/
































































































































































































































Текст
А.И.ЛЕОНОВ
ИНЕРЦИОННЫЕ
АВТОМАТИЧЕСКИЕ
ТРАНСФОРМАТОРЫ
ВРАЩАЮЩЕГО
МОМЕНТА
А.И. ЛЕОНОВ
ИНЕРЦИОННЫЕ
АВТОМАТИЧЕ СКИЕ
ТРАНСФОРМАТОРЫ
ВРАЩАЮЩЕГО
МОМЕНТА
Москва « Машиностроение » 1978
ББК 32.96—04
Л47
УДК 621.83.069.2
Рецензент докт. техн, наук, проф. Г. Д. Есин
Леонов А. И.
Л47 Инерционные автоматические трансформаторы вра-
щающего момента. — М.: Машиностроение, 1978.—
224 с., ил.
В пер.: 1 р. 10 к.
В книге изложены основы теории инерционных бесступенчатых
автоматических трансформаторов вращающего момента с упругими
элементами и описаны конструкции трансформаторов для различных
машин.
Разработка теории осуществлена для обобщенной схемы инер-
ционного трансформатора. Выделено предпочтительное семейство
импульсных механизмов, обеспечивающих наименьшую динамиче-
скую напряженность схемы трансформатора. Получены аналитиче-
ские решения нелинейных дифференциальных уравнений движения
на всех режимах работы. Рассмотрены нелинейные колебания транс-
форматора. Рекомендуется методика выбора параметров при проекти-
ровании.
Книга предназначена для инженеров и научных работников
машиностроительной промышленности.
31301-016 <о ББК 32.96—04
038(01)-78 6П2.1.081
© .Издательство «Машиностроение», 1978 г.
ПРЕДИСЛОВИЕ
Инерционные трансформаторы являются бесступенчатыми ав-
томатическими по своей природе передачами механического типа,
предназначенными для преобразования скорости и вращающего
момента на рабочих органах машин. Обладая высоким КПД,
близким к КПД ступенчатых передач, они имеют в то же время
компактные конструкции, вписывающиеся в габариты ступенчатых
приводов и в ряде случаев снижающие габариты, защищают дви-
гатель от перегрузки и остановки в моменты затормаживания рабо- .
чих органов, допускают создание конструкций с коэффициентами
трансформации момента, большими, чем, например, у гидротранс-
форматоров. На режиме прямой передачи, характерном для авто-
мобилей, инерционный трансформатор работает как упругая ди-
намическая муфта и значительно снижает крутильные колебания
в трансмиссии по сравнению со ступенчатой передачей.. При уста-
новке этого привода на горных, строительных, сельскохозяйствен-
ных, дорожных и других машинах, стендах для имитационных
и ускоренных испытаний полезной оказывается вибрационная
подача момента на рабочий орган.
Первые инерционные передачи были изобретены в 20-х годах у
нашего столетия. Примерно до начала 60-х годов работы-по инер-
ционным передачам носили эпизодический характер. Этот период/
характеризовался изобретением ряда передач (Спонтан, Хоббса,
Заславского и др.), работы по которым прекращались вследствие
трудностей теоретического и практического плана. Отсутствовали
необходимая систематизация знаний и глубокие теоретические
исследования в этой области. Последнее подтверждается серьез-
ными недостатками, присущими многим ранним конструкциям.
Период с 60-х годов по настоящее время характеризуется не-
прерывными исследованиями, накоплением теоретических и экспе-
риментальных данных, высоким уровнем теоретических исследо-
ваний, широким применением вычислительной техники, постоян-
ной реализацией теоретических разработок в опытных образцах.,
Результаты исследований обобщены на Всесоюзных конференциях2
bJ1968, 1972, 1976 годах (Одесский технологический институт)
и в 1969,1972,1977 годах (Челябинский политехнический институт).
1* J
Большинство работ посвящено исследованию жесткой схемы
инерционного трансформатора (жесткой называется модель, в ко-
торой пренебрегается упругостью звеньев). Обращение исследова-
телей к схеме без упругих элементов следует признать естествен-
ным. Решение сложных проблем на первой стадии исследований
обычно начинается с реализации наиболее простых идей.
; ’ В последние годы все большее число работ выполняется по
упругой схеме, представляющей качественно новую модель инер-
ционного трансформатора. Упругой модели в отличие от жесткой
свойственны нелинейные колебания реактора на режиме затормо-
женного ведомого маховика, участки накопления и отдачи потен-
циальной . энергии упругими элементами на режиме трансформа-
ции момента, различные законы движения реактора и ведомого
маховика на участке их совместного Движения, большие возмож-
ности по реализации характеристик, большее число степеней сво-
боды и другие особенности. Введение упругих элементов в меха-
низмы свободного хода (МСХ) позволило значительно снизить
динамическую напряженность инерционного трансформатора.
Опытные образцы подтвердили конкурентоспособность конструк-
ций с упругими элементами.
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
а, Р, 6, ф — углы поворота ведущего ' маховика, реактора, ве-
домого маховика и грузового звена;
у — угол поворота наружной обоймы корпусного меха-
низма свободного хода;
% — угол поворота радиуса ОВ в обобщенной схеме
импульсного механизма;
ф — угол поворота грузового звена относительно радиуса
О В;
х± — р — 6 — разность углов поворота реактора и ведомого ма-
ховика, определяющая деформацию выходных упру-
гих элементов на участке совместного движения;
а, Р> 6, ф, у, к, ф — угловые скорости соответствующих звеньев;
т — масса грузового звена;
и — число грузовых звеньев;
а, b — постоянные обобщенной схемы импульсного меха-
низма, определяемые по уравнению У# = аа + Ьр;
е — ОВ — расстояние от оси трансформатора до точки В гру-
зового звена;
h — BS — расстояние между точкой В и центром масс S гру-
зового звена;
г± — радиус солнечной шестерни или эпицикла;
г2 — радиус сателлита;
— момент инерции ведущего маховика и приведенных
к нему масс двигателя относительно оси 0 трансфор-
матора; '
J2 — момент инерции реактора относительно оси О транс-
форматора ;
J3 — момент инерции наружной обоймы корпусного меха-
низма свободного хода и приведенных к ней масс
соединительных деталей и упругих элементов относи-
тельно оси 0 трансформатора; '
— момент инерции ведомого маховика и приведенных
к нему масс ведомых элементов относительно оси О
трансформатора;
Js — момент инерции грузового звена относительно оси,
проходящей через центр масс S;
Jb — момент инерции грузового звена относительно оси,
проходящей через точку В;
Мд — момент двигателя;
Мс — момент сопротивления, приведенный к ведомому валу
трансформатора; '
Л4Х — момент трения в корпусном механизме свободного
хода;
М2 — момент трения в механизме свободного хода ведо»
мого маховика;
Afp — {nmehty' sin ф' —- ----ф'^ ф"п/в — nmbh [ ф" cos ф +
+ у—-----ф'^ ф' sin ф j j а2 — момент от инерционных сил грузовых звеньев,
действующий на заторможенный реактор;
Мр~ nmehqa? £ 1----~ ----j sin ф — момент от
инерционных сил грузовых звеньев, действующий
на заторможенный реактор в случае предпочтитель-
ного семейства импульсных механизмов;
5
Л4Рп1ах “ nmehqa? 1----— ----qj j — максимальное за
цикл значение момента на заторможенном реакторе от
инерционных сил грузовых звеньев для предпочти-
.тельного семейства импульсных механизмов;
.. 1 < • 2 г 1 ь ( ь \ 1'
Мв = — nmehqas 1----------I-------q ) — среднее за цикл
Л L & \ £ J I
значение момента от инерционных сил грузовых
звеньев на заторможенном ведомом маховике для
предпочтительного семейства импульсных механиз-
мов в случае жестких механизмов свободного хода;
U — жесткость корпусных упругих элементов (равняется
моменту, который необходимо приложить к реактору,
чтобы повернуть его на 1 рад относительно корпуса
трансформатора в направлении заклинивания меха-
низма свободного хода);
U1 — жесткость выходных упругих элементбв (равняется
моменту, который необходимо приложить к реак-
тору, чтобы повернуть его на 1 рад относительно
ведомого маховика в направлении заклинивания
механизма свободного хода);
</ф(а —Р)-
—ру------передаточное число, равное частному от деления от-
носительной скорости ф грузового звена на разность
угловых скоростей а ведущего маховика и р реак-
(ф \
Фл= . -г-1;
. а — р )
ф' = q — для предпочтительного семейства импульсных меха-
низмов;
#2Ф(« —Р) .
d(a-p)2 ’
q± ~ qa1Q — значение угла ф в начальной точке участка накопле-
ния и отдачи потенциальной энергии;
q2= q (a2o ~ Рго) ~ значение угла ф в начальной точке участка разгона
реактора;
q3 = q («Зо — рзо) — значение угла ф в начальной точке участка совмест-
ного движения;
(6Z \ 2 / о, \
— + ф' J nJ в + Zntnqh ( — +ф' j cos ф*
А2 = nmab -ф- ( — + ф I (—----ф \ nJ в + nmh + (6 — л) Ф cos Ф;
Л3 = J2 + nmb2 + --ф' nJ в + 2nmfyh (-----ф' cos ф;
Л4 = + Ф'^ Ф'^в + ntnah ^ф"со8-ф — +ф'^ ф' sin ф^ ;
Л4 = — nmahq + q'j sin ф — для предпочтительного семейства;
Л5 = (-----ф') ф"п/в -ф nmbh
[ ф" COS ф + (ф----------Ф'
ф' sin Ф
6
Ab — nmbhq\^—--qj sin ф— для предпочтительного семейства';
Л6 = птМ?' sin ф;
Л7 = А3 4-
= Ji 4- Л + пте2 + nJв + 2nmeh cos ф;
Н2 — (bJi — aJ2) 4- nJ в + nmeh cos ф;
f/2
я3-4^(62/1+а2/2)+п/в;
Я4 = nmeh sin ф;
V-i-(Wi + *!W;
H«=(bJi —aJJ f — Htt
Я7 = Ji 4- птеа 4- 4~Ф'^ nJ в + ^2 4-ф' nmeh cos ф;
Я8 = J2 + nmeb 4- ---’ Ф') nJ в 4" ( 2 -ф' nmeh cos ф;
„ #(Ф) . (ф).
' </ф ’ ' t/ф2 ’
/ a \2
Bi — Ji 4- nma2 4- ( — + QJ nJ в',
B2 ~ nmab + 4* qj nJs\
/ b \2
B3 ~ J2 4- nmb2 + ( -q\ nJb\
Г / h \2 1
Д = Bi (B3 + J3) — B2 — J i J 2 + J 3 + nmb2 4- —— q у nJ в J 4"
+ (*^2 + *^з) [nma2 + 4- 4" nme2q2nJB',
^1 = B1B3 — Bl = Jl^Ji + nmb2+^-----4 +
4- J 2 nma2 4- ( — + Я j nJ в 4“ nme2q2nJ в\
Д2 = ЛХЛ3 — Л| = J± p2 + nm^2+ ----Ф') nJs+
4- 2nmbh -------ф'^ со$ф] + J2 [nma2 4- + Ф nJ в +
4- 2nmah +фЛ созф^ 4" яте2ф/2 (nJв — nmh2cos2ip);
7
^з —
1/ B1 w + ^1).
У А?2©2
8 = <?а10;
ei ~ Q (азо Рзо)J
82 = <7 (а20 р20);
_ nmehqa.l0 f, b ( b Д’] B2 ' а ( а
D1------------^1__
( = nmehqa%a ( _р_ в / Pao / j _ Рао V
8 Д1 ( 1 \ «20 I \ «20 /
nme/^a|0 fo , с / PaoV /, Рзо V
----7------ {&1 -Г -— — 1----------:—
1 ( \ азо / \ азо /
Глава I
КОНСТРУКЦИИ И КЛАССИФИКАЦИЯ
ИНЕРЦИОННЫХ ТРАНСФОРМАТОРОВ
1. Конструкции инерционных трансформаторов
Ниже рассмотрены наиболее характерные инерционные пере-
дачи, начиная с первых конструкций и кончая конструкциями
60-х годов.
Передача Спонтан. На рис. 1 показана инерционная пере-
дача, разработанная в Швеции компанией «Спонтан» 159].
Ведущий маховик’/, соединенный с валом двигателя, приводит
в движение грузовые звенья 2 посредством шатунов. 10, шарнирно
закрепленных на маховике и грузовых звеньях. Последние с по-
мощью шарикоподшипников посажены на эксцентрики 3, жестко
связанные с главной ведущей гильзой 4. Смещение центра эксцен-
трика от оси передачи равно ег. Ведущая гильза 4 посредством
роликовых МСХ может замыкаться на реактивную гильзу 6
или ведомую гильзу 5, связанную с ведомым маховиком. Ведомый
маховик служит барабаном трансмиссионного тормоза. Реактивная
гильза 6 снабжена маятниковым колесом 9 и через упругие эле-
менты 7 связана с корпусом 8 передачи.
При заторможенном автомобиле ведущая гильза 4 будет не-
подвижна, так как повороту по часовой стрелке препятствует ве-
домая гильза 5, связанная с заторможенным ведомым махови-
ком, а повороту против часовой стрелки — реактивная гильза
6, удерживаемая деформированными на определенную величину
упругими элементами 7. Грузовые звенья 2 вращаются на непод-
вижных эксцентриках 3. [При изменении [угла ф от 0 до л (см.
рис. 1, б) центробежная сила Р грузового звена приложена так,
что грузовое звено стремится повернуть ведущую гильзу по ча-
совой стрелке (в направлении вращения вала двигателя). Другие
инерционные силы для упрощения не показаны. При изменении
угла ф от л до 2л к гильзе прикладывается момент, действующий
против часовой стрелки. Таким образом, при вращении грузовых
звеньев на гильзу действует знакопеременный крутящий момент.
Прямой импульс момента передается через ведомую гильзу 5
на ведомый маховик, обратный импульс — через реактивную
гильзу 6 и упругие элементы 7 на корпус передачи.
При движении автомобиля, когда момент сопротивления на
ведомом маховике больше момента двигателя, имеет место цикли-
9
ческая работа передачи. Цикл движения складывается из четырех
участков. На первом участке (ф > 0) ведущая гильза под действием
сил со стороны грузовых звеньев разгоняется до угловой скорости
ведомой гильзы. Когда угловые скорости гильз оказываются рав-
Нйми, включается выходной МСХ, расположенный между гиль-
зами, и начинается участок совместного движения ведущей и
ведомой гильз. Здесь импульс момента передается на ведомый
маховик. При дальнейшем движении </ф > л) обратный импульс
момента тормозит ведущую гильзу до остановки. Выходной МСХ
выключается' в начале’ участка торможения. После остановки
ведущая гильза под действием обратного импульса момента стре-
мится повернуться в направлении, противоположном вращению
вала двигателя. Включается МСХ между ведущей и реактивной
гильзами, и Обе гильзы поворачиваются в направлении, противо-
положном вращению вала двигателя. Упругие элементы на„ рас-
сматриваемом участке накапливают потенциальную энергию и от-
дают ее при последующем разгоне ведущей гильзы. Затем цикл
повторяется.
Если момент сопротивления на ведомом маховике не превышает
крутящий момент двигателя, происходит выход на прямую пере-
10
дачу. На режиме прямой передачи циклическая работа отсутству-
ет; ~ведущий маховик, грузовые звенья, ведущая и ведомая гильзы
вращаются как одно целое, совершая колебания друг относительно
друга вследствие переменности момента двигателя и момента со-
противления. Грузовые звенья повернуты на некоторый угол ф,
что обусловлено передачей момента двигателя.
Передача Спонтан, как и другие описываемые передачи, авто-
матически реагирует на изменение сопротивления. Пояснение
автоматической природы дано ниже.
Рис. 2. Передача ХоббсА
Передача Хоббса. Инерционная передача, представленная
на рис. 2, была предложена X. Хоббсом (Австралия) и разрабо-
тана для применения на грузовых автомобилях фирмой «Моделей»
(Англия) [59]. В 1935 г. фирма показала передачу на выставке
грузовых автомобилей в Лондоне.
Ведущий вал 1 передачи изготовлен заодно целое с передней
крышкой ведущего маховика 2* Ведущий маховик, выполненный
разборным, несет в себе подшипники качения, в которых устано-
влены оси сателлитов 4. На осях кроме сателлитов закреплены
неуравновешенные грузы 3. Ось, сателлит 4 и неуравновешенный
груз 3 составляют грузовое звено. Сателлиты 4 находятся в зацеп-
лении с центральной шестерней 5, закрепленной на карданном
валу 8 автомобиля. Передача включает один МСХ, состоящий из
внутренней, обоймы 9, закрепленной на карданном валу, рабочих
тел 7 и наружной обоймы 6, связанной с корпусом передачи.
11
При вращении ведущего маховика грузовые звенья в зависимо-
сти от положения сателлитов стремятся вращать центральную
шестерню 5 и карданный вал 8 то в направлении вращения вала
двигателя, то в противоположном направлении. Прямой импульс
момента передается на трансмиссию автомобиля. При действии
обратного импульса передний конец карданного вала стремится
повернуться в направлении, противоположном вращению вала
двигателя. Этому повороту препятствует МСХ. Как видно, перед-
ний конец карданного вала совершает прерывистое движение,
которому присущи разгоны, торможения, выстой. Задний конец
Рис. 3. Передача Чалмерса
вала при равномерном движении автомобиля Совершает равномер-
ное вращение След '.'лтельно, карданный вал выполняет функ-
ции торсионного вала. Для сглаживания неравномерности
вращения карданного вала на его заднем конце установлен махо-
вик 10.
При малых оборотах двигателя момент инерционных сил гру-
1 зовых звеньев, пропорциональный квадрату оборотов, оказыва-
ется небольшим, и автомобиль удерживается на месте с помощью
тормозов. Карданный вал при этом будет закручен на небольшой
угол и останется неподвижным, если пренебречь упругостью
МСХ. При движении автомобиля с достаточно большим сопроти-
влением на колесах устанавливается режим трансформации мо-
мента,* характеризуемый циклической работой передачи. При
небольшом сопротивлении на колесах (момент сопротивления на
карданном валу не превышает момента двигателя) происходит
переход на прямую передачу. Неуравновешенные грузы занимают
положение, близкое к крайнему. Маховик 2, неуравновешенные
грузы 3, сателлиты 4 и центральная шестерня 5 вращаются как
единое целое с небольшими колебаниями друг относительно друга.
12
имеют неуравновешен-
Рис. 4. Передача Балжк
На уклоне автомобиль может удерживаться от движения назад
МСХ. Последний выполнен реверсивным. Он устанавливается в по-
ложение переднего или заднего хода с помощью гидравлического
цилиндра, который управляется поршневым золотником, приво-
димым в действие рычагом. *
Передача Чалмерса (рис. 3) предназначена, по мнению изобре-
тателя, для установки на автомобиль [26, 48].
Солнечная шестерня 1, закрепленная на ведущем валу 2, при-
водит в движение сателлиты 4. Последние
ные грузы и вращаются на
осях водила 3, которое че-
рез- фланец 12 связано с
наружными обоймами двух
МСХ: 10 и 11. Внутренняя
обойма 5 МСХ 10 закреп-
лена на ведомом валу 7>
Внутренняя обойма 6
МСХ 11 связана с шестер-
ней 8, находящейся в за-
цеплении с рейкой 9.
При вращении ведуще-
го вала сателлиты 4 с не-
уравновешенными грузами z
создают знакопеременный
момент на водиле 3. Пря-
мой импульс через МСХ 10
передается на ведомый
вал 7. Обратный импульс через МСХ 11, шестерню 8, рейку 9 и
поршни 13 воспринимается упругими элементами, запасающими
потенциальную энергию. Накопленная потенциальная энергия
расходуется при действии прямого импульса.
Цикл работы передачи складывается из разгона водила 3
до угловой скорости ведомого вала 7, совместного движения во-
дила и ведомого вала, при котором на ведомые элементы передается
импульс момента, торможения водила до остановки и движения
его при действии обратного импульса, когда потенциальная энер-
гия запасается упругими элементами и расходуется при разгоне
водила.
Передача Балжи. М. Ф. Балжи (Челябинский политехнический
институт) была предложена и исследована в ряде работ [4—81
инерционная передача без упругих элементов (рис. 4) [7]. Веду-
щий маховик 2, жестко связанный с ведущим валом 1, приводит
в движение посредством шатунов 12 грузовые звенья 11. Послед-
ние с помощью подшипников качения посажены на эксцентрики 10,
которые закреплены на промежуточном валу 9, названном
М. Ф. Балжи реактором. На реакторе установлены внутренние
обоймы б и 7 МСХ. Наружная обойма 8 первого МСХ связана с кор-
пусом передачи. Наружная обойма второго МСХ — с ведомым
13
маховиком 5 и ведомым валом 4, которые могут быть заторможены
лентой 3.
При вращении ведущего маховика 2 инерционные силы грузовых
звеньев создают на реакторе 9 знакопеременный крутящий момент.
Прямой импульс момента (при действии которого реактор стре-
мится повернуться в направлении вращения вала двигателя)
передается через МСХ на ведомый маховик 5. При действии об-
ратного импульса момент воспринимается корпусом передачи.
Цикл работы передачи складывается из разгона реактора до угло-
вой скорости ведомого маховика, совместного движения реактора
и ведомого маховика, торможения реактора до остановки и вы-
стоя реактора при действии обратного импульса.
Проф. М. Ф. Балжи проведены экспериментальные исследова-
ния предложенной им схемы, подтвердившие высокий КПД
инерционных передач и приемлемость их внешней характеристики
[6]. Под его руководством проведены теоретические и эксперимен-
тальные исследования по кулачковому, эксцентриковому и пла-
Рис. 5. Инерционный трансформатор с парад
14
нетарным импульсным механизмам, по роликовым и пластинчатым
МСХ [56], созданы и испытаны экспериментальные образцы транс-
форматоров автомобиля Урал-355М, тракторов Т-100, Т-130,
автомобилей М-21, «Волга», Урал-375 и др.
Большинство дальнейших исследований по инерционным пере-
дачам проводилось по жесткой схеме трансформатора, предложен-
ной проф. М. Ф. Балжи.
Инерционный трансформатор с параллелограммным импульс-
ным механизмом. Для автомобиля Урал-355М был спроекти-
рован и изготовлен опытный образец инерционного транс-
форматора с параллелограммным импульсным механизмом
(рис. 5) [9].
Трансформатор включает корпус 9, ведущий маховик 4, четыре
грузовых звена 5, каждое из которых связано с маховиком 4
с помощью двух смещенных один относительно другого шатунов 6,
ведомый вал 13 с маховиком 12, промежуточный вал 1 и два пла-
стинчатых МСХ двустороннего действия (рис. 5, в).
лелограммным импульсным механизмом
15
Ведущий маховик 4 установлен непосредственно на конце
коленчатого вала двигателя. Промежуточный вал, имеющий форму
коленчатого вала, изготовлен разборным и включает передний
фланец 1, две щеки 2, 3 и задний фланец 7. На заднем фланце 7
насажены внутренние обоймы корпусного и выходного МСХ.
Промежуточный вал имеет опоры в ведущем маховике и обойме 8,
связанной с корпусом.
Прямой импульс момента передается через МСХ на ведомый
маховик 12 и далее на ведомый вал 13, обратный импульс — через
МСХ И и обойму 10 на, корпус передачи.
Реверсирование направления вращения ведомого вала осу-
ществляется с помощью МСХ двустороннего действия. Каждый
МСХ содержит две группы пластин: первая передает момент в од-
ном направлении, вторая — в противоположном. Направление
вращения ведомого вала зависит от того, какая группа пластин
включена. Включение производится с помощью рукоятки, штока,
двух косозубых шестерен и рычага 16, связанного с пластинами.
Особенностью трансформатора является использование парал-
лелограммного импульсного механизма [30], у которого расстоя-
ние между центрами крепления шатуна равно расстоянию от
оси трансформатора до центра крепления грузового звена,
а также равны расстояния от центра крепления грузового звена
до центра крепления шатуна на грузовом звене и от оси трансфор-
матора до центра крепления шатуна на ведущем маховике. Схе-
матично параллелограммный импульсный механизм показан на
рис. 5, б. Звено ОВ обозначает промежуточный вал, OD — веду-
щий маховик, CD — шатун, ВС — грузовое звено с центром тя-
жести в точке S. Вследствие равенства длин противоположных
звеньев вытянутые положения механизма (ф — 0, л) являются
неопределенными [25]. При вращении звена OD в одном напра-
влении грузовое звено ВС из вытянутого положения может пово-
рачиваться как по часовой, так и против часовой стрелки. Для
исключения неопределенности в указанных положениях каждое
грузовое звено приводится в движение двумя шатунами, смещен-
ными один относительно другого (рис. 5, б) и закрепленными шар-
нирно на кронштейнах 15, установленных на ведущем маховике 4.
Для компенсации неточностей изготовления и сборки трансфор-
матора шатуны снабжены установленными в их головках резино-
выми втулками 14.
Характерное свойство параллелограммного импульсного ме-
ханизма заключается в равенстве углов поворота ведущего махо-
вика и грузового звена (рис. 5, б) и как следствие в равенстве их
угловых скоростей. Угловая скорость грузовых звеньев, как
й у ведущего маховика, близка к постоянной, в отличие, например,
от передачи Спонтан, где угловая скорость грузовых звеньев имеет
значительные колебания. Благодаря указанному свойству, парал-
лелограммный импульсный механизм позволяет существенно сни-
зить пиковые нагрузки на механизмы свободного хода, импульс-
16
ный механизм и двигатель за счет снижения колебаний величин
инерционных сил при сохранении их среднего уровня.
Опытный образец инерционного трансформатора с параллело-
граммным импульсным механизмом,- собранный с двигателем
внутреннего сгорания автомобиля Урал-355М, прошел испытания
в лаборатории Челябинского политехнического института.
Передача Левина. Инженером Челябинского тракторного за-
вода им. В. И. Ленина С. Ф. Левиным предложена инерцион-
ная 'передача с так называемыми «плавающими» сателлитами
(рис. 6) [29].
Рис. 6. Передача Левина
На ведущем маховике 1 закреплены гладкие кольца 6 и эпи-
цикл 5, приводящий в движение сателлиты 3 с установленными на
них неуравновешенными грузами 4. Сателлиты находятся также
в зацеплении с солнечной шестерней промежуточного вала 2.
При вращении ведущего маховика инерционные силы грузовых
звеньев прижимают сателлиты к опорным поверхностям С колец 6,
и происходит обкатывание сателлитов по этим' поверхностям.
В передаче отсутствуют подшипники, с помощью которых уста-
навливаются грузовые звенья. Такое исполнение позволяет по-
высить долговечность импульсного. механизма. В определенной
области параметров возможен отрыв сателлитов от колец 6 при
обкатывании, поэтому при создании механизма необходим прове-
рочный расчет на отсутствие отрыва.
Грузовые звенья с неуравновешенными массами создают знако-
переменный момент на промежуточном валу 2. Прямой импульс
момента передается через МСХ 8 на ведомый маховик 9 и ве-
домый вал 10, обратный импульс — через МСХ 7 на корпус пере-
дачи.
17
Автоматичность инерционных передач. Инерционные передачи
являются автоматическими по своей природе, не требующими ка-
ких-либо вспомогательных регулирующих устройств. Автоматич-
ность определяется их свойствами:
1) снижением импульса момента на ведомом маховике с ростом
его угловой скорости, обусловленным увеличением доли прямого
импульса, расходуемого на разгон промежуточного вала и грузо-
вых звеньев;
2) увеличением времени цикла с ростом угловой скорости ведо-
мого маховика.
- Проведем обоснование первого свойства на примере инерци-
онного трансформатора с параллелограммным импульсным меха-
низмом (см. рис. 5, б). Импульс момента, который передается на
ведомый маховик за один цикл, равен S = ] М dt, где М — мо-
ti
мент, действующий на ведомый маховик со стороны промежуточ-
ного вала на участке их совместного движения; /2 — время
начала и конца участка совместного движения. Перейдем под зна-
ком интеграла к переменной ф. Имеем </ф = Ф^> где угловая ско-
рость ф для параллелограммного импульсного механизма равна
ф = а — 0.
Тогда
Л
5= (1-1)
Фо ” Р
Здесь ф0 — угол ф, соответствующий началу участка совместного
движения.
Выразим момент Л4. Для упрощения выкладок пренебрежем
изменением угловой скорости а ведущего маховика и угловой ско-
рости ведомого маховика, равной р на участке совместного дви-
жения. Принятые допущения дают тем меньшую погрешность,
чем больше моменты инерции маховиков. При постоянстве а
и р имеем только две инерционные силы Рг и Р2, приложенные в
центре масс S грузового звена (рис. 5, б), модули которых равны
\P1\ = mdsB, \Pz\ = maB, где а^, — нормальные ускоре-
ния точки В и точки S в движении вокруг В.
Полагая шатун CD невесомым и рассматривая уравновешенную
на основании принципа Даламбера систему сил, приложенных
к грузовому звену ВС, найдем хв ~= Pr sin ф = mho? sin ф.
Теперь величина момента М, действующего на звено ОВ,
и, следовательно, на ведомый маховик (так как р = const), опре-
делится выражением М = хве = meha? sin ф (е = ОВ).4
При п грузовых звеньях будем иметь
М =*= ntneha? sin ф. (1.2)
18
Разность а — 0 выразим с помощью зависимости, определяю-
щей скорость р на участке разгона как функцию начального угла
Фо [41]:
а - р = а 1/ (cos ф0 1) + 1. (1.3)
Подставляя (1.3) и (1.2) в выражение (1.1), получим
Л
__ nmeha Г
~ 1/ ^nmeh ,-------J--~ J sln 'МФ =
|/ т-:---х (COS^o— 1) + 1
Г J2 + пте*
__wneto (1 + cos^o) ' 0
i f 2tuneh t , 14 11.
И J 4-nme* (с05Фо-1) + 1
Можно проследить по выражению (1.4), что с увеличением ф0
от 0 до л, соответствующим возрастанию угловой скорости ведо-
мого маховика, импульс момента уменьшается (у ^.ntn^ “>2оу .
Увеличение времени цикла с ростом угловой скорости ведомого
маховика является естественным. Время цикла соответствует по-
вороту грузового звена относительно промежуточного вала на
угол 2л. Угловая скорость грузового звена равна а, и чем больше
скорость р, достигаемая промежуточным валом, тем больше вре-
мени затрачивается на относительный поворот в 2л.
Средний момент, развиваемый инерционным трансформатором-
на ведомом валу, может быть найден как частное от деления им-
пульса момента на время цикла. С учетом сформулированных
свойств приходим к выводу, что с увеличением угловой скорости
ведомого маховика средний момент инерционного трансформатора
автоматически и непрерывно падает. И, наоборот, снижение угло-
вой скорости ведомого, маховика, приводит к автоматическому воз-
растанию среднего момента.
2. Импульсные вариаторы, и инерционные
трансформаторы
Инерционные трансформаторы и импульсные вариаторы явля-
ются механическими импульсными бесступенчатыми передачами,
изменяют как'скорость, так и крутящий момент на ведомом валу
и основаны на использовании МСХ. Изложим отличительные черты
этих передач. При описании импульсных вариаторов используется
материал книги проф. В. Ф. Мальцева [48].
Рассмотрим простейшую импульсную передачу [48] (рис. 7).
Вращение ведущего кривошипа 1 через шатун 2 и коромысло 3,
закрепленное на наружной обойме 4 МСХ, передается на ведомый
вал 5. Передача вращения от ведущего к ведомому валу сопрово-
19
ждается изменением как скорости вращения, так и крутящего
момента. При постоянной угловой скорости кривошипа 1 коро-
мысло 3 реализует один скоростной режим. Крутящий момент
передается на ведомый вал импульсами.
Для регулирования скорости вращения и крутящего момента
на ведомом валу используются различные устройства. В частно-
сти, шатун АВ может быть составлен из двух звеньев, соединен-
ных шарнирно. В этом случае регулирование осуществляется,
например, управлением одним из этих звеньев или связывающим
их шарниром. На рис. 8 показана импульсная передача [481,
в которой регулирование осуществляется управлением звена 4.
Ведущий кривошип 1, выполненный в виде эксцентрика, передает
Рис. 7. Импульсная передача
12 3 ♦ 5
Рис. 8. Импульсная передача с
ручным регулированием
вращение через звенья 2, 4, коромысло 5 и МСХ на ведомый вал.
Скоростной и силовой режимы на ведомом валу изменяются шар-
ниром <3, перемещаемым вдоль звена 4. Для придания ведомому
валу равномерного вращения используются несколько описанных
механизмов, устанавливаемых параллельно и имеющих поверну-
тые на определенный угол один относительно другого эксцен-
трики 1.
Импульсные вариаторы с ручным управлением создаются так-
же на основе кулачковых, зубчато-рычажных и других схем.
С помощью ручной регулировки изменяется скоростной и си-
ловой режимы ведомого вала в определенном диапазоне. Полная
регулировка скорости ведомого вала (от нуля до угловой скорости
ведущего вала), как правило, не достигается.
Для автоматического изменения передаточного числа в импульс-
ных вариаторах применяют регуляторные устройства. На рис. 9
показан импульсный вариатор, имеющий автоматическое измене-
ние передаточного числа в зависимости от сопротивления на ведо-
мом валу 6 [48]. Ведущий вал 9 с помощью эксцентрика 8 и шар-
нирно закрепленного на последнем эксцентрика- 7 передает дви-
жение обойме 10. Обойма через тяги 12 и пластины 11 приводит
во вращение храповик 5, расположенный на ведомом валу 6.
Пластины И с помощью рычагов имеют связь с корпусом 4 вари-
атора. Относительное положение эксцентриков определяется пру-
жиной 2, связывающей рычаги 1 и 3. Изменение сопротивления на
20 .
ведомом валу приводит к деформации пружины, относительному
повороту эксцентриков 7 и 8 и изменению их общего эксцентриси-
тета. В результате меняется ход пластин 11 и соответственно ско-
рость и крутящий момент на ведомом валу. Увеличение сопроти-
вления обусловливает снижение эксцентриситета и скорости вра-
щения ведомого вала.
На основе описания схем сформулируем отличительные черты
инерционных трансформаторов:
являются отличными от ва-
риаторов по принципу работы
импульсными ' передачами,
основанными на использова-
нии сил инерции; 2) инер-
ционные трансформаторы яв-
ляются автоматами, не ис-
пользующими какие-либо
регулирующие устройства, и
наиболее подходящими по
характеристикам для уста-
новки между двигателем и
1) инерционные трансформаторы
Рис. 9. Импульсный вариатор с автомати-
ческим управлением
исполнительными органами многих машин.
Таким образом, по принципу работы импульсные передачи
можно разделить на инерционные трансформаторы и импульсные
вариаторы. Последние по типу применяемого управления делятся
на вариаторы с ручным и автоматическим управлением.
3. Классификация инерционных трансформаторов
Единой классификации инерционных трансформаторов в на-
стоящее время не существует, однако можно провести определен-
ное подразделение, которое будет полезным для характеристики
имеющихся направлений исследования.
В зависимости от используемых сил инерцци различают транс-
форматоры'с центробежными и тангенциальными силами инер-
ции [1, 48, 59]. Разделение является условным, так как при ис-
пользовании, например, центробежных сил инерции движущихся
грузовых звеньев обязательно имеют место тангенциальные силы
инерции. Эти силы в ряде случаев оказываются значительными,
и пренебрежение ими при расчете инерционных трансформаторов
недопустимо. Однако в каждой конкретной конструкции опреде-
ляющими являются силы только одного вида: центробежные или
тангенциальные. В этом смысле и следует понимать указанное
разделение инерционных трансформаторов на два типа.
Передачи с использованием центробежных сил инерции более
компактны, так как маховик двигателя в большинстве случаев
непосредственно приводит в движение грузовые звенья. Пере-
дачи же, основанные на использовании тангенциальных сил, вклю-
чают дополнительные устройства, предназначенные для преобра-
21
зования вращательного движения ведущего вала в качательное
движение грузовых звеньев. Таким образом, первые передачи вы-
годно отличаются отсутствием дополнительных звеньев.
В связи с изложенным в книге описан и исследован только класс
трансформаторов, использующих центробежные силы инерции.
По типу импульсного механизма (согласно общей классифика-
ции теории механизмов и машин [25]) выделяются инерционные
трансформаторы с зубчатыми, стержневыми, кулачковыми и ком-
бинированными механизмами [18]. Внутри каждого из указанных
классов можно воспользоваться известными классификациями
'(например, классификация планетарных механизмов в работе [19]).
По -применяемым МСХ инерционные трансформаторы разде-
ляют на передачи с фрикционными, и нефрикционными МСХ.
К нефрикционным в основном относятся храповые МСХ, передаю-'
щие момент с помощью нормальных сил. Механизмы свободного
хода конструкции профессора А. А. Благонравова, например [13],
в которых передача момента осуществляется с помощью нормаль-
ных, сил и сил трения, мы классифицируем согласно взглядам
самого автора как нефрикционные МСХ.
В зависимости от того, учитывается ли упругость звеньев
инерционного трансформатора, различают жесткую- и упругую
модели. Трансформаторы, выполненные по упругой схеме, под-
разделяют на передачи с линейными и нелинейными упругими
элементами. Инерционные трансформаторы можно классифици-
ровать также по типу используемых упругих элементов-на основе
общей классификации по деталям машин.
Все известные инерционные трансформаторы имеют. неизмен-
ные во время эксплуатации массовые, геометрические и жесткост-
ные параметры: массы грузовых звеньев, геометрические размеры,
моменты инерции и жесткость звеньев. Практика создания опыт-
ных образцов показывает необходимость в ряде случаев и полез-
ность регулирования параметров, осуществляемого при движении
машины (трансформатор в этом случае представляет механизм
с переменной массой звеньев [12]). Например, колесные тракторы,
как правило, предназначены для выполнения широкого спектра
операций. Ряд операций требует регламентируемой скорости
движения машины, при которой двигатель не загружается на пол-
ную мощность. Широкое регулирование скорости движения за
счет двигателя неосуществимо, так как двигатели этих машин
в отличие от автомобильных имеют малый диапазон регулирования
по оборотам. Скорость движения машины при установке инерци-
онного трансформатора может изменяться за счет регулирования
неуравновешенных масс, эксцентриситета грузовых звеньев и
т. д. Регулирование параметров является важным фактором воз-
действия на характеристики и позволяет на определенных режимах
работы машин снизить нагрузки в трансформаторе. Инерционные
трансформаторы по признаку регулирования параметров можно
классифицировать на трансформаторы с регулируемыми и нерегу-
22
лируемыми параметрами. Регулируемыми могут быть любые па-
раметры трансформатора — массовые, геометрические, жесткост-
ные, скоростные.
' Механизмы свободного хода (МСХ) предназначены для пре-
образования знакопеременных импульсов момента.' По способу
Рис. 10. Классификация инерционных трансформаторов
преобразования импульсов инерционные трансформаторы под-
разделяют на трансформаторы с двумя МСХ (корпусным и выход-
ным), одним (корпусным) МСХ и трансформаторы без МСХ.
Трансформаторы с двумя МСХ представляют наиболее общую
схему, которая может быть применена в большинстве машин.
Трансформаторы с одним МСХ в основном предназначены для ис-
пользования в машинах, допускающих циклическое движение
рабочих органов_в_одном направлении с остановками. В трансфор-
23
маторах без МСХ промежуточный вал жестко соединяется с ведо-
мым валом, и рабочие органы в течение цикла совершают движение
в разных направлениях с остановками.
В трансформаторах с двумя МСХ прямой импульс момента
всегда передается на ведомый маховик, обратный импульс может
передаваться на корпус или через шестеренчатую передачу на
ведомый-маховик. По способу восприятия обратного импульса
можно выделить трансформаторы с передачей обратного импульса
на корпус и трансформаторы с передачей обратного импульса не-
посредственно на ведомый маховик.
Силовой поток может передаваться в инерционном транс-
форматоре по одной или нескольким ветвям. Соответственно транс-
форматоры подразделяются на однопоточные и многопоточные.
Классификация, трансформаторов по различным признакам
Дана на рис. 10.
4. О возможности создания инерционного
трансформатора без механизмов свободного хода
Работы по созданию инерционных трансформаторов ведутся
по нескольким направлениям. Разрабатываются конструкции
с упругими элементами на основе теории, созданной в последние
годы; проводятся исследования различных схем МСХ с целью
выбора оптимальной конструкции и т. д. По-прежнему важным
направлением является изобретение новых схем трансформаторов
и МСХ. В связи с изобретательской практикой возникает ряд об-
щих теоретических вопросов. В частности, возможна ли транс-
формация момента с помощью инерционной передачи, в которой
отсутствует «опора» на корпус (устройство, передающее крутящий
момент на корпус)? И вытекающий из предыдущего второй во-
прос — возможно ли создание инерционного трансформатора без
МСХ (только на основе импульсного механизма, который не имеет
«опоры» на корпус)? Идея создания трансформатора только на
основе -импульсного механизма весьма привлекательна, так как
именно недостаточная долговечность МСХ сдерживает широкое
внедрение инерционных передач. Периодически предлагаются
конструкции без МСХ, которые после определенных исследований
оказываются ошибочными.
Рассмотрим соосную инерционную передачу, в которой к ве-
дущему валу приложен момент двигателя Л4Д, к ведомому валу
момент сопротивления 7ИС [42]. Устройство передачи не описы-
вается, поскольку дальнейшие выкладки справедливы для любой
конструкции. Предполагается лишь, что передача не имеет
конструктивного решения, с помощью которого момент воспри-
нимается корпусом. Рассмотрим установившийся режим передачи,
соответствующий некоторому силовому передаточному числу ix
^- = М0<ч<1), 0-5)
сср
24
где Л4дср и Л4Сср — средние моменты двигателя и сопротивления
за цикл работы передачи.
Под установившимся понимается режим, при котором передача
периодически возвращается в исходное состояние (модули и плечи
векторов скоростей всех точек системы через одинаковые проме-
жутки времени 4, равны исходным).
Воспользуемся теоремой о производной по времени от момента
количества движения системы относительно оси
(1.6)
где Lo — момент количества движения всей передачи от ведущего
до ведомого вала относительно оси О передачи; Д1®0 — моменты
внешних сил, действующих на систему, относительно оси О пере-
дачи.
Проинтегрируем уравнение (1.6) за время
До2 /ц
J dL0 = J или Lq2 — Lqi = J Mtodt,
' Loi 0 i 0 i
где LOi, ^02 — моменты количества движения передачи относи-
тельно оси О в начале и конце цикла.
В случае установившегося режима работы моменты количества
движения передачи в начале и конце цикла равны L01 — Lo%,
так как массы точек неизменны, а модули и плечи векторов ско-
ростей точек в начале и конце цикла совпадают. Поэтому должно
выполняться условие
- J 2 Al‘od/ = O. (1.7)
О i
Для исследуемой инерционной передачи имеем 2 Жо~ ^д—
, i
— Мс, и если рассматривается режим трансформации момента,
то условие (1.7) установившегося движения не выполняется в силу
(1.5). Действительно, по теореме о среднем значении интеграла,
в предположении о непрерывности функций Мд и Мс, получим
J (Мд--Л4с)Л = (Мдср—Мсср)^ц. Но /ИДср - /ИСср =# 0, поэто-
му J (Мд—Mc)dt=£O. Условие (1.7) для рассматриваемой
о
передачи (в которой направление момента сопротивления не ме-
няется в течение цикла) могло бы выполняться, если бы со стороны
корпуса действовал некоторый момент Мк, направленный в сто-
рону, противоположную моменту сопротивления.
25
Таким образом, трансформация момента без «опоры» на корпус
в случае, когда момент сопротивления направлен в одну и ту же
сторону, невозможна. Создание' инерционного трансформатора
момента на основе одного импульсного механизма без «опоры»
на корпус при моменте сопротивления одного знака' также не-
возможно.
Проиллюстрируем полученные результаты с помощью извест-
ных схем трансформаторов. Передачи Слонтан, Хоббса, Чалмерса,
Балжи, Левина, инерционный трансформатор с параллелограмм-.
Рис. 11. Инерционный трансформатор
с передачей обратного импульса на ве-
домый маховик
ным импульсным механиз-
мом, описанные ранее, имеют
«опору» на корпус через кор-
пусной- МСХ. Средний мо-
мент, передающийся на кор-
пус через МСХ, может быть
вычислен по выражению (1.7).
Несколько иначе связь с кор-
пусом осуществляется в инер-
ционном трансформаторе,
передающем обратный им-
пульс непосредственно на
ведомый маховик (рис. 11).
Ведущий маховик 1 с по-
мощью шатунов 2 приводит в
движение грузовые звенья 3
параллелограммного импуль-
сного механизма, создающие
на промежуточном валу 4
знакопеременный вращающий
момент. Прям9й импульс пе-
редается через МСХ 6 на ве-
домый маховик 8, обратный —
через МСХ 5, шестеренчатую передачу 12у 11, 10, 9 на ведомый
вал 7. В рассматриваемой передаче «опора» на корпус осуществ-
ляется с помощью оси блока шестерен 10—11 и оси шестерни 9.
Момент Мк относительно оси передачи создают реакции корпуса
в месте контакта осей блока шестерен 10—И и шестерни 9 с
корпусом.
Отметим оригинальную идею осуществления инерционного
трансформатора без МСХ. Равенство (1.7) может выполняться
в случае отсутствия «опоры» на корпус в передаче, если допустить,
что момент сопротивления в течение цикла меняет знак. Именно
эта возможность была использована в машине для сварки тре-
нием [11]. Принцип работы машины для сварки трением может
быть пояснен с помощью рис. 11. Если в схеме убрать оба МСХ 5,
6 и ведомый маховик 8, а свариваемый пруток жестко закрепить
на промежуточном валу 4, то импульсный механизм за цикл ра-
боты передачи будет сообщать прутку два противоположных им-
26
пульса момента. Таким образом, за цикл работы передачи к ведо-
мому валу прикладывается момент сопротивления разных знаков.
Препятствием для широкого распространения описанного
трансформатора без МСХ является то, что установка трансформа-
тора возможна на машинах, допускающих вращение рабочего
органа в течение цикла в разных направлениях. Рабочие органы
большинства машин имеют достаточно большие моменты ицерции,
поэтому периодические остановки и разгоны рабочих органов за
малые промежутки времени будут обусловливать большие нагрузки
в передаче.
Вторая идея осуществления инерционного трансформатора
без МСХ, принадлежащая М. Ф. Балжи и Р. Н. Болдыреву, осно-
вана на использовании гидропередачи, скомпонованной с импульс-
ным механизмом. Если с реактором связать реверсивный гидро-
насос, то последний будет подавать масло к гидромоторам при
действии и прямого и обратного импульсов. Автоматичность пере-
дачи обусловлена описанными выше свойствами инерционного
трансформатора с МСХ.
В настоящее время предложены и другие' конструкции инер-
ционных трансформаторов без МСХ, предназначенных для различ-
ных машин, по условиям работы которых силы сопротивления на
ведомом валу трансформатора меняют знак в течение цикла.
Глава II
ОБОБЩЕННАЯ МОДЕЛЬ ИНЕРЦИОННОГО ТРАНСФОРМАТОРА
С УПРУГИМИ ЭЛЕМЕНТАМИ
Известно большое число схем трансформаторов и импульсных
механизмов. При создании общей теории необходимо построение
обобщенной модели, Охватывающей все интересующие исследова-
теля схемы. В данной главе описаны схемы трансформатора и им-
пульсного механизма, в совокупности составляющие обобщенную
физическую модель инерционного трансформатора с упругими
элементами [34, 35, 431.
1. Обобщенная физическая модель трансформатора,
принцип работы, терминология
На рис. 12 дана обобщенная физическая модель трансформа-
тора, разработанная на основе анализа известных конструкций
и являющаяся общей для ряда схем. При исключении одной из
упругостей 6 или 9 МСХ имеем в зависимости от использованного
импульсного механизма схемы Спонтан, Хоббса, Чалмерса и дру-
гие. Если исключаются обе упругости, получаем жесткую схему
Балжи и ее модификации при различных импульсных механизмах.
Использование обеих упругостей и обобщенной схемы импульсного
механизма, описываемой далее, дает исследуемую физическую
модель с упругими МСХ.
Физическая модель. Ведущий маховик 1 (см. рис. 12) приво-
дит в движение грузовые звенья 10 импульсного механизма. В бхе-
ме может быть использован любой импульсный механизм, поэтому
грузовые звенья показаны условно. При вращении ведущего ма-
ховика инерционные силы грузовых звеньев создают знакопере-
менный крутящий момент на промежуточном валу 2, который не
имеет жесткой связи с ведущим и ведомым маховиками. Промежу-
точный вал называется реактором. Этому термину, применяемому
в гидравлических передачах, вначале приписывалась та же роль,
что и в гидротрансформаторе. Дальнейшие работы показали,
что.и при моменте инерции реактора, равном нулю, трансформа-
ция крутящего момента возможна. Тем не менее, момент инерции
реактора является одним из основных параметров, изменением
которого регулируется внешняя характеристика трансформатора.
28
Импульс момента, стремящийся повернуть реактор в напра-
влении вращения вала двигателя (назовем его прямым или поло-
жительным импульсом), передается через МСХ 7 и упругие эле-
менты 6 на ведомый маховик 4. Импульс момента, стремящийся
повернуть реактор в направлении, противоположном вращению
вала двигателя (назовем его обратным или отрицательным импуль-
сом), передается через МСХ 8, обойму 3 и упругие элементы 9
на корпус 5 трансформатора. Упругие элементы 9 назовем кор-
пусными упругими элементами, элементы 6 — упругими элемен-
тами ведомого маховика. Аналогично МСХ 8 назовем корпусным
МСХ, МСХ 7 — выходным МСХ или МСХ ведомого маховика.
Физическая модель отра-
жает главные особенности инер-
ционного трансформатора, при-
сущие любой конструкции.
Дополнительные устройства не
показаны, чтобы просматрива-
лась только основная'функция
трансформатора. В частности,
не отражены устройства, с по-
мощью которых осуществляется
реверсирование вращения ведо-
мого вала и другие. Эти устрой-
ства применяются лишь в от-
дельных конструкциях и не
являются Общими для любой
схемы.
Принцип работы. Трансфор-
матор работает циклически. В
течение цикла работы можно
О
10 9 8
1 2 3 4 5 6
^Рис. 12. Обобщенная схема трансфор-
матора
выделить характерные участки, на которых дифференциальные
уравнения движения системы не меняются. Полному циклу соот-
ветствуют следующие участки: 1) накопления корпусными упру-
гими элементами потенциальной энергии и отдачи ее при разгоне
реактора; 2) разгона реактора под действием инерционных сил
грузов до угловой скорости ведомого маховика; 3) совместного
движения реактора и ведомого маховика; 4) торможения реак-
тора до остановки.
Первый участок начинается, когда реактор после торможения
под действием обратного импульса начинает вращаться в напра-
влении, противоположном вращению вала двигателя. На этом
участке реактор и обойма 3 корпусного МСХ движутся совместно.
Ведомый маховик 4 и импульсный механизм разобщены (МСХ 7
разомкнут). Ведомые элементы совершают движение под действием
момента сопротивления. Потенциальная энергия корпусных упру-
гих элементов вначале накапливается, а затем расходуется при
разгоне реактора. Участок заканчивается, когда запас потенци-
альной энергии корпусных упругих элементов уменьшается до
29
уровня, при котором угловое ускорение . реактора под дейст-
вием положительного импульса инерционных сил оказывается
больше углового ускорения, сообщаемого обойме 3 корпус-
ными упругими элементами. С этого момента корпусный МСХ
размыкается, и происходит разгон реактора под действием
положительного импульса до угловой скорости ведомого махо-
вика.
На участке разгона реактора ведомый маховик по-прежнему
разобщен с импульсным механизмом. Обойма 3 на этом участке
совершает затухающие колебания. Заканчивается разгон реактора
при достижении им угловой скорости ведомого маховика. В этот
момент включается выходной МСХ, и начинается участок совмест-
ного движения, на котором обойма 3 по-прежнему совершает за-
тухающие колебания. Совместное движение продолжается до
окончания действия прямого импульса и заканчивается, как пра- '
вило; при действии обратного импульса, когда абсолютная вели-
чина углового ускорения реактора под действием инерционных
сил превысит абсолютную величину углового ускорения ведомого
маховика под действием момента сопротивления. С этого момента
выходной МСХ размыкается, и происходит торможение реактора
до остановки. Если обойма 3 еще совершает колебания, то она вхо-
дит в контакт с реактором до остановки последнего. Затем цикл
повторяется вновь.
При упругих элементах большой жесткости МСХ во время пе-
редачи импульса момента включаются и выключаются несколько
раз. На малых передаточных числах (вначале разгона машины или
механизма) совместное движение реактора и ведомого маховика
происходит при действии корпусных упругих элементов. Как
важную особенность отметим малые промежутки времени проте-
кания участков и всего цикла, измеряемые сотыми и тысячными
долями секунды. Время протекания цикла имеет примерно та-
кощ же порядок,'как цвремя одного оборота двигателя с колеба-
ниями в большую и меньшую сторону.
Режимы работы. “Для ийерционного трансформатора харак-
терны три режима работы: столовый режим, режим трансформа-
ции момента и режим динамической муфты. Столовый режим со-
ответствует заторможенному ведомому маховику при работающем
двигателе. Возможность осуществления такого режима является
важным достоинством инерционных передач по сравнению со
ступенчатыми, так как при резких остановках машины принуди-
тельная остановка двигателя не происходит.
Режим трансформации момента характерен различными сред-
ними угловыми скоростями вращения ведущего и ведомого махо-
виков, соответствующими некоторому передаточному числу. Пе-
редаточным числом трансформатора будем' называть отношение
средней за цикл угловой скорости ведомого маховика к средней
за цикл угловой скорости ведущего маховика. Режим трансформа-
ции момента имеет место, когда вращающий момент на входе
30
в трансформатор меньше момента сопротивления на выходе из
трансформатора. .
На режиме динамической муфты преобразование вращающего
момента отсутствует, трансформатор передает момент двигателя.
Средние угловые скорости ведущего и ведомого маховиков равны.
2. Импульсные механизмы
Описание основных типов импульсных механизмов приводится
с целью подготовки аналитического аппарата для дальнейшего
построения обобщенной схемы импульсного механизма.
Схемы импульсных механизмов и необходимые для построения
теории кинематические зависимости приведены в табл. 1. Во всех
схемах: 1 — ведущий маховик; 2 — реактор; 3 — грузовое звено.
Точка S — центр масс грузового звена; В — характерная точка
на грузовом звене. Ведущий маховик приводит в движение грузо-
вые звенья, инерционные силы которых создают знакопеременный
вращающий момент на реакторе. Выражение ф' везде обозначает
производную от функции ф = ф (а — Р) по разности а — р.
Импульсные механизмы Хоббса, Чалмерса, Левина, непараллело-
граммный (Спонтан), параллелограммный принадлежат соответ-
ствующим передачам, описанным в гл. I.
Импульсный механизм Хоббса. Передача знакопеременного
момента на реактор, кроме схемы в табл. 1, может производиться
с помощью эпициклической шестерни, охватывающей сателлиты 3
(в этом случае гг — радиус эпицикла). На схеме показано четыре
сателлита, в конструкции их число может быть иным (чаще всего
в механизмах Хоббса, Чалмерса, Левина используются шесть
сателлитов). Угол ф обозначает угол поворота грузового звена
относительно ведущего маховика.
- Импульсный механизм Чалмерса. Привод сателлитов от веду-
щего вала. может осуществляться также с помощью солнечной
шестерни (в этом случае гг — радиус солнечной шестерни). Угол ф
обозначает угол поворота грузового звена относительно реактора.
Импульсный механизм Левина может передавать силовой
поток и в направлении, противоположном показанному в табл. 1.
В этом случае ведущим звеном является шестерня 2, реактором —
маховик 1 с эпициклической шестерней (т-!, как и в схеме табл. 1,
радиус центральной шестерни). Сателлиты обкатываются -поверх-
ностями 4 по соответствующим поверхностям ведущего маховика.
Угол ф обозначает угол поворота грузового звена относительно
радиуса ОВ.
Обобщенный планетарный импульсный механизм [36], как и
механизм Левина, использует плавающие сателлиты, обкатываю-
щиеся соответствующими поверхностями по ведущему маховику.
От схемы Левина он отличается тем, что имеет два несвязанных
один с другим зацепления: эпицикл—сателлит и сателлит—
реактор.
31
Импульсные механизмы
Таблица 1
Меха-
низмы
Схемы импульсных механизмов
Кинематические зависимости
vB «а,
Ф = q (а — Р),
(а — Р)
d (а — Р)
а = ri± r2> 9 = ± А-,
Г2
+ в случае центральной
шестерни 2;
— в случае эпициклической
шестерни 2
. vB = &Р>
ф = q(a — Р), ф' = q,
/+ солнечная ше-
b = ± г2 стерня .7
Д— эпицикл 1
г / + эпицикл 1
q = ± — I — солнечная
г2 \ шестерня 1
vB = аа + Z>P,
звено 1 — эпицикл.
звено 1 — солнеч
ная шестерня,
ф = q (а — Р),
+ (г1 4- 2г2)
4 2г2 (лг 4- г2) ’
’+ звено 1 — эпицикл
— звено 1 — солнечная шестерн /
32
Продолжение табл. 1
Меха-
низмы
Схемы импульсных механизмов
Кинематические зависимости
vB = ad +
п = f2 Ч~ Г2 + Гз)
Г2 + r3 ’
Ь = _---212-----ведущий ЭПИ-
r2 I r3
цикл,
< Г2 (/*1 ~4~ Г о Г ч)
b — ——±—L-.2 37 — ведущая
r2~T r3
солнечная
шестерня
t = q (a — ₽),
+ rt (rt + r2 + r3)
(Г1 + r2) (r2 + r3)
+ ведущий эпицикл, \
k— ведущая солнечная шестерня/
— b$, b — e~ QBt
г|)= л — arctg
e3 sin (ос — P) 3
e — e3 cos (ос — P) J
— arccos
2^4
= e2~ CD, e3— OD,
= e2 + — 2ee3 cos (a — p),
e3 — e cos (a — P) +
e4
g(g4-4 + 4) sin («-P)
V 4ф1-(4-е4+^)2
VB = b^,
b ~ e~ OB,
ф = a — P, г|/ = 1.
2 А. И. Леонов
33
Продолжение табл, 1
Меха-
низмы
Схемы импульсных механизмов
Кинематические зависимости
VB = Ж
Ь = е=ОВ,
sin 2 (а — 0) +
+ sin (а — Р) X
х ]/1 -• sin2 — ₽)
vb = аа, а — е = ОВ,
ф = arcsin-> .
_________er sin (а — 0)_______
]/е2 — 2еег cos (а — 0)
[е2 + ef — eet cos (а — 0)] X
X cos (а — 0) — еех
~ е\ [е — et cos (а — 0)] X
X [е2 + ei — 2eqcos (а — 0) ]
vb — eta, а== е— ОВ,
тр = л — 0 + arccosx
a^-ye^-a\b\
X Л
а| — Oj sin2 [а —Р — (а0—Ро)]+
+ Ь\ cos2 [а — р — (о£— Ро) ]
34
Продолжение табл. 1
Меха-
низмы
Схемы импульсных механизмов
Кинематические зависимости
vB = Zxa2 + /2а р + /зр2,
It = 1((а - ft Ji =1.2, 3),
гр = гр' = О
Силовой поток может передаваться в противоположном на-
правлении, если шестерни 2 будут ведущими, а маховик 1 вы-
полнять роль реактора (в этом случае — по-прежнему радиус
солнечной шестерни). Возможна компоновка механизма, имеющего
обе эпициклические или обе солнечные ведущую шестерню и ше-
стерню реактора. Угол ф обозначает угол поворота грузового
звена относительно радиуса ОВ.
Механизм назван обобщенным, так как представляет общую
схему для импульсных механизмов Хоббса,. Чалмерса, Левина.
Действительно, при г3 = 0 точка В уже не имеет перемещения
относительно эпицикла, и обобщенный планетарный механизм
с ведущим эпициклом обращается в механизм Хоббса. Нетрудно
проверить, что выражения a, b, q обобщенного механизма прини-
мают вид соответствующих выражений механизма Хоббса.
При гя — 0 и ведущей солнечной шестерне обобщенный плане-
тарный механизм обращается в один из вариантов импульсного
механизма Чалмерса. Аналогично получаются различные частные
случаи механизмов Хоббса, Чалмерса, Левина при г2 = 0 и
г2 = г3. При гг = 0 импульсный механизм вырождается.
Являясь общей схемой для импульсных механизмов Хоббса,
Чалмерса, Левина, обобщенный планетарный механизм в то же
время имеет более шйрокие возможности по выбору вариантов
параметров, чем эти три схемы вместе взятые.
Непараллелограммный импульсный механизм впервые был
использован в передаче Спонтан. Приведенная зависимость угла ф
от a — р получена, например, в работе [2]. Угол ф обозначает
угол поворота грузового звена относительно реактора. Непаралле-
лограммный импульсный механизм рассмотрен также в книге
[24 ] при выводе дифференциальных уравнений движения передачи
Балжи.
Параллелограммный импульсный механизм [30] предложен
с целью устранения недостатков непараллелограммного механизма.
2* 35
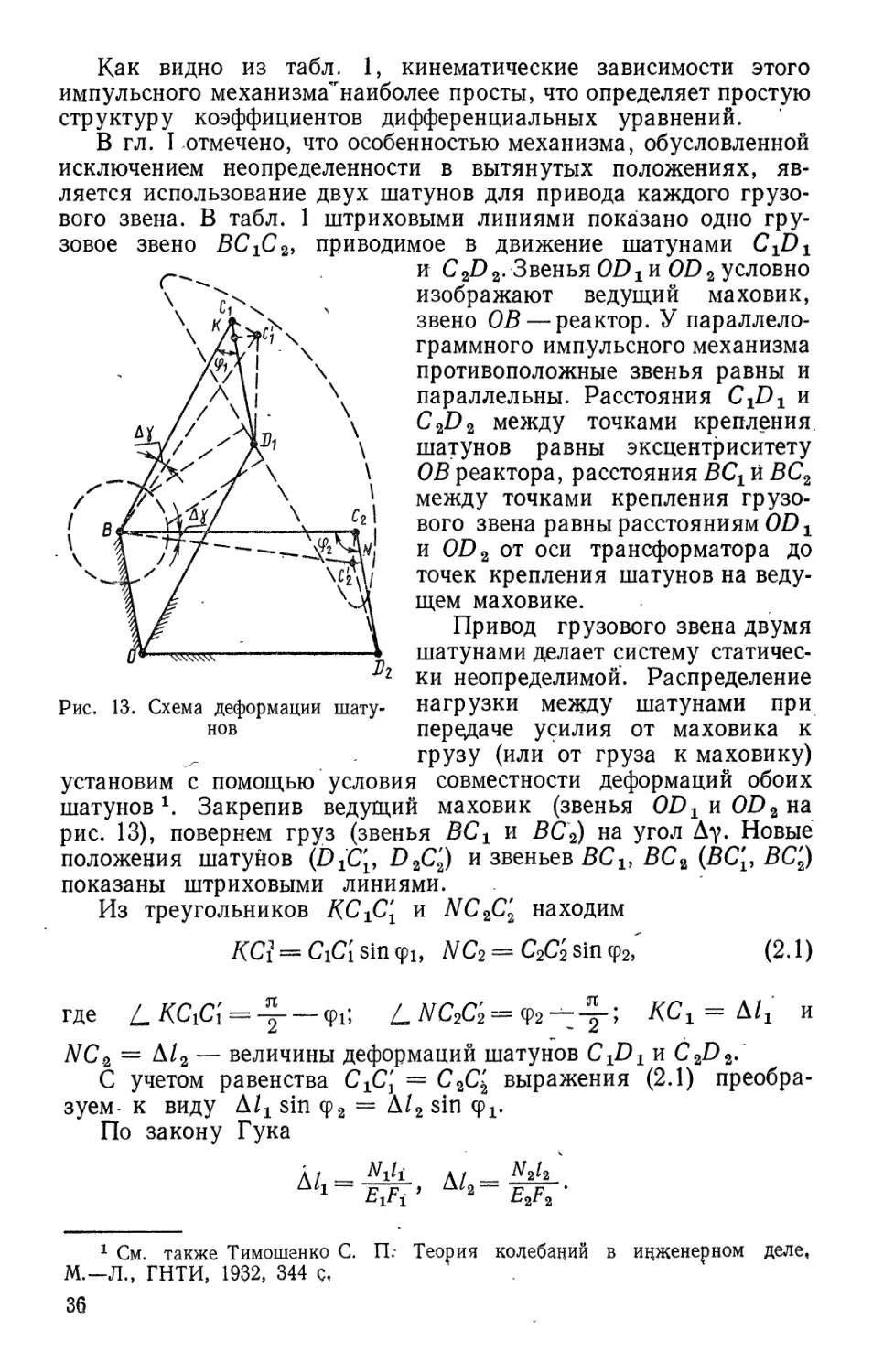
Рис. 13. Схема деформации шату-
нов
Как видно из табл. 1, кинематические зависимости этого
импульсного механизма'гнаиболее просты, что определяет простую
структуру коэффициентов дифференциальных уравнений.
В гл. I отмечено, что особенностью механизма, обусловленной
исключением неопределенности в вытянутых положениях, яв-
ляется использование двух шатунов для привода каждого грузо-
вого звена. В табл. 1 штриховыми линиями показано одно гру-
зовое звено ВСХС2, приводимое в движение шатунами
и С 2D 2. 3 вен ья OD х и OD 2 у словно
изображают ведущий маховик,
звено ОБ — реактор. У параллело-
граммного импульсного механизма
противоположные звенья равны и
параллельны. Расстояния C1D1 и
C2D2 между точками крепления,
шатунов равны эксцентриситету
ОБ реактора, расстояния ВСХ й ВС2
между точками крепления грузо-
вого звена равны расстояниям 0Dt
и 0D2 от оси трансформатора до
точек крепления шатунов на веду-
щем маховике.
Привод грузового звена двумя
шатунами делает систему статичес-
ки неопределимой. Распределение
нагрузки между шатунами при
передаче усилия от маховика к
грузу (или от груза к маховику)
установим с помощью условия совместности деформаций обоих
шатунов х. Закрепив ведущий маховик (звенья OD± и 0D2 на
рис. 13), повернем груз (звенья ВСГ и ВС2) на угол Ду. Новые
положения шатунов (Ь^, D2C2) и звеньев ВСг, ВС2 (ВС^ ВС2)
показаны штриховыми линиями.
Из треугольников КС^С^ и NC2C2 находим
KCi — CiC'i slntpx, NCi = С2С2 sin (p2> (2.1)
где = — LNC2C2-=^2-^--, = AZX и
NC% — AZ2 — величины деформаций шатунов и С2Р2.
С учетом равенства = С2С^ выражения (2.1) преобра-
зуем к виду AZX sin <р3 = Д/2 sin <рх.
По закону Гука
л/ W-Ji _____ N2l2
х~ ElFi> E2F2~
1 См. также Тимошенко С. П.- Теория колебаний в инженерном деле,
М.-Л., ГНТИ, 1932, 344 с,
36
При условии равенства длин и сечений шатунов, а также
использования одного и того же материала, после преобразова-
ния найденных выражений окончательно получим
sin <р3‘= У3 sin <pv (2.2)
Отсюда видно, что при стремлении угла <р одного из паралле-
лограммов к 0 или п нагрузка на шатун этого параллелограмма
стремится к нулю, если нагрузка на другой шатун ограничена.
В случае одного параллелограмма при стремлении угла ср к нулю
нагрузка на шатун неограниченно возрастает.
Таким образом, в результате использования сдвоенного па-
раллелограмма устраняется неопределенность в вытянутых поло-
жениях и обеспечивается качественно новое распределение на-
грузок на шатуны. ~
Уравнение (2.2) используется как дополнительное к уравне-
ниям равновесия при определении нагрузок в параллелограмм-
ном механизме.
Кривошипно-кулисный механизм с поступательной парой [17].
Грузовые звенья этого механизма приводятся с помощью ползу-
нов 4, скользящих в прорезях ведущего маховика 1.
Для вывода приведенной в табл. 1 зависимости угла ф от.
а — р рассмотрим треугольник OBD. Имеем
____6D ____gj____ • • о\
sin (л — ф) sin (а — 0) ’ \ >
где ех = BD.
Определяя OD из уравнения е2 = е2 + OD2 — 2eOD cos (а — Р),
после преобразования выражения (2.3) получим функцию ф =
= ф (а — р). .
Производная ф' равна
cos2 (а-Р) j/1 — sin2 (а — р) +
> Г / в \ 1
+ cos (а — Р) 1 — 2 (— ) sin2 (а — Р)
ф' =_____________._____ L J___________.
1 — sin2 (а — Р) X
sin2(a —Р) 4-sin (а—Р) jZ1 — sin2(a—0)
Проф. Г. Г. Васины^ отмечена особенность описываемого
механизма. В предельном случае при е — ег угол ф оказывается
равным ф = 2 (а — Р). При заторможенном реакторе и вращении
ведущего маховика с постоянной угловой скоростью грузовое
звено BD вращается также с постоянной угловой скоростью,
вдвое превышающей скорость вращения маховика. Однако меха-
низм, у которого е = е1г имеет неопределенность в положениях,
когда ф = 0, л. Для конструктивного осуществления предельного
87
механизма необходимо устройство, исключающее неопределен-
ность в вытянутых положениях.
Кривошипно-кулисный импульсный механизм с ведущим кри-
вошипом описан проф. Г. Г. Васиным. Грузовое звено ВС и реак-
тор ОС соединены с помощью кулисы С. Угол ф обозначает угол
поворота грузового звена относительно ведущего маховика.
Для вывода зависимости ф = ф (а — Р) рассмотрим Л ОВС.
Имеем
<4 _ св
sin ф sin (а — Р) ’
где б! = ОС: СВ2 = е2 + е[ — 2eei cos (а — Р).
Преобразуя последние выражения, получим зависимость ф =
= ф (а — Р)г. приведенную в табл. 1;
Кулачковый импульсный механизм предложен проф. Балжи [8].
На пальце В ведущего маховика шарнирно крепится грузовое
звено CBS (трансформаторы имеют четное число симметрично
расположенных звеньев с целью уравновешивания нагрузок на
подшипники реактора, а также ведущего и ведомого маховика).
Инерционные силы грузового звена передаются на кулачок 2,
являющийся реактором, через ролик, закрепленный в точке С
на грузовом звене. При вращении- ведущего маховика ролик
обкатывается по кулачку. Конструкция может быть осуществлена
с расположением ролика внутри или снаружи кулачка. •
В табл. 1 приведена упрощенная зависимость угла ф от раз-
ности а — р для эллиптического профиля кулачка с полуосями
«1. ьг.
Из Л ОВС находим /
гас а = + е^> cos2 + ai sin2 Л) — afoi
2eer (bl cos2 г] ф al sin2 ц)
В области параметров, где разность полуосей мала
по сравнению с аи Ь1г можно приближенно принять г] а — р —
— (а0 — р0), где а 0 — р0 — значение разности а — р, соответ-
ствующее т] = 0.
Тогда
о = arccos
(е2 4- el) —
2eexal
здесь а2 = «1 sin2 [а— р — (а0 — р0) ] -^-.&2 cos2 [а—р — (а0— Ро)1 •
При известном о угол ф бпределяется равенством ф = я +
+ а — 0. Окончательные выражения для фиф' записаны в табл. 1.
Формулы выведены для наружного профиля кулачка. В ме-
ханизмах с внутренним контуром (ролик грузового звена об-
катывается по внутренней поверхности кулачка) зависимости
для vB и ф будут такими же. Роль угла ф будет играть угол о,
так как центр тяжести грузового звена переместится на звено ВС.
38 .
Кулачковый импульсный механизм с поступательной парой [16].
Грузовые звенья BS механизма (в табл. 1 показано только одно
грузовое звено) скользят по направляющим 4 ведущего маховика 1.
Ролики В, шарнирно закрепленные на грузовых звеньях, обкаты-
ваются по внутренней поверхности кулачка 2, являющегося
реактором.
Скорость точки В найдем, рассмотрев ее движение как сложное
и приняв за подвижную систему ведущий маховик,
=/2а24-/42(а — Р)2, (2.4)
где
it = OB = /.(«-₽), .
Например, для эллиптического профиля с полуосями alt
функция /4 (а — р) запишется так
/------- .
Ч — г---------------f , 2--------- •
1/ sin2 (а — Р) + (--М cos2 (а — Р)
Выражение (2.4) можно записать в виде, представленном
в табл. 1,
= 4-/2аР + /зР 1
где /2, /3 — функции разнасти a — р.
Помимо описанных известны и другие схемы импульсных
механизмов.
Не вызывает сомнения, что будут предложены новые схемы
на основе механизмов с двумя степенями свободы, известных из
теории механизмов и машин и специальной литературы. Поэтому
одна из основных задач при построении теории, решаемая в гл. III,
заключается в выделении класса рациональных импульсных
механизмов, снижающих динамическую напряженность транс-
форматора.
3. Обобщенная схема импульсного механизма
Импульсные механизмы, включающие ведущий маховик, гру-
зовые звенья и реактор, имеют две степени свободы и являются
голономными системами. В соответствии с этим можно предложить
самую общую схему импульсных механизмов, описываемую квад-
ратичной формой обобщенных скоростей с коэффициентами, име-
ющими ограничения общего вида (например, непрерывность и
аналитичность коэффициентов как функций обобщенных коор-
динат). Однако подобная общая схема мало пригодна, поскольку
содержит недостаточно информации, необходимой при решении
дифференциальных уравнений. Движение инерционного трансфор-
матора описывается сложной системой нелинейных дифференци-
З9
альных уравнений, интегрирование которой требует применения
приближенных методов и знания структуры коэффициентов кине-
тической энергии. Поэтому при создании обобщенной схемы сле-
дует использовать конкретные идеи, основанные на свойствах
импульсных механизмов.
На рис. 14 ^показана обобщенная схема, описывающая на
основе представленных ниже кинематических зависимостей боль-
шинство известных импульсных механизмов [34, 43]. Схема по-
лучена на основе сопоставления различных свойств импульсных
механизмов, отбора и описания общих свойств, необходимых для
записи дифференциальных уравнений. Звено 1 обозначает ведущий
маховик, 2 — реактор, 3 —
грузовое звено. Центр тяжес-
ти грузового звена располо-
жен в точке S, для. упроще-
ния показано одно грузовое
звено. При вращении веду-
щего маховика / грузовые
звенья 3 приводятся в дви-
, жение й создают на реакто-
ре 2 знакопеременный вра-
щающий момент. Углы а, 0,
Ф обозначают углы поворота
ведущего маховика, реактора
Рис. 14. Обобщенная схема импульсного
• механизма
и грузового звена.
{Схема отражает юбщее свойство описываемых импульсных ме-
ханизмов, обусловленное кинематическими связями и выражаю-
щееся в том, что механизмы имеют точку на грузовом звене,
скорость которой является линейной формой обобщенных скоро-
стей а, 0
vB — ааф- 60,
(2.5)
где а, b — постоянные, определяемые схемой механизма.
Для планетарных импульсных механизмов точка. В — центр
сателлита, параллелограммного и непараллелограммного — точка
крепления грузового звена на реакторе, кулачкового — точка
крепления грузового звена на ведущем маховике и т. д.
Угол % в обобщенной схеме обозначает угол поворота радиуса
ОВ, ф — угол поворота грузового звена относительно звена ОВ.
Связь между углами а, 0, X, ф определяется уравнениями
^=оа + Ь0, |
ф = ф(а-0), )
где е = ОВ', ф — функция разности а — 0.
Первое из уравнений (2.6) находится интегрированием выра-
жения (2.5), в котором ив = ек. Справедливость второго'уравнения
очевидна, так как изменение угла ф в рассматриваемых схемах
40
возможно только за счет изменения разности углов а — р. При.
а = Р импульсный механизм вращается как одно целое и угол ф
не изменяется.
Угол <р, как видно из рис. 14,. определяется выражением
Ф = Л,гЬф. (2.7)
. Таким образом, уравнения (2.5)—(2.7) и схема на рис. 14 опи-
сывают предлагаемый обобщенный импульсный механизм. Раз-
личные конструкции импульсных механизмов определяются в этой
схеме только параметрами а, b и видом функции ф.
Для подтверждения последнего предложения воспользуемся
выражением кинетической энергии произвольного импульсного
механизма
T = -^-{J\a + ntnvs 4~ nJ sty ). (2.8)
Скорость vs центра тяжести будем находить, используя в ка-
честве полюса точку В,
Vs = + v^b + 2vBvSB COS ф, (2.9)
где vSB = hty.
После подстановки выражений (2.5)—(2.7), (2.9) в (2.8) выра-
жение кинетической энергии запишется так
т = +ЛааРН-4-Л3р2, (2.10)
где
А = Л + пта* + (у + Ф')2 nJ в + 2ntnah (у + Ф') cos ф,
А = птаЬ + (у + Ф') (у — Ф') «4 +
4-nm/i Г — + (fe — а) ф'1 cos ф,
А = А + nnib2 + (у — Ф'У nJ в + 2nmbh (у — ф') cos ф,
(2.П)
, _ Лф (а — р) .
- d(a-P) •
Из последних выражений видно, что различные схемы импульс- .
ных механизмов определяются только параметрами а, b и видом
функции ф. Значения параметров а и b сведены в табл. 2.
Свойства обобщенной схемы импульсного механизма. На рис. 15
показаны положения импульсных механизмов в координатах а,
Ь. Важно заметить, что всё импульсные механизмы, которым
свойственно уравнение (2.5), располагаются на одной прямой
< Ь = —а-^-е,
41
Значения параметров а, b
Таблица 2
Импульсные механизмы а ь
Хоббса: -
а) реактор — солнце е = гх + г2 0
. б) реактор — эпицикл Чалмерса: е = ri — г2 0
а) ведущее солнце 0 е = + г2
б) ведущий эпицикл Левина: 0 б = г± — г2
а) ведущий эпицикл ' Г1 4- г Т 4 Г2 Г1 2
б) ведущее солнце Г1 2 । г Г2
Обобщенный планетарный:
а) ведущий эпицикл г2 (Г1 + г2 + гз)
Г2+ Гз Г 2. + Гз
б) ведущее, солнце Уз Г2 (/~1 + г2 + г3) .
Гъ+ г2+ Гз
Непараллелограммный 0 е
Параллелограммный 0 е
Кривошипно-кулисный с посту- 0 е
пательной парой ..
Кривошипно-кулисный с веду- щим кривошипом е 0
Кулачковый е ^0*
Точке 1 соответствуют импульсные механизмы — непаралле-
лограммный, параллелограммный, Чалмерса, кривошипно-кулис-
ный с поступательной парой. Точке 5 — кулачковый, Хоббса,
кривошипно-кулисный с ведущим кривошипом. Импульсному
механизму Левина с ведущим эпициклом могут соответствовать
различные точки на прямой между серединой отрезка 1—5 и точ-
кой 5 в зависимости от соотношения между радиусами шестерен
и г2. Так, точке 2 соответствует механизм Левина, для которого
гх = 2г2, точке 3 — гг = г2, точке 4 — 2г} = г2. Выше середины
отрезка механизмы с ведущим эпициклом не располагаются, так
как в этом случае а > Ь. Для механизмов Левина с ведущим солн-
цем b > а, и им соответствуют точки на прямой между серединой
отрезка 1—5 и точкой 1. Обобщенные планетарные механизмы мо-
гут располагаться на всем отрезке между точками 1 и 5. Действи-
тельно, при rs —* 0 и конечном r2 b —* 0, а при г3 —> со и гх —> е
b —* е. За пределами отрезка 1—5 (при отрицательном а или Ь)
лежат обобщенные планетарные механизмы, имеющие компоновки
с солнечными или эпициклическими шестернями ведущего махо-
вика и реактора.
На рис. .16 даны графики функции ф (а — 0) для разных им-
пульсных механизмов. Прямая 1 соответствует параллелограмм-
42
ному механизму; 2 — механизму Чалмерса с ведущим солнцем
и параметрами гг = г2; 3 — механизму Чалмерса с ведущим эпи-
циклом и параметрами гх = 2га; кривая 4 — кривошипно-ку-
лисному механизму с поступательной парой, имеющему е!е1 —
= 0,4. Как особенность в поведении некоторых функций ф (а —. Р)
следует отметить отрицательные угловые коэффициенты прямых,
соответствующих определенным
областям параметров импульсных
механизмов.
.По выражению кинетической
энергии было показано, что раз-
личные импульсные механизмы
Рис. 15. График расположения
импульсных механизмов в коор-
динатах а, b
Рис. 16. Графики функции
ф (а — Р) для различных^им-
пульсных механизмов
описываются только параметрами а, b и функцией ф. Очевидно,
одни и те же характеристики трансформатора могут быть получе-
ны с помощью разных конструктивных схем выбором одинаковых
величин а, b и тождественно равных функций ф. Например, ме-
ханизм Чалмерса с ведущим эпициклом и кривошипно-кулис-
ный с поступательной парой будут осуществлять одинаковые
процессы, если принять е = ех = гг — г2, гх = 2г8. В этом
случае механизмы имеют одинаковые а, b и тождественно рав-
ные функции ф. При утверждении об одинаковости процессов раз-
личных импульсных механизмов предполагается, что соответ-
ствующие геометрические и массовые параметры, не упомянутые
ранее, равны. Так как обе схемы обеспечивают совершенно
одинаковые характеристики, но планетарный механизм Чалмерса
значительно компактнее и проще в изготовлении, то кривошипно-
кулисный q поступательной парой в предельном случае оказывает-
ся неперспективным для применения в инерционных трансформа-
торах.
Таким образом, обобщенная схема позволяет уже на пер-
вой стадии исследований отбраковывать неперспективные меха-
низмы.
43
Исключением из предложенной обобщенной схемы является
кулачковый импульсный механизм с поступательной парой (см.
табл. 1). Нетрудно проверить отсутствие у грузового звена этого
механизма точки, скорость которой удовлетворяла бы уравнению
(2.5). Выражение для квадрата скорости точки В кулачкового меха-
низма с поступательной парой содержит коэффициенты /2,
13, являющиеся функциями разности а — |3. Представление квад-
рату скорости точки В в виде квадратичной формы скоростей а,
Р с переменными коэффициентами является более общим случаем.
Однако этот случай не рассматривается, так как механизмы, со-
ставляющие указанное исключение, не принадлежат семейству
предпочтительных, описываемых в следующей главе.
В заключение заметим, что использование обобщенной схемы
импульсного механизма позволяет изменить методику создания
инерционного трансформатора. Существующая практика сводится
к изобретению импульсных механизмов, их исследованию и выбору
лучших. При таком подходе нет уверенности, что лучшая на дан-
ном этапе схема импульсного механизма является оптимальной.
Использование обобщенной схемы позволяет на первом этапе
исследований отвлечься от конструктивных различий в схемах
импульсных механизмов и провести выбор оптимальных областей
параметров а, b и функций ф. На втором этапе изобретательская
деятельность направляется на реализацию выбранных областей.
4, Математическая модель инерционного трансформатора
с упругими элементами
(дифференциальные уравнения движения)
Математической моделью в нашем случае являются системы
обыкновенных дифференциальных уравнений, описывающие дви-
жение обобщенной физической модели инерционного трансфор-
матора с упругими элементами на различных участках цикла [34].
При составлении уравнений упругими предполагаются кор-
пусной и выходной МСХ. Остальные детали приняты жесткими.
Зазоры в импульсном механизме и МСХ не учитываются, так как
в конструкциях они сводятся к минимуму и не влияют существенно
на законы движения звеньев. Упругие элементы предполагаются
линейными. '
Силы трения учтены только в МСХ. Они обусловлены поджи-
мом рабочих тел к обоймам реактора. Вследствие изменения отно-
сительной скорости соприкасающихся тел, наличия смазки и дру-
гих факторов эти силы изменяются в некоторых пределах. Однако
они принимаются постоянными; предполагается их изменение
в небольших пределах, и интерес представляет качественная кар-
тина влияния этих сил.
Принятая для математического описания модель трансформа-
тора близка к конструкциям опытных образцов трансформатора
44
с упругими элементами. Действительно, ведущий и ведомый ма-
ховики, грузовые звенья, реактор представляют весьма жесткие
детали, а МСХ и специально вводимые в них упругие элементы
являются наиболее податливыми звеньями в цепи трансформатора.
Потери в импульсном механизме невелики вследствие использо-
вания подшипников качения в наиболее нагруженных узлах
(например, параллелограммный механизм, механизм Чалмерса),
использования схемы качения грузовых звеньев по ободу ведущего
маховика (механизм Левина) и других конструктивных решений.
Дифференциальные уравнения движения обобщенной модели
инерционного трансформатора. Представленная на рис. .12 и 1.4
модель трансформатора в общем~случае имеет четыре степени сво-
боды. (За обобщенные координаты примем углы а, Р, у, 6 поворота
ведущего маховика, реактора, наружной обоймы корпусного МСХ
и ведомого маховика.
Трансформатор представляет механическую систему, на кото-
рую наложены голономные стационарные связи, поэтому кинети-
ческая энергия будет однородной квадратичной функцией обоб-
щенных скоростей
Т = 4-(Аа2+2Доф+ Д8Рг + /3?+Л^/' .. (2.12)
.. Коэффициенты At (i = 1, 2, 3), являющиеся функциями
обобщенных координат а, 0, записаны для. обобщенной схемы
импульсного механизма выражениями (2.11). Структура коэффи-
циентов А/ (I — 1, 2, 3), J3, имеет особенности, характер-
ные для всех исследуемых схем трансформаторов. Наибольшими
по величине, значительно превышающими величины J2, J3,
пта2, nmb2, nmah, nmbh, nJB, nmab, оказываются моменты инер-
ции Ji и так как </\ включает момент инерции маховика двига-
теля внутреннего сгорания или ротора электродвигателя, a Jt —
момент инерции ведомого маховика. Из величин J2, J3, пта2, nmb2,
nmah, nmbh, nmab, nJB наибольшее значение имеет момент инерции
реактора. Значение J3 обычно превышает значения пта2, nmb2,
nmah, nmbh, nmab, nJв, определяемые только массами грузовых
звеньев и геометрическими параметрами. Наименьшие значения
соответствуют моменту инерции J3. Величина момента инерции J3
обоймы 3 и приведенных деталей при конструировании сводится
к минимуму. Многие конструкции с упругими элементами (на-
пример, микрохраповые МСХ) не содержат обоймы 3. В этом слу-
чае J3 включает момент инерции рабочих тел МСХ и упругих
элементов.
Согласно изложенному, коэффициенты Л2 и J3 оказываются
меньше коэффициента А3 и значительно меньше коэффициентов
и J4. В свою очередь, коэффициент А3 примерно на порядок
меньше Аг и У4.
Ранее было отмечено, что в’цикле работы трансформатора
на режиме трансформации момента можно выделить характерные
45
участки, на которых дифференциальные уравнения движения си-
стемы не меняются. Для записи дифференциальных уравнений дви-
жения на каждом из участков воспользуемся уравнениями Ла-
гранжа
d дТ
'dqs
^- = Qs(S=l,...,4).
(2-13)
На участке накопления упругими элементами 9 (см. рис. 12)
потенциальной энергии и отдачи ее при разгоне реактора меха-
низм свободного хода 8 включен, и реактор движется совместно
с наружной обоймой 3 (0 = у). Система на этом участке имеет три
степени свободы. Потенциальная энергия упругих элементов 9
равна
Л = -1-С/р2. ' (2.14)
Используя уравнения (2.13), выражения (2.12) и (2.14) для
кинетической и потенциальной энергий, получим дифференциаль-
ные ур^:.-»ния движения трансформатора на рассматриваемом
участке
Дха + Л20 +. Л4 (а - g)® + Лв|32 - МД; .
А2а + (Л3+ J3) fr’ + Л5 (а - р)2 - Л6а2 = М2- £7р;
= — мс - М2.
(2.15),
На участке разгона реактора МСХ 7 и 8 разомкнуты. Ведомый
маховик 4 и обойма 3 с упругими элементами совершают движение
независимо от импульсного механизма. Система имеет четыре сте-
пени свободы. Дифференциальные уравнения движения трансфор-
матора на участке разгона имеют вид
+ + А (а — р)24-Лвр2= Мд;
Л2» + Л3рЛ-Л5(а-р)2 — Л6а2=Л42- М1; <2 J6)
/8у = — Uy-Ny+M^ J$= — Mc — M2,
где N — коэффициент, определяющий сопротивление движению
обоймы 3.
При совместном движении реактора и ведомого маховика
МСХ 7 замкнут, но реактор и ведомый маховик имеют разные за-
коны движения, так как МСХ представляет упругую связь между
реактором и ведомым маховиком. Обойма 3 по-прежнему совершает
колебательное движение независимо от импульсного механизма.
Система на участке совместного движения имеет четыре степени
46
свободы и описывается следующими дифференциальными урав-
нениями
Аха + Л2р + Л (а - ’р)2 + Aj? = Л1Д;
Л2а + Л3’р + А5 (а — р)2 - Л6а2 = U, (б — р) — М»
'J'y = — Uy-Ny+ Л4Х, J46 = — Мс — Ut(6- р).
(2.17)'
В начале совместного движения реактора и ведомого маховика
упругие элементы 6 недеформированы. Чтобы слагаемые в правых
частях уравнений (2.17), определяемые действием упругих эле-
ментов, обращались в ноль, начальные углы поворота ведомого
маховика и реактора должны быть равны: б30 = р30. Это условие
определяет выбор начала отсчета угла 6, при котором указанные
слагаемые оказываются наиболее простыми.
В случае, когда совместное движение реактора и ведомого
маховика начинается при действии корпусных упругих элемен-
тов 9 (что свойственно малым передаточным числам), дифференци-
альные уравнения имеют вид
Лха + Л$ + Л4 (а—Р)2 + Лвр2 = Мд;
Л2^ + (Л3 + J3) р + Л6 (а - Р)2 - Л6а2 = - £70 + (б - р),
Л’б^-Ме-^Нб-Р).
(2.18)
На участке торможения реактора обойма 3 и ведомый махо-
вик 4 совершают движение независимо от импульсного механизма.
Движение трансформатора описывается системой дифференци-
альных уравнений (2.16).
На режиме динамической муфты дифференциальные уравне-
ния движения системы имеют вид (2.17).
Дифференциальные уравнения движения обобщенной модели
инерционного трансформатора на различных участках цикла ре-
жима трансформации момента, а также на режимах динамической
муфты и стоповом приведены в табл. 3.
В дальнейших исследованиях будут использоваться также диф-
ференциальные уравнения движения трансформатора, в которых
за обобщенные координаты вместо аир приняты углы X поворота
радиуса ОВ (см. рис. 14) и ф поворота грузового звена относительно
ОВ. Зависимости между углами а, р, %, ф в отличие от (2.6) пред-
ставим ' следующей системой уравнений
а —р = /(ф), ।
аа ф- &р = ек, j
где / (ф) — функция угла ф, обратная ф (а — Р).
Определитель системы (2.19)
(2-19)
1 —1
а b
= а ф- b = е
47
Таблица 3
Дифференциальные уравнения обобщенной модели трансформатора
Участки цикла и режимы Дифференциальные уравнения
Участок 1. Накопление кор- пусными упругими элементами потенциальной энергии и отдача ее при разгоне реактора ♦ Л/а + Л2р + Л4 (а - р)2 + Л> = Ма, Л2а + (Л3 + J3) 'р + Л5 (а - 0)2 - Л6а2 = =мя~i/p, ' J^-—Mc — м2.
Участок 2. Разгон реактора Участок 4. Торможение реак- тора Л4а 4* ^аР + ^4 (а — Р)2 + -^зР2 ~ Мд, Л2а + Л3’р’ + Л6(а-^- — Л6а2 — М2 — Mf, /3V = - Uy — JVy 4- Mlt =-Mc — M2
Участок 3. Совместное движе-
ние реактора и ведомого махо-
вика. Режим динамической
муфты
Л/а + Л2Р + Л4 (а - р’)2 + Лв^= Мд,
Л2а + Лзр + Л5 (а — р’)2 — Л6а2 =
= — Uy — Ny + Afj, J46 =
= —Mc —l/j (6 —P)
Участок 3. Совместное движе- ние реактора и ведомого махо- вика при действии корпусных упругих элементов Л/а 4- Л2*р 4- Л4 (а - Р)2 4- Л6р2 = МЛ, •^2а + Мз 4" ^з) Р + ^5 (а Р)2 - Л6а2 = - (7р 4- Щ (6 — р), j4S = -Afc-l/i(6-P).
Режим заторможенного ведо- мого маховика Л1а4-4р’ + Л4(а-^)24- 4-Л> = мд> Л2а 4- Из + h) К + 4 (а -13)2 - - Л6а2 = - (У 4- иг) р.
48
отличен от нуля, поэтому система имеет единственное решение
а = Х+-|-/(ф), p = (2.20)
Используя выражения (2.12) и (2.20), запишем кинетическую
энергию обобщенной модели трансформатора в координатах
%, ф, у, б
= 2Н2Й + ^зФ2 + Лт2 + Л62). (2.21)
Дифференциальные уравнения движения трансформатора на
участке совместного движения реактора и ведомого маховика будут
-ф- Н2ф — 2ДДф + Я6ф2 =
=-Мд-Л41+^(б-Х + |/)
= (аМг 4- bMj —f- f'Ur (б -X + A f)
= - Uy - Ny + Mlt = - Mc - '(б-Г+ | /) .
Можно показать, что полученные системы дифференциальных
уравнений в широкой области изменения переменных удовлетво-
ряют условиям теоремы о существовании и единственности решений
дифференциальных уравнений и, следовательно, имеют непрерыв-
ные решения.
Примером несколько иного подхода к составлению математи-
ческой модели инерционной передачи является работа [21 L
Глава III
ПРЕДПОЧТИТЕЛЬНОЕ СЕМЕЙСТВО
ИМПУЛЬСНЫХ МЕХАНИЗМОВ
Принцип создания знакопеременного момента на реакторе оди-
наков для 'всех" импульсных механизмов и обусловлен действием
инерционных сил грузовых звеньев на некотором переменном плече.
Однако при одинаковых средних моментах, создаваемых различ-
ными импульсными механизмами на реакторе за положительную
и отрицательную части цикла, динамическая напряженность транс-
форматора оказывается существенно" различной.
В этой главе выделяется семейство импульсных механизмов,
осуществляющих процесс с наименьшей динамической напряжен-
ностью схемы [37, 44, 45].
Все импульсные механизмы, описываемые обобщенной схемой,
подразделяются на два семейства. Одни импульсные механизмы
имеют постоянную функцию
' ф'= const, (3.1)
другие — переменную. К первым относятся параллелограммный
импульсный механизм, планетарный Хоббса, Чалмерса, Левина,
обобщенный планетарный и предельный кривошипно-кулисный
механизм с поступательной парой (е = е^). Второе семейство со-
ставляют непараллелограммный, кулачковые, кривошипно-ку-
лисные механизмы и др.
Различия в поведении обоих семейств импульсных, механизмов
рассмотрим для режима заторможенного реактора ((3 = 0), на
котором они проявляются наиболее четко.
Режим заторможенного реактора не имеет места в действитель-
ности, поскольку детали МСХ даже при отсутствии специальных
упругих элементов имеют некоторую упругость, обусловливающую
колебания реактора в случае остановки ведомого маховика. Этот
режим широко использовался большинством исследователей при
разработке теории, описывающей жесткую схему трансформатора.
Очевидно, что при малых колебаниях реактора, которые будут
иметь место в случае достаточно жестких МСХ, режим неподвиж-
ного реактора можно считать первым приближением режима за-
торможенного Ведомого маховика.
50
1. Анализ импульсных механизмов на режиме
заторможенного реактора,
Основное различие импульсных механизмов с постоянной
и переменной функциями ф'. Воспользуемся допущением а =
= const, так как нас интересует в первую очередь физическая
картина.
Ускорение центра масс грузового звена обобщенной схемы за-
пишем, используя в качестве полюса точку В (см. рис. 14),
“ ~~п I I ~7г I ~т
&S — &В ~г &В “Г &SB “Г Овв*
В указанном режиме аЬ = 0, так как Vb = аа и а = const.
• ' - — V2B
Модули остальных составляющих ускорения as ра'Ьны ,
«зв=Йф2, asB = /i|<p|, где
ув = еХ, Л = -^-а, <р = Х-|-ф'а.
У механизмов с постоянной функцией ф' скорости Л, <р постоян-
ны, и модули апв, rise оказываются также постоянными. Составля-
ющая а$в равна нулю, так как <р — 0. Соответственно оказываются
постоянными и модули составляющих главного вектора сил инер-
ции грузового звена, которые определяются произведениями массы
грузового звена на модули ав, а$в (главный момент сил инерции
равен нулю вследствие <р = 0).
У механизмов с переменной функцией ф' скорость <р оказыва-
ется переменной, что обусловливает изменение модулей составля-
ющих ase, clsb ускорения as и соответствующих сил инерции в те-
чение цикла.
Различие в поведении угловой скорости и сил инерции грузо-
вого звена оказывается весьма существенным и определяет раз-
личную динамику трансформатора. У механизмов с переменной
функцией ф' изменение сил инерции приводит к значительным ко-
лебаниям нагрузок в импульсном механизме, дополнительной не-
равномерности вращения двигателя, дополнительным нагрузкам
на МСХ. !
Для иллюстрации колебаний угловой скорости грузового звена
воспользуемся кривошипно-кулисным импульсным механизмом
с поступательной парой (см. табл. 1). Рассмотрим движение точки
D как сложное, приняв за подвижную систему ведущий маховик 1.
Имеем
Й = + (3.2)
где veD = О Da.
51.
Проектируя векторное равенство (3.2) на ось, перпендикуляр-
ную OD, получим ='—J—ven = .
J J D COS T)1 D COS T]1
где Ях = LODB.
Из A ODB находим величину .OD
Знак плюс соответствует интервалу (—-у-) изменения
угла а — р, знак минус — интервалу, л) .
Используя последнее выражение, запишем абсолютную ско-
рость точки D в виде
а
vD — е^а
2
— sin 2
COS Т]1
Необходимым условием существования экстремумов функции
Vd — f (гц) будет sin г) j £ (7-) — 1 j = 0. Корни последнего урав-
нения
е/ех — ± 1; % = kn (k = 0, ± 1, ± 2,...).
. Корень е/ег = 1 соответствует предельному механизму и поэ-
тому не рассматривается, корни = —1 и т] х — kn при
k = ±1, ±2, ... не имеют смысла в исследуемом механизме.
Стационарная точка т] i — 0 является максимумом в интервале
(—у, изменения угла а—р и минимумом в интервале
/ л з \ ,
(-у, (это легко проверяется по изменению знаков производ-
ной при переходе через точку = 0).
Подозрительными будут также точки, удовлетворяющие урав-
"1 Г / g \t dvD
нению у —sin2i]1 = 0, в которых производная не
существует. Однако в этих точках экстремумов нет, так как при
переходе через них производная не меняет знак.,
Таким образом, в верхнем вытянутом положении механизма
точка D имеет максимальную абсолютную скорость, в нижнем—
минимальную. Соответственно ' максимальная и минимальная
угловые скорости грузового звена равны
«Ртах = (1 + 7^)а> Фячп = — 77) “• М
Из выражения (3.3) следует, что с увеличением е при неизмен-
ном ег колебания угловой скорости грузового звена возрастают.
52 - ’ .
Средняя угловая скорость остается постоянной, так как за каждый
оборот ведущего маховика грузовое звено поворачивается на
угол 2л. Эксцентриситет е в рассматриваемом механизме является
максимальным плечом действия инерционных сил на реактор.
Такой же характер изменения угловой скорости наблюдается
у других импульсных механизмов, имеющих переменную функ-
цию ф'. Общее свойство этих механизмов сводится к возрастанию
колебаний угловой скорости грузового звена с увеличением мак-
симального плеча действия инерционных сил на реактор. У ку-
лачкового импульсного механизма с эллиптическим профилем
роль максимального плеча играет разность полуосей эллипса
В отличие от рассматриваемых механизмов импульсные ме-
ханизмы с постоянной функцией ф' на режиме заторможенного
реактора при а = const имеют постоянную угловую скорость
грузовых звеньев (<р = -у- а -ф ф'а) . Для параллелограммного
импульсного механизма ф = а, механизма Хоббса —ср — (1 =ь
— ) а, Чалмерса —ф= ±—а и т. д.
Г2 / Г2 ‘
Таким образом, основное различие, двух семейств импульсных
механизмов с постоянной и переменной функциями ф' состоит
в прйнцип’йально отличных законах изменения угловой скорости
грузовых звеньев и соответственно разном характере изменения
инерционных сил.
Недостатки • импульсных механизмов с переменной функцией
ф', обусловленные изменением угловой скорости грузовых звеньев
на режиме заторможенного реактора, рассмотрены ниже.
Неравномерность вращения двигателя. Первое следствие не-"
равномерного вращения грузовых звеньев — увеличение нерав-
номерности вращения двигателя. Она определяется изменением
крутящего момента самого двигателя и действием переменного
момента со стороны импульсного механизма. На установившемся
режиме заторможенного реактора, когда средняя угловая скорость
двигателя остается постоянной, энергия от двигателя не подво-
дится, и средний момент двигателя равен нулю. Пренебрежем
изменением крутящего момента двигателя, которое обусловливает
известную неравномерность его вращения, имея в виду установить
действие только импульсного механизма. Тогда кинетическая
энергия импульсного механизма остается величиной постоянной
[см. (2.12)]
-у А ха2 = const. (3.4)
Из_урдвненияДЗЛ)--£ДедуеТ,.что изменение коэффициента Ах
приводит к изменению.скорости а. Согласно структуре коэффици-
ента Ад его изменение обусловлено двумя факторами: переменно-
стью функции ф' и наличием слагаемого, содержащего cos ф.
- 53
Изменение коэффициента А х за счет члена, содержащего cos ф,
может быть исключено выбором механизмов, у которых а = 6
(например, параллелограммный механизм, непараллелограмкшый,
кривошипйо-кулисн парой, планетарный
Чалмерса и др_). -В-то- же-время переменность функции ф' неиз-
бежно ведет к изменению коэффициента А х. Для непараллелограм-
много механизма и кривошипно-кулисного с поступательной парой
коэффициент Ах равен Лх = 7Х + п/вф'2. Изменение коэффи-
циента Ах этих механизмов, приводящее к появлению неравномер-
ности вращения двигателя за счет импульсного механизма, обус-
ловлено только переменностью функции ф'.
Указанная неравномерность двигателя достигает величин,
в несколько раз превышающих собственную неравномерность
вращения. Например, для опытного образца инерционного транс-
форматора автомобиля с двигателем мощностью 74 кВт, имеющего
параметры Jx = 1,5 кг-м2, n.JB = 0,19 кг-м2 и функцию ф',
изменяющуюся в промежутке 0,5 ф' sg 1,5 (что соответствует
оптимальному по нагрузке на подшипник В случаю кривошипно-
кулисного механизма с поступательной парой), колебания а,
найденные с помощью уравнения
Аха = const, (3.5)
составляли
-^=1,12. (3.6)
amin
При переходе к неравномерности р I р = atnax ~ amln ) получим
\ аСр
р?«0,12. Для существующих двигателей внутреннего сгорания
р = 0,02-4-0,03.
Для сравнения укажем; что параллелограммный импульсный
механизм и механизм Чалмерса, имеющие А х = const, не создают
неравномерность вращения двигателя на режиме неподвижного
реактора.
• Неравномерность вращения. ведущего маховика на режиме
заторможенного реактора, обусловленную действием импульсных
механизмов с переменной функцией ф', назовем дополнительной.
Дополнительная неравномерность не связана с природой транс-
форматора, так" как некоторые механизмы (параллелограммный,
Чалмерса) не имеют ее. Вместе с тем инерционный, трансформатор
с любым импульсным механизмом на режиме трансформации
момента создает определенную неравномерность вращения веду-
щего маховика вследствие импульсной природы. Эту неравномер-
ность можно назвать естественной. Расчеты показывают, . что
дополнительная ...неравномерность в несколько раз превышает
естественную. Например, для опытного образца трансформатора
автомобиля (двигатель 74 кВт) с параллелограммным импульсным
54
механизмом наибольшее значение р на режиме трансформации
момента составляло 0,05 (по сравнению с непараллелограммным
механизмом неравномерность снижается в 2,4 раза).
Нагрузки в импульсном механизме. Вторым отрицательным
следствием неравномерного вращения грузовых звеньев импульс-
ных механизмов с переменной функцией ф' являются большие
пиковые нагрузки на звенья механизма, превышающие в несколько
раз средний уровень. Проиллюстрируем это на примере криво-
шипно-кулисного импульсного механизма с поступательной па-
рой. Для получения наглядных зависимостей вначале проведем
выкладки при а — const, а затем уточним результаты е учетом
неравномерности вращения ведущего маховика.
Наиболее напряженным для большинства импульсных меха-
низмов является место контакта грузовых звеньев с реактором.
Для кривошипно-кулисного механизма это подшипник В, "с по-
мощью которого грузовое звено шарнирно крепится на реакторе.
Модуль центробежной силы грузового звена на режиме затор -
моженного реактора определяется выражением Р — mhq*. Мак-
симальное значение центробежной силы получим, используя
первое из равенств (3.3)
Pmax = rn/ia2(l +-^-)2. (3.7)
Средний вращающий момент от инерционных сил одного гру-
зового звена за положительную часть цикла на заторможен-
ном реакторе равен Мср = [4]. Используя это равен-
ство, ’выражение (3.7) преобразуем к виду
D ___ ЗТЛ4ср (в -р Cj)2 /9 Q\
'max----- \°-°)
При условии постоянства среднего момента и габаритов тран-
сформатора (е + = R = const) минимальное значение Ршах,
найденное исследованием выражения Ртах = f (е) (3.8) на экстре-
мумы, равно
R е±
е = ~х-, или е = -к- ♦
Для непараллелограммного импульсного механизма наимень-
шее значение максимальной за цикл центррбежной силы дости-
гается при е = -у- [32]. Можно и для других импульсных ме-
ханизмов определить соотношения между параметрами, при ко-
торых значение максимальной за цикл центробежной силы оказы-
вается наименьшим.
Согласно первой из формул (3.3) кривошипно-кулисный меха-
низм с поступательной парой при оптимальном е = -±-е1 имеет
максимальную за цикл угловую скорость грузовых звеньев,
55
в 1,5 раза превышающую угловую скорость а двигателя. Следо-
вательно, наименьшее значение максимальной за цикл центро-
бежной силы в 2,25 раза превышает среднее значение центро-
бежной силы. По табл. 1 можно убедиться, что при тц ='0 (т] т =
— /_ODB) в верхнем положении грузового звена реакция под-
шипника В будет равна центробежной силе (при фгааХ угловое
ускорение грузового звена равно нулю).
Следовательно, нагрузка на подшипник В грузового звена даже
в оптимальном- случае превышает в 2,25 раза среднее значение.
Аналогичное положение наблюдается и у других импульсных
механизмов, имеющих переменную функцию ф'. Для непарал-
лелограммного механизма это показано в работе [32].
Колебания нагрузки на подшипник будут еще больше, если
оптимум по каким-либо соображениям не удается реализовать.
Например, в кулачковом механизме вследствие возможности
отрыва грузового звена от кулачка конструкторам удавалось
использовать небольшие значения максимального плеча «j —
—- Ьг. В опытном образце трансформатора для трактора Т-130
(при внутреннем диаметре корпуса трансформатора 590 мм)
— Ьг = 30 мм.
Уточним полученные результаты по нагрузке на подшип-
ник В кривошипно-кулисного механизма с учетом неравномерно-
сти вращения ведущего маховика. Как видно из уравнения (3.5),
при максимальном значении ф' угловая скорость а ведущего
маховика минимальна. В связи с этим максимальная центробеж-
ная сила несколько снизится. Для оценки воспользуемся вели-
чиной (3.6) отношения угловых скоростей а, соответствующей
реальному опытному образцу. Полагая асР = а”ах п или
®min = 2«ср — «шах. и используя (3.6), получим amln = 2аср —
— 1,12ат1п. Отсюда ат1п = 0,95аср. С учетом найденного значения
amln центробежная сила в положении, соответствующем макси-
мальному значению ф', превышает среднее значение^ 2 раза,
т. е. перегрузка по-прежнему значительна.
Здесь не приведено строгое нахождение экстремумов нагрузки
на” подшипник4В кривошипно-кулисного механизма при учете
неравномерности вращения ведущего маховика и тангенциаль-
ных сил инерции грузового звена. Если максимальное значение
реакции шарнира В несколько смещено от точки, соответствующей
верхнему положению грузового звена, то оно заведомо больше
найденного уровня.
Таким образом, импульсным механизмам с переменной функ-
цией ф' свойственна перегрузка места контакта грузовых звеньев
с реактором в несколько раз по сравнению со средним уровнем.
Это существенный ^недостаток, затрудняющий создание долго-
вечных механизмов.
56
Для сравнения укажем, например; механизмы Чалмерса и
параллелограммный (имеющие ф' = const), у которых нагрузка
(Смеете контакта грузовых звеньев с реактором на режиме затор-
моженного реактора при а = const имеет постоянное значение.
- Неравномерность вращения грузовых звеньев обусловливает
колебания углового ускорения <р (отсутствующие, например, у па-
раллелограммного механизма и механизма Чалмерса). Это также
приводит к увеличению нагрузок в деталях импульсного механи-
зма, в частности в деталях, соединяющих грузовые звенья с ве-
дущим маховиком.
Нагрузки на механизмы свободного хода. Третьим отрицатель-
ным следствием неравномерного вращения грузовых звеньев им-
пульсного механизма с переменной функцией ф' является увели-
чение максимальных нагрузок на МСХ. В отличие, например,
от параллелограммного импульсного механизма и механизма
Чалмерса, у которых момент от инерционных сил на заторможен-
ном реакторе протекает по синусоидальному закону, механизмам
"с переменной функцией ф' свойственны кривые протекания мо-
мента с резко выраженными пиками.
Для исследования момента на заторможенном реакторе вос-
пользуемся вторым дифференциальным уравнением (2.16). При
Р = 0 и а — const разность Л12 — М 2 в правой части уравнения
будет определять момент, который должен быть приложен к реак-
тору, чтобы удерживать его в неподвижном состоянии. Этот
момент по модулю равен моменту, действующему со стороны гру-
зовых звеньев обобщенного импульсного механизма на реактор
и воспринимаемому МСХ
- . А1р = -(М2-Л41) = (Л6-Л6)а2?
или
Мр — {ntneMp' sin ф — ---ф') ф"п/в —
— птМ[ф" cos ф + ---ф') ф' sin ф Ji а2. (3.9)
Момент Мр протекает по синусоидальному закону только при
ф' = const. В случае переменной функции ф' синусоидальный
закон нарушается, и максимальный момент, воспринимаемый
МСХ, возрастает.
Проиллюстрируем последнее утверждение на примере криво-
шипно-кулисного механизма с поступательной парой. Формула
(3.9) для рассматриваемого механизма преобразуется к виду.
Мр^М» [-^-(ф' — 1)Ф" — ф"СО8ф + ф'281пф], (3.10)
где Мр = nmeha2-, функция ф' дана при описании импульсных
механизмов.
57
Результаты расчета по уравнению (3.10) для параметров '
— = 0,8, -Ц-=1
е± ’ meh
приведены на рис. 17. Величина Мр равна максимальному мо-
менту, действующему на заторможенный реактор параллелограм-
много импульсного механизма. Отношение Мр/Мр показывает,
во сколько раз момент на реакторе для исследуемого импульс-
Рис. 17. График относитель-
ного момента, на затормо-
женном реакторе кривошип-
но-кулисного механизма с по-
ступательной парой
ного механизма больше момента Мр. Следует отметить малое
влияние отношения JB!meh на пиковое, значение М.Р1МР. Послед-
нее в основном определяется слагаемым ф'2 sin ф.
Из рис. 17 видно, что пиковые значения момента на реакторе,
воспринимаемые МСХ, значительны.
Аналогичные результаты получены при расчетах других
импульсных механизмов с переменной функцией ф'.
2. Анализ импульсных механизмов на режиме
трансформации момента
Предыдущие результаты получены на режиме заторможенного
реактора. Упрощение уравнений позволило построить наглядные
зависимости. Обратимся к режиму трансформации момента.
Сохранение основного различия между импульсными механиз-
мами на режиме трансформации момента. Используя уравнения
(2.6) и (2.7), найдем выражение для угла поворота грузового звена
обобщенной модели на режиме трансформации момента
<р = -га + т’Р + '|’(а“р)- (з.н)
Дифференцируя (3.11), получим
/ а , , Д • , ( ь .Да (3.12)
<Р = ) а + \~ ~ ) ₽-
58-
Первое слагаемое в правой части равенства (3.12) определяет
угловую скорость грузового звена при заторможенном реакторе,
второй добавляется при движении реактора.
Анализ выражения (3.12) показывает, что по крайней мере
на ‘малых передаточных числах режима трансформации момента
(i = 0—г-0,15), где угловая скорость (3 реактора мала по сравне-
нию с а, закон изменения угловой скорости <р грузового звена
близок к закону на режиме заторможенного реактора (интервалы
изменения параметров а, Ь, как правило, 0 — е, ф' = 0,5-4-2). Эта
близость имеет место во всем диапазоне передаточных чисел на
участке накопления потенциальной энергии корпусными упру-
гими элементами, где угловая скорость § также мала. Следова-
тельно, неравномерность вращения грузовых звеньев, являющаяся
причиной отрицательных следствий при заторможенном реакторе,
-сохраняется на режиме трансформации момента. В свою очередь,
неравномерность вращения грузовых звеньев приводит примерно
к тем же максимальным значениям инерционных сил, что и на
режиме заторможенного реактора..
Проведем выкладки, обосновывающие последнее предложение.
Записывая ускорение центра масс S грузового звена в виде
as = ав ахв -]- cis в (3.13)
главный вектор сил инерции представим выражением
_ _ 4 _
Р = — mas=^Pi, (3.14)
z=i
где Pi = —тав, Ръ ~ —глав, Рз — —mdse, Ра — — mdse'
Пики нагрузок на режиме заторможенного реактора соответ-
ствовали положениям импульсных механизмов с переменной функ-
цией ф', в которых угловая скорость грузового звена достигала
максимального значения. Поэтому на режиме трансформации
момента рассмотрим положение обобщенной модели импульсного
.механизма, в котором <р максимально. В рассматриваемом по-
ложении <р — 0, и главный момент сил инерции грузового звена,
а также составляющая Р4 равны нулю. Модули ускорений арв
и ав определяются выражениями
Osb = hq? = h [ + ф') а -ф — ф') £J2,
4 = Л = 2_(аа+W. (3.15)
ее
Как следует из равенств (3-15), модули составляющих о|в,
(Рв ускорения центра масс S грузового звена и составляющих Plt
Р$ главного вектора при малых угловых скоростях р будут близки
69
к соответствующим величинам на режиме заторможенного реак-
тора.
Модуль составляющей ав равен
4=|аа+ $1- - (3.16)
Для оценки ускорений а, р воспользуемся, например, систе-
мой дифференциальных уравнений (2.16), описывающих движение
на участках разгона и торможения реактора. Разрешая первые
два уравнения относительно старших производных, получим
= -±- Из [Мд-Л (а - Р)2 - Лвра] -
- Л2[М2 — Мг - А5 (а- Р)2 — Л6а2]},
Р = 4- Их (М2 - Мг - Л5 (а - р)2 + Ла2] ~
^2
— Л2 [Л1Д — Л4(а — р)2 —Лер2]}.
(3.17)
Величина Д2 = Л Из — Л2 согласно структуре коэффициентов
(Л 2 Лх, Л2 < Л3) может быть принята равной Д2 = ЛХЛ3.
Из слагаемых -^-(М2 — Л4Х), -Л-(М2 _ д^), _Л_ Л1Д
правой части системы (3.17) наибольшей представляется величина
Л1Д/ЛХ. Моменты средних по мощности двигателей (до 100—
200 кВт) обычно не превышают 1000 Н-м, и величина MR/At
имеет порядок 103 1/са. Последняя мала по сравнению с а2, со-
ставляющей (20-Г-200). 103 1/са. Из оставшихся слагаемых в пра-
вой части системы (3.17) наибольшие имеют порядок -^-а2.
Так как отношение Л6/Л3 (согласно структуре коэффициентов
дифференциальных уравнений) в несколько раз меньше единицы,
то и модули а, р имеют порядок в несколько раз меньше аа. Соот-
ветственно ав, как правило, не превышает наибольший из модулей
<?sb, <&, и определяющими оказываются Рг и Р3. Отметим, что
модуль углового ускорения, а оказывается значительно меньше
модуля углового ускорения р, так как в правой части первого
из уравнений (3.17) наибольшим оказывается член -^-а2, а вто-
Л ’ 1
рого----/-®2, и согласно структуре коэффициентов дифферен-
та
циальных уравнений Л4/Лх меньше на порядок, чем А6/А3.
Следовательно, максимальные значения сил инерции на ре-
жиме трансформации момента при скоростях р, малых по сравне-
нию с а,"близки к соответствующим значениям на режиме непо-
движного реактора. Наиболее опасное положение, в котором на-
60
блюдаются пики нагрузок, у большинства импульсных меха-
низмов с переменной функцией ф' расположено в окрестности
ф = 0.
Таким образом, отрицательные следствия неравномерного
вращения грузовых звеньев, приводящие к большим пиковым на-
грузкам на импульсный механизм и МСХ, а также дополнительной
неравномерности двигателя, сохраняются на режиме трансфор-
мации момента.
Проиллюстрируем эти общие положения на примере криво-
шипно-кулисного механизма с поступательной парой.
Нагрузки в импульсном механизме. Рассмотрим верхнее вы-
тянутое положение кривошипно-кулисного импульсного меха-
низма с поступательной парой (ф — 0 в табл. 1). Силы инерции
представим в виде (3.14). Реакцию шарнира В разложим на две
составляющие: Rlt направленную по звену ОВ к центру О, и Т?2,
перпендикулярную к звену ОВ. Проектируя уравновешенную
согласно принципу Даламбера систему сил инерций и реакций
связей на направление ОВ, получим
Я1 = Pi + Рз = т (ав 4- anSB), (3.18)
где ав = е$2, as в = hq.
С учетом значений параметров а и b кривошипно-кулисного
механизма (а = 0, b = е) выражение (3.12) для угловой скорости <р
грузового звена запишется в виде
Ф = ф'а -ф (1 — ф') 0. (3.19)
Рассмотрим оптимальный вариант механизма (е = ех/2), ко-
торому соответствуют минимальные нагрузки на подшипник В
грузового звена. При этом варианте ф' изменяется в пределах
0,5 < ф' с 1,5. Если рассматривать передаточные числа, в ко-
торых р не превышает 0,3а (в промежутке 0 < i < 0,3), то сог-
ласно (3.19) наибольшее значение модуля второго слагаемого
не превышает 10% от наибольшего значения первого. Но первое
слагаемое определяло нагрузку на шарнир. В при заторможенном
реакторе. При учете второго слагаемого ав в (3.18) и второй со-
ставляющей R 2 модуль реакции шарнира В на различных переда-
точных числах может быть даже- больше модуля реакции в случае
заторможенного реактора.
Как видно, значительные перегрузки в месте конт.акта грузо-
вых звеньев с реактором по сравнению со средними значениями
имеют место и на режиме трансформации момента.
Для сравнения укажем параллелограммный импульсный ме-
ханизм, у которого нагрузка в месте контакта грузовых звеньев
с реактором не превышает на любых передаточных числах по-
стоянного модуля центробежной силы при заторможенном реак-
торе,
61
3. Предпочтительное семейство импульсных механизмов
и его свойства
Согласно анализу в импульсных механизмах с переменной
функцией ф' из-за большой неравномерности вращения грузовых
звеньев наблюдается значительное превышение пиковых нагрузок
над средними на детали импульсных механизмов и МСХ, а также
большая дополнительная неравномерность вращения двигателя.
Максимальные нагрузки превышают средние в 2—3 раза, неравно-
мерность вращения р двигателя выше в 3—4 раза. В случае не-,
оптимального выбора параметров указанные цифры возрастают.
Все это вместе взятое приводит к значительной напряженности
силовой цепи трансформатора.
Важно отметить, что в классе механизмов с переменной функ-
цией ф' указанные недостатки неустранимы. Можно улучшить'
один из трех факторов (снизить нагрузки на МСХ, нагрузки на
импульсный механизм, неравномерность вращения двигателя),
но при этом обязательно ухудшится другой. Действительно, вы-
кладки были проведены для оптимального случая, когда пиковое
значение реакции в наиболее нагруженном соединении импульс-
ного механизма оказывается наименьшим. Если снизить плечо
действия инерционных сил по сравнению с оптимальным, то
дополнительные нагрузки на МСХ и влияние на двигатель умень-
шатся в результате снижения колебаний ф', но при этом воз-
растут средние и максимальные нагрузки в импульсном механизме.
.Увеличение плеча действия инерционных сил по сравнению с оп-
тимальным нецелесообразно из-за ухудшения всех трех факторов.
С другой стороны, были указаны импульсные механизмы
с постоянной функцией ф', которые не имеют отмеченных недо-
статков и обеспечивают протекание процессов в трансформаторе
с меньшими нагрузками и неравномерностью двигателя. Следо-
вательно, недостатки импульсных механизмов с переменной функ-
цией ф' не связаны с природой инерционного трансформатора
и обусловлены свойствами этого семейства механизмов.
Наконец, импульсные механизмы с переменной функцией ф'
не имеют каких-либо решающих преимуществ по сравнению
с механизмами, имеющими постоянную функцию ф'. Следует
поэтому признать неперспективность применения импульсных’,
механизмов с переменной функцией ф' и выделить механизмы _
сГ постоянной функцией ф'" как семейство предпочтительных.,
’Семейство предпочтительных механизмов реализует широкий
диапазон параметров а, b и функций ф, из которого при конструи-
ровании можно выбрать механизмы с нужными свойствами.
Следует заметить, что импульсные механизмы, не имеющие
на грузовом звене характерной точки В и не описываемые пред-
лагаемой обобщенной схемой (например, кулачковый механизм
с поступательной парой), имеют недостатки механизмов с пере-
менной функцией ф'. При использовании выражения (3.13) в ка-
62
честве точки В у таких механизмов выбирают произвольную то-
чку грузового звена, имеющую переменную по модулю скорость,
и модули всех составляющих главного вектора сил инерции гру-
зового звена не могут быть постоянными на режиме заторможен-
ного реактора, что свойственно предпочтительному семейству.
В_связи с неперспективностью импульсных механизмов с пере-
менной функцией ф' исследования по ним представляют только
теоретический интерес, и поэтому далее рассмотрено в основном
предпочтительное семейство импульсных механизмов. В некото-
рых случаях результаты обобщаются на семейство импульсных
механизмов с переменной функцией ф'. ,
Импульсные механизмы предпочтительного семейства могут
быть названы’гармоническими механизмами, так как они имеют
гармонический закон протекания вращающего момента на за-
торможенном реакторе при а = const.
Вйдёление предпочтительного семейства началось с параллело-
граммного импульсного механизма, сравнение которого с непа-
раллелограммным механизмом наглядно показало преимущества
равномерного вращения грузовых звеньев. Разработка обобщен-
ной схемы позволила выделить два семейства механизмов.
Выявление свойств и выбор наиболее приемлемых импульсных
механизмов проведем на режиме заторможенного реактора. В по-
следующих главах будут подтверждены установленные свойства
и сформулированы новые, что позволит дать обоснованные реко-
мендации для выбора импульсного механизма при конструиро-
вании.
Неравномерность вращения ведущего маховика. Восполь-
зуемся интегралом энергии (3.4) Л1а2=сопз1^ . Обозначая
постоянную для предпочтительного семейства производную ф'
через q (ф' — q), коэффициент запишем в виде
Лх — Л + пта2 + (“f- + 7) п^в + Zntnah. + g) cos ф. (3.20)
Ранее отмечено, что изменение коэффициента Лх приводит
к изменению угловой скорости а ведущего маховика. Для пред-
почтительных механизмов переменным в Лх оказывается только
последнее .-слагаемое. Нетрудно видеть, что чем меньше модуль
параметра а, тем меньше при прочих равных условиях изменение
Лх и неравномерность вращения ведущего маховика, обусловлен-
ная действием импульсного механизма. При а = 0 неравномер-
ность вращения ведущего маховика отсутствует. Проверка всех
механизмов предпочтительного семейства показывает, что ale +
+ q не обращается в ноль ни у одного механизма. Например, при-
равнивание модулей ale и q обобщенного планетарного механизма
приводит к уравнению гх (гх + г2) = 0, и обращение ale + q
в ноль возможно только в случаях вырождения механизма гх ф-
+ гг = 0 или гх = 0. Таким образом, а является параметром,
63
определяющим неравномерность вращения ведущего маховика,
создаваемую импульсным механизмом.’ Параметр q влияет в тех
схемах, где а =£ 0. '
Если обратиться к схеме на рис. 15, где показаны положения
импульсных механизмов в координатах а, Ь, то общее свойство
можно сформулировать так: чем дальше от точки 1 в ту или иную
сторону расположен импульсный механизм, тем большую нерав-
номерность-ведущего маховика он создает.
После выявления с помощью аналитической модели общей
картины рассмотрим полученные результаты применительно к кон-
кретным схемам импульсных механизмов. Параллелограммный
импульсный механизм, кривошипно-кулисный механизм с посту-
пательной парой в предельном случае и планетарный Чалмерса,
у которых а = 0, не создают неравномерность вращения ведущего
маховика. Они находятся в точке 1, являющейся полюсом. Ме-
ханизм Левина занимает промежуточные положения между
точками 1 и 5. Неравномерность ведущего маховика с импульсным
механизмом Левина тем больше, чем ближе механизм распола-
гается к точке 5. Точке 5 соответствует механизм Хоббса, создаю-
щий большую неравномерность ведущего маховика, чем механи-
змы Левина. Обобщенные планетарные механизмы располагают-
ся как внутри отрезка /—5, так и за его пределами. Варьируя
'параметры этих механизмов, можно получить разные значения
неравномерности ведущего маховика (от неравномерностей! пре-
вышающих уровень механизма Хоббса, до -неравномерности,
близкой к параллелограммному импульсному механизму).
' Запишем"" выраже'нйе момента от инерционных сил* грузовых
звеньев, действующего на неподвижный реактор, в случае предпо-
чтительного семейства импульсных механизмов. Полагая в (3.9)
ф' = q, ф" — 0, получим
/Ир = nmehqa2^! —----------^81пф. (3.21)
Средний момент за положительную часть цикла (0 < ф с л)
найдется интегрированием выражения (3.21) в пределах от 0 до л
л
Л4рп = -i- ntnehqa? £ 1 —-----] J sin =
J о
= Qfiinmehqa? £ 1---— q^ J . (3.22)
Если не учитывается потенциальная энергия упругих МСХ,
то среднее за цикл (0 < ф < 2л) значение момента от инерцион-
ных сил грузовых звеньев, действующего на ведомый маховик,
в 2 раза меньше
Мв = 4" [ 1 - "Г -----4 ] ' (3’23)
64
Используя полученные зависимости, проведем оценку нерай-
номерности вращения ведущего маховика, вызываемой действием
импульсного механизма Хоббса. Средний момент (3.23) для меха-
низма Хоббса, у которого а — е, b = О, равен
Л4В = 0,32nmehqa2. (3.24)
Коэффициент At перепишется в виде
Ar = Jx + пте2 4- (1 + q)2 nJB 4- 2nmeh (1 4- q) cos ф. (3.25)
При расчете примем, максимальную мощность двигателя N —
= 100 кВт, угловую скорость двигателя, соответствующую мак-
симальной мощности, <в = 300 рад/с, максимальный коэффициент
трансформации момента Кт — 5. Момент инерции ведущего
маховика инерционного трансформатора с такими параметрами
примерно равен Jx = 1,5 кг-м2.
_ NKT 100-75-10-5
По заданным параметрам вычислим Л4В = —--------------------
СО oUv
= 1250 Н-м.
По Мв найдем nmehq = ~о 324^000 — 0,043 кг-м2.
Параметры q, hu момент инерции nJB согласно практике кон-
струирования опытных образцов примем равными q = 3, /i = 0,le,
nJB = nmeh. t
Окончательно имеем
M = 100 кВт, <o = 300 рад/с, /<т = 5, <7 = 3,
h — 0,le, Jx=l,5 кг-м2, nmehq — 0,043 кг-м2,
2nmeh(l 4~ q) = 0,11 кг-м2, (3.26)
(1 4- q)2 nJB — 0,22 кг-м2, nme2 = 0,14 кг-м2, Л4в= 1250 Н-м.
Используя интеграл (3.5) и принятые параметры, получим
ашах _ I / ^icos ф=1 _ । 06
«mln г ^lcosij>=—1
Отсюда неравномерность р = 0,06. Как видно, неравномер-
ность вращения ведущего маховика, обусловленная действием
механизма Хоббса, в 2—3 раза больше, чем у двигателей внутрен-
него сгорания.
Более рациональным выбором параметров снизить неравно-
мерность р не удается. Действительно, представим коэффициент
при cos ф в выражении (3.25) в виде
2nmeh (1 4- q) — 2nmeh 4- 2nmehq. (3.27)
Как видно из (3.24), произведение nmehq при данном двигателе
и заданном Л4В будет постоянным. Следовательно, второе слагае-
мое в (3.27) остается неизменным. Первое слагаемое может быть
уменьшено выбором большего q. Но q = 3 является достаточно
3 А. И. Леонов 65
высоким конструктивно и близким к оптимальному в данном
случае (по расчету при q = 1 р — 0,09, при q = 2 р = 0,07,
при q — 4 р = 0,06). Путь увеличения J г мало приемлем, а из-
менение пте2 и (1 + 7)2 nJB не может существенно повлиять
на неравномерность (в данных расчетах nJB принято завышенным
и не учитывалась динамика его снижения с ростом q).
Нагрузки на импульсный механизм. Используя обобщенную
схему, установим закономерности изменения нагрузок в предпоч-
тительном семействе в зависимости от параметров a, b, q. Восполь-
зуемся выражением (3.14) главного вектора сил инерции грузового
звена. Модули составляющих для предпочтительного семейства
на режиме заторможенного реактора имеют вид
Рг = т а2, Р2 = т | аа |, P3 = mh + q^* а2,
= + (3.28)
При а — е, соответствующем механизму Хоббса, модули
Pt (i = 1, ..., 4) имеют при прочих равных параметрах наиболь-
шие значения по сравнению с импульсными механизмами Чал-
мерса, Левина, параллелограммным, предельным кривошипно-
кулисным с поступательной парой и обобщенными планетарными,
расположенными на отрезке 1—5 (см. рис. 15). Согласно оценке,
приведенной при исследовании системы дифференциальных урав-
нений (3.17), определяющими будут и Р3 (главный момент сил
инерции Мя — — также мал по модулю).
Поскольку угол ф между силами Рг и Р3 постоянно растет,
то наиболее нагруженное соединение импульсного механизма
(шарнир подшипника В) оказывается под воздействием перемен-
ной нагрузки. Колебания последней существенны и достигают
максимума, когда Pt и Р3 совпадают, и минимума, когда векторы
Рг и Р3 противоположны.
Если а устремить к нулю, то а —> 0 вследствие снижения не-
равномерности вращения ведущего маховика согласно преды-
дущему свойству. Соответственно Р{ (i = 1, 2, 4) —» 0, Ms —> 0,
Р3 уменьшается, и переменность нагрузок исчезает.
При а — 0 действует только одна постоянная по модулю сила
Р3 = tnhq2a2. Нагрузки на детали импульсного механизма по-
стоянны.
Таким образом, параметр а обобщенной схемы определяет
нагрузки в импульсном механизме. Общее свойство сводится к сни-
жению уровня и колебаний нагрузок на детали импульсного ме-
ханизма при перемещении к полюсу 1 (см. рис. 15).
Нагрузки на МСХ. Согласно выражению (3.21) закон проте-
кания момента, действующего на МСХ, имеет гармонический ха-
66
рактер и одинаков для всех импульсных механизмов предпочти-
тельного семейства.
К выбору импульсных механизмов. По двум изученным при-
знакам (неравномерность вращения ведущего маховика и нагрузки
на импульсный механизм) можно дать рекомендации по выбору
импульсных механизмов при конструировании. Худшие показа-
тели имеет импульсный механизм Хоббса, создающий
неравномерность вращения ведущего маховика, в 3—4 раза пре-
вышающую неравномерность вращения двигателей внутреннего
сгорания, и имеющий колебания нагрузок на подшипники сател-
литов, в 2—3 раза превышающие средний уровень. Вследствие
этого механизм Хоббса не является перспективным для примене-
ния в инерционных трансформаторах. Не перспективны также
обобщенные планетарные механизмы (см. рис. 15), имеющие от-
рицательные Ь. Лучшими являются параллелограммный механизм
й планетарный Чалмерса, которые на рассмотренном режиме не
создают неравномерность вращения ведущего маховика и имеют
постоянную щагрузку на подшипники грузовых звеньев. Здесь
не отмечен предельный случай кривошипно-кулисного механизма
с поступательной парой, который относится к последней группе
механизмов, но является частным случаем планетарного меха-
низма Чалмерса по параметрам a, b, q, уступая, ему по компакт-
ности. Промежуточное положение между механизмом Хоббса
и параллелограммным занимают обобщенный планетарный и
механизм Левина, которым в тем меньшей степени свойственны
недостатки механизма Хоббса, чем выше они располагаются на
отрезке 1—5 (см. рис. 15).
Далее показано, что импульсный механизм Чалмерса не при-
годен к использованию в инерционных трансформаторах в общем
случае, так как реализует слишком узкий диапазон малых переда-
точных чисел и не выходит на режим прямой передачи. В связи
с этим интерес представляют обобщенный планетарный механизм
и механизм Левина, которые могут приближаться к параллело-
граммному по неравномерности вращения ведущего маховика и
нагрузкам на импульсный механизм, в то же время превосходя
его по компактности.
Согласно полученным результатам, обобщенную схему им-
пульсного механизма можно трактовать как аналитическую мо-
дель, которая дает непрерывное изменение свойств с изменением
параметров a, b, q. Конкретные конструктивные схемы импульс-
ных механизмов занимают вполне определенные положения в этой
непрерывной модели и имеют свойства, которые можно предсказать
заранее на основе общего исследования. Изобретательская деятель-
ность при наличии общей аналитической модели с известными свой-
ствами осуществляется более целенаправлецно. Следовательно,
обобщенная схема — необходимый инструмент при создании конст-
рукций трансформаторов, позволяющий конструктору уже в начале
разработки выбрать импульсный механизм с заданными свойствами
3* 67
Глава IV
ИНТЕГРИРОВАНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
ДВИЖЕНИЯ ОБОБЩЕННОЙ МОДЕЛИ
В СЛУЧАЕ ПЕРЕМЕННОСТИ ИХ СТРУКТУРЫ
Переменность структуры инерционного трансформатора имеет
место на режиме трансформации момента и обусловливает измене-
ние дифференциальных уравнений движения от участка к участку.
Законы движения звеньев обобщенной модели находятся на всех
участках цикла и в последующих главах служат основой для
выбора оптимальных параметров и исследования различных во-
просов динамики. Основным методом при нахождении законов
движения звеньев является метод малого параметра, примененный
автором при исследовании параллелограммного импульсного ме-
ханизма и в последующих работах [33, 34].
1. Участок накопления потенциальной энергии
и отдачи ее при разгоне реактора
Система дифференциальных уравнений (2.15), описывающая
движение трансформатора при накоплении потенциальной энер-
гии и отдаче ее, распадается на систему первых двух уравнений и
независимое третье уравнение.
Интеграл энергии. Первые два уравнения системы (2.15)
допускают интеграл энергии Т + П — const, если силы действия
двигателя и силы трения в выходном МСХ можно представить как
потенциальные. Полагая, например, Л4Д и ТИ2 постоянными, по-
лучим
4i24-24ap-H4 + W +
+ t/p*- 2 [Мд (а- а10) 4- М2 (6 - 610 - ₽)] = Elt
где £i = ЛцаЬ — значение коэффициента Ль вычисленное при
начальных условиях участка накопления и отдачи энергии
t --= 0, а = а^, Р = 0, 6 = 610, а = а10,
Р=0, 6 = U (4.1)
Построение решения. Решение системы первых двух уравне-
ний (2.15) при начальных условиях (4.1) будем искать по методу
малого параметра [34].
68
В коэффициентах Дх, Л2, А3 выделим переменные части
A^Bi + bi (i= 1, 2, 3), (4.2)
где Blt bi — постоянные и переменные составляющие; для пред-
почтительного семейства
&х = 2nmah 4- q\ cosф,
< г Г 2аЬ
U 2 — ПГПП I 1 &
ф q (b — а) 1 cos ф, b3 == 2nmbh (—-q\ cos ф.
С учетом (4.2) первые два уравнения системы (2.15) примут вид
(Вх Ьх) а + (В2 + Ь2) р + А (а ~Р)24~
+ Лбр2=Л4Д).
Т д .. (4.3)
(В2 + Ь2) а ф- (В3 4- J3 />3) р
4-А (а - Р)2 - = м2 - i/p.
Введем параметр непосредственно в уравнениях (4.3). Со-
гласно структуре коэффициентов дифференциальных уравнений
&х, b3, b3, Ait А Ав малы по сравнению с Вх, В3, так как послед-
ние кроме параметров грузовых звеньев включают Jx и J2. Мо-
мент Л4Д мал, например, по сравнению со слагаемым Я6а2, имею-
щим порядок момента (3.21) на заторможенном реакторе от дей-
ствия инерционных сил грузовых звеньев. Тем более малым оказы-
вается Л42.
В связи с высказанными сорбражениями представляется воз-
можным ввести параметр ц следующим образом
Вха 4- В2р 4- р [М 4- Ь$ 4- А (« — Р)2 4- API = >Мд,
4" (^8 + А) Р + И 1^2а 4" М 4"
4- А (а—Р)2 - Аа2] = нМ2—(/р.
(4.4)
Уравнения (4.3) получаются из (4.4), если в последних поло-
жить р, = 1. Использование в (4.4) одного параметра обусловлено
стремлением к упрощению выкладок.
Введение цараметра является ответственным моментом ис-
следования. Можно сослаться на монографию [14], в которой
обсуждаются эти вопросы. Сказать заведомо, какой способ введе-
ния параметра дает наилучшие результаты (и дает ли вообще),
невозможно. Целесообразность того или иного способа определя-
ется оценкой полученного приближенного решения и возмож-
ностью использования его в дальнейших исследованиях.
Решение системы (4.4) представим в виде рядов по параметру
a = ao(04-Ri(0 + p4(04-•••.)
P = Po(04-hPi(0 + h2P?W+--- i { '
§9
Подставляя ряды (4.5) в уравнения (4.4) и полагая р = О,
получим порождающую систему уравнений
Biao + ВоРо — 0» ] „
.. .. f (4.6)
^аао -|- (В3 -j- J3) ро — t/p0. J
Так как определитель системы (4.6) Л = Bi (Вз + А) — Вг—
= Ji ^2 + + nmb2 + ----q\ nJ в J + (J г 4~ Jз) [ nmc? + —|-
\ a -i
+ q\ nJB + ntne2qmJB отличен от нуля, она разрешается отно-
сительно старших производных единственным образом
т* В2и о к BjU о
а0-----д~ Ро> Ро — д- Ро-
Решение последних уравнений при начальных условиях (4.1)
имеет вид
а0 = а10, а0 = а10 +
Рв = О, 0о = О.
(4.7)
Порождающее решение (4.7) позволяет достаточно просто
вычислить последующие приближения и в то же время оказы-
вается близким к точному решению по обобщенной координате а.
Приравнивая в уравнениях (4.4) коэффициенты при р, полу-
чим систему дифференциальных уравнений для_ах, рх
Bi«i + В2Р1 + Л^ао = М д, 1
г (4.8)
Вг<Х1 (Вз + /3) Pi + (Л50 — Лео) = Af2 t/Pi, J
где Л40, Л50, Лв0 — первые члены разложений в ряды коэффи-
циентов Л4, Л5, Л6 в окрестности порождающего решения, равные
Л40 == — ntnahq + qj sin q (а0 - р0),
Ai0 = nmbhq -------q^ sin q (a0 — p0),
Лв0 = nmehq sin q (a0 — |J0).
(4.9)
При записи коэффициентов (4.9) использовано разложение simp
в степенной ряд в окрестности порождающего решения
sin ф = sin 7 [(«о—Ро) + И (ai — ₽i) + • • ’ ] = sin q (a0 — 0О) -|-
+cos<? (ц ~ [и (ах - РО+и2 (^ - Р4 + • ] + ••• (4.10)
70-
Разрешая систему (4.8) относительно старших производных,
находим
ai = {(Вз 4“ А) (Л4д — ^4оао) —
— --(Д50---^4бо)ао]}>
1 .о (4.П)
Р1 = “д' [^2 — — Ибо — ^4бо) ао] —
— В2 (Л4Д — /ко&о)} •
Второе из уравнений (4.11) преобразуем к виду
₽1 + ^i = Dsin(eZ + 71)-A^ +Ам2. (4.12)
Однородное уравнение + ^2рх = 0 имеет решение
Ph = Cicos kt + sin kt. (4.13)
Частные решения, соответствующие первому и третьему сла-
гаемым в правой части уравнений (4.12), запишем в виде
₽12= *^sin(e/ + ft), <414)
Момент двигателя Мд представим разложением в ряд Фурье
со
МД=МО+М = Л1О+ £M/Sin(-^ + a/), (4.15)
где М о, М — постоянная и переменная составляющие момента
двигателя, вычисленные при данных оборотах двигателя и данной
частичной характеристике; nx = 1 для двухтактного двигателя
и «1 = 2 для четырехтактного двигателя.
Частное решение, соответствующее второму слагаемому в пра-
вой части уравнения (4.12), с учетом разложения (4.15) примет вид
л _ В2 . / i<o » < \ /л 1
Рн-—fer-^-2u n (4Л6)
i=l \П! )
Общее решение дифференциального уравнения (4.12) найдем
как сумму решений (4.13), (4.14) и (4.16)
Pl = Сх cos kt 4- С2 sin kt 4- ^8-f.-es Sin (st 4- qj 4-
00
I M2 B2M0 B2 Mi 7 Zco 2 I „ \ /д i?\
+ 1Г ^u~ - 2j У Vh z + 7 ’ (4, 7)
\ П1 )
71
Можно упростить уравнение (4.17). Проведем оценку коэф-
фициентов D и Вследствие того, что В2 “С Blt коэф-
фициент D = -i- nmhqalo — b --------q^ J — В2а (“f" + }
упростим за счет пренебрежения В2: D = nmehqaloBt 1-— х
«(-НТ
Учитывая также неравенства В2^ВХ, В2 < В3, выражение
Д — Bi (В3 + 7з) — Вг преобразуем к виду
Д^ВИВз + Л). (4.18)
Используя зависимость (4.18), запишем окончательное выра-
жение для D
D = 57^7 nmeh^° [ 1 ~ -Т (~е-0 ] • (4’19)
В
Коэффициент -y-Afz с учетом (4.18) представим так
= (4.2°)
, (
Р —еа —......-....г--—- д
Сравним (4.19) и (4.20). Согласно формуле (3.21) правая ча'сть
(4.19) без коэффициента представляет максимальное зна-
чение момента от действия инерционных сил на заторможенном
реакторе, превышающее по модулю любую из составляющих Mt
разложения момента двигателя как минимум на порядок. Учи-
тывая также наличие в (4.20) малого безразмерного коэффици-
ента В2/Вх (составляющего несколько сотых), следует заключить,
D В, Mi
итп ------ ЧИЯииТАТТкИП ППАПЫПТЯАТ —i-----------— .
tto
«7
Совпадение k? и. (—) , соответствующее резонансу при дей-
ствии-первой гармоники двигателя, возможно только при очень
мягких упругих элементах, лежащих за пределами оптимальной
области. В конструкциях такие элементы не используются, и
резонанс на первой гармонике не имеет места. Возможный резо-
нанс, соответствующий действию второй и третьей гармоник дви-
гателя, видимо,, не опасен вследствие малых коэффициентов при
sin(-j^-Z-|-a/) в решении (4.17). К тому же его можно избежать
соответствующим выбором параметров.
Опуская в знаменателе выражения -%а_е2 слагаемое е2, что
D
приводит к уменьшению fe2_-2 , можно с помощью выкладок,
72
аналогичных приведенным выше, показать значительное превы-
, . Z) Вл Л4л
шение коэффициента наД слагаемыми и •
Упрощенное уравнение для принимает вид
Pi = G cos + С2 sin kt 4- a sin (st + qx), (4.21)
где найденные при нулевых начальных условиях постоянные ин-
тегрирования Сг и С2 равны
С1~— № — & Sil1 ^2 = — k (£2 _ 62) cos 4i-
Преобразуя первое из уравнений (4.11) с учетом (4.21), получим
cq — D± sin (е/ + дг) + (Сг cos kt 4- С2 sin kt) 4-
+ Л±ЛМд-^М2.
Интегрируя последнее уравнение, найдем
<Х] = — -О- cos (st 4- <7i) + (Cisln kt— С2cos kt) 4-
4--д-[(Вз 4~ Л>) —В2/И2] t—
-St?cos(-?'/ + “‘)+C- <4'22>
Здесь использовано разложение (4.15) момента Мд двигателя
в ряд Фурье.
Интегрируя еще раз, получим выражение для координаты ах
«!== — -^sin (е^4-^) —-^-(CiCOS^^CaSln kt) 4-
+ ~ [(®з 4" A) Mq — в2м2] -g
°°
“ S ~№" sln + а') + ^4- (4.23)
1=1
Постоянные С3, С4 находим при нулевых начальных условиях
C3 = -^cos<714-C2- С в2и Ыг 4- 00 S 1=1 n-iMi COS Я/, (G) n 1 (4.24)
С4 = sin qx 4~ Сх в2и Дйа + S sina<-
i=l
73
В рядах (4.5) ограничимся двумя слагаемыми. Окончательно
преобразованные выражения для -скоростей а, |3 запишутся в
виде
р = [& sin qr sin kt — e cos qr cos kt + e cos (e/ + gj],
a = «io + M.t + [cos qt — cos (ef + ^)] —
Z?nZ/Z) Г , , i » 1 z-\ s . 9 kt ”] ।
— дГ(Д-е2) [sin ft sin kt + 2 -p cos qt sin2—J +
+ 2 ^[cosa‘— cos(v/ + a‘)l’
(4.25)
а зависимости углов поворота а и р от времени определятся урав-
нениями
Р = -г.--- з Г s in (st + <7i)—sin qr cos kt-cos qt sin kt 1,
fV - L J
a = aio + (®io + C3) t + -J “ Sin (e* + ft) +
B2 D
Вл k? — 82
'4-
у nlMi
l’2O)2
1=1
(4.26),
В выражениях (4.25), (4.26) для a и a опущено малое слага-
емое, содержащее коэффициент В^2 , которое можно учесть
при исследовании влияния момента трения в механизме свобод-
ного хода ведомого маховика.
Представленное решение имеет смысл, если
k + е.
В резонансном случае k = 8 решение уравнений (4.8) нахо-
дится в ином виде. Алгоритм решения известен, однако решение
не цриводится, так как случай k = е дает лишь одну точку из
бесчисленного множества вариантов параметров. Как показано
далее, значение k = е соответствует упругим элементам малой
жесткости, лежащим за пределами оптимальных параметров.
Третье из уравнений (2.15) при нахождении скорости сводится
к квадратурам, если момент сопротивления представляет функ-
74
цию времени, угловой скорости или угла поворота. Зависимости
для скорости 6 в указанных случаях имеют вид
t
6 = 6,0-77 J(Afc+M2)df,
4 о
д
6а = 6?0-^- j(Mc + M2)d6, (4 27)
610
6
_ j f d8 — /
* . J Me + M2 ~l-
610
В ряде исследований можно усреднить момент сопротивления,
приняв его постоянным. В этом случае ведомый маховик совершает
равнопеременное движение согласно уравнению
' 6 = 610 + 610/ - ?. (4.28)
К анализу приближенного аналитического решения. Рассмо-
трим второе уравнение (4.25), описывающее колебания угловой
скорости ведущего маховика. Оценим коэффициенты слагаемых
с целью выяснения определяющих членов.
В выражении для £>х
n _ nmehqalo (Т. __ b_ ( b \ 1 В2
U1~ A Н1 е \ е VJ'/AV—i
\ е /
BIU
Д (fe2 — e2) •
A BW
преобразуем член д(^2_е2)
В%и _ BIBJJ _
A(fe2 —еа) В1Д(62 —е2)
1 R
Bi (. e2\ Ла-
(4.29)
и близость е//г к единице
можно пренебречь по срав-
Учитывая, что В2 < Вх, В2 < В3
BW
не имеет места, слагаемым : —<г-
Д (fea — е2)
нению с В3 + J3. Тогда коэффициент В, принимает вид
В %___I
\а '
-) —1
п __ nmehqv’^
Dr----------
(4.30)
75
Используя (4.18), (4.19), выражение в (4.25) преоб-
разуем так
е
—8«) = “ / е \» Де nmehclaw [ 1 — — (— <?) ] • (4.31)
Переходим к оценке слагаемых во втором уравнении (4.25).
Последнее слагаемое определяет колебания угловой скорости а
за счет переменной составляющей момента двигателя, амплитуда
которых известна. Слагаемое, включающее коэффициент (4.31),
имеет порядок выражения
nmehqa2w [ 1 —L -<?) ] . (4.32)
I
Порядок третьего слагаемого, определяемого коэффициентом
Dj/e, зависит от импульсного механизма. Если а = 0, что соот-
ветствует параллелограммному импульсному механизму, плане-
тарному Чалмерса и предельному случаю кривошипно-кулисного
с поступательной парой, то порядок £>х/е такой же, как и (4.32).
В случае а = е, что соответствует механизму Хоббса, первым сла-
гаемым в фигурных скобках равенства (4.30) при оценке можно
пренебречь, и порядок Dx/e будет соответствовать порядку выра-
жения ‘ .
nmehqaio (1 -f- q). (4.33)
Обычно используемые значения q == 0,5-н2.
Сравнивая (4.33) и (4.32), приходим к выводу, что величина
(4.33) превышает в несколько раз величину (4.32), так как В3 +
+ J3 > В 2. Следовательно, механизм Хоббса создает и на уча-
стке накопления потенциальной энергии режима трансформации
момента большую неравномерность вращения ведущего махо-
вика, чем импульсные механизмы Чалмерса, параллелограммный
и кривошипно-кулисный в предельном случае. Это подтверждает
вывод о том (гл. III), что чем дальше расположен импульсный
механизм от точки 1 (см. рис. 15), тем большую неравномерность
ведущего маховика имеет трансформатор.
Представляется возможным также провести оценку слагав-
D I J
мого 3 J Мр? в сравнении с (4.33). Представим (4.33) в виде
1 ^3 4~ ^3
qa10 &
(4.34)
76
Время t протекания обратного импульса можно приближенно
оценить по формуле t = где ф = q (а — р). Полагая
фср ±= qa, получим завышенное значение t = tilqa. Так как
Л4Ртах при средних коэффициентах трансформации Момента (Кт —
— 5) на порядок больше Мо, то колебания угловой скорости
ведущего маховика под действием импульсного механизма Хоббса
превышают колебания под действием среднего момента двига-
теля.
Согласно найденному решению в практических расчетах инер-
ционных трансформаторов нет смысла использовать разложение
момента Мл двигателя в ряд Фурье. С инженерной точки зрения
допустимо пренебрежение небольшой неравномерностью враще-
ния ведущего вала, определяемой переменной составляющей мо-
мента двигателя. Момент м^жно принять постоянным и равным
среднему значению при данных оборотах и данной характеристике
двигателя. Прием усреднения момента двигателя распространен
в литературе. Например, в работе [28] при расчете колебаний
корпуса ракеты не учитывается изменение тяги.двигателя.
Оценка аналитического решения. Сходимость построенных
рядов и достаточность использования двух членов с хорошим
приближением к точному решению можно попытаться установить
с помощью аналитических оценок, например [33]. Однако общий
подход при выводе таких оценок, основанный на использовании
мажорантных рядов, делает оценки заниженными. Отказ от ис-
пользования оценок областей сходимости рядов по параметру
и величин остаточных членов — характерная черта прикладных
исследований. Сошлемся на обсуждение этого вопроса в работе
114].
В нашем случае, когда рещаются достаточно сложные нели-
нейные уравнения и используются только первые два члена раз-
ложения решения в ряды, надеяться на хорошие результаты при
использовании аналитических оценок не приходится. В связи
с этим для оценки решения здесь и далее использованы цифровые
вычислительные машины, что позволяет получить практически
точные решения для заданных параметров, т. е. практически
точные локальные оценки?
Недостаток метода — невозможность проверки бесчисленного
множества значений параметров — не является решающим. По-
лученные приближенные решения и точные решения, гарантиру-
емые теоремой о существовании и единственности решения, яв-
ляются непрерывными. Следовательно, малым изменениям ар-
гумента t соответствуют малые изменения этих решений. Это оз-,
начает, что в окрестности тех значений параметров, где прибли-
женное аналитическое и машинное решения близки, следует ожи-
дать также хорошей сходимости точного и приближенного’решений.
Окончательную оценку проводят экспериментально. При этом
проверяют как соответствие' математической модели реальным
' 77
образцам, так и достаточную инженерную точность Полученных
аналитических решений.
На рассматриваемом участке путем сравнения с машинным
решением оценивалась точность уравнений (4.25). В качестве
расчетной модели везде принят инерционный трансформатор с
двигателем мощностью N = 100 кВт и угловой скоростью а =
= 300 рад/с при максимальной мощности.
Из уравнений (4.25) следует, что закон изменения угловой
скорости реактора при заданных начальных условиях определя-
ется только параметрами k и е. В связи с этим на вычислительной
машине просчитывалась вся область безразмерного параметра
k/e, = 0,5-4-3,5, представляющая интерес. Закон изменения а
оценивался при а = 0, соответствующем наименьшей неравномер-
ности вращения ведущего маховика, и а = е, соответствующем
неравномерности механизма Хоббса.
Дифференциальные уравнения (2.15) решались на цифровой
вычислительной машине М-222 при следующих коэффициентах:
1) В1=1,54 кг-м2; 6ц = 0; В2 = 0;
&21 = 0,043 кг-м2;
В3 = 0,17 кг-м2; &31 = й4 = &5 = 0; Ь3 = 0,043 кг-м2;
J3 — 0,02 кг-м2;
Л12 = 0; Мд = 250 Н-м; q—1; nJB = ntneh;' h = е.
2) = 2,02кг-м2;&u = 0,17кг-м2; B2 = — 0,043 кг-м2;
&21 = — 0,043 кг • м2; В3 — 0,17 кг • м2; Ь31 = 0;
=— 0,086 кг-м2; Ьъ = 0; Ь3 = 0,043 кг-м2;
J3 = 0,02 кг-м2; Л42 = 0;" Мд = 250 Н-м; </=1;
nJB = 0,5 ntneh; h = 0,1 е.
(4.35)
Здесь использованы обозначения Лх = Br + btl cos ф, Л2 =
= В3 + &21 cos ф, А3 = В3 + b31 cos ф, Л4 = &4 sin ф, Л6 =
= b-0 sin ф, Лв = b3 sin ф.
Первый вариант значений коэффициентов (4.35) соответствует
импульсным механизмам с параметрами а = 0, b = е, имеющим
наименьшую неравномерность вращения ведущего маховика,
второй — механизму Хоббса с параметрами а — е, b = 0, имею-
щему большую неравномерность вращения. Средний за цикл
момент Мв на ведомом маховике для обоих вариантов задан
одинаковым и равным пятикратному моменту двигателя при мак-
симальной мощности, т. е. Л4В = 1250 Н-м. По заданному Мв
найдено значение ntneh и далее значения всех коэффициентов
дифференциальных уравнений.
Начальные условия приняты одинаковыми для обоих вариан-
тов (4.35) и соответствуют использованию всего обратного импульса
78
участок накопления и отдачи потенциальной энергии начинается
с ф = л) : t — 0, а10 = л, р10 = 0, а10 = 300 рад/с, 01О = 0.
Задача Коши на вычислительной машине М-222 решалась по
стандартной программе, основанной на использовании метода
Рунге-Кутта. Шаг счета принят постоянным и равным 1-Ю-5 с.
Расчеты, проводимые нами на протяжении последних лет, указы-
высокую точность, получаемую при таком шаге. Счет
мелким шагом не изменяет результаты.
На рис. 18 даны графики
угловой скорости jj реактора
для первого из вариантов
(4.35) и различных отношений
k/e. Значения жесткости U
Рис. 18. Графики угловой скорости реактора на участке на-
копления и отдачи потенциальной энергии
(сплошные линии — машинное решение; штриховые — аналитиче-
ское решение)
корпусных упругих элементов, подсчитанные по. формуле k =
= равны &/е=0,5 — {/ = 4280 Н-м/рад; Л/е — 1,2 — (7 =
= 24 600 Н-м/рад; k/e = 1,5 — U = 38 400 Н-м/рад; k/e =
=2 — £7 = 68 500 Н-м/рад; k/e = 2,5 — {/= 112 000 Н-м/рад;
fe/e = 3 — {/ = 154 000 Н-м/рад; k/e = 3,5 —U = 200000 Н-м/рад.
Резонансное значение /г/е = 1 опущено. Окончание счета для всех
кривых соответствует моменту, когда угол |3 реактора обращается
в ноль (корпусные упругие элементы не деформированы).
Во всей области наблюдается хорошая сходимость машинного
и аналитического решений. Начиная со значений k/e = 2, раз-
личие между решениями мало и на графике не прослеживается.
Некоторый сдвиг части графика наблюдается для k/e = 0,5,
соответствующего упругим элементам малой жесткости (они не
79
используются в конструкциях и не представляют практического
интереса). у
Графики угловой скорости 0 по второму варианту (4.35)
для всех значений kh близки к представленным на рис. 18 и
поэтому не приведены.
Колебания угловой скорости а ведущего маховика -значи-
тельно меньше колебаний скорости 0, поэтому данные сравни-
тельных расчетов представлены Таблица 4 Угловая скорость а, рад/с [k/s= 2t первый вариант (4.35)] в виде таблиц. В табл. 4 при- ведены результаты 'машинного и аналитического расчета по первому варианту (4.35) для k/& — 2. Окончание счеуа соот- ветствует р = 0. Различие машинного и. ана- литического решений незначи-
с амаш аанал
0 0,002 0,004 0,006 0,008 0,01 300 300,06 300,14 300,45 300,2 299,9 300 300,3 300,6 301 301,3 301,6 тельно. Такого же порядка оно оказывается для других /г/е первого варианта. Результаты расчета а по второму варианту (4.35) даны в табл. 5. Данные табл. 5 показывают хорошее соответствие между ана-
литическим и машинным решениями. В формуле (4.25) для угловой
скорости а определяющим при расчете оказывается третье слага-
емое [cos qt— cos + <7±)], поэтому можно рекомендовать
упрощенную формулу
а = а» + 1 + [cos qx — cos (st + q^].
Слагаемое (sin qx sin kt + 2e/6 cos qx sin2 -у-) ска-
зывается в области упругих элементов малой жесткости (й/е <1,5).
Таблица 5
Угловая скорость а, рад/с [по второму варианту (4.35)]
/, с k/е, =з 1,2 k/г » 2 Ve = 3
амаш аанал амаш аанал амаш аанал
0 300 300 300 300 300 300
0,002 297,7 297,2 297,7 297,8 297,8 298 >
0,004 290,7 289,5 291 291,5 291,5 292,3
0,006 281,6 280 283,5 284,2 285 285
0,008 276 272,6 279,5 278,5 280,1 279
0,01 276,3 270,3 278,3 276,3 276,9 276,3
0,012 279,5 273 277,6 277,2
0,013 281 277
80
Расчеты на вычислительной машине (см. табл. 4 и 5) подтвер-
ждают свойство предпочтительного семейства о снижении нерав-
номерности вращения ведущего маховика при стремлении им-
пульсного механизма к полюсу 1
(см. рис. 15).
Предыдущие результаты касались
случая использования всего обратно-
го импульса. При частичном исполь-
зовании обратного импульса; что со-
ответствует различным передаточным
числам режима трансформации момен-
та, также получены хорошие резуль-
таты по сходимости машинного и ана-
литического решений. На рис. 19,
например, даны графики скоростей р
для первого варианта (4.35) при
kls — 1,4', соответствующие началь-
з
ным условиям: t — 0/ аХо =-2-л;
Рю = 0, а10 = 300 рад/с, 01О = 0.
Замечание о расчете семейства им- . ной энергии
пульсных механизмов С переменной (сплошная линия-машйнное реше-
функцией ф'. Сравнительные резуль- ние: штриховая -^аналитическое
тэты аналитических и машинных рас-
четов показывают, что при малых эксцентриситетах импульсные ме-
ханизмы с переменной функцией ф' можно рассчитывать по фор-
мулам предпочтительного семейства, усредняя ф' и принимая его
(сплошная линия—машинное решение; штриховая—аналитическое решение)
постоянным. На рис. 20, например, приведены графики угловой
скорости р кривошипно-кулисного механизма с поступательной
парой, имеющего параметры:
1. Jx = 5 кг-м2; J2 = 0,5 кг-м2; nJB = 0,3 кг-м2; пгц —
= 38,6 кг; а = 0; Ъ = е — 0,05 м; h = 0,08 м; Л4Д = 270 Н-м;
(7 = 30 000 Н-м/рад; М2 — 0; е/ех = 0,1; q = 0,9.
81
2. — 5 кг-м2; J2 = 0,5 кг-м2; nJB = 0,3 кг-м2; пт =
= 38,6 кг; а = 0; b = е = 0,05м; h = 0,08м; Л1Д = 270 Н-м;
U = 30 000 Н-м/рад; М2 = 0; е!ег — 0,2; q = 0,8.
Расчет проводился при начальных условиях: t = 0, а10 = л,
Рю = 0, «ю = 150 рад/с, рю = 0.
2. Участок разгона реактора
Начало участка разгона. Разгон реактора непосредственно
под действием инерционных, сил грузовых звеньев начинается
после размыкания корпусного МСХ. До этого момента обойма 3
корпусного МСХ (см. рис. 12) и реактор 2 движутся с одинаковой
угловой скоростью (обойма поджимается к реактору корпусными
упругими элементами, отдающими накопленную потенциальную
энергию). Момент . размыкания определяется условием у = р’,
где у — ускорение обоймы, обусловленное действием упругих
элементов и сил сопротивления; р — ускорение реактора под
действием инерционных сил грузов и сил сопротивления.
Используя уравнения (2.16), приведем указанное условие
к виду
- Д[Мд - Л(а - Р)2 + Л6р2]}.
Для получения приближенной оценки оставим в этом уравне-
нии только определяющие слагаемые, отбросив остальные
- -Г ч = -ТГ К4Л - ЛИ8) (« - Р)2 + 4Ла2Ь
л 1/*3
отсюда
’=-&и к-4* - а‘а‘> ( - 4)’ ~л‘а‘ ’
Для параллелограммного импульсного механизма, например,
последняя формула запишется
nrnehJM2 „ .
-(77+^77 C0S^’
где ф2о — Угол Ф в момент окончания участка накопления и
отдачи потенциальной энергии.
Расчеты показывают, что угол у в трансформаторах, у которых
отсутствует цельная обойма 3, составляет тысячные доли радиана,
в то же время угол поворота реактора на обратном импульсе
82 '
Достигает 0,1—0,15 рад. Например, в трансформаторе Для динами-
ческого стенда (см. гл. IX, с. 198), имеющем параметры: т =
= 9 кг, п = 4, е = 0,05 м, h = 0,053 м, J3 — 0,033 кг-м2, J2 =
= 0,267 кг-м2, а = 293 рад/с, U = 250 000 Н-м/рад, угол у
не превышает 0,003 рад. В связи с этим для ряда конструкций
в начале участка разгона реактора можно принять р = 0 (на
предыдущем участке у = Р).
Первые интегралы. Система (2.16) дифференциальных урав-
нений на исследуемом участке распадается на систему двух пер-
вых уравнений и два отдельных уравнения. Вместо уравнений,
определяющих обобщенные координаты аир, удобнее рассмат-
ривать уравнения для обобщенных координат А, ф, получаемые
из (2.22)
ЯД Я2ф — 2Я4Аф -]- Я6ф2 — -[- /И2 — Мг,
-j- Н^\' -]- ЯД2 -р Я5ф2 =
= 4-[а(М1-М2) + &Л1д].
(4.36)
Как следует из выражения (2.21) и записи коэффициентов Н{
(i — 1, 2, 3), кинетическая энергия не содержит координаты А.
Точно также А не содержится в выражениях для потенциальной
энергии, так как оба механизма свободного хода разомкнуты.
На исследуемом участке координата А является поэтому квази-
циклической и может быть записан соответствующий ей первый
интеграл
^= [(Мд+Л^-Л^ + Сз.
O7v J
При постоянных Мд, М2, Л4Х интеграл перепишется в виде
ЯД + Я2ф = (Мд + М2 - MJ t.+ С6. (4.37)
Используя начальные условия
i = 0, А = А20, ф = ф20, А = А20, ф = ф20, (4.38)
получим С5 = Я12А20 + Я22ф20, где Н12 и Я22 вычислены в точке
(4.38).
Интеграл (4.37), преобразованный к скоростям а, р, имеет
ВИД
Н,а + Н£ = (Мд+М2~М^ + С5, (4.39)
где
Н7 — Л + птеа 4- (-у- + ф') nJR ^2 — + ф') nmeh cos ф,
Я8 = /2 ф- nmeb ----фЛ nJ в + ^2 ---ф') nmeh cos ф.
83
Существование квазициклической координаты для импульсных
механизмов инерционного трансформатора отмечено в работах
автора.
Разрешим уравнение (4.37) относительно X
Х = -^-[(Мд + Ма — + (4.40)
Нетрудно видеть по коэффициентам Hlt Н2, что уравнение
(4.40) содержит в правой части из обобщенных координат только
координату ф. Это позволяет подстановкой уравнения (4.40)
во второе уравнение (4.36) свести систему (4.36) четвертого по-
рядка к -одному уравнению второго порядка
(Я^З - Я!) ф + (я2 [Я4( 1 - -1 f ]+ед}ф2+
+ Я2 (Мл + М2 — М4) + [(Мд + М - MJ t + с6р -
(4.41)
Этот метод понижения порядка системы уравнений известен
из аналитической механики; для трансформаторов без упругих
элементов он использован в работе [53].
Дифференциальные уравнения движения трансформатора на
участке разгона реактора, кроме интеграла (4.37), допускают
еще один первый интеграл. Если момент Мд двигателя и моменты
трения Mi и М2 положить постоянными, то можно считать, что
их действие обусловлено потенциальными силами. В этом случае
может быть записан интеграл энергии
- Т+П — const,
или
Лга2 4- 2А 2а 0. + Л3р2 — 2 [ Мд (а — а20) +
+ М2(6-620-р + Рзо) - ЛМ₽- Р20)] = Е2, (4.42)
где Е2 = Л12а2о 2Л22а2оРго 4~ Лз2р2о; Л12, Л22, Лз2 — зна-
чения коэффициентов Лх, Л2, Л3, вычисленные при начальных
условиях участка разгона реактора
t ~ of = а20, Р = Р20, 6 = 62q, а = <х2о, Р == Р23> А — 62о. (4.43)
Построение решения. Приближенное решение дифференциаль-
ных уравнений на участке разгона реактора можно искать, ис-
пользуя уравнение (4.41), полученное понижением порядка сис-
темы на две единицы. Однако попытки построения решения не
привели к более простым выкладкам и более точным результатам,
чем в случае решения исходной системы. В связи с этим восполь-
зуемся исходной системой (2.16) дифференциальных уравнений.
84
Представляя коэффициенты Ль Л2, Аа по формулам (4.2),
введем параметр в первых двух уравнениях системы (2.16) на ос-
новании изложенного на с. 69.
Вха + В2р + jx [&ха 4- &2р + Д4 (а — р)2 + Л6р2] = иМд, 1
• (4.44)
В2а + В3р 4- jx [62а 4- &3р 4- Д5 (а — 0)2 — Лва2] = |л (М2 — Мх).
Решение системы (4.44) ищем в виде рядов (4.5) при начальных
условиях (4.43).
Интегрирование порождающей системы
В4а0 4~ В2рз= 0>
В2а0 4* ВзРо = Q>
определитель которой Д1 = В\Вз — Bl отличен от нуля, приво-
дит к уравнениям
«0 — а20> «О — а20* 4“ а20>
Ро == Рао> Ро = Рго^ Рго-
Система для определения функций аъ Pi имеет вид
В1«! 4- В2Р1 + Л40 (сто—Ро)2 Н- ЛвоРо — Л4д>
Вга14- Взр! 4- Л50 (ао — Ро)2 — Дбо«о = М2 — Mi,
(4.45)
(4.46)
где первые члены Л40, Л50, Лв0 разложений коэффициентов Ait
А5, Ав в ряды в окрестности порождающего решения (4.45) запи-
саны выражениями (4.9).
Разрешая систему (4.46) относительно старших производных,
получим \
ai = {Вз [Л1Д — Л4о(ао — Ро)2 — ЛбоРо] —
— Вг[Мг— Mi — Л 50(5x0— Ро)2_|“ Лбо<Хо]}>
Pi = *д~ {Bi [М2 — М1 — Д5о(«о — Ро)2 4" Лбо«о] —
— В2 [Л4д — Д40 (ао — Ро)2 — ЛбоРо]}•
(4.47)
. Уравнения (4.47) интегрируются независимо одно от другого.
Момент Мд двигателя усредняется, так как при разложении
в ряд Фурье получаются результаты, аналогичные полученным
ранее (см. с. 77).
Преобразуем уравнения (4.47) к виду
а4 = D2 sin (e2f + 72) + А- Мд - -g- (М2 - MJ, (4 48)
Pi == В3 sin (е2/ 4- q2) — -^2- Мд 4- (Ма — Mt).
85
Интегрируя уравнения (4.48) при нулевых начальных усло-
виях, получим
«1 = -у2- [cos q2 — cos (eaf + ?2)] + Г Mд —
fc2 L
₽i = ~~ [cos q2 — cos (82z + q2)] -
b2
-[-й-ж»-4г
(4.49)
Сохраняя в рядах только два члена, запишем решение для
скоростей системы (4.44)
« = а20 + (cos q2 — cos (е2/ + q2)] +
82
+ [т? М '
Р = fc. + V1 |cos q, - cos (sa( + ?„)] -
e2
(4.50)
Выкладки относятся к интегрированию первых двух уравне-
ний исходной системы (2.16), описывающей движение трансформа-
тора на участке разгона реактора.
Решения четвертого уравнения остаются теми же, что и на
участке накопления и отдачи потенциальной энергии. Третье
уравнение (2.16) представляет уравнение затухающих колебаний
линейного осциллятора. Перепишем его в обычной форме
** I * 1 / t Е 1 \
В конструкциях трансформаторов корпусные упругие эле-
менты являются достаточно жесткими, сопротивление при коле-
баниях обоймы малым. Поэтому всегда -j-, и
имеет место случай малого сопротивления. Решение уравнения
(4.51) записывается в виде
т_Ле“'81п 1/JJ 1 + ъ . («2)
, \ У /
Постоянные интегрирования А и ух находятся по начальным
условиям участка разгона.j
К анализу решения. Для оценки слагаемых во втором урав-
&
нении (4.50) упростим коэффициент D3. Для отношения <
а20
86
< 0,3, соответствующего началу участка разгона, величиной
-т22- можно пренебречь, поскольку достаточно грубой прикидки
а20
коэффициента D3 в рассматриваемом случае. Учитывая также,
что В2 С Bi и <=« В^з, имеем
D3 = nmehqalo [ 1------— д') ] . (4.53)
Для сравнения коэффициента и слагаемого MRt
запишем их в виде
Рз 1 1
е2
о---------— Мо , -ф- МЛ = 4—%- МЛ. (4.54)
Вз q(ai9~M Pmax’ Д1 Д В3 В1 д ' '
Модуль второго выражения (4.54) значительно меньше модуля
первого даже при наибольшем t в силу наличия малого безраз-
мерного коэффициента В2/В2 и вследствие того, что AfPmax на
порядок больше Л4Д. В связи с этим можно во втором уравнении
^4.50) пренебречь слагаемым -у- MRt. В обоих уравнениях можно
отбросить слагаемые, содержащие М 2 — М х. ,
Теперь уравнения (4.50) запишутся
а = а20 + (cos - cos (е2/ Ц- q2)] + A. Mt,
Ь2 ^1
₽ = Р20 + [cos <?2 — cos (е2/ + q2)].
Ь2
(4.55)
Последние зависимости имеют простой и удобный для исследо-
вания вид.
Интегрируя уравнения (4.55) при начальных условиях (4.43),
цолучим
. / • . D2 \ 1 . ВМп /2 ,
а = а20 + ^а20 И—— cos q2) t -[-----д---g- +
+ fsin ч*-sin
P — P20 + (P2O H---C0S +
+ [Sin <?2 - sin (e2f + <72)].
e2
Для анализа влияния импульсного механизма на неравномер-
ность вращения ведущего маховика рассмотрим коэффициент D2-
D = nmehqalb (/. _ р20 \2 Гд /_а_ . \
2 Д1 1\ а2о ) L 3 е к е -Т-Ч) -Г
+ в4(4-«)]-а.
/'jM2 _ в2
\ а20 /
87
С увеличением а коэффициент D2 возрастает, так как Ва >
> В2, и колебания угловой скорости а ведущего маховика, как
следует из (4.55), возрастают.
Об одном методе упрощения уравнений. Представляет интерес
метод упрощения уравнений [52], основанный на использовании
допущения а = const во втором уравнении (2.16). Возможность
пренебрежения колебаниями угловой скорости ведущего махо-
вика (а = const) сформулирована М- Ф. Балжи. В работе [52]
при условии а — const найден закон движения реактора непа-
раллелограммного импульсного механизма в жесткой схеме тран-
сформатора.
Использование условия а = const во втором уравнении (2.16)
представляется возможным, так как колебания угловой скорости
ведущего маховика невелики, что подтверждается решениями на
вычислительной машине. Член 42а также оказывается неболь-
шим, так как Л2<Лаиа<р (см. гл. III, п. 2). Вообще, чем
больше момент инерции ведущего маховика, тем точнее резуль-
таты интегрирования, основанные на допущении а = const.
В первом уравнении (2.16) использовать условие постоянства
угловой скорости а нельзя, так как член А ха не является ма-
лым (коэффициент Аг содержит момент инерции ведущего махо-
вика).
Используя условие а = const и переходя во втором уравнении
(2.16) к координате ф, получим
+ ---'1’,)2ув +
4- 2nmbh (—
\ е
1___
г2
nJв : ф J ф" + nmbh £ ф’ cos ф -]-
+ ---Ф') Ф' sin ф^-^5-= — nmeha?sinф----к- (М2 — Мг).
Левая часть последнего уравнения представляет производную
по углу ф от выражения — -±- А3
Ф2
Ф'а ’
т. е.
Jk- = — nmeha? sin ф - (Ма - MJ. (4.57)
uy V
88
Интегрируя ,(4.57) при начальных условиях (4.38), (4.43)
и возвращаясь к скоростям а, 0, найдем
2
2nmeh (cos ф — cos ф20)---г»- (Л42 — Мг) (a —
a
— P — a2o 4" P20) + 4s2 f 1---
\ a /
A3
(4.58)
Эта формула проверена на вычислительной машине для парал-
лелограммного импульсного механизма и механизма Чалмерса.
Результаты расчета указывают на достаточную ее точность.
В конце параграфа будут даны сравнения с машинным реше-
' нием.
Оценка решений. Решением исходных дифференциальных
уравнений на вычислительной машине М-222 проверены зави-
симости (4.55) угловых скоростей а, р от времени, а также
зависимость (4.58) угловой скорости р от угла ф. Начальные
условия выбирались по результатам расчета на предыдущем участ-
ке накопления и отдачи потенциальной энергии так, чтобы они со-
ответствовали размыканию корпусного МСХ. Проверялась область
отношений k/&, соответствующих различным жесткостям корпусных
упругих элементов. Более мягким элементам соответствуют более
высокие начальные скорости р реактора (см. рис. 18). Решения
построены для обоих вариантов (4.35).
На рис. 21 показаны зависимости угловой скорости р реактора
от времени для первого варианта (4.35). Кривые 1—4 соответст-
вуют начальным условиям:
1) / = 0; a =6,97; р = 0; a = 297,5 рад/с;
Р= 103,4 рад/с.
2) / = 0; a = 6,62; p = 0;a = 298,4 рад/с;
Р = 80,3 рад/с.
3) f=0; a = 6,15; р = 0; a = 300 рад/с;
Р = 45,7 рад/с.
4) / = 0; a = 5,84; Р = 0; a = 300,8 рад/с;
Р = 21,5 рад/с,
(4.59)
89
полученным на участке накопления и отдачи потенциальной энер-
гии по моменту размыкания МСХ для следующих значений жест-
кости корпусных упругих элементов
1) £/8=1,2; {/ = 24 600 Н-м/рад. '
2) £/е=1,5; {/ = 3840° Н-м/рад.
3) £/е = 2; U = 68J500 Н-м/рад.
4) £/8 = 2,5; {/= 112 000 Н-м/рад.
(4.60)
Сходимость машинного и аналитического решений удовлетво-
рительная. Счет осуществлялся до достижения угловой скоростью
Рис. 21. Графики угловой скорости
реактора на участке разгона
(сплошные линии — машинное решение;
штриховые — аналитическое решение)
импульса, тормозящего реактор.
Р реактора угловой скорости
а ведущего маховика. Аналити-
ческие решения 1 и 2 рассчитаны
без разбиения участка разгона
на периоды, 3 и 4 получены раз-
биением участка разгона на два
периода (первый период до ско-
рости р = (0,5 — 0,6) а, вто-
рой— до р = а). Начальные
условия второго периода полу-
чаются по результатам конца
первого периода. Для уточне-
ния счета при разгоне с малых
угловых скоростей реактора до
угловой скорости ведущего ма-
ховика можно рекомендовать
разбиение участка разгона на
три периода” (первый "период—р20 « р «Л),5а; второй —
0,5а с р < 0,8а; третий — 0,8а < р с а).
Некоторое снижение угловой скорости р для кривых 3 и 4
(см. рис. 21) объясняется началом разгона при действии обратного
Таблица 6
Угловая скорость а, рад/с, ведущего маховика
на участке разгона реактора
t, с амаш аанал t, с амаш аанал
0 298,4 298,4 0,008 293,5 297
0,002 298 298,6 0,01 290,5 295,2
0,004 297 298,6 0,011 289 294,5
0,006 295,6 298,5
90
Расчеты угловой скорости 0 по второму варианту (4.35) не
дают существенных отличий ни в качественном поведении кривых,
ни в количественных результатах, и поэтому не представлены.
Колебания угловой скорости а ведущего маховика, как и на
участке накопления и отдачи потенциальной энергии, небольшие.
В табл. 6 даны результаты расчета для первого варианта (4.35) коэф-
фициентов дифференциальных урав-
нений и второго варианта начальных
условий (4.59).
Сходимость решений удовлетво-
рительная. При расчете аанал по
первой формуле (4.55) участок вре-
мени разбивался на два периода. Ве-
личины изменения а по другим ва-
риантам начальных условий имеют
такой же порядок, как и в табл. 6.
На рис. 22 даны зависимости
угловой скорости 0 реактора от угла ф
для первого варианта (4.35) коэффи-
циентов дифференциальных уравне-
ний и начальных условий t — О,
а = 6,28 рад, а = 300 рад/с, 0 = 0,
fj = 0. Аналитическая зависимость
рассчитана по формуле (4.58).
Рис. 22. Графики угловой ско-
рости реактора на участке раз-
гона
(сплошная линия — машинное ре-
шение; штриховая — аналитическое
решение)
3. Участок совместного движения реактора
и ведомого маховика
Участок начинается с момента достижения угловой скоростью
реактора угловой скорости ведомого маховика. Эту точку можно
найти совместным решением уравнений, описывающих изменение
скоростей реактора и ведомого маховика на участке разгона.
На исследуемом участке система уравнений (2.17), описыва-
ющая движение трансформатора, распадается на систему из
трех уравнений!
Аха + Л80 + Л4 (а - 0)2 + А& =
Л8а + Л3 *0 + Л5(а — 0)2 - Л6а2 = С7Х (6 - 0) - Mv . (4.61)
J46 == — Afc — t/x(6 — 0),
и отдельное уравнение, определяющее движение обоймы 3 (см.
рис. 12)
73у = — Uy — Ny + Мг (4.62)
Для системы (4.61) при условии постоянства Л4Д, Мс, Mt
записывается интеграл энергии
Т-\- П = const,
91
или
Лха2 + 2Л2ар + Л3р2 + J# + Ui (Р - 6)2 —
* — 2 [2Ид(а — ада) —Л4С(6 — бзо) — Afx(p — рз0)] = £3, (4.63)
где
Ез — А 1з«зо 2Лгз«зоРзо ~Ь ЛззРзо 4" J4630-
Коэффициенты Л/3 (i = 1, 2, 3) вычислены при начальных
условиях участка совместного движения
t — 0, а = о^3о» « == ®зо, Р = Рзо» Р = Рзо»
, б = 630 = Рзо, б = 63о = Рзо* (4.64)
Понижение порядка системы (4.61) с помощью интеграла (4.63)
невыгодно, так как в этом случае усложняется применение метода
малого параметра.
Построение решения. Вводя параметр аналогично предыду-
щим построениям, систему дифференциальных уравнений (4.61)
запишем
В4сс -]- Вар “F И 1^ха 4~ АР + ^4 (а — Р)2 4“ -^оР2! ~
В2а + ВзР + р [&2а + Ь3р 4~ Л5 (а — Р)2 — Лва2] =
^(S-P)-^,
J46=._
Решение будем искать в виде рядов по параметру
a = ao(O + pai(/) + p2a2(O4----------, ‘
Р = Ро(0 + рР1(0 + и2Р2(0+---,
б==бо(О + нМО + н2МО+--> .
(4.65)
(4.66)
Подставляя ряды (4.66) в уравнения (4.65) и полагая р = О,
получим порождающую систему
Bja0 -f- В2Ро = О,
В2«о 4" ^зРо = (^о Ро)»
— — Ui (^о — Ро)-
(4.67)
Выражая из первого уравнения а0
a — — 6
»о-------Ро>
92
понизим порядок системы
ад0-Ро),'
•Л^О = — ^(«0 — Ро)- .
(4.68)
Далее можно было бы воспользоваться традиционным мето-
дом Эйлера решения систем линейных уравнений с постоянными
коэффициентами. Однако представляется несколько более про-
стым понижение порядка системы (4.68). Обозначая
Ро — == х0,
систему (4.68) приведем к уравнению второго порядка
хо4-^хо = О. (4.69)
При начальных условиях (4.64) начальные условия для х0
будут нулевыми, и общее решение уравнения (4.69) оказывается
нулевым
х0 = х0 = 0.
Уравнения (4.67) и (4.68) упрощаются
«;=Ро='б;=о,
и при начальных условиях (4.64) имеют решения
®0 = «30, а0 ~ + ®30> Ро = ^0 = Рз0> Ро = = РзО^ + Рзо- (4.70)
Приравнивая в (4.65) слева и справа коэффициенты при ц.
с учетом (4.70), получим систему уравнений, которая определяет
функции аг (0, Pi (0, (t):
BitXj 4- ^2p'i + -^40 (а0 — Ро)2 + А воРо — ^д,
^2а1 + ВзРх + Л60 (ао — Ро)2 — Лоао = " /471)
= С/1(б1-Ф1)-Л«1,
где Л40, Л50, Лв0 — первые члены разложений коэффициентов Л4,
А5, А6 в степенные ряды в окрестности порождающего решения
(4.70), записанные равенствами (4.9).
Выражая из первого уравнения системы (4.71) ах
«1 = - («о - Ро)2 - ДЛ (4.72)
93
и исключая его из системы, получим
iW6.)Л4Д + ‘
+ (“о-Ро)2 ("тф' ^40 ^5°) +
+ («о+4рОЛв°]’ (4’73)
Подстановкой
Pi-6x = xx (4.74)
сведем систему (4.73) к одному уравнению второго порядка
Xi + klXl = [ - М х - Мд 4- (а0 - Ро)2 X
х (-^ Ло - Л50 ) + (а20 + ^Ро) Лео] . {4 75)
После преобразования уравнения (4.75) получим
А + kfa, = D4 sin (ех/ + q3) + Мд. (4.76)
Выражения Dit 8X и q3 отличаются от D3, е2 и только тем,
что в последних вместо начальных условий а20, р20 стоят а30, р30.
Общее решение уравнения (4.76) имеет вид
хх = Св cos k4t 4- С7 sin kJ 4- г» о2~sin (М + Чз) 4- ~й~ х
х м4—мд\
\ Л 1 Д1 д/
Момент Мс сопротивления при нахождении хх и далее прини-
мается постоянным.
Аналогичная предыдущим оценка (см. п. 2) показывает, что
слагаемое
с kj — el ’
начальных
(“T-----Мд) мало по сРавнению
и им можно пренебречь. Вычисляя С6 и С7 при нулевых
условиях, запишем окончательное выражение для хх:
Х1 = kl-el ' [sin№ + Чз) — slnЧзcoskit----cosq3sin .
(4.77)
Скорость хх равна
*1 = [cos + ?з) + sin Чз sln^f - cos q3 cos .
. (4.78)
94
В дальнейшем ограничимся двумя слагаемыми в рядах (4.66).
Поскольку переменная х представляет разность р — би решение
порождающего уравнения (4.69) нулевое, то формулы (4.77) и
(4.78) определяют деформацию и скорость деформации упругих
элементов ведомого маховика.
Подставляя решение (4.77) в систему уравнений (4.73), полу-
чим два^отдельных уравнения для и 6Р
& (sln cos kJ + -g- cos <7S Sin kj) [ 1 -
-dMsin - v - 4г мд,
\ = 74^-e2- [ Sin (et/ + q9) - sin q3 cos kJ -
--cos q3 sinkj~\ —
«1 J J 4
Выражения для скоростей 01( б1( найденные интегрирова-
нием (4.79) при нулевых начальных условиях, записываются в виде
k = А^-е*)" О1" Яз 81П klt + 2 V C°S Яз Sin2 “¥) +
+ J^r[1 -^§rhl)-]lcos^-cos(ei/ + ^)]-
-^-(B^ + B^H,
61 = ' T;fel^fr e2j ' [cos q3 - cos (Bji + g8)] - sin q3 x
X sin kJ — 2 COS q3 sin2 -^-1-t.
Углы поворота бх определятся уравнениями
Pi = СSin Яз (1 ~C°S ~ “8"C0S Яз Sin +
+ nH1 ~ [sin ~ sin +
+ cos (1 - t ~ 4- >
Sl = {4f tsin ~ sin (^+^1 “
(4.80)
(4.81)
— 2 sin q3 sin2 —%- cos q3 sin kj] +
“ I
+ cos^3
УЛ
A^i8i
Me
/ 4
z2
2 ’
95
Скорость 04 найдем, интегрируя уравнение (4.72),
cq = - 4- Pi + 4- MRt + -%- [cos <73 - cos^ + q3)]. (4.82)
Ограничиваясь в рядах (4.66) первыми двумя слагаемыми,
запишем выражения для скоростей р, 6, а на участке совместного
движения реактора и ведомого маховика:
— 080 + 8?> [ Sin Sin klt + 2 Х
X COS^jSin2 ] + -^- [ 1 — Д1 ^2 2 е2) ]х
X [cos </3 — cos (e2f + <7з)1 — (В2Л4Д 4- t,
= 0з° + в?) {“ё"fcos~cos (ej/ +
+ <7з)1 — sin Чз sin kJ — 2 -|S- cos % sin2 —
Mc ,
Ц T'
a = a30 — 1 [ sm Яз sin Kt 4-
+ 2 cos ft sin2-^-1 + Г1 -
«1 Z J cj L
—[cos<73-cos(8^ + %)1-
- -j- (В2мл+BiMi) /} + A- MRt +
[cos q3—COS (eit + <7з)1.
(4.83)
Углы поворота p, 6, a найдем, используя выражения (4.70),
(4.81), (4.82)
0 = 030 + 030 4" cos Яз~^~
1 _/_
)]
1 (W/W4-+
— cos q3 sin 1 4-
^1 J
- [shift —sin(e^4-<73)l ,
ил
X [2sin<73sin2-^-
21Г1-
«I
96
UiDt
(kl ~ 8‘
и,й. \ . мс t* ,
-тir-COSVs / —_д—4-
Л^181 / 1/4 2
' k2
-± [sin q3 — sin (ех/ ф- q3)l —
ei
— 2 sin q3 sin2 + y- cos q3 sin kTt
(4.84)
I Г ’ , fio-^4 ( 1 UiBi \ лло 1 J. I
<* = «30+^30- 3^(1 DA )C0S?s] t +
+ w К + X {B*M*+ f2 “
? ( [ 2 sin <h sin2 — F cos <7з sin V ] +
Bi ) AjAj (k{ — ex) L 2 йх j
D«
U&
[sin</3— sin(8j/ + g3)]
2
1
1
В уравнениях (4.83), (4.84) возможны упрощения. Например,
в^первом уравнении (4.83)’ может быть опущено малое слагаемое
-у- (В2МЛ -J- BiM,) t, в третьем уравнении можно пренебречь
слагаемым -^-(В2Л4ДЦ-В]Л41) t, малым по сравнению
с -g- MRt. В выражении (4.82) на режимах, соответствующих ма-
В3 а
лым передаточным числам, можно опустить слагаемое -& рх.
Решение (4.84) системы дифференциальных уравнений (4.65)
имеет смысл, если kt =# 8Х. В резонансном случае (/гх = 8Х) реше-
ние строится в другой форме, которая является известной. Это
решение не приводится, поскольку совпадение}/гх и ех соответ-
ствует упругим элементам малой жесткости, не используемым
в конструкциях. Действительно, kl и ех имеют вид
ki = 7J- + , 8Х = q (а30 р80).
Примем для определенности i/x = U. С небольшой погреш-
ностью имеем А1 А. Следовательно, fei> fe2 •
Почти во всей области передаточных чисел справедливо неравен-
ство в = qa13 > q (а30— р30) = ех. В реальных образцах k > 8.
С учетом последнего замечания fex > ех.
Решение дифференциального уравнения (4.62), описывающего
движение обоймы, приведено ранее (см. с. 86),
4 А. И. Леонов 97
Оценка решения. На рис. 23 приведены графики скоростей х
Р, 6, рассчитанные на машине (сплошные линии) и по формулам
(4.78), (4.83) для первого варианта (4.35) и дополнительных дан-
ных:
J4 = 2 кг-м2; /Д = 38 400 Н-м/рад, Л4с = 625 Н-м, ^ = 0.
(4.85)
Расчет проводился при начальныхчусловиях
а = 7,5 рад, Р = 6= 0,26 рад, а = 297,5 рад/с,' р = 6= 120рад/с,
(4.86)
найденных на предыдущем участке для k/& — 1,5. Кривые соответ-
ствуют передаточному числу
i
«=*0,4. Совпадение аналитических
и машинных кривых хорошее. Для
скоростей р и 6 различие на ри-
сунке не прослеживается.
Результаты с хорошим соответ-
ствием машинных и аналитических
кривых х, р, 6 получены для раз-
ных передаточных чисел и жестко-
стей выходных упругих элементов.
В табл. 7 приведены сравни-
тельные результаты расчета угло-
вой скорости а ведущего маховика
для данных (4.85) и начальных
условий (4.86).
Данные таблицы показывают
хорошую сходимость результатов.
На рис. 24, а показаны графи-
ки скоростей х, р, 6 для первого
участке совместного движения ре-
актора и ведомого маховика
варианта (4.35) и дополнительных данных J4 = 2 кг-м2, иг =
= 38 400 Н -м/рад, Мс = 300 Н -м; /Их = 0, построенные при на-
чальных условиях а = 9,1 рад, р = 6 = 1,23 рад, а = 292 рад/с,
Р = 6 = 236 рад/с. Кривые соответствуют передаточному числу
i 0,8. На рис. 24, б графики построены для первого
Таблица 7
Угловая скорость а, рад/с, на участке совместного движения
с амаш аанал if, с амаш аанал
0, 297,5 297,5 0,008 293,3 292,3
0,002 296,4 296,4 0,01 293 291,7
0,004 295,2 294,8 0,011 293,1 291,6
0,006 294,2 293,4
98
варианта (4.35), дополнительных данных 74 = 2кг-м2, U1—
= 68 500 Н -м/рад, Л4С = 1250 Н -м, Мг = 0, при начальных усло-
виях а = 7,04 рад, р = 6 = 0,14 рад, а — 300 рад/с, Р = 6 =
— 61 рад/с. Передаточное число в последнем случае i 0,2.
Рис. 24. Графики скоростей на участке совместного движения реак-
тора и ведомого маховика
Для проведенных расчетов характерно снижение колебаний
угловых скоростей х, р, 6 и деформаций х выходных упругих эле-
ментов с увеличением жесткости последних. Зависимость макси-
мальной деформации выходных упругих элементов от (рис. 25)
построена для первого варианта
коэффициентов (4.35), дополни-
тельных данных (4.85) (параметр U х
изменялся) и начальных усло-
вий (4.86).
Расчеты по второму вариан-
ту (4.35) для скоростей х, р, 6
при тех же {начальных усло-
виях, что и для первого ва-
рианта, практически не изменяли
результаты.
Рис. 25. Деформации выходных
упругих элементов
4. Участок торможения реактора
Участок торможения реактора начинается с момента размы-
кания выходного механизма свободного хода, которому соответ-
ствует равенство углов поворота р реактора и 6 ведомого махо-
вика
Р = 6. (4.87)
При р — 6 упругие элементы выходного МСХ недеформированы.
Как правило, размыкание происходит при действии обратного
импульса. В более редких случаях (например, при разгоне машины
4* 99
под уклон под действием собственной силы тяжести) участок тор-
можения начинается при выполнении условия (4.87) уже в конце
прямого импульса.
Движение трансформатора на участке торможения реактора
описывается теми же дифференциальными уравнениями (2.16), что
и на участке -разгона. Иными оказываются только начальные
условия.
Воспользуемся поэтому решениями для участка разгона, из-
менив соответственно начальные условия.
Первый интеграл (4.37) имеет вид
ЯхХ + Я2ф = (Мя 4- М2 — AQ t + С8, (4.88)
где С8 = Н14Х40 + ДгЖо; Ни, Я24 вычислены при начальных
условиях участка торможения
/ = 0, X = Х40, ф = ф48, X = Х40, ф = ф48. (4.89)
Формула (4.58) запишется х
(Г 2nmeh (cos ф — cos ф40) — \
1/ -4-(Л42-ЛГ1)(а-₽-а4о + ₽4о) + Л34(,1--^\|
I/ а \ а / I
1 _ f --------:---------------------------1--------у,
(4.90)
где Ам — коэффициент А3, вычисленный при начальных усло-
виях (4.89) и равный
Л34 = h + nrnb2 + —- Ф«У nJв 4- Znmbh — ф4о) cos ф4о-
Аналогично преобразуются формулы для скоростей а, р.
Приведем выражения скоростей a, |J для предпочтительного
семейства импульсных механизмов
•а = а40 4- (cos q (а40 — р40)—cos q[ (а40 — р40) 14-
Я (а40 — г4о)
+ (а40-р40)11+-^^>
0 = 04о + , Dsi0- Г {cos <7 (“40 - 04о) — cos q [(а40 - 0«) 7 4-
Я (а40 — Р4о)
+ (°Чо
100
(4.91)
- где
Рис. 26. График угловой скорости
реактора на участке торможения
а40> Рло» ®4о> ₽4о — начальные данные участка торможения, со-
ответствующие (4.89).
На рис. 26 дан график -угловой скорости р реактора, полу-
ченный решением исходных дифференциальных уравнений участка
торможения на вычислительной
машине и расчетом по форму-
ле (4.90) для первого варианта (4.35)
при начальных условиях
t = 0, а = л, Р = 0, а = 300 рад/с,
- р = 295'рад/с. (4.92)
Машинная и аналитическая кри-
вые почти совпадают, и различие
на графике не прослеживается.
Расчет по второму варианту (4.35)
дает практически ту же кривую,
что и по первому варианту.
Результаты сравнения анали-
тического и * машинного решений
позволяют рекомендовать проведе-
ние расчета по формулам (4.91)
на участке торможения реактора по трем периодам (1 — от Р
0,95а до Р = 0,8а; II — от р = 0,8а до р = 0,6а; III — от
р = 0,6а до р = 0). Если торможение реактора начинается с.угло-
вой скорости, меньшей 0,8а, используются только два периода;
при торможении со скорости, меньшей 0,6а, — один период.
5. Совместное движение реактора и ведомого маховика
при действии корпусных упругих элементов
На малых передаточных числах совместное движение реактора
и ведомого маховика начинается при действии корпусных упру-
гихЙэлементов. Для исследования указанного режима работы
101
трансформатора воспользуемся дифференциальными уравнениями
(2.18).
Решение для предпочтительного семейства импульсных меха-
низмов строим в виде рядов
а = а0 (0 + рах (/) + р2а2 (/) + • • •, '
Р = Ро(/) + рР1(О + н2Р2(О+•••. •
6 = М04-нМ04-н2М0+----
(4.93)
После введения параметра уравнения (2.18) запишутся
+ АР 4" И [&i® + М 4- Л (а — р)2 + Л6р2] = рЛ4д,
Аа 4~ (А 4~ А) Р 4~ и (^2а 4~ АР + А (а — Р)2—Аа21=
- - и£/Ро - и (нРх+н2Рз +•••) + их (б - Р),
Параметр в первом слагаемом правой части второго уравнения
вводится для упрощения выкладок. Только такой способ введения
параметра позволяет использовать простой алгоритм для на-
хождения достаточно точного и негромоздкого решения. После
умножения на р всего слагаемого £/р решение по двум членам
ряда оказывается неточным, а по трем слишком громоздким.
Если же при слагаемом (7р не вводить параметр, нахождение вто-
рых членов рядов (4.93) значительно усложняется.
При р — 1 уравнения (4.94) обращаются в уравнения (2.18).
Подставляя ряды (4.93) в (4.94) и приравнивая слева и справа
слагаемые, не содержащие р, получим порождающую систему
А®0 + АРо = О,
Аао + (А 4* А) Ро = А (А “ Ро).
J460 = — U4 (б0 Ро).
(4.95)
Система уравнений (4.95) при начальных условиях (4.64)
будет иметь такое же решение, как и система (4.67),
®о = «30. «0 = ®30^ 4" ®30> Ро ~ А = Рзо, Ро = 60 = Рзо/ 4” Рзо- (4.96)
Приравнивая в (4.94) слагаемые при р, получим систему
уравнений, описывающую функции ах, рх, бх
A®! + APi Ai0 (а0 — Ро)2 4~ -^боРо = Л^д,
^2®1 4- (^з 4- ^з) Р1 4- Ао («0 — Ро) — Л6Э«0 =
m
Первые члены Л40, Д50) До разложений коэффициентов А4, А5,
Ав в’ряды в окрестности порождающего решения (4.96) представ-
лены выражениями (4.9).
Из первого уравнения системы (4.97) находим
а1 = -1-[Л4д — B2Pi — До («о — Ро)2 * 4—Доро]- (4.98)
Понижая порядок системы (4.97) путем исключения а1( после
необходимых преобразований получим
Pi + 4е (и + Pi - Si = D* sln Ы + Яз) -
J4 J4
(4.99)
4
Характеристическое уравнение линейной однородной системы,
соответствующей уравнениям (4.99),
x2+Jt([/+t/1)
имеет две пары мнимых корней
^1,2 “ ~ ^1» ^3,4 = ~ ^2’
УЛ
к
JA
= О
(4.100)
где
Д(/х 4- J(U UJ j ']/'] 4&B1UU1J4
L ~ V [М714-/4В1(С7 4-О2. ’
Решение линейной однородной системы, соответствующей урав-
нениям (4.99), запишется в виде
Pll “j (С9 COS 4~ (0х/)
4“ (<°2----(Gil COS (02^ С12 Sin<02/),
v < } (4.101)
6ц = —(Cg cos Ciq sin (ti]t
4- Cu cos (d2t + Ci2sin
Коэффициенты частного решения системы (4.99)
Pi2 = sin fat + qs) + N2 cos (e51 + q3)t 1
^12= ^3 sin (ех/-|~ %) 4~ ^4 cos (ex/4~ ^7з)> j
103
соответствующего синусу в правой части, находятся методом не-
определенных коэффициентов и оказываются равными
д, = ______________*')
ui
W2 = W4 = 0.
Аналогично находятся, коэффициенты частного решения
₽i3 = AV + tfe, 613 = AM + Af8, (4.103)
соответствующего оставшимся слагаемым в правой части системы
(4.99),
А6 = А7 = _р80, ^6 = ._^(мс + Амд + г/рзо),
лг8==Лг?_^.
Общее решение уравнений (4.99) находится как сумма реше-
ний (4.101)—(4.103):
Pi — —у1-) (С9coscoj/С10 sin®]/) + (<о| — 4) X
X (Си cos ®2/ + С12 sin со2/) + N sin (ех/ + q3) — + Nt,
6t = —(С9 cos св]/ С10 sin ©]/ 4* Си cos ®2/ 4~ С13 sin <o2f) 4-
*/ л
4“ sin (ei^ “F 7з) Рзо^ ^8
При нулевых начальных условиях постоянные интегрирова-
ния ,С9> llt 12 равны
Q _______1
О 9 —---г у
/ J4СО9 \
Л/”! Sin q3 -р Л(в +
X (N з sin N8)
Q —_______1
Jл(£ \
—д-^------11 (sxA^3 cos q8 — p30) +
+ 1cos <7з — Рзо
104
Qli — ~Tj~ (^з sin 7з + ^s) — £9, Ci2 — Л, (^lAfз COS q3 — Рзо)
(71
Ограничиваясь в рядах (4.93) двумя членами, получим сле-
дующие выражения для р и б
р == Рзо 4" ---(С9 cos 4~ СХ9 sin ®х0 4~ 1
\ •> i /
+ (®2 — (Cn'cos со2/ + CJ2 sin <Й2У) + Nx sin + q3) + Ne,
6 = p30 —(C9 cos ® xf + C10 sin «7 4- Cu cos ®2i 4- C12 sin ®2i) 4-
4-yvs sin (exZ 4-(/g) 4-A^e- (4.104)
Скорости p и 6 определятся уравнениями
P = oji — yi-) (— C9 sin 4- Cio cos 4- ®2 ^«2 —jr-) X
X (—Cu sin <a2f 4- CX2 cos co2Z) 4- cos (ex/ 4~ <7з)> (4.105)
6 = [®x (C9 sin (axt — C10 cos ®x0 4" ®2 (Сц sin — C12 cos ®2/)]4*
**4 .
4“ ei^s cos (ех/4~ ^s)-
Полученные выражения можно упростить, пренебрегая сла-
гаемым -у2- Мл в коэффициенте TVe и слагаемым -у2- Рзо в коэффи-
циенте D4. Допускаемая при этом погрешность не превышает 0,5%.
Функции ах и «х находятся интегрированием уравнения (4.98).
Выражение для скорости ах имеет вид
“i= - -J41 + V"[cos qa ~ cos (£1/ + <7з)1’
Ограничиваясь двумя членами первого из рядов (4.93), полу-
чим следующее уравнение для скорости а ведущего маховика
« = азо 4-' -тй-1 —Рх 4- [cos <7з - cos (ех/ 4- ^)], (4.106)
£»1
где
Р1 = Р — Рзо = ^(01---( С9 Sin й)3/ ^10 COS СО]/) 4~
I
4- со2 ((о| — (— Сп sin (02/ 4- С12 cos (О20 4-
\ /
4-МЛ cos (8г/4-^з)~рзо-
105
А,5, рад/с
о 0,1 0^2-10'4,с
Рис. 27. Графики скоростей реактора
и ведомого маховика на участке сов-
местного движения при действии кор-
пусных упругих элементов
(сплошные линии — машинное решение;
штриховые — аналитическое решение)
го
Найденное аналитическое решение проверялось расчетом на .
вычислительной машине. Сравнительный анализ показал прием-
лемость аналитического решения для инженерных расчетов. На
рис. 27 приведены графики скоростей реактора и ведомого махо-
вика для трансформатора с импульсным механизмом Левина при
следующих данных: <7. = 1,74 кг-м2; J2 = 0,107 кг-м2; 73 =
= 0,012 кг-м2; = 1,1 кг-м2;
А,6, рад/с__________________ • nJв = 0,0258 кг-м2; пт =
=21,4 кг; а—0,084 м; b=0,042 м;
е = 0,126 м; h = 0,011 м;
q = 1,33; МД = 270 Н • м; .
U = 20 000 Н - м/рад;] =
= 30 000 Н • м/рад. Кри-
вые 1 соответствуют начальным
условиям: t = 0, р = 6 =
= —0,09 рад, а = 0,36 рад,
а = 150 рад/с, р = 6 = 15 рад/с
и Мс = 2700 Н-м; кривые 2 —
начальным условиям t = 0, р =
= 6 = —0,04 рад, а — 0,58 рад,
а = 150 рад/с, р = 6 = 30 рад/с
и Мс = 1350 Н-м.
Различие машинного и ана-
литического решений для ско-
рости 6 незначительно, и на рисунке не прослеживается. Ско-
рость а ведущего маховика изменялась мало, и поэтому соответ-
ствующие графики не приведены.
6. Замечания по результатам интегрирования
дифференциальных уравнений
1. При интегрировании дифференциальных уравнений на всех
участках цикла выявилась общая черта в законах движения
звеньев инерционного трансформатора — малое влияние схемы
импульсного механизма предпочтительного семейства на движе-
ние ре.актора и существенное влияние на неравномерность враще-
ния ведущего маховика. Расчет проводился по двум вариантам
параметров, представляющим параллелограммный импульсный
механизм и механизм Хоббса. Одинаковыми в обоих случаях
были заданы моменты инерции ведущего и ведомого маховиков,
средний момент на заторможенном реакторе от инерционных сил
грузовых звеньев, параметр q, жесткости упругих элементов МСХ,
моменты двигателя и сопротивления, начальные условия. Оба
механизма удовлетворяли условию выхода на прямую передачу.
Несмотря на то, что механизмы различно влияют на дви-
гатель, кривые угловых скоростей и углов поворота реактора
мало отличаются одна от другой (в пределах инженерной точности
106
одна из кривых может быть заменена другой). Такой же резуль-
тат получается по угловым скоростям и углам поворота реактора
для обобщенного планетарного механизма и механизма. Левина,
занимающих промежуточные положения между планетарным
Хоббса и параллелограммный импульсными механизмами.
Существенно отличались колебания угловой скорости веду-
щего маховика. У механизма Хоббса неравномерность вращения
ведущего маховика в 2—3 раза превышает неравномерность вра-
щения, свойственную параллелограммному импульсному меха-
низму.
2. На основе результатов интегрирования, оценок угловых
ускорений и структуры коэффициентов дифференциальных урав-
нений можно рекомендовать общий подход,' упрощающий инте-
грирование дифференциальных уравнений движения трансформа-
тора и являющийся модификацией метода последовательных при-
ближений. Суть его сводится к следующему. Во втором дифферен-
циальном уравнении систем (2.15)—(2.18) пренебрегается измене-
нием угловой скорости а ведущего маховика. При условии а =
= const интегрированием второго и последующих дифференциаль-
ных уравнений находят законы изменения 0, у, б. Решение для 0
подставляют в первое уравнение, интегрированием которого на-
ходят закон изменения а. Если точность решений недостаточна,
используют последующие приближения.
3. На режиме трансформации момента подтверждено свойство
предпочтительного семейства импульсных механизмов, заклю-
чающееся в снижении неравномерности вращения ведущего махо-
вика при а —> 0.
Глава V
ОПТИМАЛЬНАЯ ОБЛАСТЬ ПАРАМЕТРОВ ИНЕРЦИОННОГО
ТРАНСФОРМАТОРА С УПРУГИМИ ЭЛЕМЕНТАМИ
Выбор оптимальной области параметров инерционного транс-
форматора основывается на аналитических решениях, получен-
ных при интегрировании дифференциальных уравнений в преды-
дущей главе. Рассматриваются различные передаточные числа
режима трансформации момента (0 < i < 1).
Оптимальная область найдена в безразмерном виде, связы-
вающем все параметры трансформатора: геометрические, массо-
вые, жесткостные и скоростные, В качестве основных критериев
при выборе оптимальной области приняты минимальная циклич-
ность нагружений М.СХ при передаче импульса момента, макси-
мум потенциальной энергии упругих элементов М.СХ, обеспечи-
вающий снижение масс грузовых звеньев и нагрузок во всей цепи
трансформатора, минимальные деформации упругих элементов
МСХ. Исследования по затрагиваемым вопросам изложены в ста-
тьях [35, 38, 39].
1. Исследование работы корпусных упругих элементов
при использовании всего обратного импульса
Воспользуемся первой формулой (4.25), описывающей движе-
ние реактора предпочтительного семейства импульсных механиз-
мов на участке накопления потенциальной энергии и отдачи ее при
разгоне'реактора
₽ = sin sin kt — cos q-i cos kt + cos (e/ + 7i) ] • 15.1)
Изменение угла 0 определяется выражением
Р = £ е2 [ sin (е/ + <7i) — sin qx cos kt-cos qx sin kt]. (5.2)
Рассмотрим вначале участок накопления потенциальной энер-
гии, соответствующий использованию всего обратного импульса.
Действие обратного импульса начинается при ф = л (например,
параллелограммный импульсный механизм), или при ф = —л
(например, планетарный Хоббса с эпициклической шестерней
108
реактора), или при Я5 = 0 (например, планетарный Чалмерса с ве-
дущей солнечной шестерней). Полагая в уравнении (5.2) =
= 0, ±л, получим
6 = ± ,,Д 2- (sin st-г- sin kt} . (5.3)
1 k? — 8a \ k J ' '
Знак плюс соответствует началу действия обратного импульса
при ф = 0, минус— при ф = ±л.
Для нахождения стационарных точек функции р = [3 (() вос-
пользуемся необходимым условием cos kt — cos e,t = 0, или
sin -2^-s /-sin 0. (5.4)
Корнями уравнения (5.4) будут
^ = ^-0 = 0, ±1, ±2,...). (5.5)
Отрицательные значения и опускаются, так как аргу-
менту t отрицательный знак не приписывается.
Исследуем стационарные точки, используя вторую производ-
ную от функции р ((), - ,
р= ± (k sin kt — e sih 8/). " (5.6)
Подставим в последнее выражение значения корней tilL
к , D& /1 . 2kni , 2еш \
Р = ± v-----------2“ Я Sin -V-----8 Sin V--) .
1 £2 •— 82 \ & + 8 & + 8)
Преобразуя в этом равенстве аргумент первого синуса к виду
2kni 4 2ш г/у । x , -
после необходимых преобразований получим
Ь" ' — ^8 2sjti
р —• н- "т sin "т j . (5.7)
Г k—8 k+ъ V 7
Подстановка корней ti2 в выражение (5.6) дает
о* D& . 2&«rti /г*
₽=±МТЯПКГ7' <5-8)
При соотношениях между k и 8, которые не обращают в ноль
синусы, производная (5 оказывается положительной или отрица-
тельной, и значения (5.5) определяют минимумы или максимумы
функции р (/). В тех точках, где синусы обращаются в нуль, тре-
буется дополнительное исследование. Приравнивая аргументы
синусов в (5.7) и (5.8) к In, найдем эти точки
£=е01- 1), £ = 8(-у-+ l)(i, / = ± 1, ±2, ...). (5,9)
109
Значения i и /, при которых k становится отрицательным, не
рассматриваются, так как k — положительная величина.
Стационарные точки, соответствующие значениям (5.9), можно
проверить, воспользовавшись выражением для скорости Р (О
P = ± -fe2 _e2 sin —t sin t. (5.10)
Подставляя первые из равенств (5.9) и (5.5) в уравнение (5.10),
получим
sinni-slnn(i — /) = 0. (5.11)
Какими бы ни были числа i и i — I, вычисленные no’i, I в (5.9),
произведение синусов при переходе через точки (5.5), соответ-
ствующие равенствам (5.9), не меняет знак. Для проверки этого
утверждения достаточно рассмотреть различные комбинации чет-
ных и нечетных, положительных и отрицательных значений чи-
сел i и i — I. Следовательно, корни (5.5) при значениях (5.9) не
определяют экстремумы.
Рассмотрим поведение функции р (/) при изменении отноше-
ния kls. Положим, например, 8 > 0 и k > 8. Значение i = 0
соответствует началу движения реактора при действии обратного
импульса. Отрицательные i отбрасываются, так как при k > 8
tn и tiz отрицательны. При i — 1 значение определяет первый
экстремум после начала движения
= <512>
Проверка по выражению (5.7) показывает, что Р > 0 и
определяет минимум при любых k > 8. Действительно, по диф-
ференциальным уравнениям можно установить, что значениям
8 > 0 (q > 0) соответствуют только те механизмы, у которых
обратный импульс начинается при ф = л. Этим механизмам в (5.3)
соответствует знак минус, а в (5.7) — плюс.
Значению tti при i = 1
^ = 7^? (5ЛЗ)
в промежутке 8 < k < 2s соответствуют и максимумы и минимумы
в зависимости от знака синуса в (5.8). В промежутке 2s < k < Зе
ускорение р согласно (5.8) положительно (учитывается знак минус
в правой части) и в точке (5.13) имеем минимум. Наконец, при
k > Зе значение (5.13) определяет максимум, за исключением
точки k = 5е. Как и в случае первого минимума, промежуток
времени (5.13) до появления экстремума уменьшается с увеличе-
нием k/s.
Таким образом, корни (5.5), за исключением значений (5.9),
определяют последовательные значения максимумов и минимумов
функции р (f) в зависимости от соотношения между k и е.
НО
По значениям корней (5.5) прослеживается закономерность
в поведении реактора: с ростом fe/e (при условии постоянства в)
частота колебаний угловой скорости реактора возрастает. Эта
закономерность естественна, так как с увеличением k при неиз-
менности геометрических и массовых параметров возрастает
жесткость корпусных упругих элементов. Таким образом, физи-
ческая картина движения реактора в трансформаторе соответ-
ствует полученным теоретическим результатам.
2 . Выбор оптимальной области параметров
при использовании всего обратного импульса
Цикличность нагружений корпусного МСХ. Передача импульса
вращающего момента упругим МСХ в инерционном трансформа-
торе сопровождается колебаниями момента. М.ожйо выделить два
характерных закона протекания
момента: с одним нагружением
МСХ (в пределах цикла работы
трансформатора МСХ один раз
нагружается и один раз разгру-
жается) и несколькими нагруже-
ниями. Несколько колебаний пе-
редаваемого момента в пределах
одного цикла свойственно доста-
точно жестким МСХ. Предпочти-
тельным является закон протека-
ния момента с одним нагружением.
При этом, во-первых, достигается
минимальная цикличность работы
МСХ, во-вторых, исключаются воз-
можные размыкания МСХ и после-
дующие включения с ударом. Рис. 28. График угла поворота реак-
Выделим область параметров, тора механизма Левина на обрат-
в которой обеспечивается мини- - ном импульсе
мальная цикличность нагружений
корпусного МСХ и исключаются его размыкания при передаче
импульса момента. Таким образом, первым критерием при выборе
оптимальной области является минимальная цикличность нагру-
жений МСХ при передаче момента.
Рассмотрим график изменения угла поворота р реактора при
действии обратного импульса (рис. 28). Расчет проведен для пла-
нетарного импульсного механизма Левина с параметрами ='
— 5 кг-м2; = 0,4 кг-м2; Js = 0,04 кг-м2; nJ в = 0,051 кг-м2;
пт — 16 кг; е = 0,135 м; а = 0,09 м; b = 0,045 м; h = 0,04 м;
q — 1,33; k = 400 рад/с при начальных условиях: t = 0; Р = 0;
а = 2,36 рад; р = 0; а = 150 рад/с.
Законы изменения угла р для других импульсных механизмов
при использованном соотношении между k и s аналогичны.
111
График заканчивается вторым экстремумом функции р (/),
соответствующим моменту времени t = 0,021 с. До точки, в ко-
торой функция р (/) имеет минимум, происходит накопление по-
тенциальной энергии, затем до обращения р (/) в ноль— отдача
потенциальной энергии и в интервале положительности функ-
ции р (0 — торможение наружной обоймы корпусного МСХ.
Размыкание корпусного МСХ может происходить как до точки
Р = 0, так и после этой точки. Момент размыкания устанавли-
вается равенством ускорения реактора, описываемого уравне-
нием (5-6), и ускорения обоймы 3 (см. рис. 12), определяемого дей-
ствием корпусных упругих элементов,
(5.14)
Ускорение ух обоймы находим по деформации упругих эле-
ментов
и
V=— у.
До момента размыкания реактор и обойма движутся вместе
и углы Т и Р равны, поэтому ускорение ух выразим с помощью
уравнения (5.3)
Vi = ± -у- •.«D . (-т- sin £/ — sin еЛ . (5.15)
- J3 я2 — е2 \ k } . ' '
Используя уравнения (5.6) и (5.15), условие (5.14) преобра-
зуем к виду
k sin kt — е sin е/ = , (е sin kt — k sin e/)
или
sin^=V77^7$sineZ- . ‘ (5Л6)
Из уравнения (5.16) находим момент времени //соответствую-
щий размыканию МСХ. .
Размыкание до точки Р = 0 происходит только в случае, если
на реактор в этот момент действует уже положительный импульс.
При действии отрицательного импульса размыкание невозможно,
так каК моменты от инерционных сил грузов и корпусных упругих
элементов, направленные навстречу друг другу, поджимают на-
ружную обойму корпусного МСХ к реактору.
После точки р = 0 размыкание имеет место только при дей-
ствии отрицательного импульса. Последний случай' нежелателен.
После размыкания МСХ реактор тормозится действием обратного
импульса, а наружная обойма колеблется с высокой циклической
частотой, определяемой равенством
112
Колебания обоймы приводят к ударам о замедляющийся и мед-
ленно разгоняющийся в начале положительного импульса реак-
тор. Кроме того, возможна остановка реактора, и если отрицатель-
ный импульс еще действует, то возможен удар в МСХ при обрат-
ном движении.
При размыкании корпусного МСХ во время действия поло-
жительного импульса описанные удары не могут произойти. Ско-
рость реактора после размыкания возрастает, а скорость наруж-
ной обоймы корпусного МСХ после незначительного увеличения
снижается. На участке, где скорости реактора и обоймы одновре-
менно возрастают (непосредственно после точки размыкания),
угловое ускорение реактора увеличивается вследствие возрастания
инерционных сил, а угловое ускорение обоймы падает вследствие
уменьшения потенциальной энергии упругих элементов.
В связи с изложенным задача заключается в установлении об-
ластей включения МСХ до точки р = 0 и после этой точки.
Рассмотрим область параметров 0 < k < е и установим, совпа-
дает ли в этой области интервал положительности функции Р (/)
с интервалом действия обратного импульса.
С небольшой погрешностью можно принять, что угол ф от-
носительного поворота грузового звена за период действия обрат-
ного импульса (как и прямого) равен л. Тогда время протекания
обратного импульса найдем из равенства '
л
, л = J ф<// — фср4, (5.17)
О'
где — время действия обратного импульса.
Скорость ф для семейства предпочтительных механизмов равна
Ф = <7(а-Р).
По” значению tix, соответствующему первому экстремуму,-
видно, что по крайней мере до момента времени I « л/e скорость Р
в области k < 8 отрицательна. Поэтому при отбрасывании 0
в последнем равенстве скорость ф уменьшается. Если принять
фср = <7а, (5.18)
то согласно этому равенству скорость фср будет несколько зани-
женной.
Используя в равенстве (5.17) значение скорости (5.18), полу-
чим неравенство для оценки времени протекания обратного
импульса
^<Л= —. (5.19)
qa 6
С другой стороны, момент времени f2, начиная с которого
функция р (0 становится положительной, может быть с большим
113
запасом оценен по времени первого экстремума. Полагая в (5.12)
k — 8, получаем оценку /2
. .. я
(5.20)
Сравнение неравенств (5.19) и (5.20) показывает, что в области
k < 8 интервал положительности функции р (t) не содержится
в интервале действия обратного импульса. Таким образом, размы-
кание корпусного МСХ при действии обратного импульса может
произойти только в области k > 8.
Уравнение (5.16) преобразуем к виду
t ЛВ1 f е у
sin^ = ---------А ,\k-' -sin8/. (5.21)
Д
J В J
Так как А Вх (Ва + J«), то величина —Лт" со'
ZX о3 -j- J3
гласно структуре коэффициентов дифференциальных уравнений
оказывается малой, а коэффициент в правой части выражения (5.21)
1 _ / 8 \2
/ _ Д К k )
6 , J3Bj
д
несколько больше единицы.
Уравнение (5.21), по которому находятся точки размыкания
корпусного МСХ, перепишем в виде
sin kt = /5 sin еЛ (5.22)
Для сравнительных оценок следует найти точки, в которых
функция р (/) обращается в ноль. Полагая правую часть выраже-
ния (5.3) равной нулю, получим требуемое уравнение
sin kt = — sin st
8
Графическое решение последнего уравнения и уравнения (5.22)
представлено на рис. 29. Для большей наглядности излагаемых
далее утверждений синусоида sin kt построена для двух вариантов:
k = 1,58 и k = 2,5е. Синусоида sin kt в случае k — 1,5е сначала
пересекает синусоиду Z5 sin"st, затем sin еЛ Это означает,
что размыкание корпусного МСХ происходит до точки р = 0.
Нетрудно заметить, исследуя графическое решение, справедли-
вость этого вывода во всем интервале е < k < 28.
Таким образом, исследование графических решений показы-
вает, что в интервале 8 < k < 2s размыкание корпусного МСХ
114
и последующее включение с ударом при действии обратного им-
пульса не происходит.
В интервале 2е < k < 3s точка размыкания МСХ встречается
после точки р = 0. Этому интервалу соответствует выключение
МСХ при действии отрицательного импульса.
Область Зе < k < 4е оказывается безопасной. Объясняется
это тем, что в точке второго экстремума (максимума), определяе-
мого равенством (5.13), функция р (£) отрицательна. Она имеет
Рис. 29. Графическое решение урав-
нений
Рис. 30. Графики угла поворота
реактора на обратном импульсе
(сплошные линии — машинное реше-
ние; штриховые — аналитическое реше-
ние
уже иной закон протекания, чем на рис. 28 и оказывается отри-
цательной во всем интервале действия обратного импульса.
Графики изменения функции р (/) в интервале 3s < k < 4s
для параллелограммного импульсного механизма (кривые 1) и
механизма Левина (кривые 2) показаны на рис. 30. Расчет импульс-
ного механизма Левина проведен при следующих параметрах:
/1 = 5 кг-м2; /2 = 0,36 кг-м2; J3 = 0,04 кг-м2; nJB =
— 0,051 кг-м2; пт = 16 кг; е — 0,135 м; а = 0,09 м; b = 0,045 м;
h — 0,04 м; q — 1,33; U — 254 000 Н-м/рад; Л4Д = 270 Н-м;
начальных условиях: t = 0; Р — 0; а = 2,36 рад; 0=0; а =
= 150 рад/с.
Для параллелограммного импульсного механизма, имеющего:
Ji — 5 кг-м2; J2 = 0,46 кг-м2; /3 = 0,04 кг-м2; nJB — 0,03 кг-м2;
пт — 40 кг; а = 0, b- = е = 0,05 м; h = 0,08 м; Мд = 270 Н-м;
U = 176 500 Н-м/рад, начальные условия приняты: t = 0; Р = 0;
а = 3,14 рад; Р — 0; р = 0; а = 150 рад/с.
Величины U, определяющие жесткость корпусных упругих
элементов, подобраны таким образом, чтобы выполнялось соот-
ношение k = 3,68.
Таким образом, исследование графического решения на
рис. 29 показывает, что области безударной работы корпусного
115
МСХ и области, в которых возможны удары, чередуются. В интер-
валах 0 < k/e, < 1, 2п — 1 < k/e < 2п (п = 1, 2, ...) размыка-
ние корпусного МСХ при действии обратного импульса не проис-
ходит, в интервалах 2п < k/г < 2п + 1 (п = 1,2,...) корпусные
МСХ могут размыкаться при действии обратного импульса.
На рис. 31 показаны области работы корпусного МСХ. За-
штрихованы области параметров, в которых размыкание корпус-
ног'о-МСХ происходит при действии обратного импульса и воз-
можны последующие включения с ударом.
Рис. 31. Области работы корпусного
механизма свободного хода при ис-
пользовании всего обратного им-
пульса
Таким образом, предпочтительной является. область р,аботы
корпусного МСХ, соответствующая интервалу
0<_£<2. . . • (5.23)
В этой области исключаются размыкания МСХ во время дей-
ствия обратного импульса и обеспечивается минимальная циклич-
ность нагружений. Кроме того, на основании физических сообра-
жений можно сделать вывод, что области (5.23) соответствует наи-
более полное использование обратного импульса, поскольку по-,
тенциальная энергия упругих элементов накапливается в течение
действия всего обратного импульса. В других областях за период
действия обратного импульса происходит несколько колебаний
реактора, и часть обратного импульса расходуется на разгоны
и- торможения реактора.
Потенциальная энергия корпусных упругих элементов. Пол-
нота использования обратного импульса может быть оценена по-
тенциальной энергией, накапливаемой упругими элементами.
В связи с этим вторым критерием при выборе области параметров
трансформатора служит максимум потенциальной энергии корпус-
ных упругих элементов.
Предварительно исследуем изменение максимального момента
,Му = U\ рга)п |, действующего со стороны корпусных упругих эле-
ментов на реактор.
Модуль минимального угла поворота реактора, соответствую-
щего первому экстремуму, определяется подстановкой значения
времени (5.12) в выражение (5.3)
ю . । I В ( 8 , 2ле \ I
IPmlnl — | — \ k Sin /г -р е 81П /г + е ) | ’
116
Применяя здесь преобразования, аналогичные
- при выводе формулы (5.7), находим
|Pmn|= ° „,31..-^.
А® ( 1-в) 1+ —
\ kJ 1 8
Используя выражение/ k2 = получим
^£___ sin __2£L_.
1-4Л i + A
проведенным
(5.24)
I Pmln I
Далее имеем
44у __ I ^Pmln I _ 1 2л
Л4уо . Му0 ~ 6 k ’
k + 8
(5.25) •
где
м =
з’0 Bi •
Зависимость (5.2^) построена на рис. 32. Максимальное зна-
чение функции Mj/My0 = f (k/&) лежит в интервале 1 < Лг/е < 2
и равно 1,77.
В интервале 3 < k/& <4 максимальный момент на реакторе
от упругих элементов, который может быть использован при дей-
ствии положительного импульса, определяется вторым минимумом.
Это, например, видно из рис. 30. Второму минимуму по времени
будет соответствовать значение t21 = 4л/(£ + е). Подставляя это,
значение в выражение (5.3), после преобразований получим
Afv 1 . 4л
(6'26)
k 8
Коэффициент при синусе в последнем выражении не превы-
шает 1,5. Следовательно, максимальный момент от упругих эле-
ментов на реакторе в исследуемом интервале меньше максималь-
ного момента в интервале (5.'23).
Можно проверить, что и в других интервалах безударной ра-
боты корпусного МСХ максимальный момент от упругих элемен-
тов не превышает максимального момента в интервалеО < /г/е <2.
Рассмотрим изменение потенциальной энергии в зависимости
от отношения 7г/8. Подставляя в равенство П — U№/2 значение
U = -g- и модуль угла Pmln согласно выражению (5.24), получим
значение максимальной потенциальной энергии, соответствующей
первому экстремуму функции р (t)
П -_________**
1 1 max — /
_ gin2 1
2 0111 Ь •
1----1+ —
kJ 1 8
(5.27)
117
Используя уравнение (5.25), последнее выражение преобра-
зуем к виду
П - Bi ( МУ V
"max — 2Д \ k )
(5.28)
Для удобства графического построения равенство (5.28) пред-
ставим так
^тах __ / Му . k \2
^2 \ ^уо ® /
(5.29)
г ZAjLz
где £3 = .
График функции (5.29) дан на рис. 33 сплошной линией (штри-
ховая линия пояснена ниже). В интервале k/e > 2 функция моно-
Рис. 32. График максимального от-
носительного момента на реакторе от
действия сид корпусных упругих эле-
ментов
ментов
тонно убывает. Максимум потенциальной энергии достигается
в точке k/e = 0,65.
Максимальная потенциальная энергия во втором интервале
(3 < k/e < 4), где исключаются удары, определяется также ра-
венством (5.28). По величине она значительно меньше потенциаль-
ной энергии, накапливаемой при первом экстремуме, так как
Му/Му0 снижается, a kke возрастает.
Можно проверить, что с возрастанием номера интервала макси-'
мальная потенциальная энергия, накапливаемая упругими эле-
ментами при действии обратного импульса, падает.
Сплошная линия .на рис. 33 отражает запас потенциальной
энергии, накапливаемой упругими элементами к моменту оста-
новки реактора (что соответствует первому экстремуму). Однако
остановка реактора может происходить при действии как поло-
жительного, так и отрицательного импульса. Если период на-
копления потенциальной энергии заканчивается при действии
положительного импульса, то это означает, что часть положи-
тельного импульса уже -израсходована до начала разгона реак-
тора. При остановке реактора во время действия отрицательного
119
импульса часть потенциальной энергии будет израсходована за
счет отрицательного импульса. В соответствии с этим точка макси-
мума потенциальной энергии не отражает оптимального значе-
ния k/г. Найдем интервал наибольших полезных значений по-
тенциальной энергии.
Прежде всего заметим, что с уменьшением kt& увеличивается
промежуток времени (5.12) до первого экстремума. С другой сто-
роны, снижение fe/s, означающее относительное уменьшение жест-
кости упругих элементов, вызывает увеличение модуля скорости (j
реактора на обратном импульсе. Для подтверждения этого есте-
ственного с физической точки зрения положения воспользуемся
выражением (5.1) для скорости р, преобразованным в случае ис-
пользования всего обратного импульса к виду
= fe82e2 (cos kt—cos e/). (5.30)
Графики функции (5.30) для разных значений kts при 8 =
= 150 рад/с даны на рис. 34. Увеличение модуля скорости р
реактора приводит к увеличению скорости ф и согласно (5.17)
снижению времени tx протекания обратного импульса. В резуль-
тате промежуток времени между окончанием действия обратного
импульса и остановкой реактора увеличивается, что вызывает ис-
пользование большей части положительного импульса до оста-
новки реактора. Следовательно, можно указать точку k/г = 0,65,
левее которой полезный запас потенциальной энергии заведомо
снижается. Действительно, левее этой точки потенциальная энер-
гия согласно рис. 33 снижается, а часть затраченного до оста-
новки реактора положительного импульса увеличивается.
С возрастанием k/s имеем обратную картину. Время G проте-
кания обратного импульса увеличивается, а промежуток вре-
мени tilL до первого экстремума уменьшается. При некотором от-
ношении kJ & эти промежутки времени оказываются равными.
Упомянутому отношению k/г соответствует окончание периода
накопления потенциальной энергии точно к началу действия
положительного импульса. В зависимости от геометрических и
массовых параметров импульсных механизмов указанное отноше-
ние изменяется. Для его оценки приравняем /1Х(5.12) и ^(5.17):
2л л а
, . = —--.—, где pCD — средняя угловая скорость реактора
“г q (а 0ср)
за время действия отрицательного импульса. Отсюда kt& = 1 —
— 2 . Полагая рср/а« —0,1, требуемое отношение kJ& можно
принять kt г =1,2.
Правее точки kte, = 1,2 остановка реактора, соответствующая
первому экстремуму, происходит уже при действии обратного
импульса (тенденция изменения величин tt и /ц сохраняется).
119
Следовательно, часть накопленной упругими элементами потен-
циальной энергии расходуется при действии обратного импульса.
В соответствии с этим можно указать точку k/e = 1,2, правее
которой полезный запас потенциальной энергии, расходуемой
при действии положительного импульса, будет снижаться.
' Приведенные соображения дают достаточно узкий интервал
(0,65 < k/e < 1,2), в котором находится наибольшее полезное
значение потенциальной энергии, расходуемой при действии^по-
скорости реактора при действии обратного относительных углов поворота
импульса (значения р/£> следует умножить наружной обоймы корпусного
на 10~2) механизма свободного____хода
ложительного импульса (изменение потенциальной энергии по-
казано ориентировочно штриховой линией на рис. 33).
Таким образом, оптимальным с точки зрения полноты исполь-
зования обратного импульса является интервал
0,65 < — <1,2,
8
(5.31) -
Детальное уточнение закона изменения потенциальной энер-
гии в этом интервале не проводилось,, поскольку на выбор пара-
метров при конструировании накладываются другие ограниче-
ния, и практически не представляется возможным его использо-
вание.
О других критериях выбора параметров корпусных упругих
элементов. Одним из требований, предъявляемых к упругим эле-
ментам при конструировании, является обеспечение минималь-
ного поворота наружной обоймы корпусного МСХ при накопле-
нии потенциальной энергии. Корпусные упругие элементы доста-
точно жесткие, и большие перемещения требуют создания громозд-
ких элементов, выходящих за габариты существующих приводов.
Достаточно сказать, что наиболее употребительные в машинострое-
нии витые пружины по указанной причине не находят применения
в опытных образцах.
120
Для исследования наибольших углов поворота обоймы вос-
пользуемся уравнением (5.24), преобразовав его к виду
где L3 = D/&2.
График изменения функции (5.32) дан на рис. 35. С возраста-
нием /г/s максимальный угол поворота наружной обоймы корпус-
ного механизма свободного хода резко падает.
Оценим возможные углы повррота, например, для параллело-
граммного импульсного механизма. Отношение D/&2 для механиз-
мов, выходящих на прямую передачу, можно принять 0,25. Тогда
при k/e, — 0,9 угол поворота составляет 0,475 рад, а при k/г =
= 1,8—0,135 рад. Углы поворота до 0,1—0,15 рад приемлемы,
большие углы поворота трудно осуществить при сохранении ком-
пактной конструкции.
Другое важное требование к упругим элементам сводится
к обеспечению минимальной скорости наружной обоймы корпус-
ного МСХ. После размыкания МСХ происходит разгон реактора,
совместное движение реактора и ведомого маховика, торможение
реактора. На этих участках обойма тормозится до остановки или
до минимально возможного уровня скорости. Чем больше ско-
рость обоймы в момент размыкания МСХ, тем труднее конструк-
тивно осуществить торможение.
Из рис. 34 видно, что чем больше k/&, тем меньше скорость
реактора на обратном импульсе. Так же изменяется скорость реак-
тора и в момент размыкания МСХ, что подтверждается исследо-
ванием уравнений.
Оптимальная область. Обобщение результатов проведенного
исследования, посвященного отысканию оптимальных параметров
по отдельным критериям, приводит к бесспорному выводу: из
областей, представленных на рис. 31, оптимальной для корпус-
лого МСХ в случае использования всего обратного импульса
является область (5.23). В ней обеспечивается минимальная цик-
личность нагружений МСХ, отсутствие размыканий при передаче
обратного импульса с возможным последующим ударным включе-
нием, наиболее полное использование обратного импульса. При
определенных параметрах из этой области углы поворота и угло-
вые скорости наружной обоймы корпусного МСХ оказываются
приемлемыми при создании конструкций. В следующих главах
будет показано, что использование рекомендуемых областей по
обоим МСХ позволяет снизить нагрузки в 2—3 раза. Таким обра-
зом, реализация области (5.23) ведет к решению главной задачи —
снижению динамической напряженности и созданию наиболее
благоприятных условий работы трансформатора.
Область (5.23) является достаточно широкой. Критерий циклич-
ности нагружения и отсутствия размыканий при действии обрат-
131
кого импульса не ограничивает возможности выбора параметров.
Во всей области обеспечивается одно нагружение и отсутствие
размыканий. Однако наиболее йблное использование обратного
импульса достигается в интервале (5.31), соответствующем сере-
дине области. Левее середины (примерно в интервале 0 < /?/е <
< 0,7) выбирать параметры нецелесообразно. С одной стороны,
в этом интервале снижается полнота использования обратного
импульса и как следствие возрастает динамическая напряженность
схемы. С другой стороны, чрезмерно возрастают углы поворота
и скорости наружной обоймы корпусного МСХ, так что реализа-
ция их в конструкциях оказывается затруднительной. Разработка
ряда опытных образцов трансформаторов с упругими элемен-
тами (см. гл. IX) показывает, что конструктивные ограничения'
(в первую очередь невозможность осуществления больших углов
поворота наружной обоймы) сужают оставшийся интервал 0,7 <
< k/г < 2. Параметры трансформаторов удается реализовать
в частичной области 1,5 < k/г <2.
Таким образом, основная рекомендация сводится к выбору
параметров в области
1,5<4<2 (5.33)
со стремлением обеспечить возможно более низкую границу этого ,
отношения. Если конструктивно удается осуществить более по-
датливые элементы, чем рекомендуемые, то может быть исполь-
зована область 0,7 < kle, < 1,5.
3. Исследование работы корпусных упругих элементов
на различных передаточных числах
режима трансформации момента
Передаточные числа i характеризуются разными углами ф,
при которых начинается участок накопления потенциальной энер-
гии. Согласно аналитическому решению в гл. IV, угол ф в момент
начала участка накопления потенциальной энергии равен qt.
Рассмотрим поэтому интервал изменения угла qlt соответствующий
разным передаточным числам режима! трансформации 0 < i < 1.
Например, в случае е > 0 (q >0), представляющем наибольший
практический интерес, угол qt изменяется в промежутке [л, 2л].
Особый интерес вызывает поведение функции р (t) в окрест-
ности первого экстремума, так как именно этот экстремум опре-
деляет запас потенциальной энергии, накапливаемой при действии
обратного импульса, наибольшие нагрузки, воспринимаемые кор-
пусным МСХ, наибольшую деформацию упругих элементов.
Воспользуемся уравнением (5.2). Необходимое условие суще-
ствования экстремумов запишем, приравнивая к нулю правую
часть уравнения (5.1)
— sin Vi sin kt — cos cos kt -f- cos ef) = 0. (5.34)
8
122
Используя известное преобразование
£ . j
— sin = L4 cos t) 2,
8
— cos qt — Lt sin i]3,
(5.35)
у равнение (5.34) приведем к виду
Ьц sin (т]2 + kt) + cos (е/ + <h) = 0, (5.36)
где L4= |/cos2ft+ (A)3 sin2 ft, tg ц2 = — ctg ft.
Нетрудно проследить следующее соответствие между Л4 и &/s:
Рис. 36. Графики изменения промежут-
ка времени до остановки реактора при
действии обратного импульса
Рис. 37. Графики наибольшего отно-
сительного угла поворота реактора при
действии обратного импульса
Если ввести безразмерное время т = &t, то после преобр азо
вания уравнения (5.34) получим
k k k
— sin ft sin — т — cos ft cos — т-|-cos (ft + т) = 0.
Из последнего выражения следует, что экстремумы функ-
ции р (0 определяются только отношением kt& и углом qr.
Экстремумы могут находиться для различных kt г в интервале
изменения ft графическим решением уравнения (5.36) или реше-
нием на вычислительной машине непосредственно уравнения (5.34).
На рис. 36 представлены графики изменения промежутка вре-
мени t-i с начала движения до первого экстремума (минимума),
рассчитанные на вычислительной машине применительно к 8 —
— 150 рад/с.
Используя диаграмму на рис. 36, можно определить наиболь-
шую деформацию упругих элементов при различных k/& и разных
передаточных числах, которым соответствуют определенные
углы ft. На рис. 37 приведены графики изменения относительного
123
угла |Pmml, соответствующего первому экстремуму. Расчет про-
веден по уравнению
0 = [ — sin ft cos kt-cos qx sin kt sin (ft -f- &t) J ,
,\T/ ~1
полученному преобразованием выражения (5.2).
Для ориентировочной оценки по рис. 37 угла поворота реак-
тора в радианах можно принять q = 1 (что соответствует парал-
лелограммному импульсному механизму) и L3 = 0,25.
Как видно из рис. 37, кривые имеют общую закономерность:
с увеличением передаточного числа (что соответствует увеличе-
нию ft) деформация несколько возрастает, а затем снижается.
Наибольшие деформации упругих элементов, а следовательно,
и наибольшие нагрузки на корпусной механизм свободного хода
достигаются при малых передаточных числах.
Можно приближенно считать, что максимальная деформация
корпусных упругих элементов имеет место при использовании
всего обратного импульса.
Установим предпочтительную область работы при различных
передаточных числах. Ускорение $ реактора равно
(J = ~ sin q-t cos kt -J- cos ft sin kt —
-—rsin(<7i + 8/)] •
Используя условие (5.14), получим уравнение, решением ко-
торого находятся моменты времени, соответствующие размыка-
нию корпусного МСХ,
----k2^ sin q1 cos kt e (-j-j--cos ft sin —
— ( ~r---sin (qx 4- sf) = 0.
£2Д
Подставляя значение U = -к—, уравнение преобразуем к виду
С~ГВ-----0 Sin ft COS W + — f-Д----1) COS ft sin kt —
\ о / \ v g-Dj / 8 \ J gJ5j /
<5'37)
Точки обращения в ноль функции 0 (/) найдем из уравнения
sin ft cos kt + -r- cos ft sin kt — sin (ft et) = 0. (5.38)
c?
124
г
з
<Ъ>Р'ад
Рис. 38. Области работы корпус-
ного механизма свободного хода
й/е<2
Сравнивая корни уравнений (5;37) и (5.38), можно установить
для различных и /г/е области, в которых размыкание корпус-
ного МСХ происходит при действии обратного импульса.
На рис. 38 представлены результаты машинного расчета для
случая = 10. Заштрихована область, в которой возможна
ударная работа корпусного МСХ. Расчет для других значений -тД-
дал аналогичные результаты. Напри-
мер, для = 5 и 7-g-= 10 гра-
ничные кривые мало отличаются друг
от друга, и на рисунке изменение
не прослеживается. Наибольший ин-
терес представляет промежуток 5 <
c-г-н- < 10 изменения величины-7-^-.
Jsai
Из рисунка видно, что первая об-
ласть (0 < kl& <2), в которой ис- ’
ключаются удары корпусного МСХ,
с увеличением передаточного числа
расширяется; Поэтому при проекти-
ровании достаточно выбрать параметры МСХ в области 0
на режиме использования всего обратного импульса.
4. Оптимальная область параметров корпусного МСХ
1. На основе сопоставления результатов исследования в пре-
дыдущих параграфах оптимальной оказывается область
’ ' 1,5<4-<2. (5.39)
Во-первых, выбор параметров в указанной области по сравне-
нию с областями k/s > 2 позволяет наиболее полно запасти по-
тенциальную энергию и максимально снизить нагрузки в транс-
форматоре на самом тяжелом режиме работы корпусного МСХ —
в случае использования всего обратного импульса. С увеличением
передаточного числа использование обратного импульса сни-
жается, и корпусной МСХ разгружается.
Во-вторых, обеспечивается минимальная цикличность -нагру-
жения корпусного МСХ на режиме трансформации момента.
В-третьих, в этой области исключаются возможные размыка-
ния и удары во время действия обратного импульса на режиме
трансформации момента. В других областях опасность размыка-
ния сохраняется в определенной зоне передаточных чисел. Сле-
дует заметить, что даже если весь МСХ не размыкается в этих
областях, но нагрузка на него колеблется во время передачи
импульса момента, то возможны выключения и включения с уда-
ром отдельных наименее нагруженных рабочих тел (например,
125
некоторых пластин микрохрапового МСХ или роликов фрик-
ционного МСХ). Всегда имеется часть рабочих тел МСХ, .воспри-
нимающих меньшую по сравнению со средним уровнем нагрузку.
В-четвертых, наиболее полное использование обратного им-
пульса позволяет значительно снизить массы грузовых звеньев
и трансформатора. Количественные оценки по снижению масс
грузовых звеньев приведены в гл. VIII.
Наконец, область (5.39) оказывается конструктивно осуще-
ствимой.
2. Реализация оптимальной области зависит от используе-
мого двигателя. В случае применения асинхронных электродвига-
телей (например, горные машины) используется один скоростной
режим двигателя. Выбранное оптимальное отношение k/e не ме-
няется при эксплуатации. Для двигателей внутреннего сгорания
характерна широкая область скоростных режимов. В этом случае
корпусные упругие элементы рассчитывают на один скоростной
режим, как правило, режим использования максимальной мощ-
ности. С уменьшением скорости двигателя-отношение k/e выйдет
из оптимальной области, так как k для данного трансформатора
постоянно, а 8 меняется. Однако это не опасно в силу резкого
снижения нагрузок, пропорциональных квадрату скорости.
3. Полученные результаты справедливы и для семейства им-
пульсных механизмов с переменной функцией ф' при малых от-
носительных эксцентриситетах, поскольку движение таких меха-
низмов достаточно хорошо описывается аналитическими зависи-
мостями для предпочтительных импульсных механизмов (см.
гл. IV).
5. Исследование работы выходных упругих элементов.
Оптимальная область параметров
Как и в случае корпусного МСХ, интерес представляет нахо-
ждение области работы выходного МСХ, в которой исключаются
размыкания при передаче импульса момента и обеспечивается
эффективное использование упругих элементов.
Воспользуемся уравнениями (4.77) и (4.78),. описывающими де-"
формацию и скорость деформации выходных упругих элементов,
£) Г 8 "1
4 sin (ej 4- 78) — sin q3 cos kvt-------------cos qs sin ktt ,
Zq 81 J
Xi = 2 Г cos (e^ + <?3) + — sin <7зsin Kt — cos <7з cos •
— 8 j L -I
(5.40)
Сравнивая их с уравнениями (5.1) и (5.2), определяющими
деформацию и скорость деформации корпусных упругих элемен-
тов, убеждаемся в том, что это одни и те же уравнения с различ-
ными коэффициентами. Если в (5.40) коэффициент Z)4 заменить
на D, kx на 8Х на 8, q3 на q^, то получим уравнения (5.1) и (5.2).
126
Рассмотрим выражения для коэффициентов D и £>4
ntnehqalo ( г b / Ь \ 1 R а / а. . \)
D = — (М1 - — +?)]’
о.-^”!в1+в JM-Мх
I \ «30 / \ «30 J
(5.41)
На основании результатов интегрирования дифференциальных
уравнений имеем а10^а30. Сргласно структуре коэффициентов
дифференциальных уравнений можно принять А *=« Ах. При jj30 —*
—» 0 коэффициенты D и £>4 мало отличаются один от другого. Зна-
чения и k
также оказываются близкими, если принять жесткости U, Ui кор-
пусных и выходных упругих элементов равными. Действительно,
и по структуре коэффициентов дифференциальных
ZA1 £>3
уравнений величиной 1/J4 можно пренебречь по сравнению с 1/В3.
Наконец, е4 е при рз0 —» 0.
По аналогии с корпусными упругими элементами для выход-
ных упругих элементов будем рассматривать режим использова-
ния всего прямого импульса, для которого в зависимости от схемы
импульсного механизма qs = 0 или q3 = —л, и 0ЗО = 0. В этом
случае разность между qs и qlt определяющими начальные углы ф
при использовании всего прямого и обратного импульсов, равна л,
и правые части уравнений, описывающих р и х, а также [3 и х,
отличаются только знаками. Изменение знаков повлияет лишь
на заключение об экстремумах, В тех точках, где при использова-
нии всего обратного импульса функция р (0 имела минимумы,
в случае использования всего прямого импульса будут максимумы,
и наоборот. Это соответствует физической картине процессов
в трансформаторе: при действии обратного импульса угловая ско-
рость реактора вначале возрастает по модулю, будучи отрицатель-
ной, и первым после начала движения встречается минимум, при
действии прямого импульса скорость в начале участка положи-
тельна, и первым будет максимум.
Таким образом, деформация и скорость деформации выход-
ных упругих элементов на режиме использования всего прямого
импульса изменяются по тем же законам, что деформация и ско-
рость деформации корпусных упругих элементов на режиме ис-
пользования всего обратного импульса. В связи с этим результаты
127
по исследованию работы корпусных упругих элементов (см. п. 1),
нахождению их максимальной деформации и наибольшей потен-
циальной энергии (см. п. 2) будут справедливы и для выходных
упругих элементов. Несколько иными оказываются уравнения,
по которым находятся предпочтительные области работы выход-
ного МСХ.
Предпочтительная область работы выходного МСХ. Лучшие
условия работы выходного МСХ имеют место в случае, когда его
размыкание не происходит во время. действия положительного
импульса. При подобных размыканиях возможно повторное
£.. включение с ударом всего МСХ
-^sink,t,sinstt ИдИ отдельных рабочих тел.
Следовательно, задача сводится
к установлению областей, в ко-
торых размыкание МСХ проис-
ходит при действии отрицатель-
ного импульса.
Рассмотрим режим исполь-
зования всего прямого импуль-
са. Полагая в первом из урав-
нений (5.40) <7з = 0 и прирав-
нивая правую часть нулю,
найдем условие, по которому
определяется время размыкания
выходного МСХ
Рис. 39. Графическое решение уравне-
ний sin 8]/—-г1- sin k±t = б. (5.42)
Как и в случае корпусного МСХ, можно установить, что при
ki < размыкание происходит только после окончания действия
положительного импульса.
Исследуем интервал k± > 8V Для наглядности используем
графическое построение на. рис. 39. Нетрудно проследить по по-
ведению кривой -U- sin kjt моменты пересечения ее с кривой
sin 8Х/, соответствующие первым после t = 0 корням уравне-
ния (5.42). В интервале 1 < — <2 пересечение кривых проис-
' 1 »,
» Л «ГС О Q —
ходит после точки t = — = -г—, в интервале 2 < --^ < о до
<7«зо 1
JL . «П»
точки г —— и т. д.
<7^30
Момент окончания прямого импульса установим, используя
уравнение
’ (5-43)
Фер
где Фер = Я (аср — Рср) среднее значение скорости ф за время
от начала участка совместного движения до окончания прямого
128
импульса; аср, рсР — средние скорости ведущего маховика и реак-
тора за тот же промежуток времени. х
Для нахождения времени протекания прямого импульса можно
воспользоваться уравнением
ф (t) — п,
где ф'(0 = <7 [а (0 — Р (0 h а (0> Р (0 даны выражениями (4.84).
Полагая в (5.43) аср = а30, Рср = 0, получим приближенное
значение времени t, соответствующее окончанию прямого им-
пульса,
f = 4-. (5.44)
да 30
Сравнивая (5.44) с результатами решения уравнения (5.42),
приходим к выводу: в интервале
0<А<2 (5.45)
размыкание выходного МСХ происходит после окончания действия
прямого импульса, в интервале 2 < k1le.1 < 3 при действии пря-
мого импульса и т. д. Наблюдается такое же чередование, как и
в случае корпусных упругих элементов.
С учетом РСр значение (5.44) времени, соответствующее окон-
чанию прямого импульса, увеличивается (на рис. 39 вертикаль-
ная прямая смещается вправо), а верхнее значение интервала (5.45)
несколько снижается. Как видно, на режиме' использования всего
прямого импульса предпочтительной оказывается область (5.45).
Машинный расчет показывает, что с увеличением q6 область
(5.45), в которой отсутствуют размыкания выходного МСХ при
действии положительного импульса, расширяется, как и в слу-
чае корпусных упругих элементов.
Таким образом, рекомендуемые оптимальные области пара-
метров. корпусных и выходных упругих элементов практически
совпадают. При конструировании можно вначале выбрать опти-
мальные параметры корпусных упругих элементов, а затем жест-
кость выходных элементов принять равной жесткости корпусных
упругих элементов.
Максимальные деформации выходных упругих элементов. Иссле-
дование максимальных деформаций упругих элементов имеет
важное значение для МСХ ведомого маховика. Рабочие тела, упру-
гие элементы, наружная обойма и другие детали МСХ распола-
гаются в ведомом маховике, т. е. занимают более ограниченное
пространство, чем корпусной МСХ. *
Значения времени, соответствующие максимумам функ-
ции хг(0, найдутся из уравнения
%i(f) = 0.
5 А. И. Леонов
129
Используя второе уравнение (5.40) и переходя к безразмер-
ному времени т =• ех£ получим
cos (т + <78) 4- — sin q3 sin -^- х—cos q3 cos — x = 0. (5.46)
8i 8i 8i
Подставляя значения соответствующих корней уравнения (5.46)
в первое из уравнений (5.40), найдем максимальные деформации
Рис., 40. Графики относительной
максимальной деформации выход-
ных упругих элементов
Рис. 41. Графики максимальной де-
формации выходных упругих эле-
ментов
упругих элементов. Предварительно первое из уравнений (5.40)
преобразуем к виду
Х1 = —Г [sin ~sln дз cos х ~'
61 . kl Т
----cos q3 sin — x ,
«1 ' 8i J
(5-47)
где £5 = D4/81.
Результаты машинного расчета уравнений (5.46), (5.47) при-
ведены на рис. 40. Для оценки деформаций упругих элементов
можно воспользоваться параллелограммным импульсным меха-
низмом, положив рзо = 0, £5 = 0,25. Тогда, например, при
6х/ех = 1,25 получим ximax = 0,31 рад.
На рис. 41 показаны графику изменения максимальной де-
формации Xifflax выходных упругих элементов с изменением отно-
шения :р80/а. Возрастание последнего приводит к уменьшению 8Х.
Начальное значение ^Х/8Х при р30 = 0 принято равным 1,5. Кри-
вая 1 соответствует параметрам о = е, <7=1, —д—- = 0,25,
кривая 2-1- параметрам b — е, q — 2, пте^1 = 0,25. Наиболь-
шие деформации достигаются при р80 — 0.
Эффективность использования выходных упругих элементов.
Снижение массы грузовых звеньев при использовании обратного
импульса является естественным. Накопление потенциальной энер-
гии на обратном импульсе и ее использование при действии пря-
130
мого импульса повышает средний момент на выходе трансформа-
тора.
Применение упругих элементов ведомого маховика позволяет
также повысить момент на выходе трансформатора и снизить массы
грузовых звеньев.
Рассмотрим второе уравнение (4.83). Приращение угловой ско-
рости ведомого маховика на участке совместного движения на-
ходится с помощью этого урав-
нения
Д6 =
UjPt , {kj
7?i(fti-ei) I 61
[cos q3 —
— cos^ + ft)! —
— sin q3 sin k^t—
После некоторых преобра-
зований и перехода к безраз-
мерному времени т = по-
лучим
Рис. 42. Графики максимального от-
носительного'приращения угловой ско-
рости ведомого маховика
Дб =-------/ -\» (cos q3 — cos (т + q3) — sin q3 sin т —
2(тг) cos^sin* 2 A-t-L7[1 - (^) ]*}>
гяе £ _ T _
где Le- . , L7-
81\1 + -дГ/
Полагая в последнем уравнении все параметры, за исключе-
нием klt постоянными, построим графики максимальных за цикл
приращений Дбтах угловой скорости ведомого маховика.
Результаты машинного расчета для значения L7 = 0,5 пред-
ставлены на рис. 42. Кривые максимального приращения угловой
скорости ведомого маховика имеют экстремумы в интервале 1,1 <
< < 2. Чем больше значение q3 (что соответствует увели-
чению передаточного числа трансформатора), тем больше сме-
щается экстремум в сторону увеличения
Проведенные расчеты указывают на возможности снижения
динамической напряженности трансформатора с помощью под-
бора упругих элементов ведомого маховика. Например, согласно
кривой q3 — 0 выбор значения kj/si = 1,5 вместо = 3 дает
б* 131
увеличение максимального приращения угловой скорости ведо-
мого маховика в 2 раза. Максимальный выигрыш за счет выходных
упругих элементов может быть получен в области малых переда-
точных чисел, так как кривые, соответствующие q3 = 0 и q3 =
= л/5, имеют наибольшие колебания.
При реализации одной и той же выходной характеристики соот-
ветствующим подбором упругих элементов достигается снижение
масс грузовых звеньев.
6. Замечания по выбору областей параметров
трансформатора
Оптимальная область (5.39)
* 1,5< —<2
’ 8
получена в безразмерном виде безотносительно к какой-либо кон-
струкции, что позволяет считать ее достаточно общей рекомендацией.
Область (5.39) справедлива как для корпусных, так и для вы-
ходных упругих элементов. В случае выходных упругих элемен-
тов отношение kh заменяется на kje^.
Подставляя , значения k и е, неравенство (5.39) представим
в виде / U Ji + пта? nJв J3 nmb2 -f- q^ + ->
1,5 < f ^ + (J3+J3) Гптаг+(— + nJA+nme^nJB " у L \ / J <7«io
Из последнего выражения следует, что рекомендуемая область
связывает геометрические параметры, массу грузовых звеньев,
моменты инерции, жесткости и угловую скорость ведущего махо-
вика, т. е. практически все параметры инерционного трансформа-
тора, в результате чего она является универсальной.
Проведенное при выборе оптимальной области исследование
затрагивает общие вопросы, справедливые для всех конструк-
ций МСХ. Для частных типов конструкций оптимальная область
может быть уточнена, исходя из других критериев, например,
минимальности напряжения в упругих элементах или элементах
МСХ. Если какой-либо из дополнительных критериев будет ре-
шающим, то в этом случае оптимальными могут оказаться и после-
дующие области: 2 < kle, < 3, 3 < kle <4, .... Однако, чем
дальше используемая область отстоит от оптимальной 1,5 < kle <
< 2, тем более ухудшаются такие важные факторы, как нагрузки
в импульсном механизме, контактные напряжения в МСХ, массо-
вые параметры и др.
Наилучшим в любом случае окажется вариант, когда по всем
критериям проходит рекомендуемая область (5.39).
Г лава VI
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ ОБОБЩЕННОЙ МОДЕЛИ
ИНЕРЦИОННОГО ТРАНСФОРМАТОРА
НА РЕЖИМЕ ДИНАМИЧЕСКОЙ МУФТЫ
Режим динамической муфты отличается от режима трансфор-
мации момента характерными особенностями. После выхода на
динамическую муфту движение трансформатора по участкам пре-
кращается, и механизм вращается как единое целое со средней
угловой скоростью двигателя. Вследствие возмущений на уста-
новившееся движение звеньев накладываются колебания, которые
оказываются малыми в широкой области параметров. При уста-
новившемся движении (средние скорости ведущего и ведомого
маховиков постоянны) выходной МСХ передает только момент
двигателя, который значительно меньше максимального переда-
ваемого момента на режиме трансформации. Корпусной МСХ на
режиме динамической муфты разомкнут. Вследствие значительной
разгрузки МСХ и малых относительных перемещений звеньев ре-
жим динамической муфты оказывается наиболее благоприятными
С этой точки зрения наилучшие условия при установке транс-
форматора обеспечивают автомобили, которые до 90% всего вре-
мени движения используют режим прямой передачи.
Вследствие неизменности структуры трансформатора дифферен-
циальные уравнения движения на режиме динамической муфты
не меняются.
, Впервые колебания динамической муфты были исследованы
в работе [51 ], основанной на линеаризации уравнений движения.
Последующие работы также использовали линейную постановку
задачи. Отметим работы пррф. Г. Д. Есина, в которых созданы
основы теории динамических муфт с центробежными связями [23 ].
Исследование нелинейных колебаний трансформатора на ре-
жиме динамйческой муфты проведено в работе [40].
1. Условие выхода трансформатора
на режим динамической муфты
Область возможного применения инерционного трансформа-
тора является чрезвычайно широкой. Некоторые машины (напри-
мер, автомобили) требуют использования всего диапазона переда-
точных чисел 0 < i < 1, т. е. использования режимов от затор-
133
моженного ведомого маховика до выхода на прямую передачу.
Другие машины в силу специфики осуществления технологиче-
ского процесса используют только часть диапазона передаточных
чисел.
Установим возможные границы передаточных чисел, достигае-
мых трансформаторами при различных областях параметров пред-
почтительного семейства импульсных механизмов [41].
Воспользуемся формулой (4.58), положив"Л42 — Л41 = О,
2nmeh (cos ф — cos ф20) + А32 1
Верхняя граница передаточных чисел определяется макси-
мальной угловой скоростью реактора. В режиме, когда сопротив-
ление на выходе машины отсутствует, максимальная угловая ско-
рость ведомого маховика, определяющая границу передаточных
чисел, равна максимальной угловой скорости, достигаемой ре-
актором.
Трансформатор без упругих элементов. При отсутствии упру-
гих элементов разгон реактора начинается при нулевой началь-
ной. скорости р2о — 0- Угол ф20 Для одних импульсных механиз-
мов равен 0, для других----л. Разгон заканчивается для пер-
вых механизмов при ф — ±п, для вторых — при ф = 0.
В случае окончания, разгона при ф = максимальная угло-*
вая скорость р реактора определится выражением
при окончании разгона в точке ф = 0 получим
Уравнение (6.1) описывает, например, параллелограммный ме-
ханизм, кривошипно-кулисный с поступательной парой в предель-
134
ном случае, механизм Хоббса, *а также механизмы Чалмерса, Ле-
вина и обобщенный планетарный в определенных областях пара-
метров. Уравнение (6.2) описывает, например, механизм Чал-
мерса при отрицательных значениях q.
Наибольший интерес представляет случай достижения угло-
вой скоростью Р реактора угловой скорости а двигателя, что яв-
ляется условием выхода инерционного- трансформатора на цря-
мую передачу. Указанное условие выполняется, когда числители
подкоренных выражений уравнений (6.1) и (6.2) обращаются
в нуль
J2 + nmb2 + — я') п^в + Zruribh — ^)~ ^nmeh — 0>
(6.3)
J2 4- ---q^ nJв — 2nmbh ------q'j +4nmeh=0.
С помощью этих уравнений находятся необходимые зависи-
мости между параметрами грузовых звеньев и моментом инер-
ции J2 реактора при-различных b и q.
Условия (6.3) могут быть записаны в виде
^=0 — 4nmeh = 0, Л34=_л 4nmeh = о,
где Лз.ф=0, Азф ,= п — значения коэффициента А3, вычисленные
веточках ф = О, —л.
Из физических соображений следует, что выход на прямую
передачу имеет место и в случае, когда левые части уравнений (6.3)
меньше нуля. .
Рассмотрим первое из условий (6.3) выхода на режим динами-
ческой муфты, охватывающее наибольшее число импульсных ме-
ханизмов, при изменении параметров a, b, q обобщенной схемы.
Используя зависимость JB =. J$ + mh2, сумму второго, третьего
и четвертого слагаемых преобразуем к виду
f(b, q) = nmb2 ------q^ nJB 4~ 2nmbh — q} —
[/ h \ ~|2 / h \2
b + h\~e--q)\ -rnJs(—- Я) • M
Нетрудно установить, что функция f (b, q) определенно поло-
жительная.
Исследуем f (b, q) на экстремумы. Имеем
f = 2™[»(1+А) + (Л^,)(л + ^.)],
Приравнивая нулю частные производные df/db, df/dq, получим
только одну стационарную точку b = q — 0, которая оказывается
135
мийимумбм в силу того, что f (b, q) определенно положительная
функция.
Таким образом, при b —» 0, q—* О сумма второго, третьего
и четвертого слагаемых стремится к нулю, слагаемое 4nmeli не-
ограниченно возрастает согласно (3.23) (при условии Мв = const)
и J2 —> оо. С увеличением модулей q и b момент инерции J2 реак-
тора снижается.
При q = 0 импульсные механизмы вырождаются. Поэтому
точка <7 = 0 и ее окрестность исключаются из рассмотрения.
Установленное свойство предпочтительного семейства импульс-
ных механизмов можно сформулировать следующим образом.
цию
Чем дальше находится им-
пульсный механизм от полю-
са b = q = 0, тем меньший
момент инерции J2реактора
может быть использован при
конструировании для транс-
форматоров, выходящих на
режим динамической муфты.
Для иллюстрации выска-
занных положений предста-
вим графически момент инер-
ции реактора по первому
уравнению (6.3) как функ-
q при различных b. С этой целью выражение nJB запишем
в виде nJB = (vx > 1), где vx определяет взаимосвязь
между моментами инерции JB и Js грузового звена. Согласно
уравнениям (6.3) функция J2 = f (?) представляет параболу.
Преобразуя уравнения (6.3) к каноническому виду, находим -
J2 — пт ^4eh — &2 (1 — j =
J2 + пт 4eh -ф b2 (j —j =
= —nm^\q-b(^----У Г
(6.5)
Параболы, соответствующие первому уравнению, имеют вер-
шины в точках с координатами -ф ; rim \y4eh — b2x
X (1—4“)])’ ВТОРОМУ Уравнению в точках ---------------
—пт ^4eh-j~b2 (1——Ветви парабол найравлены вниз.
На рис. 43 представлены графики первой функции (6.5) для раз-
личных значений J, vx = 2 и й = 0,5е. Кривые показаны выше
136
оси q, так как момент инерции реактора не может быть отрица-
тельным.
Наиболее благоприятной является область вершин парабол,
в которой верхняя граница момента инерции реактора оказы-
вается наибольшей. Нахождение этой области имеет важное
значение, например, при установке трансформаторов с быстро-
ходными двигателями. Согласно выражению (3.23) увеличение
скорости а двигателя приводит к резкому снижению величины
ntneh. В то же время момент инерции реактора по конструктивным
соображениям не может быть малым. В этом случае возможность
использования той или иной схемы импульсного механизма опре-
деляется величиной верхней границы момента инерции реактора.
Интересными и важными оказываются выводы, вытекающие
из второго уравнения (6.5). Поскольку > 1, ординаты вершин
парабол оказываются всегда отрицательными. Таким образом,
для механизмов, описываемых вторым уравнением, не существует
значений момента инерции реактора, обращающих числитель
подкоренного выражения уравнения (6.2) в ноль. Последнее
означает, что импульсные механизмы, описываемые уравнением
(6.2), не выходят на прямую передачу. Более того, наши попытки
применения, например, механизма Чалмерса с центральной ве-
дущей шестерней показали, что этот механизм реализует весьма
узкий диапазон передаточных чисел и не пригоден для применения
в большинстве машин.
Невозможность выхода некоторых схем импульсных механиз-
мов на прямую передачу была указана в работе [10].
К импульсным механизмам, описываемым уравнением (6.2),
кроме механизма Чалмерса с ведущим солнцем, относятся также
планетарный механизм Левина с центральной ведущей шестерней
и обобщенный планетарный .в некоторой области параметров.
•Полученные результаты позволяют уточнить оптимальную
область параметров импульсных механизмов. В гл. III было
показано существование первого полюса (Ь = е), в котором на-
грузки на импульсный механизм и неравномерность вращения
ведущего маховика оказываются наименьшими. В этой главе
показано существование второго полюса (Ь = 0, q = 0), кото-
рому соответствуют наибольшие возможности по выбору момента
инерции реактора. Очевидно, оптимальной областью импульсных
механизмов следует считать отрезок [0, е ] изменения параметра b
(/—5 на рис. 15). За пределами этого отрезка показатели по всем
критериям ухудшаются.
Проведем оценку изменения параметра q в оптимальной об-
ласти. Рассмотрим только вершины парабол (рис. 43), в которых
моменты инерции реактора достигают наибольших значений.
Абсциссы вершин^парабол определяются равенством
q^b(— + 4-Y (6.6)
\ е 1 hvi ) v '
137
Полагая b = Q и b = е, находим q = 0 и <7=1+-—.
Кривошипные импульсные механизмы (параллелограммный, кри-
вошипно-кулисный с поступательной парой в.предельном случае)
имеют значения параметра q, равные
<7-1, <7 = 2. (6.7)
Для планетарных импульсных механизмов при hie = 0,1,
Vj = 3, получим
0 с <7 < 4,3; . _ (6.8)
Окрестность q = 0 исключается по приведенным выше сооб-
ражениям, большие значения q не используются вследствие
увеличения цикличности работы МСХ. Поэтому обычно в опытных
образцах
0,5 <’<? <2. ' (6.9)
Представленное исследование проведено для случая выхода
трансформатора на режим динамической муфты. Если по усло-
виям работы машины трансформатор реализует частичную область
передаточных чисел и не выходит на режим динамической муфты,
то числитель подкоренного выражения-уравнения (6.1) больше
нуля. В указанном случае интервал изменения q может быть шире.
Влияние моментов трения в МСХ. По уравнению (4.58) не-
трудно проследить влияние моментов трения Мх и М2 в МСХ
на разгон реактора. Если Л42 > Л4Ь то числитель подкоренного
выражения уменьшается и реактор достигает больших скоростей.
В случае же Л4Х > М2 реактор достигает меньших скоростей.
Проведем сравнительную оценку членов 2nmeh (cos ф — cos ф20)
2
и — (М2— Л4Х) (а— р — а20 4* р20). Например, для опытного
образца погрузочной машины 1ПНБ2 величина nmeh составляла
0,028 кг-м2 (пт = 20,4 кг, е — 0,126 м, h = 0,011 м). Модуль
члена 2nmeh (cos ф — cos ф20) при ф20 = 0 и ф = л равен
12«те/<(со8ф — созф20)| = 0,112 кг-м2. (6.10)
Корпусной МСХ содержал 14 пластин, каждая из которых
прижималась к храповику с усилием 30 Н. При общей силе под-
жима 420 Н и коэффициенте трения f = 0,1 сила трения состав-
ляла 42 Н. Соответствующий ей момент трения Мг на радиусе
храповика 0,095 м получается равным 4 Н-м. Полагая М2 = 0,
искомую оценку получим с запасом (величина момента М2 мало
отличается от величины MJ. При угловой скорости двигателя
а = 150 рад/с и q = 1,33 модуль члена -ту (М2—MJ (а — р —
— «го + Р20) Равен
|-^-(М2 — Мх)(а-Р—а20 + р20) = 0,84-10"3 кг-м2. (6.11)
| а
138
Сравнивая последнюю величину с величиной (6.10), прихбдим
к выводу о возможности пренебрежения моментами трения в МСХ.
Подобные соотношения имеют место и в других опытных образцах
инерционных трансформаторов.
Трансформатор с упругими элементами. Проведенные выкладки
по определению верхней границы передаточного числа будут
справедливы и для инерционного трансформатора с упругими
элементами. С возрастанием передаточного числа и приближением
к верхней границе все большие доли прямого и обратного импульса
затрачиваются на разгон и торможение реактора. Потенциальная
энергия, накапливаемая упругими элементами, уменьшается,
и действие упругих элементов все меньше сказывается на движе-
нии деталей. В предельном случае (когда реактор достигает верх-
ней границы передаточного числа) упругие элементы уже не всту-
пают в действие. Устанавливается определенное равновесие между
движением реактора на прямом и обратном импульсах. Действи-
тельно, в конце разгона (ф = л) реактор только- касается ведо-
мого маховика и сразу же начинает тормозиться (если бы имело
место совместное движение, то это означало бы, что реактор
не достиг максимальной скорости). Весь же обратный импульс
расходуется на торможение реактора до остановки.
Покажем последнее с помощью формул (4.58) и (4.90), опустив
на основании предыдущих рассуждений разность Л42—
Пусть реактор при разгоне в промежутке [0, л ] изменения угла ф
достигает угловой скорости 0Х. Тогда по уравнению (4.58)
имеем
рх\8 — 4nmeh-j-A3
« ) X
(6-12)
или
1
Аз + Anmeh — Аз,
а /
(6.13)
где Аз — значение А3 при ф = 0 (в момент начала разгона);
Аз — значение А3 при ф = л (в конце разгона).
Пусть теперь реактор тормозится в промежутке [л, 2л ] изме-
нения угла ф с начальной угловой скоростью рх. Угловая ско-
рость р в конце участка торможения определится с помощью
уравнения (4.90)
1-----Аз = 4nmeh ф- Аз (1-----------. (6.14)
а / \ а /
Сравнивая (6.14) и (6.13), убеждаемся, что в конце участка
торможения скорость 0 оказывается равной нулю.
139
2. Периодическое решение дифференциальных уравнений
на режиме динамической муфты
На режиме динамической муфты инерционный трансформатор
представляет, по сути дела, два податливых звена, встроенных
последовательно между двигателем и трансмиссией. Одним по-
датливым звеном является упругий механизм свободного хода
ведомого маховика. Роль другого податливого звена играет
импульсный механизм с двумя степенями свободы. Его упругие
свойства определяются действием центробежных сил грузовых
звеньев и имеют динамический характер.
Проведем сравнительную оценку жесткостей импульсного
механизма и механизма свободного хода. Усредненная характе-
ристика импульсного механизма на режиме динамической муфты
может быть получена, например, из первого уравнения системы
(2.16), если положить а = (3 = const
Л6аа=Л1д (6.15)
или
sin ф =---------------------. - (6.16)
ntnehq а2
Зависимость (6.16) показывает, на какой угол ф будут повер-
нуты грузовые звенья при передаче постоянного момента Мя
и равномерном вращении всех звеньев трансформатора.
Согласно выражению (3.21) величина ntnehqa2 представляет
максимальный момент, действующий на заторможенный реактор
в случае параллелограммного импульсного механизма. Следова-
тельно, nmehqa2 на порядок болвше момента Мл двигателя,
и угол ф оказывается малым. Тогда
ф =----' (6.17)
timehq д?
Используя равенство ф= q (а—Р), выражение (6.17) пре-
образуем к виду
а — р = —(6.18)
nmehq2 а2
Полагая в формуле (6.18) а — р = 1, установим, какой момент
необходимо приложить к импульсному механизму, чтобы его
деформация (разность между углами поворота а и Р) составила
1 рад,
Л4Д = nmehq'2, а2. (6.19)
Жесткость выходного механизма свободного хода найдем,
используя равенство klz = v. Подставляя сюда выражения для k
и е, полагая А = ВХВ3, Uг = U, получим
t/x = v2B3<?2a2. (6.20)
140
Равенство (6.20) определяет момент, который необходимо
приложить к механизму свободного хода, чтобы деформировать
его на 1 рад.
Сравнивая правые части (6.19) и (6.20), убеждаемся, что при
v = 1,5—2 жесткость механизма свободного хода на порядок
и-более превышает жесткость импульсного механизма. Поэтому
упругость выходного механизма свободного хода в дальнейших
выкладках не учитывается.
Воспользуемся уравнениями (2.17), которые с учетом послед-
него предложения для гармонических импульсных механизмов
преобразуются к виду
Л^4-Л2Р + А(а-Р)24-Лбр2=Мд, 1
...... . ? (6.21)
Л2а + Л7р +А(« - № - А«2 = - A J
где Л7 = А3 + Л = Jz + Ji + nmb2 + (-^—- nJ в 4~ Znmbh х
х ("7--</)со8ф.
В дальнейшем представляется более удобным перейти к коорди-
натам р и ф. Используя зависимость между координатами ф =
= q (а—Р), запишем преобразованные уравнения
Y АФ + Их -F л2) р + А- л4ф2 + Ар = мл,
А- АФ + (Л2 + л7) р + А- л# - А М-Ф + р) = - мс.
ч ч \ ч /
Обобщенная координата р вследствие вращения всей системы
с некоторой угловой скоростью © не описывается периодической
функцией. Поэтому перейдем к новой переменной согласно равен-
ству
р = (о/4-г/. • (6.23)
С учетом (6.23) уравнения (6.22) преобразуются к виду
~ АФ + (А + л2) у + А л4ф2 + лв (® + у)2 = мд,
ч ч
1 • • • • 1 • / 1 • .\2
— Л2Ф + (Л2ф- Л7)у 4- Л<5ф2 — Л6 ( — ф ® + У) —— Мс.
Ч Ч \ Ч '
(6.24)
Момент Мд двигателя представим в виде разложения в ряд
Фурье
Мд=М04-М= А4- S MfSinf— / + аЛ. (6.25)
1=1 X п1 '
141
Для двухтактного двигателя внутреннего сгорания пг = 1,
для четырехтактного — 2.
Разрешая уравнения (6.24) .относительно старших производ-
ных, получим
* = {(А + 4) Мд + (Дх + А2) Мс - Ав (А2 + Л7) (® + £)* +
+ Ms (А 4 А) — А На 4 А)] Ф2—A Mi + А) Ч’ 4
4 w 4j > У — —А^с—АМд4-^г (АА ~ АА) Ф2 А
4 АА Ф 4 ®4 у') 4 АА (®4 т/)2|,
(6.26)
где
д3= jv |у2 4.у4 4- nmb^-\- ~ <?)2^в] 4 (Л 4 А)[п/па24
+ ("Г + ?)2 nJe\ + nme^nJB4 2nmeh [-у (т-?) А 4
4 у (у +?) + А) ~ ~Т nmehq2 cos Ч*] cos ф.
Выражение 1/Д3 представим в виде ряда
^Г= / 1 7? Ч ==^-[1~^'+(~^)2------------]’ (6-27)
Аз Т?4 I - 5 J А4 L А4 \ л4 / J
где ^4=Л[А4А4 nmb* 4- (^—----------nJe ] 4 (/а 4 4) X
X птс? 4- (-7- А ?)2 4 nme^nJв, R6 = 2ntneh —
. — <?) 4 4 v (т* + ?) (4 4 Л) —y nmehq2 cos ]cos '*’•
Согласно структуре коэффициентов дифференциальных урав-
нений всегда < Rt и ряд (6.27) сходится.
Для понижения порядка системы (6.26) используем первый
интеграл (4.39), соответствующий квазицйклической координате %.
Для исследуемого случая этот интеграл перепишется в виде
Я7а + Н8$ = (Л40 - Л4С) t 4- j Мdt + N,
где N — постоянная, которая найдется из условий периодич-
ности решения.
142
Переходя к координатам ф, 0 и используя (6.23), получим
-i- И А + (Я7 + Hs) (со 4 у) = (Мо - Мс) t + J М di + N.
' (6.28)
По уравнению (6.28) нетрудно установить, что решение для у
и ф может быть периодическим только при условии
МО = МС. - (6.29)
Раскладывая коэффициент в ряд (сходящийся согласно
структуре коэффициентов дифференциальных уравнений),
1 _ 1 ' _ 1 Г1__________, ( Ri V
я7 + я8 ~ ~ Яв L Rt )
где R6 = + J2 + Л + п^в + пте2, R2 = 2nmeh cos ф, (6.30)
и учитывая условие (6.29), уравнение (6.28) преобразуем к виду
Hi
qRe
©.
(6.31)
Периодическое решение будем строить для системы уравнений,
включающей первое уравнение (6.26) и уравнение (6.31). Вводя
параметр р, запишем указанную систему
+ -—^гЛ;) <“+*+1k х
х (Л, + Л„) - А, (А, + л,)1 «j? - х
(6.32)
x(v* + “+ w)’}- У“[•-+
При ц = 1 уравнения (6.32) обращаются в уравнение (6.31)
и первое уравнение (6.26). Принятый способ введения параметра
обусловлен несколькими обстоятельствами. Во-первых, соблю-
дается принцип введения параметра при малых членах. Напри-
мер, отношение ₽7/Т?6. составляет менее Одной сотой. Во-вторых,
при таком способе введения параметра порождающее решение,
как будет видно из дальнейшего изложения, представляет равно-
143'
мерное вращение системы, на которое накладываются колебания
от воздействия переменной составляющей момента двигателя.
С физической точки зрения подобное порождающее решение близко
к ожидаемому истинному. Наконец, в-третьих, алгоритм построе-
ния решения оказывается простым.
Решение системы (6.32) будем искать в виде рядов
Ф = Фо + рФх + Р2Фа 4->1 оо.
I 12 1 г (6.33)
' у — у о + 4“ ^2У2 4~ • • • • J
Функции sin ф, cos ф в коэффициентах уравнений (6.32) раз-
ложим в окрестности порождающего решения в ряды вида
sin ф = sin ф0 4- cos ф0 (рфх + ц2ф2 4-) —
- ^^(И1 + Н2Ф2+---)2--------- ’ (6.34)
Постоянную У также представим в виде ряда по параметру
^ = Л4 + цД4 + ц2Д44-... " (6.35)
Подставляя ряды (6.33—6.35) в уравнения (6.32) и приравни-
вая слагаемые, не содержащие параметр, получим порождающую
систему
ф; = о, у0 = -±- jМЛ4--^--^2-ф0, (6.36)
где Я70 — первый член разложения коэффициента Я7 в ряд в окре-
стности порождающего решения, равный
Я70 == Л + птеа 4- + q) nJB 4- (2 -у- 4* <?) nmeh cos ф0.
Общее решение первого уравнения (6.36) будет
Фо — О13^ 4"
Условия периодичности решения системы (6.36) имеют вид:
Cis = 0, 'Nq— R6<a = 0. При выполнении последних условий
система (6.36) имеет семейство периодических решений,. завися-
щее от двух произвольных постоянных,
Фо= Ом, Уо = j?e J J М dtdt 4- С15. (6.37)
Приравнивая в уравнениях (6.32) слагаемые, содержащие р
в первой степени, с учетом (6.37) находим
Фх — [0го + Ао) (Мо — Лвосо2 4- Л4) 4" Mio 4"
4~ Л20) (Мс — Аи>«2)] >
У!-----ИГ }Mdt qRt Rl N^~RT'
(6.38)
144
где Д10, Aw, Д70, Rn — первые члены разложений коэффициен-
тов Л,- (i — 1, 2, 6, 7), Т?7 в ряды в окрестности порождающего
решения, равные
А»= Л + пта2 + + q\2nJв + 2nmah 4- q\ cosф0,
о
Л20 = nmab 4- (-J- 4- 6 а q — q2) nJB 4- ntnh Г4-
\ v c / L e
4- q (b — a) cos ф0,
Л60 = nmehq sin ф0, T?70 = 2nmeh cos ф0,
A70 = J24~ Л + ntnb2 + (A----nJв + 2nmbh ----------q\ cosф0.
При выполнении условий
Мй - Л6Осо2 = 0, Мс - Лво<о2 = 0 (6.39)
скорость фх оказывается периодической функцией периода 2л
= «. И*> +.А?). ( Mdi + С16. •• (6.40)
*\4 J
Из условий (6.39) находится постоянная интегрирования Си
порождающего решения
sinф0 = sin С14 = —• (6.41)
Как видно из уравнений (6.37), (6.41), движение порождающей
системы представляет равномерное вращение с наложенными
колебаниями, при котором грузовые звенья повернуты относи-
тельно звена ОВ на угол ф0, определяемый равенством (6.41).
Этот поворот обусловлен передачей на режиме динамической
муфты постоянной составляющей А40 момента двигателя.
Уравнение (6.41) представляет характеристику динамической
муфты — зависимость между передаваемым моментом М 0 и углом ф0
деформации импульсного механизма при заданной угловой ско-
рости ©. Впервые подобная характеристика приведена в работе
[511, основанной на линеаризации уравнений. Условие (6.41)
для параллелограммного импульсного механизма получено в ра-
боте [31 ].
При С1в = 0 первое уравнение (6.38) имеет семейство перио-
дических решений
,м.. + л.) ,_Cii. (6 42)
Постоянная интегрирования С17 может быть найдена из условий'
периодичности решения для функций ф2> Уа-
145
При использованных условиях периодичности для и Л/\ =
D
= -^-ДГ0 составляющая у1 также имеет периодические решения
периода 2 л
ft = - -^[^° + Н1й (л^+ Ло) ] J J М dtd^ С18. (6.43)
Заметим, что условия периодичности для решения фх, ух
выполняются тождественно относительно постоянной С15. Можно
проверить, что и последующие постоянные интегрирования, со-
держащиеся в функциях yt (i — 1,2, ...), не будут входить в усло-
вия периодичности для функций ф;-, у; (j = 2, 3, ...). Это соответ-
ствует физической картине колебаний в трансформаторе. Дей-
ствительно, состояние системы при колебаниях не зависит от
того, на какой угол повернулась вся системы (а, следовательно, ,'
и’реактор) вследствие вращения со средней угловой скоростью ®.
Поэтому постоянные С15 и С18 в дальнейшем полагаем равными
нулю.
Ограничимся в рядах (6.33) двумя слагаемыми. Тогда решения
для скоростей ф, у будут иметь вид
ф = <7 Мао + л?о). [Mdt,
J
Ri« 7/70 (Л2о -р Л7())
R,
(6.44)
• 1
y~ Re
Ri
где
(6.45)
b-^COS
i=l
Покажем, что следующими приближениями можно пренебречь.
Рассмотрим, например, уравнение для "ф2, которое получается
приравниванием слагаемых при р2 в первом уравнении системы
(6.32)
Ф2 == —qR*> (Л*° + л?о) м + q (Лг1 + Ап) M4>i—
_ Ию +2Л2о + Л70) ^2^_2 ^60 ^10 ^2°) (0^!_2 X
Rt
Ri
<МбО И10 Ч~ 24о + ^7о) m *
(6.46)
. Ri
где A2i, Лв1, Л71 — коэффициенты вторых членов разложений А 2,
Л9, Л7 в окрестности порождающего решения, равные
Л21 = — nmh + (b — a) q J sin ф0,
Л61 = nmehq cos ф0, Л71 = — 2nmbh ---q'j sin ф0.
146
Анализ уравнения (6.46) показывает, что после интегрирова-
ния каждое слагаемое в правой части будет содержать интеграл
того же типа (от суммы синусов или косинусов), что и интеграл
первого уравнения (6.44), но коэффициенты при этих интегралах
будут по крайней мере на порядок меньше коэффициента в пра-
вой части первого уравнения (6.44). Рассмотрим, например,
третье слагаемое. Воспользовавшись выражением (6.42), где
С17 = 0, это слагаемое преобразуем к виду
£8 = ^«1 ^Ю ^20 + ^7о) 0)2^ <Мб1 Ию ^20 + Ао)
X Г _ П2 4(Л20 4; Л70) sln +
L i
После интегрирования выражения Ц получим
т л___' „2 ?Лв| (Л10 + 2Ла0 + Л70) f q (Ла0 + Л70) f Mt
Lsat~-П1 — j —
X sin (1-\-a A dt
• \ Я1 /
Согласно структуре коэффициентов дифференциальных урав-
нений коэффициент ^61 ^10 + '4l?°) в правой части ПОСЛеД-
^М
него выражения не превышает нескольких сотых.
3. Анализ периодического решения
Рассмотрим движение ведущего и ведомого маховиков на
режиме динамической муфты, используя выражения для ско-
ростей (6.44). Переходя во втором уравнении (6.44) к переменной 0,
получим закон изменения скоростей реактора и ведомого маховика
р = со .г _§*_ ри dt,
Кв J
где (6.47)
Г> _ 1 Rio ^10 (Л20 + Л70)
1 W к •
Используя уравнения (6.44), (6.47) и зависимость ф = q (а—р),
найдем закон изменения угловой скорости ведущего маховика
а = со Г jlio (л?о + Л7о) id 4] f _М dt. (6’48)
L e Re J J Дю
147
Преобразуем коэффициент /?8. Рассматривая вначале раз-
ность 1---, ВЫразим _ fjw (Л 20 -ф Л70), исполь-
зуя значения входящих коэффициентов
/?4 — Я70(Л20 -ф Л70) — —[nmab -ф -ф ---
-ф nmeh (2-^-q^ cos ф0 J — (J2 -ф ./4) [nmab -ф -ф X
X — q^ nJp -ф nmeh ^2 -у + q^ cosi|)0] + пт&цгпЗв — (6.49)
— [ппгеа -ф -ф q'j nJB -ф nmeh. (2 -у- -ф q'j cos ф0 j x
X [nmeb -ф ----q^ nJB -ф nmeh (2 -q^ cos ф0] •
Из равенства (6.49) видно, что определяющие коэффициенты Jx
и J4 входят в разность Т?4 — Я70 (Л 20 -ф Л70) линейно, в то время
как /?4 содержит произведение указанных коэффициентов. Сокра-
щая дробь—4~^70^20~1~ на Jx или J4, получим выражение,
л4
числитель которого определяется в основном параметрами гру-
зовых звеньев и реактора, а знаменатель содержит в качестве
одного из слагаемых J ± или J4. Согласно структуре коэффициентов
дифференциальных уравнений значение подобного выражения
составляет несколько сотых. Еще меньше оказывается модуль
отношения /?70/Д?6. Таким образом, коэффициент Rs в (6.47) при-
нимает значения в несколько раз меньше единицы.
Обращаясь к уравнению (6.48), заметим, что числитель и
знаменатель отношения содержит произведения мо-
л4
ментов инерции 7Х, Л, и поэтому отношение имеет порядок еди-
ницы.
Следовательно, амплитуда колебаний ведущего маховика на
рассматриваемом режиме больше амплитуды колебаний ведомого
маховика.
Для сравнения с уравнением (6.47) найдем закон движения
ведомого вала ступенчатой коробки передач при условии, что
момент инерции ведущего маховика, вращающихся деталей сцеп-
ления и коробки передач, а также приведенных ведомых элемен-
тов, как и в случае трансформатора, будет равен 7?6. Воспользо-
вавшись дифференциальным уравнением вращательного движе-
ния, находим
(!_« +<6'50)
148
Сравнивая (6.47) и (6.50), можно установить, что амплитуда
колебаний ведомого вала инерционного трансформатора на ре-
жиме прямой передачи меньше амплитуды колебаний ведомого
вала ступенчатой коробки передач вследствие наличия множи-
теля Z?8. Благодаря отмеченному свойству, трансмиссия на ре-
жиме прямой передачи работает в лучших условиях при уста-
новке трансформатора. С физической стороны снижение колеба-
ний объясняется тем, что трансформатор на режиме прямой пере-
дачи представляет упругую динамическую связь между ведущим
и ведомым валами.
Возможности снижения динамических нагрузок в трансмис-
сиях с помощью центробежных связей исследованы в докторской
диссертации [23]. Полученные результаты указывают, что на
режиме динамической муфты инерционный трансформатор, име-
ющий ту же природу, что и центробежные связи, является также
гасителем колебаний.
4. Устойчивость равномерного вращения
трансформатора
Согласно периодическому решению на режиме динамической
муфты имеют место малые колебания звеньев, которые наклады-
ваются на равномерное вращение ведущего маховика, грузовых
звеньев, реактора и ведомого маховика. "Поэтому естественно
рассмотреть устойчивость равномерного вращения трансформа-
тора при постоянно действующих возмущениях [27, 31, 51].
Вводя диссипативные члены р2а, р3р [51 ], определяющие
сопротивление вращению ведущего и ведомого маховиков, урав-
нения (6.21) перепишем в виде
А® + ЛР + А(а-Р)2 + ЛР2= Мд-р2а,
Д2а + Л$+ А5 (а — Р)2 — А 6а2 = — Мс — р<$.
Равномерное вращение а = |3 = © является частным реше-
нием дифференциальных уравнений (6.51) при условии
Мд — р2со = М с + рз® = nmehq со2 sin ф0. (6.52)
Из равенства (6.52) может быть найдено значение угла ф0,
на который повернуты грузовые звенья вследствие передачи
момента Мд двигателя при равномерном вращении всей системы
и сопротивлениях р2а, р3р.
Для исследования устойчивости равномерного вращения транс-
форматора воспользуемся первым уравнением (6.51) и первым
интегралом (4.37), преобразованным для режима динамической
муфты к соответствующему виду
+ Д2р + Д4 (а - Р) + Двр2 = Мд - рД 1
• • (О' Оо)
Д8а + Д9р = (Мд - Мс) / - р2а - р3р + С6, J
149
где
Л8 = Jj 4- ntnea + (•£"+ <7) в + nmeh ^2 — -|- q\ cos ф;
(Ь \ / ь \
—-----q\ nJB nmeh 12 —--q j cos ip;
C5 = (Л80 4* Д80) co 4- %; Ao. Ao—значения коэффициентов Л8,
Ай, вычисленные в точке ф = ф0.
Примем равномерное вращение за невозмущенное движение.
Углы аир представим в виде
а = со/ 4- х 4- ф0, 1
Р = со/4-«/, )
(6.54)
где х, у — возмущения обобщенных координат а, р.
Подставляя (6.54) в (6.53), раскладывая sin ф и cos ф в ряды
sin ф = sin фо + q (х - у) cos ф0 - (х — у)2 4--,
cos ф = cos фо—q (х — у) s in фо — СУД q2 (х — у)2 + • • •,
после линеаризации уравнений возмущенного движения получим
уравнения первого приближения
Л10х 4- Л-20у’+ a6q<f>2 (х—у) cos ф0 + 2а8о>у sinф0 + р2х = О, J
Л80х + Адду — q<s> (а8 + а9) (х — у) sin ф0 + рдХ + р8у = 0, /
где At — Bi 4- dz cos ф (t = 8,9); Л10, Л20 — значения коэф-
фициентов Л!, Л 2, вычисленные в точке ф — ф0; Лв = ae sin ф.
Характеристическое уравнение системы (6.55) будет
. сор3 + qp2 + с2Р + с8 = 0, (6.56)
где с0 = Л10Лоо — ЛэдЛго, Ci = Л 1вРз А (^Ао Ао) Рг> - ^2 =
= qa> (а8 4- Од) (р2 + 2а6® sin ф0) sin ф0 + ра (р3 — 2а8<а sin ф0)+
+ a8q&2 (Л80 + Л90) cos ф0, с3 = a8qa2 tp2 + р3) cos ф0.
По критерию Гурвица корни уравнения (6.56) имеют отрица-
тельные вещественные части, если удовлетворяются неравенства
Ci>0, qc2 — c0c3>Q, с3>0. (6.57)
Первое условие (6.57) выполняется всегда в силу структуры
дифференциальных уравнений обобщенной модели трансформа-
тора. Второе и третье условия выполняются, если
cos ф0 >0. (6.58)
Неравенство (6.58) является условием асимптотической устой-
чивости равномерного вращения инерционного трансформатора
150
и, следовательно, устойчивости трансформатора на режиме ди-
намической муфты при постоянно действующих возмущениях.
Как видно, устойчивость имеет место в области — у <ф0 <у •
Положительные углы ф0 соответствуют механизмам с положитель-
ными q, отрицательные — механизмам с отрицательными q. Во
втором параграфе данной главы было показано, что трансформа-
торы на режиме динамической муфты работают при малых углах ф0.
Поэтому на указанном режиме вследствие широкой области устой-
чивости они имеют большой запас по передаваемому моменту.
Полученные аналитические результаты подтверждаются испы-
таниями опытных образцов. Работа трансформатора на режиме
динамической муфты устойчива, и даже переходы с режима ди-
намической муфты на режим трансформации момента в некоторых
случаях оказываются затруднительными.
Глава VII
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ ОБОБЩЕННОЙ МОДЕЛИ
ИНЕРЦИОННОГО ТРАНСФОРМАТОРА НА РЕЖИМЕ
ЗАТОРМОЖЕННОГО ВЕДОМОГО МАХОВИКА
Осуществление режима заторможенного ведомого маховика
при работающем двигателе является одним из достоинств инер>
ционных передач, исключающих перегрузку двигателя при, резких
остановках рабочих органов машины.
На этом режиме реактор, будучи подпружиненным с обеих
сторон упругими МСХ, совершает нелинейные колебания под
действием инерционных сил гр'узовых звеньев. Ведущий маховик
при установившемся движении вращается с некоторой средней
угловой скоростью, на которую накладываются колебания за
счет действия двигателя и импульсного механизма.
Мощность на выходе трансформатора равна нулю. Без учета
потерь в трансформаторе мощность на входе в трансформатор при
установившемся движении также равна нулю, и соответственно
равен нулю средний момент двигателя.
1. Периодическое решение дифференциальных уравнений
на режиме заторможенного ведомого маховика
Исключая в системе дифференциальных уравнений (2.18)
третье уравнение, определяющее движение ведомого маховика,
полагая во втором уравнении 6 — 0 и в первом Ма = 0, полу-
чим систему, описывающую движение обобщенной модели на
режиме заторможенного ведомого маховика
-^2р + 4i(a — Р)2+ АР2 =
+ (Л8 + /8) р + Л5 (a - № - Лва2 = - (U + 473) р. J
Здесь не учтена переменная составляющая момента двигателя,
которая обусловливает известную неравномерность вращения
ведущего маховика.
Будем находить периодическое решение системы дифферен-
циальных уравнений (7.1). Координата а, определяющая движе-
ние ведущего маховика, монотонно возрастает и не описывается
периодическим законом, поэтому перейдем к новой переменной
a = w/-|-x, (7.2)
152
где (о — средняя угловая скорость двигателя; х — переменная,
которая может быть периодической.
Уравнения (7.1) преобразуем к виду
(Bi + bn cos ф)х + (В2 4- b21 cos ф) р 4- Л4 (со 4- х—Р)2 4- Лвр2 = О,
(В2 4- &21 cos ф) х 4- (В3 4- А + &31 cos ф) р 4- Л6 (и 4- х — Р)2 —
_Лв(со + х)2 = -(£/4-£Ш
(7-3)
’ где Ai = Bi 4- btl cos -ф (/ = 1, 2, 3).
Согласно структуре коэффициентов. дифференциальных урав-
нений члены bllt Ь31 малы по сравнению с Вх, В3 + J3.
По физическим соображениям средняя угловая скорость двига-
теля © значительно превышает угловые скорости х, р. В связи
с этим слагаемые, содержащие коэффициенты Ьп, Ь31, Ь31 и
скорости х, р, предполагаются малыми.
Для преобразования системы (7.3) к виду с коэффициентами
периода 2л по времени, перейдем к новому времени т = qat.
Дифференциальные уравнения (7.3) запишутся
г / 1 \ 2
+ В2Р" 4~ (Ьпх" + b2iP") cos i|) + ( — + %' ~ Р') +
L \ Ч /
+ ae₽'2 sin ф = 0;
В2х" 4~ (В3 4- J3) Р" 4- {Ъ21х" 4- fegiP’) cos ф 4" Г аь +
* L \ Ч
+ х'- р')2 - + х')2]81Пф =---------р,
(7.4)
где At = eq sin ф (i = 4, 5, 6); штрихом обозначено дифферен-
цирование по т.
sin ф и cos ф разложим в ряды вида
sin ф = sin [т 4- q (х — Р)] = sin т 4- cos т-</ (х — Р) —
^<72(х-р)2-..
(7.5)
153
Введем в уравнения (7.4) малый параметр
4- В£" + -^2- sin т + р/(&цх" + М") cos ф 4- (sin ф —
— sin т) 4- Г-77- (х' — р') 4- at (х' — Р')2+ав₽'21 sin ф) = О,
L v J ( I
B2Z 4- (Вз + W 4- sin т 4- И {(Ь„х" 4- М") COS ip 4-
(7.6)
+ (sin ф - sin т) + Г (х' - Р') + аъ (х' - р')2 -
*7 L */
- «в (-у *' + *'2) ] sin ф} = - ₽•
При р — 1 уравнения (7.6) обращаются в уравнения (7.4).
Для построения периодического решения используем теорию
квазилинейных колебаний [47 ]. Система уравнений (7.6) по отно-
шению к т является периодической с периодом 2л, поэтому реше-
ние ищем в виде рядов
x = x04-|ur14-p%4-•••, 1
р= Ро+ иР1+н2₽2+ •••; / ( ’
где х{, Р, (t = О, 1, ...) — некоторые периодические функции
периода 2л.
Подставляя (7.7) в (7.6) и полагая р = 0, получим порожда-
ющую систему уравнений
p;4-^p0 = D6sinT, '
х'о = ^Ро------д^- [а4 (В3 4- Л) + (п« - аб) В2] Sin т. (7'8)
Поскольку k3 в общем случае отлично от целого числа, то первое
уравнение (7.8) имеет единственное решение периода 2л [47],
соответствующее вынужденным колебаниям реактора,
о .
= (7.9)
Второе уравнение (7.8) с учетом (7.9) принимает вид
4 = D7sinT, (7.10)
где
n n nmeh (R Г < Ъ ( b \ 1
Р?= ---Д?-{ Ч1 -
—7" (“ + (^3 + '
154
Периодическое решение уравнения (7.10) запишется
Xq = — В7 sin т 4~ СХ9, (7.11)
где СХ9 — постоянная, которая найдется из условий периодич-
ности решения для хх, рх.
Нетрудно установить, что в рекомендуемой области параметров
амплитуда колебаний В7 значительно меньше амплитуды •
jDa
Для ориентировочных оценок амплитуда мож^т быть
принята равной 0,1—0,15 рад.
Дифференциальные уравнения для хх, рх находятся после
приравнивания в левой и правой частях системы (7.6) коэффи-
циентов при р. Сохраняя в разложениях'(7.5) sin ф и.соэ ф только
два первых члена (в силу быстрого убывания членов), после соот-
ветствующих преобразований получим следующее уравнение для
К + ^з₽1 = As sin Т + D9 cos т + £>хо sin 2т
ф- Вхх cos 2т ВХ2 sin Зт -j- £>хз cos Зт ф- ВХ4 4т ф~ Вхз, (712)
где D8 = (d7 ф- j ) р(2«в 2а5 — 3<?&2i) Вх Ф-
+ 2<АХВ2) D7 + [2<?&ЗХВХ - (3^2Х - 2«4) В2] ;
В9 = [ (а3 — аъ) ф- а4Ва —<72Рхв J;
~~ <7^21) ба4В21 D7 ф-
» Ф~ 1(<7^з1.+ За5 — ав) Вх — (qb21 ф- За4) В2] j j ф-
+ + ipM d™' = #{к2а* - 2а«-
— <7^ai) Вх — 4а4В2) D7 -ф- [4а6Вх — (qb21 -ф- 2а±) В2] 5
^1а = "4Д” (^7 £« — 1 ) |f(^2i ~ 2а5 2ae) Bt 4- 4а4В2] D7 —
- [4а5Вх - (qb21 ф- 2а4) В2\ ; D13 =-----Вхв;
£>11 + kf —Т ) £*16’ £>16 ~ ~2Ё~ “Ь 2йб —
— 2ав) ВХВ7 (qb21—2а4) В2 ^2_2 j j ; Pxe = (Вха5 —
—- В2а4) (d7 ae BxD7 — В2 ^2 _J ^2 j .
155
Периодическим решением уравнения (7.12) периода 2л будет
sin т + -^тcos т + sin 2т +
+ -fef=Z cos 2т + iprg- sin Зт +'fef-9 C0S Зт +
+ iFT6sin4^ + >-
Дифференциальное уравнение для xlf полученное с учетом
только двух первых членов в разложении sin ф, cos ф и выраже-
ния (7.13), имеет вид
Xi = Az sin о 4- £>18 cos т + Dig sin 2т + D20 cos 2т ф-
4- D2i sin 3т -J- D22 cos 3т -j- £>23 sin 4т 4~ D2$. (7.14)
nmehq ( q + 2 —) Dt
Постоянная DM = —Cw--------on'itz—n — п0 условию ne-
(£3 1)
риодичности функции Ху должна быть равна нулю. Следовательно,
Си = 0 и коэффициенты £>z (i = 9, 11, 13, 15, 18, 20, 22, 24)
обращаются в нуль. Из оставшихся коэффициентов. £>,• уравнения
(7.13) наибольшее значение имеет Dlo. Последний включает сла-
гаемые, линейные относительно амплитуд £>7 и j > в т0 вРемя
как коэффициенты D3, D13, Du содержат квадраты, кубы ампли-
туд и их произведения. Предполагая, что k3 не является близким
к целому числу, в выражении для сохраним только член, содер-
жащий D13. Тогда коэффициенты D17, £>19, £>2Ь £>23 принимают вид
^17 = “4Д* (fy 4~ j ) ^К3<7^214- 2«s 2ae) В2 — 2qbn X
X (Ва 4~ У3)] £>7 4~ [(3<7^21—2п4) (В3 4- /3) — 2<7&згВ2] J. j j 4~
4- ; £>1® = -^д ^[(^214- Зав — Заз) Вг 4- (В3 4- АН х
х £>7 -р [(ав — 3«5 — qb31) В3 4- (qb2i 4~ З04) (В3 4- /3)] 1
-тН°’+^Ьи-т4|^)-о». о.=4(с'+
“Ь 2 J. 1 ) ^((2^5 + 2я6 — qb21) В2 — 4я4 (В3 + з)] ^7 + [4^В2 —
-(^1 + 2а4)(Вз + Л)]1^} + ^; Я23 =
= ^7 + 1 ) ^25» ^25 ~ 1^4 (^3 + А) — ^5^2!
х (О’ + тДг)2 + “• [В!°- -(В> + ТгМ •
156-
Структура коэффициентов Dt (i = 17, 19, 21, 23) однотипна.
Коэффициенты £>]7, Dal, D23 малы по сравнению с Ь19, так как
содержат квадраты, кубы амплитуд D,, и их произведения.
Ограничиваясь в (7.14) слагаемым, содержащим П19, после
интегрирования имеем sin 2т -ф С20. Постоянная Сао
находится из условий периодичности функций (32, х2.
Сохраняя в рядах (7.7) два первых члена и переходя к вре-
мени t, с учетом упрощений 0Х, хг получим следующее периодиче-
ское решение системы уравнений (7.3):
0 = .sin qa>t -|- sin2qat,
3 3
х = — £>7 sin qat----0s- sin 29®/.
(7-15)
В уравнениях (7.15) опущена постоянная Са0, не влияющая
на амплитуду и частоту колебаний.
Проведем сравнительную оценку слагаемых в решении (7.15).
Отбрасывая в коэффициенте D10 малые члены, представим
Дю
в виде
Dio __ D& [ nmeh V b (b X <
^4 - ( 2(B3 + J3)(fe|-4) L 7 u V
Для оценки отношения . в (7.16) воспользуемся первым
х ^3 “Г J 3
условием (6.3) выхода трансформатора на режим динамической
муфты
,, ( b \
, , nmbh (---а )
nmeh __ 1 j \ е V /7 j
В8 ~ 4 + 2В3 •
tz b nmeh 1'
Как правило, следовательно, —g—. Еще
ar nmeh <
меньше будет отношение — у трансформаторов, которые по
условиям осуществляемого технологического процесса не выходят
на режим динамической муфты. Таким образом, множитель
(й nmeh п ,
12 (В + 77)’ составляет величину порядка 0,1 и менее.
Рассмотрим множитель ------. Полагая k/& = 2, используя
здесь выражения для k, & и равенство Д = Вх (В3 + 73), полу-
чим 4. Сравнивая последнее соотношение с фор-
мулой ^з— пРи условии U=U1, находим &з = 8.
157
n e b (b \ <
Выражение 5 — (— — q\ — 1, например, для параметров опыт-
ного образца трансформатора погрузочной машины 1ПНБ2 Ъ/е =
= 0,33, q = 1,33 равно 2,65.
Как видно, в ряде случаев выражение в фигурных скобках
(7.16) составляет несколько сотых, и второе слагаемое в первом
уравнении (7.15) можно отбросить. Это косвенно указывает на
возможность использования только двух членов рядов (7.7) при
построении решения.
G учетом указанных упрощений законы изменения обобщен-
ных координат аир будут иметь вид
D
Л,— 1
О
sin qat,
а, = <i>t — D4 sin qat — sin 2q®t.
(7.18)
Результаты экспериментальных исследований (см. гл. IX)
хорошо согласуются с полученными теоретическими законами.
В работе [3] периодическое решение для импульсного меха-
низма Хоббса с упругим реактором, закрепленным на выходе,
строится методом последовательных приближений.
2, Анализ периодического решения
Преобразуем первое уравнение (7.18), описывающее движение
реактора. Пренебрегая в коэффициенте слагаемым, содержа-
щим В 2, и используя выражение A & B.t (В3 Js), получим
р, _ -4(4-0]
U + Ui-q^(Bs + Ja) * ' ’ '
В коэффициенте (7.19) по сравнению с его неупрощенным вы-
ражением отсутствует параметр Jlt который оказывает малое
влияние на движение реактора..
Используя равенство (3.23) для среднего за цикл момента
на ведомом маховике от действия инерционных сил грузовых
звеньев при заторможенном реакторе, выражение (7.19) преоб- _
разуем к виду
__ ____яМв_______ п 20)
Л|-1 U + Ui-q^(B3 + Js) '
Равенства (7.19) и (7.20) определяют амплитуду колебаний
реактора, а величина q& — частоту колебаний. Реактор колеб-
лется с круговой частотой, равной относительной угловой ско-
рости ф грузовых звеньев, вычисленной при заторможенном реак-
торе и вращении ведущего маховика с угловой скоростью
Частота колебаний совпадает с частотой воздействия инерционных
сил грузовых звеньев на реактор 4(при повороте грузового звена
на угол ф = 2л реактор совершает одно колебание).
158
Анализ законов движения ведущего маховика и реактора.
Для исследования влияния импульсного механизма на колебания
угловой скорости ведущего маховика рассмотрим структуру
коэффициента Р7 [уравнение (7.18)1, преобразовав его к виду
#7 = 77 lnmehB2 [7 (4 ~ — 1 ] + nmah (т + ?) + 7з) +
<7<о2(л|—1) J’
(7.21)
Выражение в фигурных скобках содержит три слагаемых.
Преобразуем третье слагаемое, пренебрегая малыми членами
[1-4(4-,)]Д. Р.22)
Используя оценку kl = 8, получим
^3
о
Следова-
тельно, первое слагаемое в правой части (7.21) имеет тот же по-
рядок, что и третье. Сравнивая второе слагаемое и преобразован-
ное к виду (7.22) третье слагаемое, приходим к выводу, что при
а = е и 0,5 < q с 2 определяющим оказывается, второе за счет
множителя y + ? 0 в силу В3 + /3 > В2. Аналогичными ока-
зываются выкладки по коэффициенту D19 второго уравне-
ния (7.18).
Таким образом, как на режиме трансформации момента, так
и на режиме заторможенного ведомого маховика неравномерность
вращения ведущего вала оказывается тем больше, чем больше
параметр а обобщенной схемы импульсного механизма. По выра-
жению (7.20) можно установить, что различия в конструктивных
схемах импульсного механизма мало влияют на колебания
реактора.
3. Резонансные режимы. Параметрический резонанс
Решение (7.18) имеет смысл, если k3 =}= 1 В случае k3 = 1
в системе возникают резонансные колебания. Из выражения
(7.13) видно, что может возникать не только главный резонанс
(k3 — 1), но и резонансы типа k3 = 2, 3,...
Покажем, что для области параметров, реализуемой в кон-
струкциях, главный резонанс исключается. Воспользуемся вы-
ражением для k3, преобразуя его с учетом равенства А = Вг X
X (В3 73),
_ U + Uj
3 qW(Bs + J3) •
(7.23)
159
Согласно исследованию оптимальной области корпусных упру-
гих элементов в гл. V, рекомендуется использовать интервал
1,5 < k!& <2. Подставляя сюда выражение для k и 8, имеем
и
2,25 < —-----------< 4.
?2а2 (^з + Л)
(7.24)
Используя рекомендацию выбора равных жесткостей корпус-
ных и выходных упругих элементов U = Ult приведенную в гл. V,
и выражение (7.24), получим оценку изменения kj
4,5 < Аз <8. (7.25)
Как видно, практически исключается не только главный
резонанс, но и резонанс, соответствующий k3 =• 2.
Заметим, что на режимах запуска и остановки двигателя,
а также изменения оборотов двигателя при заторможенном ве-
домом маховике инерционный трансформатор также не проходит
через главный резонанс и резонанс k3 — 2. Действительно, на
указанных режимах угловая скорость со ведущего маховика
будет меньше расчетной, соответствующей режиму максимальной
мощности, и согласно равенству (7.23) Аз будет превышать ниж-
нюю границу интервала (7.25).
Периодическое решение на режиме заторможенного ведомого
маховика построено на основе перехода к новой переменной
с помощью равенства а = <вГ-|-х. В результате такой замены
исходные автономные уравнения (7.1) преобразовались в неавто-
номные, содержащие функции времени т с периодом 2л. Резо-
нансы в системе при использованном способе построения решения
можно классифицировать как обычные резонансы в квазили-
нейной системе, обусловленные действием периодического внеш-
него возбуждения.
С физической стороны этот подход выглядит вполне естествен-
ным.' Вращаясь достаточно равномерно, ведущий маховик при-
водит грузовые звенья, которые осуществляют воздействие на
подпружиненный реактор с циклической частотой qa. Последняя
соответствует частоте оборотов грузовых звеньев при а = ®
и р = 0. Экспериментальные исследования показывают, что
реактор совершает установившиеся колебания строго с частотой qo.
При несколько ином способе построения решения рассмотрен-
ные резонансы оказываются параметрическими. Для упрощения
рассуждений положим а = ® = const (х = х = 0). Второе диф-
ференциальное уравнение (7.3), которым будет описываться
движение реактора, представим в виде
₽-В. + 4+». MX - А, (« - Й! - (I/ + ЩИ,
где b3 — 2ntnbh — q'j cos ф.
160
Раскладывая р в РЯД
#3 ~Г J3 "Т йз
1 __ 1
/ \ Во 4-. Д
(В‘ + /8)(14--в#7г) •
^3
В3 + ^3
\ в3 + j3 ) 1
используя разложения типа (7.5) и отбрасывая в последнем диф-
ференциальном уравнении малые члены, получим дифферен-
циальное уравнение
^^[1 + ^Н=ттг!ап’*
йз + •< з L U + U1 J “з ~Г з
являющееся уравнением Матье с правой частью, широко исполь-
зуемым в литературе [15, 20, 57]. С учетом некоторых малых
отброшенных членов получается уравнение Хилла с правой
частью.
Параметрический резонанс возможен вблизи соотношений
(п=1, 2, ...),
qa> У Bs~\- J3
, ИЛИ
/г3 = п/2 (п— 1,2, ...).
Из последнего равенства видно, что найденные ранее резонансы
(ks = 1, 2,...) могут рассматриваться как параметрические.
Сравнение нижней границы (7.25) изменения k3 и последних
равенств показывает, что в опытных образцах исключается не
только главная область параметрического' резонанса (n = 1),
но и последующие области, до 4-й включительно.
4. О максимальных нагрузках в механизмах
свободного хода. Рекомендации
по выбору параметров
Проведем сравнение результатов, полученных на режимах
заторможенного ведомого маховика и трансформации момента,
с целью установления режима наибольших нагрузок на меха-
низмы свободного хода.
Нагрузки на упругие МСХ определяются их деформациями.
На режиме трансформации момента деформации корпусного МСХ
оценим для случая использования всего обратного импульса,
деформации выходного МСХ по использованию всего прямого
импульса. При равенстве жесткостей (V — деформации будут
одинаковыми. Полагая в дальнейших выкладках U = t/n
6 А. И. Леонов 161
воспользуемся выражением (5.24) наибольшего угла поворота
корпусного МСХ при накоплении потенциальной энергии
I Р.1П I - Sln. (7.26)
Наибольший угол поворота реактора при заторможенном
ведомом маховике определится как удвоенная амплитуда коле-
баний реактора, описываемых первым уравнением (7.18)
Ртах = 7^’ <7’27)
^-1
Подставляя в равенства (7.26), (7.27) значения коэффициентов
D, De, ks и пренебрегая малыми членами, преобразуем их к виду
IPminl = ^------Ртах т , (7.28)
1—т 2
где
_ nmehqa20 г - b , ь \ 1 пмв
F(B3 + A) L1 q)l и •
Результаты расчета по формулам (7.28) приведены в табл. 8.
Второй столбец в табл. 8 отражает относительные деформации
на режиме трансформации момента, третий — на режиме затор-
моженного ведомого маховика.
Проведенные расчеты показывают, что режим заторможенного
ведомого маховика не является наиболее нагруженным. Дефор-
мации упругих элементов на режиме трансформации момента
(при использовании всего прямого или обратного импульса)
примерно в 1,5 раза больше, чем на режиме заторможенного
маховика. Этот факт находит определенное физическое толкова-
ние. На режиме трансформации момента (за исключением диапа-
зона малых передаточных чисел) каждый из участков совместного
движения и накопления потенциальной энергии сопровождается
действием только одной упругой связи (выходного или корпус-
ного МСХ). На режиме заторможенного ведомого маховика колеба-
ния реактора обусловлены действием обоих упругих МСХ. Есте-
ственно, что большие деформации достигаются при менее жестких
связях.
В табл. 9 приведены результаты машинного расчета (при
а = 300 = const) максимальных деформаций МСХ на различных
передаточных числах для опытного образца трансформатора
с параметрами (8.24). Отношению k/г = 1,5 соответствуют же-
сткости МСХ U == Uу = 32 400 Н м/рад; k/& = 2 — l/ = t/1 =
162
= 57 600 Н -м/рад; й/е = 2,5 — U = иг = 90 000 Н-м/рад;
k/e = 3 — U = = 129 600 Н м/рад.
Как следует из. табл. 9, наибольшие деформации корпусного.
МСХ и, следовательно, наибольшие нагрузки на него имеют место
в области малых передаточных чисел 0 < i < 0,2.
Наибольшие нагрузки на выходной МСХ могут сдвигаться
даже-в зону средних передаточных чисел.
Если жесткости МСХ разные, то согласно экспериментальным
исследованиям равновесное положение реактора при колебаниях
на режиме заторможенного ведомого маховика смещается в сто-
рону более податливого МСХ. При сохранении суммы жесткостей
амплитуда колебаний .реактора
не изменится, а деформация бо-
лее податливого МСХ увели-
чится за счет смещения рав-
новесного положения.
Вывод о наибольших дефор-
мациях МСХ на режиме транс-
формации момента является
важным. Ранее, согласно тео-
рии, описывающей жесткую
схему инерционного трансфор-
матора, считалось, что наибольшие нагрузки имеют место на ре-
жиме заторможенного ведомого маховика. При расчете на макси-
мальные напряжения рассматривался именно этот режим. Видимо
допускаемые при подобном расчете ошибки являлись одной из
причин выхода из строя опытных конструкций инерционных транс-
форматоров. Жесткости МСХ созданных ранее образцов соизмери-
мы с жесткостями, фигурирующими в наших расчетах.
Таблица 9
Максимальные деформации, рад, МСХ при различных i
Таблица 8
Наибольшие деформации
механизмов свободного хода
k/Q ‘Рщах^®
1,5 1,94 1,29
2 1,73 1,14’
3 1,5 1,06
1 fe/e = 1,5 Л/8==2 fe/s=>2,5
а 6 со. JS ю 1 ео. Й б со. ю Й е СО. J <о 1 со. й б СО. й JB ю 1 СО.
0 0,154 0,154 0,077 0,077 0,047 0,047 0,032 с 0,032
0,14 0,2 0,22 0,125 0,074 0,081 0,057 0,057 0,037
0,25 0,18 0,195 0,1 0,09 0,077 0,058 0,054 0,042
0,36 0,16 0,19 0,085 0,107 0,068 0,068 0,05 0,048
0,46 0,13 0,196 0,073 0,106 0,054 0,069 0,041 0,049
0,56 0,105 0,18 0,057 0,1 0,043 0,065 0,034 0,047
0,66 0,076 0,16 0,042 0,089 0,033 0,058 0,026 0,041
0,75 0,05 0,13 0,028 0,078 0,024 0,05 0,018 0,037
0,85 0,028 0,11 0,021 0,065 0,016 0,043 0,011 - 0,033
Примечание. Везде | ₽mln | — для корпусного МСХ, ((3 6)шах — Для вы-
ходкого МСХ.
6* '163
Отметим особенности в поведении максимального момента М,
который передается выходным МСХ на заторможенный ведомый
маховик. Выражение для момента получим, умножая удвоенную
амплитуду (7.20) колебаний угла 0 на жесткость выходного МСХ
М =------------------и,.
U-YUr-q^kB^J^
Полагая U — Ult после преобразования последнего равенства
получим
М3шах= . (7.29)
2~\k)
Увеличение параметра k при неизменности остальных пара-
метров трансформатора и скорости двигателя приводит к сниже-
нию момента на заторможенном ведомом маховике. Однако, начиная
с некоторого k/ъ снижение момента происходит очень медленно.
Например, увеличение kfe с 1,5 до 3 Приводит к снижению Мзшах
всего на 11%. В то же время деформации упругих элементов
при этом резко снижаются.
Глава VIII
РАСЧЕТ ИНЕРЦИОННОГО ТРАНСФОРМАТОРА
С УПРУГИМИ ЭЛЕМЕНТАМИ.
МЕТОДИКА ВЫБОРА ПАРАМЕТРОВ
Вопросы расчета и методика выбора параметров инерционного
трансформатора с упругими элементами [46] основываются на.
результатах теоретического исследования в предыдущих главах.
1. Преимущества упругой модели инерционного
трансформатора по сравнению с жесткой
Упругая модель по сравнению с жесткой имеет существенные
преимущества: снижаются максимальные и средние нагрузки
на МСХ, максимальные и средние нагрузки на импульсный меха-
низм, неравномерность вращения ведущего и ведомого маховиков,
масса грузовых звеньев и т. д. Все это приводит к снижению
динамической напряженности силовой цепи инерционного транс-
форматора и увеличению его долговечности.
Снижение нагрузок на МСХ. Рассмотрим режим заторможенного
ведомого маховика. Кривые протекания относительного момента,
передаваемого выходным МСХ на' ведомый маховик (рис. 44),
соответствуют: 1 — жесткой схеме трансформатора; 2 — упругой
схеме при различных жесткостях U и <3 — упругой схеме
при равенстве жесткостей U и Ux МСХ. После точки t — Т/2
момент согласно кривой 1 равен нулю, так как в интервале Т/2 <
< t < Т реактор взаимодействует с корпусным МСХ. Через УИРшах
обозначен максимальный момент на заторможенном ведомом
маховике в случае жесткой схемы трансформатора и предпочти-
тельного семейства импульсных механизмов
МРтах = [ 1 - 7 (4 “ ] • <8Л)
Все кривые имеют синусоидальный закон протекания момента.
Вычислим средние моменты, соответствующие каждой кривой, .
т '
2 М
MPfflaxsin^dZ = -^s,
Q
165
т
м2 = 4" f [ --"ах- 2P1Mpmax (1 4 sin qat) + PlMp 1 dt =
0
Рис. 44. Графики вращающего момента
на заторможенном ведомом маховике
__ ^2max ^^Pmax ^g
T
m3=4-J ^(1+sin^d/==^?i-
о
Здесь M.2 , Мз — максимальные значения момента для
кривых 2 и 3;-M1( Af2,.. Л48— средние значения момента для
кривых 1, 2, 3; Т = — —
период колебаний; ргМ₽тах —
момент от действия упругих
элементов, определяемый сме-
щением равновесного положе-
ния при колебаниях за счет
более податливого МСХ.
Аналогичные зависимости
имеют место на режиме затор-
моженного ведомого маховика
для корпусного МСХ.
Проведем сравнение макси-
мальных моментов4Иршах,Л42юах,
Мз при условии равенства
средних моментов Mlt М3, М3,
что будет соответствовать неизменности внешней характеристики
трансформатора для передаточного числа i — 0.
Приравнивая Л4Х и Л43, получим
М3 = — MD = 0,64AL . ' (8.3)
rfmax л "шах ’ Ртах1 ' *
Согласно равенству (8.3), использование упругой схемы, ко-
торой свойствен закон протекания момента, описываемый кри-
вой 3, позволяет снизить максимальные нагрузки на МСХ при
заторможенном ведомом маховике в 1,57 раза по сравнению
с жесткой схемой.
Зависимость между максимальными моментами МРтах и А42тах
найдем, приравнивая и М2,
(8'4)
Из равенства (8.4) следует, что в случае кривой 2 протекания
момента в упругой схеме, получаемого за счет различных жестко-
166
стей МСХ, максимальный момент снижается по сравнению с же-
сткой схемой более чем в 1,57 раза. Значительное различие в же-
сткостях МСХ приводит к существенным деформациям более
податливого МСХ, и этот вариант мало приемлем. Реальным
в упругой схеме является снижение максимального момента,
действующего на МСХ, при заторможенном ведомом маховике
в 1,57—2 раза по сравнению с жесткой схемой.
Можно указать верхнюю границу снижения максимального
момента на МСХ, соответствующую идеальному теоретически
возможному варианту, когда действующий на МСХ момент будет
постоянным. В этом случае М = Л4тах, и после приравнивания М
и Л4Х получим наибольшее по сравнению с жесткой схемой сни-
жение максимального момента в л раз.
На режиме трансформации момента в упругой схеме по сравне-
нию с жесткой также имеет место снижение максимального мо-
мента, действующего на МСХ. Рассмотрим, например, корпус-
ной МСХ. У трансформатора с упругими элементами возрастание
передаточного числа приводит к увеличению доли обратного
импульса, затрачиваемой на торможение реактора. Вследствие
этого доля обратного импульса, расходуемая на накопление по-
тенциальной энергии, снижается, что обусловливает снижение
деформации упругих элементов и, следовательно, нагрузок на
з
них. Как видно из рис. 37, уже при (/х = — л деформация кор-
пусного МСХ резко падает. В то же время корпусной МСХ же-
3
сткой схемы трансформатора до <ух = — л в каждом цикле на-
гружается максимальным моментом, равным максимальному
моменту на режиме заторможенного ведомого маховика (вершина
синусоиды штриховой линии на рис. 44).
Средний момент, действующий на корпусной МСХ на режиме
трансформации, падает вследствие того, что время включения
в обеих схемах отличается мало, а максимальный момент в упру-
гой схеме существенно ниже.
Другим резервом повышения долговечности трансформатора
является встраивание упругих элементов в МСХ, позволяющее
более равномерно нагрузить рабочие тела. Характерным примером
в этом отношении являются микрохраповые МСХ. Неоднократные
попытки применения их в жесткой схеме не привели к положи-
тельным результатам. Имеют место большие перегрузки отдельных
рабочих тел и последовательный выход их'из строя. Введение
же упругих рабочих тел в микрохраповых механизмах позволило
значительно снизить перегрузки и привело к созданию работо-
способного инерционного трансформатора. В настоящее время
микрохраповой МСХ — один из перспективных механизмов для
применения в инерционных трансформаторах вращающего момента.
Снижение масс грузовых звеньев. Физическое истолкование
результатов. Проведем сравнительную оценку масс грузовых
167
звеньев жесткой схемы трансформатора, момент которой описы-
вается кривой 1, и упругой схемы, которой соответствует кривая 3
(см. рис. 44).
Для жесткой схемы трансформатора средний за цикл момент
на заторможенном ведомом маховике определяется равенством
(3.23)
Л1В = 4" nmeh^ [1 —[у (у ~ я) ] •
Отсюда находится суммарная масса грузовых звеньев жесткой
схемы
ел*«а D—4(4—*)]
(8.5)
Максимальный момент на заторможенном ведомом маховике
упругой схемы при условии U = IJзаписан выражением (7.29).
Согласно третьему равенству (8.2) среднее значение момента'
в два раза меньше
М3 =
Выражая из последнего равенства массу грузовых звеньев
для упругой схемы трансформатора, получим
М3
nm =
(8-6)
Сравнение равенств (8.5) и (8.6) при условии постоянства
среднего момента на заторможенном ведомом маховике (AfB — М3)
показывает возможность существенного снижения массы грузовых
звеньев упругой схемы по сравнению с жесткой. При k/e — 2
масса в упругой схеме снижается-в 1,8 раза, при k/e =1,5 —
в 2 раза, при k/e = 1 — вл раз. Если использовать при сравне-
нии закон протекания момента, описываемый кривой 2, то сни-
жение масс будет еще больше. Реальным при создании конструк-
ций является снижение масс грузовых звеньев в упругой схеме
по сравнению с жесткой в 2—3 раза. Интересно, что даже при
достаточно жестких МСХ {k/e = З-г-4) масса грузовых звеньев
снижается в-1,6 раза.
Остановимся кратко на физическом обосновании снижения
масс грузовых звеньев. Рассмотрим только случай корпусных
упругих элементов, поскольку рассуждения по выходному МСХ
оказываются аналогичными.
Известно основное положение теории упругих систем: измене-
ние частоты воздействия при неизменной амплитуде возмущающей
168
силы приводит к изменению амплитуды колебаний системы.
Именно это положение применимо в нашем случае. Снижение масс
грузовых звеньев получено вследствие оптимального выбора
отношения Л/е. Но е = qa представляет относительную скорость ф
грузового звена при заторможенном реакторе. Если учесть, что
воздействие в трансформаторе инерционное и определяется отно-
сительной скоростью вращения грузовых звеньев, то величина е,
по сути дела, определяет частоту действия возмущающей силы.
В то же время величина k определяется параметрами системы
(массовыми, геометрическими и параметрами упругих элементов).
Следовательно, выбор оптимального отношения k/e. означает
выбор оптимальной частоты возмущающей силы. Естественно,
что таким путем может быть получено увеличение деформации
упругих элементов и, как следствие, увеличение действующего
момента или. снижение масс грузовых звеньев при условии по-
стоянства среднего момента на выходе.
Снижение массовых параметров трансформатора. Снижение
масс' грузовых звеньев в упругой схеме трансформатора, обосно-
ванное выше, в свою очередь, приводит к снижению массовых
параметров основных деталей трансформатора.
Используя первое условие (6.3) выхода инерционного транс-
форматора на режим динамической муфты
+ wb2 + (у — q^2 nJB Ц- 2nmbh (у — q^ — \nmeh = 0,
нетрудно'установить снижение момента инерции и массы реак-
тора.
Масса ведущего маховика уменьшается благодаря более ком-
пактной конструкции при снижении масс грузовых звеньев и
снижении инерционных воздействий на него со стороны импульс-
ного механизма.
Масса ведомого маховика также может быть снижена при
сохранении его' неравномерности вращения, так как в упругой
схеме увеличивается время совместного движения по отношению
ко всему времени цикла.
Таким образом, общая масса инерционного трансформатора
с упругими элементами снижается по сравнению с жесткой схемой,
хотя введение упругих элементов несколько увеличивает массу
и габариты МСХ.
Сравнение схем по нагрузкам на импульсный механизм. На-
грузки в импульсном механизме определяются действием нормаль-
ных и касательных составляющих сил инерции, пропорциональ-
ных квадратам угловых скоростей и ускорений звеньев. Для
сравнения воздействия тех и других составляющих произведем
оценку угловых ускорений ведущего маховика и реактора для.
гармонических импульсных механизмов. Рассмотрим вначале
участки разгона и торможения реактора. Воспользуемся диффе-
169
ренциальными уравнениями (2.16). Разрешая их относительно
старших, производных, получим
« = 4 Ла* 1МД-Л4(а - Р)2-Л6Р2] -
/11/13 — /12
- л /2 Л2 [Af2 —Л41 - Аб (а - Р)2 + Л6а2], (8.7)
Л1Я3 — Л2
Р = Z1 .2-1^2 - М, - Л5 (а - Р)2 + Да2) -
- [Мд - А(« —Р)2 - АР2]- (8-8)
Пренебрегая здесь величиной А%, малой согласно структуре
коэффициентов по сравнению с А]А3, уравнения преобразуем
к виду
•• Ма А. * • Л
A[^2Z^x_A(a_p)2+ А.а2
= ^(«-Р)2+ ^-“2-
-4г[^-х(а-^)2-^ •
(8.9)
Согласно структуре коэффициентов дифференциальных урав-
нений безразмерные коэффициенты -ф-, Л4-, -ф-> 4s- имеют
«1 А1 Al
примерно один и тот же порядок, и их максимальные значения
составляют несколько сотых. Обращаясь’ к правой части первого
уравнения (8.9) отметим, что максимальные значения величин
Мд_
4 и л,
двигателя с
= 500
С
1 обычно меньше других слагаемых. Например, для
Z МП
Мд = 500 Н-м и Ji — 1 кг-м2 будем иметь -j=- =
В то же время при -ф- = 0,05 и а = 300 рад/с зна-
А ' 1
чение слагаемого -А а2 равно 4500 рад/с2. Поэтому максимальные
значения ускорения а определяются слагаемыми, содержащими
квадраты скоростей. Имея в виду получить верхнюю границу
ускорения а, примем его максимальное значение равным сумме
модулей четырех слагаемых в правой части, содержащих ско-
рости аир. Указанная сумма будет наибольшей, если положить
Р = 0 в слагаемых, содержащих a—р и р = а в слагаемом -^-р2.
170
Принимая каждый коэффициент при а2 равным 0,05 (что в ряде
случаев является завышенным), будем иметь следующую оценку
для углового ускорения а
а < 0,2а2. (8.10)
Действительные значения а обычно в 2—3 раза меньше ука-
занной верхней границы.
Из второго уравнения (8.9) нетрудно видеть, что величина 0
определяется вторым и третьим слагаемыми. Первое и четвертое
слагаемые оказываются малыми. Сумма второго и третьего сла-
гаемых будет наибольшей по модулю, когда скорость 0 мала
и знаки обоих слагаемых совпадают. Последнее имеет место,
когда q > Ъ/е (рассматривается область положительных b и q).
Для указанного случая второе уравнение (8.9) преобразуем,
воспользовавшись выражениями для коэффициентов А3, Л5, Д6
nmehq 1 + у (q—j sin ф
0max — "7~~b Г"2 7 а2-
J2 -|- nmb2 (— — q\ nJ в — 2nmbh (q ——\ cos ф
Полагая в последнем равенстве sin ф = 1 и cos ф = 1, полу-
чим выражение, которое определяет завышенные значения 0тах
nmehq Г1 + 4 (q — М 1
fU =---------------------------^“7------TVa2- (8J1)
/2 + nmb2 +(~ — qj nJ В — 2nmbh (q —— \
Для трансформаторов, выходящих на режим динамической
муфты, используем первое условие (6.3). Тогда
₽л,.х=4ч[1 + 7(’“4)]а2' <8Л2>
Для параллелограммного импульсного механизма, у которого
q = 1, b = е, последнее равенство дает следующую оценку
0шах = 0,25а2. (8.13)
У других гармонических импульсных механизмов q может
быть больше единицы и согласно (8.12) 0тах возрастает. Как
показывает практика конструирования опытных образцов, зна-
чения q оказываются небольшими, и угловое ускорение реактора
может быть оценено величиной
0гаах < 0,5а2. (8.14)
Для трансформаторов, не выходящих на режим динамической
муфты, максимальные значения 0 оказываются ниже границы
(8.14).
171
На участках накопления потенциальной энергии и совместного
движения реактора и ведомого маховика в правых частях урав-
нений (8.9) добавляются слагаемые, зависящие от параметров
упругих элементов. Рассмотрим, например, уравнения (2.15),
описывающие участок накопления и отдачи потенциальной энер-
гии. Если разрешить уравнения (2.15) относительно старших
производных, то в правых частях первого и второго уравнений
(8.9) добавляются соответственно слагаемые •
(8Л5)
Из Т A3 rJ3
Полагая во втором из выражений (8.15) А3 В3 и используя
Л2 = -в^ТГ' получим
лз "г •'з
Наибольшее из рекомендуемых значений k равно 2s = 2qa.
Максимальные углы 0, соответствующие этому значению k,
составляют примерно 0,1 рад. Учитывая, указанные значения k
и р, последнее равенство преобразуем к виду
-^[1 = 0,4^. (8.16)
, Л3 -f-
При q 1,6 имеем
(8.17)
Я3 “Г
Вследствие появления рассматриваемого слагаемого угловое
ускорение на участке накопления потенциальной энергии
возрастает. Согласно расчетам опытных образцов на цифровой
вычислительной машине угловое ускорение р обычно не пре-
вышает величины а2. '
Первое выражение (8.15) содержит малый множитель AJAy
и вследствие этого мало влияет на угловое ускорение а. Поэтому
на исследуемом участке предыдущая оценка (8.10) для а прак-
тически остается неизменной.
Примерно такие же оценки для ускорения получаются и на
участке совместного движения реактора и ведомого маховика.
С введением в механизмах свободного хода упругих элементов
реактор получает возможность поворота в направлении, проти-
воположном вращению двигателя, и обгона ведомого маховика
на участке совместного движения реактора и ведомого маховика.
Однако в рекомендуемой области параметров упругих элементов
существенного изменения скоростей не происходит. При накопле-
нии потенциальной энергии корпусными упругими элементами
угловая скорость реактора не превышает величины .(0,1 4-0,15) а.
172
Рис. 45. Схема инерционных сил и реакций
связей грузового звена импульсного меха-
низма Левина
Примерно на такие же величины скорость реактора может пре-
вышать скорость ведомого маховика на участке совместного
движения.
На основании изложенных оценок и расчетов на вычислитель-
ной машине можно утверждать, что определяющими при расчете
нагрузок на импульсный механизм оказываются, доставляющие
сил инерции грузовых звеньев, содержащие квадраты угловых
скоростей а, 0. Поскольку у и жесткой
моделей отличаются мало,
а масса грузовых звеньев
упругой модели снижается
в 2—3 раза, то составляю-
щие сил инерции грузовых
звеньев и, следовательно,
' нагрузки в упругой модели
снижаются примерно в
2—3 раза.
Проиллюстрируем вы-
сказанные утверждения на
примере импульсного ме-
ханизма Левина. Восполь-
, зуемся схемой реакций
связей и сил инерций гру-
зового звена, представлен-
ной на рис. 45. Модули сил (i — 1, .... 4) и момента Ми пары
сил инерций определяются выражениями
Рг — те№, Р2 — tnh<f2, Ps — те | К|, Р4 = mh | <р |, Ми = Js | ф |. (8.18)
Из уравнений равновесия изображенной на рис. 45 системы
сил, приложенной к грузовому звену, получим следующие фор-
мулы для реакций Р4, R2, R3
Ri = + P2 cos ф 4- P4 sin ф,
£2 = 4[(p*-57pi) sintp- (1 + ^СО5ф)Р3-
— (y- + cosi|Ap4 —J-Wj,
\ Г2 / '2 J
= т [ (t;Pi + sin-- (zr-^cosl)Jpr+
+ (_L-cos^P4+ J-AfJ.
\ r2 / r2 J
173
После преобразований последних выражений с учетом за-
висимостей (8.18), (2.6), (2.7), находим
= те{(±- а-+| ₽)2 + 4 [ + q) « +
' • +(4-?)p]2cos^+4[(4+4® +
+ (4~4] sin'O’
Я2 = — те [ (-2- + </) а + 0- — 7) р]2 sinip -
-4(T“+402sln',’~('1+4cosir)x
(8.19)
Х(та + 7Р )“ (^+tC0S^)I (~+ а +
\ Р у у л (> у | \ (✓ у
+ (7-<0О’
^==Т/п4“^(т“ + 7р)25Ш^ + 4[(т+^“ +
+ (4 - ?) ₽]2 811^- (1 - 4 cosф) (4 “ + 7 Р ) +
+(44 - 4cos *) [ (4+4«+ (7 - ё ]} •
Так как общий множитель 1/2 и множители h/e, h/r2 у первого
слагаемого в правой части выражения Rr отсутствуют, то макси-
мальные значения реакции в несколько раз превышают зна-
чения реакций 7?2 и 7?3. Поэтому сравнение схем проведем по
реакции Rlf определяющей наиболее нагруженное соединение —
ведущий маховик-сателлит. На основании оценок (8.10), (8.17)'
и с учетом малого множителя h/e, составляющего величины по-
рядка 0,1, представляется возможным пренебречь слагаемыми,
содержащими ускорения. Тогда выражение для преобра-
зуется к виду
7?1 = /п4(4а + Ар)2 + 4[(4 + </)« + (A-7)₽]2cos4}.
(8.20)
Так как различие в скоростях сравниваемых схем невелико,
а масса грузовых звеньев у трансформатора с упругими элемен-
тами снижается в 2—3 раза, то величина наибольшей реакции Ri
снижается примерно в 2—3 раза.
174
Изложим одно частное замечание, касающееся схемы импульс-
ного механизма Левина. Поскольку схема использует плавающие
сателлиты, то важно, чтобы при работе механизма действующие
силы прижимали сателлит к венцу маховика. В противном случае
механизм будет работать с ударами. Контакт сателлита с опорной
поверхностью ведущего маховика имеет место только в случае,
когда реакция положительна. Из формулы (8.20) следует,
что возможны отрицательные значения Rx и отрыв сателлита
от ведущего маховика. Поэтому следует делать проверку на воз-
можность отрыва сателлита от ведущего маховика.
О других преимуществах схемы трансформатора с упругими
элементами. Выше сформулированы основные преимущества упру-
гой схемы по сравнению с жесткой, обеспечивающие существенное
снижение динамической напряженности трансформатора и уве-
личение его долговечности. Отметим другие преимущества, кото-
рые достигаются использованием схемы с упругими элементами.
1. При исследовании характеристики (6.16) динамической
муфты
О 111 \L7 •
nmehqa2
было показано, что при передаче момента двигателя Ма угол ф
поворота звеньев составляет несколько градусов. Однако транс-
форматор на режиме муфты может передавать значительно боль-
ший момент. Пока угол ф не достигнет значения л/2, работа
трансформатора на режиме динамической муфты устойчива.
Вследствие большого запаса по передаваемому моменту переход
с режима динамической муфты на режим трансформации затруднен.
Снижение масс грузовых звеньев у трансформатора с упру-
гими элементами приводит к увеличению угла ф и снижению
запаса по передаваемому моменту. Процесс перехода с режима
динамической муфты на режим трансформации становится более
плавным и вызывает меньшую перегрузку двигателя.
2. Снижается неравномерность вращения ведомого маховика
вследствие увеличения времени совместного движения реактора
и ведомого маховика и снижения времени протекания других
участков. Время протекания участка накопления и отдачи по-
тенциальной энергии сокращается по сравнению с временем вы-
стоя реактора в жесткой модели в результате увеличения относи-
тельной скорости ф = q (а—|3). Время разгона оказывается
меньше вследствие действия на этом участке упругих элементов.
Снижение времени торможения обусловлено тем, что участок
торможения в упругой модели начинается при угловых скоростях
реактора меньших, чем скорости ведомого маховика.
3. Снижается неравномерность вращения ведущего маховика
в силу уменьшения модулей инерционных сил грузовых звеньев.
4. Введение упругих элементов обусловливает плавные пере-
/ 175
ходы трансформатора с участка на участок, в результате чего
исключаются «мягкие удары», вызванные скачками ускорений.
5. В трансформаторе с упругими элементами к основным
параметрам, обеспечивающим различные характеристики транс-
форматора, добавляются еще два: жесткости корпусных и вы-
ходных упругих элементов. В результате'этого расширяются воз-
можности достижения различных характеристик.
6. Снижение максимальных нагрузок во всей силовой цепи
трансформатора- приводит к снижению неучтенных деформаций
звеньев.
Как видно, совокупность преимуществ упругой модели, по
сравнению с жесткой оказывается значительной.
2. Расчет внешней характеристики
инерционного трансформатора
Задача построения внешней характеристики сводится к на-
хождению момента сопротивления и средних скоростей ведущего
и ведомого валов передачи, при которых трансформатор совер-
шает периодическое движение (в конце каждого цикла движения
обобщенные скорости и координаты равны соответствующим
значениям в начале цикла).
Для трансформатора с упругими элементами, в отличие от
трансформатора без упругих элементов, процесс построения
характеристик усложняется. В случае отсутствия упругих эле-
ментов можно с достаточной степенью точности считать; что тор-
можение, реактора начинается при ф = О или ср = в зави-
симости от схемы импульсного механизма. Скорости 0 реактора
и 6 вёдомого маховика на участке совместного движения пред-
полагаются равными. Поэтому алгоритм решения задачи оказы-
вается простым. Изменяя последовательно от'цикла к циклу
момент сопротивления, добиваются равенства с заданной степенью
точности скорости 0 = 6 реактора и ведомого маховика, соответ-
ствующей ф = О или ф = ±л, в начале и конце цикла. Слежение
производится только по одной переменной 0 = 6. Кроме того,
предполагается, что после остановки реактора на обратном импуль-
се он остается неподвижным до начала действия прямого импульса.
С.введением упругих элементов все упрощающие предположе-
ния отпадают, а характерные точки ф = 0, ±л исчезают. Разгон
реактора и торможение начинаются при самых различных зна-
чениях угла ф.
Построение характеристик трансформаторов с упругими эле-
ментами производилось с помощью различных алгоритмов. Наи-
более приемлемым оказался описываемый ниже алгоритм, раз-
работанный для применения цифровых вычислительных машин.
Аналитический расчет характеристик весьма трудоемок и при-
меняется редко.
176
Алгоритм построения внешней характеристики трансформатора
с упругими элементами. Общая методика сводится к разысканию
периодических решений, соответствующих различным передаточ-
ным числам. Счет ведется по участкам методом Рунге—Кутта.
Системы дифференциальных уравнений приведены в гл. II. Ре-
шения на отдельных участках цикла последовательно припасо-
вываются одно к другому. В начале счета задаются скорости
и углы поворота реактора, ведущего и ведомого маховиков,
а также моменты сопротивления и двигателя. При этом скорости 6
и р, а также углы 6 и р принимаются равными, что соответствует
началу участка совместного движения реактора и ведомого ма-
ховика. Моменты сопротивления и двигателя, а также скорости
ведущего и ведомого маховиков задаются в начале счета согласно
идеальной характеристике или какой-либо апробированной ха-
рактеристике, если предполагается, что последняя близка к истин-
ной. В процессе счета при переходе с участка на участок началь-
ные условия на каждом последующем участке берутся с конца
предыдущего. Цикл просчитывается, и конечные скорости и углы
поворота сравниваются с начальными. После сравнения осуще-
ствляется корректировка данных. Возможны разные способы.
Например, начальные скорости остаются неизменными, т. е.
такими же, как и в начале счета, а изменяются моменты двига-
теля и сопротивления, а также углы а, Р, ф. Корректировка мо-
мента сопротивления и угла ф проводится, например, по фор-
мулам
Ни = Ч>«„„ = К. - * - ' <8'21’
где ДМС — 6-кон . ^222- J4; Мс., MQ. —моменты сопротив-
Гц/ I х+1
ления в i-ом и i + 1-ом циклах; б(- , 6,- — начальная и
конечная угловые скорости ведомого маховика за i-й цикл; /цг —
время протекания i-ro цикла; фг+1нач, ф4кон — начальный угол ф
в i + 1-ом цикле и конечный в i-ом цикле. Момент двигателя
корректируется точно так же, как и момент сопротивления.
Угол р в начале каждого -цикла можно полагать равным нулю,
а а находить по Ф»+1 . Описанный спрсоб корректировки пред-
ставляется как поиск по заданным скоростям момента сопротив-
ления и двигателя.
При другом способе корректировки моменты сопротивления
и двигателя остаются неизменными от цикла к циклу, а меняются
угловые скорости и углы поворота. Несколько более сложным
представляется одновременное изменение углов, скоростей и
моментов.
После корректировки цикл просчитывается вновь. Процесс
счета одной точки характеристики считается законченным, когда
начальные и конечные данные после некоторого цикла совпадают
177
с заданной точностью. По расчетам последнего цикла находят сред-
ние скорости ведущего и ведомого маховиков и соответствующее
конечному значению момента сопротивления передаточное число I.
Последовательное применение алгоритма в нескольких точках
позволяет построить зависимости Мс = f (i), М„ = (i).
Отметим несколько специфических особенностей, характери-
зующих алгоритм построения внешней характеристики транс*-
форматора.
1. В рекомендуемом алгоритме ошибка от цикла к циклу не
накапливается, поскольку каждый цикл считается с вновь за-
данными начальными условиями. Иначе обстояло бы дело, если бы
алгоритм предусматривал использование в качестве начальных
данных конечные данные предыдущего цикла.
2. Счет в каждом цикле не случайно начинается с участка сов-
местного движения. Вследствие равенства скоростей 6 = р в на-
чале этого участка слежение от цикла к циклу производится
по числу переменных на единицу меньше. Заметим, что это един-
ственная характерная точка, позволяющая обойтись минимумом
переменных при слежении. На участке совместного движения
есть еще одна, точка, в которой скорости р и 6 оказываются рав-
ными. Однако в этой точке следует дополнительно задавать де-
формацию выходных упругих элементов.
3. Внешняя характеристика трансформатора строится при ус-
ловии постоянства средней скорости двигателя на различных
передаточных числах. Этот принцип дает единственную кривую,
по которой можно судить о главных свойствах передачи. В про-
тивном случае исследователи получали бы множество случайных
характеристик, так как при одном и том же передаточном числе
создаваемый трансформатором инерционный момент изменяется
в зависимости от угловой скорости двигателя. Как правило,
внешняя характеристика строится по средней угловой скорости,
соответствующей максимальной мощности двигателя. Сохранение
постоянства средней угловой скорости двигателя является до-
полнительным условием, по которому производится слежение
в процессе счета.
4. После построения зависимости момента сопротивления Мс
от передаточного числа i при а = const может оказаться, что кри-
вая Мс ~ f (О в некоторых интервалах проходит выше идеальной
гиперболической характеристики. Последнее означает перегрузку
двигателя в указанных интервалах. Для электродвигателя боль-
шие перегрузки недопустимы, так как они могут иметь место в те-
чение длительного промежутка времени и ведут к перегреву дви-
гателя, поэтому в случае электродвигателя параметры должны
быть изменены соответствующим образом. В случае двигателей
внутреннего сгорания перегрузка приведет к снижению частоты
вращения двигателя, и расчетная характеристика в интервалах
перегрузки должна быть построена вновь. Параметры могут ос-
178
таться неизменными, если вновь построенная характеристика
(не лежащая выше идеальной) удовлетворяет заданным требова-
ниям.
5. Шаг счета принят постоянным и равным 0,00001 с. Ряд кон-
трольных попыток счета с меньшим шагом практически не изме-
нял результаты.
Расчеты характеристик опытных образцов инерционных транс-
форматоров на вычислительной машине М-222 показали, что из-
менение угловой скорости двигателя в течение цикла мало влияет
на характеристику трансформатора. Алгоритм решения можно
упростить, принимая скорость а постоянной. Исходными в этом
случае, например на участке совместного движения ведомого ма-
ховика и реактора, являются уравнения
Л*Р + А (а - р)2- Л6а2 = ^(6-Р),
J^ = —Uy-Ny, — Мс - Ux (6 - р).
Условие а = const приводит к небольшой погрешности (по-
рядка 5%), в то же время существенно упрощая алгоритм счета.
Отпадает слежение по средней скорости двигателя, моменту дви-
гателя, углу а и соответствующие им корректировки. Зависимость
среднего момента двигателя от передаточного числа i строится
автоматически по найденной кривой Мс = f (i) с помощью выра-
жения
Мд = iMc. (8.23)
Последняя формула находится использованием теоремы о
Производной по времени от кинетической энергии трансформа-
тора dT/dt = 2 N. В случае периодического движения системы
изменение кинетической энергии за цикл равно нулю. Поэтому
сумма мощностей будет равна нулю, откуда и следует (8.23).
Сходимость алгоритма является хорошей. При условии не-
случайного подбора начальных данных (например, использова-
ние таблицы начальных углов ф, рекомендуемой ниже) одна точка
характеристики просчитывается через 2—4 цикла. Машинное
время на М-222 для расчета всей характеристики составляет
20—40 мин. При необходимости машинное время может быть со-
кращено увеличением шага счета до 0,0001 с, что в большинстве
случаев допустимо.
Более подробно упрощенный алгоритм расчета характеристики
формулируется следующим образом.
Участок 1 (совместное движение). Используются уравне-
ния (8.22). Данные для начала счета: t — 0, ₽ = 6 = Рю» Ф —
= Фю> Р = 6 = 0, а - at + а0, а0 - уФю, Y^Yio, Т = Тю,
Мс = Л1с1. Счет до момента р = б (на первых точках это условие
не проверяется, пока не появится достаточная разность (3 =— б).
После выполнения условия (3 = 6 переход на участок 2.
179
Участок 2 (торможение). Начальные условия с конца уча-
стка 1. Дополнительное условие Ur = 0. Счет до 0 = 0, затем
переход на участок 3.
Участок 3 (накопление потенциальной энергии). Начальные
условия
участка
первого
(3 = 0, а =-уф, остальные начальные условия с конца
2. Дополнительные условия: t/x = 0, в правой части
уравнения (8.22) добавляется слагаемое —U$, А3 за-
Таблица 10
Начальные данные для. расчета внешней характеристики
Ь1о> рад/с / /г/8 = 1,5 £/8 = 2,5 £/8 = 4,5
Фю, рад i - Фю» рад i Ф1о» рад i
30 0 * 0,16 —0,4 ** 0,14 0,6 0,12
60 0,36 0,25 0,4 0,25 1,1 0,25
90 0,8 0,37 0,9 0,36 1,3 0,35
120 1,2 0,47 1,3 0,45 1,5 0,45
150 1,6 0,57 1,6 0,55 1,7 0,55
180 1,9 0,67 1,9 0,65 1,9 0,65
210 2,2 0,76 2,1 .0,75 2,1 0,75
240 2,5 0,85 2,4 0,85 2,3 0,84
*
**
0,19;
0,07.
меняется на А3 + Js, второе дифференциальное уравнение (8.22)
не считается. Счет до (J = 0 (на первых точках участка это условие
не проверяется) и переход на участок 4.
Участок 4 (разгон). Начальные условия с конца участка 3.
Дополнительное условие U х = 0. Считать до 0 = 6, затем кор-
ректировка начальных данных и переход на следующий цикл.
Рекомендуемые для начала счета углы ф и соответствующие
им передаточные числа приведены в табл. 10.
Данные табл. 10 получены расчетом опытного образца средней
мощности (100 кВт) при частоте вращения двигателя 3000 об/мин.
При передаточных числах 0,1—0,2 участок разгона реактора ис-
чезает и появляется участок совместного движения реактора
и ведомого маховика при действии корпусных упругих элемен-
тов. Счет в этом случае начинается с указанного участка. В табл. 10
для 01О=ЗО отмечены углы Р1О деформации корпусных МСХ, соот-
ветствующие началу участка совместного движения при действии
корпусных упругих элементов.
На рис. 46 приведены характерные кривые угловых скоростей
реактора и ведомого маховика, полученные сшиванием траекторий
на отдельных участках цикла и соответствующие периодиче-
скому движению трансформатора. Кривые построены с помощью
упрощенного алгоритма (a = const) при следующих параметрах:
180
Jъ = 0,105 кг-м2; J3 = 0,012 кг-м2; J4 — 1,1 кг-м2, nJB —
= 0,026 кг-м2; пт = 20,4 кг; а = 0,084 м; Ь = 0,042 м; е =
= 0,126 м; h = 0,011 м; q = 1,33; U = Ur = 15_200 Н-м/рад;
а = 150 рад/с.
График на рис. 46, а соответствует Л4С = 299 Н-м и переда-
точному числу i = 0,42, график на рис. 46, б—Л4С = 541 Н-м
и передаточному числу i = 0,12. На графике рис. 46, б совместное
Рис. 46. Периодические решения скоростей для трансформатора с упругими
элементами
совместному движению реактора и ведомого маховика, I — сов-
местному движению реактора и ведомого маховика при действии
корпусных упругих элементов. Участок разгона реактора отсут-
ствует.
На рис. 47 показаны внешние характеристики, построенные
с помощью упрощенного алгоритма для трансформатора с двига-
телем а = 300' рад/с и параметрами:
В3 = 0,16 кг-м2; Ь3 = 0; Ь-а = 0; Ьл = 0,043 кг-м2; 1 g..
q — 1; b = е; J3 = 0; J4 = 0,5 кг-м2, J
где Л3 = В3 + b3 cos ф, Л5 = b5sin ф, Л6 = fe6sin ф.
Кривой k/e = 1,5 соответствуют жесткости МСХ U = U х =
= 32 400 Н-м/рад, k/e = 2,5— /7 = (У х = 90 000 Н-м/рад,
k/e = 4,5 — U = U г = 291 600 Н -м/рад. Штриховая линия соот-
ветствует характеристике жесткой модели с параметрами (8.24).
На больших передаточных числах i = 0,9-= 1 осуществляется
выход на прямую передачу, и трансформатор не работает на уста-
новившихся режимах. Неустойчивые ветви характеристики в этом
181
ИйтерваЛе передаточных чисел не показаны. Из'графиков на рис. 47
следует:
1) в широкой зоне передаточных чисел трансформатор с упру-
гими элементами при одних и тех же массах грузовых звеньев
может обеспечивать вращающий момент, в 2—3 раза превышаю-
щий момент трансформатора без упругих элементов;
2) с уменьшением жесткости корпусных и выходных упругих
элементов вращающий момент увеличивается, что подтверждает
результаты гл. V.
3) при i —> 1 характеристики трансформатора с упругими
элементами сближаются между собой и с характеристикой транс-
форматора без упругих элементов; это подтверждает вывод о
снижении действия упругих элементов при выходе на .прямую
передачу.
Повышение вращающего момента в упругой схеме обеспечи-
вается как корпусными, так и выходными упругими элементами.
Для оценки действия выходных упругих элементов на рис. 48
представлены характеристики трансформатора с параметрами:
J2 = 0,071 кг-м2 3; J3 = 0,012 кг-м2; = 1,1 кг-м2; nJB =
= 0,026 кг-м2; пт = 21,4 кг; а = 0,084 м; b = 0,042 м;
е = 0,126 м; h = 0,011 м; q = 1,33; а = 150 рад/с; U —
= 23 000 Н -м/рад. При построении различных кривых изменя-
лась только жесткость выходных упругих элементов. Кривой
k-Je^ = 2,2 соответствует 6Д = 23 000 Н-м/рад, k-Jbi — 1,65 —
— U13 000 Н -м/рад, = 1,2 — Uг = 6850 Н -м/рад. Штри-
ховой линией показана характеристика трансформатора без упру-
гих элементов, имеющего указанные выше параметры. Кривая
44и описывает идеальную характеристику.
182
3. О неустановившихся процессах
В отличие от ряда механических систем, в которых неустано-
вившиеся режимы являются наиболее нагруженными, в инер-
ционном трансформаторе нагрузки на основные элементы при
установившихся и неустановившихся процессах на режиме транс-
формации момента практически не отличаются. Это свойство
инерционного трансформатора обусловлено его внутренней ди-
намичностью.
Рассмотрим установившийся и неустановившийся процессы,
начинающиеся при одинаковых начальных условиях, за один
цикл движения трансформатора. В следующем цикле снова можно
сравнивать этот же неустановившийся процесс с каким-то другим
установившимся при новых начальных условиях. И тот и другой
процессы на режиме трансформации момента протекают цикли-
чески. Установившийся процесс характеризуется периодично-
стью. В конце цикла обобщенные координаты и скорости имеют
те же значения, что и в начале цикла. Неустановившийся про-
цесс, обусловленный изменением момента двигателя или сопро-
тивления, заканчивается при значениях координат и скоростей,
отличных от начальных.
Оценим нагрузки в МСХ, ббусловленные изменением момента
двигателя и сопротивления. На участке накопления и отдачи
потенциальной энергии деформация корпусного МСХ описыва-
ется первым уравнением (4.26). Уравнение не содержит момент
двигателя 2ИД и момент сопротивления Л4С. Слагаемое, содержащее
момент двигателя [уравнение (4.17)], оказалось весьма малым
и было опущено. Это означает, что при одинаковых начальных
условиях участка накопления и отдачи потенциальной энергии
деформации корпусного МСХ при установившемся и неустано-
вившемся процессах оказываются практически одинаковыми, не-
смотря на изменение Мл и Л4С.
Деформации выходного МСХ определяются уравнением (4.77),
которое также не содержит момента двигателя и сопротивления.
Можно проследить по опущенным при выводе формулы (4.77)
членам, содержащим моменты двигателя и сопротивления, что
их существенное изменение мало повлияет на деформацию выход-
ных упругих элементов. Следовательно, нагрузки на выходные
упругие элементы при установившихся и неустановившихся
процессах отличаются мало и определяются в основном внутрен-
ней динамикой инерционного трансформатора.
Нетрудно показать, что нагрузки на импульсный механизм
также мало отличаются при установившихся и неустановившихся
процессах.
Указанное свойство инерционного трансформатора естественно
с физической точки зрения. Действительно, цикл движения инер-
ционного трансформатора протекает за малый промежуток вре-
мени (несколько сотых секунды), а моменты двигателя и сопротив-
183
ления приложены к ведущему и ведомому маховикам, имеющим
достаточно большие моменты инерции. Поэтому скорости ведущего
и ведомого маховиков за цикл не успевают сильно измениться,
и влияние внешней среды мало сказывается на динамику транс-
форматора в пределах цикла. . ,
Таким образом, рекомендации по выбору оптимальных па-
раметров справедливы в широкой области условий работы инер-
ционного трансформатора, включающей как установившиеся,
так и неустановившиеся режимы.
4. Методика выбора параметров.
Расчет трансформатора
Расчет инерционного трансформатора при разработке конструк-
ции — достаточно трудоемкая задача, осуществляемая методом
последовательных приближений. На этапе проработки эскизного
проекта конструктор должен иметь простую методику, требующую _
минимальных затрат при выборе параметров. На этом этапе
выбирается схема трансформатора, проводится элементарный
прочностной расчет, осуществляется первая прикйдка габаритов
и массовых параметров трансформатора, оценка его конкуренто-
способности. Стадию детальной разработки конструкции сопро-
вождает точный расчет, проводимый, как правило, на цифровых
вычислительных машинах. На этой стадии рассчитывается внеш-
няя характеристика во всем диапазоне передаточных чисел,
проводится детальный прочностной расчет, учитываются специфи-
ческие требования, накладываемые разными условиями работы
машин, и т. д. ‘ ,
Таким образом, следует рекомендовать проведение расчета
инерционного трансформатора в два этапа: приближенный анали-
тический расчет параметров трансформатора и уточненный рас-
чет параметров на цифровых вычислительных машинах.
Методика приближенного аналитического выбора параметров
трансформатора. Исходными при аналитическом расчете транс-
форматора являются следующие данные:
а) максимальная мощность двигателя Af, угловая скорость
двигателя а при максимальной мощности и максимальный момент
Мд двигателя;
б) -максимальный коэффициент трансформации момента
/Сг = ^-Х, (8.25)
где Мвтах — наибольшее значение среднего за цикл вращаю-
щего момента на ведомом валу трансформатора (момент по внеш-
ней характеристике трансформатора при i = 0);
184
в) максимальная угловая скорость 6шах ведомого вала транс-
форматора;
г) ориентировочные габариты трансформатора.
Методика выбора параметров включает рекомендации по всем
основным параметрам инерционного трансформатора.
1. Выбор параметров а, b импульсного механизма проводят
согласно рекомендациям гл. III и VI. Наилучшим вариантом яв-
ляются значения а = О, b = е, при которых достигается наимень-
шая неравномерность вращения ведущего маховика и наименьшие
нагрузки на импульсный механизм. Однако значения а = О,
b = е могут быть практически реализованы только с помощью
параллелограммного импульсного механизма, уступающего по
компактности планетарным импульсным механизмам. Если парал-
лелограммный механизм не удовлетворяет требованиям конструк-
тора, значения а, Ь выбирают в промежутке между точками 1
и 5 (см. рис. 15), где расположены обобщенные планетарные
механизмы и механизмы Левина. Выбор параметров а, b между
точками 1 и 5 следует проводить так, чтобы механизм оказывался
возможно выше на отрезке 1—5. Чем выше находится механизм,
тем меньше нагрузки на него и меньше неравномерность вращения
ведущего маховика. Увеличение а можно рекомендовать только
в случае конструктивных трудностей при обеспечении выхода
трансформатора на режим динамической муфты.
2. Параметр е выбирается в зависимости от схемы импульс-
ного механизма. Для параллелограммного импульсного механизма
оптимальным является значение е = RI3 (R — внутренний ра-
диус корпуса трансформатора), обеспечивающее наименьшие на-
грузки на подшипники грузовых звеньев. Для планетарных
импульсных механизмов следует выбирать максимально воз-
можное значение е, при котором массы грузовых звеньев наи-
меньшие.
3. Параметр q определяет цикличность работы МСХ. Предва-
рительно он выбирается в промежутке q — 0,5-4-2. При выбранных
а и b параметр q для параллелограммного импульсного механизма
и механизма Левина оказывается заданным.
4. Параметр h для планетарных импульсных механизмов мо-
жет быть предварительно принят равным h = 0,1 е, для паралле-
лограммного h = е.
5. При известных параметрах a, b е, h, <7 общая масса грузовых
звеньев в случае U = U х (кривая 3 протекания момента на за-
торможенном ведомом маховике, рис. 44) находится по формуле
пт ==
ehqa?
(8.26)
Отношение /г/е при этом принимается равным kl& = 1,5-4-2.
Г ' Г85
В случае использования различных жесткостей V и V х (кривая 2
протекания момента на рис. 44) общая масса грузовых звеньев
определится равенством
„т _ - <?2«2 (58 + А)] КТМЛ
ггт------;—=-----rg--------, (о. 21)
ehqa? ц2
где U2— наибольшая из жесткостей U, Vх МСХ.
Число п грузовых звеньев обычно принимается равным: п —
= 6— для планетарных импульсных механизмов, п — 4 — для па-
раллелограммного импульсного механизма.
6. Момент инерции реактора J2 находится по заданной макси-
мальной угловой скорости 6тах ведомого вала трансформатора.
В случае выхода трансформатора на режим динамической муфты
(6тах = “) параметры трансформатора должны удовлетворять
условию (6.3) выхода на прямую передачу
J2 + nmb2 4~ — <7 У nJв + 2nmbh — q'j — 4nmeh — 0. (8.28)
В случае частичного использования диапазона передаточных
чисел (6тах < а) максимальную скорость 6тах ведомого вала
представим в виде
^тах = Ртах ~ 0^'
Подставляя последнее равенство в (6.1), получим условие,
которому должны удовлетворять трансформаторы с частичным
использованием диапазона передаточных чисел
ч. / b \2 / Ь \
J2 + nmb2 (-----q) nJ в + 2nmbh I---q ) — Anrneh
---------- (Ь V--------------- (Ь 4............ = 0 - H)2-
, J2 -|- nmb2 + ( —-q\ nJ в — 2nmbh ( —-q\
(8.29)
Момент инерции реактора J2 находится из равенств (8.28),
(8.29).
7. Жесткость корпусных упругих элементов выбирается с по-
мощью зависимости
-|- = 1,5-4-2. . (8.30)
Рекомендуется использовать меньшие значения k/&. Однако
деформации МСХ не должны быть слишком большими (приемлемые
деформации 0,1-4-0,15 рад). Если напряжения в упругих элемен-
тах, параметры которых выбраны согласно (8.30), не проходят
по условиям усталостной прочности, необходимо выбирать kl& > 2.
Жесткость выходного МСХ рекомендуется выбирать равной
жесткости корпусного МСХ (U = 17х). В случае различных жест-
186
костей более податливым целесообразно принимать корпусной
МСХ, который менее нагружен в области высоких передаточ-
ных чисел.
Найденные предложенным способом параметры являются ори-
ентировочными и позволяют с малыми затратами времени провести
первую эскизную проработку проектируемой передачи. Методика
предполагает такой выбор параметров, чтобы полученная харак-
теристика удовлетворяла заданным требованиям в двух крайних
точках (i = 0 и i = 1).
После первой эскизной проработки конструкции производят
детальный расчет трансформатора: расчет характеристики со-
гласно представленному выше алгоритму, силовой и прочностной
расчет, расчет по различным требованиям (например, близость
расчетной и идеальной характеристик) и т. д. Расчет сопровож-
дается окончательной разработкой конструкции.
Глава IX
КОНСТРУКЦИИ И ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
ОПЫТНЫХ ОБРАЗЦОВ ИНЕРЦИОННЫХ
ТРАНСФОРМАТОРОВ С УПРУГИМИ ЭЛЕМЕНТАМИ
Описываемые в этой главе конструкции созданы коллективом
научных сотрудников Челябинского политехнического института
под руководством автора. В разработке и изготовлении образцов
большое участие принимали сотрудники конструкторских бюро
Ульяновского и Уральского автозаводов, Копейского, Кыштым-
ского и Карпинского машиностроительных заводов.
1. Описание конструкций опытных образцов
инерционных трансформаторов с упругими элементами
Инерционный трансформатор для бурового станка СВБ-2м.
Использование инерционного трансформатора позволяет увели-
чить производительность станка за счет регулирования оборотов
бурового става и импульсной подачи момента на рабочий орган.
На рис. 49 представлены продольный и поперечный разрезы
инерционного привода, который явился первой разработкой с уп-
ругими элементами. Асинхронный двигатель (мощность 40 кВт,
1500 об/мин) приводит во вращение ведущий маховик 1 транс-
форматора, закрепленный на валу 3 электродвигателя. В каче-
стве импульсного механизма использован параллелограммный
механизм. Каждое из четырех грузовых звеньев 4 приводится
в'движение двумя шатунами 5, закрепленными с помощью под-
шипников качения на пальцах грузовых звеньев и пальцах крон-
штейнов 21 (разрез А—А). Последние жестко закреплены на ве-
дущем маховике.' Для компенсации неточностей изготовления и
деформаций, при работе трансформатора в головках шатунов
установлены резиновые втулки. Грузовые 'звенья с помощью
подшипников качения установлены на реакторе, представляющем
собой разборную конструкцию, состоящую из деталей 2, 6, 19, 20.
В конструкции использованы роликовые МСХ с индивидуаль-
ным поджимом каждого ролика (разрез Б^Б). Наружная обойма
корпусного МСХ 7 имеет приливы 18, с помощью которых усилие
с корпусного МСХ передается на шток 22 и упругие элементы
188
23. В качестве упругих элементов использованы пакеты тарельча-
тых пружин. Наиболее употребительные в машиностроении ви-
тые пружины согласно расчету оказывались громоздкими и не
вписывались в заданные габариты. Для гашения колебаний обоймы
Рис. 49. Инерционный привод бурового станка СВБ-2М
18 после периода накопления и отдачи потенциальной энергии
установлены резиновые амортизаторы 24. Прямой импульс мо-
мента передается через МСХ 8 непосредственно на ведомый ма-
ховик 9, сглаживающий колебания скорости ведомого вала.
Специальные упругие элементы в МСХ ведомого маховика не
устанавливались.
Вращение бурового става в обоих направлениях обеспечива-
ется редуктором, установленным после трансформатора. Пара
шестерен 10, 17 находится в постоянном зацеплении. Включение
прямого или обратного вращения бурового става осуществляется
рычагом 15, действующим на блок шестерен 14, 16. Вращение
в прямом направлении передается через шестерни 16, 11, в об-
ратном — через шестерни 14, 13, 12. Благодаря установке редук-
тора трансформатор работает в диапазоне более высоких пере-
Рис. 50. Инерционный трансформатор с пакетными механизмами свободного
хода -
даточных чисел, которым соответствуют меньшие нагрузки в транс-
форматоре.
Использование параллелограммного импульсного механизма
обусловлено, с одной стороны, преимуществами этого механизма,
с другой—достаточными габаритами для размещения трансфор-
матора и редуктора. Попытки применения в конструкции меха-
низма Чалмерса оказались безуспешными.
Для создания более компактной- конструкции разработан
второй вариант трансформатора для бурового станка СВБ-2М
(рис. 50), отличающийся от первого применением импульсного
механизма Левина и пакетных МСХ.
На валу 12 электродвигателя закреплен ведущий маховик
5 трансформатора, приводящий в движение сателлиты 10 с не-
190
уравновешенными грузами 7. Жесткое соединение грузов 7 и
сателлита обеспечивается болтом 8 и шпонкой 13. Сателлиты
с неуравновешенными грузами обкатываются по кольцам 6,
связанным с венцом ведущего маховика 5. В конструкции исполь-
зовано шесть сателлитов. Для предотвращения выпадания и
проворота болтов 8 при сборке на грузе 7 сделана сегментная
канавка, а головка болта 8 выполнена фасонной.
Корпусной и выходной МСХ имеют одну ведущую обойму,
состоящую из корпуса 3, установленного на шлицах реактора 11,
и крышки 16, которая крепится к корпусу 3 винтами. В торцовых
поверхностях корпуса .3 и крышки 16 выполнены пазы для раз-
мещения пакетов стальных пластин 14, служащих для замыка-
ния МСХ. Пластины имеют некоторое осевое перемещение, огра-
ниченное резиновыми кольцами 17, предназначенными для пред-
отвращения ударов о поверхность ведомых обойм 2 и 15 при за-
мыкании МСХ. Постоянный поджим пластин к поверхностям
ведомых обойм производится резиновым кольцом 19. Резиновые
кольца 17 и 19 фиксируются от осевых перемещений втулкой 18.
На торцовых поверхностях ведомых обойм корпусного и выход-
ного МСХ установлены болты 9 С радиальными зубьями. Для
компенсации погрешностей изготовления МСХ и обеспечения
контакта между пластиной и зубом по плоскости зуба болты 9
установлены в ведомых обоймах 2 и 15' на резиновых втулках 20
и закреплены гайками 22 через резиновые прокладки 21. Ведомая
обойма 2 МСХ, передающего прямой импульс, закреплена на ве-
домом маховике 1, ведомая обойма- 15 МСХ, воспринимающего
обратный импульс, установлена на реакторе с помощью шарико-
подшипника и может качаться относительно корпуса трансформа-
тора.
Выступы ведомой обоймы 15 МСХ, воспринимающего обратный
импульс, входят в пазы стаканов 4, в которых установлены тарель-
чатые пружины и резиновые амортизаторы, гасящие колебания
ведомой обоймы после размыкания МСХ.
Корпусной МСХ, как и в первом варианте, имеет специально
встроенные упругие элементы, МСХ ведомого маховика выполнен
жестким. Редуктор, предназначенный для реверсирования вра-
щения бурового става и смещения рабочего диапазона пере-
даточных чисел трансформатора, оставлен без изменений.
Достоинством импульсного механизма Левина, как и других
..планетарных импульсных механизмов, является наиболее раци-
ональное использование объема, что позволяет получить ком-
пактную передачу. Специфическое достоинство механизма — об-
катывание грузовых звеньев ✓по кольцам ведущего маховика.
Это исключает применение подшипников и вследствие небольших
напряжений в месте контакта сателлитов с опорными поверхно-
стями ведущего маховика увеличивает долговечность импульсного
механизма. Наконец, импульсный механизм Левина по срав-
нению с импульсным механизмом Хоббса позволяет снизить не-
191
равномерность вращения ведущего маховика, и как следствие,
силовое воздействие в местах контакта грузовых звеньев с ведущим
маховиком.
Интересной является идея пакетного МСХ. В этом механизме,
как и в храповом, применен упор обойм, но вместо отдельных ра-
бочих тел используются пакеты стальных пластин. Применение
достаточно тонких пластин (порядка 1 мм) позволяет свести удар
в момент заклинивания, свойственный храповым механизмам,
к минимуму. Микрохраповые МСХ имеют полки зуба порядка 3 мм.
Число зубьев пакетного МСХ в несколько раз меньше, чем у хра-
пового МСХ, в результате чего переход от одного зуба к другому
оказывается плавным.
Осевые габариты привода бурового станка при установке
инерционного трансформатора снижаются до 910 мм против
1010 мм в серийном ступенчатом образце и радиальные до 560 мм
против 650 мм серийного образца.
Инерционный привод погрузочной машины 1ПНБ2. Машина
1ПНБ2, изготовляемая на Копейском машиностроительном заводе,
предназначена для погрузки горной массы в подземных выработ-
ках. Мощные нагребающие лапы приводятся в действие от асин-
хронного электродвигателя (мощность 15 кВт, 1500 об/мин) с по-
мощью ступенчатой передачи.
Решение о разработке инерционного привода нагружающих
лап было принято исходя из возможности повышения произ-
водительности машины за счет автоматичности и импульсной
природы привода, а также улучшения условий работы двигателя.
Применение инерционного привода исключает принудительные
остановки двигателя при резких возрастаниях сопротивления.
Конструкция привода приведена на рис. 51. На валу 1 электро-
двигателя закреплен ведущий маховик 2 трансформатора. В ка-
честве импульсного механизма использован механизм Левина.
Для уменьшения бокового износа колец 5, по которым обкатыва-
ются грузовые звенья, применены специальные износостойкие
кольца 3, фиксирующие осевое положение «плавающих» сател-
литов 4. Вид на импульсный механизм показан на разрезе
А—А.
На реакторе 6 с помощью соответствующей посадки и штифтов
17 закреплены храповые колеса 7 и 8 корпусного и выходного МСХ.
Рабочие тела 16 корпусного МСХ являются одновременно упру-
гими элементами. Они расположены в пазах кольца 9 и закрыва-
ются крышкой 19. Концы рабочих тел закреплены конусным коль-
цом 18. Кольцо 9 удерживается шпонкой 10 от поворота относи-
тельно корпуса. Характерной особенностью использованного
упругого МСХ является минимальная масса рабочих тел и упру-
гих элементов, поскольку эти детали объединены.
Рабочие тела 20 выходного МСХ закреплены в ведомом ма-
ховике 11 с помощью конусного кольца 21 и крышки 22. Специ-
альные упругие элементы в выходном МСХ не использовались.
192
Леонов
со
GO
Храповые колеса имеют зубья с длиной полки 5 мм и высотой
1 мм. Число зубьев каждого храповика равно 120.
На выходе из трансформатора использован редуктор с двумя
парами (12—13 и 14—15) косозубых шестерен, находящихся
в постоянном зацеплении. Общее передаточное число редуктора
равно 4,72. Редуктор и изготовленный заодно с нцм корпус ведо-
мого маховика использованы с серийного привода машины.
Момент инерции реактора йодобран таким образом, чтобы ведомый
маховик не превышал скорости 0,53 а, т. е. 760 об/мин. В соответ-
ствии с этим частота вращения ведомого вала редуктора изменя-
лась в пределах 0—160 об/мин. Расчетный рабочий диапазон
30—120 об/мин.
Смазка образца производится разбрызгиванием. Определенное
количество смазки заливается в корпус передачи.
Габариты инерционного привода те же, что и у серийного при-
вода.
Новым в конструкции инерционного привода машины 1ПНБ2
явилось применение храповых МСХ с малым зубом. Идея приме-
нения микрохрапового МСХ принадлежала М- Ф. Балжи. Под
его руководством были сделаны конструктивные разработки
в жесткой схеме трансформатора. Эта идея была высказана не слу-
чайно. Роликовые, пластинчатые и другие МСХ, принцип дей-
ствия которых основан на использовании сил трения, имеют нор-
мальные нагрузки
Р _ Гтр
f ’
на порядок превышающие силы трения. Микрохраповые МСХ
передают момент с помощью нормальных сил и имеют контактные
-напряжения, по крайней мере, на порядок меньше, чем у ролико-
вых. Вследствие использования площадки контакта между рабо-
чим телом (пластиной) и зубом храповика напряжения в микро-
храповых МСХ оказываются еще меньше.
Микрохраповые МСХ допускают большой износ пластин без
нарушения характеристик и рабочих усилий. Они менее требова-
тельны к точности изготовления, сборки и имеют четкий про-
цесс заклинивания. В микрохраповых МСХ достигается наиболее
простое конструктивное введение упругих элементов, так как
рабочее тело (пластина) одновременно является упругим элементом.
Недостатками микрохраповых МСХ являются удары рабочих
тел о храповик в момент заклинивания, обусловленные определен-
ной длиной полки зуба, и удары рабочих тел о храповик при хо-
лостом ходе во время перехода их с зуба на зуб. Исследования
показывают, что с помощью "ряда конструктивных решений на-
грузки во время ударов могут быть снижены до уровня расчетных
рабочих нагрузок. Микрохраповые МСХ следует считать одними
из наиболее перспективных в трансформаторах с упругими эле-
ментами,
194
Параметры опытного образца инерционного трансформатора
машины 1ПНБ2 следующие: = 0,084 м; г2 = 0,042 м; h =
=0,011 м; а=0,084 м; b = 0,042 м; е = 0,126 м; п = 6; q = 1,33;
т = 3,4 кг; Jг — 1,74 кг-м2; J2 = 0,105 кг-м2; J3 = 0,01 кг-м2;
Л = 0,81 кг-м2; JB = 0,0043 кг-м2; 77 = 27 600 Н-м/рад.
Инерционный привод машины 1ПНБ2 был изготовлен на Ко-
пейском машиностроительном заводе и опробован на лаборатор-
ном стенде в Челябинском политехническом институте. Попытка
применения жесткого микрохрапового МСХ оказалась неудач-
ной. Выходной МСХ вышел из строя на расчетном режиме (все
рабочие тела были поломаны). В связи с этим выходной механизм
для дальнейших испытаний был изготовлен упругим.
Максимальные расчетные напряжения в упругих элементах
описанного опытного образца на режиме заторможенного ведомого
маховика равны 318 МПа. Корпусной механизм свободного хода
содержал 30 пружин, изготовленных из листовой стали 65Г
толщиной 2,2 мм, шириной 12 мм. Конфигурация пружины пред-
ставляла набор последовательно соединенных полуколец с внут-
ренним радиусом 2,8 мм.
Вариант инерционного трансформатора машины 1ПНБ2 с па-
раллелограммным импульсным механизмом. Уравновешенность
параллелограммного импульсного механизма, позволяющая устра-
нить воздействия на опорные подшипники реактора, достига-
ется достаточно просто в конструкции с четырьмя грузами (по
два груза на каждую сторону). В машинах с двигателями неболь-
шой мощности использование четырех грузов нерационально.
Для создания компактной конструкции желательно использо-
вание минимума грузовых звеньев, а именно двух (по одному
на Гкаждую сторону). Подобная конструкция была разработана
для трансформатора машины 1ПНБ2 (рис. 52.)
Ведущий маховик 1 трансформатора с помощью шатунов 3
приводит в движение два грузовых звена 4. Пальцы шатунов
крепятся в грузовых звеньях 4 и кронштейнах 2, связанных с ве-
дущим маховиком. Уравновешивание достигается применением
соответствующей конфигурации грузовых звеньев, центры тя-
жести которых смещены от осей крепления грузов на реакторе 7.
С этой же целью грузовые звенья имеют специальные приливы 5.
Возможна заливка свинцом определенных объемов 6 грузового
звена. Проведено также соответствующее уравновешивание ре-
актора. В остальном нет принципиальных отличий от предыду-
щей конструкции.
При разработке инерционного трансформатора для машины
1ПНБ2 была предпринята попытка использования импульсного
механизма Чалмерса с ведущим эпициклом. Однако, несмотря
•на то, что расчетный диапазон передаточных чисел в проекти-
руемой передаче ограничен (0«- 0,53), добиться приемлемой ха-
рактеристики не удалось. Видимо, использование импульсного ме-
ханизма^Чалмерса возможно только для малых передаточных чисел.
7* 195
Вариант инерционного трансформатора машины 1ПНБ2 с упру-
гими корпусным и выходным МСХ. Экспериментальные исследо-
вания опытных образцов показали, что микрохраповые МСХ
работоспособны только в упругой модели инерционного транс-
форматора. В жесткой модели пластины постепенно выходят
7 6
Рис. 52. Инерционный трансформатор погрузочной машины 1ПНБ2
с параллелограммный импульсным механизмам
из строя, вследствие их неравномерного включения. В связи
с этим был создан вариант трансформатора машины 1ПНБ2
с обоими'упругими МСХ. Изменению подверглись только МСХ,
поэтому описывается их конструкция.
Корпусной МСХ (рис. 53) расположен в проставке 7, связанной
с корпусом передачи. Пластина 1 закреплена на оси поршня 2,
который перемещается внутри стакана 6. С одной стороны поршня
в стакане 6 расположен основной рабочий пакет 3 тарельчатых
пружин,' удерживаемый и регулируемый винтом 4. Стакан фикси-
руется в проставке с помощью крышки 5 и болтов. С другой сто-
роны поршня между передней торцовой стенкой стакана и поршнем
196
расположен вспомогательный пакет 9 тарельчатых пружин,
предназначенный для смягчения удара в конце рабочего хода
поршня. От проворота в стакане поршень удерживается штифтом
8, скользящим в канавке на боковой поверхности поршня. Пла-
стина 1 поджимается к храповику 12 с помощью пружины и пор-
шенька 10. Точная установка пластин относительно храповика
по длине зуба достигается при сборе механизма некоторым пово-
ротом стакана 6 перед закреплением крышки. Вытекание масла
между стаканом и проставкой предотвращается резиновым коль-
цом 11. Корпусной МСХ имеет 12 стаканов.
9 10 И 12
Рис. 53. Механизмы свободного хода инерционного привода машины 1ПНБ2
Аналогично устроен выходной МСХ. Стаканы 14 распо-
ложены в ведомом маховике 13 и удерживаются крышками 15,
закрепленными на ведомом маховике с помощью болтов 16. Число
стаканов, как и в корпусном МСХ, равно 12.
Отметим особенность расчета описанных МСХ. Вследствие
малой полки зуба пластина и ось стакана составляют угол ах
с касательной к храповику в точке контакта пластины с храпо-
виком. После расчета параметров U, U г и перемещения пЬрцря S
согласно изложенной теории их следует уточнить по формулам
cos2 ах cos2 ах
S' = SCOSC^,
где UJ, U[, S' — действительные значения параметров U, Uг
И перемещения S, по которым выбирают тарельчатые пружины.
197
Первые конструкции трансформаторов с упругими элементами
содержали специальную наружную обойму корпусного МСХ,
с которой были соединены упругие элементы. Эта обойма имела
достаточно большой момент инерции, и для гашения колебаний
после рабочего хода в конструкции устанавливали резиновые
амортизаторы. В связи с индивидуальным подпружиниванием
каждой пластины в описанном храповом МСХ необходимость уста-
новки обоймы отпала, и масса колеблющихся после рабочего хода
частей значительно снизилась. Гашение колебаний поршней,
пластин и тарельчатых шайб достигается за счет сил трения, воз-
никающих при перемещении указанных деталей.
Инерционный трансформатор стенда для ускоренных испыта-
ний привода мощностью 200. кВт показан на рис. 54. Использо-
ван параллелограммный импульсный механизм. В сварном кор-
пусе 1 установлен ведущий маховик 2 коробчатой конструкции,
на левом конце которого на шлицах крепится полумуфта 9, при-
соединяемая к электродвигателю постоянного тока с частотой
вращения до 2800 об/мин. К' ведущему маховику прикреплены
четыре кронштейна 10 с запрессованными пальцами, с помощью
Рис, 54. Инерционный трансформатор
198
которых через шатуны 3 приводятся в движение грузовые звенья 4.
Неразборный реактор 7 установлен в ведущем маховике и корпусе
на подшипниках качения. На коленах реактора с помощью
подшипников скольжения (подобно отработанной конструкции
двигателя внутреннего сгорания) установлены грузовые звенья,
состоящие из двух частей 4 и 8, в которых при помощи штифтов 5
фиксируются вкладыши 6 подшипников скольжения. На хвосто-
вике реактора установлено храповое колесо 11, являющееся ве-
дущей обоймой корпусного и выходного МСХ. Конструкция МСХ
аналогична описанной выше. Используются стаканы с располо-
женными в них пакетами тарельчатых шайб. Ведомая обойма 12
корпусного МСХ крепится к корпусу, а ведомая обойма выход-
ного МСХ — к ведомому маховику 13. На хвостовике ведомого
маховика установлена полумуфта 14, при помощи которой.к транс-
форматору присоединяется испытываемый привод. Массы грузо-
вых звеньев регулируются за счет наборных пластин 15.
Система смазки трансформатора комбинированная. Подшип-
ники скольжения грузовых звеньев смазываются под давлением
маслом, подводимым через сверления в корпусе к хвостовику
стенда для испытаний привода
199
ведущего маховика и далее через сверления в реакторе к вклады-
шам подшипников. Остальные детали установки смазываются
разбрызгиванием.
Отличительной особенностью приведенной конструкции яв-
ляется применение неразборного реактора, который оказывается
Рис., 55. Инерционный трансформатор автомобиля УАЗ-469
более жестким и надежным, чем в предыдущих конструкциях
с применением параллелограммного импульсного механизма.
Инерционный трансформатор автомобиля УАЗ-469 (рис. 55)
спроектирован для установки с двигателем 53 кВт и 3800 об/мин
при максимальной мощности.
;• Маховик / двигателя приводит в движение плавающие сателли-
ты 2 с неуравновешенными грузами 3. На реакторе 4 закреплены
храповики 7, 13 и диск 8. Последний служит для реализации рас-
четного момента инерции реактора. Обратный импульс воспри-
нимается упругими пластинами 5, оси которых закреплены в кор-
пусе передачи. Пластины 5 поджимаются к храповику с помощью
рычагов 6 и пружин, Прямой импульс момента передается через
200
упругие пластины 11 на ведомый маховик 10. Пластины 11 под-
жимаются к храповику 13 с помощью рычагов 12, грузов 9 и
пружин. Грузы 9, жестко связанные с осями рычагов 12, служат
для уравновешивания инерционных сил пластин 11. При большой
частоте вращения ведомого маховика центробежная сила дости-
гает 300—400 Н на одну пластину, в связи с чем поджим пластины
к храповику упругими элементами оказывается неэффективным.
В конструкции использован комбинированный поджим: инерци-
онный с помощью грузов 9 и упругий с помощью пружин, фикси-
рующих положение грузов 9. Упругие пластины 5 и 11 имеют
форму, показанную на рис. 60.
Включение заднего и нейтрального положения производится
рычагом раздаточной коробки передач.
Корпус 15, крепящийся к раздаточной коробке, выполнен
с целью сохранения существующего в серийном образце осевого
расстояния между двигателем и раздаточной коробкой. Инерци-
онный трансформатор снижает осевые габариты по сравнению
со сцеплением и коробкой передач на 120 мм, сохраняя радиаль-
ные габариты. Ручной тормоз 14 расположен в корпусе 15.
Коэффициент трансформации момента для спроектированного
образца равен Кт — 5,2.
2. Сравнение инерционных трансформаторов
с передачами других типов
Кроме описанных передач, являющихся наиболее характер-
ными, проведены конструктивные разработки инерционного транс-
форматора для автомобиля «Запорожец», скреперных лебедок
и других машин. Ряд инерционных перадач разработан в несколь-
ких конструктивных вариантах. Все описанные в п. 1 типы им-
пульсных механизмов и механизмов свободного хода (за исключе-
нием пакетных МСХ), а также ряд других конструктивных ва-
риантов МСХ были изготовлены и прошли экспериментальную
проверку в лаборатории Челябинского политехнического Инсти-
тута.
Подытоживая большую работу по созданию долговечного инер-
ционного трансформатора, можно констатировать появление
первого поколения инерционных трансформаторов с упругими
элементами. Выявились характерные черты инерционных транс-
форматоров, что позволяет сравнить их с существующими пере-
дачами.
1. Инерционные трансформаторы вписываются в габариты
ступенчатых приводов или несколько снижают эти габариты.
Как правило, импульсный механизм инерционного привода не
превышает размеров сцепления или соединительной муфты сту-
пенчатого привода, а размеры МСХ (и при необходимости допол-
нительного редуктора) меньше размеров коробки передач или
соответствующего редуктора ступенчатого привода. В сравнении
201
с гидротрансформаторами инерционные трансформаторы сущест-
венно снижают габариты.
2. Инерционные передачи имеют высокие коэффициенты транс-
формации момента, превышающие соответствующие коэффици-
енты гидротрансформаторов. Для инерционного трансформатора
УАЗ-469 коэффициент трансформации составляет Кт = 5,2, для
трансформатора погрузочной машины 1ПНБ2 согласно экспери-
ментальной характеристике Кт = 7,7. Реальными являются ко-
эффициентьГтрансформации до Кт = 10.
3. Вследствие сохранения и в ряде случаев некоторого умень-
шения существующих габаритов инерционные передачи имеют
примерно такую же массу, как и ступенчатые передачи, превос-
ходя по этому показателю гидротрансформаторы.
4. КПД инерционных передач в рабочей области передаточ-
ных чисел составляет 0,85—0,95, что несколько ниже, чем у сту-
пенчатых передач, но выше, чем у гидротрансформаторов.
5. Благодаря вибрационной подаче момента на ведомый вал
инерционный трансформатор повышает производительность гор-
ных и других машин, превосходя по этому показателю ступенча-
тые и бесступенчатые передачи.
6. При установке на автомобиль инерционный трансформатор
повышает вибрацию трансмиссии по сравнению со ступенчатой
передачей на режиме трансформации момента и гасит колебания
на режиме прямой передачи. О результирующем эффекте действия
трансформатора на трансмиссию можно будет судить после ши-
роких испытаний инерционного привода на автомобиле.
7. Инерционный трансформатор менее сложен по конструкции,
чем гидротрансформатор, но несколько сложнее ступенчатых
передач..
8. По долговечности инерционный трансформатор уступает
существующим передачам.
В перспективе при отработке конструкции следует ожидать
дальнейшего улучшения показателей инерционного трансформа-
тора.
3. Экспериментальное исследование опытного образца
инерционного привода погрузочной машины 1ПНБ2
Экспериментальные испытания опытного образца проведены
в лаборатории Челябинского политехнического института на
стенде, сконструированном научными работниками Челябинского
политехнического института совместно с работниками СКБ
Копейского машиностроительного завода и изготовленном на
Копейском машиностроительном заводе.
Задачи эксперимента. Исследования проведены с целью про-
верки главных теоретических положений созданной теории.
Основное положение теории — значительное повышение вращаю-
202
щего момента на выходе трансформатора за счет применения упру-
гих элементов, снижения на этой основе масс грузовых звеньев
и нагрузок во всей силовой цепи трансформатора. Поэтому пер-
вой и главной задачей экспериментального исследования яви-
лось построение внешней характеристики опытного образца
трансформатора с упругими элементами и сравнительный анализ
характеристик упругой и жесткой моделей.
Второе важное положение — утверждение о протекании мо-
мента на заторможенном ведомом маховике выше, оси абсцисс
(см. рис. 44). Этот момент, передаваемый выходным МСХ, нахо-
дится по результатам исследования нелинейных колебаний ре-
актора. В случае закона изменения момента, протекающего выше
оси абсцисс, максимальное значение момента в упругой модели
значительно меньше максимального значения момента в жест-
кой модели (при условии равенства средних моментов на выход-
ном МСХ за цикл). Соответственно вторая задача эксперименталь-
ного исследования сводилась к определению момента, передава-
емого выходным МСХ на режиме заторможенного реактора.
Третьей задачей экспериментального исследования являлось
определение максимальной угловой скорости ведомого маховика
при отсутствии момента сопротивления. В ряде машин выход
инерционного трансформатора на режим прямой передачи не дол-
жен осуществляться по условиям технологического процесса.
Максимальная скорость ведомого маховика в этом случае огра-
ничивается. Ограничение достигается выбором определенного
момента инерции реактора. Важной представлялась проверка
возможности подобного ограничения скорости.
Таким образом, экспериментальное исследование предус-
матривало следующий объем работ: а) построение внешней ха-
рактеристики; б) определение закона изменения момента на вы-
ходном МСХ при заторможенном ведомом маховике и различных
жесткостях механизмов свободного хода; в) определение, макси-
мальной угловой скорости ведомого маховика трансформатора.
Выполнение намеченного объема экспериментальных работ
по сути дела представляет экспериментальную проверку прибли-
женных аналитических решений нелинейных дифференциаль-
ных уравнений. Сравнение теоретических и экспериментальных
результатов позволяет проверить, насколько точно решение не-
линейных дифференциальных уравнений отражает действитель-
ные законы движения звеньев трансформатора.
Описание экспериментального стенда. Фотография стенда пред-
ставлена на рис. 56. Экспериментальный стенд включает асин-
хронный электродвигатель марки КОФ-214. мощностью 15 кВт,
1470 об/мин, инерционный трансформатор вращающего момента,
редуктор с передаточным числом 4,72, корпус стенда, тормоз-
ное устройство.
Электродвигатель присоединяется к проставке, которой
расположен инерционный трансформатор. Конструкция трансфор-
203
Рис. 56. Экспериментальный стенд
Рис. 57. Импульсный механизм в сборе с реактором
204
матора описана в п. 1. На рис. 57 показана фотография импульс-
ного механизма в сборе с реактором. На переднем плане видны
неуравновешенные грузы и храповые колеса, насаженные на ре-
актор. На рис. 58, 59 представлены фотографии корпусного и
выходного МСХ. Корпусной МСХ показан в сборе с корпусом.
Видны стаканы, в которых расположены пакеты тарельчатых
пружин, пластины и поршеньки, поджимающие пластины к хра-
Рис. 58. Корпусной механизм свобод-
ного хода
Рис. 59. Выходной механизм свободного
хода
повику. Выходной МСХ показан в сборе с ведомым маховиком.
На рис. 60 представлена фотография второго варианта МСХ.
Проставка состыковывается с корпусом редуктора. Послед-
ний не имеет каких-либо изменений по сравнению с серийно вы-
пускаемым образцом. Электродвигатель, трансформатор и редук-
тор собираются в единый блок и составляют инерционный привод
машины 1ПНБ2. Блок крепится консольно на корпусе стенда.
В корпусе стенда расположен тормозной барабан, сидящий на
шлицах ведомого вала редуктора, и тормозное устройство. По-
следнее состоит из тормозной ленты, охватывающей маховик,
и рычага, опирающегося на стойку.
Экспериментальное построение внешней характеристики транс-
форматора. Для построения характеристики необходимо знать
вращающий момент и угловую скорость на ведомом валу редук-
тора.
Схема установки датчиков и тарировки тензодатчиков изоб-
ражена на рис. 61. Для замера вращающего момента использо-
валось тормозное устройство стенда. Тензодатчики 8 наклеива-
лись на рычаг 3 и регистрировали деформацию при изгибе. Дат-
чики имели базу 20 мм при сопротивлении 200 Ом. Была исполь-
205
зована полумостовая схема включения. Сигнал от тензодатчиков
подавался на усилитель 8АНЧ-7М и далее на один из каналов
осциллографа Н-115.
При проведёнии тарировки основным требованием является
сохранение условий нагрузки тензоузла такими, какие существуют
в реальных условиях эксперимента. Тарировка тензодатчиков
производилась с помощью динамометра 10. Последовательное
нагружение осуществлялось домкратом И. Для повышения точ-
ности тарировки и последующего замера вращающего момента
использовался шарик 9, расположенный в лунке рычага 3. По
Рис. 60. Механизм свободного хода
.Рис. 61. Схема экспериментального
стенда
показаниям индикатора динамометра и осциллографа был построен
тарировочный график, использованный при обработке осцил-
лограмм.
Экспериментальный замер вращающего момента сводился
к записи показаний тензодатчиков при различных передаточных
числах и последующему вычислению вращающего момента с ис-
пользованием тарировочн'ого графика. Передаточное число из-
менялось затяжкой тормозной ленты 1.
Для замера скорости ведомого вала редуктора использовался
фотоэлектрический импульсный датчик. Алюминиевый диск 4,
имеющий 80 отверстий, был закреплен на ведомом валу редуктора,
а оптическое устройство и фотоэлемент 5 на корпусе 2 стенда.
К достоинствам использованного датчика следует отнести про-
стоту изготовления, отсутствие контакта с вращающимся диском,
малые габариты.
В случае подачи сигналов фотоэлектрического датчика непо-
средственно на осциллограф 6, на осциллограмме регистрируется
периодическая кривая. Расстояние между пиками кривой соот-
ветствует повороту диска на угол 4°30' (соответствующий рассто-
206
янию между осями двух соседних отверстий). Определяя с помощью
отметчика время поворота на указанный угол, можно найти сред-
нюю угловую скорость вращения вала, которая будет близка
к истинной вследствие малого угла поворота. Однако обработка
осциллограмм при описанном методе измерения весьма трудо-
емка. С целью снижения трудоемкости обработки осциллограмм
М,Н-м
ООО
400
0,5
Рис. 62. Внешняя характеристика
трансформатора погрузочной машины
1ПНБ2
и осуществления регистрации непосредственно закона изменения
скорости ведомого вала была использована схема измерения,
включающая датчик, частотомер 43-7, приставку и осциллограф
Н-115. Калибровка шлейфа ос-
циллографа в указанной схеме
производилась с помощью зву-
кового генератора ГЗ-16. Сиг-
нал определенной частоты за-
писан на пленку в качестве
тарировочного.
Экспериментальное опреде-
ление закона изменения скорос-
ти ведомого маховика сводилось
к записи показаний по указан-
ной схеме при различных пе-
редаточных числах.
Вращающий момент и угло-
вая скорость замерялись на
тормозном барабане 7, закреп-
ленном на ведомом валу редук-
. тора. Каждый замер произво-
дился при постоянной затяжке тормозной ленты. Для определе-
о
ния соответствующих характеристик на ведомом маховике транс-
форматора производился перерасчет с учетом передаточного числа
редуктора 4,72. Средняя скорость асинхронного электродви-
гателя меняется незначительно и поэтому считалась постоянной,
равной 154 рад/с. По средним скоростям ведомого маховика и
двигателя определялось передаточное число, соответствующее за-
меренному вращающему моменту. Последовательные замеры во
всем диапазоне передаточных чисел от i = 0 до ifflax позволяют
построить внешнюю характеристику трансформатора.
Результаты теоретического и экспериментального определения
внешней характеристики инерционного трансформатора погру-
зочной машины 1ПНБ2 представлены на рис. 62. Кривая 1 опи-
сывает теоретическую внешнюю характеристику трансформатора,
построенную с помощью описанного в гл. VIII алгоритма на вы-
числительной машине М-222, кривая 2 — экспериментальную
"характеристику, кривая Л4И — идеальную характеристику. Для
сравнения приведена теоретическая характеристика жесткой мо-
дели трансформатора (штриховая линия 3), построенная по двум
крайним точкам i = О, / = 1г. По условиям работы привода угло-
вая скорость ведомого маховика ограничена (i = 0,46) и транс-
207
форматор погрузочной машины 1ПНБ2 не выходит на режим ди-
намической муфты.
Все экспериментальные записи получены на расчетной ча-
стоте вращения двигателя 1470 об/мин. Расчетные параметры транс-
форматора приведены на стр. 195, жесткости МСХ эксперименти-
руемого образца равнялись I) ~U1= 15 000 Н-м/рад.
Анализ графиков на рис. 62 приводит к следующим важным
выводам.
- 1. Достигнута хорошая сходимость теоретических и экспери-
ментальных результатов. Внешняя характеристика является об-
общающим показателем, расчет которой основывается на резуль-
татах интегрирования дифференциальных уравнений движения
трансформатора и исследования корпусных ивыходных упругих
элементов. Поэтому хорошая сходимость результатов теории
и эксперимента по внешней характеристике указывает на пра-
вильность основных теоретических положений.1
2. Подтвержден основной теоретический вывод о возможности
значительного увеличения вращающего момента за счет приме-
нения упругих элементов и снижения на этой основе масс грузо-
вых звеньев. Сравнение кривых 2 и 3 показывает, что вращающий
момент упругой модели трансформатора по экспериментальной
характеристике практически во всем диапазоне передаточных
чисел превышает вращающий момент жесткой модели в 2—3 раза.
Ступенчатый привод машины 1ПНБ2 работает при передаточном
числе i — 0,276 спроектированного инерционного трансформатора.
Действительно, частота вращения ведомого вала редуктора в сту-
пенчатом приводе 86 об/мин. С учетом передаточного числа
редуктора i = 4,72 частота вращения ведущего вала редуктора
(или ведомого вала инерционного трансформатора) 406 об/мин.
Отношение 406/1470 составляет 0,276. В точке i = 0,276 вращаю-
щий момент по экспериментальной характеристике в 3 раза пре-
вышает вращающий момент трансформатора без упругих элементов.
3. Следует отметить достаточно удачный вид полученной
внешней характеристики трансформатора в применении к машине
1ПНБ2. Рабочие органы этой машины рассчитаны на опреде-
ленную рабочую скорость. Установка инерционного трансформа-
тора повышает максимальную рабочую скорость, так как вво-
дится диапазон скоростей, в котором работает привод. Однако
значительное увеличение скорости недопустимо по ряду причин
(большие инерционные нагрузки и пр.). Поэтому точка максималь-
ной скорости не должна лежать далеко от средней точки рабочего
диапазона. Указанное требование может быть выполнено именно
с помощью полученной характеристики, в которой вращающий
момент резко возрастает при небольшом снижении скорости по
сравнению с максимальной скоростью (интервал i — 0,4 -=-0,46
на рис. 62).
Определение закона изменения момента на выходном МСХ
при заторможенном ведомом маховике. Момент на выходном МСХ
208
замерялся с помощью тензодатчиков ПКБ 30—200, наклеиваемых
на реактор перед храповиком выходного МСХ. По расчету коле-
бания массы храповика вносят погрешность менее 0,5% от за-
меряемого момента. Поэтому полученные на осциллограмме за-
писи соответствуют моменту, действующему на упругие пластины
выходного МСХ.
Осциллограммы момента на выходном МСХ при запуске элек-
тродвигателя (разгоне ведущего маховика с угловой скорости,
равной нулю, до выхода на установившийся режим) показаны
Рис. 63. Осциллограммы момента на выходном МСХ при запуске двигателя
и заторможенном ведомом маховике
на рис. 63. Слева на осциллограммах даны тарировочные значения
момента. В конце осциллограмм видны установившиеся колебания,
когда амплитуда и частота колебаний не изменяются.
. Осциллограмме а соответствуют жесткости МСХ U =
= 33 850 Н-м/рад; иг = 37 040 Н-м/рад; осциллограмме б —
U = 45 450 Н-м/рад; U 3 = 33 330 Н-м/рад, осциллограмме в —
U = 44 450 Н-м/рад; Ur = 18180 Н-м/рад. При эксперимен-
тальном определении закона изменения момента были реализо-
ваны следующие параметры трансформатора: а — 0,084 м; b —
— 0,042 м; е = 0,126 м; h = 0,009 м; q = 1,33; пт — 19,8 кг;
nJB — 0,0216 кг-м2; ' J1 — 1,74 кг-м2; J2 = 0,046 кг-м2;
J3 — 0,01 кг-м2; J4 — 0,81 кг-м2.
Из осциллограмм видно, что кривые момента лежат' выше
оси абсцисс. Чем больше отличаются жесткости МСХ, тем больше
отрыв графика момента от оси абсцисс. Частота установившихся
колебаний по эксперименту совпадает, с частотой, найденной тео-
ретически по первой формуле (7.18). На осциллограммах рассто-
яние между двумя жирными отметками времени соответствует
0,2 с. За это время совершается примерно семь колебаний момента.
По первой формуле (7.18) круговая частота колебаний составляет
qa> и при q — 1,33, ® = 154 рад/с равна q<& = 205 рад/с. Сле-
209
довательно, период колебаний Т =
= 0,0306с, и за 0,2 с те-
0 2
оретически должно совершаться -Q = 6,6 колебаний.
Теоретические и экспериментальные значения размахов коле-
баний (удвоенных амплитуд) момента приведены в табл. 11.
Таблица 11
Значения удвоенных амплитуд момента на выходном МСХ
и, Н-м/paR 1Л, Я-м/рад ^экс’ Я-м ^теор’ Я-м и, //•м/рад Я-м/рад ^Экс’ Я-м ^теор’ Я-м
45 450 18 180 600 580 33 850 33 850 1170 1020
45 450 33 330 840 850 24 390 37 040 1200 1230
33 850 37 040 1020 1056 16 390 37 040 1600 1440
В таблице 7Иэкс.и 7Итеор равны удвоенной экспериментальной
и теоретической амплитуде колебаний. Величина 7Итеор находи-
2/) F
лась по формуле AfTeop = -^J1 Ц.
Жесткости МСХ во время эксперимента изменялись за счет
установки различного числа упругих пластин.
Из табл. И следует удовлетворительная сходимость теорети-
ческих и экспериментальных результатов.
Сравним относительные углы поворота обойм МСХ наших
упругих конструкций и более ранних считавшихся жесткими
образцов. Например, значениям U — Uг — 33850 Н-м/рад со-
ответствует угол поворота одной обоймы МСХ относительно дру-
гой
Р = 2 £2_ 1 — 13>2 = 0,029 рад,
что составляет менее 2°. Для роликовых МСХ поворот на такие
углы имеет место в вариаторах, не говоря уже о трансформаторах,
которым свойственны большие деформации. Но согласно экспе-
рименту момент на выходном МСХ при поворотах на указанные
углы оказывается выше оси абсцисс. Отсюда следует весьма важ-
ный вывод, что большинство более ранних образцов инерционных
трансформаторов были упругими, а рассчитывались как жесткие.
Это приводило к значительным перегрузкам и являлось наиболее
вероятной причиной выхода трансформаторов из строя.
Максимальная угловая скорость ведомого маховика трансфор-
матора. При снятой тормозной ленте максимальная частота вра-
щения ведомого вала редуктора согласно записанным осцилло-
граммам равнялась 140 об/мин. С учетом передаточного числа ре-
дуктора 4,72 частота вращения ведомого маховика 661 об/мин.
Теоретическое значение максимальной угловой скорости ре-
актора (и ведомого маховика трансформатора), найденное по фор-
210
муле (6.1) с учетом параметров, приведенных на с. 195, равно
Рт = 79,5 рад/с, что соответствует 760 об/мин. Указанные значе-
ния теоретической и экспериментальной скоростей зафиксированы
на графиках рис. 62 как точки пересечения кривых 1,2 с осью i.
Поскольку теоретическое значение максимальной угловой ско-
рости ведомого маховика трансформатора не учитывает потери
в редукторе и подшипниках скольжения тормозного барабана,
сходимость теоретического и экспериментального результатов
по максимальной скорости следует считать приемлемой.
4. К оценке долговечности инерционного
трансформатора с упругими элементами
Расчет ресурса работы инерционного трансформатора про-
ведем применительно к опытному образцу инерционного транс-
форматора автомобиля УАЗ-469. Двигатель и серийная коробка
передач УАЗ-469 имеют следующие параметры:
1) максимальная мощность двигателя, передаваемая короб-
кой передач 50 кВт при пд = 3800 об/мин;
2) крутящий момент двигателя при максимальной мощности
Мя = 127 Н-м;
3) передаточные числа коробки передач: — 4,12, in = 2,64,
/ц[ ==: 1,58, tjv == 1.
В качестве расчетных параметров инерционного трансфор-
матора примем один из вариантов, прошедших конструктивную
разработку:
а — 0,068 м; b = 0,022 м, е — 0,09 м; h = 0,01 м; п = 4; •
т = 2,12 кг; q — 0,75; JB = 0,0056 кг-м2; Jx = 0,54 кг-м2; т.п
/2 = 0,022_ кг-м2; Js = Q, J4 = 0,4 кг-м2; U = Ur =
= 31 400 Н-м/рад. , •
Прц равенстве жесткостей МСХ момент на заторможенном
ведомом маховике протекает согласно кривой 3 (см. рис. 44)
и коэффициент трансформации Ат может быть найден по формуле
После подстанрвки данных (9.1) получим
„ _ 8,5-0,09-0,01-0,75-158 000 [1 —0,25 (0,25 — 0,75)] _4]о
Лт 127 [2— (0,3)®] • ’
Следовательно, принятые расчетные параметры инерционного
трансформатора обеспечивают необходимую трансформацию мо-
мента. Вращающий момент на заторможенном ведомом маховике
при i — 0 равен
Л4В = /ИД-КТ== 127-4,13 = 525Н-м. (9.2)
211
Можно проверить по уравнению (6.1), что инерционный транс-
форматор с параметрами (9.1) выходит на режим прямой передачи.
Выбор деталей для расчета на долговечность. Испытания
опытных образцов, инерционных трансформаторов показывают,
что их недостаточная долговечность определяется МСХ. Им-
пульсный механизм является достаточно отработанным и не вы-
ходит из строя. Испытания микрохраповых МСХ, примененных
в трансформаторе УАЗ-469, показали, что наиболее слабым
звеном МСХ являются основные упругие элементы — пластин-
Рис. 64. Схема микрохрапового ме-
ханизма свободного хода
Рис. 65. Схема пластинчатой пружины
чатые пружины. Схема микрохрапового МСХ показана на рис. 64. ,
Пружины 1 шарнирно закреплены в корпусе трансформатора 2
(корпусной МСХ) или ведомом маховике (выходной МСХ). Они
испытывают напряжения изгиба и работают на усталость, по-
скольку частота нагружения (частота импульсов) примерно равна
числу оборотов двигателя и является довольно высокой. А. Ф. Дуб-
ровским показано, что схема на рис. 64 является одной из наименее
нагруженных [22]; Рассчитаем на усталость пдастину корпус-
ного МСХ.
Данные для расчета пластины на усталость. Примем следующие
данные для расчета пластины (рис. 65): h = 2,3' мм; = 22 мм;
Ьг = 40 мм; R = 72 мм; I = 106 мм; R.x = 50 мм; п2 = 60;
а = 45°, где h, br — толщина и ширина пластины; R — радиус
пластины; I — длина хорды пластины; Rx — радиус, храповика;
п2 — число пластин в одном МСХ.
. Расчеты показывают, что такие пластины обеспечивают задан-
ную жесткость U МСХ и перемещения согласно первой формуле
(7.18). Приведем зависимость, связывающую параметры пластины,
перемещение ее конца и действующую силу [50],
а—1 sin 2а + а cos2»') • (9.3)
CJ \ -W ** /
212
Здесь / — перемещение одного конца пластины вдоль хорды от
действующей силы Р при условии, что второй конец закреплен
шарнирно; Р — сила, действующая на пластину со стороны хра-
повика вдоль хорды; Е — модуль упругости (принят равным
2-105 МПа); J — момент инерции сечения (^=="пу)’
h, а, Р — параметры пластины, обозначенные на рис. 65.
Если в формулу (9.3) подставить перемещение f, вычисленное
с помощью первой формулы (7.18), максимальный модуль силы Р,
найденный ниже, параметры blt a, R пластины, то как нетрудно
подсчитать, толщина пластины h получится равной 2,3 мм.
В качестве материала пластины выберем сталь 65С2ВА, име-
ющую ов = 1900 МПа.
Расчет пластины на усталость. Для расчета пластины на уста-
лость воспользуемся теорией и методикой, приведенной в книге
158]. . '
Предел выносливости гладкого лабораторного образца опре-
делим по формуле
= (0,4-е-0,5) <тв. (9.4)
Прочным легированным сталям, к которым относится сталь
65С2ВА, соответствует нижняя граница соотношения (9.4), по-
этому
0.! = 0,4-1900 = 760 МПа. (9.5)
Максимальное напряжение и блок нагружения' пластины.
Максимальный момент, действующий на корпусной МСХ при
заторможенном ведомом маховике, равен Л1шах = 2Л4В =
= 2>525 = 1050 Н-м. Максимальное значение момента в области
малых передаточных чисел (0 ci < 0,2) превышает в 1,5 раза
значение момента при заторможенном ведомом маховике. Среднее
значение максимального момента, действующего на МСХ в об-
ласти малых передаточных чисел (0 < i < 0,2), будет в 1,25 раза
больше максимального момента при заторможенном ведомом
маховике Мтах = Мтах-1,25 = 1320 Н-м. На одну пластину
приходится передаваемый момент Mmax = — 22 Н-м. Хорда
пластины расположена по касательной к храповику (рис. 64),
поэтому максимальная сила, действующая на пластину вдоль
хорды, определится как отношение Afmax к радиусу храповика
р Л^ах _22_ 44() н
гаах Ry. 0,05
При стреле прогиба пластины hr — 22 мм максимальный из-
гибающий момент в наиболее опасном сечении (середина пластины)
равен Л4ИЗп1ах =? Рт^НЛ = 440-0,022 = 9,8 Н-м. Момент со-
213
противления W для прямоугольного сечения пластины будет
bh2 40-2,З2 ок о з -г а
lF=-g-==—g—= 35,2 мм*. Таким образом, максимальное
напряжение при пульсирующем цикле, которому подвержена
пластина, оказывается равным
' п , — Л1”3 шах _
° max-------—
= 278 МПа.
Максимальная амплитуда пульсирующего цикла
а =139 МПа.
атах
В микрохраповом МСХ одновременное включение пластин
не происходит, поэтому необходимо ввести соответствующий
коэффициент перегрузки. Примем его равным /Сп = 2,1. С уче-
том коэффициента перегрузки максимальная амплитуда напря-
жения в пластине равна
%ах= 139.2,1 = 292 МПа.
Для формирования блока нагрузок воспользуемся данными
по продолжительности использования передач автомобиля, при-
веденными в [54]. Продолжительность использования передач
в % от общего времени движения автомобиля:
I и заднего хода............................... 0,6
II 3
III . 7
IV (прямая) 74
Накат .........................................15,4
На автомобиле с бесступенчатой инерционной передачей сле-
дует ожидать некоторого снижения продолжительности езды
на режиме трансформации за счет улучшения динамики автомо-
биля, отсутствия переключения передач и т. д. (режиму транс-
формации соответствуют передачи I, II, III и заднего хода).
Из-за отсутствия данных по автомобилям с автоматическими инер-
ционными передачами примем расчетное распределение времени
на режиме трансформации соответствующим приведенным выше
данным. Данные по распределению времени работы инерционного
трансформатора приведены ниже:
Режим работы
трансформатора, .ха-
рактеризующийся пе-
редаточным числом I = 0-4- i = 0,2-4- I = 0,6-т- i = 1 Накат
-4-0,2 -4-0,6 4-1 (прямая
передача)
Продолжительность
использования в % от
общего времени дви-
жения автомобиля 0,6 3 7 74 15,4
Распределение амплитуд момента, передаваемого пластиной
корпусного МСХ на различных режимах, полученное расчетным
214
путем, дано на рис. 66. Блок состоит из трех ступеней. Первая
ступень соответствует режиму i = 04-0,2 вторая — i = 0,24-0,6,
третья — i = 0,64-1. Режим i = 1 не представлен, так как
на прямой передаче корпусной МСХ совершает холостой ход
и не нагружен. В качестве иллюстрации результатов расчета рас-
смотрим первую ступеньку блока (см. рис. 66). Режим i = 04-0,2
составляет 0,6% от общего времени движения автомобиля.
На 100 000 км пробега при средней скорости движения 30 км/ч
имеем 3330 ч общего времени
движения. Продолжительность
режима i = 04-0,2 равна
3330-0,006 = 20 ч. Согласно
первой формуле (7.18) колеба-
ния при i = 0 (заторможенный
ведомый маховик) проходят с
круговой частотой qa. Следо-
вательно, одно колебание имеет
продолжительность
2л
да
6,28__— о 021
0,75-398 ’
С.
Рис. 66. Распределение амплитуд мо-
мента, передаваемого пластиной (ко-
личество циклов на 100 000 км про-
бега автомобиля или на 3330 ч, исходя
из средней скорости движения 30 км/ч)
За 20 ч число циклов, соот-
ветствующее 1=04-0,2, составит
А600-20 =3 4-10* '
0,021 °’* ш
Отметим, что при расчете блока нагрузок число циклов принято
завышенным. С увеличением передаточного числа число циклов
за единицу времени снижается, так как цикл растягивается. Нами
принято при расчете первой ступени время цикла, соответству-
ющее i — 0. Завышенные значения обусловлены также тем, что
все расчеты цикличности и нагруженное™ в блоке проведены
при максимальной скорости двигателя, где они достигают макси-
мальных значений. В реальных условиях движения автомобиля
максимальные обороты двигателя используются только в неко-
торой части от общего времени движения. Подобные завышения
некоторых данных сделаны для упрощения расчетов и получе-
ния, хотя и заниженных, но более надежных результатов по
усталостной прочности.
В табл. 12 представлена функция' распределения амплитуд
напряжений в пластине корпусного микрохрапового МСХ.
Расчетные характеристики сопротивления усталости. Медиан-
ное значение предела выносливости о-1д найдем по формуле [58]
(9.6)
215
Коррозионные воздействия не учитываем, так как пластины
работают в обычных трансмиссионных маслах. Поэтому р в фор-
муле (9.6) — коэффициент влияния качества обработки поверх-
ности.
Отношение — принимаем равным 1, так как в наиболее опас-
®<т
ном сечении (середина пластины) отсутствуют концентраторы
напряжений, абсолютные размеры сечения невелики (40 мм х 2 мм),
сечение имеет плавные очертания.
Коэффициент упрочнения рупр примем равным 1, хотя методы
упрочнения при изготовлении пластин применяются. Коэффици-
Таблица 12 Таблица 13
Распределение амплитуд Расчетный блок амплитуд
напряжений в пластине МСХ напряжений пластины
i VZ6-' млн. циклов %’ МПа vi6> млн. циклов /(.=^ ‘ v6 аашах 1
Gamax ашах
1 1 3,4 292 1 1 3,4 0,25 0,25
2 . 3 0,81 0,5 10 14 237 147 2 0,81 10 0,75 0,6
ент Р качества обработки поверхности примем равным 0,6, так
как пластины шлифуют. >
Таким образом,
Лад = = -р- = = 1,67.
Медианное значение предела выносливости
ff == 2g. = 455 МПа.
1,0/
= 0,1,
m — 10 и Мо =
Коэффициент вариации примем Va_i
Ь10в.
д
Исходные данные для расчета. Блок амплитуд напряжений
представлен в табл. 12. Величина. v(-a соответствует 100 000 км
пробега автомобиля или примерно 3330 ч работы автомобиля.
Определим 0,5о_1д = 0,5-455 = 228 МПа. Амплитуду в третьей
строке (см. табл. 12).исключим из рассмотрения, так как для нее
<газ<0,5о_1д.
Общее число циклов в блоке будет v6 — (3,4 + 10) млн.цик-
лов- = 13,4 млн. циклов. '
Блок амплитуд напряжений, принятый в дальнейших расче-
тах, дан в табл. 13.
216
Характеристики иагружейности: (Jamax = 292, МПа; /б —
= 100 000 км.
Характеристики сопротивления усталости: сг__1д = 455 МПа,
= о,1; Nq = 1 • 106 циклов; т == 10.
Расчет на усталость. Расчет ведем по второму расчетному
случаю ([58], гл. VI), т. е. расчет на усталость при нерегулярной
напряженности и ограниченном ресурсе.
Находим £
2
1—1
= 1.0,25 + 0,81-0,75 = 0,86.
Вычисляем ар
р %их ~ °>5о-1д
292-0,86 — 228' _ _
292 - 228 — u>d/-
Рис. 67. Функция распределения ре-
сурса пластины микрохрапового меха-
низма свободного ходаг
Медианное число блоков до разрушения находим по формуле
а „ст"1, Nn
f ₽ Д ° _ 0,37-45510-10в
Л 2 . 29210-3,4- 10е + 23710-107 = 6>5-
1=1
Медианный ресурс пластины, выраженный в сотнях тысяч
километров пробега автомобиля, равен
L = Пб = 6,5 • 100 000 = 650 000 км.
У
Среднее квадратическое отклонение логарифма ресурса
•Sig L = 0,434m 1/у2а_г = 0,434 -10/0,12 + 0,12 = 0,61.
Здесь У8 из-за отсутствия данных принято равным 0,1. Функ-
ция распределения ресурса, на логарифмически нормальной
вероятностной бумаге представлена на рис. 67.
Ресурс пластины выходного МСХ будет несколько меньше,
чем у корпусного.
Результаты приведенного оценочного расчета по выносливости
основных элементов микрохраповых МСХ следует признать удов-
летворительными, имея в виду, что пробег автомобилей до капи-
тального ремонта составляет 150—300 тыс. км, Ресурс пластины
может быть повышен обдувкой дробью, которая не учтена в рас-
чете.
217
Следует заметить, что поломка одной-двух пластин в микро-
храповом механизме свободного хода не выводит его из строя.
ОСНОВНЫЕ НАПРАВЛЕНИЯ РАБОТ ПО ИНЕРЦИОННЫМ
ТРАНСФОРМАТОРАМ С УПРУГИМИ ЭЛЕМЕНТАМИ
Существует ряд направлений по инерционным трансформа-
торам, разработка которых в конечном счете приведет к созда-
нию еще более компактных, долговечных и конкурентоспособ-
ных конструкций. Укажем основные направления.
1. Выбор оптимальных схем линейных упругих элементов и
как следствие механизмов свободного хода. Хотя опробовано до-
статочно много конструктивных вариантов и выбраны приемле-
мые для использования, однако возможности снижения напряже-
ний в упругих элементах и их габаритов далеко не исчерпаны.
2. Разработка теории и конструкций механизмов свободного
хода с нелинейными упругими элементами. Созданная теория
описывает упругие элементы, имеющие линейную зависимость
деформаций от действующей нагрузки. Представляется, что ли-
нейная зависимость не является оптимальной и использование
нелинейных упругих элементов позволит получить определенные
выгоды.
3. Разработка трансформаторов с регулируемыми параметрами.
Условия работы машин настолько разнообразны, что всегда име-
ется возможность использовать различные значения масс грузовых
звеньев, геометрических размеров, моментов инерции звеньев,
жесткостей механизмов свободного хода и т. д. Например, в инер-
ционном* трансформаторе автомобиля на режиме прямой передачи
выгодно использовать массы грузовых звеньев, в несколько раз
меньшие, чем на режиме трансформации момента. Регулирование
параметров поможет снизить нагрузки в силовой цепи трансфор-
матора на определенных режимах.
4. Создание многопоточных инерционных трансформаторов.
Использование других потоков мощности, кроме инерционного,
позволяет снизить нагрузки в инерционной ветви и повысить
долговечность трансформатора.
5. Выбор наилучших материалов й обработок для условий
работы в инерционном трансформаторе.
6. Разработка конструкций оптимальных импульсных меха-
низмов. Планетарные импульсные механизмы имеют достаточно
компактную конструкцию. Однако возможности снижения на-
грузок в силовой цепи трансформатора за счет импульсного ме-
ханизма не исчерпаны. В частности, не предложена компактная
схема, реализующая параметры a, b, q параллелограммного им-
пульсного механизма.
СПИСОК ЛИТЕРАТУРЫ
1. Антонов А. С. Силовые передачи колесных и гусеничных машин. Л., «Ма-
шиностроение», 1975, 480 с.
2. Артоболевский И. И. Теория механизмов и машин. М., «Наука», 1975, 640 с.
3. Архангельский Г. В., Мальцев В. Ф., Юзюк В. С. Особенности динамики
машинных агрегатов с инерционными импульсными механизмами. Сб. «Инер-
ционно-импульсные механизмы, приводы и устройства». (Труды I Всесоюз-
ной научной конференции) № 134. Челябинск, ЧПИ, 1974, с. 194—199.
4. Балжи М. Ф. Автотракторный, инерционный трансформатор крутящего
момента. Сб. трудов ЧПИ «Расчет и конструирование машин», дополнение
к выпуску № 10, 1957, с. 36—49.
5. Балжи М. Ф. Пластинчатый автолог (механизм свободного хода). Сб. тру-
дов ЧПИ «Расчет и конструирование машин», дополнение к выпуску № 10,
1957, с. 50—59.
6. Балжи М. Ф. Лабораторные испытания инерционного бесступенчатого
трансформатора крутящего момента. Сб. трудов ЧПИ «Расчет и конструи-
рование машин», дополнение к выпуску № 10, 1957, с. 61—70.
7. Балжи М. Ф. Бесступенчатая инерционная импульсная передача для тран-
спортных машин. Авторское свидетельство № 153817. «Бюллетень изобре-
тений ц товарных знаков», 1963, № 7.
8. Балжи М. Ф. Кулачковый импульсный механизм. Авторское свидетельство
№ 154123. «Бюллетень изобретений и товарных знаков», 1963, № 8.
9. |Балжи М. Ф., Леонов А. И. Автоматический инерционный трансформа-
тор крутящего момента. Авторское свидетельство № 195818. «Изобретения,
промышленные образцы, товарные знаки», 1967, № 10.
10. Балжи М. Ф., Леонов А. И. К анализу некоторых схем планетарных им-
пульсных механизмов. Сб. статей «Конструирование и расчет гусеничных
машин». Челябинск, ЧПИ, 1967. Вып. 44, с. 49—57.
11. Балжи М. Ф., Болдырев Р. Н., Воинов Н. П., Ровинскйй Э. А. Машина
для сварки трением. Авторское свидетельство № 275703. «Открытия, изоб-
ретения, промышленные образцы, товарные знаки», 1970, № 22.
12. Бессонов А. П. Основы динамики механизмов с переменной массой звеньев.
М., «Наука», 1967, 280 с.
13. Благонравов А. А., Ковалев Е. А. Клиновой механизм свободного хода.
Авторское свидетельство № 302525. Бюллетень «Открытия, изобретения,
промышленные образцы, товарные знаки» 1971, № 15.
14. Блехман И. И. Синхронизация динамических систем. М., «Наука», 1971,
894 с.
15. Болотин В. В. Динамическая устойчивость упругих систем.—М., Гос-
техтеоретиздат, 1956, 600 с.
16. Васин Г. Г., Балжи М. Ф., Геренштейн А. В. Импульсатор инерционного
трансформатора крутящего момента. Авторское свидетельство № 297835.
«Открытия, изобретения, промышленные образцы, товарные знаки», 1971,
219
17. Васин Г. Г. Инерционный импульсатор. Авторское свидетельство .№ 304386.
«Открытия, изобретения, промышленные образцы, товарные знаки», 1971,
№ 17.
18. Васин Г. Г. Состояние вопроса по инерционно-импульсным механизмам
и перспективы их применения в машиностроении. Сб. «Инерционно-импульс-
ные механизмы, приводы и устройства» (Труды I Всесоюзной научной кон-
ференции), Челябинск, ЧПИ, 1974, № 134, с. 3—8.
19. Волков Д. П., Крайнев А. Ф. Трансмиссии строительных и дорожных ма-
шин. Справочное пособие. М., «Машиностроение», 1974, 424 с.
20. Вульфсон И. И., Коловский М. 3. Нелинейные задачи динамики машин.
Л., «Машиностроение», 1968, 282 с.
21. Дмитриев Б. Н., Дадаев А. Н., Умняшкин В. А. Каноническая форма
уравнений движения машинного агрегата с инерционной передачей. Меж-
вузовский сборник научных трудов «Бесступенчато-регулируемые пере-
дачи». Ярославль, ЯПИ, 1976, вып. I, с. 61—67.
22. Дубровский А. Ф. Исследование нагруженности корпусного механизма
свободного хода инерционного трансформатора. Сб. трудов «Динамика
инерционных приводов, трансформаторов и устройств». Челябинск, ЧПИ,
1976, № 173, с. 121—125.
23. Есин Г. Д. Основы теории механизмов с центробежными связями и иссле-
дование влияния их на снижение динамических нагрузок в машинах. Ав-
тореф. дисс. на соиск. учен. степ, д-ра техн. наук. Челябинск, ЧПИ, 1970.
24. Зиновьев В. А., Бессонов А. П. Основы динамики машинных агрегатов.
М., «Машиностроение», 1964, 240 с.
25. Кожевников С. Н. Теория механизмов и машин. — М.: «Машиностроение»,
1973, 591 с.
26. Кожевников С. Н., Есипенко Я. И., Раскин Я. М. Механизмы. Справочное
пособие. М., «Машиностроение», 1976, 784 с.
. 27. Колебания сложных механических, систем. Под редакцией д-ра техн, наук
К. М. Рагульскиса. Вильнюс, «Минтис», 1969, 246 с.
28. Колесников К. С. Продольные колебания ракеты с жидкостным ракетным
двигателем. М., «Машиностроение», 1971, 260 с.
29. Левин С. Ф. Инерционная импульсная передача. Авторское свидетельство
№ 199611. «Изобретения, промышленные образцы, товарные знаки», 1967, № 15.
30. Леонов А. И. Импульсный механизм инерционного трансформатора кру-
тящего момента. Авторское свидетельство № 174044. «Бюллетень изобре-
тений и товарных знаков», 1965, № 16.
31. Леонов А. И. Устойчивость и колебания параллелограммного импульс-
ного механизма инерционного трансформатора крутящего момента. «Маши-
новедение», 1965, № 6, с. 3—8.
32. Леонов А. И. К выбору оптимальных параметров непараллелограммного
импульсного механизма. Сб. «Конструирование и расчет гусеничных машин»,
Челябинск, ЧПИ, 1966, вып. 36, с. 36—42.
33. Леонов А. И. Некоторые особенности применения метода малого пара-
метра при решении задачи Коши для обыкновенных дифференциальных
уравнений. Сб. «Машиноведение и прикладная математика», Челябинск,
’ ЧПИ, 1971, № 99, с. 179—185.
34. Леонов А. И. К теории инерционных преобразователей крутящего момента,
использующих обратный импульс. «Машиноведение», 1972, № 4, с. 55—61.
35. Леонов А. И. Проблема инерционного бесступенчатого трансформатора —
прогрессивного привода вибрационных машин и пути ее решения. «ТеЬрия
вибрационных механизмов» (Материалы Международного симпозиума, Виль-
нюс, 1973) Каунас, 1973, с. 79—86.
36. Леонов А. И. Обобщенный планетарный импульсный механизм. Сб. «Ма-
шиноведение», Челябинск, ЧПИ, 1973, № 125, с. 120—123.
37. Леонов А. И. Предпочтительное семейство импульсных механизмов. Сб.
«Машиноведение». Челябинск, ЧПИ, 1973, № 125, с. 68—71. <
38. Леонов А. И. К выбору оптимальных параметров корпусных упругих эле-
ментов. Сб. трудов «Динамика машин и рабочих процессов», Челябинск,
ЧПИ, 1973, № 129, с. 64—69.
220
39. Леонов А. И. Исследование выходных упругих элементов инерционного
трансформатора. Сб. «Динамика машин и рабочих процессов», Челябинск,
' ЧПИ, 1973, № 129, с. 70—75. ‘
40. Леонов А. И. Нелинейные колебания инерционного трансформатора кру-
тящего момента. Сб. «Механика машин», АН СССР, «Наука», 1973, вып. 41,
с. 39—44.
41. Леонов А. И. Условие выхода инерционного трансформатора с упругими
элементами на режим динамической муфты. Сб. трудов «Машиноведение»,
Челябинск, ЧПИ, 1974, № 142, с. 92—95.
42. Леонов А. И. К общей теории инерционных трансформаторов вращающего
момента. «Известия вузов. Машиностроение», 1975, № 7, с. 49—52.
43. Леонов А. И. Обобщенная схема импульсных механизмов. Сб. научных
трудов. «Динамика инерционных трансформаторов, приводов и устройств»,
Челябинск, ЧПИ, 1976, № 173, с. 16—23.
44. Леонов А. И. Инерционный трансформатор вращающего момейта-резуль-
таты работ и перспективы создания. Сб. трудов «Динамика инерционных
трансформаторов, приводов и устройств». Челябинск, ЧПИ, 1976, № 173,
с. 3—15.
45. Леонов А. И. Выделение предпочтительного семейства на основе анализа
импульсных механизмов. Межвузовский сб. научных трудов «Бесступен-
чато-регулируемые передачи», Ярославль, ЯПИ, 1976, вып. № 1, с. 56—61.
46. Леонов А. И. Методика выбора параметров инерционных трансформаторов
с упругими элементами. Сб. трудов «Динамика инерционных трансформа-
торов, приводов и устройств». Челябинск, ЧПИ, 1976, № 173, с. 105—110.
47. Малкин И. Г. Некоторые задачи теории нелинейных колебаний. М., ГИТТЛ,
1956, 492 с.
48. Мальцев В. Ф. Импульсивные вариаторы. М., Машгиз, 1963, 279 с. И
49. Матвеев Н. М. Методы интегрирования обыкновенных дифференциальных
уравнений. М., «Высшая школа», 1967, 564 с.
50. Мельник А. Н. Выбор оптимальных параметров микрохраповых механиз-
мов свободного хода с упругими элементами. Тезисы докладов V Всесоюз-
ной научно-технической конференции по вариаторам и передачам гибкой
связью. Одесса, ОТИПП, 1976, с. 171—172.
51. Полецкий А. Т., Есин Г. Д., Завьялов Г. А. Устойчивость равномерного
вращения и частоты собственных колебаний центробежной муфты. «Изве-
стия вузов. Машиностроение», 1962, № 7, с. 5—13.
52. Полецкий А. Т., Поляков А. П. Исследование движения реактора инер-
ционного трансформатора крутящего момента. Сб. «Теория машин и меха-
низмов», изд-во АН СССР, 1964, вып. 98—99.
53. Полецкий А. Т., Васин Г. Г. К интегрированию уравнений инерционного
трансформатора момента. Сб. статей «Динамика машин», М., «Машинострое-
ние», 1969, с. 297—308.
54. Прочность и долговечность автомобиля. Под редакцией д-ра техн, наук
Б. В. Гольда. М., «Машиностроение», 1974, 328 с.
55. Решетов Д. Н. Новое в конструкциях деталей машин. М., «Машинострое-
ние», 1969.
56. Сборники статей ЧПИ. Под редакцией профессора М. Ф. Балжи. Челя-
бинск, ЧПИ, вып. 1, 36, 44, 52, 62.
57. Светлицкий В. А. Передачи с гибкой связью. Теория и расчет. М., «Ма-
шиностроение», 1967, 155 с.
58. Серенсен С. В., Когаев В. П., Шнейдерович Р. М. Несущая способность
и расчеты деталей машин на прочность. М., «Машиностроение», 1975, 488 с.
59. Хельдт П. М. Автомобильные сцепления и коробки передач. М., Машгиз,
1947, 328 с.
ОГЛАВЛЕНИЕ
Предисловие.......................................................... 3
Основные обозначения................................................. 5
Глава /. Конструкции и классификация инерционных трансформа-
торов ............................................................... 9
1. Конструкции инерционных трансформаторов.................. 9
2. Импульсные вариаторы. и инерционные трансформаторы 19
3. Классификация инерционных трансформаторов................. 21 -
4. О возможности создания инерционного трансформатора без
механизмов свободного хода.................................. 24
Глава II. Обобщенная модель инерционного трансформатора с упру-
гими элементами .................................................... 28
1. Обобщенная физическая модель трансформатора, принцип
работы, терминология........................................ 28
2. Импульсные механизмы..............................., • 31
3. Обобщенная схема импульсного механизма.................. 39
4. Математическая модель инерционного трансформатора с уп-
ругими элементами (дифференциальные уравнения движе-
ния) ...................................................... 44
Глава III. Предпочтительное семейство импульсных механизмов ..." 50
1. Анализ импульсных механизмов на режиме заторможен-
ного реактора .............................................. 51
2. Анализ импульсных механизмов на режиме трансформа-
ции момента ...............................,................ 58
3. Предпочтительное семейство импульсных механизмов и его
свойства ................................................... 62
Глава IV. Интегрирование дифференциальных уравнений движения
обобщенной модели в случае переменности их структуры 68
1. Участок накопления потенциальной энергии и отдачи ее
при разгоне реактора........................................ 68
2. Участок разгона реактора................................ 82
3. Участок совместного движения реактора и ведомого махо-
вика ...................................................... 91
4. Участок торможения реактора............................. 99
5. Совместное движение реактора и ведомого маховика при
действии корпусных упругих элементов 1.................. 101
6. Замечания по результатам интегрирования дифференциаль-
ных уравнений « ,. • t , 10$
223
Глава V. Оптимальная область параметров инерционного трансфор-
матора с упругими элементами ...................................... 108
1. Исследование' работы корпусных упругих элементов при
использовании всего обратного импульса.................... 108
2. Выбор оптимальной области параметров при использова-
нии всего обратного импульса.............................. 111
3. Исследование работы корпусных упругих элементов на
различных передаточных числах режима трансформации
момента . . . . .......................................... 122
4. Оптимальная область параметров корпусного МСХ .... 125
5. Исследование работы выходных упругих элементов. Опти-
мальная область параметров ............................... 126
6. Замечания по выбору областей параметров трансформа-
тора ..................................................... 132
Глава VI. Нелинейные колебания обобщенной модели инерционного
трансформатора на режиме динамической муфты...................... 133
1. Условие выхода трансформатора на режим динамической
муфты..................................................... 133
2. Периодическое решение дифференциальных уравнений на
режиме динамической муфты ................................ 140
3. Анализ периодического решения.......................' . 147
4. Устойчивость равномерного вращения трансформатора . . . 149
Глава VII. Нелинейные колебания обобщенной модели инерционного
трансформатора на режиме заторможенного ведомого ма-
ховика .................................................). . . . . 152
1. Периодическое решение дифференциальных уравнений на
режиме заторможенного ведомого маховика................... 152
2. Анализ периодического решения.......................... 158
3. Резонансные режимы. Параметрический резонанс .... 159
4. О максимальных нагрузках в механизмах свободного хода.
Рекомендации по выбору параметров ........................ 161
Глава VIII. Расчет инерционного трансформатора с упругими элемен-
тами. Методика выбора параметров .................................. 165
1. Преимущества упругой модели инерционного трансформа-
тора по сравнению с жесткой............................... 165
2. Расчет внешней характеристики инерционного трансформа-
тора ..................................................... 176
3. О неустановившихся процессах ..................... . 183
4. Методика выбора параметров. Расчет трансформатора . . . 184
Глава IX. Конструкции и экспериментальное исследование опытных
образцов инерционных трансформаторов с упругими эле-
ментами ........................................................... 188
1. Описание конструкций опытных образцов инерционных
трансформаторов с упругими элементами..................... 188
2. Сравнение инерционных трансформаторов с передачами *
других типов............................................ 201
3. Экспериментальное исследование опытного образца инер-
ционного привода погрузочной машины 1ПНБ2................. 202
4. К оценке долговечности инерционного трансформатора
с упругими элементами..................................... 211
Основные направления работ по инерционным трансформаторам с упру-
гими элементами.................................................... 218
Список литературы............. ... ................................ 219
ИБ^№ 1909
Анатолий Иванович Леонов
ИНЕРЦИОННЫЕ АВТОМАТИЧЕСКИЕ
ТРАНСФОРМАТОРЫ ВРАЩАЮЩЕГО МОМЕНТА
Редактор Н. П.Ошерова
Художественный редактор Н. А. Парцевская
Технический редактор Н. В. Тимофеенко
Корректор О. Е. Мишина и Л. Я. Шабашова
Переплет художника Е. В. Бекетова
Сдано в набор 17.01.78. Подписано в печать 27.04.78. Т-09607.
Формат 60X90V1» Бумага типографская №3. Гарнитура
литературная. Печать высокая. Усл. печ. л. 14,0
Уч.-изд. л. 14,65 Тираж 10 500 экз. Заказ 779. Цена 1 р. 10 к.
Издательство «Машиностроение», 107885. Москва, Б-78,
1-й Басманный пер., 3 .
Ленинградская типография № 6 Союзполиграфпрома
при Государственном комитете Совета Министров СССР
по делам издательств, полиграфии и книжной торговли
193144, Ленинград, С-14'4, ул. Моисеенко, 10