...14 0,79 19... 14 0,90
24 24...18 0,80 30...24 0,85
19...14 0,90 30 24...19 0,80
19...14 0,90
Травяная мука (температура агента сушки 6=400...500°С)
Исходная влажность травы оц, % ки> Исходная влажность травы и>1, % кш
50 0,38 70 0,95
55 0,45 75 1,00
60 0,54 80 1,70
65 0,68 85 2,30
При сушке семенного зера пропускную способность принимают
равной 0,6 qo.K.
Как видно из таблицы 14, пропускная способность сушилок для
трав значительно увеличивается при снижении исходной влажно-
сти растений. С этой целью экономически целесообразно подвяли-
вание свежескошенной травы до 65...75% влажности, которое сле-
дует проводить только в хорошую погоду, контролируя при этом
содержание каротина и протеина (снижение их не должно быть
выше 10%).
Большое влияние на пропускную способность агрегатов для
приготовления травяной муки оказывает плющение свежескошен-
ных стеблей, длина и равномерность их резки перед сушкой. Плю-
щение люцерны повышает qo.H в 1,2... 1,4 раза; длина резки
20...30 мм считается оптимальной.
496
§ 12. Контроль и регулирование режимов сушки
и вентилирования
_ Основная задача контроля и регулирования процесса сушки—-
определение и настройка установок на оптимальный режим рабо-
ты. Изменяемые параметры в сушилках и установках активного»
вентилирования — температура и влажность агента сушки (или-
охлаждения) и экспозиция процесса.
В сушилках, работающих на твердом топливе, температуру
теплоносителя изменяют количеством наружного воздуха, подавае-
мого в смесительную камеру, для чего регулируют положение за-
слонки в воздухопроводе. При сжигании жидкого и газообразного
топлива регулируют его подачу в камеру сгорания, а при нагреве
воздуха в электрокалориферах — число работающих секций. Влаж-
ность меняют за счет частичного направления отработанного теп-
лоносителя повторно в смесительную камеру. С этой целью патру-
бок на выходе теплоносителя соединяют со смесительной камерой;..
Различная экспозиция сушки может быть достигнута регулировкой
выпускных механизмов (см. § 7).
Оптимальные значения регулировочных параметров устанавли-
вают вручную или системами автоматичекого управления.
При ручном регулировании оператор оценивает режим процес-
са по контрольным приборам, отбором проб зерна и интуитивно»
подбирает положение регулируемых узлов.
Для автоматического управления сушкой и активным вентили-
рованием применяют системы регулирования процессами по одно-
му или нескольким параметрам.
Система автоматического управления по одному параметру—•
устройство автоматической стабилизации температуры агента суш-
6i(V 5
Рис. 325. Схемы автоматического управления процессом сушки по параметрам,
регулирования:
а — одному; б — двум; Д — датчик; СУ — сравнивающее устройство: У — усилитель; ИМ —
исполнительный механизм; 00 g—объект обработки.
32—421
497
ки. Это устройство (рис. 325, а) включает в себя: датчик темпера-
туры (Д), усилитель (У) и исполнительный механизм (ИМ).
Датчик срабатывает при температуре агента сушки, превышаю-
щей допускаемую /д, которую устанавливают по предельной тем-
пературе нагрева зерна 0Д. В автоматических системах используют
ртутные, манометрические и электрические датчики, аналогичные
применяемым в термометрах (см. стр. 486). Такие системы просты
по устройству и надежны в работе, но они не обеспечивают полу-
чения кондиционной влажности объекта сушки при оптимальном
режиме, так как не настраиваются на изменение входных парамет-
ров высушиваемых материалов.
В меньшей мере отмеченные недостатки имеет система регули-
рования процессом сушки по конечной влажности объекта. Наибо-
лее перспективны для таких систем — электрические влагомеры,
устанавливаемые в конечных зонах камеры сушки шахтных
сушилок или в отборнике проб зерна на входе в охладительную
камеру.
Системы автоматического управления по двум и более парамет-
рам находят применение в шахтных сушилках при регулировании
по перепаду влажности в начале wt и конце w2 сушильной камеры,
при активном вентилировании по перепаду температур воздуха t0
и зерновой массы 02 (рис. 325, б).
Схема такой системы состоит из двух датчиков: температуры
воздуха Д/ и зерна Де. Датчики преобразовывают температуры
в выходные величины Rt(t) и /?е(т), которые сопоставляются
в сравнивающем устройстве (СУ). Если сигнал рассогласования
А/=02—io больше нечувствительности прибора, то срабатывают
последующие звенья (усилитель и исполнительный механизм) и
температура объекта обработки (ООб) изменяется. Находят при-
менение системы регулирования и с двумя разноименными пара-
метрами: температура — влажность зерна, температура агента
сушки — влажность зерна и др.
При многопараметровом регулировании режим сушки или ак-
тивного вентилирования приближается к оптимальному: дости-
гается кондиционная влажность объектов обработки и в большей
мере сохраняются их качественные показатели.
Глава XVI
СХЕМЫ И ЭЛЕМЕНТЫ КОНСТРУКЦИЙ УБОРОЧНЫХ МАШИН
§ 1. Типы машин и схемы их рабочих процессов
Типы машин. По способу агрегатирования уборочные машины
«бывают: навесные; прицепные безмоторные с приводом от вала
отбора мощности (ВОМ) трактора или самоходного шасси; при-
цепные моторизованные с приводом рабочих органов от отдельного
двигателя; полунавесные и самоходные.
498
Поток объекта обработки по-
лучает различное направление
движения, в зависимости от спо-
соба агрегатирования и назначе-
ния машины.
Фронтальная навеска
используется для косилок, колес-
но-пальцевых граблей, волокуш,
валковых жаток, льнотеребилок
и других машин небольшой мас-
сы. Объект обработки переме-
щается в машине 2 (рис. 326, а)
перпендикулярно или параллель-
но направлению движения трак-
тора 1. При такой навеске повы-
шается маневренность агрегата.
Жатки и косилки с фронтальной
Рис. 326. Типы уборочных машин;-
а — фронтальные; б — с боковой на-
веской; в — Г-образиые; г — продоль-
но-прямоточные; д — поперечно-поточ-
ные; е — продольно- и поперечно-по-
точные; ж — Т-образные самоходные;
з — продольно-поточные самоходные;
1 — трактор (шасси); 2 — машина.
навеской могут применяться для
обкоса препятствий, прокоса по-
воротных полос и разгрузочных
площадок. При большой массе
машины фронтальная навеска
приводит к недопустимой раз-
грузке движителей трактора
(самоходного шасси).
Бокова я
навеска машины (рис. 326, б) на трактор приме
няется для косилок и жаток, а в полунавесном варианте — для’
кормоуборочных машин. Направление движения потока в машине
при таком соединении совпадает с направлением движения агрега-
та. Такая навеска значительно увеличивает сцепные свойства дви-
жителей трактора, улучшает обозреваемость и управление рабочим
процессом машины. Однако подобные машины трудно соединять
с трактором (нет унификации), кроме того, на агрегат действует
поворачивающий момент, ухудшающий устойчивость хода в гори-
зонтальной плоскости.
Задняя навеска используется преимущественно для при-
цепных моторизованных и безмоторных зерноуборочных комбай-
нов, картофелеуборочных и свеклоуборочных комбайнов, комбай-
нов для уборки кукурузы, льна и кормовых культур. По направле-
нию потока в машине среди этой группы различают Г-образные
(рис. 326, в), продольно-поточные (рис. 326, г) и поперечно-
поточные (рис. 326,6). Ряд машин имеет сложные схемы рабо-
чих процессов, в которых поток объекта обработки имеет как про-
дольное, так и поперечное направление движения (рис. 326, е).
Комбинированное соединение применяется для мно-
госекционных машин. При этом секции машин навешивают фрон-
тально, в середине и сзади трактора или шасси. К таким машинам
32*
49»
относятся трех-, пяти- и семибрусные косилки, многосекционные
жатки, машины, одновременно выполняющие разные технологиче-
ские процессы, например косилка и плющилка, косилка и грабли.
. Самоходные системы широко используют для сложных
машин. Такие машины легче, маневреннее прицепных, ими может
управлять один человек. Однако наряду с преимуществами они
дороги и нерентабельны при малом сроке использования в году.
Самоходные зерноуборочные комбайны по своему рабочему
процессу бывают Т-образные (рис. 326, ж) и продольно-поточ-
ные (рис. 326,з).
Т-образные комбайны применяются на уборке зерновых культур
со стеблестоем длиной до 1,2 м, а продольно-поточные — на уборке
длинносоломистых высокоурожайных хлебов.
§ 2. Технологические и рабочие процессы комбайнов
В зависимости от назначения и вида уборочные машины могут
выполнять один или несколько технологических процессов. Ком-
байнами, как правило, выполняется несколько процессов. После-
довательность технологических процессов в сложных машинах оп-
ределяется логической сущностью и технико-экономическими пока-
зателями.
Рассмотрим последовательность технологических процессов,
выполняемых сложными уборочными машинами.
Кормоуборочные комбайны срезают траву, кукурузу, подсол-
нечник и другие кормовые культуры при уборке, измельчают их
и в измельченном виде подают в транспортные средства. Для убор-
ки трав на сено с досушиванием активным вентилированием или для
приготовления сенажа и травяной муки травы предварительно
-скашивают и подвяливают в валках, а затем комбайн подбирает
подвяленную траву из валков и опять же измельчает ее.
Применяют как самоходные, так и прицепные кормоуборочные
комбайны. Основные узлы, выполняющие технологические процес-
сы, — это жатка или подборщик, питающее и измельчающее уст-
ройства. На комбайн навешивают сменные жатки двух типов: для
уборки трав с высотой стеблестоя до 1,5 м и кукурузы с более вы-
соким стеблестоем.
Рабочий процесс самоходного кормоуборочного комбайна с
жаткой для уборки трав приведен на рисунке 327.
Полосу стеблей, срезаемых жаткой, от нескошенного массива
-отделяют пассивные (жатка для уборки трав) или активные (ку-
курузная жатка) делители. Стебли к сегментно-пальцевому режу-
щему аппарату 1 подводит копирующее мотовило 2. Для уравнове-
шивания машины и облегчения работы режущего аппарата на жат-
ке установлены два ножа, каждый из которых рассчитан на V2
захвата. Один нож приводится механизмом качающей шайбы, рас-
положенным с правой стороны, а другой — с левой. Срезанные стеб-
ли мотовило подводит к сужающему шнеку 3. Шнек сужает поток
500
Рис. 327. Схема рабочего процесса самоходного кормоуборочного комбайна:
/ — режущий аппарат; 2 — мотовило; 3 — шнек; 4, 5, 6 — питающие вальцы; 7 — противо*
режущая пластина; 8 — измельчающий барабан; 9 — трубопровод; 10 — козырек.
растительной массы до ширины горловины питающего устройства
и подает массу к питающим вальцам 4, 5 и 6. Ось верхнего валь-
ца 6 выполнена подпружиненной, она может перемещаться в за-
висимости от толщины подаваемого слоя массы. Вальцы 6 и 7 не
только транспортируют массу, но и подпрессовывают ее. Подпрессо-
ванный слой массы вальцы подают к измельчающему барабану S,
который измельчает растения и направляет массу воздушным по-
током и ударным действием ножей по силосопроводу 9 в транс-
портное средство, движущееся слева, справа или сзади комбайна.
Для уборки кукурузы применяют жатку сплошного среза с це-
почно-планчатым транспортером; при подборе валков комбайн обо-
рудуют подборщиком с пружинными пальцами. Для облегчения
транспортирования измельченной массы в комбайне предусмотрено
сменное измельчающее устройство со швырялкой, устанавливаемой
после барабана 8.
Кукурузоуборочные комбайны. В фазе молочно-восковой и пол-
ной спелости кукурузу убирают специальными комбайнами. При
полной спелости комбайн срезает растения, отрывает початки от
стеблей, очищает их от оберток и измельчает стебли. Когда куку-
рузу убирают в стадии молочно-восковой спелости, оторванные по-
чатки не очищают от оберток. Наряду с указанными способами
кукурузоуборочный комбайн может убирать кукурузу с одновре-
менным измельчением початков и стеблей. В сельскохозяйственном
производстве многих стран применяют машины, которые сначала
отрывают початки, а затем срезают стебли. При такой последова-
тельности технологических процессов наблюдаются большие потери
как початков, так и вышелушенного зерна.
601
Рассмотрим рабочий процесс кукурузоуборочного комбайна.
Комбайн рассчитан на уборку кукурузы, посеянной с между-
рядьями 70... 90 см. Стебли, частично полеглые и отклоненные
от оси рядка, подводятся делителями 1 (рис. 328) и подъем-
ными цепями 2 в рабочее русло, где их захватывают подающие
цепи 4.
Срезанные режущим аппаратом 3 стебли подаются цепями
к початкоотрывочным вальцам 6. Комбайн укомплектован сменны-
ми вальцами трех типов: пассивными — для уборки кукурузы
в стадии полной спелости, активными — для уборки в молочно-вос-
ковой спелости и битерными — для уборки с измельчением почат-
ков и стеблей на силос. Перед початкоотрывочными вальцами уста-
новлен лобовой щит 5, который несколько наклоняет стебли и
способствует лучшему их захвату и протягиванию.
В процессе протаскивания стеблей через вальцы початки отры-
ваются и поступают на транспортер 13, а стебли измельчаются
аппаратом 8. Измельченная масса стеблей поступает по трубе 7
в кузов рядом движущегося транспорта. Початки с транспорте-
ра 13 падают на скатную доску /бив этот момент подвергаются
воздействию воздушной струи от вентилятора /2. Листостебельная
масса, попавшая с початками, выдувается и падает на землю.
По скатной доске початки поступают на очистительный аппа-
рат 14, где с них снимается обертка.
Очищенные початки шнеком 10, а затем транспортером. 17
подаются в кузов 18, прицепленный к комбайну. Обертки и выше-,
лущенное из початков зерно поступает на транспортер 15. Зерно,
просыпаясь между планками транспортера 15 и его нижней
ветвью, подается к шнеку 19. Шнек перемещает зерно на транспор-
тер очищенных початков, которым зерно вместе с початками по-
дается в кузов. Обертка транспортером 15 выбрасывается на
землю.
При уборке кукурузы в стадии молочно-восковой спелости
оторванные от стеблей початки направляют к шнеку 10, минуя
очистительный аппарат 14, для чего скатную доску 16 переставля-
ют в другое положение.
Технологические процессы среза и измельчения массы при убор-
ке кукурузы в стадии молочно-восковой спелости без отрыва по-
чатков выполняют так же, как и при их отделении.
Зерноуборочные комбайны. При прямом комбайнировании ма-
шина выполняет следующие операции технологического процесса:
срезание стеблей, обмолот хлебной массы, выделение зерна из гру-
бого вороха, очистку вороха, измельчение или прессование незер-
новой части урожая. При раздельном комбайнировании рабочий
процесс состоит из подбора валков, образованных валковыми жат-
ками, обмолота хлебной массы и далее следуют те же процессы,
что и при уборке прямым комбайнированием.
Измельчать стебли можно как перед обмолотом, так и после
него. Выбор рациональной последовательности определяется тех-
502
Рис. 328. Схема рабочего процесса прицепного кукурузоуборочного комбайна:
/ — делители: г —подъемные цепи; 3— режущий аппарат; 4 — подающие цепи; 5 — щит; 6 — отрывочные вальцы; 7 —трубы
измельчителя; 8 — нзмельчительный аппарат; S — колесо; 10 — шнек початков; 11 — прижимы очистительного аппарата; 12 —
вентилятор; 13 — транспортер неочищенных початков; 14 — очистительный аппарат; 15 — транспортер обертор; 16 — скатная
доска; 17 — транспортер очищенных початков; 18 — кузов початков; 19 — шнек для зерна.
Рис. 329. Схема рабочего процесса зерноуборочного комбайна:
1 — режущий аппарат; 2 — делители; 3 — мотовило; 4 — шнек; 5 — плавающий транспортера
€ — приемный битер; 7—барабан; 8— зерновой бункер; 9, 10 и 22— зерновые шнеки; 11—
отбойный битер; 12 — зерновой элеватор; 13 — двигатель; 14 — соломотряс; 15 — соломона-
биватель; 16 — полово-соломокопнитель; 17 — половой а биватель; 18 — колосовой шнек; 19 —•
верхнее жалюзийное решето; 20 — нижиее жалюзийное решето; 21 — колосовой элеватору
23 — вентилятор; 24 — транспортная доска; 25 — дека.
нико-экономическими факторами. Измельчение растений перед
обмолотом снижает мощность, потребную на обмолот. При измель-
чении массы перед обмолотом можно опустить процесс ее измель-
чения после соломотряса, что позволит снизить общие энергозатра-
ты на все процессы. Однако измельчение растений перед обмоло-
том затрудняет процесс выделения зерна из грубого вороха и
очистку зерна на решетах. Пока не найдено техническое решение
по эффективному выделению зерна из вороха и его. очистке при
измельчении массы перед обмолотом. Поэтому энергетически целе-
сообразная последовательность процесса сдерживается техниче-
скими трудностями.
Все технологические процессы в зерноуборочном комбайне вы-
полняются следующими его основными узлами: жаткой, молотил-
кой и рабочими органами для уборки незерновой части урожая
(соломо-половокопнителями, измельчителями, прессами).
Рабочий процесс комбайна во многом зависит от его типа.
Рассмотрим рабочий процесс на примере Т-образного комбай-
на типа СК-5 (рис. 329).
Делители 2 жатки отделяют полосу стеблей, равную ширине
захвата комбайна, а планки мотовила 3 захватывают порцию стеб-
лей из этой полосы и подводят ее к режущему аппарату /. Срезан-
ную массу планки мотовила подают к шнеку 4. Шнек правой и ле-
вой спиралями сдвигает хлебную массу к середине, где ее захваты-
вает пальчиковый механизм шнека и подает снизу к плавающему
транспортеру 5. Планки нижней ветви транспортера 5 захватыва-
ют массу, и прижимая ее к днищу корпуса, перемещают к прием-
ному битеру 6. Битер направляет стебли лопастями к молотильно-
му устройству.
504
Молотильное устройство (барабан 7 и дека 25) нарушает связь/
зерна с колосом. Часть зерна и мелкие примеси (полова и сбоина)
проходят сквозь отверстия деки и поступают на транспортную
доску 24 грохота. Остальную массу (грубый ворох), выходящую -
из молотильного пространства, отбойный битер 11 направляет на
соломотряс 14.
Соломотряс выделяет свободное зерно из соломы. Мелкий во-
рох (зерно, полова, сбоина), провалившийся сквозь отверстия со-
ломотряса, желобами клавиш ссыпается на транспортную доску.
Солома, перемещаемая соломотрясом к выходу, поступает
к граблинам соломонабивателя 15. Зубья граблин захватывают
порцию соломы и продвигают ее в камеру 16 полово-соломокопни-
теля. Когда камера наполнится соломой до верхнего уровня, граб-
лины начинают подпрессовывать массу. Если убирают солому с из-
мельчением или прессованием, то вместо полово-соломокопнителя
устанавливают соответственно измельчитель или пресс.
Зерно и полова проходят между пальцами транспортной доски
и падают на переднюю часть верхнего желюзийного решета 19, а
длинные примеси (сбоина), скользя по пальцам решетки транс-
портной доски, поступают ближе к середине решета. Легкие при-
меси выдуваются воздушным потоком от вентилятора 23, а затем
граблинами половонабивателя 17 проталкиваются в камеру поло-
во-соломокопнителя.
Зерно и некоторые примеси обрабатываются на верхнем 19 и
нижнем 20 решетах и проходом сквозь них поступают к шнеку 22.
Зерновой элеватор 12 и распределительный шнек 10 направляют
зерно в бункер 8. При заполнении бункера зерно выгружают в
транспортные средства шнеком 9. Сходом с жалюзийных решет
идут крупные примеси (необмолоченные колосья). Сход с верхнего
решета частично проваливается сквозь отверстия удлинителя и
поступает в нижний колосовой шнек 18, а затем элеватором 21
и верхним колосовым шнеком подается к отбойному битеру 11, а
битером — в барабан для повторного обмолота.
При раздельном комбайнировании жатку оборудуют подбор-
щиком, тогда режущий аппарат и мотовило выключают из работы.
После подбора валков все технологические процессы, кроме среза,
повторяются.
Зерноуборочные комбайны применяют также для уборки куку-
рузы, подсолнечника и других культур. В этих случаях в основном
видоизменяется рабочий процесс жатвенной части. При уборке
кукурузы на зерно комбайн оборудуют жаткой сплошного среза
или ручьевой жаткой. В первом случае вся масса (стебли и почат-
ки) направляется в молотилку, во втором — только початки.
Картофелеуборочные комбайны работают по следующим техно-
логическим схемам. Подкапывают картофельные грядки, отделяют
картофель от почвы, разрушают почвенные комки, отрывают клуб-
ни от столонов, удаляют ботву и растительные остатки и отделяют
Клубни от камней и комков.
505
ВидА
Рис. 330. Схема рабочего про-
цесса картофелеуборочного
комбайна:.
а — элеваторная модификация; б —•
грохотная модификация; / — боко-
вина; 2 и 15 — подкапывающие ле-
меха; 3 — основной элеватор; 4 —
б
встряхиватель; 5 и 18 — ком подави-
тели; 6 — грохот; 7 — транспортер ботвоудаляющего устройства; 8 — барабанный транспор-
тер; 9 — прижимной транспортер; 10 — горка; 11 — транспортер-переборщик; 12 — транспор-
тер клубией; 13 — бункер; 14 — транспортер примесей; 16 и 17 — решета грохота.
Разрушение почвенных комков происходит как в процессе про-
сеивания почвы (тогда рабочие органы для разрушения комков
устанавливают между первым и вторым грохотами или между
элеватором и грохотом), так и после просеивающих рабочих орга-
нов. При разрушении комков перед просеивающими рабочими
органами повреждается меньше клубней, так как почва смягчает
действие комкодавителей на клубни. Однако эффективность разру-
шения комков выше при второй схеме.
Камни и неразрушенные комки отделяются обычно в конце
рабочего процесса машины, для этого используют наклонные
транспортеры-переборщики, на которых большую часть процесса
разделения выполняют вручную.
На рисунке 330 показана схема рабочего процесса картофеле-
уборочного комбайна. В зависимости от почвенных условий ком-
байн применяется в элеваторной (рис. 330, а) или грохотной
(рис. 330, б) модификациях. В элеваторной модификации комбайн
подрезает пласт пассивным лемехом 2, а рыхлит его и отсеивает
почву прутковым элеватором 3. В грохотком комбайне лемех 15
колеблется вместе с первым решетом 16. На элеваторе 3 и реше-
тах 16 и 17 отсеивается основная часть почвы.
Масса, сошедшая с просеивающих органов, поступает в ком-
кодавители 5 или 18. Между пневматическими баллонами комки
разрушаются.
506
После баллонов почва просеивается на решетах грохота 6. Да-
лее масса поступает на транспортер 7 ботвоудаляющего устрой-
ства. Клубни и мелкие примеси просыпаются между прутками
транспортера на барабанный транспортер 8, а ботва (с неотор-
ванными клубнями) и растительные примесн зависают на прутках
транспортера и выбрасываются ими после прохода через прижим-
ной транспортер 9 на поле сзади комбайна. При протаскивании
ботвы оставшиеся на ней клубни отрываются от столонов отбой-
ными прутками и тоже падают на транспортер 8.
Рис. 331. Схема рабочего процесса свеклоуборочного комбайна с тереблением
корня за ботву:
I — подкапывающая лапа; 2 — ботвоподъемиик; 3 — теребильный аппарат; 4 — ботвообре-
вающнй аппарат; 5 — бункер ботвы; 6 и 8 — элеваторы корней; 7 — шнековый очиститель.
Б07
Рис. 332. Схема рабочего процесса свеклоуборочного комбайна с предваритель-
ной обрезкой ботвы:
1 — дисковые ножи; 2 — продольный транспортер ботвы; 3 — битер; 4 — поперечный транс-
портер; 5 — бункер корней; 6 — транспортер корней; 7 — бункер ботвы; 8 — транспортер-
очиститель корней; 9 — копачн.
Клубни с примесями комков и камней подаются барабанным
транспортером 8 на горку 10 и вследствие разности в коэффициен-
тах качения комки почвы и клубни картофеля разделяются на два
потока, поступающих на транспортер-переборщик 11. Здесь от
клубней вручную дополнительно отделяют камни и комки (рабо-
чие, стоящие по сторонам транспортера-переборщика). Клубни за-
грузочным элеватором 12 подаются в бункер-копильник 13, а при-
меси транспортером 14 выводятся на поле.
Свеклоуборочные комбайны работают по следующим техноло-
гическим схемам: подкапывание корней, теребление их за ботву,
обрезка ботвы, очистка корней от почвы; обрезка ботвы, выкапы-
вание (выжимание) корней, отделение и очистка их от почвы.
Первая последовательность процессов применима при уборке
свеклы с развитой и хорошо сохранившейся ботвой, вторая техно-
логическая схема используется независимо от состояния ботвы.
Рабочий процесс в комбайне теребильного
типа протекает так. Ботвоподъемники 2 (рис. 331), перемещаясь
вдоль рядка, поднимают полегшую ботву, сжимают ее в пучки и
направляют в приемную щель раскрытых лап теребильного аппа-
рата 3. Одновременно с этим подкапывающие лапы 1 подкапыва-
ют корни, несколько приподнимают пласт почвы вместе с корнями,
разрыхляют почву, нарушая связь корнеплодов с ней.
S08
Закрываясь, лапы теребильного аппарата захватывают пучок
ботвы и, перемещаясь вместе с цепью вверх, вытаскивают корни
из почвы. Далее теребильный аппарат переносит свеклу к ботво-
обрезающему аппарату 4. У выравненных корней ножи обреза*
ют ботву и отбрасывают ее в бункер 5, а корни падают на эле-
ватор 6, который подает их на шнековый очиститель 7. Очищенные
от почвы корни транспортер 8 направляет в тележку или бун-
кер.
Рабочий процесс в комбайне выкапывающего
типа (рис. 332) протекает следующим образом. При движении
ботву собирают в пучок полозковыми копирами и срезают ее дис-
ковыми ножами-1. Срезанная ботва продольным транспортером 2„
битером 3 и поперечным транспортером 4 подается в бункер 7.
Корни на двух рядках с предварительно обрезанной ботвой выжи-
маются копачами 9 и далее транспортером-очистителем корней 8
и транспортером 6 направляются в бункер 5. Транспортер-очисти-
тель наряду с перемещением корней частично очищает их от почвы
и отсеивает ее.
Комбайны по указанным схемам могут быть одно-, двух- и
трехрядными.
Льноуборочные комбайны теребят стебли, очесывают коробочки
и связывают стебли в снопы или расстилают их на поле для вы-
лежки в тресту.
Рис. 333. Схема рабочего процесса льно-
комбайна:
1 — делитель; 2 — теребильный аппарат; 3 — по-
перечный транспортер; 4 — зажимной транспор-
тер; 5 — очесывающе-транспортнрующее устрой-
ство; 6 — сноповязальный аппарат; 7 — транспор-
тер; 8 — тракторный прицеп.
509
Схема рабочего процесса комбайна, выполняющего указанные
процессы, приведена на рисунке 333.
При движении комбайна делители 1 разделяют стебли льна
на полосы и подводят их к рабочему руслу теребильных аппара-
тов 2. Теребильные аппараты выдергивают лен и переносят его
поперечным транспортером 3 к зажимному транспортеру 4, кото-
рый, зажав стебли между ремнями, удерживает их от выдергива-
ния при очесе. Очесывающий барабан 5 отрывает коробочки при
-круговом поступательном движении гребней. Стебли, зажатые
ремнями, подаются в вязальный аппарат 6 для связки в снопы.
Лопасти барабана подхватывают очесанный гребнями ворох и
перемещают его вверх, а затем через окно сбрасывают на транс-
портер 7. Транспортер подает ворох в прицеп 8.
§ 3. Регулирование положения рабочих органов
в вертикальной плоскости
Общие сведения. При выполнении таких процессов как среза-
ние и теребление, сгребание и подбор растений, съем хлопка, под-
капывание грядки при уборке клубней и корнеплодов необходимо,
чтобы рабочие органы занимали оптимальное положение относи-
тельно заданной поверхности. Заданной может быть поверхность
поля (жатки, подборщики, грабли, теребилки, хлопкоуборочные
и другие машины), поверхности кустов (чаеуборочные и плодоубо-
рочные машины). Находят применение механические системы опор-
ного копирования поверхности и гидромеханические системы авто-
матического регулирования (ГМСР) положения рабочих органов
машин по вертикали.
Рассмотрим указанные способы копирования заданной поверх-
ности.
Механические системы опорного копирования. В таких систе-
мах рама с рабочими органами опирается на колеса (катки) или
на башмаки (лыжи), копирующие поверхность поля. Так, для
выдерживания заданной глубины погружения в почву подкапываю-
щие лемехи и лапы / корнеклубнеуборочных машин соединяют
жестко с рамой 2 (рис. 334, а) или с подвижной рамой 3
(рис. 334,6), причем последнюю шарнирно связывают с полуосями
колес основной рамы. Глубину подкапывания изменяют перемеще-
нием передних колес (полунавесные машины) или рабочих орга-
нов (прицепные, навесные машины) относительно рамы. На опор-
ные колеса таких систем действуют большие нагрузки, поэтому
колеса должны быть больших размеров. На почвах с переменной
плотностью такие системы работают неудовлетворительно: при
большой плотности глубина хода уменьшается, а при малой уве-
личивается из-за «зарывания» опорных элементов в почву.
С целью уменьшения давлений колес или башмаков на почву
применяют одношарнирные (рис. 335) и многозвенные (рис. 336)
механические системы с пружинным уравновешиванием.
S10
Рис. 334. Подвеска подкапывающих лемехов:
а — жесткое соединение лемеха с рамой; б — соединение лемеха с по-
движной рамой; / — лемех; 2—основная рама; 3 —подвижная рама.
Рис. 335. Схемы одношарнирного соединения рабочих органов:
а — с пружинным уравновешиванием; б — с аккумуляторным уравновеши-
ванием; 1 — копиры; 2 — корпуса с рабочими органами; 3 — пружина; 4 —
аккумулятор; 5 — клапан; 6 — гидроцилиндр.
Рис. 336. Схема механизма подвески пальцевого бруса косилки:
1 — пальцевый брус; 2 — тяговая штанга; 3 — пружина.
В одношарнирной системе пружину 3 соединяют непо-
средственно с корпусом 2, несущим рабочий орган. Заданное поло-
жение рабочих органов относительно поверхности почвы получают
изменением высоты установки колес или башмаков, а натяжением
пружины регулируют давление их на почву. При неровном рельефе
давление изменяется: на возвышениях оно падает, на впадинах
снижается, из-за чего возможно «зарывание» башмаков в почву
или «галопирование» корпуса с рабочим органом.
Для устранения указанных недостатков в одношарнирных си-
стемах применяют уравновешивание с использованием пружин-
ных или гидропневм этических аккумуляторов.
Неровности поля при этом также копируют башмаки или коле-
са, а заданное силовое взаимодействие башмаков с почвой под-
держивают аккумуляторы 4 (рис. 335,6). Энергия в аккумулято-
рах накапливается за счет сжатия пружин или газа. В тех слу-
чаях, когда усилие на башмаках возрастает сверх заданного, сра-
батывает клапан 5 и пружина или газ выталкивают масло из
аккумулятора в камеру гидроцилиндра 6.
При работе на рельефе с большой частотой изменения неровно-
стей такие системы не обеспечивают требуемого качества работы
из-за замедленного действия.
В многозвенной системе (рис. 336), применяемой для
уравновешивания пальцевого бруса косилок, пальцевый брус 1
соединяют с рамой тяговой штангой 2. В рабочем положении баш-
маки пальцевого бруса, скользя по поверхности почвы, копируют
се рельеф. Высоту среза регулируют перестановкой башмаков
относительно пальцевого бруса.
Пальцевый брус поднимает механизм ABCDiDEFKG. При
подъеме вначале поворачивается двуплечий рычаг АВ, который
связан с механизмом подъема косилки, и приводит в движение
звено ВС. Звено ВС перемещает упорный рычаг CDlt который
через звенья DE и EF действует на подъемный рычаг FG. Когда
подъемный рычаг упрется своей гранью в выступ башмака (точ-
ка м), башмак вместе с пальцевым брусом начинает вращаться
•относительно шарнира К. Вращение пальцевого бруса вокруг шар-
нира происходит до тех пор, пока не выбран зазор s между упор-
ным рычагом CDi и звеном DE. После этого поворот пальцевого
бруса и тяговой штанги происходит, как поворот целого механизма
вокруг шарнира О.
Длину звена EF механизма подъема можно изменять, влияя
на соотношение нагрузки на внутреннем и внешнем башмаках.
При укорочении звена нагрузка на внешний башмак уменьшается,
а при удлинении увеличивается. Одновременно с этим общую на-
грузку на внешний и внутренний башмаки можно изменять натя-
жением пружины 3. Оптимальные нагрузки соответствуют
300...400 Н на внутреннем башмаке и 100... 150 Н на наружном. На
«башмаках фронтального аппарата нагрузка должна быть в преде-
лах 100...200 Н.
S12
Рис. 337. Схемы:
а — подвески копирующей жатки; б — сил, действующих на звенья механизма навески; 1 —
корпус копирующей части; 2— наклонный корпус; 3 — гидроцилиндры; 4 — пружины; 5 —
ограничители; 6 — копирующие башмаки.
В четырехзвенном механизме жаток зерно- и кормо-
уборочных машин корпус 1 (рис. 337, а) копирующей части соеди-
няют с наклонным корпусом 2 механизмом ABCD. Сочленение зве-
на АВ с наклонным корпусом 2 выполняют шаровым шарниром А,
обеспечивающим копирование башмаками 6 поверхности поля в
поперечной и продольной плоскостях. Высоту среза регулируют
изменением положения башмаков по высоте. Для уравновешива-
ния жатки применяют пружины 4, изменяя натяжение которых
получают заданное давление башмаков на почву.
В транспортное положение жатку поднимают гидроцилиндры 3,
поворачивая наклонный корпус 2 относительно оси EF. В начале
поворота наклонного корпуса копирующая часть жатки не подни-
мается, а только выбирается зазор между звеном CD и опорными
кронштейнами. Только после того, как зазор будет выбран, копи-
рующая часть начинает подниматься вместе с наклонным корпусом
как одно целое.
В некоторых машинах уравновешивающие пружины устанавли-
вают не сбоку наклонного корпуса, а на корпусе копирующей
части. Такое конструктивное решение улучшает компоновку меха-
низма передач к рабочим органам жатки.
При четырехзвенной подвеске, как и при одношарнирном креп-
лении на неровном рельефе, натяжение пружин изменяется: на
возвышениях оно уменьшается, на впадинах увеличивается. Но при
такой схеме подвески давление на башмаки зависит не только от
натяжения пружин, но и от положения мгновенной оси поворота п
механизма ABCD (рис. 337,6).
Рассмотрим статическое равновесие механизма.
На звенья механизма действуют: сила тяжести Р копирующей
части машины, сила Т натяжения пружин, реакция N на башмаки
и сила трения F башмаков о почву. Используя «рычаг» Н. Е. Жу-
ковского, имеем следующее условие равновесия всех сил:
РЬ— Та—Nc-j-Fd=O.
33—424
513
Так как F=fN, где f— коэффициент трения башмаков о почву, то,
решая, получаем
N = РЬ~Т.а .
с — fd
Для устойчивого копирования рельефа поля необходимо, чтобы
сила N была в пределах 300...400 Н. Указанного значения сила
достигает на горизонтальной плоскости. Звенья механизма ABCD
подбирают так, чтобы с изменением натяжения пружины на релье-
фе с малой частотой колебания неровностей положение полюса л
обеспечивало бы постоянным усилие, действующее на башмаки.
На рельефе с большой частотой изменения неровностей такие
системы не позволяют получить динамического уравновешивания:
давление на башмаки колеблется в недопускаемом диапазоне, что
вызывает поломки креплений башмаков или сгруживание ими рых-
лой почвы. Поэтому на участках с большой частотой неровностей
корпус соединяют жестко с рамой машины. В этих случаях баш-
маки не опускают до соприкосновения с почвой, а положение
рабочих органов изменяют гидроцилиндрами.
Гидромеханические системы опорного копирования. В таких си-
стемах рабочий орган отслеживает положение колес и башмаков,
не воспринимающих, как в механических навесных устройствах,
силы, действующие на элементы конструкции, несущие рабочие
органы.
На рисунке 338 приведены принципиальные схемы типичных
гидромеханических систем автоматического регулирования глуби-
ны хода подкапывающих лемехов корнеклубнеуборочных
(рис. 338, а) и высоты расположения шпиндельных барабанов
(рис. 338, б) хлопкоуборочных машин.
Рассматриваемые системы регулирования включают датчики,
исполнительные механизмы, задатчики положения рабочих органов
и механизмы ручного управления положением рабочих органов.
Датчики состоят из копиров 7 и механизмов ABCDEFGH
(рис. 338,а) или AtBiCiDiEiFiGiHiRyLiMi (рис. 338,6), кинемати-
чески связанных с золотниками распределителей 4 (прямая связь).
Наряду с прямой связью копир глубины хода лемехов (рис. 338, а)
соединен механизмом ONMLKJEDCAB, кинематическая цепь кото-
рого образует обратную связь.
Исполнительные механизмы (гидрораспределители 4,
гидроцилиндры 5, рычаги PLM и S\R\P\) преобразуют перемеще-
ние золотника гидрораспределителя в перемещение рабочих орга-
нов.
Задатчик положения предназначен для установки рабо-
чих органов в заданную позицию относительно копиров, что дости-
гается изменением длины одного из звеньев механизма прямой или
обратной связи (звенья JK и Gj/A).
Механизм ручного управления положением
рабочих органов служит для включения рычагов, воздейст-
514
2
a
Рис. 338. Схемы гидромеханических систем опорного копи-
рования:
а — глубины хода лемехов; б — шпиндельных барабанов хлопкоубо-
рочных машин; 1— бак; 2— фильтр; 3_—насос; 4 — гидрораспредели-
гели; 5 — гидроцилиндры; 6 — лемех; 7 — копиры; 8 — колеса машины;
9 — обтекатель; 10 — шпиндельный барабан.
33*
вующих на распределитель или на обратные клапаны масляной
магистрали.
При работе на ровном рельефе копиры перекатываются по по-
верхности поля, золотник гидрораспределителя занимает нейтраль-
ное положение, полости гидроцилиндров перекрыты и рабочие
органы машины установлены в позицию, определяемую задатчи-
ком положения. Оптимальную глубину хода устанавливают непо-
средственно в поле, регулируя рабочие органы так, чтобы избе-
жать потерь.
На неровностях копиры изменяют положение и механизмами
прямой связи перемещают золотники гидрораспределителей, кото-
рые управляют работой гидроцилиндров. Гидроцилиндры через си-
стему рычагов и тяг изменяют положение рабочих органов отно-
сительно рамы. Перемещаясь, рабочие органы воздействуют меха-
низмом обратной связи (рис. 338, а) на золотник перераспредели»
теля, устанавливая его в нейтральное положение.
В системе, приведенной на рисунке 338,6, перевод золотника
в нейтральное положение в процессе перемещения рабочих орга-
нов происходит путем перемещения шарниров А\ и A'i по вертикали,
а далее звеньями механизма прямой связи.
В таких системах копиры не нагружены силами, действующими
на рабочие органы, рычаги и тяги механизмов связи имеют значи-
тельно меньшие массы и моменты инерции, чем в механических си-
стемах опорного копирования. В результате чего такие системы
чувствительнее к изменению рельефа поля, отличаются быстродей-
ствием, копиры меньше «зарываются» и «галопируют» на неровном
рельефе с переменной плотностью почвы. Дисперсия положения
рабочего органа в несколько раз меньше, чем при механических
системах опорного копирования.
§ 4. Параметры машин
Производительность и пропускная способность. Уборочные ма-
шины рассчитывают на определенную производительность. При
ее выборе учитывают: зоны применения машин; состояние убирае-
мых культур; размеры и рельеф участков; состояние почвы; пара-
метры энергетических средств, планируемых для агрегатирования
с машиной; эксплуатационные показатели обслуживающих средств
(погрузочно-разгрузочных устройств и транспортирующих машин).
Оптимальная производительность должна соответствовать вы-
соким технико-экономическим показателям: материалоемкости,
энергоемкости и затратам труда.
Производительность машины рассчитывают по пропускной спо-
собности, исходя из формулы:
(375)
где QM — производительность машины;
qo — пропускная способность машины;
Тем — коэффициент использования времени смены.
516
Под пропускной способностью машины понимают массу убирае-
мой культуры в одну секунду при допускаемых показателях каче-
ства уборки.
За пропускную способность молотилки комбайна принимают
приведенную подачу qo при £=0,6 и коэффициенте потерь зерна р
за молотилкой, не превышающем 1,5%. Коэффициент потерь р —
сумма коэффициентов: недомолота 6, схода зерна с соломой tjc и
половой Tjo, т. е.
Р=6+т1с+11о-
Тогда при £ = 0,6 из выражений (267) и (270) имеем
q0=2,5BvA3, (376)
Пропускная способность молотилки на уборке малозасоренной
пшеницы при влажности массы до 18% указана цифрой в марке
комбайна. Так, для молотилки комбайна СК-5 номинальная про-
пускная способность <7о.п = 5 кг/с, а для СК-6 — </о.н = 6 кг/с.
При уборке хлебных злаков с коэффициентом соломистости
Р=И=0,6 пропускная способность qo не будет равна номинальной
<7о.н. Тогда пропускную способность qo рассчитывают, исходя из
условия, что подача соломы qc в молотилку комбайна при любых
значениях £ равна qc при £=0,6.
Из выражения (270) при р^15%, получаем
= (377)
При уборке длинносоломистых влажных хлебов пропускная
способность зернового комбайна составляет 0,6....0,8 от qo.H-
Загрузка машины должна соответствовать ее пропускной спо-
собности. Это соответствие достигается выбором оптимальных зна-
чений ширины захвата машины и скорости движения агрегатов
с учетом урожайности А3 убираемой массы.
При заданной пропускной способности ширину захвата и ско-
рость машины выбирают, исходя из условий работы и возможно-
стей энергетических средств.
Длина пальцевого бруса и ширина захвата косилок. Параметры
пальцевого бруса существенно влияют как на качество работы
косилки, так и на ее технико-экономические показатели.
Одним из таких параметров служит длина пальцевого бруса.
От этого параметра зависит расход металла на 1 м захвата ко-
силки.
На рисунке 339, а изображена кривая удельной материало-
емкости в зависимости от длины пальцевого бруса прицепных
косилок. Из графика следует, что с увеличением его длины масса
косилки в расчете на 1 м захвата снижается. Увеличение длины
пальцевого бруса приводит к росту производительности машины
и снижению затрат труда.
517
Число польиеВых. брусьев
Рис. 339. Изменение массы косилок, отнесенной к 1 м ширины захвата
в зависимости от длины и числа пальцевых брусьев:
слева — прицепной; справа — навесной; I — длина пальцевого бруса.
Однако с увеличением длины бруса ухудшается копирование
рельефа поля, затрудняется установка зазоров в элементах режу-
щей пары. Все это ухудшает надежность среза, увеличивает трение
сегментов о вкладыши, что может привести к быстрому их износу.
Чем длиннее брус, тем больше длина ножа. С удлинением ножа
повышаются силы инерции. Увеличение сил инерции может вы-
звать силовое перенапряжение деталей ножа и привести к полом-
кам.
В существующих тракторных косилках длину пальцевого бруса
принимают равной 2,1 м.
Требуемая ширина захвата косилок определяется классностью
применяемого энергетическогко средства и условиями использова-
ния косилок. В соответствии с этим бывают: одно-, двух-, трех-,
пяти- и семибрусные косилки.
На рисунке 339, б изображена кривая изменения удельной
материалоемкости в зависимости от ширины захвата косилки. Из
кривой видно, что трехбрусные косилки экономичнее, чем пяти- и
семибрусные. Такое повышение расхода металла на 1 м широко-
захватных косилок объясняется тем, что в пяти- и семибрусных
машинах усложняется привод к режущим аппаратам, затрудняет-
ся соединение пальцевых брусьев как в секции, так и с трактором.
Широкозахватные косилки можно с достаточной эффективно-
стью применять на массивах с большими размерами, в пустынных
и пустынно-степных районах страны.
Ширина захвата жаток. Ширина как комбайновых, так и рядо-
вых жаток определяется пропускной способностью комбайна.
Загрузка комбайна должна быть равна его пропускной способно-
сти. Это соответствие достигается подбором скорости комбайна
или ширины захвата жатки при прямом комбайнировании, а так-
же массы 1 м валка при раздельной уборке.
Работа комбайна на повышенных скоростях увеличивает мощ-
ность, потребную на перекатывание,- повышает силовую напряжен-
ие
ность узлов и механизмов комбайна, что может снизить эксплуата-
ционную надежность агрегата.
В зависимости от ширины захвата жатки комбайна или массы
1 м валка оптимальную скорость движения агрегата выбирают
такой, при которой загрузка молотилки равна ее пропускной спо-
собности.
Допускаемая масса 1 м валка зависит от почвенно-климатиче-
ских условий. Опытами установлено, что оптимальная масса валка
равна 2,5...4 кг/м (меньшие значения соответствуют районам повы-
шенного увлажнения, большие — районам Юга и Юго-Востока).
Из выражения (376) следует, что ширина захвата жатки
в=-даг- <378>
Чтобы использовать комбайны на различной урожайности,
к ним изготавливаются жатки с шириной захвата 6—7 м для высо-
коурожайных и соломистых и 5 м для малоурожайных хлебов.
Рядковые жатки выпускаются с шириной захвата 4,9 и 6 м,
разрабатываются жатки с большей шириной захвата (10—15 м).
Оптимальная масса 1 м валка (3,5...5 кг/м) при работе комбай-
на на малоурожайных хлебах с жатками с шириной захвата
5—6 м может быть достигнута спариванием жаток или укладыва-
нием хлебной массы в один валок за два прохода агрегата.
Широкозахватные 10- и 15-метровые жатки делают секционны-
ми с укладкой массы в один, два или более валков. Ширину захва-
та каждой секции выбирают равной 5—6 м. При таких размерах
создается оптимальный валок при урожайности зерна Д3«ЗО ц/га.
Жатки для уборки зернобобовых культур выпускаются с шири-
ной захвата 3...5 м.
Ширину захвата силосоуборочных, кукурузоуборочных и дру-
гих машин подбирают аналогичным способом.
В силосоуборочных комбайнах применяют жатки с шириной
захвата 1,8...2,6 м.
Грузоподъемность машин. Производительность волокуш, коп-
новозов, стогометателей и других уборочных машин во многом
зависит от их грузоподъемности, которая определяется тяговыми
способностями трактора или шасси, предельной устойчивостью
агрегата и допускаемой загрузкой пневматических шин.
Для сволакивания копен соломы применяют тросово-рамочные
волокуши. Раму волокуши боковинами из тросов соединяют с дву-
мя колесными или гусеничными тракторами.
Грузоподъемность Рг тросово-рамочной волокуши, учитывая тя-
говые способности трактора, находят из выражения:
Рг==2Р^^ (379)
где Рг — грузоподъемность волокуши;
Ркр — усилие на крюке трактора;
519
е — коэффициент использования тягового усилия тракторов,
равный 0,90;
f — коэффициент сопротивления протаскиванию копен по
стерне, равный 0,45...0,50.
Копны сена и соломы перевозят к местам скирдования копно-
возами, которые навешивают спереди или сзади на трактор.
К раме 1 шарнирно присоединяют пальцы 3 (рис. 340), сверху коп-
ну прижимают рамой 2.
Грузоподъемность копновоза, исходя из продольной устойчиво-
сти агрегата, определяют с учетом предельного коэффициента е3
использования запаса устойчивости. Коэффициент е3 представляет
•собой отношение суммарного момента от силы тяжести и грузо-
подъемности копновоза, взятого относительно точки опоры колес
(точка О), к моменту от силы тяжести трактора, т. е.
РкА + PJ (380)
8 Р^С 9 ' 7
где Р-г — сила тяжести трактора;
Рк — сила тяжести копновоза;
Рг — грузоподъемность копновоза:
а,Ь,с — расстояния от точки О до линии действия соответственно
СИЛ Рк, Рг, Рт-
Для колесных тракторов класса .1,4 т предельным значением
считают 83=0,4.
Исходя из этого, имеем
п 0,4PjC — РКА
г~ b
Найденная по выражению (381) грузоподъемность Рг копновоза
должна удовлетворять условию предельно допускаемой загрузки
пневматических шин трактора. Нагрузку на передние и задние
колеса трактора можно отыскать из уравнения моментов всех сил
.относительно точки О. Для неподвижного трактора, когда силы
Рис. 340. Схема к расчету грузоподъемности копновоза:
J — рама копновоза; 3 — прижимная рама; 3 — пальцы.
620
Тп и T3 сопротивления перекатыванию (передних и задних колесу
равны нулю, имеем
ДГ Рт?---Рца-- РгЬ
п= £ •
#з=Рт+Рк+Л--^п. (382)
где Лгп и N3 — реакция соответственно на передние и задние ко»
леса;
L — продольная база трактора.
При равномерном движении трактора, кроме вертикальный
реакций, на него действуют и горизонтальные Тп и Т3.
Если принять Ta=fNn и T3=fN3, где f — коэффициент сопро-
тивления перекатыванию, то
PD=yNl-\-n=—-^-~Prb УТ+Р, (383)
7?3=VM+Ti=(PT+PK+Pr-^) ГПр. (384)
Для шин И...38 задних колес трактора допустимая величина
нагрузки на одно колесо не должна превышать 14 500...15 500 Н.
Из выражения (381) видно, что грузоподъемность копновоза
тем выше, чем меньше плечи а и Ь. Размер этих плеч зависит от
конструкции копновоза и механизма навески трактора.
Производительность тросовых волокуш и коцновозов на один
цикл работы можно выразить следующей зависимостью:
где — продолжительность одного цикла работы машины;
Рг — грузоподъемность.
Продолжительность цикла работы волокуши складывается из
времени на погрузку, t2 на разгрузку и /3 на переезды под погруз-
ку и обратно, т. е.
Время t3 определяется расстоянием s от копен до места их
укладки и скоростью движения трактора с грузом и без него, т. е.
или
3 »2 V1V2
где t'l и С2 — соответственно скорости движения копновоза с гру-
зом и без груза.
Заменяя t3 полученным выражением, имеем
- гк+ST (385)
[*1 +'2 + Vlt>2 J
Из выражения (385) видно, что производительность увеличи-
вается с уменьшением времени загрузки и разгрузки и повышением
5Я
скоростей th и v2 движения агрегата. С увеличением расстояния $,
на которое транспортируют копны, производительность агрегата
снижается.
Тросовые волокуши и особенно копновозы выгодно использо-
вать при небольших расстояниях перевозок. Наряду с этим тран-
спортирование копен тросово-рамочными волокушами на значи-
тельные расстояния приводит к большим потерям и загрязнению
половы и соломы.
Производительность копновоза значительно ниже, чем произ-
водительность тросовой волокуши при той же дальности перевоз-
ки. Однако применение копновозов уменьшает загрязнение массы
и облегчает последующее скирдование.
Рабочая скорость движения машин. Производительность маши-
ны находится в прямой зависимости не только от ширины ее
захвата и грузоподъемности, но и от скорости движения.
Скорость движения агрегата ограничивается пропускной спо-
собностью рабочих органов машины.
Из выражения (232) скорость машины
v=qo/BAp. (386)
Из-за непрерывного изменения пропускной способности для
высококачественной и эффективной работы необходимо изменять
и скорость V. Заданное значение скорости определяется переда-
точным числом силовой передачи
у — шгдД^]б_, (387)
где Ид — частота вращения вала двигателя;
DK — диаметр колеса;
т]б — коэффициент, учитывающий потери от буксования;
iTp — передаточное число механизма передач (кроме вариато-
ра);
i — передаточное число вариатора.
Решая совместно уравнения (386) и (387) при q = qo, получаем
_т1ЯдДк'Пб^-4р И 881
<7о»тр ‘ ’
Из этого выражения следует, что при загрузке машины, равной
пропускной способности, передаточное число вариатора клиноре-
менной передачи должно изменяться пропорционально урожайно-
сти убираемой культуры АР. Графическая зависимость i от Ар
приведена на рисунке 341..
Ординаты между линиями АВ и CD равны диапазону измене-
ния передаточного числа вариатора Ai=2,6.
С помощью графика можно определить передаточное число ко-
робки передач и вариатора для работы на оптимальном режиме.
В самоходных уборочных машинах применяют вариаторные
устройства, позволяющие изменять передаточное число без пере-
522
ключения коробки передач. Принципы действия этих устройств
зависят от типа передачи момента от вала двигателя к ведущим
колесам или гусеницам. Наибольшее распространение в самоход-
ных машинах находят механические и гидромеханические пере-
дачи.
В механической трансмиссии (рис. 342, а) с бессту-
пенчатым регулированием скорости движения машины вращаю-
щий момент от двигателя 1 (вариатором 2, сцеплением 3, короб-
кой передач 4, через дифференциальный механизм 5 и бортовые
редукторы 6) передается на колеса или гусеницы машины.
Частоту вращения ведущих колес в механической передаче
изменяют клиноременными вариаторами, наибольшее применение
находят вариаторы с двумя (ведомым и ведущим) раздвижными
шкивами (рис. 343, а) и с двухручьевым раздвижным блоком
(рис. 343,6).
В вариаторах с раздвижными шкивами крутящий момент пере-
дается от шкива 1 (343, а) ведущего вала на шкив 2 ведомого.
Шкив ведущего вала состоит из подвижного диска 4, смонтирован-
ного на валу, и неподвижного диска 3. Шкив ведомого вала имеет
диск 5, закрепленный на валу жестко, и диск 6, посаженный на
этом валу свободно.
Передаточное число изменяют сдвиганием дисков 4 и 6 в новое
положение. Диск 4 перемещается вдоль вала гидравлическим ме-
ханизмом, а диск 6 сдвигается ремнем при увеличении и пружи-
ной 7 при уменьшении скорости движения комбайна. Вариаторы
такого принципа действия применяют и для изменения частоты
вращения рабочих органов машин (мотовила, барабана, вентиля-
тора и др.).
Клиноременный вариатор ходовой части с двухручьевым раз-
движным блоком передает вращающий момент верхним привод-
ным ремнем 9 (рис. 343,6) от шкива <8 коленчатого вала двигате-
ля на блок 10 вариатора, а с блока нижним ремнем 11 на шкив 12
сцепления.
Передаточное число вариатора изменяется при повороте вил-
ки /3 с блоком от действия гидроцилиндра 14. При этом изме-
няется расстояние между блоком и шкивом коленчатого вала,
а также между блоком и шкивом сцепления, причем одно расстоя-
ние увеличивается, а другое уменьшается.
Гидромеханические трансмиссии выполняют в ос-
новном по двум схемам: с двухмашинными (рис. 342, 6) и трех-
машинными (рис. 342, в) объемными гидравлическими механизма-
ми (ОГМ). В двухмашинном ОГМ поток энергии от насоса 8
с регулируемым объемом подаваемой жидкости идет к нерегули-
руемому гидромотору 9, соединенному с ведущим валом коробки
передач 4, далее так же, как и при механической передаче. Транс-
миссия с трехмашинным ОГМ включает регулируемый насос 8 и,
ступенчато-регулируемые гидромоторы 10, встроенные в бортовые
редукторы 6 движителей 7.
523
Рис. 341. Изменение переда-
точного числа вариатора кли-
ноременной передачи на ходо-
вую часть в зависимости от
урожайности растительной мас-
сы:
1 — III передача; 2 — II передача;
3—1 передача.
Ю
10
Рис. 342. Принципиальные схе-
мы передачи момента на дви-
жители уборочных машин:
а — механическая передача; б —
двухмашинная гидромеханическая;
в — трехмашннная гидромеханиче-
ская передача; 1 — двигатель; 2 —
вариатор клнноременной передачи;
8 — сцепление; 4 — коробка передач; 5 — дифференциальный механизм; 6 — бортовые ре-
дукторы; 7 — движители; 8 — регулируемый гидронасос; 9 — нерегулируемый гидромотор;
90 — ступенчато регулируемые гидромоторы.
Рис. 343. Схемы вариаторов клиноременной передачи:
а — с двумя раздвижными шкивами; б — с центральным двухручьевым раздвижным бло-
ком; в — блок в разрезе; 1 — ведущий шкив; 2 — ведомый шкив; 3 и 5 — неподвижные диски
ведущего и ведомого шкивов; 4 и 6 — подвижные диски; 7 — пружина; 8 — ведущий шкив;
9 и 11 — клиновидные ремни; /0 —блок вариатора^ 12— ведомый шкив; 13 — вилка; 14 —
гидроцилиидрр А — внешний диск; Б — средний диск.
При использовании гидротрансмиссии с двухмашинным ОГМ.
упраздняется вариатор клиноременной передачи и сцепление, а
с трехмашинным ОГМ, кроме того, коробка передач и дифферен-
циальный механизм, их заменяют более технически совершенными
гидронасосами и моторами. В результате этого повышается на-
дежность и долговечность передачи, независимое расположение
насосов и моторов улучшает компоновочную схему машин, подчи-
няя ее технологическим целям, облегчается конструктивное реше-
ние проблем дистанционного и автоматизированного управления
рабочим процессом. Гидрообъемные механизмы расширяют унифи-
кацию трансмиссий различных машин и их модификаций. Указан-
ные преимущества в большей мере относятся к трехмашинным
механизмам, применение которых предпочтительнее в сравнении
с двухмашинными на агрегатах с меньшим диапазоном изменения
скоростных и силовых параметров (зерноуборочные комбайны,
самоходные широкозахватные жатки, картофелеуборочные комбай-
ны и др.).
Трансмиссии с ОГМ требуют высокой чистоты жидкости и гер-
метичности соединений в элементах передач, их к. п. д. на 10... 12 %
ниже, а себестоимость выше, чем механических трансмиссий.
На рисунке 344 приведена схема гидрообъемного механизма
трансмиссии.
Аксиально-поршневой насос 4 подает масло по нагнетательной
магистрали 9 или 17 к тяговому гидромотору 15, а от него по слив-
ной магистрали 17 или 9 масло поступает обратно к насосу. На-
сос 4, магистрали 9, 17 и гидромотор 15 образуют замкнутый кон-
Рис. 344. Схема гидрообъемной передачи уборочных машин:
1 — бак; 2 — грубый фильтр заливной горловины; 3 — вакуум-метр; 4 — регулируемый акси-
ально-поршневой насос; 5 — сервоцнлнндр; 6 — всасывающая магистраль; 7 — золотник гид-
роусилителя управления; в — подпиточный насос; 9 и /7 — масляные магистрали; 10—об-
ратные клапаны; 11 й 12 — предохранительные клапаны основной магистрали; 13 — сливной
клапан; 14— челночный золотник; 15—акснально-поршневой мотор; 16— дренажная ма-
гистраль; 18 — датчик температуры масла; 19— охладитель масла (радиатор); 20 — фильтр
тонкой очистки; 21 — предохранительный клапан подпиточной магистрали.
525
тур, по которому циркулирует масло при движении машины.
В зависимости от направления подачи масла от насоса меняется
роль магистралей 9 и 17. При одном направлении насос нагнетает
масло, например в магистраль 9, а по магистрали 17 оно посту-
пает от гидромотора к насосу, а при другом, наоборот, нагнета-
тельной становится магистраль 17, а сливной 9. Запирают масло
в соответствующих магистралях обратные клапаны 10’, максималь-
ное давление а? 35 МПа ограничивают предохранительными кла-
панами 11 и 12. В соответствии с направлением потока масла ма-
шина движется вперед или назад.
Направление потока и количество подаваемого масла изменяют
наклоном шайбы или блока цилиндров аксиально-поршневых насо-
сов.
Блок или шайбу поворачивают рычажными механизмами или
гидроусилителями, включающими золотник управления 7 и серво-
цилиндр 5.
В процессе работы часть масла вытекает сквозь неплотности
сочленений (в насосе и моторе) и отводится дренажной маги-
стралью 16 через охладитель 19 в бак 1. Температуру масла в баке
отмечают по термометру 18 (максимальный нагрев масла не дол-
жен превышать 80°C). Компенсирует утечку масла подпиточный
шестеренчатый насос 8, нагнетающий масло из бака по всасы-
вающей магистрали 6 к обратным каналам. Во всасывающей ма-
гистрали допустимо разряжение не более 25 Па.
Давление в подпиточной магистрали (~1,5 МПа) ограничива-
ет предохранительный клапан 21. Челночный золотник 14 и кла-
пан 13 служат для поддержания постоянным напора (1,4 МПа) в
зоне низкого давления. Золотник включается автоматически неза-
висимо от напора в линии высокого давления.
В гидрообъемных трансмиссиях применяют аксиально-поршне-
вые моторы, которые устанавливают на коробках передач (двух-
машинные ОГМ) или на ведущих колесах (трехмашпнные ОГМ).
В системах с регулируемыми гидромоторами применяют гидроуси-
лители управления наклоном блока цилиндров.
§ 5. Энергетический баланс уборочного агрегата
Составляющие баланса. Режим работы машины зависит не
только от пропускной способности, но и от энергетических возмож-
ностей источника энергии. Распределение мощности в агрегате
зависит от его типа.
В соответствии с этим имеем:
самоходные, навесные и прицепные агрегаты, в которых энер-
гия подается от одного двигателя и расходуется как на передви-
жение агрегата, так и на привод рабочих органов машины;
прицепные агрегаты с моторизованной машиной, в которых
энергия на передвижение и на привод рабочих органов расходует-
ся от разных двигателей.
526
Баланс мощности уборочного агрегата выражается следующей
зависимостью:
^аг=ЛГкач+ЛГх.х+^р, (389)
где Nar — общая потребная мощность;
М.кач — мощность на качение агрегата;
Л^х.х—мощность, необходимая для холостого хода рабочих
органов и механизмов машины;
Л/’р — мощность, потребная на выполнение машиной рабочего
процесса.
Мощность на перекатывание машин. Мощность, потребную на
перекатывание, находим нз выражения:
„ (Ъ + Тг + Т^у
кач W16
где Л—сопротивление перекатыванию рабочей машины (ком-
байна, жатки, косилки и т. д.);
Т2 — сопротивление перекатыванию прицепа, присоединенного
к рабочей машине (прицепные копнители, емкости для
сбора урожая и т. д.);
Тз —сопротивление перекатыванию трактора;
т]тр — механический к. п. д. трансмиссии;
т]б — коэффициент буксования движителей.
Сопротивление перекатыванию трактора или машины склады-
вается из сопротивления Т качению колес.
Сопротивление перекатыванию колеса находим из выраже-
ния (77).
Если машина самоходная, то 73 = 0, тогда при v = q0IBAr, имеем
следующее выражение для определения мощности на качение
машины:
дд ___(71 + 72) qo
кач ЧтрЧб/Мр •
Если отнести к силе тяжести Р машины, т. е.
получим
ДД ----
кач'“ ЧтрЧбДЛр •
(391)
пли
где
дд —мдо
**кач— л
лР
м=—-р -
Чтр1]бЛ ‘
Мощность Nкач на перекатывание всего агрегата складывается
из мощности Нкач, потребной на качение машины, и мощности
Л^кач— на качение трактора.
527
Мощность на привод рабочих органов. Мощность на привод
рабочих органов складывается из мощности на холостой ход и
мощности, потребной на выполнение технологического процесса.
Мощность холостого х о д а рабочих органов и механиз-
мов машины зависит от сопротивлений в подшипниках, от трения
транспортирующих устройств по направляющим и днищам, на
сообщение движения воздуху и т. д. Мощность холостого хода
характеризует конструкцию машины и ее состояние. При правиль-
ной регулировке и хорошем техническом обслуживании машины
мощность Nx.x может быть значительно снижена.
Мощность рабочего процесса зависит от раститель-
ной массы, подаваемой в машину.
На основании экспериментальных данных для большинства
машин эта мощность прямо пропорциональна загрузке:
Np=Noq, (392)
где No — мощность, необходимая для выполнения рабочего процес-
са при загрузке 1 кг/с.
В таблице 15 приведены ориентировочные данные коэффициен-
та а и мощностей Nx.x, No для уборочных машин основных типов.
ТАБЛИЦА 15
Значение a, No и
Наименование машины Сопротивление перекатыванию машины, отнесенное к 1 т ее массы, а*, Н/т Мощность холостого хода х, кВт ' Удельная мощность рабочего хода NQt кВт-с/кг
Зерноуборочный комбайн (1,2...2)103 8...9,5 5,1...5,8
Силосоуборочный комбайн (2,5...5)103 5,5...7,0 2,5.-.3,5
Картофелеуборочный ком-
байп (3,6...6)103 8...10 2,8...4,5
Кукурузоуборочный ком-
байн (2,5...5)103 /,5 8,6 2,3...5,0
Льноуборочный комбайн (2,0...4)16®./ 7...8 3,0...4,5
♦ Значение а приводится без учета мощности на самоперекатывание трактора (шас-
си). — Прим, автора.
Заменяя в выражении (389) NKa4 и Np по формулам (391) и
(392), получаем для самоходной машины
Nar=^+Nx.^Noqo. (393)
При подаче д, равной пропускной способности q0, выражение
(393) в координатах Nar и Ар (рис. 345) представляет собой гипер-
болу (линия АВС).
Пусть суммарная эффективная мощность двигателей агрегата
будет NK (линия DBE), тогда соотношение мощности Маг и Уд
определяет режим работы машины.
528
ланса уборочного агрегата при раз-
ной урожайности массы.
Так, в зоне I, когда NaT<Nn,
машина может работать в опти-
мальном технологическом режи-
ме, соответствующем наивыгод-
нейшей пропускной способности.
Разница между расчетной
эффективной мощностью Nn дви-
гателя и потребной мощностью
Afar представляет собой остаток
неиспользованной мощности 1
Noct- Этот остаток тем больше,
чем выше урожайность Др. Ра-
бота агрегата с недоиспользо-
ванной мощностью сопровожда-
ется нерациональным расходом
топлива и повышенными затра-
тами труда. Для наиболее полной загрузки двигателей в пределах
этой зоны целесообразно совмещать процесс, выполняемый рабо-
чей машиной, с другими операциями, например использовать зер-
ноуборочные комбайны с устройствами для сбора незерновой ча-
сти урожая (измельчители, швырялки, прессы и тележки).
В зоне II потребная мощность Afar выше расчетной эффектив-
ной мощности А^д двигателя. Работа машины в этой зоне ограничи-
вается не пропускной способностью, а энергетическими возмож-
ностями двигателей. В этом случае рабочие органы машины будут
действовать при загрузках ниже оптимальных, эксплуатация ма-
шины в таком режиме сопровождается низкими показателями и
непроизводительными затратами.
Более эффективное использование машины в пределах II зоны
при той же мощности двигателей возможно, если увеличить шири-
ну захвата или при раздельном комбайнировании создать соответ-
ствующий валок широкозахватными жатвенными агрегатами.
§ 6. Управление, регулирование и контроль качества работы
Общие сведения. Современные уборочные машины оборудова-
ны гидравлическими, электрическими, электрогидравлическими и
другими системами автоматического или ручного управления.
Гидравлическая система предназначена: для изменения поло-
жения вала мотовила жаток, подкапывающих лемехов картофеле-
уборочных комбайнов; для подъема и опускания жаток, грабель-
ных решеток стогометателей, теребильных аппаратов; для замед-
ления или убыстрения движения машины и ее механизмов, для
облегчения поворота управляемых колес и т. д.
Гидравлическая система машин включает в себя гидронасосы,
распределительную и регулирующую аппаратуру, гидроцилиндры,
емкости для запаса рабочей жидкости, маслопроводы, предохрани-
тельные и редукционные клапаны и другие устройства.
34—424
529
В прицепных, навесных и полунавесных машинах часть узлов
и агрегатов системы (насосы, распределители, емкости, клапаны)
устанавливают на тракторе или самоходном шасси, другую часть
(гидроцилиндры и согласующие клапаны) — на машине.
В гидросистемах большей частью применяются шестеренные
насосы и золотниковые распределители. Рабочей жидкостью систем
служит дизельное масло.
Применяются гидроцилиндры одностороннего (плунжерные) и
двухстороннего (поршневые) действия.
Основные узлы гидравлической системы соединяются металли-
ческими маслопроводами или гибкими шлангами высокого давле-
ния с металлическими оплетками.
Управление — ручное или автоматическое — через регуляторы
(автоматические регуляторы загрузки машин, стабилизаторы гори-
зонтальности рамы и автоводители). Большей частью применяют-
ся автоматические регуляторы электрогидравлического действия.
Ряд узлов и механизмов современных машин оборудованы
световой и звуковой сигнализацией. Так, например, сигнализирую-
щие устройства применяются в механизмах привода колосовых и
зерновых шнеков и элеваторов, в механизме закрытия соломо-по-
ловокопнителей комбайнов, в бункерах, соломотрясах.
Система сигнализации помогает вовремя устранить возможные
неполадки в работе сборочной единицы, сигнализировать о необхо-
димости своевременного обслуживания отдельных рабочих органов
комбайна.
Все это позволяет повысить эксплуатационную надежность и
производительность машин.
Система сигнализации получает питание от генератора или ак-
кумуляторных батарей трактора или самоходной машины.
Гидравлическая система зерноуборочного комбайна включает
в себя две системы. Одна из них служит для изменения передаточ-
ного числа клиноременной передачи на ходовую часть, подъема,
•опускания мотовила и изменения частоты его вращения, подъема
я опускания жаткн, облегчения и ускорения выгрузки зерна из
бункера, очистки воздухозаборника радиатора двигателя, открытия
и закрытия полово-соломокопнителя. Эта система названа основ-
ной. Другая система служит для поворота управляемых колес.
Принципиальная схема гидросистемы приведена на рисун-
ке 346.
В процессе управления одним из узлов основной системы ше-
стеренный насос 9 подает масло из резервуара по нагнетательной
магистрали 19 к распределителю 7. По пути поток масла проходит
нейтральную полость распределителя 11 полово-соломокопнителя.
В зависимости от того, какой золотник распределителя 7 установ-
лен в рабочее положение, масло нагнетается в один из следующих
тидроцилиндров: подъема мотовила 1 и жатки 3, вариаторов часто-
ты вращения колес 6 и мотовила 5, очистки воздухозаборника 8,
вибропобудителей 2.
530
Рис. 346. Принципиальная схема гидравлической системы зерноуборочного ком-
байна:
1, 2, 3. 4. 5. 6 и 8 — гидроцилиндры соответственно подъема мотовила, вибропобудителя,
жатки, копнителя, частоты вращения мотовила, вариатора колес комбайна, очистки возду-
хозаборника; 7 — гидрораспределнтель; 9 и 13 — шестеренчатые насосы; 10 и 12 — предо-
хранительные клапаны; 11 — гидрораспределнтель включения копнителя; 14 — резервуар
для масла; 15 — гидроцилиндр механизма поворота управляемых колес; 16 — распредели-
тель системы управляемых колес; 17 — насос-дозатор; 18 и 19 — магистрали; 20 — гидрорас-
пределитель автоматического регулятора загрузки молотилки.
При установке золотника гидрораспределителя И в рабочее
положение масло приводит в действие гидроцилиндры полово-
соломокопнителя 4, к гидрораспределителю 7 масло в этот момент
не поступает. Когда действуют плунжерные гндроцилиндры 1, 3, 4,
гидрораспределнтель соединяет их только с нагнетательной или со
сливной магистралями системы, а при работе поршневых гидро-
цилиндров одновременно одна полость соединена со сливной,
а другая — с нагнетательной магистралями. По сливной магистра-
ли масло перетекает в резервуар. В нейтральном положении зо-
лотников гидрораспределителей 7 масло перепускается его клапа-
ном по сливной магистрали 18 в резервуар 14.
Гидросистема управляемых колес действует независимо от пер-
вой системы. При повороте рулевого колеса получают перемеще-
ние связанные с ним движущиеся части насоса дозатора 17,
который нагнетает масло, поступающее от насоса 13, в парораспре-
делитель 16. Золотник распределителя перемещается под дейст-
вием давления масла и соединяет одну из полостей гидроцилинд-
ра 15 с нагнетательной полостью насоса-дозатора, а другую — со
сливной магистралью. В зависимости от направления вращения
рулевого колеса золотник распределителя соединяет то одну, то
34*
531
другую полости гидроцилиндра с насосом-дозатором и с резервуа-
ром. При неподвижном рулевом колесе золотник под действием
пружин занимает нейтральное положение, при котором масло за-
пирается в обоих полостях гидроцилиндра, удерживая механизм
управляемых колес в заданном положении. С гидросистемой
управляемых колес соединен гидрораспределитель 20 автоматиче-
ского регулятора загрузки молотилки. Золотник регулятора пере-
мещается в зависимости от подачи q и соединяет поток масла, по-
ступающий от насоса (через распределитель 16), с гидроцилинд-
ром 6 вариатора частоты вращения колес, отчего изменяется
скорость движения комбайна. Принцип работы автоматического
регулятора рассмотрен ниже. Обе системы имеют предохранитель-
ные клапаны 10 и 12, перепускающие потоки масла от насосов в
сливные магистрали, тем самым ограничивая максимальное давле-
ние в системах.
Автоматическое регулирование загрузки машин. Для повыше-
ния производительности и качества работы машин на них устанав-
ливают автоматические регуляторы, поддерживающие заданную
загрузку обрабатываемой массы или режим работы машины.
На зерноуборочных комбайнах, например, используют автома-
тические регуляторы загрузки молотилки (АРЗМ), поддерживаю-
щие загрузку комбайна q, приблизительно равной пропускной спо-
собности молотилки q0, т. е. <7=</о.
Регулятор состоит из датчика подачи, исполнительного меха-
низма, задатчика подачи, механизма ручного управления скоро-
стью движения комбайна и автоматического устройства снижения
скорости при выключении сцепления трансмиссии.
Датчик АРЗМ выполнен в виде полозков 2 (рис. 347, а),
тяги 3, троса 5, рычагов 4, 7 и 15, кинематически связанных с зо-
лотником гидрораспределителя 14.
Исполнительный механизм (гидрораспределитель 14,
гидроцилиндр 12, вариатор ходовой части) преобразует перемеще-
ние золотника в перемещение подвижного диска блока вариатора.
При установившемся процессе работы золотник занимает ней-
тральное положение, комбайн движется с постоянной скоростью,
соответствующей заданной подаче и толщине слоя hH под цепями
плавающего транспортера.
Задатчик подачи служит для установки q изменением
длины АВ троса 5, выступающей из оболочки 9 гибкой тяги. Опти-
мальное значение q0 оценивают интуитивно или УПЗ (стр. 537).
Регулирование скорости движения комбайна происходит при
изменении урожайности соломистой части Ас растительной массы.
Если Ас увеличивается, то повышается и толщина слоя до Л,-.
Тогда на вход датчика (рис. 347, б) поступает возмущение, равное
разности hi—hH. Полозки датчика, поворачиваясь против хода
часовой стрелки, перемещают золотник вправо. Так как ширина Ь
запорной части золотника больше ширины окна bi, то в пределах
перемещения золотника Xi = Ab (Ab — перекрытие) окна гидро-
532
Рис. 347. Схемы автоматического регулирования загрузки комбайна:
а — принципиальная; б — функциональная; 1 — цепь плавающего транспортера; 2 — полозок;
3 — тяга; 4, 7 и 15 — рычаги; 5 — трос; б — пружина; 3 — вал; 9 — оболочка гибкой тяги;
10 — рычаг задатчика подачи; 11 — рычаг ручного управления; 12 — гидроцнлнндр вариато-
ра клиноременной передачи; 13 — педаль сцепления; 14 — золотник гидрораспределителя;
15 — двуплечий рычаг.
распределителя остаются закрытыми, а затем открываются про-
порционально перемещению х. Когда х> Ab+blt окна полностью
открыты. В процессе движения золотника рычаги 4 и 7 (рис. 347, а),
стягиваемые пружиной, поворачиваются вместе до тех пор, пока
золотник не дойдет до упора, после чего поворачивается только
рычаг 4, при этом пружина растягивается. Такая конструкция
уменьшает усилия, действующие в звеньях датчика на участках
с высоким и густым хлебостоем. Когда hi<ZhK, полозки датчика
поворачиваются по ходу часовой стрелки, пружина перемещает
золотник влево и при х > Д6 скорость комбайна увеличивается.
Неравномерность массы хлебостоя на поле оценивают коэф-
фициентом вариации Ла- По экспериментальным исследова-
ниям kA = 15...25°/о, а частота изменения урожайности f=(0,8...
...5) 10-2 Гц. Установлено, что рабочие органы жатки увеличивают
порционность подачи транспортируемой массы. Присоединяе-
мые жаткой возмущения носят высокочастотный характер
533
(/'=0,5... 1,5 Гц). Высокочастотные возмущения следует рассмат-
ривать как помехи на входе системы, так как регулирование с та-
кой частотой приведет к перегрузке узлов трансмиссии машины и
ухудшению условий труда на ней. Поэтому датчик должен подав-
лять высокочастотные помехи. Для этого частота /0 его собствен-
ных колебаний f0 f'.
Механизмы ручного управления скоростью
используют на полях с урожайностью, изменяющейся с большой
амплитудой и частотой (/>0,05 Гц). Изменяя положение рукоят-
ки 11 (рис. 347, а), управляют вручную положением золотника
гидрораспределителя 14. Перекрытие АЛ (рис. 347, б) определяет
наименьшее изменение АЛ и минимальное отклонение подачи А#
от заданного значения, которое приводит в действие исполнитель-
ный механизм. Изменение во времени регулируемого параметра
принято называть переходным процессом. Возможны колебатель-
ный и монотонный характеры кривых переходного процесса. При
колебательном характере увеличиваются динамические нагрузки
в системе передач, ухудшаются условия труда. Для сельскохозяй-
ственных машин выбирают монотонный характер переходного про-
цесса.
Автоматическое устройство снижения скоро-
сти движения комбайна действует при выключении сцепления:
педаль 13 (рис. 347, а) через систему тяг и рычагов перемещает
золотник на уменьшение скорости. Благодаря такому устройству
уменьшаются усилия в механизмах трансмиссии при последующем
трогании машины.
Анализ переходного процесса регулирования. Рассмотрим пере-
ходный процесс на примере автоматического регулирования за-
грузки молотилки зерноуборочного комбайна. Пусть воздействие
на систему имеет вид мгновенного возмущения, т. е. постоянная
в пределах длины АВ участка (рис. 348), урожайность соломистой
части Ас в точке В скачком возрастает до Ас, а затем остается
неизменной до точки С. На участке АВ комбайн двигался с по-
стоянной скоростью Vi, при которой подача массы, поступающей
в молотилку, соответствовала заданной qH, а толщина слоя под
цепями плавающего транспортера — Лн. С увеличением урожайно-
сти в точке В возрастет и подача растительной массы, т. е. на
начало жатки поступает не qH, a qt, причем qi>qK. Растительная
масса подачи qi с толщиной слоя под цепями hi через время т
дойдет до полозков датчика. Если принять, что система безинер-
ционна, а возмущение Ah=ht—hK больше зоны нечувствительно-
сти АЛ, то в момент времени t—r скорость комбайна начнет умень-
шаться (точка а). Одновременно с ней снижается и подача массы
(точка е). Уменьшение толщины слоя под цепями плавающего
транспортера (точка с) запаздывает на время т.
Характер изменения скорости зависит от параметров вариато-
ра клиноременной передачи на ходовую часть, массы комбайна и
сопротивления его перекатыванию.
534
Рис. 348. Схема переходного процесса регулирования загрузки молотилки:
— апериодический переходной процесс; б, в и г — колебательные переходные процессы.
Допустим для упрощения анализа, что скорость комбайна
изменяется, по прямолинейной линии ab. Тогда вариатор изменит
скорость комбайна с vmax до за время Тв (Тв — постоянная
времени вариатора):
ЛМ^ах-^п)//, (394)
где / — ускорение движения комбайна.
Так как Vmax=VminAi (At—диапазон регулирования вариатора),
то
/==«т;п(у-1) (395)
По такому же закону будут изменяться подача q (линия ef)
и толщина ht (линия cd). Как только линия cd пересечет верхнюю
границу зоны нечувствительности (точка d), золотник гидрорас-
пределителя перейдет в нейтральное положение и изменение ско-
рости прекращается (точка Ь). В результате устанавливается
новая скорость v2 движения комбайна, которую можно определить
по выражению:
v2=v1—jt. (396)
Хотя скорость v2 стала постоянной, толщина слоя продолжает еще
изменяться в течение времени т. Если за это время разница hi—hn
оказывается меньше зоны нечувствительности АЛ, то установится
апериодический переходной процесс. Однако возможно, что за вре-
мя т толщина слоя уменьшится настолько, что окажется за преде-
лами нижней границы зоны нечувствительности (рис. 348,6),
тогда на вход датчика поступает возмущение, вызывающее коле-
535
бателышй характер переходного процесса. Такой процесс регули-
рования приводит к неравномерному движению комбайна, отрица-
тельно сказывающемуся на долговечности трансмиссии, ходовой
части, на качестве работы и условиях труда комбайнера. Поэтому
система не должна иметь колебательный переходной процесс.
Устранить указанный недостаток можно за счет: увеличения
зоны нечувствительности с Ah до Ah' (рис. 348,6), но это ухудша-
ет качественные показатели работы комбайна, для АРЗМ прини-
мают Ah/hB=E уменьшения времени т на Ах (рис. 383,в), но, как
указано, время х определяется местом установки датчика ,и задано
конструкцией регулятора; увеличения постоянной времени Тв
вариатора, в результате чего изменение толщины слоя будет проис-
ходить не по линии dk, а по линии dki (рис. 348, г). Из кривых
(рис. 348) видно, что условие устойчивого переходного процесса
будет обеспечено, если за время х толщина слоя изменится не
более чем на 2 Ah, т. е. точки k будут в пределах зоны нечувстви-
тельности. Так как изменение толщины слоя прямо пропорцио-
нально изменению скорости движения комбайна, то условие устой-
чивого переходного процесса будет следующим:
2Ah > a Av, (397)
где а — коэффициент пропорциональности;
Av — приращение скорости комбайна за х.
Имея в виду, что Av=jx, a j выражается зависимостью (395),
находим
2ДЛ > Ct,mln(A»'-l) т (398>
1 в
Если принять, что в точке В урожайность увеличилась до такого
значения, при котором комбайн движется с минимальной скоро-
стью Umin на заданной передаче, то avmin—hB. Исходя из этого,
находим
A/z/ftH=e< (At2~1)y ,
или
7’В>(Д1—1)т/2в. (399>
Для автоматического регулятора загрузки молотилки современных
комбайнов Д£=2,6, т=0,6 с; в— 1О...15%. Тогда, исходя из условия
устойчивого переходного процесса, 7^=4,0... 5,0 с. Уменьшение по-
стоянной времени Тв устраняет опасность колебательных режимов:
работы систем, но удлиняет переходной процесс, что ухудшает
качественные показатели работы комбайна. Постоянная Тв может
быть изменена регулированием натяжения пружины перепускного*
клапана гидрораспределителя регулятора загрузки.
Система контроля качества работы зерноуборочного комбайна-
Решение проблемы повышения эффективности и качества уборкш
536
урожая требует создания техниче-
ских средств, оптимизирующих ре-
жим работы машины. Применяе-
мые АРЗМ зерноуборочных ком-
байнов поддерживают загрузку
молотилки близко к субъективно
выбранной ее пропускной способ-
ности. Последняя изменяется в ши-
роких пределах как во времени ра-
боты, так и в зависимости от участ-
ков поля. Объективно определить с
некоторой точностью пропускную
способность в конкретный момент
времени можно при использовании
технических средств контроля ка-
чества работы. Таким устройством
является указатель потерь зерна
(УПЗ) молотилкой комбайна.
Рис. 349. Блок-схема указателя
потерь зерна молотилкой комбай-
на:
1 и 2 — преобразователи потерь зерна
соломотрясом; 3 — преобразователь по-
терь зерна очисткой; 4 — преобразова-
тель зерна, поступающего в бункер;
5 и 6 — усилители; 7 — блокирующее
устройство; 8 — блок соотношения; 9 —
гальванометр.
Прибор УПЗ указывает коэффициенты схода зерна с соломой
и половой. Он включает в себя (рис. 349): четыре пьезометриче-
ских преобразователя 1, 2, 3, 4, усилители 5 и 6, блокирующее
устройство 7; блок соотношений 8 и стрелочный гальванометр 9.
В УПЗ предусмотрено три пьезоэлектрических преобразователя
потерь зерна, два из них 1 и 2 установлены в конце средних кла-
виш соломотряса и один 3 — под удлинителем верхнего решета
очистки. Четвертый преобразователь — преобразователь подачи
зерна — закреплен на дне решетного стана, на него просыпается
часть зерна, поступающая в зерновой бункер.
Пьезоэлектрические преобразователи основаны на использова-
нии пьезоэффекта, в результате которого ударные импульсы пре-
образуются в электрические сигналы. Зерно, которое выделяется
из соломы в конце клавиш и из вороха, сходящего с очистки, уда-
ряет по пластмассовым мембранам, в них создаются акустические
волны, поляризующие кристаллы чувствительных элементов, при-
крепленных к мембранам. Амплитуда Ue создаваемого электри-
ческого сигнала зависит от продолжительности т фронта нараста-
ния импульса: чем меньше продолжительность т больше Ue- Для
ударов зерна характерно меньшее значение т, чем для соломы,
причем чувствительность последующей аппаратуры такова, что она
не регистрирует сигналы от удара соломистых частиц.
Преобразователи потерь соединяют последовательно, сигналы
от них поступают в усилитель 5, а от преобразователя подачи зер-
на в бункер сигналы идут в усилитель 6. Усилители увеличивают
мощность сигналов, которые на выходе из усилителя направляют-
ся в цепь блока соотношений 8. Здесь создается напряжение,
прямо пропорциональное суммарной частоте сигналов от преобра-
зователей потерь и обратно пропорциональное частоте сигналов от
преобразователя подачи зерна.
537
Полученный ток поступает на гальванометр 9, показывающий
массовую долю потерь зерна.
В измерительном блоке УПЗ предусмотрено блокирующее
устройство, исключающее ложную информацию при отсутствии
сигналов от преобразователя 4 подачи зерна. Наряду с рассмот-
ренным УПЗ, устанавливаемым на отечественных комбайнах, при-
меняют указатели без блока соотношений. Такими приборами оце-
нивают значение абсолютных потерь зерна за молотилками зерно-
уборочных комбайнов.
Оценка потерь зерна УПЗ. Частота воздействий на
чувствительные элементы преобразователей потерь и подачи не
равны соответственно числу потерянных зерен и поступивших
в бункер, а пропорциональны им, так как не все зерна могут по-
пасть из вороха на мембрану. Поэтому цифры градуировки галь-
ванометра УПЗ не соответствуют доле потерь зерна во всем много-
образии условий работы комбайна. В зависимости от сложившейся
ситуации в организации уборки УПЗ может найти применение в
различных вариантах для оценки качественных показателей рабо-
ты и оптимизации режимов использования комбайна.
С помощью УПЗ оценивают фактические потери зерна за моло-
тилкой комбайна. Для чего на типичном для убираемого поля
хлебостое собирают в отборники проб солому, полову и зерно,
поступающее в бункер, одновременно записывают через каждые
2...3 с показания стрелки гальванометра 9 (рис. 349). Длину конт-
рольного гона выбирают так, чтобы собранная масса соломистой
части урожая составила 50... 100 кг. Солому и полову обрабаты-
вают имеющимися в хозяйствах средствами с целью выделения из
них потерянного зерна. Число повторностей опыта принимают не
меньше трех. Затем находят средний коэффициент потерь зерна
за молотилкой р=6-И]с+т]о и средний показатель стрелки гальва-
нометра рг- По соотношению р/рг определяют масштаб показаний
прибора.
Описанным методом отбора проб определяют пропускную спо-
собность молотилки (при р= 1,5%) в конкретных условиях уборки.
Используя коэффициент потерь р=1,5%, находят показание галь-
ванометра рг, соответствующее потерям р = 1,5%.
По этим показаниям находят положение рукоятки задатчика
подачи АРЗМ.
В тех случаях, когда определение потерь затруднено, то УПЗ
используют как индикатор выбора режима работы молотилки.
Предварительно узлы комбайна регулируют .интуитивно, исполь-
зуя соответствующие рекомендации. Проводят пробную работу,
устанавливая показание стрелки гальванометра в середине диапа-
зона шкалы. Затем изменяют регулировки рабочих органов так,
чтобы уменьшить коэффициент потерь р. Выполняя несколько
регулировок, находят оптимальный режим работы молотилки.
В случае, когда показания рт выходят за выбранный диапазон,
изменяют загрузку комбайна.
538
Наряду с описанным указатель потерь зерна служит сигнализа-
тором нарушения технологического процесса и аварийной работы,
узлов комбайна. Так, гальванометр «зашкаливает» в случае зали-
пания отверстия подбарабанья и передней части рабочей поверхно-
сти клавиш, а также при неисправном механизме привода венти-
лятора, при биении клавиш и вала половонабивателя. Гальвано-
метр показывает «О» при забивании задней части поверхности
клавиши и решета очистки, а также в случае забивания зернового
шнека.
Электромеханические устройства для контроля работы меха-
низмов. С целью предотвращения поломок узлов машины для ре-
гулирования режимов, для оценки качества их работы уборочные
машины оборудуют электромеханическими приборами и устрой-
ствами.
В конструкции зерноуборочных комбайнов применяют устрой-
ства, сигнализирующие: о забивании колосовых и зерновых шнеков
и элеваторов, а также пространства между соломотрясом и кры-
шей- камеры молотилки; об открытии клапана копнителя; о запол-
нении зернового бункера. Для оценки потерь зерна за молотилкой
комбайна в систему электрооборудования включают указатель
Потерь зерна (УПЗ), о котором речь шла ранее. Ряд комбайнов
зарубежных конструкций имеют сигнализаторы аварийной частоты
вращения валов таких рабочих органов, как барабаны, вентилято-
ры, соломотрясы и др. Кормоуборочные комбайны оборудуют
электромагнитными клапанами управления гидрораспределите-
лями.
Элементы системы сигнализации и УПЗ включают в общую
схему электрооборудования машин. Типичная схема сигнализации
зерноуборочного комбайна приведена на рисунке 350.
Датчик соломотряса действует в случае остановки со-
ломополовонабивателя. При этом солома, скопившаяся на клави-
шах соломотряса, давит на рычаг 18. Рычаг отклоняется, преодо-
левая действие пружины 17, перемещает пластину 15, которая
замыкает контакты 14, и по цепи идет ток: от плюсовой клеммы
аккумуляторной батареи 2 или генератора 1 на контактный выклю-
чатель 5, обмотку и контакты промежуточного реле 6 звукового
сигнала, выключатель 8 звукового сигнала, контакты 14 и затем
на массу. Одновременно с этим ток проходит в звуковой сигнал 10
и сигнальную лампочку 13, включенную в цепь параллельно.
Цепь звукового сигнала 10 можно прерывать выключателем 8.
Когда солома не действует на рычаг, пластина 15 отходит от кон-
тактов 14 и размыкает их.
Датчики перегрузки колосовогс! и зернового
шнеков и элеваторов установлены на механизме привода
валов шнека. Оба датчика устроены и действуют по одному прин-
ципу.
На корпусе подшипника вала шнека закрепляют контактный
выключатель с подвижной 21 и неподвижной 23 пластинами. Пла-
539
Рис. 350. Схема электромеханических контролирующих устройств зерноубороч-
ных комбайнов:
1 — генератор; 2 — аккумуляторная батарея; 3 — амперметр; 4 предохранитель; 5 — кон-
тактный выключатель; 6 и 7 — промежуточные реле звукового сигнала; 8 и 9 — выключате-
ли звукового сигнала; 10 — звуковой сигнал; 11, 12 и 13 — сигнальные лампочки; 14 и 29 —
контакты; 15 н 27 — пластины; 16— коленчатая ось; 17, 22 и 28— пружины; 18 — рычаг;
19 — муфта; 20 — шкив; 21 и 24 — подвижные пластины; 23 — неподвижная пластина; 25 —
клапан копнителя; 26 — толкатель; 30 — кнопка звукового сигнала; 31 и 32 — датчики соло-
мотряса; 33 — датчик очистки; 34 — датчик зерновой массы, поступающей в бункер; 35 —
блок измерений; 36 — регистрирующий прибор.
стина 23 изолирована от массы и соединена с источником тока,
а пластина 21 замкнута на массу. Пружина 22, поворачивая плас-
тину 21, размыкает контакты. Один конец пластины 21 располага-
ют на расстоянии 2 мм от торца ступицы шкива 20. Вращающий
момент передается клиноременной передачей на шкив 20, затем
через храповую предохранительную муфту 19 на вал шнека. Когда
сопротивление на валу шнека возрастает выше допускаемого,
зубчатые диски предохранительной муфты пробуксовывают. При
этом шкив, периодически перемещаясь вдоль вала, поворачивает
пластину 21 и замыкает цепь, загорается лампочка 13 и начинает
действовать звуковой сигнал 10.
Датчик сигнального устройства зернового
бункера представляет собой такой же контактный выключатель,
540
замыкающийся под действием напора зерна, заполняющего бун-
кер. Когда зерно поворачивает пластину 24, оно замыкает цепь
лампочки 12, промежуточного реле 7 звукового сигнала 10.
Выключают звуковой сигнал выключателем' 9. Датчик монтируют
внутри бункера на предельной высоте заполнения его зерном.
Датчик сигнализирующего устройства копни-
теля расположен на кронштейне его левой боковины. На левом
брусе клапана 25 закреплен толкатель 26 с пружиной 28, который
при закрытом клапане нажимает на кнопку 27 выключателя и
размыкает контакты. В этом случае цепь сигнальной лампочки 11
разрывается и лампочка гаснет. При открытом клапане контакты
замкнуты и сигнальная лампочка горит, т. е. она бывает включена
в течение всего периода выгрузки копны. Когда педаль механизма
выгрузки освобождена, клапан закрывается и сигнальная лампоч-
ка гаснет.
Указатель потерь зерна действует по принципу, уже
изложенному ранее (см. стр. 537, 538). Для подключения его
в электрическую систему комбайна применяют двухпроводное со-
единение. Датчики соломотряса 31, 32 и очистки 33 подключают
между собой последовательно, выводы их цепи подсоединяют
к клеммам d и е блока измерений 35. Вывод (+) датчика 34, оцени-
вающего массу намолоченного зерна, соединяют с клеммой с,
а вывод (—) — с клеммой е.
Блок измерений клеммами f и g подключают к аккумуляторной
батарее 2. Потери оценивают прибором 36, присоединяемым
к клеммам а и Ь.
§ 7. Устойчивость и регулирование положения машины
на склонах
Понятие об устойчивости. Способность машины сохранять поло-
жение равновесия при действии на нее внешних сил или возвра-
щаться к этому положению, когда силы сняты, называют устой-
чивостью. Сохранение равновесия в поперечно-вертикальной пло-
скости называют поперечной, а в продольно-вертикальной плоско-
сти — продольной устойчивостью машины. При нарушении устой-
чивости машина опрокидывается.
Рассмотрим метод расчета продольной и поперечной устойчи-
вости на примере уборочных машин, наиболее подверженных оп-
рокидыванию (самоходные комбайны, стогометатели, скирдообра-
зователи и др.).
Поперечная устойчивость. Для выявления поперечной устойчи-
вости рассмотрим работу машины на склоне. Уклон будем харак-
теризовать углом а (рис. 351) наклона поверхности поля к гори-
зонту.
В поперечно-вертикальной плоскости на агрегат действует сум-
марная сила тяжести машины и обрабатываемого продукта, сила
инерции движения, реакции почвы и сила ветра.
541
Фис. 351. Схема к расчету поперечной устойчивости агрегата:
слева — силы, действующие на агрегат в поперечно-вертикальной плоскости; справа — силы,
действующие в плоскости поверхности склона.
Пусть результирующая Р всех сил тяжести приложена в точ-
ке О, координаты а, b и с которой зависят от конструкции машины
и массы груза в ней.
Принимаем, что в общем случае координата Ь (рис. 351) сме-
щена вправо от продольной оси DC, а агрегат, движущийся по скло-
ну, совершает поворот влево (при этом будет наибольшая опас-
ность опрокидывания).
Из сил инерции на агрегат действуют: касательные силы от
жироскопической пары вращающихся частей (колес, валов и т. д.)
н центробежные силы, возникающие в связи с поворотом агрегата.
Момент от касательных сил определяется значениями маховых
•масс, вращающихся в поперечной плоскости. Так как колеса трак-
тора вращаются в продольной плоскости, а масса вращающихся
"частей двигателя невелика, то момент касательных сил инерции
-не оказывает существенного влияния на устойчивость агрегата в по-
перечно-вертикальной плоскости. Из-за малого значения пренебре-
гаем также моментом жироскопической пары колес машины.
Центробежную силу РЦб, возникающую при повороте агрегата,
•можно определить по формуле:
^'цб=тг0<Вп,
где т — масса агрегата, кг;
<Вп —угловая скорость поворота агрегата;
542
Го — расстояние от следа центра тяжести О' до мгновенной
оси поворота — точки л.
Проекции центробежной силы на поперечную и продольную»
плоскости соответственно равны:
F'6=mr0c0ncose
F"6=mroft>2sin в.
Как видно из рисунка, coSE=(r4~6)/ro, sine=c/r0.
Так как соп = н/г, где v — скорость движения середины заднего мо-
ста агрегата, то _
(г + Ь) v2 CV*
^цб- у— и Кцб=т
Пренебрегая эластичностью шин и боковым проскальзыванием,
по рисунку находим
r~£/tgy,
где L —база агрегата;
у — угол поворота передних колес относительно продольной
оси агрегата.
Подставляя r=L/tgy в выражения для Кцб и Кцб, получаем
______ (L+fetg-rttgytft _ ctg2yua
' Цб д2 И цб Д2
Реакции почвы на ведущие колеса можно представить нормаль-
ными к поверхности (N3.n и Na.n) и касательными к ней (Т’з.л »
Та.п) силами, а реакции на ведомые колеса заменить равнодейст-
вующими Nn и Тп, приложенными к середине рамы.
Сила R от действия ветра наиболее опасна при направлении
ее с левой стороны агрегата. Значение этой силы находят по фор-
муле:
R=ewS6ul,
где в» — коэффициент, пропорциональности, при расчетах прини-
мают равным 0,6...0,9 Нс2/м4;
5б — площадь боковой поверхности агрегата;
ив — скорость движения ветра.
Эти силы стремятся опрокинуть агрегат. Опрокидывание в по-
перечной плоскости может произойти относительно линии АВ, про-
ходящей через точку А опоры ведущих колес и проекцию шарни-
ра В оси управляемых колес. Пусть линия АВ с продольной осью
машины составляет угол р.
Из условия равенства суммы моментов всех сил относительно1
оси АВ имеем
2 МАВ=N3 ,Л1 + Ра sin a cos р 4- Ra cos р —Pd cos а-|- F^a cosp-|-
4-fu6asinp=0.
543
Решая относительно Ns.n, получаем
N3 л~(Pd cos а—Ра sin a cos 0 —Ра cos £ —F'a6a cos £ —F"l6a sin £//.
При неподвижно стоящем агрегате сил Гц.б=0. Тогда получим
Af3JI=(Pdcosa—Pnsinacosp—/?acos£)/Z > 0.
При Р3.л>0 агрегат не опрокидывается. Исходя из этого, находим
Af3JI=(Pdcos<z—Pasinacosp—Ra cos $)/1 > 0.
Если принять Р=0, то из уравнения для N3.n>0 получим
tg a <d/a cos р.
Предельный угол склона, на котором неподвижная машина не
опрокинется, следует рассчитывать по формуле:
tgaraax=d/acos£. (400)
С учетом поворота и действия сил ветра условие устойчивости
будет следующим:
ZV3J1=(Pd cos а—Ра sin a cos £—Ra cos £—F'^a cos £ —F^a sin £)/Z > 0,
откуда
^H6acosP + f£6asinp+Kacosp
f— z <
Pd cos a — Pa sin a cos P £/ ,
------------------------(a).
(401)
I
Критический угол определяют из диаграммы (рис. 352),
где f(a) —правая часть неравенства (401). От оси ординаты диа-
граммы— ось f(a) на расстоянии t, равном левой части неравен-
ства, проводят линию МК. Точка L пересечения линий МК и /(«)
дает значение критического узла аКр поперечного наклона агрегата.
Из выражений (401) следует, что опасность, опрокидывания
в поперечной плоскости тем больше, чем выше расположен центр
тяжести машины относительно опорной плоскости, чем быстрее
движение и круче поворот
Рис. 352. Диаграмма попереч-
ной устойчивости агрегата.
машины.
В конструкциях машин (стогоме-
татели, стоговозы и др.) предусмотре-
ны устройства, блокирующие мост
управляемых колес в шарнире В
(рис. 351), тогда осью опрокидывания
будет линия АВу что увеличивает
устойчивость агрегата.
Продольная устойчивость. Если
центр тяжести смещен по ходу впе-
ред, опрокидывание в продольно-вер-
тикальной плоскости более возможно
относительно линии, соединяющей
точки опоры передних колес.
544
Рассмотрим равновесие за-
торможенной машины. На не-
подвижный агрегат, стоящий
вдоль склона, действуют сле-
дующие силы (рис. 353): сила
тяжести Р, нормальные Nn и
N3 и касательные Тп и Т3 ре-
акции почвы, действующие со-
ответственно на передние и
задние колеса; сила R дейст-
вия ветра и моменты Мс и Ма
сопротивления колес качению.
Если силой действия ветра в
продольно-вертикальной плос-
кости в расчетах пренебречь,
то из равенства нулю суммы
моментов всех сил относитель-
но точки Е имеем
2me=P(L —с) cos а—
Рис. 353. Схема к расчету устойчиво-
сти агрегата в продольно-вертикальной
плоскости.
Ра sin а—N3L-[-Mc-[-Mc=0.
Слагаемое Л1с+Л1с всегда больше нуля, поэтому оно увеличи-
вает устойчивость. Если для надежности расчета принять его рав-
ным нулю, то получим
N3 = [Р (L —с) cos а—Ра sin a]/L.
Устойчивость сохраняется при Лг3^0. Тогда условие устойчивости
будет: N3=[P(L—c)cosa—Ра sin a]/L^0. Решая выражение при
N3 = G, получаем tga=(L—с)/а.
Предельный угол склона, на котором агрегат может стоять не
опрокидываясь в продольно-вертикальной плоскости, находим из
формулы:
tgamaI=-^. (402)
С увеличением высоты подъема груза координата а увеличи-
вается, a tg amax уменьшается.
Ускоренное движение агрегата вниз по склону увеличивает
его продольную устойчивость, а замедленное — уменьшает. Но на
спуске агрегат должен двигаться с включенной Передачей на коле-
са. Поэтому движение вниз по склону с достаточной точностью
можно принять равномерным. В этом случае угол склона, по кото-
рому агрегат может двигаться, не опрокидываясь, равен предель-
ному углу amax и определяется по формуле (402).
Системы автоматического выравнивания рабочих органов в про-
странстве. Наряду с опасностью опрокидывания машин на склонах
и косогорах значительно ухудшаются качественные показатели их
работы: обрабатываемый продукт сгруживается в одну сторону,
изменяется его кинематика, перекосы в сочленениях вызывают
повышенный износ трущихся пар и более частые поломки деталей.
35—424
545
Для поддержания рамы машины в заданном положении при-
меняют системы автоматического выравнивания положения рабо-
чих органов в пространстве. Находят применение. системы, вы-
равнивающие положение молотилки комбайнов как в одной (попе-
речной или продольной), так и в двух плоскостях. На рисунке 354'
приведены принципиальные схемы выравнивающих устройств
поплавковым (рис. 354,а), маятниковым.(рис.354,б) и гидростати-
ческим (рис. 354, в)'датчиками. Шток поплавка 5 и подвес маятни-
ка 13 кинематически связаны с золотниками гидрораспределите-
лей 8. Последние направляют потоки масла, подаваемого под дав-
лением от насоса 1 в гпдроцилиндры 12, воздействующие на
остов 6 молотилки.
Чувствительный элемент поплавкового датчика — поплавок —
помещен в резервуар 4 с жидкостью, а маятникового — груз — за-
креплен на подвесе. Корпус поплавкового и шарнир маятнико-
Рис. 354. Принципиальные схемы устройств автоматического выравнивания убо-
рочных машин в пространстве:
а — с поплавковым датчиком; б — с маятниковым датчиком; в — с гидростатическим датчи-
ком; 1 — насос; 2 — фильтр; 3 — бак для жидкости; 4 — резервуар; 5 — поплавок; 6 — остов
машины; 7 — механизм ручного выравнивания; 8 — парораспределитель; 9 — рычаг; 10 —
упоры; // — тяга механизма колес; 12 — гидроцилиндры; 13 — маятник; 14 — гидравлический
демпфер; 15 — гидростатический датчик. _ .
54<?
Рис. 355. Функциональная схема системы автоматического выравнивания мо-
лотилки на склонах:
Д — датчик; ИМ — исполнительный механизм; О — объект регулирования.
вого датчиков соединены с молотилкой. Гидростатический датчик
действует по принципу сообщающихся сосудов, в них установлены
электроды. При заданном положении молотилки электроды не ка-
саются жидкости (ртути), а при кренах ртуть замыкает цепь элек-
трогидравлического клапана, перепускающего масло в гидроци-
линдры, и происходит выравнивание молотилки.
Внешним воздействием (возмущением) системы автоматическо-
го выравнивания является изменение угла склона а (рис. 355),
к нему добавляются высокочастотные (f=8...1O Гц) возмуще-
ния а' — помехи от наклона остова машины при наезде колес на
микронеровности и участки поля с различной плотностью почвы.
Если в рассматриваемый момент времени угол наклона остова —
®s, то на вход датчика поступает сигнал рассогласования Да=«+
.+ а'—>cts.
Датчик преобразует угловые перемещения чувствительного эле-
мента в линейное смещение золотника гидрораспределителя из
нейтрального положения, а также поглощает помехи а', которые
имеют частоту f. Из-за соизмеримости f с частотой собственных ко-
лебаний рамы комбайна (fo — 7...8 Гц) могут возникнуть резонанс-
ные явления (f=fo) и произойдет опрокидывание машины. Для
устранения резонанса поплавок изготавливают с ребрами и пере-
городками, а маятник снабжают гидравлическим демпфером 14
(рис. 354). Трение и зазоры в сочленениях деталей датчика и зо-
лотника приводят к нечувствительности системы на изменения
амплитуды возмущения а' (для рассматриваемых датчиков она
составляет 2...3°). Такое значение нечувствительности не сказы»
нается на качественных показателях уборочных машин.
важный показатель работы системы автоматического вырав-
нивания положения машины — длительность процесса регулирова-
ния. Она зависит от инерционности датчика и быстродействия
исполнительного механизма (ИМ). Последняя определяется массо-
вой подачей жидкости в гидроцилиндры. Верхний предел быстро-
действия ИМ выравнивающих устройств ограничивают скоростью
изменения угла наклона остова машины, которая по условиям
труда не должна превышать (5,2...6,1) • 10-2 рад/с. При таких пара-
метрах выравнивание не должно быть колебательным. Колебатель-
ный характер выравнивания машин, имеющих системы регулирова-
ния с поплавковым датчиком, может быть вызван недостаточным
демпфированием поплавка (мало жидкости в баке) или слабо за-
тянутой пружиной, центрирующей поплавок.
«5* 547
§ В. Механизмы направления движения уборочной машины
Уборочные машины имеют большую массу, они работают, об-
разуя значительную колею. Для поворота управляемых колес
таких машин приходится прикладывать повышенные усилия на
рулевое колесо. Для снижения усилий в рулевом механизме уста-
навливают гидроусилители или применяют гидрообъемные меха-
низмы поворота колес.
Наряду со значительными усилиями для поддержания заданно-
го направления движения машины требуется неослабное внимание,
утомляющее оператора. Поэтому применяют автоматические
устройства регулирования направления движения машины.
Гидроусилитель рулевого механизма. Корпус гидрораспредели-
теля (рис. 356, с) системой тяг и рычагов связан с рулевым коле-
сом 8, а его золотник (звено FE) — с механизмом АВС поворота
управляемых колес 4.
При повороте рулевого колеса корпус гидрораспределителя
смещается относительно золотника, тогда масло поступает от на-
соса 2 в одну из полостей гидроцилиндра 5, а из другой полости
сливается в бак <3. Происходит поворот управляемых колес. Так
как золотник связан механизмом DCBAEF с колесами, то их пово-
рот перемещает золотник в нейтральное положение, при котором
масло запирается в гидроцилиндре, а его поток от насоса направ-
ляется в бак. Таким образом, поворот колес механизмом с гидро-
усилителем происходит по мере вращения штурвала.
Применение гидроусилителей рулевого механизма уменьшает
усилие на штурвале в сравнении с механическим рулем. Однако
такие системы не исключают большого числа тяг и рычагов, зазо-
ры в сочленениях которых вызывают значительный (до 25...28°)
Рис. 356. Принципиальные схемы:
а — механического рулевого управления с гидроусилителем; б — гидрообъемного рулевого
управлеиня; 1— фильтр жидкости; 2 — насос; 3 — бак; 4 — управляемые колеса; 5 — гидро-
цилиндры; 6 — гидрораспределители; 7 — предохранительный клапан; 8 — штурвалы руле-
вого управлеиня; 9 — насос-доэатор; 10 и 11 — нагнетательный и сливной трубопроводы от
насоса усилителя.
548
холостой ход рулевого кдлеса, что влияет на безопасность дви-
жения.
Гидрообъемное рулевое управление. В этом механизме рулевое
колесо 8 (рис. 356, б) непосредственно связано валом с вращаю-
щейся шестерней (сателлитом) насоса-дозатора 9, располагаемого,
как правило, в кабине машины. При вращении рулевого колеса,
а следовательно, и сателлита, насос-дозатор подает масло в гид-
рораспределитель 6 и, смещая золотник, нагнетает его в одну из
полостей гидроцилиндра 5, вызывая поворот колес. Из другой
полости масло перепускается на слив. Поворот колес в ту и дру-
гую сторону происходит только при вращении рулевого колеса,
а в неподвижном состоянии пружина золотника ставит его в ней-
тральное положение, запирая масло в обоих полостях гидроци-
линдра. '
Подпитка насоса-дозатора выполняется по-разному. Когда ра-
ботает двигатель машины, масло нагнетается по магистрали 10 от
насоса-усилителя (на схеме не показан) через распределитель
к насосу-дозатору. В случае буксировки с неработающим двига-
телем или при неисправном насосе-усилителе масло засасывается
насосом-дозатором из сливной магистрали. Так как момент на
валу насоса-дозатора пропорционален перепаду давлений АР на-
гнетания Рн и выпуска Рв, т. е. АР=Ра—Рв, то следует, что мо-
мент, потребный на поворот рулевого колеса, при одинаковом
сопротивлении колес повороту значительно меньше при работаю-
щем насосе-усилителе.
Гидрообъемное рулевое управление менее материалоемко
(в 2,5...3 раза), чем механическое с гидроусилителем, холостой ход
рулевого колеса в нем меньше (4...6°). Однако такой механизм тре-
бует большого момента для поворота штурвала при неработающем
насосе-усилителе, особенно при загустевшей жидкости.
Автонаправители. Автоматические устройства, предназначенные
для регулирования направления движения прицепных машин,
принято называть автонаправителями. Последние находят приме-
нение в свекло- и кукурузоуборочных комбайнах, в ботвоубороч-
ных и других машинах.
Применение автонаправителей способствует повышению рабо-
чих скоростей уборочных агрегатов, уменьшает потери и повреж-
дение убираемой культуры, а также облегчает труд операторов.
На рисунке 357, а приведена типичная схема автонаправителя,
применяемого на свеклоуборочных комбайнах. Его действие сво-
дится к следующему. Два копира 9 движутся между рядками рас-
тений. Тягой ВС механизма прямой связи ABCD они соединены
с золотником гидрораспределителя 8, перепускающего масло
в гидроцилиндр 6. На прямолинейных рядках копиры удерживают
золотник в нейтральном положении, масло фиксирует поршень
гидроцилиндра и дышло OOi машины в неподвижном положении.
При искривлении рядка растений копиры, отклоняясь, смещают
золотник, масло из нагнетательной магистрали перепускается в
549
Рис: 357. Принципиальные схемы:
а — автонаправнтеля; б — автоводителя машин по рядкам; 1 — предохранительный клапан;
2 —насос; 3—бак для масла; 4 — фильтр; 5 — прицеп трактора; 6 и И — гидроцилиндры;
- 7 — двуплечий рычаг; 8 — гидрораспределнтель; 9 — копиры; 10 — рама.
одну из полостей гидроцилиндра, а из другой выходит в сливную
магистраль. В результате чего поршень, перемещаясь, поворачива-
ет раму 10 машины относительно точки Oi дышла ООЬ Из-за асим-
метрии относительно линии тяги рама начинает поворачиваться
относительно точки О присоединения дышла к прицепу 5. При
повороте рамы копиры, расположенные между рядками, переме-
щают золотник в нейтральное полржение. Ручное управление —
от двуплечего рычага.
Автоводители. Системы автоматического вождения самоходных
уборочных машин получили название автоводителей. Они находят
применение в корнеуборочных самоходных машинах.
Направление рабочих органов по рядкам растений происхо-
дит при помощи механизма поворота управляемых колес A1B1C1D1
(рис. 357, б) от гидроцилиндра 6.
Когда положение копиров 9 не соответствует рядкам растений,
золотник гидрораспределителя 8 смещается копирами и механиз-
мом прямой связи EFGHK из нейтрального положения, что вызы-
вает поворот управляемых колес машин гидроцилиндром 6. Коле-
са, поворачиваясь, через механизм обратной связи DiLMNP сме-
щают корпус распределителя, устанавливая его в нейтральное
положение относительно золотника. В течение некоторого време-
ни машина продолжает движение с повернутыми колесами, из-за
чего рама с рабочими органами и копирами смещается также
к рядкам растений. Смещение копиров относительно рядков будет
вызывать поворот колес в обратную сторону до тех пор, пока
550
копиры и управляемые колеса не расположатся в параллельных,
плоскостях.
В необходимых случаях изменяют положение рабочих органов
относительно рядков, воздействуя на гидроцилиндр 11.
Глава XVII
ПРОИЗВОДСТВЕННЫЕ ПРОЦЕССЫ МАШИННОГО СБОРА
УРОЖАЯ
§ 1. Общие сведения
Всякий производственный процесс складывается из ряда после-
довательных операций, которые можно разделить на технологиче-
ские, подготовительные и вспомогательные. В результате техноло-
гических операций (процессов) происходят видоизменения в уби-
раемых объектах (срезание, обмолот, разделение, измельчение,
прессование и т. д.). Для получения заданных свойств убираемой
продукции и эффективного выполнения технологических процессов
проводят подготовительные операции (ворошение растений, обо-
рачивание валков, удаление листьев химическими средствами
и др.).
Вспомогательные операции включают; подбор, погрузку,
транспортирование, затаривание, складирование убранного уро-
жая.
Последовательность операций при уборке урожая зависит от
убираемой культуры, от природно-климатических условий, от на-
личия средств механизации и от организационных принципов и
ситуаций.
Уборка урожая складывается из сбора и частичной обработки
продуктов в поле, а также из первичной переработки их на стацио-
нарных комплексах (пунктах).
Уборка — завершающая стадия возделывания сельскохозяйст-
венных культур, от сроков уборки и организации уборочных работ
во многом зависят качество и эффективность сбора урожая. Важ-
нейшее условие роста производства дешевой сельскохозяйственной
продукции — механизация уборочных процессов.
В нашей стране комплексно механизирована уборка кормов,
зерна, корнеклубнеплодов, хлопка, льна и других культур. Повсе-
местно переходят на поточные производственные процессы уборки,
в результате которых сбор урожая организуют по схеме: поле —
емкость (бункер) машины — транспортное средство — пункт пер-
вичной переработки урожая в хозяйствах или заготовительный
пункт.
Ниже рассмотрены наиболее типичные схемы производственных
процессов уборки кормовых, зерновых, прядильных культур, кор-
неклубнеплодов.
551
§ 2. Способы уборки трав и кормовых культур
В зависимости от зон уборки, вида приготавливаемых кормов и
имеющейся системы машин применяют различные схемы производ-
ственных процессов (рис. 358).
Кошение возможно без плющения и с одновременным плюще-
нием. Последнее рекомендуется для всех зон страны. Плющение
стеблей убыстряет их сушку, в результате чего вся масса (листья
и стебли) высыхает одновременно. Уменьшение длительности суш-
ки снижает потери каротина от действия солнечных лучей и от
осыпания листьев. На повышение питательности корма существен-
ное влияние оказывают ворошение травы в прокосах и оборачива-
ние валков. Эти операции особенно необходимы при неблагоприят-
ных погодных условиях и повышенной влажности почвы.
Уборка трав на сено во всех зонах страны возможна следую-
щими способами: в рассыпном виде, с прессованием и с измель-
чением.
В рассыпном виде уборка трав на сено находит широкое приме-
нение. В сравнении с другими способами требуются менее
энергоемкие, простые и надежные машины. Однако неоднократная
погрузка и выгрузка сена приводят к большим затратам труда,
значительным потерям листьев и соцветий.
Прессование сена при заготовке снижает потери растительной
массы при перевозках, хранении и раздаче, полнее используется
Рис. 358. Способы уборки трав и кормовых культур.
552
грузоподъемность транспортных средств. Но на прессование сена
и последующее измельчение тюков и рулонов требуются повышен-
ные затраты энергии.
Измельчение сена способствует выполнению всех операций
уборки от скашивания трав до раздачи их животным без затрат
ручного труда. Наряду с этим используемый комплекс машин при-
меняют и для уборки трав и кормовых культур на сенаж, силос,
зеленую подкормку, травяную муку, гранулы и брикеты.
В полупустынных районах рекомендуется одновременно со ска-
шиванием трав собирать их в порции с последующим подбором и
дроблением массы этих порций.
Центральное направление развития комплекса кормоубороч-
ных машин в предстоящий период — значительное сокращение
потерь корма при уборке и хранении. В дальнейшем расширится
применение высокопроизводительных самоходных и прицепных
кормоуборочных комбайнов, косилок-плющилок, увеличится досу-
шивание сена активным вентилированием, найдут применение мо-
бильные машины для кошения и приготовления брикетных кормов
из трав и хлебов, убираемых в стадии молочно-восковой спелости,
будут созданы автоматизированные технические средства для
экспресс-методов анализа кормовых культур и приготавливаемых
из них кормов.
§ 3. Процессы уборки зерновых культур
Зерно — одно из важнейших источников экономического могу-
щества страны. По валовому сбору пшеницы, ржи и ячменя Совет-
ский Союз занимает первое место в мире. В СССР производство
зерна на душу населения более чем в 2,5 раза превышает среднее
миров.ое значение.
Комбайновые способы уборки. Основной способ уборки хлебов
во всем мире — комбайновая уборка с последующей доработкой
зерна на стационарных зерноочистительно-сушильных комплексах.
В Советском Союзе производится около 60% всего мирового
выпуска зерноуборочных комбайнов.
Для дальнейшего повышения качаства и эффективности убороч-
ных работ создаются зерноуборочные комбайны с пропускной спо-
собностью 10... 12 кг/с, с увеличенной в 1,2...1,4 раза энергонасы-
щенностью, с бункерами вместимостью 5...6 м3. При уборке
кукурузы на зерно найдут применение четырех-шестирядные са-
моходные комбайны.
В зависимости от состояния убираемой культуры, спелости зер-
на, погодных условий и возможностей производства зерновые уби-
рают прямым и раздельным комбайнированием.
Прямое комбайни ров ан и е предусматривает срезание
растений, обмолот растительной массы, выделение зерна из соло-
мы, очистку зерна от примесей, сбор продуктов обмолота (зерна,
половы, соломы). Все эти операции выполняет комбайн одновре-
менно, в период полной спелости зерна.
553
Прямым комбайнированием убирают равномерно созревающие,
малозасоренные хлеба с густотой стеблей не более 300...350 расте-
ний на 1 м2.
Раздельное комба'йнирование отличается от прямо-
го тем, что растительную массу срезают и обмолачивают не одно-
временно, а разделяют во времени на две фазы: вначале растения
срезают и укладывают в валки валковыми жатками для подсыха-
ния и дозревания (первая фаза), затем, через 3...5 дней, подбирают
растения из валков, обмолачивают и разделяют зерно, солому и
полову (вторая фаза).
Раздельным способом зерновые культуры начинают убирать
раньше, чем при прямом комбайнировании, когда зерно находится
еще в стадии восковой спелости. При таком способе меньше те-
ряется зерна от осыпания, лучше обмолачивается масса, меньше
теряется зерна в соломе и полове, особенно при уборке неравно-
мерно созревающих и засоренных культур. Раздельным комбайни-
рованием убирают участки с густотой стеблестоя не менее 300...
350 растений на 1 м2.
Способы уборки незерновой части урожая. Наряду с зерном
определенную ценность представляет незерновая часть урожая
зерновых (полова и солома). Полову и солому используют для
корма скоту (питательность 1 кг половы равна 0,39...0,49, соло-
мы — 0,20...0,25) и как подстилку для животных. Солома — также
ценное сырье для получения целлюлозы. Своевременный сбор со-
ломы и половы позволяет освобождать поля и быстро заделывать
влагу в почву. При уборке зерновых комбайны собирают до 75%
семян сорняков, большая часть которых остается в соломе и поло-
ве. Поэтому сбор соломы и половы уменьшает засоренность полей,
повышая тем самым плодородие почвы.
Последовательность операций уборки незерновой части урожая
зависит от устройств, устанавливаемых на комбайнах и предназ-
наченных для обработки и сбора соломы и половы. К таким уст-
ройствам относятся полово-соломокопнители и универсальные на-
весные приспособления ПУН.
Копнители оборудуют (рис. 359,7, см. форзац) четырехзвенны-
’Ми соломо- и половонабивателями ABCD и AiBiCJX. Звенья ВС
и BiCi этих механизмов снабжены зубьями, которые захватывают
Рис. 359. Схемы производственных процессов уборки незерновой части урожая
.(продолжение подписи, начало см. форзац) :
1 — соломотряс; 2 — гребенка рамы; 3 — перекрытие камеры; 4 — боковина; 5 — клапан; 6 —
тидроцилиндр; 7 —тяга; 8 — пальцы; 9 — пружина; 10 — дннще; // — удлинитель решета;
1/2 — лоток; 13 — измельчающий барабан; 14 — трубопровод; 15 — шнек; 16 — вентилятор;
П _ Противорежущая пластина; 18 — патрубок половы; 19 — валкообразующее устройство;
20 — скатная доска; 21 и 22 — разбрасыватели; а — сволакивание копей; в — скирдование:
с — разрезание скирд; d — транспортировка скирды; е — измельчение соломы из скирды и
сбор в тележки; f — транспортировка копен; g — загрузка и разгрузка скирдовоза; h —
транспортирование половы и измельченной соломы; I — подбор валка с копнением соломы;
/ — подбор, уплотнение, образование стога; k — транспортировка стога; I — подбор валков,
прессование со сбором тюков в тележку; tn — подбор валков, укладка тюков в поле; п —
подбор тюков, образование штабелей; р — транспортировка штабелей; ч и s — транспорти-
ровка половы.
Б54
солому, сходящую с соломотряса /, и полову, поступающую
с удлинителя решетного стана 11, и продвигают их в камеру коп-
нителя. Камера копнителя образована двумя боковинами, опроки-
дывающимся днищем 10 с пальцами 8, решетчатым перекрытием 3
и откидным задним клапаном 5.
Сформированная копна выгружается при размыкании защелки,
фиксирующей днище камеры. Днище поворачивается (ось О) от
действия силы тяжести копны и силы натяжения пружин 9. Вместе
с днищем поворачивается относительно оси Oi и задний клапан.
Копна, сцепляясь со стерней поля, сползает с наклонного днища.
После выгрузки копны клапан и днище в исходное положение
возвращают гидравлические цилиндры 6.
Приспособление ПУН может работать по одной из пяти схем,
приведенных на рисунке 359, II... VI.
В зависимости от устройств для сбора соломы и половы, кото-
рыми оборудуют комбайны, возможны следующие способы уборки
незерновой части урожая: уборка соломы и половы из копен
(рис. 359, /, схемы Л и В), сбор половы и измельченной соломы
в транспортное средство, прицепленное к комбайну (рис. 359,//),
подбор всей незерновой части из валков (рис. 359,///, схемы А и В
и рис. 359, IV, схемы С и D), сбор половы и подбор соломы из
валков и сбор половы в транспортное средство (рис. 359, IV, схе-
мы С, D), сбор половы в транспортное средство и разбрасывание
по полю измельченной соломы (рис. 359, V), разбрасывание поло-
вы и измельченной соломы по полю (рис. 359, VI). .
Сбор соломы и половы комбайном в копны
с последующей уборкой по схемам А и В (рис. 359,/)
находит широкое распространение в большинстве зон страны.
Такие способы не требуют больших затрат труда, но теряется
большое количество половы, затрудняется подготовка полей для
последующей обработки почвы, отвлекается внимание комбайнера
на управление копнителем.
Измельчение соломы и сбор ее вместе^ с поло-
вой (рис. 359, II) в прицепные тележки, присоединенные к ком-
байну, обеспечивает поточную уборку биологического урожая,
освобождает поля для последующих работ, снижает потери поло-
вы и соломы. Недостатки этого способа следующие: частая пере-
цепка емкостей снижает производительность комбайна, возраста-
ют силовая напряженность трансмиссии комбайна и потребная
мощность двигателя, повышается запыленность рабочего места
комбайнера, одновременно требуется больше транспортных и энер-
гетических средств для сбора и перевозки зерна, соломы и половы
от комбайна.
Валковая уборка соломы (рис. 359,III, IV) снижает
потребную мощность двигателя, облегчает работу комбайнера.
Применение при этом способе подборщиков-стогообразователей
(рис. 359, ///, схема В) значительно снижает число технических
средств на уборке соломы и половы в сравнении с другими спосо-
555
бами. Такой способ предпочтительнее при высокой пропускной
способности комбайнов.
Некомбайновые способы уборки зерновых культур. При таких
способах уборки часть операций обработки урожая переносят
с поля на стационар.
Способ «Невейка» предназначен для совместного сбора
зерна и половы мобильной молотилкой в рядом движущийся транс-
порт или прицепную тележку. Зерно от половы очищают на пункте
ворохоочистительными машинами. Зерно и полову при этом спосо-
бе собирают в одну емкость, что упрощает организацию работ
в сравнении со сбором зерна и половы в разные емкости при ком-
байновом способе. Однако из-за малой плотности массы
(120... 160 кг/м3 зерна и половы) требуются объемные транспорт-
ные средства и большие площади зерноочистительных пунктов.
Трехфазный способ уборки включает в себя следующие
операции: скашивание растительной массы в валки (первая фаза),
подбор, измельчение и сбор массы в емкости транспортного сред-
ства (вторая фаза), обмолот и разделение вороха на пункте
(третья фаза). При таком способе на зерноочистительном пункте
собирается и обрабатывается весь биологический урожай. Еще
больше упрощаются полевые машины, уменьшается их материало-
емкость. Увеличивается в сравнении с комбайновым способом про-
должительность суточной работы машин, упрощаются индустри-
ально-поточный метод уборки и применение автоматизации
управления производственными процессами. Для энергоемких
процессов (обмолот, обработка соломы и половы) используется
электричество.
Трехфазный способ требует большого числа транспортных
средств для одновременного сбора и транспортирования всего био-
логического урожая, значительно возрастают размеры пунктов.
Трехфазная уборка с подсушиванием расти-
тельной массы предусматривает срезание и измельчение
растительной массы мобильной машиной с последующим транспор-
тированием ее на стационар, где ее подсушивают активным вен-
тилированием, а затем обмолачивают и разделяют на зерно, соло-
му и полову. Такой способ оправдан при неблагоприятных погод-
ных условиях, когда уборка другими способами невозможна или
сопровождается большими потерями.
§ 4. Процессы уборки прядильных культур
Уборка хлопчатника. По урожайности хлопчатника и валовым
сборам хлопка-сырца СССР занимает ведущее место в мире; сред-
няя урожайность за 50 лет возросла в 3 раза, а годовой объем
производства — в десятки раз. Основным звеном технического
прогресса в хлопководстве явилось широкое развитие комплекс-
ной механизации уборочных работ. Машинный сбор хлопка
в 4...5 раз сокращает продолжительность уборки, каждый час ме-
556
•Подготовка Уборка
поворотной хлопчатника
полосы на всем поле
Рис. 360. Схема последовательности операций механизированной уборки хлоп-
чатника.
ханизированного труда заменяет около 40 ч ручного труда. Быст-
рыми темпами растет парк хлопкоуборочных машин. Создаются ,
многорядные и скоростные машины для сбора хлопка с увеличен-
ной вместимостью бункера, внедряются приспособления, обеспечи-
вающие совмещение сбора раскрытого хлопка, подъем нижних
коробочек и раздавливание зеленого курака.
Наиболее перспективная схема последовательности машинного
сбора хлопка приведена на рисунке 360.
Дефолиацию (обезлиствение) кустов хлопчатника проводят за
несколько дней до начала сбора волокна, выбирая при этом такие
сроки, когда опадает не менее 75...80% листьев. Десикацию (высу-
шивание) кустов на поворотных полосах проводят за день-два до
общей дефолиации, что обеспечивает к началу машинного сбора
полное высушивание кустов и раскрытие на них около 80% коро-
бочек.
Значительно повышает полноту сбора хлопка десикация
перед вторым машинным сбором, а также машинный подбор
557
опавшего хлопка перед и после сбора курака. Наряду с этим пол-
нота сбора растет при раздавливании зеленых коробочек одно-
временно со вторым сбором хлопка.
В результате применения поточной уборки по рассмотренной
схеме уровень механизации достигает 97%, а полнота сбора —
94%.
Уборка льна. По объему производства льна СССР занимает
первое место в мире. Среднегодовой объем закупок льноволокна
составляет около 0,5 млн. тонн.
В Программе дальнейшего развития Нечерноземья большая
роль отводится льноводству.
Наиболее трудоемкий процесс в льноводстве — уборка, на нее
приходится 70...80% от всех трудозатрат на возделывание льна.
Лен на волокно убирают в ранней желтой спелости, в фазе
желтой спелости убирают селекционные участки, а в полной —
масличные льны.
Находят распространение три способа механизированной убор-
ки льна (рис. 361): сноповой, комбайновый и раздельный.
Сноповой способ — вытеребленный лен расстилают в
ленту или связывают в снопы. Уборка с расстилом льна в ленту
с последующим обмолотом и расстилом соломы на льнище и
с приготовлением тресты в хозяйствах требует больших затрат
труда, ряд операций пока еще приходится выполнять вручную.
Полевая сушка льна в лепте или в снопах затягивает сроки убор-
ки, особенно при неблагоприятных погодных условиях, что приво-
дит к возрастанию потерь семян и к снижению качества волокна.
При сдаче снопов после обмолота на льнозаводы уменьшается
потребность в рабочей силе в колхозах и совхозах. Особенно эф-
фективна сноповая уборка с обмолотом и последующей обработкой
льна на льнозаводах промышленности и на межхозяйственных
комплексах.
Для уборки льна при неблагоприятных погодных условиях це-
лесообразна сушка тресты в конусах или шатрах с последующим
их подбором, выравниванием и вязкой в снопы.
В перспективе возможна уборка льна с формированием круп-
ных снопов, тюков или рулонов; при уборке в тюки или рулоны
стебли перепутываются и получается «однотипное» волокно. Это
направление значительно облегчает механизацию работ при убор-
ке и послеуборочную обработку.
Комбайновый способ уборки распространен шире.
Одновременно с тереблением растений комбайн очесывает коро-
бочки и собирает их в емкости, а соломку расстилает на льнище
Или связывает в снопы. Эффективность этого способа во многом
зависит от последующей механизации процессов сушки и перера-
ботки вороха, очесанного со стеблей. Ворох (головки льна, цвето-
ножки, оторванные стебли, сорняки) имеет повышенную влажность
(до 60%), поэтому требуется быстрая сушка с последующей пере-
работкой.
558
сноповой
Раздельный
Теребление,
расстил в ленту
Вязка снопоб
Подбор снопоб, погрузка,
транспортирование для обмолота
Рис. 361. Способы уборки льна.
КОМБАЙНОВЫЙ
Установка
снопов 6 бабки
.........
Теребление,
вязка в снопы
Транспортирование,
вороха
Сушка
Разделка
вороха
Совьем тресты,
вязка в снопы
Погрузка снопов
в транспортное
средство
Транспортирование
к местам
складирования, или
на льнозаводы
Применяемые комбайны неудовлетворительно убирают нерав-
номерный по длине и особенно короткостебельный лен: наблюда-
ются большие потери семян из-за недоочеса. Для устранения этого
недостатка целесообразно изменять положение очесывающего
аппарата относительно зажимного транспортера, равномернее
загружать транспортер вороха по ширине.
Раздельный способ уборки заключается в том, что вы-
теребленный лен расстилают на поле в ленту для просушки стеб-
лей и дозревания семян. Используя естественную сушку, добивают-
ся необходимого качества вымолота семян при устойчивых погод-
ных условиях.
§ 5. Машинные способы уборки корнеклубнеплодов и овощей
Производство картофеля, свеклы, овощей и плодов приобретает
все большее народнохозяйственное значение. Большой объем про-
изводства овощей достигнут в нашей стране. Доля СССР в миро-
вом производстве таких культур, как картофель и сахарная свекла,
составляет около 50%. Возделывание корнеклубнеплодов и ово-
щей связано с большими затратами труда. Значительная их часть
(до 60%) приходится на уборку урожая. В предстоящие годы
намечен существенный рост средств механизированной уборки
овощей. Созданы комплексы машин для поточной уборки карто-
феля, сахарной свеклы, кормовых корнеплодов. Расширяется при-
менение самоходных широкозахватных корнеклубнеуборочных ма-
шин и самоходных комбайнов для уборки капусты, моркови,
помидоров, огурцов и других культур.
В создании и внедрении в сельскохозяйственное производство
высокопроизводительных комплексов для механизации процессов
в овощеводстве, садоводстве и виноградарстве большая роль при-
надлежит Международному обществу «Агромаш», созданному в
соответствии с уставом СЭВ. В результате совместной деятельно-
сти стран — участниц Общества — ускоренными темпами решается
проблема разработки новых технологических процессов сбора и
первичной переработки овощей, фруктов, ягод и винограда.
В последующие годы в машинах для уборки корнеклубнепло-
дов, овощей и фруктов найдут применение автоматические регуля-
торы режимов работы и загрузки, автоводители, расширится гид-
рофицированный привод движителей и рабочих органов.
Корнеклубнеплоды и овощи убирают комбайновым, раздельным
и комбинированным способами.
Комбайновый способ уборки может быть одно- и
двухфазным.
При однофазном способе комбайн подкапывает пласт почвы
вместе с корнеклубнеплодами, отделяет корни или клубни от бот-
вы, очищает их от почвы, собирает в емкости ботву и клубни
(корни). Такой способ применяют для уборки картофеля, сахар-
ной свеклы, кормовых и столовых корнеплодов.
560
При уборке картофеля однофазный способ наиболее применим
при слаборазвитой ботве, а для корнеплодов, наоборот, когда
ботва сильно развита и имеет достаточную прочность, обеспечи-
вающую извлечение корня из почвы за ботву без ее разрыва.
При двухфазном способе ботву удаляют перед подкапыванием
пласта с корнеклубнеплодами. Удаляют ботву механическим (сре-
зание, дробление, теребление) и химическим способами. Механи-
ческое удаление ботвы проводят за 2... 15 дней до начала уборки
ботвоуборочными машинами, собирающими ботву в емкости или
разбрасывающими ее по полю. Химическое удаление ботвы при-
меняют при уборке картофеля.
При уборке сахарной свеклы ботву удаляют как специальными
ботвоуборочными машинами, так и комбайном, одна часть кото-
рого предназначена для срезания и сбора ботвы, другая — для
подкапывания, очистки и сбора корней.
Раздельный способ предусматривает выкапывание клуб-
ней или корней с нескольких рядков — двух, четырех, шести — и
укладывание их на поверхность почвы в один валок. В валках
почва, приставшая к корнеклубнеплодам, подсыхает, повышается
прочность кожицы клубней. Затем валок подбирают машинами,
которые очищают клубни (корни) и погружают их в емкости. При
раздельной уборке, как правило, ботву предварительно удаляют.
Раздельная уборка применима на связных и влажных почвах.
Комбинированный способ применяют при уборке кар-
тофеля. При таком способе клубни с двух или четырех валков
подкапывают копателями, частично очищают от почвы и уклады-
вают в междурядья двух неубранных рядков, которые затем уби-
рают комбайнами вместе с уложенными на них клубнями.
Глава XVIII
КОМПЛЕКСЫ ДЛЯ ПОСЛЕУБОРОЧНОЙ ОБРАБОТКИ УРОЖАЯ
Комплексы послеуборочной обработки урожая — совокупность
машин, оборудования и средств управления ими, выполняющих
в потоке превращение трав, зерна, плодов, корнеплодов и других
материалов в продукты с заданными показателями качества.
Находят широкое применение комплексы по переработке и
приготовлению кормов, обработке зерна, початков кукурузы, кар-
тофеля, семечковых и цитрусовых плодов, овощей, льна, хлопка
и других продуктов.
§ 1. Технологические линии переработки
и приготовления кормов
Задача приготовления кормов — снизить потери питательных
свойств растений при хранении, транспортировке и раздаче кор-
мов, повысить их усвояемость и облегчить трудоемкие операции
при раздаче животным.
36—424
561
Рис. 362. Схемы технологических линий приготовления витаминных кормов-
« — травяной муки и гранул; б — жома и клеточного сока; 1 — транспортирующие устрой-
ства; 2 —устройства повторного измельчения; 3 — пневмосепаратор; 4 — плющилка зерна и
стеблевых узлов; 5 — сушилка; 6 и в — циклоны; 7 — дробилка; 9 — затаривающее устрой-
ство; 10— емкость для хранения; 11 — гранулятор; 12— устройство для внесения антиокис-
лителей; 13 — шнековый пресс; 14 и 15 — емкости для жома н клеточного сока; 1S — иасос.
Ниже приведены технологические линии приготовления вита-
минных кормов.
Распространенными витаминными кормами являются травяная
мука и гранулы, а также брикеты грубых кормов.
Травяную муку приготавливают из бобовых и злаковых трав,
•богатых протеином, каротином и минеральными веществами, иног-
да используют хвою и ботву сахарной свеклы. Расширяется при-
готовление муки из вегетативной массы зернофуражных культур
(ячменя, овса, кукурузы с сорго и др.), убранных в стадии молоч-
но-восковой спелости.
Технологические потоки приготовления травяной муки и гранул
включают полный цикл операций, начиная с транспортирования 1
(рис. 362, а) измельченной растительной массы от машин, работаю-
щих в поле, и кончая закладкой готовой продукции на хране-
ние 10.
В зависимости от перерабатываемой массы, применяемых
машин и требований на конечную продукцию возможны следую-
щие схемы технологических потоков приготовления травяной муки.
Первая схема включает операции 1—5—6—7—8—9—10.
Такую технологическую линию применяют при приготовлении муки
из трав, измельченных в поле так, что основная их часть (не ме-
нее 85%) имеет длину частиц )^30 мм. Перед транспортирова-
нием готовой продукции к местам ее хранения целесообразно зата-
ренную муку охлаждать (операция 9). Для чего при сушильном
агрегате создают промежуточный склад двух-трехдневным запа-
сом продукции, охлаждаемой вентиляционной установкой.
Хранят муку при влажности w = 8...10% в бумажных, полиэти-
леновых мешках, в мешках из плотной ткани или в герметизиро-
ванных траншеях и металлических башнях. Помещения для хране-
ния муки должны быть сухими (сро = 65...75%), минимальные поте-
ри каротина соответствуют температуре Z=2...4°C.
Вторая схема включает операции 1—5—6—7—8—11—
12—10. Ее применяют при гранулировании муки. Гранулы хранят
562
в металлических емкостях. Для уменьшения потерь каротина
в процессе хранения рекомендуют применять добавки, которые
вводят в виде суспензий в массу, подавая их в смеситель грану-
лятора (операция 12). Потери каротина значительно снижаются
при подаче очищенных продуктов сгорания природного газа в ем-
кости для хранения гранул.
В то»! случае, когда масса, поступающая с поля, имеет боль-
шую длину резки (меньше 85% частиц с длиной резки 30 мм),
ее дополнительно измельчают на стационаре (операция 2).
При сушке зернофуражных культур для приготовления муки их
листостебельная масса и зерно высыхают неодновременно, что сни-
жает качество выхода продукта. Для устранения отмеченного
недостатка положительные результаты дает плющение 4 зерна и
стеблей с междоузлиями, предварительно выделенных из всей мас-
сы пневмосепаратором 3.
Приготовление витаминных кормов методом механического
обезвоживания трав включает операции 1—2—13—1—14 и 15—16
(рис. 362,6). Приготовление кормов по такой технологии исклю-
чает сушку. Срезанные и измельченные растения обезвоживаются
механическим сжатием растений. При этом получают жом влаж-
ностью 50...60% и клеточный сок. Жом закладывают на сенаж,
а сок, содержащий протеин, каротин и аминокислоты, перераба-
тывают в растительно-белковый концентрат, хранение которого
в герметизированных емкостях сводит к минимуму потери пи-
тательных веществ. Эффективность использования корма, приго-
товленного по рассмотренной технологии, увеличивается до 36%.
Необходимое условие работы поточной линии — взаимосвязь
ее звеньев. В каждый момент времени количество массы, посту-
пающей к комплексу, должно соответствовать массе готовой про-
дукции. Излишнее количество сырья, подвозимого транспортом,
приводит к его порче перед обработкой, недостаток — к простою
оборудования. Допускается запас сырья, равный 10...15% пропуск-
ной способности лимитирующего узла линии.
Исходя из этого, имеем
<УР Ji = —ffCP-=(1,1... 1,15) <7ofPsT3, (403)
где Qm — производительность агрегата, скашивающего (под-
бирающего) и измельчающего растения на поле;
t9l, ^2* ^₽з— соответственно продолжительность работы полевого
агрегата, транспортных средств и комплекса, пере-
рабатывающего растение в корм;
пь Рт — число и средняя грузоподъемность транспортных
средств;
1\, Оср — плечо и средняя скорость транспортирования
массы;
Ti, та, тз — коэффициенты использования времени смены.
36* 56Э
В случае приготовления травяной муки и гранул производй-
'тсльность лимитирует сушильный агрегат. Тогда, принимая исход-
ную влажность растений wt, получаем следующее равенство:
QJPlxi 2lt —(U0-.-l.15) <70{ 100_Шг ^р2тз. (404)
где <?ог — пропускная способность сушилок (см. выражение 374а).
По равенству (404) рассчитывают число транспортных средств
для заданного комплекса приготовления корма. При комплектова-
нии транспортных агрегатов используют тракторные прицепы при
li < 8 км или автосамосвалы, когда /1^8 км.
§ 2. Комплексы послеуборочной обработки зерна и початком
Технологические линии обработки зерна служат для очистки,
сушки и сортирования продовольственного зерна и семян колосо-
вых культур, зернобобовых, риса, кукурузы и семян трав.
Рассмотрим технологические линии обработки зерна с доведе-
нием его до продовольственных и семенных кондиций.
В зависимости от исходной влажности зерна возможны раз-
личные схемы технологических потоков его обработки.
Первая схема потока (рис. 363,а) предусматривает
сушку зерна (исходная влажность wi>16%), очистку в воздуш-
ном потоке, сортирование на решетах и триерах. При этом прини-
маем такую последовательность цикла обработки: 1—2—За — 4—
5—6—7—8—9—36—10—11—12. Очищенное зерно поступает
в бункер 15, фуражное — в бункер 14, а отходы собираются
в емкость 13.
Первичная очистка зерна 4 перед сушкой устраняет нарушение
потока в сушильных и охладительных камерах, увеличивает рав-
Рис. 363. Схемы потоков очистки и сушки зерна:
а — продовольственного; б — семенного; / — весы; 2 —завальная яма; 3, 6, 8, 16 и 19 —
нории; 4 — машины предварительной очистки; 5 — сушилки; 7 — охладительная колонка;
9 — промежуточная емкость; 10 — машины первичной очистки; И — шнек; 12 — триерный
блок; 13 н 20 — емкости для отходов; 14 и 21 — емкости для фуражного зерна; 15 — емкость
для очищенного зерна; 17 — машины вторичной очистки; 18— пневматические столы; 22
и 23 — емкости соответственно II и I сорта семян.
564
номерность сушки. Промежуточная емкббть 9 выравнивает пото-
ки зерна на входе и выходе. В нее ссыпается излишек зерна, по-
данного на очистку, а также накапливается часть зерна в качестве
резерва для работы комплекса в случае нарушения потока зерна,
подаваемого с поля.
Вторая схема включает операции 1—2—За — 36 — 10—
И—12, которые соответствуют обработке зерна (исходная влаж-
ность w 1 16%) без сушки. При обработке такого зерна возможно
между нориями За и 36 использование промежуточной емкости 9.
Третья схема (работа без разделения зерна по длине) ана-
логична первой и второй до входа зерна в триерный блок, а далее
оно выводится шнеком в емкость 15.
Описанные технологические линии применяют и при подготов-
ке семян, но при этом производительность линий значительно сни-
жается, а получение семян классной кондиции затруднено из-за
отсутствия в комплексе сортировальных машин.
Для семенного зерна предусматривают приставки, технологи-
ческие линии которых (рис. 363,6) продолжают рассмотренные
выше. На этих линиях семена дополнительно обрабатывают на
машинах вторичной очистки и пневматических сортировальных
столах (схема потока — 16—17—18—19 с выходами: легких при-
месей 20, фуражного зерна 21, зерна второго сорта 22 и первого
сорта 23). Возможна схема работы, аналогичная рассмотренной,
но без сортирования семян на пневматических столах.
Разделение и сушку зерна риса проводят на технологических
линиях, сходных с рассмотренными. Однако из-за низкой теку-
чести зерновой массы и высокой засоренности применяют обору-
дование с развитой разделяющей поверхностью; машины вторич-
ной очистки, триерные блоки, как правило, включают на обработ-
ку параллельных потоков.
Линии для очистки семян трав, льна и других мелкосеменных
культур строят из двух отделений: приемно-вентилируемого и очи-
стительно-сушильного. В первом отделении семена подсушивают
в бункерах активного вентилирования, а во втором — очищают от
примесей, дополнительно вытирают их из коробочек, сушат и сор-
тируют на пневматических сортировальных столах или на электро-
магнитных сепараторах. (Вытирают семена как перед сушкой, так
и после нее.)
Послеуборочную обработку кукурузы с обмолотом початков в
поле ведут на тех же комплексах, на которых обрабатывают зерно
хлебных злаков. Если же с поля поступают початки кукурузы, то
их обрабатывают на стационарных пунктах со следующим техно-
логическим потоком: початки разгружают в завальную яму или
на площадку с твердым покрытием, далее их подают на початко-
очиститель, где удаляют с них обертку, затем обмолачивают. При
повышенной влажности початки перед обмолотом сушат.
Необходимую производительность комплекса для обработки
зерна подбирают по звену, имеющему минимальную пропускную
565
Способность. В зерноочистительно-сушильных комплексах такое
звено —сушильные агрегаты, а на очистке и сортировании зерна
(работа без сушки) — машины вторичной очистки и сортирования
(триерные блоки, пневматические столы, электромагнитные сепара-
торы) .
Определив пропускную способность qo лимитирующего звена по
выражениям (354, 355 или 374а), находят производительность всей
технологической линии по формуле:
(405>
где t — продолжительность работы линии за день, принимается
равной 15...18 ч;
т — коэффициент использования времени смены, равный при-
близительно 0,84.
Полученное значение производительности должно быть равно
максимальному значению массы зерна mt, поступающего за сутки
от зерноуборочных комбайнов, т. е. QM—mt.
Если QK<Zmt, то рассматривается возможность использования
в составе комплекса более производительного оборудования, на-
пример сушилки с большей пропускной способностью, или допол-
нительно в технологическую линию включаются бункеры активно-
го вентилирования для продувания зерна холодным или подогре-
тым воздухом. В том случае, когда этого сделать нельзя, устанав-
ливают комплексы с большей производительностью или предусмат-
ривают в хозяйстве несколько очистительно-сушильных отделений.
§ 3. Технологические линии обработки картофеля,
корнеплодов и плодов
Комплексы послеуборочной обработки картофеля, корнеплодов
и плодов выполняют ряд общих процессов: очистку плодов от рас-
тительных остатков и почвы, машинное разделение на фракции,
ручное выделение примесей и некондиционных плодов и клубней,
загрузку, выгрузку и затаривание.
Технологические линии для обработки картофеля (рис. 364, а)
предусматривают перед разделением клубней по геометрическим
размерам (операция 5) очищать их от растительных остатков,
камней и почвы. В отдельных линиях предусматривают ручное
выделение на переборочных столах 6 поврежденных клубней, рас-
тений, комков почвы и камней. Применяют комплексы без проме-
жуточных емкостей и с бункерами-накопителями 4. Линии с бун-
керами ускоряют прием клубней с поля и обеспечивают непрерыв-
ность всего технологического цикла. Иногда вместо бункеров кар-
тофель закладывают в резервные емкости на площадках с твердым
покрытием и навесом. Выходы с очистки, с переборочных столов
или с сортировальных машин (при отсутствии переборочных сто-
лов) направляют в бункеры готовой продукции и отходов, а из них
подают элеваторами в транспортные средства, в контейнеры или
в мешки.
566
Рис. 364. Схемы технологических линий обработки:
а — картофеля; б — плодов; 1 — приемный бункер; 2 — транспортер; 3 — устройства для
очистки клубней от примесей; 4 — бункер-накопитель; 5 — устройства для разделения на
фракции; 6 — переборочные столы; 7 — бункеры для фракций; 8 — бункер камней и поч-
венных комков; Р — лотки для отходов; 10 — опоражнивающее устройство; // — устройство
для подсушки плодов; 12 — затаривающие устройства.
Технологические линии для обработки овощных культур вклю-
чают дополнительные операции обработки корнеплодов: отмин
пера (для лука), мойки (для моркови, помидор) и другие.
Линии товарной обработки плодов (рис. 364,6) имеют, как
правило, столы для ручной переборки 6 перед машинным разде-
лением на фракции 5.
С плантации плоды на линии поступают в таре (контейнеры,
ящики, поддоны, сетки). Для механизации затаривания плодов
в машины применяют опоражниватели, работающие по сухому и
мокрому принципу. При сухом опоражнивании плоды из тары уда-
ляются за счет тяжести различными механизмами. С целью умень-
шения повреждения контейнеры с плодами при опоражнивании
погружают в воду (мокрое опоражнивание). Плоды всплывают и
их перемещают из резервуара в последующие объекты линии. При
таком способе повреждение плодов снижается почти в 2 раза.
Однако после выгрузки необходима подсушка плодов, что услож-
няет оборудование комплексов и увеличивает энергозатраты.
Ручную переборку плодов 6 проводят перед машинным разде-
лением на фракции. Нестандартные плоды сбрасывают в лотки 9,
а товарные — подают на фракционные делители плодов 5, после
чего они поступают в тару 12.
, Пропускная способность линии для клубней и плодов лимити-
руется, как правило, производительностью переборочных столов.
Раздел пятый
МЕЛИОРАТИВНЫЕ МАШИНЫ
Мелиорация (от латинского meliorate — улучшение) — сово-
купность мероприятий, направленных на коренное улучшение зе-
мель. Известно, что без мелиорации, т. е. без улучшения основного
средства производства — земли, вкладываемые в сельское хозяй-
ство капитальные вложения не могут дать должного эффекта,
поэтому мелиорация земель является важнейшим составным эле-
ментом комплекса мероприятий по интенсификации сельскохозяй-
ственного производства.
Мелиорации в зависимости от задач, которые решаются при их
осуществлении, подразделяют на три вида: гидротехнические,
культуртехнические и химические. Однако важнейшим видом при-
нято считать гидротехнические мелиорации, т. е. регулирование
водного режима путем осушения избыточно увлажненных почв и
орошения почв в засушливых земледельческих районах.
Известно, что из 1,5 млрд, га возделываемых земель в мире
! около 60% нуждается в орошении. Орошаемые же площади охва-
тывают лишь около 245 млн. га, что составляет около 16,5% обра-
батываемых земель. Однако на них производится более 50% всей
сельскохозяйственной продукции.
Большое значение гидротехническим мелиорациям придавал
В. И. Ленин. В письме коммунистам Закавказья в 1921 году он
1 писал: «Орошение особенно важно, чтобы поднять земледелие и
скотоводство во что бы то ни стало». «Орошение больше всего нуж-
! но и больше всего пересоздаст край, возродит его, похоронит
прошлое, укрепит переход к социализму»*.
Определяя мелиорацию как важнейшее звено аграрной полити-
ки партии на современном этапе, товарищ Л. И. Брежнев на май-
ском (1966 г.) Пленуме ЦК КПСС отмечал, что мелиорация —
I «это не текущая кампания, — это — программа в области сельского
хозяйства, рассчитанная на длительный срок...», а, выступая на
июльском (1970 г.) Пленуме ЦК КПСС, сказал: «В широком
развитии мелиорации — будущее нашего сельского хозяйства».
Мелиорация стала одной из важнейших общепартийных и об-
щегосударственных задач, важнейшей составной частью программы
•Ленин В. И. Поли. собр. соч., изд. 5-е, т. 43, с. 199...200.
568
по дальнейшему развитию сельского хозяйства во всех зонах
страны.
Высокими темпами проводится мелиорация земель в Нечерно-
земной зоне РСФСР, в республиках Прибалтики, в Полесской низ-
менности и на Дальнем Востоке. Она дает возможность осваивать
новые земли, резко повышать плодородие уже используемых зе-
мель, создает необходимые условия для получения стабильных
гарантированных урожаев, не зависящих от стихийных сил при-
роды.
Практическая реализация решений партии в области мелиора-
ции земель требует комплексной механизации мелиоративных
работ. Для производства мелиоративных работ применяют следую-
щие машины: культуртехнические, землеройные общестроительные,
землеройные мелиоративные, машины для ремонта и содержания
мелиоративной сети и машины для полива.
Глава I
МАШИНЫ ДЛЯ КУЛЬТУРТЕХНИЧЕСКИХ РАБОТ
§ 1. Общие сведения
Культуртехнические работы проводят: при освоении новых зе-
мель под пашню; при коренном и поверхностном улучшении сено-
косов и пастбищ и на старопахотных почвах. К культуртехниче-
ским работам для всех перечисленных земель относятся прежде
всего работы, связанные с устранением всех механических пре-
пятствий, мешающих их обработке, т. е. пней, древесно-кустарни-
ковой растительности, камней, кочек и т. п., а для вновь осваивае-
мых земель — еще и первичная обработка почвы (дернины). В со-
ответствии с этим комплекс машин, предназначенных для прове-
дения культуртехнических работ, подразделяют на две группы:
машины для подготовки земель к освоению; машины для первич-
ной обработки мелиорируемых земель.
§ 2. Машины для подготовки земель к освоению
Машины для корчевания пней. В практике находят примене-
ние главным образом механические способы корчевания с приме-
нением специальных машин или орудий.
Корчевание пней машинами или орудиями включает в себя
следующие операции: подготовку пней к корчеванию, корчевку
пней, стряхивание почвы с корней, удаление выкорчеванных пней
за пределы участка, засыпку я.м и планировку поверхности. Раз-
личают прямой и раздельный способы корчевания. Крупные пни
корчуют только раздельным способом, при этом способе выкорче-
ванные пни сразу не убирают с поля, а оставляют лежать на ме-
сте, повернув корнями на юг. После просыхания прилипшей к кор-
569
Рис. 365. Основные типы рабочих ор-
гано® корчевателей:
а — поступательного движения; б — с комби-
нированным движением; в — вращательного
движения (ротационные); 1 — клык-корчева-
гель; 2 — отвал; 3 и 4 — рама; 5 — клык-со-
биратель; 6 — двуплечий рычаг.
ням почвы (через 10...20 дней)
ее стряхивают, а пни сгреба-
ют в мелкие кучи для допол-
нительной просушки (на 5..10
дней) или вывозят за пределы
участка. Собранные пни сжи-
гают в больших кучах или
траншеях. Для их быстрого-
поджигания используют спе-
циальные зажигательные ап-
параты или огнеметы. Сжигать
древесную массу можно толь-
ко на минеральных почвах,
сжигание на. торфяниках за-
прещено. Применение раздель-
ного способа обеспечивает луч-
шее сохранение плодородного
слоя и дает прибавку урожая.
Сопротивление пня
при корчевании зависит от по-
роды дерева (вида его корне-
вой системы), диаметра пня,
давности рубки, механического состава и влажности почвогрун-
та, а также способа корчевания. Наибольшее распространение по-
лучил способ запрокидывания под действием горизонтальной си-
лы, что объясняется простотой конструкции рабочего органа и воз-
можностью непрерывной (поточной) его работы, в то время как
выдергивание и выкручивание обуславливают циклический харак-
тер работы.
Рабочие органы корчевальных машин чрезвычайно много-
образны. Наибольшее распространение получили рабочие органы
в виде поступательно перемещаемых зубьев (клыков), двуплечих
рычагов с клыками-корчевателями и корчующих роторов
(рис. 365). Рабочий орган в виде клыка-корчевателя 1 (рис. 365, о),
движущегося поступательно, корчует пни, оказывая на них давле-
ние под некоторым углом к горизонтали или горизонтальное и вы-
полняя одновременно рыхление почвы. Роторный рабочий орган
(рис. 365, в) корчует пни и погребенные древесные остатки. Три
клыка этого ротора располагаются под углом 120° один к другому,
'диаметр ротора 1,2... 1,3 м. Клык ротора совершает сложное дви-
жение: вращательное относительно своей оси и' поступательное
вместе с машиной. В результате поступательного перемещения
клык вначале надавливает на пень в направлении движения ма-
шины, нарушая его сцепление с почвой, а затем в результате
вращательного движения извлекает его на поверхность. Рабочий
орган рычажного типа (рис. 365, в) снабжен сдвоенными двупле-
чими рычагами 6, шарнирно укрепленными на раме 4, и клыками-
собирателями 5, Клыки-корчеватели, составляющие нижние плечи
57 б
рычагов 6, заводят под корень пня и, приложив усилие от гидро-
цилиндров или барабанной лебедки к верхним плечам рычагов,
извлекают пень из почвы, воздействуя на него под углом к гори-
зонтали, т. е. в направлении наименьшего сопротивления. КлЫки-
собиратели 5 в процессе движения разрывают корни и вычесывают
их на поверхность. Рама 4, помимо основного назначения, может
служить опорой при корчевании пней в циклическом режиме
работы. Использование двуплечего рычага позволяет получать зна-
чительно большие рабочие усилия, чем при использовании просто-
го клыка-корчевателя, при той же мощности двигателя трактора,
а следовательно, корчевать пни большего диаметра — до 70 см.
Машины и орудия для корчевания пней также довольно раз-
нообразны.
Корчевальная борона — одно из самых простых корче-
вальных орудий — способна корчевать пни диаметром до 15 см.
Она состоит из треугольной рамы, навесного устройства и рабочих
органов — зубьев, нижняя часть которых изогнута вперед и на-
плавлена твердым сплавом. Зубья крепят в кронштейнах рамы
пальцами, их число в зависимости от условий работы можно изме-
нять (в одной из конструкций от девяти до трех). Корчевальные
бороны выпускают только навесными. Для облегчения очистки
зубьев вместо верхней тяги механизма навески трактора устанав-
ливают гидроцилиндр, который позволяет увеличивать угол на-
клона рамы при ее подъеме.
Корчеватели и корчеватели-собиратели получи-
ли широкое распространение. Они рассчитаны на корчевку пней
диаметром до 30...40 см. Основные узлы таких орудий (рис.365,а):
толкающая рама 3, клыки-корчеватели 1 и отвал 2. В некоторых
конструкциях, кроме рамы и рабочих органов, предусматривают
еще противовесы, с помощью которых выравнивают давление гу-
сениц трактора на почву, что способствует увеличению корчую-
щего усилия на почвах со слабой несущей способностью. Толкаю-
щая рама, как правило, П-образной формы и состоит из двух тол-
кающих брусьев и поперечины. Задние концы толкающих брусьев
шарнирно соединяют с поперечной балкой или двумя кронштей-
нами, жестко закрепленными на лонжеронах рамы трактора.
В некоторых конструкциях рамы выполняют универсальными —
для навешивания сменного оборудования кустореза и бульдозера.
Поднимают и опускают толкающую раму при помощи двух гидро-
цилиндров, установленных на кронштейнах в передней части трак-
тора. Клыки-корчеватели (от 4 до 9) устанавливают на попереч-
ном брусе рамы. Отвал 2 служит для сбора и перемещения выкор-
чеванных пней.
Корчевальные машины предназначены для корчевания
крупных пней диаметром до 50...70 см. Основные узлы машин: на-
весное устройство, корчевальная рама, рабочий орган с комбини-
рованным движением клыков-корчевателей, четыре гидроцилинд-
ра — два для подъема и опускания корчевальной рамы и два для
571
поворота клыков-корчевателей. Рабочий орган (рис. 365, б) состо-
ит из двух спаренных двуплечих рычагов 6 с клыками-корчевате-
лями, свободно посаженных на оси корчевальной рамы, и двух
клыков-собирателей 5, жестко закрепленных на раме. Клыки-кор-
чеватели под действием двух гидроцилиндров или барабанной ле-
бедки могут поворачиваться на угол 60°, создавая корчующее уси-
лие при опоре рамы 4 на почву. Мелкие пни корчуют поточным
способом, т. е. сходу, без поворота клыков-корчевателей. При кор-
чевке очень крупных пней их корни сначала подрезают с трех сто-
рон, затем клыки-корчеватели заглубляют под пень до соприкосно-
вения корчевальной рамы с почвой и поворотом клыков извлекают
пень из почвы.
Роторные корчевальные машины корчуют пни диа-
метром до 18...20 см и погребенные древесные остатки с глубины
до 30 см. Основные узлы: рама, ходовая часть, корчующий ротор,
снимающе-передающий и транспортирующе-отряхивающие роторы,
формирователь валка, механизм передачи движения и гидроци-
линдры подъема. Рабочий орган (рис. 365, в) состоит из несколь-
ких трехклыковых секций, между которыми установлены зубчатые
диски. Конструкции снимающе-передающего и транспортирующе-
отряхивающих роторов аналогичны. Выкорчеванные пни с по-
мощью снимающе-передающего ротора передаются на транспор-
тирующе-отряхивающие, которые отряхивают почву с пней и одно-
временно перемешают их в формирователь валка. Взрыхленный
корчующим ротором слой почвы уплотняется цилиндрическим при-
катывающим катком.
Простейшие приспособления, например траловая
цепь (ЦТ), находят применение наряду со столь сложными маши-
нами. В некоторых зарубежных странах (Австралия, Индия, Шри
Ланка и др.) корчевка цепями находит широкое распространение.
Цепь длиной, как правило, до 50 м перемещают от двух до четы-
рех тракторов, которые движутся параллельно на расстоянии
(с шириной захвата) от 10 до 25 м. При корчевке цепями размер
подкоренных воронок и количество почвы на корнях выкорчеван-
ных пней меньше, чем при корчевке корчевателями-собирателями,
производительность также очень высокая (от 9 до 18 га в смену).
Машины для расчистки земель от кустарника. Современные
технологии расчистки закустаренных земель предусматривают при-
менение целого комплекса машин и орудий: кусторезов, корчевате-
лей, корчевателей-собирателей, кустарниковых граблей и т. п.
Все применяемые способы расчистки осваиваемых полей от
кустарника можно разделить на две категории: без удаления
кустарника с поля, т. е. путем заделки его в почку; с удалением
кустарника с поля. Способы, относящиеся к первой категории,
предпочтительнее, так как исключают операции сгребания и транс-
портирования за пределы поля, связанные к тому же с потерями
плодородной почвы. Однако они не всегда осуществимы. Заделать
в почву можно лишь мелкий и средний кустарник диаметром до
572
8 см и высотой до 5...6 м при условии, что толщина гумусного слоя
не меньше 20 см и почва покрыта дерниной, делающей пласт связ-
ным. Если же кустарник крупный или гумусный слой имеет тол-
щину меньше 20 см и не задернен, то в этом случае расчистку
поля проводят обязательно с удалением кустарника за его преде-
лы. Так как все способы, относящиеся к первой категории, сов-
мещают расчистку поля от кустарника с первичной обработкой
почвы и выполняются орудиями для первичной обработки почвы,
то они и будут охарактеризованы при описании этих орудий. Здесь
же рассмотрим лишь способы, относящиеся ко второй категории,
т. е. связанные с применением машин и орудий для удаления дре-
весно-кустарниковой растительности с поля. Удалять кустарник
с поля можно тремя способами: прямое удаление, т. е. одновремен-
но корчевать, сгребать и транспортировать за пределы поля всю
древесно-корневую массу; раздельное удаление, т. е. одновременно
корчевать всю древесно-корневую массу и оставлять ее на поле
в валках для просыхания и удалять с поля после просыхания и
отряхивания почвы с корней; раздельное удаление сначала над-
земной части, затем корней и пней.
При выборе способа удаления кустарника исходят из того,
чтобы количество сгребаемой вместе с ншм почвы было минималь-
ным. Исследования показали, что третий способ позволяет пример-
но в 4 раза по сравнению с первым и в 2 раза по сравнению со
вторым уменьшить количество сволакиваемой за пределы поля
плодородной почвы. Поэтому, несмотря на большее число опера-
ций, этот способ является основным, универсальным и наиболее
распространенным в практике проведения культуртехнических
работ.
Технологическая схема очистки закустаренных земель при
этом способе включает следующие операции: срезку надземной
части кустарника, сбор срезанной древесины в вал, корчевку кор-
невых остатков, сбор корневых остатков в вал, уничтожение валов.
Таким образом, основные технологические операции — это среза-
ние, сгребание, корчевка.
Рабочие органы для выполнения этих операций — режущие ап-
параты, зубья для сгребания и зубья для корчевки.
Режущие аппараты для срезания древесно-кустарниковой рас-
тительности подразделяют на два типа: пассивного действия и
активного действия.
Режущие аппараты пассивного действия чаще устанавливают
на кусторезах. Такой аппарат (рис. 366, а) состоит из клина 1, кар-
каса 2, отвалов 3 и ножей 4. Ножи 4 закреплены в нижней части
рабочего органа V-образно, т. е. в форме клина с углом 60...640
(в плане). В передней части каркаса 2 установлен носовой клин /.
Каркас 2 обшит листовой сталью и образует симметричную двух-
отвальную поверхность. При движении рабочего органа носовой
клин 1 раскалывает пни и раздвигает поваленные деревья, ножи 4
срезают кустарник, а отвалы 3 отводят его в стороны, укладывая
573-
его в валки. Качество среза зави-
сит от заточки ножа, высоты его
установки над поверхностью поля,
вида кустарника и диаметра его. -
ствола у корневой шейки, а также
от свойств почвы. Высокое качест-
во резания обеспечивается при ост-
рой заточке ножа — толщина лез-
вия 0,2...0,4 мм. Ножи с помощью
опорной копирующей лыжи уста-
навливают на высоте от 0 до 2 см
от поверхности поля. Если участок
засорен мелкими поверхностными
камнями, то ножи несколько под-
нимают, однако качество среза при
этом ухудшается, так как стволы
малого диаметра пригибаются к
поверхности почвы. Пассивные но-
жи лучше срезают кустарник с от-
носительно жесткими стеблями
(ольху, осину, орешник и т. п.) и
хуже с гибкими, мягкими стебля-
ми (например, иву). Срезание ку-
старника возможно как на сухо-
дольных, так и на торфяно-болотных почвах. Однако усилие ре-
зания при этом не должно превышать силу закрепления ствола
в почве, так как в противном случае произойдет выдергивание
растений из почвы. С учетом этого условия все большее распрост-
ранение получает зимняя срезка кустарника пассивными рабочи-
ми органами, так как зимой стволы становятся более хрупкими,
а промерзшая почва создает большое сопротивление смятию
(подпор) при отклонении ствола в процессе резания. В зимнее
время для срезания кустарника оказывается возможным наря-
ду с пассивными рабочими органами кусторезов применять и ножи
отвалов бульдозеров. Однако в отличие от ножей кусторезов, ра-
ботающих по принципу резания со скольжением, ножи отвалов
бульдозеров, расположенные перпендикулярно направлению дви-
жения, выполняют рубящее резание, отчего качество резания
ухудшается. Однако в современных машинах для срезания древес-
но-кустарниковой растительности находят применение главным
образом дисковые фрезы — с рабочим органом в виде зубчатого
диска с вертикальной осью вращения (рис. 366,6). Такой рабочий
орган обычно состоит из зубчатого диска 7, штанги 6 и гидроци-
линдров 5 для поворота штанги. Диаметр диска до 1500 мм, окру-
жная скорость режущих зубьев до 46 м/с. Этот аппарат универ-
сален, так как хорошо срезает как жесткий, так и гибкий кустар-
ник, а также деревья диаметром до 25 см. По сравнению с пас-
сивным режущим аппаратом качество работы активного аппарата
574
значительно выше, но производительность значительно ниже, кро-
ме того, он гораздо сложнее в устройстве.
Рабочими органами для сгребания срезанной или выкорчеван-
ной древесно-кустарниковой массы являются зубья. Основное тре-
бование ко всем таким рабочим органам заключается в том, чтобы-
в кучи попадало минимальное количество почвы. Это уменьшает
потери почвы и позволяет полностью сжигать древесину без ее-
дополнительного перетряхивания. Поэтому зубья кустарниковых
граблей в процессе работы не должны углубляться в почву, а долж-
ны скользить по ее поверхности, для чего нередко снабжаются
опорными лыжами.
Кусторезы с пассивным рабочим органом
(рис. 366, а) получили наиболее широкое распространение. Такой
кусторез состоит из следующих основных узлов: рабочего органа
(рис. 366,а), толкающей рамы (иногда с противовесом), пружин-
ных стабилизаторов, гидроцилиндров. Рабочий орган соединен
с толкающей рамой через шаровую опору и два пружинных ста-
билизатора, смягчающих толкающие усилия и- придающих ему
устойчивость в горизонтальной плоскости. Гидроцилиндры (един-
или два) служат для подъема и опускания рамы. Кусторез снаб-
жают наждачнЫхМ устройством с гибким приводом для заточки
ножей в полевых условиях. В некоторых конструкциях толкающая
рама выполнена универсальной и в качестве сменного рабочего»
оборудования поставляются кустарниковые грабли, а также кор-
чеватель-собиратель и бульдозер.
Кустарниковые грабли выпускают и в виде отдельного*
орудия. Такие грабли состоят из рамы с механизмом навески и.
зубьев, закрепленных при помощи пальцев в пазах поперечного
бруса рамы. При навешивании граблей на трактор вместо верх-
ней тяги механизма навески трактора устанавливают гидроци-
линдр.
Кусторезы: с активным рабочим органом монти-
руют, как правило, на базе крана; крановое оборудование пр»
этом заменяют оборудованием для срезки кустарника. Рабочий
орган в виде дисковой фрезы (рис. 366, б) в некоторых конструк-
циях снабжают захватом для удержания и укладки кустарника в,
деревьев. Известны и конструкции кусторезов с активными рабо-
чими органами, выполненные на базе трактора.
Машины для уборки камней. Камни — причина многочисленных
подомок и простоев почвообрабатывающих, посевных и уборочных,
машин. Поэтому удаление камней — одна из важнейших культуро-
технических операций.
Для извлечения камней из почвы применяют машины как не-
прерывйого (поточного), так и циклического действия. Причем
крупные камни корчуют только машинами циклического действия»
а мелкие извлекают машинами непрерывного действия. Очень
крупные камни, не поддающиеся корчевке, предварительно дро-
фят взрывом,, используя, как правило, накладные заряды.
57^
Рис. 367. Камнеуборочная машина:
1 — гребенка; 2 — рама; 3 — гидроцилиндр
поворота гребенки; 4 — пневматическое
колесо; 5 — гидроцнлиндр поворота бунке-
ра; 6 — бункер.
Корчевка больших полускры-
тых и скрытых камней практиче-
ски не отличается от корчевки
пней. Для корчевки камней при-
меняют те же машины цикличе-
ского действия, что и для кор-
чевки пней: корчеватели, корче-
ватели-собиратели, а также спе-
циально созданные для уборки
камней корчеватели-погрузчики
и, наконец, землеройные строи-
тельные машины — бульдозеры.
Машина непрерывного действия состоит из подающего рабочего
органа, сепарирующего устройства, выгружающего транспортера
или бункера. Подающие рабочие органы можно разделить на две
группы: прочесывающие и подкапывающие; первые выполняют в
'виде гребенок или роторов с пружинными зубьями, которые при
движении машин вычесывают камни из пахотного слоя почвы; вто-
рые подкапывают и подают на сепарирующие органы всю массу
камней вместе с почвой.
Камнеуборочная машина с прочесывающим
рабочим органом (тина УКП) — предназначена для уборки
камней размером от 12 до 65 см, находящихся на поверхности или
•скрытых в почве на глубине не более 10 см. Основные узлы маши-
ны (рис. 367): рама, гребенка, решетчатый бункер, гидроцилиндры
поворота гребенки и опрокидывания бункера, пневматические ко-
леса.
Рабочий орган — гребенка 1 с зубьями, расстояние между
которыми можно изменять с помощью распорных втулок. Этим
расстоянием определяется минимальный размер вычесываемых
камней. В процессе работы камни, вычесанные из почвы гребенкой,
иакапливаются на ней. По мере накопления камней гребенку с.по-
мощью гидроцилиндров 3 поворачивают и камни скатываются
в бункер 6. Заполненный камнями бункер разгружают путем его
опрокидывания (с помощью гидроцилиндра 5) на краю поля или
в транспортное средство. Машина хорошо разделывает прочесан-
ный слой почвы, так что на старопахотных почвах исключается не-
обходимость дальнейшей предпосевной обработки.
Камнеуборочная машина с подкапывающим
рабочим органом (типа КУМ) предназначена для удаления
камней размером от € до 40 см, расположенных на поверхно-
сти или скрытых в почве на глубине до 15 см. Основные ее узлы:
рама, подкапывающий пассивный лемех, ленточный и маятнико-
вый транспортеры, механизмы привода и шасси. В процессе рабо-
ты лемех подкапывает и подает смесь почвы и камней на сепари-
рующие транспортеры, где почва просеивается. Камни же посту-
пают на поперечный транспортер, который подает их в движущий-
ся рядом лафет-накопитель. Поверхность поля после прохода этой
'576
машины оказывается покрытой ровным рыхлым слоем почвы, по
которой можно производить посев.
- Одно из главных требований к качеству работы этих машин —
обеспечение минимальных потерь (выноса) плодородной почвы.
Наименьший вынос почвы до 0,5% обеспечивают те машины, кото-
рые удаляют камни без разрушения почвенного покрова, при рабо-
те машин с сепарирующими рабочими органами вынос мелкозема
составляет 1...2%, наибольший вынос плодородной почвы до
20...25% от массы камней наблюдается при работе машин с выгре-
бающими и выталкивающими рабочими органами (корчевателей,
корчевателей-собирателей, бульдозеров и т. п.).
Машины для выравнивания поверхности полей. Перед первич-
ной обработкой вновь осваиваемых земель проводят, как правило,
грубую планировку, которая сводится к срезанию и разделке кочек ,
высотой более 15 см и засыпке ими ям, образовавшихся после
корчевки пней, крупных и средних камней. При этом нельзя допус-
кать полного срезания дернового слоя, хотя бы даже на отдель-
ных участках. Такую работу чаще всего проводят бульдозерами,
скреперами, иногда грейдерами, которые Относятся к общестрои-
тельным землеройным машинам и будут рассмотрены в следующей
главе.
§ 3. Машины и орудия для первичной обработки почвы
Приемы первичной обработки почвы и необходимые для их
осуществления машины и орудия определяют с учетом типа почвы,
ее состояния, толщины гумусного слоя и предполагаемого исполь-
зования. От правильного выбора способа первичной обработки и
применяемых машин и орудий зависит урожай сельскохозяйствен-
ных культур в первый и последующие годы.
Способы первичной обработки. Основной и наиболее распро-
страненный способ первичной обработки вновь осваиваемых зе-
мель — вспашка кустарниково-болотными плугами с последующей
разделкой пластов и прикатыванием.
^Мощные, уложенные наклонно к дну борозды, пласты распа-
ханной кустарниково-болотными плугами целины необходимо раз-
делать так, чтобы на поверхности образовался рыхлый, мелко-
комковатый слой, благоприятный для роста и развития растений.
Этого достигают путем разделки пластов тяжелыми дисковыми
боронами. Чтобы исключить вынос заделанных в почву древесных
остатков на поверхность, глубину дискования выдерживают на
*/2—2/з толщины пластов; его проводят сначала вдоль, а затем по-
перек или под углом к направлению первичной обработки.
Последнюю операцию — прикатывание — выполняют гладкими
цилиндрическими водоналивными катками: на влажной почве лег-
кими, на сухой тяжелыми, т. е. заполненными водой. Прикатыва-
ние проводят как на торфяных, так и на минеральных почвах.
Прикатыванием выравнивают поверхность поля, улучшают водный
37—424 577
режим слоя, а на торфяных почвах еще и предотвращают ветровую
и водную эрозию.
Однако применение кустарниково-болотных плугов не всегда
эффективно. Например, на осушенных болотах с хорошо разложив-
шимся торфом при отсутствии связной дернины запахать кустар-
ник не удается. В этом случае оказывается целесообразным при-
менение специальной болотной фрезы. За один проход в процессе
глубокого (до 40 см) фрезерования измельчаются стволы деревьев,
кустарник, небольшие пни и корневища, происходит перемешива-
ние измельченной древесины с почвой и укатывание перефрезеро-
ванной массы. Однако при этом на поверхности почвы остается
большое количество щепы и древесных остатков крупнее 10 см,
которые мешают работе посевных и посадочных машин и могут
вызывать их поломки. Кроме того, в верхнем слое сосредотачи-
вается большое количество семян сорняков, приводящих к силь-
ному засорению посевов. И, наконец, очень низкая производитель-
ность (0,03...0,04 га/ч) также сдерживает широкое распространение
этого способа.
Однако применение фрез эффективно только на торфяниках, на
минеральных же почвах из-за сильного абразивного износа их ра-
бочих органов — тарельчатых ножей — фрезы, как правило, не
используют. Поэтому на минеральных почвах, покрытых дерниной,
с толщиной гумусного слоя менее 20 см наиболее эффективно при-
менение плугов общего назначения, оборудованных корпусами
с винтовыми отвалами. Вспашку плугами с винтовыми отвалами
производят на глубину, равную толщине гумусного слоя; качество
вспашки зависит от связности и мощности дернины.
Плуг с винтовыми отвалами оказывается эффективным и при
коренном улучшении (омолаживании) малопродуктивных естест-
венных кормовых угодий (лугов и пастбищ), особенно в районах
с недостаточным увлажнением. Основным агротехническим требо-
ванием в этом случае является полный (на 180°) оборот пласта,
который может обеспечить только лишь плуг, оборудованный кор-
пусами с винтовыми отвалами. Перевернутый пласт в этом случае
служит своеобразным фильтром: он допускает прорастание ценных
длиннокорневищных злаков и бобовых, но преграждает путь мел-
кому разнотравью, которое отмирает и разлагается, удобряя
почву. Поверхность перевернутого пласта легко пропускает влагу,
которая, как губкой, поглощается и удерживается дерниной, а
затем используется корнями омоложенных растений. Урожай сена
на омоложенном луге без подсева и с подсевом трав в 2...4 раза
выше, чем на целине.
Для окультуривания солонцовых почв находят применение
трехъярусные плуги. Такие почвы состоят из верхнего плодородного
гумусного слоя, среднего солонцового и нижнего карбонатного
слоев, причем в карбонатном слое находится гипс, пригодный для
улучшения солонцового слоя. Поэтому задача сводится к тому,
чтобы обернуть и разрыхлить верхний плодородный слой плугом»
Б78
Рис. 368. Машины и орудия для первичной обработки почвы:
а — кустарниково-болотный плуг; б — трехъярусный плуг; в — машина для фрезерования
закустаренных земель; 1 — опорная лыжа; 2 — плоский иож; 3 — накладка; 4 — рама; 5 —
полевая доска с ушнрнтелем; 6 — корпус первого яруса; 7 — корпус третьего яруса; 8 —
корпус второго яруса; 9— черенковый иож; 10— передний прижимной каток; 11 — кустар-
ник; 12— отбойная плита; 13 — фрезерный барабан; 14 — тарельчатый нож; 15 — гидроци-
лиидр; 16 — задний уплотнительный каток.
оставив его сверху, а солонцовый слой перемешать с частью кар-
бонатного. Аналогичная задача возникает и при окультуривании
подзолистых почв.
Особенности конструкций машин и орудий. В связи с тем, что
удельное сопротивление вновь осваиваемых почв значительно боль-
ше, чем старопахотных, машины и орудия для первичной их обра-
ботки отличаются от соответствующих машин общего назначения
повышенной прочностью, большими габаритами и массой, повы-
шенной надежностью при работе в различных условиях.
Кустарниково-болотные плуги для предупреждения
забивания кустарником выполняют, как правило, однокорпус-
ными. Основные узлы такого плуга (рис. 368, а): рама 4, корпус
с полевой доской и ее уширителем 5, сменный нож 2. Плужный
корпус снабжен полувинтовым отвалом с регулируемым пером,
распорками (для жесткости) и полевой доской с уширителем для
устойчивого хода плуга в горизонтальной плоскости. Плуг также
снабжен сменными ножами: черенковым, дисковым и плоским
с опорной лыжей. Черенковый нож служит для работы на мине-
ральных почвах и предназначен для выкорчевки мелких пней и
крупных корней. Дисковый нож применяют для работы на торфя-
ных почвах с мелкими древесными корнями, а плоский с опорной
37*
579 -
ЛЫЖей — для работы на заболоченных землях, поросших кустарни-
ком и засоренных погребенной древесиной. Лыжа служит одной
из опор плуга в рабочем положении и, кроме того, она прижимает
кустарник к поверхности поля для лучшего его перерезания. Ее
положение регулируют в зависимости от требуемой глубины па-
хоты. Щиток 3, установленный в плоскости ножа, предохраняет
корпус плуга от забивания древесной и кустарниковой раститель-
ностью.
Плуги общего назначения, применяемые со сменными
винтовыми корпусами (типа К.ВС), должны быть обязательно
снабжены дисковыми ножами диаметром не менее 450 мм, устанав-
ливаемыми перед каждым корпусом плуга. Без ножей боковые
кромки задернелых пластов вследствие беспорядочного отрыва об-
разуются рваными, отчего резко ухудшается качество укладки
пластов и возрастает тяговое сопротивление плуга. Учитывая то,
что наибольший эффект при коренном улучшении естественных
кормовых угодий может быть при полном обороте пласта,
а полный оборот пласта получается при отношении b/а > 2...2,3,
максимальная глубина пахоты при 6 = 35 см ограничивается
16... 18 см.
Трехъярусные плуги применяют для коренного улучше-
ния солонцовых и подзолистых почв. Такой плуг (рис. 368, б)
состоит из рамы 4, трех корпусов: переднего 6, основного 7 и зад-
него 8 и черенкового ножа 9. Передний и задний корпуса имеют
культурную лемешно-отвальную поверхность, основной — кони-
ческую. Передний корпус подрезает и оборачивает верхний слой
почвы; ниже и правее расположен основной корпус, обрабатываю-
щий почву третьего яруса; сзади, в одной продольно-вертикальной
плоскости с передним корпусом, но ниже его, располагается зад-
ний корпус, который обрабатывает почву второго яруса. Передний
и задний корпуса имеют отверстия в стойках для регулировки
толщины снимаемого слоя, глубина хода основного корпуса уста-
навливается с помощью опорного колеса. Максимальная глубина
пахоты 40 см.
Машинадля глубокого фрезерования (рис. 368, в)
предназначена для первичного фрезерования заросших кустарни-
ком и мелколесьем почв без их предварительной очистки. Она со-
стоит -из фрезерного барабана 13, двух передних катков 10 и одно-
го заднего 16, отбойной плиты 12 и гидроцилиндров 15. Фрезерный
барабан 13 представляет собой стальной цилиндр с гнездами для
крепления тарельчатых ножей 14. Отбойная плита ограничивает
глубину фрезерования и прижимает поваленную древесину к по-
верхности почвы в процессе фрезерования. Зазор между кромкой
отбойной плиты и ножами фрезерного барабана должен быть
3...5 мм. Его устанавливают с помощью шпилек крепления отбой-
ной плиты. Ножи по мере затупления поворачивают на 120°. Зад-
ний каток 16 в транспортном положении служит опорой машины,
а в рабочем прикатывает профрезерованный слой почвы.
580
/ Тяжелые диско в ы е бороны отличаются от полевых
борон большим диаметром дисков, большей нагрузкой на диск и
несколько иной его конфигурацией. Если у полевых борон диаметр
диска 450 мм, то у тяжелых дисковых борон — 660 мм; масса,
приходящаяся на один диск бороны, составляет: у полевых борон
30...35 кг, у тяжелой — до 50 кг. Для более интенсивного крошения:
почвы диски тяжелых борон выполняют вырезными.
Г л а в а II j
ЗЕМЛЕРОЙНЫЕ МАШИНЫ ОБЩЕГО НАЗНАЧЕНИЯ
§ 1. Общие сведения
Землеройные машины находят все большее распространение
в хозяйствах. Их используют при строительстве различных соору-
жений, силосных и сенажных траншей, ремонте дорог, плотин, оро-
сительных каналов и т. п.
Механический способ производства земляных работ предусмат-
ривает последовательное выполнение таких процессов: отделение
от естественного массива и выемка (копание) грунта; транспорти-
ровка к месту укладки и разгрузка; отделка земляного сооруже-
ния (разравнивание, уплотнение и т. п.). Некоторые из землерой-
ных машин, например экскаваторы, практически выполняют лишь
один из перечисленных процессов — разработку грунта и поэтому
нередко работают совместно с транспортными средствами (авто-
машинами, землевозами и т. п.). Вынутый из забоя грунт они гру-
зят в транспортные средства или отсыпают в отвал. Другие же,
как, например, бульдозеры, выполняют практически все перечис-
ленные процессы. Некоторые машины производят два процесса —
разработку и транспортировку грунта — и поэтому получили наи-
менование землеройно-транспортных машин (бульдозеры, скрепе-
ры, грейдеры и т. п.).
По характеру работы землеройные машины подразделяют на
две группы: циклического и непрерывного действия. К машинам
Щнвииеского действия относятся одноковшовые экскаваторы,
бульдозеры и скреперы. К машинам непрерывного действия отно-
сят многоковшовые экскаваторы, грейдеры и грейдер-элеваторы.
Кроме того, различают землеройные машины с пассивными и ак-
тивными рабочими органами. К машинам с пассивными рабочими
органами относят те, у которых отделение грунта от естественного
Массива и заполнение им рабочих органов происходит в результате
движения рабочих органов вместе со всей машиной (бульдозеры,
скреперы, грейдеры и т. п.). К машинам с активными рабочими
органами относят те, у которых отделение и набор грунта выпол-
няются рабочими органами, перемещающимися независимо от кор-
пуса машины (одно- и многоковшовые экскаваторы). В качестве
рабочих органов на этих машинах используют различные ножи
(отвалы) и ковши.
§ 2. Взаимодействие рабочих органов с грунтом
Типы рабочих органов, их основные параметры. Геометриче-
ская форма и размеры рабочего органа зависят от назначения
машины. Рабочие органы землеройных машин можно подразделить
на три основных типа: зубья, ножи с отвалами, ковши.
Зубья (рис. 369,а) служат главным образом для рыхления
грунта и могут быть использованы как самостоятельные рабочие
органы (на рыхлителях, корчевателях и др.) или в составе ковшо-
вых и ножевых рабочих органов (на экскаваторах, бульдозерах
и т. и.). Они выполняют подготовительную операцию —рыхление
твердых грунтов, которая предшествует копанию. Основной же
технологический процесс землеройных машин — копание грунта —
ведется ножами с отвалами и ковшами.
Ножи с отвалами копают и транспортируют грунт на
небольшие расстояния. Ножи выполняются в виде прямого
(рис. 369,6) или дискового (рис. 369, в) и предназначены для от-
деления грунта от основного массива и подачи его на отвальную
поверхность. Прямые ножи с отвалами (рис. 369, б) перемещают
грунт либо в направлении движения перед собой, либо отваливают
его в сторону. Их применяют на бульдозерах, грейдерах, а также
в. отдельных конструкциях траншейных экскаваторов (цепных и
роторных). Сферические диски (рис. 369, в) отделяют грунт от
основного массива, рыхлят его и подают на транспортер, их уста-
навливают на грейдерах-элеваторах.
Ковши выполняют более сложные функции: они не только
отделяют грунт от основного массива, но и забирают его, переме-
щают к месту разгрузки и высыпают. Ковши подразделяются на
два основных вида: с заполнением при вертикальном или наклон-
в
Рис. 369. Основные типы рабочих органов
землеройных машин:
я — рыхлительный зуб; б — нож с отвалом; в —
сферический диск; г — ковши с зубьями и сплош-
ной режущей кромкой; д — ковш с передней за-
слонкой.
582
ном движениях (рис. 369, г) и с заполнением при горизонтальном
движении (рис. 369, д). Первые служат основными рабочими
органами экскаваторов, вторые — скреперов. Ковши скреперов обо-
рудованы передними заслонками и транспортируют грунт на зна-
чительные расстояния.
Геометрическая форма рабочих органов определяется следую-
щими основными параметрами (рис. 369): зубьев — шириной В и
длиной /г; прямых ножей с отвалами — шириной захвата В, высо-
той Н и радиусом кривизны г; сферических дисков — диаметром D
и радиусом кривизны г; ковшей — шириной В, длиной L, высо-
той Н и вместимостью V.
Установка рабочих органов в пространстве относительно на-
правления главного движения оказывает большое влияние на их
технологические свойства и сопротивление почвы копанию и харак-
теризуется следующими основными углами (рис. 370): углом реза-
ния (крошения) а, углом заострения I, задним углом е2, углом ата-
ки (захвата) 0 (на рисунке не показан). Кроме того, в качестве
дополнительной характеристики пользуются: центральным углом <о,
углом опрокидывания ф и передним углом ®ь
Сопротивление грунтов копанию. Как известно выше, режущая
часть любого рабочего органа землеройной машины имеет форму
клина и характеризуется одними и теми же параметрами. При
копании отвальным рабочим органом (рис. 371, а) образовавшаяся
стружка 1 сначала продвигается вверх по отвалу; вверху она раз-
рушается и падает вниз, образуя так называемую призму волоче-
ния 2. Подъем стружки определяется как свойствами грунта, так
и профилем отвала: при малосвязных сухих грунтах разрушение
стружки начинается сразу же после отделения от массива. При
ковшовом рабочем органе (рис. 371,6 и в) часть грунта 3 запол-
няет ковш, а другая часть образует перед ковшом призму волоче-
ния 2. При горизонтальном движении ковша (рис. 371,6) в мало-
связных мягких сухих грунтах объем призмы волочения может до-
ходить до 0,5 Ук, где Ук— объем ковша; в связных крепких грун-
тах' он составляет (0,15...0,20) Ук. С увеличением угла наклона
траектории (рис. 371, в) объем призмы волочения под влиянием
силы тяжести уменьшается: при наклоне в 30° примерно в 2 раза,
при наклоне в 60° в 3 раза, увеличивая наполнение ковша. Таким
образом, копание грунта — сложный процесс, включающий в себя
резание грунта, перемещение его по рабочему органу, перемеще-
ние образовавшейся призмы волочения, а для ковшовых рабочих -
органов и заполнение ковша.
Движение рабочего органа в процессе взаимодействия
с грунтом может быть прямолинейнным (рис. 372, а) или криволи-
нейным (рис. 372, 6). При этом различают: направление главного
движения (по оси X), обеспечивающего отделение стружки или за-
хват разрыхленного грунта; направление подачи (по оси У), пер-
пендикулярное к направлению главного движения, регулирующее
толщину срезаемой стружки или объем захватываемого грунта.
583
Рис. 370. Основные установочные параметры рабочих органов землерой-
ных машин:
л — рыхлительного зуба: б — ножа с отвалом и сферического диска; в — ковша.
Рис. 372. Основные виды движения рабочего органа и резания (копаиия)
грунта:
а — прямолинейное движение; б — криволинейное движение; в — блокированное ре-
зание; г — полусвободное резание; д — свободное резание.
Главное движение совпадает с траекторией движения рабочего
органа при прямолинейном поступательном движении или направ-
лено по касательной к траектории при криволинейном движении.
У бульдозеров, скреперов и одноковшовых экскаваторов движение
подачи может быть периодическим (при врезании), но может про-
исходить и на всем протяжении копания. Скорость главного дви-
жения в несколько раз превышает скорость движения подачи.
Резание (копание) грунтов (рис. 372) различают следующее:
блокированное, полусвободное~й свободное. При блокированном
резании (рис. 372, в) рабочий орган срезает стружку передней и
двумя боковыми кромками, при полусвободном (рис. 372, г) — пе-
редней и одной боковой и при свободном (рис. 372, д) — только
передней кромкой. Блокированное резание, как правило, наблю-
дается в начале разработки слоя (забоя), свободное — в конце,
наиболее распространено полусвободное резание.
В общем случае сила сопротивления копанию R направлена
под некоторым углом к траектории режущей кромки рабочего ор-
гана. Общую силу сопротивления R можно представить в виде
касательной Rx и нормальной Ry составляющих (рис. 378, а и б).
При установившемся процессе копания между этими составляющи-
ми существует определенное соотношение: Ry=mRx, где т — ко-
эффициент, значение которого изменяется в пределах 0,1...0,6 в за-
висимости от угла заточки (заострения), заднего угла, степени
затупления режущей кромки, а также от вида и состояния грунта.
Обычно при острых режущих кромках сила Ry направлена в сто-
рону забоя, при затупленных — в противоположную сторону.
В этом случае она стремится вытолкнуть рабочий орган из грунта;
но ее действие преодолевается силой тяжести рабочего оборудо-
вания, а в некоторых машинах и усилием от гидропривода.
Гораздо больший интерес вызывает другая составляющая Rx,
представляющая собой сопротивление перемещению рабочего орга-
на в грунте по направлению главного движения. От ее численного
значения зависят важнейшие показатели всей машины, такие, как
энергоемкость процесса, требуемая мощность двигателя, произво-
дитедьность, усилия в узлах.и механизмах, а следовательно, и ма-
териалоемкость машины. При определении этой силы
проф. Н. Г. Домбровский по 'аналогии с формулой акад. В. П. Го-
рячкина для плугов предложил учитывать всю совокупность со-
противлений, возникающих в процессе копания грунта, в результа-
те чего получил /?х=/?т+^р+Лпр, где RT — сопротивление трения
от перемещения рабочего органа по грунту; Ry — сопротивление
резанию; Ruy — сопротивление перемещению призмы волочения и
наполнению ковша.
Раскрыв значения отдельных составляющих, он получил
(406)
где f — коэффициент трения рабочего органа о грунт;
N — нормальное давление рабочего органа на грунт;
535
kp — удельное сопротивление резанию;
В — ширина захвата ножа рабочего органа;
б — толщина стружки;
е — коэффициент сопротивления наполнению ковша и пере-
мещению призмы волочения;
kn — коэффициент наполнения ковша (отношение объема раз-
рыхленного грунта в ковше к его вместимости);
V — вместимость ковша;
Vnp — объем призмы волочения.
Для практических расчетов проф. Н. Г. Домбровский рекомен-
дует упрощенную формулу:
(407)
где kK — удельное сопротивление копанию.
Удельное сопротивление копанию всегда больше удельного со-
противления резанию (kK > kv). Оно изменяется в очень широких
пределах: от 16 кПа на песке (грунт I категории) до 4500 кПа на
мерзлых грунтах (грунт VII категории). Умножив левую и правую
части уравнения (407) на длину пути рабочего органа I и решив
его относительно kK, получим kK=Rxl/B6l. Так как Rxl — работа,
а ВЫ — объем грунта, на копание которого она затрачена, то ко-
эффициент kK приобретает размерность Дж/м3 и характеризует
удельную энергоемкость копания.
Влияние основных параметров на удельное сопротивление ко-
панию. Во избежание сильного износа режущей кромки и зубьев
угол их заострения i не принимают ниже 20...22° для влажных пла-
стичных грунтов и менее 22...250 для крепких каменистых грунтов.
Минимальные значения сил трения рабочего органа о поверхность
забоя обеспечиваются при заднем угле ег не менее 5...8°. Увеличе-
ние угла резания (копания) а вызывает повышение удельного со-
противления копанию тем больше, чем плотнее грунт.
С уменьшением угла захвата 0 отвально-ножевого рабочего
органа удельное сопротивление копанию падает, достигая мини-
мума при 20°.
Увеличение толщины стружки б (в пределах от 0,1 до 0,33 В)
приводит к уменьшению kK на 10... 12%.
С увеличением вместимости ковша kK уменьшается; например,
при увеличении с 0,25 до 15 м3 kK снижается на 12...16%. Зубья на
режущей кромке выполняют опережающее рыхление грунта. Их
применение эффективно на крепких грунтах, на сыпучих неэффек-
тивно.
Ширину зуба принимают по условиям прочности из расчета
нагрузки не более 7 кН на 1 см режущей кромки. Расстояние меж-
ду зубьями принимают равным 1,25...2,5 ширины.
Возрастание скорости рабочего органа повышает удельное со-
противление копанию. Так, например, при а = 40° возрастание ско-
рости с 1 до 7 м/с вызывает повышение kK на 28%. Однако уве-
личение скорости копания выше 4,5...5 м/с допустимо только для
588
машин крупных типоразмеров, но и у них вызывает резкое уве-
личение динамических нагрузок, а поэтому не находит применения.
Нормальная скорость копания 2,5...3,5 м/с.
§ 3. Землеройно-транспортные машины
Наибольшее распространение, получили следующие землеройно-
транспортные машины: бульдозеры, скреперы, грейдеры и грейдер-
элеватор ы.
Бульдозеры. Так как бульдозеры перемещают разработанный
грунт волоком (толканием), то их применение рационально при
перемещении грунта на сравнительно небольшие расстояния — до
100 м, а наиболее эффективно — при перемещении на расстояние
15...30 м.
По способу установки отвала бульдозеры подразделяют на два
типа: с неповоротным отвалом (типа Б); с поворотным отвалом
или универсальные (типа БП). На бульдозерах типа Б отвал
закреплен на толкающей раме жестко под прямым углом к про-
дольной оси трактора (рис. 373,а). На универсальных бульдозерах
(типа БП) отвал крепится к раме шарнирно и может изменять
свое положение как в горизонтальной плоскости (рис. 373,6), так
и в вертикальной (рис. 373,в). Универсальный отвал позволяет
более широко использовать бульдозер на планировочных работах,
профилировании полотна дорог, при террасировании склонов.
По способу управления бульдозеры подразделяют также на
два типа: с канатно-блочным управлением; с гидравлическим
управлением. Основной недостаток первой системы — невозмож-
ность принудительного заглубления отвала при работе на тяжелых
и плотных грунтах. Заглубление происходит за счет силы тяжести
и толкающего усилия трактора. В настоящее время бульдозеры
с канатно-блочным управлением находят ограниченное применение
(только на мощных гусеничных тракторах). Наибольшее распрост-
ранение (более 80%) получили бульдозеры с гидравлическим уп-
равлением, которое позволяет производить принудительное заглуб-
ление отвала в грунт, что особенно важно при работе на тяжелых
грунтах. * '
Рис. 373. Типы бульдозеров:
а — с неповоротным отвалом; б — универсальный при (аоложенин отвала в плане; в — уни-
версальный прн положении отвала в вертикальной плоскости; 1 — рама бульдозера; 2 —
толкатель; 3 — отвал. ' t
№
Рис. 374. Бульдозер с неповоротным отвалом и гидравлическим управлением в
работе:
1 — призма волочения; 2 — отвал; 3 — компенсаторы; 4 — гидроцнлиндр; 5 — трактор; 6 —
рычаг управления распределителем; 7 — кронштейн; 8 — цапфа; 9 — кронштейн для гидро-
цилиндра; 10 — толкающая балка; 11— крюк для транспортной подвески; 12 — толкающая
балка;' 13 — лыжа (тарельчатый башмак).
Бульдозер (рис. 374) состоит из базовой машины — трактора и
бульдозерного оборудования. Бульдозерное оборудование включа-
ет: отвально-ножевой рабочий орган (отвал) 2, толкающие бал-
ки 12, гидроцилиндр (один или два) двойного действия 4 и опор-
ную лыжу (башмак) 13. Неповоротные отвалы, как правило, вы-
полняют постоянной кривизны с радиусом, примерно равным
высоте отвала (гязН). Остальные параметры принимают, как
правило, следующие значения: угол резания а=55°, задний угол
62=25°, угол опрокидывания ф=74°.
В бульдозерном оборудовании для мощных тракторов нижнюю
часть отвала обычно соединяют с толкающими брусьями шарнир-
но, а верхнюю — с помощью винтовых раскосов, состоящих из тру-
бы и ввинченных в нее двух стержней с правой и левой резьбой.
Вращая трубу, изменяют длину раскосов, а вместе с ней и у^л
копания (резания), чаще всего от 35 до 55°. Ножи бульдозеров
обычно выполняют из трех частей: средней — длинной и двух бо-
ковых — коротких. Их изготовляют из специальной износостойкой
стали или из обыкновенной углеродистой с наплавкой слоя твердо-
го сплава или отбеленного чугуна. Они, как правило, имеют'двух-
стороннюю заточку, что позволяет по мере износа переворачивать
ножи.
Бульдозеры с гидравлическим управлением, как правило, снаб-
жают опорными башмаками (лыжами), которые позволяют в пла-
вающем положении копировать рельеф местности.
Рабочий процесс бульдозера обычно состоит из процессов
копания, перемещения и разравнивания грунта. При копании отвал
заглубляют в грунт на 10...20 см и одновременным движением впе-
ред срезают грунт, который накапливается перед отвалом, образуя
призму волочения. По достижении призмой волочения высоты от-
588
вала он выглубляется. Далее бульдозер перемещает призму воло-
чения к месту разгрузки.
При рациональном режиме работы, обеспечивающем полное
использование мощности двигателя, в начале резания, когда грун-
та перед отвалом еще нет, нож заглубляют на максимальную глу-
бину, а затем, по мере увеличения призмы волочения, чтобы не
заглох двигатель, постепенно выглубляют нож, уменьшая толщи-
ну стружки. При таком режиме путь набора грунта снижается
в 1,5 раза, полностью используется мощность двигателя.
При транспортировании грунта значительная его часть теряется
вследствие соскальзывания с краев отвала в боковые валики. Для
сохранения расчетной производительности необходимо компенси-
ровать эти потери небольшим заглублением ножа на некоторое
расстояние h, которое может быть определено из формулы:
/г=Утер/В/, _ (408)
где VTep — объем грунта, теряемого на пути движения бульдозе-
ра (З...6% от общего объема призмы волочения, мень-
шее значение — для связных, большее — для несвяз-
ных грунтов);
। В —длина отвала (ширина захвата);
I — длина пути.
Объем призмы волочения, оказывающий большое влияние на
производительность бульдозера, зависит от размеров отвала и
свойств грунта и определяется по формуле:
Ущ>=knSB sin 6=kKIBB sin 0/(2 tg <p), (409)
где kK — коэффициент заполнения емкости перед отвалом в до-
лях единицы от наибольшего возможного заполнения,
равный приблизительно 0,6...0,8;
S — площадь поперечного сечения грунта перед отвалом
(рис. 374), S = №/(2tg<p);
—длина отвала;
' ' ’5> ’ 6 —- угол атаки (захвата);
Ф —угол естественного откоса грунта, равный 30...40°.
Скреперы. Скреперы предназначены для выполнения землерой-
ных работ с транспортировкой грунта на значительные расстояния
(от 100 до 8000 м). Их классифицируют преимущественно по вме-
стимости ковша, по способу агрегатирования с тягачом, способу
разгрузки, по типу управления, а также и по некоторым другим
признакам. Вместимость ковша — основной параметр скрепера;
различают скреперы малой (до 3 м3), средней (от 3 до 10 м3)
и большой (свыше 10 м3) вместимости.
По способу агрегатирования скреперы подразделяют на при-
цепные, полуприцепные и самоходные. Прицепные скреперы агрё-
гатируют, как правило, с гусеничными тракторами, полуприцеп-
«ые — с колесными. Полуприцепные часть своей силы тяжести (до
2
Рис. 37'5. Прицепной скрепер с гидравлическим управлением и разновидности
ковшей:
а — общий вид скрепера; б — ковш со свободной разгрузкой; в — ковш с полупринудитель-
ной разгрузкой; г — ковш с принудительной разгрузкой; / — дышло; 2 — тяговая рама (хо-
бот); 5 — гидроцнлнндр; 4— передняя заслонка; 5 — ковш; 6 — колеса; 7 — подъемная ра-
ма; 5 — ножи.
45%) передают на ведущие колеса тягача, повышая его сцепной
вес и улучшая тяговую характеристику.
По способу разгрузки различают скреперы со свободной, по-
лупринудительной и принудительной разгрузкой (рис. 375).
При свободной разгрузке грунт выгружают опрокидыванием
всего ковша (рис. 375, б). Ковш отличается простотой конструкции,
но разгрузка влажных и липких грунтов очень затруднительна,
поэтому применяется только для разработки нелипких малосвяз-
ных грунтов. Вместимость ковшов со свободной разгрузкой, как
правило, не превышает 2...3 м3. При полупринудительной разгруз-
ке грунт выгружают поворотом одного днища или дниша вместе
с задней стенкой относительно боковых стенок ковша (рис. 375,в),
что обеспечивает хорошую очистку боковых стенок; само днище
и задняя стенка при разработке липких связных грунтов очищают-
ся неудовлетворительно. Принудительная разгрузка характери-
зуется перемещением задней стенки вдоль ковша (рис. 375,г), т. е.
относительно днища и боковых стенок, что обеспечивает самую
лучшую очистку ковша, однако при этом существенно усложняет-
ся его конструкция.
По типу управления различают скреперы с канатным, гидравли-
ческим и комбинированным управлением. Наибольшее распростра-
нение получили скреперы с гидравлическим управлением, которое
позволяет принудительно заглублять ковш в грунт.
В сельскохозяйственном производстве применяются преимуще-
ственно прицепные скреперы с гидравлическим управлением
590
(рис. 375). Основные части скрепера: ковш 5 с ножами 8, перед-
няя заслонка 4, гидроцилиндр 3, прицепное устройство (дышло) 1,
пневматические ходовые колеса 6. Рабочий орган скрепера —
ковш 5 с ножами 8 и передней заслонкой 4.
Наилучшее заполнение ковша при минимальной призме волоче-
ния достигается при установке передней заслонки с выпуклой впе-
ред стенкой. Ножи ковша скрепера должны иметь угол копания
(резания) от 25 до 40° в зависимости от свойств грунта (мень-
ший— для сыпучих, больший — для пластичных грунтов). При
этом сыпучие материалы способны заполнить 60...80 % объема ков-
ша, а пластичные — до 130%.
Рабочий процесс скрепера состоит из четырех последова-
тельно повторяющихся операций: заполнения ковша в забое (копа-
ния), транспортирования грунта к месту его укладки, выгрузки
грунта из ковша, возвращения разгруженного скрепера в забой.
Энергоемкость перечисленных операций неодинакова. Максималь-
ное сопротивление развивается в процессе заполнения ковша грун-
том особенно в его конце, минимальное — при возвращении порож-
него скрепера в забой. При отсутствии трактора-толкача добиться
максимального заполнения ковша можно путем применения рацио-
нального режима копания. В начальный период копания ввиду от-
сутствия призмы волочения и отсутствия грунта в ковше сопротив-
ление скрепера минимально и, чтобы полностью использовать мощ-
ность двигателя, необходимо заглубить нож на максимальную глу-
бину. В дальнейшем, чтобы не заглох двигатель, нож постепенно
выглубляют. При таком режиме копания можно добиться макси-
мального коэффициента наполнения (1,0...1,1), сократив путь, не-
обходимый для наполнения ковша, почти в 2 раза по сравнению
с другими режимами.
Чем больше толщина стружки, тем лучше заполняется ковш.
Максимальную толщину стружки в начале копания можно опреде-
лить по формуле:
(410)
где FT — максимальное тяговое усилие тягача;
/?ск —сопротивление перемещению порожнего скрепера;
kK — удельное сопротивление копанию (резанию);
В — ширина захвата ножа скрепера.
При работе на горизонтальном участке максимальное тяговое
усилие тягача FT = PT(pC4, а сопротивление скрепера jRcK = FCKf,
где Рт и Рек — соответственно силы тяжести тягача и скрепера,
<Рсц — коэффициент сцепления движителей тягача с грунтом;
f-—коэффициент сопротивления перекатыванию колес скрепера.
Максимальной производительности скрепера можно добиться при
наибольшем коэффициенте наполнения ковша (1,2...1.25) и наи-
большей скорости движения при транспортировании грунта в отвал
и возвращении порожнего скрепера в забой. При разработке плот-
ных грунтов (III.„IV категории) для повышения производительно-
591
сти скреперов необходимо предварительное рыхление грунта спе-
циальными рыхлителями.
Стоимость земляных работ, выполненных скреперами, значи-
тельно дешевле, чем экскаваторами при одновременной перевозке
грунта автомобилями-самосвалами, поэтому скреперы получили
большое распространение.
Грейдеры и грейдер-эл еваторы в отличие от бульдозеров и
скреперов относятся к землеройно-транспортным машинам непре-
рывного действия.
Грейдеры производят резание грунта и перемещение его
вдоль отвала для сваливания в стороне от разрабатываемой поло-
сы. Поэтому основной вид работы, на которой используют грейде-
ры, — профилирование земляного полотна за счет грунта, вынуто-
го из боковых кюветов. Грейдеры широко используют для строи-
тельства и ремонта сельскохозяйственных дорог и, кроме того, с их
помощью выполняют: нарезку каналов мелкой оросительной сети,
террасирование склонов в горах, различные, планировочные рабо-
ты, очистку дорог от снега и т. п.
Грейдеры классифицируют: по способу агрегатирования, по си-
стеме управления рабочим органом, по длине рабочего органа.
По способу агрегатирования грейдеры подразделяют на при-
цепные и самоходные (автогрейдеры).
По системе управления грейдеры подразделяют на механиче-
ские, гидравлические и комбинированные. Прицепные, как прави-
ло, имеют механическую, а автогрейдеры — гидравлическую систе-
мы управления. Гидравлическая система, помимо создания легко-
сти управления, позволяет передавать на отвал значительную
часть силы тяжести машины, что способствует хорошему заглуб-
лению его в грунт.
В зависимости от длины рабочего органа различают легкие
грейдеры — с длиной ножа 2.5...3 м, средние — с длиной ножа
3...3.4 м и тяжелые — с длиной ножа — 3,4...4,3 м. Легкие грейде-
ры применяют в основном для текущего ремонта дорог, средние —
для строительства и ремонта и тяжелые — для выполнения боль-
ших объемов строительных работ в тяжелых условиях.
Главные узлы грейдера (рис. 376,а): рабочий орган (отвал) /,
ходовая рама 2, тяговая рама 8, передние 7 и задние 3 колеса, ор-
ганы (механизмы) управления 5, дышло 6. Отвал крепится к по-
воротному кругу тяговой рамы 8 с помощью универсальной подвес-
ки, которая позволяет устанавливать его под различными углами
в горизонтальной и вертикальной плоскостях, а продольная база
грейдера обеспечивает полноповоротность отвала (на 180°).
Подвеска тяговой рамы и крепление к ней поворотного круга поз-
воляют: поворачивать поворотный круг относительно его верти-
кальной оси, изменяя таким образом угол захвата 6 (рис. 376,6);
поднимать или опускать правый или левый края тяговой рамы,
изменяя при этом так называемый угол зарезания р (рис. 376,в);
поднимать или опускать рабочий орган по всей его длине, изменяя
592
Рис. 376. Общий вид прицепного грейдера и схемы основных его регулировок:
а — общий вид грейдера; б — изменение угла захвата; в — изменение угла зарезания; г —
изменение толщины срезаемой стружки; 1 — отвал; 2 — ходовая рама; 3 — задние колесаг
4 — сиденье грейдериста; 5 — рычаги управления; 6 — дышло; 7 — передние колеса; 8 — тя-
говая рама; 9 — поворотный круг.
толщину срезаемой стружки (рис. 376,г). Тяговая рама 8 впереди
соединена шаровым шкворнем с ходовой рамой 2, а сзади — с ры-
чагами механизма подъема. Ходовая рама опирается сзади на
ось задних колес 3, а спереди — на ось передних колес 7, с кото-
рой соединяется шарнирно. Наклон передних и задних колес в вер-
тикальной плоскости регулируется, что повышает устойчивость
грейдера при работе на откосах (склонах). Все регулировки отва-
ла выполняются вручную с помощью рычагов и штурвалов 5, рас-
положенных в задней части ходовой рамы. Грейдер присоединяет-
ся к трактору с помощью дышла 6 или гибкой связью (трос, цепь);
Дышло можно устанавливать под углом к продольной оси грейде-
ра. При этом продольная ось грейдера не будет совпадать с про-
дольной осью трактора, а будет параллельна ей.
Отвал устанавливают в положение, соответствующее характе-
ру выполняемой работы, и с учетом свойств грунта.
Так, например, при выполнении основного вида работы — про-
филирования земляного полотна — рабочий процесс состоит из
двух операций: вырезания грунта из кювета и перемещения его
к оси дороги. Для вырезания грунта из кювета отвал наклоняют
в поперечно-вертикальной плоскости, устанавливая угол зареза-
ния р в пределах от И до 15°. Перемещение грунта вдоль отвала,
к оси дороги, обеспечивается установкой отвала под различными
углами захвата 0. Однако, чем меньше угол захвата 0, тем меньше-
и ширина захвата отвала, а следовательно, и производительность,
грейдера. Поэтому нужно выбрать оптимальный угол 0, т. е. воз»
можно больший, но такой, при котором было бы скольжение грун-
38—424
593;
та вдоль отвала. Это можно сделать лишь с учетом свойств грун-
та (угла трения ф) из условия скольжения: 0<9О°—ф. Следова-
тельно, при работе на влажных липких грунтах, характеризующих-
ся большим углом трения ср, угол захвата '0 будет меньше, чем при
работе на сыпучих (когда угол трения меньше). Угол резания а
при этом устанавливают из условий минимального сопротивления
резанию в пределах от 35 до 40° (меньшие значения для связных,
большие для сыпучих грунтов).
При настройке грейдера на планировочные работы устанавли-
вают угол захвата 0=90°, угол резания а в пределах от 40 до 60°,
угол зарезания р в пределах от 0 до 3°.
При настройке на террасирование склонов снимают дышло и
передние колеса, а шаровую опору ходовой рамы устанавливают
на прицепное устройство трактора, что увеличивает маневренность
грейдера.
Г рейдер-элеватор — узкоспециализированная землерой-
ная машина непрерывного действия с весьма высокой производи-
тельностью. Грейдер-элеватор предназначен главным образом
для возведения невысоких насыпей автомобильных дорог и
устройства неглубоких выемок и каналов. Основные узлы полупри-
пепного грейдер-элеватора: рабочий орган плужного типа, как
правило, сферический диск; поперечный транспортер и двигатель
для привода транспортера и органов управления. Сферический
диск характеризуется следующими параметрами: диаметр £>=600...
1200 мм, радиус кривизны г= (0,85...1,0)£>, угол заострения
х= 15...20°. Диск устанавливают с углом резания а=20...40° и углом
захвата 0 = 40...50°, заглубляют на (0,4...0,5)£>. Грунт, вырезанный
сферическим диском, поднимается по нему и падает на нижнюю
часть транспортера, который перемещает его вверх и в сторону
я сбрасывает в отвал или в транспортное средство. Наименьшие
потери грунта при его подаче с диска на транспортер — при мини-
мальном зазоре между ними: 3...6 см. На сыпучих и липких грун-
тах машина работает плохо: в первом случае из-за больших потерь
при подаче с диска на транспортер, во втором случае — из-за за-
липания ленты транспортера.
§ 4. Экскаваторы
Все экскаваторы подразделяются на две принципиально различ-
ные группы: одноковшовые и многоковшовые.
Одноковшовые экскаваторы предназначены для разработки
(выемки) грунта из забоя и погрузки его в транспортные средства
или перенесения и выгрузки в отвал. Большая разновидность смен-
ного рабочего оборудования (ковш, корчеватель, крюк, копер
и т. п.) позволяет применять их для самых разнообразных работ:
землеройных, культуртехнических, строительно-монтажных, погру-
зочно-разгрузочных и т. и. Широкое применение находят они в
сельскохозяйственном производстве при выполнении самых различ-
594
ных работ, в том числе при строительстве и эксплуатации (очист-
ка, ремонт и т. п.) гидромелиоративных систем.
По назначению экскаваторы подразделяют на универсальные^
полууниверсальные и специальные. К универсальным относят экс-
каваторы, конструкция которых позволяет работать не менее чем
с четырьмя видами сменного рабочего оборудования. При двух-трех,
видах рабочего оборудования экскаватор относят к полуунивер-
сальным, при одном — к специальным. Универсальные, как прави-
ло, снабжены ковшами малой и очень малой вместимости, спе-
циальные (шагающие драглайны, вскрышные, карьерные, туннель-
ные и т. п.) — ковшами большой вместимости.
По величине возможного поворота в горизонтальной плоскости
платформы с рабочим оборудованием экскаваторы подразделяют
на полноповоротные и неполноповоротные. В первых платформа
может поворачиваться вкруговую, во вторых — менее, чем на 360°'
(как правило, 160...270°). Неполноповоротные, как правило, смон-
тированы на базе колесных тракторов и автомобилей.
По виду ходового оборудования различают пневмоколесные,
гусеничные, шагающие, железнодорожные и плавучие экскаваторы.
Наиболее распространены гусеничные и пневмоколесные. Первые-
обладают высокой проходимостью, но низкой скоростью передви-
жения, вторые, наоборот, мобильны, но проходимость их ограни-
чена.
В гидромелиоративном строительстве и в сельскохозяйственном
производстве при эксплуатации мелиоративных систем применя-
ют гусеничные экскаваторы с ковшами вместимостью от 0,4 до
2,5 м3 и пневмоколесные с ковшами от 0,15 до 0,65 м3. Все экска-
ваторы, применяемые в сельскохозяйственном производстве, как
правило, универсальные. Промышленность производит их со сле-
Рис. 377. Сменное рабочее оборудование универсальных экскаваторов, пред-
назначенных для строительства и эксплуатации гидромелиоративных"^систем:
а — прямая лопата; б — обратная лопата; в — драглайн; г — боковой драглайн; д — грей-
дер; е — кран.
38*
595
дующими основными видами сменного рабочего оборудования:
^прямая лопата (рис. 377, а) —для разработки выемок, распо-
ложенных выше уровня стоянки экскаватора (в карьерах, котлова-
нах, крупных каналах), с погрузкой в транспортные средства; об-
ратная лопата (рис. 377, б) — для разработки грунта ниже уровня
•стояния экскаватора (рытье траншей, небольших каналов и котло-
ванов) с выгрузкой, как правило, в отвал; драглайн (рис. 377, в) —
для разработки выемок ниже уровня стояния экскаватора (кана-
лов, котлованов и т. п.) с отсыпкой грунта преимущественно в от-
пал;
драглайн для бокового копания (рис. 377, г) —для очистки от
заиления и травяной растительности дна оросительных и осуши-
тельных каналов;
грейфер (рис. 377, д) — для разработки узких и глубоких
выемок (колодцев, котлованов под различные опоры и т. п.), по-
грузки и разгрузки сыпучих материалов, расположенных как ниже,
так и выше уровня стояния экскаватора;
кран (рис. 377, е) —для погрузочно-разгрузочных и монтажных
работ.
Все перечисленное рабочее оборудование подразделяют на две
группы: рабочие органы с гибкой подвеской (драглайн, грейфер,
кран и т. п.) и рабочие органы с жесткой подвеской (обратная и
прямая лопаты, планировочный ковш и т. п.). Из рабочего обору-
дования с гибкой подвеской наибольшее распространение находит
драглайн, а из рабочего оборудования с жесткой подвеской — об-
ратная лопата. Рассмотрим общее устройство и принцип работы
экскаваторов с оборудованием драглайна и обратной лопаты,
механическим и гидравлическим приводом.
Рабочее оборудование д р а г л а й н а навешивают, как
правило, на гусеничный экскаватор с механическим приводом
(рис. 378). Рабочее оборудование драглайна состоит из следующих
•основных частей: ковша 5, стрелы 8, наводящего устройства 10,
полиспаста с канатами 2 подвески стрелы, канатами ковша: подъ-
-емным 1, тяговым 9 и разгрузочным 6. Ковш 5 драглайна имеет
•форму совка, его боковые стенки выступают вперед, где охватыва-
ются сверху аркой, придающей его передней части необходимую
жесткость. Ковш 5 подвешен к подъемному канату 1 при помощи
двух подъемных цепей 4, прикрепленных к боковым стенкам. Две
тяговые цепи 7 с одного конца крепятся к передним торцам боко-
вых стенок ковша 5, а с другого — к тяговому канату 9. Перестав-
ляя концы тяговых цепей по высоте ковша, изменяют врезание его
в грунт. При работе на легких грунтах тяговые цепи крепят выше,
а на тяжелых ниже (ближе к режущей части). Разгрузочный ка-
нат 6 перекинут через блок 3 и крепится одним концом к тяговому
канату 9, другим — к арке ковша. Его длину надо отрегулировать
так, чтобы поднятый в воздух ковш при натянутом тяговом канате
не опрокидывался, а его днище было наклонено под углом 15...20°
к горизонту. Стрела 8 пятой укреплена на поворотной платформе,
596
1
ковш врезался в грунт соответственно в
начале и конце разработки забоя; III —
процесс копания; 1 — подъемный канат;
2— канаты подвески стрелы (полиспаста); 3 — разгрузочный блок; 4—подъемная цепь; 5-*
ковш; б— разгрузочный канат; 7 — тяговая цепь; 8 — стрела; 5 —тяговый канат; 10 — на-
водящее устройство.
а передним (верхним) концом с помощью стрелоподъемного поли-
спаста с канатами 2 подвешена к двуногой стойке. Наклон стрелы
можно изменять от 25 до 70°. Наводящее устройство (направ-
ляющая обойма) 10 направляет тяговый канат 9 на барабан ле-
бедки, предохраняя его от соприкосновения с деталями поворотной
платформы.
Рабочий процесс экскаватора складывается из последовательно
чередующихся в одном цикле операций: резание грунта и запол-
нение им ковша (копание), подъем ковша с грунтом, поворот
платформы экскаватора вокруг оси к месту выгрузки, выгрузка
грунта йз ковша, обратный поворот платформы экскаватора в за-
бой, опускание ковша в исходное положение для копания. При
отпускании подъемного каната ковш из положения 1 под действи-
ем силы тяжести падает в забой и врезается в грунт (положе-
ние II или Па). После этого тяговым канатом подводят ковш
к экскаватору, одновременно выбирая слабину (подтягивая) подъ-
емного каната. Двигаясь, ковш срезает стружку и наполняется
грунтом. Наполнение происходит на длине пути, равной: на легких
грунтах 1...2, на средних 2...3 и на тяжелых 4...5 длинам ковша.
Наполненный ковш поднимают к стреле подъемным канатом при
подторможенном тяговом канате, как правило, совмещая подъем
ковша с поворотом платформы к месту разгрузки. Для разгрузки
ковша тяговый канат отпускают, при этом разгрузочный канат
ослабевает и ковш с грунтом вследствие расположения центра
597
Рис. 379. Экскаватор с гидравлическим управлением на базе колесного трак-
тора:
1 — трактор; 2 — рама навесного оборудования; 3 — поворотная колонка; 4, 7, 10 и 12 —
гидроцилиндры стрелы, ковша, рукояти, опорного башмака; 5 — стрела; 6 — рукоять; 8 —
ковш; 9— шарнир; // — опорный башмак; 13—иасосы; 14 — отвал бульдозера; 15—гидро-
цилиндр отвала бульдозера.
тяжести впереди оси подвески опрокидывается и занимает поло-
жение I, грунт высыпается. После выгрузки грунта ковш воз-
вращают в забой. После окончания разработки грунта с данной
стоянки экскаватор передвигают на новую, переместив его на раз-
мер шага. Шаг не должен быть больше, чем '/г длины стрелы при
продольном (торцевом) копании и '/3 длины стрелы при попереч-
ном (боковом) копании, так как в противном случае будут боль-
шие недоборы выемки.
Обратная лопата — основное оборудование неполнопо-
воротного колесного гидравлического экскаватора (рис. 379), вы-
полненного на базе колесного трактора и широко применяемого
в сельскохозяйственном производстве. Основные узлы экскаватор-
ного оборудования: рама 2, поворотная колонка 3, стрела 5, ру-
коять 6, ковш 8, насосы 13, гидроцилиндры 4, 7, 10 и 12, опорные
башмаки И. На остове трактора смонтирована обвязочная рама 2,
задняя ее часть служит опорой для поворотной колонки 3. К ниж-
ней части этой колонки шарнирно присоединена стрела 5, а к верх-
ней — гидроцилиндр поворота стрелы 4. К стреле 5 с помощью
шарнира 9 присоединена рукоять 6, которая может поворачивать-
ся относительно стрелы с помощью двух гидроцилиндров 10.
Ковш 8, в свою очередь, шарнирно присоединен к рукояти 6 и мо-
жет поворачиваться относительно нее с помощью гидроцилпндра 7.
Колонка допускает поворот рабочего оборудования на 160°. Для
повышения устойчивости во время копания экскаватор опирается,
кроме колес, на опорные башмаки 11, снабженные гидроцилиндра-
ми 12. Обратная лопата при необходимости может быть легко пе-
рестроена на прямую. Кроме того, экскаватор может работать со
сменным рабочим оборудованием: грейферным ковшом, крановой
подвеской, вилами для погрузки силоса, соломы и т. п. Наличие
598
бульдозерного оборудования, выполняющего отчасти и роль про-
тивовеса, позволяет этим же агрегатом засыпать траншеи после
прокладки труб.
Рабочий процесс экскаватора с обратной лопатой складывает-
ся из тех же операций, что и при оборудовании драглайном. Раз-
работку грунта можно также производить как продольным (узкие
траншеи), так и поперечным (широкие выемки) способами. При
необходимости грунт можно выгружать не только в отвал, но и
в транспортные средства. Однако это сопряжено с определенными
трудностями, так как грунт выгружается не в одной точке и не
с постоянной высоты.
Многоковшовые экскаваторы имеют ряд преимуществ перед
одноковшовыми. Операции копания, транспортирования и разгруз-
ки грунта выполняются многоковшовыми экскаваторами одновре-
менно и непрерывно, т. е. они совершают непрерывную полезную
работу по экскавации грунта, тогда как у одноковшового экскава-
тора время экскавации составляет всего лишь 15...30% от общего
времени цикла. В связи с этим производительность многоковшовых
в 1,5...2 раза выше, а удельный расход энергии на 20...40% ниже,
чем одноковшовых. Наконец, многоковшовые экскаваторы равно-
мерно во времени и более полно используют мощности двигателей
и обеспечивают получение точного профиля поперечного сечения
выемки, в то время как одноковшовые оставляют значительный
недобор. Применение многоковшовых экскаваторов позволяет
в 2...2,5 раза снизить стоимость работы по отрытию каналов и
траншей. Однако, несмотря на перечисленные преимущества, мно-
гоковшовые экскаваторы получили значительно меньшее распро-
странение, чем одноковшовые. Объясняется это прежде всего тем,
что они не только не являются универсальными, но, напротив, узко
специализированы. Кроме того, многоковшовые экскаваторы спо-
собны работать только па однородных грунтах не выше I—IV ка-
тегорий без включения камней и пней.
Многоковшовые экскаваторы бывают сухопутными и плавучими
(землечерпалки). Сухопутные многоковшовые экскаваторы клас-
сифицируют главным образом по расположению рабочего органа
относительно направления движения машины и по конструкции
рабочего органа. Если движение ковшей происходит в плоскости,
совпадающей или параллельной направлению движения машины
(оси канала), то такие экскаваторы называют экскаваторами про-
дольного копания или траншейными. Если же движение ковшей
происходит в плоскости, перпендикулярной направлению движения
машины (оси канала), то такие экскаваторы называют экскавато-
рами поперечного копания, или карьерными.
По конструкции рабочего органа многоковшовые экскаваторы
подразделяют на два типа: цепные и роторные. Рабочий орган цеп-
ного экскаватора — бесконечная цепь, несущая на себе ковши
или скребки (рис. 380,о), роторного — жесткий ротор с ковшами
(рис. 380,6). Роторные экскаваторы по сравнению с цепными
599
2
Рис. 380. Схемы многоковшовых траншейных экскаваторов:
а — цепного; б — роторного; 1 — базовый тягач; 2 — механизм для подъема и опускания
рабочего органа; 3 и 7 — ведущая н ведомая звездочки; 4 — рама; 5 — ковш; 6 — цепь; 8 —
поперечный транспортер; 9 — зачистной щит; 10 — опорно-направляющие ролики; 11 — poTopi
имеют большую производительность, меньший удельный расход
энергии (на 35...40%), более высокий к. п. д. Однако с увеличе-
нием глубины траншей габариты и масса роторных экскаваторов
возрастают в большей мере, чем цепных, поэтому роторные экска-
ваторы выпускают для рытья сравнительно неглубоких траншей —
до 2 м, в то время как цепные — до 6 м. По способу соединения
с базовой машиной те и другие подразделяют на навесные и полу-
прицепные. Первые жестко соединены с базовой машиной, у вто-
рых верхний конец рамы соединен с базовой машиной шарнирно,
а нижний — свободно опирается на дно траншеи, благодаря чему
поверхностные неровности, по которым движется машина, не ска-
зываются на выровненности дна траншеи. В гидромелиоративном
строительстве наибольшее распространение получили траншейные
многоковшовые экскаваторы с роторным и цепным рабочими орга-
нами. Их используют для рытья траншей при строительстве гори-
зонтального трубчатого дренажа, для строительства оросительных
и осушительных каналов и т. п.
Цепной траншейный экскаватор (рис. 380,а) со-
стоит из базового тягача 1, подъемного устройства 2, рабочего
органа 3...7, приемно-питающего устройства и транспортера (на
схеме не показаны). Рабочий орган состоит из рамы 4, ведущих 3
и ведомых 7 звездочек, двух цепей 6 с закрепленными на них ков-
шами 5 или скребками. Чаще применяют ковши. Однако при ра-
боте на липких грунтах, когда ковши залипают, и при разработке
мерзлых грунтов, когда они плохо заполняются, предпочтительнее
применять скребки. Угол резания а в большинстве конструкций со-
ставляет 25...30°. Задний угол ег для устранения трения днища
ковша о грунт принимают 7... 15°. Определяющим размером слу-
жит ширина ковша, так как от нее зависит ширина траншеи.
Приемно-питающее устройство может быть представлено лотком,
роликами, вращающимся конусом и т. п. Транспортер, располо-
женный перпендикулярно продольной осн машины, как правило,
600
имеет небольшие габариты, но относительно высокую скорость
ленты.
Выемка грунта происходит при одновременном движении экс-
каватора вдоль траншеи и ковшей вдоль рамы рабочего органа.
Ковши срезают его тонкими слоями. Загруженные грунтом ковши,
огибая ведущие звездочки, опрокидываются и высыпают грунт на
приемно-питающее устройство, которое подает его на транспортер,
а транспортер отсыпает в отвал. За один проход траншея выкапы-
вается на полную глубину, ее ширина равняется ширине ковшей.
Роторный траншейный экскаватор (рис. 380, б) со-
стоит из базового тягача 1, устройства для подъема и опускания
рабочего органа 2, ротора 11с ковшами 5, зачистного щита 9 и
транспортера 8. Ротор 11 с ковшами 5 опирается на опорно-на-
правляющие ролики 10, установленные на раме 4; сзади ротора
установлен зачистной щит 9.
При движении экскаватора вдоль оси траншеи и вращении
ротора ковши срезают стружку и заполняются грунтом. При пово-
роте ковшей открытой стороной вниз грунт высыпается и попадает
на транспортер, который отсыпает его в сторону.
Режим работы многоковшового экскаватора определяется
следующими параметрами: скоростью движения экскаватора, ско-
ростью движения цепи или окружной скоростью ротора, толщиной
стружки или подачей на один ковш. На производительность экска-
ватора оказывают основное влияние: конструктивный параметр —
емкость ковша VK и два кинематических параметра — число раз-
грузок ковшей в минуту nz й скорость движения экскаватора va.
Выбор оптимального соотношения этих параметров обеспечивает
максимальную производительность и минимальную материалоем-
кость экскаватора. Теоретическая производительность экскаватора
<2Т (м3/ч) зависит от вместимости ковша VK (л) и числа разгрузок
ковшей в минуту пг‘.
QT=0,06VKnz. • (411)
Как видно из выражения (411), обеспечить требуемую произ-
водительность Qt можно при определенном соотношении вместимо-
сти ковша VK и числа разгрузок ковшей в единицу времени п-.
Чтобы получить возможно меньшие размеры и массу экскаватора,
необходимо иметь ковши наименьшей емкости. Тогда, чтобы сохра-
нить ту же производительность, нужно увеличить число разгрузок
ковшей в минуту nz. Последнее зависит от относительной скорости
движения ковшей vK (м/с) и шага (расстояния между ними) /к
(мм) и связано с ними следующей зависимостью:
лг=6.10и. (412)
Практикой установлены следующие значения nz: для цепных
траншейных экскаваторов (ЭТЦ) — 20...40, для роторных (ЭТР) —
160... 170. Увеличивать пг можно путем увеличения скорости движе-
ния ковшей (цепи) vK и уменьшения расстояния между ними /1;.
601
Однако здесь существует предел: с увеличением скорости сверх
этого предела резко возрастают динамические нагрузки на рабо-
чий орган и машину и ухудшается разгрузка ковшей, поэтому ско-
рость ковша принимают: для цепных экскаваторов не более
1,2 м/с (на тяжелых грунтах — 0,7...0,8 м/с, на легких 1,0...1,2 м/с),
для роторных — в зависимости от диаметра ротора и категории
грунта от 0,9 до 2 м/с. Шаг ковшей tK принимают минимальным
из условий, исключающих попадание грунта с разгружающегося
ковша на идущий вслед за ним ковш (в цепных экскаваторах) ,
так как это привело бы к снижению производительности.
Практикой установлено, что толщина стружки не должна пре-
вышать на легких грунтах Vz, а на тяжелых ’/з высоты ковша. Она
связана с другим важным параметром — подачей на один ковш:
/K=t>s/60nz, (413)
где va— скорость движения экскаватора, м/ч.
Следует отметить, что для роторных траншейных экскаваторов
в отличие от цепных толщина стружки на протяжении рабочего
хода ковша не остается постоянной, а непрерывно увеличивается,
достигая максимума у выхода ковша из забоя. Причем для прак-
тических расчетов можно принимать максимальную толщину
стружки, равную подаче на один ковш бтах « 1х- Скорость движе-
ния экскаватора va (м/ч), от которой зависит толщина снимаемой
стружки, определяют из условий равенства производительности
ковшовой цепи (411) и производительности, замеряемой по объему
выемки прорываемой траншеи, т. е. QT=0,06 VEnz = BHva, откуда
цэ—0,06Укп2/ВЯ, (414)
где В — ширина ковша, м;
Н — глубина траншеи, м.
Так как B=con'st и nz=nzmax==const, то, следовательно va за-
висит от заданной глубины траншеи (обратно пропорциональ-
на ей).
Максимальное значение скорости экскаватора наблюдается
при минимальной глубине траншеи, которая соответствует для
цепных экскаваторов наименьшему углу наклона рамы рабочего
органа к горизонту 15...20°, а для роторных — минимальной глуби-
не погружения ротора /7ты ~ 0,2 Dp, где £>р— диаметр ротора. Ми-
нимальная скорость экскаватора необходима при максимальной
глубине забоя, которая соответствует: у цепных экскаваторов мак-
симальному углу наклона рамы к горизонту — не более 55°, у ро-
торных— максимальной глубине погружения ротора Ятах~ (0,7...
0,75) Dp.
Современные траншейные экскаваторы имеют до 16 различных
скоростей движения для копания в оптимальном режиме траншей
различной глубины.
602
Глава III
МАШИНЫ ДЛЯ УСТРОЙСТВА И СОДЕРЖАНИЯ
МЕЛИОРАТИВНОЙ СЕТИ
§ 1. Общие сведения
В засушливых земледельческих районах, где осадков мало,
а испаряемость высокая, запасы почвенной влаги пополняют во-
дой, искусственно подаваемой на поля, т. е. применяют орошение.
В районах болот и избыточно увлажненных земель для улучшения
аэрации почвы, повышения ее температурного режима и стимули-
рования аэробных процессов разложения органического вещества
искусственно удаляют избыток влаги, направляя его в водостоки и
водоемы, т. е. применяют осушение.
На нынешнем этапе развития мелиорации предпочтение отдает-
ся системам двойного регулирования. Такие системы позволяют
получать на засушливых и переувлажненных землях гарантиро-
ванные высокие урожаи сельскохозяйственных культур.
Понятие об оросительной системе. Для подачи воды на поля
строят оросительные системы. Основные элементы всякой ороси-
тельной системы: источник орошения (река, озеро, грунтовые воды
и т. п.), водозаборное (головное) сооружение, оросительная сеть.
Водозаборное сооружение может быть представлено
шлюзом-регулятором или насосной станцией. Шлюз-регулятор при-
меняют в том случае, когда уровень воды в источнике орошения
выше, чем уровень орошаемой площади, и вода поступает в ороси-
тельную сеть самотеком, а насосную станцию — в том случае, ког-
да уровень воды в источнике орошения ниже уровня орошаемой
площади и воду приходится поднимать в оросительную сеть насо-
сами. Первую оросительную систему называют самотечной, вто-
рую — механической. В нашей стране преобладают самотечные
оросительные системы.
Оросительная сеть состоит из двух составных частей:
проводящей и регулирующей. Проводящая сеть доставляет (про-
водит) воду от водозаборного сооружения до орошаемого поля,
а регулирующая — распределяет ее по площади орошаемого поля.
В зависимости от характера проводящей сети различают ороси-
тельные сети трех типов: открытые, закрытые и комбинированные.
В зависимости от характера регулирующей части, т. е. от спо-
соба распределения воды по площади поля, различают три основ-
ных способа орошения: поверхностное, дождеванием и подпоч-
венное. При поверхностном орошении вода распределяется напус-
ком, при дождевании дробится дождевальными аппаратами на
капли и падает на почву в виде искусственного дождя, при подпоч-
венном — вводится в пахотный слой почвы по заложенным в грунт
трубам и поступает в почву за счет ее всасывающей способности.
603
В нашей стране преобладают открытые оросительные сети с по-
верхностным способом полива. Проводящая часть такой сети пред-
ставлена постоянными каналами, а регулирующая — временными
'оросителями, которые после полива (перед культивацией, уборкой
и вспашкой) заравнивают. К проводящей сети относят: магист-
ральный канал и распределительные каналы различных порядков;
(межхозяйственные, хозяйственные и внутрихозяйственные). От
водозаборного (головного) сооружения вода поступает в маги-
стральный канал, из которого попадает в межхозяйственные рас-
пределители, подающие воду нескольким хозяйствам. Хозяйствен-
ные распределители получают воду из межхозяйственных и подают
ее внутрихозяйственным распределителям, которые подводят воду
к полям. Регулирующая сеть распределяет воду по площади поля,
после чего она переводится из состояния тока в почвенную влагу.
Различают три разновидности регулирующей сети и связанных
с ними способов распределения воды по полю: борозды (полив по
бороздам), полосы (полив по полосам), чеки (полив затоплением).
Полив по бороздам считается наиболее совершенным. Вода из
временных оросителей поступает в сквозные (проточные) или ту-
пые (затопляемые) борозды. В первом случае в процессе движе-
ния, а во втором в состоянии покоя вода через дно и откосы бо-
розд впитывается в почву и переходит в состояние почвенной вла-
ги. Способ применяют для полива овощных и пропашных культур.
При поливе по полосам вода движется по поверхности выров-
ненных длинных полос, ограниченных земляными валиками высо-
той 20...30 см, и в процессе движения впитывается в почву. Шири-
на полос колеблется от 1,3...4,2 м (узкие полосы) до 30...40 м (ши-
рокие полосы). Полив этого вида применяют преимущественно как
влагозарядковый и предпосевной, а также для полива зерновых
культур и трав, реже — для полива кукурузы и садов.
При поливе затоплением небольшой горизонтально спланиро-
ванный участок — чек, ограниченный со всех сторон земляными
валиками высотой 25...30 см, наполняют слоем воды, которая, на-
ходясь в состоянии покоя, впитывается в почву. Такой способ при-
меняют главным образом для орошения риса и трав, а также как
влагозарядковый и для промывки засоленных почв.
Понятие об осушительной системе. Основные элементы (части)
осушительной системы: регулирующая сеть, проводящая сеть, водо-
приемник, а также ограждающая сеть, предохраняющая осушаемые
территории от поверхностных и грунтовых вод, притекающих с вы-
шележащих территорий. Регулирующая сеть служит для регули-
рования водного режима осушаемой территории. Она поглощает
избыточную влагу из почвы и направляет образовавшиеся элемен-
тарные потоки в проводящую сеть. Регулирующая сеть может быть
открытой, т. е. представленной открытыми каналами, и закрытой,
т. е. представленной дренами. Открытые системы применяют, как
правило, при предварительном осушении болот, малопродуктивных
лугов и т. п. Каналы регулирующей части системы называют осу-
604
шителями, собирателями и т. п.
Их устраивают на расстоянии
от 60 до 120 м один от другого.
Проводящая сеть отводит воду,
поступающую из регулирующей
сети, в водоприемник. Ее выпол-
няют обычно открытой. В этом
случае она состоит из транспор-
тирующих собирателей (ТС) и
магистрального канала (МК).
При осушении закрытым дрена-
жем проводящая часть систе-
мы — коллекторы может быть
как закрытой (ЗК), так и откры-
той (ОК). Поступление воды в
водоприемник (озеро, реку и т. п.)
может быть самотечным или с
механическим водоподъемом.
Рис. 381. Изменение скорости погло-
щения воды почвой в зависимости»
от времени при различных способах
полива:
1 — напуском; 2 — дождеванием.
Понятие о системе двойного регулирования. Одностороннее осу-
шение не обеспечивает высоких урожаев, так как водный режим
на таких землях создается стихийно, и в летний бездождевой пе-
риод растения нередко страдают от недостатка влаги. На торфя-
никах и минеральных почвах с хорошей водопроницаемостью по-
дачу влаги в засушливый период можно производить шлюзованием
осушительной системы. Для этого на осушительных каналах стро-
ят систему шлюзов. Закрывая шлюзы в засушливый период, задер-
живают воду и поднимают ее уровень в каналах. При этом подни-
мается уровень грунтовых вод, а подпертая вода из канала и древ
путем инфильтрации по капиллярам увлажняет корнеобитаемый
слой почвы. На минеральных почвах, характеризующихся плохой
водопроницаемостью, для орошения в засушливый период исполь-
зуют дождевальные установки или поверхностное орошение. При
этом открытую осушительную сеть используют в качестве ороси-
тельной.
Процессы впитывания и фильтрации воды в почвогрунтах. При
орошении влага поступает на поверхность почвы в форме капель.
’ (дождевание) или определенным слоем (полив напуском) и погло-
щается почвой, проходя через ее поверхность. Процесс поглощения'
(инфильтрации) влаги почвой разделяют на два периода: впитыва-
ние и фильтрацию. Впитывание воды в почву — это процесс запол-
нения ею свободных пор под действием гравитационных и капил-
лярных сил, возникающих на границе смачивания. По мере запол-
нения пор водой скорость впитывания уменьшается (рис. 381). Она
зависит от свойств почвы и способа полива. Для почв легкого ме-
ханического состава кривые пологие, тяжелого — более крутые.
При поливе напуском (кривая 1) в начальный период скорость,
впитывания в несколько раз больше, чем при поливе дождеванием
(кривая 2). С течением времени разность скоростей уменьшается.
605
После того как все поры почвы будут заполнены водой, за исклю-
чением пор, занятых защемленным воздухом, начинается фильтра-
ция воды, т. е. перемещение ее под действием, главным образом
гидростатического напора. Скорость фильтрации к$ остается прак-
тически неизменной. Скорость поглощения (фильтрации) воды поч-
вой после ее насыщения подчиняется закону Дарси, согласно кото-
рому скорость передвижения влаги v (мм/мин) пропорциональна
градиенту гидравлического потенциала уД:
о=кфуЯ, (415)
где Кф — коэффициент фильтрации, зависящий от свойств почвы,
мм/мин;
уД — градиент гидравлического потенциала, движущая сила
процесса.
Гидравлический потенциал, характеризующий движущую силу
процесса, представляет собой сумму отдельных потенциалов, на-
пример гравитационного и капиллярно-сорбционного.
Формула (415) может быть применена и для описания первого
периода инфильтрации — периода впитывания влаги в ненасыщен-
ную почву. Однако в этом случае вместо коэффициента фильтрации
Кф в формуле (415) будет фигурировать коэффициент впитывания
Ki #= const. Уменьшаясь с увеличением влажности почвы, коэффи-
циент впитывания Kt постепенно приближается по численному зна-
чению к коэффициенту фильтрации Кф и, наконец, становится рав-
ным ему в момент /вп (рис. 381), когда процесс поглощения влаги
переходит из периода впитывания к периоду фильтрации.
Передвижение влаги в почве происходит под действием сил трех
•различных категорий: сорбционных, капиллярных и гравитацион-
ных. Все три силы действуют одновременно, но в каждый момент
е определенном объеме почвы преобладающее значение приобретает
какая-либо одна сила в зависимости от свойств почвы и родержа-
ния в ней влаги.
При поверхностном поливе напуском, например по бо-
роздам, вода впитывается в почву через дно и стенки борозд и да-
лее движется на легких (песчаных) почвах под преобладающим
воздействием гравитационных сил, вследствие чего контуры увлаж-
нения оказываются вытянутыми вниз (рис. 382, а), на тяжелых
(глинистых и суглинистых) — под воздействием не только гравита-
ционных, но и соизмеримых с ними капиллярных сил, вследствие
- чего контуры увлажнения оказываются вытянутыми вниз и в сто-
роны (рис. 382, б).
При подпочвенном орошении вода поступает в почву
через дрены—увлажнители (рис. 382, в) и перемещается в ней как
вследствие гидравлического напора, так и под действием гравита-
ционных, капиллярных и сорбционных сил. Контуры увлажнения
могут быть различными в зависимости от свойств почвы.
При поливедождеванием вода в виде капель впитывает-
ся по поверхности поля вертикальной инфильтрацией. Поэтому ос-
306
новное условие нормального протекания процесса состоит в том,
чтобы интенсивность дождя (слой воды, поступающей на полива-
емую площадь в единицу времени) не превышала скорости впиты-
вания влаги (водопроницаемости почвы). В этом случае полив
происходит без образования луж, а следовательно, и без стока во-
ды и связанной с ним водной эрозии почвы. Так, например, при ин-
тенсивности дождя 0,8 мм/мин полив без образования луж будет
продолжаться ti минут (рис. 381), при этом на поливаемую пло-
щадь будет вылита и ею впитана вода слоем /ii=p/i=0,8 мм/мин-
•25 мин=20 мм, или 200 м3/га. Если при этом вылитый слой воды
окажется меньше поливной нормы* (/ц<т), то дальнейший полив
будет происходить с образованием луж. Чтобы весь полив провес-
ти без образования луж, нужно снизить интенсивность дождя. Од-
нако при этом снижается и производительность, так как на полив
с меньшей интенсивностью дождя затрачивается большее количест-
во времени. Нетрудно догадаться, что максимальная производи-
тельность на поливе без образования луж может быть достигнута
в том случае, когда интенсивность дождя в течение всего времени
полива будет равняться водопроницаемости почвы. Однацо для это-
го дождевальная машина позиционного действия должна обеспе-
чить переменную, уменьшающуюся по кривой 2 (рис. 381) интен-
сивность дождя, для чего современные машины не приспособлены.
При дренаже главной движущей силой является градиент
гидростатического давления, возникающий вследствие падения дав-
ления у дрен, вызываемого отводом воды через них. Вокруг дрен
возникают поверхности, имеющие одинаковые давления, а следова-
тельно, и одинаковые потенциалы переноса влаги. Пересечение
этих поверхностей поперечными плоскостями дает изопотенциаль-
ные линии 4 (рис. 382, г), причем П1</72<Пз. Движение влаги
происходит от большего потенциала к меньшему по линиям тока 6^
которые перпендикулярны изопотенциальным кривым. Это движе-
ние подчиняется закону Дарси, и поэтому приток воды на единицу
длины дрены можно подсчитать по формуле:
V=Sv=8кфуП, (416>
где S— площадь поперечного сечения потока грунтовых вод.
Поперечные сечения каналов и классификация машин для их
сооружения. Открытые каналы в земляных руслах по объему и
стоимости работ относят к основным элементам осушительных и
оросительных систем. Каналы могут быть образованы как с по-
мощью выемок, так и с помощью насыпей. Каналы осушительной
сети прокладывают только в выемках (рис. 383, а). Каналы оро-
сительной сети должны «командовать» над орошаемой террито-
рией, т. е. горизонт воды в их рабочей части должен быть выше
* Под поливной нормой понимают количество воды, которое необходимо-
подать за один полив (в мм или м3/га). Средней расчетной поливной нормой
обычно считают 30 мм, или 300 м3/га. Суммирование всех поливных норм за
год дает оросительную норму Af=2m.— Прим, автора.
607
Рис. 382. Схемы движения влаги в почве при различных видах полива и дре-
наже:
<а—полив по бороздам на легких почвах; б — полив по бороздам на тяжелых почвах; в —
подпочвенный полнв; г — закрытый дренаж; 1 — борозды; 2 — контуры увлажнения; 3 — дре-
на-увлажнитель; 4 — нзопотенциальные кривые; 5 — дрена-осушнтель; 6 — линии движения
®лаги.
поверхности земли, что достигается прокладкой их, как правило, в
полувыемках-полунасыпях (рис. 383, б), а в некоторых местах и
полностью в насыпях (подушках) (рис. 383, в).
Поперечное сечение большинства открытых каналов независимо
от назначения имеет форму трапеции (рис. 383, а, б, в, г). Такая
«форма облегчает строительство, укрепление русла и уход за ним.
Только в некоторых случаях (при неустойчивых, слоистых грунтах)
крупным магистральным каналам придают параболическую форму
а, б, в и г — трапецеидальные соответ-
ственно в выемке, в полувыемке-полу-
иасыпн, в насыпи (подушке) и огради-
тельного (нагорного); д — параболиче-
ское магистрального канала; 1 — ка-
вальер; 2 — берма; 3 — бровка; 4 — от-
кос; 5 — дно; 6 — дамба; 7 — резерв;
<8 — разровненный грунт.
в поперечном сечении рабочей
части (рис. 383, д).
Основные элементы, попереч-
ного профиля каналов (рис. 383):
дно 5, откосы 4, берма 2, каваль-
ер 1, дамба 6, резерв 7. Берма 2
уменьшает вероятность ополза-
ния вынутого грунта в канал.
Кавальер отличается от простого
отвала тем, что отвал — это бес-
форменная масса лишнего грун-
та, а кавальеру придают форму
трапеции. На оградительных на-
горных каналах кавальер, или
отвал, устраивают только с од-
ной стороны (рис. 383, г). Дам-
ба 6 — это качественная насыпь,
которая служит рабочей частью
канала. Резерв 7— выемка, из
которой берут грунт для устрой-
ства насыпи.
Линейные размеры попереч-
ных сечений каналов внутрихо-
зяйственной сети, как правило,
не превышают 1,5...2,5 м, что за-
трудняет или делает невозмож-
ным строительство этих каналов
4508
землеройными и землеройно-транспортными машинами общего
назначения. В этих случаях целесообразно применять специальные
мелиоративные машины. По назначению эти машины можно под-
разделить на следующие группы: для устройства (копания) откры-
тых каналов; для разравнивания кавальеров; для планировки дна
и откосов каналов; устройства антифильтрационных экранов; со-
держания и ремонта каналов; планировки орошаемых площадей;
устройства и разравнивания временных оросителей; устройства
закрытого дренажа и т. п. Производство мелиоративных работ
должно быть основано на рациональном использовании как обще-
строительных, так и мелиоративных машин.
§ 2. Машины для устройства каналов
К этой категории мелиоративных машин относят: машины для
прокладки (копания) каналов — каналокопатели и машины для
отделки каналов: кавальероразравниватели, откосопланировщики,
машины для устройства антифильтрационных покрытий.
Каналокопатели. При прокладке внутрихозяйственных каналов
малопроизводительные и тяжелые машины циклического дейст-
вия— одноковшовые экскаваторы—практически полностью вытес-
нены высокопроизводительными машинами непрерывного дейст-
вия— каналокопателями. Преимущества каналокопателей по срав-
нению с одноковшовыми экскаваторами состоят в том, что этими
машинами отрывают каналы глубиной до 3 м за один проход
практически без доделочных работ, затрачивая при этом значитель-
но меньшее количество энергии.
По рабочим органам каналокопатели подразделяют на машины
с пассивными (плужными), активными (ротационными) и комби-
нированными рабочими органами. Каналокопатели с пассивными
(плужными) рабочими органами применяют для прокладки как
осушительных, так и оросительных каналов глубиной до 1,2 м.
Применение каналокопателей с ротационными рабочими орга-
нами позволяет значительно увеличить площадь поперечного сече-
ния канала, разрабатываемого за один проход. Однако в настоящее
время получили распространение две разновидности рабочих орга-
нов: фрезы и роторы, как правило, в сочетании с другими конструк-
тивными элементами активного и пассивного действия. Фрезы ра-
ботают на высоких скоростях резания (до 30 м/с), срезая грунт
тонкой стружкой и отбрасывая его на расстояние до 10 м (инер-
ционная разгрузка). Поэтому их применяют для прокладки осуши-
тельных каналов в болотно-торфяных грунтах, где необходимы вы-
сокие скорости для чистого среза торфа, измельчения древесной
растительности и отбрасывания вынутого грунта.
Роторы, напротив, применяют для разработки оросительных
каналов в минеральных грунтах, так как принцип их действия ос-
нован на гравитационной разгрузке, и поэтому скорость вращения
ротора, как правило, не превышает 2 м/с.
39—424
609
8
9
7
Рис. 384. Каналокопатели:
а — плужный; б — шнекороторный; в — фрезерный; 1 — лемех; 2 — заднее колесо; 3 — ниж-
ний отвал; 4 — верхний отвал; 5 — бермоочнститель; 6 — открылок; 7 — тяговая рама; 8 —
полиспаст; 9 — стойка; 10 — переднее колесо; И — канат; 12 — нож; 13 — прицеп; 14 — тя-
говый трос; 15 — ходовая рама; 16 — прицеп; 17 — передняя опора; 18 — транспортер; 19 —
задняя опора; 20 — зачистной корпус; 21 — шнек-откосник; 22 — ротор; 23 — рушитель; 24 —
противовес; 25 — привод фрез; 26 — рыхлитель; 27 — фреза; 28 — лопатка фрезы; 29 — двух-
отвальный корпус; 30 — нож; 31 — гидроцилиндр регулирования уклона.
Отечественная промышленность выпускает плужные, фрезерные
и шнекороторные каналокопатели.
Плужный канал о копатель (рис. 384, а) предназначен
для рытья открытых каналов как в минеральных, так и в торфяных
грунтах, свободных от крупных камней и крупной древесины. Ос-
новные его узлы: рабочий орган 1, 3, 4, 5 и 6, нож 12, тяговая 7 и
ходовая 15 рамы, передние 10 и задние 2 колеса. Рабочий орган
состоит из лемеха 1, двух нижних наклонных отвалов 3, двух верх-
них вертикальных отвалов 4 со съемными бермоочистителями 5 и
шарнирно присоединенными открылками 6, положение которых
фиксируется штангами. Кромки нижних отвалов 3 остро заточены.
Нож 12 установлен под тупым углом резания, что устраняет его
забивание растительностью. Тяговая рама 7 передним концом шар-
нирно соединена с ходовой рамой 15, а к заднему ее концу прива-
рен рабочий орган. Благодаря шарнирному соединению тяговая
рама может поворачиваться относительно ходовой, что необходимо
для перевода из рабочего положения в транспортное и обратно.
Перестановкой переднего конца тяговой рамы 7 в отверстиях при-
цепа 13 изменяют угол резания и глубину копания грунта. На стой-
ке 9 подвешен полиспаст 8, через него пропущен канат 11, один
конец которого присоединен к ходовой раме, а другой — к барабану
лебедки, установленной на тракторе. При работе с двумя трактора-
ми передний присоединяют к прицепу 13 с помощью тягового тро-
са 14, пропущенного между гусеницами заднего. При движении
каналокопатели нож разрезает дернину по оси канала, лемех под-
резает грунт по его дну, а острые кромки нижних отвалов — со сто-
роны откосов.
Подрезанный со всех сторон и разделенный на две части пласт
поднимается по право- и левооборачивающим рабочим поверхно-
стям корпуса и укладывается по обе стороны. При этом бермоочи-
стители формируют бермы, а при их отсутствии — открылки фор-
мируют откосы дамб.
Шнекороторный каналокопатель (рис. 384, б) пред-
назначен для прокладки оросительных каналов в минеральной поч-
ве. Рабочий орган каналокопателя комбинированный. Он состоит
из ротора с ковшами 22, двух наклонных конических шнеков 21,
расположенных по обе стороны от ротора, двух активных рушите-
лей 23 зачистного корпуса 20. Ротор разрабатывает центральную
часть канала на ширину дна, а наклонные шнеки — откосы канала.
Весь разработанный грунт ковшами ротора поднимается и сбрасы-
вается в бункер, установленный над ленточными питателями, а
из питателей — на отвальные транспортеры 18, которые выносят,
грунт в стороны, образуя двухсторонние отвалы. Окончательное
сечение канала профилирует зачистной корпус 20, оборудованный
двухсторонними отвалами. Активные рушители 23 способствуют
равномерной загрузке ковшей ротора. Шнекороторные каналокопа-
тели оборудуют системой автоматики, которая дает возможность
получать заданный уклон дна канала (по световому лучу) и ста-
39*
611
билизировать ось канала в вертикальной плоскости (по электрон-
ному отвесу).
Фрезерный к а н а л о коп ате л ь (рис. 384, в) предназначен
для прокладки осушительных каналов глубиной до 1,7 м в торфя-
ных грунтах. Рабочий орган каналокопателя комбинированный. Он
состоит из двух дисковых фрез 27, наклоненных под углом 45° к
горизонту, и двухотвального корпуса 29, установленного между
фрезами. Передняя клиновидная часть корпуса подрезает нижнюю
часть слоя (дно канала) и делит его на две равные части. Фрезы
разрабатывают грунт вдоль откосов ножами 30, расположенными
по периферии, и разбрасывают его по обе стороны канала на рас-
стояние до 10 м. Грунт в средней части сечения канала по мере
внедрения фрез под действием рыхлителей 26 и силы тяжести об-
рушивается, частично рыхлится и отбрасывается в стороны лопат-
ками 28. Задняя часть двухотвального корпуса защищает отрытый
канал от забрасывания грунтом, подбирает осыпавшийся грунт
и подает его к фрезам, т. е. окончательно зачищает откосы канала.
Машины для отделки каналов. После прокладки каналов, как
правило, проводят некоторые отделочные работы, которые заклю-
чаются в разравнивании кавальеров, планировке откосов и устрой-
стве антифильтрационных экранов. Отделочные работы выполняют
с помощью кавальероразравнивателя и специального комплекта
машин, в который входят профилировщик, бетоноукладчик и на-
резчик швов.
Кав альерор аз р авнивате л ь предназначен для сдвига-
ния грунта в сторону от бровки канала с одновременным его раз-
равниванием. При этом не допускаются: осыпание грунта в канал,
повреждение бровки и дернового покрова бермы. Основные узлы
машины: рабочий орган отвально-ножевого типа, толкающая охва-
тывающая рама, механизмы перекоса и поворота отвала, гидро-
оборудование и противовес. Рабочий орган—отвал не имеет прин-
ципиальных отличий от бульдозерного, поэтому кавальероразрав-
ниватели могут работать и как бульдозеры и их часто называют
бульдозерами-кавальероразравнивателями. Длина (ширина захва»
та) отвала должна перекрывать след трактора из расчета, чтобы
край гусеницы двигался на расстоянии не менее 0,5 м от бровки
канала. На одной из сторон отвала установлен открылок, предот-
вращающий осыпание грунта в канал. В современных кавальеро-
разравнивателях гидравлические цилиндры обеспечивают поворот
отвала как на месте, так и на ходу на угол захвата 0= ±45° и на
угол зарезания £= ±7°, что позволяет избежать холостых проходов
и повысить производительность.
Машины для устройства антифильтрационных
экранов. В результате фильтрации через дно и откосы каналов
теряется до 50% воды, поданной через головное сооружение. Поте-
ри воды, помимо снижения к. п. д. каналов (отношение расхода
воды в конце к расходу в начале — голове канала), способствуют
заболачиванию и засолению ценных земель, приводят к увеличению
612
эксплуатационных затрат и т. п. Борьбу с потерями воды на филь-
трацию можно вести двумя путями: уменьшением пористости мест-
ных грунтов, в которых проходит канал (уплотнение, кольматация,
солонцевание и т. п.); устройством специальных антифильтрацион-
ных покрытий (бентонитовая глина, бетон, битум, полиэтиленовая
пленка и т. п.). Опыт показал, что наиболее эффективны бетонные
облицовки. Их стоимость, отнесенная к одному году службы, нахо-
дится на уровне стоимости простых, но малоэффективных меро-
приятий. Процесс по устройству монолитной облицовки каналов
состоит из следующих операций: подготовка основания для обли-
цовки, укладка бетона, уход за бетоном; нарезание и заливка швов.
Для выполнения этих операций промышленность выпускает комп-
лекты машин трех типоразмеров для каналов глубиной до 1,5; 3
и 4 м. В комплект входят: профилировщик, бетоноукладчик и на-
резчик швов. Так как к профилю поперечного сечения, уклону дна,
ровности и гладкости антифильтрационной облицовки предъявля-
ются высокие требования, то все машины комплекта перемещаются
по рельсовому пути, который укладывают на снивелированную по-
верхность берм и дно в соответствии с заданным продольным укло-
ном канала.
Профилировщик предназначен для окончательной плани-
ровки дна и откосов канала перед бетонированием с точностью
±2 см. Он состоит из рабочего органа, рамы, двух тележек и сило-
вой установки. Рабочим органом служит ковшовая цепь поперечно-
го черпания и зачистные ножи. Рама представляет собой ферму,
составленную из секций, скрепленных болтами, и опирающуюся на
две тележки. Это позволяет регулировать ее длину в зависимости
от размеров канала. Поднимая или опуская раму на ходовых те-
лежках с помощью винтовых домкратов, регулируют толщину сни-
маемой стружки грунта. Ковши разгружают срезанный грунт не-
посредственно на берму или на транспортер, который перемещает
его в отвал. Для каналов глубиной более 3 м применяют машины,
планирующие один откос и половину дна (неполнопрофильные пла-
нировщики) , а для каналов глубиной 3 м и менее — машины, пла-
нирующие весь периметр поперечного сечения (профилировщики).
Бетоноукладчики подразделяются на машины циклическо-
го и непрерывного действия. Первые — неполнопрофильные (рис.
385, б) — применяют для каналов глубиной более 3 м; они уклады-
вают бетон в направлении, перпендикулярном оси канала, и после
каждого прохода останавливаются, загружаются бетоном и переме-
щаются вдоль осн канала на ширину захвата. Вторые — полнопро-
фильные (рис. 385, а) — применяют для каналов глубиной 3 м и
менее; они укладывают бетон, перемещаясь вдоль оси канала, и за-
гружаются бетоном в движении или во время остановки. Бетоно-
укладчик состоит из рабочих органов, рамы, двух ходовых тележек
и силовой установки. Рабочими органами являются ячеистый укла-
дочный бункер, вибробрус и выглаживающий брус. Толщину укла-
дываемого бетона регулируют установкой фермы и вибробруса с
613
Рис. 385. Схемы бетоноукладчиков:
а — полнопрофильного; б — неполнопрофильного; 1 — бетонная облицов-
ка; 2 — переносные рельсовые пути; 3 — загрузочный бункер; 4 — ферма
(рама).
помощью винтовых подъемников. Для увлажнения грунта перед
укладкой бетона в передней части фермы смонтированы водяной
бак, насос и трубопровод с форсунками. Во время рабочего хода
бетонная смесь поступает из укладочного бункера и ровным слоем
распределяется по всей ширине захвата. Одновременно с укладкой
ведется уплотнение и выглаживание бетона с помощью вибробру-
са и выглаживающего бруса. Загрузка выполняется с помощью за-
грузочного бункера 3, который перемещается по рельсам фермы 4.
Для приема бетонной смеси из самосвалов загрузочный бункер
выводят на край бермы. Бетоноукладчик образует сплошное покры-
тие, в котором под действием переменных температур и неравно-
мерных осадок грунта могут образовываться трещины. Для пред-
отвращения их образования в облицовке нарезают температурно-
деформационные швы. Эту работу выполняют нарезчики швов.
Нарезчик швов не только нарезает продольные и попереч-
ные швы в свежеуложенной бетонной облицовке, но и наносит на
ее поверхность пленкообразующую жидкость, которая предохраняет
бетон от преждевременного высыхания. Основные узлы: ферма,
две ходовые тележки и рабочие органы. Рабочий орган для нарез-
ки швов — вибронож, выполненный спереди по дуге окружности и
снабженный расположенным сзади резиновым успокоителем, кото-
рый, двигаясь вслед за ножом, предотвращает обваливание или
оплывание кромок шва. Продольные швы нарезают в движении,
поперечные — при остановке машины путем перемещения ножевых
кареток по направляющим фермы. Для нарезки швов в каналах
глубиной до 1,5 м применяют плоский трапецеидальный нож, снаб-
женный вибраторами. Форма ножа соответствует поперечному се-
чению канала. Рабочий орган для нанесения пленкообразующей
жидкости состоит из бака, оборудованного электронагревателями
и мешалкой, насоса и форсунки, смонтированной на подвижной ка-
ретке. Во время движения машины форсунка с кареткой переме-
614
щается по ферме поперек канала и наносит жидкость на поверх-
ность облицовки.
Заливщик швов, смонтированный на шасси автомобиля,
служит для заливки швов водонепроницаемыми пластичными би-
тумно-резиновыми мастиками, чтобы исключить потерю воды. Он
выполняет следующие операции: продувку швов сжатым воздухом,
грунтовку стенок швов и внесение горячей битумно-резиновой мас-
тики в швы.
Для облицовки каналов, размеры которых не соответствуют па-
раметрам бетоноукладчиков, применяют скользящие виброформы
или используют общестроительные методы укладки бетона. При
облицовке каналов сборными железобетонными плитами применя-
ют плитоукладчик, который монтируют на базе стрелового крана.
Плиты осторожно укладывают на предварительно уложенную по-
лиэтиленовую пленку.
§ 3. Машины для подготовки полей к поливу
Подготовка полей к поливу сводится к планировке поверхности
поля и к устройству регулирующей сети (выводных и поливных
борозд, временных оросителей, валиков и т. п.). Для выполнения
этих работ применяют планировщики и машины для устройства и
заравнивания временных оросительных сетей.
Планировщики. Неровный микрорельеф на орошаемых землях
приводит к тому, что во впадинах растения вымокают, а на возвы-
шениях остаются не политыми, в результате чего урожай снижает-
ся в 2...2,5 раза. Поэтому планировка орошаемых земель — важная
составная часть мелиоративных работ. Планировочные работы
на мелиорируемых землях подразделяются на два вида: капиталь-
ные (строительные) и эксплуатационные. Строительная планиров-
ка, в процессе которой ликвидируют ямы, бугры, овраги и т. п.,—
это грубая планировка. Ее выполняют, как правило, скреперами и
бульдозерами. Эксплуатационные планировки проводят после гру-
бых планировочных работ, а также периодически для выравнива-
ния микрорельефа поля после обработок при поливах. Для прове-
дения эксплуатационных планировок используют специальные ма-
шины— планировщики. По типу рабочего органа планировщики
подразделяют на ковшовые и отвальные. Длиннобазовый ковшовый
планировщик с шарнирной рамой (рис. 386, а) предназначен для го-
ризонтальной планировки рисовых полей (полив затоплением), но
может быть использован и для планировки полей под наклонную
плоскость (полив по полосам и бороздам). Он состоит из следующих
основных узлов: ковша 9, рыхлителя 10, базовой рамы 4, ходовой
части 8 и гидроцилиндров 2,5 и 6. Ковш 9 бездонный, включает
отвал со съемным ножом и двумя боковинами, шарнирно присоеди-
нен к базовой раме 4. Рыхлитель 10 представляет собой балку с
рыхлительными зубьями, снабженными предохранительными паль-
цами, которые срезаются при превышении допускаемой нагрузки.
615
Рис. 386. Схема планировщика:
а — в рабочем положении; б — в транспортном положении; 1—дышло (передок); 2, 5 и 6—
гидроцилиндры; 3 — тяга; 4 — базовая рама; 7 — стойка; 8 — ходовая часть; 9 — бездонный
ковш; 10 — рыхлитель.
Передний конец базовой рамы 4 с помощью гидроцилиндра 2 и тя-
ги 3 соединен с передком 1, а задний конец — с Н-образной стойкой
7 ходовой части 8. Ходовая часть состоит из переднего колесного
хода с двумя и заднего с четырьмя пневматическими колесами. При
переводе в транспортное положение (рис. 386, б) при помощи гид-
роцнлиндров 2 и 6 рама поднимается, задние колеса сближаются с
передними, уменьшая базу с 12 до 8 м, что создает большую мане-
вренность и облегчает транспортировку.
В работе зубья рыхлителя 10 рыхлят почву на возвышениях,
ковш 9 заполняется разрыхленной почвой и на ровных участках
волочит ее, а во впадинах отсыпает, заполняя понижения. Благода-
ря длинной базе планировщика ковш не копирует, а планирует
поверхность поля, автоматически устраняя неровности высотой
20...30 см, длина которых меньше удвоенной его базы.
Машины и орудия для устройства регулирующей сети. Так как
регулирующая сеть представлена различными бороздами и валика-
ми (палами), то ее нарезают с помощью различного рода бороздо-
делателей и валикоделателей (палоделателей). Поскольку эта сеть
временная, то наряду с машинами и орудиями для ее нарезки су-
ществуют также машины и орудия для ее заравнивания. Наиболее
эффективны универсальные, которые служат как для нарезки, так
и для заравнивания регулирующей сети. К числу таковых относит-
ся каналокопатель-заравниватель универсальный (КЗУ), представ-
ляющий собой универсальную раму, на которую можно устанавли-
вать сменные рабочие органы каналокопателя и заравнивателя
каналов, палоделателя и разравнивателя пал, чнзель-культиватора
616
и планировщика-выравнивателя. Названные рабочие органы позво-
ляют выполнять все операции по нарезке и разравниванию регу-
лирующей сети.
Для нарезки временных оросителей на раме 2 (рис. 387, а)
устанавливают корпус каналокопатели. Корпус состоит из стойки
8, лемеха 7, правого и левого отвалов 3 с ножами 4 и пятки 6. Ле-
мех и ножи отвалов нарезают канал трапецеидального сечения,
образующийся пласт разделяется на две части и укладывается от-
валами по обе стороны, а пята уплотняет дно оросителя. Сменные
Рис. 387. Универсальный каналохопатель-заравнизатель:
а — каналокопатель; б — заравниватель: в — палоделатель; г — разрав-^затель пал* 1 —
опорное колесо; 2—рама; 3 —отвал: 4 — нож; 5 — коонштейн пяты- 5 —пята* 7 —лемех1
8 — стойка корпуса; 9 — отвал; 10 — нож; 11 — разравнивающая доска; 12 — каток* /3 — по-
перечная балка; 14 — удлинители. ’ ’
617
лемех и ножи (широкие и узкие) позволяют нарезать оросители
шириной по дну 30 и 50 см и глубиной соответственно 25 и 30 см.
Для заравнивания каналов (рис. 387, б) используют отвалы 9,
которые крепят раствором вперед к удлинителям рамы в передней
части и к балке 13 в задней. За ними устанавливают разравниваю-
щую доску И и каток 12, опорные колеса 1 крепят с наклоном
стоек назад. В процессе работы ножи отвалов срезают дамбы, а
отвалы перемещают их в канал, доска разравнивает насыпанную
в канал почву, а каток уплотняет.
Для поделки валиков (рис. 387, в) положение отвалов 9 остает-
ся таким же, как и при заравнивании каналов, но на их концах
закрепляют удлинители 14. Срезанная в процессе работы почва
перемещается отвалами к середине, образуя валик высотой до
40 см, шириной на уровне поля 90 см и поверху 10 см.
Для разравнивания валиков (рис. 387, г) левый и правый отва-
лы с удлинителями меняют местами, устанавливая их так, чтобы
передние обрезы отвалов совместились, а кромки ножей располо-
жились под углом 60° один к другому.
Кроме того, орудие может быть переоборудовано в чизель-куль-
тиватор и планировщик. Чизель-культиватор снабжают рыхлитель-
ными лапами, а планировщик — ножами из угловой стали. Заглуб-
ление рабочих органов во всех модификациях регулируют опорны-
ми колесами 1, а у планировщика — опорными полозками.
Мелкие и средние поливные борозды нарезают культиваторами-
окучниками.
§ 4. Машины для устройства закрытого дренажа
Общие сведения. Закрытые дренажные системы получили ши-
рокое распространение благодаря большим преимуществам перед
открытыми. Они не создают помех механизации сельскохозяйствен-
ных процессов, не требуют отчуждений площадей, надежно дейст-
вуют в течение длительного времени. По назначению их разделяют
на два вида: осушительные и ирригационные.
Ирригационный дренаж выполняют только материальным, осу-
шительный— материальным, земляным и комбинированным. Из
многих разновидностей материального дренажа в настоящее время
применяют только трубчатый — главным образом гончарный и
пластмассовый. Гончарные дрены изготовляют из отдельны корот-
ких (0,3...0,6 м) или длинных (3...6 м) трубок диаметром от 50 до
200 мм. В первом случае вода попадает в них сквозь зазоры в 1...
2 мм между торцами трубок, во втором — сквозь специальные во-
допропускные отверстия (перфорации, щели, поры). Пластмассо-
вые трубки диаметром 40...75 мм и длиной не менее 300 м посту-
пают в бухтах. На осушаемых землях дренажные трубки заклады-
вают на глубину от 0,8 до 2 м (глубже слоя промерзания) с рас-
стоянием между дренами от 10 до 60 м, на орошаемых — на
глубину от 3 до 4 м с расстоянием от 100 до 300 м.
618
В соответствии с приведенной классификацией дренажных си-
стем дренажные машины подразделяют на две группы: машины
для устройства материального (трубчатого) дренажа; машины для
устройства земляного дренажа.
Машины для устройства трубчатого дренажа ведут укладку
дренажных трубок двумя способами: траншейным и бестраншей-
ным.
Траншейный способ имеет две разновидности: обычный тран-
шейный — при ширине траншей 0,4...0,6 м и более и узкотраншей-
ный— при ширине траншей 0,1...0,3 м. В первом случае ширина
траншей позволяет укладывать любые дренажные трубки как меха-
низированным, так и ручным способом, во втором случае резко
сокращается объем землеройных работ, но ширина траншей не
позволяет рабочему опускаться на ее дно, и поэтому требуется при-
менять специальные трубоукладчики.
Машины для укладки дренажных труб траншей-
ным способом созданы на базе многоковшовых траншейных
экскаваторов и получили название экскаваторов-дреноукладчиков.
Они снабжены двумя комплектами рабочих органов—землеройным
и трубоукладочным.
В качестве землеройных рабочих органов применяют: при тран-
шейном способе, как правило, цепной многоковшовый, при узко-
траншейном — цепной скребковый, иногда шнековый. Роторные на-
ходят ограниченное применение из-за больших габаритов и массы.
Принцип действия этих рабочих органов рассмотрен ранее.
Вслед за землеройным рабочим органом установлен дреноук-
ладчик. Он представляет собой каркас с двумя боковыми металли-
ческими листами 8 (рис. 388, а), между которыми расположены
наклонный нрутковый желоб 5 и две катушки 10 и 11, а снизу —
опорная лыжа 12. Продольные стенки 8 скреплены поперечными
траверсами и удерживают стенки траншеи от обрушивания в пе-
риод укладки труб. Прутковый желоб 5 служит для спуска дре-
нажных труб на дно траншеи. Он состоит из двух частей — верхней
и нижней, соединенных между собой шарнирно, что дает возмож-
ность поднимать нижнюю часть для закладки подстилающей филь-
трующей ленты с катушки 11 в корыто. Трубки перемещаются по
лотку свободно, т. е. под действием силы тяжести. Оптимальный
профиль лотка и подбор материала с минимальным коэффициентом
трения позволяют получить усилие стыковки, равное (5,0...5,5) mg.
В некоторых конструкциях при укладке легких трубок применяют
принудительное поджатие трубок фрикционным роликом, цепным
или роторным толкателем. Трубки подают вручную, при скорости
движения дреноукладчика 180 м/ч нужно подавать в желоб 9...10
трубок в минуту. Катушка 10 и расположенное под ней корыто
служат для укладки накрывающей фильтрующей ленты. Лыжа 12
в передней части снабжена очистителем дна, а в нижней — полу-
круглым выступом, выдавливающим желобок на дне траншеи (для
лучшей укладки трубок).
619
13
15
5 6 7 8
18
388. Машины для устройства труб-
Рис.
чатого дренажа:
а — траншейным
способом;
кронштейн;
6 — дренажные трубки;
стенка; 9 — штатив; 10 и 11
трующей лентой;
внутренний иож;
веска трактора;
бан: 19 — якорь;
способом; б — бестраншейным
1 — гндроцилиндр; 2 — датчик; 3 —
4 — каретка; 5 — прутковый желоб;
7 — трос; 8 — боковая
катушки с филь-
12— лыжа; 13— барабан; 14—
15 — наружный нож; 16 — па-
17 — гидроцилиндр: 18 — бара-
29 — труба; 21 — трубопроводя-
ший тракт.
21 20 19
Трубоукладчик с помощью гидроцилиндра 1 и каретки 4 мо-
жет перемещаться относительно рамы землеройного рабочего ор-
гана. В транспортном положении он опирается на кронштейн 3.
Барабан 13 для пластмассовых трубок смонтирован на дополни-
тельной раме. При укладке пластмассовой трубки один ее конец
пропускают через направляющее кольцо и желоб 5 на дно тран-
шеи и закрепляют (заякоривают) в устье дрены. В процессе дви-
жения трубка сматывается с барабана 13 и укладывается на дно
траншеи.
Дреноукладчики, как правило, снабжают системами для выдер-
живания уклона дна траншеи. Наиболее распространены следящие
системы. Система состоит из датчика 2, смонтированного на земле-
ройном рабочем органе, копирного троса 7, установленного на шта-
тивах 9 параллельно намеченной траншее. На трос опирается щуп
датчика 2 следящей системы. При отклонении рабочего органа в
ту или иную сторону по сигналу датчика включается соответствую-
щий электромагнит, который перемещает золотник, переключаю-
щий подачу масла в ту или иную полость гидроцилиндра, т. е. на
подъем или опускание рабочего органа.
Машина для укладки трубок бестраншейным
способом (рис. 388, б) состоит из черенкового ножа 14 и 15,
620
гидроцилиндра 17, барабана 18, трубопроводящего тракта 21. Че-
ренковый нож служит для прорезания в грунте щели, иногда его
выполняют телескопическим, что позволяет с помощью гидроци-
линдра 17 обеспечивать заданный уклон дна щели. На ровных уча-
стках уклон обеспечивается постепенным выглубленнем внутренней
части ножа 14. Барабан 18 во избежание саморазматывания снаб-
жают тормозком. Пластмассовая труба может формироваться и в
процессе укладки из пластмассовой ленты толщиной 0,5...1,2 мм.
Для этого укладчик снабжают трубоформирователем. Пленочная
дрена вводится в дополнительную трубу длиной 1...2 м и заякори-
вается, после чего начинают прокладку дрены. В конце трассы ме-
ханизм поднимают до глубины 0,5 м, отрывают шурф и ставят за-
глушку на конец дрены.
Машины и орудия для устройства земляного дренажа. Для об-
разования кротовин применяют кротодренажные машины и крото-
ватели.
Кротодренажная машина (рис. 389, а) состоит из рамы
1, ножа 2, цепи 3 и дренера 4. Нож черенкового типа служит для
разрезания грунта в вертикальной плоскости, затачивается с обеих
сторон под углом 25°. Дренер 4 представляет собой сочетание трех
фигур: конуса, цилиндра и усеченного конуса. Передняя коническая
его часть раздвигает и уплотняет грунт, средняя цилиндрическая
стабилизирует движение и задняя в виде усеченного конуса сгла-
живает упругие деформации стенок дрены. На минеральных почвах
применяют дренеры диаметром 60...100 мм, на торфяных—150...
200 мм. Кротодрепажная машина предназначена для глубокого
кротового дренажа — на глубину 0,6...1,0 м.
Кротова те ль (рис. 389, б) прокладывает кротовины на глу-
бине 35...50 см. Мелкое кротование быстрее осушает пахотный слой,
способствует аэрации и более раннему прогреву почв, позволяет
Рис. 389. Машины и орудия для устройства зе/ляного дренажа:
а — кротодренажная; б — кротователь; е — дренажно-дисковая: г — дггнажно-баровая* 1 —-
рама; 2 — нож; 3 — цепь; 4 — дренер; 5 — полевая доска; о — нож: 7 — дренер; 8 диск
фрезы; .9 — закрывающие ролики; 10 — груз; ц — гидроцплчндрь.; 12 — реечный механизм*
"13 — цепь; 14 •>— рама; 15 — зубья.
621
раньше начать полевые работы. Кротователь устанавливают на
один из корпусов плуга. Он состоит из ножа 6, дренера 7 и двух
планок 5, одна из которых выполняет роль полевой доски.
Для образования щелевых дрен применяют дренажно-дисковые
и дренажно-баровые машины, оборудованные активными рабочими
органами, способными перерезать древесину. Они работают с высо-
кой скоростью резания, но малой поступательной скоростью на
торфяниках, засоренных погребенной древесиной, кустарником,
пнями.
Дренажно-дисковая машина (рис. 389, в) снабжена
дисковой фрезой 8 и закрывающими роликами 9. Фреза совершает
сложное движение: поступательное вместе с машиной, вращатель-
ное вокруг горизонтальной поперечной оси и качательное относи-
тельно продольной оси. Вследствие качаний фрезы дрена расширя-
ется книзу и имеет большую площадь поперечного сечения. Конус-
ные ролики 9 снабжены режущими дисками. Благодаря шарнирно-
му соединению с рамой и грузом 10 они прорезают дернину и сдви-
гают почву к середине, закрывая верхнюю часть дрены на глубину
до 40...50 см.
Дренажно-баровая машина (рис. 389, г) снабжена ра-
бочим органом в виде бесконечной цепи 13 с зубьями-скребками 15
(баром). Она прорезает щелевую дрену прямоугольного поперечно-
го сечения, которая в верхней части закрывается конусными роли-
ками 9, заглубляемыми гидроцилиндром И. Из рабочего положе-
ния в транспортное и наоборот машина переводится с помощью
гидроцилиндра 11 и реечного механизма 12.
§ 5. Машины для ремонта и содержания мелиоративных систем
Общие сведения. В процессе эксплуатации открытых каналов
с течением времени их форма и размеры значительно изменяются.
Вследствие отложения наносов, зарастания русл травянистой и
кустарниковой растительностью площадь живого сечения каналов
существенно уменьшается, снижается их пропускная способность.
Ремонт и содержание открытых мелиоративных систем сводится
к выполнению двух основных видов работ: удалению наносов и
удалению травянистой и кустарниковой растительности. Соответст-
венно этому и машины по ремонту и содержанию мелиоративных
систем подразделяют на машины для удаления наносов и машины
для удаления растительности. Первые, как правило, вместе с на-
носами удаляют и растительность.
Машины для очистки каналов от наносов. Для очистки от нано-
сов на крупных каналах применяют общестроительные машиньТ, а
на внутрихозяйственных распределителях---освоенные в последние
годы специализированные каналоочистительные и приспособленные
для этой цели мелиоративные строительные машины. Все их под-
разделяют на машины непрерывного и циклического действия. Пер-
вые, в свою очередь, подразделяют на машины с пассивными (от-
622
вальными) и с активными рабочими органами. Машины с отваль-
ными рабочими органами высокопроизводительны, но требуют
больших тяговых усилий и не могут работать в разжиженных на-
носах и в каналах, где есть вода, а поэтому находят ограниченное
применение. Большее распространение получили машины непрерыв-
ного действия с активными рабочими органами и машины цикличе-
ского действия.
Каналоочистители непрерывного действия с ак-
тивными рабочими о р г а н а м и. Наибольшее распростране-
ние получили каналоочистители с фрезерными (роторными), много-
ковшовыми и отчасти скребковыми рабочими органами.
Фрезерные каналоочистители применяют для очистки дна, от-
косов или всего профиля поперечного сечения канала. В соответст-
вии с этим фрезы устанавливают осью вращения параллельно оси
канала, перпендикулярно откосу или используют двухфрезерный
рабочий орган. Фреза с осью вращения, параллельной оси канала
(рис. 390, а), предназначена для очистки дна канала. Она пред-
ставляет собой диск с радиально установленными ножами-лопат-
ками (ротор-метатель), находящийся в кожухе с раструбом («улит-
ке»), который можно поворачивать с помощью гидроцилиндра для
изменения дальности выбрасывания грунта. Двухфрезерный кана-
лоочиститель (рис. 390, б) оборудован рабочим органом, состоящим
из малой и большой фрез. Ось вращения первой параллельна, вто-
Рис. 390. Схемы кана.тоочистителей непрерывного действия с активными рабо-
чими органами:
с — фрезерного; б — двухфрезерного; в — двухфрезерного каналокопателя; г — многоковшо-
вого берегового; д — многоковшового седлающего; е — скребкового.
623
рой перпендикулярна оси канала. Обе фрезы шарнирно соединены
с поворотной рамой, благодаря чему большую фрезу устанавли-
вают в соответствии с заложением откоса канала. Малая фреза
очищает дно, а большая — откос канала, снимая за один проход
слой грунта толщиной до 20 см.
Для очистки откосов канала можно использовать также двух-
фрезерный каналокопатель (рис. 390, в). Все фрезерные канало-
очистители характеризуются большой окружной (до 30 м/с) и ма-
лой поступательной скоростью (400... 1000 м/ч), благодаря чему
срезают грунт тонкой стружкой, одновременно измельчая корневи-
ща, кустарник, погребенную древесину и отбрасывая их на рас-
стояние от 5 до 20 м. Лучше всего они работают на увлажненных
торфяных грунтах и при слое воды до 15...25 см. На сухих мине-
ральных грунтах ножи фрез сильно нагреваются и быстро затупля-
ются, на каменистых наносах — не могут работать вообще.
Многоковшовые каналоочистители подразделяют на машины с
рабочими органами для продольного и поперечного копания. Пер-
вые очищают только дно, вторые дно и один откос канала. Наи-
большее распространение получили многоковшовые цепные экска-
ваторы поперечного копания. Современные каналоочистители
такого типа снабжены телескопической рамой, что позволяет наст-
раивать их как на береговую (рис. 390, г), так и на седлающую
(рис. 390, 5) схему работы. Рама рабочего органа каналоочистите-
ля выполнена также телескопической, что дает возможность наст-
раивать его для очистки каналов различной глубины. Многоковшо-
вый рабочий орган надежно работает как на сухих, так и на влаж-
ных наносах. Он предназначен для каналов, заполненных водой,
даже если есть мелкие каменистые включения; вместе с наносами
машина удаляет растительность любой густоты. К недостаткам
этого рабочего органа следует отнести большую материалоемкость,
низкую удельную производительность.
Скребковые каналоочистители (рис. 390, е) отличаются малой
материалоемкостью. Они работают аналогично многоковшовому ра-
бочему органу поперечного копания, но откос канала используется
для подпора грунта при его транспортировке. Это не дает возможг
ности очищать только дно канала и исключает применение этих
машин на каналах с креплеными откосами. Так как скребки
выгружают грунт у ведущей звездочки прямо на берму, то тре-
буется дополнительная операция для его перемещения в отвал
(кавальер).
На сухих, каменистых грунтах скребки и цепи быстро изнаши-
ваются, не могут работать на откосах, поросших растениями с раз-
ветвленной корневой системой, переувлажненные грунты налипают
на скребки или стекают с них. Из-за этих недостатков такие кана-
лоочистители применяют лишь в отдельных случаях, например
при восстановлении профиля деформированного канала.
Для очистки больших магистральных мелиоративных каналов,
применяют малогабаритные землесосные снаряды (земснаряды).
624
Рис. 391. Боковой драглайн и специальные ковши для очистки каналов:
а — боковой драглайн; б и в — ковши драглайна для очистки из-под воды и с открылками;,
г и д — ковши обратной лопаты профильный для продольной очистки из-под воды и уши-
ренный для поперечной очнсткн; 1 — качающийся блок; 2 — подъемный канат; 3 — ковш:
4 — тяговый канат; 5— боковая стрела; 6 — оттяжка; 7— экскаватор; 8 — основная стрела;
9 — канал.
Каналоочйстители циклического действия при-
меняют в тех случаях, когда нельзя использовать каналоочистители
непрерывного действия (каменистые наносы, каналы обсажены
деревьями, узкие или сильно деформированные бермы и т. п.). Все
они снабжены одноковшовым рабочим оборудованием, смонтиро-
ванным на базе экскаватора, иногда на базе трактора. Широко
используют для этих целей строительные одноковшовые экскавато-
ры, оснашая их дополнительными стрелами и специальными ков-
шами.
Установка дополнительной боковой стрелы 5 (рис. 391, а)
на экскаваторе с рабочим оборудованием драглайн позволяет пере-
мещать ковш 3 вдоль оси канала 9. Боковую стрелу 5 устанавли-
вают под углом 90° к основной 8 и закрепляют оттяжкой 6. Тяго-
вый канат 4 проходит через блок боковой стрелы 5 и наводку на
тяговую лебедку, а подъемный канат 2 проходит через качающийся
головной блок / на барабан подъемной лебедки.
В связи с тем что наносные отложения в каналах имеют неболь-
шую плотность и малое удельное сопротивление копанию, спе-
циальные очистные ковши делают в 1,5...2 раза большей емкостью,
чем обычные. Для продольной очистки узких каналов применяют
узкие (до 0,2 м в нижней части) профильные ковши (рис. 391, г),
при поперечной очистке, наоборот, — широкие (до 2.5 м), но корот-
кие (рис. 391, д). Для повышения эффективности при черпании
грунта из-под воды ковши снабжают отверстиями (рис. 391, б и г).
Для сохранения профиля канала при продольной очистке ковши
снабжают открылками (рис. 391, в).
40—424
625
Машины для удаления растительности основаны на трех раз-
личных принципах воздействия на растения: механическом, терми-
ческом и химическом.
Механические косилки по расположению относительно
канала подразделяют на внутриканальные (плавучие) и береговые.
На тех и других применяют режущие аппараты преимущественно
двух типов: ротационные (дисковые) и сегментные. Преимущество
плавучих косилок заключается в том, что они могут срезать рас-
тительность в каналах, обсаженных деревьями, недостаток — не
имеют рабочих органов для удаления срезанной растительности
из канала.
Наземные косилки с ротационными рабочими органами подраз-
деляют на многороторные и однороторные. Многороторные одно-
временно скашивают растительность на откосе и дамбе, но не обо-
рудованы приспособлениями для уборки срезанных растений. Одно-
роторные снабжены направляющим кожухом и срезанную на от-
косах растительность отбрасывают на берму. Наиболее распрост-
раненные сегментные косилки имеют шарнирные составные рамы,
позволяющие скашивать растения на откосах и бермах. Для регу-
лирования установки режущего аппарата в зависимости от зало-
жения откосов канала их снабжают подъемным механизмом, состо-
ящим из червячного редуктора с барабаном, троса и системы бло-
ков, а для сгребания скошенной травы — подборщиком и грабель-
ным аппаратом.
Машинысогневыми рабочими органами снабжены
шарнирной составной рамой, на которой размещены форсунки. На-
сос подает к форсунке жидкое топливо, а вентилятор— воздух. Об-
разующийся от сжигания топлива факел направляют на растения,
устанавливая раму с форсунками параллельно дну и откосам кана-
ла. Под действием высокой температуры растения погибают.
Машины для химической борьбы с растениями пред-
ставляют собой, как правило, опрыскиватели, иногда разбрасыва-
тели гранулированных гербицидов. Распыливающие устройства вы-
полняют в виде поворотной головки с наконечником, совершающей
качательные движения, или в виде неподвижных наконечников, за-
крепленных на шарнирной составной раме, устанавливаемой па-
раллельно дну и откосам канала.
Машины для очистки дренажных труб. В процессе эксплуата-
ции происходит засорение дрен мелкими частицами грунта (заиле-
ние) и отложениями химических соединений (заохривание). Для
предотвращения полной закупорки дрен проводят их профилакти-
ческую очистку один раз в 10...15 лет, а при интенсивном заиле-
нии— раз в 4...5 лет. Очищать дрены можно со вскрытием или без
вскрытия. Очистка с полным вскрытием дрен равносильна строи-
тельству нового дренажа. Известны химический, механический и
гидравлический способы очистки трубчатых дрен без их вскрытия.
Наибольшее распространение получил гидравлический способ
очистки-дрен с протаскиванием промывочного шланга по дрене.
626
Рис. 392. Схема машины для промывки дрен:
а — промывочная машина; б—устройство реактивной головки; / — цистерна; 2— барабан;.
3 — шланг; 4 — реактивная головка; 5 — насосно-моторный агрегат.
Отечественная промышленность выпускает машины для промыв-
ки осушительных дрен (диаметром не менее 30 мм) и дрен на оро-
шаемых площадях (диаметром от 150 до 250 мм). Машины имеют
существенные конструктивные отличия, но принцип их действия
одинаков. Промывочная машина для очистки осушительных дрен
(рис. 392, а) состоит из двух одноосных прицепов, на одном из ко-
торых установлена цистерна 1 с водой, на другом — насосно-мотор-
ный агрегат 5, барабан 2 со шлангом 3 и реактивной головкой
4. Насосно-моторный агрегат 5 состоит из двигателя внутреннего
сгорания, одноступенчатого цилиндрического редуктора и трех-
плунжерного насоса. Барабан 2 снабжен фрикционным тормозом.
Шланг 3— полиэтиленовый длиной 120 м, реактивная головка 4
(рис. 392, б) имеет одно фронтальное и несколько (от двух до
шести) тыльных отверстий. При работе головку вводят в устье
дрены, подаваемая от насоса под высоким давлением (2 МПа) во-
да, выходя из отверстий головки, образует несколько струй. При
этом передняя струя размывает наносы, находящиеся перед голов-
кой, задние струи создают реактивную силу, способствующую пе-
ремещению шланга с головкой по дрене. Тяговую силу головки
Fr можно определить по формуле (Н):
Fr=7?Tncosa—/?ф, (417)
где /?т и 7?ф — реактивные силы тыльной и фронтальной струй, Н;
и — число тыльных отверстий;
а — угол, образуемый реактивной тыльной струей с
осью головки.
Реактивные силы (/?, и /?$) определяют по формуле:
R=ySH, (418)
где у — удельный вес жидкости, Н/м3;
о — площадь выходного отверстия, м2;
Н — напор жидкости, м.
Сопротивление перемещению шланга по мере удаления головки
от устья возрастает. По опытным данным оно изменяется от 140 до
300 Н.
40*
627
Глава IV
/МАШИНЫ ДЛЯ ПОЛИВА
§ 1. Общие сведения
‘Соответственно трем применяемым способам орошения все ма-
шины для полива можно разделить на три группы: для поверхност-
ного полива, для подпочвенного полива, для полива дождеванием
(дождевальные машины).
Машины для поверхностного полива в нашей стране не получи-
ли широкого распространения, так как у нас преобладают само-
течные безмашинные системы орошения. Однако отечественная
промышленность выпускает поливные передвижные агрегаты
(ППА) двух разновидностей: для полива по бороздам (хлопчатни-
ка и других пропашных культур) и для полива по чекам (риса и
сопутствующих ему в севообороте культур). Основные узлы ППА:
«асос с редуктором, всасывающий трубопровод, гибкий поливной
трубопровод, устройство для раскладки и сборки поливного трубо-
провода, эжектор. Осевой горизонтальный насос с одноступенчатым
повышающим редуктором смонтирован на раме, навешиваемой
на трактор сзади. Привод от ВОМ трактора. К всасывающему па-
трубку насоса присоединен всасывающий трубопровод с сетчатой
водозаборной коробкой на конце. Для подъема и опускания всасы-
вающего трубопровода служит кран с ручной лебедкой или гидро-
фицированный механизм. К напорному патрубку насоса присоеди-
нена клапанная коробка с обратным клапаном, который перекры-
вает напорную линию во время запуска, что необходимо для созда-
ния вакуума с целью заполнения водой всасывающей линии. По-
ливной трубопровод составлен из четырех капроновых прорезинен-
ных шлангов длиной по 100 или 120 м, соединяемых между собой
патрубками и хомутами. Трубопровод для полива по бороздам
снабжен регулируемыми отверстиями — водовыпусками на фас- з
стоянии, равном ширине междурядий (60 и 90 см), а трубопровод i
для полива по чекам — спаренными нерегулируемыми водовыпуска- 1
ми с полотнами-гасителями напора струи. 1
Устройство для раскладки и сборки поливного трубопровода 1
может быть смонтировано на одноосной прицепной тележке или j
закреплено на лонжеронах в передней части трактора. Оно вклю-
дает в себя барабан, червячный редуктор, кулачковую муфту и 1
гидромотор, работающий от гидросистемы трактора. Эжектор рас- |
положен на выпускной трубе трактора и резиновым шлангом сое- |
динен со всасывающим трубопроводом. После раскладки поливного 1
трубопровода его конец присоединяют к напорному патрубку насо- ’
са, а всасывающий трубопровод опускают в ороситель. Включают
эжектор, и всасывающая линия заполняется водой. После запол- ;
нения включают насос и выключают эжектор — вода подается на 1
полив. По окончании полива трубопровод отсоединяют от насоса, j
328 ' . ’
разъединяют на части и наматывают на барабан, всасывающий
трубопровод поднимают и переезжают на новую позицию. С одной
позиции поливают 8...10 га. Применение машин позволяет прово-
дить полив из каналов, расположенных в выемках, т. е. ниже поли-
ваемой площади, а следовательно, существенно сократить объем
земляных работ при строительстве оросительной сети.
Машины для подпочвенного полива подводят воду обычно в
процессе рыхления междурядий растений. Для этого в рыхлитель-
ных лапах устраивают водопроводящие каналы, через которые во-
да, как правило, вместе с растворенными в ней минеральными
удобрениями попадает на глубину рыхления почвы, оставляя ее
поверхностные слои сухими.
По способу подвода воды такие машины подразделяют на два
типа: с проходным трубопроводом и с наматываемым трубопро-
водом. В первом случае полиэтиленовый трубопровод, снабженный
пружинными водовыпускными клапанами, укладывают вдоль пути
машины и пропускают через водоприемное нажимное устройство,
смонтированное на машине. В процессе движения машины нажим-
ное устройство открывает пружинные клапаны и вода поступает
сначала в бак, а затем через рабочие органы в корнеобитаемый
слой почвы. Во втором случае трубопровод, один конец которого
присоединен к гидранту, а другой — к приемной колонке машины,
наматывается на барабан с реверсивным приводом или сматывает-
ся с него в зависимости от направления движения. Для подпочвен-
ного полива деревьев и кустарников применяют машины с рабочи-
ми органами в виде гидробуров.
Машины для полива дождеванием. Так как орошение стало
распространяться в зонах с недостаточным, средним и даже избы-
точным увлажнением, где оно служит как бы дополнением к есте-
ственным осадкам в засушливые периоды, все большее применение
стали находить дождевальные машины, позволяющие проводить
полив с малыми нормами. Путем частых поливов с небольшими по-
ливными нормами можно поддерживать влажность почвы, близкую
к оптимальной, а следовательно, создавать условия, более благо-
приятные для роста и развития растений, и повышать их урожай-
ность.
§ 2. Рабочие органы дождевальных машин и установок
Назначение и классификация. Рабочие органы дождевальных
устройств предназначены для преобразования водного потока в дож-
девые капли, транспортирования капель па определенные расстоя-
ния и распределения их по площади полива. Их работой определя-
ется качество дождя, так кап по их работе судят о качестве работы
всей машины или установки.
По характеру процесса образования дождя их разделяют на
две группы: веерные и струйные. Первые создают широкий вееро-
образный поток воды в виде тонкой пленки, которая, встречая
\ 6М
сопротивление воздуха, распадается на отдельные капли. Они не-
подвижны относительно машины или установки и одновременно
орошают всю прилегающую к позиции площадь в пределах даль-
ности полета капель, отличаются простотой устройства и получили
наименование дождевальных насадок. Вторые создают поток воды
в виде осесимметричных струй, которые в процессе движения под
действием сопротивления воздуха распадаются на отдельные кап-
ли. Они одновременно орошают прилегающую к позиции площадь
в пределах дальности полета струи в форме сектора. Для ороше-
ния площади круга им сообщают вращательное (угловое) движе-
ние относительно машины или установки. Струйные рабочие орга-
ны с поворотными устройствами сложнее веерных, их называют
дождевальными аппаратами.
Все рабочие органы, т. е. дождевальные насадки и аппараты,
подразделяют главным образом по дальности разбрызгивания и
напору воды на три группы: короткоструйные, или низконапорные
(дальность полета капель до 8 м, напор воды 0,05...0,15 МПа);
среднеструйные, или средненапорные (дальность полета капель до
35 м, напор воды 0,15...0,5 МПа); дальнеструйные, или высокона-
порные (дальность полета капель до 60 м, напор воды свыше
0,5 МПа).
Короткоструйные рабочие органы выполняют, как правило, в
виде дождевальных насадок. Находят применение дефлекторные,
половинчатые, щелевые и центробежные разбрызгивающие насад-
ки.
Дефлекторные насадки (рис: 393, а) получили наиболь-
шее распространение. Корпус 2 насадки навинчивают на верти-
кальный стояк. Струя воды, выходя под напором из отверстия
диафрагмы, обтекает дефлектор 1, в результате чего образует плен-
ку воронкообразной формы, которая при дальнейшем движении
распадается на капли и орошает прилегающую к насадке круговую
площадь. Пленка сходит с дефлектора под углом 30° к горизонту,
что обеспечивает максимальную дальность полета образующихся
из нее капель. К достоинствам дефлекторных насадок относят срав-
нительно малый размер капель (0,9...1,1, мм) и небольшой расход
энергии на их образование. Однако капли неоднородны по величине,
интенсивность их распределения по площади полива также нерав-
номерна. По мере удаления от насадки размер капель возрастает,
а интенсивность дождя сначала возрастает, а затем падает. Из-за
высокой интенсивности дождя (0,75... 1,1 мм/мин) их применение
в машинах и установках позиционного действия весьма ограничено.
С увеличением напора воды и диаметра выходного отверстия на-
садки расход и дальность разбрызгивания воды увеличиваются.
Расход воды через насадку может быть определен по формуле
(141) с учетом того, что коэффициент расхода р для дефлекторных
насадок равен 0,8...0,9.
Половинчатые или щелевые насадки применяют,
если нужно получить односторонний полив.
630
4 5 6
7
8
9 10 11 12 13
за
<9
33
дожде-
25
- 28
явим
насадки:
щелевая,
31
15
18
19
20
21
№
П
32
Рис. 393. Рабочие органы
вальных машин и установок:
а, б, в иг — короткоструйные
дефлекторная, половинчатая, ____________
центробежная; д и е — среднеструйный и
дальнеструйный дождевальные аппараты;
/ — дефлектор; 2 — корпус; 3 — верхняя
крышка; 4 — колпачок; 5 — фиксатор; 6 —
штифт; 7 — пружина; 8 — фторопластовая
шайба; 9 — упор; 10 — сопло; 11 и 13 —
лопатки; 12 — коромысло; 14 — сопло; 15 — ствол; 16 — корпус; 17 — сопло; 18 — основание;
19 — стакан; 20 — резиновая шайба; 21 — фторопластовая шайба; 22 — упорное кольцо; 23 —
стержень; 24 — рычаг; 25 — стопорный винт; 26 — пружниа; 27 — упор; 28 — фланец: 29 й
38 — прокладки; 30— манжета; 31 — упорная шайба; 32 — втулка; 33 — корпус; 34 — ствол;
35 — выпрямитель; 36 — ось коромысла; 37 — сопло; 39 — коромысло; 40 — лопатка
В половинчатой насадке (рис. 393,6) дефлектор 1 имеет фор-
му половины конуса и приварен к отогнутой пластине, которая
перегораживает в корпусе 2 половину выходного отверстия. По-
ловинчатая насадка работает аналогично круглой. Расход воды
определяют по той же формуле, имея в виду, что она выходит через
полукруглое отверстие площадью f—nd2/8.
Щелевая насадка (рис. 393, в) может быть получена путем про-
пила трубы. Вытекающая из щели вода имеет форму плоской вее-
рообразной пленки. Распадение ее на капли происходит менее
интенсивно, чем в дефлекторных насадках, вследствие чего вбли-
зи насадки возникает неорошаемая зона. Площадь отверстия на-
садки f=ad<ph/360, где ср—центральный угол факела разбрызгива-
ния; ц—коэффициент расхода, равный 0,7.
Центробежная насадка (рис. 393, г). Вода в нее посту-
пает через тангенциальный канал корпуса 2, благодаря чему ин-
тенсивно закручивается, вовлекаясь в вихревое движение. На вы-
ходе из центрального отверстия верхней крышки 3 образуется коль-
цевой поток со свободным пространством в центре. После выхода
из отверстия благодаря тангенциальным составляющим скорости
поток воды расширяется, образуя тонкую воронкообразную пленку,
которая под действием сопротивления воздуха теряет устойчивость
и распадается на капли.
Среднеструйные дождевальные аппараты служат рабочими ор-
ганами большинства современных дождевальных машин и устано-
вок. Несмотря на многомарочность, их конструкции однотипны и..
не имеют принципиальных отличий. Наиболее распространено се-
мейство унифицированных аппаратов типа «Роса» (рис. 393, д).
Базовый аппарат этого семейства состоит из корпуса 16, ствола 15,
выходных сопл 10, 14 и 17, основания 18, механизма враще-
ния 4...9, 11...13 и механизма секторного полива 22.. .27.
Корпус 16 отлит из алюминиевого сплава и снабжен тремя водо-
проводными каналами. Ствол 15 и сопла 10, 14 и 17—-пластмассо-
вые. Сопла сменные, что позволяет изменять расход воды и интен-
сивность дождя. Для гашения турбулентных потоков и увеличения
за счет этого дальности полета струи внутри ствола 15 установлен
выпрямитель или успокоитель, представляющий собой набор про-
дольных пластин, разделяющих поток на несколько участков. Ос-
нование 18 имеет вид шестигранной втулки (под ключ) с наружной
резьбой для крепления к трубопроводу. Бронзовая втулка, запресо-
ванная в основание 18, — это радиальный подшипник для бронзо-
вого стакана 19, ввернутого в корпус 16, а фторопластовые
шайбы 21 выполняют роль упорных подшипников. Резиновые шай-
бы 20 герметизируют внутреннюю полость аппарата. Механизм
вращения включает в себя коромысло 12 с лопатками 11 и 13, воз-
вратную пружину 7, фиксатор 5 со штифтом 6. Возвратная пружи-
на одним концом закреплена в коромысле, другим — в фиксаторе.
В процессе поворотов коромысла 12 трение происходит между
бронзовой втулкой, напресованной на ось, и фторопластовой шай-
632
бой 8, установленной в коромысле 12. Механизм секторного полива
состоит из упора 27 и рычага 24, посаженных на одну ось и соеди-
ненных между собой пружиной 26; стержня 23 со стопорным вин-
том 25 и пружинных упорных колец 22.
Вода из трубопровода поступает в корпус 16 и через сопла 10,
14 и 17 выбрасывается наружу в виде струй, расположенных под
углом 30° к горизонту. В воздухе струи распадаются на капли, оро-
шая узкую полоску поля в виде сектора. Корпус с соплами враща-
ется по кругу за счет кинетической энергии верхней струи. При
вылете из сопла 10 вода ударяется о лопатку 13, вследствие чего
коромысло 12 получает запас кинетической энергии, под действием
которой поворачивается на угол от 30 до 90°, закручивая пружину
7. Обратный ход коромысла 12 происходит под действием закру-
ченной пружины 7, а в конце усиливается действием струи на ло-
патку 11. В конце обратного хода коромысло 12 ударяет в упор 9
на корпусе 16, в результате чего корпус с соплами поворачивается
на угол 2...3°. После удара лопатка 13 вновь попадает в струю во-
ды, и цикл повторяется. В результате происходит прерывистое дви-
жение корпуса по окружности. Скорость вращения регулируют
предварительным закручиванием пружины 7 с помощью фиксатора 5
и штифта 6. Частота вращения 0,25...1,0 мин-1. Для полива по
сектору стержень 23 перемещают в нижнее положение (опускают)
и фиксируют винтом 25. Угол сектора и направление полива уста-
навливают соответствующим разворотом упорных колец 22.
Дальнеструйные дождевальные аппараты разных марок отлича-
ются главным образом конструкцией механизмов вращения; В от-
дельных конструкциях для вращения дальнеструйных дождеваль-
ных аппаратов (ДДА) используют: механическую энергию от ВОМ
трактора, кинетическую энергию струи, разрежение воздуха на вы-
ходе струи из сопла, реактивную силу струи.
Механический привод от ВОМ трактора состоит из шес-
теренчатого и червячного редукторов или червячного редуктора и
храпового механизма. Его применение ограничивается только трак-
торными дождевальными машинами.
Кинетическая энергия струи, вылетающей из сопла, ис-
пользуется в разборных переносных установках и широкозахватных
машинах. Их выполняют в двух вариантах: с качающимся в верти-
кальной плоскости коромыслом (ныряющей лопаткой) и с вращаю-
щейся турбинкой.
Дальнеструйный аппарат с качающимся коромыслом (рис. 393,
е) вследствие своей простоты находит наибольшее распространение
в стационарных системах. Основные его узлы: корпус 33, ствол 34,
сопло 37 и коромысло 39 с лопаткой 40. Лопатка имеет двойную
кривизну, т. е. в вертикальной и горизонтальной плоскостях. Поэто-
му струя воды, вышедшая из сопла 37, ударяясь о лопатку 40, не
только отклоняет ее вниз (на угол до 120°), но и поворачивает в
сторону на угол 2...6° (в зависимости от напора). Противовес, рас-
положенный по другую сторону от оси 36 коромысла 39, возвра-
633
щает лопатку 40 в струю, и цикл повторяется. Лопатка не только
поворачивает ствол, но и выполняет роль дефлектора. Когда она
входит в струю, то орошается площадь вблизи аппарата, когда вы-
ходит из нее, орошается площадь, удаленная от аппарата.
В аппарате с турбинкой обеспечивается круговое вращение ство-
ла с помощью турбинки, лопасти которой входят в струю воды,,
выбрасываемую через сопло. От турбинки через два червячных
редуктора, кривошипно-шатунный и храповой механизмы вращение
передается червяку, который обкатывается вокруг червячного ко-
леса, закрепленного на неподвижном корпусе, и приводит во вра-
щение ствол. Скорость вращения ствола регулируют изменением
входа лопаток турбинки в струю. В процессе работы турбинка от-
секает часть струи, обеспечивая тем самым хороший полив зоны,
расположенной вблизи аппарата. Однако это приводит к снижению
дальности полета струи на 25...30% •
Мех а низ м в р а щен и я, работающий за счет разрежения,
создаваемого струей. Сопло такого дождевального аппарата
заканчивается диффузором (расширяющейся насадкой). Поток
воды, проходя узкое сечение диффузора, образует зону вакуума.
Эту зону соединяют трубкой с пневматическим, например диафраг-
мовым, двигателем, работающим за счет перепада давления меж-
ду атмосферой и вакуумом в диффузоре. Колебания диафрагмы
обычно через храповой механизм приводят в движение ствол аппа-
рата.
Если ось сопла расположить под некоторым углом к оси ство-
ла или отнести ее в сторону, то возникнет реактивный момент,
который может быть использован для вращения ствола дождеваль-
ного аппарата. Дальнеструйные дождевальные аппараты, вращение
которых основано на этом принципе, обычно оборудуют специаль-
ными тормозными устройствами, воспринимающими разность меж-
ду вращающим моментом от реактивной силы струи и моментом
трения вращающихся частей аппарата. Наиболее распространены
гидравлические и механические тормозные устройства. Гидравли-
ческий тормоз обычно представляет собой шестеренчатый или иной
ротационный масляный насос, перегоняющий масло по замкнутому
каналу, сопротивление которого регулируется вентилем или кра-
ном.
Изменяя сопротивление, регулируют частоту вращения ствола
дождевального аппарата.
§ 3. Основные элементы дождевальных систем
Состав и классификация дождевальных систем. Дождевальная
система, как правило, состоит из трех основных элементов: насос-
ной станции (насоса с двигателем), забирающей воду из источника
орошения и создающей напор, необходимый для ее разбрызгива-
ния; трубопроводов, распределяющих воду по орошаемой террито-
рии; дождевальных машин или аппаратов, преобразующих водный
634
поток в дождевые капли и распределяющих их по поверхности по-
лива.
Все дождевальные системы (по А. Н. Костикову) подразде-
ляют на три типа: стационарные, полустационарные и передвиж-
ные.
Насосные станции бывают стационарными и передвижными.
Стационарные обычно представляют собой капитальные сооруже-
ния и обслуживают крупные оросительные системы, выполняя роль
головного водозаборного узла. В колхозах и совхозах нашей стра-
ны широкое распространение находят передвижные насосные стан-
ции, которые, в свою очередь, подразделяются на сухопутные и
плавучие. Отечественная промышленность выпускает широкий ас-
сортимент сухопутных передвижных насосных станций; плавучие
станции находят ограниченное применение: их используют в тех
случаях, когда невозможно или нецелесообразно применять сухо-
путные, например при подаче воды из водоисточников с топкими,
высокообрывистыми берегами и резко изменяющимся уровнем
воды.
Выпускаемые промышленностью сухопутные передвижные на-
сосные станции отличаются по производительности (подаче),
напору и типу привода. Подача воды увязана с ее расходом дожде-
вальными машинами, а напор — с часто встречающимися геодези-
ческими высотами расположения орошаемых участков над водоис-
точниками. Диапазон изменения подачи —от 25 до 705 л/с, напо-
ра— от 0,1 до 1,1 МПа, привод от ВОМ трактора или от собствен-
ного двигателя.
В зависимости от напора (высоты подъема воды) насосные
станции подразделяются на три группы: низконапорные — при на-
поре до 0,25 МПа, средненапорные — при напоре от 0,25 до 0,5 МПа,
высоконапорные — при напоре выше 0,5 МПа.
Насосные станции с приводом от ВОМ трактора монтируют на
раме, навешиваемой на трактор, а насосные станции с собственным
двигателем — на раме-салазках или на одно- и двухосном прице-
пах с пневматическими шинами.
Навесные насосные станции (типа СНН) с приводом от ВОМ
трактора наиболее мобильны. Однако они должны быть относи-
тельно легкими и компактными, поэтому их выпускают с подачей не
более 75 л/с. Обязательное наличие повышающего редуктора и ис-
пользование в работе трактора удорожает стоимость установки, по-
етому и стоимость поданной воды оказывается выше, чем для на-
сосных станций с собственным двигателем. Их целесообразно при-
менять для полива небольших участков с частой сменой позиций,
при подаче воды непосредственно в дождевальные машины или
установки.
Передвижные насосные станции с собственным двигателем (ти-
па СНП) менее мобильны и зачастую работают на одном месте
в течение всего оросительного сезона, но стоимость подаваемой ими
воды ниже. Их выпускают с двигателями внутреннего сгорания и с
635
электродвигателями (подача от 25 до 705 л/с); они получили наи-
большее распространение.
Общее устройство. Передвижная сухопутная насосная станция
типа СНП предназначена для подачи воды из открытых водоисточ-
ников к дождевальным машинам или в открытую оросительную
сеть.
Она состоит из рамы-салазок или прицепа, двигателя, насоса,
всасывающего трубопровода с механизмом подъема, эжектора или
вакуум-насоса, напорного трубопровода, механизмов и приборов
контроля и управления. Насосные станции, смонтированные на ра-
ме-салазках, имеют низкую маневренность. Насосные станции,,
смонтированные на одно- и двухосных прицепах, обладают луч-
шей мобильностью, их перевозят на буксире трактора или авто*
мобиля.
Для привода насосной станции используют, как правило, дизель-
ные двигатели внутреннего сгорания. Мощность двигателя насос-
ной станции рассчитывают с учетом ее работы при полном откры-
тии заслонки.
Насосы преобразуют энергию двигателя в энергию напора воды.
Насосные станции снабжают, как правило, центробежными насо-
сами, в редких случаях — осевыми пропеллерными. Находят при-
менение центробежные насосы двух разновидностей: с односторон-
ним подводом воды — консольные (марки К) и с двухсторонним
подводом воды (марки Д).
Находят применение одно- и двухколесные насосы. Последние
могут работать в двух режимах: параллельном (двухпоточном) и
последовательном (двухступенчатом). При параллельном режиме
полость каждого колеса снабжена отдельным всасывающим и на-
порным трубопроводами, подача возрастает вдвое по сравнению с
одноколесным насосом. При настройке на последовательный режим
полости колес соединяют переводным коленом, в результате пода-
ча уменьшается, а напор возрастает вдвое. Осевые пропеллерные
насосы обеспечивают высокую производительность, но с малым
напором (от 2 до 10 м), поэтому находят применение в низконапор-
ных насосных станциях. По сравнению с центробежными они имеют
более высокий к. п. д. (0,90...0,95), их рабочие колеса меньше исти-
раются частицами песка и ила, содержащимися в воде. Для подъ-
ема и опускания всасывающего трубопровода служит, как правило,,
ручная лебедка со стрелой, блоками и тросом. Всасывающую ли-
нию при пуске заполняют водой с помощью специального вакуум-
насоса, эжектора или вручную. Насосные станции с собственным
двигателем, как правило, оборудованы системой автоматической'
защиты двигателя и реле времени. Автоматическая защита контро-
лирует режим работы систем охлаждения и смазки двигателя и
давление в напорной линии насоса и отключает двигатель при нару-
шении нормального режима работы. Реле времени отключает дви-
гатель по истечении определенного, заранее заданного, време-
ни работы. Это позволяет одному машинисту обслуживать не*
636
сколько насосных станций, работающих одновременно на разных,
участках.
Плавучие насосные станции отличаются более высокой материа-
лоемкостью, так как их монтируют на понтонах, связанных между
собой рамой, или металлическом судне. Наиболее распространен-
ные плавучие насосные станции типа СНПЛ имеют ряд унифици-
рованных узлов с сухопутными передвижными насосными станция-
ми типа СНП соответствующей подачи. По водоему станция пере-
мещается за счет работы водометного движителя. Воду от насоса
можно направлять в напорный трубопровод или в сопло водомет-
ного движителя. В последнем случае реактивная сила, развиваемая
струей, приводит станцию в движение. Для изменения направления
движения сопло с помощью штурвала поворачивают вокруг верти-
кальной оси.
Рабочийпроцесс. Перед пуском насосной станции закрыва-
ют задвижку напорной линии, а рабочую камеру насоса и всасы-
вающую трубу заполняют водой. Включают двигатель и, дав ему
отработать 0,5... 1 мин, медленно открывают задвижку напорной
трубы. По показаниям вакуумметра и манометра убеждаются в
том, что насос работает в нужном режиме.
Подачу и напор регулируют двумя способами: изменением по-
ложения задвижки и изменением частоты вращения вала насоса.
Первый наиболее прост, но приводит к значительному снижению
к.п.д. насоса.
В конструкциях современных передвижных насосных станций
находят применение оба способа.
Быстроразборные трубопроводы и арматура. Быстроразборные
трубопроводы предназначены для подачи воды от передвижных
насосных станций к дождевальным машинам и установкам или в
открытые оросительные каналы. Такой трубопровод состоит из от-
дельных труб (секций) длиной 5...6 м, соединяемых быстроразъем-
ными муфтами. При соединении конец одной трубы входит в рас-
труб другой — смежной. По форме раструбных концов различают
разборные трубопроводы с шаровыми (типа РТШ), конусными
и цилиндрическими (типа РТ) соединениями. Во всех конструкциях
раструб снабжен резиновой манжетой, которая создает уплотнение
автоматически под действием напора воды в трубопроводе. После
выключения насосной станции напор исчезает и трубопровод вы-
пускает воду через муфты автоматически. Это исключает местное
затопление растений, неизбежное при опорожнении трубопровода в
одном месте. За счет эластичности манжет и зазоров между труба-
ми их можно соединять не только соосно, но и под углом до 10...
15° одна к другой, чем достигается необходимая приспособляе-
мость в условиях сложного рельефа местности. Для предотвраще-
ния повреждений растений каждая труба (секция) снабжена опо-
рой высотой 0,1...0,4 м.
Быстроразборные трубопроводы снабжены водораспределитель-
ной арматурой: гидрантами-задвижками, колонками, трубами-
63?
«крестовинами, заглушками, устройствами для присоединения дож-
девальных машин. Арматура также имеет быстроразборные соеди-
нения, унифицированные с соединениями соответствующих трубо-
проводов. Виды и количество арматуры зависят от размеров и кон-
фигурации орошаемого участка, количества дождевальных машин.
Дождевальные агрегаты, машины и установки. Дождевальными
установками называют простейшие дождевальные устройства, со-
стоящие из быстроразборных переносных трубопроводов и раз-
брызгивающих воду рабочих органов. Дождевальные машины в
отличие от установок снабжены еще и средствами для механизиро-
ванного перемещения. Дождевальные агрегаты в отличие От уста-
новок и машин содержат все элементы дождевальной системы, ко-
торые навешены на трактор и работают в движении. По принципу
действия (технологии дождевания) дождевальные устройства под-
разделяют на устройства позиционного действия и устройства, ра-
ботающие в движении, а по виду перемещения — на устройства с
фронтальным перемещением и устройства с перемещением по кру-
гу. И, наконец, в зависимости от дальности разбрызгивания раз-
личают короткоструйные, среднеструйные и дальнеструйные
устройства.
Дождевальные установки могут быть стационарными,
с переносными трубопроводами, с механизированным перемеще-
нием трубопроводов. Наиболее широкое распространение получили
установки с переносными быстроразборными трубопроводами. Они
предназначены для полива небольших участков со сложным рель-
ефом местности. Расход воды в таких установках не превышает
50 л/с, а производительность 50 га в сезон. При повышении рас-
хода воды (для увеличения подачи) требуется увеличение диа-
метра и толщины стенок, а следовательно, и массы труб, что не-
приемлемо при ручной их переноске.
К установкам такого типа относится КИ-50 (комплект иррига-
ционный— расход воды 50 л/с). В его состав входят (рис. 394):
магистральный трубопровод 3 и 5, два распределительных трубо-
провода 9, четыре оросительных трубопровода (дождевальные
крылья) 6 с дождевальными аппаратами 8, гидранты 4 и 7. Маги-
стральный трубопровод длиной 906 м состоит из первого участка
3 (труба .0 = 150 мм) и второго участка 5 (труба 0 = 125 мм).
Распределительные трубопроводы 9 длиной по 270 м располагают
по двухсторонней схеме в начале и конце магистрального трубопро-
вода. При такой схеме половина расходуемой воды еще в начале
участка отводится в правый распределительный трубопровод, что
позволяет второй участок магистрального трубопровода выполнить
из труб меньшего диаметра. Дождевальные крылья длиной по
126 м (0 = 105 мм) располагают перпендикулярно распределитель-
ным трубопроводам 9 по обе стороны от них. На каждом крыле
установлено по четыре среднеструйных дождевальных аппарата 8
типа «Роса» на расстоянии 36 м один от другого. В комплект вхо-
дит и гидроподкормщик, который служит для внесения одновре-
«38
менно с поливом растворимых минераль-
ных удобрений и может быть установлен
в начале распределительного трубопро-
вода.
Одновременно работают два дожде-
вальных крыла — одно слева, другое
справа от магистрального трубопровода.
Два других крыла в это время разбира-
ют, переносят и подготавливают к рабо-
те. После выдачи поливной нормы их
выключают, а включают подготовленные
к работе крылья, присоединенные к рас-
пределительным трубопроводам с про-
тивоположных концов. Передвигая кры-
лья навстречу одно другому, поливают
всю площадь по обе стороны распреде-
лительных трубопроводов, после чего
разбирают распределительные трубопро-
воды, переносят и присоединяют их к
следующим гидрантам магистрального
трубопровода. Присоединив к ним кры-
лья, поливают другую часть участка. За
один полив каждый распределительный
трубопровод последовательно обслужи-
вает три позиции. Аналогично устроены
Рис. 394. Схема дождеваль-
ной установки с быстрораз-
борными переносными тру-
бопроводами:
1 и 2 — насосная станция; 3 и
5 — первый и второй участки ма-
гистрального трубопровода; 4 —
гидрант магистрального трубо-
провода; 6 — оросительный тру-
бопровод; 7 — гидрант распреде-
лительного трубопровода; 8 —
среднеструйный дождевальный
аппарат; 9 — распределительный
трубопровод.
и поставляемые из ЧССР в пашу страну
дождевальные установки «Сигма-Ирис-50». Основной недостаток
таких установок — большие затраты ручного труда на переноску
труб и связанная с ними низкая производительность труда.
М н о гоо по р н ые д ож д ев а л ьн ы е машины позици-
онного действия. Для устранения больших затрат ручного
труда при переноске труб дождевальных установок конструкторы
пошли по пути установки оросительных трубопроводов на колеса.
В результате появились, по существу, новые высокопроизводитель-
ные машины, требующие минимальных затрат ручного труда (при-
соединение к гидранту). Однако при этом они утратили основные
положительные качества установок с разборными трубопроводами:
способность работать на участках с неровным рельефом, в садах,
виноградниках и т. п. Установки такого типа, получившие название
дождевальных колесных трубопроводов, нашли широкое примене-
ние как в нашей стране, так и за рубежом.
Наиболее просты по конструкции машины, в которых ороси-
тельный трубопровод одновременно служит и валом привода опор-
ных колес. Машина отечественного производства такого типа
(«Волжанка») состоит из магистрального трубопровода 10 и двух
независимых дождевальных крыльев 1 ... 8 (рис. 395, а). Крылья
располагают по обе стороны от магистрального трубопровода со
смещением на одну позицию одно от другого. Каждое крыло со-
6391
1
|ф»ис. 395. Многоопорная дождевальная машина позиционного действия:
ей —схема машины; б — автоматический сливной клапан; 1— концевая заглушка; 2— сред-
’«еструйный дождевальный аппарат; 3 — приводная тележка; 4 — ведущее колесо; 5 — сек-
ция трубопровода; 6 — опорное колесо; 7 — узел присоединения; 8 — гидрант; 9— водопод-
водящий трубопровод; 10 — двигатель; // — болт; 12 — резиновая пластина; 13 — стальная
планка.
стоит из оросительного трубопровода длиной от 150 до 400 м, соб-
ранного из отдельных секций 7, и приводной тележки 3. Секция
представляет собой трубу, посредине которой установлено разъем-
ное опорное колесо 6. Секции соединены между собой с помощью
присоединительных фланцев. На корпусе присоединительного флан-
ца установлен среднеструйный дождевальный аппарат кругового
действия и автоматический сливной клапан. Дождевальный аппа-
рат присоединен к поливному трубопроводу с помощью механизма
самоустановки, который в процессе перемещения удерживает дож-
девальный аппарат в вертикальном положении. Сливные клапаны
предназначены для рассредоточенного слива воды из трубопровода
перед переездом на новую позицию. Клапан (рис. 395, б) состоит
из овальной резиновой пластины 12, установленной внутри фланца
каждого звена трубопровода с помощью болта 11с гайкой, и план-
ки 13. При нормальном напоре резиновая пластина плотно прижи-
мается водой к внутренней стенке фланца, плотно закрывая отвер-
стия. При падении давления пластина отгибается и вода через
сливные отверстия выходит из секции трубопровода. Приводная
тележка 3 установлена в середине крыла. Вращение от двигателя-
внутреннего сгорания 10 через реверс-редуктор передается на два
дополнительных ведущих колеса 4 и водопроводящий трубопровод
•с ходовыми колесами.
Работает машина позиционно с фронтальным перемещением с
•одной позиции на другую. После присоединения к гидранту под
напором воды сливные клапаны автоматически закрываются и
дождевальные аппараты начинают работать. После пуска первого
крыла присоединяют и запускают второе. Выдав поливную норму,
-отъединяют крыло от гидранта, запускают двигатель и, перекатив
крыло к следующему гидранту, включают его в работу. Оба крыла
могут работать одновременно. Машина предназначена для полива
640
низкостебельных культур высотой не более 1,0 м. Для полива высо-
костебельных культур применяют другую дождевальную машину
такого же типа (ДФ-120 «Днепр»), в которой оросительный трубо-
провод поднят на высоту 2,1 м и установлен на двухколесных само-
ходных тележках с помощью ферм и растяжек.
Многоопорные дождевальные машины, работаю-
щие в движении. Для полива в движении отечественная про-
мышленность выпускает машины двух разновидностей: с движе-
нием по кругу; с фронтальным движением. Примером машины
первого типа может служить дождевальная машина «Фрегат»
ДМУ; второго — двухконсольный дождевальный агрегат
(ДДА).
I. Дождевальная машина кругового движения (рис. 396, а)
представляет собой движущийся по кругу многоопорный трубопро-
вод на колесах. Основные узлы: неподвижная опора 1, водопрово-
дящий трубопровод 2 со среднеструйными дождевальными аппара-
тами 3 кругового действия, самоходные тележки 5 с гидравличе-
ским приводом, дальнеструйный дождевальный аппарат 4 секторно-
го полива, система регулирования скорости движения тележек,
механическая и электрическая системы защиты от поломок.
Риг. 396. Дождевальные машина и агрегат, работающие в движении:
а—-кругового движения; б — фронтального движения; / — неподвижная опора; 2 — секция
трубопровода с фланцевым соединением; 3 — средиеструйный дождевальный аппарат; 4 —
дальнеструйный дождевальный аппарат секторного полива; 5 — самоходные тележкн с гид-
роприводом; 6 — гидродомкрат; 7 — раскосы; 8 — панели: 9 — верхний пояс; 10 — концевая
панель; 11— стойки; 12— плавучий клапан; 13 — трактор: 14—поворотный круг; 15 — рас-
порки; 16 — дождевальные насадки; 17 — растяжки; 18 — концевая насадка; 19 — открылки;
20 — трубы нижнего пояса.
41—424
641
Центральная неподвижная опора собрана из угловой стал»
и представляет собой ферму, имеющую вид усеченной пирамиды.
Ее устанавливают над гидрантом водопроводящей сети. С помощью
неподвижного колена, стояка, расположенного по вертикальной
оси опоры, и поворотного колена водопроводящий трубопровод
соединяют с гидрантом. Водопроводящий трубопровод составлен,
из стальных оцинкованных труб с фланцами для их соединения и
имеет переменное сечение: первый участок, расположенный ближе
к центру, составлен из труб большего диаметра, чем второй, распо-
ложенный на периферии. Он установлен на А-образных рамах теле-
жек с помощью растяжек на высоте 2,2 м, что позволяет поливать
высокостебельные культуры, например кукурузу.
Машина составлена из отдельных секций. Каждая секция со-
стоит из звена (пролета), водопроводящего трубопровода и тележки
с двумя колесами, расположенными одно за другим. Каждая труба
снабжена двумя штуцерами: верхним — для установки дождеваль-
ного аппарата и нижним — для сливного клапана. Для равномер-
ности полива применяют среднеструйные дождевальные аппараты
четырех типоразмеров с различным расходом воды и дальностью
струи: чем дальше расположен аппарат от центральной неподвиж-
ной опоры, тем больше расход воды и дальность струи. На конце-
вой секции, кроме среднеструйного, установлен и дальнеструйный
аппарат секторного полива. Машина передвигается при поливе
за счет энергии (напора) воды в трубопроводе. Гидропривод те-
лежки состоит из клапана-распределителя, гидроцилпндра, двупле-
чего рычага и толкающей штанги с двумя концевыми выступами.
Вода из трубопровода через клапан-распределитель поступает в
гидроцилиндр. Под действием напора воды гидроцилиндр поднимает-
ся (шток неподвижен) и через двуплечий рычаг приводит в движение
толкающую штангу, которая своими концевыми выступами упира-
ется в почвозацепы колес и толкает их в направлении движения.
Скорость движения тележек различна и по мере удаления от непод-
вижной центральной опоры возрастает. Необходимое соотношение
скоростей различных тележек устанавливается автоматически с
помощью механизма синхронизации, состоящего из дроссельных
клапанов с приводами и тяг, укрепленных на водопроводящем тру-
бопроводе. Когда скорость той или иной тележки изменяется, то
трубопровод изгибается, при этом тяги через привод воздействуют
на дроссельный клапан, увеличивая или уменьшая расход воды,
поступающей в гидроцилиндр до тех пор, пока тележка не станет
в одну линию с другими тележками. Скорость движения машины
задается установкой вручную крана-задатчика, установленного на
последней тележке. При этом время одного оборота машины можно
изменять от 37...51 мин (для разных модификаций машины) до 10
суток. Обычно поливная норма выдается за один оборот машины,
поэтому, изменяя скорость машины, регулируют поливную норму.
Машину выпускают в десяти модификациях, отличающихся
различной длиной водопроводящего трубопровода (от 335 до
€42
453 м). Машина высокопроизводительная. Она орошает с одной
позиции от 40 до 72 га; один человек может обслуживать несколь-
ко машин. Однако машина имеет высокую материалоемкость, ее
трудно перемещать с одного участка на другой, и, кроме того, она
оставляет неполитой до 12...17°/о площади при прямоугольной фор-
ме участка.
II. Двухконсольный дождевальный агрегат представляет собой
совокупность всех элементов дождевальной системы, навешенных
на трактор, оборудованный ходоуменыпителем. Основные узлы:
водозаборный узел с плавающим водозаборным клапаном, центро-
бежный насос с редуктором, двухконсольная пространствен-
ная ферма с короткоструйными дождевальными насадками, гид-
росистема для управления фермой и водозаборным узлом, эжек-
тор. Плавучий всасывающий клапан 12 (рис. 396, б) соединен
со всасывающим патрубком насоса при помощи двух труб и двух
шарнирных муфт (вертикальной и горизонтальной), которые
дают ему возможность перемещаться в пространстве.
Двухконсольная ферма служит не только несущей конструкцией,
но и выполняет роль оросительного трубопровода, подводящего во-
ду к дождевальным насадкам. Она смонтирована из отдельных па-
нелей 8. Каждая промежуточная панель состоит из двух водопрово-
дящих труб 20 нижнего пояса, двух стоек 11, одного стержня 9
верхнего пояса, распорки 15, двух раскосов 7, двух растяжек 17
и двух открылков 19 с насадками 16. Натяжение раскосов и растя-
жек регулируют стяжными гайками. Каждая панель в поперечном
сечении имеет форму равностороннего треугольника, размеры кото-
рого от панели к панели по мере удаления от трактора уменьшают-
ся, соответственно уменьшается и диаметр водопроводящих труб
нижнего пояса и сечение стержня верхнего пояса. Чтобы создать
постоянную интенсивность дождя по ширине захвата, учитывая па-
дение напора по длине водопроводящих труб, диаметр отверстий
в насадках по мере их удаления от середины к концам постепенно
увеличивают. Дождевальные насадки 16 промежуточных панелей—
короткоструйные дефлекторные, а насадки 18 концевых панелей —
струйные с отражательными лопатками. Консоли фермы соединены
одна с другой при помощи поворотного водопроводящего круга 14,
предназначенного для поворота фермы вокруг вертикальной оси
при переводе в транспортное положение. Поворотный круг опира-
ется на гидродомкрат 6, состоящий из четырех гидроцилиндров
двухстороннего действия, снабженных опорными роликами для по-
воротного круга. Гидродомкрат устроен таким образом, что при
подъеме штоков одной пары цилиндров штоки другой пары опуска-
ются. Это позволяет быстро выравнивать консоли при поперечных
наклонах трактора в работе и продольных в транспортном положе-
нии.
Для работы дождевального агрегата нарезают временные оро-
сительные каналы с расстоянием один от другого, равным шири-
не захвата агрегата (120 м). При поливе агрегат медленно движет-
41*
643
ся по дороге, проложенной вдоль оросителя. Плавучий клапан пе-
ремещается на поплавке, забирая воду, которую насос подает через
напорный трубопровод в поворотное кольцо, откуда она поступает
в водопроводящие трубы нижнего пояса и дождевальные аппараты;
Агрегат может быть оборудован гидроподкормщиком. Недостатки
агрегата — громоздкость, высокая материалоемкость, снижение ко-
эффициента использования земель (на 2...3°/о) за счет отвода части
их под временные оросители.
Дальнеструйные дождевальные машины получили
широкое распространение как в нашей стране, так и за рубежом.
Такие машины бывают навесными и прицепными, с собственным
двигателем и с приводом от трактора. Наибольшее распростране-
ние получили навесные машины с приводом от ВОМ. трактора.
В состав этой машины, как и рассмотренного выше двухконсольно-
го дождевального агрегата, входят все элементы дождевальной си-
стемы, включая насос, и забор воды осуществляется также из от-
крытой оросительной сети, но в отличие от агрегата машина работ
тает позиционно. Основные узлы машины (рис. 397, а): всасываю-
щий узел 4 и 5 с механизмом подъема, центробежный насос 3 с
редуктором 1, дальнеструйный аппарат 8 с механизмом вращения
2, 14, 13, 10, 9 и 7, гидроподкормщик 6, эжектор 12. Всасывающий
узел состоит из водозаборной коробки 5, тонкостенной стальной
трубы 4 и поворотных муфт, позволяющих забирать воду справа
и слева от машины. Для подъема и опускания всасывающего узла
служит ручная лебедка. Редуктор 1 одноступенчатый, повышает
частоту вращения рабочего колеса насоса (обычно до 2100 мин-1).
Насос центробежный консольного типа. Дальнеструйный дожде-
вальный аппарат имеет, как правило, два сопла: большое (основ-
ное) и малое. Большое орошает внешнюю часть круга, малое —
внутреннюю. Малое снабжено разбрызгивающей лопаткой, пере-
крывающей часть сечения струи. Изменяя положение лопатки, ре-
гулируют равномерность полива вблизи машины. Для регулирова-
ния интенсивности дождя основное сопло выполнено сменным. При-
вод ствола от ВОМ трактора. Вращение передается через кардан-
ный вал 15, первичный вал редуктора 1, червячный редуктор 2,
шарнирный валик 14, кривошипно-кулисный механизм 10 и храпо-
вой механизм 7. Положение ствола во время обратного хода со-
бачки фиксируется тормозом 9. Частота вращения ствола 0,2 мин-1.
Для работы по сектору в отверстия фланца ствола вставляют упо-
ры, которые, нажав на переключатель, поворачивают собачку, в
результате чего ствол начинает вращаться в обратную сторону.
Счетчик-водомер 11 учитывает частоту вращения рабочего колеса
насоса, которая затем пересчитывается в кубометры воды. Гидро-
подкормщик 6 состоит из бака цилиндрической формы, соединен-
ного трубопроводами с напорной и всасывающей линиями, и шне-
кового смесителя с ручным приводом. Поступление воды в бак и
отсасывание из него концентрированного раствора регулируют вен-
тилями.
644
Рис. 397. Схемы дальнеструйной дождевальной машины и разновидностей по-
лива:
а — схема машины; б и в — полив по кругу; г и д — полив по сектору; 1— редуктор; 2—»
червячная передача; 3 — насос; 4 — всасывающая труба; 5 — водоприемник; 6 — гидропод-
кормщик; 7 — храповой механизм; 8 — ствол; 9 — тормоз; 10 — кривошнпно-кулисный меха-
низм; 11— водомер; 12 — эжектор; 13 — коническая передача; 14 — шарнирный валик; /5—*
карданный вал.
Перед поливом нарезают временные оросительные каналы. Рас-
стояние между каналами устанавливают в зависимости от даль-
ности полета струи R и принятой схемы полива, исходя из необхо-
димости перекрытия площадей, орошаемых со смежных позиций.
Перекрытие позволяет пополнить количество воды на периферии
круга, где ее выпадает меньше, чем по остальной площади круга.
Существуют две схемы полива: полив по кругу (рис. 397, бив)
й полив по сектору (рис. 397, гиб). Полив по кругу считают пред-
почтительнее, так как с одной позиции орошается большая пло-
щадь. Однако эта схема имеет и существенный недостаток, особен-
но проявляющийся при больших нормах полива: при перемене по-
зиций агрегат должен передвигаться на расстояния R по политой
почве, что при глубоком увлажнении приводит к образованию
645
глубокой колеи. При секторном поливе агрегат переезжает на но-
вую позицию по неполитой почве. На секторный полив рекомендуют
переходить при скорости ветра 1.5...2 м/с, когда наблюдается зна-
чительный снос капель. При этом направление полива должно сов-
падать с направлением ветра.
Каждая из схем имеет по две разновидности. При поливе по
кругу позиции машины можно располагать по углам квадрата (рис.
397, б) или углам треугольника (рис. 397, в); при поливе по сек-
тору— по углам прямоугольника (рис. 397, г) и треугольника (рис.
397, д). При этом расстояние b между каналами, обозначенными
горизонтальными осевыми линиями, составит в первом случае 1,42
и 1,5 R, а во втором—1,73 и 1,865 R. Ввиду того что дальность
струи может изменяться в зависимости от конкретных условий
(ветер, напор воды и т. п.), расстояние между каналами прини-
мают на 0,2 R меньше расчетного и при необходимости переходят
от одной схемы полива к другой. Расстояние между позициями по
ходу машины / определяют также в зависимости от дальности
струи.
Дальнеструйные дождевальные машины по сравнению с други-
ми дождевальными машинами отличаются малой удельной мате-
риалоемкостью, компактностью, большой маневренностью и высо-
кой проходимостью. Они способны поливать однолетние и много-
летние растения, в том числе сады, лесопитомники и т. и., без их
механического повреждения. При этом средняя интенсивность дож-
дя дальнеструйных машин в 2...5 раз ниже, чем короткоструйных,
что позволяет вести полив тяжелых почв без образования луж, а
также поливать почвы с неровным рельефом. Однако на равномер-
ность распределения дождя сильно влияет ветер. Энергоемкость
этих машин высокая, что связано с необходимостью создания высо-
ких напоров воды.
§ 4. Перспективные системы дождевания
Основное направление совершенствования систем дождевания
сводится к стремлению обеспечить непрерывное в течение всего
вегетационного периода водоснабжение растений в соответствии с
ходом их водопотребления. Это позволяет постоянно поддерживать
оптимальную влажность активного слоя почвы и оптимальный вод-
ный режим растений, что приводит к повышению урожайности
сельскохозяйственных культур в 1,5...2 раза по сравнению с обыч-
ным дождеванием. Добиться этого можно лишь путем рассредото-
чения поливного тока по орошаемой площади и во времени, т. е.
за счет увеличения числа одновременно работающих дождевальных
аппаратов и резкого снижения интенсивности дождя. К числу таких
систем дождевания относятся импульсная, капельная и тонкодис-
персная (аэрозольная).
Импульсные дождевальные системы отличаются от обычных
тем, что работают в режиме прерывистой (импульсной) подачи во-
646
ды на орошаемую поверхность
поля. Основные элементы такой
системы: напорообразующий
узел (насосная станция), маги-
стральный, распределительные и
оросительные трубопроводы, им-
пульсные дождевальные аппара-
ты. Импульсный дождевальный
аппарат («дождевальная пуш-
ка») отличается от обычного
тем, что его рабочий цикл состо-
Рис. 398. Схема импульсного дожде-
вального аппарата:
1 — ствол; 2 — поршень; 3 и 4 — клапаны;
5 — пружина; 6 — гидроаккумулятор.
ит из двух непрерывно чередую-
щихся периодов: периода накоп-
ления воды в аппарате, периода
выплеска (выброса) ее под дей-
ствием сжатого воздуха.
Известны импульсные дожде-
вальные аппараты двух типов:
автоколебательного действия; принудительного действия. Первые
способны обеспечить лишь такой режим работы, при котором пери-
од накопления только в 5...10 раз больше периода выброса воды,
вследствие чего расход воды не может быть меньше 0,5... 1 л/с;
вторые обеспечивают режим работы, при котором период накоп-
ления в 50...200 раз больше периода выброса, вследствие чего
подводимый расход воды может быть снижен до 0,1 л/с и менее,
а средняя интенсивность дождя может находиться в пределах
0,01... 0,002 мм/мин. Наибольшее распространение получили дож-
девальные аппараты второго типа, работающие в «ждущем режи-
ме» по сигналам понижения давления в трубопроводной сети.
Система дождевания с аппаратами принудительного действия,
помимо перечисленных выше основных элементов, включает еще и
генератор командных импульсов, работающий в автоматическом
режиме. Импульсный дальне- или среднеструйный дождевальный
аппарат, работающий по сигналам понижения давления в трубо-
проводной сети (рис. 398), состоит из трех основных элементов: ре-
зервуара (гидроаккумулятора) 6, запорного устройства 2, 3, 4 и 5
и ствола 1 с соплом. Вода под высоким давлением, но с малым рас-
ходом подается в гидроаккумулятор 6, где постепенно накаплива-
ется. В период накопления воды клапаны 3 и 4 закрывают проход
в ствол 1, и вода не может выйти через него. По мере поступления
воды находящийся в гидроаккумуляторе воздух сжимается, давле-
ние его повышается. При достижении верхнего давления Ншах гене-
ратор командных импульсов сбрасывает давление в напорной сети,
вследствие чего под действием сжатого воздуха клапаны 4, а затем
3 открываются и происходит выброс накопленного объема воды —
«выстрел». В момент выстрела срабатывает механизм вращения,
и корпус аппарата поворачивается на заданный угол. Сра-
батывание всех дождевальных аппаратов происходит синхрон-
647
но. Клапан 4 закрывается под действием пружины 5 при падении
давления в гидроаккумуляторе до нижнего предела //min. Клапан
3 закрывается под действием поршня 2 при повышении давления
в сети, после чего цикл повторяется. Продолжительность периода
накопления воды в гидроаккумуляторе составляет от 50 до 300 с.
Давление Нтах и ЯП11Г1 и диаметр выходного отверстия сопла d
выбирают, исходя из необходимой дальности полета струи R и от-
ношения Hmaxld, определяющего диаметр капель, на которые рас-
падается струя.
При импульсном дождевании дальность полета струи значи-
тельно больше, чем при непрерывном истечении. Она зависит от
//так. d, угла наклона ствола к горизонту, вместительности гидро-
аккумулятора, продолжительности выстрела. Вместимость гидро-
аккумуляторов составляет от 15 до 500 л, верхний предел давле-
ния //max—от 0,4 до 1,0 МПа, радиус действия (дальность полета
струи) — от 20 до 70 м. По объему выброса воды за один рабочий
цикл различают аппараты малого (до 3 л), среднего (от 3 до Юл)
и большого (более 10 л) объемов выброса. Наиболее распростра-
нены аппараты среднего объема выброса. Так как импульсные
дождевальные аппараты работают с подводимыми расходами
(0,1...2 л/с), во много раз меньшими, чем обычные (10...40 л/с), то
это позволяет в 5...8 раз уменьшить диаметры водоподводящих
трубопроводов и применить насосно-силовое оборудование малой
мощности, в результате чего капитальные затраты на строитель-
ство снижаются более чем в 3 раза. Так как диаметр водоподво-
дящих трубопроводов составляет 12...30 мм, то возможно приме-
нение пластмассовых труб с укладкой бестраншейным способом.
Резкое снижение интенсивности дождя позволяет использо-
вать импульсные дождевальные системы для орошения склонов с
почвами низкой водопроницаемости, исключает эрозию; так как
почва не переувлажняется, то почвенная корка не образуется и
отпадает необходимость в послеполивной обработке почвы;
Системы капельного орошения дают еще большее рассредоточе-
ние поливного тока, так как позволяют локально подводить воду
к каждому растению в виде отдельных капель с помощью точеч-
ных микроводовыпусков — капельниц. В систему капельного оро-
шения (рис. 399) входят: контрольно-распределительный блок
магистральный трубопровод 9, распределительные трубопро-
воды 10, капельницы И. Контрольно-распределительный блок,
как правило, включает в себя мотор 1, насос 2, задвижку 3,
фильтр 4, водомер 5, манометр 6, бак-смеситель 7 и инжектор 8.
Системы капельного орошения проектируют обычно с напо-
ром 0,07...0,28 МПа. Низконапорные системы считаются предпоч-
тительнее, так как в них можно применять более дешевые трубы
и капельницы большего диаметра, что уменьшает вероятность их
забивания. Для .создания необходимого напора используют насо-
сы небольшой мощности и производительности, водонапорные
башни, а иногда и просто перепад отметок между источником во-
648
Рис. 399. Схема системы капельного орошения:
1 — двигатель; 2 — насос; 3 — задвижка; 4 — фильтр; 5 —водомер; 6 — манометр; 7— бан-
смеситель; 8 — инжектор; 9 — магистральный трубопровод; 10 — распределительный трубо-
провод; 11 — капельница; 12 — растение.
доснабжения и орошаемой 'площадью (самотечные системы). Ма-
гистральный 9 и распределительные 10 трубопроводы монтируют,
как правило, из полиэтиленовых труб обязательно черного цвета
(для предотвращения развития водной растительности), первые
диаметром 38...51 мм, вторые — от 6 до 19 мм. Трубопроводы в нив’-
конапорных системах монтируют без соединительных муфт, встав-
ляя трубы одна в другую. Расстояние между распределительными
трубопроводами — от 0,8 м для полевых культур до 6 м для плодо
во-ягодных и соответствует ширине междурядий.
Капельницы изготавливают из пластмассы темного цвета, с
расходом от 1 до 15 л/ч. Их конструкции весьма разнообразны.
Наиболее простая представляет собой микротрубку из полиэтиле-
на высокой плотности с внутренним диаметром от 0,3 до 2,0 мм;
регулирование расхода — за счет изменения потерь на трение, т. е.
путем изменения длины микротрубки. Более надежна в смысле
предотвращения забивания капельницы с отверстием большого
диаметра, состоящая из цилиндра и ввернутой в него пробки. Про-
странство между нарезкой пробки и внутренней резьбой цилиндра
образует спиральный проход, по которому идет вода. Вворачивая
или выворачивая пробку, изменяют длину пути, а следовательно,
и расход воды. Вытекая каплями, вода увлажняет почву в виде зо-
ны эллипсовидной формы глубиной около 1 м и шириной до 2,6 м
с выходом на поверхность у основания ствола дерева. При этом
почва в междурядьях поддерживается в сухом состоянии, что соз-
дает неблагоприятные условия для роста сорняков. Уменьшение
объема увлажняемой почвы позволяет экономить воду и приводит
К формированию менее разветвленной корневой системы, дающей
возможность уплотнить посадки и повысить продуктивность. Этот
способ обеспечивает наиболее высокую отдачу урожая на единицу
затраченной воды и удобрений, так как обеспечивает оптимальный
водный и питательный режим почвы, позволяет полностью автома-
тизировать подачу воды в соответствии с потребностями сельско-
хозяйственных культур. В рассматриваемых системах, однако, пока
еще высока первоначальная стоимость и есть вероятность закупор-
ки капельниц из-за естественного загрязнения воды."
649
Тонкодисперсное увлажнение применяют для создания искусст-
венного микроклимата с целью защиты растений от воздействия вы-
соких температур в жаркие дни и от заморозков — в холодные.
Для мелкодисперсного распыливания воды применяют специальные
установки (ТОУ) или вентиляторные опрыскиватели. Дальность
полета капель до 200 м.
§ 5. Основные показатели работы
Качество дождя характеризуют его интенсивностью, диаметром
капель и силой их удара о почву и растения. Чем меньше интенсив-
ность дождя и диаметр его капель, тем меньше он разрушает
структуру почвы, тем лучше впитывается в нее. И, наоборот, при
большой интенсивности и крупных каплях структура почвы сильно
разрушается, на ее поверхности образуются лужи, а после полива
и подсыхания — почвенная корка.
Интенсивность дождя. Основной показатель работы дождеваль-
ных устройств — интенсивность дождя, под которой понимают
приращение слоя воды в данной точке поверхности почвы за еди-
ницу времени при непрерывном дождевом потоке. Вследствие рас-
текания воды по орошаемой поверхности толщина ее слоя во всех
точках будет одинаковой, поэтому в практике пользуются, как пра-
вило, средними значениями.
Средней интенсивностью дождя рСр называют отношение сред-
него слоя осадков АСР, выпавших на одновременно орошаемой пло-
щади S, к продолжительности t непрерывного дождевания:
Рср=М- (419)
Так как объем воды V, поданной на всю площадь S, будет ра-
вен hcpS, то Pcv=V/St- Учитывая, что V/t=Q, где Q — расход воды
дождевальным устройством, получим рСр=Q/S.
В практике принято расход Q измерять в л/с, S в м2, а р в
мм/мин,
тогда
pcp=60Q/S. (420)
Формулы (419) и (420) справедливы как для дождевальных
устройств с позиционным поливом, так и для устройств, работаю-
щих в движении. Следовательно, рСР не зависит от скорости дви-
жения машины.
При позиционном поливе короткоструйными (неподвижными)
насадками рСР должна быть равна или меньше скорости впитыва-
ния воды в почву. В противном случае вода не будет успевать впи-
тываться, что приведет к образованию луж и нежелательного сто-
ка, вызывающего эрозию почвы. При поливе дальне- и среднеструй-
ными аппаратами полоса одновременного полива непрерывно по-
ворачивается и время воздействия дождя на каждую точку оро-
шаемого круга определяется шириной полосы и угловой скоростью
650
вращения аппарата. Кратко-
временное воздействие позво-
ляет вести полив с большей
интенсивностью дождя (см.
рис. 381). Скорость впитыва-
ния можно ориентировочно
принимать: для тяжелых почв
0,1...0,2, средних 0,2...0,3 и лег-
ких 0,5...0,8 мм/мин.
Формула (420) позволяет
по известным 3 (для данной
дождевальной машины или
установки) и рСр (для данной
почвы) определить максималь- 400- определению коэффициента
„ эффективности полива:
ную подачу Q, при которой ' .™„ии, равной интенсивности дождя (изо-
будет обеспечена наибольшая гнеты); б — кривая s=f(p)-
производительность на поливе
без образования луж.
Машины, работающие в движении, могут поливать без образо-
вания луж с большей интенсивностью дождя. При этом чем больше
скорость движения, тем меньше время воздействия дождя, а следо-
вательно, больше допускаемая интенсивность (см. рис. 381). Для
повышения впитывающей способности почвы, а следовательно, до-
пускаемой интенсивности дождя и производительности дождеваль-
ной машины или установки перед поливом проводят рыхление, ще-
левание и т. п.
Коэффициент эффективности полива дает оценку равномерности
распределения дождя по площади поля. Для его определения по
всей площади одновременного полива рядами, перпендикулярными
оси канала, или по радиусам расставляют дождемерные сосуды,
имеющие форму цилиндра или перевернутого усеченного конуса.
После работы дождевальной машины в течение некоторого времени
t с помощью мензурки замеряют объем воды V в каждом сосуде.
Зная площадь входного отверстия сосуда Звх и объем V находящей-
ся в нем воды, определяют сначала слой осадков h = V]Sm, а затем
интенсивность дождя p = h!t или р=У/Звх/ в месте установки каж-
дого сосуда. По полученным данным строят линии равной интен-
сивности дождя (изогиеты), соединяя плавными кривыми точки
равной интенсивности. Полученный график (рис. 400, а)* служит
характеристикой распределения интенсивности дождя данной на-
садкой, аппаратом или машиной. По его данным строят вспомога-
тельный график (рис. 400, б). На нем по оси абсцисс откладывают
средние значения интенсивности дождя р, а по оси ординат — пло-
щади 3, политые дождем соответствующей интенсивности. Площа-
ди 3 определяют путем планиметрирования по изогиетам основного
* Изогиеты представлены упрощенно, в виде концентрических окружностей,
действительная их форма сложнее.— Прим, автора.
651
графика. Значения р и S для построения вспомогательного графика
определяют по формулам р= (р/+рх-н)/2; S=Sx+i—S,-. На оси абс-
цисс вспомогательного графика откладывают среднеэффективную
интенсивность дождя рср.Эф, а по обеим -сторонам от нее — предель-
ные значения интенсивности в соответствии с агротехническим до-
пуском ±25%. Для определения рср.Эф, по данным графика S=f(p),
составляют вариационную таблицу, содержащую три столбца: рь
Рг> Рз-Р«; Si, S2, 5з„.5п; ppSi, P2S2, рз«$з—рпЗл.
Среднеэффективную интенсивность дождя находят путем про-
смотра третьего столбца как величину, дающую наибольшее зна-
чение произведения pS, т. е. из условия рср.Эф S=max. Площадь 5аф,
ограниченная кривой S=f(p), ординатами 0,75 рср.Эф и 1,25 рСр.эФ и
осью абсцисс (заштрихована), находится в пределах агротехничес-
ких допусков и поэтому называется эффективно политой площадью.
Отношение эффективно политой площади 5Эф ко всей площади под
графиком S называют коэффициентом эффективности полива:
ЛЭф.п=5эф/5. (421)
Чем ближе &эф.п к единице, тем равномернее полив. Площади
5Эф и S определяют планиметрированием графика. Слева от эффек-
тивно политой площади 5Эф располагается недостаточно политая
5нед, а справа — избыточно политая площадь SH36. В некоторых
случаях для более полной характеристики полива определяют ко-
эффициент недостаточности полива kIlen.n=SHen/S и коэффициент
избыточности полива /гнзб.п=5НЗб/5. По изогиете, соответствующей
половине среднеэффективной интенсивности (0,5 рср.Эф), перекры-
вают дождь со смежных позиций (определяют рациональные рас-
стояния между соседними положениямц ^ождевальной машины).
По агротехническим требованиям коэффициент эффективности пб-
лива с учетом перекрытия должен быть не ниже 0,7. Для более гру-
бой приближенной оценки пользуются иногда коэффициентом рав-
номерности полива &Рав.п= Pep/ртах, где рср и ртах—соответственно
среднее и максимальное значения интенсивности дождя.
Условие равномерности полива. Полив измеряют толщиной слоя
осадков h, выпавших на орошаемую площадь. При равномерном
поливе h = const для всей орошаемой площади. Из формулы (419)
h=pt. Следовательно, равномерность полива зависит от соотноше-
ния интенсивности дождя р и продолжительности его воздействия
t на каждую точку орошаемой поверхности.
Для дождевальных машин с короткоструйными насадками, ра-
ботающих в процессе фронтального движения, например двухкон-
сольных, продолжительность воздействия дождя на каждую точку
орошаемой площади по ширине захвата одинакова, и, следователь-
но, условием равномерности полива будет постоянство интенсив-
ности дождя по ширине захвата. Для машин со средне- и дальне-
струйными дождевальными аппаратами, создающими вращающую-
ся струю, процесс дождевания протекает более сложно, и равно-
мерность полива может быть обеспечена лишь при определенной
652
закономерности изменения ин-
тенсивности дождя по длине
струи. Для определения этой
закономерности обратимся к
формуле (419) и рассмотрим
параметры, влияющие на вре-
мя t. Опыт показывает, что
для всех среднеструйных и
многих дальнеструйных (при
Qsg:30 л/с) дождевальных ап-
паратов зона одновременного
полива имеет форму полосы
примерно постоянной шири-
ны b (рис. 401, а). При этом
продолжительность воздейст-
вия дождя на некоторую точку
г от оси вращения ствола О, t
вращения ствола. Подставив знг
Рис. 401. Необходимое распределение
интенсивности дождя средне- и дальне-
струйными аппаратами при равномер-
ном поливе:
а — схема полива; б — график зависимости
P=f(r).
А, расположенную на расстоянии
= Ь!ыг, где ш — угловая скорость
чение t в формулу (419), получим
p=hwlb.
(422)
Формула (422) при h=const и выражает собой закономерность
изменения р, обеспечивающую равномерность полива. Так как b и
<у— величины постоянные, то формулу (422) можно записать в виде
р=сг, где с=h(i)/b = const не что иное, как угловой коэффициент, а
формула (422), следовательно, представляет собой уравнение пря-
мой, проходящей через начало координат (рис. 401, б). Таким об-
разом, равномерность полива средне- и дальнеструйными аппара-
тами будет обеспечена в том случае, если интенсивность дождя
будет возрастать по мере удаления от оси вращения сопла по за-
кону прямой линии.
Чтобы сделать вывод о том, насколько действительная законо-
мерность изменения интенсивности дождя соответствует идеальной,
обратимся к рисунку 402, на котором приведена эксперименталь-
ная характеристика распределения интенсивности дождя аппара-
том с диаметром отверстия сопла 27 мм при напоре 0,4 МПа. Верх-
ний график представляет собой зависимость р=/(г), ниже приведе-
ны изогиеты струй, а еще ниже — эпюры распределения интенсив-
ности дождя по ширине полосы полива в различных поперечных
сечениях. Из зависимости р=/(г) следует, что в первой поло-
вине струи (от 0 до 25 м) ив ее конце (от 43 до 50 м)
наблюдается недополив. Этот недостаток в первой половине струи
' устраняют двумя способами: перекрыванием части поперечного се-
чения струи дефлекторными устройствами или лопастями турбинок
механизма вращения сопла; установкой дополнительного малого
сопла с дальностью струи не более 25...30 м. В первом случае часть
потока воды, ударяясь о дефлектор или лопасти, распадается на
капли и орошает площадь вблизи сопла, во втором — недополив
устраняется действием дополнительной струи, в которую при необ-
653
ходимости может быть также введена дефлекторная лопатка. Не-
дополив в конце струн пополняется за счет перекрытия орошаемых
площадей с соседних позиций.
Дальность действия, влияние ветра. Стволы дальне- и средне-
струйных дождевальных аппаратов устанавливают под углом 28...
32 ° к горизонтальной плоскости, чтобы получить наибольшую даль-
ность полета струи. Кроме угла наклона ствола, на дальность
полета струи оказывают влияние напор воды Н и диаметр выход-
ного отверстия сопла d. Из многочисленных эмпирических формул
для определения дальности полета струи, предложенных различны-
ми авторами, наиболее простая и выразительная формула
Б. М. Лебедева;
(423)
где а и р—коэффициенты (а=0,5, а р = 25-10-5). Входящее в фор-
мулу (423) отношение Hid является характеристикой дождя, кри-
терием крупности капель, на которые распадается струя. Чем оно
больше, тем мельче капли. При ///J<900 — сплошная струя, не
распадающаяся на капли; при Hfd=900... 1500—крупные капли,
непригодные для дождевания; при H/d= 1500... 1700—капли сред-
ней крупности, пригодные для полива трав на лугах и пастбищах;
при Hfd= 1700...2200—мелкие капли, пригодные для орошения всех
культур; при Hfd=2400—2600—очень мелкие капли, пригодные
для орошения рассады самых нежных растений. Дальнейшее уве-
654
Рис. 403. Дальность полета струи и влияние ветра:
« — графики зависимостей при различных d; б —влияние ветра на форму орошае-
мой площади; е — график зависимости Ыа=Г(и).
личение H/d нецелесообразно, так как связано с повышенным рас-
ходом энергии.
Формула (423) справедлива для неподвижных струй. Вращение
ствола относительно вертикальной оси приводит к уменьшению
дальности полета струи. При частоте вращения 0,1...1 мин-1, харак-
терной для дождевальных аппаратов, дальность полета струи
уменьшается на 5... 15%. Как видно из графиков (рис. 403, а), с
увеличением напора Н дальность полета струи R растет сначала
очень быстро, затем все медленнее, приближаясь к некоторому
пределу, зависящему от диаметра d отверстия сопла. Чем d боль-
ше, тем больше и предельное значение R.
Существенное влияние на дальность полета струи и форму оро-
шаемой ею площади оказывает ветер. Если при безветренной пого-
де орошаемая площадь имеет форму круга радиусом R, т<^ даже
при небольшом ветре она принимает форму эллипса (рис. 403, б),
у которого большая ось а ~ 2R и совпадает с направлением ветра,
а малая ось b уменьшается по мере увеличения его скорости. Отно-
шение b/а интенсивно уменьшается при увеличении скорости ветра
до 3...4 м/с, а в дальнейшем изменяется мало (рис. 403, в). Влия-
ние ветра особенно сильно сказывается при высоких напорах, когда
образуются мелкие капли. Даже небольшие скорости (3...5 м/с) в
этом случае сильно искажают форму струи и орошаемой площади.
Поэтому при ветре рекомендуется применять более низкие напоры
и меньшие углы наклона стволов к горизонту.
Производительность дождевальных машин, работающих в дви-
жении, как и любых других мобильных сельскохозяйственных ма-
шин, зависит от ширины захвата, скорости движения и коэффи-
циента использования рабочего времени. Разница лишь в том, что
во избежание образования луж особенно на почвах с небольшой
впитывающей способностью полив может проводиться не за один,
а за несколько проходов. В таких случаях необходимое число про-
ходов определится из условия:
n=m/h, (424)
где т—поливная норма, мм;
h — слой воды, вылитый за один проход, мм.
655
Производительность машин, работающих позиционно, зависит
от размера площади. S, орошаемой с одной позиции, и числа пози-
ций (перестановок машины) z в единицу времени или смену, т. е.
Q—zS. За время Т число позиций z=KT]t, где к—коэффициент
использования рабочего времени, t—продолжительность полива с
одной позиции. Учитывая, что t=ml$cv, apCp=Q/S> получим z=
— Kl'QlmS. Подставив значение z в первоначальное выражение, бу-
дем иметь
£2=«7’QJ'm. (425)
Если £2 измерять в га, Т — в ч, Q — в л/с, пг — в мм, то £2 =
=0,36 KTQ/m. При т=30 мм, к=0,83, £2 = 0,01 Q га/ч. Так как
Q — PcpS, a S=mR2, то, подставив вместо Q его значение в формулу
(425), будем иметь £2=клрср7?27'/т. Как видим, производитель-
ность в наибольшей мере зависит от дальности полета струи (она
в квадрате). Но одну и ту же дальность полета струи R можно по-
лучить при различных напорах И и диаметрах отверстия сопла d
(рис. 403, а). Чтобы получить одинаковую дальность струи с наи-
меньшей затратой энергии, нужно знать, какой из этих двух пара-
метров оказывает большее влияние на расход энергии.
Мощность струи, представляющая собой расход энергии в еди-
ницу времени, зависит от расхода воды Q, напора /7 и удельного
веса у:
Кстр=№. (426)
Мощность, необходимая для привода насоса, NK=NCTp/i]B. с т)н, где
"Пв- с и Цн— к. п. д. соответственно водопроводящей системы и насо-
са. Подставив значение Q из формулы (141) в формулу (426), бу-
дем иметь
Устр=ТИл<РЯУ2^74.
Так как выражение yjwr ^2^/4=const, то, обозначив его через с,
получим
2VCTP=cdV73/2. (427)
Из выражения (427) видно, что диаметр отверстия сопла оказы-
вает несколько большее влияние на расход энергии, чем напор во-
ды Н. Характеристикой энергоемкости дождевальной машины или
установки можно считать расход энергии на единицу производи-
тельности. Так как производительность £2 = kQ, где к — коэффи-
циент пропорциональности, то
NI&=4QHIkQ=kJ1. (428)
Как видим, удельный расход энергии пропорционален напору
Н. Следовательно, наименее энергоемкими являются дождевальные
устройства с короткоструйными насадками и наиболее энергоем-
кими— устройства, оборудованные дальнеструйными дождеваль-
ными аппаратами. Однако, несмотря на это, дальнеструйные дож-
девальные аппараты находят широкое распространение, так как по-
казывают высокую производительность.
656
УПРАЖНЕНИЯ
Приведенные ниже упражнения не исчерпывают всех тех вопросов, какие-
могут возникнуть при изучении рабочих процессов, выполняемых сельскохозяйст-
венными и мелиоративными машинами. Они концентрируют внимание главным*
образом на тех задачах, которые приходится решать инженеру-механику сельско-
хозяйственного производства в его инженерной эксплуатационной практике.
К ПЕРВОМУ РАЗДЕЛУ
1. Имеем два плужных корпуса с цилиндроидальными рабочими поверхно-
стями. Основные параметры первого плужного корпуса: уо=42р, утах=48°; вто-
рого: уо=38°, утах=50°. К какому типу относятся первая и вторая рабочие по-
верхности плужных корпусов?
Ответ: первая относится к культурному, вторая — к полувинтовому типу
рабочих поверхностей.
2. Определить коэффициенты скольжения при подрезании почвенного пласта
лезвием лемеха культурного и полувинтового корпусов плуга iK и in.B, если угол
трения почвы о лемех фп=26°.
Ответ: iK » 0,576, a in.B « 0,712.
3. Для условий упражнения 2 определить толщину лезвия лемеха б, если ра-
диус его кривизны г=0,5 мм.
Ответ; 6 ~ 0,44 мм.
4. Плужный корпус с рабочей поверхностью винтового типа имеет следую-
щие основные параметры: длину рабочей поверхности L=0,92 м, ширину захвата
6=35 см, расчетную глубину пахоты а=20 см, угол закручивания пласта ₽шах=
= 150°. Определить критическую рабочую скорость плуга пКр, снабженного таки-
ми корпусами, без учета связности пласта.
Ответ: »«р«й,58 м/с, или 9,2 км/ч.
5. Определить максимальную допускаемую глубину пахоты Стах связной
почвы плугом с винтовыми корпусами, если ширина захвата корпуса 6=35 см.
О тв е т: аШах < 28 см.
6. Для условий упражнения 5 определить максимальную глубину пахоты
вшах, при которой будут выполнены агротехнические требования по основному
показателю — обороту пласта: он будет повернут не менее чем на 140°.
Ответ: Отах «С 20,5 см.
7. Тяговое сопротивление плужного корпуса, определенное, например, мето-
, дом тензометрирования, составляет 7 кН, коэффициент трения почвы о полевую
доску /=0,476. Определить, какую часть от тягового сопротивления корпуса
(в %) составляет сопротивление трения полевой доски о стенку борозды.
Ответ: « 21,2%.
8. Две полевые доски имеют одинаковую площадь контакта со стенкой бо-
розды hili—hj.2, однако высота первой больше, чем второй (61 > 62), а длина
второй больше, чем первой (l2 > Л). Какая из них принадлежит плужному кор-
пусу для обработки торфяно-болотных почв и какая — плужному корпусу для
обработки старопахотных почв?
Ответ: первая принадлежит корпусу для обработки торфяно-болотных,
а вторая — корпусу для обработки старопахотных почв.
42—424
657
9. Угол трения лезвия стрельчатой культиваторной лапы о корни сорняков
(рк=24°, а о почву <рп=28°. Определить, при каких углах раствора культиватор-
ной лапы у будет обеспечено скольжение корней сорняков, находящихся в почве,
по лезвию лапы, а также значение оптимального угла раствора у<шт с точки зрения
наименьшей вероятности забивания.
О т в е т: у < 62°, уОпт = 31°.
10. Определить зону деформации почвы рыхлительной лапой культиватора
(/min, /max, L и 6J, если ширина ее захвата 60=5 см, начальный угол крошения
аа=20°, глубина обработки почвы о=16 см и угол трения почвы о лапу Фп=26°.
Ответ: /min «7,8 см; /max«36 см; L«16,6 см и bt«16,7 см.
11. Черенковый нож плуга, лезвие которого имеет радиус кривизны г= 1,0 мм,
в процессе работы перерезает корневища с углом трения <pK=16° и отрезает поч-
венный пласт с углом трения <рп=30°. Какова толщина лезвия 6 (ширина сминае-
мой полоски материала) в первом и втором процессах?
Ответ: 6к«0,55 мм; бп«1,0 мм.
12. Определить, под каким углом а к горизонту следует установить черенко-
вый нож плуга, для того чтобы обеспечить скольжение в процессе резания кор-
невищ с углом трения <рк=18° в почве с углом трения <рп=22°.
Ответ: а < 68°.
13. Определить направление равнодействующей реакции почвы в продольно-
вертикальной плоскости на универсальную стрельчатую лапу (угол Ч'), если угол
трения почвы о лапу <рв—26°.
Ответ: Чг=46... 48°.
14. Необходимо обработать поле дисковым лущильником на глубину а=10 см.
Определить угол атаки дисков 6, при котором будет обеспечено качество обра-
ботки, соответствующее агротехническим требованиям (высота гребней h^0,5 а),
если диаметр дисков 0=450 мм, расстояние между дисками в батареях 6=170 мм.
Ответ: 0=30°.
15. Болотная фреза характеризуется следующими основными параметрами:
диаметр фрезерного барабана по концам ножей d=710 мм, число ножей на каж-
дом диске z=7, частота вращения фрезерного барабана «=200 мин-1. Определить
показатель кинематического режима 7. и рабочую скорость агрегата v, на которые
необходимо его настроить для обработки связной почвы средней задерненности.
Ответ: Х«7,1; о» 1,05 м/с, или 3,8 км/ч.
16. Для условий упражнения 15 определить максимальную толщину стружки
бшах при глубине фрезерования а=12 см.
Ответ: 6тах»3,4 см.
17. Густота посевов сахарной свеклы составляет в среднем 12 растений на
одном метре длины рядка. Прореживатель характеризуется следующими основ-
ными параметрами: диаметр обоймы по концам ножей </=520 мм, число ножей в
обойме z=8, длина лезвия ножа прореживателя SH=25 мм. Определить коэффи-
циент прореживания Bi и показатель кинематического режима Л, на которые необ-
ходимо настроить прореживатель.
Ответ: «1=0,5; 7. «4,09.
18. Поле, которое должен обрабатывать гладкий цилиндрический каток диа-
метром «/кт=700 мм, характеризуется углом трения почвы о каток <pi=18° и углом
трения почвы о почву ф2=22°. Определить, будет ли происходить сгруживание
комков перед катком, если максимальный диаметр (размер) комков, находящихся
на поверхности поля, составляет </Км=80 мм.
Ответ: сгруживания комков происходить не будет.
19. Определить глубину колеи h от колеса сеялки при ее работе на поле, поч-
ва которого характеризуется коэффициентом объемного смятия <7=1,5 Н/см3.
Диаметр опорных колес сеялки 0=1200 мм, ширина обода .6=150 мм, на колесо
действует сила тяжести от массы сеялки Р=3 кН.
Ответ: й«7 см.
20. Пахотный агрегат состоит из трактора класса 30 кН и пятикорпусного
плуга с корпусами шириной захвата 6=35 см, два из которых отъемные, что по-
зволяет ему работать с четырьмя или тремя корпусами в зависимости от удель-
ного сопротивления почвы и глубины вспашки. Определить, на какое число кор-
1)58
пусов и должен быть настроен плуг, если его удельное сопротивление /<=110 кПа.
а заданная глубина пахоты а=25 см.
Ответ: л=3.
21. Для условий упражнения 21 определить к.п.д. т) плуга, если его вес
р=9600 Н, коэффициент сопротивления протаскиванию в открытой борозде
f=0,7, рабочая скорость 4... 5 км/ч.
Ответ: т)«0,78.
ко ВТОРОМУ РАЗДЕЛУ
1. Зерновая сеялка в процессе работы прошла путь 1ск=42 м, при этом ее
опорные ходовые колеса диаметром £>=125 см сделали 10 полных оборотов.
Определить коэффициент скольжения колес сеялки в.
Ответ: е » 0,07, или 7%.
2. Для условий упражнения 1 определить, на какую расчетную норму высева
семян Срасч нужно установить сеялку, чтобы обеспечить высев с заданной нормой
Qs=180 кг/га.
Ответ: QPac4= 193 кг/га.
3. Определить максимальную, допускаемую по условиям качества, рабочую
скорость картофелесажалки с ложечно-дисковым высаживающим аппаратом при
рядовой Пр и гнездовой иг посадках, если расстояние между гнездами при гнез-
довой /к. г = 70 см и клубнями в рядке при рядовой посадке 1К. р = 35 см, а число
клубней в гнезде при гнездовой посадке т=3.
Ответ: цр= 2,45 м/с, или 8,82 км/ч; vT= 1,63 м/с, или 5,9 км/ч.
4. Определить расчетную рабочую скорость рассадопосадочной машины и
(с закладкой рассады в рассадодержатели вручную), если заданное расстояние
между растениями в рядке (шаг посадки) /р=70 см.
Ответ: v=0,468 м/с, или 1,68 км/ч.
5. Для условий упражнения 4 определить, сколько времени t отводится на
закладку рассады в рассадодержатель (период закладки).
Ответ: 1,5 с.
6. Определить, какое количество рассадодержателей г необходимо установить
на каждом диске высаживающего аппарата для того, чтобы настроить рассадо-
посадочную машину на заданный режим работы: шаг посадки Zp = 25 см, показа-
тель кинематического режима работы по наружным концам рассадодержателей
£=1,3. Диаметр диска по концам рассадодержателей £>=750 мм.
Ответ: г=8.
К ТРЕТЬЕМУ РАЗДЕЛУ
1. Полевой вентиляторный опрыскиватель снабжен распыливающим устрой-
ством с 12-ю распылителями и благодаря применению вентилятора имеет ширину
захвата В=20 м. Подача ядохимиката (рабочей жидкости) через распылитель
9=10 дм3/мин. Определить необходимую рабочую скорость и движения агрегата,
которая обеспечит внесение ядохимиката в количестве <2 = 1200 дм3/га.
Ответ: и=0,835 м/с, или 3 км/ч.
2. Для условий упражнения 1 определить диаметр d выходного отверстия
распиливающего наконечника, если опрыскиватель оборудован тангенциальными
наконечниками центробежного типа, а давление" рабочей жидкости в подводящей
системе Д=2 МПа.
Ответ: d=3 мм.
3. Садовый опрыскиватель снабжен осевым вентилятором, диаметр выходного
отверстия сопла которого <2=0,4 м. Настроить вентилятор на рациональный ре-
жим работы, т. е. определить необходимую производительность Q, если высота
деревьев Н=6 м, ширина междурядий В=6 м, крона достаточно густая и необхо-
димая скорость воздушного потока прн входе в крону Пж«20 м/с, коэффициент
турбулентности струи а=0,1.
Ответ: <2=34 000 м3/ч.
42'
659
К ЧЕТВЕРТОМУ РАЗДЕЛУ
1. Определить относительную растянутость е ленты льна, вызываемую дели-
телями. Среднеарифметическая длина стеблей льна £=60 см, угол между рабочи-
ми прутками делителя 2Р=40°, высота установки делителя от земли Л=10 см.
Ширина захвата одного ручья 26=30 см. Коэффициент трения стеблей льна о по-
верхность прутков принять равным 0,3.
Ответ: е=19%.
2. Рассчитать длину SP теребильного ручья, в пределах которой происходит
выдергивание полеглого льна с длиной стебля £=60 см (длина корня k=5 см).
Принять, что направление движения машины совпадает с направлением полег-
лости стеблей (угол полеглости 0=60°), скорость теребильных ремней п=2,7 м/с,
(скорость движения машины о=2,5 м/с. Захват стеблей ручьем происходит на
высоте 10 см от поверхности земли.
Оценить условие, при котором обеспечивается чистота теребления льна, если
.длина ручья с плотным прилеганием ремня Зд=ЗО см.
Ответ: SP=6 см.
3. Рассчитать скорость движения свеклоуборочного комбайна, при которой
•обеспечивается оптимальное направление теребления корня (а=±30°). Скорость
цепи и=1,2 м/с, угол наклона рабочей поверхности подкапывающей лапы к гори-
зонту ап=15°. При тереблении корня теребильная лапа движется прямолинейно
под углом а=17° к горизонту.
Ответ: 0=1,0... 1,2 м/с.
4. Комбайн убирает пшеницу с редким хлебостоем. Принимая допускаемую
скорость удара планкой мотовила (число планок мотовила 2=5, радиус г=0,6,
вынос вала с=0,1) по колосу ид=2,5 м/с, вычислить (при ц = 1) показатель кине-
матического режима работы мотовила X и скорость движения комбайна о.
Ответ: 1=2, «=1,5 м/с.
5. Рассчитать перебег с осевых линий сегментов относительно осей пальцев
в крайних положениях ножа. Режущий аппарат нормального резания однопро-
бежный (шаг сегментов (=76,2 мм, радиус кривошипа г=38,1 мм).
Ответ: с=3 мм.
6. Определить скорости начала инм, «нв н конца инк, «нк резания травы по
рисунку 216,6 (масштаб изображения 1:2). Частота вращения кривошипа меха-
низма привода ложа п=12 с-*. Указать одну из причин среза растений с неравно-
мерной по высоте стерней:
а) не соблюдено условие защемления растений между сегментом и противо-
режущей пластиной (сумма углов a+P=i36o20', коэффициенты трения растений
по лезвию сегмента и противорежущей пластины tg<pi=tg<p2=0,15, острота лез-
вий 30 мкм);
б) малы скорости резания;
в) велика подача £ (скорость машины 2,5 м/с).
Ответ: «ни=2,5; «нм=3,4; инк =3,2; пнк=2,5 м/с.
7. Найти скорость движения косилки с ротационно-дисковым аппаратом (чис-
ло ножей 2Н=2, длина ножа /я=5 см, частота вращения ножей п=25 с-1), при
которой режущий аппарат не забивается травой: на растения действуют ножи, а
не диск.
Ответ: v =С2,5 м/с.
8. Определить ширину захвата одной секции колесно-пальцевых граблей
(число колес г=6, радиус колеса по концам пальцев г=700 мм) при сгребании из
прокоса. Расстояние Н нижней линии травы от поверхности земли принять рав-
ным 5 см. > .
Ответ: 6=3 м.
9. Рассчитать скорость движения кормоуборочного комбайна при уборке рас-
тительной массы с урожайностью Ар=50 т/га. Плотность массы, поступающей
к питающим вальцам, принять равной 50 кг/м3, скорость подачи массы к вальцам
«тР = 1,5 м/с, высота горловины измельчающего аппарата Аг-0,1 м.
Ответ: v= 1,8... 2,25 м/с.
660-
10. Найти мощность, потребную на прессование сена из валков в тюки плот-
ностью 150' кг/м3. Валки образованы колесно-пальцевыми граблями шириной за-
хвата 5=6 м, урожайность Др=5 т/га при влажности растительной массы
16... 18% скорость движения пресс-подборщика »=1 м/с.
Ответ: N=43 кВт.
11. Найти значение зазора между вальцами (диаметр вальцов D=70 мм),
применяемыми для отрыва плодов (клубней) от ботвы (меньший размер плода
d=20 мм). Коэффициент трения f плодов о вальцы принять равным 0,8.
Ответ: а 4 мм.
12. При какой скорости движения кукурузоуборочного комбайна вальцы
обеспечивают непрерывное и равномерное протягивание стеблей (урожайность
Лр=15 т/га, ширина междурядий 5=70 см, плотность слоя стеблевой массы
рр=35 кг/м3)?
Частота вальцов п=18 с-1, длина 1=450 мм, диаметр £>.=80 мм, зазор между
вальцами а=4 мм.
Ответ: »=1,2 м/с.
13. Определить скорость движения зерноуборочного комбайна (ширина за-
хвата жатки В=5 м, молотилка однобарабанная шириной 1,2 м) при уборке пше-
ницы урожайностью Л3=3,5 т/га, влажностью ш=15... 17% (коэффициент соло-
мистости ₽=0,6), принимая потери вымолоченным (свободным) зерном за соло-
мотрясом (длина /с=3,6 м), равным 0,5%.
Ответ: ®=1,00 ... 1,16 м/с.
14. Принимая данные упражнения 13, вычислить потери свободным зерном
в полове. Площадь очистки равна 1 м2 при ширине решета 5=1 м.
О т в е т: т]с=0,17... 0,33%.
15. Рассчитать скорость движения комбайна (номинальная пропускная спо-
собность молотилки комбайна <7он=5 кг/с, ширина захвата жатки В=5 м) при
уборке малозасоренной пшеницы (урожайность зерна Ла=4 т/га, влажность
Щ=Г8%) с коэффициентом соломистости (3=0,55.
Ответ: о=1,1 м/с.
16. Чему равны при условиях, указанных в упражнении 15, подачи в моло-
тилку зерна <7з и соломистой массы qc, а также фактическая <7ф и приведенная
q подачи?
Ответ: </3=12,2; ^с=2,7; <7ф=4,9; <7=4,5 кг/с.
17. Рассчитать пропускную способность qop решета (площадь 1 м2) ветро-
решетной зерноочистительной машины при сортировании семян ржи (влажность
семян 10 ... 12%, коэффициент засоренности 2,5%).
Ответ: <;<,₽=0,37 кг/с.
18. Чему равна пропускная способность qm триерного блока, включающего
четыре параллельно работающих цилиндра (диаметр цилиндра 0,6 м, длина 1,5 м)
при выделении овсюга из пшеницы?
Ответ: </от= 1,80 ... 2,04 кг/с.
19. Рассчитать массу mt продовольственного зерна ржи влажностью w =24%,
которую можно обработать за 10 ч на зерноочистительном комплексе КЗС-40Ш,
включающем сушилку СЗШ-16.
Ответ: «1 = 100 т.
20. Принимая, что равновесная влажность ®Р семян подсолнечника изменяет-
ся в зависимости от относительной влажности воздух <р0 по кривой 2 (рис. 310),
вычислить температуру, на^оторую следует подогреть воздух с <ро=95% при суш-
ке активным вентилированием для длительного хранения семян.
О т в е т: т ~ 3°.
21. Рассчитать радиус г2 по концу лопаток рабочего колеса вентилятора и
частоту вращения колеса п для досушивания сена (площадь стога 50 м2) актив-
ным вентилированием. При расчете принять напор //=350 Па, ширину вентиля-
тораВ=1 м. За аналогию выбрать вентилятор, у которого (при ц=тах) коэффи-
циент Д=12,6 (формула 323), а 5=2,6 (формула 326).
Ответ: Г2=0,4 м, номер вентилятора — 8, п=12 с-1.
22. Чему равна частота вращения лопастного колеса вентилятора № 8 (ши*
,рииа колеса 5=1 м), безразмерная характеристика которого приведена на рисун-
661
ке 293, б, при охлаждении 50 м3 насыпи початков с влажностью > 18%?
Сопротивление слоя принять 250 Па, вентилятор работает с ц=тах.
Ответ: п— 24 с-1.
23. Найти мощность двигателя Ng зерноуборочного комбайна (ширина жат-
ки В=5 м, масса комбайна 8 т), убирающего пшеницу (урожайность зерна
А3=4 т/га, коэффициент соломистости (3=0,7) с загрузкой, равной пропускной
способности (номинальная пропускная способность молотилки комбайна <7он=
=5 кг/с). Расчет выполнить по наибольшим значениям удельной мощности на
перекатывание и на рабочий ход комбайна.
Ответ: Ne=77 кВт.
К ПЯТОМУ РАЗДЕЛУ
1. Бульдозер с неповоротным отвалом, имеющим параметры: высоту отвала
/7=1200 мм и ширину захвата (длину) В=3600 мм, работает на несвязных грун-
тах, характеризующихся коэффициентом наполнения Аи=0,8 и углом естественно-
го откоса <р=30°. Определить, на какую глубину h следует заглублять нож отва-
ла (толщину стружки), для того чтобы компенсировать потери грунта в процессе
его транспортировки, если длина пути его перемещения 7=15 м.
Ответ: h«0,4 см.
2. Для условий упражнения 1 определить сопротивление копанию Rx, связан-
ное с восполнением потерь грунта в процессе его транспортировки, и работу А,
затрачиваемую на это, если удельное сопротивление копанию Дн=80 кПа.
Ответ: Дх=1150 Н, А = 17,3 кДж.
3. Скрепер на пневматических колесах весом 23 кН с ковшом, имеющим нож
шириной захвата В=2150 мм, работает с гусеничным трактором класса 30 кН
(весом 57 кН) без толкача. Определить максимальную толщину стружки бтах
в начале копания, если агрегат работает на тяжелом суглинке с удельным сопро-
тивлением копанию Ак=160 кПа, коэффициент сцепления гусениц с грунтом
ФсЦ=0,95, а коэффициент сопротивления перекатыванию колес скрепера ц=0,20.
Ответ: бшах~14 см.
4. Определить режим работы (рабочую скорость и„ и толщину стружки 7К)
траншейного цепного экскаватора, характеризующегося следующими основными
параметрами: вместимость ковша VK=23 дм3, ширина ковша Вк=500 мм, шаг
ковшей /к=950 мм, скорость движения ковшей пк=0,7 м/с. Траншея, отрываемая
экскаватором, имеет глубину 77=150 см и ширину В=50см.
Ответ: щ>«81 м/ч, /к~3 см.
5. Дождевальная установка позиционного действия снабжена дефлекторны-
ми насадками с диаметром выходного отверстия <7=5 мм, давление воды перед
насадкой /7=250 кПа. Определить среднюю интенсивность дождя pop, если с од-
ной позиции поливается круговая площадь диаметром 0=10 м, коэффициент рас-
хода ц=0,8.
Ответ: рср«Д,27 мм/мин.
6. Для условий упражнения 5 определить, будут ли образовываться лужи
при работе установки на легких почвах.
Ответ: лужи образовываться не будут.
7. Пользуясь графиком на рисунке 381, определить время 7, на которое надо
включать дождевальную установку позиционного действия, чтобы произвести по-
лив без образования луж, а также количество воды Л, вылитой за это время на
поливаемую площадь в пересчете на 1 га; средняя интенсивность дождя рср=
=0,5 мм/мин.
Отв чт: /«50 мин; h«25 мм, или 250 м3/га.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
Маркс К., Энгельс Ф. Сочинения. Изд. 2-е, т. 20, 24, 25, М.: Госполитиздат,
1961, 1964.
Ленин В. И. Поли. собр. соч. Изд. 5-е, т. 33. М.: Госполитиздат.
Материалы XXV съезда КПСС, М.: Политиздат, 1976.
Брежнев Л. И. О дальнейшем развитии сельского хозяйства СССР. Доклад
на Пленуме ЦК КПСС 3 июля 1978 г. М.: Политиздат, 1978.
Алферов С. А. Динамика зерноуборочного комбайна. М.: Машиностроение,
1973.
Босой Е. С. и др. Теория, конструкция и расчет сельскохозяйственных машин.
М.: Машиностроение, 1978.
Бузенков Г. М., М а С. А. Машины для посева сельскохозяйственных куль-
тур. М.: Машиностроение, 1976.
Василенко И. Ф. Зерновые комбайны СССР и зарубежных стран. М.: Ко-
лос, 1964.
Гельфенбейн С. П., Неволь к о Н. М. Автоматизация контроля процесса
работы посевных машин. М.: ВНИИТЭИСХ, 1975.
Гильштейн П. М. и др. Почвообрабатывающие машины и агрегаты. М.: Ма-
шиностроение, 1969.
Горячкин В. П. Собрание сочинений в трех томах. Изд. 2-е, М.: Колос, 1967.
Гуров И. Н. и др. Машины для уборки и обработки зерновых культур. М.:
Машиностроение, 1964.
Жел и говений В. А. Элементы теории почвообрабатывающих машин и ме-
ханической технологии сельскохозяйственных материалов. Тбилиси: Изда-
тельство Грузинского сельскохозяйственного института, 1960.
Карпенко А. Н. и др. Сельскохозяйственные машины. М.: Колос, 1976.
Князев А. А. Новые почвообрабатывающие орудия. Куйбышев: 1975.
Лебедев Б. М. Дождевальные машины. М.: Машиностроение, 1977.
Листопад Г. Е. и др. Сельскохозяйственные и мелиоративные машины. М.:
Колос, 1976.
Лурье А. Б., Громбчевский А. А. Расчет и конструирование сельскохозяйствен-
ных машин. Л.: Машиностроение, 1977.
Народное хозяйство СССР за 60 лет. Юбилейный статистический сборник ЦСУ
СССР. М.: Статистика, 1977.
П у с т ы г и н М. А. Теория и технологический расчет молотильных устройств.
М.: Огиз-Сельхозгиз, 1948.
Резник Н. Е. Силосоуборочные комбайны. М.: Машиностроение, 1964.
Рябов Г. А. и др. Мелиоративные и строительные машины. М.: Колос, 1976.
Сабликов М. В. Сельскохозяйственные машины. М.: Колос, 1968.
Синеоко® Г. Н., П а но в И. М. Теория и расчет почвообрабатывающих ма-
шин. М.: Машиностроение, 1977.
Справочник конструктора сельскохозяйственных машин. Т. 1, 2, 1967, т. 3, 4,
1969.
Шепов а лов В. Д. Автоматизация уборочных процессов. М.: Колос, 1978.
663
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Отражает основные понятия и определения, приведенные в тексте учебника.
Ссылки даны на те страницы, где приводятся те или иные термины и раскрыва-
ются существенные стороны их смысла. Расположение—алфавитное.
Абсолютная влажность почвы 11
Агент сушки 467
Апериодический переходной процесс
регулирования 535
База трактора 521
Безразмерная характеристика венти-
лятора 439
Вариационные кривые 419
Влагосодержание зерна 470
Влажность зерна 469
Вынос вала мотовила 296
— носка стеблеподъемника 276
Высота гребня 61
— стерни 320
Высота установки делителя 271
----подборщика 336
----режущего аппарата 320
Вязкость почвы 18
Газообразная фаза почвы 11
Гигроскопичность удобрений 160
Глубина колец 112
Градиент гидравлического потенциа-
ла 606
Грузоподъемность 519
Дальность полета струи 654
Диапазон регулирования вариатора
535
— съема влаги 496
Дисперсность распыла 234
Допускаемое значение коэффициента
схода 395
-------подачи на один штифт 394
Жидкая фаза почвы 10
Загрузка молотилки 532
‘Задатчик подачи 532
Задний (затылочный) угол 87, 583
Защитная зона 123
Зона нечувствительности регулятора
загрузки молотилки 536
Зона очеса 355
Интенсивность дождя 607, 650
Качественная характеристика венти-
лятора 439
Колебательный переходный процесс
535
Контуры увлажнения 606
Корреляцирнные таблицы 421
Коэффициент буксования 109
— вариаций урожайности 533
— взаимодействия стеблей 296
— влагопоглотительной способности
воздуха 491
— внедряемости порошка 425
— восстановления семян 159
— впитывания 606
— дробления зерна 388
— засоренности зерна 388
— - интенсивности сепарации 407
— использования времени смены 656
— концентрации воздушной среды 441
— магнитной проницаемости порошка
453
— недомолота 387
—объемного смятия почвы 14
— парусности 423
— перекатывания 112
— полезного действия 153
— пористости слоя 493
— потерь зерна 381
— прореживания 98
— расхода 246
—• сепарации 388
V — скольжения 107, 167
— соломистости 380
664
Коэффициент сопротивления воздуха
422
— сопротивления протаскиванию 137
— схода зерна 393
точности сортирования 432
-V’-трения почвы 16
— фильтрации 606
— циркуляции 238
— эжекции 237
— эффективности црлива 651
Критическая скорость (скорость вита-
ния) 423
Критический радиус отверстия 162
Критический угол поперечного накло-
на агрегата 544
Кураю 376
^Липкость почвы 17
— удобрений 161
. «Мертвая зона» 355
Мощность струи 656
Невязи узла 362
V Оптимальный угол раствора культи-
ваторной лапы 79
Оросительная норма 607
V Острота лезвий 206
Отгиб растений делителями 270
---режущим аппаратом 320
V Относительная влажность газовой
среды 471
'---почвы 11
Относительная растянутость ленты
льна 271
V Передний угол 87
’ V Пластичность почвы 18
V Плотность почвы 8
^Площади нагрузки 325
' •— подачи 325
Подача зерна 380
. —колосьев 391
— на ковш 602
— на нож 96
— ножа 312
Л. —приведенная 381
— растительной массы 340
. <, — соломы 380
— фактическая 381
"^Подпорные режущие аппараты 303
^Показатель кинематического режима
* дискового ножа 90
------мотовила Й92
---— прореживателя 99
------рассадодержателя 184
---— режущего аппарата 324
------решета 428
•-----соломотряса 404
------теребильных аппаратов 278
------триера 449
-------фрезы 95
— полноты разделения зерна 431
— сопротивления сети 439
Поливная норма 607
Поперечный отуиб стеблей 320
Постоянная времени вариатора 535
Предел прочности почвы 12
— сопротивления почвы 15
Предельная скорость движения части-
цы 430
— температура нагрева зерна 472
---теплоносителя 494
Предельный угол склона 545
Призма волочения 583, 589
Присасывающая сила 171
Продольный отгиб стеблей 321
Пропускная способность вальцов (пи-
тающих, плющильных) 372
-------картофелесортировки 463
-------машины 517
-------очистки 460
— — — пресса 350
-------сушилок 495
Прочность семян 159
Рабочая длина вальцов 372
— — штифта (зуба) 393
Рабочий объем катушки 167
Равновесная влажность зерна 470
Радиус кривизны диска 86
Размерная характеристика вентиля-
тора 438
Режущая пара 303
Рассеваемость удобрений 160
Скважность почвы 8
Скорость потока 385
—резания стеблей 317
Скрытая теплота парообразования 493
Следы штифтов (зубьев) 394
Слеживаемость удобрений 160
Смещение оси кривошипа (дезаксиал)
308
Смещенные растения 281
Соломистость растительной массы 380
Сопротивление копанию 583
Спелость почвы 11
Степень задернения пласта 20
— неравномерности сопротивления
плуга 139
Сыпучесть удобрений 160
Твердость почвы 14
Твердая фаза почвы 8
Теплоноситель 467
Теребильный ручей 277
Толщина активного слоя 166
— стружки 97
665
Угол атаки 87
V — заточки (заострения) 87, 583
— зарезания 583, 592
— захвата 592
V — защемления 103
— крошения 24
— наклона пальцев мотовила 299
— заточки 206
— разворота стеблей 340
— - резания 87, 583
, Удельная масса .почвы 10
V — мощность 228
V — работа резания 77
Удельный расход зерна 162
Удельное сопротивление копанию 586,
591
V плуга 138
---посевных и посадочных машин
227
У-----почвы 81, 138
V Упругость почвы 18
— семян 159
Урожайность зерна 380
— растительной массы 340
— соломистой части растений 532
Условие отрыва плодов 371
— захвата растений 371
— защемления стеблей 317
Установочная высота среза растений
320
Усушка зерна 489
Физическая глина 9
Физический песок 9
Ход ножа 313
V Хрупкость почвы 19
Частота вращения барабана 395
— возмущающего воздействия 404
— колебаний ножа 313
— посадки 183
— ходов поршня 350
I/ — вращения шнека 345
--шпинделя 375
Число бичей 393
— воздухообменов 493
— заходов 394
— прочесов 356
— ударов бичами 386
— • — планкой мотовила 294
Чистота съема хлопка 373
Шаг бичей 386
— винтовой линии 394
— мотовила 294
— насечки 206
— посадки 183
— противорежущей части 304
— режущей части 304
— рядка 224
Ширина валка 330
Экспозиция сушки 494
Энтальпия воздуха (теплоносителя]
ОГЛАВЛЕНИЕ
Введение............................................................
раздел первый
МАШИНЫ И ОРУДИЯ ДЛЯ ОБРАБОТКИ ПОЧВЫ
Глава I. Строение, фазовый состав и технологические свойства почвы
§ 1. Строение и фазовый состав......................................
§ 2. Технологические свойства почвы.................................
Глава II. Технологические основы механической обработки почвы .
§ 1. Технологические операции и процессы . .............
§ 2. Взаимодействие клина с почвой.................................
§ 3. Развитие поверхности плоского клина в криволинейную поверхность
Глава III. Лемешно-отвальные корпуса................................
§ 1. Виды вспашки..................................................
§ 2. Разновидности корпусов, основные конструктивные элементы
§ 3. Общие принципы построения рабочих поверхностей................
§ 4. Технологические свойства и классификация применяемых рабочих по-
верхностей .........................................................
§ 5. Особенности скоростных рабочих поверхностей...................
§ 6. Теоретические основы технологического процесса вспашки
§ 7. Действующие силы..............................................
§ 8. Качество работы...............................................
Глава-IV. Зубья, лапы, ножи и подрезающие лемехи....................
§ 1. Назначение и разновидности....................................
§ 2. Зона деформирования почвы зубьями и рыхлительными лапами
§ 3. Основы технологического процесса резания лезвием...............
§ 4. Воздействие полольной лапы на корни сорняков..................
§ 5. Силовая характеристика........................................
§ 6. Установка рабочих органов, режим и качество их работы
Глава V. ‘Дисковые рабочие органы...........................
§ 1. Разновидности и назначение.....................................
§ 2. Основные геометрические параметры.............................
§ 3. Установочные параметры и их влияние на качество обработки почвы
§ 4. Силовые характеристики........................................
Глава VI. Ротационные рабочие органы активного действия . . . .
§ 1. Разновидности, назначение, основные параметры.................
§ 2. Траектория движения . ....................................
§ 3. Основные показатели работы....................................
§ 4. Настройка.....................................................
§ 5. Действующие силы, энергоемкость ._............................
Глава VII. Уплотняющие и опорные органы машин.......................
§ 1. Назначение и разновидности..................... ... .
§ 2. Обоснование основных параметров...............................
§ 3. Режимы качения................................................
§ 4. Сопротивление качению.........................................
3
7
7
12
20
21
22
31
33
34
35
40
42
45
49
53
60
65
65
70
72
78
80
81
84
84
86
87
90
91
91
94
96 М
97
99
101
101
103
104
109
667
Глава VIII Элементы конструкций и схемы почвообрабатывающих машин
и орудий .........................................................
§ 1. Классификация ...............................................
§ 2. Способы крепления рабочих органов к раме.....................
§ 3. Размещение рабочих органов к колес на раме...................
§ 4. Подъемно-установочные механизмы..............................
§ '5. Предохранительные механизмы и устройства....................
Глава IX. Силы, действующие на почвообрабатывающие машины и орудия,
и условия их равновесия ..........................................
§ 1. Тяговое сопротивление ..................................
§ 2. Условия равновесия...................................... ...
§ 3. Автоматическое управление.......................... . . .
§ 4. Коэффициент полезного действия...............................
РАЗДЕЛ ВТОРОЙ
ПОСЕВНЫЕ, ПОСАДОЧНЫЕ МАШИНЫ И МАШИНЫ ДЛЯ
ВНЕСЕНИЯ УДОБРЕНИИ
Глава I. Общие сведения..........................................
§ 1. Способы посева, посадки и внесения удобрений................
§ 2. Технологические свойства семян и удобрений..................
§ 3. Общая схема рабочего процесса...............................
Глава II. Питающие емкости и дозирующие устройства...............
§ 1. Питающие емкости............................................
§ 2. Высевающие аппараты сеялок..................................
§ 3. Аппараты для дозирования удобрений..........................
§ 4. Высаживающие аппараты.......................................
Глава III. Устройства для размещения семян и удобрений по полю
§ 1. Семяпроводы и тукопроводы....................... . . .
§ 2. Гнездообразующие устройства................................
§ 3. Сошники.....................................................
§ 4. Устройства для заделки семян, клубней, рассады..............
§ 5. Разбрасывающие устройства...................................
Глава IV. Рабочие процессы, конструктивные с?емы и оценка работы
машин . .........................................
§ 1. Классификация....................................
§ 2. Универсальные сеялки............................... .
§ 3. Специальные сеялки .........................................
§ 4. Посадочные машины...........................................
§ 5. Машины для внесения минеральных удобрений.....................
§ 6. Машины для внесения органических удобрений..................
§ 7. Автоматизация процессов.....................................
§ 8. Оценка качества работы и тяговое сопротивление..............
113
ИЗ
118
120
130
132
136
137
141
150
153
155
155
158
161
162
162
164
172
177
185
185
187
188
194
195
200
200
201
205
209
211
215
218
223 .
РАЗДЕЛ ТРЕТИЙ
МАШИНЫ ДЛЯ ХИМИЧЕСКОЙ ЗАЩИТЫ РАСТЕНИИ
Глава I. Общие сведения..........................................229
§ 1. Методы защиты растений.................................. . 229
§ 2. Ядохимикаты и способы их применения.........................230
§ 3. Влияние размера частиц ядохимиката на эффективность обработки 234
§ 4. Общая схема рабочего процесса...............................236
Глава II. Основные конструктивные элементы.......................236
§ 1. Емкости, мешалки, эжекторы................................. 236
§ 2. Насосы и питатели...........................................238
§ 3. Рабочие органы распыливающих устройств.................. . 242
§ 4. Распиливающие устройства....................................249
Глава III. Конструктивные схемы и рабочие процессы машин .... 257
§ 1. Протравливатели............................................ 257
4,2. Опрыскиватели ..........................................., . 259
§ 3. Аэрозольные генераторы.....................................260
668
§ 4. Опыливатели..................................................
§ 5. Фумигаторы .................................................
§ 6. Требования к качеству работы.................................
§ 7. Вопросы автоматизации .......................................
262
26»
265
266»
РАЗДЕЛ ЧЕТВЕРТЫЙ
УБОРОЧНЫЕ МАШИНЫ
Глава I. Делители и стеблеподъемники.................................268*
§ 1. Назначение и типы делителей......................................268
§ 2. Отгиб растений делителями...................................... 270*
§ 3. Установка и режим работы делителей ............................271
§ 4. Назначение и типы стебле- и ботвоподъемников.....................27»
§ 5. Установка стебле- и ботвоподъемников.............................27&
Глава II. Теребильные аппараты........................................277
§ 1. Назначение и типы теребильных аппаратов ....... 277
§ 2. Рабочий процесс ленточно-роликовых аппаратов.....................278
§ 3. Теребление растений ленточно-дисковым аппаратом..................282
§ 4. Режим работы и установка ленточно-роликовых и дисковых теребиль-
ных аппаратов.........................................................^84
§ 5. Назначение и рабочий процесс цепочно-лапчатого теребильного аппа-
рата ................................................................285-
§ 6. Установка и режим работы цепочно-лапчатого аппарата . . . 287
Глава III. Мотовила и подводящие устройства........................282
§ 1. Назначение и типы мотовил.......................................282
§ 2. Кинематика мотовила...............................> ... 291
§ 3. Коэффициент полезного действия мотовила с ножом .... 294
§ 4. Установка и режим работы мотовила................................297
§ 5. Подвод стеблей цепями......................................... 800-
Глава IV. Режущие аппараты............................................802
§ 1. Конструктивные и регулировочные параметры.......................802
§ 2. Механизмы привода ножа........................................ 308>
§ 3. Кинематика ножа..................................................311
§ 4. Взаимодействие режущей пары с растением..................... . 315
§ 5. Отгиб стеблей и высота стерни....................................312
§ 6. Кинематический режим работы ротационно-дискового аппарата . . . 324
§ 7. Площади подачи и площади нагрузки...............................325
§ 8. Силы, действующие на нож.........................................327
Глава V. Рабочие органы для сгребания, ворошения и подбора растений 332
§ 1. Типы граблей ’...................................................332
§ 2. Технологические параметры сгребания травы колесно-пальцевыми
граблями..............................................................332
; .§ 3. Подбор растений . 334
Глава VI. Транспортирующие устройства уборочных машин .... 338
§ 1. Назначение и типы...............................................338
§ 2. Параметры валка...............................................342
. § 3. Скорость транспортирования массы............................. 343
§ 4. Параметры шнеков...............................................344
Глава VII. Рабочие органы для прессования, гранулирования и брикети-
рования ..............................................................347
§ 1. Общие сведения...................................................347
§ 2. Типы прессов.....................................................348
§ 3. Рабочий процесс поршневого пресса ............................. 352
§ 4. Регулирование плотности прессования.............................352
§ 5. Мощность при уплотнении растительной массы.......................353
Глава VIII. Очесывающие устройства льноуборочных машин .... 354
§ 1. Назначение и типы очесывающих устройств..........................354
§ 2. Технологические показатели работы очесывающих устройств 355
§ 3. Режим очеса однобарабанным аппаратом............................357
Глава IX. Вязальные аппараты..........................................352
§ 1. Процесс образования снопа........................................352
662
§ 2. Рабочий процесс аппарата шпагатной вязки.......................
§ 3. Формирование спрессованной массы в тюки........................
§ 4. Рабочий процесс аппарата проволочной вязки.....................
§ 5. Циклограмма работы вязального аппарата.........................
Глава X. Рабочие органы для отрыва и плющения........................
§ 1. Типы и назначение отрывочных и плющильных устройств
§ 2. Условие захвата стеблей гладкими вальцами......................
§ 3. Скорость вращения вальцов......................................
Глава XI. Устройства для съема хлопка................................
§ 1. Рабочий процесс вертикально-шпиндельного аппарата ....
§ 2. Захват и наматывание хлопка шпинделем ......
•§ 3. Съем хлопка со шпинделя.................................
§ 4. Рабочий процесс устройств для сбора и обработки курака
Глава XII. Молотильные устройства . ........................
•§ 1. Параметры растительной массы, определяющие вымолот зерна
•§ 2. Подача убираемой культуры......................................
§ 3. Типы молотильных устройств.....................................
§ 4. Рабочий процесс бильного молотильного устройства...............
§ 5. Технологические показатели работы молотильных устройств
§ 6. Зависимость коэффициентов недомолота 6, сепарации s и дробления d
зерна от конструктивных параметров бильных молотильных устройств
§ 7. Параметры и загрузка растительной массой штифтовых молотильных
устройств ...........................................................
§ 8. Выбор регулировочных параметров м режим работы молотильных
устройств ... ............................................
§ 9. Силовые и энергетические параметры работы молотильных устройств
Г лава XIII Соломотрясы..............................................
•§ 1. Назначение и типы соломотрясов..........................
§ 2. Кинематический режим работы соломотряса.....................
§ 3. Сепарация зерна клавишным двухвальным соломотрясом
Глава XIV. Рабочие органы и технологические процессы устройств для
очистки и сортирования сельскохозяйственных культур..................
§ 1. Сущность очистки и сортирования................................
§ 2. Способы очистки и сортирования.............................
§ 3. Физико-механические свойства сельскохозяйственных материалов,
влияющие на их разделение...........................................
§ 4. Плоские разделяющие поверхности............................
§ 5. Воздушные системы.............................................
§ 6. Цилиндрические триеры..........................................
§ 7. Рабочие процессы и режимы работы машин, разделяющих материалы
по свойствам поверхности и плотности.............................
§ 8. Рабочие процессы устройств для очистки и сортирования сельскохо-
зяйственных материалов .............................................
Глава XV. Консервирование и сушка растительных материалов
§ 1. Значение консервирования и сушки...........................
§ 2. Способы консервирования.......................................
§ 3. Способы сушки.................................................
§ 4. Свойства зерна и растений как объектов сушки..................
§ 5. Устройства для обработки материала кислотами..................
§ 6. Разновидности и принцип работы сушилок и установок активного
вентилирования .....................................................
§ 7. Конструктивные элементы сушилок конвективного действия
§ 8. Устройства для контроля параметров сушки......................
§ 9. Определение основных показателей конвективной сушки
§ 10. Массовый расход воздуха и теплоты на активное вентилирование
§ 11. Режим работы и производительность сушилок и установок активного
вентилирования ............................................... . .
§ 12. Контроль и регулирование режимов сушки и вентилирования
Глава XVI. Схемы и элементы конструкций уборочных машин
§ 1. Типы машин и схемы их рабочих процессов.......................
360
363
364
366
367
367
370
372
372
372
374
375
376
378
378
380
381
384
387
389
393
394
398
402
402
404
407
409
409
409
418
426
452
455
465
465
465
466
469
473
474
479
485
488
491
494
497
498
498
670
§ 2. Технологические и рабочие процессы комбайнов......................500
§ 3. Регулирование положения рабочих органов в вертикальной плоскости 510
§ 4. Параметры машин...................................................516
§ 5. Энергетический баланс уборочного агрегата.........................526
§ 6. Управление, регулирование и контроль качества работы . . . 529
§ 7. Устойчивость и регулирование положения машины на склонах 541
§ 8. Механизмы направления движения уборочной машины .... 548
Глава XVII. Производственные процессы машинного сбора урожая 551
§ 1. Общие сведения....................................................551
§ 2. Способы уборки трав и кормовых культур............................552
§ 3. Процессы уборки зерновых культур..................................553
§ 4. Процессы уборки прядильных культур................................556
§ 5. Машинные способы уборки корнеклубнеплодов и овощей . . . 560
Глава XVIII. Комплексы для послеуборочной обработки урожая . . . 561
§ 1. Технологические линии переработки и приготовления кормов . 561
§ 2. Комплексы послеуборочной обработки зерна и початков . . 564
§ 3. Технологические линии обработки картофеля, корнеплодов и плодов 566
РАЗДЕЛ ПЯТЫЙ
МЕЛИОРАТИВНЫЕ МАШИНЫ
Глава I. Машины для культуртехнических работ...........................569
§ 1. Общие сведения....................................................569
§ 2. Машины для подготовки земель к освоению...........................569
§ 3. Машины и орудия для первичной обработки почвы.....................577
Глава 11. Землеройные машины общего назначения.........................581
§ 1. Общие сведения....................................................581
§ 2. Взаимодействие рабочих органов с грунтом..........................582
§ 3. Землеройно-транспортные машины ... 587
§ 4. Экскаваторы.......................................................594
Глава III. Машины для устройства и содержания мелиоративной сети 603
§ 4. Общие сведения................................................... 603
§ 2. Машины для устройства каналов.....................................609
§ 3. Машины для подготовки полей к поливу .... ... 615
§ 4. Машины для устройства закрытого дренажа...........................618
§ 5. Машины для ремонта и содержания мелиоративных систем . . . 622
Глава IV. Машины для полива............................................628
§ 1. Общие сведения....................................................628
§ 2. Рабочие органы дождевальных машин и установок....................629
§ 3. Основные элементы дождевальных систем......................... . 634
§ 4. Перспективные системы дождевания..................................646
§ 5. Основные показатели работы........................................650
Упражнения.............................................................657
Указатель литературы ............... 663
Предметный указатель...................................................664
НИКОЛАИ ИВАНОВИЧ КЛЕНИН,
ВЯЧЕСЛАВ АЛЕКСАНДРОВИЧ САКУН
СЕЛЬСКОХОЗЯЙСТВЕННЫЕ
И МЕЛИОРАТИВНЫЕ МАШИНЫ
ЭЛЕМЕНТЫ ТЕОРИИ РАБОЧИХ ПРОЦЕССОВ,
РАСЧЕТ РЕГУЛИРОВОЧНЫХ ПАРАМЕТРОВ
И РЕЖИМОВ РАБОТЫ
Редактор Л. И. Чичёва
Художественный редактор 3. П. Зубрилина
Технический редактор Н. А. Никонова
Корректор А. М. Ушакова
ИБ № 1515
Сдано в набор 25.04.80. Подписано к печати
04.10.80. Т-17429. Формат 60Х907|в. Бумага тнп.
№ 2. Гарнитура литературная. Печать высокая.
Усл. печ. л. 42. Уч.-изд. л. 46,48. Изд. № 344.
Тираж 40 000 экз. Заказ № 424. Цена И р. 90 к.
Ордена Трудового Красного Знамени издательство
«Колос», 107807, ГСП, Москва, Б-53,
ул. Садовая-Спасская, 18.
Московская типография № 11 Союзполиграфпрома
при Государственном комитете СССР по делам
издательств, полиграфии и книжной торговли.
Москва, 113105, Нагатинская ул., д. 1.
/ — сбор» соломы и роловы комбайнами
в копны с последующим скирдованием
на поле А или с вывел кой скирды
скирдовозом В; 1! — измельчение соло-
1Г.Т|Л vnnj/io мы к°мбайном и сбор незерновой части
ЧСЛ И УРОЖАЯ: урожаи в прицепные тележки;
[if - сбор соломы и половы к «алчи с
последующим копнением .4, спмопбра
зованнем И или прессованием и О
Л'— сбор соломы а валки с н<х дую-
щим прессованием С и по юны а
прицепные тележки: V —и «мельншие и
разбрасывание соломы со сборов н<л"ч-
ч<,1 в прицепные тележки; Vr «»мс.»*-
чение соломы и разбрасывай .- •< ,».»»
роя части урожая ио гоню «чк*'
и не см. текст).*