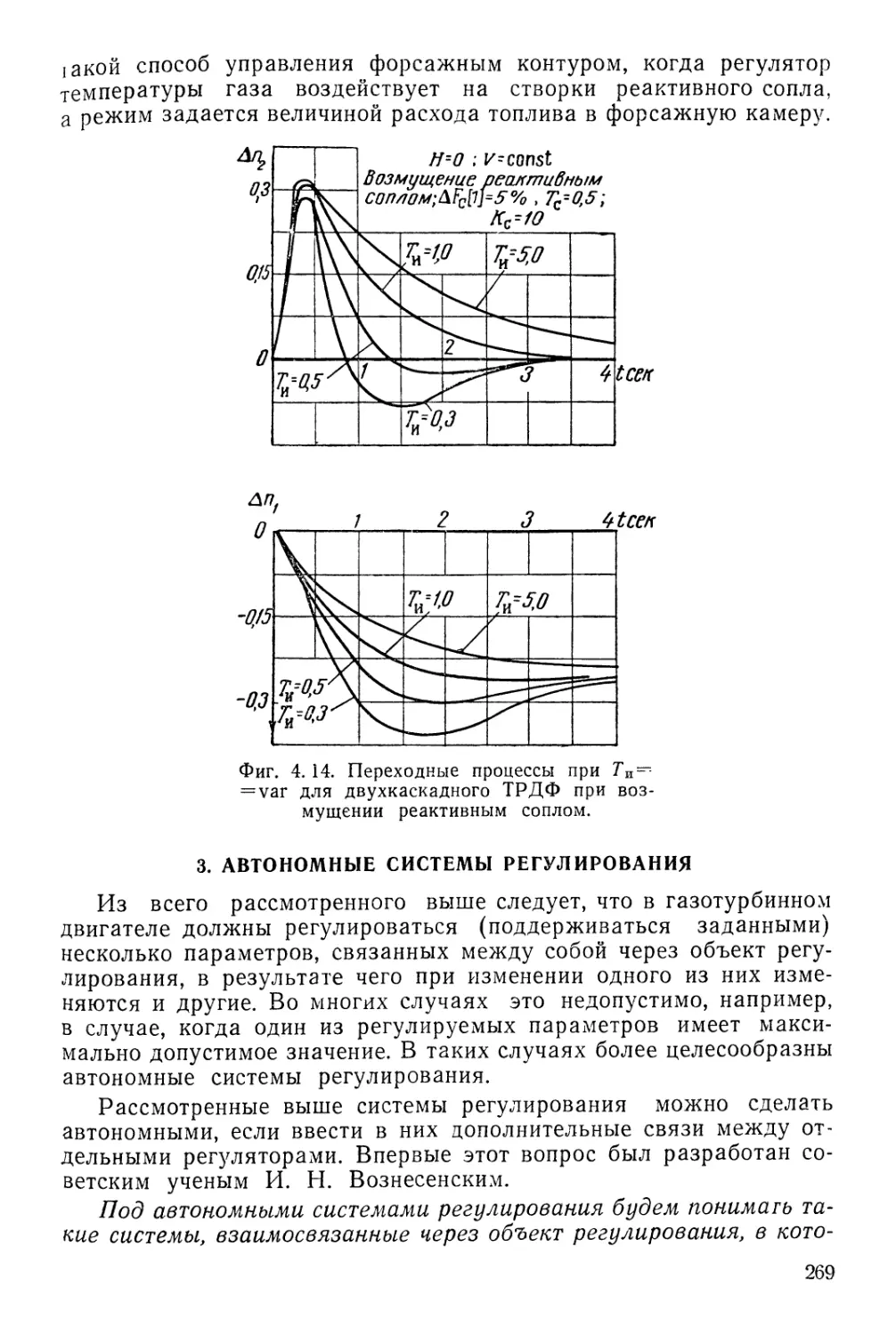
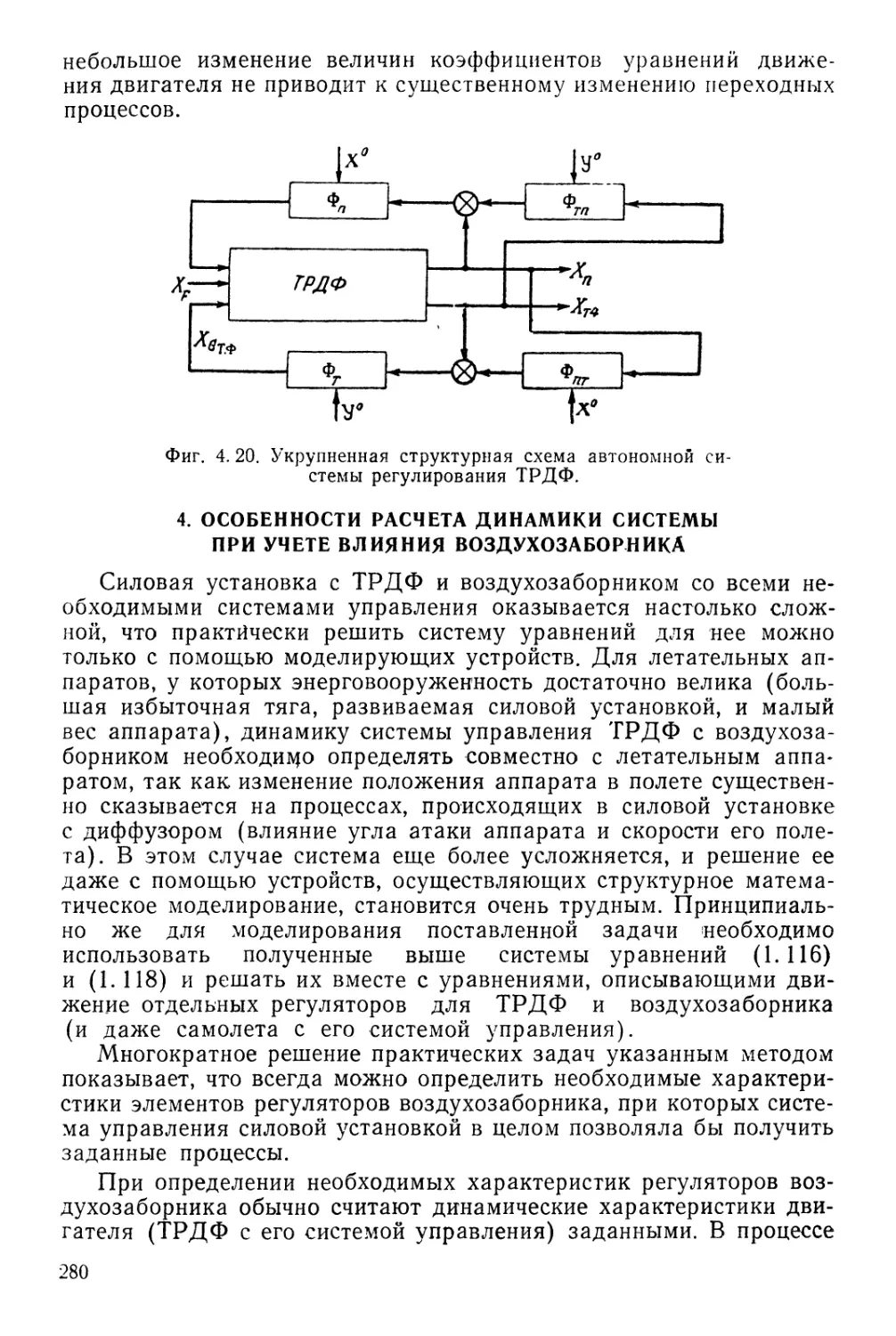
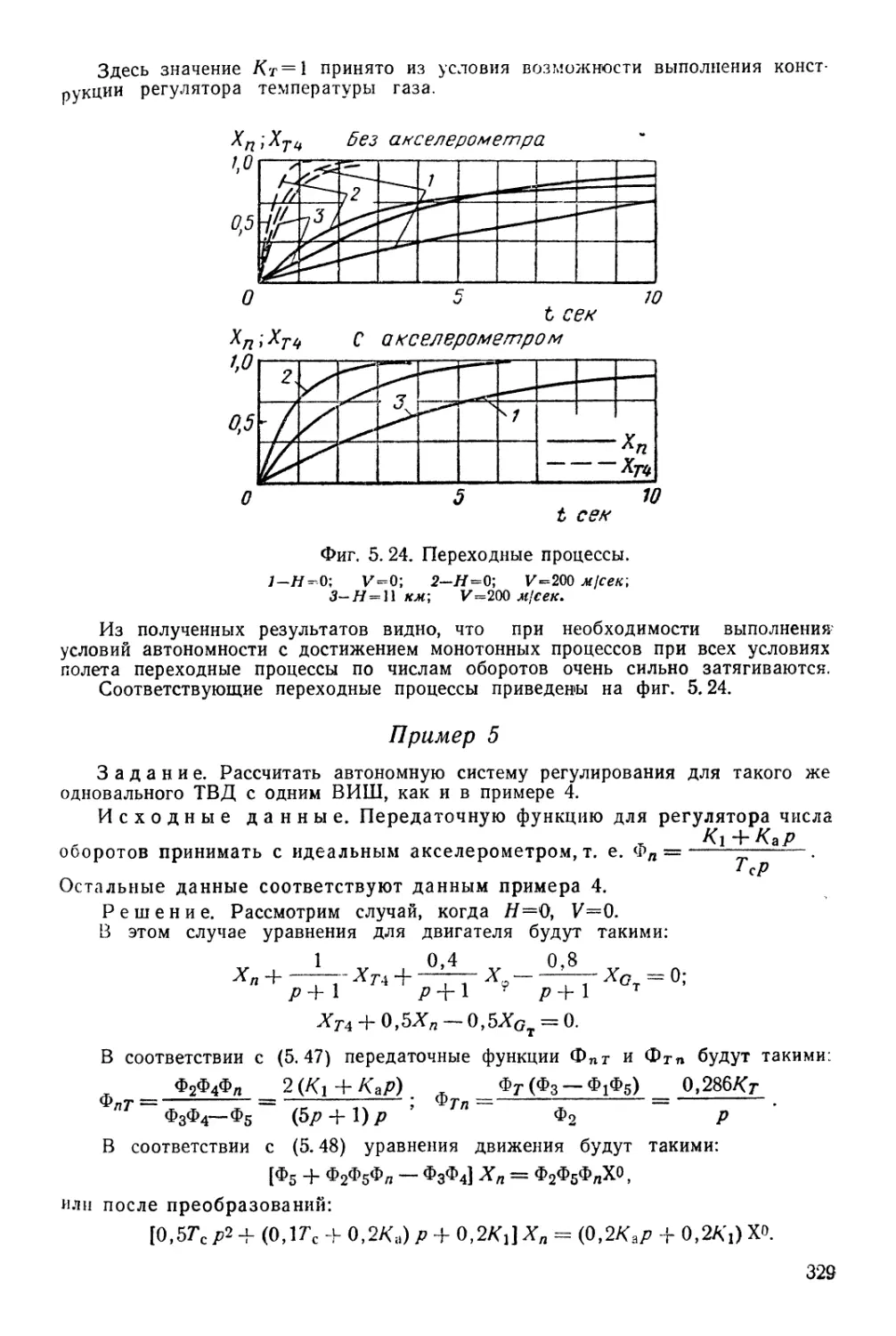
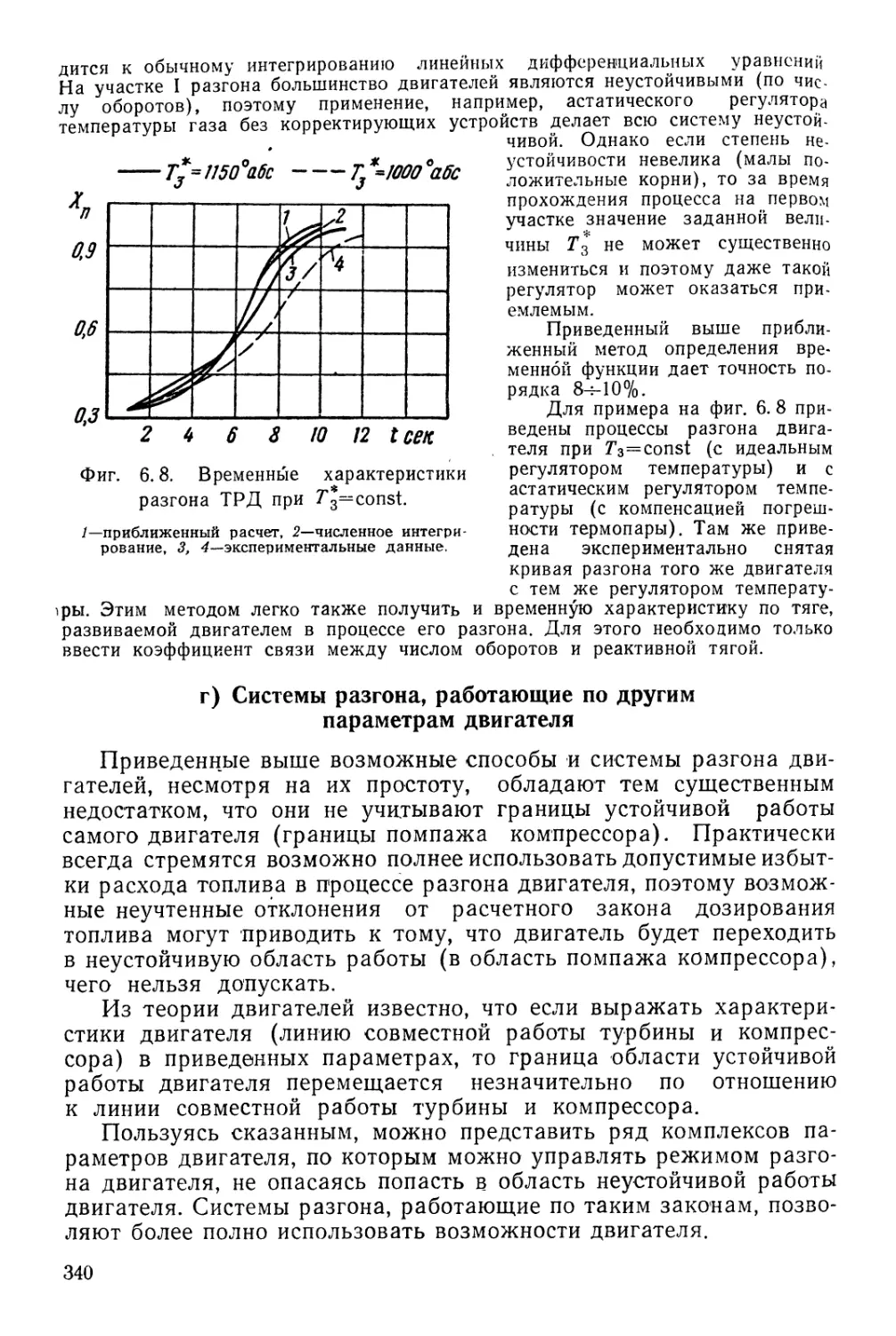
/




























































































































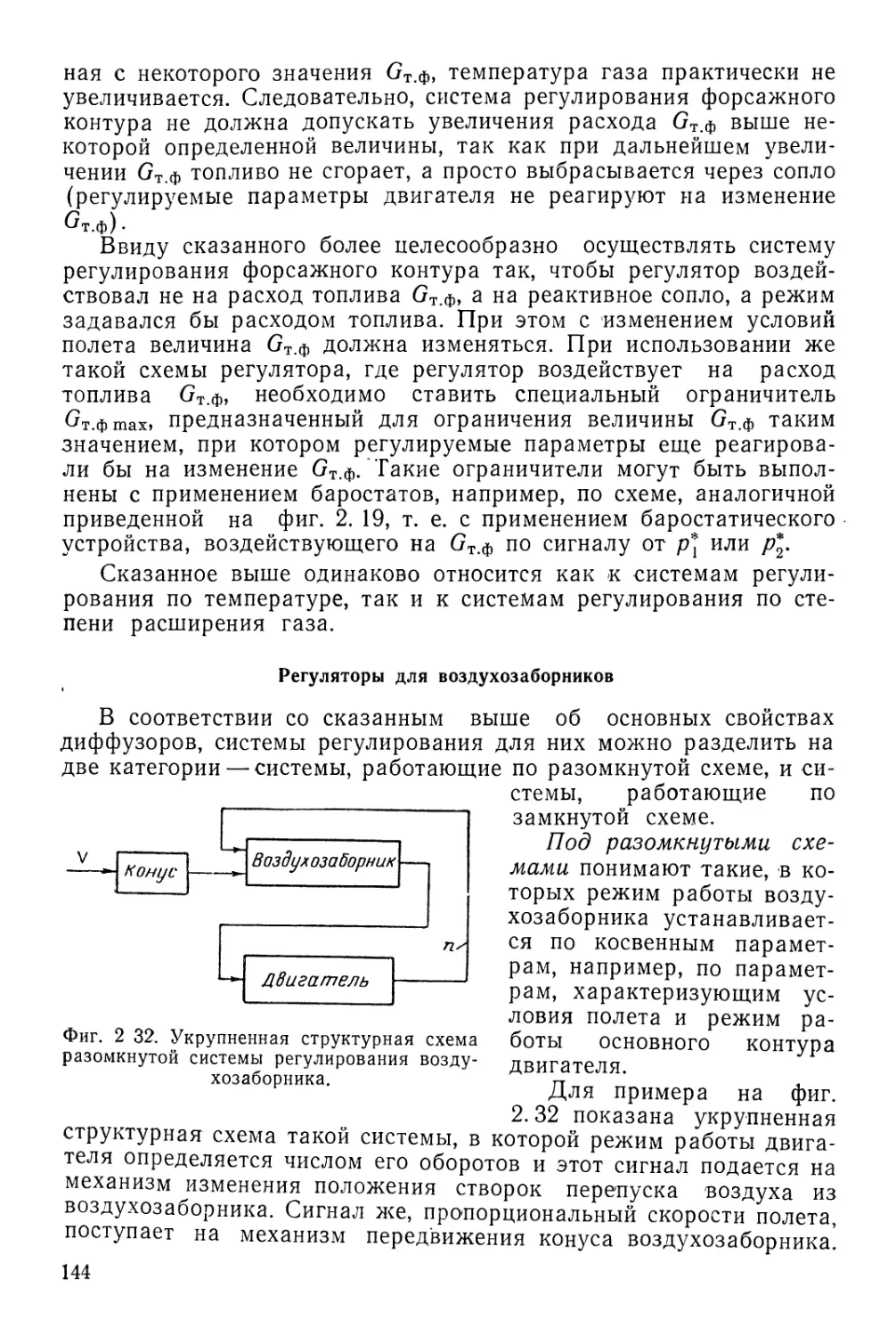

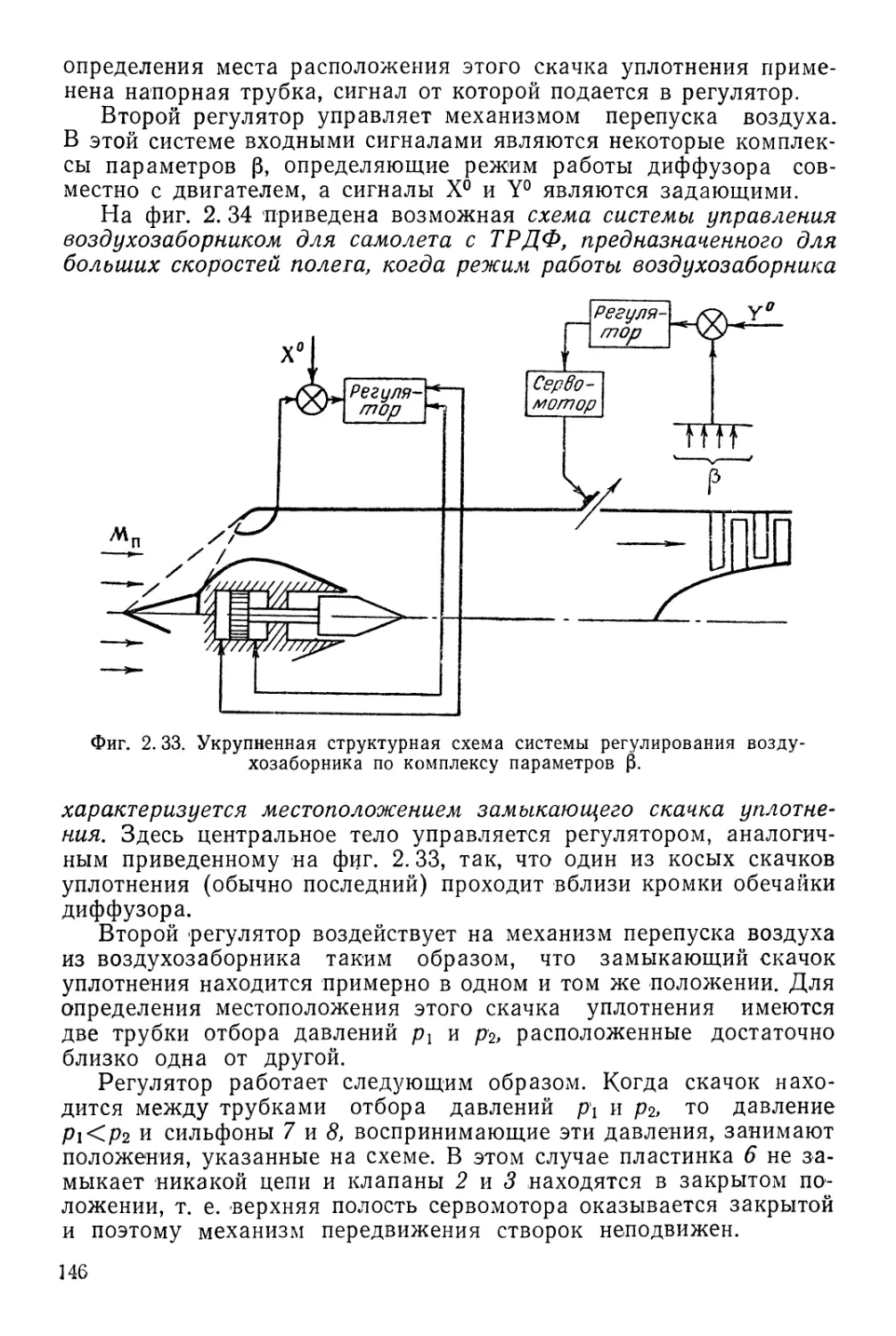





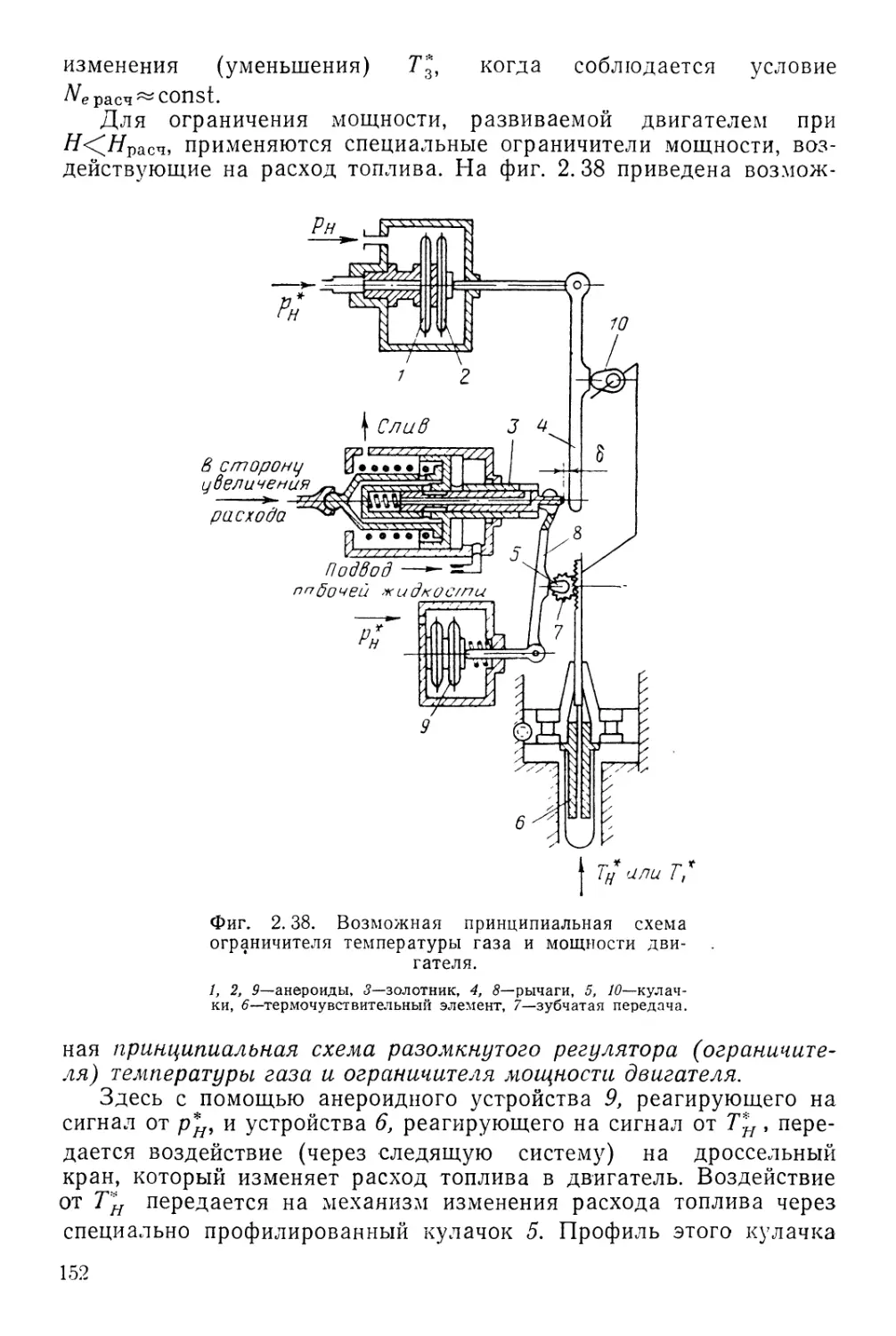





































































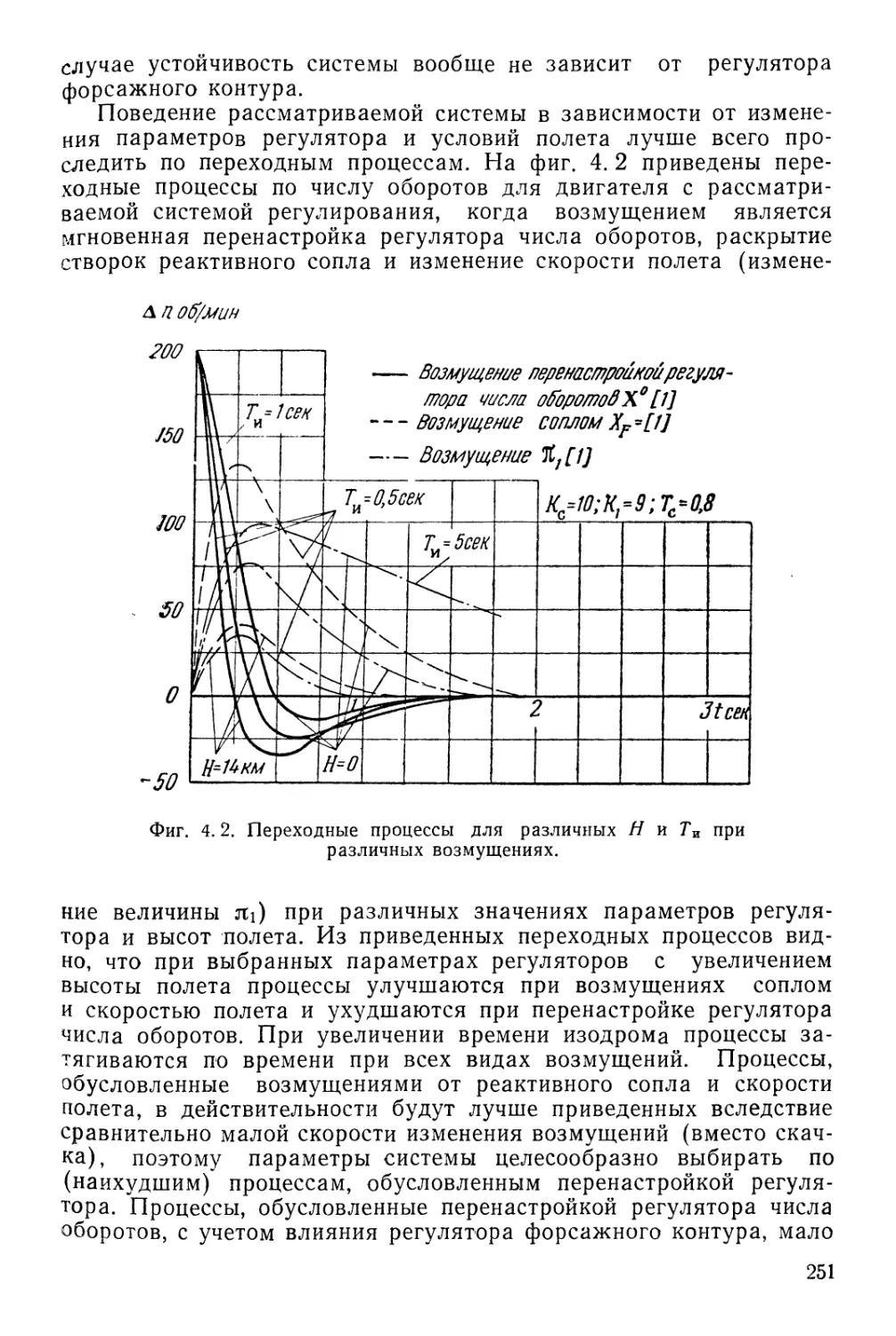
















































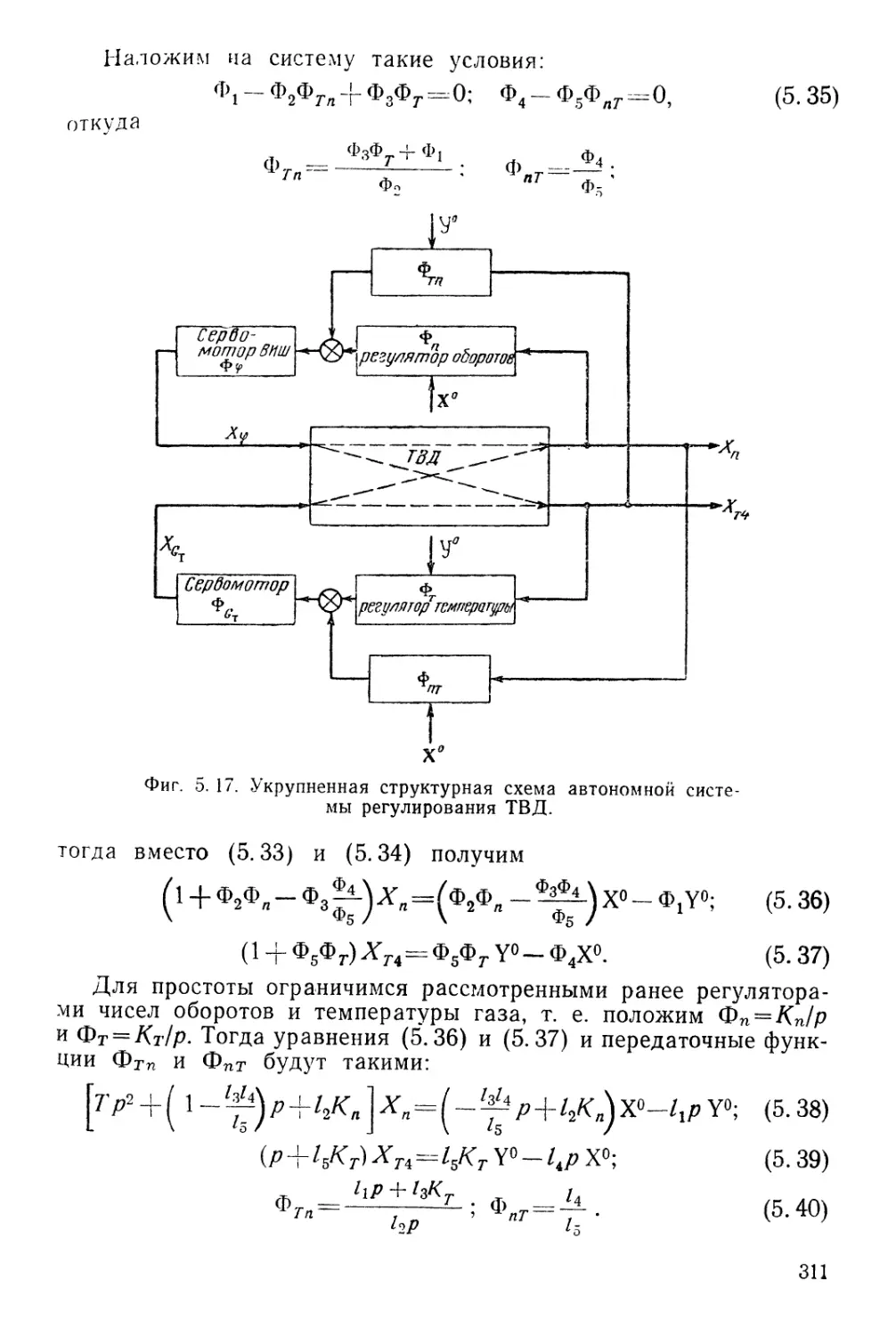




















































































































































































































Текст
А. А. Ш Е В Я К О В
АВТОМАТИКА
АВИАЦИОННЫХ
И РАКЕТНЫХ
СИЛОВЫХ УСТАНОВОК
ИЗДАНИЕ ВТОРОЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Допущено
Министерством высшего и среднего
специального образования РСФСР
е качестве учебника
для механических и авиационных вузов
и факультетов
ИЗДАТЕЛЬСТВО
«МАШИНОСТРОЕНИЕ»
Москва 1965
УДК 629.13.03:621-52
В книге разработаны и систематизированы материалы па
теории автоматического регулирования авиационных и
ракетных силовых установок и управления ими. Рассмотрены
системы регулирования для основных схем установок с
турбореактивными и турбовинтовыми двигателями^ а также системы для
ряда схем прямоточных воздушно-реактивных и жидкостных
ракетных двигателей.
Кроме того, коротко рассмотрены основные вопросы по
системам управления для силовых установок, в которых
используется ядерная энергия.
Книга является учебником для авиационных вузов по
курсу «Теория автоматического регулирования авиационных и
ракетных силовых установок». Она может быть полезной также
инженерам и научным сотрудникам, работающим в области
автоматического регулирования авиационных и ракетных
силовых установок.
Рецензент Московское Высшее техническое училище
им. Баумана
Редактор инж. К. Я. Зайцева
ПРЕДИСЛОВИЕ
Авиационная и ракетная техника относятся к наиболее
сложным отраслям знаний, которые к тому же, весьма быстро
совершенствуются и развиваются. Совершенствуются и развиваются не
только существующие образцы силовых установок, но возникают
и принципиально новые виды установок, требующие применения
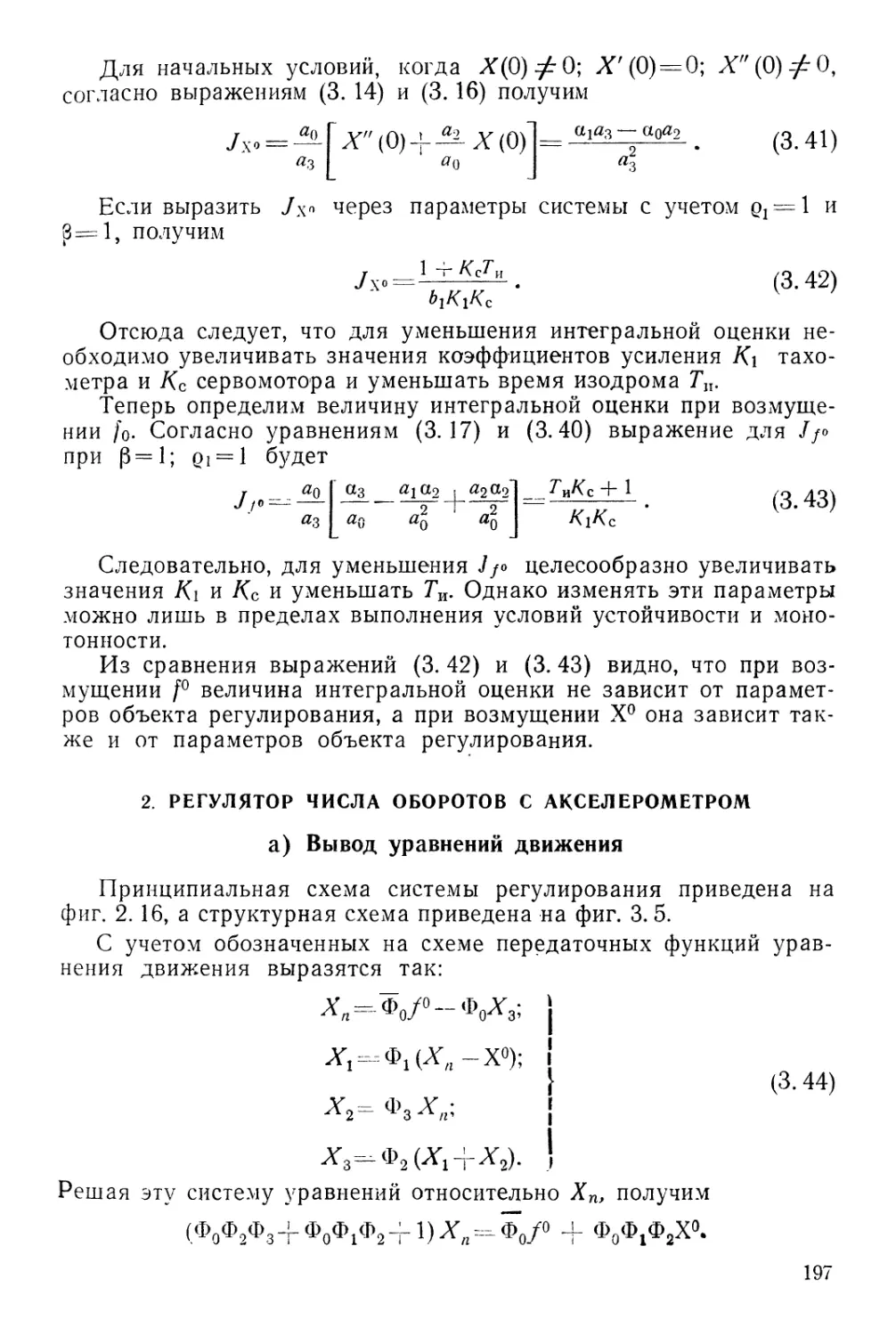
новых методов автоматизации и управления ими.
Естественно, что с развитием собственно силовых установок
развиваются и совершенствуются и системы управления ими,
причем удельный вес систем управления все время возрастает. Это
объясняется усложнением процессов, происходящих в установках,
и предъявлением более жестких требований к параметрам,
определяющим режим работы установки.
С увеличением скорости и высоты полета крылатых летательных
аппаратов увеличивается взаимное влияние силовой установки
и летательного аппарата, поэтому в современных системах
автоматического управления режимами работы авиационных силовых
установок необходимо учитывать это взаимное влияние.
Получение максимальных значений удельных параметров
современной силовой установки связано с необходимостью определенной
оптимизации процессов, что приводит не только к существенному
усложнению системы управления, но и к необходимости применения
новых принципов управления.
Несмотря на простоту принципа действия ракетных силовых
установок, системы автоматического управления ими весьма
сложны. Это объясняется особенностью протекания рабочего процесса
в ракетных двигателях и большой агрессивностью применяемых
рабочих тел. Здесь также введение оптимизации процессов является
основой для получения более высоких значений удельных
параметров.
Надежность является основным критерием в оценке
совершенства любой системы автоматического управления для любой
авиационной и ракетной силовой установки, поэтому при создании
новой системы управления этому вопросу уделяется первостепенное
внимание.
1327 3
Из сказанного выше следует, что создание удовлетворительно
работающей системы регулирования для современных
авиационных и ракетных силовых установок является сложной и трудной
задачей.
Настоящая книга является вторым изданием вышедшей в 1960 г.
в издательстве Оборонгиз книги под названием «Автоматика
авиационных силовых установок».
В настоящем издании в книгу дополнительно включены главы,
относящиеся к системам управления установками с жидкостными
ракетными и прямоточными воздушно-реактивными двигателями,
а также к системам управления установками, в которых
используется ядерная энергия. Материал, относящийся к системам
управления установками с газотурбинными двигателями, в
значительной степени переработан и дополнен, а глава, относящаяся
к системам управления установками с поршневыми двигателями,
исключена.
Исходным материалом для написания новых глав и разделов
послужили сведения, опубликованные в различных книгах и в
периодической печати, систематизированные и переработанные
автором, а также собственные разработки автора.
Как и в первом издании, автор пытался рассматривать весь
комплекс вопросов автоматизации режимов работы силовых
установок с единой точки зрения — органической связи свойств
регулируемых объектов с соответствующими свойствами систем
управления и условиями их эксплуатации.
При изложении материала настоящей книги предполагалось,
что читатель знаком с основами теории автоматического
регулирования, теорией двигателей и моделированием процессов.
Содержание книги соответствует утвержденной учебной
программе по одноименному курсу. .
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
Для газотурбинных воздушно-реактивных двигателей
/?д—реактивная тяга в н или кГ;
п
/?уД = ——• удельная тяга в н тяги/кг/сек топл или кГ тяги/кг/сек топл;
LK—работа, затрачиваемая на привод компрессора, с учетом
механических потерь, отнесенная в 1 кг сжимаемого воздуха;
Мъ— крутящий момент, необходимый для привода агрегатов, в н • м или
кГ • м;
Мк— крутящий момент, необходимый для привода компрессора, в н • м
или кГ • м;
Мтр— крутящий момент, обусловленный наличием сил трения, в н • м
или кГ - м;
NB—эквивалентная мощность для ТВД в кет или л. с.\
Ne —• эффективная мощность, снимаемая с винта, в кет или л. с;
Л/уд— удельная мощность в кет/кг еозд/сек или л. с/кг еозд/сек;
Ne уД— удельная мощность (эффективная) в кет/кг еозд/сек или л. с./кг
еозд\сек;
GT — расход топлива в кг/час;
Ов—расход воздуха в кг/сек;
GK — расход воздуха через компрессор в кг/сек-,
Gc—-расход газа через реактивное сопло в кг/сек;
Gr— расход газа в кг\сек;
СуД—удельный расход топлива в кг-топл/н тяги час для ТРД
и кг ■ топл/кет час для ТВД или соответственно кг топл/кГ тяги
час и кг топл/л. с. час;
Ни — теплотворность топлива в кдж/кг или ккал/кг;
//ад—-полный адиабатный напор компрессора;
М —число Маха — отношение скорости полета к скорости звука;
Pi\ T& wi — давление, температура и скорость газа (воздуха) в сечении i;
P*i> T*~ полные давление и температура в сечении I;
р', Т • V—давление и температура окружающей среды и скорость полета;
F—площадь реактивного сопла на срезе в м2;
FT — площадь проходного сечения соплового аппарата турбины в м2;
Fz—> площадь проходного сечения сопла в ж2;
рс — статическое давление на срезе сопла в кГ/см2 или н/см2;
J i — момент инерции в кГ • м- сек2 или н • м • сек2;
D — диаметр винта в м;
h* — адиабатный теплоперепад на турбине;
А — термический эквивалент работы;
#=11,9— постоянный коэффициент в выражении для крутящего момента
турбины и компрессора;
kT—'Показатель адиабаты для газа;
/г,-—-число оборотов в рад/сек или об/сек;
g — ускорение силы тяжести в м/сек2;
а-—коэффициент состава смеси (избытка воздуха);
(3-—коэффициент мощности винта;
&к1 $ф—'Коэффициенты потерь полного давления в основной и форсажной
камерах сгорания;
у\т— относительный эффективный к.п.д. турбины с учетом выходной
скорости в реактивном сопле;
f]e — эффективный к.п.д. двигателя;
%.с — к.п.д. камеры сгорания;
т)п— полетный к.п.д.;
"Пв —к.п.д. воздушного винта;
f\o — полный (экономический) к.п.д.;
^ад— адиабатный к.п.д. компрессора;
Q — плотность воздуха в кг/м3;
X—'Относительная поступь винта;
^к— степень повышения давления в компрессоре;
* * *
^об^'^ск— общая степень повышения давления;
7^—значение степени повышения давления в компрессоре,
соответствующее /?уд max;
^c — степень расширения газа в реактивном сопле;
-л^—степень расширения газа в турбине;
тс*к—скоростная степень повышения давления;
т\к—• общий или эффективный к.п.д. компрессора;
£—'Коэффициент выделения тепла;
(J-—отношение расходов;
«Рс—коэффициент потерь в сопле;
»т-—коэффициент потерь в турбине;
<¥'—-угол установки лопастей винта;
Од—расход воздуха через диффузор в кг/сек;
Gn— расход воздуха через перепуск в кг/сек;
Ря — проходное сечение диффузора в м2;
Fn— проходная площадь, открываемая створками перепуска, в м2;
/к— координата, определяющая положение центрального тела
диффузора, в м;
сд— коэффициент восстановления давления в диффузоре;
9д—коэффициент расхода воздуха через диффузор;
Мд—число М в выбранном сечении диффузора;
S—комплексное число в преобразовании Лапласа;
Tj—постоянная времени в сек;
Ki\ &i\ bi—коэффициенты усиления;
d
Р = ——оператор дифференцирования;
dt
ТРД— турбореактивный двигатель;
ТРДФ—.турбореактивный двигатель с форсажной камерой;
ТВД—турбовинтовой двигатель;
ВИШ—винт изменяемого шага;
ЧЭ — чувствительный элемент;
САР—система автоматического регулирования.
Для прямоточных воздушно-реактивных двигателей
— коэффициент тяги;
SM—лобовая (миделевая) площадь двигателя в м2;
д— скоростной напор;
а — коэффициент избытка воздуха;
б—-относительный подогрев;
TL — температура воздуха (газа) в сечении i двигателя в °К;
/?д—полное давление воздуха за диффузором в н/см2 или кГ/см2;
п
.RVi = ——-удельная тяга в н тяги!кг/сек топл или кГ тяги/кг/сек топл-
GT
С/д—расход воздуха через диффузор в кг/сек;
Gc— расход газа через реактивное сопло в кг/сек;
Qx—приток тепла в двигатель с воздухом в кдж/сек или ккал/сек;
Qc~* расход тепла с газами в кдж/сек или ккал/сек;
QT—приток тепла при сгорании топлива в кдж/сек или ккал/сек;
G, Q—количество воздуха (газа) и тепла, находящихся внутри
двигателя, соответственно в кг, кдж или кг, ккал;
Y/— плотность воздуха (газа) в сечении i двигателя в кг/м3;
Pi— статическое давление воздуха (газа) в сечении i двигателя
в н/см2 или кГ/см2;
Vi—'объем элемента I двигателя в м3;
М.[—-число М в сечении i двигателя;
Fc~ площадь критического сечения реактивного сопла в м2.
Для жидкостных ракетных двигателей
№с— скорость истечения газов из реактивного сопла в м/сек;
^ср—площадь сопла на срезе в м2;
Рср—давление в струе газа на срезе сопла в н/см2 или кГ/см2',
Тк—-температура газа в камере сгорания в °К;
рк -ч давление газа в камере сгорания в н/см2 или кГ/см2;
fx—молекулярный вес газа;
Wc
/?уд = — — удельная тяга;
Gok—расход окислителя в камеру сгорания в кг/сек;
ОГ0р — расход горючего в камеру сгорания в кг/сек;
is G°K
Кт = ~z,— — массовое соотношение расходов компонентов;
\ртор
^топ = ^ок + ^гор —■ расход топлива в кг/сек;
~ ^топ
Суд = —— — удельный расход топлива;
Яд
^кр~~* площадь сопла в критическом сечении в м2;
7Zc = ~— — степень расширения газа в сопле;
^к£
Сгг—«расход газа через реактивное сопло в кг/сек;
Gy—количество газа в камере сгорания в кг;
V—объем камеры сгорания в м3;
МТур—^крутящий момент, развиваемый турбиной, в н • м или кГ ■ м;
Мок\ Мгор— крутящие моменты насосов окислителя и горючего соответственно
в н • м или кГ • м\
п — число оборотов ТНА в рад/сек или об/сек;
Ртт — давление газа в газогенераторе в н/см2 или кГ/см2;
Vr—объем газогенератора в м3;
Gy г—.количество газа в объеме газогенератора в кг;
Gn— расход перекиси водорода в кг/сек;
Grr—расход газа из газогенератора в кг/сек;
рв—давление в баке с перекисью водорода в н/см2 или кГ/см2;
^кр— площадь проходного сечения крана, изменяющего расход перекиси
водорода, в м2;
GB — расход газа в бак для наддува в кг/сек;
^п. в—расход газа, заполняющего объем вытесненной из бака
перекиси, в кг/сек;
G—-количество газа, находящегося в баке с перекисью водорода, в кг;
Yb. n~~ плотность перекиси водорода кг/м3;
/?б—~ давление газа в баллонах в н}см2 или кГ/см2;
/^др—площадь проходного сечения крана, изменяющего расход газа,
в м2\
йф—расход жидкости через форсунки в кг!сек;
/?ф—давление жидкости перед форсунками в н/см2 или кГ/см2;
Рт.н—давление, развиваемое насосами ТНА, в н/см2 или кГ/см2;
Рняа— величина наддува баков с компонентами в н/см2 или кГ/см2;
рст—величина давления за счет высоты Яст столба жидкости в н(см2
или кГ/см2;
р-—величина давления, обусловленная наличием ускорения полета;
/'пот— величина потерь давления из-за местных сопротивлений и вязкости
жидкости;
/?ин—• величина потерь давления из-за инерционных сил, связанных
с ускорением течения жидкости при изменяющемся расходе;
V—ускорение полета в м/сек2;
/?—натуральная и универсальная газовые постоянные.
Для ядерных силовых установок
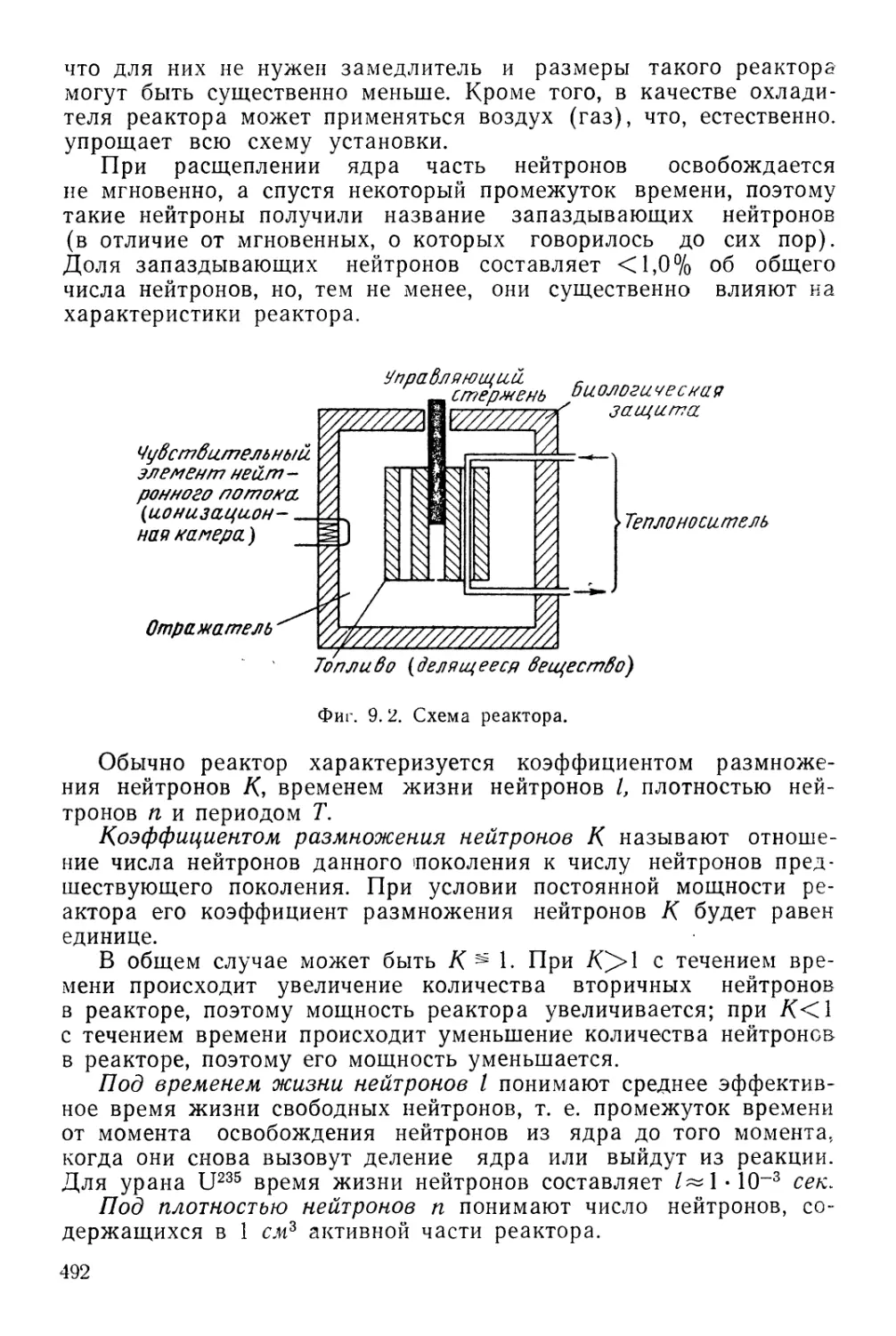
/С—коэффициент размножения нейтронов;
/— время жизни нейтронов;
Т— период реактора в сек;
I — среднее время жизни запаздывающих нейтронов всех групп в сек;
$1— доля запаздывающих нейтронов i-й группы от общего числа
нейтронов;
п— плотность нейтронов;
С— плотность запаздывающих нейтронов;
А = —— постоянная распада запаздывающих нейтронов;
'з
а— температурный коэффициент;
Тр— средняя температура реактора в °К;
■^ср—'усредненная температура теплоносителя реактора в °К:
Т gp— усредненная температура стенки теплообменника в °Ю
Г^р—средняя температура воздуха в °К;
7°х—-температура теплоносителя на выходе из реактора в °К;
Т™— температура теплоносителя на выходе из теплообменника в °К;
Т^х—температура теплоносителя на входе в реактор в °К;
С/р—расход теплоносителя через реактор в кг/сек;
бт. о— расход теплоносителя через теплообменник в кг/сек;
йп— расход теплоносителя чере? перепуск в кг/сек;
MR— крутящий момент для привода насоса в н • лГили кГ • м;
лн— число оборотов насоса в рад/сек или об/сек;
F — проходная площадь крана перепуска теплоносителя в м2;
пА — число оборотов вала турбокомпрессора в рад\сек или об /сек.
Примечание. Параметры, отнесенные к заторможенному
потоку, обозначены звездочкой.
Глава I
СИЛОВЫЕ УСТАНОВКИ С ГАЗОТУРБИННЫМИ
ДВИГАТЕЛЯМИ
Под силовой установкой с газотурбинными двигателями будем
понимать необходимый комплекс устройств, позволяющих получать
силу тяги, потребную для летательного аппарата. Поскольку
газотурбинные двигатели (ГТД) разделяются на турбореактивные
(ТРД) и турбовинтовые (ТВД), то в соответствии с этим будем
раздельно рассматривать силовые установки с турбореактивными
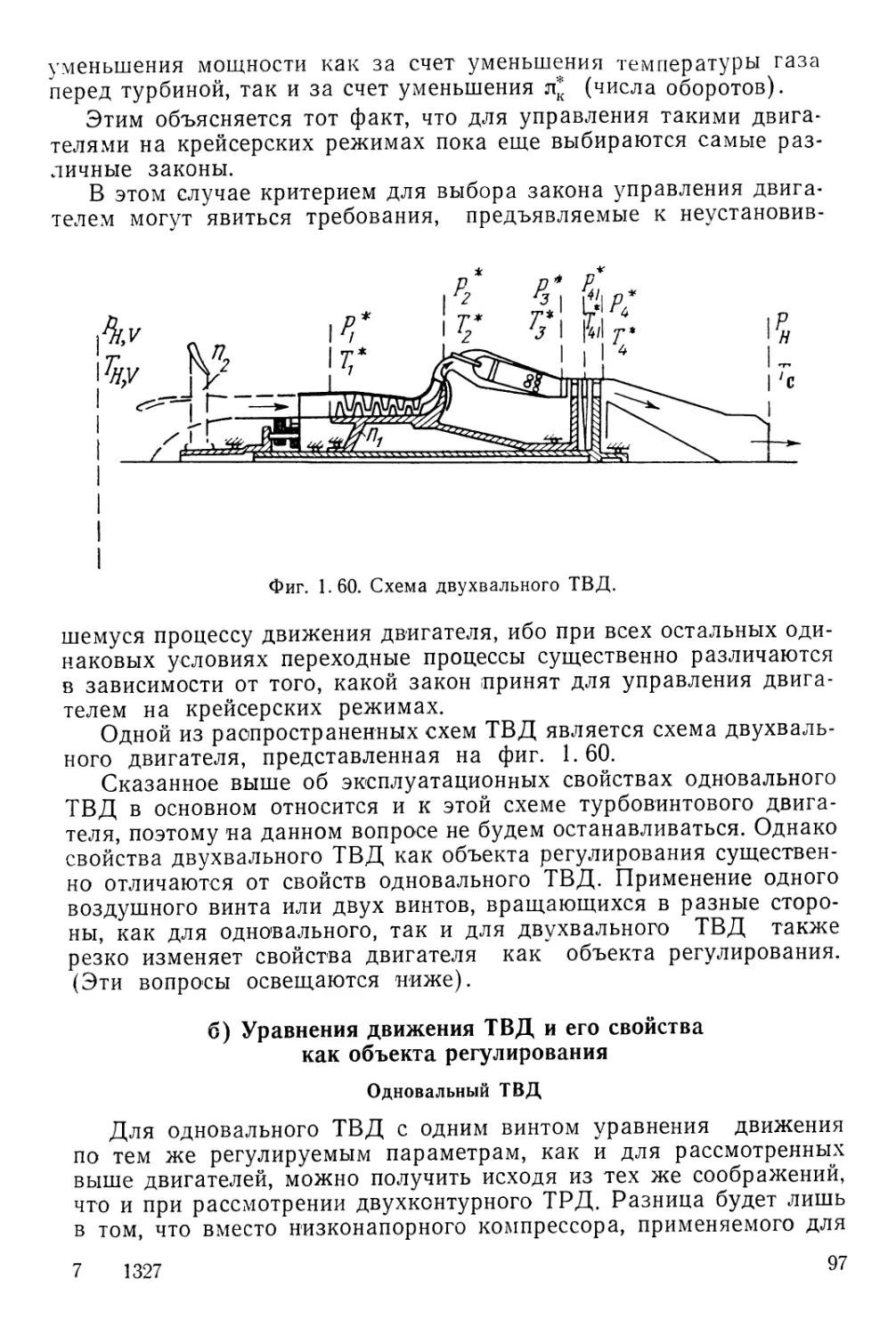
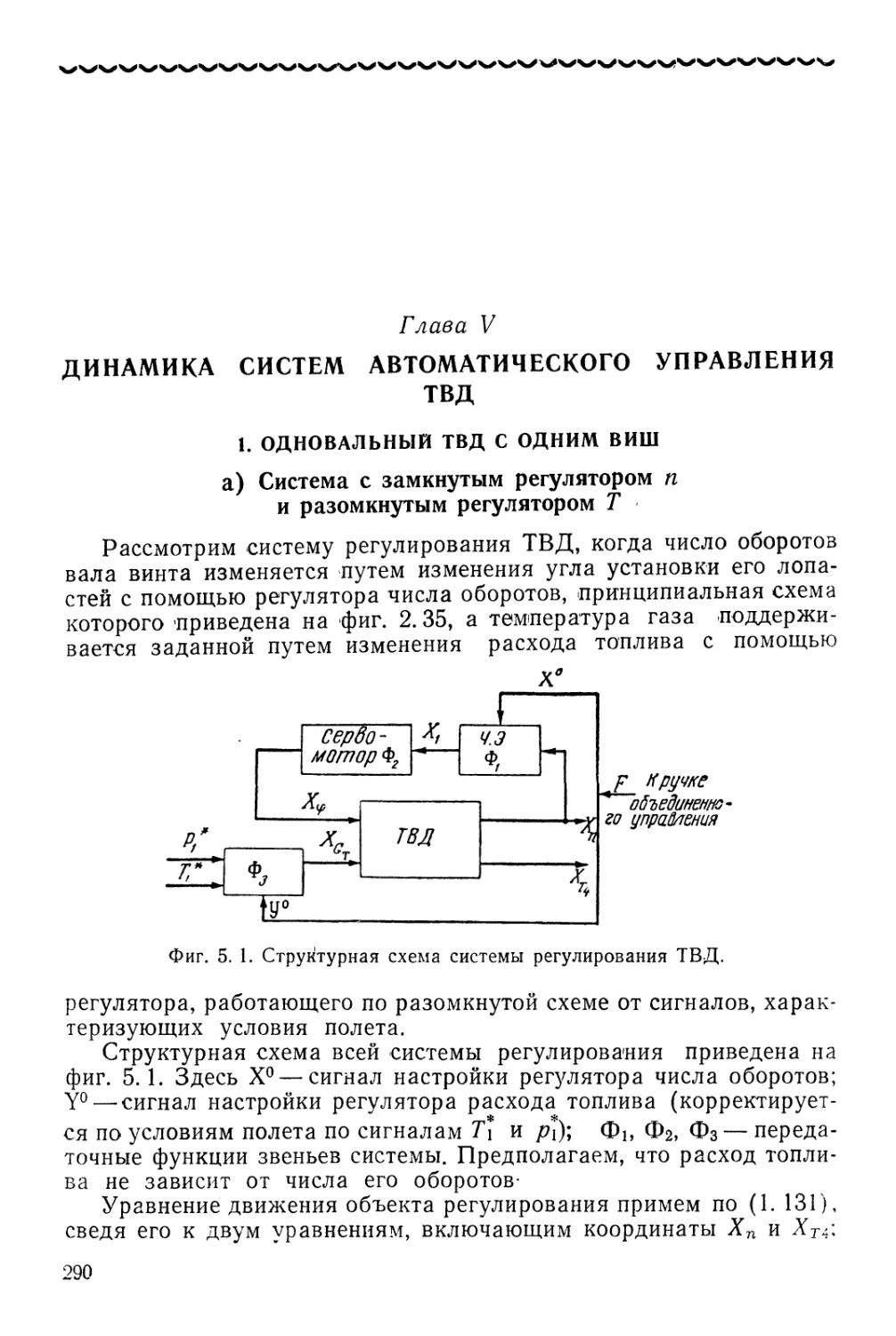
двигателями и силовые установки с турбовинтовыми двигателями.
1. ОСНОВНЫЕ СВЕДЕНИЯ ОБ ЭКСПЛУАТАЦИОННЫХ
СВОЙСТВАХ ОДНОВАЛЬНЫХ ТУРБОРЕАКТИВНЫХ
ДВИГАТЕЛЕЙ (ТРД)
а) Основные характеристики
Турбореактивный двигатель как тепловая машина
характеризуется сложным рабочим процессом, который в нем происходит.
Несмотря на многообразие типов авиационных ТРД, многие их
характеристики подчинены общим зависимостям. Основными же
характеристиками любого авиационного двигателя, в том числе
и ТРД, являются характеристики его как движителя.
Для всех авиационных двигателей полезная работа, получаемая
в результате подвода тепла к рабочему телу, определяется
приращением кинетической энергии рабочего тела, отбрасываемого
против направления движения (полета). У ТРД полезная работа
определяется приращением кинетической энергии продуктов сгорания,
вытекающих из реактивного сопла.
Принципиальная схема простейшего ТРД приведена на фиг. 1.1,
где показаны основные характерные сечения проточной части
двигателя и приведены обозначения, которые будут употребляться
в дальнейшем.
Потенциальная энергия продуктов сгорания, приобретенная
в процессе предварительного сжатия и последующего подвода тепла
при сгорании, частично преобразуется в кинетическую энергию
9
в процессе расширения в турбине и в реактивном сопле, и
частично непосредственно переходит в работу на колесе турбины.
Часть энергии идет на привод компрессора и вспомогательных
агрегатов, а остальная часть идет на ускорение потока газа, выте-
ср
Фиг. 1.1. Принципиальная схема турбореактивного
двигателя.
кающего из реактивного сопла, и тем самым на создание
реактивной тяги, направленной в сторону полета.
На фиг. 1.2 показан характер изменения величин давления,
температуры и скорости потока воздуха и продуктов сгорания,
протекающих через двигатель. В полете характер изменения этих
величин несколько изменяется из-за влияния внешних условий
полета — рн, Тн и V.
J U
5' 5
Фиг. 1.2. Характер изменения р} Т и w по тракту двигателя.
Свойства турбореактивного двигателя обычно выражаются
через его характеристики. Основными характеристиками являются
скоростные, высотные и характеристики по числу оборотов. Под
скоростными характеристиками понимают зависимость тяги,
развиваемой двигателем, и удельного расхода топлива от скорости по-
10
лета при неизменных высоте полета и числе оборотов двигателя.
При этом температуру газа перед турбиной обычно принимают
постоянной.
На фиг. 1.3 приведены расчетные скоростные характеристики
двигателя (где тяга дана в относительных величинах), из
которых виден характер изменения тяги и удельного расхода
топлива.
В свою очередь, тяга и удельный
расход топлива могут быть выражены
через другие очень важные параметры
рабочего процесса двигателя. К
таким параметрам в первую очередь
относятся: удельная тяга (тяга,
отнесенная к расходу воздуха), расход
0,8
0,6
'0
У
/У
// = /
\ 1
н=о
-**
0 км
х
//=0
/
\S
s
у
Wkm
__ i —'
/
^—
^*
H^Wkm
0,2
Суд
1,6
1J5
t?
\2
1,1
з,о
0,9
О 400 800 1200 1600 2000
V мм/час
Фиг. 1. 3. Скоростные
характеристики ТРД.
220
190
160
/JO
/00
70
40
О 400 8001200/600 2000
V км/час
Фиг. 1.4. Изменение
относительных параметров
двигателя с изменением скорости
полета.
Н— const
суд
— А
L
^у
h
1
h
У
у
воздуха, степень повышения давления в компрессоре, температура
газа перед турбиной.
На фиг. 1.4 приведен иной вид характеристик, представленных
в виде изменения относительных величин тяги, удельной тяги,
расхода топлива, удельного расхода топлива и расхода воздуха в
зависимости от скорости полета при всех других постоянных
параметрах. За 100% приняты параметры, соответствующие V=0.
Как видно из фиг. 1.4, с увеличением скорости полета расход
воздуха GB увеличивается, а удельная тяга Еуд уменьшается,
в результате чего тяга Лд сначала уменьшается, а затем
увеличивается. Расход топлива увеличивается в соответствии с увеличением
расхода воздуха.
Под высотными характеристиками ТРД понимают зависимость
тяги и удельного расхода топлива от высоты полета при постоян-
11
д
1,0
0,8
0,6
Ofi
0,2
О
Суд
Ь*
',3
1,2
/J
О 3 6 9 12 15 18 21
Н км
Фиг. 1.5. Высотная
характеристика ТРД.
\
ч
N
Ч
К= const
ч
ч^
160
130
100
70
40
10
V — const
^ч.
V?
^s
^^
Л
у
*т
^<
/
<**
^уд
7*
Г^
(А
^5
0 J 6 9 /2 15 18 21
И им
Фиг. 1.6. Изменение
относительных значений параметров
двигателя с изменением высоты полета.
д
1,0
0,8
0,6
0,2
^ул
\
\
\
у
\ /
к
ч
/
L/
/
1ft
12
10
0,2 Oft 0,6 0,8 1,0
~ ^тах
Фиг. 1.7. Дроссельная
характеристика ТРД.
12
ном числе оборотов и неизменной скорости полета. При этом
температуру газов перед турбиной принимают постоянной.
На фиг. 1.5 приведена расчетная высотная характеристика
двигателя, из которой виден характер изменения тяги и удельного
расхода топлива.
Изменение относительных величин основных параметров
двигателя в зависимости от высоты полета показано на фиг. 1. 6. За 100%
приняты параметры, соответствующие #=0. Как видно, с
увеличением высоты полета расход воздуха уменьшается, а удельная
тяга увеличивается (при #>11 км значение удельной тяги
практически не изменяется). В соответствии с характером протекания
GB и Луд изменяется тяга двигателя Лд, которая все время
уменьшается.
Расход топлива GT изменяется главным образом в соответствии
с изменением расхода воздуха, в связи с чем удельный расход
топлива Суд сначала немного уменьшается (до #=11 км), а затем
практически остаемся постоянным.
Так как двигатель эксплуатируется на самолете не только при
различных внешних условиях (р#, Тн, V), но и при различных
числах оборотов, то для исчерпывающего суждения о свойствах
двигателя применительно к конкретному типу самолета необходимо
знать зависимость тяги и удельного расхода топлива также и от
числа оборотов двигателя. Такие характеристики, которые
выражают зависимость тяги и удельного расхода топлива от числа
оборотов двигателя (при данной скорости и высоте полета),
называются характеристиками по числу оборотов или дроссельными
характеристиками.
Для примера на фиг. 1.7 приведена дроссельная характеристика
двигателя. Следует отметить резкое возрастание тяги двигателя
с увеличением числа оборотов и заметное уменьшение удельного
расхода топлива.
Для различных двигателей закон изменения реактивной тяги
от числа оборотов будет различный, но для двигателей с
нерегулируемым реактивным соплом приближенно можно считать эту
зависимость такой:
^(Г ал)
где /?z = 3,5-=-5,5 при работе двигателя на стенде и в полете.
Все рабочие режимы двигателя лежат на дроссельной
характеристике.
Из сказанного в этом разделе следует, что характеристики
двигателя значительно изменяются как по режимам, так и по условиям
полета. Изменение же характеристик двигателя должно привести
к изменению его свойства как объекта регулирования, что
необходимо учитывать при создании системы автоматического управления
двигателем.
13
б) Режимы работы
Эксплуатация любой авиационной силовой установки связана
с возможностью получения различных значений тяги, поэтому
система управления должна позволять устанавливать двигатель на
заданный режим его работы, а сам двигатель должен допускать
возможность работы на различных режимах в определенном
диапазоне их изменения.
Под режимами работы турбореактивного двигателя понимают
такие сочетания значений некоторых параметров его рабочего
процесса, при которых достигается необходимое значение тяги
и расхода топлива.
В зависимости от схемы и типа двигателя заданная тяга может
быть получена при различных способах управления им. Однако
из всех возможных способов управления выбирается такой, при
котором заданная тяга может быть получена при наименьшем
расходе топлива.
Под способом управления режимами работы двигателя
понимают характер воздействия на регулирующие органы двигателя и
через них на параметры рабочего процесса, которые и определяют
режим работы. При неизменных внешних условиях (p#=const,
Тн=const и F= const) управление режимами работы ТРД является
относительно простой задачей, сводящейся к управлению
режимами стационарных двигателей. Эта задача резко усложняется при
изменяющихся внешних условиях.
Основными параметрами, определяющими характеристики
всякого ТРД, в том числе и режимы его работы, являются степень
повышения давления в компрессоре я* и температура газов 7*
перед турбиной; поэтому задача определения способа управления
двигателем представляет собой выбор для каждого режима таких
значений ~* и 7*, при которых расход топлива GT был бы
наименьшим. Обычно интересуются двумя режимами работы
двигателя— максимальным и крейсерским. Для получения
максимального режима работы двигателя, очевидно, необходимо
поддерживать максимальный расход воздуха через двигатель,
максимальное значение л* и максимальное значение 7*. Поэтому
получение максимального режима работы двигателя не
представляет особых трудностей.
Иначе обстоит дело с крейсерскими режимами. Имеется
несколько способов их получения, однако не все они одинаково
пригодны ввиду того, что при этом получаются различные расходы
топлива.
Первый способ может быть осуществлен путем изменения
расхода воздуха дросселированием потока на входе в компрессор.
Однако этот способ приводит к значительному увеличению
удельного расхода топлива и, кроме того, к некоторому уменьшению
к. п. д. компрессора т]ад. В то же время, этот способ позволяет
получить хорошие характеристики двигателя по его приемистости,
14
т# е. способности в короткое время увеличивать режим работы (см.
ниже).
Второй способ получения крейсерских режимов может быть
осуществлен путем изменения степени повышения давления я*
в компрессоре при поддержании Г* = const. Однако и этот способ
приводит к увеличению удельного расхода топлива. Это видно из
графика, приведенного на фиг. 1.8, где показана зависимость
изменения удельного расхода топлива Суд от степени повышения
давления я* для различных значений Г*.
УД/ 3,2 3J 'ЗА
'УД
Фиг. 1.8. Характер зависимости
изменения удельного расхода топлива
от степени повышения давления
в компрессоре для различных
значений Т^.
Фиг. 1.9. Характер изменения
величины реактивной тяги
и удельного расхода топлива
в зависимости от числа
оборотов.
Третий способ получения крейсерских режимов может быть
осуществлен путем сохранения значения к*=const и изменения Т1==
= var, или jt* = var и Г* =var.
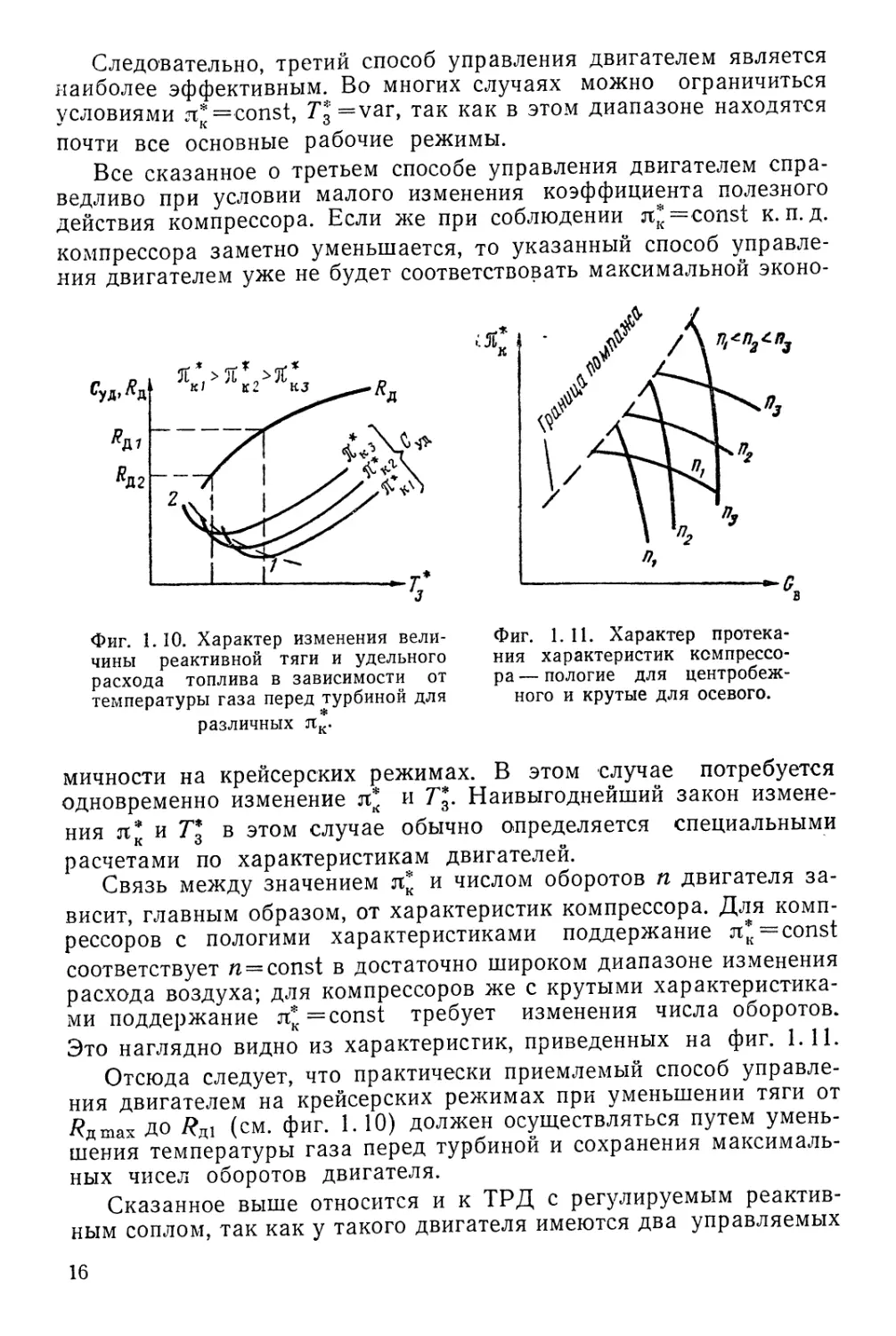
Для заданных условий полета характер изменения величин
тяги /?д и удельного расхода топлива Суд в зависимости от числа
оборотов п, степени повышения давления я* и температуры газов
Т\ перед турбиной представлен на фиг. 1.9 и 1. 10. Из этих
характеристик следует, что уменьшение тяги #Д1</?тах целесообразно
производить путем уменьшения значения Г* и сохранения як'тах
до такого значения 7?д, которому соответствует минимум удельного
расхода. Дальнейшее уменьшение тяги Rj&<Rr\ целесообразно
осуществлять путем изменения как Т\, так и я*, двигаясь по
кривой 1—2, соединяющей минимумы кривых Суд (см. фиг. 1. 10).
Б этом случае, очевидно, заданная тяга /?д будет получена при
наименьшем возможном расходе топлива, хотя при этом значения
Удельного расхода и будут увеличиваться.
15
Следовательно, третий способ управления двигателем является
наиболее эффективным. Во многих случаях можно ограничиться
условиями 3t*=const, r*=var, так как в этом диапазоне находятся
почти все основные рабочие режимы.
Все сказанное о третьем способе управления двигателем
справедливо при условии малого изменения коэффициента полезного
действия компрессора. Если же при соблюдении jt*=const к. п. д.
компрессора заметно уменьшается, то указанный способ
управления двигателем уже не будет соответствовать максимальной эконо-
Фиг. 1.10. Характер изменения
величины реактивной тяги и удельного
расхода топлива в зависимости от
температуры газа перед турбиной для
различных як.
Фиг. 1.11. Характер
протекания характеристик
компрессора — пологие для
центробежного и крутые для осевого.
мичности на крейсерских режимах. В этом случае потребуется
одновременно изменение я* и Т\. Наивыгоднейший закон
изменения я* и 7* в этом случае обычно определяется специальными
расчетами по характеристикам двигателей.
Связь между значением я* и числом оборотов п двигателя
зависит, главным образом, от характеристик компрессора. Для
компрессоров с пологими характеристиками поддержание я* = const
соответствует п = const в достаточно широком диапазоне изменения
расхода воздуха; для компрессоров же с крутыми
характеристиками поддержание tt*=const требует изменения числа оборотов.
Это наглядно видно из характеристик, приведенных на фиг. 1.11.
Отсюда следует, что практически приемлемый способ
управления двигателем на крейсерских режимах при уменьшении тяги от
Яд max ДО /?Д1 (см. фиг. 1.10) должен осуществляться путем
уменьшения температуры газа перед турбиной и сохранения
максимальных чисел оборотов двигателя.
Сказанное выше относится и к ТРД с регулируемым
реактивным соплом, так как у такого двигателя имеются два управляемых
16
фактора — расход топлива и проходное сечение регулируемого
реактивного сопла, с помощью которых и можно изменять число
оборотов и температуру газа перед турбиной.
в) Зависимости для /?уд и Суд
Чтобы полнее представить действующие законы, рассмотрим более подробно
зависимости, определяющие тягу и экономичность двигателя от основных его
параметров.
Величина тяги, развиваемая турбореактивным двигателем, определяется из
выражения
Rn = R7JlGB. (1.2)
В свою очередь, удельная тяга /?уд определяется выражением:
RyA= — (l4*>l>-V)+jr<j>c-PH)lW. (1-3)
Из приведенного выражения видно, что при заданной скорости полета
удельная тяга зависит от скорости истечения газа из реактивного сопла и от давления
на срезе сопла.
Произведя некоторые преобразования выражения (1.3), которые обычно
приводятся в курсах по теории ТРД, с целью выявления зависимости /?уд от
основных параметров рабочего процесса, можно написать:
с'р
л
уз
/ 1
1 ~ \ 8Kt
fer-l "
:J \
102
ът\.
^'Ю.гвб |
"Мт
1/
(1.4)
или в общем виде (при рн — const; Тн = const; V = const)
Луд = ЛуД(те*, т]к>т]т,^, Ък, Тс). (1.5)
Выясним, как влияют основные параметры на изменение величины удельной тяги.
На фиг. 1. 12 показан характер изменения удельной тяги в зависимости от
величины степени повышения давления в компрессоре для различных значений
температуры газа перед турбиной и различных значений произведения
коэффициентов полезного действия компрессора и турбины.
Такой характер изменения удельной тяги объясняется влиянием двух
противоречивых факторов. С одной стороны, увеличение степени повышения
давления в компрессоре приводит к увеличению скорости истечения газа из
реактивного сопла и, следовательно, к увеличению удельной тяги; с другой стороны,
это же увеличение степени повышения давления в компрессоре приводит к
повышению температуры воздуха Г2 за компрессором, что при условии постоянства
температуры газа Г3 перед турбиной приводит к снижению подводимого к газу
тепла и к возрастанию потерь в компрессоре и турбине.
При малых значениях я^ более интенсивно влияет первый фактор,
приводящий к повышению 7?уд, но по мере возрастания зтк начинает преобладать
второй фактор, приводящий к понижению RyK.
2 1327 17
т*г
УД
Фиг. 1.12. Характер изменения
удельной тяги /?уД в зависимости от
степени повышения давления в
компрессоре як для различных значений
температуры газа Т3 и величин
произведения к. п. д. компрессора и
турбины Т|к • Т]т.
3,2
УД
Фиг. 1. 13. Характер изменения
наивыгоднейшей степени
повышения давления в компрессоре як
в зависимости от скорости полета
для различных высот и
температур газа.
Фиг. 1.14. Характер изменения
удельной тяги /?уд в зависимости от
величины температуры газа Т3 для
различных пк и различных величин
произведения Т]„ -Т}т.
Используя зависимость (1.4), можно определить наивыгоднейшее значение
—*
степени повышения давления в компрессоре як, при котором будет получена
максимальная удельная тяга. Это значение выражается зависимостью
(1.6)
Из этого выражения видно, что наивыгоднейшая степень повышения
давления в компрессоре л* увеличивается с возрастанием температуры газа перед
турбиной и коэффициентов полезного действия компрессора и турбины и с
понижением температуры воздуха перед компрессором и коэффициента потери
давления в камере сгорания.
С увеличением высоты полета при неизменной скорости полета
скоростная степень повышения давления тс*к увеличивается, однако
темперапоэтому я*
повытура Т\ уменьшается быстрее, чем растет (^ск) г
шается.
С увеличением же скорости полета при неизменной высоте полета и прочих
неизменных условиях наивыгоднейшая степень повышения давления в
компрессоре уменьшается вследствие увеличения скоростной степени повышения давления.
Для примера на фиг. 1.13 показан характер изменения наивыгоднейшей
степени повышения давления в компрессоре от скорости полета для различных
высот и температур газа перед турбиной при всех остальных постоянных
параметрах. Влияние температуры газа перед турбиной на удельную тягу таково, что
с увеличением температуры Тъ удельная тяга резко возрастает, причем это
возрастание тем больше, чем больше скорость полета. Это поясняется фиг. 1. 14,
где показан характер изменения удельной тяги в зависимости от величины
температуры газа перед турбиной для различных степеней повышения давления
в компрессоре и различных значений произведения коэффициентов полезного
действия компрессора и турбины.
Таким образом, с изменением температуры газа перед турбиной можно сильно
изменять удельную тягу, причем это изменение будет тем эффективнее, чем
больше степень повышения давления в компрессоре.
Для выяснения вопроса об экономичности ТРД рассмотрим выражения,
определяющие часовой расход топлива GT и удельный расход топлива Суд.
Часовой и удельный расходы топлива определяются выражениями
GT — Яд,Суа —
3600 V
(L7)
уд~
В свою очередь це и т)п выражаются так:
и Чж~"
Из приведенных выражений для Суд, t)e и т]п видно, что г\е и г\п зависят
от тех же параметров рабочего процесса двигателя, что и удельная тяга, так как
они также являются функцией w5, а Суд, кроме того, является функцией и Ни.
2* 19
Произведя некоторые преобразования с выражениями для Суд, цс и г\п,
которые обычно приводятся в курсах по теории ТРД с целью выявления зависимости^
Суд от основных параметров рабочего процесса двигателя, можно написать
* «0,286 -,
3861/ ср
/Т-*
3
7^
_*0,286 |
-0,24^
V
(1.8)
Или в общем виде (при ря=const; TH=const; V= const)
Рассмотрим, как влияют основные параметры на изменение величины
удельного расхода топлива.
УД
С
уд
\
к* ^
В| с
У'
7ej
>--
Кг
LZ
■авава
W
Фиг. 1. 15. Характер изменения
удельного расхода топлива в
зависимости от величины
произведения т]к ' Лт для различ-
ных JtK и У3-
•кМТ/
Фиг. 1. 16. Характер изменения
удельного расхода топлива
в зависимости от я* для
различных значений Т\ и
произведения Т]к • Т]т.
Увеличение произведения tjk""^ приводит к резкому уменьшению удельного
расхода топлива. Это видно из фиг. 1. 15, на которой показано изменение
удельного расхода топлива в зависимости от величины произведения т]кЛт для
различных значений степени повышения давления в компрессоре и различных
температур газа перед турбиной. Изменение удельного расхода топлива в зависимости
от степени повышения давления в компрессоре для различных значений
произведения т]кТ)т и различных температур газа перед турбиной, вытекающее из
выражения (1.4), показано на фиг. 1.16. Характер протекания приведенных
кривых остается таким же и для различных скоростей полета. Такой характер
протекания зависимости Суд от як объясняется тем, что при V=const сначала при
увеличении я* значение ^к-ть увеличивается и Суд уменьшается, а далее, по
20
мере увеличения jt* значение т^к • Цт начинает уменьшаться, что и приводит
к увеличению Суд. Из тех же кривых следует, что имеются такие
наивыгоднейшие значения я*, которым соответствует минимальный удельный расход
топлива.
С увеличением скорости и уменьшением высоты полета наивыгоднейшая
-тепень повышения давления в компрессоре в отношении получения
минимального удельного расхода топлива уменьшается. Это объясняется теми же
причинами, которые вызывают соответствующее изменение удельной тяги Яуд.
*•**, ■ <
Nv/fu?
<>
"--^
^<
*-—.
Ik
7^
^
2
>v
V
VA,
Фиг. 1. 17. Характер изменения
наивыгоднейшей степени повышения
давления в компрессоре в
зависимости от высоты полета для различных
значений скоростей полета и Г3.
f/км
Фиг. 1. 18. Характер изменения Г3
в зависимости от высоты полета для
различных скоростей полета,
различных як и различных величин
произведения Т]к "Пт.
Можно также определить те наивыгоднейшие степени повышения давления
в компрессоре для различных условий полета, при которых будет получен
наименьший удельный расход топлива.
На фиг. 1. 17 приведены кривые, показывающие характер изменения
наивыгоднейшей степени повышения давления в компрессоре для получения
наименьшего удельного расхода топлива в зависимости от высоты полета, для
различных значений скоростей полета и температур газа перед турбиной.
Такой характер протекания кривых объясняется влиянием возрастания
скоростного сжатия. Можно было бы также определить то значение температуры
газа перед турбиной, при которой получается минимальный удельный расход
топлива. В результате оказалось бы, что значение этой температуры при
увеличении скорости полета увеличивается, а при увеличении высоты полета —
уменьшается. Такой именно характер изменения Г3 в зависимости от изменения высоты
полета для различных скоростей полета и различных я* и г]к*т|т и показан на
фиг. 1. 18.
Влияние потерь давления в камере сгорания бк и в реактивном сопле фс
на удельный расход топлива ясно видно из выражения (1.8). Как видно, эти
потери существенно влияют на величину удельного расхода топлива. Таким
образом, из всего рассмотренного выше вытекает, что выбор способа управления
Двигателем на крейсерских режимах представляет собой достаточно сложную
задачу хотя бы потому, что существует очень сложная зависимость между
параметрами рабочего процесса по тракту двигателя, которая еще более усложняется
при изменяющихся внешних условиях. Практическое решение рассматриваемого
вопроса требует проведения большой расчетной работы по характеристикам
двигателя, на основании которых только и возможно с необходимой точностью
определить способ управления двигателем.
21
Еще раз подчеркнем, что рассматриваемый способ управления двигателем
может быть осуществлен в том случае, если имеются какие-то два устройства,
допускающие независимое изменение как числа оборотов двигателя (или JtK),
так и температуры газа перед турбиной Г3, например, путем изменения расхода
топлива и проходного сечения реактивного сопла.
Реактивное сопло может работать в докритическом и в сверхкритическом
режимах истечения. При критическом перепаде давлений в сопловом аппарате
турбины площадь проходного сечения сопла Fc выражается зависимостью *:
(ь т*
у*75
0,25Л_
V
Отсюда видно, что Fc зависит от общей степени повышения давления яО5=лк,
а значит, она зависит от скорости и высоты полета.
При достаточно больших сверхзвуковых скоростях полета применяют не
сужающиеся, а расширяющиеся реактивные сопла, причем у такого сопла
регулируется не только критическое сечение, но и сечение на срезе. Последнее
необходимо для уменьшения потерь в сопле.
Приведенные данные позволяют судить о рациональных способах управления
двигателем в отношении получения максимальных и крейсерских режимов его
работы.
Зная способ управления двигателем или (что то же) необходимое сочетание
значений соответствующих параметров рабочего процесса, определяющих режим
его работы, можно определить свойства двигателя как объекта регулирования
и выбрать для него необходимую систему автоматического управления.
г) Подобные режимы
Если поддерживать число оборотов двигателя постоянным, то с изменением
внешних условий полета режим работы компрессора и, следовательно, всего
двигателя будет изменяться. Этого можно избежать, если поддерживать
заданными критерии подобия.
Из теории двигателей известно, что если поддерживать заданными критерии
подобия, то режим работы компрессора не будет изменяться при изменении
внешних условий.
Такими критериями подобия для компрессора являются^ величины
п\Ут\ и G^\fT\\p\. При условии, что n/j/Yj = const и GB ]/V !//>!= const,
режимы работы компрессора являются подобными, т. е. при этом
сохраняются подобие потока и равенство чисел М во всех сечениях компрессора.
Важно заметить, что на подобных режимах работы компрессора
сохраняются постоянными значения тс*, т\к и T^JT\.
Ввиду этого для поддержания заданного режима работы двигателя
оказывается целесообразным поддержание постоянными не действительных
чисел оборотов двигателя, а приведенных, равных /гпр = п\уТ\. Заметим
также, что с этой точки зрения является однозначным—поддерживать ли
постоянным
ппр = nib' Т\ = const или тс* = const.
1 Принято /гГ=1,33; сР = 0,28;
22
2. УРАВНЕНИЯ ДВИЖЕНИЯ И СВОЙСТВА ОДНОВАЛЬНОГО
ТРД КАК ОБЪЕКТА РЕГУЛИРОВАНИЯ
Выше было показано, что эксплуатационные свойства ТРД
изменяются с изменением условий полета и режима работы двигателя.
Естественно предположить, что в соответствии с таким изменением
эксплуатационных свойств будут изменяться и свойства двигателя
как объекта регулирования.
Создание удовлетворительно работающей системы
автоматического регулирования возможно лишь в том случае, если известны
свойства объекта регулирования, т. е. в данном случае свойства
двигателя как объекта регулирования.
Под свойствами двигателя как объекта регулирования будем
понимать характер неустановившегося движения во времени
выходной координаты (обороты, тяга, температура и др.), когда на
входе приложено стандартное возмущение.
Так как движение объекта регулирования выражается
дифференциальными уравнениями, то его свойства можно выразить
видом уравнения движения и характером 'изменения коэффициентов,
входящих в это уравнение, т. е. характером изменения постоянных
времени и коэффициентов усиления.
ТРД представляет собой сложную динамическую систему со
многими аккумуляторами энергии; эта система подчинена
воздействию многих физических и химических законов, полностью учесть
которые при выводе уравнения движения не представляется
возможным.
К очевидным аккумуляторам энергии относятся вращающиеся
массы, объем реактивного сопла, заполненного сжатым газом,
объем между компрессором и турбиной, объем входного
устройства, заполненный сжатым воздухом, и аккумулятор тепловой
энергии.
Накопленный опыт и проведенные многочисленные расчеты
по определению свойств ТРД как объекта регулирования
показывают, что не все перечисленные аккумуляторы энергии в
одинаковой степени влияют на эти свойства. Определяющим
аккумулятором энергии являются вращающиеся массы, к которым относятся
турбина, компрессор, соединительные валы и движущиеся массы
вспомогательных агрегатов, приводящиеся в движение от вала
турбины. Остальные аккумуляторы энергии настолько мало влияют
на свойства объекта, что без большой погрешности ими можно
пренебречь. Следовательно, для решения задачи в первом
приближении можно ограничиться учетом лишь одного аккумулятора
энергии в виде вращающихся масс, т. е. ограничиться одной
степенью свободы движения.
Преобразование энергии в процессе горения, в результате чего
происходит выделение тепла, в первом приближении можно
представить как безынерционный процесс, происходящий с некоторым
запаздыванием во времени.
23
Уравнение движения должно показать связь между
параметрами рабочего процесса двигателя, которые приняты за
регулируемые координаты (параметры), и координатами управляющих
факторов. Для двигателя с нерегулируемым реактивным соплом
регулируемыми параметрами являются число оборотов п и температура
газа перед турбиной Г* (или за турбиной Г*), а управляющим
фактором является расход топлива GT. В соответствии с этим
выходными координатами могут быть число оборотов или
температура газов перед турбиной (или за турбиной), а входной
координатой — расход топлива.
При эксплуатации самолета в любых условиях обычно
интересуются (при заданной высоте полета) скоростью полета, которая
для известного самолета определяется развиваемой двигателем
реактивной тягой.
С этой точки зрения за регулируемый параметр было бы
целесообразно принимать развиваемую двигателем реактивную тягу.
Хотя в принципе такие системы управления и могут быть
осуществлены, но, помимо них, должны быть и другие системы,
регулируемыми параметрами которых должны быть параметры рабочего
процесса, отражающие как режим работы двигателя, так и
тепловые и прочностные характеристики двигателя. При этом число
оборотов и температура газа перед турбиной являются такими
параметрами, которые в достаточной степени характеризуют все эти
особенности двигателя.
Движение объекта регулирования будем рассматривать в
линейном приближении, справедливом при малых отклонениях
обобщенных координат объекта.
а) Уравнения движения по числам оборотов
Первым исходным уравнением, справедливым для
неустановившегося движения, будет следующее:
2^ — =Мт — Мк-Мл — Мтр. (1.11)
Уравнение (1.11) выражает равенство между мом.ентом
инерционных сил и действующими моментами, иначе говоря это
уравнение указывает, что часть развиваемой двигателем мощности идет
на приращение кинетической энергии (ускорение или замедление
вращения).
Величины моментов Ма и Мтр малы по сравнению с Мт и Мк>
кроме того, они сравнительно мало изменяются с изменением
числа оборотов двигателя, поэтому без большой погрешности
можно принять, что Ma^const и -Мтр« const.
Исходным уравнением для установившегося движения будет
24
Уравнение в отклонениях получим, если из (1.11) вычтем
(1. 12), т. е. 2тсУ^ = дМт-дЖк, (1.13)
dt т к v ;
где
Уравнение (1.13) является нелинейным, так как АМК и ДМТ
связаны нелинейной зависимостью с теми параметрами рабочего
процесса, которые приняты нами за обобщенные координаты.
Крутящий момент, развиваемый турбиной, при всех прочих одинаковых
условиях и при сверхкритическом перепаде на сопловом аппарате
турбины зависит от состояния газа перед турбиной, т. е. от
параметров р*, Т\. В свою очередь, р* зависит от я*, я*к, Тн и рн.
Как указывалось выше, л* зависит главным образом от числа
оборотов /г, а я*к от скорости полета V и Тн. Температура газа Г* при
прочих одинаковых условиях зависит от расхода топлива GT. Таким
образом, функциональную зависимость Мт от параметров рабочего
процесса можно записать в общем виде следующим образом:
Крутящий момент, необходимый для привода компрессора, при
всех прочих одинаковых условиях зависит от состояния воздуха
на входе в компрессор, т. е. от параметров р*, Т\ и давления на
выходе из компрессора р\л
В свою очередь р* *и Т\ зависят от р#, Тн и V. Имея в виду, что
/?2=тс*/?*, можно считать, что р\ зависит от числа оборотов
компрессора. Таким образом, функциональную зависимость Мк от
параметров рабочего процесса можно в общем виде записать так:
MK=MK(n,GT,pH,TH, V).
Однако из практики известно, что величина Ми очень мало за-
виСит от расхода топлива GT, поэтому в дальнейшем будем
принимать:
MK = MK(n,pHJH,V). (1.15)
Приращения по указанным переменным, полученные в
результате разложения функций в ряд Тейлора, при ограничении
первыми членами ряда, будут такими:
■dv -
25
Подставляя полученное значение для АМТ и AAfK в выражение
(1.13), получим
tf/ ' \ д dJ \dG/ \д
дп dnJQ \dGT/0 \дрн dpH/Q
ЛдТн дТн)0 H^\dV dV )<Г
Переходя далее к безразмерным величинам, получим линейное
дифференциальное уравнение в виде
PHJH,V\ (1.18)
где
у ^0 max 2~-/ .
д /ЛЛ/f ч '
) nO max
TOmax\dGT/o
r An
1 n~
f[(pH, TH, V)—члены, учитывающие влияние внешних условий.
Здесь Гд имеет размерность времени и физически определяет
постоянную времени объекта регулирования; q — характеризует
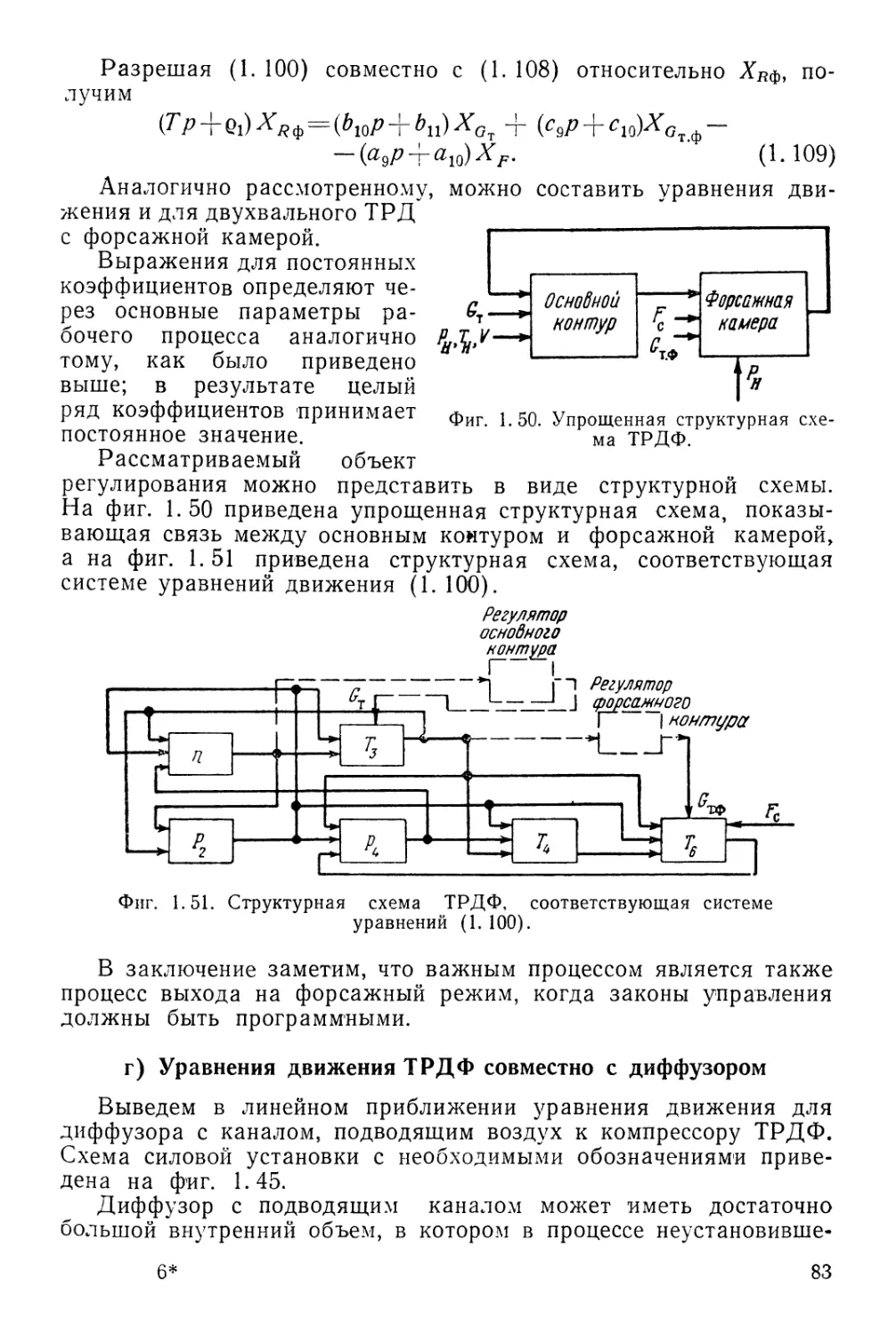
самовыравнивание объекта регулирования и называется коэффициентом
самовыравнивания. Коэффициент самовыравнивания показывает,
может ли двигатель без регулятора устойчиво работать при
заданных числах оборотов.
Это же уравнение можно записать в ином виде: с
(Тлр-\-1)Хп=Кга XQ -\-fi(pH,TH,V)9 (Ь19)
где
Т' 2izJ
Т = л =
д - /дМк дМт\
/дМк дМт\
\ дп дп /о
(
TOmax\dGT
Q п /дМк_дМт\
шах\ дп дп /о
f\ {рн, THt V) — члены, учитывающие изменение внешних условий.
В таком виде Гд также имеет размерность времени и также
называется постоянной времени объекта регулирования, а
Кют—называется коэффициентом усиления, который физически выражает
26
изменение регулируемой величины в долях величины приложенного
возмущения при установившемся движении. Из полученных
уравнений видно, что выходной обобщенной координатой или
регулируемой величиной является число оборотов двигателя Хп, а входными
координатами являются расход топлива X gt и внешние условия.
Фиг. 1. 19. Характер переходного процесса при
изменении величин Гд и Q.
Решение уравнения (1.19) при условии, что на вход подано
единичное возмущение и что при £=0 Хп = 0, будет:
Г
(1.20)
Из этого выражения видно, что процесс изменения числа
оборотов двигателя будет сходящимся в том случае, если q>0, т. е.
в этом случае с течением времени установится новое значение
числа оборотов, которое и будет поддерживаться двигателем и без
регулятора. Если q = 0, то число оборотов двигателя будет
изменяться с постоянной скоростью, а если q<0, to число оборотов
двигателя будет изменяться с увеличивающейся скоростью.
Двигатель, у которого q<0, не может устойчиво работать без
регулятора.
Увеличение Тд при одном и том же значении q приводит к
увеличению времени регулирования. Эти свойства регулируемого
объекта поясняются кривыми, приведенными на фиг. 1.19, где
показан характер протекания переходных процессов для различных
значений q и Гд.
б) Уравнения движения по любому параметру
Для составления уравнений движения регулируемого объекта
по температурам газа Г* — перед турбиной, Г* — за турбиной или
27
по любому другому параметру необходимо воспользоваться
дополнительными уравнениями.
Для этого рассмотрим зависимости, связывающие значение
параметров рабочего процесса в характерных сечениях газового
тракта двигателя, оставляя те же предпосылки о возможности не
учитывать другие аккумуляторы энергии, кроме вращающихся масс
двигателя.
В этом случае необходимо ввести в рассмотрение следующие
уравнения:
dt т к
т*
2 1 l / *Т 1\ 1
GK~Gr; j (1 21)
г
Второе уравнение определяет связь между степенью
повышения давления я* и температурой Г* воздуха за компрессором при
известных значениях давления р\ и температуры Г* воздуха на
входе в компрессор; третье уравнение определяет приближенное
равенство расходов воздуха, проходящего через компрессор — GE,
и газа, проходящего через турбину — GT. В действительности
существует зависимость Gr=GB-i-GT, однако ввиду малости GT по
сравнению с GB, расходом топлива можно пренебречь без заметных
погрешностей для окончательного результата. Четвертое уравнение
определяет связь между степенью расширения газов в турбине я^
и температурами газа перед турбиной Г* и за турбиной Т\\ пятое
уравнение определяет равенство расходов газа через турбину G
и через реактивное сопло Gc; шестое уравнение определяет связь
между расходом топлива GT и подогревом газа от температуры Г*
до температуры Г*.
Для упрощения дальнейшего изложения будем считать, что
к. п. д. компрессора, турбины и камеры сгорания остаются
постоянными, что справедливо только при малых отклонениях параметров
рабочего процесса. Кроме того, ограничимся рассмотрением таких
режимов работы двигателя, при которых на сопловом аппарате
турбины всегда будет критический или сверхкритический перепад
давлений. Как было показано при рассмотрении эксплуатационных
свойств двигателя, этому условию отвечают почти все рабочие ре-
28
#<имы двигателя с высоким значением степени повышения давления
в компрессоре. Будем считать также, что потери давления в камере
сГорания остаются постоянными.
Нелинейные зависимости для Мт, Мк, GK, Gr и Gc могут быть
представлены (при неизменных внешних условиях,
сверхкритическом перепаде на сопловом аппарате турбины и при GK^Gr) в
следующем виде:
Мк=Мк{Ок>п,ж*к);
GK=GK(p*2, n);
(1.22)
Линеаризируя обычным путем (1.21) с учетом (1.22) и
учитывая, что р1=рУк и Р*3=рУ1} получим
.п0 \/дМк\
дмЛ] у г Pto\/dMT\/dGr\ .
дт* /JAr3i" м LW )Wr
0 L\aor J W3 Г\дт*3 /J0Ar3i м0
j_J_/dMj\] у Ряо [/дМЛ/дОк\ 1 ,
+ Р:\д0\ >*~м LU)\к) pi
/дМА_±_~\ х —?I<l(?Mi\ X •
у
у .
р2'
(1.23)
(1.24)
Рго dG
\
dGr
U Jo I
, 3/0
LT3'
(1.25)
O'rO'
Xpfr
(1.26)
29
(dGc \ Y I Jjo (dGc
\dp4 /0 y GcQ \дТ4
dGK
Кроме того, учтем уравнение, связывающее величину давления
воздуха за компрессором с давлением перед турбиной, в виде
/>з = 6кР2> которое в безразмерной форме будет выглядеть так:
Хр3=Хр2. (1.29)
Таким образом, мы получили семь линейных уравнений, в
которые входят восемь неизвестных: Хп, Хтъ, XpZ, Хр2, Хт2, ХТ4,
ХР4, Xq^ .
Для удобства в дальнейшем исключим иэ полученных семи
уравнений координаты ХТ2 и Хрг с помощью уравнений (1.24)
и (1.29) и введем следующие обозначения:'
Мо ' М0[\дп
/dMT\/dGT
)
К /dAft
щ
Ко (дМЛ .
Р\ и
Р
tlQ /UUK \ # ^r ~ ДЦ /^Г 1 ф y^ __
= Г40 /dGc \
Gco \dT*4 )Q
к\ УРкоТК1 1 .
30
Qo
^3_ . у __А/>2 .
3 т.* ' "/* р2 * '
Р20
г 30
X
р\-
lXUa LSI л \(f
-—IT* лТ4—-—*-* ло„ — ~77~'•
АО
Тогда окончательно система уравнений будет иметь следующий
вид:
Л Г4 А гз
ъ=0;
2 + К5пХп =
4=0;
(1.30)
Разрешая систему (1.30) относительно любой входящей в нее
координаты и оставляя в правой части уравнения координату XG^t
получим искомые уравнения, в том числе и уравнения
относительно Хп, Хтг и Хта-
Воспользовавшись правилом Крамера, можем написать
(1.31)
(1.32)
(1-33)
где А, Д„, Дтз и ДТ4 — определители, составленные из
коэффициентов уравнений, т. е.
д =
0
О
О
К5,
О
о
о
о
0
о
о
1
— К4Т4
о
о
о
1
о
Определитель Дтз отличается от Д вторым столбцом, вместо
которого следует подставить первый столбец из Дп; определитель
Дт4 отличается от Д пятым столбцом, вместо которого следует
подставить первый столбец из Дп.
31
Раскрывая определители, после преобразований получим
следующие уравнения движения:
(1.34)
^oT; (1-35)
XGT. (1.36)
Если уравнение (1.34) разделить на рь то получим выражение
(Тдр + 1)Хп = КютХОтУ которое получали ранее [см.
уравнение (1.19)].
Здесь т _ т . к ___ь\
Ql T Ql
Уравнение движения рассматриваемого ТРД по реактивной тяге
в линейном приближении получим, если дополнительно введем
в рассмотрение уравнение (1.2), определяющее зависимость
реактивной тяги от удельной тяги и расхода газа, т. е. ^=/?yflGc.
Нелинейные зависимости для GB~GC приведены выше, т. е. Gc =
= Gc(pl> Г*), а для 7?уД эти зависимости определяются
выражением (1.5), из которого следует, что при допущении (для малых
отклонений) г)к = const, r|T = const, фс = const, V—const и при
неизменных внешних условиях
Линеаризируя приведенные выражения, получим уравнение
XR — К6тгХгз—К6р2Хр2—К6р^Хр4 — К67ЧХТ4=0, (1.38)
где
Ядо
к /о чди
Разрешая (1.30) совместное (1.38) относительно координаты XRy
получим
л . х л X И Я<^
Здесь определитель А имеет прежнее выражение, а определитель AR
будет таким:
f>+e -tfjra -/Clp2 ^4 О О
^2« --^2ГЗ ^2р2 0 0 0
О -1 -Кгръ -K3pi 1 О
*J A/ITQ I\ л„Ъ 1\ЛпЛ A. AT A ^
— А 4р4 — А 4Г4
0
0
0
32
Раскрывая определители, получим
Ха1. (1.40)
Выражения для коэффициентов, входящих в уравнения (1.34),
(1.35), (1.36), (1.40), через коэффициенты, входящие в уравнения
системы (в результате раскрытия определителей), носят очень
громоздкий характер. Поэтому при решении практических задач
целесообразно сначала определить цифровые значения
коэффициентов исходной системы уравнений, а после этого раскрывать
определители.
в) Уравнения движения с учетом времени
запаздывания выделения тепла при сгорании
топлива
Приведенные выше уравнения движения по числу оборотов, температуре
газов перед и за турбиной и реактивной тяге получены в предположении, что
изменение температуры газа Т 3 происходит в точном соответствии с изменением
величин расходов топлива и воздуха и температуры воздуха за компрессором,
без какого-либо запаздывания во времени.
В действительности выделение тепла при сгорании топлива происходит с
некоторым запаздыванием, т. е. от момента нанесения возмущения по расходу
топлива до момента, когда это топливо сгорит и в результате этого выделится тепло
и повысится температура газов, проходит некоторое время т. Для получения
уравнения движения объекта регулирования, более точно отражающего
происходящие в двигателе явления, иногда необходимо учитывать это время
запаздывания.
Величина времени запаздывания t при изменении температуры газов Тз из~
меняется в зависимости от режима работы двигателя и условий полета, но при
рассмотрении малых отклонений регулируемых параметров можно принимать
т=const.
Протекание процесса горения с запаздыванием выделения тепла в камере
сгорания на время t эквивалентно представим таким процессом, в котором будем
условно считать, что выделение тепла происходит как бы без запаздывания,
а подача топлива в камеру сгорания происходит с запаздыванием на ту же
величину t. Это позволяет наглядно выделить из объекта регулирования с
запаздыванием запаздывающее звено, считая его последовательно соединенным с
объектом регулирования без запаздывания. Учитывая, что передаточная функция
запаздывающего звена есть е~хр и что при последовательном соединении звеньев
их передаточные функции перемножаются, получим такие уравнения движения:
T (1.41)
= (Ь2р + Ь3) Хат; (1.42)
(Тр + oi) ех"Хт4 = (Ь4р + Ь5) XCj; (1.43)
(1.44)
Из приведенного видно, что если время запаздывания т имеет существенную
величину, то свойство объекта регулирования может существенно измениться,
причем в худшую сторону. Некоторые количественные оценки величины времени
запаздывания, которые позволяют судить о целесообразности его учета,
приводятся ниже.
3 1327 33
г) Уравнения движения ТРД с нерегулируемым
соплом с учетом влияния агрегатов топливной системы
Полученные выше уравнения движения регулируемого объекта
не учитывают влияния топливной системы двигателя. У
большинства ТРД рассматриваемого типа топливный насос приводится
во вращение от вала двигателя, поэтому расход топлива через насос
зависит от числа оборотов двигателя. Между топливным насосом
и форсунками двигателя устанавливается регулирующий орган,
изменяющий расход топлива, который в общей системе управляется
специальным регулятором. Выясним изменение свойств объекта
регулирования с учетом зависимости расхода топлива в двигатель
от положения регулирующего органа и числа оборотов насоса, так
как расход топлива можно изменить как изменением положения
регулирующего органа, так и числом оборотов насоса (двигателя).
Широкое распространение получили топливные насосы
объемного типа, шестеренчатые или плунжер'ные. Рассмотрим влияние этих
насосов.
Подача топлива в двигатель с помощью указанных насосов
зависит от числа оборотов насоса и положения а регулирующего
органа, т. е. GT = GT(n, а), тогда
) №) Да.
/о \ да /о
Переходя к безразмерным величинам, получим
(1.45)
где
v n0 /dGT\ # jr a0 /dGT \ . Y Да
Ai=-—(-г—), Да = ~—IT""")' л* = —•
Ото \ ип /о ^то V ^а /о ао
Подставляя полученное значение XG , например, в уравнение
(1.34), получим
(TnP + Qn)Xn=KabxXa9 (1.46)
где
Qn=Qi~blK1; Tn=T.
Из полученного видно, что значение коэффициента
самовыравнивания уменьшается, следовательно, свойства объекта
регулирования ухудшаются при таком законе подачи топлива в двигатель,
когда GT = GT(n, a).
Если предположить, что расход топлива не зависит от числа
оборотов двигателя (насоса), что достигается, например,
применением устройств, поддерживающих постоянный перепад давлений
топлива на регулирующем органе, то для этого случая будем иметь
GT = GT(a), и соответственно
Y ap fdGT \ у
ap fd
G* gt0 V
34
Тогда вместо (1.46) получим
(Tp + QjX^Ka^X*. (1.47)
В этом случае левая часть уравнения остается прежней и,
следовательно, свойства объекта регулирования улучшаются, когда
GT = GT(a) по сравнению со случаем, когда GT = GT(n, a).
Это очень важный вывод для практического осуществления
системы питания двигателя топливом.
Аналогичные выводы следуют и при рассмотрении уравнений
(1.35) и (1.36).
д) Уравнения движения ТРД с регулируемым
реактивным соплом
Для этого случая используем уравнения (1.21), а в
функциональных зависимостях для уравнений, приведенных в (1.22), учтем
зависимость расхода газа через реактивное сопло от величины
проходного сечения реактивного сопла Fc, т. е. примем
Тогда вместо (1.27) можно написать
Рго / dGr \ ^ \]j®l д°т \ гг ^40 / dGc
^rO \ ^3 /о Р G
, _^40_/aGc_ ^
Gqo \ дТу Gcq \ш с
(1.49)
Вводя обозначения KAF——(—-) , XF=—-, получим четвер-
Gcq \oFc /o ^co
тое уравнение системы (1.30) в виде
зХт* — ^4Р4^р4 — ^4Т4^Т4 ~ КАрХр. (1. 50)
Разрешая (1.30) (без четвертого уравнения) и (1.50)
относительно Хп, Хтз и ХТ4, получим соответственно
Определитель А имеет прежнее выражение, а определитель Дп равен
О —К1ТЪ —Кг 2 Кг 4 О
О —/^ ЛГ О О
О 1/^/^*1
V-J -I i\OnO i\ Qn4 a
35
Определители Агз и АТ4 отличаются от А тем, что вместо
второго и пятого столбцов подставляется соответственно первый
столбец из Ап.
Раскрывая определители, получим
(1.52)
(1.53)
(1.54)
Аналогичным путем можно получить уравнение движения одноваль-
ного ТРД с регулируемым реактивным соплом и по реактивной
тяге. В этом случае система уравнений будет состоять из (1.30)
(без четвертого уравнения), (1.50) и (1.38). Разрешая эту систему
относительно XR, получим
Здесь Ая равен
^2п —^273 ^2р2 0. О О
О 1 _ К —К 1 О
^^ ^ 3 Vе* ^ Зя4
О is- TS is If If У
^ 47*3 л<4р2 ' ^ 4/?4 ^ 474 ^4fAf
К К К 0 0 К X
п if if if if п
u A673 A6/?2 A6/;4 A674 u
Раскрывая определители, получим
(1.56)
Сравнение выражений (1.52), (1.53), (1.54), (1.56) показывает,
что в неустановившемся движении число оборотов п и температура
газа Г* двигателя зависят от величины проходного сечения
реактивного сопла, а температура газа Г* и реактивная тяга #д зависят,
кроме того, и от скорости изменения проходного сечения
реактивного сопла.
Физически это объясняется тем, что изменение параметров
воздуха (газа), связанное с изменением проходного сечения
реактивного сопла, происходит практически безынерционно, а изменение
тех же параметров воздуха (газа), связанное с изменением числа
оборотов, происходит инерционно. Влияние скорости изменения
величины проходного сечения реактивного сопла в процессе
неустановившегося движения на Г* и /?д учитывается соответственно
коэффициентами а3 и а^
36
е) Определение коэффициентов уравнений
движения ТРД
Как указывалось выше, свойства двигателя как объекта регулирования могу:
быть выражены видом уравнений движения и значениями коэффициентов,
входящих в эти уравнения. В настоящем разделе определим выражения для этих
коэффициентов для различных режимов работы двигателя и различных услови:!
полета. Для этого воспользуемся известными из теории двигателей
термодинамическими и газодинамическими соотношениями; некоторые из них были приведены
при рассмотрении эксплуатационных свойств двигателя.
Точное аналитическое определение значений коэффициентов, входящих
в уравнения движения, сопряжено с большими трудностями вычислительного
характера. Кроме того, поскольку процесс сжатия в компрессоре для
различных режимов его работы может быть описан достаточно точно лишь
экспериментальными характеристиками компрессора, то весь метод вычисления
коэффициентов принципиально сводится к графоаналитическому методу. В то же время
часто для практической работы нет необходимости в точном вычислении значений
коэффициентов уравнений движения для каждого режима работы двигателя
потому, что вся задача динамики системы решается приближенно.
Ниже приведено приближенное определение коэффициентов полученных
выше уравнений для основных рабочих режимов двигателя, когда перепад
давлений на сопловом аппарате турбины либо критический, либо сверхкритический.
Для определения выражений постоянных коэффициентов, входящих в
уравнения движения, необходимо воспользоваться уравнениями (1.21) и
зависимостями (1.22); последние должны быть представлены в явном виде. Из этих
зависимостей можно получить выражение для частных производных, входящих
в постоянные коэффициенты уравнений движения.
Пользоваться приводимыми ниже материалами целесообразно в том случае,
когда имеются данные теплового расчета двигателя или необходимые
экспериментальные данные, снятые с двигателя.
Крутящий момент, развиваемый турбиной, выражается так:
п п75А
Адиабатический теплоперепад /гт выражается через другие параметры
рабочего процесса так:
Заменяя в выражении для Мт величину теплоперепада его значением,
получим
где
kr~-1
Из этого выражения определяются необходимые частные производные, т. е.
/дМЛ Л^о /дМЛ Мт0
<Шт\ МтОуг
37
Крутящий момент, необходимый для привода компрессора, выражается
формулой
Полный адиабатический напор компрессора Яад выражается через другие
параметры рабочего процесса так:
Заменяя в выражении для Мк величину адиабатического напора его
значением, получим
Из этого выражения определяются необходимые частные производные, т. е.
/<Шк\ ___Мк0 /дМк\ _Мк0
\ дп /0 п0 ' \ dGK /0 GK0 '
/дМк\ МкОу k-l
Расход воздуха через компрессор зависит от числа оборотов компрессора,
давления воздуха на входе и на выходе и от температуры воздуха на входе
з компрессор. Эти зависимости достаточно достоверно аналитически не
выражаются; поэтому их получают экспериментально в виде характеристик
компрессора.
Характеристиками центробежного и осевого компрессоров называют графики,
показывающие зависимости я* и г^д от расхода воздуха и числа оборотов
компрессора. Такие графики, справедливые лишь для определенных условий на входе
в компрессор, обычно называют нормальными характеристиками, а графики,
справедливые для любых условий на входе, называют универсальными
характеристиками компрессора.
Для пояснения на фиг. 1.20 показана нормальная характеристика
центробежного компрессора (без значений к. п. д.). Перестроив эту
характеристику, можно получить зависимости GK = GK(n) при различных значениях
я*. Имея в виду, что р\ — ^к Z7*» /?i = constH Т\=. const и пользуясь
нормальной характеристикой компрессора, можно графическим
дифференцированием определить значения частных производных (dGK/dn)0 и (dGK/dp2)o
для определенных условий на входе в компрессор.
Для примера на фиг. 1.21 приведена перестроенная нормальная
характеристика компрессора, позволяющая определить (dGK/dn)0 графическим
дифференцированием.
Универсальные характеристики компрессора получают путем
приложения теории подобия газовых потоков к расчету компрессора и строят в
координатах я* = тс* (GKi V~t\Ip*i) Для различных значений п\\Т\ и к. п. д.
Для примера на фиг. 1. 22 показана универсальная характеристика
компрессора.
Перестраивая эту характеристику для определенного режима работы
компрессора, можно получить значения тех же частных производных.
38
Допустимый режим работы компрессора ограничивается наличием неустой
чивого режима его работы (или помпажным режимом), что на приведенных ха
рактеристиках отмечено штрих-пунктирной линией.
ют off/мин
Ю500 off/мин
22 26 30 3k 38 №
Фиг. 1.20. Нормальная характеристика
центробежного компрессора.
Приближенно считают, что компрессор начинает работать неустойчиво тогда,
когда расход воздуха через него становится меньше тех значений, при которых
для данных чисел оборотов достигается наибольшая степень повышения
давления. В этом случае поток воздуха, протекающий через компрессор, становится
пульсирующим, давление сильно колеблется,, растет температура воздуха,
возникают вибрации и тряска компрессора и двигателя.
£ кг/сен 7>const
к 56
о •— ' ■ ■ ■ ■ ■ • * -»«
9t0 9Л 9.8 ЮЛ /ОМ ПО lifi //,<? 12,2 ПОб/лтт
Фиг. 1.21. Характеристика компрессора, перестроенная
из нормальной характеристики, приведенной на
фиг. 1.20.
Это явление, достаточно сложное по своей природе, обычно объясняют
срывом потока на лопатках колеса и диффузора центробежного компрессора или на
лопатках осевого компрессора.
39
Приближенно границу неустойчивой работы компрессора можно определить
выражением
Частные производные (dGr/dp^)0 и (dGr/dTl)Q можно определить,
используя уравнение расхода газа в виде
F 'I/,
f-t'-iiPz f 4
kr
* kr~l
(Р1\кГ
[[Pti
Vм 1
(p!\ k
\Pz )
V R
(1.59)
J.SJ 4,29 i95 5,61 6,72 5,93 7,S9 8,25
m
-z
Фиг. 1.22. Универсальная характеристика
центробежного компрессора.
— для докритических скоростей истечения, и в виде
?тРз V и , 1 / I/ J
\^r "i A/ r
(1.60)
— для критических и сверхкритических скоростей истечения.
Для основных рабочих режимов работы двигателя перепад давлений^ на
сопловом аппарате турбины почти всегда критический или сверхкритический,
поэтому в дальнейшем воспользуемся уравнением (1.60).
d) Более подробным расчетом, с использованием фазовой плоскости, можно
показать, что в некоторых случаях помпаж может возникать и тогда, когда
*
40
Ил этого выражения определяются необходимые частные производные, т. е.
/дОг \ _ Ого . /dGr \ ___Gro_
Значения частных производных (dGc/dT^)Q и (dGc/dpl)Q можно
определить из уравнений расхода, аналогичных выражениям (1.59) и (1.60), но
записанных для сопла в виде
/^[(#(#1
а Jii_ Ь L J__ (L61)
У Яг К
— для докритических скоростей истечения, и в виде
— для критических и сверхкритических скоростей истечения.
Из приведенных выражений с учетом лсрн=р1 получаем значения для
частных производных, т. е.
Осо
2Т*Ю
(ЖсЛ _
U;/o~~
tfco(^r —1) / 3_
2к*срнкг
■i * k
1-ГосО ЛГ
для докритических значений перепадов давлений и
/дСсД __^со.. /^\ __
U0 \^4 /0 ^40
— для критических и сверхкритических значений перепадов давлений.
Полученные выражения для частных производных позволяют упростить при-
веденные выше коэффициенты в уравнениях движения. Принимая, что в
установившемся движении Мто=Мко=-/Йо; GTo^GKO; GTO=Gco, получим такие
выражения для коэффициентов системы уравнений (1.30):
2nn0J __
!~ М '' Q~
Мо ' Q~ GK0\dn
kr
г
ъ* kv — 1
тО
41
-£(£)/ «—'■*
kT
К
тО
Ката ~ — 0,5;
= —0,5;
Qo
Qo '
g—l r T* *~
— Uk' 2 *к
JO
Аналогичным путем можно определить коэффициенты уравнений и для
других случаев, например, когда перепад давлений в реактивном сопле докри-
тический.
Базисные величины, входящие в выражения для коэффициентов, т. е. Mo,^kOi
"*то> ^го ... и др., следует брать соответствующими их значениям для исходного
режима работы двигателя. Это значит, что для различных режимов работы
двигателя базисные величины изменяются или, как иногда говорят, принимают
«скользящие» значения.
В уравнение движения (1.38) входят частные производные (дЛуЛ/дТ$)Q-y
(d(/c/d/?4)0; (dGc/dTl}0; ( д/?уд/дтс*)0. Выражения для второй и третьей
частных производных даны выше, а выражения для первой и четвертой можно
получить, используя (1. 4).
Отсюда находим частные производные
(МуЛ =
42
(к
g «уд+
102,57^
ср т; kT-\f I \ ftr ш,ьт\-ь
~А <. Аг I 8К<Л* / ~ х,1
С учетом приведенного выше коэффициенты уравнения (1.38) будут:
V:
К
К673 =
Квр2 — •
-)
g /о
Ср
~~А
= — 0,5;
102,5^^
Аналогичным путем можно определить коэффициенты уравнений для других
случаев, например, когда перепад давлений в реактивном сопле докритический.
Коэффициенты уравнения (1.50) аналогичны приведенным выше, за
исключением коэффициента K4F—Fco/Gco(dGcldFc)o. Частную производную (dGcldFc)o
определяем из выражений (1.61) или (1.62), откуда следует, что как для до-
критического, так и для сверхкритического истечения из реактивного сопла она
имеет одинаковое выражение:
(dGc\ ^Ocp
Отсюда значение коэффициента Kaf = \.
Влияние топливной системы учитывается уравнением (L45). Для объемных
насосов с достаточной степенью точности можно считать, что расход топлива
изменяется пропорционально числу оборотов п и положению сервомотора
(регулирующего органа), определяемому величиной а. Тогда частные производные
(dGT/dn)o и (dGT/da)o будут такими:
V ^/г Л л0 ' \ да /о а0
Подставляя полученные выражения в (1.45), получим XQ —Xn+Xa} т. е.
Ki = l; Ka = l. Тогда уравнение (1.46) можно записать в виде
(Tnp+pi)Xn = biXa. (1.63)
Определение величины времени т запаздывания выделения тепла в камере
сгорания можно произвести лишь приближенно, причем главным образом с помощью
экспериментальных данных. Обычно значение т колеблется в пределах
0,05—0,2 сек.
Выясним характер изменения величин постоянной времени двигателя Т
и коэффициента самовыравнивания Qi при изменении режима работы двигателя
и условий полета.
Так как избыточный крутящий момент Мп=Мт—Мк уменьшается с
уменьшением числа оборотов двигателя, значение постоянной времени увеличивается.
Коэффициент же самовыравнивания при этих условиях, наоборот,
уменьшается, что объясняется характером изменения величин крутящих моментов тур-
43
бины и компрессора в зависимости от числа оборотов двигателя. Эти
зависимости приведены на фиг. 1.23 для случая, когда GT = const и GT = Gr(n).
На фиг. 1.24 показан характер изменения величин постоянной времени и
коэффициента самовыравнивания в зависимости от числа оборотов двигателя.
Изменение величин постоянной времени Тж и коэффициента
самовыравнивания Qi при изменении условий полета (Я, V) происходит несколько иначе.
Характер изменения Гд и Qi при изменении высоты полета Я и при скорости полета
V=const показан на фиг. 1.25. Такой характер изменения Гд объясняется
уменьшением избыточного момента Мп с увеличением Я; характер изменения q{ объ-
Н- const
Vs- const
Фиг. 1.23. Зависимость Мт = Мл(п) и
Мк=Мк(п) при GT=const и GT = GT(n).
Фиг. 1.24. Характер
изменения величин
постоянной времени и
коэффициента
самовыравнивания в зависимости от
числа оборотов при
1 и l/=const
ясняется характером протекания Мт =
=Мт(/г) и Мк=Мк(п). Характер
изменения Тд и Qi при изменении скорости
полета V и при Н=const показа» на
фиг. 1.26.
Такой характер изменения Гд объясняется соответствующим изменением
избыточного момента Мж; характер изменения Qi объясняется также характером
протекания Мт=Мт(п) и Мк=Мк(п). Таким образом, из приведенного выше
можно сделать вывод, что с уменьшением числа оборотов двигателя свойства
его как объекта регулирования ухудшаются. На малых числах оборотов при
законе подачи топлива, соответствующем <7Т = (/Т(я), значение коэффициента
самовыравнивания может достигнуть нуля и даже иметь отрицательное значение.
Двигатель с такими свойствами не может работать устойчиво без регулятора.
С увеличением высоты полета свойства двигателя также ухудшаются потому,
что уменьшается значение коэффициента самовыравнивания.
Таким образом, двигатель будет обладать наихудшими свойствами как
объект регулирования — при малых числах оборотов, на наибольшей высоте
и при наименьшей скорости полета. Эти особенности двигателя хорошо
известны на практике.
Значения Тл и Qi можно определить и экспериментально, пользуясь
некоторыми характеристиками двигателя. При этом по экспериментально снятым
характеристикам двигателя на стенде на земле и определенным по ним значениям
Тд и Qi, пользуясь теорией подобия, можно определить значения ТД и Qi для
различных условий полета, когда V=var; Я=уаг. Основные соображения по
такому методу определения 7Д и Qi сводятся к следующему.
Постоянная времени ТД из (1. 19) при всех остальных одинаковых
условиях зависит от величины избыточного момента Ми. При работе двигателя на
разных высотах, но на подобных режимах величину избыточного момента можно
считать пропорциональной расходу воздуха через двигатель, так как
отношение величин температур газа (воздуха) во всех сечениях двигателя остается
постоянным.
44
Напомним, что подобными режимами для ТРД с нерегулируемым
реактивным соплом называются такие режимы, для которых чис./ю М полета и
приведенные обороты пПр=п/уТ\ одинаковы.
Расход же воздуха через двигатель при различных высотах полета
изменяется по такому закону:
~~ Ро л/тн
РНУ 7V
^я
где Сб0 — расход воздуха через двигатель при Мп=Ма0 или Мп==0
и ро^ЬОЗЗ кГ/см2, Г0=288°К, а СвЯ — расход воздуха при Мп = Мп0 или Мп=0
и каких-то значениях рн, Тн.
л
р,
Пг
Тд V; const
>н
Фиг. 1.25. Характер изменения
величин постоянной времени и
коэффициента самовыравнивания в
зависимости от высоты полета Н для раз
личных чисел оборотов.
Фиг. 1.26. Характер изменения
величин постоянной времени и
коэффициента самовыравнивания в
зависимости от скорости полета
V при H=const.
Учитывая, что с увеличением высоты полета расход воздуха через двигатель
уменьшается и, следовательно, уменьшается избыточный момент, можно написать
г до
Ро
-Л или ТдН = Та0— ]/ -f.
(1.64)
Здесь Тдя — значение постоянной времени двигателя при НфО, а 7д0 — ее
значение при Н=0.
Коэффициент усиления Кют из (1. 19) с изменением высоты полета (при
подобных режимах) не изменяется. Влияние высоты полета Я при различных
скоростях полета V на изменение Гд и Кют можно определить для подобных
режимов таким же методом, но при этом на стенде необходимо получить
значения Гд и /Сютпри соответствующей скорости полета V^O.
Указанный метод позволяет очень быстро определить необходимые
коэффициенты уравнения движения двигателя для различных условий полета.
ж) Допустимые области работы и структурные схемы
Как следует из изложенного выше, возможные или допустимые
режимы работы двигателя ограничены определенной областью. Гра-
•ницами допустимой области работы двигателя являются: а)
максимально допустимое число оборотов; б) максимально допустимая
45
температура газа перед турбиной; в) зона устойчивой работы
компрессора; г) зона устойчивого горения топлива в камере сгорания
в зависимости от состава смеси; д) зона вибрационного горения
и срыва пламени.
Максимально допустимое число оборотов связано с прочностью
двигателя и определяется главным образом прочностью лопаток
турбины, которые работают в потоке горячего газа, и поэтому
прочность их материала резко уменьшается с увеличением температуры
газа. Этими же причинами
объясняется и необходимость
ограничения температуры
газа.
Ограничение, связанное с
неустойчивой работой
компрессора, вызывается
пульсацией потока воздуха и газа,
при которой резко возрастают
вибрационные нагрузки на
лопатки компрессора и
нарушается установившийся
процесс горения в камерах
сгорания. Такой режим работы
компрессора является очень
опасным для двигателя.
Ограничения, связанные с
процессом горения в камере
сгорания, вызываются
необходимостью не допустить зату-
это приводит к остановке дви-
Фиг. 1.27. Границы допустимой области
работы двигателя.
1—линия максимально допустимых чисел
оборотов, 2—то же для температуры, 3—линия
неустойчивой работы компрессора, 4, 5—линии
неустойчивого горения, 6—линия,
соответствующая Q\=Q, 7—линия статических режимов
работы двигателя (равновесные режимы).
ибо
хания процесса горения,
гателя.
Перечисленные границы области допустимой работы двигателя
можно изобразить графически в координатах Мтк=Мтк(п) [или
NTK = NTK(n)], как показано на фиг. 1.27. Заштрихованная область
является областью допустимой работы двигателя. Эту область,
в свою очередь, можно разделить на две области условием qi = 0,
что соответствует линии 6.
В области, где Qi>0, двигатель может устойчиво работать без
регулятора, а в области, где Qi<^0, двигатель без регулятора
устойчиво работать не может. Там же показана линия 7,
соответствующая статическим режимам работы двигателя, отвечающим
условиям МтО=Мко + Л4а+МТр.
Система управления двигателем должна быть такой, при
которой в процессе неустановившегося движения режим работы
двигателя не мог бы выйти из указанной области допустимой работы.
Располагая уравнениями движения объекта регулирования,
можно представить его в виде структурной схемы, которая
позволит более наглядно понять учитываемые связи между отдельными
46
параметрами рабочего процесса, принятыми за обобщенные
координаты в системе уравнений движения.
На фиг. 1.28 приведена структурная схема объекта
регулирования, движение которого описывается системой уравнений (1.30).
Регулятор
г—Г Л П А%
Фиг. 1.28. Структурная схема объекта регулирования согласно системе
уравнений (1.30).
Там же показано воздействие XGt и внешних условий рн, Тн, V
и условно показано включение регуляторов числа оборотов или
температуры газов перед или за турбиной.
На фиг. 1.29 приведена структурная схема объекта
регулирования, движение которого описывается системой уравнений (1.30)
с учетом уравнений (1.38) и (1.50).
Выходная координата XR остается незамкнутой потому, что
двигатель рассматривается без самолета. При совместном рассмотре-
Регулятор
4JLT'
Регумлтоо
Фиг. 1.29. Структурная схема объекта регулирования согласно системе
уравнений (1.30), (1.38), (1.50).
47
нии двигателя с самолетом координата XR замыкается на самолет,
выход из которого воздействует на V. Там же показано
воздействие Fc регулируемого реактивного сопла.
з) Частотные характеристики
Как указывалось выше, свойства объекта регулирования можно
выразить не только видом уравнения движения и величинами
входящих в него постоянных коэффициентов, но и частотными
характеристиками.
Преобразуем уравнение (1. 19) по Лапласу, считая, что на вход
подано единичное возмущение лишь расходом топлива. Тогда
передаточная функция будет выражаться так:
/c(s)=-#^=^v.
Заменяя S = /co, получим частотную характеристику. В декартовых
координатах, где по вещественной оси откладываются М (со) =
KiG • Kin to7\ /
— —f-^— , а по мнимой оси TV (со)— 7 , частотная (ампли-
тудно-фазовая) характеристика будет представлять собой
полуокружность. Характер протекания амплитудно-фазовых
характеристик для различных режимов работы двигателя при неизменных
внешних условиях показан на фиг. 1.30. При этом распределение
частот вдоль характеристики показано одной характерной точкой,
когда аргумент вектора равен—я или со = 1/Гд и coi>co2>o33.
Отметим интересные свойства подобных режимов двигателей,
характеризующие объект регулирования по числу оборотов при
различных высотах полета и V=const. В этом случае коэффициент
усиления остается постоянным, и поэтому амплитудно-фазовая
характеристика представляется одной полуокружностью для всех
высот полета, но с различным распределением частот вдоль
характеристики.
Распределение же частот для точки, где со=1уТд при различных
высотах полета, подчиняется такому закону:
где Гдо — значение постоянной времени при #=0.
На фиг. 1.31 представлен характер изменения величины со для
точки частотной характеристики, где со = 1/Тдн, в зависимости от
высоты полета.
Аналогично рассмотренному, можно построить
амплитудно-фазовые характеристики по уравнениям (1.53) и (1.54),
определяющие свойства объекта регулирования по координатам Хтз и ХТА.
48
В этом случае (при неизменных внешних условиях)
передаточные функции при воздействии XGr и XF будут-.
Xr3(S)
a2
Qi
где
0
ч
п
t\
Н= const
V= const
\ ) К
г*-
~1
Фиг. 1.30. Характер протекания
амплитудно-фазовых характеристик по
числу оборотов для различных режи-
, мов работы двигателя.
О)
\
\
-
\
\
4 8 12 16 20Нки
Фиг. 1.31. Характер
изменения со="г— в зависимо-
тлН
сти от высоты полета при
подобных режимах
двигателя.
Амплитудно-фазовые характеристики, например, при
воздействии XG будут такими:
Кгз(ш) =
01
+ 1
Oi
Tl-r
д)2Г^ +
На ■
У1 д I У1 д '
В декартовых координатах эти характеристики будут
представлять собой полуокружности, центры которых расположены на оси
абсцисс на расстоянии от оси ординат, большем радиуса
окружности, и обращенные в сторону положительных ординат, если
Т\>ТД и 7УГД>1, и в сторону отрицательных ординат, если Тг<Тп
и 7УГД<1.
На фиг. 1.32 приведен характер протекания
амплитудно-фазовых характеристик, определяющих свойства объекта регулирования
по координатам Хтъ и ХТа при воздействии ХОт. Особый интерес
1327
49
представляет определение частотных характеристик, определяющих
свойства объекта регулирования, уравнение движения которого
получено с учетом запаздывания выделения тепла при сгорании
топлива. Наличие такого запаздывания в известных случаях может
заметно влиять на свойства регулируемого объекта. Например,
частотная характеристика согласно выражению (1.41) будет
х (ш) =
е-
Из этого выражения видно, что с возрастанием со вектор годографа
смещается на угол тсо по сравнению с ранее рассмотренным
случаем, когда т = 0. Отсюда вытекает, что свойства объекта регулиро-
Фиг. 1.32. Характер протекания
амплитудно-фазовых характеристик по температурам газа Гз и ^4
для различных режимов работы двигателя.
вания ухудшаются с увеличением значения т. Годограф же
частотной характеристики должен представлять собой спираль,
навивающуюся на начало координат, когда со—*оо. Наиболее
интересно определить частотные характеристики с учетом влияния
времени запаздывания т по координатам ХТг и XR при воздействии
XGt и Xf.
Согласно изложенному выше эти частотные характеристики
будут такими [из (1.42) и (1.44) и из (1.53) и (1.56) с учетом
времени запаздывания т]:
(/<■>) =
ХГз(ш)
XF (/со)
Qi
a2
Q\
T4
TAw -
1
ТАш -
Ы + 1
с
.р-'Л
50
(o)
где
Строить такие характеристики целесообразно при т = 0, а далее
каждый вектор, соответствующий заданному со, необходимо
повернуть по часовой стрелке на угол тсо.
На фиг. 1.33 и 1.34 приведены амплитудно-фазовые
характеристики с учетом запаздывания для двигателя, работающего на
максимальном режиме при #=0, V=0. Коэффициенты частотных
характеристик взяты из рассмотренного ниже примера 1, а
запаздывание т принято равным 0,1 сек.
х--о
Фиг. 1.33. Характер протекания амплитудно-фазовой
характеристики по температуре газа Г3 с учетом
времени запаздывания выделения тепла в камере
сгорания.
Анализ свойств объекта регулирования с помощью частотных
характеристик удобен не только потому, что 'при этом легко
сравнивать свойства двигателя при различных режимах его работы
в различных условиях полета, но также и потому, что частотным
методом легко экспериментально определить эти свойства.
Для экспериментального определения свойств двигателя как
регулируемого объекта достаточно на его вход подать топливо,
расход которого должен изменяться по гармоническому закону, и
записать на выходе те параметры, относительно которых хотят
построить частотные характеристики.
Практически целесообразно записывать сразу все интересующие
нас выходные параметры: л, T^T\4 #д, что сокращает эксперимент.
Изменяя частоту входного сигнала, легко получить полные
амплитудно-фазовые характеристики.
4*
51
Обычно приходится проводить такой эксперимент при
нескольких режимах работы двигателя. В практике работы известны и
другие методы экспериментального определения характеристик
двигателя, определяющих его свойства. Например, можно на входе
хл(ш)
Фиг. 1.34. Характер протекания амплитудно-фазовой
характеристики по реактивной тяге с учетом времени запаздывания
выделения тепла в камере сгорания.
в двигатель изменять расход топлива в виде скачка и записывать
изменение выходных сигналов.
Такие характеристики (временные) также позволяют
определить коэффициенты уравнений движения. Кроме того, из теории
автоматического регулирования известно, что имеется однозначная
связь между частотными и временными характеристиками, которая
позволяет в случае необходимости воспользоваться как теми, так
и другими характеристиками.
и) Примеры
Пример 1
Задание. Определить значения коэффициентов, входящих в уравнения
движения (1.34) — (1.36), по числу оборотов и температуре газов перед и за
турбиной одновального ТРД с нерегулируемым соплом, без учета влияния агрегатов
топливной системы, при #=0, V=0, для максимального режима работы
двигателя.
Исходные данные. Момент инерции вращающихся масс двигателя
равен /=0,6 кГ-М'Свк2—(5,88 н-м-сек2); компрессор центробежный,
характеристика которого приведена на фиг. 1.20. Остальные необходимые данные из
теплового расчета двигателя приведены в таблице.
52
Режим
двигателя
п0
r
=GC
GT
YjT
Максимальный
1230 радIсек 50 кг/сек
или
193 об/сек
0,86 кг/сек
0,750,894,30
2,14
1125° К
Режим
двигателя
Максимальный
486° К
953° К
43,5 н/см*
или
4,44 к
1,33
1,40,28
10500
ккал/кг
0,98
Решение. Крутящий момент, развиваемый турбиной и потребный для
вращения компрессора, определяем по выражению (1.57)
мк0 = мт0 = м0=
11,9-0,89-0,28-1125-50-427
75-193
= 870 кГ-м = 8550 н-м.
Отсюда значение постоянной времени Ti будет:
„ 2nn0J 2-3,14-193-0,6
870
= 0,83 сек.
/dGK\ /dGK \
Для определения частных производных! — ) и (—г) воспользуемся
\дп/0 \дпк/0
характеристикой компрессора, приведенной на фиг. 1.20.
Дифференцируя графически в точке кривой, соответствующей
(dGK \
—¥ ) = _ Ю,4.
Перестраивая кривые, приведенные на фиг. 1.20, в координатах GK и л,
как это показано на фиг. 1.21, графическим дифференцированием опреде-
/dGK \ /dGK \
ляем значениеГ—-—) для той же точки, т. е. (—-J =0,8.
\ дп /о \ дп /о
Далее, воспользовавшись приведенными в таблице данными, определяем
значение коэффициентов, приведенных на стр. 41—42:
= 2,2о', ^М/?4 == 1 t^'t *^2p2 == — 1 ,^»
Сбл 3,1; ^5Р2 1,17.
Воспользовавшись выражениями (1.31), (1.32), (1.33), составляем
определители Д, Ап, Атз и АГ4:
0,83/7
3,1
о
0
3,1
— 0,5 —2,25
0,5 —1,9
— 1 0,25
-0,5 1
1,8 —1,17
1,2
0
0,3
0
0
0
1
0,5
0
53
0
0
0
0
1
0,83/? + 3
3,1
0
0
3,1
0,83/? + 3
3,1
0
0
3,1
— 0,5
0,5
— 1
-0,5
1,8
,1 0
0
0
0
1
,1 —0,5
0,5
i
— 0,5
1,8
— 2,25
— 1,9
0,25
1
— 1,17
— 2,25
-1,9
0,25
1
-1,17
— 2,25
— 1,9
0,25
1
— 1,17
1,2
0
0,3
— 1
0
1,2
0
0,3
1
0
1,2
0
0,3
— 1
0
0
0
1
0,5
0
0
0
1
0,5
0
0
0
0
0
1
Раскрывая приведенные определители, получим искомые уравнения
движения по числу оборотов и температуре газов перед турбиной и за турбиной в виде
(2,7р+5,4) Хп = \т
(2,7/7+5,4) Хтз= (1,8р+2,0) Xaj
(2,7/7+5,4) ХТА= (1,58/7+0,31) XGr
Разделив правую и левую части первого уравнения на 1,8 и 5,4
соответственно, получим
(1,5/7+3,0) Хп = XGt; (0,5/7+1) Хп = 0,ЗЗХот.
Отсюда видно, что коэффициент самовыравнивания Qi = 3,0, а постоянная времени
7^ = 0,5 сек.
Пример 2
Задание. Определить значения коэффициентов уравнения движения (1.40)
по развиваемой двигателем реактивной тяге. Двигатель тот же, что и в
предыдущем примере.
Исходные данные. Данные теплового расчета принимать из
предыдущего примера, и, кроме того, бк=0,9б; фс=0,99.
Решение. Определяем значение удельной тяги /?уд по (1.4):
/?уд —
■/"2-9,8
9,8
0.99Х
X
0,28.
1125.427 [l-
0,25
о0,286
Тогда #д=#уд. GBO3A = 60- 50=3000 кГ (29460 н).
Далее определяем значение коэффициентов, приведенных на стр. 43:
40,25-j
50-1125-С
50-602-9,8
54
50.4,3-0,98 ГО,28
8 /
.1,25.427.0.25 (-
0'25
Х6/72 50.602-9,8 [4,3
102,5-288-0,285]
~~0,9.0,75-4,30'71J '
Составляем определитель Ад:
0,83/7 + 3,1 —0,5 —2,25 1,2
3,1 0,5 —1,9 0
0 —1 0,25 0,3
О —0,5 1 —1
3,1 1,8 —1,17 О
О —1,2 —0,13 1
Раскрывая определитель Ад и учитывая (1.39), находим
0,5 О
О 1
0,5 О
Пример 3
Задание. Определить значения коэффициентов, входящих в уравнение
движения, по числу оборотов и температуре газов перед и за турбиной одновального
ТРД с регулируемым реактивным соплом без учета влияния агрегатов топливной
системы при #=0, V—0, для максимального режима работы двигателя.
Исходные данные. Данные по тепловому расчету двигателя принимать
из предыдущих примеров.
Решение. В этом примере можно воспользоваться теми же значениями
коэффициентов уравнений, что и в предыдущих, а значение коэффициента Кар
з уравнении (1.50) определим исходя из того, что Gc^=mFC) где m=const.
Отсюда (dGc/dFc)o—GcofFco или Kaf — L
Согласно (1.51), необходимо вычислить значения только определителей
Ап, Агз и Аг4, так как А можно взять из предыдущего примера. Подставляя
полученные в предыдущих примерах коэффициенты, получим:
0 —0,5 —2,25 * 1,2 0
0 0,5 —1,9 0 0
0 —1 0,25 0,3 1
XF
-0,5
1
— 1
0,5
1,8 —1,17
0 0
0,83/7-
3,1
0
0
3,1
0,83/? Н
3,1
0
0
3,1
h 3,1 0
0
0
xF
XG
~~ о, 1 —~
т
-0
0
-1
-0
1
—
—
—
,5
,5
,5
,8
2,
1,
0,
1
1,
—
—
25
9
25
17
2,
1,
0,
1
1,
25
9
25
17
1
0
0
-1
0
—
,2
,3
1
0
о,
1
0
0
0
1
0
0
,2
3
,5
0
0
0
XF
Хп
55
Раскрывая определители и пользуясь (1.51), получим окончательно
(0,5/7 + \)Хп = 0,33 ЛГот + 0,63 Л>;
(0,5/? + 1) Х-рз = (0,оо/? + U,o/j Л<з — и,оЛ/?,
(0,58/7 + 1) ХТ4 = (0,3/7 + 0,07) XGt + (0,13/7 - 0,7) ^.
Для определения коэффициентов уравнения (1.56) воспользуемся выражением
(1.55), для чего определим Ад. Предварительно определяем коэффициенты
уравнения (1.38), приведенные на стр. 43, которые равны /С6тз=1,1; /СбР2 = 0,13;
/Сбр4 = 1; #6Т4=_0,5. Тогда
0,83/? + 3,1 —0,5 —2,25 1,2 0 0
3,1 0,5 —1,9 0 0 0
0 —1 0,25 0,3 1 0
0 —0,5 1 —1 0,5^
3,1 1,8 —1,17 0 0 XGj
О —1,1 —0,13 —1 0,5 О
Раскрывая определитель и учитывая (1.55), получим
Проходное сечение реактивного сопла обычно изменяется с помощью
специального сервомотора; поэтому в уравнении движения целесообразно
иметь не координату Хр = &Fc/Fcq, а относительную координату
сервомотора ХС = А1/1О, где i — координата, определяющая положение сервомотора.
В общем виде зависимость между величиной проходного сечения
реактивного сопла Fc и положением сервомотора нелинейная, поэтому Fc = Fc(l).
Линеаризируя это выражение, получим Хр — (——) Хс. Подставляя
^со V °1 /о
это значение Хр в правую часть уравнения движения, будем иметь
входным сигналом координату сервомотора Хс, а не сечение сопла Хр.
Численное значение коэффициента при Хс обычно определяется по
конкретной зависимости Fc=Fc(l).
Пример 4
3 адание. Определить значение коэффициента самовыравнивания Qn,
входящего в уравнение (1.46) движения одновального ТРД, рассмотренного в
предыдущих примерах, с учетом влияния агрегата топливной системы.
Исходные данные. Данные по тепловому расчету двигателя принимать
из предыдущих примеров. Расход топлива осуществляется по закону
п0 fdGT \
Решение. Находим значение коэффициента К\ = ~— ~^—
От0 \ дп /0
щего в уравнение (1.45). Для объемных (плунжерных) топливных насосоз
без большой погрешности можно принимать, что расход топлива изменяется
пропорционально числу оборотов п и положению сервомотора а. Тогда вы-
/аот\ /*£тЛ , (д°Л °то
\
/о
входя-
ражения для частных производных Г
/dGT\ /dGT\ , /dGT\ Gt0
\ дп /q \ да /о \ дп /0 п0
[■——) = . Подставляя эти значения в выражения для К\ и /Са, полу-
\ да /о а0
чим /Ci = 1, Ка = 1.
56
Следовательно, выражение (1.46) будет:
Таким образом, значение коэффициента самовыравнивания уменьшается
примерно на 33%, что должно привести к ухудшению свойств двигателя как объекта
регулирования, особенно при работе его на пониженных режимах.
Пример 5
Задание. Определить значения постоянной времени при Нф 0 при работе
того же одновального ТРД с нерегулируемым реактивным соплом на подобных
режимах, при У=0.
Исходные данные. Данные теплового расчета двигателя принимать из
предыдущих примеров.
Решение. Ранее было определено значение постоянной времени, равное
7=0,5 сек при #=0 и V=0. Пользуясь выражением (1.64), находим значение
7дн для НФ 0 при подобных режимах двигателя, принимая, что величины рп
и Тн меняются в соответствии с международной стандартной атмосферой
(МСА): т гои
ТлН='
ДО'
El
5,0
Результаты расчета показаны на графике,
приведенном на фиг. 1.35.
Фиг. 1.35. Изменение величины
Гд при #=var,
соответствующей подобным режимам
работы двигателя.
3,0
2,0
1.0
0,5
V--0
У
/
1
/
8 12 16 20Нкм
3. ДВУХВАЛЬНЫЕ ТРД (С ДВУХКАСКАДНЫМ КОМПРЕССОРОМ)
а) Общие сведения
Принципиальная схема такого двигателя показана на фиг. 1.36;
из этой схемы видно, что основным отличием ее от одновального
ТРД является наличие двух турбин, каждая из которых приводит
во вращение один каскад компрессора.
Применение двухвальных ХРД диктуется главным образом
необходимостью расширения зоны устойчивой работы компрессора и,
следовательно, достижением некоторого, хотя и небольшого,
улучшения экономичности двигателя. Как указывалось выше, для
улучшения экономичности двигателя необходимо повышать значение я*,
что легче достигается с помощью двухкаскадного компрессора.
Кроме того, это позволяет улучшить работу компрессора на
пониженных режимах работы двигателя, облегчить совместную работу
ступеней компрессора и запуск двигателя. При такой схеме работы
двигателя оба каскада компрессора могут работать при
наивыгоднейшем соотношении окружных скоростей в широком диапазоне
режимов работы двигателя.
57
Наличие второго каскада компрессора позволяет более
правильно организовать течение воздуха в компрессоре на нерасчетных
режимах и тем расширить зону его устойчивой работы.
\Рну
v
Фиг. 1.36. Схема двухвального ТРД.
Эксплуатационные свойства такого двигателя во многом
аналогичны одновальным ТРД, рассмотренным выше, но существует
и некоторое отличие.
Свойства такого двигателя как объекта регулирования
значительно отличаются от свойств одновального ТРД.
Что касается способов (законов) управления таким двигателем,
то они примерно одинаковы со способами управления
одновальным ТРД.
б) Вывод уравнений движения двухвального ТРД
с регулируемым соплом
При выводе уравнений движения двухвального ТРД с
регулируемым соплом будем принимать те же основные допущения, которые
принимались при рассмотрении одновального ТРД, и уравнения
движения относительно интересующих «ас регулируемых
параметров будем выводить с учетом аккумуляторов энергии,
обусловленных лишь вращающимися массами.
Воспользовавшись обозначениями, приведенными на фиг. 1.36,
для неизменных внешних условий можно написать систему
нелинейных уравнений в следующем виде:
(1.65)
58
'21
r 41
^
41
(1.65)
)
Приведенные уравнения имеют тот же смысл, что и для
рассмотренного выше одновального ТРД, причем число уравнений
увеличивается в соответствии с тем, что в данном случае
рассматривается раздельно движение каждого каскада.
Для упрощения дальнейшего изложения будем считать, что
к. п. д. т]К1 и т]к2 каскадов компрессоров, ступеней турбины t]ti и т)т2
и к. п. д. камеры сгорания т]к.с при малых отклонениях 'параметров
рабочего процесса остаются постоянными.
Кроме того, ограничимся рассмотрением таких режимов работы
двигателя, при которых на сопловых аппаратах ступеней
турбины всегда будет критический или сверхкритический перепад
давлений.
Будем считать также, что потери давления в камере сгорания
остаются постоянными, т. е. Рз = 6кр2- При указанных условиях
нелинейные зависимости для Мти AfT2, MKU Mk2j GKh GK2, Grl, Gr2
и Gc могут быть представлены так:
Г21);
r2, я
, /г2, к*к
n2);
(1. 66)
Линеаризируя обычным путем выражения (1.65) с учетом (1.66)
и учитывая, что
59
после соответствующих преобразований получим такую систему
линейных уравнений:
+ Q\) ХпХ — К1ТЗХ
-f К1р4гХр41 -f- Ki
З — К1р2Хр2
XP2i = 0;
l = 0;
= 0;
— КЬр2Хр2 —
i=0;
ХТ41 — Хтз — К6р2Хр2 — К6р41Хр41 = 0;
р2 ~Г
"Т ^9
4 A 9
\ К
(1.67)
Здесь введены следующие обозначения:
М
10
\ дпх
о
м
20
= п10 UdMkl \
М\о L\ dni /
[
дп2 /Jo
дМт1\\ .
дмт1
Г
, /дМк1\ ( дМк1 \ ( dGKl \ , (дМк
~ Kii^rJ~v"^rA^rJ^~te
60
_ 1 [7сШк1\ « /дМк1\/дОк1
дМ
т2
^Ит2 \ . ]
*b ) 4;
M
20
к2\ |
K2 Г
"*' *^ 1 • к — "20
4"2-gU
*/'2io
K0 [\dp
dplJ \d/J \вПг)21 *Дчк1-1 Jo'
/'го /^Gki \ . дг _ «ю /^GKl\ .
"р 'I ' Л4л1—"р 1"^ 1'
Kl\
1
ц /0
"р. д • 'I ' Л4л1—"р. 1"^
ак0 \ др21 /0 Ок0 \ дгц /0
dGK / \
I дт: г
\ о 'о
YiSio
/С6Л= ;-
«tI&I1 —^Tl) +^т1 "'"* ^xioU—^Tl) —^т1
61
/>30 / C^rl \ . rr _ 730 / *?rl \ K _ ^410 / dGr2 \
2=~^.— л * > А8ГЗ— n \ at* ' A8p41 —"7; -ч *
„ r4iu /aGr2\ . ^ _ ^410 (dGr2
^87-41 =i A
8Г41—~^ \~лт* I ' Jy9ptt — п \ л* I ' ^9Г41 — г \ лт* I
Gr0 \^41/о G^0 \ОР41/о °гО \^41/0
/4
__F0/dGc\,
/0
Qo
p T*
10Г2 ^ч
Qo
^ Г /a<7Kl \1 cp /dOKl\
==o7L (з~ ]\м)ъ onl =^( 2)o Wo'
«»,
=^L( з" 2) 2Ite^+ 2l( 3~
Решая систему (1.67) относительно любой входящей в нее
координаты и оставляя в правой части уравнения координаты XF
и XG получим искомые уравнения, в том числе и уравнения
относительно координат Хп, Хп2> Хтг, ХТа в таком виде:
(1.68)
А * Л п2 = АП2> А • Л Т4 = Дгз.
Здесь определитель Л имеет следующее выражение;
62
к
а. О
к
из
к
1
О *->
о
к
— CN 00 . ^ Ю
к к к к к
к
к
.со о,
к к
ккооо^ккко
CQ ^ "Э СО
к к к к
к
о о
о о о
о/
о о
63
Определители Ап, АП2, Агз и АГ4 отличаются от А соответственно
столбцом, составленным из правых частей системы (1.67), который
нужно подставить в А.
Раскрывая определители, после несложных преобразований
получим следующие уравнения движения:
{)ХР; (1.69)
+ ахР + а2) Хп2 = {Ъ2р + b3) XGt + (с2р + с8) *,; (1. 70)
(1.71;
^^^f
(1. 72)
Из рассмотрения полученных уравнений движения двухвального
ТРД с регулируемым соплом следует, что числа оборотов обоих
каскадов зависят не только от величин расхода топлива XG и
проходного сечения реактивного сопла XF, но и от скорости изменения
этих величин. Температуры же газа ХТз и ХТ4: зависят, кроме того,
и от ускорения изменения XG^, а ХТА даже и от ускорения XF.
С этой точки зрения указанные свойства рассматриваемого
двигателя резко отличаются от одновального ТРД. Чтобы техмпература
газов не превышала определенной величины в процессе
неустановившегося движения, необходимо ограничивать не только величины
скорости изменения XG и XF, но и величины ускорений.
Уравнение движения, определяющее изменение развиваемой
двигателем реактивной тяги, можно получить при совместном
рассмотрении системы (1.67) и линеаризированного уравнения
(1.2), т.е.
XR — КптъХтъ — КПр2Хр2 — КПр4Хр4 — КПТ4ХТ4 = KUFXF, (1. 73)
где
уд \
. * I »
^к /0
dGc\
<^4 /0
SGq \
dF )0*
/0 /?дО
здесь использована зависимость ^ = ^1^2-
Решая уравнения (1.67) и (1.73) относительно XR, получим:
(ао/Я + ахР + а2) XR = (ft10/?2 + bnp + *12) XGt +
+ (^2 + ^ioPHr^ii)^. (1.74)
64
Из уравнения (1.74) видно, что в процессе неустановившегося
движения изменение реактивной тяги зависит от величин скоростей
и ускорений изменений расхода топлива и проходного сечения
реактивного сопла.
Для двухвального ТРД с нерегулируемым реактивным соплом
приведенные выше уравнения движения останутся в силе, однако
в них нужно положить XF = 0.
Определение выражений для постоянных коэффициентов, входящих в
полученные уравнения движения, производится аналогично тому, как это было
сделано при рассмотрении одновального ТРД. В результате получим следующие
выражения для коэффициентов:
«io/^X п^,Хм\ . * о,5;
Окю \ дпг /о Gk2q \ дп2 /о
kr — 1 k — 1 *
* k 1 * k
4lO г * хк10 '
k-l
k — l *-JT
k-l
k — l * "T~ kT — 1
^2/741 — 1 +
2p41 — x I ^ZT"
^21 | GK2
V Ml /0 L Gk2 >21
fe-1
* Л —1 ^*ПГ"
^210 '
^KO \^2l/0 *-T-
5 1327 65
k-\
k—\ *1Г
Р210
f 210
5p2
— 1
P2°
7; T^T
GKQ \ dp2
4-o
IS
9/741
1 .
l>
k-1 -I
тск1 ^l— * -j о
Коэффициенты уравнения (1.73) одинаковы с коэффициентами уравнения
(1.38), причем следует принимать лк = ^Kj \2, коэффициент же Kuf — 1.
Остальные коэффициенты имеют то же выражение, что и приведенные
выше. Пользуясь приведенными выражениями для коэффициентов и данными,
полученными из теплового расчета двигателя, после раскрытия определителей
можно определить значения коэффициентов уравнений (1.69), (1.70), (1.71),
П. 72) и (1.74).
4. ДВУХКОНТУРНЫЕ ТРД (ТРДД)
а) Общие сведения
Двухконтурные ТРД отличаются от одноконтурных наличием
второго (внешнего) контура, по которому течет воздух (газ). Две
принципиальные схемы одновальных двухконтурных ТРД
приведены на фиг. 1.37; из этих схем виден способ работы этих
двигателей.
д)
Фиг. 1.37. Схемы одновальных двухконтурных ТРД."
Дополнительное большое количество воздуха, проходящего
через внешний контур такого двигателя, увеличивает реактивную тягу
по сравнению с одноконтурным ТРД. Для этого в двухконтурном
двигателе применяется низконапорный компрессор (который
можно рассматривать и как высоконапорный винт) с большим расходом
воздуха. Развиваемая двухконтурным ТРД реактивная тяга
складывается из тяги основного контура и тяги дополнительного
контура, т. е.
^ g
66
(1.75)
Удельная тяга определяется как отношение развиваемой
двигателем реактивной тяги /?д к расходу воздуха через основной
контур GBi, т. е.
# K2— (I + K)V /| 7g4
уД GBi g
ГДе К=-^- — коэффициент расхода воздуха через второй
(вспоив! могательный) контур.
Удельный расход топлива определяется выражением
г _ 3600GBl _ 3600 /| 77ч
Из этого выражения следует, что при коэффициенте избытка
воздуха а = const удельный расход топлива уменьшается с
увеличением удельной тяги /?уд.
Большое влияние на величины /?уд
и Суд оказывает распределение
располагаемой энергии между основным и
вспомогательным контурами. Не оста-
УД
"УД
//= const
УД
Фиг. 1.38. Относительное Фиг. 1.39. Характер проте-
изменение кания дроссельных характе-
— Ry ристик.
К=° навливаясь на этом вопросе, заметим лишь, что
и q наивыгоднейшему распределению энергии при
~п — улУ определенном значении коэффициента расхода К
уд~ С ^^о' соответствуют максимальное значение удельной
у тяги RYx и минимальное значение удельного
расхода топлива Суд.
В зависимости от значения коэффициента К и изменяющихся условий полета
изменяются значения удельной тяги и удельного расхода топлива. С увеличением
значения К, при прочих неизменных условиях, удельная тяга #уд возрастает
(в ограниченном диапазоне скоростей полета), а удельный расход топлива Суд
уменьшается.
Некоторые эксплуатационные свойства двухконтурного ТРД можно
выразить такими же характеристиками, как и для других двигателей, т. е. высотными,
скоростными и дроссельными характеристиками. Для примера на фиг. 1.38
приведено относительное изменение развиваемой двухконтурным ТРД реактивной
тяги и удельного расхода топлива от скорости полета, а на фиг. 1.39 приведены
Дроссельные характеристики. Выбор способа получения крейсерских режимов
67
для такого двигателя во многом аналогичен приведенному выше для обычного
ТРД, т. е. крейсерские режимы необходимо получать в первую очередь путем
уменьшения температуры f\ газа перед турбиной до значения, соответствующего
СУд = СуДт1п, и далее —как уменьшением температуры газа, так и уменьшением
числа оборотов двигателя.
\Ph,v
J TW
|
| f
I.
1 ^<V-
f
1
^wiv^
|r/
flfftf^
I
Y///V/
КЧ\\\Ч
p*
H21
//////
к
15
>A
Й
11/41
/ / / /УД\
^щ$
!*
^ванв
Я
«45
—-^
I **~
si ^
^r.
1 /7
\-ffc
Фиг. 1.40. Схема двухвального двухконтурного ТРД.
Для увеличения развиваемой двигателем тяги во втором контуре может
сжигаться дополнительное количество топлива, что приведет к увеличению
скорости истечения газа из сопла второго контура.
Схема двухвального двухконтурного двигателя приведена на фиг. 1.40; из
этой схемы ясен способ работы двигателя. В таком двигателе также возможно
сжигание топлива во втором контуре.
б) Уравнения движения двухконтурного ТРД
В зависимости от схемы двухконтурного двигателя уравнения
движения будут различные.
Для двигателя, схема которого приведена на фиг. 1.37, а,
уравнения движения можно составить исходя из тех же основных
соображений, которые были использованы при рассмотрении одноваль-
ного ТРД. Различие будет лишь в том, что в этом случае
необходимо рассмотреть совместно с уравнениями (1.21) еще и уравнения
движения, учитывающие условия работы второго контура.
Для этого первое уравнение системы (1.21) следует записать
в виде
w »j Т К В' \ * /
где Мв — крутящий момент, необходимый для привода
компрессора второго контура.
68
Для случая, когда угол установки лопастей компрессора
второго контура постоянный, для неизменных внешних условий можно
написать
Мв = Мв(п, GB2, *.*), (1.79)
где Gb2 — расход воздуха, проходящего через второй контур;
тс* — степень повышения давления в компрессоре второго
контура.
Дополнительными уравнениями будут следующие:
b. = l + [^_l]-L; (1.80)
GB2=GC.B, (1.81)
где Г*—температура воздуха за компрессором второго контура;
Сев — расход воздуха через реактивное сопло второго
контура.
Для случая нерегулируемого реактивного сопла второго
контура уравнения расходов имеют следующий вид:
GB2 = GB2(n, pi); (1.82)
Осл = Осл(р1 Tl\ (1.83)
где /7* — давление воздуха за компрессором второго контура.
Линеаризируя выражения (1.78), (1.80), (1.81) обычным
путем, с учетом выражений (1.22), (1.79), (1.82), (1.83), получим
следующие уравнения:
(Tlp+Q)Xn-KinXr3-Klp2X/a+KlpiXpl-KlpBXpB = 0; (1.84)
К6пХп-К6рвХрв = 0. (1.85)
Решая совместно (1.84), (1.85) и последние четыре уравнения
системы (1.30) относительно координат Хп, ХТз, ХТ4 получим такие
уравнения:
(1.86)
Уравнение, учитывающее изменение реактивной тяги,
развиваемой двигателем, можно получить при совместном рассмотрении
дополнительного уравнения
Яд = #1 + Я2 = 0сЯ£ + %!- (^с.в-Ю, 0.87)
где /?уд—удельная тяга основного контура;
wCtB— скорость истечения воздуха из реактивного сопла
дополнительного контура.
69
Выражения для Ryl, дас.в и Gc в общем виде будут такими:
R°l= R°CA(T3, 4); (1.88)
дас.в=дас.в (pi, T*B); (1.89)
ОС=ОС(Я 71). (1.90)
Линеаризируя (1.87), с учетом (1.83), (1.88), (1.89) и (1.90),
получим
" -К7рвХрв-К7ТвХТв=0. " " (1.91)
Решая совхместно (1.84), (1.85), (1.91) и последние четыре
уравнения системы (1.30) относительно координаты XR, получим
Хп. (1.92)
Из сравнения (1.86) и (1.92) с ранее полученными
выражениями (1.34), (1.35), (1.36) и (1.40) видна полная аналогия
уравнений движения одноконтурного и двухконтурного одновальных ТРД.
Для двигателя, соответствующего схеме, приведенной на
фиг. 1.37у б, вывод уравнений движения остается аналогичным
рассмотренному, за исключением необходимости учета уравнений
G=GK + GB и GB = mGK, выражающих распределение воздуха по
контурам. Если сжигание топлива происходит во втором контуре,
то необходимо дополнительно учитывать уравнение типа шестого
из системы (1.21).
Для двухвального двухконтурного двигателя, схема которого приведена на
фиг. 1.40, уравнения движения можно получить, используя те же основные
положения, которые были приведены при рассмотрении двухвального ТРД и од-
новального двухконтурного ТРД.
В этом случае необходимо учитывать два аккумулятора энергии в виде
вращающихся масс, т. е. «компрессор + первая турбина» и «вентилятор+вторая
турбина». Исходвые уравнения движения будут следующие:
2lzJl ~dt = Мп ~ Мк' Мп = Мп (Гз: Gr' "i: **0;
2rj2 ~i = M^~Мв' м^ = мт2(г«; Gri; "2; «У;
T\
= 1+(^т—1)—; MK=MJGK; щ; гЛ;
Г2 . , ,v -ч 1
= 1 + (^кТ — О — '> м* =Мв (Ов; п2; **);
Г21 Ч " ' "ПК
G = GR -f GK; GB = mGK; GB = GB (z?^; n2 );
70
У41
= Gr
В результате линеаризации для случая, когда во втором контуре топливо не
сжигается и когда имеется одно регулируемое сопло в основном контуре,
получим такую систему уравнений:
OiP + Qi) Хп — КгтзХтг — ^1р2^р2 + KipAiXpti + K\p2\Xp2\ — 0;
Q2) ^/22 — ^2Г41^Г41 ~ К<1р\\Хр\\ + КърАХр4 + %2р2\Хр2\ = 0;
= 0;
р2 = 0;
= 0,"
Полученные уравнения справедливы при сверхкритических перепадах на
сопловых аппаратах турбин, неизменных внешних условиях и нерегулируемом
реактивном сопле во втором контуре. Решая полученную систему уравнений
относительно интересующих нас координат, получим уравнения вида (1.69),
(1.70), (1.71) и (1.72), из которых во многом видна аналогия с двухвальным
ТРД. Если в рассматриваемом двигателе сжигается топливо во втором контуре,
то для вывода уравнений движения необходимо использовать уравнение типа
шестого из системы (1.21). В этом случае реактивное сопло второго контура
должно быть регулируемым.
Из сказанного выше о двухконтурных двигателях можно сделать вывод, что
их свойства близки к свойствам одновального и двухвального одноконтурных
ТРД, поэтому и системы автоматического управления для таких двигателей
должны быть во многом аналогичными.
5. ТРД С ФОРСАЖНЫМ УСТРОЙСТВОМ (ТРДФ)
а) Общие сведения по ТРДФ
При эксплуатации самолета часто требуется иметь возможность
увеличить тягу, развиваемую турбореактивным двигателем, хотя бы
на ограниченный ^промежуток времени.
Для этой цели применяются специальные устройства,
позволяющие значительно увеличить развиваемую двигателем реактивную
71
тягу. Такие двигатели принято 'называть турбореактивными
двигателями с форсажным устройством (ТРДФ).
Существует несколько способов форсирования тяги ТРД, однако
каждый из них, обладая определенными положительными и
отрицательными особенностями, может применяться лишь при
удовлетворении определенных требований, предъявляемых к форсажным
устройствам.
Один из способов форсирования развиваемой ТРД реактивной тяги
заключается в охлаждении сжимаемого в компрессоре воздуха, за счет испарения
жидкости, впрыскиваемой в поток воздуха перед компрессором. Жидкость
впрыскивается с помощью специальной системы через форсунки.
При испарении жидкости от воздуха отнимается тепло, равное теплу
парообразования, вследствие чего и происходит охлаждение воздуха. В связи с этим
уменьшается потребная работа для сжатия воздуха до заданного давления
и уменьшается его температура в конце сжатия.
Это позволяет увеличить давление воздуха за компрессором и,
следовательно, увеличить давление газа перед турбиной при сохранении одной и той же
мощности турбины, отнесенной к единице протекающего через нее газа. В
результате увеличивается перепад давлений, срабатываемый в реактивном сопле, что
приводит к увеличению скорости истечения газа из реактивного сопла и,
следовательно, к увеличению реактивной тяги. Кроме того, при сохранении
постоянной температуры газа Г3 перед турбиной, увеличивается также и весовой
расход воздуха через двигатель. Одновременно с уменьшением температуры
воздуха на выходе из компрессора и при Тг = const увеличивается расход топлива,
что приводит к увеличению его удельного расхода.
Этот относительно простой способ форсирования тяги обладает, однако,
большим недостатком, выражающимся в большом расходе впрыскиваемой
жидкости. Например, расход воды, необходимый для увеличения тяги при взлете
на 10°/о, превышает расход топлива почти в 1,5 раза. Кроме того, не при всех
условиях полета впрыскиваемую жидкость удается полностью испарить в потоке
воздуха.
Одним из способов форсирования тяги, получивших широкое
распространение на практике, является дополнительное сжигание
топлива в пространстве между турбиной и реактивным соплом, для
чего устанавливается специальная форсажная камера сгорания.
Такой способ форсирования тяги связан с увеличением удельного
расхода топлива. Для пояснения на фиг. 1.41 приведена
принципиальная схема ТРДФ с форсажной камерой. Сгорание
дополнительного топлива в форсажной камере происходит с использованием
кислорода, имеющегося в выходящих из турбины газах, из-за
наличия избытка воздуха в основной камере сгорания. Благодаря
сжиганию дополнительного количества топлива в форсажной камере
температура газа перед реактивным соплом резко повышается
и в связи с этим увеличивается скорость истечения газа из
реактивного сопла, что и приводит к повышению реактивной тяги,
развиваемой двигателем.
Способ управления двигателем с таким форсажным устройством
должен быть таким, чтобы включение и выключение форсажного
устройства не отражалось на режимах работы основного контура.
Действительно, если предположить неизменной величину
проходного сечения реактивного сопла, то увеличение температуры газа
в форсажной камере (в результате сжигания дополнительного
72
топлива) приведет к повышению давления газа за турбиной
и к уменьшению перепада давления, срабатываемого на турбине.
Это, в свою очередь, приведет или к переходу двигателя на
пониженные режимы работы при Т% = const, или к увеличению Г*.
Отсюда следует, что при всех прочих одинаковых условиях, для
сохранения неизменным режима работы основного контура ТРДФ
«Л1
Фиг. 1.41. Схема двигателя с форсажной камерой (ТРДФ).
при сжигании дополнительного топлива в форсажной камере
необходимо соответственно изменять площадь проходного сечения
реактивного сопла.
Увеличение скорости истечения газа из- реактивного сопла форсажной камеры
по сравнению со скоростью без форсажной камеры происходит примерно
пропорционально корню квадратному из отношения температур газа Tl перед
реактивным соплом и за турбиной Г4, т- е-
(1.93)
wc
где дас.ф — скорость истечения газа из реактивного сопла форсажной камеры.
Используя известные соотношения из теории двигателей, можно от
скорости истечения газа из реактивного сопла перейти к тяге, развиваемой
двигателем, т. е.
(1.94)
где /?д — тяга, развиваемая двигателем без форсажа.
Из этого выражения следует, что увеличение тяги при форсировании
двигателя будет тем больше, чем больше отношение температур Т^/Т^ . На фиг. 1.42
и 1.43 для примера приведены графики, показывающие изменение развиваемой
ТРДФ относительной тяги Яф/#фо и удельного расхода топлива Суд.ф в
зависимости от скорости полета, характеризуемой числом Мп, для различных значений
Tq. Там же для сравнения показан характер протекания аналогичных
зависимостей для обычного ТРД. Из этих характеристик видно, что с увеличением
скорости полета Яф резко возрастает, причем в большей степени для того двигателя,
у которого больше температура газа Г6 в форсажной камере; удельный расход
73
И-11 км
2
J Mr
3Mt
Фиг. 1.42. Зависимость
относительной тяги от Мп при
различных температурах газа.
Фиг. 1.43. Зависимость удельного
расхода топлива от Мп при
различных температурах газа.
Фиг. 1.44. Характер зависимости
Иф/Ял. и Суд.ф/Суд от степени
повышения температуры газа в форсажной
камере.
74
топлива Суд.ф также увеличивается, причем увеличение удельного расхода
топлива Суд.ф при форсировании двигателя определяется выражением
где a — коэффициент избытка воздуха в основной камере; as =
суммарный коэффициент избытка воздуха.
На фиг. 1.44 показан характер зависимости тяги и удельного расхода
топлива от величины отношения температур газов Tq/T4, откуда видно, что с
увеличением температуры газа в форсажной камере удельный расход топлива
возрастает значительно быстрее, чем тяга двигателя, в результате чего экономичность
двигателя ухудшается.
Ввиду того, что ТРДФ устанавливаются на летательных аппаратах,
предназначенных для больших сверхзвуковых скоростей полета, для них
характерным является большое значение величины jt*k . Поэтому для таких ТРДФ
значение я* принимаемся относительно малым.
Таким образом, управление режимами работы ТРДФ по данному методу
форсирования сводится к такому закону изменения величины проходного сечения
реактивного сопла, при котором параметры рабочего процесса основного
контура должны оставаться такими же, какими они были бы, если бы не было
форсажного устройства. Отсюда следует, что внешние условия, влияющие на
изменение параметров рабочего процесса основного контура, будут влиять также
и на режим работы форсажного устройства. Установление необходимого режима
форсирования практически сводится к установлению определенной температуры
газа в форсажной камере (или к определенному проценту увеличения тяги,
развиваемой двигателем без форсажного устройства). Величина температуры газа
в форсажной камере в современных двигателях доходит до ~2000° К. В
зависимости от назначения, ТРДФ может быть либо с фиксированными режимами,
либо с плавно изменяющимися (всережимный) в определенной области
изменения Т6.
При регулировании форсажного контура регулируемым параметром может
быть какой-либо параметр рабочего процесса (или комплекс параметров),
определяющий режим работы основного контура, а управляющими факторами могут
быть расход топлива в форсажную камеру или проходная площадь реактивного
сопла.
Поскольку работа форсажного устройства влияет на все
параметры рабочего процесса основного контура, то в принципе
безразлично, какой из параметров рабочего процесса основного
контура (или какое-либо сочетание этих параметров) принять за
регулируемый параметр форсажного режима. Однако для
получения минимальных динамических погрешностей при
неустановившемся движении всей системы автоматического регулирования
форсажного режима выбор регулируемого параметра является
достаточно важным, и в то же время сложным делом. Решение
этой задачи связано и с выполнением условия, при котором работа
форсажного контура не должна влиять на режим работы
основного контура.
Регулируемыми параметрами могут быгь различные параметры
(или комплексы) рабочего процесса, как, например, величины Т\,
Tv р\\р\> Р\\р1 РЬ Р\ и ДР-
75
После выбора способа управления форсажным режимом ТРДФ
можно определить динамические характеристики двигателя как
объекта регулирования, которые необходимы для проведения
анализа и синтеза динамики всей системы автоматического
регулирования.
Если требуется относительно малый прирост тяги, то способ форсирования
ТРДФ может быть несколько иным. В этом случае дожигание топлива за
турбиной происходит без раскрытия реактивного сопла, в результате чего повышается
температура газов как перед турбиной, так и за турбиной.
Однако этот способ форсирования можно применять в том случае, если
прочность соплового аппарата и рабочих лопаток турбины допускает такое повышение
температуры газов.
б) Общие сведения по входному устройству
(диффузору)
Обычно ТРДФ устанавливаются на летательных аппаратах,
предназначенных для больших сверхзвуковых скоростей полета.
Характерной особенностью таких аппаратов является наличие на
них специальных входных устройств (диффузоров), в которых
воздух тормозится от сверхзвуковой скорости до дозвуковой. При
рассмотрении силовой авиационной установки с ТРДФ необходимо
учитывать взаимное влияние входного устройства (диффузора)
и двигателя.
Фиг. 1.45. Принципиальная схема диффузора с двигателем.
На фиг. 1.45 приведена принципиальная схема силовой
установки с ТРДФ. Здесь применен диффузор с подвижным
центральным телом и, кроме того, имеются каналы переменного сечения
(достигаемого с помощью подвижных створок) для перепуска
воздуха из объема перед компрессором.
Для понимания дальнейшего кратко выясним физический смысл
процессов, происходящих в диффузоре.
Как известно, процесс торможения потока воздуха от
сверхзвуковой скорости до дозвуковой связан с возникновением скачков
уплотнения (давления), которые приводят к потере энергии в
диффузоре. При больших сверхзвуковых скоростях полета выгодно
тормозить воздух в диффузоре, рассчитанном на получение
нескольких косых скачков и слабого замыкающего прямого скачка,
так как в этом случае потери в диффузоре получаются меньшими,
76
чем при торможении с получением одного мощного прямого скачка.
Совершенство работы диффузора оценивается коэффициентом
восстановления давления сгд, определяющим отношение давления
заторможенного потока, прошедшего диффузор, к давлению
идеально заторможенного потока, т. е.
Ри
чу-1
(1.96)
Для примера на фиг. 1.46 приведена зависимость
ад max
при различных способах торможения воздуха в диффузоре.
0,8
0,6
0,4
0,2
Л\;
г з
5 Мг
Фиг. 1. 46. Зависимость сгд от
Мп.
/—прямой скачок, 2—косой скачок-Ь
+ прямой скачок, 3—два косых
скачка-f прямой скачок.
Фиг. 1.47.
Характеристики диффузора в
координатах ад—фд.
Свойства многоскачкового сверхзвукового диффузора с
постоянным сечением (не регулируемым) таковы, что при изменении
скорости полета изменяются коэффициент восстановления давления
(7д и коэффициент расхода фд (отношение истинного расхода
воздуха через диффузор к максимально возможному).
Обычно диффузоры проектируют так, что расчетному режиму
соответствует такое расположение скачков уплотнения, при котором
косые скачки пересекаются на кромке обечайки диффузора, и при
этом получают расчетные значения ад и срд.
При увеличении скорости полета величина сгд уменьшается из-за
увеличения потерь в диффузоре, а величина фд не изменяется.
При уменьшении скорости полета величина фд уменьшается, что
приводит к увеличению сопротивления полету (увеличивается
внешнее сопротивление). Свойства диффузора выражаются его
характеристиками, которые приведены для примера на фиг. 1.47; из этих
77
характеристик видно, что величины ад и срд очень резко изменяются.
Оптимальному режиму работы диффузора соответствует точка на
характеристике, расположенная вблизи от изгиба (излома)
характеристики. Уменьшение срд до величины, меньшей определенного
значения, приводит к появлению помпажного режима диффузора,
что недопустимо.
Если изменять величину сопротивления тракта двигателя за
диффузором (например, путем изменения числа оборотов
двигателя), то свойства диффузора также будут изменяться. Это видно
из фиг. 1. 48, где показана качественная картина изменения ад и фд.
При увеличении сопротивления за диффузором выше расчетного
УВеличение
числа М
Увеличение
сопротивлений
за
диффузором
Расчетное
сопротивление за диффузором
Уменьшение
сопротивления
< •уг за диффузором
Фиг. 1.48. Влияние изменения характера течения
в диффузоре на его характеристики в координатах
СГд—фд.
(при дросселировании двигателя) величина фд уменьшается
(уменьшается расход воздуха через диффузор) и увеличивается внешнее
сопротивление. При этом прямой замыкающий скачок будет
вытеснен из горла диффузора по направлению, обратному течению
воздуха (в сторону входа в диффузор). При значительном
увеличении сопротивления за диффузором наступает неустойчивое
положение замыкающего скачка и возникает помпаж диффузора, чего
допускать нельзя.
При уменьшении сопротивления за диффузором (при
форсировании двигателя) прямой замыкающий скачок переместится внутрь
диффузора и его интенсивность увеличится, в результате чего
величина ад уменьшится, а величина фд останется без изменения.
Таковы основные свойства диффузора, рассчитанного на
большие скорости полета. Из этих свойств вытекает, что режим работы
диффузора необходимо строго согласовывать с режимом работы
ТРДФ. При этом для получения максимально возможной
эффективной тяги силовой установки необходимо иметь сгд = схДтах
и Фд^Ь Это означает, что необходима согласованность в расходных
характеристиках диффузора и ТРДФ.
Характеристики двигателя и диффузора могут быть выражены
в одних и тех же координатах, что и показано на фиг. 1.49. Здесь
г °Уп
по оси аосцисс отложен приведенный расход воздуха Gnp =
Как видно из этих характеристик, каждому значению скорости
полета соответствует своя точка на линии совместной работы дви-
>7=COriSt #=
Характеры с тик и
диффузора
Характеристики
двигателя
Линия совместной
работы двигателя
диффузора
М
ш
М
пз
Фиг. 1.49. Зависимость ад от приведенного расхода
воздуха Gup для различных Мп.
гателя и диффузора. Перемещение рабочей точки по линии
совместной работы должно быть связано с изменением режима работы
как диффузора, так и двигателя, а это, в свою очередь, связано
с необходимостью изменения основных параметров процесса как
в диффузоре, так и в двигателе.
Изменение параметров процесса торможения потока воздуха
в диффузоре возможно осуществлять путем целого ряда
воздействий, но обычно это делается путем перемещения центрального тела
и раскрытия (закрытия) створок, осуществляющих перепуск
воздуха из диффузора (воздухозаборника) в атмосферу, как показано
на фиг. 1.45.
Регулируемым параметром, определяющим режим работы
диффузора, может быть некоторый комплекс давлений р, в который
входят "сигналы, снимаемые с определенных мест в диффузоре
и (или) даже с летательного аппарата, но такие, чтобы этот
параметр р определял режим работы, которому соответствует условие
°д==сгдтах и фд=1. Режим работы диффузора определяет также
и местоположение прямого замыкающего скачка уплотнения, нахо-
79
дящегося в диффузоре, поэтому и местоположение скачка можег
использоваться в качестве регулируемого параметра. Кроме того,
поддержание в определенном месте диффузора постоянного
значения Мд также достаточно полно определяет режим его работы.
в) Вывод уравнений движения ТРДФ
При выводе уравнений движения ТРДФ воспользуемся
результатами, полученными при рассмотрении обычного ТРД без
регулируемого сопла, и отдельно рассмотрим форсажную камеру. По
процессам, происходящим в двигателе, ТРДФ имеет большое
сходство с ТРД с регулируемым соплом. Действительно, так же как
в ТРД с регулируемым соплом, изменение площади проходного
сечения реактивного сопла приводит к изменению параметров
рабочего процесса по тракту двигателя, так и в ТРДФ изменение
величины расхода топлива в форсажной камере (изменение р\
вследствие изменения Г*) также приводит к изменению тех же
параметров рабочего процесса двигателя. Следовательно,
изменение величины Г* в ТРДФ (с неизменным проходным сечением
реактивного сопла) как бы аналогично по своему воздействию
регулируемому реактивному соплу. В ТРДФ, при условии
поддержания неизменным режима основного контура, любому режиму
работы двигателя на форсажном режиме должна соответствовать
определенная величина проходного сечения реактивного сопла.
Следовательно, при переходе ТРДФ с одного форсажного режима
на другой (при изменении расхода топлива в форсажную камеру)
величина изменения проходного сечения реактивного сопла должна
быть вполне определенной.
Таким образом, поддержание неизменным режима работы
основного контура можно осуществлять как путем изменения
расхода топлива (/т.ф (при /7c = const), так и путем изменения
величины проходного сечения Fc реактивного сопла (при GT.<j) = const).
Выведем уравнения движения ТРДФ по указанным выше
параметрам (комплексам) рабочего процесса, принимаемым за
регулируемые параметры.
Принимаем, что расход газа из основного контура равен
расходу газа из реактивного сопла форсажной камеры.
Уравнения движения для основного контура останутся теми же,
что и полученные при рассмотрении одновального ТРД. Уравнение
движения для форсажной камеры можно получить, используя
следующие основные выражения:
ll 11 (1.97)
Первое уравнение аналогично пятому уравнению системы
(1.21), но нелинейная зависимость для Gc (при pH = const) будет
иной, а именно:
Ge = Gc(pl, Tl, Fe). (1.98)
80
Второе уравнение аналогично по структуре шестому уравнению
системы (1.21) и выражает связь между расходом топлива GT ф
в форсажную камеру и температурой газа в ней.
Третье уравнение учитывает потери полного давления в
форсажной камере. Линеаризируя обычным методом выражения
(1.97), с учетом (1.98) и четвертого выражения системы (1.22),
получим:
где
сО
Qoi
Krta "
Ooi
(1.99)
dGc\ . rr ^60 / dGc\
дРб)0' 4Т6 Gco V дТб/{
?jo_( dGc\ k- __ сР°гоКо
^ ^)^
——-*] , Afi7-a = -
Qoi
dT
3/0
-'т.ф
Ooi
60
Коэффициенты Кар2, Катъ одинаковы с аналогичными
коэффициентами в системе (1.30), a Kaf — ё коэффициентами в (1.50). Таким
образом, система уравнений, описывающих движение ТРДФ, будет
такой:
7\Р+0) Хп
— Klp4Xp4 — 0;
lp4Xp4
тз
— K3pAXp4i
0;
К4р4Хр4 — К4Т6ХТ6 -— K
+ К5пХп = K5GtXg^
— К6Т4ХТ4 =
Разрешая уравнения (1. 100) относительно
получим:
4FXF;
p2+К6ТгХтз-\-К6Т6ХТ6
(1.100)
О-
; 0.102)
^; (1- ЮЗ)
т т1ф А-^ (1.104)
В указанных уравнениях постоянные коэффициенты
определяются коэффициентами системы (1.100). Структура полученных
уравнений движения аналогична структуре уравнений, полученных
1327
81
при рассмотрении ТРД с регулируемым соплом, что указывает на
некоторую аналогию в явлениях, 'происходящих в этих двигателях.
Для получения уравнения движения, определяющего изменение
величины я*, необходимо дополнительно рассмотреть уравнение
Линеаризируя это уравнение, получим
Хр2 — Хр4 — Хпт = 0.
где
(1.105)
Заменяя в системе (1. 100) Хр4 = Хр2—Хп ,
систему уравнений:
Здесь
^2Р2^р2 + К2пХп — К2тгХтг = 0;
ХТ4 — Хтг — КЪр2Хр2 -j- АГзтст^ТСт = 0;
2 4" КАТЪХтг -|- Ка%тХ%^ —- К4Т6Хте =
2Хр2 + К5пХп = K5GtXg
K6T6XT6 — К6Т4ХТ4 = Я'
Чр2~
получим такую
. (1.106)
Разрешая (1. 106) относительно координаты Л^т, получим
+ (anp + aB)XF. (1.107)
Аналогично рассмотренному, можно составить уравнения
движения и относительно любой другой комбинации рабочих
параметров двигателя, принятых за регулируемые координаты.
Уравнение движения, определяющее изменение развиваемой
двигателем реактивной тяги, можно получить при совместном
рассмотрении с системами уравнений (1. 100) или (1. 106) уравнения
(1.94) после его линеаризации.
Линеаризируя (1.94), с учетом (1.38), получим
~ К7Т6ХТ6 — К7Т4ХТ4 4- К7р4Хр4 -]г К7ТЗХТЗ -
■г К7р2Х Р2 + K7FXF = 0.
(1.108)
82
Разрешая (1. 100) совместно с (1. 108) относительно Хт,
получим
' (1.109)
Аналогично рассмотренному, можно составить уравнения
движения и для двухвального ТРД
с форсажной камерой.
Выражения для постоянных
коэффициентов определяют
через основные параметры
рабочего процесса аналогично
тому, как было приведено
выше; в результате целый
ряд коэффициентов принимает Фиг L50 Упрощенная СТрукТурная схе-
постоянное значение. ма ТРДФ.
Рассматриваемый объект
регулирования можно представить в виде структурной схемы.
На фиг. 1.50 приведена упрощенная структурная схема,
показывающая связь между основным контуром и форсажной камерой,
а на фиг. 1.51 приведена структурная схема, соответствующая
системе уравнений движения (1. 100).
Регулятор
оснодного
контура
-»-| --^ регулятор
^
форсажного
I | контура
л п
□
Фиг. 1.51. Структурная схема ТРДФ, соответствующая системе
уравнений (1. 100).
В заключение заметим, что важным процессом является также
процесс выхода на форсажный режим, когда законы управления
должны быть программными.
г) Уравнения движения ТРДФ совместно с диффузором
Выведем в линейном приближении уравнения движения для
диффузора с каналом, подводящим воздух к компрессору ТРДФ.
Схема силовой установки с необходимыми обозначениями
приведена на фиг. 1.45.
Диффузор с подводящим каналом может иметь достаточно
большой внутренний объем, в котором в процессе неустановивше-
83
гося движения аккумулируется воздух. Поэтому при выводе
уравнений движения мы будем учитывать лишь один этот аккумулятор
энергии, считая, что тепло практически не передается через стенки
воздухозаборника.
Исходное уравнение для расхода воздуха будет таким:
0 = 0^0^0^ (1.110)
где G — количество воздуха, находящегося во входном
устройстве;
Од, (jj, Gn — расход воздуха соответственно через диффузор, в
сечении перед компрессором и через устройство для
перепуска (створки).
В свою очередь, для G можно написать:
G = ARVJlyJl-\-AKVKyu (I. Ill)
где Лд и Л к — постоянные коэффициенты; Уж и VK — внутренние
объемы в диффузоре и в канале соответственно; уд и Yi — плотности
воздуха соответственно в диффузоре (в конечном его сечении) и в
канале (в сечении перед компрессором). В дальнейшем только для
краткости последующего изложения примем, что Vj^>VK, и поэтому
вместо (1.111) будем иметь
О = АлУлУл. (1.112)
Используя (1.112) и очевидные зависимости
-£-=(ЛЛ* и Yo=—, (1-ПЗ)
А) \ Yo / #то
после подстановки в (1.110) получим
^ = 0,-0,-0,. (1.114)
Кроме того, используя следующий ряд общих выражений,
характеризующих зависимости для расходов, давлений и температур
воздуха в тех же сечениях входного устройства и устанавливающих
связь между основными параметрами 1:
\)ож=оар:,т:,мт,ол
2) р*=р*(рт, Мг);
3) т*т=Т*г(Т„ Мг);
(1.115)
Мп, Мг);
5) О, =0,(^1, Tl, M,);
6) p*=p"i(Pi> Mi)=
1 Здесь мы не учитываем влияния углов атаки и скольжения летательного
аппарата ввиду упрощения всей задачи. При более точном решении поставленной
задачи влияние этих углов необходимо учитывать.
84
9) рг=рг(Мт, Мп, од, рн)\
n, р2);
I
(1.115)
10) ад = ад (Мп, /к,
I
И) 9д = ?д(Мп, 1Ъ FCTB, /г, р2). J
Здесь pj, рГ, Т*, Тт, М г — соответственно полные и статические
давления и температуры и число М потока вблизи критического
сечения (горла).
Кроме того, приближенно будем 'принимать
Т\=ТТ и р\ — рг-
Ниже некоторые из приведенных неявных зависимостей приводятся
в явном виде.
Линеаризируя (1.114) и (1.115), получим
2) Хож~
4) Хт* —
7)Хр\
8) Хт{
9)^
11) АГад —
х = 0;
0;
14)*,=,
(1.116)
85
Здесь Xi= обобщенные координаты, а Кг — постоянные
'о
коэффициенты.
Систему уравнений (1. 116) необходимо решать совместно с
системами (1.100) или (1.106). Однако в этом случае система
уравнений для ТРДФ должна учитывать изменяющиеся величины
давления и температуры потока воздуха перед компрессором
(в конце самолетного канала, см. фиг. 1.45) и условия равенства
расходов воздуха перед и за компрессором. Чтобы это учесть,
необходимо при выводе уравнений движения для основного контура
ТРДФ [исходные уравнения (1.21), (1.97) и (1.98)] принять в
выражениях для крутящего момента, необходимого для привода
компрессора, и для расхода воздуха через компрессор, такие
зависимости:
Мк----Мк(р1\ п; Т},р1;Ок);)
Gk = Gk(P^ П\ Ти Pi). )
В результате вместо системы (1. 100) получим
(1.117)
15)
16)
18) K\ST4XT4 —
=0;
Кг8р2Х
г8р2Хр2
— (1.118)
~—Kl9T2XT2 =
K2Qp2Xp2 -f K20TZXT3 —
K2Xp2Xp2 -|- К2ХтгХгз-f K
— K2]T4XT4 =
Xmi ~~ I<22p2 X p
Здесь в отличие от принятого ранее вводим обозначения
индексов со звездочкой, потому что в общую систему уравнений
движения входят температура и давление в сечениях перед компрессором,
соответствующих полным и статическим значениям этих величин.
Индексы координат в сечениях за компрессором обозначены, как
и прежде, без звездочек, хотя они и относятся к полным
(заторможенным) их значениям. Таким образом, движение ТРДФ с входным
устройством описывается системами уравнений (1.116) и (1.118),
86
в двадцать два уравнения которых входят столько же обобщенных
координат и, кроме того, координаты воздействующих факторов.
Как говорилось выше, регулируемым параметром для
воздухозаборника может быть какой-то комплекс давлений (3 (как 'Правило,
определяемый экспериментально), определяющий режим его
работы. Для примера и только ради упрощения дальнейшего
изложения, положим, что в качестве такого комплекса давлений
принят комплекс Р = ра/Рб, где ра — статическое давление в каком-то
месте в начале тракта воздухозаборника, а /?б — статическое
давление в каком-то месте в конце тракта воздухозаборника.
Предположим далее, что величины этих давлений подчиняются соотношениям
Ра = С\рг и рб = с2ри тогда
С2 Pi
Линеаризируя $ = с —,
Pi
Pi C2
получим
Xi=XPt-XPx. (1.119)
Регулируемыми же параметрами для ТРДФ примем Xп и ХТа-
Далее целесообразно исключить из системы уравнений (1.116),
(1. 118) и (1. 119) все переменные, кроме X?j Х<,л, Хп и Хт4, в
результате чего получим такую систему уравнений (в предположении,
что 7я = const и рн = const):
2) 1
3) (
4) l4TiXri -\- 14пХп
\ о-
Разрешая (1.120) относительно Хп, ХТ4, Ха, Х$, получим
(1.121)
т3р + m4) XFс?
4. ^^-j- q4
87
'т.ф'
О-
-f ахр + а2)Хр =
Ст.ф- . (1Л24)
Как видно из полученных уравнений, координаты ХТА, Х$ и Ха
могут изменяться скачком при изменении скачком некоторых
воздействующих факторов. Следовательно, переходные процессы в
общей системе регулирования, в принципе, могут иметь
нерегулируемые забросы или провалы.
Полученные выше уравнения движения для воздухозаборника
(1. 116) применимы лишь в том случае, если возможно
линеаризировать характеристики диффузора. Это значит, что если, например,
установившемуся режиму соответствует точка на вертикальной
(или горизонтальной) ветви характеристики диффузора,
приведенной на фиг. 1.47, и если в процессе неустановившегося движения
эта точка не сходит с этой ветви, то можно воспользоваться
полученными выше уравнениями. В противном случае необходимо
учитывать действительную нелинейную характеристику диффузора.
Обычно такие сложные задачи, как исследования рассматриваемой системы,
проводятся на моделирующих установках, где имеется возможность учитывать
действительные (нелинейные) характеристики диффузора. В этом случае
необходимо десятую и одиннадцатую зависимости системы (1.115) выразить
соответствующими характеристиками, которые и набирать на моделирующей
установке.
Для определения выражений постоянных коэффициентов, входящих в
полученные выше уравнения, вместо зависимостей системы (1.115) необходимо
воспользоваться зависимостями в явном виде, которые будут такими:
1)0д =
2gk
Рг
где
: —ПМ2 + 2
(1.125)
4)
Рг = j 3)
7-г __ ТН
т(Мг) т(Мя)
88
5) Oj =
9) Gn =
где
(*+!)/? yY*
i-£==?<Mi);
7) r*=
(ft +
(1.125)
Остальные зависимости (1. 115) не могут быть записаны в явном виде и они
определяются экспериментально. Кроме того, необходимо воспользоваться
такими газодинамическими функциями:
Т 2
— = т(М);
7"*
(k—
(k
(1.126)
которые позволяют определить отношение температур и давлений в потоке
к значениям заторможенных температуры и давления того же потока. Как
показывают более детальные расчеты подобных систем регулирования, инерционность
диффузора и воздухоподводящего канала для некоторых типов летательных
аппаратов оказывается сравнимой с инерционностью вращающихся масс ТРДФ.
Это является характерной особенностью рассматриваемой силовой установки.
д) Примеры
Пример 1
Задание. Определить значения коэффициентов, входящих в уравнения
движения (1. 101), (1. 102) и (1. 103), для одновального ТРДФ при Н=0 и V=0,
для максимального режима работы двигателя.
Исходные данные. Данные, относящиеся к основному контуру
двигателя, принимать из первого примера (на стр. 53). Остальные данные, получаемые
из газодинамического и теплового расчетов двигателя принимать такими:
кг/сек; /?4=2,35 кГ/см2 (23 н/см2); срс=0,98; Лк.ф = 0,9
7*=1500°К; 5ф =
= 2,15
(21,1
Решение. Определим значения коэффициентов, входящих в уравнения
(1.99):
5ф/4
со
дР
б/0
"з/о
= 1,0;
89
К 476 =
Gc0 [ дТ\
Г6/О
= — 0,5;
Cp(T*6~Tl)oTlo /Юг
= 2,78;
= 1,75;
Коэффициенты /С4р2 и /С4Т3 берутся из выражений системы (1.30); они будут
равны: /С4р2=1; Катз = —0,5. Значение коэффициента Kaf принимаем по
уравнению (1.48), откуда получаем /C4f = 1.
Значения остальных коэффициентов в (1. 100) принимаем из примера 1 на
стр. 53. Тогда определители будут такими:
Д =
ATS =
0,83/7 + 3,1
3,1
0
0
3,1
0
0
0
0
Хр
G
G Дч
0,83/7 + 3,1
3,1
0
0
3,1
0
0,83/? + 3,1
3,1
0
0
3,1
0
— 0
0
— 1
-0
1
— 0
— 0
0
— 1
— 0
1
— 0
0
0
0
р
G
xG
— 0
0
— 1
— 0
1
— 0
5
5
,5
,8
,5
,5
,5
,5
8
,5
г.ф
,5
,5
,5
,8
,5
— 2,25
— 1,9
0,25
1
— 1,17
1,0
— 2,25
— 1,9
0,25
1
— 1,17
1,0
-2,25
— 1,9
0,25
1
— 1,17
1,0
— 2,25
— 1,9
0,25
1
— 1,17
1,0
1,2
0
0,3
— 1,07
0
0
1,2
0
0,3
— 1,07
0
0
1,2
0
0,3
— 1,07
0
0
1,2
0
0,3
— 1,07
0
0
0
0
1
0
0
— 1
0
0
1
0
0
1
0
0
1
0
0
0
0
0
Хр
G
•**■ G
0
0
0
0,5
0
,75 2,78
0
0
0
0,5
0
,75 2,78
0
0
Q
0,5
0
75 2,78
0
0
0
0,5
0
.2,78
90
Раскрывая приведенные определители, получим искомые уравнения
движения:
(0,5/? + 1) Хп = 0,49^от ~0,13^от.ф + 0,63Л>с;
(0,5/7 + 1)Л>3= (0,33/7 + 0,25) XGj + 0,1 XG - 0,48 XF;
(0,5/7 + 1)^7-4= (0,3/7 + 0,08) XGt + (0,03/7 + 0,13) Xqt +(0,13/?—0,68)Л>с.
Пример 2
Задание. Определить значения коэффициентов, входящих в уравнение
(1. 107), для одновального ТРДФ при #=0 и V=0 для максимального режима
работы двигателя.
Исходные данные. Данные, полученные из теплового расчета
двигателя, взять из предыдущего примера.
Решение. В соответствии с выражениями системы (1.106) определяем
значения коэффициентов:
= К\ /74 —K\P2=Z — 1,05; /С1тс = К\р± — 1,2;
ъР2 + Хз/74 = - 0,55; АЦ = КгР± = — 0,3;
== ^4р2 — ^4/74 = — 0,07; К^п = ^4/?4 = 1,07.
Тогда исходная система уравнений будет такой:
(0,83/7 + 3,1№-0,5*гз-1,05^2 —1,2* =0;
- 1,9 Хр2 + 3,1 Хп + 0,5 Хгз = 0;
0,55 *р2 —0,3 *тс =0;
— 0,5 Хгз + 1,07 Хк +0,5
Разрешая эту систему уравнений относительно Х% , получим
%
+ (0,25/7 + 0,6) XF.
6. ТУРБОВИНТОВЫЕ ДВИГАТЕЛИ (ТВД)
а) Основные сведения по эксплуатационным свойствам
Турбовинтовой двигатель (ТВД) относится к двигателям с
комбинированной тягой: развиваемая им тяга слагается из реактивной
тяги и тяги, развиваемой воздушным винтом.
Существует несколько конструктивных схем турбовинтовых
двигателей и в зависимости от их схемы свойства двигателя как
объекта регулирования существенно меняются.
91
На фиг. 1. 52 приведена схема одновального турбовинтового
двигателя с одним винтом, принцип работы которого ясно виден
из этой схемы. Часть общей энергии срабатывается на турбине
Силодая устанобна
с Винтом
Фиг. 1.52. Схема одновального турбовинтового двигателя (ТВД).
и идет на привод винта и компрессора, а часть энергии
срабатывается в реактивном сопле. По рабочему процессу турбовинтовой
двигатель ничем не отличается от турбореактивного.
Однако по эксплуатационным свойствам ТВД резко отличается
от ТРД. Основное различие заключается в том, что на относительно
меньших скоростях полета применение трубовинтового двигателя
оказывается более выгодным, чем турбореактивного. Это
объясняется главным образом
характеристиками воздушных винтов.
Указанное преимущество ТВД на
небольших скоростях полета можно
наглядно видеть из кривых,
приведенных на фиг. 1.53, где показан
характер изменения удельного расхода
топлива Суд и полного
(экономического) к. п. д. г]о от скорости полета
для винтомоторной силовой
установки и установки с турбореактивным
•V двигателем. До определенной
скорости полета более выгодной
оказывается винтомоторная установка, которая
позволяет получить большие
значения г]о и меньшие значения Суд; при
дальнейшем увеличении скорости
полета преимущества остаются уже за
ТРД.
Из схемы работы ТВД вытекает, что развиваемая турбиной
мощность должна быть большей для ТВД, чем для ТРД, что
вытекает из необходимости затраты мощности на привод винта. ТВД
обычно 'проектируют из такого расчета, чтобы примерно 80-f-90%
Фиг. 1.53. Характер
изменения удельного расхода
топлива Суд и полного
(экономического) к. п. д. т]0 в
зависимости от скорости
полета V для ТВД и ТРД.
развиваемой двигателем мощности снималось с винта, а остальные
10—20%—с реактивного сопла.
ТВД характеризуется развиваемой им эквивалентной мощностью #э, в
которую входит мощность, снимаемая с винта и с реактивного сопла, т. е. .
=Ne +
75т
(1.127)
Соответственно удельная мощность Л/уД для такого двигателя определяется
выражением
:<?в ~GB
(1.128)
Экономичность ТВД оценивается по удельному эффективному расходу
топлива Суд.
т;
Фиг. 1.54. Характер
зависимости Ne уд от температуры газа
Т^з для различных значений jtk.
Фиг. 1.55. Характер зависимости
Суд от Т3 лРи различных
значениях JT., .
Чтобы разобраться, как изменяются эксплуатационные свойства двигателя
в зависимости от изменения некоторых параметров его рабочего процесса,
необходимо Ne уд и Суд выразить через параметры рабочего процесса. В результате
проведения определенных преобразований для Ne уд можно получить
5,7 срТг
*r-r
1 —
> — l
где обозначения параметров рабочего процесса такие же, как и для ТРД.
Из приведенного следует, что температура газа перед турбиной оказывает
большое влияние на NeYR. Это хорошо видно из фиг. 1.54, где приведено
изменение Ne уд в зависимости от Тз Для различных значений JtjJ. Чем больше л*,
тем более резко изменяется Ne уд в зависимости от температуры газа перед
турбиной. Именно поэтому ТВД стремятся делать с относительно более
высокой температурой газа перед турбиной и повышенным значением степени
повышения давления в компрессоре. Влияние остальных параметров рабочего
процесса примерно такое же, как и для ТРД.
93
Выразив удельный эффективный расход топлива также через параметры
рабочего процесса, можно получить
*0,286
71 к
— 1
Суд '
632
"Чад
1 —
0,24«0'286 —
Из уравнения видно, что Суд существенно зависит от
и т^.
На фиг. 1.55 и 1.56 показано изменение Суд в зависимости от температуры
газа перед турбиной для различных значений степеней повышения давления
Н= const
- const
УД
Фиг. 1.56. Характер зависимости
Суд от я* при различных
значениях Гд.
Фиг. 1.57. Характер
изменения Ne, Яд и Суд в
зависимости от скорости
полета V.
газа перед турбиной. Характер протекания Суд от Т3 Резко отличается от
соответствующего характера протекания этой зависимости для ТРД, так как в
рассматриваемом случае Суд непрерывно уменьшается с увеличением Г3. Таким
образом, увеличение Т3 в ТВД выгодно и из соображений экономичности. Влияние
остальных параметров рабочего процесса на свойства ТВД примерно такое же,
как и для ТРД.
Влияние внешних условий на эксплуатационные свойства
двигателя нагляднее всего представляется его скоростными и
высотными характеристиками.
Скоростные характеристики представляют собой зависимость
эффективной мощности, реактивной тяги и удельного эффективного
расхода топлива от скорости полета при #=const и п = const. Для
примера на фиг. 1. 57 показан характер изменения /?д, Ne и Суд от
скорости полета.
Увеличение значения Ne объясняется увеличением Л^еуд и
увеличением расхода воздуха через двигатель.
94
Уменьшение реактивной тяги /?д объясняется тем, что скорость
истечения газа из реактивного сопла увеличивается медленнее,
чем скорость полета.
Уменьшение удельного эффективного расхода топлива
объясняется увеличением Ne и увеличением коэффициента избытка
воздуха, так как 7"з =const, а Т% увеличивается.
Высотные характеристики представляют собой зависимость
эффективной мощности, реактивной тяги и удельного эффективного
расхода топлива от высоты полета при V=const и п = const.
Для примера на фиг. 1.58 приведены высотные характеристики
ТВД, из которых виден характер изменения мощности, реактивной
тяги и расхода топлива с высотой полета. До высоты #=11 км
температура наружного воздуха по МСА изменяется. Поэтому
изменение значения Ne объясняется действием двух противоположных
факторов. С одной стороны, увеличивается суммарная степень
повышения давления, что приводит к увеличению эффективной
удельной мощности двигателя; с другой стороны, уменьшается
массовый расход воздуха, что приводит к уменьшению мощности.
Действие этих двух факторов и обусловливает уменьшение
эффективной мощности двигателя.
Для высот #>11 км, где температура наружного воздуха по
МСА постоянна, уменьшение Ne происходит относительно быстрее,
так как л:Об=const, поэтому и NeyR=consi.
Уменьшение реактивной тяги происходит по тем же причинам,
что и для ТРД, о чем говорилось выше.
Изменение значения удельного эффективного расхода топлива
определяется значением произведения аЛ^уд. Для высот полета
Н<\\ км значение коэффициента избытка воздуха а уменьшается,
а Л^еуд увеличивается, причем NeyK увеличивается быстрее, чем
уменьшается а; в результате этого произведение аА^уд
увеличивается (и удельный эффективный расход топлива уменьшается. Для
высот полета #>11 км Cyд=const.
Эксплуатационные свойства ТВД по режимам работы
определяются его характеристикой по числу оборотов, или дроссельной
характеристикой К
Дроссельные характеристики представляют собой зависимость
эффективной мощности, реактивной тяги и удельного эффективного
расхода топлива от числа оборотов при V=const, H=const и при
постоянном угле установки лопастей винта. Для примера на
фиг. 1. 59 приведена дроссельная характеристика, из которой виден
характер изменения Ne, 7?д и Суд в зависимости от числа оборотов
двигателя. Причины, обусловливающие такой характер изменения
указанных параметров, те же, что и рассмотренные выше для ТРД.
Из рассмотренного выше следует, что с изменением условий
полета и режима работы двигателя эксплуатационные свойства его
1 Или в виде сетки характеристик при нескольких значениях угла установки
лопастей винта.
95
существенно изменяются, причем характер этого изменения
подчиняется многочисленным сложным законам, часто действующим
в противоположные стороны. Практически же отыскание
характеристик, определяющих эксплуатационные свойства двигателя,
достигается проведением многочисленных расчетов. Изменение
эксплуатационных свойств двигателя приводит к изменению его свойств
как объекта регулирования, что должно учитываться при
разработке соответствующей системы автоматического управления двигате-
V=const
УД
-H
Фиг. 1.58. Характер
изменения Ne, Яд и Суд в
зависимости от высоты полета Н.
п
Фиг. 1.59. Характер
изменения Ne, R% и Суд в
зависимости от числа оборотов
двигателя п.
лем. Выбор закона управления двигателем на крейсерских режимах
подчиняется, как и в случае ТРД, требованию получения
минимального расхода топлива.
Для одновального ТВД крейсерские режимы могут быть
получены различными путями с примерно одинаковыми показателями
по экономичности двигателя.
Как было показано, на удельный расход топлива главным
образом влияют температура газа перед турбиной и степень
повышения давления в компрессоре; поэтому область возможных
крейсерских режимов должна быть ограничена законами Г* = const
и я* = const(n = const). Возможность осуществления этих граничных
условий для получения крейсерских режимов обеспечивается
применением винтов изменяемого шага, у которых к. п. д. относительно
мало изменяется при значительных изменениях мощности,
снимаемой винтом, и изменением числа оборотов.
Из тех же приведенных выше характеристик следует, что как
при снижении Г*, так и при снижении я*, экономичность двигателя
ухудшается, т. е. любой метод снижения мощности приводит к
увеличению удельного расхода топлива. При этом степень увеличения
удельного расхода топлива практически одинакова для случая
96
уменьшения мощности как за счет уменьшения температуры газа
перед турбиной, так и за счет уменьшения л* (числа оборотов).
Этим объясняется тот факт, что для управления такими
двигателями на крейсерских режимах пока еще выбираются самые
различные законы.
В этом случае критерием для выбора закона управления
двигателем могут явиться требования, предъявляемые к неустановив-
Фиг. 1.60. Схема двухвального ТВД.
шемуся процессу движения двигателя, ибо при всех остальных
одинаковых условиях переходные процессы существенно различаются
в зависимости от того, какой закон принят для управления
двигателем на крейсерских режимах.
Одной из распространенных схем ТВД является схема
двухвального двигателя, представленная на фиг. 1.60.
Сказанное выше об эксплуатационных свойствах одновального
ТВД в основном относится и к этой схеме турбовинтового
двигателя, поэтому на данном вопросе не будем останавливаться. Однако
свойства двухвального ТВД как объекта регулирования
существенно отличаются от свойств одновального ТВД. Применение одного
воздушного винта или двух винтов, вращающихся в разные
стороны, как для одноъального, так и для двухвального ТВД также
резко изменяет свойства двигателя как объекта регулирования.
(Эти вопросы освещаются ниже).
б) Уравнения движения ТВД и его свойства
как объекта регулирования
Одновальный ТВД
Для одновального ТВД с одним винтом уравнения движения
по тем же регулируемым параметрам, как и для рассмотренных
выше двигателей, можно получить исходя из тех же соображений,
что и при рассмотрении двухконтурного ТРД. Разница будет лишь
в том, что вместо низконапорного компрессора, применяемого для
1327
97
двухконтурного ТРД, для ТВД применяется воздушный винт
изменяемого шага.
В соответствии со сказанным, для ТВД, схема которого
приведена на фиг. 1.52, остается справедливым уравнение (1. 78). Однако
нелинейные зависимости для Мв будут такими:
V).
(1.129)
Следовательно, исходной системой уравнений будет система
(1.21), где первое уравнение нужно заменить уравнением (1.78).
Линеаризируя (1.78), с учетом (1. 129) и первых двух выражений
системы (1.22) (для случая, когда внешние условия неизменны),
получим такое уравнение движения:
(TlP+Q)Xn-KlT3Xr3-Klp2Xp2 + KipiXp4 + /<l9X9=0. (1.130)
Следовательно, система уравнений движения будет аналогична
системе (1.30), где первое уравнение заменено уравнением
(1. 130), т. е.:
(Тгр-\- о) Хп — КтХтз — К]р7Х
(1.131)
- п ^2Т^ХТЗ — ^'
ХТ4 — Хтг—К3р2Хр2 — К3р4Хр4=0;
К4р\Хр4 — К4Т4ХТ4=0;
i //■ у /^ v
2"Г/^5лЛл==/^5От AGT.
Коэффициенты q и /Скр в уравнении (1. 130) равны
/дМв\ (дМт\ , /дМк
пр [/дМк\ . /дМв\
Мо [\ дп Г\ дп )
\ дп
\/dGK \1 .
Д дп /Jo'
(дМв\ ср0 у Аср
Остальные коэффициенты одинаковы с коэффициентами системы
(1.30). ■;
Разрешая систему (1. 131) относительно координат Хп, ХТз, ХТ4,
получим А'Х„ = А„; Д-Хтз=Агз; A-XTi—Дт4- Здесь Д имеет такое
же выражение, как и в (1.31), а выражение для Ап будет таким:
0
0
0
0
0
0
1
0
Определитель Агз отличается от А вторым столбцом, вместо
которого следует подставить первый столбец из Ап; определитель ДТ4
98
отличается от А пятым столбцом, вместо которого следует
подставить первый столбец из Дп.
Раскрывая определители, после преобразований получим такие
уравнения движения:
(1.132)
Сравнение полученных уравнений с (1.34), (1.35) и (1.36)
показывает, что различие между ними заключается лишь в
дополнительном члене правой части, учитывающем влияние изменения угла
установки лопастей ВИШ.
, Уравнение движения по развиваемой ТВД тяге можно получить,
если дополнительно ввести в рассмотрение уравнение
Я=#.+Яд, (1.133)
где RB — тяга, развиваемая винтом; /?д — реактивная тяга.
Нелинейная зависимость для RB будет:
/?в=#в(я, Т, Рн> Тн, V). (1.134)
Уравнение, характеризующее изменение реактивной тяги, примем
в форме (1.38).
Линеаризируя (1.34), при неизменных внешних условиях
получим
XR в = К&пХп -\- Кб?Х9. (1.135)
Отсюда с учетом (1.133) получим такое уравнение:
V ^вО iv- v АдО IS V АдО IS у ^лО ту v
AR— ~^~ К6пЛп — -£— Л6ТЗЛп —*\6р2Лр2 — —1\6рАЛр4-—
^ ^ (1. 136)
Решая (1.131) совместно с (1.136) относительно координаты
XR, получим
д.^ = Д/?. (1.137)
Определитель А имеет прежнее выражение (из 1.31), а
определитель Ал выразится так:
О — К2ТЗ К2р2 0 0 0
О -1 -^зР2 ~К3р4 1 О
о к к к к о
^ 47*3 4d2 4d4 4У4
I/ IS IS С\ C\ IS У
Д 5/2 Д 57-3 A 5p2 ^ ^ *\ Ю G
7* 99
Раскрывая определители, получим
{Tp-\-Ql)XR = {b,p + bl())XGi-\-{bnp^bl2)X,. (1.138)
Сравнение полученного уравнения с (1.40) показывает, что
различие между ними заключается лишь в дополнительных членах
правой части, учитывающих влияние изменения как величины угла
установки лопастей, так и скорости его изменения.
Выражения для коэффициентов, входящих в уравнение (1. 136),
будут следующими:
К = п° [д^в\ • К = Уо (д^в\
*^в0 \ ^Н. / 0 АвО > ^Т /0
Остальные коэффициенты уравнения (1.136) одинаковы с
коэффициентами уравнения (1.38).
Двухвальный ТВД
Уравнение движения для двухвального ТВД, схема которого
приведена на фиг. 1.60, можно получить по аналогии с уравнением
для двухвального ТРД, однако в этом случае не нужно учитывать
второй компрессор.
Уравнения движения во многом будут аналогичны уравнениям,
приведенным выше, поэтому подробно на их выводе не будем
останавливаться.
Использовав в этом случае систему (1.65) без третьего и пятого
уравнений при Мк2=Мв и Т*Х^Т\ и использовав систему (1.66)
без зависимости для GK2 и Мк2, а также (1.129), после обычной
линеаризации 'получим в общем виде систему уравнений следующего
вида:
п
п2~Т /42/?4Kv/?41~r/42/74^v/?4
rs V" Г).
V | is у п.
\Л п\~\'^4ТЗЛТг — U>
rSXr3 + K5p4lXpil + Kip2Xp2=0; \ (1Л39)
у гл.
±1** пА\ w?
Разрешая эту систему уравнений относительно числа оборотов
вала винта Xn2i получим
(1.140)
Число оборотов Хп\ ротора турбокомпрессора («первая турбина+
+ компрессор») не зависит от числа оборотов системы «вторая тур-
бина + винт».
100
Разрешая первое, третье, четвертое, пятое, седьмое и девятое
уравнения системы (1. 139) относительно Хпи ХТЗ) А'Г4ь получим
(1.141)
(1.142)
(1.143)
(аор + аг) Xя1=
(аор-\-'а1)Хгг= {Ь
\)ХТ41=(Ь8р
Из сравнения (1.140), (1.141), (1.142), (1.143) видно, что
изменять число оборотов турбокомпрессора Хп\ и температуры газа
Хтз и ХТ4\ можно лишь путем изменения расхода топлива, причем
температура газов зависит не только от величины расхода, но и от
скорости изменения расхода топлива.
Изменять же число оборотов вала винта Хп2 можно как путем
расхода топлива, так и путем изменения угла установки лопастей
винта, причем на число оборотов оказывают влияние также и
скорости изменения этих координат.
ТВД с соосными ВИШ
Современные турбовинтовые двигатели развивают большие мощности,
поэтому и винты должны быть больших размеров и иметь большие окружные
скорости на концах лопастей. Однако на самолет невозможно поставить винты
слишком большого размера и, кроме того,
увеличение их окружной скорости приводит к
уменьшению к. п. д. винтов. Поэтому применяют два
соосных винта, вращающихся в разные
стороны, приводимые от вала двигателя через
обычный или дифференциальный редуктор.
Примерная кинематическая схема
дифференциального редуктора приведена на фиг. 1.61.
Выведем уравнение движения одновального
ТВД с дифференциальным редуктором и соос-
ным ВИШ.
Из кинематической схемы
дифференциального редуктора следует, что в процессе
неустановившегося движения может быть
отклонение от заданных чисел оборотов как обоих
винтов, так и вала турбины.
Следовательно, для вывода уравнения движения, например, по числам
оборотов первого винта п\ъ> второго винта /22в и турбины пт необходимо ввести
в рассмотрение аккумуляторы энергии, обусловленные наличием вращающихся
масс, с первым винтом, а также со вторым винтом и массы турбокомпрессора.
Это можно записать так:
Фиг. 1.61. Возможная схема
дифференциального редуктора
для привода ВИШ.
dt
JlBf
2%J2
dt
= M2 — M2Bt
(1.144)
где
и М2 — части крутящего момента, развиваемого турбиной, передающиеся
на соответствующий ВИШ. Кроме того, справедливо такое
уравнение:
2~/т —J-- = М1 — (М1в + М2в)
101
(1.145)
Величины крутящих моментов, передающихся на каждый винт, обратно
пропорциональны передаточным числам редуктора для каждого винта. Поэтому,
если обозначить передаточные числа через i\ и i2 (соответственно винтам), то
можно написать
dnT
dnT
(1. 146)
Связь между числами оборотов винтов и турбины можно записать в таком
виде:
пт = пиа\ Л- п2ваъ (1.147)
где ai и а2 — постоянные коэффициенты.
Выражение для Мт соответствует первому выражению из системы (1.22),
а для М1в и М2в уравнения будут такими:
После линеаризации (1.146) получим такие уравнения: .
(Т[р + qJ) Х1В + (Т'7р - с;> *т- АГ]7,3^ГЗ
Х2в+ (ТтР - QT) ZT -
(Ы49)
Кроме того, уравнение (1. 147) после преобразования можно записать так:
+ Кз^2в. (Ы50)
Здесь новые переменные обозначены так:
Апт
Ап1в Д«2в Аф^
J Л2в= , Л ,= ,Л
Я1в0 Л2в0 TlO
Из выражения (1. 150) следует, что если известны две координаты, то
третья определяется однозначно; поэтому за регулируемые координаты
целесообразно принимать какие-либо две из трех, т. е. либо число оборотов турбины
и число оборотов одного винта, либо числа оборотов двух винтов. В
соответствии с этим, предполагая, что за регулируемые параметры приняты числа
оборотов винтов, уравнения движения можно написать в такой форме:
{Т\Р + Ql) ^1в
в2)
/V" V"
(1.151)
102
Для получения уравнений движения по числам оборотов винтов и турбины
и по температуре газов необходимо совместно решить уравнения (1. 149) и (1. 150)
с уравнениями 2, 3, 4 и 5 системы (1.30), где координату Хп нужно заменить
координатой Хг. В результате этого получим следующие уравнения:
(аор? + а1Р + а2) Х1в = (Ьор + Ьг) Х^ + (Ь2р + Ь3) *?2+
+ (bAp+bb)XGj (1.152)
(ло/?2 + агр + а2) Х2в = (bQp + Ь7) X?l-\- (b8p + b9) Х„2+
+ (bioPJrbn)XG^ (1.153)
(а0р2 + я1/? + л2) X? = (*12/? + *1з) ^?i+ (^14Р + ^15) ^2+
От; (Ы54)
Ь2А) XG^. (1.155)
Аналогично составляются уравнения движения и по другим параметрам,
принимаемым за регулируемые.
При более точном рассмотрении физических явлений, происходящих в
двигателе с дифференциальным редуктором, необходимо учитывать взаимное
аэродинамическое влияние соосных винтов. Это влияние обусловлено изменением
аэродинамических характеристик винтов из-за изменения потока воздуха за
и перед винтами.
Для одновального ТВД с обычным редуктором и двумя соосными ВИШ
уравнения движения выводятся аналогично рассмотренному выше, поскольку
вал турбины жестко связан с валами ВИШ. В этом случае в качестве
регулируемых параметров обычно принимают число оборотов винта (турбокомпрессора)
и температуру газа перед или за турбиной.
в) Возможные законы управления и определение
выражений для коэффициентов
Из уравнений (1.132) видно, что изменять параметры Хп, Хт^
ХГ4, можно как путем изменения расхода топлива, так и
изменением угла установки лопастей винта. Эффективность воздействия
на регулируемые параметры (Хп и Хтз или ХТа) с помощью
указанных в уравнениях (1.132) управляющих факторов (XGt и Х9)
различна, поэтому и характер неустановившегося движения при
всех остальных одинаковых условиях должен быть различным.
Характер протекания значения коэффициента qi, определяющего
самовыравнивание одновального ТВД, почти полностью совпадает
с характером протекания аналогичного коэффициента для
одновального ТРД, рассмотренным выше.
Для двухвального ТВД с одним винтом в качестве регулируе-
мых параметров обычно принимают число оборотов винта или
число оборотов турбокомпрессора и температуру газа. Однако
103
в этом случае число регулируемых параметров превышает число
управляющих факторов.
Из уравнений (1.34), (1.35), (1. 140), (1. 142) видно, что
расходом топлива можно изменять любой регулируемый параметр,
а углом установки лопастей — лишь число оборотов винта. Поэтому
практически один из трех регулируемых параметров (пи п2, Т3)
лишь ограничивается по максимальной его величине — например,
может ограничиваться число оборотов
турбокомпрессора.
М Мъ I Особенностью двухвального ТВД яв-
в / ляется характер протекания величины
коэффициента самовыравнивания.
Благодаря наличию свободной турбины
в этом двигателе ее моментная
характеристика сильно отличается от
характеристики обычного турбокомпрессора.
На фиг. 1.62 показан характер измене-
^ п ния крутящих моментов в зависимости
от числа оборотов свободной турбины.
Фиг. 1.62. Характер изме- Такой характер протекания моментных
нения крутящих моментов (статических) характеристик и обеспе-
свободной турбины и винта чивает большое значение коэффи-
В огВроТИовОСвТалаОвТинТЧаИСЛа «иента самовыравнивания, что во мно-
гих случаях позволяет применять
регулятор числа оборотов ВИШ без каких-либо
стабилизирующих устройств.
Определение выражений для частных производных, входящих в
постоянные коэффициенты уравнений, методически производится аналогично
рассмотренному выше. Новым является определение частных производных
/дМв\ (дМв
нения"(1.130) иТСбл и /Сбср уравнения (1.135).
Крутящий момент, необходимый для привода винта во вращение,
определяется так:
М D5(32
(—-1 ; ( ~ ) ; (dRB/dn)Q и (dRJdy)Q, входящих в коэффициенты q и /С1<р урав-
\ дп /0 \ ду /0 г
где q — плотность воздуха; D — диаметр винта; Р— коэффициент мощности
винта; со — угловая скорость вращения винта.
Коэффициент мощности винта Р является функцией угла установки лопастей
Ф и относительной поступи винта А,, т. е. Р = р(ф,Я). В свою очередь,
lk=2nV/D(a — V/Dny где V—скорость полета. Зависимости Р = Р(ф, ^) обычно
даются в виде сетки характеристик, которые, как правило, получаются в
результате аэродинамических продувок винта. На этих же сетках наносятся значения
к. п. д. винта. На фиг. 1.6.3 приведены подобные характеристики винта.
При одном и том же числе оборотов винта разным скоростям полета должны
соответствовать различные углы установки лопастей винта, т. е. различные
значения коэффициента р. Это согласуется также с тем, что для различных
скоростей полета необходимы различные величины тяги, развиваемой винтом,
т. е. различные значения р. При этом выбирают такой режим работы винта,
при котором его к. п. д. по возможности оставался бы максимальным.
104
Таким образом, если задана скорость полета V, число оборотов винта п
и крутящий момент, развиваемый двигателем, то, пользуясь приведенным выше
выражением для Мв, можно определить значение Р, и по характеристикам винта
определить значение угла установки лопастей ф.
Полученное выше уравнение движения составлено в предположении, что
V=const; поэтому будем принимать ^ = const/ft. Дифференцируя выражения для
Мв по п и по ф, получим
"о
Значения частных производных (д$/дХ)0 и (дХ/д(р)0 определяются из сетки
характеристик винта графическим дифференцированием, причем для определения
(дХ/д(р)0 необходимо характеристики винта перестроить в этих координатах.
Фиг. 1.63. Аэродинамические характеристики винта.
Аналогично сказанному выше, могут быть построены характеристики
винтов и по развиваемой ими тяге. Такие характеристики дают зависимость
значения коэффициента тяги а от величины относительной поступи X для различных
углов установки лопастей винта ф.
На фиг. 1.64 для примера приведена такая характеристика винта.
Тяга, развиваемая винтом, определяется следующим выражением:
R £М2
cos у =
cos у,
где a — коэффициент тяги винта, определяемый по характеристикам винта, т. е.
( Я)
Y — угол атаки самолета, который для многих режимов полета мал,
поэтому cosy~1.
Дифференцируя исходные выражения по п и по ф, получим
Л по L \ д\ /Jo' \ ду /о а0 \ дХ /0 \ ду /0*
дп
Частные производные (да/дХ)0 и (дХ/д(р)о определяются из характеристик
винтов графическим дифференцированием, причем для определения (дХ/д(р)0 эти
105
ОС
Фиг. 1.64. Тяговая характеристика
винта.
Регулятор
г—(Ю-1
i i
пЗи—
XT.
Регулятор
1
r=
Фиг. 1.65. Структурная схема одновального ТВД с обычным
редуктором.
106
характеристики необходимо предварительно перестроить в соответствующие
координаты.
Регулятор
Регулятор
2 В
Регулятор
Ш
d
ЦХп
Регулятор
Г
г i
Фиг. 1.66. Структурная схема одновального ТВД с
дифференциальным редуктором и двумя ВИШ.
Рассмотренные двигатели в соответствии с полученными выше уравнениями
движения можно представить в виде структурных схем. Так, на фиг. 1.65
представлена структурная схема одновального ТВД с обычным редуктором, а на
фиг. 1.66 — с дифференциальным редуктором и двумя соосными винтами. Там
же условно показано возможное подключение регуляторов.
Глава II
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ГАЗОТУРБИННЫМИ ДВИГАТЕЛЯМИ И ОСНОВНЫЕ
ТРЕБОВАНИЯ К НИМ
1. ОСНОВНЫЕ ТРЕБОВАНИЯ К СИСТЕМАМ УПРАВЛЕНИЯ
Выявленные выше свойства рассмотренных двигателей как
объектов регулирования позволяют решить вопрос о выборе таких
регуляторов, которые позволяли бы получить процессы,
отвечающие заданным требованиям.
Прежде всего остановимся на общих требованиях, которым
должна отвечать система автоматического регулирования. Для
различных двигателей эти требования весьма различны; основные
наиболее характерные требования будут рассмотрены ниже.
Из рассмотрения силовых установок, проведенного в гл. I,
следует, что как установившиеся, так и неустановившиеся режимы
работы двигателя ограничиваются определенной допустимой
областью изменения параметров; поэтому система автоматического
регулирования должна допускать лишь такие отклонения от
заданной линии рабочих режимов, которые не выходили бы из
допустимой области.
Согласно фиг. 1.27 эта область для ТРД ограничивается
максимальным числом оборотов, максимальной температурой газа перед
турбиной, границей помпажа и границей устойчивого горения
топлива в камере сгорания. Чтобы не превысить допустимых значений
этих параметров, применяют специальные ограничители ftmax,
Т'зтах и др., которые воздействуют на соответствующие
управляющие факторы. А для того чтобы установить ТРД на заданный
режим работы, необходимо поддерживать определенное значение
числа оборотов двигателя и температуры газов перед турбиной.
Для этого необходимо иметь два регулятора — регулятор числа
оборотов и регулятор температуры газов для ТРД с регулируемым
соплом, и только один регулятор числа оборотов для ТРД с
нерегулируемым соплом.
Для быстрого перевода ТРД с минимального режима работы на
максимальный необходимо иметь еще одно дополнительное устрой-
108
ство, которое называется автоматом (регулятором) приемистости
(разгона). Иногда же требуется ограничивать максимальную тягу
двигателя или крутящий момент турбокомпрессора, для чего
нужны дополнительные регулирующие устройства. Для некоторых
типов двигателей требуется поддерживать заданными не только
«физическое» (т. е. действительное) число оборотов п двигателя,
но и приведенное, выражающееся соотношением пи$ = п/У Т\,
Очевидно, что в этом случае система управления двигателем должна
быть дополнена еще одним устройством.
Самолеты, на которых установлено несколько двигателей,
должны иметь устройство, синхронизирующее работу всех двигателей
по развиваемой ими тяге (мощности). Чтобы синхронизировать
работу некоторых из перечисленных устройств и регуляторов,
необходимо иметь механизм объединенного управления,
позволяющий осуществить перенастройку регулирующих устройств для
изменения режимов работы двигателя.
Из сказанного следует, что для автоматического управления
режимами работы двигателя требуется довольно много регуляторов
и других устройств, что в целом делает систему управления
достаточно сложной.
В дальнейшем все регуляторы и другие устройства, входящие
в систему управления двигателем, будем называть системой
автоматического управления режимами работы двигателя. Отдельные
же регуляторы этой системы, рассматриваемые совместно с
объектом регулирования, будем называть конкретной системой
автоматического регулирования, например, системой регулирования
числа оборотов и др.
К системам автоматического управления предъявляются очень
жесткие требования как в отношении допустимых динамических
и установившихся погрешностей, так и в отношении надежности
работы систем в процессе эксплуатации.
Требования к отдельным регуляторам и, следовательно, ко всей
системе управления можно выявить при совместном рассмотрении
двигателя и самолета как единой динамической системы, при
условии предъявления к ней определенных эксплуатационных
требований, которым должен отвечать летательный аппарат. Выполнение
части этих требований должно обеспечиваться свойствами самолета
(планера), а 'выполнение остальных требований — свойствами
двигателя. Если такие требования к двигателю известны, то можно
определить и те требования, которые необходимо предъявлять
и к системе автоматического управления двигателем.
К разным классам самолетов должны предъявляться различные
требования, так же как и к двигателю, и к системе его управления.
Подробное рассмотрение этого вопроса выходит за рамки
настоящей книги, поэтому ограничимся здесь лишь перечислением
основных требований к отдельным системам регулирования двигателей.
109
В основном требования к системам регулирования газотурбинных
двигателей сводятся к следующему:
Система регулирования чисел оборотов
1. Заданное число оборотов двигателя на основных режимах
должно поддерживаться с максимально возможной точностью,
и в любом случае — с погрешностью менее 0,5%.
2. Величина перерегулирования в переходном процессе,
вызванного всеми возможными видами возмущений, не должна
превышать 2—4% при максимальном режиме работы двигателя.
3. Характер переходных процессов должен быть монотонным,
однозначным или близким к этому.
4. Время переходных процессов должно быть не более 2^-3 сек.
5. Система регулирования числа оборотов должна быть
пригодной для всех рабочих режимов работы двигателя (от режима
малого газа до максимального режима).
Система регулирования температуры газа
1. Заданная температура газа на максимальном режиме
работы двигателя должна поддерживаться с максимально возможной
точностью, и в любом случае — с погрешностью менее 0,5%.
2. Величина перерегулирования в переходном процессе,
вызванного всеми возможными видами возмущения, не должна превышать
нескольких процентов; время, в течение которого проходит процесс
перерегулирования (заброс) в сторону увеличения температуры,
не должно превышать l,0-f-l,5 сек.
3. Время переходного -процесса должно быть не более 3 сек.
4. Система регулирования температуры газов должна быть все-
режимной.
Другие устройства системы управления
1. Ограничители максимальных чисел оборотов должны
работать с погрешностью менее 0,5% при всех условиях полета
самолета.
2. Требования к переходным процессам при работе
ограничителя числа оборотов такие же, как и для регулятора числа оборотов.
3. Ограничители максимальной температуры газа должны
работать с точностью до 0,5% на всех режимах работы двигателя.
4. Требования к переходным процессам при работе
ограничителя температуры газа такие же, как и для регулятора
температуры.
5. Управление режимами работы двигателя должно
осуществляться от одной ручки управления.
Требования к остальным устройствам системы управления
настолько разнохарактерны, что обобщать их для всех двигателей
нецелесообразно.
НО
2. ВОЗМОЖНЫЕ СТРУКТУРНЫЕ СХЕМЫ СИСТЕМ УПРАВЛЕНИЯ
Исходя из выявленных свойств объекта регулирования и перечисленных
выше основных требований к отдельным системам регулирования, можно
определить необходимые свойства отдельных регуляторов, входящих в общую
систему управления двигателем. Прежде всего выясним возможные принципы
построения схем систем управления.
Если в одном объекте регулируются несколько параметров, то
целесообразно, чтобы часть регуляторов работала по замкнутой схеме, а часть — по
разомкнутой. Это объясняется тем, что применение нескольких регуляторов,
работающих по замкнутой схеме, в одном обекте регулирования, приводит
к взаимному влиянию одного контура регулирования на другой через объект,
в результате чего уменьшается запас устойчивости. Применение части
регуляторов, работающих по разомкнутой схеме, позволяет избежать влияния одного
контура регулирования на другой и тем самым повысить запас устойчивости.
Для ТРД с нерегулируемым реактивным соплом единственным
управляющим фактором является расход топлива, в то время как регулируемыми
параметрами могут быть число оборотов двигателя и температура газа. В
большинстве случаев за регулируемый параметр принимают число оборотов, поэтому
температура газов лишь ограничивается по максимальному значению.
Необходимость ограничения температуры газа объясняется изменением внешних условий
полета, в результате чего одному и тому же значению числа оборотов может
соответствовать различное значение температуры газа.
Для ТРД с регулируемым реактивным соплом имеются два управляющих
фактора — расход топлива и площадь реактивного сопла; поэтому можно
применить два регулятора — регулятор числа оборотов и регулятор температуры
газов.
В этом случае целесообразно, чтобы оба регулятора работали по замкнутой
схеме и в крайнем случае один из них (регулятор температуры), может
работать по разомкнутой схеме. В последнем случае система будет проще, но
точность поддержания заданного значения температуры газа будет относительно
меньшая. Это объясняется трудностью осуществления такого счетно-решающего
устройства, которое реагировало бы на изменение внешних условий рн\ Тн; V
и с соответствующей точностью изменяло бы величину проходного сечения
реактивного сопла. Действительно, передаточные функции для объекта регулирования,
когда входом являются величины рн, Тн, V, а выходом — величина Г3, ста"
новятся очень сложными; ввиду этого формировать сигналы в счетно-решающем
устройстве оказывается трудной задачей. Поэтому очень часто выбирают
приближенный и более простой закон коррекции по внешним условиям, что и не
позволяет точно поддерживать заданную величину температуры газа с помощью
разомкнутой схемы.
Таким образом, возможные схемы регуляторов (в отношении работы по
замкнутой или разомкнутой схемам) для ТРД с нерегулируемым и регулируемым
реактивным соплами в самом простом случае можно свести к вариантам,
приведенным в таблице.
Таблица
Тип двигателя
ТРД с нерегу-
чируемым соплом
Схемы регуляторов
регулятор
числа
оборотов
Замкнутая
схема
регулятор
температуры
газа
Ограничитель
максимальной
температуры
другие устройства
1. Ограничитель
максимальных чисел
оборотов
2. Регулятор разгона
(автомат приемистости)
111
Продолжение
Тип двигателя
ТРД с
регулируемым соплом
Схемы регуляторов
регулятор
числа
оборотов
Замкнутая
схема
регулятор
температуры
газа
Замкнутая
схема
Разомкнутая
схема
другие устройства
1. Ограничитель
максимальных чисел
оборотов
2. Регулятор разгона
(автомат приемистости)
Возможные укрупненные структурные схемы систем управления для ТРД
с нерегулируемыми и регулируемыми реактивными соплами показаны на
фиг. 2. 1—2. 4.
Регулятор чисел
оборотов
Ограничитель
максим чисел
оборотов
Регулятор
чисел оборотов
Рн\Тн\
ТРД
с
нерегулируемым с on//ом
\Ограничитель
*— максим темпе-
ратуры газа
—Х°
Задатчик
режима
•v
Ограничитель
макгимальн чи-
сел оборотов
а)
Ограничитель
максим температуры
Г
JX»
Регулятор
числа оборотов
ТРД
с регулируемым
соплом
Ограничитель
максимальн.
температуры [«
Регулятор ^
температуры
Сервомотор
*
Управляющие
элемент
Чувствительные
жменгы
■5
mv
Фиг. 2. 1. Укрупненные структурные схемы ТРД с регулируемым и
нерегулируемым реактивными соплами, с регулятором числа оборотов.
112
Из этих схем можно понять законы управления, способы подсоединения
регуляторов и прохождение сигналов.
Для ТРД с нерегулируемым соплом иногда вместо регулятора числа
оборотов применяют регулятор расхода топлива с дополнительным корректирующим
Топлидная
система
Регулятор
расхода
топлива
корректир
устройсгбо
ПТ
Ограничитесь
максимальных
чисел оборотов
ТРД
Ограничитель
^^ максимальной
—-л температурь!
газа
Фиг. 2.2. Укрупненная структурная схема ТРД
с нерегулируемым реактивным соплом, с
регулятором расхода топлива.
устройством по внешним условиям рн, Тп, V. В этом случае регулируемым
параметром является расход топлива, и по отношению к нему система
регулирования работает по замкнутой схеме, а по отношению к числу оборотов — по
разомкнутой.
Применение регулятора расхода топлива имеет свои положительные и
отрицательные стороны. Положительной стороной является то, что при постоянном
расходе топлива динамические характеристики объекта регулирования
изменяются в лучшую сторону, т. е. при этом увеличивается значение коэффициента
г_
Регулятор
пг или пг
ТРД
с нерегулируемым
соплом \
\Р \Т W
Ограничитель
п, или пг
Ограничитель
г
Г
г
Топлибная
система
Регулятор
расхода
топлиба
норретир.
устройсгбо
la)
ТП
б)
ТРД
с
нерегулируемым соплом
Ограничитесь
Фиг. 2. 3. Укрупненные структурные схемы двухвального ТРД с
нерегулируемым реактивным соплом, с регуляторами числа оборотов и расхода топлива.
1327
113
самовыравнивания q. В этом случае значение q будет соответствовать объекту
регулирования без учета влияния топливной системы.
Отрицательной стороной является то, что регулятор расхода топлива с
корректирующим устройством не может достаточно точно поддерживать заданный
режим двигателя по числу оборотов из-за влияния внешних условий, так как
по отношению к числу оборотов такая схема регулятора является разомкнутой.
Укрупненная структурная схема такой системы регулирования показана на
фиг. 2.2.
U'
Регулятор
п, или п2
\Рн \^и
Cj
4
у
ТРД с
регулируемым реактиб-
HbIM СОПЛОМ
Регулятор
/7/ или п? или
Ограничитель
Т7* или п2
1 х а
1 Г
/я^ 7-
\
\ 1 Л
ч \
*Г"Х°
J г
/ \
Г\2 *
1
*
Фиг. 2.4. Укрупненная структурная схема двухваль-
ного ТРД с регулируемым реактивным соплом, с
двумя регуляторами числа оборотов.
Для двухзального турбореактивного двигателя с нерегулируемым
реактивным соплом регулируемыми параметрами могут быть числа оборотов обоих
каскадов и температура газа. Управляемый же фактор остается один — расход
топлива. Поэтому можно осуществлять регулирование лишь какого-то одного
параметра, а остальные необходимо ограничивать по максимальной величине,
воздействуя на расход топлива.
Благодаря наличию газовой связи между обоими каскадами числа оборотов
их в установившемся движении связаны между собой однозначно. Это видно
из выражений (1.69) и (1.70); если положить в них XF = 0, p= 0 и исключить
Xq^ получим выражение
у Ьх у
h
Следовательно, можно регулировать число оборотов какого-либо одного
каскада, а второй будет следить за регулируемым. В переходном же процессе
будет какое-то отставание (опережение) одного каскада от другого в
зависимости от степени «жесткости» их связи и инерционности каскада.
Для рассматриваемого двигателя можно применить либо регулятор числа
оборотов, либо регулятор расхода топлива, что и указано на укрупненных
структурных схемах, приведенных на фиг. 2.3, а, б.
114
Для двухзального ТРД с регулируемым реактивным соплом имеются два
управляющих фактора — расход топлива и проходное сечение реактивного сопла,
а регулируемые параметры остаются прежними.
В соответствии с этим может быть несколько способов подключения
регуляторов к двигателю. Эти способы можно характеризовать следующей записью:
1) GT-> щ\ Fc-> n2\ ^з max «-ограничивается GT;
2) <7T-> п2\ Fc^ nx\ Т^з max "~ ограничивается GT;
3) GT -> Т^; Fc~* щ\ /22max *- ограничивается GT.
Эта запись означает, что определенным управляющим фактором
регулируется (ограничивается) определенный регулируемый параметр.
Остальные способы, характеризуемые возможными сочетаниями
управляющих факторов и регулируемых параметров, практически мало пригодны из-за
малой эффективности влияния управляющих факторов на регулируемые
параметры, т. е. ввиду малых значений коэффициентов усиления в уравнениях движения.
На фиг. 2. 4 приведена возможная укрупненная структурная схема,
соответствующая указанным способам управления двигателем.
Для одновального ТРД с форсажным устройством (см. фиг. 1.41)
регулируемыми параметрами могут быть число оборотов^ температура газа или
комплекс параметров для форсажного контура, а- управляющими факторами
являются расход топлива в основной контур, расход топлива в форсажное устройство
и площадь проходного сечения реактивного сопла.
Если величина площади проходного сечения реактивного сопла
устанавливается в зависимости от режима форсажа, то эта координата уже не будет
входить в число управляющих факторов. Согласно уравнениям (1. 101-М. 104)
могут быть осуществлены следующие способы управления:
1) <Зт-> п; Ст>ф -> Т\, или тг^, или другой комплекс; ^з max *~
ограничивается (7Т;
2) GT-> Т%; С7т.ф-^ тс*, или р\у или другой комплекс; п <-
ограничивается <7Т.
Если режим форсажного контура задается расходом топлива в форсажную
камеру (?т.ф, то в указанных законах управления нужно вместо Ст.ф
подставить Fc.
Для основного контура могут применяться как регулятор числа оборотов,
так и регулятор расхода топлива с корректором по внешним условиям;
укрупненные структурные схемы приведены на фиг. 2.5, а, б.
Для двухвального ТРД с форсажным устройством регулируемыми
параметрами могут быть числа оборотов каскадов, температура газа перед турбиной или
за турбиной или комплекс параметров; управляющими факторами являются
расход топлива в основной контур, расход топлива в форсажную камеру или
площадь проходного сечения реактивного сопла. Возможные законы управления для
случая, когда расходом топлива в форсажную камеру устанавливается режим
форсажа, будут такие:
1) GT -> п\\ Fc-+ n2; ^з max «-ограничивается GT;
2) GT-> Tl; Fc-> n2; щ -«-ограничивается GT;
3) GT-> n2\ Fc-> пг; T'l max «-ограничивается GT;
4) GT-> n2 (или /zj); Fc-* 7g, или T\t или другой комплекс
ni max «-ограничивается GT;
^з max "-ограничивается (7Т.
Соответствующая упрощенная структурная схема приведена на фиг. 2. 6.
8* 115
Gr—n,Fc ~
F'T\
Ограничитель
П U/7U Т3*
Регулятор
П или Т*
. и или / ^ .
f {» Г Л /'
1 * * \^Vj
ГРД
с форсажным
устройством
Регулятор tf,
к*или
другого комплекса
+~т/
ч
другие комплексы
Ограничитель
п или Т *
о
Топлибная
система
основного
контура
Регулятор
расхода
топлива
±
Регулятор
П U/7U Т3*
Ст +
ГРД
с срорсажным
устройством
Регулятор 1£
ft* или друго*
го комплекса
комплексы
Корректирующее
устройство^
пт^
Фиг. 2. 5. Укрупненные структурные схемы одновального ТРДФ с
регуляторами основного и форсажного контуров.
116
Для одновального ТВД с одним винтом (см. фиг. 1.52) регулируемыми
параметрами являются число оборотов винта и температура газа, а управляющими
факторами являются расход топлива и угол установки лопастей винта.
Из уравнений (1.132) видно, что изменять каждый из регулируемых
параметров можно любым управляющим фактором, т. е.:
1) <?->л; Ст-Г*; 2) ? -> Г*; GT -> п.
На практике часто применяют первый способ управления.
В соответствии с указанными способами управления и возможностью
применения регулятора температуры, работающего по разомкнутой или по замкнутой
схемам, упрощенные структурные схемы приведены на фиг. 2.7.
if "
\
У
/
1
L
Ограничитель
п, или Г*
Регулятор
nf, пг или TS
"П
J
ТРД двухвальн'ый
с форсажным
устройством
1
Регулятор
п, или п2 или
71* ил и др. комплекс
1
2
\ J \~'"'
. \ f - •-'
\
г
/
у
J
* *илц другой
**лТ комплекс
Фиг. 2. 6. Укрупненная структурная схема двухвального ТРДФ
с регуляторами основного и форсажного контуров.
Для одновального ТВД с двумя соосными винтами регулируемыми
параметрами являются числа оборотов винтов (или винта и турбины) и температура
газа, а управляющими факторами — расход топлива и углы установки лопастей
винтов. Наиболее приемлемыми способами управления являются следующие:
l)<Pi—"i; <Р2-Л2; GT->Tl\ 2) <pi^ nx\ cp2-> лт; GT-+Tl,
которые соответствуют полученным ранее уравнениям движения (1. 152), (1. 153),
(1. 154) и (1.155).
При условии, что для регулирования чисел оборотов применяются
регуляторы, работающие по замкнутой схеме, а для регулирования температуры — по
замкнутой или по разомкнутой схемам, упрощенные структурные схемы будут
такими, как показано на фиг. 2.8, а, б.
Для двухвального ТВД с одним винтом (см. фиг. 1.60) регулируемыми
параметрами являются числа оборотов турбокомпрессора, числа оборотов вала
винта и температура газа; управляемыми факторами являются расход топлива
117
Регулятор
П
г
ТВД
одновальныи с
бантом
Регулятор
h
к
Топливная
система
Корректирующее
устройство
\\\
* ГР ■
одновальныи
с одним
винтом
т с одним
t Винтом П *~>
Ограничу- I
тель •+*
Фиг. 2. 7. Укрупненные структурные схемы одновального ТВД с
регуляторами числа оборотов и расхода топлива.
Регулятор
п2 или пТ
ixf
Регулятор
ТВД
однодольный с
ддумя соосными
винтами
Регулятор
ГхГ
Регулятор
nz или пг
Регулятор
п.
корректирующее
устройство
ТВД
одновальныи
с двумя
соосными винтами
Ограничитель
— Я,
Фиг. 2.8. Укрупненные структурные схемы одновального ТВД с двумя
соосными ВИШ, с регуляторами числа оборотов и расхода топлива.
118
и угол установки лопастей винта. В соответствии с уравнениями движения,
полученными выше, способы управления могут быть такими:
1) GT-> nJ
2) GT-+ 7g
»/2B; 7%max <-ограничивается GT
nQ\ n «-ограничивается GT.
nJK
В соответствии с указанными способами управления и при условии, что
регулирование температуры газа может осуществляться регуляторами,
работающими как по замкнутой, так и по разомкнутой схеме, а регулятор числа оборо-
Регулятор
ГОД
двухдольный с
одним винтом
Регулятор
/7 ^
Регулятор
л*
П
Ограничитель
Топливная
система
Корректирующее
устройство
ГвД
двулвальный
с одним винтом
Ограничитель
Т3'илиТ;
Л
Ограничитель
Лтк
'тк
Фиг. 2.9. Укрупненные структурные схемы двухвального 1ВД с одним
ВИШ, с регуляторами числа оборотов и расхода топлива.
тов — по замкнутой схеме, упрощенные структурные схемы будут такими, как
показано на фиг. 2.9, а, б.
Для двухвального ТВД с двумя соосными ВИШ регулируемыми
параметрами могут быть числа оборотов винтов, турбины, турбокомпрессора и температура
газов, а управляющими факторами — расход топлива и углы установки лопастей
винтов. Законы управления для такого двигателя могут быть такими:
2) cpi ->
г-+ пъ
>2-> пт;
-+ ^з или
*тк;
ИЛИ Gj -> П
тк-
В соответствии с этим упрощенные структурные схемы приведены на
фиг. 2. 10, а, б.
Приведенные упрощенные структурные схемы позволяют более полно
разобраться в способах управления двигателями и присоединения регуляторов и
ограничителей в общей схеме управления двигателями.
При строгом рассмотрении полученных ранее уравнений движения
двигателей видно, что возможны и некоторые другие способы управления как
результат возможного сочетания регулируемых параметров и управляющих факторов.
Однако малость значений коэффициентов усиления практически затрудняет
использование этих возможностей.
119
f.
a;
Регулятор
Регулятор
К
PA \T» W
ТдД
двулвальный с
двумя COOCHblMU
винтами
Регулятор
„ или Т'
Ограничитель
Г3* или /7ТК
ТВД
дбухбальныи с дву
мя сооснйши
вантами
корректирующее
устройство
Фиг. 2. 10. Укрупненные структурные схемы двухвального
ТВД с двумя соосными ВИШ, с регуляторами числа
оборотов и расхода топлива.
120
3. ПРИНЦИПИАЛЬНЫЕ СХЕМЫ РЕГУЛЯТОРОВ
а) Регуляторы для ТРД
На практике получили распространение регуляторы скорости
вращения самых различных схем и конструкций.
Однако все эти схемы можно разделить на две группы —
гидромеханические регуляторы и электрические или
электрогидравлические регуляторы. Каждая группа регуляторов может быть
разделена еще и по способу стабилизации процесса. В качестве
стабилизирующих устройств 'применяются изодромная (или гибкая) обратная
связь, дифференциаторы, жесткая обратная связь (иногда с
компенсацией величины неравномерности) и др. Регуляторы
отличаются также и по конструктивному выполнению отдельных их
элементов.
В качестве чувствительного элемента широкое распространение
получил центробежный тахометр, обладающий рядом преимуществ
по сравнению с другими видами тахометров; применяются также
гидравлические и электрические тахометры. Последние два вида
тахометров применяются в гидромеханической и электрической
системах регулирования соответственно, а центробежный тахометр
может применяться для обеих систем.
В качестве усилительных элементов применяют золотниковые
усилители, пневматические и гидравлические реле для
гидравлических систем, релейные, магнитные, ламповые и полупроводниковые
усилители для электрических систем. Выходными каскадами
служат гидравлические, электрические и пневматические сервомоторы.
Автоматика авиационных ГТД развивалась на основе уже
имевшихся достижений по автоматизации поршневых авиационных
двигателей и стационарных турбинных установок; поэтому совершенно
естественно, что целый ряд вопросов по автоматизации
авиационных ГТД решался с учетом этих достижений; в частности,
центробежные тахометры, золотниковые усилители, изодромные
гидравлические стабилизаторы и другие элементы были применены
в авиационных ГТД в самом начале их возникновения.
Ниже приводятся некоторые принципиальные схемы
регуляторов скорости вращения.
На фиг. 2. 11 приведена принципиальная схема изодромного
регулятора скорости вращения, основными элементами которого
являются: центробежный тахометр 1, золотник 4, букса обратной
связи 3, пружина 5, подпирающая буксу обратной связи, пружина 6,
уравновешивающая силу, развиваемую тахометром, рычаг
обратной связи 8, поршень обратной связи 9, перепускной дроссель 10
с пружиной 11, золотник 'постоянного перепада давлений 12 с
пружиной 13, дроссельный кран 75. К золотнику 4 подводится масло
под высоким давлением, подаваемое по специальной магистрали
от шестеренчатого насоса. Это же масло подводится и к поршню
обратной связи. Топливо под большим давлением от специального
шестеренчатого топливного насоса подводится по специальной
121
магистрали к перепускному дросселю 10 и дроссельному крану 15.
По выходе из перепускного дросселя топливо попадает обратно
в топливный бак, из которого питается топливный насос.
При одном и том же расходе топлива через насос, перемещая
перепускной дроссель 10 вверх или вниз, можно перепустить раз-
вход масла под
давлением
Нкамере
сгорания
Фиг. 2. 11. Принципиальная схема регулятора числа оборотов.
/—центробежный тахометр, 2—жиклер, 3—букса обратной связи, 4—золотник, 5,
6—пружины, 7—кулачковый валик, 8—рычаг обратной связи, Р—поршень обратной связи,
10—топливный перепускной дроссель, //—пружина, 12—золотник, 13—пружина,
14—соединительный канал, 15—дроссельный кран, 16—канал малого газа.
личные расходы топлива на слив, непосредственно через
дроссельный кран 15 и через форсунки в камеры сгорания двигателя.
Если число оборотов двигателя по какой-либо причине
превысило заданное значение, то перепускной дроссель переместится
вверх и тем самым увеличит количество топлива, подаваемого на
слив; расход топлива в двигатель уменьшится, вследствие чего
уменьшится и число оборотов двигателя. При уменьшении числа
122
оборотов двигателя по сравнению с заданным произойдет обратное
движение.
Регулятор работает следующим образом. Центробежный
тахометр 1, приводимый во вращение от вала двигателя, передвигает
золотник 4, который уравновешивается пружиной 6. Предположим,
что требуется перевести двигатель на большее число оборотов.
Для этого поворачивают кулачковый валик 7 вправо и, сжимая
пружину 6, перемещают золотник 4 вверх. В результате этого
масло из напорной магистрали начнет поступать в полость над
поршнем обратной связи 9, а из полости под поршнем перепускного
дросселя 10 масло начнет вытекать на слив. Это приведет к тОхМу,
что в первый момент поршень 9 и дроссель 10 начнут перемещаться
вниз и расход топлива, адущий на слив, уменьшится, вследствие
чего расход топлива в камеру сгорания увеличится и число
оборотов двигателя начнет увеличиваться.
Одновременно с передвижением поршня 9 вниз букса обратной
связи 3 'под действием пружины 5 начнет перемещаться вверх и
будет стремиться закрыть окна золотника и ликвидировать доступ
масла в полости над поршнем 9 и предотвратить слив из полости
под поршнем дросселя 10.
Если бы количество масла, заключенное между поршнями 9
и 10, не изменялось в процессе работы регулятора, то букса 3
полностью перекрыла бы окна золотника; описанное устройство
работало бы как жесткая обратная связь и заданной нагрузке (расходу
топлива) соответствовало бы определенное число оборотов,
изменяющееся с изменением величины нагрузки. Однако, когда
поршень 9 опустится вниз от первоначального положения, верхняя
золотниковая часть этого поршня откроет доступ масла из
напорной магистрали через жиклер 2 в полость между поршнями 9 и 10,
и количество масла, заключенное в полости между поршнями,
начнет увеличиваться и начнется перемещение поршня 9 обратно
вверх. В результате поршень 9 займет свое первоначальное
положение. Перепускной дроссель 10 останется в положении, при
котором на перепуск пойдет такой расход топлива, что, если его вычесть
из расхода, подаваемого топливным насосом, то получим расход
топлива в двигатель, соответствующий новому заданному числу его
оборотов. Золотник 4 и букса 3 также займут свое прежнее
положение.
Следовательно, эффект изодрома создается в результате
истечения жидкости из объема, заключенного между поршнями 9 и 10,
через жиклер 2 под действием некоторого перепада давлений.
При необходимости уменьшения .числа оборотов двигателя
описанные движения будут протекать в обратном направлении и лишь
с той разницей, что из объема между поршнями 9 к 10 масло нач-
, нет вытекать через тот же жиклер под действием перепада
давлений, создаваемого пружиной 5. В результате перепускной дроссель
переместится вверх и увеличит расход топлива на перепуск и тем
123
самым уменьшит расход топлива в двигатель, что и приведет
к уменьшению числа оборотов двигателя.
Регулятор работает в соответствии с описанным выше порядком
не во всей области изменения чисел оборотов, а в диапазоне их
изменения от максимальных до каких-то промежуточных значений.
От этих промежуточных чисел оборотов и до числа оборотов,
соответствующего малому газу, регулятор числа оборотов не работает,
а работает регулятор постоянного перепада давлений (или
регулятор расхода) на дроссельном кране 15.
В этом случае рычаг на кулачковом валике 7 поворачивается
влево и с помощью специальной тяги поворачивает дроссельный
кран 15. В результате этого уменьшается проходное сечение 16
этого крана и обе полости над и под поршнем перепускного
дросселя 10 соединяются между собой через канал 14 на кране 15.
Соединение этих полостей разгружает перепускной дроссель 10, который
теперь будет управляться золотником 12.
Расход топлива через дроссельный кран 15 сохраняется
пропорциональным его проходному сечению в том случае, если на кране
удерживается постоянный перепад давлений.
Регулятор расхода или регулятор 'перепада давлений на
дроссельном кране 15 работает следующим образом. Если почему-либо
перепад давлений увеличился, то золотник 12, находящийся в
равновесии под действием, с одной стороны, силы, развиваемой
давлением топлива перед краном, а с другой стороны — силы,
развиваемой давлением за краном и пружиной 13, переместится вниз
и откроет доступ топлива из канала с высоким давлением в полость
под поршеньком перепускного дросселя 10. В результате этого
перепускной дроссель начнет подниматься кверху, сжимая при этом
пружину 11. Очевидно, когда будет достигнут заданный перепад
давлений на дросселе 15 (величина которого определяется
затяжкой пружины 13), под поршеньком перепускного дросселя
установится какое-то давление топлива, которое будет уравновешено
силой пружины 11. При этом перепускной дроссель займет такое
положение, при котором будет перепускаться такое количество
топлива из полости высокого давления, которое обеспечит заданный
перепад давлений на дроссельном кране 15.
Наконец, если дроссельный кран 15 перекрыть полностью, то
благодаря имеющемуся обводному каналу установится такой
минимальный расход топлива, который соответствует режиму малого
газа двигателя. Этот обводный канал 16 показан вверху справа.
Таким образом, поддержание заданных чисел оборотов в
диапазоне от промежуточных до оборотов, соответствующих малому
газу, происходит с помощью регулятора, работающего по
разомкнутой схеме относительно чисел оборотов и по замкнутой схеме
относительно расхода топлива. При этом стабилизация процесса
поддержания заданных чисел оборотов происходит лишь благодаря
большому значению коэффициента самовыравнивания двигателя
из-за постоянного расхода топлива.
124
Конструктивная схема описанного регулятора скорости
вращения приведена на фиг. 2. 12.
Несколько отличной от схемы регулятора числа оборотов,
показанной на фиг. 2. И, но очень похожей на нее, является схема,
приведенная на фиг. 2. 13. Отличие заключается в том, что сервопор-
Фиг. 2. 12. Конструктивная схема регулятора числа оборотов.
/—дроссельный кран, 2—кулачковый валик, 3—букса обратной связи, 4—золотник, 5—грузики
тахометра, б—масляный насос, 7—рычаг обратной связи, 8—поршень обратной связи,
9—-масляная подушка, 10—топливный дроссель, //—золотниковое устройство регулятора расхода.
шень дроссельного крана 11 сделан с одним поршнем, а изодромом
является обычный катаракт 9 с дросселем. Корпус катаракта
удерживается всегда в одном и том же положении с помощью пружин 4
и 10, работающих на сжатие.
Эффект изодрома получается за счет катаракта, в котором
происходит истечение жидкости из одной полости в другую через
жиклер, и пружин, удерживающих корпус катаракта. Этот
регулятор числа оборотов работает аналогично рассмотренному выше.
Рассмотренный изодромный регулятор скорости вращения,
приведенный на фиг. 2. 11, в принципе может применяться для ТРД как
с регулируемым, так и с нерегулируемым реактивным соплом.
В частности, такой регулятор применялся для ТРД с регулируемым
соплом, где он действовал совместно с регулятором температуры
газа, работавшим по разомкнутой схеме. Поэтому далее мы
рассмотрим схему разомкнутого регулятора температуры газа
(корректора).
Принципиальная схема разомкнутого регулятора температуры
приведена на фиг. 2. 14. Входным сигналом в этот регулятор
является величина скоростного напора, т. е. величина р*{ — Рн =
= Д/?сю а выходным сигналом — угол поворота вала, приводящего
125
в движение механизм регулируемого реактивного сопла. Регулятор
(или корректор температуры газа по внешним условиям) состоит
из мембранных коробок 14, соединенных с золотником 10, пружин
(с двух сторон), сервомотора 4, золотника обратной связи 9,
рычага обратной связи 3, шестеренчатого сервомотора 6 и
шестеренчатого перебора 7 с винтом обратной связи на валу 8.
Фиг. 2. 13. Принципиальная схема регулятора числа оборотов.
1—центробежный тахометр, 2—золотник, 3—букса, 4, 5—пружины, 5—кулачковый валик,
7—рычаг обратной связи, 8—цилиндр изодрома, 9—катаракт с жиклером, 10,
12—пружины, //—топливный дроссель, 13—золотник, 14—пружина, 15—соединительный канал,
/б—топливный насос, 17—канал малого газа.
Регулятор (корректор) работает следующим образом. При
отклонении скоростного напора от заданной величины мембранная
коробка деформируется и передвигает золотник 10 в ту или иную
сторону; масло из напорной магистрали 5 под давлением начинает
поступать в одну 'из полостей сервомотора 4. При передвижении
сервомотора 4 открываются окна золотника 9, в результате чего
из той же напорной магистрали масло начинает поступать в
шестеренчатый сервомотор 6 и поворачивать выходной вал 8. Поворот
126
выходного вала приводит в движение золотник 9, который
перекрывает окна. Следовательно, каждому положению сервомотора 4
соответствуют определенные положения выходного вала и конуса
реактивного сопла.
Рычаг обратной связи 3, соединенный с сервомотором 4 и
золотником 10 через мембранную коробку, также осуществляет
жесткую обратную связь, в результате чего передвижение серво-
/ 2
Фиг. 2. 14. Принципиальная схема разомкнутого
регулятора температуры газа.
/—рычаг настройки, 2—соединение рычага обратной связи с
поршнем, 3—рычаг обратной связи, 4—сервомотор, 5—вход масла под
давлением, 6—шестеренчатый сервомотор, 7—шестеренчатый
перебор, 8—вал управления реактивным соплом, 9, 10—золотники,
//—давление (полное) перед компрессором, 12—атмосферное
давление, Л?—жиклер, 14—мембранная коробка, 15—корпус
мембранной коробки, 16—слив масла, 17—профильный кулачок.
мотора 4 приводит в движение золотник 10, перекрывающий
проточные окна. Следовательно, и в этом случае каждому значению
входного сигнала АрСк соответствует определенное положение
сервомотора 4.
Из рассмотренного следует, что описываемый регулятор,
предназначенный для поддержания (корректирования) заданного
значения температуры газа, работает по разомкнутой схеме, где
каждому значению сигнала АрСк соответствует определенное проходное
сечение реактивного сопла.
Сигнал от Дрск в известном диапазоне его изменения может
рассматриваться как приблизительно пропорциональный величине
подогрева воздуха на входе в компрессор; поэтому для
поддержания заданной температуры газа с изменением условий полета
необходимо соответственно изменять проходное сечение реактивного
сопла, что и осуществляет этот регулятор (корректор).
127
Поскольку число оборотов и температура газов связаны между
собой однозначно (при неизменных внешних условиях), очевидно,
что при настройке регулятора числа оборотов необходимо также
настраивать и регулятор температуры на определенную величину
температуры газа.
Для этого в рассматриваемом регуляторе (корректоре)
температуры имеется специальное устройство, состоящее из рычага 1
Фиг. 2. 15. Конструктивная схема разомкнутого регулятора температуры газа.
/—рычаг настройки, 2—рычаг обратной связи, 3—поршень сервомотора, 4—вход масла под
давлением, 5—золотник, 6, 7—соединения золотника с валом сервомотора,
8—шестеренчатый сервомотор, 9—вал управления реактивным соплом, /0—шестеренчатый перебор,
; 15—корпус
мембранной коробки, 16—слив масла.
//—канал от р."* 12—золотник, 13—мембранная коробка. 14—сигнал от
и профильного кулачка 17 и связанное с сектором газа, что
позволяет одновременно задавать необходимые значения числа
оборотов и температуры газа двигателя.
Конструктивная схема описанного регулятора (корректора)
температуры газа приведена на фиг. 2. 15.
На фиг. 2. 16 приведена принципиальная схема регулятора
скорости вращения с акселерометром, где чувствительным элементом
является центробежный тахометр /, управляющий золотником 2
сервомотора 4. Расход топлива через двигатель изменяется
посредством перепуска топлива из напорной магистрали, что
осуществляется с помощью перепускного дросселя 9.
Стабилизирующим механизмом служит устройство, состоящее
из элементов 5, 6, 7, 8, дающее сигнал, пропорциональный скорости
128
изменения числа оборотов двигателя. Этот сигнал суммируется
с сигналом, пропорциональным величине отклонения числа
оборотов, на сервомоторе 4. Стабилизирующее устройство работает
следующим образом. Если изменяется число оборотов двигателя,
т. е. dn/dt=£0, то под действием разности момента инерционных
сил и момента, развиваемого пружиной 7, происходит поворот
вращающегося груза 6 вместе с золотником 8 относительно
вращающейся втулки 5.
Отдала f
ддигатем\
Насос для
масла
Т) Насосдля
топлида
Фиг. 2.16. Принципиальная схема регулятора скорости вращения с
акселерометром.
/—центробежный тахометр, 2—золотник, 3—механизм настройки, 4—сервомотор, 5—втулка
с резьбой, 6—груз (вращающаяся масса), 7—пружина, 8—золотник, 9—дроссель топлива,
10—-камера сгорания двигателя.
Благодаря резьбовому соединению груза 6 с втулкой 5
происходит осевое перемещение золотника, что приводит к увеличению
расхода масла в сервомотор 4 и изменяет его скорость движения
пропорционально величине ускорения вращения двигателя.
Следовательно, законом управления для рассматриваемого
регулятора числа оборотов является сумма сигналов — от величин
скорости вращения и ускорения вращения. Описанный регулятор
числа оборотов может применяться как для ТРД с
нерегулируемым, так и для ТРД с регулируемым реактивным соплом.
На фиг. 2. 17 приведена принципиальная схема электрогидравлического
регулятора скорости вращения> чувствительным элементом его является таходинамо
Z, величина снимаемого напряжения с которого пропорциональна скорости
вращения. Сигнал с таходинамо подается на магнитный усилитель 2. На этот же
магнитный усилитель подается сигнал, пропорциональный ускорению вращения,
который получается благодаря дифференцированию снимаемого с таходинамо
1327
129
сигнала с помощью /?С-контура. Далее суммированный и усиленный сигнал после
выпрямления подается на пропорциональное электромагнитное реле 3, которое
дросселирует выход рабочей жидкости (топлива) из левой полости
сервомотора 6.
Подача топлива в двигатель осуществляется с помощью плунжерного
насоса 7, который приводится во вращение от вала двигателя. Расход топлива
через насос зависит от числа его оборотов и от угла наклона шайбы 8, которая
управляется сервомотором 6. Правая полость сервомотора соединена непосред-
Фиг. 2. 17. Принципиальная схема электрогидравлического
регулятора скорости вращения.
/—таходинамо, 2—магнитный усилитель, 3—пропорциональное реле, 4, 5.
13—жиклеры, 6—сервомотор, 7—плунжерный насос, 8—наклонная шайба,
9—радиальные отверстия, 10—корпус, //—ограничитель максимальных чисел
оборотов, 12—мембрана.
ственно с напорной топливной магистралью, а левая — через жиклер 5; кроме
того, левая полость сервомотора соединена со сливом через регулируемый
жиклер 4, проходное сечение которого изменяется электромагнитным реле 3.
Регулятор работает следующим образом. Если почему-либо число оборотов
двигателя возрастет сверх заданной величины, сигнал от таходинамо увеличится,
якорек электромагнитного реле подтянется кверху и несколько увеличит
проходное сечение жиклера 4, в результате чего давление в левой полости сервомотора
уменьшится и поршень этого сервомотора передвинет наклонную шайбу 8,
установив ее на меньший угол наклона. Насос начнет подавать меньшее количество
топлива в двигатель и число оборотов его уменьшится. В процессе
неустановившегося движения к сигналу, пропорциональному отклонению числа оборотов,
добавляется сигнал, пропорциональный величине ускорения вращения, в
результате чего и происходит стабилизация процесса.
130
В эгой же схеме предусмотрен ограничитель максимально допустимых чисел
оборотов //, принцип работы которого состоит в следующем. Если число
оборотов двигателя превысит допустимое, то благодаря наличию радиальных
отверстий 9 в роторе насоса (обладающих насосным эффектом) давление топлива
в корпусе 10 повысится и прогнет мембрану 12, которая с помощью рычажка
откроет жиклер 13. В результате этого давление топлива в левой полости
сервомотора 6 уменьшится, поршень переместит наклонную шайбу в сторону меньшем
производительности насоса и число оборотов двигателя уменьшится 1.
/
А
/
/
Дроссельный кран
Кфорсункаи
7/ 7 6
Фиг. 2. 18. Принципиальная схема регулятора расхода топлива.
/—плунжерный топливный насос, 2—сервомотор, 3—ограничитель максимальных
чисел оборотов, 4—баростат, 5—анероид. 6—суммирующий рычаг, 7—диафрагма,
8—-жиклер, 9—мембрана, 10—поршень, 11—шток.
На фиг. 2.18 приведена принципиальная схема регулятора
расхода топлива. Как отмечалось выше, такой регулятор работает по
замкнутой схеме в качестве регулятора расхода топлива, а по
отношению к числу оборотов он работает по разомкнутой схеме.
Этот • регулятор состоит из плунжерного топливного насоса 1,
сервомотора 2, изменяющего положение наклонной шайбы,
ограничителя максимальных чисел оборотов 3 и специального
устройства 4, реагирующего на изменение внешних условий. Иногда это
устройство называют баростатическим устройством (баростат).
Баростат состоит из анероида 5, воздействующего на рычаг 6,
который закреплен на опорной диафрагме 7; второй конец рычага 6
1 Применение таходинамо (постоянного тока) в качестве чувствительного
элемента не позволяет поддерживать число оборотов двигателя с высокой
точностью из-за большой неточности работы таходинамо (1,5ч-2,О°/о). Поэтому для
электрических систем в качестве чувствительного элемента более целесообразно
применять центробежный тахометр с последующим электромеханическим
преобразователем или таходинамо переменного тока.
о* 131
изменяет проходное сечение жиклера 8. Кроме того, имеется
чувствительный элемент, замеряющий давление топлива, развиваемое
топливным насосОхМ. Это устройство состоит из упругой мембраны 9,
поршенька 10 и штока 11, также воздействующего на рычаг 6.
Таким образом, на рычаге 6 суммируются два сигнала: один — от
анероида и второй—от величины давления топлива, развиваемого
насосом. На той же фиг. 2.18, в верхнем левом углу, приведена
характеристика форсунки, из которой следует, что каждому
значению давления топлива в напорном коллекторе соответствует
определенный расход топлива через форсунку. Следовательно, можно
считать, что сигнал, поступающий на рычаг 6 от величины давления
топлива, пропорционален расходу топлива (при постоянном
значении плотности топлива).
Схема топливного насоса переменной производительности с
ограничителем максимальных чисел оборотов аналогична схеме,
приведенной на фиг. 2. 17. Регулятор, приведенный на фиг. 2. 18,
работает следующим образом. При изменении по каким-либо причинам
заданного расхода топлива в двигатель изменяется давление
топлива за насосом, вследствие чего шток 11 чувствительного элемента
передвигает рычаг 6, который увеличивает или уменьшает
проходное сечение жиклера 8 и тем самым изменяет давление топлива
в правой полости сервомотора, приводящего наклонную шайбу.
Изменение положения наклонной шайбы в соответствующую
сторону изменяет расход топлива в двигатель. Следовательно, но
отношению к сигналу, пропорциональному величине расхода топлива,
этот регулятор работает по замкнутой схеме.
Как было выяснено при рассмотрении эксплуатационных
свойств двигателя, с изменением внешних условий рн, Тн, V
должен изменяться и расход топлива.
Изменение расхода топлива при изменении внешних условий
осуществляет анероид 5. Если предположить, что на его
деформацию влияют величины р* и Г*, то из той же схемы регулятора
можно видеть, что с изменением величины общего сигнала,
идущего от анероида, изменяется проходное сечение жиклера 8
и тем самым изменяется расход топлива через двигатель.
Напомним, что по мере увеличения высоты полета действуют
следующие факторы: уменьшение рн приводит к уменьшению
расхода топлива вследствие уменьшения расхода воздуха;
уменьшение Тн приводит к увеличению расхода топлива вследствие
относительного увеличения расхода воздуха через двигатель;
увеличение V приводит к относительному увеличению расхода воздуха
в результате увеличения р*. Таким образом, в зависимости от
изменяющихся внешних условий должно происходить и
соответствующее изменение расхода топлива так, чтобы число оборотов
сохранялось постоянным.
Однако при всех возможных условиях полета сигнал,
подаваемый от анероида, не может совпадать с необходимым сигналом,
132
при котором устанавливался бы требуемый расход топлива и числа
оборотов оставались бы неизменными при изменении внешних
условий. Поэтому коррекция изменения расхода топлива по условиям
полета с помощью анероида является приближенной, в результате
которой значение чисел оборотов практически не сохраняется
неизменным при изменении условий полета.
Кроме того, такая схема регулятора может дать заметное
отклонение значений чисел оборотов двигателя и от изменения
характеристик ее элементов, что присуще разомкнутой схеме.
Фиг. 2. 19. Конструктивная схема баростата.
Однако рассмотренная схема регулятора очень проста и
надежна в эксплуатации, благодаря чему она и получила достаточно
широкое распространение на практике.
Следует обратить внимание на то, что рассматриваемый
регулятор не имеет никаких стабилизирующих устройств и
стабилизация процесса по числу оборотов происходит лишь в результате
наличия большого коэффициента самовыравнивания двигателя
из-за постоянства расхода топлива, осуществляемого этим
регулятором.
Конструктивная схема баростата показана на фиг. 2. 19, а
схема регулятора расхода топлива (насоса с ограничителем
максимальных оборотов) приведена на фиг. 2.20.
На фиг. 2.21 приведена принципиальная схема системы
регулирования для ТРД с регулируемым реактивным соплом с электро-
133
гидравлическими регуляторами числа оборотов и температуры газа
за турбиной, работающими по замкнутым схемам.
Регулятор числа оборотов во многом аналогичен
рассмотренному выше, за исключением применения в нем таходинамо
переменного тока / и шестеренчатого топливного насоса 2, работающего
с перепуском. Регулятор числа оборотов работает по сигналам от
величин отклонения и скорости отклонения регулируемого
параметра. Эти сигналы складываются в магнитном усилителе. Электро-
Фиг. 2. 20. Конструктивная схема регулятора расхода топлива (насоса с
ограничителем максимальных оборотов).
магнитное пропорциональное реле 3 перемещает золотник, который
управляет дроссельным клапаном 4, изменяющим расход топлива
в двигатель. В регуляторе температуры газа в качестве
чувствительного элемента 'применена термопара 5, а в качестве
промежуточных усилителей — усилители 6, 7, выходной гидравлический
усилитель 8 (гидромотор), приводящий в движение конус (или
створки) реактивного сопла.
Этот регулятор работает также по сигналам от величин
изменения и скорости изменения регулируемого параметра, для чего
между промежуточными усилителями 6, 7 введен .ftC-контур 9.
Выходной сервомотор астатический, для привода золотника которого
применяется пропорциональное электромагнитное реле 10. Имеется
единая ручка управления 11 для настройки обоих регуляторов на
заданные величины. Способ работы рассматриваемой системы
регулирования ТРД с регулируемым соплом понятен из приведенной
схемы.
134
Регуляторы температуры газа могут быть составлены из самых
различных элементов, часто совершенно различных по
конструкции, но они должны быть достаточно быстродействующими, чтобы
процессы регулирования проходили с малыми забросами. Как
увидим ниже, это требование трудно выполнимо, поскольку объект
регулирования по температуре газа является практически
безынерционным.
Ю
Фиг. 2.21. Принципиальная схема регулятора числа оборотов и
температуры газа для ТРД с регулируемым реактивным соплом.
1— таходинамо, 2—шестеренчатый насос, 3, 10—пропорциональные реле,
4—дроссельный клапан, 5—термопара, в, 7—усилители, 8—гидромотор, 9—контур RC, //—ручка
управления.
Существуют различные мнения по вопросу о том, где более
целесообразно поддерживать заданную температуру газа — перед
или за турбиной. И для одного, и для другого случая имеются свои
положительные и отрицательные стороны.
Прежде всего напомним, что независимо от того, регулируется
ли температура газа перед или за турблной, требования к величине
допустимого перерегулирования определяются жаропрочностью
материала соплового аппарата и лопаток рабочего колеса турбины.
Все современные двигатели обычно рассчитываются на возможно
более высокую температуру газа, поэтому запас по жаропрочности
135
r-радиус сечения
элементов турбины оказывается очень малым. Этим и объясняется
жесткость требований к переходным процессам по температуре
газа.
Кроме того, когда говорят о температуре газа за или перед
турбиной, то понимают под этим среднемассовую температуру газа.
В действительности же поле температур как перед, так и за
турбиной неравномерно как по радиусу, так и по окружности. Для
примера на фиг. 2.22 приведены две изотермы, соответствующие
одному из сечений двигателя.
Неравномерность поля температур объясняется очень многими
причинами, главными из которых являются: неравномерная подача
топлива через форсунки,
неравномерное поле скоростей
воздуха, выходящего из
компрессора, всякого рода отклонения от
нормального процесса горения
и др. Величина неравномерности
поля температур иногда
составляет 100—150° С, причем эта
величина изменяется в зависимости
от режима работы двигателя.
Кроме того, при создании
двигателя стремятся специально
ввести неравномерность поля
температур по радиусу с целью
уменьшения температуры лопаток
турбины в местах их крепления
в дисках.
Отмечается также и нерегулярность поля температур газа,
т. е. в одной и той же измеряемой точке при 'неизменном режиме
работы двигателя температура газа изменяется по произвольному
закону, причем эти изменения достигают значительных величин..
Это явление обычно объясняют многими причинами, но, по всей
вероятности, главными из них являются непостоянная подача
топлива в двигатель системой автоматического регулирования в
пределах точности ее работы и большая турбулентность потока
воздуха.
Таким образом, измерить истинную температуру газа в
двигателе очень трудно и осуществить это можно лишь приближенно.
Кроме того, приборы, применяемые для измерения температуры
газа, также обладают определенными динамическими
погрешностями, что еще более затрудняет суждение о действительной
температуре газа.
Учитывая сказанное выше, обычно для измерения температуры
газа применяют несколько термопар, соединенных либо
последовательно, либо параллельно, что дает возможность усреднить
полученный результат измерения и таким образом приблизиться к
действительному значению температуры газа. Чем больше точек изме-
Фиг. 2.22. Характер температурного
поля двигателя.
136
рения, тем ближе будет измеренная величина к действительному
значению температуры.
Измерение температуры газа Г* пеРВД турбиной осложняется
ее высоким значением, относительно большой неравномерностью
и опасением за состояние двигателя в случае разрушения
термопары и попадания ее частиц на лопатки турбины. В то же время
следует иметь в виду, что при этом можно более точно определить
режим работы двигателя и учесть температурную напряженность
материала турбины.
Температуру газа Г* за турбиной легче измерить ввиду того,
что там наблюдается меньшая неравномерность температурного
поля и сама величина температуры меньше — приблизительно на
150—200°.
Однако при этом следует иметь в виду, что значение
температуры Т\ не всегда однозначно характеризует величину температуры
Т\. Такая «неоднозначность» зависимости Г* от П для различных
режимов работы двигателя может быть объяснена изменением
степени понижения давления в турбине и изменением к. п. д.
турбины.
На практике в большинстве случаев измеряют усредненную
температуру газа за турбиной.
Ограничители максимального значения температуры газа
работают по тому же принципу, что и регуляторы температуры, но
воздействуют они или на изменение расхода топлива, или на
настройку регулятора.
На фиг. 2. 23 приведена схема ограничителя температуры газа для
двигателя, работающего с регулятором числа оборотов, аналогичным приведенному на
фиг. 2. 18.
Температура газа за турбиной измеряется блоком термопар /; далее сигнал
усиливается в магнитном усилителе 2 и идет на электромагнитное реле 3,
которое управляет жиклером 4. Последний соединен с полостью сервомотора 5. Если
температура газа превысит заданную величину, то сечение жиклера 4
увеличится и давление в левой полости сервомотора уменьшится, в результате чего
наклонная шайба насоса переместится в сторону уменьшения расхода топлива.
Как видно, действие ограничителя температуры газа аналогично действию
рассмотренного выше ограничителя скорости вращения.
Как отмечалось выше, к надежности работы системы регулирования
предъявляются самые жесткие требования. Это находит свое отражение в том, что
наряду с основной системой регулирования иногда применяют аварийную, более
простую систему, которая вступает в работу в случае выхода из строя основной
системы. Часто аварийная система применяется там, где используется
электроэлектронная аппаратура, которая пока еще не может считаться вполне надежной
по сравнению с гидромеханической аппаратурой.
На фиг. 2.24 приведена еще одна принципиальная схема регулятора
температуры, который может служить и ограничителем максимальной температуры.
Регулятор работает следующим образом. Если температура газа равна
заданной, то сигнал от термопары 1 уравновешивается напряжением, снимаемым
с потенциометра. Если температура газа не равна заданной, то сигнал от
термопары усиливается в магнитном усилителе 2 и включает электродвигатель 3,
который с помощью кулачка 4 передвигает золотник 5 и подает масло от насоса
8 к гидромотору 6. Последний перемещает конус реактивного сопла 7 (или
створки сопла) и тем самым изменяет температуру газа. В последнем каскаде
137
усиления имеется жесткая обратная связь — от гидромотора к буксе золотника.
Здесь применены два дросселя, которые работают так, что при отклонении
сигнала в одну сторону ампер-витки в управляющей обмотке W\ одного дросселя
создадут ток одинакового направления с ампер-витками подмагничивающей
обмотки w2, а в обмотке другого дросселя, наоборот, — ток разного
направления. В этом случае переменный ток, протекающий по обмоткам w3, поступит
на обмотку w4 и, через конденсатор, на обмотку w5 электродвигателя. Благодаря
Ограничитель
температуры
Фиг. 2.23. Принципиальная схема регулятора числа оборотов с ограничителем
максимальной температуры газа.
/—термопара, 2—магнитный усилитель, 3—электромагнитное реле, 4—жиклер, 5—сервомотор
насоса.
сдвигу фаз по току в обмотках ш4 и w5 на 90° электродвигатель будет
вращаться и с помощью гидромотора 6 будет изменять положение конуса реактивного
сопла.
При изменении температуры газа в другом направлении характер работы
дросселей будет обратным и электродвигатель 3 будет вращаться в обратном
направлении.
В системе предусмотрена ручка объединенного управления, позволяющая
одновременно настраивать на заданные значения число оборотов и температуру
газа.
При регулировании двигателя по приведенным числам оборотов, т. е. по
комплексу nnv=nl'\/rx^ на регулятор числа оборотов должны подаваться два
сигнала: один — пропорциональный действительному числу оборотов, а второй —
пропорциональный величине температуры заторможенного потока на входе в
компрессор, причем необходимо иметь устройство, подающее сигнал по функции
/'
138
На фиг. 2.25 показан характер изменения значений пПр = п/ у j* от
величины температуры заторможенного потока для различных значений
действительных (физических) чисел оборотов двигателя и зависимость пар от п для
различных значений Т^. Эти зависимости могут быть получены при помощи счетно-
решающего устройства.
Ц Л
Регулятор числа\
оборотов сплун
жерным насосом
и ограничитель
максимальных
чисел оборотов
Фиг. 2. 24. Принципиальная схема ограничителя максимальной температуры
газа.
/—термопара, 2—магнитные усилители, 3—электродвигатель, 4—кулачок, 5—золотник,
5—гидромотор, 7~конус реактивного сопла, 8—масляный насос.
На фиг. 2. 26 показана возможная схема счетно-решающего устройства,
которое корректирует сигнал настройки регулятора числа оборотов так, что система
регулирования работает по сигналу Япр=я/"|/У*.
В качестве чувствительного элемента для замера температуры Т\
применяют трубку, закрепленную одним концом неподвижно и изготовленную из мате-
V 1.2 г.з
v V б) п
Фиг. 2. 25. Характер зависимости приведенных чисел оборотов
от температуры заторможенного потока.
139
Счетно-
решающее
устройство
Фиг. 2.26. Принципиальная схема корректора, выдающего сигнал
в систему регулирования, пропорциональный п/у Т* .
1—термопара, 2—кулачок, 3—механизм настройки.
V
Корректор
Регулятор
чисел
оборотов
Фиг. 2.27. Схема воздействия
корректора, выдающего сигнал,
пропорциональный п/у Т*, для
электрической части схемы
регулятора числа оборотов.
140
риала, который имеет большой коэффициент расширения, и стержень,
изготовленный из материала с очень малым коэффициентом расширения. Стержень
соединен через рычажную передачу с кулачком 2, который осуществляет затяжку
пружины регулятора. %Кроме того, имеется рычаг настройки 3 на заданное число
оборотов. *
Укрупненная структурная схема такого устройства показана на той же
фиг. 2.26.
Необходимый закон коррекции (нелинейный) осуществляется путем выбора
соответствующего профиля кулачка 2. Величина Т\ изменяется с изменением
условий полета; это изменение может происходить с достаточно большой
скоростью. Поэтому постоянная времени чувствительного элемента температуры
должна иметь-относительно небольшую величину. Для получения малой
динамической ошибки величина этой постоянной времени, определяющей
быстродействие всего корректирующего устройства, должна выбираться исходя из
заданных требований, главным образом к скороподъемности самолета.
Для электрических схем регуляторов, работающих по сигналу /гпр=я/
может применяться такое же или другое устройство; оно также должно
воздействовать на настройку регулятора, как это показано на фиг. 2.27.
Для других типов турбореактивных двигателей, как, например, для двух-
вальных ТРД с регулируемым и нерегулируемым реактивным соплом, для двух-
контурных двигателей и возможных аналогичных им других схем, могут
применяться регуляторы рассмотренных выше схем. В каждом конкретном случае,
конечно, будет определенное отличие, но общие принципы останутся примерно
теми же.
б) Регуляторы для ТРДФ
Регуляторы для форсажного контура
Регулирование основного контура ТРДФ осуществляется с
помощью тех же регуляторов, которые описаны выше. Особенностью
в данном случае является регулирование форсажного контура. Как
говорилось выше, регулируемыми координатами могут быть
различные параметры и комплексы параметров рабочего процесса,
а именно: Тг Т*; р\\р\\ р\\р\\ /?*, р\ и др.
На фиг. 2. 28 приведена схема системы регулирования форсаж-
Рч *
ного контура, работающего по сигналу от —5==71Т . Здесь пневма-
Ра
тический (мембранный) делитель давлений 1 выдает сигнал, про-
р\
порциональныи величине —— = тг, и воздействует на сервомотор
Ра
с жесткой обратной связью 2, который изменяет расход топлива
в форсажную камеру. Регулятор (клапан) 3 поддерживает
примерно постоянный перепад давлений топлива на регулирующем органе.
Поддерживая заданную степень расширения газов на турбине,
стремятся оставить неизменным режим работы основного контура.
С помощью же специальной настройки Y0 можно изменять
заданную степень расширения. Режим работы форсажной камеры
задается открытием проходного сечения реактивного сопла с помощью
специального устройства 5.
141
Регулятор работает следующим образом. При раскрытии
реактивного сопла уменьшается давление за турбиной р*э т. е.
возрастает я*. Вследствие этого мембрана делителя 1 с золотником
сервомотора перемещается кверху и сервомотор 2 срабатывает в
сторону увеличения расхода топлива в форсажную камеру, т. е. в сто-
Фиг. 2.29. Схема
сажного контура,
регулятора
форработающего по
Фиг. 2.28. Схема регулятора
форсажного контура, работающего по
сигналу от ят= ——, с воздействием сигналу от ят= —-, с воздействием
Ра Р\
на расход топлива. на реактивное сопло.
1—мембранный делитель давлений,
2—сервомотор с жесткой обратной связью,
3—клапан, 4—топливный насос, 5—механизм
управления реактивным соплом.
рону увеличения давления р\. Аналогично регулятор будет
работать и при повышении давления р*т
В обратную сторону регулятор будет работать при увеличении
давления р\ или при уменьшении давления р\%
На фиг. 2.29 приведена несколько измененная схема регулиро^
вания форсажного контура, работающего по тому же сигналу от
re*, когда регулятор воздействует не на расход топлива в
форсажную камеру, а на проходное сечение реактивного сопла. В этом
случае режим работы форсажного контура задается определенным
142
расходом топлива в форсажную камеру. Принцип работы этого
регулятора ясен из схемы.
На фиг. 2. 30 приведена укрупненная схема регулятора
форсажного контура, работающего по сигналу от р\. Здесь с помощью
плунжерного насоса 1 топливо подается к форсункам 2, причем
расход топлива дозируется в зависимости от величины сигнала р\.
Сигнал р* воспринимается\анероидом 3, который через рычаг
воздействует на сопло-заслонку 4 и последняя изменяет слив из правой
полости сервомотора 5. С помощью кулачка 6 осуществляется об-
Фиг. 2.30. Схема регулятора форсажного
контура, работающего по сигналу от р\.
/—плунжерный насос, 2—форсунка, 3— анероидная
коробка. 4—сопло-заслонка, 5—сервомотор,
б—кулачок обратной связи.
Фиг. 2.31. Характер
зависимости Г4=/(£т.ф).
ратная связь по положению поршня сервомотора, изменяющего
наклон шайбы насоса 1. Следовательно, каждому значению р\
соответствует определенный расход топлива в форсажную камеру.
С помощью кулачка 6 можно осуществлять необходимый
нелинейный закон подачи топлива.
Аналогичная схема регулятора может работать по сигналу
от р*. При включении форсажного контура одновременно с
подачей топлива в форсажную камеру раскрывается реактивное
сопло.
При регулировании форсажного контура по сигналу от Г* или
от Г* может использоваться какой-либо регулятор температуры
газа, например, приведенный на фиг. 2.21. В этом случае он
должен воздействовать либо на расход топлива в форсажную камеру,
либо на створки реактивного сопла.
Горение топлива в форсажной камере может нормально
протекать лишь в определенном диапазоне значений коэффициента
избытка воздуха а. Поэтому в процессе регулирования форсажного
контура необходимо соблюдать условие amin<a<amax- На фиг. 2. 31
показан характер зависимости температуры газа на выходе из
форсажной камеры от расхода топлива; из графика видно, что, начи-
143
ная с некоторого значения GT^} температура газа практически не
увеличивается. Следовательно, система регулирования форсажного
контура не должна допускать увеличения расхода бт.ф выше
некоторой определенной величины, так как при дальнейшем
увеличении G-г.ф топливо не сгорает, а просто выбрасывается через сопло
(регулируемые параметры двигателя не реагируют на изменение
ет.ф).
Ввиду сказанного более целесообразно осуществлять систему
регулирования форсажного контура так, чтобы регулятор
воздействовал не на расход топлива бт.ф, а на реактивное сопло, а режим
задавался бы расходом топлива. При этом с изменением условий
полета величина бт.ф должна изменяться. При использовании же
такой схемы регулятора, где регулятор воздействует на расход
топлива G-г.ф, необходимо ставить специальный ограничитель
От.фтах, предназначенный для ограничения величины бТ.ф таким
значением, при котором регулируемые параметры еще
реагировали бы на изменение G-г.ф. Такие ограничители могут быть
выполнены с применением баростатов, например, по схеме, аналогичной
приведенной на фиг. 2. 19, т. е. с применением баростатического
устройства, воздействующего на бт.ф по сигналу от р* или /?*.
Сказанное выше одинаково относится как к системам
регулирования по температуре, так и к системам регулирования по
степени расширения газа.
Регуляторы для воздухозаборников
В соответствии со сказанным выше об основных свойствах
диффузоров, системы регулирования для них можно разделить на
две категории — системы, работающие по разомкнутой схеме, и
системы, работающие по
замкнутой схеме.
Под разомкнутыми
схемами понимают такие, в
которых режим работы
воздухозаборника
устанавливается по косвенным
параметрам, например, по
параметрам, характеризующим
условия полета и режим
работы основного контура
Конус
L
Воздухозаборник
Двигатель
Фиг. 2 32. Укрупненная структурная схема
разомкнутой системы регулирования
воздухозаборника.
двигателя.
Для примера на фиг.
2. 32 показана укрупненная
структурная схема такой системы, в которой режим работы
двигателя определяется числом его оборотов и этот сигнал подается на
механизм изменения положения створок перепуска воздуха из
воздухозаборника. Сигнал же, пропорциональный скорости полета,
поступает на механизм передвижения конуса воздухозаборника.
144
Причем система работает так, что при увеличении скорости
полета V центральное тело (конус) (воздухозаборника выдвигается
('передвижение конуса может быть не плавное, а ступенчатое);
при одной и той же скорости полета, но при уменьшении числа
оборотов двигателя, раскрываются створки перепуска
(увеличивается перепуск воздуха).
Механизм передвижения конуса и створок может представлять
собой либо электромеханическое, либо электрогидравлическое
устройство.
По вполне понятным причинам такая система регулирования
(разомкнутая) не позволяет достаточно точно ^поддерживать
необходимый режим работы воздухозаборника, но зато она весьма
проста и надежна в работе.
Под замкнутыми системами регулирования воздухозаборника
понимают такие системы, в которых режим работы
воздухозаборника устанавливается по внутренним параметрам, определяющим
этот режим.
Как говорилось выше, основным критерием для выбора
законов управления воздухозаборником является получение
максимальной эффективной тяги. В зависимости от того, какие
регулирующие органы предусмотрены на воздухозаборнике и каковы
характеристики самого воздухозаборника, могут быть весьма
различными и законы управления воздухозаборником.
Для того чтобы судить о том, находятся ли регулирующие
органы воздухозаборника в оптимальных положениях и какова
величина отклонения от этих положений (обеспечивающих
максимальное значение эффективной тяги), используют комплексы
статических и полных давлений, измеренных в потоке воздуха,
набегающего на воздухозаборник, и внутри воздухозаборника. Иначе
говоря, по этим комплексам давлений, а в некоторых случаях и по
давлениям, отбираемьш с летательного аппарата, судят о
величинах ад и фд. При этом в системе управления используют два сигнала
от комплексов давлений — один сигнал характеризует
действительное значение эффективной тяги при данном положении
регулирующих органов, а второй сигнал характеризует возможное
максимальное значение эффективной тяги (или соответственно эти же
сигналы позволяют судить о значениях ад и фд).
В принципе замкнутые системы регулирования
воздухозаборников можно разделить на две группы — системы, работающие по
некоторому комплексу параметров |3, определяющему режим
работы диффузора, и по местоположению замыкающего скачка
уплотнения.
На фиг. 2. 33 приведена укрупненная схема системы
регулирования воздухозаборников, работающей по комплексу параметров
J3. Здесь центральное тело перемещается специальным регулятором
так, что один из косых скачков уплотнения сходится (проходит
вблизи или касается) на кромке входной части (диффузора). Для
10 1327 145
определения места расположения этого скачка уплотнения
применена напорная трубка, сигнал от которой подается в регулятор.
Второй регулятор управляет механизмом перепуска воздуха.
В этой системе входными сигналами являются некоторые
комплексы параметров р, определяющие режим работы диффузора
совместно с двигателем, а сигналы Х° и Y0 являются задающими.
На фиг. 2. 34 приведена возможная схема системы управления
воздухозаборником для самолета с ТРДФ, предназначенного для
больших скоростей полета, когда режим работы воздухозаборника
Сервомотор
Регулятор
Фиг. 2. 33. Укрупненная структурная схема системы регулирования
воздухозаборника по комплексу параметров (3.
характеризуется местоположением замыкающего скачка
уплотнения. Здесь центральное тело управляется регулятором,
аналогичным приведенному на фиг. 2.33, так, что один из косых скачков
уплотнения (обычно последний) проходит вблизи кромки обечайки
диффузора.
Второй регулятор воздействует на механизм перепуска воздуха
из воздухозаборника таким образом, что замыкающий скачок
уплотнения находится примерно в одном и том же положении. Для
определения местоположения этого скачка уплотнения имеются
две трубки отбора давлений рх и р% расположенные достаточно
близко одна от другой.
Регулятор работает следующим образом. Когда скачок
находится между трубками отбора давлений р\ и ръ то давление
Рг<р2 и сильфоны 7 и 8, воспринимающие эти давления, занимают
положения, указанные на схеме. В этом случае пластинка 6 не
замыкает никакой цепи и клапаны 2 и 3 находятся в закрытом
положении, т. е. верхняя полость сервомотора оказывается закрытой
и поэтому механизм передвижения створок неподвижен.
146
Если по каким-либо причинам скачок уплотнения переместится
из области между трубками отбора давлений, то давления рх и р2
окажутся практически равными друг другу, и поэтому сильфоны
переместят пластинку 6 вверх или вниз, и в этом случае замкнется
одна из цепей соленоидов клапанов 2 или 3, в результате чего либо
\Ри
Фиг. 2. 34. Возможная схема регулирования воздухозаборника по
местоположению скачка уплотнения.
7—сервомотор, 2, 3—электромагнитные клапаны, 4, 5—жиклеры, 5—пластинка, 7, 8—ане-
роидные коробки.
рабочая жидкость из напорной магистрали будет подаваться в
полость сервомотора через жиклер 5 и сервомотор сработает в
сторону открытия створок, либо из полости сервомотора жидкость
будет вытекать через жиклер 4 и сервомотор сработает в сторону
закрытия створок. При перемещении скачка уплотнения далее
.места отбора давления pi в направлении к входу в диффузор
давление в сильфонах будет относительно больше, чем при
перемещении его внутрь диффузора, далее места отбора давления р2.
Поэтому в первом случае замкнутся контакты и сработает соленоид
клапана 3, а во втором случае сработает клапан 2.
Могут быть и другие схемы замкнутых регуляторов
воздухозаборников, например, работающие по сигналу,
пропорциональному числу Мв в каком-либо сечении диффузора.
в) Регуляторы для ТВД
Для одновалькых ТВД, свойства которых как объектов
регулирования определяются весьма малым коэффициентом самовы-
10-
147
равиивания, целесообразно применять регуляторы чисел оборотов
со стабилизирующими устройствами.
Для двухвальных ТВД, свойства которых как объектов
регулирования по числу оборотов системы винт—турбина определяются
существенной величиной коэффициента самовыравнивания, можно
применять регуляторы чисел оборотов с менее эффективными
стабилизирующими устройствами или в известных случаях без
каких-либо стабилизирующих устройств. Регуляторы же числа
оборотов системы компрессор — турбина для этих двигателей должны
быть аналогичны рассмотренным выше регуляторам для
турбореактивных двигателей, так как свойства их как объектов
регулирования примерно одинаковы.
Для регулирования температуры газа в ТВД можно применять
как регуляторы, работающие по замкнутой схеме, так и
регуляторы, работающие по разомкнутой схеме, причем они будут обладать
теми же положительными и отрицательными свойствами, что и
рассмотренные выше регуляторы для ТРД. Для ТВД с соосными ВИШ
отличие будет заключаться лишь в количестве регуляторов чисел
оборотов, которых в этом случае должно быть два.
В процессе управления ТВД на самолете иногда требуется
устанавливать лопасти винта на различные углы без помощи
регулятора, т. е. с помощью дополнительных устройств. Например,
в определенных случаях лопасти устанавливают во флюгерное
положение, когда винт должен оказывать наименьшее
сопротивление полету при неработающем двигателе, или на определенный
постоянный угол (одно, два значения), когда установкой лопастей
не управляет регулятор.
Выполнение этих операций также должно предусматриваться
в общей системе управления двигателем.
Кроме того, сами винты могут иметь различную конструкцию,
когда привод лопастей осуществляется либо с помощью
электрического, либо с помощью гидравлического сервомоторов. В
соответствии с этим общая схема управления ТВД получается несколько
сложнее, чем схема управления ТРД.
На фиг. 2. 35 приведена принципиальная схема системы
управления ТВД с регулятором числа оборотов ВИШ, из которой видно
назначение каждого агрегата системы.
Система работает следующим образом. С помощью ручки
объединенного управления 4 регулятор 22 настраивается на
определенное значение числа оборотов и одновременно регулятор
расхода топлива (не показан на схеме) также настраивается на
определенный расход топлива. К золотнику регулятора подводится
масло под давлением от насоса 8 и золотник распределяет масло
в одну или в другую полость сервомотора ВИШ; в результате этого
поршень сервомотора 20 перемещается и поворачивает лопасти
винта 21. Для увеличения и уменьшения угла установки лопастей
требуются различные усилия, поэтому в канале масла, подаваемого
на увеличение угла установки лопастей, давление масла больше,
148
чем во втором канале. Давление в первом канале поддерживается
клапаном 24, а во втором (предназначенном для уменьшения угла
установки лопастей) — клапаном 15.
Во время полета и посадки угол установки лопастей не должен
быть меньше определенной величины. Это важно потому, что
17
Фиг. 2.35. Принципиальная схема системы управления числом оборотов
ТВД.
/—к дроссельному крану, 2—к отсечному топливному крану, 3—управление
стоп-краном и вводом лопастей во флюгер, 4—объединенное управление дросселем и
регулятором ВИШ, 5—выключатель на шасси, 6—ручной переключатель, предотвращающий
уменьшение шага винта на взлете, 7—масло из магистрали двигателя, 8—насос
регулятора числа оборотов, 9—кнопка вывода лопастей из флюгера, 10—реле,
11—флюгерный насос, 12—кнопка ввода во флюгер, 13—масло из бака, 14—гидравлический
выключатель флюгерного насоса, 15—редукционный клапан малого шага,
16—положение при заданном числе оборотов в полете, 17—пружинящая гильза, 18—золотниковый
клапан, 19—плунжер управления убирающимся упором, 20—рабочий поршень винта;
21—лопасть, 22—регулятор числа оборотов, 23—соленоид, 24—редукционный клапан
масляного насоса.
в противном случае может возникнуть отрицательная тяга,
развиваемая винтом, в результате чего самолет потеряет скорость. Для
обеспечения этого имеется убирающийся упор минимального шага
винта, который состоит из золотникового клапана 18, нагруженного
пружиной, и плунжера 19, расположенного в пружинящей гильзе
17. Плунжер 19 при своем движении разжимает гильзу 17 и
выступы на гильзе ограничивают ход поршня 20 и, следовательно,
ограничивают поворот лопастей 21 в сторону малого шага. Плунжер 19,
149
а следовательно, и упор минимального шага в полете могут
управляться, например, от шасси самолета. Для этого на шасси
имеется выключатель 5, который при нагрузке шасси замыкает
цепь соленоида 23 и соленоид соединяет полость клапана 15 с
клапаном высокого давления.
В результате этого масло из канала малого шага (второго)
через клапан 18 (который срабатывает при этом давлении)
поступает под плунжер 19, отодвигает его, упоры гильзы 17 убираются
и поршень 20 может передвигаться дальше в сторону уменьшения
шага.
Ввод лопастей во флюгерное положение осуществляется с
помощью насоса И, который приводится во вращение от
электродвигателя. От этого насоса масло под большим давлением
подводится к правой полости сервомотора, поршень которого переводит
лопасти во флюгерное положение. При вводе лопастей во флюгер
летчик нажимает кнопку 12 и одновременно передвигает рукоятку
стоп-крана 3 назад до отказа, в результате чего закрывается
топливный кран и золотник регулятора 22 поднимается кверху. Для
вывода лопастей из флюгерного положения нажимается кнопка 9.
Для двигателя, схема управления винтом которого была
приведена на фиг. 2. 35, вместо регулятора температуры газа
применяется регулятор расхода топлива с коррекцией величины расхода
в зависимости от внешних условий с помощью баростата,
описанного выше.
Для более точного поддержания температуры газа перед
турбиной с помощью разомкнутых регуляторов применяют специальные
корректирующие устройства, работающие по сигналам,
характеризующим условия полета.
Известно, что для поддержания неизменной температуры газа
Т*ь при постоянном числе оборотов, расход топлива должен быть
связан с изменением р*н и Т*н зависимостью вида GT=cp*Hf (Т*н)ч
где с=const. Характер зависимости -^ =/(Т*н) показан на
Рн
фиг. 2. 36. Используя эти зависимости, возможно создать
соответствующее корректирующее устройство, которое будет так
воздействовать на расход топлива, что будет достигнуто условие
Т*ъ «const.
Для обеспечения полета с расчетной скоростью на расчетной
высоте от двигателя требуется определенная мощность. На эту
мощность и рассчитывается двигатель. Однако при полете на
меньших высотах мощность, развиваемая двигателем, может
существенно увеличиться по сравнению с расчетной. Это приведет к
неизбежной поломке двигателя, так как по прочности он не
рассчитывается на такие мощности. Для понимания сказанного на фиг. 2. 37
приведен характер изменения Ne, GT и Г* от высоты полета. Здесь
пунктиром показано протекание характеристик при таком законе
150
Р'н
Фиг 2.36. Характер зависимости
Фиг. 2.37. Характер изменения Ne>
Gr и Г3 от высоты полета Я.
15 1
изменения (уменьшения) Г3\ когда соблюдается условие
Л^ерасч — COnst.
Для ограничения мощности, развиваемой двигателем при
#<^#Расч, применяются специальные ограничители мощности,
воздействующие на расход топлива. На фиг. 2. 38 приведена возмож-
в сторону
увеличения
Подвод —■
ппо~очеп жидко с/пи
-г, f
или Г,
Фиг. 2.38. Возможная принципиальная схема
ограничителя температуры газа и мощности дви- .
гателя.
1, 2, 9—анероиды, 3—золотник, 4, 8—рычаги, 5,
10—кулачки, 6—термочувствительный элемент, 7—зубчатая передача.
ная принципиальная схема разомкнутого регулятора
(ограничителя) температуры газа и ограничителя мощности двигателя.
Здесь с помощью анероидного устройства 9, реагирующего на
сигнал от р*н, и устройства 6, реагирующего на сигнал от Т^,
передается воздействие (через следящую систему) на дроссельный
кран, который изменяет расход топлива в двигатель. Воздействие
от Т*н передается на механизм изменения расхода топлива через
специально профилированный кулачок 5. Профиль этого кулачка
152
подбирается так, чтобы получить зависимость расхода топлива от
Тн, приведенную на фиг. 2.36.
Ограничение мощности, развиваемой двигателем,
осуществляется с помощью анероидов 1 и 2 и того же устройства 6,
замеряющего температуру Т^. Здесь анероид / реагирует на разность
давлений (р*н—рн) и выдает сигнал, пропорциональный
скоростному напору, а анероид 2 реагирует на сигнал от рн-
Следовательно, это устройство выдает сигнал в систему ограничения мощности
с учетом высоты и скорости полета. Сигналы от этого устройства
и устройства, замеряющего Гя, с помощью кулачка 10,
складываются на рычажном суммирующем механизме. При достижении
Ne = Nevac4 механизм ограничения мощности ограничивает
перемещение дроссельного крана в сторону увеличения расхода топлива.
При jVe<A^Pac4, т. е. при Я>ЯРасч между рычагом механизма
ограничения мощности и золотником 3 следящей системы привода
дроссельного крана образуется зазор б. В этом случае механизм
ограничения не работает.
г) Регуляторы для «разгона» ГТД
и другие устройства
Рассмотренные выше схемы управления газотурбинными
двигателями не включали устройств, позволяющих осуществить
быстрый перевод двигателя с режима малого газа на максимальный
режим работы. Процесс такого перевода обычно называют
разгоном двигателя. Особенностью процесса разгона двигателя
является зависимость температуры газа от скорости изменения расхода
топлива; так как температуру газа нельзя увеличивать выше
определенной величины, необходимо ограничивать не только величину
расхода топлива, но и скорость ее нарастания. Поэтому
использование для автоматизации процесса разгона двигателя
приведенных выше схем регуляторов невозможно.
Для того чтобы разогнать двигатель за минимальное время,
необходимо в процессе разгона иметь максимально допустимый
избыточный крутящий момент на турбине. Для турбореактивного
двигателя с нерегулируемым реактивным соплом этого можно
достичь повышением температуры газа до максимального значения,
а в случае регулируемого реактивного сопла, кроме того, и
раскрытием створок реактивного сопла.
Если бы разгон двигателя осуществлялся с помощью
регуляторов чисел оборотов или регулятора расхода топлива,
работающих по любой из приведенных выше схем, то, пренебрегая
влиянием конечной скорости движения некоторых элементов
регуляторов, можно было бы получить характеристики расходов топлива
в двигатель, приведенные на фиг. 2. 39. Линии 1—2 и 3—4
соответствуют характеристикам дзигателя по расходам топлива при
установившихся режимах двигателя для Н = 0 и #=Ятах, линии 5—-6
153.
и 7—8 соответствуют расходам топлива при Т\ =const также для
Н = 0 и Я=Ятах.
При разгоне двигателя с помощью регулятора числа оборотов,
перенастраивающегося с оборотов nx на nmax, расход топлива
в двигатель для любых промежуточных чисел оборотов будет
соответствовать характеристике насоса, т. е. расход мгновенно
увеличивается с GTi до GT3. Далее по мере возрастания числа оборотов
он возрастает примерно до GT4 и только потом уменьшится до Gtq.
Значит расход топлива при #~0 будет изменяться по ломаной
7
Фиг. 2.39. Характеристики расхода топлива в процессе «разгона» ТРД
с помощью регуляторов числа оборотов и расхода топлива.
1—9—10—2, а при H = Hm3iX он будет изменяться по линии 3—12—
10—4.
Следовательно, избытки топлива AGT = GT.n—GT^, т. е.
увеличение расхода топлива сверх необходимого при установившемся
движении, будут значительно большими, чем это допустимо при
условии Tgmax^00115*- Относительная величина избытков будет
возрастать по мере увеличения высоты полета, так как расход топлива,
соответствующий установившимся режимам, уменьшается.
При разгоне двигателя с помощью регулятора расхода и
корректора по внешним условиям (баростата) в том же диапазоне
чисел оборотов при #=0 расход топлива в двигатель для любых
промежуточных чисел оборотов будет соответствовать
характеристике насоса до значения расхода, равного GT6, а далее он будет
оставаться постоянным, т. е. расход будет изменяться по ломаной
1—9—11—2. Для случая H=HmaiX расход будет изменяться по
линии 3—13—4.
154
Слаб
От дроссельного
чрана
Как видно, и в том и в другом случаях избытки в расходах
топлива будут значительно превышать допустимые. Это наглядно
видно на той же фиг. 2. 39, где приведен характер зависимости
AGT от числа оборотов для рассмотренных случаев.
Из сказанного следует, что для разгона двигателя необходимо
применять такие устройства, которые не позволяли бы превысить
максимально допустимое значение температуры газа перед
турбиной.
Как отмечалось при рассмотрении объектов регулирования,
границей допустимой области
работы двигателя является не __
только максимальная
температура газа, но и граница
устойчивой работы компрессора и
камеры сгорания.
Возможным решением задачи
автоматизации разгона
двигателя было бы такое, чтобы
разгон производился с помощью
программного регулятора
температуры газа, учитывающего
также необходимость ограничения
максимально допустимых
избытков расхода топлива с целью не
допустить возникновения пом-
пажа компрессора и
неустойчивого горения топлива в камере
сгорания.
На фиг. 2.40 приведена принципиальная схема автомата
приемистости (разгона) для ТРД. Этот автомат обеспечивает
осуществление разгона двигателя, обладающего достаточно большими
избытками расходов топлива на всех высотах полета. Автомат
работает так, что при увеличении значения pi (а значит при увеличении
расхода воздуха) давление в полости над мембраной увеличивается
и благодаря этому уменьшается сечение окна перепуска топлива
из коллектора, что увеличивает расход топлива в двигатель. Если
же давление топлива в коллекторе больше необходимого, то
поршенек поднимается кверху и увеличивает проходное сечение окна
перепуска топлива из коллектора, что уменьшает расход топлива
в двигатель.
Таким образом, в принципе такой автомат приемистости
представляет собой весы, в которых с одной стороны действует сила,
пропорциональная р^ а с ДРУг°й стороны—сила,
пропорциональная давлению топлива рт в коллекторе. С некоторым приближением
можно считать, что величина р\ пропорциональна массовому
расходу воздуха, а величина рт пропорциональна расходу топлива,
поэтому можно считать, что такой автомат приемистости поддержи-
155
к Форсункам
Фиг. 2.40. Принципиальная схема
автомата приемистости,
вает приблизительно постоянный состав смеси и приблизительна
постоянную температуру газа.
Недостатком такого автомата приемистости является довольно-
большая ошибка в точности поддержания заданных избытков
расхода топлива, а следовательно, и температуры газа. Это
объясняется главным образом тем, что такой автомат не реагирует на
изменение температуры воздуха за компрессором и поэтому сигнал
от pi не пропорционален расходу воздуха. Повышение
температуры воздуха за компрессором приблизительно можно считать
показательной функцией от числа оборотов, т. е.
Т2— Т'\ = const -iix или Ti =74-|- const -/га.
Поэтому для учета изменения расхода воздуха в зависимости
от изменения величины Т\ необходимо дополнительно подать в
систему сигналы либо от Т\, либо от Г*, соответствующих внешним
условиям, и от числа оборотов.
Неучет коррекции расхода топлива от этих сигналов
приводит к тому, что если, например, такой автомат приемистости
отрегулировать правильно для работы при #=0 и n = nmSLX, то для
п<птах и #>0 он будет давать заниженную температуру газа и не
будет получена оптимальная приемистость. Если же такой автомат
приемистости будет правильно отрегулирован для #=#шах, то при
H<Hm8iX он будет давать относительно повышенную температуру
газа.
Непрограммность такого автомата также отражается на
приемистости, так как для двигателей, у которых границы устойчивой
работы компрессора и камеры сгорания лежат ниже границы
максимальной температуры (см. фиг. 1.27), приходится производить
общую настройку автомата на пониженную температуру газа.
Необходимо также учитывать, что ошибка в точности
поддержания температуры газа зависит и от того, что в рассматриваемой
схеме автомата приемистости подается сигнал, пропорциональный
не величине абсолютного давления за компрессором pj, a
величине разности давлений pj —рн\ расход топлива также неточно
пропорционален его давлению перед форсункой.
На фиг. 2.41 представлена схема автомата приемистости, несколько
отличного от рассмотренного выше. Дозирование топлива в форсунки осуществляется
клапаном 1, который поддерживает постоянный перепад давлений рн—Рф с
помощью мембранного клапана 2 и регулируемого жиклера 3. Сигнал от величины
р2 подается через сильфон на суммирующий рычаг 4, на который действует
также усилие от пружины, опирающейся на клапан /. Этот рычаг изменяет
сечение регулируемого жиклера 5 и тем самым изменяет положение сервомотора
6, иглы перепуска 7, а также и количество топлива, перепускаемого из напорной
магистрали на вход шестеренчатого топливного насоса 8.
Этот автомат приемистости работает следующим образом. При переводе
ручки управления с режима малого газа на максимальный режим работы
двигателя давление топлива перед форсунками упадет и благодаря этому увеличится
перепад давлений на клапане 1. В результате этого мембранный клапан
постоянного перепада давлений 2 увеличит проходное сечение жиклера 3 и умень-
156
шит давление топлива в левой полости сервомотора клапана /, вследствие чего
он переместится в сторону увеличения проходного сечения, т. е. в сторону
восстановления перепада давлений. Одновременно с передвижением клапана /влево
уменьшится усилие, оказываемое пружиной на рычаг 4, и благодаря этому
увеличится площадь жиклера 5, в результате чего поршень сервомотора 6 и игла 7
передвинутся кверху, т. е. в сторону увеличения перепуска топлива из напорного
коллектора.
С увеличением чисел оборотов растет значение р\ и с помощью сильфона
пропорционально этой величине уменьшается проходное сечение жиклера 5, что
приводит к увеличению расхода топлива в двигатель.
■►/г форсункам
Фиг. 2.41. Принципиальная схема автомага приемистости.
1—клапан с сервомотором. 2—мембранный клапан, 3, 5—регулируемые жиклеры, 4—сум
мир>ющий рычаг, £—сервомотор, 7—нгла перепуска, 8—топливный насос, 9,
/#—нерегулируемые жиклеры.
Таким образом, на дозирующем клапане 1 всегда сохраняется постоянный
перепад давлений топлива, а величина расхода топлива изменяется
пропорционально величине pj*
При максимальном значении р'о перепуск прекращается и дальнейшее
управление топливом осуществляется с помощью регуляторов числа оборотов или
расхода топлива. При переходе с максимального режима работы двигателя на
режим малого газа автомат приемистости не вступает в работу, так как при
этом усилие со стороны сильфона, реагирующего на изменение pj, все еще
остается большим и жиклер 5 также остается закрытым.
Из уравнения движения (1.35) следует, что, если ограничивать скорость
изменения (нарастания) расхода топлива, то можно добиться того, чтобы
максимально допустимая температура газа не была превзойдена. Физически это
означает, что сектор газа необходимо переводить не мгновенно, а с какой-то
определенной скоростью. Устройства, обеспечивающие такое передвижение
сектора газа, называются замедлителями и позволяют безопасно разгонять
двигатель.
157
На фиг. 2. 42 приведена возможная принципиальная схема
гидравлического замедлителя. При движении ручки управления в
сторону увеличения режима окна в поршне оказываются перекрытыми
и поршень передвигается вправо в результате поступления
жидкости в левую полость сервомотора через жиклер. Сечение жиклера
подбирается так, чтобы скорость передвижения сервомотора была
заданной. При обратном движении ручки управления окна в
поршне оказываются открытыми и под действием пружины поршень
легко следит за движением ручки управления.
Ручка управления
-•—-Tj—»»
УменьшмиеТУвеличение
топливному
хрануили
устройству
перенастрой ми
регулятора числа оборотов
) {Жиклер
Маш или топливо
под давлением
Шив
Фиг. 2. 42. Возможная принципиальная схема замедлителя.
Если гидравлическая характеристика топливного крана
линейная, то скорость изменения расхода топлива с помощью указанного
замедлителя остается примерно одинаковой. Однако для получения
оптимальной приемистости она должна быть переменной, как это
следует из фиг. 2. 39, где представлена зависимость избытка
расхода топлива от числа оборотов двигателя. Выдержать точно
необходимый (нелинейный) закон подачи топлива трудно, поэтому
разгон двигателя даже с помощью замедлителя не позволяет
получить оптимальной приемистости, т. е. наименьшего возможного
времени разгона.
Для двигателей с регулируемым реактивным соплом
целесообразно одновременно с работой регулятора разгона двигателя
увеличивать проходное сечение реактивного сопла и сохранять его
таким до момента, когда число оборотов близко подойдет к
заданному. Затем это сечение необходимо уменьшить до значения,
соответствующего режиму настройки.
Для разгона двигателя может применяться и регулятор
температуры газа, работающий по замкнутой схеме. В этом случае в
процессе разгона соблюдается условие Т\ ~const, которое сохраняется
до достижения двигателем числа оборотов, близкого к заданному.
Однако, как уже об этом говорилось выше, на некоторых
промежуточных режимах разгона двигателя избытки топлива AGT, соответ-
158
ствующие условию ^з^^зтах» оказываются недопустимо
большими из-за опасности возникновения неустойчивой работы
компрессора (помпажа). Ввиду этого для таких режимов разгона избытки
топлива необходимо уменьшать. Этого можно добиться с помощью
регулятора температуры газа, в котором используется программное
устройство настройки. В этом случае сигнал настройки в регуляторе
температуры газа должен являться функцией приведенных
параметров двигателя. Для разгона двигателя по закону Tl=T^m2LX
используют те же регуляторы, которые предназначены для
поддержания основных рабочих режимов. Схемы таких регуляторов
температуры газа были приведены выше.
Маневренность летательного аппарата тем лучше, чем меньше
время разгона (приемистости) двигателя, поэтому всегда стремятся
уменьшить время разгона.
Пределом для этого времени является мера инерционности
разгоняемых масс двигателя; оно зависит также от величины
избыточного крутящего момента.
Однако можно представить себе такой двигатель, для которого
время приемистости может быть весьма малым. Для обеспечения
этого необходимо создавать двигатели с регулируемыми входными
и выходными сечениями и все режимы работы двигателя получать
при /г = const. Тогда режим разгона, связанный с раскруткой масс
двигателя, будет отнесен к режиму запуска двигателя, а изменение
мощности (тяги) двигателя от величины, соответствующей малому
газу, до максимальной будет протекать в течение времени,
соответствующего времени перекладки регулирующих органов.
Для турбовинтовых двигателей применяются аналогичные
устройства для обеспечения процесса разгона, так как характер
явления остается тем же. Однако в схемах управления есть
некоторые отличия, которые обусловлены тем, что для мало
стабилизированных регуляторов чисел оборотов винта применяется
программная настройка регулятора числа оборотов. Это обусловлено
следующим: при резкой перенастройке регулятора числа оборотов
ВИШ в начале разгона уменьшается угол установки лопастей
винта, в результате чего уменьшается тяга, что по многим причинам
недопустимо; уменьшение угла установки обусловлено самим
принципом работы регулятора числа оборотов. Действительно, число
оборотов регулируется изменением угла установки лопастей винта,
и если почему-либо число оборотов ВИШ уменьшилось по
сравнению с заданным, то регулятор стремится уменьшить угол установки
лопастей винта, чтобы возросло число оборотов.
Аналогичное явление происходит и в том случае, если
регулятор перенастраивается. Замедленная же перенастройка регулятора
числа оборотов ВИШ позволяет избежать этого явления, т. е. в этом
случае тяга, развиваемая винтом, не будет падать.
Принципиальные схемы устройств, позволяющих производить замедленную
перенастройку регулятора оборотов ВИШ, аналогичны схеме, приведенной на
159
фиг. 2.42. В частности, на фиг. 2.43 приведено устройство замедлителя настройки,
где в отличие от схемы, приведенной на фиг. 2. 42, использован сервомотор
поворотного типа. Рычаг 1, связанный с ручкой управления, поворачивает через
кулачок 5 рычаг 4, связанный с дроссельным краном. Рычаг 1 закреплен на
валике, правая часть которого выполнена в виде поворотного золотника 9, управ-
Слид ~
О/т/ валика
у правлены
Jonommitf
Фиг. 2.43. Конструктивная схема замедлителя настройки регулятора
числа оборотов ВИШ.
1—рычаг, связанный с ручкой управления, 2—слив масла, 3—рычаг, связанный с
механизмом настройки регулятора числа оборотов, 4—рычаг, связанный с дроссельным
краном, 5—кулачок управления подачей топлива, 5—кулачок управления настройкой
регулятора числа оборотов, 7—лопатка сервомотора, &—упор, 9—золотник,
10—жиклер, 11—масляный фильтр. 12— подвод масла.
ляющего гидравлическим сервомотором 7. Кулачок 6, закрепленный на полом
валике сервомотора, поворачиваясь, перемещает рычаг 3, управляющий настрой-
кой регулятора ВИШ.
При быстром перемещении ручки управления необходимое запаздывание
настройки регулятора числа оборотов создается жиклером 10, установленным на
входе рабочей жидкости в сервомотор и ограничивающим скорость поворота
сервомотора.
Кроме рассмотренных выше агрегатов, входящих в общую систему
управления Двигателем, на некоторых турбореактивных двигателях применяются
ограничители максимальной мощности или максимального крутящего момента,
развиваемого турбиной. Обычно эти устройства весьма просты и представляют собой
160
ограничители максимального расхода топлива, работающие по сигналам от
внешних условий, о чем говорилось выше.
В общую систему управления двигателем включаются иногда
специальные устройства, обеспечивающие устойчивую (безопасную)
работу компрессора. Как отмечалось выше, под устойчивой
работой компрессора понимают беспомпажный режим его работы.
Граница устойчивой работы компрессора при совместной работе
его с другими агрегатами — турбиной, камерой сгорания, входным
устройством — во многом определяет свойства двигателя, причем
главным образом в процессе неустановившегося движения, так как
от этого зависит диапазон допустимой области работы двигателя.
40
60
ЯО
/00 п%
Фиг. 2. 44. Перемещение границы помпажа в
зависимости от температуры воздуха на входе.
/—граница помпажа при температуре воздуха на входе
+50° С, 2—то же при —20° С, 3—линия рабочих режимов.
На фиг. 2.44 показан характер изменения границы помпажа
в зависимости от величины температуры воздуха на входе в
компрессор; из графика следует, что допустимая область работы
двигателя с уменьшением температуры воздуха существенно сужается.
Такое перемещение границы помпажа затрудняет полноценное
использование возможностей обеспечения оптимального разгона
двигателя, так как допустимые избытки расхода топлива также
должны изменяться по этому закону. В особенно неблагоприятных
случаях (не только из-за влияния температуры воздуха) граница
помпажа может так близко проходить к линии рабочих режимов,
что становится невозможным разогнать двигатель.
Выходом из положения может явиться искусственное смещение
границы помпажа в сторону расширения допустимых избытков
топлива благодаря смещению рабочей точки на характеристике
компрессора, например, путем перепуска части воздуха из
компрессора (помимо турбины) или путем поворота лопаток
направляющего аппарата компрессора.
Из характеристик компрессора (см. фиг. 1.20) следует, что при
увеличении расхода воздуха при /z=const рабочая точка
смещается вниз и направо, т. е. в сторону от границы помпажа. Этим свой-
11
1327
161
ством компрессоров и пользуются для расширения области
устойчивой работы двигателя. При этом необходимо иметь в виду, что
экономичность двигателя в этом случае ухудшается. Однако
сужение области устойчивой работы двигателя из-за помпажа иаблю-
Перепуск
открыт
Перепуск
закрыт
Область наименьших
допустимых избытков
топлива
Область рабочих
режимов
Фиг. 2. 45. Возможные законы управления перепуском
воздуха из компрессора по числу оборотов
двигателя.
дается главным образом на средних числах оборотов двигателя,
т. е. до основных рабочих режимов. При более высоких числах
оборотов, соответствующих более высоким режимам, перепуск
воздуха из компрессора становится ненужным.
В зависимости от характеристик компрессора перепуск воздуха
из компрессора может осуществляться по двум законам, как
показано на фиг. 2» 45. До области наименьших допустимых избытков
Сигнап
от п или
Д клапанам
"перепуска
Сигма/?
к
Ш-_5
0
с
4
ц
1
и
Н клапанам
перепуска
Фиг. 2.46. Схемы управления клапанами перепуска воздуха из
компрессора.
162
топлива перепуск воздуха может осуществляться, но может и не
осуществляться. Устройства, которые применяются для перепуска
воздуха как в турбореактивных, так и в турбовинтовых двигателях,
по принципу их работы очень просты, но по конструктивному
выполнению весьма разнообразны. Управляющим сигналом может
быть сигнал, пропорциональный числу оборотов или пропорцио-
* / п
нальныи величине я" /или
!i [
перепуска воздуха из
2 3
Общая схема управления клапанами
компрессора приведена на фиг. 2.46.
В случае применения нескольких клапанов перепуска бывает
целесообразно осуществить их
включение в работу в определенной
последовательности; тогда
устанавливаются дополнительные
управляющие и силовые элементы.
Усилие^ со стороны / ^Усилие со стороны
большой мембраны^ '/малой мембраны
перепад на трубке
Фиг. 2.47. Схема управления
клапанами перепуска воздуха из
компрессора.
/—клапан, 2, 5—мембраны, 3—шток,
<*—мембранный регулятор, ^—давление
воздуха за компрессором, 7—насадок
Вентури, 8—-перепускные клапаны, 9—
из промежуточной ступени
компрессора, 10—сервопоршень.
Фиг. 2. 48. Характер изменения давлений
воздуха на входе в трубку Вентури и в
ее горле.
Несколько отличается от приведенной
выше схема управления клапанами
перепуска, показанная на фиг. 2.47; эта схема
включает в себя сервопоршень 10, который
управляет распределением воздуха в
перепускные клапаны 8, в мембранный регулятор 4, действующий от перепада
давлений в трубке Вентури, через которую воздух из-за компрессора перепускается
на вход в компрессор. Система работает по сигналу от степени повышения
давления в компрессоре. Работа этого устройства основана на различном характере
протекания зависимости давления воздуха за компрессором (на входе в трубку
Вентури) и давления в узком сечении трубки Вентури.
На фиг. 2.48 показан характер изменения давлений на входе в трубку
Вентури и в ее горле в зависимости от числа оборотов компрессора.
Устройство, схема которого приведена на фиг. 2.47, работает следующим
образом. Сервопоршень 10 перемещается под действием разности давлений на
его торцы, площади которых различны. К торцу с большей площадью подводится
давление, меньшее, чем к торцу с меньшей площадью, в результате того, что из
этой полости давление стравливается клапаном 1. Перемещение сервопоршня W
влево открывает доступ воздуху из-за компрессора к клапанам 8, которые за-
163
крывают перепуск воздуха из промежуточной ступени компрессора. Клапан /
управляется мембранным регулятором 4, мембраны которого имеют различные
площади, причем к меньшей мембране подводится давление, соответствующее
давлению на входе в трубку Вентури, а к большей — соответствующее давлению
в горле трубки Вентури.
При малых числах оборотов, когда степень повышения давления в
компрессоре мала (и поэтому мал перепад давлений на трубке Вентури), тарельчатый
клапан / открыт, так как усилие, действующее со стороны малой мембраны,
больше, чем со стороны большей мембраны. Это объясняется характером
протекания давлений в указанных местах трубки Вентури и поясняется
приведенными на фиг. 2. 48 характеристиками сил, действующих на обе мембраны.
В этом случае сервопоршень перекрывает доступ воздуха из-за компрессора
к клапанам 8У поэтому осуществляется перепуск воздуха из промежуточной
ступени компрессора. Такое положение сервопоршня обусловлено тем, что усилие,
действующее со стороны меньшей площади, больше, чем со стороны большей
площади.
При увеличении числа оборотов или при увеличении степени повышения
давления в колесе компрессора, соотношение давлений в указанных местах
трубки Вентури изменяется, как показано на той же фиг. 2.48. При определенном
соотношении площадей мембран регулятора 4 усилие, действующее со стороны
большей мембраны, становится больше, чем усилие, действующее со стороны.
меньшей мембраны. Поэтому клапан / закрывается, в результате чего в обеих
полостях сервопоршня 10 давления сравниваются и он передвигается влево, так
как усилие, действующее со стороны большей площади, становится большим,
чем усилие, действующее со стороны меньшей площади; при этом клапаны 8
закрываются и перепуск воздуха прекращается. При уменьшении числа оборотов
или степени повышения давления устройство срабатывает в обратном порядке.
Следовательно, описанное устройство обеспечивает такой закон управления
перепуском воздуха, при котором перепуск осуществляется с самого начала
работы двигателя и продолжается до таких значений степени повышения давления,
при которых область устойчивой работы двигателя уже не ограничивается пом-
пажом компрессора, т. е. так, как показано пунктиром на фиг. 2. 45.
Такое устройство будет работоспособно лишь при условии, что перепад
давлений в трубке Вентури больше критического, так как при докритическом
перепаде в указанных местах трубки Вентури значение як, при котором будет
осуществляться закрытие (открытие) клапанов перепуска 8, зависит от
условий полета.
На практике применяют и некоторые другие устройства, обеспечивающие
управление перепуском воздуха из компрессора.
Для изменения границы неустойчивой работы компрессора
применяют также поворотные направляющие аппараты в компрессоре.
В этом случае, если можно использовать релейную характеристику
для управления лопатками направляющих аппаратов, применяют
устройства, аналогичные рассмотренным выше. Если же
оказывается необходимым применить закон слежения в повороте лопаток
направляющего аппарата за входным сигналом (пщ> или я* ), то
используют гидромеханическую следящую систему.
д) Общие схемы управления двигателями
В заключение этой главы, посвященной рассмотрению
возможных схем систем управления ГТД, приведем несколько
принципиальных схем систем управления двигателями совместно с
системами подачи топлива.
164
САР для ТРД с нерегулируемым соплом
На фиг. 2. 49 приведена схема системы автоматического
управления для одновального ТРД с нерегулируемым реактивным соплом.
Здесь вверху показана общая схема, а внизу — конструктивные
схемы отдельных агрегатов этой системы.
Система состоит из регулятора расхода топлива, регулятора
числа оборотов, автомата приемистости и других устройств.
Подача топлива в двигатель осуществляется с помощью двух
плунжерных насосов 1, работающих на одну сеть. Из насосов
топливо проходит через топливно-масляный радиатор 4, дозирующую
иглу 6 регулятора (автомата) приемистости, дроссельный кран 9,
распределительный клапан 28 и поступает к форсункам 30.
В принципе рассматриваемая система во многом аналогична
системе с регулятором расхода топлива, схема которой была
приведена на фиг. 2. 18. Однако есть и отличие, которое заключается
в том, что режим работы двигателя задается установкой
определенных чисел оборотов двигателя. Иначе говоря, режим задается
грубо (во всем диапазоне) с помощью регулятора расхода
топлива, а точно (в узком диапазоне) с помощью регулятора числа
оборотов. Или, если считать, что расход топлива определяет нагрузку
двигателя, то рассматриваемая система управления относится
к комбинированным системам, в которых управление
осуществляется и по нагрузке и по параметру.
Рассмотрим раздельно работу каждого из перечисленных выше
регуляторов.
Регулятор расхода топлива
Принцип работы регулятора расхода топлива, который принят
в рассматриваемой схеме, поясняется схемой, приведенной на
фиг. 2. 50. От основной топливной магистрали, идущей от насоса
к двигателю, в которой находится дроссельный кран, отходит
шунтирующий трубопровод с врезанным в него жиклером постоянного
сечения Fh В этот трубопровод за жиклером F\ включен
мембранный клапан, в котором имеется жиклер переменного сечения,
регулируемый положением центрального тела мембраны. В линии за
регулируемым жиклером имеется второй жиклер постоянного
сечения jF2, через который жидкость (топливо) сливается в объем,
где всегда поддерживается постоянное давление.
Из схемы работы мембранного клапана видно, что давления
в обеих его полостях (при отсутствии жесткости мембраны) будут
одинаковы, поэтому и перепады давлений на дросселе и на жиклере
Fi также будут одинаковыми, а расходы будут пропорциональны
проходным сечениям. Следовательно, при известной величине
проходного сечения дросселя о расходе топлива через него можно
судить по величине расхода в шунтирующей цепи. Расходы через
165
жиклеры F\ и F2 будут одинаковыми, поэтому давление р2 перед
жиклером F2 из равенства расходов определяется как
г насоса
т. е. перепад давлений Ар=рн—Р\ на дроссельном кране
пропорционален давлению р2 перед жиклером F2. Поэтому по величине
р2 можно судить о перепаде давлений на дросселе, что и
использовано в рассматриваемой схеме
регулятора расхода.
Теперь вернемся к той же
схеме, приведенной на фиг.
2.49. Здесь под дросселем 9
топливо отбирается в
шунтирующую линию с жиклером 29
(жиклер f\ на фиг. 2. 50) и
далее через сопла-заслонки 11
или 12 оно попадает в правую
полость мембранного клапана
21 с регулируемым жиклером
22 и далее—в жиклер 23
(жиклер F2 на фиг. 2. 50).
Давление топлива перед жиклером
23 (давление р2 на фиг. 2. 50)
воспринимается мембранным
Фиг. 2. 50. Схема работы регулятора устройством 24 И соответствую-
расхода топлива. щая сила от мембраны
передается на суммирующий
рычаг 25 баростатического устройства. Давление топлива за
дросселем подается в левую полость клапана 21. Перепад давлений
на дросселе 9 изменяется в результате изменения
производительности насосов / благодаря тому, что с помощью сервомоторов
изменяется наклон шайб. Левые полости сервомоторов соединены
с напорной топливной магистралью на выходе из насосов, а правые
полости соединены с той же магистралью через сопловое
дросселирующее устройство 26, которое позволяет дросселировать напор
жидкости изменением положения рычажка 25 (в принципе работы
этого устройства много аналогичного с работой обычной струйной
трубки).
Таким образом, при изменении проходного сечения дроссельного
крана 9 на нем изменится перепад давлений, а следовательно,
пропорционально ему изменится величина давления перед
жиклером 23 и изменится также усилие, действующее на рычажок 25,
и он повернется. В результате этого изменится степень
дросселирования подводимой жидкости в дросселирующем устройстве 26,
изменится давление в правых полостях сервомоторов насосов, и они
изменят расход в сторону восстановления перепада давлений на
166
дросселе 9. При этом проходные сечения сопел-заслонок 11 и 12
и давление в анероидной коробке баростата предполагаем
неизменными.
Если, например, проходное сечение дросселя 9 изменяется в
сторону его увеличения, то перепад давлений на нем уменьшается,
а следовательно, уменьшается и давление перед жиклером 23,
и уменьшается усилие, действующее со стороны мембраны 24 на
рычажок 25. В результате этого рычажок 25 поворачивается в
сторону увеличения сечения соплового устройства 26 п в правой
полости сервомоторов насосов повысится давление топлива,
наклонные шайбы повернутся на больший угол и увеличится
производительность насосов, и поэтому перепад давлений на дросселе
увеличится (восстановится).
Таким образом, расход топлива в двигатель будет зависеть лишь
от проходного сечения дроссельного крана. При уменьшении
проходного сечения дросселя 9 движение происходит в обратную
сторону.
С изменением высоты полета усилие, действующее со стороны
анероида баростата, изменяется, и с помощью того же рычажка 25
и дросселирующего устройства 26 изменяется давление в правой
полости сервомоторов насосов и соответственно изменяется их
производительность. В результате этого при том же проходном
сечении дросселя 9 на нем установится новый перепад давлений. Если,
например, высота полета увеличивается или скорость полета
уменьшается, то величина давления р'\ в анероидной коробке
уменьшается, усилие на рычажок 25 со стороны анероида увеличивается,
и поэтому он будет поворачиваться в сторону увеличения
дросселирования в устройстве 26. В результате этого уменьшится
производительность насосов и перепад давлений на дросселе 9
уменьшится. При увеличении величины р\ движение будет происходить
в обратном направлении.
Для того чтобы обеспечить возможность настройки статических
характеристик рассматриваемого регулятора расхода под
заданный расход, жиклер 23 (см. конструктивную схему) выполнен с
переменным сечением, являющимся функцией от величины давлений
топлива перед ним.
Регулятор числа оборотов
В рассматриваемой схеме последовательно с жиклером
постоянного сечения 29 включено сопло-заслонка 11, рычажок которого
может перемещаться под действием усилия, развиваемого
мембраной 10. Мембрана 10 перемещается под действием разности двух
сил — силы пружины (работает на растяжение) и силы давления
жидкости в полости над мембраной, пропорциональной квадрату
числа оборотов двигателя.
Включение сопла-заслонки 11 последовательно с жиклером 29
дает возможность изменять расход жидкости в шунтирующей вет-
167
ви, а следовательно, изменять давление жидкости в полости под
мембраной 24, т. е. изменять расход топлива в двигатель.
Датчиком числа оборотов служит устройство 2, конструктивная
схема которого приведена на той же фиг. 2.49, слева, внизу. Это —
гидромеханический датчик, давление жидкости на выходе из
которого пропорционально квадрату числа оборотов. Он состоит из
вращающегося корпуса 31 с укрепленной на нем пластинкой 32 со
сливным соплом. Сопло дросселируется пластинкой 33,
скрепленной с помощью пластинчатой пружины 36 с пластинкой 32. Кроме
того, пластинки 32 и 33 соединены между собой мембраной 35.
Датчик работает следующим образом. В наружный корпус
через клапан 37 поступает топливо из напорной магистрали,
которое затем, пройдя сливное сопло в пластинке 32, сливается. Сопло
дросселируется пластинкой 33 с помощью действующих на
нее усилий: с одной стороны — от давления топлива, подводимого
к левой полости мебраны 35, а с другой стороны — от
несбалансированного груза 34, укрепленного на той же пластинке 33.
Из равенства этих сил следует, что при вращении датчика с
постоянным числом оборотов командное давление рКом на выходе из
него будет пропорционально квадрату числа оборотов, независимо
от того, что топливо может обладать различной плотностью, т. е.
PwnTV = kn2 и р^эф.мембр Рком, откуда рком= -— п2. Таким
' эф.мембр
образом, на мембране 10 сравниваются два сигнала — сигнал от
механизма настройки (либо изменяется величина затяжки
пружины, либо изменяется направление вектора силы от пружины по
отношению к направлению перемещения мембраны) и сигнал от
действительного значения числа оборотов двигателя. Разность этих
сигналов воздействует на сопло-заслонку //, в результате чего
с помощью регулятора расхода изменяется расход топлива в
двигатель. Настройка регулятора числа оборотов и настройка
регулятора расхода производятся от одной ручки.
Следовательно, работа регулятора числа оборотов происходит
следующим образом. Если по каким-либо причинам число
оборотов двигателя превысит заданное значение, то давление жидкости
в полости над мембраной 10 повысится и сечение сопла-заслонки
11 увеличится, в результате чего расход в шунтирующей ветви
увеличится и увеличится также значение давления жидкости как перед
жиклером 23, так и в левой полости мембраны 24. В результате
этого устройство 26 задросселируется, уменьшится давление жид»
кости в правой полости сервомоторов насосов, насосы будут
подавать меньший расход топлива в двигатель, и поэтому число
оборотов двигателя уменьшится. При отклонении числа оборотов
в другую сторону описанные движения будут происходить в
обратном порядке.
Из сказанного выше следует, что в рассматриваемой схеме
регулятора числа оборотов нет никаких стабилизирующих (коррек-
168
тирующих) устройств; это можно допустить лишь при наличии
регулятора постоянного расхода топлива.
Клапан 37 применен для того, чтобы уменьшить (или
ликвидировать совсем) неравномерность (статизм) датчика числа оборотов
при изменении расхода топлива в двигатель с изменением высоты
и скорости полета. Статизм возникает потому, что при увеличении
высоты полета и n=const уменьшается давление топлива за
насосом и, если предположить, что давление жидкости на выходе из
датчика числа оборотов постоянное, то расход через клапан 37
должен уменьшиться. Это может произойти только в том случае,
если допустить заметное перемещение пластинки 33,
дросселирующей сливное сопло, что и обусловливает наличие статизма.
Для уменьшения величины статизма датчика клапан 37
выполнен с изменяющимся проходным сечением, в результате чего при
том же уменьшении давления топлива за насосом из-за увеличения
высоты полета произойдет увеличение проходного сечения этого
клапана, и тогда потребная степень дросселирования сливного
сопла останется примерно той же и перемещения пластинки 33
практически не произойдет.
Автомат приемистости
В рассматриваемой схеме автомат приемистости дозирует
топливо в двигатель по сигналу, пропорциональному величине
давления воздуха за компрессором /?2, с коррекцией его по величине
степени повышения давления лк. Для этого имеется дроссель 6,
на котором поддерживается постоянный перепад давлений с
помощью аналогичного рассмотренному выше устройству регулятора
расхода 7, воздействующему на подачу топлива насосами. В корпус
с анероидом 20 подается давление воздуха, пропорциональное
величине ръ а сигнал от анероида с помощью рычага 16 подается на
сопло-заслонку 15, которое дросселирует проток .жидкости через
верхнюю полость сервомотора дросселя 6. Давление топлива перед
дросселем 6 и за ним подается по обе стороны мембраны 39, усилие
от которой через рычаг 40 воздействует на дросселирующее
устройство 41, аналогичное (по способу работы) устройству 26.
Рассматриваемый автомат приемистости работает следующим
образом. При повышении давления р2 анероид 20 сжимается и
рычажок 16 увеличивает проходное сечение сопла-заслонки 15, в
результате чего в верхней полости сервомотора дросселя 6 давление
уменьшится, и дроссель будет перемещаться кверху, в сторону
увеличения проходного сечения, а следовательно, и расход топлива
в двигатель увеличится. Одновременно с перемещением дросселя
6 изменится перепад давлений на нем, в результате чего мембрана
39 переместится кверху и с помощью рычажка 40 увеличит
проходное сечение дросселирующего устройства 41. В результате этого
давление жидкости в правой полости сервомоторов насосов
увеличится, наклонная шайба переместится в сторону увеличения рас-
16S
хода топлива насосами, и поэтому перепад давлений на дросселе
6 восстановится.
Как было сказано выше, разгон двигателя осуществляется по
величине давления р2 воздуха за компрессором с коррекцией по
величине степени повышения давления як в компрессоре. Сигнал
коррекции по як (давление в полости А) вводится с помощью
сильфонов 18 (эвакуированного) и 19 и ряда жиклеров,
дросселирующих подвод воздуха к отдельным полостям корректирующего
устройства. Из уравнений расходов воздуха через жиклеры
постоянного сечения а и жиклер переменного сечения б можно видеть,
что давление воздуха в полости А является функцией величин р2
и як. Наличие сигнала коррекции по як позволяет более полно
использовать свойства двигателя в отношении его разгона в
различных условиях полета.
Другие устройства системы управления
Для ограничения максимально допустимой температуры газа
в рассматриваемой системе управления предусмотрен
пропорциональный электромагнитный клапан 13, который через рычаг
воздействует на сопло-заслонку 12 (включено параллельно
соплу-заслонке //). Ограничитель температуры газа (на схеме не приведен)
воздействует на клапан 13 так, что при увеличении температуры
газа выше допустимой проходное сечение сопла-заслонки 12
увеличивается, в результате чего давление жидкости под мембраной 24
возрастает и уменьшается расход топлива в двигатель.
В системе предусмотрен также ограничитель 3 максимального
числа оборотов двигателя. Из схемы видно, что при превышении
допустимого числа оборотов командное давление жидкости (от
датчика числа оборотов) под мембраной ограничителя 3 возрастет,
и через сопло-заслонку жидкость будет вытекать из правой полости
сервомоторов, в результате чего производительность насосов
уменьшится.
Кроме указанного, в системе 'предусмотрен клапан малого
газаД на котором с помощью того же регулятора расхода топлива
поддерживается постоянный перепад давлений.
САР для ТРД с регулируемым соплом
На фиг. 2.51 приведена принципиальная схема системы
управления одновального ТРД с регулируемым соплом. Эта схема во
многом аналогична рассмотренным выше схемам, приведенным на
фиг. 2. 11 и 2. 14. Здесь число оборотов вала двигателя ооддержи-
вается изодромным регулятором, во многом аналогичным
регулятору, приведенному на фиг. 2.11, поэтому подробного описания
способа его работы не приводим. Этот регулятор отличается от
регулятора, приведенного на фиг. 2.11, тем, что в нем существует
специальная система разгона (приемистости), работающая по сиг-
170
налу, пропорциональному величине р\% Система управления соплом
в этом регуляторе отличается от схемы, приведенной на фиг. 2. 14,
тем, что в качестве сигнала управления здесь принят сигнал,
пропорциональный величине я*, а также иным способом привода
подвижных элементов реактивного сопла.
Система работает следующим образом.
В процессе запуска двигателя топливо из насоса 4 подается
через клапан постоянного давления 46 и клапан запуска 47 к
пусковым форсункам 53.
При выходе двигателя на малый газ поворачивается ручка
управления 22 и топливо из того же насоса 4 подается к основным
форсункам 50 через топливный кран 19, на котором
поддерживается постоянный перепад давлений с помощью специального
регулятора перепада. В этом случае к мембране 20 подводятся давления,
равные давлениям за и перед краном 19, и при наличии отклонения
от заданного перепада давлений золотник 21 осуществляет перепуск
топлива. Заданный перепад давлений устанавливается пружиной,
воздействующей на тот же золотник 21. Таким образом, на режиме
малого газа двигатель работает при постоянном расходе топлива
(при расходе топлива, пропорциональном проходному сечению
топливного крана 19). В этом случае основной дозирующий
топливный кран 15 с помощью пружины 12 находится в открытом
состоянии.
При переводе двигателя на рабочие режимы вступает в работу
система разгона двигателя. В этом случае от той же ручки
управления 22 и механизмов 25 и 34 осуществляется настройка
регулятора числа оборотов (затяжка пружины 35 золотника 40) на за:
данный режим.
Под воздействием сигнала рассогласований золотник 40
передвинется и с помощью поршня сервомотора 32 и пружины 12
дроссельный кран 15 переместится в сторону открытия до упора
рычага 11 в упор 13. Таким образом осуществляется дозирование
допустимого расхода топлива в двигатель в процессе его разгона.
При разгоне двигателя в различных условиях полета
допустимый расход топлива корректируется по сигналу,
пропорциональному величине р^. Для этого вторая опора рычага 11 перемещается
сервомотором 16, работающим с помощью золотника 17 в
следящем режиме от сигнала анероидной коробки 26, реагирующей на
величину р*#
Следовательно, если, например, уменьшается величина р\, то
золотник 17 и сервомотор 16 перемещаются в сторону упора 13
и тем самым уменьшают расход топлива в двигатель при его
разгоне.
Одновременно с перемещением дросселя 15 в сторону
увеличения расхода топлива происходит поворот рычага 30, который
перемещает золотник 54, в результате чего сервомотор 55 с
золотниковым распределением переместится вправо и рабочая жидкость
171
начнет поступать в сервомоторы 1 управления створками
реактивного сопла, перемещая их в сторону открытия.
При достижении двигателем числа оборотов, близкого к
заданному, регулятор числа оборотов начнет перемещать дроссель 15
в сторону уменьшения расхода топлива и одновременно через
рычаг 30 и механизм управления створками реактивного сопла начнет
перемещать створки в сторону уменьшения проходного сечения
сопла.
При изменении режима работы двигателя, т. е. при изменении
значения Як, проходное сечение реактивного сопла также
изменяется. Для этого во внутреннюю полость мембранной коробки 42
подводится давление, пропорциональное рг, а во внешнюю ее
полость— давление р*. Для выдерживания заданного закона
управления реактивным соплом Fc=f(nl) используется пневматический
редуктор, в котором можно изменять сечение входного жиклера
с помощью иглы 44 и механизма настройки 43.
При отклонении числа оборотов от заданного отработка сигнала
в рассматриваемой системе происходит аналогично тому, как
об этом говорилось при рассмотрении схемы, приведенной на
фиг. 2.11.
При уменьшении мощности в полете двигатель переходит на
минимально допустимый расход топлива, величина которого
изменяется в зависимости от условий полета. Для этого установлен
упор 14, в который упирается рычаг 11 и тем самым ограничивается
ход дроссельного крана 15 в сторону уменьшения расхода топлива.
Клапан 29 служит для предотвращения возможности передачи
больших усилий от поршня сервомотора привода дросселя 32 на
систему ограничения расхода топлива. В том случае, когда
рычаг 11 находится на упоре 13, перемещение поршня изодрома 31
в сторону увеличения расхода топлива может происходить без
передачи больших усилий на поршень 32 ввиду того, что из
межпоршневой полости жидкость может вытекать через клапан 29.
Как видно из схемы системы управления, рабочим телом для нее
является масло.
Для гашения возможных колебаний давления топлива в
магистралях в системе питания топливом предусмотрен демпфер 2.
При необходимости аварийного уменьшения мощности
двигателя включается соленоид 24 с золотником 23, в результате чего
топливо из напорной магистрали будет поступать на слив.
САР для одновального ТРДФ
На фиг. 2.52 приведена принципиальная схема системы
управления для одновального ТРДФ. Система состоит иэ регулятора
числа оборотов и автомата приемистости для основного контура
и регулятора форсажного контура с устройством управления створ-
172
ками реактивного сопла. Для подачи топлива как в основной, так
и в форсажный контуры применяются плунжерные насосы.
Рассмотрим отдельно работу систем для каждого контура.
Система для основного контура
Регулятор числа оборотов является изодромным регулятором;
принцип его работы во многом аналогичен принципу работы
регулятора, схема которого была рассмотрена ранее и приведена на
фиг. 2. 11. Разница состоит лишь в том, что сервомотор в
рассматриваемой схеме регулятора воздействует на наклонную шайбу
насоса, а не на дроссель. Кроме того, вместо вращающегося
жиклера 2, примененного в регуляторе, показанном на фиг. 2.11, здесь
применен дроссельный пакет 11, состоящий из пластин с
отверстиями. Здесь давление топлива, поступающего в золотниковое
распределение из напорной магистрали (рабочая жидкость),
поддерживается постоянным с помощью клапана 5. Режим работы основного
контура (число оборотов) задается ручкой управления 8, с
помощью которой осуществляется затяжка пружины регулятора
и открывается дроссельный кран. Следовательно, с помощью
рассматриваемого изодромного регулятора число оборотов двигателя
будет поддерживаться точно заданным.
Для разгона двигателя используется автомат приемистости,
состоящий из мембранного устройства 14 с золотником 17, анероид-
ной коробки 13, корректирующего жиклера с мембраной 15,
воздушного фильтра 16 и золотника 7. Дозирование топлива в
двигатель в процессе его разгона осуществляется по величине давления
воздуха р2 за компрессором. Для обеспечения сочетания
допустимых избытков расхода топлива с величиной р2 при разгоне
двигателя в различных условиях полета применяются анероидная
коробка 13, реагирующая на давление р2 и осуществляющая затяжку
пружины мембраны 14, и мембранное устройство 15, реагирующее
на давление р{ и изменяющее проходное сечение регулируемого
жиклера, стоящего на входе в верхнюю полость мембраны 14.
Таким образом, давление в верхней проточной полости мембраны 14,
а следовательно, и усилие, действующее на эту мембрану,
подбирается пропорционально величине допустимых избытков расхода
топлива. На золотнике 17 сравниваются силы, действующие со
стороны воздуха и со стороны топлива.
Принцип работы рассматриваемого автомата приемистости во
многом аналогичен принципу работы автомата, схема которого
приведена на фиг. 2.41. Разница заключается лишь в том, что
в нашем случае расход топлива в двигатель изменяется путем
изменения производительнотси насоса, а не воздействием на перепуск
топлива.
С помощью золотника 7 осуществляется подача рабочего тела
в полости сервомотора для обеспечения поворота наклонной шайбы
и изменения производительности насоса. Это осуществляется сле-
173
дующим образом. Если золотник 17 перемещается кверху (расход
топлива больше допустимого), то верхняя полость золотника 7
соединяется со сливом и золотник перемещается вверх. В результате
этого в левую полость сервомотора 12 подается жидкость с
большим давлением, а правая полость соединяется со сливом и
наклонная шайба перемещается в сторону уменьшения
производительности насоса. При чрезмерном уменьшении расхода топлива
золотники 17 и 7 опускаются вниз и под действием пружины наклонная
шайба перемещается в сторону увеличения производительности
насоса. При достижении числа оборотов двигателя, близкого к
заданному, дозирование топлива осуществляется под контролем
регулятора числа оборотов.
Система для форсажного контура
Топливо подается в форсажную камеру с помощью
плунжерного насоса 22 через кран управления 30, отверстие 32 и запорный
клапан 33 к форсункам 34. Расход топлива устанавливается
устройством, задающим режим, и далее корректируется пропорциональна
изменению величины полного давления перед компрессором р{.
Здесь по-существу применен регулятор расхода (давления)
топлива, схема которого была приведена на фиг. 2.18. Здесь добавлено
лишь устройство жесткой обратной связи по ходу поршня
сервомотора 23 через кулачковое устройство 27 на сопло-заслонку 28.
Наличие этого устройства позволяет более гибко производить
настройку регулятора на заданные законы подачи топлива.
Там же на фиг. 2. 52 (вверху, справа) показана схема
управления реактивным соплом. Здесь с домощью нескольких
гидравлических сервомоторов 38 осуществляется передвижение кольца 39 и,
следовательно, створок 40 реактивного сопла. Распределительный
золотник 41 перемещается с помощью электромагнитных
соленоидов 42 и 43. Сервомотор 38 имеет жесткую электрическую обратную
связь, которая осуществляется с помощью шестерни 44 и
потенциометра 45. Для управления соплом имеется электрический
мостик 48, в плечи которого включены задающие потенциометры 47,
потенциометр обратной связи 45 и два постоянных сопротивления.
В диагональ мостика включено трехпозиционное поляризованное
реле 49, включающее соленоиды 42 и 43.
Работа системы регулирования форсажного контура происходит
следующим образом. С помощью ручки управления 46 через
кулачок 50 производится поворот топливного крана 30 и одновременно
(или со сдвигом во времени) подается сигнал от задающих
потенциометров 47 на мостик 48. В результате этого, с одной стороны,
регулятор расхода перейдет на увеличенную подачу топлива в
форсажную камеру, а, с другой стороны, под действием сигнала
рассогласования поляризованное реле 49 включит соленоид 42, и
сервомотор 38 начнет раскрывать створки 40 реактивного сопла.
При балансе на мостике сервомотор остановится. Следовательно,
174
каждому положению ручки управления 46 должен соответствовать
определенный расход топлива в форсажную камеру и определенное
раскрытие створок реактивного сопла. При неизменном положении
ручки управления 46, но при изменении величины полного
давления р\ перед компрессором, будет происходить пропорциональное
изменение расхода топлива в результате деформации анероида 29.
При уменьшении режима работы форсажного контура движение
будет происходить в обратном направлении.
Форсажный контур можно включить лишь в том случае, если
основной контур работает на максимальном режиме, что
обеспечивается соответствующей установкой кулачков 50 и 51.
При выключенном форсажном контуре насос 22 продолжает
вращаться, поэтому во избежание его перегрева устанавливается
некоторый минимальный расход топлива на слив (на вход
насоса 1 основного контура). В этом случае кран 30 с помощью ручки
управления 46 поворачивается в такое положение, когда внутренняя
его полость через отверстие 32 соединяется со сливом.
Кроме указанных выше, в рассматриваемой схеме управления
форсажным контуром предусмотрены следующие агрегаты:
золотник 3, предотвращающий возможность чрезмерного повышения
давления топлива за насосом; клапан 33, предотвращающий
возможность попадания топлива в форсунки 34 при выключенной системе
подачи; соленоид 24, воздействующий на сопло-заслонку 25 и
предназначенный для аварийного выключения форсажного контура.
САР для ТВД
На фиг. 2. 53 приведена принципиальная схема системы
автоматического управления для одновалъного ТВД; слева, внизу
приведена схема регулятора числа оборотов, а справа—схема
регулятора температуры газа (подачи топлива).
Схема регулятора числа оборотов ВИШ
Лопасти ВИШ 13 поворачиваются при движении поршня
сервомотора 9, который соединен с лопастями с помощью шатунов 12.
ВИШ работает по схеме обратного действия, т. е. переход
лопастей в сторону увеличения угла установки лопастей винта
происходит под действием давления масла, подаваемого в полость А
цилиндра (передвижение поршня 9 вправо), а переход лопастей
в сторону уменьшения угла установки лопастей (передвижение
поршня 9 влево) происходит под действием моментов от
поперечных центробежных сил самих лопастей и дополнительно под
действием давления масла, подаваемого в полость Б.
Приведенная схема регулятора ВИШ выполняет следующие
функции:
1. Поддерживает заданное число оборотов ВИШ путем
изменения угла установки лопастей (шага винта).
175
2. Устанавливает ВИШ на промежуточные гидравлический или
механический упоры и снимает его с этих упоров.
3. Фиксирует угол установки лопастей винта (в любой момент
времени) гидравлическим и центробежным фиксаторами.
4. Принудительно вводит лопасти винта во флюгерное
положение и выводит из него.
Рассмотрим раздельно принцип работы ВИШ при выполнении
каждой из перечисленных функций.
1. Поддержание заданного числа оборотов
От вала двигателя приводятся во вращение шестеренчатый
масляный насос 18 и центробежный тахометр с грузиками и
золотником 37.
Масло подводится к шестеренчатому насосу из напорной
магистрали двигателя, а по выходе из насоса масло с высоким давлением
поступает на фильтр 28 и далее к золотниковому распределению
регулятора, т. е. к золотнику 37 и усилительной (следящей)
буксе 35.
Как видно из схемы, при увеличении числа оборотов по
сравнению с заданным букса 35 переместится вниз и соединит канал
большого шага с напорной магистралью, в результате чего через
открытый клапан / масло высокого давления будет поступать в
полость А воздушного винта и передвинет поршень 9 вправо, что
приведет к повороту лопастей 13 в сторону увеличения угла
установки, а следовательно, к уменьшению числа оборотов. В этом
случае масло из полости В воздушного винта будет сливаться в картер
двигателя.
При уменьшении числа оборотов по сравнению с заданным
движение будет происходить в обратном направлении и в этом случае
канал большого шага 16 ВИШ с помощью буксы 35 будет соединен
со сливом, в результате чего поршень 9 передвинется влево, что
приведет к уменьшению угла установки лопастей, а следовательно,
к увеличению числа оборотов двигателя.
В рассматриваемом случае расположение отдельных элементов
втулки ВИШ будет таким, как указано на схеме, в результате чего
канал 14 фиксатора шага будет находиться под большим
давлением масла, поступающего из насоса, и поэтому через указанные
на схеме каналы под поршнем клапана / установится большое
давление и он все время будет оставаться открытым. Канал 15 малого
шага все время будет находиться под давлением масла,
поступающего иэ магистрали двигателя (равного давлению масла на входе
в насос 18).
В зависимости от положения лопастей необходимый момент
для их поворота изменяется, поэтому, если бы давление масла в
канале большого шага было неизменным, то скорость перестановки
лопастей была бы переменной, что недопустимо из-за изменения
176
в этОхМ случае общего коэффициента усиления регулятора числа
оборотов.
Для устранения этого применен редукционный клапан 36, в
пружинную полость которого подводится масло из регулятора
(переменного давления), в результате чего как бы корректируется
усилие, развиваемое пружиной, и поэтому изменяется срабатываемый
перепад давлений на этом клапане (изменяется давление масла на
выходе из насоса 18). Клапан 17 служит для предотвращения
возникновения обратного потока масла в насос 18.
Настройка регулятора числа оборотов на заданное значение
оборотов осуществляется с помощью механизма, состоящего из
поршня 31, рейки 33 и винта 32 с шестеренчатой гайкой.
Предполагается, что двигатель имеет вертикальную линию рабочих режимов,
поэтому регулятор настраивается на одно значение числа оборотов.
Изменением давления масла под поршнем 31 с помощью
дросселирования сливного отверстия золотником 51 осуществляется
передвижение поршня 31 и изменение настройки регулятора.
Как видно из приведенного, никаких стабилизирующих
(корректирующих) устройств в цепи регулятора числа оборотов нет.
2. Установка ВИШ на промежуточные
гидравлический и механический упоры
и снятие его с этих упоров
При уменьшении режима работы двигателя, например, при
заходе на посадку, и при необходимости обеспечить последующий
быстрый набор мощности (например, в случае неудачного захода
на посадку) нельзя допускать чтобы угол установки лопастей винта
уменьшался до величины ф, равной или близкой к величине
нулевого угла ф0. Если допустить такое «облегчение» винта до ф0, то
с помощью рассматриваемой системы управления невозможно
будет обеспечить быстрый набор (восстановление) тяги, необходимой
для ухода на второй круг. В соответствии со сказанным,
применяется специальное устройство, которое при наличии сигнала на
облегчение винта не позволяет лопастям уйти на угол, меньший
некоторого фупор>фо.
В рассматриваемой схеме ВИШ это достигается следующим об-
разом.
При движении лоршня 9 в сторону уменьшения шага (влево)
произойдет соединение канала слива (в поршне) с каналами
золотников 11 и 7 и через них с полостью Г. В результате слива масла
из полости Г, клапан 1 под действием пружины закроется, масло
из полости А не будет сливаться, и поршень 9 остановится в таком
положении, при котором лопасти будут стоять на угле установки,
равном фупор.
Если по каким-либо случайным причинам не произойдет
фиксации угла установки лопастей на фупор с помощью рассмотренного
гидравлического устройства (гидравлический упор), то сработает
12 1327 177
система механической фиксации на угле фуПор, меньшем фуПор на
1—2° (механический упор).
В этом случае при дальнейшем (небольшом) продвижении
поршня 9 влево шарики 5 упрутся в гильзу, ввернутую в корпус
цилиндра, и остановят продвижение поршня в сторону уменьшения
угла установки лопастей. Шарики же будут находиться между
деталями 3 и 6 в положении, указанном на схеме.
Снять лопасти с указанных упоров можно лишь при наличии
специального сигнала, что осуществляется летчиком. Для этого
летчик должен с помощью специальных устройств замкнуть
электрическую цепь, в результате чего сработает соленоид 30 и
продвинет золотник в сторону сжатия его пружины (на схеме вверх).
В результате этого масло высокого давления из насоса 18 будет
подано к торцам золотников 21 и 22 и они передвинутся вверх;
тогда канал 14 фиксатора шага будет соединен со сливом, а
канал 15 малого шага будет соединен с напорной магистралью
из насоса. Тогда в полостях Б и Е ВИШ будет иметь место высокое
давление масла, а в полостях Д и Ж — давление слива. Под
действием большого давления масла на торец золотника 7 он
переместится вправо (сожмет пружину 8) и соединит полость Г с
большим давлением, в результате чего клапан / откроется и полость А
будет соединена (через каналы регулятора при поднятой вверх
буксе 55) со сливом.
Кроме того, поскольку в полости Б будет большое давление
масла, а в полости Д — давление слива, то поршенек 6 сожмет
пружину 4 и переместится влево (относительно поршня 9), и тогда
шарики 5 войдут внутрь гайки 3 и позволят свободно перемещаться
поршню 9 влево до упора (до значения <р=<р0).
При этом угол установки лопастей винта все время остается
под контролем регулятора, и изменять фо<Ф<ФУпор можно по тому
же принципу, который был рассмотрен при описании принципа
работы регулятора числа оборотов. Изменение угла установки
в пределах фо<Ф<Фупор необходимо для осуществления
торможения самолета (обычно после касания самолетом земли) с целью
уменьшения его пробега.
Как следует из рассмотренной схемы, при необходимости
загрузить винт до значения ф>фуПор переводом его из положения ф=фо
движение поршня 9 будет происходить без какой-либо остановки
его на значении ф=фуПор или ф=фуПор-
3. Фиксация шага винта гидравлическим
и центробежным фиксаторами
В случае выхода из строя по каким-либо причинам регулятора
числа оборотов необходимо зафиксировать лопасти винта на тех же
углах установки, которым перед этим соответствовал режим работы
двигателя. В противном случае винт может «облегчиться» (ф—>фо)
и в полете возникнет недопустимая отрицательная тяга. Одной из
178
возможных причин выхода регулятора из строя может явиться,
например, поломка насоса 18. В этом случае давление масла за
этим насосом резко упадет, следовательно, оно упадет и в канале 14
фиксатора шага, в результате чего упадет давление и в полости Г,
а клапан / закроется и не даст возможности вытекать маслу
из полости А. В этом случае винт будет работать при cp=constr
т. е. как винт фиксированного шага.
При недопустимо больших раскрутках винта, при n>nROm
также необходимо зафиксировать шаг винта и не дать возможности
винту «облегчиться» (в противном случае, это приведет к еще
большей раскрутке винта). Для этого предусмотрен центробежный
фиксатор шага винта, который действует следующим образом.
При превышении допустимого числа оборотов золотник 11 под
действием центробежных сил переместится по радиусу и сожмет
пружину 10. В результате этого проточка между поясками
золотника соединится со сливом, полость Г также соединится со сливом,
клапан 1 закроется, полость А отсоединится от регулятора и
лопасти будут зафиксированы на том угле, при котором сработал
рассмотренный фиксатор. При уменьшении числа оборотов
золотник 11 переместится на прежнее место и ВИШ будет находиться
под контролем регулятора.
4. Ввод лопастей во флюгерное положение
и вывод из него
При полете самолета в случае какой-либо неисправности в
работе двигателя последний должен быть остановлен, а лопасти винта
должны быть поставлены во флюгерное положение, т. е. в
положение наименьшего сопротивления полету. Это осуществляется
следующим образом. Летчик включает электродвигатель 27, который
приводит во вращение флюгерный насос 26. Одновременно с этим
подается сигнал на прекращение подачи топлива. Масло из
насоса 26 под большим давлением перемещает золотник 24 вверх и
поступает в фильтр 28, а оттуда через канал в золотнике 22 в канал 14
фиксатора шага. Кроме того, при перемещении золотника 24 вверх
масло под большим давлением начнет поступать через проточку
золотника 23 под торец золотника 19 и переместит его вверх, в
результате чего в канал 16 большого шага также начнет поступать
масло высокого давления. В результате этого в полости А и Г ВИШ
будет подано масло с высоким давлением, и поршень 9 будет
перемещаться в сторону большого шага до упора. Из полости Б масло
будет вытесняться в масляную систему двигателя. По достижении
лопастями флюгерного положения масляный насос 26 отключится
с помощью сигнала от конечного выключателя.
При выводе лопастей из флюгерного положения летчик
включает тот же электродвигатель 27 флюгерного насоса 26 и
соленоид 25. В результате этого золотники 23 и 24 переместятся вверх
и тогда масло с высоким давлением поступит в полость между зо-
12* 179
лотниками 21 и 20, золотник 20 переместится вверх и соединит
канал 15 малого шага с высоким давлением масла, подаваемого из
насоса 26. В этом случае канал 16 большого шага будет соединен
со сливом, так как при неработающем двигателе золотник 37 и
букса 35 будут подняты вверх. В результате этого полость А будет
соединена со сливом, а в полостях Г и Б будет иметь место высокое
давление, в результате чего поршень 9 будет перемещаться влево,
т. е. в сторону вывода лопастей из флюгерного положения.
В процессе вывода лопастей из флюгерного положения в полете
винт начинает раскручиваться (используя набегающий поток
воздуха) и при достижении числа оборотов, равного числу оборотов
запуска, двигатель начинает работать под контролем регулятора.
Перед запуском двигателя флюгерный насос и соленоид 25
выключаются.
Схема регулятора температуры газа
(подачи топлива)
Схема регулятора подачи топлива приведена справа на той же
фиг. 2.53. Шестеренчатый топливный насос 58 приводится во
вращение от вала двигателя; насос подает топливо через дроссельный
кран 56 и распределительный клапан 39а к форсункам 396. Перед
насосом 58 имеется подкачивающий центробежный топливный
насос 60 и топливно-масляный радиатор 59, предназначенный для
охлаждения масла в системе двигателя. На выходе из насоса 58
имеется клапан 57 постоянного перепада давлений на золотник 51,
который одновременно служит для перепуска топлива на вход в
насос в случае чрезмерного повышения давления топлива.
Дроссельный кран 56 имеет возможность как поворачиваться вокруг оси, так
и перемещаться вдоль оси, в результате чего его проходное
сечение F будет изменяться в зависимости от суммы этих движений.
Поворот дроссельного крана осуществляется под действием
пружины на рычаг 53, который закреплен на оси. Упором для поворота
дросселя служит или ручка управления 54 или шток поршня
сервомотора 55. Осевое перемещение дроссельного крана осуществляется
с помощью гидравлического сервомотора 50 одностороннего
действия, ход золотника 49 которого ограничивается рычажками 46
и 46а.
При относительно малых расходах топливо подводится к
форсункам по одному каналу, так как золотник 38 под действием
пружины закрывает второй канал. На схеме показано положение
деталей распределительного клапана 39а в том случае, когда
работают оба канала. При остановке двигателя подача топлива
полностью прекращается втулкой стоп-крана 39.
Таким образом, режим работы двигателя задается расходом
топлива в двигатель, т. е. положением ручки управления 54.
Рассматриваемая система подачи топлива позволяет
выполнять следующие функции:
180
1) ограничивать расход топлива исходя из условия —не
превышать максимально допустимые значения температуры газа и
мощности, развиваемой двигателем;
2) осуществлять разгон (обеспечивать необходимую
приемистость) двигателя.
Рассмотрим раздельно выполнение системой каждой из
указанных функций.
1. Ограничение температуры газа
и мощности двигателя
Здесь применен принцип ограничения температуры газа с
использованием разомкнутой системы, т. е. системы, входными
сигналами для которой являются Т\ и р*. Из уравнения GT =
=const 'P\f(T*) следует, что с изменением условий полета расход
топлива GT должен изменяться пропорционально сигналу pi и
нелинейно зависеть от сигнала Т*. Для введения этих сигналов в
систему ограничения служат сильфон 47, реагирующий на изменение
р*, и термочувствительный элемент 48, реагирующий на изменение
Т\. Оба эти сигнала суммируются на рычажке 46, который
ограничивает передвижение золотника 49, а следовательно, и
поршня сервомотора 50 в сторону увеличения расхода топлива (влево)
через дроссельный кран 56. Рабочая жидкость для сервомотора
подается от масляного насоса 42 через жиклер постоянного сечения.
Для высотных ТВД условие ограничения мощности,
развиваемой двигателем, вводится из-за ограниченной прочности элементов
двигателя, особенно элементов редуктора, поэтому эта система
ограничения должна работать лишь при высотах полета, меньших
расчетной, т. е. при #<#раСч.
При ограничении мощности двигателя используются сигналы,
пропорциональные рн и (р* — рн). В соответствии с этим анероид 44
дает сигнал, пропорциональный рн, а сильфон 45 дает сигнал,
пропорциональный (р!—рн). Оба эти сигнала суммируются на
рычажке 46а, который также ограничивает возможность
продвижения золотника 49 в сторону увеличения расхода топлива.
Как говорилось выше, ограничитель мощности работает (лишь
при #<//Расч, поэтому при Я>Ярасч золотник 49 не соприкасается
с рычажками 46а и между ними устанавливается какой-то зазор а.
2. Схема разгона (приемистости) двигателя
Для разгона двигателя используется гидравлический
сервомотор 55 одностороннего действия, в полость которого поступает
масло из насоса 42 под давлением, пропорциональным квадрату числа
оборотов двигателя. Для этого используется центробежный
тахометр 43, золотник которого дросселирует поступление масла в
полость з, откуда оно сливается через жиклер постоянного сечения.
181
Следовательно, в полости з будет давление масла,
пропорциональное квадрату числа оборотов тахометра, т. е. двигателя.
Под давлением масла, находящегося в полости з, передвигается
золотник 40, который дозирует поступление масла в сервомотор 55
пропорционально этому давлению.
Под действием пружины рычаг 53 всегда стремится
повернуться в сторону увеличения расхода топлива, но его ограничивает
ручка управления 54, в которую он упирается.
Шток на поршеньке сервомотора 55, когда он поджимается
пружиной до упора, не доходит до рычага 53 на расстояние 6. Такое
расположение элементов системы соответствует положению после
запуска двигателя, т. е. когда число оборотов двигателя
соответствует числу оборотов малого газа. В это время лопасти ВИШ
установлены на угол ф0 и в двигатель подается расход топлива,
соответствующий режиму малого газа. При разгоне двигателя ручка
управления 54 устанавливается летчиком в положение заданного
режима. Вслед за перемещением ручки управления 54, рычаг 53
под действием пружины поворачивается до соприкосновения со
штоком сервомотора 55 (выбирается зазор 6), ввиду чего в
двигатель поступает начальный избыток расхода топлива и двигатель
начинает раскручиваться. По мере возрастания числа оборотов
возрастает давление масла в полости з, а следовательно, и в
сервомоторе, и поэтому шток сервомотора 55 отодвигается под
возрастающим усилием, создаваемым давлением масла в efr) полости.
Такое движение будет происходить до тех пор, пока рычаг 53 не
упрется в ручку управления 54 и не установится заданный режим
работы двигателя.
Одновременно с поворотом рычага 53 и дроссельного крана 56
поворачивается кулачок 52, который, воздействуя через пружину
на золотник 51, дросселирует слив масла из полости этого
золотника (давление увеличивается). В результате этого давление под
поршнем 31 увеличивается и, передвигаясь, он осуществляет
перенастройку регулятора числа оборотов (затягивает пружину 34).
Соответствующая загрузка ВИШ осуществляется регулятором
числа оборотов.
В приведенной схеме системы управления для одновального
ТВД рассмотрены лишь основные условия ее работы. В
действительности полная схема системы управления для такого двигателя
значительно сложнее.
Глава III
Г
ТРД
ДИНАМИКА СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ТРД
В настоящей главе выводятся уравнения движения систем
регулирования и рассматриваются вопросы динамики для некоторых
схем, приведенных выше.
А. СИСТЕМЫ РЕГУЛИРОВАНИЯ ДЛЯ ОДНОВАЛЬНОГО
ТРД С НЕРЕГУЛИРУЕМЫМ РЕАКТИВНЫМ СОПЛОМ
1. ИЗОДРОМНЫЙ РЕГУЛЯТОР ЧИСЛА ОБОРОТОВ
а) Вывод уравнений движения
Составим уравнения движения и проведем краткий анализ
динамики системы регулирования числа оборотов ТРД с
нерегулируемым реактивным соплом и регулятором, показанным на схеме,
приведенной на фиг. 2. 13.
Указанные там
элементы регулятора дают
возможность представить
систему регулирования в
виде структурной схемы,
как это показано на
фиг. 3. 1. Там же
показано направление
движения сигналов, введено
обозначение
передаточных функций звеньев и
показаны два ВОЗМОЖНЫХ фиг> з. 1. Структурная схема системы регу-
способа воздействия: на- лирования.
стройкой на другие числа
оборотов Х° и возмущением, воздействующим на двигатель, /°.
С учетом обозначенных на схеме передаточных функций звеньев,
уравнения движения звеньев примут следующий вид:
(3.1)
Изодром *2
Сервомотор
Ф,
Ф
±
Тахометр $f
X механизм
настройки
букса-
сумматор
сигналов
183
Решая эту систему уравнений относительно Хп, получим
Рассмотрим случай, когда действует какое-либо одно
возмущение. Передаточные функции для замкнутой системы регулирования
относительно этих возмущений можно получить, если поочередно
приравнять /° = 0 или Х° = 0.
Напомним, что под передаточной функцией понимают
отношение выходного сигнала к входному, преобразованных по Лапласу,
при нулевых начальных условиях.
Следовательно, передаточные функции
выразятся так1:
ф — ±!L —.
^*^ п
Фоф1ф2-Ь<2>2фз +
ф0(1+ф2фз)
ф = *п =
f /0 Ф0ф1ф2 И"
(3.2)
(3.3)
Фиг. 3. 2. Схема действия
сил в центробежном
тахометре.
Теперь определим передаточные функции
отдельных звеньев, для чего составим
уравнение их движения.
Для вывода уравнения движения
центробежного тахометра рассмотрим
установившееся и неустановившееся его
движения.
В процессе установившегося движения
схема действия сил на золотник будет
такой, как показано на фиг. 3. 2. Р\ —
приведенная сила, развиваемая грузиками, а Р2 — сила, развиваемая
пружиной. Входной координатой является число оборотов, а
выходной — положение золотника у.
Сила Рз, обусловленная жидким трением, равна нулю, так как
dy/dt=O. Следовательно, для установившегося движения
справедливо равенство Pi = P2. Значение Pi зависит от числа оборотов п
и положения золотника у, т. е. Р{=Р\(п, у); значение Р2 зависит
лишь от положения золотника у, т. е. Р2 = Р2(у).
В процессе неустановившегося движения возникают1
инерционные силы и сила трения Р3. Величина инерционной силы
пропорциональна приведенной к оси золотника массе Мпр и ускорению
золотника, а величина силы трения — пропорциональна скорости
передвижения золотника. Следовательно, для неустановившегося
движения можно написать уравнение
где К — коэффициент пропорциональности.
dt
1 Здесь и далее при написании передаточных функций условно не будем
писать параметра преобразования 5.
184
Линеаризируя это уравнение, получим
Здесь
7^2 "" ""'"
'дР\
- I /7 I
ал
\ ду /0 V ^у /о max v д^ v
— * л 1 = ; а „=-
дР\\ Утах
^ )
)
0 /о
Коэффициенты Тг и Гк — размерные по времени. Наличие
в уравнении движения членов, содержащих первую и вторую
производные, свидетельствует о наличии динамической погрешности,
присущей рассматриваемой системе. Для уменьшения этой
погрешности необходимо максимально возможно уменьшить значение
коэффициентов при производных.
Коэффициент пропорциональности К на практике имеет очень
малую величину, поэтому без большой погрешности можно принять
/С^О, что дает Гк^0. Если предположить, что возмущения,
воздействующие на тахометр, отсутствуют, то вместо выражения (3.4)
получим
Решением этого уравнения будет
Хх =
t + Bsint.
тг тт
Отсюда частота собственных колебаний тахометра будет
f= 1 Уь
Для того чтобы сигнал в тахометре искажался как можно
меньше, необходимо увеличивать f, т. е. уменьшать значение Тг. Именно
поэтому современные центробежные тахометры выполняются с
минимальным значением приведенной массы Мпр и максимальным
значением п. Обычно частота собственных колебаний таких
тахометров составляет 25—30 гц, что вполне достаточно для того, чтобы
считать, что сигнал в таком тахометре практически не искажается,
т. е. Т2Г ~0. Тогда уравнение движения тахометра будет таким:
8^,=^ или Х1^—Хп=КхХп. (3.5)
В таком виде будем в дальнейшем применять уравнение движения
центробежного тахометра, передаточная функция которого
Фг = Кг. (3.6)
185
Теперь выведем уравнение двиоюения изодрома.
Из фиг. 3.3 видно, что изодром составлен из катаракта,
жиклера и пружин. Обозначим перемещение буксы золотника символом
AZ, соотношение плеч рычага обратной связи — i, перемещение
цилиндра катаракта — Am и перемещение поршня
сервомотора — А/.
Уравнение действующих сил (без учета массы) будет
F =F
л пр •* кап
где
, развиваемая пружинами;
Сх и С2 —коэффициенты жесткости пружин;
/7кат — сила, развиваемая катарактом.
Если скорость течения жидкости через жиклер сечением /ж
обозначить V, а площадь цилиндра
катаракта /кат, то из условия неразрывности
(~~2 течения для относительной скорости
перемещения поршня катаракта можно
написать:
/ж dt
Величина квадрата скорости течения
жидкости через жиклер практически
пропорциональна величине перепада
давлений.
Для малых величин изменения
давления можно принимать, что скорость
течения пропорциональна величине
перепада давлений, т. е.
Фиг. 3.3. Схема изодрома.
где рКат — давление в цилиндре
катаракта.
На основании сказанного можно написать
Отсюда усилие, развиваемое катарактом, будет
•'кат d
где
/жт dt
-Д/И) = Лсат/кат = ^кат =
/ка
(Д/-Д/В),
186
Подставляя полученные значения в уравнение действующих сил
и учитывая, что AZ2 = /Am, получим
Введя обозначения
у — AZ у _ А/
А2— 7 » Л3 — ~
/3 /7
-х1 ^ . р "max
Ci -г ^С2 zmax
получим окончательно
(Ги/7 + 1)^2=Ги^^3. (3.7)
Здесь Тш — имеет размерность времени и называется временем
изодрома.
Входным сигналом для изодрома является координата
сервомотора Xz, а выходным — положение буксы Х2.
Следовательно, передаточная функция изодрома будет
^ Т^ . (3.8)
1 к }
Уравнение движения гидравлического сервомотора получим из
условия неразрывности струи жидкости, т. е.
dt '
где V — скорость течения жидкости в окнах^ золотника;
b — ширина открытой части окна золотника;
F — площадь поршня сервомотора.
Гидравлические сервомоторы обычно выполняют так, что
развиваемое ими усилие значительно превышает потребное, поэтому
приближенно можно считать, что течение жидкости через окна
золотника происходит при постоянном перепаде давлений, что
означает 1/^const.
Пренебрегая массой сервомотора, из уравнения неразрывности
(с учетом сказанного) получим такое уравнение движения
сервомотора:
ТсРХъ=Хх или рХг=КсХи (3.9)
где Тс=—^— имеет размерность времени и называется постоян-
VyQb
ной времени сервомотора; АТС— коэффициент усиления.
тс
Следовательно, передаточная функция для сервомотора будет
®2=^Г = -±-=—. (ЗЛО)
Хх Тср р
187
Передаточную функцию для объекта регулирования принимаем
в соответствии с выражением (1.34).
Подставляя передаточные функции звеньев регулятора в
выражения (3.2) и (3.3), получим окончательно (при допущении, что
а1р±аъ . {3 П)
я/?з + агр* + а2р + «з
, (3.12)
+
+ а2р
где ао==--ЬгКсКг;
Следовательно, относительно рассматриваемых возмущений
уравнение движения будет:
{а0р^а1Р^а2р-\-а3)Хп={Чр^ч)Х^р{а2р+аъ)^. (3.13)
Устойчивость системы регулирования определим, применяя
критерий Раута — Гурвица, т. е. для устойчивой системы при
положительных (однозначных) коэффициентах левой части уравнения
необходимо, чтобы
плпо
1 3 =ага2 —
а0а2
Раскрывая значения коэффициентов, получим такое условие
устойчивости:
Отсюда видно, что запас устойчивости системы регулирования
увеличивается с увеличением значения
коэффициента-самовыравнивания Qi, так как в этом случае значение неравенства возрастает.
Это также означает, что с уменьшением чисел оборотов двигателя,
когда значение q\ уменьшается, запас устойчивости уменьшается
и переходные процессы могут ухудшиться. Предположив, что
Qi —^0, получим
Это условие устойчивости практически всегда выполняется, но
величина неравенства может оказаться недостаточной для получения
требуемых переходных процессов.
Если положить Ги—>0, что соответствует системе регулирования
без изодрома, то при qi>0 условием устойчивости будет 5nQi>0>
188
т. е. стабилизация процесса в данном случае будет происходить
лишь в результате того, что коэффициент самовыравнивания имеет
положительное значение; при Qi<0 и Ги—>0 система будет
неустойчивой.
Отсюда следует, что расчет системы регулирования необходимо
вести из условия получения заданных процессов при наименьших
числах оборотов и при полете на максимальной высоте с
наименьшей скоростью, так как это отвечает наихудшим условиям в
отношении устойчивости системы. Во всех других условиях полета
переходные процессы должны быть относительно лучше.
Из уравнения (3. 13) легко определяются значения
регулируемых параметров, когда t—>oo или р—>0:
т. е. при установившемся режиме работы двигателя число оборотов
точно соответствует заданному, следовательно, рассматриваемая
система астатична относительно возмущений Х° и /°. Под
возмущением /° нужно понимать воздействие от изменяющихся внешних
условий полета.
б) Выбор параметров регулятора
Как было установлено ранее, при изменении условий полета
и режима работы двигателя изменяются динамические
характеристики объекта регулирования, т. е. значения величин коэффициента
самовыравнивания qi и постоянной времени Т. Поэтому при
неизменных параметрах регулятора переходные процессы будут
различными вследствие изменения значения q\ и Т. Для конкретного
самолета с конкретным ТРД всегда известно, на каких режимах
работы двигателя какие значения скорости и высоты полета можно
достичь. Поэтому в трехмерном пространстве с координатами п, V,
Н имеется некоторая ограниченная область, определяющая
характер изменения интересующих нас параметров qx и Г, так как
каждому сочетанию п, V, Н соответствуют определенные значения
Qi и Т.
В общем виде таких сочетаний может быть сколько угодно;
практически важно решить задачу по выбору параметров
регулятора для таких сочетаний п, V, Н, при которых свойства двигателя
наихудшие, т. е. при V^VW, # = #max и п = пт[П. Если при этом
окажется, что для некоторых других условий полета и режимов
работы двигателя заданные переходные процессы не получаются,
то целесообразно ввести устройства, с помощью которых можно
было бы перенастраивать параметры регулятора либо по режимам
работы двигателя, либо по условиям полета. Однако почти всегда
удается так подобрать параметры регулятора, что переходные
процессы получаются приемлемыми для большей части области
изменения п, V, И.
189
Определение параметров регулятора будем проводить с учетом
нулей передаточной функции из условия получения монотонных
переходных процессов.
Для определения начальных условий напомним некоторые поло-
жения из теории автоматического регулирования. Начальные
условия, при которых протекают переходные процессы, определяются
различными внешними возмущениями, которые могут быть
приложены к различным звеньям системы регулирования. В данном
случае будем рассматривать лишь два вида возмущений — настройкой
регулятора Х° и изменением нагрузки /°, которые прикладываются
соответственно к первому звену регулятора и к объекту
регулирования.
При интегрировании дифференциальных уравнений с помощью обратного
преобразования Лапласа автоматически учитываются начальные условия, однако
в этом случае остается до некоторой степени скрытым влияние начальных
условий на процесс регулирования. Между тем тот же результат можно получить,
если рассматривать уравнение без правой части, но с учетом определенных
начальных условий. Различие между этими двумя возможными способами решения
при построении переходных процессов заключается в том, что для статических
систем [например, уравнение (3. 13) при возмущении Х°] начало координатных
осей переносится на величину начального отклонения. Иначе говоря, при
решении уравнений первым способом (с правой частью) переходный процесс
начинается из начала координат и при t -*• °° регулируемая величина достигает
какого-то значения Х°; при решении уравнений вторым способом (без правой
части, но с определенными начальными условиями) переходный процесс
начинается не из начала координат, а с ординаты, равной Х°, и при t -*• °о
регулируемая величина достигает оси абсцисс.
Различают два определения начальных условий: во-первых, такие
начальные условия, которые характеризуют состояние системы в любой момент времени
до нанесения возмущения. Для системы регулирования, движение которой
описывается дифференциальным уравнением порядка п, таких начальных условий
должно быть п; во-вторых, такие начальные условия, которые характеризуют
переходный процесс непосредственно после нанесения скачкообразного
возмущения в момент времени ^=(0+).
Начальные условия в первом смысле будем принимать нулевыми. Это
означает, что в момент нанесения возмущений система находилась в состоянии рав
новесия (установившееся движение) и поэтому все п начальных условий будут
нулевыми.
Рассмотрение же начальных условий в момент времени t= (0+) обусловлено
тем, что практически скачкообразного возмущения быть не может, а может
быть возмущение, наносимое за очень малый промежуток времени 8, в течение
которого состояние системы может измениться в величинах регулируемых
координат, их скоростей, ускорений и других величин.
Определим начальные условия, соответствующие £=(0+), для
чего воспользуемся известным преобразованием Лапласа с учетом
правой и левой частей уравнения (3.13).
При условии, что переходный процесс начинается в начале
координат и что возмущение единичное, начальное отклонение
определяется по такому выражению:
190
Если перенести начало координат на величину Х(0), то
начальное отклонение будет равно конечному при старой системе
координат и определится выражением
X (0) = lim SL[X(t)].
S-+0
Следовательно, связь между старой и новой системами
координат осуществляется по зависимости
Следовательно, для (3.13) будем иметь (при 1[Х°(1)] = —\:
X(0)=limS а*5 + a° = 0;
S (aS3 + aS^ + aS + a) S
a3) S
a°
Hm5
S->o (a0S* + axS2 + a2S + a3) S as
Следовательно, начальное отклонение будет
аз #3
В дальнейшем начальное отклонение как при старом, так и при
перенесенном начале координат будет обозначать
^нач = ^(0)=-^. (ЗЛ4)
а3
Начальную скорость определим по известному выражению:
X' (0) = lim | S*L [X (/)] - SX (0) | =
S
S2
. х.7 =0. (3.15)
■a2S + as)S
Здесь А'/(0)=0, потому что принимается Z(0)=0, так как
перенесение начала координат не влияет на начальную и последующие
производные.
Начальное ускорение также определим по известному
выражению:
X"(0) = hm\S3L[X(t)]-S2X(0)-SX'(0)\ =
53 а*5 + a° S2X (0)SX' (0)
'- OQ -f «iS2 + a2S ' ~4° W W
(3.16)
Для астатической системы [например, уравнение (3.13) при
возмущении /°] перенесение начала координат не имеет смысла, так как
процесс начинается из начала координат и при t^oo сходит к оси
абсцисс.
191
Аналогично при /° [1] будем иметь такие начальные условия:
S—оо
S
S2
- a2S + л3) ^
(a2S + аз) ^
= 0;
-SX(0)
«2
aQ
(a2S + a3S) 5
-S2X(0)-
(3.17)
+ a3)S
аз a2ai
aQ a20
Отметим интересную особенность полученных начальных
условий. Если в выражении (3.17) заменить выражения
коэффициентов через параметры системы, то получим
т. е. при возмущении, приложенном к объекту регулирования,
начальные условия зависят лишь от параметров объекта
регулирования.
Если же в выражениях (3.14), (3.15) и (3.16) произвести ту
же замену, то получим
Здесь начальные условия зависят уже от параметров как объекта
регулирования, так и регулятора.
Выясним условия монотонности процесса при возмущении,
обусловленном перестройкой регулятора. Для этого вспомним
некоторые положения из теории автоматического регулирования.
Необходимым условием монотонности является равнозначность между
начальным отклонением ^(0) и первой не обращающейся в нуль производной,
в данном случае Я"(0), т. е. при Х(0)>0 необходимо, чтобы было Я"(0)<0
и, наоборот, при Х(0)<0 необходимо, чтобы было Х//(0)>0. Однако это
условие не является достаточным, так как при достаточно большом абсолютном
значении первой не обращающейся в нуль производной, даже при Х/7(0)<0
и достаточно малом значении Z(0)>0, переходный процесс все же может иметь
перерегулирование.
При действительных корнях характеристического уравнения третьей степени
решение дифференциального уравнения можно записать так:
X (0 = Аге-р*'+ A2e~P2t -f
(3.18)
где pi; рг/ Рз — корни характеристического уравнения. Из трех составляющих
процесса определяющей является та, которая медленнее остальных затухает.
Очевидно, этой составляющей соответствует ближайший к мнимой оси корень.
Если принять распределение корней |pi|< |рг1 < | Рз1, то из теории
автоматического регулирования известно, что необходимые и достаточные условия
монотонности можно свести к условию
Ах > 0, (3.19)
где А\—коэффициент в уравнении (3.18) при составляющей процесса,
соответствующей ближайшему к мнимой оси корню. При действительных отрица-
192
тельных корнях и условии, что pi есть ближайший к мнимой оси корень, (3. 19)
выражает условие монотонности процесса.
Значение коэффициента А\ может быть выражено через корни
характеристического уравнения и начальные условия следующим образом:
А = X (0) р2р, + X' (0) (р2 -j- дз) -г *" (0) 2())
(/^2 — Pl)(P3 — Pi)
Используя это выражение для Ль можно получить условие монотонности
для различных начальных условий, в том числе и для нашего случая, когда
Х(0)^0 Л'(0)0 Л"(0)^0
Для комплексных корней характеристического уравнения необходимым
условием монотонности является условие
|а|>|л|, (3.21)
где а—-действительная часть комплексного корня. Условие (3.21) показывает,
что ближайшим к мнимой оси является действительный корень р\.
Введем в рассмотрение скорость изменения регулируемого параметра, т. е.
продифференцировав (3. 18), получим
или при комплексных корнях
\r/ /j\ d —p,t t d Л—я4-/3 W i r> Л(—a — /8) t /q f)O\
— Л \t) = и\в -рDc2^ -у-D^e • \o-ZZ)
Рассмотрим также комплексную функцию действительного параметра
"л? (j.\ с* d л(—V.-\-l$)t i D Л—P\t /О OQ'i
y\ (I) = Zt>2^ с &1& ? W* ^^/
действительная часть которой равна функции —^7(0-
На границе монотонности должно быть условие: —X'(t)=Qt поэтому для
данного случая функция (3.23) должна принимать чисто мнимое значение.
В этом случае функция (3.23) вырождается в такую:
X (т) = —^- e(-i+i) Ч-1 = Хо (1)-\-1, (3.24)
где
a—р\
Выражение
~^2 (_v_|-f)x -у , -у /о ос\
является уравнением логарифмической спирали. Поэтому вся задача
определения условий монотонности согласно (3. 24) сводится к нахождению точек
пересечения логарифмической спирали (3.25) с линией Х=—1, так как
(3.26)
Если логарифмическая спираль не имеет точек пересечения с линией Х=—1, то
процесс будет монотонным. При наличии точки касания логарифмической спирали
с этой прямой система будет находиться на границе монотонности.
Таким образом, для комплексных корней, когда |a|>lpi|, необходимое и
достаточное условие монотонности можно представить выражением
(3-27)
13 1327 ' 193
где Хо и Yo — координаты логарифмической спирали при т^О, а
(328)
Зная коэффициенты уравнений, корни характеристического уравнения и
заданные начальные условия, можно установить конкретные соотношения,
определяющие условия монотонности процесса.
Однако подобные задачи можно решать гораздо проще, если для известных
начальных условий и известного распределения корней характеристического
уравнения выразить условия монотонности через параметры Вышнеградского и
нанести соответствующие кривые на диаграмму Вышнеградского К Выполним это для
статической системы регулирования и начальных условий Х(0) =£0; Х'(0)=0;
Х^^ФО. Преобразуем исходное уравнение (3.13) в нормированное
(учитывается возмущение Х°), используя подстановку t
п = (Ар+ В) Х0,
з Г Ф
t=xi/ —;
у *о
где
afaf
получим
а3
(3.29)
В случае действительных корней характеристического уравнения и
распределения |/?i | < |/?2 I < |/?з I» используя (3.20) и учитывая известное
соотношение между корнями в виде Pip2p3=z—> Для заданных выше
надо
чальных условий получим такое необходимое и достаточное условие
монотонности:
X" (0)
(3.30)
Для нормированного уравнения (3.29) эти же условия монотонности будут
такими:
Х(0)
Pi
(3.31)
Для нормированного уравнения начальные условия вместо (3. 14)—(3. 16)
можно записать так:
тогда
Х(0)=—В; X" (0) =
Х"(0) А
if—T
(332)
Приравнивая (3.31) и (3.32), получим уравнение линий, ограничивающих
области монотонности, в виде
т-т-
В рг
Используя зависимость для р\ от коэффициентов нормированного уравнения
(3-33)
в виде
Р\
(3.34)
1 Это выполнено Л. Н. Гецовым и Г. П. Анучкиным.
194
и значения самих коэффициентов по (3.29), это же условие монотонности
можно записать так:
ао
— Лоао)
— а2а0) < 0.
(3. 35)
Для нанесения на диаграмму Вышнеградского линий, ограничивающих
области монотонности, необходимо в (3.34) подставить (3.33). Тогда получим
В В2 А
В>А А ~~^ + ВТ
(3.36)
?2Н
Ю
8
6
2
ТГ°05
If i
\0 2р.
in
\ 1Ш
/1 /1/1
1 1
тт
JT
т
д Т
\ 1
_1л
Ijfl
//I
I
4
4
0
1
й
г
Pi
\
!
Ц
/ft
^f
/*
1
wr
'/i
--0J
^fl/
67^
*—-
^T
^ I I
^. I'—
Фиг. 3.4. Диаграмма
Вышнеградского с областями монотонных
процессов.
Следовательно, при заданных ~zr области монотонности ограничиваются ли-
В
ниями pi=const и располагаются выше этих линий, как это показано на фиг. 3.4
для области, которой соответствуют действительные отрицательные корни.
Для случая, когда имеются один действительный и два комплексных корня
[(—а+ф); (—а—ф); —pj, возможная область монотонности при условии
ia!>|Pil располагается в области, ограниченной кривой
9Л£+27=0.
(3.37)
Это соответствует кривой £OZ) на диаграмме Вышнеградского на фиг. 3.4.
Разделяя (3. 25) на мнимую и действительную части при т=0 с учетом (3. 32)
и с учетом того, что
[(а + $)PlX(0)+X"(0)](a-m
31 =
13*
195
а также известного соотношения между корнями нормированного
характеристического уравнения третьей степени в виде
получим такое уравнение для Yo, входящее в (3.27):
[2 - (A-Pl) p\\ -J-(A- 3Pl) Pl
(3. 38)
— Spi
I _ p 4211/2
Если теперь подставить в (3.27) выражения (3.38) и (3.36) с учетом
того, что
то получим трансцендентное уравнение линии, ограничивающей область
монотонности, в виде
А ' Л (3.39)
Решить такое уравнение можно только графически. Считая заданным /4/£=const,
можно нанести кривые B=f(A) на диаграмму Вышнеградского, что и выполнено
на фиг. 3.4. Области монотонности располагаются выше нанесенных границ
монотонности, как показано штриховкой. Вдоль кривой ОЕ граница
монотонности для действительных корней переходит в границу монотонности для
комплексных корней. Таким образом, при указанных начальных условиях, пользуясь
приведенной диаграммой, можно очень быстро определить необходимые параметрй
системы регулирования при сохранении переходного процесса монотонным.
Минимумы границ монотонности (пунктирная кривая) при комплексных
корнях соответствуют минимуму интегральной оценки и поэтому время
переходного процесса будет наименьшим.
Следовательно, практически решение задачи с помощью
диаграммы Вышнеградского по отысканию таких параметров
регулятора, при которых процесс оказывается монотонным (при
рассмотренных выше начальных условиях), сводится к совместному
решению выражений (3.29) и (3.32), когда заданы коэффициенты
Вышнеградского А и В и начальные условия А/В.
Для получения минимального времени регулирования
необходимо принимать большее значение А/В, так как в этом случае
уменьшается величина интегральной оценки. Результат выбора
параметров регулятора указанным образом определяется величиной
интегральной оценки. Для монотонных процессов, описываемых
уравнением третьего порядка при нулевых начальных условиях,
выражение для интегральной оценки будет таким:
аз
ао
(3.40)
196
Для начальных условий, когда ^"(0)^0; X' (0) = 0; Х"
согласно выражениям (3. 14) и (3.16) получим
2 . (3.41)
«3 [ #0 J Я3
Если выразить /х" через параметры системы с учетом qx = 1 и
8=1, получим
yXo = 1^Y" ' (3'42)
Отсюда следует, что для уменьшения интегральной оценки
необходимо увеличивать значения коэффициентов усиления Кг
тахометра и /<с сервомотора и уменьшать время изодрома Ги.
Теперь определим величину интегральной оценки при
возмущении /о. Согласно уравнениям (3.17) и (3.40) выражение для //о
при р=1; Qi = 1 будет
г _Я^ Г _Оз_ ^1 СС2 | ^2
Л3 Л0 ^о Л
Следовательно, для уменьшения J/o целесообразно увеличивать
значения К\ и /Сс и уменьшать Ги. Однако изменять эти параметры
можно лишь в пределах выполнения условий устойчивости и
монотонности.
Из сравнения выражений (3. 42) и (3. 43) видно, что при
возмущении /° величина интегральной оценки не зависит от
параметров объекта регулирования, а при возмущении Х° она зависит
также и от параметров объекта регулирования.
2. РЕГУЛЯТОР ЧИСЛА ОБОРОТОВ С АКСЕЛЕРОМЕТРОМ
а) Вывод уравнений движения
Принципиальная схема системы регулирования приведена на
фиг. 2. 16, а структурная схема приведена на фиг. 3. 5.
С учетом обозначенных на схеме передаточных функций
уравнения движения выразятся так:
(3.44)
Решая эту систему уравнений относительно Хп, получим
197
Отсюда находим передаточные функции:
ф =
п
Хп
Ф0Ф1Ф2
Ф0Ф2Ф3 + Ф0Ф1Ф2
I
(3.45)
- /о Ф0Ф2Ф3 -f- Ф0Ф1Ф2 + 1 ' j
Передаточные функции для Ф1 и Фг примем из выражений (3. 6)
и (3.10) соответственно. Передаточную функцию Фз для
акселерометра, дающего сигнал, пропорциональный величине ускорения
вращения ротора двигателя,
получим исходя из
следующих соображений.
Вращающуюся массу, соединенную
с валом двигателя зубчатой
передачей через пружину,
можно уподобить массе,
подвешенной на пружине.
Если обозначить символом
а угол поворота
инерционной массы (см. позицию 6
на фиг. 2. 16) относительно
вращающегося валика
привода (в процессе
неустановившегося движения), то
уравнение движения массы
Фиг. 3.5. Структурная схема системы ре- акселерометра по углу по-
гулирования. ворота а можно представить
в виде
настройка
Уа а
В правой части уравнения стоит член, учитывающий инерционное
усилие, создаваемое массой от ускорения вращения; /а—момент
инерции вращающейся массы; р — коэффициент вязкого трения;
Y—коэффициент жесткости пружины; п — число оборотов массы;
К — передаточное число от вала двигателя к массе.
Перемещение золотника Х2 пропорционально углу поворота
массы, т. е.
Х2 = та.
Поэтому написанное выше уравнение можно представить так:
(3.46)
где
т2 - -
1 а —
^я
тупо
198
Тогда частота собственных колебаний будет /= 2rJ, ; величина
ga представляет собой декремент затухания; Ка — коэффициент
усиления.
Уменьшая значение Га (уменьшением величины массы или
увеличением коэффициента жесткости пружины), можно увеличить
частоту собственных колебаний и, доведя ее до f= 15-^20 гц, можно
считать 7^~0.
Тогда уравнение движения акселерометра можно записать так:
(Тгр+1)Х2 = кйрХп, (3.47)
где Г1 = 2Га£а имеет размерность времени и служит мерой
погрешности измерения величины ускорения вращения вала двигателя.
Отсюда передаточная функция акселерометра будет:
Фв=*2.= -^--. (3.48)
3 хп тгР+1
Подставляя передаточные функции звеньев в (3.45), получим
(при допущении, что Фо = Фо)
(3.49)
-Ь аъ
ф = (Д2Р + аз)/> ^ (3. 50)
a0p3 + ap<2+ap + a
где
Следовательно, уравнение движения будет таким:
(а0/73+а1/72 + а2/7 + а3)^л=(а1/7 + ао)Хо+/7(а2/7 + аз)/0, (3.51)
Устойчивость системы определяется неравенством
Отсюда видно, что запас устойчивости увеличивается при
возрастании значения коэффициента самовыравнивания q\. На малых
режимах работы двигателя, когда q\—+0, получим неравенство:
Если отключить акселерометр, положив /Ca = ^i=0, то при
Qi—>0 система становится неустойчивой.
Если положить Qi>0 и К& = Т1 = 0, то устойчивость будет
определяться неравенством Tqi>0, т. е., как и в случае изодромного
регул ятооа, пои 7"и = 0.
199
Конечное значение регулируемого параметра при
перенастройке регулятора будет таким же, как и для системы с изодромным
регулятором
^л(со) = Х0.
Следовательно, система астатична относительно возмущений
Х° и /°.
б) Выбор параметров регулятора
Определение параметров регулятора будем проводить с учетом
нулей передаточной функции из условия получения монотонных
процессов.
Определим начальные условия аналогично тому, как это было
сделано при рассмотрении системы с изодромной обратной связью
в соответствии с выражениями (3.14), (3.15) и (3.16):
() ()
#3 #0 Т
Параметры системы целесообразно выбирать с помощью той же
диаграммы Вышнеградского с нанесенными границами
монотонности, как и при рассмотрении изодромной системы.
Величина интегральной оценки при qi = 1 и возмущении Х° [1]
определяется согласно (3.41) следующим выражением:
Из сравнения этого выражения с (3. 42) видно, что при условии
Ь\Кь = Ти процессы с изодромным регулятором и с регулятором
с акселерометром будут одинаковыми.
Начальные условия при возмущении /° при qi = 1 согласно (3. 17)
будут
а0 Т я0 а0 Л
Величина интегральной оценки при Qi = l и указанном
возмущении определяется согласно (3.40) следующим выражением:
± (3.53)
Отсюда следует, что при возмущении /° для уменьшения
величины интегральной оценки целесообразно увеличивать значения
/Ci И Ко-
Из сравнения этого выражения с (3. 43) видно, что при
возмущении /° процессы с изодромным регулятором будут хуже, чем
с акселерометром, причем разница в интегральной оценке будет
на величину TJKu
Ниже при рассмотрении конкретных примеров показано, как
отличаются переходные процессы при различных возмущениях
и начальных условиях.
200
Теперь определим интегральные оценки для монотонного
процесса при 7^—0. Начальные условия при возмущение Х° будут (при
перенесении начала координат):
X(0)=-llm\s ^^ = -1;
S0 | [TSZfaKK + iiS + btfK^S
A"(0) = lim \S2 ^^ 0 | = 0.
я I [TS* ь (ЬКК + Q)S Ь^Кс] S |
Условием монотонности для уравнения второго порядка при
таких начальных условиях примем равенство действительных и
отрицательных корней характеристического уравнения.
Для интегральной оценки получим следующее выражение:
1 + ***°*« . (3.54)
bKK У
Сравнивая с (3.52), видим, что выражение для интегральных
оценок одинаково для случая, когда Т\Ф0 и 7*1 = 0.
Однако такой вывод был бы неправильным. Действительно,
условия монотонности при 7\=0 и Тхф0 соответствуют
различным соотношениям между параметрами системы, в результате чего
сами параметры будут различными. Чем больше значение Тъ тем
меньше должны быть значения Кс и Къ а следовательно, будет
расти и величина интегральной оценки. Если в выражении (3. 54)
вместо /Са подставить его выражение из условия равенства корней
/' К Т 1
характеристического уравнения /Са = 2 | / —— , то получим
V
- (3'55)
Определим интегральную оценку при возмущении /°. Начальные
условия при этом возмущении будут следующими:
И=0;
52—— г—i—~ ° =~-
Тогда для интегральной оценки получим следующее выражение:
Jfo = . (3.56)
■ Ь.КгКс V J
Во всех случаях, когда определяется интегральная оценка,
обусловленная возмущением /° на объект регулирования,
принимается единичное возмущение. Однако в действительности такого
возмущения на двигатель никогда не бывает; поэтому полученные
оценки в действительности будут значительно меньше.
Ниже при рассмотрении конкретных примеров показано, какие
процессы могут происходить при этих возмущениях.
201
3. ПРИМЕРЫ
Пример 1
Задание. Рассчитать систему регулирования числа оборотов одновального
ТРД с нерегулируемым реактивным соплом при его работе на стенде на режиме,
близком к максимальному, при условии получения монотонных переходных
процессов при перенастройке изодромного регулятора.
Исходные данные. Уравнение движения двигателя принимать из
примера 1, приведенного в разд. 1 гл. I (стр. 52); уравнение движения всей системы
регулирования принимать по (3.13).
Решение. Воспользуемся диаграммой Вышнеградского с нанесенными
кривыми границ монотонности на фиг. 3. 4. Для дальнейшего положим, что в
уравнении изодрома (3.8) (3=1; тогда определению подлежат коэффициенты Кс, К\
и Ги« Эти три коэффициента определим, воспользовавшись выражениями (3. 29)
и (3.32), причем предварительно зададимся значениями коэффициентов
Вышнеградского, расположенных на кривой, соединяющей точки минимумов границ
монотонности.
Положим для первого расчета: А = 4; В —Б; А/В = А, т. е.
Заменяя коэффициенты их выражениями через параметры регулятора и
объекта регулирования, получим такие выражения для Ки Кс и Тп при Qi — \ и Р=1:
К\ =
Кс =
С*Т(В-С)-Т„
~ст
Л
г-4(В-С)].
Z
Подставляя принятые значения для А, В и С, получим
(3.57)
Варианты
1
2
Коэффициенты
Кг
171,0
13,0
Кс
0,01
25,5
т„
7,46
0,54
Соответственно значения постоянной времени сервомотора будут:
=
Полученные значения постоянных времени сервомотора являются
нереальными для практического выполнения.
Выбирать точку на диаграмме Вышнеградского по кривой, соединяющей
минимумы границ монотонности, в сторону увеличения значения А/В—С
нецелесообразно, так как при этом будут получены значения параметров, еще менее
подходящие для практических целей.
Выберем следующие значения коэффициентов:
А -3,5; В = 4,2;
202
В этом случае получим следующие значения параметров:
Варианты
3
4
Кг
55,5
8,3
Коэффициенты
/Сс
0,034
14,4
Т
1 и
4,66
0,59
Значения постоянной времени сервомотора будут:
1 1
Тс1 = = 29,6 сек; Тс<> = —— = 0,07 сек.
1 0,034 14,4
Эти значения также еще далеки от приемлемых.
Примем Л=2,5; 5=2,9; Л/£=С==1,5.
Б этом случае получим такие значения параметров
Варианты
5
6
Коэффициенты
Кг
15,7
5,5
Кс
0,212
2,3
1,24
0,635
Значения постоянной времени сервомотора будут:
0О1О ' ' О Q '
,Z1Z Z, О
Полученное значение постоянной времени Гс2=0,43 сек близко к практически
применяемому.
Коэффициенты уравнения в соответствии с (3. 13) для шестого варианта
будут такими:
<Z! = 2,64; ао = 4,15; а2 = 0,21; а3=0,81.
Дальнейший выбор коэффициентов в сторону уменьшения значений А/В не
имеет смысла потому, что при этом будет раст_и_величина интегральной оценки.
Нецелесообразно также при данном значении Л/В = 1,5 выбирать точки с
различными значениями А и В, так как во всех остальных случаях интегральная
оценка также будет увеличиваться. Полученные же значения коэффициента
усиления К\ и время изодрома Ти являются вполне приемлемыми.
Определим величины интегральных оценок для четвертого, пятого и шестого
вариантов, воспользовавшись (3.42) и полученными выше значениями для Таг
Кс и К\.
Соответствующие значения будут такими:
Варианты 4 5 6
/Хо
0,25 1,10 0,55
Для проверки правильности выбранных параметров построим переходные
процессы для пятого и шестого вариантов.
203
Для пятого варианта имеем следующие значения коэффициентов уравнения:
я0 = 0,62; Л! = 1,87; Д2 = 2,62; а3=\,1;
а! = 1,35; ао=1,1О; а2=0,41; а3= 0,415;
тогда уравнение движения будет:
Корни характеристического уравнения будут:
Xi = —0,63; Я2 = —1,2+/ -1,13; 13 = —1,2—М,13.
Хп
1,0
1
L
/
ь
/
~1?
1
^л
/
"^
у
-■^
-
2
S**
1
3
— 1 —
3
7
г /
Фиг. 3. 6. Переходные процессы
с изодромным регулятором.
Перенастройка регулятора:
/—вариант 5; 2—вариант 6.
Изменение нагрузки: 3—вариант 5;
4—вариант 6.
Изображение искомой координаты при условии X°=\[t] будет:
1,355+1,10 Cq_ d C2
5 ~~
Хп (5) -
5(0,6253 + 1,8752 + 2,625 + 1,1) 5 ' S~)
Отсюда находим значения постоянных Со, С\, С2,
1,10 „ 1,35Х! + 1,Ю
С,=.
1,35 Х2 + 1,10
5 —
1,35Х3+ 1,10
С3
5 — U
Следовательно, уравнение переходного процесса будет таким:
После подстановки цифровых значений корней и преобразования получим
Хп (t) = 1,0 — 0,31е-°'63/ — 1, lie-1'2' sin (1,13* + 0,65).
Соответственно для шестого варианта получим:
Хп it) = 1,0 — 0,30e~lt27/ — 1, \е~2^ sin (2,21* ~ 0,65).
Соответствующие переходные процессы даны на фиг. 3. 6.
Пример 2
Задание. Проверить качество переходных процессов системы,
рассчитанной в первом примере, но при возмущении /°.
Исходные данные. Воспользоваться результатами расчета пятого
и шестого вариантов первого примера.
204
Решение. Предполслая, чю процесс при гюзмущении /° будет
знакопостоянным, определим величины интегральных оценок согласно (3.43).
Для пятого варианта получим Jfo = 0,38; для шестого варианта /^„=0,20; для
четвертого варианта /^о = 0,08.
Для проверки определим переходные процессы. Для пятого варианта
уравнение движения будет таким:
Отсюда находим изображение искомой координаты при /°=1[/]:
5(0.415 4-0,41) Cj_ t C2 , С3
^*■ П. V*-*/ ^-> /л ллпс , -j C7 СО I О АО С I 1 1\ С "} С *> С V*
о IU, OZo ° "7" I , о / о - —}— Z, OZo ~р 1 > А / о —Л j »3 — Л о о — A3
Постоянные Сь С2, С3 определяем из таких выражений:
0,41^+0,41 ^ 0,41Х2 4-0,41 0,41Х3 4-0,41
£> __ _ . Q^ __ —. . (^^= .
(Xj — Х2) (Xj — Х3) " (Хо — Xj) (Хо — Хз) (Хз — Xj) (X3 — Хз)
Уравнение переходного процесса будет
Xп (/) ■-= (~>\£ х 4~ С9^ 2 4~ ^з^ 3 •
После подстановки цифровых значений и преобразований для пятого
варианта получим
Хп (0 = 0,14^~°'63/ —0,55e~1>lw cos (1,13/ 4- 1,26).
Аналогично для шестого варианта получим
Х„ (/) = 0,29е~1>29/ —0,34^"2'3^ cos (2,21/ 4- 0,52).
На фиг. 3.6 приведены переходные процессы.
Еще раз подчеркнем, что возмущение /° в виде 1[/] практически не может
существовать, так как изменение f° скачком по-существу означает изменение
скачком расхода воздуха через двигатель, чего в действительности у
двигателя, не имеющего регулируемого входа, не может быть. По условиям полета f°
изменяется относительно медленно; поэтому приведенные переходные процессы
при возмущении f° скачком нужно рассматривать как предельные.
Действительные же процессы будут существенно лучше полученных.
Пример 3
Задание. Рассчитать систему регулирования числа оборотов одновального
ТРД с нерегулируемым реактивным соплом при работе двигателя на стенде, на
режиме, близком к максимальному, при условии получения монотонных
переходных процессов при перенастройке регулятора с акселерометром.
Исходные данные. Уравнение движения двигателя принять из
примера 1, приведенного в разд. 1 гл. I (стр. 52), а уравнение движения всей
системы регулирования—-по (3.51).
Решение. Воспользуемся той же диаграммой Вышнеградского,
приведенной на фиг. 3.4. Определим значения коэффициентов /Са, Кс, Ки Ти ПРИ
которых переходный процесс оставался бы монотонным, а время регулирования было
бы наименьшим. Для этого выберем параметры Вышнеградского по кривой,
соединяющей минимум границы монотонности, и воспользуемся выражениями
для коэффициентов Вышнеградского:
а\ ZA~
Л~ a^a^-{TTlfi^
ЯГ1'* I (3.58)
I
205
Из полученного видно, что параметры Ка, Кс, Ки Т\ не определяются
однозначно. Однако поставленную задачу можно решить, если задаться значением Ти
а из первых двух выражений (3.58) определить общий коэффициент усиления
/C=6,/f,/Cc и К&, т. е.
ТТХА
' '
Связь с параметрами Вышнеградского получим, если перемножим первое
и третье выражения (3.58), т. е.
Далее на кривой, соединяющей минимумы границ монотонности диаграммы
Вышнеградского, выбираем точку, соответствующую найденному значению
произведения АС при заданном значении Ти которая и определяет значения
параметров А, В и С.
Параметры, подсчитанные для различных Тх при /Сс=2,3, имеют следующие
значения:
т
0
0
0
1
,2
,1
,05
AC
1
1
1
,4
,2
,1
2
2
2
,15
,05
,02
2
2
2
В
,60
,50
,45
0
0
0
Параметры
С
,65
,58
,54
К
3,4
9,8
31,6
к
2
2
2
,3
,3
,3
/
1
2
5
Са
,4
,9
,8
К
4
12
41
1
,5
,9
,5
Ка
Кг
0,31
0,23
0,14
Значения интегральных оценок, вычисленных по выражению
приведены на фиг. 3.7.
Значения коэффициентов уравнений (3.51) в соответствии с полученными
выше значениями параметров регулятора будут такими:
0
0
0
,2
,1
,05
а,
0,68
0,98
1,58
а0
3,4
9,8
31,6
0
0
0
а2
,066
,033
,016
Коэффициент
«3
0,33
0,33
0,33
а0
0,1
0,05
0,025
<
0
0
0
ч
,7
,6
,55
«2
2,75
4,18
6,96
а
3
9
31
3
,4
,8
,6
206
Переходные процессы, построенные аналогично тому, как это делалось в
предыдущих примерах, приведены на фиг. 3.8. Уравнения движения соответственно
для Г, = 0,2; Г!=0,1 и Г, = 0,05 будут:
Хп (О = 1,0 - О^-1'88' + 0,54е~2'56' sin (3,36* + 0,09);
Хп (t) = 1,0 — 0,93е-3>69/ -Ь 2,68е-4>ш sin (5,97* + 0,025);
Хп (0 = 1,0-2,41^-7'4f-f- 2,13e-7'3/ sin (10,84* + 0,72)-
U/J
OfiO
0,30
0/5
Л
/
/
/\
i
№ OJQ 0J5 Ц20 0Я5Т,
Фиг. 3.7. Зависимость
величины интегральной
оценки от значения 7V
w
{
//
I/,
//
/
/
'
~~Я~\
1
1 1
/ 2 3t сек
Фиг. З. 8. Переходные процессы.
1 и 4: tfa = 1.4: tfj-1,45: Г^-0,2;
3 и 6: К -5,8; /Г,=41,5; Г, = 0,05.
Пример 4
Задание. Проверить качество переходных процессов системы,
рассчитанной в третьем примере, но при возмущении /° на двигатель.
Исходные данные. Воспользоваться результатами расчета
предыдущего примера.
Решение. Предполагая, что процессы при возмущении /°
знакопостоянные, определим величины интегральных оценок по выражению (3.53), которые
будут:
7j=0,2; 0,1; 0,05;
у/0= 0,098; 0,034; 0,011.
Переходные процессы, построенные аналогично тому, как это уже делалось
в предыдущих примерах, для случая 7i=0,2; Г]=0,1 и 7i=0,05 приведены на
той же фиг. 3.8; уравнения движения, соответственно, будут такие:
^(0 = 0,17^~1'88/-0,24^-2'56/cos (3,36* +0,80);
^(O = 0,12^-3'69/-0,15^-4'16/cos (5,97/ 4-0,64);
Хп (t) = 0,6*?-7'4/ — 0,098е~7'3/ cos (10,84* + 0,87).
Из фиг. 3.8 видно, что процессы являются знакопостоянными, причем
лучшему процессу соответствуют параметры /Са=5,8; /Ci=41,5; 7i=0,05.
207
Пример 5
Задание. Рассчитать систему регулирования числа оборотов одновального
ТРД с нерегулируемым реактивным соплом при работе двигателя на стенде
на режиме, близком к максимальному, при условии получения монотонных
переходных процессов, обусловленных перенастройкой регулятора с акселерометром
и изменением нагрузки при идеальном акселерометре (7*1 = 0).
Исходные данные. Уравнение движения двигателя принять по
прежнему примеру.
Решение. Примем по-прежнему, что /Сс = 2,3; тогда определению подлежат
параметры /Ci и /Са.
w
0,8
0,6
Off
0.2
у.
V
/v
К
V
/Г
-—.
U 10 20 30 40 50Kf
Фиг. 3.9. Зависимость
величины интегральной
оценки от значения К\.
W
тг-о
//
:;m£=
*->—
■1 III
^m -
/ г , згсек
Фиг. 3. 10. Переходные процессы.
2 и 4: # =3,4; ^Г,=8,2Б.
Будем выбирать величины этих параметров из условия минимума
интегральной оценки, определяемой по выражению (3.54), т. е.
На границе монотонности (корни действительные отрицательные) получим
ркл + 1у=«^
откуда, считая по-прежнему заданными ^] и 71, получим
АГа=—1,33 ± 1,63 y~Kv
Задаваясь значениями К\ и определяя значения /Са, найдем величину
интегральной оценки. На фиг. 3.9 приведены кривые изменения значений /Хо и /Са
для различных значений К\\ из кривых виден монотонный характер уменьшения
JXo с увеличением К\. Практически нет смысла выбирать значения /Ci>30-^-40,
так как процесс от этого существенно не улучшится, а коэффициенты усиления
тахометра К\ и акселерометра /Са получаются при этом очень большими,
практически трудно выполнимыми. Переходные процессы для случаев /Са=2,1
и /(а = 3,4 приведены на фиг. 3.10; уравнения движения соответственно будут
такие:
*,,(*) = 1,0 +0,17е-4'54'-1,17е-м6/;
208
Выбирая большие значения /Са, получим лучшие переходные процессы.
При возмущении /° на объект регулирования величины интегральных оценок по
(3.56) при тех же значениях К\ определяются кривой, приведенной на той же
фиг. 3. 9, а переходные процессы изображены на фиг. 3. 10; уравнения движения
соответственно будут такие:
Пример 6
Задание. Определить условия возникновения автоколебаний в системе
регулирования числа оборотов турбореактивного двигателя с нерегулируемым
реактивным соплом и изодромным регулятором, приведенным на фиг. 2.11.
Исходные данные. Уравнения движения двигателя принять по
выражениям (1.34) и (1.41), а уравнение движения тахометра по выражению (3.5).
Решение. Рассматриваемая система является нелинейной, так как
золотник поршня обратной связи (изодрома) 9 (см. фиг. 2. 11) при самых малых его
перемещениях открывает значительно большие проходные сечения, чем сечение
жиклера 2 в золотнике 4. Следовательно, истечение рабочей жидкости в полость
рХ3
Х2
J1
z \
Фиг. 3. 11. Характеристика нелинейности.
изодрома и обратное перетекание ее практически происходит с постоянной
скоростью независимо от величины открытия окон золотника обратной связи.
Если предположить, что окна золотника изодрома имеют некоторое перекрытие,
то характеристика нелинейного элемента будет такой, как показано на фиг. 3. 11,
где Ь — величина перекрытия окон золотника, а Кч — скорость передвижения
изодрома.
Составим уравнения движения регулятора, для чего воспользуемся схемой,
приведенной на фиг. 3.12, и структурной схемой, приведенной на фиг. 3. 13.
Для линейной части регулятора входом является координата рХъ — скорость
изодрома, а выходом — координата Х2 — положение буксы обратной связи.
Уравнение движения сервомотора как астатического звена примем в виде
где Кс — коэффициент усиления сервомотора.
Уравнение движения изодрома получим в предположении, что скорость
движения поршенька изодрома (координата Х2) отличается от скорости движения
поршня сервомотора (координата Х4) на постоянную величину скорости
изодрома рХ3, т. е.
= рХ2.
—
Х
— h
Замечая, что Х2= —- Х2 = КХ2, получим окончательно
h
14 1327
(3.61)
209
Таким образом, уравнения движения системы будут-
(Tp + l)Xn=-b1Xi; |
Х\ = К\Хп\ I
(3.62)
pX3=F(X2). j
Передаточная функция линейной части системы, полученная из первых
четырех уравнений (3.62), будет
Хо Тр% + /? + К\Ь\Кс /о £>оч
ш = —-— — —— . (о- оо)
л рХ3 p[KTp*+(K + KcT)p + Kc(KibiK+l)]
Поставленную задачу решим, применяя частотный метод первого
приближения.
Фиг. 3. 12. Схема к выводу уравнений.
Частотная характеристика линейной части системы W(m) согласно (3.63}
будет такой, как показано сплошной кривой на фиг. 3. 14. Что касается
характеристики нелинейной части, то для заданного вида нелинейности определим ее,
предполагая, что автоколебания носят синусоидальный характер. Произведя
гармоническую линеаризацию pX3=F (A sin at) разложением в ряд Фурье и
ограничиваясь первой гармоникой, получим приближенную передаточную функцию
нелинейной части вида WH = F(A)/A. По фиг. 3.11 определяем (см. стр. 209).
-0
Первый и. третий интегралы равны нулю, так как в этом случае
Кроме того, видно, что sin щ = Ь/А. Следовательно, можно написать
F(A)
А
к—и
-— f
/С2 sin udu,
где и — Ыш
210
После интегрирования получим
ш F (А)
Это и есть приближенная передаточная функция нелинейной части, которая
зависит лишь от амплитуды А. Следовательно, частотная характеристика нелинейного
элемента будет располагаться на действительной оси, как это показано на той же
фиг. 3. 14, но не дойдет до начала координат на величину я6/2/С2; здесь Ь —
половина зоны перекрытия окон золотника, а /Сг — постоянная скорость изодрома.
Как видно из фиг. 3. 14, в случае неучета запаздывания сгорания топлива
в двигателе автоколебания в системе регулирования не возникнут, так как
частотные характеристики линейной и нелинейной частей системы не пересекаются.
В случае отсутствия зоны перекрытия окон золотника, когда нелинейная
зависимость имеет характер, показанный на фиг. 3. 15, частотная характеристика
такого элемента будет располагаться также на действительной оси, но дойдет
до начала координат, так как при Ь=0 величина отрезка лЬ/2К2=0.
Теоретически в этом случае также не могут возникнуть автоколебания, так
как частотные характеристики не пересекаются, но, учитывая возможные ошибки
приближенного метода решения, гарантировать отсутствие автоколебаний нельзя.
При учете запаздывания сгорания топлива в камере сгорания линейная часть
системы регулирования будет описываться такими уравнениями:
= К\Хп\
Передаточная. функция линейной части системы будет такой:
Wjl = ~Jx^ = р [КТРъ+ (К + KJ) р + КсКгЬгКе-^ — Кс] ' ^'64)
Частотная характеристика линейной части системы будет иной, чем для
случая т=0, так как для каждого значения со вектор поворачивается на угол тсо.
В общем случае частотная характеристика линейной части будет такой, как
показано пунктиром на фиг. 3. 14. В этом случае частотная характеристика может
пересекаться с характеристикой нелинейного элемента и тогда в системе будут
автоколебания.
Следовательно, условием отсутствия автоколебаний будет
а граничным условием будет
-й- <аб5)
где с —- отрезок на действительной оси, отсекаемый частотной характеристикой
линейной части.
Величину отрезка можно определить из выражения (3.64), где необходимо
подставить p=i(x), а частотную характеристику выразить так:
Полагая У(со)=О, определим со и подставим его значение в (/(со).
Очевидно, что граничному условию (3.65) будет соответствовать граничное
значение величины запаздывания т.
14* 211
ГРД
Чд
хл
Сербомотор
J Изодром -*-
|«—
1 X
Д\/\
\
Фиг. 3. 13. Структурная
схема.
Фиг. 3. 14. Частотные
характеристики.
Фиг. 3. 15. Нелинейная
характеристика
золотника.
212
В случае нелинейной характеристики без зоны перекрытия окон золотника
и при учете запаздывания в объекте регулирования возникнут автоколебания,
так как частотные характеристики обязательно пересекутся.
Б. СИСТЕМЫ РЕГУЛИРОВАНИЯ ДЛЯ ОДНОВАЛЬНОГО
ТРД С РЕГУЛИРУЕМЫМ РЕАКТИВНЫМ СОПЛОМ
1. ВЫВОД УРАВНЕНИЙ ДВИЖЕНИЯ И ВЫБОР ПАРАМЕТРОВ
Регулируемыми параметрами для такого двигателя являются
число оборотов и температура газов перед или за турбиной.
Структурная схема подключения регуляторов показана на фиг. 2. 1,6.
В качестве регулятора числа оборотов примем регулятор с
идеальным акселерометром, а в качестве регулятора температуры
газов — регулятор температуры, схема которого приведена на
фиг. 2.21. Предполагаем, что имеется объединенное управление
обоими регуляторами, как это показано на той же фиг. 2.21.
Выведем уравнение движения регулятора температуры газов.
Структурная схема регулятора температуры показана на фиг. 3. 16.
Уравнение движения термопары примем в виде
(7> + 1)*,=/СтХГ4. (3.66)
Здесь Тт — постоянная времени термопары; /Ст — коэффициент
усиления; Х\ — ТЭДС термопары.
Из выражения (3. 66) видно, что чем меньше величина Тт, тем
меньше динамические 'погрешности термопары, и, следовательно,
в любой момент времени сигнал на выходе меньше отличается от
действительного. Однако Гт не может быть очень малой величиной,
так как это связано с надежностью работы термопары. Для
обычной термопары с чехлом постоянная времени составляет не менее
5^-6 сек, а для открытой—l-f-2 сек.
Усиление сигнала в первом каскаде, состоящем иэ магнитного
и электронного усилителей, происходит с некоторым запаздыванием
из-за наличия магнитного усилителя.
Как известно из теории автоматического регулирования,
уравнение для магнитного усилителя с достаточным приближением
можно принять в такой форме:
^*Д вх1 •
Уравнение для электронного усилителя принимаем в виде
уравнения для безынерционного звена в виде
"мшх2 = *^у^вх2'
Поскольку ХВых1 = ^вх2, то общее уравнение усилителя (с учетом
управляющего сигнала, равного Х° = /Ст^т4) можно записать так:
(Т2Р+ 1)Х2=К2(Х{ -Х°), (3.67)
где __ _
К2=КУКМ.
Дифференцирование сигнала происходит с помощью 7?С-конту-
ра, схема которого показана на фиг. 3. 17.
. 213
Регулятор
п
ТРД
L
Сервомотор
Электромагнитное
аеле
Усилитель
Хг.
Термопара
ЛА
Усилитель
Дифференциатор
X
Фиг. 3. 16. Структурная схема
регулятора температуры газов.
с щ
ге,
Фиг. 3. 17. Схема дифференцирующей
ячейки.
214
Уравнение движения этого контура, полученное из уравнения,
вязывающего напряжения на входе и ца выходе,
преобразуется к такому виду:
(TnP+l)X3 = (Tup + R)X2, (3.68)
где
О I П D _!_ D
*\\ \ *^2 *м ~t~ Д2
Подбирая значения сопротивлений и емкости, можно получить
различные значения параметров Тп и R. Следует иметь в виду,
что с уменьшением значения R точность дифференцирования
увеличивается.
Усиление сигнала во втором усилителе происходит аналогично
тому, как это происходит в первом усилителе, поэтому уравнение
для него будет
Г4=./СаА"3. (3.69)
Для электромагнитного реле входным сигналов является
напряжение, снимаемое с усилителя, а выходным — положение якоря
(золотника).
Уравнение движения электромагнитного реле получим исходя
из следующего. Уравнение действующих сил на якорь будет
=0, (3-70)
где РПр — усилие, развиваемое пружиной;
Q — вес якоря и золотника;
Рр — усилие, развиваемое элекромагнитными силами;
Рт — инерционное усилие, обусловленное массой и ускорением
подвижных частей.
При малых отклонениях якоря можно выбрать такое его
положение, при котором величина электромагнитных сил Рр
практически не зависит от положения якоря. В этом случае величина
электромагнитных сил определяется таким выражением:
Яр = const/2,
где / — ток в катушке реле.
Положим, что / = /о + Дг« Тогда при условии (Д/)2~0 получим
Яр = const (/* +2*о д/).
Ьыражение для А/ определим, применяя уравнение
электрического равновесия цепи катушки реле с учетом того, что потоко-
215
сцепление г|) является функцией как тока i, так и положения якоря
/, т. е.
dl di dt
Здесь г — омическое сопротивление катушки соленоида;
и — напряжение, снимаемое с усилителя.
db .
Учитывая, что—= ai и переходя к малым приращениям, полу-
dl
чим такое выражение:
bu = rtJ,-\-uiotJ,-\-a&ibl -\-L ——,
dt
где L = dty/di — индуктивность катушки реле; а = const.
Обычно скорость движения якоря относительно мала; поэтому
членом aAiAl можно пренебречь как величиной второго порядка
малости. Вводя оператор дифференцирования, из полученного вы:
ражения найдем значение Ai, т. е.
Аи —
r + Lp
Подставляя полученное в выражение для Рр, получим
Г -f- Lp
Подставляя выражение для Рр в (3. 70) и считая, что РПр
+ СпрД/; Pm=mp2Al, после преобразования и сокращения на члены,
учитывающие статическое равновесие, получим
h
const + Un2in Аи
Вводя обозначения
т L г* m т const
Г С пр ^ пр'
дг __ const + 2uQi0 ф у А/ у Аи_
получим окончательно
Обычно Тк очень мало, поэтому, полагая Гк^0, получим
(TiP2+T4p+l)X5=K4X4.
216
Для более грубых расчетов можно принимать и Гм ~0, тогда
получим
(Т4р+1)Х5=К4Х4. (3.72)
В таком виде будем применять в дальнейшем уравнение соленоида.
Уравнение гидромотора возьмем такое же, как для обычного
астатического звена, так как каждому положению золотника
(сигналу на входе) соответствует определенная скорость вращения,
а следовательно, и постоянная скорость перемещения конуса
реактивного сопла.
Следовательно, уравнение движения гидромотора примет вид
pXF = KciX5, (3.73)
Из фиг. 1.10 видно, что в некоторой области работы
двигателя для получения экономичных режимов целесообразно изменять
режим его работы путем изменения температуры газов, сохраняя
неизменным значение степени повышения давления в компрессоре
itK. Будем предполагать, что исходный режим работы двигателя
близок к максимальному, поэтому в качестве возмущения примем
перенастройку регулятора температуры газов. Число оборотов
двигателя должно оставаться неизменным, что приблизительно (при
пологих характеристиках компрессора) и будет отвечать условию
Як= const.
С учетом написанных выше уравнений для всего регулятора
температуры получим такое уравнение:
_ Л _ л _
(TlP + 1) (Tnp + 1) (T2p + 1) (Т3р + 1) (Т4р + \)р
1 (Тпр + R)
> + 1){Т2р + 1)(ТзР + 1)(Т4р + 1)
или, обозначив
74)
ф =
2 Р (ТР + 1) (Т2р + 1) (Тгр + 1) (Т4р +1) '
получим
ф1^4-^^ф2Х°. (3.75)
Передаточную функцию регулятора числа оборотов с
идеальным акселерометром примем такой:
*n=^=(Ki + K*P)^-- (3-76)
Хп Р
Следовательно, для решения поставленной задачи необходимо
решить совместно систему (1.30), в которой четвертое уравнение
заменить выражением (1.50) с учетом (3.75) и (3.76).
Для дальнейшего упрощения систему уравнений, описывающую
движение объекта регулирования, сведем к двум уравнениям,
включающим координаты Х„, ХТ4, XF, ХоТ) т. е.
(3.77)
Здесь коэффициенты т0; тх; ...т5 выражаются через коэффициенты
исходной системы.
Итак, исходную систему уравнений принимаем в следующем
виде:
(Tlp-]-m0)Xn-{-mlXr4 — m2XG =0;4
тпъХп - пг4Х
п
,-*/> = (>;
(3. 78)
/facrnpou/(a=const
Регулятор
п Фв
Регулятор
Ф,
Настройка X
Фиг. 3. 18. Укрупненная
структурная схема.
В соответствии с этой системой уравнений укрупненная"
структурная схема системы показана на фиг. 3. 18. Решение системы
представим в виде:
А У A V0 т* А У Л Y0
Д «-Л п== ДЛ • Л И Д*-Л7*4 — 1лj4 ' Л ?
где
Д =
TtP+щ
щ
0
ф
т1
-тА
ф]
0
0
-1
_1
0
— щ
щ
0
1
д —
0
0
ф2
0
тх
-тА
Ф,
0
0
\
\
0
— т
т
0
1
218
дГ4=
Щ
0
0
ф2
0
0
-1
— 1
0
— т,
т
0
1
Для некоторого упрощения задачи в дальнейшем будем
принимать магнитные усилители безынерционными, что при малых
коэффициентах усиления в них можно принять без существенных
погрешностей для окончательных результатов. В рассматриваемой
схеме основное усиление происходит в электронных усилителях,
а магнитные усилители главным образом выполняют функции
преобразователей тока.
Таким образом, вместо (3.67) и (3.69) получим
X2 = KaXi; Х4=К3Х3. (3.79)
После раскрытия определителей и замены Фь Ф2 и Ф„ их
выражениями с учетом (3.79) получим
алр5 + а2р\+щрг + аф2+аьр + а6) Xn = — (b xp\ + b2p + b3) рХ°;
(3. 80)
а6) ХГ4=
(3.81)
где
uT4TT;
+ KJ<rRmQ;
bl=TuTrmiK;
= mxm3 — m0m4;
Ь5=~К(ТпТТт2КаКс+ТиТТт0-Т1§3);
219
Предполагая, что система устойчивая, найдем конечное значение
параметров Хп(оо) и Хт4(оо):
b2S + bs)
= 0;
S-+Q
b7S
a6)
или после подстановки значений коэффициентов получим
Предполагая, что переходные процессы по Хп знакопостоянные,
а по Хт4 — монотонные, определим величины интегральных оценок.
Предварительно определим начальные условия. Для уравнения
(3. 80) получим
. . . + а6)
= 0
и далее
aQ
S-+0
. . . + a6)
= ^1Д1 1
Учитывая, что общее выражение для интегральной оценки имеет
вид
(3. 82)
в соответствии с этим выражением для /„ получим
«6
220
Заменяя коэффициенты их выражениями, получим
Начальные условия для уравнения (3.81) с учетом переноса
начала координат, будут такими:
0)
4() ^4()
а6 а0
i 2Mi^2 + b5a\ bAa\
I 3 4
a% a%
a
% a%
Тогда в соответствии с (3.82) выражение для интегральной
оценки будет
\jT4\=±(b7-^)=TT -_ yi . (3.84)
1 m а6\7 а6 ) т KKTRm2 K '
Дальнейшее использование рассматриваемой системы в общем
виде обычными в теории регулирования методами связано с
известными трудностями из-за высокого порядка уравнений. Поэтому
определение необходимых значений параметров системы, при
которых получаются переходные процессы с необходимым качеством,
целесообразно производить методом математического
моделирования, сводящимся к интегрированию исходных уравнений
движения с помощью электроинтеграторов. В связи со сказанным
отметим, что изменяющиеся условия полета изменяют свойства
регулируемого объекта, поэтому решение даже самой простой
практической задачи связано с очень большим объемом вычислительных
работ. Естественно, что этот большой труд по вычислительным
работам оказывается целесообразным выполнять с помощью
интеграторов.
Чтобы составить представление о характере переходных
процессов при изменении некоторых параметров системы, разберем
конкретный пример.
2. ПРИМЕР
Задание. Рассчитать систему регулирования одновального ТРД с
регулируемым реактивным соплом (определить основные параметры) при работе на
максимальном режиме так, чтобы при перенастройке регулятора температуры
газа за турбиной процесс изменения температуры был близким к монотонному
при минимальном времени регулирования, а изменение чисел оборотов не
превышало 5%.
Исходные данные. Регулятор числа оборотов принять с идеальным
акселерометром, рассчитанным в предыдущем примере. Данные по двигателю
принять из первого примера. Регулятор температуры принять по схеме,
приведенной на фиг. 2.21. Инерционность магнитных усилителей не учитывать.
221
Решение. Определим коэффициенты уравнений (3.77), для чего
используем систему (1.30), в которой четвертое уравнение заменим выражением (1.50).
и числовые значения коэффициентов, полученные в примерах 1 и 3 разд. 1 гл. I.
Получим следующие коэффициенты:
7^ = 0,83; то=— 4,32; /щ = —4,0; /я2=—1,78;
/п3=5,66; т4=— 3,84; тъ=— 2,25.
Подставив найденные коэффициенты, получим такие уравнения движения
объекта регулирования:
(0,83/? — 4,32) *„—4,0*r4+l,78*o =0;
5,66^+3,84*^—*^—2,25*О = °-
В соответствии с уравнениями (3.80), (3.81) и приняв значения /(0=2,3;
Ki=8,25; /(a=3,4, полученные из предыдущего примера, получим такие значения
коэффициентов этих уравнений:
а0 = 3,19ТиТТТ4; аг = П, 1ТпТтТ4 + 3,19 (ГПГ4 + ТпТт + Г47\);
д2 = 11,1 (ТпТ4 + ГПГТ + Т4ТТ) + 3,19 (7^ + Тт + 74) + 41,4ТпТ4Тт;
-0,837^7^+3,19;
= 11,1 + 41,4(Гп + Гт + Г4) + 7WT (18,227-ц - 0,83/?);
= 41,4 + 4,1^Д:Т (8,257-ц + 3,4/?) + 4,32KKTR;
^ [13,9ГПГТ — (Гп + TTR) 0,83 +
7'т/г) + 33,87'117чт —0,83/?];
b7 = K[l$,22R + 33,8 (Ти + Гт/?); ^8 = 33,87?/?.
При выборе значений постоянной времени Гт термопары нужно исходить
из тех соображений, чтобы она имела минимально возможное значение. Для
открытой термопары, конструктивно выполненной так, что ее прочностная
характеристика позволяет обеспечить кратковременную работу термопары в условиях
достаточно высоких температур и скоростей потока газа, постоянная времени
обычно составляет величину порядка Гт = 1,0-^2,0 сек. Получить меньшие
значения Гт практически не удается.
Коэффициент усиления /Ст определяется из характеристики термопары,
выражающей зависимость изменения ТЭДС от температуры спая. Для учета
неравномерности поля температур и его усреднения примем, что чувствительный
элемент состоит из 12 термопар, соединенных последовательно (хотя лучше
параллельно). В дальнейшем условно примем /CT = 1, что не имеет существенного
значения, поскольку можно выбирать любой коэффициент усиления для
последующих звеньев.
Постоянная времени Г4 электромагнитного реле также должна быть
минимально возможной. Развиваемое им усилие должно быть на один порядок выше
усилия, необходимого для перемещения золотника; потребное усилие для малых
золотников составляет несколько десятков граммов. Следовательно, необходимое
усилие, развиваемое реле, должно составлять несколько сот граммов.
Для таких реле величина постоянной времени ТА практически может быть
получена равной Т±—0,10-4-0,15 сек. Следовательно, для дальнейшего расчета
222
примем 74 = 1,0 сек; /Or = 1,0; Г4 = 0,1 сек. Тогда выражения для коэффициентов
будут такими:
ао = О,32Тп; «1 = 4,6Гц+0,32; а2 = 19,54Г11+5,41;
«3=15,247-!! — 0,83ГпК+60,94; д4 = 41,4ГП+К (18,227^—
— 0,83/?) + 56,6; а5 = 33,8АТП + 18.32KR + 41,4;
а6 = 33, SKR; Ьг=4КТи; b2 = 4R(Tn + R); bs = U<R;
Ь4=—о,ЖКТп; Ь5=К(7,4Тп—0,Ш); £б = К (52,02Ги +
+ 17,4/?); ^=/((33,87^+52,02/?); *8 = 33,8*#.
Из условия заданного процесса необходимо определить параметры Г1Ь К, /?„
п
дели
возм
/////Ж/////-
чина
ишенио s
к
k
у^Е
/ у
X
р:
\п
<0
\
3
4г
"^—.
-—■
<
V
—-^/
■
£—i-
S:
%%%
5=
—J
———
Ш^
" 2
3
4
Я
о,з
ол
0,1
0,1
ТИ
0,1
0,1
0,5
0,05
К
0,8
1J
0,8
3,0 I
ty%no числу одоротоВ
^^
1 2 J 4 5 teen
Фиг. 3. 19. Переходные процессы.
Необходимые значения этих параметров целесообразно определять по
переходным процессам, которые нужно получить с помощью электроинтегратора.
На фиг. 3. 19 представлены *переходные_процессы по температуре газов и числу
оборотов при различных значениях Гц, К и R. Поставленным условиям задачи
отвечают переходные процессы при всех приведенных значениях Г1Ь К^я R, т. е.
К =0,8-^3,0; # = 0,1-5-0,3; Гп = 0,05ч-0,1.
Для того чтобы довести решение поставленной задачи до практического
значения, необходимо аналогичным образом исследовать рассматриваемую систему
для других условий полета и других возмущений. При этом необходимо
проделать аналогичный расчет, но уже с другими данными по объекту регулирования.
Значение постоянной времени термопары также изменится, так как изменится
поток омывающих ее газов.
Приближенно можно считать, что величина постоянной времени термопары
изменяется по такому закону:
гДе
ТТ — значение постоянной времени, соответствующей новому
режиму работы двигателя;
Тт0 — то же для исходного режима работы двигателя;
G — расход воздуха (газа), соответствующий новому режиму
работы двигателя;
-ь 0,5 — показатель степени; К = const.
223
Наиболее жесткие требования к переходным процессам предъявляются на
максимальных режимах работы двигателя. На промежуточных режимах
допускается ухудшение переходных процессов, поэтому обычно удается так подобрать
параметры регулятора, что одно и то же их значение удовлетворяет всем
условиям работы системы регулирования.
Выбор значений коэффициентов усиления каждого звена системы при
условии, что К=К=^КъКаКсх, уже не отражается на качестве переходных процессов
и производится в соответствии с конструктивными соображениями. Например,
значение Кс\—'Коэффициента усиления сервомотора регулятора температуры —
целесообразно выбирать таким, чтобы была возможность конструктивного
выполнения. Учитывая, что постоянная времени сервомотора ТсХ = \/Кси целесообразно
принять /Cci = 0,5, тогда ГС1=2Д Коэффициент усиления Ка реле можно принять
/<4=1; тогда при условии, что /С=0,8-ьЗ,0, получим /С2/Сз= 1,6-^-6,0; разграничение
же этих коэффициентов не имеет принципиального значения.
В. СИСТЕМЫ РЕГУЛИРОВАНИЯ ОДНОВАЛЬНОГО ТРД
С НЕРЕГУЛИРУЕМЫМ РЕАКТИВНЫМ СОПЛОМ
И РЕГУЛЯТОРОМ РАСХОДА (ДАВЛЕНИЯ,
ПЕРЕПАДА ДАВЛЕНИИ) ТОПЛИВА
1. ВЫВОД УРАВНЕНИЙ ДВИЖЕНИЯ И ВЫБОР ПАРАМЕТРОВ
Используем рассмотренную ранее схему регулятора расхода
(давления) топлива, приведенную на фиг. 2. 18, с программным
изменением расхода топлива по условиям полета.
Составим уравнения движения регулятора, для чего используехМ
структурную схему системы, приведенную на фиг. 3.20.
Для чувствительного элемента входным сигналом является
давление топлива на выходе из плунжерного насоса, а выходным
сигналом— перемещение штока 11 (см. фиг. 2.18) и, следовательно,
рычага 6 сопла-заслонки. Если считать топливо несжимаемым
и пренебречь инерционностью движущихся масс, то входной и
выходной сигналы будут однозначно связаны между собой; поэтому
уравнение движения чувствительного элемента запишется так:
*! = *!*,,+/* (3.85)
Здесь f2 учитывает влияние баростата на положение
сопла-заслонки;
Xi — координата перемещения сопла-заслонки;
ХРт—координата давления топлива за насосом.
Для составления уравнения движения сервомотора
воспользуемся схемой, приведенной на фиг. 3.21. Уравнение действующих сил
на поршень сервомотора можно записать так:
PcuF + Cl=prFl9 (3.86)
где /7См — давление топлива в полости сервомотора;
F; F\ — эффективные площади сервомотора;
/ — положение поршня сервомотора;
рт— давление топлива за насосом;
С — коэффициент жесткости пружины.
224
ТРД
Дроссельный иран
V-
баростат
ф
- ч.э U
Топливный
насос
Сервомотор
Фиг. 3.20. Структурная схема регулятора
расхода (давления) топлива.
Фиг. 3.21. К выводу уравнения
движения сервомотора.
15 1327
225
Используем также условие неразрывности жидкости, которое
запишем в виде
где V\ — объемный расход топлива через жиклер из магистрали
насоса;
172 — то же из полости сервомотора на слив;
V — объемный расход топлива в полость сервомотора.
Имея в виду, что V = F —, написанное условие неразрывности
dt
можно выразить так:
FJii=Vl-V2- С3'87)
Нелинейные зависимости для V\ и V2 примем в таком виде:
Vx = Vi(Pr, л-); ^2-^2(/7см, у),
где у — координата перемещения рычага сопла-заслонки.
После линеаризации и совместного решения уравнений (3.86)
и (3.87) получим такое уравнение движения сервомотора:
(Тср+\)Х2=/<2ХРт + КгХъ (3.88)
где
; К2
С^-Гг-V* Cl°
дРсы
a7
Далее используем уравнения расходов в виде
Оя=Ояр; Олр=Оф, (3.89)
где GH; GflP; бф — расход топлива через плунжерный насос,
дроссельный кран и форсунки соответственно.
Объемный расход топлива GH через насос зависит от числа его
оборотов пп и положения сервомотора / (наклонной шайбы), т. е.
GB=Gn(nH, l). Расход топлива через дроссельный кран зависит от
перепада давлений на нем и от его проходного сечения, т. е.
£О( ^)
Расход топлива через форсунки практически зависит лишь от
давления топлива перед форсункой, т. е.
226
Производя обычную линеаризацию (3.89), получим
°F; (3.90)
ф (3.91)
где
П
н{)
н \ К —
77; 5~
6 G\dbp)' 7
1 F v n.
гдр0 РфО
Далее используем уравнение связи давлений топлива за
насосом,^ перед форсункой и перепадом давлений на дроссельном
кране в виде
Рт = Рф + *Р- (3.92)
Эту же зависимость в относительных величинах можно представить
так:
V 1-> V I /1 Р>\ V /Q OQ\
р ==z d> I~ V —&)-Л-Ъ рч уО.ио)
где
Pi .
Для удобства найдем выражения для некоторых из полученных
коэффициентов, для чего определим частные производные.
Расход топлива через плунжерный насос можно представить
в виде
откуда
i н \ нО . / н \ нО
I I , I 1 —' г
\дпи/о /2но \ dl /о /о
Расход топлива через дроссельный кран можно представить
в виде
откуда
/дбдрч Одро
\дЪр)о~2Ъро'
Расход топлива через форсунки можно представить в виде
15* 227
откуда
/д0Ф\ _ °Ф
Таким образом, получим следующие значения коэффициентов:
АГ4 = 1; /С5 =1; /С6 = 0,5; К7 = 1; К8 = 0,5.
Уравнение движения двигателя напишем в прежнем виде, т. е.
Здесь бт = (?ф, поэтому XGl =0,5Хф. Член /° учитывает влияние
внешних условий полета ри, Гн, Vl\ Следовательно, окончательно
система уравнений движения будет такой:
(3.94)
Х1=К1ХРт-\-/2;
0,5ХьР+Х°р=0,5Хф;
В четвертом уравнении изменен знак перед координатой Х2 по
характеру регулирования (при замыкании системы). Разрешив
систему (3.94) относительно Хп и ХРт, получим
,(3.95)
(3.96)
^ Выведенные в § 2 гл. I уравнения движения двигателя справедливы при
неизменных внешних условиях. Если принять, что эти условия изменяются, то,
например, по числам оборотов и по температуре газа получим такие уравнения:
ff J Xv.
Поэтому в дальнейшем под /° будем понимать определенную функцию правой
части уравнения, соответствующей определенному возмущению.
228
Устойчивость такой системы определяется неравенствами
которые выполняются при любых режимах работы двигателя. Как
видно из полученных выше уравнений, система является
статичной относительно возмущений X??, /° и /2, поэтому точное
поддержание заданных чисел оборотов двигателя с помощью такой
системы регулирования невозможно.
Из тех же уравнений видно, что действующие возмущения /°
и /г, обусловленные влиянием внешних условий, оказывают
соответственно противоположные воздействия на двигатель и баростат.
В этом и заключается основное значение применения баростата,
который при изменении внешних условий так воздействует на
регулятор расхода (давления) топлива, что последний стремится
сохранить приблизительно неизменным число оборотов двигателя
или уменьшить величину его изменения по сравнению с той,
которая была бы в системе без баростата.
Возмущение /& воздействующее на чувствительный элемент от
баростата, и возмущение Р(рн, Тн, V) от внешних условий на
баростат (см. фиг. 3.20) связаны между собой такой зависимостью:
где Ф — передаточная функция баростата.
Если приближенно считать, что через баростат сигналы от рн>
Тн> V подаются в цепь регулирования без искажения, то можно
представить сигнал /2 в виде обобщенного влияния всех внешних
условий на перенастройку регулятора.
Тогда при Х% = const из (3.95) в силу принципа суперпозиции
можно записать
л К2 + КхКз + 0,5 — 0,5*2 " V "
Аналогично и для ХРт можно написать:
V (00) = ftzMP . (3.98)
PtV ' ^ + ^^ + 05 05*
Подбирая соответствующее значение Ф, можно числитель
выражения (3. 97) максимально приблизить к нулю, что будет
свидетельствовать о малой неравномерности системы по условиям
полета. Ввиду того, что с изменением внешних условий передаточная
функция двигателя изменяется, то при Ф = const невозможно
скомпенсировать погрешности по числам оборотов для всех условий
полета. Уменьшить же ошибку можно лишь путем изменения
характеристики баростата, т. е. сделать Ф = уаг.
229
Статическую характеристику работы системы регулирования
можно представить графиком, приведенным на фиг. 3. 22, где
показан характер изменения числа оборотов в зависимости от изменения
высоты полета при неизменном положении дроссельного крана.
Из этого графика видно, что при #=var число оборотов
поддерживается с точностью до А/г; при отсутствии баростата, начиная
с п = п\ и Н = Ни с увеличением высоты полета число оборотов п
возрастает вплоть до п = птах при Н = Н2, при дальнейшем
увеличении высоты полета число оборотов остается неизменным и равным
я = ^тах вследствие ограничения регулятором предельных чисел
оборотов. При наличии баростата
число оборотов изменяется с
увеличением высоты полета в пре-
"яи I «««Y'wr^rxrm делах> обусловленных как
характеристикой баростата, так и
самого регулятора расхода (дав-
*,
27/
ления) топлива.
В
I ' В горизонтальном полете при
J L—_*_. переводе двигателя с одного ре-
^ Н^ жима работы на другой путем
изменения проходного сечения
Фиг. 3.22. Статическая характеристик дроссельного крана МОЖНО СЧИ-
ка системы. тать, что рн=const, TH = const,
V= const, так как за это время,
в течение которого устанавливаются новые числа оборотов,
скорость полета практически остается неизменной. Следовательно,
в этом случае /0я^0.
Тогда вместо выражений (3.95) и (3.96) получим:
+ l-bx](\-k)XF.
Конечные значения параметров Хп и ХРт при условии
будут: •
" °° ~ !-f-0,5 — 0,5*! '
0,5 — 0,5*!
Отсюда видно, что остаточная неравномерность по
регулируемому параметру ХРт меньше, чем по параметру Хп в
>т(«>) l-*i
230
У *
Качество процесса по Хп определим с помощью интегральной
оценки, предполагая, что процесс монотонный. Монотонность же
процесса определим, выбирая параметры системы (Тс, К\, Къ Kz)
из условия равенства действительных отрицательных корней
характеристического уравнения. В этом случае, применяя оценку вида
ею
/= )Xn(t)dt, при единичном возмущении получим
*6
[ЛГ2 + ATiATs -Ь 0,5 (1 — *!)12 ' l ' ;
Отсюда видно, что для уменьшения интегральной оценки
необходимо уменьшать значение Тс и приближать значение
коэффициента к=рф/рт к единице.
Практически удается для всех условий полета и режимов
работы двигателя получить переходные процессы близкими к
монотонным, с приемлемым временем регулирования.
Теперь рассмотрим такую же систему регулирования, как
приведенная на фиг. 2. 18, но с работающим регулятором предельных
чисел оборотов. В этом случае будем считать неизменным
положение дроссельного крана, т. е. XV = const.
Уравнение движения сервомотора будет другим. В этом случае,
аналогично рассмотренному ранее, условие неразрывности
запишем в виде V=V\—V2—V3y где Vz— объемный расход топлива
через сопло-заслонку регулятора предельных чисел оборотов.
Нелинейная зависимость для 1/3 будет Уз=Уз(Рсм, У\), где у\—
координата перемещения рычага сопла-заслонки. После обычной
линеаризации получим
(7> +1) Х2 =K2XPj + К3Хг
где
Уравнение движения чувствительного элемента получим в том
же предположении, что и ранее, т. е.
где Хп=-^ ; /?ц — давление топлива в полости над мембраной, со-
Аш
ответствующее давлению за каналами в роторе, создающими эффект
центробежного насоса.
Связь между числом оборотов и давлением рц получим,
используя зависимость
Ра=ра(п) или Хп = -(^)
Рио V on /0
Использовав зависимость рц = сх2Я2, получим Хц = 2Хп.
231
Окончательно получим следующее уравнение движения
сервомотора:
(Гс^+1)А'2=/С2^ + /Сз^1+/Г1о^л, (3.100)
где #,0 = 2*9*,.
Следовательно, исходная система уравнений движения будет
такой:
xx=kxkPi+U I
г-К]0Хп; | (3.101)
р ф Р1 |
Знак перед координатой Хп в уравнении сервомотора изменен
из условия замыкания системы.
Разрешая систему (3. 101) относительно Хп, получим
+K2+KlK3]f°-0,5b1K2U (3.102)
Условие устойчивости рассматриваемой системы определяется
следующими неравенствами:
+ КК)>05ЬТ;)
Из сравнения выражений (3. 103) с (3. 96а) видно, что в этом
случае запас устойчивости уменьшается, и поэтому переходные
процессы могут быть хуже, чем при неработающем регуляторе
предельных чисел оборотов. Система также остается статической,
величина остаточной неравномерности которой оценивается
выражением
Полученный вывод хорошо согласуется и с практическими
результатами, подтверждающими ухудшение переходного процесса
при одновременной работе регулятора предельных чисел
оборотов.
2. ПРИМЕР
Задание. Рассчитать регулятор расхода (давления) топлива для одно-
вального ТРД с условием получения монотонных переходных процессов (по
числу оборотов) при работе двигателя на стенде, на режиме, близком к
максимальному. В качестве возмущения принять скачкообразный перевод дросселя газа.
Исходные данные. Данные для двигателя взять из приведенных ранее
232
в настоящей главе примеров; уравнение движения системы регулирования
принять по (3.95).
Решение. Согласно условию задачи /°=f2=0, поэтому исходным будет
следующее уравнение движения:
[0,5 (Т + Тс) + Т (K2+KiK3) - О,ЬТсЬг] р +
В соответствии с выражением (3. 99) для получения наименьшего времени
регулирования необходимо уменьшать значение Тс и выбирать значение
коэффициента k, близким к единице.
Примем наименьшее значение Тс, которое можно осуществить практически,
т. е. прежнее значение Гс=0,3 сек. Тогда определению подлежат коэффициенты
0,06
0.04
0,02
8 W 12
Фиг. 3. 23. Зависимость величины интегральной
оценки Jn от значения m (m=K+KK
усиления К\\ /Сг; Къ, k. Используя заданное значение Т=0,5; 6i=0,33, получим
такое уравнение:
{0,05/?2 + [0,32 + 0,5 (/С2 + КгКг)] Р + 0,33 + К2 + КгКз} Хп =
Начальными условиями для этого уравнения будут
■■*«>-■
Для указанных начальных условий получение монотонных переходных
процессов сводится к наличию действительных отрицательных корней
характеристического уравнения. Из характеристического уравнения видно, что корни будут
действительными отрицательными при любом положительном значении ш—
=/C2+/Ci/C3.
Предварительно определим величины интегральных оценок для различных
значений m=K2+KiKz-
Согласно сказанному выше /г=Рф/рт. Обычно на максимальном режиме
работы рф«(0,7гг-0,8), поэтому £^0,7-^0,8. Примем £=0,8, тогда 1—£=0,2.
Применяя выражение (3.99) и выбранные значения параметров, строим
зависимость Jn—f(m), которая показана на фиг. 3.23. Из полученной кривой следует,
что изменение значения m=K2+K\Ks в широком диапазоне практически
не влияет на величину интегральной оценки. Поэтому выбор значения
параметров Ки %2, Кг подчиним конструктивным соображениям, т. е. условиям
возможности реального выполнения конструкции.
Ориентировочно мсжно принять т= 1-=-5. Примем т=1; тогда уравнение
движения будет таким:
(/>2 + 16,4/? + 26,6) Хп = 1,32 Х0 [1].
233
Интегрируя это уравнение обычным путем, получим
^2 X t 1
где Х\ и Яг — корни характеристического уравнения.
Определим переходные процессы при частичных режимах работы того же
двигателя при п=9500 об/мин и п=7500 об/мин с тем же регулятором. Значения
постоянной времени Т коэффициента усиления двигателя Ьх и коэффициента К
для этих режимов его работы примем такими:
п
рад
993 -—=158 об/сек - 9500 об/мин
сек
рад
785-— = 125 об/сек = 7500 об/мин
сек
Параметры
Т
1,4
4,4
Ь\
0,77
2,0
К
0,7
0,6
Будем также считать, что возмущение в системе наносится мгновенным
изменением проходного сечения дросселя. Производя известные вычисления, получим
такие уравнения движения соответственно для /г=9500 об/мин и /г=7500 об/мин:
(/?2 + 7,15/7 + 3,75) Хп = 0,72 Х<> [1];
п=11580 об/мин
А
г
У
/
^П-9500
об/ми
П=7500 Об/МН
Н
Соответствующие кривые переходных процессов приведены на фиг. 3.24,
из которой видно, что для всех режимов работы двигателя процессы монотонные,
но время регулирования увеличивается
при снижении режима работы
двигателя.
Если провести аналогичный анализ
для условий работы двигателя при #>0
и У>0, то можно было бы убедиться,
что процессы остаются монотонными,
хотя время регулирования несколько
возрастает по сравнению с работой на
стенде. Анализ рассматриваемой системы
регулирования аналогичным методом
с учетом работы регулятора предельных
чисел оборотов [уравнение (3. 102)]
показывает, что характер переходных
процессов становится колебательным.
Например, на фиг. 3.25 приведены
переходные процессы для рассмотренной выше системы регулирования при работе
регулятора предельных чисел оборотов, обусловленные единичным возмущением
/°[1] на двигатель для различных высот полета.
Таким образом, проведенный расчет системы регулирования расхода
(давления) топлива показывает, что при работе двигателя на режимах,
соответствующих числам оборотов меньше максимальных (работа на баростате), можно
получить монотонные переходные процессы, а при работе на максимальных числах
оборотов, когда работает регулятор предельных чисел оборотов, возникают
колебательные переходные процессы.
4 tCBK
Фиг. 3. 24. Переходные процессы.
234
Возникновение колебательных процессов на максимальных числах оборотов
и большая остаточная неравномерность являются серьезным недостатком
рассматриваемой системы регулирования.
Stcen
Фиг. 3.25. Характер переходных процессов при работе
регулятора предельных чисел оборотов.
Г. СИСТЕМЫ РЕГУЛИРОВАНИЯ ТРД С ДВУХКАСКАДНЫМ
КОМПРЕССОРОМ И ДВУХКОНТУРНЫХ ТРД
Рассмотрим систему регулирования двухвального ТРД (см.
фиг. 1.36) (двухкаскадный компрессор) с нерегулируемым и
регулируемым реактивными ошлами и с изодромным регулятором
числа оборотов.
1. СИСТЕМЫ РЕГУЛИРОВАНИЯ ТРД С ДВУХКАСКАДНЫМ
КОМПРЕССОРОМ С НЕРЕГУЛИРУЕМЫМ РЕАКТИВНЫМ СОПЛОМ
Способ управления ТРД с двухкаскадным компрессором и
нерегулируемым реактивным соплом был проиллюстрирован на
фиг. 2. 3, а. Рассмотрим такие режимы работы двигателя, при
которых регуляторы предельного числа оборотов и предельной
температуры газа не работают.
Будем считать, что регулятор числа оборотов воздействует на
расход топлива и тем самым поддерживает заданным число
оборотов одного из каскадов, а число оборотов второго каскада
изменяется в соответствии с движением первого.
Ранее были получены уравнения движения такого двигателя
при условии XF = 0 [см. (1.69) и (1.70)]. Так как рассматривается
случай, когда f^const, то исходными уравнениями движения
объекта регулирования будут:
Рассмотрим случай, когда регулятором поддерживается число
оборотов низконапорного (Хп2) каскада, и определим поведение
обоих каскадов при наиболее реальных возмущениях.
235
Для этого исходную систему уравнений (1.67) сведем к двум,
исключив все переменные, кроме ХпХ и Хп2 (полагая XF=0); в
результате получим
1п* J
Гя1+/). I
Здесь Гв и Гн соответственно — постоянные времени
высоконапорного и низконапорного каскадов, а 1Ъ 1% k> Ц — коэффициенты
усиления; /° — внешнее возмущение на низконапорный каскад.
Сначала выясним условия устойчивости самого объекта
регулирования. Для этого решим уравнения (3. 104) относительно Хп\
или Хп2:
+ Тв)
Отсюда условие устойчивости будет
т. е. произведение коэффициентов усиления по числам оборотов
обоих каскадов должно быть меньше единицы. Практически для
всех двигателей это условие устойчивости выполняется.
Схему регулятора примем по фиг. 2. 13. Структурная схема всей
системы регулирования показана на фиг. 3.26.
Уравнения движения звеньев регулятора, т. е. чувствительного
элемента, изодрома и сервомотора возьмем соответственно в виде
(3.5), (3.7) и (3.9). Тогда исходная система уравнений движения
будет такой:
(3.105)
(Тир+\)Х2=Ти$рХ3. }
Обобщенные координаты приняты в соответствии со
структурной схемой (следовательно, Хо^ = Х3). Разрешая уравнения
(3. 105) относительно ХП2 и Хп\, получим
\а0р4 + а,/?3 + а2р2 + а3р + а4) Х„2=(ао/Я + atp + а2) Х° +
+ (а3^ + а4/>+а5)А/0; (3-106)
(аор* + alP3 + а2р* + <hP + О Х„1 = (а«Р2+а?Р + а8) Х°+
+ (tW* + alo/> + an)/\ (3.107)
236
где
ao=-TBTJH\ a^
«2 = (Тв + Ти)
aA = i
Из выражений (3. 106)
и (3. 107) видно, что
рассматриваемая система
регулирования числа оборотов
низконапорного каскада Хп2
относительно возмущения /°,
приложенного к объекту
регулирования, и относительно
возмущения Х°,
обусловленного перенастройкой,
является астатической, а по
отношению к числу
оборотов высоконапорного
каскада — статической.
Устойчивость системы
регулирования определяется
неравенством
Д3=а3 (аха2 — а0а3) > а4а\.
Раскрывая значения
коэффициентов при р=1,
получим такое условие
устойчивости:
{(1-/2/4)(/Сс7-и
a.o=m; a^
alQ=l2m — i
X"
"настройка
Фиг. 3.26. Структурная схема системы
регулирования.
-(Тя+Т,)ТИ] [(Тя+Тв) (КСТИ
Щ\-твт»тк\{\-Щ (тИкс+\)+
(3.108)
Из этого неравенства видно, что для его увеличения необходимо
увеличивать значения Кс и Ги. Если предположить, что изодром
отключен, т. е. Ги=0, то получим следующее условие устойчивости:
237
В этом случае неравенство уменьшается по сравнению со
случаем ТИФО, причем для увеличения этого неравенства необходимо
уменьшать значения К\ и /Сс. Конечные значения регулируемых
параметров ХП2 и Хп\ при перенастройке регулятора будут:
При возмущении /° конечное значение параметра Хп] будет
h + ^4
Из полученного видно, что остаточная неравномерность системы
по параметру ХпХ при возмущении /° зависит лишь от параметров
объекта регулирования.
Определим выражение для интегральных оценок /ь считая, что
переходные процессы — монотонные при возмущении Х° [1] и
однозначные при возмущении /° [1]. Начальные условия для (3. 106) при
возмущении Х°[1] будут:
X(0) = -^; X'(0) = 0; X"(0) -^ ; Х"\0)= a^~Za^ •
а4 а0 а0
то же при возмущении /°[1]:
-0; Л7(0) = -^; X"(0)^-
а0
Начальные условия для уравнения (3. 107) при возмущении
Х°[1] будут:
-.-^; А'/(0)=0; X" (0) ---^ .
а4 д0
то же при возмущении /°[1]:
Воспользовавшись выражением (3.82), определим выражение
для каждой интегральной оценки, т. е.
с Уз +
J п2, /° —
аоа4
в) + Ти (Тв1гКгКс - hh + 1 - 7^ВГН) 4- Тв ,
TnKcVs + hU)
238
, п7а4 —
J п\,Х* о
«4
1) (W4 -'i -^WWWs /Л) - A'iA'c^b /3 ('1 -г/0/3) _
КхКс {h
(3.111)
«10^4 —
/»-
4
+ 1) (/1 + hh) +
n 3 n2v
Из полученного следует, что для уменьшения интегральной
оценки необходимо увеличивать значения коэффициента усиления
К\Кс-
Ниже на конкретном примере определяется порядок этих
величин.
Аналогично можно провести анализ системы регулирования,
когда поддерживается заданным число оборотов каскада высокого
давления, а каскад низкого давления будет находиться в следящем
режиме. В этом случае будет получена следующая система
уравнений движения;
I (3.113)
Изменение по сравнению с системой (3. 105) произошло за счет
третьего уравнения, где вместо координаты Хп2 поставлена
координата Хп\. Ниже при рассмотрении конкретного примера
определяются переходные процессы и для этого случая регулирования,
что позволяет сравнить эти два возможных варианта
регулирования двухкаскадного ТРД.
2. СИСТЕМЫ РЕГУЛИРОВАНИЯ ТРД С ДВУХКАСКАДНЫМ
КОМПРЕССОРОМ С РЕГУЛИРУЕМЫМ РЕАКТИВНЫМ СОПЛОМ
Разберем один из возможных способов управления таким
двигателем, у которого число оборотов высоконапорного каскада
изменяется посредством изменения расхода топлива, а число
оборотов низконапорного каскада — путем изменения величины
проходного сечения реактивного сопла, При этом предельное значение
температуры газа должно ограничиваться воздействием на расход
топлива.
239
Регулятор числа оборотов высоконапорного каскада,
изменяющий расход топлива, примем изодромным. Регулятор числа
оборотов низконапорного каскада примем с жесткой обратной связью,
например, по схеме, приведенной на фиг. 3. 27. Структурная схема
всей системы регулирования приведена на фиг. 3. 28.
Уравнения движения объекта регулирования получим, <если из
системы (1.67) исключим все переменные, за исключением Хп{
и Хп2, т. е.
(3.114)
Открытие
Закрытие
/( cm Зорком реактивного
сопла
Фиг. 3.27. Схема
регулятора числа оборотов с
жесткой обратной связью.
— Сервомотор^ */ 1
Из од ром ф.
ч.э
1'опливо
f° »
'Сопло
Лбухкаскад-
ныи
ТРД
настройка
[Сервомотор
s
Г
Ч.Э
Ф
х;
Мастройпа
Фиг. 3.28. Структурная схема системы
регулирования.
Уравнение движения чувствительного элемента регулятора
числа оборотов низконапорного каскада 'примем аналогичным
третьему уравнению (3. 105), а уравнение движения сервомотора с
жесткой связью — в виде уравнения, соответствующего апериодическому
звену.
Тогда исходная система уравнений будет такой:
t = К i (Х^ — Хп1);
240
Здесь обобщенные координаты приняты в соответствии со
структурной схемой, приведенной на фиг. 3.28.
Как отмечалось выше, в общей системе управления двигателем
имеется объединенное управление, которое позволяет
устанавливать заданный режим двигателя единой ручкой. В частности, для
рассматриваемой системы должно быть объединенное управление,
позволяющее одновременно устанавливать заданное значение чисел
оборотов высоконапорного Хп2 и низконапорного Хщ каскадов.
В общей системе уравнений необходимо учесть и уравнение
движения устройства объединенного управления. Если обозначить
перемещение ручки объединенного управления символом Х°, то будет
справедливо уравнение
Х°=т1Х°1 = т2Х2, (3.116)
связывающее возмущения X? и Х<> и характеризующее различную
перенастройку регуляторов.
Далее необходимо учесть уравнение статики двигателя
[Xni—f(Xn2)], связывающее значения чисел оборотов
высоконапорного и низконапорного каскадов в установившемся движении. Для
этого необходимо воспользоваться статическими характеристиками,
показывающими зависимость Xn\=f(Xn2) для различных Лот и XF.
На фиг. 3. 29 приведен характер таких зависимостей; там же
нанесена линия рабочих режимов, каждой точке которой
соответствует определенное значение Хпь ХпЪ Xgv Xf.
Из таких характеристик легко получим зависимость
Х°1 = щХ1 (3.117)
Далее из (3.116) и (3.117) получим
где
тг=^; т2= _L . (3.118)
w?2 /И3 tri\
Разрешая (3. 115) относительно Хп\ и ХП2 с учетом (3. 118),
получим
(3.119)
5)/0. (3.120)
В коэффициенты по, п\, ..., ао, си ••• входят параметры исходной
системы (3.115), которые мы не приводим ввиду громоздкости
выражений.
16 1327 241
Из полученных уравнений следует, что для устойчивой системы
относительно возмущения /° число оборотов высоконапорного
каскада в установившемся движении не изменяется, в то время как
число оборотов низконапорного каскада Хп2 изменяется.
Действительно, конечное значение регулируемых параметров
будет таким:
X
п
а5
\—- а*0 Х° =
X0'
V (оо) =
п2
а5
,/^/*/y/£rCOnst/ / ^ 5 Следовательно, для
" ""режимов* уменьшения остаточной
неравномерности по
параметру Хп2, обусловленной
возмущением /°, необходимо
увеличивать коэффициенты
усиления регулятора
низконапорного каскада /С2 и К$.
Система астатична по
параметру Хп\ при
возмущении Х° и /°.
Дальнейшее
исследование такой достаточно
сложной системы целесообразно
провести на конкретном
примере, что и сделано ниже.
Примейенные выше
уравнения движения системы
регулирования при
рассмотрении двухкаскадного ТРД
как с нерегулируемым, так и с регулируемым реактивными
соплами, справедливы для такой топливной системы, в которой
расход топлива зависит лишь от положения регулирующего органа
(сервомотора) —иначе говоря, когда перепад давлений на
регулирующем органе остается неизменным, как, например, в случае
применения шестеренчатого насоса с регулятором перепада
давлений.
В случае применения плунжерного насоса, расход топлива
через который зависит как от положения сервомотора (наклонной
шайбы), так и от числа оборотов, в общей системе уравнений
необходимо учитывать и уравнение движения насоса в виде (1.45).
242
Фиг. 3.29. Зависимость Xni=f(Xn2) при
различных Xqt и Xf\ жирная линия —
линия рабочих режимов.
Тогда уравнения движения объекта регулирования (например,
в случае регулируемого сопла) необходимо принимать в виде
Решая эти уравнения совместно с (1.45) и считая, что насос
приводится во вращение от высоконапорного каскада, получим
такие уравнения:
(тнР+1) хп2 =/Л+^л1+'Л+Л
гце
Т 1*К 1 14
1 —
•* н
Здесь fe = ^ и X3=Xa из (1.45).
Так как 0<^1—/з&<1, значение Гн>3пн и все коэффициенты
усиления также возрастают. При всех прочих одинаковых
условиях это приводит к ухудшению переходных процессов.
Отметим также, что привод топливного насоса от
высоконапорного или низконапорного каскада существенного влияния на
переходные процессы не оказывает.
3. СИСТЕМЫ РЕГУЛИРОВАНИЯ ДЛЯ ОДНОВАЛЬНЫХ
ДВУХКОНТУРНЫХ ТРД
Схема одновального двухконтурного ТРД приведена на фиг. 1.37. Система
автоматического регулирования для такого двигателя во многом аналогична
системе для одноконтурного одновального ТРД. Для случая нерегулируемых
реактивных сопел и сопловых направляющих аппаратов уравнения движения
по числу оборотов и температуре газов были получены ранее [см. (1.86)].
Для анализа динамики системы регулирования, например, по числу оборотов,
необходимо систему (1.86) решить совместно с, уравнениями движения
регулятора— тремя последними уравнениями системы (3.105). В результате получим
решение, аналогичное тому, которое было получено при рассмотрении
одновального ТРД.
Если имеется регулируемое реактивное сопло в первом контуре и, кроме
числа оборотов, регулируется еще и температура газов, то в общей системе
уравнений движения необходимо учесть уравнения движения регулятора
температуры, например, в виде (3.75). В результате получим решение, аналогичное
тому, которое было получено при рассмотрении одновального ТРД с
регуляторами числа оборотов и температуры газов.
Если имеется регулируемый направляющий аппарат в первом или во втором
контуре, или даже одновременно в обоих контурах, то при условии, что лопатки
направляющих аппаратов устанавливаются на определенный угол одновременно
с заданием режима работы двигателя от общей ручки управления, при анализе
Динамики системы регулирования необходимо учитывать лишь возмущение
на двигатель, обусловленное перемещением направляющих аппаратов. В этом слу-
16* 243
чае уравнение движения объекта регулирования вместо (1.86) нужно принимать
в виде
(Тр + Ql) Хп= ЬгХот+ Ь2ХаХ + b3Xa2f
где X ttj и Xaz —координаты углов установки лопаток направляющих аппаратов.
Далее необходимо учесть уравнение движения механизма объединенного
управления, связывающее величины координат Ха\ и Ха2 и настройку
регулятора числа оборотов Х°.
Из всего сказанного ранее об одновальных двухконтурных ТРД следует вы-
"вод, что по своим свойствам, в отношении динамики системы регулирования, они
мало чем отличаются от одновальных одноконтурных ТРД; поэтому дальнейшее
их рассмотрение нецелесообразно.
4. СИСТЕМЫ РЕГУЛИРОВАНИЯ ДЛЯ ДВУХВАЛЬНЫХ
ДВУХКОНТУРНЫХ ТРД
Системы автоматического регулирования двухвальных двухконтурных ТРД
во многом зависят от схемы двигателя, но в то же время они во многом
аналогичны системе регулирования ТРД с двухкаскадным компрессором.
Для двигателя, представленного на фиг. 1.40, когда регулируемым
параметром является число оборотов ротора основного контура, а ротор второго контура
находится в следящем режиме и реактивные сопла и направляющие аппараты
не регулируются, система уравнений движения должна включать уравнения
объекта вида (1.69) — (1.72) и уравнения регулятора. В отношении динамики
системы регулирования двухвальные двухконтурные ТРД по своим свойствам
близки к ТРД с двухкаскадным компрессором.
Если в двухвальном двухконтурном ТРД, приведенном на фиг. 1.40,
применяется сжигание топлива во втором контуре, то поведение такой системы
регулирования существенно отличается от ТРД с двухкаскадным компрессором.
5. ПРИМЕРЫ
Пример 1
Задание. Определить параметры системы регулирования ТРД с
двухкаскадным компрессором и нерегулируемым реактивным соплом, когда число
оборотов низконапорного каскада регулируется изодромным регулятором путем
изменения расхода топлива. Переходные процессы должны быть близкими к
монотонным при работе двигателя на стенде, когда режим его работы близок к
максимальному. В качестве возмущения принять перенастройку регулятора.
Исходные данные. Схему регулятора принять по фиг. 3. 3, а
коэффициенты уравнений (3. 104) такими: Гв = 0,5 сек\ Гн = 1,14 сек; /i = 0,3; /2=0,2;
/з = 0,64; /4 = 0,43.
Решение. Поставленную задачу целесообразно решать с помощью
электроинтегратора. Для рассматриваемого случая будет справедлива система
уравнений (3. 105) и определению подлежат параметры К\\ /Сс» TV, P считаем равным 1.
Из неравенства (3. 108) можно видеть, что система остается устойчивой
в широком диапазоне изменения параметров /Сь Кс и Ги. Чтобы иметь
представление о том, в какую сторону изменяется значение этого неравенства при
изменении значений /Сь Кс и Ги, представим его в виде С>1, где С — частное от
деления левой части неравенства на правую. Задаваясь различными значениями /Сь
Кс и 7И, можно определить значения С, что и представлено на фиг. 3. 30. Прямая
€=\ определяет границу устойчивости системы. Из кривых, приведенных на
фиг. 3. 30, видно, что на величину неравенства особенно эффективно влияет
величина времени изодрома Ги. Поэтому для выбора параметров, при которых
переходный процесс удовлетворял бы заданным требованиям, целесообразно
исследовать влияние на переходные процессы величин ТИ и Кс, задаваясь практически
приемлемым значением коэффициента усиления тахометра К\. В дальнейшем
примем /Ci=8.
244
с
w
8
6
и
z
1
1 -
У////
fe1
fas
^*
Одлт
у////
i
V 1
:ть устой
У////у
уУ///
/
чивос
—-—1
JQ.r\
-mr}
^^
%mu
y/z/zV/z/A
1.
'//<■
0 2 4 6 8 10 12 /«
ТШ;КС;К,
Фиг. 3.30л Изменение величины
неравенства С в зависимости от
изменения параметров К\, Kg и
Т
/
/
r
2
>4 -
&Г
^—w '
3t
t
1 2 ЗЬсек
Фиг. 3.31. Переходные процессы при j
Ги=0,5 сек; /Cc^var. !
5
3
2
/■
5
3
2
1
- j
i
/
/
И ^
14
t,j
Гц-1,0
0
ȣ
S=4-
ti',o Us
•
teen
и 1 2 teen
Фиг. 3.32. Переходные процессы
при /Сс=5; 7H=var.
245
Из выражения (3. 109) видно, что для уменьшения времени регулирования
следует увеличивать Кс и уменьшать Ги. На фиг. 3.31 и 3.32 приведены
переходные процессы, полученные с помощью электроинтегратора для различных
значений Тя и Кс при заданных остальных параметрах. Из рассмотрения
этих процессов следует, что наиболее приемлемыми значениями будут Ги=1
и /(с=5. При этих значениях параметров процесс практически остается
монотонным (по числу оборотов низконапорного каскада Хп2), с вполне приемлемым
временем регулирования t^l сек. Величина же интегральной оценки согласно
(3. 109) будет /я2§Хв =0,2.
Из рассмотрения тех же процессов видно, что в то время как для Хп2
получается монотонный процесс, для Хп\ (каскад высокого давления) процесс
получается с перерегулированием около 25°/о от величины возмущения.
Увеличение Ги до величины, превышающей 1 сек, лишь затягивает процесс, не изменяя
его монотонного характера; увеличение Кс до значения, превышающего 5, хотя
и улучшает процесс (уменьшается время регулирования), но добиться в реальной
конструкции гидравлического сервомотора величины постоянной времени,
существенно меньшей 70 = 0,2 сек, затруднительно.
Пример 2
Задание. Определить параметры системы регулирования двухвального
ТРД с регулируемым реактивным соплом, когда число оборотов высоконапорного
каскада регулируется изодромным регулятором путем изменения расхода
топлива, а число оборотов низконапорного каскада регулируется регулятором с
жесткой обратной связью путем изменения проходного сечения реактивного сопла.
В качестве возмущения принять перенастройку регулятора. Переходные
процессы для обоих каскадов должны быть близкими к монотонным.
Исходные данные. Коэффициенты уравнений (3. 114) принять такими:
Гв = 0,5 сек; Ги=1,14 сек; /j = 0,3; /2=0,2; /3=0,64; /4=0,43; /5=1,43.
Параметры регулятора высоконапорного каскада принять по данным
предыдущего примера.
Решение. Поставленную задачу также целесообразно решать с помощью
электроинтегратора. Определению подлежат параметры /(2, Къ и Тс регулятора
низконапорного каскада. Коэффициент усиления /С2 тахометра примем по
аналогии с предыдущим примером: /С2=8. Выбор параметров /С3 и Тс подчиним
условиям получения наименьшей остаточной неравномерности и заданного характера
переходного процесса.
Остаточная неравномерность регулирования определяется полученным ранее
выражением, т. е.
у , v сцо Yft Щ (h Л- hh) + KiKtfndih Y0
#5 hh "Г 1\ Л- Л
Выясним, какие величины остаточной неравномерности можно ожидать при
различных значениях /С3.
Предварительно зададимся значениями коэффициентов т2 и т3 из
выражений (3.116) и (ЗЛ17), характеризующих влияние объединенного управления.
Примем ш2=1; /п3=0,5. Тогда из (3.116) получим mi=0,5. Значения mi и гп2
в (3.118) будут такими: га! = 0,5; т2=1.
Уравнение движения сервомотора с жесткой обратной связью [последнее
уравнение в системе (3.115)] можно представить двумя уравнениями вида
рХ5 = Кс (Х4-Х5) и ^5 = Ко*Хъ.
Здесь Ко.с — коэффициент обратной связи, а Кс—коэффициент усиления
сервомотора. Сравнивая эти два уравнения с последним уравнением системы (3.115),
получим:
Т ^
246
Значения коэффициента обратной связи можно принимать в пределах
% с = 0,5-^-6,0; значения коэффициента усиления сервомотора Кс < 5, так как
' ыполнить конструкцию с большим значением коэффициента усиления
затруднительно. Отсюда коэффициент /С3=2-г-0,2; соответственно значения ТС=2КС^-
"nf
1А
12
10
as
0,6
ол
0,2
/ Координата Хп2
/I 2 Координата Хп/
1
II
и
Ш/
у
Л'
Y*
V/
V
J.-X-3
Y/
X
р
3
г
.
Ж°
/
2
J
4
кч"^^_
===
Жс
10
3,0
0,5
0.1
KQC
JO
0,5
КО
5,0
Кз
10
2.0
W
0,2
тс
0,33
0,66
2,0
2,0
5 tcetc
Фиг. 3. 33. Переходные процессы.
0,2Кс- Теперь определим возможную величину остаточной неравномерности
в зависимости от величины /С3, используя зависимость Хп2( оо) = (0,125-^-0,120)Х°.
Таким образом, изменение значения Кг в широком диапазоне очень мало
изменяет остаточную неравномерность; поэтому выбор значения /С3, как и
значения Гс, подчиним получению заданных переходных процессов.
На фиг. 3.33 приведены осциллограммы переходных процессов по Хп\ и Хп2,
полученные с помощью электроинтегратора при различных значениях Гс, Кг, Кс
и Ко.с. Из рассмотрения осциллограмм видно, что процессы, описываемые
кривыми 4, близки к заданным.
Глава IV
ДИНАМИКА СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ТРДФ
По мере развития турбореактивных двигателей, все большее
число их оснащается устройствами для форсирования тяги в виде
форсажной камеры, где сжигается дополнительное количество
топлива. На основании ранее выявленных свойств ТРДФ в этой
главе исследуется динамика систем регулирования двигателей
с форсажными устройствами с различными способами их
управления.
1. ОДНОВАЛЬНЫЙ ТРДФ
Рассмотрим систему управления ТРДФ, когда число оборотов
двигателя поддерживается с помощью изодромного регулятора,
а топливо в форсажную камеру подается в зависимости от величины
сигналов р* или р\, или р\\р% или Т\ш
Уравнение движения объекта регулирования по числу
оборотов примем в виде (1. 101); уравнения движения регулятора числа
оборотов примем по (3.5), (3.7) и (3.9); будем также считать^
что топливный насос основного контура плунжерный, уравнение
движения которого примем в виде (1. 45).
а) Регулирование форсажного контура
по сигналу от р\
В качестве регулятора форсажного контура используем ранее
рассмотренный регулятор расхода топлива, приведенный на
фиг. 2. 18, с тем отличием, что теперь на баростат будет поступать
сигнал, пропорциональный величине р\, будут отсутствовать
ограничитель максимальных чисел оборотов и дроссельный кран,
изменяющий расход топлива (см. также фиг. 2.32). Структурная
схема всей системы регулирования двигателя приведена на
фиг. 4. 1, а принципиальная схема — на фиг. 2.52.
248
Здесь в зависимости от изменения величины полного давления
р 1 воздуха на входе в компрессор изменяется расход топлива
в форсажную камеру.
В ранее полученной системе уравнений движения регулятора
форсажного контура (регулятора расхода) учтем следующие
изменения: расход топлива в форсажную камеру будем считать
пропорциональным его давлению за насосом, т. е. Хатф=КХРт;
координату перемещения баростата Х6 будем считать пропорциональной
величине Jti =Api//?io, т. е. Хь =
Топлидный
насос
Сервомотор
j Х2
Изодром
Тахометр
ТРДФ
Хп
Топливный
насос
Уудстдитель-
ныйэлемент
сердо-
мотор
\баростат
Фиг. 4. 1. Структурная схема системы регулирования
ТРДФ по сигналу от р\.
Тогда в соответствии с (3.85), (3.88) и (3.90) будем иметь
следующие уравнения (введено новое обозначение):
ф згс1 —УРавнение чувствительного элемента;
(Тср-\- l)X5=I(4XGrr ф+^5^4 — У равнение сервомотора;
хот.Ф==^ехп+^7Х5 — уравнение насоса.
Эти уравнения удобно свести к одному в таком виде:
(4.1)
где
,=К61К; К=1-К4К7-К2КЪК7.
24$
Следовательно, исходная система уравнений будет такой:
= КС(Х1 — Х2); ^
Gl = КЪХ п -\- KSXZ;
.ф~'чб"я1 "I- )
Здесь обобщенные координаты соответствуют обозначениям
на структурной схеме фиг. 4. 1.
Разрешая (4. 2) относительно Хп, получим
(аоР4 + агРъ ~т а2Р2 + азР + ад Хп = (aQp2 -f- агр + а2) Х° +
где
ао=ТсТТи; al=TTcr.
а4=1гКгКсК9; ао=/Г17чсГ
а3=ГсГи(1—/x/<r8); а4 = (Гс
аь=12Т^ o,7=l2m; m = Kc
Из полученного видно, что относительно возмущений,
обусловленных изменением площади реактивного сопла XF, изменением
величины полного давления перед компрессором Я1 и
перенастройкой регулятора числа оборотов Х°, система по числу оборотов
является астатической.
Такую систему регулирования практически всегда можно
сделать устойчивой. Если положить 7И—+0, то условие устойчивости
будет иметь вид
(1 - 1,К8 - K6l2+TeKtKAK9) (Т+ТС-ТС1ХК&) > ТТ^К&Кг
Если теперь положить Д"8 == /Сб = 0, что соответствует условию
независимости расхода топлива в основной контур и в
форсажную камеру от числа оборотов двигателя (насосов), то запас
устойчивости увеличивается. Такое свойство системы сохраняется
и при ТпФО. Это наглядно видно из структурной схемы,
приведенной на фиг. 4. 1. Действительно, когда мы полагаем Кв=0, то это
значит, что ликвидируется один из замкнутых контуров через
объект регулирования (топливный насос форсажного контура)
и регулятор форсажного контура становится разомкнутым. В этом
*} В уравнении (1.101) Gi = l
250
случае устойчивость системы вообще не зависит от регулятора
форсажного контура.
Поведение рассматриваемой системы в зависимости от
изменения параметров регулятора и условий полета лучше всего
проследить по переходным процессам. На фиг. 4. 2 приведены
переходные процессы по числу оборотов для двигателя с
рассматриваемой системой регулирования, когда возмущением является
мгновенная перенастройка регулятора числа оборотов, раскрытие
створок реактивного сопла и изменение скорости полета (измене-
л а off/мин
200
J50 Mft-T*—-I
№
1
ПС
НА
\
\ \
В
п
н
Jv
—1Ukm
/шг
ч/
—
Возмущение перенс
тора числа o/fopt
Возмущение сопл
Возмущение %;[
Ти=0,5сек
^>-
\
UL
^У
н=о
Т^дсек
<
22==
кс=
хстройнойрегу,
шодХ°[1]
ом XF=[I]
пя-
?
Jtcen
О
-50
Фиг. 4.2. Переходные процессы для различных Я и Ги при
различных возмущениях.
ние величины п\) при различных значениях параметров
регулятора и высот полета. Из приведенных переходных процессов
видно, что при выбранных параметрах регуляторов с увеличением
высоты полета процессы улучшаются при возмущениях соплом
и скоростью полета и ухудшаются при перенастройке регулятора
числа оборотов. При увеличении времени изодрома процессы
затягиваются по времени при всех видах возмущений. Процессы,
обусловленные возмущениями от реактивного сопла и скорости
полета, в действительности будут лучше приведенных вследствие
сравнительно малой скорости изменения возмущений (вместо
скачка), поэтому параметры системы целесообразно выбирать по
(наихудшим) процессам, обусловленным перенастройкой
регулятора. Процессы, обусловленные перенастройкой регулятора числа
оборотов, с учетом влияния регулятора форсажного контура, мало
251
отличаются от процессов, полученных оез учета влияния
регулятора форсажного контура.
б) Регулирование форсажного контура по сигналу
от /?*
Одна из возможных принципиальных схем регулирования форсажного
контура показана на фиг. 4. 3, из которой ясен принцип работы такой схемы. Схему
регулятора числа оборотов примем прежней. Структурная схема всей системы
регулирования приведена на фиг. 4.4.
Уравнение движения двигателя (1. 100) сведем к двум уравнениям такого
вида:
■* \ -у 7 V | / V ] Т V ' i 7 V
■ L) -Ли — М /?2 i ^2 л» ' ^З^г4 »б о* )
Л.Г 1 ЛГ 1 ЛГ I \ /
Уравнения движения звеньев регулятора форсажного контура примем
такими:
Хл = КъХрч — чувствительный элемент;
(Тер +l)XQ =КзХ4—сервомотор с жесткой обратной связью.
|ш/ насос
ft форсункам
сервомотор гт~
изодром
\Л2
J
Тахометр
(■—Xе
ТРДФ
I Серба-
мотор
ч.э
Фиг. 4.3. Принципиальная Фиг. 4.4. Структурная схема системы,
схема регулирования фор- регулирования ТРДФ по сигналу от pi-
сажного контура по
сигналу от р2-
1—перепускной клапан,
2—чувствительный элемент,
3—сервомотор. 4—насос.
Следовательно, исходная система уравнений будет такой:
(Тр + 1) Хп =
т ф
+
(4.5)
252
(4.5)
Обобщенные координаты соответствуют обозначениям на структурной схеме,
приведенной на фиг. 4.4.
Разрешая (4.5) относительно Хп, получим
4- сц/> 4- 02) Х° -Ь
-f aAp + а5) /^, (4.6)
где
#о = ТТСТИ; ах = ГсГ/тг -f ^и (^c^i 4- 71),* «2 = Щ[тс (Щ 4 ^и)]
4 Ги [ТсКсКгК9 (12 - hh) - K2Ksh (U + Wll
fc/f 1/C9 [^и^2 + Tc (l2 + /A)];
^КсКд (l2 4 /1/5);
А'с^э (/2 + /lW;
a2 = К\КсК$т2\ а3 = ТиТс1е; а4 = Ги/6т -f 7c/6;
«5 = ^6^; л* = -^с^иР 4- 1;
«1 = 1 — /2/f8 + ^1^4 — hlsKs; m2 = l2+ hh 4- hhK2Kz.
Из (4.6) видно, что при возмущениях, обусловленных изменением сечения
реактивного сопла и перенастройкой регулятора, система по числу оборотов
является астатической.
Такая система практически всегда устойчива. Если же положить Тп—*0
с учетом, что /i>0; /3>0 и /б>0, то условие устойчивости будет таким:
[1 - /2*8 + hh - /l/5*8 + /3*2*3 (/4-/5*8) +
4 *c*i*9^c (/2 + hh)\ Id - /2*8 4 hh - /1/5*8) Те + Т]>
> Гс77Сс*1*9 (/2 + /1/5 + hhK2Ks). (4.7)
Если положить Kg=O, что соответствует условию независимости расхода
топлива в основной контур от числа оборотов двигателя, то, как видно из (4.7),
запас устойчивости увеличивается. При Тп¥=0 это свойство системы сохраняется.
Поведение этой системы в зависимости от изменения параметров регулятора
и условий полета можно видеть по переходным процессам, приведенным на
фиг. 4. 5. Здесь взят тот же двигатель, что и при рассмотрении системы,
работающей по сигналу от р,, и те же параметры регуляторов.
Как видно из процессов, характер их остался прежним, т. е. с увеличением
высоты полета процессы при возмущении, обусловленном изменением сечения
реактивного сопла, улучшаются, а при возмущении перенастройкой регулятора
числа оборотов — ухудшаются. Увеличение времени изодрома приводит к
затягиванию процессов.
Сравнимость процессов, приведенных на фиг. 4. 2 и фиг. 4. 5, объясняется тем,
что в обеих системах имеется один дополнительный контур, замкнутый на объект
регулирования: в первом случае — через насос, а во втором — через весь
регулятор форсажного контура. Поскольку сервомотор регулятора форсажного
контура имеет сравнительно малую постоянную времени (Гс«0,1 сек) и величина р2
253
практически однозначно связана с числом оборотов, обе системы становятся
аналогичными.
Тем не менее при изменении сечения реактивного сопла процессы во втором
случае несколько хуже, чем в первом. Это объясняется наличием запаздывания
в сервомоторе регулятора форсажного контура.
Однако система, работающая по сигналу от р^у имеет определенное
преимущество перед системой, работающей по сигналу от р]. Это преимущество
заключается в более полном учете изменений, происходящих в двигателе от
изменяющихся условий его работы; в частности, учитывается изменение характеристик
компрессора, так как сигнал в регулятор форсажного контура отбирается после
А Л Об/MUH ■
200
' V= const ; H=mr
Возмущение перенастройкойре г у*
лятора числа оборотов Х° И]
Возмущение соплом Хг^[1]
Фиг. 4. 5. Переходные процессы по числу оборотов ТРДФ для
различных Н и ТИ при различных возмущениях.
компрессора. Этим достигается более полное сохранение режима основного
контура.
Некоторым отличием от рассмотренной системы является такая схема
регулирования, в которой в регуляторе форсажного контура применяется насос
переменной производительности (аналогично схеме, приведенной на фиг: 2. 52, с
воздействием на баростат сигнала р\ вместо pi). В этом случае исходная система
уравнений вместо (4.5) будет:
(Тр + 1) Хп = 1хХр2 + hXOi
Хр2 =
Хг =
К9Х3;
(4.8)
254
Анализ динамики такой системы регулирования показывает, что переходные
процессы в ней несколько ухудшаются и запас устойчивости уменьшается,
по сравнению с системой, рассмотренной выше.
в) Регулирование форсажного контура по сигналу
ОТ р2.'Р4:=~г
Здесь в качестве регулятора форсажного контура используется
регулятор, принципиальная схема которого приведена на фиг. 2. 28.
Рассмотрим случай работы этого регулятора при наличии жесткой
обратной связи и регулятора перепада давлений на регулирующем
органе.
Напомним, что, поддерживая
заданную степень расширения газов на
турбине, мы тем самым стремимся
оставить неизменным режим работы
основного контура двигателя. С
помощью же сигнала настройки Y0 в
регуляторе можно изменять заданную
степень расширения я*„
Регулятор числа оборотов основ-
ного контура примем прежним — изо-
дромным, с шестеренчатым
топливным насосом и регулятором перепада
давлений на регулирующем органе.
Общая структурная схема всей
системы приведена на фиг. 4. 6.
Уравнение движения объекта
регулирования получим, сведя систему
(1. 106) к трем уравнениям вида
Фиг. 4.6. Укрупненная
структурная схема системы
регулирования ТРДФ по сигналу
от V
(4.9)
Выведем уравнения движения чувствительного элемента
регулятора форсажного контура, для чего воспользуемся схемой,
приведенной на фиг. 2. 28, где входными сигналами являются
значения р2 и Р4, а входным — положение золотника (мембраны).
Уравнение действующих сил на мембрану будет
где р2,1 и р4 — давление соответственно в нижней и верхней
полостях мембраны; /м — эффективная площадь мембраны; С — жест-
255
кость мембраны; / — перемещение мембраны (золотника). Это же
уравнение в относительных величинах будет
+m2Xh (4.10)
где
v
1 =
Пренебрегая малым изменением объемов полостей мембраны
при ее перемещении, учтем изменение давления только в нижней
полости мембраны уравнением
RT dt Vl V2'
где V—объем нижней полости мембраны; Qi — расход газа через
первый жиклер; Q2 — расход газа через второй жиклер. Используя
нелинейные зависимости Q\ — Q\{p2, Y°) и Q2 = Q2(P2, ь /), после
линеаризации получим
(TlP+\)Xp,A=m3Xp2-m4Xt+m5Y*. (4.11)
Подставляя значения Хр2, i из (4. 11) в (4. 10), с учетом (1. 105),
получим такое уравнение:
(4.12)
где T\f m, Ш\, т2 — постоянная времени и коэффициенты усиления,
обусловленные ранее введенными обозначениями, а Хг = Д///о —
выходная координата чувствительного элемента.
Значение постоянной времени 7\ может быть очень малым и в
первом приближении может не учитываться; поэтому в качестве
уравнения движения чувствительного элемента в дальнейшем
примем следующее уравнение:
Хх т = тХр2 - щХг - m2Y°. (4.13)
Тогда исходная система уравнений движения будет такой:
X1=Kl(X0-Xn);
к = тХ^—mxXl —
256
Здесь обобщенные координаты соответствуют обозначениям
структурной схеме, приведенной на фиг. 4. 6.
Разрешая (4. 14) относительно Хп и Хч, получим
)<шг / О I I \ Vfl I
. Хп = (РоР2 + ai/? + a2)X° +
на
(а0р4
а
а
(4. 15)
а4) ЛГЯ т =
а1б) xf -
«2o) Y°. (4.16)
Из полученных уравнений видно, что по числу оборотов Хп си-
сгема является астатической относительно возмущений XF и Y0,
по степени же расширения Х%т система является статической
относительно тех же возмущений.
Конечное значение регулируемых параметров будет таким:
(oo)= а20 Y°=^
1T a4
Здесь коэффициенты |3Ь (32, ... составлены из коэффициентов,
входящих в уравнения движения объекта регулирования. Отсюда
видно, что по числу оборотов система осталась астатической при
возмущении Х°.
Устойчивость рассматриваемой системы регулирования мало
чем отличается от рассмотренной выше, работающей по сигналу
от величины давления воздуха за компрессором р\.
Эта система позволяет относительно простым способом
вводить необходимую коррекцию по ят, воздействуя на настройку
регулятора форсажного контура Y0. Например, может применяться
коррекция от сигнала, пропорционального степени повышения
давления воздуха в компрессоре или скорости полета и т. д. В этом
случае без существенного нарушения динамических свойств
системы можно изменить ее статические характеристики и более
полно приблизиться к наивыгоднейшим режимам работы двигателя
при различных числах его оборотов и различных условиях полета
самолета.
Поведение рассматриваемой системы в зависимости от
изменения параметров регулятора и условий полета можно уяснить по
1327
257
переходным процессам, приведенным на фиг. 4. 7. Здесь взят тот
же двигатель, что и при рассмотрении систем, работающих по
сигналам от р\ и /72, и те же параметры регуляторов основного
контура. Как видно из рассмотрения процессов, характер их
протекания в зависимости от числа оборотов остался примерно прежним.
Однако ввиду увеличения постоянной времени сервомотора
регулятора форсажного контура при возмущении реактивным
«соплом, время регулирования и величина заброса заметно
увеличиваются.
В данном случае при возмущении перенастройкой Х° с
увеличением высоты полета процессы ухудшаются, а при возмущении
—Возмущение перенастройкой
регулятора числа оборотов^]
—Возмущение соплом Х-р]
Фиг. 4. 7. Переходные процессы по числу оборотов ТРДФ
для различных Н, Тс и Ги при различных возмущениях.
реактивным соплом, наоборот, улучшаются. Увеличение времени
изодрома Ги несколько увеличивает время регулирования;
увеличение коэффициента обратной связи регулятора форсажного
режима (уменьшение /С2 и Тс) несколько улучшает процессы,
особенно при возмущении реактивным соплом. Следует иметь в виду,
что с увеличением высоты полета процесс горения топлива в
форсажной камере может ухудшаться [уменьшается г)к.ф в (1.97)]
и поэтому нарушается зависимость между изменением расхода
топлива и изменением температуры газа в форсажной камере. При
очень сильном изменении т]к.ф вся система регулирования по Ят
с воздействием на расход топлива в форсажную камеру становится
очень вялой или вообще неработоспособной. В этом случае (при
применении регулирования по nl) более целесообразно, чтобы
регулятор воздействовал на створки реактивного сопла, как показано
на фиг. 2. 29.
258
г) Регулирование форсажного контура по сигналу от Т\
В качестве регулятора форсажного контура можно
использовать любой регулятор температуры газа за турбиной, например,
регулятор, схема которого приведена на фиг. 2.21; уравнения
движения звеньев этого регулятора были получены ранее.
Как и ранее, будем предполагать, что регулятор форсажного
контура управляет изменением расхода топлива в форсажную
камеру, а режим устанавливается изменением проходного сечения
реактивного сопла. Кроме того, будем считать, что расход топ-
_Lx
Топливный
насос
Сервомотор
Изодром
Тахометр
xF\
гулятор
репада \+*
~1лении I
ТРДФ
Сервомотору"5^
AM.
о ]—;
Соленоид
Усилитель
Дифферент
атор
ч.з
\К
Усилитель
хг
Фиг. 4.8. Структурная схема системы регулирования ТРДФ
по сигналу от Г^*
лива в форсажную камеру не зависит от числа оборотов насоса
(имеется регулятор перепада давлений на дроссельной игле).
В качестве регулятора числа оборотов примем изодромный
регулятор с плунжерным топливным насосом.
Структурная схема всей системы регулирования приведена на
фиг. 4. 8.
В дальнейшем для упрощения и приближенного решения
задачи предположим, что инерционность термопары полностью
скомпенсирована дифференцирующим контуром и пренебрежем
инерционностью реле и усилителей. Тогда уравнение движения регулятора
температуры вместо (3.75) можно представить в виде
pX4=K2(Y°-XT4\ (4.18)
где Къ — общий коэффициент усиления регулятора температуры;
Y0 — сигнал настройки регулятора температуры.
17*
259
Уравнение движения объекта регулирования получим из
системы (1.100), сведя ее к двум уравнениям вида
т. ф ' 8 F'
Тогда исходная система уравнений движения будет такой:
у / у _[_ / у _|_ / у 1 / у .
7*4— 3 п 1~ 7 G "1 4 G rh~i 8 Z7'
(4.20)
Здесь обобщенные координаты обозначены в соответствии со
структурной схемой, приведенной на фиг. 4.8.
Разрешая (4. 20) относительно Хп и ХТа получим
а4) Хп = (а8^ + alP + а2) Х° +
+ (а,р + а7)рУ»; (4.21)
(а0р4 + ахръ + ^Р2 + Яз/7 + а4) ^Г4 = (а8/?2 + а9/? + а10) рХ° +
18)Y0. (4.22)
Из полученных уравнений видно, что по числу оборотов
двигателя система является астатической относительно возмущений XF
и Y0; по температуре же газа система является астатической
относительно возмущений Х° и XF.
Конечное значение регулируемых параметров при перенастройке
регуляторов будет таким:
^(oo)=-^-X°=X°; *74(ooM^Yo = Y0. (4.23)
#4 #4
Отсюда видно, что при перенастройке регуляторов система
также является астатической.
Устойчивость рассматриваемой системы при условии Ги—>0
и /j-—0*); /2<0; /3<0; 4<0 выражается таким неравенством:
{КгК9Кс (/5 - Щ - К2 [ V3+к - К* (hh+Ш\) X
X [П4К2+К8 (1г17 - /Б) ~ /Л +1 ] > ТК2К9КХКС {14,+Щ.
Имея в виду, что Мз + иЖгЩв + Щ, для увеличения запаса
устойчивости целесообразно уменьшать коэффициент усиления ре-
*) Значение коэффициента 1\ при практических расчетах получается мало
отличающимся *от нуля.
260
гулятора форсажного контура /(2. Это же свойство системы
справедливо и для случая Ги=й=О.
При более детальном исследовании оказывается, что запас
устойчивости рассматриваемой системы все же меньше, чем в
рассмотренных выше случаях.
Поведение системы регулирования в зависимости от изменения
параметров регуляторов и условий полета можно уяснить по пере-
— возмущение перенастройкой регулятора
температуры У ТО
возмущение реактивным^ соплом XF СП
возмущение перенастройкой регулятора
числа оборотов Х°Ш,
Постоянная Времени сервомотора
регулятора температуры=2сек;У--ш$\
(сек
Ьсек
Фиг. 4. 9. Переходные процессы по числу оборотов и температуре газа
за турбиной ТРДФ при различных условиях полета, возмущениях и
параметрах регуляторов.
ходным процессам, приведенным на фиг. 4.9. Здесь двигатель взят
тот же, что и при рассмотрении систем, работающих по сигналам
от рГ, р2 и я*, и те же параметры регулятора основного контура.
Как видно из фиг. 4.9, характер протекания процессов здесь
отличается от приведенных выше. Для этих процессов характерным
является увеличение колебательной составляющей процесса при
повышении высоты полета как при возмущении реактивным
соплом, так и при перенастройке регулятора температуры газа.
Увеличение времени изодрома уменьшает колебательную составляющую
процесса, но увеличивает время регулирования. Уменьшение
постоянной времени сервомотора регулятора температуры газа до
261
значения, меньшего 2 сек, резко увеличивает колебательную
составляющую процесса, а увеличение ее — затягивает процесс.
Для получения приемлемых процессов на всех высотах полета
целесообразно применять перенастраивающийся изодром.
Введение статизма в регулятор температуры газа, например,
путем применения сервомотора с жесткой обратной связью,
заметно стабилизирует процесс, уменьшая его колебательную
составляющую; но это приводит к существенной неточности в поддержании
температуры газа.
При уменьшении скорости изменения сечения реактивного сопла
и перенастройки регулятора температуры (по сравнению со
скачком) процессы резко улучшаются.
При рассмотрении двигателя как объекта регулирования
указывалось, что режим работы двигателя определяется не только
числом оборотов, но и температурой газа перед турбиной (или за
турбиной). С этой точки зрения рассматриваемая система
регулирования имеет определенное преимущество, так как она позволяет
поддерживать заданными и число оборотов и температуру газа.
Исследования показывают, что в случае применения регулятора
температуры газа для форсажного контура, когда регулятор
воздействует на створки реактивного сопла, переходные процессы
получаются более приемлемыми. Это объясняется тем, что изменение
сечения реактивного сопла более эффективно воздействует на
регулируемые параметры, чем расход топлива в форсажную камеру
(в уравнении движения объекта регулирования значение
коэффициента усиления по соплу больше, чем по топливу).
При регулировании форсажного контура по сигналу от Т\
результаты получаются во многом аналогичными* рассмотренному.
А) Турбонасосная подача топлива в форсажную
камеру
В связи с ростом реактивной тяги, развиваемой двигателями, резко
увеличивается расход топлива, особенно в форсажную камеру. Применение для этой
цели плунжерных топливных насосов (переменной производительности) связано
с определенными трудностями конструктивного характера, а применение
шестеренчатых топливных насосов с приводом от вала двигателя связано с
необходимостью осуществлять перепуск большого количества топлива в тот момент,
когда форсажная камера не работает. Кроме того, существенно увеличивается
вес системы и затрудняется размещение на двигателе таких больших агрегатов.
Применение топливных насосов с приводом от воздушной турбины
позволяет во многом избавиться от перечисленных выше недостатков. В этом
случае турбина должна работать на воздухе, отбираемом от компрессора
двигателя, и приводить во вращение топливный насос. Такая схема топливной системы
позволяет полностью отключать турбонасосиый агрегат, когда форсажная
камера не работает и в этом случае могут применяться как шестеренчатый, так
и центробежный топливные насосы.
262
Топливные системы с турбонасосом могут быть различными. Рассмотрим
схему, когда путем изменения числа оборотов турбонасоса поддерживается
постоянный перепад давлений на дроссельном кране, который с помощью регу-
аятора форсажного контура дозирует топливо в форсажную камеру. Изменение
"числа оборотов турбонасоса достигается с помощью дросселирования воздуха
либо на входе в турбину, либо на выходе из нее.
Принципиальная схема такой системы топливоподачи приведена на
фиг. 4. 10, а укрупненная структурная схема всей системы регулирования ТРДФ
с турбонасосом (ТНА) показана на фиг. 4.11.
Составим уравнения движения системы регулирования. Уравнения
движения ТНА выведем с учетом инерции вращающихся масс. Используя
исходное уравнение 2т:Утн —* = МТ — Мн и нелинейные зависимости вида Мт =
dt
=МТ (/?2> пю Р) и Мн = М (пН1 /?н), после линеаризации получим
4-
где
/дМЛ
т __ 2lzJ i _ Р™ ^ д/72 /о
ТН /<^<Шл ' 10
/<^___<Шл ' 10 /гн0 /дА^^дМ^л
V дпн дпн /о \ дпн дпн /0
/дМт\ /дМи\
V ар )0 />но ^^н /0
_ Ро V ар )0 _ />но
° пн0 /д^Шл ' " п
/д^^Шл ' " пн0 /dMn^dNLA
\дпн дпн/0 \дпн дпн/0
Апн Ар Д/?н
«нО Р0 " Рн0
Здесь пп — число оборотов ТНА; (3 — положение регулирующего органа
турбины; рн — давление топлива за насосом; Мт, Мп — крутящие моменты
соответственно для турбины и для насоса.
Далее рассмотрим два уравнения расходов топлива: одно — между
насосом и регулирующим органом регулятора форсажного режима Q1 — Q2, а
второе— между тем же регулирующим органом и форсунками Q2=Qs-
Используя нелинейные зависимости вида
после линеаризации получим два таких уравнения:
h7XpT ~ 0.
Здесь Х4=Аа/а0 — координата регулирующего органа регулятора
форсажного контура: ХРт=Арт/рт0 — давление топлива перед форсунками.
Уравнение чувствительного элемента и сервомотора регулятора перепада
давлений примем в виде
*б = Кц [Z0 - (ХРн-ХРт)]; (Тср + 1)Х5 = К15Х6.
Уравнения для двигателя получим из (1. 100), сведя эту систему к трем
уравнениям, путем исключения всех переменных кроме Хп\ Хр2; ХТа-
263
Регулятор
форсажного
контура
Фиг. 4. 10. Принципиальная схема топливопо-
дачи форсажного контура ТРДФ с ТНА.
Насос
*J
Регулятор
п
n
ТРДФ
Регулятор
П
*p?
ЛРт
Сервомотор
ч.э
Рн
тня
}X
/7Н
Фиг. 4. 11. Укрупненная структурная схема системы
регулирования ТРДФ.
264
Регуляторы числа оборотов и температуры газа примем прежними, считая,
что регулятор температуры газа воздействует на расход топлива в форсажную
камеру. Тогда исходная система уравнений будет такой:
(Тр + 1) Хп = /,ДГГ4 + l5XGr + hXp2;
Xj4 = 13Хп -j- .
Xp2 = l\\Xn
К7Х
Р2;
(4.24)
Последнее уравнение учитывает связь между расходом топлива через
форсунки и его давлением, a Z0 — настройка регулятора перепада давлений.
Решая систему (4.24) относительно Хп и Хта, получим уравнения вида
. +а6) Хп = (ао/>4 + ац^з + . . . + а4) ХО +
(а5/?4
а9) рХР
а15р -Ь а16) /?Z0.
+ а6) ХТ4 = (а17/?4 +
4-
а13)
«21) Р*-0 +
. + а32) Y»
(4.25)
(4.26)
Подробное исследование таких систем регулирования показывает, что
несмотря на две лишние степени свободы движения в ней, по сравнению с
системой без турбонасоса, переходные процессы как по Хп, так и по ХТ4 получаются
сравнимыми с процессами, ранее приведенными на фиг. 3. 40.
Это объясняется тем, что доля изменения расхода топлива в форсажную
камеру, возникающего при изменении перепада давлений на регулирующем
органе, относительно мала. Кроме того, величина постоянной времени
турбонасоса 7т н имеет относительно малую величину (Гтн<0,2 сек) и коэффициент
самовыравнивания достаточно велик.
2. ДВУХВАЛЬНЫЙ ТРДФ
Различные системы регулирования одновальных ТРДФ,
рассмотренные выше, могуг быть применимы и для ТРДФ с двухкас-
кадным компрессором. Результаты, полученные выше, во многом
соответствуют и условиям работы этого двигателя.
265
Рассмотрим систему регулирования ТРДФ с двухкаскадным
компрессором, когда низконапорный каскад управляется изодром-
ным регулятором числа оборотов, воздействуя на расход топлива
в основной контур, а форсажный контур управляется регулятором
постоянства степени расширения газа на турбине (на двух
турбинах), воздействуя на расход топлива в форсажную камеру.
При этом примем, что режим для форсажного контура задается
величиной раскрытия реактивного сопла.
Уравнение движения объекта регулирования получим из (1.67),
где девятое уравнение необходимо заменить первым уравнением
(1.99) и в последнем Хр2 заменить координатой Хр^и а Хтг
заменить координатой Xtau т- е.
^9/?41^/?41 I ^97Ч1^Т41 ^9/?4^/?4 K9TqXtq = КдХр.
Кроме того, необходимо учесть второе уравнение (1.99).
Полученную систему уравнений необходимо свести к четырем
уравнениям вида
(ТвР+\)Хп1=1хХп2
л2
Далее необходимо использовать (1.105), заменив Хр± разностью
Уравнение движения регулятора числа оборотов примем по
(3.5), (3.7), (3.9), а для регулятора форсажного контура
—последние два уравнения из (4.14). Структурная схема всей системы
приведена на фиг. 4.12.
Исходная система уравнений движения будет такой:
h
t = Kc (Xt—X2);
(4. 27)
266
Обозначения приняты в соответствии со структурной схемой,
приведенной на фиг. 4. 12. Разрешая эту систему относительно ХпЪ
Хп2, получим
. . . +а3)Х° +
l0)Y^ (4.28)
. . . +а14)Х° +
(4.29)
Отсюда видно, что число оборотов низконапорного каскада ХП2
в установившемся режиме не изменяется при изменении сечения
—Xе
Фиг. 4. 12. Структурная схема системы
регулирования двухкаскадного ТРДФ.
реактивного сопла XF и при изменении степени расширения газа
на турбине сигналом перенастройки Y0.
Поведение рассматриваемой системы можно уяснить по
переходным процессам, приведенным на фиг/4. 13 и 4. 14. Эти процессы
соответствуют двухкаскадному ТРД, рассмотренному в примере на
стр. 244, но с добавлением к нему форсажной камеры и
регулируемого реактивного сопла. Режим работы двигателя соответствует
стендовому, близкому к максимальному, при возмущении
реактивным соплом с увеличением проходного сечения реактивного сопла
на 5%.
По этим процессам видно влияние изменения постоянной
времени и коэффициента усиления сервомоторов регуляторов и влияние
времени изодрома. Коэффициент усиления принимался из условия
получения 3% точности по степени расширения газов лт. Лучшим
267
переходным процессам соответствует наибольшее быстродействие
сервомотора регулятора основного контура и примерно то же время
изодрома, как и в рассмотренном выше примере двухкаскадного
ТРД без форсажной камеры.
An.
Н--0 ; V=const
Возмущение реактивным соплом;
AFC[1]=5% \T-0,5
и
№
1
2
3
4
Лс
10
10
2
2
Тс
0,1
0,5
0.1
0,5
И сек
/ij о5/мип
'0,3
Фиг. 4. 13. Переходные процессы при /Cc = var,
7c = var для двухкаскадного ТРДФ при
возмущении реактивным соплом.
Более детальный расчет показывает, что если применять
астатический регулятор форсажного контура (без жесткой обратной
связи), то. колебательная составляющая процесса существенно
увеличивается.
Если изменить способ управления так, чтобы регулятор
форсажного контура воздействовал на створки реактивного сопла,
а не на расход топлива, то переходные процессы несколько
улучшились бы, аналогично тому, как это было показано выше для
одновального ТРДФ. Вообще, приближенно можно считать, что
с одной и той же системой регулирования поведение
рассматриваемой системы во многом аналогично поведению такой системы для
одновального ТРДФ. И в этом случае оказывается целесообразным
268
1акой способ управления форсажным контуром, когда регулятор
температуры газа воздействует на створки реактивного сопла,
а режим задается величиной расхода топлива в форсажную камеру.
03
015
1
fk
/
/
V
\\
M~0 »
Возмущение t
X
к
2^
T/0,3
/-const
оешгтибным
frfff
/
"^—
—
*-—
Фиг. 4. 14. Переходные процессы при Тт=-
= var для двухкаскадного ТРДФ при
возмущении реактивным соплом.
3. АВТОНОМНЫЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ
Из всего рассмотренного выше следует, что в газотурбинном
двигателе должны регулироваться (поддерживаться заданными)
несколько параметров, связанных между собой через объект
регулирования, в результате чего при изменении одного из них
изменяются и другие. Во многих случаях это недопустимо, например,
в случае, когда один из регулируемых параметров имеет
максимально допустимое значение. В таких случаях более целесообразны
автономные системы регулирования.
Рассмотренные выше системы регулирования можно сделать
автономными, если ввести в них дополнительные связи между
отдельными регуляторами. Впервые этот вопрос был разработан
советским ученым И. Н. Вознесенским.
Под автономными системами регулирования будем понимать
такие системы, взаимосвязанные через объект регулирования, в кото-
269
рых при течении переходного процесса по какому-либо одному
регулируемому параметру, обусловленному определенном
возмущением, остальные регулируемые параметры не изменяются под
влиянием этого возмущения. Рассмотрим автономные системы
применительно к одновальным ТРДФ.
Для краткости изложения ограничимся рассмотрением одной
системы регулирования ТРДФ, когда числа оборотов изменяются
вследствие изменения расхода топлива в основном контуре, а в фор-
хг
регулятор оборотов
ГРМ<Р
Фг регулятор
температуры
-д.
■**
Фиг. 4. 15. Укрупненная структурная схема
автономной системы регулирования ТРДФ.
сажном контуре температура газа за турбиной изменяется
вследствие изменения расхода топлива в форсажную камеру сгорания.
Укрупненная структурная схема всей системы регулирования
с дополнительными связями приведена на фиг. 4.15, где указаны
передаточные функции регуляторов числа оборотов Фп и
температуры Фт, передаточные функции устройств, осуществляющих
дополнительные связи Фпт и ФТп, и обобщенные координаты.
Работу такой системы регулирования нужно понимать так:
если, например, изменилось (увеличилось) число оборотов Хп,
то сигнал Аз должен так измениться и изменить (увеличить)
величину расхода топлива в форсажную камеру Хс^фУ чтобы
температура газа ХТ4 оставалась неизменной. То же и при изменении
температуры газа ХТА- сигнал Х^ должен так измениться и изменить
величину расхода топлива в основную камеру ХСт, чтобы число
оборотов Хп оставалось неизменным.
270
Составим уравнения движения системы регулирования. В общем
случае уравнение движения двигателя представим в виде
Для удобства в дальнейшем исключим координату ХТ4 из
первого уравнения, т. е. представим уравнение объекта регулирования
в виде
GT "I 2 С?т#ф 6 F » I
f ф F ф V* _4_ ф Y —О I
ln 7^VGT 4/10тфТ *8Af — v>'
где
Фк=-
(4.30)
/5
/,
Т'р+1
/2 + hU
ф2= *t-v* =,
ф = ^^3 _
6 Г ^'/7+1 '
ф3=/3; ф7=^7; ф4=^4; ф8=^
Знаки перед каждым членом уравнения взяты в соответствии
с направлением влияния каждого из факторов на регулируемые
координаты, если считать все коэффициенты положительными.
Тогда в соответствии с приведенной структурной схемой исходная
система уравнений движения будет такой:
271
Разрешим систему (4.31) относительно Хп и ХТ4; в результате
получим следующие уравнения:
V (ф _|_ ф ф ф ф _Л1 X = (7ФГФ -4-ФоФ -г) X
/nV 3 1^ 7 л 4 пТ/1 п LV 5 л f 2 лПЛ
~ " - - — - - - я - i ,4 32
— ф ф 1 I
4 Г/ |
[(1
\ (4.33)
+ Ф2Фп7.)_(Ф8+Ф7Ф/|-Ф4Фя7.)(Ф5ФГ/|-Ф2Ф7.)]¥в
-[Ф8(1 + Ф5ФЯ + Ф2ФЛГ) + Ф6(Ф3+Ф7ФЛ-Ф4Ф
Наложим на систему такие условия:
(4.34)
Из этих условий определим выражения для ФТп и Фпт, т. е.
ф =ФЯ(Ф7 —Ф3Ф5)
Тп
Тогда вместо (4.32) и (4.33) получим
Фл + Ф2Ф„г)Хл=(Ф5Ф„ + Ф2Ф„г)
Ф7ФГ;! + Ф4ФГ) ХТА = (Ф7ФГп + Ф4ФГ) Y°;
(4.35)
(4.36)
(4.37)
\-ф4фпт)]хг- (4.38)
Из этих уравнений видно, что система является полностью
автономной, так как от возмущения Х° изменяется только число
оборотов Хп, а от возмущения Y0 изменяется только температура
газа ХТ4.
В соответствии с этим, условия (4. 34) будем называть
условиями полной автономности.
Кп
Для определенности результатов предположим, что ФЛ=—- ;
Р
272
Тогда, используя (4.35), получим
ф _
Тп
ф ^
=
Ф2Ф3 -{- Ф4 (hT' р + /4 -f /2*3)
а уравнения движения будут такими:
(4. 39)
(4.40)
(4.41)
(4.42)
где
QKaKr; Ь0=Т%1'51'6;
Теперь исключим в системе (4.31) все переменные, кроме Хп
и ХТ4; получим такие два уравнения:
(4.43)
(4.44)
(4.45)
(4.46)
(4.47)
273
Наложим на систему такие условия:
Ф5Ф7.л-Ф2Фг=0; Ф3+Ф7Фл-Ф4ФпГ=0.
Тогда вместо (4.43) и (4.44) получим
пт)
Ф7ФГл + Ф4ФГ
=(Ф7ФД- Ф4ФпГ) Х
+ (Ф7ФГ„ + Ф4Ф7.) у -
18 1327
Условием (4.45) мы так же как бы «расщепили» систему двух
регулируемых параметров на две самостоятельные системы, в
которых возмущение Y0 действует только на техмпературу газа ХТ4у
а возмущение Х° действует на оба регулируемые параметра, т. е. по
возмущению Y0 система стала автономной, а по возмущению Х°
осталась неавтономной. Назовем такую систему системой с
частичной автономностью, а условия (4.45) —• условиями частичной
автономности.
Из условия (4.45) определяем передаточные функции ФпГ
и ФТи, т. е.
ф _ф2фг. ф _ Ф3 + Ф7Ф/1
*гп~ ф5 ' *"т~ Ф4 "
К Кт
Принимая, как и ранее, Фл=— и Фт=—, получим
р Р
*• (4-48)
Для дальнейшего предположим, что можно реально
осуществить устройства, имеющие полученные (или очень близкие к ним)
передаточные функции ФТп и Фпт- Подставляя выражения для
передаточных функций в (4.46) и (4.47), получим такие уравнения
движения:
(4.49,
(4.50)
Наложением условий (4.45) и (4.34) система (4.31) сводится
к двум системам с пониженными порядками дифференциальных
уравнений.
Для сравнения окончательных результатов рассмотрим также
неавтономную систему регулирования, т. е. положихМ Ф71т=Фт = 0.
Тогда разрешив (4.31) относительно Хп и ХТА, получим
{Гр*+(КТГ1А+1) f
+ КпКт (Щ7 + Щ} Хп = [Кп1'5р + КпКт (#7 + Щ] Х° +
^KTr2pY0 + l'6p*XF; (4.51)
274
-f [П4Кпр- + Kr (l'2l3+ /4) /> + KnKT (#7 + Щ\ Y° -
- [T V2 + (V6+/8) P + Kn (t'Js + rjy)] pXF. (4. 52)
В этих уравнениях принята зависимость Ц1в—/г4 = 0, которая
получается из предпосылки, что в установившемся движении режим
основного контура не изменяется при изменении режима
форсажного контура. Это означает, что в уравнениях движения объекта
регулирования [первые два уравнения (4.31)] Xn=XT4 = XG =0
и поэтому они сводятся к следующему:
откуда и следует указанная выше зависимость между
коэффициентами усиления (при р = 0).
Теперь проведем относительное сравнение трех возможных
вариантов систем регулирования применительно к одному и тому же
ТРДФ, причем для максимального режима работы двигателя
примем такие числовые значения коэффициентов уравнений объекта
регулирования:
Г = 0,7; /^ = 1,0; Г2 = 094; /^==1,6;
/7-0,5; /4 = 0,05; /3 = 0,18; /8-0,2.
Значения коэффициентов усиления регуляторов ограничим
следующим диапазоном: /(n=l-f-10; /Cr=l-f-10. Если представить
коэффициент усиления регулятора /С=/С1/С2, где К\ — коэффициент
усиления безынерционных звеньев регулятора, а Д"2 —
коэффициент усиления астатического сервомотора, то за счет изменения
значения Кг можно получить значения постоянной времени
сервомотора Гс=1//С2 в очень широких пределах, вполне достаточных
для практических целей.
а) Сравнение по областям устойчивости
Для системы с полной автономностью по числам оборотов в
соответствии с (4.40) условие устойчивости выразится так:
т. е. система устойчива при любых значениях Кп и значениях
коэффициентов уравнений объекта регулирования. В соответствии
с (4.41) система также устойчива по температуре газа при любых
значениях Кт-
Для уравнения (4.42) условие устойчивости будет
275
после подстановки выражений коэффициентов в это неравенство
можно убедиться, что и в этом случае система оказывается
устойчивой при любых значениях Кп и Кг-
Области
устойчивости
|
\
К
и 2 4 6 8 /0 12 /4 Ку.
Фиг. 4.16. Граница области
устойчивости неавтономной системы
регулирования.
Система с частичной автономностью [в соответствии с
выражениями (4.49) и (4.50)] также устойчива при любых значениях Кп
и Кг. Для неавтономной системы в соответствии с (4.51) и (4.52)
условие устойчивости будет
Соответствующая граница области устойчивости в координатах
Кп, Кт представлена на фиг. 4.16, из которой видно, что по области
устойчивости наихудшей системой является неавтономная.
б) Сравнение по величинам интегральных оценок
Как отмечалось выше, для максимальных режимов работы
двигателя необходимо получать процессы, близкие к монотонным.
Поэтому расчет системы будем вести на получение минимума
интеграла вида
j = hx*+T*X2)dt. (4-53)
Выбирая минимум (4.53), приближаем процесс к экспоненци
альному с постоянной времени Т и тем самым приближаем его
к монотонному. Уменьшение значения Т связано с увеличением
быстродействия системы и увеличением колебательной
составляющей процесса, а увеличение значения Т дает более плавные
процессы, приближающиеся к монотонным.
В соответствии с (4. 53), по известным из теории
автоматического регулирования методам, определяем значения /п и /Т4, причем
276
для процессоз, регулируемых по числам оборотов, принимаем Г = 2,
а для процессов, регулируемых по температуре газа, принимаем
Т=\. За возмущение принимаем перенастройку регуляторов с
помощью устройства объединенного управления, уравнение движения
которого принимаем в виде
тю—уо — m vo /л ^а\
£* А — ТПХ\ , [ft. ЭЧ)
где считаем mi=4,0. Кроме того, за возмущение принимаем также
и изменение проходного сечения реактивного сопла XF[l].
На фиг. 4. 17 и 4. 18 приведены полученные расчетом кривые изме-
Возщщение1°Ш
температура газа; число оборот од
OUT
0.2 Oft 0,6 08 1,0 12 14 16 t,8 201,1
№
1.2.3
4
5
система
неавтономная
с частичной
автономностью
автономная
Фиг. 4. 17. Изменение значений /п и /Г4 в зависимости
от значений коэффициентов усиления регуляторов при
возмущении 2° [1].
нения Jn и JT4 при указанных возмущениях как функции обратных
величин коэффициентов усиления регуляторов (для того же
двигателя).
Характерным для рассматриваемых процессов (в соответствии
с протеканием значений Jn и JTa) является то, что для
неавтономной системы величины Jn и Jta зависят от параметров обоих
регуляторов, поэтому выбор оптимальных значений их затруднителен.
Кроме того, сами величины Jn и /Т4 имеют несколько большие
значения для неавтономной системы.
На фиг. 4.19 приведены переходные процессы по Хп и Хп< для
которых параметры регуляторов выбраны по лучшему их
сочетанию.
277
Из этой фигуры видно, что с автономной системой получаются
лучшие процессы, причем система с частичной автономностью по
процессам приближается к автономной системе.
Качественные выводы, полученные в результате рассмотрения
системы с астатическими регуляторами без корректирующих
устройств, остаются справедливыми и для регуляторов с
корректирующими устройствами, но количественное различие в показателях
качества процессов между автономной и неавтономной системами
сглаживается.
Возмущение XFdJ
температура газа
число оборотов
с частичной автономностью
0,2 0,4 0,6 0,8 W f,2 /,* 16
Фиг. 4. 18. Изменение значений /те и /г4 в зависимости от значений
коэффициентов усиления регуляторов при возмущении XF [1].
Рассмотренная система автономного регулирования
соответствует укрупненной структурной схеме, приведенной на фиг. 4.15,
когда сигналы от дополнительных устройств суммируются с
основными перед входом в объект регулирования. Но может быть и
другая схема суммирования сигналов, например, на выходе из объекта
регулирования или в какой-либо другой точке цепи.
На фиг. 4.20 приведена такая укрупненная структурная схема,
когда суммирование сигналов осуществляется на выходе из объекта
регулирования.
Рассмотрение такой схемы системы автономного регулирования
приводит к тем же окончательным результатам, но условия
частичной и полной автономности изменяются, т. е. изменяется вид
передаточных функций ФпТ и ФТп.
Исходя иэ этого целесообразно суммировать сигналы в такой
точке схемы, где передаточные функции Фпт и ФТп получаются
наиболее простыми.
При различных режимах работы двигателя и различных
условиях полета коэффициенты уравнения движения двигателя
изменяются; поэтому при неизменных параметрах регуляторов нельзя
получить полного выполнения условий как частичной, так и полной
автономности. Однако более подробные расчеты показывают, что
278
W t се/*
№
1
2
3
4
5
6
i
0.3
0,3
0,3
0,3
о.г
0,2
п7
10
1.0
0.2
о:г
0,2
0.2
Возмущет
xFcu
гчи
Z41J
XpCU
г°т
xFn]
ie Система
неавтономная
неавтономная
с частичной автономностью
с частичной автономностью
автономная
автономная
Фиг. 4. 19. Переходные процессы при
возмущениях Z0 [1] и XF [1].
279
небольшое изменение величин коэффициентов уравнений
движения двигателя не приводит к существенному изменению переходных
процессов.
г—*
х$Т(
к
ТРДФ
р
г 1
< ■
—<&*-
|У
t |г
ФГ/7 Г
г v
-4ч
1
ф^ 1^ 1
Фиг. 4. 20. Укрупненная структурная схема автономной
системы регулирования ТРДФ.
4. ОСОБЕННОСТИ РАСЧЕТА ДИНАМИКИ СИСТЕМЫ
ПРИ УЧЕТЕ ВЛИЯНИЯ ВОЗДУХОЗАБОРНИКА
Силовая установка с ТРДФ и воздухозаборником со всеми
необходимыми системами управления оказывается настолько
сложной, что практически решить систему уравнений для нее можно
только с помощью моделирующих устройств. Для летательных
аппаратов, у которых энерговооруженность достаточно велика
(большая избыточная тяга, развиваемая силовой установкой, и малый
вес аппарата), динамику системы управления ТРДФ с
воздухозаборником необходимо определять совместно с летательным
аппаратом, так как изменение положения аппарата в полете
существенно сказывается на процессах, происходящих в силовой установке
с диффузором (влияние угла атаки аппарата и скорости его
полета). В этом случае система еще более усложняется, и решение ее
даже с помощью устройств, осуществляющих структурное
математическое моделирование, становится очень трудным.
Принципиально же для моделирования поставленной задачи необходимо
использовать полученные выше системы уравнений (1.116)
и (1.118) и решать их вместе с уравнениями, описывающими
движение отдельных регуляторов для ТРДФ и воздухозаборника
(и даже самолета с его системой управления).
Многократное решение практических задач указанным методом
показывает, что всегда можно определить необходимые
характеристики элементов регуляторов воздухозаборника, при которых
система управления силовой установкой в целом позволяла бы получить
заданные процессы.
При определении необходимых характеристик регуляторов
воздухозаборника обычно считают динамические характеристики
двигателя (ТРДФ с его системой управления) заданными. В процессе
280
решения рассматриваемой задачи особенно важно определить
такие характеристики системы управления воздухозаборником, чтобы
ни при каких возмущениях на систему воздухозаборник не мог
попасть в неустойчивый режим работы (режим помпажа).
Наиболее существенными возмущениями нужно считать изменение
режима работы двигателя (как увеличение, так и уменьшение режима),
изменение величины Мп и изменение угла атаки летательного
аппарата.
5. ПРИМЕРЫ
Пример 1
Задание. Рассчитать систему^ регулирования одновального ТРДФ при
работе двигателя на максимальном режиме, при #=0; V=Q, при условии
получения переходных процессов, близких к монотонным при единичном возмущении
настройкой и близких к однозначным при единичном возмущении нагрузкой.
Исходные данные. Для основного контура принимать изодромный
регулятор числа оборотов; для форсажного контура принимать астатический
регулятор температуры газа. Законами управления для двигателя принимать:
Xgt -» Хп\ Хст ф — ХТА.
Необходимые данные по двигателю принимать из примера 1 на стр. 89.
Управление реактивным соплом осуществлять с помощью следящей системы
с жесткой обратной связью от механизма объединенного управления.
Топливный насос принимать шестеренчатым, с идеальным регулятором перепада на
дроссельном кране.
Решение. Для регулятора температуры примем условие, что
инерционность термопар полностью скомпенсирована дифференцирующим устройством.
Кроме того, примем, что инерционности электромагнитных усилителей и
электромагнитного реле (пропорционального) пренебрежимо малы. Тогда уравнение
движения регулятора температуры можно принять в форме (4. 18). Исходной,
системой уравнений движения будет (4.20), в которой, однако, перед
координатой сопла XF необходимо поставить передаточную функцию механизма
привода реактивного сопла вида
ТсопР+1
~( С*
Числовые значения коэффициентов системы (1. 100) были определены
в примере 1 на стр. 89. Сведем систему (1. 100) к двум уравнениям, исключив
из нее все переменные, кроме Хп и Хта, в результате чего получим уравнения
с такими числовыми значениями коэффициентов:
(0,83/7-4,34) *я-
Тогда исходная система уравнений движения будет такой:
(0,83/? — 4,34) Хп - 4,0ХТА = — 1,78 XGj;
XF +
XF + 13,9^-Jfr^ ф
28Г
хп,х
Фиг. 4.21. Переходные
процессы
0,5
-05
-7 ■
I
J.
ff£
^—
x°\i\
•^втфМ
r 1 1
^yVlD
/
Гх^Т^Г^Уз 6 j^
ч
I
T —П Я ■ A' — 9 7 is —J t: .
/j^ Uf 0 , n.Q—x ,O f /v » 'cfJt
■ ^c
—;
in
1.0
сек
Фиг. 4. 22. Переходные процессы.
282
Значения Tcon и /С3 выбираются из условий надежного запуска форсажной
камеры и выхода на форсажный режим, так что значения этих величин должны
быть заданы. Для дальнейшего расчета примем ГСОп=1 сек; /Сз= 1. Тогда
определению подлежат /С2= —, Т„, Кс и К\.
*с
Эту задачу целесообразно решать методом структурного математического
моделирования исходной системы. Результаты такого моделирования приведены
на фиг. 4.21, из которой видно, что при выбранных значениях Ги = 0,8 сек\
A'i=2,5; /(0 = 2,3; 7(2 = 3 процессы близки к требуемым при возмущениях Х° [1];
Y0 [1] и XF [11.
Пример 2
Задание. Рассчитать систему регулирования того же ТРДФ на
получение процессов, аналогичных указанным в примере 1, но при законе
управления
^GT — Хп\ XF — ХТА.
Исходные данные. Передаточную функцию механизма
управления реактивным соплом принимать Фс = , где Тсои = 1. Задание
ТсопР + 1
режима работы форсажного контура осуществлять расходом Xqt .[1].
Решение. Исходная система уравнений будет такой:
(0,83р-4,34) Хп~4,0ХТ4 =-1,78 XGr;
32,18 Хп + 21,55Я>4 = 5,55 XF + 13,9 Xqt — XGj ф;
-l)pXF = K2(40-XT4).
Здесь также необходимо определить значения /G, 7'и, Л'с и К\. Решать
поставленную задачу целесообразно тем же методом структурного
математического моделирования; результаты решения представлены на фиг. 4.22. Здесь
преднамеренно взяты те же значения для Ги, К\ и /(с, что и значения
соответствующих величин в прошлом примере; при этом удовлетворительные процессы
получаются при /С2=0,6. Из всех приведенных процессов обращает на себя
внимание процесс Xn(t) при Y0 [1], который получается несколько затянутым.
Это объясняется достаточно большой постоянной времени сопла (ТСоп — 1,0),
выбранной из условий нормального процесса выхода на форсажный режим.
Пример 3
Задание. Рассчитать систему регулирования для того же одновального
ТРДФ при работе его на максимальном режиме, при Н=0, V=0, при условии
получения переходных процессов, близких к монотонным — при единичном
возмущении настройкой регулятора числа оборотов и однозначных — при
единичном возмущении нагрузкой (реактивным соплом), когда законом управления
является
283
Исходные данные. Регулятор числа оборотов и динамические
характеристики двигателя (уравнения движения) принимать прежними. Управление
реактивным соплом осуществлять с помощью того же механизма объединенного
управления. Регулятор форсажного контура принимать по фиг. 2. 28.
Решение. Исходная система уравнений будет (4.14). Определим
коэффициенты уравнений двигателя, для чего из системы (1. 106) исключим все
переменные, кроме Хп, Хпт, ХР2, в результате чего получим
(0,83р + 6,2) Хп —2,95 Хр2—1,2Хг =0;
5,68^2 — 8,1 Хп = XGl\
4,3^2 — 3,3^ — 6,48^ =ХОтф — 5,56Л>.
Управление реактивным соплом примем таким же, как в первом
примере, т. е. механизму управления должна соответствовать передаточная функция
Кз
т n,i с теми же цифровыми данными. Уравнение движения для чувстви-
1 COIl" ' A
тельного элемента регулятора форсажного контура примем без учета его
инерционности по (4. 13).
Параметры для регулятора числа оборотов (основного контура) примем
равными тем, которые получились в результате решения примеров 1 и 2 на
стр. 202—205 (на том предварительном основании, что двигатели одинаковые).
Тогда исходная система уравнений будет такой:
(0,83/? +6,2) *Л — 2,95^2 — 1,2^ =0;
— 8,1 Хп = XGj;
=*отф-5,56 Кз XF;
т*ф ТР + 1
(0,64/7
Определим выражения для коэффициентов m и mi (коэффициент /Пг нас
не интересует, поскольку возмущение Y0 — перенастройкой регулятора ят —
не наносится).
Выражения для коэффициентов mi и т,2 в (4.10) в результате приведения
исходного уравнения (р4—р2л)!к = Ы к относительным величинам будут
такими:
/72,10 Clp
т\ = —~; т2 = 4 •
Р40 P40JM
Поскольку в установившемся режиме Р2,ю== P4Qi то Щ = 1. Выражения
для коэффициентов т3, т4, т5 в (4.11) в результате линеаризации исходного
V .
уравнения — р2Л = Qi (Ръ Y0) — Q2 (/?2Л; /) будут такими:
Н *
(—)
\ др2 /о
/ dQ2\
1 1
\иР2Л /0
Р20
Qo
Р2Л0
Qo
(
\о
dl /oQo
^Q2 \ Р2Л0
1
]Р2Л /0 Qo
(d^)o
х^гл /о
Qo
Р2Л0
Qo
284
Как говорилось выше, перепады давлений на жиклерах (см. фиг. 2.28)
сверхкритические, поэтому выражения для частных производных будут
такими:
(?0±
\др2
д$Л $20 /dQ2\ =020. (ЭОЛ __ QlQ
др2л/о~ Р2ло* \ Ы /о h ' W°/o Yg '
Отсюда выражения для коэффициентов будут т3=тА=т5=\.
Выражения для коэффициентов т, т\ и т2 в (4. 12) будут:
т = 1 — т^/из = 0; т1 — т2 — /тг1т4 = т2 — 1; т2
Следовательно, предпоследнее уравнение в исходной системе можно
записать (Y° = 0 в силу сказанного выше по условию задачи) так:
Хг
Объединяя два последние уравнения исходной системы, получим
Таким образом, для получения заданных процессов необходимо определить
значения постоянной времени Тс и коэффициента /С2. Поставленную в условии
задачу будем решать методом структурного математического моделирования,
причем неравномерность по параметру Хк должна быть в пределах 5-i-8%.
Результаты моделирования представлены на фиг. 4.23, из которой видно, что
при /Ci=5,5; Ги=0,64; /Сс=2,3; /С2==:70; Тсоп = \,0 и Гс = 1,0 процессы получаются
вполне приемлемыми.
Пример 4
Задание. Рассчитать систему регулирования для того же ТРДФ на
получение тех же процессов, как и в примере 3, когда законом управления
является
Исходные данные. Передаточную функцию механизма
управления реактивным соплом принимать Фс = .
ТсопР 4- 1
Задание режима работы форсажного контура осуществить расходом
^Ч.ф [1].
Решение. По аналогии с третьим примером исходная система уравнений
движения будет такой:
(0,83р+ 6,2)А-Л— 2,95^2 —1,2 ЛГ =0;
5,68 Хр2~ 8,1 Xn = XGj;
285
0,5
-0.51-77
/
е
—7
*;=
S
f
у/
т-р
f 4
--5,5]
Xй [7]
^^
.X,[f]
? J--4 5- 6
I i t сек.
7и-
■■0,84
; к с*
= 2,3;
Фиг. 4.23. Переходные процессы.
0,5
1
/
г
У
А
/
=20,
? v
.ф^
^соп
J-~
= 2
.-v
Фиг. 4.24. Переходные процессы.
286
Решение задачи также целесообразно осуществлять методом структурного
математического моделирования с определением значения /С2, так как ТСап
должно быть заданным. В отличие от предыдущего примера примем ГСОп=2,
тогда при /(г=20 получаются приемлемые процессы, показанные на фиг. 4.24.
Пример 5
Задание. Рассчитать автономную систему регулирования для тоге
же ТРДФ при законе управления Xqt~* Хп; Xqt .-+ Xj4 на получение тех
же переходных процессов, как и в предыдущих примерах, при возмущении
механизмами настройки регуляторов.
Исходные данные. Регулятор числа оборотов принимать с
идеальным акселерометром, а регулятор температуры газа таким же, как и в
примере 1; топливный насос принимать шестеренчатым, с безынерционным
регулятором перепада давлений топлива на регулирующем органе.
Решение. Уравнение движения двигателя используем в форме,
приведенной в примере 1, т. е.
Хп — ФХХТ4 = —
где
4,0 ( 5,55
Ф1=0,83/>— 4,34' Ф4 = 32,18 ="°' ''
1,78 13,9
ф 1 ф —!— = о,43;
2 0,83/7-4,34' ь 32,18 ' '
Фз = ^^- = 0,67; Фб=~^—= 0,031.
3 32,18 6 32,18
Регуляторы числа оборотов и температуры газа принимаем по условию
с такими передаточными функциями:
, Кт . ф
Фг = ; Фп =
ТсР
где К\ и Ка — коэффициенты усиления тахометра и акселерометра
соответственно, а Тс — постоянная времени сервомотора.
Структурная схема системы будет соответствовать схеме, приведенной на
фиг. 3. 46, а исходная система уравнений движения будет такой:
287
Разрешая эту систему относительно Хп и Л'/4, получим
\«Ъ Л-<Ь<Ь АЛ w (ф1 + Ф2Ф7-/»)(1 - Ф5Фл - ФбФлТ-) 1
(Ф3 + Ф5Ф7л — ФбФг) + л , . .
L 1 + ФгФл J
- *#, - \
L
2Фл
f (1- Ф5Ф„ -
f (ф5ф„ н- ф6фг)- (Фз+Тг;~ФбФг)ф2Фя 1хо+
L Ф1+Ф2Фгп J
| уо
г -f Ф® J
В соответствии с (4.34) наложим такие условия автономности:
откуда находим
ф __ — Фд (Фг + ф5> . __
Ф6 ' Гл""
Подставляя эти выражения в полученные выше уравнения и разрешая их
относительно Хп и Хт4 соответственно для возмущений Х° и Y0, получим
Раскрывая передаточные функции, получим
[0,83 Тср2 + (1,78 /Св-4,34
+ 1,7*КЦХП = (1,78 /С*/? + 1,
(0,53/? + 0,055 /Сг) ^Г4 = 0,
Устойчивость контура регулирования числа оборотов определяется условием
1,78/Са>4,34Гс, или /Са>2,43Гс-
Определим возможность получения монотонных процессов по Хп при Х° [1].
Начальные условия будут
Условием монотонности при этих начальных условиях и при действительных
отрицательных корнях характеристического уравнения является ограниче-
ние, накладываемое на начальную скорость Х'(0), которое можно записать*
как ЛГ/(0)<Х2^Г(0) или X'(0) < ^ l—^(0), где \г и Х2 —корни характе-
^jAj -f" a'2
ристического уравнения, причем | Xj | < |Х2|, а коэффициенты
288
ах
0,83 Тс
1,78/Cj
0,83 Тс
Корни характеристического уравнения определяются как
1
№
1
2
3
*а
2
2
1
К,
?,о
1fl
1,5
Тс
0,43
0,2
0J5
Фиг. 4. 25. Переходные процессы.
При условии равенства корней получим
X1,2=-2,15^L и /Св = 2,
^ с
Тогда условие монотонности Х'(0) < Я2Х(0) сводится к виду К\=—2,44 Тс,
откуда следует, что условие монотонности не выполняется при действительных
значениях параметров системы, поэтому в данной задаче можно говорить лишь
о процессах, близких к монотонным. По температуре же газа XT4f как это
видно из полученного выше уравнения, процессы всегда монотонные.
Возможные переходные процессы по Хп и ХТа приведены на фиг. 4. 25.
19 1327
Глава V
ДИНАМИКА СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ТВД
1. ОДНОВАЛЬНЫИ ТВД С ОДНИМ ВИШ
а) Система с замкнутым регулятором п
и разомкнутым регулятором Т
Рассмотрим систему регулирования ТВД, когда число оборотов
вала винта изменяется путем изменения угла установки его
лопастей с помощью регулятора числа оборотов, принципиальная схема
которого приведена на фиг. 2.35, а температура газа
поддерживается заданной путем изменения расхода топлива с помощью
к ручке
объединеино -
го управления
Фиг. 5. 1. Структурная схема системы регулирования ТВД.
регулятора, работающего по разомкнутой схеме от сигналов,
характеризующих условия полета.
Структурная схема всей системы регулирования приведена на
фиг. 5.1. Здесь Х° — сигнал настройки регулятора числа оборотов;
Y0 — сигнал настройки регулятора расхода топлива
(корректируется по условиям полета по сигналам Т\ и /?*); фь ф2, Ф3 —
передаточные функции звеньев системы. Предполагаем, что расход
топлива не зависит от числа его оборотов-
Уравнение движения объекта регулирования примем по (1. 131),
сведя его к двум уравнениям, включающим координаты Хп и ХТ4:
290
л
сервомотор Ф2
х
1 Л°т
fy°
-*/
ч.з
ТВД
1
1 ' \
передаточные функции Ф\ и Фг примем по (3.6) и (3. 10), а
передаточная функция <&z=XGl/F=K.
Если принять XGt = KF=X°g , то исходная система уравнений
движения будет такой:
& ]
]
XTA-\-lAXn=lbXGj\ !
* * (*Х°) j
Условия полета будем считать неизменными. Разрешая (5.1)
относительно Хп и ХТа, получим
llAXn=KxWJP+
; (5.2)
W6]X°Ol. (5. 3)
Из полученного следует, что в установившемся движении при
изменении расхода топлива X°G число оборотов остается
неизменным, а при изменении числа оборотов Х° температура газа
изменяется противоположно изменению числа оборотов.
Устойчивость системы определяется условием
которое практически всегда выполняется.
Конечное значение регулируемых параметров будет таким
Хп(со)=Х°; XTi(oo)=-l4X°; Xri(oc) = l5X%r-
Предполагая, что переходный процесс по числу оборотов при
возмущении Х°[1] будет монотонным, а при возмущении Х£ [1] —
однозначным, определим величины интегральных оценок.
Начальные условия для (5.2) при возмущении Х° [1] будут
-АГ(О)= —1; Л"(0) = 0;
то же при возмущении Хо [1]:
^(0)=0; ^(0)= h~~hh .
Тогда величины интегральных оценок в соответствии с (3.40)
будут:
г 1—/1/4 . г h — hh
J J
Следовательно, для уменьшения величины интегральной оценки
необходимо увеличивать коэффициент усиления регулятора. Так
как условием монотонности процесса при начальных условиях
19* 291
; ^'(0) =0 является получение действительных
отрицательных корней характеристического уравнения, т. е.
граничное значение коэффициента усиления регулятора должно
быть
Тогда значения интегральных оценок для этого случая будут:
/ 4Г
Детальные расчеты конкретных систем регулирования
показывают, что приемлемые переходные процессы получаются при
сравнительно небольших коэффициентах усиления регулятора. Однако
в этом случае вся система регулирования получается
медленнодействующей, и поэтому не всегда удовлетворяет условиям
практики, когда нужна достаточно большая скорость перестановки
лопастей винта, т. е. большое значение Кс- Повышенные скорости
перестановки лопастей винта нужны, например, для
предотвращения раскрутки винта при переходе на максимальный режим работы
двигателя и в некоторых других случаях. Процесс же стабилизации
в рассматриваемой системе регулирования происходит только в
результате положительного самовыравнивания двигателя, т. е. за счет
положительного значения коэффициента qi в (1. 132). Так как
величина этого коэффициента незначительна, переходные процессы по
своему качеству ограничены.
Улучшить систему регулирования можно введением
корректирующих устройств в цепь регулятора числа оборотов. Более
целесообразно применять акселерометры, дающие сигнал в прямую цепь
от ускорения вращения вала винта, так как применение обратной
скоростной связи (изодрома) связано с конструктивными
трудностями вывода сигнала, соответствующего положению лопасти винта
во вращающейся втулке винта. При расположении регулятора
числа оборотов во втулке винта можно применять и изодром.
Для примера рассмотрим систему регулирования числа
оборотов того же ТВД, когда в цепь регулятора включен акселерометр.
Принципиальная схема акселерометра была приведена на фиг. 2.16.
Структурная схема всей системы регулирования приведена на
фиг. 5.2. Уравнение движения акселерометра примем в форме
(3.47). Тогда исходная система уравнений движения будет такой:
(5.4)
292
Обобщенные коэффициенты соответствуют обозначениям
структурной схеме.
Разрешая (5.4) относительно Хп и ХТ4, получим
на
(аорг
=- (а4р -f а5) Х° +
(5.5)
(5.6)
Сервомотор
Акселерометр
ТВД
объединенносв
управления
Фйг. 5.2. Структурная схема системы регулирования ТВД
с акселерометром.
где
= ТГг; ах=Т+7,(1-1,1,); а2=-\ -/A
z=kl<(1Kl\ ао=Тг12Кс; аг=12КгКс; o,2^
Из полученного следует тот же вывод, что в установившемся
движении при изменении расхода топлива Xgt число оборотов
остается 'неизменным, а при изменении числа оборотов Х°
температура газа изменяется в направлении, противоположном числу
оборотов. Устойчивость же системы определяется неравенством
из которого видно, что оно увеличивается с увеличением
значения /(а (коэффициент усиления акселерометра) и с уменьшением Тх
(погрешность замера величины ускорения вращения).
Если положить Ti = 0, что соответствует идеальному
акселерометру, то условие устойчивости будет таким:
и /2>0.
293
Поскольку всегда /г>0, то величина этого неравенства
значительно больше неравенства, полученного для системы без
акселерометра, и поэтому в рассматриваемой системе процессы должны
быть лучше. Действительно, считая «процессы монотонными по
числу оборотов при возмущении Х° [1] и однозначными при возмущении
^gt [1], подсчитанные аналогично приведенному выше (при 7^=0,
на границе монотонности) интегральные оценки будут такими:
Jnt X° = ■
чис/io оборотов
температура газов
7 tce/c
Фиг. 5. 3. Переходные процессы по числу оборотов и
температуре газов за турбиной для ТВД с акселерометром и без
него для различных условий полета и параметров
регулятора.
Значение полученных интегральных оценок меньше, чем в
случае без акселерометра.
С помощью акселерометра можно добиться существенного
повышения быстродействия системы и получить требуемые процессы
даже для случаев выхода на максимальный режим работы
двигателя.
На фиг. 5.3 приведены переходные процессы, которые можно
получить при создании системы регулирования. Эти процессы
получены в результате интегрирования выражений (5.2), (5.3), (5.5)
и (5. 6), причем устройство объединенного управления учтено
уравнением
Это уравнение показывает связь между перемещением ручки
объединенного управления F с заданным расходом топлива XG
294
и заданным числом оборотов Х°. Следовательно, в исходных урав-
т
нениях необходимо учесть, что XGt =mF и Х°= —г, и тогда в
правых частях уравнений будет одно возмущение F [1].
Из переходных процессов видно, что введение акселерометра
значительно улучшает процесс.
б) Система регулирования с замкнутыми регуляторами пи Т
Теперь рассмотрим систему регулирования, включающую
регулятор температуры газа, работающий по замкнутой системе и
воздействующий на расход топлива. Регулятор чисел оборотов примем
прежним. Схему регулятора температуры газа примем прежней,
С ер во -
мотор
ч.з
ба-
ТВД
Cept
мотор
Усилитель
ч.э.скоупт
сациеи
ч
Фиг. 5. 4. Структурная схема системы
регулирования ТВД с регулятором температуры
газа.
а уравнение движения его примем по (4.18), где погрешности
термопары скомпенсированы. Структурная схема всей системы
приведена на фиг. 5.4. Исходная система уравнений движения при
условии, что расход топлива не зависит от числа оборотов и что
регулятор числа оборотов без акселерометра, будет такой:
(5.7)
Обобщенные координаты соответствуют обозначениям на
структурной схеме.
295
Разрешая (5. 7) относительно Хп и ХТа, получим
р^(Т15К2+\-1х14)Р2 + (12КсКх + 15К2-
p + Ц5К2КСКХ} Хп = (KxKJ2p + 1215К2КСКХ) Х° -f
+ (13К2-111ЪК2) PY°; (5.8)
2-{-\-l1l4)p" + (l2KcKl + l5K2~l3liK2)p +
t2l5K2KcKx] XTi = KxKJ2l4pX°+[/С2П5/72 j_
] Y°. (5.9)
Устойчивость рассматриваемой системы определяется
неравенством
(775/С2+! ^/Л)[1,КсК1^К2{1ъ^Щ]>Т121ьК,КсК„ (5.10)
которое всегда выполняется при условии Л/4<1 и /б—Ы4>0.
Однако добиться приемлемых переходных процессов с такой
системой регулирования все же трудно, так как весь процесс
стабилизации происходит лишь в результате положительного
самовыравнивания двигателя, которое мало, особенно на режимах его
работы ниже номинального.
Для улучшения процессов регулирования введем идеальный
акселерометр в схему регулятора числа оборотов. Тогда исходная
система уравнений движения будет
= 0; ■
,2V TAh )
Разрешая (5.11) относительно Хп и ХТ4> получим
г + KJ5K2)} р + КСКХ121ЬК2) Хп = (Кх12КсР + КхКсК2Ць) Х° +
xi2i5k2} хТ4=кхкс12
121ъКсКь)р + 121ъКсКхК2\Чь. (5.13)
Устойчивость системы определяется уже неравенством
(Т15К2 +1 - /,/4 + /f c/CaZ2) f/C2 (/s - /3/4) + КЛ X
X (Кх 4- KaW] > ТКСКХ121ЪКЬ
296
которое значительно больше, чем для случая без акселерометра.
С такой системой можно получить приемлемые переходные
процессы как по числу оборотов, так и по температуре газа.
Выше мы предположили, что замер величины ускорения
вращения, замер и дифференцирование сигнала температуры газа,
усиление и преобразование сигналов в цепи регулирования происходят
без погрешностей. В действительности это не совсем так; какие-то
погрешности обязательно имеются и если они велики, то процесс
Возмущение перенастройкой
регулятора температуры газа
№
нр
Температура газа
If=O,v= const
Постоянная
бремени
термопары
ТТ
Фиг. 5.5. Переходные процессы по числу оборотов и температуре газов
ТВД при различных параметрах регулятора (без акселерометра).
может существенно ухудшаться. Многочисленными расчетами
и практикой показано, что если погрешность в цепи регулятора
числа оборотов превышает тПогр>-0,25 сек, то процессы становятся
неприемлемыми. То же относится и к погрешности замера
температуры газа, когда увеличение постоянной времени чувствительного
элемента (некомпенсированная часть) до т>1,0 сек практически
делает процессы также неприемлемыми.
На фиг. 5. 5 и 5. 6 приведены переходные процессы, полученные
для того же двигателя с различными системами регулирования
при различных условиях полета, когда число оборотов не
перенастраивается на другие числа оборотов, а режим работы двигателя
изменяется путем изменения температуры газа за турбиной
сигналом настройки Y0.
На фиг. 5. 5 приведены такие процессы, когда в системе
отсутствует акселерометр при скомпенсированной и нескомпенсирован-
ной инерционности термопары; видно, что когда учитывается
погрешность в замере температуры, процессы ухудшаются.
На фиг. 5. 6 приведены такие процессы, когда в системе
включен акселерометр при скомпенсированной и некомпенсированной
инерционности термопары. Как видно, процессы улучшаются по
297
сравнению со случаем без акселерометра, причем влияние
погрешности замера температуры остается примерно таким же.
Возмущение перенастройкой
регулятора температуры газа
Скомпенсировано
полностью
№
кр
Постоянная
бремени
термопары
Коэффициент
усиления
регулятора
температуры Кг
н
Фиг. 5. 6. Переходные процессы по числу оборотов и температуре газов ТВД
при различных параметрах регулятора и условиях полета (с акселерометром).
Более детальный расчет показывает, что увеличение только
высоты полета ухудшает процессы, а увеличение только скорости
полета— улучшает процессы.
в) Система с ограничением МКртах
При рассмотрении эксплуатационных свойств ТВД отмечалось, что с
изменением высоты полета существенно изменяются его параметры. Это
определенным образом отражается на выборе способа управления таким двигателем.
Например, на фиг. 5. 7 показан характер зависимости изменения Мкр и Г3 при
изменении высоты полета, из которой следует, что от земли до расчетной
высоты необходимо ограничивать величину крутящего момента, развиваемого
двигателем, а за расчетной высотой необходимо ограничивать температуру
газа. Необходимость ограничения крутящего момента и температуры газа
связана с прочностью конструкции двигателя. В этом случае система управления
должна дополнительно включать регулятор (ограничитель) крутящего момента
двигателя.
Рассмотрим работу системы регулирования, когда при полете до
расчетной высоты работают регулятор числа оборотов, воздействующий на угол
установки лопастей винта, и ограничитель крутящего момента, воздействующий
на расход топлива. Регулятор числа оборотов примем таким же, что и выше,
и будем считать, что расход топлива не зависит от числа оборотов двигателя.
Схему ограничителя крутящего момента примем по фиг. 5.8. Ограничитель
крутящего момента имеет жесткую обратную связь, поэтому поддерживать
точно заданную величину крутящего момента нельзя, да это и не требуете*,
поскольку двигатель имеет определенные запасы прочности. По величине
крутящего момента и числу оборотов можно однозначно определить мощность,
развиваемую двигателем, поэтому такую систему регулирования можно назвать
системой регулирования мощности двигателя. Структурная схема всей системы
приведена на фиг. 5.9. Уравнения движения звеньев ограничителя примем
в предположении, что чувствительный элемент безынерционен.
298
Уравнение движения объекта регулирования получим, если в исходное
уравнение введем крутящий момент в редукторе Мр, т. е.
dn
2lzJldt =Мт~Мк-МР-
После обычной линеаризации этого уравнения вместо (1. 130) получим
\Т\Р ~Ь Q) Хп — К\тзХтз — КхръХрч + К\р^Хр4 — Км^м ~ 0, (5.14)
где Хл1=АЛ^р/МРо — относительный момент на редукторе.
Кроме того, введем в рассмотрение уравение моментов между редуктором
и винтом в виде
-Мв,
■газона
\\\о грани-
Шеният/
расч
И
Фиг. 5.7. Изменение МКр и Гд с
изменением высоты полета Я.
после обычной линеаризации которого получим такое уравнение:
(ТмР + 1)^/г = Км^м — ^?Х(?я (5.15)
Тогда система уравнений движения для двигателя будет состоять из (1. 131)
без первого уравнения, (5. 14) и (5.15), которые необходимо свести к двум
уравнениям, включающим координаты Хп и Хм- Тогда исходная система
нений движения будет такой:
(TlP
(Т2Р ч
1ХХМ -
)
= 0;
Х9 = 0;
(5.16)
299
Топливо
8 двигатель
Шестерня неподвижная
редуктора двигателя
Фиг. 5.8. Принципиальная схема ограничителя
крутящего момента.
Сервомотор
ч.э -,
акселерометр
ТдД
Сервомотор
х,
1
ч.э
huo
Фиг. 5.9. Структурная схема
системы регулирования по
сигналу от iVfKp.
300
разрешая (5. 16) относительно Хп и XMi получим
?3 4- alP2 + а2/> + аз) *п = [TcKcKiKvJiP +
+ К2КзНКмР Y°; (5.17)
— (а3/?2 + а*Р + «s) x° +
+ (а6/?2 + а7/? + а8) Y0, (5.18)
где
а0 = Гс (Г2^Л1 + 7У0; а2 - Гс (Км + 1г + КсК-лКф) -Ь
+ ^2 (/i + ^2^3) + тгкм;
+ Км + KcKiKl;?liTc;
а5= A:i/CcA:lc?; а6 - T2K2Ksh; «7 = /з^2^з (К1?КсКй + 1);
Условие устойчивости, определяемое неравенством а\п2^>а^а^ как видно
из структуры коэффициентов, всегда выполняется. Если даже положить, что
обратная связь в ограничителе крутящего момента отсутствует, то
устойчивость будет определяться неравенством
[Тс (h + Км + КсК*Кф) + K2hT2] [KcKi9 (KihTc +
которое также практически всегда выполняется. Расчеты показывают, что
в рассматриваемой системе и без жесткой обратной связи в цепи ограничителя
крутящего момента можно получить приемлемые переходные процессы. Если
звенья регуляторов будут иметь заметные погрешности, то стабилизация в цепи
ограничителя необходима. Конечное значение регулируемых параметров будет
таким:
h
На фиг. 5. 10 приведены переходные процессы, полученные в результате
интегрирования приведенной выше системы уравнений при работе ТВД на
стенде, когда возмущение наносится с помощью устройства объединенного
управления, воздействующего на настройку регулятора числа оборотов и на
настройку ограничителя крутящего момента, работающего с жесткой обратной связью.
Из этих кривых видно, что увеличение коэффициента усиления Къ
(ограничитель моменгга) ухудшает процессы.
2. ОДНОВАЛЬНЫЙ ТВД С ДИФФЕРЕНЦИАЛЬНЫМ РЕДУКТОРОМ
И ДВУМЯ СООСНЫМИ ВИШ
Рассмотрим систему регулирования названного ТВД, когда в качестве
регулятора температуры применяется разомкнутый регулятор (безынерционный
корректор расхода топлива по условиям полета), а в качестве регуляторов чисел
оборотов —• астатические регуляторы (без стабилизирующих устройств); регу-
301
—число оборотов
у» — крутящий момент
л Возмущение одновременное по числу оборотод
1^Г i i ~i и крутящему моменту-
ХЧП и У"Ц]
Шозфсрициент усиления К3
2. » - -
Фиг. 5. 10. Переходные процессы по числу оборотов и
крутящему моменту при различных параметрах регулятора.
h*
серво-
мотор
Ч.Э
* ТВЛ
с дифференциальным
редуктором
Сервомотор
ЧЭ
Фиг. 5.11. Структурная схема системы регулирования ТВД
с дифференциальным редуктором и двумя соосными ВИШ.
302
зируемыми параметрами являются числа оборотов винтов. Схема
дифференциального редуктора была показана на фиг. 1.61. Структурная схема такой
системы приведена на фиг. 5. 11.
Уравнения движения объекта регулирования получим, если в системе,
состоящей из (1.149), (1.150) и последних четырех уравнений (1.30) исключим
переменные Хр2, Хр4 и ХТз- Тогда исходная система уравнений движения будет
такой:
(Т1Р + 1) Х1в + (Trp + qt)Xt + hXTi + KVfX9l = 12Xqt;
(T2p + 1) Х2в
(Ттр + 6т) Xr
Х2в = 0;
— Х2);
Разрешая эту систему относительно Х1в, Х2в, XTt Хт4, получим
. . . + а4) Х1в = (а0/?2 + а! р + а2) Х^—
а4) /?Х§ + («5/>2 + а6/7 + а7) рХОт; (5.20)
. . . |+ аА) Х2в = — (а8р + а9) /?Х? +
(«Ю/'2 + «И/7 + а12) ^2+ (а13Р2 + а14/? + «15) PXQT\ (5. 21)
аА) Хт = (а16р2 + а17/? + а18) X ?+
^ («22Р2 + «23/? + «24) />*от; (5.22)
4- ^!/?з 4- . . . 4- аА) ХТА = — (а25/?2 4- «26/? + «27) X?—
— («28/?2 + «29/? + «30) Х2+ («31/?4 + «32/?3 + ♦ • • + «Зб) XGT- (5. 23)
Здесь введены такие обозначения:
«о = Т{Г2 + Гт (Г2/4 + 7у3); «1 == Гт (/3 4- Ц) + ^2^2 + Tfa
"2 = (71! + /з^т) ^3 + (^2 + /Л) ^4 + (/3 + U) (От - ^1W + 1J
«о-
a2=
«5=
a8=
a10 —
«6 =
аг =
a3 =
5; «7 =
a9 =
ф (От -
«11 =
303
«12 = K2Kz2K2.JbA\ а13 = Txb5; а14 = bs; а15 =
«16 - КхКсхКфТ* а17 = КгКс1Кф;
«18 = К\Ь^Кс\К\Лъ\ «19 = ^2^с2^2</4^Ь
«20 == К2Кс2К2Л4, «21 == ^2^4^c2^2f^4»
«22 = 7У2/3 "Ь ^1^5; «23 = *2*3 + ^5?
«24 = (^3 — ^4> ^ «25 =
«26 - КгКсгКф^: «27 -
«28 = ^2^c2^2f^4^5^b «29=
«зо = K2b4Kc2K29l4l5', «si - /6 [7^2 + ^т (7V4 + ?Уз)];
«32 = Wl + /6ГТ (/3 + /4) + ТУб,' «33 =
+ Ь3ТТ) - /2/5 (/3 + Ц16) + /6
^6»' «35 =
j — hhh-
Из полученных уравнений следует, что в установившемся движении
изменение расхода топлива изменяет лишь мощность двигателя и не влияет на
числа оборотов винтов и число оборотов турбины, так же как и изменение числа
оборотов одного из винтов не влияет на число оборотов другого винта. Однако
изменение числа оборотов любого из винтов изменяет число оборотов турбины.
Температура же газа за турбиной изменяется от всех трех возмущений.
Рассматриваемая система регулирования устойчива в большом диапазоне
изменения чисел оборотов, причем стабилизация процесса в такой системе
происходит лишь в результате положительного самовыравнивания двигателя.
Однако запас устойчивости в ней меньше (примерно в два раза по критическим
коэффициентам усиления), чем в рассмотренной выше системе без
дифференциального редуктора. Это объясняется взаимным влиянием двух контуров
регулирования, связанных между собой дифференциальным редуктором. По этой
поичине рассматриваемая система регулирования также делается относительно
медленнодействующей аналогично тому, как это отмечалось при рассмотрении
ТВД с обычным редуктором и регулятором без стабилизирующих устройств.
Запас устойчивости также резко уменьшается, если в системе имеются
достаточно существенные погрешности, искажающие сигналы при прохождении
их по цепи регулирования.
Конечные значения регулируемых параметров будут
Х1в (оо) == Х^; Х
2в (оо) =
ХГ4 (оо) =1315Х°г; ХТА (оо) = /4/5Х2°;
Если при заданном режиме работы двигателя числа оборотов обоих винтов
одинаковы, то в третьем уравнении (5. 19) коэффициенты /3 и Ц равны, и тогда
при одном и том же изменении числа оборотов любого из винтов числа
оборотов турбины и температура газов будут изменяться пропорционально
коэффициенту /5. Кроме того, число оборотов турбины остается неизменным, если число
оборотов одного винта уменьшить, а число оборотов другого винта увеличить
на одну и ту же величину. Однако при этом мощности, снимаемые с винтов,
будут различными и по-разному будут нагружены шестерни редуктора, что при
режимах, близких к максимальным, не допускается из-за условий прочности.
304
Напомним, что полученные результаты справедливы в тех случаях, когда
не учитывается аэродинамическое влияние винтов друг на друга.
Введение корректирующих устройств в цепи регуляторов чисел оборотов,
например, акселерометров, улучшает процесс регулирования примерно в такой
же степени, как у ТВД с одним винтом.
Характер возможного неустановившегося движения рассматриваемой
системы регулирования по интересующим нас параметрам лучше всего проследить
по переходным процессам, которые приведены на фиг. 5. 12.
акселерометра
С апселерометром
12 3 4 5 6 7tcen
Возмущение топлибом
/ Z 3 4tca<
Фиг. 5. 12. Характер переходных процессов по Х!в; Х2*\ X^
ХТ- Хта ТВД при возмущении расходом топлива.
/Я>0 V>0; 2—H = 0\ V=0; 3—Я = 0; V>0.
Здесь принят тот же двигатель (турбокомпрессорная его часть), который
был выбран при рассмотрении ТВД с одним винтом, но к нему добавлен
дифференциальный редуктор с двумя соосными винтами, вращающимися в разные
стороны. Кроме того, оба регулятора одинаковы по своим параметрам, поэтому
процессы по числам оборотов винтов и вала турбины при возмущении расходом
топлива и одинаковой настройке регуляторов протекают одинаково.
Если в цепи регуляторов включены акселерометры, то процессы
существенно улучшаются. Приведенное протекание величин углов установки лопастей Х^
и X^ показывает, что при наличии акселерометра эти углы монотонно
нарастают, поэтому не может быть провала тяги.
На фиг. 5. 13 приведены переходные процессы для системы без
акселерометров, когда перенастраиваются числа оборотов винтов одновременно с
изменением расхода топлива; при этом имеется небольшая разность в настройках
чисел оборотов: Х^—Х§ ^=0. В этом случае значения чисел оборотов винтов
колеблются около значений, соответствующих числам оборотов турбины.
Температура же газа изменяется в направлении, противоположном изменению
числа оборотов турбины, причем в момент нанесения возмущения топливом
получается максимальный заброс. Введение в этом случае корректирующих
устройств также улучшает переходные процессы. Получаемые в этом случае
процессы во многом аналогичны рассмотренным выше для одновального ТВД
с одним винтом.
3 ДВУХВАЛЬНЫЙ ТВД С ОДНИМ ВИШ
Рассмотрим систему регулирования, когда число оборотов вала
винта изменяется посредством изменения угла установки лопастей
20 1327 305
w
i
%
0,5
без акселерометраh'=0\V=const
' \
I
M~%
i
4-
f
\t~
S>-
-^
—^*
^/B
Л2В
^^
/ Z
5 6 7 8 ЬСек
Фиг. 5. 13. Характер переходных процессов при
возмущении перенастройкой регуляторов, когда
после режима ^ib=^2b регуляторы
перенастраиваются: Aib>A"ib и А<2в>А>2в, причем XiB—Л2в>0.
Cepdo-
мотор «
Y
1 1 Л?т
9J
y°
ft
X,
I.
xu
1
*'
ГВД
дбулВальный
Л^/
20 ручка
объединенного
управления
Фиг. 5. 14. Структурная схема.
306
винта, а температура газа — посредством изменения расхода
топлива; при этом положим, что число оборотов турбокомпрессора не
достигает предельного значения.
Схему регулятора чисел оборотов примем прежней, без
корректирующих устройств, так как (согласно сказанному выше при
рассмотрении объектов регулирования) самовыравнивание у такого
двигателя относительно велико; примем, что регулятор
температуры газа работает по разомкнутой схеме с коррекцией расхода
топлива по условиям полета. Общая структурная схема такой системы
приведена на фиг. 5.14.
Уравнение движения объекта регулирования примем в виде
(1.139), но поскольку нас будут интересовать координаты Хп\у Хп%
Хт4и сведем исходную систему уравнений к трем уравнениям вида
. 24)
(Твр + \)Хп2- 12Хп1 - 1гХТ4+ 14Х9=
Х
Т4
- 16Хп1 =
При определении движения по координате Хп\ (число оборотов
турбокомпрессора) используем только первое уравнение (5.24);
по координате ХТа (температура газа за турбиной) — используем
только первое и третье уравнения (5.24); по координате Хп2
(число оборотов вала винта) — используем полностью уравнения (5.24)
и уравнения регулятора. Следовательно, исходная система будет
й
такой:
(5.25)
pX9=KcXv
Уравнения движения по указанным трем координатам будут
такими:
От; (5-26)
-kh)XQ- (5.27)
(5.28)
Устойчивость системы определяется неравенством
Т(14КсК{Г+\)+Тв>0,
которое всегда выполняется.
20*
307
Переходный процесс по ХпХ согласно (5.26) представляет собой
экспоненту; переходный процесс по Хт4 представляет собой также
экспоненту, но в момент приложения возмущения температура
скачком изменяется на величину h. Действительно, если разделить
правую часть на левую (5.27), получим
Т4
Следовательно, собственно переходный процесс начнется тогда,
когда регулируемая величина будет иметь значение ХТА = 17 и будет
протекать по экспоненте согласно уравнению
(Tp+l)XT4= ^l^Xa^ (5.29)
Параметры системы регулирования по Хп2 можно выбрать,
используя диаграмму Вышнеградского, как это рассматривалось
выше.
Если предположить, что процесс по Хп2 монотонный — при
возмущении перенастройкой регулятора и однозначный—-при
возмущении расходом топлива, то величины интегральных оценок
согласно (3.40) будут такими:
г _ хо . _/5
Jn2,X°— » ^я2От—
С учетом устройства объединенного управления, уравнение
движения которого примем в виде
вместо (5.28) можно написать:
с+Т)Р
(5. 30)
Интегральная оценка при условии, что процесс по Х712
монотонный, будет
^- Z°. (5.31)
Величина Jn2tZ0 равна сумме полученных выше двух оценок
с учетом влияния устройства объединенного управления, т. е.
Jя2, Z° = Jл2, Хо -j- Jп% от.
Следовательно, для улучшения переходных процессов необхо*
димо увеличивать коэффициент усиления регулятора. Возможный
характер переходных процессов при возмущении ручкой объединен-
308
4
Fconsf:
Возмущение ручной
объединенного управления
лого управления показан на фиг. 5. 15. Детальный расчет
показывает, что процессы по числу оборотов вала винта с такой системой
регулирования получаются приемлемыми для практики.
Рассмотрение других
возможных систем регулирования
для двухвальных ТВД с
регулятором температуры газа,
работающим по замкнутой схеме,
а также двигателя с
дифференциальным редуктором и двумя
соосными винтами с
различными системами
регулирования показывает, что
переходные процессы по всем
регулируемым параметрам
получаются относительно лучшие, чем
при той же системе
регулирования, но с одновальным ТВД
(без свободной турбины). Это
объясняется лучшими
свойствами двухвального ТВД.
Jtce/t
Фиг. 5. 15. Характер переходных
процессов по Хп\, ХП2 и Хта при
возмущении ручкой объединенного
управления.
4. АВТОНОМНЫЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ ТВД
а) Одновальный ТВД
Рассмотрим автономные системы регулирования одновального
ТВД с одним винтом. Укрупненная структурная схема с
дополнительными связями приведена на фиг. 5.16; на ней указаны
обозначения передаточных функций регуляторов Ф„ и Фт, звеньев,
обеспечивающих дополнительную связь ФпТ и ФТп и обобщенных
координат.
Из этой схемы следует, что сигналы от регуляторов и устройств,
обеспечивающих дополнительные связи, суммируются на входе
в двигатель, действуя непосредственно на расход топлива и угол
установки лопастей винта. В действительности же нужно положить,
что имеется один сервомотор, управляющий углом установки
лопастей винта, и один сервомотор, управляющий расходом топлива;
тогда сигналы от регуляторов и устройств, обеспечивающих
дополнительные связи, должны суммироваться на входе в эти
сервомоторы. Такая укрупненная структурная схема приведена на фиг. 5.17.
Однако для простоты в дальнейшем рассмотрим схему,
приведенную на фиг. 5.16, так как различия в свойствах автономной
и неавтономной систем одинаково проявляются как для системы,
приведенной на фиг. 5.16, так и для системы, приведенной на
фиг. 5. 17.
Уравнения движения двигателя примем по первым двум
уравнениям из системы (5.7), при этом введем передаточные функции
для каждой координаты в первом и втором уравнениях, для чего
309
разделим первое уравнение на (Тр+l). Тогда исходная система
уравнений движения будет такой:
Х2=Фп(Хп-Х°);
\У
ф
та
% регулятор
числа оборотов
ГВД
% регулятор
температуры
Ту*
пт
(5. 32)
Фиг. 5. 16. Укрупненная структурная схема автономной
системы регулирования ТВД.
Здесь
h
h
Г/7 + 1 * 7/7+1 ° Г/7+1 * * ^ D
Исключив в системе (5.32) все переменные, кроме Хп и Хт^
получим
Y°; (5. 33)
Ф5Фл7. Х°. (5.34)
(Ф4 - Ф5ФлГ) Хп + (1 + Ф5Ф
310
Наложим на систему такие условия:
откуда
Фо
Ф4
(5.35)
СерШ-
моглорвиш
ф
регулятор оборотов
\Х°
Т8Л
Сервомотор
(Ь
~ г
%
регулятор температурь/
~-х~
Фиг. 5. 17. Укрупненная структурная схема автономной
системы регулирования ТВ Д.
тогда вместо (5.33) и (5.34) получим
бФг) А-74 =
°~ Ф4Х°.
(5.36)
(5. 37)
Для простоты ограничимся рассмотренными ранее
регуляторами чисел оборотов и температуры газа, т. е. положим Фп = Кп/р
и Фт = Кт/р- Тогда уравнения (5.36) и (5.37) и передаточные
функции ФГп и ФпТ будут такими:
(lf)°-llPY0; (5.38)
(5.39)
311
Для дальнейшего рассмотрения предположим, что с некоторым
приближением можно практически осуществить устройства,
имеющие передаточные функции в соответствии с уравнениями (5.40).
Из рассмотрения выражений (5.38) и (5.39) видно, что
наложенные условия (5.35) не развязывают систему (не делают ее
автономной), хотя уравнения движения при этом значительно
упростились. Действительно, при возмущении в системе как
перенастройкой регулятора чисел оборотов Х°, так и перенастройкой
регулятора температуры газа Y0 в переходном процессе изменяются оба
регулируемые параметра. Однако характерным для такой системы
регулирования является то, что изменение каждой регулируемой
координаты зависит лишь от параметров двигателя и
соответствующего регулятора, т. е., например, Хп зависит только от Кп и
соответственно ХТ4 зависит только от Кт-
Введем уравнение движения для объединенного управления
в виде
тогда вместо (5.38) и (5.39) получим
%Ь\ пЛ-1 к 1 z°*
(5.41)
m\
Устойчивость движения по Хп обеспечивается, так как-2—<[1.
h
Рассмотрим, какие же процессы можно получить при такой системе
регулирования. Из первого уравнения (5.41) следует, что
начальные условия будут
т. е. при этих начальных условиях нельзя получить монотонные
процессы по числу оборотов при возмущении Z0. Выберем значение
коэффициента усиления Кп регулятора числа оборотов из условия
получения действительных корней характеристического уравнения,
т. е. /Сл<! 5 ~~ 32 • Тогда, начиная с момента времени гъ где
регулируемый параметр достигает максимума (минимума), процесс
будет монотонным. Для этого случая величина интегральной
оценки будет иметь такое выражение:
jnl^A^(\+h-\z». (5.42)
InKn\ т1/
312
Из второго уравнения (5.41) также следует, что монотонные
процессы получить нельзя. Действительно, поделив правую часть
ХТА 'б*
на левую, получим —^ - — /4 i ^^ , т. е. процесс по
7^4 протекает так, что в начальный момент скачком (практически
же с большой скоростью) изменяется на величину —/4 и далее по
экспоненте стремится (от величины — /4) к величине ( j- /4). Сле-
\/7Zj /
довательно, и в этом случае процесс будет характеризоваться
провалом (забросом) регулируемого параметра.
Если перенести начало координат на величину ( [-lA, то
\щ 7
начальное отклонение ^(0)= — ( г2/4) и величина интеграль-
\щ /
ной оценки будет
r (5.43)
тг J
Следовательно, для уменьшения значений /n,z<> и JT4,zo и
соответственно для улучшения переходных -процессов необходимо
увеличивать коэффициенты усиления Кп и Кт регуляторов.
Задаваясь допустимыми соотношениями между величинами
интегральных оценок в виде 1п,2о—т21т4,г°, мож(но из (5.42) и (5.43)
найти необходимые соотношения между коэффициентами усиления
регуляторов (для процессов, близких к монотонным), т. е.
• Теперь рассмотрим влияние других условий автономности, для
чего разрешим (5.32) относительно Хп и ХТ4, после чего получим-
Ф3ФГ) Ф5Ф„Г] Х°+ЦФ3ФГ- Ф2ФГП) (1 + Ф5ФГ)-
^Ф^т (5.44)
X (Ф8ФГ- Ф2ФГЛ)] V- [Ф5ФЛ7.(1 + Ф2Ф„ - Ф3Ф„т-) +
+ (Ф4-Ф5ФлГ)(Ф2Фл-Ф3ФлГ)] Х°. (5.45)
Наложим на систему такие условия:
(5.46)
313
Ф5Ф лГ (1 +Ф2ФЛ - Ф3Ф„гЖФ4 - Ф5Ф„г) X
Отсюда определим передаточные функции Фп1 и ФГп, т. е.
ф «г <•»»»««>. (5.47)
Условия (5.46) приводят к тому, что в правой части (5. 44)
пропадает возмущение Y0, а в правой части (5. 45) пропадает
возмущение Х°, т. е. получается полностью автономная система
регулирования, когда при перенастройке регулятора температуры газа число
оборотов в переходном режиме остается неизменным, а при
перенастройке регулятора числа оборотов температура газа остается
неизменной. Поэтому условия (5.46) будем называть условиями
полной автономности и соответственно условия (5. 34) будем
называть условиями частичной автономности.
После подстановки (5.47) в (5.44) и (5.45) получим
5 4
Сравнение полученного результата с уравнениями (5.36)
и (5.37) показывает, что относительно тех же возмущений
уравнения движения по температуре газа одинаковые, а по числу
оборотов отличаются друг от друга лишь правой частью.
Будем предполагать, что с известным приближением
практически можно осуществить устройства, имеющие передаточные
функции в соответствии с выражениями (5.47); после подстановки
принятых выше выражений для каждой передаточной функции
получим
ф X^J
хп (i5Tp + i5-i3i4)P Tn хТА 12Р
или соответственно уравнения движения
(15Тр+15 - Щ рХ3=121<КпХп; 12рХ, - (/8 - Щ КТХТА.
После подстановки в уравнения (5. 48) выражений для каждой
передаточной функции получим
j (5.50)
{ (5.51)
Условия устойчивости для (5.50) остаются прежними. Выясним,
какие же переходные процессы можно получить с такой системой
регулирования. Для (5.50) начальные условия будут: Х(0)=—1;
Х7(0)=0; при условии, что корни характеристического уравнения
действительные и отрицательные, процессы будут монотонные,
т. е. условием монотонности будет
314
Для процессов, близких к монотонным, величины интегральных
оценок будут
г /5 — /3/4 г * /£ £О\
Jn,z°= —> JT4,z° = —Г7Г" • (О. oz;
Задаваясь допустимыми соотношениями между величинами
интегральных оценок в виде Jn,z° = ^2^n,z°t из (5. 52) получим
необходимое соотношение между коэффициентами усиления
регуляторов:
is V тЪ1Ъ
На границе монотонности (равные действительные и
отрицательные корни характеристического уравнения) значения
коэффициентов усиления будут
-hh)
Для сравнения определим, какими же свойствами обладает
система без введения каких-либо дополнительных связей. Хотя такая
система рассматривалась выше [см. (5.7)], запишем ее теперь так:
(5. 53)
Принимая те же передаточные функции регуляторов, после
разрешения (5.53) относительно Хп и ХТ4 получим
l' »
-
(О.
hKTT [(/5 /3/4)^7- , 1 Т^Л
^- /72+ £ - /2/4/С„ |
(5.55)
Устойчивость системы определяется неравенством, аналогичным
(5. 10), т. е. при 1\Ц<\ и k—Ы4>0 система всегда устойчива.
315
Предполагая процессы монотонными, определим выражения для
интегральных оценок. Начальные условия для системы (5.54)
будут
гп{Г
а для (5. 55)
ХГ4(0)-=--\;
Щ
Х'та (0) -
4 - 15КГТ) 15КГ - h (13КГ + VO
Соответственно выражения для Jn,z° и Jt4,z<> будут
jn zo ^^з- hh) -(/5 ~
4, 2° :
l-f/4
(5. 56)
Для сравнения окончательных результатов по трем
рассмотренным возможным схемам регулирования ТВД предположим, что
процессы во всех случаях близки к монотонным при одних и тех же
значениях Кп и /Сг. Тогда для двигателя, рассмотренного в первом
примере на стр. 322 (коэффициенты приведены в таблице), в
соответствии с (5. 42), (5. 43), (5. 52) и (5. 56) для тех же режимов
работы двигателя получим значения для интегральных оценок,
которые указаны в таблице.
Автономность
Частичная
Полная
Jп,1° ' JTA, Z°
ккЛ +щ>
, ?5 — ^3^4
пЛ° ПК
?=§
10,7
Кп
0,5
Кп
Режим
Я = 0
1^=200 м/сек
8,6
Кп
0,67
Кп
Н = 11 ял*
V = 200 м/сек
5,2
*л
1,2
/Сл
316
Продолжение
Автономность
Нулевая
Частичная
Полная
Нулевая
Jn,Z° ' ^Г4, Z0
(/з — /1/5) — (/б — /3/4) ^1
1^1^1\Кп
^Г4, Z0 — 7 j^r ( ^ + 2/4 )
/5^Г Wl /
1
^z- -Mr
(/5_/з/4) (!_«,)
1+/4
/б*г
?го°
4,5
кя
8,6
Кт
6,7
КТ
1,2 3,0
/С» /<т-
Режим
1/ = 200 ж1, сек
1,55
/с*
14,0
/Сг
11,0
Кт
1,5 5,0
/СЛ Кт
1/^200 ж/^/с
0,8
/Сп
3,0
Кт
1,3
Кт
10.0 2,5
Кп Кт
Из этой таблицы видно, что наилучших результатов по числу
оборотов следует ожидать от системы, обладающей полной
автономностью, когда /n,z<> и Jt4,z° соответствуют системе (5.52).
Однако приведенное сравнение не является достаточно полным,
поскольку не учитываются действительные области монотонности
для каждого из рассмотренных вариантов. С этой точки зрения
вариант с частичной автономностью не может сравниваться
с остальными двумя, так как он в принципе не позволяет получить
монотонные процессы.
Для варианта с полной автономностью, когда условия
монотонности определяются равенством действительных и отрицательных
корней характеристического уравнения, значение Кп для процесса
по числу оборотов определяется условием
„ . (/5-/3/4)2
что для тех же режимов работы двигателя дает такие значения для
Кп и соответственно для Jn, zc'
317
Коэффициент
ту- •
Ал
Режим
Н = 0
V = 0
< 0,025
>2,0
Я = 0
К = 200 м)сек
< 0,056
> 12
И = 11 *глг
К=200 jf/сел:
< 0,125
>9,5
Значения же Кт могут выбираться любыми.
Для неавтономной системы регулирования области
монотонности определим для процессов по числам оборотов только для
случая действительных и отрицательных корней
характеристического уравнения. В соответствии с ранее полученными начальными
условиями для системы (5.54), т. е. Хп(0) =— 1; Х'п (0)=0;
Л^(0)>0, условием монотонности будет выражение (3.30) или для
нормированного уравнения — (3.32). Если использовать (3. 33)
с учетом (3.30), то условие монотонности для нормированного
уравнения сведется к следующему условию:
Для случая равенства корней характеристического уравнения,
когда Л—5 = 3, условие монотонности сводится к условию
или через коэффициенты уравнения (5.54) к условию
ик
кп
щ
кт - nlil к\ к1<о.
Для того же двигателя и на тех же режимах работы это
неравенство не удовлетворяется ни при каких значениях Кп и Кт-
т. е.. по числу оборотов нельзя получить монотонные процессы.
Близкие же к ним процессы можно -получить лишь при очень малых
значениях Кп и Кт, и во всяком случае при значениях, меньших,
чем определенные выше для случая автономной системы
регулирования.
Таким образом, и с учетом областей монотонности автономная
система регулирования оказывается лучшей.
Рассмотренные выше автономные системы регулирования ТВД
(с частичной и полной автономностью) соответствуют случаю,
когда условия автономности выполняются полностью. Практически
невозможно выдержать условия автономности для всех условий
полета и режимов работы двигателя; поэтому полученные выше
результаты нужно рассматривать как наилучшие.
318
б) Общие условия автономности
Условия автономности, когда известны передаточные функции объекта
регулирования и регуляторов, легко получить с помощью матриц.
Поясним на примере системы регулирования ТЗД, рассмотренном выше,
как записать в виде отдельных матриц объект регулирования и регуляторы.
Разрешим первые два уравнения (5.32) относительно Хп и Х*?с
Фд — Ф1Ф5
—: -п—
(5.57)
ф5 _
где
#11 =
1 —
Ф2Ф4
(5.58)
; ^i2 =
— Ф2
ф5 _ ф3ф4
Ф2Ф
2Ф4
~" 1^Ф2Ф4-
Тогда уравнение движения объекта регулирования можно записать в виде
матрицы
<*2\ #22
(5.59)
Входными координатами (указанными стрелками) являются Xqt и Ху, а
выходными (также указанными стрелками) являются Хп и Хт4*, при этом каждая
входная координата умножается на матрицу-столбец, а каждая выходная
координата является суммой результатов умножения каждого входного сигнала на
соответствующий элемент матрицы-строки. Следовательно, матрицу (5.59}
по входным и выходным сигналам можно разделить так:
вход,от — ■
X ~Х
вход, ? <р
аи
#12
= (ап
#22
х, п~ Хп =
-^вых, ТА = XjA = T p
Уравнения движения регуляторов можно также записать в виде матрицы
hi h
(5.60)
Входными координатами являются Хп—Х° и Y'j--XTa, а выходными
^ и Хаг
Если теперь объект регулирования соединить с регуляторами, то получим
систему, состоящую из двух матриц, как показано на фиг. 5. 18.
В матрице регуляторов элементы Ьи и Ь22 являются соответственно
передаточными функциями регулятора числа оборотов и регулятора температуры
319
газа, т. е. Ьц—Фп; Ь22 = Ф7, а элементы bl2 и Ь2\ являются передаточными
функциями дополнительных устройств, т. е. Ь\2 = Фпт и Ь2\~ФТп.
Из рассмотрения схемы прохождения сигналов согласно фиг. 5. 18 видно,
что при возмущении системы, например, перенастройкой регулятора числа обо-
Объеюп регулирования
Фиг. 5. 18. Блок-схема системы регулирования.
ротов Х°, сигнал температуры газа будет формироваться в соответствии с
уравнением
(Хп - ХО) Ьпа22 4- (Хп -ХО) Ь12а21 - (Хп - ХО) (bna22 + bl2a2l) = ХТ4. (5.61)
Аналогично при возмущении системы перенастройкой регулятора
температуры газа Y0 сигнал числа оборотов будет формироваться в соответствии
с уравнением
- хТ4) Ъ2Ха12 + (У© - ХТА) Ь22ап - (Y0
(Ь21а12 + Ь22ап) = Хп. (5.62)
Для полностью автономной системы выражения (5.61) и (5.62) должны
равняться нулю; поэтому получим такие условия автономности:
(5.63)
+ ^22^11 =
v*-;
f
V*"
t
fTa,2*°,2aff •
b2iat2*b?7a!t>
\
bf/a22+bt2a2f
b2lu22*l22a2f
Фиг. 5. 19. Матричная схема системы регулирования.
из которых можно определить передаточные функции &12=Фпг и 621 = Фг».
и которые соответствуют выражениям (5.47). Схему, приведенную на фиг. 5.18,
можно представить одной общей матрицей в таком виде, как показано на
фиг. 5. 19. Отсюда видно, что для того, чтобы сделать систему автономной
относительно возмущений Х° и У°, необходимо матрицу диагонализировать, т. е.
положить действительными те же условия (5.63), и в этом случае получим
диагональную матрицу, как показано на фиг. 5.20.
320
В общем случае, когда регулируются п параметров и когда известны
передаточные функции объекта регулирования по каждому параметру и
передаточные функции регуляторов, передаточные функции для дополнительных
устройств, обеспечивающих автономность, получают аналогичным образом,
причем условия (5.63) будут содержать п(п— 1) уравнений. Например, для
объекта, в котором должны регулироваться три параметра, матричная блок-
схема будет такой, как показано на фиг. 5.21. В соответствии с указанной выше
схемой прохождения сигналов при ненулевой разности входных сигналов откло-
ч°-х
О Л-pif.
Хп ~ -X.
I ♦
4
г
Ъпа12*Ъ12аи , о
0 ЬмЪпй*
у* х*
Фиг. 5. 20. Матричная схема системы регулирования.
нение каждой регулируемой координаты от «чужого» регулятора можно
записать в виде:
АХ\ = (Х2 — .
А V / V \f
&XX = (A3-~ / 1
д у / у V
&Л2 = (Аз —
-f
ЧГ ^2
Фиг. 5. 21. Матричная блок-схема.
Для автономной системы значения АХи АХ2, АХ3 должны равняться нулю,
поэтому условия автономности будут
f #32#12 + ^33^11 =0;
23 + ^12^22 ~Ь ^13^21 ^ О,"
~Ь ^12^32 ~Ь ^13^31 == 0;
г\
(5.64)
21
1327
321
Считая заданными передаточные функции объекта и собственно
регуляторов (передаточные функции Ьп, Ь22, &зз), можно из (5.64) определить
выражение для передаточных функций дополнительных устройств, осуществляющих
автономность, т. е. из первого и шестого уравнений (5. 64) определить Ь2\ и Ь23,
из второго и четвертого уравнений определить 63i и ЬЪ2 и из третьего и пятого
уравнений определить Ь\2 и Ь1г.
5. ПРИМЕРЫ
Пример 1
Задание. Рассчитать систему регулирования числа оборотов одноваль-
ного ТВД с одним винтом для получения близких к монотонным переходных
процессов при возмущении ручкой объединенного управления, когда двигатель
работает на режиме, близком к максимальному. Схему регулятора числа
оборотов принять без корректирующих устройств, а схему регулятора температуры
газа — разомкнутой, с коррекцией расхода топлива по условиям полета.
Исходные данные. Коэффициенты уравнения движения объекта
регулирования согласно (5. 1) принять такими:
я
КМ
0
0
11
V
м/сек
0
200
200
Т
1,0
0,3
0,8
1\
1,0
1,0
1,0
h
0,4
0,5
0,35
h
0,8
0,4
0,7
и
0,5
0,5
0,5
h
0,5
0,3
0,6
Щ
0,31
0,29
0,25
Уравнение движения устройства объединенного управления принять в виде
Z°=X°=miXGT. Значения гп\ приведены в той же таблице.
Решение. Уравнение (5.2) с учетом уравнения движения устройства
объединенного управления будет иметь вид
[ТР2 + (1 _
которое преобразуем с учетом
Т
щ
с = /Ср и
' К°т= ! /l/4 ;
i = l
) Хп = (^ р
к такому виду:
Здесь 1—/i/4=Qi выражает самовыравнивание двигателя. Поэтому, если
решить первые два уравнения (5. 1) относительно Хп, то получим
1) Хп = - KJ
т. е. коэффициенты Гд, Ко и Kg имеют то же смысловое значение, что и в
(1. 132), если правую и левую части первого уравнения (1.132) разделить на
Qi (b2 имеет отрицательный знак). Рассматриваемая система всегда
устойчива, так как Гд > 0; КрК.с > 0. Условие монотонности по-прежнему примем
в виде
*'<0)
Х(0)
Р2,
322
где р2 — наибольший корень характеристического уравнения, корни для
которого принимаем действительными и отрицательными.
Условием получения действительных и отрицательных корней
характеристического уравнения является
а значение наибольшего корня будет
Начальные условия будут такими:
т{ГА
Тогда условие монотонности выражается так:
Отсюда значение коэффициента усиления регулятора /Ср на границе
монотонности будет
is
Подставляя Заданные по условию значения коэффициентов, находим для
заданных условий работы (полета) возможные коэффициенты усиления
регулятора:
И
км
0
0
11
V
м/сек
0
200
200
1/
КР
<о
<0,35
<0,12
Отсюда видно, что монотонные процессы можно получить лишь при таких
условиях полета: #=0, У=200 м/сек и #=11 км, У=200 м/сек; при #=0
и V=0 нет такого значения Лр, которому удовлетворяло бы условие
монотонности. Если исходную систему уравнений разрешить относительно Х<?> то
получим
(Тдр*+Р+КРК9) Х? = (- Гд/Ср р + —^ - Кр ) Z0,
откуда конечное значение Л"«р (со) будет
Если KGTjmi~ 1» то ^<р(°°) — ^cpW> т- е- Угол установки лопастей винта
после окончания переходного процесса останется неизменным. Из
полученного же выше значения для Кр следует, что Кр может иметь действи-
21*
323
тельные значения лишь при условии Kg \m\ < 1> которому соответствует
Х9(оо) < Х9(0).
Следовательно, монотонные процессы в рассматриваемой системе могут быть
получены лишь в том случае, когда угол установки лопастей в конце процесса
будет меньше начального угла при возмущении в сторону увеличения мощности
без акселерометра
с акселерометром
Фиг. 5. 22. Переходные процессы.
-Я-0; V-200 м/сек; *Г=4; К~
2-Я-0;
3-Н=0; V
V =200 м\сек\
км; К---200 Mfcefc;
двигателя и больше начального угла — при возмущении в сторону уменьшения
мощности двигателя. Это означает, что способ управления двигателем должен
быть таким, чтобы, например, увеличение мощности (тяги) двигателя
происходило за счет увеличения числа оборотов при одновременном уменьшении угла
установки лопастей винта. Соответствующие переходные процессы приведены
на фиг. 5.22.
Пример 2
Задание. Рассчитать систему регулирования аналогично первому
заданию, но с введением корректирующих устройств в цепь регулятора числа
оборотов в виде идеального акселерометра.
Исходные данные. Те же, что и в первом примере.
Решение. Уравнение (5.5) с учетом, что в (5.4) Т\ = 0 и с учетом
устройства объединенного управления, будет таким:
где выражения для Гд, Кр, Kgt> K9 одинаковы с выражениями в первом
примере. Начальные условия также остаются прежними, а выражение для наи-
324
большего действительного отрицательного корня характеристического
уравнения будет иметь вид
+ 1 +
Условие монотонности будет
*\О_ 1
- 4/Ср/С/д] .
Отсюда значение коэффициента усиления регулятора /СР на границе
монотонности будет
/72!
\ mj /
Из полученного видно, что если даже KGtlmC>^i то выбором
соответствующего значения Ка можно сделать процессы монотонными. Граничные
значения Ла, при которых /Ср имеют действительные значения, и, следовательно,
процесс будет монотонным, для тех же случаев полета, равны:
н
км
0
0
11
V
м/сек
0
200
200
Граничное
значение
ка
Ка>1
АГа<0,9
АГа<Ю,0
Следовательно, в рассматриваемом случае можно получить монотонные
процессы при всех условиях полета. Однако для этого необходимо устройство,
которое изменяло бы соответствующим образом коэффициент усиления /Са по
условиям полета, например, при одном и том же коэффициенте усиления
регулятора /Ср. Если принять /Ср=4 для всех случаев полета, то значения /Са
сек
будут следующими:
н
км
0
0
11
V
м/сек
0
200
200
*Р
4
4
4
Ка
1,3
0,8
9,5
1,0
0,9
10,0
Соответствующие переходные процессы приведены на той же фиг. 5.22,
откуда видно, что для режима полета при #—11 км и V=200 м/сек процесс
325
очень сильно затянут. Величина же интегральной оценки в соответствии с (3. 82)
и начальными условиями, полученными в первом примере, выражается так:
Подставляя в это выражение полученное выше значение для /Ср, получим
Это выражение позволяет судить о качестве переходного процесса в
системе (в области монотонных процессов) только по данным объекта
регулирования и объединенного управления. Цифровые величины интегральных оценок
приведены выше в таблице. Что касается изменения температуры газа за
турбиной, то, поскольку расход топлива изменяется скачком и далее остается
постоянным и температура газа однозначно связана с числом оборотов
турбокомпрессора для любого момента времени, нет необходимости решать систему
уравнений относительно Хта. Для этого необходимо определить величину
первоначального заброса, для чего в уравнении (5.6) (при T\ — Q) с учетом
устройства объединенного управления, необходимо разделить правую часть на левую;
целая часть и определяет величину заброса (провала). Далее для любого
момента времени температура газа уменьшается (увеличивается)
пропорционально увеличению (уменьшению) числа оборотов
+ 1)р+ К?КР] ХГ4 = ^-
где
Целая часть от деления составит h]mu а уравнение для дальнейшего
движения будет
a + l)p+ KVKP) XTi = (^~^ р - К?КРЦ ) Z0.
Из этого уравнения видно, что температура газа от значения
с течением времени уменьшается до значения
Коэффициентом пропорциональности между значениями числа оборотов и
температуры газа служит коэффициент Ц. Для примера на той же фиг. 5. 22
приведено изменение ХТ4 для тех же режимов полета.
Пример 3
Задание. Определить влияние возможных запаздываний (инерционно-
стей) в системе регулирования на переходные процессы. Принять, что
запаздывание в сервомоторе ВИШ вызывается возможным наличием в гидросистеме
пузырьков воздуха.
Исходные данные. Двигатель тот же, что и в предыдущих
примерах; регулятор числа оборотов без акселерометра, как в первом примере;
запаздывание (инерционность) в сервомоторе ВИШ учитывать экспоненциальным
звеном.
Решение. Указанное запаздывание учтем вводом в структурную схему
системы регулирования дополнительного экспоненциального звеиа, которое
включается последовательно с выходным звеном регулятора (сервомотора).
326
Тогда вместо двух последних уравнений системы (5. 1) напишем уравнение
регулятора в таком виде:
^е t —величина возможного запаздывания (инерционности) в сервомоторе
ВИШ.
Решая это уравнение совместно с уравнением движения объекта
регулирования и уравнением движения объединенного управления, получим
+ (t +
K,KV
Р -г
15
х=о
Щ2
г" з 4 5 6
Фиг. 5.23. Переходные процессы.
7Ьсен
На фиг. 5.23 приведены переходные процессы, соответствующие этому
уравнению при условии Я=0; V=Q и /СР=2,5 " при различных значениях т.
Как видно, происходит существенное ухудшение процессов при увеличении
значения t При достаточно большом значении t система может быть даже
^неустойчивой. Критическое значение т определяется из условия границы
устойчивости в виде
В существующих регуляторах чисел оборотов запаздывание в ВИШ
необходимо учитывать, так как его значение достигает т=0,05ч-0,3 сек.
Пример 4
Задание Рассчитать автономную систему регулирования для того же
одновального ТВД с одним ВИШ из условия получения переходных процессов,
близких к монотонным, с минимальным временем регулирования, при
скачкообразном возмущении настройками регуляторов и при тех же условиях полета.
Исходные данные. Данные по двигателю принимать из первого
АЛ
примера; передаточные функции для регуляторов принимать фл — ;
327
Фт=—. Схему подключения дополнительных устройств принимать
Р
по фиг. 5. 16.
Решение. Рассмотрим случай полета при #=11 км, V—200 м/сек.
В этом случае уравнения для двигателя будут такими:
Q'35 У °'7 у О-
0,5^-0,6^ = 0.
Передаточные функции Фпт и Фг, для дополнительных устройств в
соответствии с (5.49) будут такими:
ф = 1^К" °>7К» .
(h-hh)KT 0.286 Кт
hP P '
В соответствии с (5.50) и (5.51) уравнения движения будут такими
\тР2+(i-lJb^p + hKn j Хп = /2/слхо,
или
(2,
Получение монотонных процессов по Хп связано с условием наличия
действительных отрицательных корней характеристического уравнения, т. е. условием
или кп< 0,124.
Выбор значения коэффициента усиления Кт связан лишь с конструктивными
соображениями.
Проводя аналогичные вычисления для других условий полета и принимая
значения для /Сп, соответствующие границе области монотонности, получим
следующие выражения для передаточных функций ФпТ и Фтя, значения /Сп
и уравнения движения:
И = 0; V == 0.
+ 20/? + 1) *л = Х0; (2,0/? + 1) Хгл - Y0.
Я — 0; К = 200 м/сек.
; Ф 2; /С 0°56; «
И ,9р
Я = 11 к.и; У = 200 .к/сек.
(19,2^2 + 9,5/? f 1) ЛГЛ - Х0; (1,67/? + 1) ХТА =
328
Здесь значение Кг — 1 принято из условия возможности выполнения
конструкции регулятора температуры газа.
Хп;Хти без акселерометра
t сек
*п
1,0
0,5
;*Г4
2,
L/,
!£■
Л
с
акселерометром
^*~
и
. "
—-—-
-тг
1 1
у
лп
10
Ь сек
Фиг. 5.24. Переходные процессы.
«3- Н -1Г км; V -200 л/«л
Из полученных результатов видно, что при необходимости выполнения
условий автономности с достижением монотонных процессов при всех условиях
полета переходные процессы по числам оборотов очень сильно затягиваются.
Соответствующие переходные процессы приведены на фиг. 5.24.
Пример 5
Задание. Рассчитать автономную систему регулирования для такого же
одновального ТВД с одним ВИШ, как и в примере 4.
Исходные данные. Передаточную функцию для регулятора числа
оборотов принимать с идеальным акселерометром, т. е. Фп =
Остальные данные соответствуют данным примера 4.
Решение. Рассмотрим случай, когда #=0, V=0.
В этом случае уравнения для двигателя будут такими:
Тср
v
В соответствии с (5.47) передаточные функции Фпт и ФТп будут такими:
Ф2Ф4Фл 2(Ki+KaP) . ФГ(Ф3~Ф1Ф5) 0,286/Ст-
ф _, . ■ . ■ • ФТг> = = '
Ф3Ф4—Ф5 (Ьр + 1)Р Ф2 Р
В соответствии с (5.48) уравнения движения будут такими:
[Ф5 + Ф2ФбФл — Ф3Ф4] Хп = Ф2Ф5ФлХ0,
или после преобразований:
[Г ,17-с -у О,2К*)Р + 0,2Кг]Хп = (О,2АГа/7 + 0,2/<'i)X0.
329
Уравнение движения по координате ХТп останется прежним, каким оно было
получено в предыдущем примере.
Условием монотонности процессов для полученного уравнения является
получение действительных отрицательных корней характеристического
уравнения и условия X'(0) < Р2Х(0), где р% — больший корень характеристического
уравнения. Начальные условия будут (с учетом переноса начала координат)
следующие:
S-+0
=Нт
S-+0O
О,1ГС + 0,2К*)р
0,2/CaS+0,2/Ci
[0,5Тср* + (0,1ГС + 0,2/Са) Р 4- 0,2/Ci]
= —1;
- sx (0)
Будем рассчитывать процессы при равных действительных и
отрицательных корнях характеристического уравнения, т. е. при условии
(0,1Гс+О,2/Са)2=4. 0,5-0,17^.
Кроме того, из 'условия X* (0) < р^Х (0), которое мы будеАм принимать
соответствующим границе монотонности, т. е. X' (0) = р2Х(0), следует
0,4/Са
Гс +0,2/Са
Тс '\ 2-0,5Гс
Отсюда находим Ка—0,5Тс.
Подставляя это значение в условие равенства корней, получим К&=5К\.
Следовательно, если задаться значением Гс, то все остальные параметры
системы будут однозначно определяться условием нахождения системы на
границе монотонности. Примем условно Гс = 1 сек; тогда /fa = 0,5 и /Ci=0,l.
Подставляя полученные значения в уравнения движения, будем иметь
Проводя аналогичные вычисления для других условий полета, получим
следующие выражения для передаточных функций Фпт, значений параметров /Сь
Гс и уравнения движения:
Ф =
пТ
Ф =
пТ
0,2
10/7 + 1) Хп =
Я = 0; V = 200
Х0.
1,85(0,9/?Ч-1)
1,85
/7(0,9/7+1) р
(0,81/?2 + 1,8/7 + 1) Хп = (0,9/7 + 1)
Н = 11 kjk; V = 200 jc/ggig.
0,44(1,92/7 + 1)
=0,74; /Са-0,67; Гс =
М4
/7 '
/fa = 1,19; ^ =
пТ /7(1,92/7+1)
(3,7/?2 + 3,84/? + 1) Хп = (1,92/7 + 1) Х0.
Переходные процессы Хп (t) приведены на той же фиг. 5.24. Из сравнения
результатов этого примера с результатами, полученными в предыдущем
примере, видно влияние акселерометра в автономной системе регулирования.
Глава VI
ПРИЕМИСТОСТЬ, ИЛИ РЕГУЛИРОВАНИЕ «РАЗГОНА» ГТД
Под временем приемистости двигателя понимают время
перехода его с малого режима работы на больший режим при
максимальной скорости перенастройки регулятора. В частности, под
полным временем приемистости понимают время перехода двигателя
с режима малого газа на максимальный (взлетный) режим, а под
частичным временем приемистости — время промежуточного
диапазона набора мощности (тяги). При анализе приемистости
двигателя, или его разгона, следует иметь в виду, что параметры
системы регулирования изменяются так значительно, что не
представляется возможным рассматривать эту систему как систему,
соответствующую малым изменениям параметров.
Решить поставленную задачу, т. е. определить характер
движения системы в процессе разгона двигателя, можно несколькими
способами, например, обычным методом численного
интегрирования, численно-графическим методом, графоаналитическим
методом, методом фазовой плоскости и др. В дальнейшем воспользуемся
методом фазовой плоскости (методом изоклин) как основным и,
кроме того, рассмотрим приближенный метод.
1. ТУРБОРЕАКТИВНЫЕ ДВИГАТЕЛИ
а) Система с замедлителем
Рассмотрим поведение системы регулирования при разгоне одно-
вального ТРД, когда в системе разгона используется замедлитель,
схема которого приведена на фиг. 2.42 и который воздействует на
топливный кран с постоянным перепадом давлений на нем.
Это означает, что расход топлива через топливный кран зависит
лишь от его проходного сечения.
Уравнение движения двигателя напишем в обычном виде, т. е.
2kJ — = Мт-Мк
at
Примем, что избыточный крутящий момент турбокомпрессора
АМТК является функцией двух переменных — числа оборотов п
331
и расхода топлива GT. Предположение, что AMTK—f(n, GT),
допустимо, так как можно считать, что в течение времени разгона
двигателя внешние условия практически не изменяются; кроме того,
полагаем, что имеются рее данные, полученные из теплового
расчета двигателя, позволяющие определить ДМтк для любых
чисел оборотов при известном расходе топлива.
Тогда исходное уравнение движения двигателя можно
представить в виде
dn =f(n,GT) ,6 j.
dt 2tJ K ' }
Выражение для АМТК =/(n, GT) может быть найдено из
уравнений (1.21), (1.57), (1.58) и из известных характеристик
компрессора.
Как видно из схемы замедлителя, приведенной <на фиг. 2.42, при
условии постоянного давления жидкости на входе в замедлитель
скорость передвижения его поршня будет практически постоянной.
Если считать, что проходное сечение топливного крана изменяется
пропорционально его перемещению, то скорость изменения расхода
топлива будет также постоянной, т. е.
^ т. (6.2)
т
dt
Разделив (6.2) на (6.1), получим
*G 2rJm
dn f(n,Qr)
(6.3)
В координатах GT, n выражение (6. 3) представляет собой
наклон кривой в данной точке плоскости GT, п. Задаваясь постоянным
значением dGT/dn=a = const, можно в тех же координатах
определить кривую, соответствующую постоянному наклону искомой
кривой, т. е. изоклину в виде
Q 2^IHLf{n)*)9 (6.4)
а
Давая различное значение а = const, получим на плоскости ряд
изоклин, и тогда станет возможным из любой точки плоскости, как
из начальной, провести кривую GT=/(#). Для примера на фиг. 6. 1
показан характер протекания искомой кривой GT=/(n) и изоклин
dGT/dn=a=const для двигателя с центробежным компрессором.
Здесь кривые GT=f(n) проведены с учетом масштаба величин,
откладываемых по осям. Там же условно показана область работы
основного регулятора числа оборотов.
*) Поскольку ДМтк =/(л, GT) аналитически не выражается, то задача
решается графически,
332
На этот же график можно нанести граничные кривые
допустимой (максимальной) температуры газа перед турбиной и границу
устойчивой работы компрессора. Для этого нужно воспользоваться
теми же общими уравнениями и характеристикой компрессора. Для
примера такие кривые нанесены на той же фиг. 6. 1.
Совершенство системы разгона определяется тем, насколько
близко кривая GT = f(n) проходит от граничных кривых максималь-
a>az>a3
к^
s Область работы
основного
регулятора
Ъ п/п0
ОА
0,6
0,8
Фиг. 6. 1. Характер протекания кривой разгона и изоклин для ТРД
с замедлителем.
ной температуры газа и устойчивой работы компрессора. Чем
ближе кривая GT=f(n) проходит к кривым максимальной
температуры газа и устойчивой работы компрессора (а может быть и к
кривой устойчивого горения топлива в камере сгорания), тем полнее
используются возможности двигателя и тем меньше время его
разгона.
Указанный метод анализа системы разгона дает возможность
определить характер изменения и величину регулируемого
параметра, но безотносительно к времени, т. е. он не дает временной
характеристики.
Для получения переходного процесса необходимо интегрировать
системы (6.1) и (6.2), например, методом численного
интегрирования или любым другим методом.
Для получения процесса разгона с замедлителем с более
полным использованием всех возможностей двигателя при
изменяющихся внешних условиях вводятся дополнительные корректоры,
изменяющие скорость перемещения поршня замедлителя.
б) Система с автоматом приемистости
Рассмотрим разгон двигателя с автоматом приемистости, схема
которого представлена на фиг. 6.2. Эта схема во многом
аналогична ранее приведенной на фиг. 2. 40, но отличается от нее тем,
что вместо перепуска топлива из магистрали за насосом изменение
333
расхода топлива в двигатель осуществляется путем изменения
производительности насоса поворотом наклонной шайбы с помощью
сервомотора. Кроме того, для лучшей «подгонки» расходной
характеристики такого автомата приемистости (при изменяющихся
внешних условиях) к заданной включены два дополнительных
корректора. Один корректор включен параллельно жиклеру / на входе
Фиг. 6. 2. Схема автомата приемистости.
в надмембранную полость 2 и изменяет проходное сечение жиклера
3 в зависимости от величины перепада давлений р\—рщ\ второй
корректор включен параллельно жиклеру 4 и изменяет проходное
сечение жиклера 5 на выходе из надмембранной полости 2 в
зависимости от величины рн-
Выведем уравнение движения такого автомата приемистости.
Ввиду малости надмембранного объема и массы золотника 6 будем
считать такой автомат приемистости безынерционным. Уравнения
сил, действующих на золотник, и расхода топлива запишем так:
F р А-С I =F р - )
"м-Г прзол 30л^т' (6.5)
где FMi /^зол —соответственно, эффективные площади мембраны и
золотника;
334
/;т, /?м-—давления топлива за насосом и в надмембранной
полости;
/3ол"~кооРДината, определяющая положение золотника;
Спр — коэффициент жесткости пружины мембраны;
GH, GT — расходы -Топлива через насос и через форсунки.
Для каждого значения рн давление в надмембранной полости
зависит только от значения давления за компрессором pi, т. е.
pbi~f(P*)- Расходы топлива через насос и форсунки можно
выразить в виде
0н=тгп1 и Ст = /к2'|/^
где / — координата сервомотора (наклонной шайбы).
Тогда уравнения (6.5) можно записать так:
G2T ]
GT ]
д + С презол = F зо л ~2~ ' I (6 6)
Tfln I \ ' У
mxnl=G^ J
Уравнение движения сервомотора было получено ранее в виде
Подставляя в это уравнение зависимости для / и /30л,
полученные из (6.6), найдем
'2
или
dGr ^ 1 [пцк 1
dt T \Cnp L
^зол С„
В общем виде это уравнение будет
^=Л(л,С7Т1 ^). (6.7)
Следовательно, исходная система уравнений будет такой:
dn _f(n,GT) .
dt" 2*J "'
(6. 8)
dtf 1 » т» 2 ' 2 2 > т •
Третье уравнение по существу выражает характеристику
компрессора. Исключив время из системы (6.8), получим
dn /<w,Gr) ' ;
335
Дальнейшее построение кривой GT = f(n) производится
аналогично рассмотренному выше, т. е. задаются величинами
/K, Or, f2(n, GT)]2nJ
T/2*
и из a^J
n, GT)
определяют изоклины GT=/i(n); по ним из любой точки, как из
начальной, проводят искомую кривую GT=/(«).
Для примера на фиг. 6. 3 показан характер движения при
разгоне ТРД с осевым компрессором, когда разгон осуществляется
с помощью автомата приемистости.
1.ОП/Ц,
Фиг. 6. 3. Характер протекания кривой разгона и изоклин для ТРД
с автоматом приемистости.
Разгон двигателя с таким автоматом также производится до
чисел оборотов, близких к тем, на которые настроен регулятор
числа оборотов. После этого автомат приемистости выключается
и дальнейшим движением управляет регулятор числа оборотов.
Система разгона двигателя может включать и оба
рассмотренных устройства, т. е. и замедлитель, и автомат приемистости. Тогда
весь диапазон разгона необходимо разделять на две области и
исследовать движение в каждой из них отдельно.
Несмотря на относительно простую схему расчетов режимов
разгона ТРД, практическое ее применение связано с довольно
громоздкими вычислениями.
в) Система разгона с регулятором температуры газа
На практике интересуются не только выяснением вопроса о мере
использования полноты возможностей двигателя при его разгоне, но и временной
характеристикой разгона, т. е. изменением числа оборотов или даже величины тяги
во времени. В этом случае приходится интегрировать нелинейную систему
уравнений любым приближенным способом.
В соответствии с этим рассмотрим приближенный метод определения
временной характеристики процесса разгона двигателя, когда в качестве
устройства, позволяющего разогнать двигатель, принят регулятор температуры газа.
336
В этом случае можно более полно использовать возможности двигателя.
Сущность рассматриваемого приближенного метода определения
временных характеристик процесса разгона двигателя заключается в том, что если
принять температуру газа перед турбиной постоянной, то движение одноваль-
ного одноконтурного ТРД по числу оборотов можно описать двумя линейными
дифференциальными уравнениями с постоянными коэффициентами,
справедливыми для диапазона изменения чисел оборотов от примерно соответствующих
(или несколько превышающих их) малому газу до максимальных.
Используя некоторые термодинамические зависимости в
предположении, что на сопловом аппарате турбины имеется критический
перепад давлений, можно выяснить характер зависимости вида
*1
1 — г:* кг =f(n). Эту зависимость приближенно можно рассматривать как
состоящую из двух плавно сопряженных прямых, как это видно из фиг.
6.4, где приведены эти зависимости для двух значений температуры газа
перед турбиной.
KJ
к
, *~кГ - 0.6
0,5
ОА
0,3
0,2
0,1
0,20
0J6
0/2
0,08
от
/
=Г20О°К^
~У_
J
У
=
T*=WOO°K
0,25 0,5 0,75 1,0 п
Фиг. 6.4. Характер зависимости
1-я; *г =/(«).
и
J
z/
/
/
/
/
/
7Г*=/ОО0°К
0,2 OA 0,6 0.8 1,0
Фиг. 6.5. Характер зависимости
k—1
• k
-!=/(")•
Для" осевых компрессоров' с достаточно большим значением як за-
к—\
* k
висимость ъК —\=/г(п) также может приниматься приблизительно
линейной функцией в достаточно большом диапазоне изменения чисел
оборотов, как это, например, показано на фиг. 6.5 для различных значений
температуры газа перед турбиной.
Расход воздуха (газа) также можно приближенно считать линейной
функцией примерно для такого же диапазона изменения чи?ел оборотов, как это
видно из фиг. 6.6.
Из выражений (1.57) и (1.58) для крутящих моментов турбины и
компрессора видно, что если принять средние значения к. п. д. компрессора и
турбины постоянными, а расход газа (воздуха) и величины 1—гс'т г и
22 1327 337
k-l
я* * —i принять пропорциональными числу оборотов, то при Т3 = const ве~
личины этих моментов будут изменяться линейно в зависимости от числа
оборотов. Следовательно, если принять зависимости
k-l
Gr = GK =
'"к
■ 1 =J
п: 1—г.*
п,
то исходные уравнения движения с учетом (1.57) и (1.58) можно написать
так:
dt
J—
dt
(6.10)
(6.11)
где
75Л об/сек'
75 A
nUtT
)
а
V
k
г-\
}
-1
RT\I
75%
*г-г
)м.г
кГм
об/сек'
кГм-
O-< *p )max ^/^.
Здесь уравнение (6. 10) справедливо для первого участка движения, где
кривая, представленная на фиг. 6.4, имеет положительный наклон, а
уравнение (6.11) справедливо для второго участка, где та же зависимость выражена
горизонтальной линией. Величина Мо выражает мгновенное изменение
крутящего момента, развиваемого турбиной, из-за увеличения скачком температуры
газа Г3 от значения, соответствующего режиму, с которого начинается разгон,
7'3м#г> до максимального значения, при котором производится разгон; величина Е
выражает максимальное значение крутящего момента, развиваемого турбиной.
Таким образом, ^изменение крутящего момента турбокомпрессора в
зависимости от числа оборотов и мгновенного изменения температуры газа перед
турбиной (до ^3max==cons^:) приближенно можно представить так, как показано
на фиг. 6.7.
Характер зависимостей MT=/(/z) и MK=f(n) определяет устойчивость
объекта регулирования при его разгоне, когда 7"зтах= const для всего диапазона
разгона. Как видно из фиг. 6.7, на участке I разгона объект неустойчив (или
близок к неустойчивому),, так как крутящий момент турбины нарастает круче,
чем крутящий момент компрессора, т. е. в уравнении (6. 10) К>С. На участке II
разгона объект устойчив.
Если ввести обозначения
i =
2rJ
т
Зм.г
"(Tl ~T.L,) «м.г (K - C) •
с (Tl -
338
то
получим уравнения движения в окончательной форме
(6.12)
(6.13)
действительные соответственно для участков I и II.
При условии, что в процессе всего разгона регулятором температуры
поддерживается заданное значение Тд, отыскание временной функции сводится
к интегрированию полученных уравнений обычным методом. Регуляторы
температуры газа обычно обладают достаточным быстродействием и поэтому
практически можно считать г£ «const. Для получения более точного результата
нужно рассмотреть процесс разгона двигателя с регулятором температуры.
1.0
0,8
0,6
ОА
0,2
0,2 44 0,6 0,8 1,0 П
Фиг 6.6, Характер зависимости Фиг. 6.7. Приближенный ха-
GK—f(n). рактер зависимости MT—f(ti)
и MK=f(n).
Для этого необходимо дополнительно ввести в рассмотрение уравнение
движения камеры сгорания и регулятора.
Воспользовавшись вторым и шестым уравнениями системы (1.21) и вы-
юоо°к
А
//
//
J2001
'К
ft—1
k
ражениями GK= Квп', %к — 1 = /(я* п
уравнение для камеры сгорания в виде
получим
(6.14)
где
П-А
гЗм.г
7*
1 Зм.г
Строго говоря, значения коэффициентов ах и а2 изменяются с изменением
числа оборотов, но величина этого изменения не очень большая; поэтому
приближенно можно считать ai=const и а2=const. С учетом того, что с увеличе^-
нием сверхзвуковой скорости полета целесообразно уменьшать значение як,
изменение этих коэффициентов будет еще меньше. Следовательно, уравнение
движения объекта регулирования будет включать уравнения (6. 12) или (6. 13)
и (6. 14) соответственно для участков I и II разгона.
Далее необходимо решать эти уравнения совместно с уравнением
регулятора температуры газа, что здесь не приводится, так как это практически сво-
22* 339
0,6
0,3
>
а?
/
п
//
/
V
2 4 б 8 Ю 12 tcett
Фиг. 6.8. Временные характеристики
разгона ТРД при 7"3=const.
/—приближенный расчет, 2—численное
интегрирование, 3, 4—экспериментальные данные.
дится к обычному интегрированию линейных дифференциальных уравнений
На участке I разгона большинство двигателей являются неустойчивыми (по
числу оборотов) поэтому применение, например, астатического регулятора
температуры газа без корректирующих устройств делает всю систему неустои-
F JF . чивой. Однако если степень не-
*_ о / г* /л/?/?0 к устойчивости невелика (малы по-
Tj-"50 aOc ~'j ~'oo° аос ложительные корни), то за время
прохождения процесса на первом
участке значение заданной
величины Гз не может существенно
измениться и поэтому даже такой
регулятор может оказаться
приемлемым.
Приведенный выше
приближенный метод определения
временной функции дает точность
порядка 8-5-10%.
Для примера на фиг. 6. 8
приведены процессы разгона
двигателя при Г3=const (с идеальным
регулятором температуры) и с
астатическим регулятором
температуры (с компенсацией
погрешности термопары). Там же
приведена экспериментально снятая
кривая разгона того же двигателя
с тем же регулятором температу-
тры. Этим методом легко также получить и временную характеристику по тяге,
развиваемой двигателем в процессе его разгона. Для этого необходимо только
ввести коэффициент связи между числом оборотов и реактивной тягой.
г) Системы разгона, работающие по другим
параметрам двигателя
Приведенные выше возможные способы и системы разгона
двигателей, несмотря на их простоту, обладают тем существенным
недостатком, что они не учитывают границы устойчивой работы
самого двигателя (границы помпажа компрессора). Практически
всегда стремятся возможно полнее использовать допустимые
избытки расхода топлива в процессе разгона двигателя, поэтому
возможные неучтенные отклонения от расчетного закона дозирования
топлива могут приводить к тому, что двигатель будет переходить
в неустойчивую область работы (в область помпажа компрессора),
чего нельзя допускать.
Из теории двигателей известно, что если выражать
характеристики двигателя (линию совместной работы турбины и
компрессора) в приведенных параметрах, то граница области устойчивой
работы двигателя перемещается незначительно по отношению
к линии совместной работы турбины и компрессора.
Пользуясь сказанным, можно представить ряд комплексов
параметров двигателя, по которым можно управлять режимом
разгона двигателя, не опасаясь попасть в область неустойчивой работы
двигателя. Системы разгона, работающие по таким законам,
позволяют более полно использовать возможности двигателя.
340
Анализ работы систем разгона ТРД при различных условиях
полета самолета показывает, что с увеличением высоты и скорости
полета время приемистости изменяется мало. Это объясняется тем,
что, с одной стороны, число оборотов малого газа увеличивается
с увеличением высоты полета и поэтому диапазон разгона
двигателя по числу оборотов сокращается; с другой же стороны — с
увеличением высоты полета величина избыточного крутящего момента
дМтк уменьшается. Действительно, из основного уравнения дви-
dn
жения 2nJ -^~ =АМТк следует, что время разгона двигателя
dn
vr ЛЛ*™
уменьшение разности nmax—Ям.г и уменьшение АМтк практически
компенсируют друг друга и
поэтому значение этого
интеграла изменяется мало.
Существенного улучшения
процесса разгона двигателя
можно достичь, если
стремиться все режимы работы
двигателя получать либо при
неизменном числе оборотов, либо
при минимальном его
изменении. В этом случае лишь малая
часть тепловой энергии будет
тратиться на разгон ротора
двигателя; поэтому изменение
режима работы двигателя мо-
П Об/мин
'max
п2 ИГ
Нг
щ
У
у
6 8 W 121 сек
Фиг. 6.9. Процессы разгона.
жет осуществляться
практически со скоростями
срабатывания управляющих органов.
Однако для осуществления такого способа разгона двигателя
необходимы дополнительные регулирующие устройства для
компрессора (желательно и для турбины), что, естественно,
усложняет всю систему управления двигателем.
Для представления о характере переходных процессов при
разгоне двигателя, когда в качестве устройства, обеспечивающего
разгон, используются одновременно замедлитель и автомат
приемистости, на фиг. 6.9 приведены осциллограммы разгона для
различных условий работы двигателя с осевым компрессором. Для
ТРД, режим работы которых связан с изменением числа оборотов,
время разгона от числа оборотов, соответствующих режиму малого
газа, до числа оборотов, соответствующих максимальному
режиму, составляет £Раз=10-^20 сек. Для тех ТРД, у которых получают
различные режимы работы или при неизменном числе оборотов,
341
или при очень малом диапазоне их изменения, время разгона
может составлять £раз=2-нЗ сек.
При проведении конкретного расчета процесса разгона
необходимо учитывать работу антипомпажных устройств компрессора,
с помощью которых, с одной стороны, перемещается граница
неустойчивой работы компрессора, а, с другой, — изменяется и
характеристика совместной работы турбины и компрессора. Это должно
учитываться при определении величины допустимого избытка
расхода топлива (или величины избыточного крутящего момента).
2. ТУРБОВИНТОВЫЕ ДВИГАТЕЛИ
Рассмотрим разгон одновального ТВД с одним винтом, когда
режимы работы двигателя определяются наклонной линией
рабочих режимов. Как отмечалось выше, принципиально нет никакого
различия между разгоном ТРД и ТВД, так как для обоих
двигателей в процессе разгона необходимо поддерживать максимально
возможный крутящий момент на валу двигателя.
Однако в ТВД разность между крутящим моментом
турбокомпрессора и моментом, поглощаемым винтом, зависит не только от
величины крутящего момента турбокомпрессора, но и от момента
винта. Уменьшая момент винта, можно увеличить величину
избыточного момента и тем ускорить разгон двигателя. Следовательно,
в процессе разгона ТВД должны участвовать в работе как
устройство, обеспечивающее максимально возможный крутящий момент
турбокомпрессора, так и регулятор числа оборотов винта, с
помощью которого можно изменять момент на винте.
Рассмотрим систему разгона ТВД, когда устройством,
обеспечивающим приемистость двигателя, является ограничитель
максимальных чисел оборотов, схема которого приведена на фиг. 6. 10,
а в качестве регулятора числа оборотов используется астатический
регулятор без корректирующих устройств. Эта схема полностью
аналогична схеме, приведенной на фиг. 2.53.
Работа ограничителя максимальных чисел оборотов заключается
в том, что он осуществляет изменение расхода топлива в двигатель
в соответствии с числом оборотов в каждый данный момент
времени.
Из принципа работы рассматриваемого устройства (см.
пояснение к фиг. 2.53) следует, что если осуществить начальное
превышение расхода топлива над равновесным, т. е. увеличить расход
топлива по сравнению с необходимым для работы двигателя с
постоянными числами оборотов, то в течение всего времени разгона
двигателя будет поддерживаться избыток в расходе топлива.
Действительно, как только будет переставлена ручка 10 в сторону
увеличения числа оборотов (мощности) двигателя, топливный кран
повернется до соприкосновения с упором (штоком) 5 и увеличится
расход топлива в двигатель. Увеличение числа оборотов в связи
с этим приведет также к передвижению упора 5 в сторону увели-
342
чения расхода топлива и таким образом будет осуществляться
постепенное увеличение расхода топлива до тех пор, пока рычаг 8
не упрется в ручку 10, т. е. пока расход топлива не увеличится до
заданного.
Фиг. 6. 10. Схема устройства для разгона ТВ Д.
/—тахометрический датчик, 2—золотник, 3—жиклер, 4—сервопоршень, 5—шток, 6—кран,
7—валик, 8—рычаг, 9—пружина, 10—ручка управления, //—эксцентрик, 12—регулятор
числа оборотов ВИШ. 13—поршень гидропередачи, 14 и 16—приборы для измерения
давления, /5—прибор для замера температуры, /7—золотник.
Одновременно с изменением расхода топлива поворотом
эксцентрика 11 происходит перенастройка регулятора числа оборотов.
Если пренебречь инерционностью промежуточных звеньев такой
системы разгона, то в каждый данный момент времени данному
числу оборотов будет соответствовать вполне определенный расход
топлива, т. е. GT=f\(n) и, следовательно, крутящий момент,
развиваемый двигателем, будет равен
Так как разгон двигателя происходит при практически
неизменных Т\ и р*, корректоры не участвуют в процессе разгона двига-
343
теля. Анализ движения рассматриваемой системы разгона
проведем с помощью того же метода изоклин.
Исходным уравнением движения двигателя будет прежнее
уравнение:
Выразив момент Мв через число оборотов п и угол установки
лопастей винта ф в виде
М в = Суп2,
'получим уравнение движения двигателя
(6 15)
dt 2tJ V ;
Уравнение движения регулятора числа оборотов будет
<р=—(я — /г0),
где /Ср — коэффициент усиления регулятора;
п0 — сигнал настройки регулятора числа оборотов.
При большом сигнале рассогласования регулятор входит в зону
насыщения. Нелинейная характеристика с насыщением имеет вид,
приведенный на фиг. 6. 11. Следовательно, уравнение движения
регулятора можно записать в таком виде:
-^-=/i[*p(*-*o)b (6-16)
Решая совместно уравнения (6. 15) и (6. 16), получим
уравнение изоклин в координатах ф, п в виде
d9 2nJfi IKp(п — по)] ,л17.
—i- = . (о. 17)
dn f(n) Cyn?
Далее обычным методом строятся изоклины при d(p/dn=a = const
и по ним из начальной точки проводится кривая q>=F(n). Границей,
разделяющей всю плоскость на области, соответствующие
движению в зоне насыщения и движению в зоне пропорциональности,
будет условие п=п. При движении в зоне насыщения уравнения
изоклин будут:
rfy ^ 2-kJFq
dn f(n) —
а при движении в зоне пропорциональности
j<p 2nJKp (n — nQ)
dn
При построении таких кривых нужно иметь в виду, что
сущность действия регулятора числа оборотов заключается в том, что
при большом сигнале рассогласования (при большой величине
перенастройки регулятора) он стремится настолько резко уменьшить
344
df
dt
Фиг. 6.11. Нелинейная
характеристика регулятора числа
оборотов ТВД.
угол установки лопастей (уменьшить крутящий момент,
поглощаемый винтом), что это приводит к резкому уменьшению тяги,
развиваемой винтом.
Для избежания этого делают специальные упоры во втулках
винта, которые не позволяют регулятору уменьшить угол установки
лопастей меньше некоторого допустимого. Влияние этих упоров
на процесс разгона двигателя необходимо учитывать, соблюдая
условие ф>фтт.
Следовательно, на плоскости в
координатах ф, п должны быть области,
соответствующие работе регулятора
в зоне насыщения и в зоне
пропорциональности.
В качестве примера на фиг. 6. 12
приведена кривая ф=,/7(/г),
построенная в относительных величинах. При
построении кривой нужно иметь в виду,
что лопасти начнут отходить от упора
только по достижении двигателем
заданного числа оборотов. В данном
случае начальный режим двигателя
выбран таким: /г/ло = 0,7 и ф/фО = О,8.
По кривой q>—]F(n) видно, что в начале разгона угол установки
лопастей резко уменьшается вплоть до упора малого газа, равного
ФУпор/фо = 0,6,и далее разгон идет с неизменным углом установки
до момента /г/ло~1, т. е. до момента, когда число оборотов почти
достигнет заданного.
С этого момента винт, хотя и начнет загружаться
(увеличивается угол ф), но число оборотов все же будет возрастать, не
выходя, однако, из зоны пропорциональности регулятора. В зоне
пропорциональности происходит затухающее колебательное движение
с амплитудами по п и ф, которые видны из графика. На графике
также видно, что заброс, числа оборотов составляет около 10%,
а заброс угла установки лопастей — около 20%, что является
недопустимым из-за резкого изменения тяги.
Такой характер движения системы объясняется малой
скоростью перестановки лопастей винта. Увеличить же эту скорость
нельзя из-за малого запаса устойчивости системы регулирования,
который уменьшается с увеличением быстродействия ВИШ. Ввиду
этого в систему регулирования целесообразно включать
корректирующие устройства.
Если предположить, например, что в регулятор числа оборотов
включен идеальный акселерометр, который также может работать
в зоне насыщения, то уравнение движения его можно записать
в виде
^п0)}, (6.18)
345
где Кс — коэффициент усиления сервомотора.
. Зона Зонапропор- Зона
насьщения циональности насыщений
U7 \0.8 U9 1,0 V 1t2 t.3n/n0
улор минимального угла
Фиг. 6.12. Зависимость ф=/(«) и
изоклины для ТВД с астатическим
регулятором числа оборотов без
корректирующих устройств.
Зона пропорциональности
0,7/0,8 0.3 1,0 Ц 1,2 /,ЗЩ
Упор минимального угла
Фиг, 6. 13. Зависимость (p=f(n) и
изоклины для ТВД с регулятором числа
оборотов с акселерометром.
346
Исключив время из (6. 15) и (6. 18), получим уравнения изоклин
виде
/g
dn
Далее обычным методом строятся изоклины при d(p/dn=a = const
и по ним из начальной точки проводится кривая y—F(n). Для
примера на фиг. 6. 13 приведена кривая q>=F(n), построенная в
относительных величинах для того же двигателя, из которой видно,
что переходный процесс резко улучшился.
В этом случае уравнения изоклин будут
2nJKc\n-n + ^(/1->^с*л21
и
dn /(л) — Суп?- dn /(л) —С<р/г2
соответственно для движения в зоне насыщения и в зоне
пропорциональности.
По -полученным кривым y = F(n) можно представить характер
изменения тяги R, развиваемой двигателем. Для этого необходимо
воспользоваться зависимостью /?в = /(^, Ф, Я, q)- Эта зависимость
обычно принимается в виде
где D — диаметр винта;
q — плотность воздуха;
а — коэффициент тяги винта.
Коэффициент тяги винта а является функцией угла установки
лопастей <р и относительной поступи винта Я, т. е.
а=а(ф, X),
где X=V/Dn (V — скорость полета). Зависимость а(ф, К) обычно
задается в виде сетки кривых, как показано для примера на
фиг. 6.14. Соответствующие зависимости изменения тяги в функции
RB=f(n) приведены на фиг. 6.15, которые соответствуют кривым,
приведенным на фиг. 6. 12 и 6. 13. Из фиг. 6. 15 видно, что когда
в систему включен акселерометр, характер изменения тяги
протекает более благоприятно.
Анализ различных систем разгона ТВД при различных
условиях полета самолета показывает, что время приемистости двигателя
изменяется незначительно; это объясняется теми же причинами,
что и для ТРД. Здесь также можно достичь существенного
улучшения процесса разгона двигателя, если все (или почти все)
режимы его работы будут протекать при постоянном числе оборотов
(при вертикальной линии режимов) или при очень небольшом
диапазоне их изменения. В этом случае время приемистости практиче-
347
ски определяется только скоростью перестановки лопастей винта
и допустимой величиной заброса по числу оборотов; при этом
скорость перестановки лопастей мо- _
жет быть существенно увеличена, я^тг8-
если в регулятор числа оборотов ъо
включено корректирующее уст- кг
ройство. и
ю
0.9
0.8
0.7
0.6
45
0*t
0,3
0.2
0J
*——■
*--^
\
\
■■ —
==а-*
\
V
s
^vl
ч
\
Ч^
ч.
\
V
к%)
^>
\
\
\
V
\
ч
\
ч
ч
\
>
ч
\
\%
\
\
\
\ ;
_|
1
к
||
\^
С акселерометром i
Без
Мб
акселеро-
JTWCL "
/
v JZ-
/
> 1
П
/
\
—
Фиг. 6. 14. Характеристика винта
вида a=f(q>, Я),
0.7 0.8 0.9 1,0 11 1.2 1.3П/П
Фиг. 6.15. Зависимость /?в=/(я)
для регулятора с
акселерометром и Оез акселерометра.
Глава VII
СИЛОВЫЕ УСТАНОВКИ
СО СВЕРХЗВУКОВЫМИ ПРЯМОТОЧНЫМИ
ВОЗДУШНО-РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ (СПВРД)
1. ОСНОВНЫЕ СВЕДЕНИЯ ПО ЭКСПЛУАТАЦИОННЫМ СВОЙСТВАМ
Прямоточные воздушно-реактивные двигатели (ПВРД)
отличаются от газотурбинных двигателей отсутствием турбины и
компрессора; сжатие воздуха >в ПВРД происходит за счет торможения
набегающего потока в диффузоре (воздухозаборнике). В таком
двигателе осуществляются те же необходимые процессы сжатия,
подведения тепла и расширения рабочего тела, какие характерны для
любого воздушно-реактивного двигателя.
В принципе, ПВРД могут применяться на летательных
аппаратах, предназначенных как для скоростей полета меньше звуковых,
так и для сверхзвуковых скоростей, но главным образом они
предназначены для сверхзвуковых полетов, а именно: для крылатых
сверхзвуковых аппаратов дальнего действия, сверхзвуковых
зенитных управляемых аппаратов и снарядов класса воздух—воздух.
Целесообразность применения СПВРД на летательных
аппаратах, предназначенных для очень больших скоростей полета
(Мп = 2,5ч-5,0 и более), обусловлена тем, что на этих режимах
полета они имеют меньший удельный расход топлива, чем двигатели
любого другого типа.
На фиг. 7. 1 приведена схема СПВРД, из которой ясен принцип
его работы; там же показан характер изменения давления,
температуры и скорости течения воздуха и газа по тракту двигателя.
Реактивная тяга у такого двигателя образуется так же, как
и у ТРД, за счет истечения с большой скоростью газов из
реактивного сопла.
Наиболее сложным элементом в таком двигателе является
диффузор (воздухозаборник) для торможения (сжатия) воздуха от
сверхзвуковой до дозвуковой скорости. Основные свойства такого
диффузора полностью аналогичны свойствам диффузоров
(воздухозаборников), применяемым для ТРДФ, которые подробно
рассматривались выше. При достаточно большом диапазоне изменения
скорости полета целесообразно применять регулируемые диффу-
349
зоры, например, посредством передвижения центрального тела или
обечайки диффузора и использования других регулирующих
устройств.
Ударные
Набегающий, потону] Волны
Воздуха - "**г -
Фиг. 7. 1 Схема СПВРД и характер распределения температур, давлений
и скоростей потока по тракту двигателя.
а) Основные сведения по характеристикам
Основные эксплуатационные свойства СПВРД можно
выразить рядом характеристик, основными из которых являются
регулировочные (дроссельные), скоростные и высотные.
Регулировочные (дроссельные) характеристики выражают
зависимость основных параметров двигателя от температуры газа
п
ТГ. Основными параметрами являются: удельная тяга /?уд= Т^"'
равная отношению развиваемой двигателем реактивной тяги Rn
п
к расходу топлива GT; коэффициент тяги CR=~ , равный отно-
шению развиваемой двигателем тяги к произведению величины
лобовой площади двигателя (миделя) 5М на величину скоростного
К
напора набегающего потока q=ir рн№ п.
Для примера на фиг. 7. 2 показан характер указанных
зависимостей, определяющих регулировочную характеристику двигателя
с регулируемым реактивным соплом для различных скоростей по-
350
Я> 11 им
£B=const
лета и для диапазона изменения Тт в пределах 1300° K<7V<2200PK.
Здесь проходное сечение реактивного сопла изменяется так, что
расход воздуха остается постоянным и равным максимально
возможному, и поэтому коэффициент расхода срд= 1.
Показанный на фиг. 7. 2 характер протекания коэффициента CR
объясняется увеличением скорости истечения газа из сопла с
ростом температуры газа. Поэтому и тяга, развиваемая двигателем,
возрастает с ростом Тт. Однако с увеличением скорости полета Мп
значение CR снижается из-за увеличивающихся потерь и
уменьшения относительного подогрева
газа.
Показанный на той же
фигуре характер протекания
удельной тяги /?уд
объясняется Тем, ЧТО ВеЛИЧИНе /?УДтах
соответствует оптимальный
подогрев газа вопт; при
увеличении или уменьшении 9 от
значения 9 опт значение /?уд
уменьшается. С ростом
скорости полета RyA несколько
возрастает.
Если реактивное сопло
нерегулируемое, то для такого
двигателя при TT=TT,VSiC4 все
параметры, определяющие
режим работы двигателя, будут
одинаковы с параметрами дви-
Фиг. 7.2. Характер протекания
регулировочных (дроссельных) характеристик.
гателя, у которого сопло
регулируемое; при ТтфТт^асч эти параметры снижаются для
двигателя с нерегулируемым соплом.
Скоростные характеристики выражают зависимость тех же
основных параметров двигателя от скорости полета Мп при
постоянной температуре газа 7r=const. Для примера на фиг. 7.3
показан общий характер протекания зависимостей /?УД=/(МП)
и Сд=/(МП) для двигателей с регулируемыми и нерегулируемыми
проходными сечениями, для диапазона изменения Мп в пределах
2,5<Мп<4,0.
Для двигателя с регулируемыми сечениями указанный
характер изменения CR объясняется уменьшением степени подогрева
воздуха (поскольку Тт—const, а температура воздуха на выходе из
воздухозаборника увеличивается); характер изменения 7?уд
объясняется тем, что сначала в результате роста давления газа в камере
сгорания и роста величины термического к.п.д. значение удельной
тяги /^''увеличивается, а далее — в результате уменьшения
относительного подогрева воздуха (газа)—значение /?уд уменьшается.
Для двигателя с нерегулируемыми сечениями к влиянию
указанных выше величин добавляется влияние диффузора и сопла, в ре-
351
зультате чего такой двигатель лишь на расчетной скорости полета
Мп.расч имеет значения CR и /?уд, одинаковые с их значениями для
двигателя с регулируемыми сечениями, а при Мп=£Мп.Расч значения
CR и 7?уД уменьшаются.
Высотные характеристики выражают зависимость тех же
основных параметров двигателя от высоты полета при Mn=const и
неизменном коэффициенте
избытка воздуха а = const. Для
примера на фиг. 7.4 показан
общий характер протекания
зависимостей /?уД=/(Я) и CR =
^n = const
od = const
Тн-const; — двигатель с регул и -
руемыми сечениями
7r = const; двигатель с
нерегулируемыми, сечениями.
Фиг. 7.3. Характер протекания
скоростных характеристик.
Ним
Фиг. 7.4. Характер протекания
высотных характеристик.
Некоторое увеличение /?уд и CR до Н=П км объясняется
уменьшением температуры воздуха с высотой (по МСА) на входе в
двигатель. При полетах на высотах Н>\\ км ЯУД и CR практически
сохраняют свои значения. Развиваемая двигателем реактивная тяга
/?д уменьшается с ростом Н из-за уменьшения расхода воздуха
через двигатель. Значение коэффициента восстановления давления
в диффузоре Од не зависит от высоты полета Я.
б) Возможные законы управления
Основным законом управления СПВРД является условие
получения максимальной эффективной тяги, которая при прочих равных
УСЛОВИЯХ СООТВеТСТВуеТ УСЛОВИЮ (7д=(Хдтах и фд=1'
Однако в зависимости от назначения СПВРД законы
управления все же будут различными. Для зенитных управляемых
аппаратов, для которых режим разгона является основным, необходимые
законы управления СПВРД легко уяснить из фиг. 7.5, где показан
характер зависимости величины коэффициента тяги CR от скорости
полета Мп при различных значениях коэффициента избытка
воздуха а.
352
Из приведенных кривых видно, что в диапазоне Mnmini<Mn<
<Mnmin2 необходимо поддерживать максимальное значение сгд,
а при Mn>Mnmm2 необходимо поддерживать а~1*.
s-^mzx
мп
Фиг. 7. 5. Возможные законы управления СПВРД.
Для крылатых аппаратов дальнего действия, для которых
крейсерский режим является основным, необходимо дополнительно
поддерживать определенную скорость полета Мп.Расч, что видно из
аналогичных зависимостей, приведенных на фиг. 7. 6. Из тех же зави-
maoc
M
Мт
пттпа ^п.расч7 т
Фиг. 7. 6. Возможные законы управления СПВРД.
симостей видно, что во всех случаях необходимо ограничивать
значения amin<ct<amax для обеспечения возможного диапазона
изменения тяги двигателя.
* Если аппарат разгоняется с помощью специальных устройств до
Мп>Мп min2, то в этом случае отпадает необходимость в поддержании 0Д max.
23 1327
353
Таким образом, несмотря на кажущуюся простоту
рассматриваемого двигателя, эксплуатационные свойства его по условиям
полета и режимам работы изменяются весьма существенно.
2. УРАВНЕНИЯ ДВИЖЕНИЯ СПВРД
а) Вывод уравнений движения
Рассматриваемый двигатель в отношении происходящих в нем
процессов является весьма малоинерционным и, кроме того, в нем
нельзя выделить существенную инерционность, как это делалось
при рассмотрении ГТД.
Для СПВРД будем учитывать два аккумулятора энергии —
энергию сжатого воздуха (газа) и тепловую энергию.
Для вывода уравнений движения в линейном приближении
с. учетом указанных инерциониостей необходимо использовать два
уравнения — уравнение расхода и уравнение теплового
баланса, т. е.:
(Q,+QT-Qc)dt=dQ,
где GA, GT, Gc — соответственно расход воздуха через диффузор,
расход топлива и расход газа через реактивное
сопло;
Qz, Qt, Qc — соответственно приток тепла в двигатель через
диффузор, приток тепла в результате сгорания
топлива и расход тепла через реактивное
сопло;
G, Q — соответственно количества воздуха (газа) и
тепла, содержащихся в двигателе.
Для дальнейшего изложения примем в качестве исходных такие
уравнения:
^ -ОС; (7.1)
Qc- (7.2)
Рассмотрим подробно уравнение (7.1). Количество воздуха
(газа) G, содержащегося внутри двигателя в процессе
установившегося движения, можно определить, если рассмотреть каждый
элемент двигателя отдельно. Для каждого элемента двигателя
содержащееся в нем количество воздуха (газа) определяется так:
Если весь двигатель условно разделить на три характерные
участка— диффузор, камеру сгорания и сопло — и если ввести в
рассмотрение параметры потока в соответствующих сечениях, как
указано на фиг. 7. 1, то можно написать:
где Аи Л2у Л3 — постоянные коэффициенты;
У и Уъ Уз— объемы соответствующих участков двигателя;
354
Уд» Yr> Yc — плотности воздуха (газа) в указанных сечениях
двигателя.
Используя очевидные зависимости
^=Ш* и Yo=-^ (7.4)
Ро \Yo/ #T
и учитывая, что на втором участке (камера сгорания) происходит
подвод тепла, после дифференцирования (7.3) с учетом (7.4)
получим вместо (7.1):
A\V\_dP& I A2V2 dpr А2У2Уго dTr , АгУг dpc _^ , ^ _
Г ^ "Г #Г ^ Тг0 dt ^ RTc0 dt д^" т с*
(7.5)
Для каждого участка двигателя содержащееся в нем количество
тепла определяется так:
Тогда для тех же участков двигателя и тех же сечений по его
тракту можно написать
где В\, В2. В3 — также постоянные коэффициенты; у« и Т% —
плотности и температуры воздуха (газа) в тех же сечениях тракта
двигателя; ср — теплоемкость при постоянном давлении.
Дифференцируя (7.6), с учетом (7.4), вместо (7.2) получим
dpA . срВ2У2 dpr СрВзу3 dPc __
Нелинейные зависимости для G№ Gc, Q№ QT, Qc примем в
неявном виде такими:
<Зд=Од(Мп, о,, <рд, Мд, Тн, рн);
OC = OC(FC, 8, Мп, Т„, р„, о,);
Рд=Фд(мп. °д. ?д. мд. 7л» z7//); ^ (7-8)
Qc=Qc(Mn, 8, .Рс, од, /;„, Гя);
QT=QT(OT).
В полученных уравнениях (7.5), (7.7), (7.8) число переменных
больше числа уравнений. Для получения совместной системы
уравнений необходимо дополнительно использовать такие
зависимости:
Л = Л(МД, Мп, од, рн)\ )
Рг = Рг(ал> Рн, Мг> Мп); |
Тг=Тг(в,Тн, МР1 Мп); 1 (7.9)
]
Mr = Mr(Fc); J
23* 355
Мп
Мп
(7.9)
Первые пять уравнений (7. 9) выражают зависимость давлений
и те!мператур воздуха (газа) в исходных сечениях тракта
двигателя и могут быть написаны в явном виде, что и приводится ниже;
последние две зависимости не могут быть определены в явном виде,
поэтому их нужно понимать как записанные в неявном виде
характеристики диффузора, определяемые экспериментальным путем *.
Линеаризируя (7.5), (7.7) и (7.9), с учетом (7.8), получим:
н
4"K7
4- ХРг~
5. ХТ —
8. Х9^ —
Здесь приняты следующие обозначения:
Т РпО ^1^1 . г РгО ^2^2 . г УгО л \/ .
У1;7д — "7Г~~РГ ' 1Рт~7Г Р Т ' ХТт~~~7Г 2 2'
(7.10)
до
гО
Шп
* В выражениях (7. 8) и (7. 9) не учитывается влияние углов атаки и
скольжения летательного аппарата на характеристики диффузора. В действительности
же, если эти углы будут значительно отклоняться от расчетных значений,
их влияние нужно учитывать введением, например, зависимости ад=
= сГд(6, Мп, ^с, /к, Y*)> гДе Y» — Угол атаки (с учетом влияния угла
скольжения).
356
-М • Д" =rJ cO/^^c \ .
dGT dGc \
is ^#0 / оил
KiPH=-~-I-
°r Qo
^н
; тч
=~o7
Qo R
Qo V °v /o
_?jio fdQ
Оо \дол
Fc0 (dQc
1
M7
K.
2/7
н Qo
= Гяо/^д dQe\
Со К *Vo
A ^до
Д /^ДО V Лтд /о ^ ^0 \ ^я/0 Д /?г0 \ дЧ /0
ЛН0_1иРг_\ . if _Мг0 / с//^г\ t ^ ivinQ /^/^г \ .
1^ I > 'MMj. "—" l^w I ' ^4Мгт— l^»« I»
A-5e = f-(^) ;
-* гО
iv- Мп0 /^г \ . /^ ад0 /дрс\ .
д5мп-^-ктгЬ ^"^IX"' '
дРс\ .
J
Мп0
/^ ivin<) / ^с \ . iv- «О / уад \ . /^ iV1n0 / уат \ .
Д6МП — 777~~ » ^79 — —~ , ^УМт, — I ТП~) *
К7Р=-
ад0 V дГс Л ' 7/« ад0 V dlK )0 ' 89 ТдО V ^9 /о'
Fc0 /dN[r\ у А/?д т у А/?г # у. ДГГ # у. А/7С #
РлО РгО * гО РсО
АМП
Аад
мд
357
А/^с . у _Аб .
_Арн. у _№Т
А-р—
В полученной системе уравнений пятнадцать переменных, из
которых шесть: XFc, XGl, Х1к, ХМп, Хрн, Хтн являются внешними
воздействиями, поэтому число уравнений в (7. 10) совпадает с
числом переменных.
Разрешая (7. 10) относительно Хц\л, Хв, ^5Д? получим (в
предположении Tn^const, рн = const):
т; (7.11)
alP + а2) Хь = (V2 + V + *s) хмп +
т; (7.12)
7)XGT. (7.13)
Полученные выше линейные дифференциальные уравнения
справедливы лишь для определенных пределов изменения переменных,
а Ихменно: для таких пределов, при которых линейная система
уравнений еще может приблизительно правильно описывать
действительные процессы. Из характеристик, приведенных на фиг. 1.47,
видно, что они являются существенно нелинейными и могут быть
приближенно составлены из кусочно-линейных участков. Поэтому
произведенная выше линеаризация справедлива лишь при условии,
если изменение соответствующей переменной происходит в
пределах одного «куска» кусочно-линейной зависимости. Ниже
предполагаем, что указанные условия выполняются.
Для вывода уравнений движения по коэффициенту избытка
воздуха а и реактивной тяге /?д необходимо дополнительно
использовать зависимости
a = a(8, Мп, Тн)\
Яд=Яд(Мп, Мд, /%, рн, од, срд).
Линеаризируя (7. 14), получим
Ха — К ю qXq = /<1омп^мп "Г КШнХТн; (7. 15)
-<А' (7Л6)
358
где
(да \ гг Мп0
да \
дТн/0
М10
Мп
KwPtJ=-
U ~ \ rt rt
1 0
X —Aa • У — А/^д
ал ^до
Совместное решение (7. 10) с (7. 15) или (7. 16) дает такие
уравнения (в предположении Тн=const, рн=const):
gjr0T; (7.17)
а1;? + а2) XR = (b15p*+bl6
XGT. (7.18)
В уравнениях (7.11), (7.12), (7.13), (7.17), (7.18)
постоянные коэффициенты а0, ах ..., Ьо, Ъ\ ..., с0) сг ..., /0, /i ..., m0, mi ...
составлены из постоянных коэффициентов исходных уравнений.
При выводе уравнений было принято, что выделение тепла при
сгорании топлива происходит мгновенно и распределение
параметров в самом двигателе не учитывалось. Поскольку СПВРД
обладает малой инерционностью, существенные запаздывания
учитывать необходимо. В дальнейшем мы будем учитывать лишь
запаздывание т, связанное с выделением тепла при сгорании
топлива.
Аналогично тому, как это делалось при выводе уравнений для
ТРД, учет запаздывания т сводится к тому, что в уравнениях
движения, полученных выше, необходимо произвести подстановку
*), (7.19)
*) В дальнейшем принимаем те же обозначения: XG =Х0 .
359
в результате чего в правой части уравнений движения перед
координатой Xgt необходимо поставить оператор е~хр.
Из полученных уравнений видно, что при нанесении
возмущений Хъ\п [1], ^VJl]» ^/iJl] все Регулируемые параметры изменяются
Фиг. 7. 7. Структурная схема СПВРД.
скачком, что является отличительным и существенным свойством
рассматриваемого двигателя; воздействие XGt[1] не приводит
к скачку.
Структурная схема рассматриваемого двигателя,
соответствующая выражениям (7. 10) и (7. 16), приведена на фиг. 7.7,
откуда легко видеть путь прохождения сигналов.
б) Определение коэффициентов
Для определения выражений постоянных коэффициентов, входящих в
полученные выше уравнения, необходимо воспользоваться известными из курса
теории двигателей соотношениями, определяющими связь между параметрами
состояния воздуха (газа) в характерных сечениях двигателя.
Давления и температуры воздуха (газа) в потоке за диффузором
обозначим рд и Гд, в камере сгорания перед реактивным соплом рг и Гг, в
критическом сечении реактивного сопла рс и Тс, расход воздуха через диффузор
и через сопло Сд и Gc', все эти величины определяются через другие параметры
рабочего процесса двигателя в явном виде следующим образом:
К (Мд)
(7.20)
360
RTU t (Mn)
H L J
Gc =
т/
kg [t(Mc)]
[t (Mn)]
Кроме того, связь между Мг и Fc выражается так:
(7.20)
мг[т(мг)]2(^г 1}--^-
(7.21)
Fr \kr -f
Здесь т(М,) и к (М[) определяют функции (1.126) в соответствующем
сечении двигателя; ас и ак — коэффициенты потерь давлений в сопле и камере
сгорания соответственно; FK, Fr — площади сечений в конце диффузора и
камеры сгорания соответственно.
Расходы тепла через диффузор и реактивное сопло и тепло, вносимое в
камеру в результате сгорания топлива, в явном виде выражаются так:
ЗЛ-1
Ос =
г"1 I
[t(Mc)]
2(*г-1)
QT = HUG^KX
Зависимости (7. 14) в явном виде выражаются так:
к.ст (Мп) 1
;
а = ■
(7.22)
(7.23)
'ср
•х
асак X
(Мп)
ft+1
*n)J
(7.24)
361
Здесь WCp — скорость газа на срезе сопла; Vn — скорость полета. Выражение
(7.24) соответствует случаю, когда отсутствует дополнительное (внешнее)
сопротивление диффузора, т. е., когда имеется расчетное течение в диффузоре
и когда в реактивном сопле газ расширяется до давления рн.
По приведенным зависимостям определяют выражения для частных
производных и далее выражения для всех коэффициентов, входящих в исходные
уравнения.
Проделав указанное, получим такое выражение для приведенных в (7. 10),
(7. 15) и (7. 16) постоянных коэффициентов:
^ \ ^с /О Д ^сО
IS IS IS IS К •
Л1ГС~ A2FC~A3^ — А3ря-А4?д-
Quo—Qco „ Quo
vo д vo
/дд \ ^— ^ Q.iO— QcO
(mn)0 2 Qo ;
^=т-
Q
тО
9
= мпо kx (Мп)о;
(Мг)0;
~1)т (Мг)0;
10В
1
-l)t (Мп)о;
a0 u
K,1C =1 +
1+
/ О^
V1 + gR
Г«(Мп)1 *г
IОк"сОд J
362
Qo= Qco=
to; <?o = ^co = Сд0 + GT;
МО
1 +
fer--l Гтг(Мп)1 kr
_2_loKocaJ
Г*(Мп)1 Лг
Ьк°с°д J
GaVu
(k+l)
Постоянные коэффициенты Лг- и £*, входящие в выражения для
коэффициентов Tipл, Т2рд, Т\рг, Т2рг . . . определяются по геометрическим данным
и по данным распределения температур и давлений (в радиальном направлении
и по длине) для каждого участка двигателя. Смысл введения этих коэффи
циентов в выражения (7.3) и (7.6) состоит в том, что они позволяют
определять количество воздуха, газа и тепла на каждом участке двигателя по
значениям параметров в выбранном сечении. Поэтому указанные коэффициенты
являются коэффициентами пропорциональности и математически могут быть
выражены так:
f ydV ср \ Г y dTdV
v ;
■f Ь
vlTl
Здесь I y dV выражает действительное количество воздуха (газа),
содержащегося в г-м участке двигателя, а
RTt
— то же количество, но
подсчитанное по параметрам в выбранном сечении. Соответственно
С С
у dVdT выражает количество тепла, содержащегося на i-м участке
двигателя, а
R
- — то же количество тепла, но подсчитанное по
параметрам в выбранном сечении. Из приведенных в (7.10) выражений для
коэффициентов Т^р , Г2р , Tip и Т%р видно, что при всех остальных
одинаковых условиях с увеличением размеров двигателя численные значения этих
коэффициентов увеличиваются, так как увеличивается длина
соответствующих участков двигателя.
в) Примеры
Пример 1
Задание. Определить приближенное значение коэффициентов линейного
уравнения для СПВРД по параметрам ад, Мд, 6 при наличии регулируемого
реактивного сопла и нерегулируемого диффузора.
363
Исходные данные. Данные по двигателю принимать следующими.
Мп = 4; Н = 25 км (рн= 18,6 мм рт. ст. = 2480 н/м* = 253 к
5ГЯ=216,5°К; #в = 42677 кдж\кг-= 10200 шал/кг; i)K.c=l;
ас = 0,9; ак = 0,97; рГ = 11,2 н/см* = 11400 кГ/м*
рл = И ,5 л/сл2 = И 750 л:Г/^2; /?с = 5,85 я/с^2 = 5970
Мд = 0,323; Мг = 0,336; Л = 1,4; Лг = 1,33; /? = 29,3;
^Фд дфк дуп
^ = ^=^ = 0; ^ = 42,5,3/^; Ст = 1,5
^ = 0,24; ^ = 0,53 лЗ; Fc = 0,452^2; 0=2,11; 7д = 890°К;
Гк = 1880°К; Гс = 1650°К.
Значения постоянных коэффициентов А-и В;, V-и входящих в выражения
TipR, ^ipr"-y принимать такими:
^ = 0,83; Л2 = 1,6; Л3 = 0,8; Л2 = 0,81;
Я2 = 1,18; В3 = 0,73; ^=0,8^; К2=2,0М
У3 = 0,6 лз.
Величину времени запаздывания х принимать равной т=0,1 сек. Внешние
условия характеризуются величинами рн = const; 7^ = const.
Решение. Определим значения базисных величин расходов и значения
функций т-(Мг) и л(М<).
В соответствии с (1. 126) находим:
(Мп) =
1,4
г. (Мп) = [t (N[n)]k X = (0,238)lf4 l = 0,0065;
(Mr) =
(1,4-1)0,3232
1)М^ + 2 (1,33—1)0,3362
В соответствии с (7.22) находим:
ЗЛ-1
3 . 1,4-1
-,2 (1,4-1)
= 0,24-0,53-0,Г л"° — ' -'" -" '" ' °'98
= 2200 ккал/сек = 9205 кдж/сек.
364
qt0= //eGTT)K.c = 10 200-1,5-1 = 15 300 ккал/сек = 64 100 кдж/сек;
Qc0 = QQ = <Эд0 + Qt0 = 2200 + 15 300 = 17 500 ккал\сек = 73 220 кдж/сек.
Далее определяем значения коэффициентов в (7.10)
Т(?) = 42.0,283-b
42,5 — 44,0 °
44,0 ^~°'156;
Х
K^^L-^U -""" =-0,034;
д Gc0 44,0
Gc0
2200-17 500 С°
Х 17 500 — 5'32>
Qao-Qco 2200-17 500
д= Qco ~ 17500
2?~(? ~
17 500
17 500
15 300
r 0^232 1
L 2 v J
Кт =— ^М^т(Мд)0=— 1,4-0,3232.0,98=—0,142;
п)о = 42.1,4-0,238 = 5,33;
г Мг)0 =-0,3362-1,33-0,982 =-0,147;
^4МП= ^змп^ 5'33' ^5МГ =~ М?о № - 1) т (Мг)о =
=—0,3362(1,33 — 1).0,982 =—0,036;
/СбМд= М^о(Л-1)т(М„)о = 42(1.4-1)-0,238 = 1,52;
365
= |о,
33б fl —0,3362 1>
c Jo 0,3
^8Mn=Ar8Fc=0;
Ло ^ 1 11750-0,83-0,643
"7=
i^ = G7w^= 44-29,3-890 =6
_/>co АъУг _ 5970-0,8-0,41 _ 3
1Pc Go RTCO 29,3-44-1650
;
T = Yrt j ,/ ^го Л2^2 14000-1,6-0,94
17* — AoVо = = = lo.O* 10—**Z
1Гг G 2 2 ^rrr0 Go 44-29,3-1880 ' "
14000-1,6-0,94
18510 '
2Рд=
44-29,3-1880 =18'5
11750-0,81-0,643-0,24
17500-29,5
14000-1,18-0,94-0,24
П"^ QcoRr = 17500-29,5 15'610 :
PcoB3VsCp 597Q ■ Q, 73 • 0,41 • 0,24 _
T2Pc~ QcoRr ~ 17 500-29,5 -Ь2-Ю ■
«
Используя значения приведенных выше коэффициентов, получим такую
систему уравнений:
п +18,5.103;,* - 18,5-103/?Х +1,5.103^*
А г 1 J. С
— 0,5Х9= 0,034.АТ„ — 0,156ZM — X„ ■
» С/т Мп Ус)
ХР-Х. + ,Мд Мп; ^^ ^
^_ -*, = 1,52Z -0.12Z ; Хр-Ха=5,ЗЗХ .
Тг ° Мп г с ус °д Мп,
Ха —0,914^=— 5,07*^—0,9^
366
Разрешив полученную систему уравнений, будем иметь:
(1,3-10-6^2 + 17.10-3^+1)^ =—(34.10-6/72 — 3,3-10-3/? + 5,65) Xы —
Д мл
— (8,9-10-6/72 + 7,7-10-3/?+ о,58)А". + (0,7-10~3/? + 0,59)е~*ЛрХп ;
гс от
(13-10-б/?2+17-10-3/?+ 1)^м =_ (16-10-5/?2+ 26-10-3/7 — 0,33) ^м —
— (33.10-5/72+3,1.10-2/,+ 1,06) JX +(4,1-10-3/7-0,39)£-°'1/7Х. ;
(13- 10-б/?2 + 17, Ю-З/7 +1)Хе=— (6-10-5/72 + 10,6-10-2/7 + 0,67) Хм —
мп
-(0,5-10-6/72 + 0,8-10-3/7+ 0,07)*_ +(0,7.10-3/7 +0,65)^-°'1/7^ .
Пример 2
Задание Определить приближенное значение коэффициентов линейного
уравнения СПВРД по а (коэффициенту избытка воздуха).
Исходные данные. Данные по двигателю принимать те же, что
и в первом примере. Кроме того, принимать L= 14,8; ао=2,О. Внешние условия
характеризуются величинами p^^const; rH = const.
Решение. Определим значения коэффициентов, входящих в (7.15):
ео(ао+^-) 2,11 (2 + ^)
106 ~ ао(во-1) ~ 2(2,11-1) ~ ' '
(2 + ^) (1,4-1)0,238 =-0,79.
Тогда уравнение (7.15) будет таким:
Далее необходимо из этого уравнения определить Х§ и подставить его в
уравнение, разрешенное относительно Х0, из первого примера. В результате получим
такое уравнение движения:
(13-1О-6/72 + 17-10-3/7+ 1)Ха=(1,7-10-б/?2 +7,5-10-3/7 +0,53) ZMn+
+ (1-10-6/72+ 1,6-10-3/7 + 0,14) X .— (1,4-10-3/7+ 1,3)£-0Л/7^ .
Пример 3
Задание. Определить приближенное значение коэффициентов линейного
уравнения движения того же СПВРД по реактивной тяге £д.
Исходные данные. Данные по двигателю принимать те же, что
и в первом примере. Кроме того, принимать /?до=: 1900 кА=18620 н.
367
Решение. Определим значения постоянных коэффициентов, входящих
в (7. 16), для чего предварительно определим скорость полета У„:
Vn= N[nykgRTH =41/^1,4-9,8-29,3-216,5 = 1180 м/сек.
Тогда коэффициенты уравнения будут такими:
)
= 1+1
ГММпЛ йг
T — 1 L °к°сДд J
*-— 1
/ 42,5-1180\ 1,33 — 1
+ 1V + 9,8-1900/ 2-1,33
Г 0,0065 1
[o,97-0,9-0,3J
1,33-1 \
1,33
Г 1,33-1 -
/ 0,0065 \ 1>33
I 40,97-0,9-0,3/
= 1,24;
42,5.1180
9,8-1900
1 +
„—1
l,4X
X
33 — 1 Г 0,0065
-1,33 [0,97-0,9.0,;
1,33 — 1
2
1,33-1
1,33
Г 0,0065 I
~" [о,97.0,9-0,3]
1,33-1
1,33
42,5-1180
2-9,8
368
В соответствии с полученным уравнение (7. 16) будет таким:
XR +2>37*мд -1.24^д = 3,7^с+9.0^М11.
Далее необходимо систему уравнений, полученную в первом примере,
решить совместно с полученным уравнением относительно Х#. Проделав
сказанное, будем иметь:
(13-10-6/72 + 17.10-3/7+1) XR =- (28-10-4^2 + 0,48/? + 0,095) *Мп+
+ (4,5-10-4/72 + о,О34/?~ 6,5) X- +(~0,01/? + 1,65) е~°ЛрХп .
Г Q Uj
Из рассмотрения приведенных выше примеров видно, что значения
коэффициентов при вторых, и даже при первых производных, относительно малы.
Однако с увеличением размеров двигателя значения этих коэффициентов
увеличиваются.
При более детальном расчете коэффициентов уравнений можно заме-
/ дод \ /дал ( дад \ / д<рд \
тить, что величины частных производных I ) , I — ) , ( ——) , I ) ,
\аМп/0 \00/о \огс/0 \аМп/о
/с/срд\ / д<?п \
I—) » ( ) весьма существенно влияют на окончательные результаты,
\ 08 /о V or с /0
поэтому определять их нужно с достаточно высокой степенью точности.
3. ВОЗМОЖНЫЕ СХЕМЫ СИСТЕМ УПРАВЛЕНИЯ
а) Общие сведения
В зависимости от назначения летательного аппарата законы
управления двигателем, а следовательно, и системы управления
будут различными.
Для зенитных управляемых аппаратов, когда применяется
СПВРД с нерегулируемыми сечениями, законами управления
могут быть: GT—►amm; GT—^сгд, поскольку управляющим фактором
является только расход топлива GT. Эти законы нужно понимать
так, что изменение а и ад может производиться только в
результате изменения расхода топлива GT, причем в любой момент
времени отрабатывается только какой-либо один из регулируемых или
ограничиваемых параметров.
Для подачи топлива в двигатель обычно используется турбо-
насосный агрегат, состоящий из центробежного насоса и
воздушной турбины, причем на турбине срабатывается перепад давлений
воздуха, равный Ap = pl—рн- Протекание характеристик
центробежных насосов показано на фиг. 7. 8, из которой видно, что с
изменением числа оборотов изменяются как расход, так и давление
топлива на выходе из насоса. Чтобы избавиться от влияния
изменения расхода топлива, вызванного изменением числа оборотов
насоса, можно установить либо быстродействующий регулятор
перепада давлений на дроссельном органе (аналогично схеме,
приведенной на фиг. 4. 10), либо регулятор числа оборотов насоса
(при пологих характеристиках насоса).
24 1327 369
Ри
Сеть 1 /Сеть 2
/
Фиг. 7.8. Характеристика
центробежного насоса.
Регулятор
СПЗРД
Ограничитель
Зд^
Летательный
аппарат
ТНД
Регулятор
п
Фиг. 7.9. Возможная структурная схема системы управления
СПВРД.
370
В соответствии со сказанным укрупненная структурная схема
системы управления СПВРД с нерегулируемыми сечениями может
быть такой, как показано на фиг. 7. 9.
Для дальних летательных аппаратов, на которых применяется
СПВРД с нерегулируемыми сечениями, законами управления мо-
гуть быть: Ст—>ад; стт — атт; GT — атах; GT-^Mn, поскольку здесь
также управляющим фактором является расход топлива GT.
Регулятор
м
Регулятор
6
СПВРД
Ограничитель
Ограничитель
ос
mtn
Летательный
аппарат
ТН Й
Регулятор
п
п
Фиг. 7.10. Возможная структурная схема системы управления
СПВРД.
В соответствии с этими законами укрупненная структурная
схема системы управления такого двигателя может быть такой,
как показано на фиг. 7. 10.
Для тех же аппаратов, но с применением СПВРД с
регулируемыми сечениями, законами управления могут быть:. GT-+Oa;
GT —amin; GT—>amax; GT—*Mn; Fc—+МП; /К->МП. Здесь проходное
сечение реактивного сопла Fc и положение центрального тела
диффузора /к- корректируются по мере изменения Мш что сводится
по существу к получению (приближенно) максимальной
эффективной тяги при ад = адтах; <рд=1 и 0 = 0ОПТ.
Укрупненная структурная схема приведена на' фиг. 7.11. По
вопросу об установлении необходимых степеней точност.и
поддержания регулируемых параметров еще не накоплено достаточно
материала. Приближенно можно принимать такие данные:
необходимая точность поддержания параметра ад равна 1,5-т-2,0%,
параметра а —Зн-4%; параметра Мп — 2-=-3%; допустимые
кратковременные максимальные отклонения для огд равны или меньше
З-г-4%; для а —равны или меньше 5%; для Мп — равны или
меньше 5%.
24*
371
Mr
Корректор
Корректор
1к
h
-
'4
V
г
Регулятор
!м",
Регулятор
"*!
А -
СП ВРЛ
Ограничитель
&т1п
<-<
Ограничитель
amajc
^^ лд
ОС
Й
F
Летательный
annaparr
THR
7
г»
Регулятор
п
и°
Фиг. 7.11. Укрупненная структурная схема управления.
Фиг. 7. 12. Характер
протекания зависимостей ад =
и а^р =/(/Ип).
372
б) Возможные схемы регуляторов
В регуляторах диффузора наиболее сложным элементом
является чувствительный элемент, который должен измерять
величину ад с необходимой точностью.
Из выражений
* *
^_^_ = Рж .
Д ' ^ и 1 »
Рн
2*
/п*
Р ^пр
видно, какие сигналы нужно вводить в систему измерения, для
того чтобы получить сигнал, пропорциональный ад. Здесь рпр,
^пр—соответственно статическое и полное давления за прямым
скачком уплотнения (при односкачковой схеме торможения). В
общем виде эти зависимости будут такими:
<*A = fl(Pl Рпр> Рн) ИЛИ *Л = /2(Р*Л, /?пр> Pup, РнУ
Сложность такого устройства замера сгд очевидна.
Можно использовать какой-либо другой комплекс параметров
Р (аналогично тому, как об этом говорилось в соответствующем
разделе о ТРДФ), и сигнал от него подать в систему управления.
Наконец, можно использовать комплекс р=о^ = —4-, который
Рпр
однозначно связан с величиной од, т. е.:
1-, или -4r-=/i(Mn).
пр - ' "л
На фиг. 7. 12 показан характер этих зависимостей. Как видно
из выражения для стпР, этот сигнал можно получить с помощью
любого пневматического делителя, например, с помощью устрой-
* Ря \
ства, приведенного на фиг. 2.28 (для замера сигнала кт==—г|.
Ра '
Сигнал Рпр можно получить с помощью обычной напорной трубки.
373
В принципе можно также использовать и сигнал о =——, ко-
Рпр
торый также имеет однозначную зависимость от сигнала од, т. е.
или ад = /2(Мп).
:-1
Кроме указанного, можно использовать сигнал местоположения
замыкающего скачка уплотнения в диффузоре или значение Мд
в определенном сечении диффузора, которые также однозначно
связаны с величиной ад.
Из приведенных выше зависимостей видно, что все они
являются функцией Мш поэтому в систему управления обязательно
нужно вводить сигнал, пропорциональной величине Мп. В принципе,
для этого можно использовать любое быстродействующее
устройство для замера Мп (махметр), например, работающее по формуле
_1_
Мп= Г k+l ( Pw , J^zLYI 2 , или в общем случае Mn==/i^V
L 2k V Рн ' k+l /J \рн
т. е. по формуле, где Мп выражено в виде функции отношения двух
давлений (как следует из формул газовой динамики, Мп может
быть выражено через целый ряд отношений давлений, а не только
через —).
На фиг. 7. 13 приведена возможная схема управления СПВРД
с нерегулируемыми сечениями, когда управляющим сигналом
является сигнал, пропорциональный о пр.
Здесь используются пневматические делители типа
приведенных на фиг. 2. 28. К одному из делителей подводятся давления
р* и р*, а к другому р*р и рн, поэтому положение рычага сопла-
р1
заслонки 1 пропорционально величине оПр=1~7~у & положение ры-
Лф
чага сопла-заслонки 3 пропорционально Mn = f[f™L). Сервомотор 5
4 Рн1
перемещает дроссель, благодаря чему изменяется расход топлива
в двигатель. На этом дросселе поддерживается постоянный
перепад давлений с помощью регулятора перепада давлений
аналогичного регулятору, приведенному на фиг. 4. 10.
Перенастройка регулятора а„Р по зависимости alp=f(N[u)
осуществляется жиклером 8, проходное сечение которого изменяется
с помощью сервомотора 6 и кулачка 7. Работа такого регулятора
происходит следующим образом. Полагаем пока Mu = const; тогда
при увеличении ад от расчетного значения будет увеличиваться р*п,
374
мембрана делителя поднимется кверху, рычажок сопла-заслонки 1
задросселирует жиклер сопла-заслонки 2, и сервомотор 5
сработает в сторону уменьшения расхода топлива в двигатель. При
Фиг. 7. 13. Возможная принципиальная схема системы регулирования.
/, 2, 3, 4—сопла-заслонки, 5, 6, 9-— сервомоторы, 7—кулачковый механизм,
8—регулируемый жиклер, 10—сильфон.
уменьшении сгд от расчетного значения движение будет
происходить в обратном направлении. При изменении Мп переместится
мембрана второго делителя, переместится рычажок
сопла-заслонки 3, переместится сервомотор 6 с кулачком 7 и перенастроит
жиклер 8 на новое значение ад. Если Мп увеличилось (увеличилось р*р ),
то мембрана второго делителя переместится кверху, поршень сер-
375
вомотора 6 переместится вниз, и кулачок 7 задросселирует жик~
лер 8, в результате чего мембрана второго делителя переместится
вниз и сервомотор 5 увеличит расход топлива в двигатель. При
уменьшении Мп движение будет происходить в обратном
направлении.
Фиг. 7. 14. Возможная принципиальная схема системы регулирования
положения скачка уплотнения в диффузоре.
I, 2-—сильфоны, 3—плата, 4—сервомотор, 5, 6—жиклеры, 7, 8—электромагнитные
клапаны, 9—чувствительный элемент, 10—сервомотор.
В этом случае собственно регулятор (Тп*р перенастраивается
на другое значение регулируемого параметра по зависимости
о*р =/(Мп). При этом нужно помнить, что на обоих делителях
обязательно должен быть критический перепад давлений на жиклерах.
Регулятор перепада давлений топлива на дроссельном органе
работает так же, как об этом говорилось при пояснении схемы,
приведенной на фиг. 4. 10.
Схема системы принципиально не изменится, если для замера
величины Мп использовать вместо комплекса Мп=/(-^) какой-
FH
либо другой комплекс, включающий отношение давлений.
376
На фиг. 7. 14 приведена возможная принципиальная схема
системы регулирования того же двигателя для случая, когда
регулируемым параметром является местоположение замыкающего
скачка уплотнения. Здесь предполагается, что местоположение
замыкающего скачка может изменяться в пределах установки
устройств для отбора давлений рх и рг- Соответствующее такому
перемещению скачка изменение ад принимается допустимым.
За скачком уплотнения давление больше, чем перед скачком,
поэтому одинаковые сильфоны (коробки) 1 и 2 будут по разному
нагружены. При положении скачка уплотнения, показанном на
схеме, в сильфоне / давление меньше, чем в сильфоне 2, поэтому
плата 3 занимает указанное на схеме положение и электрические
цепи оказываются разомкнутыми, а электромагнитные клапаны 7
и 8 закрыты, т. е. расход топлива в двигатель соответствует
необходимому.
При перемещении скачка уплотнения влево или вправо
(соответственно при увеличении или при уменьшении ад) замыкается
одна из цепей и срабатывает какой-либо клапан, осуществляющий
либо впуск (клапан S), либо выпуск (клапан 7) рабочей
жидкости в сервомотор, который соответственно уменьшает или
увеличивает расход топлива в двигатель. Замыкание цепей происходит
потому, что при перемещении скачка уплотнения левее места
отбора давления р\ или правее места отбора рг давления в обоих
сильфонах оказываются приблизительно одинаковыми, поэтому
при выходе скачка в левую сторону замыкаются верхние контакты
(клапан §), а при выходе в правую сторону — нижние контакты
(клапан 7). Подбирая сечения жиклеров 5 и 6, можно изменять
скорость срабатывания сервомотора 4. Регулятор перепада
давлений прежний.
Рассмотренный принцип работы регулятора может быть
осуществлен не только в электрогидравлическом, но и в
гидравлическом варианте, как показано на фиг. 7. 15, из которой понятен
принцип работы такого регулятора.
В регуляторах (ограничителях) атщ и атах наиболее сложным
элементом является также чувствительный элемент. Из выражения
a=GB/L0GT следует, что для получения сигнала, пропорционального
величине а, необходимо измерять расход воздуха GB и расход
топлива GT (при условии постоянства коэффициента полноты
сгорания топлива).
Замерить расход воздуха через двигатель с необходимой
точностью очень трудно. Действительно, расход воздуха через
двигатель (диффузор) определяется как
откуда видно, что осуществить необходимое счетно-решающее
устройство весьма затруднительно (даже, если F^ = const). Пока
эту сложную задачу можно решить лишь очень приближенно,
377
а именно: представить, что существует такой комплекс давлений
Y, снимаемых с различных мест диффузора или летательного
аппарата, изменение которого (при изменении условий полета)
выражает закон, аналогичный закону изменения расхода воздуха через
диффузор. Для относительно небольшого диапазона изменения
условий полета подобрать необходимый комплекс у давлений,
очевидно, возможно.
Фиг. 7. 15. Возможная принципиальная схема системы регулирования
положения скачка уплотнения в диффузоре.
/—золотник, 2—сервомотор, 3, 4—манометрические коробки, 5, б—жиклеры,
7—регулятор постоянства перепада давлений.
Предположим для примера, что при FK=const необходимый
комплекс давлений у выражается как GB~m(pi—р2), где рх и р2 —
давления (полные или статические) в каких-то местах
летательного аппарата или диффузора.
Расход топлива выражается зависимостью GT = mi у рф — /?д,
поэтому выражение для а можно записать так:
^^т2 Рх~~Р2 (7.25)
В соответствии с этим выражением на фиг. 7. 16 приведена
возможная принципиальная схема ограничителей amin или атах.
Здесь два регулируемых жиклера / и 2, проходное сечение
которых изменяется в зависимости от величин Ар = р\—/?2
и Дрт=рф—рд соответственно. В проточных системах между
двумя жиклерами со сверхкритическими перепадами поддержи-
378
ваются давления р и /7, которые являются функциями /? = /
и P=/(GT). В пневматическом делителе 3 положение выходного
золотника пропорционально отношению этих сигналов. Этот
золотник управляет двумя соплами-заслонками 4 и 5,
воздействующими на сервомотор 6, который изменяет расход топлива в
двигатель. Если почему либо ск^ащш, то срабатывает сопло-заслонка 4
Из насоси
Фиг. 7.16. Возможная принципиальная схема регулятора коэффициента избытка
воздуха а.
/, 2—регулируемые жиклеры, 3—делительный механизм, 4, 5—сопла-заслонки, 5—сервомотор.
и сервомотор уменьшает расход топлива в двигатель, а если
(x>ctmax, то сервомотор увеличивает расход топлива. В пределах
ctmin<cc<^amax ограничитель а не работает. Здесь перепады
давлений на всех жиклерах должны быть сверхкритическими.
В такой схеме изменение величины давления воздуха р на входе
в проточные камеры не сказывается на работе ограничителя (на
статических характеристиках). Подбором профилей жиклеров /
к 2 (или с помощью какого-либо другого устройства) можно
получить необходимую статическую характеристику ограничителя.
Из уравнений равенства расходов через жиклеры, с учетом, что
p = aiGB и p = a2GT, получим зависимость —^-=С!/,где с и С\ —
G + с
GT
постоянные величины.
Отсюда, если
GTLQ
-=0, и
- Gr
379
^— /, так как величина с относительно мала. Характер
зависимо
мостей Ов=/(р1 — р2) и G7=mlyрф — р*д показан на той же
фиг. 7. 16.
В регуляторах Мп может быть использован тот же
чувствительный элемент для замера величины Мп, который был показан на
фиг. 7. 13. Выходной сигнал из такого датчика должен
воздействовать не на устройство перенастройки регулятора ад, как показано
на фиг. 7. 13, а на сервомотор, изменяющий расход топлива в
двигатель, например, через сопло-заслонку.
Обычно системы регулирования Мп делаются с допустимой
неравномерностью (статической ошибкой), которая в
рассматриваемой схеме легко осуществляется.
В общей схеме регулирования СПВРД с нерегулируемыми
сечениями все управляющие сигналы (от апр, ctmin, amax> Мп)
вводятся на один сервомотор, изменяющий расход топлива в двигатель.
Для СПВРД с регулируемыми сечениями схемы систем
управления существенно усложняются и по ним пока не накоплено
необходимых данных,
4. ДИНАМИКА СИСТЕМ РЕГУЛИРОВАНИЯ
Ниже рассматриваются некоторые вопросы динамики систем
регулирования только для СПВРД с нерегулируемыми сечениями.
а) Системы регулирования стпр
Рассмотрим систему регулирования с введением сигнала,
пропорционального величине сгпР. Используем схему системы
регулирования, приведенную на фиг. 7. 13, с одним изменением: в контур
топливоподачи введем устройство перепуска топлива из регулятора
перепада давлений топлива на дроссельном кране и введем
регулятор числа оборотов ТНА. Тогда принципиальная схема контура
подачи топлива будет такой,,как показано на фиг. 7. 17.
Соответствующая укрупненная структурная схема приведена на фиг. 7. 18,
где показаны необходимые координаты и передаточные функции.
Здесь оператор запаздывания е~^р выражает наличие времени
запаздывания ti в системе замера давления воздуха за прямым
скачком рпри рПр, связанного с существованием достаточно длинных
трубопроводов и ограниченной скоростью распространения
сигнала.
Составим уравнения движения системы регулирования.
Уравнение двигателя по координате Хр* получим из (7.10),
д
т. е.
(2+alP+а2
р п
(mnP+m13) e-v XOi. (7.26)
380
И сервомотору
регулятора бЗ
двигатель
Фиг. 7.17. Схема системы подачи
топлива.
Сердомотор
_Ё5_
ТНЙ
Xе
СПВРД
СРУ0
х6 хч
"ПР
С-РУ,
Серб о мотор -
Фиг. 7.18. Укрупненная структурная схема.
381
Полное давление торможения за прямым скачком р*р является
функцией Мп и выражается так:
Для малых отклонений при условии pH=const можно написать
(7.28)
(7.29)
(р. *
——); тогда в относительных величинах получим
<ЭМ /
где К = -1г-К1Мп0. Определяя Кх из (7.27), получим
Следовательно, передаточная функция Ф * ==1=/^.
^пр Х±
Для статического давления за прямым скачком также можно
написать
где #2=( J 5 поэтому в относительных величинах получим
, (7.30)
где /С=const. Тогда передаточная функция Фрп =К.
Уравнение для ТНА используем по аналогии из системы
(4. 24), т. е.:
(ТТпР+1)ХПн=КгХр* + К2Х7-КгХ2; ]
(7.31)
где Х7=—1-—проходная плошадь регулирующего органа турбины,
пропорциональная выходной координате сервомотора; Х2=—- —
^20
проходная площадь топливного дросселя.
Уравнение движения сервомотора 6 ца фиг. 7. 13 примем по
аналогии с (3. 88) в виде
382
где выходным сигналом является перемещение иглы жиклера 8
(см. фиг. 7.13), а входным — положение рычажка
сопла-заслонки 4. В делителе давлений р*/рн (CPYi на фиг. 7. 18) выходным
пр
сигналом является положение рычажка сопла-заслонки 3 (см.
фиг. 7.13). Пренебрегая инерционностью полостей и подвижных
частей и принимая перепады на всех жиклерах
сверхкритическими, из условия равенства расходов воздуха через жиклеры
получим такое уравнение:
Х5=Х5-ХРн. (7.33)
Аналогично составляется уравнение движения для второго
делителя (СРУ2 на фиг. 7.18). Из уравнений ^(р*, l) = G2{p'2, l{)
получаем
Хр*-Х4-Х3=Хь (7.34)
где
h рпр рпр /ю
Уравнение движения сервомотора 5, показанного на фиг. 7. 13,
будет аналогично уравнению (7.32), но выходной координатой
здесь будет уже положение топливного крана (Х2 на фиг. 7. 18),
а входной — положение рычажка сопла-заслонки / (координата
Х\ на фиг. 7. 18), т. е.:
(7.35)
Регулятор перепада давлений на топливном кране принимаем
идеальным. Регулятор числа оборотов ТНА принимаем с жесткой
обратной связью; его уравнение будет:
(7> +1) Х7=КЪ (Х>-ХЯа). (7.36)
Следовательно, исходная система должна включать уравнения
(7.26), (7.29), (7.30), (7.31), (7.32), (7.33), (7.34), (7.35)
и (7.36). Кроме того, необходимо учесть влияние времени
запаздывания ti уравнением Х4 = е~~х^ЛгМп.
Исключая некоторые переменные из перечисленных уравнений
и считая рн = const, для дальнейшего анализа примем за исходную
такую систему:
. I
2/Т1 ~ | 1 \ V I/ V I V V IS V . I /7 Q74
. IУ тиР ~т~ *■) •/*- п =~= A j^v #—у--А 2-Л п — А з^ 2' i V* • ^' /
4. (;.... ц
383
6/^1-. I 1 \ у I/ V I 11 rX1\
. (Т2р-Г Ч Х2 = 1\1Л j, f [I.OI)
)
где
Здесь регулируемым параметром является координата Хъ
пропорциональная величине о*р (или сгд).
Разрешив систему (7. 37) относительно Хь предварительно
изменив знаки перед полиномом при координате XG в первом
уравнении и перед координатой Х7 во втором уравнении, получим
• • •+bl9)e-^p]XMn. (7.38)
Кроме запаздывания Ть при более точном решении задачи
необходимо учитывать запаздывание t2, связанное с распространением
волны давления в самом двигателе (от входа в диффузор до места
отбора давления р*). Возьмем приближенно Тг^Ть Для учета
этого запаздывания необходимо первое уравнение системы (7.37)
представить в таком виде:
l9 п
-vXGT. (7.39)
Разрешая это уравнение с остальными шестью уравнениями
системы (7.37) относительно той же координаты (при Тг—Ti), получим
е-^)р]Хмп- (7.40)
Из полученных уравнений видно, что система обладает
остаточным статизмом, так как
Хж =
Регулятор перепада давлений на топливном кране может иметь
весьма большое быстродействие (собственная частота 30->40 гц),
а инерционность ТНА относительно велика (постоянная времени
0,1<^тн<0,3), поэтому с достаточной степенью точности можно
считать, что перепад давлений на топливном кране всегда
поддерживается заданным и, следовательно, расход топлива
практически не будет зависеть от числа оборотов ТНА.
384
В этом случае система (7.37) при /Cs=l сводится к такой:
дХ *={bl8p2 + Ь19р + Ь20)ХМп- 1
д I
j
(T2P+\)XOt=K7Xv I
Соответствующая структурная схема приведена на фиг. 7.19.
Из (7.41) получаем
(7.42)
Если учесть запаздывание Тг^Ть то получим
1)е-%р]Х1 =
(7.43)
где
Q-Q=T{r2UQ, $o=TiT2 (bX8 — aQ);
— aQ) — K6T2ao'>
IS / I -» T4 \
/y ___ к I /y _j_ ril 1 •
а4=а2
В этом случае
Система регулирования должна работать так, чтобы новое
значение параметра Х\ в статике было точно равно заданному,
поэтому величины /Сб и Кч должны выбираться с учетом заданного
закона изменения Xi=/(Mn). Значение Кб должно изменяться
с помощью профиля кулачка 7, показанного на фиг. 7. 13.
25 1327 385
к7
Tzp+1
СРУ
СПВРД
*R
p + t
Область
устойчивости^
Фиг. 7. 19. Структурная схема
системы регулирования ад.
«7
Фиг. 7.20. Характер
протекания границ областей
устойчивости.
без стабилизации
Фиг. 7.21. Характер протекания пере- Фиг. 7.22. Структурная схема,
ходных процессов.
386
Области устойчивости определяются характеристическим
уравнением и могут быть выявлены подстановкой р = /(о и £-/о)Х =
= coscot—/sin cot. Выделяя вещественную и мнимую части и
приравнивая их по отдельности нулю, получим два уравнения вида
— aju)3 -{- a3u> -f- («5oj2 — a7) sin та -f a6co cos tod=0. j
Изменяя 0<со<оо, можно построить границы областей
устойчивости. Для примера на фиг. 7. 20 показан характер протекания
границ областей устойчивости.
Определение качества процессов целесообразнее всего
производить с помощью структурного математического моделирования.
Общей характеристикой для процессов являются большие
величины забросов (провалов) при возмущении вида АМП [1]; процессы
существенно улучшаются при возмущении AMn = Y^ (возмущение
ДМП изменяется не скачком, а равномерно за некоторое время t),
что видно из кривых, приведенных на фиг. 7.21.
Ниже при решении конкретных примеров дается характеристика
возможных переходных процессов.
Для улучшения переходных процессов целесообразно ввести
прямой сигнал, пропорциональный скорости изменения
регулируемого параметра, или обратный сигнал, пропорциональный скорости
изменения расхода топлива. Структурная схема таких систем
приведена на фиг. 7. 22.
Рассмотрим для примера систему с обратным сигналом.
Исходная система уравнений будет такой:
(7.45)
Здесь мы принимаем, что дифференцирование сигнала XG^
происходит без погрешности. Сводя (7. 45) к одному уравнению и
считая Ti^t2, получим уравнение, аналогичное (7.43), но с другим
выражением для коэффициентов левой части, т. е.:
2+К7К9); al = a0(
а остальные коэффициенты будут одинаковы с ранее полученными.
Если обозначить Tz = T2 + KiK% то при KiK^>Q значение Г3
в рассматриваемом случае будет больше значения Т2 в (7.43).
25* 387
Поскольку Т2 в (7. 43) не входит в коэффициенты as, ae, (X7, стоящие
под оператором запаздывания, то для простоты относительного
сравнения запасов устойчивости систем (7. 45) и (7. 43) будем
рассматривать левые части уравнений при т = 0. В этом случае
характеристическое уравнение будет таким:
оно сводится к выражению
где при относительном сравнении принимаем С\, С2, ... = const.
Условием устойчивости будет:
откуда видно, что с увеличением Т2 неравенство возрастает.
В рассматриваемом случае Г3>Г2, поэтому запас устойчивости
для (7. 45) увеличивается. Переходные процессы в такой системе
улучшаются, что видно из той же фиг. 7.21.
б) Система регулирования местоположения
скачка в диффузоре
Для рассмотрения динамики такой системы используем схему,
приведенную на фиг. 7.14, которой соответствует структурная
схема, приведенная на фиг. 7. 23. Чувствительный элемент примем
безынерционным, с релейной характеристикой; электромагнитные
клапаны примем в качестве запаздывающих звеньев с постоянным
СерВопотор
Электро —
магнитный,
клапан
Чубстбсс -
тельный
элемент
PXGr
СПвРД
-ь
*7 = 5
+ъ
Фиг. 7.23. Структурная схема системы
регулирования положения скачка уплотнения в
диффузоре.
Фиг. 7. 24.
Характеристика нелинейности.
временем запаздывания хи а сервомотор — в качестве
интегрирующего звена (сервомотор с постоянной скоростью).
Нелинейная характеристика приведена на фиг. 7. 24, где для
общности приняты различные (постоянные) скорости сервомотора
/С2=— и /С3=— при движении его в разные стороны (зона 2
соответствует допустимому перемещению скачка в диффузоре).
388
Составим уравнения движения системы.
При малых изменениях ад можно считать, что положение
замыкающего скачка в диффузоре / будет пропорционально величине ад,
т. е. Аод = КА1. В относительных величинах это будет Xajk=KXh
где Xt=—. Подставляя это в (7.13), получим уравнения
двигало
теля. Тогда исходная система уравнений движения будет такой:
7" ПРИ
О
(7.46)
с2
Рассмотрим условия возникновения автоколебаний в этой
системе, для чего применим метод гармонической линеаризации.
Предполагаем, что колебания входного сигнала в нелинейный
элемент будут почти синусоидальными, и что высшие гармоники
сигнала на выходе из нелинейного элемента не учитываются. Это
означает, что сигналы, соответствующие высшим гармоникам,
проходя через линейную часть системы, настолько уменьшаются по
амплитуде, что ими можно пренебречь.
Применяя гармоническую линеаризацию к последнему
уравнению (7.46), получим
(7.47)
где q(А) —коэффициент, зависящий от вида нелинейной
характеристики и амплитуды колебаний А. Для рассматриваемого случая
выражение для q(A) будет таким:
JV=¥: (7.48)
Разрешая (7.46) с учетом (7.47) относительно Х\, получим
Xl = [
lo
p + bn] per*
(7.49)
Параметрами системы, которые можно изменять, являются ТсЪ
Тс2 и Ь. Определим границы области устойчивости системы в
зависимости от величины—= 1 , для чего рассмотрим
характере Tci Т
ристическое уравнение (7.49).
с2
389
Предположим пока, что t + ti==0, тогда согласно критерию
Раута — Гурвица граничное условие устойчивости можно записать
так:
(7.50)
Разрешая (7.50) с учетом (7.48) относительно 1/Тс, получим
(7.51)
Здесь введено обозначение для амплитуды Лш поскольку при
автоколебаниях она имеет постоянную величину. Из выражения (7.51)
видно, что (\/Тс)—*оо при А\—б2—*0 или при Лп-+оо. Найдем
(l/7*c)min, для чего продифференцируем выражение (7.51) по Аи
и приравняем нулю. Получим
Hr+f) Р п П (7.52)
min V cl yc2'min am ЯЩ
В соответствии с этими результатами на фиг. 7. 25 показан
характер зависимости An=f(—\ .
\ У с '
Из полученного видно, что с увеличением зоны
«нечувствительности», равной 2 в (с увеличением расстояния между местами
отбора давлений) значение (1/Гс)т1п увеличивается
пропорционально величине этой зоны.
Теперь выясним вопрос об устойчивости автоколебаний.
Заменим в характеристическом уравнении (7.49) р = ш и после
разделения на мнимую и действительную части получим
(7.53)
Из теории автоматического регулирования известно, что
устойчивым автоколебаниям соответствует условие
дА да до> дА
которое мы и используем; но предварительно найдем частоты
автоколебаний, для чего каждое из уравнений (7.53) приравняем нулю,
и тогда получим
f _m1a1 55)
т7а0 — т6аг
Далее из (7.53) находим частные производные по (7.54)
и, подставив их в (7.54), получим
390
где
К
_4m6m7/
2 /C22 V
!L(i ^i—)fJ-+±Y
к \ m7aQ — ЩС11 /\Tci / c2/
Из полученного видно, что при A^>bY2 неравенство (7. 56) не
удовлетворяется, а при Ап<Ь}/2 — удовлетворяется.
Следовательно, на фиг. 7. 25 верхней ветви кривой соответствуют неустойчивые
колебания, а нижней — устойчивые, что и показано стрелками.
Ш 2.JL +JL
\7c/mlri Tc ТС1 Тс2
Сервомотор
Обратная
сдязь
Элентро-
мпгнитный
клапан
СПВРД
Фиг. 7.25. Границы области авто- Фиг. 7.26. Структурная схема системы ре-
колебательных режимов. гулирования положения скачка уплотнения
в диффузоре.
Если теперь положить в (7.49) t+ti=^=0, использовать
выражение
и заменить в характеристическом уравнении р = /оо, то, разделив
на мнимую и действительную части, получим
(7.57)
К
Приравнивая эти выражения нулю, определим из них (для
заданных х+Х\ = const) An а соп. Исследуя далее полученное
выражение аналогично рассмотренному выше, можно убедиться, что
характер протекания границ областей устойчивости остается
прежним, но (1/Гс)т1п уменьшается, т. е. граница области устойчивости
при t+ti>0 смещается влево, что и показано на той же фиг. 7. 25.
Для расширения области устойчивости введем скоростную
обратную связь, как показано на фиг. 7. 26, где сигнал, пропорцио-
391
нальный скорости изменения расхода топлива, подается на вход
с обратным знаком.
В этом случае исходная система уравнений вместо (7. 46) будет
такой:
} (7.58)
Сводя (7.58) к одному уравнению, получим
.
Ьп) ре
Для упрощения задачи и возможности сравнения с
полученными выше результатами положим t=Ti=0; тогда характеристическое
уравнение будет таким:
K[i+Koq{A)]j'J^K[i+Ko(t(A)]
Из условия граничной устойчивости будем иметь:
(7.60)
Разрешая (7.50) относительно q{A), получим
' (7.61)
a0m7 —
Сравнивая (7.60) с (7.61), можно видеть, что при /Со>О
величина q{A) возрастает, а следовательно, возрастает и величина
1/Тс, что находится в соответствии с (7.48).
Следовательно, введение обратного сигнала, пропорционального
скорости изменения расхода топлива, позволяет расширить области
устойчивости системы и увеличить скорости \/Тс без опасения
попасть в автоколебательную зону. Если положить теперь if>0, Ti>0,
то полученный вывод сохранится.
В рассмотренных системах можно так подобрать параметры,
что переходные процессы окажутся приемлемыми, особенно в
системе с введением корректирующего устройства. Ниже при
рассмотрении примеров этот вопрос будет обстоятельно рассмотрен.
392
в) Система регулирования а
Используем принципиальную схему ограничителя а,
приведенную на фиг. 7. 16, которой соответствует структурная схема,
приведенная на фиг. 7.27. Составим уравнения движения системы.
Предположим, что действительны зависимости p\=f\ (Мп)
и Р2 = ЫМп), т. е. что давления рх и р2» снимаемые в каких-то
местах диффузора или летательного аппарата являются функциями
Мп. Тогда р\—p2=Ap = f(N[n). Отсюда для координаты /2 рычажка
жиклера 1 (см. фиг. 7. 16) справедливо следующее уравнение (без
Сердомотор *
xph
е-чн
,*,
■ Ф3
СРУ
pip
' СПВРД
Фо
х,
- ф,
*
хр1
-Асе
хр
*2
t '
-^ у
л
1
х_
р
Фиг. 7. 27. Структурная схема,
учета инерционности емкостей и подвижных частей ввиду их
малости) :
ХгЛ=КхХЛп. (7.62)
Давление р в проточной полости пропорционально координате
/2 (оно же пропорционально расходу воздуха через двигатель),
поэтому, пренебрегая инерционностью накопления воздуха, получим
уравнение
Х-=К2Хи. (7.63)
Тогда передаточная функция Фь на схеме, приведенной на
фиг. 7.27, будет Ф1=/С1/С2.
Поскольку перепад давлений на топливном кране постоянный
(идеальный регулятор перепада), то расход топлива в двигатель
х(
висимостью
G и давление его перед форсункой Хр связаны очевидной за-
(7.64)
поэтому передаточная функция Ф3 =
393
Без учета инерционности подвижных частей и накопления
воздуха в полостях, из схемы очевидна зависимость /i=/(p*, Рф);
поэтому будет справедливо уравнение
Х1х=КАХр^-КъХРд. (7.65)
Кроме того, по аналогии с (7.63) имеем
Xp=KJCh. (7.66)
Уравнение пневматического делителя по аналогии с
полученным ранее будет
Хр-К7Х-=К8Ха. (7.67)
Уравнение сервомотора примем в форме
(Тср+\)ХОт=К9Ха. (7.68)
Уравнение движения двигателя примем в форме (7.39).
Разрешая систему уравнений (7. 62) -f- (7. 68) и (7.39)
относительно Ха При Tl=t2, ПОЛуЧИМ
[(аорд + ахр2 + а2р + а3) + («s/7 + ае) е~т/7] *« =
~^\ ХМп. (7.69)
Дальнейший анализ поведения во времени рассматриваемой
системы проводится методом, аналогичным методу анализа
поведения системы регулирования а*р. Обычно удается так подобрать
параметры ограничителя, что при возмущении скоростью полета
процессы получаются удовлетворительными.
г) Система регулирования Мп
Систему регулирования Мп необходимо рассматривать
совместно с летательным аппаратом, поэтому сначала выведем уравнение
движения аппарата. Будем рассматривать лишь продольное
движение аппарата (его центра тяжести) при воздействии на него
порывов воздушной скорости (турбулентность атмосферы) и
перенастройки регулятора Мп при //=const.
Исходным уравнением будет
RA-pC9 (7.70)
где V=VC—Vn; Vc—скорость горизонтального полета аппарата;
Vn—'Скорость горизонтального порыва; R%— тяга, развиваемая
двигателем; рс — сопротивление полету летательного аппарата;
т — масса аппарата.
Инерционность аппарата в сотни раз больше инерционности
двигателя, поэтому для дальнейшего анализа вместо (7. 18) примем
такое уравнение двигателя по развиваемой им тяге:
V 17 v ! ^П V С7 *7А\
J\ р ==- -^М "1 Л(/ . у/ . / 1)
394
Зависимость для сил сопротивления полету примем в форме
Pc = Pc(Vc)- Линеаризируя (7.70), с учетом полученного, будем
иметь
IT п I 1\ V тИ V ! Т «V /"7 70\
V тР\ Ч ЛУ= Лв \'тРЛтп ('•'*)
а2 т
где
Т = V°m К = — (^-\ — ^И- • X ^Vc • X А^п v
Как известно, Мп=—- п При горизонтальном полете
будем принимать Тн = const; тогда
Тогда вместо (7.72) получим
где
Ко =1^. (7.73)
т а2
Коэффициент Km в уравнении (7. 72) определяет устойчивость
летательного аппарата по скорости полета Мп. Величину и знак
этого коэффициента можно определить по статическим
характеристикам двигателя и летательного аппарата, выражающим законы
протекания характеристик /?Д(МП) и /?С(МП). При определенных режимах
полета эти характеристики могут протекать так, как показано на
фиг. 7. 28; из фиг. 7. 28 видно, что при Мп=МПрасч -^ <С 0,
поэтому такой аппарат неустойчив по Мп. В соответствии со
сказанным, вместо (7.73) нужно написать
(Тпр- 1)ХМа=КотХОг+ТмрХаН. (7. 74)
В качестве чувствительного элемента регулятора Мп примем
пневматический делитель, приведенный на фиг. 7. 13, а сервомотор,
изменяющий расход топлива в двигатель, примем с жесткой
обратной связью. Тогда исходная система уравнений движения будет
такой:
V тпР ~/--мп -^ит-~ит i - пи nm' | /7 г,гч
(/. /Ь)
где Х° — сигнал от механизма перенастройки регулятора Мп. Сводя
(7.75) к одному уравнению, получим
(7.76)
395
Условием устойчивости является Tm>Tx и K\KGr >1, которое
всегда можно выполнить. Остаточная неравномерность оценивается
выражением
расч Мп
Фиг. 7.28. Характеристика
протекания зависимостей
/?/(М), Рс=/(МП).
возмущение X^t]
Фиг. 7.29. Характер переходных
процессов.
При возмущении системы порывом вида Хпм [1] в начальный
момент времени Хм изменяется скачком, а далее сигнал
отрабатывается до нуля. Переходные процессы, как правило, носят
неколебательный характер, что показано для примера на фиг. 7.29.
Вводить в систему какие-либо дополнительные корректирующие
устройства нецелесообразно, если допустимые погрешности по
точности поддержания Мп имеют достаточную величину.
д) Примеры
Пример 1
Задание 1. Рассчитать систему регулирования коэффициента
восстановления давления в диффузоре СПВРД с нерегулируемыми сечениями.
Допустимое перерегулирование величины ад должно быть не более 5% при
минимальном времени регулирования и при возмущении вида AMn=Y*-
Исходные данные. Уравнение движения двигателя принимать таким:
(0,001/0 + 0,08/7 + 1) X * =-(0,005/7 +0,4) e~
+ (0,02/?2 + 0,7/> — 1,4)ХМ ^
Схему регулятора принимать в соответствии с фиг. 7.13 и 7.19. Регулятор
перепада давлений на топливном кране принимать идеальным.
Запаздывание Х\ в (7.41) принимать равным Ti=0,02 сек. Значение коэффициента К
в третьем уравнении (7.41) принимать К = 1. Зависимости Ха =/(Мп)
принимать Ха =—1,4Х
Решение. Из фиг. (7.12) видно, что при малом АМП связь между ад
и о* будет Од——/(а* , поэтому Xz =—Xа* . Исходной системой уравне-
д апр
396
ний движения будет (7.41), где регулируемой координатой является Хх
Используя приведенные в задании числовые значения коэффициентов
уравнений, из (7.41) получим такое уравнение:
ф,001Т1Т2р*+ [0,087^2+0,001 (Tl + T2)]p*+ [7т1Г2+0,08(Г1+7т2) +
+0,001] р2+(Т1+Т2+ОЩр+\ + [—0,00ЬТ1К7р2
—О,ООЬК7)Р+ОАК7]е-°>1Р\ Х{= №>№
+0Л9{Т1+Т2)— 0,001К6Т2] рЗ+ [—2,4Г1Г2+0,62(Г1+Г2)—0
—0,001К6+0,019] р2+[0,б2— ищТх+Ъ)— К6Т2—0,08К6] р—
Хб\
3%
№
крибой
1
2
3
*6
0,12
0,1
0,1
кп
2,0
3,0
3,0
0,25
0,5
0,5
?2
0,1
0,1
0,1
N°
градиента
1
2
3
«*
•ч,
\
1
v^4
A/"
^Г '
ч
-^.
V
:
J~
Wo *"
Фиг. 7. 30. Возможные переходные процессы по ад
при возмущении порывом.
Здесь параметрами, подлежащими определению, являются Т\, Т2, /Сб и Кт.
Заранее можно видеть, что значение Т2 должно быть минимально
возможным, поскольку коэффициенты в уравнении двигателя весьма малы.
Коэффициенты Кб и К? должны выбираться так, чтобы в установившемся
движении новому значению Хмп точно соответствовало заданное значение
Ха (или Хс* ). В условии задано Ха =—1,4^мп, поэтому статизм в сис-
д пр д
теме должен быть таким:
(
*-<~>- 1+0,4«7 =
Отсюда соотношение между коэффициентами должно быть: 1 =0,56 /С7—Kg-
Определение необходимых значений параметров регулятора целесообразно
производить методом структурного математического моделирования. Результаты
такого моделирования системы приведены на фиг. 7. 30, где показаны процессы
при различных /Се, Къ т\ и различных градиентах изменения Мп,
(&M t)
т. е. (&Mn yt).
Из приведенных процессов видно сильное влияние величины градиента [у)
и относительно слабое влияние коэффициентов регулятора.
Заданная величина перерегулирования менее 5% может быть получена лишь
для случая, когда АМП изменяется равномерно за время > 2,5 сек. Если принять,
что ЛМП (порыв) плавно нарастает за то же время 2,5 сек, но начальная и
конечная скорости равны нулю, как показано на той же фиг. 7.30, то процессы
получаются практически монотонными.
397
Если принять, что порыв нарастает скачком Xмп [1J, то ни при каких
параметрах регулятора нельзя получить заданных процессов. С увеличением скорости
полета Хмп величина коэффициента восстановления давления уменьшается,
поэтому важно ограничить начальный заброс по А" * , а нижний провал не играет
°пр
существенного значения (и наоборот — при уменьшении ^мп)«
Таким образом, ответ на поставленную задачу будет таким: при времени
нарастания порыва, равном 2,5 сек, параметры регулятора целесообразно
принимать следующими: /Сб = 0,7; /<7=3; Ti = 0,5; Г2 = 0,1.
Пример 2
Задание 2. Рассчитать систему регулирования коэффициента
восстановления давления того же СПВРД, с тем же регулятором, но с дополнительным
корректирующим сигналом в обратной связи. Требования к процессам прежние.
Исходные данные. Структурную схему регулятора принимать пс
фиг. 7.22 с корректирующим устройством с передаточной функцией К$р.
Решение. Для решения этой задачи примем те же условия, что
Хв =-* * .
°пр
+3%
№
кривой
1
Z
3
*6
0,7
0,7
0,7
з,о
3,0
3,0
т,
0,5
0,5
0,5
0,1
0,1
0,1
к9
0,15
0,15
0,25
No
градиента.
1
г
2
-3 — Ьсен
±3%
Фиг. 7.31. Возможные переходные процессы по стд
при возмущении порывом.
В соответствии с условиями, исходная система уравнений будет такой:
(0,001/?2+0,08/? + 1)Х „ = (—0,005/? + 0,4) e-
Р
+ (0,02/?2
Хх -
Здесь регулируемым параметром является Х\. Параметрами системы,
подлежащими определению, являются Гь Г2, K$, Ki и К$. Соотношение между коэффи:
циентами Ке и К7 примем из условий обеспечения заданной статики системы.
398
принимая Ха=—1У4Хмп, откуда аналогично прежнему находим 1 =0,56^7—^Се-
Значение Гг должно быть минимально возможным.
Определение остальных параметров производится тем же методом
структурного математического моделирования, результаты которого приведены на
фиг. 7.31. Из рассмотрения приведенных процессов видно, что и в этом случае
на величину перерегулирования сильно влияет величина градиента порыва,
однако, по сравнению с результатами, полученными в первом примере, видно, что
для достижения той же величины перерегулирования можно принимать больший
градиент, т. е. то же изменение ДМП можно допустить уже за 1 сек вместо
2,5 сек.
Таким образом, для выполнения поставленных в условии задачи требований
целесообразно принять такие значения параметров регулятора: Кв=0,7\ /(7=3,0;
7*1 = 0,5; 7^ = 0,1; /Сэ=0,25, которые обеспечивают получение заданных процессов
при нарастании порыва ДМП примерно за 1 сек.
Пример 3
Задание 3. Определить области устойчивости и подобрать параметры
регулятора для системы регулирования местоположения замыкающего скачка
в диффузоре СПВРД с нерегулируемыми сечениями. Величина перерегулирования
должна быть менее 510/о при минимальном времени регулирования и при
возмущении ДМП градиентом.
Исходные данные. Схему регулятора принимать по фиг. 7. 14;
уравнение движения двигателя принимать таким:
(0,001/?2 + 0,05р + 1) КХг = (—0,005/7 + 0,4) e~°']p^GT+
+ (0,02/72 + 0,7/7-1,4) XMn;
коэффициент К принимать равным К=\. Остальные данные принимать такими
же, как в первом примере.
Решение. Используем систему уравнений (7.46), из которой после
сведения ее к (7.49) получим
{0,001/73 + 0,08/72 + [1 - 0,005? (А) е~°Л2р\ р + 0,4? (Л) е~0Л2р} Хг^
= (0,02/>2 + 0,7/? - 1,4) ре-°>02рХмп-
Предположим пока, что е~°*12р=\; тогда при симметричной характеристике
сервомотора (по скорости) минимальное значение удвоенной величины постоянной
времени сервомотора в соответствии с (7.52) будет:
/ 2 \ ala2K^b 0,08-3,14-6
\ Тс )m\n~ aQm7 — axm6 ~~ 0,001-0,4—0,08-0,005 ~~
Принимая допустимую зону перемещения скачка в установившемся режиме
6 = 0,02 (или 2°/о), получим (2/Гс)min=314 ■ 0,02=6 28. Следовательно, постоянная
времени сервомотора (при симметричной характеристике) будет
При несимметричной характеристике сервомотора из (7.48) видно, что при
(1/5пс)тт=6,28 будет:
или Гс1=
На фиг. 7.32 приведена зависимость Tci=f(Tc2).
В соответствии с (7.55) частота автоколебаний (при— > 6,28] будет:
399
Если t+Ti = 0,12 сек, то, приравнивая каждое уравнение (7.57) нулю и
исключая из них q(A), получим
(я0о2 — а2) —— W sin (tea) -f COS (tea) = d^w —— a) COS (to)) — sin (too) ;
Vml J L^7 J
Г 0,005 1
(0,001a)2— i) —-^—a>sin(0f12co) + cos(0,12co) =
Г 0,005 1
= 0,08a> — со cos (0,12co) —sin (0,12 со).
Эти выражения удобно решать графическим способом, в результате чего
находим 0)п^6,0.
0,2 0,4 0,6 0,8 1ft 1t2 Tc2
Фиг. 7.32. Зависимость
Ofi 0,8 1,2 1fi 2,0 Tc
Фиг. 7.33. Границы области
устойчивости.
Подставляя это значение оп в одно из уравнений (7.57), найдем значение
для q(A)t которое равно: ^(Л)=21,7. Используя (7.48), получим
2
Принимая £ = 0,02 и условие получения (l/7'c)mjn при An = byr2, из
полученного выражения для q (А) находим:
- + тМ =1,36.
■c/min \J cl *■ с2 /min
Сравнивая с результатами, полученными при t+ti = 0, видим, что в этом
случае допустимая скорость сервомотора уменьшается, и при симметричной
характеристике сервомотора его постоянная времени будет равна:
- 2
Тс = =1,47 сек (вместо 0,32 сек).
1,36
В соответствии с полученными цифрами на фиг. 7.33 приведены границы
области устойчивости в координатах Ап—Тс. На фиг. 7.34 приведены возможные
переходные процессы, полученные методом структурного математического
моделирования, из которых видно, что увеличение скорости нарастания порыва резко
увеличивает величину заброса регулируемого параметра Xt.
Уменьшение зоны «нечувствительности» b и уменьшение постоянной времени
сервомотора сдвигают систему в область автоколебательных режимов. При Ь =
=0,02 приемлемыми параметрами системы можно считать Tci = 71C2== 1,5 при гра-
400
диенте нарастания порыва за время, равное 1,5-^-2 сек. Если принять 6 = 0,03,
то приемлемыми параметрами будут Гс 1 = 7^2= 1,0 при градиенте нарастания
порыва за время менее 1,5 сек.
N° v
кривой
1
2
3
1+
5
Т<ГТС2
1,5
1,5
1,5
1,0
1,0
Ъ
0,02
0,02
0,02
0,03
Оу01
№
градиента
1
2
3
3
7
teen
Фиг. 7. 34. Возможные переходные процессы.
Пример 4
Задание 4. Произвести аналогичный расчет системы регулирования
местоположения скачка в диффузоре с регулятором, включающим корректирующий
сигнал (передаточная функция Кор).
Исходные данные. Структурную схему регулятора принимать по
фиг. 7.26. Требования к процессам и возмущения принимать теми же, что
и в примере 3. Регулятор перепада давлений на топливном кране принимать
идеальным. Время запаздывания принимать равным: t=Ti=0.
Решение. Для этого случая было получено уравнение (7. 59а) и
граничное условие устойчивости (7.60).
Из (7.60) определим значение q(A) при /С=1:
(Л) _
Используя (7.48) и принимая, по-прежнему, что (\/Tc)min при
получим
0,001-0,4 + 0,08-0,05 —0,08/CG 0,01—/Со *
2 и 6 = 0,02,
mm
)
c/min
,02)2-0,022
Отсюда получаем
3,14 (У '2-0,02)2
6,28
min > 1 —100/Со"
26 1327
401
Из полученного результата видно, что на границе устойчивости путем
изменения значения /Со=О-ч-О,О1 можно изменять (1/Гс)тт в пределах 6,28< (~^Г~) <
\ * c/mln
<оо и соответственно изменять значение постоянной времени сервомотора (при
симметричной характеристике) в пределах 0,32>Гс>0. Если принять Тс =0,1 сек,
№
кривой.
1
2
3
5
Тс,-Гс2
15
15
15
15
0,5
Ь
ОМ
0.0 Z
о.о г
0,01
0,02
*О
0,02
0,02
0,02
0,02
0,02
№
градиента.
1
2
3
3
1
Фиг. 7.35. Возможные переходные процессы.
то необходимое значение коэффициента /Со будет: /С0=0,007. Соответствующая
этому значению /Со=0,007 граница автоколебательных режимов проведена
пунктиром на фиг. 7.33.
Переходные процессы, полученные структурным математическим
моделированием рассматриваемой системы, приведены на фиг. 7. 35; по этим кривым легко
выбрать оптимальные параметры регулятора.
Пример 5
Задание 5. Рассчитать систему регулирования скорости
полета^летательного аппарата так, чтобы при возмущении, обусловленном перенастройкой
регулятора Х°[\], процессы были монотонными, а при возмущении порывом ветра
вида Хш [1] — однозначными (неколебательными), с минимальным временем
регулирования.
Исходные данные. Уравнение летательного аппарата принимать таким:
(200 р — 1) ХМп = 1 }2XGt + 200^ZnM.
Схему регулятора скорости полета принимать с жесткой обратной связью.
Решение. В соответствии с (7.75) и заданным уравнением летательного
аппарата, вместо (7.76) получим
[200Г1/?2 + (200 - 7-j) р + 1,2/Ci -
Для обеспечения устойчивости системы необходимо иметь: Ti<200
и К\>—=0,835. Коэффициент К\ играет существенную роль в ха-
1,2
рактере процесса, что видно из статических характеристик, приведенных
на фиг. 7.36. Действительно, из второго уравнения (7.75) видно, что коэффи-
402
циент Ki выражает отношение ^l^TTT"' значение которого не может быть очень
АМП
большим, так как допустимое отклонение Д#д ограничено amin и аШах, а
отклонение АМд не может быть очень малым из-за приближения всей характеристики
регулятора к релейной.
В то же время значение К\ нужно стремиться выбирать максимальным.
Предположим, что AGT=±(0,084-0,l)GTo и ДМп=±(О,О5-ьО,1)Мпо, тогда
получим 2,0>/(i>0,8. Из условия устойчивости необходимо иметь К\>0,835, поэтому
примем /Ci = l,8.
Рс
Ограничитель
//X//////////
R
Фиг. 7. 36. В выбору коэффициента усиления
регулятора скорости полета.
Таким образом, применение статического регулятора скорости полета
позволяет как бы изменить характер протекания зависимости /?Д=/(МП), приведенной
на фиг. 7.36, на другой, с другим углом наклона кривой, обеспечивающим
выполнение условий устойчивости системы.
Что касается выбора значения Ти то из практических соображений примем
0,2<Г1<2,0 сек. В частности, примем 7^=2 сек. Из полученного уравнения
движения видно, что при возмущении Х° [1] и действительных корнях
характеристического уравнения процессы будут монотонными. В нашем случае корни
характеристического уравнения будут: р\~—0,49; р2=—0,005.
Уравнение движения будет таким:
= 2,16X0 + (400/? + 200) рХш.
= ,«1^2/?1,Х0 = 1»86Х°.
(400/?2 + 198/? + 1,
Отсюда определяем:
Для уменьшения статизма необходимо увеличивать значение /<i. После
интегрирования полученного уравнения движения при Х° [1] получим
„ .„ -Ь86 ,
шпу ' 0,005 —0,49 v
При возмущении Хп1А [1] скорость вначале изменится на единицу скачком и
далее в соответствии с уравнением движения
(400/?2 + 198/? -Ь 1,16) ХМп= (2р - 1,16) А'пМ 11]
26*
403
будет изменяться по уравнению
0,495е-°'005<-0,()1й-0'496
*М"{t) = 0385 ~'
Характер соответствующих переходных процессов показан на фиг. 7. 37.
-^500
100 200 300
Фиг. 7. 37. Характер переходных
процессов.
Глава VIII
СИЛОВЫЕ УСТАНОВКИ С ЖИДКОСТНЫМИ РАКЕТНЫМИ
ДВИГАТЕЛЯМИ (ЖРД)
1. ОСНОВНЫЕ СВЕДЕНИЯ ПО ЭКСПЛУАТАЦИОННЫМ СВОЙСТВАМ
а) Характеристики
Жидкостные ракетные двигатели по принципу работы
принципиально отличаются от других реактивных двигателей тем, что
в них в качестве окислителя 'при сгорании горючего используется
не кислород воздуха, а специальные окислители.
ЖРД применяются главным образом для различных ракет,
а также для самолетных ускорителей и стартовых устройств.
Несмотря на различное назначение ЖРД, схемы таких двигателей
во многом сходны между собой, поэтому в дальнейшем при
рассмотрении эксплуатационных характеристик ЖРД не
учитываются особенности, вытекающие из их назначения.
Реактивная тяга у такого двигателя образуется за счет
истечения продуктов сгорания из сопла и определяется выражением
^ (8.1)
При />н>рср тяга двигателя /?д уменьшается, а значит с
увеличением высоты полета тяга увеличивается.
Величина Дд зависит и от скорости Wc, которая для
сверхкритического истечения определяется выражением
¥
vMm
k — i l \ Рк
Pox
Pox
При ри < р величина зависит только от степени расши-
Рк
рения газа в сопле ~с = ——« т. е. для конкретного двигателя с из-
Лф
405
вестным к скорость W зависит только от и не зависит от ве-
Рк
личины давления в камере (при rK=const).
Массовый расход газа через сопло зависит от рк и практически
пропорционален ему; температура газов Гк, молекулярный вес \i
и показатель k адиабаты (изоэнтропы) практически зависят лишь
от соотношения компонентов. Поэтому для ЖРД, у которого яс =
= const, можно считать, что скорость Wc зависит лишь от
соотношения компонентов /Ст= —^, т. е.
, (8.3)
следовательно, соотношение компонентов /Ст является очень
важным параметром, определяющим процесс в двигателе.
На фиг. 8. 1 для примера приведен характер протекания
завита
симостей Тк, [х, k, /?уд = —^ от соотношения компонентов Кт. Су-
8
ществует точка /Ст1, в которой /?уд имеет максимальное значение,
поэтому обычно Кт=Кп принимается за расчетное.
Таким образом, в общем случае развиваемая двигателем
реактивная тяга может быть представлена зависимостью R^=f( GT, /CT,
Рср» рн), а для расчетного случая, когда рСр=№ справедливо
соотношение /?д=/(GT, /Ст).
Давление рк в камере сгорания при /Ст = const и jtc = const
зависит от расхода компонентов GT и также является важным
параметром рабочего процесса двигателя. Обычно режим работы двигателя
(тяга) устанавливается по величине рк, поэтому при Рс^Фрн тягу,
развиваемую двигателем, мы будем выражать так:
Яд=/(Л, К*, Рн)- <8-4>
Свойства ЖРД обычно выражаются его характеристиками —
регулировочной (дроссельной) и внешней (высотной).
Регулировочная характеристика выражает зависимость тяги,
расхода топлива и удельного расхода от давления газов в камере
сгорания при определенных параметрах окружающей среды.
На фиг. 8.2 для примера приведена регулировочная
характеристика, где за единицу приняты значения параметров при
максимальном режиме работы двигателя, соответствующем рк=50 кГ/см2.
Видно, что с увеличением рк практически пропорционально ему
увеличиваются тяга R и расход топлива GT, а удельный расход Суд
уменьшается. Увеличение Суд при уменьшении рк объясняется
AW\
уменьшением термического к. п. д. т]т, который равен: т]т= »
2g-#tt
где i4=const.
Отсюда следует, что при уменьшении режима работы
двигателя (уменьшение рк) экономичность двигателя существенно ухуд-
106
7k;*;
^-^
^-—
^-—-"
—и.
—V
*W
I
7к
'L-
-*г
и-
LX
Фиг. 8. 1. Характер
зависимости Гк, ji, ^ и i?yfl от
соотношения компонентов /Ст.
^д
СХу v»i /уу Л ггг
0,50
0,25
0
Фиг. 8.2.
Сг
V
>
К.
1 -^д гаал
/
У
иуц max
^УД тО-Х '
1,10
70 20 30 40 50 р^кГ/см2
Регулировочная характеристика
двигателя.
407
шается. При неизменном режиме работы двигателя У?д и Суд не
зависят от скорости полета.
Внешняя характеристика выражает зависимость
развиваемой двигателем тяги от высоты полета (не относится к полету
в безвоздушном пространстве). На фиг. 8.3 для примера
приведена внешняя характеристика двигателя для двух значений давлений
рк, из которой видно, что с ростом Я (уменьшением рн) тяга
увеличивается, причем в большей степени для двигателя с меньшим
значением рк.
Степень расширения газа в сопле влияет на величину ^д
потому, что изменяется скорость истечения газа из сопла Wc, т. е. при
уменьшении рСр/Рк[ а значит, при увеличении jtc = ~4 скорость Wc
\ ^кр/
увеличивается, поэтому
1,15
1,10
1,05
1 1
> 1 Н
7* р^ВОнТ4
Л | ,
-tin
72 -
у ■
i
—
п
..
1
J 6 9 12 15 18Нкм
увеличивается и 7?д. Из выражения (8.1)
. следует, что для двигателя с
меньшим значением рср/Рк (при
рк = const) условие рСр=ря будет
выполняться на большей высоте.
В соответствии с этим, из-за
перерасширения газа в сопле
(Pcv<Ph) тяга будет
уменьшаться с уменьшением высоты
полета.
На фиг. 8. 4 приведен
характер изменения RA=f(H) для
двигателей с различным значением
Рср/Рк, откуда видно, что с
уменьшением Рср/Рк условие
Фиг. 8.3. Высотная характеристика
двигателя.
выполняется на больших высотах. Там же пунктиром показана
зависимость У?д=/(//) для идеально регулируемого двигателя, т. е.
для такого двигателя, у которого при любом значении Я
выполняется условие Рср=/?н и для него же при всех условиях полета
будет получаться оптимальное значение удельной тяги. Выполнить
условие рС1?=рк при pH = var можно лишь с помощью
регулируемого сопла, что практически осуществить пока не представляется
возможным.
В связи с тем, что в ЖРД используется специальный окислитель
вместо кислорода воздуха, теплотворность топлива (горючее+
+ окислитель) значительно уменьшается по сравнению с
теплотворностью одного горючего, поэтому удельный расход топлива в ЖРД
значительно больше, чем, например, в ТРД. Температура газов
в ЖРД весьма высока и достигает ~3000° К, поэтому камера
сгорания и сопло охлаждаются одним из компонентов, который затем
поступает в камеру сгорания.
В качестве горючего для ЖРД применяются углеводороды
и спирты (керосин, метиловый и этиловый спирты и др.)» а в
качестве окислителя — жидкий кислород, азотная кислота, перекись
408
водорода и др. Выбор необходимых компонентов топлива является
сложной задачей и зависит от многих факторов; при этом очень
важным фактором является получение максимальной удельной тяги.
Xapi
при
A
гкте^
j
о иен
1
PkZ
чиха
-1
A
-Pre
" Plif
Рщ
£
, . Ргср
Рк1 ^~Pk2
77расч
И
Фиг. 8.4. Характер • изменения тяги /?д в
зависимости от высоты полета Н. (рт — Рм)*
б) Возможные схемы двигателей
Применяемые в ЖРД компоненты топлива, как правило, весьма
агрессивны при их взаимодействии, т. е. при их соединении
'происходит настолько бурная реакция, что процесс может носить даже
характер взрыва. Поэтому к надежности систем подачи
компонентов, так же как и вообще к надежности двигателей этого типа,
предъявляются весьма высокие требования.
По принципу действия системы подачи компонентов топлива
можно разделить на две основные группы: насосную (обычно тур-
бонасосная) и вытеснительную.
На фиг. 8. 5 приведена схема вытеснительной системы подачи
компонентов, из которой понятен принцип ее работы.
Специальными регуляторами давлений и расходов устанавливается
необходимый расход топлива и соотношение массовых расходов
компонентов. В некоторых конструкциях двигателей вместо баллонов со
сжатым газом применяется генератор газа, в котором горит заряд
относительно медленно горящего вещества и газ вытесняет
компоненты из баков.
На фиг. 8. 6 и фиг. 8. 7 приведены возможные схемы двигателей
с турбонасосной шодачей компонентов. На фиг. 8.6 приведена схе-
,ма, когда турбина ТНА работает на третьем компоненте. Здесь
в газогенератор от специального насоса подается третий компонент.
В газогенераторе образуется газ в результате разложения третьего
компонента (обычно перекиси водорода) с помощью специального
катализатора. Для создания необходимого давления перед
насосами (с целью обеспечения бескавитационной работы) в баках для
горючего, окислителя и перекиси водорода поддерживается необ-
409
ходимое давление с помощью баллонов со сжатым газом (или
с помощью отбора газов из камеры сгорания или из
газогенератора). Поддержание необходимых расходов компонентов и их
соотношения обеспечивается специальными регуляторами.
На фиг. 8. 7 приведена схема двигателя, когда в газогенератор
подаются основные компоненты.
Для первоначальной раскрутки
ТНА при запуске двигателя с такой
системой подачи применяется заряд
медленно горящего вещества,
причем образовавшийся в результате
его горения газ поступает в турбину
и тем раскручивает ТНА до необхо-
Баллоны с газом
Высокого давления
Бак с
горючим
•баллон
с газом
Высокого
давления
Регуляторы
дабления
"Регуляторы
расхода
* Бак с
окислителем
Турдонасосный
агрегат
Парогазо -
генератор
—Регулирующие
органы
Фиг. 8.5. Укрупненная
схема вытеснительной системы
подачи компонентов.
Фиг. 8. 6. Укрупненная схема
двигателя с турбонасосной системой
подачи компонентов.
димого (минимального) числа оборотов. Для того чтобы
температура газов перед турбиной не превышала допустимой величины,
регулируется соотношение расходов компонентов, поступающих
в газогенератор.
На фиг. 8.8 приведена схема двигателя, когда газы из
газогенератора поступают в камеру сгорания, а не выбрасываются наружу,
410
как это было в первых двух схемах. Такую схему двигателя
называют закрытой; характерной особенностью этой схемы является
относительно высокая экономичность. Здесь компоненты подаются
в газогенератор специальными
насосами, сидящими на одном валу
с ТНА. Раскрутка ТНА у такого
двигателя осуществляется также
с помощью медленно горящего
вещества. Из
особенность
баллоны с газом
tfb/сокого давления
Бак для
горючего
Газогенератор
бак для
окислителя
этой схемы видна ее
состоящая в том, что
Лорохо&ой
заряд
о сГ4 Турбонасос-
ный агрегат
Фиг. 8. 7. Укрупненная схема
двигателя с турбонасосной
системой подачи компонентов.
Бак для
окислителя
Баллоны с газом
0 0 0 0 {{^ысо/<ого давления
ф fa* для горючего
^Пороховой заря о9
Газогенератор
Й
Гур&онасосный
агрегат
камера
сгорания
Фиг. 8.8. Укрупненная схема двигателя с
турбонасосной системой подачи компонентов.
давление компонентов за насосаАми газогенератора должно быть
существенно выше давления за насосами камеры сгорания.
Для ЖРД, устанавливаемых дт самолетах (ускорители), где
основным двигателем является газЪтурбинный двигатель, подача
компонентов может осуществляться насосами с приводом от вала
газотурбинного двигателя. Могут применяться и другие схемы
двигателей.
2. ВЫВОД УРАВНЕНИЙ ДВИЖЕНИЯ
а) Трехкомпонентный двигатель с ТНА, с подачей
третьего компонента методом вытеснения
Рассмотрим схему трехкомпонентного двигателя с ТНА, когда
третий компонент подается в газогенератор методом вытеснения.
Схема такого двигателя приведена на фиг. 8. 9, где показаны
необходимые координаты для каждого учитываемого элемента
двигателя как аккумулятора энергии.
411
Рассматриваемый двигатель имеет много аккумуляторов
энергии, но учитывать мы будем лишь самые главные, к которым
относятся: накопление газов в объемах (камера сгорания,
газогенератор, баки компонентов, баллоны со сжатым газом), масса ТНА,
масса жидких компонентов.
Фиг. 8.9. Схема ЖРД с ТНА.
Камера сгорания представляет собой неизменный объем V, в
который поступает топливо GT, а выходит газ Gr, и в ней могут
накапливаться газ и тепло. В дальнейшем мы будем учитывать лишь
накопление газа, так как накопление тепла очень мало влияет на
конечные результаты.
В установившемся движении массовые расходы топлива и газа
равны, т. е. GT~GT. В неустановившемся движении GT=^Gr — из-за
газа в объеме камеры сгорания, что можно запи-
накопления
сать так:
dGv
dt
= G — G
(8.5)
где Gv — количество газа, находящегося в камере сгорания.
412
Воспользуемся уравнением состояния газа в виде
Qv=4t;p*' (8-6)
где ц, Гк и рк являются переменными, причем ^ и Гк являются
функциями соотношения компонентов /Ст, т. е. u = ti(/Cr); 7Y =
= ТК(К?).
Линеаризируя (8.6), с учетом зависимости Gv—Gr(p- KT)
получим
(8.7)
где
'гО
о
ф
]
дТк dKrlo
Расход топлива Хтои и соотношение компонентов Za можно
выразить через расход компонентов. Для этого используем такие
зависимости:
После линеаризации получихМ
где
\(т~.. ЛГг-
•^ок^
Подставляя (8.8) в (8.7), получим
{T+KX^ (8.9)
413
где
— Ки Jr
Чтоп
Из (8.9) видно, что давление в камере сгорания зависит не
только от расходов компонентов, но и от скорости их изменения, что
является существенным свойством камеры сгорания.
Выделение тепла в камере сгорания
происходит с некоторым временем
запаздывания. Иногда величиной этого
запаздывания пренебречь нельзя, и
тогда уравнение движения будет
таким:
—-
——-.
/
й"
/
/\
>
г '
^ТОП
1
;
^ !
Фиг. 8. 10, Расходные
характеристики камеры
двигателя.
:)*ок. (8.10)
Из выражения (8. 9) видно, что по
рк камера является устойчивым
звеном. Это же можно видеть и из
расходной характеристики камеры двигателя,
приведенной на фиг. 8. 10 *.
Турбонасосный агрегат по схеме аналогичен ТНА,
рассмотренным выше, и включает !в себя турбину и два насоса. Для
неустановившегося движения справедливо такое уравнение:
где Мтур, Мок, Мгор — крутящие моменты турбины и насосов
окислителя и горючего.
Нелинейные зависимости для моментов примем такими:
ЛГтур=Мтур(/г,/?гг); М0К=М0К(п, Оок); МГ0р = МГ0р(п,ОГ0р)
где ргг —давление газа перед турбиной.
После линеаризации (8.11), с учетом (8.12), получим
rj-t -у . rjrr лг
(8.12)
(8.13)
где
2rJn0
тн
п0 /(
дМг
Ор
дп
^^Итур\ и
дп /о
Ргго
* Здесь не рассматриваются вопросы неустойчивого горения, когда
взаимодействие процессов в камере с системой подачи компонентов может приводить
к неустойчивому процессу в камере.
414
= Go /дМгор\ ^
Mq уд(7горуо'
А/г
по ГГ Pttq
В дальнейшем будем принимать уравнение ТНА в виде
— К у is у ту' y (R 1Д\
'^20^*/^р„„ -^гок^ок ^ ггоо^ топ? V°* l^)
где постоянные коэффициенты получены делением коэффициентов
из (8.13) на коэффициент самовыравнивания q'.
Газогенератор представляет собой фиксированный объем Vr,
в который подается перекись водорода. Под действием
катализатора перекись разлагается, в результате чего образуется газ (паро-
газ), так что из газогенератора вытекает газ. Уравнение движения
газогенератора выводится аналогично тому, как это делалось для
камеры сгорания, т. е. для неустановившегося движения
справедливо уравнение
^ОГГ, (8.15)
где Gn— массовый расход перекиси; Grr — расход газа.
Воспользовавшись уравнением состояния
°Уг=^ Т^гг, (8. 16)
и принимая зависимости
г9 /7B, FKp); ОГГ=ОГГ(рГГ), (8.17)
где рв — давление в баке с перекисью; .Ркр — площадь проходного
сечения крана, регулирующего расход перекиси; /?гг —давление
газа в газогенераторе; Тгг —температура газа в газогенераторе,
после линеаризации получим
Х%, (8.18)
где ~^
д(7п \
^в /О
„ ^ "^В д» "■* КО w /vurr ^^П
хо'=—; лкв=
Рв РвО КР ^кро' Wrr ^
°гг ^'гг/о
*} Выделение тепла при разложении перекиси водорода происходит также
с некоторым временем запаздывания, которое в дальнейшем учитывать не будем.
415
, Здесь принимаем, что перекись водорода разлагается без остатка
с выделением такого количества тепла, при котором температура
газа Т гг постоянна.
Изменение величины наддува бака с перекисью водорода
получим из уравнения
-^ = GB-Gn.B, (8.19)
где G — количество газа, находящегося в баке с перекисью;
GB— расход газа, поступающего в бак для его наддува;
Gn.B — расход газа, заполняющего объем вытесненной из бака
перекиси.
Далее используем уравнение состояния газа pBVB = GRTB,
продифференцировав которое по времени, получим
УВ^± = КГВ—. (8.20)
3 dt B dt v }
Подставляя (8.20) в (8.19), получим
£*&-=<? В-Ом. (8.21)
dt
Расход газа Gn.B, идущего на заполнение объема вытесненной
перекиси, из условия равенства объемов можно выразить так:
СП.В=^^Л, (8-22)
Ув.п К* в
Следовательно, вместо (8.21) можно написать
^В dPB Q ^В.П Рп /О
RTB dt ~ B Yb.h RTB'
Здесь переменными являются: GB.n — расход перекиси с плотностью
\'в.п и расход газа GB с давлением рв (плотность газа Yb=-j
(
Температуру газа Тв приближенно считаем постоянной.
Нелинейные зависимости для GB и GB.n принимаем такими:
где /^др — проходное сечение регулирующего органа впуска газа
в бак; рб — давление газа в баллонах.
Линеаризируя (8.23), с учетом приведенных нелинейных
зависимостей, получим
{T^p^\)Xp^KApXp^KA]lpX^~KATYXpT^K,FXKr (8.24)
где
Т — ^bJPbQ . if _ /*60 /д°
п'в~RTBOGBOl ' 4рб GB0£ \д
416
Fm /dGB\ РггоРм /dGB.n\
A 4др — T 7 а7Г~ ' A 4гг — ~^r 7^—~r - '
GB0/ \дГлр!0 GB()yBMRTli{)[ \дргг /0
A 4/7 —
/?во Г Pb d(?B.n d£B i pBGBM I ^
^во L Ув.и^тв дрв дрв Ув.п^в Jo'
Л-ipo б Рбо
Изменение давления в баллонах с газом, из которых наддувает-
ся бак с перекисью, получим из уравнения
^7-°в, (8-25)
где Go — количество газа в баллонах. Воспользовавшись тем же
уравнениемЪостояния газа и нелинейной зависимостью GB = GB(pBy
^др, Рб), после линеаризации получим такое уравнение (считая
приближенно, что за время неустановившегося движения будет
израсходовано мало газа из баллонов, и поэтому температуру газа
считаем неизменной):
(рбР + \)ХРб=-К5р1ХРв-К51рХлр, (8.26)
где
-р __
6
_ РвО /дОв \ .
р* G0l2 \dpJo
„ /"дро/^GB \ 1бо /dGB \
Аир~о72^Л; 2~О0 \дрб)о
Уравнение сети подачи компонентов. Изменение расходов
горючего и окислителя зависит от изменения: давлений перед
форсунками (обусловленного изменением потерь давлений в магистралях),
напора, развиваемого насосами, ускорения полета летательного
аппарата и статического давления столба жидкости.
Для дальнейшего анализа примем, что расход горючего и
окислителя через форсунки двигателя подчиняется такому закону:
— рк), или Оф = т(/?ф —/?к), (8-27)
где вф — расход жидкости через форсунки; рф — давление
жидкости перед форсунками; т = const.
В дальнейшем будем предполагать, что объемы всех емкостей
и трубопроводов системы подачи остаются неизменными, т. е., что
трубопроводы и емкости абсолютно жесткие (при недостаточной
жесткости будет иметь место взаимодействие с конструкцией, что
может существенно отразиться на конечных результатах).
27 1327 417
Давление жидкости перед форсунками является сложной
функцией многих аргументов, которую запишем так:
Рф = Рф(Ртн, Л,ад, At. Pv, Рпот, Pf> РЛ (8.28)
где рти —давление, развиваемое турбонасосом; рНад — величина
наддува баков; рст — величина давления, определяемая столбом
жидкости; р^—величина давления, обусловленная наличием
ускорения полета аппарата; рПот — величина потерь давлений из-за
местных сопротивлений и вязкости жидкости; pF — величина
потерь давлений в регулирующем органе; рИн — величина потерь
давлений из-за инерционных сил, связанных с ускорением течения
жидкости при изменяющемся расходе.
Давление, развиваемое ТНА, является функцией числа оборотов
насоса и расхода жидкости, т. е.
или Рт=Ртн(^Оф). (8.29)
Величина давления от статического напора столба жидкости
определяется выражением
/7CT=//CTY[sin(8 + a)], (8.30)
где Нет — высота столба жидкости; a—угол атаки летательного
аппарата; 8 — угол между горизонталью и касательной к
траектории полета.
Величина давления от ускорения полета V определяется таким
выражением:
p ()
Величины потерь давлений из-за местных сопротивлений и
вязкости жидкости и потерь в регулирующем органе примем
пропорциональными бф, т. е.
Рио* = ЩО%, Рр = Щ°^, (8.32)
где гп\ и Ш\ — постоянные коэффициенты; F — площадь
проходного сечения регулирующего органа.
Величину потерь давлений из-за инерционных сил, связанных
с ускорением течения жидкости при изменяющемся расходе, при-
мем пропорциональной (?ф, т. е.
рп=ща* <8-33)
Тогда выражение (8. 28) в явном виде будет таким:
()2 сту[*1п(() + а)} +
1ф_щ f|. (8.34)
418
Подставляя это выражение в (8. 27), получим
(8.35)
После линеаризации этого уравнения получим
где
где
//c-roYCOsal/o
H лу +
^;
Яст0
над » у ,>
/'надо ^0
Будем предполагать, что для малых промежутков времени Яст
изменится мало и что вследствие этого расход изменится мало,
поэтому в первом приближении этим изменением в дальнейшем будем
пренебрегать.
Уравнение (8.36) одинаково как для системы подачи горючего,
так и для системы подачи окислителя, поэтому необходимо ввести
в рассмотрение два таких уравнения и тогда окончательно получим:
где
+ K
lir
1 ок—
m2GOK0
:
is АтадО . is
А6наД — , > А61> —
(8.37)
(8. 38)
419
Рк()
I ок
ml
f}2 .
2 / okO'
^Q
^OK =_^Hf
над „ок
Y A1>
V Vo
В уравнении (8.38) выражения для коэффициентов будут
аналогичны приведенным, но соответственно для горючего.
Далее необходимо учесть изменение величин давлений
(наддува) в баках с окислителем и горючим аналогично тому, как это уже
делалось с системой подачи перекиси. Однако во избежание
повторения всех приведенных выше выкладок и предполагая, что это
влияние мало сказывается на конечном результате, в дальнейшем
не будем учитывать влияние изменяющегося давления наддува
в баках (поэтому на фиг. 8.9 не показана система наддува бака
с горючим). Не будем учитывать также и уравнение сети подачи
' перекиси из-за наличия Яст и V.
Таким образом, для рассматриваемого ЖРД в линейном
приближении будет справедлива такая система уравнений:
2. УтнР + 1) Ха=КгРггХРгг - К2окХок -
is у
^гюр^гор'
3. (Тг
4. (
6.
(8.39)
I - ^ остл */?. ст
— КвРкХРк;
7. (Тгорр+ l)Xrop =
420
В системе (8.39) всего 16 переменных, из которых девять
являются либо заданными воздействиями, либо координатами,
соединяемыми с регуляторами, т. е.
Vok . Vrop. Vok. Vrop. vok . Vrop. Y' X ' X
Разрешая (8.39), получим уравнение движения ЖРД относительно
любой переменной.
Для вывода уравнения движения по тяге, развиваемой
двигателем, необходимо линеаризировать (8.4), в результате чего получим
Хх = К8РкХРк + К8,Ха + К8НХн, (8.40)
где
к -121- X - Р"
Ядо Рт
В дальнейшем будем прини^мать рн = const, поэтому Хн = 0.
Объединяя (8.40) с уравнением для X* из (8.8), получим
XR = KspKXрк + К%0КХок — К\ТорХгор^ (8. 41)
где
Разрешая (8.39) совместное (8.41), получим уравнение ЖРД
по тяге. Из системы (8. 39) ясно видна сложность процессов,
происходящих в рассматриваемом двигателе, поведение которого
определяется дифференциальным уравнением седьмого порядка с
запаздыванием. Проведение анализа динамики такого двигателя
общеизвестными методами сильно затруднено из-за сложности задачи.
Однако для приближенных расчетов задачу можно несколько
упростить, учитывая то, что инерционность ТНА на порядок больше
инерционности всех остальных звеньев двигателя и, кроме того,
используя существенное различие в частотных характеристиках
отдельных контуров, всю систему можно «расщепить» на отдельные
контуры и рассматривать каждый контур раздельно. Такие
контуры образуются, если к объекту регулирования присоединить
регуляторы, управляющие показанными на схеме, приведенной на
фиг. 8.9, регулирующими органами. Например, если присоединить
регулятор (редуктор) давления газа, выходящего из баллонов для
наддува бака с перекисью, и если этот регулятор достаточно
быстродействующий, то можно считать, что величина наддува бака
в любой момент времени будет примерно постоянной. То же самое
421
можно отнести и к системам наддува баков с окислителем и
горючим. Ниже при решении конкретных примеров приводятся величины
инерционностей отдельных звеньев двигателя, подтверждающие
сказанное.
В соответствии со сказанным выше положим T'K = TV=TOK—
= TYop = т^О; ^в= 0; поэтому четвертое и пятое уравнения (8.39)
не учитываем.
Тогда система уравнений вместо (8.39) будет такой:
is у .
гпп ^™~ *\ 1 г» if ■** nvt
К—А'2горА'г
гор;
хгор=к1пхп
(8.42)
Кроме того, необходимо учитывать (8.41).
Разрешая (8.42) относительно ХРк, Хп, Хок и Хтор, и с учетом
(8.41) относительно XR, получим:
(а
а5)
(q4p + qb) Xf;
(a
(8.43)
-a9)X™v + (q8p + q9)Xf. }
Из полученных уравнений видна особенность поведения
двигателя по указанным параметрам, которая заключается в том, что,
кроме координаты ХПу все остальные зависят не только от
величины, но и от скорости изменения расхода компонентов.
В момент вертикального взлета, когда скорость полета еще мала
и поэтому можно не учитывать сопротивления окружающей среды,
ускорение полета V связано с развиваемой двигателем тягой
выражением
RA-Mg=MVy (8-44)
где М — масса летательного аппарата.
422
В общем случае масса М является переменной величиной,
поскольку расходуются окислитель и горючее. Однако приближенно
для малого промежутка времени примем М^ const. Тогда (8.44)
выразится в безразмерной форме так:
& (8-45)
С учетом полученного, из (8.42) и (8.41) вместо (8.43)
получим:
(Гр
{Тр+\)Хп=Ь7Хкр+ a
X
ок.
F ,
(8.46)
Разрешая (8.42)v совместно с Ха =Х0К—Хгор относительно Ха,
получим
Из (8.46)по сравнению с (8.43) следует, что в момент взлета
аппарата свойства двигателя несколько изменяются из-за изменения
величин коэффициентов усиления и постоянной времени.
б) Трехкомпонентный двигатель с ТНА, с подачей
третьего компонента от насоса
Схема такого двигателя была приведена на фиг. 8.6.
Выведем уравнения движения. Будем принимать давление наддува баков
постоянным и не будем учитывать влияние ускорения полета на изменение расхода
перекиси.
Уравнение ТНА будет таким:
dn
2TZJ г—- = МТур — МОК — МГор —- М„тВ,
где дополнительный член Мп.в учитывает величину крутящего момента насоса,
подающего перекись, нелинейная зависимость для которого будет
После линеаризации получим
/Т1 -r\ I r\f \ V — I/' V I/1 V ' I/4 V If V ^й AQ\
\J ТИР ~г Q ) л п — А 2/?гг л Ррг— ^ 2ок л ок —. А 2ГОр л гор— А 2ПЛ ш V0* *о)
где
/ — п° [д^ок ^^гор дМи.в дМ-тур
Mq [^ дп дп дп дп
ДСп
> _ GQ /oAln.B \ у АС7П
Д2п~ Мо \ dGn Л1 Go '
Выражения для остальных коэффициентов аналогичны полученным в
уравнении (8. 13).
423
Для вывода уравнений движения магистрали подачи перекиси воспользуемся
приведенным выше методом.
Расход перекиси через форсунки в газогенератор подчиняется такому закону:
O\ = m(p^n — pTT)t (8.49)
где рф.п — давление перед форсунками; ra = const. Давление p,j,.n принимаем
зависящим от таких параметров:
Рф.п = Рф.гЛРн.п, Рнаъ Рпот, Ркр), (8.50)
где рп п — давление, развиваемое насосом; рпот — величина потерь давлений
из-за местных сопротивлений и вязкости жидкости; ркр — величина потерь из-за
сопротивления регулирующего органа с сечением FKV. Здесь в явном виде
зависимости для ри п и рпот будут аналогичны выражениям (8.29) и (8.32).
Зависимость для потерь рКр имеет вид
Ркр = ш2-^-. (8.51)
Подставляя указанные зависимости в (8.49), получим
а>2 s>2
°ф.п / П \2 2 о m2Gn
= Ai.no I— ~ KG ~ mxG^ — —2— + Рнит, — Ргг. (8.52)
^ \/1о/ ^кр 1[
Линеаризируя (8.52) и считая /?ш»д~ const, получим
V m кр / ' крО
Подставляя (8.53) в (8.48), получим окончательно
/•J* ' | -I \ \Г Г/ VT rr ЛГ If VT шг у /Q СГ 1 V
где
v' _._*■ Zero
* ^ 11 А От-
к,
2п
У равнение, учитывающее изменение давления в газогене рато ре > получим
аналогично рассмотренному выше, т. е. исходным уравнением будет
dGyT
— = ^п — Gry где Gyr — количество газа, находящегося в газогенераторе
и некоторой части трубопровода; Gn — расход перекиси; GT — расход газа.
У и,
Воспользовавшись тем же уравнением состояния газа GyT~ —~—РГГ
R Tyyq ll
и считая Gr = Gr (ргг), после линеаризации получим
IV,.
[ R
ргго / еаг \ 1
Gn0 \ др yJ ' 1
424
Заменяя Хп из (8.53), получим
{ТггР -г \)ХР =
В. 56)
где
Vr
7Yr=
2/7н.
пО
гг
что
dGn
Остальные уравнения остаются прежними, т. е. для камеры сгорания —
уравнение (8.9), для магистралей окислителя и горючего — уравнения (8.37) и (8.38)
соответственно и для реактивной тяги — уравнение (8.41).
Следовательно, система уравнений будет такой:
iго,,)
-<ТлР + Кш)
(Тггр + 1)ХР
гг
ок. ( (8.57)
+ 1)
1уХу— КтркХрк ^Ki
F
Если принять те же допущения, т. е. положить 7^= 7>г= 7\ж= ^гор —
а==т^гО, то получим такую систему:
Xрк = Airop^rop — ^Iok^okJ
/—^бРк &к~' ^б/
[ (8.58)
Хок =
Разрешая (8.58) относительно ХРк, Хп, Хок, Хгор, XR и принимая
Ръ&я.~ const, получим уравнения, аналогичные (8.43), но с другими
значениями коэффициентов.
Для момента вертикального взлета необходимо дополнительно учесть
выражение (8.45); тогда в системе (8.58) четвертое и пятое уравнения будут такими:
^ОК . v
(8.59)
Разрешая (8.58) без четвертого и пятого уравнений вместе с уравнениями
(8:59) относительно Xр , ХПу Хор, ХОц, XRi получим уравнения,, аналогичные
(8.46), но с другими значениями коэффициентов.
425
в) ЖРД с ТНА, с газогенератором, питающимся
основными компонентами
Схема такого двигателя была приведена на фиг. 8. 7. Выведем
уравнения движения при тех же допущениях.
Уравнение для камеры сгорания останется прежним, т. е. (8.9)
или (8. 10).
Уравнение для ТНА также останется прежним, т. е. (8.14).
Уравнение для газогенератора выводится аналогично уравнению
для камеры сгорания, поэтому сразу запишем его по аналогии
с (8.9), т. е.
) Хг = (Тагр + KloV) *гор - (Тир + Кш)Хг0К, (8. 60)
где
гор.г
о
Хпк =-
гор.гО
Аж.гО
a Grop.r и GoK.r соответственно расходы
горючего и окислителя в газогенератор.
Коэффициенты в уравнении (8. 60) имеют
одинаковое выражение с коэффициентами в
выражениях (8.7), (8.8) и (8.9), но только
они отнесены к расходам компонентов
через газогенератор.
Для вывода уравнений магистралей
используем схему, приведенную на фиг.
8.11, с указанными там обозначениями.
Здесь р — давление за насосом в точке
разветвления сети.
Составим уравнения для каждого
участка сети, т. е. от бака до точки разветвления,
от точки разветвления до камеры сгорания
и от точки разветвления до газогенератора.
Влияние ускорения полета на участок
магистрали от точки разветвления до газогенератора учитывать
не будем.
Для первого участка величину давления в точке разветвления
можно выразить аналогично давлению по уравнению (8. 34) в виде
— / П \2 rsr>2 г>2 • , //CTlV COS а ,7 ,
Фиг. 8.11. Схема
магистрали подачи
компонентов.
где члены правой части выражают воздействие тех же факторов,
что и в выражении (8.34).
Линеаризируя это уравнение при рНад~const, получим
cos a
g
cos a
р'
(8. 61)
426
Для малых промежутков времени положим, что Нст1 изменяется
мало и расход также изменяется мало, поэтому в первом
приближении этим изменением можно пренебречь. Тогда вместо (8.61)
получим
a У
(8. 62)
Для участка сети от точки разветвления до камеры сгорания
уравнение расхода запишем так:
О$ = т(рф.к-Рк), (8.63)
где GK — расход в камеру сгорания чер£з форсунки, а
ри — давление перед форсунками.
В свою очередь, давление рф.к можно выразить так:
т G
— тАик
где члены правой части имеют тот же смысл, что и ранее, но
только для соответствующего участка сети, а последний член выражает
потери на регулирующем дросселе с 'проходным сечением FRV.
Подставляя выражение для рф.к в (8.63) и линеаризируя при
#ст2~ const, получим
2^
& дрО
Для участка от точки разветвления до газогенератора
уравнение расхода будет таким:
О*г = м(Рф.г-Рг), (8-65)
где Gr — расход в газогенератор через форсунки, а рф.г — давление
перед форсунками. Здесь
2 . m7G2r
Рф.г = Р - ^б°г + Яст3У [sin (0 + a)] - m,Gr ~ -^-.
гкр
Подставляя это выражение для рф.г в (8. 65) и линеаризируя при
tfCT3^const, получим
m7OtQp+ 2/-L
крО
427
Кроме рассмотренного, необходимо учесть уравнение расходов
C11 = GK + Gr, после линеаризации ^которого получим
Gn()XaH^GK,XaK+Gr,XQr (8.67)
Таким образом, движение рассматриваемого двигателя в
линейном приближении определяется такой системой:
2.
3.
ХРг = (7\,р + К3гор.г)ХГО]КГ-
~f Кзок.г) ^ок.г'
5* V 2гор/7Т~ 1) ^гор.к==^
Ар гор'*/; гор'
гор
7
V"
7 гор.н/Лгор.н
Угор.к^гор
V Л- К
^гор.к I ^ Уго
(8. 68)
р ок
А
11. А Иок.н^ок.н == ^Иок.Ак.к ~Т
12. XR — K 12ркХ
13. -Ла = -лок.к yV
Здесь первое уравнение аналогично (8.9), но с учетом времени
аапаздывания' т; второе уравнение соответствует (8. 14); третье
уравнение соответствует (8.60), но с учетом времени запаздывания
Х2'У четвертое и последующие уравнения соответствуют и
аналогичны уравнениям (8.62), (8.64), (8.66), (8.67), (8.41), (8.8).
Из этой системы уравнений видно, что характерной
особенностью рассматриваемого двигателя является взаимное влияние
расходов компонентов в камеру сгорания и в газогенератор не только
через турбонасосный агрегат, но и через сеть. Разрешая (8.68) ог-
428
носительно интересующих нас. обобщенных координат, в том же
предположении, что
т' т'==Т =Т Т Т Т =
* к— I г 1гор л 2гор J Згор л 1ок Y 2ок
+ {ахр + а2) Xp'4
к*
Хок.к = (
(8. 69)
(Г/7+1) XR = (
-|- (asp+а9)
(gsp
Из этих уравнений видно, что все координаты, кроме числа
оборотов Х71 в неустановившемся движении, зависят не только от
величин проходных сечений регулирующих органов Xrsv, Х°*, Х™р ,
гг гг гк
Х°*, но и от скорости их изменения. Это является существенной
к
особенностью свойств рассматриваемого двигателя как объекта
регулирования.
Изменение соотношения компонентов, поступающих в
газогенератор, приводит к изменению температуры газа в нем и,
следовательно, к изменению режима ТНА, т. е. соотношение компонентов
и температура газа в газогенераторе связаны однозначно. Если
необходимо поддерживать (ограничивать) заданную температуру
газа в газогенераторе, то необходимо систему (8.68) разрешать
с дополнительным уравнением
КаГХг=Х0К г — Хгор.г, (8.70)
которое получено из соотношения Хаг = Х0К г — Хгор г [выражение,
аналогичное (8.9), но для газогенератора], а также из
предположений Хлг =
и Хг=
429
г) ЖРД с подачей компонентов методом вытеснения
Принципиальная схема такого двигателя была приведена на фиг. 8.5.
Составим уравнения движения такого двигателя, для чего рассмотрим схему,
приведенную на фиг. 8. 12, где обозначены координаты входа и выхода для каждого
учитываемого элемента двигателя как
аккумулятора энергии. Будем учитывать
следующие аккумуляторы энергии: камеру
сгорания, баллоны со сжатым газом,
объемы газа над баками окислителя и горючего,
массы движущейся жидкости
(компонентов).
Уравнение камеры сгорания останется
прежним.
Уравнение, учитывающее изменение
давления в баллонах с газом, из которых
наддуваются баки с окислителем и
горючим, выводится аналогично рассмотренному
выше. В этом случае используем уравнение
где Gq — количество газа в баллонах,
a GBi и Gb2— расходы через клапаны
(регуляторы) давлений в баки с
компонентами.
Fx и
Фиг. 8. 12. Принципиальная схема
ЖРД с вытеснительной системой
подачи компонентов.
1—баллоны ic газом высокого давления,
2—регуляторы давления, 3—дроссели,
4—бак для горючего, 5—бак для
окислителя, 6—регуляторы расхода,
7—камера сгорания.
Принимаем GBl = Св1(/?б, р
и Gb2 = Gb2 (/7б, р™Л, F2), где
F2 — проходные сечения клапанов.
Используя уравнение состояния газа,
после линеаризации получим
где
GoRTol '
dG
B2
дР»
"Go/WWo' G0 [dpt-dptl-
Уравнение, учитывающее изменение давления наддува в баках, выводится
аналогично тому, как выводилось уравнение (8.24), где вместо GB.n и Yb-п
принимают G0K, Crop, Yok, Yrop. Для одного компонента будем иметь выражение,
аналогичное уравнению (8.23). Например, для горючего:
К'ъ dt -O1 Yrop RTB
Используя те же зависимости для GBi, после линеаризации получим
(8- 72)
430
где
'prop najxvJ р
над от п 1
Ю в^вОЧ
к __ Рбо /dGBA
' Рб~ О1 \дР);
о
.^f)o;
*3,
гОр
/на'до^горо . _ /£g Г Gr°P
— от г ' ^ rv
др
ийл Jo
Аналогичное уравнение будет и для окислителя:
F<\ — а 4ок-^ок« (8.73)
Уравнения д„^ магистралей подачи компонентов выводятся аналогично тому,
как выводились уравнения (8.37) и (8.38), где единственным отличием будет
отсутствие напора, развиваемого насосом, т. е.:
(ТокР + 1) *ок =К5над^аКд + *бст*£т + КъуЧ~-^РкХРк + ^5^5? I (8. 74)
(Ггор/7 + 1) ХГ0р = /Сбнад^Л + /Сбст^Рт + К&Ху-КбРкХрк + ^6F ^г/р. (8.75)
Здесь выражения для коэффициентов аналогичны тем, которые получены в
уравнениях (8.37) и (8.38), за исключением того, что теперь /ок = 2 (— +
_ Vm
-f- /tzj -f-—2J (аналогичное выражение будет и для /гОр).
Следовательно, общая система уравнений для рассматриваемого двигателя
будет такой:
1- (Т'кР
2. (Тбр
3.
р Ст
. (ТгорР + 1) ^гор = А^бнад
(8.76)
В этой системе 13 неизвестных, из которых семь являются либо
заданными воздействиями, либо координатами, соединяемыми с регуляторами
(Хр}1 Хр2; Ху\ Х°р\ Х™Р; ХрС1; Хгрст).
Структурная схема, соответствующая системе уравнений (8.76), приведена
на фиг. 8. 13, из которой виден путь прохождения сигналов.
Для рассматриваемого двигателя регуляторы давлений, обеспечивающие
заданные величины наддува баков с компонентами, также делаются достаточно
431
быстродействующими, поэтому по тем же соображениям в первом приближении
будем считать Х™]};1 = 0; Х™л = 0.
Тогда в системе (8.76) можно не учитывать второе, третье и четвертое
уравнения. Считая также для малых промежутков времени Хркст^0 к Хгрст^0,
для момента старта летательного аппарата, с учетом (8.41) и (8.45),
получим вместо (8.76) такую систему уравнений:
(Т'кр -f 1) етрХРк = (Тор -г /Cirop) *гор - (Т*Р "
(Ггор/Н-
гор-
[ (8.77)
Xy -
пок
гнад
над
рг?
Фиг. 8. 13. Структурная схема.
Разрешая систему (8.77) относительно XРк и XR, получим-
— %р ^гор — (lxp2 _l. [2р + /3) е~хр Хо£;
2/7 + #з) + (^о/72 + ^l/7 + ^2) ^"~х/? ] ^^ =
'4-^6) + (^У/72 + С8Р + С9) е~~ "Р J X™ +
) _ (/7 р2 + 18Р + /9) £-т/? ] ^5?. (8.79)
(8.78)
Составление уравнений движения в линейном приближении для других типов
двигателей производится аналогичным способом.
43 2
д) Определение коэффициентов
Ниже определяются приближенные выражения для коэффициентов,
входящих в полученные выше уравнения движения.
/dGr \
В уравнении (8.7) частная производная! ) определяется из уравне-
\ дрк /о
ния расхода, соответствующего сверхкритическому истечению из
реактивного сопла:
/ РТ
ft—1
откуда
/dGr ^
\дрк /о Рко
В этом же уравнении ц, Тк и k являются функциями"соотношения
компонентов Kj, как показано для примера на фиг. 8.1, причем эти зависимости
различны для различных компонентов.
Обычно двигатель рассчитывается на максимальное значение /?уд, которому
соответствуют определенные значения (х, Гк и Кг, поэтому определение частной
(dGr \
) нужно производить при этих значениях \х, Тк и /Ст. Уравне-
ОКт /о
ние расхода газа в неявном виде будет:
; ^к(А:т); Ь(Кт)\ рк], поэтому
WT /о \ Ф Л WT /О \ <^^к Л WT /о U* /о Wt /0 '
Первые частные производные каждого слагаемого определяются из того же
уравнения расхода, записанного в явном виде, а вторые — путем графического
дифференцирования зависимостей типа приведенных на фиг. 8.1. Окончательное
выражение для этой частной производной будет:
г\ /_Ф\ 9lb_(<E*\ gro Ого/ dk \
t/o Ut/o2(^o Wt/o 2Гк0 2 Wx/o
Г 1 __ 2 2 1 1
X[ k - (Л-1)2 ^-bl ^ — lj
/dGv\ /dGv\
Частные производные! ) и ( -——) определяются из уравнения
\ о\± /о \ оТк /0
У
Уо v-
состояния газа: Gy = — —— рк и равны:
R I к
U/o" Л^ко ' \ дТк /0
\ ____
/ ~
Подставляя полученные выражения для частных производных в выражения
дли коэффициентов (8.7), получим
GrQRTK0 [дКт
(*— I)2 * + ! * —
28 1327 433
Определить время запаздывания т аналитическим путем не представ
ляется возможным и можно лишь указать на основные параметры, влияющие
на величину этого времени, к которым относятся: качество распыла, давление
в камере сгорания, некоторые свойства самих компонентов и др. В среднем
можно принимать т=0,001^-0,01 сек.
Частные производные в уравнении (8.13) находятся из выражений
aN
М =
Аг =
Ян0 =
где я, с, С\ — постоянные. Отсюда для каждого насоса находятся
/дМ\ MQ /дМ\ Мо
\dGJo~ Go ' \дп)о ~ п0
Если характеристики насосов заданы графически: //иас=/(С?) для
различных п, то частные производные находятся графическим
дифференцированием.
Ь 1
IZI1
и Grr ~ тргг (где
1 —(——J
второе уравнение соответствует сверхкритическому истечению; ч}7— к. п. д.
турбины; р4 — давление за турбиной) получим выражения для остальных част -
ных производных (8.13):
/„—1 — 1
дп
м
турО
о ло ургг/0 Ргго
Тогда выражения для коэффициентов этого уравнения будут:
е'=^(^г
Для уравнения (8.18) частные производные определяются аналогично рас»
dG\ Grr
; используя Gn = miFKp у /?в — /?гг>
смотренному
()
/dGrr\
: [г I =
\^гг /о
где
;
ргго
/ ^п \
= const, получим: ( т \ =
\^г/о
п \ ^п
—1 =
b/o 2(/7B —ргг)
кр Л) крО
Тогда коэффициенты будут такими:
Г^ГГ + ^ 1 .
по Ггг
I.» I I
3^~ ^ L^
— Ргг) + ^п
^гг Оп
434
—I"1.
Рв Jo
Для уравнения (8.24) коэффициенты определяются аналогично, т. е.:
V v Г 1
Т t>= —* I -4- ■
Я'ЛюТво^ло L2(/?b~Ргг)
_ Ув.пСвО Г 1 —I"1-
/'вОУвО^пО 1.2 (Рв — Ргг) Ръ JO
п Г 1 1
Л- ^.^ £Х£0 * _1
4^Г 9.п„п(пп— пЛ \с).(п^~р ) Pi
' Рво12(Рв — РГГ) Р* Jo
Аналогично для коэффициентов (8. 26) /
'°- G0RTB0 ' ^р°-"'
так как принимаем перепад давлений на регулирующем органе сверхкри-
тическим и поэтому! ) =0; А^5др = 1-
\^в /о
В уравнениях (8.37) и (8.38) необходимо определить значения m, mh m2
и К, так как все остальные величины известны. Из (8.27) получаем гп— .
Коэффициенты гп, К и Ш\ являются коэффициентами потерь давлений
соответственно в форсунке, насосе и в сети и входят в уравнение (8.35) в виде
суммы, поэтому эту сумму потерь можно определить из выражения (8.35) при
G Л\ — 0 те*
+ К-\- ТП\ + ~ ~~2— { 2~ п<1 ~^~ Рнйд, Н~ ^ctY sln (в + О) +
Ясту cos aV
L
а коэффициент т2 имеет выражение т2=уИ , где L и f — длина и площадь
ygf
трубопроводов соответственно (здесь т2 определяется как сумма потерь по
отдельным участкам трубопроводов системы подачи).
Частные производные и коэффициенты уравнения (8.41) определяются
из
р фф ур () р
Г п wc n /dWc\ I
уравнения расхода при #уд= — = ^удтах и (—-) = 0 , т. е.:
L g wat/o J
\дКт)о \ dGr /0 \ дКт /о ^го \ дКт /о * \ дрк )0 \ dGr /0 \ дрк /0 *
Следовательно,
Если /?уд =£/?Уд max, то необходимо в уравнение тяги подставить выражение для
расхода газа и скорости его истечения из сопла и найти соответствующие частные
28* 435
пооизводные или в заданной графически зависимости Ryn-f(Ki-) найти графи-
(0 w с\
Т7Г ) •
Oi\i /о
е) Примеры
Пример 1
Задание. Определить приближенные значения постоянных коэффициентов,
входящих в уравнение движения двигателя, схема которого приведена на
фиг. 8. 9, при работе его на стенде на максимальном режиме при вертикальной
установке двигателя.
Исходные данные. Принимать следующие данные по двигателю,
полученные из теплового расчета:
Объем камеры сгорания V 0,35 м3
Молекулярный вес газа |х 23,5
Температура газа а камере сгорания Т1{ . . . 26509 К
Давление в камере сгорания рк 15,5 кГ/см2, или 152 н/см2
Расход газа Gr 125 кг/сек
Соотношение компонентов /Ст 1,23
Показатель адиабаты для газа k 1,2
Реактивная тяга, развиваемая двигателем, /?д 25 «103 кГ, или 245-103 н
Число оборотов ТНА п 63,4 об/сек, или 398 рад/сек
Момент инерции ТНА /тн * 0,09 кГ-см- сек2, или
0,882 н- см- сек2
Мощность турбины N. 465 л. с, или 342 кет
Давление в газогенераторе ргг 26,3 кГ/см2, или 258 н/см2
Давление газа за турбиной р4 1,75 кГ/см2у или 17,2 н/см2
Показатель адиабаты для газа в
газогенераторе, kr 1,3
Мощность насоса для окислителя N0K • • .. * 190 л. с, или 140 кет
Мощность насоса для горючего Л^гор 275 л, с, или 203 кет
Расход окислителя G0K 69 кг/сек
Расход горючего GrOp 56 кг/сек
Давление наддува бака с перекисью
водорода рв . * . . . > 35 кГ/см2, или 343 'н/см2
Температура газа в газогенераторе Ггт . . . 658° К
Объем газогенератора Vr 0,015 м?
Расход газа из газогенератора Сгг 2,13 кг/сек
Температура сжатого газа в баллонах Тв . . . 290° К
Объем наддуваемой части бака для
перекиси Уп.в . . . 0,05 ж3
Плотность перекиси водорода уи.и ...... . 1400 кг/м3
Расход газа для наддува бака с перекисью GB 0,06 кг/сек
Давление сжатого газа в баллонах р(~, .... 150 кГ/см2, или 1470 н/см2
Объем баллонов со сжатым газом Vo . . . . 0,15 м3
Повышение давления окислителя в насосе Ртн ок 16,2 кГ/см2, или 159 н/см2
То же в насосе горючего ртн г0 19,8 кГ/см2, или 194 н/см2
Давление наддува бака с окислителем рнад ок 1,5 кГ/см2, или 14,7 н/см2
Давление наддува бака с горючим рнад-гор • • 0,5 кГ/см2, или 4,9 н/см2
436
Статический напор в системе подачи окислителя
Яст.ок 5.5 М
То же в системе подачи горючего Нст гор . '. 7,5 м
Площадь сечения баков с окислителем и
горючим F 2,0 л2
Площадь сечения трубопроводов / 0,02 мг
Плотность окислителя уОи 1140 кг/м3
Плотность горючего Yrop 860 кг/м3
Графики зависимости TK—f(KT), k~f(KT), p—f(KT)> — = #уд :
= f(KT) для топлива: этиловый спирт+ 25% воды и жидкий^кислород
приведены на фиг. 8.14. Расчет вести при — = /?уд тах
о-
Величину запаздывания для камеры сгора- tlV
ния принимать т=0,005 сек. Потери
давлений для регулирующих органов окислителя
и горючего принимать равными 10% от
общих потерь.
Решение. Коэффициенты,
подлежащие определению, входят в уравнения
(8.39) и (8.41). д
В первом уравнении (8. 39) постоянная „ w
времени Тк равна
3000
2600
2200
0,35-23,5-15,5-104
~~ 848-2650-125
*0,005 сек.
Зависимости р., ТК и к от Кт для
указанных компонентов топлива приведены на
фиг. 8. 14, откуда графическим
дифференцированием находим
нг
230
226
222
-
-
•
1
—•—.
^*-
х~
к
*^
^УД
——.
---
М-
-
-
<_-
—-*■
-
-
/,22
V*
И'
22
20
12
Фиг. 8.14. Зависимость р-, Гк, к
и /?Уд рт соотношения
компонентов Кт,
Тогда значение Та будет
1,23-0,35-15,5-104
~ 125-848-2650
Значение К^ в уравнении (8. 7) будет:
d\i 1 дТк
437
Тогда выражение (8.7) запишется так:
(0,005р + 1) ХРк = Xr0 + (O.OOlp + 0,09) Ха.
Коэффициенты уравнения (8.9) будут:
С7гОр 56
Kiwi» = f u + ^1топ7Г- = -0,09 + — = 0,356;
Кюк^Кы-К7оп^ = -0,09-^ = -0,646;
тогда первое уравнение (8.39) будет:
(0,005/? + 1) е°№РХРк = (0,001р + 0,646) *ок +
+ (— 0,001 р + 0,356) *гор.
Для уравнения (8.41) имеем (при Хн—0):
1,23/5> 125 1000-125
/
p~125 12.23.5~ 2-2650
125 (—0,04)
2
поэтому для (8.40) будем иметь: А'/? = Л'рк —0,09^ и для (8.
= ХРк — 0,09.ЛГОК + 0,09 Агор.
Коэффициенты уравнения (8. 13) определяем согласно полученным ранее
выражениям, т. е.:
■ 2nJn0 2.3,14.0,09.63,4
щ /Мок Мгор Мтур\ 63,4/35,8 52,2 88
Typ \ 63,4/35,8 52,2 88 \
п~/0 =~8Т^6М + 63Д + 63Т4/ 2*
!
88 1,3
88 i^i
/М Г__1 (~§ -
f Gq Mokq 69'35,8
88-69
Gp Л1гОр0 56-52,2
88-56
Тогда уравнение (8. 13) запишется так:
(0f41p +2) ЛГЯ = 0,27 JTP — 0,41
а уравнение (8.14):
(0,205/? + 1) Хп = 0,135 Хр — 0,205 Хок — 0,295 Хгор.
438
Коэффициенты уравнения (8. 18) также определяем согласно ранее полученным
выражениям, т. е.:
RTr
0,015-23,5-104
= 0,03;
2,13 2,13 I
bi+ 2(35-26,3)]
35-2,13-104
2-2,13(35 —26,4) 104+ 2,13-26,3-104
3/7 ~
L ^гг
2,13-104
)\ =
2,13
= 0,38.
[26,3 ' 2(35-26.3)J
Тогда уравнение (8. 18) будет таким:
(0,03/7 + 1) Хр = 0,8ХРв + 0,38 Л>.
Коэффициенты уравнения (8.24) в соответствии с ранее полученным будут:
™ Г ! + ! Г'-
QGnO L2 (/?в ~~ /?гг) /?в Jo
0,05-1400-104 Г 1 11-1
—» i — =0,39:
848-290-40-2,13 L2 (35— 26,3) 35 J
Ув.пОво Г 1 1 1-*
1400-0,06-104 Г 1 1 1-1
35-104-40-2,13 [2(35 — 26,3) ~*~ 35 J ' "
Ргго | * _
~ 2рво(Рв - Ргг)0 [2 (Рв - Ргг) Рв
26,3-104 Г 1 —I"1- о с
L2(35 — 26,3)+ 35 J ~"~ ''
2-35(35 —26,3)-104
Тогда уравнение (8.24) будет таким:
Коэффициент уравнения (8.26) будет:
__ РбоУбо 150-104-0,15 _
6 С/?Г 0,06-848-290 ' '
439
а само уравнение запишется так:
(1Ь,15р + 1)ХРб = -Хлр,
/dGB \
так как КъРв = 0 вследствие того, что (т—) =0
\орв /о
(сверхкритический перепад давлений).
Значения коэффициентов уравнений (8.37) и (8.38) определяем в соотвег
ствии с их выражениями, т. е.:
-{-К + Щ + ~2 I = "Г2 I 2"
m Fo/ok Gok L Л0
;< sin (0 + a)
~ 692 '
— + К + mx + ■
— г z i
гор
1 f PTH ^dYrop cos a V
^— —y- «2 + /?над.гор + ^cxYrop sin (0 + a) +
'«рЬ Jo
--—r [19,8+ 0',5 +7,5-0,086- 15,5] =17,3;
562
860-9,81-0,02
1140-2
"""1140-9,81-0,02
: = 2(— + /f + mi + ^-j G\K = 2-5,95-692 = 56,5103;
\ m г r\ I
\ i ° /OK
/гор — 2 I
гор
10,2-69 A Mn
10,2-56
2^тнок 2-16.2-10*
~7^'
56,2-103 =5'/5=
THroP 2-19,8-lQ4
А 7л = = = o.ODl
/rop 10,7-104 ' '
Ртяок L5-1Q4
1^в =027;
1^в 56,5-104 =
/?над.гор 0,5-104
£ко 15,5-104
/ok 56.5-103
440
Потери давлений на регулирующих органах по заданию должны составлять
10°-'о от общих потерь, т, е.
—- = 0,1 ( — + К + /Я1 + ^£-) = 0.1 -5,95 - 0,595,
^оок \ т Fo /ок
-^— = 0,1 (— + Л' + т, + 5") = О,Ы7,3 = 1,73.
Тогда коэффициенты Д'6/г и Ktf будут:
mi GL 692
^ 22°595
т\
Следовательно, уравнения будут такими:
(0,012р + 1) ^ок = 5,75 А'„ + 0,267 Л^д - 2,75 ХРк + 0,1
(0,005 /> + 1) ^гор^ 3.66 Xh + 0,046 ЛГ^Р - 1,43 ХРк + 0,1
Тогда искомая система уравнений будет такой:
1. (0,005 р-\-\)е°^рХ'Рк^ (0,001/? + 0,646) ХОк+ (— 0,001р + 0,356)ЛГгор:
2. (0,205 р+1)Хп = 0,135 ^ргг — 0,205 *ок ~~ 0,295 *rop;
3. (0,№p + l)Xprr=:0,&XPB + 0,d8XF;
4. (0,39 /7+1) *Рв = 0,33 Aj,e 4- 0,ЗЗАгдР -f 0,52 АГ^^ - 0,ЗЗДкр;
5. (15,15р+1)-Yp6 = --Yv; '
6. (0,012р+ 1) Аок = 5,75Хп +0,276А^д — 2,75^к + 0,1 X™;
7. (0,005/? + 1) *гор == 3,66 Хп + 0,046 #£; - 1,43^к + 0,1 X™*;
8. XR = ^к - 0,09*ок + 0,09АГгор.
При возможности допущения ^над^^над"^ соответствующие члены правой
части в шестом и седьмом уравнениях могут быть опущены. При необходимости
разрешить систему относительно Ха — коэффициента массового соотношения
компонентов — необходимо дополнительно учесть уравнение Xа—ХОк—Xrov.
Пример 2
Задание. Определить приближенные значения коэффициентов
уравнений движения того же двигателя в момент вертикального взлета летательного
аппарата при условии, что величины наддува баков с перекисью водорода,
окислителем и горючим постоянны и что расход и соотношение компонентов остаются
такими же, как и для предыдущего примера (когда двигатель закреплен на
стенде): считать, что постоянство расходов и их соотношения поддерживается
изменением сечений регулирующих органов.
Исходные данные. Использовать данные предыдущего примера; вес
летательного аппарата принимать равным 12,5» 103 кГ.
441
Решение. Задача сводится к определению тех же коэффициентов системы
уравнений движения, но с учетом ускорения полета, учитываемого в шестом
и седьмом уравнениях системы (8.39).
Воспользуемся системой уравнений (8.42), но примем Ткф0, ТгФ0, ТокФОг
^гор^О, т Ф 0. Следовательно, необходимо определить коэффициенты K$ys К7у
и К9.
Из выражения (8.44) следует, что величина ускорения полета летательного
аппарата в момент старта будет:
Из уравнений (8. 37) и (8. 38) определяем значения lOK> *rop> Key и
согласно их выражениям, т. е.:
(— + К + шг -ь ЩЛ = -^- -у1 п2 + РнаЛш ок 4- //ctYok sin (8 + a) +
5,5-0,114-9,81
9,81
^гор
= 7,25;
Pm
V4
Л? -f-
. гор
sin (8 + a) +
тУгор cos a
V-Рк =
Jo
/0K = 2| —
\ да
/гор = 2 (—
^-J
^o /о
- 15.5] = 19,4;
+ * +
Ягтуоксоза
+
^K = 2.7,25-692 = 6,9-10»;
p= 2-19,4-562 = 12,12-104;
^0 /гор
5,5-1140-9,81
9,81-6,9-104 ==0'09;
7,5-860-9,81
° = 9,81.12,12-104 =0'°53-
Далее из уравнения (8.45) определяем Кд= • ?° = ^ = 2.
^^ 125Ю3
0==
cos a .
^-12,5-Ю3
Из условия задачи следует, что увеличение расходов компонентов из-за
наличия ускорения компенсируется увеличением потерь в регулирующих органах:
следовательно, для определения коэффициентов KeF и КчР необходимо учесть
разницу в потерях давления по сравнению с результатом, полученным в
предыдущем примере (при 1/=0), которая будет равна:
[ —
Г^) =7,25 — 5,95 = 1,3;
^ /
— -f-ZC-t-mj + тг| =19,4 — 17,3 = 2,1.
т Fo/r0p
442
— 2
Тогда значения выражений tni/F0 будут такими:
= 0,595 + 1,3=1,895; -^- = 1,7 + 2,1=3,
''о
М) ок 'о гор
Значения Kqf и Ktf будут такими:
т\ Gok 692
a- -— = 2.1,895 ——— = 0,25;
/^Оок *ок 0,9-104
т\ Grop 562
^238=0,20.
pr =238
М)гор *гор 12,2-104
Значения ТОк и ГгОр будут такими:
10,2-69
°О1ввж:
10,2-56
Условие Л^ = Адад ~ ^над ~ ^ дает возможность не учитывать
четвертое и пятое уравнения и соответствующие члены в шестом и седьмом
уравнениях системы (8.39).
Тогда искомая система уравнений будет такой:
1. (0,005р + 1) е°>трХРк — (0,001/7 + 0,646) Хок — (— 0,001/> + 0,356) X
X Агор == 0;
2. (0,205 р + 1)Хп — 0,135ХРгг + 0,205 Хок + 0,295 Хгор = 0;
3. (
4. (0,01 р + 1)Аок~5,75^-0,18^ + 2
5. (0,005/7 + 1)Хгор-3,66*я-0,106Л:/г ^
6. XR -^к + 0,09Хок — 0,09-АТгОр = 0.
Пример 3
Задание. Определить приближенные значения постоянных коэффициентов,
входящих в уравнения ЖРД, схема которого приведена на фиг. 8.12, при работе
двигателя на стенде на максимальном режиме при вертикальной установке
двигателя.
Исходные данные. Величину наддува баков с компонентами
принимать постоянной. Камеру сгорания, компоненты топлива, их расходы и
соотношение расходов, величины давлений перед форсунками, потери в сети и другие
данные принимать из первого примера.
Решение. Коэффициенты, подлежащие определению, входят в систему
уравнений (8.77). Коэффициенты первого уравнения остаются прежними.
Значения коэффициентов, входящих во второе и третье уравнения, определяются
аналогично тому, как это делалось в первом примере. Поскольку по условиям
443
задачи следует, что величины расходов компонентов, потери в семи и другие
величины остаются прежними, то и значения коэффициентов будут теми же, т. е.:
=17,3;
/ГОр
/гор= 10,7-104; /Ок = 56,5-103; /и2ок = 10,2; /тг2гОр = 10,2,
поэтому 7\>к = 0,012 с£/с; ГгОр = 0,005 сгл:. Остальные коэффициенты также
совпадают с их значениями, полученными в первом примере.
Следовательно, система уравнений (8.77) будет такой (при V=0):
(0,005/7 4- 1)в°'005/7^к = (0,001 р 4-0,646) .Y0K+ (—0,001 р + 0,356) *гОр;
(0,012 р 4- 1) Л-Ок - - 2,75 ХРк + 0,1 ЛГ0/;
(0,005 /7 -f 1)А-гОр=-- 1,43 ХРк 4- 0,1 *™р;
Л> - ХРк - 0,09 Хок -f 0,09 ХгОр.
3. ВОЗМОЖНЫЕ СХЕМЫ СИСТЕМ УПРАВЛЕНИЯ
а) Общие сведения
В зависимости от назначения летательного аппарата и типа
двигателя требования, предъявляемые к системам управления ЖРД,
будут весьма различными, поэтому достаточно лолно
охарактеризовать их очень сложно.
Условно можно всю систему управления ЖРД разделить на две
группы. К первой группе относятся устройства, обеспечивающие
начальный и конечный режимы, т. е. подготовку к запуску, запуск,
вывод на режим, близкий к заданному и останов двигателя. Ко
второй группе относятся устройства, обеспечивающие поддержание
заданного режима работы двигателя.
Требования к первой группе устройств в основном определяются
принятым способом управления этими режимами работы
двигателя. Общими же требованиями для них являются — безусловная
надежность в работе; минимальная инерционность; большой запас
устойчивости, обеспечивающий нормальную работу при большом
случайном изменении характеристик аппаратуры; отсутствие
автоколебаний; надежная работа при большом диапазоне изменения
температуры агрегатов, рабочей жидкости и окружающей среды,
а также при значительных перегрузках в любом направлении.
Кроме указанного, для каждого агрегата системы управления
могут существовать свои конкретные требования, характеризующие
точность, диапазон работы, развиваемые усилия, ток и напряжения
срабатывания для электрических элементов и т. д. Об:тчно это
весьма жесткие требования.
Общей характеристикой, оценивающей работу всей системы
запуска двигателя, может служить время выхода на режим, которое,
например, лпя баллистических ракет обычно составляет менее
2ч-3 сек.
444
Устройства, относящиеся к первой группе и обеспечивающие
начальный и конечный режимы работы двигателя, имеют
разветвленную сеть различных блокировок, позволяющих производить вполне
определенную последовательность операций по управлению
двигателем. Требования к устройствам, относящимся ко второй группе,
обеспечивающим рабочий режим работы двигателя, существенно
зависят от назначения двигателя.
Для зенитных управляемых ракет можно считать допустимыми
требования, обеспечивающие: диапазон изменения тяги,
соответствующий полному диапазону устойчивой работы камеры, при
допустимой неточности поддержания заданной тяги <2%; неточность
поддержания соотношения расходов компонентов в основной
камере <±2,5—3,0% и в газогенераторе <±3,0%; неточность
поддержания величины наддува баков <3,5-f-4,0% и др.
Для баллистических ракет можно считать допустимыми
требования, обеспечивающие: диапазон изменения тяги ±15%;
неточность поддержания тяги (при наличии регулятора скорости полета)
<±2%; неточность поддержания соотношения расходов
компонентов в основной камере (при наличии регулятора пропорциональной
выработки) <±1,5% и в газогенераторе <±2,0%; неточность
поддержания величины наддува баков <3% и др.
Эти требования являются очень приближенными и в каждом
конкретном случае они могут существенно изменяться.
б) Возможные схемы регуляторов
В зависимости от назначения двигателя и летательного
аппарата системы регулирования ЖРД могут быть весьма различными.
Например, для баллистических ракет с ЖРД характерным является
относительно малый диапазон изменения тяги двигателя, что
позволяет несколько упростить систему управления по сравнению
с системой управления, применяемой для зенитных аппаратов, для
которых необходим' большой диапазон изменения тяг. К тому же
для зенитных аппаратов с целью получения большого диапазона
тяг могут (применяться многокамерные двигатели, т. е. по существу
несколько двигателей, часть которых в процессе полета многократно
выключают и запускают. Это еще больше усложняет систему
управления для таких аппаратов.
В целом системы управления такими двигателями, даже одно-
режимными, весьма сложны; это объясняется главным образом
тем, что, с одной стороны, необходимо выполнять определенную,
довольно сложную последовательность операций по самому
процессу управления двигателем, причем выполняться она должна с
большой точностью; с другой стороны, из-за агрессивности
применяемых компонентов должна быть обеспечена полная безопасность
протекания процессов в двигателе. Существенным осложнением
является также и то, что системы управления должны быть
дистанционными.
445
Ниже приведено несколько схем систем управления ЖРД, из
которых видна последовательность необходимых операций по
управлению двигателем и способы их выполнения. На фиг. 8. 15
приведена принципиальная схема системы управления ЖРД с ТНА,
предназначенного для баллистической ракеты. Основными
компонентами для этого двигателя являются спирт и жидкий кислород,
а газогенератор работает на перекиси водорода с жидким
катализатором (перманганат натрия). Принцип работы собственно
двигателя очевиден из самой схемы.
Рассмотрим работу системы управления с момента, когда
двигатель заполнен компонентами.
Перед запуском двигателя открывается вентиль 1 и сжатый газ
из баллонов 2 поступает в сеть наддува бака с перекисью
водорода 3 и бака с перманганатом натрия 4. По пути движения газа
последний в редукторе (регуляторе) 5 редуцируется с давления
~200 ат до меньшего, например, до 30-f-35 аг, величина которого
определяется характеристиками ТНА и газогенератора. По пути
движения газа из баллонов в магистрали врезаны дистанционные
клапаны 6, 7, 8, которые пока остаются закрытыми.
Перед запуском дренажный кислородный клапан 9
дистанционно закрывается и в баке с жидким кислородом 10 повышается
давление частично в результате испарения жидкого кислорода, а
частично в результате подпитки его газом от стационарного источника
по трубопроводу 11.
Далее включается соленоид клапана 7, который, срабатывая,
пропускает сжатый газ к дренажным клапанам 12 и 13, в
результате чего они закрываются и разобщают с атмосферой баки с
перекисью водорода и перманганатом. Наконец, с помощью
управляющего электропневмоклапана 15 открывается предварительный
спиртовой клапан 14 и спирт поступает к главному спиртовому
клапану 16. В этом положении система управления готова к запуску,
который осуществляется двумя ступенями — предварительной
и основной.
В процессе предварительной ступени запуска на обмотку
электропневмоклапана 17 подается напряжение, в результате чего
открывается дренажный канал и через него посредством главного
кислородного клапана 18 управляющий газ стравливается в
атмосферу и под действием пружины клапан приоткрывается. В
результате этого через форсунки в камеру сгорания начнет поступать
жидкий кислород.
При открывании (частичном) главного кислородного клапана
через специальный выключатель подается напряжение на обмотку
электропневмоклапана 17а, который, срабатывая, сбрасывает
давление управляющего газа в атмосферу из механизма главного
спиртового клапана 16 и он под действием пружины приоткрывается.
В результате этого спирт самотеком будет поступать в камеру
сгорания, проходя рубашку охлаждения камеры. Указанная
последовательность операций позволяет подать в камеру сгорания сначала
446
Конус ракеты
Баи с перманга-
натом натрия
Ц"— -, 1
Ларогазогенз- |
7ритор (ПГГ)
Подсоединение к установке
на пусковой платформе
^^ Условные обозначения:
ЕШ -спирт щ л о о
-*г«^иа мс/адю* |-т?/юшсь Л%7вЗа
\-парогаз Щ-перманганагп натрия
CZD-воздухf газообразный кислород "
Фиг. 8. 15. Принципиальная схема ЖРД с системой подачи компонентов.
/—ручной вентиль, 2—баллоны со сжатым газом, 3—бак с перекисью водорода, 4—бак
с перманганатом натрия, 5—воздушный редуктор, 5—главный управляющий клапан, 7,
8, 15, 31, 34—электропневмоклапаны, 9—дренажный кислородный клапан, 10—бак с
жидким кислородом, 10 а—бак со спиртом, //—трубопровод, 12, 13—дренажные клапаны,
14—предварительный спиртовой клапан, 16—главный спиртовой клапан, 17, 17
а—управляющие электропневмоклапаны, 18—главный кислородный клапан, 19, 20—обратные
клапаны, 21—смеситель, 22—реле давления, 23—электромагнитный клапан. 24—основной
клапан перекиси водорода, 25—турбина, 26—насос подачи спирта, 27—насос подачи
жидкого кислорода, 28—подогреватель кислорода, 29—обратный клапан, 30—трубка
забора воздуха, 32—клапан наддува бака со спиртом, 33—дроссельный клапан,
35—баллоны со сжатым газом.
447
кислород, а затем спирт, что гарантирует отсутствие взрыва.
Зажигание-смеси осуществляется от пиротехнического запала (может
осуществляться и от электрического, а при самовоспламеняющихся
компонентах вообще не требуется никакого устройства для
зажигания). В результате в камере сгорания устанавливается спокойное
горение спирта в кислороде.
В процессе основной ступени запуска (по истечении некоторого
минимального времени после предварительной) подается
напряжение на клапан 6, который срабатывает, и через обратные
клапаны 19 и 20 сжатый газ будет поступать в баки с перекисью и пер-
манганатом, в результате чего перманганат будет выдавливаться
в смеситель 21. Когда давление перманганата в трубопроводе
достигнет некоторой величины, сработает реле давления 22 и
включит управляющие обмотки клапанов 23 и 5, в результате чего
перекись водорода начнет поступать в ограниченном количестве
в смеситель через клапан 23 и отверстие в клапане 24.
При срабатывании клапана 8 к клапану 24 будет подаваться
сжатый газ, под действием которого клапан 24 откроется, но не
сразу, а через некоторое время (через 0,3—0,4 сек). Следовательно,
в смеситель 21 сначала поступает ограниченное количество
перекиси водорода — в результате срабатывания клапана 23, а далее
полное количество ее — в результате срабатывания клапана 24.
В результате реакции разложения перекиси водорода в
смесителе образуется газ (парогаз), который приводит в движение ТНА,
т. е. турбину 25 и насосы 26 и 27, Отработанный газ проходит через
подогреватель кислорода 28 и через реактивные сопла
выбрасывается наружу. С увеличением числа оборотов насосов
увеличиваются давления спирта и кислорода, в результате чего полностью
открываются главные клапаны 16 и 18 и в камеру будет поступать
максимальный расход компонентов, а следовательно, двигатель
будет развивать максимальную тягу.
Кислородный бак 10 наддувается благодаря тому, что часть
кислорода отбирается от клапана 18 и подводится через обратный
клапан 29 к подогревателю 28, где кислород испаряется и поступает
в бак. При повышении давления в кислородном баке выше
допустимого открывается дренажный клапан 9, через который
газообразный кислород выбрасывается наружу.
При полете на относительно малой высоте бак со спиртом
наддувается от скоростного напора встречного воздуха с помощью
трубки забора воздуха 30, расположенной в передней части
летательного аппарата. К тому моменту, когда полет будет происходить
на достаточно большой высоте, аппарат должен иметь ускорение
(из-за уменьшения массы ракеты при той же тяге), которого
должно быть достаточно для создания необходимого давления спирта
перед насосом 26, и поэтому сработает электропневмоклапан 31
и с помощью сжатого газа закроется клапан 32, разъединяющий
полость бака с атмосферой.
448
В таком положении будет находиться система управления
двигателем, пока аппарат не достигнет скорости полета, близкой к
заданной.
Для баллистической ракеты достижение конечной цели полета
(попадание в цель) будет обеспечено тем точнее, чем более точно
будут выдержаны заданные скорость полета, направление полета
и координата начала свободного полета.
Одним из условий получения заданной скорости полета (в
конце участка полета с работающим двигателем) является
постепенное уменьшение тяги, развиваемой двигателем. Практически это
сводится к переводу двигателя на уменьшенный режим работы.
Для этого по сигналу от специальной системы управления
полетом срабатывает клапан 8, в результате чего давление
управляющего газа стравливается через клапан 24 и он, закрываясь,
уменьшает поступление перекиси водорода в смеситель 21, в результате
чего уменьшается поступление газа к турбине ТНА, а также
уменьшается подача компонентов топлива в камеру сгорания; в
соответствии с этим частично прикрываются клапаны 16 и 18.
По достижении заданной скорости полета двигатель полностью
останавливается, для чего по сигналу от системы управления по
летом срабатывают (обесточиваются) клапаны 17 и 17а, подводя
управляющий газ к клапанам 16 и 18, в результате чего
клапаны 16 и 18 закрываются полностью и поступление компонентов
топлива в камеру сгорания прекращается. Одновременно
срабатывает (также обесточивается) клапан 6 и закрывается клапан 23,
в результате чего прекращается подача сжатого газа в бачки
с перекисью и перманганатом натрия и полностью прекращается
подача их в смеситель 21. Обесточивается также и клапан 15, в
результате чего сжатый газ, поступая через дроссельный клапан 33,
стравливается наружу через дренажное отверстие клапана 15,
и клапан 33 медленно закрывается.
С момента остановки двигателя аппарат продолжает полет как
обычный артиллерийский снаряд.
Принципиальные схемы некоторых указанных выше клапанов
управления приведены ниже; рассмотрение этих схем
дополнительно поясняет работу системы управления.
На фиг. 8.16 приведена принципиальная схема главного
спиртового клапана (позиция 16 на фиг. 8.15), из которой видно, что,
когда имеется давление управляющего газа, камера полностью
отсоединена от насоса. При снятии давления управляющего газа
клапан под действием пружины несколько приоткрывается.
При полном расходе спирта пружина сжимается под давлением
спирта и клапан открывается полностью; при частичном режиме
клапан удерживается в каком-то промежуточном положении.
На фиг. 8.17 приведена принципиальная схема главного
кислородного клапана (позиция 18 на фиг. 8.15), из которой видно, что,
когда имеется давление управляющего газа, камера полностью
отсоединена от насоса. При снятии давления управляющего газа под
29 1327 449
Выход
в 5ак
nodBod
в
От насоса
подачи
спирта
Фиг. 8.16. Схема главного
спиртового клапана.
Злектропереключатель
ГЬдвод
управляют его
воздуха
В камеру
От на coco подачи
| кислорода
Фиг. 8.17. Схема главного кисло
родного клапана.
Н главному
клапану
Подвод
управляю —
щего воздуха
От главного
клапана
I Подвод управляю-
I щего воздуха к
-L—— полости
цилиндра
Соленоид
I Отвод воздуха
т из полости
цилиндра
Фиг. 8. 18. Схема управляющего клапана.
450
действием пружины открывается маленький поршенек, и кислород
через боковые отверстия будет поступать в камеру. При полном
расходе кислорода пружина большого поршня сжимается под
давлением кислорода и клапан открывается полностью.
На фиг. 8.18 приведена принципиальная схема управляющих
клапанов (позиции 17 и 17, а на фиг. 8.15), из которой видно, что
в указанном положении управляющий газ подается к главным
клапанам, а при срабатывании соленоида наоборот—отводится от
главных клапанов.
Воздух
низкого
давления
Воздух
высокого
давления
Фиг. 8. 19. Схема редуктора
(регулятора наддува).
Фиг. 8.20. Схема электро-
пневмоклапана.
На фиг. 8.19 приведена схема воздушного редуктора, из
которой видно, что в зависимости от степени затяжки пружины
величина давления газа на выходе может быть различной; на фиг. 8.20
приведена схема электропневмоклапана, иэ которой видно, что,
когда соленоид не включен, полость входа отделена от полости
выхода. При включении соленоида якорек втягивается и через шток
сжимает пружину и тем самым открывает отверстие, соединяющее
обе полости.
Целый ряд клапанов других конструкций работают по
аналогичным принципам. От всех перечисленных на схеме, приведенной на
фиг. 8.15, элементов управления требуется абсолютная надежность,
поэтому схемы их устройства выбираются простыми.
Кроме рассмотренных устройств, в общей системе управления
имеются еще дополнительные элементы управления,
обеспечивающие заполнение баков компонентами, заполнение баллонов сжатым
газом и др.
Из рассмотренного видно, что даже для самого простого
двигателя система управления получается очень сложной. Система
существенно усложнится, если требования к поддержанию режима
работы двигателя достаточно жесткие, о чем будет сказано ниже.
29*
45!
Существенным недостатком рассмотренной системы управления
является невозможность поддержания определенного значения
соотношения компонентов /Ст с достаточной степенью точности.
Это объясняется различным влиянием ускорения полета на расход
каждого компонента и отклонениями от расчетного значения 7\т.
В результате этого к концу полета вынужденно остается излишек
Фиг. 8.21.
Принципиальная схема управления
ЖРД.
Фиг. 8.22.
Принципиальная схема управления
ЖРД.
одного из компонентов, что существенно ухудшает характеристики
летательного аппарата.
На фиг. 8.21, 8.22 и 8.23 приведены укрупненные
принципиальные схемы возможных систем управления ЖРД с ТНА для
баллистических ракет с регуляторами, поддерживающими заданный
режим работы двигателя и заданные соотношения расходов
компонентов. В этих схемах опущены устройства, обеспечивающие
запуск двигателя, вывод его на режим и останов, потому что они
во многом аналогичны рассмотренным выше схемам.
Из этих схем видно, что регулятор тяги, входным сигналом для
которого является величина рк, изменяет режим работы
газогенератора и может воздействовать (что не обязательно) на дроссель,
изменяющий расход одного из компонентов.
452
Корректор
\по К
Регулятор соотношения расходов компонентов Кт может
включаться различно. Например, в схеме, приведенной на фиг. 8.21,
регулятор Кт измеряет расходы каждого компонента, сравнивает их
отношение с заданным сигналом и в зависимости от
результирующего сигнала изменяет расход второго компонента так, чтобы
соотношение расходов компонентов было заданным.
В схеме, приведенной на фиг. 8.22, регулятор Кт выполнен
в виде устройства, измеряющего
уровень жидкости (компонентов) в баках
и в зависимости от результирующего
сигнала изменяющего расход второго
компонента. Здесь рассогласование сигналов
по уровню пропорционально
рассогласованию сигналов по суммарному расходу
компонентов, поэтому такой регулятор
по-существу является и регулятором
пропорциональной выработки компонентов.
В схеме, приведенной на фиг. 8.23,
регулятор Кт включается по схеме,
приведенной на фиг. 8. 21, но в него
дополнительно вводится сигнал настройки от
регулятора пропорциональной выработки
компонентов, который работает по схеме,
приведенной на фиг. 8. 22. Это позволяет
избежать накопления ошибок по
расходам компонентов и в этом случае
появляется возможность выработать (без
остатка) оба компонента.
В зависимости от схемы двигателя
могут быть и другие варианты
подключения регуляторов.
Для зенитных управляемых
летательных аппаратов может применяться схема
управления, приведенная на фиг. 8.21, поскольку в них трудно
замерить уровень жидкости (или остатка жидкости) в баках из-за
того, что аппарат занимает различные положения в полете.
Регулятор тяги может быть выполнен по различным схемам, но
в качестве входного сигнала для него очень удобно использовать
давление рк в камере сгорания, так как реактивная тяга,
развиваемая двигателем, практически пропорциональна величине этого
давления. Выходной сигнал из регулятора тяги воздействует на режим
работы газогенератора и может одновременно воздействовать на
дроссель, изменяющий расход одного из компонентов (что, однако,
не обязательно).
Для некоторых летательных аппаратов необходимо
поддерживать заданной или изменять по заданной программе скорость
полета. В этом случае регулятор скорости полета может
воздействовать на задатчик регулятора тяги, как показано на фиг. 8. 24.
Регулятор
Фиг. 8.23. Принципиальная
схема управления ЖРД-
453
Когда газогенератор работает на основных компонентах,
необходимо иметь дополнительный регулятор соотношения расхода
компонентов для газогенератора. Схема подключения такого
регулятора показана на фиг. 8.25. В этом случае регулятор тяги
воздействует на один из компонентов, поступающих в газогенератор.
Для регуляторов соотношений расходов компонентов входным
сигналом может быть давление компонентов перед форсунками
Регулятор
Кг
Фиг. 8.24. Схема воздействия
регулятора скорости полета на
регулятор тяги.
Фиг. 8.25. Принципиальная
схема управления ЖРД.
или сигнал от устройства, изхмеряющего действительный расход
компонентов. В зависимости 'от размеров двигателя (расходов
компонентов) могут применяться регуляторы соотношений
расходов непосредственного действия (для малых расходов) или с
промежуточным усилением (для больших расходов).
На фиг. 8.26 приведены возможные принципиальные схемы
регуляторов соотношения расходов компонентов с промежуточным
усилением статического и астатического действия в
гидромеханическом исполнении.
На фиг. 8,27 приведена возможная схема такого же регулятора
/Ст, но прямого действия; принцип работы регулятора понятен из
приведенной схемы.
454
Что касается регуляторов тяги для зенитных аппаратов, то они
могут выполняться в самых различных вариантах, например, так,
как показано на фиг. 8. 28. По-существу регулятор тяги является
регулятором давления газа в камере сгорания.
а) —
б)
—V-
сигнал поступает
дросселя изменяет
Вход
гор
Фиг. 8. 26. Схема регуляторов соотношения расходов компонентов,
а—астатический, б—статический.
Что касается регуляторов пропорциональной выработки
компонентов для баллистических аппаратов, то в принципе они могут
состоять из устройств, замеряющих уровни жидкости
(компонентов) в баках, с электрическим выходом; сигнал с выхода поступает
в электрический мост, откуда управляющий
в электродвигатель, который либо с помощью
сопротивление сети подачи перед
камерой сгорания одного из
компонентов, либо осуществляет
перенастройку регулятора
соотношений расходов компонентов.
Возможная принципиальная
схема такого устройства приведена
на фиг. 8. 29, из которой понятен
принцип работы регулятора.
На фиг. 8. 30 приведена
возможная укрупненная
принципиальная схема управления силовой
установкой, предназначенной для
баллистических ракет. Здесь
имеются регуляторы: тяги,
соотношения расходов компонентов
для камеры сгорания и газогенератора,
Фиг. 8.27. Схема регулятора
соотношения расходов компонентов.
пропорциональной
выработки компонентов и скорости полета. Принцип работы каждого
из регуляторов понятен из схемы; для замера скорости полета
используется акселерометр с последующим интегрированием
сигнала ускорения полета. Могут применяться и другие схемы.
На фиг. 8.31 приведена еще одна сокращенная схема системы
управления ЖРД, предназначенного для баллистических ракет
средней дальности типа «Тор» и «Юпитер». Этот двигатель рабо-
455
тает на жидком кислороде и керосине, развивает тягу около
62 000 кГ (в двух камерах) при соотношении компонентов /Ст^2,2.
Схема такого двигателя в принципе аналогична схеме,
приведенной на фиг. 8.7, в которой газогенератор работает на основных
компонентах. Камера сгорания имеет возможность поворачиваться
с помощью специальных устройств для осуществления управления
Дс
■" J*
Фиг. 8. 28. Схема регуляторов тяги,
а—непосредственного действия, б—с промежуточным усилителем.
полетом по углу тангажа и по курсу, а также управления
вращением аппарата.
Здесь в турбонасосный агрегат 14 подводятся оба компонента
из баков, а в турбину 13 подводится газ- из газогенератора 7.
В процессе запуска двигателя в первый момент из стартового
бака 1 методом вытеснения азотом по трубопроводу 2 горючее
через обратный клапан 3 подается к регулятору расхода
компонентов 11 газогенератора 7 и к клапану запуска 16. Окислитель может
поступать в камеру сгорания из основного бака (на схеме не
указан) через открытый основной клапан 17 (бак окислителя надду-
вается минимальным
давлением). Включение
пиротехнического воспламенителя
18 приводит к сжиганию
электрического соединения
в воспламенителе, к
открытию основного клапана
окислителя 17 и к открытию
ит уровнемера
окислителя
От уровнемера
горючего
Фиг. 8.29. Схема регулятора
пропорциональной выработки компонентов.
клапана запуска 16. В
результате осуществляется
воспламенение компонентов
и в камере сгорания
устанавливается спокойное горение.
В камере сгорания помещен кусок электропровода 22,
включенный в общую систему программного управления двигателем,
который в результате высокой температуры газов в камере сгорает,
благодаря чему подается сигнал на регулятор 11, открывающий
доступ компонентам в газогенератор, и на его воспламенитель 10.
456
В это время окислитель подается в газогенератор из стартового
бака 1 тем же методом вытеснения через обратный клапан 4.
Сигнал, подтверждающий включение воспламенителей в
газогенераторе, одновременно является сигналом на открытие основного
клапана горючего. Сгорание в газогенераторе (соотношение
компонентов, равное 0,351, соответствует температуре газов 650° С)
приводит к раскрутке турбины 13 и насосов подачи горючего и
окислителя.
Задание
3 .—^программы
Фиг. 8.30. Возможная схема управления ЖРД.
Когда давления за насосами превысят давления в стартовых
баках, питание газогенератора будет осуществляться от насосов
через обратные клапаны 8 и тот же регулятор 11. В это время^кла-
паны 3 и 4 закроются и стартовые баки отсоединятся. Дальнейший
разгон двигателя до заданного режима работы осуществляется
за время около трех секунд. Управление режимом работы
двигателя осуществляется через регулятор 1L
Наддув бака с кислородом осуществляется по схеме,
приведенной на фиг. 8.15, а наддув бака с горючим осуществляется
газообразным азотом, получаемым иэ жидкого азота с помощью
подогрева его в специальном теплообменнике. Необходимая величина
наддува баков поддерживается регуляторами (редукторами),
аналогичными приведенным выше.
На фиг 8.32 для примера приведена схема основного
кислородного клапана, принцип работы которого понятен из самой схемы.
жидкий •
кислород
£23 керосин
азот (Nz)
Фиг. 8.31. Схема ЖРД с системой управления.
/—стартовый бак, 2—подача азота от наземного источника. 3,
8—обратные клапаны горючего, ^-обратный клапан окислителя.
5-регулятор окислителя, б-шайба, 7-газогенератор, Р-подача
газа для продувки, /0—воспламенитель газогенератора, Л-регу~
лятор расхода газогенератора, /2-подача масла из бака,
Id—турбина 14—ТНА, 15—подача азота под высоким давлением,
16—клапан горючего для начального воспламенения топлива (клапан
запуска), /7-основной клапан окислителя, /«-воспламенитель.
/i-основной клапан горючего (закрыт), 20-камера сгорания
21—колонка распределения подвода сжатого азота. 22—сгорающий
электропровод.
Здесь перевод клапана из одного положения в другое
осуществляется с помощью пневматического поршневого сервомотора,
питаемого газообразным азотом под большим давлением. Для
обеспечения надежной работы клапана применен его обогрев. Кроме того,
имеются устройства, сигнализирующие о положении клапана.
458
Рабочим телом для всех пневматических устройств системы
управления двигателя, упомянутого выше, является газообразный
азот.
16
Фиг. 8. 32. Схема основного клапана окислителя.
/—место соединения подогревателя, 2—термостат, 3—рубашка подогревателя,
4—подача азота для продувки, 5—уплотнение, 6—стопорная пластина
уплотнения, 7—дроссельная заслонка, 8—рабочий вал, 9—винт для регулирования
переключателя положения, 10, 12—рычаги переключателя, //—датчик
положения, /<?—вывод сигнала с переключателя, 14, /7—подвод сжатого азота
на открытие и закрытие клапана, /5—-поршень, 16—возвратная пружина.
18—термопара.
Как следует из схемы, приведенной на фиг. 8.31, у этого
двигателя нет специальных устройств, поддерживающих постоянным
соотношение расхода компонентов в камеру сгорания, ввиду чего
величина /Ст изменяется в процессе полета ракеты примерно от
2,16 до 2,45, соответственно для момента взлета и для момента
отключения двигателя.
4. ДИНАМИКА СИСТЕМ РЕГУЛИРОВАНИЯ
а) Сведения по устойчивости ЖРД
Рассматриваемый тип двигателя обладает той особенностью,
что процесс сгорания в камере может быть неустойчивым даже
в двигателе самой простой схемы и при отсутствии какой-либо
системы управления им.
Обычно неустойчивость двигателя в указанном смысле
разделяют на низкочастотную неустойчивость и высокочастотную не-
459
устойчивость, причем первому виду неустойчивости соответствуют
частоты до 200ч-300 гц, а второму — от 1000 гц и выше.
Низкочастотные колебания представляют собой колебания
системы «камера сгорания + система подачи компонентов», а
высокочастотные колебания представляют собой акустические колебания
в камере сгорания и не зависят от системы подачи.
Колебания, возникающие в камере, в той или иной степени
зависят от конфигурации головки камеры и самой камеры сгорания,
физических и химических свойств компонентов, некоторых
случайных факторов (местного соотношения компонентов в зоне горения,
формы топливных струй), характеристик элементов двигателя,
пульсации насосов, нежесткости трубопроводов,
неудовлетворительной работы редукторов давлений в баках и других факторов. Учесть
все эти действующие факторы при расчете двигателя не
представляется возможным, поэтому во многих случаях характеристики
подбираются экспериментально так, чтобы получить устойчивую
работу двигателя в заданном диапазоне изменения режимов его
работы.
Поскольку низкочастотные колебания возникают в системе
«камера сгорания + система подачи компонентов», то для
уменьшения взаимодействия между камерой сгорания и системой подачи
увеличивают перепад давлений на форсунках. Это приводит к тому,
что камера сгорания в меньшей степени взаимодействует с
системой подачи и поэтому расширяется область устойчивой работы
двигателя. С другой стороны, очень большой перепад давлений на
форсунках способствует возникновению высокочастотных колебаний,
которые также недопустимы.
Компрохмиссное решение, учитывающее оба указанных явления,
обычно находят с помощью эксперимента.
Для более наглядного представления об указанных свойствах
двигателя на фиг. 8.33 приведен характер переходных процессов
по давлению газов в камере сгорания для одного и того же
двигателя при различных тягах (различных перепадах давлений на
форсунках), при скачкообразном возмущении на входе. Видно, что
с уменьшением режима работы двигателя колебательная
составляющая процесса увеличивается (запас устойчивости уменьшается),
что является общим свойством всех ЖРД.
Свойства двигателя как динамической системы удобно
выражать частотными характеристиками. Например, на фиг. 8.34
приведены типовые амплитудно-фазовые (частотные) характеристики
разомкнутой системы «камера сгорания + магистрали» для
двигателя с вытеснительной системой подачи (соответствует схеме,
приведенной на фиг. 8,5). Здесь входом является задающее давление
в баках с компонентами, а выходом —давление газов в камере
сгорания. Из этих характеристик следует, что, несмотря на
относительно небольшое уменьшение амплитуды для кривой 1 при
относительной частоте (о=— =10, существует заметный сдвиг фаз даже
460
при гораздо меньших частотах. Это объясняется влиянием врехмени
запаздывания т. Кривая 2, соответствующая меньшему режиму
двигателя, протекает менее благоприятно, так как для той же
относительной частоты о)= — «10 амплитуда уменьшается в большей
О)0
Рк
Фиг. 8.33. Характер переходных
процессов по давлению газов в
камере сгорания.
степени и увеличивается фазовый сдвиг. Это полностью
увязывается с характером переходных процессов, приведенных на фиг. 8.33.
Такой характер протекания процессов объясняется главным
образом тем, что с уменьшением режима работы двигателя возрастает
значение коэффициента усиления разомкнутой системы.
Для примера на фиг. 8.35 приведен характер изменения
величины коэффициента усиления разомкнутой системы /(раз в зависи-
LV
Фиг. 8.34. Частотные характеристики для ЖРД
с вытеснительной системой подачи.
/—режим 100°Я 2—режим 50%.
мости от режима работы двигателя. Там же показан характер
изменения коэффициента усиления в замкнутой системе, имеющего
тт ^раз
выражение л3ам=
1 +К
раз
461
раз
-Араз
20 W 50 еоТягаХ
Фиг. 8.35. Характер изменения
величины коэффициентов
усиления.
IV
Фиг. 8. 36. Частотные характеристики для ЖРД с ТНА.
У—режим 100<7е, 2—режим 50Vt.
462
Видно, что с уменьшением режима работы двигателя значение
/(зам увеличивается (хотя и в меньшей степени), что также приводит
к уменьшению запаса устойчивости.
На фиг. 8.36 приведены аналогичные амплитудно-фазовые
характеристики для ЖРД с ТНА. Здесь входом является положение
клапана, изменяющего расход газа в турбину (расположенного за
газогенератором), а выходом — давление газа в камере сгорания.
Здесь фазовый сдвиг при частоте, большей со = — =5, происходит
главным образом из-за влияния времени запаздывания т, а
уменьшение амплитуды, начиная примерно с © = — =1, обусловлено
главным образом влиянием инерционности ТНА.
В дальнейшем мы не будем рассматривать вопросы
низкочастотной и высокочастотной неустойчивости, во-первых, как не имеющие
прямого отношения к системам управления двигателями, а,
во-вторых, потому что даже минимальные частоты низкочастотных
колебаний существенно выше «регуляторных» частот, и поэтому мы
будем считать, что система управления на них практически не
реагирует.
б) Система регулирования наддува баков
Выше указывалось, что величины наддува баков с
компонентами приближенно можно принимать постоянными. Рассмотрим этот
вопрос подробнее. Предположим, что регулятор наддува баков
сделан по схеме, приведенной на фиг. 8.19, и подсоединим его между
баллонами со сжатым газом и баком. Составим уравнения
движения такой системы в линейном приближении, принимая в качестве
возмущения изменение расхода жидкости из бака.
Уравнение регулятора выведем с учетом массы движущихся
частей. Уравнение действующих сил будет:
- Лш + ^д + А^др - Аад^др + Рнад^м - Л* = О,
где члены уравнения представляют собой соответственно силы
инерции; силы демпфирования; силы, действующие на клапан со
стороны давления в баллонах; силы, действующие на клапан со стороны
давления наддува; силы, действующие на мембрану со стороны
давления наддува; сила, развиваемая пружиной (не учитываем
аэродинамические силы, действующие на клапан и мембрану).
Обозначая координату клапана символом / и считая проходное
сечение пропорциональным /, т. е. /7дР=С/, можно написать:
где т — масса клапана; р —коэффициент вязкого трения; /^ —
эффективная площадь мембраны; Спр — коэффициент жесткости
пружины.
463
После преобразования получим
где
К6=С1оРбо: K7=pmK9(FM-Cl0).
Уравнения движения, учитывающие изменения давления газа
в баллонах и баке, были получены ранее, поэтому окончательно
система уравнений будет такой:
1) ХРб = —- CIQX{ — К2Хнаа;
КХ fi (8. 80)
Здесь «использованы уравнения (8.24) и (8.26), но с другими
обозначениями, a XF — площадь проходного сечения крана,
изменяющего расход жидкости из бака.
Для дальнейшего анализа будем считать Т^^>ТиаЖ1 а
собственную частоту клапана, равную
j
2*
Г
V
2г.
пр
W V
— С (рб — /7„ад)0 I '
весьма высокой. Это позволяет с достаточным приближением
считать рб— const и Хрб =0; тогда вместо (8.80) получим:
д/7 +1) ^над— K7Cl0Xt= — K5XF;
(8 81)
Характеристическое уравнение будет:
^надР3 + (Я^над + ^о) ^ + (^над + «l) Р + #2 ~ ^4^7 = Oi
условие устойчивости будет:
или после замены коэффициентов
~/7над)]. (8.82)
Коэффициент С, определяющий характеристику регулирующего
органа (ее крутизну, так как FRV=Cl)y играет весьма
существенную роль. При достаточно крутой характеристике клапана (большое
значение С) система может оказаться неустойчивой. В этом случае
увеличивающиеся амплитуды колебания возрастут до значений,
ограничивающих ход клапана и, следовательно, в системе
установится режим автоколебаний.
464
По мере увеличения времени работы двигателя величина 7'11ад
увеличивается, а величина (ро—Риал) уменьшается, поэтому
значения коэффициентов С и Спр нужно выбирать по результатам
расчета системы для крайних режимов.
При расчете рассматриваемой системы интересуются не только
ее устойчивостью, но и величиной неравномерности регулирования.
Это важно в отношении прочности баков, поэтому неравномерность
выбирается минимальной
Определим, от каких параметров зависит величина
неравномерности в этой системе, для чего разрешим (8.81) относительно Х1тп
и, положив р=0, получим
«г ^ \Рб /?над/0 ^ пр ту \г
С2/С4/>над</о — С [KaPhslrFm + (Рб — /7над)]о "f ^пр
Видно, что с увеличением значения С величина неравномерности
уменьшается. Следовательно, нужно выбирать компромиссное
значение коэффициента С—из условий устойчивости и из условий
наименьшей неравномерности.
Что касается переходных процессов, то они должны быть по
характеру близки к монотонным, чего практически не трудно
достичь.
в) Система регулирования тяги с астатическим
регулятором
Рассмотрим ЖРД с ТНА, схема которого была приведена на
фиг. 8.15. Схему регулятора тяги примем такой, как показано
на фиг. 8.37, а регулятор соотношения расходов компонентов
примем идеальным (или будем считать, что он отсутствует вообще).
В уравнениях движения для этого двигателя, полученных ранее,
положим
/ г ■* п-в * ок * гор 1 а и*
Тогда для двигателя, работающего на стенде, будет
справедлива такая система уравнений [вместо (8.42)]:
г р y IS Y W Y
уЛрк — l\ irOp^V гор A i0K^ 0„
гг гг
Грк; } (8.83)
г jy у
Lrop г<7п'* п'
30 1327 465
Д
В газогене-
ратор
Задатчик
режима
Фиг. 8.37. Схема
регулятора тяги.
/Г.
2 0К
%2 ГОр
ТтнР+1
{6П
{?Рк
лтоп~ ок гор
гор
чгор
7~P
I
Фиг. 8 38. Структурная схема.
Здесь последние два уравнения относятся к регулятору тяги.
Структурная схема системы приведена на фиг. 8.38, где указаны
все необходимые координаты и передаточные функции.
Разрешая систему уравнений (8.83), получим
[(аор2 + ахр + %>/> + (Ьор* + Ьгр + Ь2) ег-р\ ХРк = Ь2е-р\\ (8. 84)
где
а о—ТкТти; ах=Тк (1 -f K2r0VKln + К2окК6п) + ^тн»
Ьх = КггорКЧРк — К1окКвРк — (К1горК<2ок-\-К1окК2гОр) X
X {КъРкКЧп — К7РкК6п); b2=KcKiK2p^K3F (К1горК7п — КХокК6п).
Система является астатической, что видно из выражения
X (oo) = lim ^^ Х° = Х°.
^ ^о (лop^ + Л!/? + л2) /? + (V2 + ^1/^ + *2) ^~~TjP
Рассмотрим вопросы устойчивости системы, т. е. определим
области устойчивости в наиболее важных параметрах, к
которым отнесем коэффициент усиления (общий или регулятора)
и время запаздывания т.
В характеристическом уравнении из (8.84) положим р = /со
и там же заменим e-xi(*= cos тсо—i sin то и, выделив вещественную
и мнимую части и приравняв их по отдельности нулю, получим
cos та) — (Р2 •— 60а)2) sin тсо=0.
Далее необходимо из уравнений (8. 85) определить Ь2 и т, что
в общем случае дает &2=fi((o); т=/2(со). Задаваясь далее 0<со<оо,
необходимо построить границы области устойчивости в этих
координатах.
Практически же решать эту задачу целесообразно
графоаналитическим путем, т. е., разрешив оба уравнения (8.85)
относительно 62, получим
COSTw
+ b\u> COS to)
Sin TO)
а далее для каждого значения т>0 нужно построить
вспомогательные графики вида b2=f(a)) для каждого уравнения. Пересечение
этих кривых дает искомые значения Ъ2 и о при заданном
т>0. Для примера на фиг. 8.39 показан общий характер
протекания границы области устойчивости. Возможные переходные
процессы приведены ниже — на фиг. 8. 52.
30* 4€?
г) Система регулирования тяги со статическим
регулятором
Двигатель оставим прежним, а регулятор примем в
соответствии со схемой, приведенной на фиг. 8.40. Если принять те же
упрощающие положения по двигателю, что и в рассмотренном
выше случае, то система уравнений будет аналогична системе
Область .,,
устой, чи в ост и
* Т
Фиг. 8.39. Характер
протекания границы области
устойчивости.
Д
В
газогенератор
I Задатчик
I режима
Фиг. 8.40. Схема
регулятора.
(8.83), за исключением седьмого уравнения (для сервомотора),
которое теперь будет таким:
{Tcp+\)X2=KZXX. (8.86)
Структурная схема, приведенная на фиг. 8.38, для этого случая
изменяется только из-за наличия обратной связи (что показано
там же пунктиром).
В результате решения исходной системы уравнений получим
(8. 87)
Система является статической, что видно из выражения
Хр (со) =, lim
р к о
а2р +а3
^ X».
Ьхр + Ь2)
#3 "Г"
Определение областей устойчивости проведем в параметрах
&2 — Тс для различных значений т методом, аналогичным
рассмотренному выше.
468
В результате из характеристического уравнения вместо
уравнений (8. 85) получим
— ах<*>2 + аъ -\- (Ь2 — 60о)2) cos та> -f- Ьх<л sin тш=0;
— a0to3 -f- а2и — (Ь2 — Ьо о2) sin та) -\- Ьхю cos то)=0.
Далее определяем аналогичным
методом границы области устойчивости, ^
которые для примера приведены на
фиг. 8.41. Возможные переходные
процессы приведены ниже — на
фиг. 8. 54.
д) Система регулирования тяги,
работающая по сумме двух сигналов
(8.88)
х>о
Рассмотрим систему
регулирования тяги для того же двигателя, когда
управляющим сигналом является
сумма сигналов: сигнал отклонения+
сигнал скорости отклонения.
Система уравнений будет аналогична системе (8.83), за
исключением последнего уравнения, которое теперь будет таким:
). (8.89)
Фиг. 8.41. Характер
протекания границ областей
устойчивости.
Здесь принимаем, что происходит идеальное дифференцирование
сигнала ХРк с коэффициентом усиления Т\. Структурная схема,
приведенная на фиг. 8.38, для этого случая изменяется только из-за
наличия дополнительно включенного устройства с передаточной
функцией Т\р (что показано там же пунктиром).
В результате решения исходной системы уравнений получим
уравнение вида (8.84), в котором коэффициент Ьх выражается так:
X (КвРкК7п— К7РкК6п)-\-ТхК2рггКЗ
а все остальные коэффициенты одинаковы с аналогичными
коэффициентами в уравнениях (8.83).
Следовательно, введение сигнала, пропорционального скорости
изменения регулируемого параметра, увеличивает коэффициент при
первой производной, т. е. увеличивает запас устойчивости в системе.
При этом, конечно, система остается астатической, так как
**(°o)-X°.
Для этой системы целесообразно определять границы области
устойчивости в координатах Ь2 — Т\ для различных т>0.
Дальнейший ход построения границ областей устойчивости
полностью аналогичен с рассмотренными выше случаями. Характер
протекания границ областей устойчивости аналогичен показанному
469
на фиг. 8.41. Возможные переходные процессы приведены на
фиг. 8.56.
Требования к качеству переходных процессов для всех
рассмотренных случаев регулирования тяги обычно сводятся к получению
процессов, близких к монотонным. При малом изменении режима
работы двигателя с помощью механизма перенастройки регулятора
тяги обычно удается получить процессы, по характеру близкие
к монотонным (для максимального режима). С уменьшением
режима работы двигателя возрастает колебательная составляющая
процесса.
Более подробное исследование систем управления двигателей
с учетом влияния регулятора соотношения расходов
компонентов показывает, что при всех остальных одинаковых положениях
области устойчивости сужаются.
При практическом решении конкретных задач об устойчивости
рассматриваемых систем (особенно приближенными методами)
необходимо выбирать параметры системы так, чтобы они
соответствовали возможно большему запасу устойчивости.
е) Система регулирования тяги ЖРД с вытеснительной
системой подачи
Рассмотрим систему регулирования тяги ЖРД, схема которого была
приведена на фиг. 8. 12, а регуляторы тяги примем прежними. Кроме того, учтем
регулятор соотношения расходов компонентов, который будем считать
выполненным по схеме, приведенной на фиг. 8.26, б.
Для двигателя используем полученную ранее систему уравнений (8.77),
в которой положим Та = ТОц — ТГо1>^^0.
Уравнение движения регулятора соотношений расходов (давлений перед
форсунками) компонентов выведем, используя уравнение равновесия сил,
действующих на обе полости мембраны, и уравнение интегрирующего звена, т. е.:
+ ^ок ^ ^ГОр^ГОр +^ГОр'
/g gQ4
Здесь рок и рГор—'Давления окислителя и горючего в месте отбора импульса
(перед форсунками); F0K и .Prop — эффективные площади мембраны и сильфо-
нов; ^оки^гор—усилия, развиваемые пружинами; Хвых — координата
положения сервомотора, пропорциональная расходу Crop, а Хвх — координата
положения золотника, дросселирующего выход жидкости из полости сервомотора.
Принимая G20K = m0K (рок — рк) и G2r0? = mrOp (ргОр — Рк), после
преобразования вместо уравнений (8.90) получим
(Тср + 1)Хгор = К2Хок + КзХрк> (8.91)
где
(горокЫо
j с =' с = ; к 2 = -
.2 " yvV ~9. - Г°Р
cxpSl F fSi
r°P m^ Vm
r^rop
470
РкО
/^ок ^гор Ч
( — )
\ток тгор /
-QK "*ГОр
.2 Fr0?
гор
2G
Здесь /о — начальная координата дросселирующего золотника;
£"гор, Сок — суммарные жесткости пружины, мембраны и сильфона.
Исходная система уравнений для астатического регулятора тяги при
V = 0 будет такой:
(т'п ' 1 \ о1 Py ■=. К X К X ' ^
4-
(8.92)
РсР -
Структурная схема рассматриваемой системы приведена на фиг. 8. 42, где
указаны обобщенные координаты и передаточные функции.
*■
г
К ок
~Кзрк 1
-квРк
KT0V
KSF
w
Г**
кг
Тс р+1
к3
Тс Р+1
^гор
xz
i
\
1
t
Kt
X,
гоп ^
/и
\\
у' -
лтоп
Р
%1
ок+^г
е-^Р
ор у
t'oK
f
/ ^*
лок лгор
^/ок
тк Р + 1
ТкР+1
хр
к
Jx°
Фиг. 8. 42. Структурная схема.
Разрешая систему уравнений (8.92), получим
[(яо/?2 -|- сцр -г а2) р -г (&ор2 4- bip -f ^2) е~хр ] -^р = ('и/? + bo) е~т
8, 93)
где
h-
- Kl0K); m -
471
Из полученного видно, что система является астатической. Далее необходимо
определить границы области устойчивости в координатах (Кр=К\Кс)—Тс для
различных значений т, для чего целесообразно использовать тот же метод. В
результате расчета на фиг. 8. 43 для примера показан характер протекания границ
областей устойчивости.
Для системы регулирования тяги со статическим регулятором определение
областей устойчивости производится аналогичным образом. В этом случае в
системе (8.92) четвертое и пятое уравнения нужно заменить выражением (8.86).
В результате решения исходной системы уравнений получим
+ ах/>2
-f л3
Ь2)
(8.94)
'Область устойчивости
Область устойчив
Фиг. 8. 43. Характер
протекания границ областей
устойчивости.
Фиг. 8.44. Характер протекания
границ областей устойчивости.
Здесь система уже статическая, так как Xv (оо) = Xq. Границы
к 1 + ^2
области устойчивости для этой системы целесообразно определять в
параметрах К\Кс — Тс для различных значений Tj и фиксированного значениях.
Вычисления производятся аналогичным методом. В результате расчета на
фиг. 8. 44 для примера приведен характер протекания границ областей
устойчивости.
Для случая, когда регулятор тяги работает по отклонению и скорости
отклонения регулируемого параметра, в исходной системе уравнений (8. 92) необходимо
четвертое и пятое уравнения заменить уравнением (8.89). В результате
разрешения этой системы получим уравнение, аналогичное уравнению (8.93), в
котором, однако, коэффициент Ь\ имеет выражение:
Ь\ =
— Кз) 4-
а все остальные коэффициенты одинаковы с соответствующими коэффициентами
уравнения (8.93). Здесь также увеличение коэффициента Ьх приводит к
увеличению запаса устойчивости в системе. Характер протекания границ областей
устойчивости для этой системы аналогичен протеканию границ, показанному на
фиг. 8.44.
472
ж) Учет нелинейностей в системах регулирования
тяги
В рассмотренных выше системах регулирования не учитывались
нелинейности, которые обязательно имеются в системе. В
замкнутых системах регулирования тяги ЖРД наличие существенных
нелинейностей может иметь решающее значение для устойчивости
системы. Возможные нелинейности в рассматриваемых системах
могут возникнуть из-за наличия сухого трения в подвижных
частях, из-за гистерезисных характеристик чувствительных
элементов, из-за наличия зоны насыщения и по другим причинам.
При решении вопроса об устойчивости системы известные
нелинейности необходимо учитывать.
Выясним вопрос об устойчивости системы регулирования тяги
ЖРД с ТНА при учете характеристики сухого трения в
чувствительном элементе. •■
Для примера примем систему уравнений по (8.83), где шестое
уравнение должно быть другим.
Выведем уравнение движения чувствительного элемента с
учетом сухого трения, пренебрегая массой подвижных частей. В
соответствии с фиг. 8.37 уравнение действующих сил будет таким:
где Р — сила давления газов на сильфон; РПр — сила, развиваемая
пружиной; Рс — упругая сила сопротивления самого сильфона;
Рт--сила сухого трения. Сила сухого трения имеет постоянную
величину, но меняет направление при изменении знака скорости
движения, как показано на фиг. 8.45. Следовательно, для указанной
нелинейности можно записать:
при Х = 0. J
Преобразовывая уравнение действующих сил с учетом того, что
Р^Рсрк', Pnp = Cnvl; РС = СС1; где Fc— эффективная площадь
сильфона; Спр, Сс — жесткости пружины и сильфона; /—перемещение
чувствительного элемента и используя уравнения (8.95), получим
такое уравнение движения чувствительного элемента:
^^-А^Х*, J ( j
где А_ Л) д- _ , fcPkq у _ а/
СПр + С с (Спр+Сс) h h
Соответствующая характеристика чувствительного элемента
с учетом силы сухого трения приведена на фиг. 8.46.
Для исследования системы применим метод гармонической
линеаризации. Поскольку из характеристики, приведенной на
фиг. 8.46, видно, что существует зависимость выходного сигнала
от знака производной входного сигнала в нелинейный элемент, то
473
после гармонической линеаризации заданной нелинейности вида
X, = F(Хр ) получим
Xl = \q(A) + ^^ p], (8.97)
I со I
I- J
где
q(A)~ I F (A sin и) sin и du\
sin и) cos и du.
-Рп
dx
ж
Фиг. 8.45. Характеристика
действия сил сухого трения
Фиг. 8.46. Характеристика
нелинейного звена.
Для определения выражений коэффициентов q(A) и ^i(^) Pac-
смотрим фиг. 8.47, из которой видно, что весь диапазон
интегрирования можно разделить на три участка, т. е.:
тс/2 к—и1
2 Г . 2 Г
ъА J кА J
О tc/2
тс
I Ki{Asinu — h) sin и'du;
—«i
— f /f, (Л sin и- h) X
^ J
r,A J
0
XsinMrf#+-
*/2
X cos udu-\
Здесь sinw1
x
I
тгЛ J
A
Ci (A sin u — h) cos #
4 2/z
или &J —arcsin^
A
474
После проведения интегрирования получим
А
(8. 98)
Следовательно, исходной системой уравнений будет система
(8.83), где шестое уравнение нужно заменить уравнением (8.97).
где
Фиг. 8.47. К определению коэффициентов ряда Фурье.
Разрешая исходную систему уравнений, получим
[(а0р2 + а
Ьх=.
X (К6РкК7п — K7Pi<K&n
b2=q (A)
хр + Ь2)е-^]ХРк=0,
-(К К А-К К~ W
v4 1гор/ч 2ок I *ч 1ок'ч2гор/ /ч
<cK2p^K3F (К1горК7п — КХокК6п);
(^lrop^V* ~ КХокК6п).
(8.99)
Остальные коэффициенты одинаковы с соответствующими
коэффициентами уравнения (8.84).
В уравнении (8.99) правая часть приравнена нулю потому, что
отыскиваются собственные колебания системы (автоколебания).
Выясним возможность возникновения автоколебаний с частотой
(оп и амплитудой Ап вида ХРк —Лпэтсоп^ для чего воспользуемся
тем же методом, т. е. подстановкой в уравнение (8.99) значений
Р=/соп и е~хшп =cosTcon—/sintcon. Разделив полученное выражение
на действительную и мнимую части и приравняв их по отдельности
нулю, получим
— ахсо2 -(- (Ь2 — £0со2) cos та) -f V0 sin т<о -f Kqx (A) sin то = 0;
— а0со3 -j- а2оз -(- bxa cos тш + Kqx (A) cos то — (8- 100)
— (b2 — &0о)2) sin то = 0,
475
I ДС
К =
Q\ (А)
— К1окК6Рк
X (К6РкК7п — К7РкК6п);
X
дШ
к
к,
к
Зависимость по(8. /02)
Задисимость
по\8.Ю1)
h
Фиг. 8.48. Зависимость
коэффициентов от амплитуды А.
Фиг. 8.49. К определению
величин К и со.
Определим Лп и <оп в зависимости от Я для различных т. Разрешив
каждое из уравнений (8.100) относительно К, с учетом знака перед
qx(A), согласно уравнению (8.98) получим
(8.101)
1
К -
{ (A) sin to)
1
[ __ а о)3 i а2ы2 — Ьх<& cos тсо — (Ь2 — Ь0ы2) sin таз].
(8.102)
Далее построим зависимости вида К=Дсоп) для уравнений
(8 101) и (8 102), причем для этого целесообразно предварительно
построить зависимости qi(A)=f(A) и q{A)=f(A) в соответствии
с уравнениями (8.98).
На фиг. 8.48 приведены зависимости ^—=f(A) и
= f(A) пользуясь которыми легко определить значения q(A) и
qx(A) при заданных амплитуде Ап, коэффициенте усиления Кх и
величине А.
Пересечение кривых K=f{®n) для уравнений (8.101) и (8.102)
дает значение озш как показано на фиг. 8.49 (для исследования всей
области необходимо несколько раз повторить указанное
построение). Далее необходимо построить зависимости ЛП=МЛ) и соп-
476
причем для этого необходимо использовать те же
графики, которые приведены на фиг. 8.48, и графики, приведенные
на фиг. 8.49. Все это нужно проделать для т = 0 и т>0. Характер
искомых зависимостей приведен на фиг. 8.50, откуда видно, что
4=0
"max*
Л'т
Фиг. 8.50. Характер протекания границ областей устойчивости.
с увеличением /С, амплитуда Ап и частота (оп увеличиваются,
достигая максимального значения при /С=/Стах-
Устойчивость найденных периодических решений определяется
методом, рассмотренным выше, а результаты такого рассмотрения
показаны на фиг. 8.50 стрелками.
5. ПРИМЕРЫ
Пример 1
Задание. Определить границы области устойчивости и возможные
переходные процессы для системы регулирования тяги ЖРД с ТНА.
Исходные данные. Схему системы регулирования принимать по
структурной схеме, приведенной на фиг. 8.38 с астатическим регулятором (без
корректирующих устройств). Числовые значения коэффициентов, входящие в
систему уравнений для двигателя, принимать из примера, приведенного на
стр. 436.
Решение. Исходная система уравнений в соответствии с (8.83) будет
такой:
(0,005 р + 1) е°'тр ХРк = 0,356 *гОр + 0,646*ОК;
(0,205 р + 1) Хп - К2рггХргг - 0,205 Хок — 0,295 ХгОр;
Хок = 5,75 Хп — 2,75 ХРк;
^гор = 3,66 Хп — 1,43 ХРк;
Приводя эту систему к виду (8.84), получим
[(0,001/>2 + 0,221/? + 3,255)/? + (0,473/?2 + 2,08/7 +
477
Далее заменяем в характеристическом уравнении р = т и, используя £ zm~
-cos та)—I sin tco, переходим к уравнениям вида (8.85), т. е.:
— 0,221со2 + (5,02/С — 0,473со2) cos tco + 2,08co sin tco = 0;
~ 0,001соЗ + 3,255со + 2,08со cos tco — (5,02/< — 0,473w2) sin tco = 0,
где К=К\КсК2ргг^р — общий коэффициент усиления. Границу области
устойчивости будем определять в координатах К—т, для чего необходимо решить
систему из двух полученных уравнений, принимая со за параметр, т. е. получить
выражения /C=/i(со) и t=/2(co). Воспользуемся рекомендованным выше
графическим методом и построим вспомогательные зависимости вида /C=f(co) для
каждого уравнения при заданном t.
Разрешая оба уравнения относительно К, получим:
0,221со2 -[- 0,473cq2 cos to) — 2,08 sin tco
К== 5,02 cos tco '
3,255co — 0,001co3 + 2,08cocostco + 0,473co'2Sintco
5,02 sin tco
Далее при t=const строим две кривые, дающие зависимость /C=fi(co) и /(=/2(со).
Пересечение этих кривых дает значения К и со. Повторяя указанное для
нескольких значений t, получим зависимость вида /(=/2 00, определяющую границу
области устойчивости.
На фиг. 8.51 приведен результат численного расчета, откуда видно, что
увеличение t достаточно сильно сужает область устойчивости. Возможные
переходные процессы при Х°[1], определенные методом моделирования, приведены
на фиг. 8. 52.
Пример 2
Задание. Определить границы области устойчивости и возможные
переходные процессы для системы регулирования тяги ЖРД с ТНА.
Исходные данные. Схему системы регулирования принимать в
соответствии с фиг. 8.38, но с регулятором, включающим жесткую обратную связь
Двигатель принимать прежним.
Решение. Исходной системой уравнений будет система (8.83), в которой
седьмое уравнение необходимо заменить уравнением (8.86), а приведенная
к виду (8.87) система будет такой:
{0,001/?з -J- (0,221Гс + 0,001) />2 + (3,255ГС + 0,221) р + 3,255 + [0,473Гс/>2 +
+ (2,517-с + 0,473)р + 5,02/С1/Сс/С2/>Г1Лз/> + 2,51]
- 5,02 КхКсК2р
Производя далее аналогичную подстановку в характеристическое уравнение,
получим такие уравнения вида (8.88):
(0,221Гс + 0,001) о)2 + 3,255 + (5,02АГ + 2,51 — 0,4737>2) cos та> +
+(2,51ГС + 0,473) со sin tco = 0;
0,001соЗ + (3,255ГС + 0,221) со — (5,02/С + 2,51 — 0,4737>2) sin tco +
+ (2,51ГС + 0,473) со cos tco =0,
где также
Границу области устойчивости будем определять в координатах К—Тс
х=0 и т=0,01 сек. Для этого воспользуемся тем же графическим методом и
478
115
WO
125
WO
75
50
25
A
J
к
s
^t.
Г"К
^777
t*r*.
Область устойчивости
1
1 f IT
/777,
0,02
0,06 o,os zee*
Фиг. 8.51. Характер протекания
границы области устойчивости.
№
кривой
К
1
50
2
25
3
5
0J 0,2 0,3 0^ 0,5 0,6 tcex
Фиг. 8. 52. Возможные переходные процессы.
47?
«строим вспомогательные зависимости при т^--const и rc=^const вида /(=/(со)
для каждого уравнения.
Разрешив два полученные уравнения относительно К, будем иметь:
/у-
__(0,221 Гс+0,001) соЗ—3,255—(2,51—0,4737>2) cos to -(2,51ГС + 0,473) со sin то>
5,02 cos to)
К =
(3,255ГС-Ю,221) со—0,001соЗ--(2,51—0,4737>з) Sjn тсо-f (2,51ГС -f 0,473) со cos та>
~ 5,02 sin тсо
Теперь в координатах К—со построим вспомогательные зависимости вида
■K=/i(co) и /C=f2(co) при Гс = const и T=const. Пересечение этих кривых дает
значение К и со. Повторяя этот расчет для нескольких значений Тс и т. получим
зависимость вида /С=/(ГС) при T=const. Для других значений т необходимо
все проделать заново. Результаты численных расчетов приведены на фиг. 8.53,
из которой видно, что увеличение т также сильно сужает область устойчивости,
причем с увеличением К увеличивается значение Тс (уменьшается скорость
сервомотора). Возможные переходные процессы при Х°[1], определенные методом
моделирования, приведены на фиг. 8.54.
Пример 3
Задание. Определить границы области устойчивости и возможные
переходные процессы для системы регулирования тяги ЖРД с ТНА.
Исходные данные. Регулятор тяги принимать работающим по
отклонению и скорости отклонения регулируемого параметра. Двигатель принимать
прежним.
Решение. Исходной системой уравнений движения будет система (8.83),
в которой седьмое уравнение нужно заменить уравнением (8.89).
Разрешая эту систему относительно ^/?к, получим
{(0,001/72 + 0,221/? -f 3,255) р + [0,473/72 + (2,08 + 5,02 Тг К2ргг*<зг) Р +
Производя аналогичную подстановку в характеристическом уравнении, получим
два таких уравнения:
— 0,221со2 + (5,р2/С — 0,473со2) cos тсо -f (2,08 + 5,02 Тх) со sin тсо = 0;
— 0,001соЗ + 3,255со + (2,08 + 5,02Тх) со cos тсо —
— (5,02 К 4- 0,473ш2) sin то = 0,
где
К = KiKJbp^KzF', Tt = Т1К2РггКзр.
Границу области устойчивости будем определять в координатах /С—Т для
различных т, применяя тот же графический метод.
Разрешив полученные уравнения относительно /С, получим:
5,02 cos тсо
3,255со — 0,001соЗ + (2,08 + 5,027^) со cos Тсо 4- 0,473о>2 sin Тсо
5,02 sin тсо
480
к
400
ZOO
X
J
=0-
/
&
£ x=o,oi-L/y
R.s
\J
/
А
<>v
fi" {Область
устой чи 6ости
0,5 1,0 1,5 ,7с
Фиг. 8.53. Границы области
устойчивости.
№
кривой
К
Тс
1
25
¥
Z
3
0,3
3
3
0,5
0,1 0,2 0,3 0,4 0,5 0,6 Ьсек
Фиг. 8. 54. Возможные переходные процессы.
31 1327
481
к
900
800
700
600
500
НОО
300
200
100
Фиг. 8. 55, Границы области
устойчивости.
CtfU
yc
v^
% -0,005
^=0,01
гпойчи
\^
лас
вое
mu
№
кридой
К
Ъ
1
50
0,25
2
5
0,25
3
5
0,5
Ц-
10
0,5
0,1 ог2 о,з о^ 0,5 0,6 гсек
Фиг. 8. 56. Возможные переходные процессы.
482
Проделывая далее расчеты, аналогичные выполненным в первом и втором
примерах, получим зависимости вида K=f(T\), приведенные на фиг. 8.55, из
которых видно, что и в этом случае увеличение т существенно сужает область
устойчивости, а при увеличении К необходимо увеличивать Т\ (коэффициент
усиления по производной).
Возможные переходные процессы при Х°[1], определенные методом
моделирования, приведены на фиг. 8.56.
6. УРАВНЕНИЯ ДВИЖЕНИЯ В НЕЛИНЕАРИЗОВАННОЙ ФОРМЕ
Для решения ряда вопросов по системе управления двигателями
рассматриваемых типов, например при исследовании системы
в достаточно широком диапазоне изменения тяги двигателя или при
необходимости получения более точного решения, приведенные
выше линеаризованные системы уравнения движения оказываются
непригодными. В этом случае необходимо рассматривать
нелинейную систему уравнений движения, составленную в такой форме,
чтобы поставленную задачу можно было решать либо на
аналоговых моделирующих установках, либо на цифровых вычислительных
машинах.
Рассмотрим этот вопрос на примере двигателя, схема которого
приведена на фиг. 8.9.
Прежде всего составим уравнения движения для такого
двигателя, хотя многие из них уже были приведены ранее.
В отличие от ранее принятых допущений будем принимать
действительные характеристики насосов и турбины и характеристики
\i=\x(Kt); Тк=Тк(Кт) и к = к(Кт)у которые обычно задаются
графически.
Для камеры сгорания справедливы такие уравнения:
6v=Qt-Qr; О^
''-" /S
Q —Q 4-0
^т — иокТи
гор'
р
Зависимости \л{Кч), Тк(Кт) и &(/Ст) выдаются в виде
характеристик (см. фиг. 8.1), поэтому для них нужно получить
аналитические выражения. В этом случае целесообразно рассматривать
комплексы
/Н-1
или
аналитическое выражение для которых можно представить с
помощью квадратичных полиномов вида
k+i
31 * 483
Для системы подачи принимаем, что расход каждого
компонента (расход через форсунку G<j>) определяется по уравнению
(8.27), т. е.:
ф + ру-р^-рр-р^-- р,),
где нужно использовать уравнения (8.30), (8.31), (8.32) и (8.33).
Что касается напора, развиваемого насосом, ртн, то он
определяется действительными характеристиками насоса (напорными),
заданными графически в координатах (£lll) — (—\ Такая характе-
\ Ф / \п )
ристика для примера показана на фиг. 8.57. Для учета этой харак-
Ртн
п2
Ь
5l
п
Фиг. 8.57. Напорная
характеристика насоса.
>■■
и_
с,
Фиг. 8.58. Характер
зависимости 'Пт=/( — )•
теристики необходимо получить ее аналитическое выражение, что
можно сделать также с помощью квадратичных полиномов вида
Для турбонасосного агрегата используется уравнение (8.11),
которое целесообразно представить в виде
Мощность, развиваемая турбиной, Л^тур, выражается так:
тогда крутящий момент будет
где а — постоянный коэффициент пересчета.
484
Для активных турбин, которые применяются для ЖРД
(активные турбины характерны тем, что у них окружное усилие на ободе
колеса возникает только за счет поворота потока газа, без
дальнейшего его ускорения в каналах лопаток рабочего колеса),
коэффициент полезного действия г\т зависит от отношения окружной
скорости колеса и к скорости газа на выходе из соплового аппарата
си т. е. т]т=/( —J, причем значение г\т изменяется весьма
существенно.
Примерный характер протекания зависимости r\T = f(!_\
показан на фиг. 8.58. Эта зависимость также представляется в
графическом виде, а для учета ее в общей системе уравнений ее
необходимо аппроксимировать аналитическим выражением,
представляющим собой также квадратичный полином вида
Выражение для скорости истечения С\ будет таким:
*,-jA»
а расход газа через турбину Grr определится (в установившемся
движении расход газа через турбину равен расходу через
газогенератор) из выражения
— для докритического перепада давлений, и из выражения
Q
р—1
— для критического и сверхкритического перепадов давлений.
Здесь будем считать krr = const и Тгг = const.
Окружная скорость колеса турбины на среднем его диаметре
выражается так:
где mT = const; Z)cp — диаметр колеса турбины.
485
Крутящий момент, необходимый для привода насосов, опреде
ляется выражением
Щ*
где с = const; у— плотность жидкости; цн — к. п. д. насоса.
Здесь г]н также существенно зависит от режима работы насоса
и поэтому r]H=var. Характеристика, выражающая зависимость г)и
представляется в графическом виде в координатах г]н -; ее не
п
обходимо аппроксимировать аналогичными полиномами видг
г]н=/4 + /5 (—) + Ц-3) Для каждого насоса.
\п/ \п /
В 'приведенных выше уравнениях мы принимаем YoK^consi
и Yrop = const. Для более точного учета весового расхода каждого
компонента (особенно того компонента, с помощью которого
происходит охлаждение камеры сгорания) необходимо учитывать
изменение у из-за изменения температуры компонентов. Для этогс
необходимо дополнительно ввести в рассмотрение уравнения
определяющие передачу тепла от газа в камеру сгорания к компо
ненту.
Для газогенератора используются уравнения (8.15) и (8.16)
Уравнение расхода компонента (перекиси водорода) в
газогенератор примем таким:
где <7i = const,
а уравнение расхода Grr было получено ранее. Для удобства
в дальнейшем целесообразно объединить уравнения (8.15) и (8.16).
в результате чего получим
dt ^г^г
Для дальнейшего анализа примем, что величины наддува
баков с компонентами (как об этом говорилось выше) остаются
неизменными в течение всего времени работы двигателя, т. е.:
р°кж const; рг6°Р ^ const; pB ^ const.
Далее учтем влияние объема газа за турбиной, для чего
предполагаем, что за турбиной имеется объем VT и что 'на выходе
из этого объема расположен неизменный дроссель, на котором
всегда имеется сверхкритический перепад давлений.
Обозначая температуру и давление газа за ту£биной символами
Т4 и р4 и учитывая уравнение состояния p4VT = GTRrrT4, аналогично
рассмотренному выше, получим такое уравнение:
~ТГ{ т
ЛТГ тур
486
тле GTyp = Grr и выражение для Grr было получено выше, a G —
расход газа через дроссель, выражение для которого будет таким:
VW
Кроме того, необходимо учесть выражение, связывающее давления
и температуры газа перед и за турбиной в виде
*rr-i
*rr
Таким образом, в нелинеаризованной форме уравнения
движения рассматриваемого двигателя с учетом указанных выше
допущений будут такими:
для камеры сгорания
dt v RKTK (KT)
1 гор
Л—1
ft+1
для системы подачи компонентов
/С р?^ /?
£>
ок ^ок . ок ^.окА .
[sin (6 +a)];
487
гор гор. гор гор/>
гр2 * гор
гор
для турбонасосного агрегата
———— (М —М —М V
.v or VKiTvp iviok yKJrop/>
at Zt.J
TT
V
для докритического перепада давлений и
1
2
для критического и сверхкритического перепадов давлений
;
~7
для газогенератора
(а—аГГ
dt
488
для объема газа за турбиной
dt
/
28
T I - I n I ^ 1; °ТуР=°гг.
Если задача решается для всей системы управления, то к
написанной выше системе уравнений необходимо добавить уравнения
регуляторов, которые приведены в системе (8.83), или (8.86),
или (8.89).
В зависимости от точности решения задачи решается вопрос
об учете времен запаздывания выделения тепла в камере сгораниях
и газогенераторе ть Для учета времени запаздывания необходимо
в приведенных выше уравнениях учесть зависимости
Иногда временем запаздывания ti в газогенераторе считают
время пребывания порции газа в объеме газогенератора, которое
определяется как —— =тПр. Здесь Gvt [кг]— количество газа,
содержащегося в объеме газогенератора, a GB.n — —расход газа
из газогенератора; тогда получим GB.n=GB.u(t—тпр).
Как видно из приведенной выше системы уравнений, решить ее
обычными методами не представляется возможным из-за
громоздкости выражений. Такие задачи чаще всего решаются с помощью
цифровых вычислительных машин, для чего на основании
приведенных уравнений составляется специальная программа счета.
Совершенно очевидно, что результаты расчета с использованием
приведенных уравнений значительно полнее отражают действительное
поведение системы.
Для двигателей других возможных типов уравнения
составляются аналогичным образом.
Глава IX
АВТОМАТИКА СИЛОВЫХ УСТАНОВОК ДРУГИХ ТИПОВ
1. ЯДЕРНЫЕ СИЛОВЫЕ УСТАНОВКИ
а) Общие сведения
Ядерными силовыми установками будем называть такие
установки, источником энергии в которых является ядерная энергия,
причем освобождаемая при делении ядер энергия используется для
подогрева рабочего тела установки.
В зависимости от назначения, схемы силовых установок могут
быть весьма различными, но условно их можно разделить на
воздушно-реактивные, ракетные и энергетические ядерные силовые
установки.
На фиг. 9.1 приведены возможные схемы таких силовых
установок, к которым относятся: ядерный ПВРД (ЯПВРД) без
промежуточного теплоносителя; то же с промежуточным
теплоносителем; ядерный ТРД с промежуточным теплоносителем; ядерный
ТВД с промежуточным теплоносителем; ядерный ракетный
двигатель; ядерная энергетическая силовая установка. Во всех этих
схемах установок применяется реактор. Принцип действия
установки каждого типа понятен из схемы. Режим работы реактора
изменяется с помощью специального механизма управления.
Выясним основные процессы, происходящие в реакторе.
На фиг. 9.2 приведена схема реактора с управляющими
стержнями. В центральной части реактора находится ядерное топливо,
которое размещено в замедляющем материале.
Источником первичных нейтронов являются те нейтроны,
которые получаются в результате естественного радиоактивного
распада топлива. При захвате ядром топлива нейтрона ядро
расщепляется, при этом выделяется большое количество энергии
и освобождаются вторичные нейтроны, которые также могут
вызвать деление ядер.
Нейтроны могут поглощаться не только топливом (делящимся
веществом), но и другими материалами реактора или вообще
вылетать из реактора. Наличие отражателя позволяет уменьшить
выход нейтронов из реактора.
490
Условием поддержания цепной реакции является следующее:
после деления ядра, вызванного захватом нейтрона, по крайней
мере один вторичный нейтрон должен вызывать расщепление
нового ядра.
Фиг. 9. 1. Схема силовых установок с использованием реактора.
а, б—ЯПВРД, в—ЯТРД, г—ЯТВД, д—ЯЖРД, е—энергетическая установка.
В зависимости от энергии нейтрона при захвате его ядром,
реакторы разделяются на реакторы, работающие на тепловых,
промежуточных и быстрых нейтронах. Наибольшее распространение
пока получили реакторы, работающие на тепловых нейтронах,
?• е. на нейтронах с относительно небольшой энергией. Для
авиационных и ракетных силовых установок более перспективными
являются реакторы, работающие на быстрых нейтронах, потому
491
что для них не нужен замедлитель и размеры такого реактора
могут быть существенно меньше. Кроме того, в качестве
охладителя реактора может применяться воздух (газ), что, естественно,
упрощает всю схему установки.
При расщеплении ядра часть нейтронов освобождается
не мгновенно, а спустя некоторый промежуток времени, поэтому
такие нейтроны получили название запаздывающих нейтронов
(в отличие от мгновенных, о которых говорилось до сих пор).
Доля запаздывающих нейтронов составляет <1,0% об общего
числа нейтронов, но, тем не менее, они существенно влияют на
характеристики реактора.
Управляющий
стержень
Чувствительный
элемент нейт -
ронноео потока,
(ионизационная камера)
биологи чесная
защита
► Теплоноситель
Отражатель
Топливо (делящееся вещество)
Фиг. 9. 2. Схема реактора.
Обычно реактор характеризуется коэффициентом
размножения нейтронов /С, временем жизни нейтронов /, плотностью
нейтронов п и периодом Т.
Коэффициентом размножения нейтронов К называют
отношение числа нейтронов данного 'поколения к числу нейтронов
предшествующего поколения. При условии постоянной мощности
реактора его коэффициент размножения нейтронов К будет равен
единице.
В общем случае может быть /(^1. При /С>1 с течением
времени происходит увеличение количества вторичных нейтронов
в реакторе, поэтому мощность реактора увеличивается; при /С<1
с течением времени происходит уменьшение количества нейтронов
в реакторе, поэтому его мощность уменьшается.
Под временем жизни нейтронов I понимают среднее
эффективное время жизни свободных нейтронов, т. е. промежуток времени
от момента освобождения нейтронов из ядра до того момента,
когда они снова вызовут деление ядра или выйдут из реакции.
Для урана U235 время жизни нейтронов составляет /^1«10~3 сек.
Под плотностью нейтронов п понимают число нейтронов,
содержащихся в 1 см3 активной части реактора.
492
Под периодом реактора Т понимают время, в течение которого
число нейтронов в реакторе изменится в е раз.
Если в данный момент плотность нейтронов равна п и если
положить /С>1, или /С=1+Л/С, то в последующем поколении плотность
нейтронов в реакторе будет /г(1+Д/С), или прирост плотности
за одно поколение будет равен: Ап = п-АК. Поскольку
эффективное время жизни нейтронов равно /, то скорость изменения ПЛОТ-
г/я A/(n
ности нейтронов за одно поколение выразится так: — = ; после
dt l
*JLt
интегрирования получим п = ще 1 , т. е. после нанесения
скачкообразного возмущения А/С плотность нейтронов п будет нарастать
по экспоненте. В е раз плотность увеличится при =1, т. е. за
время t=— =Т сек, которое и называется периодом реактора.
Ад
При неизменной мощности реактора будем иметь п = п0,
поэтому е 1 =1 и А/С=О и тогда t = T = oo; чем более интенсивно
развивается процесс в реакторе, тем меньше его период.
Для мгновенных нейтронов время жизни / очень мало, поэтому
период Т очень мал, что свидетельствует об очень интенсивном
изменении плотности нейтронов.
Запаздывающие нейтроны образуются не непосредственно
при делении ядра, а испускаются ядрами-осколками спустя
некоторое время после деления ядра. Время жизни ядер-осколков
значительно больше времени жизни мгновенных нейтронов, поэтому
процесс в реакторе, обусловленный запаздывающими нейтронами,
протекает относительно медленнее. Например, для урана U235
принято считать для мгновенных нейтронов / = 0,001 сек, а среднее
время жизни для запаздывающих нейтронов /3~ 0,1 сек.
Таким образом, при одном и том же значении А/С период
реактора Т только для запаздывающих нейтронов в 100 раз больше
периода для мгновенных нейтронов, и поэтому во втором случае
процесс будет протекать значительно медленнее, чем в первом.
Например, если принять А/С=0,005, то за 1 сек для
мгновенных нейтронов плотность нейтронов п увеличится в соответствии
с выражением п = п^е 1 в — =148 раз, а для запаздывающих ней-
п0
тронов в— =1,05 раз. Поэтому, если в первом случае практически
невозможно осуществить систему регулирования с необходимым
быстродействием, то во втором случае это вполне возможно.
Влияние запаздывающих нейтронов в том смысле, как об этом
говорилось выше, справедливо, если А/С не более определенной
величины Р; в противном случае процесс в реакторе будет экспо-
493
ненциальыый, нарастающий с очень большой скоростью.
Например, для уранового реактора (3 = 0,0075, поэтому для него должно
быть А/С< 0,0075.
б) Вывод приближенных уравнений
для реактора
Выведем уравнения реактора по нейтронной и тепловой
мощностям в линейном приближении.
В установившемся движении мощность, определяемая
нейтронным потоком (числом делений ядер), равна тепловой мощности
по эквиваленту 3- 1010 делений/сек и соответствует мощности
в 1 вт (без учета потерь). В неустановившемся движении такого
равенства нет из-за накопления тепла в материале реактора.
В реакторе, работающем в установившемся режиме при А/С = О
и /(=1, изменим коэффициент размножения нейтронов на /( =
= 1+А/С. В результате этого в реакторе начнет изменяться
плотность нейтронов, которая складывается из изменения плотностей
мгновенных нейтронов пм и запаздывающих /г3, т. е.
Дл = Д/гм + Д/гзэ (9.1)
где
&п = п — п0; д/гм=/гм — /гм0; &п3 = п3 — пз0.
Выражение для Апм определим из рассмотрения прироста пм
для различных поколений нейтронов. Прирост плотности
мгновенных нейтронов за все поколения будет:
о мо(+)мо мо
)-/гм0=/гм0 (1 + ААГ)2—/гм0= /гм0 (2дАГ-дА:2);
А Лмз="мз - "мо="мо (1 + Д/С)3 - "мо = "мо (ЗА К + Зд/С2 + А/С3);
А ям* = "м* ~ "мо = /гм0 (1 + Д КУ — пи0 = /гм0
где /? —сумма членов, включающая А/Са; а = 2, 3,..., q.
Пренебрегая величинами второго порядка малости, примем
д/Са?«О, т. е. /? = 0, поэтому для поколения q суммарный прирост
мгновенных нейтронов будет
(9.2)
Промежуток времени Д^, в течение которого прошло q
поколений, и время жизни нейтронов связаны между собой выражением
... А/
At = ql или q= — .
Заменяя в уравнении (9.2) выражение для q, получим
Ьпи = п6 ^-д/. (9.3)
494
Определенная доля р мгновенных нейтронов каждого поколения:
тратится на создание ядер-осколков, испускающих
запаздывающие нейтроны, поэтому для определения прироста плотности
мгновенных нейтронов нужно принять для коэффициента
размножения выражение /С= 1 + Л/С—р. В результате этого вместо
(9. 3) получим
Длм = /г0-^=^-д*. (9.4)
Теперь определим выражение для изменения плотности
запаздывающих нейтронов п3.
Если символом С обозначить число ядер-осколков в единице
объема, испускающих запаздывающие нейтроны, и если принять,
что каждое ядро-осколок испускает один нейтрон, то в единицу
Q
времени будет испускаться— =СХ запаздывающих нейтронов,
^3
Здесь Х= постоянная распада, которая выражает излучение
^3
запаздывающих нейтронов в единицу времени ядрами-осколками.
Поэтому прирост запаздывающих нейтронов за время At будет
дС = дл3 = С0Хд/. (9.5)
Подставляя (9.4) и (9.5) в (9.1), в пределе получим
dn Ml , (9.6)
dt I
Далее необходимо учесть накопление ядер-осколков, что
можно выразить уравнением
-^-=Q1 —Q2, (9.7)
где Qi—число ядер-осколков, возникающих в единицу времени;
Q2— число распадов ядер-осколков также в единицу
времени.
Уравнение (9. 7) показывает, что скорость изменения плотности
ядер-осколков равна разности скоростей образования
ядер-осколков и распада этих ядер-осколков.
В соответствии со сказанным выше об образовании ядер-
осколков, излучающих запаздывающие нейтроны, как (3-ой части
от общего числа нейтронов, выражение для Q\ будет: Qi= —.
Выражение для Q2, определяющее скорость распада
ядер-осколков, будет — = СХ.
Тогда вместо (9.7) можно написать
—=^--лС. (9.8)
dt I K J
495
Следовательно, движение реактора по мощности, определяемой
по нейтронному потоку (нейтронной мощности), описывается
уравнениями
dn AK — 3
dt I
dt I
(9.9)
В действительности существуют несколько групп
запаздывающих нейтронов с различными временами жизни. Например, для
урана U235 известны шесть групп запаздывающих нейтронов
со временем жизни от 0,07 сек до 80 сек. Количественный выход
каждой группы запаздывающих нейтронов также различен, но
в целом для U235 он составляет 0,755%.
При достаточно точных расчетах нужно учитывать каждую
группу запаздывающих нейтронов, тогда уравнения движения
вместо (9.9) будут такими:
2
dt
dC*-lLn л С
(9.10)
где Рг и Ci относятся к i-й группе запаздывающих нейтронов
и если число всех групп равно q, то число уравнений в системе
(9.10) будет равно q+\.
Для приближенных расчетов возможно принимать среднее
время жизни запаздывающих нейтронов равным /Ср и суммарную
долю всех запаздывающих нейтронов равной (За; эти величины
выражаются так:
1-я % l&i
q
2 Р/
f=l
Например, для урана U235 значение /ср составляет /ср= 12,24 сек,
а соответствующая усредненная постоянная распада Яср=— =
^ср
= 0,082 l/сек. Ниже будем принимать /ср, А,ср и Ps, поэтому будет
справедлива система (9.9), где /, X и р будем писать без индексов.
Сводя (9.9) к одному уравнению, получим в операторной
форме:
496
Это дифференциальное уравнение отражает поведение реактора по
мощности, определяемой нейтронным потоком.
В действительности плотность нейтронов п различна в
различных точках активной зоны реактора, но предположим, что
относительное изменение плотности нейтронов приблизительно
одинаково для всей активной зоны, поэтому измеренный нейтронный
поток в выбранной точке реактора будем считать
пропорциональным нейтронной мощности реактора. То же самое относится
и к коэффициенту размножения нейтронов (обычно вводится
понятие эффективного коэффициента размножения /СЭф).
Теперь выведем уравнение реактора по тепловой мощности,
т. е. по мощности, измеренной по тепловому потоку.
Температура материала реактора оказывает существенное
влияние на процессы в реакторе, так как при этом изменяется
величина коэффициента размножения. Обычно с увеличением
температуры материала реактора (главным образом,
замедлителя) коэффициент размножения К уменьшается. Изменение
коэффициента размножения (или реактивности q= —j при изменении
температуры материала реактора учитывается температурным
коэффициентом, который обозначается символом а.
Для учета влияния температуры на изменение плотности
нейтронов в выражении (9.6) необходимо учесть член аДГр,
выражающий изменение А/С, где АГР — отклонение от средней
температуры реактора. Тогда вместо (9.6) получим
^ А*РдА7» (9П)
В действительности температура реактора различна в различных
его точках, поэтому (под Тр будем понимать некоторую среднюю
температуру реактора, достаточно полно характеризующую
изменение процесса в реакторе. При работе реактора развиваемая
реактором энергия снимается с него в виде тепла, для чего через
реактор пропускается охладитель (теплоноситель, рабочее тело).
На схемах, приведенных на фиг. 9. 1, например, таким
охладителем может быть воздух, жидкий металл и др. Следовательно,
температура реактора будет зависеть не только от количества тепла,
выделяемого реактором, но и от количества тепла, уносимого
охладителем. Кроме того, тепло накапливается в массе реактора.
Очевидно скорость изменения температуры реактора будет
пропорциональна разности этих теплот, т. е.:
m(Qp-Qx), (9.12)
Qp — количество тепла, выделяемого реактором в единицу
времени; Qx — количество тепла, уносимого
охладителем (теплоносителем) в единицу времени.
32 1327 497
Для приближенных расчетов можно принять Qp==an и Qx~
1 / т> Р т^ОХч
= 0(1 —/Ср), т. е. количество тепла, выделяемого реактором
в единицу времени, пропорционально плотности нейтронного
потока п, а количество тепла, уносимого охладителем в единицу
времени, пропорционально разности усредненных температур —
реактора Тр и охладителя Гер- Тогда вместо (9.9) можно
написать:
dn
dt
dC
dt
AK — P —
n-\-C\;
\
dt
= m[an-b(Tv-T°Cp)].
(9.13)
После линеаризации (9.9) получим
TV n "7 С~~~Г *'
P nQ
или, сводя к одному уравнению, получим
где
(9. 14)
(9.15}
„р An „ _ А/С v __ AC
лп — ——, лк——-; лс— —--
Из уравнения (9.15) видно, что, если не учитывать влияние
изменяющейся температуры реактора, то реактор по своим
свойствам будет являться астатическим звеном, поскольку в левой
части уравнения имеется нулевой корень.
Если изменить АК скачком, т. е. ^#[1], то решение (9.15)
будет
уР п (Л £>—аЛ\\п i /О 1 &\
Л.п=С1^у1 — 6 2 )-\-и^1. \\j. lOj
На фиг. 9.3 сплошной линией показан характер изменения
нейтронной мощности реактора при А^Ш; из фигуры видно, что
в первый момент проявляется влияние экспоненциальной
составляющей, а далее мощность нарастает по линейному закону.
После линеаризации уравнений (9.13) получим
'n-\-—j--XT —Xc = —j— Хк\
-о
тащ
тр
1 о
хтх=о,
(9.17)
498
или, сводя к одному уравнению, получим
(9.18)
XK-(b7p-bs) рХГх, (9.19)
где
b + ;
; &1 &о(/и6 + ); b2=b0mbl; bb=
Выясним влияние коэффициента а на устойчивость реактора.
При положительных коэффициентах характеристического
уравнения условием устойчивости будет аха^>аъ или после подстановки
выражений для коэффициентов получим неравенство—aano(mbl+
-\-fi)<b[(XlJt-fi2),+ mbl(kl + p)]i которое выполняется при с0>0.
Кроме того, и из условия а3]>0 видно, что реактор устойчив лишь
при а>0.
Физически устойчивость реактора нужно понимать в том
смысле, что, если, например, положить А/С>0, то плотность нейтронов
начнет возрастать и температура реактора начнет увеличиваться.
Но одновременно с увеличением температуры реактора начнет
уменьшаться А/С. Наконец, при каком-то значении температуры
реактора принятое ранее значение А/О>0 будет полностью
скомпенсировано и реактор начнет работать при установившемся
режиме. Факт компенсации значения А/С температурным коэффициентом
а выражается знаком минус перед числом аДТр в выражении (9.11),
хотя коэффициент а положителен.
Таким образом, если учитывать температурный коэффициент, то
свойства реактора характеризуются его -положительным
самовыравниванием, что является важнейшим свойством реактора.
Характер переходных процессов по Хрп и Х$ в соответствии
с уравнениями (9. 18) и (9. 19) при возмущении Хк [+1] и Хк [—1]
показан на той же фиг. 9. 3, откуда видно, что в рассматриваемОхМ
случае реактор становится устойчивым звеном в общей системе
управления.
На устойчивость реактора влияет также эффект, связанный с
отравлением его продуктами деления горючего, которые действуют
как вредные поглотители нейтронов и поэтому нарушают общий
баланс нейтронов в реакторе. Эффект отравления реактора
существенно сказывается при рассмотрении вопросов пуска и останова
реактора.
32* 499
Возмущение Хк [+ /]
Возмущение
Фиг. 9.3. Характер переходных процессов в реакторе.
X
к
х?
< j*T -
х,
US+»+hl)S
(5+\)«Г0
mann
6 То [S+m Ъ)
ф (S) "^ ^"
JT/
JT|
jrrp
^rx
Фиг. 9.4. Структурная схема реактора.
500
Полученные выше результаты можно выразить передаточными
функциями и частотными характеристиками. На фиг. 9. 4 приведена
структурная схема реактора, соответствующая системе уравнений
(9. 17). Здесь Ф^) получено из уравнения (9. 15), Ф2(5) —из
первых двух уравнений (9. 17), а Фз(5) и Ф4(5) — из третьего
уравнения (9. 17). Положив, кроме того, Х1=Х1-\-Х2 и Ipr = Z3+^4,
получаем эквивалентность приведенной структурной схемы с системой
(9.17). Эта схема по-существу выражает реактор, охваченный
отрицательной обратной связью из-за влияния температурного
коэффициента.
Эти же свойства реактора выражаются частотными
характеристиками, показанными для примера на фиг. 9. 5 и 9. 6. На фиг. 9. 5
приведены логарифмические
частотные характеристики,
полученные в соответствии
с уравнением (9. 15) для
двух значений времени
жизни мгновенных нейтронов
при р = 0,0075 и Я = 0,0082.
Низкочастотная часть этих
характеристик определяется
запаздывающими нейтро- - 8
нами, а высокочастотная —
мгновенными.
Здесь условно показано
совпадение L = 0 дб при
со=1 для случая /=1-10-*.
При анализе поведения та-
-4
0,001
-120
100 W
Фиг. 9.5. Частотные характеристики
реактора.
кого реактора нужно иметь в виду, что в общем случае [^)
будет какой-то общий коэффициент усиления Коф\. Значение Ко
определяется значением п0 и выбранным базисным значением щ
при переходе к относительным величинам вида ^£ = — вместо при-
Пб
нятого ранее Х\~-— при линеаризации исходных уравнений.
1огда получим
06
щ
Следовательно, общий коэффициент усиления зависит от мощности,
развиваемой реактором, поэтому и свойства реактора зависят от
развиваемой им мощности. Это условие является существенной
особенностью реактора.
На фиг. 9.6 приведены логарифмические частотные
характеристики, полученные в соответствии с уравнениями (9. 18) и (9.19),
из сопоставления которых с характеристиками, ранее
приведенными на фиг. 9. 5, видно влияние температурного коэффициента.
501
Цш) 20
до
0,01 0,1 1,0 10 700 (О
Фиг. 9.6. Частотные характеристики реактора.
Фиг. 9. 7. Возможная схема ЯТРД.
502
в) Уравнения движения остальных элементов
силовой установки
Рассмотрим для примера схему ЯТРД с промежуточным
теплоносителем, приведенную на фиг. 9.7, которая в принципе
аналогична схеме, показанной на фиг. 9.1, в (разница между этими
двумя схемами состоит лишь в способе привода насоса, наличии
устройства для перепуска теплоносителя и перепуска воздуха
в схеме, приведенной на фиг. 9.1).
Здесь предусмотрена обычная камера сгорания для сжигания
углеводородного топлива, которая работает при отключенном
реакторе. В этом случае приведенная схема двигателя соответствует
обычному ТРД, управление которым рассмотрено выше.
В этой схеме двигателя изменение тяги может осуществляться
как с помощью симметричного изменения направления струи
газа, истекающего из реактивного сопла, так и с помощью
изменения степени подогрева воздуха в теплообменнике.
Уравнения движения собственно двигателя будут
аналогичными приведенным ранее, т. е.:
1. 2kJ dJhL = MT-MK-MH;
dt
3. OK=G ; i
У [ (9.20)
4. -£=1-,£(1_<-т.);
1 3
5. GTyp=Gc;
6. ^х.о^.о^ср -Яр) =CpGK(Tl -Я). j
Здесь в первом уравнении учитывается крутящий момент Мн
для привода насоса теплоносителя, а шестое уравнение
соответствует уравнению теплового баланса, выражающему равенство
между теплом, «поступающим для подогрева воздуха в
теплообменнике, и теплом, снимаемым с теплообменника, выраженными через
усредненные температуры, т. е. через Г£р—усредненную
температуру стенки теплообменника и ТсР —усредненную температуру
воздуха. Остальные уравнения остались прежними; обозначения
соответствуют приведенным на фиг. 9.7.
При выводе уравнения теплообменника будем учитывать
накопление в его массе тепла, поэтому скорость изменения
усредненной температуры стенки теплообменника ГсР будет пропорциональ-
503
на разности между притоком и отводом тепла, что можно
записать так:
at
-Q°A-QB), (9. 21)
где Qtt — расход тепла в теплообменнике, вносимого
теплоносителем с температурой 7°*; От1 — расход тепла из
теплообменника, отводимого теплоносителем с температурой ТТ; QB —
расход тепла, уносимого воздухом.
Указанные расходы тепла можно выразить через расходы
теплоносителя и воздуха, их температуры и теплоемкости; тогда
вместо (9.21) получим
dTc
-*-=щ[ся0тл(1? -T?)-cpGK(Tl -Tl)l (9.22)
Усредненное значение температур воздуха и стенки
теплообменника приближенно выразим так:
T% = bx{Tl+Tl)\ . (9.23)
Тсср = Ьг(Т°/+Т1х). (9.24)
Усредненное значение температуры теплоносителя Г?р в
реакторе выразим так:
ni=bx(n4TT). (9.25)
Расход тепла, снимаемый теплоносителем из реактора,
выраженный через усредненные и действительные значения
температур, выразим так:
/>р(Гр -Т%)=сяОр (7Г-ГГ), (9.26)
где Fp и ар — омываемая поверхность и коэффициент теплопере-
хода от стенки, к теплоносителю.
Соответственно расход тепла, вносимый в теплообменник,
также выраженный через усредненные и действительные значения
температур теплоносителя, выразим так:
^т.о«т.о <ТЪ -П.)=*»0,.о (^0Х -ТТ), (9. 27)
где /Vo и ат.о — соответственно омываемая поверхность и
коэффициент теплоперехода от стенки к теплоносителю. Далее
необходимо учесть условие равенства расходов теплоносителя в виде
p (9.28)
где Gn — расход теплоносителя через кран перепуска.
504
Температуру теплоносителя перед входом его в насос
выразим так:
^ох 1 г ап + J х
х
Кроме перечисленного, необходимо учесть влияние систеАмы
прокачки теплоносителя из реактора в теплообменник и через
кран перепуска.
Расход теплоносителя через реактор приближенно выразим
так:
\ -Ръ), (9-30)
где рн— давление теплоносителя за центробежным насосом, а
Ръ — суммарные потери давления во всем остальном
контуре.
Давление, развиваемое насосом, определяется по выражению
(8.29), т. е.
(9.31)
а потери давления в контуре приблизительно выразим так:
(9.32)
Потери ps состоят из потерь в теплообменнике Pt.o = ^t.oG?.o
и потерь на кране перепуска рп= —Од, где тТ.о и ти — коэффи-
циенты потерь, a f — площадь сечения крана перепуска.
Поскольку оба эти сопротивления подключены параллельно, то общий
коэффициент потерь будет
= тТ.отп ^ (9>33)
mn
Подставляя в уравнение (9.30) выражения (9.31), (9.32)
и (9.33), получим
Н ~— -^)UV==PM-—') • (У.^4)
\т2 тп +
Таким образом, исходная система уравнений будет такой:
dt I
(9.35)
dt l
3. -^- = m[an + b (Гp - Ttp)V,
505
4. 2x
6. 0K=0Typ;
7. 5=1-ч
9. ^т.о«т.о
//7е
ю. _£iL
11. Tlp^
12. Г?РХ=
13. Tl^
-г?) -
+Т?);
14. / х =
15. Op=t
16. />p|
17. Z7- na.
(71P- ^)=cm0I.0
(9.35)
Нелинейные зависимости в неявном виде для GK, GTyp, Gc, MT,
Мк, Мн примем такими:
K=GK(pl; пй); Мт=Мт(Т1,пА,к;
ТР=Отур(Я 71); МК=МК{*1, я,);
(9-36)
Ос=О0(/7; Г!, ^с);Жн^Мн(йд,Ср).
После линеаризации (9.35) с учетом (9.36) и, принимая
const и Т* =const, получим:
p*=const и 7* = const, получим:
\ (9.37)
506
-f"Kip^Xpi -\- KiPtXPi=0;
p, + KlOTbXT:t
(9.37)
4.
5.
6.
7. KiPlXPi -f- Ki
8. K&p,XP2-f-/C8
9-
10.
И.
12.
13.
14.
16.
17.
pp ^
Здесь всего 21 переменная, из которых три являются
воздействующими факторами, а именно: Хк, Л>с, ZF — соответственно
координаты стержней реактора, площадь реактивного сопла двигателя
и площадь проходного сечения крана для перепуска
теплоносителя.
В этой системе при каждой переменной и коэффициенте
имеется соответствующий индекс, согласованный с ранее принятыми
обозначениями, по которым легко находится соответствие между
уравнениями (9.35) и (9.37).
р + К16ТохХТох +
4" ^i6fx Xfx=0;
+ /С
1бГг
507
Для дальнейшего анализа исключим из (9.37) все переменные,
кроме Х%, X*n, XG , Х°*, Xfx, на которые должен воздействовать
регулятор; тогда получим:
+ а7) p
2. (а10р2 + апр + а12) X* + (а13р + аи)
+ а16) Х°/г + (аЛ7р + а18) ^fx
3. (а19р + а20)Х°тХг + (а21р + а
4. ^
+ [а1ър +
В соответствии с этой системой уравнений на фиг. 9.8 приведена
укрупненная структурная схема рассматриваемой силовой
установки.
i
XF
г
ч
—>-■■ 1
хп
-*>
1
X*
1 >.
хох
Фиг. 9. 8. Укрупненная структурная схема.
г) Уравнения для полной системы управления
На ранее приведенной схеме (см. фиг. 9.7) показана одна из
возможных схем системы управления. Здесь с помощью счетно-
решающего устройства Ф3 снимается сигнал, пропорциональный
величинам температуры теплоносителя на выходе из реактора
и на входе в него, а также замеряется расход теплоносителя.
Таким образом, величина выходного сигнала из этого
счетно-решающего устройства будет пропорциональна тепловой мощности
реактора.
508
Устройство Ф4 замеряет плотность нейтронного потока,
поэтому величина выходного сигнала из него пропорциональна
нейтронной мощности реактора.
Сравнение этих двух сигналов происходит в устройстве Фг,
и сигнал разности через усилитель Ф! воздействует на стержни
реактора так, чтобы уравнять тепловую и нейтронную мощности.
В устройства, предназначенные для сравнения сигналов Фг,
вводится сигнал Х° заданного уровня мощности.
В системе предусмотрен ограничитель предельных чисел
оборотов ротора турбокомпрессора, состоящий из устройств Ф5 и Фб,
воздействующий на перепуск теплоносителя из горячей магистрали
в холодную. Этим уменьшается подвод тепла в теплообменник,
в результате чего уменьшается степень подогрева воздуха перед
турбиной и число оборотов уменьшается (ограничивается).
С помощью устройства Ф7, приводящего в движение створки,
часть газа может симметрично отклоняться от осевого течения
и поэтому тяга будет изменяться (как осевая составляющая) при
сохранении примерно неизменным режима работы установки (по
тепловой мощности).
Если принять обозначения, приведенные на фиг. 9.7, за
передаточные функции соответствующих устройств системы
управления, то уравнения движения регуляторов будут такими:
2. А-^Фал
3. Х2=Ф2(Хг
4. Хк=ФгХ2;
(9.39)
На фиг. 9. 9 приведена укрупненная структурная схема всей
системы управления, соответствующая уравнениям (9.38) и (9.39).
Из совместного решения уравнений (9.38) и (9.39) можно
получить уравнения движения всей системы по интересующим нас
параметрам. Например, по параметрам Хрп и ХАп в общем случае
уравнения будут такими:
X* + q2(p)Y* + q(p)Z*; J
где Q(p), <7i(p) —полиномы, порядок которых зависит от
передаточных функций звеньев системы.
Исследования таких очень сложных систем управления, какой
является рассматриваемая система, можно проводить лишь с по-
509
мощью специальных моделирующих машин, поэтому приведенное
выше рассмотрение является лишь примером методики расчета
подобных систем.
1
1
Xfx
*n.
1,
p
_н
vA
An
у OX
ATV
1
- Ф-7 Г
1
z»
fb
Ф/
iy'
d>,
1 ,
* 4-
*e
4*2
Ф
T
>
Фиг. 9. 9. Укрупненная структурная схема.
2. РАКЕТНЫЕ ДВИГАТЕЛИ ТВЕРДОГО ТОПЛИВА (РДТТ)
а) Общие сведения
На фиг. 9.10 приведена схема двигателя твердого топлива
(РДТТ). В камере сгорания размещается твердое топливо,
которое поджигается с помощью запального устройства. Твердым
топливом для этих двигателей служит по-существу порох, который
обладает относительно меньшей скоростью горения, причем
температура газа при сгорании этого топлива практически постоянна.
Истечение газа из сопла создает реактивную тягу; при этом
давление в камере может быть очень большим.
Несмотря на явные преимущества такого двигателя, он имеет
и существенные недостатки, главными из которых являются
зависимость скорости горения топлива от его температуры;
ограниченные значения давлений газа в камере сгорания, при которых
обеспечено нормальное горение топлива (не горит при малых
давлениях и детонирует при больших); неустойчивое горение
топлива.
Несмотря на указанные недостатки, РДТТ находят очень
широкое применение в качестве силовой установки для различного
рода ракет.
510
В настоящее время РДТТ для ракет делаются главным
образом нерегулируемыми в том смысле, что не применяются какие-
либо специальные устройства для изменения режима работы
(тяги) двигателя, но зато широко применяется программное
изменение тяги посредством подбора формы заряда с определенным
профилем. Твердое топливо горит по поверхности, поэтому при
изменении формы заряда (по мере выгорания топлива)
изменяется расход газа, а следовательно, изменяется и тяга.
Однако из-за нестабильности характеристик топлива (в том
числе их зависимости от температуры заряда топлива)
практически невозможно получить стабильные тяговые характеристики
такого двигателя.
Для улучшения характеристик
РДТТ весьма целесообразно
применять устройства, которые
позволяли бы произвольно (не
программно) изменять режим его
работы. Одним из возможных
направлений решения этой
задачи является применение
регулируемых реактивных сопел,
однако, в этом случае существенные осложнения возникают из-за
высокой температуры газа и неблагоприятных свойств самого газа,
ибо совместное действие этих факторов приводит к очень быстрому
разрушению реактивного сопла. В дальнейшем, однако, рассмотрим
РДТТ с регулируемым реактивным соплом.
На фиг. 9.11 приведена возможная схема регулирования 7?д
для такого РДТТ. Здесь проходное сечение реактивного сопла
изменяется путем перемещения центрального тела с помощью
поршневого пневматического сервомотора, рабочим телом для
которого являются газы, отбираемые от двигателя (или от
бортового источника питания).
Тяга, развиваемая двигателем, пропорциональна расходу газа
через сопло Gc (при неизменной температуре газа), что можно
выразить так:
Фиг. 9. 10. Схема двигателя твер'
дого топлива.
где с=const.
Следовательно, для системы управляющим сигналом должен
быть сигнал Х\у пропорциональный величине /?д, т. е. X\ = CipKFc
(см. фиг. 9. 11).
Для получения такого сигнала может быть использован какой-
либо множительный механизм, куда должны подаваться
сигналы, пропорциональные рк и Fc.
Пневматический сервомотор, перемещающий центральное тело
реактивного сопла, работает в соответствии с этим управляющим
сигналом Хи как это следует из приведенной схемы. С помощью
специального механизма настройки можно получать постоянное
511
значение тяги или изменять ее по необходимому закону,
определяемому системой управления полетом ракеты.
Могут быть применены и другие схемы управления РДТТ.
Устройство 1 |
программного *- \Р -Ht\\
измененияRn или \ A J I ".
сигнал от регул я - ' j '
тора скорости,
{ускорения) пол г та
v
тельный,
механизм
71
Чувств и -
тельнь/и
элемент
t
Фиг. 9.11.
Возможная схема
РДТТ.
регулирования тяги
б) Уравнения движения
При расчете динамики системы регулирования РДТТ
необходимо учитывать свойства самого двигателя, в том числе влияние
на эти свойства характеристик топлива.
Как говорилось выше, свойства твердых топлив таковы, что
скорость их горения зависит от давления в камере сгорания и
температуры самого топлива, причем с увеличением давления газа
и температуры заряда скорость горения увеличивается. Например,
для некоторых топлив скорость горения и приближенно может
быть выражена так:
■К
Cpl
И = /(*з> Ас).
или в неявном виде:
где t3 — температура заряда; рк — давление газов в камере
сгорания; Го, К, С, q — постоянные.
512
Следовательно, свойства РДТТ зависят в числе прочих
факторов и от начального состояния двигателя (от /3).
Для вывода уравнения движения РДТТ по давлению в камере
сгорания рк и по реактивной тяге /?д в линейном приближении
необходимо использовать уравнение расхода в виде GT=GV + GC
или соответственно
t = — (Yk,
'*/
k+l
kg
RT,
-(-Ч
к \k + 1/
(9.41)
Здесь левая часть уравнения выражает секундную массу
сгоревшего топлива, а правая — сумму секундного приращения массы
газов в камере сгорания и секундного
расхода газа через реактивное сопло. ^
После линеаризации выражения G
(9.41) с учетом u=f(pKy t3) получим
С =-*!*-, (9.42)
где T(VK)—переменная, зависящая
от объема камеры сгорания.
Для малого промежутка времени
и больших значений VK приближенно
примем 1/K~const; тогда получим
(ТКр + \)ХРк = -К1ХРс. (9.43)
То, что коэффициент
самовыравнивания положителен, можно видеть из
расходных характеристик, приведенных
ражающих зависимости Gc = Gc(pH) и G
К
Фиг. 9. 12. Характер
протекания зависимостей Gc^
Ч(Р«) и GT=/(pK).
на фиг. 9. 12, вы-
, = GT(pK).
Как следует из уравнения (9.41), расход газа через
реактивное сопло Gc (при fc = const) может быть выражен зависимостью
Gc = aI/7K; расход топлива в соответствии с приведенной выше за
висимостью может быть выражен (при t3=const) как GT = a2p%.
Для положительного самовыравнивания необходимо, чтобы
было справедливо неравенство—->—L; из фиг. 9. 12 видно, что
дрк дрк
это условие выполняется.
Для вывода уравнения движения по реактивной тяге
необходимо дополнительно использовать зависимость Rp, = CpKFc, после
линеаризации которой получим
(9.44)
(9.45)
Решая совместно уравнения (9.42) с (9.44), получим
=~K [T(VK)
X
или для малых промежутков времени и больших VK получим
, (9.46)
зз
1327
513
где
к \—Ki I —/Ci
При расчете динамики системы регулирования РДТТ
необходимо учитывать, что сгорание топлива происходит с некоторым
временем запаздывания.
Из сказанного выше следует, что для получения заданных
переходных процессов могут быть использованы относительно
простые регуляторы.
3. ИОННЫЕ И ПЛАЗМЕННЫЕ ДВИГАТЕЛИ
Эти двигатели могут развивать очень малые тяги и поэтому
они предназначены только для полетов в космосе. Реактивная
тяга у таких двигателей создается за счет вылета частиц (ионов)
из сопла с очень большой скоростью из-за воздействия на них
электромагнитных сил.
В настоящее время накоплено еще относительно мало сведений
по управлению такими двигателями, поэтому приводимый ниже
материал является по-существу лишь кратким обзором
материалов, опубликованных по этому вопросу.
Ионный двигатель создает тягу за счет реакции струи
электрически ускоренных ионов. Ионом может являться атом, лишенный
одного или более электронов, или молекула, несущая заряд.
Ионизация рабочего тела двигателя может осуществляться с помощью
электрической дуги или раскаленной пластины. В качестве
рабочего тела могут применяться щелочные металлы, обладающие
низкой энергией ионизации и низкой температурой плавления
и испарения.
С помощью электромагнитных сил ионы разгоняются в
двигателе до необходимой скорости и вылетают через сопло. Если
выбрасывать из двигателя только ионы (положительно
заряженные частицы), то аппарат получит отрицательный заряд, что
недопустимо. Для предотвращения этого явления должна быть
осуществлена система выделения электронов.
На фиг. 9. 13 показана возможная принципиальная схема
ионного двигателя. Здесь рабочее тело методом вытеснения из бака 15
через форсунку подается в испаритель 8 и далее в ионизационную
камеру 9. Проходя решетку-распределитель 10 и ионизирующие
сетки 11, частицы разгоняются и вылетают через катодную
решетку 12 с большой скоростью. Баки и испаритель подогреваются
подогревателями 13. Более подробно возможное устройство
ионизационной камеры показано на той же фиг. 9. 13.
Система управления рассматриваемым двигателем должна
обеспечивать возможность изменять величину реактивной тяги,
для чего предусматривается регулятор 14, с помощью которого
можно изменять расход рабочего тела, а также устройство 16,
изменяющее величину и напряжение тока, подводимого к двига-
514
телю. Кроме указанного, в системе должны быть регуляторы,
поддерживающие определенную температуру в баках, испарителе,
а также необходимые температуры решетки-распределителя
и ионизирующих сеток.
12
Фиг. 9. 13. Возможная принципиальная схема ионного
двигателя.
i /—вольфрамовая решетка, предназначенная для ионизации рабочего
тела, 2—-электронные пушки (для выброса электронов), 3—ускоритель
скорости ионов, 4—решетка-распределитель, 5—электроподогреватель,
6—трубка для подачи рабочего тела, 7—баллон со сжатым газом,
8—испаритель, 9—ионизационная камера, /0—решетка-распределитель,
//—ионизирующая сетка, 12—катодная решетка, 13—подогреватель,
14—регулятор (редуктор), 15—бак с рабочим телом, 16—устройство
для подвода электроэнергии.
При расчете динамики системы управления такими
двигателями необходимо рассматривать систему управления собственно
двигателем с системой управления энергетической установкой, от
которой питается двигатель.
Плазменный двигатель по принципу его работы несколько
отличается от ионного. Плазма представляет собой электрически
нейтральную газовую смесь, содержащую отрицательно заряженные
частицы — электроны и положительно заряженные частицы — ионы.
Ионизация газа будет иметь место тогда, когда энергетический
уровень возбужден так сильно, что орбитальные электроны,
вращающиеся вокруг атома ядра, могут переходить из своих обычных
1327
33*
515
состояний в состояния с более высокими энергетическими уровнями
и в конце концов начнут отрываться с внешних орбит, образуя
положительно заряженные ионы. Благодаря тому что газ имеет
свободные электроны и ионы, он способен подвергаться воздействию
внешних магнитных и электрических полей.
Основой принципа работы плазменного двигателя является
сжатие и ускорение рабочего тела в магнитном поле и выбрасывание
плазмы через сопло с большой скоростью. В отличие от ионного
двигателя, в котором ионы и электроны ускоряются в раздельных
потоках, в плазменном двигателе ускоряются смешанные частицы
в одном потоке.
Электрод
Фиг. 9. 14. Принципиальная схема плазменного
двигателя.
/—реактор, 2—турбогенератор, 3—энергетическая установка,
4-~конденсатор, 5—камера, 5—клапан системы подачи рабочего
тела, 7—емкость с рабочим телом.
Упрощенно работу плазменного двигателя можно представить
себе следующим образом. Если к венцам трубки, содержащей газ
при низком давлении, прикладывается электрическое поле, то ток,
вначале сконцентрированный в узком слое у внешнего диаметра
трубки, начинает течь через газ. В результате возбуждается
магнитное поле, окружающее газ, и благодаря давлению, которое
оказывает магнитное поле, газ сжимается в трубке до тех пор, пока не
наступит равновесие между внутренним и магнитным давлениями.
При этом температура газа сильно возрастает (это свойство плазмы
называется пинч-эффектом).
Принципиальная схема плазменного двигателя приведена на
фиг. 9. 14. Здесь в камеру 5 (см. фиг. 9.14, а) из емкости 7 через
клапан 6 подается рабочее тело (газ). От источника энергии 3,
включающего, например, реактор 1 и турбогенератор 2У
заряжается конденсатор 4, который далее разряжается на камеру 5.
Ток будет проходить по внешней поверхности возникающей при
этом плазмы. Магнитное поле, созданное током, оказывает влияние
на плазменный цилиндр, заставляя его сжиматься в тонкую трубку
с осью, проходящей через электроды. При этом возникает явление,
подобное действию поршня. Этот «магнитный поршень» (см,
фиг. 9.14,6) создает ударную волну, которая увеличивает давление
516
и температуру газа. В центре электрода имеется сопло, через
которое плазма выходит в виде высокоскоростной струи.
Следовательно, такой двигатель работает как пульсирующий.
К параметрам регулирования в этом типе двигателя относятся:
режим работы источника энергии и подача рабочего тела. В
принципе эти вопросы могут решаться аналогично тому, как об этом
говорилось при рассмотрении ионных двигателей.
4. УРАВНЕНИЯ ДВИЖЕНИЯ, БОЛЕЕ ТОЧНО УЧИТЫВАЮЩИЕ
ПРОЦЕССЫ В РАССМОТРЕННЫХ ВЫШЕ ЭЛЕМЕНТАХ УСТАНОВОК,
И ОСНОВНЫЕ ПОЛОЖЕНИЯ ПО ВЫВОДУ УРАВНЕНИЙ
ДЛЯ ДРУГИХ ЭЛЕМЕНТОВ
Приведенные выше уравнения движения для ядерных силовых
установок и электродвигателей лишь весьма приближенно отражают
действительный характер движения. Для решения
практических задач, особенно для конечной стадии расчета систем
управления (для основных режимов работы, а также и для процесса
разгона), необходимо задачи динамики таких систем решать с
большей точностью. Для этого с помощью аналоговых моделирующих
или цифровых вычислительных машин решаются системы линейных
и нелинейных уравнений, составляемые с учетом целого ряда
уточняющих положений.
Здесь мы не ставим целью получить полную систему уравнений
движения для рассматриваемых типов установок, а рассмотрим
лишь наиболее важные и во многом общие вопросы для ряда
установок.
а) Теплообменные аппараты
Во многих из приведенных выше и в других возможных типах
силовых установок могут применяться теплообменные аппараты,
правильное описание динамики которых в сильной степени
отражается на конечном результате, поэтому важно более правильно
описать происходящие в них процессы.
Поставим задачу — вывести уравнения (или передаточную
функцию) для теплообменного аппарата с более полным, чем это
было сделано выше, учетом действующих факторов (найти
изменение температуры газа и жидкости как функцию длины и времени)
в предположении единичного возмущения на входе.
Для примера рассмотрим трубчатый теплообменник, в котором
холодный газ течет по трубкам, а горячая жидкость течет в
межтрубном пространстве с соблюдением принципа противотока, как
показано на фиг. 9.15.
Будем предполагать, что теплоизлучение во внешнее
пространство отсутствует, и поэтому тепло от жидкости передается газу
(или обратно) только через соприкасающиеся поверхности. Кроме
того, примем, что поток тепла является одномерным (т. е.
учитывается течение только вдоль длины теплообменника), что потери
517
напоров постоянны и не будем учитывать градиент температур
за счет теплопроводности и накопление газа в объеме газовой
полости.
Если теперь выделить элемент теплообменника в сечении х
длиной dx, то для этого элемента можно написать следующие
уравнения теплового баланса относительно газа, стенки и жидкости
(иначе говоря, с учетом изменения температур газа и влияния
материалов теплообменника и жидкости):
дТх
/ v
(ХЖГ ж
(9.47)
<г.г
Фиг. 9. 15. Расчетная схема теплообменного аппарата.
Здесь обозначены символами Г^1; Тгх; Tj — температуры стенки,
газа и жидкости в сечении х\ ст, см, сж — удельные теплоемкости
газа, металла и жидкости; аг, аж — коэффициенты теплоотдачи
газа и жидкости; FT, Fm, FM — поверхности теплоотдачи для газа,
жидкости и металла; ум — плотность металла; / — длина
теплообменника; Gr, G>k—массовые расходы газа и жидкости.
Коэффициенты теплоотдачи аг и аш являются функциями
массовых расходов газа и жидкости, т. е. ar = ar(Gr) и am=am(Gm)y
удельные теплоемкости являются функциями температур, т. е.
Однако из теории теплопередачи известно, что если зависимости
a==a(G) существенно влияют на процесс, то зависимости с=с(Т)
518
оказывают незначительное влияние на него, 'поэтому в дальнейшем
учтем лишь зависимости a = a(G).
Раскрывая полные дифференциалы в уравнениях (9.47), т. е.
имея в виду, что
а также, что
(да \ кГ> dx
-
последовательно получим, например, для первого уравнения,
следующее выражение:
или, так как
получим
*ттх= дТ* at ■ ягтх=*гтх 1 , 9ГГХ
dx dt dx ' дх dt Wr дх '
Учитывая далее, что ar=ar(Gr), получим
—£. ) =0,
dt 'о
—£. ) =0, поскольку прини-
dt 'о
мается, что температура газа на входе изменяется скачком;
поэтому, проводя дальнейшие преобразования и считая V=Fl, в безраз-
,, AT V х v AGr
мерных координатах Хт = —; Xi=—; XG =-—L получим такое
Го / г аг0
уравнение:
дХт дХг
а +
"г(Хт-Хгт)+а4ХОг, (9.48)
где
' п2 У0» аЗ
Ог0
(П'_^)(^-)-/^
дх
519
Проводя аналогичные преобразования для остальных двух
уравнений системы (9.47), получим
дХи
^ (ХжХ?) + а7 (Хгт-Х?) +a8XGm~a9XGr; (9. 49)
a
10
дХ*
—-
dt
а
дХ
11
1
ж
-=ап(Х?-Хжг)-а13ХОж,
где
(9.50)
» aU — У 0' #12—
Следовательно, для дальнейшего анализа необходимо совместно
рассматривать уравнения (9.48), (9.49) и (9.50).
Применим преобразование Лапласа относительно переменной t
[считая — =S; x(t, Xt)=x(S, Xi) и оставив обозначения перемен^
dt
ных прежними]; тогда полученные выше уравнения будут такими:
дХгт
дХж
ап -^=—а12 (Хт —
(9.51)
При условии, что температура стенки нас не интересует, исключим
из уравнений (9.51) координату Хт\ тогда получим
дХгт
(9. 52)
дХж
dXt '
где
—
—
-f «б + а7
а2
а9
•Og
#2
«7
a7
520
^(a6 + a7) + ^- (a5 - a6)] S + -^
a\\ <4i J an
al #8
#б5 + Дб-Ьл7 а\\ &5S+a6-\-a7
D^ = .
#5^ ~Ь Л6 ~Ь а1
Дальнейшее аналитическое решение системы (9.52) можно
провести, применяя вторично преобразование Лапласа по переменной
%и т.е. — = ^hI(S, Xi)^=X(S, %) и с учетом граничных условий
oXi
разрешить систему относительно Xt(S, X) и Xr(S, К). Далее после
разрешения относительно интересующей нас переменной
необходимо полученные уравнения подвергнуть обратному преобразованию
Лапласа, получая последовательно сначала Xt(S, Xt) и Xf (S, Xt),
а затем Xt(U X{) и Хт {t, Xt). Однако, если проделать все
указанное выше, можно убедиться, что в результате мы получили бы
гиперболические функции, коэффициенты и аргумент которых
представляли бы собой полиномы относительно S и X. В результате
такой путь решения оказывается практически неприемлемым.
Таким образом, выявляется необходимость в приближенном
решении полученных выше дифференциальных уравнений с частными
производными. Идея такого способа решения основана на
приближении решения дифференциальных уравнений с частными
производными первого порядка к решению упрощенных линейных
дифференциальных уравнений также первого порядка, но с
запаздыванием. Некоторым обоснованием правомерности применения
такого метода решения является то, что дифференциальные уравнения
с частными производными можно рассматривать как разностные
уравнения, которые, в свою очередь, связаны с уравнениями,
учитывающими запаздывание.
Рассмотрим, например, первое уравнение (9.52). Решение этого
уравнения в виде изображения, как известно, можно
представить так:
1 г- 1
у г /г» у \ п о 1 (Л Y^ Л У _L AY \ p^
j\ f [о, -А ■[) — с? I \-**2 ^"""" 3 (/ ~Т" 4 G /
(9.53)
При граничных условиях (см. фиг. 9.15)
Yr {(Л С\ Yr*x*
Лт(у, о)=Лт ,
А. 7* \'» &) ==~**• Т
521
уравнение (9. 53) можно записать так:
1 1
уГ.Г Vr.X л л I 1
Лт =лт е и -\-е
о
1
X е° dXv (9.54)
В общем случае выражение (9.54) можно записать с помощью
специально введенных передаточных функций Ф(5) в таком виде:
XY = Ф1 (5) Хгтх + Ф2(S)Х^- Ф8(5) *Ог + Ф4 (5)^Ож, (9. 55)
где
о
1 , 1
l \jAldXl
J A2e° dXt;
о J Л4^° rfJT,.
о
Далее необходимо определить передаточные функции Фг(5).
Предварительно приведенное выше выражение для Ах преобразуем
в следующий вид:
^_5 +
а2
где
■5+1
г
±i2, (9.56)
Gro^r (аж^ж + аг^г)о
причем коэффициенты К и а — безразмерные.
522
Тогда передаточная функция d>i(S) выразится так:
-К (ат9£-Ц)
d>l(S) = e-A^=e'^se x*s+l . (9.57)
Здесь первый множитель e~T*s представляет собой передаточную
функцию запаздывающего звена. Наличие второго множителя
затрудняет дальнейшее использование полученного выражения для
(Pi(S), поэтому задачу будем решать приближенно с помощью
разложения этого множителя в степенной ряд и ограничимся
первым членом разложения.
Поскольку
, Г/С(ax2S + I)"]2 1
+ —ТТЛ— "9Г~""
L t2o + 1 J 2\
- 1)1Л
-J'
то, ограничиваясь первым членом ряда, получим
К (
—/С)
Следовательно, в общем виде выражение для CPi(S) теперь будет
таким:
Ф- (S)=e-^smiS+mK (9.59)
i\ TS + 1
Далее необходимо определить выражения для /пь /п2 и Г. Для
этого положим, что переходные процессы близки к монотонным (такой
характер процессов подтверждается практикой) и, используя
линейную интегральную оценку, потребуем, чтобы начальные и
конечные значения приближенной и действительной передаточных
функций и величины их интегральных оценок совпадали. Из этих
условий и найдем выражения для гаь т2 и Т. Конечные значения
переходных функций будут:
к
e
откуда находим
(at
26'+1
+ 1
)
5-0 е* '
Начальные значения переходных
/С (CtT2«J-f-l)
о т
1
1
5
-со ^а '
WjS+ma"
Г5 + 1
функций
/WjS+ ^2
7^5 + 1
— т2,
будут:
5-ОО Г
523
откуда находим
Выражение для Т находим из сравнения линейных интегральных
оценок, для чего, дифференцируя
К (
е и
TS + l
при S—►() и сравнивая их, находим
т2/С(1 —a) ,q 6m
Тогда искомая приближенная передаточная функция будет такой:
/Ст2(1-а)
ф,
.6„
где
Далее определяем передаточную функцию Фг(5), которая
равна:
-\Aldxl \ )
о J Л» ^л^. (9.62)
J
U
Аналогично получаем передаточные функции Фз(5) и Ф4(5),
которые соответственно равны
(9. 63)
где
а2
Следовательно, вместо (9.55) можно написать
vt.t QTS + 1 уг.х ( К уж
Ог 4-
1
Кл
(9.64)
f
524
Сравнивая выражение для Т из уравнения (9.60) с
выражением для т2 из уравнения (9.56), можно показать, что они близки
по своему значению.
Действительно, если разложить в ряд функцию ek^~a\ входящую
в выражение для Т, и ограничиться первыми членами, то получим
Г_т2/С(1—с) _ т2/С(1—а) _т
Тогда окончательно приближенное первое уравнение системы
(9.52) будет таким:
г Ож1 (9.65)
где ri = 7Wr2.
Проделав аналогичные расчеты для второго уравнения системы
(9.52), получим аналогичное уравнение вида
(T2S + \)X^=(^T2S +1) XV - KJCF +
(a4T2S +1) *Ож - /Г7*Ог§ (9*66)
где коэффициенты Т2, рь /Cs, ^Сб, /С7 и а4 выражаются через те .же .
параметры теплообменного аппарата.
Решая совместно уравнения (9.65) и (9.66), получим
приближенные искомые уравнения, которые в общей системе
регулирования двигательной установки можно решать с помощью
аналоговых моделирующих машин.
Для более точного решения задачи можно использовать
полученную выше трансцендентную передаточную функцию, не
аппроксимируя ее дробно-рациональной функцией.
При необходимости получить еще более точное решение
зависимости a = a(G) можно не линеаризировать, а ввести в
рассмотрение близкие к действительным зависимости,
аппроксимированные, например, полиномами второй степени, как было сделано
ранее при рассмотрении аналогичных вопросов для ЖРД. Кроме того,
можно учесть накопление газа в газовой полости теплообменника
с помощью рассмотренных выше методов.
Полученные выше уравнения во многих случаях дают
достаточно точное для практических целей приближение, однако для
проверки правильности аппроксимации всегда целесообразно
проверить степень приближения с помощью сравнения
амплитудно-фазовых характеристик исходной и аппроксимированной систем
в области интересующих нас частот.
б) Реакторы
Приведённые выше уравнения реактора (9.11) -г-(9.17) с
учетом влияния нагрева материала на происходящие в нем процессы
лишь очень приближенно отражают действительную картину и по-
525
I ^вход
этому все изложенное выше по-существу лишь помогает правильно
понять взаимодействие теплового контура с кинетикой реактора.
На самом же деле в зависимости от конструкции реактора
процессы теплопередачи в нем могут быть весьма сложными и их
правильное математическое описание очень трудно и сложно
выполнить. Это определяется тем, что реактор представляет собой
«многослойную» систему с распределенными параметрами и
неравномерным тепловыделением, поведение которой описывается
уравнениями в частных
производных.
Ниже излагаются основы
возможного подхода к
приближенному математическому описанию
поведения реактора, когда
приблизительно правильно
отражаются действительные свойства
реактора и рассматриваются
такие уравнения, которые дают
возможность использовать для
решения всей задачи аналоговые
моделирующие установки.
Для примера рассмотрим
реактор с газообразным теплоноси-
Фиг. 9.16. Расчетная схема реак- телем (например, для схемы
тора. установки, приведенной на фиг.
9Л,е).
Разделим реактор на два взаимосвязанных ^онтура — контур,
относящийся к кинетике реактора, и тепловой контур.
Что касается кинетики реактора, то при условии, что
используется U235, процессы деления ядер и выделения тепла достаточно
точно описываются уравнениями (9.9), или (9.10), или (9.14).
Для теплового же контура составим уравнение в предположении
учета конвективного теплообмена между теплоносителем (газом)
и стержнями реактора (тепловыделяющими элементами — ТВЭла-
ми) с учетом накопления тепла в материале ТВЭла. Иначе говоря,
пренебрегаем явлениями теплопроводности в радиальном и осевом
направлениях, а также пренебрегаем накоплением тепла в
теплоносителе и накоплением его массы. Кроме того, не будем учитывать
потери тепла во внешнее пространство и накопление его в других
материалах реактора (часто этот расход тепла составляет всего
несколько процентов от общего расхода тепла).
По аналогии с приведенным выше для теплообменного
аппарата исходное уравнение, описывающее изменение температуры
теплоносителя (уравнение теплового баланса), можно записать
в том же виде, в каком было записано первое уравнение (9.47), т. е.:
cTQTdTx = "гРг (Tvx — Tx)dx, (9. 67)
526
или после раскрытия полного дифференциала
г <г;-^ <9-68>
где Тх—температура ТВЭла в сечении х\ Тх —температура
теплоносителя в том же сечении; сг и Gr — теплоемкость и расход
теплоносителя соответственно.
Для ТВЭла уравнение теплового баланса будет аналогично
второму уравнению (9.47), т. е.:
cvFvyvdx ^L^Q^x-^ (Тх -rx)dx, (9. 69)
где ср — теплоемкость ТВЭла; Qvx — тепловыделение реактора,
пропорциональное плотности нейтронов п, т. е. Qpx = a/2. Расчетная
схема, соответствующая приведенному описанию, показана на
фиг. 9.16.
Таким образом, для дальнейшего анализа уравнения (9.68)
и (9. 69) являются исходными. В уравнении (9. 68) W= —
является скоростью для теплоносителя (газа), которая обычно очень
велика, а поэтому величина 1/W очень мала. Ввиду этого часто
оказывается возможным пренебречь членом, содержащим 1/W,
и тогда вместо (9.68) получим
гг^^Ц%-Гх). (9.70)
Этим уравнением и будем пользоваться в дальнейшем.
Здесь, как и ранее, принимаем ar=ar(Gr) и cp = const и сг=
= const. Линеаризируя уравнения (9.69) и (9.70) обычным путем,
получим
ai
bt —
1 dt
где
/ ТР Тг \ / \ / ИТГ
а _ cTGTQ и __/ J x~~J х \ Gr0 1даг \ crGrQ I / Qi x
Ггаго \ -«о /ох аг0 \О(^г '0 ^гаг0 у 0 \ ох
ar0Fr arQFr \ То /ох аг0 \dC7r
Ml „ AT* аг, AOnr
527
Исключив из уравнений (9.71) переменную Хрт и преобразовав
по Лапласу по переменной /, получим такое уравнение
(обозначения переменных оставляем прежними):
дХ г
^: + bSXrbX? + (bS + bJX. (9.72)
Далее необходимо решить это уравнение, например, так же, как
это делалось при рассмотрении теплообменных аппаратов.
дХг
Если обозначить —^=$Хт9 то характеристическое уравнение
dX
i
для (9.72) будет таким;
h ^
откуда 6= - = — AX(S) и тогда решение должно отыски-
ваться в виде
XrT=Cie-A'lS)X'-\-CtH dIl=-C1A1(S)e-At{S)Xf. (9.73)
dXi
Обозначив —?2_ = i4 (5) и М1$ + Д2-*з=л (5)
^S 1 2 e^S + l 3
уравнение (9.72) перепишем так:
дЛ"г
—Г+А(5) ^=Л(5)^ + ^з(5) ^Gr. (9. 74)
Для определения С\ и С2 в уравнениях (9.73) подставим
искомое решение в уравнение (9.74), в результате чего получим
с §
2 At(S) AX(S) г
Далее из первого уравнения (9.73) при Xi=Q определяем
С| = л 7* вх— С'2==:* вх ^>2»
откуда
/° Тг ^г(^) г^р ^з(^) у /п 7А^
С1==Гвх "^T(iy Q ~Ш) °г' ( }
Подставляя теперь выражения для Cj и С2 в первое уравнение
(9.73), получим
AiS)x (9 77)
528
Для получения уравнения по координате Хт используем второе
уравнение (9.71), из которого после преобразования Лапласа по
времени получим
Хт = В, (S) Хгт + В2 (S) Х% - В, (S) XGe, (9.78)
^=w;^=w:
Подставляя далее в уравнение (9.78) выражение для Хт из
уравнения (9.77), получим
ХРТ=ВХ (S) е- м {S) xrrrBX + \вг
L
+ В2 (5)] Х% + [^ (5) ^ (1 - е~ А>(S) xi) - В, (S) ] ХОг. (9. 79)
При неравномерном тепловыделении ТВЭла, о чем говорилось
выше, необходимо учитывать зависимость Ov0 x==QvOmuX / (х), где
f(x) должна быть заданной. Здесь 0р0х — тепловыделение ТВЭла
в сечении х, которое учитывается координатой——=Xq. Кроме
__ QpOx
того, нужно иметь в виду, что Х% — ахХ*, где ^—относительная
плотность нейтронов, входящая в уравнение кинетики реактора.
Таким образом, полученные уравнения (9.77) и (9.79)
позволяют приближенно определить значения температур рабочего тела
и ТВЭла в любом сечении реактора. Принимая Xt= — = 1, получим
'о
значения температур на выходе из реактора.
Дальнейшее упрощение полученных передаточных функций:
уг—е
1 вх
Х
Т __A2(S)
Ax(S)
34 1327 529
в смысле сведения их к дробно-рациональным функциям
производится таким же методом, который был описан при рассмотрении
теплообменных аппаратов.
Следовательно, полная система уравнений для реактора состоит
из выражений (9.14) и (9.77) или (9.79).
При решении конкретной задачи приводимым методом
необходимо иметь в виду, что зависимости
гр__гг\ / / дТг
х л х \ I [ Ul х
Т0 /Ох Т0 \ °Х /Ох
справедливые для сечения х и входящие в выражения для
коэффициентов а2 и &з, могут быть приближенно выражены через х
следующим образом. Из уравнений (9. 69) и (9. 70) для равновесного
режима находим
(тр тг \ п 1 1 I дтг\ о 1
х— х \ Vp х1- I I x\ Vp jtr*
I = И I I = ,
■* 0 I Ox ^гО' г^О ■* 0 \ OX /qx ^t^to' 0
а далее приближенно принимаем, что
__ j i ^_ t ^o
ox )Qx ^
Од: ч L / Ox
Тогда после несложного преобразования получим
Тг
crGro A ох
Т0 /Ох
Это позволяет учесть зависимость коэффициентов а2 и 63 от Xi.
Что касается зависимости f(x), характеризующей
неравномерность тепловыделения по длине ТВЭла, то обычно это — примерно
симметричная кривая относительно координаты — .
При необходимости иметь более точное решение нужно с
помощью цифровых вычислительных машин решать систему
уравнений, состоящую из первых двух уравнений (9.13) и (9.71).
в) Излучатели
В приведенной выше возможной схеме ядерной энергетической
установки используется излучатель, назначение которого
рассеивать тепло в пространство в соответствии с циклом работы
установки.
Конструктивные схемы излучателей могут быть весьма
различными, но в принципе они представляют собой (пластинчатые или
другие) аппараты с весьма развитой поверхностью, причем с одной
стороны тонкой стенки поверхности подводится тепло теплоносите-
530
лем, а с другой стороны стенки, обладающей большим
коэффициентом черноты, тепло рассеивается в пространство.
Поставим задачу вывести приближенные линеаризованные
уравнения (передаточные функции) для такого излучателя.
Газовый излучатель
Для решения этой задачи остается справедливым тот же
подход, который использовался при рассмотрении теплообменного
аппарата и реактора; однако здесь имеется и существенное отличие,
которое заключается в том, что если ранее учитывался только
конвективный теплообмен, то в данном случае необходимо
учитывать передачу тепла в пространство излучением, которое
подчиняется закону Стефана — Больцмана.
При приближенном решении задачи примем такие исходные
условия:
1) из конструктивных соображений величины внутренней и на-
,ружной поверхностей, приходящихся на единицу длины излучателя,
условно принимаем неизменными;
2) степень черноты е, коэффициент излучения абсолютно
черного тела а и коэффициент потерь давлений принимаем неизменными;
3) пренебрегаем влиянием теплопроводности и накоплением
газа в объеме излучателя.
Исходными уравнениями будут уравнения баланса тепла для
материала излучателя и для рабочего тела, которые можно
записать так:
дТ*
Здесь, как и ранее, Тгх к Тх—температуры газа и стенки в
сечении х\ Fn — поверхность излучения, a ar=ar(Gr). Раскрывая
полный дифференциал dTx, после линеаризации и перехода к
относительным величинам получим:
дХтг . дХгт , „м .
dt dXl \ (9.80)
дХм
а5 -^ + а6Хт = а7Хгт
где коэффициенты аи а2,...,а7 выражаются через исходные пара-
/дГЛ п
метры, причем для установившегося значения принято!—^1 =и.
\ dt /0
Сравнивая уравнения (9.48) и (9.49) с (9.80), можно видеть
их полную аналогию, а коэффициенты аи #2, #з> #4» &ь имеют даже
одинаковые выражения.
34* 531
Преобразовывая по Лапласу уравнения (9.80) по времени
и исключая не интересующую нас переменную Хт, получим
(обозначения переменных оставляем прежними):
дХг
—L + Al(S)XrT = Bl(S)XGr, (9.81)
где
А (<?\—т с | K(ar2S+ 1).
Т0 н 1
Т20
о /оч ^(aT
1 W =
т26 -Ь 1
а7'
Решение уравнения (9.81) имеет следующий вид:
(9'82)
J
0
При граничных условиях
XrT(0,S)=Xrfr;
xTT{i, S)=xy,
где Хт'т и Хт'х — температуры газа на входе в излучатель и на
выходе из него соответственно; тогда уравнение (9.82) запишется так:
-\A,dXl -}*.<!*, Д ]л^Х,
XV = XYe ° +е о )BlXQtei dXt. (9'83)
О
Теперь запишем это уравнение аналогично ранее приведенному
в таком виде:
XF = <bl(S)XTTr+ Ф2(5)^Ог, (9.84)
где
1
- jAt (S) dXt ^ к (
i
- ( Al(S)dXln
Ф2(5) = ^ ° J ^
J
0
Я /оч /<i (aiT25 + 1)
= £5,(0)=
532
Дальнейшее преобразование функции CDi(S) в смысле
аппроксимации ее дробно-рациональными функциями можно провести
методом, аналогичным рассмотренному выше для теплообменных
аппаратов.
При необходимости учета накопления массы газа в объеме
излучателя нужно ввести в совместное рассмотрение дополнительное
уравнение материального баланса в виде
^=Ог.вх-Ог.вых. (9.85)
Имея в виду соотношение prV=GvRTT, после дифференцирования
и подстановки в (9.85) «получим в безразмерных величинах:
Х°'~ -х°<-^ (9'86)
где Gyo — количество газа в объеме излучателя;
у г А/?г . у- А^г.вых . у А^г.вх
Р рг0 °г.вых Gr0 °г.вх Gr0
Это уравнение необходимо решать совместно с полученными выше
уравнениями.
Паровой излучатель
В отличие от газового в паровом излучателе в результате
охлаждения пара происходит его конденсация, т. е. превращение пара
в жидкость, поэтому и теплопередача в этом случае осуществляется
иначе.
Для вывода уравнений разделим излучатель на два
характерных участка, соответствующих шроцессу конденсации и процессу
охлаждения жидкости соответственно. Кроме того, примем
дополнительно к ранее сформулированным такие упрощающие
допущения:
1) расход рабочего тела не зависит от процесса излучения
тепла;
2) температура стенок равна температуре рабочего тела;
3) температура и давление насыщенного пара принимаются
неизменными по длине участка конденсации.
Далее напишем уравнения баланса тепла для каждого участка.
1. Для участка конденсации
Для этого участка приближенно можно написать такое
уравнение:
фъ QJirtxrQn (9. 87)
где mM — масса единицы длины материала стенки излучателя;
Т\ — температура пара и стенки; 1\—длина участка
конденсации; х— коэффициент сухости шара на входе в излучатель; см —
35 1327 533
теплоемкость материала излучателя; г—теплота парообразования;
GK — расход рабочего тела; III — периметр излучающей
поверхности. Здесь мы пренебрегаем накоплением пара в объеме излучателя.
Это уравнение выражает скорость изменения температур пара
и стенки (с учетом распределения их по длине) пропорционально
разности теплот — поступающей с паром и рассеивающейся во
внешнее пространство.
2. Для участка охлаждения рабочего тела
написать т
\ - Твых) -
Для этого участка приближенно можно написать такое
уравнение:
р (9.88)
где сж, дш — теплоемкость и плотность жидкого рабочего тела
соответственно; /2 — длина участка охлаждения; F2 — площадь
поперечного сечения каналов протока жидкости; ГСР2 — средняя
температура жидкости; П2 — периметр излучающей поверхности; Гвых —
температура жидкости на выходе из излучателя.
Это уравнение имеет тот же смысл, что и уравнение (9.87), но
применительно ко второму участку, причем здесь берется сумма
масс—-металла и жидкости.
Кроме того, необходимо учесть такие выражения:
(9.89)
После обычной линеаризации (9.87) и (9.88) с учетом (9. 89)
и учета характеристики насыщенного пара, дающего однозначную
связь между давлением его и температурой Ti=f(pKVi) для данного
рабочего тела, получим такие уравнения:
(Гр +\)ХТьы,= ахХа+а%Ха + а3Хх+{Тхр-\-а4)Хрк9] j
ч) Хп. j (9'90)
Здесь в координаты аи #2,. • •, #7 и Г, Гь Г2, Г3 входят исходные
параметры излучателя, а обобщенные координаты обозначены как
Xi— —-, причем индекс при X соответствует обозначению пара-
Хю
метра, входящего в исходное уравнение. Разрешая уравнения
(9.90) относительно интересующего нас параметра, получим
искомое уравнение (или передаточную функцию).
Если требуется более точное описание процессов, то необходимо
рассматривать уравнения баланса тепла раздельно для пара и для
стенок излучателя на первом участке и раздельно для жидкости
и для стенки на втором участке.
534
г) Парогенераторы
Ядерные энергетические установки, работающие по паро-жидко-
стному циклу, в которых используются турбогенераторы, включают
в себя парогенераторы, предназначенные для получения пара
рабочего тела. В принципе получение пара может происходить как
непосредственно в реакторе, так и в специальных парогенераторах,
когда с помощью специального
теплоносителя тепло от реактора переносится в
парогенератор. Схемы парогенераторов могут
быть самыми различными, но в принципе
они похожи на теплообменные аппараты,
например, такие, как показанный на
фиг..9. 15, причем в этом случае
теплоноситель первого контура, переносящий тепло
из реактора, поступает в междутрубное
пространство, а внутрь трубок подается
рабочее тело (обычно жидкий металл), из
которого в результате его кипения образуется
пар.
Для расчета систем управления такими
установками очень важно правильно
описать динамику процессов в таких
парогенераторах.
Поставим задачу — вывести
приближенные уравнения или передаточные функции
для рассматриваемого типа
парогенератора.
По сравнению с рассмотренным выше
решение поставленной задачи существенно
сложнее, так как в этом случае мы имеем
дело с процессом передачи тепла через
стенку жидкости с фазовым превращением
(кипением). Ввиду сложности описания
действительных процессов в парогенераторе
несколько схематизируем его и учтем лишь
главные действующие факторы.
Условно разделим длину
парогенератора на четыре отдельных участка:
/—участок подогрева рабочей жидкости (экономайзерный участок); //—
участок пузырькового кипения; ///—участок развитого кипения;
IV—участок подогрева (перегрева) пара.
Второй и третий участки можно также характеризовать резким
изменением величины коэффициента сухости пара (коэффициент
сухости х изменяется от 0 до 1) и соответственно величиной
коэффициента теплоотдачи а. Расчетная схема с разделением на
участки и показанным на ней характером изменения температур
приведена на фиг. 9. 17.
Фиг. 9.17. Расчетная
схема парогенератора.
/—участок подогрева
рабочей жидкости
(экономайзерный участок); 7/—участок
пузырькового кипения, Ill-
участок развитого кипения,
IV—участок подогрева
(перегрева) пара.
35*
535
На первом участке теплообмен происходит по законам,
аналогичным рассмотренным выше для теплообменных аппаратов
(жидкость — жидкость).
На втором участке происходит кипение лишь на поверхности,
и, так как рабочая жидкость еще не догрета до температуры
кипения, то пузырьки пара исчезают, как только они отрываются от
стенки; здесь уже теплопередача иная, чем на первом участке.
На третьем участке рабочая жидкость достигает температуры
кипения, поэтому сформировавшиеся у поверхности нагрева
пузырьки пара не исчезают (пленочное кипение).
На четвертом участке происходит подогрев пара (здесь уже
нет кипения) по законам, аналогичным рассмотренным выше для
теплообменных аппаратов (жидкость — газ).
Для установившегося процесса длины соответствующих
участков, так же как и температуры теплоносителя и рабочего тела на
границе этих участков, остаются неизменными; для
неустановившегося процесса они, естественно, изменяются.
Уравнения для процессов будем выводить в предположении
малых отклонений от установившегося состояния.
Сделаем следующие допущения:
а) аккумулирующую способность массы парогенератора на
каждом участке отнесем к массе теплоносителя первого контура;
2) ввиду малой толщины стенки и большого значения
коэффициента теплоотдачи не будем учитывать температурный градиент
стенки и поэтому среднюю температуру стенки отдельных
участков можно принимать равной средней температуре теплоносителя
первого контура;
3) общий коэффициент теплопередачи принимаем постоянным
на всех рассматриваемых участках;
4) считаем, что количество пара на втором и третьем участках
является линейной функцией длины участков;
5) считаем, что температура насыщения пара является
линейной функцией давления на выходе из парогенератора;
б) предполагаем, что расход теплоносителя практически не из-
хменяется по длине парогенератора;
7) ввиду малой толщины стенки принимаем поверхности
теплопередачи по обоим контурам одинаковыми;
8) пренебрегаем потерями тепла во внешнее пространство;
9) давление во втором контуре постоянно и оно значительно
превышает перепад давления в парогенераторе.
Составим уравнения баланса тепла для каждого участка.
1. Первый участок
Уравнение теплоперехода от теплоносителя первого контура
к рабочему телу:
«А (т^-Т-^^у^СпОпРе-Т,), (9.91)
536
где си — коэффициент теплоотдачи от стенки к жидкости на этом
участке, причем сц[ ккал 1= const;
[м^°С час J
IIi — суммарный периметр теплопередающей поверхности;
G\u C\\ — расход и теплоемкость рабочего тела соответственно.
Здесь
^^f (9-92)
— средняя температура теплоносителя первого контура (и
температура стенки).
Остальные обозначения в соответствии с фиг. 9. 17.
2. Второй участок
Уравнение теплоперехода от теплоносителя первого контура
к кипящему рабочему телу, выраженное через коэффициент
сухости пара х2 (от лг=О долг=лг2):
х2г0п = <х2П2 (Гср2 - Щ1^ 1ъ (9.93)
.„- . г г , -г . =const;
\_ kz \
Х2 — коэффициент сухости пара, соответствующий второму
участку;
п2 — коэффициент теплоотдачи.
Здесь
Т^( (9'94)
— средняя температура теплоносителя первого контура (и
температура стенки) для второго участка.
3. Третий участок
Уравнение теплоперехода от теплоносителя первого контура
к кипящему рабочему телу, выраженное через коэффициент сухости
пара хъ (от лг=лг2 до лг = лг3):
ct И (7^ Т )1 =х rGu (9. 95)
где обозначения аналогичны приведенным выше, а
7чср3=?1=^^1 + /2 + ^=^) + 7ч1, (9.96)
причем
т = 0 при /i+^2~h4\^
т = /j A- /2 -f- /3 — I при 1\-\
537
4. Четвертый участок
Уравнение теплоперехода от теплоносителя первого контура
к пару:
са0п (Г3-Г4) = а4П4 ( 7-j-^i) /«, (9. 98)
где cR— теплоемкость сухого пара, причем
/4=о при /</1+/2+/3;) (9>99)
Здесь для простоты за среднюю температуру стенки принята
температура теплоносителя на входе Т2.
Далее учтем накопление тепла во всей массе парогенератора
и массе теплоносителя таким уравнением:
y4, (9. 100)
где С\, Щ—теплоемкость теплоносителя первого контура и масса
теплоносителя в объеме парогенератора;
Сш тм — теплоемкость и масса материала парогенератора.
Здесь принято
Т^-1^, (9.101)
а сухость пара хвых на выходе из парогенератора (в
предположении изменения сухости по длине парогенератора по Линейному
закону) находится из соотношения
*.«=1-^- (9-102)
Значение Ц в уравнении (9.100) находится из выражений (9.99).
Принимаем, что температуры насыщения Г4, Т$, Т6 зависят от
давления ркр в соответствии с характеристикой (кривой) насыщения
вида Ti=f(pKpi), которая должна быть задана для
рассматриваемого рабочего тела.
После линеаризации приведенных выше уравнений (9.91)-=-
(9.102) и некоторого преобразования с учетом зависимости
Ti=f(pKi>i) получим такую систему уравнений:
538
(Г/7+1) XTl = al9Xn + п^Х01 + #21
=0;
(9-
при Vi + V2 + '>0
J
Здесь в коэффициенты au a2i..., a30, 6b b2 входят исходные
параметры парогенератора, а обобщенные коэффициенты
обозначены как Xi= —-, причем индекс при Z соответствует
обозначено
нию параметра, входящего в исходное уравнение.
Из приведенной системы уравнений видно, что в общем случае
может существовать такой режим работы, когда четвертого
участка (перегретого пара) может и не быть.
Разрешая систему уравнений (9.103) относительно любого
интересующего нас параметра, получим исходные уравнения или
передаточные функции.
Для более точного решения рассматриваемой задачи
необходимо написанные выше уравнения теплового баланса для каждого
участка составить с учетом влияния длины соответствующего
участка парогенератора и накопления тепла в нем. Например, для
первого участка можно написать такие уравнения теплового баланса
для теплоносителя и рабочего тела соответственно:
(lv Тер1)=сг [(7\-Г2) -^ + Тг ]х
х h+fm тг] -ciGiTi -ai/iTTi (^ - ^т1); -(э-ш4)
(9.105)
где F{, уг, Сг — соответственно поверхность, плотность и
теплоемкость.
В левых частях этих уравнений учитывается накопление тепла
в массе, а в первых частях учитывается разность теплот —
поступающей в участок и уходящей из него.
Аналогичные по смыслу уравнения составляются и для других
участков. Совместное решение полученных уравнений в области
изображений по Лапласу относительно интересующей нас
координаты позволяет получить искомую передаточную функцию.
539
д) Другие элементы установок
В зависимости от схем установок отдельные их элементы могут
быть весьма разнообразны по конструкции и даже по принципу
действия. Однако это не означает, что для описания происходящих
в них процессов нужно каждый раз вводить в рассмотрение какие-
то принципиально новые соображения.
На самом деле происходящие процессы в подавляющем
большинстве элементов, входящих в ядерные силовые установки,
приближенно описываются рассмотренными выше методами, которые для
решения задачи автоматического управления в первом
приближении безусловно являются вполне приемлемыми.
В принципе в большинстве элементов происходят процессы
теплопередачи и движения рабочего тела, при описании которых, как
правило, необходимо учитывать накопление тепла и рабочего тела,
а также распределение параметров.
Как было показано выше, такие задачи практически могут
решаться лишь приближенно, поэтому решающим критерием
правильности решения является эксперимент. Это непреложное положение
обязательно нужно иметь в виду при решении конкретных
практических вопросов.
Ввиду указанного нет необходимости описывать процессы в
других возможных элементах ядерных установок, так как, пользуясь
приведенным выше материалом, всегда легко осуществить это.
Сказанное относится также и к элементам электродвигателей,
и к системам подачи для них рабочего тела (обычно жидкого
металла).
ЛИТЕРАТУРА
1. «Автоматическое регулирование авиадвигателей», Сборники статей под
редакцией А. А. Шевякова: выпуск второй, Оборонгиз, I960; выпуск четвертый, Обо-
ронгиз, 1962.
2. Александров В. Л., Воздушные винты, Оборонгиз, 1951.
3. А н д р о н о в А. А., X а й к и н Э. С, Теория колебаний, ОНТИ, 1937.
4. Блох 3. Ш., Динамика линейных систем автоматического регулирования,
ГТТИ, 1952.
5. Боднер В. А., Автоматика авиационных двигателей, Оборонгиз, 1956.
6. Болгарский А. В.у Щукин В. К., Рабочие процессы в жидкостно-
реактивных двигателях, Оборонгиз, 1953.
7. Бондарюк М. М., И л ь я ш е н к о С. М., Прямоточные
воздушно-реактивные двигатели, Оборонгиз, 1958.
8. Булгаков Б. В., Колебания, ГТТИ, 1954.
9. В а т с о н Е. А., Топливные регуляторы и сгорание в авиационных
газотурбинных двигателях, «The Engineer», 1955, v. 200, № 5213; № 5214.
10. Вознесенский И. Н., О регулировании машин с большим числом
регулируемых параметров, «Автоматика и телемеханика», 1948^ № 4—5.
11. Гол а нин Л. Ф., Теория ядерных реакторов на тепловых нейтронах,
Атом из дат, 1957.
12. Гор М., К е р р о л И., Динамика регулируемого двухкомпонентного
жидкостного ракетного двигателя с насосной системой подачи, «Jet propulsion»,
1957, v. 27, № 1.
13. Джем ис он Р., Прямоточные воздушно-реактивные двигатели,
Journal of the Royal Aeronautical Society, 1957, v. 61, № 558.
14. Джонсон С, Керли Н., Реинг Дж., Моделирование
нестационарного кипящего режима в реакторах, охлаждаемых водой под давлением,
JRE Transactions on Nuclear Science, 1958, v. 5—5, № 1.
15. Залманзон Л. А., Черкасов Б. А., Регулирование газотурбинных
и прямоточных воздушно-реактивных двигателей, Оборонгиз, 1956.
16. Иноземцев Н. В., Зуев В. С, Авиационные газотурбинные
двигатели, Оборонгиз, 1952.
17. К р а с с о в с к и й А. А., Интегральные критерии оценки качеств
регулирования, Машгиз, 1949.
18. К р ы л о в Н. М. и Боголюбов Н. Н,, Введение в нелинейную
механику, АН СССР, 1937.
19. Кулагин И. И., Теория авиационных двигателей, Оборонгиз, 1958.
20. Л а в р е н ц О. Н., Топливные системы для газотурбинных двигателей,
JRAS, 1955, v. 59, № 539.
21. Лев И., Гор М, Росс С, Устойчивость и управление реактивных
систем, работающих на жидком топливе, ARS Journal, 1953.
22. Основы автоматического регулирования, под ред. В. В. Солодовникова,
Машгиз, 1954.
23. Петров Б. Н., О построении и преобразовании структурных схем,
Известия ОТН АН СССР, 1945, № 12.
541
24. Петров Б. Н., Общие уравнения, передаточные функции и частотные
характеристики систем автоматического регулирования, сборник «Теория
автоматического регулирования», Машгиз, 1951.
25. Попов Е. П., Динамика систем автоматического регулирования, ГТТИ,
1954.
26. Р е й х е в Р., Применение автоматических устройств для
регулирования жидкостных реактивных двигателей, VDJ Zeitschrift, 1957, N° 2.
27* Р е й ч я Р., Динамическая устойчивость двигательных установок с ЖРД,
«Aero Digest», 1956, v. 73, № 5.
28. Саттон Д., Ракетные двигатели, ИЛ, 1952.
29. Силовая установка ракеты «Блю стрик», «Aeroplane», 1961, № 2594.
30. С и н я р е в Г. Б., Д о б р о в о л ь с к и й М. В., Жидкостные ракетные
двигатели, Оборонгиз, 1955.
31. Стечк ин Б. С, К а з а н д ж а н П. К., А л е к с е е в Л. П.,
Говоров А. Н., Н е ч а е в Ю. Н., Ф е д о р о в Р. М., Теория реактивных двигателей.
Лопаточные машины, Оборонгиз, 1956.
32. С теч к ин Б. С, К а з а н д ж а н П. К., А л ексее в Л. П.,
Говоров А. Н., К о н о в а л о в Н. Е., Н е ч а е в Ю. Н., Федоров Р. М., Теория
реактивных двигателей, Рабочий процесс и характеристики, Оборонгиз, 1958.
33. Цыпкин Я. 3., Устойчивость систем с запаздывающей обратной связью,
«Автоматика и телемеханика», 1946, № 2—3.
34. Цянь Сюэ-сэнь, Техническая кибернетика, ИЛ, 1956.
35. Ш ев я ко в А. А., Автоматика авиационных силовых установок, Оборок-
гиз, 1960.
36. Шульц М., Регулирование энергетических ядерных реакторов, ИЛ, 1957.
37. .Aviation Age", 1954, v. 22, № 6, p. 132.
38. Regulation ATAR, Каталог фирмы SNECMA, № 206-571.
ОГЛАВЛЕНИЕ
Стр.
Предисловие 3
Условные обозначения 5
Глава I
Силовые установки с газотурбинными двигателями
1. Основные сведения об эксплуатационных свойствах одновальных
турбореактивных двигателей (ТРД) 9
а) Основные характеристики 9
б) Режимы работы .. . , 14
в) Зависимости для /?уд и Суд 17
г) Подобные режимы 22
2. Уравнения движения и свойства одновального ТРД как объекта
регулирования ... 23
а) Уравнения движения по числам оборотов 24
б) Уравнения движения по любому параметру 27
в) Уравнения движения с учетом времени запаздывания выделения
тепла при сгорании топлива 33
г) Уравнения движения ТРД с нерегулируемым соплом с учетом
влияния агрегатов топливной системы 34
д) Уравнения движения ТРД с регулируемым реактивным соплом . . 35
е) Определение коэффициентов уравнений движения ТРД 37
ж) Допустимые области работы и структурные схемы 45
з) Частотные характеристики 48
и) Примеры 52
3. Двухвальные ТРД (с двухкаскадным компрессором) 57
а) Общие сведения 57
б) Вывод уравнений движения двухвального ТРД с регулируемым
соплом 58
4. Двухконтурные ТРД (ТРДД) 66
а) Общие сведения 66
б) Уравнения движения двухконтурного ТРД 68
5. ТРД с форсажным устройством (ТРДФ) 71
а) Общие сведения по ТРДФ 71
б) Общие сведения по входному устройству (диффузору) 76
в) Вывод уравнений движения ТРДФ 80
г) Уравнения движения ТРДФ совместно с диффузором 83
д) Примеры 89
6. Турбовинтовые двигатели (ТВД) 91
а) Основные сведения по эксплуатационным свойствам 91
б) Уравнения движения ТВД и его свойства как объекта
регулирования 97
Одновальный ТВД 97
Двухвальный ТВД 100
543
Стр.
ТВД с соосными ВИШ 101
в) Возможные законы управления и определение выражений для
коэффициентов ЮЗ
Глава II
Системы автоматического управления газотурбинными двигателями
и основные требования к ним
1. Основные требования к системам управления 108
2. Возможные структурные схемы систем управления 111
3. Принципиальные схемы регуляторов 121
а) Регуляторы для ТРД < 121
б) Регуляторы для ТРДФ 141
Регуляторы для форсажного контура 141
Регуляторы для воздухозаборников 144
в) Регуляторы для ТВД 147
г) Регуляторы для «разгона» ГТД и другие устройства 153
д) Общие схемы управления двигателями 164
Регулятор расхода топлива „ 165
Регулятор числа оборотов 167
Автомат приемистости 169
Другие устройства системы управления 170
Схема регулятора числа оборотов ВИШ 175
Схема регулятора температуры газа (подачи топлива) ..... 180
Глава III
Динамика систем автоматического управления ТРД
A. Системы регулирования для одновального ТРД с нерегулируемым
реактивным соплом 183
1. Изодромный регулятор числа оборотов 183
а) Вывод уравнений движения 183
б) Выбор параметров регулятора 189
2. Регулятор числа оборотов с акселерометром 197
а) Вывод уравнений движения 197
б) Выбор параметров регулятора 200
3. Примеры ' 202
Б. Системы регулирования для одновального ТРД с регулируемым
реактивным соплом ". 213
1. Вывод уравнений движения и выбор параметров 213
2. Пример 221
B. Системы регулирования одновального ТРД с нерегулируемым
реактивным соплом и регулятором расхода (давления, перепада
давлений) топлива 224
1. Вывод уравнений движения и выбор параметров 224
2. Пример 232
Г. Системы регулирования ТРД с двухкаскадным компрессором и двух-
контурных ТРД 235
1. Системы регулирования ТРД с двухкаскадным компрессором с
нерегулируемым реактивным соплом 235
2. Системы регулирования ТРД с двухкаскадным компрессором с
регулируемым реактивным соплом 239
3. Системы регулирования для одновальных двухконтурных ТРД .... 243
4. Системы регулирования для двухвальных двухконтурных ТРД .... 244
5. Примеры 244
544
Стр.
Глава IV
Динамика систем автоматического управления ТРДФ
1. Одновальный ТРДФ ; 248
а) Регулирование форсажного контура по сигналу от р\ 248
б) Регулирование форсажного контура по сигналу от р\ 252
в) Регулирование форсажного контура по сигналу от рУРа^К • • 255
г) Регулирование форсажного контура по сигналу от Т^ 259
д) Турбонасосная подача топлива в форсажную камеру ..... 262
2. Двухвальный ТРДФ 265
3. Автономные системы регулирования 269
а) Сравнение по областям устойчивости 275
б) Сравнение по величинам интегральных оценок 276
4. Особенности расчета динамики системы при учете влияния
воздухозаборника 280
5. Примеры 281
Глава V
Динамика систем автоматического управления ТВД
1. Одновальный ТВД с одним ВИШ . , 290
а) Система с замкнутым регулятором п и разомкнутым
регулятором Г 290
б) Система регулирования с замкнутыми регуляторами п и Т . . . . 295
в) Система с ограничением Мкр max 298
2. Одновальный ТВД с дифференциальным редуктором и двумя соосными
ВИШ 301
3. Двухвальный ТВД с одним ВИШ 305
4. Автономные системы регулирования ТВД 309
а) Одновальный ТВД 309
б) Общие условия автономности 319
5. Примеры 322
Глава VI
Приемистость, или регулирование «разгона» ГТД
1. Турбореактивные двигатели 331
а) Система с замедлителем 331
б) Система с автоматом приемистости . . . '. 333
в) Система разгона с регулятором температуры газа 336
г) Системы разгона, работающие по другим параметрам двигателя 340
2. Турбовинтовые двигатели . « . 342
Глава VII
Силовые установки со сверхзвуковыми прямоточными
воздушно-реактивными двигателями (СПВРД)
1. Основные сведения по эксплуатационным свойствам 349
а) Основные сведения по характеристикам 350
б) Возможные законы управления 352
545
Стр.
2. Уравнения движения СПВРД 354
а) Вывод уравнений движения . , 354
б) Определение коэффициентов . . 360
в) Примеры 363
3. Возможные схемы систем управления 369
а) Общие сведения 369
б) Возможные схемы регуляторов 373
4. Динамика систем регулирования . . с 380
а) Системы регулирования а„р 380
б) Система регулирования местоположения скачка в диффузоре . . 388
в) Система регулирования а 393
г) Система регулирования Мп 394
д) Примеры 396
Глава VIII
Силовые установки с жидкостными ракетными двигателями (ЖРД)
1. Основные сведения по эксплуатационным свойствам 405
а) Характеристики . 405
б) Возможные схемы двигателей 409
2. Вывод уравнений движения 411
а) Трехкомпонентный двигатель с ТНА, с подачей третьего
компонента методом вытеснения 411
б) Трехкомпонентный двигатель с ТНА, с подачей третьего
компонента от насоса 423
в) ЖРД с ТНА, с газогенератором, питающимся основными
компонентами 426
г) ЖРД с подачей компонентов методом вытеснения 430
д) Определение коэффициентов 433
е) Примеры . „ , . 436
3. Возможные схемы систем управления 444
а) Общие сведения 444
б) Возможные схемы регуляторов 445
4. Динамика систем регулирования 459
а) Сведения по устойчивости ЖРД 459
б) Система регулирования наддува баков 463
в) Система регулирования тяги с астатическим регулятором .... 465
г) Система регулирования тяги со статическим регулятором .... 468
д) Система регулирования тяги, работающая по сумме двух сигналов 469
е) Система регулирования тяги ЖРД с вытеснительной системой
подачи "... 470
ж) Учет нелинейностей в системах регулирования тяги 473
5. Примеры 477
6. Уравнения движения в нелинеаризованной форме 483
Глава IX
Автоматика силовых установок других типов
1. Ядерные силовые установки 490
а) Общие сведения * 490
б) Вывод приближенных уравнений для реактора 494
в) Уравнения движения остальных элементов силовой установки . . 503
г) Уравнения для полной системы управления 508
546
Стр.
2. Ракетные двигатели твердого топлива (РДТТ) в 510
а) Общие сведения ^ 510
б) Уравнения движения 512
3. Ионные и плазменные двигатели 514
4. Уравнения движения, более точно учитывающие процессы в
рассмотренных выше элементах установок, и основные положения по выводу
уравнений для других элементов 517
а) Теплообменные аппараты 517
б) Реакторы 525
в) Излучатели 530
Газовый излучатель 531
Паровой излучатель 533
г) Парогенераторы 535
д) Другие элементы установок 540
Литература 541
Алексей Андреевич Шевяков
АВТОМАТИКА АВИАЦИОННЫХ И РАКЕТНЫХ СИЛОВЫХ УСТАНОВОК
Переплет художника Л. А. Витте
Издательский редактор А. А. Хрусталева Техн. редактор М. С. Владимирова
Г-27074 Подписано в печать 24/1II 1965 г. Учетно-изд. л. 34,45
Формат бумаги 60X90Vi6= 18,13 бум. л.—36,25 печ. л., в т. ч. 4 цветных вкл.
Цена 1 р. 31 к. Тир. 5000 экз. Сводный план 1965 г. № 685 (ВУЗы и техникумы)
Заказ 1327/1955
Московская типография № 26 «Главполиграфпрома»
Государственного комитета Совета Министров СССР по печати
Ул. Чернышевского, 9.