/



































































































































Текст
WacfjbGLHWbbe главъс
ВЫСШЕЙ МАТЕМАТИКИ
для инЖенеусов тс студентов втузов
И. А. ГОЛЬДФАЙН
ВЕКТОРНЫЙ АНАЛИЗ
ТЕОРИЯ ПОЛЯ
е
ИЗБРАННЫЕ ГЛАВЫ ВЫСШЕЙ МАТЕМАТИКИ
ДЛЯ ИНЖЕНЕРОВ И СТУДЕНТОВ ВТУЗОВ
И. А. ГОЛЬДФАЙН
ВЕКТОРНЫЙ АНАЛИЗ
И ТЕОРИЯ, ПОЛЯ
ИЗДАНИЕ ВТОРОЕ
Под редакцией Р. С. Г У ТЕР А
Допущено Министерством
высшего и среднего специального образования СССР
в качестве учебного пособия
для высших технических учебных заведений
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1968
-5Г7ГГ
Г63
УДК 512. 942
Векторный анализ и теория поля. Гольдфайн И. А.,
изд-во «Наука», Главная редакция физико-математи-
ческой литературы, М., 1968.
Книга предназначена для студентов втузов, а также для инже-
неров, которые хотят освежить свои знания в области векторного
исчисления и теории поля, имеющие большое прикладное значение
в разделе высшей математики.
Почти всем понятиям поля предшествуют физические предпо-
сылки, их породившие. Доказательства теорем излагаются в геоме-
трической форме, а отдельные места даются в их физической
интерпретации. Книга снабжена рядом Примеров, взятых из области
физики, что делает изложение более наглядным и доходчивым.
Кроме того, изложение ведется так, что ^ает возможность
исключить дополнительные главы или отдельные параграфы но
векторному исчислению и теории поля, которыми снабжены совре-
менные учебйики по специальным предметам, использующие эти
разделы математики.
Материал вполне согласуется с программой по предлагаемым
разделам курса «Высшая математика» Министерства высшего и спе-
циального среднего образования.
Гольдфайн Иуда Абелевич
ВЕКТОРНЫЙ АНАЛИЗ И ТЕОРИЯ ПОЛЯ
М., 1968 г. 128 стр. с илл.
Редактор М. М. Горячая
Техн, редактор С. Я. Шкляр -Корректор Н. Д. Дорохова
Сдано в набор 7/II 1968 г. Подписано к печати 17/VI 1968 г. Бумага 84 X ЮЗ^за-
Физ. печ. л. 4. У слови, печ. л. 6,72. Уч.-изд. л. 6,18. Тираж 50 000 экз. Т-08392.
Цена книги 22 коп. Заказ № 1499.
Издательство «Наука».
Главная редакция физико-математической литературы.
Москва, В-71, Ленинский проспект, 15.
Ордена Трудового Красного Знамени Ленинградская типография № 1
«Печатный Двор» ймеци А. М. Горького Главполиграфпрома Комитета по печати
при Совете Министров СССР, г. Ленинград, Гатчинская ул., 26.
2-2-3
17-68
ОГЛАВЛЕНИЕ
ГЛАВА I
Переменные векторы
§ 1. Переменные векторы, зависящие от скалярного аргумента. 5
§ 2. Производная вектора по скалярному аргументу и ее меха-
нический смысл....................................... 8
§ 3. Правила дифференцирования векторов. Производная еди-
ничного вектора ...................................... 12
§ 4. Разложение производной от вектора по двум направле-
ниям: направлению самого вектора и направлению, ему
перпендикулярному..................................... 15
§ 5. Дифференциал, неопределенный и определенный инте-
гралы от векторной функции скалярного аргумента .... 16
§ 6. Площадь как вектор.................................................. 21
§ 7. Приложения к дифференциальной геометрии ............................ 24
§ 8. Разложение вектора ускорения на касательную и нормаль-
ную составляющие...................................... 34
глава и
Теория поля
§ 1. Вводные замечания. Скалярное и векторное поле ..... 36
§ 2. Поверхности уровня и градиент скалярного поля. 38
§ 3. Свойства градиента. Задачи........................ 46
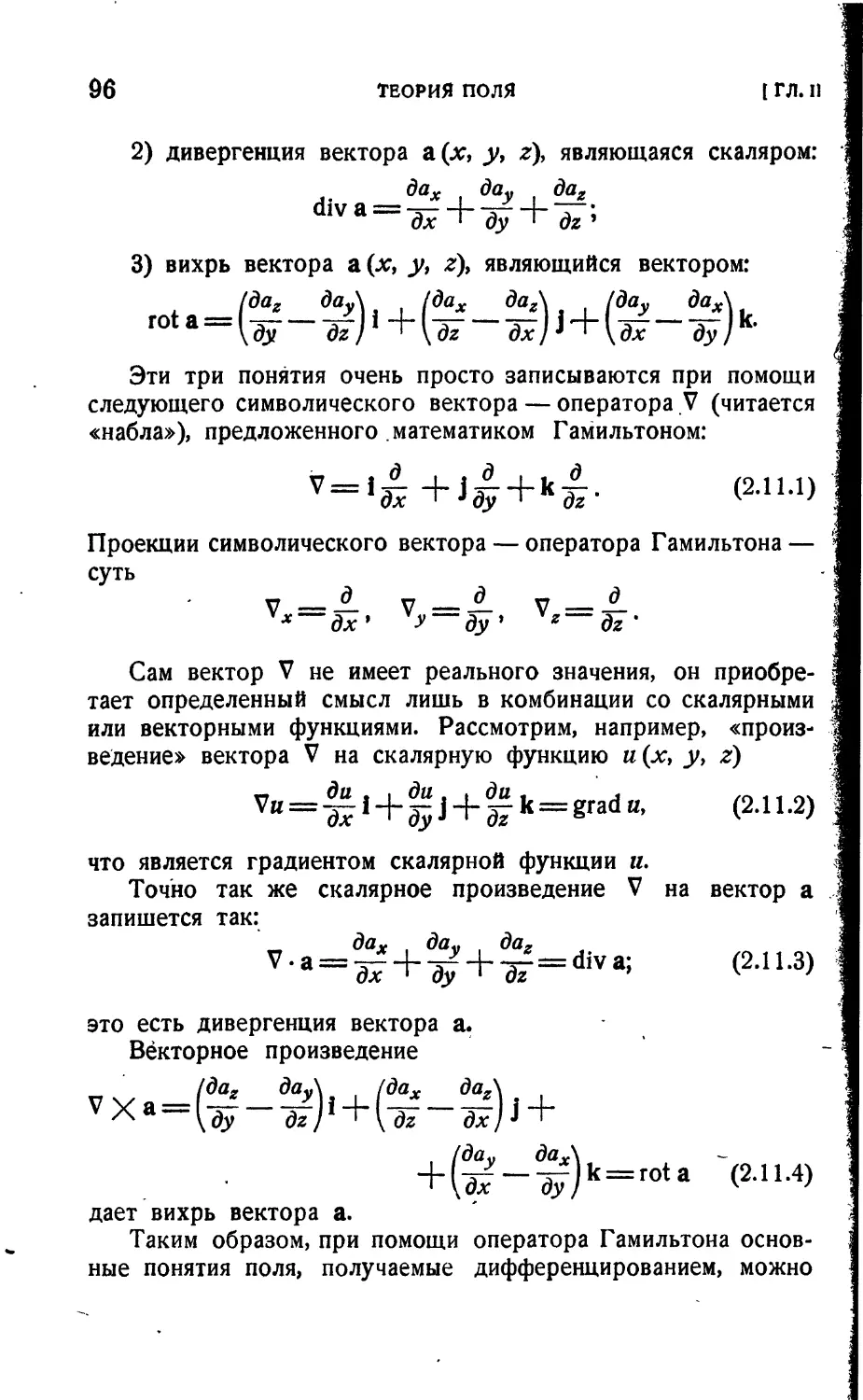
§ 5. Дивергенция векторного поля. Ее. выражение в коорди-
натной форме.............................................. 57
§ 6. Теорема Гаусса — Остроградского. Векторные трубки.
Задачи.................................................... 64
§ 7. Линейный интеграл и циркуляция вектора. 74
§ 8. Вихрь векторного поля.............. 79
§ 9. Выражение вихря поля через проекции вектора поля; свой-
ства вихря. Задачи....................................... 85
1*
F
4 ' ОГЛАВЛЕНИЕ
§ 10. Теорема Стокса.................................. 91
§11. Оператор Гамильтона. Дифференциальные операции вто-
рого порядка. Оператор дифференцирования по направ-
лению .................................................. 95
§ 12. Потенциальное векторное поле. Уравнения Лапласа и
Пуассона................................................104
§ 13. Градиент, дивергенция, лапласиан и вихрь в криволиней-
ных координатах. Сферические и цилиндрические коорди-
наты. Центральные и осевые скалярные поля...............110
§ 14. Уравнения Максвелла..............................121
ГЛАВА I
ПЕРЕМЕННЫЕ ВЕКТОРЫ
§ 1. Переменные векторы, зависящие
от скалярного аргумента
В курсе математического анализа изучается понятие
функции — переменная величина х называется однозначной
функцией переменной величины t, если каждому допусти-
мому численному значению t соответствует определенное
численное значение х. В этом определении фигурируют только
численные значения величин t и х, т. е. I и х являются
скалярными величинами или скалярами, так что речь
идет о скалярной функции скалярного аргумента. Ана-
логично этому можно дать определение векторной функции
скалярного аргумента, которая будет изучаться в первой
главе.
Предположим, что каждому допустимому численному
значению скалярной переменной величины t соответ-
ствует определенный вектор а, т. е. определенное числен-
ное значение его модуля и определенное направление в про-
странстве. Тогда говорят, что вектор а есть векторная
функция скалярного аргумента t; это записывают так:
а = а (О-
При изменении t вектор a (f) изменяется, вообще говоря, как
по модулю, так и по направлению.
Проекции ах, ау и az вектора а на оси прямоугольной
системы координат в пространстве в свою очередь прини-
мают определенные численные значения для каждого допусти-
мого численного значения t и потому являются скалярными
функциями скалярного аргумента t. Их обозначают через
ux(t), ay(t) и az(t). Согласно формуле разложения вектора
6
ПЕРЕМЕННЫЕ ВЕКТОРЫ
|ГЛ. I
по ортам прямоугольной системы координат, вектор а (О
может быть представлен так (рис. 1):
а (0 = ах (0 i Н- (0 j + МО к- G-1-0
Таким образом, задание векторной функции скалярного
аргумента равносильно заданию трех скалярных функций
этого аргумента.
Изменение векторной функции а (0 графически можно
изобразить так. Векторы а(0, соответствующие разным зна-
чениям t, откладывают от общего начала О.
/При изменении t конец вектора а(0 опишет
некоторую кривую, называемую годографом
векторной функции а (0 (рис. 2). Точка Сбудет
полюсом годографа.
Вектор, изменяющийся только по модулю
(с постоянным направлением), имеет своим
годографом луч (полупрямую), выходящий из
полюса (рис. 3). Вектор, изменяющийся только
по направлению, модуль которого постоянен,
Рис. 3. имеет своим годографом кривую, лежащую на
сфере с центром в полюсе (рис. 4).
Кривую в пространстве обычно задают в параметрической
форме:
x = x(0, y=y(t), z = z(t). (1.1.2)
Следовательно, уравнение кривой в проекциях можно запи-
сать так:
r = xi-f-yj4-zk, (1.1.3)
§ П
ВЕКТОРЫ, ЗАВИСЯЩИЕ ОТ СКАЛЯРНОГО АРГУМЕНТА
7
где х, у и z определяют уравнениями (1.1.2), а г — радиус
вектор точки, перемещающейся по кривой PQ (риС. 5).
Приведем некоторые примеры. Как известно, винтовой
линией называется кривая, которую описывает точка,
участвующая в двух движениях: равно-
мерном вращении вокруг оси и равно-
мерном прямолинейном движении вдоль
этой оси. Если ось вращения принять
за ось Oz прямолинейной системы ко-
ординат и считать, что угловая ско-
рость вращения равна 1, то параметри-
ческие уравнения винтовой линии будут
иметь вид
х — a cos f, у = a sin t, z = ct,
где a — расстояние движущейся точ-
ки М от оси вращения (в. данном
случае от оси Oz), с — скорость пере-
мещения вдоль оси вращения, t — вре-
мя, а также угол поворота точки М
(рис. 6). Следовательно, в проекциях
уравнение винтовой
линии напишется так:
г = a cos ti a sin t j ctk.
Уравнения эллипса и циклоиды, лежащих в координатной
8
ПЕРЕМЕННЫЕ ВЕКТОРЫ
[ГЛ. I
плоскости хОу, в проекциях имеют вид
г — a cos Й + b sin tj и г = a (t — sin f) i —а (1 — cos f) j.
Точка Mi(x, у, 0) (рис. 5) лежит в плоскости хОу
и является проекцией точки М (х, у, z) на эту плоскость;
при изменении аргумента t радиус-вектор точки
pg = xi+yj
опишет линию PiQi, являющуюся проекцией кривой PQ на
плоскость хОу (значок гур указывает, что речь идет о
проекции на плоскость, перпендикулярную оси Ог). Значит,
отбрасывая последнюю составляющую в уравнении кривой
(1.1.3), мы получаем уравнение проекции этой кривой на
плоскость хОу.
Аналогично, рх = уj -|- zk и ру = х\-\- zk будут уравне-
ниями проекций той же кривой PQ на плоскости yOz и xOz.
Например, отбрасывая в уравнении винтовой линии составляю-
щую по оси Ог, мы получим уравнение ее проекции на пло-
скость хОу, а именно уравнение окружности p(? = acos/i4-
~|-asinfj (см. рис. 6).
§ 2. Производная вектора по скалярному аргументу
и ее механический смысл
Рассмотрим векторную функцию a (f) скалярного аргу-
мента t (рис. 7) и выберем произвольное, но вполне опреде-
ленное значение t этого аргумента. Вектор, соответствующий
выбранному значению t, есть
ОМ = a (t) = ах (01 + ау (t) j + аг (t) k.
Давая аргументу приращение Af, мы получим другой век-
тор ON:
ON=»a(f + Af) = ax (t + Af) (f-|- M) k.
Вектор ON получается из вектора ОМ путем прибавления
к последнему вектора MN. Поэтому вектор MN естественно
назвать приращением вектора а(0 и ввести обозначение
Аа (t) = MN.
Мы имеем MN=0N—ОМ или
Aa(0 = a(f + A/)~a(0.
§ 2] ПРОИЗВОДНАЯ ВЕКТОРА ПО СКАЛЯРНОМУ АРГУМЕНТУ
Вектор Да (t) представляет собой разность векторов a (t -(- kt)
и а (0- ‘Как известно, проекция разности двух векторов на
ось равна разности проекций этих векторов на ту же ось.
Поэтому
Да (0 = Даж (0 i + Дау (0 j + Даг (0 к,
где
Да* (0 = ах (t Д0 — ах (0,
Да, (0 = ау (t -j- Д0 — ау (0,
ДаД0 = аг(^ + Д/)-аг(0.
• Кроме того,
| Да (01 = /Дах(0’ + Да,(0’ + Даг(04. (1.2.1)
По аналогии со скалярными функциями векторную функ-
цию а (0 называют непрерывной при данном значении аргу-
мента Л если модуль ее приращения стремится к нулю
вместе с М:
lim | Да (01 = 0.
Д/->0
Формула (1,2.1) показывает, что для не-
прерывности векторной функции необхо-
димо и достаточно, чтобы все три ее
проекции на оси координат были не-
прерывны. Следовательно, чтобы найти
предел векторной функции при Д£—>0, до-
статочно найти пределы трех ее проекций
на оси координат:
lim а(^ + Д0 = 1 Mm «Л.(^4~Д0 +
д/->о дг—о
-pj lim av (t -]- ДО -(- k lim
д/-+о д/-*о
(1.2.2)
v Для двух векторов а и b имеет
|а — b|11 а| — |b11. Следовательно,
|Да(01^||а(^+Д0|-|а
Отсюда можно заключить, что непрерывность векторной
функции влечет за собой непрерывность ее модуля. Обрат-
ное предположение является неверным: модуль векторной
функции может быть непрерывным, а сама векторная функ-
ция может претерпевать разрывы; примером может служить
10
ПЕРЕМЕННЫЕ ВЕКТОРЫ
[ГЛ. I
любая разрывная векторная функция с постоянным модулем
(постоянная величина непрерывна).
Отметим еще, что годографом непрерывной векторной
функции скалярного аргумента является непрерывная кривая.
Легко показать, что сумма, разность, скалярное и век-
торное произведения двух непрерывных вектЬрных функций,
а также произведение непрерывной векторной функции на
непрерывную скалярную являются непрерывными функциями.
Составим для непрерывной векторной функции а С) отно-
шение А и перейдем к пределу при Ы -> 0. Этот предел,
если только он существует, называется производной вектор-
ной функцией или производным вектором от вектора а (/)
и обозначается через а' (/) или .
_ da(t)
Ясно, что эта производная —есть векторная функ-
ция того же скалярного аргумента t.
Определим направление векторной производной. Предпо-
ложим, что скалярная величина -^-^>0. Тогда при умноже-
нии на направление вектора Да (/) не изменится и вектор
как и вектоР Да(0» будет направлен по секущей MN
годографа в сторону возрастания аргумента. Если, наоборот,
Д*<0, то вектор Да(^) направлен в сторону убывания
но при делении на отрицательной скаляр направление вектора
Да (О
меняется на противоположное, и, следовательно, вектор
по-прежнему лежит на секущей и направлен в сторону воз-
растания /. Когда Д^ —> 0, секущая в пределе превращается
в касательную, если последняя существует. Следовательно,
производная от векторной функции а(0 скалярного аргу-
мента t лежит на касательной к годографу и напра-
влена в сторону возрастания аргумента (рис. 7).
В проекциях
г д (0 • ।
I и 1 1
11Ш —11т
М-0 М-0
(О | ^(0 !.1
Д; Jt & к]
§ 2]
ПРОИЗВОДНАЯ ВЕКТОРА ПО СКАЛЯРНОМУ АРГУМЕНТУ
11
На основании формулы (1.2.2) можно написать .
da (Q _dax(t) . , day (t) da, (t),
dt ~~ dt dt J ~r dt ’
где
dax (0 _ lim bax (t) day (t) _ Да^ (t)
dt dt ’ dt “'«“о *
= lim
dt Д/->0
— производные скалярных функций ax (t), ay (0, az (0 no
аргументу t. Согласно формуле (1.2.3), можно утверждать,
что проекции производной от вектора на оси координат равны
производным от соответствующих проекций этого вектора.
Модуль производной вектора а (0 равен
И* (О I 1/ [ *ах (‘) V । ! db W V । ( daz (О V
I dt I— г \ dt / dt ) 1 \ dt ) ‘
Установим механическое значение производной вектора.
Пусть материальная точка движется по траектории (рис. 8),
уравнение которой в проекциях имеет
вид:
r = xi+j/j + zk,
где x — x(t\ y=y(t), z = z(t) —
уравнения траектории в параметриче-
ской форме, t — время. Тогда вектор
изображает перемещение
А, Дг (О
точки за время Дг, а отношение д~
дает среднюю скорость перемещения
за этот промежуток времени. Переходя
к пределу при Д^ -> 0, из вектора средней скорости получим
вектор истинной скорости v в момент t Следовательно,
вектор скорости v есть производная радиуса-вектора дви-
жущейся точки по времени’.
v =
di — di 1 । dt J ' dt
(1.2.5)
12
ПЕРЕМЕННЫЕ ВЕКТОРЫ
[ГЛ. I
Его модуль
С другой стороны, в дифференциальной геометрии дока-
зывается, что производная от длины кривой s по параметру t
также выражается формулой
ds__ ЛГ(dx\* . [dy\* . (dz\*
dt ~ V \dt ) '\dt J ' \dt) *
Таким образом, численное значение (модуль) вектора скоро-
сти равно производной от длины дуги траектории по времени:
* = (1.2.6)
Дифференцируя вектор г два раза, получим вектор уско-
рения w:
Его модуль
d2x . . d2y . . d2z ,
w=-dF ’ +
(1.2.7)
1 Г [ dax \« . / rfay \« , [ dsz V
w==v •
§ 3. Правила дифференцирования векторов.
Производная единичного вектора
Приведем основные правила дифференцирования вектор-
ных функций.
1°. Производная суммы векторов равна сумме производ-
ных слагаемых:
d (а + b) da , db п □ 1 \
dt ~~dt'dt (1.3.1)
(здесь и в дальнейшем для краткости вместо а (О, Ь(£) бу-
дем просто писать а, Ь, имея в виду, что речь идет о век-
торных функциях скалярного аргумента t).
2°. Пусть векторная функция а (/) умножается на ска-
лярную функцию т (t) того же скалярного аргумента. Тогда
d (та)___ (la , dm
dt т dt ‘ dt а<
(1.3.2)
§3]
ПРАВИЛА ДИФФЕРЕНЦИРОВАНИЯ ВЕКТОРОВ
13
В правой части последней формулы имеем сумму векторов,
из которых первый коллинеарен вектору а второй —
вектору а.
3°.
d (а • b) db । • do, q
-dT- = a dr + bdF- (L33)
4°.
т^^х^ + агхь. (1.3.0
Доказательство всех этих формул аналогично доказатель-
ству соответствующих формул дифференциального исчисления.
В качестве примера выведем формулу (1.3.4). Имеем
д (а X Ь) = (а+Да) х Ф4-ДЬ) - а х ь = а х b+a X ДЬ+
4-Да X ЬЧ-Да ХАЬ — аХЬ = аХ ДЬ4~Да X Ь4-Да X ДЬ.
Пользуясь свойствами векторного произведения, можно на-
писать, что
Т^ = ’Х4?+-^ХЬ + ЛаХ^-
Перейдем к пределу при Д/ -> 0. Тогда
4^ = X £) + пш (£ X Ь)+
+ Z“(4,x£) = aX£ + TXb + °x£ =
= аХ$ + $ХЬ.
Отметим, что правая часть формулы (1.3.3) является сум-
мой скаляров, а правая часть формулы (1.3.4) — суммой век-
торов, причем в последней формуле нельзя переставлять со-
множители, ибо векторное произведение не обладает свой-
ством переместительности.
Рассмотрим теперь единичный вектор а°(/)> изменяющийся
при изменении скаляра t только по направлению (рис. 9).
В этом случае
|а»(/ + Д0| = !а°(01 = 1
14
ПЕРЕМЕННЫЕ ВЕКТОРЫ
|ГЛ. t
и треугольник OMN является равнобедренным. Модуль век-
тора приращения Aao(0 = AfA/ определится из равенства
|Aa’(0| = 2sin42-,
где Д<р=^Л1СМ—угол смежности векторов а0 (0 и
а°(^4~^0 (О/И=1). Отсюда следует, что
I da» I 2sin ~Т_
I |-Jl® Ы “д^о
sin 4г- А /7
—д-^-Нш = (1.3.5)
hf д/„од* dt
2
так как =
а-о а
Рассматривая аргумент t как время, можно интерпрети-
ровать производную как угловую скорость вращения
единичного вектора.
tZa°
Из рис. 9 непосредственно следует, что вектор пер-
пендикулярен к вектору а0 (0> так как при приближении
точки N к точке основание /ИА/ равнобедренного тре-
угольника OMN стремится занять
уг положение, перпендикулярное к бо-
* ковой стороне ОМ. Итак, производ-
ная от единичного вектора а°(0
ух есть вектор, перпендикулярный
\ к нему, модуль которого равен
О* v угловой скорости вращения.
° Отсюда * следует, что производ-
^ис* 9* ная единичного вектора, вообще
говоря, не есть единичный вектор;
она будет вектором с постоянным модулем только в том
случае, если вращение первоначального вектора происходит
равномерно.
ЯдО
Перпендикулярность векторов а0 и можно вывести
еще и из того, что годограф векторной функции а° = а°(/)
/7д0
есть кривая, расположенная на единичной сфере, а на-
правлен по касательной к ней.
§ 4) РАЗЛОЖЕНИЕ ПРОИЗВОДНОЙ ПО ДВУМ НАПРАВЛЕНИЯМ 15
§ 4. Разложение производной от вектора
по двум направлениям: направлению самого вектора
и направлению, ему перпендикулярному
Пусть векторная функция а = а (/) скалярного аргумента t
изменяется как по величине, так и по направлению. Вектор
а (0 можно представить как произведение его модуля a(t) и
единичного вектора его направле-
ния а°(0-
а (0 = а (0 а0 (О-
Согласно формуле (1.3.2),
dt dt ‘ dt*
__ de**
Вектор как «производная
единичного вектора, перпенди-
кулярен вектору а0 и тем самым
вектору а. Следовательно, пер-
rfa°
вое слагаемое есть вектор,
Рис. 10.
перпендикулярный вектору а, а слагаемое а° — вектор,
ему параллельный. Таким образом, формула (1.4.1) дает
разложение производной от вектора а по направле-
нию первоначального ректора а и к нему перпендикуляр-
ному (рис. 10).
Когда вектор а изменяется только по модулю, то век-
тор а0 сохраняет постоянное направление и -^-=0. Равен-
ство (1.4.1) принимает вид
de da
dt dt
Если же вектор а имеет постоянный модуль, то = 0 и
de____________________ rfa°
dt ~a~dT *
T, de
В этом случае образует с вектором а прямой угол.
I 6 ПЕРЕМЕННЫЕ ВЕКТОРЫ (ГЛ. I
§ 5. Дифференциал, неопределенный и определенный
интегралы от векторной функции скалярного аргумента
По аналогии с дифференциалом скалярной функции диф-
ференциал векторной функции а(£). есть вектор da, опреде-
ляемый равенством
da = ~dt, (1.5.1)
где dt — M — приращение скалярного аргумента (для неза-
висимого переменного дифференциал и приращение совпадают).
cfa
Дифференциал вектора da, как и производная -& векто-
ра а, лежит на касательной к годографу (рис. 11). Напра-
вление da на этой касательной зависит от знака dt*. при
dt 0 вектор da направлен в сторону возрастания аргумента t, '
при df<^0, наоборот, в сторону его убывания (при умножении
вектора на отрицательный скаляр
Лего направление изменяется на про-
тивоположное).
Запись дифференциала векторной
функции в проекциях имеет вид
dax dav daz
d*=wdtl+-^dti+^dtb
или
da = dax i do^ j 4- da^k, (1.5.2)
Рис- ll- где daxi dayi daz— дифференциалы
скалярных функций ax> ay и az.
Модуль дифференциала векторной функции определяется
формулой
IЛ | = V(dax)* + (day^(darf. (1.5.3)
В частности, для дифференциала радиуса-вектора точки г
и его модуля находим
dr = dx i dy j + dz k (1.5.4)
и
| dr | = y(dx)24-(dy)24-(d^)2. (1.5.5)
С другой стороны, дифференциал длины дуги кривой ds,
как известно, определяется формулой
ds —V (dx)* 4- (dyf -|- (dz)3. (1.5.6)
§ 5] ДИФФЕРЕНЦИАЛ, ИНТЕГРАЛЫ ОТ ВЕКТОРНОЙ ФУНКЦИИ 17
Следовательно,
* |dr| = ds, (1.5.7)
т. е. модуль дифференциала радиуса-вектора точки ра-
вен дифференциалу длины дуги, описываемой этой точкой.
Перейдем теперь к рассмотрению интегралов от векторной
функции.
Определение. Неопределенным интегралом от век-
торной функции скалярного аргумента называется
совокупность всех векторных функций b(f), производные
которых совпадают с a(t), т. е.
T) = a(f)- G-5.8)
^Неопределенный интеграл от векторной функции, как и
^в интегральном исчислении, обозначается знаком Имеем
\ _ Ja(Q^=b(0 + c,
\где Ь(0 — определенная векторная функция, удовлетворяющая
^уравнению (1.5.8), с — произвольный постоянный вектор.
В проекциях неопределенный интеграл получает вид
J а (0 dt = $ ах (t)dti -|- $ ау (t) dt] + $ (0 dtk
(постоянный вектор с опущен). Таким образом, интегриро- *
вание векторной функции можно свести к трем обычным
интегрированиям.
Определенный интеграл проще всего определить как при-
ращение неопределенного:
t
J а(ОЛ = Ь(0-Ь(*о).
Определенный интеграл можно также рассматривать как пре-
дел интегральной суммы:
i k=?n
\z{t)dt—Wm 2 a(ft)(fw- tJ,
>0 »^cak = 0 к /
где tv t& ... , tn — значения t, вставленные между f0 и t,
причем tn^ = t\ кроме того, ...при -вее—-разности
^+i — tk стремятся к нулю. • е пуб/гис?/!
, им. о/И. ЛЕНИНА
, • Уи. 1 - •
18
ПЕРЕМЕННЫЕ ВЕКТОРЫ
{ГЛ. I
Пример. Электрический ток силы / течет снизу вверх
по бесконечному проводу, совпадающему с осью 6z. Найти
вектор Н напряженности магнитного поля, создаваемого этим
токбм, в произвольной точке пространства М (х, j,, z)
(рис. 12).
Рассмотрим достаточно малый элемент = оси
Oz (OP = ty. По закону Био — Савара напряжение ^Н*)
магнитного поля, создаваемого в точке М током, протекаю-
щим по элементу провода б/С, направлено перпендикулярно
плоскости, содержащей - точку Л1 и элемент dZ и обращено
в такую сторону, чтобы вращение
мая во внимание, что
от положительного направления
оси Oz (ку&г течет ток) к точке М
по кратчайшему пути казалось
происходящим против часовой
стрелки. Иначе говоря, вектор rfH
совпадает по направлению с век-
торным произведением d£ X И,
где d£ = PPt (\d$\ = <), a г1 =
— PM. Кроме того, по этому же
закону численное значение напря-
жения (модуль вектора rfH) опре-
деляется формулой
dH=~i sin (dgfrjX,
rl
где (cfg, Г1) — угол, образованный
векторами </£ и п- Прини-
dt, X fl I = fi sin (rfg, г,), можем
написать
dH = ^(^Xn)-
*) Напоминаем читателю, что дифференциал независимой пере-
менной совпадает с ее приращением, а дифференциалы функции-
отличаются от ее приращений на бесконечно малую величину бо-
лее высокого порядка, чем приращения аргумента. Последние сла-
гаемые после суммирования и перехода к пределу исчезают. По-
этому приращения векторной функции Н можно сразу заменить
соответствующими дифференциалами, а суммирование — интегриро-
ванием.
§ 51 ДИФФЕРЕНЦИАЛ, ИНТЕГРАЛЫ ОТ ВЕКТОРНОЙ ФУНКЦИИ 19
Чтобы получить искомый вектор И в точке М нужно
просуммировать все векторы tZH, относящиеся к различным
элементам РРХ провода, т. е. проинтегрировать выражение
для dh по всей оси Oz> что дает
Н= J ^(«ХгО. (1.5.9)
— 00
f
Для вычисления этого интеграла лучше всего перейти к про-
екциям. Имеем
Г1 = Р2Й = 0Л1 —ОР.
Но ОМ = х! 4~yj zk — радиус-вектор точки М, a OPиСк.
Поэтому Г1 = xl 4-yj 4~ (г — С) к;
Г1 = /х8 4-у« 4- (г - у8=Кр’ 4- (z -Л)2; (1.5.10)
р = Ух2 4- у2 — расстояние точки М от провода (см. рис. 12).
Как известно, векторное произведение векторов a = aj-j-
4"avj4~a«l{ и b=Z>J 4-&yj4~Ask равно
а х Ь = (а_Д — агЬу) i 4- (агЬх — aj>z) j 4~ (axby — ауЬх)
(1.5.И)
Поэтому
^Хг! = [О-(г —Q —rfCy]14-I^ —0-(г —С)]) +
4-(0-у — Ox)k = —ydU4-xdy .
и формула (1.5.9) принимает вид
+°°
Н = /(—У14-Х1) С —------------J7-.
JL [₽ -ь<г—с> 1 -
Действительно, точка /И фиксирована и х, у, а также /,
как постоянные величины, можно вынести за знак интеграла.
Кроме того, величина 14 заменена ее выражением (1.5.10).
Интеграл, стоящий в правой части последней формулы,
легко вычисляется подстановкой С — ^ = ptg^, тогда
й!;=-Д-Л.
4 cos4
20
ПЕРЕМЕННЫЕ ВЕКТОРЫ
|ГЛ. I
Пределами интегрирования по t будут zt~, так как t —
===±^- при tg/==±oo. Таким образом,
оо 2
• * dC _ С _______________________dt____________
[р2 + (z — С)2]‘/2 _ cos’ t [₽’ + Р2 tg2 /],/2 ~
"“2
те z те
__ 1 P _________dt___________ 1 f cos’ t dt__
' cos2/[l+tg2H8/2~₽r ' cos2/ —
л те
“7 “ *2
те
... 1 г - *2 1
*/# = ^[sin/] n=p-
~ 7
здесь использовалась формула 1-|-tg2 ^ ==.
Итак, вектор напряженности Н магнитного поля, созда-
ваемого электрическим током силы /, текущим по бесконеч-
ному проводу, совпадающему с осью Ог, в точке М (х, у, z)
определяется формулой
(1.5.12)
где р — расстояние точки М от провода. Модуль вектора Н,
т. е. «численное значение этого напряжения в точке Л1, вы-
разится так:
Отсутствие в формуле (1.5.12) единичного вектора к оси
Oz указывает, что вектор Н перпендикулярен оси Oz\ этого
следовало ожидать, ибо в силу закона Био — Савара век-
тор Н должен быть перпендикулярен проводу.
Интересно сопоставить формулу (1.5.12) с формулой для
линейной скорости v материальной точки, вращающейся про-
тив часовой стрелки с угловой скоростью ю вокруг оси Oz
§6]
Площадь как вектор
21
(рис. 13). Линейная скорость v направлена в сторону дви-
жения, и ее численное значение, как известно, равно юр, где
р — расстояние вращающейся точки М (х, у, z) от оси враще-
ния, в данном случае от оси Ог.
Поэтому, если угловую скорость представить в виде век-
тора <о, лежащего на оси Oz (оси вращения), с модулем ад
и направленного вверх, то направление линейной скорости v
будет совпадать с направлением векторного
<оХг (см. рис. 13), модуль
которого как раз равен юр,
ибо произведение юр есть
площадь параллелограмма,
построенного на векто-
рах (о и г. Следовательно,
v = ю X г-
Имеем ш = юк, так как к
есть единичный вектор на-
правления вектора о). Исполь-
зуя формулу (1.5.11), после
вычислений получим
©X !• = “(— +
произведения
I
Рис. 13.
и
V = О) (—4-j). (1.5.13)
Сравнивая между собой формулы (1.5.12) и (1.5.13), мы
приходим к выводу, что вектор напряженности магнитного
поля, созданного электрическим током, текущим по беско-
нечному прямолинейному проводу, совершенно подобен век-
тору линейной скорости материальной точки, вращающейся
вокруг оси, совпадающей с проводом, с угловой скоростью,
обратно пропорциональной квадрату расстояния этой точки
от оси вращения.
§ 6. Площадь как вектор
Площадь треугольника OMN на рис. 8 равна половине
площади параллелограмма, построенного на векторах г (t)
и Дг(0> и потому, согласно определению векторного произ-
ведения, 1/2(гХДг) представляет собой вектор с модулем,
22
ПЕРЕМЕННЫЕ ВЕКТОРЫ
(ГЛ. Т
равным площади треугольника OMN, направленный перпен-
дикулярно его плоскости в такую сторону, чтобы движение
от точки М к точке N казалось происходящим против
часовой стрелки.
Пусть теперь конец радиуса-вектора г (0 описывает зам-
кнутую плоскую » выпуклую кривую L, ограничивающую пло-
щадку S, причем полюс О находится внутри 5 (рис. 14).
Впишем в кривую L про-
извольную ломаную и
соединим вершины этой
ломаной с О (рис. 15). Тогда фигура, ограниченная лома-
ной, распадется на ряд треугольников, нормали которых
совпадают с нормалью к площадке £ Поэтому, чтобы
сложить площади всех этих треугольников, иначе говоря,
для получения площади, ограниченной вписанной лома-
ной, достаточно сложить векторы 1 /2 (г X Аг), относящиеся
ко всем этим треугольникам, причем векторы нужно склады-
вать так, чтобы передвижение по ломаной происходило
против часовой стрелки. После перехода к пределу при
длине каждой стороны ломаной, стремящейся к нулю, послед-
няя сумма перейдет в векторный интеграл от 1/2(гХ^г)>
взятый по линии £, а фигур?, ограниченная ломаной, пре-
ПЛОЩАДЬ КАК ВЕКТОР
23
§6]
вратится в площадку 5, ограниченную кривой £, и мы
приходим к заключению, что вектор
S=l-jrXdr (1-6.1)
численно равен площади площадки S, ограниченной кривой L
(см. рис. 14), и направлен по Нормали к ее плоскости в та-
кую сторону, чтобы обход по контуру L при интегрировании
совершался против часовой стрелки (интеграл, стоящий
в правой части формулы (1.6.1), криволинейный, так как
он берется по кривой L).
В проекциях вектор S [формулы (1.1.3), (1.5.4) и (1.5.11)]
имеет вид
S (ydz — zdy)l-\- (zdx — xdz) j-|-
-|-J(xrfy—j/rfx)kj. (1.6.2)
Следовательно, проекция вектора S на ось Oz
S2 — (х dy —у dx). (1.6.3)
С другой стороны, проекция Ц на плоскость хОу кривой L
(см. § 1) выражается уравнением
Тогда, согласно формуле (1.5.11),
?z X d^2 = (xdy—ydx)k
и площадь S2, ограниченная кривой Lp выразится интегралом
S2 =t= j ( (х dy —ydx) (1.6.3')
' Л
(единичный вектор k отброшен, ибо речь идет о численном
значении площади).
Площадь есть проекция площади S на плоскость хОу\
на кривых L и L] координаты х и у принимают одни и те же
значения. Поэтому проекция вектора S на какую-нибудь
24
ПЕРЕМЕННЫЕ ВЕКТОРЫ
[ГЛ. Т
ось, в данном случае на ось Oz, равна площади проекции
площадки S на плоскость, перпендикулярную оси проекции.
Следовательно, чтобы получить величину проекции площади S
на какую-нибудь плоскость, нужно вектор S, определяемый
формулой (1.6.2), спроектировать на нормаль к этой пло-
скости.
Это дает право рассматривать площадь как вектор,
причем вектор, представляющий площадь, нужно откладывать
по нормали к площади в определенную сторону и его модуль
должен быть равен численному значению площади.
Площадь, рассматриваемая как вектор в только что ука-
занном смысле, называется ориентированной.
Попутно получена теорема: площадь проекции плоской
фигуры на плоскость равна площади проектируемой фигуры,
умноженной на косинус угла, образованного нормалями
к плоскости проекции и проектируемой фигуры, ибо, как
известно, проекция вектора на ось равна модулю вектора,
умноженному на косинус угла между направлением самого
вектора и положительным направлением оси проекции.
§ 7. Приложения к дифференциальной геометрии
Для дифференциальной геометрии, изучающей кривые и
поверхности методами дифференциального исчисления, наи-
более удобным представлением кривой является представле-
ние ее в параметрической форме.
Пусть точка М (х, у, z) описывает кривую L в про-
странстве (рис. 16). Параметром, определяющим положение
точки М на кривой, будем считать длину s дуги AM кри-
вой, отсчитываемую от определенной точки А кривой до
точки М. Радиус-вектор г точки М будет функцией скаляр-
ного аргумента $: г = г($). В проекциях радиус-вектор
точки запишется как
r = xi-]-j/j-|-zk,
где x = x(s), y=y(s), z = z(s)— скалярные функции длины
дуги s. При этом величина s считается положительной, если
она отложена в определенную сторону от точки А, которую
мы примем за положительную, и отрицательной, если она
отложена в другую сторону.'
§ 7] ПРИЛОЖЕНИЯ К ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ 25
Продифференцируем вектор г по скаляру $; получим
новый вектор' т = ^, направленный по касательной к кри-
вой в сторону возрастания $.
Модуль этого вектора
| т i = lim
As -> 0 dS
Но | Дг | = MN (хорда), а Д$ =
= MN (дуга); известно, что
отношение длины хорды, стяги-
вающей дугу, к длине дуги
стремится к единице, когда
длина последней стремится к
нулю. Следовательно, | т | = 1,
т. е. вектор т есть единич-
ный вектор касательной к
кривой, направленный в сторону возрастания $. В проекциях
’ = Й=Й' + Й< + Йк о-7-')
Так как единичный вектор касательной т лежит на самой
касательной, то уравнения касательной к кривой в точке М,
как известно из аналитической геометрии, напишутся так:
Х—х____ У—у _Z — z
dx dy dz ’
ds ds ds
(1.7.2)
где X, Y, Z — текущие координаты точки на касательной,
а х, у, z — координаты точки касания, причем значения
dx dy dz *
производных берутся в точке касания.
Плоскость, перпендикулярная касательной и проходящая
через точку касания, называется нормальной плоскостью.
Любая прямая, лежащая в этой плоскости и . пересекающая
кривую в точке касания М, будет нормалью кривой. Таким
образом, у пространственной кривой имеется бесчисленное
26
ПЕРЕМЕННЫЕ ВЕКТОРЫ
(ГЛ. I
множество нормалей. Уравнение нормальной плоскости можно
получить, используя условия перпендикулярности прямой и
плоскости. Мы получим
g(^-x) + g(r-j) + g(Z-^) = 0. (1.7.3)
где X, Y и Z — координаты точки на нормальной плоскости,
г» dr
Вектор как производная единичного вектора т,
перпендикулярен к последнему. Поэтому вектор лежит
единичный
dr
можно
ds
единичный
.7.
в нормальной плоскости и определяет некоторую нормаль,
называемую главной нормалью. На последней выберем
положительное направление, которое будем считать совпа-
дающим с направлением вектора Обозначим
вектор этого направления через v. Тогда вектор
представить в виде произведения его модуля на
вектор этого направления:
dr I dr I
— = — Iv.
ds j ds I
Пользуясь формулой (1.3.5), можно написать, что
dr .. До d®
Н- = lim = -у2-,
as • д$_>о “s
где Дер — угол смежности векторов т($) и т (s -1- As), т. е.
угол смежности' касательных к кривой. Поэтому, как и .
„ „ I dr I
в случае плоской кривой, величину назовем кривизной
кривой. Ее обозначают через K=\IR, где R— радиус кри-
визны кривой:
В проекциях
dt d2r d2x . t d2v . । d2z« , „
ds = (1.7.5)
Кривизна К найдется по формуле
К~ V +^dFj • (L7-6>
§7J
ПРИЛОЖЕНИЯ К ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
27
Равенство (1.7.4) принимает следующий вид:
Н*' - (1-7.7)
’ = ?£• (1.7.8)
В соответствии с формулами (1.7.5) уравнения главной нор-
мали имеют вид . г
X х_____У У ___Z z ri 7 о\
d2x d2y d2z ’ I • • /
ds2 ds2 ds2
X, Y и Z — текущие координаты точки на главной нормали.
Плоскость, перпендикулярная главной нормали и прохо-
дящая через точку касания, называется спрямляющей
плоскостью кривой. Она
определяется уравнением У'
%(Х-х) + %ЛГ-у> +
—vs
+ = (1.7.10) ^77 <
Плоскость, проходящая Рис- 17,
через касательную и главную
нормаль, называется соприкасающейся плоскостью. Эту
плоскость'Можно определить как предельное положение пло-
скости, проходящей через касательную в точке М параллельно
касательной в точке 7V, когда точка N стремится к перво-
начальной точке 7И (рис. 17). В самом деле, плоскость, про-
ходящая через касательную в точке М и параллельная каса-
тельной в точке N, содержит единичные векторы t(s) и
т($-|-Д$) касательных в точках М и N. Следовательно, эта
плоскость содержит их разность Дт ($) = т (s -|- As) — т ($),
а значит, и отношение В пределе при Д$->0 эта" пло-
скость пройдет черезхвекторы т и ~ = lim т. е. через
as
векторы касательной и главной нормали.
Соприкасающуюся плоскость можно также определить
как предельное положение плоскости, проходящей через три
28 ПЕРЕМЕННЫЕ ВЕКТОРЫ [ГЛ. I
точки кривой, когда эти три точки пересечения стремятся
слиться в одну. Если кривая — плоская, то касательные ко
всем ее точкам находятся в плоскости кривой. Тогда сопри-
касающаяся плоскость совпадает с плоскостью кривой и бу-
дет одна и та же для всех ее точек. Главная нормаль кри-
вой будет совпадать с нормалью, определенной на плоскости.
В общем случае, когда кривая не является плоской, сопри-
касающаяся плоскость при переходе от одной точки кривой
к другой меняет свое положение в пространстве.
Возьмем ня пространственной кривой две точки М и А/.
Угол между соприкасающимися плоскостями в этих точках
будет характеризовать, насколько кривая отклоняется от
плоской (закручивается) на участке MN. Отношение этого
угла к длине дуги AW называют средним'кручением кривой
на участке MN; предел этого отношения, когда дуга MN
стягивается к точке М называется кручением кривой
в точке М. Ясно, что кручение плоской кривой равно нулю.
Угол между двумя плоскостями удобнее всего измерять
углом между перпендикулярами, восставленными к этим
плоскостям. Перпендикуляр, восставленный к соприкасаю-
щейся плоскости в точке /И соприкосновения с кривой, назы-
вается бинормалью. Так как бинормаль перпендикулярна
касательной и главной нормали, то она может быть получена
как пересечение нормальной и спрямляющей плоскостей.
Пусть Дф— угол между двумя соседними бинормалями;
тогда угол между двумя соприкасающимися плоскостями
также равен Дф. Поэтому кручение можно рассматривать как
предел отношения угла смежности бинормалей Дф к длине
соответствующей дуги, когда последняя стремится к нулю.
Таким образом, пространственная кривая, в отличие от
плоской, имеет две характеристики (кривизны). Мы назвали
их кривизной и кручением. Иногда их называют соответ-
ственно первой и второй кривизной. Пространственные кри-
вые, не являющиеся плоскими, называются поэтому кривыми
двоякой кривизны.
Единичный вектор положительного направления бинормали
обозначим через р. Это направление по бинормали выберем
так, чтобы векторы т, v, р были ориентированы в про-
странстве точно таким же образом, как оси Ох, Оу и Oz
заранее выбранной системы координат, т. е. чтобы враще-
ние от вектора т к вектору v вокруг вектора Р по крат-
§7]
ПРИЛОЖЕНИЯ К ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
29
чайшему пути происходило против часовой стрелки. При
таком выборе направления единичного вектора р касательная,
главная нормаль и бинормаль в точке М образуют прямо-
угольную систему координат, совершенно подобную си-
стеме Oxyz (рис. 18). Следовательно, для единичных векто-
ров т, v и Р справедливы формулы, аналогичные формулам
Рис. 18.
для единичных векторов (ортов) осей прямоугольных коор-
динат, именно
tXv = ₽. vX₽ = t,
vXf=—Р> PXv=—т,
(1.7.11)
(1.7.12)
Из формулы (1.5.11) и из первой формулы (1.7.11) выте-
кает, что
Уравнения
dy d2z dz d2y\
ds ds2 Us Us2) 9
'dz d2x • dx d2z\
Jis ds2 ds ds*)9
dsa ds rfsS j.
(1.7.13)
X—x Y—y Z — z
fiz
будут уравнениями бинормали, а уравнение
^(X-x) + ^(r-j) + ^(Z-^) = 0
— уравнением соприкасающейся плоскости, где
(1.7.14)
(1.7.15)
X, Y
W — Му
V* — Wt
30 ПЕРЕМЕННЫЕ ВЕКТОРЫ [ГЛ. I
и Z—текущие координаты, соответственно, бинормали и
соприкасающейся плоскости; величины ру и опреде-
ляются формулами (1.7.13).
Таким образом, в каждой точке кривой существуют три
взаимно перпендикулярных вектора т, v и р, которые обра-
зуют прямой трехгранный угол; последний называется сопро-
вождающим трехгранником или трехгранником Френе
(рис. 18).’ Эти векторы попарно определяют следующие пло-
скости: векторы т и v — соприкасающуюся, векторы v и р
нормальную, векторы риг — спрямляющую. Последние
определяются уравнениями (1.7.15), (1.7.3), (1.7.10).
Отметим, что, вообще говоря, кривая лежит по Одну
сторону от спрямляющей плоскости, пересекает нормальную
и соприкасающуюся плоскости, причем с соприкасающейся
• плоскостью кривая имеет три слившиеся в одну общие точки.
Кручение пространственной кривой обозначают х = —,
где р — величина, обратная кручению, которую называют
радиусом кручения: Величина кручения может быть вычи-
слена по формуле
dx dy dz
ds ds ds
d^ d\y d2z (17 16) ds2 ds2 ds2 ,
dzx dzy d3z
dsz dsz ds3
на выводе которой мы останавливаться не будем.
Как показывает формула (1.7.16), кручение простран-
ственной кривой выражается рационально через производные
радиуса-вектора, т. е._ определяется однозначно не только
по абсолютной величине, но и по знаку. В соответствии
с этим (и в противоположность кривизне) кручение рассма-
тривается со знаком: мы принимаем, что кручение х^>0,
если при передвижёнии точки по кривой вращение трехгран-
ника Френе происходит против часовой стрелки.
Необходимо иметь в виду, что формулы для кривизны
и кручения, а также уравнения элементов трехгранника
Френе, приведенные выше, имеют весьма ограниченное при-
менение, так как требуют, чтобы радиус-вектор точки кри-
вой был задан как функция длины, дуги. Если радиус-
§ 7) ПРИЛОЖЕНИЯ К ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ 31.
вектор г задан как функция произвольного параметра, то
формулы должны быть преобразованы к этому параметру.
Рассмотрим в качестве примера винтовую линию (рис. 6)
г — a cosfi a sin tj 4“ rtk,
где a — радиус основания цилиндра, t — угол, образованный
проекцией радиуса-вектора точки М на плоскость хОу'
с осью Ох, с — постоянная, определяющая шаг h винтовой
линии: й =
Прежде всего перейдем от параметра t к нужному нам
параметру — длине дуги $. Имеем ds — \dr\, но
dr — — a sint dt i a cost dtj с dtk,
поэтому
| dr ’ =У( — «sin t cos tdt)2-\-(c dt)2 — Va2 -f- M
Обозначив У а2-{-с2 через /п, получим ds = \ dv\ — mdt.
За начало отсчета возьмем точку Д которой соответ-
ствует t — О (рис. 6). Тогда
/ t
ds= mdt—m(t — ty = mt,
о о
откуда t— s/tn.
Таким образом, оказывается, что параметр t пропорцио-
нален длине дуги s, поэтому замена параметра t длиной
дуги s не вызывает никаких дополнительных трудностей при
вычислениях. Уравнение винтовой линии после замены пара-
метра принимает вид
г = a cos i cl sin — j 4- с — k.
m 1 mJ 1 m
Дифференцируя последнее равенство no s, получим:
т = ^ = —sin — i-(-—cos —j-|-—k. (1.7.17)
ds m m 1 m m J 1 m v s * 7
Из (1.7.17) заключаем, что касательная к винтовой линии об-
разует с осью Oz постоянный угол 7, причем cos7 = c/z».
Касательная в точке М определяется уравнениями
X — a cos— Y — a sin— Z — с —
________т __ т _____ т
s___________s________с 9
— в sin — a cos —
т т
32
ПЕРЕМЕННЫЕ ВЕКТОРЫ
|ГЛ. 1
где X, У и Z—текущие координаты точки на касательной,
a s = AM. Уравнение
$ !,, s \ ।
— a sin — \Х — a cos —) +
т\ m ] 1
4- a cos — ( Y — a sin —4- с (z — с —— О
1 m \ mJ 1 \ mJ
будет уравнением нормальной плоскости в той же точке М
Дифференцируя уравнение (1.7.17), получим:
dx d2r a s , a s .
ds ds2 m2 m m2 m J
Согласно формуле (1.7.6), кривизна — равна
(1.7.18)
1 I dx L -ж /7 а ~ s \2 I [ а s \2 а
7? I ds I г \ я? С S ю j m2 Sln ~rnj "т2'
(1.7.19)
Единичный вектор главной нормали выразится формулой
^dx s . . s .
v == R = — cos — i — sin — i.
ds m mJ
Следовательно, главная нормаль перпендикулярна оси Oz,
ибо вектор v не содержит компоненты по оси Oz.
Уравнения главной нормали и спрямляющей плоскости
напишутся соответственно
чл s
X—a cos —
________т
s
cos —
т
У — a sin —
т „ s
------------- Z—c —
. .s ’ т
sm —
т
(знак минус отброшен) и cos \Х — a cos sin —
— a sin —) = 0 или cos — X 4- sin — Y — a = 0, где s —
mJ. m 1 m
=AM и X, У, Z текущие координаты на главной нормали
или на спрямляющей плоскости.
Главная нормаль к винтовой линии пересекает ось Oz
в точке (о, 0, ибо координаты этой точки удовлет-
воряют уравнениям главной нормали; спрямляющая плоскость
касается цилиндра по образующей, проходящей через точку М,
так как эта плоскость содержит касательную к винтовой
линии и параллельна оси Oz.
ПРИЛОЖЕНИЯ К ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
33
Единичный, вектор 0 бинормали есть векторное произве-
дение единичных векторов касательной и главной нормали.
Значит [см. формулу (1.5.11)],
P = tXv = [~ cos~0--(- sin -Y]i +
r m m\ m)\ 1
- f- ( — cos —~ sin —) • 01 j +
‘ Lm \ Щ) \ w JJ 1
। Г a . s f . s\ a s / s \1 -
------sin — — sin —------cos — — cos — k
‘ L m m\ mJ m m\ mJ J
или
Pc.s. c s . , a .
= — sin — 1----cos — j H--k.
m m m mJ 1 m
Отсюда следует, что бинормаль также образует с осью Oz
постоянный угол, косинус которого равен —.
Уравнения бинормали и соприкасающейся плоскости име-
ют вид
X — a cos — К — a sin — Z — с —
т т т
s s а
с sm — —с cos —
т т
{множитель ~ отброшен и
с sin — (х — a cos —) —
т \ т) -
— с cos ~f У — a sin -j-afz— с—^ = 0.
т \ т) 1 \ т)
Вычислим теперь кручение винтовой линии по формуле
dx d2r
(1.7.16). Входящие в нее величины находятся из ра-
d3r
венств (1.7.17), (1.7.18). Остается только найти Для
этого продифференцируем (1.7.18)
d3r а . s . а з .
= —о sin — 1-----cos — j.
ds3 m3 m m3 m J
2 И. А. Гольдфайн
34
ПЕРЕМЕННЫЕ ВЕКТОРЫ
[ГЛ. I
Формула (1.7.16) принимает вид
х = Я’
. а . s
----sin —
т т
a s
—з- cos--------о
пг т т*
a $ а
m* Sln ЙГ
а sc
— cos----
т ~
а
т т
sin — О
т
s ~
<* О л
-г cos — О
т9 т
или
ml т*
Подставляя сюда вместо R2 его выражение (1.7.19), окон-
чательно получим
m4 а2 с с
% = а2 т6 “ т* *
Таким образом, у винтовой линии кривизна и кручение —
постоянные величины.
§ 8. Разложение вектора ускорения на касательную
и нормальную составляющие
Координаты х, у, z движущейся точки рассматриваются
в кинематике как функции времени £ Будем считать радиус-
вектор точек траектории
г = xl -|- у j -)- zk
сложной векторной функцией длина дуги траектории s
будет промежуточным аргументом. По правилу дифференци-
рования сложной функции вектор скорости выразится фор-
мулой
dr dr ds
V = ;— =---------------------------
dt ds dt *
Ho ^==r — единичный вектор касательной, a —
ds dt
численное значение скорости в момент t (формула (1.2.6)).
Поэтому
у = тгт.
§8]
РАЗЛОЖЕНИЕ ВЕКТОРА УСКОРЕНИЯ
35
Дифференцируя последнее равенство по Л получим вектор
ускорения w. В силу формулы (1.3.2)
Производную можно, используя (1.2.6) и (1.7.7), запи-
сать так:
dt__d* v
dt ds dt R
Следовательно,
(1.8.1)
Получили разложение Рис. 19.
вектора ускорения на ка-
сательную и нормальную составляющие (рис. 19), причем
v2
нормальная составляющая направлена в положительную
сторону главной нормали, ибо множитель положителен.
Векторы т и v — единичные взаимно перпендикулярные
векторы, поэтому численное значение ускорения выразится
формулой 4 '
Равенство (1.8.1) показывает, что вектор ускорения w
лежит в плоскости, образованной векторами т и V, т. е.
в соприкасающейся плоскости траектории. Отсюда вытекает,
что вектор ускорения перпендикулярен к бинормали
траектории движущейся точки.
ГЛАВА II
ТЕОРИЯ ПОЛЯ
§ 1. Вводные замечания. Скалярное и векторное поле
Термин «поле» обычно употребляется в физике для обо-
значения части пространства (или. всего пространства), в ко-
торой рассматривается некоторое физическое явление. Так,
например, температура воздуха в разных точках простран-
ства образует поле температур, а атмосферное давление —
поле давлений. Электрический заряд создает вокруг себя
электростатическое поле: на каждый электрический заряд,
помещенный в некоторой точке поля, действует сила, вполне
определенная по величине и направлению (закон Кулона).
Можно привести много примеров такого рода. Во всех
случаях, когда речь идет о процессе, характеризующемся
скалярной величиной (температура, давление и т. п.), поле
называется скалярным. Если же рассматриваемый процесс
характеризуется векторной величиной, как в случае указан-
ного выше электростатического поля, то поле называют
векторным. Вектор всегда можно рассматривать как силу,
и поэтому векторное поле еще называется силовым полем.
Приведенные примеры разъясняют происхождение поня-
тия поля в математике. Теперь можно дать следующее ма-.
тематическое определение поля. Пусть в области Q про-
странства задана функция точки и = f(P) (Р означает любую
точку области G). Тогда говорят, что в Q > определено
скалярное поле. Функция u = f(P) предполагается одно-,
значной и принимающей конечные действительные значения.
Аналогично, если каждой точке Р области G ставится
в соответствие вектор, то говорят, что в G определено
векторное поле.
Таким образом, понятие скалярного поля не содержит
ничего нового по сравнению с понятием функции точки.
§ 1] ВВОДНЫЕ ЗАМЕЧАНИЯ. СКАЛЯРНОЕ И ВЕКТОРНОЕ ПОЛЕ 37
Если О—область трехмерного пространства, как это обычно
и имеет место, то скалярное поле и можно рассматривать
как функцию трех переменных х, у и z (координат точки Р):
и = и (х, у, z)
или, что то же самое, функцию одного векторного аргумента
г — радиуса-вектора точки Р области G:
и = и (г).
Можно еще добавить, что величина и, характеризующая
скалярное поле, может зависеть также и от времени: темпе-
ратура воздуха в одних и тех же точках может быть раз-
личной в разные моменты времени. Однако мы ограничимся
рассмотрением лишь таких полей, где и не зависит от
времени. Такие поля называются стационарными.
Точно так же вектор а, определяющий векторное поле,
можно рассматривать как векторную функцию трех скаляр-
ных аргументов х, у и z или одного векторного аргумента
г — радиуса-вектора точки Р области Q. Как и выше,
в дальнейшем мы ограничимся рассмотрением лишь стацио-
нарных векторных полей, не зависящих от времени:
а = а (х, у, z) = а (г).
Приведем некоторые примеры скалярных полей. Потен-
циал электростатического поля определяется формулой
, (2ЛЛ)
где е —заряд, а г = ]/х2-[“/*+2,2 — расстояние точки до
заряда, помещенного в начале координат. Функция (2.1.1)
определяет скалярное поле во всем пространстве, за исклю-
чением начала координат, где г = 0 и потенциал обращается
в оо. _________________
Функция и — ]/!^— х*—У1— принимает действитель-
ные значения только при х2 -j-j/2 -|- z* R2. Поэтому в дан-
ном случае поле будет определено лишь в части простран-
ства, ограниченной сферой с центром в начале координат.
Уравнение этой сферы имеет вид
x2-|-j2-f-^ = Ra.
38
ТЕОРИЯ ПОЛЯ
(ГЛ. п
Точно так же для функции и = arc sin гт-—, необхо-
димо, чтобы выполнялось условие
I ..
или равносильное ему условие г*^х?-}-у*; этим условиям
удовлетворяют координаты всех точек, находящихся вне и на
поверхности прямого кругового конуса с уравнением
— z2 = 0.
Функция -д- qz _р р определяет поле во всем
пространстве, за исключением точек, принадлежащих » пло-
скости + By 4- Cz-{-D = Q, в которых знаменатель обра-
щается в нуль.
§ 2. Поверхности уровня и градиент скалярного поля
Рассмотрим скалярное поле, заданное функцией и —
— и(х, у, г) которая предполагается однозначной и непре-
рывной фуйкцией х, у и г, имеющей непрерывные частные
производные первого порядка.
Определим те точки, в которых явление протекает оди-
наковым образом, т. е. точки, где функция и(х, у, z) При-
нимает одно и то же значение С,
и(х, у, z) — C (С — const). (2.2.1)
' Это уравнение можно рассматривать как уравнение неко-
торой поверхности в пространстве. Давая в уравнении (2.2.1)
величине С значения Cif С2, С3,..., получим ряд
поверхностей, на каждой из которых физическое явление
протекает одинаково. Эти поверхности называются поверх-
ностями уровня скалярного поля. Так как функцию, задаю-
щую скалярное поле, часто, независимо от ее физического
смысла, называют потенциалом, то поверхности уровня на-
зывают также эквипотенциальными поверхностями, т. е.
поверхностями равного потенциала.
Через каждую точку Р(х0, у0> го) проходит поверхность
уровня; ее уравнение можно найти следующим образом.
Точка Р лежит на поверхности уровня, и потому ее коорди-
§ 2J . ПОВЕРХНОСТИ УРОВНЯ И ГРАДИЕНТ СКАЛЯРНОГО ПОЛЯ 39
наты должны удовлетворять уравнению этой поверхности,
значит,
ч(х» Уо, го) = с.
Отсюда заключаем, что
ности, проходящей че-
рез точку Р (х0, у0, г0),
имеет вид
и(х, у, z) =
= и(х&у& г0). (2.2.2)
Так как и (х,у, z) —
однозначная функция,
то каждой точке поля
соответствует одно
значение функции; по-
этому через каждую
точку поля проходит
только одна поверх-
ность уровня.
Для скалярного
поля, образованного
функцией
и=УR?—х® —у1— z*>
уравнение эквипотенциальной поверх-
поверхностями уровня будет семейство концентрических сфер
с центром в начале координат:
или
V — х*—у*— z* —С
х*+у* + **=Ф — С*-
В частности, при С=0 получим
т. е. сферу, ограничивающую поле, а при C—R получим
т. е. начало координат (в этом случае / сфера стягивается
в точку) (рис. 20).
40
ТЕОРИЯ ПОЛЯ
[ГЛ. п
Эквипотенциальные поверхности для скалярного поля
и = arc sin уда^
Ухг±уг
определятся из уравнения
г ~
arc sin -====С,
ух2+у2
откуда
= sin С; z* — (х2 + >2) sin2 С.
/х2+у2 v ’ k
Последнее уравнение определяет семейство круговых ко-
нусов с общей вершиной в начале координат (рис. 21). От-
- метим, что начало координат принадлежит всем поверхностям
Рис. 21.
уровня; в этой точке функция и
перестает быть однозначной.
У потенциала электростати-
ческого поля и = — поверхностями
уровня будет семейство концен-
трических сфер с центром в точке,
где находится электрический заряд.
Чтобы изучить физическое
явление, определяемое скалярной
функцией и (х, у, г), нужно в пер-
вую очередь исследовать, как
изменяется и при переходе от
одной точки пространства к дру-
гой. Для этого рассмотрим какую-
нибудь точку Р (х0, _у0> го) и через
нее проведем поверхность уровня
и (х, у, z) = С, где С =и (х0,>0> Zq)
(формула (2.2.2)). Затем построим
соседнюю поверхность уровня
(рис. 22), определяемую уравне-
нием
и (х> у, z) = С + АС.
Приращение Дм скалярной функции и (х, у, Z) при переходе
из точки Р в точку М равно ДС:
Дм = ДС,
1
причем это приращение не зависит от положения точки М'
на соседней поверхности уровня.
§2]
ПОВЕРХНОСТИ УРОВНЯ И ГРАДИЕНТ СКАЛЯРНОГО ПОЛЯ 41
Отношение приращения функции и к длине соответствую-
щего отрезка РМ назовем средней скоростью изменения функ-
нии и (х, у, z) на отрезке РМ. Эта средняя скорость
зависит от длины РМ,
иначе говоря, зависит от
положения точки М на
поверхности уровня
и (х, у, — ДС;
она достигнет наибольшей
величины по направлению,
где длина отрезка РМ
будет наименьшей.
Будем приближать точ-
ку М к точке Р; тогда
Дм = ДС станет умень-
шаться до нуля и поверх-
ность уровня, проходящая
через точку М, будет
стремиться слиться с поверхно-
стью уровня, проходящей через точку Р. Отношение
вообще говоря, стремится к некоторому пределу, называе-
мому истинной скоростью изменения скалярной функции
и(х, у, z) в точке Р по направлению вектора РМ. Из
сказанного следует, что эта скорость зависит от направления
вектора РМ. Нужно иметь в виду, что эта скорость есть
скаляр, ибо она является пределом скалярной вели-
Ьи
чинырМ-
Вместо прямолинейного отрезка РМ можно взять дугу PQ
произвольной кривой, проходящей через точку Р. Тогда пре-
Ди
дел скаляра даст выражение для скорости изменения
функции и (х, у, z) по направлению касательной к этой кри-
вой в точке Р (предполагается, что такая касательная суще-
ствует).
Как будет показано ниже, для любой кривой, имеющей
в точке Р касательную РМ, например PQ, значение преде-
ла^- в точке Р сохраняет одно и то же значение, т. е.
42
ТЕОРИЯ ПОЛЯ
[ГЛ. п
зависит исключительно от направления касательной в точ-
ке Р.
Чтобы найти аналитическое выражение для этой скорости,
поступим следующим образом: за параметр, определяющий
положение точки на кривой PQ, возьмем длину s дуги этой
кривой, отсчитываемую от определенной, лежащей на кривой,
точки А:
AP = s, PQ — As.
Тогда к становится функцией s и
lim
Q-*P
Ьи .. Ди du
— =hm т— = —.
PQ &S-+0
Выражение есть производная от -функции и (х, у, z)
по направлению РМ\ ее можно рассматривать как производ-
ную от сложной функции н(х, у, z) по переменной 5, где
х, у и z рассматриваются как промежуточные аргументы.
По правилу дифференцирования сложной функции
du du dx । du । du f О 9
ds~ dxds' ду ds ' dz ds* {2.2.6)
Как видно из формулы (2.2.3), производная зависит,
* ди ди ди ~
во-первых, от частных производных , в точке Р,
значения которых однозначно определяются точкой Р, в ко-
торой вычисляется производная, и, во-вторых, от произвол-
dx dy dz
ных^-, которые определяют направление каса-
тельной к кривой PQ в точке Р (см. формулу (1.7.1)).
Таким образом, формула (2.2.3) показывает, что производ-
ная функции и по любой кривой, касающейся в точке Р наг
правления Р2И, имеет одно и то же значение, как это было
_ du -ч v
указано выше. Значение называют поэтому производной
функции и{х, у, z) по направлению.
Теперь легко установить, что по направлению, каса-
тельному к эквипотенциальной поверхности, производная
§ 2} ПОВЕРХНОСТИ УРОВНЯ И ГРАДИЕНТ СКАЛЯРНОГО ПОЛЯ 43
от и (х, у, z) равна нулю:
Чтобы в этом убедиться, достаточно рассмотреть кривую,
лежащую на поверхности уровня. Вдоль такой кри-
вой Ди = 0, откуда вытекает наше утверждение.
Возвращаясь к формуле (2.2.3), заметим, что вектор
dx а . dy . . dz f
s-i+^J+a-sk=T
(см. формулу (1.7.1)) есть единичный вектор выбранного на-
правления. Если ввести в рассмотрение новый вектор с проек-
та ди ди , л
циями , то правую часть формулы (2.2.3)
можно рассматривать как скалярное произведение этого нового
вектора на единичный вектор т выбранного направления.
Этот новый вектор называется градиентом скалярного поля и
и обозначается через gracP и:
grad» = ^l + |J + ^k. (2.2.4)
Проекции градиента на оси координат и его модуль выразятся
формулами
gradx и = ^, grady и = , grad2 и = (2.2.5)
и
|grad „ И+ + (£)’. (2.2.6)
Из формулы (2.2.6) следует, что градиент может быть
тождественно равен нулю лишь в случае, когда
д“=0, ^ = 0, ^ = 0,
дх ду дг
т. е. когда и — постоянная величина. Однако возможно
равенство нулю всех частных производных первого по-
рядка в отдельных точках и для случая, когда функ-
ция и отлична от постоянной, т. е. градиент скалярного поля
может в отдельных точках обращаться в нуль. Такие точки
являются особыми точками поля, и мы оставляем их без
44
ТЕОРИЯ ПОЛЯ
[ГЛ. п
рассмотрения, ограничиваясь лишь обыкновенными точка-
ми, которые характеризуются тем, что в них градиент поля
отличен от нуля.
Введя понятие градиента скалярного поля, равенству (2.2.3)
можно придать вид
57 “ grad «• т, (2.2.7)
т. е. скорость изменения скалярного поля по заданному
направлению ~ равна скалярному произведению градиента
этого поля на единичный
вектор данного направления.
Если вектор т лежит
в касательной плоскости,
то, как было выяснено
выше, — 0. Но скаляр-
ное произведение равно
нулю только в том слу-
чае,
тели
или
равен нулю. Второй слу-
чай исключается, так как мы рассматриваем лишь обык-
новенные точки поля. Следовательно, градиент направлен пер-
когда сомножи-
перпендикулярны
когда один из них
пендикулярно к касательной плоскости эквипотенциальной
поверхности, т. е. по нормали к этой поверхности (рис. 23).
Так как т — единичный вектор, то скалярное произведе-
ние grad w-т равно проекции gradw на направление век-
тора т. Следовательно,
du л
5- = grad, и,
(2.2.8)
т. е. скорость изменения скалярного поля по некоторому
направлению равна проекции градиента на это напра-
вление.
Как известно, проекция вектора достигает своего наи-
большего значения, когда направление оси проекции совпа-
дает с направлением вектора. Тогда проекция вектора на ось
равна модулю этого вектора. Поэтому производная по на-
правлению нормали равна
du
dn
= . grad и |,
(2.2.9)
§2]
ПОВЕРХНОСТИ УРОВНЯ И ГРАДИЕНТ СКАЛЯРНОГО ПОЛЯ 46
где dn — дифференциал нормали, отложенный в сторону гра-
диента и.
Так как правая часть (2.2.9) положительна, то и возра-
стает в том же направлении, что и dn, т. е. в направлении
градиента.
Итак, grad и есть вектор, направленный по нормали
к поверхности уровня в сторону возрастания функции и
и численно равный скорости изменения функции и по
этому направлению. Чтобы получить скорость изменения
функции и по любому направлению, достаточно спроекти-
ровать grad и на это направление. Таким образом, в каждой
точке скалярного поля можно построить вектор — градиент
поля, который образует векторное7 поле.
Понятие градиента скалярной функции можно исполь-
зовать для составления уравнений касательной плоскости и
нормали к поверхности.
Пусть поверхность задана неявным уравнением
F(x, у, г) = 0. (2.2.10)
Ее можно рассматривать как эквипотенциальную поверхность
скалярной функции
u = F(x, у, z).
Поэтому 4 t
gradi/ = ^F(x, у, z)14-^F(x, у, *)J +
+ з^(* у' z)k
определяет направление нормали к этой поверхности в точке
М (х, у, z). Следовательно, уравнения нормали и касатель-
ной плоскости к поверхности (2.2.10) имеют вид
Х—х _ У—у _ Z —*
dF (х, у, z) dF (х, у, z) dF (х, у, г)
дх ду dz
и
дР(х у, г)
дх
dF (х, у, г)
ду
(Y-y) +
dF (х, у, г)
dz
(Z —z) = 0,
где X, У и Z — текущие координаты точки на нормали или
на касательной плоскости; х, у и z — координаты выбран-
ной точки на поверхности (2.2.10).
46
ТЕОРИЯ ПОЛЯ
[ГЛ. И
§ 3. Свойства градиента. Задачи
1°. Градиент алгебраической суммы скалярных функций:
grad (и -f- — grad и 4- grad#. (2.3.1)
Это непосредственно вытекает из определения градиента (2.2.4),
ибо производная суммы равна сумме производных.
2°. Градиент произведения скалярных функций:
grad (uv) = и grad v 4" v grad (2.3.2)
В правой части мы имеем сумму векторов, причем и и v —
скалярные множители. В самом деле,
. , ч д (uv) dv , ди
gradH«v)=-y-=«^ + т
и т. д., т. е. проекции на все три оси координат векторов,
стоящих в обеих частях равенства (2.3.2), равны друг другу,
а это значит, что сами векторы равны.
В частности, получаем
grad и* == 2п grad и. г
Задача 1. Найти градиент потенциала электростати-
ческого поля, образованного точечным зарядом
и = — = — •— *).
.г 7
Решение. Рассмотрим два способа решения этой за-
дачи: а) геометрический, использующий свойства градиента,
и б) аналитический.
а) Для функции м = — поверхностями уровня будут кон-
центрические сферы с центром в точке, где находится элек-
трический заряд. Нормаль к сфере совпадает с ее радиу-
сом, поэтому grad и направлен по радиусу сферы к ее
центру, ибо функция и = у- возрастает с уменьшением г.
*) Это выражение предполагает, что заряд помещен в начало
координат. В противном случае г~У(х— *0)2 + СУ—Л)2 + (2—*0)2,
где х0, у0, z0 — координаты заряда.
§ 8] СВОЙСТВА ГРАДИЕНТА. ЗАДАЧИ 47
Следовательно, дифференциал нормали dn равен —dr, и
в силу формулы (2.2.9) можно написать
Теперь остается умножить полученное выражение на — г°,
где г° — единичный вектор радиуса-вектора точки. Имеем '
г = гг°, г°= — г.
г
Итак,
grad —= —г° = —г.
6 г г* г3
Вектор — grad у называется напряженностью электро-
статического поля и обозначается через D:
D = —grady = pr° = pi“. (2.3.3)
б) Найдем проекции градиента, пользуясь формулами (2.2.6);
Дифференцируя равенство w = y по х> получим
ди ____________________________е^дг
дх г2 дх'
Так как = то
n dr п дг х
2г-$-=2х, ^-= —.
дх дх г
Таким образом,
ди ех
&х г3 ’
Аналогично
ди еу ди ег
ду г39 дг — 7® *
Формула (2.2.4) в нашем случае принимает вид
. е ex.ey.ez* - .
grad - = —F 1 —j — р к =
= — -J (*> + + гк) = — рг.
48
ТЕОРИЯ ПОЛЯ
ТЛ. п
Задача 2. Найти grad (г • а), где а = ах1 + ау j 4- а2к —
постоянный вектор, а г = х! -}- j/j 4~ zk — радиус-вектор точки.
Решение. В соответствии с формулой для скалярного
Рис. 24.
всех точках поля одинаковое
произведения двух, векторов
г. а = хах + уау -|- zaz,
(2.3.4)
откуда вытекает
d (г • а)_д (г • а)_____
дх —а^ ду ~аУ'
dz г
и
grad (г • а) =
= aJ4-aj4-azk = a.
Отсюда, в частности, следует,
что grad (г • а) сохраняет во
направление, совпадающее с на-
правлением вектора а, так что поверхностями уровня скаляр-
ного произведения г • а являются плоскости, перпендикуляр-
ные вектору а (рис. 24)..
Это обстоятельство можно вывести непосредственно из
равенства (2.3.4). Давая выражению а • г постоянное значе-
ние С, получим уравнение плоскости
ахх 4“ ауУ + azz = С.
§ 4. Векторные линии. Поток векторного поля
Как сказано в § 1 этой главы, векторное поле можно
рассматривать как векторную функцию радиуса-вектора точки
а = а(г) (2.4.1)
или как векторную функцию трех скалярных переменных х,
у и z\
а = а (х, у, z).
Разложив вектор а по осям координат, найдем
а = ах1 -j” ayj 4~
где аХУ ау и az — скалярные функции х, у и г.
§4]
ВЕКТОРНЫЕ ЛИНИИ. ПОТОК ВЕКТОРНОГО ПОЛЯ
49
Таким образом, векторное поле определяется тремя ска-
лярными функциями х, у и г.
Для графического изображения векторного поля вводят
понятие ' о векторных или 4 силовых линиях, которые имеют
также и определенный физический смысл. Векторной или
силовой линией векторного поля называется кривая,
в каждой точке которой касательная к ней совпадает
с направлением векторного поля в
точке касания (рис. 25).
Через каждую точку М вектор-
ного поля, вообще говоря, проходит
одна векторная линия, касательная к которой совпадает с век-
тором а в точке М Итак, векторные линии определяют
в каждой точке направление векторного поля в этой точке.
Например, напряженность электростатического поля опре-
е п «,
деляется вектором г, где е — электрический заряд, г —
расстояние от точки поля до заряда, г° — единичный вектор
направления вектора, соединяющего заряд с точкой поля.
Поэтому для положительного заряда векторными линиями
будут лучи, выходящие из заряда (рис. 26). Для магнитного
поля векторными (силовыми) линиями будут линии, sвыходя-
щие из северного полюса и оканчивающиеся в южном.
В качестве еще одного примера векторного поля рассмо-
трим поток несжимаемой жидкости. Допустим, что в каждой
точке жидкость движется со скоростью, которая зависит
60
ТЕОРИЯ ПОЛЯ
[ГЛ. II
исключительно от положения точки в пространстве и не зависит
от времени. Тогда говорят, что мы имеем стационарное те-
чение жидкости. Вектор скорости жидкости а(х, у, г) дает
в каждой точке направление, по которому. стремится про-
двинуться частица жидкости, попавшая в эту точку? Вектор-
ные линии будут линиями тока жидкости.
Найдем систему дифференциальных уравнений, определяю-
щую векторные линии поля.
Пусть г — радиус-вектор какой-нибудь векторной линии.
Тогда вектор
dr = dxl -р dy\ -}“ dzk
направлен по касательной к ней. По определению векторной
линии векторы а и dr должны быть коллинеарны, откуда
следует пропорциональность их проекций. Следовательно,
— = — (2.4.2)
а/ 47
что даёт систему дифференциальных уравнений векторных
(силовых) линий.
Задача 3. Определить векторные линии магнитного
поля, .образованного постоянным электрическим током с си-
лой 7, текущим по бесконечно длинному прямолинейному
проводу.
Решение. Если принять провод за ось Oz, то вектор И
напряженности искомого магнитного поля выражается фор-
мулой (1.5.12)
В данном случае
27 27
-- р2 у, Оу----- р2 X, CLZ-0.
Уравнения (2.4.2) получают вид
dx dy dz
--У ~Х О’ ;
(общий множитель р можно отброситьJ. Система распа-
дается на два уравнения: dz = 0, откуда z = C (постоянная^
§41
ВЕКТОРНЫЕ ЛИНИИ. ПОТОК ВЕКТОРНОГО ПОЛЯ
61
dx dy гт '
и —Последнее уравнение можно переписать так:
У х
xdx ——ydy, откуда находим:
**2 ..2
+ х’ +/=2Ct.
Следовательно, векторные линии напряженности магнит-
ного поля определяются уравнениями ха -f-у* == 2Ct и г = С;
эти линии являются окружностями с центрами на оси Oz,
лежащими в плоскостях, пер- г
пендикулярных этой оси
(рис. 27).
Аналогичная картина по-
лучается для векторного
поля, образованного векто-
рами линейных скоростей
частиц жидкости, вращаю-
щейся вокруг оси Oz [см.
формулу (1.5.13)].
Рассмотрим теперь важ-
ное понятие потока вектор-
ного поля» Пусть векторное
поле определено векторной
функцией а(х, у, z). Для
наглядности будем считать
а (х, у> z) вектором ско-
Рис. 27.
рости некоторого потока
несжимаемой жидкости, движущейся стационарно. Тогда, как
указывалось выше, векторные линЬи будут линиями тока
жидкости. Рассмотрим произвольную поверхность S, находя-
щуюся в потоке, и подсчитаем, какое количество жидкости
протекает через эту поверхность за единицу времени. Для
этой цели прежде всего разобьем поверхность 5 на элемен-
тарные площадки Да.
Как это обычно делается в интегральном исчислении,
каждую площадку Да будем считать плоской, а вектор а —
постоянным по модулю и одинаково направленным в каждой
точке площадки.
Если площадка расположена перпендикулярно ли-
ниям тока (вектору а), то, согласно определению скорости,
количество жидкости, протекающей сквозь площадку в
52
ТЕОРИЯ ПОЛЯ
(Гл. и
единицу времени, равно а Да, где а — модуль вектора а. В слу- ;
чае наклонной (относительно линий тока) площадки
сквозь нее будет протекать такое же количество жидкости,
как сквозь проекцию этой площадки на плоскость, перпен-
дикулярную направлению тока жидкости, т. е. вектору а
(рис. 28). Площадь проек- |
ции равна площади проек- ;
тируемой фигуры, умно- '
женной на косинус угла, |
образованного нормалями
к плоскостям проекции ;
и проектируемой фигуры
(см. стр. 26), поэтому
количество жидкости Дф, '
протекающее сквозь пло-
щадку Да, выразится фор- -
мулой
AQ = а Да cos (а, п) =
= апДа, (2.4.3) ’
Рис. 28.
где (а, п) — угол между ,
вектором а и нормалью п к площадке Да, а ап — проекция /
вектора а на эту же -нормаль.
Площадку Да можно представить в виде вектора Да,
направленного по нормали к площадке, модуль которого
равен численному значению Да (в единицах площади). Тогда
v а Да cos (а, п) = а • Да
и Дф = а-Да (2.4.4)
(а«Да — скалярное произведение векторов а и Да).
Формулы (2.4.3) и (2.4.4), выражающие количество '
жидкости, протекающее через площадку Да, являются при- |
ближенными. Поэтому общее количество жидкости, проте- J
кающее через поверхность 5, которое равно сумме количеств j
жидкости, протекающих сквозь отдельные площадки Да, '
может быть приближенно выражено формулой
= (2-4.5)
Эта сумма содержит обычные ошибки интегральных сумм,
связанные со сделанными допущениями относительно Да и а.
ВЕКТОРНЫЕ ЛИНИИ. ПОТОК ВЕКТОРНОГО ПОЛЯ
58
§ 4]
Но при неограниченном увеличении числа, элементарных
площадок и стремлении к нулю их размеров интегральная
сумма (2.4.5) стремится к определенному пределу. — инте-
гралу по поверхности:
Q = J ^anda = ^ Ja-rfa, (2.4.6)
s s
который и определяет количество жидкости Q, протекающее
через поверхность S за единицу времени.
Независимо от физического смысла векторного поля а
интеграл по поверхности (2.4.6) называют потоком вектор-
ного поля а через поверхность S. В интеграле
Q = (2.4.7)
S
выражающем поток в скалярной форме, ап означает проекцию
вектора а на направление нормали к поверхности, a rfa —
элемент площади поверхности. Тот же поток в векторной
форме выразится интегралом
Q = $ $ а • eta, (2.4.8)
где а — вектор поля, a rfcr означает вектор, направленный
по нормали к поверхности в каждой точке и численно рав-
ный элементу площади поверхности S. В обоих случаях
следует иметь в виду определенную сторону поверхности,
выбор которой обусловливается выбором одного из двух
возможных направлений, нормали.
Как уже было указано выше, если векторное поле а есть
поле скоростей текущей жидкости, то поток поля а через
поверхность S определяет количество жидкости, проте-
каю и^ей через S в единицу времени. Этим, между, прочим,
и объясняется выбор названия «поток». Если а означает
вектор магнитного поля, то поток вектора выражает коли-
чество магнитных силовых линий, проходящих через 5.
Аналогично истолковывается поток вектора в других случаях.
Укажем еще одну формулу для потока вектора в форме
поверхностного интеграла по координатам. Для этой цели
рассмотрим разложение вектора rfa по ортам прямоугольной
системы координат в пространстве. Будем считать, что про-
екция элемента площади поверхности da на координатную
64
ТЕОРИЯ ПОЛЯ
(Гл. п!
плоскость является элементом площади в соответствующей
плоскости. Так как вектор do
верхности, то угол между da
углу между площадкой do и
проекция вектора do на ось
направлен по нормали к по-
и, например, осью Ох равен
плоскостью yOz и потому
Ох равнах dydz. Таким же
образом находятся проек-
ции вектора do на дру-
гие оси. Следовательно,
мы можем написать
do = dy dzl
+ dz dx j -j- dx dyk.
Разложив по ортам той
же системы координат
вектор а, получим
а = ах1 ау j -j- azk,
откуда
a-do = axdydz-f-
-j-aydzdx~±- az dx dy.
Таким образом, для потока вектора находим выражение
Q = J J ах dy dz -f - ау dz dx -j- аг dx dy.
s
(2.4.9)
Заметим, что поток вектора есть скалярная величина.
Особый интерес представляет тот случай, когда по-
верхность S замкнута и ограничивает некоторый объем Т.
Тогда поток вектора через S можно изобразить интегралами
a-rfa, (2.4.10)
andv, (2.4.11)
ах dy dz + ау dz dx -f- clz dx dy (2.4.12)
(кружок на знаке интеграла указывает на то, что поверх-
ность S замкнута). В этом случае за направление вектора п
обычно берут направление внешней нормали (рис. 29).
§4]
ВЕКТОРНЫЕ ЛИНИИ. ПОТОК ВЕКТОРНОГО ПОЛЯ
65
В точках, где векторные линии выходят из' объема Г,
жидкость вытекает, внешняя нормаль образует с вектором а
острый угол и скалярное произведение a-tZ<r^>0; в точ-
ках же поверхности, где векторные линии входят в объем 7,
жидкость втекает, внешняя нормаль составляет с вектором а
тупой угол, поэтому а-Аг<^0. Отсюда следует, что поток
вектора, определяемый интегралом (2.4.10), дает разность
между количествами
жидкости, вытекающей из
объема Т и втекающей
.в него в единицу вре-
мени.
Когда жидкость не-
сжимаема, то количество
жидкости внутри объема Т
должно все время оста-
ваться неизменным. Пусть
теперь поток положите-
лен; это значит, что из
объема Т вытекает больше
жидкости, чем втекает.
При постоянстве коли-
чества жидкости внутри
объема Т это возможно
только тогда, когда вну-
три объема Т сущест-
вуют источники, питаю-
щие поток. Наоборот, если поток вектора отрицателен,
то количество вытекающей жидкости меньше количества
жидкости втекающей; следовательно, внутри Т имеются
стоки, поглощающие излишек жидкости. Если в объеме Т
нет ни источников, ни стоков, то количества жидкости, вы-
текающей и втекающей в объем, равны друг другу и поток
вектора должен быть равен нулю.
Можно сказать, что источники — точки, откуда векторные
линии начинаются, а стоками — точки, где векторные линии
кончаются (рис. 30).
В электростатическом или магнитном поле источниками
будут, соответственно, положительные заряды или северный
полюс магнита, а стоки — отрицательные заряды или южный
полюс магнита.
56
ТЕОРЙЯ ПОЛЯ
[ГЛ. п
Задача 4. Найти поток вектора г (г — радиус-вектор
точки) через внешнюю сторону поверхности прямого круго-
вого цилиндра (рис. 31), если начало координат лежит
в центре нижнего основания цилиндра. Размеры цилиндра:
R— радиус основания цилиндра, Н—его высота.
Решение. Для вычисления потока вектора восполь-
зуемся формулой (2.4.11). В нашем случае поверхность S
состоит из боковой поверхности
и двух оснований цилиндра. Прток
запишется в виде суммы интегра-
лов:
rn da -|-
нижн. верх,
осн. осн.
На боковой поверхности внешняя
нормаль параллельна плоскости хОу
и проекция на нее гп равна R. По-
этому
$ \ rnda = R\ ра =
бок. бок.
нов. пов.
= R-2'KRH=2nR*H
Рис* (2nRH—площадь боковой поверх-
ности цилиндра).
На нижнем основании радиус-вектор перпендикулярен
нормали и гл = 0. Значит,
S $ГП^ = °-
нижн.
осн.
На верхнем основании нормаль направлена параллельно
оси Oz вверх и гп = Н. Следовательно,
$ \гпЛ<з = Н\ № =
верх,
осн.
верх,
осн.
§61
ДИВЕРГЕНЦИЙ ВЕКТОРНОГО ПОЛЯ
67
Окончательно получим
rnda = SvR*H.
Задача 5. Найти поток радиуса-вектора точки-г через
внешнюю сторону поверхности прямого конуса, вершина
которого совпадает с началом
координат, если известны радиус
основания конуса R и его вы-
сота Н (рис. 32).
Решение. Имеем
бок. осн.
пов.
На боковой поверхности конуса
радиус-векТор совпадает с обра-
зующей конуса и поэтому состав-
ляет с нормалью конуса угол
в 90°.
Значит,
Игя^ = 0.
бок.
пов.
На основании конуса проекция гп равна И и
rnda = Н § $ rnda = HitR*.
осн. осн.
Поток вектора определяется формулой
rnd<3 = nR*H.
§ 5. Дивергенция векторного поля. Ее выражение
в координатной форме
Рассмотрим векторное поле а и некоторую замкнутую
поверхность S в этом поле. Допустим, что поток вектора
через внешнюю сторону поверхности S положителен:
a-do>0.
58
ТЕОРИЯ ПОЛЯ
(гл. п
Как было указано в предыдущем параграфе, если рас-
сматривать данное векторное поле^ как поле скоростей дви-
жущейся жидкости, то положительность потока указывает,
что количество жидкости, вытекающей из объема, заклю-
ченного внутри S, больше, чем количество жидкости, вте-
кающей в этот объем. Иначе говоря, внутри объема должны
находиться источники поля, обильность (интенсивность) ко-
торых характеризуется величиной потока векторного поля
через поверхность 5. Аналогично обстоит дело и когда
поток векторного поля отрицателен; в этом случае внутри
объема должны находиться стоки. Однако возможно, что
в обоих случаях внутри объема находятся и источники, и
стоки, но при положительности потока общая обильность
источников превосходит обильность стоков, а при отрица-
тельности потока дело обстоит наоборот. Поэтому величина
потока характеризует обильность источников и стоков лишь'
суммарно. Более точной характеристикой является средняя
удельная обильность, которая определяется отношением по-
тока вектора через поверхность S к объему 7, ограниченному
этой поверхностью:
(П)а^а
Т •
В поле скоростей текущей жидкости при положитель-
ности потока это отношение показывает среднее количество
жидкости, поступающей из единицы объема внутри по-
верхности S за единицу времени. Если, наоборот, поток
отрицателен, то отношение определяет количество жидкости,
поглощаемой в среднем единицей объема за единицу времени.
Чтобы получить характеристику удельной обильности
источника (стока) в каждой отдельной точке, поступают
следующим образом. Рассмотрим некоторую точку Р век-
торного поля а и заключим ее внутри небольшой замкнутой
поверхности S, например внутри сферы достаточно малого
радиуса. Объем, ограниченный поверхностью S, обозначим
через Дт. Разделив поток вектора а через поверхность S
на объем Д-г, получим среднюю удельную обильность
Дт
§51
ДИВЕРГЕНЦИЯ ВЕКТОРНОГО ПОЛЯ
59
Предел этой величины, когда объем Дт стремится к нулю
и Дт стягивается в точку Р, если такой предел существует,
называется дивергенцией вектора а и обозначается через
div а:
(П) anda
div а = litn ----- *). (2.5.1)
Дивергенция векторного поля есть скалярная величина.
Она образует скалярное поле в данном векторном поле.
Имея в виду физическое-.значение потока вектора, можем
сказать, что при div а > 0 точка Р представляет собой
источник,- откуда жидкость вытекает, а при div а 0 точка Р
представляет собой сток, поглощающий жидкость;, иначе
говоря, в точках поля с положительной дивергенцией век-
торные линии начинаются, а в точках поля с отрицательной
дивергенцией — кончаются.
Из предыдущих рассуждений также следует, что интен-
сивность источника (стока) в точке Р характеризуется ди-
вергенцией поля в этой точке и может быть принята равной
дивергенции или ей пропорциональной. Обычно в физике
интенсивностью (плотностью) источников или стоков принято
считать величину l/4-rcdiva> т. е. выбирать коэффициент про-
порциональности равным 1/4к. Такой выбор коэффициента
пропорциональности объясняется тем, что, как будет пока-
зано ниже (задача 7), для плотности р объемного заряда ди-
вергенция электростатического поля равна 4тср; плотностью р
источника естественно в данном случае считать именно
плотность Объемного заряда. Таким образом, в поле с источ-
никами плотности р имеем
diva = 4кр. (2.5.2)
*) Если отношение ——неограниченно возрастает по своей
абсолютной величине при Ат —> 0, то это обстоятельство условно
записывают следующим образом: diva=±oo, причем знак-f-
пишется тогда, когда это отношение" неограниченно возрастает,
оставаясь положительной величиной, и знак —, если оно неогра-
ниченно возрастает по абсолютной величине, принимая лишь отри-
цательные значения.
60
ТЕОРИЯ ПОЛЯ
[ГЛ. II
Векторные поля, у которых div а = 0, называются соле- :
ноид аль ними. Такие поля не могут иметь ни источников,
ни стоков, а значит, и точек, где начинаются или кончаются ;
векторные линии. Векторные линии соленоидального поля
либо замкнуты, либо начинаются и кончаются у границ поля :
(или уходят в бесконечность). •
.Определение (2.5.1) неудобно для практического под- :
счета величины дивергенции. Гораздо более удобным для s
этой цели является выражение дивергенции в координатной
форме, к выводу ко-
торого мы сейчас пе- 1
рейдем.
Пусть Р (хв,_у0,г0) —
точка в вектор-
ном поле a = aj-j-
ау j + в кото-
рой мы хотим опреде- '
лить дивергенцию по-
ля. Рассмотрим парал- i
лелепипед с центром :
в точке Р, ребра
которого параллельны .
координатным осям и
равны, соответственно, j
Дх, Ду, Дг (рис. 33). i
Примем поверхность этого параллелепипеда за поверхность S
и применим к нему формулу (2.5.1). ;
Поток вектора а через поверхность S состоит из шести
интегралов, взятых по всем граням параллелепипеда:
a„da = $ J a„da4- J $ a„da$ a„(Za,
ADi BCi ABi j
+$ 5 5 5 a«<Zo+5 5i
DCi AC ~ A1C1 |
(для краткости прямоугольник ADDiAi обозначен через ADi, \
BCCiBi — через BCi и т. д.). ~
Рассмотрим интегралы, взятые по двум противополож- ;
ным граням ADi и ВС^ На грани BCi направление внешней ;
нормали совпадает с положительным направлением оси Ох,
поэтому здесь ап = ау, на грани ADi внешняя нормаль
$4
ДИВЕРГЕНЦИЯ ВЕКТОРНОГО ПОЛЯ
61
направлена в отрицательную сторону оси Ох, и здесь
ап = — ах, кроме того, х на каждой из граней ВСХ и AD\
сохраняет постоянное значение, равное, соответственно,
х0 + у Дх и х0 — у Ах. Чтобы получить эти грани, нужно
менять величину у в пределах от _у0—^-Ajz до Jo + y4y
и величину z— от г0— уДг до г04-уАг; поэтому инте-
гралы по этим граням можно заменить двукратными инте-
гралами, Соответственно, от функции ах (х0 4~ у Дх, у, z^
и ах(хц — уДх, у, по переменным у и z в указанных
выше одних и тех же пределах.
Применяя последовательно теорему Лагранжа о конечном
приращении к разности
ах (*о + у д*> У’ *) — а/о — у Дх> у>
по переменной х и теорему о среднем значении для двой-
ного интеграла, можем написать
= S \а^~ $ \a*d<3 =
At) i ВС i ВС i AD i
, 1 A , I A
.Уо + у Д.У *o + -J
= S § k/o+y Дх> у> —
11 y
•Уо-2-Д.У го--2Д*
— — у Ax, y, dxdy =
— -^^(Xo 4-01 Ax, j/, z)kxdydz =
l A i A
Уо-уД^ г0--2Дг
/1а .1a-
«Уо + ^Ду *o + -2 Д*
= ^-~^jiAx dy dz = kx&y^z,
.Уо-^Ду
62
ТЕОРИЯ ПОЛЯ
(ГЛ. п
где 61 по абсолютной величине меньше у, но зависит,
вообще говоря, от х и j, — значение частной про<
взводной в некоторой точке внутри параллелепипеда.
Аналогично
а^°=(^-)2ДхД^Дг>
(даЛ ! даг\ да»
где \ду Д и \dz /3 —значения частных производных
и взятых в некоторых других точках внутри паралле-
лепипеда.
Следовательно, поток вектора а через параллелепипед
равен
$ande = f+ №-} 4- 1 ДхДуДг.
ЛТ |_\ д* /1 1 \ ду /2 1 \ 02 Уз] У
Разделив полученное выражение на объем параллелепипеда,
At = AxAyAz и переходя к пределу, когда размеры парал-
лелепипеда уменьшаются до нуля, находим, что .
fanda s
__________дах । &ау I &az
о Дт дх ду ' dz
или
j. । да» । daz
div а=-У- +4-5-’l + , (2.5.3)
дх 1 ду 1 dz ’ v 7
причем значения частных производных, стоящих в правой
части, берутся уже в точке Р, где ищется значение дивер-'
генции. 1
Свойства дивергенции:
Iе. Дивергенция суммы векторных полей равна алгебра-
ической сумме дивергенций слагаемых:
div (а Ь) = div а 4“ div Ь. (2.5.4)
§6]
ДИВЕРГЕНЦИЯ ВЕКТОРНОГО ПОЛЯ
63
В самом деле, пусть
а = аЛ-ОуЛ-аЛ b = bxl + by j -|- bzk,
тогда
а + b — (ах 4- bx) i 4“ (ву + by) j 4“ + А?) к
и
diV (а | Ь) = [ $ (ау^гЬу) _|_ д (0^4- =
___дах . дЬх । dfly . дЬу । да2 . dbz
дх ‘ дх * ду । ду ' dz ‘ dz '
— tdax I даУ I да*\ | I dbx I дЬУ
\ дх * ду * dz j ' \ dx ‘ dy
div а 4- div b.
2°.
div (ua) = w div a 4~ a • grad w, (2.5.5)
где и — скалйрная функция переменных х, у и г, т. е.
она образует скалярное поле. ~
Действительно,
а = ах\ 4~ Ду j + а2к, иа = uaxi 4- иауj 4~ иагк.
Поэтому
dlv(«a)=^ + ^ + ^=
= а, + а,%- + ^ + «.%- =
дх 1 х дх 1 ду 1 У ду 1 dz 1 г dz
- „(дах . дау . даг \ , / ди , ди , ди\
== “ I лг + ~ду +~дГ] + \ах~дх + аУ ~ду + а^) •
тт ди ди ди
Но частные производные суть проекции grad а.
Следовательно,
ди 1 ди , ди .
йх + аУ~& + SF = а 8rad “
(скалярное произведение векторов а и grad и) и
div (ua) = м div a -j- а • grad и.
64
теорий поля
[ГЛ. и
§ 6. Теорема Гаусса — Остроградского.
Векторные трубки. Задачи
Теорема Гаусса — Остроградского. Поток
вектора а через замкнутую поверхность S равен инте-
гралу от diva, взятому по объему Т, ограниченному
поверхностью S,
fada = J J J divarfx (2.6.1)
7
или
(у) ап da = Ц j div a dx.
s т
(2.6.2)
При этом предполагается, что проекции ах, ау, аг век-
торного поля а непрерывны внутри S вместе со своими
частными производными. Интеграл, стоящий в правых частях
последних двух равенств, тройной, ибо он берется по объему,
а интегралы слева являются интегралами по поверхности.
Доказательство. Пусть замкнутая поверхность 5
ограничивает объем Г. Разобьем объем Т на п мелких
частей (элементарных объемов!) Дтп Дт2, ..., Дтл, ограничен-
ных соответственно замкнутыми поверхностями Si, S2,..., Sn.
Такое разбиение можно осуществить, например, при помощи
трех семейств плоскостей, параллельных плоскостям коор-
динат XOY, YOZ и XOZ.
Элементарные объемы, лежащие целиком внутри Т,
при таком разбиении представляют собой параллелепипеды
с гранями, параллельными координатным плоскостям. Эле-
ментарные объемы, примыкающие к поверхности S, имеют
вид параллелепипедов, срезанных частями поверхности S,
причем некоторые грани или части граней этих объемов
также лежат внутри Г. Из определения дивергенции (2.5.1)
следует, что для поверхности Sk
a- d<3
------= div а 4- е*,
Ат.---I к
где — достаточно малая положительная величина (пере-
менная величина может быть представлена в виде суммы
своего предела и величины, стремящейся к нулю).
§61
ТЕОРЕМА ГАУССА—ОСТРОГРАДСКОГО
Йв
Последнее равенство может быть переписано иначе:
ф а • de = div а ДтЛ еЛДтЛ, (2.6.3)
sk
где значение дивергенции берется в некоторой точке, при-
надлежащей объему ДтА, а — достаточно малые величины,
разные для различных объемов ДтЛ. Полагая в последнем
равенстве А=1, 2, .л, получаем п равенств вида (2.6.3).
Сложение их дает
/I £=л Л==л
У, Ф а • da = Л div а Дт*+ £ еЛДтЛ.
Л=1 Sk k=A k=\
(2.6.4)
Рассмотрим объем ДтЛ, лежащий целиком внутри поверх-
ности S (рис. 34). Поток через параллелепипед ДтЛ равен
сумме потоков через все его
грани. Каждая грань этого
параллелепипеда принадлежит
также соседнему параллеле-
пипеду, и в равенстве (2.6.4)
интеграл по каждой грани внут-
реннего элементарного объема
будет браться два раза.
Внешние нормали общей
грани двух смежных паралле-
лепипедов имеют противопо-
ложные направления, поэтому
соответствующие два интеграла
взаимно уничтожаются. По этим
же причинам взаимно уничто-
жатся интегралы, взятые по плоским частям поверхностей
пограничных элементарных объемов, находящимся внутри Т.
В соответствии с этим в левой части равенства (2.6.4)
останутся только интегралы, взятые по отдельным частям
поверхности S, которые в сумме дадут поток вектора а
через всю поверхность S. Итак, при любом разбиении
объема Т на части
k=n k—n
ф а • de = 2 div а ДтЛ + X еЛ ДтЛ. (2.6.5)
5 /?=1 Л=1
3 И. А. Гольдфайн
66
ТЕОРИЯ ПОЛЯ
[ГЛ. п
Будем теперь неограниченно увеличивать п с таким
расчетом, чтобы все размеры каждого элементарного объема.
стремились к нулю. Тогда левая часть формулы (2.6.5)
остается неизменной, а первая сумма правой части будет
иметь своим пределом объемный интеграл
J^divatfc.
Докажем, что вторая сумма правой части стремится
к нулю. В самом деле, можно считать *), что для достаточно
большого п существует такая бесконечно малая величина а,
что
Ы<«, |®В |<а> •••> |6п|<а
lim а = 0.
л-»со
Тогда
k—n
Л=1
k—n k—n
Jfe=l
Сумма всех элементарных объемов
равна всему объему Т. Следова-
тельно,
k—n
lim У ейДтй
л-оо t=1
Г lim а = 0.
«-►00
После перехода к пределу формула (2.6.5) получает вид
а • da = J div a dx.
Примечание. Теорема Гаусса — Остроградского ос-
тается в силе, когда объем Т ограничен несколькими, на-
пример двумя, замкнутыми поверхностями (рис. 35). Все
рассуждения остаются без изменения, только пограничные
элементарные объемы распадаются на два класса: примы-
кающие к внешней поверхности S и к внутренней поверх-
ности Sj. В этом случае интегрирование в левых частях
♦) При некоторых дополнительных предположениях относи-
тельно вектора а, которые мы не будем точно формулировать, но
предполагаем выполненными.
S6)
ТЕОРЕМА ГАУССА—ОСТРОГРАДСКОГО
67
формул (2.6.1) и (2.6.2) нужно вести по обеим поверх-
ностям 5 и Sj.
В ряде случаев бывает удобным записывать теорему
Гаусса — Остроградского в координатной форме. Заменив
дивергенцию div а ее выражением по формуле (2.5.3) и за-
писав поток в виде поверхностного интеграла по коорди-
натам (2.4.12), найдем, что формуле Гаусса — Остроград-
ского можно придать вид
ах dy dz ау dz dx -f-az dx dy =
= 5
(2.6.6)
Следствие 1. В соленоидальном поле (diva = 0) по-
ток вектора через любую замкнутую поверхность равен
нулю, так как для такой поверхности правая часть фор-
мулы (2.6.1) обращается в нуль.
Следствие 2. Пусть в точке Р имеется изолирован-
ный источник или сток, т. е. diva равна нулю всюду
в поле, кроме точки Р. Тогда поток вектора а через по-
верхность S, содержащую внутри себя точку Р, не зави-
сит от формы поверхности (рис. 35):
(2.6.7)
Действительно, рассмотрим объем Г, заключенный между
поверхностями 5 и Внутри этого объема diva = 0. Со-
гласно приведенному выше примечанию и в силу след-
ствия 1, му можем утверждать, что
anrfa = 0
или
Проекция вектора а берется на внешнюю нормаль по от-
ношению к объему, поэтому на поверхности Si эта нор-
маль п направлена внутрь. При изменении направления
3*
68
ТЕОРИЯ ПОЛЯ
1ГЛ. IT
нормали на противоположное проекция переменит свой знак.
Следовательно,
Отсюда вытекает
Формулу (2.6.7) можно интерпретировать так: поток
вектора через замкнутую поверхность, при деформации по-
следней, остается неизменным до тех пор, пока поверх-
и и применим к
ность при своем изменении не кос-
нется новых источников или стоков,
где div а^О.
Векторные трубки. Рас-
смотрим в векторном поле а какую-
нибудь площадку S и проведем
через границу этой площадки век-
торные линии; образуемая при этом
фигура называется векторной труб-
кой. Векторные линии, проходящие
через 5, лежат целиком внутри
трубки, так как в противном случае
они пересекали бы векторные линии,
лежащие на боковой поверхности
трубки (рис. 36).
Рассмотрим объем Т, ограничен-
ный боковой поверхностью трубки
и двумя поперечными сечениями S
нему теорему Гаусса. Поток вектора
через боковую поверхность трубки равен нулю, ибо там
вектор а лежит в ее касательной плоскости. Остаются потоки
вектора через поперечные сечения 5 и В первом из них
внешняя нормаль направлена в сторону, противоположную
направлению векторных линий, и потому
Jdiv a dx = J anda — ^anda,
т Si s
(2.6.8)
где в обоих интегралах, стоящих справа, вектор а проекти-
руется на нормаль, направленную в сторону векторных линий.
§ 6]
ТЕОРЕМА ГАУССА—ОСТРОГРАДСКОГО
69
Для соленоидальных полей diva=;0 и левая часть по-
следнего равенства обращается в нуль. Следовательно» в
этом случае
Janda — J and<s. (2.6.9)
<S Si
Таким образом, в соленоидальном поле поток вектора
через поперечное сечение трубки остается постоянным
вдоль всей трубки.
Если векторная трубка имеет весьма малое сечение, a S
и перпендикулярны векторным линиям, то можно счи-
тать, что ап = а\ формула (2.6.9) принимает вид
а Да = at Дар (2.6.10)
где а, ах — значения модуля вектора а на сечениях 5 и Si,
а Да, Aat — площади этих сечений.
Пример. Пусть электрический ток течет по проводу.
Количество электричества, протекающее через перпендику-
лярное сечение в единицу времени^ называется силой тока /.
Более точно, сила тока 1 есть производная по t от количе-
ства электричества Q, протекшего за время t через сечение:
. В качестве вектора, характеризующего А ток, берут
направленный в сторону течения тока вектор i, модуль ко-
торого равен отношению силы тока к площади сечения:
/ = ~. Этот вектор i называется плотностью тока (см.
ниже § 13). Тогда провод можно рассматривать как век-
торную трубку для i. Если ток замкнут (замкнутая цепь),
то векторные линии замкнуты, что характерно для поля, не
имеющего ни источников, ни стоков, т. е. diva = 0. Сле-
довательно, /Да = /!Даь или l=lv Значит, сила тока I
в замкнутой цепи имеет во всех сечениях одно и то же
значение.
Задача 6. Найти дивергенцию радиуса-вектора точки г,
а также определить при помощи терремы Гаусса — Остро-
градского поток этого вектора через замкнутую поверх-
ность S, ограничивающую произвольный объем Т.
Решение. Имеем г — Тогда
divr = ^+^ +J = l + 1 + 1=3.
дх 1 ду ‘ dz 1 1
70
ТЕОРИЯ ПОЛЯ
(ГЛ. и
Формула Гаусса — Остроградского (2.6.2) для вектора г
получает вид
ф rn d<3 = 3 J dz = 3 Г.
В частности, поток через полную поверхность цилиндра
(см. задачу 4) выразится так:
S
а конуса (см. задачу 5) —
rn = 3 • 1 kR’//=
О
Задача 7. Определить дивергенцию и поток через лю?
бую замкнутую поверхность вектора индукции D = ^r°
электростатического поля, образованного одним зарядом
электричества е, помещенным в начале координат (г — рас-
стояние точки поля от заряда, г° — единичный вектор ра-
диуса-вектора точки поля).
Решение. Используя результаты, полученные при ре-
шении задачи 1, можем написать, что
D = £r = £(xi-H44-*10.
Следовательно, проекции вектора D будут
D D D —-
их--- ,«> иу г* > --г»‘
Продифференцируем проекцию Dx по х:
г» — 3хг^
dDx ох
—= = е------а .
дх г*
w дг х
При решении этой же задачи было выяснено, что
Значит,
г® ____________________ Зх№
dDx г г! — 3хг
Ш е г* ~~е г* *
§6|
ТЕОРЕМА ГАУССА-ОСТРОГРАДСКОГО
71
Аналогично
дРу г* —Зу» дРг_ г' — Зг'
ду г* * $г е гь
Отсюда вытекает, что
.. г, га —Зх’ , г’ —Зу‘ , гг — Зг*
div D = e—-------k е---=-4_ 4- е —=-=- =
j-o I fO I рЪ
3r8 —3(x2 + v2 + ^) 3r* — 3r* ’
= e---------—_!_/.—I—i — e-----— — o.
r8 r8
Итак, дивергенция вектора индукции D равна нулю
всюду, за исключением начала координат, где помещен за-
ряд и где вектор D обращается в оо.
Если замкнутая поверхность S не содержит внутри себя
заряда, то внутри нее divD = 0 и по первому следствию
теоремы Гаусса — Остроградского поток вектора D через S
равен нулю:
ф Dn da = 0.
s
Если же поверхность S содержит внутри себя заряд, то
из второго следствия теоремы Гаусса — Остроградского
следует, что поток вектора D не зависит от вида поверх-
ности. Поэтому в качестве поверхности S возьмем сферу
радиуса /? с центром в начале координат. Внешняя нор-
маль к сфере направлена по вектору г° и ммеетодинаковое
направление с D; в этом случае
D„=|D| = ^.
На сфере г сохраняет постоянное значение, равное R,
откуда
Dnda=^~da=^i =?= 4~е.
Итак, поток вектора индукции электростатического поля,
созданного одним электрическим зарядом е, через произ-
вольную замкнутую поверхность, заключающую внутри себя
заряд, равен 4ке.
Чтобы получить дивергенцию в точке, где находится
заряд, нужно величину потока 4ке разделить на объем Дт,
72
ТЕОРИЯ ПОЛЯ
[ГЛ. п
ограниченный поверхностью 5, и перейти к пределу при
Дт -> 0; при этом первый член отношения 4ке остается не-
изменным, а второй Ат уменьшается до нуля и потому от-
ношение неограниченно увеличивается. Соответственно этому
нужно признать, что дивергенция вектора индукции элек-
тростатического поля, образованного точечным зарядом,
обращается в бесконечность в точке, где помещен заряд.
По-другому обстоит дело с объемным зарядом Q, распре-
деленным по некоторому объему Т. Рассмотрим произволь-
ную точку Р этого объема и заключим ее внутри малого
объема Дт, ограниченного поверхностью 5 и содержащего
часть заряда AQ. Предел
lim ~ = р (2.6.11)
называется плотностью объемного заряда в точке Р (будем
предполагать, что этот предел существует везде внутри Г).
Плотность р объемного заряда, вообще говоря, зависит
от выбранной точки Р: р = р(Р). Вне объемного заряда нет
электричества, и там р = 0.
В теории пространственного потенциала доказывается,
что поток электростатического поля, образованного объем-
ным зарядом, через произвольную замкнутую поверхность S
зависит исключительно от части заряда, находящейся внутри S,
и равен 4kAQ, где AQ является той частью объемного за-
ряда, которая находится внутри S. Применяя эту теорему
к объему Дт, получаем, что внутри Т дивергенция опреде-
ляется пределом
lim ^^ = 4яр (см. формулу (2.6.11)).
Д-с— 0
Итак, дивергенция вектора индукции электростати-
ческого поля, образованного объемным зарядом, вне за-
ряда равна нулю, а внутри равна 4кр, где р — плотность
объемного заряда.
Эта теорема имеет важное значение в теории электро-
статического поля. Отметим еще, что Максвелл автомати-
чески перенес эту теорему на случай электромагнитного
поля (см. § 13).
Задача 8. Вычислить div (re), где е — ех1 eyj —
постоянный вектор, а скаляр г — расстояние от точки до
начала координат.
$ 61
ТЕОРЕМА ГАУССА—ОСТРОГРАДСКОГО
73
Решение. Имеем re = re J rey j + ге£к; тогда
I д(™у) । ^(гег)_ дг>р
' дх ’ ду ‘ dz * дх • ? ду ’ * dz ’
Но
dr__х dr__у dr__z_
dx T’ dy r9 dz ~F*
Следовательно, '
div (re) = <?, у + <?v £ + «?г у =y (exx + evy -f- e.z)—-^ (er)
(г = х1+^]4-гк).
Задача 9. Найти дивергенцию поля линейных скоро-
стей вращающейся вокруг оси жидкости и дивергенцию век-
тора напряжения магнитного поля, образованного электри-
ческим током, текущим по бесконечному прямолинейному
проводу.
Решение. Если принять за ось Oz ось вращения жидко-
сти или, соответственно, провод, по которому течет ток, то
проекции вектора линейной скорости и вектора напряженно-
сти магнитного поля Н выразятся формулами [см. формулы
(1.5.13) и (1.5.12)]
= —toy, ру = о)х, Vg — Q
или
Нх = -21^, HV = 2I^, Яг = 0.
Будем иметь
divv = -<og+«>g = 0.
Я4) 44)
divH=_2ZAJ+2/_U=
2ур 2хр . ..
. 27 дх 2! ду = 4,ух 41ху — О
р« р« р< р«
(р» = х’+/, 2р^=2х, 2р^ = 2у).
Дивергенция обоих полей равна нулю, откуда следует, что
эти поля соленоидальны-
74
ТЕОРИЯ ПОЛЯ
[ГЛ. и
§ 7. Линейный интеграл и циркуляция вектора
Рассмотрим некоторую дугу произвольной кривой L в век-
торном поле, определенном вектором а (х, у, z) (рис. 37).
Дифференциал dr радиуса-вектора точки, перемещаю-
щейся по кривой, лежит на касательной к этой кривой. Его
модуль равен дифференциалу дуги ds кривой (см. § 5 главы I).
Рис. 37.
Возьмем теперь участок дуги As.
Обозначим через As вектор длины As,
выходящий из некоторой точки дуги
и направленный по касательной
к этой дуге. Скалярное произведение
а • As выражает работу АД кото-
рую совершает вектор а при пере-
мещении точки по отрезку As:
АД = а • As.
Суммируя скалярные произведения, относящиеся ко всем
элементам дуги L, и переходя к пределу, когда число
элементов неограниченно возрастает, а длина каждого эле-
мента стремится к нулю, мы получим-криволинейный интеграл
А в $ а • ds,
L
который определяет работу вектора а при передвижении точки
приложения вектора по дуге £. Этот интеграл называют
также линейным интегралом вектора а вдоль дуги L кри-
вой. При этом ds означает вектор, направленный по каса-
тельной с модулем, равным дифференциалу дуги кривой ds;
в соответствии с формулой (1.5.7) ds = dr и интеграл А
можно преобразовать к виду
Д = $а.</г. (2.7.1)
L
Как известно,
а • dr = at ds
(аг есть проекция вектора а на касательную т). Поэтому
интеграл А можно еще изобразить так:
A = \a,ds. (2.7.2)
4
§ 7] ЛИНЕЙНЫЙ ИНТЕГРАЛ И ЦИРКУЛЯЦИЯ ВЕКТОРА 75
Имеем
a = aJ + M + a*k’ г = +
И
dr = dxi -f-dyj 4“ dzk (формула (1.5.4)). *
Следовательно,
a • dr = ax dx 4~ ау dy 4~ аг dz*
Линейный интеграл (2.7.1) принимает вид
А = J ах dx -J- dy dy 4» аг dz. (2.7.3)
t
Таким образом, как и для потока вектора, рассмотрен-
ного в § 4, мы получили три разных аналитических выра-
жения для работы сил векторного поля: векторное (2.7.1)
и в виде линейных интегралов — по длине дуги (2.7.2) и по
координатам (2.7.3).
Если дуга L принадлежит векторной линии, касательная
в каждой ее точке имеет направление вектора айв силу
свойств скалярного произведения а • dr = a ds. В этом случае
имеем
А = J a ds;
L
этот интеграл всегда положителен, ибо а и ds — положи-
тельные величины.
Особый интерес представляет случай, когда кривая L
замкнута и линейный интеграл берется по всей кривой; тогда
линейный интеграл называется циркуляцией С вектора а вдоль
кривой L. Циркуляцию вектора а вдоль кривой L можно
записать одним из интегралов
С=фа-</г, (2.7.4)
L
C=§axds, (2.7.5)
L
С—§ ах dxау dyаг dz. (2.7.6)
L
76
ТЕОРИЯ ПОЛЯ
(ГЛ. п
Обход по контуру L при принятой нами правой системе
координат совершается против
часовой стрелки (рис. 38).
Если среди векторных
линий имеются замкнутые
кривые, то циркуляция С
вдоль такой кривой имеет вид
С=± Jarfs.
L
Знак 4“ или знак —
берется смотря по тому,
совпадает ли направление
вектора а на векторной ли-
нии с направлением обхода
кривой L или они противо-
положны (рис. 39). Во вся-
ком случае циркуляция
вдоль замкнутой векторной линии отлична от нуля.
Можно сказать, что циркуляция С выражает работу век-
торного поля а вдоль замкнутой кривой L.
Задача 10. Найти линейный интеграл вектора a = x3i —
—j3] вдоль первой четверти окружности г = R cosfi -|- R sin tj
(рис. 40).
Решение. На окружности х = R cos t, y = R sin t.
Вектор а на этой окружности запишется так:
а = R3 cos3 tl — R3 sin3 tj.
§ ЛИНЕЙНЫЙ ИНТЕГРАЛ И ЦИРКУЛЯЦИЯ ВЕКТОРА 77
Кроме того,
dr = — R sin t dtl r|- R cos t dt]
и скалярное произведение a • dr найдется следующим образом:
а • dr = — R4 cos31 sin t dt — R4 sin31 cos t dt =
= — R4cos t sin f(cos3^ + sin4)t# =— yR4 sin %tdt.
При движении по дуге L в направлении, противополож-
ном вращению часовой стрелки, параметр t изменяется в пре-
делах от 0 до у. Поэтому линейный интеграл вдоль L будет
равен
к
2 Л
А = а • dr = — j yR* sin It dt = y R* [^]q2=
= y A? (cos Я — cos 0)== — у
Задача 11. Найти циркуляцию вектора a=yi—xj
вдоль замкнутой кривой, образованной осями координат и
первой четвертью астроиды r==Rcos3/i-|-Rsin3£j (рис. 41).
Решение. Линия L состоит из двух отрезков ВО и ОА
осей координат и дуги АВ астроиды. Обход по L нужно со-
вершать против часовой стрелки. Поэтому циркуляция век-
тора будет равна
ф а • dr = $ а • dr + $ а • dr + J а • dr.
АВ ВО ОА
Вычислим каждый из интегралов правой части отдельно.
78
ТЕОРИЯ ПОЛЯ
[ГЛ. п
На астроиде
х = R cos’ t, у = R sin3t\
поэтому
а = R sin3 fl — Rcos3 tj.
Кроме того,
dr = — 3R cos2t sin t dtl -]- 3R sin21 cos t dtj.
Тогда
a • dr — — 3R2 sin * t cos21 dt — 3R2 cos* t sin21 dt =
= — 3R2 sin2£ cos21 (sin2f-|- созг t)dt = —jR’ sin22/cft. '
При движении по дуге АВ в направлении от А к В параметр t
изменяется в пределах от 0 до у. Будем иметь
те
У
a-dr = — sin22£(ft =
J 4 J
АВ О
те
У Л
= _|R2^_JHL25-0 + ^ = -^kR2.
На отрезке О А оси Ох имеем j = 0, поэтому там век-
тор а примет вид
а = 0 • 1 — х] = — xj.
Кроме того, на оси Ох находим r = xi, dr = dxl и a-rfr =
= 0 • dx — х • 0 = 0. Соответственно этому
$ a-rfr = 0.
ОА
Далее, на отрезке ВО оси Оу имеем х = 0, a=ji, r=-yj,
dr = dyj, откуда a-dr—y-O-^-O-dy — O и
J а • dr = 0.
во
з
Следовательно, искомая циркуляция равна —
§81
ВИХРЬ ВЕКТОРНОГО ПОЛЯ
79
Задача 12. Найти циркуляцию вектора a =^2i по замк-
нутой кривой, составленной из правой половины эллипса
г = cos tl bx sin tj и отрезка
оси Оу (рис. 42).
Решение. На эллипсе
х = ах cos t,
y = bi sin f,
a = sin21i,
dr = — sin t dtl + cos t dt},
a-dr = —axb\ sin31 dt
При движении по дуге эллипса
BiAB в направлении против часо-
вой стрелки параметр t меняется
к к ~
от —у до у. Значит,
те те
"2 7
J a-dr = — Д1&* sin4tft = — ajftJ J sin2< sin tdt =
BiAB __. 2L
2 2
те
"2 ’L
С Г 1 12
= aM \ (1 — cos21) d cos t = а^ц cos t—5-cos’q —
J L d J «
2
= atfij [cos 4- — -i" cos3£ — cos (— -у) + T cos’ (— 7^1 ~ °-
На отрезке ВВ» где x = 0, a=yi> r=j/j, dr = dy},
a • dr = 0; поэтому
a-dr = 0.
BBi
Следовательно, искомая циркуляция равна нулю*
§ 8. Вихрь векторного поля
Рассмотрим поле линейных скоростей жидкости, вращаю-
щейся вокруг оси с угловой скоростью ш. Найдем цирку-
ляцию вектора скорости v по произвольной замкнутой пло-
ской кривой L, ограничивающей поверхность 6*. Не уменьшая
80
ТЕОРИЯ ПОЛЯ
[ГЛ. п'
общности рассуждений, можно считать, что ось вращения
совпадает с координатной осью Oz. Тогда проекции вектора v
(см. формулу (1.5.13)) будут
vx = — u>y, Vy = (i)X, vz = 0.
В силу фомулы (2.7.6) циркуляция вектора v по кривой L
С== § — toy dx ых dy = <»§ — ydx-\-xdy
L L
(постоянный множитель со вынесен за знак интеграла).
Интеграл в правой части (без множителя со) равен удвоен-
ной площади проекции поверхности S на плоскость хОу
(см. формулу (1.6.3)). Таким образом, циркуляция вектора v
по замкнутой кривой L равна удвоенному произведению
угловой скорости вращения со и площади проекции Sz по-
верхности S на плоскость, перпендикулярную оси вращения.
Имеем 5^ = 5 cos (Oz, п), где S — площадь, ограниченная
кривой 4, a (Oz, п) — угол, образованный осью Oz и нор-
малью п к плоскости кривой L. Следовательно,
С= 2(oS cos (Oz, п).
С другой стороны,
со cos (Oz, п) = о)л,
где о)л — проекция направленного по оси Oz вектора угловой
скорости © на нормаль к плоскости кривой L. Поэтому
С= 2San.
Итак, циркуляция поля линейных скоростей жидкости,
вращающейся вокруг оси по замкнутой кривой, равна удвоен-
ному произведению площади, ограниченной этой кривой, и
проекции вектора угловой скорости вращения на нормаль
к плоскости кривой. Отсюда вытекает, что циркуляция
достигает своего наибольшего значения, когда нормаль
к плоскости кривой совпадает с осью вращения: фл = (о.
Таким образом, циркуляция зависит исключительно от вели-
чины площади S и от ориентировки этой площади отно-
сительно оси вращения. В частности, если плоскость кри-
вой L проходит через ось вращения, то циркуляция по 4
равна нулю, ибо в этом случае о)п = 0.
§81
ВИХРЬ ВЕКТОРНОГО ПОЛЯ
81
Аналогичную картину мы имеем в электромагнитном
поле, образованном электрическим током, текущим по бес-
конечному прямолинейному проводу. В самом деле, если
провод принять за ось Oz, то проекции вектора напряжен-
ности поля И (см. формулу (1.5.12)) выражаются так:
9/ 97
Нх=~у, НУ = ^Х, /4 = 0,
где р — расстояние от точки до провода. В качестве кривой
L возьмем плоскую замкнутую кривую, проектирующуюся
на перпендикулярную проводу плоскость в виде окруж-
ности (эллипс) с центром на проводе. Дальше будет пока-
зано, что циркуляция вектора И не зависит от формы кри-
вой. Вдоль этой проекции расстояние р сохраняет постоянное
значение и его можно вынести за знак интеграла. Циркуляция
С вектора Н по такой кривой Lj выразится интегралом
р-®—ydx-pxdy.
Пользуясь теми же рассуждениями, что и для вектора V,
4
Приходим к выводу, ЧТО искомая циркуляция C=-rSIn>
где 1п — проекция вектора электрического тока I на нормаль
к плоскости кривой
Таким образом, в обоих случаях циркуляция вектора
поля определяется проекцией некоторого другого вектора
(вектора угловой скорости или, соответственно, вектора элек-
трического тока) на нормаль к плоскости кривой, вдоль
которой берется циркуляция, и площадью,^ ограниченной этой
кривой. В обоих случаях отношение циркуляции по кривой
к площади, ограниченной этой кривой, равно 2<ол или, соот-
4 4
ветственно, /л, т. е. проекциям векторов 2®, 1 на нор-
маль к плоскости кривой (р2— скалярный множитель).
В случае произвольного векторного поля можно считать,
что на небольших участках векторное поле будет вести
себя примерно так, как поле линейных скоростей вращаю-
щейся жидкости или как магнитное поле, порожденное элек-
трическим током вблизи провода, по которому он течет,
если, конечно, циркуляция поля не равна нулю. Поэтому
можно предположить, что для произвольного векторного
82
ТЕОРИЯ ПОЛЯ
[ГЛ. п
гопя в каждой его точке существует еще один вектор,
который в основном определяет циркуляцию поля по гра-
ницам малых площадок, содержащих эту точку. Именно,
отношение циркуляции векторного поля по замкнутой кривой
к величине площади, ограниченной этой кривой, равно с точ-
ностью до бесконечно малой величины проекции этого нового
вектора на нормаль к площадке; слова «с точностью до бес-
конечно малой величины» означают, что степень точности
приближения неограниченно возрастает, когда размеры пло-
щадки уменьшаются до нуля. Тем самым мы пришли к по-
нятию вихря векторного поля.
Вихревым вектором векторного поля называется вектор,
проекция которого на каждое направление равна пределу
отношения циркуляции векторного поля по контуру L пло-
ской площадки Да, перпендикулярной этому направлению,
к величине этой площадки, когда размеры площадки стре-
мятся к нулю, а сама площадка стягивается в точку.
Вихревой вектор поля, образованного вектором а (х, у, <?),
обозначается через rota (читается: вихрь вектора а). Имеем
ф a -dr
lim ---------= rotna.
* Да '
Да оо
(2.8.1)
Нормаль п к площадке направляется так, чтобы при вычи-
слении циркуляции обход по контуру L казался совершаю-
щимся против часовой стрелки.
Примечание. Кроме термина «вихрь векторного поля»,
также используются термины «ротор», что означает по-латыни
«вращатель», или «кёрл» (curl а), что означает по-английски
«завиток».
Формула (2.8.1) показывает, что при неизменной вели-
чине площади значение циркуляции по контуру площадки
зависит от ориентировки последней относительно направления
вихревого вектора поля и оно будет наибольшим, когда
площадка перпендикулярна вихревому вектору, ибо в этом
случае проекция вихревого вектора будет наибольшей и
будет равна его модулю.
Чтобы оправдать введение понятия вихревого вектора,
нужно доказать, что левая часть равенства (2.8.1) дей-
ствительно является проекцией некоторого вектора на
§ Si
ВИХРЬ ВЕКТОРНОГО ПОЛЯ
83
направление нормали к Да. Для этого рассмотрим достаточно
малый треугольник АВС, произвольно расположенный в про-
странстве, но вершины которого лежат на осях координат
(рис. 43); из последнего ясно видно, что
ф a-rfr+ ф a-dr-j- ф a-dr= ф a-dr, (2.8.2)
ОАВО ОВСО ОСАО АВСА
ибо линейные интегралы по отрезкам ОД ОВ и ОС бе-
рутся по два раза в противоположных направлениях и,
следовательно, взаимно
уничтожаются.
Пусть а, р и 7 — углы,
образованные нормалью
к плоскости треугольни-
ка АВС с осями коор-
динат. Так как треуголь-
ники ОАВ, ОВС и ОСА
являются проекциями тре-
угольника АВС на пло-
скости хОу> yOz и xOz,
то
$оав = 8ABC cos I»
$ОВС = 8ABC C0S а>
Soca = Sabc cos р.
Если ввести величины /л, Ixi л
ф а • dr = 1п$двс>
АВСА
§ a-dr = lxSoBc>
ОВСО
то формула (2.8.2) принимает
1п$АВС = IgSoAB + IxSoBC + lySoCA
или
1п8авс = ЦЗавс cos 7 4“ 1х$авс cos а 4~ 1у$двс cos р.
1У, 1г> определяемые из равенств
ф a-dr — IgSoAB>
°АВ0 (2.8.3)
& а • dr — lySocA,
ОСАО
вид
Отбрасывая общий множитель Sabc> мы видим, что 1п есть
проекция вектора на нормаль к плоскости АВС> проекциями
которого на оси Ох, Оу и Oz являются 7Х, 1у, 1г. Но из
84
Теория поля
(Гл. it
формул (2.8.3) вытекает, что /л, 1Х, 1у и 1г являются отно-
шениями циркуляции вектора а вдоль треугольников АВС,
ОВС, ОСА, О АВ к площадям соответствующих треуголь-
ников. Следовательно, предел (2.8.1) можно рассматривать
как проекцию некоторого вектора на нормаль к площадке Да,
по крайней мере для площадок, имеющих вид треугольников,
изображенных на рис. 43. Но при некоторых предположе-
ниях относительно вектора а можно считать, что предел (2.8.1)
не зависит от формы площадки Да: требуется лишь, чтобы
ее размеры уменьшались до нуля. При таких предположе-
ниях относительно вектора а существование вихревого век-
тора, т. е. вектора, проекция которого на нормаль к пло-
щадке равна пределу (2.8.1), доказано вполне.
В начале этого параграфа было установлено, что в поле
линейных скоростей v вращающейся жидкости отношение
циркуляции по произвольной замкнутой кривой к площади,
ограниченной этой кривой, равно проекции постоянного век-
тора 2<о на направление, перпендикулярное этой площадке,
и потому предел этого отношения также равен этой же
проекции вектора 2(0. Отсюда следует, согласно определению
вихревого вектора, что
rot v = 2<о.
Таким образом, вихревой вектор поля линейных скоро-
стей вращающейся жидкости есть постоянный вектор, на-
правленный параллельно оси вращения, модуль которого
равен удвоенной угловой скорости вращения.
Значение циркуляции по контуру площадки зависит от
ориентировки последней относительно вихревого вектора
(ротора); оно становится наибольшим, когда площадка пер-
пендикулярна вихрю, ибо тогда проекция последнего на
нормаль, равная его модулю, будет наибольшей. Можно
сказать, что вихрь в векторном поле есть вектор, напра-
вление которого определяет (перпендикулярно) плоскость,
где предел (2.8.1) достигает своего максимума, и модуль
которого равен этому максимуму.
Отметим, что вихрь данного векторного поля образует
новое векторное поле, для которого в свою очередь можно
найти дивергенцию и вихрь: div (rot a), rot (rot а). В частно-
сти, векторные линии поля вихрей называются вихревыми
линиями. Дальше будет показано, что поле вихрей есть
§ 9] ВЫРАЖЕНИЕ ВИХРЯ ЧЕРЕЗ ПРОЕКЦИИ ВЕКТОРА ПОЛЯ 85
соленоидальное поле: div(fota) = 0 и соответственно этому
вихревые линии или замкнуты, или начинаются и кончаются
у границ поля (см. конец § 3 главы II). Вихревые линии
поля линейных скоростей вращающейся жидкости являются
прямыми, параллельными оси вращения, ибо, как раньше
было выяснено, для такого поля направление вихря совпа-
дает с направлением вектора угловой скорости.
§ 9. Выражение вихря поля через проекции
вектора поля; свойства вихря. Задачи
По определению, проекция вихря поля rota на ось Ох
в точке Р(х0, равна пределу отношения циркуляции
вектора а по контуру площадки, перпендикулярной оси Ох,
к величине самой площадки, когда последняя, стремясь
к нулю, стягивается к точке Р. В качестве такой площадки
возьмем небольшой прямоугольник ABCD с центром в точке Р,
лежащий в плоскости, параллельной плоскости yOz (рис. 44).
86
ТЕОРИЯ ПОЛЯ
[ГЛ. II
Пусть размеры прямоугольника ABCD суть ДВ = Ау,
ДО=гД^. Циркуляция вдоль ABCD [формула (2.7.5)] состоит
из линейных интегралов, взятых последовательно по сто-
ронам АВ» ВС» CD» DA. На стороне АВ x = xQ, z = z*—
— у Az, а у изменяется от у0 — у Ду до у0 4~ у Ау и ds = dy»
направление интегрирования совпадает с положительным
направлением оси Оу» поэтому здесь a_ = av. На противо-
л 1
положной стороне CD имеем x = xQ, z = z04-yAz и
ах —— ау» ибо интегрирование проводится в отрицательном
направлении оси Оу; ds должен быть больше нуля, поэтому
и здесь интегрирование по у нужно проводить так, чтобы
dy>0, т. е. в пределах от yQ — уАу до Уо + у Ау. Значит,
J azds-\- ^a^ds =
АВ CD
. 1 А
Уо + 2 ДУ
= (х0, у» z0 — У Az^ — ау [х& у, z0 + у Az^j dy.
Уо - у АУ
Применяя последовательно теорему Лагранжа о конечном
приращении и теорему о среднем значении для определен-
ного интеграла, получим
J ат ds -j- \ ds =
АВ CD
, 1 а
Уо + уАу
= — ^^(х0, у, zo + 0t Az)Aziy =
Уо - -% Ау
где 01 — величина по абсолютной величине меньшая у,
/ д \ да у
но зависящая, вообще говоря, от у; (gjayL— значение
§9]
ВЫРАЖЕНИЕ ВИХРЯ ЧЕРЕЗ ПРОЕКЦИИ ВЕКТОРА ПОЛЯ
87
в некоторой точке прямоугольника ABCD. Аналогично
\ I = ДгДу.
вс da 3
Поэтому циркуляция вектора а по контуру ABCD
выразится так:
(Б а.
ABCD
Но площадь SABCD = ^ykz> следовательно,
& дт ds
Ду Да \дгу)\
При переходе к пределу, когда Д_у->0, Д2->0, будем
иметь.
х dag да»
го^а = ^Г-757
даг дау
где значения и ~ берутся в точке Р.
Применяя подобные рассуждения к циркуляциям по конту-
рам прямоугольников AiBjCiDj и (рис. 44),
дим к выводу, что
координат равны
проекции вихревого вектора rota
прихо-
на оси
Соответственно
dag да»
а?.
r0Iva— dz дх'
дау даж
Г0^а = 7^-7П7-
(2.9.1)
этому можно написать '
rota =
к
(2.9.2)
и
|rot а|=
dy
дх
88
ТЕОРИЯ ПОЛЯ
|ГЛ. п
Вихревой вектор по своему строению напоминает вектор-
ное произведение двух векторов, в котором проекции пер-
вого сомножителя заменены знаками дифференцирования
по х, у и z. Поэтому rot а можно символически записать
в виде
rot а =
1 j
д д_
дх ду
к
д
dz
&у ^z
Свойства вихря вектора.
1°. Дивергенция вихревого вектора векторного поля-
div (rot а) = 0. (2.9.4)
Действительно,
droUa . drotva t drot-a
dlv(rota) = ^-+-^ + —=
d [dag day\ d /dax dag\ d fday dax\
dx\dy dz )'dy\ dz dx )^dz\dx ду/
d*ag dsav dsax d*ag d?av d*ax
—-_________d______________— -I_______________л
dx dy dx dz ‘ dy dz dy dx ‘ dz dx dz dy
2°. Вихрь суммы векторных полей:
rot (а b) = rot а -|- rot Ь.
(2.9.5)
Вывод аналогичен доказательству соответствующей формулы
для градиента и дивергенции.
3°. Вихрь произведения вектора на скалярную функцию:
rot (wa) = w rot а + grad и X a, (2.9.6)
где и — скалярная функция от х, у, z.
В самом деле, запишем проекцию вихря вектора «а на
ось Ох:
rot*(иа)=(иаг) - (иау)=ид-!± + агд£-
дау ди /даг дау\ ди du
— и -----а» = и -з------4- а, 3-------х- =
dz у dz \ду dz) • г dy у dz
и rot* а + (grad и X а)*,
$91
ВЫРАЖЕНИЕ ВИХРЯ ЧЕРЕЗ ПРОЕКЦИИ ВЕКТОРА ПОЛЯ
89
х ди ди < .
ибо — проекции grad и на оси у и z. Аналогично
rot^ (иа) = и rot^ а + [grad и X а]^,
toig (wa)=v rot* а + (grad и X а)*.
Следовательно, у векторов, стоящих в левой и правой
частях равенства (2.9.6), проекции на все оси координат,
соответственно, равны, а в таком случае сами векторы
также равны.
4°. Дивергенция векторного произведения векторных
полей:
div (а X Ь) = Ь • rot а — а • rot b, (2.9.7)
так как
div (а х Ь) =^(а X Ь)ж + ^(а х b), + (а X Ь)г =
== fa (ay^z azby) “t~ (asfix ах^г) ~Ь gj (axby ay^x) 13
/da, дал (da* de^\
~~b*\dy dz)'by\dz dx) ' °z\dx dy )
(dbg dby\ (dbx дЬг\ fdby dbx\
~ax[dy~lF)~ay\dz~dx]~az\'dx~'dy)=!X
= b • rot a — a • rot b.
Задача 13. Найти rot (га), где a — постоянный вектор,
Решение. Имеем
га = r (aJ 4- ayj агк)=raj + rayj -f - rajc.
_ dr у dr z
Так как аг и ау — постоянные, а ^- = у ’ ^=—, то
ч d z v d z ч dr dr
rot^(ra) — fy(raz) dz^ray} — a‘ dy aydz —
= аг^г— аЛ = 7(гХ а)ж.
Аналогично
rotj, (га) = у (г х Л)у, rot* (га)—у (г X a)z>
т. е.
rot (га) — у (г Ха).
90 ТЕОРИЯ ПОЛЯ {Гл. п
Задача 14. Вычислить rot (г-а) Ь, где а и b — постоян-
ные векторы, аг — радиус-вектор точки.
Решение. Пусть
а = axl + ау j + a*k, b = bx\ + by j -f- beK г — xl -f- У j +
Тогда
r • a = axx -f- ayy -f-
и
(r. a) b = (a*x + ayy -j- atz) (V -f- by j -|- Z>*k).
Значит,
rot* (r • a) b = (a*x -f- ayy a,z) b, —
— gj (flxX + ayy + atz) by = ауЬг — atby = [a X b]*.
Поэтому
rot(r-a)b = aX b.
Этот результат можно получить иначе при помощи фор-
мулы (2.9.6). Имеем
rot (г • а) b = (г • a) rot b -f - grad (г • а) X Ь.
Но b — постоянный вектор, поэтому rotb = 0; кроме того,
grad (г • а) = а (см. задачу 2). Следовательно,
rot (г • a) b = а X Ь.
Задача 15. Найти вихрь вектора напряженности маг-
нитного поля Н в условиях примера на стр. 18.
Решение. В силу формулы (1.5.12)
„ 21 у. 21 г» Л
Нх — pi У> Щ — pix> Нх — 0,
где р^ = х?4“У. Поэтому
rot* Н— — ~ °’ rot> Н~ д1 ~ °’
. д ! 21х \ д I 21у \
го^"-дх\х2 + // ду\ х3+у»)~
_ д,(х*+^)-2х* , 2, (х»4-/)-2/ _
“ (Xs+у8)2 (Xs+ /)8 “
ТЕОРЕМА СТОКСА
91
§ 101
Таким образом, rotH = 0 везде, кроме оси Oz. в точках
которой последние формулы теряют свой смысл (знамена-
тели обращаются в нуль). Отметим, что в противополож-
ность этому вихрь поля линейных скоростей вращающейся
жидкости не равен нулю (см. предыдущий параграф).
§ 10. Теорема Стокса
Теорема Стокса. Циркуляция вектора а по замк-
нутой линии L равна потоку вихревого вектора через
произвольную поверхность S, лежащую в векторном поле
и имеющую своей границей линию L:
§ а • dr — rot а • do;
L S
§ ax ds == rotn a dor;
L S
(2.10.1)
(2.10.2)
здесь az означает проекцию вектора а на касательную к кри-
вой £, a rotn а — проекцию вихря вектора а на нормаль к 5,
причем обход по L нужно совершать против часовой стрелки
(рис. 45). При этом предполагается, что проекции Ojp Оу. ag
векторного поля а непрерывны на поверхности 5 вместе со
своими частными производными.
Рис. 46.
Доказательство этой теоремы имеет много общего
с доказательством теоремы Гаусса — Остроградского.
92
ТЕОРИЯ ПОЛЯ
|ГЛ. п
Поверхность 5 разобьем на т достаточно мелких частей
Дар Да9, ...» Дат, ограниченных замкнутыми линиями Lp
Lg, Lm (рис. 46).
Из определения (2.8.1) вытекает, что для площадки Да*
фа-flfr
где sk — достаточно малая величина (для сравнения см.
стр. 64). Последнее равенство может быть переписано иначе:
ф axds = rotn а Да* е* Да*,
La
где проекция вихря берется в некоторой точке площадки Да*,
а е* — достаточно малые величины, разные для различных
площадок.
Полагая в последнем равенстве Л=1, 2, ..., т и скла-
дывая полученные равенства, найдем:
k = m k = m k = m
У, §axds = У rot„aAa* + £ е*Да*.
*«1 *«1
В левой части линейные интегралы вдоль внутренних
линий берутся два раза в противоположных направлениях
и, следовательно, взаимно уничтожаются (рис.46); остаются
только линейные интегралы, взятые по отдельным частям
внешнего контура L, которые в сумме дадут искомую цир-
куляцию; тогда при любом разбиении
&axds= У rot, а Да* 4- у е* Да*.
I Л=1 . fe=l
Будем теперь неограниченно увеличивать число частей тп
с таким расчетом, чтобы размеры каждой площадки умень-
шались до нуля. Тогда левая часть последнего равенства
остается неизменной, а первая сумма правой части имеет
своим пределом интеграл по поверхности
$ rotn a da;
§ 101
ТЕОРЕМА СТОКСА
93
вторая сумма, как и в теореме Гаусса — Остроградского,
стремится к нулю. Следовательно,
ф ах ds = J J rot„ a rfo,
l s
что и требовалось доказать.
Теорема Стокса в координатной форме запишется так
(см. формулы (2.7.6) и (2.4.9)):
§axdx + aydy-{-<1,(12=^ — ^dydz-J-
L S
tdax da-\ , fdav dax\ _
+ (Hz ~ Их ) dz dx + \dx ~ ~dy ) dx dV- (2-10-3)
Следствие 1. Теорема Стокса гласит, что поток вихря
вектора а не зависит от вида поверхности S, проходящей
через кривую L, и равен циркуляции вектора а по этой
кривой. Поэтому, если через кон-
tnyp L провести две поверх-
ности S и Si, то
J J rotn a da = rotn a da.
sJ si
Поверхности S и ограни-
чивают некоторый объем Т. Чтобы
обход по L казался происходя-
щим против часовой стрелки,
надо нормаль к поверхности
направить внутрь объема Т\ по-
этому, меняя направление нормали
на противоположное (рис. 47),
т. е. на внешнее по отношению
к Г, получим
$ J rotrt a da = 0,
S + Si
т. е. поток вихря вектора через замкнутую поверхность
равен нулю. К этому результату можно также прийти, ис-
пользуя теорему Гаусса — Остроградского, ибо div (rot а) = 0.
Это означает, что поле вихря является соленоидальным.
94
ТЕОРИЯ ПОЛЯ
[ГЛ. п
Следствие 2. Если в некоторой части векторного
поля повсюду rot а = 0, то циркуляция вектора а по
любому замкнутому пути L в этой части поля равна
нулю:
§ axds = J J 0 • d<5 = 0.
L
Обратно, если циркуляция векторного поля а по любой
замкнутой кривой равна нулю, то rot а = 0 и поле без-
вихревое. В самом деле, предположим, что в некоторой
точке Р поля вихревой вектор отличен от нуля. Тогда в силу
непрерывности вихря (для этого до-
статочно, чтобы частные производ-
ные от проекций вектора а были
непрерывными функциями х, у и г)
найдется такая малая поверхность 5,
содержащая Р и ориентированная
в пространстве так, чтобы везде на
ней rotna^>0. Для этой поверх-
ности
^rotnada>0.
s
Из теоремы Стокса будет следовать,
что циркуляция вдоль кривой, огра-
ничивающей S, также больше нуля,
а это противоречит нашему предпо-
ложению, что циркуляция вдоль
любой замкнутой кривой равна нулю.
Раньше было показано, что цир-
куляция вдоль замкнутой векторной
линии не может равняться нулю. Следовательно, в безвихре-
вом поле a (rota = 0) не могут существовать замкнутые
векторные линии при условии, что области, ими ограничен-
ные, целиком лежат в векторном поле.
В задаче 15 мы видели, что вихрь магнитного поля
равен нулю, за исключением оси Oz, по которой протекает
ток, образующий это магнитное поле. Поэтому циркуляция
вектора напряженности Н по замкнутой кривой равна нулю,
если ось Oz не проходит сквозь область, ограниченную этой
кривой. Если ось Oz проходит через область, ограниченную
§ 11]
ОПЕРАТОР ГАМИЛЬТОНА
95
кривой, то циркуляция не зависит от вида кривой, ибо через
две кривые, окружающие провод Oz, можно провести поверх-
ность, на которой rot//=0 (рис. 48) (ср. с задачей 7).
Значит, для вычисления циркуляции вектора Н по любой зам-
кнутой кривой, окружающей ось Oz, достаточно взять окруж-
ность Li радиуса R с центром на Oz, плоскость которой
перпендикулярна проводу. На такой окружности р = /?
см. задачу 15) и
7_7 _ и __________ ^IX, r_J _ Л
/7Ж-- , nx---U.
Соответственно этому
<£ Н • dr — ~ (j) —ydx + xdy.
м м
Но интеграл, стоящий в правой части, выражает удвоенную
площадь проекции круга Li на плоскость хОу, равную
удвоенной площади самого круга, ибо плоскость круга Li
параллельна плоскости хОу. Следовательно,
(£ Н • dr = ~ те/?2 = 4те/. (2.10.4)
м
Итак, циркуляция вектора напряженности Н магнитного поля,
образуемого электрическим током силы 1, текущим по бес-
конечному прямолинейному проводу, или равна нулю, или
есть постоянная величина — 4те/, когда замкнутая кривая, вдоль
которой берется циркуляция, окружает провод. В частности,
(2.10.4) имеет место, когда за Li взята кривая, получаемая
при сечении провода любой плоскостью.
§11. Оператор Гамильтона.
Дифференциальные операции второго порядка.
Оператор дифференцирования по направлению
Итак, в теории поля основное значение имеют следую-
щие понятия:
1) градиент скалярной функции и(х, у, z), являющийся
вектором:
, ди . । ди . । ди «
grad« = ^-, + 5rj + ^k;
96
ТЕОРИЯ ПОЛЯ
[ ГЛ. II
2) дивергенция вектора а (х, у, г), являющаяся скаляром:
дах . дау да,
dlva=a? +dz'
3) вихрь вектора а(х, у, z), являющийся вектором:
(даг дау\ (дах даЛ (дау дах\
го а ^2у \dz дх/ \дх ду) *
Эти три понятия очень просто записываются при помощи
следующего символического вектора — оператора V (читается
«набла»), предложенного математиком Гамильтоном:
v='E+^ + kS- <2111>
Проекции символического вектора — оператора Гамильтона —
суть
Сам вектор V не имеет реального значения, он приобре- |
тает определенный смысл лишь в комбинации со скалярными
или векторными функциями. Рассмотрим, например, «произ- 1
ведение» вектора V на скалярную функцию и (х, у> z) j
v“=S1+5J + sk = krad"’ <2112>
что является градиентом скалярной функции и. <
Точно так же скалярное произведение V на вектор a J
запишется так:
ddv да<, да? :
V.a = ^4--^ + -^ = diva; (2.11.3)
дх 1 ду 1 dz ’ v 7 *
это есть дивергенция вектора а.
Векторное произведение
[dav дах\
4- -И — k = rota (2.11.4)
1 \ дх ду / v 7
дает вихрь вектора а.
Таким образом, при помощи оператора Гамильтона основ-
ные понятия поля, получаемые дифференцированием, можно
§ Hl
ОПЕРАТОР ГАМИЛЬТОНА
97
записать в виде различного рода произведений, применяемы!
в векторной алгебре. Используя свойства этих произведений,
мы можем получить формулы для вышеуказанных понятий
поля. Например, div (rot а) при помощи оператора Гамиль-
тона запишется так:
div (rot а) = V. (V X а).
Как известно, смешанное произведение трех векторов
a (b X с) обладает свойством v
а(ЬХс) = Ь(сХа) = с(аХЬ); (2.11.5)
кроме того, векторное произведение двух одинаковых век- .
торов равно нуЛю. Следовательно,
V.(VXa) = a(VXV) = O,
т. е. div (rot а) = 0 (результат, полученный аналитическим
путем в § 9 главы II).
Точно так же
rot (grad w) = V X (Vzz) = (V X V) и = 0 (2.11.6)
г
(и есть скалярный множитель, поэтому его можно вынести
за знак векторного произведения).
Имеем
' diV(gradH) = divf^-i + ^j + ^ = S- + S + S.
7 \dx 1 dyJ 1 dz / дх2 1 dy2 1 dz2
Используя оператор Гамильтона V, мы можем написать, что
div (grad zz) = V • (Vzz) = (V . V) и = V2zz,
ибо скалярное произведение вектора на самого себя равно
квадрату модуля этого вектора. Получили скалярный опе-
ратор
V2 — -4- d2 I д2 Г2 11 7)
— dx2 ‘ dy2 ' dz2' * *lkZ'
который носит название оператора Лапласа или лапласиана.
Как известно, квадрат модуля вектора равен сумме квад-
ратов его проекций и потому
\ ду j \ dz ) дх* ду1 г dzs ‘
4 И. А. ГольдфаЙн
as
ТЕОРИЯ ПОЛЯ
[ГЛ. Й
Будем иметь
и
V2w = div (grad к)
V2,, = ^£ ।
dx2 ‘ dy2 ~ dz2 *
(2.11.8)
(2.11.9)
В математическом анализе формула (2.11.9) принимается
в качестве определения лапласиана от скалярной функции
и(х, у, z)\ встречается также обозначение оператора Лап-
ласа символом V.
Применяя скалярный оператор Лапласа V3 к векторной
функции а = а(х, у, г), согласно правилу умножения век*
тора на скаляр, получим:
V2a = V4i + V2aj4-V4k* (2.11.10)
Таким образом, лапласиан от векторной функции а
есть вектцр, проекции которого — лапласианы от соот-
ветствующих проекций вектора а, причем они (лапла-
сианы) получаются из формулы (*2.11.99 путем подста-
новки вместо и проекций вектора а.
Рассмотрим еще rot (rot а). Можно написать, что
rot (rot а) = V X (V X а).
В векторной алгебре выводится формула
аХ(ЬХс) = (а-с)Ь —(а-Ь)с. (2.11.11)
Значит,
V X (V X а) = (V. а) V — (V • V) а
или
rot (rot а) = grad (div а) — V2a, (2.11Л 2)
где V2a определяется формулой (2.11.10). Выражения
div (rot a), rot (grad и), div (grad и), rot (rot a)
называются дифференциальными операциями второго порядка,
так как они сводятся к двухкратному дифференцированию
скалярных или векторных функций и в их символической
форме оператор Гамильтона V встречается два раза. С этой
точки зрения grad и, diva и rota являются дифференциаль-
ными операциями первого порядка.
§ П]
ОПЕРАТОР ГАМИЛЬТОНА
99
Символ V употребляется еще для обозначения следующих
дифференциальных операций первого порядка. В § 1 этой
главы была выведена формула (2.2.7)
du .
^ = grad«.T,
определяющая скорость изменения скалярной функции
и(х,у, z) по направлению единичного вектора касательной т.
Предположим, что направление, по которому нужно найти
скорость изменения и, дается вектором е = exl eyj -|- егк.
Соответствующий единичный вектор е° равен ~е и
^ = grad«.e° = -i-(e.grad и).
Скалярное произведение, стоящее в правой части, удобно
представить при помощи скалярного оператора е • V, кото-
рый имеет вид
e.V — ex^-4-ev4~ + ez4~‘ (2.11.13)
х дх 1 У ду 1 z dz v 7
Умножая этот символический скаляр на и, получим искомое
скалярное произведение
e-Vw==<?^4-^|- + ^^- = e-grada (2.11.14)
И
du 1 , г, ч 1 / ди । ди . ди\ /о 1.
- = T(e.VM) = T^ + ^ + ^). (2.И.15)
Оператор (2.11.13) можно также применить к векторной
функции а (х, у, z). Будем иметь
или
е- Va = e- е- —J— е - Vazk (2.11.16)
4*
100
ТЕОРИЯ ПОЛЯ
(ГЛ. II
Выясним смысл последней формулы. Пусть требуется
da
найти скорость изменения векторной функции а (х, у, z)
по направлению вектора е. Эта скорость есть вектор, проек-
ции которого выражаются формулами (2.11.15), где вместо и
нужно поставить соответствующую проекцию вектора а:
z/a ^ах, . ^ау. । daz
ds~ ~ds ’ 'ds ~
= У (e • VaJ + e • VaJ + e • Vazk) = ~ (e • Va). (2.11.18)
Следовательно, оператор e-Va дает скорость изменения
вектора а по направлению вектора е, умноженную на мо-
дуль вектора е.
Таким образом, наряду с gradzz, diva, rota в теории
поля еще рассматриваются дифференциальные операции пер-
вого порядка е • Vzz и е • Va, определяемые формулами (2.11.15)
и (2.11.18) — всего пять дифференциальных операций первого
порядка.
Исходя из смысла е • V, можно его назвать оператором ;
дифференцирования по направлению. ;
При применении оператора V к произведениям не нужно
забывать, что по существу он представляет собой оператор '
дифференцирования и, следовательно, подчиняется правилу
дифференцирования произведения. Так, например, для произ-/
ведения двух скалярных функций и и v получаем
V (uv) = и V-u v Чщ
это значит
grad (uv) — и grad v 4" v grad «•
Точно так же
V (на) = zz (V • а) 4~ а • (Vzz); V X (zza) = zz (V X а) 4~ Vn у а
или
div (на) = и div а -}- a grad и; rot (zza) = zz rot a 4~ grad и X a.
Такое правило действий над произведениями гарантирует
безошибочность результатов только в тех случаях, когда
оператор V применяется один раз к произведениям двух ска-
лярных функций или скалярной и векторной функций и когда
скалярный множитель можно вынести за знак скалярного и
векторного произведений. Гораздо хуже обстоит дело, если
§ HI
ОПЕРАТОР ГАМИЛЬТОНА
101
операция V совершается хотя бы один раз над произведе-
ниями двух векторных функций. Здесь для получения пра-
вильного ответа нужно руководствоваться следующим пра-
вилом: оператор V применяется только к одному из сомно-
жителей, для чего над ним ставят знак полученные
таким образом тройные произведения складывают и преобра-
зуют по правилам векторной алгебры так, чтобы V стояло
на предпоследнем месте перед множителем, снабженным зна-
ком последний в конце преобразований может быть
отброшен.
Пример. Найти символическим методом (при помощи
оператора V):
1) div(aXb), 2) rot(aXb), 3) grad(a-b).
I I
1) div(a X b) = V(a X b) = V (a X b)+ V (a X b).
В соответствии с формулой (2.11.5)
V(aXb) = a(bXV) = -a(VXb) и V (1 X b)=^b(V X а).
Значит,
V(a X b) = b(V X a) —a(V X b)
или
div (а X b) = b rot а — a rot b.
В частности, если b — постоянный вектор, то rotb = 0 и
div (а X b) = b rot а. (2.11.19)
Отсюда вытекает следующая формула, нашедшая приме-
нение в теории электричества:
$rotarfx = -|j аХ^ог, (2.11.20)
где S — поверхность, ограничивающая объем Г. (Выраже-
ния, стоящие в обеих частях последнего равенства, следует
рассматривать как векторы, проекции которых определяются
объемными, соответственно, поверхностными интегралами
от проекций векторов, находящихся под знаком этих интег-
ралов.)
В самом деле, умножим скалярно объемный интеграл,
стоящий в левой части еще не доказанной формулы (2.11.20),
102
ТЕОРИЯ ПОЛЯ
[ГЛ. II
на произвольный постоянный вектор Ь. Внося этот постоян-
ный вектор Ь под знак объемного интеграла и применяя
последовательно равенство (2.11.19) и теорему Гаусса — Ост-
роградского, получаем
Ь • rot a dx = Ь • rot a dx =
т т
= Щ div (а X Ь) dx = (а X Ь) • rfa.
т s
Согласно формуле (2.11.5),
(а X Ь) • da = b • (da X а) = — b • (а X da).
Значит,
b • rot a dx = — Ь • (а X da),
т s
Ввиду произвольности вектора Ь из последнего соотношения
вытекает формула (2.11.20).
I I
2) rot(a X b) = V X (а X b) = V X(а X b) +V X (а X b).;
В силу формулы (2.11.11)
V X (а X b) = (V. b) а — (V. а) Ь.
Во втором члене правой части поставим а впереди V,
ибо V не действует на а; отбрасывая в нем скобки, по-
лучим:
I
V X (а X b) = (V. Ь) а — а • Vb.
Аналогично,
I
V X (а X Ь) = b • Va — (V • а) Ь.
Следовательно,
VX(aXb) = (V-b)a —(V-a)b + b. Va —a-Vb,
иначе говоря,
** rot (а X b) = a div b — b div a -f- b • Va — а • Vb;
ОПЕРАТОР ГАМИЛЬТОНА
103
§ ill
a-Vb и b*Va нужно понимать как операцию (2.11.16) по
направлению вектора а, соответственно Ь, произведенную
над вектором Ь, соответственно а. Используя формулу
(2.11.17), получим:
( dbx । । дЬЛ, ,
/ дЬу дЬу dby\ .
+ и + °? 77 + “ *-)J +
+ (“-й+а>у+“-'а')к' <2JL21>
Ь.?аЦ^ + ^ + ^)1 +
+ (г,-Й + ''Л' + 6.ж)к- <2Л!-22)
I I
3) grad (а • b) = V(a • b)= V (а • b) + V (а • Ь).
Для раскрытия первого члена правой части найдем предва-
рительно aXr°tb- Имеем [см. формулу (2.11.11)]:
I I
а X rot b = a X X Ь) = (а-b) V — (a- V)b =
I I
= V (а • b) — а • (Vb).
Отсюда вытекает, что
4:
V(a-b) = a X (V X b) +a* Vb.
Меняя местами векторы а и Ь, получим:
4
V(a.b) = bX(VXa)4-b. Va.
Окончательно,
grad (а • b) = а X rot b + b X rot а 4“ а • Vb + b • Va,
где последние два члена определяются равенствами (2.11.21),
(2.11.22).
104
ТЕОРИЯ ПОЛЯ
[ГЛ. 11^
Рассмотренные примеры показывают, что с оператором V
нужно обращаться осторожно: небрежность в обращении
с ним может привести к ошибкам. Поэтому целесообразно
формулы, полученные символическим путем при помощи V,
проверять обычным аналитическим методом.
§ 12. Потенциальное векторное поле.
Уравнения Лапласа и Пуассона
Если a = grad^, то функцию и — — v называют потен-
циальной функцией или потенциалом векторного поля а.
Таким образом,
а = — gradw = — — ~ j — ^k (2.12.1)
Ь дх dy J dz 47
или, иначе,
da ди ди n
ax ——-s-, av — —-v- , az = — (2.12.2)
x дх9- У dy 9 z dz v 7
Формула (2.12.1) показывает, что потенциальная функ-
ция не определяется полем однозначно: непосредственно'
очевидно, что любая функция, отличающаяся от и постоян-
ным слагаемым, имеет тот же градиент, что и w, а потому
также может рассматриваться как потенциал поля а. Выбор:
знака минус оказывается более удобным с физической точки,
зрения: векторные линии поля а обычно бывают направлены
в сторону убывания потенциала. Так, например, тепло пере-
мещается ~от места более нагретого к менее нагретому,
электрический ток течет от точки с более высоким потен-
циалом к точкам с меньшим потенциалом, жидкость течет
туда, где давление меньше, и т. д.
Основной особенностью потенциального вгекторного поля
является то, что потенциальное векторное поле вполне
определяется одной скалярной функцией — его потенциа-
лом, тогда как для задания произвольного векторного поля
требуется знание трех скалярных функций — проекций век-
тора на оси координат.
Большой интерес представляют условия, которым должно
удовлетворять векторное поле а, чтобы быть потенциальным.
Эти условия выражаются следующей теоремой.
Теорема об условии потенциальности. Для
того чтобы векторное поле а = а (х, у, z) было потен-
§ 12]
ПОТЕНЦИАЛЬНОЕ ВЕКТОРНОЕ ПОЛЕ
105
циальным, необходимо
безвихревым, т. е.
и достаточно, чтобы оно было
rot а = 0.
(2.12.3)
Доказательство необходимости. Пусть век-
торное поле а является потенциальным. Тогда существует
такая скалярная функция и = и (х, у, z), что а = — grad и.
Поэтому
rot а = — rot (grad и) = 0
(см. формулу (2.11.6)), что и требовалось доказать.
Доказательство достаточности. Пусть rot а = 0.
Тогда в силу второго следствия теоремы Стокса внутри
поля циркуляция вектора а по любому замкнутому контуру
равна нулю. Возьмем в поле две произвольные точки А и В
и соединим их двумя кривыми АСВ и ADB (рис. 49),
такими, чтобы область, ограниченная контуром ADBCA,
целиком лежала внутри поля. Этот кон-
тур ADBCA состоит из двух частей ADB В
и АСВ и потому
$ a-dr-J- $ a-rfr = 6. / \
ADB ВСА / / I
Но при изменении направления интегри- / /
рования линейный интеграл изменяет свой с[ /
знак. Следовательно, f h
J a-rfr = — J г-dr / /
ВСА АСВ I /
И I
$ a-dr = $ a-dr. (2.12.4)
ADB АСВ A
Кривые АСВ и ADB — произвольные Рис* 49,
в поле а. Поэтому из выполнения усло-
вия (2.12.3) следует, что криволинейный интеграл (2.12.4)
не зависит от пути интегрирования, а зависит только
от положения его концов А и В; можно сказать, что этот
криволинейный интеграл есть функция двух точек А и В.
Пусть теперь начальная точка фиксирована, а конечная
является произвольной точкой поля. Чтобы подчеркнуть это
обстоятельство, конечную точку обозначим через М (х, у, z),
106
ТЕОРИЯ ПОЛЯ
[ГЛ. п
переходе от
При
М(х,у,г)
50.
а начальную через Р(х0, у0, z0). Тогда соответствующий
криволинейный интеграл станет функцией одной точки М.
Обозначим эту функцию через г>(7И):
v(M) — a-dr. (2.12.5)
РМ . v
точки М к точке W (рис. 50)
функция v получает приращение No:
Nu = а • dr = $ ax ds,
MN MN
где az — проекция вектора а на
направление MN. На основании тео-;
ремы о среднем 1
i
где As = MN a (aT)t — значение ax \
в некоторой точке отрезка MN.i
Отсюда вытекает, что 1
(значение ах берется в точке М). Сравнивая последнее ра-
венство с формулой (2.2.8), приходим к выводу, что 1
а = grad v. 4
Итак, векторное поле а есть потенциальное с потенциа-J
лом и = — v, что и утверждалось. •
Для интеграла по дуге АВ можно написать 1
$ а. dr = а • dr — $ а • dr = v (В) — v (Д).
АВ РВ РА
Но V = — и и потому
а • dr = и (Д) — и (В). (2.12.6)
АВ
Итак, в потенциальном поле линейный интеграл от век-
тора поля по некоторой кривой равен разности значений
потенциала поля в начальной и конечной точках кривой.
Учитывая физический смысл криволинейного интеграла,
приходим к выводу, что работа потенциального векторногр
§ 12]
ПОТЕНЦИАЛЬНОЕ ВЕКТОРНОЕ ПОЛЕ
107
поля вдоль некоторой кривой не зависит от формы
кривой и равна разности значений потенциала поля
в начальной и конечной точках.
Формула (2.12.6) показывает, что за потенциальную
функцию поля можно принять величину линейного интеграла,
отсчитываемую от любой фиксированной точки. Возможность
выбора произвольной точки отсчета соответствует указан-
ному выше обстоятельству, что потенциальная функция оп-
ределяется лишь с точностью до постоянного слагаемого.
Чтобы определить потенциал однозначно, следует выбрать
определенную точку отсчета, т. е. точку, в которой значе-
ние потенциальной функции принимается равным нулю.
Обычно из физических соображений за точку с нулевым по-
тенциалом принимается точка на границе поля или в беско-
нечности. Тогда формула (2.12.6) принимает вид
a- dr = и (А), (2.12.7)
АВ
так как w(£) = 0.
Равенство (2.12.7) приводит к определению потенциала
поля, часто употребляемому в физике: потенциал поля в точке А
равен работе сил поля при перемещении точки из А в беско-
нечность.
Примечание 1. В § 10 было установлено, что усло-
вие (2.12.3) равносильно условию равенства нулю цирку-
ляции вектора а по любому замкнутому пути. Имея в виду
физический смысл циркуляции, можем дать следующее оп-
ределение потенциального поля. Векторное поле называется
потенциальным, если работа поля вдоль любой замкну-
той кривой равна нулю.
Согласно формуле (2.3.3), вектор электростатической
индукции точечного заряда е образует потенциальное поле.
В теории пространственного потенциала доказывается, что
свойство потенциальности сохраняется и для электростати-
ческого поля, образованного объемным зарядом. Следова-
тельно, в обоих полях нельзя получить работу движением
по замкнутой кривой.
Примечание 2. Доказательство достаточности усло-
вия (2.12.3) основано на теореме Стокса. Однако она имеет
место только тогда, когда векторное поле существует везде
на поверхности S, в то время как сама циркуляция требует
108
ТЕОРИЯ ПОЛЯ
[ГЛ. п
только существования векторного поля вдоль линии Л, огра-
ничивающей область S. Поэтому не исключен случай,
когда нужно вычислить циркуляцию по замкнутой кривой,
ограничивающей область, где векторное поле существует
не в каждой точке; тогда теорема Стокса не применима.
В частности, могут существовать точки, где потенциал поля
не определен, и при обходе по замкнутому контуру, заклю-
чающему внутри себя эти точки, потенциал может получить
другое значение; тогда этот потенциал будет многозначной
функцией; линейный интеграл вектора поля будет, вообще
говоря, зависеть от пути интегрирования.
Такой случай имеет место для магнитного поля, опреде-
ляемого вектором
Потенциалом этого поля будет функция
и = — 27 arctg^,
ибо
' 21 —
ди х2 21у ди 21 х ди ~
'дх 1.3^ x2-f-y2> ду х2+у2’ dz
х2
И
Н = — grad и.
Но и — многозначная функция и значение линейного инте-
грала от Н зависит от пути интегрирования; циркуляция по
замкнутой линии, сквозь которую проходит провод, как мы
убедились раньше, не равна нулю. Этим объясняется замкну-
тость векторных линий поля Н (см. задачу 3).
Таким образом, указание на стр. 94, что в безвихревом
поле не существует замкнутых векторных линий только при
условии, что ограниченные ими области целиком находятся
внутри поля, является существенным.
Векторные линии потенциального поля а обычно допол-
няются поверхностями уровня потенциала и (рис. 51), кото-
рые им ортогональны, т. е. в каждой точке поверхности
уровня нормаль к последней, проведенная в сторону умень-
шения w, совпадает с направлением касательной к векторной
линии в этой же точке. Последнее следует из того, что
§ 12J
ПОТЕНЦИАЛЬНОЕ ВЕКТОРНОЕ ПОЛЕ
109
градиент скалярного поля направлен по нормали к поверх-
ности уровня поля, а а = — grad zz (см. § 2 этой главы).
Из содержания этого же параграфа также вытекает, что
модуль вектора а выражает скорость изменения потенциала
по направлению нормали в сторону уменьшения и. Поэтому,
чем больше расстояние между двумя соседними поверхностями
уровня потенциала, тем меньше модуль вектора а.
Согласно формулам (2.12.1) и (2.11.8),
diva =— div(grad и) = —V2zz, (2.12.8)
определяется формулой (2.11.9). Но
а и плотность р его источ-
где V3 и — лапласиан и
дивергенция векторного поля
ников (стоков) связаны соот-
ношением
div а = 4zp
(формула (2.5.2)).
Формула (2.12.8) принимает
вид
— (2.12.9)
Если известно распреде-
ление источников и стоков
потенциального поля, иначе
Рис. 51.
говоря, если плотность р
источников (стоков) дана как функция х, у, г, то равенство
(2.12.9) можно рассматривать как уравнение в частных про-
изводных второго порядка (см. формулу (2.11.9)) отно-
сительно потенциала поля zz. Это уравнение носит название
уравнения Пуассона. Оно является основным уравнением
теории потенциального векторного поля, ибо, как это было
указано в начале настоящего параграфа, такое поле вполне
определяется своим потенциалом.
В точках, где отсутствуют источники и стоки, р = 0 и
уравнение Пуассона (2.12.9) приобретает вид
V2zz = 0
или
d2zz । d2zz . d2a________
dx2"*- dy2 ' dz2-
(2.12.10)
110
ТЕОРИЯ ПОЛЯ
[ГЛ. п
Последнее уравнение называется уравнением Лапласа,
а удовлетворяющие ему дважды непрерывно дифференци-
руемые функции — гармоническими функциями.
При решении задачи 8 было указано, что дивергенция
вектора индукции электростатического поля, образованного
объемным зарядом с плотностью р, равна 4кр внутри заряда
и нулю вне его. Соответственно этому потенциал такого
поля удовлетворяет уравнению Пуассона внутри заряжен-
ного тела и уравнению Лапласа вне его.
§ 13. Градиент, дивергенция, лапласиан и вихрь
в криволинейных координатах.
Сферические и цилиндрические координаты.
Центральные и осевые скалярные поля
Основные понятия теории поля, как градиент, диверген-
ция и вихрь, имеют определенный физический смысл и не
требуют введения системы координат; например, градиент
есть скорость изменения скалярной функции по направлению,
по которому эта скорость достигает своего максимума.
Дивергенция выражает удельную плотность источников или
стоков поля. Вихрь дает, грубо говоря, циркуляцию вектора,
приходящуюся на единицу площади поверхности, ориен-
тированной так, чтобы эта циркуляция была наибольшей.
При решении задач для вычисления этих величин при-
ходится пользоваться координатами. В некоторых случаях
использование декартовых координат может оказаться не-
удобным, и положение точки в пространстве выгоднее
определять не при помощи координат х, у, z, а при помощи
трех других величин и, v и w, более отвечающих условиям
задачи.
Величины и, v, w, определяющие положение точки в про-
странстве, называются криволинейными координатами точки.
От них требуется, чтобы каждой тройке их числовых зна-
чений соответствовала вполне определенная точка пространства.
Обратно, каждой точке пространства должна соответствовать
тройка числовых значений и, v и w. Можно сказать, что
каждая из величин и, v, w является функцией радиуса-вектора
точки.
Так как радиус-вектор точки вполне определяется ее
прямоугольными координатами, то криволинейные координаты
КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ
111
являются функциями прямоугольных координат х, у и г
той же точки:
u = и (х, у, z), v = v (х, у, г), w = w (х, у, z)
и, обратно, прямоугольные координаты х, yt z суть функ-
ции криволинейных координат:
х = х(и, v, w), y=y(u, v, w), z = z(u, v, w).
Уравнения
1) u(x, у, z) = Cb 2) v(x, y, z) = C2, 3) w(x, y, z) = C3
(Ct, Ca и C3— постоянные) определяют поверхности уровня
соответственно для функций и (х, у, z), v (х, у, z) и w (х, у, z).
Придавая каждой из величин Ср С2, С3 различные значения,
мы получим три семейства поверхностей, именуемых коор-
динатными поверхностями.
каждую точку пространства,
за исключением, быть может,
нескольких изолированных
точек, проходит по одной
координатной поверхности
каждого семейства, иначе
говоря, будем предполагать,
что w, w — однозначные
функции х, у, z. Коорди-
натные поверхности попарно
пересекаются по координат-
ным линиям (рис. 52).
Вдоль линии пересече-
ния поверхностей из 2-го
и 3-го семейств координаты
v и w сохраняют постоянные
Будем предполагать, что через
значения; изменяется только и.
Аналогично, на линиях пересечения поверхностей 3) и 1)
или 1) и 2) меняются, соответственно, только v или w.
Таким образом, на каждой из координатных линий прямо-
угольные координаты точки х, у и z являются функциями
только одной из переменных и> v и w, а на каждой из
координатных поверхностей — двух из переменных и, v, w.
Координатные линии, где переменна лишь w, v или w,
будем соответственно обозначать через (и), (г/) и (w).
112 ТЕОРИЯ ПОЛЯ [ГЛ. п 1
Будем предполагать, что в каждой точке координатные g
линии ортогональны друг другу, т. е. что касательные J
к координатным линиям в каждой точке образуют попарно |
прямые углы; в этом случае координатные поверхности также |
будут ортогональны между собой. Координатные линии
ориентируем в пространстве так, чтобы в каждой точке |
касательные к ним, отложенные в сторону возрастания coot- 1
ветствующей криволинейной координаты, образовали правую |
прямоугольную систему. ' |
Обозначим через ett, и ew единичные векторы каса- j
тельных к координатным линиям (zz), (г>) и (w). Эти векторы
ед, е^, ew будут векторными функциями zz, v, w, а при |
движении по координатной линии они станут функциями |
только одной соответствующей криволинейной координаты. |
Пусть dsn, dsv> dsw — элементы длин дуг соответствую- %
щих координатных линий. Согласно формуле (1.5.7) для |
любой кривой ds = \dr\ (г — xi —Hj'j ^k). Вдоль линии (zz) у
изменяется только zz, поэтому здесь g
*=Л л|+»''“)+и <г“к' ' j
W = + !
Аналогичные выражения получим для дифференциала dr
радиуса-вектора точки, перемещающейся по остальным двум
координатным линиям (т>) и (w). Следовательно,
dsa = Li du, dsv — Lt dv, dsw — L3 dw
где
(2.13.1)
У \ди) ‘ \дй) ~T\du) 9
(2.13.2)
Величины Lv L3 называются коэффициентами Ламе
данной криволинейной системы координат.
v § 13]
КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ
113
Элементы площадей координатных поверхностей и элемент
объема выразятся, соответственно, формулами
rfw, (1<Зъ = ЦЦ d/wdu, d^ = L^L^du dv, (2.13.3)
rfx = du dv d<w. (2.13.4)
Рис. 53.
Выразим основные величины векторного поля в криво-
линейных ортогональных координатах.
1°. Найдем выражение для градиента скалярной функции
U(u, v, w) в криволинейных координатах w, v и w. Проек-
ция grad U на направление единичного вектора ед есть
скорость изменения U по этому направлению и выражается
м dU 1 dU , к
производной: -з— = -у— -у- (чтобы указать, что дифференци-
CIS uZJ
рование ведется лишь по одной переменной и, в правой час-
ти буква d заменена на д).
Значит,
/ л z А 1 dU
(grad^e^y-^.
Аналогично
7 а г г\ \ dU
(gradtOe^^^-,
, , ,А 1 ди
(grad^ew = T-^.
Следовательно,
а Гт 1 ди
grad ^=-ц-
. 1 dU
1 dU
L. dw^w‘
'2
(2.13.5)
2°. Формула для дивергенции в криволинейных коор-
динатах и, v и w выводится точно так же, как в прямо-
угольных координатах х, у, z, но для получения дивергенции
в точке A(w0, ^о) берут криволинейный параллелепипед,
определяемый значениями криволинейны^ координат w0 и
п04~Дн, 770 и ^оЦ-Дг/, w0 и + (рис. 53). Однако нуж-
но учесть, что здесь элементы длины выражаются не непо-
средственно через дифференциалы координат, а более слож-
ными формулами (2.13.1), где Lp L* Ц — функции от w, v, w,
114
ТЕОРИЯ ПОЛЯ
[ГЛ. и
В соответствии с формулой (2.13.4) для объема Дт этого Ж
параллелепипеда имеем Ж
uq 4- Дя vq 4- Дт> wq 4*Д
Дт= § j LiLjZ.3 du dv dw = [Z.iZ.gZ.3]i Д« Дт» Диу, . Ц
«о w0 ж
где индекс I указывает, что значение выражения ЦЦЦ нужно >
взять в некоторой - определенной точке внутри объема Дт,
согласно теореме о среднем значении для тройного интеграла. .Ж
Поток вектора а через противоположные грани ВССхВг 9
и ADDiAp принимая во внимание, что на них элемент Ж
площади равен L^dvdw, напишется так: Ж
Т>0 4- Атт Wo 4- Д W 44;
J ае (п0-[-Дп, v, w)L^L3dvdw— '
То Wo *1
то + Дт wo + Дда ’5
— J $ аеи (uOt v, w)L2L3dvdw = |
То Wo ' ‘I
, т0 4- Д'» w0 4 Aw \
= \ I |^7(Д^З«е„) I
V V I (✓ U * J11
То Wo ’]
= [дй ]П1 Ди Дт? Aw, 1
где индекс II указывает, что значения частной производной
берутся внутри объема Дт, сообразно с теоремой Лагранжа -
о конечном приращении функции, а индекс III имеет такой
же смысл, как и индекс I.
Аналогичные формулы имеют место для потоков вектора а I
через остальные, попарно взятые, противоположные грани.
Подставляя найденные значения в формулу (2.5.1), когда
Ди, Дт?, Д-w стремятся к нулю, находим, что дивергенция
в криволинейных координатах выражается следующим образом:
d’V а = zir 1а*J .
(2.13.6) 1
3°. Лапласиан V2« скалярной функции U(ut v9 w) есть J
дивергенция от ее градиента; следовательно, лапласиан
§ 13] КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ 115
в криволинейных координатах имеет вид
__ I М ( L%LZ dU \ । д f dU\ ।
LkL2Lz [Эн \ du j * dv \ L2 dv / '
+ ^-(^-4^4. (2.13.7)
‘ dw \ Lz dwJ J v 7
4°. Определим теперь вихрь вектора а в криволинейных
координатах и, v и w. Найдем проекцию его на направле-
ние вектора еи. Для этого вычислим циркуляцию вектора а
по контуру ADDiAi (рис. 53), ограничивающему криволи-
нейный прямоугольник, лежащий на координатной поверх-
ности u = uQ.
Вдоль линий AD и меняется только v от г/0 до
г>0 -Дг>; для перехода от линии AD(,w = Wq) к линии AiDi
(w = w0-|-Aw) надо изменить w только на величину Aw.
Чтобы обход по контуру ADDiAi казался со стороны век-
тора e/z происходящим против часовой стрелки, необходимо
двигаться в направлении ADDiA^ Имеем
$ axds-\- $ axds =
AD DiAi
т>0-|-Дт> т>0-|-Дг>
= § aev(u0,v,w)Lidv— J aev(ul),v,‘wl)-\-^w')Lidx> =
Vo VQ
Vq Дт>
= — \ Г4г(^«е_)1 Awdw = —Г^-(/.4ае_)1 AwAv.
j Luw ' v ji *0 Точно так же ax ds аг ds = DD1 AiA Wo + = 5 [flew(«0> ®e + Av, W)- Wo [_UW ' - ® JU -aew(llo> vl),w)]L3dw= . = [^(/-заи]|11Дг’Ди’-
116
ТЕОРИЯ ПОЛЯ
[ГЛ. it
Найдем площадь До прямоугольника ADDfAp Последний
лежит на координатной поверхности и — и^ поэтому
г>0-[- hv Wq -|- Aw
Да= Д $ LJL3dv dw = [L2L3]w &w.
г»о w0
Согласно определению вихря (формула (2.8.1)),
ф ах ds
. v ADDiAi
rote a = hm--------r 1 .
Да-► О Да
Следовательно,
rote a= -7Д—Т“Г-(£зЯе )— Д-(£2ае)1.
ea L2Ls [ dv v 6 w7 dw v J J
Аналогично получаем
rote a= 7Д— ГД- (Liae ) — -~(L3ae )1,
% LsLt [ dw v 1 a' du v d ew7 j’
rote a = -уД- ГД- (Z,2ae ) — Д- (Aiae ) ],
w LiL2 [ du v 4 v -dv v 1 » J9
т. e. вихрь в криволинейных координатах пишется так:
rot а=-цц ] е«+
+ 1Д7 [ dw (Л1ае? ~ Тй ] ег- +
+1^7[du ~ ~dv ^Liae^] &w‘ 13-8)
чДля получения лапласиана V2a от векторной функции а
надо использовать соотношение (2.11.12), согласно которому
V’2a = grad (div а) — rot (rot a). (2.13.7')
Второй член правой части находят двукратным примене-
нием формулы (2.13.8) к вектору а, а первый член — после-
довательным применением к вектору а сначала формулы
(2.13.6), а затем к полученному результату (2.13.5).
Примеры:
А) Сферические координаты. Положение точки М
в пространстве определяется: 1) расстоянием г точки М от
фиксированной точки О (центра), 2) углом 0, образованным
§ 13]
КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ
117
радиусом-вектором ОМ точки М с фиксированной полу-
прямой Oz (полярной осью), 3) углом ср, заключенным между
фиксированной плоскостью xOz и полуплоскостью, ограни-
ченной осью Oz' и про-
ходящей через , точку М
(рис. 54).
Чтобы каждой точке
соответствовала только
одна тройка значений г,
6 и ср, расстоянию г дают
только положительные зна-
чения, 6 изменяют в пре-
делах О и, а ср — в
пределах 0 ср 2тг.
Координатными поверх-
ностями являются:
г = const — сферы с цент-
ром в О,
б = const — конусы
с осью Oz,
ср = const — полуплоскости,
ограниченные осью Oz.
Координатными линиями
будут: лучи [линии (г)], вы-
ходящие из центра О, окружности — меридианы [линии (6)]
с центром в О и радиусами г, пересекающие ось Oz; окруж-
ности — параллели [линии (ср)] с центрами на оси Oz и радиу-
сами г sin 6. Соответственно этому единичные векторы коор-
динатных линий обозначим через ег, е0 и еу.
Принимая во внимание форму координатных линий, можно
утверждать, что элементы их длин выражаются формулами
dsr — dr, ds$ = r dft, ds? = r sin 6 dy. Отсюда следует (см. фор-
мулы (2.13.1))
L1=l, Ц = г, L3 = r sin 6. (2.13.9)
Формулы (2.13.5), (2.13.6), (2.13.7) и (2.13.8) в этом случае
перепишутся так:
. Z7 dU , 1 dU . 1 dU 1О 1ЛЧ
grad^e^^-^; (2.13.10)
11$
Теория поля
[ГЛ. П
далее,
div а = -g-V-a Г sin 9 (r3ar) r-^ (ае sin 9) г -^-1;
г2 sm 6 L dr v r/ 1 06 v ь 71 0? J ’
(2.13.11)
тл/ 1 Г • a d ! 2 dU\ i d [ . a dU\ . 1 d2Ul
V*U = - .—Q Sina-Tj- Г2-д— + W SinG-sK- H-----------------r-fr “ТГ ;
r2 sm 0 L dr \ dr j 1 00 \ 06 j 1 sm 6 0<p2 J ’
(2.13.12)
rot a=—* +
r sm 6 [ 06 0cp J r 1
I 1 Г 1 даг д(г0уи 1 Г 0 (где) даг ~|
' г L sin 6 0cp dr J ° ‘ г L дг 06 ] е<₽*
(2.13.13)
Из рис. 54 видно, что О/И2 = х, Af2Af1=j и ®M3 = z.
Рассматривая последовательно треугольники 0М±М и ОМ^Му
приходим к следующим урав-
нениям, выражающим прямо-
угольные координаты через
сферические:
х = г sin 6 cos ср;
у = г sin 9 sin ср;
z = г cos 9.
(2.13.14)
Исходя из равенств (2.13.3)
и' (2.13.9), для элемента пло-
щади поверхности сферы ра-
диуса R получаем выражение
da = R* sin 9 rf9rfcp. (2.13.15)
Б) Цилиндрические координаты. Положение
точки М пространства определяется: 1) расстоянием р
точки М от фиксированной прямой Oz, 2) углом ср, обра-
зованным фиксированной плоскостью xOz с полуплоскостью,
ограниченной Oz и проходящей через М, 3) расстоянием z
точки М от плоскости хОу, перпендикулярной Oz и про-
ходящей через фиксированную точку О этой прямой (рис. 55),
причем р, ср и z изменяются в пределах: 0=^р<^оо,
0^ср<^2к и —оо<^<г<^оо.
§ 13] КРИВОЛИНЕЙНЫЕ КООРДИНАТЫ
119
Координатными поверхностями являются: р = const — ци-
линдры с осью Ог, <? = const — полуплоскости, ограничен-
ные Ог, г = const — плоскости, перпендикулярные Ог.
Координатными линиями будут: лучи [линии (р)], перпен-
дикулярные оси Ог и начинающиеся на этой оси; окруж-
ности [линии (ср)] с центрами на Ог и радиусами р, плоскости
которых перпендикулярны этой оси; прямые [линии (г)],
параллельные оси Ог.
Из формы координатных линий вытекает: dsp = dp,
ds? — р dcp, dsz = dz. Соответственно этому = L3 = 1,
L2 = p. Формулы (2.13.5), (2.13.6), (2.13.7) и (2.13.8) прини-
мают вид
< тт dU , 1 dU .dU
grad U=-^~ е0Ч------4- е,;
& dp р 1 р дер ? 1 dz z’
div а— 1 P(pg>) + — I d(pa*>l-
P L dp ' dep dz J’
WrT 1 rd / dU\ . 1 d2U . d2471
P [dp dP)+ P dep2 дг2]’
(2.13.16)
(2.13.17)
(2.13.18)
, Г 1 &az
rot а = ——
Lp
1Г^92_^р]е (2.13.19)
p L dp dep J z v 7
Цилиндрические координаты связаны с декартовыми сле-
дующими соотношениями:
х = р cos ср, j/ = psincp, г = г. (2.13.20)
Центральные и осевые скалярные поля.
Если скалярная функция и зависит исключительно от рас-
стояния г рассматриваемой точки М до некоторой точки О,
т. е. и — ц(г), то образованное ею скалярное поле назы-
вается центральным; примером такого поля является ска-
лярное поле потенциала точечного электрического заряда
u = elr (см. задачу 1 на стр. 49). В центральных полях на
сфере с центром в точке О величины г и, следовательно,
и (г) сохраняют одно и то же значение. В соответствии
с этим центральные поля также называются сферическими.
Если скалярная функция зависит только от расстояния р
рассматриваемой точки до некоторой прямой, то определенное
ею скалярное поле называется осевым полем, а прямая.
120
ТЕОРИЯ ПОЛЯ
{ГЛ. п
от которой отсчитываются расстояния, — осью поля. В осевых
полях на цилиндрах, оси которых совпадают с осью поля,
величина р и функция и(р) сохраняют постоянное значение;
поэтому осевые поля также называются цилиндрическими
полями.
Ясно, что для центральных полей удобнее всего пользо-
ваться сферическими координатами, а для осевых — цилин-
дрическими. В обоих случаях скалярные функции, опреде-
ляющие поля, зависят лишь от одной координаты и потому
их частные производные по остальным двум криволинейным
координатам обращаются в нуль. В соответствии с этим
основные характеристики скалярного поля запишутся так:
Центральные (сферические) скалярные поля:
gradH(r) = —^ег,
(Н = — -- Гг2 —^1
v и V) — rfr l dr J •
Осевые (цилиндрические) скалярные поля:
gradiJ(p) = -^^-ep,
V72 / \ 1 d Г du (р) 1
(2.13.21)
(2.13.22)
Если функция и имеет один и тот же вид на плоскостях,
проходящих через некоторую прямую, то говорят, что обра-
зуемое ею поле обладает осью симметрии. Для таких по-
лей также целесообразно применять сферические или цилин-
дрические координаты.
Именно, если эту прямую (ось симметрии) принять за
полярную ось сферической системы координат или за ось Oz
цилиндрической системы координат, то соответствующие
полям скалярные функции не зависят от координаты ср, ибо
в этих двух системах координат угол ср как раз определяет
положение плоскости, которое (положение) не влияет на
характер физических явлений. Соответственно этому в фор-
мулах (2.13.10), (2.13.12), (2.13.16), (2.13.18) пропадут
члены, содержащие частные производные по ср. Например,
лапласианы получают вид
_,7 1 Г • с д f э ди \ । д / . п ди
V2h = sin 9 -т- г2 -s sin 9 ж
r2 sin 9 Ц dr \ dr / * (70 \ об \
УРАВНЕНИЕ МАКСВЕЛЛА
121
§ 14]
(сферические координаты),
V2zz = у р j (цилиндрические координаты).
Отметим, что лапласианы встречаются в весьма широком
круге вопросов теоретической физики, причем применение
лапласиана в сферических координатах связано с использо-
ванием сферических функций Лапласа и полиномов Лежандра,
а применение лапласиана в цилиндрических координатах —
с функциями Бесселя; поэтому функции Бесселя также назы-
ваются цилиндрическими функциями. Однако нужно иметь
в виду, что формулы (2.13.7), (2.13.12), (2.13.18) и т. д.
относятся лишь к лапласианам от скалярных функций; если же
речь идет о лапласиане от векторной функции, то эти фор-
мулы могут быть применены только к лапласианам проекций
этой векторной функции на оси прямоугольной системы
координат, так как определение лапласиана от векторной
функции (2.11.10), как и определение оператора «набла»
(2.11.1), относится лишь к прямоугольным системам коор-
динат. Здесь лучше применит^ формулу (2.13.7'), используя
выражения для вихря, дивергенции и градиента в соответ-
ствующих системах криволинейных координат.
§ 14. Уравнения Максвелла
Пусть в некоторой части пространства (физической среде)
создано электромагнитное поле, характеризуемое векторами
электрической и магнитной напряженности Е и Н. Последние
в общем случае зависят не только от рассматриваемой точки,
но также и от времени t (случай нестационарного поля),
т. е. являются функциями координат х, у, z и времени t\
Е = Е (х, у, z, t), Н = Н (х, у, z, t).
Как известно, среда, в которой происходят электрические
и связанные с ними магнитные явления, характеризуется
величинами у, е и (у — проводимость, е — диэлектрическая
проницаемость, р- — магнитная проницаемость). В однородной
среде у, е, будут постоянными величинами, но в общем
случае они также будут функциями х, у, z и t.
Пусть 1 — вектор плотности электрического тока, т. е.
вектор, численно равный количеству электричества, проте-
кающего в единицу времени (вернее, производной от коли-
чества электричества по времени) через единичную площадку,
122
ТЕОРИЯ ПОЛЯ
[Гл. tt
(2.14.1)
перпендикулярную направлению движения электричества, при-
чем вектор i йаправлен в сторону этого движения. Вектор
плотности 1 состоит из двух составляющих: тока проводимо-
сти ?Е (закон Ома) и тока смещения, получаемого вследствие
1 д(еЕ)
явления индукции в диэлектриках; он равен
Таким образом,
• ~ , 1 д (еЕ)
’ = ?Е + 4?Т
Рассмотрим теперь произвольную замкнутую кривую L,
ограничивающую поверхность S. Закон электромагнитной
индукции Фарадея гласит: циркуляция электрического век-
тора Е (электродвижущая сила) вдоль L равна производной
по времени от потока вектора магнитной индукции р,Н через
поверхность S, взятой со знаком минус
&E.dr= —С p.H-rfa.
L ЛГ
Как известно, при весьма общих предположениях отно-
сительно подынтегральной функции дифференцирование по
параметру (в данном случае по t) можно совершать под зна-
ком интеграла, поэтому закону Фарадея можно придать вид
L S
Левую часть последнего равенства преобразуем согласно
теореме Стокса, получим
И—=-ив^
S 5
Формула (2.14.2) имеет место для любой поверхности 5,
а это возможно только тогда, когда подынтегральные функ-
ции совпадают. Значит,
го1в=_^.
Это — так называемое второе уравнение Максвелла в вектор-
ной форме. Первое уравнение Максвелла получается следую-
щим образом. В конце § 10 этой главы было показано, что цирку-
ляция вектора магнитной напряженности Н вдоль границы сече-
ния провода, по которому течет ток силы I, равна 4к/. Этот ре-
(2.14.2)
§ U]
УРАВНЕНИЕ МАКСВЕЛЛА
123
зультат распространяют на произвольное электромагнитное поле
ф Н • dr = Ы,
L
где в нашем случае I означает количество электричества,
протекающего через S в единицу времени. Принимая во
внимание смысл i и формулу (2.14.1), будем иметь
s <s
Следовательно,
(j) Н • dr = 4 к
L
S,S[«
1 d (eE)
4k dt
Применяя к левой части последнего равенства теорему Стокса
и отождествляя затем подынтегральные функции в обеих
частях равенства, мы приходим к первому уравнению Макс-
велла в векторной форме:
А Г р I 1 д(еЕ)П
rot Н = 4к тЕ -4- ----.
L 1 4л dt J
Чтобы иметь возможность измерять величины, связанные
с электрическим или магнитным полями, в абсолютных элек-
тростатических и электромагнитных единицах, в правые
части уравнений Максвелла приходится вводить множи-
тель 1/с, где с = 3»1О10 см/сек — скорость света в пустоте.
Тогда уравнения Максвелла приобретают вид
rotH = L-[lE + 3LW], (2.14.3)
rotE = — — (2.14.4)
с dt v 7
К этим двум основным уравнениям Максвелла приба-
вляют еще два дополнительных. Последние получаются из
следующих соображений. В задачах 7 и 9 было установ-
лено, что дивергенция вектора электростатической индукции
объемного заряда плотности р равна 4кр, а дивергенция век-
тора И напряженности электромагнитного поля, образованного
током, текущим по бесконечно длинному проводу, равна нулю.
Для произвольного электромагнитного поля эти соотно-
шения сохраняются, только их относят, соответственно,
124
ТЕОРИЯ ПОЛЯ
[ГЛ. п
к векторам еЕ и (хН. Таким образом,
div(eE) = 4zp (2.14.5)
и
div(jxH) = 0. (2.14.6)
Если электромагнитное поле не содержит зарядов, то их
плотность р равна нулю и уравнение (2.14.5) принимает вид
div (еЕ) = 0. (2.14.7)
Напишем также уравнения Максвелла в прямоугольных
координатах. Пусть разложения векторов Е и И имеют вид
Векторы равны только в том случае, когда равны их проек-
ции ' на три оси координат; поэтому уравнение (2.14.3)
равносильно следующим трем уравнениям:
дНг дНу_ 1 Г d(eEJl
ду дг ~ с [ * х “1" dt J ’
—^2 = 1 [4^ I [
dz дх с [ 1 -У 1 dt J ’
= £№)]
дх ду с [ 1 dt J
Уравнение (2.14.4) дает
дЕу _ Id (цНх) дЕх дЕг _ Id (у.Ну)
ду dz с dt ' dz дх с dt ’
дЕу дЕх _ 1 д(рНг) 11
дх ду с dt
Уравнения (2.14.5) и (2.14.6) приобретают вид
Ц£г)+Ц?,>+Ц&) = 4
дх 1 ду 1 dz и
д(у.Нх) , д^Ну) , д(^Нг)
дх ' ду dz — 1V
Таким образом, проекции Ех, Eyi Ez, Нх, Ну, Нг и
плотность зарядов р связаны между собой системой из восьми
уравнений с частными производными первого порядка вида I,
II, III и IV. Зная свойства среды, т. е. у, е и jx, а также
некоторые начальные и граничные условия, можно решить
вопрос о нахождении вида поля в любой момент t путем
решения (интегрирования) уравнений I, II, III и IV.
§ U]
УРАВНЕНИЕ МАКСВЕЛЛА
125
Особый интерес представляет собой - тот случай, когда
физическая среда однородна и не содержит электрических
зарядов, т. ё. когда е, у и р. — постоянные величины, а р = 0.
Тогда в уравнениях (2.14.3), (2.14.4), (2.14.6) и (2.14.7) е,
у, р. можно, как постоянные величины, вынести за знак диф-
ференцирования и, кроме того, отбросить в последних двух
из перечисленных уравнений множители р. и в. Будем иметь:
rot Е =
с dt9
div Н = 0,
div Е = 0.
(2.14.8)
(2.14.9)
(2.14.10)
(2.14.11)
Над обеими частями уравнения (2.14.8) произведем опе-
рацию взятия вихря. Приняв во внимание, что взятие вихря
сводится к дифференцированию, а результат дифференциро-
вания, как правило, не зависит от порядка дифференциро-
вания, получаем
rot (rot Н) = у (7 rot Е 4- ± A rot е) . (2.14.12)
(Нужно иметь в виду, что у и е — постоянные величины.)
В силу формул (2.11.12) и (2.14.10)
rot (rot Н) = grad (div Н) — V2H = — V2H.
Используя еще уравнение (2.14.9), уравнение (2.14.12) пере-
nme»TaK:-V'H=^(-®^-g!!-) или
= <21413>
Это уравнение содержит только Н.
Аналогично, совершив операцию взятия вихря над обеими
частями уравнения (2.14.9), получим:
rot (rot Е) = — у rot Н.
Согласно формулам (2.11.12), (2.14.11) и (2.14.8), послед-
нее уравнение может быть представлено в виде
v — с д Н с
frE I £ дЕ\1___(у I s д2Е\ (2 14 141
126
ТЕОРИЯ ПОЛЯ
(ГЛ. п ’
Уравнения (2.14.13), (2.14.10), с одной стороны, и урав-
нения (2.14.14), (2.14.11), с другой стороны, по своей стру-
ктуре совершенно одинаковы. Следовательно, мы можем
утверждать, что в случае однородности среды и отсутствия
электрических зарядов оба вектора электрической и магнит-
ной напряженности Е и Н удовлетворяют одной и той же
системе двух уравнений в частных производных второго
и первого порядков:
и
divV = 0, (2.14.16)
где вместо вектора V нужно подставить либо вектор Е,
либо вектор Н.
Уравнение (2.14.15) называется уравнением распростра-
нения электромагнитных волн в однородной проводящей
среде; это же уравнение также называется телеграфным
уравнением, так как оно встречается в задаче о распро-
странении колебаний по длинным линиям.
Два вектора равны только в том случае, когда их про-
екции на три оси координат равны друг другу. Поэтому^
уравнению (2.14.15) должны удовлетворять порознь шесть
величин: Ех, Еу, Ez, Нх, Hv, Hz — проекции векторов Е
и Н на оси координат, причем Ех, Еу, Ez и Нх, Ну, Hz
в отдельности, удовлетворяют уравнению (2.14.16), которому
можно придать вид
• ^ + ^ + ^ = 0. (2.14.16')
дх ‘ оу 1 OZ 4 7
Если среда представляет собой идеальный диэлектрик,
то 7 = 0 и в уравнении (2.14.15) член, содержащий у, об-
ращается в нуль; оно принимает более простой вид
V2V=
ер, д2У
с2 dt2
или
где
V2V
1 д2У
~а2 dt2 ’
(2.14.17)
§U1
Уравнение максвелла
127
(под 14 как и выше, можно подразумевать любую из вели-
чин E# Еу, Ег, Нх, Ну, Hz, причем первые три и послед-
ние три порознь связаны соотношением (2.14.16)).
Уравнение (2.14.17) называется уравнением распростра-
нения электромагнитных волн в однородном диэлектрике.
Предположим, что У есть скалярная функция, зависящая
от времени t и расстояния г рассматриваемой точки до не-
которой точки О: V= V (г, t). Иными словами, предпола-
гается, что функция У образует скалярное центральное поле,
зависящее от t. В силу формулы (2.13.21) уравнение (2.14.17)
примет вид
_1_£/ 2дУ\ 1 д2У
г2 dr \ dr ) a2 dt2 *
(2.14.18)
Уравнение (2.14.18) называется уравнением сфериче-
ской волны; а есть скорость распространения этой волны
по направлению лучей (г).
Обычно уравнению сферической волны (2.14.18) придают
другой вид. Согласно правилу дифференцирования произведения,
д(гУ) дУ . Т7 дУ д (гУ) тт
~lr = r + V’ откуда rdF = ~ v- ПоэтомУ
drV дг)~дг\ Г дг)~Г дг\Г дг)^Г дг~
_d\d(rV) л dV_ r<?’(rV) WliW
Or J"rrdr—rL dr8 dr] i-rdr“
• _ds(r2V)
~r dr* •
Уравнение (2.14.18) принимает вид
1 д2 (rV) _ 1 д2У
г dr2 a2 dt2 •
Принимая во внимание, что расстояние г не зависит от вре-
мени, окончательно получаем
д2 (гУ) _ 1 д2 (гУ)
dr2 a2 dt2 *
(2.14.19)
Обозначив гУ через U и заменив г буквой х, получим
д2Е _ 1 д2Е
дх2 a2 dt2 *
(2.14.20)
Это уравнение в частных производных 2-го порядка на-
зывается уравнением плоской волны по направлению оси х
128
ТЕОРИЯ ПОЛЯ
{ГЛ, II
или уравнением Даламбера. Его общее решение имеет вид
U—fi (х 4- at) -|-/2 (х — at),
где Л(хoi) и — <&)—лроизвольнйе дважды диф-
ференцируемые функции своих аргументов. Однако в те-
ории электричества предпочитают в качестве аргументов
брать величины t-\-~ и t — общее решение уравне-
ния (2.14.20) представляют так:
^=/1(^+т)+/*(<-J),. (2.14.21)
причем обычно рассматривается только 2-й член правой
части f^[t — Ограничимся только доказательством того,
что функция U, определяемая формулой (2.14.21), является
действительно решением уравнения (2.14.20).
В самом деле, продифференцируем уравнение (2.14.21)
два раза по х и по t. Так как и f<i(t——
функции одного аргумента соответственно, t — у,
то ' ди—г(/л_х\х. fit ±V.
дх '2 \ -я / а ’
d2U__fir l/j । х\ 1 । .fj ' х\ 1
дх2 а2 \ . 7 а ) а8 ’
daU d2U
Подставив найденные таким образом‘значения гт и
ох* ос*
в. уравнение (2.14.20), мы видим, что оно удовлетворяется
тождественно, т. е. что функция (2.14.21) является реше-
нием уравнения (2.14.20). В соответствии с этим функция
является общим . решением уравнения сферической волны
(2.14.19).
Цена 22 коп.