/























































































































































































































































































































































Текст
:..
штшт
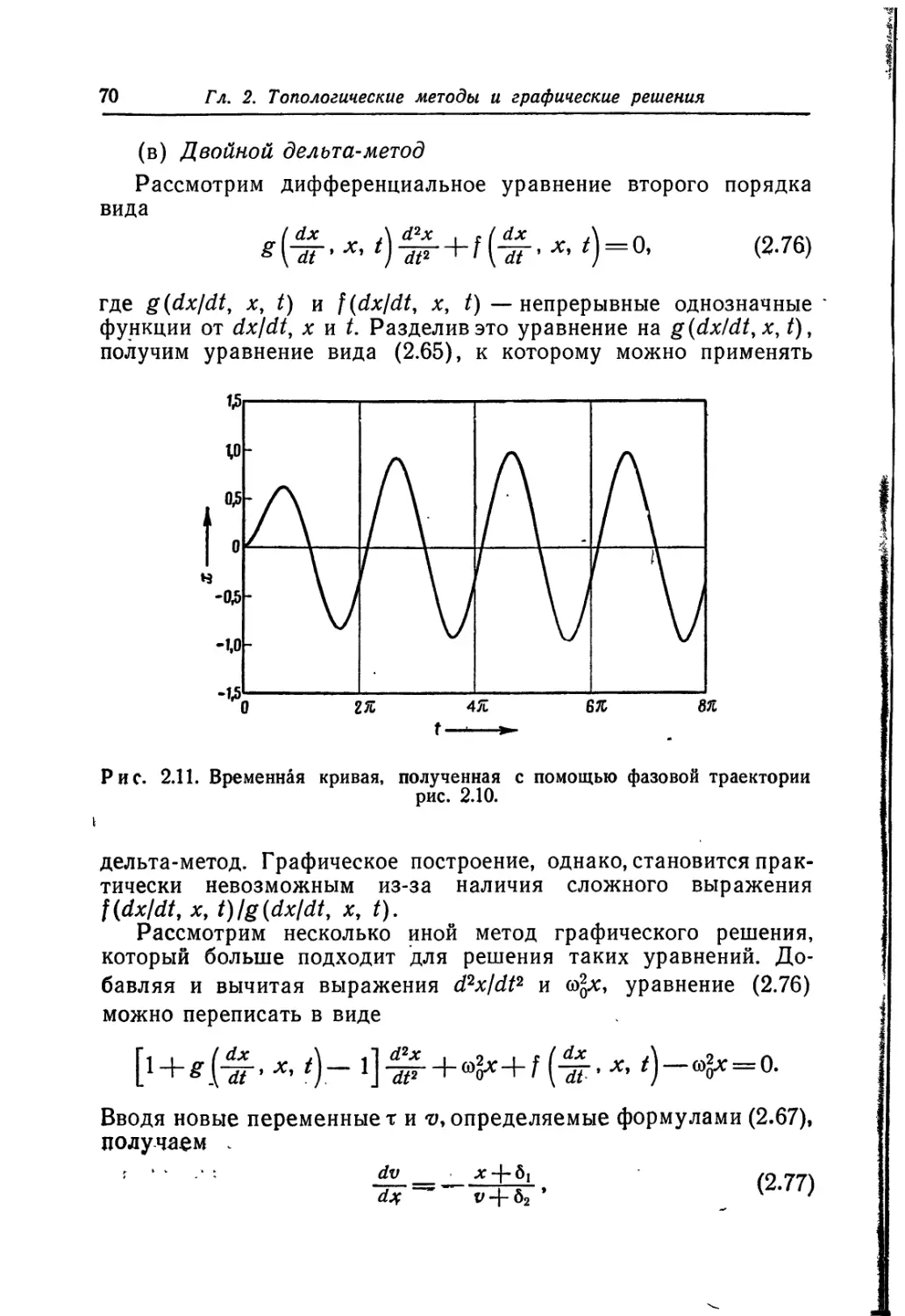
КОЛЕБАНИЯ
В ФИЗИЧЕСКИХ СИСТЕМАХ
NS*
ИЗДАТЕЛЬСТВО
«МИР»
McGraw-Hill Electrical and Electronic Engineering Series
NONLINEAR OSCILLATIONS
IN
PHYSICAL SYSTEMS
CHIHIRO HAYASHI
Professor of Electrical Engineering
Kyoto University
McGRAW-HlLL BOOK COMPANY
Mew york, san francisco, Toronto, london
1964
Т. X а я с и
Нелинейные колебания
в
физических системах
Перевод с английского
Б. А. БОЛДОВА и Г. Г. ГУСЕВА
Под редакцией
В. Е. БОГОЛЮБОВА
ИЗДАТЕЛЬСТВО «МИР» МОСКВА 1968
УДК 534
Монография известного японского ученого Т. Хаяси
посвящена теории нелинейных колебательных процессов,
происходящих в самых различных физических системах.
Книга представляет собой переработанное и дополненное
издание одной из более ранних работ автора, знакомой советскому
читателю по русскому переводу (Хаяси Т., Вынужденные
колебания в нелинейных системах, ИЛ, М., 1957). Однако после
переработки и дополнения получилась фактически новая книга.
Она отличается от предыдущей не только новыми разделами,
но и значительно усовершенствованной методикой изложения.
Книга представляет интерес как для физиков и инженеров
различных специальностей, имеющих дело с теорией нелинейных
колебаний и ее приложениями, так и для математиков,
занимающихся теорией дифференциальных уравнений.
Редакция литературы по математическим наукам
Инд. 2-3-2
ПРЕДИСЛОВИЕ К РУССКОМУ ИЗДАНИЮ
Предлагаемое вниманию читателя новое издание книги
японского ученого Т. Хаяси *) представляет интерес с нескольких
точек зрения.
Во-первых, в ней приведено систематическое изложение
популярных методов анализа нелинейных систем, главным
образом описываемых нелинейными дифференциальными
уравнениями второго порядка.
Во-вторых, в ней собран воедино богатый теоретический и
экспериментальный материал, накопленный автором книги в
связи с исследованиями установившихся и переходных
процессов в упомянутых нелинейных системах, находящихся под
периодическим внешним воздействием.
В-третьих, в книге изложен ряд оригинальных исследований
автора, относящихся к некоторым общим проблемам,
касающимся рассматриваемых процессов.
В части, посвященной изложению методов анализа
нелинейных систем, наряду с аналитическими методами расчета
приводятся топологические и графические методы, пригодные для
расчетов автономных и в особенности неавтономных систем.
Подробно рассмотрены различные варианты определения
устойчивости нелинейных систем, причем большое внимание
уделяется определению устойчивости периодических колебаний.
В этой части новое издание выгодно отличается от первого,
поскольку в предлагаемой книге этот материал существенно
переработан и дополнен оригинальными исследованиями автора. По
систематичности и обилию тщательно подобранных примеров
изложение представляет методический и научный интерес.
Вызывает сожаление, что автор книги, отмечая важную роль
исследований Н. М. Крылова, Н. Н. Боголюбова, Ю. А. Митро-
польского, не нашел нужным изложить предложенные ими
асимптотические методы, которые стоят в ряду наиболее
мощных современных, математически обоснованных и
универсальных аналитических методов.
!) Первое издание опубликовано в США в 1953 г., русский перевод под
названием «Вынужденные колебания в нелинейных системах» выпущен
Издательством иностранной литературы в 1957 г.
6 Предисловие к русскому изданию
Основное содержание книги посвящено анализу различных
явлений в нелинейных системах при наличии периодического
внешнего воздействия. Теоретический анализ в этой части книги
почти повсеместно сопровождается экспериментальной
проверкой, а в очень многих местах и сопоставлением с расчетами на
вычислительных машинах. Такое тройное совпадение часто
позволяет без строгой теоретической оценки точности расчета
чувствовать некоторую уверенность в правомерности
теоретических предпосылок.
Несмотря на очень широкий круг проблем, охваченных
тематикой книги, ее конкретное содержание несколько уже ее
названия. В частности, в книге остались неосвещенными такие
вопросы, как исследования параметронов, которые привлекают к
себе все больше внимания как в Советском Союзе1), так и за
рубежом. Кроме этого, не рассмотрены специфические
особенности явления резонанса в цепях с нелинейными емкостями,
а также колебания в системах со многими степенями свободы.
Среди оригинальных исследований автора, включенных в
книгу, можно назвать, кроме разработки методики определения
устойчивости колебаний, о чем упоминалось выше, еще
определение начальных условий, приводящих к различным типам
колебаний, а также анализ почти периодических колебаний и ряд
других.
В целом книга Т. Хаяси представляет большой научный и
практический интерес для широкого круга специалистов,
сталкивающихся с проблемами нелинейных колебаний.
В. Боголюбов
1) Этому вопросу посвящены, в частности, работы [138, 126, 124, 129] и
многие другие.
~* '*' \z"
ПРЕДИСЛОВИЕ
Цель этой книги — предоставить инженерам и
исследователям основную информацию, касающуюся такого важного
раздела, как нелинейные колебания в физических системах.
Поскольку дифференциальные уравнения, описывающие такие
системы, нелинейны и в общем случае не могут быть решены
точно, то приходится удовлетвориться приближенными .
решениями, которые дают достаточную информацию о нелинейных
колебаниях. В соответствии с этим в данной книге излагаются
основные методы отыскания приближенных решений
нелинейных дифференциальных уравнений. Необходимо с самого
начала заметить, что вопросы, рассматриваемые в этой книге,
в основном касаются вынужденных колебаний; более того, в
основной части текста исследуются только системы с одной
степенью свободы. Однако и в таких системах при воздействии
на них внешних сил могут иметь место разнообразные
колебания.
Настоящая книга является существенно переработанным и
дополненным изданием книги автора «Вынужденные колебания
в нелинейных системах», опубликованной в 1953 г. В данную
книгу включен материал, изложенный в предыдущем издании,
и новые работы автора, которые появлялись в различных
технических журналах после 1953 г. Как упомянуто выше, книга
преимущественно посвящена анализу вынужденных колебаний
и содержит описание соответствующих экспериментальных
исследований и обоснование различных аспектов теории. Часть
материала этой книги была изложена на лекциях студентам
старших курсов Киотского университета и Массачусетского
технологического института.
Работая над этой книгой, автор стремился представить
основные положения и теорию нелинейных колебаний в форме,
удобной тем читателям, главные интересы которых лежат в
области применения этих идей и методов к конкретным
физическим задачам. Поэтому автор всюду подчеркивает соответствие
между теорией и экспериментом. Практически на протяжении
всей книги аналитические результаты хорошо согласуются с
экспериментальными фактами. Автор не стремился к строгому
математическому изложению теории нелинейных
дифференциальных уравнений, поэтому с математической точки зрения
8 Предисловие
некоторые вопросы остаются открытыми для обсуждения,
особенно случай, когда отклонение от линейности не является
малым. Хотя эта книга ни в коем смысле не предназначена для
профессиональных математиков, автору было бы очень приятно,
если бы содержащиеся в книге результаты привлекли их
внимание и позволили автору надеяться дать в будущем более
строгое обоснование использованным методам анализа.
Автор выражает признательность доктору Р. Торикаи,
бывшему ректору Киотского университета, чье влияние на научное
становление автора весьма значительно. Автор благодарен
покойному доктору Р. Рюденбергу из Гарвардского университета,
профессорам Д. П. Ден Гартогу и Г. М. Пейнтеру из Масса-
чусетского технологического института за их поддержку и
ценные советы. Он обязан многим, способствовавшим подготовке
этой книги, особенно доктору Ю. Нисикава, присоединившемуся
к работе автора в области нелинейной механики, который
проверил значительное число расчетов и дал ряд ценных советов.
Нельзя не выразить признательности доктору X. Сибаяма,
мистеру М. Эйбу и мистеру Ю. Уеда за плодотворное
сотрудничество. Автор весьма признателен профессору Т. Д. Хиггинсу из
Висконсинского университета, который редактировал рукопись.
Тщательный просмотр им текста вызывает глубокую
благодарность. Наконец, автор ценит помощь, оказанную мисс С. Икари,
которая напечатала рукопись.
Т. Хаяси
Введение
г
По существу все задачи механики нелинейны. Обычно
применяемый метод линеаризации является приближенным
методом расчета, который в большинстве случаев дает вполне
удовлетворительный, а иногда и достаточно хороший результат.
Существует, однако, ряд задач, когда линейное представление
совсем неприменимо. В нелинейных системах часто имеют место
существенно новые явления, принципиально невозможные в
линейных системах [15, 66, 111]1). Основной целью этой книги
является не изложение методов повышения точности расчета
путем линеаризации, а концентрация внимания на тех сторонах
задач, где нелинейность приводит к существенно новым
явлениям. Математическое содержание этой книги основано на
работах Пуанкаре [81—84], Бендиксона [6] и Ляпунова [28, 29, 57,
61]. Применяемые методы принадлежат Рэлею [91], Ван-дер-
Полю [85—88], Дуффингу [21], Мандельштаму и Папалекси [72],
Андронову, Хайкину и Витту [3, 4].
Хотя явление нелинейных колебаний изучалось многими
учеными, современные достижения в теории и методах нелинейного
анализа связаны с работами Дуффинга [21] и Ван-дер-Поля
[85—88]. Значительный объем исследований был выполнен в
Советском Союзе. В основном эта работа была выполнена двумя
группами исследователей: первую представляют Мандельштам,
Папалекси, Андронов, Хайкин и Витт, а вторую — Крылов,
Боголюбов и Митропольский (см. [3, 10, 55 и 72]). Книга Минор-
ского [75] включает результаты русских ученых, а также
собственные исследования автора. Среди других книг по этим
вопросам следует упомянуть работы Стокера [100], Мак-Лахлана
[70], Каннингхэма [18], Ку [56] и Каудерера [53]. Недавняя книга
Минорского [76] — прекрасное дополнение к литературе по
нелинейной механике.
Настоящая книга делится на четыре части. Часть I, состоят
щая из трех глав, посвящена главным методам нелинейного
анализа. Существует два главных направления в современном
развитии нелинейного анализа: аналитические методы последо-
*) Номера в скобках относятся к литературе, приведенной в конце
книги. [При ссылке на переведенные книги указаны страницы
соответствующего русского издания.] *" '
10
Введение
вательных приближений и топологические методы графического
интегрирования. Первые две главы посвящены этим методам.
В гл. 1 описываются аналитические методы, включая метод
возмущений, метод итераций, метод усреднения и метод
гармонического баланса. Обычно эти методы применяются для
отыскания периодических решений нелинейных дифференциальных
уравнений. Однако при определенных условиях они могут
применяться и для изучения переходных режимов.
Метод возмущений применим к уравнениям, в которых
малый параметр относится к нелинейному члену. Приближенное
решение ищется в виде степенного ряда, причем члены ряда
содержат малый параметр в последовательно возрастающих
степенях. Метод решения дифференциальных уравнений,
основанный на процессе последовательных итераций, называется
методом итераций. Хотя итерации можно выполнять
несколькими способами, методику, предлагаемую в книге, можно, по-
видимому, рассматривать как наиболее приемлемую; она
согласуется с результатами, полученными методом возмущений.
Метод усреднения применяется в случае, когда амплитуда и фаза
колебания медленно изменяются в зависимости от времени.
Метод гармонического баланса, являющийся прямым следствием
метода усреднения, часто используется для получения
периодических решений в колебательных системах при внешнем
воздействии. В связи с принципом гармонического баланса
описывается метод, повышающий точность приближения
периодических решений.
Вышеупомянутые аналитические методы математически
законны для уравнений с малой нелинейностью. Однако их можно
применять и для уравнений с не слишком большой
нелинейностью. Применимость этих методов проверяется путем решения
числовых примеров для случаев большой нелинейности.
Сравнение их с решениями, полученными с помощью цифровых
вычислительных машин, показывает, что они дают
удовлетворительную точность.
В гл. 2 рассматриваются топологические методы анализа
нелинейных систем. Эти методы основаны на изучении
представления решений дифференциальных уравнений на фазовой
плоскости или в фазовом пространстве. В нелинейных системах
периодические решения соответствуют предельным циклам цли
особым точкам, а переходные режимы соответствуют
интегральным кривым, -которые с ростом времени стремятся к этим
предельным циклам или особым точкам. Следуя Пуанкаре [81—84]
и Бендиксону [6], можно изучать типы особых точек и их
основные свойства; рассматриваются также некоторые критерии
существования предельных циклов.
Введение 11
Графические методы анализа, изложенные в гл. 2,
применяются для построения интегральных кривых. Наиболее широко
применяется метод изоклин, но он требует сравнительно много
времени. Метод Льенара полезен при рассмотрении
автоколебаний. Начиная решение либо методом изоклин, либо методом
Льенара, необходимо всю плоскость заполнить отрезками
прямых, определяющих наклон касательной к интегральной кривой.
Если же необходимо построить только одну интегральную
кривую, то удобнее использовать дельта-метод и метод наклонных
прямых, поскольку они непосредственно приводят к решению,
принимая во внимание только ту информацию, которая касается
искомой интегральной кривой. Следует также упомянуть, что
от интегральных кривых, полученных этими методами, легко
перейти к временным зависимостям, поскольку течение времени
отмечается на интегральной кривой — это присуще самой
методике построения. Дельта-метод можно рассматривать как
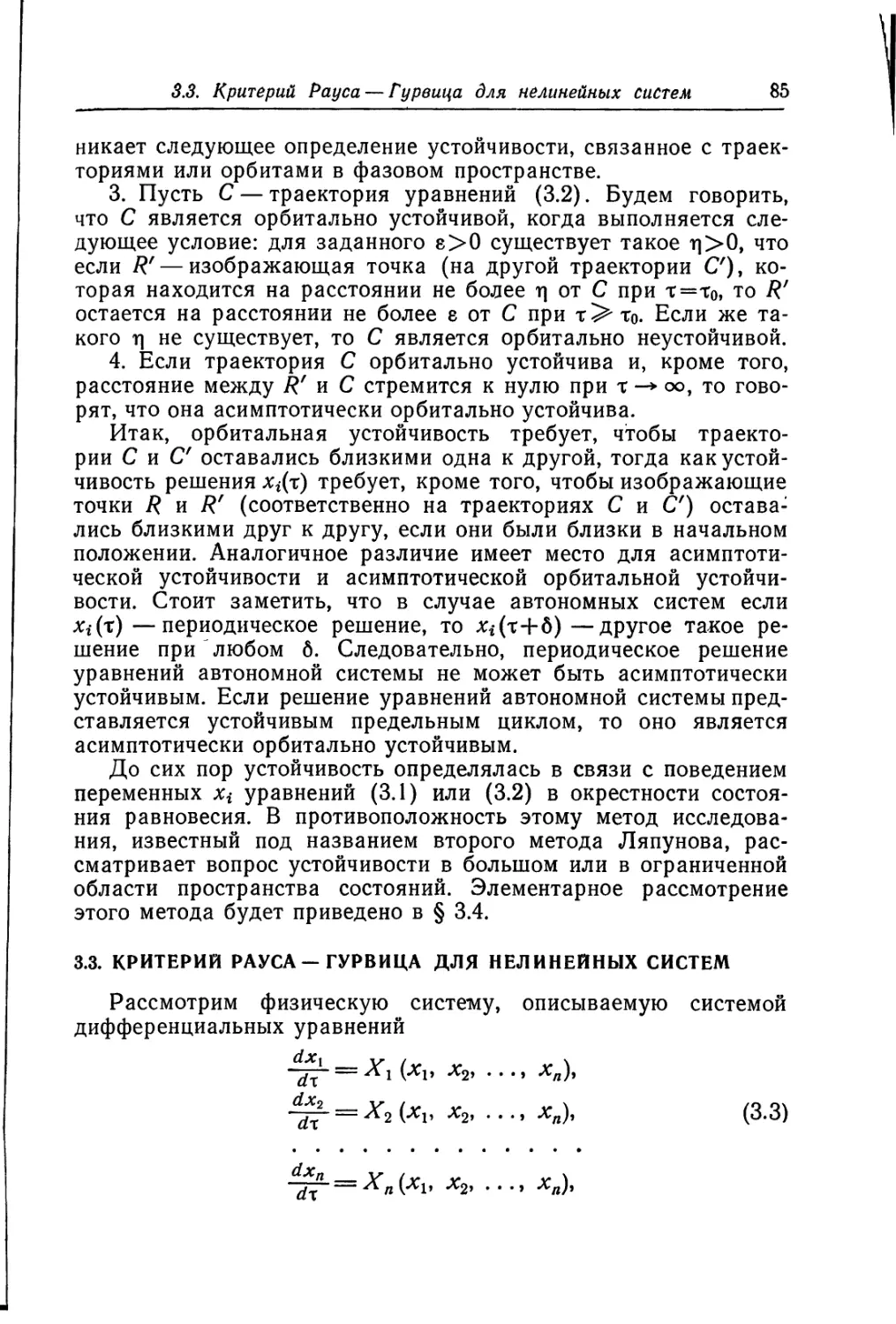
обобщение метода Льенара. Излагается также двойной
дельта-метод, который является обобщением дельта-метода. Метод
наклонных прямых с модификациями основного принципа
может применяться для графического решения уравнений как
неавтономных, так и автономных систем.
Исследованию устойчивости нелинейных систем посвящена
гл. 3. В ней рассматриваются несколько критериев
устойчивости, которые используются в последующих главах.
Рассматривается также применение критерия Рауса — Гурвица к
нелинейным системам. Вводится критерий устойчивости Ляпунова
и в связи с этим приводится его основная теорема [61].
Существенным моментом этого метода является построение функции
Ляпунова. Однако простой методики получения такой функции
не существует.
Вопрос устойчивости особенно важен при изучении
периодических колебаний нелинейных систем. Устойчивость можно
исследовать путем решения уравнения в вариациях, которое
характеризует малые отклонения от периодических режимов.
Уравнение в вариациях приводится к линейному уравнению,
коэффициенты которого периодически зависят от времени. Типичными
примерами таких уравнений являются уравнения Матье и
Хилла. Рассмотрению теории этих уравнений уделяется
достаточное внимание. Характеристический показатель решения
тесно связан с устойчивостью периодических колебаний; он
вычисляется методом Уиттекера [112—114].
Часть II, состоящая из четырех глав, посвящена изучению
вынужденных колебаний в установившемся режиме. Особое
внимание уделяется исследованию устойчивости периодических
режимов с помощью уравнений Матье и Хилла, дающих критерий
12 Введение
устойчивости. В гл. 4 условия устойчивости устанавливаются
путем сравнения характеристического показателя, полученного
в гл. 3, с затуханием системы. Эти условия определяют не
только устойчивость колебаний основной частоты, но также и
устойчивость ультрагармонических и субгармонических колебаний.
Поэтому обобщенное условие устойчивости, полученное таким
способом, особенно полезно при изучении периодических
колебаний в нелинейных системах, поскольку эти периодические
режимы могут стать неустойчивыми из-за нарастания
самовозбуждающихся колебаний, имеющих частоту ультрагармоники
или субгармоники. Отмечается, что условие устойчивости,
полученное по критерию Рауса — Гурвица, содержится в
приведенных выше условиях. Показано, что границу устойчивости
определяет вертикальная касательная к характеристической кривой.
Следующие три главы посвящаются исследованию
различных видов периодических колебаний. В гл. 5 рассматриваются
гармонические колебания, в которых основная составляющая,
имеющая ту же частоту, что и частота внешней силы,
преобладает над ультрагармоническими. При этом нелинейность
рассматривается как при симметричной, так и при несимметричной
характеристиках. В гл. 6 изучаются ультрагармонические
колебания в последовательно-резонансных цепях. Эти колебания
имеют место в том случае, когда амплитуда внешней силы очень
велика. Рассматривается также возбуждение
ультрагармонических колебаний в параллельно-резонансных цепях. Гл. 7
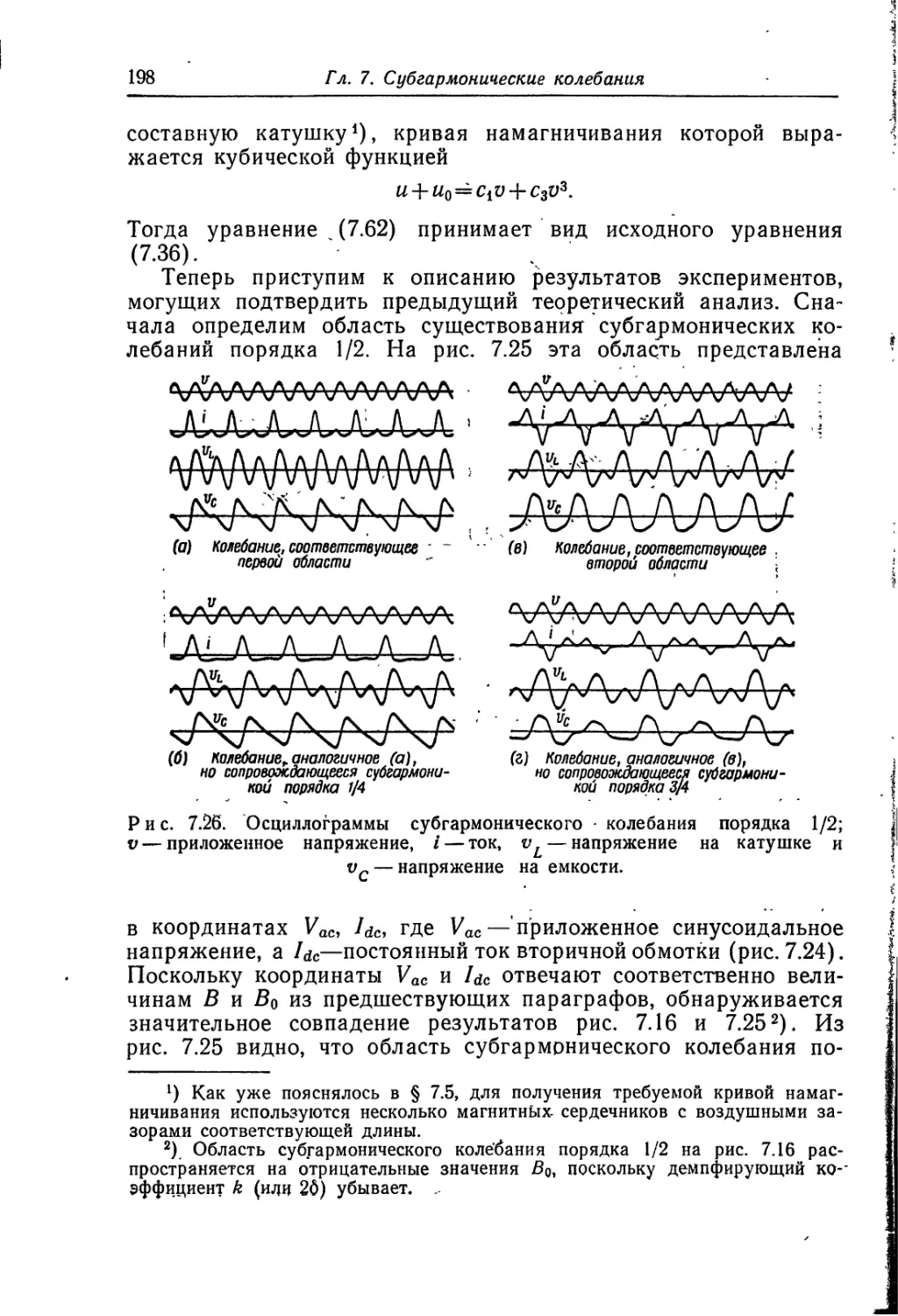
посвящена субгармоническим колебаниям, в которых наименьший
период колебаний равен целому кратному периода внешней
силы. Обсуждается связь между нелинейной характеристикой и
порядком субгармоники. Достаточно подробно исследуются
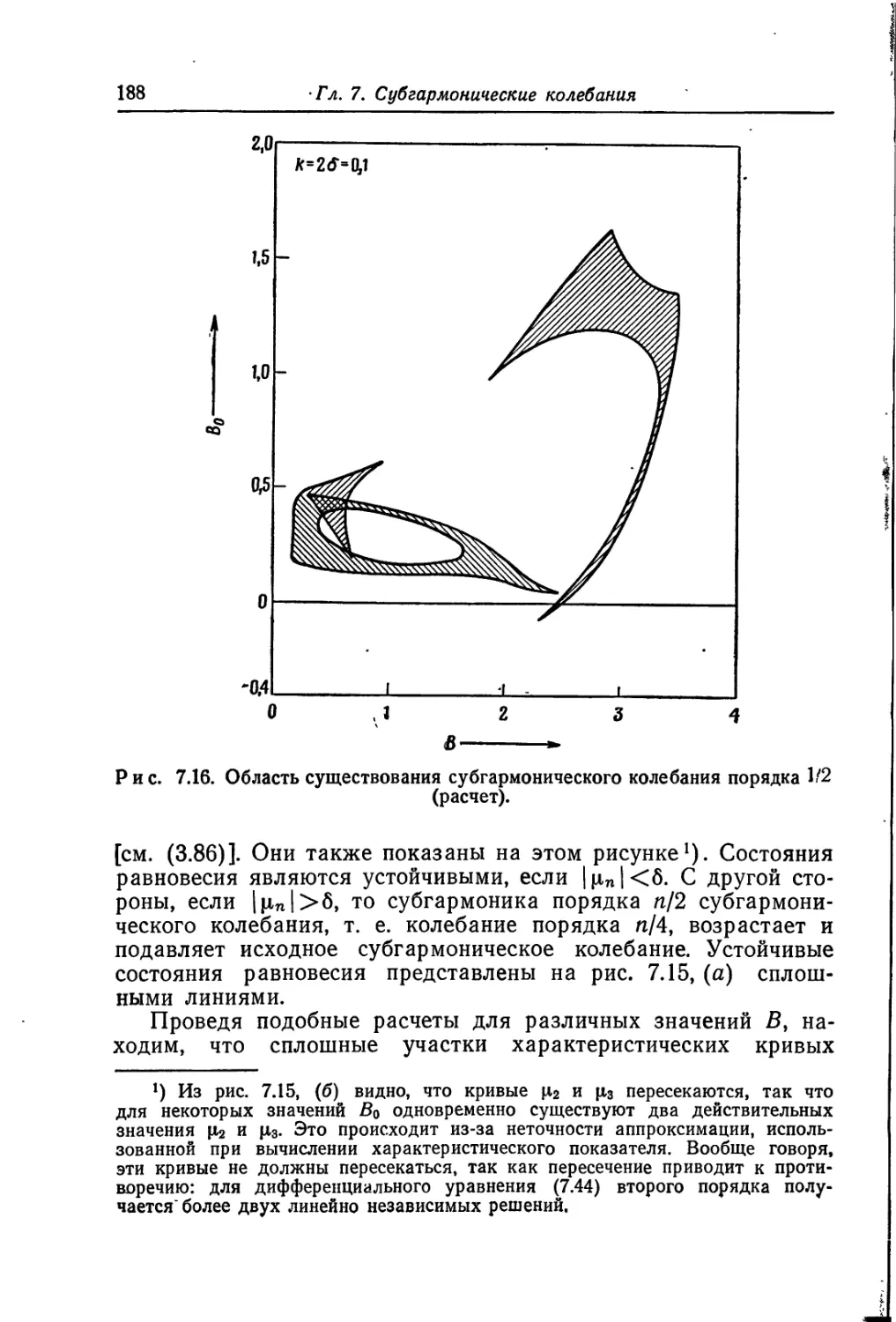
субгармонические колебания порядков 1/2 и 1/3. )
Для каждого вида колебаний, упомянутых выше, при
исследовании устойчивости режимов равновесия применяется условие
устойчивости, полученное в гл. 4. Это условие особенно удобно
при исследовании устойчивости ультрагармонических и
субгармонических колебаний. Экспериментальные исследования
выполняются в электрической цепи, содержащей в качестве
нелинейного элемента индуктивность с насыщающимся сердечником.
В соответствующих случаях обнаруживается
удовлетворительное совпадение между теоретическим анализом и
экспериментальными результатами.
Часть III, состоящая из четырех глав, посвящена изучению
нелинейных колебаний в переходном режиме. Для этой цели
используется топологический метод анализа. В первых двух главах
применяется фазовая плоскость, координатами в которой служат
изменяющиеся во времени составляющие колебаний; одна из
Введение 13
них находится в фазе с внешней силой, а другая ей
ортогональна. При выводе автономных уравнений, позволяющих
применить метод фазовой плоскости, делается предположение, что
составляющие по времени изменяются медленно. Основная идея
при изучении интегральных кривых автономных уравнений
состоит в том, что особые точки соответствуют установившимся
режимам, а интегральные кривые — переходным процессам.
Переходные процессы периодических колебаний
рассматриваются в гл. 8. Исследуются особые точки, соответствующие
периодическим режимам равновесия. Приводятся характерные
примеры построений на фазовой плоскости, которые показывают
общий характер гармонических колебаний как в переходном,
так и в установившемся режимах. При этом рассматривается
связь между начальными условиями и возникающими
периодическими колебаниями. Кроме того, с использованием методов
Пуанкаре и Бендиксона проводится подробное исследование
особых точек, особенно в случае, когда две особые точки
сливаются и образуют точку более высокого порядка. Эксперимент,
выполненный в электрической цепи, содержащей насыщающийся
сердечник, согласуется с предыдущим анализом.
Аналогичным образом в гл. 9 исследуются переходные
процессы субгармонических колебаний порядков 1/2, 1/3 и 1/5.
Положение несколько усложняется для субгармонических колебаний
порядка 1/2, поскольку в этом случае существует ряд колебаний с
различными амплитудами. Результаты, полученные теоретически,
также согласуются с экспериментальными исследованиями и
анализом на аналоговой вычислительной машине.
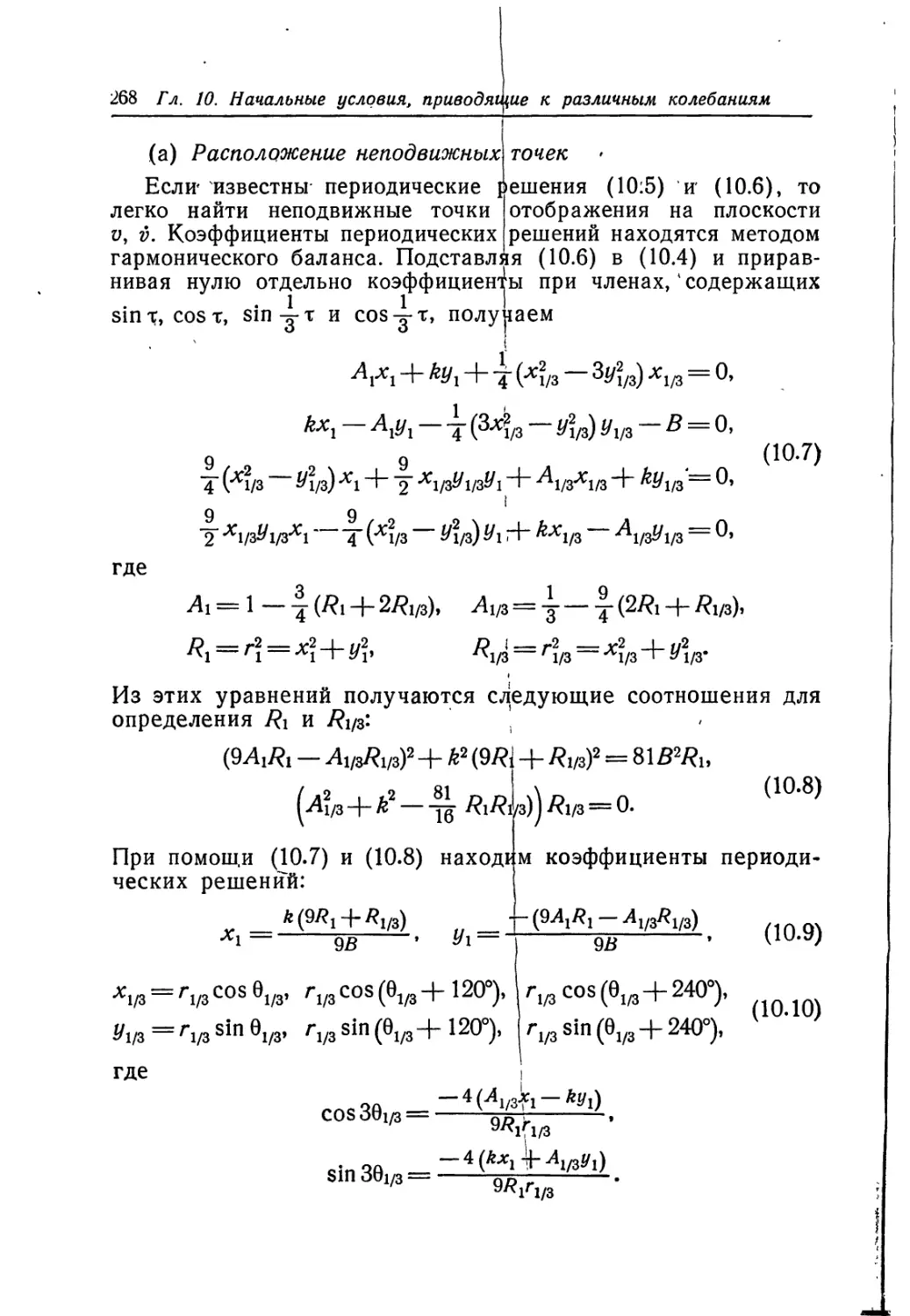
В гл. 10 исследуется связь между начальными условиями и
результирующими периодическими колебаниями, описываемыми
уравнением Дуффинга. Этот вопрос уже рассматривался в
предыдущих главах на основе метода фазовой плоскости. При этом
предполагалось, что амплитуда и фаза колебания изменяются
во времени медленно. Хотя этот метод анализа успешно
использовался при изучении гармонических и субгармонических
колебаний, однако для рассматриваемого вопроса он может не дать
удовлетворительных результатов. Во-первых, это может
случиться, если начальные условия заданы значениями, которые
существенно отличаются от соответствующих значений
установившегося режима. Тогда предположение, что амплитуда и фаза
колебания изменяются медленно, не выполняется, а,
следовательно, и результат, полученный с помощью этого метода,
является недостаточно точным. Во-вторых (и это более
существенно), этот метод является практически неприемлемым, если
в установившемся режиме ожидается возбуждение ряда
гармоник. В этом случае анализ необходимо выполнять на основе
14 Введение
графических построений в многомерном пространстве, что
практически невозможно.
В этой главе описывается метод анализа, который применим
и в таких случаях. Здесь также рассматривается поведение
изображающей точки на фазовой плоскости, однако
координатами фазовой плоскости являются переменная и ее
производная по времени. Начальное условие задается расположением
точки на фазовой плоскости. Особое внимание уделено
рассмотрению расположения изображающих точек, соответствующих
началу каждого периода внешней силы. Математически эти
точки могут быть получены как последовательные образы точек,
соответствующих начальным условиям, при итерации
отображения. Далее неподвижные точки следует сопоставить с
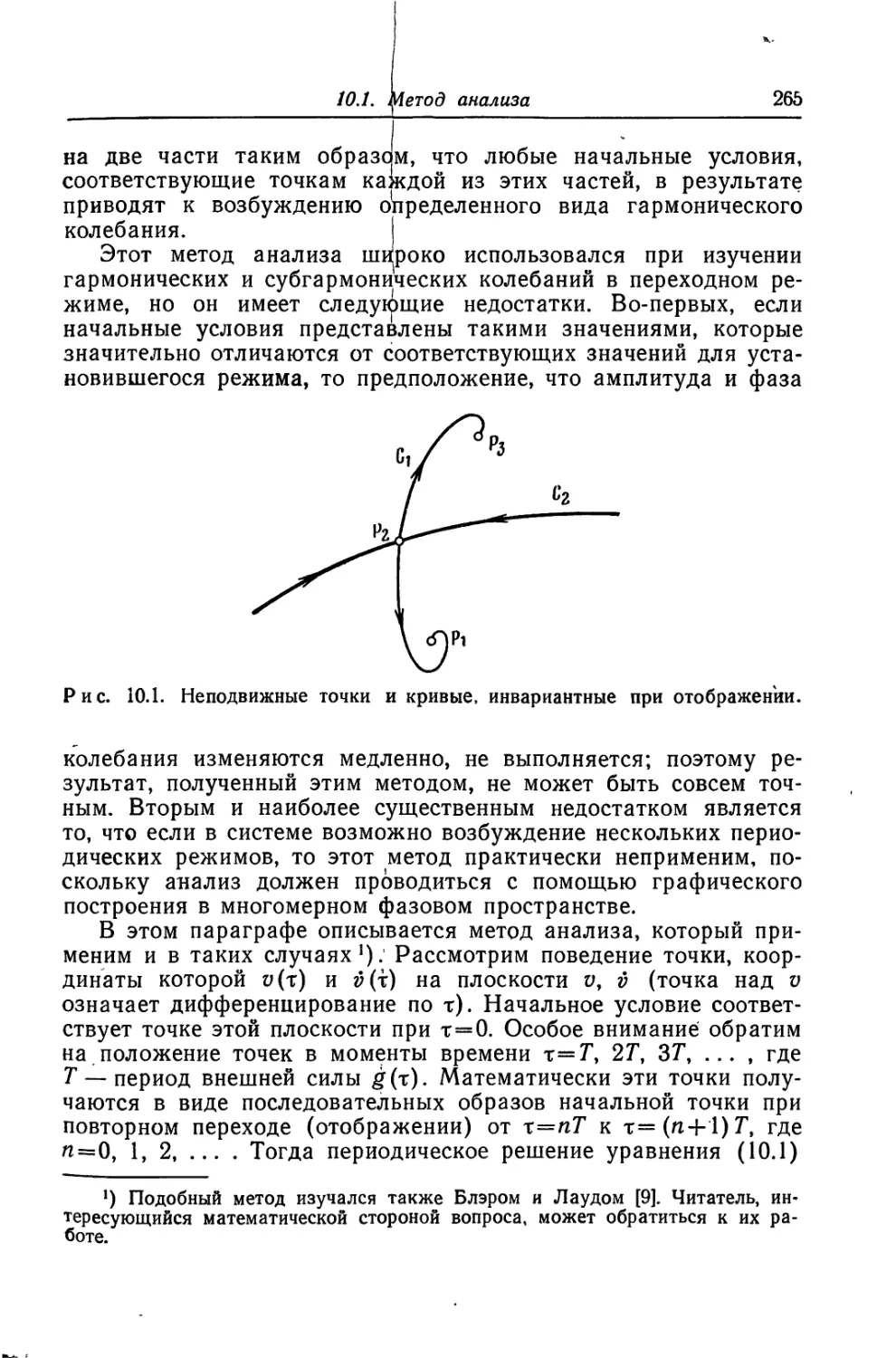
периодическими решениями рассматриваемого уравнения.
Неподвижные точки, соответствующие неустойчивым режимам,
представляют особый интерес. Через эти точки проходят две кривые,
инвариантные при отображении. Последовательные образы
приближаются к неустойчивой неподвижной точке по одной из этих
кривых, тогда как удаление образов от неподвижной точки
происходит по другой кривой. Первая является граничной кривой
между областями притяжения, каждая из которых
соответствует начальным условиям, приводящим к конкретному виду
периодического решения.
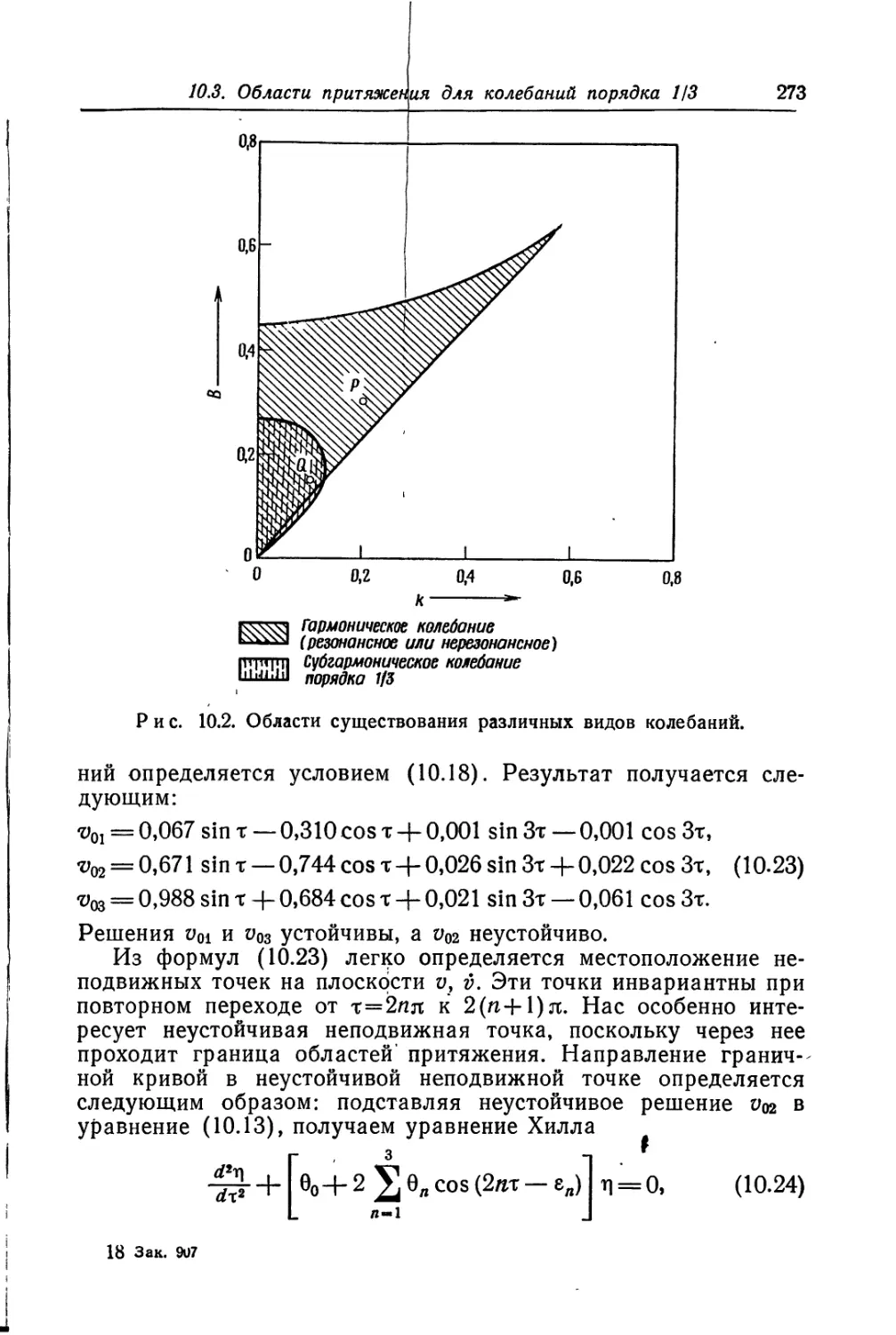
Даются два примера областей притяжения. Первый пример
касается областей притяжения, приводящих к гармоническим
и субгармоническим колебаниям порядка 1/3 в симметричной
системе. Во втором примере рассматриваются области
притяжения, соответствующие гармоническим и субгармоническим
колебаниям порядков 1/2 и 1/3 в несимметричной системе.
В гл. 11 рассматриваются так называемые «почти
периодические колебания», когда амплитуда и фаза колебания
медленно, но периодически изменяются даже в установившемся
режиме. Однако, поскольку форма кривой колебания, как
правило, не повторяется, то почти периодическое колебание, строго
говоря, является непериодическим.
Здесь при исследовании используется метод фазовой
плоскости. Предполагается, что решения можно брать в виде
рядов Фурье, в которых коэффициенты считаются медленно
изменяющимися во времени. Эти коэффициенты Фурье
соответствуют координатам изображающей точки в фазовом
пространстве. Следовательно, периодическое колебание, определяемое
постоянными коэффициентами, соответствует особой точке в
фазовом пространстве. Почти периодическому колебанию в этом
случае соответствует предельный цикл. Поскольку почти
периодическое колебание обусловлено модуляцией амплитуды и фазы,
Введение 15
то изображающая точка не стремится со временем к особой
точке, а непрерывно перемещается по предельному циклу.
Время, необходимое изображающей точке для завершения
одного полного оборота по предельному циклу, не является целым
кратным периода внешней силы; отношение этих периодов
является, как правило, числом иррациональным.
В гл. 11 рассматриваются также два характерных случая
почти периодических колебаний. Первый относится к случаю,
когда гармоническое колебание в резонансной цепи становится
неустойчивым и переходит в почти периодическое. Второй —
это случай почти периодического колебания, которое возникает
из субгармонического колебания порядка 1/2 в параметрически
возбуждаемой цепи. Для этих случаев приводятся числовые
примеры; во втором случае для различных значений параметров
системы получено два различных вида предельных циклов.
В части IV, состоящей из двух глав, рассматриваются
вынужденные колебания в автоколебательных системах с
отрицательным сопротивлением. Сначала (гл. 12) рассматриваются
захватываемые колебания. Если к системе не приложена внешняя
сила, то в ней может возникнуть самовозбуждение колебаний.
После приложения периодической внешней силы частота
самовозбужденного колебания в некоторой полосе частот может
совпадать с вынуждающей частотой. Это явление захватывания
частоты имеет место также и в том случае, когда отношение
двух частот близко к целому числу (отличному от единицы).
В этом случае собственная частота системы захватывается
частотой, которая в целое число раз больше или меньше
вынуждающей частоты. В гл. 12 особое внимание уделено
изучению периодических колебаний, обусловленных захватыванием
частоты. Амплитудные характеристики захватываемых
колебаний получаются методом гармонического баланса; устойчивость
этих колебаний исследуется путем применения уравнения Хил-
ла. Области, в которых одновременно имеют место различные
виды колебаний захватывания, а также почти периодические
колебания, находятся соответствующим изменением амплитуды
и частоты внешней силы. Теоретические результаты
сравниваются с решениями, полученными на аналоговой
вычислительной машине; отмечается их удовлетворительное совпадение.
Гл. 13 посвящена почти периодическим колебаниям, которые
имеют место в самовозбуждающихся системах при периодическом
воздействии. Как отмечалось в гл. 12, собственная частота
системы захватывается не только на вынуждающей частоте, но
также и на частотах ультрагармоники и субгармоники.
Следовательно, почти периодические колебания должны
рассматриваться совместно с захватываемыми крлебаниямр ца щщ
16 Введение
частотах. Поскольку захватываемое колебание на частоте
ультрагармоники или субгармоники представляется суммой
вынужденных и свободных колебаний, имеющих соответственно
вынуждающую частоту и частоту захватывания, то и почти
периодическое колебание, которое из него возникает, может •
быть выражено этой же суммой, но амплитуда и фаза
собственных колебаний предполагаются медленно изменяющимися
во времени.
Для изучения почти периодических колебаний применяется
метод фазовой плоскости. Переменными фазовой плоскости
являются изменяющиеся во времени две составляющие
амплитуды свободного колебания, которые выражаются в
квадратурах. Следовательно, захватываемое колебание соответствует
особой точке на фазовой плоскости, а почти периодическое
колебание — предельному циклу. В этой главе исследуются почти
периодические колебания, включая и те, которые возникают из
захватываемых колебаний на частотах основной гармоники,
ультрагармоники и субгармоники. Подсчитываются предельные
циклы, соответствующие почти периодическим колебаниям;
кривые зависимости от времени получаются численным
интегрированием по предельному циклу. Этот метод анализа является
особенно полезным при изучении перехода захватываемых
колебаний к почти периодическим. Возникновение и затухание
предельного цикла, соответствующего почти периодическому
колебанию, также исследуется для системы с нелинейной
восстанавливающей силой.
В конце книги даны шесть приложений и задачи, связанные
с материалом каждой главы. В приложении I приводятся
разложения функций Матье сеи seu ..., се3, ses\ в приложении II
даны неустойчивые решения уравнения Хилла, подсчитанные
с помощью метода Уиттекера. Обобщенная форма уравнения
Хилла является предметом приложения III. В приложении IV
условие устойчивости сравнивается с условием устойчивости,
полученным Мандельштамом и Папалекси [72] для
субгармонических колебаний. В приложении V приводятся дополнительные
замечания, касающиеся интегральных кривых и особых точек,
на которые имеются ссылки в III и IV частях книги. Наконец,
в приложении VI приводится схема электронного коммутатора,
который используется в экспериментах; подробно описывается
последовательность операций.
ЧАСТЬ 1
Основные методы анализа
нелинейных колебаний
? 3аР- Щ
ГЛАВА 1
Аналитические методы
1.1. ВВЕДЕНИЕ
Нахождение аналитического решения дифференциального
уравнения, если это возможно, обычно дает значительные
преимущества. Аналитическое решение получается в алгебраической
форме и не требует введения численных значений параметров
или начальных условий в процессе решения. Когда же такое
решение получено, можно подставить любые численные
значения и исследовать всю совокупность решений. Ввиду такой
гибкости анализа естественно сначала попытаться отыскать
решение заданного дифференциального уравнения в аналитической
форме. Однако следует иметь в виду, что только очень
немногие из уравнений, описывающих реальные физические системы,
достаточно просты и допускают точное решение. В общем
случае не существует методов, способных давать точное решение
произвольно выбранного нелинейного дифференциального
уравнения. Таким образом, для некоторых часто встречающихся
классов дифференциальных уравнений единственно пригодными
являются различного вида методы приближений.
Для того чтобы можно было получить аналитическое
решение, все связи, необходимые для описания рассматриваемой
физической, системы, должны быть выражены в виде
математических соотношений. Любая опытная зависимость, полученная
в результате экспериментальных измерений и представленная
в виде соответствующего графика, должна быть преобразована
в уравнение. Составленные уравнения системы затем
анализируются с целый получения решения, которое выражается в
виде комбинации известных табулированных математических
функций.
Рассмотрим систему п дифференциальных уравнений
первого порядка
—rff — Х\ (хи хъ • • •» хп* О»
—£- — Х2(хг, хъ ..., хпУ t), (1.1)
-gjr — Хп (Xi, X21 ... > хп, t)y
2*
20 Гл. 1. Аналитические методы ,
где Хи ..., Хп — аналитические функции неизвестных
переменных хи ..., хп и времени tl). Если рассматривать хи ..., хп
как компоненты я-мерного вектора х, а Хи ..., Хп — как
компоненты я-мерного вектора X, то эта система примет более
простую форму
|г = Х(х, ')• (1-2)
Может оказаться, что X зависит только от х и не зависит от t:
тогда уравнение (1.2) имеет вид
•§- = Х(х). (1.3)
Система такого типа называется автономной. Уравнение (1.2),
в котором время t присутствует в явном виде, соответствует
неавтономной системе.
Дифференциальные уравнения, имеющие нелинейные члены,
связанные с малым параметром, изучались Пуанкаре [83,
стр. 79—161]. В этом случае функция Х(х, t) разбивается на
две части, и мы пишем
-§. = F(x, 0 + l*G(x, 0. <L4)
причем нелинейные члены входят только в G(x, /). Параметр \х
в идеальном случае должен был бы быть безразмерной
величиной, а его численное значение — малым. При этом условии
решение уравнения (1.4) часто можно найти в виде ряда
х = х<°> (t) + ixx") (0 + \х2х{2) (t) + .... ' (1.5)
При достаточно малом \i ряд сходится довольно быстро, так что
уже первые два или три члена дают хорошую точность. Реше:
ние (1.5) обычно подбирается так, чтобы при \х^>0 оно
стремилось к точному решению
x=x<P>(f)
линейного уравнения
■f- = F(x, t).
Отыскание решения (1.5) является предметом метода малого
параметра Пуанкаре. Этот метод вместе с его видоизменениями
составляет основную тему настоящей главы. Когда параметр
велик, теория Пуанкаре становится неприменимой, и для таких
1) Уравнение порядка п легко свести к системе (1.1)»
1.2. Метод возмущений 21
случаев аналитические методы не исследованы достаточно
широко1). Однако следует заметить, что с практической точки
зрения указанный метод может давать удовлетворительные
результаты и для не очень малых значений параметра.
1.2. МЕТОД ВОЗМУЩЕНИЙ 2)
Одним из важнейших методов решения нелинейных
дифференциальных уравнений является метод возмущений. Раньше
этот метод применялся лишь в астрономических расчетах.
Благодаря фундаментальным работам Пуанкаре и позднейших
математиков область его применимости расширилась, включив
более общие вопросы нелинейной механики.
Как упоминалось выше, данный метод применим к
уравнениям, в которых малый параметр связан с нелинейными
членами. Практически разложение в ряд производится по
степеням малого параметра, умноженным на коэффициенты, которые
являются функциями независимой' переменной. Затем один за
другим определяются коэффициенты разложения, обычно путем
*) В работе Рябова [92] рассматриваются пределы применимости метода
малого параметра в теории нелинейных колебаний.
2) Метод возмущений более известен в литературе под названием метода
Пуанкаре [83]. Этот метод является вариантом мощного класса методов
малого параметра, разработанных главным образом трудами советских
математиков Н. М. Крылова, Н. Н. Боголюбова, Ю. А. Митропольского [55, 10,
135], а также Л. И. Мандельштама, Н. Д. Папалекси, А. А. Андронова,
А. А. Витта, С. Э. Хайкина [133, 137, 3].
Детальное описание конкретно метода Пуанкаре читатель найдет в
монографии [3], а также в книге А. А. Фельдбаума [147], где отмечены
отличительные особенности данного метода от родственных. Популярное изложение
несколько видоизмененного метода Пуанкаре (метода возмущений)
приведено Каннингхэмом [18], где специфика методики иллюстрирована
разнообразными техническими примерами.
Преимуществами метода являются относительная простота выкладок,
возможность получения высших приближений без существенного
усложнения решения.
Основной недостаток метода проявляется, как только приходится
рассматривать нелинейные колебания. В этом случае, как показано ниже на
примерах, в ряде, изображающем решение, появляются слагаемые,
пропорциональные малому параметру и времени. Понятно, что при относительно
большом произведении времени на. малый параметр эти слагаемые не позволят
правильно описать процесс. Для того чтобы освободиться от них, приходится
вводить условие периодичности решения. Отсюда возникает ограничение
применимости метода возмущений: он оказывается непригодным, например,
для расчета колебательных систем с относительно медленным изменением
амплитуд колебаний в переходном процессе. Для таких систем метод
позволяет рассчитывать только установившийся режим периодических колебаний.
В данной главе примеры, иллюстрирующие применение метода
возмущений, относятся только к режиму установившихся периодических колебаний,—
Прим. ред.
^
22
Гл. L Аналитические методы
решения системы линейных уравнений. Однако такое описание
этой методики несколько поверхностно. Поступая таким
образом, часто можно столкнуться с серьезной трудностью в" виде
так называемых «вековых членов», т. е. членов в уравнении
(1.5), которые при t-*<x> неограниченно возрастают и, таким
образом, нарушают сходимость ряда !).
В качестве примера появления вековых членов рассмотрим
дифференциальное уравнение
**. + х + ]и* = 0ш (1.6)
Попытаемся решать это уравнение со следующими начальными
условиями:
*(0) = А х'(0) = 0 (' = |-). ' (1.7)
Подставим решение в виде степенного ряда
X(t) = X0(t) + »Xl(t) + VL*X2(t)+ ;.. (1.8)
в уравнение (1.6); мы получим степенной ряд относительно ц,,
который должен тождественно равняться нулю, т. е.
коэффициенты при последовательных степенях \i должны равняться
нулю. Приравнивая нулю отдельно каждый из этих
коэффициентов, мы получаем следующую систему линейных
уравнений:
4 + х0 = 0,
(1.10)
Для того чтобы определить x0i хи ..., воспользуемся
начальными условиями (1.7), которые приведут к новым условиям
*о(0) = Л, *,(()) = 0,
х'0(0)=о, *;(0)=о, /=i, 2, з,....
В силу этих условий первое уравнение (1.9) дает
х0=А cos t.
Следовательно, второе уравнение (1.9) принимает вид
jcJ + ^j = — ^A3cost — ~;43cos3/,
1) В некоторых частных случаях при /->оо решение само безгранично
возрастает но амплитуде, причем оказывается невозможным устранить из
разложения (1.5) члены с бесконечно возрастающими амплитудами. Эти
члены не относятся к вековым, так как они являются неотъемлемой частью
решения.
1.2. Метод возмущений 23
и его решение равно
хг = — -J АН smt — -^ Л3 (cos t— cos 3/).
Здесь первый член является вековым членом, который
содержит t за знаком тригонометрической функции.
Появление вековых членов в этом случае можно объяснить
следующим образом. При \х = 0 решение является
периодическим с периодом 2я. Однако из-за нелинейного члена \ххг в
уравнении (1.6) решение для \хфО может не быть периодическим
с тем же самым периодом (в действительности, как вскоре
будет показано, оно не является периодическим). Так как период
порождающего решения х0=А cos t постоянен и равен 2я,
последующие члены в уравнении (1.8) должны привести к
изменению периода; в результате ^появляются вековые члены.
Следующий простой пример сделает это утверждение особенно
убедительным, а именно для малого 8 имеет место разложение
гЧ2 z4z
sin (u)+^ = sin Ы + et cos at jf s*n ®* gr cos ®*"+"
Необходимо отметить, что при исключении вековых членов
неизвестные величины, такие, как частота свободного
колебания и амплитуда самовозбуждающегося колебания, не должны
быть заранее зафиксированы в порождающем решении1). В
остальной части этого параграфа мы описываем практическую
процедуру нахождения периодических решений некоторых
характерных нелинейных дифференциальных уравнений.
(а) Автономные системы
Рассмотрим дифференциальное уравнение вида
dt2
.x = »f(x,^), (1.11)
где \i — безразмерный параметр, который считается малым.
Предполагается также, что f(x, dx/dt) является многочленом
относительно х и dx/dt. При jx=0 периодическое решение
уравнения (1.11) легко получается как линейная комбинация
функций sin/ и cost, т. е. период решения равен 2я. Однако при
\хфО частота периодического решения становится неизвестной,
поэтому целесообразно заменить независимую переменную /
переменной т=ю£, где со — неизвестная частота периодического
решения. Ясно, что теперь переменная х имеет период 2я
1) Во всех последующих примерах, рассматриваемых в этой главе (кроме
§ 1.4), автор ищет периодические решения нелинейных дифференциальных
уравнений. — Прим. ре$.
24 Гл. 1. Аналитические методы
относительно т. Уравнение (1.11) после этой замены примет
вид1)
02х +- х = \if (х> юл:). (1.12)
Как указано выше, рассматриваемый метод заключается в
разложении искомого решения х(х) в степенной ряд
относительно малого параметра щ причем коэффициенты ряда
являются периодическими функциями т. Поэтому мы пишем
х(х) = х0(х)-)г\хх1(х) + \х2х2(х)-\- ..., (1.13)
где Xi(x) —функции т с периодом 2я. Помимо разложения #,
необходимо также разложить по степеням \х неизвестную
величину о, а именно
С0 = О0 + |Ш1 + |Х2(1)2+ •••• (Ы4)
Подставим выражения (1.13) и (1.14) в (1.12) и приравняем
коэффициенты при одинаковых степенях \х. В результате мы
получим систему линейных дифференциальных уравнений
второго порядка относительно Xi(x), которая также содержит
неизвестные величины сог-. Поскольку рассматривается только
периодическое решение, начало отсчета х может быть выбрано
произвольно. Поэтому выберем его так, чтобы х(х)=0 при т=0.
Это начальное условие и условие периодичности х(х) служат
для определения неизвестных величин в (1.13) и (1.14).
Чтобы подробнее пояснить применение метода возмущений,
вновь рассмотрим дифференциальное уравнение
jg£ + x + ^3 = 0. (1л5)
Заменим в уравнении (1.15) независимую переменную t
переменной х=Ы; тогда
g?x-{-x-\-\lx* = 0. (1.16)
Подставляя (1.13) и (1.14) в (1.16) и приравнивая
коэффициенты при одинаковых степенях \х, мы получаем следующую
систему линейных уравнений:
jA fflJvf*o = 0' <U7>
р,1: (dft1 + xl = — 2<d0®lx0 — x%, (1.18)
\х2: (о20х24-х2 = —(2о0со2 + (of)x0 — 2%(olxl — 3x*xv (1.19)
1) Здесь и на протяжении этой главы точка над буквой означает диф-
!нцирование по т; две точки соответствуют второй производной.
1.2. Метод возмущений 25
Начальные условия, как и ранее, определяются формулами
(1.7). Поскольку x(t+2jt) =*(т), мы имеем следующие условия
для определения неизвестных величин в вышеприведенных
уравнениях:
xi(x + 23t) = xt(x)9 ^ (1.20)
Хо(0) = А, *|+1(0) = 0, "
*, (0) = 0, 1 = 0, 1, 2, ....
С учетом этих условий решение уравнения (1.17) имеет вид
x0 = Acosx, (1.22)
©о=1. (1.23)
Решение (1.22) и есть порождающее решение.
В силу (1.22) и (1.23) уравнение (1.18) принимает вид
х1^гх1 = Ы1 — 1 Л2) Л cost—-i-A3cos3t. (1.24)
Если бы коэффициент при cost не был равен нулю, то решение
уравнения (1.24) содержало бы тэшт, т. е. вековой член.
Поэтому условие периодичности для Xi(x) требует, чтобы
коэффициент при cost равнялся нулю, т. е.
<*l = YA2' О-25)
Следовательно, в силу условий (1.21) решение уравнения (1.24)
можно записать в виде
ХХ=-^А*(— COST + COS Зт). (1.26)
Продолжая таким же образом, получаем
23 3 1
Х2 = -Щ4 Л5 C0S Т ~ "128"Л* C0S 3t + "1024 Л* C0S 5т- (!,28)
С учетом формул (1.13), (1.22), (1.26) и (1.28) решение
уравнения (1.15) с точностью до членов второго порядка
относительно ц имеет вид
х (t) = (Л —1 »А* + -jjgj. цМ") cos wt +
4- (i цЛ3 — -j^- ц2Л5) cos 3g>* + -j^j- цМ5 cos 5ю* + .... (1.29)
26
Гл. 1. Аналитические методы
Из соотношений (1.14), (1.23), (1.25) и (1.27) определяется
частота ©:
© = 1 + !^-JL^+ .... (1.30)
Очевидно, что частота со зависит от амплитуды колебания А.
В качестве другого примера рассмотрим уравнение Ван-дер-
Поля
^_[Х(1_Х2)^_|_^==0) (1.31)
где (л — малая^положительная величина. Выполняя в
уравнении (1.31) замену переменной т=©£, мы, как и раньше,
получаем
^—^(l— х2)х + х = 0. (1.32)
Подстановка разложений (1.13) и (\Л4) в (1.32) приводит к
системе линейных уравнений
jxO: ©£0 + *0 = 0, (1.33)
[х1: ©<& -f Xj = — 2©^^ + со0 (1 — х2) x0, (1.34)
у2: Ufa + х2 = — (2©0©2 + со*) х0 — Ъй^ххх +
-f ®г (1 — 4) х0 — 2©^^^ + ©0 (1 — **) х1? (1.35)
Используя условия х(т+2п) =х(х) и £(0)=0 для определения
неизвестных величин в этих уравнениях, мы получаем
х/(т + 2л) = х/(т), (1.36)
^(0) = 0, / = 0, 1, 2, .... (1.37)
С помощью этих условий находим решение уравнения (1.33); -
x0 = A0cosr, (1.38)
©о=1, . (1.39)
где постоянная Л0 пока еще не определена; ее находят на
следующем этапе. Решение нулевого порядка (1.38) является
порождающим решением.
В силу (1.38) и (1.39) уравнение (1.34) принимает вид
/ А2 \ А3
хх ]-хх = 2сохА0 cos t-f Д (-~- — 1J sin т + -4°- sin Зт. (1.40)
1.2. Метод возмущений
27
Если бы коэффициенты при cost и sinr не были равны нулю,
то решение уравнения (1.40) содержало бы члены вида tcost
и TsinT, т. е. вековые члены.
Следовательно, условие периодичности *i(t) требует, чтобы
коэффициенты при cost и sinт равнялись нулю, т. е.
А0 = 0
или
А2
-±—1=0 и ^ = 0. (L41)
Заметим, что Л0==0 дает решение нулевой амплитуды (значение
этого факта обсуждается в одном из последующих
параграфов), и рассмотрим решение Л0=2 первого уравнения (1.41).
Тогда (1.38) принимает вид
x0 = 2cost. (1-42)
Если взять Л0=—2, то мы не получим ничего нового, так как
это приводит к решению противоположной фазы, т. е. решению,
отличающемуся по фазе на я радиан от решения (1.42). Общее
решение уравнения (1.40) теперь запишется в виде
хг = Аг cos т + Вх sin т — -£• sin Зт. 0-43)
#
Постоянная Bt определяется требованием fi(0) = 0; таким
образом,
Вг = т- (Ь44)
Постоянная Ai определяется на следующем этапе.
В силу (1.39) и (1.41) —(1.44) уравнение (1.35)
принимает вид
•хг2 + ^2 = (4со2+ -^созт-Н-гЛ! sinT —
—-|cos3T-f-3Asin3T+-|cos5T. (1.45)
Условие периодичности х2(т) дает следующие соотношения:
©2 = —-L, А = 0. (1.46)
Следовательно, из (1.43) и (1.44) имеем
з 1 *
хг =-£-sinT — ^sin3T, (1-47)
28 Гл. 1. Аналитические методы
В силу соотношений (1.46) общее решение уравнения (1.45)
принимает вид
3 5
х2 = А2 cos т 4- В2 sin т -f- -jg- cos Зт — -gg- cos 5т. (1.48)
Постоянная В2 определяется из условия Лг(0)=0; отсюда
получаем, что В2=0. Продолжая таким же образом, можно
определить неизвестные величины в правых частях (1.13) и (1.14).
При помощи некоторых вычислений найдено, что условие
периодичности х3(т) дает
А —1
л2 — — 8 .
Следовательно,
13 5
х2 = — -g-cosT + -jg-cos3T — -^r cos5x. (1-49)
С учетом (1.13), (1.42), (1.47) и (1.49) решение уравнения
(1.31), включая члены вплоть до второго порядка
относительно \i, можно записать в виде
х = \2 —-g-p,2] cos cot -\--£\isir\(dt +
О 1 С
+ -jg- [i2 cos Зсо/ — -j- (л sin Зсо^ — "gg" ^2 cos 5«tf. '1.50)
Используя (1.14), (1.39), (1.41) и (1.46), определим частоту ш:
о)=1 —и-iA (1-51)
(б) Неавтономные системы
Рассмотрим дифференциальное уравнение вида
4£+* = цф. ■£.<). (1-52)
где (л — малый параметр, а /(#, dx/d£, t) —функция, зависящая
от х, dx/dt, t. Предположим, что f(x, dx/dt, t) является
периодической функцией относительно t с периодом 2я. Покажем, как
используется метод возмущений для получения периодического
решения уравнения (1.52), которое имеет ту же частоту, что
и внешняя сила. Уравнение (1.52) приводится к виду
*£ + x = tf[x,%.x+*), (1-53)
где x=t — б. В противоположность предыдущему случаю
автономных систем, хотя частота искомого периодического
колебания известна, фазовому углу основной гармоники колебания
нельзя приписать произвольное значение, как это было еде-
1.2. Метод возмущений 29
лано в (1.42), когда этот угол был принят равным нулю. Ниже
будет показано, что неизвестный фазовый угол б
предпочтительно вводить таким образом, чтобы иметь возможность
выбрать начальное условие, обеспечивающее удобство
последующих аналитических выкладок, а именно
*(т) = 0 при т = 0. (1.54)
Метод возмущений состоит в разложении искомого решения
х(х) в ряд по степеням малого параметра \х, коэффициенты
которого являются функциями т с периодом 2я. Помимо
разложения в ряд х9 необходимо также разложить в ряд по
степеням \i неизвестную величину б. Таким образом, решение
уравнения (1.53) ищется в форме рядов
х (х) = х0 (т) + \исг (т) + \х2х2 (т) + ..., (1.55)
6 = 60 + ^ + ^+ .... (1.56)
Продолжая аналогично тому, как в случае автономных систем,
можно определить неизвестные величины в правых частях
(1.55) и (1.56).
В качестве примера дифференциального уравнения вида
(1.52) рассмотрим уравнение Дуффинга
/12 Y
-~+x = \x(--ax — VxZ+Fcost). (1.57)
Введение неизвестного фазового угла б в уравнение (1.57) дает
*£ + х = |1[_ ax — p^ + FcosCr+d)], (1.58)
где x=t — б. Подстановка разложений (1.55) и (1.56) в (1.58)
и объединение членов с одинаковыми степенями (л дают систему
дифференциальных уравнений
\л°: 3с0 + х0 = 0, (1.59)
р,1: xl+xl = — axQ — №* + Fcos(x-\-60), (1.60)
\х2: х2 + х2 = — ахг — 3$хрсг — F6X sin (т + 60), (1.61)
В этих уравнениях неизвестные величины следует находить из
условий
*,(т + 2я) = *,(т), (1.62)
i£(0) = 0, / = 0, 1, 2, .... (1.63)
Решая уравнение (1.59) при условии i0(0) = 0, мы получаем
x0(x) = AQcosx. (1.64)
30
Гл. 1. Аналитические методы
Подстановка (1.64) в (1.60) приводит к следующему уравнению:
хг + хг =— (аД>+ jMo — -Fcos60jcos т —
— F sin 60 sin т — -1 рЛо cos Зт. (1.65)
Если коэффициенты при cost и sint в правой части уравнения
(1.65) не равны нулю, то в решении лг4(т) появляются вековые
члены. Они соответствуют колебаниям, амплитуды которых с
ростом времени т неограниченно возрастают. Условие
периодичности Xi требует, чтобы эти коэффициенты равнялись нулю;
поэтому
аД + |-Мо —^cos60 = 0, sind0=.0
Следовательно, имеем
аЛ0 + |Мо-/7 = 0, 60 = 0. (1.66)
Первое из соотношений (1.66) определяет амплитуду
А0ЛИспользуя начальное условие #i(0)=0, можно записать общее
решение уравнения (1.65) в виде
хг = Д cos т + -$2 Ио cos Зт, (1.67)
где Ai — постоянная интегрирования, которая определяется на
следующем этапе.
Подстановка выражений (1.64) и (1.67) в (1.61) дает
следующее дифференциальное уравнение:
х2 + *2 = — (аД+-|ИоД -+--jig P2^o)cost — f^smx —
— 1Мо(зЛ + ^аЛ+^Мо)со8 3т —-jlg-p^cosSt., (1.68)
Для того чтобы в решении х2(х) не появились вековые члены,
приравняем нулю коэффициенты при cost и sinr: Получаем
<•
А,- тЩ-Я- *i = 0- 0-69)
Первое выражение (1.69) определяет коэффициент At в (1.67).
В силу (1.69) общее решение уравнения (1.68) может быть за-
L2. Метод возмущений
31
писано в виде
Х2 (т) = А2 cos т + ± Мо (ЗД +1 аЛ0 + A Mo) cos Зт -
г.2 л5
+ 3^^ cos 5т, (1.70)
где Лг — постоянная интегрирования.
Продолжая таким образом, можно последовательно
определить *з(т), #4(t), ... и бз> 64* • • • • Используя условие
периодичности #з(т), определим амплитуду Аг и фазу бг:
- ЗМо (орЛЙ + 2Р2Л60 + 40рЛрЧ + 768^)
Л* = 7 о ^ • 62 = 0. (1.71)
1024
t(a + l-P^)
Учитывая полученные результаты, решение x(t) с точностью до
членов второго порядка относительно ц включительно можно
записать в виде
х (t) = (А) + нД + 112Л2) cos t +
+ £ Ио [Л + -jg- (2аЛ0 + Зр А\ +- 48 Д)] cos 3/ +
+-£p2^cos5/,' (1.72)
где амплитуды Л0, Ai и Л2 определяются соответственно
равенствами (1.66), (1.69) и (1.71).
Гармоническое решение уравнения Дуффинга с диссипатив-
ным членом
d2x
dt2
.x=^ix(—ax—^ — k^-+-FcosA (1.73)
Может быть найдено почти таким же образом. Уравнение (1.73)
можно переписать в виде
х-+х = \х[— ах— px3 — &k + .Fcos(t + 6)], (1.74)
Где т==/ — б. Решение х(т) и фазовый угол б представляются
& виде степенных рядов относительно |х, т. е.
х(т) = х0(т) +.|хл1(т)4-|а2-«2(т)+- ..., (1.75)
6 = eb+|i61 + |i%2 + .... (Ь76)
Подстановка выражений (1.75) и (1.76) в уравнение (1.74) и
приравнивание коэффициентов при одинаковых степенях \х
приводят к системе дифференциальных уравнений относительно
32
Гл. 1. Аналитические методы
неизвестных величин в правых частях (1.75) и (1.76). Эти
величины определяются из условий
xi(x + 2n) = xi(x), (1.77) -
jc,(0) = 0, / = 0, 1, 2, .... (1.78у
Способ, аналогичный описанному в предыдущем случае, дает
в первом приближении следующее решение:
л:0(т) = i40cost. (1-79)
Амплитуда А0 и фазовый угол 60 определяются из условия
периодичности хх(т), а именно
аЛ0 + -|рЛо —^cos60 = 0, Ы0 —^sindo^O,
откуда
[(a+4p^)2 + /]^ = F2.
cos60 = (a+-|-Mo)-^-. sin60 = £
Р '
(1.80)
Решение ^(т), которое обеспечивает поправочный член
порядка ц, имеет вид
xi(t) = ^iCOSt + -^-MoCOs3t. (1.81)
Амплитуда Ах и фазовый угол 6, определяются из условия
периодичности х2(т):
А =■ 3р2Л°
128(a + |-Mo + *tg60) '
6,=
9 s (1-82)
Объединяя полученные выше результаты, решение x{t) с
точностью до членов первого порядка относительно ц можно
записать в виде
х00 = (А0-\- цД)cos(* —60 — m.6j) +
j +^Lp^cos3(;-6o-nSi). (1-83)
где A0, So и At, 6i определяются соответственно уравнениями
(1.80) и (1.82).
1.3. Метод итераций
33
1.3. МЕТОД ИТЕРАЦИЙ
Метод решения нелинейных дифференциальных уравнений,
основанный на процессе последовательных итераций,
называется методом итераций.
Итерации могут выполняться целым рядом способов, однако
общим для них является следующее: сначала решается
уравнение, в котором пренебрегают некоторыми членами, затем
полученное решение подставляется в ранее опущенные члены и
определяется второе, более точное решение*).
Рассмотрим в качестве примера нахождение гармонического
решения уравнения Дуффинга
х + х = \х (— ах — рх3 + F cos т), (1-84)
где (Л—малый параметр. Будем исходить из решения2)
x0 = A0cost (1.85)
как первого приближения. Так как это решение определено без
учета правой части уравнения (1.84), то разность между х0 и
точным решением х должна быть величиной первого порядка
относительно \х.
Подстановка х0 в правую часть уравнения (1.84) дает
дифференциальное уравнение, решение которого представляет
собой второе приближение, а именно
.^4 -лг, = |х(— аЛ0 — -J-Pj4o4-^)cost — ^-ДОИоСовЗт. (1.86)
Поскольку правые части уравнений (1.86) и (1.84) могут
различаться на величину порядка \х2, можно ожидать, что второе
приближение Xi даст решение с точностью до величины первого
порядка относительно \х. Условие периодичности Xi требует,
чтобы в решении Xi не появлялись вековые члены; следовательно,
аЛ-Ь 1^0-^ = 0. (1.87)
Это уравнение позволяет определить амплитуду Л0. С учетом
(1.87) решаем (1.86) и находим
xl = Alcosx + ^ iiMo cos Зт, (1.88)
!) Графоаналитический вариант метода итераций с оценкой условий
сходимости итерационного процесса дан П. А. Ионкиным [127]. — Прим. ред.
2) К решению х0 можно добавить В0 sin t, однако в этом случае В0 на
следующей ступени итерации окажется нулем.
3 Зак. 907
34
Гл 1. Аналитические методы
где амплитуда Аи как можно ожидать, отличается от А0 только
на величину первого порядка относительно \i. Подставляя (1.88)
в правую часть уравнения (1.84), получаем
x2 + x2 = \i[ — аАг — ^А\ — — ix^AlA] -f^jcost-
— \ цр [л? + -i- ii (2а + ЗМ?) Ло] cos Зт —
— -^VlYaIaI cos 5т. (1.89)
Члены порядка выше \х2 в правой части этого уравнения
опускаются. Так как правые части уравнений (1.89) и (1.84) могут
различаться на величину порядка (л3, то третье приближение х2
должно быть решением с точностью до величины порядка \i2.
Условие периодичности для х2 дает
аД +1 рЛ? + Tig- №2AlA\ -F = 0. (1.90)
Считая, что разность между Л0 и Ai является величиной
первого порядка по |Л, решаем уравнение (1.90) относительно Ai
и получаем
3[х$2А%
Аг = Ао 9° . (1.91)
128(а + |р4)
Таким образом,
2,5
3|*Р^
(a+TP^S)
128
1 з '
cos т 4- ^9 иР-Ло cos Зт,
где Л0 определяется из уравнения (1.87). Как и следовало
ожидать, этот результат согласуется с точностью до величины
первого порядка относительно \х с решением, полученным методом
возмущений [формула (1.72)].
1.4. МЕТОД УСРЕДНЕНИЯ1)
(а) Автономные системы
Рассмотрим дифференциальное уравнение
x + x, = \if{xy x) (1.92)
*) Метод усреднения часто встречается под названием метода Ван-дер-
Поля [88]. Подробное изложение этого метода приведено, в частности, в [3].
Весьма плодотворное развитие этого метода применительно к расчету
переходных процессов в сложных нелинейных системах принадлежит Р. В. Хох-
лову [150]. — Прим. ред.
1.4. Метод усреднения
35
или эквивалентную ему систему
Х = у' (1.93)
y-\-x = \if(x9 у),
где \i — безразмерный параметр, который предполагается
малым. Предположим также, что f(x, у) —полином относительно
л; и у. Поведение рассматриваемой системы описывается
движением изображающей точки х(т), у(х) по интегральным кривым
уравнений (1.93) в плоскости ху у. Эти интегральные кривые
называются траекториями изображающей точки. При (л = 0
уравнения (1.93) становятся уравнениями гармонического
осциллятора; в этом случае траекторией является окружность с центром
в начале координат. Изображающая точка вращается по этой
окружности в направлении по часовой стрелке с единичной
угловой скоростью.
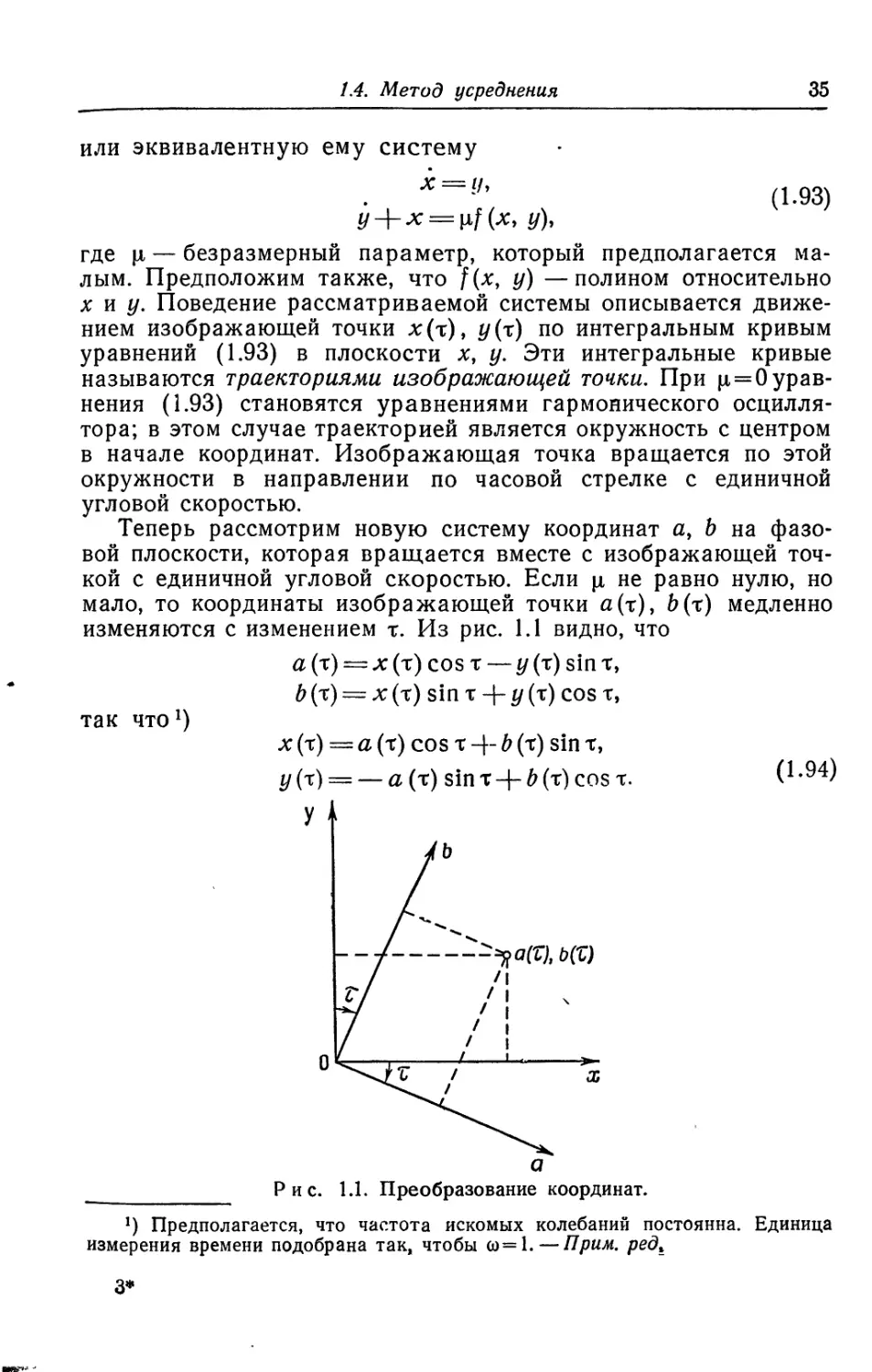
Теперь рассмотрим новую систему координат а, Ь на
фазовой плоскости, которая вращается вместе с изображающей
точкой с единичной угловой скоростью. Если \х не равно нулю, но
мало, то координаты изображающей точки а(х), Ь(х) медленно
изменяются с изменением т. Из рис. 1.1 видно, что
а (т) = х (т) cos т — у (т) sin т,
b (т) = х (т) sin т -+- у (т) cos т,
так что1)
х (т) = а (т) cos x-\-b (t) sin т,
у (т) = — а (т) sin т + Ь (т) cos т. (1-94)
Рис. 1.1. Преобразование координат.
!) Предполагается, что частота искомых колебаний постоянна. Единица
измерения времени подобрана так, чтобы со=1. — Прим. ред±
3*
36 Гл. 1. Аналитические методы
Подставляя (1.94) в (L93), получаем
a cos х -4- b sin т = О,
(1.95)
—a sin т -j- 6 cos т == pif (a cos т -f- b sin т, — а sin т -f- 6 cos т).
Решая уравнения (1.95) относительно производных а и Ь,
находим
а = — ix/ (a cos т + 6 sin т, — a sin х -f- 6 cos т) sin т,
(1.96)
b = \xf(a cos т + 6 sin т, — a sin т + b cos т) cos t.
Разлагая правые части в ряд Фурье, получаем
a=|x(-^ + -A$isinT-f-A.iCOST + -ArfSin2T-|-AaCos2T+ .. V
(В (L97)
6 = jxU^-4-^isinT + ^iCOST + ^2Sin2T4-^2COs2T+ .. Л,
где Л и 5 являются соответствующими коэффициентами Фурье
функций
— / (acosT-f-^sint, —а sinx-\-bcost) sinт,
/ (acost + ftsinr, —a sin т-f- ft cost) cost
Правые части (1.97) показывают, что a и b являются
периодическими функциями времени. Однако из-за присутствия малого
параметра \х как а(т), так и Ь(х) являются медленно
меняющимися функциями времени т. Следовательно, можно считать,
что а(х) и Ь(х) остаются приблизительно постоянными в
течение одного периода 2я. При таком предположении уравнения
(1.96) в первом приближении можно записать следующим
образом:
2я
а = — ~ J f(a cos х + Ь sin т, — a sin х -f- b cos т) sin x dx,
*° . '•<(1-98>
b = -~ I f (acost + ftsint, —asint-f-6cosT)costrfT.
0
Из (1-97) имеем
^ = FXA^A, h = ii^^L. (1.99)
Если эти уравнения сравнить с точными уравнениями (1.97), то
видно, что уравнения в первом приближении получаются из
точных уравнений путем усреднения последних за период 2я,
1.4, Метод усреднения 37
что соответствует отбрасыванию всех членов ряда Фурье, кроме
первых, в правой части (1.97).
Система (1.99) имеет то преимущество, что при переходе
к полярной системе координат переменные могут быть
разделены. Полагая
tf = rcos9, 6 = rsin8, (1.100)
из уравнений (1.98) получаем
2Л
a = rcos8—rBsin 8 = — -^- J f [r cos (8—т), г sin (8— т)] sinxdx,
о
2л
b = г sin 9 + г9 cos 8 = -^ \ f[r cos (9 — т), г sin (9 — т)] cos т dx.
о
Переменные г (г) и 8(т) в течение одного периода 2я также
остаются приблизительно постоянными, поэтому умножение
первого уравнения на cos 8, второго — на sin 8 и сложение их
дают
2rt
г = —^ \ f(r cos и, — г sin и) sin и da.
о
Аналогично получаем
2Л
8 ="2^7" f f(rcosu> — >"sin#)cos udUy (1.101)
о
где и = х— 8.
(б) Неавтономные системы
Рассмотрим дифференциальное уравнение
x-{-x=\xf(x, х, т), (1.102)
где функция f(x, i, т) явно зависит от времени т, и
предположим, что f(x, х, т+2я)=[(х, х, т). Вводя новые переменные
а(т) и Ь(т), как и ранее, получаем
х (х) = а (т) cos т + Ь (т) sin т,
/Л / ч • Л/ ч (1Л03)
у(т) = — а(х) sint + ^Wcost. v '
Так как по определению у(х) = х(х), то
a cos х -\- b sin x = 0, (1.104)
~-a sin T+ucost = (ji/:(acbST4-6sinT, —asinr + ^cost, т).
38 Гл. 1. Аналитические методы
Решение уравнений (1.104) относительно производных а и й
дает
а = — uf(a cos т -4- Ь sin т, — a sin т -4- 6 cos т, т) sin т,
(1.105)
6 = М/(acosr-f-ftsinr, —a sin т-f-6cost, t)cost.
Поскольку а и б являются медленно меняющимися функциями
времени т, мы предполагаем, что в течение одного периода 2я
они постоянны. Функция f (a cosr+ft sin т, —asinr+bcosr, т)
при этом периодична с периодом 2я. Следовательно,
разложение правых частей уравнений (1.105) в ряд Фурье дает
a = ix(-^-\-Aslsmx-\-Aclcosx-+- Л^ sin2T + ^2COs2t-f # e V
(1.106)
b = \x (-~-\-Bslsinr ~\- 5clcosT + ^2Sin2t + ^2COs2T+ ... |,
где А и В — соответствующие коэффициенты Фурье функций
— f (acost-j-ftsint, — a sin т -f- ft cost, t)sint,
f (a cos т -f- ft sin т, — a sin т + ft cos т, т) cos т.
Отбросим осциллирующие члены в правой части уравнений
(1.106); мы получим соотношения, определяющие а и б в
первом приближении, а именно
2я
а = — о^- \ f (a cos т+ft sin т, — a sin т-f-ft cos t, т) sin т rft,
(1;
b =9^ | /(# cos т-f-ft sinт, —a sin т-f-ft cost, т) cost dr.
Уравнения (1.107) довольно просто были найдены Ван-дер-Полем.
Он положил x(T) = a(t)cost + ft (T)sinr, подставил в
уравнение (1Л02) и таким образом получил
a cos т — 2а sin т -)- 6 sin т -f- 2ft cos т =
= \if (a cos т + ft sin т, — a sin т-f- b cos т -f- a cos т -f- ft sin т, т).
Следуя его методу, нужно пренебречь членами, содержащими
а, 6, |ха и ц,ё, так как а(%) и ft(r) предполагаются медленно
меняющимися функциями т. Разложение f в ряд Фурье-и прирав-
1.5. Принцип гармонического баланса
39
нивание коэффициентов при sint и cost приводит к
уравнениям (1.107).
Метод усреднения применим не только для изучения
периодических колебаний, но также и для изучения переходных
процессов, в которых амплитуда и фаза колебаний медленно
изменяются с ростом времени.
1.5. ПРИНЦИП ГАРМОНИЧЕСКОГО БАЛАНСА *)
Этот метод широко используется для нахождения
периодических решений нелинейных дифференциальных уравнений2).
Сначала поясним этот прием на основе метода усреднения,
описанного в предыдущем параграфе. Гармоническое решение
уравнения (1.102) в первом приближении может быть записано
в виде
х (т) = a cos т + b sin т, (1.108;
где амплитуды а и b считаются постоянными, так как мы
рассматриваем периодическое решение3). Тогда уравнения (1.107)
примут вид
f /{acosт-f-bsint,
о
f f (acosт + bsint,
0
Легко видеть, что эти соотношения получаются непосредственно
путем подстановки (1.108) в (1.102) и приравнивания нулю
отдельно коэффициентов при sint и cost. В этом и состоит
принцип гармонического баланса4).
!) Принцип гармонического баланса, обоснованный Н. М. Крыловым и
Н. Н. Боголюбовым [55], получил дальнейшее развитие в трудах Н. Н.
Боголюбова и Ю. А. Митропольского 110], а также в ^работе Ю. А. Митрополь-
ского [135]. — Прим. ред.
2) В монографии Н. Н. Боголюбова и Ю. А. Митропольского [10] в ряде
мест показано применение метода гармонического баланса также и для
исследования переходных процессов в нелинейных системах. — Прим. ред.
3) Далее в тексте рассматриваются колебания с частотой ю=*1. Ниже
при переходе к рассмотрению уравнения Дуффинга автор вводит и другие
гармоники. — Прим. ред.
4) Метод переходной функции [54] можно рассматривать как
приложение принципа гармонического баланса (Аналогичные идеи содержатся в
работах Л. С. Гольдфарба [134], который ввел понятие эквивалентного
комплексного коэффициента усиления нелинейного элемента, а также в работах
Е. П. Попова, И. Е. Пальтова [141] и других исследователей. — Прим. ред.)
Этот метод широко используется для анализа нелинейных систем
управления [17].
— a sin т + b cos т, т) sin т dx = 0,
(1Л09)
— a sinт-f- bcost, t)cost^t = 0.
40
Гл. 1. Аналитические метода
Периодическое решение более высокой точности может быть
получено следующим образом. Периодическое решение сначала
разлагают в ряд Фурье с неизвестными коэффициентами.
Затем предполагаемое решение подставляется в исходное
уравнение и коэффициенты при синусах и косинусах соответствующих
частот отдельно приравниваются к нулю. Решая полученную
таким образом систему уравнений, можно определить
неизвестные коэффициенты предполагаемого решения. В периодическом
решении принимаются во внимание только члены основной
частоты и дополнительно несколько членов других частот (обычно
частот субгармоник или ультрагармоник), поскольку они
наиболее важны. Могут, конечно, присутствовать и члены других
частот, однако их можно в большинстве случаев опускать.
Лучшее приближение можно получить, если принять в расчет
большее число членов ряда Фурье. Однако вычисления в этом
случае оказываются слишком громоздкими.
Опишем один практический способ получения улучшенного
приближения на основе принципа гармонического баланса.
Рассмотрим гармоническое решение уравнения Дуффинга
4S + * ^ + ax + px3 = Fcost. (1.110)
Возьмем в качестве первого приближения решения функцию
х0 (т) = Л10 cos т + Вго sin т (bill)
и попытаемся найти решение более высокой точности, которое
не существенно отличается от первого приближения1).
Подстановка выражения (1.111) в (1.110) дает
[— (l — а — ~ р/&) Лю+ kBio] cos T-+
+ [— (l — a — |- p/tfo) Вю — kAxo] sin т +
4-1 p (Л?0 — 3£io) Лio cos Зт +
+1р(ЗЛ?о — £?0)£iosin3T==/7cosT, (1.112)
где Rio = Л?о+ Bio. Так как в первом приближении
принимаются во внимание только члены, содержащие основную
гармонику, то слагаемые, содержащие третью гармонику, опус-
*) Уравнение (1.110) может иметь другие периодические решения, в
которых преобладают составляющие ульграгармоник или субгармоник. В таких
случаях эти составляющие должны быть включены в решение (1.111;.
(1.113)
1.5. Принцип гармонического баланса 41
каются и приравниваются коэффициенты при sint и cost в
обеих частях равенства, т. е.
— (l—« — ^№2ю) A1Q + kBl0 = F,
Ыю+(1— а — -§-Р#1о)я10 = 0,
откуда
Л10 = -(1-а — |р/??0)^. Bl0 = k^> (1.114)
где [(l-a-lp^+A2]/?^-/72.
Второе приближение берется в виде
л: (т) = (Аго+еЛп) cos т + (Bl0 + е£п) sin т -f
+ еЛ31 cos Зт + е531 sin Зт. (1.115)
Следует заметить, что введение малого параметра е в
поправочные члены показывает порядок величин коэффициентов.
Подставим (1Л15) в (1.110) и приравняем нулю отдельно
коэффициенты при cost, sint, cos3t и sin3t. Пренебрегая членами,
содержащими 8 в степенях выше первой, получаем систему
уравнений
»
(1 —а—3/ — п)гАи — (k-{-m)eBn—(/—/г)еЛ31 —теВг1 = 0,
(k — т) гАи + (1 —а — /—Злг) гВи + meAzl—(l—n) гВг1 = 0,
— (/ — п) гАп + тгВп + (9 — а — 2/ — 2п) еЛ31 — 3keB3l =
=(|/-/г)л10, (Ы16)
— тгАп — (/ — п) е£п -|-3&ЛГ1 -f (9 — а — 2/ — 2/г) е£31 =
= (l--Ln)Bl0,
где
/ = *4-Mio. т = уРЛю5ю, п = -£$В\о-
Решение системы линейных уравнений (1.116) дает
коэффициенты гА1и еВц, еЛ31 и eB3i поправочных членов в равенстве
(1.115). Метод улучшения приближения, описанный выше,
особенно полезен, когда амплитуда каждой гармоники
уменьшается с ростом порядка гармоник.
42 Гл. 1. Аналитические методы
1.6. ЧИСЛЕННЫЕ ПРИМЕРЫ РЕШЕНИЯ
УРАВНЕНИЯ ДУФФИНГА
Аналитические методы, описанные в предшествующих
параграфах, считаются пригодными только для решения
дифференциальных уравнений с малой нелинейностью. При
использовании этих методов приближенное решение ищется в виде
степенного ряда по малому параметру (л, степень которого
последовательно возрастает. Когда параметр \х становится
большим, такие последовательные приближения уже неприемлемы.
Однако и при этом условии указанные методы все еще можно
применять.
В этом параграфе мы рассмотрим уравнение Дуффинга с
конкретными значениями параметров, а именно
-g-+x3 = 0,2 cost, (1.117)
4^ + 0,2 U + x3 = 0,3cost. (1.118)
Эти уравнения можно получить, полагая малый параметр \х в
предшествующих параграфах равным единице [уравнения (1.57)
и (1.73)]. Гармоническое решение уравнения (1.117) можно
записать в виде
х(х) = Агcost-f-AjcosЗт Ь Л5 cos 5т-|- .... (1.119)
Коэффициенты ряда, найденные методом возмущений и
методом гармонического баланса, приведены в табл. 1.1 и 1.2.
Таблица 1.1
Гармонические решения уравнения (1.117),
полученные методом возмущений
Гармоническое
решение
1
2
3
Порядок
приближения
Первый
Второй
Третий
Первый
Второй
Третий
Первый
Второй
Третий
Приближенное решение
Ах
—0,207
—0,207
—0,207
1,244
1,216
1,211
—1,037
-1,017
-1,016
А,
—0,000
—0,000
0,060
0,066
—0,035
—0,036
л
0,000
0,003
—0,001
1.6. Численные примеры решения уравнения Дуффинга 43
Таблица 12
Гармонические решения уравнения (1.117),
полученные методом гармонического баланса
I армони-
ческое
решение
1
2
3
Порядок
приближения
Первый
Второй
Третий
Первый
Второй
Третий
Первый
Второй
Третий
Приближенное решение
А
—0,207
—0,207
—0,207
1,244
1,213
1,212
—1,037
—1,017
—1,016
А
—0,000
—0,000
0,067
0,066
—0,036
—0,035
Аь
0,000
0,003
—0,001
В этом частном случае имеются три типа гармонических
колебаний. Точные решения с точностью до четвертого
десятичного знака получены на цифровой вычислительной машине. Они
равны:
хх (т) = — 0,2066 cos т — 0,0003 cos Зт —
— 0,0000 cos 5т — 0,0000 cos 7т -f ....
х2 (т) = 1,2103 cos т-f 0,0658 cos Зт +
+ 0,0035 cos 5т + 0,0001 cos 7т +
*3(т) = —1,0161 cost —0,0352 cos Зт —
— 0,0012 cos 5т— 0,0000 cos 7т +
Третье приближение в табл. 1.1 и 1.2 удовлетворительно
согласуется с этими решениями.
В качестве второго примера рассмотрим нахождение
гармонического решения уравнения (1.118)
л;(т) = Д cosT + #iSinT +A}Cos3t + 53sui3t +
Коэффициенты этого решения приведены в табл. 1.3 и 1.4.
44 Гл. 1. Аналитические Методы
Точные решения с коэффициентами, вычисленными вплоть
до четвертого десятичного знака, следующие:
хг (т) = — 0,3101 cos т + 0,0670 sin т —
— 0,0007 cos Зт + 0,0004 sin Зт +
х2 (т) = 0,6864 cos т + 0,9841 sin т —
— 0,0597 cos Зт +0,0214 sin Зт+ ....
л:3(т)== —0,7404cost+ 0,6768 sinт-4-
+ 0,0223 cos Зт-+-0,0231 sin3r+
Второе приближение в табл. 1.3 и 1.4 хорошо согласуется с
этими решениями.
Таблица 1.3
Гармонические решения уравнения (1.118),
полученные методом возмущений
Гармоническое
решение
1
2
3
Порядок
приближения
Первый
Второй
Первый
Второй
Первый
Второй
Приближенное решение
Аг
—0,310
—0,310
0,703
0,717
-0,748
—0,745
В\
0,067
0,067
1,012
0,972
0,699
0,669
А,
—0,001
—0,055
0,020
Вг
0,001
0,019
0,027
Таблица 1.4
Гармонические решения уравнения (1.118),
полученные методом гармонического баланса
Гармоническое
решение
1
2
3
Порядок
приближения
Первый
Второй
Первый
Второй
Первый
Второй
Приближенное решение
Аг
—0,310
—0,310
0,703
0,684
—0,748
—0,744
#i
0,067
0,067
1,012
0,988
0,699
0,671
А,
—0,001
—0,061
0,022
вг
0,001
0,021
0,026
ГЛАВА 2
Топологические методы
и графические решения
2.1. ВВЕДЕНИЕ
Топологический метод анализа !) является одним из важных
способов исследования различных явлений, связанных с
нелинейными колебаниями. Этот метод применяется для изучения
автономных систем. При помощи этого метода решения
дифференциальных уравнений ищутся не как явные функции времени,
а в виде интегральных кривых в фазовом пространстве или,
более общим образом, в пространстве состояний2).
Исследование интегральных кривых позволяет получить достаточное
представление о качественном характере решения, а также
некоторые количественные данные. Однако если полагаться на
графические методы представления решений, то применимость метода
обычно ограничивается системами малого порядка.
Условие равновесия, когда система находится в состоянии
, покоя, соответствует особой точке3) в пространстве состояний;
периодическим решениям соответствуют предельные циклы.
Следовательно, интегральные кривые, которые стремятся к таким
особым точкам или предельным циклам, могут изображать
переходный режим системы. В этой главе рассматриваются
общие свойства особых точек и предельных циклов, а также
описываются некоторые методы графического решения нелинейных
дифференциальных уравнений.
Для изучения нелинейных дифференциальных уравнений
используется также метод отображений. Неподвижные точки
и инвариантные кривые относительно повторного отображения
обладают свойствами, аналогичными свойствам особых точек и
интегральных кривых дифференциальных уравнений. Подобные
исследования будут изложены в гл. 10.
*) Большое число фундаментальных работ по топологическому анализу
опубликовано в Советском Союзе. Особенно значительный вклад внесен
школой А. А. Андронова (см., например, [3, 115]). — Прим. ред.
2) Обширная область исследования топологических свойств методами
векторного анализа рассмотрена в [130]. Интересное исследование на эту
тему проведено К. М. Поливановым и Ф. П. Жарковым [139]. — Прим. ред.
3) Такого рода термины определяются в следующем параграфе.
46 Гл. 2. Топологические методы и графические решения
2.2. ИНТЕГРАЛЬНЫЕ КРИВЫЕ И ОСОБЫЕ ТОЧКИ
НА ПЛОСКОСТИ СОСТОЯНИЙ
В этом параграфе мы рассмотрим автономную систему,
которая описывается двумя дифференциальными уравнениями
первого порядка, а именно
£ = Х(х,у), 4L = Y(x.y), (2.1)
где Х(ху у) и Y(x, у) —полиномы относительно х и у. Можно
исключить из этих уравнений dx и написать
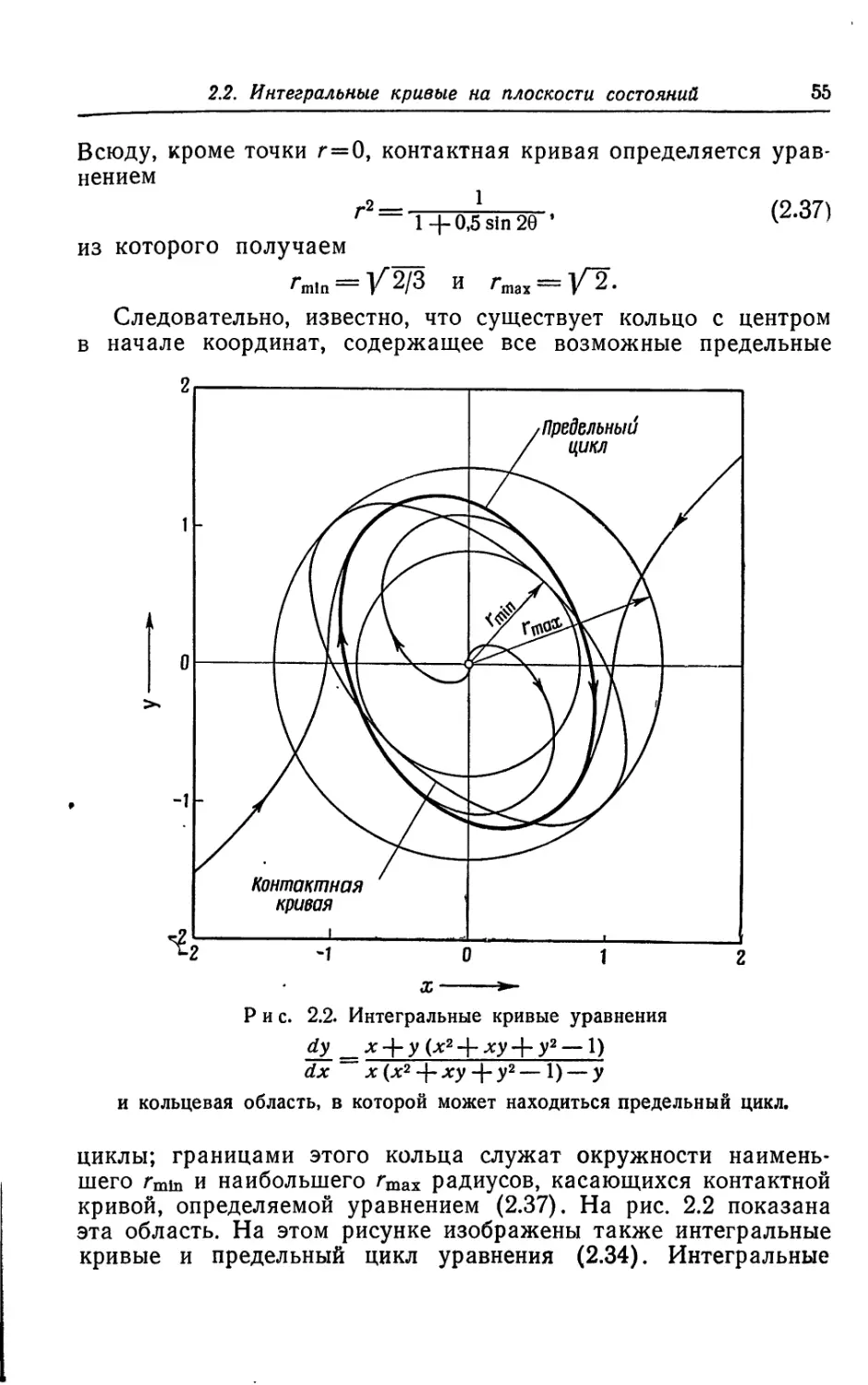
dy_ _ У (х, и) ,9 9.
dx ~~ X (х, у) ' ^'^
Как упоминалось выше, мы ищем интегральные кривые
уравнения (2.2) на плоскости х, у, т. е. на плоскости состояний
переменных х и у. Если между переменными имеется соотношение
типа dx/dx=y, то плоскость состояний называют фазовой
плоскостью. После того как получены интегральные кривые
уравнения (2.2) на плоскости состояний, нетрудно найти решения
х{х) и у{х) уравнений (2.1). Таким образом, поведение системы
может быть представлено движением изображающей точки
*(*)» У СО по интегральным кривым уравнения (2.2). Эти
интегральные кривые называются траекториями изображающей
точки.
Любая точка х, у, для которой функции Х(х, у) и Y(xy у)
не обращаются в нуль одновременно, называется обыкновенной
точкой, соответствующей уравнению (2.2). Точка х0, {/о, в
которой X(x0i уо) = Y(x0, Уо) =0, называется особой точкой.
Физически особая точка представляет собрй точку равновесия, так
как при этом условии х(х) и у(х) постоянны.
Рассмотрим систему дифференциальных уравнений вида
dx
—.==а1х-\-а2у-\-Х2(х, у),
и (2-3)
±jL = bxx+b2y + Y2{x, у),
где Х2, Y2 — полиномы, состоящие из членов порядка выше
первого относительно хну. Так как правые части этих уравнений
равны нулю при x = y=0, то начало координат является особой
точкой1). Будем интересоваться пока интегральными кривыми
1) Заметим, что при помощи замены переменных всегда можно перевести
особую точку х0, уо в начало координат и таким образом получить
дифференциальное уравнение вида (2.3) в окрестности этой особой точки.
2.2. Интегральные кривые на плоскости состояний 47
= 0. (2.8)
в окрестности начала координат. Тогда вместо уравнений (2.3)
можно рассматривать линейные уравнения
£L = aiX 4. а2у, ^L = bxx + b2y, (2.4)
из которых, исключая т, получаем
dy _ bix + b2y /25^
dx ахх-\-а2у ' \ ' )
Полагая
х=Аеи, у = ВеХх (2.6)
и подставляя эти решения в уравнения (2.4), имеем
(ах — X) А'+ а2В = 0, ЬХА -f (ft2 — А,) £ = 0. (2.7)
Нетривиальные решения для Л и В существуют только в том
случае, когда X является корнем характеристического уравнения
ах — X а2
Ьх Ь2 — X
Решение этого квадратного уравнения дает
jL _ fli + h ± У(а\ — Ь2)2 + 4д^7 /2 д\
Рассмотрим случай, когда корни Xi (i=l, 2) не равны нулю и
различны. Если значения Xi найдены, то отношение BJAi опре-
, деляется из уравнений (2.7), а именно
J^=aL=2± = T=Jim (2
А[ — а2 о2 — Х[ v '
Общее решение уравнений (2.4) можно записать в виде
x = AxeK>x+A2ehx, y = Bxe^x + B2ehx. (2.11)
Так как отношение ArfBi определяется равенствами (2.10), то
произвольные постоянные в (2.11) могут быть определены из
начальных условий.
(а) Классификация особых точек
Пуанкаре [84, стр. 14] классифицировал типы особых точек
в зависимости от характера интегральных кривых вблизи этих
особых точек, т. е. в зависимости от вида корней
характеристического уравнения.
1. Особая точка является узловой точкой (или просто
узлом), если корни характеристического уравнения оба
действительны и одного знака, т. е. если
(al — b2)2 + 4a2bl>0 и ахЬ2—афх>0. (2.12)
48 Гл. 2. Топологические методы и графические решения
2. Особая точка является седловой точкой (седлом), если
оба корня действительны, но имеют разные знаки, т. е. если
(а, — b2f -f Aa2bx > О и axb2 — a2bx < 0. (2.13)
3. Особая точка является фокальной точкой (или просто
фокусом), если корни комплексно сопряженные, т. е. если
(ax — b2f-\-4a2bx<0. (2.14)
4. Особая точка является либо центром, либо фокусом1),
если оба корня мнимые, т. е. если
К — b2)2+4a2bx<0 и ^+.^ = 0. (2.15)
В этом случае невозможно различить эти две особые точки,
используя только линейные уравнения (2.4) 2).
Кроме того, мы считаем особую точку устойчивой, если при
возрастании т изображающая точка интегральной кривой
движется в сторону этой особой точки, и неустойчивой — в
противном случае. Для устойчивых особых точек действительная
часть X отрицательна, для неустойчивых положительна.
Рис. 2.1. Типы особых точек на плоскости состояний.
Рассмотрим примеры разных типов особых точек. На
рис. 2.1, (а) приведен пример узловой точки. Особая точка этого
примера является устойчивой, так как изображающая точка
*(т)> у(ъ) с ростом т движется по интегральной кривой в
направлении, указанном стрелками, и в конце концов приходит
в узловую точку. К седловой точке на рис. 2.1, (б) примыкают
четыре траектории, составляющие две различные интегральные
кривые. По двум из этих траекторий с увеличением т точка
*(т)> У(г) приближается к особой точке, в то время как по двум
другим удаляется от нее, так что седло является существенно
*) В случае фокуса употребляется также термин спиральная точка, а в
случае центра — вихревая точка.
2) Что касается уравнений (2.3), Пуанкаре [84, стр. 95] дал критерий,
позволяющий различать эти особенности (разд. V. 2).
2.2. Интегральные кривые на плоскости состояний 49
неустойчивой особой точкой. Мы видим также, что между
указанными траекториями расположены четыре области,
содержащие континуум интегральных кривых гиперболической формы,
которые не достигают особой точки. На рис. 2.1, (в) приводится
пример неустойчивого фокуса, из которого выходят траектории,
не имеющие в этой точке определенного направления. Наконец,
на рис. 2.1, (г) представлен центр, окружаемый континуумом
кривых, из которых ни одна не достигает особой точки.
Направление интегральных кривых в особых точках типа
узла или седла может быть найдено следующим образом.
Сначала предположим, что заданы такие начальные условия, при
которых Ai = 0 или Л2=0 в (2.11); тогда
у В2 у в.
Эти уравнения прямых, проходящих через особую точку, дают
направление интегральных кривых в особой точке. Обозначая
у/х через (л, мы с учетом (2.9) и (2.10) получаем
_ — (Д1 — Ь2) ±V(al — b2y -f 4a2&7 /о ia\
Mi, 2 — 2а~2 • {* Щ
Таким образом, как и должно быть, направление
интегральных кривых определено, когда jii и ц,2 действительны, т. е.
когда особая точка либо узел, либо седло.
(б) Каноническая форма дифференциальных уравнений
Уравнения (2.4) при помощи линейных преобразований
можно привести к каноническому виду. Умножая первое
уравнение на /, второе на m и складывая, получаем
11R + m % = ^ + **т) х + ^ + ^т) У* (2Л 7)
где / и пг — постоянные, которые легко определяются. Выберем
постоянную % так, что
axl -\- bxm = М, (аг — X)I + bxm = О,
или (2.18)
a2l-\-b2m = Xm, a2l-\-(b2— X)m = 0.
Нетривиальное решение для I и m существует только в случае,
когда X является корнем квадратного уравнения
\ а, —% ЬЛ I
I «, *-лГа (2Л9>
4 За*. 907
50 Гл. 2. Топологические методы и графические решения
Отношения h/nii и 1г1шъ соответствующие корням Xt и А,2
уравнения (2.19) (которые предполагаются различными)1), могут
быть определены из уравнений (2.18). Полагая
а = lxx+mxy, v = l2x-\- щу, (2.20)
мы с учетом (2.17) и (2.18) получаем
|Н^# + ^1НМЛ* + *10) = М. -ЯГ = **«- (2-21)
Таким образом, в результате линейного преобразования (2.20)
уравнения (2.4) преобразуются к канонической форме (2.21).
Уравнение (2.19), так же как и (2.8), является
характеристическим уравнением системы (2.4).
Если корни этого характеристического уравнения U и Яг
комплексно сопряженные, то и и v являются также комплексно
сопряженными. Полагая
Я,1==а + уР, й = Б + УЛ.
А,2 = а — ур, z> = | —/г)
(j — мнимая единица) и подставляя в (2.21), мы получаем
-§=<4-рЧ. -^ = р| + ал. (2.22)
Уравнения (2.22) легко решаются путем введения полярных
координат g=pcosq>, T] = psin(p. В этих переменных уравнения
приводятся к виду
■S—P. 1=Р. (2-23)
и интегральные кривые определяются формулой р = С^(а/Р)ф, где
С — постоянная интегрирования. Таким образом, эти
интегральные кривые являются логарифмическими спиралями.
(в) Интегрирование уравнения (2.5)
Уравнение (2.5) легко проинтегрировать известным
способом, применяемым для однородных уравнений. Решение ищется
в виде
(у — ix.xf1 (у — \12х)~к = const, (2.24)
где A,i 2 и \ц 2 определяются соответственно формулами (2.9)
и (2.16).
1) Если характеристическое уравнение (2.19) имеет двойной корень
Я=Л1 = Лг, то вместо уравнений (2.21) мы получаем следующий вид
канонических уравнений:
du . dv t «
dx dx '
Подробности см. в [16, стр. 83].
1
Z.2. Интегральные кривые на плоскости состояний 51
В частности, если в указанном уравнении (ai—b2)2+4a2bi=0,
то %i=k2 и 1И=М-2. В этом случае решение принимает вид
log[(al-b2)x^2a2y] = ^bVA^y +const- <2-25)
Если а2 = 0, то
[bxx+(b2 — ах)у\ x~b^ = const. (2.26)
В случае, когда особая точка является фокусом, К и \i в
уравнении (2.24) являются комплексными числами. При этом
целесообразно выразить интегральные кривые в полярных
координатах
x = rcos8, y = rsin9.
Тогда уравнение (2.5) примет вид
1 dr_ ax cos2 Q -f- (а2 -\- bx) sin 9 cos 9 -f- Ь2 sin2 9 ,~ ^74
T dQ~ bx cos2 9 + (b2 — aO sin 9 cos 9 — a2 sin2 9 " \*-*')
Проинтегрировав (2.27), получаем [109]
r> 0M arc tg О
r= . c'e (2.28)
V ^ cos2 9 + (b2 — л0 sin 9 cos 9 — a2 sin2 9 v
где
д{ = д1 + ^2 q_ — 2д2 tg 9 — a2 + fr2
D = (ax — b2f+Aa2bx (D < 0).
(С — произвольная постоянная.)
Интегральные кривые спиралями охватывают начало
координат. Изменение радиуса спирали г за каждый оборот
определяется выражением
г (0 + 2я) = е°'2лМ • г (6), (2.29)
где о равно 1 или —1 соответственно при а2 < 0 или а2 > 0.
Далее из (2.4) получаем
^ilft-^ + ^+W cos28 + (*2 -aO sin 20].
Так как особая точка является фокусом, имеем
{ax — b2)2-\~4a2bx<0
или
(bx-a2f > (a2+bxf + {b2-axf;
4*
52 Гл. 2. Топологические методы и графические решения
при этом dQ/dx имеет тот же знак, что и (Ьг—а2). Поскольку
а2 и Ьг имеют разные знаки, можно заключить, что
1. Если а2 >0 (или bl<0)> то -тг<0-
dl (2-3°)
2. Если а2 < О (или Ьх > 0), то -^ > 0.
Отсюда следует, что при а2>0 изображающая точка (г, 6)
движется с ростом т по интегральной кривой в направлении по
часовой стрелке и стремится к особой точке при условии, что
£~2яЖ>1или (а! + 62)<0. В этом случае особая точка устойчива.
Другие возможные случаи могут быть рассмотрены
аналогичным образом.
(г) Особые точки в частных случаях; особые точки более
высокого порядка
Согласно классификации, приведенной в п. 2.2(a), тип
особой точки определяется видом корней характеристического
уравнения Xi и Х2, исключая случаи, когда эти корни равны нулю,
чисто мнимые или кратные. Теперь обсудим некоторые из этих
исключенных частных случаев.
Сначала рассмотрим случай, когда (аА — b2)2 + 4a2bl = Q.
Корни Xi и Х2 действительны и равны. Хотя подробное рассмотрение
здесь не приводится1), однако можно заключить, что
соответствующая особая точка является узлом. Пример такого случая
будет приведен в п. 8.6(a).
Важно заметить, что условие ai + &2=0 не является
достаточным для различения центра и фокуса в случае, когда (а4—Ь2)2 +
+4a26t<0. В этом случае корни А* и Х2 являются чисто
мнимыми и имеют разные знаки. Следуя анализу, проведенному
Пуанкаре [84, стр. 95], мы приводим в § V.2 критерий
различения этих двух типов особых точек. Применение этого критерия
будет показано в п. 13.4(6).
До сих пор мы рассматривали простые особые точки.
Особая точка, для которой один или оба корня
характеристического уравнения равны нулю, называется особой точкой более
высокого порядка. Хотя бы один корень равен нулю, если
выполняется одно из следующих условий:
а1 = а2 = 0, Ьг = Ь2 = 0 или ^ = ^- (2.31)
Если a!=a2 = 0 (или bi = fr2=0), то кривая Х(х, t/)=0 (или
Y(xf у) =0) имеет в начале координат (т. е. в особой точке)
кратную точку, а если ai/a2=fti/&2, то кривые Х(х, у) =0 и
Y(x, y)=0 имеют в начале координат общую касательную.
1) Строгое рассмотрение характера данной особой точки приводится Бен-
диксоном [6, стр. 50].
й.2. Интегральные криёые На йлоскости состояний S3
В подобных случаях тип особой точки определяется
полиномами Х2(х, у) и У2{х, у) из уравнений (2.3), содержащими
члены порядка выше первого относительно х и у.
Следуя методике, разработанной Бендиксоном, можно
изучить особые точки более высокого порядка, а также получить
аналитическое выражение для интегральных кривых вблизи этих
точек. Можно ожидать (хотя и не всегда) совпадение особых
точек, когда один из корней характеристического уравнения
равен нулю. Подобные примеры будут рассмотрены в п. 8.6(6),
13.3(6), 13.4(a) и 13.6(6), где получаются особые точки типа
узел-седло. Случай, когда оба корня характеристического
уравнения равны нулю и особая точка является точкой типа угла,
рассматривается в п. 8.5(6).
(д) Предельные циклы
До сих пор мы рассматривали особые точки и интегральные
кривые системы дифференциальных уравнений. Интегральные
кривые обычно заканчиваются в устойчивой особой точке типа
узла или фокуса. Когда особая точка является центром,
интегральные кривые образуют континуум концентрических петель
вокруг центра, которого ни одна из них не достигает. Физически
это соответствует консервативным системам. Однако в
некоторых неконсервативных системах обнаруживаются замкнутые
траектории или предельные циклы, на которые с обеих сторон
навиваются соседние траектории.
Для нелинейной системы, описываемой уравнениями
£ = Х{х,у), 4L = V{x,y), (2.32)
установление существования предельного цикла представляет
в общем случае достаточно трудную задачу. Метод
контактных кривых, предложенный Пуанкаре, иногда оказывается
полезным при нахождении расположения возможного
предельного цикла. С этой целью рассмотрим сначала семейство
концентрических окружностей с центром в особой точке
уравнений (2.32).
Затем найдем на плоскости х, у геометрическое место точек,
в которых эти окружности касаются интегральных кривых
уравнений (2.32). Это геометрическое место точек образует
контактную кривую. Предположим, что эти контактные кривые
лежат в ограниченной области на плоскости х, у. Если
предельный цикл вообще существует, то он должен быть расположен
в кольце с центром в особой точке, границами которого служат
«самая внешняя» и «самая внутренняя» из окружностей,
касающихся контактной кривой; их радиусы мы обозначим
соответственно rmax и rmin.
54 Гл. 2. Топологические методы и графические решения
До сих пор мы рассматривали семейство концентрических
окружностей, касающихся интегральных кривых уравнений
(2.32). Лучшее приближение к предельному циклу можно
получить, если вместо концентрических окружностей выбирать более
подходящие по форме замкнутые кривые.
Иногда можно установить, что предельных циклов нет; в
некоторых случаях оказывается полезным критерий Бендиксона
[6, стр. 78], который дает условие отсутствия замкнутых
траекторий. Критерий Бендиксона формулируется следующим
образом: если выражение дХ/дх+dY/dy не меняет знака в
некоторой области D плоскости х, у, то в этой области не могут
существовать замкнутые траектории.
Доказать это легко. Предположим, что в области D
существует замкнутая траектория y- Согласно известной теореме
Гаусса, если D' — область, заключенная внутри y> то
Однако вдоль пути y удовлетворяются уравнения (2.32),
так что Xdy— Ydx=0. Отсюда следует, что криволинейный
интеграл равен нулю. Полученное противоречие доказывает
критерий.
Пример.
Рассмотрим дифференциальное уравнение
dy _ х + у(х* + ху + у2 — 1) /9 одч
dx ~ х(*2 + ху + У2 — 1) — У ' У V
Так как начало координат является особой точкой,
рассмотрим семейство концентрических окружностей с центром в
начале координат:
х2+у2 = const;
для этих окружностей
! = -?• С2-35)
Контактная кривая определяется уравнением
х+у(х* + ху + у*-1) _ х
х(х2 + ху + у2 — 1) — у у '
или
(х* + ху+у*-\)(х* + у*) = 0. (2.36)
Введение полярных координат #=rcos8, y=rsin0 преобразует
уравнение (2.36) к виду
[(1+A5sin20)r2— 1]г2=0.
2.2. Интегральные кривые на плоскости состояний 55
Всюду, кроме точки г=0, контактная кривая определяется
уравнением
1
г2_.
(2.37)
1+0,5 sin 20 '
из которого получаем
гтш = УЩ и гтах = 1Л2.
Следовательно, известно, что существует кольцо с центром
в начале координат, содержащее все возможные предельные
ih
-1Н
h
Г №
итюктная
кривая
i
/Предельный
/ цикл 1
J?J^V/\
\ / 1 / \ /
—«—— 1 *
-1
1
Рис. 2.2. Интегральные кривые уравнения
dy _^х + у(х2 + ху + у2-\)
dx х (х2 + ху + у2 — 1) — у
и кольцевая область, в которой может находиться предельный цикл.
циклы; границами этого кольца служат окружности
наименьшего rmin и наибольшего rmax радиусов, касающихся контактной
кривой, определяемой уравнением (2.37). На рис. 2.2 показана
эта область. На этом рисунке изображены также интегральные
кривые и предельный цикл уравнения (2.34). Интегральные
56 Гл. 2. Топологические методы и графические решения
кривые получены путем преобразования уравнения (2.3.4) к виду
dr
rdQ
= (1+0,5 sin28)r2 —1
и использования изоклин rdQ/dr (§ 2.4). Очевидно, что
контактная кривая определяется одной из этих кривых, для которой
dr/(rdQ)=0.
2.3. ИНТЕГРАЛЬНЫЕ КРИВЫЕ И ОСОБЫЕ ТОЧКИ
В ПРОСТРАНСТВЕ СОСТОЯНИЙ
Рассмотрим систему дифференциальных уравнений первого
порядка
dx
— = aix + a2y-{-azz-{-X2(x, у, z),
*jL==blx+b2y + bzz+Y2{x, у, z\ (2.38)
-4±==Clx-{-c2y-\-czz + Z2{x, у, z),
где X2i Y2 и Z2 — полиномы, содержащие члены порядка выше
первого относительно х, у и z.
Поскольку правые части уравнений (2.38) равны нулю для
x=y=z=0, начало координат является особой точкой. В
окрестности этой особой точки мы можем рассматривать следующую
систему линейных дифференциальных уравнений:
(2.39)
Полагая
х = Аек\ у = Ве%\ z = Ceu (2.40)
и подставляя эти решения в (2.39), получаем
blA-\-{b2 — %)B + bzC = 0t (2.41)
clA-{-c2B + (c3 — X)C = 0.
dx
~1х
dy
dx
dz
dx
^=агх + а2у-+-а^
= bxx-\-b2y-\~bzz,
= cxx-\-c2y + czz.
2.3. Интегральные кривые в пространстве состояний 57
Нетривиальное решение для А, В и С существует только
в том случае, когда Я, является корнем характеристического
уравнения
(Х\ — А/ а2 #з
Ьг Ь2 — Х Ьг
Сл Со Cq
= 0. (2.42)
Рассмотрим случай, когда корни Хг (/=1, 2, 3) не равны нулю
и различны. Для конкретных значений Л* отношения Ах: В{: С*
определяются из уравнений (2.41); таким образом, получаем
где Djk(%i) —алгебраическое дополнение элемента /-й строки
и &-го столбца. Общее решение системы (2.39) может быть
записано в виде
х = Ахе^х + А2ек»х + А3ек*х,
у = вгек*х 4- В2е**х + Я3*м. (2-44)
г = Сге^х -+• С2*х* + С3*х»т.
Заметим, что отношения Л<: В{: С* определяются уравнениями
(2.43), поэтому формулы (2.44) включают три произвольные
постоянные.
»
(а) Классификация особых точек
Следуя Пуанкаре [84, стр. 167], типы особых точек
уравнений (2.39) можно классифицировать в зависимости от вида
корней А, характеристического уравнения (2.42).
1. Если все корни действительны и одного знака, то особая
точка является узлом.
2. Если все корни действительны, но имеют разные знаки,
то особая точка является седлом.
3. Если среди корней имеется один действительный и два
комплексно сопряженных, сумма которых имеет тот же знак,
что и действительный корень, то особая точка является фокусом.
4. Если среди корней имеется один действительный и два
комплексно сопряженных, сумма которых имеет знак,
противоположный знаку действительного корня, то особая точка яв*
ляется седлом-фокусом.
5. Если два комплексно сопряженных корня чисто мнимые,
то особая точка может бьпь центром, фокусом или седлом-
фокусом.
&
58 Гл. 2. Топологические методы и графические решения
Типы особых точек в пространстве состояний показаны на
рис. 2.3. Поступая так же, как и для случая фазовой плоскости
(г) Седло-фокус (д) Центр
Рис. 2.3. Типы особых точек в пространстве состояний.
в п. 2.2(a), находим, что направление интегральных кривых
в особой точке для действительных значений X определяется
формулой
x:y:z = Ai:Bl:Cl*=Dll (Л,): D12 fa): D13 (kt). (2.45)
2.4. Метод изоклин
59
(б) Каноническая форма дифференциальных уравнений
Подобно тому, как это делалось для двумерного случая в
п. 2.2(6), уравнения (2.39) можно привести к каноническому
виду
du * dv * dw . /п ,оч
где %i (/=1, 2, 3) являются корнями уравнения (2.42), а новые
переменные и, v и w определяются уравнениями
а = lxx + я^у -f- #i<£,
^ = /2X4- ^2f/ + #2^, (2.47)
^ = /3x + w3// + *hz-
Отношения liimiirii (/=1, 2, 3) определяются из выражений
h Щ ni /9 дя\
Dn(h) D2X(U) ~ /).iW K ™}
где Djft (^г) — алгебраическое дополнение элемента /-й строки
и k-vo столбца.
Когда среди корней X уравнения (2.42) имеется один
действительный, скажем Хи и два комплексно сопряженных, Х2 и Лз,
мы можем написать
А,3 = а — ур, ^ = 1 — /^. ^ ' '
• Подстановка выражений (2.49) в (2.46) приведет к
уравнениям
-g- = al - рт|, U = К + «Л, (2.50)
которые легко интегрируются путем введения полярных
координат [см. уравнения (2.22)].
2.4. МЕТОД ИЗОКЛИН
В предшествующих параграфах мы уже обсуждали
характер особенностей и предельных циклов дифференциальных
уравнений (2.3) и (2.38). При рассмотрении особых точек этих
систем важную роль играют линейные части уравнений.
Интегральные кривые этих уравнений, расположенные вне
окрестностей особых точек, определяются присутствием членов
более высокого порядка. Поскольку общие решения этих
уравнений трудно получить в аналитической форме, обычно
используются графические методы решения.
60 Гл. 2. Топологические методы и графические решения
Основным графическим методом является известный метод
изоклин. Применим этот метод к системе, описываемой
уравнениями %
£=Х(х,у), 4L = Y(x,y); (2.51)
при этом мы будем искать интегральные кривые уравнения
* = *$у[> (2.52)
dx X (ху у) v '
которое получается из системы (2.51) исключением
независимой переменной т. Функции Х(х, у) и Y(x, у) могут быть
нелинейными относительно х и у. Предположим, что
4-х = ICwh = П*,У) = с = const. (2.53)
Это уравнение полностью определяет кривую на плоскости х, у,
вдоль которой наклон dy/dx интегральных кривых остается
постоянным. Такая кривая называется изоклиной. Очевидно, что
наклон интегральных кривых в особой точке не определяется
однозначно, и изоклины будут пересекаться в этой точке.
Метод изоклин дает возможность исследовать поле
интегральных кривых графически, не решая дифференциального
уравнения. После того как кривая F{xy y)=c проведена, вдоль
нее наносят короткие отрезки прямых, имеющих заданный
наклон dy/dx —с. Повторяя эти построения для других
значений с, получают ряд кривых
F{x, y)=c, си с2, ...
с соответствующими наклонами, указанными на этих кривых.
Эти наклоны, таким образом, определяют поле направлений
касательных к интегральным кривым в некоторой области
плоскости х, у.
Начиная из точки х0, Уо и следуя всегда по направлению
линий поля, можно начертить некоторую непрерывную кривую.
Полученная кривая, очевидно, является интегральной кривой,
проходящей через начальную точку *0, Уо.
Этот метод является особенно ценным, когда точный вид
решения дифференциального уравнения не известен. Например,
этот метод был применен Ван-дер-Полем в его раннем
исследовании уравнения
.g-^l-^fg. + ^o, ц>0. (2.54)
Это уравнение может быть сведено к системе
£ = у, «L^Q-x^y-x.
2.4. Метод изоклин
6/
(2.55)
интегральные кривые которой определяются выражением
dy _ и>(1— х2)у — х
dx у
Единственной особой точкой уравнения (2.55), очевидно,
является начало координат х=у=0; следовательно, метод приме-
Р и с. 2.4. Решение уравнения Ван-дер-Поля методом изоклин.
ним всюду, кроме этой точки. Уравнение изоклин (2.53) в этом
случае имеет вид
\i(l—x2)y — x = cy.
(2.56)
При фиксированных jx и различных значениях наклона с
получен ряд кривых (2.56), вдоль которых наклон фазовых
траекторий является постоянным.
На рис. 2.4 показаны эти построения Ван-дер-Поля [85] для
jx = l в уравнении (2.54); они не требуют пояснения. Это
62 Гл. 2. Топологические методы и графические решения
графическое построение позволяет установить существование
устойчивого предельного цикла, к которому при возрастании т
стремятся интегральные кривые как из точек, расположенных
внутри предельного цикла, так и из внешних точек. После того
как интегральная кривая известна, временная характеристика
переменной х уравнения (2.54) может быть найдена численным
интегрированием выражения
т={^. (2.57)
Иногда полезно представить систему (2.51) в полярной
системе координат, в результате чего легче проводить интеграль-
Р и с. 2.5. Интегральная кривая в полярных координатах,
ные кривые. Допустим, что система описывается уравнениями
-£-=/?(/-, е), |L=e(r,e). (2.58)
Тогда изоклина относительно радиуса-вектора определится
выражением
где ф — угол, под которым интегральная кривая пересекает
радиус-вектор (рис. 2.5). Это видоизменение метода изоклин
будет использовано в гл. 13 для анализа на фазовой плоскости
субгармонических колебаний.
2.5. МЕТОД ЛЬЕНАРА
Метод, разработанный Льенаром [62], применим для
некоторых специальных видов дифференциальных уравнений второго
порядка1). Этот метод особенно удобен при рассмотрении так
1) Обобщение этого метода предложил Ле Корбейе [58].
2.5. Метод Льенара
63
называемых самовозбуждающихся колебаний, но применим
также и в других случаях, а именно тогда, когда
демпфирующий член нелинеен, восстанавливающая сила линейна
относительно х, а дифференциальное уравнение дается в виде
•S+K-5t)+x=0 (2-60)
или
dv \ (v)-\-x
• dx v '
(2.61)
где v — производная х по времени т.
Графическое построение по методу Льенара показано на
рис. 2.6. Метод дает возможность определить направление
интегральной кривой в любой точке плоскости х, v.
Соответствующая процедура состоит в следующем:
1. Сначала на плоскости xt v вычерчивается кривая
x—f(v).
z=-f(v)
А
I ^^^.
и
R
x+f(v)
V
/w
О S \ ,Я
Рис. 2.6. Применение метода Льенара для построения пол л направлений.
2. Для того чтобы определить направление поля в любой
точке Р(х, v), из точки Р параллельно оси х проводится прямая
до пересечения с кривой x=*—f(v) в точке R.
3. Из точки R опускается перпендикуляр на ось х в точку S.
Направление ноля в точке Р ортогонально линии SP.
То, что это построение дает правильное направление поля,
видно непосредственно из уравнения (2.61) и из того, что
тангенс угла наклона прямой SP равен v/[x+f(v)]. Легко также
заметить, что направление поля в любой другой точке
плоскости х, v, скажем в точке Р\ ортогонально прямой SP', если
ордината точки Р' равна отрезку RS.
64
Гл. 2. Топологические методы и графические решения
Дифференцирование уравнения (2.60) по т дает
= 0.
d2v , d Г£ , ч1 dv .
dx2
(2.62)
Примером уравнения вида (2.62) является уравнение Ван-дер-
Поля
d2v /Л 9ч dv ,
= 0, |х>0.
(2.63)
dx2 Г>\* " / dx
Уравнение (2.62) можно записать следующим образом:
dw . d r £ , ч1 , v ъ
где w — производная v по времени т. После введения новой
переменной z=w+f(v) уравнение (2.63) примет вид
<te.tr Л (2 64)
dv
•f(v)
= 0.
Это уравнение имеет тот же вид, что и (2.61), поэтому для
получения интегральной кривой можно применить построение Лье-
нара. Методика построения заключается в следующем. На
плоскости vy z (рис. 2.7) вычерчивается кривая z=f(v). Для того
Рис. 2.7. Применение метода Льенара для решения уравнения (2.64).
чтобы определить направление интегральной кривой в точке
^(^ь zi)> проводится прямая v = Vi до пересечения с кривой
z=f(v) в точке R. Из точки R проводится прямая параллельно
оси v до пересечения с осью z в точке S. Направление поля в
точке Р ортогонально прямой SP. Очевидно, что все нормали
}
2.6. Дельта-метод 65
к интегральным кривым уравнения (2.64) для v=Vi проходят
через одну и ту же точку S, координаты которой 0, f(vi).
Следовательно, взяв точку S на оси z, ордината которой равна
f(Vi), и описав с центром в точке S ряд дуг окружностей, как
показано на рис. 2.7, получим элементы интегральных кривых
на прямой "0 = 01. Выбирая другие точки v = v2, v3, ... на оси v
и повторяя те же построения, получим дополнительные
элементы интегральных кривых. Имея поле таких линейных элементов,
можно провести из начальной точки v0, z0 непрерывную кривую,
следующую вдоль элементов поля направлений. Очевидно, что
эта кривая и будет интегральной кривой уравнения (2.64).
Наконец, фазовые траектории на плоскости a, w легко получаются
из интегральных кривых рис. 2.7, поскольку w=z — f{v).
2.6. ДЕЛЬТА-МЕТОД
Для получения графического решения дифференциального
уравнения методом изоклин или методом Льенара необходимо
всю фазовую плоскость заполнить отрезками прямых,
определяющих направление интегральных кривых. Если же требуется
найти лишь одну интегральную кривую, то практически
используются только некоторые из этих отрезков. Способ графического
построения, известный под названием дельта-метода [13, 49],
является более прямым методом отыскания требуемого
решения, поскольку с помощью этого метода получаются только те
данные, которые непосредственно касаются интересующей нас
интегральной кривой1).
В этом параграфе описывается дельта-метод для решения
дифференциальных уравнений второго порядка. Двойной дельта-
метод, видоизменение этого метода, применяется для решения
дифференциальных уравнений более общего вида и также
будет рассмотрен ниже.
(а) Сущность метода
Дельта-метод применяется для решения дифференциальных
уравнений вида
£■ + /(•£•*. <)-<>• (2-65)
где функция f(dx/dtt x, t) должна быть непрерывной и
однозначной, однако может быть нелинейной. Для того чтобы
1) Ту же цель построения интегральных кривых без заполнения
изоклинами всего поля направлений преследует метод, предложенный С, А. Стеба-
ковым [143, 144]. — Прим. ред.
5 Зак. 907
66 Гл. 2. Топологические методы и графические решения
воспользоваться этим методом, уравнение переписывают,
добавляя и вычитая выражение ю^л:, что дает
**+fflgx + /(-£.*, /)_<в§* = 0. (2.66)
Член юре может быть выделен из выражения f(dx/dt, x, /).
Уравнение (2.66), описывающее реальные физические системы,
всегда допускает такое выделение. Постоянная соо определяется
по виду уравнения (2.65) или выбирается из других
соображений. Вводя новые переменные
т = со0/, * = -з£. (2-67)
уравнение (2.66) можно переписать в виде
dv х -\- 6 (у, х, т)
dx v '
где
6(^, х, x) = -jfU0v, х, — \— х.
В общем случае функция б (а, х, х) зависит от всех трех
переменных у, х и т, но при малых изменениях этих переменных она
остается практически постоянной. Это является основным
предположением рассматриваемого метода. Если же б — постоянная,
то переменные уравнения (2.68) можно разделить и уравнение
проинтегрировать; в результате получим
{х+б)2+ v2 = const = г2. (2.70)
Это выражение является уравнением окружности радиусом г
с центром в точке х=—б, а = 0. Следовательно, б равняется
смещению центра окружности в отрицательном направлении оси х.
Это смещение б и дает методу его название. Итак, для малого
приращения т интегральная кривая может быть
аппроксимирована малой дугой окружности.
Дельта-метод наиболее удобно применять для уравнений,
имеющих колебательные решения. Постоянную юо в
уравнении (2.67) предпочтительно выбрать равной частоте колебания,
или, в более общем случае, так, чтобы в процессе графического
расчета изменение функции б (ру х, т) было настолько малым,
насколько это возможно. На рис. 2.8 показано графическое
построение с помощью этого метода. Это построение состоит в
следующем:
1. Определяется начальная точка Pq{xq, v0) на плоскости
х} v при t==tq.
(2.68)
(2.69)
2.6. Дельта-метод
67
2. При помощи формулы (2.69) вычисляется начальное
значение б и фиксируется точка Q0(—б, 0) на оси х.
3. Из точки Р0 проводится дуга окружности с центром в Q0.
Дуга P0Pi представляет часть интегральной кривой. Эта дуга
должна быть достаточно короткой, чтобы изменение б было
малым.
4. Повторение шагов 1, 2 и 3 дает совокупность коротких дуг
с центрами на оси х, из которых получается непрерывная
интегральная кривая.
VI
^ у
А^
Чо °
i
Ли
А
йх^
\и
Ц
X
Рис. 2.8. Короткий отрезок дуги окружности как часть интегральной
кривой, построенный с помощью дельта-метода.
Разлагая приращения х и v в ряд Тейлора, получаем общее
выражение для локальной погрешности, т. е. погрешности на
каждом шаге, в виде
(2.71)
где (d6/dx)o и (йЧ1йт2) 0 — значения соответствующих
производных при т=то и Д9 — приращение угла радиуса-вектора для
отдельной дуги.
Можно легко найти приращение времени т; точное
выражение для времени получается из соотношения
dx = — = de.
V
(2.72)
Таким образом, Д9 в формулах (2.71) можно заменить на Дт,
т. е. на -приращение времени, соответствующее отдельной дуге
окружности. , .
Ь*
68 Гл. 2. Топологические методы и графические решения
(б) Приближение более высокого порядка
В предшествующем графическом решении величина б,
вычисляемая в начале каждого шага, используется на всем
интервале. Очевидно, что приближение будет улучшено, если на
протяжении этого интервала вместо начальной величины
использовать среднее значение б. На рис. 2.9 показано графическое по-
Р и с. 2.9. Видоизмененный дельта-метод.
строение для такого приближения более высокого порядка. Оно
состоит в следующем:
1. Определяется начальная точка Яо(*о, v0) при т=то.
2. Как и ранее, из (2.69) вычисляется начальное значение б
и фиксируется точка Q0(—б, 0).
3. Проводится дуга окружности РоРщ с центром в Q0;
приращение угла выбрано равным Ат/2.
4. Вновь вычисляется» 6 = бт с использованием
промежуточных значений xm, vm и то+Ат/2. Определяется положение точки
Qm(—бт, 0) на оси х.
5. Проводится дуга окружности P0Pi с центром в Qm;
приращение угла равно Ат. Дуга P0Pi представляет часть
интегральной кривой.
Локальные погрешности оцениваются выражениями
Сравнивая с выражениями (2.71), мы видим, что точность
повысилась.
2.6. Дельта-метод
Пример.
Рассмотрим в качестве примера уравнение Дуффинга
Это уравнение можно записать в виде
dv х -f- 6 (г/, х, т)
dx v *
где
(2.74)
(2.75)
6(v, Ху т) = —x + .k3 + 0,7x> — 0,75cost,
dx ,
На рис. 2.10 показана интегральная кривая, соответствующая
начальным условиям х=0 и v=0 при т=0. Используя соотноше-
Р и с. 2.10. Фазовая траектория для уравнений (2.75)/
. i
\C"7VJ
ние (2.72), траекторию на плоскости х, v легко преобразовали
во временную характеристику x(t), которая представлена на
рис. 2.1 К
70 Гл. 2, Топологические методы и графические решения
(в) Двойной дельта-метод
Рассмотрим дифференциальное уравнение второго порядка
вида
*(#'*<)4£ + f(-£'*.<) = °. (2J6>
где g(dx\dt, х, t) и f(dx/dt, x, t)—непрерывные однозначные
функции от dx/dt, x и t. Разделив это уравнение на g(dx/dt,x, t),
получим уравнение вида (2.65), к которому можно применять
Рис. 2.11. Временная кривая, полученная с помощью фазовой траектории
рис. 2.10.
дельта-метод. Графическое построение, однако, становится
практически невозможным из-за наличия сложного выражения
f(dx/dt, х, t)lg(dx/dt, x, t).
Рассмотрим несколько иной метод графического решения,
который больше подходит для решения таких уравнений.
Добавляя и вычитая выражения d2x/dt2 и ю§х, уравнение (2.76)
можно переписать в виде
Вводя новые переменные ти-о, определяемые формулами (2.67),
получаем .
г ' > .' : dv Х-\-Ъх
d* tf + 62 *
(2.77)
2.6. Дельта-метод 71
где
©0 \ ©0;
Если эти функции 6i и Ьг предполагаются постоянными, то
уравнение (2.77) можно проинтегрировать и получить
(х + 6xf н- (v +■ 62)2 = const = г2. (2.78)
Это уравнение окружности радиусом г с центром в точке х—
= —бь ^ =—62- Таким образом, ограничение, требующее, чтобы
центр дуги окружности находился на оси х, более не вводится.
Следует заметить, однако, что простое соотношение (2.72)
между Л6 и Ат в двойном дельта-методе не применяется.
Пример.
Рассмотрим реакцию последовательной цепи LRC1) на
подключение постоянного входного напряжения (рис. 2.12). В тех
Цр) С
- *-
о—'ЧЯЯЯЯГ*—WW-
1
Рис. 2.12. Подключение постоянного напряжения к последовательной
цепи LRC.
же обозначениях, что и на рисунке, уравнение цепи можно
записать в виде
где ф — магнитный поток сердечника, п — число витков обмотки
сердечника и q — заряд конденсатора. Допустим, что кривая
намагничивания сердечника определяется -уравнением
q> = clni + c2th(ni), (2.80)
') Имеется в виду феррорезонансная цепь с индуктивностью, зависящей
от тока. —.Прим. редк
72 Гл. 2. Топологические методы и графические решения
где Ci и с2 — постоянные, зависящие от материала сердечника.
Вводя численные значения параметров
/г=1, /? = 0,2, С = 2,5,
с1 = 0,08, с2 = (1А
и используя уравнения (2.79) и (2.80), получаем
(1.2-*'-§-)-$ + 0^ + * = 2.6*.
Уравнение (2.81) можно привести к виду (2.77), т. е.
di __£+Al
dq' * + 6г '
где
61 = 0,5/ — 2,5£, 62 = 0,2/ — / th2 /.
При выводе этих уравнений частота ш0 в (2.67) выбирается
равной единиде, так что x=t. Фазовые траектории для различ-
(2.81)
(2.82)
Рис. 2.13. Фазовые траектории для уравнений (2.82).
ных величин Е, выходящие из начала координат q=0, /=0,
приведены на рис. 2.13.
2.7. МЕТОД НАКЛОННЫХ ПРЯМЫХ
В этом параграфе описывается графический метод наклон»
ных прямых, который применяется для решения определенных
типов нелинейных дифференциальных уравнений, включая
уравнение Ван-дер-Поля и уравнение Дуффинга. Основные положе-
2.7. Метод наклонных прямых
73
ния этого метода уже использовались несколькими
исследователями [97, 99]. Полное изложение метода и применение к
изучению переходных гидравлических процессов дано Пейнтером
[79]1). Видоизменение основного метода позволяет применить
его для решения уравнений, описывающих неавтономные
системы 2).
(а) Сущность метода
В качестве предварительного примера найдем решение
уравнения первого порядка
-3? =/(*). (2-83)
удовлетворяющее начальному условию х=хо при т=то.
Соотношение для приращений переменных может быть записано в виде
A*=[fWlcp-A*. (2.84)
где
[fcoicp—^-J/eorfT,
То
Дт = т1—т0 —малое изменение т,
&х = хх— х0 —малое изменение х за время Дт.
В основе рассматриваемого метода лежит использование
среднего арифметического для \f (т)]ср, т. е.
[fW]cp = |(/o + fi). (2.85)
где'
Тогда приближение &xs для Дл: определяется формулой
А*, = If Ы + f (to + At)] -^ • (2.86)
Это выражение говорит о том, что для приближения был
использован метод трапеций.
*) Автор весьма обязан Пейнтеру за обсуждение этого метода.
2) Родственные графические методы, предназначенные для расчета
неавтономных систем, изложены в [146. 131, 123, 118, 142, 116, 117, 122, 120].
В связи с широким внедрением вычислительных машин должна быть
произведена переоценка ценности графо-аналитических и численных
методов. — Прим. ред.
74 Гл. 2. Топологические методы и графические решения
Приближенное приращение Дхя может быть получено
графически на плоскости х, f(x) (рис. 2.14). Сначала определяется
начальная точка Яо(*о, /о)- Из точки Р0 проводится прямая, а
Рис. 2.14. Графическое построение для получения kxs по формуле (2.86)*
именно наклонная прямая Р$М до пересечения с осью х в
точке М. Угол 6 выбран так, что
(2.87)
для заданного значения Ат. Из точки М проводится другая
наклонная прямая под тем же углом 9 к вертикальной прямой
в точку Ри ордината которой равна f(ti). Тогда
QoQi = QoA« + A«Q1 = /(To)tge + /(T1)tge = (fo + M-T-
Тем самым определяется приращение Axs [формула (2.86)].
Практическая методика графического построения поясняется
на рис. 2.15. Построение выполняется следующим образом:
1. Сначала в правой полуплоскости т, f(x) вычерчивается
кривая f(t). На этой плоскости наносится начальная точка Р0
с координатами to и х0.
2. Зная положение точки Ро, можно определить точку Q0
в левой полуплоскости с координатами х0 и /о-
Штрих-пунктирная линия, проведенная под углом 45°, служит для перехода
от значений х на горизонтальной оси к соответствующим
значениям на вертикальной оси.
)
2.7. Метод наклонных прямых
75
3. Затем из точки Q0 проводится наклонная прямая в
точку хт оси х. Из точки хт проводится вторая наклонная прямая
в точку Qu ордината которой /i=/(t0+At).
4. Зная точку Qi9 легко определить точку Р±, которая, как
показано на рис. 2.15, лежит на кривой решения x(i) при
Ti=to+At.
Рис. 2.15. Графические построения для решения уравнения (2.83).
5. Последующие точки Р2, Рз, • •. на кривой решения
получают, повторяя шаги 1—4.
Точность этого метода соответствует точности метода
трапеций. Ошибка может быть значительной, если кривизна f(r)
велика и приращение Ат выбрано слишком большим.
Локальная погрешность этого метода для приращения переменной х
оценивается выражением
-1-/;(Дт)з + 0[(Дт)4], (2.88)
ес = Дхс—Дл: =
где точки означают дифференцирование по т. Это выражение
позволяет оценить величину подходящего приращения
независимой переменной т. Интервал Дт предпочтительно выбирать
гак, чтобы
Дт < 3/
12ед
/о
где га —допустимая погрешность.
76 Гл. 2. Топологические методы и графические решения
(б) Уравнения второго порядка для автономных систем
Найдем графическое решение системы уравнений вида
dx
dx+g(x)-y = 0,
4L + h(y) + x = 0.
(2.89)
Систему (2.89) можно преобразовать в уравнение второго
порядка
4£+4#+*(4f+«)+*-°- ^
Это уравнение включает некоторые известные типы
дифференциальных уравнений, а именно: ^
1. Если g(х) =с и h(y)=ky (с, k — постоянные), то мы
получаем линейное уравнение
4^ + k^a4 + x + kc = Q' (2-91)
2. Если g(x) — — \ix-\-(\I3)\xxz (jx = const) и й(у) = 0, то
получается уравнение Ван-дер-Поля
%- n(l_^-f-* = 0. (2.92)
3. Если g-(л:) = 0 и h(y) =— ay-f-Pf/3 (a> Р —постоянные), то
получается уравнение Рэлея
d2x
■[—f(#n#+*-* <2-93>
dx2
Метод графического построения интегральных кривых
уравнений (2.89) поясняется на рис. 2.16. Порядок построения
следующий:
1. Сначала строятся графики функций g(x) и —h(y) и
наносится начальная точка Р0 с координатами х0 и у0 для т=то.
2. Из точки Яо проводится наклонная прямая SLt до
пересечения с кривой g(x) в точке М, где угол 9 равен arctg(Ar/2).
Из точки М проводится наклонная прямая SL2.
3. Из точки Р0 вновь проводится наклонная прямая SL3 до
пересечения с кривой —h(y) в точке N. Из точки N проводится
наклонная прямая SL^. Пересечение прямых 5L4 и SL2 дает
точку Pi(xu f/i) на интегральной кривой при Ti=To+At.
2.7. Метод наклонных прямых 77
4. Последующие точки Р2, ^з, ... на интегральной кривой
получаются повторением шагов 1, 2 и 3.
Из рис. 2.16 ясно, что
Axs — хх — х0 = (Хх —хт) -f- (хт — х0) —
= [У0 — g(Xm)]^r + [yi — g(Xm)]^>
(2.94)
Эти значения дают хорошее приближение для приращений Дх
и Д{/, поскольку 2g{xm)ttg(x0)+g(x]) и 2h(yn)™h(y0)+h(yt)e
1 у.дм
zrh(y)
Рис. 2.16. Графические построения для решения уравнений (2.89).
Пример.
В качестве типичного примера рассмотрим уравнение Ван-
дер-Поля. Полагая в уравнении (2.92) jx= 1,0, имеем
d2x -(1-ж»)£+* = 0
dx*
или
dx—x 3x-\-y, dx— x.
(2.95)
(2.96)
78 Гл. 2. Топологические методы и графические решения
На рис. 2.17 построена кривая g(x) =—х+х3/3. Начальная
точка выбрана при х=0 и у=—0,05. Затем построение
продолжается из этой точки с углом 0 = arc tg(At/2) = arc tg (0,2/2).
Некоторые из этих наклонных прямых для точек 1—4 показаны
на рисунке тонкими линиями. Из-за отрицательного
демпфирования при малых значениях х интегральная кривая
раскручивается наружу и переходит в предельный цикл. Аналогично на-
Рис. 2.17. Фазовая траектория уравнений Ван-дер-Поля (2.96).
чальная точка, находящаяся вне этого предельного цикла,
приводит к кривой, скручивающейся внутрь до соединения с тем
же самым предельным циклом. Поскольку определяемые
графически точки расположены равномерно по времени т, данные,
соответствующие этим точкам, легко преобразовать к
координатам х и т, как показано на рис. 2.18. Время, которое
требуется, чтобы изображающая точка завершила один полный
оборот по предельному циклу, равно 6,64..., а амплитуда х
при этом равна 2,01... . Эти величины хорошо согласуются с
точными значениями 6,687 и 2,009, которые были вычислены
с точностью до трех десятичных знаков Урабе [108J.
2.7. Метод наклонных прямых
79
(в) Уравнения второго порядка для неавтономных систем
Видоизменение изложенного выше метода для автономных
систем позволяет применить его для графического решения
уравнений неавтономных систем вида
£+*1<*>-*-0,
(2 97)
^■+h(y) + g2(x) = f(x)
или
d2x , dg{ dx
dx2
Ь чг ж+h Ш + * <*>] + ^2 <*>= ' <т>- (2-98)
Рис. 2.18. Временная кривая, полученная с помощью фазовой траектории
рис. 2.17.
К уравнениям данного вида относятся следующие:
1. Если gzW^dgildx и /*(*/) =0, то мы получаем уравнение
с нелинейным демпфированием
(2.99)
d2x
dx
dx2
\-gz(x)-jZ+g2(x) = f(*)-
2. Если gi(x)=kx (& = const) и /*({/) =0, то получается
уравнение Дуффинга
-Sr + *£ + ft(*) = KT)- (2Л0°)
На рис. 2.19 показано графическое построение интегральной
кривой уравнений (2.97). Порядок построения следующий:
1. Сначала вычерчиваются графики функций gt(x) и —h{y)
и наносится начальная точка Рд.
у,д,(х)
(о) Ю
Рис. 2.19. Графические построения для решения уравнений (2.97).
ыш>и<лйштйише*^т'^^ФШ^^^^-
2.7. Метод наклонных прямых
81
2. Из точки Ро проводится наклонная прямая SLi до
пересечения с кривой gi(x) в точке М. Из точки М проводится
наклонная прямая SL2.
3. Вычисляется значение g2(x) для абсцисс х точек
наклонной прямой SL2. Затем проводится кривая g2{x), абсцисса
каждой точки которой равна этому вычисленному значению g2(x).
4. Наносится точка Qo(£2(*o), f/o); сдвигая ее влево на
величину f(to), определяем положение точки R0.
5. Из точки Ro проводится прямая SL3 до пересечения с
кривой —h(y) в точке N. Из точки N проводится прямая SL^
6. Прямая 5L4 сдвигается вправо на величину f(ti) и
получается прямая SL^ Она пересекает кривую g2(x) в точке Qi1).
7. Через точку Qi проводится горизонтальная прямая. Ее
пересечение с SL2 дает точку РА интегральной кривой при ti =
=То + Дт.
8. Последующие точки интегральной кривой получаются
повторением шагов 1—7.
Это построение дает приближенные приращения х и у за
время Дт в виде
А** = [Уо — Si С**)] -у* + \Уг — В\ (xm)] -у- •
^ys^\f^o)-g2(Xo)-h(yn)]^+[f(xl)-g2(xl)~h(yn)]^
(2.101)
Локальные погрешности такого приближения имеют порядок
выше второго относительно Дт.
Пример.
Рассмотрим уравнение Дуффинга
^ + k-^+\x\x = Bcos2x + B0 (2.102)
при & = 0,20, В = 1,50, В0=0,50 или эквивалентную систему
уравнений
dx
dv (2-ЮЗ)
-g. = _£y —|*|x+£cos2t+B0.
1) Графическую работу можно упростить, если воспроизвести наклонную
прямую SL2 и кривую g2(x) на листе прозрачной бумаги, как показано на
рис. 2.19, (б). Помещая ось у и наклонную прямую SL2 рис. 2.19, (б) на
соответствующие прямые рис. 2.19, (а), можно легко найти точку пересечения
Qi прямой SL4 с кривой g2(x)4
6 Зак. 907
82 Гл. 2. Топологические методы и графические решения
На рис. 2.20, (а) показана интегральная кривая, построенная
для начальных условий л:=0, dx/dx=y=0 при т=0. Интервал
времени Дт равен я/12. Через достаточно продолжительный
промежуток времени интегральная кривая приходит в конце
концов к замкнутой кривой, изображенной на рис. 2.20, (б). Время,
2, , ■ 2г
«
-1
-2
I 1—Гт
-1
о
(а) (б)
Рис. 2.20. Фазовые траектории субгармонического колебания порядка 1/2..
(а) Переходный режим, (б) Установившийся режим.
Рис. 2.21. Осциллограммы субгармонического колебания порядка 1/2,
полученные с помощью фазовых траекторий рис. 2.20. (а) Переходный режим.
(б) Установившийся режим.
которое требуется, чтобы изображающая точка завершила один
полный оборот по этой замкнутой кривой, равно 2я, т. е.
двойному периоду внешней силы, поэтому данное колебание
является субгармоническим порядка 1/2. Легко получить
временные характеристики х(т), показанные на рис. 2.21,
ГЛАВА 3
Устойчивость нелинейных систем
3.1. ВВЕДЕНИЕ
Вопрос об устойчивости касается поведения системы,
находящейся вблизи состояния равновесия, при воздействии на нее
малого возмущения. Вообще говоря, любое возмущение вблизи
неустойчивого состояния равновесия приводит ко все большему
удалению системы от этого состояния. Противоположный
случай имеет место вблизи устойчивого состояния равновесия.
Состояние равновесия может быть либо стационарным, либо
колебательным. Если оно стационарное, то переменные системы
остаются постоянными; если оно колебательное, то эти
переменные подвергаются непрерывным периодическим изменениям.
В линейных системах, где существует только одно состояние
равновесия, вопрос об устойчивости является сравнительно
простым. Если же система нелинейна, то могут существовать
несколько состояний равновесия. Устойчивое состояние
равновесия существует реально, тогда как неустойчивое не может
сохраняться. Следовательно, вопрос об устойчивости является
особенно важным при изучении нелинейных систем.
Периодические решения, полученные аналитически или графически в
предыдущих главах, только представляют состояние равновесия;
его фактическое существование должно быть подтверждено
исследованием устойчивости. Как отмечено в гл. 2, состояние
равновесия может находиться в определенной связи с особой
точкой или предельным циклом на плоскости состояний (или в
пространстве состояний). Следовательно, устойчивость
состояния равновесия зависит от топологической конфигурации
интегральных кривых вблизи особой точки или предельного цикла.
Обычно не трудно точно определить, что подразумевается
под устойчивостью линейной системы. Вследствие
многообразия явлений, которые могут возникнуть в нелинейной системе,
нет возможности пользоваться единственным определением
устойчивости, приемлемым в любом случае. По этой причине
в последующих параграфах будет введено несколько
понятий устойчивости. Основная цель этой главы — описать
несколько критериев устойчивости, которые будут использоваться
6*
84 Гл. 3. Устойчивость нелинейных систем
в последующих главах. В настоящей главе изучаются также
вариационные уравнения второго порядка — уравнения Матье и
Хилла, — которые получаются из исходных дифференциальных
уравнений при рассмотрении малых отклонений от
периодического решения. Решения этих вариационных уравнений
определяют устойчивость исходной системы.
3.2. ОПРЕДЕЛЕНИЕ УСТОЙЧИВОСТИ ПО ЛЯПУНОВУ
Рассмотрим физическую систему, описываемую п
дифференциальными уравнениями первого порядка
—^ = Xt(xv х2, ..., хп, т), / = 1, 2, ..., п, (3.1)
где т — независимая переменная, которая здесь рассматривается
как безразмерное время; хи х2, ..., хп — зависимые
переменные, а Хи Х2, ..., Хп — в общем случае нелинейные функции
этих переменных. Если время т не появляется в явном виде в
функциях Хи Х2, ..., Хп, то система является автономной и
можно написать
~-jpr==:лд^1, х2, ..., хп)> * = 1, 2, ..., ft, (3'2)
Прежде всего рассмотрим устойчивость решения *г(т),
/=1, 2, ..., п, которое удовлетворяет уравнениям (3.1) или (3.2).
1. Назовем решение х{(х) устойчивым, если для заданных
е>0 и то существует такое т]=г|(е, то), что любое1) решение
x/i(x)y для которого |*z(*0)—•^(f0)l<Tb удовлетворяет
неравенству \xt(x)—х'.(т)\<е для т>то. Если такого т\ не существует,
то Xi(x) является неустойчивым.
2. Если решение х{(х) является устойчивым и, кроме того,
(лгДт) — л^(т)| ->0 при т—> оо, то мы говорим, что это решение
асимптотически устойчиво.
Проще говоря, это определение означает, что решение
устойчиво, если все решения, проходящие вблизи него, остаются в его
окрестности; оно асимптотически устойчиво, если указанные
решения асимптотически приближаются к нему.
В предыдущей главе показано, что решение уравнений (3.2)
может быть найдено не в виде явной функции времени т, а как
траектория в пространстве хи -.., хп [после исключения т из
уравнений (3.2)]. В этом случае время соответствует скорости
движения изображающей точки вдоль траектории. Отсюда воз-
1) Здесь подразумевается, что xt (т) —решение, близкое к исследуемому
на устойчивость, т. е. к xt(x). Развернутое определение устойчивости по
Ляпунову, отождествляемое часто с первым методом Ляпунова или теоремой
Ляпунова, приведено в [3]. — Прим ред.
3.3. Критерий Рауса — Гурвица для нелинейных систем 85
никает следующее определение устойчивости, связанное с
траекториями или орбитами в фазовом пространстве.
3. Пусть С — траектория уравнений (3.2). Будем говорить,
что С является орбитально устойчивой, когда выполняется
следующее условие: для заданного е>0 существует такое т]>0, что
если /?' — изображающая точка (на другой траектории С),
которая находится на расстоянии не более у\ от С при т=т0, то R'
остается на расстоянии не более е от С при т^>то. Если же
такого ц не существует, то С является орбитально неустойчивой.
4. Если траектория С орбитально устойчива и, кроме того,
расстояние между R' и С стремится к нулю при т —> оо, то
говорят, что она асимптотически орбитально устойчива.
Итак, орбитальная устойчивость требует, чтобы
траектории С и С оставались близкими одна к другой, тогда как
устойчивость решения яДт) требует, кроме того, чтобы изображающие
точки R и R' (соответственно на траекториях С и С')
оставались близкими друг к другу, если они были близки в начальном
положении. Аналогичное различие имеет место для
асимптотической устойчивости и асимптотической орбитальной
устойчивости. Стоит заметить, что в случае автономных систем если
Xi(x) —периодическое решение, то хг(т+6) —другое такое
решение при любом б. Следовательно, периодическое решение
уравнений автономной системы не может быть асимптотически
устойчивым. Если решение уравнений автономной системы
представляется устойчивым предельным циклом, то оно является
асимптотически орбитально устойчивым.
До сих пор устойчивость определялась в связи с поведением
переменных х{ уравнений (3.1) или (3.2) в окрестности
состояния равновесия. В противоположность этому метод
исследования, известный под названием второго метода Ляпунова,
рассматривает вопрос устойчивости в большом или в ограниченной
области пространства состояний. Элементарное рассмотрение
этого метода будет приведено в § 3.4.
3.3. КРИТЕРИЙ РАУСА-ГУРВИЦА ДЛЯ НЕЛИНЕЙНЫХ СИСТЕМ
Рассмотрим физическую систему, описываемую системой
дифференциальных уравнений
-^jT" = Х\ (XV Х2> • • • > Хп)>
—^ = X2(xv х2, ..., хп), (3.3)
-gf-—Xn(Xi, х2у ..., хп),
86
Гл. 3. Устойчивость нелинейных систем
где т — безразмерное время, a Xlt Х2, ..., Хп — в общем случае
нелинейные функции зависимых переменных xtl х2, ..., хп\
таким образом, рассматриваемая система является автономной1).
Состояние равновесия может быть представлено особой
точкой или предельным циклом системы (3.3). Критерий Рауса —
Гурвица применим только для первого случая, т. е. для точки
равновесия, где все производные переменных хи х2у ..., хп по т
одновременно равны нулю2). При этом условии получаем
Л i (х^ х2, ..., хп) = О,
X2(xv х2, •.., хп) = 0, (3.4)
Лп [Xi, х2, ...» хп) = 0.
Если система является линейной, то получается единственная
система значений переменных х, удовлетворяющая уравнениям
(3.4). Следовательно, состояние равновесия определяется
однозначно. Однако, поскольку мы рассматриваем нелинейные
системы, уравнения (3.4) являются нелинейными алгебраическими
уравнениями. Этим уравнениям могут удовлетворять более чем
одна система значений переменных х. Поэтому нелинейные
системы могут иметь несколько состояний равновесия.
Для исследования устойчивости системы вблизи выбранной
точки равновесия приложим к этой системе достаточно малое
возмущение, отклоняя переменные хи х2, ..., хп от значений,
соответствующих состоянию равновесия. Если при
неограниченном возрастании времени т все эти переменные возвращаются
к исходным значениям, соответствующим равновесию, то
система в рассматриваемой точке равновесия является
асимптотически устойчивой 3). С другой стороны, если все или некоторые
из этих переменных с ростом т отклоняются все дальше от
своих исходных значений, соответствующих равновесию, то
система является неустойчивой. Обозначим систему значений,
1) Использование метода усреднения позволяет привести
дифференциальное уравнение второго порядка для неавтономной системы к виду системы
(3.3) с двумя зависимыми переменными Х\ и Х2. Однако условие
устойчивости, полученное по критерию Рауса — Гурвица для этой автономной
системы, может не быть достаточным для исходной неавтономной системы.
Подробности см. в приложении IV.
2) В случае, когда состояние равновесия представляется устойчивым
предельным циклом, оно обладает асимптотической орбитальной устойчивостью.
Однако непосредственного метода отыскания предельного цикла уравнений
(3.3) не существует. Метод контактных кривых Пуанкаре [п. 2.2 (д)] и
метод Ляпунова, приведенный в следующем параграфе, оказываются иногда
полезными для доказательства существования предельного цикла.
3) В дальнейшем, если не оговорено противное, мы будем рассматривать
этот вид устойчивости,
3.3. Критерий Рауса —Гурвица для нелинейных систем 87
соответствующих равновесию, через х10, х2о, ..., хп0 и
рассмотрим малые вариации |г- (i= 1, ..., п):
«*i —•^io + Ii»
(3.5)
Подставляя выражения (3.5) в (3.3) и пренебрегая членами
порядка выше первого относительно |* (£=1, ..., я), получаем
1FT =a"^ + а^2 + ••• +л1я|я,
-^Г = a2ili + #22l2 + • • • + #2л£л>
(3.6)
<*£*
dx
:^/zlll+^n2&2+ ••• + алл£л»
где коэффициент а^ равен производной dXJdxj в точке Xi=Xio,
^2=^20, •.. i Xn = Xno, соответствующей состоянию равновесия.
Ляпунов доказал [61; 75, стр. 52], что если действительные части
корней характеристического'уравнения системы (3.6)
отрицательны, то соответствующее состояние равновесия является
устойчивым; если же хотя бы один из корней имеет
положительную действительную часть, то равновесие является
неустойчивым1). Характеристическое уравнение можно записать в виде
#2i #22 — ^ • ■
<*1п
а2п
а„
аП2
ап
Этот определитель п-то порядка дает уравнение вида
а^п+агка'1 + ... +#л-А + #л=0.
(3.7)
(3.8)
Чтобы найти знаки действительных частей корней А,, можно
использовать критерий Рауса — Гурвица [45, 95]. Для этого
построим сначала систему из п определителей, составленных
1) Мы рассматриваем случай, когда действительные части корней'
отличны от нуля. Если корни чисто мнимые или нулевые, то уравнения (3.6)
первого приближения становятся неприменимыми. Особые точки, связанные
с подобными состояниями равновесия, рассматривались в п. 22 (г).
Гл. 3. Устойчивость нелинейных систем
из коэффициентов характеристического уравнения (3.8). Эти
определители образуются следующим образом:
а0 О
I LI/1 Lisf\ I I
Д1=|а1|, Д2:
ах а0
Д„ =
а3 а2
аг а0 О О
а3 а2 d\ a0
аъ аА а3 а2
Аз =
а,
аъ а2 ах
а5 а4 аъ
(3.9)
О 0 0 0 ... ап
Критерий Рауса — Гурвица утверждает, что действительные
части корней % отрицательны при условии, что все
коэффициенты а0, аи ..., CLn положительны и определители Дь A2, ...
,.., Ап также положительны. Поскольку нижняя строка
определителя Ап состоит полностью из нулей, кроме последнего
элемента ап, то Дп = апЛп-1. Итак, для устойчивости системы
необходимо, чтобы ап>0 и Дп-1>0, так что отпадает
необходимость в вычислении Ап *).
В качестве простейшего применения этого метода
рассмотрим систему дифференциальных уравнений
dx=X(x,y), %- = Y(x,y).
dx
(3.10)
Точка равновесия, в которой х и у постоянны, получается путем
решения системы Х(х, {/)=0, У(#, у) =0. Для исследования
устойчивости напишем характеристическое уравнение
^2 — (ЯП + #22) ^ + #11^22 #12^21 =0» (3-11)
где аи = (дХ1дх)0, а12 = (дХ/ду)0, a2l=(dY/dx)0, а22 = (д¥1ду)0;
индекс 0 показывает, что рассматривается значение частной
производной в точке равновесия. Применение критерия Рауса —
Гурвица дает условия устойчивости:
— аи — а22 > 0, аиа22 — а12а21 > 0. (3.12)
1) С ростом степени п характеристического уравнения вычисление
определителей становится очень трудоемким До некоторой степени его облегчает
использование определителя Маркова [50] [или применение критерия Льена-
ра — Шипара, см. Г а н т м а х е р Ф. Р., Теория матриц, М., 1967. — Ред.].
S.4. Критерий устойчивости по Ляпунову
89
3.4. КРИТЕРИЙ УСТОЙЧИВОСТИ ПО
ЛЯПУНОВУ1)
Сущность данного метода сначала поясняется с помощью
топологического анализа следующего простого примера.
Рассмотрим систему, описываемую дифференциальными
уравнениями
4f = </ — х(*2 + У2),
dy <ЗЛЗ)
и исследуем поведение траекторий на плоскости состояний.
Очевидно, что начало координат х=0, у=0 является особой точкой,
которая соответствует состоянию равновесия системы. Нас
интересует устойчивость этой особой точки. Пусть интегральная
кривая, т. е. траектория уравнений (3.13), изображается на рис. 3.1
кривой OPQ. Если состояние равновесия является
асимптотически устойчивым, то с ростом т изображающая точка x(x)fy(x)
стремится к началу координат. На рисунке также изображена
окружность, определяемая уравнением
V(x, у) = х*+у* = г\ (3.14)
где г — расстояние между точкой Р и началом координат О.
Рассмотрим поведение точки пересечения Р окружности и
интегральной кривой с ростом времени т. Как х, так и у являются
функциями времени т, поэтому V — тоже функция т. Начало
координат является асимптотически устойчивой особой точкой,
если V(x) —убывающая функция т, стремящаяся к нулю при
т->оо. Из уравнения (3.14) получаем
dV _ ох dx I 2u dy .
dx dx ' У dx
Подставляя сюда уравнения (3.13), получаем
^ = 2х1у-х(х* + у>)] + 2у[-х-у(х*+у>)]=-2(х>+у>)*.
(3.15)
Следовательно, dV/dx<0 для всех значений х и х, у, исключая
начало координат. Итак, можно сделать вывод, что
изображающая точка, которая начала свое движение в любой начальной
1) Этот критерий, известный под названием второго (или прямого)
метода Ляпунова, был развит советскими математиками [60, 61, 67, 71]. лоро-
шее изложение теории Ляпунова имеется в книге Хана [29]. См. также
[23, 24, 28, 52, 57, 98].
90 Гл. 3. Устойчивость нелинейных систем
точке *(0), у(0) плоскости х, уу с ростом т стремится к началу
координат. Таким образом, система (3.13) имеет только одно
устойчивое состояние равновесия, соответствующее началу
координат.
Вид уравнения (3.14) обычно выбирается так, чтобы
траектория системы и линия V=const имели одну точку пересечения.
На рис. 3.2 уравнение V=const определяет семейство концен-
Р и с. 3.1. Траектория OPQ и ок- Р и с. 3.2. Траектория и концен-
ружность с центром в начале коор- трические эллипсы,
динат.
трических эллипсов. Если рассматриваемая система
описывается системой уравнений с п переменными, то уравнение
V=const задает семейство замкнутых поверхностей в д-мерном
пространстве.
Опишем теперь этот метод в общем случае. Рассмотрим
систему дифференциальных уравнений
^ = Xt{xv х2, ..., хп), / = 1,2 я, (3.16)
и предположим, что начало координат является особой точкой
этой системы.
Введем положительно определенную функцию V(xu ..., хп),
которая обладает следующими свойствами:
1. V и ее первые частные производные непрерывны в
некоторой области £>, содержащей начало координат.
2. Вне начала координат V положительна; она равна нулю
только в начале координат.
3.4. Критерий устойчивости по Ляпунову
91
Тогда производная V по времени вдоль траектории системы
(3.16) определяется формулой1)
Положительно определенная функция V(xu ..., хп) называется
функцией Ляпунова, если dVldx=W(xu ...,#n) 40в области D.
С помощью этих определений теорему Ляпунова об
устойчивости можно сформулировать следующим образом 2):
Если в некоторой области D, содержащей начало
координат, существует функция Ляпунова V(xit ..., *п), то начало
координат является устойчивой особой точкой. Более того, если
функция —dV/dx=—W(xu ..., хп) также положительно
определена в области D, то устойчивость является асимптотической.
Применяя эту теорему к конкретной физической системе,
можно столкнуться с трудностями при определении функций
Ляпунова. Метод не дает способа определения таких функций;
он только устанавливает, что если такая функция существует,
то условие устойчивости выполняется. Ниже мы приведем
несколько примеров функции Ляпунова, которые могут оказаться
полезными при практическом применении метода.
Сначала рассмотрим уравнение второго порядка вида
^ + nx)~ + g{x)--=0. (3.18)
Для упрощения будем предполагать, что f(x) и g(x) являются
многочленами, причем f(x)—четным, a g(x)—нечетным. Бо:
лее того, будем считать, что функция g(x) монотонно
возрастает с ростом х. Даже при таких ограничениях уравнение (3.18)
может дать ряд интересных примеров, таких, как уравнение
Ван-дер-Поля, уравнение Рэлея, уравнения электрических
цепей LRC (см. § 2.6 и 2.7).
Удобно ввести интегралы
X X
F(x) = | f(x)dx9 0(х)= | g(x)dx.
о о
!) Заметим, что производная dV/dt является функцией от **, равной
нулю в начале координат.
2) Интуитивно ясно, что если вблизи состояния равновесия физической
системы энергия этой системы все время уменьшается, то равновесие
является устойчивым. Теорема Ляпунова является обобщением этого факта.
Функция Ляпунова представляет собой расширение понятия энергии.
Математическое обоснование теоремы Ляпунова см. в работе [57] или
[76, стр. 137].
92
Гл. 3. Устойчивость нелинейных систем
Функция F(x) является нечетной, a G(x)—четной и F(0) =
= G(0)=0. Вместо уравнений (3.18) будем рассматривать
эквивалентную систему
£ = y-F{x), *L = -g(x). (3.19)
Очевидно, что начало координат является особой точкой этой
системы. В этом случае удобно выбрать функцию Ляпунова
в виде
V(x, y) = \y*+G{x). (3.20)
Фактически это выражение соответствует полной энергии
системы при f(x)=0, т. е. когда в системе отсутствует затухание.
Отсюда сразу же находим
4£- = -*(*)F(*). (3.21)
Следовательно, можно сделать вывод, что если —g(x)F(x)4^,0
в некоторой области Д содержащей начало координат, то
начало координат является устойчивой особой точкой. В
частности, если —g(x)F(x)<0 при #, не обращающемся в нуль внутри
области Д то устойчивость является асимптотической.
Далее рассмотрим систему уравнений первого порядка
■g-^a^ + a^ + f^y), % = b1x+b7y + g(x,y)% (3.22)
где мы предполагаем, что f(x, у) и g(x, у) —полиномы, не
содержащие членов первой степени относительно х и у. Кроме
того, предположим, что линейная система
*L = ахх + ад, 4? = Ь*х + Ь*У (3'23)
имеет асимптотически устойчивую особую точку в начале
координат. Это равносильно тому, что характеристическое уравнение
(ai — Я) (62 — А,) — а2Ь{ = 0
имеет два корня с отрицательными действительными частями,
т. е.
аг + Ь2<0 и alb2 — a2bl>0. (3.24)
Попытаемся определить функцию Ляпунова для линейной
системы (3.23); выберем ее в виде квадратичной формы
V (х, у)=± (ах2+2$ху + W2). (3.25)
ЗА. Критерий устойчивости по Ляпунову
93
Неизвестные коэффициенты а, р и у определим таким
образом, чтобы производная dV/dx была отрицательно
определенной функцией вида
4^ = -(*2+У2). (3.26)
Из формул (3.23) и (3.25) получаем
dV
— = (ах + ру) (агх + а2у) + (р* + уу) [Ьхх+Ъ2у). (3.27)
Сравнивая выражения (3.26) и (3.27), получаем
а1а + 61р = — 1, а2а4-(а1 + *2)Р + М = 0, а2РЧ-^ = — Ь
Решая эти уравнения относительно а, р и у, находим
(^i+b2)(alb2 — a2bl) *
ft а\Ъ\ -\-a2b2
(al+b2)(alb2 — a2b1) '
(3.28)
(Л,+*2)(в1*2 — Ml) '
Таким образом, неизвестные коэффициенты функции
Ляпунова (3.25) определены. Из условий (3.24) видно, что
ау — р2>0 и y>0- Следовательно, V(x, у) является
положительно определенной функцией для любых значений х и у.
Теперь вернемся к исходной нелинейной системе (3.22).
Используя ту же функцию Ляпунова V(x, у), найдем dV/dx:
-^ = -(x2 + y2) + (ax+Py)f(x, y) + {fix + yy)g(x, у). (3.29)
Поскольку полиномы f(x, у) и g(x, у) не содержат членов
первой степени, для достаточно малых значений х и у
производная dV/dx отрицательна. Следовательно, начало координат
является асимптотически устойчивой точкой. Если мы сможем
найти такую область D, для которой правая часть равенства
(3.29) отрицательна, то можно будет заключить, что любые
траектории внутри этой области D при возрастании т пересекают
кривую V=const снаружи внутрь. Нахождение такой области D
полезно при изучении траекторий, которые не расположены в
окрестности начала координат1).., л : - •-.
1) При помощи этого метода в п. 13.6 (а) будут изучаться предельные
циклы, соответствующие почти периодическим колебаниям в
автоколебательной системе,
94 Гл. 3. Устойчивость нелинейных систем
До сих пор рассматривалась система двух уравнений
первого порядка. В случае большего числа уравнений можно
действовать в основном таким же образом. Допустим, что система
с п переменными задана в виде
Хх = dnXi + €tx2X2 + • • • + &1пХп Ч" /l (XV -*2» ...» Хп)>
Х2 — CL2lXx + #22-*2 +■•••+ а2пХп + /2 (XV Х2> • • •» Хп)'
(3.30)
Хп — ап\Х\ Ч~ ап2Х2 +
\ аппХп \ In \XV Х2* • • •» хпп
где точки над xh ..., хп означают дифференцирование по т,
a ft, ..., fn — полиномы, не содержащие членов первой степени
относительно этих переменных. Эту систему можно представить
в матричной форме
х2
аи
а<2\
а12
#22
0>2п
ап\ аП2
а„
II Л'!
х2
L хп -
+
h |
и
-fnJ
или
(3.31)
(3.32)
x=Ax-\-t
Предположим, что линейная система
х = Ах
имеет асимптотически устойчивую особую точку в начале коор
динат. Функция Ляпунова для этой линейной системы выби
рается в виде квадратичной формы
" bll b\2 • • • Ь1п
Ъ<У\ Ьоо • • • Ьу
V = [xx x2
хп\
'22
"2п
Ь
х2
= х'Дх, (3.33)
пп -21- **п JL
L ьп1 ьп2
где х'— транспонированная матрица х, а В — симметричная
матрица (т. е. Ъц=Ьц). Производная функции V по времени
равна
V = xfBx + х'Ях = х' (А В + В А) х. (3.34)
Поступая аналогично предыдущему [см. уравнение (3.26)],
положим
V = — {х\ + ... + х\) = — х'Ех, (3.35)
где Е— единичная матрица. Из уравнений (3.34) и (3.35)
следует, что
А'В + ВА = — Е. (3.36)
3.4. Критерий устойчивости по Ляпунову
95
Неизвестные п(п+1)/2 элементов матрицы В определяются
системой линейных уравнений (3.36), число которых равно числу
неизвестных. Алимов [2] показал, что такая функция V является
положительно определенной1) и может быть использована как
функция Ляпунова.
Применяя эту функцию Ляпунова, рассмотрим исходную
систему (3.30). Производная функции V по времени примет вид
V = х'Вх + х'Ях = (Ах + f У Вх + х'В (Ах + f) =
= -x'Ex + 2i'Bx. (3.37)
Следовательно, как и прежде, можно заключить, что начало
координат является асимптотически устойчивой точкой и что
внутри области, где выражение —х'Ех+2¥Вх отрицательно,
любая траектория с увеличением времени т пересекает
поверхность V=const снаружи во внутрь.
Основное достоинство критерия Ляпунова состоит в
следующем. Во-первых, трудная (и часто неразрешимая) задача
интегрирования системы уравнений в вариациях заменяется
намного более простой задачей алгебраического характера. Во-
вторых, критерий позволяет определить устойчивость в
ограниченной или неограниченной области2) пространства состояний
вместо устойчивости в окрестности точки равновесия.
Следовательно, этот критерий может также дать топологическую
картину поведения траекторий, в некоторых областях пространства
состояний.
Как отмечалось ранее, трудность использования этого
критерия заключается в построении функции Ляпунова3). Условие
устойчивости, полученное этим способом, является, конечно,
достаточным. Следовательно, если функция Ляпунова выбрана
неудачно, то это условие устойчивости может привести к
слишком сильным ограничениям на параметры системы.
!) Необходимое и достаточное условие положительной определенности
функции V состоит в том, что последовательные главные миноры
симметричного определителя В положительны.
2) Для того чтобы рассматривать устойчивость в большом, необходимо,
чтобы уравнение V=c (с—const) задавало замкнутую поверхность, которая
при достаточно большом с может содержать любую точку пространства
состояний. Условие замкнутости поверхности К— с обеспечивается, если V не
п
является ограниченной при 2 ■*/ -> оо.
/-1
3) Метод построения функции Ляпунова для широкого класса систем
дан Шульцем и Гибсоном [98].
96 Гл. 3. Устойчивость нелинейных систем
Пример 1.
Рассмотрим уравнение Ван-дер-Поля
**_е(1_^£ + <к = 0| е>0, (3.38)
или эквивалентную ему систему
#-»+«(*-4)- *—* «"">
Корни характеристического уравнения линейной системы,
полученной путем отбрасывания нелинейного члена в уравнении
(3.39), равны
42 — § •
Поскольку 8 положительно, начало координат является
неустойчивой особой точкой.
Для исследования поведения траекторий вблизи начала
координат применим к системе (3.39) критерий Ляпунова.
Используя (3.20), образуем функцию Ляпунова
X
О
Тогда
V = XX-\-yy = ZX2[\ — -—-).
Следовательно, V>0 для х2<3. Отсюда можно заключить, что
любая траектория системы (3.39) при е>0 направлена во
внешность окружности х2+у2=const, если ее радиус меньше ]Л} *).
Пример 2.
Рассмотрим следующую систему дифференциальных
уравнений:
^£ = _x-f/ + (^2 + f/2)^ % = х-У+(х* + у*)У- (3.40)
*) Существование предельного цикла системы (3.39) доказывается
следующим способом. Поскольку предельный цикл, если он существует, лежит
вне круга радиусом построим кольцеобразную область с внутренней
границей #2+#2=3. Внешняя граница выбирается так, чтобы траектории
системы (3.39) на ней были направлены внутрь кольца. Найти внешнюю
границу, обладающую таким свойством, нетрудно; см., например, [100].
В этом кольце нет особых точек (начало координат является
единственной особой точкой), поэтому внутри этой области существует предельный
цикл.
«9.5. Устойчивость периодических колебаний
97
Пренебрегая нелинейными членами, напишем
Так как корни характеристического уравнения этой системы
равны —l±f, то начало координат является асимптотически
устойчивым фокусом. Выберем функцию Ляпунова в виде
V(x, f/) = y(ax2 + 2pxf/ + Yf/2) (3.42)
и предположим, что
1/=-(х2+{/2).
Тогда неизвестные коэффициенты в (3.42) определяются по
формулам (3.28). Таким образом, получаем
V(X, y) = 4(x2 + (/2).
Теперь применим эту функцию Ляпунова к исходной системе
(3.40). Тогда
У = х[-х-у-\-(х2 + У2)х]-\-у[х-у + (х2 + У2)У] =
= г2(г2-1),
где г2=х2+у2. Следовательно, если г<1, то все траектории
уравнений (3.40) с ростом времени т по спирали приближаются
к началу координат. С другой стороны, если г>1, то эти
траектории раскручиваются наружу от окружности г=1. Отсюда
можно заключить, что система (3.40) имеет один устойчивый
фокус в начале координат и один неустойчивый предельный
цикл г=1.
3.5. УСТОЙЧИВОСТЬ ПЕРИОДИЧЕСКИХ КОЛЕБАНИЙ [34]
Как отмечалось в § 3.3, уравнения в вариациях, связанные
с поведением решения в окрестности состояния равновесия,
образуют линейную систему с постоянными коэффициентами.
В этом параграфе мы рассмотрим случай, когда решение
системы является периодическим с периодом Т. Система может
быть не обязательно автономной, однако мы предполагаем, что
время входит только в виде периодических функций с
периодом Т. Уравнения в вариациях, соответствующие такому
решению, принимают вид
li = Яц СО 6i + a12 (*) h + • • • + а1я (т) Ъп9
|2 = а21 (т) 1г + а22 (т) £2 + • • • + ^ъп (т) 1л» (3.43)
1д = аш (т) \\ + ап2 (т) Ь + • • • + а>пп (т) £*>
7 Зак. 907
98 Гл. 3. Устойчивость нелинейных систем
где
ац{* + Т) = ач(х)> /, /=1, 2, ..., п.
Теория, известная под названием теории Флоке [22], дает
основные сведения о решениях этих уравнений, хотя
определение решений может быть, вообще говоря, достаточно
трудоемким. Далее приводится краткое изложение этой теории [76].
Используя векторные обозначения (§ 1.1), допустим, что
f'(T)=[f{(T), ..., /£(Т)], /=1, .... Я,
есть фундаментальная система решений уравнений (3.43). В
этих обозначениях нижние индексы соответствуют
составляющим вектора; различные векторы отличаются верхним
индексом. Поскольку уравнения (3.43) не меняются при замене т на
т+Г, векторы V(x+T) образуют другую систему решений.
Следовательно,
f'(T+r)=2S ЬУ(т), (3.44)
7-1
где векторы Ъ1 линейно независимы.
Теперь попытаемся найти решение F(t), обладающее
следующим свойством:
F(x+T) = mF(%). (3.45)
Полагая
F(t)=2 cjt>(x)
7-1
и используя равенство (3.44), получаем
F (т + Т) = S cjlj (т + Т) = S сj 2 bit1 (т) - S 21 *iftj«' W-
7-1 7-1 *-i 7-1 /-i
Из (3.45) получаем
7-1
Сравнение двух последних выражений дает
2 ( 2 ^7 — mcA iJ (т) = 0. (3.46)
3.5. Устойчивость периодических колебаний 99
Поскольку решения V(x) линейно независимы, коэффициенты
уравнения (3.46) должны равняться нулю; таким образом, мы
приходим к системе
(b\ — m)ci-\- b\c2+ ...+ b\cn = 0,
b\Cl-\-{bz2-m)c2+ .. .+bn2Cn =-0,
*l<?i+ *«<* + . • • + (bn — m)cn = 0.
Нетривиальное решение с существует, если
b\ — m
ы
b\ — m
ы
Ы
bn2
b\
Ы
b\
bl—m
= 0.
(3.47)
(3.48)
Корни mu... , m»n этого характеристического уравнения
называются характеристическими множителями системы (3.43).
Можно показать, что они не зависят от решений Р(т). Поскольку
векторы-столбцы Ь* линейно независимы, пг=0 не может быть
решением уравнения (3.48). Подставляя какое-нибудь решение
уравнения (3.48) в (3.47) и определяя с, получаем искомое
решение F(t) уравнений (3.43). Предположим, что корни тг-
уравнения (3.48) различны; тогда мы найдем фундаментальную
систему решений F*(t), обладающих свойством
Fi(x+T) = miFl(x).
Определяя <р(т) формулой
,<т) = [ехр(-^т)]р<т).
имеем
ф(т+Г) = [ехр(^-^т)]-^тР(т) = ф(т);
таким образом, функция <р(т) является периодической с
периодом Т. Следовательно, можно написать
где
1, 2, ,
(3.49)
_ log tnt
п.
7»
100 Гл. 3. Устойчивость нелинейных систем
Этот-результат известен как теорема Флоке; числа щ
называются характеристическими показателями системы (3.43).
Теперь рассмотрим устойчивость периодических решений.
Если все характеристические показатели системы (3.43) имеют
отрицательные действительные части, то вариации %и • • •, In
с ростом времени стремятся к нулю. Если хотя бы один
характеристический показатель имеет положительную действительную
часть, то вариации с ростом времени т увеличиваются.
Следовательно, справедливо общее утверждение: если все
характеристические показатели уравнения в вариациях, соответствующего
периодическому решению, имеют отрицательные действительные
части, то решение асимптотически устойчиво. Если же хотя бы
один характеристический показатель имеет положительную
действительную часть, то решение неустойчиво.
Основная трудность в этом анализе состоит в том, что
исходная фундаментальная система решений Р(т), из которой
находятся характеристические показатели, вообще говоря,
неизвестна. В настоящее время соответствующие практические
вычисления ограничиваются в основном системами второго
порядка.
В качестве характерного и сравнительно общего примера
рассмотрим следующее уравнение:
£+/(*• £■)=«& <3-5°)
где
е(х+х0)=е(х).
Уравнения этого типа, включая уравнение Дуффинга, часто
встречаются при описании физических систем.
Можно сослаться на исследования Треффтца [107],
касающиеся свойств периодических решений уравнения (3.50). Его
вывод приводится здесь без доказательства: при условии, что
решение ограничено и асимптотически устойчиво, оно должно
в конце концов приводить к периодическому решению, в
котором наименьший период равен либо периоду то внешней силы,
либо целому кратному (отличному от единицы) периода т0.
В соответствии с этими двумя случаями используются термины
гармоническое колебание и субгармоническое колебание.
Основываясь на теории Флоке, исследуем устойчивость
периодического решения уравнения (3.50). Допустим, что это
решение выражено в виде
*(т) = т>о(т), (3-51)
где v0(x+nxo)=v0(x); n — положительное целое число. Малое
отклонение от этого периодического решения обозначим через g;
3.5. Устойчивость периодических колебаний
101
тогда подстановка v0(x)+l вместо v(x) в уравнение (3.50)
приводит к уравнению в вариациях *)
в котором символ ( )0 обозначает подстановку v0(x) и г;о(т)
после дифференцирования. Так как коэффициенты при | и |
являются периодическими функциями т, то уравнение (3.52)
можно представить в виде
i-\-F(x)i + O(x)l = 0. (3.53)
Вводя новую переменную т], определяемую выражением
£ = {ехр[—1 \F(x)dx]}i\, (3.54)
и исключая таким образом из уравнения (3.53) слагаемое с
первой производной, получаем
Ч + {О(т)-±^г-\\Г(т)Г}Ч = 0. (3.55)
В этом линейном уравнении коэффициент при ц является
периодической функцией т и может быть разложен в ряд Фурье.
Согласно теории Флоке, можно выбрать такое частное
решение /i(t), что
Л(т+Г) = тЛ(т), (3.56)
где Т — основной период ряда Фурье, a m — определенный выше
характеристический множитель. Пусть ц\{х) и т]2(т)—линейно
независимые решения, удовлетворяющие начальным условиям
4i(0)=l, 4i (0) = 0,
%(0) = 0, Л2(0)=1.
Тогда
т*-\чх{Т)+Щ{Т)\т+\=0. (3.57)
1) Условие правомерности перехода от уравнения (3.50) к (3.52) для
частного случая, когда / lv> 7"pfiW-Tr + Mu). рассмотрено в книге
Л. А. Бессонова [119, стр. 324—327]. Для общего случая, описываемого в
данной книге, условия законности такого перехода можно уяснить из [107]. —г
Прим. ред.
102 Гл. 3. Устойчивость нелинейных систем
По определению характеристический множитель m связан с
характеристическим показателем \х соотношением т = е^т, так что
сЬцТ = ±ЫТ)+ъ(Т)). (3.58)
Поскольку мы рассматриваем действительные функции tji(t) и
т]2(т), функция ch \iT также является' действительной.
Следовательно, произведение \хТ может быть действительным,
мнимым или комплексным, но мнимая часть его должна иметь вид
пп, где п — целое число. Таким образом, общее решение
уравнения (3.55) записывается в виде
ц (т) = схе»ху (т) + с2е-»гЦ (т), (3.59}
где без ограничения общности можно считать, что \х является
действительным или мнимым (но не комплексным), а ф(т),
г|)(т) —периодические функции т с периодом Т или 27\ Следует
заметить, что, поскольку произведение двух корней уравнения
(3.57) равно единице, два характеристических показателя в
решении (3.59) имеют противоположные знаки.
Из формул (3.54) и (3.59) легко видеть, что отклонение £
с ростом времени т стремится к нулю, если действительные
части выражений —8±\х отрицательны, где 26 — постоянный член
ряда для F(x). Следовательно, соответствующее периодическое
решение асимптотически устойчиво. Напротив, если хотя бы
одна из действительных частей —б±(л положительна, то
отклонение | с ростом т неограниченно возрастает, и
соответствующее периодическое решение неустойчиво. Таким образом,
для установления критерия устойчивости необходимо вычислить
характеристический показатель в (3.59). Несколько
конкретных уравнений вида (3.55) будут рассмотрены в следующих
параграфах.
3.6. УРАВНЕНИЕ МАТЬЕ [51, 69, 73, 74]
В качестве примера уравнения (3.55) рассмотрим уравнение
Матье; это будет удобным введением к нашим дальнейшим
рассмотрениям. Следуя Уиттекеру [113], это уравнение можно
записать в виде
~fit + (a+\6qcos2T)x==0, (3.60)
где параметры a, q предполагаются действительными. Это
уравнение является частным случаем линейного уравнения второго
порядка с периодическими коэффициентами. Таким образом,
3.6. Уравнение Матье
103
применима теория Флоке; частное решение уравнения (3.60)
берется в виде
лг = ^ф(т), (3.61)
где \i — характеристический показатель, зависящий от
параметров а и q, а ф(т) —периодическая функция т с периодом,
равным я или 2я. Поскольку уравнение (3.60) не изменится,
если вместо т написать —т, то е~^х(р(—т) —другое решение,
образующее с первым линейно независимую систему.
Следовательно, общее решение уравнения (3.60) может быть записано
в виде
х = схе^ (т) -f с2е-*хц (— т), (3.62)
где Ci и с2 — произвольные постоянные.
Теперь исследуем устойчивость решений. Будем различать
следующие случаи:
1) решение считается неустойчивым, если оно неограниченно
возрастает при т—> оо;
2) решение считается устойчивым, если оно остается
ограниченным при т->оо;
3) решение, имеющее период я или 2я, называется
нейтральным; его можно рассматривать как частный случай устойчивого
решения.
Поскольку ф(т) и ф(—т) в (3.62) периодичны по т,
устойчивость зависит от е»х или от \х. Рассматривая решение в виде
(3.62), где ф(т) имеет период я или 2я, можно считать, что
характеристический показатель \х принимает действительное или
чисто мнимое значение. Следовательно, решение (3.62)
неустойчиво, если (л действительное, и устойчиво, если \х мнимое.
(а) Функции Матье и соответствующие собственные
значения параметров [26, 69, 74, 113]
Рассмотрим случай 3, т. е. периодические решения
уравнения (3.60) с периодом я или 2я. Эти решения по определению
называются функциями Матье. Для того чтобы такие решения
могли существовать, параметр а для каждого значения q
должен принимать одно из бесконечной последовательности значений,
т. е. а должно быть одной из бесконечной последовательности
функций от q. Если q равно нулю, то искомыми решениями
являются 1, cost, siriT, cos2т, sin2т и т. д.; соответствующие
значения а равны квадратам целых чисел. При других
значениях q функции Матье обозначаются через се0(ху q), се{(х, q),
sei(т, ?), се2(х, q), se2(x, q) и т. д. Через сеп(х, q) и sen(x, q)
обозначаются те функции Матье, которые при q->0 сводятся
соответственно к cosazt и sinm;.
104
Гл. 3. Устойчивость нелинейных систем
Ряды Фурье для функций Матье удобно записывать в виде
оо
С*2п (Т> Я) = 2 Аг (Я) COS 2лГ,
г=0
оо
сЪт+Л*> Ч)= 2 j4a,+I(?)cos(2r+ 1)т,
г=0 (3.63)
СО
se2n (т, ?) = 2 #2г (?) sin 2rr,
со
s*2n+i(*. ?)=2^2r+i(?)sin(2r+l)T.
В этих рядах коэффициенты Л и В являются функциями q. Если
модуль \q\ достаточно мал, эти коэффициенты и соответственно
функции Матье разлагаются в ряды по степеням ql). При
данном q значение а определено для каждой функции Матье; оно
называется собственным значением, соответствующим
рассматриваемой функции Матье [47]. Обозначая собственные
значения, соответствующие функциям cen(r, q) и sen(rf q), через асп
и asn, имеем следующие разложения 2):
acl = l-8q-8q* + 8q*-\q*+...,
ал = 1+8^-8^-8^-4^ +
j80 2 6104
3 q 27
Л I OU 9 01U4- >,
а* = 4--£*Ч-зг*Ч-..., (3.64)
а,з = 9 + 4^- 8<7з + ^ ^+...,
ай = 9 + 4^» + 8^ + -^^+...,
Таблицы функций Матье сео(т, <7), ..., с^5(т, <7); ^(т, <7)» • • •
..., se6(т, ^) и соответствующие собственные значения
вычислены Айнсом и др. [47, 48, 64]. Характеристические кривые,
показывающие зависимость между q и aC7lf asn (/i=l, 2, 3), при-
!) О сходимости этих рядов для функций Матье известно очень мало.
Только для ce0(xtq) Ватсон [110] путем построения мажорирующего ряда
показал, что степенной ряд сходится, если 32|^|2<1.
2) Разложения функций Матье приведены в приложении I.
3.6. Уравнение Матье
105
ведены на рис. 3.3, где жирные кривые получены на основании
табличных данных, а тонкие — на основании вычислений при
помощи (3.64). Эти характеристические кривые делят плоскость
на области устойчивости и неустойчивости; таким образом,
О I 2 3 4 5 6 7 8 9 10 11 12 13
Q ^
Рис. 3.3. Диаграмма устойчивости уравнения Матье.
исходное уравнение (3.60) имеет неустойчивое решение, если
точка (a, q) лежит в области неустойчивости, расположенной
между кривыми асп и авп, и устойчивое решение, если точка
(a, q) лежит вне областей неустойчивости.
(б) Решения в областях неустойчивости
Как уже отмечалось в § 3.5, устойчивость равновесия в
нелинейных системах может быть исследована путем подсчета
характеристического показателя неустойчивого решения
уравнения в вариациях (3.55). Для решения подобного уравнения
применяется метод бесконечного определителя Хилла [44] и
многие другие, среди которых метод, предложенный Уиттекером
[112, 113], наиболее удобен для нахождения неустойчивого
решения в случае, когда \q\ мал.
Следуя Уиттекеру, найдем сначала неустойчивое решение,
соответствующее первой области неустойчивости на рис. 3.3,
расположенной между линиями ас1 и asi. Согласно формулам
106
Гл. 3. Устойчивость нелинейных систем
(3.64), если параметры а и q удовлетворяют соотношению
a = aci= 1 —8q- 8<72 + 8<73 + ...,
то уравнение (3.60) имеет решение (см. приложение I)
х = сех (т, q) = cos т ~\- q cos Зт + q2 (— cos Зт + -g- cos 5тJ •+-
4-<73(-g-cos3T— -g-cos5T + -jg-cos7tJ+ ...,
а если a = asl = l-\-8q — 8q2 — 8#3+..., то
x = sex(t, q) = sin т-f- <y sin Зт + #2(sin Зт + -j sin 5т) +
+ qz f-g- sin Зт + -g- sin 5т-f- j^ sin 7т J +
Уиттекер показал, что эти решения представляют собой
вырожденный случай почти периодического решения уравнения Матье
вида
х = е»хц(х),
где
(p(t) = sin(T — a) + #3cos(3T — a)_|_ft3Sin(3t — a) +
+ a5cos(5T—a) + 65sin(5T —a)+... (3.65)
и где a — новый параметр, принимающий для неустойчивых
решений значения между 0 и —я/2. Следовательно, функции
Матье cei(x1 q) и S£i(t, q) являются просто частными случаями
этих решений соответственно при а=—я/2 и а=0.
Характеристический показатель \i и неизвестные коэффициенты а3, b3, ...
в (3.65) определяются следующим образом. Поскольку a, q и
jx, а связаны между собой, для малых значений \q\ можно
предположить, что
|1«=?х(о) + ?яЦо)-Ь?»ц(0)+...,
a = l + ^a(o) + ^(o) + ^Y(o)+... . <Л№'
Подставляя (3.65) и (3.66) в (3.60) и приравнивая нулю
коэффициенты при одинаковых степенях q, окончательно получаем
a3 = 3q2sin2a-\-3q3sin4a+ ...,
b3 = q + q2 cos 2o-\-q3i g-+ 5cos4a) + ...,
as=¥-qssit\2o+..., (3.67)
*5 = -§-?2+4<73cos2(T+---'
ix = 4^ sin 2a— 12^3sin2a+..., (3.68)
a=l+8?cos2o-f-?2(— 16-4-8cos4a)—8?3cos2a+....
3.6. Уравнение Матье
107
Поскольку рассматривается вопрос об устойчивости, можно
ограничиваться вычислением только характеристического
показателя |ы. С этой целью из второй формулы (3.68) найдем а
и затем, подставляя найденное значение в первую формулу,
определим значение \х.
Поступая так же, в случае неустойчивого решения,
соответствующего второй области неустойчивости, которая
расположена между кривыми ас2 и as2 [114], получаем
ф (т) = sin (2т — a) -f- q Г2 sin а + -g"sin № — а) 1 -f-
1 Г 8
+ -g- q2 sin (6т — a) -f- <73 у sin а — 16 sin3 a —
g- sin 2a cos (4т — a) + f — -^ + -g- sin2 a) sin (4т — a) +
+ -^sin(8T-a)]+..., (3.69)
|i = —Vsln2a+...f a = 4 — q2(^- — 32sin2a) + (3.70)
Для третьей области неустойчивости, заключенной между
кривыми асЪ и as3, получаем
Ф (т) = sin (Зт — a)-f- q \ — sin (т — а) + -j sin(^ — <*) 1 +
+ ?2[-sin(T + a)1Lsin(7T-a)] + ^|"_|sin(T_a) +
+ ^-sin(5T-^a) + ^-sin(9T-a)]+..., (3.71)
M>=l(?3sin2a4-..., a = 9 + 4<?2 + 8?3cos2a+.... (3.72)
С помощью этих разложений легко вычислить
характеристический показатель \ху если известен новый параметр а.
Однако практически, когда надо решить уравнение Матье, в
первую очередь бывают известны параметры а и q, а найти а по
данным а и q довольно трудно. Чтобы обойти эту трудность,
сначала при помощи (3.68), (3.70) и (3.72) находят а и [i
путем варьирования q и а, а затем на плоскости а, (7 вычерчивают
кривые постоянных значений \i, a, как показано на рис. 3.4—3.6.
Рис. 3.4. Кривые \i = const и о = const в первой области
неустойчивости.
Рис. 3.5. Кривые ц — const и а = const во второй области
неустойчивости.
3.7. Уравнение Хилла 109
На этих рисунках изображены соответственно первая, вторая и
третья области неустойчивости, которые на рис. 3.3 заштрихо-
ци
0,4
0,3
0,2
0,1
0
v\ N
Ik \ •
° ll
°* 11
\\г
k
IK Л
' 1
)СА
' //
-mm
о /
7
&//
7%
R?
П
9,0
9,5
1Ц0
О *-
10,5
11,0
Рис. 3.6. Кривые \к = const иа = const в третьей области
неустойчивости.
ваны. С помощью этих кривых по заданным а и q
непосредственно вычисляются значения pi и а.
3.7. УРАВНЕНИЕ ХИЛЛА [12, 44, 6S, 101, 113]
(а) Проблема устойчивости для уравнения Хилла
Уравнение Хилла имеет вид
d2x
dx2
\ V-I
\
0V cos 2vt 1 x = 0,
(3.73)
ПО Гл. 3. Устойчивость нелинейных систем
где величины 60, 9i, 82 ... заданы1), а ряд 2 levl сходится.
Теория, изложенная в предшествующем параграфе, применима
также и к уравнению Хилла; таким образом, решение
уравнения (3.73) может быть либо устойчивым, либо неустойчивым.
Рассмотрим вкратце неустойчивое решение, используя метод
замены параметра, предложенный Уиттекером. Согласно теории
Флоке, частное решение уравнения (3.73) имеет вид
* = *и*<р(т). (3.74)
Подставляя (3.74) в (3.73), получаем
Следуя Уиттекеру, периодическую функцию ф(т) для п-й
области неустойчивости в первом приближении можно взять в
виде
(p(t) = sin(tfT — а), я=1, 2, 3, ..., (3.76)
где a— новый параметр, подлежащий определению.
Подставляя (3.76) в (3.75) и приравнивая отдельно к нулю
коэффициенты при sinnx и при cos/гт, получаем
2\in sin a + (80 + \i2 — п2) cos a — 9Л cos a = О,
(3.77)
2\xn cos a — (80 + \i2 — ti2) sin a — Qn sin a = 0.
Отсюда
I* = -gjj" sin 2a,
(3.78)
0O = n2 + 6„ cos 2a — (^ J sin2 2a.
Исключая из этих соотношений а, получаем
у? = — (Эо + я2) Ч- У4л2е0 + е*. (3.79)
Из (3.78) по данным 60 и 6П находятся \л и а, так что частное
решение (3.74) в предположении (3.76) легко определяется. Бо-
1) Предполагается, что параметры 0V малы.
3.7. Уравнение Хилла
111
лее того, если в (3.78) вместо а написать —а, то величина 60
останется прежней, а знак \i изменится на противоположный.
Следовательно, второе линейно независимое решение можно
взять в виде
и общим решением с двумя произвольными постоянными будет
х = схе^ sin (пх — а) + с2е~*хх sin (пх -f- а). (3.80)
Поскольку характеристический показатель \х может
принимать только чисто мнимое или действительное значения в
соответствии с тем, является ли решение устойчивым или
неустойчивым, то для неустойчивого решения имеем ц2>0. В силу
(3.79) это условие преобразуется к виду
(в0 — /^2 + ej (60 — лг2 — вЛ)< 0
или |вя|>|в0 — п2\. (3.81)
На границе между областями устойчивости и
неустойчивости ц=0, поэтому граничные кривые л-й области
неустойчивости определяются формулой
е0 = /г2±ел, (3.82)
которую можно вывести также непосредственно из второго
равенства (3.78), если положить а=—я/2 и о=0х).
(б) Обобщенное уравнение Хилла
До сих пор мы рассматривали уравнения Матье и Хилла
как наиболее типичные случаи уравнения (3.55) из § 3.5.
Однако в более общей форме уравнение в вариациях может быть
представлено в виде
(ОО ОО v
во + 2 J] %s sin 2vt + 2 J] 8V, cos 2vt | x = 0. (3.83)
v-l v-1 /
Это уравнение можно рассматривать как обобщенную форму
уравнения Хилла. Метод Уиттекера можно применять также и
в этом случае. Таким образом, выбирая для х первое
приближение
х = е»х$т(пх — а), /г=1, 2, 3, ..., (3.84)
*) Отсюда видно, что значения pi и а, а следовательно, и граница п-й
области неустойчивости определяются только значениями Go и 9П и не
зависят от других параметров. Это обусловлено тем, что в наших вычислениях
мы ограничивались первым приближением. При более точном приближении
остальные параметры влияют на \х и а, как будет показано в приложении II,
где эти параметры учитываются вплоть до третьих степеней (см. также [46]),
112
Гл. 5. Устойчивость нелинейных систем
получаем
2\хп = Qnc sin 2a — Qns cos 2а,
(3.85)
90 = п2 — \i2-\-Qns sin 2а+ 6ЛС cos 2а.
Исключение а из уравнений (3.85) дает
у? = - (е0 -+■ п2) + V4«2e0+e;, е2л = eL+eL. (3.86)
Последнее равенство совпадает с (3.79). Из (3.85) мы
получаем два различных по абсолютной величине значения а;
обозначая их соответственно через Gi и а2, получаем общее
решение *)
х = схе^х sin (пх — От) ■+ с2е-»х sin (пх — а2). (3.87)
3.8. УЛУЧШЕННОЕ ПРИБЛИЖЕНИЕ ХАРАКТЕРИСТИЧЕСКОГО
ПОКАЗАТЕЛЯ ДЛЯ УРАВНЕНИЯ ХИЛЛА
В предшествующем параграфе характеристический
показатель был вычислен в первом приближении при условии, что
решение, соответствующее области неустойчивости, имеет вид
х=е*хх<р(х), где q)(x)=s'm(nx—а). Однако, как видно из п. 3.6(6)
и приложения III, периодическая функция ф(т) в общем случае
содержит члены, соответствующие частотам, отличным от п.
Следовательно, можно получить более точное значение
характеристического показателя, если учесть некоторые из этих
дополнительных членов.
В этом параграфе мы рассмотрим в основном
характеристические показатели, соответствующие решениям для первой,
второй и третьей областей неустойчивости, так как в большинстве
приложений эти области низкого порядка играют особенно
важную роль. Ради удобства мы начнем с изучения второй области
неустойчивости, а затем остановимся на первой и третьей.
(а) Характеристический показатель, соответствующий
второй области неустойчивости
Поскольку периодическая функция ф(т) в областях
неустойчивости четного порядка обычно содержит неосциллирующий
член, то целесообразно добавить в выражении ф(т) постоянное
слагаемое; таким образом, получаем
х = е»ху (т) = &* [с + sin (2т — а)]. (3.88)
1) Здесь мы ограничились первым приближением. Более точное
приближение приведено в приложении III, где учитываются члены вплоть до вторых
степеней параметров 9,
8.8. Улучшенное приближение характеристического показателя 113
Подставляя это в уравнение (3.83) и приравнивая отдельно нулю
постоянные члены и коэффициенты при sin 2т и cos 2т, получаем
с (0О -f- ц2) + 01, sin о + 8U cos a = О,
2с0„ — (ва, — 4ц) sin 0 + (0О + М>2 — 4 — 02<;) cos о = 0,
2с01с — (0О + ц2 — 4 -4- 0.2с) sin 0 -f- (02* 4- 4ц) cos a = 0,
(3.89)
откуда, исключая с и о, имеем
0о +И2 в„
Д(ц) =
0,
20
Is
20,
0о + ц2-4-02<;
0,
= 0. (3.90)
02,-4ц
,1С *2, + 4ц 0о + ^2-44-02с
Как отмечалось ранее, во второй области неустойчивости
выполняется условие ц2>0, а при приближении к границе этой
области ц стремится к нулю. Следовательно, поскольку
рассматривается окрестность границы области, величина ц2 так
мала, что при реализации условия ц2>0 степенями ц выше
второй можно пренебречь. Кроме того, мы предполагаем, что
параметры 6ь 62 достаточно малы. Тогда, согласно уравнению
(3.90), это условие преобразуется к виду
16ц2 = — (0О - 4)2 + 02 + 2 ^=10? ■
е„
или
Д(0);
д- 1(01с — 01,) 02е + 201с0и02$] > 0,
<о.
0о 0и
20и 0о — 4 — 02с
201С 02s
ew
02,
0о_4+02,
(3.91)
(3.92)
Это неравенство является условием, при котором
характеристический показатель \х действительный, и, таким образом,
решение уравнения (3.83) соответствует второй области
неустойчивости. Из уравнения (3.90) непосредственно следует, что
определитель Д(0) равен нулю, когда параметры 0
соответствуют границе второй области неустойчивости.
(б) Характеристический показатель, соответствующий
первой и третьей областям неустойчивости
Поскольку периодическая функция ф(т) в областях
неустойчивости нечетного порядка содержит члены, соответствующие
только нечетным гармоникам (см. приложение III), мы
предполагаем, что решение имеет, вид
х = е»т<р (т) =
8 Зак. 907
: е»х [ах sin (т — ог) -\- а3 sin (Зт — а3)]. (3.93)
114
Гл. 3. Устойчивость нелинейных систем
Подставляя это в уравнение (3.83) и приравнивая
коэффициенты при sinx, cost, sin3t и cos3t отдельно к нулю,
получаем
(8U — 2\i)a1s'mol — (Э0+ц2— 1 — 6le)ajCOsa, —
— Фи — B2s) «3 S^ °3 — Фи — Q2e) «3 COS 03 = О
(воЧ-^2— 1 -Ь 6lc)a, sin о,, — (в„Ч- 2ц)a, cos a, +
+ Фи + 02с) «з sin о3 — (6lf + eto) a3 cos 03 = О,
(3.94)
(01, + 9а,) aj sin 0j — (0,с — 02c)tfi cos о, +
+ (%s — 6[x) a3 sin 03 — (0O + v? — 9 — 63c) a3 cos o3 = 0,
(Pic + 02C)«! sin 0i + (Qu — 62i) a, cos Oj +
+ (во + M-2 ~ 9 4- 93c) a3 sin 03 — (Q3s -f 6ц) a3 cos 03 = 0.
Отсюда, исключая av a3, 0: и 03, имеем
iee-f|i«—l—ele e„-2|» e,,—e24. _eIJS+e„ i
eIS+2n e0+|i»-i+ew ew+eM Qlc+%c I о
e,c-e2c 6,,+e,, e0+^-9-e3(; %s-^
I —e„+eM ele+e* o3,+6|i е, + ц*-9 + е,в I
(3.95)
Условие |х2>0 выполняется для первой и третьей областей
неустойчивости, и ц равно нулю на границах этих областей.
Поступая так же, как в п. (а), мы можем заключить, что
условие ц2>0 приводит к неравенству
Д(0) =
I 60— 1— ®lc 915 Qlc — Q2c
_ 915 % — 1 + ®1С 915 И" %S
®ic — %c ®ls-\-®2s % —9 — %c
I — 9U+e25 Qlc+®2c 93s
(3.96)
Это условие, при котором характеристический показатель \i
является действительным, так что решение уравнения (3.83)
соответствует первой или третьей области неустойчивости. Из
уравнения (3.95). непосредственно следует, что определитель
Д(0) равен нулю на границах первой и третьей областей
неустойчивости.
— 9и + 925
®1с+®2с
% — 9 + %с \
<0.
ЧАСТЬ II
Вынужденные колебания
в установившемся режиме
ГЛАВА 4
Устойчивость периодических колебаний
в системах второго порядка
4.1. ВВЕДЕНИЕ
Если на линейную систему действует периодическая сила, то
результирующее движение представляет собой суперпозицию
колебаний двух типов: свободных колебаний системы и
вынужденного ее колебания, возникающего под действием внешней
силы. В тех случаях, когда система асимптотически устойчива,
свободные колебания затухают сравнительно быстро и следует
рассматривать только вынужденное колебание, имеющее ту же
частоту, что и внешняя сила. Таким образом, при рассмотрении
линейных систем вынужденное колебание однозначно
определяется параметрами системы и внешней силой и ни в коей мере
не зависит от начальных условий, при которых начинается
колебание. Однако нелинейные системы в этом отношении
обладают совершенно иными свойствами. Принцип наложения
становится неприменимым. В нелинейной системе наряду с
колебаниями, имеющими тот же период, что и внешняя сила, может
появиться целый ряд других периодических колебаний.
В данной главе мы сосредоточим внимание на вопросах
устойчивости периодических колебаний. Рассмотрим снова
дифференциальное уравнение второго порядка (3.50)
5"И(* ■£■)-««■ «■»
где функция f(v, dv/dx) в общем случае является нелинейной,
а е(х) представляет собой периодическую внешнюю силу1).
Из теории дифференциальных уравнений известно, что
уравнение (4.1) имеет решение v(x)t которое однозначно определяется
величинами v(0) и (dv/dx) t=:o, т.е. заданными начальными
условиями. Однако отличительной чертой нелинейных систем
является то, что в одной и той же системе могут существовать
различные виды периодических колебаний, зависящие от
1) Как отмечалось в § 3.5, устойчивое решение уравнения (4.1) является
либо гармоническим, либо субгармоническим, даже если преобладают
гармоники более высокого порядка.
118 Гл. 4. Устойчивость колебаний в системах второго порядка
разных значений начальных условий. Экспериментальные
данные, приведенные на рис. 4.1, показывают форму
приложенного напряжения (60 гц) и результирующих токов в
последовательной электрической цепи, содержащей катушку с
насыщающимся сердечником и емкость. Как будет показано
в § 5.1, эта система описывается уравнением, которое является
частным случаем уравнения (4.1), Прикладывая одно и то же
синусоидальное напряжение (я), мы наблюдаем колебания
вида (б) и (в), имеющие в установившемся режиме ту же
частоту, что и приложенное напряжение, поэтому эти колебания
Включение
(о) tA/WWWVWVV;
(Й-
Рис. 4.1. Различные виды колебаний в нелинейной системе, (а)
Приложенное напряжение, (б) Нерезонансное колебание, (в) Резонансное колебание,
(г) Субгармоническое колебание.
являются гармоническими. Осциллограмма (г), однако,
представляет субгармоническое колебание порядка 1/3, поскольку
частота установившегося режима составляет одну треть
вынуждающей частоты. Эти осциллограммы получены для
различных значений начального заряда конденсатора *).
В противоположность случаю линейных дифференциальных
уравнений общее решение уравнения (4.1) при заданных
начальных условиях получить достаточно трудно. Более того,
поскольку точное решение, как правило, нельзя выразить через
элементарные функции, уравнение (4.1) решают различными
приближенными методами. До сих пор, имея дело с
периодическими решениями, мы обычно вводили для v(x) представление
в виде ряда Фурье с неизвестными коэффициентами, которые
затем определялись методом гармонического баланса. Следует,
]) Связь между начальными условиями и результирующими колебаниями
будет изучаться в части III.
4.2. Условие устойчивости периодических решений 119
однако, заметить, что периодические режимы, которые легко
находятся этим методом, не всегда реализуемы. Существуют
только те из них, которые устойчивы, поэтому полученные
периодические решения далее исследуются на устойчивость.
4.2. УСЛОВИЕ УСТОЙЧИВОСТИ ПЕРИОДИЧЕСКИХ
РЕШЕНИЙ [34]
Как указывалось в § 3.5, условием устойчивости
периодического решения уравнения (4.1) является неравенство
Re(— 6±ц)<0, (4.2)'
где 26—постоянный член ряда F(x) уравнения (3.53), а \х —
характеристический показатель решения (3.59). Если \х — чисто
мнимое число, то это условие сводится к неравенству б>0. Если
\i — действительное число, неравенство (4.2) равносильно
следующим двум условиям:
6>0, б2> и,2. (4.3)
Рассмотрим теперь эти условия, используя
характеристический показатель, вычисленный в § 3.6—3.8. Выделим для
удобства следующие два случая.
, Случай 1. Уравнение в вариациях (3.55) имеет вид
d2x\
dx2
% + 2 J] 6V cos (2vt — ev) U = 0. (4.4)
v-i
Подставляя (3.86) в (4.3), получаем
6>0, (4.5)
(eo-"2)2+2(eo + "2)62+S4>0l л=1, 2, 3, ... . (4.6)
Последнее неравенство является условием устойчивости первого
приближения *) для я-й области неустойчивости. Для того чтобы
периодическое решение было устойчивым, условие (4.6) должно
выполняться одновременно для всех значений п.
Случай 2. Уравнение в вариациях (3.55) имеет вид
-0 +1 в0 + 2 f] 6V cos (vr — 8V)J л = 0. (4.7)
l) Если ищутся условия устойчивости для более высокого приближения,
то следует обратиться к приложениям II и 111, где приводится более точное
вычисление jx.
I
120 Гл. 4. Устойчивость колебаний в системах второго порядка
Условия устойчивости могут быть получены точно так же, как
это сделано выше. В результате имеем
6 > 0, (4.8)
[8о-Ш2]2 + 2[8о + Ш2]б2+б4>8- Л=1' % 3> "•■ <4'9)
Заметим, что эти условия применимы к системам, которые
описываются уравнением
•g- + 26-g + fH = *(T), (4.10)
где f(v) —нелинейная функция от v. Как будет показано в
последующих главах, случай 1 обычно используется тогда, когда
функция f(v) нечетна, а случай 2 — когда f(v) не является
нечетной.
4.3. УЛУЧШЕННЫЕ УСЛОВИЯ УСТОЙЧИВОСТИ
Следуя методике § 3.8, улучшим условие устойчивости (4.6)
или (4.9) для областей неустойчивости низкого порядка.
(а) Условие устойчивости для п = 2
Случай 1. Если уравнение в вариациях приводится к виду
(4.4), можно считать, что ц имеет вид
y\ = e*iX[c + sin(2T — а)]. (4.11)
Характеристический показатель jx определяется уравнением
(3.90), т. е. уравнением Д(ц)=0. Поскольку условие
устойчивости дается неравенством б2 — pi2>01), на границе второй
области неустойчивости имеем Д(6)=0. Разложим уравнение
(3.90) в ряд по степеням (б2 — \i2) и отбросим степени
(б2 — \х2) выше первой. Тогда, как и ранее [см. п. 3.8(a)],
получим
16(62-tx2) = (90 + 62-4)2-922-2 9°+|2574 6? +
[(el — eL)e2,-f-261,61,62,] +1662 > о (4.12)
или
I в0 + 62 6ц бц
д(б)= 26i, е0+б2—4 —е2г е2,—45 |>о. (4.13)
! 2е„ е2,+4б е0+&2-4+е2.
Это и есть условие устойчивости для второй области неустойчи
вости.
1) Предполагается, что б>0.
4.4. Дополнительные замечания об условиях устойчивости 121
Случай 2. Если уравнение в вариациях приводится к виду
(4.7), то т] принимает вид
г] = е»х [с + sin (т — а)]. (4.14)
Действуя так же, как выше, мы получаем улучшенное условие
устойчивости для второй области неустойчивости в виде
4 (б2
V) = (e0+62-
2
i)2
el-
%+v-
Л-в\+
или
e0+62 е„
2в„ е0+б2-1-е2.
>0. (4.16)
%+6*
ё^рз- [(в1 - в?,) в* + 2в1евив2,] + 462 > О (4.15)
К
02,-26
2Э1с 625 + 26 0о+62_1+02с1
(б) Условия устойчивости для п = 1 и я = 3
Если уравнение в вариациях приводится к виду (4.4), то г\
имеет вид
г\ = е*х [аг sin (т — at)-\-a3 sin (Зт — о3)]. (4.17)
Полагая б > 0 и пользуясь условием (3.95) и неравенством
(б2 — м*2) >0, получаем улучшенное условие устойчивости
Д(в) =
в0+а»-1-в1в
9,^ + 26
в1в-в2*
-*U+*U
в1*-М
e0+u2-!+V
вМ+в1»
ew+«w
е1С-92,
в1, + вМ
е0+^-9-е3с
вм+ю
-в1* + в2*
в1С+в2<!
вм-"
е0+у-9+93<, |
>0.
(4.18)
4.4. ДОПОЛНИТЕЛЬНЫЕ ЗАМЕЧАНИЯ ОБ УСЛОВИЯХ
УСТОЙЧИВОСТИ
(а) Условие устойчивости (4.6) для п=1
Сначала рассмотрим условие (4.6) для первой области
неустойчивости. Поскольку в этом случае решение уравнения в
вариациях (4.4) принимает вид e^sin (т — о) + члены более
высокого порядка относительно 6ь 02,.. •], условие (4.6)
устанавливает устойчивость против нарастания неустойчивых
колебаний, в которых составляющая основной частоты преобладает
над гармониками более высокого порядка.
Для того чтобы изучить вопрос об устойчивости более
конкретно, рассмотрим пример
л+»■£ + /(«) = * cost,
rfT2
(4.19)
122
Гл. 4. Устойчивость колебаний в системах второго порядка
где f(v) —нечетная функция относительно i>, и проанализируем
случай, когда периодическое решение аппроксимируется
гармоническим колебанием
v=x sin х+у cos т. (4.20)
Амплитуды хну легко находятся методом гармонического
баланса. А именно, подставляя (4.20) в (4.19) и приравнивая
коэффициенты при sin т и cos т в обеих частях равенства,
получаем следующую систему уравнений для определения х и у:
2л
1
X (х, у) = —л; — 26*/ -f- — J / (v) sin х dx = 0,
о
2я
Y(х, у) = 2bx — y-{-—(f(v)cosxdx = B.
(4.21)
В этом случае уравнение в вариациях принимает вид (4.4),
и мы получаем
v=»l v-1
где
2я
0
2я 2л
^+k-f2^evisin2vT + 2 21evccos2vT)4 = 0) (4.22)
2я
о
2я
e^=^rJ-i-sin2TflfT=4-/5-C0StsintrfT
о о
2л
1 Г df dv .„„^ дХ , 0А
= — "тг- з- sin тат= -хг + 26 =
л J dv ду ду ■
о
2л
I С df dv . дУ 0*
= — -^г- -з- cos т д?т = -г 26,
л J dv ох дх
о
2л 2л
в (4.22а)
2л 2л 2л
= f-+1-0o-62:
2л 2Я
-^Ji*—Н£-п"*-«И-«--1-£.
4.4. Дополнительные замечания об условиях устойчивости 123
Теперь условие устойчивости (4.6) можно записать в виде
80 + 62 — п2-
0„,Ч-2«6
-еяе Вп,-2пй
>о.
(4.23)
Полагая п=1 и подставляя параметры 6is и 9ic, определенные
формулами (4.22а), получаем условие устойчивости (4.6) в
окончательном виде
дХ дХ
дх ду
дУ дУ
дх ду
Последняя форма условия устойчивости может быть также
получена из критерия Рауса — Гурвица (§ 3.3). Чтобы
проверить это, рассмотрим вариации |(т) и т](т) соответственно
амплитуд х я у и напишем
>0.
(4.24)
где
v (т) = х (т) sin т + у (т) cos т,
*(т)=х+£(т), У(т)={/+г)(т).
(4.25)
Тогда если с течением времени |(т) и т](т) стремятся к нулю,
то соответствующее периодическое решение (4.20) является
устойчивым. Подставляя (4.25) в (4.19) и приравнивая
коэффициенты соответственно при sin т и cos т в обеих частях
равенства, получаем
„ dr\ . дХ ? дХ
Z47~f"dx~s>4r~din~
:0,
„ ^ , дУ dY n
(4.26)
dx
дх
При этом предполагается, что £(т) и т](т) являются медленно
меняющимися функциями т, так что можно пренебречь
величинами d2\\dx2 и d\\dx2, и что б достаточно мало, так что
величинами б d\\dx и б dv\/dx также можно пренебречь. Решения этих
уравнений имеют вид еКх, где % определяются из
характеристического уравнения
~ 4*- —2Л
дх_
дх
ду
£+»
dY
дУ
= 0.
(4.27)
Следовательно, периодическое решение (4.20) является
устойчивым при условии, что действительные части корней h
124 Гл. 4. Устойчивость колебаний в системах второго порядка
отрицательны. Это условие устойчивости можно записать в
виде 1)
дх ду ^u'
дх ду ду дх ^
Первое неравенство выполняется всегда, поскольку в силу
(4.22а) оно сводится к неравенству 6>0. Второе неравенство
уже было выведено как критерий устойчивости при помощи
уравнения Хилла.
Убедимся далее, что характеристическая кривая,
показывающая зависимость амплитуды периодического колебания от
амплитуды внешней силы 5, имеет вертикальную касательную на
границе устойчивости, что соответствует границе первой
области неустойчивости.
Чтобы доказать это, положим г2=х2+у2. Тогда
характеристическая кривая, т. е. зависимость между Виг, легко
получается путем решения уравнений (4.21). Дифференцирование
уравнений (4.21) по В дает
дХ dx . дХ dy _n
дх dB "+" ду dB ~U'
dY dx . dY dy _.
дх dB "" ду dB~ Ь
Решая эту систему уравнений, получаем
d±__dX_± dy _дХ \
dB ду A1 dB~ дх А *
где
(4.29)
(4.30)
^_дХ_дУ__ дХ дУ
дх ду ду дх '
В результате имеем
— ( дх х дХ\
dr дг dx . дг dy г у дх ду ) (А Ъ1\
dB ~ дх dB "+" ду dB ~ Д ' \*-6Ч
Следовательно, на границе устойчивости при Д=0 имеется
вертикальная касательная (dr/dB —>oo).
До сих пор рассматривался частный случай периодического
решения (4.20) 2). Однако следует отметить, что выводы,
полученные в этой части, верны и для более общих случаев, когда
возникают иные виды колебаний3).
1) См. условия устойчивости (3.12).
2) Более подробное исследование гармонического колебания будет
проведено в гл. 5 и 8.
3) Рассмотрение случая субгармонических колебаний приводится в
приложении IV.
4.4. Дополнительные замечания об условиях устойчивости 125
(б) Условие устойчивости (4.6) для п > 2
Мы обращаем особое внимание на это условие, так как оно
до сих пор подробно не рассматривалось, хотя и играет важную
роль при исследовании устойчивости нелинейных периодических
колебаний. Исследование устойчивости нелинейных систем
часто встречается во многих физических и технических журналах.
В приложении IV, например, приводится условие устойчивости,
полученное Мандельштамом и Папалекси [72], которое
сравнивается с нашим условием. Анализ показывает, что критерий
Мандельштама и Папалекси согласуется с нашим условием для
случая /i=l, но он не дает никакой информации при я>2.
В нашем исследовании обобщенное условие устойчивости (4.6)
для п-й области неустойчивости дает критерий,
характеризующий устойчивость п-й гармоники основного колебания,
поскольку решение уравнения в вариациях для п-й области
неустойчивости имеет вид e^sin (их— а) + члены более высокого порядка
относительно 9i, 02, .. J.
Наше обобщенное условие окажется эффективным при
исследовании гармонического колебания, в котором преобладают
более высокие гармоники (см. § 6.1). Это условие устойчивости
будет также полезным при исследовании ультрагармонических
(см. § 6.3) и субгармонических колебаний (см. § 7.4 и 7.6). При
изучении, например, субгармонического колебания порядка 1/3
мы часто встречаемся с самовозбуждением второй гармоники
этого субгармонического колебания, т. е. с субгармоническим
колебанием порядка 2/3, которое подавляет исходное
субгармоническое колебание. Таким образом, условие устойчивости для
первой области неустойчивости становится в этом случае
недостаточным. Эта неустойчивость из-за подавляющего колебания
может быть обнаружена, если в условии устойчивости (4.6)
положить п=2.
(в) Условие устойчивости (4.9)
Рассуждения, приведенные в п. (а) и (б), применимы также,
если п заменить на я/2. Так как решение уравнения в
вариациях (4.7) в п-й области неустойчивости имеет вид
e»x[sin(jnx — a)+ ...],
то в этой области будет возбуждаться гармоника порядка п/2
по отношению к основному колебанию.
Так, если рассматривать дифференциальное уравнение
.(4.19), то условие устойчивости (4.9) для п=1 устанавливает
126 Гл. 4. Устойчивость колебаний в системах второго порядка
устойчивость против нарастания неустойчивого колебания,
имеющего частоту, равную половине частоты вынуждающей
силы, и соотношения, полученные в п. (а), можно вывести,
полагая п = 2 в (4.9). Однако уравнение в вариациях принимает
вид (4.7) в том случае, когда нелинейная функция f(v) в (4.19)
не является нечетной относительно v или когда внешняя сила
содержит постоянную составляющую. В таких случаях
периодическое решение обычно содержит постоянную составляющую и,
следовательно, целесообразно обратиться к улучшенному
условию устойчивости, исследованному в п. 4.3(a).
(г) Улучшенное условие устойчивости (4.15)
Рассмотрим более подробно это условие, поскольку оно
полезно для исследования нелинейных колебаний в системах,
элементы которых имеют несимметричную характеристику (§ 5.2
и 7.6).
Поступая аналогично тому, как мы делали это в п. (а),
рассмотрим дифференциальное уравнение
^r + 2b^ + f(v) = Bcosx + B0, (4-32)
где асимметрия заключена в функции f(v), не являющейся
нечетной, или обусловлена присутствием постоянной силы Во-
Предполагая, что периодическое решение имеет вид
v = z-{-xsinx-\-y cos т, (4.33)
мы получаем следующие соотношения для определения
величин х, у и z:
2я
X (х, у, z) = — х — 2Ьу-\ f f(z>) sin т Л: = О,
•ГС J
о
2rt
У(х, у, z) = 2bx — у + ^ j f(v)cosxdx = B, (4.34)
о
2я
Z(x,y,z)=-±-$f(v)dx = B0.
При этих условиях уравнение в вариациях принимает вид
(4.7), и. мы имеем
(оо оо \
% + 2 2 е¥, sin vt + 2 ^ %с cos vx U = 0, (4.35)
V-l V-1 /
4.4. Дополнительные замечания об условиях устойчивости 127
где
О
2л
D ltd).. \ дХ 6Z
2л
о I Г df . 1 dK <?Z
ду '
(4.35a)
0
2я
= -^~1+0o+62-
В силу этих соотношений условие устойчивости (4.15)
принимает вид
дХ
дх
дУ
дх
dZ
дх
дХ
ду
дГ
ду
dZ
ду
дХ
dz
дУ
dz
dZ
dz
>о.
(4.36)
Эта форма условия устойчивости может быть выведена из
критерия Рауса — Гурвица, как это было сделано в п. (а).
Рассмотрим теперь вопрос о вертикальной касательной к
характеристической кривой. Полагая г2=х2+у2 и решая (4.34),
получаем соотношение между В> В0 и г. Дифференцируя (4.34)
по В и считая В0 постоянной, имеем
дХ dx . дХ dy . дХ dz _п
дх dB "+" ду dB^ dz dB ~U'
dY dx . dY dy . dY dz _ 1
dx dB "•" dy dB~T~ dz dB ~ lf
(4.37)
128 Гл. 4. Устойчивость колебаний в системах второго порядка
Решая эти уравнения, получаем
дХ dZ дХ dZ
dx
dB
dy
dB
dz
дХ
dx
dy
dZ
dz
A
Д
dy
дХ
dz
dz
dZ
dx
?
(4.38)
и, следовательно,
dr dr dx , dr_ dy x dx , у dy
~dB~ Тх1Ш^о^^~~~^*Т~Ш~~~
_ 1 Г (dX dZ dX dZ\. (dX dZ dX dZY] ,, опч
Итак, при Д = 0 характеристическая кривая (соотношение между
Виг) имеет вертикальную касательную на границе
устойчивости, что соответствует границе второй области
неустойчивости *).
(д) Улучшенное условие устойчивости (4.18)
Рассмотрим снова уравнение (4.19), но уже предполагая, что
периодическое решение имеет вид
v = хх sin х-+- У\ cos х + *зsin Зт + f/зC0S Зт. (4.40)
Таким образом, здесь учитывается также третья гармоника.
Поступая так же, как раньше, получаем следующие соотношения
для определения неизвестных коэффициентов в правой
части (4.40):
2я
Xi(xv Уи *з> yz) = — xl — 26yl-\-^jf(v)sinxd% = 0,
о
2я
УЛх» Ун х» у3) = 2Ьх1— {/i + -~ J f(v)cos%dx = B,
о
2я
Хг(х19 yv хг, у3) = — 9*з — 6бг/з + -^ J f(v)sln3%dx = 0,
о
2я
V*(xv yv х& у3) = 66х3 — 9{/3+^ j f (v)cos3xdx = 0.
1) Подобный вывод можно получить и для случая, когда В является
постоянной, а меняется В0.
4.4. Дополнительные замечания об условиях устойчивости 129
Уравнение в вариациях имеет вид
(со оо * \
90 + 2 J] e¥, sin 2vt + 2 J] %c cos 2vt U = 0, (4.42)
V=»l V=l /
где
2л
О
2л
о
— 2 \ дуг ' дх3 ) 2\ ду{ дхх ) '
2я
О
о
о
— 2 \дде, dyt j'
2я
О
2л
^=ijwCOs6^ = ^- + 9-eo-62 =
9 + e0+62,
о
дХ3
дх3
Рассмотрим вопрос о вертикальной касательной к
характеристической кривой. Так как приближение для периодического
решения улучшено введением третьей гармоники, то было бы
желательно использовать вместо (4.6) улучшенное условие
9 Зак. 907
130 Гл. 4. Устойчивость колебаний в системах второго порядка
устойчивости (4.18). В силу (4.42а) условие устойчивости (4.18)
преобразуется к виду
дХх
дхх
дУх
дхх
дХ3
дх{
дУз
дХх
дУх
дУх
дУх
дХ3
дУх
дУ3
дХх
дх3
дУх
дх3
дХ3
дх3
дУА
дУз
дУх
дУз
дХ3
дУг
JTi
дхх
дУх
дх*
дУз
>о.
(4.43)
Дифференцирование уравнений (4.41) по В дает
дХх dyx . дХх dx3 . дХх dy3 ~
дух dB "Г" дх3 dB "T" ду3 dB U'
дУх dyx , дУх dx3 , дУх dyz -
дХх dxx
дхх dB
дУх dxx
дхх dB
дХ3 dxx
дхх dB
дУ3 dxx
дух dB
дХ3 dyx
дух dB
дУ3 dyx
дх3 dB
дХ3 dx3
дх3 dB
дУъ dx3
дхх dB ~Т~ дух dB *т~ дх3 dB ~ дуг dB
ду3 dB
дХ3 dy3
дуз dB
дУ3 dy3
= 0,
(4.44)
= 0.
Решая эти уравнения, получаем
dxx
dB
dyx _ Д22
dB ~ Д
dx3
dB
dB A ' ^'*0)
где А2/ (/=1, 2, 3, 4) —алгебраическое дополнение 2-й строки
и /-го столбца определителя Д. Тогда
Ж = ТЛ (хАг + Уг^п)*
~Jft — ТТЛ" 0*3^23 + Уз^24)»
г3Д
(4.46)
где
Л = А+уЪ г1=х1+у1
Следовательно, при А=0 имеет место вертикальная касательная
к характеристическим кривым (кривым зависимости между В
и гх и В и г3) на границах устойчивости, что соответствует
границам первой и третьей областей неустойчивости.
ГЛАВА 5
Гармонические колебания
5.1. ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ ПРИ СИММЕТРИЧНОЙ
НЕЛИНЕЙНОЙ ХАРАКТЕРИСТИКЕ
В настоящей главе рассматриваются гармонические
колебания [19—21, 94J, в которых основная составляющая, имеющая
тот же период, что и внешняя сила, в такой степени
преобладает над более высокими гармониками, что последними можно
пренебречь. Для того чтобы сделать физическую сторону более
ясной, мы рассмотрим электрический колебательный контур и
выведем для него нелинейное дифференциальное уравнение
вида (4.10) [31,33].
(а) Основное уравнение
На рис. 5.1 представлена схема электрического контура,
нелинейные колебания в котором обусловлены наличием катушки
индуктивности L с насыщающимся сердечником и возникают
М?)
>л
гЛ/WWS
-'ЧЯЯЯШР-
гъ) В sin иг
Рис. 5.1. Резонансная цепь с нелинейной индуктивностью.
при воздействии на контур переменного напряжения Е sin at.
Как показано на рисунке, параллельно емкости С подключено
сопротивление Rt которое обеспечивает диссипативность
контура. В тех же обозначениях, что и на рис. 5.1, имеем
п -~- -+- RiR = Е sin о/,
Ri>r = -q J ic^t* *= Ir ~Ь 'с»
(5.1)
а*
IS2 Гл. 5. Гармонические колебания
где п — число витков катушки индуктивности, а ф — магнитный
поток сердечника. Пусть кривая намагничивания сердечника
выражена в виде
tii = ajcp 4- Я3Ф3+#5<Р5 + • • • 1 (5.2)
где аи а3, а5, ... — постоянные, зависящие от материала
сердечника. Следует заметить, что в уравнении (5.2) явление
гистерезиса не учитывается. Для того чтобы было удобно
анализировать случаи, когда частота о) меняется, положим o)=vo)o, где
о)0—фиксированная частота, a v—переменный параметр. Введем
безразмерные переменные и и v, определяемые соотношениями
i = I ji, Ф = Ф„г>, (5.3)
где /п и Фп — некоторые базисные величины соответственно
тока и магнитного потока. Тогда уравнение (5.2) можно
переписать в виде
и = -±- (агФпЪ + azOW 4- аь®№ + . •.) =
= с$) + czifi 4- c5ifi 4- ... . (5.4)
Хотя базисные величины /п и Фп могут быть выбраны
совершенно произвольно, для упрощения вычислений их удобно
связать соотношениями
ЛсооСФл = /Л, £i4-£s4-£54- ••• =Ь (5.5)
Исключая затем iR и ic из уравнений (5.1) и учитывая (5.3) —
(5.5), получаем
U + ^W + ^ + ^3+^5+ ... =Scosvt, (5.6)
где
t = co0/-iarctg^ A=-5jnf.
В = —%rVv2+k2.
па>0Фп v
Таким образом мы пришли к уравнению вида (4.10), в котором
нелинейная функция f(v) является симметричной, а именно
нечетной функцией от v. Аналогичное уравнение может быть
получено и для механической системы, в которой
восстанавливающая сила нелинейна [21, стр. 78].
5.1. Колебания при симметричной нелинейной характеристике 133
(б) Периодические состояния равновесия
Для облегчения вычислений рассмотрим простой, но
типичный случай уравнения (5.4), когда
с5 = с7= ... =0,
так что
и = с{о-\-съ&1). (5.7)
Мы предполагаем, что для случая гармонического колебания, в
котором составляющая основной частоты, имеющая период
2rt/v, преобладает над более высокими гармониками,
периодическое решение уравнения (5.6) имеет вид 2)
v0 = x sin vt + у cos vt. (5.8)
Подставляя (5.8) в (5.6), где нелинейность определяется
уравнением (5.7), и приравнивая нулю отдельно коэффициенты при
sin vt и cos vt, получаем
Ах -+ vky = 0, vkx — Ay = B, (5.9)
где
A = v*-cv- \czr\ r* = x*+y*.
Исключая из (5.9) х и t/, имеем
(A2-i-v2k2)r2 = B2. (5.10)
Это довольно простое соотношение тем не менее хорошо
согласуется с экспериментальными данными [31, 29, стр. 601; 94,
стр. 728]. На рис. 5.2 представлены амплитудные
характеристики гармонического колебания, т. е. зависимость между
Е1(псооФп) и г2, для случая, когда Ci = 0,l, с3=0,9 и v = l. На
рис. 5.3 представлена амплитудно-частотная характеристика
гармонического колебания, т. е. зависимость между v и г2, для
случая, когда й=0,1, c3=0,9 и k = 0,2.
*) Кривая намагничивания стального сердечника, представленная урав-.
нением (5.4), обычно содержит члены cnvn, в которых п принимает значения
до 9 и даже больше. Однако, поскольку рассматривается гармоническое
колебание, можно пренебречь такими высокими степенями vt и это не окажет
существенного влияния на последующий анализ. Кубическую характеристику
можно реализовать, создав в сердечнике зазор подходящей формы или
используя сердечники из специальных материалов (§ 7.5).
2) Если В в (5.6) велико, необходимо принимать во внимание члены
с более высокими гармониками; этот случай будет рассмотрен в следующей
главе.
134 Гл. 5. Гармонические колебания
О 0,2 0,4 0.6 0,8 Ю
ЕЦпш0Фп)
Рис. 5.2. Амплитудная характеристика гармонического колебания.
(в) Условие устойчивости периодических решений
Состояния равновесия, определяемые уравнениями (5.9) или
(5.10), не всегда осуществимы; они могут реально существовать
лишь тогда, когда они устойчивы. Следуя ходу рассуждений
предшествующей главы, изучим вопрос об устойчивости
состояний равновесия и найдем периодические решения, которые
соответствуют устойчивым состояниям. Для этого рассмотрим
малое отклонение g от состояния равновесия и заменим в
уравнении (5.6) v на Vo+%. Принимая во внимание уравнение для
нелинейности (5.7), получаем уравнение в вариациях
^ + k^ + cll + 3czvll = 0.
Используя преобразование
5.1. Колебания при симметричной нелинейной характеристике 135
Рис. 5.3. Частотные характеристики гармонического колебания.
приводим это уравнение к виду
d2x\
dx2
+ (*i-|*2+3*3^ = 0.
Подставляя теперь в это уравнение периодическое решение
(5.8), получаем в конечном итоге уравнение Матье
где
-g +[00+29, cos (2vt -е)]л = 0,
% = ^ — -5-£2+-|<У2> 6i = -f-<y2. e = arctg ff^
(5.11)
Условие устойчивости для первой области неустойчивости
определяется неравенством (4.6) при п=1. Поскольку в
уравнениях (5.11) периодический коэффициент при ц имеет период
зх/v, это условие принимает вид
(% - v2)2+4 (в0+v^) k2 + ± k4 > ei
136 Гл. 5. Гармонические колебания
Подставляя сюда значения 9о и 9i из (5.11), получаем
A2 — ^czAr2+v2k2>0. (5.12)
Рассмотрим, что физически означает это условие. Сначала
предположим, что амплитуда Е изменяется, в то время как
частота v остается постоянной. Тогда в силу уравнения (5.10)
имеем
Следовательно, условие устойчивости может быть переписано
в виде
dB2 . Л dE2 ^ Л /с 10ч
__.>0 или ^г>0. (5.13)
Отсюда видно, что периодическое решение является устойчивым
при условии, что амплитуда г с возрастанием внешней силы В
увеличивается. С физической точки зрения это условие
представляется вполне правдоподобным. На рис. 5.2 область
неустойчивых решений, где dB2jdr2 отрицательна, заштрихована.
Необходимо также заметить, что граница между областями
устойчивости и неустойчивости определяется условием
^1 = 0
dr2 Vi
которое определяет вертикальную касательную к
характеристической кривой на границе устойчивости [см. п. 4.4(a)].
Таким образом, мы видим, что при определенных значениях
k и Е имеются три типа состояний равновесия. Два из них
являются устойчивыми и одно неустойчивым1). Как отмечалось
в п. 4.4(a), это неустойчивое состояние переходит в одно из
устойчивых состояний вследствие роста отклонений вида
e^(sin(vT — о) +...], где действительная часть X положительна.
Чтобы различать два устойчивых состояния, будем называть
одно из них (с большей амплитудой) резонансным, а другое
(с меньшей амплитудой) нерезонансным. На рис. 5.2 видно, что
амплитуда г с увеличением Е медленно возрастает, начиная
с нулевого значения (k при этом поддерживается постоянным),
и колебание является нерезонансным. При подходе к границе
заштрихованной области дальнейшее незначительное
увеличение Е вызовет скачок к резонансному состоянию, сопровождаю-
1) Оригинальный подход к определению устойчивости состояний
равновесия феррорезонансной цепи приведен К. М. Поливановым в [140].—Прим.
ред.
5.2. Колебания при несимметричной нелинейной характеристике 137
щийся увеличением амплитуды г, после чего с ростом Е
величина г возрастает довольно медленно. Напротив, с
уменьшением Е амплитуда колебания делает скачок от резонансного
состояния к нерезонансному1). Этот скачок происходит при
более низких, чем прежде, значениях Я, поэтому имеет место
явление гистерезиса. Если выбрать Е между этими двумя
критическими значениями и приложить к контуру напряжение этой
амплитуды, то в зависимости от заданных начальных условий
возникает резонансное или нерезонансное колебание2).
Теперь рассмотрим случай, когда частота v изменяется, в то
время как амплитуда Е остается постоянной. При этом имеем
dr2 — 2Аг2 — к*г2 + (Е/пщФп)* ' (ЭЛ4)
Следовательно, как и ранее, касательная к
амплитудно-частотной кривой на границе устойчивости вертикальна. На рис. 5.3
пунктирные части кривых соответствуют неустойчивым
состояниям равновесия. С изменением v также имеет место явление
гистерезиса.
До сих пор рассматривалось условие устойчивости для
случая /г=1. Вообще говоря, необходимо также рассмотреть
условия при я>-2. Но, как будет показано в § 6.1, их следует
принимать во внимание только при очень больших 90. При этом г*
и В также становятся большими, так что в решении уравнения
(5.8) следует учитывать более высокие гармоники. Детальное
рассмотрение ультрагармонических колебаний откладывается
до гл. 6. Здесь же отметим, что в случае, когда В не очень
велико, одно только условие при я=1 обеспечивает
устойчивость.
5.2. ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ ПРИ НЕСИММЕТРИЧНОЙ
НЕЛИНЕЙНОЙ ХАРАКТЕРИСТИКЕ
(а) Основное уравнение
Если в уравнении кривой намагничивания железного
сердечника (5.4) присутствуют члены с у2, у4, ..., то
характеристика становится несимметричной и результирующие
колебания несколько отличаются от симметричного случая.
Рассмотрим случай, когда
u = CiV + c2v2+c3v*. (5.15)
1) Так как это резонансное явление связано с насыщением железного
сердечника, то явление скачка иногда называется феррорезонансом [90г 94].
2) Эта задача рассматривается в части III.
138 Гл. 5. Гармонические колебания
При этом уравнение (5.6) принимает вид1)
4J + k ~аЧ + С\° + C2lP+Ctffi = В COS Т.
Это уравнение легко преобразуется к другому виду:
d2v'
dv'
dx2
hk^r + cy + cfzvf6 = Bcosx + B0,
(5.16)
(5.17)
где v' = v+'c2/(3cz), a c'v c'^ B0—постоянные, зависящие от си с2
и с3. Из уравнения (5.17) видно, что нелинейная
характеристика симметрична, а внешняя сила несимметрична, поскольку
она содержит постоянную составляющую В0.
R
гЛЛЛЛЛ/Ч
*
(а)
R
r-A/WWS
1(9)
i *
*
'"bjEsin utf
(6)
Рис. 5.4. Резонансные цепи с несимметричной характеристикой.
Электрические системы, дифференциальные уравнения
которых имеют вид (5.16) или (5.17), вполне реализуемы. Схемы
таких систем представлены соответственно на рис. 5.4, (а) и (б).
На рис. 5.4, (а) катушка индуктивности имеет вторичную
обмотку, по которой протекает постоянный ток смещения /0, так
что кривая намагничивания при этом определяется уравнением
*) Рассматривается только случай v=l.
5.2. Колебания при несимметричной нелинейной характеристике 139
(5.15). На рис. 5.4, (б) постоянное напряжение Е0
накладывается на переменное напряжение Е sin cot, так что система
описывается уравнением (5.17).
Рассмотрим систему рис. 5.4, (б), взяв основное уравнение
в виде1)
^ + k^ + <v*==Bcosx + B0. (5.18)
(б) Периодические режимы
Если система несимметрична, то магнитный поток железного
сердечника в общем случае имеет постоянную составляющую,
поэтому мы полагаем
^о = z + х sin т -f- У cos т. (5.19)
Подставляя (5.19) в (5.18) и приравнивая постоянный член и
коэффициенты при sinr и cost отдельно к нулю, получаем
•|г2г + г3 = £0, Ax+ky = Q, kx — Ay = B, (5.20)
где
Л=1—-|г2 —Зг2, г2 = *2+*/2;
исключая х и у из второго и третьего уравнений (5.20), имеем
(А2 + £2)г2 = £2. (5.21)
Периодические решения находятся из уравнений (5.20). На
рис. 5.5 показано изменение амплитуды у гармонического
колебания для недиссипативного случая, т. е. при k = 0 (в этом
случае х=0). На рис. 5.6 представлена зависимость между \В\
и г2 при В0=0,36. При определенных значениях \В\ и k имеется
пять видов состояния равновесия 2).
1) Когда железный сердечник имеет большой воздушный зазор,
необходимо учитывать линейный член относительно v. Однако этот дополнительный
член не вносит существенных изменений в дальнейший анализ.
2) Если соединить в цепи переменного тока несколько катушек с
ферромагнитными сердечниками, рассчитанными так, чтобы они насыщались при
разной индукции, и дать общее подмагничивание постоянным током, то
можно получить ступенчатую вольтамперную характеристику этой системы
катушек. Включив конденсатор последовательно с этой системой катушек,
можно получить весьма большое число феррорезонансных скачков (в
зависимости от добротности контура), а характеристика, соответствующая фиг. 5.6,
приобретет вид кривой с большим числом точек перегиба.
Исследование и расчет такой цепи были выполнены переводчиками
данной книги [см. сб. Доклады научно-технической конференции, сек. А и Т,
МЭИ, 1967, стр, З-Щ — Прим. ред.
Рис. 5.5. Амплитудная характеристика гармонического колебания при
несимметричной характеристике (недиссипативныи случай).
Рис. 5.6. Амплитудная характеристика гармонического колебания при
несимметричной характеристике (диссипативный случай).
5.2. Колебания при несимметричной нелинейной характеристике ' 141
(в) Условия устойчивости периодических решений
Найдем теперь условия устойчивости состояний равновесия.
Поступая таким же образом, как для симметричного случая
в п. 5.1(b), получаем, что отклонение | от состояния равновесия
удовлетворяет уравнению
Используя преобразование
1 = е * л
и подставляя в уравнение периодическое решение (5.19), мы
приходим к уравнению в вариациях типа уравнения Хилла, а
именно
<*т2 "•
е0 + 2Уеясо8(«т —е„) L = 0, (5.22)
где
е0 = |-г2+3г2—\k\
2 ^"* 4
в| = в^4-в2в. e„ = arctg-^-,
"ПС
Qls = 3xz, Qlc = 3yzy
%s = 2 ХУ> 82* = -J" (У2 — X2)'
Это уравнение имеет вид (4.7), и, следовательно, условия
устойчивости определяются неравенствами (4.9). Исследуем
условия устойчивости для второй области неустойчивости, чтобы
проверить устойчивость против нарастания неустойчивых
колебаний той же частоты, что и частота периодического решения
(5.19). Поскольку рассматриваемая система несимметрична и
в решении (5.19) присутствует постоянный член z, удобно
вместо (4.9) воспользоваться улучшенными условиями
устойчивости (4.15). Итак, можно написать
4(62-V)=(0o+62_ iT-$-2b+»-lti+
+ vfe5" К9'с ~ °^ 02с + 201<ei*e^ + 4й2 > 0, (5.23)
где 6=й/2. Подставляя' значения параметров, относящиеся к
уравнению (5.22), получаем
142 Гл. 5. Гармонические колебания
в силу (5.20) и (5.21) это условие можно записать в виде1)
dB2
dr2
>0.
(5.25)
Из этих условий устойчивости видно, что пунктирные участки
кривых рис. 5.5 и 5.6 соответствуют неустойчивым состояниям.
Нужно было бы также рассмотреть условия устойчивости
для других областей неустойчивости. Однако при изменении В
в пределах, указанных на рис. 5.5 и 5.6, никаких существенных
результатов не получается, поэтому дальнейшие рассмотрения
опущены. Таким образом, можно сделать заключение, что в
несимметричной системе, описываемой уравнением (5.18), в
некоторой области значений величины В могут существовать три
вида периодических колебаний.
5.3. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
В этом параграфе представлены результаты
экспериментального исследования с целью сравнения их с вышеприведенным
теоретическим анализом. В случае, когда насыщающийся
сердечник снабжен вторичной обмоткой, как это показано на
'ас ||
К2 Ь
АЛЛА; ПЯ№^—~и
Vdc#
Рис. 5.7. Резонансная цепь, содержащая катушки с подмагничиванием
постоянным током.
рис. 5.4, в ней протекает пульсирующий ток, обусловленный
трансформацией первичного тока. Для подавления этой
переменной составляющей во вторичной цепи прибегают к контуру,
представленному на рис. 5.7. Как-показано на этом рисунке,
для этой цели используются две катушки индуктивности, вто-
!) Если вместо условия устойчивости (4.15) воспользоваться условием
(4.9), то последнего члена в левой части (5.24) не будет, и мы не сможем
получить условие 5.25.
5.3. Экспериментальное исследование 143
50 ЮО 150
Приложенное напряжение Vac, в
200
Рис. 5.8. Амплитудная характеристика гармонического колебания при
несимметричной характеристике.
ричные обмотки которых соединены таким образом, что
трансформируемые в них напряжения основной частоты взаимно
компенсируют друг друга. Однако по мере повышения степени
насыщения сердечника в цепи постоянного тока начинает
протекать ток второй гармоники (как видно из осциллограммы
рис. 5.9), поэтому для ослабления этой пульсации в цепь
включается катушка L высокой индуктивности1).
На рис. 5.8 в обозначениях рис. 5.7 представлена
зависимость между Vac и 1ас для различных значений Uc- Жирной
линией показана характеристика для /^с=1,4 а. В этом случае по
мере увеличения напряжения Vac два раза происходит скачок
тока 1ас по амплитуде. Проводя эксперимент в обратном
порядке, т. е. уменьшая Vac, можно обнаружить, что новая
кривая не совпадает полностью с прежней, а каждый скачок от
1) Заметим, чго система после этого становится симметричной, и
результаты, приведенные ниже, соответствуют симметричной системе. — Прим. перев.
144 Гл. 5. Гармонические колебания
большего тока к меньшему имеет место при меньших, чем
прежде, значениях Vac- Итак, между резонансным и
нерезонансным состояниями существует третье устойчивое состояние,
которое мы будем называть субрезонансным. Все это
согласуется с теоретическими рассмотрениями1).
Осциллограммы напряжений и токов для этих трех случаев
представлены на рис. 5.9. Осциллограмма (а) снята для случая,
когда питающее напряжение Vac постепенно увеличивается. Два
у,
'*
'^ттштшттштшшшшшт
(а)
vm /www A/VWVWY МАМАМ/
ь /www ЛОМАЛА/ VyVyWyV
wvwwwwwvw mmmwnw
л/vvvvvvvvvvvvvvvv VVWWWWVWVVW
V2 ЛЛЛЛЛЛЛЛЛЛЛЛЛ
fdc
Г« (8)
Рис. 5.9. Осциллограммы напряжений и токов в системе с несимметричной
характеристикой, (а) Колебание при нарастании приложенного напряжения Vac.
(б) Нерезонансное состояние, (в) Субрезонансное состояние, (г) Резонансное
состояние.
скачка тока /ас отмечены стрелками, причем первый из них
соответствует переходу от нерезонансного состояния к
субрезонансному, а второй — от субрезонансного состояния к
резонансному. Осциллограммы (б)— (г) характеризуют эти состояния
более отчетливо; ток 1ас сначала соответствует нерезонансному
состоянию, затем — субрезонансному (имеет место сдвиг по
фазе) и наконец — резонансному состоянию. Из осциллограммы
также видно, что с ростом амплитуды Vac значительно
возрастает ток второй гармоники во вторичной цепи.
Области существования этих трех состояний, полученные
экспериментально, представлены на рис. 5.10. Стрелки на
рисунке соответствуют переходу из одного состояния в другое при
1) Сравниваются разные системы: теоретический анализ для
несимметричной цепи и эксперимент для симметричной цепи. Для сравнения необходимо
провести эксперимент в цепи рис. 5.4, (а). — Прим. перев.
5.3. Экспериментальное исследование
145
2,5
2,0
U
1
I i,o
I
\n~*
Е
1 Я8
1 1
1 1 1
/
лч
f-*
с
Не
н
5—
-R N-
/X
i
«
^к
f
5-
Чг-к
-
лД
-R
а\\
ад
0 50 100 150
Приложенное напряжение Vac в
Рис. 5.10. Области различных видов колебаний; N-
5 — субрезонансное, R — резонансное.
200
- нерезонансное,
изменении Vac в направлении стрелок. Так, например, для
случая /dc=l,5 а при возрастании Vac до величины,
соответствующей границе DE, колебание переходит от нерезонансного
состояния к субрезонансному и далее, при достижении Vac
границы ЛВ, колебание переходит от субрезонансного состояния к
резонансному. Заметим, что если с ростом Vac до значений,
соответствующих участку GH границы DE, происходит
пересечение отрезка GH, колебание переходит непосредственно от
нерезонансного состояния к резонансному. Границу GI можно
определить, если поддерживать Vac постоянным, постепенно
увеличивая при этом /<*с от более низких значений, при которых
колебание соответствует субрезонансному состоянию. Мы
видим, наконец, что субрезонансное состояние может иметь место
при условии, что величина постоянного тока Uc выбрана в
области между Ви£.
10 Зак 907
ГЛАВА 6
Улыпрагармоническиё колебания
6.1. УЛЬТРАГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
В ПОСЛЕДОВАТЕЛЬНО-РЕЗОНАНСНЫХ ЦЕПЯХ
В предшествующей главе устойчивость гармонических
колебаний исследовалась путем применения уравнений в вариациях
типа уравнения Хилла. Как отмечалось в п. 5.1(b), в том
случае, когда амплитуда В внешней силы очень велика, следует
рассматривать условие устойчивости (4.6) для д>2. Колебания
при этих условиях заслуживают рассмотрения, поскольку, если
не удовлетворяется указанное выше условие устойчивости, то
происходит аномальное возбуждение ультрагармоник [31, 29,
стр. 670; 94, стр. 778]. Так как в этой области проведено еще
мало исследований, в этом параграфе мы рассмотрим такие
колебания.
Имея в виду электрическую цепь, изображенную на рис. 5.1 *),
рассмотрим уравнение
4*+*£ + t,_*C08T. (6.1)
Поскольку нас особенно интересует случай, когда В принимает
большие значения, периодическое решение уравнения (6.1)
целесообразно выбирать в виде
v0 = xl sin т + yl cos т + xz sin Зт + yz cos Зт. (6.2)
Члены, соответствующие гармоникам выше, чем третья,
конечно, также присутствуют, но в данном приближении они
опускаются. Подставляя (6.2) в (6.1) и приравнивая нулю отдельно
коэффициенты при членах, содержащих sin-t, cost, sin3t и
cos3t, получаем
Aixi + kyx+4 (*i — У\) xz + -2 x\Wz = 0,
kxx — Axyx — T [x\ — y\) Уъ + y xuhxz = #>
Azxz + 3&/3 + \xx И - Щ = °' 6'3)
3kxs - Л3Г/3 - \ yx (3x( - y\) = 0,
l) В отличие от параллельно-резонансных цепей, которые будут
рассматриваться в § 6.3, такие цепи мы называем последовательно-резонансными.
6.1. Колебания в последовательно-резонансных цепях 147
fr=0,?
it
[V-- Первая
i область]
' неустойчивости ф
Вторая
область
Г/ ^-cHi
>*-*
неустойчивости
Третья
-область-
неустоичивости
Ю
20
25
Рис. 6.1. Амплитудная характеристика колебаний в
последовательно-резонансной цепи.
где
А=1~т(г1 + 2гз> r\ = x\ + yl
A3 = 9-i(2^ + i> rl^xt+yl
Исключая составляющие х и у в приведенных выше
уравнениях, получаем
[(*-^М-ЭДч-
(6.4)
(Л1+9^)г1 = ^гв.
На рис. 6.1 представлены кривые, полученные при помощи
уравнений (6.4) для & = 0,2.
В соответствии с рис. 6.1 определим устойчивость состояний
равновесия. Аналогично тому, как это делалось раньше,
приведем уравнение в вариациях к виду
10*
148 Гл. б. Ультрагармонические колебания
Выполняя замену переменных
1 = е
-±k%
Ц
и подставляя периодическое решение (6.2), получаем уравнение
в вариациях типа Хилла, а именно
3 П
%-\-2^Qncos(2nx — гп)\
d*r\
dx2
+
л = 1
л = о,
(6.5)
где
^tOI+D-t*
в/1 = 9/Ii + ft»C»
е,.=
ея
e„ = arctg-g«-
1* = Т (^i^i — *i& 4- *aPi). eie = — Т И — yi) +
ft.
Ч-у^Л + ^з).
з
^2c = "O" ( -*1«*3 + f/lf/з)'
J3*
3
ез«? = -
•тН-i
Условие устойчивости (в первом приближении), полученное
при 26 = £ = 0,2 из (4.6), имеет вид
(80-я2)2+2(90 + /г2)62 + 64>82, *=lf2,3. (6.6)
Следовательно, если параметры 6, вычисленные в соответствии
с (6.5), не удовлетворяют условию (6.6), то периодическое
решение (6.2) является неустойчивым и фактически не существует.
Обратимся к геометрическому анализу поведения параметров
на диаграмме устойчивости, соответствующей уравнению Хилла.
Граничные кривые, разделяющие области устойчивости и
неустойчивости, определяются формулой
(во-Аг2)2 + 2(е0+/г2)62 + 64 = е2, 6 = 0,1. (6.7)
Эти граничные кривые на рис. 6.2 изображены тонкими линиями.
Из (6.3) и (6.5) видно, что, задавая В, на диаграмме
устойчивости можно нанести точку (во, 9П). Следовательно, с
изменением В точки (8о, 0П) будут перемещаться по кривым 8П,
изображенным на рисунке жирными линиями. Такиц. образом, в
силу условия устойчивости (6.6) периодические решения
становятся неустойчивыми, когда точка (9о, 0П) лежит в п-и
области неустойчивости. Участки неустойчивости на рис. 6.2 отме-
6.1. Колебания в последовательно-резонансных цепях 149
чены пунктирными линиями. Теперь рассмотрим каждую
область неустойчивости подробно.
Случай 1. Точка (9о, 9i) лежит в первой области
неустойчивости.
В этом случае условие устойчивости (6.6) прия=1
нарушается. Неустойчивость такого вида рассматривалась в п. 5.1(b).
Однако в данном параграфе учитывается третья гармоника,
поэтому периодическое решение (6.2) дает лучшее приближение
1 4
k=l&~W
первая вторая
область область
{неустойчиво- неустойчиво
U сти . сти
Рис. 6.2. Кривые параметров 9 для уравнения (6.5) при изменении
амплитуды Я.
по сравнению с решением в § 5.1. Таким образом, желательно
воспользоваться условием устойчивости с тем же порядком
приближения, что и при нахождении этого периодического решения.
Как отмечалось в п. 4.4 (д), при использовании улучшенного
условия устойчивости (4.18) вместо (6.6) получается условие
существования вертикальной касательной к
характеристической кривой на границе устойчивости, что соответствует границе
первой области неустойчивости. Неустойчивые состояния,
определенные таким образом, отмечены на рис. 6.1 пунктирными
линиями.
Случай 2. Точка (Э0, 0г) лежит во второй области
неустойчивости.
Условие устойчивости (6.6) при п=2 нарушается. На рис. 6.2
видно, что кривая 82 входит во вторую область неустойчивости
150
Гл. 6. Ультрагармонические колебания
вблизи точки с абсциссой Э0=4. Улучшенное условие
устойчивости для второй области неустойчивости определяется
выражением (4.12). Применяя это условие, мы определяем участки
неустойчивости на характеристической кривой (на рис. 6.1 они
показаны пунктирными линиями). Как отмечалось в п. 4.4(6),
неустойчивые колебания во второй области неустойчивости1)
соответствуют четным гармоникам.
Случай 3. Точка (9о, 0з) лежит в третьей области
неустойчивости.
Условие устойчивости (6.6) при д = 3 нарушается. В этом
случае справедливы те же замечания относительно
вертикальной касательной к характеристической кривой, что и в первом
случае. Как видно из рис. 6.1, с изменением В имеет место
скачок амплитуд гх и г3.
Резюмируя вышесказанное, отметим, что при очень
больших амплитудах В внешней силы периодическое решение (6.2)
характеризуется наличием четных гармоник, соответствующих
второй области неустойчивости, и аномальным поведением
нечетных гармоник, соответствующих третьей области
неустойчивости2). Можно предположить, что при дальнейшем
увеличении амплитуды В будет иметь место возбуждение высших
гармоник.
6.2. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
Сравнивая рис. 6.1 с рис. 5.2, мы видим, что при очень
больших амплитудах В происходят аномальные явления. Поскольку
В — амплитуда внешней силы, мы будем проводить эксперимент
для последовательно-резонансной цепи (рис. 5.1), к которой
прикладывается значительное напряжение.
На рис. 6.3 показана зависимость действующего значения
тока (жирная линия) для широкого диапазона изменения
приложенного напряжения. С помощью гетеродинного
гармонического анализатора этот ток разлагается на гармонические
составляющие. Результаты этих измерений показаны тонкими
линиями; цифры на них указывают порядок гармоник. Первая
область неустойчивости расположена между 24 и 40 в
приложенного напряжения; явление скачка в этой области обычно
1) Для того чтобы найти установившееся значение амплитуд четных
гармоник, необходимо учесть составляющие этих гармоник в периодическом
решении (6.2).
2) Решение уравнения (6.1) на аналоговой вычислительной машине
подтверждает это заключение. См. также экспериментальные результаты в
следующем параграфе.
6.2. Экспериментальное исследование
151
О 100 200 300 400 500 600 700 800
Приложенное напряжение, в
Рис. 6.3. Ток в резонансном контуре .и его гармонические составляющие
при большом насыщении сердечника.
называют феррорезонансом (§ 5.1). Вторая область
неустойчивости простирается от 180 до 580 е. Как можно было ожидать
на основании предшествующего анализа, характерной
особенностью для этой области является преобладание четных
гармоник. Третья область неустойчивости расположена между 660
и 670 е. В этой области происходит скачок амплитуды
колебаний к другому устойчивому состоянию. На рис. 6.4
представлены типичные осциллограммы колебаний; кроме того, дается
процентное содержание каждой гармоники.
Для перевода колебаний в области неустойчивости более
высокого порядка необходимо значительно повысить
приложенное напряжение, поскольку конденсатор, включенный
последовательно, ограничивает ток, который вызывает насыщение
сердечника катушки. Следовательно, можно ожидать, что
152 Гл. 6. Ультрагармонические колебания
S
!
000
%й
а
шо
ЯП
60
40
20\
0
100
80
60
40;
20
0
S 100!
со
1
1
НО,
60
40
20
0
шо;
80
60
40
20
0!
1 lil li
! 1 III 1
Mill
f V
Vs 150 1
Ц-Ш к \ м\ I
Н+Н/
1 1 1 1 1
ilMIM
1 1 1 I I /
1——Н—\-4
Ж-Н7
т 1 т f ! '
III1
Т —*
1 1 1 1 1
A /*\ A /~\
r\ p\
w V4
i 1 1 1 J. 1
1 V (1 V'300
W/ W
И И ii Ш 1 1 1
- V
\У\
J_L K\,J
fct v\/
lil. 111 i-
II 1 li i
h J
A—\r^J
j У--356
{\
w / n
v \У V/
. I,-Lt-1 ■ 1 ■ 1 ■ 1 ■ 1
II—■ i 18 ПД ИИ ■ И ill 1 ■ 1 И 1 ■ I ■ 1 ■ I ■ 1 - I
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
порядок гармоник
i » ' t i » i i » i i I
0 100 200 300 400 500 600 700 800 900 WOO f
частота
Рис. 6.4. Характерные осциллограммы токов и их гармонический анализ.
ультрагармонические колебания, вероятно, появятся и в
параллельно-резонансной цепи; этот вопрос мы изучим в следующем
параграфе.
6.3. УЛЬТРАГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
В ПАРАЛЛЕЛЬНО-РЕЗОНАНСНЫХ ЦЕПЯХ Г31,т.ЗО, стр. 418]
На рис. 6.6 изображена схема, в которой две параллельно-
резонансные цепи соединены последовательно. Предполагается,
что параметры цепи L и С в каждом контуре одинаковы. В
отдельно взятом контуре под воздействием переменного
напряжения не возникнет никаких необычных явлений, поскольку
напряжения на L и С равны приложенному напряжению.
I
1
6.3. Колебания в параллельно-резонансных цепях 153
Обозначая токи в L и С соответственно через 1ь и ic,
получаем уравнения цепи1)
nlit=T $ icdt=±Esiri(ot,
(6.8)
где п — число витков катушки индуктивности, а ф — магнитный
о
А
йп wt
If
О и
L
J©
VO
}о
хо
ю
Уо
L
Jo
Vo
Jo
)о
XD
Vo
Рис. 6.5.
Параллельно-резонансная цепь с
нелинейной индуктивностью.
Рис. 6.6. Направление контурных
токов, вызванных возмущением.
поток в сердечнике. Поступая таким же образом, как для
гармонических колебаний в п. 5.1(a), положим
lL = liflv 'с = ЛЛ:» Ф = Ф,^> С = Спт (6.9)
и допустим, что кривая намагничивания имеет вид
uL = с {о + c3vz. (6.10)
Как и ранее, мы налагаем условия
п^СпФп = /п, ^ + ^=1.
'п~п—Лп> ^1-Г^З—А- (6Л1)
Тогда в силу условий (6.9) и (6.11) уравнения (6.8)
преобразуются к виду
г/2». 1
:В cost, (6.12)
где
d2v _J_
~аЧ> — т Uc'
х = о/, В =
1
2 п(йФп
1) Предполагается, что обе резонансные цепи находятся в совершенно
одинаковом режиме, так что на каждый контур приходится половина
приложенного напряжения. Далее мы будем исследовать устойчивость именно в
этом режиме.
154 Гл. 6. Ультрагармонические колебания
Следовательно, для периодического режима получаем
v0 = у cos х = — В cos т. (6.13)
Теперь рассмотрим устойчивость этого режима. Обозначим
соответственно через 6uLy Ьис и g вариации величин uL, uc и v
в одном из резонансных контуров. Тогда в другом резонансном
контуре возникнут соответствующие отклонения —duL, —дис
и —£. Применяя первый закон Кирхгофа для узловой точки
обоих контуров, имеем
6^ + 6ис = 0. (6.14)
Следовательно, токи, вызванные этими возмущениями,
будут течь в обоих контурах в противоположных направлениях,
как показано на рис. 6.6, и не будут протекать по внешнему
источнику.
Из уравнения (6.10) следует, что duL и | связаны
соотношением
buL = (cx + 3c3vl)b (6.15)
Подставляя (6.14) и (6.15) в (6.12), имеем
Далее, подставляя периодическое решение (6.13), получаем
уравнение типа Матье
U + (во+20! cos 2т) 1 = О, (6.16)
где
8о = i (*i + 1 С*У2) • ei = i Т с^'
Заметим, что периодический режим (6.13) становится
неустойчивым, если уравнение (6.16) имеет неустойчивое решение,
и что ультрагармоническое колебание (главным образом п-я
гармоника) будет возбуждаться в том случае, если точка (0о, 0i)
лежит в п-и области неустойчивости.
Как отмечалось в § 6.1, ультрагармоническое колебание с
большой вероятностью возникает, когда 60 увеличивается.
Для последовательно-резонансной цепи мы имеем соотношения
(6.4) *). Отсюда следует, что для увеличения 60 необходимо,
чтобы амплитуда внешней силы В была велика. Однако в
параллельно-резонансной цепи 8о может быть легко увеличено,
поскольку, как видно из уравнения (6.13), у=—В.
Следовательно, ультрагармонические колебания в параллельно-резонансной
1) См, также рис. 6.1.
}
6.3. Колебания в параллельно-резонансных цепях 155
цепи могут иметь место при сравнительно низком приложенном
напряжении. Это согласуется с рассмотрениями, приведенными
в конце § 6.2.
Теперь определим области, которым соответствует
возбуждение ультрагармонических колебаний. Ради упрощения
расчетов возьмем частный случай
Ci=0 и с3=1.
Тогда из уравнений (6.16) получаем следующие соотношения,
связывающие параметры 9о и Эь
00 = 29, = -^-. (6.17)
Эта линейная зависимость между 90 и Oi изображена на
диаграмме устойчивости уравнения Матье (рис. 6.7). Области
неустойчивости порядков 1, 2, 3, ... представлены соответственно
О Ш 20 30 40 50
Рис. 6.7. Геометрическое место точки 60, Q{ при изменении величины В2/т,
когда 0О и 0! связаны соотношением (6.17).
заштрихованными зонами I, II, III, ... (см. рис. 3.3). Таким
образом, мы видим, что при возрастании В2/т прямая (Э0, 9i)
поочередно проходит через области устойчивости и
неустойчивости. Если через ап и Ьп обозначить точки пересечения этой
[
156 Гл. 6. Ультрагармонические колебания
Рис. 6.8. Области возбуждения ультрагармонических колебаний (расчет).
прямой с границей п-й области неустойчивости (как показано
на рисунке), а через 8ап и 8ьп — соответствующие значения 8П,
то на плоскости В, m граничная кривая п-й области, в которой
преобладает возбуждение п-й гармоники, определится
соотношениями
!Л —a JLJL —а
2 m ~ °ал' 2 m — "*"•
(6.18)
Частные значения параметров 6ап и вьп легко находятся из
рис. 6.7; они приведены в табл. 6.1. Подставляя эти значения
Таблица 6Л
п
®Ьп
1
0,66
1,78
Значения 8ДЛ и 6^
2
3,71
6,10
3
9,24
12,88
в (6.18)
4
17,27
22,00
5
27,76
33,82
6
40,66
47,80
6.4. Экспериментальное исследование
157
О 50 100 150 200 250 300 350 400
Приложенное напряжение^
Рис. 6.9. Области возбуждения ультрагармонических колебаний
(эксперимент).
в уравнения (6.18), получаем области ультрагармонических
колебаний, показанные на рис. 6.8 *).
6.4. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
Вначале проведем эксперименты с электрической цепью,
представленной на рис. 6.5. Поскольку Вит пропорциональны
соответственно приложенному напряжению и емкости, то,
изменяя эти величины, найдем области, которые соответствуют
возбуждению высших гармоник. Результаты эксперимента
представлены на рис. 6.9, на котором цифры I, II, III, ... соответ-
1) Римские цифры I, II, III, ... в каждой области соответствуют тем же
Цифрам на рис. 6.7,
158
Гл. 6. Ультрагармонические колебания
500 25
400 20
| 300&15|
I л
8 i
1 |
| 200 10|
100 5
0 О
—i— "' i ' i 1 1—
Осциллограммы VN
100 150 200 250 300
Приложенное напряжение v,e
400
Рис. 6.10. Неустойчивость напряжения нейтрали, обусловленная
ультрагармоническим возбуждением.
ствуют цифрам на рис. 6.8. На этом же рисунке приведены
осциллограммы емкостного тока 1С и приложенного
напряжения V; основные частоты являются 1-, 2-, 3-,...-кратными
возбуждающей частоты.
В результате возбуждения отдельных гармоник потенциал
точки соединения обоих резонансных контуров относительно
средней точки приложенного напряжения будет изменяться
с частотой, равной частоте этой гармоники. На рис. 6.10 пред-
6.4. Экспериментальное исследование
159
Приложенное напряжение VQC,e
Рис. 6.11. Ультрагармонические колебания и их гармонический анализ.
ставлена зависимость напряжения нейтрали VN от
приложенного напряжения1). Из рисунка видно, что начавшееся
возбуждение может быть приостановлено путем снижения
приложенного напряжения до значения более низкого, чем первоначальное.
Предшествующий анализ не выявил этого явления гистерезиса,
так как при достаточно сильном возбуждении режим цепи
изменяется, и теория, предполагающая наличие периодического
режима (6.13), более неприменима2). Необходимо также
отметить, что области рис. 6.9 соответствуют началу самовозбуждения
1) Возбуждаемое колебание, соответствующее первой области неустойчи-
вости (отмеченной цифрой I), имеет ту же самую частоту, что и
приложенное напряжение. Это явление в электрических линиях передачи иногда
называют нейтральной инверсией.
2) Установившаяся амплитуда возбуждаемых колебаний может быть
найдена путем включения в предполагаемое периодическое решение (6.13)
наряду с составляющей основной частоты также и составляющих других
частот. Затем методом гармонического баланса определяются амплитуды этих
составляющих.
160 Гл. 6. Ультрагармонические колебания
колебаний, но колебания могут поддерживаться и за
пределами заштрихованных областей, когда приложенное
напряжение несколько снижается.
На рис. 6.11 жирными линиями изображены кривые
зависимости действующего значения тока в емкости /с от приложен-
момент включения
--^nnhH4HfH4ii
а^лллллллллллл
Рис. 6.12. Нарастание самовозбуждающихся колебаний. V — приложенное
напряжение, VQ — напряжение на конденсаторе, /с — ток конденсатора.
ного напряжения Vac. Этот ток разлагается на свои
гармонические составляющие (вычерченные тонкими линиями; числа
показывают порядок гармоник). Можно заметить, что нечетные
гармоники присутствуют в областях нечетного порядка, т. е.
в областях I, III, V, ..., а четные гармоники — в областях
четного порядка, т. е. в областях II, IV,
VI, ... . Это хорошо согласуется с
теорией уравнения Матье, как и
позволяла ожидать форма
неустойчивого решения, приведенная в п. 3.6(6).
Можно предположить, что если к
цепи прикладывается переменное
напряжение, то самовозбуждающееся
колебание по мере увеличения
амплитуды будет постепенно нарастать,
принимая вид
e^x\sin(nx — а) + ...], ц>0.
Рис. 6.13. Подавление само
возбуждающегося
колебания.
В конце концов колебания достигнут
установившегося режима с постоянной
амплитудой, которая ограничивается
нелинейной характеристикой цепи. Это подтверждается
экспериментом. Пример такого переходного процесса приведен на
рис. 6.12, где показано возбуждение седьмой гармоники,
которая соответствует седьмой области неустойчивости уравнения
Матье.
В заключение отметим, что если возбуждение этих
колебаний нежелательно, то его можно предотвратить, применяя еле-
6.4. Экспериментальное исследование
161
дующую схему. К катушкам индуктивности добавляют
вторичные обмотки, как показано на рис. 6.13, и соединяют их
последовательно-встречно. Тогда из-за того, что аномальное
колебание возбуждается в первичных контурах в противоположных
направлениях (рис. 6.6), во вторичных катушках получается
цепь короткого замыкания, препятствующая нарастанию
аномального колебания. С другой стороны, ток, вызванный
приложенным напряжением, течет по первичным катушкам в
одинаковых направлениях и не приводит к возникновению тока во
вторичной цепи. Таким образом, вторичный контур действует
только для предотвращения аномального колебания и не
оказывает влияния на первичный вынужденный ток.
11 Зак. 907
ГЛАВА 7
Субгармонические колебания
7.1. ВВЕДЕНИЕ
В предшествующих двух главах исследовались
гармонические и ультрагармонические колебания, основная частота
которых равна частоте v внешней силы. Теперь рассмотрим
субгармонические колебания с основной частотой 1/v (v=2, 3, 4, ...).
Как было кратко отмечено в § 3.5 и 4.1, эти колебания
принадлежат к другому важному типу нелинейных колебаний и часто
встречаются в различных областях техники и физических наук
[35, 65, 72, 76, 80, 96, 100].
Вначале рассмотрим основное уравнение
Jg. + 26-g. + f(<,) = Scosv-c, (7.1)
в котором 26 — постоянный коэффициент затухания, a f(v) —
член, характеризующий нелинейную восстанавливающую силу.
Заметим, что так как период внешней силы равен 2n/v, то
субгармоническое колебание порядка 1/v будет иметь период 2я
и может быть представлено в виде линейной комбинации
функций sint и cost.
В следующих параграфах сначала будет исследовано
соотношение между нелинейной характеристикой, представленной
членом f(v), и порядком 1/v субгармонических колебаний.
Затем будут подробно рассмотрены субгармонические колебания
порядков 1/3 и 1/2; в частности, особое внимание будет уделено
устойчивости периодических колебаний1).
7.2. СВЯЗЬ МЕЖДУ НЕЛИНЕЙНОЙ ХАРАКТЕРИСТИКОЙ
И ПОРЯДКОМ СУБГАРМОНИЧЕСКИХ КОЛЕБАНИЙ
Для исследования этого вопроса рассмотрим полином,
соответствующий восстанавливающей силе f(v):
^ f (v) = cxv + с*Р + с#Р -Ь • •. (7.2)
l) В настоящей главе рассматриваются только установившиеся
колебания. Переходные процессы субгармонических колебаний исследуются в гл. 9
и 10. [Автор не уделяет внимания энергетическим соотношениям при
субгармонических колебаниях; см. по этому вопросу Ивашев В. Н., Пари-
лис И. И., Колебания в нелинейных электрических системах, Ташкент,
1967. — Прим. ред.]
7.2. Связь между характеристикой и порядком колебаний 163
где Си с2, св,... — постоянные, определяемые нелинейной
характеристикой. Как и в случае гармонических колебаний [см. (5.5)],
на эти постоянные без ограничения общности можно наложить
условие
*1 + *2 + £з+ ... = 1. (7.3)
Поскольку мы рассматриваем установившиеся колебания,
можно считать, что периодическое решение уравнения (7.1)
имеет вид
^0 = 2:+A:sinT + f/cosT+^cosvT, (7.4)
где рассматриваются наиболее важные члены, определяющие
постоянную составляющую zt субгармоническое колебание
х sin%+y cost и колебание ojcosvt, имеющее частоту внешней
силы1). Следуя Мандельштаму и Папалекси [72], амплитуду w
можно аппроксимировать выражением
Такая аппроксимация законна в том случае, когда
нелинейность мала. Однако, как будет показано в п. 7.3(b) и § 7.4,
соотношение (7.5) дает достаточно хорошую аппроксимацию
даже тогда, когда отклонение от нелинейности велико2).
Подставляя (7.4) в (7.1) и приравнивая нулю отдельно
коэффициенты при sinr и cost, мы получим следующие
результаты в зависимости от вида нелинейной характеристики (7.2).
Случай 1. Нелинейность определяется выражением
f(v)=CiV + C3V*.
В этом случае нелинейность симметрична, поскольку f(v)
нечетна, постоянный член z в (7.4) обычно отбрасывается, и,
таким образом, упомянутая выше подстановка при v=2, 4,
5,... приводит к уравнениям
[l-|(^+f/2)-4^2]^+Af/ = 0,
[l-i(x2 + ^)-|^]f/-^ = 0, (7'6)
где k=2d/c3. Умножая первое уравнение на у, второе на х и
вычитая второе из первого, получаем
£(*2+У2)=0.
*) При этом предполагается, что коэффициент затухания 26 не очень
велик, поэтому член, содержащий sin vt, может быть опущен.
2) Понятия «велико» и «мало» было бы желательно определить более
точно, например, путем сравнения с каким-либо параметром цепи. Однако
обычно это не делается. — Прим. ред*
11*
164 Гл. 7. Субгармонические колебания
Это означает, что при наличии затухания (т. е. при & =£ 0)
амплитуда субгармонического колебания равна нулю.
Следовательно, в этом случае субгармонические колебания порядков
1/2, 1/4, 1/5, ... не могут иметь места1). Однако, как будет
выяснено в следующем параграфе, для v = 3 могут получиться
действительные не равные одновременно нулю корни х и у. Таким
образом, мы получаем ряд состояний равновесия, причем
некоторые из них являются устойчивыми2). Отсюда мы заключаем,
что в случае, когда в разложении (7.2) содержится нелинейный
член czvz, могут возникать субгармонические колебания
порядка 1/3.
Случай 2. Нелинейность определяется выражением
f (V) =C\V + C2V2 + CsV*.
Нелинейность несимметрична, и в (7.4) следует учитывать
постоянный член z. В этом случае могут возникнуть
субгармонические колебания порядка 1/2. Подробное исследование будет
проведено в § 7.6—7.83).
Случай 3. Нелинейность определяется выражением
,' f(v)=civ + c5vs.
Хотя в разложении f(v) нелинейный член c3v3 отсутствует,
субгармонические колебания порядка 1/3 в данном случае
возможны. Детальное исследование будет проведено в § 7.4. В этом
случае также поддерживаются субгармонические колебания
порядка 1/5. В § 9.4 будут рассматриваться эти колебания в
переходном процессе.
На основании вышеизложенного можно было бы заключить,
что наличие в (7.2) члена cvvy желательно для возникновения
субгармонических колебаний порядка 1/v. Однако, как было
отмечено в случае 3, это условие не является необходимым.
Можно также сделать вывод, что субгармонические колебания
порядка 1/v не возникают в тех случаях, когда наибольший
показатель степени нелинейных членов в (7.2) меньше v.
!) Следует отметить, что более тщательное исследование, при котором
принимается во внимание постоянный член z, показывает, что
субгармоническое колебание порядка 1/2 может иногда иметь место даже в этом случае.
Этот результат подтверждается экспериментально, хотя область
возникновения колебания при этом крайне ограничена. Поэтому, строго говоря,
сделанное заключение следовало бы изменить с учетом этого обстоятельства.
2) Эти состояния равновесия нет необходимости поддерживать;
колебания сохраняются в том случае, если они устойчивы.
3) В большинстве случаев, когда дифференциальное уравнение имеет
субгармоническое решение порядка 1/2, в нем присутствует член f(v) =\v\v
[уравнение вида (7.1)] и дополнительный неосциллирующий член во внешней силе.
7.3. Субгармонические колебания порядка Уз
165
(а) субгармоника порядка 1/2
/WWWWWWWV
^,*л vv ^л ,v .л
(г) субгармоника порядка 1/5
ЛЛЛЛЛЛЛЛАЛЛЛД
ЛЛЛЛЛЛЛЛЛЛЛЛЛЛЛ
^ ^, ^ ^, ■
^CA/VV4 ■Ч8^лЧцу^лл
(б) субгормоника порядка 1/3
WWVWWWWW
ft) субгармоника порядка 1/4
(д) субгармоника порядна 1/7
/JW—v^ *Л_
(ej субгармоника порядка 1/9
Рис. 7.1. Осциллограммы субгармонических колебаний, v — приложенное
напряжение, / — ток, v. — напряжение на индуктивности, v^ — напряжение
^ на конденсаторе.
На рис. 7.1 приведено несколько осциллограмм,
иллюстрирующих субгармонические колебания различных порядков. Эти
осциллограммы получены в электрической цепи, состоящей из
катушки индуктивности с насыщающимся сердечником и
последовательно включенной емкости. Вследствие насыщения
сердечника под действием приложенного переменного напряжения
в этой цепи возникают субгармонические колебания.
7.3. СУБГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ ПОРЯДКА 1/3
ПРИ НЕЛИНЕЙНОЙ ХАРАКТЕРИСТИКЕ,
ПРЕДСТАВЛЕННОЙ КУБИЧЕСКОЙ ФУНКЦИЕЙ f351
Исследуем субгармонические колебания порядка 1/3 в
системе, описываемой дифференциальным уравнением
d*v ^2b^L + cxv + c^ = Bcos^ (7.7)
dt*
d%
166
Гл. 7. Субгармонические колебания
(а) Недиссипативный случай
Вначале рассмотрим систему, в которой коэффициент
затухания 26=0. Тогда уравнение (7.7) принимает вид
*V ,.___. „_о- {7Я)
dx2
+ ci^ + ^з^3 = В COS Зт.
Заметим, что в силу (5.5) Ci + c3=l. С учетом приближения (7.5)
периодическое решение уравнения (7.8) берется в виде
v0 = л: sin т +у cos x-\- w cos Зт,
(7.9)
где
w =
1—З2
в=-±в.
Подставляя (7.9) в (7.8) и приравнивая нулю отдельно
коэффициенты при членах, содержащих sinr и cost, получаем
[1—|(*2+У2)—\ ™2]х = -^2ху,
[1-4(^+^)-4^2]«/=--^(^-у2).
(7.10)
Умножая первое уравнение
пТ,5
\
\
\
1 \
\
\
\
ч
^
а]
^-J
0,5
О
0,5
^т-1-W
-V
-1,0 -0,8 -Q6 -0,4 -0,2 0
ш—»-
Рис. 7.2. Амплитудная
характеристика
субгармонического колебания порядка 1/3;
нелинейность представлена
кубической функцией.
на у, второе на х и выполняя
вычитание, получаем
л: = 0 или x=±yWy.
Следовательно, имеем всего шесть
состояний равновесия. Однако мы
рассмотрим лишь те состояния
равновесия, для которых х=0,
поскольку другие, как будет показано
ниже, имеют ту же амплитуду и
отличаются только по фазе на 2я/3 и
4я/3 радиан, т. е. на один или два
периода приложенной силы. Этот
результат является естественным
следствием возбуждения
субгармонических колебаний порядка 1/3.
Для х=0, предполагая, что во
втором уравнении (7.10) уфО,
получаем
y2 + wy+ 2w2 — 4 = 0. (7.11)
На рис. 7.2 изображена дуга
Эллипса, соответствующего этому
7.3. Субгармонические колебания порядка Уз 167
уравнению. На этом рисунке показана связь между
амплитудой w (которая предполагается здесь пропорциональной
внешней силе В) и амплитудой у субгармонического колебания.
Теперь выведем условия устойчивости состояний равновесия,
описываемых уравнением (7.11). Поступая обычным образом,
рассмотрим отклонение g от состояния равновесия, для
которого справедливо уравнение
-g-+(Cl + 3^)i=o.
Подставляя в это уравнение периодическое решение,
определяемое равенством
Щ=У cosx+w cos3t,
получаем следующее уравнение типа Хилла:
^+(% + ^ntos2nx\l = 0> (7.12)
где
% = сг + y С*(У2+^2)» е2 = -g сз™У>
ei = т сг (У2 + ^<ту\ ез = 4"с*™2'
Поскольку w и у определяются соответственно из (7.9) и (7.11),
параметры 6, входящие в уравнения (7.12), легко могут быть
вычислены.
Условие устойчивости в случае недиссипативной системы
получается из неравенства (4.6) при 6=0, т. е.
(60 - п? + 9Л) (90 - п? - 9J > 0 (7.13)
или
|80-я2|>|8л|; п=19 2, 3.
При п = 1 это условие соответствует отсутствию нарастания не*
устойчивых колебаний, основная частота которых совпадает
с частотой субгармонического колебания. С учетом (7.11) и
(7.12) это условие приводится к виду
2y>—w. (7.14)
Отсюда следует, что состояния равновесия, представленные на
рис. 7.2 пунктирной линией, являются неустойчивыми.
На рис. 7.3 показаны кривые зависимости 6П (я=1, 2, 3)
от 9о, полученные путем изменения значений величины w
(или В) для случаев Ci = 0 и с3=1. Как и следовало ожидать
из условия устойчивости при я=1, кривая 9i заходит в первую
168 Гл. 7. Субгармонические колебания
область неустойчивости на пунктирном участке аЬ. В
критических точках а и Ь имеем
2у=— w.
Эти точки соответствуют точкам А и В на рис..7.2. Рис. 7.3
показывает, что ни 02, ни 9з не заходят в соответствующие области
неустойчивости1). Итак, в рассматриваемом случае условия
Рис. 7.3. Кривые параметров 0 для уравнения (7.12), получающиеся при
изменении w.
(7.13) при п=2 и п = 3 удовлетворяются автоматически;
следовательно, для проверки устойчивости достаточно одного условия
(7.14)2). Таким образом, можно заключить, что часть кривой,
проведенная сплошной линией на рис. 7.2, соответствует
устойчивым состояниям.
1) На рис. 7.3 видно, что первая и вторая области неустойчивости
частично перекрываются. Это объясняется недостаточностью аппроксимации
при выводе условия устойчивости. Строго говоря, области неустойчивости не
должны перекрываться. Однако в приведенном выше анализе периодическое
решение получается в первом приближении, так что используется и условие
устойчивости первого приближения.
2) Если кривая 0П (я>2) заходит в n-ю область неустойчивости, то
будет возникать неустойчивое колебание порядка л/3. При значительном
возрастании этого колебания первоначальное субгармоническое колебание
порядка 1/3 не сможет более поддерживаться. Пример подобного случая (я=2)
будет рассмотрен в § 7.4.
7.3. Субгармонические колебания порядка 7з 169
(б) Диссипативная система
Если в нелинейной системе учитывается затухание, то
основное уравнение принимает вид (7.7), т. е.
d2%) Н- 26 ^r + cxv + c3v* = В cos Зт. (7.15)
dx2 ^* dx
Периодическое решение выражается в виде1)
^0 = A:sinT + t/cosT + ^cos3T, (7.16)
где
В
Подставляя (7.16) в (7.15) и приравнивая нулю отдельно
коэффициенты при sint и cost, получаем
Ax+ky = -^2xy, kx-Ay = ^(x*-y% (7.17)
где
A = \-^{x*+y*)-^w\ k = %.
Возводя обе части этих уравнений в квадрат и складывая
результаты, получаем
Л2 + £2 = (-^)2г2, г* = х*+у\ (7.18)
Если здесь положить r2 = R и w2=W, то
^R2+{^W-^)R+[^W2-bW + k^+\) = 0. (7.19)
Отсюда определяется зависимость W от /?, а следовательно,
и амплитуда субгармонического колебания; кривые зависимости
для нескольких значений k изображены на рис. 7.4, (а) и (б).
Составляющие х и у амплитуды г могут быть получены
следующим образом. Из уравнений (7.17) и (7.18) имеем
*-т«*-ё—° и *•-■}/&--£-а
Отсюда
x = rcosQ, rcos(e + 120°), r cos (9 + 240°),
y = rsmQ, r sin (в + 120°), г sin (в + 240°),
где
вшзе—~£L. совзе—^L.
(7.20)
') В дальнейшем в этой главе рассматриваются системы с относительно
высокой добротностью, т. е, системы, близкие к консервативным.—Прим. ред.
170
Гл. 7. Субгармонические колебания
Вопрос устойчивости можно решать так же, как и в
предыдущем случае. Уравнение, характеризующее малые
отклонении;2)—*-
(а)
Рис. 7.4. (а) Зависимость между W и R в (7.19). (б) Амплитудная
характеристика субгармонических колебаний порядка 1/3.
ния | от периодического решения, имеет вид
■Ц + 26 ^- + (Cl + 3^)l = 0.
При помощи подстановки 1 = е-6хц это уравнение приводится
к виду
• jgL+(Ci_6*4-3^tl=0.
Подставляя сюда периодическое решение (7.16), получаем
следующее уравнение Хилла:
-Й + к+22вясо8(2Лт-ея)1т1 = 0, (7.21)
7.3. Субгармонические колебания порядка 7з
171
где
# = eL + 0L, гп = arc tg -J**-,
К = f £з* (У — ^)» ei* = т *з (— *2 + У2 + 2<гш/),
625 = "2 сз*и*> 92c = ^ сг^Уу
935=0» 0з^ = -4^з^2-
Условие устойчивости для диссипативной системы дается
неравенством (4.6), т. е.
(е0— /г2)2+2(0о + /г2)б2 + 64>92; я=1, 2, 3. (7.22)
Условие для я=1 мы находим, подставляя сюда значения 0о
и 9i из (7.21) и учитывая (7.17) и (7.19); окончательно
получаем
/? + |^-у>0. (7.23)
Отсюда следует, что состояния равновесия, представленные на
рис. 7.4 пунктирными линиями,.являются неустойчивыми.
На рис. 7.5 показаны кривые 0П (я=1, 2, 3), которые
получаются при изменении значений w (или В) для случая Ci=0,
с3=1 и 6=0,1. Как видно из этого рисунка, граничная линия
первой области неустойчивости определяется гиперболой1), и
0i заходит в эту область на пунктирном участке аЬ. В
критических точках а и Ь имеем
Эти точки соответствуют точкам Л и В на рис. 7.4. Из рис. 7.5
ясно также, что ни 02, ни 03 не пересекают соответствующих
областей неустойчивости. Отсюда следует, что при п=1
условие (7.23) является достаточным для установления
устойчивости периодических режимов в том случае, когда
нелинейность определяется кубической функцией.
1) Если затухание 6=0, гипербола вырождается в пересекающиеся
прямые (на рис. 7.5 они изображены штрих-пунктиром) с точкой
пересечения (1,0),
172 Гл. 7. Субгармонические колебаний,
(в) Замечания об аппроксимации, используемой в предше*
ствующем анализе
Как отмечалось в § 7.2, аппроксимация (7.5) приемлема в
том случае, когда нелинейность мала, т. е. линейный член С\0
в (7.2) преобладает над нелинейным. Однако, как будет видно
Рис. 7.5. Кривые параметров 0 для уравнения (7.21), получающиеся при
изменении w.
из следующего примера, эта аппроксимация допустима и в том
случае, когда линейный член в выражении функции f(v)
отсутствует.
Ради простоты рассмотрим недиссипативный случай,
полагая в уравнении (7.8) Ci = 0 и с3=1. Имеем
-g-+*3 = Scos3T.
Подставляя периодическое решение
Vo=y cost+до cos3t
7.3. Субгармонические колебания порядка 7з
173
£
*;
и приравнивая нулю отдельно
коэффициенты при членах,
содержащих cost и cos3t,
получаем
у2+да/+2ад2 — у = О,
т"У3 + "2 wy2 ~^~ Т w* — 9w = B.
(7.24)
На рис. 7.6 представлены
кривые, построенные в соответствии
с уравнениями (7.24). Таким
образом, мы видим, что
аппроксимация а;=—В/8 обеспечивает
достаточную степень
точности1). Ясно также, что,
поскольку w не совсем точно
пропорционально В, предельные
значения достигаются ими
неодновременно.
Далее покажем, что
характеристическая кривая имеет
вертикальную касательную на границе устойчивости, когда
параметры 9 уравнения в вариациях (7.12) соответствуют границе
первой области неустойчивости2). Амплитуды у и w для
предельных значений В, т. е. В = 0 и В = 7,205 (максимум),
находятся из уравнений (7.24). Параметры 0 определяются из (7.12).
Результаты вычислений приведены в табл. 7.1.
Таблица 7.1
42
18
м
о
(
ни
-Ц8
-17
—^-~~
V
в—-1
i i / i
4 6 / 8 1
Рис. 7.6. Зависимость w и у от
В в (7.24).
в
0
7,205
Значения у, w
У
1,127
0,285
w
0,0510
—0,8655
и 0 для В
во
1,9092
1,2443
= 0 и В =
в,
1,0392
—0,3078
= 7,205
в,
0,0862
—0,3681
в3
0,0019
0,5619
1) Установлено, что эта аппроксимация допустима также и в диссипа-
тивном случае.
2) Поскольку мы рассматриваем недиссипативную систему,
характеристический показатель решения уравнения (7.12) на границе области
устойчивости обращается в нуль,
174 Гл. 7. Субгармонические колебания
Граница первой области неустойчивости в первом
приближении определяется формулой •
60=1 ±е1в (7.25)
Подставляя значения 9i из табл. 7.1, получаем
Оо=2,0392 при 5=0,
0о=1,ЗО78 при 5 = 7,205.
Эти значения отличаются от приведенных в табл. 7.1
соответственно на 6,8 и 5,1%, что объясняется неточностью
аппроксимации, примененной при выводе уравнения (7.25).
Следовательно, для подсчета значений у и w при помощи уравнений
(7.24) следует применить более точную аппроксимацию,
например, воспользоваться разложением 1)
0o=i±6i-"~e?-le22-1Le23±ie102±
± -J2 е20з + -gj 0i + -^g- 9i02 ± -jgg- 6163 + -щ-9l02 + (7-26)
+ 2304 9l9^ ± 18 ^ ~~ 288"вг^ + ' ' *'
Теперь, подставляя значения 0Ь 02, 03 из табл. 7.1 в равенство
(7.26), получаем
00=1,9038 при 5 = 0,
0о=1,2352 при 5 = 7,205,
которые отличаются от величин, представленных в табл. 7.1,
соответственно на 0,28 и 0,73%. Таким образом, расхождение
значительно уменьшилось; следовательно, можно заключить,
что граница устойчивости соответствует предельным значениям
амплитуды 5 внешней силы2). Этот вывод согласуется с
физическими соображениями.
7.4. СУБГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ ПОРЯДКА 1/3
ПРИ НЕЛИНЕЙНОЙ ХАРАКТЕРИСТИКЕ,
ПРЕДСТАВЛЕННОЙ ПОЛИНОМОМ ПЯТОЙ СТЕПЕНИ [35]
Для сокращения выкладок рассмотрим только недиссипа-
тивный случай. Полагая в (7.1) и (7.2)
v = 3, 6 = 0 и с2 — с3 = сА = с6= ... ==0,
1) Это соотношение получается из равенства (II. 4) (приложение II),
если положить а=0 и а*——л/2.
2) Следует заметить, что амплитуда w принимает предельные значения
не на границе устойчивости.
7.4. Субгармонические колебания порядка 7з
175
имеем
d2v
-г-? + cxv + cgfi = В cos Зт,
rft2
(7.27)
где £j-|-£5=l в силу (7.3). Подставляя периодическое
решение
s>o = #cost + *b;cos3t при w = —g-
в (7.27) и приравнивая нулю коэффициенты при членах,
содержащих cost, получаем
У4 +4^У3+6^У+3'ау3у + 3^4— -| = 0. (7.28)
Зависимость у от w представлена на рис. 7.7. Отрицательные
значения у на рисунке не показаны, поскольку, как вскоре бу-
1.4
1,2
1,0
0,8
0,6
0,4
0,2
О
/
'
,1
1
\
\
\ \
/
/
/
/
/
/
/
с
°м
1
__ 1
Чо
-0,8 -0,6 -0,4
цт »>
-0,2
Рис. 7.7. Амплитудная характеристика субгармонического колебания
порядка 1/3; нелинейность представлена функцией пятой степени.
дет доказано, состояния равновесия в этой части являются
неустойчивыми. *
Вопрос об устойчивости решается так же, как и в
предыдущем параграфе. Уравнение в вариациях приводит к уравнению
176 Гл. 7. Субгармонические колебания
Хилла вида
Ц- + (% + 2 J 0rt cos 2/гт") £ = 0, (7.29)
где
0о = °i + Т °ъ (Зу4+4<ш/3+ 12«>у+ З^4),
9i = T^(y4 + 3^t/34-3^V+3^),
92 = 4 ^s(f/4+ 12^+6^V+ 12^3y),
93 = |. £?Б (да/3+3<ау2{/2+^4), (7.29а)
94=|-^(3^2+2^3у),
Условие устойчивости для га=1 получается путем подстановки
6о и 9i в неравенство (7.13). Далее в силу (7.28) окончательно
находим
y3+^wy2+3'W2y + ^'W*>0 при яу<0. (7.30)
Обращаясь к рис. 7.7, мы видим, что состояния равновесия,
соответствующие отрезку кривой между Л и В, удовлетворяют
условию (7.30). Граничные точки А я В соответствуют
предельным значениям w.
На рис. 7.8 представлены кривые 0П (я=1, 2, 3), которые
получаются при изменении величины w (или В) для случая,
когда Ci=0, c5=l. Как и следовало ожидать из условия
устойчивости для п=\у кривая 0i на пунктирном участке аЪ заходит
в первую область неустойчивости. Далее видно, что кривая 02 на
пунктирном участке cd заходит во вторую область
неустойчивости. Следовательно, на участке cd условие устойчивости для
п=2 не выполняется. В этом случае возникает неустойчивое
колебание порядка 2/3, которое подавляет исходное
субгармоническое колебание.
Как упомянуто выше, кривые рис. 7.8 представлены для
случая, когда Ci = 0, c5=l. С увеличением С\ (или уменьшением съ)
эти кривые перемещаются в направлении к точке (1, 0), что
видно из выражений для 0П в (7.29а). Поэтому с приближением
системы к линейной участок cd во второй области
неустойчивости сокращается и в конце концов исчезает. Мы видим также,
что ни в одном из случаев кривые 0з, 04, 05, бе не заходят в со-
7.4. Субгармонические колебания порядка Уз
177
ответствующие им области неустойчивости. Следовательно,
можно заключить, что в случае, когда нелинейность
характеризуется полиномом пятой степени, должны быть рассмотрены
условия устойчивости для п=2 и /i=l. Точки Л, В, С, D на
рис. 7.7 соответствуют критическим точкам а, Ь, с, d на рис. 7.8,
Рис. 7.8. Кривые параметров 0 из (7.29а), получающиеся при изменении w.
поэтому субгармоническое колебание порядка 1/3 существует
только на участках АС и BD.
Теперь, как в конце предыдущего параграфа, рассмотрим
аппроксимацию, использованную в приведенном анализе. Пусть
дифференциальное уравнение имеет вид
и + ^^ясс^зт.
Подставляя периодическое решение
<v0 = у cos т + w cos Зт
и приравнивая нулю отдельно коэффициенты при cost и cos3t,
получаем
уА+|. wy3+Qw2y2 + 3w*y + 3<зу4—у = О,
* 1S 1S IS 5 (7*31)
12 Зак. 907
178 Гл. 7. Субгармонические колебания
Кривые, соответствующие
уравнениям (7.31), представлены на
рис. 7.9. Из рисунка видно, что
аппроксимация w = —Б/8
также обеспечивает приемлемую
точность.
Для граничных величин В,
т. е. для В=0 и В = 7,546
(максимум), амплитуды у и w
определяются из уравнений (7.31), а
параметры 9 —из (7.29а).
Результаты вычисления приведены
в табл. 7.2.
Подстановка значений 0t в
* (7.25) дает
Э0 = 3,0327
90=1,3385
для £ = 0,
для 5 = 7,546.
Рис. 7.9. Зависимость w и у от Эти величины отличаются отпри-
В в (7.31). веденных в табл. 7.2
соответственно на 9,1 и 5,8%. Применяя
опять более точную аппроксимацию (7.26) вместо (7.25),
получаем
00 = 2,7234 для £ = 0,
0о=1,2415 для 5 = 7,546;
эти значения отличаются от приведенных в табл. 7.2
соответственно на 1,9 и 2,0%. Следовательно, можно заключить, что
граница устойчивости соответствует предельным значениям
амплитуды внешней силы В.
Таблица 7:2
Значения у, w и в для й = 0и 5 = 7,546
в
0
7,546
У
1,0759
0,1542
w
0,0716
—0,8818
в0
2,7795
1,2651
01
2,0327
—0,3385
в2
0,7655
--0,3736
е3
0,1337
0,8210
До сих пор рассматривалась граница устойчивости для
первой области неустойчивости. Подобное исследование можно
провести и для второй области неустойчивости. Но в этом случае
7.5. Экспериментальное исследование 179
граница устойчивости не имеет уже простой связи с внешней
силой и, кроме того, как это будет видно позднее при
описании эксперимента, в окрестности границы устойчивости
наряду с исходным субгармоническим колебанием может
существовать малое паразитное колебание порядка 2/3. Следовательно,
точки с и d на рис. 7.8, как бы точно они не были определены,
не будут представлять критических точек, где исходное
субгармоническое колебание перестает существовать. Поэтому
дальнейшее исследование границы устойчивости для второй области
неустойчивости не имеет большого значения и здесь опускается.
7.5. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ [35]
В этом параграфе мы сравним теоретические результаты
предшествующих параграфов с экспериментальными
результатами, полученными при^ рассмотрении последовательной
электрической цепи, содержащей катушку индуктивности с
насыщающимся сердечником и конденсатор. Как отмечалось в
п. 5.1 (а), если к цепи приложено переменное напряжение
(в данном случае 60 гц), то уравнение цепи имеет вид (7.1).
При подходящих начальных условиях в цепи легко возникает
субгармоническое колебание порядка 1/3 с частотой 20 гц.
Исйользуя в качестве нелинейного элемента обычную
катушку индуктивности с сердечником из трансформаторной
стали, найдем прежде всего область существования
субгармонических колебаний порядка 1/3. На рис. 7.10, (а) эта область
заштрихована. Появление незаполненной части внутри области
существования субгармонических колебаний является
характерной особенностью, впервые обнаруженной Мак-Краммом[68]
и автором, но в то время теоретически еще не объясненной.
Из предшествующего анализа, однако, ясно, что
незаполненная часть соответствует областям неустойчивости порядка
я>-2, так как нелинейная характеристика обычной
трансформаторной стали определяется выражением1)
f (v) = cxv + czv* + ctffi + c7v7 + ..., (7.32)
где коэффициенты с5, с7,... преобладают над сх и с3. Если
используется сердечник, характеристика которого имеет вид
f(v) = cxv + cz^t (7.33)
то незаполненная часть внутри заштрихованной области
исчезает, как и можно было ожидать из теоретических рассмотре-
1) Физически уравнение (7.32) представляет кривую намагничивания
сердечника, т. е. зависимость магнитного потока v от намагничивающего тока
12»
180 Гл. 7. Субгармонические колебания
ний § 7.3. Такого сердечника в действительности не существует,
но характеристику (7.33) можно получить, соединяя
последовательно несколько катушек индуктивности и подбирая соответ-
0 100 200 300 400
* Приложенное напряжение, в
(о)
0 100 200 300 400
Приложенное напряжение, в
(б)
Рис. 7.10. Области существования субгармонического колебания порядка 1/3.
(а) Кривая намагничивания, определяемая уравнением (7.32). (б) Кривая
намагничивания, определяемая уравнением (7.33).
1000
600
400
200
/
f
1 У
У
г
0 5 10 15 ,20 25 30
намагничивающий ток, а
Рис. 7.11. Комбинированная характеристика, аппроксимирующая кубическую
кривую. / — без зазора, 2— с зазором, 3—результирующая характеристика,
полученная из / и 2.
ствующим образом величину воздушных зазоров каждого
сердечника. На рис. 7.11 показан пример, в котором использованы
два сердечника, один —с воздушным зазором, а другой — без
7.5. Экспериментальное исследование 181
зазора. Результирующая характеристика дает достаточно
хорошее приближение к (7.33). При помощи этой комбинированной
индуктивности найдена область существования
субгармонических колебаний порядка 1/3, которая представлена на
рис. 7.10, (б). Очевидно, что самовозбуждающиеся колебания,
соответствующие областям неустойчивости порядка я>2,
полностью исключаются, так что экспериментальная проверка
теоретического анализа вполне удовлетворительна.
250
.1
и
ад ^
S S3
It
200
150
100
50
1
1
1 ' У
№у
/ 1
щ
5М
\/
л
/
1 1
; 1\
ki/з;
1 \ '
«2/з\
||
11
HI
500
400
300
200
Ю0
50 100 ISO 200
Приложенное напряжение^
(а)
1
1 У
\/
5/3
•^м
7/3
О ГО0 200 300 W
Приложенное напряжение^
(б)
Рис. 7.12. Гармонический анализ субгармонического колебания порядка 1/3.
(а) Кривая намагничивания, определяемая уравнением (7.32). (б) Кривая
намагничивания, определяемая уравнением (7.33).
Далее с помощью гетеродинного гармонического
анализатора был исследован гармонический состав этих колебаний.
Результаты для случаев, когда нелинейность задается
соответственно уравнениями (7.32) и (7.33), приведены на рис. 7.12.
На рис. 7.12, (а) можно видеть гармоники более высоких
порядков 2/3, 5/3, 7/3, .... Колебание порядка 2/3 является
особенно существенным, поскольку именно это колебание
(связанное со второй областью неустойчивости), быстро возрастая,
подавляет исходное субгармоническое колебание [см. рис. 7.8
и 7.10, (а)]. С другой стороны, на рис. 7.12, (б) такое
подавляющее колебание отсутствует, и субгармоническое колебание
порядка 1/3 существует по всей области [см. рис. 7.3 и 7.10, (б)].
В заключение необходимо заметить, что хотя
субгармоническое колебание порядка 1/5 может возбудиться при нелиней*
182 Гл. 7t Субгармонические колебания
ности вида° (7.32), оно не наблюдается, когда нелинейность
определяется выражением (7.33). Этот результат также
согласуется с исследованиями § 7.2.
7.6. СУБГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ ПОРЯДКА 1/2
ПРИ НЕЛИНЕЙНОЙ ХАРАКТЕРИСТИКЕ,
ПРЕДСТАВЛЕННОЙ ПОЛИНОМОМ ТРЕТЬЕЙ СТЕПЕНИ
В этом параграфе рассматривается субгармоническое
колебание порядка 1/2, наименьший период которого равен
удвоенному периоду внешней силы. Как упоминалось в § 72, при
несимметричной нелинейности может возникнуть колебание
порядка 1/2. Поэтому рассмотрим дифференциальное уравнение
' - k -2- + cxv -f c2v2-{- czvz = В cos 2т, (7.34)
dx2 ' dx
в котором нелинейная восстанавливающая сила несимметрична
из-за присутствия квадратичного члена. Как и в § 5.2, это
уравнение легко преобразуется к виду
^ + k^ + c[v' + c',v'z = Bcos2x+Bb (7.35)
в котором восстанавливающая сила симметрична, но внешняя
сила несимметрична, поскольку она содержит постоянную
составляющую В0. Для удобства анализа возьмем уравнение в
виде (7.35) и далее будем исследовать субгармонические
колебания порядка 1/2.
(а) Периодические решения
Опустим штрихи в (7.35) и запишем основное уравнение
в виде1)
^ + k^ + cx<v + c,v* = Bzos2x + B0. (7.36)
Периодическое решение будем искать в виде
^0(т) = z+х sin т + у cos т + w cos 2т, (7.37)
где рассматриваются только наиболее важные составляющие:
постоянный член z, субгармоническое колебание х sinx+y cost
и колебание w cos 2т, имеющее вынуждающую частоту. Следуя
Мандельштаму и Папалекси [72], для амплитуды w мы
используем аппроксимацию
В п. (в) будет показано, что эта аппроксимация допустима.
1) Заметим, что Ci+Ci—L
7.5. Субгармонические колебания порядка 7г
183
Подставляя (7.37) в (7.36) и приравнивая нулю отдельно
коэффициенты при sinr, cost и постоянной составляющей,
получаем
Ах ~{-ky = — 3cswxz9 kx — Ay = — 3czwyz>
где
Л = (1_^)_^(|-г2+3^+4^2),
(7.39)
r2 = x2+y2.
Исключение х и у из (7.39) дает
A2+k2 = (3czwz)2,
Составляющие х и у амплитуды г имеют вид
x = rcose, r cos (9+ 180°),
y = rsin6, r sin (0+180°),
(7.40)
(7.41)
где
sin 20 = — -=-£—, cos 26 = -
3c3wz ' 3c3wz
Примеры амплитудных характеристик, подсчитанных с
помощью уравнений (7.40), показаны на рис. 7.13 для следующих
параметров системы1):
^ = 0, £3=1,0 и £=0,1.
(б) Условие устойчивости периодических решений
Исследуем устойчивость состояний равновесия,
определяемых уравнениями (7.39). Поступая обычным способом,
рассмотрим малое отклонение | от состояния равновесия. Уравнение
в вариациях имеет вид
^■ + *# + с16 + Зс8^ = 0. (7,42)
!) Из уравнений (7.40) и (7.41) видно, что если знак В0 изменяется, то
знаки z и, следовательно, sin 29 и cos 20 также изменяются, так что в
результате 0 изменяется на 90°. Следовательно, если изменяется знак В0, то
составляющие х и у имеют вид
х = г cos (9 + 90°), г cos (0 + 270°),
у = г sin (0 + 90°), г sin (0 + 270°).
В частности, когда В0=0, существуют четыре типа субгармонических
колебаний порядка l/2j отличающихся друг от друга по фазе на 90°.
184 Гл. 7. Субгармонические колебания
Используя подстановку
1 = е~6хц при 26 = £,
приводим уравнение (7.42) к виду
-^ + (с1-№ + 3£?з^т, = 0. (7.43)
Поскольку периодическое решение v0(x) было определено
1,01
ОД
W|
0,4
о
1,2 С'^*^
/c=2fr=0,1
0,9
0,6
ь 2^ ^JW/ / i i7(]i * \ \
-0,2 0 0,2 0,4 0,6 0,8 ^ 1,2 1,4 1,6 1,8
дп
Рис. 7.13. Амплитудные характеристики субгармонического колебания
порядка 1/2; нелинейность представлена кубической функцией.
в п. (а), подстановка (7.37) в (7.43) приводит к уравнению
Хилла вида
О,
где
^+кн-2 2в-С08(дт-ея)1ч =
e2„ = eL+eL, e„ = arctg-^
(7.44)
7.6. Субгармонические колебания порядка 1/2 185
^25 — "5" съхУ>
%e = Tcs(-^ + y2+4wz),
%s = ~2 C3WX' 9зс = у С8«У.
e4s=o,
94С = хсзда2
В соответствии с изложенным в § 4.2 состояния равновесия
будут устойчивыми при условии, что
[во-(у)2]2 + 2[е0+(|)2]б2 + б4>е2, «=1,2,3,4. (7.45)
Это выражение является условием устойчивости первого
приближения для п-й области неустойчивости. Для того чтобы
периодические решения были устойчивыми, условие (7.45)
должно выполняться для всех значений п одновременно1).
Поскольку периодическое решение (7.37) известно, то значения
1.5
ф
«о
CD
Ф*
1,0
0,5
Г Первая ^
область
неустойчиво-/
к сти /
I
'/
*,'/*-
/X."
J/- Вторая
bj? область
/уч иеустойчиво-
1 X" сти У
I l
-»» *"" X. jC
5^\
04
1
5=1,2 /\
6=0,05/
/ Третья
/ область
/\ ^неустой-
/ \ /учивости \
*-~ /\"\
\
Г 1
0,5
1.0
1,5
2,0
2.5'
0о"
Рис. 7.14. Кривые параметров 0 для уравнений (7.44), получающиеся при
изменении В0.
Оо,... , 04 легко подсчитываются из (7.44). На рис. 7.14
представлены кривые 9i,... , 94 для случая, когда 26 = 0,1 и 5=1,2,
а 50 изменяется. В такой плоскости области неустойчивости
легко получаются из условия (7.45). Границы между областями
устойчивости и неустойчивости представлены гиперболическими
]) Если 0П заходит в n-ю область неустойчивости, то субгармоника
порядка л/2 этого субгармонического колебания, т. е. колебание порядка /г/4,
возбуждается с отрицательным затуханием [см. п. 4.4(b)].
186 Гл. 7. Субгармонические колебания
кривыми, выше которых находятся области неустойчивости.
Следовательно, кривые 9i, 02, 0з заходят в своих пунктирных
частях в области неустойчивости, и соответствующие состояния
равновесия неустойчивы.
До сих пор рассматривались условия устойчивости первого
приближения, определяемые неравенством (7.45). Однако
полученный таким путем аналитический результат недостаточно
хорошо согласуется с экспериментом, который будет описан в
§ 7.8. В частности, условие устойчивости для я=2 не может
служить для проверки того, что границе устойчивости для
второй области неустойчивости соответствует вертикальная
касательная к характеристическим кривым (см. рис. 7.13). Это
получается из-за неточности аппроксимации, которая применялась
для вывода условия устойчивости (7.45). Поэтому
предпочтительно вместо (7.45) использовать улучшенное условие
устойчивости (4.15). Запишем его еще раз1)
4(62-|x2) = (8o+62-l)2-9l-2 %+j2-1 (g +
[(el - eL) e2c+2elcelse2i] + 462 > o. (7.46)
Подставляя сюда значения параметров 0 из (7.44), получаем
+i с*Аг\4т+Зсз)] - «и > °- (7-47)
Более того, в силу (7.39) это условие преобразуется к виду
(1_!г2_3г2)г^>0, (7.48)
причем мы предполагали, что В0 меняется, а В остается
постоянной.
Взяв теперь снова случай £ = 26 = 0,1 и 6=1,2, найдем
зависимость амплитуды г субгармонического колебания от В0 [см.
рис. 7.15, (а)]. Кривая продолжена в обе стороны тонкими
линиями, для того чтобы при заданном В0 получить единственное
значение г. Значение \х2 (индекс означает порядок соответствую-
1) Это частное условие для п=2 является наиболее важным, поскольку
оно определяет устойчивость колебаний, имеющих ту же частоту, что и
субгармоника.
7.6. Субгармонические колебания порядка 72 187
Вп
Рис. 7.15. Устойчивость состояния равновесия, (а) Амплитуда
субгармонического колебания порядка 1/2. (б) Характеристический показатель,
связанный с устойчивостью.
щей области неустойчивости) подсчитывается из уравнения
(7.46), т. е.1)
4[xl^-(90 + 62-l) + 9i+2 \+|2571 9?-
—ёдаг [(eL —в?,) bc + 2QleQifi2s]. (7.49)
На рис. 7.15, (б) представлена зависимость \i2 от В0. Кривые
IXj и \хг находятся из уравнения
^=_[ео+(|)2] + /^^н1
(7.50)
1) Как отмечалось в п. 4.3(a), уравнение (7.49) справедливо только для
1м-21=б, поэтому оно не дает правильного значения \х2 в случае \\i2\ ф $•
Однако это несущественно, когда рассматривается только вопрос об устой*
чивости.
188 Гл. 7. Субгармонические колебания
2,0
1,5
А
V
0
-ОА
О ,1 2 3 4
<в *
Рис. 7.16. Область существования субгармонического колебания порядка 1/2
(расчет).
[см. (3.86)]. Они также показаны на этом рисунке1). Состояния
равновесия являются устойчивыми, если |(ЛП|<6. С другой
стороны, если |fxn|>6, то субгармоника порядка п/2
субгармонического колебания, т. е. колебание порядка я/4, возрастает и
подавляет исходное субгармоническое колебание. Устойчивые
состояния равновесия представлены на рис. 7.15, (а)
сплошными линиями.
Проведя подобные расчеты для различных значений В,
находим, что сплошные участки характеристических кривых
*) Из рис. 7.15, (б) видно, что кривые |Л2 и р,3 пересекаются, так что
для некоторых значений В0 одновременно существуют два действительных
значения ц2 и jx3. Это происходит из-за неточности аппроксимации,
использованной при вычислении характеристического показателя. Вообще говоря,
эти кривые не должны пересекаться, так как пересечение приводит к
противоречию: для дифференциального уравнения (7.44) второго порядка
получается* более двух линейно независимых решений.
К=2<Г'0,1
±^ L
7.6. Субгармонические колебания порядка 7г 189
Рис. 7.17. Полные амплитудные характеристики субгармонического коле*
бания порядка 1/2 (расчет).
рис. 7.13 представляют устойчивые состояния равновесия. На
рис. 7.16 в координатах В, Во представлена область
существования субгармонического колебания порядка 1/2. В незаштри-
хованной области, окруженной заштрихованной,
субгармоническое колебание не возбуждается. Как видно из рис. 7.15, это
происходит вследствие нарастания неустойчивого колебания
с частотой, составляющей 1/4 или 3/4 частоты внешней силы.
Заметим также, что в зоне перекрытия областей,
заштрихованной в двух направлениях, в зависимости от начальных условий
могут возбуждаться два различных вида колебаний порядка
1/21). Наконец, на рис. 7.17 показана полная амплитудная
характеристика субгармонического колебания порядка 1/2, на
которой устойчивые состояния представлены сплошными
линиями.
1) Дальнейшие подробности, касающиеся различных видов
субгармонических колебаний порядка 1/2 в их связи с переходным процессом, будут
рассмотрены в § 9.5
190 Гл. 7. Субгармонические колебания
(в) Об аппроксимации (7.38)
Как уже упоминалось в п. 7.3(b), выражение
для v=3 является достаточно хорошей аппроксимацией даже
при существенной нелинейности системы. Эта аппроксимация
is-— --'-'-"
V-
1°
-0,5
~W
45, .
-г -1 oi 2 3 4
в—+
Рис. 7.18. Зависимость до, у и z от В в уравнениях (7.52).
применима также для случая, когда рассматривается
субгармоническое колебание порядка 1/2 (т. е. v=2). Убедимся в этом,
рассмотрев недиссипативный случай, когда периодическое
решение берется в виде
<0o = z + t/cosT-f-<a/cos2T, (7.51)
где 2, у и w — неизвестные величины, которые вскоре будут
найдены.
Подставляя (7.51) в исходное уравнение (7.36), полагая
при этом &=0, Ci = 0, c3=l и приравнивая соответственно
свободные члены и коэффициенты при cost и cos2т в обеих ча-
71. Субгармонические колебания порядка 7г 191
стях равенства, получаем
3z2-\-3zw + ^y2 + ^w2—1=0, (7.52)
3z2w -\- -£ zy2 + у f/2,re; 4- ^ ^ — Фа; = В.
Коэффициенты z, у и w в (7.51) для заданных значений В и В0
определяются из уравнений (7.52). Выполнив расчеты, мы
увидим, что применение аппроксимации (7.38) дает приемлемую
точность. В качестве примера рассмотрен случай, когда В0=0Л
а г, у и w меняются в зависимости от В; соответствующие
кривые представлены на рис. 7.18. Точные значения w, найденные
из уравнений (7.52), достаточно хорошо приближаются
значениями w = —В/3.
7.7. СУБГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ ПОРЯДКА 1/2
ПРИ НЕЛИНЕЙНОЙ ХАРАКТЕРИСТИКЕ,
ПРЕДСТАВЛЕННОЙ СИММЕТРИЧНОЙ КВАДРАТИЧНОЙ
ФУНКЦИЕЙ [38]
»
(а) Подавление нежелательных самовозбуждающихся
колебаний
Как упоминалось в § 7.3 и 7.5, субгармоническое колебание
порядка 1/3 является наиболее устойчивым, когда нелинейная
характеристика представлена кубической функцией. По
аналогии с этим фактом можно сделать вывод, что подходящим
видом нелинейности для получения субгармонических колебаний
порядка 1/2 будет выражение
f(v) = \v\v. (7.53)
Эта функция является квадратичной для и§0и нечетной
относительно v1). Из-за отсутствия лучшего термина назовем ее
симметричной квадратичной функцией. В соответствии с этим
запишем основное уравнение субгармонического колебания по*
рядка 1/2 в виде
^ + k£- + \v\v = Bcos2x + B0. (7.54)
!) Аналогично, подходящим видом f(v) для получения
субгармонических колебаний порядка 1/v будет |»v""1b%
192 Гл. 7. Субгармонические колебания
Однако выражение \v\v аналитически неудобно, поэтому
разложим его в степенной ряд вида (7.2). Если для простоты взять
только первые два члена разложения, то мы получим то же
самое уравнение (7.36) в предположении, что \v\v можно
аппроксимировать выражением CiV + c3v3. Например, нелинейность
в уравнении (7.36) можно выразить так:
f (V) = CjV -f cz& = 0,3*0 + 0,7<я3.
(7.55)
Постоянные d и с3 выбираются таким образом, чтобы
разность между \v\v и CiV + Czvz в области изменения у, где
существует субгармоническое колебание порядка 1/2, была
достаточно малой. Соответствующие характеристики сравниваются на
рис. 7.19.
В предыдущем параграфе была приведена амплитудная
характеристика субгармонического колебания порядка 1/2 для
случая, когда Ci=0 и с3=1,0. В этом случае субгармоническое
колебание могло стать неустойчивым из-за нарастания
неустойчивых колебаний, соответствующих первой или третьей области
неустойчивости на диаграмме устойчивости уравнения Хилла.
Ниже будет показано, что такие неустойчивые колебания
подавляются, если нелинейность определяется равенством (7.53)
или (7.55). На рис. 7.20, (а) показана амплитудная
характеристика субгармонического колебания порядка 1/2 для случая,
когда • параметры системы,
описываемой уравнением (7.36),
соответственно равны
с1 = 0,3; г3 = 0,7; * = 0,1; В = 1,2.
Характеристические показатели \хи
\х2 и цз, найденные из (7.49) и (7.50),
представлены на рис. 7.20, (б).
Таким образом, мы видим, что
неустойчивое колебание
соответствует условию |цг|>б и что
нарастание субгармонических колебаний
порядков 1/4 и 3/4 исключено (ср.
рис. 7.15).
(б) Анализ с помощью
аналоговой вычислительной машины
Области существования субгар-
Рис. 7.19. Нелинейная харак- конических колебаний порядка 1/2
теристика | v \ v и ее аппрок- можно найти с помощью аналоговой
симация степенным рядом. вычислительной машины. Рассмот-
£.,0
2,0
15
10
05
о
£
0,
1 0,
1
Зич-0,71Д
//
//
//
5 I
г *-
п
/
1 А
i /1
//
ч 1
// 1
/ \v\v\
0 1,5
77. Субгармонические колебания порядка 1/2 193
Вп
Рис. 7.20. Устойчивость состояний равновесия, (а) Амплитуда
субгармонического колебания порядка 1/2. (б) Характеристический показатель,
связанный с устойчивостью.
рим системы, описываемые уравнениями
d2v. + 2b^- + v'i = Bcos2T + B0,
dx2
dx
^^2b^ + \v\v = Bcos2r + B0.
(7.56)
(7.57)
На рис. 7.21 приведена блок-схема набора задачи на
аналоговой вычислительной машине для решения уравнения (7.57).
Обозначения на рисунке соответствуют общепринятым1).
Нелинейная характеристика \v\v точно реализуется с помощью
специального умножителя, показанного на рисунке. Для решения
уравнения (7.56) этот специальный умножитель заменяемся
обычным, который воспроизводит кубическую функцию.
Субгармоническое колебание порядка 1/2 может
возбуждаться при определенных начальных условиях v(0) и #(0),
*) Интегрирующие усилители блок-схемы интегрируют входные
напряжения относительно машинного времени / (в секундах), которое в два раза
больше безразмерного времени т, т. е. /=2т.
13 Зак. 907
194
Гл. 7. Субгармонические колебания
0,125 В0
100 о ф
-Ц>- -0>- -о-
Интегрирующий Суммирующий Потенциометр
усилитель усилитель
Рис. 7.21. Блок-схема для решения уравнения (7.57).
которые задаются на интегрирующих усилителях. Медленно
изменяя значения В и В0, мы получаем область существования
субгармонического колебания. На рис. 7.22 заштрихована такая
область для системы, описываемой уравнением (7.56), а рис. 7.23
соответствует уравнению (7.57). Как и ожидалось из
теоретического анализа, проведенного в § 7.6, внутри заштрихованной
области на рис. 7.22 из-за нарастания неустойчивых
субгармонических колебаний порядков 1/4 и 3/4 появляется свободная
зона (рис. 7.16). С другой стороны, на рис. 7.23 такие
препятствующие колебания не наблюдаются. Итак, мы видим, что
нарастание субгармонических колебаний порядков 1/4 и 3/4
полностью исключено, если нелинейность определяется выражением
f(v) = \v\v.
в-
Рис. 7.22. Область существования субгармонического
колебания порядка 1/2; нелинейность представлена кубической
функцией (расчет на аналоговой вычислительной машине).
Рис. 7.23. Область существования
субгармонического колебания порядка 1/2; нелинейность
представлена симметричной квадратичной функцией
(расчет на аналоговой вычислительной машине).
196 Гл. 7. Субгармонические колебания
7.8. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
В этом параграфе мы рассмотрим субгармонические
колебания порядка 1/2, описываемые исходным уравнением (7.36), и
сравним экспериментальные результаты с результатами,
полученными из предшествующего анализа.
На рис. 7.24 показана схема электрической цепи, в которой
субгармоническое колебание возникает из-за присутствия
катушки индуктивности L с насыщающимся сердечником при
воздействии на цепь переменного напряжения Е sin 2со£. Для
полуда.
Е sin 2 cj*
R
1 jJ\A/W\An
*с С
Рис. 7.24. Резонансная цепь с подмагничиванием постоянным током.
чения несимметричной нелинейной характеристики на
сердечник, как показано на рисунке, нанесена вторичная обмотка, по
которой течет постоянный ток. В соответствии с обозначениями
рис. 7.24 имеем
я-§- + /?/£==£sin2о)/, /?/* = -£- J icdU * = **+/<;» (7-58)
где п — число витков первичной обмотки, а ф — магнитный
поток сердечника.
Поступая таким же образом, как в п. 5.1(a), вместо /, /0
и ф введем безразмерные переменные а, и0 и v с помощью
соотношений
i = /nu, i0 = /nu0, ф = Фл<а, (7.59)
где 1п и Фп — соответствующие базовые величины тока и маг*
нитного потока. Пренебрегая гистерезисом, можно взять
кривую намагничивания в виде1)
и + #о = CjV +• czv* + cbv5 +
(7.60)
1) При этом предполагается, что вторичная обмотка катушки имеет то
же самое число витков что и первичная.
7.8. Экспериментальное исследование
197
го
I
1
to
-5
А
1рШ
к
л
ш
ш
Л
щ
Жк
вшР
Щк
ЩЩ
ш
1
D
50
300
100 150 200 250
Приложенное напряжение vQCle
> и с. 7.26. Область существования субгармонического колебания порьдка 1/2
(эксперимент).
где си с3, с5, ... — постоянные, зависящие от материала
сердечника. Далее аналогично тому, как мы уже делали ранее, для
удобства свяжем базовые величины /п и Фп соотношениями
п®*СФп = /п, Cl + cs+c5 + ... =1. (7.61)
Исключая затем iR и 1С из уравнений (7.58) и используя
(7.59), (7.60) и (7.61), получим
^ + k^ + cxv + c^ + cbv*+ ... = Scos2T-f-S0, (7.62)
<ix
где
x = &t — 4-arctg-^-, k-
k_
2 •
l_
5:
П(йФп
V4 + k2, B0 = Uo.
Кроме того, для того чтобы обеспечить лучшее согласование
экспериментальных результатов с анализом § 7.6, используем
198 Гл. 7. Субгармонические колебания
составную катушку1), кривая намагничивания которой
выражается кубической функцией
Тогда уравнение (7.62) принимает вид исходного уравнения
(7.36).
Теперь приступим к описанию результатов экспериментов,
могущих подтвердить предыдущий теоретический анализ.
Сначала определим область существования субгармонических
колебаний порядка 1/2. На рис. 7.25 эта область представлена
V>!A/WWv/WW\A
JUXXXXXJI
vwwwwvw
(а) Колебание, соответствующее ' ~
первой области
s/ЧЛчЛчЛчЛчЛ
(б) Колебание* аналогичное (а),
но сопровождающееся
субгармоникой порядка г/4
Рис. 7.26. Осциллограммы субгармонического - колебания порядка 1/2;
v — приложенное напряжение, / — ток, v —напряжение на катушке и
vQ — напряжение на емкости.
в координатах Vac, Л*с, где Vac — приложенное синусоидальное
напряжение, а /<*с—постоянный ток вторичной обмотки (рис. 7.24).
Поскольку координаты Vac и /<*с отвечают соответственно
величинам В и В0 из предшествующих параграфов, обнаруживается
значительное совпадение результатов рис. 7.16 и 7.252). Из
рис. 7.25 видно, что область субгармонического колебания по-
1) Как уже пояснялось в § 7.5, для получения требуемой кривой
намагничивания используются несколько магнитных- сердечников с воздушными
зазорами соответствующей длины.
2) Область субгармонического колебания порядка 1/2 на рис. 7.16
распространяется на отрицательные значения BQy поскольку демпфирующий ко-"
зффициент k (или 26) убывает.
vlwwwwwv
,,,,Л;ЛЛЛЛЛУ
(в) Колебание, соответствующее .
второй области \
7,8. Экспериментальное исследование
199
«
4D
200,
160
120
д0\
40
0
200
160
§ ml
ft
1
S
<и
§!
3
§
8
ж
00
40
0
200
160
П0\
80
40
0
200
160
120
80
40
о'
i
1
i
i
it
'} '
, |
i
1
: В
i
i
((6)
1
1
1
1
|
(в)
i
1 , 1, 1
Uu
. ,„.. i
1 .
(г)
\\—1—I—I—I 1 i I 1 I I I—JL
О У4 1/2 3/4 1 5/4 3/2 7/4 2 9/4 5/2 11/4 3
Порядок гармоник
0 50 100 150 200
частота
Рис. 7.27. Гармонический состав v для осциллограмм рис. 7.26.
рядка 1/2 можно разделить на две области, что показано
изменением направления штриховки. Для удобства назовем их
первой и второй областями; первая 'соответствует токам /^с от 2
до 8 а, а вторая-г токам lcd от —2 до 18 а. В зоне, общей для
этих областей, например в точке Л, для заданных значений Vac
и Idc существуют два вида субгармонических колебаний
порядка 1/2. Осциллограммы этих I колебаний приведены. на
рис. 7.26.. ♦ ( . . *- ..'--•
Как и ожидалось из рассмотрения рис. 7.15, свободная часть
внутри первой области появляется из-за возбуждения
неустойчивых колебаний порядка 1/4, так как..в этом случае
характеристический показатель (jii, соответствующий первой области
неустойчивости уравнения Хилла, возрастает, или, другими
словами, условие устойчивости |jiij <6 нарушается. Подобно этому
в..свободной части, окруженной.второй областью, неустойчивое
колебание порядка 3/4 подавляет исходное, субгармоническое
200
Гл. 7. Субгармонические колебания
О 100 200 . 300
Приложенное напряжение Vac,e
Рис. 7.28. Гармонический анализ v при изменении Vас.
колебание порядка 1/2, так как в этом случае |ц,3| становится
больше 6.
Вышеприведенные положения подтверждаются эксперимен
тально осциллограммами субгармонического колебания
порядка 1/2. Осциллограммы (а) и (в) на рис. 7.26 получены для
значений Vac и /dc, определяемых координатами "точки А на
рис. 7.25, причем (а) соответствует первой области, а (в) —
второй. Осциллограммы (б) и (г) получаются для случаев, когда
точка А подходит к свободной части соответственно первой и
второй областей. Напряжение vL на катушке индуктивности
исследовалось с помощью гармонического анализатора. Резуль- ',
таты исследования приведены на рис. 7.27, где случаи {а)—(г) \
соответствуют осциллограммам (а) — (г) на рис. 7.26. Как и |
следовало ожидать, колебание порядка 1/4 обнаруживается в ^
(б), а колебания порядка 3/4 заметны в (г) 4).
1) Следует заметить, что в случаях (а) и (в) рис. 7.27 колебания
порядков 1/2 и 1 преобладают над всеми остальными. Поскольку напряжение на
катушке пропорционально производной по времени от потока сердечника, то
приближение, принятое для периодического решения, i. е. (7.37), является
вполне удовлетворительным.
7.8. Экспериментальное исследование
201
Далее измеряются гармонические составляющие напряжения
на катушке при изменении Vac и при постоянном /dC = 4 а.
Соответствующие результаты приведены на рис. 7.28. Из рисунка
видно, что нарастание неустойчивых колебаний порядков 1/4
и 3/4 вызывает подавление субгармонического колебания
порядка 1/2 в свободных частях соответственно первой и второй
Амперы
Приложенное напряжение ,е
Рис. 7.29. Полные амплитудные характеристики субгармонического
колебания порядка 1/2 (эксперимент).
областей. Наконец, полная амплитудная характеристика
субгармонического колебания порядка 1/2, полученная с помощью
гармонического анализатора, изображена на рис. 7.29. Она
достаточно х*орошо совпадает с теоретической характеристикой,
представленной на рис. 7.17.
Сравнивая экспериментальные результаты и теоретическое
исследование, можно описать основные черты
субгармонического колебания порядка 1/2 следующим образом:
1. Колебание порядка 1/2, вероятнее всего, возбуждается в
случае, когда либо нелинейная восстанавливающая сила, либо
внешняя сила несимметричны. Следует заметить, однако, что
202 Гл. 7. Субгармонические колебания "
колебание порядка 1/2 может все-таки возбудиться и в
симметричной системе, если затухание достаточно мало1).
2. В противоположность случаю .возбуждения
субгармонических колебаний порядка 1/3 при определенных условиях в
одной и той же системе могут возбуждаться два различных вида
колебаний порядка 1/2 в зависимости от выбранных начальных
условий (см. § 9.5, где этот вопрос рассматривается более
подробно).
3. Колебание порядка 1/2 часто сопровождается
возбуждением неустойчивых колебаний порядка 1/4 или 3/4, которые
подавляют исходное колебание. Для обнаружения этого вида
неустойчивости удобно пользоваться обобщенным критерием
устойчивости, приведенным в гл. 4." .
4. Подходящим видом нелинейности для возбуждения
колебания порядка 1/2 является симметричная квадратичная
функция. В этом случае нарастание неустойчивых колебаний
порядков 1/4 и 3/4 полностью подавляется.
1) Субгармонические колебания порядка 1/2 возбуждаются при £р=0
(рис. 7.16) или при /dc=0 (рис. 7.25).
I
ЧАСТЬ III
Переходные процессы
вынужденных колебаний
•
ГЛАВА 8
\
Гармонические колебания
8.1. ВВЕДЕНИЕ
Как было упомянуто в § 4.1, для рассматриваемого
нелинейного дифференциального уравнения в зависимости от
начальных условий может существовать несколько различных
видов периодических решений. В части II наше внимание было
сосредоточено на периодических решениях и на проблеме их
устойчивости. Теперь нам предстоит исследовать переходные
режимы, т. е. колебания в процессе их перехода к
установившемуся состоянию. После того как эти исследования будут
выполнены, станет ясной связь между начальными условиями и
результирующими периодическими колебаниями. Однако обычно
решить нелинейное дифференциальное уравнение при
произвольных начальных условиях невозможно, за исключением
частных случаев, для которых точное решение известно в
аналитической форме [18, стр. 80]. К счастью, некоторых успехов
в изучении переходных режимов удается достичь при помощи
топологического метода исследования [32, 33, 36].
Итак, метод, используемый в следующих параграфах,
состоит в том, что сначала нелинейное дифференциальное
уравнение второго порядка, соответствующее неавтономной системе,
сводится к уравнению вида
dy _ Г (*, у) ,я и
dx ~~ Х(х% у) ' \°'1>
а затем находятся интегральные кривые, исходя из основного
предположения, что особые точки уравнения (8.1) соответствуют
установившимся режимам, а интегральные кривые —
переходным *).
Пользуясь этим методом исследования, мы сначала изучим
в настоящей главе гармонические колебания, а затем в гл. 9 —
субгармонические колебания.
!) Этот метод исследования использовался Андроновым и Виттом [4] для
изучения явления захватывания частоты в ламповом генераторе.
206 Гл. 8. Гармонические колебания
8.2. ПЕРИОДИЧЕСКИЕ РЕШЕНИЯ И ИХ УСТОЙЧИВОСТЬ
Этого вопроса мы уже касались в § 5.1; здесь же мы, не
ограничиваясь установившимися состояниями, сосредоточим
внимание на переходных режимах.
Рассмотрим систему, описываемую дифференциальным
уравнением
4£+*£ + «» = Ясовт, (8.2)
в котором нелинейная восстанавливающая сила выражена
кубической функцией у3, а коэффициент затухания k предполагается
постоянным1). В случае гармонических колебаний, в которых
основная составляющая, имеющая период 2я, преобладает над
высшими гармониками, решение уравнения (8.2) можно
приближенно представить в виде
v (т) = х (т) sin т -f- У (t) cos т. (8.3)
где обе амплитуды х(х) и у(х) являются функциями т; по
истечении переходного процесса эти амплитуды приобретают
постоянное значение2).
Подставляя (8.3) в (8.2) и приравнивая нулю отдельно
коэффициенты при членах, содержащих sint и cost, получаем
dy 1
^ = ^(-kx-{-Ay + B)^X(x, у),
% = у (— Ах—кУ) = Y (*> У)*
где
А = \-\г\ г2 = х2 + У2.
Найденные уравнения получены в предположении, что
амплитуды л:(т) и у(х) так медленно меняются в зависимости от т,
что членами, содержащими d2x/dx2 и cPyjdx2, можно пренебречь.
Коэффициент затухания k тоже предполагается сравнительно
малой величиной, так что члены, содержащие kdx/dx и kdyjdx,
могут быть также отброшены. Результаты, которые будут
получены из уравнений (8.4), не могут применяться в том случае,
когда имеются резко выраженные ультрагармонические коле-
1) Линейный член относительно v в уравнении (8.2) опущен, поскольку
это не приводит к существенным изменениям в последующем анализе.
2) Периодическое решение определяется формулой (5.8).
8.2. Периодические решения и их устойчивость 207
бания. Но, поскольку мы рассматриваем гармонические
колебания, применение уравнений (8.4) можно считать законным!).
В нашем дальнейшем исследовании уравнения (8.4) играют
важную роль, так как они служат основными уравнениями при
изучении как переходных, так и установившихся состояний.
Рассмотрим сначала установившееся состояние, когда амплитуды
х(х) и у{%) в (8.3) постоянны, т. е.
£ = X(x,y) = 0, % = Y{x,y) = 0. (8.5)
С учетом этих условий из уравнений (8.4) следует, что
установившаяся амплитуда r0=Yxl~\-yl периодического решения
vo(x) определяется формулой
(A2 + f)rl = B2, (8.6)
а компоненты х0, у0 амплитуды г0 имеют вид
2 * 2
Эти результаты согласуются с исследованиями п. 5.1(6).
Вопрос об устойчивости периодического решения был уже
рассмотрен нами в п. 5.1(b). Как отмечалось в п. 4.4(a),
условие устойчивости для первой области неустойчивости, т. е.
условие (4.6) при /1=1, может быть также получено из критерия
Рауса — Гурвица. Имея это в виду, выведем условия
устойчивости периодического решения следующим образом.
Рассмотрим малые отклонения | и т) соответственно от
амплитуд х0 и уо и выясним, когда эти отклонения с ростом
времени будут приближаться к нулю.
Из уравнений (8.4) получаем2)
£ = ах1 + а*и ^ = ^ + М. (8.8)
1) Уравнения (8.4), соответствующие автономной системе, можно также
получить, применяя метод усреднения, описанный в п. 1.4 (б). Строго говоря,
те предположения (первоначально сделанные Апплтоном и Ван-дер-Полем
[5; 86]), которые использовались для получения автономной системы (8.4),
следовало бы проанализировать с точки зрения их применимости для
описания колебаний, представленных уравнением (8.2). Некоторые попытки в этом
направлении были сделаны Крыловым и Боголюбовым [55, стр. 12] и Лефше-
цем [59; 3, стр. 341] для случая, когда нелинейность достаточно мала.
2) Члены степени выше первой относительно g и ч\ опускаются.
208
Гл. 8. Гармонические колебания
где
"HfL..=^-f4
У = Уо
У = Уо
(8.8а)
У = Уо
Характеристическое уравнение системы, описываемой
уравнениями (8.8), имеет вид
0,
ix — л а2
Ьх Ь2 — Я,
или
Я,2 — (ах + b2)l + ахЬ2 — а2Ьх = 0. (8.9)
Если действительные части корней X отрицательны, то
отклонения £ и ц с течением времени т стремятся к нулю. В этом
случае соответствующее периодическое решение устойчиво. Это
условие устойчивости дается критерием Рауса — Гурвица
(§3.3), т. е.
— ах — Ь2>0 и axb2 — a2bx>0. (8.10)
Подставляя (8.8а) в (8.10) и используя (8.6), получаем
£>0,
27 /УЯ2 (8-11)
jLr4_3r2 + k2+.l>0 или ™>0.
lb а/*0
Очевидно, что первое условие выполняется всегда, так как
рассматривается положительное затухание. Второе условие
совпадает с полученным ранее в п. 5.1 (в).
8.3. АНАЛИЗ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ
С ПОМОЩЬЮ ИНТЕГРАЛЬНЫХ КРИВЫХ
Как уже упоминалось, нашей задачей является изучение
решения уравнения (8.2) в переходном режиме, т. е. решения,
которое с течением времени становится в конце концов
периодическим. С этой целью, следуя Пуанкаре [81, 82, 84] и Бендик-
8.3. Анализ колебаний с помощью интегральных кривых 209
сону [б]1), удобно перейти к рассмотрению интегральных
кривых следующего уравнения, полученного из уравнений (8.4):
«L^nfiiL. (8.12)
dx X (х, у) х
Поскольку время т явно в это уравнение не входит,
интегральные кривые на плоскости ху у можно построить при
помощи метода изоклин или какого-либо другого метода2). Как
упоминалось в § 8.1, периодические решения уравнений (8.4)
соответствуют условию #(т)= const и у(г)= const, т. е. особым
точкам уравнения (8.12), когда Х(х, у) и У(х, у) одновременно
равны нулю.
Предположим теперь, что на плоскости ху у выбрана точка
х(0), у(0), которая соответствует начальному условию. Тогда
изображающая точка х(т), у (г) с ростом времени будет
двигаться по интегральной кривой, проходящей через точку х(0),
{/(0), и в конечном итоге придет к устойчивой особой точке3).
Отсюда следует, что в плоскости ху у переходным режимам
соответствуют интегральные кривые уравнения (8.12), а
установившимся (периодическим) решениям — особые точки.
Зависимость от времени v(x) в переходном режиме может быть
получена с помощью криволинейного интеграла
ds = Y{dxf + {dy)\ (8.13)
ч
ds
Ухн*,у)-{-У2(х,у)
где Х(хуу) и Y(xy у) определяются уравнениями (8.4); ds —
линейный элемент интегральной кривой.
Рассмотрим типы особых точек уравнения (8.12), которые
соответствуют периодическим решениям уравнения (8.2). Как
отмечалось в п. 2.2 (а), особые точки классифицируются в
соответствие с видом корней характеристического уравнения
(8.9), т. е.
д _ а\ + h ± У{а\ — Ь2)2 + 4ggfr (8 14)
где аи а2, Ь{ и Ь2 определяются выражениями (8.8а).
1) См. также [16, 89].
2) См. в § 2.5—2.7 другие графические методы решения.
3) Вообще говоря, изображающая точка не всегда приводит к особой
точке; иногда она может стремиться к предельному циклу. В этом случае
изображающая точка с течением времени неизменно движется по этому
Циклу. Однако, применяя критерий Бендиксона [п. 2.2 (д)], легко заметить,
что предельного цикла для уравнения (8.12) не существует, поскольку
в силу (8.8а)
дх ' ду
Если &=0, то существует континуум замкнутых траекторий, охватывающих
центр, но предельный цикл отсутствует (§ 8.6),
14 Зак. 907
210 Гл. 8. Гармонические колебания
Рис. 8.1. Амплитудная характеристика гармонического колебания и особые
точки.
На рис. 8.1 представлена зависимость между В и г\,
определенная из уравнения (8.6), для нескольких значений k. Теперь
мы будем различать эти состояния равновесия *) в соответствии
с видом особых точек. Граничная линия между узлами и
седлами может быть найдена из условий (2.12) и (2.13), т. е.
alb2 — a2bl=^0, (8.15)
откуда после подстановки выражений (8.8а) получаем
27
Ж^-3го + ^2+1=0.
(8.16)
*) Эти состояния равновесия реально существуют только в том случае,
когда они соответствуют устойчивом особым точкам.
8.4. Анализ колебаний на фазовой плоскости 211
Это уравнение равносильно условию dB2jdr\ = 0 [см. второе
условие (8.11)]. Область седловых точек, где величина dB2\drQ
отрицательна, отмечены штриховкой. Поскольку один из
корней характеристического уравнения в этой области всегда
положителен, периодические состояния здесь неустойчивы. Это
согласуется с результатами, полученными в предыдущем
параграфе.
Аналогично граничная линия между узлами и фокусами
определяется из условий (2.13) и (2.14); ее уравнение имеет вид
{ах-Ь2? + Ы2Ьх = 0\ (8.17)
после подстановки выражений (8.8а) получаем
§r04-3rg+l=0, откуда /? = |. |. (8.18)
Эти границы на рис. 8.1 показаны пунктирными линиями.
Поскольку из (8.8а) следует, что ^ + 62=—k, легко видеть, что
периодические режимы в областях узлов и фокусов устойчивы.
8.4. АНАЛИЗ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ
НА ФАЗОВОЙ ПЛОСКОСТИ [32, 33, 36]
В предыдущем параграфе мы кратко коснулись переходных
режимов, которые связаны с интегральными кривыми
уравнения (8.12). Однако для большей наглядности полезно
исследовать расположение интегральных кривых в некоторых типичных
случаях. Рассмотрим частные случаи уравнения (8.4),
соответствующие следующим значениям величин k и В:
Случай 1. £ = 0,2, В = 0,3.
Случай 2. 4=0,7, В = 0,75.
Как видно из рис. 8.1, в первом случае имеются три
различных состояния равновесия, в то время как во втором — только
одно. Расположение интегральных кривых для этих двух
случаев показано соответственно на рис. 8.2 и 8.3. Особые точки
определяются уравнениями (8.5); результаты вычислений
приведены в табл. 8.1 х).
Интегральные кривые на рис. 8.2 и 8.3 построены с помощью
изоклин, изображенных пунктирными линиями; числа на
изоклинах показывают соответствующие значения dy/dx. Как
следует из уравнений (8.4), изображающая точка х(х), у(х) с
ростом времени будет двигаться по интегральной кривой в
направлении, указанном стрелкой, приближаясь в конце концов к
') В габл. 8.1 через ЦьЦг обозначены тангенсы угла наклона
касательных к интегральным кривым в особых точках.
14*
Рис. 8.2. Интегральные кривые для гармонического колебания в случае
трех особых точек. Сплошные линии — интегральные кривые. Пунктирные
линии — изоклины.
Рис. 8.3. Интегральные кривые для гармонического колебания в случае
одной особой точки. Сплошные линии — интегральные кривые. Пунктирные
линии — изоклины.
8.4. Анализ колебаний на фазовой плоскости
213
Таблица 8.1
Особые точки рис. 8.2 и 8.3
Особая
точка
Рис. 8.2, 1
Рис. 8.2, 2
Рис. 8.2, 3
Рис. 8.3
Хо
0,067
0,699
1,012
0,983
Уо
—0,310
—0,748
0,703
—0,295
A.j, Л<2
—0,100±0,423/
0,170, —0,370
—0,100 ±0,289/
—0,082, —0,618
1*1» *Ч
0,392, 2,113
1,275, —12,21
Наименование
Устойчивый фокус
Седло (неустойчиво)
Устойчивый фокус
Устойчивый узел
устойчивой особой точке. На рис. 8.2 имеются три особые точки;
точки 1 и 3 являются устойчивыми, и соответствующие им
периодические режимы реализуются. Точка 2 является седловой
точкой с присущей ей неустойчивостью. Соответствующий ей
Рис. 8.4. Области начальных условий на плоскости г, 9, приводящих
к резонансному колебанию (не заштрихована) и нерезонансному колебанию
(заштрихована).
периодический режим не может поддерживаться, потому что
любое незначительное отклонение от точки 2 будет приводить
колебание к устойчивому состоянию, представленному точкой 1
или точкой 3. Очевидно также, что одна из интегральных
кривых, проходящая через седловую точку, разделяет всю плоскость
на две области, в одной из которой все интегральные кривые
214
Гл. 8. Гармонические колебания
направлены к особой точке 1, а в другой — к особой точке 3. Эта
особая интегральная кривая называется сепаратрисой.
На рис. 8.4 эти области показаны в координатах г, 8, где
г(0)—амплитуда, а 8(0)—фазовый угол решения v{x) при
т=0, т. е.
г(0) = У-^(0)+^(0), 9(0) = arctg^^. (8.19)
Далее из (8.3) и (8.4) получаем
v(0) = y(0),
v(0) = x(0)^y(0) = x(0)^[x(0) + ky(0)-^rH0)x(0)],
где точки обозначают дифференцирование по т. При помощи
этих соотношений указанные выше области представлены на
плоскости у, v, как показано на рис. 8.5. Из этого рисунка
становится ясной связь между начальными условиями и
возникающими колебаниями: колебания, соответствующие начальным
(8.20)
Рис. 8.5. Области начальных условий на плоскости г/, г), приводящих к
резонансному колебанию (незашрихована) и нерезонансному колебанию
(заштрихована).
условиям из заштрихованной области, стремятся в конце
концов к установившемуся режиму, соответствующему особой
точке 1, тогда как колебания, начинающиеся из незаштрихованной
области, стремятся к режиму, соответствующему особой точке 3.
Видно также, что особая точка 2 находится на граничной
кривой, разделяющей эти две области.
8.5. Анализ интегральных кривых для консервативных систем 215
На рис. 8.3 мы имеем только один устойчивый узел, другими
словами, для любых произвольно заданных начальных условий
имеем единственное периодическое решение.
Амплитуда и фазовый угол колебания в окрестности особой
точки будут приближаться к предельному состоянию по
затухающей синусоиде в случае, когда соответствующая особая
точка — устойчивый фокус, и по затухающей экспоненциальной
кривой в случае, когда особая точка является устойчивым
узлом. Когда начальное значение амплитуды г велико,
колебание в переходном режиме имеет более высокую частоту, чем
частота внешней силы, так как изображающая точка #(т), у(т),
соответствующая переходному режиму, движется по
интегральной кривой вокруг начала координат в направлении против
часовой стрелки.
8.5. ГЕОМЕТРИЧЕСКИЙ АНАЛИЗ ИНТЕГРАЛЬНЫХ
КРИВЫХ ДЛЯ КОНСЕРВАТИВНЫХ СИСТЕМ
Хотя во всех реальных системах происходит рассеяние
энергии, изучение консервативных систем представляет интерес, во-
первых, из-за некоторых особенностей интегральных кривых для
этих систем, и, во-вторых, как введение к последующему
изучению неконсервативных систем.
Полагая ^ = 0 в уравнениях (8.4), имеем
%-^(-$А/+!)+в)ш.Х(х, у),
$-№*-х)-г(*.ь (8-21)
откуда получаем
Y (х, y)dx — X (х, у) dy = 0. (8.22)
Поскольку в силу уравнений (8.21) дХ/дх+дУ/ду=0, уравнение
(8.22) становится интегрируемым, и его полный интеграл имеет
вид
Тбг4 — ?г2 — ВУ = С> (8.23)
где С — постоянная интегрирования. С помощью уравнения
(8.23) легко находятся интегральные кривые системы (8.21);
пример будет приведен позже.
^Чтобы исследовать интегральные кривые в окрестности
особой точки, перенесем начало координат в эту особую точку х0,
Уоу вводя новые переменные | и т), а именно
л: = х04-|» У = Уо+*\-
216 Гл. 8. Гармонические колебания
Тогда основная система уравнений (8.4) примет вид
Л3).
(8.24)
-g- = а,£ + а2ц - -§■ (у012 + 2х0|т) + Зу0Л2 + I2*! + т]3),
где
-g. = Ъх\ + М + 4 (Зх042 + 2</0|т, + ад2 +13 + W),
а1 = (^ж_^=т(-*-т*м>)'
*«в(^Цвт[-1+т(3*8+^]-
/
Эти уравнения применимы как к системам с затуханием, так и
к системам без затухания. Они сводятся к уравнениям (8.8),
если пренебречь членами со степенями выше первой
относительно | И Т|.
В рассматриваемом случае, полагая k=0 в уравнениях (8.24)
и помня, что #о=0 в силу уравнений (8.7), имеем
%■ = а2ц -1 (у0¥ + 3f/0ri2 + 12Ч + Л3),
5- = ^ + |(2уо1л+13 + 1Л2),
где
*2 = т(1—Т»о)' *i = i(—^Т^о)-
Уравнения (8.25), как и (8.21), интегрируются. В результате
интегрирования получаем
Ьг1* - atf+4 [f/оЛ (I2 + Л2) + \ (I2 + Л2)2] = С, (8.26)
где С — постоянная интегрирования.
Для того чтобы классифицировать типы особых точек,
вычислим при помощи (8.14) корни характеристического уравнения:
lv А,2 = ± Уафх, ах + Ь2 = 0. (8.27)
8.5. Анализ интегральных кривых для консервативных систем 217
Кривая зависимости между В и г\
для & = 0 представлена на рис. 8.6
(ср. рис. 8.1). Разделим эту
кривую на три части I, II, III (как
показано на рисунке); границы
каждой части определяются точками А
и В, для которых соответственно
г;; = 4/3 и /-J = 4/9.
Этим участкам соответствуют
следующие особые точки:
I Центр1) (a26i<0).
II Седло (a26i>0).
Ill Центр1) (a26i<0).
Пример.
Рассмотрим случай, когда В =
=0,2. Здесь возможны три
состояния равновесия (рис. 8.6); данные
для соответствующих особых точек
приведены в табл. 8.2.
Интегральные кривые уравнений
(8.21) легко получаются при
помощи уравнения (8.23) для различных значений С.
Результаты приведены на рис. 8.7. Мы видим, что в консервативной
системе каждая интегральная кривая образует замкнутую
траекторию, которая не стремится к устойчивой особой точке.
Таблица 8.2
Рис. 8.6. Амплитудная
характеристика гармонического
колебания в консервативной
системе.
Особая
точка
1
2
3
Уо
—0,207
—1,037
1,244
Особые точки рис.
Ки Кй
±0,468/
±0,262
±0,316/
щ, \х,
Т 0,369
8.7
Классификация
Центр (нейтрален)
Седло (неустойчиво)
Центр (нейтрален)
Таким образом, изображающая точка х(т), */(т), начавшая
движение из точки, соответствующей заданным начальным
условиям *(0), у(О), с ростом времени продолжает движение по
1) Как показал Пуанкаре [84, стр. 95], условие, что корни
характеристического уравнения чисто мнимые, не является достаточным для того,
чтобы различить центр от фокуса. Однако в данном случае, как будет
показано в § V. 2, особая точка является центром,
.218
Гл. 8. Гармонические колебания
40 -1,0 0 1,0 2,0
х »-
Рис. 8.7. Интегральные кривые для гармонического колебания в
консервативной системе.
замкнутой траектории в направлении, указанном стрелками. Это
означает, что амплитуда и фазовый угол колебания в
установившемся режиме не остаются постоянными, а периодически
меняются. Так, колебание по фазе может опережать внешнюю
силу или отставать от нее. Если замкнутая траектория не
охватывает начало координат, то углы опережения и отставания
взаимно компенсируются после обхода изображающей точки по
замкнутой траектории, и колебание, таким образом, будет
синхронным с внешней силой. С другой стороны, если начало
координат расположено внутри замкнутой траектории, то в
результате каждого цикла будет получаться разность в фазе?,
доставляющая 2я радиан, и колебание не будет синхронным с
-внешней силой.
В заключение рассмотрим случаи, когда режим системы
,характеризуется точками Л и В рис. 8.6..
8.5. Анализ интегральных кривых для консервативных систем 219
(а) Интегральные кривые системы, соответствующей точке А
рис. 8.6
Полагая В = 0 в уравнениях (8.21), имеем
dy х_
dx у '
или после интегрирования
#2 + t/2=const.
Следовательно, интегральные кривые образуют семейство
концентрических окружностей с центром в начале координат, так
что особая точка (в данном случае начало координат) является
центром. Период Г, необходимый для того, чтобы
изображающая точка х(т), у(х) сделала один оборот по замкнутой
траектории, определяется выражением
Т = & . ds =& , , % х =—V- (8.28)
2 \ 4 / 4
Теперь предположим, что начальное условие задается
точкой х(0), f/(0), расположенной на окружности радиусом
г = )/Ч/3; тогда период Т окажется равным бесконечности. Как
можно видеть из уравнений (8.21), изображающая точка #(т),
у(х) в этом случае остается в своем начальном положении. Это
означает, что частота колебания совпадает с частотой внешней
силы. Далее из уравнений (8.21) также можно видеть, что
изображающая точка #(т), у{%) движется по окружности в
направлении против часовой стрелки, когда г2>4/3, и в направлении
по часовой стрелке, когда г2<4/3. В первом случае колебание
имеет более высокую частоту, чем внешняя сила, во втором
случае картина будет обратной. Итак, мы можем сделать заклю:
чение, что частота колебания меняется в зависимости от г и
совпадает с частотой внешней силы только в случае, когда г2=4/3.
(б) Интегральные кривые системы, соответствующей
точке В рис. 8.6
В этом случае &=0 и В=4/9. Из уравнений (8.6) и (8.7)
получаем
*о = 0> % = —§■• ^=4- (8-29)
Как видно из рис. 8.1, в точке В соприкасаются области узлов,
фокусов и седел. Исследуем характер этой особой точки1).
1) Последующий анализ связан с § V. 1 и работой Бендиксона [6, стр. 58,
62, 74].
220 Гл. 8. Гармонические колебания
Из уравнений (8.25) имеем
а1 = а2 = Ь2 = 0, &! = — у,
откуда А,1 = А,2 = 0. Уравнения (8.25) принимают вид
5-=|а2+зл2)-|а2л+лз),
подставляя сюда dz = bldr = — ~odx, получаем
-§- = -4(£2 + Зг!2)+|(|2гЦ-Т13),
(8.30)
5-=^+||л-|-(13+^).
(8.31)
dz ъ ' 2 *» ' 8
Интегральные кривые на плоскости |, т) приближаются к началу
координат, касаясь прямой | = 0. Применяя подстановку g=JCiT],
имеем
<ta 3 9 9 <8-32)
17 = XV ■+■ Т ^ ~ "8 ^ - Т *№•
Теперь интегральные кривые на плоскости хи ц приближаются
к началу координат, касаясь прямой т]=0. Далее с помощью
подстановки r\=Xiyi уравнения (8.32) приводятся к виду
gi = 2xltJl +■§-tf + (^х^-|^з_?^?- т x\yi) ■
Касательные к интегральным кривым в начале координат на
плоскости xv yl определяются выражением (см. § V.1)
*i^(*i+yf/i) = 0. (8.34)
Однако в этом уравнении касательные Xi = 0 и t/i=0
вырождаются в начало координат плоскости £, у\, поэтому мы будем
рассматривать только интегральные кривые, имеющие в начале
координат касательную хх + -j уг = 0. С этой целью применим
преобразование
У1 = (у2 — т)*1-
J
8.5. Анализ интегральных кривых для консервативных систем 221
Тогда уравнения (8.33) примут вид
■■*i<P(*i. %)
(8.35)
2_
1,1 dx, ~ 1 9 i2
<ty2 - 3^2 + "2 ^2 + ^ О**' %)
1
-2—?У2 + *1$(х1' У2)
где ф (хиУъ) и i|)(#i, {/г)—полиномы относительно Xi и {/2. Как
показано в § V.1, уравнение (8.35) может быть представлено
в виде
хт^ = аУ + Ьх+в^У^
где В (х, у) состоит из членов степени выше первой относительно
х и у. Для уравнения (8.35) имеем
т = 1 (нечетное число) и а = —6<0,
так что особая точка (*i = 0, {/2=0) является седлом1) и
интегральные кривые стремятся к ней, имея касательные *i = 0 и
У2 = 0.
Таким образом, в результате всех преобразований имеем
1 = ххч = х\У1 = х\{у2 — 1), ц = х1у1 = х\[у2 — |).
Как отмечалось ранее, касательная *i=0 в плоскости g, ц
сводится к началу координат, касательная же {/2=0 переходит
в кривую
& = —4*?. Л = —у*?. (8.36)
и можно считать, что она представляет интегральные кривые в
окрестности начала координат плоскости £, т|. На рис. 8.8
в соответствующих координатах представлена касательная
{/2=0. Имеются две и только две ветви интегральных кривых,
которые стремятся к началу координат плоскости §, т], имея
касательную 5=0, потому что если их было более чем две, то
на плоскости хи {/2 существовало бы более чем две ветви
интегральных кривых, стремящихся к началу координат с
касательной {/2=0, что противоречит природе седловой точки.
В заключение отметим, что данная особая точка
представляет собой седло-узел; как видно из уравнений (8.30),
изображающая точка ?(т), ц{%) с ростом времени движется по
интегральной кривой в направлении, указанном стрелками
!) Имеется другая особая точка уравнения (8.35) с координатами #i=0
и #2== 2/3, однако необходимость в рассмотрении этой особой точки отпадает,
когда исследуются интегральные кривые на плоскости |, г\.
222 Гл. 8. Гармонические колебания
[рис. 8.8, (в)]. Следовательно, состояние равновесия,
соответствующее этой особой точке, неустойчиво. Можно также заме-
У2
li
-1 t
~*1
(а)
Р и Cv 8.8. Интегральные кривые в соответствующих координатах; особая
точка соответствует точке В рис. 8.6.
тить, что с ростом В центр 1 и седло 2 рис. 8.7 приближаются
друг к другу и в результате их слияния возникает седло-узел.
8.6. ГЕОМЕТРИЧЕСКИЙ АНАЛИЗ ИНТЕГРАЛЬНЫХ
КРИВЫХ ДЛЯ ДИССИПАТИВНЫХ СИСТЕМ
. В § 8.3 и 8.4 мы уже рассмотрели интегральные кривые и
особые точки, соответствующие гармоническим колебаниям. Как
отмечалось там, типы особых точек определяются, если
известны корни (отличные от нуля) характеристического уравнения
(8.3$. Дцнако остаются еще не рассмотренными частные случаи,
когда один или оба .корня равны нулю. Особая точка в этом
случае называется особой точкой более высокого порядка
[п. 2.2 (г)]. Пример подобной особой точки был приведен в
предшествующем параграфе, где рассматривалась точка типа седло-
удел. В настоящем параграфе мы рассмотрим некоторые
частные случаи и исследуем характер соответствующих особых
точек.
8.6. Анализ интегральных кривых для диссипативных систем 223
(а) Особые точки, расположенные на границах между
областями узлов и фокусов (рис. 8.1)
Как отмечалось в § 8.3, эти границы определяются
значениями [см. (8.18)]
9 4 9 4
'о 3 0 9
Поскольку уравнение (8.17) справедливо и в этом случае,
корни характеристического уравнения А,4 и %2 легко находятся из
(8.8а) и (8.14); они равны
Я,1 = ^ = —J-A. ' (8.37)
Отсюда следует, что особая точка является устойчивым узлом и
направление касательных к интегральным кривым определено
в особой точке однозначно1).
(б) Особые точки на границе между областями узлов и
седел (рис. 8.1)
Эта граница определяется условием dB2jdr\ = 0. Решая
уравнение (8.16) относительно г\, находим
rl=*±VTEE. (8.38)
Определяя значения х\ и у\ при помощи (8.7) и подставляя их
в (8.24), получаем
аг = а2 = 0,
1r6^(2±KT^L_11, (8.39)
ь2=— Л,
так что корнями характеристического уравнения являются
А,1 = 0, l2 = — k. (8.40)
Итак, рассматриваемая особая точка является точкой более
высокого порядка. Исследуем устойчивость этой особой точки
следующим образом.
Уравнения (8.24) можно записать в этом случае так:
-Ц- = - 4 (Уо12 + 2х0Щ + Зг/оЛ2 + 12Ц + Л3),
н я (8-41)
£1 == ь& - £т)Н-| (Зх0£2+ 2у0^ + ад2+ 1* + Ы\
1) Следует обратиться к уравнению (2.16),
224 Гл. 8. Гармонические колебания
Подставляя сюда dz = — kdx, получаем
% = Xv ■Й" = »1-а6 + К1, (8.42)
где
Хх = 4 ((/о!2 + 2x0|Ti -+- 3.%Л2 + l2ri + Л3).
8*
'8£'
yi = - 5Г* <3*о£2 + 2«/о4л + ЗД2 -+-13 + £Л2)>
а=т-
Касательные к интегральным кривым в начале координат
плоскости £, т] определяется уравнением (см. § V. 1)
Б(ч-оБ) = 0. (8.43)
Сначала покажем, что имеются две и только две ветви
интегральных кривых, которые имеют в начале координат
касательную £ = 0. Используя преобразование £ = фг|, приведем
уравнения (8.42) к виду
|Н-Ф+^УоЛ + *2, -S—1 + Г» (8Ж)
где Х2 и У2 — полиномы, состоящие из членов степени выше
первой относительно ф и rj. Характеристическое уравнение в
этом случае принимает вид
(Л.+ 1) (Л.— 1)=0,
так что особая точка, т. е. начало координат плоскости ф, г\,
является седлом.
Следовательно, имеются четыре ветви интегральных кривых,
примыкающих к началу координат. Две из них
аппроксимируются прямой т] = 0, однако в плоскости g, т] они сводятся к
точке — началу координат. Таким образом, мы имеем две и
только две ветви интегральных кривых, которые примыкают к
началу координат плоскости g, ц с касательной g = 0. Одна из
них располагается над осью g, а другая — под осью g.
Отекла можно заключить, что все другие интегральные
кривые, примыкающие к началу координат, имеют касательную
ц — ag = 0. Для того чтобы исследовать их, применим к
уравнениям (8.42) подстановку
Мы получим
6'-£--*3^-*<«+*>• (8-«)
8.6. Анализ интегральных кривых для диссипативных систем 225
ИЛИ
62|r = *+ + *S + *i(&.+). (8*46)
где
3 2ах0 + (3а2+l)i/o ' 2а*0+ (За2 + 1) у0 *
a ^i(£, i|>)—ряд, состоящий из членов степени выше первой
относительно £ и ij). Это уравнение имеет вид уравнения (V. 3) из
§ V. 1 при т = 2 (четное число)1). Следовательно, разбивая
плоскость |, ij) на две области по оси ij), мы видим, что все
интегральные кривые, расположенные по одну сторону от оси ij) (по
какую именно, зависит от знака а), подходят к началу
координат и что по другую сторону к началу координат подходит одна
и только одна интегральная кривая, в то время как все другие
удаляются от него. Следовательно, можно заключить, что
состояние равновесия, соответствующее этой особой точке,
неустойчиво.
Для получения приближенного уравнения интегральных
кривых в окрестности особой точки применим подстановку
р="~а~Ъ ? = «♦ + *£• .
Тогда уравнение (8.46) примет вид
?Тр=*Я + В\{р, д). (8.47)
Поскольку В\(р, q) состоит из членов степени выше первой
относительно р и q, ими можно пренебречь по сравнению с q, так
как наши рассмотрения ограничиваются только особой точкой и
ее окрестностью. Интегрируя уравнение (8.47) при этом
условии, имеем
q = Ce-VP, (8.48)
где С — постоянная интегрирования. Возвращаясь к исходным
координатам, окончательно получаем
т, = (а-£& + С'в-«/б)|, С = -£. (8-49)
Пример.
Для иллюстрации предшествующего анализа рассмотрим
систему с коэффициентом затухания &=0,2. Тогда из (8.38)
получаем
Г2= 1,3058 и г\ = 0,4720.
]) Здесь предполагается, что 2ал'о+ (За2+1)#о не равно нулю. Далее
будет рассмотрен случай, когда это выражение равно нулю.
15 Зак. 907
226 Гл. 8. Гармонические колебания
0.010
4005
t
0
0,005
ШЛО
0.015
ч
Г\
1
J
i
_J
т
Т "1
i
1
1
1
J
/
1
I
11
к
ш
-0,01 -0,005 0 ДО05 0,01
С -
Рис. 8.9. Слияние узла и седла, приводящее к * узло-седловому
распределению интегральных кривых.
Для второго значения г\ легко получаются следующие
величины:
х0 = 0,2032, у0 = — 0,6563,
5 = 0,4645, а = — 1,460,
а = — 0,0979, 6 = 2,004.
Подставляя эти значения в (8.49), можно начертить
интегральные кривые для различных значений С; они показаны на
рис. 8.9. Из уравнений (8.41) видно, что изображающая точка
|(т), т](т) будет двигаться по интегральной кривой в
направлении, указанном стрелкой. Итак, точка х(т), у(х) стремится к
началу координат при £<0 и удаляется от начала координат при
g>0. Отсюда, как уже отмечалось, следует, что состояние
равновесия, соответствующее этой особой точке, неустойчиво.
Теперь для завершения наших исследований рассмотрим
исключенный ранее случай, когда
2ax0 + (3a2+l)f/0 = 0. (8.50)
3.6. Анализ интегральных кривых для диссипативных систем 227
Этот случай имеет место, когда уравнение (8.38) имеет равные
корни. При этом
1 — 3k2 = О, или k = -т=г.
КЗ
Нетрудно получить следующие значения, удовлетворяющие
условию (8.50):
#1 = #2 = 0> ^1 ==: Т ' ^2 =
Vs '
*,, = — _, Я,2 = 0.
Подставляя эти значения в уравнение (8.45), имеем
6 н%
1
2-5 + -^^ ^—*24--8-&^2-
V*
iP-1-l*-
Уравнение, однако, не приняло формы уравнения (8.46),
поэтому производим дальнейшее преобразование переменных
•ф = (уЛ2+ф)^ и получаем
х[; + ^4(/2Ч-ф)-3^|(У2 + ф)2 +
*12(/2 4-ф)2 + 1-1^|г(1/2 4 ф)']"1 -^|-2|2(1А2+Ф)
или '
|3-^- = 2Ф —-1,1 + ^(1, ф), (8.51)
где ^2(1, ф) состоит из членов степени выше первой. Это
уравнение по форме совпадает с уравнением (V. 3) при т = 3
(нечетное) и а=2>0. Следовательно, особая точка является узлом.
Чтобы найти интегральные кривые в окрестности этой особой
точки, положим
Р = у?Ь ^ = 2ф-^|.
15*
228 Гл. 8. Гармонические колебания
0,15
0,10
№
t
0
-005
-.П1П-
-0.15
'
I
(
i
1
'
,
г
1
1
1
1
[
1
1
J
i
f
-0,1
-0,05 0.
t
0,05
0,1
Рис. 8.10. Слияние узла и седла, приводящее к узловому распределению
интегральных кривых.
Тогда уравнение (8.51) можно записать в виде
Р^ = Я + В',(р,д), (8.52)
где /?г(А я) состоит из членов степени выше первой.
Пренебрегая этими членами, интегрируем уравнение (8.52) и
получаем
где С — постоянная интегрирования. В первоначальной
плоскости |, т] получаем
Hw+^-w*2H^w)*-
(8.53)
Интегральные кривые, определенные для ряда значений С,
представлены на рис. 8.10. Из уравнений (8.41) видно, что
изображающая точка при любых начальных условиях будет двигаться
8.7. Экспериментальное исследование
229
по интегральной кривой в направлении, указанном стрелкой, и в
конце концов придет в начало координат. Следовательно, эта
особая точка и соответствующее состояние равновесия являются
устойчивыми.
Итак, мы можем заключить, что состояние равновесия,
соответствующее особой точке на границе между областями узлов
и седел, обычно неустойчиво. Следовательно, колебание
переходит к другому состоянию равновесия, которое устойчиво.
Однако в случае, когда k =1/У"3, /^ = 8/9, это состояние равновесия
становится устойчивым. С физической точки зрения этот
результат выглядит вполне правдоподобным, поскольку в этом частном
случае нет других состояний равновесия (рис. 8.1).
8.7. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ [33, 36, 96]
Как упоминалось в § 4.1, характерной особенностью
нелинейных колебаний является то, что в зависимости от начальных
условий для данной системы могут получаться различные типы
установившихся режимов.
Например, на рис. 4.1 мы видим три типа колебаний: два
гармонических и одно субгармоническое колебание порядка 1/3,
которые получаются в электрическом контуре, содержащем
нелинейную индуктивность. В этом параграфе рассматриваются
эксперименты, проведенные для аналогичного контура
(подробности объясняются ниже), и определяются области начальных
условий, которые приводят к возбуждению соответствующих
типов периодических колебаний. Однако здесь мы ограничимся
изучением только гармонических колебаний; возникновение
субгармонических колебаний будет рассмотрено в следующей
главе.
Приступим к описанию некоторых экспериментальных
результатов, подтверждающих предшествующий анализ. Как уже
было показано на рис. 8.2, имеются два вида устойчивых
колебаний, соответствующих особым точкам 1 и 3. В п. 5.1 (в) мы
различали их как резонансные и нерезонансные колебания в
соответствии с тем, велика или мала их амплитуда. Поэтому ясно,
что, особая точка 3 на рис. 8.2 соответствует резонансным
колебаниям, а особая точка 1—нерезонансным колебаниям.
В предшествующем анализе начальные условия задавались
амплитудами синусйой и косинусной составляющих а(0), т. е.
координатами #(0) и у(0) начальной точки на плоскости х, у.
Однако в настоящем эксперименте это неудобно, поэтому мы
выберем в качестве начальных условий величину начального
напряжения конденсатора и фазовый угол приложенного
230 Гл. 8. Гармонические колебания
напряжения в начальный момент его воздействия на контур.
Схема электрического контура, использованного в нашем
эксперименте, представлена на рис. 8.11. Начальное напряжение VCo
конденсатора С подается от батареи £4 путем замыкания в
нужный момент ключа SW{. Что касается другого начального
условия, т. е. фазового угла подключаемого напряжения, то обычный
механический ключ непригоден для точного управления
моментом включения; поэтому используется электронный коммутатор,
состоящий из двух тиратронов Vi и V2, которые соединены
Ег Е,
Н>И |l|l|l|l|b-!
fsinort
Рис. 8.11. Экспериментальная цепь с приспособлениями для задания
начальных условий.
встречно-параллельно. Они становятся проводящими при подаче
положительного потенциала на их сетки в момент, когда
фазовый угол приложенного напряжения принимает требуемое
значение1).
Наличие остаточной намагниченности в насыщающемся
сердечнике существенно влияет на эксперимент. Следовательно,
сердечник должен быть размагничен, или по крайней мере
остаточная намагниченность должна сохраняться постоянной. Если
пренебречь этим обстоятельством, то результаты экспериментов
будут носить случайный характер. Поэтому, как показано на
рис. 8.11, сердечник катушки индуктивности имеет вторичную
обмотку, по которой при замыкании ключа SW2 пропускается
постоянный ток от батареи Е2. Перед началом каждого
эксперимента сердечник намагничивается в определенном направлении
путем пропускания необходимого тока через вторичную
обмотку сердечника; после размыкания ключа SW2 сохраняется лишь
постоянная остаточная намагниченность.
r4h
I Л ' 1\ I
1 111 I I I ..J
\ 'таяяпр—WW
L R
I
Ч0
ш
sw1
') Подробнее о схеме управления см. в приложении VI.
8.7. Экспериментальное исследование
231
0° 90° 180° 270° 360°
Угод включения в0
Рис. 8.12. Области начальных условий, приводящих к резонансному
колебанию (незаштрихована) и нерезонансному колебанию (заштрихована).
Следуя этой процедуре, мы выполняем эксперимент,
возбуждая колебания при различных комбинациях начальных
условий VCo и 6о (во — угол, соответствующий фазе приложенного
напряжения в момент включения). Результаты этого
эксперимента приведены на рис. 8.12. Заштрихованная часть рисунка
соответствует области начальных условий, вызывающих
нерезонансное колебание, а незаштрихованная часть соответствует
резонансному колебанию. Следует заметить, что благодаря
постоянному подмагничиванию заштрихованная область несколько
смещается вверх. Если бы перед каждым экспериментом
сердечник был полностью размагничен, то заштрихованная часть
оказалась бы симметричной относительно оси абсцисс, если бы
мы сдвинули часть, соответствующую значениям Vco<0, на 180°
вдоль горизонтальной оси Эо.
232 Гл. 8. Гармонические колебания
Рис. 8.13. Области начальных условий, приводящих к резонансному
колебанию (незаштрихована) и не резонансному колебанию (заштрихована),
полученные при различных значениях приложенного напряжения.
Подобные эксперименты выполнялись для нескольких
значений приложенного напряжения; результаты представлены на
рис. 8.13. Как и ожидалось из предшествующего анализа (см.
рис. 8.1), с ростом приложенного напряжения заштрихованные
области, соответствующие нерезонансным состояниям,
сжимаются. Однако нерезонансное состояние может быть получено
и для очень больших значений Усо, если выбрать подходящий
начальный угол включения 9о. Эти экспериментальные
результаты, за исключением незначительных расхождений, таких, как
разветвление заштрихованных областей, согласуются с
результатами предшествующего теоретического анализа (см. рис. 8.4).
ГЛАВА 9
Субгармонические колебания
9.1. АНАЛИЗ СУБГАРМОНИЧЕСКИХ КОЛЕБАНИЙ
С ПОМОЩЬЮ ИНТЕГРАЛЬНЫХ КРИВЫХ
В предшествующей главе мы уже рассмотрели переходные
процессы установления гармонических колебаний и подробно
проанализировали устойчивость состояний равновесия,
соответствующих особым точкам на фазовой плоскости. Теперь
рассмотрим субгармонические колебания, основная частота
которых составляет часть 1/v (v — целое положительное число)
частоты внешней силы. Как упоминалось в гл. 7, такие колебания
могут возбуждаться в нелинейных системах, например в
случае, когда система описывается уравнением Дуффинга
^r + k^ + f(v) = Bcosvx, (9.1)
а периодическое решение в первом приближении берется
в виде [см. (7.4)]1)
v = z-\-x sin т + у cos т-|- w cos vt, (9.2)
где
w^j^-B. (9.2a)
В этой главе решение уравнения (9.1) также
рассматривается в виде (9.2), но при этом предполагается, что
коэффициенты z, х и у являются медленно меняющимися функциями
времени т. Амплитуда w определяется уравнением (9.2а). Это
означает, что при возбуждении субгармонического колебания
существует сопровождающее колебание, которое является
гармоническим колебанием нерезонансного типа [п. 5.1(в)]2)\
В последующих параграфах, используя метод анализа,
1) В этой главе, так же как и в гл. 7, рассматриваются только системы
с высокой добротностью, благодаря чему и оказывается возможным
представить решение соотношением (9.2). Соотношение (9.2а) представляет
собой аппроксимацию, предложенную Л. И. Мандельштамом и Н. *Д. Папа-
лекси [72]. — Прим. ред.
2) Экспериментально подтверждается, что субгармоническое колебание
не может существовать совместно с р'езонансным колебанием.
234 Гл. 9. Субгармонические колебания
изложенный в гл. 8, мы исследуем интегральные кривые и
особые точки, соответствующие субгармоническим колебаниям
порядков 1/3, 1/5 и 1/2.
Заканчивая эти вводные замечания, следует отметить, что
настоящий анализ только отвечает на вопрос, существует ли
определенный вид субгармонического колебания. Если
возбуждается несколько различных видов колебаний (например,
субгармонические, нерезонансные и резонансные), то этот метод
анализа практически не применим, поскольку графические
построения необходимо выполнять в многомерном фазовом про-,
странстве. Подобные случаи анализируются другим методом,
который будет рассмотрен в гл. 10,
Р2. АНАЛИЗ СУБГАРМОНИЧЕСКИХ КОЛЕБАНИЙ
ПОРЯДКА 1/3 НА ФАЗОВОЙ ПЛОСКОСТИ [33, 36]
Обратимся сначала к субгармоническим колебаниям
порядка 1/3 (т. е. v=3) и рассмотрим дифференциальное
уравнение
^ + ki + v" = Bcos3x- <9'3)
Поскольку нелинейность симметрична, постоянная
составляющая z в решении (9.2) может быть отброшена. Тогда решение
уравнения (9.3) принимает вид
v (т) = х (т) sin т + У (*) cos т -f- w cos Зт, (9.4)
где
да = т4згЯ = ->
Подставляя это решение в (9.3) и приравнивая отдельно
нулю члены, содержащие sint и cost, получаем
-§7 = 4Т— kx + Ay + fW(& — y*)]==X(x, у),
dy_ w . . я N.... (9-5)
dx
1 / 3 \ (9*5) ;|
= ^[—Ax — ky—-^wxyj = V(xy у), ||
где
Л=1-~г2— |-^2, г2 = х2 + {/2.
Необходимо, однако, помнить, что при выводе уравнений (9.5)
должны быть сделаны предположения, указанные в § 8.2.
Периодические решения определятся из уравнений
Х(х,у) = 0, Г(х,у) = 0. (9.6)
9.2. Анализ колебаний порядка 1/3 на фазовой плоскости 235
Из уравнений (9.5) и (9.6) видно, что амплитуда г0
установившегося колебания удовлетворяет уравнению
А*+Р = {Щг1 (9.7)
которое совпадает с (7.18). Амплитуды х0 и у0 определяются
выражениями (7.20). В п. 7.3(6) отмечалось, что устойчивость
периодического решения может быть определена только из
условия (7.22) для /г=1. Это условие устойчивости получается
также из критерия Рауса — Гурвица (как показано в § 8.2) или
из рассмотрения устойчивости особых точек уравнения
dy_ _ Y (х, у) (q я.
dx~ Х(х, у)' Фл0)
где Х(х, у) и Y(x, у) определяются уравнениями (9.5). Как
и ранее, особые точки этого уравнения соответствуют
периодическим решениям уравнения (9.3), а интегральные кривые —
переходным решениям. Характер особой точки х0, Уо
определяется видом корней характеристического уравнения
Я,2 — (аг + b2)%-\- axb2 — афх = 0, (9.9)
где
У = Уо
У = Уо
У = Уо
У~Уо
Для того чтобы показать расположение интегральных
кривых, исследуем конкретную систему с параметрами
& = 0),2, В = 3,2.
Тогда из (9.4) имеем w=—0,4. Подставляя эти значения в
(9.5) и применяя метод изоклин, построим интегральные
кривые уравнения (9.8). Результаты построения представлены на
рис. 9.1, где можно видеть семь особых точек. Эти особые точки
можно также определить из (7.18) и (7.20). Подробные данные
для этих точек приведены в табл. 9.1, где ць ц2 —тангенсы
углов наклона касательных к интегральным кривым в особых
точках.
236
Гл. 9. Субгармонические колебания
Особые точки рис. 9.1
Таблица 9.1
Особая
точка
х0
Уо
Д„ ]i2
Классификация
—1,123
0,889
0,234
—0,858
0,610
0,248
0
—0,378
—0,784
1,162
0,209
0,639
—0,848
0
-0,100±0,599/
-0,100 ±0,599/
-0,100 ±0,599/
0,365, —0,565
0,365, —0,565
0,365, —0,565
-0,100 ±0,500/
0,613, —7,274
-35,24, —0,4071
-0,543, 0,767
Устойчивый фокус
я я
Я I»
Седло (неустойчиво)
я я
» »
Устойчивый фокус
Из рис. 9.1 видно, что особые точки 1, 2 и 3 представляют
устойчивые состояния субгармонических колебаний; они распо-
-2,5 -ьр -1,5 -1,0
2,0 2,5
Рис. 9.1. Интегральные кривые, соответствующие субгармоническому
колебанию порядка 1/3. Сплошные линии — интегральные кривые,
пунктирные линии — изоклины.
ложены в вершинах правильного треугольника с центром в
начале координат. Угловое расстояние между любыми двумя из
этих особых точек соответствует одному периоду внешней силы.
9.3. Экспериментальное исследование
237
Это вполне правдоподобный результат для субгармонических
колебаний порядка 1/3.
Из интегральных кривых рис. 9.1 также видно, что любое
колебание, начавшееся в точке (которая определяется
заданными начальными условиями) одной из заштрихованных
областей, приходит в конце концов к особой точке 1, 2 или 3,
расположенной в той же самой области, т. е. при этом происходит
возбуждение субгармонического колебания. Напротив, любое
колебание, начинающееся из незаштрихованной области,
приходит в конце концов к началу координат, т. е. в этом случае
субгармоника не возбуждается. Аналогично случаю
гармонических колебаний зависимость v от т в переходном режиме
определяется криволинейным интегралом (8.13). Если начальное
условие соответствует точке, находящейся далеко от начала
координат, то колебание в переходном режиме имеет более
высокую частоту, чем частота субгармонического колебания,
потому что изображающая точка #(т), у(т), соответствующая
переходному режиму, движется по интегральной кривой в
направлении против часовой стрелки относительно начала
координат1).
9.3. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
Используя электрическую цепь рис. 8.11, опишем некоторые
эксперименты, позволяющие сравнить результаты для
субгармонических колебаний порядка 1/3 с предшествующим
теоретическим анализом.
Изменяя приложенное напряжение V и емкость
конденсатора С, определим сначала область существования
субгармонических колебаний порядка 1/3. Результат эксперимента приведен
на рис. 9.2, где эта область выделена штриховкой.
Определена также область, где существуют резонансные и
нерезонансные гармонические колебания. На рис. 9.2 изображена
кривая ABC, которая дает границу этой области. Колебание,
которое вначале- находится в нерезонансном состоянии, при
повышении напряжения до границы ВС переходит в резонансное.
Напротив, когда напряжение понижается до величин,
соответствующих границе АВ, имеет место переход от резонансного
состояния к нерезонансному. Таким образом, внутри области,
ограниченной кривой ABC и заштрихованной пунктирными
линиями, в зависимости от выбранного начального условия могут
*) Подробное исследование устойчивости состояний равновесия, которые
соответствуют особым точкам более высокого порядка, может быть
выполнено тем же способом, что и в §_8.5 и 8.6.
238 Гл. 9. Субгармонические колебания
существовать либо резонансные, либо нерезонансные колебания.
В дальнейшем мы рассмотрим переходный режим
субгармонического колебания порядка 1/3 и определим области начальных
условий, которые приводят к возбуждению субгармоники.
50 100 150 200
Приложенное напряжение, в
{лч\х\ч\ч Резонансные или нерезонанс-
Ь*Ш?А ные колебания
Субгармонические колебания
порядка J/3
Рис. 9.2. Области существования различных видов колебаний.
Переходный режим
Вольты Угол включения;320° Приложенное напряжение
'00]
30,
201
I о!
** «01
•20feOOJ
j K\>^v^v^v/^v^'VAvAv'\/']
{Вольты
400i
V-
Тон
напряжение на емкости
Установившийся
режим
кЛЛ/1
^\,
-цу
Рис. 9.3. Колебания, приводящие к возбуждению субгармонического
колебания порядка 1/3.
Как видно из рис. 9.2, в точке D, для которой
С = 100 мкф, V = 40 в,
существуют два вида периодических колебаний, а именно
нерезонансное и субгармоническое. Опишем эксперименты, которые
9.3. Экспериментальное исследование
239
Рис. 9.4. Полярная диаграмма, показывающая зависимость индукции or
фазового угла приложенного напряжения. Радиальная шкала — индукция
(амплитудное значение в гауссах). Угловая шкала — фазовый угол
приложенного напряжения.
i
проводились для системы с этими параметрами. Как
указывалось в § 8.7, в качестве начальных условий задаются начальное
напряжение конденсатора VCo и фазовый угол приложенного
напряжения 0О в момент включения.
На рис. 9.3 показан переходный процесс при начальных
условиях 1/Со=312 в и 9о = 320°, который приводит к возбуждению
субгармонического колебания порядка 1/3. Поскольку
начальное напряжение на конденсаторе сравнительно велико,
колебание в переходном процессе имеет большую частоту, чем в
установившемся режиме. Для того чтобы провести более
тщательное сравнение этого результата с предшествующим анализом,
измерим магнитную индукцию в сердечнике и фазовый угол
240 Гл. 9. Субгармонические колебания
Рис. 9.5. Полярная диаграмма, показывающая зависимость напряжения на
емкости от фазового угла приложенного напряжения. Радиальная шкала —
напряжение на емкости (амплитудное значение). Угловая шкала — фазовый
угол приложенного напряжения.
приложенного напряжения в каждый момент времени, когда
ток достигает экстремального значения1). Эти величины
представлены в полярных координатах на рис. 9.4. На этом рисунке
траектории соответствуют интегральным кривым, проходящим
в заштрихованных областях рис. 9.1. Как видно из рисунка,
эти траектории с ростом времени принимают вид спиралей
вокруг точек, соответствующих установившемуся режиму.
Аналогично на рис. 9.5 представлены амплитудные значения
напряжения на конденсаторе и соответствующие фазовые углы
х) Поскольку потерями в сердечнике можно пренебречь, следует считать,
что ток и магнитный поток в сердечнике совпадают по фазе. Таким образом,
магнитная индукция достигает экстремального значения при указанном
фазовом угле.
9.3. Экспериментальное исследование 241
Рис. 9.6. Области начальных условий, приводящих к субгармоническим
колебаниям порядка 1/3. Радиальная шкала — начальное напряжение на
емкости, угловая шкала — угол включения.
приложенного напряжения. Поскольку в момент максимального
напряжения на конденсаторе ток равен нулю (рис. 9.3), то
субгармоническое колебание имеет место, когда эти максимальные
напряжения и фазовые углы выбраны в качестве начальных
условий. Следовательно, точки на рис. 9.5 являются точками,
соответствующими начальным условиям, приводящим к
возбуждению субгармонических колебаний. Используя электронный
синхронный коммутатор, о котором говорилось в § 8.7,
определим далее (изменяя начальные условия Vco и 9о) области
начальных условий, приводящих к возбуждению церезонансных
колебаний и субгармонических колебаний. Результаты
эксперимента приведены на рис. 9.6, где заштрихованные области
соответствуют начальным условиям, приводящим к возбуждению
16 Зак. 907
242 Гл. 9. Субгармонические колебания
субгармоники, а незаштрихованные области — начальным
условиям, приводящим к нерёзонансному колебанию1). Эти
результаты хорошо согласуются с теоретическим анализом
(рис. 9.1).
9.4. СУБГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
ПОРЯДКА 1/5 [36]
Как отмечалось в § 7.2, субгармонические колебания
порядка 1/5 имеют место, если нелинейность f(v) в уравнении
(9.1) определяется функцией и5. Таким образом, напишем
и предположим, что периодическое решение имеет вид
v (т) — х (т) sin т + У (*) cos т + w cos 5т, (9.11)
где
• = t=f*«-tsta
Поступая аналогично тому, как в § 9.2, получаем
^-==,^-kx + Ay-^w(x^-6x2y2 + y^]^X(xiy)f
dy
dx
где
= ±[-Ax — ky-\-^wxy(x2-y2)] = V(x, у),
(9.12)
A=--l — ^r* — ^-w2r2 — ^-w\
r2 = x2-\- у2.
Колебания установившегося режима определяются
уравнениями
Х(х,у) = 0, У(х,у) = 0. (9.13)
Подставляя (9.12) в (9.13), определим амплитуду колебания г0,
соответствующую установившемуся режиму:
Л2 + *2 = (-ж)Ч (9-И)
Составляющие х0 и у0 определяются выражениями
*0 = /-oCos(9 + 72°.az),
</0 = r0sin(8 + 72o.fl), я = 0, 1, 2, 3, 4, ( '
]) Области начальных условий, приводящих к резонансным,
нерезонансным и субгармоническим колебаниям, будут рассмотрены в п. 10.6 (а).
9.4. Субгармонические колебания порядка 1/5 , 243
где
cos 58:
16/g
bwrl
sin 58:
16Л
bwrz0
(9.16)
(а) Анализ на фазовой плоскости
Переходный режим определяется интегральными кривыми
уравнения
dy Y (*, у)
dx Х(х,у)*
где Х(х, у) и Y(x, у) даются уравнениями (9Л2). Вид особой
точки х0, Уо определяется характеристическим уравнением
^2-(al + b2)l + alb2—a2bl = Oi (9Л7)
где
^=(wl.x^i{A-T[2yo(rl+3w2)-wyo^4-yt)}}'
У = Уь
* 'Х—Хп, ч '
' Х—Хо,
У = Уо
*2 = (1г). е=т{-*+т[2д^о('?н-з«'2)+^о(^-з^]}.
Особые точки рис. 9.7
(9.17а)
Таблица 9.2
Особая
точка
1
2
3
4
5
6
7
8
9
10
11
Хо
-0,616
0,499
0,924
0,072
—0,876
—0,819
0,083
0,870
0,454
-0,589
0
Уо
—0,724
—0,810
0,225
0,948
0,362
-0,354
-0,888
—0,195
0,767
0,669
0
Klt A,2
—0,020 ±0,618/
—0,020 ±0,618/
—0,020±0,618/
—0,020 ±0,618/
—0,020 ±0,618/
0,512, —0,552
0,512, —0,552
0,512, —0,552
0,512, —0,552
0,512, —0,552
—0,020 ±0,500/
Ц«» V-t
150,9, —1,143
—0,333, 0,432
1,375,-10,70
-1,403, —0,223
0,314, 1,693
Классификация
Устойчивый фокус
» V
9 »
» »
я п
Седло (неустойчиво)
я я
» я
» 1»
1» 1»
Устойчивый фокус
16*
244 Гл. 9. Субгармонические колебания
Рис. 9.7. Интегральные кривые для субгармонических колебаний порядка 1/5.
Сплошные линии — интегральные кривые. Пунктирные линии — изоклины.
Для того чтобы показать расположение интегральных
кривых, исследуем конкретную систему с параметрами
£ = 0,04, В = 9,6.
Тогда из второго уравнения (9.11) имеем а>=—0,4. После
подстановки этих значений в (9.12) и применения метода изоклин
получим соответствующие интегральные кривые уравнения
(9.16); они представлены на рис. 9.7. Как видно из рисунка,
имеется 11 особых точек. Подробные данные для этих точек
приведены в табл. 9.2, где \iit \i2 — тангенсы углов наклона
касательных к интегральным кривым в особой точке.
Особые точки с 1 по 5 являются устойчивыми фокусами и
соответствуют устойчивым субгармоническим колебаниям.
Интегральные кривые, которые с ростом времени т подходят к сед-
ловым точкам с 6 по 10, разделяют всю плоскость на две
9.4. Субгармонические колебания порядка 1/5 245
0°
Рис. 9.8. Области начальных условий, приводящих к субгармоническому
колебанию порядка 1/5. Радиальная шкала—начальное напряжение на
емкости. Угловая шкала — угол включения.
группы областей, а именно на заштрихованные и незаштрихо-
ванные области. Колебание, начинающееся из точки #(0), у{0)
одной из заштрихованных областей, приходит к одной из
особых точек с 1 по 5, соответствующих возбуждению
субгармонических колебаний, тогда как колебание, начинающееся в неза-
штрихованной области, приходит к особой точке 11. Поскольку
в точке 11 х=0 и t/=0, в этом случае не происходит
возбуждения субгармонического колебания.
(б) Экспериментальное исследование
Поступая так же, как в § 9.3, проведем эксперимент для
определения областей начальных условий, которые приводят
к возбуждению субгармонических колебаний порядка 1/5 и
гармонических колебаний нерезонансного типа. Эти области
показаны на рис. 9.8. Этот рисунок хорошо согласуется с рис. 9.7.
полученным аналитически.
246 Гл. 9. Субгармонические колебания
9.5. СУБГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
ПОРЯДКА 1/2, Г36, 381
(а) Основные уравнения
В гл. 7 мы уже рассматривали субгармонические колебания
порядка 1/2 в установившемся режиме. Теперь обратим особое
внимание на устойчивость периодических колебаний и для
исследования этого вопроса применим теорию устойчивости
уравнения Хилла. Как показано в п. 7.7(a), подходящую форму
нелинейности для получения субгармонических колебаний
порядка 1/2 дает функция f(v) = \v\v. Поэтому мы запишем
дифференциальное уравнение для субгармонических колебаний
порядка 1/2 в виде
-S-+*-S+mx,=z?cos2t+'s° (9Л8>
или в более удобном для аналитических рассмотрений
эквивалентном виде
^r + k^r + c1v + c3tf = Bcos2'c + B0. (9.19)
Представим периодическое решение в форме
v (т) = z (т) + х (т) sin т + У (*) cos т + w cos 2т, (9.20)
где
В этом случае устойчивость периодического решения может
быть установлена с помощью условия (4.15) [см. также
п. 7.6(6)]*). Как вскоре будет показано, это условие
устойчивости можно также вывести из критерия Рауса — Гурвица,
Подставляя (9.20) в (9.19) и приравнивая отдельно нулю
коэффициенты при членах, содержащих cost, sinт, и
постоянную составляющую, получим
^ = ±(—kx + Ay — 3cswyz)==X{x, у, z\
*L = ^ (_ Ах - ky — 3czwxz) = Y (х, у, z\ (9.21)
1) Условие устойчивости для я-й области неустойчивости (л=1, 3, 4, ...)
обычно выполняется, если нелинейность имеет вид f(v)—\v\v (см. § 7.7).
9.5. Субгармонические колебания порядка 1/2 247
где
А = {\-сх)-с^г*+Ъг*+^<т*), г2 = х2+</2.
Следует заметить, что при выводе уравнений (9.21) должны
быть сделаны предположения, указанные в § 8.2.
(б) Периодические решения и их устойчивость
Для того чтобы получить зависимость между начальными
условиями и колебаниями, к которым приводят эти начальные
условия, необходимо сначала исследовать всевозможные виды
установившихся колебаний при различных комбинациях пара*
метров системы. Поэтому предварительно рассмотрим субгармо*
нические колебания порядка 1/2 в установившемся режиме.
Поскольку в установившемся режиме х{т), у{%) и z(x) в
уравнении (9.20) становятся постоянными, имеем1)
Подстановка этих условий в уравнения (9.21) приводит к
соотношениям, которые мы уже получали в п. 7.6(a) [см. (7.39)].
Следовательно, составляющие решения (9.20) x0i y0, z0 и г0
в установившемся режиме определяются из выражений (7.40)
и (7.41).
Теперь исследуем устойчивость периодических решений,
используя критерий Рауса—Гурвица. С этой целью
рассмотрим достаточно малые отклонения |, т] и £ от состояний
равновесия, определяемые выражениями
! = * — *о> Ч = Ц — №>» С = 2 — z0. (9.23)
Тогда если эти отклонения §, ц и £ с ростом т стремятся к нулю,
то решение является устойчивым. Подставляя (9.23) в (9.21),
получаем
£ = а211 + а22Ц + а2& <9'24>
1) В силу (9.21) третье условие следует из двух первых.
248 Гл. 9. Субгармонические колебания
здесь
а" = (ir)o = - Т (I <W/o+ A),
«12 = (|f )0 = 4 (Л - 4 c3yl - 3c3wz0),
«is = (U)0 = — у с3Уо (2г0 + да),
a2i= (1г)о = - Т (Л _ 4 с**о + 3c3w0),
«22==(-^-)0= 2"(-2^з^оУо — *). (9.24а)
й23 = (w)0 = 2" СзХ° (2г°— да)'
a3i= ("5г)0 = ¥ Сз*° (22° — да)«
«32 = (-^-)0 = "2 сзУо (2г0+да),
йзз = (Ц)0 = ^1 + ^з(4'-о + 34 + 4^).
где (дХ/дх)0, ..., (dZ/dz)o — это значения дХ/дх, ..., dZ/дг
при #=#o, f/=f/o и 2=z0. Характеристическое уравнение
системы (9.24) имеет вид
аи — 1
а.
'21
а12 а13
«22 ** «23
«31
а
33
= 0,
или
«зз^2 —{
аи а13
«31 «33
+
«22 «23
а
32
а
зз
■%+
«21 «22 «23
«31 «32 «33
(9.25)
= 0. (9.26)
Критерий Payca—Гурвица утверждает, что система (9.24) и,
следовательно, периодическое решение устойчивы при условии
«зз > О,
«11 «13
«31 «33
+
«22 «23
«32 «33
<о,
«11
«21
«31
«12
«22
«32
«13
«23
«33
==Д>0.
(9.27)
9.5. Субгармонические колебания порядка 1/2 249
Первое и второе условия (9.27) всегда выполняются, так как
в силу (9.24а)
(9.28)
азз-
#31 #33
+
#22 #23
#32 #33
Следовательно, существенным условием устойчивости
периодического решения является третье неравенство Д>0.
Подстановка выражений (9.24а) в определитель А приводит к довольно
длинному выражению. Однако в силу (7.40) и (7.41) условие
устойчивости окончательно можно записать в виде
А = &y*z0 (l - с, - } съг\ - Зс& ) ^| > 0. (9.29)
Поскольку Ci + c3=l [см. (7.3)], это условие совпадает с (7.48).
Примеры.
Для того чтобы проиллюстрировать приведенное выше
исследование, рассмотрим некоторые характерные комбинации
параметров системы и изучим различные виды субгармонических
колебаний порядка 1/2.
Как указывалось в п. 7.7(a), нелинейность \v\v
аппроксимируется выражением
\v\v^cxv-\- czvz = 0,3*0 + 0Jv\ (9.30)
Рассматриваемая аппроксимация справедлива для той
области значений v, где возможны субгармонические колебания.
При помощи уравнений (7.40) для некоторых значений k и В
найдены амплитудные характеристики (зависимость г0 от В0);
они изображены на рис. 9.9. Устойчивость периодических
решений исследуется с помощью условия (9.29). На рисунке
сплошными линиями показаны устойчивые режимы, пунктирными —
неустойчивые. Следует отметить, что поскольку х=0 и у = 0
удовлетворяют уравнениям (9.22), то v(x) =z0 + w cos2t —
другое периодическое решение. На рис. 9.9 представлены различные
виды субгармонических колебаний порядка 1/2, соответствующие
разным значениям параметров системы.
Случай 1. £ = 0,2, 5 = 0,6, В0 = 0А [рис. 9.9, (а)].
Возможны два вида субгармонических колебаний
порядка 1/2, отличающихся только по фазе на я радиан. Когда эта
субгармоника отсутствует, периодическое решение (т. е. г0=0)
является устойчивым. Следовательно, субгармоническое
колебание возникает только при подходящим образом выбранных
начальных условиях.
250 Гл. 9. Субгармонические колебания
1,0
0,5
t
-
Л'
/ "
h
1 л
-UU-
B'Ofi
»Ц—»l
(а)
0,5
1.0
1,0
0,5
t
г
I1.
||
I/
/1
о- — -
-4-
Л-0,2
в-1,5
'*-*• 1
(6)
0,5
tf
Рис. 9.9. Амплитудные характеристики субгармонических колебаний
порядка 1/2.
Случай 2. Л = 0,2, В = 1,5, В0 = 0,5 [рис. 9.9,(6)].
Что касается субгармонических колебаний порядка 1/2, то
положение то же самое, что и в случае 1. Однако
периодическое решение г0=0 неустойчиво; следовательно, любые
начальные условия приводят к возбуждению субгармонических
колебаний.
Случай 3. £ = 0,2, 5=1,5, В0=0,25 [рис. 9.9,(6)].
Возможны два различных значения амплитуды г0, и для
каждого значения амплитуды существуют два вида
субгармонических колебаний порядка 1/2, отличающихся по фазе на я
радиан. Периодическое решение г0 = 0 неустойчиво;
следовательно, любые начальные условия приводят к возбуждению
субгармонических колебаний.
9.6. Анализ колебаний порядка 1/2 на фазовой плоскости 251
. Случай 4. £=0,1, £ = 2,0, В0=0 [рис. 9.9, (в)].
Как отмечалось в п. 7.6(a), возможны четыре
субгармонических колебания порядка 1/2, отличающихся друг от друга по
фазе на я/2 радиан. Периодическое решение г0=0 устойчиво;
следовательно, субгармоническое колебание возникает только
при подходящим образом выбранных начальных условиях.
Случай 5. £=0,01, В = 1,8, В0=0,15 [рис. 9.9, (г)].
Возможны три различных значения амплитуды г0, и для
каждого значения амплитуды существуют два вида
субгармонических колебаний порядка 1/2, отличающихся по фазе на я
радиан. Периодическое решение г0=0 неустойчиво;
следовательно, любые начальные условия приводят к возбуждению
субгармонических колебаний.
9.6. АНАЛИЗ СУБГАРМОНИЧЕСКИХ КОЛЕБАНИЙ
ПОРЯДКА 1/2 НА ФАЗОВОЙ ПЛОСКОСТИ
Как упоминалось ранее, здесь нашей задачей является
исследование решения уравнения (9.18) или (9.19) в переходном
режиме, т. е. решения, которое с ростом времени приводит к
периодическому решению. С этой целью исследуем интегральные
кривые уравнения
dy _ Y(xy yt z)
dx X (х, у, z)
(9.31)
при Z{x, у, z)=B0, где Х{х, у, z), Y(x, у, г) и Z(x, у, г)
определяются соотношениями (9.21). Из третьего уравнения (9.21)
нетрудно заметить, что z определяется однозначно, если
известны х и у. Периодические решения для установившегося
режима удовлетворяют условиям (9.22) и соответствуют особым
точкам уравнения (9.31), т. е. точкам, в которых Х(х, у, z) и
У(*. У у z) равны нулю.
Типы особых точек классифицируются в зависимости от
вида корней А, характеристического уравнения (9.26).
Используя (9.28), запишем дискриминант D уравнения (9.26) в виде
м
аи
#31
#13
#33
+
#22
#32
#23
#33
- 4а33А = #зз (#зз*2 - 4А). (9.32)
Кроме того, заметим, что, согласно (9.28),
а-
'31
а
+
#22 #23
33
а
32
#■
зз
< 0 и азз > 0
(9.33)
252 Гл. 9. Субгармонические колебания
Следовательно, особые точки уравнения (9.31)
классифицируются таким образом:
1. Если D>0 и А>0, то корни X характеристического
уравнения оба действительны и отрицательны, так что особая точка
является устойчивым узлом.
2. Если D>0 и Д<0, то корни X характеристического
уравнения действительны, но имеют противоположные знаки, так
Рис. 9.10. Интегральные кривые уравнений (9.31) на плоскости х, у;
параметры системы следующие: & = 0,2, В = 1,5 и £0 = 0,25.
что особая точка является седловой точкой с присущей ей
неустойчивостью.
3. Если £<0, то корни % характеристического уравнения
комплексно сопряженные и действительные части их
отрицательны, так что особая точка является устойчивым фокусом.
Пример.
Сначала рассмотрим пример, соответствующий случаю 3 в
п. 9.5 (б), где система имеет следующие параметры:
£=0,2, В = 1,5, В0=0,25.
Как показано на рис. 9.9, (б), в этом случае возможны два вида
субгармонических колебаний порядка 1/2 с различными
амплитудами. Интегральные кривые для этого частного случая
приведены на рис. 9.10. Как и следовало ожидать, в этом случае
9.6. Анализ колебаний порядка 1/2 на фазовой плоскости 253
Таблица 9.3
Особые точки рис. 9.10
Особая
точка
1
2
3
4
5
6
7
*0
0,376
—0,376
0,586
—0,586
0,407
—0,407
0
Уо
0,883
—0,883
0,586
—0,586
0,176
—0,176
0
*0
0,265
0,265
0,190
0,190
0,263
0,263
0,375
—0,100±0,090/
—0Д00 ±0,090/
0,098, —0,298
0,098, —0,298
—0,100±0,055/
—0,100±0,055/
0,086, —0,286
Hi» Н2
0,156, 5,322
0,156, 5,322
0,696, —0,696
Классификация
Устойчивый фокус
» »
Седло (неустойчиво)
п п
Устойчивый фокус
» я
Седло (неустойчиво)
имеется семь особых точек 1, 2, ..., 7; подробные данные для
этих точек приведены в табл. 9.3, где jib \лг — тангенсы углов
наклона касательных к интегральным кривым в особых точках.
В соответствии с уравнениями (9.21) изображающая точка
х(х), у(х) с ростом х движется вдоль интегральной кривой в
направлении, указанном стрелками, и в результате приходит
к одной из устойчивых особых точек 1, 2, 5 или 6. Поскольку
расстояние между особой точкой и началом координат
определяет амплитуду колебания г0, субгармонические колебания,
представленные особыми точками 1 и 2, имеют равные амплитуды,
но противоположные фазы; то же справедливо и для особых
точек 5 и 6. Особые точки 3, 4 и 7 являются седловыми
точками со свойственной им неустойчивостью; периодические
режимы, соответствующие этим точкам, не могут поддерживаться,
потому что любое незначительное отклонение от седловой точки
приведет колебание к одному из устойчивых фокусов.
Сепаратрисы, т. е. интегральные кривые, которые входят в седловые
точки, делят всю плоскость на четыре области; на рисунке они
по-разному заштрихованы. Все интегральные кривые,
заключенные в любой из этих областей, сходятся в устойчивой особой
точке, расположенной в этой же области. Таким образом, связь
между начальными условиями х(0), у(0) и результирующими
субгармоническими колебаниями становится совершенно ясной.
Поскольку начало координат является неустойчивой особой
точкой, любые начальные условия приводят к возбуждению
субгармоники.
До сих пор интегральные кривые рассматривались на
плоскости х, у. Так как постоянная составляющая z(x) также
изменяется с изменением х(х) и у(т), то интегральные кривые
в действительности расположены на йоверхности, которая
254 Гл. 9. Субгармонические колебания
определяется дополнительно третьим уравнением (9.21).
Геометрическое расположение интегральных кривых в пространстве
х9 у, z показано на рис. 9.11.
Теперь предположим, что в качестве начальных условий для
решения уравнения (9.19) берутся v(0) и г;(0), где точка
указывает дифференцирование по т; тогда соответствующие этим
начальным условиям х(0), у(0) и z(0) определятся
уравнениями (9.20) и (9.21), т. е.
*(0) = г(0) + у(0) + да,
v (0) = г (0) + х (0) + у (0) ^ х (0), {9М)
^(0) + ^з{[|"^(0) + 22(0) + |^2]г(0)-
-4^[^2(0)-у2(0)]} = 50.
Используя эти соотношения, области начальных условий
рис. 9.10 можно изобразить в координатах v, v, как показано на
рис. 9.12. Так как в установившемся режиме
v (т) = z0 + х0 sin т + Уо cos т + ^ cos 2т.
(9.35)
1) (т) = х0 cos т — у0 sin т — 2*0 sin 2т,
то периодические решения, соответствующие устойчивым
особым точкам 1, 2 и 5, 6 на рис. 9.10, представлены здесь
замкнутыми кривыми соответственно I и II. Период прохождения
изображающей точкой у(т), г;(т) одного цикла по кривой I (или
II) равен 2я, т. е. удвоенному периоду внешней силы.
Траектория, которая начинается из точки v(0), г;(0), расположенной
в одной из этих областей, например в области, содержащей
точку 1 (или 2), приведет к замкнутой кривой I; изображающая
точка у(т), v(r) в установившемся режиме будет проходить
через точку 1 (или 2) при т=2пт, где п — достаточно большое
положительное целое число. Аналогично, начальные условия,
соответствующие области, содержащей точку 5 (или 6),
вызовут колебания, которые в установившемся режиме
представлены замкнутой кривой II; изображающая точка у(т), v{%)
будет проходить через точку 5 (или 6) при т=2яя.
Теперь рассмотрим пример, соответствующий случаю 4
п. 9.5(6), когда система имеет следующие параметры:
£ = 0,1, £ = 2,0, В0=0.
Как показано на рис. 9.9, (в), в этом случае возможны
четыре вида субгармонических колебаний порядка 1/2, которые
имеют одинаковую амплитуду, но отличаются друг от друга
Рис. 9.11. Интегральные кривые уравнений (9.31) в фазовом пространстве
х, у, z\ параметры системы следующие: k = 0,2, В =1,5 и Д> = 0,25.
Рис. 9.12. Области начальных условий, приводящих к возбуждению
субгармонических колебаний порядка 1/2, и траектории периодических решений,
соответствующие устойчивым особым точкам рис. 9.10.
256
Гл. 9. Субгармонические колебания
0,5 1,0 1,5 2,0
Рис. 9.13. Интегральные кривые уравнений (9.31) на фазовой плоскости
лс, у\ траметры системы следующие: £ = 0,1, 5 = 2,0 и В0 = 0.
по фазе на я/2 радиан. Интегральные кривые для этого
частного случая приведены на рис. 9.13. Как и ожидалось, здесь
имеется девять особых точек 1, 2, ..., 9; значения их координат
приведены в табл. 9.4, где, как обычно, (ль \х2— тангенсы углов
наклона касательных к интегральным кривым в особых точках.
На рис. 9.13 мы видим, что особые точки 1, 2, 3, 4
соответствуют устойчивым режимам субгармонических колебаний и что
эти точки находятся в вершинах правильного четырехугольника
с центром в начале координат. Угловое расстояние между двумя
соседними особыми точками соответствует половине периода
внешней силы. Особые точки 5, 6, 7, 8 являются седловыми
точками; следовательно, соответствующие им периодические
решения неустойчивы. В противоположность предыдущему случаю
особая точка 9, т. е. начало координат,, является устойчивым
фокусом. Таким образом, можно сделать следующий вывод:
9.6. Анализ колебаний порядка 1/2 на фазовой плоскости 257
Таблица 9.4
Особые точки рис. 9.13
Особая
точка
1
2
3
4
5
6
7
8
9
*0
0,229
—0,229
—0,789
0,789
0,320
—0,320
—0,683
0,683
0
Уо
0,789
—0,789
0,229
—0,229
0,683
—0,683
0,320
—0,320
0
*0
0,134
0,134
—0,134
—0,134
0,093
0,093
—0,093
—0,093
0
Xlt л2
—0,050 ±0,140/
—0,050 ±0,140/
—0,050 ±0,140/
-0,050 ±0,140/
0,095, —0,195
0,095, —0,195
0,095, -0,195
0,095, —0,195 |
-0,050 ±0,117/
1*1» V-2
0,301, 2,434
0,301, 2,434
-3,322, -0,411
-3,322,-0,411
Классификация
Устойчивый фокус
» »
п v
я п
Седло (неустойчиво)
» я
п п
» я
Устойчивый фокус
любое начальное условие, соответствующее точке в
заштрихованной области, приведет к субгармоническому колебанию,
которому соответствует одна из особых точек 1, 2, 3, 4, тогда как
Рис. 9.14. Интегральные кривые уравнений (9.31) в фазовом пространстве
х, у, z\ параметры системы следующие: £ = 0,1, В = 2,0 и Во=*0.
начальные условия, соответствующие точкам в незаштрихован-
ной области, приводят в начало координат, не вызывая
субгармонических колебаний. Принимая во внимание третье
уравнение (9.21), можно изобразить интегральные кривые в про-*
странстве л:, у, z (рис. 9.14).
17 Зак. 907
258 Гл. 9. Субгармонические колебания
Рис. 9.15. Области начальных условий, приводящих к возбуждению
субгармоники порядка 11% и траектории периодических решений,
соответствующие устойчивым особым точкам рис. 9.13.
Процедура, использованная в предыдущем примере,
позволяет воспроизвести области начальных условий и устойчивые
особые точки рис. 9.13 в координатах v, v, как показано на
рис. 9.15. Периодические решения, соответствующие особым
точкам 1, 2 и 3, 4, показаны соответственно замкнутыми кривыми
I и II. Так как эти колебания являются субгармоническими
колебаниями порядка 1/2, то время, необходимое для того, чтобы
изображающая точка у(т), v{x) совершила один цикл по
кривой I (или II), равно 2я. Особая точка 9, т. е. начало
координат на рис. 9.13, соответствует колебаниям без субгармоники.
Периодическое решение, соответствующее этой особой точке,
Представлено замкнутой кривой III. Изображающая точка у(т),
$(т) проходит через точку 9 при %=пл, где п — достаточно боль-
(а)
(6)
(в)
(г)
id)
Рис. 9.16. Конфигурации областей начальных условий, приводящих к
возбуждению субгармоник порядка 1/2.
1.5 2,0
Рис. 9.17. Области начальных условий, приводящих к возбуждению
субгармоник порядка 1/2, и траектории периодических решений (расчет на
аналоговой вычислительной машине) (см. рис. 9.12).
17*
260 Гл. 9. Субгармонические колебания
шое положительное целое число. Таким образом, время,
необходимое изображающей точке v(r), v(x) для прохождения
полного цикла по кривой III, равно я, т. е. периоду внешней силы.
Наконец, на рис. 9.16 показаны характерные конфигурации
областей начальных условий, приводящих к возбуждению
субгармонических колебаний порядка 1/2. Они соответствуют
следующим случаям:
а. Любые начальные условия приводят к одному из двух
субгармонических колебаний порядка 1/2, амплитуды которых
одинаковы, но фазы отличаются на п радиан.
б. Начальные условия приводят либо к субгармоническим
колебаниям порядка 1/2, либо к колебаниям, в которых это
субгармоника отсутствует. Субгармонические колебания имеют
одинаковые амплитуды, но .отличаются по фазе на я радиан.
е. Любые начальные условия приводят к субгармоническим
колебаниям порядка 1/2. Эти колебания имеют две различные
амплитуды, и для каждой амплитуды имеются два колебания,
которые отличаются по фазе на я радиан.
г. Начальные условия приводят либо к субгармоническим
колебаниям порядка 1/2, либо к колебаниям без этой
субгармоники. Субгармонические колебания имеют одинаковые
амплитуды, но отличаются по фазе на я/2 радиан.
д. Любые начальные условия приводят к субгармоническим
колебаниям порядка 1/2. Эти колебания имеют три различные
амплитуды, и для каждой амплитуды имеются два колебания,
которые отличаются по фазе на я радиан.
9.7. ИССЛЕДОВАНИЕ НА АНАЛОГОВОЙ ВЫЧИСЛИТЕЛЬНОЙ
МАШИНЕ
Блок-схема для решения уравнения
-g- + 26-g. + Mt> = £cos2T + 50 (9.36)
была уже приведена на рис. 7.21 !). Используя эту блок-схему,
исследуем решение для переходного процесса и сравним
результаты с предыдущим анализом.
Случай 1'. й = 0,2, В = 1,5, В0 = 0,25.
Результаты, представленные на рис. 9.17, получены
следующим образом. Точка а(0), г;(0), т. е. одно из начальных
условий, задается на плоскости v(r)> v(x) индикатора вычислитель-
г) Уравнение (9.36) совпадет с (9.18), если 26 заменить на k.
9.7. Исследование на аналоговой вычислительной машине 261
(О)
(6)
Рис. 9.18. Осциллограммы субгармонических колебаний порядка 1/2 в
случае, когда £ = 0,2, В = 1,5 и £а = 0,25. (а) Полученные методом фазовой
плоскости, (б) Полученные на аналоговой вычислительной машине.
ной машины. Затем кривая решения, т. е. траектория точки
у(т), v(x), начинающаяся из; точки а(0), г;(0), приходит к одной
из замкнутых кривых I или II. При повторении этого процесса
для различных значений начальных условий вся плоскость
оказывается разбитой на четыре области. Область, содержащая
точку m (m = l, 2, 5 или 6), определяется так, чтобы
изображающая точка у(т), г;(т), которая начинает свое движение из
этой области, проходила через точку m при т=2яя, где п —
достаточно большое положительное целое число1). Результаты,
приведенные на рис. 9.17, удовлетворительно согласуются с
1) Для этой цели используется индикатор: который отмечает каждые два
периода внешней силы В cos2t.
262 Гл. 9. Субгармонические колебания
—J I I I I I I I I I
-2,5 -2,0 -1,5 -1.0 -0,5 0 0,5 1,0 1,5 2,0
и *-
Рис. 9.19. Области начальных условий, приводящие к возбуждению
субгармоники порядка 1/2, и траектории периодических решений (расчет на
аналоговой вычислительной машине) (см. рис. 9.15).
рис. 9.12, полученным из теоретических соображений. В обоих
случаях параметры системы были одинаковы. Следовательно,
допущения, сделанные при выводе уравнений (9.21), могут быть
приняты. Временные характеристики субгармонических
колебаний приведены на рис. 9.18, (а) и (б). Кривые рис. 9.18, (а)
получены путем подстановки значений х0, f/о и г0 в
установившемся режиме из табл. 9~3 в уравнения {9.35). Кривые на
рисунке 9.18,(6) получены при помощи аналоговой
вычислительной машины. Как видно из рисунка, возможны четыре
субгармонических колебания порядка 1/2, которые изображаются
двумя различными по форме кривыми; колебания одинаковой
формы отличаются по фазе на я радиан.
Случай 2. £=0,1, В=2,0, В0 = 0.
Поступая так же, как в первом случае, получаем рис. 9.19,
который снова достаточно хорошо согласуется с рис. 9.15,
полученным из теоретических соображений. В противоположность
9.7. Исследование на аналоговой вычислительной машине
263
1
а
§
1
(о)
Рис. 9.20. Осциллограммы основной гармоники и субгармоники порядка 1/2
в случае, когда k = 0,1, В = 2,0 и £0 = 0. (а) Полученные методом фазовой
плоскости, (б) Полученные на аналоговой вычислительной машине.
предыдущему случаю начальные условия, заданные в неза-
штрихованной области, приводят к колебаниям без
субгармоники порядка 1/2. Временные характеристики представлены на
рис. 9.20, (а) и (б). Кривые с 1 по 4 изображают
субгармонические колебания порядка 1/2; кривая 9 изображает колебание
без этой субгармоники.
ГЛАВА 10
Начальные условия,
приводящие к различным видам
периодических колебаний
10.1. МЕТОД АНАЛИЗА [40]
В этой главе мы уделим особое внимание связи между
начальными условиями и периодическими колебаниями систем,
описываемых дифференциальным уравнением
^ + k^ + f{v) = g(x), (10.1)
где k — постоянный коэффициент, f(v) — полином
относительно у, a g(x)—периодическая функция времени т.
Прежде чем перейти к дальнейшему исследованию,
рассмотрим кратко метод, который уже использовался в предыдущих
главах. Для краткости ограничимся проблемой анализа
гармонических колебаний при воздействии внешней силы g{x) =
= Bcost. Запишем решение уравнения (10.1) в виде
v(x)=x{x) smx+y(x) cost,
где предполагается, что амплитуды х(х) и у(х) являются
медленно меняющимися функциями времени т. При этом условии
можно вывести систему уравнений вида
*L = X[x9y),
(10.2)
где Х(ху у) и Y(x, у)—полиномы относительно х и у,
которые легко могут быть найдены. После исключения т из
уравнений (10.2) на плоскости х, у строятся интегральные кривые»
т. е. траектории изображающей точки х(х), у(х). Особая точка,
для которой Х(х, у)=0 и Y(x, у) =0, соответствует
периодическому решению уравнения (10.1). Для некоторых значений k
и В существуют три особые точки, а именно два устойчивых
фокуса и одна седловая точка с присущей ей неустойчивостью
(рис. 8.2). Интегральная кривая, стремящаяся с ростом т к сед-
ловой точке, является сепаратрисой, которая делит плоскость
ЮЛ. I
метод анализа
265
на две части таким образом, что любые начальные условия,
соответствующие точкам каждой из этих частей, в результате
приводят к возбуждению определенного вида гармонического
колебания. I
Этот метод анализа широко использовался при изучении
гармонических и субгармонических колебаний в переходном
режиме, но он имеет следующие недостатки. Во-первых, если
начальные условия представлены такими значениями, которые
значительно отличаются от соответствующих значений для
установившегося режима, то предположение, что амплитуда и фаза
h
Рис. 10.1. Неподвижные точки и кривые, инвариантные при отображении.
колебания изменяются медленно, не выполняется; поэтому
результат, полученный этим методом, не может быть совсем
точным. Вторым и наиболее существенным недостатком является
то, что если в системе возможно возбуждение нескольких
периодических режимов, то этот метод практически неприменим,
поскольку анализ должен проводиться с помощью графического
построения в многомерном фазовом пространстве.
В этом параграфе описывается метод анализа, который
применим и в таких случаях1). Рассмотрим поведение точки,
координаты которой v(x) и г>(т) на плоскости v, v (точка над v
означает дифференцирование по т). Начальное условие
соответствует точке этой плоскости при т=0. Особое внимание обратим
на положение точек в моменты времени т=Г, 2Г, ЗГ, ... , где
71 — период внешней силы g(r). Математически эти точки
получаются в виде последовательных образов начальной точки при
повторном переходе (отображении) от х=пТ к т= (п+1)Т, где
я=0, 1, 2 Тогда периодическое решение уравнения (10.1)
1) Подобный метод изучался также Блэром и Лаудом [9]. Читатель,
интересующийся математической стороной вопроса, может обратиться к их
работе.
266 Гл. 10. Начальные условия, приводящие к различным колебаниям,
представляется неподвижной точкой на плоскости а, г). Для
большей определенности вновь рассмотрим гармоническое
колебание, которое только что упоминалось. В этом случае
существуют три неподвижные точки, соответствующие периодическим
решениям уравнения (10.1). На рис. 10.1 они обозначены Ри Р2
и Рг\ Pi и Р3 устойчивы, а Р2 неустойчива. Через точку Р2
проходят две кривые С\ и С2, инвариантные относительно этого
отображения. При повторном отображении точки кривой С2
приближаются к Р2, тогда как точки кривой С{ приближаются к Р2
при повторном обратном отображении. Итак, последовательные
образы начальной точки будут стремиться либо к Ри либо к Р3
в зависимости от того, с какой стороны от С2 находится
начальная точка. Таким образом, кривая С2 является границей между
двумя областями; любые начальные условия, соответствующие
точкам в одной из областей, приводят к определенному виду
гармонического колебания. Назовем эти области областями
притяжения. Поведение геометрических мест образов аналогично
поведению интегральных кривых в окрестности седловой точки
плоскости х, у1).
Области притяжения для различных видов периодических
решений могут быть найдены следующим образом.
1. Принимая частоту гармонического или субгармонического
колебания за наименьшую частоту, разлагаем периодическое
решение в ряд Фурье. Если периодическое решение,' устойчивое
либо неустойчивое, существует, то коэффициенты главных
членов ряда Фурье определяются методом гармонического баланса.
2. Вводится малое отклонение | от периодического решения,
которое определяется уравнением в вариациях для уравнения
(10.1), т. е.
где v0 — рассматриваемое периодическое решение. Уравнение
(10.3) имеет вид уравнения Хилла, решение которого может
быть найдено каким-нибудь приближенным методом. Таким
образом, можно различать устойчивые и неустойчивые
неподвижные точки и определять наклон инвариантной кривой С2 в
неустойчивой неподвижной точке Р2 (рис. 10.1).
3. Границей между областями притяжения является
инвариантная кривая С2, которая представляет собой
геометрическое место образов, приближающихся к неустойчивой непо-
*) Следует отметить, что в первом случае оказывается мало
эффективным и этот метод анализа, поскольку при быстром изменении амплитуды
последовательные образы могут оказаться расположенными достаточно
далеко друг от друга и проведение кривых становится затруднительным. —
Прим. перев.
10.2. Симметричные системы
267
движной точке с обеих сторон. Эти кривые можно получить,
начиная движение с одной или с другой стороны от
неустойчивой неподвижной точки и интегрируя исходное уравнение (10.1)
по убывающему времени, т. е. используя в уравнении (10.1)
численного интегрирования можно
вычислительной машиной. Установ-
отрицательное время. Для
воспользоваться цифровой
лено, что если две начальные точки задаются не точно на
кривой С2, а по обе стороны Ьт нее, но достаточно близко одна
к другой, то после нескольких повторений отображения
траектории образов, начинающиеся из этих точек, почти сливаются
одна с другой. i
В последующих параграфах ищутся области притяжения для
нескольких характерных видов периодических колебаний в
нелинейных системах.
10.2. СИММЕТРИЧНЫЕ СИСТЕМЫ
В качестве примера уравнения (10.1) рассмотрим
дифференциальное уравнение
4^ + kW + v =Bcosx'
(10.4)
Это уравнение не изменится, если поменять знак v или
изменить т на я радиан, поэтому система, описываемая уравнением
(10.4), называется симметричной. Поскольку нелинейность
задана кубической функцией 'относительно у, то можно ожидать,
что имеется периодическое /решение, наименьшая частота
которого равна либо частоте воздействия, либо частоте
субгармонического колебания порядка] 1/3 (§ 7.2) *). При подходящем
выборе параметров системы к и В можно считать, что
периодическое решение для гармонического колебания имеет вид
v0(x) = xl sinт + у!cost, _ (10.5)
а для субгармонического колебания2) —вид
Vq (х) = х1/г sin -g- T + 0J3 cos -3-t + -*i sint + f/j cos t. (10.6)
В этом приближении членами других частот мы пренебрегаем.
Гармоническое или субгармоническое колебание возбудится —
зависит от начальных условий. Этот вопрос будет рассмотрен
в § 10.3. I
!) Субгармоническое колебание порядка 1/2 может существовать только
в узкой области значений параметров системы. Однако, поскольку такой вид
колебаний в несимметричной системе может иметь место, этот случай будет
рассмотрен ниже, в § 10.4. j
2) Решение (10.6) уже не исходит из требования высокой добротности
системы, как это предполагалось при исследовании субгармонических
колебаний в предыдущих главах. — Прим. ред.
268 Гл. 10. Начальные условия, приводящие к различным колебаниям
(а) Расположение неподвижным точек
Если- известны периодические решения (10:5) и (10.6), то
легко найти неподвижные точки отображения на плоскости
v, v. Коэффициенты периодических решений находятся методом
гармонического баланса. Подставляя (10.6) в (10.4) и
приравнивая нулю отдельно коэффициенты при членах, * содержащих
sinт, cost, sin-g-т и cos-g-т, полунаем
I
Аххг + kyx + \ (4з - 3У?/з) *1/з = °>
kxx — Агуг — \ {Щ1Ъ — у2/3) у1/3 — В = 0,
9 (Ю.7)
где
Т (*1/з ^i/з) х\"+" 2 xii$il$\ ~^~ А/Л/з Н" ^i/з — 0,
"2" хг/дУ г/з^г Т 0*1/3 ^i/з) #i Г"Ь ^i/з А/з#1/з == 0»
Л! = 1 -1 (/?! + 2/?1/3), А1/3 = | — т (2/?i + /?1/з),
/?1 = Г2 = Х2 + У?»
м/з-
г2 = **2
г1/3
-*?*+»*
vl/3
1/3*
Из этих уравнений получаются следующие соотношения для
определения Ri и /?i/3:
(9Л,/?1 - Л1/3^1/3)2 + А2 (9/?1 + /?1/з)2 = 81 £2/?ь
(Л?/3+ft2 - -5J- №)) /?1/з = 0,
(10.8)
При помощи (10.7) и (10.8) находим коэффициенты
периодических решений:
_ M9^i + ^i/3) „
•*1 — gg . f/r
*i/e = г1/з cos ei/3' г1/з cos (е1/з + 120°)>
#1/з = г1/з sin V ri/3 sin (е1/з+ 120°)'
где
^/зСО5(е1/3 + 240о),
(10.9)
(10.10)
cos 39i/3 —щ^—
sin 36
i/з:
— 4(fcr14Hi41/8y1)
9^lrl/3
10.2. Симметричные системы
269
Из второго уравнения (10|
Aifz+k —yq
8) видно, что
!RiRi/s = 0 или /?1/3 = 0.
При #1/з=0 субгармоническое колебание не возбуждается и
соотношения (10.9) определяют коэффициенты гармонического
решения (10.5) *).
(б) Исследование устойчивости
Теперь необходимо рассмотреть устойчивость периодических
решений (а следовательно! неподвижных точек), определяемых
соотношениями (10.9) и (10.10). Аналогично тому, как это
делалось в п. 7.3(6), рассмотрим малое отклонение £(т),
определяемое выражением I
v(x) = v0(x) + l(x). (10.11
Подставляя это выражение в (10.4) и вводя новую переменную
х\(х) в соответствии с формулой
£(т) = *"*\|(т), (10.12)
получаем уравнение в вариациях
S + (-T*2+3*ob=0. (ЮЛЗ)
Подстановка (10.6) в (10.13) приводит к уравнению Хилла вида
d2x\
dx*
-b[Oo + 2S 9„cos(2/*-l — еЛ)]л=0, (10.14)
где
02 = eL+eL e„ = arctg-^,
з
®is = -J (Х1У\/з ~ У\х\1ъ + х1/зУг/г)'
®ic == ~% \xixi/a + У1У1/3 ~2 XW"+" T Ущ '
3 3
Q2s = "J (*l#l/3 + #Л/з)' 92* = Y (— XlXl/3 + ^1^1/3)'
e35 = _2-X:iyi'
°з«? — 2 \ 2 1 ^ 2 yi)'
*) Поступая таким же образом, как в § 1.5, можно получить
приближение более высокого порядка для периодического решения, в котором
учитываются более высокие гармоники.
270 Гл. 10. Начальные условия, приводящие'к различным колебаниям
Согласно теории Флоке, решение
быть записано в виде
уравнения (10.14) может
Л(т) = ^>(т)+^-ц>(т),
(10.15)
где \х — характеристический показатель, зависящий от
параметров 9, ф(т) и г|)(т), которые являются периодическими
функциями т, а С\ и с2 — произвольные постоянные. Из уравнений
(10.12) и (10.15) видно, что с ростом т отклонение £(т)
стремится к нулю при условии, что затухание k/2 больше \х (jj,>0).
Следовательно, условием устойчивости периодического решения
v0(x) является неравенство -^k — ш>0. Если \х вычислено в
первом приближении, то это условие приводит к неравенству
(§4.2). |
[•.-(1)Т+гК+Ш1)'+(1)'>"..
п=\, 2, 3. (10.16)
Подставляя в (10.16) параметры в из (10.14), получаем
(Ri + Rifi - 4fJ — (&+Т ^i/з + 4 ^1/з)#1/з + щ& > 0
я=1,
(
Для
Ri + Ri/з—4f)2-Wvz+wk2>0 для " = 2' (10Л7)
(^i + /?i/3-|)2— \&+^k2>0 для /г = 3.
Если для п = т это условие не выполняется, то периодическое
решение (10.5) или (10.6) становится неустойчивым вследствие
нарастания самовозбуждающегося колебания с частотой т/3.
Случай 1. Возбуждение гармонического колебания.
■> Так как в этом случае /?1/з = 0, то первое и второе условия
(10.17) выполняются. Третье условие преобразуется к виду
27 р2
-3/?1 + *2+1>0.
(10.18)
Это выражение является условием устойчивости периодического
решения (10.5) [см. п. 5.1(b)].
Случай 2. Возбуждение субгармонического колебания
порядка 1/3.
Можно проверить, что для любых комбинаций /?i и #!/3,
определяемых уравнениями (10.8), второе и третье условия (10.17)
10.3. Области притяжения для колебаний порядка 1/3
271
выполняются. В силу
разуется к виду
уравнений (10.8) первое условие преоб-
т*
Ч-Я1/8—Т>0.
Это выражение является
решения (10.6) [см. п. 7.3(6)].
3^« / (Ю.19)
условием устойчивости периодического
ДЛЯ ГАРМОНИЧЕСКИХ
КОЛЕБАНИЙ ПОРЯДКА 1/3
10.3. ОБЛАСТИ ПРИТЯЖЕНИЯ
И СУБГАРМОНИЧЕСКИХ
Как отмечалось в § ЮЛ, при возбуждении гармонического
колебания границей между двумя областями притяжения
является геометрическое местр образов v0(2nn), щ(2пл), которые
с возрастанием времени приближаются к неустойчивой
неподвижной точке. Эта кривая получается интегрированием
уравнения (10.4) для убывающего времени, т. е. при использовании
отрицательного времени. Начальные точки, соответствующие
начальным условиям, должны находиться на инвариантной
кривой С2 вблизи неустойчивой неподвижной точки Р2 (рис. 10.1).
Расположение неподвижных точек легко определяется при
помощи периодических решений (10.5) и (10.6), коэффициенты
которых находятся из (10.8)—1(10.10). Устойчивость неподвижных
точек будет изучаться в соответствии с условиями (10.18) и
(10.19). Особое внимание мы уделим рассмотрению
неустойчивых неподвижных точек. Наклон инвариантной кривой С2 в
неустойчивой неподвижной т|очке определяется следующим
образом: согласно (10.12) и (10.15), отклонение |(т) от
периодического решения v0(x) имеет вид
1(х) = сге
(-T*4h
инвариантных кривых Ci
1(0) _\(Т) _ 1(27-) =
6(0) ~ 1(Т) Ц2Г)
.(-7 *-") \,
xp(T) + ^v 2" "'"*(*)• (10.20)
В окрестности неустойчивой неподвижной точки образы на
и С2 удовлетворяют условию
. = [наклон инвариантной кривой],
где Г=2я для гармонического колебания и Г=6я для
субгармонического колебания [порядка 1/3. Отсюда следует, что
либо Си либо с2 равно нулю. Последовательные образы на
инвариантной кривой С2 с возрастанием времени приближаются
к неустойчивой неподвижной точке. Поэтому эти образы
представляются точками l(nT)t i(nT), где £(т) определяется
выражением i
272 Гл. 10. Начальные условия, приводящие к различным колебаниям
Следовательно, наклон инвариантной
ние границы областей притяжения в|
точке, определяется формулой4)
кривой С2, т. е. направле-
неустойчивой неподвижной
„_ 6(0)_ /1 . J \ , *(0)
(10.21)
Таким образом, начальная точка интегрирования расположена
на отрезке прямой, проходящей чер^з неустойчивую
неподвижную точку с наклоном а.
Пример.
Как отмечалось в § 10.2, следует ожидать, что решения
уравнения (10.4) получаются в виде гармонического колебания
и субгармонического колебания порядка 1/3. С помощью
методов, изложенных в § 5.1 и п. 7.3(6), можно получить области
значений параметров системы k и J3, соответствующие
гармоническому колебанию и субгармоническому колебанию
порядка 1/3. Результат представлен на рис. 10.2. В области,
заштрихованной сплошными линиями, возможны два различных
вида гармонических колебаний — резонансное и нерезонансное.
В зависимости от начальных условий возбуждается то или
другое колебание. Вне этой области гармоническое колебание
определяется однозначно. Область, заштрихованная пунктирными
прямыми, соответствует возбуждению субгармонического
колебания порядка 1/3.
(а) Возбуждение гармонического колебания
Сначала рассмотрим случай, когда параметры системы
равны &=0,2 и В = 0,3, так что уравнение (10.4) принимает вид
4^ + 0,2 ^ + *340,3cosт.
(10.22)
Этим значениям параметров соответствует точка Р на рис. 10.2.
При этом возбуждается только гармоническое колебание, либо
резонансное, либо нерезонансное. I
Для этих конкретных значений параметров периодические
решения находятся из (10.8) и (10.9). Устойчивость этих реше-
!) Вычисление характеристического показателя [i и периодической
функции ф(т) в решении, определяемом формулой1 (10.15), приводится в
приложении III,
10.S
. Области притяжения для колебаний порядка 1/3 27.'
0,8
0,6
i
ос
i
0.4
5
012
п
■йг
^Ш?^Р^
ж^^^
ZL 1 I 1
О 0,2 0,4 0,6 0,8
К »-
fsvvsvj Гармоническое колебание
Kv*vKi (резонансное или нерезонансное)
нищими Субгармоническое колебание
ШШ порядка №
Рис. 10.2. Области существования различных видов колебаний.
ний определяется условием (10.18). Результат получается
следующим:
v0l = 0,067 sin т — 0,310 cos т + 0,001 sin Зт — 0,001 cos Зт,
<y02 = 0,671 sinr — 0,744cost + 0,026sin3t + 0,022 cos Зт, (10.23)
Vos = 0,988 sin т + 0,684 cos x + 0,021 sin Зт — 0,061 cos Зт.
Решения v0i и v03 устойчивы, a v02 неустойчиво.
Из формул (10.23) легко определяется местоположение
неподвижных точек на плоскости и, v. Эти точки инвариантны при
повторном переходе от т=2ял; к 2(га+1)я. Нас особенно
интересует неустойчивая неподвижная точка, поскольку через нее
проходит граница областей' притяжения. Направление
граничной кривой в неустойчивой неподвижной точке определяется
следующим образом: подставляя неустойчивое решение v^ в
уравнение (10.13), получаем уравнение Хилла
-0 + к+ 2 S вл cos (2пх - ел)1 ц = 0, (10.24)
18 Зак. 907
274 Гл. 10. Начальные условия, приводящие к различным колебаниям
где1)
80 =1,497,
в,= 0,803, е1 = —1,473,
82 = —0,051, е2 = 0,129,
е8 = —0,001, ej, = — 1,417.
Частное решение уравнения (10.24j), которое при возрастании т
стремится к нулю, определяется выражением
Л(т) = £г^ф(т), (10.25)
где
11 = 0,261,
ф (т) = sin (т + 1,070) + 0,104"sin (Зт-0,737)-0,005 sin (5т + 0,898).
Подставляя jx, a|)(0) и -ф (0) из (10.25) в (10.21), найдем
направление а граничной кривой в неустойчивой неподвижной точке:
а=—0,106.
Неподвижные точки и их характеристики приведены в табл. 10.1.
Таблица ЮЛ
Неподвижные точки, соответствующие периодическим
решениям уравнения (10.22) „
Неподвижные точки
1
2
3
Возбуждаемая|
гармоника
Основная
—0,311
—0,722
0,624
0,069
0,748
1,052
—0,106
Устойчивость
Устойчива
Неустойчива
Устойчива
Траектории периодических решений, т. е. геометрические
места точек 0О(т), г)о(т) на плоскости у, г), доказаны на рис. 10.3.
Внешняя и внутренняя траектории представляют
соответственно резонансное v03 и нерезонансное voi колебания, тогда как
средняя траектория, изображенная пунктирной линией,
представляет неустойчивое колебание у02. На этом рисунке также
показано расположение неподвижных точек. На рис. 10.4
представлены последовательные образы при рассматриваемом
отображении для гармонического колебания, полученные по
методике, описанной в § 10.1. Граница между двумя областями
притяжения выделена жирной линией, по которой с ростом времени
1) Аргументы 8 измеряются в радианах.
}
-1.5 -1,0 -Ц5 0 0,5 W 1.5
v *-
Рис. 10.3. Траектории решений уравнения (10.22)
3
2
1
А
0
•ь
-1
-2
-3
-2-1012
У а-
Рис. 10.4. Геометрическое место образов при повторных отображениях
(возбуждение основной гармоники).
18*
1т*
276 Гл. 10. Начальные условия, приводящие к различным колебаниям
изображающая точка приближается к. неустойчивой
неподвижной точке 2. Эта граница была -получена при начале движения
с обеих сторон (в направлении а) от неустойчивой неподвижной
точки путем интегрирования уравнения (10.22) для
убывающего времени. Для этой цели использовались аналоговые и
цифровые вычислительные машины. Эти области притяжения
соответствуют результату, полученному в § 8.4 с помощью анализа
на фазовой плоскости (см. рис. 8.5).
(б) Возбуждение гармонического колебания и
субгармонического колебания порядка 1/3.
Теперь рассмотрим случай, когда параметры системы
равны & = 0,1 и В=0,15; уравнение (10.4) принимает тогда вид
S + 0'147 + ^3 = O'15c0ST- (10-26)
Поскольку этим параметрам соответствует точка Q на рис. 10.2,
в установившемся режиме будут присутствовать гармонические
(резонансное и нерезонансное) колебания и субгармоническое
колебание порядка 1/3.
Для этих конкретных значений параметров периодические
решения (10.5) и (10.6) определяются из (10.8) — (10.10).
Устойчивость этих решений определяется условиями (10.18) и (10.19).
Ниже приводится окончательный результат. Для
гармонического колебания
^01 = 0,011 sin т —0,153 cost,
%2 = 0,806 sin т — 0,716 cos т + 0,023 sin Зт + 0,037 cos Зт, (10.27)
<у03 = 0,960 sin т + 0,686 cos т +0,019 sin Зт — 0,040 cos Зт.
Решения vQl и ^03 являются устойчивыми, a v02
неустойчивым. Для субгармонического колебания
Vo4 = 0,063 sin -g- т+0,358 cos i т + 0,032 sinт—0,180cost,
v05 = — 0,342 sin j т—0,124cos -i T+0,032sint—0,180cost,
<0O6 = O,278 sin j% — 0,234cos~t + 0,032sint—0,180cost,
<0O7 = 0,149 sin у t +0,226 cos ~t +0,025 sin t—0,171 cost,
Vqs = —0,271 sin -j t+0,016 cos ~ т+0,025 sint—0,171 cost,
<r>09 = 0,122 sin~t — 0,242cos yT + 0,025sint—0,171 cost.
Решения a04, ^05, ^oe устойчивы, a v0b v0Si v09 неустойчивы.
(10.28)
10.3.
1,0
I
,»
1 ,
0
-0,5
-1.0
■Г\\
1 '3"
L <~ ■* "■ ^ ^k
r,./rFvM 1
vKv
-V s
. V
1 1
* 1
_. 1 I
277
-
-1,0 -0,5 0 Qfi 1,0
(I *»
Рис. 10.5. Траектории устойчивых решений уравнения (10.26),
Из (10.27) и (10.28) легко определяется положение
неподвижных точек на плоскости v, г). В случае гармонического
колебания неподвижные точки инвариантны при повторном
отображении т=2/гя к 2(я+1)я; в случае субгармонического
колебания неподвижные точки инвариантны при каждом третьем
повторении этого отображения. По методике, описанной в
предыдущем случае, из уравнения (10.21) определяется
направление а граничной кривой в неустойчивой неподвижной точке.
Данные о неподвижных точках приведены в табл. 10.2.
На рис. 10.5 показаны траектории, устойчивых решений и
расположение устойчивых неподвижных точек. Следует
заметить, что точки 4, 5 и 6, соответствующие субгармоническому
колебанию, находятся на одной траектории и что при повторном
отображении эти неподвижные точки перемещаются, следуя
одна за другой в направлении стрелок.
Методика, изложенная в § 10.1, позволяет получить полную
картину областей притяжения, приводящих к возбуждению
гармонических и субгармонических колебаний (см. рис. 10.6).
Области притяжения, соответствующие возбуждению
субгармонических колебаний, при подходе к области гармонических
колебаний с неподвижной точкой 3, а также при стремлении к
-ь
-2h
о Устойчивая
неподвижная точка
• Неустойчивая неподвиж
ная точка
J I
-2
-1
Щ-'Л I l Основная гармоника
| Субгармоника порядка J/3
Рис. 10.6. Области притяжения при возбуждении основной гармоники и
субгармоники порядка 1/3.
10.4. Несимметричные системы
279-
Таблица 10.2
Неподвижные точки, соответствующие периодическим решениям
уравнения (10.26)
Неподвижная точка
1
2
3
4
5
6
7
8
9
Возбуждаемая гармоника
Основная
»
»
Субгармоника порядка 1/3
» » »
» » »
» » »
» » »
» » »
V
—0,153
—0,679
0,646
0,178
—0,304
—0,413
0,056
—0,155
—0,413
V
0,011
0,876
1,016
0,053
—0,082
0,124
0,075
—0,065
0,066
а
—0,020
—0,644
-0,164
0,263
Устойчивость
Устойчива
Неустойчива
Устойчива
»
»
»
Неустойчива
»
»
бесконечности приобретают вид сужающихся полос. Эти
крайне узкие полосы на рисунке не приводятся, поскольку
вычисления становятся слишком трудоемкими.
10.4. НЕСИММЕТРИЧНЫЕ СИСТЕМЫ
В качестве примера уравнения (10.1) рассмотрим
дифференциальное уравнение
^ + k^ + ^ = Bcosx + B0t (10.29)
где асимметрия появляется из-за постоянной составляющей
внешней силы1). В дополнение к колебаниям, указанным в
§ 10.2, в этом случае можно ожидать возбуждения
субгармонических колебаний порядка 1/2. Периодическое решение
уравнения (10.29) можно взять в виде
v0(x) = ^sinr + f/icos т -\-z (10.30)
для гармонического колебания и в виде
v0 (т) = х1/2 sin -J х -f- У1/2 cos "J т + xi sin т + У\ coS т + z (10-31)
или
Z;0(T) = ^1/3sin-g-T + |/1/3Cos-g-T + ^1sinT + y1cosT + e (10.32)
!) Уравнение (10.1) с несимметричной нелинейностью f {v)=civ+c2v2+czv3
легко преобразовать к уравнению с симметричной нелинейностью и
несимметричной внешней силой [см. п. 5.2 (а)].
280 Гл. 10. Начальные условия, приводящие к различным колебаниям
для субгармонического колебания. Поскольку система
несимметрична, в решение добавлен неосциллирующий член г. Если
параметры системы k, Б и В0 выбраны подходящим образом, то
в зависимости от начальных условий в системе может
возникнуть один из видов колебаний, определяемых выражениями
(10.30) —(10.32).
Поступая так же, как в § 10.2, можно найти коэффициенты
периодических решений. Условия устойчивости этих
периодических решений также получаются при помощи решения
уравнений в вариациях типа уравнения Хилла.
(а) Возбуждение гармонических колебаний
Коэффициенты периодического решения (10.30) имеют вид
*i=TT' У^^ПГ1* П0.33)
где
A = 1-t(/?i+4Z> Xi=r2i=x\+yl z=z2'
В этих выражениях неизвестные коэффициенты /?i и Z
определяются путем решения системы уравнений
(Л?4-£2)/?1 = Я2, (%Ri+z)z^Bo. (10.34)
Применяя неравенство (4.9), получаем условия устойчивости
(rx + 2Z—I)2 — 4RxZ+±k2>0 для я=1,
(Ъ + Ж—4) — \R2 + ^-k2>0 для п = 2.
£сли условие для п=т не удовлетворяется, то периодическое
решение (10.30) становится неустойчивым вследствие
возникновения самовозбуждающихся колебаний с частотой т/2.
б) Возбуждение субгармонических колебаний порядка 1/2
Коэффициенты периодического решения (10.31) имеют вид
„ _*(**i+*i/2) ., -Wi-^1/2/?1/2)
*i — 4В • Уг— 4В
^i/2=^i/2cose1/2, ri/2Cos(e1/2+i80o> (10-36)
Уг/2 = ^1/2 sin 61/2, r1/2 sin (61/2 + 180°),
10.4. Несимметричные системы 281
где
А = 1—|(#> + 2/?1/2-f4Z),
Aip = -J- — | (2/?i + /?vj + 4Z),
/?, = r^ = ^+t/j, /?1/2 = г^ = х\п -+- у\р, Z = z2,
cos291/2 = g^ , sin26I/2 = g^j .
В этих выражениях неизвестные коэффициенты Ru Rip и Z
могут быть определены путем решения системы уравнений
(4Л,/?1 - Л1/2/?1/2)2+^2 (4/?, + R1/2)2 - 16B*Ri = 0,
A2li2+k2 — 36^iZ = 0, (10.37)
Условия устойчивости можно также записать в виде
(Ri + RV2+2Z—±if +
+ (Ri + Ri/2 — j}Rift-\--^k2>0
(Ri + Ri/2+2Z-±J-
— (4RiZ+{ Ri/2 + -g- A1/2#1/2) + -J- ft» > 0
(/?i + /?vs + 22—|)2 —/?i/?w + \k? > 0
(/?i + /?i/2 + 2Z—|)2 —J-/?? + £# >0
Если условие для n = m не удовлетворяется, то периодическое
решение уравнения (10.31) становится неустойчивым вследствие
возникновения самовозбуждающихся колебаний с частотой т/4.
В этом частном случае условие для п=4 является излишним,
поскольку оно всегда выполняется для значений, полученных из
(10.37). Следовательно, условия для я=1, 2 и 3 должны
обеспечивать устойчивость этого периодического решения.
для л=1,
(10.38)
для п = 2,
для п = 3,
для п = 4.
282 Гл. 10. Начальные условия, приводящие к различным колебаниям
(в) Возбуждение субгармонических колебаний порядка 1/3
Коэффициенты периодического решения уравнения (10.32)
имеют вид
_k(9R1 + Rlfi) -(ЭЛ^-Л^з)
1 — 9В ' "! — Ш ' ии-йу^
хмг = гщ cos 01/з, 0/3 008(01/3+120°), ri/3Cos(0i/3+24O0),
Ущ = Гцз sin 01/з, ri/з sin (01/з+120°), п/з sin (0i/3 + 240°),
-тде
Л, = 1 — |(/?i + 2/?,/3 + 4Z),
Л,/3 = у —j (2/?, + /?!/з + 4Z),
/?1:=г^ = л:1 + «/1, ^?1/з = ^/3 = л:1/з+1/1/з, Z = z2,
Cos30i/3 = 9R^ ' sm301/3= щ^ .
'Неизвестные коэффициенты Ru R1/3 и Z могут быть найдены
путем решения системы уравнений
(9AiRi — А/3Я1/3)2 + tf (9/?, + ЗД2 - 81£*/?i = О,
Л?/з+£2— ^ /?i/?w = 0, (10.40)
f(#i + Я1/з +-| Z) г - Я0 = 0.
.Условия устойчивости следующие:
(Ri + Ri/3-\-2Z — ±y—4R1/3Z+-±Tk2>0 для »=1,
{/?i + /?i/3 + 2Z—^)2—
— (Ri + -j ^'/з+1- А1Я) Rm + -^ £2 > 0 для я = 2,
(^i + /?i/3+2Z-i)2-4^iZ+i-^>0 Дляй = 3, (10.41)
.(/?i + /?V8+2Z — -pj2- RiRw-+-£ k2 > 0 для п = 4,
(^i + ^i/3-f-2Z-^)2+|Y-*2>0 для « = 5,
(/?i + /?V8+2Z—|)2-|/?2 + |£2>0 для n = 6.
10.5. Области притяжения для колебаний порядков 1/2 и 1/3' 283
Если условие для п — т не удовлетворяется, то периодическое
решение уравнения (10.32) становится неустойчивым вследствие
возникновения самовозбуждающихся колебаний с частотой т/6.
Условия для п=4, 5 и 6 в этом частном случае являются
излишними, поскольку они всегда выполняются для значений,
полученных из (10.40). Следовательно, условия для я=1, 2 и 3
должны обеспечивать устойчивость этого периодического
решения.
10.5. ОБЛАСТИ ПРИТЯЖЕНИЯ ДЛЯ ГАРМОНИЧЕСКИХ
И СУБГАРМОНИЧЕСКИХ КОЛЕБАНИЙ ПОРЯДКОВ 1/2 И 1/3
Процедура, аналогичная использованной в § 10.3, позволяет
найти на плоскости у, v области притяжения для
соответствующих видов колебаний для уравнения (10.29).
Пример.
На рис.* 10.7 и 10.8 показаны области, соответствующие
возбуждению гармонических и субгармонических колебаний.
Параметры В и В0 меняются, k остается постоянным. Из формы
уравнения (10.29) видно, что области этих периодических
колебаний появятся также и для отрицательных значений В0
симметрично относительно оси В. Появление на рис. 10.7 незаштри-
хованной части внутри области, соответствующей
нерезонансным колебаниям, обусловлено нарастанием неустойчивых
субгармонических колебаний порядка 1/2. В этом случае первое
условие (10.35) не удовлетворяется. Аналогично в незаштрихо-
ванной части рис. 10.8, ограниченной областью,
соответствующей субгармоническим колебаниям порядка 1/2, возникают
неустойчивые колебания порядков 1/4 и 3/4, которые приводят
к подавлению первоначальных субгармонических колебаний
порядка 1/2. В этом случае первое и третье условия (10.38) не
выполняются [см. п. 7.6(6) и § 7.8].
Рассмотрим случай, когда параметры системы равны &=0,05,
В=0,14 и В0=0,005. Уравнение (10.29) принимает вид
^ + 0,05-^ + <у3 = 0,14 cost+ 0,005. (10.42)
Поскольку этим значениям параметров соответствует точка R
на рис. 10.7 и 10.8, то в установившемся режиме можно
ожидать возбуждения гармонических колебаний (резонансных и
нерезонансных) и субгармонических колебаний порядков 1/2 и 1/3.
Для этих значений параметров системы периодические
решения и их устойчивость исследуются при помощи
соотношений (10.33) — (10.41). Ниже приводятся результаты этих
нерезонансное
колебание
V и с. 10.7. Области существования гармонического колебания (резонансного
или нерезонансного).
; та ^ ада* спшв азята"'"
Рис. 10.8. Области существования субгармонических колебаний порядков
1/2 и 1/3.
10.5. Области притяжения для колебаний порядков 1/2 и 1/3 285
исследований. Для гармонических колебаний имеем
<d01 = 0,111 + 0,008 sin т — 0,147 cos т,
щ2 = 0,003 + 0,399 sin т — 0,983 cos т +
+ 0,038 sin Зт — 0,016 cos Зт, (10.43)
<г,03 = 0,002 + 0,488 sin т +1,088 cos т +
+ 0,059 sin Зт + 0,020 cos Зт,
где vov v03 устойчивы*, а v^ неустойчиво.
Для субгармонических колебаний порядка 1/2 имеем
VoA = 0,069 + 0,079 sin 1 т + 0,526 cos ~ т +
+ 0,040 sin т — 0,180 cos т,
<v05 = 0,069 — 0,079 sin i т — 0,526 cos -J т +
+ 0,040 suit —0,180 cost,
(10.44)
^06 = 0,039 + 0,255sin-iT + 0,416cos~T +
* # +0,039 sin т —0,220 cost,
<г;07 = 0,039 — 0,255 sin-J-т — 0,416 cos-^т +
+ 0,039 sin т — 0,220 cos т,
где ^04» ^05 устойчивы, a Vqq, v07 неустойчивы.
Для субгармонических колебаний порядка 1/3 имеем
<у08 = 0,019 + 0,033 sin -~т + 0,388 cos 1т +
+ 0,016 sin т — 0,166 cos т,
^ = 0,019—0,353 sin-i-т—0,165 cos-i-T +
+ 0,016 sin т — 0,166 cos т,
<0OlO = 0,019+ 0,320 sin-i-т — 0,223 cos -^т +
+ 0,016 sin т — 0,166 cos т,
! i (Ю.45)
vm = 0,039 + 0,177 sin ~т+0,165 cos -±-т +
+ 0,012 sin т —0,160 cost,
^012 = 0,039 — 0,233 sin -J-t — 0,067 cos -1т +
+ 0,012 sin т —0,160 cost,
^0l3 = 0,039+ 0,055 sin-i-т — 0,236cps~T +
+ 0,012 sin т — 0,160 cos т,
где u08, ^09, »ow устойчивы, а и0ц, v0i2i и01з неустойчивы.
286 Гл. 10. Начальные условия, приводящие к различным колебаниям
Используя формулы (10.43) — (10.45), легко найти
расположение неподвижных точек на плоскости у, v. Поступая, как
раньше, при помощи (10.21) определим направление а
граничной кривой в неустойчивой неподвижной точке. Полученные
таким способом неподвижные точки и соответствующие им данные
приведены в табл. 10.3.
Таблица 103
Неподвижные точки, соответствующие периодическим решениям
уравнения (10.42)
ная точка
1
2
3
4
5
6
7
8
9
10
11
12
13
Возбуждаемая гармоника
Основная
»
»
Субгармоника порядка 1/2
» » »
» » »
» » »
Субгармоника порядка 1/3
» » »
» » »
» » »
» » »
» » »
V
—0,036
—0,996
1,111
0,415
—0,638
0,235
—0,597
0,241
—0,313
—0,371
0,045
—0,187
—0,357
V
0,008
0,513
0,665
0,080
—0,001
0,166
-0,088
0,027
—0,102
0,123
0,071
-0,066
0,030
а
1,054
—0,601
2,994
—0,674
—0,194
0,199
Устойчивость
Устойчива
Неустойчива
Устойчива
»
»
Неустойчива
»
Устойчива
»
»
Неустойчива
»
»
Траектории устойчивых решений показаны на рис. 10.9. На
этом рисунке также показано расположение устойчивых
неподвижных точек. Области притяжения, приводящие к
возбуждению гармонических колебаний и субгармонических колебаний
порядков 1/2 и 1/3, изображены на рис. 10.10. Границы между
областями притяжения были получены путем начала движения
с двух сторон (в направлении а) от неустойчивых неподвижных
точек и интегрирования /уравнения (10.42) для убывающего
времени. Подобно случаю, представленному на рис. 10.6,
область притяжения, приводящая к неподвижной точке 3,
расположена вне этих областей и на рисунке не приведена.
10.6. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
(а) Симметричная система [33]
В § 8.7 мы рассматривали случай, когда в результате
переходного процесса в электрической цепи рис. 8.11
устанавливаются колебания основной гармоники. В этом параграфе
Рис. 10.9. Траектории устойчивых решений уравнения (10.42).
| 1 Основная
гармоника
10.10. Области притяжения при возбуждении основной гармоники
субгармоник порядков 1/2 и 1/3.
288 Гл. 10. Начальные условия, приводящие к различным колебаниям
135° 180° 225°
Угол включения
Нерезонансное
колебание
Резонансное
колебание
Субгармоника
порядка 1/3
Рис. 10.11. Области начальных условий, приводящих к возбуждению
гармонического колебания (резонансного или нерезонансного) и субгармонического
колебания порядка 1/3.
рассматривается та же самая симметричная система, но в
зависимости от различных значений начальных условий в ней
могут существовать либо гармонические, либо субгармонические
колебания порядка 1/3.
Как видно из рис. 9.2, возможны три вида колебаний, а
именно резонансные, нерезонансные и субгармонические
колебания порядка 1/3. Эти колебания возникают, если
емкость С и приложенное напряжение V выбраны так, что они
180е
360е
540*
720
900° Ю80в 1260°
Угол включения
1620е
1800'
CD □
Субгармоника
порядка 1/2
Субгармоника
порядка 1/3
J9800
2160е
Рис. 10.12. Области начальных условий, приводящих к возбуждению субгармоник порядков 1/2 и 1/3.
290 Гл. 10. Начальные условия, приводящие к различным колебаниям
соответствуют общей части двух областей, одна из которых
заштрихована сплошными линиями, а другая — пунктирными. На
рис. 10.11 показаны результаты эксперимента, выполненного при
этих условиях1). Сравнивая этот рисунок с результатами
предшествующих экспериментов, представленных на рис. 8.12 и 9.6,
можно заметить, что области субгармонических колебаний
порядка 1/3 вследствие появления областей, соответствующих
резонансным колебаниям, сжимаются и приобретают вид узких
полос, очень тесно примыкающих друг к другу.
(б) Несимметричная система [36]
Как отмечалось в § 7.8, субгармонические колебания
порядка 1/2 могут возникать в электрической цепи, изображенной
на рис. 7.24, вследствие асимметричного намагничивания
сердечника. Дифференциальное уравнение, описывающее
поведение этой системы, имеет вид (7.36) или (10.29). Поскольку эти
уравнения содержат кубический член относительно у, то можно
также ожидать появления субгармонических колебаний
порядка 1/3.
С помощью этой цепи был произведен эксперимент.
Параметры системы выбирались так, что, задавая различные
значения начальных условий, в системе можно было получить
субгармонические колебания порядка 1/2 либо 1/3. Результаты
эксперимента показаны на рис. 10.12. Области начальных условий,
которые приводят к возбуждению двух видов субгармонических
колебаний порядка 1/2 [см. (10.36)], незаштрихованы или
заштрихованы точками2). Каждая область поочередно появляется
через каждые два периода приложенного напряжения.
Аналогично области начальных условий, приводящие к трем видам
субгармонических колебаний порядка 1/3 [см. (10.39)],
заштрихованы линиями в различных направлениях. Каждая область
появляется через каждые три периода приложенного
напряжения. Следовательно, области в целом повторяют конфигурацию
через каждые шесть периодов приложенного напряжения3).
*) Характерные осциллограммы колебаний были уже показаны на
рис. 4.1.
2) Для того чтобы различать эти два вида колебаний, их фазовые углы
относительно приложенного напряжения наблюдаются с помощью
осциллографа, развертка которого синхронизирована с электронным коммутатором
(рис. VI. 1).
3) Поскольку для субгармонических колебаний порядка 1/2 уже были
получены различные конфигурации областей начальных условий (рис. 9.16),
то в случае, когда ожидается возбуждение гармонических колебаний и
субгармонических колебаний порядков 1/2 и 1/3, мы можем иметь большое
многообразие таких конфигураций.
ГЛАВА 11
Почта периодические колебания
11.1. ВВЕДЕНИЕ
Если на нелинейную систему воздействует периодическая
сила, то результирующее колебание, как правило, но не всегда,
является периодическим. В тех случаях, когда оно
периодическое, основной период колебания равен или в целое число раз
больше периода внешней силы. Для подобных явлений
применялись названия «гармоническое» и «субгармоническое»
колебания. Существуют также некоторые частные случаи, когда
в нелинейной системе возбуждается непериодическое колебание
даже при периодическом внешнем воздействии. В этой главе
рассматривается вид колебаний, когда после окончания
переходного процесса амплитуда и фаза колебания изменяются
медленно, но периодически. Более того, отношение периода
модуляции и периода внешней силы в общем случае является
иррациональным числом, поэтому, строго говоря, нельзя считать
подобные колебания периодическими. Поскольку такие
колебания можно представить полиномами Фурье с несоизмеримыми
частотами, мы будем называть их почти периодическими коле-
баниями1).
Как отмечалось в гл. 8, переходный режим описывается
поведением изображающей точки, которая движется по
интегральной кривой уравнения (8.1). Периодическому колебанию
соответствует особая точка этого уравнения, которая определяет
амплитуду и фазу колебания. Можно заключить, что почти
периодическое колебание, если оно существует, соответствует
предельному циклу. Так как почти периодическое колебание
!) Функция f(x) называется почти периодической, если выполняются
следующие два условия:
1. Для любого заданного 8>0 существует множество таких значений т,
что
|/(*+т) — f(x)\<e при — со<#<+оо.
2. Существует такое L=L(s), что любой интервал a<x<a+L длины L
содержит по крайней мере одно значение т из указанного множества.
Теория почти периодических функций излагается в [7, 11].
19*
292 Гл. 11. Почти периодические колебания
обусловлено амплитудной и фазовой модуляцией,
изображающая точка движется по предельному циклу, к которому с
ростом времени стремятся соседние интегральные кривые.
В данной главе будут рассмотрены два характерных случая
почти периодических колебаний [37]. В первом случае
гармоническое колебание в резонансной цепи становится неустойчивым
и переходит в почти периодическое колебание. Во втором
случае рассматривается почти периодическое колебание,
возникающее в параметрически возбуждаемой цепи из субгармонического
колебания порядка 1/2.
11.2. ПОЧТИ ПЕРИОДИЧЕСКИЕ КОЛЕБАНИЯ
В РЕЗОНАНСНОЙ ЦЕПИ С ПОДМАГНИЧИВАНИЕМ
ПОСТОЯННЫМ ТОКОМ
В § 8.3 отмечалось, что уравнение (8.12) не имеет
предельных циклов, если Х(х, у) и Y(x, у) определяются
уравнениями (8.4). Там рассматривалась симметричная система; пример
такой системы был приведен в § 5.1 (см. рис. 5.1). В § 5.2 и
5.3 мы исследовали гармоническое колебание в
несимметричной системе и в установившемся режиме получили три вида
колебаний (резонансное, субрезонансное и нерезонансное).
Эксперимент производился в цепи, представленной на рис. 5.7.
В этом эксперименте мы также обнаружили, что в
установившемся режиме возбуждается колебание, которое не приходит
ни к одному из перечисленных видов гармонических колебаний,
а попеременно повторяет два различных вида гармонических
колебаний, которые примерно соответствуют субрезонансному и
нерезонансному колебаниям2). Существование такого вида
колебаний— почти периодических колебаний — объясняется
взаимодействием цепей переменного и постоянного токов (см.
рис. 5.7) 3).
!) Почти периодические колебания могут также возникать в
автоколебательной системе при воздействии на нее внешней силы. Случаи таких
колебаний рассматриваются в гл. 13.
2) Подобное явление наблюдали также Томсон [105], Хамос [30] и
Бессонов [8]. [Факт возникновения нелинейных биений в феррорезонансной цепи
с подмагничиванием был известен давно. Раскрытие некоторых сторон
физической сущности этих биений при больших насыщениях дано в [121],
дальнейшее развитие теории и математическое описание процессов приведено
в [8]. — Прим. ред.]
3) Было обнаружено, что почти периодическое колебание существует
только в том случае, когда активное сопротивление цепи постоянного тока
достаточно мало.
[Примечание автора книги относительно существенной роли активного
сопротивления цепи постоянного тока относится к схеме с последовательным
включением обмоток переменного тока (рис. 11.1). Для случая же параллель-
11.2. Колебания в резонансной цепи с подмагничиванием 293
(а) Основные уравнения
Рассмотрим электрическую цепь, схема которой приведена
на рис. 11.1 *). В отличие от схемы рис. 5.7 индуктивность
отсутствует, так что в цепи постоянного тока может протекать
f£o
Рис. 11.1. Резонансная цепь, содержащая катушки индуктивности с
подмагничиванием постоянным током.
переменный ток. Следуя обозначениям рисунка, запишем
уравнения цепи в таком виде:
d
п
dt
(<Pi + Фг) + R\1r = ^i sin о/,
n II (*i ~ ЧЪ) + #2h = Ev
(11.1)
R\1r — ~c } lcdt* h — */?"4"*c»
ного соединения этих обмоток активное сопротивление цепи постоянного тока
может быть значительно увеличено (при одновременном увеличении
постоянного напряжения), а более существенную роль играет уже сопротивление
контура, образованного обмотками переменного тока [121]. При увеличении
активного сопротивления в обоих упомянутых случаях частота почти
периодических колебаний резко возрастает, а затем колебания срываются.—
Прим. ред.]
]) Весьма краткое описание колебаний в цепи рис. 11.1 приведено в
тексте авторскою свидетельства № 76774 (приоритет 1947 г.) на «Феррорезонанс-
ное устройство для получения импульсов прямого тока». Характер этих
колебаний зависит от параметров цепи, а также от амплитуды вынуждающего
воздействия. Последнюю зависимость особенно легко проследить для цепи
с неизменными параметрами.
При малых амплитудах приложенного напряжения огибающая
колебаний почти гармоническая, изменения сдвига фазы тока относительно
приложенного напряжения малы. При увеличенных амплитудах глубина
модуляции и вариации фазы возрастают. Наконец, при еще более значительных
амплитудах огибающая колебаний приобретает вид кривой, составленной из
отрезков экспонент, столь характерный для релаксационных колебаний.. —
Прим. ред.
294 Гл. И. Почти периодические колебания
где ф1 и ф2 — магнитные потоки соответственно сердечников L\
и L2, a n — число витков обмоток сердечников (предполагается,
что все обмотки имеют одинаковое число витков). Нелинейные
характеристики сердечников берутся в виде
съц\ = nlx + ni2, cz<$\ = tiix — ni2, (11.2)
(11.3)
где с3 — постоянная, зависящая от материала сердечников.
Поступая так же, как в п. 5.1(a), введем безразмерные переменные
ix = I nttv /2 = Л*^2»
и свяжем базовые величины 1п и ФЛ соотношениями
паСФп = /„,' СгФъп = п!п.< (11.4)
Тогда уравнения (11.1) примут вид
^К+ ^2) +£i ^К4-^2) + tfi = #cost,
tfT2 V "1 Т~ "2/ П- *l rfT v ^х -г "27 "Г "I
W7(^l— ^) + *2«2 =^0э
(11.5)
где
т = со*— arc tg £lt
Я = —^Jr-Vl-J-*?. Во = —
поФ„ * l I «1 » ^и /га
Нелинейные характеристики (11.2) можно также выразить в
виде
v\ = ui + й2, ^1 = «i — «2- (1! -6)
Введя еще одну систему новых переменных
a = z>1 + z>2f 6 = ^1 — v2 (Н-7)
и используя (11.5) и (11.6), получим следующую систему
уравнений:
Hh i (11-8)
™- + ^k2{M> + b*)b = B0.
Так как мы рассматриваем гармоническое колебание, имеющее
ту же частоту, что и приложенное напряжение, то переменные
а и b можно представить в виде
а = х (т) sin т -+- у (т) cos т, b = z (т), (11.9)
11.2. Колебания в резонансной цепи с подмагничиванием 295
где х(х), у(х) и г{х)— медленно меняющиеся функции
времени т.
Подставляя (11.9) в (11.8) и приравнивая нулю отдельно
коэффициенты при членах, содержащих cos т и sin т, и неосцил-
лирующие члены, получим
*L=*-(-klx+Ay + B) = X(x, у, г),
^ = {(-^-ад = Г(х, у, г),
dz 1 Оыо)
Л = 1--^-(г2 + 4г2), r2 = jc2 + f/2,
где предполагается, что х(х), у(х), z(x) являются медленно
меняющимися функциями времени т и, следовательно, величинами
d2x/dx2, d2y/dx2, d2z/dx2 можно пренебречь и что &i достаточно
мало и поэтому можно также пренебречь величинами k^dxjdx,
k^y/dx и kidz/dx. Поскольку рассматривается гармоническое
колебание, результат, полученный с помощью уравнений (11.10),
можно считать приемлемым.
(б) Периодические решения и их устойчивость
Рассмотрим периодический режим, когда х(х)> у(х) и z(x)
постоянны, т. е.
dx ~ dy ~ dz л /л* 11\
Подстановка этих условий в уравнения (11.10) дает амплитуду
го = Ухо^гУо и постоянную составляющую z0 периодического
решения:
(ЛЧ-А?)г5 = #, ±k2(3rl + 2zt)z0 = B0. (11.12)
Составляющие х0 и уо амплитуды г0 имеют вид
2 2
*о= \ + (Alkx)*% Уо=Т+Щ/АрГ' (11.13)
Периодическому решению, т. е. состоянию равновесия
системы (11.10), соответствует особая точка лг0, у0, z0 в пространстве
х, у, г. Если эта особая точка устойчива, то и соответствующее
периодическое решение устойчиво; если же она неустойчива, то
и периодическое решение неустойчиво. Устойчивость особой
точки изучается путем рассмотрения поведения интегральных
296 Гл. 11. Почти периодические колебания
кривых в ее окрестности. С этой целью рассмотрим малые
отклонения |, ц и £ от соответствующих значений хо, у0 и z0
установившегося режима и выясним, стремятся ли эти отклонения
с ростом времени к нулю. Из (11.10) имеем
где
-27 = 02i£ + Л22Л + Л2Л.
-^■ = а816 + Лз2т1 + Л8зС.
_/д*\ _ 1 / з
*ц-
»■)■
(11.14)
_/^\ _ 3
а21 = ("53г)о==т(—Л + Тб ^)'
^2 = (^)0 = ^(4хоУо-*1)» (П.14а)
_(дГ\ _ 3
а23 — \"SFJo — Тх<?*'
a3i= Ыг)0 = — "8 kzx&o*
a32 = [~djf)0 = — -g- A^o»
азз = (#)0=-4^(^+2^о>
где (дХ/дх)о,..., (dZ/dz)0 — значения производных дХ/дх,...
...,dZ/dz при х=*о, f/=f/o и z=z0.
Характеристическое уравнение системы (11.14) имеет вид
аи — 1
а,
21
012
#22 ^
#13
#23
=-0,
(1Ы5)
или
#31 #32 #33 **
11.2. Колебания в резонансной цепи с подмагничиванием 297
где
Ьх= — (#п + #22 + #зз)>
ь2=
ь3=-
аи а12
#21 #22
+
а„
«31
аи а12 #13
#21 #22 #23
#31 #32
«33
«13
«33
+
#22
#32
==Д.
#23
#331
(11.16)
Отклонения £, т] и £ стремятся к нулю при условии, что
действительные, части Я, отрицательны. В этом случае соответствующее
периодическое решение устойчиво. Условие устойчивости дается
критерием Рауса — Гурвица (см. § 3.3), а именно
^>0, bxb2 — 63 > 0, 63>0.
(11.17)
Первое условие (11.17) выполняется всегда, так как в силу
(11.14а)
61 = -К + а22 + ^зз) = *1 + -ША2(/"о + 22:о)>0-
Подставляя (11.14а) и (11.16) во второе и третье условия
(11.17), получаем
*i(f—£А2)+{Ц*1[*1+-£М'л.+2Ф]х
Х(г2 + 2г2)-4лф2}>0) (1Ы8)
Эти выражения являются условиями устойчивости
периодического решения. Учитывая (11.12), последнее условие можно
также представить в виде
Следовательно, на границе устойчивости (11.19) имеет место
вертикальная касательная к характеристической кривой (к
кривой зависимости В0 от г\ или В0 от г^).
(в) Почти периодические колебания
Если система (11.10) имеет устойчивый предельный цикл в
пространстве х, j/, z, то изображающая точка с координатами
х(ъ), y(f) и z{%) с ростом т движется по предельному циклу;
298 Гл. 11. Почти периодические колебания
другими словами, имеет место почти периодическое колебание.
Чтобы объяснить появление этого вида колебаний, рассмотрим
случай, когда k2 и В0 значительно меньше ki. Тогда из
уравнений (11.10) видно, что dzjdx^idxjdx и dz/dx<dy/dx,raK что
движение изображающей точки описывается уравнениями
при этом изображающая точка приближается к кривой,
определяемой уравнениями dx/dx=0 и dy/dx=Q, или
(A2 + k2)r2 = B2. (11.20)
В течение этого переходного режима z(x) остается почти
постоянным. По мере приближения к установившемуся режиму
dx/dx, dy/dx и dz/dx становятся величинами одного порядка. На
8
7
6
5
4
2
1
°0 1 2 3 4
xz ^
Рис. 11.2. Предельный цикл с разрывами при k2->0.
рис. 11.2 приведена характеристическая кривая (11:20) для
случая &1=0,2 и В = 0,5. На рисунке также представлена кривая,
определяемая уравнением
^ = z = B0-^rk2(3r*+2z*)z = 0 (11.21)
для частного случая fio=&2. Точка пересечения Р этих кривых
определяет состояние равновесия, так как она удовлетворяет
уравнениям (11.11). Однако с помощью условий (11.18) легко
}
11.2. Колебания в резонансной цепи с подмагничиванием
299
проверить, что это состояние
равновесия является
неустойчивым. Поскольку в области
над кривой (11.21)
производная z отрицательна, а под этой
кривой положительна,
изображающая точка с ростом т
будет двигаться в направлении,
указанном стрелками.
Следовательно, в граничных точках
Q и R имеют место скачки, а
изображающая точка
продолжает движение по предельному
циклу, представленному на
рисунке жирной линией. До
сих пор рассматривалось
существование предельного
цикла для случая, когда
параметры системы k2 и В0 были очень
малы. Как видно из третьего
уравнения (11.10), интервал
времени, необходимый
изображающей точке для завершения
одного оборота по
предельному циклу, с ростом k2 л Во
уменьшается, даже если их
отношение остается постоянным. Ниже будет приведен более
конкретный пример такого предельного цикла.
Пример.
Численный анализ системы (11.10) был выполнен для
следующих значений параметров:
fci=0,2, &2=0,03, В = 0,5, В0 = 0,03.
По истечении достаточно большого интервала времени т
изображающая точка движется вдоль предельного цикла, как показано
на рис. 11.3. Интервал времени между двумя
последовательными точками предельного цикла равен 2я, или одному периоду
приложенного напряжения. Время, необходимое изображающей
точке для завершения одного оборота по предельному циклу,
равно 2я*15,5... . С ростом k2 и В0 это время непрерывно
уменьшается. Изображение этого предельного цикла на
плоскости г2, z2 показано на рис. 11.2 пунктирной линией. Так как
предельный цикл в пространстве х, у, z неподвижен, то осцилло-
Рис. 11.3. Предельный цикл,
соответствующий почти
периодическому колебанию в резонансной цепи
рис. 11.1.
300
Гл. П. Почти периодические колебания
граммы соответствующего почти периодического колебания для
величин а и Ь легко получаются из (11.9).
(г) Анализ при помощи аналоговой вычислительной машины
Численный анализ, описанный в предыдущем разделе,
сравнивается с решением, полученным при помощи аналоговой вы-
-3,125*//
~ 9100
|-HHB4fr-[
Рис. 11.4. Блок-схема для решения уравнений (11.22).
числительной машины. На рис. 11.4 показана блок-схема
набора задачи для решения уравнений (11.5) с нелинейностями
(11.6), а именно
d*a
da
где
dx2
а-
-fa + k2u2 = B0,
(11.22)
■vl-\-v2, b = vl — v2,
Я1 = 7 (*1 + Vb U'2 = \{V\ — V2>
На рисунке используются общепринятые обозначения (см.
рис. 7.21).
При указанных условиях были получены осциллограммы для
величин а и 6, приведенные на рис. 11.5. Последовательные
точки на кривых соответствуют моментам времени т=2ля, я=
= 1, 2, 3,... . Для того чтобы сравнить этот результат с пред-
ГСтГ
80тг
Рис. 11.5. Осциллограммы почти периодического колебания, полученные
на аналоговой вычислительной машине. Параметры системы те же, что и на
рис. 11.3.
Рис. 11.6. Предельный цикл,
соответствующий почти
периодическому колебанию рис. 11.5.
2г
J L
a^ZT
-21-
302 Гл. 11. Почти периодические колебания
шествующим анализом, используем выражения (И.9) и найдем
предельный цикл, соответствующий почти периодическому
колебанию рис. 11.5. Результат, представленный на рис. 11.6,
удовлетворительно согласуется с теоретическим результатом
рис. 11.3. Поскольку решение на вычислительной машине
получается путем непосредственного решения уравнений (11.22), то
предположения, сделанные при выводе уравнений (11.10)*,
могут быть приняты.
11.3. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
Как мы уже отмечали, почти периодическое колебание имеет
место в цепи рис. 11.1 при условии, что сопротивление R2 и
соответственно напряжение Е0 достаточно малы. С помощью
сопротивления R2 и напряжения Е0 устанавливается
соответствующая величина постоянной составляющей тока 1% При этих
условиях вторичный ток /2 не остается постоянным, а изменяется
с низкой частотой, приводя к амплитудной и фазовой модуляции
С
Рис. 11.7. Резонансная цепь, содержащая катушки индуктивности с
дополнительными обмотками.
первичного тока i\. При насыщенном сердечнике вторичный ток
h также содержит значительную составляющую удвоенной
частоты. Такое аномальное колебание может иметь место также в
цепи,, изображенной на рис. 11.7. Из-за присутствия
индуктивности L реактивное сопротивление вторичной цепи контура в
этой схеме велико, однако сердечники снабжены третьими
обмотками, которые соединены встречно-последовательно через
малое сопротивление Rz. Эта третья цепь введена для того,
чтобы исключить влияние индуктивности L.
Поступая так же, как в § 5.3, найдем зависимость амплитудьи
тока /ас от приложенного напряжения Vac (рис. 11.7). Резуль-
11.3. Экспериментальное исследование 303
О 50 100 150 200
Приложенное напряжение vaCJe
Рис. 11.8. Амплитудная характеристика гармонических колебаний; почти
периодические колебания имеют место в заштрихованной области, когда
/<fc=l,0 a.
таты эксперимента приведены на рис. 11.8. При токе /<*с=1>0 а
в области значений Vac, показанной на рисунке, имеют место
почти периодические колебания; в пределах заштрихованной .
области амплитуда тока 1ас медленно периодически изменяется.
Субрезонансные колебания (рис. 5.8) в данном эксперименте не
наблюдаются. Следовательно, можно считать, что почти
периодические колебания появляются вместо субрезонансных
колебаний. На рис. 11.9 показаны области, в которых
поддерживаются различные виды колебаний. Почти периодические колебания
возникают в заштрихованной области и главным образом в
пределах значений тока Idc от 0,8 до 2,1 а. Дополнительные
сведения приведены в подписи к рисунку.
Осциллограммы почти периодических колебаний приведены на
рис. 11.10. Осциллограмма (а) снята в цепи рис. 5.7;
осциллограммы (б), (в) и (г) —в цепи рис. 11.7. Из этих осциллограмм
304 Гл. И. Почти периодические колебания
v0 50 100 150 200
приложенное напряжение vQC,e
Рис. 11.9. Области различных видов колебаний. AA'IGD — граничная линия,
соответствующая началу резонансного колебания при увеличении Vас\
CJHBKF—граничная линия, соответствующая прекращению резонансного
колебания при уменьшении Vас\ A'JE'HG — граничная линия,
соответствующая началу почти периодического колебания при увеличении Vac\ A'IGtt—
граничная линия, соответствующая прекращению почти периодического
колебания при увеличении Vас; JHB — граничная линия, соответствующая
началу почти периодического колебания при уменьшении Vac\ A'JE'LMB —
граничная линия, соответствующая прекращению почти периодического
колебания при уменьшении Vac\ EL— граничная линия, соответствующая
переходу от субрезонансного колебания к нерезонансному при
уменьшении Vac.
видно, что амплитуда колебаний периодически изменяется, т. е.
мы имеем колебания типа биений. Частота изменения
амплитуды, т. е. частота биений, с увеличением сопротивления R3
повышается. В предшествующем анализе мы составляли
уравнения цепи относительно магнитного потока в сердечнике.
Напряжение Уз (рис. 5.7 и 11.7) непосредственно связано с
потоком, поскольку производная по времени от потока
пропорциональна У?. Осциллограммы V$ и Vac на рис. 11.10, (в) совмещены;
'ао
Момент включения
WWWWWWVW^
лЛААЛУ» лЛУ\Лл- *ЛУАЛ- V\AA/V- *«лД\У- 'Лл
^2
2& ^лллллAAAMAл ^.^JIAAAAaa^/^—*лМ
— ^^ЛЛЛ/\ЛЛ^лvЛ/V\ЛЛ^^W^
fa) Колебания, полученные в цепи рис. 5.7
Vac
'ас
/W4/V.VV
mViV
<V«>- »лцо,.,АуЛ^Д^
—Лц. .цЛц»,^
щш^
~**^ШШШШь*
^шШтШм—
^а^ХЧЛЛЛЛЛЛЛ^^ЛЛЛЛЛЛр^лЛ*.
«viHMVWWA'ANVttAAW^W.
^р
ш**
(б) колебания,полученные в цепи рис. 117 (Яз*Ь5ом)
(в) Колебания, полученные в цепи рис. 11.7 (Rgn4,7oM)
(г) колебания, полученные в цепи рис 117 0*3=17,9ом)
Рис. 11.10. Осциллограммы почти периодических колебаний.
20 Зак. 907
306 Гл. 11. Почта периодические колебания
их векторное представление показано на рис. 11.11. Вектор Vac
взят в качестве неподвижного вектора; при этом конец
вектора Уз движется по замкнутой траектории в направлении,
указанном стрелками1). Интервал времени между двумя
последовательными точками на траектории соответствует половине
периода приложенного напряжения. Следовательно, период одного
180°
Рис. 11.11. Замкнутая траектория вектора напряжения V3.
биения, т. е. время, необходимое для завершения одного
оборота вектора V3 по замкнутой траектории, в этом частном
случае равен десяти периодам приложенного напряжения. Однако
при этом не происходит явления захватывания частоты,
поскольку отношение периодов колебаний с изменением R3
изменяется непрерывно.
11.4. ПОЧТИ ПЕРИОДИЧЕСКИЕ КОЛЕБАНИЯ
В ПАРАМЕТРИЧЕСКИ ВОЗБУЖДАЕМОЙ ЦЕПИ
Схема электрической цепи приведена на рис. 11.12. При
включении синусоидального напряжения £"4 sin 2co^ в
резонансном контуре могут возникать колебания с частотой со, т. е. суб-
!) Видно, что эта траектория (качественно) соответствует теоретическим
результатам (рис. 11.3).
11.4. Колебания в параметрически возбуждаемой цепи 307
гармонические колебания порядка 1/2. Механизм возбуждения
такого рода колебаний называют параметрическим
возбуждением1). Однако при определенных условиях в установившемся
Рис. 11.12. Параметрическое возбуждение цепи, приводящее к возбуждению
субгармонического колебания порядка 1/2. При определенных условиях имеет
место также почти периодическое колебание.
режиме субгармонические колебания подвергаются
амплитудной и фазовой модуляции, другими словами, имеют место почти
периодические колебания. В дальнейшем мы будем
рассматривать именно этот случай.
(а) Основные уравнения
В соответствии с обозначениями рис. 11.12 уравнения для
рассматриваемой электрической цепи можно записать в виде
п lit (Vi + %) + %\1\= Ei sin 2co/f'
(11.23)
n~dt^~ Ф2) = — ~c J icdt = — R2iR>
Так как в цепь включена большая индуктивность L0, то
предполагается, что ток /0 сохраняется постоянным. Поступая так
же, как в п. 11.2(a), приведем уравнения (11.23) к виду
4i (vi + ^2) + *i«i = В sin 2т,
d2 d (П.24)
-d^ivi — ^2)+ £2-37 К — щ)-\-и2 = 0,
1) Этот принцип используется при разработке логических элементов
цифровых вычислительных машин [27].
20*
308 Гл. И. Почти периодические колебания
где
то
h=InU>v *2=Ai«2. в=1ш;>
Базовые значения /п и Фп связываются соотношениями (11.4).
Нелинейные характеристики сердечников Lt и L2 после
нормирования выражаются следующим образом:
^1 = ^0 + ^1 + ^2' ^2 = ^0+^1—^2' „ (11.25)
где 1о = 1пЩ' С учетом (11.25) уравнения (11.24) приводятся к
виду
l£ + iki № + 3fe2)а — 8ио\ = ^ sin 2т,
+ *2^ + i(3a2 + &2)ft = 0,
flfT2 "Т" Л'2 flft
где а и b определяются, как и ранее, формулами (11.7).
Предположим, что k{ мало; тогда первое уравнение (11.26)
имеет приближенное решение
а = — ycos2t + a0, . (11.27)
где До — постоянная интегрирования. Второе уравнение (11.26)
после подстановки (11.27) приводится к уравнению типа Хилла
с членами, соответствующими затуханию и нелинейности.
Решение этого уравнения может иметь основной период, равный 2я,
т. е. двум периодам приложенного напряжения. Следовательно,
можно ожидать, что приближенное решение уравнений (11.26)
имеет вид
а = — ^cos2t-|-z(t), w=y*
(11.28)
b = х (т) sin т + у (т) cos т,
где х(х), у(%) и z(%) — медленно меняющиеся функции
времени т. Подставляя (11.28) в (11.26) и приравнивая нулю
отдельно коэффициенты при членах, содержащих cost, sint, и
11.4. Колебания в параметрически возбуждаемой цепи 309
неосциллирующие члены, получаем уравнения
^ = -^[—-k2x + Ay + -^wyz^X(x, у, г),
-§7" = -|"(— Ах~by + jWJaJjssVix, у, г),
4r"W(W*+*-)*+ <"'29)
+ Т^(х2 — у2) — 8b0] = Z(*, у, г),
где
А=\ — А(г2 + 4г2+2^2), г2 = х*-\~у2.
Однако следует помнить, что для вывода уравнений (11.29)
необходимо сделать допущения, указанные в п. 11.2(a).
(б) Периодические решения и их устойчивость
Периодическое решение, в котором составляющие х(т), у {г)
и z(x) являются постоянными, определяется условиями
X (х0> Уо* zo) = 0, У (*<>» Уо> го) = 0»
Z(x& Уо> *о) = 0> (П-30)
где индекс 0 обозначает, что значения ху у и z
соответствуют периодическому решению. Исключение х0 и у0 из
уравнений (11.30) дает следующие соотношения для определения г0=
= У4+Уо и Ч
A2+kl=(^wz0)\ (|г2 + г2 + |^го + ^1 = 8^ (11.з1)
Следовательно, составляющие х0, у0 амплитуды г0 равны
х0 = r0 cos в, r0 cos (9 + 180°),
у0 = г0 sin 0, r0 sin (0 +180°), (1 lm6Z)
где
cos 29 = -^, sin20 = -^-
Swz0 Swzn
Поступая так же, как в п. 11.2(6), применим для
получения условий устойчивости периодического решения критерий
310 Гл. 11. Почти периодические колебания
Рауса — Гурвица. В результате находим
-W+*. [| *АСо+2го+да2)2+
+klUzl+2w* + ^)-±Arl(32-3rl-3w*)\ > 0, (11.33)
А (32 - бг2, — бг2 — Зда2) + - т&г\ — Щ^-> 0.
Второе условие может быть также записано в виде
(в) Почти периодические колебания
Методика, аналогичная упоминавшейся в п. 11.2(b),
применима и в том случае, когда периодическое решение,
определяемое условиями (11.31), является неустойчивым.
Изображающая точка системы (11.29) при малых значениях ki движется в
окрестности характеристической кривой, определяемой
уравнениями dx/dx = 0 и dy/dx=0, или
A2+kl = (^wz)2' (1Ь35)
Путем исследования знака производной dz/dx вдоль
характеристической кривой, определяемой уравнением (11.35), можно
сделать заключение о существовании предельного цикла при
малом k^
Пример.
Вначале рассмотрим пример, когда параметры системы
равны
^ = 0,2, £2 = 0,2, 5=1,0, и0 = 0,8. (11.36)
Вычисления были выполнены для системы (11.29) при этих
значениях параметров. Изображающая точка непрерывно движется
по одному из предельных циклов рис. 11.13, (а). Интервал
между двумя последовательными точками на предельном цикле
соответствует времени 2я, или одному периоду
субгармонического колебания. Время, необходимое изображающей точке для
завершения одного полного оборота по предельному циклу,
равно я* 14,8... .
}
НА. Колебания в параметрически возбуждаемой цепи
311
Далее рассмотрим пример, когда параметры системы равны
£1 = 0,1, £2 = 0,2, 5=1,0, Ио = 0,8. (11.37)
Предельный цикл, подсчитанный при этих значениях
параметров, изображен на рис. 11.13, (б). Время одного оборота по
предельному циклу равно я • 54,2 ....
При сравнении этих двух примеров было обнаружено, что,
как показано на рис. 11.13, (а) и (б), имеются два различных
(а)
(б)
Рис. 11.13. Предельные циклы, соответствующие почти периодическим
колебаниям в параметрически возбуждаемой цепи рис. 11.12. (а) Параметры
системы определяются выражениями (11.36). (б) Параметры системы
определяются выражениями (11.37).
типа почти периодических колебаний. Первое имеет два
отдельных предельных цикла, которые расположены симметрично
относительно оси z. Проекции этих предельных циклов на
плоскость х, у не содержат начала координат в своей внутренности.
В этом случае почти периодическое колебание синхронизируется
с приложенным напряжением даже несмотря на то, что форма
колебаний подвержена амплитудной и фазовой модуляции. На
рис. 11.13, (б) два предельных цикла сливаются, образуя
единую петлю. Проекция этой петли на плоскость ху у
охватывает начало координат. В этом случае почти периодические
колебания не синхронизируются с приложенным напряжением,
поскольку один оборот по предельному циклу приводит к сдвигу
по фазе на 2я радиан, т. е. на два периода приложенного
напряжения.
s
г
сз 1
О
Рис. 11.14. Осциллограммы почти периодических колебаний, полученные на
аналоговой вычислительной машине. Параметры системы определяются
выражениями (11.36).
<* 1
Ютг
20тг
ЗОтг
40тг
50тт
Рис. 11.15. Осциллограммы почти периодических колебаний, полученные
на аналоговой вычислительной машине. Параметры системы определяются
выражениями (11.37).
НА. Колебания в параметрически возбуждаемой цепи 313
(г) Исследование при помощи аналоговой вычислительной
машины
Блок-схема для решения задачи на вычислительной машине
получается непосредственно из уравнений (11.24) и (11.25).
Чтобы сравнить решение, полученное при помощи
вычислительной машины, с результатами предшествующего анализа, взяты
(а)
(6)
Рис. 11.16. Предельные циклы, соответствующие почти периодическим
колебаниям, (а) Полученные из осциллограмм рис. 11.14. (б) Полученные
из осциллограмм рис. 11.15.
те же значения параметров, т. е. (11.36) и (11.37). Для этих
случаев на рис. 11.14 и 11.15 соответственно приведены
осциллограммы величин a — v\ + v2 и b = v\—1;2. Последовательные
точки на кривых соответствуют моментам времени т=2яя, /г=1,
2, 3, ... . Применяя (11.28), на рис. 11.16 наносим предельные
циклы, соответствующие почти периодическим колебаниям. Эти
периодические циклы хорошо согласуются с результатами
числового примера (рис. 11.13).
ЧАСТЬ IV
Автоколебательные
системы при периодическом
воздействии внешней силы
ГЛАВА 12
Захватывание частоты
12.1. ВВЕДЕНИЕ
Если к автоколебательной системе приложено периодическое
воздействие, то имеет место явление захватывания частоты.
Типичным и важным случаем такого рода является система,
описываемая уравнением Ван-дер-Поля, с дополнительным членом,
соответствующим периодическому воздействию [86]. Частота
автоколебаний синхронизируется с вынуждающей частотой при
условии, что эти частоты не слишком отличаются друг от друга.
Если же разница между ними сравнительно велика, то можно
ожидать появления почти периодического колебания; другими
словами, может возникнуть биение. Захватывание частоты,
однако, имеет место также в случае, когда собственная частота
автоколебания близка к частоте, которая в целое число раз
больше или меньше вынуждающей частоты. Мы будем
называть такие захватывания соответственно ультрагармоническими
и субгармоническими. В противоположность этим типам
захватывания явление синхронизации, упомянутое выше, будем
называть гармоническим захватыванием.
Вопросу гармонического захватывания посвящено
значительное число работ [4, 14, 18, 70, 76, 100], но лишь в немногих
работах рассматривается вопрос о поведении автоколебательной
системы в случае, когда вынуждающая частота сильно
отличается от собственной частоты системы. При этих условиях можно
ожидать появления ультрагармонического или
субгармонического захватывания [39, 63, 72, 77]. В этой главе будут
рассмотрены такие типы захватывания1). Рассматриваемая система
описывается уравнением
^_8(l_tf2)^ + tf = JBcosvT + £0, (12.1)
*) Глава 13 будет посвящена изучению почти периодических колебаний,
которые имеют место при отсутствии захватывания в системе.
318
Гл. 12. Захватывание частоты
где 8 — малая положительная постоянная, a Bcosvt+Bo —
внешняя сила, содержащая постоянную составляющую. В одном
из последующих параграфов будет рассмотрена также система
с нелинейной восстанавливающей силой.
12.2. УРАВНЕНИЕ ВАН-ДЕР-ПОЛЯ
С ВЫНУЖДАЮЩИМ ЧЛЕНОМ
Рассмотрим захватывание частоты, которое имеет место в
системе, описываемой уравнением (12.1). Левая часть этого
уравнения имеет вид уравнения Ван-дер-Поля, а в правой части
находится член, соответствующий вынуждающему воздействию.
Введение новой переменной v = u — В0 приводит уравнение
(12.1) к виду
^__Fx(l_p^_^2)^ + ^ = jScosvt| (12.2)
где
„_<!-*)., ,-^г. у = ^.
Поскольку система, описываемая уравнениями (12.2), является
автоколебательной, то \х должно быть положительным, а,
следовательно, #о < 1- Кроме того, II является малой величиной, так
что если В = 0, то собственная частота системы (12.2) близка к
единице. Таким образом, если вынуждающая частота v близка
к единице, то можно ожидать захватывания колебания на
вынуждающей частоте v, т. е. гармонического захватывания.
Захватываемое гармоническое колебание v0(x) может быть
приближенно представлено в виде
v0(x) = blsinvx-\-b2 cosvt. (12.3)
С другой стороны, если вынуждающая частота v отлична от
единицы, то можно ожидать появления ультрагармонического
или субгармонического захватывания. В этом случае
захватываемое колебание имеет частоту, которая в целое число раз
больше или меньше вынуждающей частоты v. Приближенное
решение уравнения (12.2) можно представить в виде
v0 (х) = l__v2 cos vt + Ьг sin#vt + b2 cos nvx, (12.4)
где n = 2, 3, ... для ультрагармонических колебаний, я=1/2,
1/3, ... для субгармонических колебаний. Первый член
представляет вынужденное колебание на частоте воздействия.
12.3. Гармоническое захватывание
319
Второй и третий члены соответствуют захватываемому колебанию
на частоте nv, которая незначительно отличается от единицы.
Следует заметить, что, поскольку \х мало, для этого порядка
приближения члены с частотами, отличными от v и nv, можно опустить.
В последующих параграфах будут исследованы
гармонические, ультрагармонические и субгармонические колебания,
вызываемые захватыванием частоты. Будут найдены области
существования этих типов колебаний на плоскости -В, v, где
координатами служат амплитуда и частота внешней силы.
12.3. ГАРМОНИЧЕСКОЕ ЗАХВАТЫВАНИЕ
(а) Периодическое решение
Если вынуждающая частота v близка к единице, то на этой
частоте может иметь место захватывание. Результирующее
гармоническое колебание выражается формулой (12.3). Это
решение легко находится методом гармонического баланса, а
именно путем подстановки выражения (12.3) в (12.2) и
приравнивания отдельно нулю коэффициентов при членах, содержащих
sin vt и cos vt. Это дает
(1-г?)^-а1{/1+-^ = 0,
где
ь±_ ь2 2.
xi = t' »»=*• г*=х*+уЬ
«o=yf о, = —
-V
(12.5)
(12.6)
■расстройка.
Y l fxv
Исключив хг и уг из (12.5), получим
[(1-г^+о^Ц^)2. (12.7)
Легко видеть, что если амплитуда В внешней силы равна нулю,
то г{ = 1 и (Ti=0, так что a0 в (12.6) представляет установившуюся
амплитуду автоколебания. Так же легко находятся
составляющие амплитуды х\ и ух:
-.—(^)^- *-$■• о*»
где
Л- В
320 Гл. 12. Захватывание частоты
Уравнение (12.7) определяет резонансные кривые для
гармонического колебания. Они представлены на рис. 12.1. Каждая
точка этих кривых определяет амплитуду гь которая соответ-
Р и с. 12.1. Резонансные кривые гармонического колебания.
ствует частоте v возможного гармонического колебания при
заданном значении амплитуды В.
(б) Исследование устойчивости периодического решения
Периодическое решение, заданное формулами (12.7) и (12.8),
может существовать, только если оно устойчиво. В этом
параграфе устойчивость периодического решения исследуется путем
рассмотрения поведения малого отклонения g(t) от
периодического решения у0(т). Если с ростом т это отклонение £(т)
стремится к нулю, то периодическое решение устойчиво, если же
£(т) возрастает, то периодическое решение неустойчиво.
Отклонение £(т) определяется выражением
6M = *(T)-*o(T)f <12'9)
.где
vQ (т) = Ьг sin vt -f b2 cos vt = aQ {xx sin vt + yx cos vt).
12.3. Гармоническое захватывание 321
£ледует заметить, что £(т) не обязятельно имеет ту же
частоту v, что и периодическое решение1). Подставляя (12,9) в
(12.2) и учитывая, что £(т) достаточно мало, получаем
уравнение в вариациях
(12.10)
Вводя новую переменную п в соответствии с выражением
|(т) = е-»мТ1(т), (12.Ц)
где
X
u{T) = -$j(l-fiv0-yv§dr =
о
= 6т + периодические члены относительно т,
6 = !(2г?-1),
и подставляя периодическое решение и0(т), определяемое
соотношением (12.9), получаем уравнение Хилла в виде
d2r\
dx2
k + 2 29mCOs(mvT-em) L = 0, (12.12)
где
l) Устойчивость периодического решения до сих пор анализировалась
с помощью рассмотрения малых отклонений 6Ь\ и 6Ь2 от амплитуд Ь\ и Ъь
определяемых выражением
£(т) =66i sin vT+662 cos vt.
Поскольку при этом предполагается, что отклонения ЬЬ\ и ЬЬ2 с ростом т
меняются медленно, то |(т) будет иметь ту же частоту v, что и периодическое
решение vQ(x). Из-за этого ограничения, накладываемого на поведение откло-
ления £(т), условие устойчивости, полученное этим методом, будет
недостаточным, если неустойчивость вызвана отклонениями, имеющими иные частоты.
Подобный случай вскоре будет рассмотрен (см. рис. 12.2).
21 Зак. 907.
322
Гл. 12. Захватывание частоты
При выводе уравнения (12.12) члены, содержащие степени \i
выше второй, опущены. Из (12.11) и (12.12) видно, что с ростом
т отклонение £(т) стремится к нулю при условии, что
затухание б положительно и больше характеристического показателя
уравнений (12.12), который предполагается положительным.
Следовательно, условия устойчивости периодического решения
v0(x) можно записать в виде
6>0 или 2г\ — 1>0 (12.13)
и в силу условия (4.9)
[e0-(^-v)2]2+2[e0+(^-v)2]62+64>e2m. (12.14)
Из теории уравнения Хилла известно, что если второе условие
(12.14) не выполняется для /п=1 или /п=2, то отклонение £(т),
имеющее частоту v/2 или v, будет возрастать, вызывая
неустойчивость периодического решения v0(x).
Подставляя параметры 9о, 9i и 02 из (12.12) в (12.14) и
учитывая, что [х мало, получаем для т=1
(1-2/1)2—^ + а?/2>0,
где
_ l-(v/2)»
и1/2 — |л (v/2) •
и для /и = 2
(1—г|)(1—3rf)-haf>0,
где
1—V2
а = .
1 JJ.V
Следует заметить, что если условие устойчивости (12.15) не
выполняется, то отклонение £(т) не стремится к нулю, а, как мы
увидим в § 12.5, вызывает возбуждение субгармонического
колебания порядка 1/2.
Используя условия устойчивости (12.13) и (12.16), а именно
р=2г2-1>0, ^(1-г2)(1-Зг2) + а*>0, (12.17)
можно найти неустойчивые участки резонансных кривых. Они
показаны на рис. 12.1 пунктирными линиями. Легко проверить,
что на границе устойчивости при q=0 имеют место
вертикальные касательные к резонансным кривым. Условие устойчивости
(12.15)
(12.16)
12.3. Гармоническое захватывание
323
(12.15) следует рассматривать, если о1/2 мало или v«2, На
рис. 12.2 представлена область гармонического захватывания на
плоскости В, v. В заштрихованной части условие устойчивости
(12.15) не выполняется, поэтому в этой области гармонические
Рис. 12.2. Область гармонического захватывания.
колебания не поддерживаются. Как будет показано в § 12.6, в
этой области имеет место захватывание на частоте субгармо-
ники порядка 1/2.
(в) Дополнительные замечания для случая большой
расстройки
Поскольку \х мало, условие а^^>(1—г^)2 выполняется, если
v значительно отличается от единицы. При этом условии из
уравнения (12.7) получаем следующее приближенное
выражение:
<#-Нт=М2=Л2' (12Л8)
которое согласуется с предположением (12.4) для амплитуды
вынужденного колебания. В силу (12.18) первое условие (12.17)
можно записать в виде
D^l-^<0. (12.19)
а0
Ясно, что второе условие q>0 в (12.17) для случая большой рас-
стройки выполняется. Следовательно, в случае, когда
вынуждающая частота v не находится в окрестности 1 или 2,
уравнение (12.19) является единственным условием устойчивости
гармонического колебания,
21*
324 Гл. 12. Захватывание частоты
12.4. УЛЬТРАГАРМОНИЧЕСКОЕ ЗАХВАТЫВАНИЕ
(а) Периодическое решение
Рассмотрим случай, когда автоколебания захватываются на
частоте, в два или три раза большей вынуждающей частоты.
Периодическое решение уравнений (12.2) ищется тогда в виде
(12.4), где п полагается равным соответственно 2 или 3. Под*
ставляя (12.4) в (12.2) и приравнивая нулю отдельно
коэффициенты при членах, содержащих sinnvx и cosnvt, получаем
я = 2: оЛ + (Я_ф,2-_-Ё_Л' = 0,
(D —г|)*2 —оу/2 = 0,
: 03X3 + ^-4)^/3-^^ = 0,
(D — г§ха — в3у3 = О,
П-
(12.20)
(12.21)
где
х — --±- /у — -2- г2 — х1 -4- I/2
а0 = -|/^, Л = —^Ц-, D = l—?£, (12.22)
rt — v — расстройка.
\xnv
Исключая хп и уп из (12.20) и (12.21), находим амплитудные
характеристики ультрагармонических колебаний:
я = 2: [(0-г^+а2]г1 = (-4|гЛ2)2, (12.23)
п = Ъ: [(D-r^+a|]i = (^_^)2. (12.24)
Для значений D, отличных от нуля, эти уравнения можно
записать в виде
[(i-4)2+fe)2]4=/r^ n=2 или з« (12-25)
где
Г2 — \4а0) D»f Гз_ \12eJ D**
Уравнение (12.25) имеет тот же вид, что и (12.7), поэтому если
величины r\, а, и [Bj\i\a^ соответственно заменить на r2njD,
On/D и Fn, то для случая ультрагармонического колебания мо-
12.4. Ультрагармоническое захватывание 325
жно воспользоваться резонансными кривыми рис. 12.1. Как
вскоре будет показано, в случае ультрагармонического
колебания пунктирные части резонансных кривых также являются
неустойчивыми. Следует заметить, что захватывание на второй и
третьей ультрагармониках имеет место преимущественно тогда,
когда расстройка ап мала, т. е. когда вынуждающая частота
близка соответственно к 1/2 и 1/3.
(б) Исследование устойчивости периодического решения
Поступая таким же образом, как в п. 12.3(6), путем
решения уравнения в вариациях типа Хилла получаем условие
устойчивости ультрагармонического колебания. Условия устойчивости
ультрагармонического колебания второго порядка следующие:
2r\ — D > О, (D — r*)(D — 3/f) + a* > 0. (12.26)
Первое неравенство соответствует условию (12.13) для
гармонического колебания, а второе получается, если в условии (12.14)
положить т = 4. Условия устойчивости для т=1, 2, 3 также
были найдены; при этом оказалось, что все эти условия
выполняются в случае, когда v не сильно отличается от 1/2, т. е. когда
имеет место захватывание на второй ультрагармонике.
Условия устойчивости для ультрагармонического колебания
третьего порядка имеют вид
2r\ — D>0, (D — r§(D — Зг2) + а32>0. (12.27)
Условия (12.26) и (12.27) можно объединить и записать в виде
2^-1 >0. (l_4)(l-34) + (^)2>0, (12.28)
п = 2 или 3.
Эти условия имеют тот же вид, что и (12.17). Они применяются
при исследовании устойчивости резонансных кривых,
определяемых уравнениями (12.25). Отсюда следует, что, как
указывалось выше, пунктирные участки резонансных кривых на рис. 12.1
в случае ультрагармонического колебания являются
неустойчивыми.
(в) Примеры
Числовой подсчет резонансной характеристики для
ультрагармонического колебания проводился для тех же значений
параметров, что и на рис. 12.2, т. е. в (12.1)
е = 0,2, £0 = 0,5.
,Р.ис. 12.3. Резонансная характеристика для ультрагармонического
колебания второго порядка.
Рис. 12.4. Резонансная характеристика для ультрагармонического
колебания третьего порядка.
J
12.5. Субгармоническое захватывание 327
Параметры уравнений (12.2) при этом следующие:
4 4
11 = 0,15, Р = *з* и 'V=3'-
Применяя соотношения (12.22) для этих значений параметров,
можно вычислить резонансные характеристики, определяемые
уравнениями (12.23) и (12.24). Они представлены
соответственно на рис. 12.3 и 12.4. На каждом рисунке поверхность
резонансной характеристики в координатах гп, В и v, выделенная
жирными линиями, соответствует возбуждению устойчивого
колебания. Границы устойчивости определяются поверхностями
p^2rl-D = 0, ?e(D-/*)(D-3^ + o«-0,
которые также показаны на рисунках1). Кривые,
соответствующие границе устойчивых колебаний, спроектированы на
плоскость В, v. Таким образом, можно видеть, что если
амплитуда В и частота v внешней силы соответствуют некоторой точке
внутри этих областей, то возбуждаемое колебание
захватывается на удвоенной (рис. 12.3) или на утроенной (рис. 12.4) частоте
относительно вынуждающей частоты v.
12.5. СУБГАРМОНИЧЕСКОЕ ЗАХВАТЫВАНИЕ
(а) Периодическое решение
Рассмотрим случай, когда автоколебание захватывается на
частоте, составляющей 1/2 или 1/3 вынуждающей частоты.
Периодическое решение уравнений (12.2) в этом случае
определяется выражением (12.4), где п равно соответственно 1/2 или
1/3. Подставляя (12.4) в (12.2) и приравнивая нулю отдельно
коэффициенты при членах, содержащих sin nvx и cos nvr,
получаем
«= 1/2: <V*1/2+(D -/■?/,—§ A)ylft = 0,
( в \ (12,29)
«= 1/3: о1/яХщ+(р-г*/а)у1/а + ±{x^-y\lz) = Q,
2A (12.30)
l) Нетрудно проверить, что на границе устойчивости при q=Q имеет
место вертикальная касательная к поверхности резонансной характеристики.
328 Гл. 12. Захватывание частоты
ь2
л=-*-г,
1 —V2
г2п=Х1 + У2п'
где
во^т/Т, Л = -Цг, D = \-^-, (12.31)
' Y 1 —v л0
1 _ (rtV)2
оп = -—- расстройка.
Исключая из (12.29) х1/2 и у1/г находим
[{D-r\„f+o\l2—^]r>/2 = 0,
откуда амплитуда г1/2 субгармонических колебаний порядка 1/2
получается в виде
г|/2 = 0, (12.32)
или
r*/2 = D±y^A*-e*/2. (12.33)
Аналогично амплитуда г1/3 субгармонических колебаний
порядка 1/3 равна
г?/3 = 0, (12.34)
или
rU={D+iA2) ± /(D+lA2)2-£)2-<JV <12-35>
Если амплитуда г1/2 или г1/3 равна нулю, то
субгармонические колебания не возникают. Следовательно, периодическое
решение (12.4) имеет только составляющую основной гармоники
[В/(1 —v2)]cosvt. Этот случай уже был рассмотрен в п. 12.3(b).
Амплитуды г1/2 и г1/3 субгармонических колебаний можно найти
из (12.33) и (12.35) при условии, чтог правые части этих
равенств положительны. Из выражений (12.33) и (12.35) можно
видеть, что, когда ожидается захватывание на частоте
субгармоники, расстройки сг1/2 и а1/3 должны быть достаточно малыми.
(б) Исследование устойчивости периодического решения
Условие устойчивости для г1/2=0 и f*1/3=0 нет необходимости
рассматривать, поскольку оно уже обсуждалось в случае
гармонического захватывания. Условия устойчивости
субгармонических колебаний, определяемых формулами (12.33) и (12.35), на-
12.6. Области захватывания частоты
329
ходятся таким же образом, как в п. 12.3(6); в результате
получаем
п = \\ 2r?/2 —D>0, r?/2-D>0, (12.36)
я = 1: 2/*3-D>0, i/3-(^ + J^2)>0. (12.37)
Как нетрудно видеть, первые условия в (12.36) и (12.37)
фактически являются лишними. Из вторых условий следует, что
для амплитуд г1/2 и г1/3 устойчивых субгармонических
колебаний (12.33) и (12.35) следует брать знак плюс.
(в) Пример
Расчет резонансной характеристики для субгармонического
колебания выполняется для тех же значений параметров, что и
в п. 12.4(b), а именно
6 = 0,2 и £0 = 0>5,
так что
4 4
р, = 0,15, Р = -з"» /у = "3"
Эти характеристики, подсчитанные с использованием (12.33) и
(12.35), изображены соответственно на рис. 12.5 и 12.6. Жирные
линии на рисунках соответствуют геометрическому месту точек,
в которых имеет место вертикальная касательная к
характеристике. Эти линии разделяют области устойчивых и неустойчивых
колебаний; характеристикам, расположенным ниже этих
линий, соответствуют неустойчивые режимы. Кривые,
соответствующие границам устойчивых режимов, спроектированы на
плоскость В, v. Следовательно, если амплитуда В и частота v
внешней силы выбираются внутри этих областей, то возбуждаемое
колебание захватывается на частоте, составляющей 1/2
(рис. 12.5) или 1/3 (рис. 12.6) вынуждающей частоты.
12.6. ОБЛАСТИ ЗАХВАТЫВАНИЯ ЧАСТОТЫ
В предшествующих параграфах исследовалось явление
захватывания частоты на частотах основной гармоники,
ультрагармоники и субгармоники. Характеристики возбуждения
захватываемых колебаний были получены с учетом формул
(12.7), (12.23), (12.24), (12.33) и (12.35). Исследовалась также
устойчивость этих колебаний, причем в качестве критерия
устойчивости использовалось уравнение Хилла. Чтобы удобнее было
сравнивать условия устойчивости, полученные в предыдущих
Рис. 12.5. Резонансная характеристика для субгар- Рис. 12.6. Резонансная характеристика для суб-
монического колебания порядка 1,2. гармонического колебания порядка 1/3.
рщу.^-'-ч -~
12.6. Области захватывания частоты
331.
1,5
А 1.0
Ц5
Основная
гармоника
6-0,2
В«»0,5
"Г
Ультрагармоника
третьего
порядка
0.3
0А
Ультрагармоника второго
порядка
0,6
(Q) Захватывания на основной гармонике
и ультрагармониках
15
h 10
6=0,2
В<г0,5
Основная
гармоника
! г*^
1.0 1,5
( 1 IСубгармоника
^\ 1 порядка 1/2
V i
2,0 2,5
1 J Субгармоника
1 I порядка 1/3
3,0 3
5
(б) Захватывания на основной гармонике
и субгармониках
Рис. 12.7. Области захватывания частоты.
параграфах, все они собраны в табл. 12.1. Как отмечалось ра«
нее, ультрагармоническое или субгармоническое захватывание
имеет место в довольно узкой области значений вынуждающей
частоты v. С другой стороны, если амплитуда В внешней силы
достаточно велика, то захватывание на основной гармонике
имеет место при любой вынуждающей частоте v. Это
обстоятельство сделало необходимым рассматривать две
группы условий устойчивости для гармонического захватывания.
По результатам, представленным на рис. 12.2—12.6, на
332
Гл. 12. Захватывание частоты
Условия устойчивости
Частота
V/6
v/4
v/3
v/2
2v/3
3v/4
V
3v/2
2v
3v
т\
1
2
3
4
6
Субгармоника
порядка 1/3
^—
(2r?/3-D>0),
К-(^тЛ2)>0-
"""■"
m
1
2
3
4
Субгармоника
порядка 1/2
—
(2rJ/2-D>0),
—
—*
m
1
2
Основная гармоника
2rf — 1 > 0
(1-2г*)2--^ +
+ °?/2>°
2rf —4>0
(l-rj)(l-3r?) + o»>0
71
\\
-, wl
1
t\
%\
Щ
•
'■' -%
ц
Замечай и я. 1. Здесь приведены только те условия, которые нельзя исключить. Условия, 11
ные в той же колонке. ||
2. Если второе неравенство в условии устойчивости не удовлетворяется, то соответствующее f
колебаний, имеющих частоту, указанную в первой колонке таблицы. ц
рис. 12.7 области захватывания частоты построены в координа- J
тах В, v1). И
Как отмечалось в п. 12.3(b), условие устойчивости гармони- \\
ческих колебаний имеет вид D<0, если вынуждающая частота v
не находится в окрестности 1 или 2. Условия устойчивости (12.26) :
!) Анализ при этом порядке приближения показывает, что
захватывание на удвоенной частоте и субгармоническое захватывание порядка
1/2 имеют место в том случае, когда система несимметрична, т. е. когда
параметр системы Р=^0 [см. (12.23) и (12.33)].
12.6. Области захватывания частоты
333
Таблица 12.1
захватываемых колебаний
m
~т~
2
3
4
Вторая ультрагармоника
—
2r22 — D>0
(D-r22)(D-3r22) + o22>0
m
1
2
3
4
6
Третья ультрагармоника
~~~*
—
^"~
2r\— D>0
(D-rl)(D-3rl) + al>0
не приведенные в таблице (отмечено чертой), выполнены, если выполнены все условия, приведен-
периодическое решение становится неустойчивым вследствие нарастания самовозбуждающихся
и (12.27) показывают, что если D-<0, то ультрагармонические
колебания устойчивы. Следовательно, граничная кривая D=0
гармонического захватывания лежит внутри области
ультрагармонического захватывания [рис. 12.7, (а)]. Следует отметить,
что, поскольку на граничной кривой не наблюдается резких
изменений амплитуд гармонических и ультрагармонических
составляющих, выделение этой граничной кривой не имеет
практического значения.
На рис. 12.7, (б) можно видеть, что непрерывность
граничной кривой D = 0 нарушается «вторжением» области субгармо-
334 Гл. 12. Захватывание частоты
нического захватывания порядка 1/2 (ср. рис. 12.2). Кроме того,
области гармонического захватывания и субгармонического
захватывания порядка 1/3 перекрываются. Таким образом, в
общей части этих двух областей могут поддерживаться как
гармонические, так и субгармонические колебания порядка 1/3.
Следовательно, если вынуждающая частота v остается
постоянной, а амплитуда изменяется в соответствии со штрихпунктир-
ными прямыми рис. 12.7, (б), то кривые возбуждения содержат
(а) Субгармоника порядка 1/2 16) Субгармоника порядка 1/3
Рис. 12.8. Резонансные кривые при изменении амплитуды В.
гистерезисную область для субгармонического захватывания
порядка 1/3. При этом гистерезисной области для
субгармонического захватывания порядка 1/2 не наблюдается. Эти кривые
сравниваются на рис. 12.8, (а) и (б).
12.7. АНАЛИЗ ПРИ ПОМОЩИ АНАЛОГОВОЙ
ВЫЧИСЛИТЕЛЬНОЙ МАШИНЫ
Здесь мы сравним результаты, полученные теоретически в
предшествующих параграфах, с решениями, полученными с
помощью аналоговой вычислительной машины. На рис. 12.9
приведена блок-схема для решения уравнений (12.2) с теми же
значениями параметров ji, р и у, что и в п. 12.3(6), 12.4(b) и 12.5(b).
Обозначения на рисунке соответствуют общепринятым1).
Решения уравнений (12.2) ищутся при различных комбинациях
значений амплитуды В и частоты v внешней силы. Некоторые
характерные осциллограммы v(x) приведены на рис. 12.10. Точками
!) Интегрирующий усилитель блок-схемы производит интегрирование
входной величины относительно машинного времени (в секундах), которое
в данном случае в два раза больше действительного времени т.
12.7. Анализ при помощи аналоговой вычислительной машины 335
0,125В
S~\ 100 COS ИГ
Рис. 12.9. Блок-схема набора задачи для решения уравнений (12.2) на
аналоговой вычислительной машине.
на кривых отмечено начало каждого периода внешней силы. Эти
точки позволяют отличать колебания захватывания
(периодические) от биений (непериодических колебаний). Области
захватывания колебаний изображены на рис. 12.11,(а) и (б). Эти
области хорошо согласуются с результатами, полученными
теоретически, которые представлены соответственно на рис. 12.7, (а),
и (б). Выводы, касающиеся гистерезисных областей (ср.
рис. 12.8), также подтверждаются анализом на аналоговой
вычислительной машине.
До сих пор рассматривалась система с малой нелинейностыр,
другими словами, предполагалось, что е<С1 в (12.1) или |л<С1
в (12.2). Если нелинейность велика, то можно ожидать
захватывания на других частотах. Теоретический анализ для таких
случаев не производился, поскольку выкладки при этом ста-
0 5 Ш 15
(а) Основная гармоника
0 5 10 15
(Z) Субгармоника порядка 1/2
О 10 20 30
(б) Ультрагармоника второго
порядка
О 5 10 15
(д) Субгармонико порядка 1/3
(в) Ультрагармоника третьего
порядка
40 60
Биение
Рис. 12.10. Осциллограммы колебаний системы, описываемой
уравнениями (12.2).
12.7. Анализ при помощи аналоговой вычислительной машины 337
(а) Гармоническое и ультрагармоническое захватывания
15
* 10
E=0,Z
В<г 0,5
Основная
гармоника
Субгармоника
порядка 1/3
(6) Гармоническое и субгармоническое захватывания
Рис. 12.11. Области захватывания частоты, полученные на аналоговой
вычислительной машине.
новятся весьма громоздкими. Однако на рис. 12.12 приведен
пример областей захватывания, полученных при помощи
аналоговой вычислительной машины. В этом случае система
описывается уравнением
d*u
du
dx2
e(l—u2)^- + u = Bcosvx-{-B0,
где
dx
e=4 и Во=0.
На рисунке видны области захватывания на частотах,
составляющих 1/6, 1/5, 1/4, 1/3, 1/2 вынуждающей частоты v, а также
на частотах v, 3v и 5v. Если амплитуда В и частота v внешней
силы не соответствуют этим областям, т. е. расположены в
заштрихованных областях, то возникают биения.
22 Зак. 907
338 Гл. 12. Захватывание частоты
и0 1,0 2,0 3,0 4,0
, -
Рис. 12.12. Области захватывания частоты для системы с большой
нелинейностью.
12.8. АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА ПРИ НЕЛИНЕЙНОЙ
ВОССТАНАВЛИВАЮЩЕЙ СИЛЕ
Рассмотрим систему, описываемую уравнением
^_^(1_y^)|L_|_<,s = £Cosvt, (12.38)
где \х — малая положительная постоянная и y>0- Поскольку
при малых значениях v коэффициент затухания отрицателен,
можно ожидать, как и ранее, захватывания частоты. Более того,
так как восстанавливающая сила нелинейна, а именно
представлена кубической функцией относительно а, то в системе будет
наблюдаться явление нелинейного резонанса, сопровождаемое
скачками амплитуды.
(а) Периодическое решение
Если внешняя сила отсутствует, то в системе происходит
возбуждение автоколебаний. Для определения установившихся
значений амплитуды и частоты этих колебаний положим в первом
приближении
v0 (т) = а0 со s со0т (12.39)
12.8, Система при нелинейной восстанавливающей силе 339
и подставляем это выражение в уравнение (12.38) при В=0.
Затем, приравнивая нулю отдельно коэффициенты при членах,
содержащих sin coot и cos ю0т, получаем
«8=7« ^=т^=|- (12.40)
Мы видим, что собственная частота ш0 системы
пропорциональна амплитуде а0 свободных колебаний.
Если действует внешняя сила, то имеет место гармоническое
захватывание, т. е. автоколебания системы захватываются
вынуждающей частотой. Может происходить захватывание и на
других частотах, особенно на частоте субгармоники порядка 1/3,
поскольку присутствует параметр у [см. (12.35)] и
восстанавливающая сила задана в виде кубической функции относительно
v (см. § 7.2). Однако в этом параграфе мы ограничимся
рассмотрением гармонического захватывания и предположим, что
периодическое решение имеет вид
ъ0(х) = Ьг sinvt + 62cosvT. (12.41)
Подставляя (12.41) в (12.38) и приравнивая нулю отдельно
коэффициенты при членах, содержащих sinvt и cosvt, получаем
где
у —-^- и —-^- г2— jc2-U/v2
a* = Yl ' а1=ДЬГ™ V Расстройка. (12.43)
Следует заметить, что расстройка является функцией как
амплитуды г4, так и частоты v. Это естественно, поскольку
собственная частота системы определяется величиной wo^i.
Исключение Xi и tji из (12.42) дает
[Р-'^+^'НйУ- О2-44)
Амплитуды хх и уг равны
где
в
fflgrj — v2"
22*
340 Гл. 12. Захватывание частоты
Рис. 12.13. Резонансные кривые гармонических колебаний в системе с
нелинейной восстанавливающей силой.
Уравнение (12.44) определяет резонансные кривые, показанные
на рис. 12.13. Из рисунка видно, что резонансные кривые в
случае нелинейной восстанавливающей силы можно рассматривать
как полученные путем изгибания вправо соответствующих
кривых для линейного случая (см. рис. 12.1).
(б) Исследование устойчивости периодического решения
Поступая подобно тому, как в п. 12.3(6), исследуем
устойчивость периодического решения, рассматривая поведение малых
отклонений |(т) вида
v{x) = v0(x) + l(x)9 (12.46)
где
«0о(т) = bx sin vr + b2 cos vt = a0{xx sin vt + yx cos vt). (12.46a)
12.8. Система при нелинейной восстанавливающей силе 341
Если отклонение £(т) с ростом времени стремится к нулю, то
периодическое решение 1/0(т) устойчиво, в противном случае —
неустойчиво. Подставляя (12.46) в (12.38), получаем уравнение
в вариациях
•g~,x(l-Y^)-|- + (3^+2Wx»0^)| = 0. (12.47)
Введя новую переменную т|, определяемую выражением
l(x) = e-uWti{i), (12.48)
где
X
и(х) = — -^ J (1—/у^)й?т = 6т + периодические члены по т,
о
6 = т(2^-1).
и подставляя периодическое решение v0(x)9 определяемое
формулой (12.46а), мы приходим к уравнению Хилла в виде
+ 00 + 2 J вя cos (2mvr _ еж) L - О, (12.49)
d*x\
dx2
где
% = \r\-v^r\-r\ + \),
Условиями устойчивости периодического решения ?>0(т)
служат неравенства
6>0 или 2г\—1>0 (12.50)
и [см. (4.6)]
[е0_ (mv)2]2 + 2 [90 + (^v)2] *2+ *4 > С (12.51)
Подставляя значения параметров 0 из (12.49) в (12.51), для
m—l получаем
(1-/3(1 -Зг^ + о^ + г-^-а, >0. (12.52>
При выводе этого условия члены более высокого порядка
относительно \х опущены. В силу (12.44) условие (12.52) можно
записать в виде
[2va2-^(l-r2)2]-^>0. (12.53)
Следовательно, на границе устойчивости имеет место
вертикальная касательная к резонансной кривой. Поскольку 02 мало-
342 Гл. 12. Захватывание частоты
(величина порядка ji2), нет необходимости рассматривать
условие устойчивости (12.51) при пг = 2. Таким образом, мы имеем
следующие условия устойчивости гармонического: колебания: .
/7^2г2-1>0,
соИ (12.54)
Границы устойчивости при р=0 и # = 0 показаны на рис. 12.13.
Пунктирные части кривых возбуждения соответствуют
неустойчивым режимам колебаний. По этим результатам на рис. 12.14
2,0
А=0,2
Т=8
Рис. 12.14. Области гармонического захватывания в системе с нелинейной
восстанавливающей силой.
изображена область гармонического захватывания в
координатах В, v1). В общей области захватывания имеют место два
вида гармонических колебаний — резонансное и нерезонансное.
Если амплитуда и частота внешней силы не соответствуют
области захватывания, то можно ожидать появления биений.
1) Области захватывания на частотах ультра гармоники и субгармоники
могут быть получены таким же образом, как и в предыдущем случае при
линейной восстанавливающей силе.
ГЛАВА 13
Почта периодические колебания
13.1. ВВЕДЕНИЕ
Почти периодические колебания могут иметь место в
некоторых нелинейных системах при воздействии на них
периодических сил. В гл. 11 было показано, что колебания этого вида
могут возникать в электрических системах, которые в качестве
нелинейных элементов содержат насыщающиеся сердечники. Как
отмечалось в § 11.1, амплитуда и фаза почти периодического
колебания претерпевают медленное периодическое изменение даже
и в установившемся режиме. Однако поскольку отношение
между периодом изменения амплитуды и периодом внешней силы
обычно выражается иррациональным числом, то в почти
периодических колебаниях нет периодичности.
В этой главе рассматриваются почти периодические
колебания, которые имеют место в автоколебательных системах при
периодическом возбуждении [25, 41, 78, 93]. В предшествующей
главе мы исследовали явление захватывания частоты в таких
системах и получили области захватывания (рис. 12.7). Если
амплитуда и частота внешней силы соответствуют внутренней
части этих областей, то имеет место захватывание на частоте
гармоники, ультрагармоники и субгармоники. Если же внешняя
сила задана вне этих областей, то можно ожидать появления
почти периодического колебания.
До сих пор почти периодические колебания рассматривались
как комбинация колебаний, состоящих из двух простых
гармонических составляющих: одной, имеющей собственную частоту
системы, и другой, имеющей частоту вынуждающей силы1).
Если амплитуда и частота внешней силы соответствуют точке,
расположенной между областями захватывания, но не вблизи
этих областей, то приближенный метод анализа обеспечивает
достаточно хорошее описание почти периодических колебаний.
Однако если внешняя сила соответствует точке вблизи областей:
2) См., например, [100, стр. 161—185].
L
•344 Гл. 13. Почти периодические колебания
захватывания, то этот анализ 1) не дает достаточно хорошего
описания этих колебаний, поскольку форма кривых почти перио*
дических колебаний существенно отличается от формы
колебания, полученного как сумма двух простых гармонических
колебаний. Мы будем интересоваться почти периодическими
колебаниями, которое имеют место при таких обстоятельствах.
Изложенный ниже метод применим для изучения как почти
периодических, так и захватывающих колебаний.
13.2. УРАВНЕНИЕ ВАН-ДЕР-ПОЛЯ
С ВЫНУЖДАЮЩИМ ЧЛЕНОМ
Рассмотрим снова систему, описываемую уравнением (12.1):
^_e(l_«2)^ + « = *cosv* + *0f (13Л)
где е — малая положительная постоянная, а В cos vt+B0, — как
и ранее, внешняя сила. Вводя ловую переменную v = u — B0f
напишем
jg._tx(l_p^_Y^2)^ + <y = iBcosv/> (13.2)
где
*2\ о 2Д0 .. 1
jx = (l_£2o)e, p = -=£<> и у =
1-Я* г 1-4'
В предыдущей главе решение уравнений (13.2) для
захватываемых колебаний рассматривалось в виде (12.3) или (12.4).
Для почти периодических колебаний естественно считать, что
коэффициенты Ь{ и Ь2 в (12.3) и (12.4) не остаются
постоянными, а медленно меняются со временем t Следовательно,
почти периодические колебания, которые возникают из
гармонических колебаний, можно представить в виде2)
v(t) = bl(t)smvt + b2(t)co$vt. (13.3)
Подобно этому, почти периодическое колебание, которое
возникает из ультрагармонических или субгармонических колебаний,
*) Точность расчета может быть существенно улучшена, если будут
приняты во внимание высшие гармонические составляющие почти периодического
колебания. С помощью метода возмущений были выполнены расчеты вплоть
до второго порядка приближения. Однако результаты при этом оказались
менее удовлетворительными, чем полученные в этой главе.
2) Этот вид колебаний имеет место, когда амплитуда В и частота v
внешней силы изменяются так, что соответствующая точка выходит из
области гармонического захватывания (рис. 12.7).
13.2. Уравнение Ван-дер-Поля с вынуждающим членом 345
можно представить в виде
v (t) = t__v2 cos vt 4- bx (t) sin nvt + #2 (t) cos /ntf. (13.4)
Теперь выведем соотношения, которые определяют
зависящие от времени коэффициенты bi(t) и b2(t) в приведенных выше
решениях. Сначала рассмотрим почти периодическое колебание,
которое возникает из гармонического колебания. Подставляя
(13.3) в (13.2) и приравнивая нулю отдельно коэффициенты
при членах, содержащих sinvt и cosv^, получаем
где
*1»£' * = £• г\ = х\ + у\,
а0
= Y 1 ' т = ТГ'' ai = ^~^ — Расстройка.
(13 5>
(13.6>
При выводе уравнений (13.5) сделано предположение, что bt(t)
и b2(t) являются медленно меняющимися функциями t, так что
величинами (Pbjdt* и d2b2/dt2 можно пренебречь; поскольку \х
мало, \idbildt и \xdb2jdt также могут быть опущены. Уравнения
(13.5) играют важную роль в данном рассмотрении, поскольку
при изучении почти периодического колебания, возникающего из
гармонического колебания, они служат основными уравнениями.
Выражение для захватываемого колебания также можно
получить, полагая dxjdx=0 и dyJdx—Q или решая систему
Xi(xu f/i) =0, Yt(xu */i)=0 в соответствии с приведенными выше
уравнениями !).
Таким же образом могут быть рассмотрены почти
периодические колебания, которые возникают из ультрагармонических
и субгармонических колебаний. Подставляя (13.4) в (13.2) и
приравнивая нулю отдельно коэффициенты при членах,
содержащих sin nvt и cos nvt, мы приходим к следующей системе
уравнений для почти периодических колебаний:
й = 2: !£- = {D-r*)x2-o2y2 = X2{xy у2),
л» r (13-7)
J^-=a2x2 + (D-r^y2-^-A^V2(x2, y2),
1) Как и должно быть, результат совпадает с (12.5).
,346 Гл. 13. Почти периодические колебания
- J£- = oox3 + (D- rDyt—^A^V^, у3),
■Л = 1/2: -^ = (О - г^ + { л)х1/2- 01/2«/1/2=
—&Г = <Т1/2Л:1/2 + (^ ~~ Лр. — ~2 Л) У1/2 =
= М/г(х1/2» #1/2)-
л = 1 /3: —^- = (D - 4з) лг1/3 — a1/3J/1/3 +
~~Ь ~^~ Xl/3#l/3 = "М/3 (^/З' #1/з)'
(13.9)
^-Va + (D-'W»«i+
(13.10)
аде
а°= к 7'
т— ц /
т— 2 '
+ "^И/з —#1/з)
*2
А- В
_ l_(«v)»
" unv
— М/з(*1/з' #1/
г»=4+^-
«1
ЛЯРРТЛПЙ^Я
(13.11)
Уравнения (13.7) и (13.8) определяют коэффициенты bi(t) и
.62(0 почти периодических колебаний, которые возникают из
ультрагармонических колебаний соответственно второго и
третьего порядков, в то время как уравнения (13.9) и (13.10)
отвечают почти периодическим колебаниям, возникающим из
субгармонических колебаний соответственно порядков 1/2 и 1/3.
-Выражения для захватываемых колебаний можно получить,
полагая dxn/dx=0 и dynldx=0 или решая систему Хп(хп, уп) =0,
~Уп(хп,Уп) =0 в соответствии с приведенными выше
уравнениями.
13.3. Колебания, возникающие из гармонических колебаний 347
13.3. ПОЧТИ ПЕРИОДИЧЕСКИЕ КОЛЕБАНИЯ,
ВОЗНИКАЮЩИЕ ИЗ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ
(а) Предельные циклы, соответствующие почти
периодическим колебаниям
Как упоминалось в § 13.2, почти периодическое колебание,
возникающее из гармонического колебания, может быть
выражено в виде (13.3), т. е.
tF(/) = ft1(/)sinv^ + ft2(/)cosv/> (13.12)
где bi(t) и &2(0—медленно меняющиеся функции от t Эти
зависящие от времени коэффициенты, или в нормированной форме
#i(t) и r/t (т), могут быть определены из уравнений (13.5). С этой
целью рассмотрим поведение интегральных кривых,
определяемых на плоскости хи у^ выражением
■^=р;^у|) (13.13)
Известно, что если внешняя сила соответствует точке,
расположенной вне области гармонического захватывания, то уравнение
(13.13) имеет единственную особую точку, которая является
неустойчивой. Кроме того, видно, что для больших значений х{ и
У\ интегральные кривые с ростом времени т направлены к
началу координат. Следовательно, можно заключить, что
существует устойчивый предельный цикл (т. е. предельный цикл, к
которому стремятся близлежащие интегральные кривые при
возрастании т). При этом изображающая точка *i(t), */i(t)
движется по предельному циклу, приводя к непрерывному
изменению коэффициентов bi(t) и b2(t), т. е. к изменению
амплитуды и фазы гармонического колебания. Период этих
изменений равен отрезку времени, необходимому изображающей точке
для завершения одного полного оборота по предельному циклу.
Мы не будем рассматривать случай, когда расстройка
становится большой, так что собственная частота системы
захватывается частотами ультрагармоники или субгармоники. Даже если
захватывание такого вида не имеет места, почти периодические
колебания предпочтительно выражать, как это будет показано
в § 13.5 и 13.6, в иной форме, чем (13.12).
Пример предельного цикла показан на рис. 13.1, (а).
Интегральные кривые построены с помощью метода изоклин.
Параметры системы те же, что и в предыдущей, главе, т. е. в
уравнении (13.1)
8=0,2 и В0=0,5.
В соответствии с этим параметры уравнения (13.2) равны \х =
= 0,15, 0=4/3 и у=4/3. Амплитуда В и частота v внешней силы
Устойчивый Г4*
{предельный цикл ч
0,2
yVW\AAA/WWWWW\M
Внешняя сила
(6)
Рис. 13.1. Почти периодическое колебание, возникающее из гармонического
колебания, (а) Предельный цикл, соответствующий почти периодическому
колебанию, (б) Осциллограмма почти периодического колебания.
13.3. Колебания, возникающие из гармонических колебаний 349
не соответствуют области гармонического захватывания, т. е.
В = 0,2 и v= 1,1 [рис. 12.7, (б)]. Время, необходимое
изображающей точке *i(t), tji{%) для завершения одного полного оборота
по предельному циклу, составляет 12,8... периода внешней
силы, так что предположение, сделанное при выводе уравнений
(13.5), допустимо.
После того как определен предельный цикл на плоскости
хи Уи можно найти кривую зависимости от времени с помощью
криволинейного интеграла
т= f r о d$ о (13Л4)
J VХ\{*у yi) + Y\{*v У г)
где ds = V(rf^i)2+(с1у{)2 — линейный элемент предельного
цикла. Кривые почти периодических колебаний, полученные
таким образом, представлены на рис. 13.1, (б). Амплитуда и фаза
почти периодических колебаний претерпевают медленное
периодическое изменение. Точками на^кривых отмечено начало
каждого периода внешней силы. Можно видеть, что почти
периодические колебания с ростом времени t по фазе постепенно
отстают от внешней силы.
(б) Переход захватываемых колебаний в почти
периодические колебания
Рассмотрим поведение интегральных кривых уравнения
(13.13) в частном случае, когда амплитуда В и частота v
внешней силы заданы вблизи границы области гармонического
захватывания. Как отмечалось в п. 12.3(6), граница области
гармонического захватывания определяется уравнением
(1 — г2)(1—Зг2) + а2 = 0 или 2г\-\=0. (13.15)
Первое уравнение применяется в случае, когда амплитуда В и,
следовательно, расстройка at сравнительно малы. Типичные
примеры интегральных кривых для этого случая приведены на
рис. 13.2, (а), (б) и (в). На этих рисунках интегральные кривые
представлены при условиях, когда В и v для внешней силы
заданы соответственно внутри, на границе и вне области
гармонического захватывания. Как будет показано в п. 13.4(a), на
границе гармонического захватывания имеет место слияние особых
точек.
Если амплитуда В и, следовательно, расстройка а4 велики,
то применяется второе уравнение (13.15)1). Типичные примеры
!) Для промежуточных значений В и <У\ могут иметь место некоторые
сложные явления [14; 100, стр. 182]. Чтобы рассмотреть этот случай строго,
необходимо обратиться вместо уравнения (13.5) к исходному уравнению
(13.1). Однако здесь мы не будем касаться этэй проблемы.
350
- Гл. 13. Почти периодические колебания
Р.ис. 13.2. Переход захватываемого колебания в почти периодическое
колебание для случая малой расстройки, (а) Особые точки, соответствующие
гармоническим колебаниям, {б) Слияние особых точек на границе
захватывания, (в) Предельный цикл, соответствующий почти периодическому
колебанию.
интегральных кривых для этого случая приведены на рис. 13.3.
На границе гармонического захватывания, как будет показано
в п. 13.4(6), единственной особой точкой является устойчивый
фокус. Однако незначительное увеличение расстройки,
приводящее к выходу за границу области, вызывает появление малого
по размерам устойчивого предельного цикла. С увеличением
расстройки предельный цикл значительно возрастает1).
1) При увеличенной расстройке форма предельного цикла близка к
окружности. При этих условиях изображающая точка движется по предельному
циклу довольно быстро. Следовательно, предположение, сделанное при
выводе уравнений (13.5), неприемлемо. В этом случае почти периодические
колебания могут быть хорошо аппроксимированы суммой двух простых
гармонических колебаний [18, стр. 291; 100, стр. 166].
13.3. Колебания, возникающие из гармонических колебаний 351
Рис. 13.3. Переход захватываемого колебания в почти периодическое
колебание для случая большой расстройки, (а) Особая точка,
соответствующая гармоническому колебанию, (б) Особая точка типа фокуса на границе
захватывания, (в) Предельный цикл, соответствующий почти периодическому
колебанию.
Различие в поведении интегральных кривых на рис. 13.2 и
13.3 объясняется следующим образом. Почти периодическое
колебание можно рассматривать как комбинацию двух
составляющих: свободных колебаний с собственной частотой системы и
вынужденных колебаний с частотой источника. Когда имеет
место захватывание частоты, может возникать следующее
положение. Если амплитуда В внешней силы мала, то
вынужденное колебание не является преобладающим. Поскольку в этом
случае расстройка о^ также мала, то свободное колебание
захватывается вынуждающей частотой (рис. 13.2). С другой
стороны, если амплитуда В велика, то свободное колебание
подавляется вынужденным (рис. 13.3).
352
Гл. 13. Почти периодические колебания
13.4. ГЕОМЕТРИЧЕСКОЕ РАССМОТРЕНИЕ
ИНТЕГРАЛЬНЫХ КРИВЫХ НА ГРАНИЦЕ
ГАРМОНИЧЕСКОГО ЗАХВАТЫВАНИЯ
(а) Слияние особых точек
Следуя методу, предложенному Бендиксоном [6], изучим
характер особой точки 2 рис. 13.2,(6). В этом случае особая точка
находится на границе #=0 (рис. 12.1); ее координаты в силу
уравнений (12.8) и первого уравнения (13.15) определяются
выражениями
*»=—w10+Н - V ^Щ-
„ 2Ч (13.16)
где амплитуда В и частота v внешней силы связаны
соотношением
(^)2=^[1+9^-о-^)Ч- <1зл7)
Перенесем начало координат в особую точку, т. е. положим
тогда из (13.5) имеем
*± = Ь11 + Ь2ч + У1(Ъч),
(13.18)
где
а\ — а2 = 0'
ьг = — 2хюУю + °v К = 1 — 4> — З^о-
Xi (Б. Л) = - Зх10Б2 - 2у101ч - х10у? - (|2 + л2) Б,
Ух (Б. Л) = - У1012 - 2х101ц - Зу10л2 - (Б2 + Л2) Ч-
Если Х1(1, ц) и Kjd, л) пренебрежимо малы, то
характеристическое уравнение системы (13.18) имеет вид
ах — X а2
откуда
так что рассматриваемая особая точка по своему характеру не
является простой.
= 0,
ISA. Геометрическое рассмотрение интегральных кривых 353
Поступая в общем таким же образом, как и в п. 8.6(6), мы
можем определить тип особой точки и построить вблизи нее
интегральные кривые. В результате мы приходим к следующему
выводу. Если особая точка расположена на границе q=Q
гармонического захватывания, то обычно имеет место слияние
устойчивого узла с седлом. Приближенное решение уравнений (13.18)
вблизи этой особой точки определяется выражением
Н-£-4б+с*-«|)ь
(13.19)
где
-«
а-
Ь-.
b2lxl0-^2blb2yl0 + 3blxl0 '
С — постоянная интегрирования. Однако если особенность
расположена в той точке граничной кривой <7 = 0, где касательная
1
1
-0.1
,
1
\
\ '
%
0.1
1 1
0
1 ,
'0,1
)
' .
1 1
' ■
* ,
[
1
0.1
I
Y
1
■8.1
1
I }
1
«'
0
-o,ij
42
1
\
L
^
'
l
r
' i
0,1
(a)
(6)
Рис. 13.4. Слияние особых точек на границе гармонического
захватывания, (а) Узло-седловое распределение интегральных кривых в окрестности
особой точки, (б) Узловое распределение интегральных кривых в
окрестности особой точки.
вертикальна, то мы получаем узловую точку. Этот случай имеет
место, если af = 1/3 и (£/|jiva0)2 = 8/27. Приближенное решение
уравнений (13.18) для ai=—l/V^ берется в виде
т| = (- /3 + 61/2*1 - 48 /3 t + C 'le~mi% (13.20)
где С — постоянная интегрирования. На рис. 13.4, (а) и (б)
изображены интегральные кривые, представленные соответственно
23 Зак. 907
354 Гл. 13. Почти периодические колебания
выражениями (13.19) и (13.20). Изображающая точка
движется по интегральным кривым в направлении, указанном
стрелками. Таким образом, особая точка рис. 13.4, (а) является
неустойчивой, а особая точка рис. 13.4,(6) — устойчивой.
(б) Условие существования устойчивого фокуса
Рассмотрим характер особой точки рис. 13.3, (б). В этом
случае особая точка расположена на границе р = 0 (рис. 12.1).
Координаты особой точки определяются из (12.8) и второго
уравнения (13.15):
*ю = -^. йо-^Ц?58" (13-21)
Заметим, что | аг | обычно больше, чем 0,5. Перенесем начало
координат в особую точку, т. е. положим
тогда из уравнений (13.5) имеем
^L = all-\-a24-\-Xl(l, т|),
-гН^+М+Л&п).
(13.22)
где
а, = -
2Л2
Л2
(л а°\
Я2 = у —ж)аг*
( *о\ 1
61 = \3 — -^)°v b2 = ~2
2А* *
Хх ft, Л) = - 3xl0t2- 2у101ц -xl0r? -(р+ л2)h
Ух ft* Ч) = - 0юБ2 - 2*io£t| - 3у10л2 - ft2+ Л2) Ч-
Если Xi(|f т]) и y±(g, т]) пренебрежимо малы, то
характеристическое уравнение системы (13.22) запишется в виде
! — А/ а2
&! #2 — А,
Поскольку
(ai — b2f + 4aA = 1 —4а? < 0» а1 + *2 = 0»
то корни А, чисто мнимые, так что особая точка является либо
центром, либо фокусом [см. п. 2.2(a)]. В дальнейшем мы изучим
тип особой точки, следуя Пуанкаре [82, 84] (см. § V. 2).
Введение новых переменных
= 0.
х = УахЬ2 — аф1{1-\-ц)> y = (a1 + bl)l-{-(a2-\-b2)v\
13.4. Геометрическое рассмотрение интегральных кривых 355
с использованием уравнений (13.22) дает
£L = y+X2(x, у)=Х(х, у),
где1)
du (13-23^
7ЕГ---М- УА^У) = У(х, у),
z = УагЬ2 — а2Ьгх = Уо\ — 1/4т,
а Х2(х, у), Y2(x, у)—полиномы, состоящие из членов степени
выше первой относительно х и у. Теперь рассмотрим замкнутую
кривую, охватывающую особую точку и определяемую
уравнением
F(x,y)=k9
где k—малая положительная постоянная. Если функцию F(x,y)
можно выбрать таким образом, чтобы (dF/dx)X+(dF/dy)Y=0,
то особая точка является центром; если же сумма (dF/dx)X+
+ (dF/ду) Y в окрестности особой точки либо положительна, либо
отрицательна, то особая точка является фокусом.
На рис. 13.3,(6) параметры внешней силы выбраны
следующими: В = 0,2 и v= 1,069, что соответствует точке на границе
гармонического захватывания. Остальные параметры системы те
же самые, что в п. 13.3(a). В силу (13.21) получаем
хю=— 0,347 и ую=— 0,616.
Следуя методике, изложенной в § V. 2, получаем
F(x, y) = F2(x, y) + Fz{x, y) + F4(x, y) = k>
где
F2{xy y) = x2-\-y\
Fz (x, y) = — 1,26*3 4- 6,89x2y — 0,33;q/2 -f 6,50^,
F4(x, y) = — 11,86^—12,87^ — 6,26x^+11,01^.
В окрестности особой точки имеем
-^ = ^^+^Г = -6,92(^ + ^)2 + ф5(х,г/)<0,
где ф5(#, у) — полином, состоящий из членов степени выше
четвертой относительно х и у. Следовательно, интегральные кривые
!) Заметим, что г и т РМЗДТ один Ч *9Т Фе знак, поскольку а| —1/4 > О,
23*
356 Гл. 13. Почти периодические колебания
уравнений (13.23) с ростом z пересекают замкнутую кривую
P(x,y)—k в направлении снаружи во внутрь. Поэтому можно
заключить, что на исходной плоскости xit У\ особая точка #1=#ю,
{/i = t/io является устойчивым фокусом.
13.5. ПОЧТИ ПЕРИОДИЧЕСКИЕ КОЛЕБАНИЯ,
ВОЗНИКАЮЩИЕ ИЗ УЛЬТРА ГАРМОНИЧЕСКИХ
КОЛЕБАНИИ
(а) Предельные циклы, соответствующие почти
периодическим колебаниям
Если вынуждающая частота v принимает значения, близкие
к 1/2 или 1/3, то свободное колебание системы захватывается
соответственно на частоте, в два или три раза большей
частоты внешней силы [рис. 12.7, (а)]. Почти периодические
колебания, возникающие из этих ультрагармонических колебаний,
можно представить в виде
v (0 = !__V2 cos vt + b\ (0 sin nvt + b2 (t) cos nvt, (13.24)
я = 2 или З,
где bi(t) и b2(t)—медленно меняющиеся функции времени L
Эти коэффициенты, или хп(х) и уп(т) в нормированной форме,
находятся из уравнений (13.7) и (13.8). Рассмотрим поведение
интегральных кривых на плоскости хп, уп, определяемых
уравнением
"-Уп 'п \хп* Уп) ИЗ 9^
dxn~ Хп{хтУп) ' \1б-М>
Известно, что если внешняя сила не соответствует области
ультрагармонического захватывания, то уравнение (13.25) имеет
только одну неустойчивую особую точку. Очевидно также, что
для больших значений хп и уп интегральные кривые с ростом т
направлены к началу координат. Поэтому можно сделать
заключение о существовании устойчивого предельного цикла, а
следовательно, и о существовании почти периодического
колебания.
На рис. 13.5, (а) приведен пример предельного цикла
уравнения (13.25) при п=2. В этом случае соответствующее почти
периодическое колебание возникает из ультрагармонического
колебания второго порядка. Амплитуда В и частота v внешней
силы следующие: В=0,8, v = 0,47, что как раз соответствует точке,
расположенной вне области захватывания на второй
ультрагармонике [рис. 12.7,(а)]. Остальные параметры системы те же, что
Рис. 13.5. Почти периодическое колебание, возникающее из
ультрагармонического колебания второго порядка, (а) Предельный цикл,
соответствующий почти периодическому колебанию, (б) Осциллограмма почти
периодического колебания.
0,5,
-0,9
Устойчивый Ч
предельный -л \
цикл
-0,5
. Неустойчивый
^ l фокус "
0
*Г
(а)
Рис. 13.6. Почти периодическое колебание, возникающее из
ультрагармонического колебания третьего порядка, (а) Предельный цикл,
соответствующий почти периодическому колебанию, (б) Осциллограмма 1194711 периоды,
^ ' ' • - • ческого колебания.
13.5. Колебания, возникающие из ультрагармонических колебаний 359
и раньше. Время, необходимое изображающей точке для
завершения одного полного оборота по предельному циклу, в 7,64...
раза больше периода внешней силы. На рис. 13.5,(6)
представлена осциллограмма почти периодического колебания,
соответствующего предельному циклу. На рис. 13.6, (а) приведен
предельный цикл уравнения (13.25) при я = 3; соответствующее
почти периодическое колебание возникает из
ультрагармонического колебания третьего порядка. Амплитуда В и частота v
внешней силы следующие: В = 1,0, v = 0,345, что как раз
соответствует точке, расположенной вне области захватывания на
третьей ультрагармонике [рис. 12.7, (а)]. Время, необходимое
изображающей точке для завершения одного полного оборота по
предельному циклу, в 10,4... раза больше периода внешней силы.
На рис. 13.6,(6) представлена осциллограмма почти
периодического колебания, соответствующего этому предельному циклу.
(б) Переход захватываемых колебаний в почта
периодические колебания
Уравнения (13.7) и (13.8) можно объединить и записать в
виде
Ни (13-26)
где Fn — постоянная, зависящая от параметров системы, а /1=2
или 3. Введение новых переменных, определяемых выражениями
xn = VDy, yn = — VDx, r2n = Dr\
(13.27)
с учетом уравнений (13.26) дает
dx /Л 9Ч . F,
• = (1 — г2)х — оу
п
% = <*x + (l-i*)y.
(13.28)
Уравнения (13.28) имеют тот же вид, что и (13.5).
Следовательно, поведение интегральных кривых при переходе
захватываемых колебаний в почти периодические колебания аналогично
поведению при переходе гармонических колебаний в почти
периодические.
360 Гл. 13. Почти периодические колебания
13.6. ПОЧТИ ПЕРИОДИЧЕСКИЕ КОЛЕБАНИЯ,
ВОЗНИКАЮЩИЕ ИЗ СУБГАРМОНИЧЕСКИХ
КОЛЕБАНИЙ
(а) Предельные циклы, соответствующие почти
периодическим колебаниям
Если вынуждающая частота v принимает значения, близкие
к 2 или 3, то свободное колебание системы захватывается на
частоте, составляющей соответственно 1/2 или 1/3 частоты
внешней силы [рис. 12.7,(6)]. Почти периодические колебания,
возникающие из этих субгармонических колебаний, можно
представить в виде
v (0 = т^г cos vt + b\ Wsin mt + b2 (t) cos nvt, /13#29)
n =1/2 или 1/3,
где bi(t) и b2(t)—медленно меняющиеся функции времени /.
Эти коэффициенты, или в нормированном виде хп{%) и #л(т),
находятся из уравнений (13.9) и (13.10). Рассмотрим поведение
интегральных кривых на плоскости хп, уПу определяемых
уравнением
"Уп *Я \ХЮ Уп) /1Q ОГ\\
ЧГп~ хп(х„уп)- ^-dU)
Поступая аналогично тому, как мы это делали в предыдущих'
параграфах, можно прийти к заключению, что если внешняя
сила такова, что соответствующая ей точка находится вне
областей субгармонического захватывания, то уравнение (13.30)
имеет предельный цикл, соответствующий почти
периодическому колебанию.
Для графического решения уравнения (13.30) удобно ввести
полярные координаты xn = rn cos9n, #n = fn sin 9n. С учетом
уравнений (13.9) и (13.10) можно написать
-ЧГ=(°- rw) V+Т Лгт cos 261/2, (13.31)
-^- = a1/2—TAsm2Bi/2
-•-^Гг1/зС083в1/з-
(13.32)
Уравнения (13.31) не изменятся, если 61/2 заменить на 61/2+я,
тогда как уравнения (13.32) не меняются, если 01/3 заменить на
в1/3 + (2/3)я. Это означает, что интегральные кривые уравнений
IS.6. Колебания, возникающие из субгармонических колебаний 361
(13.31) и (13.32) инвариантны относительно поворота вокруг
начала координат соответственно на угол я и (2/3)я радиан.
Пусть фп — угол, который образует интегральная кривая с
радиусом-вектором; тогда
О
dQl/2 or1/2-T^sin2ei/2
^ ^1/2 ' 1/2 dr — -■ « P '
I/2 D —rt/2 + -|-v4cos2ei/2
Графическое построение интегральных кривых значительно
облегчается, если вместо изоклин строить кривые,
соответствующие постоянному значению угла ф.
На рис. 13.7, (а) показан пример предельного цикла
уравнений (13.31). Пунктирными линиями на рисунке показаны
несколько кривых, соответствующих постоянному значению угла ф.
Внешняя сила выбрана так, что В=4,0 и v = 2,15, т. е.
соответствующая ей точка на рис. 12.7,(6) находится вне области
субгармонического захватывания порядка 1/2. Остальные
параметры системы те же, что и ранее. Отрезок времени 7,
необходимый изображающей точке для завершения одного полного
оборота по предельному циклу, легко находится из второго
уравнения (13.31), а именно
ТЧ г*—= / 2% ■ (13-33)
0 |М-ТЛ8,П2в1/2 Уа21/2--ТА2
Следует заметить, что в этом частном случае предельный цикл
также можно получить аналитически, вводя функцию Ляпунова
вида
V = ах\12 + 2Ьх1/2у1/2 + су\1Т (13.34)
Следуя методике, описанной в § 3.4, найдем коэффициенты
a, b и с при условии, что dVldr = 2(x\/2-{-y21/2y В результате
получим
*-4[(л-Ия+°ь]'
*=-т4л°1/2- (13-36)
<=4[(/}+MD+°'4
270°
Ч-
(а)
(б)
Рис. 13.7. Почти периодическое колебание, возникающее из
субгармонического колебания порядка 1/2. (а) Предельный цикл, соответствующий
почти периодическому колебанию, (б) Осциллограмма почти периодического
колебания.
13.6. Колебания, возникающие из субгармонических колебаний 363
где
В силу уравнений (13.9) имеем
= 2г2 (1-1/).
rfK dK dxXp dV dyx,2
dx dx^ dx ' дуу2 dx 1/2v
Таким образом, эллипс1) V=l соответствует устойчивому
предельному циклу, к которому с ростом времени т асимптотически
приближаются соседние интегральные кривые. Подставляя в
(13.33) прежние значения параметров системы, получаем, что
Т= 10,07..., т. е. в 45,9... раза больше периода внешней силы.
Аналитическое выражение предельного цикла, представленного
на рис. 13.7,(а), получается из (13.34) и (13.35). Оно имеет вид
13,9^2- 17,9х1/2у1/2+ ЮАу21/2= 1.
Осциллограмма почти периодического колебания, подсчитанная
при помощи предельного цикла, приведена на рис. 13.7,(6).
На рис. 13.8, (а) представлен пример предельного цикла для
уравнений (13.32). Внешняя сила выбрана так, что 5 = 6,7 и
v=2,85, т. е. соответствующая ей точка на рис. 12.7,(6)
находится вне области субгармонического захватывания порядка 1/3.
Отрезок времени, необходимый изображающей точке для
завершения одного полного оборота по предельному циклу, в 67,1...
раза больше периода внешней силы. На рис. 13.8,(6) показана
осциллограмма почти периодического колебания,
соответствующего этому предельному циклу.
(б) Переход захватываемых колебаний в почти
периодические
Исследуем поведение интегральных кривых уравнения (13.30)
для случая, когда внешняя сила соответствует точке,
расположенной вблизи границы области субгармонического
захватывания. Сначала рассмотрим уравнение (13.30) для я=1/2. На
рис. 13.9,(а), (б) и (в) показаны три характерных случая
интегральных кривых, когда амплитуда и частота внешней силы
выбраны так, что точка В, v находится соответственно внутри, на
границе и вне области субгармонического захватывания
порядка 1/2. Особые точки 1 и 2 на рис. 13.9, (а) являются
устойчивыми узлами и соответствуют захватываемым колебаниям.
Особые точки 3 и 4 являются седловыми точками; они неустойчивы.
1) Нетрудно показать, что а>0, с>0 и ас>Ь2\ следовательно, V —
положительно определенная функция.
в,
w
(а)
\imjmimmimm
h *r(t) *
Внешняя сила
Рис. 13.8. Почти периодическое колебание, возникающее из
субгармонического колебания порядка 1 3. (а) Предельный цикл, соответствующий
почти периодическому колебанию (б) Осциллограмма почти периодического
колебания.
13.6. Колебания, возникающие из субгармонических колебаний 365
(в)
Рис. 13.9. Переход захватываемого колебания в почти периодическое
колебание, (а) Особые точки, соответствующие субгармоническим колебаниям
порядка 1/2. (б) Слияние особых точек на границе захватывания, (в)
Предельный цикл, соответствующий почти периодическому колебанию.
Начало координат является неустойчивым узлом. Поэтому в
зависимости от расположения начальной точки, из которой
начинается интегральная кривая, последняя будет стремиться либо
к точке 1, либо к точке 2. На рис. 13.9,(6) две особые точки
сливаются и образуют особую точку более высокого порядка. Эти
особые точки 1 и 2 являются особыми точками типа
узел-седло1). Изображающая точка, движущаяся по замкнутой
траектории, может остановиться на некоторое время в одной из этих
особых точек, но если в дальнейшем последует незначительное
*) Характер этих особых точек можно исследовать тем же способом,
что и в п. 8.6 (б) и 13.4 (а).
365 Гл. 13. Почти периодические колебания
УЦз У1/з
(а) (б)
Уф
Чъ
(в)
Рис. 13.10. Переход захватываемого колебания в почти периодическое
колебание, (а) Особые точки, соответствующие субгармоническим колебаниям
порядка 1/3. (б) Слияние особых точек на границе захватывания, (в)
Предельный цикл, соответствующий почти периодическому колебанию.
возмущение, то она будет двигаться к другой особой точке в
направлении, указанном стрелками. Предельный цикл рис. 13.9,(в)
соответствует почти периодическому колебанию.
На рис. 13.10 представлены интегральные кривые уравнения
(13.30) для я=1/3, которые получаются с помощью
вышеизложенного метода. Особые точки расположены в вершинах
правильного треугольника с центром в начале координат. Особые
точки 1, 2 и 3 рис. 13.10, (а) соответствуют субгармоническим
захватываемым колебаниям порядка 1/3, а точки 4, 5, 6 и
начало координат являются неустойчивыми. На рис. 13.10,(6) пред-
\
13.7. Система с нелинейной восстанавливающей силой 367
ставлены особые точки после слияния, т- е. точки типа узел-
седло, и расположение интегральных кривых вблизи особых
точек. Предельный цикл рис. 13.10, (в) соответствует почти
периодическому колебанию.
13.7. АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА С НЕЛИНЕЙНОЙ
ВОССТАНАВЛИВАЮЩЕЙ СИЛОЙ [25]
(а) Основные уравнения
Рассмотрим почти периодическое колебание, которое имеет
место в системе, описываемой уравнением
^-lx(l-yv*)^- + v* = Bcosvt. (13.36)
В § 12.8 исследовалось гармоническое захватывание в такой
системе. Для захватываемого колебания решение предполагалось
в виде (12.41). Следовательно, почти периодическое колебание,
возникающее из гармонического колебания, можно представить
в виде
v(t) = bl(t)sinvt~)-b2(t)cosvt, (13.37)
где коэффициенты bi(t) и b2(t) являются медленно
меняющимися функциями времени t.
Поступая так же, как в § 13.2, мы получим соотношения для
определения коэффициентов b^(t) и b2(t) в этом решении.
Подставим (13.37) в (13.36) и приравняем нулю отдельно
коэффициенты при членах, содержащих sinvt и cosW. В результате
= (1 -r^-a^ + ^s*,(*!, уг), (13.38)
= аЛ + (1 - rj) ух = Уг (xv угу
ao = Vj> °)o = ]/|. т = £*. (13.39)
ах = —— расстройка.
Следует, однако, помнить, что при выводе уравнений (13.38)
должны быть сделаны предположения, указанные в § 13.2. Эти
уравнения являются основными при изучении почти периодиче-
получим
где
dxy
~~dx
dyx
dx
368 Гл. 13. Почти периодические колебания
ского колебания, возникающего из гармонического колебания.
Захватываемое колебание можно также получить, полагая
dXi/dx=0 и dyi/dx=0 в (13.38).
(б) Предельный цикл, соответствующий почти
периодическому колебанию
Рассмотрим поведение интегральных кривых уравнения
dy{ = К, (хи yj)
dxx Хх (лг1э у{)
(13.40)
на плоскости хи Уи где Xi(xu У\) и Yi(xuy\) определяются
уравнениями (13.38). Рассмотрим особые точки уравнения (13.40),
которые соответствуют захватываемым колебаниям. Характер
особой точки Хю, Ую можно определить, решая
характеристическое уравнение [см. п. 2.2(a)]
ах — К
do
= 0,
где
а>= ©о= 1 ~ Зх>° ~ yio - 2 ^г **0 ю.
/дХЛ \ aft
**=йгг)0=-2х"Ую+°i+2 ^ 4>>
(г\у \ ...2
Ж/о =1-Х*о- Зу2ю + 2~£-ХМ
(13.41)
здесь (dXi/dxi)ot..., (diydyi) о—значения производных дХ\/дх\,...,
dYi/дУг при #i=#10 и У\=Уы. Применяя критерий Рауса — Гур-
вица, найдем условия устойчивости особой точки:
al-\-b2<0, alb2 — a2b1>0. (13.42)
Подстановка выражений (13.41) в (13.42) дает тот же
результат, что и в п. 12.8(6).
Обратимся теперь к нашему исследованию. Если в системе,
описываемой уравнением (13.36), имеют место почти
периодические колебания, то коэффициенты bt(t) и b2(t) в (13.37) или
х\(х) и у\(х) в (13.39) изменяются периодически с большим
периодом. Как и ранее, предельный цикл уравнения (13.40),
если он существует, соответствует почти периодическому
колебанию. Существует предельный цикл уравнения (13.40) или нет,
137. Система с нелинейной восстанавливающей силой 369
зависит от параметров системы1). Далее будет приведен
пример интегральных кривых, которые стремятся либо к особой
точке, либо к предельному циклу.
Пример.
Рассмотрим случай, когда параметры системы (13.36)
принимают следующие значения:
jx = 0,2, <y=8, B = 0,35, v=l.
Подставляя эти значения в (12.44) и (12.45), определим
положение особых точек на плоскости х\> у\. Устойчивость этих
точек можно определить по (12.54). Результаты приведены в
табл. 13.1, где \хи \i2 — тангенсы углов наклона касательных к
интегральным кривым в особых точках [см. п. 2.2(a)].
Таблица 13.1
Особые точки рис. 13.11
Особая
точка
1
2
3
х\о
—0,086
0,536
1,571
Ую
—0,546
—1,212
—0,255
Л|, Ад
0,39 ±3,80/
0,87, —5,89
—1,11, -7,02
М-1» ^2
2,80, 0,09
4.77. -2,54
Классификация
Неустойчивый фокус
Седло (неустойчиво)
Устойчивый узел
В противоположность случаю, представленному на рис. 8.2,
особая точка 1 становится неустойчивой, поскольку, как видно
из условия (12.50), система обладает отрицательным
затуханием для значений г], меньших 0,5. Применяя (2.28) и (2.29),
получаем для интегральных кривых в окрестности особой точки
(в полярных координатах г4 и 9i)
П(в1 + 2я) = 0,525^(0!).
Из условий (2.30) видно, что dQJdx < 0. Следовательно,
изображающая точка ri(x), 9i(т) движется вдоль интегральной
кривой в направлении по часовой стрелке и с ростом т удаляется
от особой точки.
Пользуясь методом изоклин, найдем интегральные кривые
уравнения (13.40) для выбранных значений параметров
системы. Результат показан в исходных координатах Ь\ и^г62 на
рис. 13.112). На рисунке виден устойчивый предельный цикл,
*) Возникновение и исчезновение предельного цикла при изменении
параметров системы будет рассмотрено в п. 13J (в).
2) Заметим, что хх = V2 Ьи ух = /2 Ь2.
24 За к. 907
370
Гл. 13. Почти периодические колебания
охватывающий неустойчивый фокус 1. Одна из интегральных
кривых проходит через седловую точку 2; следовательно, она
является сепаратрисой, которая делит всю плоскость на две
части. В одной из них все интегральные кривые стремятся к
предельному циклу, в другой — к узлу 3. Таким образом, в данной
системе могут возникать как почти периодическое, так и захва-
Рис. 13.11. Интегральные кривые и предельный цикл гармонического
колебания. Сплошные линии — интегральные кривые. Пунктирные линии __
изоклины.
тываемое колебания. Какое из них имеет место, зависит от
начальных условий.
На рис. 13.12 приведена осциллограмма почти
периодического колебания, представленного предельным циклом рис. 13.11.
Отрезок времени, необходимый изображающей точке для
завершения одного полного оборота по предельному циклу, т. е.
период изменения амплитуды почти периодического колебания,
равен 2я« 3,426 Поскольку начало координат расположено
вне области, ограничиваемой предельным циклом, это
колебание синхронизируется с внешней силой.
13.7. Система с нелинейной восстанавливающей силой
371
(в) Переход захватываемых колебаний в почти
периодические
Как упоминалось ранее, существование предельного цикла
уравнения (13.40) зависит от параметров системы. Однако здесь
ситуация значительно сложнее по сравнению со случаем, когда
восстанавливающая сила линейна. В предшествующем
исследовании системы, описываемой уравнениями (13.2), мы выяснили,
что почти периодическое колебание в общем случае имеет
место, если параметры системы соответствуют точке, расположен-
0,5,
0
в cos f
wwwwwww
Рис. 13.12. Почти периодическое колебание, соответствующее предельному
циклу рис. 13.11.
ной вне области захватывания1). С другой стороны, в системе
с нелинейной восстанавливающей силой в определенной полосе
значений параметров системы имеют место как захватываемые,
так и почти периодические колебания2), как можно ожидать из
несимметричного вида резонансных кривых (см. рис. 12.13).
Уравнение (12.44), которое можно также вывести из
уравнений (13.38) путем приравнивания нулю dxjdx и dyjdx, дает
связь между В, v и г4. Если величина v поддерживается
постоянной, мы получаем амплитудную характеристику
(зависимость В от г\), приведенную на рис. 13.13. Из условий
устойчивости (12.54) для гармонического колебания легко видеть, что
пунктирные участки характеристической кривой соответствуют
неустойчивым режимам.
1) Для некоторых значений параметров системы, в частности в
окрестности (£/[iva0)2=8/27 и |ai|=0,5 (рис. 12.1), гармоническое колебание
существует наряду с почти периодическим колебанием (для тех же значений
параметров). Однако эта область параметров системы крайне ограничена;
поэтому в предыдущем анализе она не рассматривалась.
?) Пример такой системы приведен на рис. 13.11.
24*
372 Гл 13. Почти периодические колебания
Возникновение и исчезновение предельного цикла с
изменением В легко проиллюстрировать путем вычерчивания
интегральных кривых уравнения (13.40) для различных значений В.
Результат представлен на рис. 13.14. Если В меньше, чем В\ на
рис. 13.13, то существует предельный цикл, который охватывает
неустойчивый фокус. Этот случай показан на рис. 13.14,(а). При
В = В{ имеет место слияние особых точек. Далее с ростом В
существуют и устойчивый предельный цикл, и устойчивый узел.
\
i
\
Ч- I
р=0
Bj В2 % В4 В5
в **
Рис. 13.13. Амплитудная характеристика гармонического колебания,
показывающая переход захватываемого колебания в почти периодическое.
При В = В2 существует замкнутая интегральная кривая,
которая начинается вседловой точке и возвращается в ту же точку.
Предельный цикл исчезает, когда В становится больше В2.
Однако если В достигает В3, то интегральные кривые
располагаются так же, как на рис. 13.14,(г) [см. рис. 13.14,(в)].
Предельный цикл вновь появляется при В3< В < В4 и при В = В4
превращается в устойчивый фокус [см. рис. 13.3,(6)]. При
значениях В между В4 и В5 существуют два вида гармонических
колебаний, а именно резонансное и нерезонансное, но
предельного цикла при этом нет. Слияние особых точек имеет место
при В = В5.
Если В уменьшается, то резонансное колебание
поддерживается до B = Bx. При значениях В, меньших Ви имеет место
/5.7. Система с нелинейной восстанавливающей силой 373
(жУ в3<в<в4
(3) B4<B<BS
(и) в=в5
Рис. 13.14. Интегральные кривые уравнения (13.40) при различных
значениях В.
только почти периодическое колебание. Следовательно, почти
периодическое колебание имеет место при В < В2 и В3 < В < В4,
резонансное колебание — при ВХ<В, а нерезонансное
колебание— при В4<£<£5. Какое из колебаний имеет место,
зависит от начальных условий. Области начальных условий,
374
Гл. 13. Почти периодические колебания
Устойчивые
узлы
Уещрйчиёые
фокусы
Устойчивые
фокусы
Г^ Неустойчивые
i i — Фокусы
фокусы
- Неустойчивые
узлы
V, V2 Vj W| V5
Рис. 13.15. Резонансная кривая гармонического колебания, показывающая
переход захватываемых колебаний в почти периодические.
приводящих к различным видам колебаний, ограничиваются
сепаратрисами, т. е. интегральными кривыми, которые с
ростом т стремятся к седловой точке.
Необходимо также заметить, что для других значений
параметров системы положение может оказаться несколько другим.
При некоторых условиях (например, при различных
значениях v) почти периодическое колебание имеет место для всех
значений В, меньших В4» или только для значений, меньших Bi
и лежащих между Вг и ВА. В последнем случае между Bi и В2
гистерезис не наблюдается, поскольку мы имеем слияние
особых точек на предельном цикле [см. рис. 13.2,(6)].
На рис. 13.15 схематически показано соотношение между
захватываемыми и почти периодическими колебаниями на
плоскости v, г\. Эта характеристика является частью резонансной
кривой рис. 12.13. Характер изменения амплитуды с
изменением v аналогичен кривой рис. 13.13 и понятен без пояснений.
На рисунке также показаны области особых точек различных
типов.
ПРИЛОЖЕНИЕ I
Разложения функций Матье
Уравнение Матье [см. уравнение (3.60)] имеет периодические
решения с периодом я или 2я в зависимости от величины
постоянной а, соответствующей заданному q. Следуя Матье [73, 74]
и Уиттекеру [112, 113], эти периодические решения, т. е.
функции Матье, мы разлагаем в ряды по степеням q, когда \q\ мал.
Ниже представлены некоторые из таких разложений.
Во-первых, для се0(х, q) имеем разложение
се0(х, q)=\ 4-4<7COs2t-{-2<72cos4t +
+ q3 (— 28 cos 2т + -i cos 6т) +
+ ?4(--^со84т + -1со88т)+ ...,
для которого постоянная а имеет вид
Аналогично для других функций Матье имеем
сег (т, q) = cos т +-q cos Зт + q2 f—cos Зт + -^ cos 5тJ +
+ qz f j cos Зт — -g- cos 5t -f- j^ cos 7т J +
+ <74(-^-cos3t + 1cos5t — ^-cos7T + -Ig5-cos9T)+ ...,
sel(xi <7) = sinT + (7sin3T + <72fsin3T + -g-sin5T) +
•+• qz l у sin Зт + -g- sin 5т + -^ sin 7т) +
+ q4(— ^sin3T + isin5t + ~sin7T + 1^5-sin9t)+ ...,
ce2(%, q) = zos2x+q[—2 + -^cos4tJ + — <72cos6t +
+^(x+#cos4T+icos8T)+
+ ?4(H-cos6t + ^Lcos10t)+ ,.m
376 Приложение I
2 1
se2 (т, q) = sin 2т + -g- q sin 4т-f- -^- #2 sin 6т —
— q* (-2f sin 4t — ^ sin 8т) +
+?4(—wsin6T+wsinl0t)+ •••»
сг3(т, <7) = cos3t—qlcosx—у cos 5т] +
+ q2 (cos t + -^ cos 7t) — q* (y cos т — -^ cos 5т — -^ cos 9т) +
+ (74(—cost —-1cos5t + -^cos7t + t^q cos 11t)+ ...,
se3(x, (7)=sin3T — qU'mx — у sin 5тJ+
+ ^(—81пт + -±-81п7т) —
— qz (y sin т — -^ sin 5т — -^ sin 9т J +
+ ^4(sinT + ~sin5T + ^sin7T + ~-sinllT)+ ....
Постоянные acn и asn, связанные соответственно с функциями
Матье cen(x,q) и sen(x, q), были приведены ранее в
формулах (3.64).
ПРИЛОЖЕНИЕ II
Неустойчивые решения уравнения Хилла
Как отмечалось в § 4.2, условия устойчивости (4.6) и (4.9)
были выведены в первом приближении, поскольку
характеристический показатель \л определялся выражением (3.86). Однако
если требуется получить условие устойчивости для приближения
более высокого порядка, то необходим более точный подсчет
характеристического показателя. Поэтому, поступая так же, как
при рассмотрении уравнения Матье в п. 3.6(6), найдем
неустойчивые решения уравнения Хилла
d2x ' '9o+22evcos2vt]x = 0. (ИЛ)
dx2
Следуя Уиттекеру [112; ИЗ, стр. 424], общее решение
уравнения (ИЛ) берем в виде
х = схе»ху{ху а) + с2£-^ф(т, — а), (И. 2)
где С\ и с2 — произвольные постоянные. Далее мы получаем
разложения для \i и Эо1).
ИЛ. Неограниченное решение, связанное с первой областью
неустойчивости
Характеристический показатель jx представляется рядом
р, = у 0! sin 2а + у Qfi2 sin 2а + -gj %% sin 2а —
_T|_93sin2a + 1^0292sin4a+-JTe293sin2a+
+ Wei9isin2a+4S58°i83sin2a +
+ W9283sin2a+TlW8i8293sin4a+ •••• ("• 3)
l) Расчет выполнялся с учетом членов вплоть до третьего порядка
относительно 6.
378 Приложение II
где параметр а находится из разложения
e0=i + elCos2a+(-i+4cos4o)e2—^e|-
— TF 0з + Т eie2cos 2a + W е2°з cos 2a -
—l-93cos2a+(—1^-+|-cos4a)02e2 +
+iei93cos2a-Wei0icos2ff-23Weie3cos2ff +
+ ^-e|e3cos2a + (-^-H-^-cos4a)eie2e3+ .... (H.4)
II. 2. Неограниченное решение, связанное со второй областью
неустойчивости
Аналогично предыдущему случаю разложения для ц и во
имеют вид
(i == 1 е2 sin 2a — -j^- 6f sin 2a + -^ 6,e3 sin 2a -f- -^ 82e4 sin 2a —
-M^sln2o+KsiIl2o+wsin4ff)^+
+ 1Же1е48!п2а+4Ш-019481п4а + ТШ02е181п2ОГ +
+ We294Sin2a+23W93e4Sin20r +
+(—Ш sin 2or + 576-sin 4<T) 9ie293 — W eie3e4 sin 2a + ..., (II. 5)
e0 = 4-r-e2cos2a + (i~icos2o)e2 + (-1L4-l-cos4o)e|—
— "Ш °з -14 94 + i ei03 cos 2a + -jL e2e4 cos 2a - ^ 6» cos 2a -+-
+ (4" - T cos 2or + Ж cos 4a) 0i02 + Ш 9i04cos 2a +
+ (- W + ТИГ cos 4a) 0i04- 255-020lcos2a-
- -ш e204cos 2o+m 0зе4cos 2a+
+ (ж—W cos 2or + W cos 4a) e'0203 +
+(w-wcos20)0A04+ .... (и. б)
Неустойчивые решения уравнения Хилла 379
II. 3. Неограниченное решение, связанное с третьей
областью неустойчивости
[х = ■! 93 sin 2а— ^QXQ2 sin 2а f -g. QXQ4 sin 2а +-^- 03 sin 2a —
-ToW933sin2a^
OO 1 1
+ Ш6 03°4 81П 2°+ Ш 91°293 Sln 4a~ W вАв4 81П 2(J +
+ToW 8i°3e4 sin 4a — W 92°зе4 sin 2a + ..., (II. 7)
eo = 9 + 03cos2a+1L9^+^.02 + (-^ + A.cos4a)ei-
—TT84 — ^ei02cos2a+l0104cos2a +
+^93cos2a-^-03COs2a-T^^2-
9 eje8cos2a-^e»e8cos2a + Xe|e4-
256 13 ^° "" 400 2U3 ^° "" ^r 140
9 n no n , / 121 , 5
3136
98ej cos 2a+ [^ + ^ cos 4a) 0^ -
W eA»4 cos 2° + (lOT+ Ж cos 4a) eAe4
— ggg 92езе4 cos 2a + (II. 8)
Периодические функции ф(т, а) и ф(т,—а) в выражении
(II. 2) также находятся для соответствующих областей
неустойчивости. Однако они не имеют прямого отношения к критериям
устойчивости, поэтому подробности, касающиеся разложений
этих периодических функций, здесь опускаются1).
!) Следует заметить, что разложения этих периодических функций вплоть
до членов второго порядка относительно 0 можно получить, если в
приложении III положить ev—0.
ПРИЛОЖЕНИЕ III
Неустойчивые решения обобщенного
уравнения Хилла
Подсчитаем неустойчивые решения уравнения (3.83).
Рассматривая другую форму уравнения:
d2x
dx*
% + 2 J] 6V cos (2vt — ev) \x = 0, (III. 1)
v-l J
запишем общее решение в виде
х = сг&х(р(х, aJ + ^-^q^T, а2), (III. 2)
где с{ и с2—произвольные постоянные, а параметры в\ и а2
определяются из приведенных ниже разложений для во
III. 1. Неограниченное решение, связанное с первой областью
неустойчивости
\х = -о- 0! sin 2а + -g- 0J02 sin (2а -+ 2е2 — е2) +
+ 24 82°3 sin (2а + ei + е2 — ез) +
+ -ie3e4sin(2a + e1 + e3-e4)+ ..., (III. 3)
60= 1 + 6, cos 2a + (-| + |cos 4a) 02-192-
-W83-i84 + T8ie2cos(2a + 28i-82) +
+ "12 928з cos (2a + гг + е2 — е3) +
+ ^r0304cos(2a + e1 + e3-84)+ ..., (III. 4)*)
Ф (т, а) = sin (т - -^ — а) + Д0, + А& + А,03 + Д04 +
+ ОД + #,0* + #,0* + ОД + *lM +
+ #130103 + #140104 + ^З^З + #240204 + #3403^4 + • • • > (Ш. 5)
1) Решая уравнение относительно а, получаем два главных значения
Ох и а2.
Неустойчивые решения обобщенного уравнения Хилла 381
где
Аг =-g-sin(3T— ^Ц — о)>
А2 = — -§- cos 2а . sin f Зт + 4f- — е2 — а) —
— -g-sin2а cos (Зт + -^ Ч — a) + -24"siri(5T—^ е2— а),
Л3 = — -gf cos2a- sin(5T+-|- —83 —aj —
—-^ sin 2а cos (бт +-|-—83 — а)+ -^ sin (7т —-|-— 83 — а),
Л4 =— -щ cos 2а . sin f 7т+ -^- — е4—а)—
— ^ sin 2a cos (7т + 4f — е4 — a ) + -^ sin (9т — -^- — е4 — a ),
£1 = -g7-cos2a . sin(3T —~2"8i~~ a) +
+ -gj- sin 2a cos (Зт — |- 8! — aj + ^g* sin (5t ~* Tei— a) •
B2 = — "384 cos 2a- sinf7T+i- — 2e2 — aj —
-3^sin2acos(7T+^- — 2^-a)4-^sin(9f-■§■" — 2e2 — a),
£3 = — -2^o"cos2a- sin(llT + ^- — 2e3—a) —
—"2880 sin2a-cos(llT + -|-— 2e3~aj +
i(l3t--5—йь-а).
8064
Sin
B,
7§2"COS 2a . sinfl5T4--^- — 2e4 —a)—
in2a.cos(l5T + -^- — 2e4 — a) +
in(l7T —^— 2e4-
10752
sin!
23 040
..).
#12 = ( 48*— 32 C0S 4a) Sin (3t + T — 82 — a) —
— -Tg sin 4a- cos(3t+~—e2 — a] —
— "Ж cos 2a sin l^T — T — e2 "~ a) +
382 Приложение III
+ -2§8 sin 2а-cos ^5т — ^± — г2 — aj +
+ wsin(7T -у»! — е2— <*).
£13 = — 4g-cos2a- sin(3T + y^ — e3 - a) —
1 /3 \
— -^g-sin 2a cos(3t +ye1 — e3 — a) +
+ (w-T§2cos4a)sin(5T4" Т~8з-а)-
B
14*
sin
4a- cos(5t+-~ — e3-— aj —
щ cos 2a • sin (7т — Ц- — e3 — a) +
+ 2304 sIn 2a ' cos (7т — \~ 8з — a) +
+iosinKlei-
-yjg2-cos2a. sinfST+yej —e4 —aj —
— 1Ш sin 2a " cos (5t + Yei—e4 —a) +
+(w-wcos4a)sin(7T+T-e4-a)-
— -g^rSin4a-cos(7T+4^—t4 — o\ —
-cos2a • sin(9T —-j—e4— aj +
i2a . cos(9t — -j—e4— aj +
ifllT-l^-
1
9600
11
9600
Sin!
11
9600
Sin
Я» = -щ- sin (Зт — -^ + 83 — 83 — a) —
—Wcos2a' sin(9t +-y—e2 —e3 —aj —
*~""~480 sin 2o " cos (9t ~^"T — 82 — 8з — a) -b
-)•
Неустойчивые решения обобщенного уравнения Хилла 383
#24 = — -128"C0S 2a " sin(3T +--у + е2 — е4 — а)"
sin2a- cos(3T+4f+e2— Ч~ а) +
128
^-cos 2a- sinnit + -~-—е2 — е4 — а)—
5760
^-sin 2а • cosfllr + y — е2— е4 — а) +
sin (13т — -j — е2 — е4 —о).
5760
13
40 320
534 = -T§io"Sin(3T—-|+83—г4 —а) —
— 2688 cos2a # sin ПЗт-f--^- — е3 — е4 — а)—
—-gggg- sin 2a . cos (13т + -^ — e3 — e4 — а) +
+ Wsin(15T-T — ^з-е4-а).
III. 2. Неограниченное решение, связанное со второй
областью неустойчивости
\х = -J- 02 sin 2а — -Г7Г- 02 sin (2а — 2г1 + е2) +
16
А
24
+ "от 010з sin (2а + гг + е2 — е3) +
+ -gj 0204 sin (2а + 2е2 — е4) + ..., (III. 6)
Oo = 4+02cos2a+[l — I cos (2a-2b,+ е2)] 0J +
+ -g- 0j03 cos (2a + ej + e2 — е3) +
+ "Ш 8284 cos (2а + 2е2 — е4) + ..., (III. 7)
Ф (т, а) = sin (2т — -J- - а) + Afi, + Л202 + Л303 + Л404 +
+ ^ + ^ + ^ + ^4 + ^9^ + 5^63 +
+ 5140!04 + #230203 + #240204 + #340394 + • • • > (Ш. 8)
384 Приложение III
где
■)•
А = — Tsin(8i~" Т~ a) + T5-sIn(4T —ci — Т"*0)'
^2 = "32" Sin (6Т — 2" 82 — а) '
Л3 = — -^2" cos2а- sin (4т Н--^-— е3 — а) —
^ sin 2a * cos (4т + -у — 8з — а) +
+ -^sin(8T-f-e
^4 = __cos2a- sin(6T + -у— е4 —а)—
— -g2*sin2a- cos f 6т -f--^- — е4 — а) +
+ Tff8ln(lOc—§—^-а).
*i =-gs4 sin(бт-&,--£-o).
fl2 =-j^cos2a-sin(6T—-|e2—a) +
+ -J024 sin 2a-cos (бт—-^ — a) +
^_sin(l0T-|e2-a),
3072
5,
1152
^2*cos2a • sinf 10т + -у — 2e3 — aj —
^ sin 2a- cosf lOr + y- — 2e3 — a) +
(14t--|—2e3-a),
1152
11520
BA =—-gp^cos2a- sinfl4T + -~ — 2e4 — aj —
—-щу sin 2°' cos (14т + Y — 2e4 — a) +
+ ^WSin(18T-f-2C4-«).
Неустойчивые решения обобщенного уравнения Хилла 385
В» = 4§ sin (a + ei —|)—i «in (За - в, +-£) —
—жsln (4т+е» - 4 е2 -а)+
-t--3g-cos2a • sin(4t— ех—-у— oj-f-
+^щ-sin 2а • cos (4т — еа —-|-— а) +
+ 5760 sin (8т - ei — 4 «а - 0) •
5,3 = ~ Ш sin (6т "l~ei~~ Т — вз ~ а) +
+-jg2"COs2a- sin(6T —ej-b-y —e3 —aj-f-
-f -j^- sin 2a • cos (бт — ex +4f — e3 — aj +
+ 960 sin (10t — ei~~ "T—*»~~ a) •
l^-cos2a- sin(4T + ej + y- — e4 — a]—
^•sin2a-cos(4T-|-ej-|--y — e4— a)—
■ggg-sin (8t + e, - T - e4 - a) +
В
1152
1152
+ T9^0-cos2a.sin(8T —e,4-T — e4 — a) +
"+" ТШ"sin 2a' cos (8т — ei + T — e< — a) +
+ W sin (12r ~ei — T ~e4 - ff) •
S23 = Wsin(ff+Te2 —8з) +
+Ыш—mcos4or) sin(4T +т—*-«)—
— -gg- sin 4o • cos(4т -\-2l— g3 — a\ _
— ggg-cos 2a- sin(8T —-у — e3 — a\ —
~"Ш sin 2a' cos (8t —T —^ ~ °) +
+ 67Ж sin l12x - 7 ^ - 4 - *J •
25 Зак. 907
386 Приложение III
^4 = (w-^C°S4Sin(6T+T-e4-a)-
— 512" sin 4a- cos(6T-|-4r — e4 —aj —
щ-cos 2a. sin f Ют — -у—e4— aj-|-
4608
-b-5gQ§-sin 2a . cos (Ют —-^ — e4 — aj+
+1^8sin(14T-|e2-e4-a)»
fi34 = T§o sin(a + -7r+e3 — e4) +
+ _l_sin(4T-|- + 83-e4-a) —
—T3440 cos2a.sin(l2T + -^ — e3 — e4 — a) —
-щ sin 2a • cos (12т + Ц-—e3 — e4 — a) +
(16t — 4p — e3—e4 —a).
13
13
^ 120 960
III. 3. Неограниченное решение, связанное с третьей об-
ластью неустойчивости
fi = -g-83sin 2а — -gj 0102sin(2a — гг — e2 + e3)-f-
+ ^6ie4sin(2a + 81 + e3-84)4- ..., (Ш.9)
48
e0 = 9 + 83cos2a + ie2 + ^-82 +
+ (-i + iC0SH83~TT84_Tei82C0S(2a-8i-e2+83) +
+ -J- Qfi4 cos (2a + гг + e3 - e4) + ..., (III. 10)
ф(t, a)= sin(зт —| - а)+41е1'+л2е2+л8е8+де4+
+ ОД + ЗД2 + ^зе1 + #4 в24 + ^126162 + We + ^ A +
-J- ^2.36263 + я248294 + ЭД04 + ..., (III. 11)
Неустойчивые решения обобщенного уравнения Хилла 387
где
Л,=
А2 =
А3 =
Вг =
Во =
— ■g-sin(t + e1 — Ц-— a) + rjg-sin(5T — г1 — 4f- — а],
-g-cos2a- sin ft — e2 + -y— <*) +
+ -g- sin 2а • cos ft — e2 -4- -у — a J-+-
+-isin(7T—e2—т-а)*
^sin(9T—|e3-a),
—-щ-cos2a • sinf5T + 4f — e4 — a)—
— -Tg- sin 2a • cos (5т -f- -y — e4 — a J -f-
+ ll2sin(llT-T-e*-0)-
— •54- cos 2a- sinft —2ej+-y — aj—
— -^ sin2a • cos (т — 2ег-\-^-— a) +
+wsin(7T-2e1-T-°)-
-i- cos 2a • sin (бт — 2e2 +~|- — a) +
+ -^gSin2a.cos(5T — 2e2 — 4f — a) +
(ц-r —2^ —-J- —a),
4480
Я,=
54 =
тгщ- cos 2a • sin [9x — -^ e3 — a) +
+ -j72g-sin2a-cos(9T —убз —aJ-f-
+^5Wsin(15t-'2Leз-o)•
Jg0-cos2a.sin(lЗт^-|-—2e4—a)—
2^Q-sin 2a • cos(13t + -|— 2e4 — a) +
(l9t —-J—2e4-o).
2560
39 424
Sin I
25*
388 . Приложение III
Si2=-[§8 sin(T — ei + e2 — T — °)~
—i^O sin (5т-Н e, — e2 —-|—0) +
+ -57eosin(9T-£i-e2-T-ff)'
5i3 = 1|g-cos20-sin(T-be1 — ■£■ — 0) +
+-3^sin20-cos^T + e1 — 4p — 0) +
H-2gg-cos20 • sin (5т— гг — -у— a\-{-
+ ^gg- sin 2o • cos (5t — e, — Ц- — a\ —
' - -3gOsin(7t + fi-Te3-a) +
" + -fBl28"sin(llT-ei — l^-0)'
14 = fiJo cos 20 • sin (7т — e, + -|- ~.e4 - 0) 4-
B,s =
640
sin 2o • cos
13
(7т — 6l-f-§- — e4 — 0) —
— "8064 sln (9x '+ ei~ T~Sa
B,
23
■*-<l) +
+ 1240 Si" (13t ~ ei ~ T~ &* ~~ °) •
= — (-[2o + 96" cos 4o] sin (т — e2 +-y — o) —'
— -gg- sin 4o • cos (т — e2 + -y — 0) —
— У44- sin (5t -I- e2 — -j 83 - 0) +
4- -щ- cos 2o • sin (7т — 83 — y — 0] 4-
"+ 2400 Sifl 2° * C0S ^7t ~ ^,—-T ~ °i +
"t -28800 Sin (13t ~ e2 - T *» ~ °)«
Неустойчивые решения обобщенного уравнения Хилла 389
^24 = -б5о cos2a-sin(T + e2 + -y—84~а) +
Н- -щ- sin 2а • cos (т + е2 + -^ — е4 — а)
13
4480
sin (7т-
-*■ —е4-а) +
+ "YY52" C°S 2(Т ' Sifl (9Т — 82 + "У — £4 — ^) +
+ ТГ52 Sin 2а ' C0S (9т ~~ 82+ Т"~ 84 ~ °) +
sin (15т — е2 — -у —е4— а],
19
120 960
534 = — TT52'sin(T— 2"83 + 84 — (J) +
+ (w-T§2cos4a)sin(5t+T-8^aJ-
— ~192~Sin 4a " C0S \^T ^~ "T — 84 — °) —
— "6272 cos 2<* • sin (1 It — 4f — e4 — a) —
sin 2a . cos (11т — у- — e4 — a J +
18 816
23/3 \
+ 282240 Sin 117T _ 1 % - e4 - 0) •
ПРИЛОЖЕНИЕ IV
Критерий устойчивости, полученный
с помощью метода возмущений
Вопрос об устойчивости периодических колебаний в
нелинейных системах рассматривался во многих научных и
технических журналах. Обратимся к статье Мандельштама и Папа-
лекси [72] и сравним данный ими критерий устойчивости с
результатом, полученным нашим методом в гл. 4. В статье
рассматриваются субгармонические колебания в цепи с
электронной лампой, которые описываются дифференциальным
уравнением
d2v
+.v = IF(v, -^-) + £cosvt, v = 2, 3, 4, ..., (IV. 1)
dx2
где параметр X — коэффициент при нелинейной функции
F(vy dv/dx) предполагается малым. Рассматриваемая задача
решалась методом возмущений. Периодическое решение,
соответствующее субгармоническому колебанию порядка 1/v, было
получено в виде
у (t) = х sin т -f- у cos x-\-w cos vt, w — «v2 ; (IV. 2)
амплитуды x и у определяются условиями
fo|?(x, у, x)sinxdx = 0, [ф(х, у, %)cosxdx = 0, (IV. 3)
о о
где
я|)(х, у, т) =
= F (x sin х -+- у cos х -f- w cos vt, x cost — у sin т — vw sin vt) .
Этот способ приводит к тому же результату, что и подстановка
(IV. 2) в (IV. 1) и приравнивание нулю коэффициентов при
членах, содержащих sint и cost (см. § 1.5). Что касается условия
Критерий устойчивости по методу возмущений 391
устойчивости, то оно было получено в виде
2я 2я
f -г-smxdx [ -з^-costtfT
J OX J OX
2я
ay
2я
J -ir sin т
* I
cos т dx
>0.
(IV. 4)
Это неравенство выведено из условия, что вариации амплитуд
х и у субгармонического колебания с ростом времени т стре;-
мятся к нулю.
С другой стороны, в нашем исследовании рассматриваются
субгармонические колебания, описываемые уравнением (7.1);.
Уравнение в вариациях (3.55) в этом случае принимает, вид «'
S+Ш-Ф-о-
(VI. б)
где индекс 0 означает подстановку периодического решения
после дифференцирования.
Теперь покажем, что условие устойчивости (IV. 4)
соответствует либо нашему условию (4.6) для первой области
неустойчивости (п=\), либо условию~(4.9) для второй области
неустойчивости (/г = 2) *).
Случай 1.
Рассмотрим в первую очередь случай, когда уравнение в
вариациях (IV. 5) приводит к уравнению Хилла вида {4.4). Тот
гда (df/dv)o в уравнении (5.3) можно разложить в ряд Фурье
(^)o = ao + aiCOs2^^2COs4T+ •••
\.. + Ъх sin 2т + b2 sin 4т ■+-
(IV. 6)
где
о
2я
av = 4l(^)0COS2VTrft'
О
2я
*veiJ(-£),e,n2vrdT' v = 1.2.3......
1) Какому именно из этих условий соответствует критерий (IV. 4),
зависит от вида нелинейной характеристики и от порядка субгармонического
колебания (см. гл. 7).
392
Приложение IV
Подставляя эти выражения в (IV. 5) и сравнивая результат
с (4.4), получаем
60 = а0-62, 28v=VVv + £v, ev = arctg-^. (IV. 7
Отсюда следует, что условие устойчивости (4.6) может быть
представлено в виде
{а0-п>?+АпФ>\{а2п-+-Ь% я=1, 2, 3, ... .
Подставляя значения а0, ап и Ъп из (IV. 6), приходим к
неравенству
[]№.-*)«]
+ 16nV62 >
2я "12
$Ш0со82пхах\ •
+
Г2я
J l"5S"Jo
Lo
+
sin 2#т я?т
или
2я
2я 2Л
1 [(l)o-^Sin2/tTrfTl [(I)o-^]COS2"^T-
2я
)2
— i J [(^-) — я2] sin ят cos nx dx \ + 4я2я262 > 0.
lo ° ]
Это условие устойчивости можно представить в виде,
подобном (IV. 4), а именно
2л 2rt
f Ч^ sin /гт dx f 4^ cos /гт dx
2я
2я
f 4^ sin nx dx f ¥„ cos /гт д?т
>0,
(IV. 8)
где
4tx = J (-Jj-J — /г21 sin /гт -f- 2/гб cos /гт,
>Fy = f(-|jH — /г2] cos nx — 2/г& sin /гт.
Условие устойчивости (IV. 4) можно вывести, полагая п=\
в (IV. 8). Действительно, сравнивая (IV. 1) с (7.1), имеем
Критерий устойчивости по методу возмущений 39$
откуда в силу (IV. 2)
£-i['-№J«»'+"-"~±i'M.-
Подстановка этих соотношений в (IV. 8) приводит к условику
устойчивости (IV. 4).
Таким образом, условие (IV. 4) не дает никаких сведений
об устойчивости для области неустойчивости порядка я>2. Эта
объясняется тем, что при выводе условия (IV. 4)
рассматриваются только вариации амплитуды субгармонического
колебания. Следовательно, на вариации налагается ограничение,
состоящее в том, что они должны иметь ту же частоту, что и
субгармоническое колебание, т. е. вариации с другой частотой в
расчет не принимаются. В нашем исследовании этого
ограничения нет. Обобщенное условие устойчивости (4.6) для п-я
области неустойчивости позволяет получить критерий для
исследования устойчивости п-й гармоники субгармонического коле-,
бания. Так, например, при рассмотрении субгармонического
колебания порядка 1/3 условие устойчивости было получено
в виде неравенства (4.6). В § 7.4 отмечалось, что в случае, когда
нелинейность определяется функцией пятой степени, условие
(4.6) следует рассматривать как при я = 2, так и при /1=1.
Случай 2.
Мы должны также рассмотреть случай, когда уравнение в-
вариациях (IV. 5) приводит к уравнению Хилла вида (4.7).
Поступая аналогично изложенному в случае 1, мы приходим к
заключению, что условие устойчивости (IV. 4) получается из
нашего условия (4.9) при я = 2. В случае субгармоническога
колебания порядка 1/2 это условие устойчивости приводит к
неравенству (4.9). Условие для п-и области неустойчивости
устанавливает устойчивость субгармонического колебания порядка
п/2. Как было показано в п. 7.6(6), при некоторых условиях
имеют место неустойчивые колебания не только порядка 1/2, но
также и порядков 1/4 и 3/4, так что условия (IV. 8) следует
рассматривать при /г=1, 2 и 3.
В заключение отметим, что условие (IV. 4) устанавливает
устойчивость только колебания с периодом, равным периоду
субгармонического колебания хsinx+y cost из (IV. 2), и что
условие (IV. 4) является частным случаем обобщенного условия
устойчивости (4.6) или (4.9).
ПРИЛОЖЕНИЕ V
Замечания, касающиеся интегральных
кривых и особых точек
В гл. 2 уже рассматривались основные свойства
интегральных кривых и особых точек, определяемых системой
дифференциальных уравнений первого порядка. В этом приложении
приводятся дополнительные сведения по топологическому
исследованию интегральных кривых, проведенному Пуанкаре и Бен-
диксоном.
V.I. ТЕОРЕМЫ БЕНДИКСОНА
Следующие теоремы1) принадлежат Бендиксону и
цитировались нами при исследовании интегральных кривых в гл. 8 и 13.
(а) Первая теорема Бендиксона
Рассмотрим систему дифференциальных уравнений
"57 = Xm-\-Xm+v -fa==Ym-\-Ym+l, (V. 1)
где Xm и Ym — однородные многочлены степени m относительно
# и у, a Xm+l и Ym+i — аналитические функции, содержащие
только члены со степенями выше т.
Теорема Бендиксона утверждает, что интегральные кривые
системы (V. 1) приближаются к началу координат, либо не имея
определенного направления, т. е. в виде спиралей, либо имея
направление, задаваемое уравнением
xVm-yXm = 0. (V.2)
(б) Вторая теорема Бендиксона
Рассмотрим дифференциальное уравнение
xm-% = <*y+bx + B(x, у), (V.3)
где В(х, у)—многочлен, содержащий только члены степени
выше первой относительно х и у; предполагается, что а Ф 0.
Бендиксоном получены следующие результаты.
) Доказательства этих теорем см. в работе Бендиксона [6, стр. 34, 45].
Замечания по интегральным кривым и особым точкам 395
Случай 1. а>0, m — четное число.
Имеется одна и только одна ветвь интегральной кривой,
стремящаяся к началу координат с левой стороны от оси у, в то
время как интегральные кривые с другой стороны оси образуют
Рис. V.I. Слияние узла и седла.
узловое распределение, т. е. образуют узловую область при
лг>0. Эти интегральные кривые схематически представлены на
рис. V. 1.
Случай 2. а<0, m — четное число.
Подстановка х=—хг сводит этот случай к предыдущему.
Таким образом, при х<0 мы имеем узловое распределение, а при
jc>0 — седловое.
Случай 3. а>0, m — нечетное число.
Начало координат является узловой точкой.
Случай 4. <z<0, m — нечетное число.
Начало координат является седловой точкой.
V.2. ТЕОРИЯ ЦЕНТРА
Виды особых точек классифицировались в соответствии
с корнями характеристического уравнения [см. п. 2.2(a)]. В
частном случае, когда корни чисто мнимые, т. е.
аг + Ь2 = 0, (ax — b2f+Aa2bx < 0, (V.4)
особая точка будет либо центром, либо фокусом. Следующий
способ, предложенный Пуанкаре [82; 84, стр. 95—114], позволяет
396 Приложение V
различить эти два вида особых точек в случае, когда
выполняются условия (V. 4).
Рассмотрим систему дифференциальных уравнений
-—=:Х1-4-Х2-+- . . . + Хп = Х,
V (v-5>
^ = r1 + r2+... + ^r,
где Хт и Ym (m=l, 2, ..., п)—однородные многочлены
степени т относительно х и у. Поскольку как X, так и Y
обращаются в нуль при х=у=6, начало координат является особой
точкой системы (V. 5).
Для того чтобы исследовать поведение интегральных кривых
вблизи этой особой точки, рассмотрим семейство замкнутых
кривых вокруг начала координат, заданных уравнением
F(x% y) = C. (V.6)
где F(xy у) —положительно определенная функция х и у, а
С —- достаточно малая положительная постоянная. Положим
>{х, y) = F7 + Fz + FA+..., (V.7)
где Fi {1=2, 3, 4, ...) —однородный многочлен степени i
относительно хну. Тогда, используя (V.5) и (V. 7), получаем
dF
dx
dF dx dF dy _( dF2 dF3 \ , y y
= "5T"rf7 + lF'dT_"l"5F"t""5F+ •••J(Ai + ^2-r----)-r-
dy
+(
-'+*£+■■■)<r,+r,+ ...).
Полагая
*»~^** + ^Г». (V.8)
имеем ,
"57 = #2! + (&, + *«) + (#41 + #32+ #23) + • • • • (V.9)
Следуя Пуанкаре, будем искать неизвестные функции F* путем
приравнивания к нулю многочленов одинаковой степени" в
правой части уравнения (V. 9):
(V.10)
#21=0,
#31 = — #22'
#41 == — #32 -
-#23^
Замечания. по интегральным кривым и особым точкам 397
Если условия (V. 4) удовлетворяются, то подходящее линейное
преобразование переменных позволит выбрать Xt и Yt в
уравнениях (V. 5) такими, что
•Xt = y и Yt=—x.
Тогда F2 = x2-\-y2 и уравнения (V.10) можно записать в виде
dFn dFa
1>ГУ--оТх = Н«> ? = 2,3, 4,.... (V.11)
Введение полярных координат x = rcosq>, y = r$inq> дает
dFq dFq dFq
дх У ду Х~ дер '
Уравнение (V.11) можно переписать так:
-IjH-M^)' ? = 2> 3, 4, ..., (V.12)
где
Fg(rcosy, г sm у) = rQFQ (cos у, $my) = rqfQ((p),
Hq (r cos ф, г sin (p) = rqHq(cos cp, sin ф) = г<7/г(7(ф).
Необходимым условием для решения этого уравнения
является
J А,(Ф)Лр = 0. (V.13)
о
Очевидно, что это условие является также достаточным,
поскольку если оно выполняется, то мы имеем
dfqW
ч
= — hq (Ф) = 2 (av C°S V(P + bv Sin V(P)
v-l
и, следовательно,
я
fg (Ф) = 2 ("V" Sifl ^ — ■—■ COS V<p) + COnSt.
Если q нечетно, то очевидно, что условие (V. 13)
удовлетворяется. Однако если q четно, то может случиться, что интеграл
не равен нулю, и тогда необходимо дополнительное
исследование. Рассмотрим следующие два случая.
Случай 1. С ростом q условие (V.13) перестает выполняться.
Предположим, что J^ /з, •••♦ fq-\ определены так, что
они удовлетьор, ют первым q — 2 уравнениям (V. 12), но f9 не
398 Приложение V
удовлетворяет (q—1)-му уравнению. В этом случае заменим
(q — 1)-е уравнение уравнением
-^ = -Мф)Ч-с0, (V.14)
где
О
таким образом, мы получаем возможность проинтегрировать
уравнение для fq. Возвращаясь к декартовой системе координат,
после умножения на г* получаем
^y-dI±x = Hq{x, у)-6^+^. (V.15)
Заметим, что в этом случае q четно. Приостановим наши
исследования и рассмотрим многочлен
Р(Х* У) = ?2 + Ръ+ • • . +Vl + /7«- (УЛ6)
Тогда для достаточно малых значений С уравнение F = C
задает замкнутую кривую, охватывающую особую точку. Если Со
отрицательно, то из (V. 9), (V. 15) и (V. 16) мы видим, что
dF _ dF у .dF v n
При этом изображающая точка интегральной кривой будет
с ростом т пересекать эту замкнутую кривую изнутри наружу.
Следовательно, особая точка является неустойчивым фокусом.
С другой стороны, если с0 положительно, то изображающая
точка будет пересекать замкнутую кривую в противоположном
направлении, так что особая точка является устойчивым фокусом.
Случай 2. Условие (V. 13) выполняется при любых
значениях q.
В этом случае уравнения (V. 11) можно решить при любых
значениях q\ получаем
F(x] y) = F2 + F3+ • • • +Fq+ •... (V.17)
причем
t;x+wy=0- <УЛ8>
Решение уравнений (V. 5) имеет вид
F(x% f/)=C; (V. 19)
это уравнение задает семейство замкнутых кривых,
окружающих особую точку. Следовательно, особая точка является
центром.
Замечания по интегральным кривым и особым точкам 399
(V.20)
где
В качестве иллюстрации вышеизложенного метода исследуем
вид особой точки в начале координат системы, описываемой
уравнениями (8.25):
— = Х1 + Х2 + ^з = Х%
Хг = а2ц, rl = bl%,
Х2 = — т у012 — ■§■ у0ц\ Y2=T Уо1ъ
^з = -т12Л-|л3, К3 = 4^+||Т12.
Ясно, что если а2&1>0, то особая точка является седлом.
Покажем, что если a26i<0, то особая точка является центром.
Положим
F<i (6, ч) = а¥+2Ь1<г\ + сц*.
Подставляя это выражение в уравнение
^ = 1^ + ^ = 0,
получаем
bxbl2 + (а2а + Ьхс) 1ц + а2Ьц2 = 0. (V.21)
Если выбрать a, b и с так, чтобы1)
а = — bv 6 = 0 и с = а2У
то уравнение (V.21) удовлетворяется тождественно и F2(l, ц)
принимает вид
F2(h Ч)^-Ьх12+а2ц\ (V.22)
Поскольку а2 и bi имеют противоположные знаки, уравнение
^2 (I, ц) = const задает семейство концентрических эллипсов,
охватывающих начало координат. Подставляя (V.20) и (V.22) в
dF* у -±- dF* v — dfz v dF* v
получаем
Гг(Ш = -ТУоЧ(12+Ч2)-
1) Мы предполагаем, что а2>0. Если же а2<0, то а, 6 и с берутся
следующими:
а—Ьи Ь = 0, с——а2.
Тогда F2(i, T])=&ig2 — а2т]2 является положительно определенной функцией.
400
Приложение V
Продолжая подобным образом, находим
Л ft. 4) = --Jtt'+n2)2.
Следовательно, уравнению (V. 18) удовлетворяет функция
F(l, т1) = -61|2 + а2Л2-|-УоЛа2 + Л2)-4-^2 + т12)2'
я решение уравнений (V. 20), т. е. F(g, v\)=C, задает семейство
замкнутых кривых, охватывающих начало координат.
Следовательно, можно сделать заключение, что особая точка является
центром *).
]) В п. 13.4(6) приведен пример, когда при условиях (V. 4) особая
точка оказывается фокусом.
ПРИЛОЖЕНИЕ VI
Электронный синхронный коммутатор
Как отмечалось в § 8.7 и 9.3, для того, чтобы задать
начальное условие 8о, т. е. фазовый угол приближенного напряжения,
при котором происходит подключение цепи, применяется
электронный синхронный коммутатор. Обычный механический
коммутатор, синхронизируемый механически или даже электрически,
для этой цели не пригоден, поскольку ему присуще Ёременнбе
запаздывание, которое различно при каждой коммутации.
На рис. VI. 1 представлена схема электронного
коммутатора, который применялся в наших экспериментах. Основные
тиратроны Vi и V2 соединены встречно-параллельно, чтобы
переменный ток мог протекать в обоих направлениях. Эти
тиратроны управляются от вспомогательных тиратронов Уз и V^,
соединенных с пик-трансформатором РТ и фазорегулятором PS.
Последовательность операций следующая: сначала ручной
выключатель SW разомкнут. При этом магнитное реле МС
обесточено и его контакты а и Ь разомкнуты. Поэтому анодная
цепь тиратронов V% и У4 оказывается разомкнутой. Поскольку
по сопротивлениям R\ и R2 ток не протекает, на них нет
падения напряжения и сетки тиратронов Vi и V2 находятся под
отрицательным потенциалом соответствующих источников смещения
£*2i и Е22. Следовательно, тиратроны Vt и V2 также заперты1).
Предположим, что выключатель SW замыкается в момент
времени, отмеченный на рис. VI. 2,(а). При этом реле МС
срабатывает и замыкает контакты а и ft, но это не приводит к
одновременному зажиганию тиратронов 1/3 и У4- Они зажигаются в
тот момент времени, когда положительные пики напряжений пик-
трансформатора РТ станут больше отрицательных напряжений
1) Тиратрон зажигается при положительном анодном напряжении, если
сеточное напряжение возросло до критического потенциала зажигания. После
того как тиратрон зажегся, анодный ток нельзя прервать или регулировать
путем изменения сеточного напряжения. Сделать тиратрон непроводящим
можно только с помощью уменьшения анодного тока до нуля на отрезок
времени, достаточный для деионизации тиратрона. Изменение анодного тока
незначительно влияет На падение напряжения в дуге, которое в нашем
случае составляет около 10 е.
26 Зак. 907
402 Приложение VI
Рис. VI.1. Схема электронного коммутатора. Vb V2 — главные тиратроны;
V3> К4— вспомогательные управляющие тиратроны; РТ— пик-трансформатор;
PS — фазорегулятор; МС — магнитное реле.
смещения Е3\ и £32 и сделают потенциалы сеток
положительными [рис. VI. 2,(6)]. После зажигания V3 и У4 падения
напряжения на R\ и R2 становятся больше напряжений смещения
E2i и Еж и потенциалы сеток Vi и V2 делаются положительными,
как показано на рис. VI. 2,(в). В результате с изменением
основного тока V\ и V2 горят попеременно. Пример
осциллограммы основного тока приведен на рис. VI. 2, (г).
Итак, мы видим, что независимо от момента замыкания
ручного выключателя SW основной переменный ток всегда
возникает при определенном фазовом угле, т. е. угле 9о
приложенного напряжения, который соответствует моменту времени,
когда на сетки V3 и V& подаются положительные пики напряжений.
Этот фазовый угол может принимать любое заданное значение,
Электронный синхронный коммутатор
403
поскольку пик-трансформатор РТ питается от
фазорегулятора PS.
Следует заметить, что, когда выключатель SW размыкается,
реле МС обесточивается и контакты а и Ь размыкаются,
вызывая прекращение анодного тока V3 и К4. Одновременно на сет-
- Момент замыкания SW
(а)
(б)
(в)
(г)
( Момент размыкания SW
Приложенное
напряжение
111 | | | I 1/
^Потенциалы катодов V&К*
_ {Потенциалы сеток V3,V4
ТЛПГП ГГ !
i
hhf-zz
i
EiuEi2
J
Потенциалы катодов VbVz
Потенциалы сеток vuv2
ккч
Ток
Рис. VI.2. Осциллограммы напряжения и тока, поясняющие работу
электронного коммутатора.
ки Vi и V2 подаются отрицательные напряжения смещения, но
разряд продолжается до того момента, пока анодное
напряжение не уменьшится до нуля [см. рис. VI. 2,(г)].
Точность синхронизации электронного синхронного
коммутатора определяется временем ионизации тиратронов и
погрешностью в установке фазы фазорегулятора. Первое имеет порядок
10 мксек, что соответствует 0,2° фазового угла1) (один период
переменного напряжения соответствует 360°), а последняя при
тщательно выполненной конструкции фазорегулятора может
быть в пределах 0,3°. Следовательно, общая погрешность
фазового угла 8о может быть меньше 0,5°.
1) Частота питания равна 60 гц.
26*
Задачи
Некоторые из задач, помещенных здесь, решаются
сравнительно легко и могут быть полезны в качестве упражнений1).
Но есть и другие, которые следует скорее рассматривать как
объект исследовательской работы. Перед началом сложных
математических исследований читателю настоятельно
рекомендуется ознакомиться с различными сторонами теории
нелинейных колебаний, используя как экспериментальные наблюдения,
так и вычислительную технику. Для этой цели приводится также
ряд задач, связанных с экспериментальными исследованиями и
применением вычислительной техники.
Глава 1
1. С помощью метода возмущений получить периодическое
решение уравнения Рэлея
d2x г1 1 (dx\*\ dx , n
во втором приближении, т. е. до порядка \i2.
2. Рассматривается пружина, имеющая характеристику
Упругая сила = х (1 ±а2х2) х,
где х — смещение пружины, ахи а2 — положительные
постоянные. Знак плюс соответствует жесткой пружине, минус —
мягкой. Если с такой пружиной связана масса М, то движение
системы описывается уравнением .
М^+х(1 ±а2х2)х = 0.
Предполагается, что а2 является малой величиной. Решить это
уравнение с помощью метода возмущений при начальных
условиях
*(0) = А (4г),_0 = 0.
х) Поскольку математические выкладки в тексте достаточно сжаты, то
предполагается, что читатель проделает их самостоятельно.
Задачи
405
Точное решение выражается в эллиптических функциях (см.
[18, стр. 108; 70, стр. 24]). Сравнить результат, полученный
методом возмущений, с точным решением.
3. Метод усреднения иногда применяется для замены
определенного вида нелинейного дифференциального уравнения так
называемым «эквивалентным линейным уравнением», которое
в первом приближении имеет то же самое решение. Используя
соотношения (1.101), показать, что эквивалентное линейное
уравнение для (1.92) имеет вид
х— 2Lmx+(\ — 29)л: = 0.
Применяя эту методику к уравнению Ван-дер-Поля (1.31),
получить эквивалентное линейное уравнение
л:— \х( 1 —^-)х -|-л: = 0.
4. С помощью метода гармонического баланса получить
гармоническое решение уравнения Дуффинга
*х + 0,2-^*-+** = £ cost
dx* i ^ dx
для значений В между 0 и 1,0. Подсчитать амплитуды основной
и третьей гармоник и графически представить их зависимость
от В.
Глава 2
5. Классифицировать особые точки следующих
дифференциальных уравнений:
(а) dx~ у • {0) dx х ч
/D\ аУ — Х + У /г\ аУ _ У — хУ
w ~dl~ x — y f (Г) I!" х-ху •
/„\ аУ _ У (*\ аУ — —х + 2х* — х*
W -Jx"— ~хТ> . Iе) Ш у
Для уравнений (д) и (е) применить методику, описанную в
п. 8.5(6) и 8.6(6).
6. С помощью метода изоклин построить фазовые
траектории для следующих уравнений:
(а) уравнение Ван-дер-Поля:
406 Задачи
(б) уравнение Рэлея:
(в) уравнение движения массы, связанной с жесткой
пружиной:
d2x
dt2
(l + 0,2x2)x = 0;
(г) уравнение движения массы, связанной с мягкой
пружиной:
4£+(1 - 0,2*») х = 0.
Существует ли какой-либо другой метод, который более удобен
для получения фазовых траекторий каждого уравнения на
плоскости х, dx/dt?
7. Маятник с вязким трением описывается уравнением
d2x , , dx , ~
dt2 ' ** dt
где & — коэффициент демпфирования. С помощью метода
изоклин исследовать поведение движения маятника на плоскости
х, dx/dt. Коэффициент k принять равным 0,5; 2 и 4.
8. Действие синхронного двигателя описывается в первом
приближении дифференциальным уравнением, аналогичным
уравнению движения маятника с вязким трением, а именно
d2x , , dx , . r
-dF + kir+csinx = L
Член d2x/dt2 представляет инерционный вращающий момент,
^условленный массой ротора и связанной с ним нагрузки; член
k dx/dt определяется вращающим моментом, обусловленным
скольжением короткозамкнутой успокоительной обмотки
относительно вращающегося поля; член cs'mx определяет
вращающий момент, обусловленный наличием угла между полями
ротора и статора, a L представляет вращающий момент внешней
нагрузки на валу двигателя. Угол х измеряется от оси, которая
вращается с синхронной скоростью вращающегося магнитного
поля. Полагая c>L, изобразить интегральные кривые
уравнения на. плоскости х, dx/dt и рассмотреть вопрос о выпадении -
синхронного двигателя из синхронизма (см. [70, стр. 160; 100,
стр. 72]).
9. Два идентичных генератора постоянного тока
последовательного возбуждения соединяются параллельно. Обмотка
возбуждения каждого генератора обладает сопротивлением г иин-
Задачи
407
дуктивностыо L. Сопротивлением обмотки якоря можно
пренебречь. Эти два параллельно соединенных генератора
подключены к нагрузке в виде сопротивления R. Связь между
напряжением генератора е и током i каждой машины задана в виде
e = aarctgbiy где а и Ь — положительные постоянные.
Найти значения токов /4 и i2 этих машин в состоянии
равновесия. Рассмотреть устойчивость состояния равновесия путем
построения траекторий изображающей точки на плоскости iif i2.
Если обмотка возбуждения одного из генераторов
соединена последовательно с якорной обмоткой другого генератора,
hy*? I*
Рис. 1.
то справедливы соотношения ei=aarctg&/2 и е2—а arctg biiu
Найти условия равновесия для этого вида соединения обмоток
и рассмотреть их устойчивость.
Указание. См. [3, стр. 355; 76, стр. 82].
10. На рис. 1 приведена схема генератора постоянного тока,
управляемого от электромашинного регулятора с
самовозбуждением. Для этой цепи справедливы следующие уравнения:
».£ + /?,/, + *,.*-£„
П2 ~rff ~Г" А2*2 :
(/?+r)/ = £0 = Sq>,
:Si<Pi>
где ER и EG — индуктируемые э. д. с. электромашинного
регулятора и генератора, которые соответственно пропорциональны
магнитным потокам cpi и ф. Поскольку электромашинный
регулятор обычно проектируется таким образом, что используется
408
Задачи
линейный участок кривой намагничивания, то индуктируемая
э.д. с. ER полагается пропорциональной токам возбуждения h
и /2. При этом, однако, учитывается магнитное насыщение
генератора. Его характеристика берется в виде
Поскольку электромашинный регулятор работает в настроенном
режиме, то справедливо соотношение
Оставляя ф и исключая остальные переменные из этих
уравнений, получаем
nL2 d2q> , \ nR2 R SM , I L{R2 , .Л, , 0 2ч1 dq> ,
где Li^riiki/Si и L2=n2k2/Si— индуктивности обмоток
возбуждения электромашинного регулятора с числом витков
соответственно П\ и n2t a M = nik2lSi==n2ki/Si — взаимная индуктивность
этих обмоток. Из-за присутствия взаимной индуктивности М
коэффициент при dcp/dt может стать отрицательным при ф =
= (R+r)E/RS. В этом случае имеет место незатухающее
колебание, т. е. качание.
Показать, что условие существования качания определяется
выражением
где (dEG/di{)0 — значение dEGldii при EG=(R+r)E/R. С
помощью анализа на фазовой плоскости вычертить в координатах
Ф, dy/dt предельный цикл, соответствующий такому качанию1).
11. Механическая система, состоящая из массы, укрепленной
на линейной пружине (упругая сила пропорциональна
деформации), и скользящая по поверхности с кулоновским трением,
описывается уравнением
d2x . , . dx . ~
^+Asignw+x = 0,
где h — положительная постоянная, а функция sign(dxfdt)
равна +1 для положительных dx/dt и —1 для отрицательных
1) Подробнее см. Н а у a s h i С, Hunting oscillation in non-linear control
systems and its stabilization, Fachtagung Regelungstechnik, Beitr. № 35,
Heidelberg, 1956.
Задачи
409
dx/dt. С помощью дельта-метода построить для этой системы
интегральные кривые на фазовой плоскости, соответствующие
начальным условиям dx/dt = 0 и x = 20h при £=0. Построить гра*
фик х как функции t до момента прекращения движения.
3 iL
R
ни
Рис. 2.
12. Рассмотреть работу электронного осциллятора, схема
которого представлена на рис. 2. Сеточная и анодная цепи
индуктивно связаны. Дифференциальное уравнение колебательного
контура имеет вид
L^ + Ri^\(i-tp)dt = 0.
Потенциал сетки её определяется выражением
:-«$■
Предполагается, что анодный ток ip зависит только от
потенциала сетки egf и эта связь выражается в виде
где аи аз и а5 — постоянные, зависящие от характеристик
электронной лампы. Из вышеприведенных уравнений легко получить
d2eP
de0
dx2
■ (о0 (Мах -RC + Шаъе\ + ЪМаье% -£ + еж = 0
где
соп==
Vlc
X = G)0/.
410 Задачи
Применить к этому уравнению метод анализа с помощью
фазовой плоскости и рассмотреть поведение осциллятора при
различных значениях М. Изобразить интегральные кривые на
фазовой плоскости для следующих двух случаев:
О)
(2)
^i>0, а3<0, а5 = 0;
ах > 0, аъ > 0, аъ < 0.
Указание. В первом случае с ростом взаимной
индуктивности М между сеточной и анодной цепями по достижении
критического значения параметра М=М0 будет наблюдаться
плавное нарастание автоколебаний. С ростом М при М>М0
амплитуда колебания постоянно возрастает. С уменьшением М имеет
место обратное явление. При М=М0 автоколебания исчезают.
Такой вид автоколебаний известен под названием «мягкого»
возбуждения.
*—li
hi f
'i с
С h
П'дг
— E
pn
(
. |Г J
>r r > f
n
3'
p
!V2 1
Рис. 3.
Напротив, второй случай приводит к «жесткому»
возбуждению. В этом случае с ростом М при М=М0 автоколебания
возникают скачком, имея определенную амплитуду, которая при
М>М0 плавно возрастает. При уменьшении М до М=М0
автоколебания не исчезают. Они исчезают скачком при
определенной величине М, которая меньше М0. Это явление соответствует
гистерезису.
13. На рис. 3 приведена схема симметричного
мультивибратора. При рассмотрении этой схемы мы пренебрегаем сеточными
токами и реакцией анода. Используя обозначения, принятые на
Задачи
411
где
рисунке, можно написать следующие уравнения:
R/x-h-g ^ lldi + rll = E9
RI2 + ^ J i2dt + ri2 = E,
ipx = Ф (egi) = Ф (ri2), ip2 = ф (eg2) = ф (rlx)9
где 1р = у(е8)—нелинейная характеристика электронных ламп
Vi и V%. Сведя дифференциальные уравнения к переменным lt
и i2 и разрешив их относительно dijdt и dijdt, получим
di{ P(iu i2) di2 _ Q (/it /2)
dt ~ Cf(ilt i2) ' dt U (ilt /2) '
Я (/,, i2) = (R + r) £ - Rry' (ri2)£,
£/ (lv i2) = /? W (rix) q/ (r/2) — (/? + /f.
Штрих означает дифференцирование по аргументу п.
Выполнить анализ на фазовой плоскости для di\/di2=
=P(iu h)IQ(h, k)- Функция ф/(п) предполагается в виде
аехр[—(bri)2], где а и b — положительные постоянные. Если
U(iu k)= 0, то dijdt и dt2/d£ становятся бесконечно большими и
токи h и i2 изменяются скачком. Следовательно, можно ожидать
разрывное периодическое решение.
Указание. Подробности см. в [3, стр. 279; 76, стр. 627].
Влияние паразитных емкостей в цепи мультивибратора
рассматривается в [3, стр. 846—855].
14. Колебательная система описывается уравнением
-^ + 0,2^ + 1*1*= 1,5 cos 2т+ 0,5.
С помощью дельта-метода построить интегральную кривую на
фазовой плоскости для этой системы, соответствующую
начальным условиям х=0 и dx/dx=0 при т=0. Сравнить полученный
результат с рис. 2.20.
15. С помощью метода наклонных прямых построить
интегральную кривую на фазовой плоскости для дифференциального
уравнения
-0 + O,1^ + x3 = O,15cost.
412 Задачи
Начальные условия следующие:
(1) х 0,15. (-£),_-0.
(2) * = 0,65, (-£),_„= 1.0.
(3) лг = 0Л8, (£-)t_o=0,05.
Для каждого из этих случаев продолжить интегральную кривую
до тех пор, пока она практически не совпадет с замкнутой
траекторией, которая представляет периодическое решение.
Глава 3
16. Рассмотреть систему
**-/(*)+ty, /(0) = 0,
4у=сх+ау9
где Ь, с и d — постоянные, причем Ьс+^ФО1). Показать, что
точка равновесия системы х=у = 0 является асимптотически
устойчивой при условии, что
x[df(x) — bcx\>0, хФО.
Применить этот критерий к уравнению
d2x
dt2
+»['-±(#Пт+*-«. ">u'
и рассмотреть область асимптотической устойчивости.
Указание. Доказательство проводится с помощью
положительно определенной функции Ляпунова
V (х, у) = J \df (I) - Ъс%\ «£ + -J (dx - byf
17. Используя метод возмущений, получить разложения вряд
периодических решений се0(т, <?)> cei(*> Q)> •••> 5^з(х, q)
уравнения Матье.
Указание. Результаты приведены в приложении I.
18. Следуя методу Уиттекера п. [3.6(6)], получить
неустойчивые решения (3.69) — (3.72) уравнения Матье,
соответствующие второй и третьей областям неустойчивости.
1) См. [29 (английское издание), стр, 43]
Задачи 413
Глава 4
19. Рассмотреть дифференциальное уравнение
.0 + 26 ■£■ + /(«) = Я cost,
где f(v)—полином относительно у, а субгармоническое
решение уравнения берется в виде
v (т) = Xi/з sin -j т + г/1/3 cos -^ т -f xl sin т -f- yx cos т.
Применяя условие устойчивости (4.18), исследовать
устойчивость этого решения. Показать, что вертикальная касательная
к характеристической кривой соответствует границе
устойчивости Д(6)=0.
Глава 5
20. Рассматривается система, описываемая уравнением
d2v . , dv . о г>
S^ + k-^ + v^Bcosx.
Показать, что гармоническое колебание v=x sin х+у cost,
имеющее амплитуду г, которая определяется как г2 = х2+у2, является
неустойчивым, если выполняется условие
8 — 4|/1 — 3k2 <9г2< 8 + 4/1— 3k2.
21. Следуя методике п. 5.1(6), построить
амплитудно-частотные характеристики для гармонических колебаний в системе,
описываемой уравнением
■S+*S-+^eBco8VT + Bo.
где £ = 0,1 и В0=0,36 (ср. рис. 5.3).
Глава 6
22. Применяя блок-схему для решения уравнения (6.1) на
аналоговой вычислительной машине, исследовать возбуждение
ультрагармонических колебаний при очень больших значениях
амплитуды В внешней силы. Снять осциллограммы v(x) для
значений В от 0 до 25.
Указание. В определенном интервале значений В
ультрагармонические колебания на второй гармонике сопровождаются
субгармоническими колебаниями.
23. На рис. 4 приведена' схема электрической цепи, в
которой два параллельно-резонансных контура соединены
414
Задачи
последовательно, причем параметры L, R и С каждого контура
одинаковы. Ссылаясь на исследование § 6.4, найти амплитуду
самовозбуждающихся колебаний в установившемся режиме.
Указание. Предположить, что основная составляющая
колебаний соответствует первой области неустойчивости, неосцил-
<э
я < ±с
sin cot
Рис. 4,
*i *FC
лирующая и вторая ультрагармоническая составляющие —
второй области неустойчивости, основная и третья
ультрагармоническая составляющие — третьей области неустойчивости.
Затем, используя метод гармонического баланса, определить
каждую составляющую.
Глава 7
24. Найти решение для субгармонической составляющей
порядка 1/3 дифференциального уравнения
{£ + k£ + v* = Bcos3x.
Исследовать устойчивость решения, используя уравнение Хилла.
Периодическое решение предполагается в виде
v (т) = хх sin т -f- уг cos т -f xz sin Зт + yz cos Зт.
Показать, что амплитуду гармонической составляющей, т. е.
(xl~\-yf)V , можно приблизить величиной В/8, как в п. 7.3(b)
(см. рис. 7.6).
25. Рассматривается консервативная система, описываемая
дифференциальным уравнением
U + ^3 = £cos3t.
Показать, что периодическое решение v0(x) =у cost+ш cos Зт
является устойчивым при условии, что
U/ + ЩВ Щ. = -(2у + w)B^->0.
Задачи
415
Таким образом, вертикальная касательная к
характеристической кривой (зависимость у от В или w от В) определяет
границу устойчивости
dB dB
dy
UU UL> л
Указание. Применить условие устойчивости (4.18).
26. В задаче 25 заменить кубическую функцию v3 функцией
пятой степени у5. Затем показать, что условие устойчивости для
периодического решения v0(x) имеет вид
dB
(5у3 + 24y2w + 18yw2 + 24яу3) В ^ =
dB
= —(8у + 15y2w + 24yw2 + 6^3) В -jji- > 0.
27. Выполнить эксперимент в электрической цепи,
приведенной на рис. 5. Путем изменения напряжения Е и емкости С
найти режимы периодических колебаний. Трансформаторы 7\
и Т2 имеют одинаковые параметры. При соответствующих
начальных условиях можно будет легко возбудить
субгармонические колебания порядков 1/2 и 1/3. Следует заметить, что при
Рис. 5.
некоторых начальных условиях во вторичной цепи возникают
преимущественно субгармонические колебания порядков 2/5
и 3/7.
Указание. Подобная электрическая цепь представлена на
рис. 6.11, где рассматривалось возбуждение
ультрагармонических колебаний. Субгармонические колебания появляются при
сравнительно малых значениях амплитуд приложенного
напряжения и больших значениях емкости.
416 Задачи
Глава 8
28. На диаграмме, приведенной на рис. 8.2, имеются три
особые точки 1, 2, 3, причем точки 1 и 3 являются устойчивыми,
а точка 2 — неустойчивой. По мере увеличения амплитуды В
внешней силы точки 1 и 2 приближаются друг к другу и в конце
концов сливаются. При этом происходит резкое увеличение
амплитуды гармонического колебания. Интегральная кривая,
выходящая из точки слияния и приводящая к особой точке 3,
соответствует переходному процессу в период скачка.
Определить значение амплитуды В, при котором происходит
скачок, и начертить диаграмму на фазовой плоскости
уравнения (8.12) для этого значения В. Кроме того, учитывая (8.3)
и (8.13), построить кривую мгновенных значений v{x) во время
переходного процесса.
Указание. Скачок амплитуды от большего значения к
меньшему происходит при уменьшении величины В до некоторого
значения, меньшего, чем исходное.
29. Собрать синхронный коммутатор, используя вместо
тиратронов Vi и V2 рис. VI. 1 кремневые управляемые вентили. Это
видоизменение позволяет уменьшить падение напряжения на
приборе в проводящий период1). После наладки этого
коммутатора проделать эксперимент, описанный в § 8.7, и построить
области начальных условий, которые приводят к резонансным
и нерезонансным колебаниям.
Глава 9
30. Анализ субгармонических колебаний на фазовой
плоскости может быть облегчен путем использования полярной системы
координат. Выразить уравнения (9.5), (9.12) и (9.21) в
переменных гиб, где x=/*cos6 и y=rsin6; затем рис. 9.1, 9.7 и 9.10
изобразить в полярных координатах. Применить метод кривых
постоянной фазы ф, изложенный в § 2.4.
31. В § 7.7 отмечалось, что субгармонические колебания
порядка 1/2 имеют место в системе, описываемой
дифференциальным уравнением
■^+k£ + \v\v = Bcos2x + B0.
Анализ этого субгармонического колебания на фазовой
плоскости приведен в § 9.5 и 9.6, где нелинейный член \v\v для удоб-
1) Управляемый кремниевый вентиль имеет характеристику, подобную
характеристике тиратрона, однако падение напряжения на нем в прямом
направлении составляет величину порядка 1/10 этого же напряжения на
тиратроне.
Задачи
417
ства аналитических выкладок аппроксимирован величиной
CiV + c3vz [уравнение (9.30)].
Поступая подобным образом, построить интегральные
кривые уравнения (9.21) для следующих двух случаев:
(1)
(2)
k = 0,2, 5 = 1,5, £0 = 0,5,
k = 0,2, 5 = 0,6, £0 = 0,4.
Построить также в координатах v, v траектории,
соответствующие периодическим решениям, и области начальных условий,
которые приводят к различным видам колебаний.
Глава 10
32. Конкретный пример уравнения Дуффинга
^ + 0,2^ + ^-0,3 cost
рассматривается в § 8.4 и в п. 10.3(a). Используя соотношение
(8.20), особые точки и интегральные кривые рис. 8.2 можно
представить в координатах а(0), г)(0). Сравнить результат,
полученный этим способом, с результатом, приведенным на
рис. 10.4,' который дает более точные сведения, чем рис. 8.2.
33. Используя метод отображения, определить области
начальных условий, которые приводят к различным видам
периодических решений дифференциального уравнения
^+k^+\v\v = Bcos2x + B0.
Значения параметров системы те же самые, что и в задаче 31.
Указание. Используя результаты задачи 31, нанести
неподвижные точки, соответствующие периодическим решениям, на
плоскости у, v.
Глава И
34. Используя уравнения (11.12), рассчитать амплитуду г0
и неосциллирующую составляющую г0 периодического решения
(11.9). Найденные значения нанести на график зависимости
от Во при изменении этого параметра в пределах от 0 до 0,06.
Остальные параметры системы принять следующими:
£i=0,20, &2=0,03, В = 0,50.
Далее, применяя условия устойчивости (11.18) и (11.19),
исследовать устойчивость этого периодического решения.
35. Применяя блок-схему, изображенную на рис. 11.4,
исследовать возникновение почти периодических колебаний системы,
27 Зак. 907
418 Задачи
описываемой уравнениями (11.22). Параметры системы принять
теми же, что в задаче 34.
36. С помощью электрической цепи, приведенной на рис. 11.12,
методом, изложенным в § 11.3, произвести эксперимент с целью
получения почти периодических колебаний, возникающих из
субгармонических колебаний порядка 1/2. Сравнить
полученные экспериментальные результаты с результатами, найденными
в п. 11.4(b). Исследовать область параметров системы, при
которых возможны почти периодические колебания.
Глава 12
37. В § 12.6 уже было показано, что области гармонического
захватывания и субгармонического захватывания порядка 1/3
частично совпадают [рис. 12.7,(6)]. Если амплитуда В и
частота v выбраны внутри этой области, то в зависимости от
различных значений начальных условий имеет место либо
гармоническое, либо субгармоническое (порядка 1/3) колебание.
Произвести анализ на фазовой плоскости для уравнений
(13.10) и определить область начальных условий, которые
приводят к субгармоническим колебаниям порядка 1/3.
Использовать значения В и v, выбранные ранее. Используя соотношение
(13.4), представить эту область в координатах v, dv/dr.
Указание. Анализ на фазовой плоскости для уравнений
(13.10) облегчается путем представления переменных xl/z и t/1/3
в полярной системе координат. Применить метод кривых
постоянной фазы ф, приведенный в § 2.4.
Интересно отметить, что при рассмотрении уравнений (13.9)
любые начальные условия приводят к возбуждению
субгармонических колебаний порядка 1/2.
38. Используя блок-схему, приведенную на рис. 12.9,
произвести анализ на аналоговой вычислительной машине и
определить области начальных условий v(0) и (dv/dx) t=o, которые
приводят к возбуждению гармонических и субгармонических
колебаний порядка 1/3. Значения В и v взять из задачи 37.
Сравнить полученные результаты с результатами задачи 37.
39. На рис. 6 приведена схема типичной физической системы,
в которой имеет место явление захватывания. Как видно из
рисунка, ламповый генератор в цепи сетки содержит источник
переменного напряжения Е sin at. Таким образом, частота
генератора захватывается частотой внешней силы со.
Дифференциальные уравнения системы имеют вид
di dln Л dee
Задачи 419
При составлении этих уравнений сеточным током пренебрегают.
Предполагается, что анодный ток iv определяется только
потенциалом на сетке её и что связь между этими двумя
величинами выражается в виде
Л2
h = f(eg) = Seg[\
3Vi
где S и Vs — положительные постоянные. Величина S
называется крутизной характеристики, а ^ — потенциалом
насыщения. Значения этих величин должны быть выбраны так, чтобы
— ip
Рис. 6.
функция ip=f(eg) соответствовала экспериментальной кривой.
Удобно ввести следующие обозначения:
er MS — RC MS
v = -
[i =
В = -
VTc
Тогда дифференциальное уравнение системы примет вид
ZJsinvt.
d2v ,л
dx2
9\ dv .
Для того чтобы автоколебания могли существовать, \i должно
быть положительным. Следует заметить, что величина НУLC
определяет собственную частоту системы.
Собрать такую колебательную систему и исследовать
захватывание автоколебаний путем изменения амплитуды Е и
частоты о внешнего источника. Построить в координатах В, v
области гармонического, ультрагармонического и
субгармонического захватываний.
27*
420
Задачи
40. Рассмотреть систему, описываемую уравнением
•^2— |i(l— Y^2)^ + *>3 = £cosvt,
где jut, у — положительные величины, причем \х мало. Для
исследования субгармонического захватывания на частоте v/3
взять периодическое решение в виде
^о (т) = —г§ 2 cos vt + bi sin— VT + *2cos — VT>
co0rj — v 3 3
где амплитуда основной гармоники 5/(<о^ — v2) определяется
уравнениями (12.44), (12.45) *). Определить bi и Ь2 и построить
в координатах б, v область субгармонического захватывания.
41. Поступая подобно тому, как в § 12.8, исследовать
явление субгармонического захватывания, которое имеет место в
системе, описываемой дифференциальным уравнением
d2v г1 / dv \2-i dv . о D
где \i и y — положительные постоянные; величина \х мала.
Глава 13
42. Поступая, как в п. 8.6(6) и 13.4(a), исследовать
интегральные кривые вблизи особой точки 1 или 2 рис. 13.9,(6).
43. В задаче 39 отмечалось, что захватываемые колебания
в колебательной цепи, находящейся под возмущающим
воздействием, имеют место на гармонической, ультрагармонической
и субгармонической частотах, если параметры В и v (или Е и со)
соответствуют внутренней части областей захватывания.
Экспериментально получить почти периодические колебания,
которые возникают в той же цепи, если амплитуда Е и
частота со внешней силы выбраны вне этих областей.
44. Применяя аналоговую вычислительную машину,
составить блок-схему для решения уравнения (13.36) и исследовать
существование почти периодических колебаний при изменении
амплитуды В и частоты v внешней силы. Сравнить результаты,
полученные на вычислительной машине, с результатами,
полученными при решении автономной системы уравнений (13.38).
Указание. Область захватывания на частоте v/З находится
аналитически в задаче 40.
45. Поступая так же, как в § 13.7, исследовать
существование почти периодических колебаний в системе, описываемой тем
же уравнением, что и в задаче 41.
1) Поскольку (1 — г^)2 <€ о*2 для области, где имеет место
субгармоническое захватывание, членом, содержащим sin vt, пренебрегаем.
Литература
Литература по нелинейным дифференциальным уравнениям и их
применению для анализа физических систем достаточно обширна. Список книг и
статей, приводимых здесь, не является исчерпывающим. В него входят
работы, на которые имеются ссылки в тексте и которые могут оказаться
полезными для интересующегося читателя 1).
1. Actes du colloque international des vibrations non lineaires (He de por-
querolles, 1951), Publ. Sci. Tech. Min. Air (France), 281 (1953).
2. Алимов Ю. И., К вопросу о построении функций Ляпунова для
систем линейных дифференциальных уравнений с постоянными
коэффициентами, Сиб. мат ем. ж., 2 (1961), 3—6.
3. А н д р о н о в А. А., В и т т А А., X а й к и н С. Э., Теория колебаний,
Физматгиз, М., 1959.
4. Андронов А. А., Витт А. А., К теории захватывания Ван-дер-Поля,
Собрание трудов А. А. Андронова, Изд. АН СССР, 1956, 51—64.
5. А р р 1 е t о п Е. V., van d e r Pol В., On a type of oscillation-hysteresis
in a simple triode generator, Phil. Mag., 6—43 (1922), 177—193.
6. В e n d i x s о n I., Sur les courbes definies par des equations differentiel-
les, Acta Math., 24 (1901), 1—88. [Русский перевод первой главы:
Венди к с о н И., О кривых, определяемых дифференциальными
уравнениями, УМ/, 9 (1941), 191—211.]
7. В е s i с о v i t с h A. S., Almost periodic functions, Cambridge University
Press, London, 1938; reprint, Dover Publications, New York, 1954.
8. Бессонов Л. А., Автоколебания в электрических цепях со сталью,
Госэнергоиздат, М., 1958.
9. Blair К. W., Loud W. S., Periodic solutions of x"+cx'+g(x)=Ef(t)
under variation of certain parameters, /. Soc. Ind. Appl. Math., 8 (I960),
74—101.
10. Боголюбов Н. Н., Митропольский Ю. А., Асимптотические
методы в теории нелинейных колебаний, Физматгиз, М., 1963.
11. Bohr H., Zur Theorie des fastperiodischen Funktionen, Acta Math., 45
(1924), 29-127; 46 (1925), 101—214; 47 (1926), 237—281.
12. В r i 11 о u i n L., A practical method for solving Hill's equation, Quart.
Appl. Math., 6 (1948), 167—,178.
13. В u 1 a n d R. N., Analysis of nonlinear servos by phase-plane-delta
method, У. Franklin Inst, 257 (1954), 37—48.
14. С a r t w г i g h t M. L., Forced oscillations in nearly sinusoidal svstems,
/. Inst Elec. Engrs. (London), 95 (3), (1948), 88—96.
l) Достаточно полный список работ по нелинейной механике и теории
нелинейных систем автоматического управления, появившихся до 1956 г.,
приводится Хиггинсом [42]. См. также [43] того же автора. Исследованию
нелинейных колебаний и анализу нелинейных цепей посвящены также некоторые
коллективные работы, см. [1, 59, 102, 103, 104, 106].
422
Литература
15. С а г t w г i g h t M. L., Nonlinear vibrations, Brit. Assoc. Advan. Sciy 6
(21), April 1949.
16. С о d d i n g t о n E. A., L e v i n s о n N., Theory of ordinary differential
equations, New York, 1955. [Русский перевод: Коддингтон Э., Л е-
винсон Н., Теория обыкновенных дифференциальных уравнений, ИЛ,
М., 1958.]
17. Cosgriff R. L., Nonlinear control systems, New York, 1958.
18. С u n n i n g h a m W. J., Introduction to nonlinear analysis, New York,
1958. [Русский перевод: Каннингхэм В., Введение в теорию
нелинейных систем, Госэнергоиздат, М. — Л., 1962.]
19. Den H a r t о g J. P., Mechanical vibrations, 4th ed., New York, 1956.
[Русский перевод: Ден Гартог Дж., Механические колебания, Физ-
матгиз, М., I960.]
20. Den Наг tog J. P., Mikina S. J., Forced vibrations with nonlinear
spring constants, Trans. ASME, 54 (1932), 157—164.
21. Duffing G., Erzwungene Schwingungen bei veranderlicher Eigenfre-
quenz una ihre technische Bedeutung, Sammlung Vieweg, Braunschweig,
1918.
22. F1 о q u e t G., Sur les equations differentielles lineaires a coefficients
periodiques, Ann. Ecole Norm. Super., 2—12 (1883), 47—88.
23. G i 11 e J. C., D e с a u 1 n e P., P ё 1 e g r i n M., Methodes modernes d'etude
des systemes asservis, Dunod, Paris, 1960.
24. G i 11 e J. С, Р ё 1 e g r i n M. J., Decaulne P., Feedback control
systems, New York, 1959.
25. Gillies A. W., The singularities and limit cycles of an autonomous
system of differential equations of the second order associated with
nonlinear oscillations, Труды Международного симпозиума по нелинейным
колебаниям, II, Киев, 1963, 134—155.
26. G о 1 d s t e i n S., Mathieu Functions, Trans. Cambridge Phil. Soc, 23
(1927), 303—336.
27. Goto E., The parametron, a digital computing element which utilizes
parametric oscillation, Proc. IRE, 47 (1959), 1304—1316.
28. Hahn W., Behandlung von Stabilitatsproblemen mit der zweiten Methode
von Ljapunov, Nichtlineare Regelungsvorgange, Munchen, 1956.
29. Hahn W., Theorie und Anwendung der direkten Methode von Ljapunov,
Ergeb. Math. Grenzg., Neue Folge, 22, Berlin, 1959. English transl.,
Prentice-Hall, 1963.
30. Haraos L. V., Beitrag zur Frequenzanalyse von nichtlinearen Systemen,
Fachtagung Regelungstechnik, Beitr. 65, Heidelberg, 1956.
31. Hay ash i C, Studies on low frequency oscillations in transformer
circuits, Elec. Rev., 29 (1941), 599—608, 670—677, 732—740; 30 (1942),
418—425, 479—495, 551—560, 597—609 (на японском языке).
32. H а у a s h i C, Forced oscillations in nonlinear systems, Osaka, Japan,
1953. [Русский перевод: Х а я с и Т., Вынужденные колебания в
нелинейных системах, ИЛ, М., 1957.1
33. Н а у a s h i С, Forced oscillations with nonlinear restoring force, J. Appl.
Phys., 24 (1953), 198—207.
34. Hayashi C, Stability investigation of the nonlinear periodic
oscillations, J. Appl. Phys., 24 (1953), 344—348.
35. H а у a s h i C, Subharmonic oscillations in nonlinear systems, /. Appl.
Phys., 24 (1953), 521—529.
36. H а у a s h i C, Initial conditions for certain types of nonlinear
oscillations, Symp. Nonlinear Circuit Analysis, 6 (1956), 63—92, New York.
37. Hayashi C, Quasi-periodic oscillations in nonlinear control systems,
Autom. Remote Control (First Intern. Congr. IFAC), v. 2, London, 1961,
889-894.
Литература
423
38. Н а у a s h i С, N i s h i к a w a Y., Abe M., Subharmonic oscillations of
order one-half, Trans. IRE Circuit Theory, CT-7 (1960), 102—111.
39. H а у a s h i C, Shibayama H., N i s h i к a w a Y., Frequency entrain-
ment in a self-oscillatory system with external force, Trans. IRE Circuit
Theory, CT-7 (1960), 413—422.
40. H а у a s h i C, N i s h i к a w a Y., Initial conditions leading to different
types of periodic solutions for Duffing's equation, Труды
Международного симпозиума по нелинейным колебаниям, II, Киев, 1963, 377—393.
41. Hay as hi С, Shibayama H., U e d a Y., Quasi-periodic oscillations
in a self-oscillatory system with external force, Труды Международного
симпозиума по нелинейным колебаниям, I, Киев, 1963, 495—509.
42. Н i g g i n s T. J., A resume of the development and literature of nonlinear
control-system theory, Trans. ASME, 79 (1957), 445—449.
43. H i g g i n s T. J., A resume of the basic literature on nonlinear system
theory (with particular reference to Lyapunov's methods), Workshop on
Lyapunov's direct method (Joint Autom. Control Conf.), M. I. T.,
Cambridge, 1960.
44. Hill G. W., On the part of the motion of the lunar perigee, Acta Math.,
8 (1886), 1—36.
45. H u r w i t z A., Uber die Bedingungen, unter welchen eine Gleichung nur
Wurzeln mit negativen reellen Teilen besitzt, Math. Ann., 46 (1895),
273—284.
46. I n с е Е. L., On a general solution of Hill's equation, Monthly Notices
Roy. Astron. Soc, 75 (1915), 436—448; 76 (1916), 431—442; 78 (1917),
141—147.
47. I n с e E. L., Researches into the characteristic numbers of the Mathieu
equation, Proc. Roy. Soc. Edinburgh, 46 (1925-1926), 20—29, 316—322;
47 (1926—1927), 294—301.
48. I n с e E. L., Tables of the elliptic-cylinder functions, Proc. Roy. Soc.
Edinburgh, 52 (1931—1932), 355—423.
49. J a cob sen L. S., On a general method of solving second-order ordinary
differential equations by phase-plane displacements, /. Appl. Mech., 19
(1952), 543—553.
50. Jarominek W., Investigating linear system of automatic control by
means of determinant stability margin indices, Autom. Remote Control
(First Intern. Congr. IFAC), v. 1, London, 1961, 76—84.
51. Jeffreys H., On certain solutions of Mathieu's equation, Proc. London
Math. Soc, 23 (1925), 437—448.
52. К a 1 m a n R. E., Bertram J. E., Control system analysis and design
via the second method of Lyapunov, /. Basic Eng. (Trans. ASME), 82D
(1960), 371—400.
53. К a u d e r e r H., Nichtlineare Mechanik, Berlin, 1958. [Русский перевод:
Каудерер Г., Нелинейная механика, ИЛ, М., 1961.]
54. К о с h e n b u r g e r R. J., Frequency response method for analyzing and
synthesizing contactor servo mechanisms, Trans. AIEE, 69 (I) (1950),
270—284.
55. К Р ы л о в Н. М., Боголюбов Н. Н., Введение в нелинейную
механику, Киев, 1937.
56. Ku Y. H., Analysis and control of nonlinear systems, New York, 1958.
57. L a S a 11 e J., L e f s с h e t z S., Stability by Liapunov's direct method
with applications, New York, 1961. [Русский перевод: Л а Салль Ж.,
Л е ф ш е ц С, Исследование устойчивости прямым методом Ляпунова,
«Мир», М., 1964.]
58. L е С о г b e i 11 е г P., Two-stroke Oscillators, Trans. IRE Circuit Theory
CT-7 (I960), 387—398, *'
424 Литература
0\}
59. Lefschetz S. (ed.), Contributions to the Theory of Nonlinear
Oscillations, 1 (1950), 2 (1952), 3 (1956), 4 (1958), 5 (1960), Ann. Math.
Studies, Princeton, N. J.
60. Л е т о в А. М., Устойчивость нелинейных систем регулирования, Гостех-
издат, М., 1962.
61. Л я п у н о в А. М., Общая задача об устойчивости движения, Гостех-
издат, М. — Л., 1950.
62. L i ё n a r d A., Etude des oscillations entretenues, Rev. Gen. Elec, 23
(1928), 901—912, 946—954.
63. Loud W. S., Locking-in in perturbed autonomous systems, Труды
Международного симпозиума по нелинейным колебаниям, II, Киев, 1963,
223—232.
64. L о w a n А. N. and others, Tables relating to Mathieu functions, New
York, 1951.
65. L u d e k e С A., The generation and extinction of subharmonics, Symp.
Nonlinear Circuit Analysis, v. 2, New York, 1953, 215—233.
66. Ludeke С A., Nonlinear phenomena, Trans. ASME, 79 (1957), 439—444.
67. Л у р ь е А. И., Некоторые нелинейные задачи теории автоматического
регулирования, Гостехиздат, М., 1951.
68. McCrurarn J. D., An Experimental Investigation of Subharmonic
Currents, Trans. AIEE, 60 (1941), 533—540.
69. M с L а с h 1 a n N. W., Theory and Application of Mathieu Functions,
London, 1947. [Русский перевод- М а к - Л а х л а н Н. В., Теория и
приложения функций Матье, ИЛ, М, 1953.]
70. М с L а с h I a n N. W., Ordinary nonlinear differential equations, 2d ed.,
London, 1955.
71. Малкин И. Г., Некоторые задачи теории нелинейных колебаний,
Гостехиздат, М., 1956.
72. М а н д е л ь ш т а м Л. И., П а п а л е к с и Н. Д., О резонансных
явлениях при делении частоты, Полное собрание трудов Л. И.
Мандельштама, II, Изд. АН СССР, 1947, стр. 7—12.
73. Mathieu E., Memoire sur le mouvement vibratoire d'une membrane de
forme elliptique, /. Math., 2-13 (1868), 137—203.
74. Mathieu E., Cours de physique mathematique, Paris, 1873.
75. Minorsky N, Introduction to nonlinear mechanics, Ann Arbor, Mich.,
1947.
76. M i n о r s k у N., Nonlinear oscillations, Princeton, N. J., 1962.
77. Nag B. R., Ultraharmonic and subharmonic resonance in an oscillator,
/. Brit. IRE, 19 (1959), 411—416.
78. Nag B. R., Forced oscillation in an oscillator with two degrees of
freedom, Proc. Inst. Elec. Engrs. (London), Part C, 108 (1961), 93—97.
79. P а у n t e r H. M., Methods and results from M. I. T. studies in unsteady
flow, /. Boston Soc. Civil Engrs., 39 (1952), 120—165.
80. P e d e r s e n P. O., Subharmonics in forced oscillations in dissipative
systems, /. Acoust. Soc. Am., 6 (1935), 227—238; 7 (1935), 64—70.
81. Poincare H., Sur les courbes definies par une equation differentielle,
/. Math., 3—7 (1881), 375—422; 3—8 (1882), 251—296.
82. Poincare H., Sur les courbes definies par les equations differentielles,
/. Math., 4—1 (1885), 167—244; 4-2 (1886), 151—217. [Русский перевод:
Пуанкаре А., О кривых, определяемых дифференциальными
уравнениями, Гостехиздат, М. — Л., 1950.]
83. Poincare H., Les Methodes nouvelles de la mecaniques celeste, v. 1,
Paris, 1892. [Готовится русский перевод.]
84. PoincareH., Oeuvres, v. I, Paris, 1928.
85. Pol B. van der, On Relaxation-oscillations, Phil. Mag., 7—2 (1926),
978—992.
Литература 425
86. Pol В. van der. Forced oscillations in a circuit with nonlinear resistance,
Phil. Mag., 7—3 (1927), 65-80.
87. Pol B. van der, Strut t M. J. 0., On the stability of the solutions of
Mathieu's equation, Phil. Mag., 7—5 (1928), 18—38.
88. Pol B. van der, Nonlinear theory of electric" oscillations, Proc. IRE, 22
(1934), 1051—1086. [Русский перевод: Ван-дер-Поль, Нелинейная
теория электрических колебаний, Связьиздат, 1935.]
89. П о н т р я г и н Л. С, Обыкновенные дифференциальные уравнения, Физ-
матгиз, М., 1961.
90. Рахимов Г. Р., Феррорезонанс, Ташкент, 1957.
91. Ray lei gh, Theory of sound, v. 1, London, 1894. [Русский перевод: Р э-
лей (Стрэтт Дж.), Теория звука, т. I, Гостехиздат, М.—Л., 1955.]
92. Рябов Ю. А., Об оценке области применимости метода малого
параметра в задачах теории нелинейных колебаний, Труды Международного
симпозиума по нелинейным колебаниям, Киев, 1963, 425—445.
93. Р я з и н П., Процессы установления колебаний в автоколебательной
системе при явлениях полного и частичного увлечения частоты, ЖТФ, V,
1 (1935), 38—52.
94. R о и е 11 е Е., Contribution a Tetude experimental de la ferro-resonance,
Rev. Gen. Elec, 36 (1934), 715—738, 763—780, 795—819, 841—858.
95. Routh E. J., Dynamics of a system of rigid bodies, adv. part, London,
1892; reprint, New York, 1955.
96. Rudenberg R., Nonharmonic oscillations as caused by magnetic
saturation, Trans. AIEE, 68 (1949), 676—684.
97. S с h n у d e г С, Druckstosse in Pumpensteigleitungen, Schweiz. Bauzei-
tung, 94 (1929), 271—273, 283—286.
98. S с h u 11 z D. G., Gibson J. E., The variable gradient method for
generating Liapunov functions, Trans. AIEE, 81 (II), (1962), 202—210.
99. S о r e n s e n К. Е., Graphical solution of hydraulic problems, Proc. Am.
Soc. Civil Engrs., 78 (1952), separate № 116.
100. Stoker J. J., Nonlinear vibrations, New York, 1950. [Русский перевод:
Стокер Дж., Нелинейные колебания в механических и электрических
системах, ИЛ, М., 1952.]
101. S t г u 11 M. О., Lamesche, Mathieusche, und verwandte Funktion-
en in Physik und Technik, Ergeb. Math. Grenzg., 1—3, Berlin, 1932,
207—322.
102. Studies in nonlinear vibration theory, Institute for Mathematics and
Mechanics, New York, 1946.
103. Symp. Nonlinear Circuit Analysis, 2. (1953), 6 (1956), Polytechnic Inst,
of Brooklyn, New York.
104. Труды Международного симпозиума по нелинейным колебаниям, I, II,
III, Киев, 1963.
105. Thomson W. Т., Resonant nonlinear control circuits, Trans. AIEE, 57
(1938), 469—476.
106. Trans. IRE Circuit Theory, CT-7 (1960), 366—553.
107. T г e f f t z E., Zu den Grundlagen der Schwingungstheorie, Math. Ann., 95
(1926), 307—312.
108. Urabe M., Periodic solutions of van der Pol's equation with damping
coefficient A,=0—10, Trans. IRE Circuit Theory, CT-7 (1960), 382—386.
См. также /. Sci. Hiroshima Univ., A-21 (1958), 193—207; A-23 (1960),
325—366; A-24 (1960), 201—217.
109. Wada Т., Graphical solution of dy/dx=f(x,y), Mem. Coll. Sci., Kyoto
Univ., 2 (1917), 151—197.
110. Watson G. N., Convergence of series for Mathieu functions, Proc.
Edinburgh Math. Soc, 33 (1914—1915), 25—30.
426
Литература
111. Weber E., Nonlinear physical phenomena, Symp. Nonlinear Circuit
Analysis, 2 (1953), 1—27, New York.
112. Whittaker E. Т., General solution of Mathieu's equation, Proc.
Edinburgh Math. Soc, 32 (1913—1914), 75—80.
113. Whittaker E. Т., Watson G. N.. A course of modern analysis,
London, 1935. [Русский перевод: Уиттекер Э. Т., Ватсон Дж. Н., Курс
современного анализа, Физматгиз, М., 1961.]
114. Young A. W., Quasi-periodic solutions of Mathieu's equation, Proc.
Edinburgh Math. Soc, 32 (1913—1914), 81—90.
ЛИТЕРАТУРА, ДОБАВЛЕННАЯ ПРИ ПЕРЕВОДЕ
115. Андронов А. А., Л е о н т о в и ч Е. А., Гордон И. И., М а й е р А. Г.,
Качественная теория динамических систем второго порядка, «Наука»,
М., 1966.
116. Башарин А. В., Расчет характеристик магнитного усилителя при
намагничивании постоянным и переменным полями, Электричество, № 1
(1956), 17—21.
117. Башарин А. В., Графо-аналитический метод расчета переходных
процессов в цепях электроприводов, питаемых от магнитного усилителя,
Труды Совещания по автоматизированному электроприводу переменного
тока, 1955 г., М., 1958, 288—300.
118. Башкир о в Д. А., Графо-аналитический метод анализа переходных
процессов в системах автоматического регулирования, Основы
автоматического регулирования, под ред. Солодовникова В. В., Машгиз, М., 1954,
1020—1044.
119. Бессонов Л. А., Нелинейные электрические цепи, «Высшая школа»,
М., 1964.
120. Богатырев О. М., Расчет переходного и установившегося режима
в цепи с нелинейными параметрами, Электричество, № 3 (1966),
69—74.
121. Боголюбов В. Е., Квазирелаксационные колебания в феррорезонанс-
ных цепях с подмагничиванием, Электричество, № 6 (1949), 42—47.
122. Боголюбов В. Е., Дятлов В. Л., Метод расчета переходных
процессов в системах высоких порядков с магнитными усилителями и
другими существенно нелинейными элементами, Труды Совещания по
автоматизированному электроприводу переменного тока, 1955 г., М, 1958,
300—312.
123. Воронов Р. А., Расчет токов и напряжений в цепи с
безынерционными нелинейными элементами, Электричество, № 8 (1953), 44—49.
124. Ершов В. Нм Рассохин Г. И., Яновский Е. А., Емкостные пара-
метроны, М., 1966.
125. Ефимов Ю. Н., К вопросу о влиянии напряжения питания на
пороговые характеристики индуктивного параметрона, Изв. вузов,
Радиотехника, 6, № 6 (1963), 683—687.
126. Жарков Ф. П., Перевозбужденный параметрон, сб. Магнитные и
цифровые элементы, «Наука», М., 1965.
127. И о н к и н П. А., О расчете нелинейных цепей итерационным способом,
Электричество, № 3 (1958), 45—50.
128. И о н к и н П. А., О расчете переходных процессов в нелинейных
электрических цепях методом последовательных ординат, Изв. вузов,
Электромеханика, № 2 (1958), 43—50.
129. К а план А. Е., Кравцов Ю. А., Р ы л о в В. А., Параметрические
генераторы и делители частоты, «Советское радио», М, 1966.
Литература
427
130. Кр асносе л ьски и М. А., Пер о в Л И., Поволоцкий А. И., W
3 а б р е й к о 3. П., Векторные поля на плоскости, Физматгиз, М., 1963.
131. Ломоносов В. Юм Переходные процессы в нелинейных цепях,
Электричество, № 7 (1952), 55—59.
132. М а л к и н И. Г., Теория устойчивости движения, «Наука», М., 1966.
133. Мандельштам Л. И., Полное собрание трудов, М., 1948—1952.
134. Метод Гольдфарба в теории регулирования, сб. статей, Госэнергоиздат,
М.— Л., 1962. .rv
135. Митр о п о л ьский Ю. А., Нестационарные процессы в нелинейных V ^
автоколебательных системах, М., 1955. г
136. Немыцкий В. В., Степанов В. В., Качественная теория дифферен- \J
циальных уравнений, Гостехиздат, М., 1950.
137. П а п а л е к с и Н. Д., Сборник трудов, М., 1948.
138. Поливанов К. М., Жарков Ф. П., Соколов В. А., Параметрон
с ферромагнитными сердечниками, Изв. вузов, Радиотехника, 5, № 4
(1962), 417—431; № 5 (1962), 543—552.
139. Поливанов К. М., Ж а р к о в Ф. П., Векторный анализ фазовой
плоскости, Изв. вузов, Радиотехника, 8, № 6 (1965), 637—647.
140. Поливанов К. М., Определение устойчивости точек равновесия при
феррорезонансе, Изв. вузов, Электромеханика, № И (1965), 1193—1196.
141. Попов Е. П., Пальтов И. Е., Приближенные методы исследования
нелинейных автоматических систем, Физматгиз, М., 1960.
142. Солодовников В. В. (ред.), Метод касательных Бейли — Матвеева,
Основы автоматического регулирования, Машгиз, М., 1954, 1044—1066.
143. С те б а ко в С. А., Анализ статически устойчивых динамических систем,
ДАН СССР, 95 (1951), 455—458.
144. Стеб а ко в С. А., Качественное исследование системы х=Р(х>у),
y=Q{x,y) при помощи изоклин, ДАН СССР, 82 (1952), 677—680.
145 С т е б а к о в С. А., Применение понятия фазового пространства для
исследования систем авторегулирования, Труды второго Всесоюзного
совещания по теории автоматического регулирования, т. I, M., 1956,
149—165. v)
146. Теодор чик К. Ф., Автоколебательные системы, Гостехиздат, М., 1952. V
147. Фельдбаум А. А., Введение в теорию нелинейных цепей, Госэнерго- \)
издат, М., 1948.
148. Франк М. Л., Графические методы интегрирования обыкновенных
дифференциальных уравнений, Гостехиздат, М. — Л., 1933. 1
149. X а р к е в и ч А. А., Нелинейные и параметрические явления в радиотех- V
нике, Гостехиздат, М., 1956.
150. Хохлов Р. В., К теории захватывания при малой амплитуде внешней
силы, ДАН СССР, 97, № 3 (1954), 411—414.
151. Чезари Л., Асимптотическое поведение и устойчивость решений
обыкновенных дифференциальных уравнений, «Мир», М., 1964.
152. Ч е т а е в Н. Г., Устойчивость движения, «Наука», М., 1965.
Указатель
Автоколебательная система 317, 338
367
Автономная система 20, 23, 34, 76,84
Амплитудная характеристика
гармонического колебания 134, 140, 143,
210, 217, 303. 372
субгармонического колебания
170, 184, 189, 201, 250
ультрагармонического
колебания 147, 151
Аналитические методы 19
Аналоговой вычислительной машины
применение 192, 260, 300, 313, 334
Андронов А. А. 9, 205
Асимптотическая устойчивость 84, 91,
100, 102
орбитальная 85
Бендиксон И. 9, 52, 208, 352, 394
Бендиксона критерий 54
Боголюбов Н. Н. 9, 207
Ван-дер-Поль Б. 9, 38, 60
Ван-дер-Поля уравнение 26, 96, 318,
344
В вариациях уравнение 97, 119, 266,
269
Вековой член 22, 25, 30
Витт А. А. 9, 205
Возмущений метод 21
Гармонического баланса принцип 39
Гармоническое колебание 100, 118,
131, 205, 272, 280
Графическое решение 45
Дельта-метод 65
двойной 70
Диаграмма устойчивости уравнения
Матье 105
Дуффинг Г. 9
Дуффинга уравнение 29, 31, 33, 40.
42, 81, 233
Изоклин метод 59, 209, 235
Инвариантная кривая 266, 272
Интегральная кривая 35, 46, 49, 56,
208, 215, 222, 233, 252, 257, 370
Итераций метод 33
Каннингхэм В. 9
Каноническая форма
дифференциальных уравнений 49, 59
Консервативная система 53, 215
Контактных кривых метод 53
Кривая намагничивания 71, 132, 153,
196
Крылов Н. М. 9
Лефшец С. 207
Льенара метод 62
Ляпунов М. А. 9, 84, 89
Ляпунова критерий устойчивости 89,
96
Ляпунова положительно
определенная функция 90, 96
Мак-Лахлан Н. В. 9
Малый параметр 20, 23, 28
Мандельштам Л. И. 9, 390
Мандельштама и Папалекси
аппроксимация 163, 182
Маркова определитель 88
Матье Е. И, 375
Матье уравнение 84, 102, 135
Минорский Н. 9
Митропольский Ю. А. 9
Наклонных прямых метод 72
Начальные условия 213, 231, 241, 245,
255, 265, 288
Неавтономная система 20, 28, 37, 79,
205
Неконсервативная система 53, 222
Неподвижная точка 266, 274, 279,286
Несимметричная нелинейная
характеристика 137, 279
Области захватывания частоты 329,
337, 342
Образ начальной точки (отображе*
ние) 265
Обыкновенная точка 46
Указатель 429.
Особая точка 45, 56, 235, 243, 369
более высокого порядка 52,
353, 365, 395
типа седло 48, 57, 210, 236, 243,
253, 257
седло-узел 53, 222
седло-фокус 57
узел 47, 57, 210
фокус 48, 51, 57, 210, 236,
243, 253, 257
центр 48, 57
Особых точек классификация 47, 57
Папалекси Н. Д. 9, 390
Параллельно-резонансная цепь 152
Параметрическое возбуждение 306
Периодическое решение 23, 39
Порождающее решение 20, 23, 25
Последовательно-резонансная цепь
142, 146
Почти периодическая функция 291
— периодическое колебание 291, 310,
343
Предельный цикл 45, 53, 97, 292,298,
311, 347, 370
Притяжения области 266, 271, 278,
283
Пространство состояний 45
Пуанкаре А. 9, 47, 52, 57, 208, 217
Рауса — Гурвица критерий
устойчивости 12, 85, 208, 248, 310
Сепаратриса 264
Симметричная квадратичная функция
191
— нелинейная характеристика 267,
286
Скачка явление 136, 299
Состояний плоскость 46
Стокер Дж. 9
Субгармоническое колебание 100, 118,
162, 174, 182, 233, 280
Топологический метод 45
Траектории изображающей точки 35,
46
Улучшенное приближение на основе
принципа гармонического баланса
40
характеристического показателя
для уравнения Хилла 112
Улучшенные условия устойчивости
периодических решений 97, 120,
126, 128
Ультрагармоническое колебание 146
Условие периодичности 27, 32
— устойчивости периодических
решений 119, 134, 141, 183, 206, 247,
269, 295, 309, 320, 325, 328, 340
Усреднения метод 35
Устойчивость по Ляпунову 84
Фазовая плоскость 46, 211, 236, 244,
251
Феррорезонанс 137, 151
Флоке теория 98, ПО, 270
Хайкин С. Э. 9
Характеристический показатель
уравнения Матье 105
Хилла уравнение 84, 109, 111, 141,
148, 170, 184, 266, 269, 322, 378
обобщенное 380
Частотные характеристики
гармонического колебания 135
Частоты захватывание 317
гармоническое 319
субгармоническое 327
•— ~- ультрагармоническое 324
Оглавление
Предисловие к русскому изданию 5
Предисловие . 7
Введение ... 9
ЧАСТЬ I. ОСНОВНЫЕ МЕТОДЫ АНАЛИЗА НЕЛИНЕЙНЫХ КОЛЕБАНИЙ
Глава 1. Аналитические методы 19
1.1. Введение 19
1.2. Метод возмущений 21
1.3. Метод итераций 33
1.4. Метод усреднения 34
1.5. Принцип гармонического баланса 39
1.6. Численные примеры решения уравнения Дуффинга .... 42
Глава 2. Топологические методы и графические решения 45
2.1. Введение 45
2.2. Интегральные кривые и особые точки на плоскости состояний 46
2.3. Интегральные кривые и особые точки в пространстве состояний 56
2.4. Метод изоклин 59
2.5. Метод Льенара 62
2.6. Дельта-метод 65
2.7. Метод наклонных прямых 72
Глава 3. Устойчивость нелинейных систем 83
3.1. Введение 83
3.2. Определение устойчивости по Ляпунову 84
3.3. Критерий Рауса — Гурвица для нелинейных систем .... 85
3.4. Критерий устойчивости по Ляпунову » . 89
3.5. Устойчивость периодических колебаний 97
3.6. Уравнение Матье 102
3.7. Уравнение Хилла 109
3.8. Улучшенное приближение характеристического показателя для
уравнения Хилла 112
ЧАСТЬ II, ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ В УСТАНОВИВШЕМСЯ РЕЖИМЕ
Глава 4. Устойчивость периодических колебаний в системах второго
порядка 117
4.1. Введение 117
4.2. Условие устойчивости периодических решений 119
4.3. Улучшенные условия устойчивости . . 120
4.4. Дополнительные замечания об условиях устойчивости . . .121
Глава 5. Гармонические колебания 131
5.1. Гармонические колебания при симметричной нелинейной
характеристике 131
5.2. Гармонические колебания при несимметричной нелинейной
характеристике . . 137
5.3. Экспериментальное исследование 142
Глава 6. Ультрагармонические колебания 146
6.1. Ультрагармонические колебания в
последовательно-резонансных цепях 146
6.2. Экспериментальное исследование 150
6.3. Ультрагармонические колебания в параллельно-резонансных
цепях 152
Q.4. Экспериментальное исследование ........... 157
Оглавление 431
Глава 7. Субгармонические колебания . . ... 162
7.1. Введение 162
7.2. Связь между нелинейной характеристикой и порядком
субгармонических колебаний ... ..... 162
7.3. Субгармонические колебания порядка 1/3 при нелинейной
характеристике, представленной кубической функцией .... 165
7.4. Субгармонические колебания порядка 1/3 при нелинейной
характеристике, представленной полиномом пятой степени . .174
7.5. Экспериментальное исследование 179
7.6. Субгармонические колебания порядка 1/2 при нелинейной
характеристике, представленной полиномом третьей степени . . 182
7.7. Субгармонические колебания порядка 1/2 при нелинейной
характеристике, представленной симметричной квадратичной
функцией 191
7.8. Экспериментальное исследование 196
ЧАСТЬ III. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ
Глава 8. Гармонические колебания 205
8.1. Введение 2(5
8.2. Периодические решения и их устойчивость 206
8.3. Анализ гармонических колебаний с помощью интегральных
кривых 208
8.4. Анализ гармонических колебаний на фазовой плоскости . .211
8.5. Геометрический анализ интегральных кривых для
консервативных систем 215
8.6. Геометрический анализ интегральных кривых для диссипатив-
ных систем 222
8.7. Экспериментальное исследование 22Э
Глава 9. Субгармонические колебания 233
9.1. Анализ субгармонических колебаний с помощью интегральных
кривых 233
9.2. Анализ субгармонических колебаний порядка 1/3 на фазовой
плоскости 234
9.3. Экспериментальное исследование 237
9.4. Субгармонические колебания порядка 1/5 242
9.5. Субгармонические колебания порядка 1/2 .. 246
9.6. Анализ субгармонических колебаний порядка 1/2 на фазовой
плоскости 251
9.7. Исследование на аналоговой вычислительной машине . . . 260
Глава 10. Начальные условия, приводящие к различным видам
периодических колебаний 264
10.1. Метод анализа 264
10.2/ Симметричные системы 267
10.3. Области притяжения для гармонических и субгармонических
колебаний порядка 1/3 271
10.4. Несимметричные системы 279
10.5. Области притяжения для гармонических и субгармонических
колебаний порядков 1/2 и 1/3 283
10.6. Экспериментальные исследования 286
Глава 11. Почти периодические колебания 291
11.1. Введение 291
11.2. Почти периодические колебания в резонансной цепи с подмаг-
ничиванием постоянным током 292
432 Оглавление
11.3. Экспериментальное исследование 302
11.4. Почти периодические колебания в параметрически
возбуждаемой цепи • . 306
ЧАСТЬ IV. АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
ПРИ ПЕРИОДИЧЕСКОМ ВОЗДЕЙСТВИИ ВНЕШНЕЙ СИЛЫ
Глава 12. Захватывание частоты 317
12.1. Введение 317
12.2. Уравнение Ван-дер-Поля с вынуждающим членом .... 318
12.3. Гармоническое захватывание . 319
12.4. Ультрагармоническое захватывание 324
12.5. Субгармоническое захватывание 327
12.6. Области захватывания частоты 329
12.7. Анализ при помощи аналоговой вычислительной машины . . 334
12.8. Автоколебательная система при нелинейной
восстанавливающей силе 338
Глава 13. Почти периодические колебания 343
13.1. Введение 343
13.2. Уравнение Ван-дер-Поля с вынуждающим членом .... 344
13.3. Почти периодические колебания, возникающие из
гармонических колебаний 347
13.4. Геометрическое рассмотрение интегральных кривых на
границе гармонического захватывания 352
13.5. Почти периодические колебания, возникающие из
ультрагармонических колебаний 356
13.6. Почти периодические колебания, возникающие из
субгармонических колебаний 360
13.7. Автоколебательная система с нелинейной восстанавливающей
силой 367
Приложение I. Разложения функций Матье 375
Приложение II. Неустойчивые решения уравнения Хилла ...... 377
Приложение III. Неустойчивые решения обобщенного уравнения Хилла 380
Приложение IV. Критерий устойчивости, полученный с помощью метода
возмущений 390
Приложение V. Замечания, касающиеся интегральных кривых и особых
точек 394
Приложение VI. Электронный синхронный коммутатор 401
Задачи 404
Литература 421
Указатель ' 428
Т. Хаяси
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ В ФИЗИЧЕСКИХ СИСТЕМАХ
Редактор Н. Плужнакова Художник А. Шкловская
Художественный редактор В. Шаповалов Технический редактор Н. Турсукова
Сдано в производство 9/Х 1967 г. Подписано к печати 25/Ш 1968 г. Бумага 60х90у1в-
= 13,5 бум. л. 27,0 печ. л. Уч.-изд. л. 24,0. Изд. № 1/3899. Цена 1 р. 91 к. Зак. 907.
Темплан 1968 г. йзд-ва «Мир», пор. № 38.
ИЗДАТЕЛЬСТВО „МИР*, Москва, 1-й Рижский пер., 2
Ленинградская типография № 2 имени Евгении Соколовой Главполиграфпрома Комитета
по печати при Совете Министров СССР. Измайловский пр., 29.
*s
щ