/





















































Автор: Горяченко В.Д.
Теги: колебания акустика физика теории колебаний
ISBN: 5-06-004166-2
Год: 2001



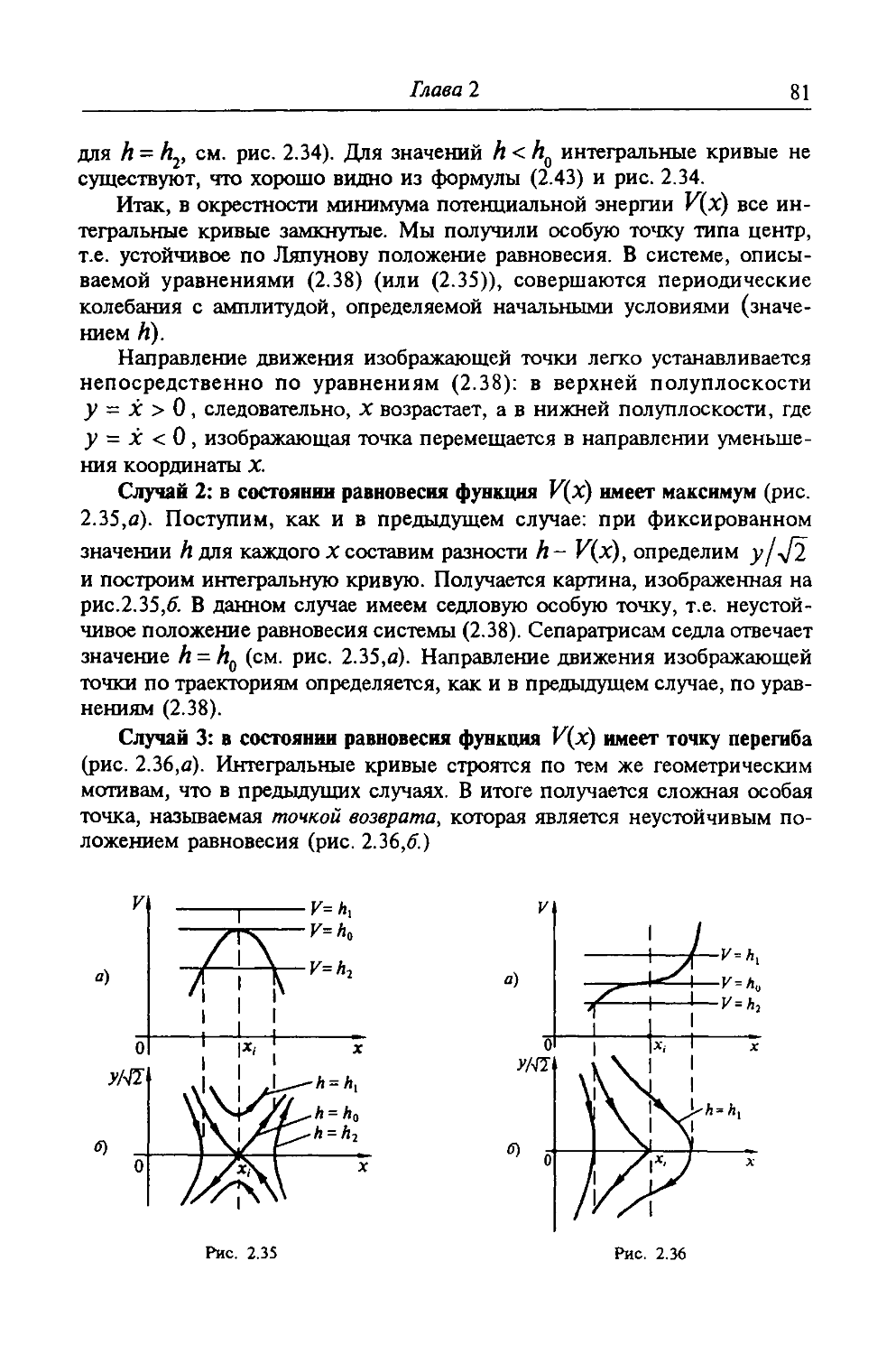
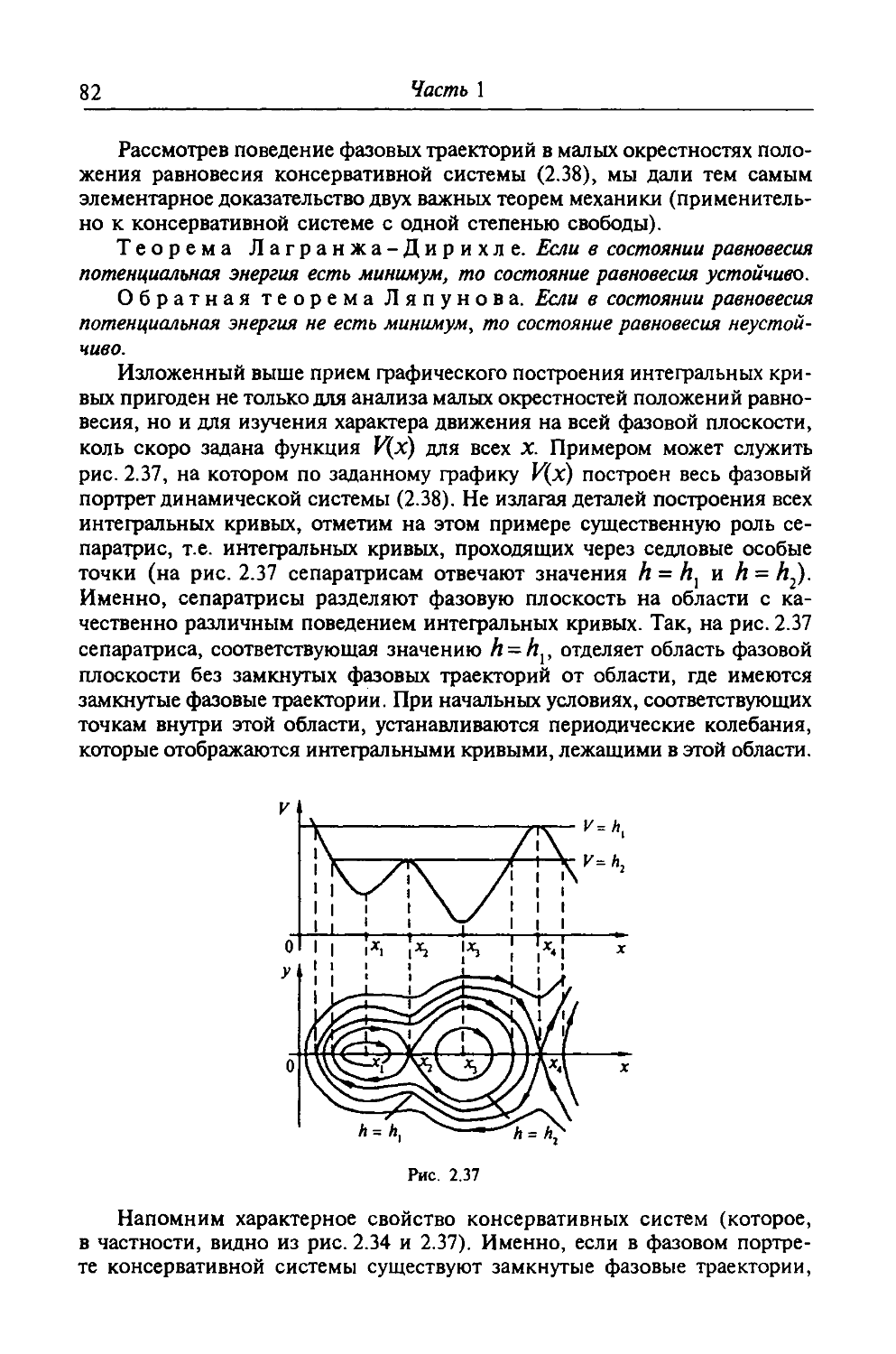
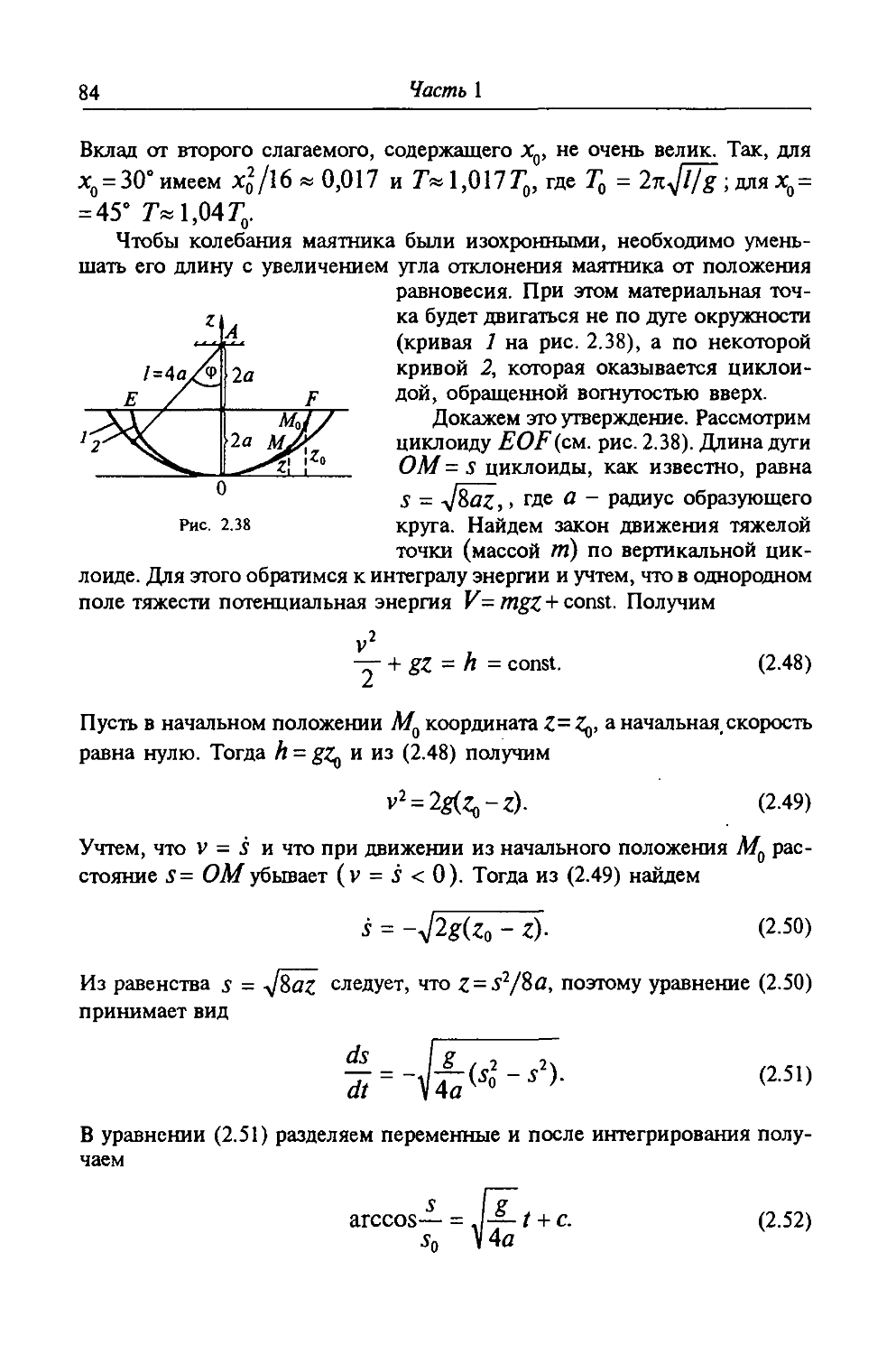
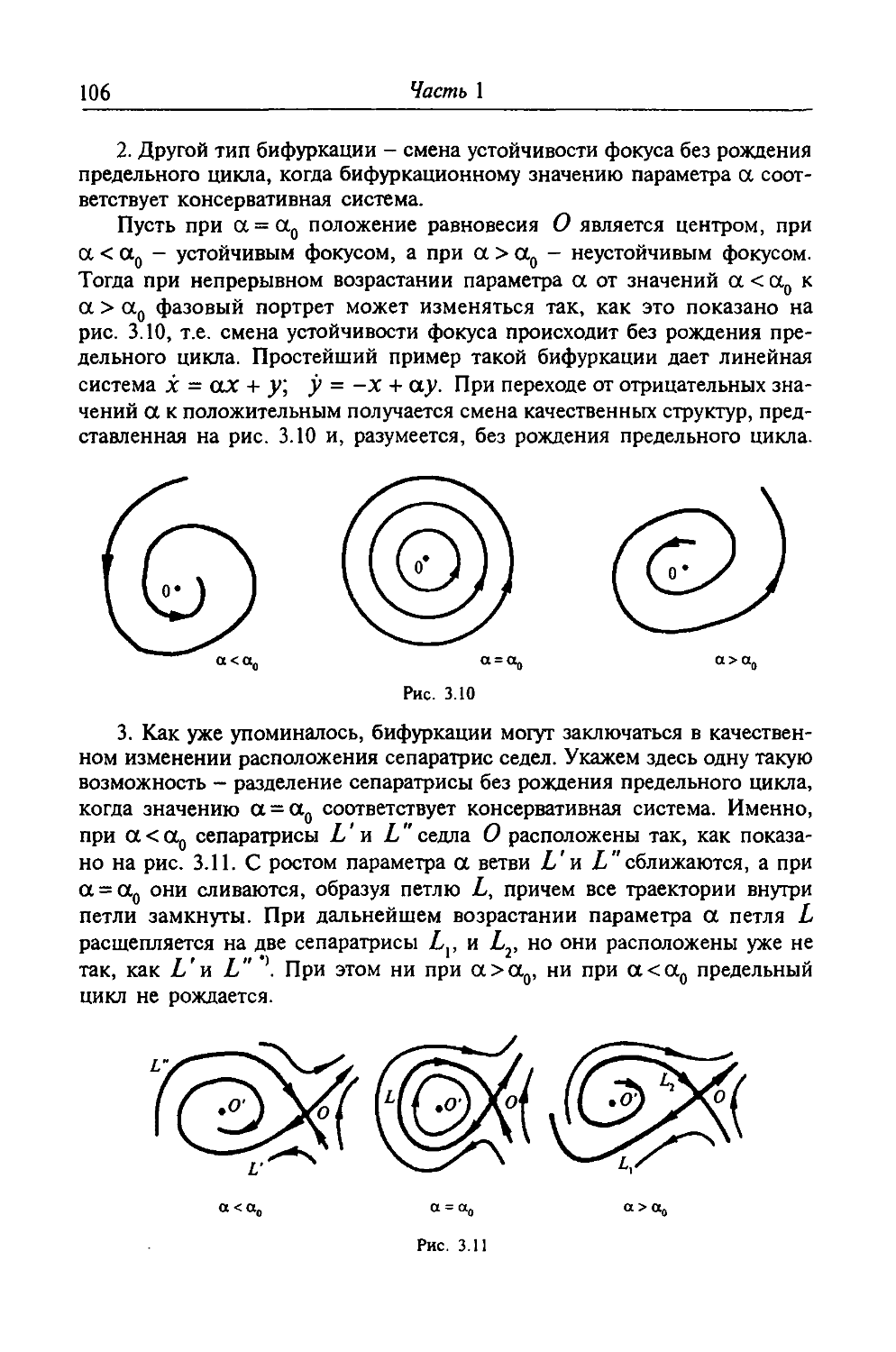
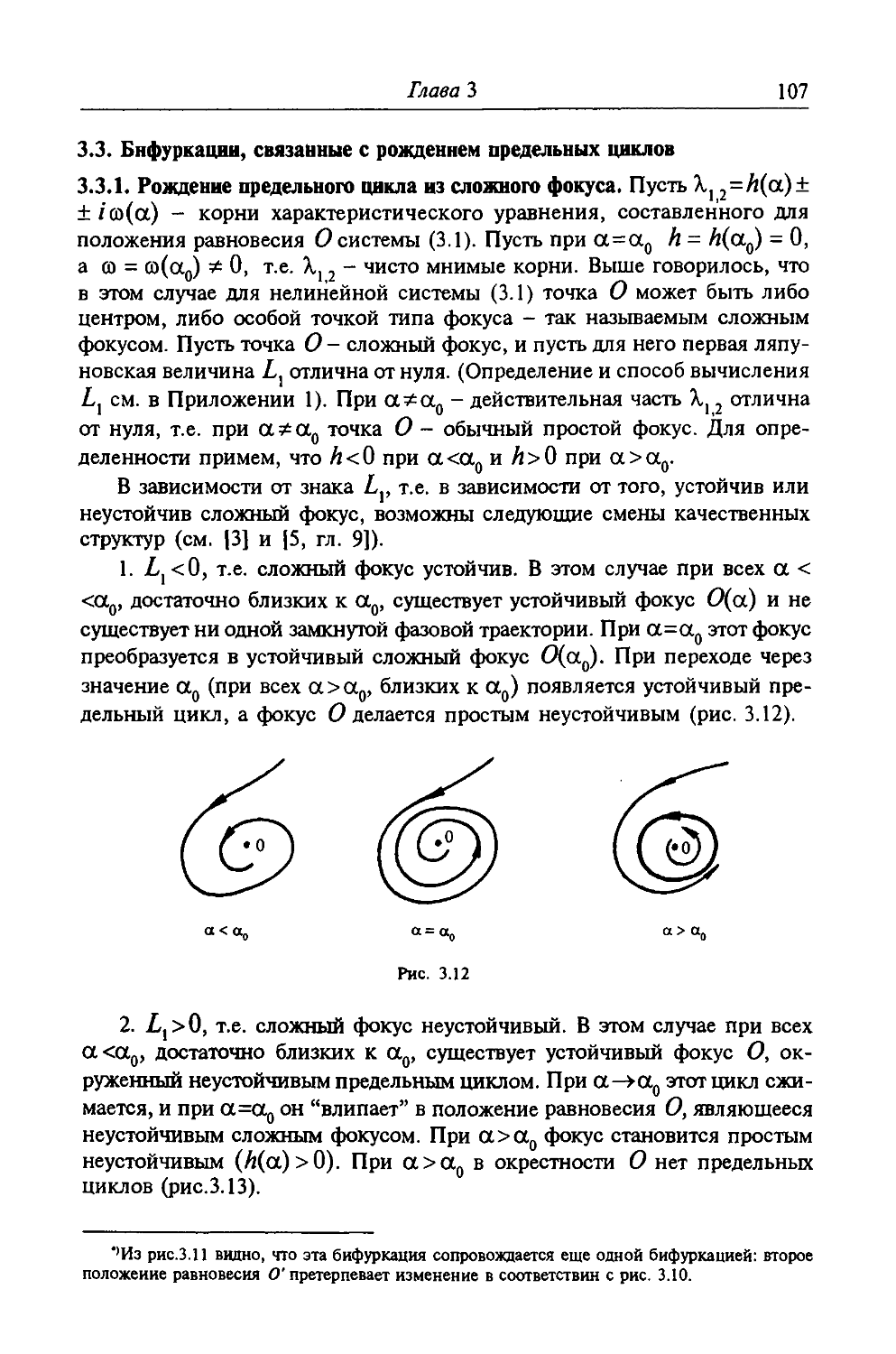
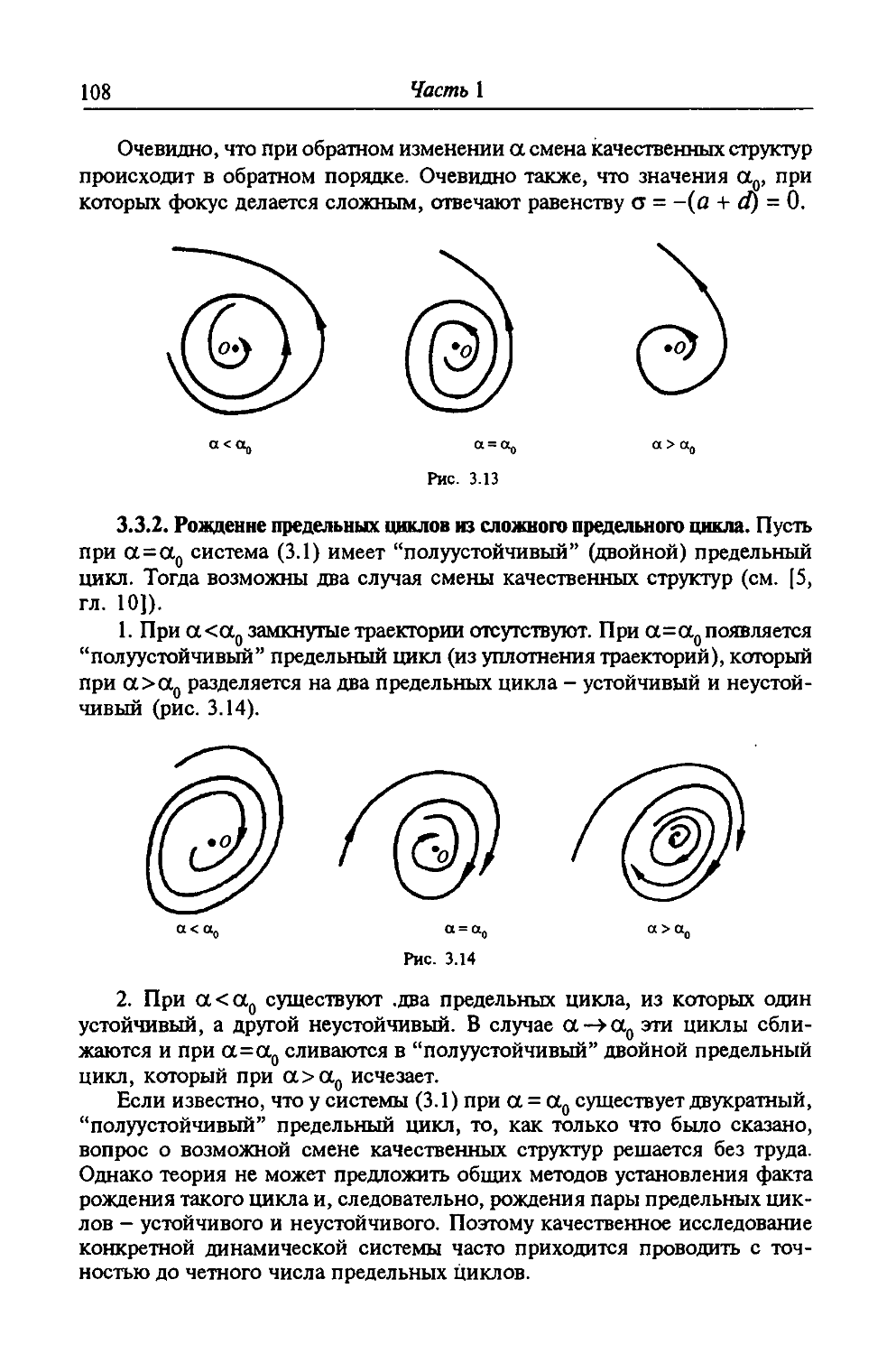
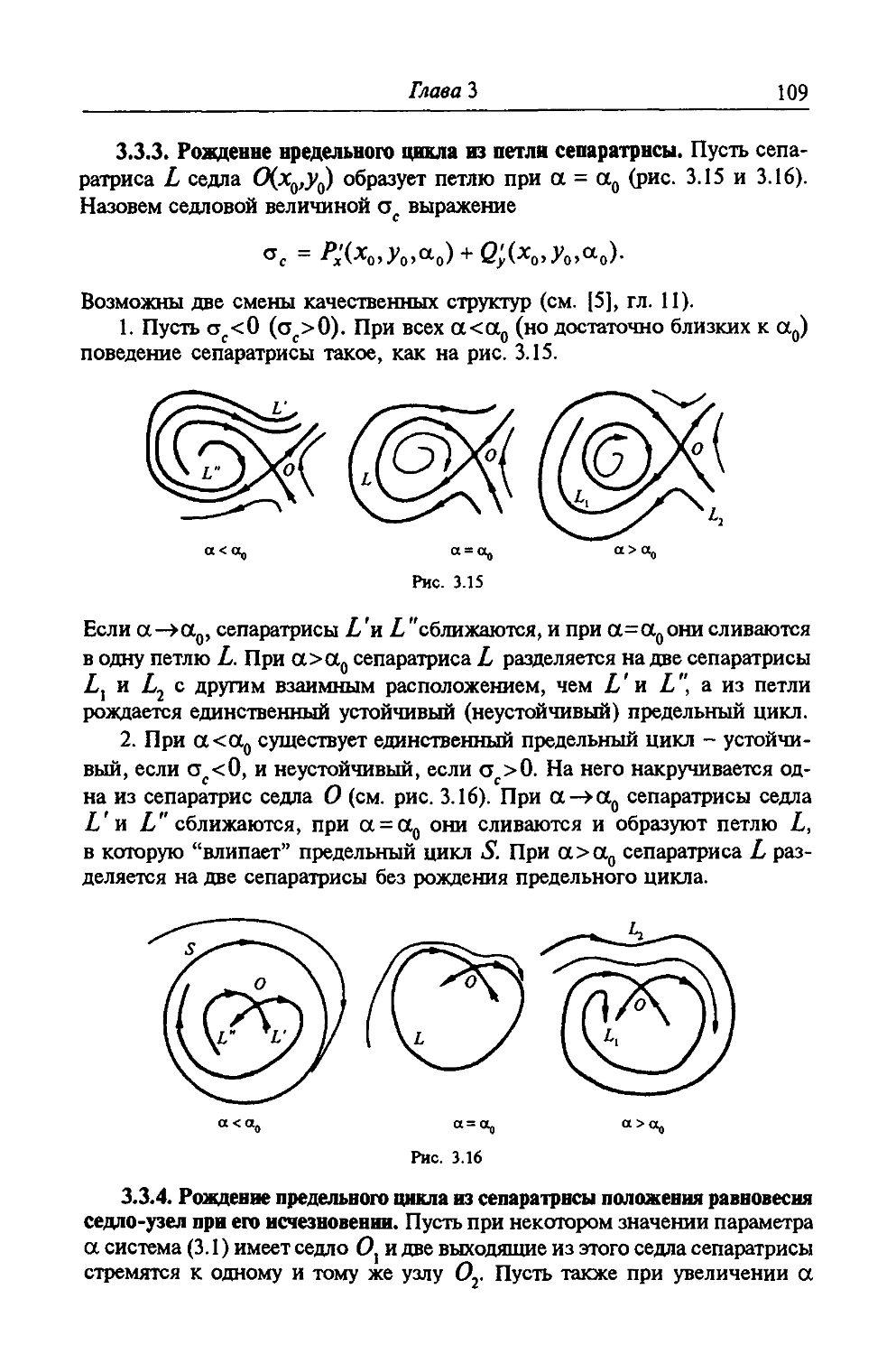
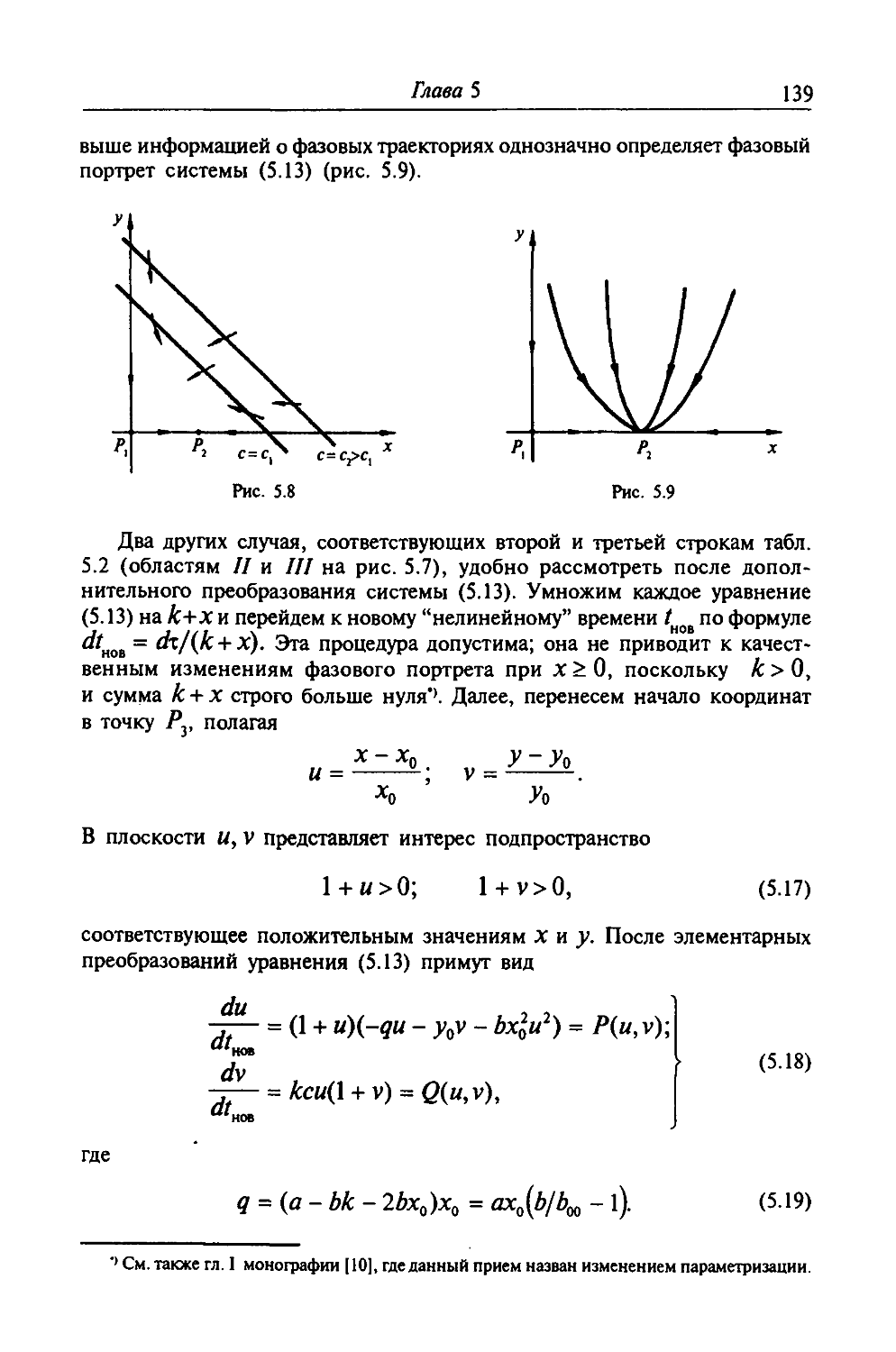
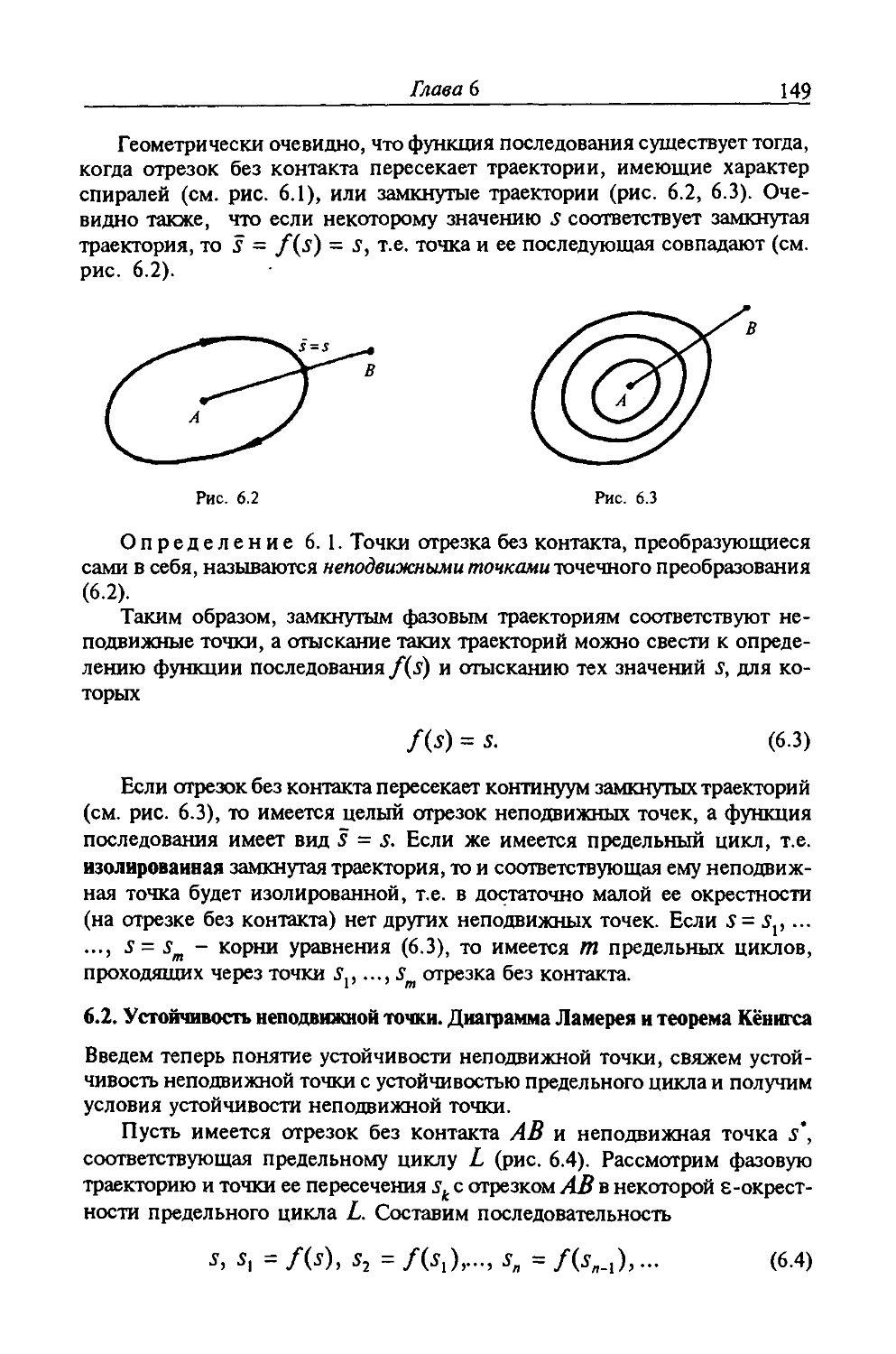
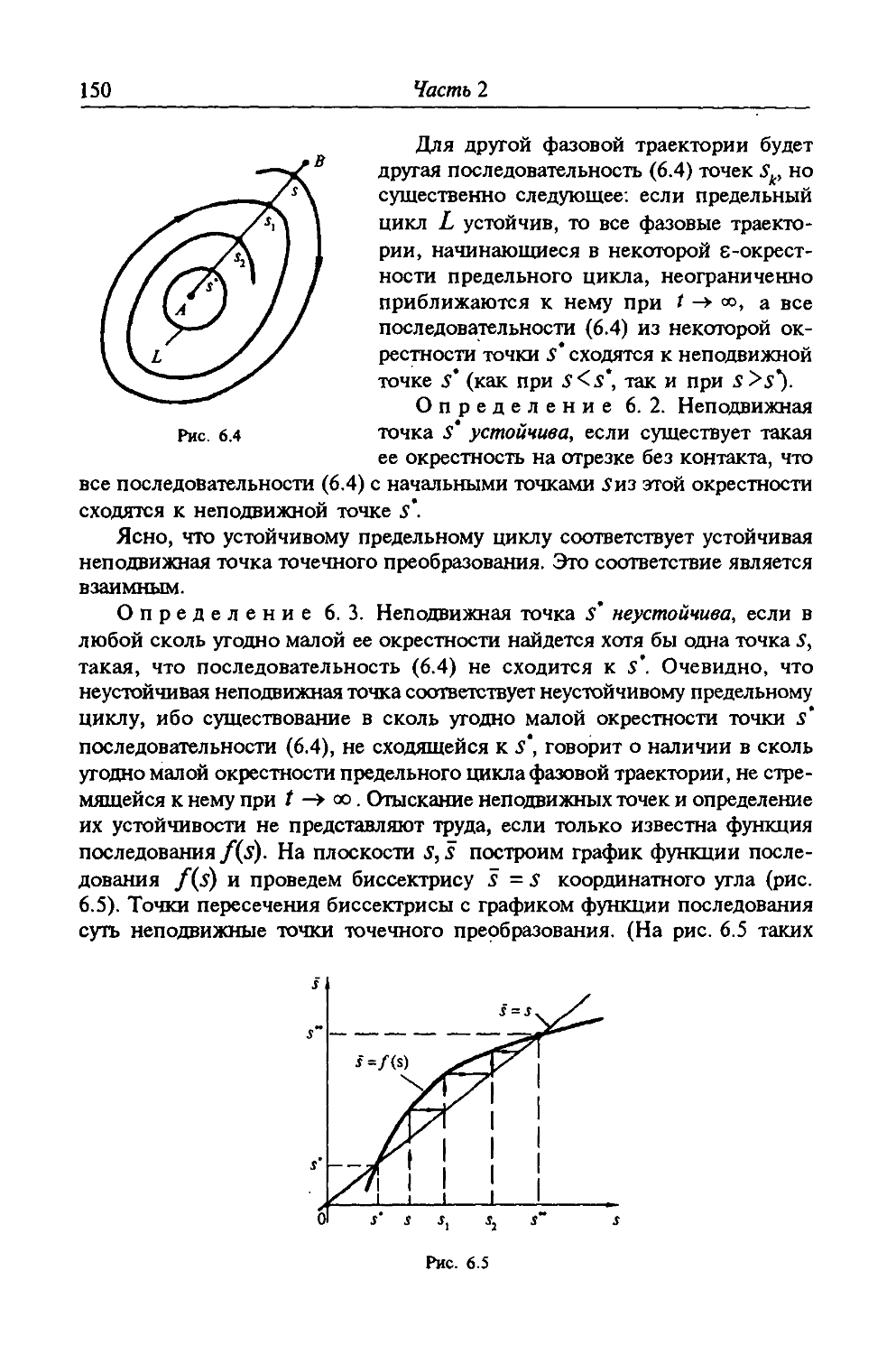
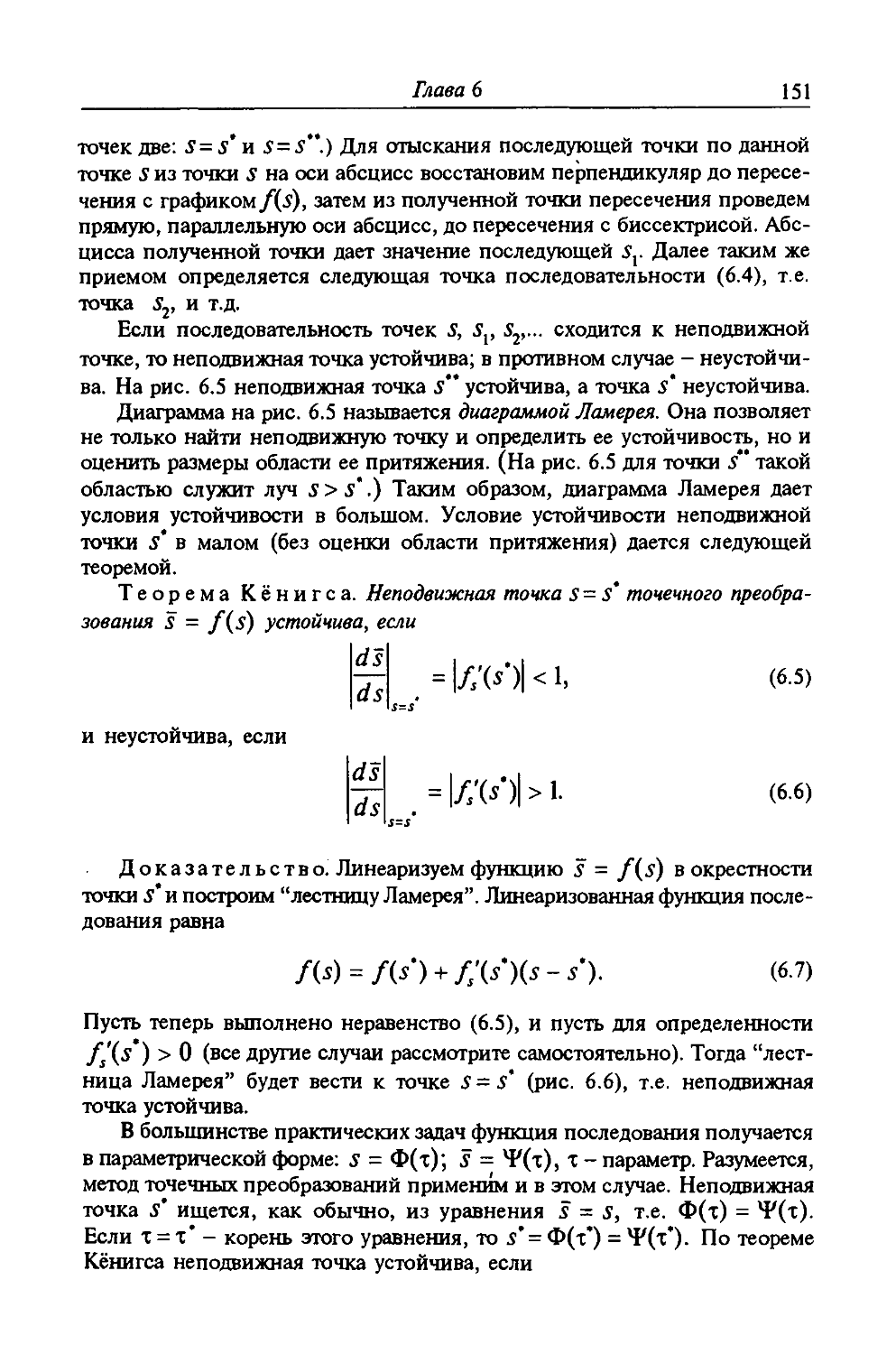
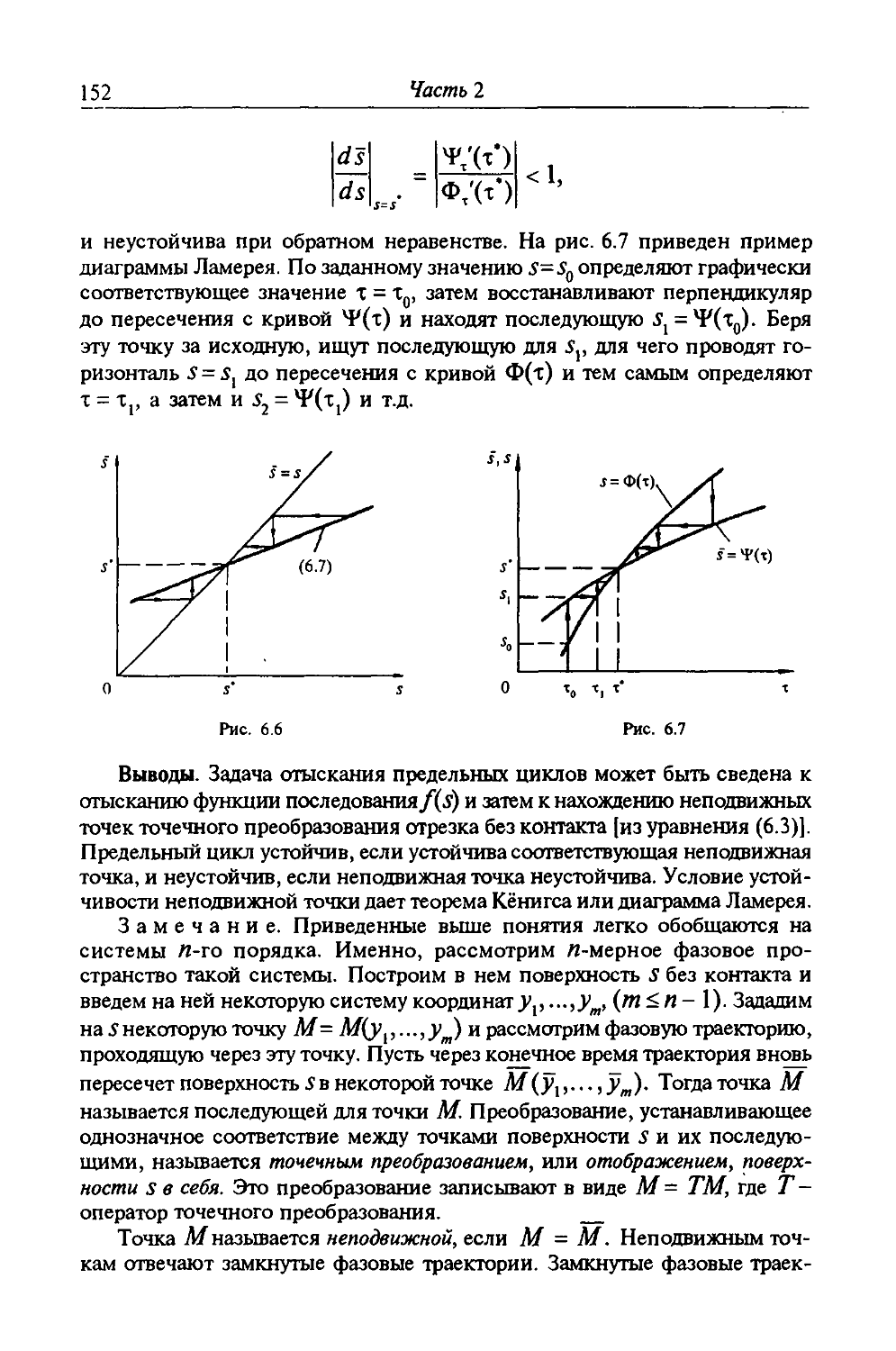
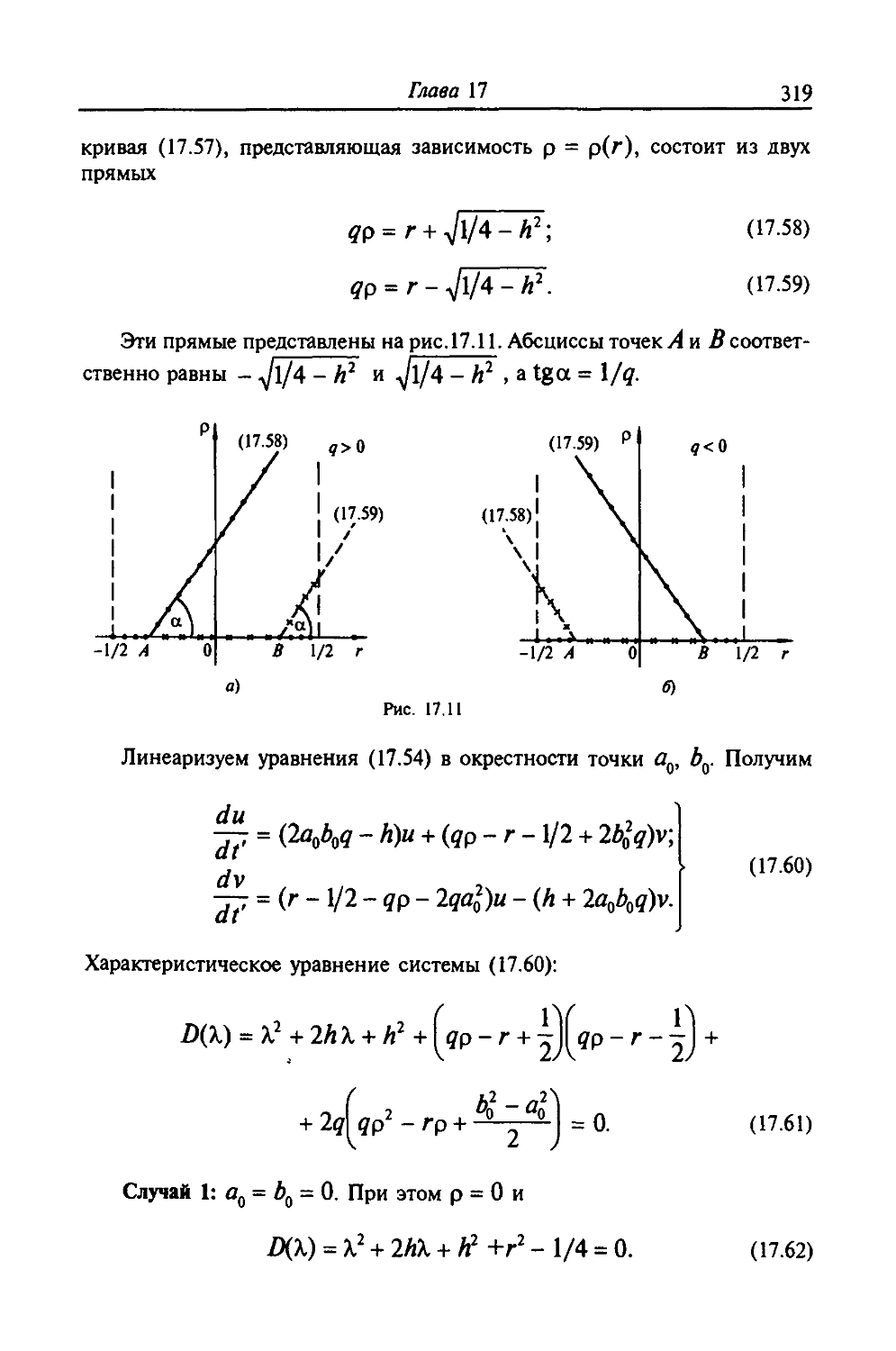
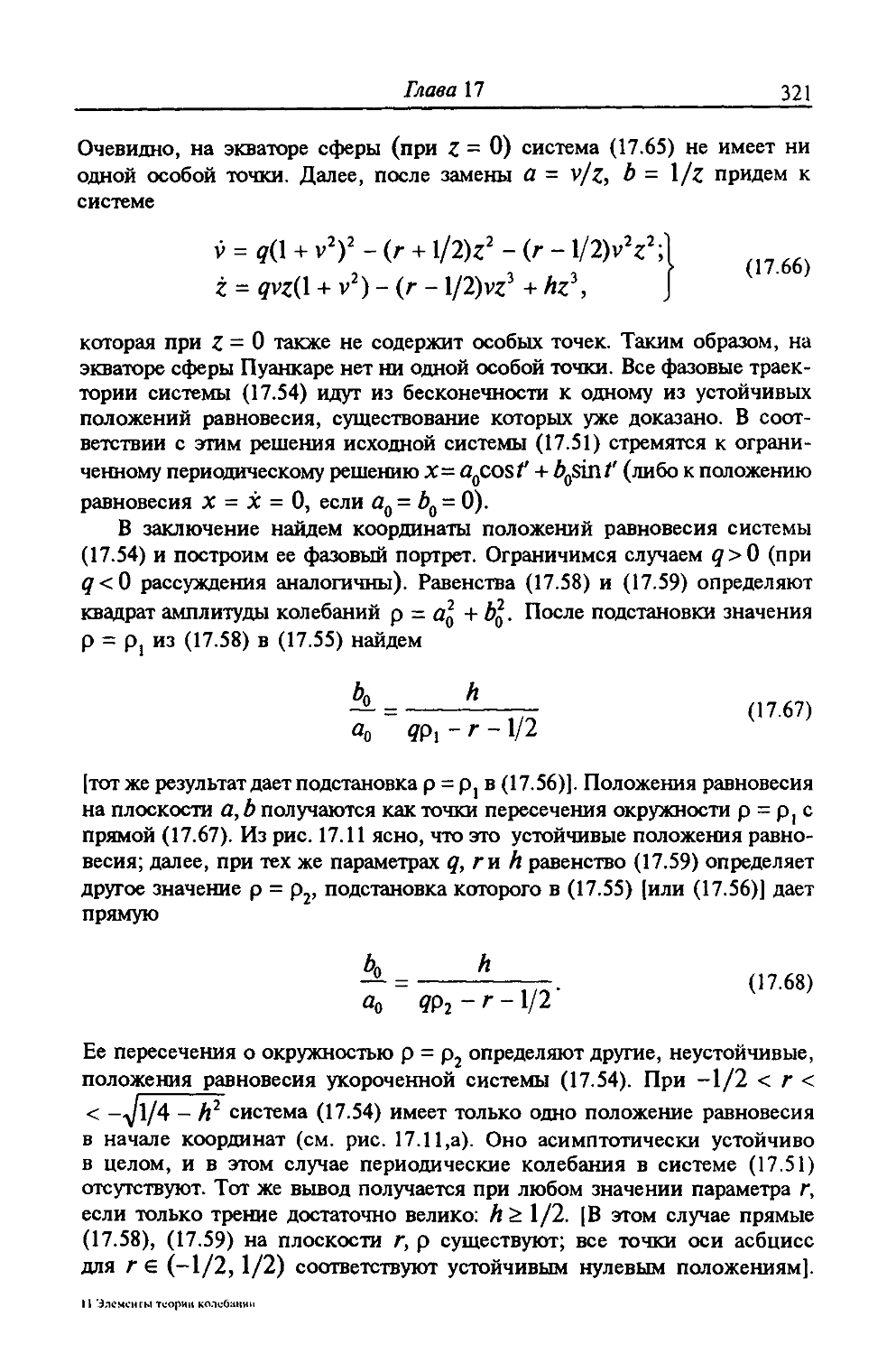
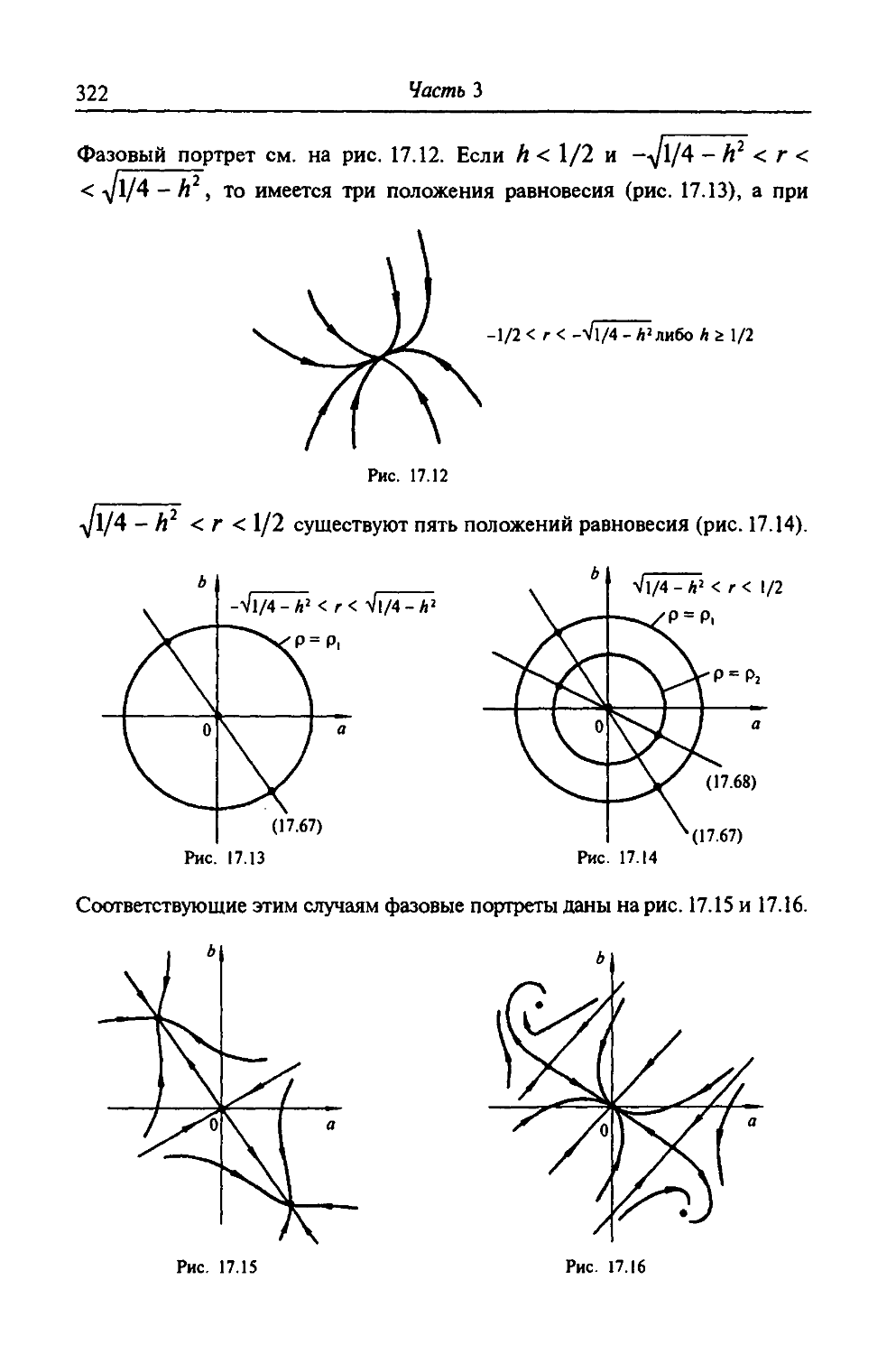
Текст
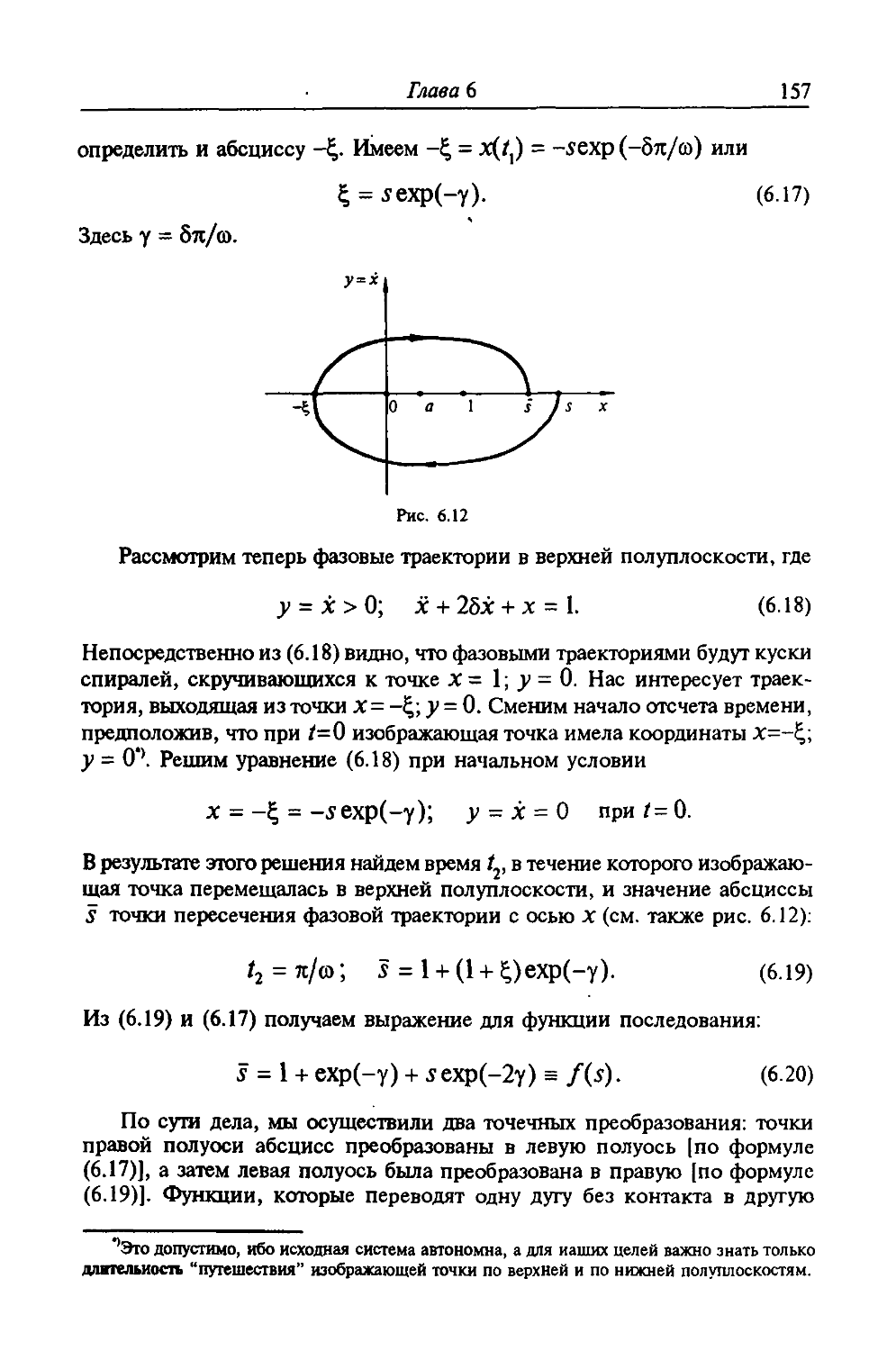
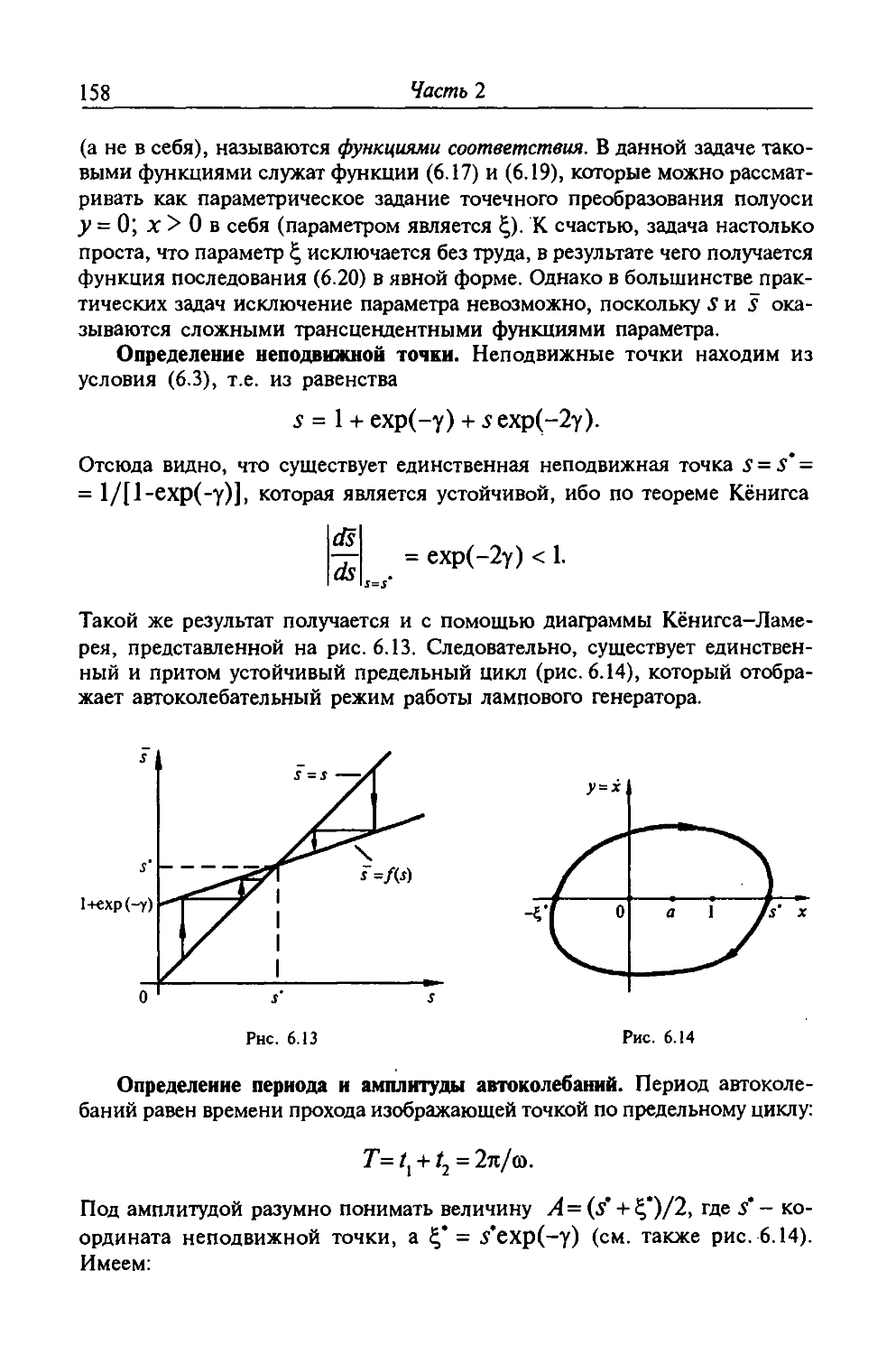
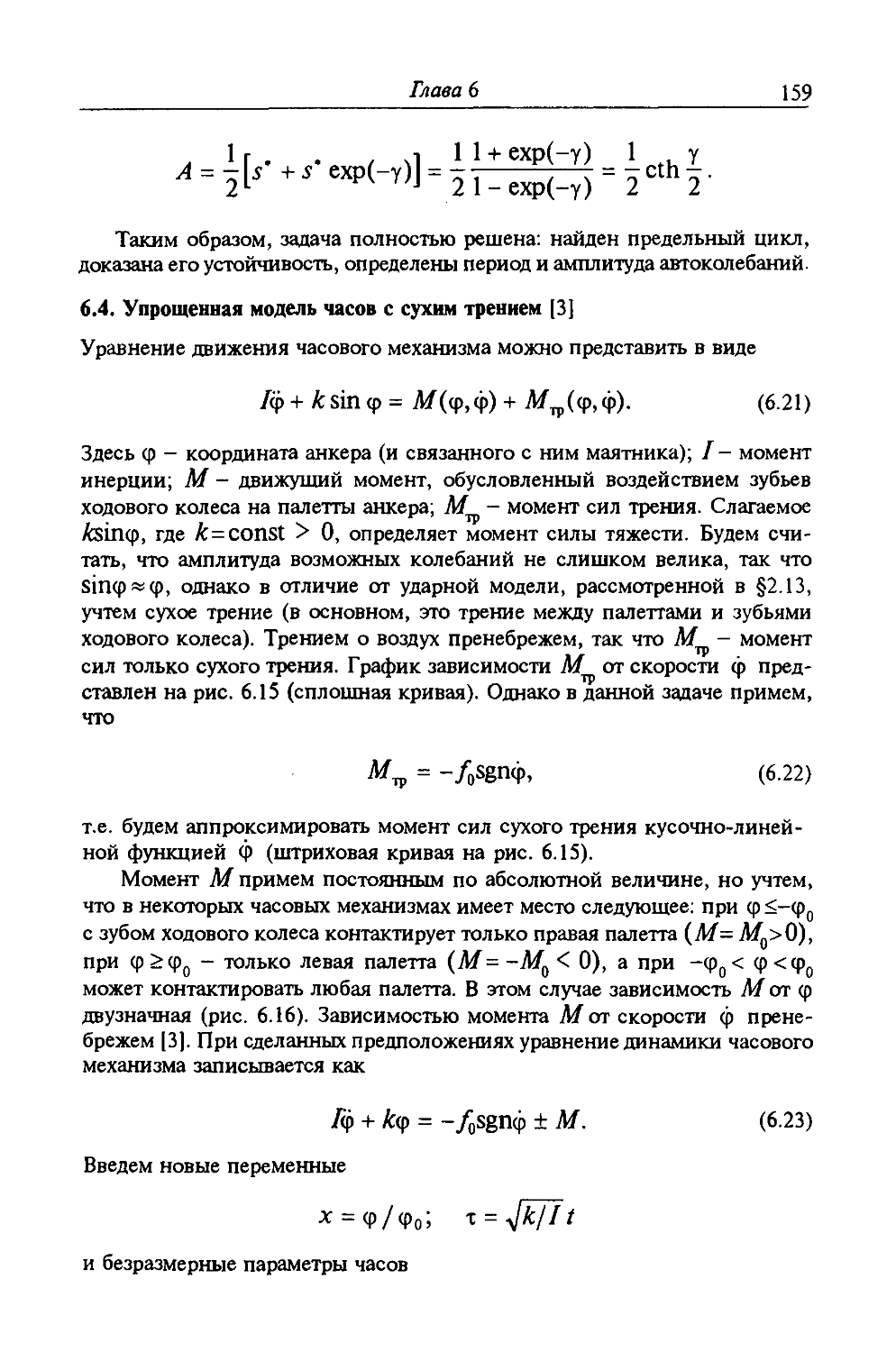
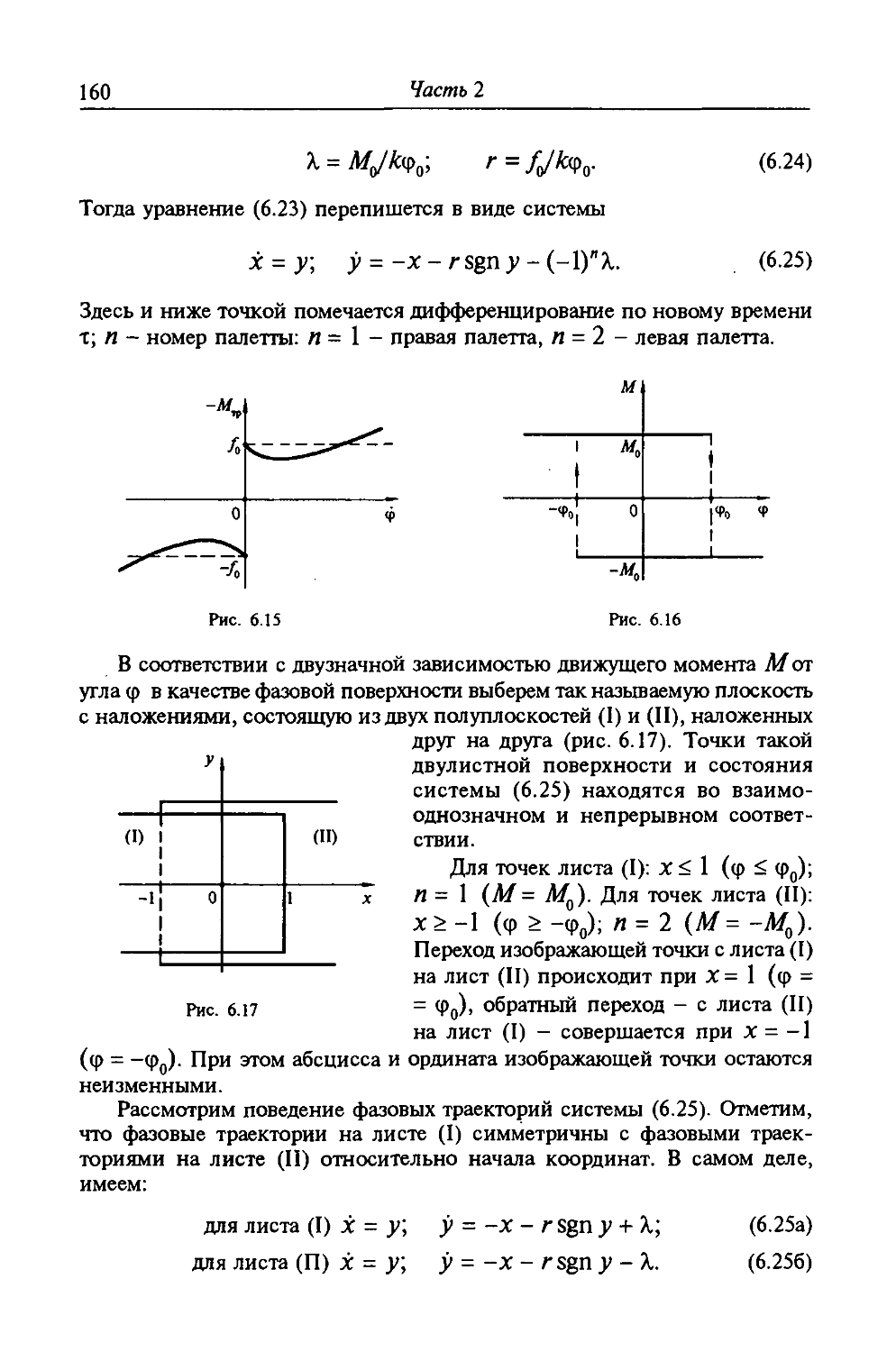
Горяченко, Вадим Демьянович
Элементы теории колебаний: Учебное пособие для студентов высших учебных
заведений.- Издание второе переработанное и дополненное. - М.: Высшая школа,
2001.-395 с.: ил.
ISBN 5-06-004166-2, 5000 экз.
Рассмотрены основные понятия и методы нелинейной теории динамических
систем: устойчивость, качественные методы исследования систем на фазовой
плоскости, методы расчета автоколебаний и колебаний под действием внешних
периодических сил. Изложение теории иллюстрировано многочисленными
примерами. Задания для самостоятельной работы сопровождаются
соответствующими указаниями и частично подробными решениями. Прикладные
задачи представлены оригинальными и имеющими самостоятельный интерес и
познавательное значение исследованиями математических моделей систем ядерной
энергетики и математической экологии. Второе издание A-е вышло в 1995 г.)
переработано и дополнено новым материалом. Для студентов, аспирантов и
преподавателей вузов в качестве пособия к начальным курсам динамики систем,
теории колебаний и математического моделирования; для научных работников и
инженеров, занятых математическим моделированием динамических систем в
различных областях науки и техники.
Электромагнитные колебания и волны
ББК 22.336
УДК 534
Оглавление
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ - 5-6c.
ПРЕДИСЛОВИЕ - 7-9c.
ВВЕДЕНИЕ - 10-25c.
B. 1 Теория колебаний - ветвь прикладной математики - 10-11c.
B.2 Краткие исторические сведения -11-12c.
B.3 Динамические системы и их классификация - 12-13c.
B.4 Типы колебаний -13-15c.
B. 5 Простейшие примеры. Свободные колебания линейной системы с одной
степенью свободы -15-19c.
B.6 Фазовое пространство и фазовые траектории динамических систем - 19-21c.
B.7 Дополнительные замечания и литература - 21-25c.
Задачи - 25c.
ЧАСТЬ 1 КОЛЕБАНИЯ НЕЛИНЕЙНЫХ АВТОНОМНЫХ СИСТЕМ:
КАЧЕСТВЕННЫЕ МЕТОДЫ - 26-145c.
Глава 1 Устойчивость положений равновесия автономных динамических систем -
26-48c.
1.1 Положения равновесия. Определения устойчивости - 26-29c.
1.2 Второй метод Ляпунова - 29-32c.
1.3 Второй метод Ляпунова (продолжение). Геометрическая интерпретация
знакоопределенных функций. Оценка области притяжения - 32-3 8c.
1.4 Устойчивость по первому приближению - 38-44c.
1.5 Заключение - 44c.
Задачи - 44-48c.
Глава 2 Качественные методы исследования нелинейных автономных систем с
одной степенью свободы - 49-100c.
2.1 Состояния равновесия систем с одной степенью свободы. Их типы и
устойчивость - 49-58c.
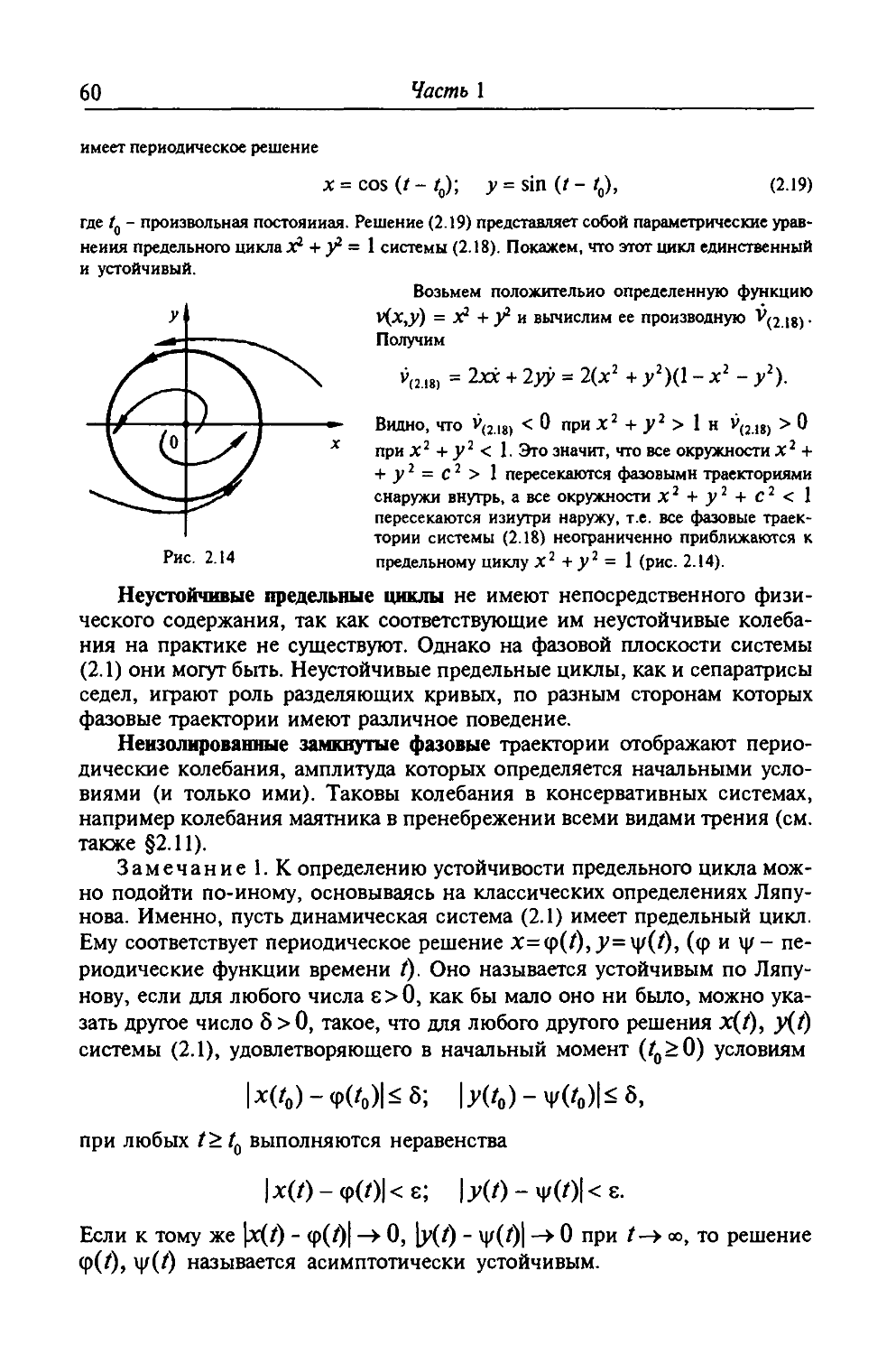
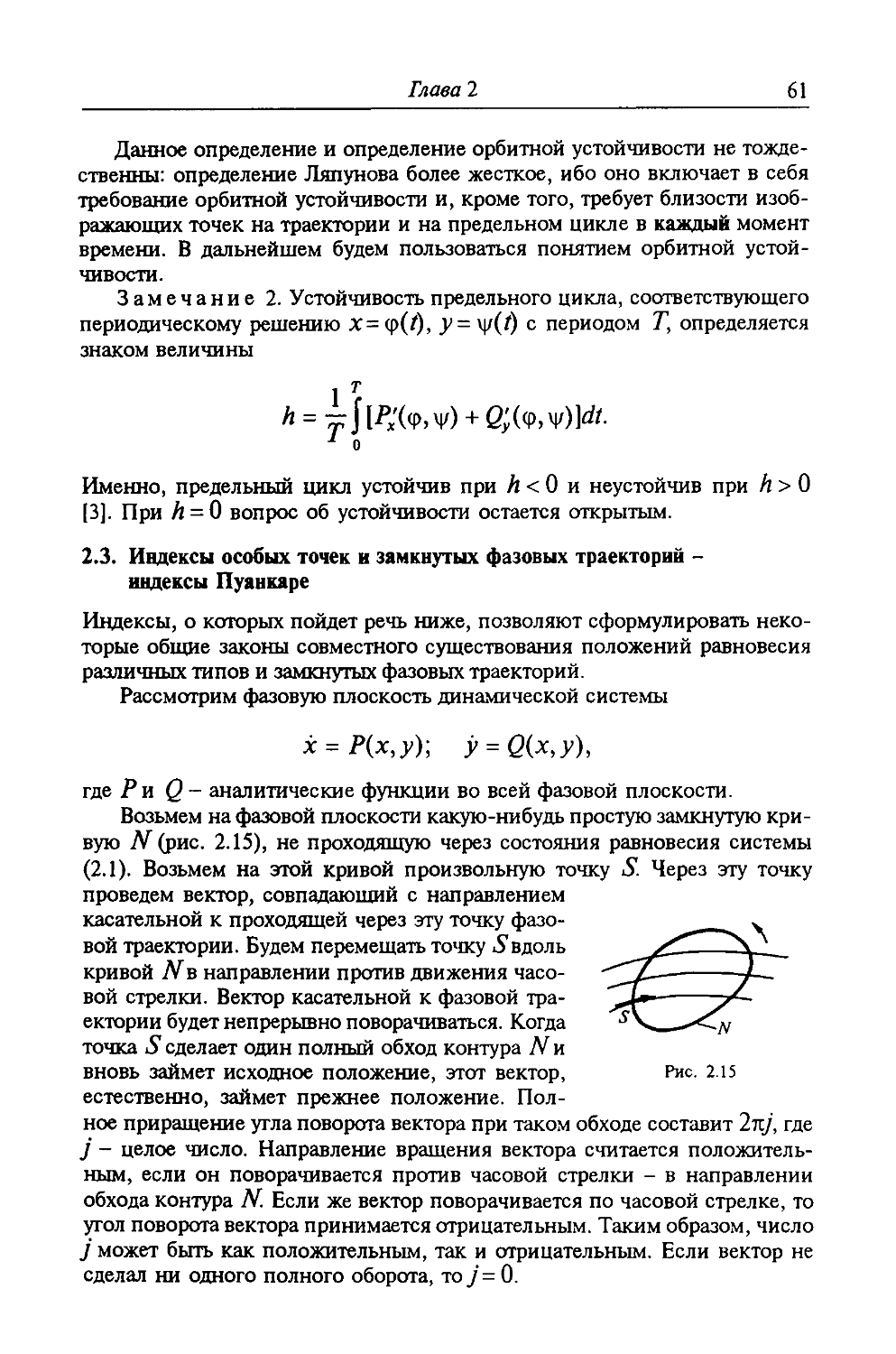
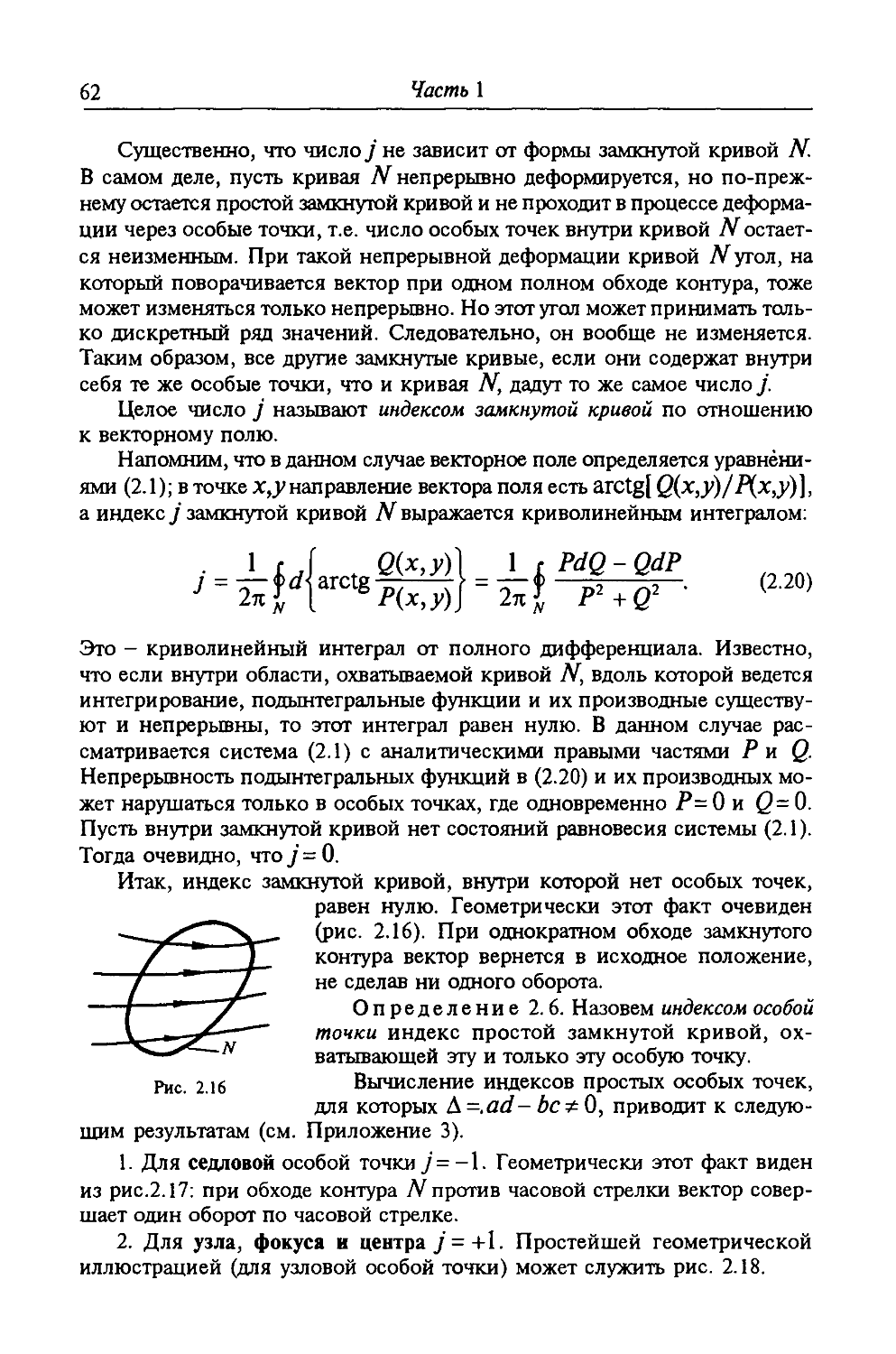
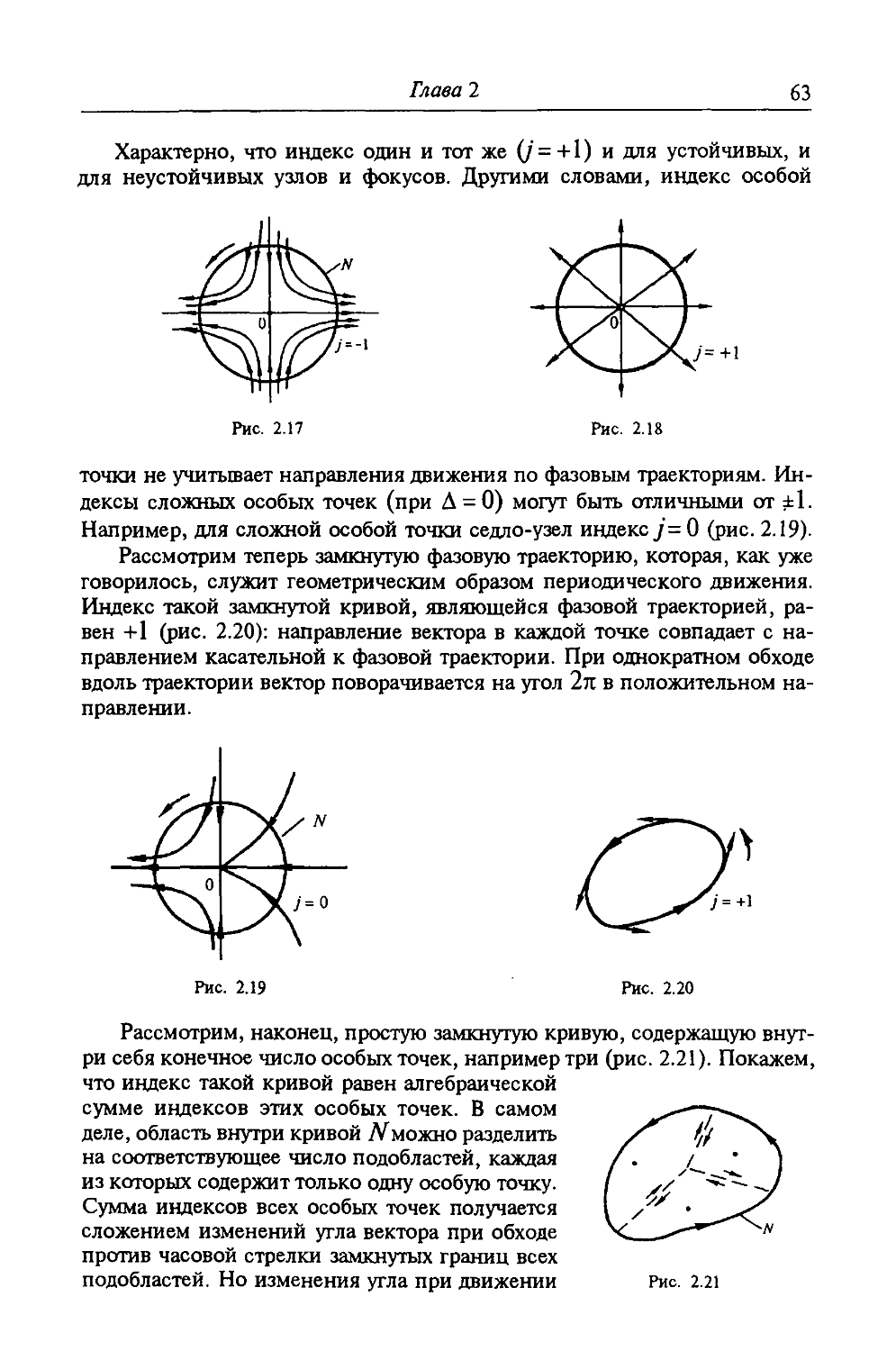
2.2 Замкнутые фазовые траектории - 58-61c.
2.3 Индексы особых точек и замкнутых фазовых траекторий - индексы Пуанкаре -
61-64c.
2.4 Критерии отсутствия замкнутых фазовых траекторий - 64-67c.
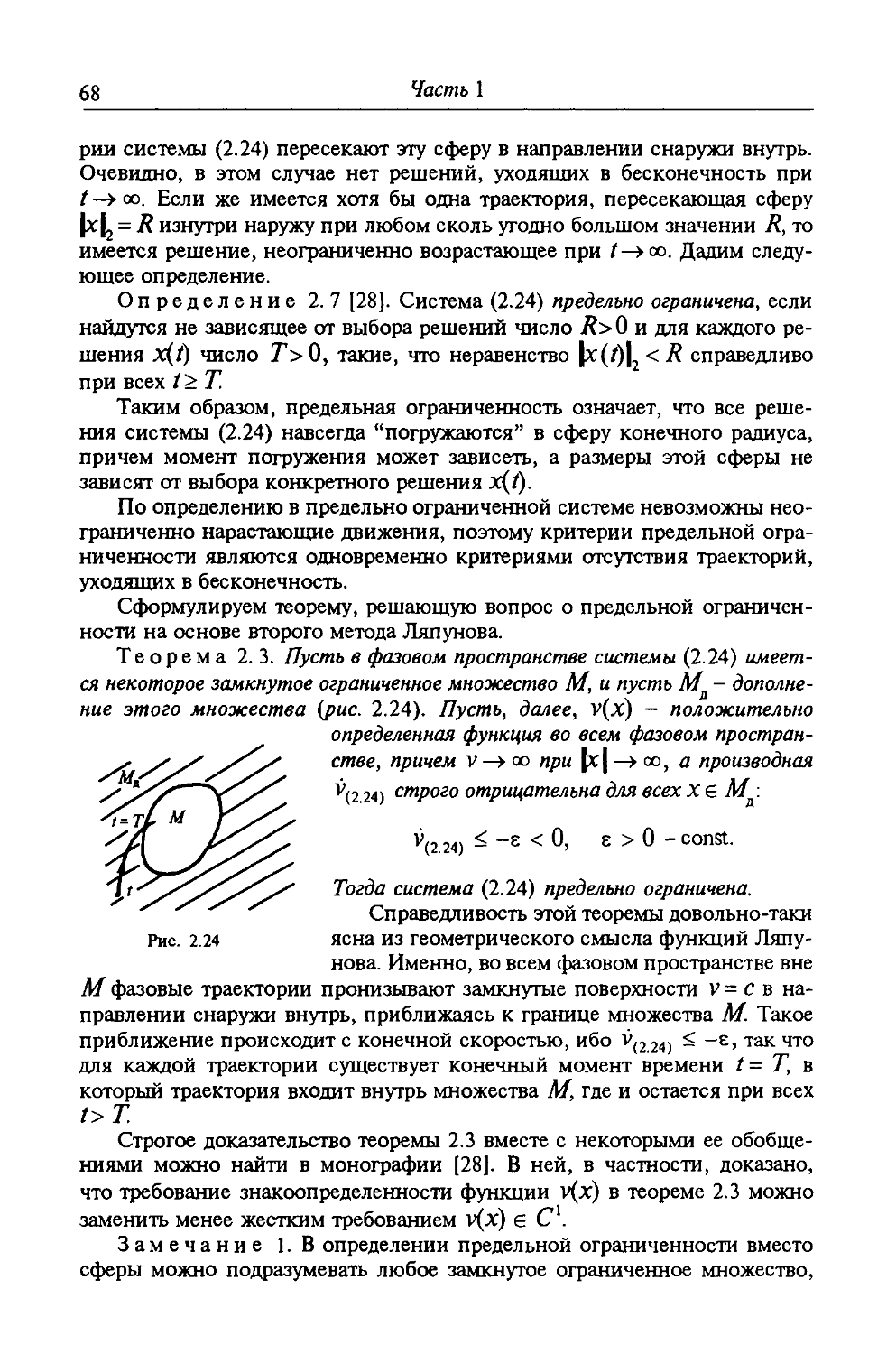
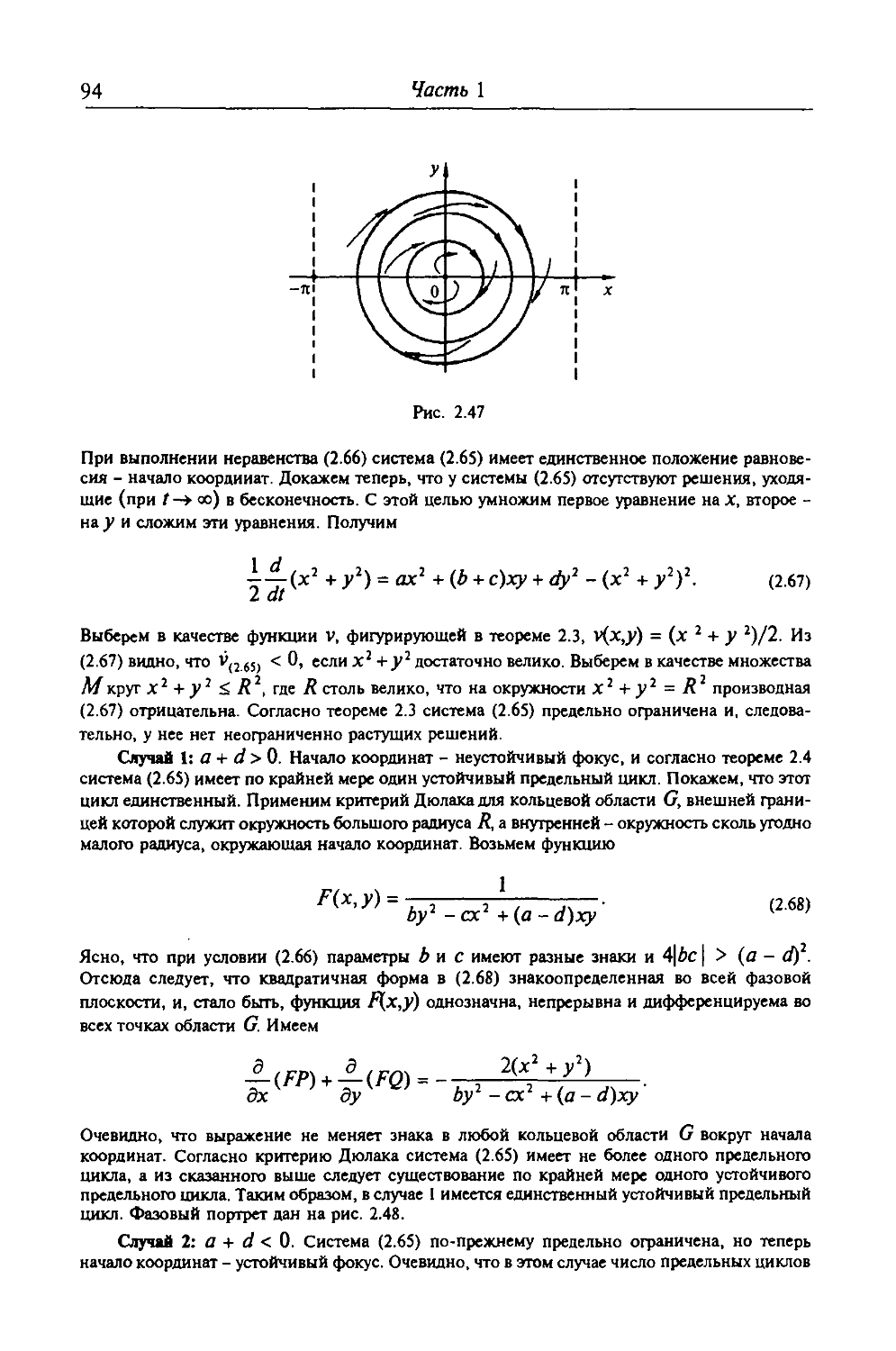
2.5 Об отсутствии фазовых траекторий, уходящих в бесконечность - 67-69c.
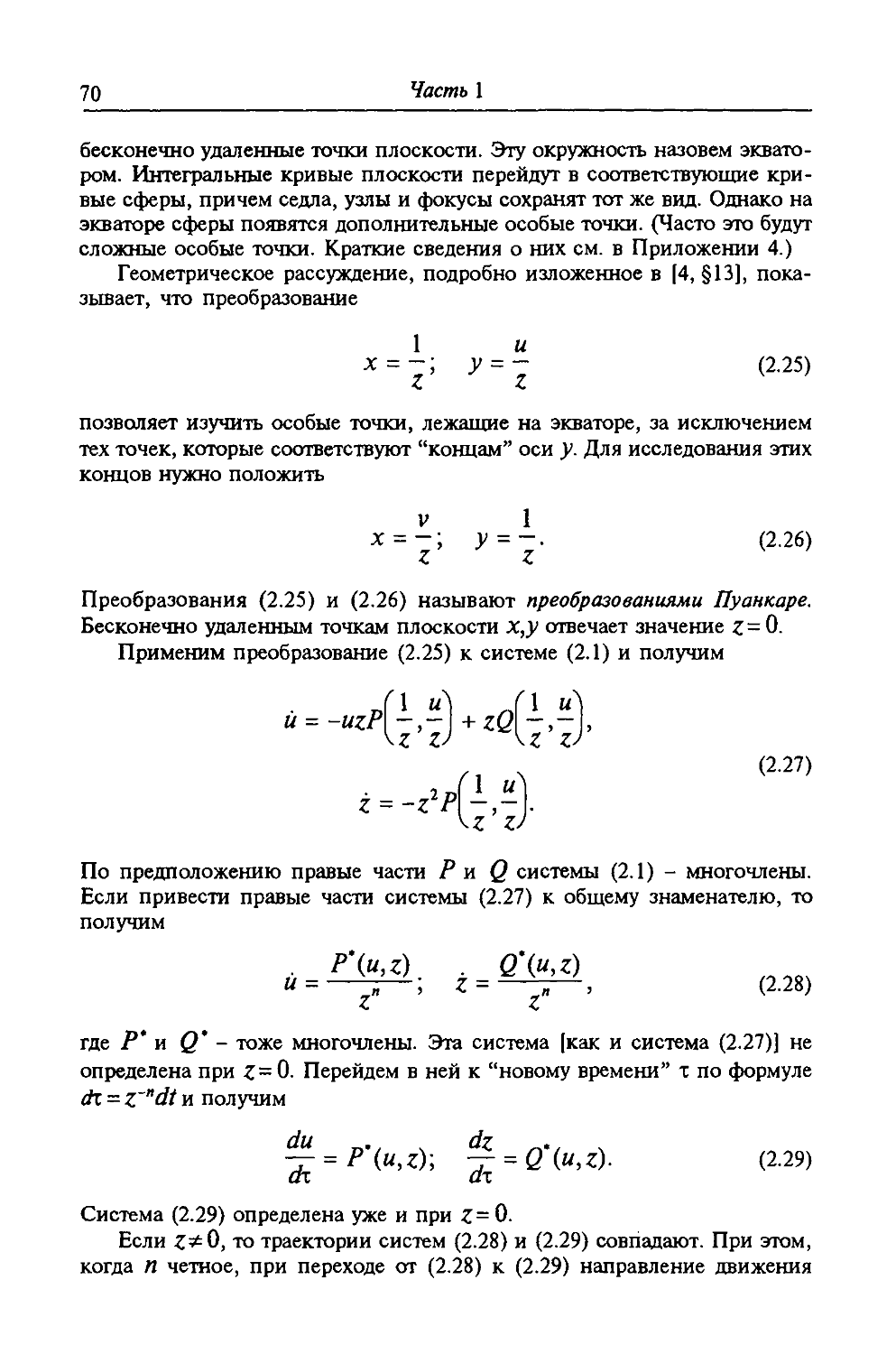
2.6 Поведение траекторий на бесконечности - 69-74c.
2.7 Оценка местоположения предельных циклов - 74-75c.
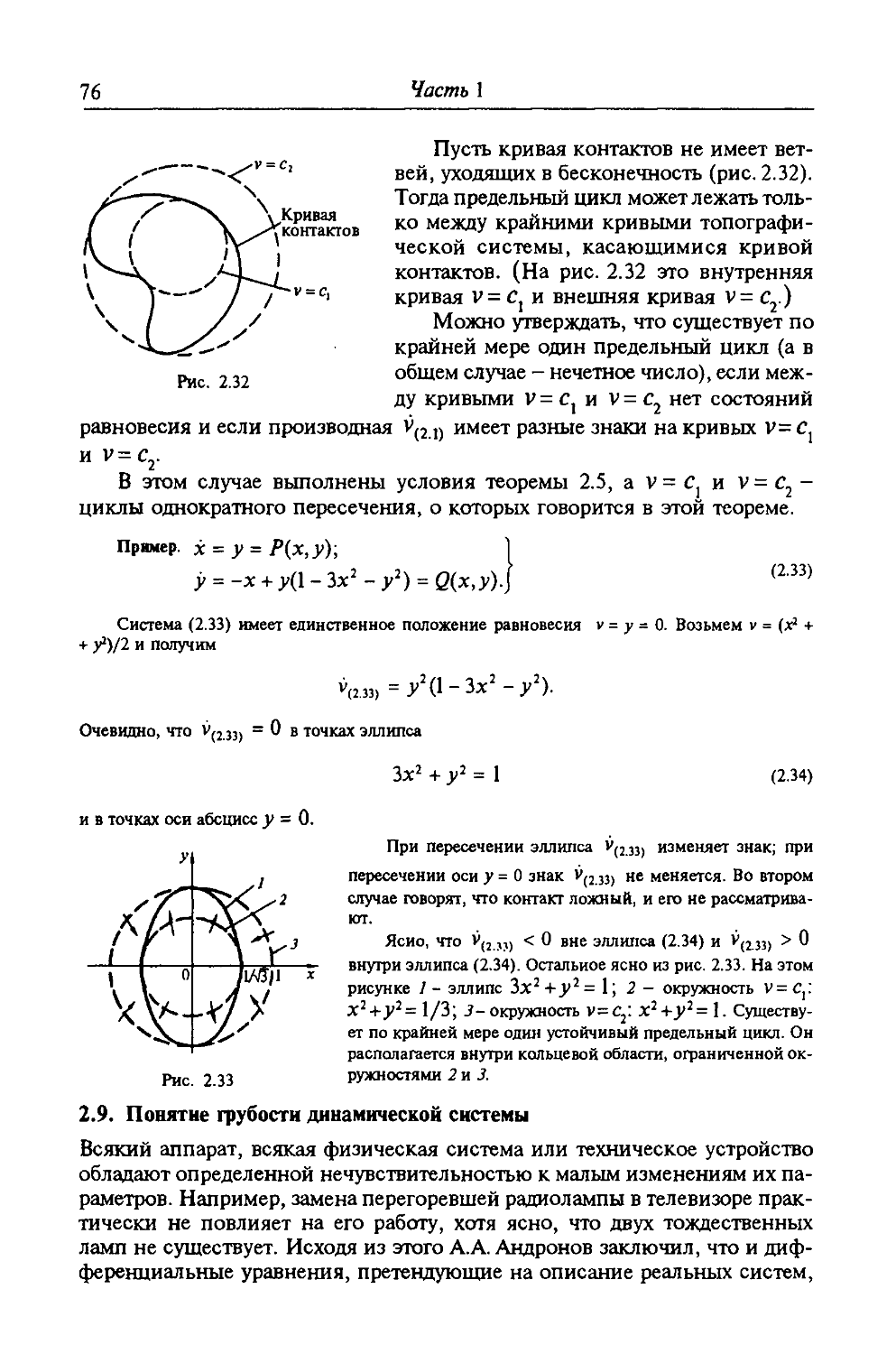
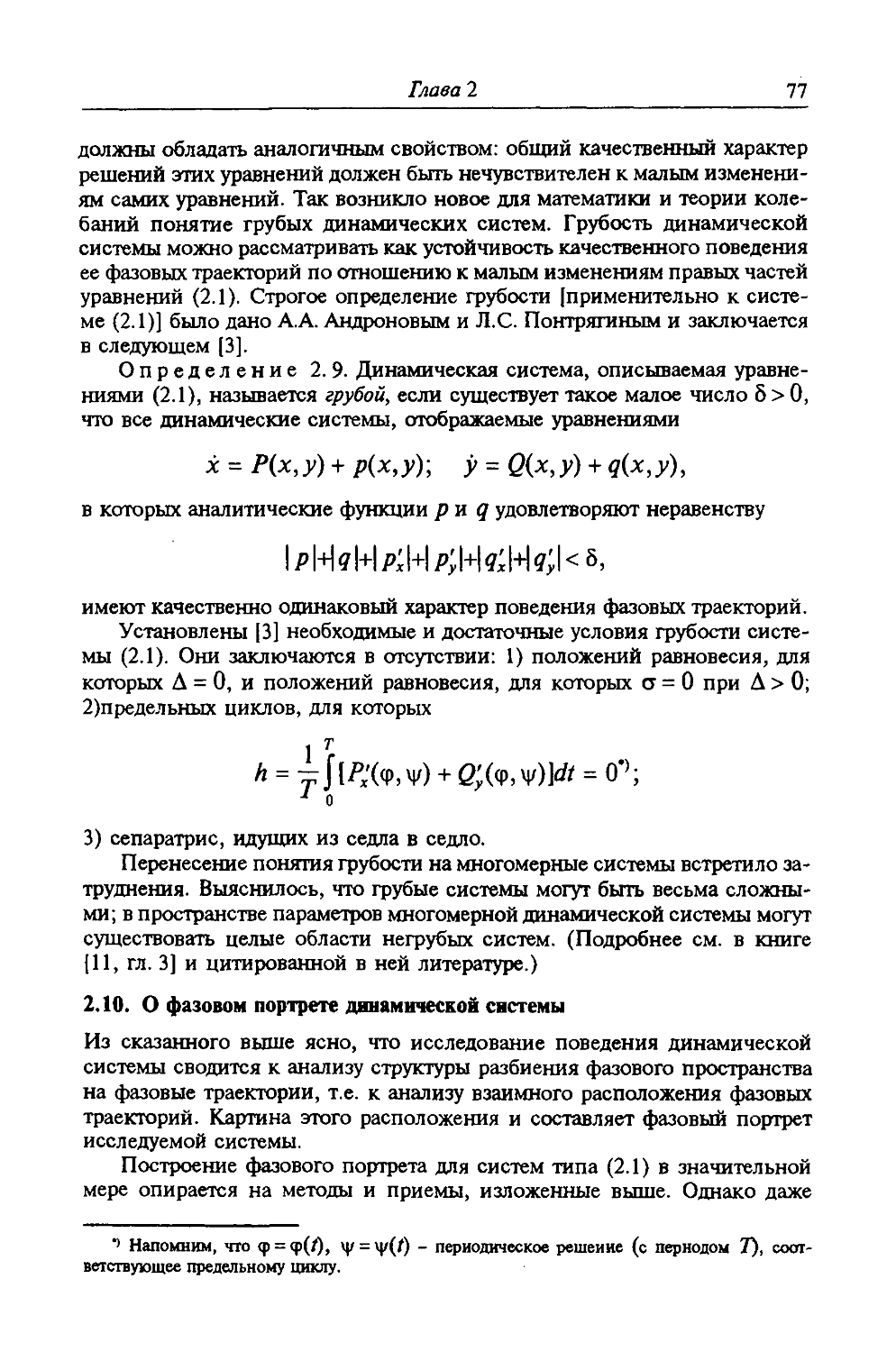
2.8 Топографическая система Пуанкаре. Кривые контактов - 75-76c.
2.9 Понятие грубости динамической системы - 76-77c.
2.10 О фазовом портрете динамической системы - 77-78c.
2.11 Простейшая консервативная система - 78-86c.
2.12 Диссипативные системы - 86-87c.
2.13 Автоколебательные системы - 87-91c.
2.14 Примеры качественного исследования автоколебательных систем - 91-95c.
Задачи-95-100c.
Глава 3 Бифуркации динамических систем второго порядка - 101-111 c.
3.1 Бифуркации и бифуркационное значение параметра -101-104c.
3.2 Простейшие бифуркации, не связанные с рождением предельных циклов - 104-
106c.
3.3 Бифуркации, связанные с рождением предельных циклов - 106-111c.
Задачи- 111c.
Глава 4 Качественные методы в динамике ядерных реакторов -112-127c.
4.1 Реактор с постоянным отводом тепла -112-114c.
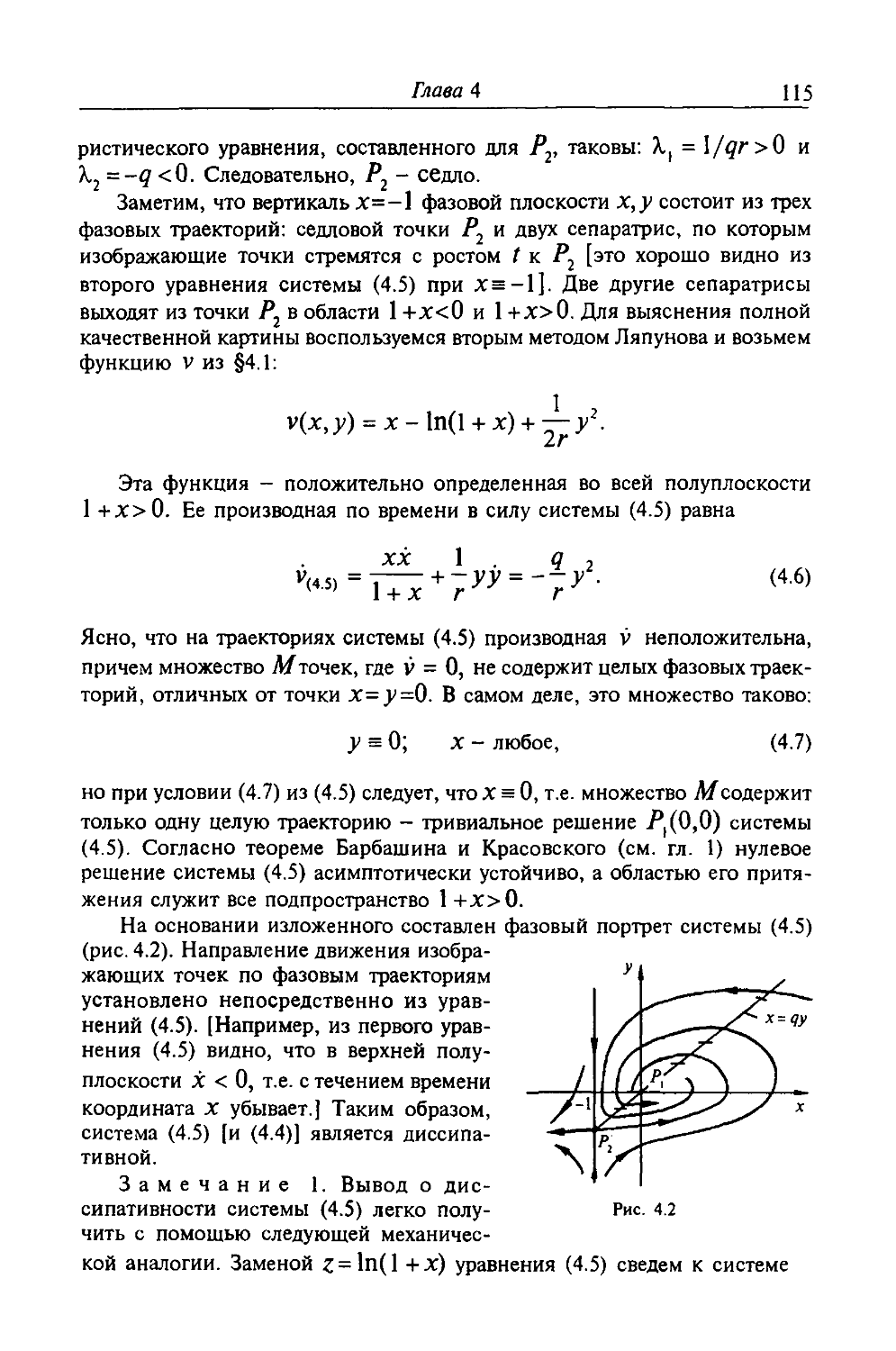
4.2 Реактор с отводом тепла, пропорциональным температуре -114-116c.
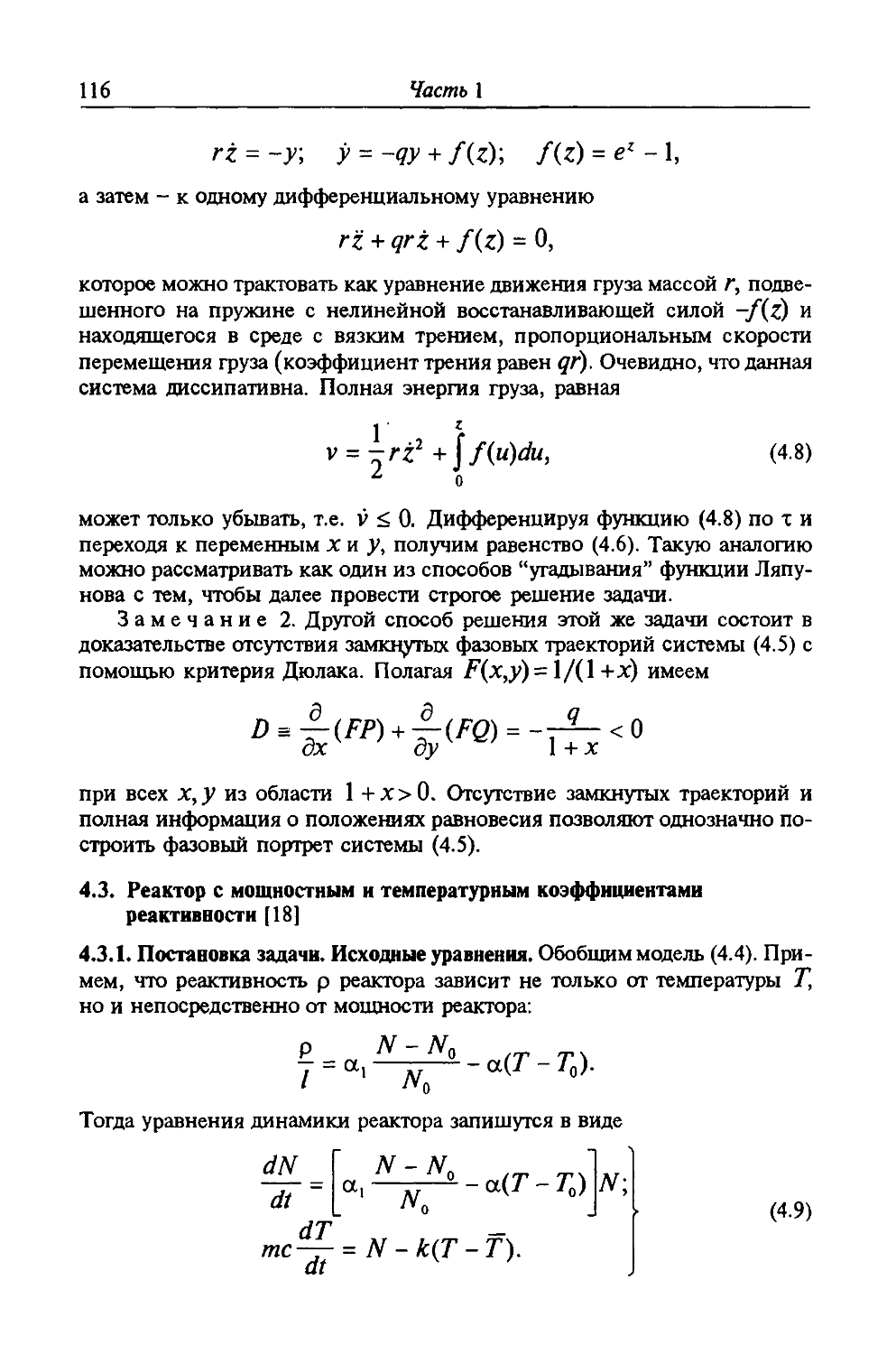
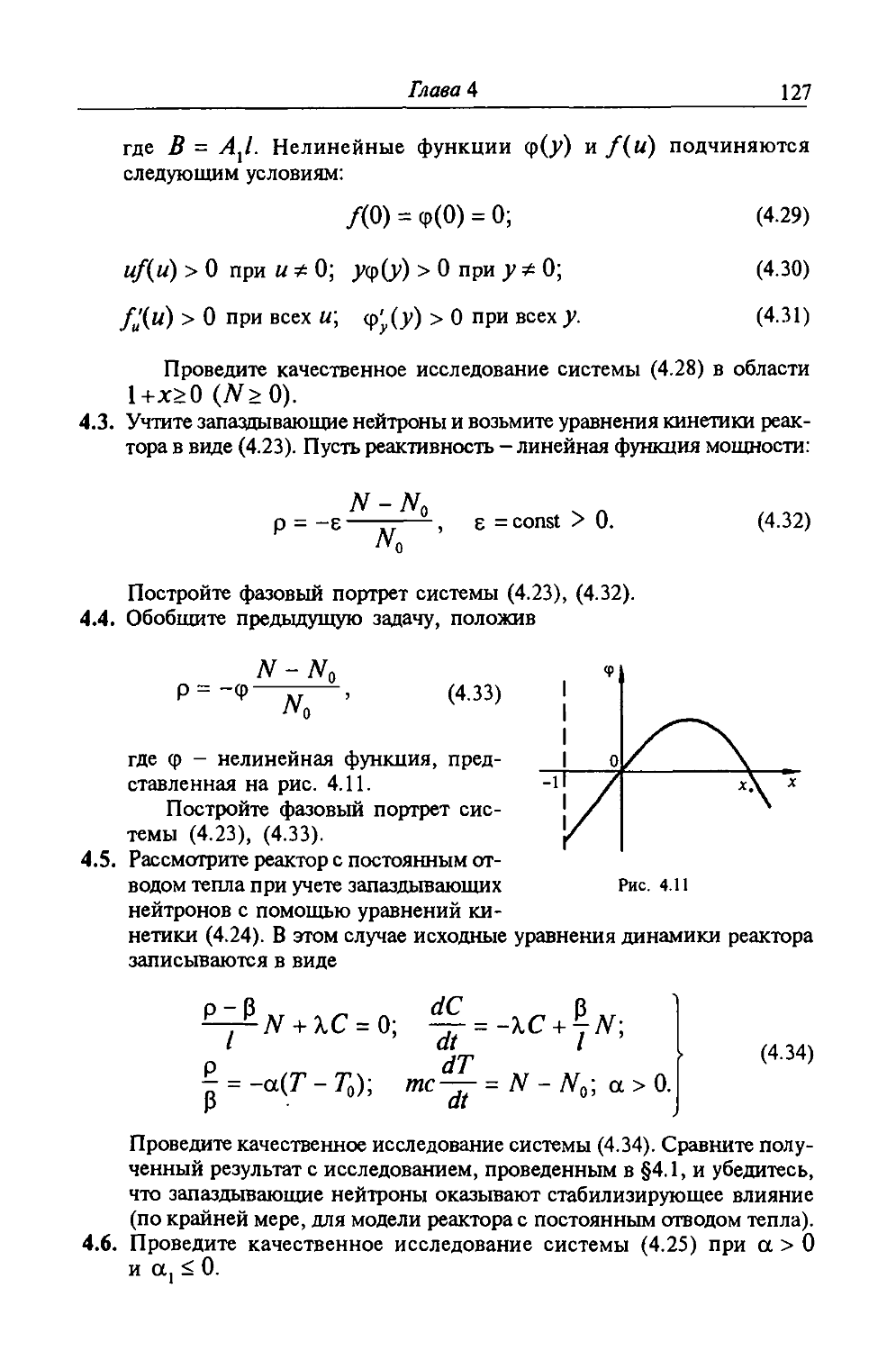
4.3 Реактор с мощностным и температурным коэффициентами реактивности -116-
124c.
4.4 Об учете запаздывающих нейтронов - 124-126c.
Задачи-126-127c.
Глава 5 Качественные методы в динамике биологических систем -128-147c.
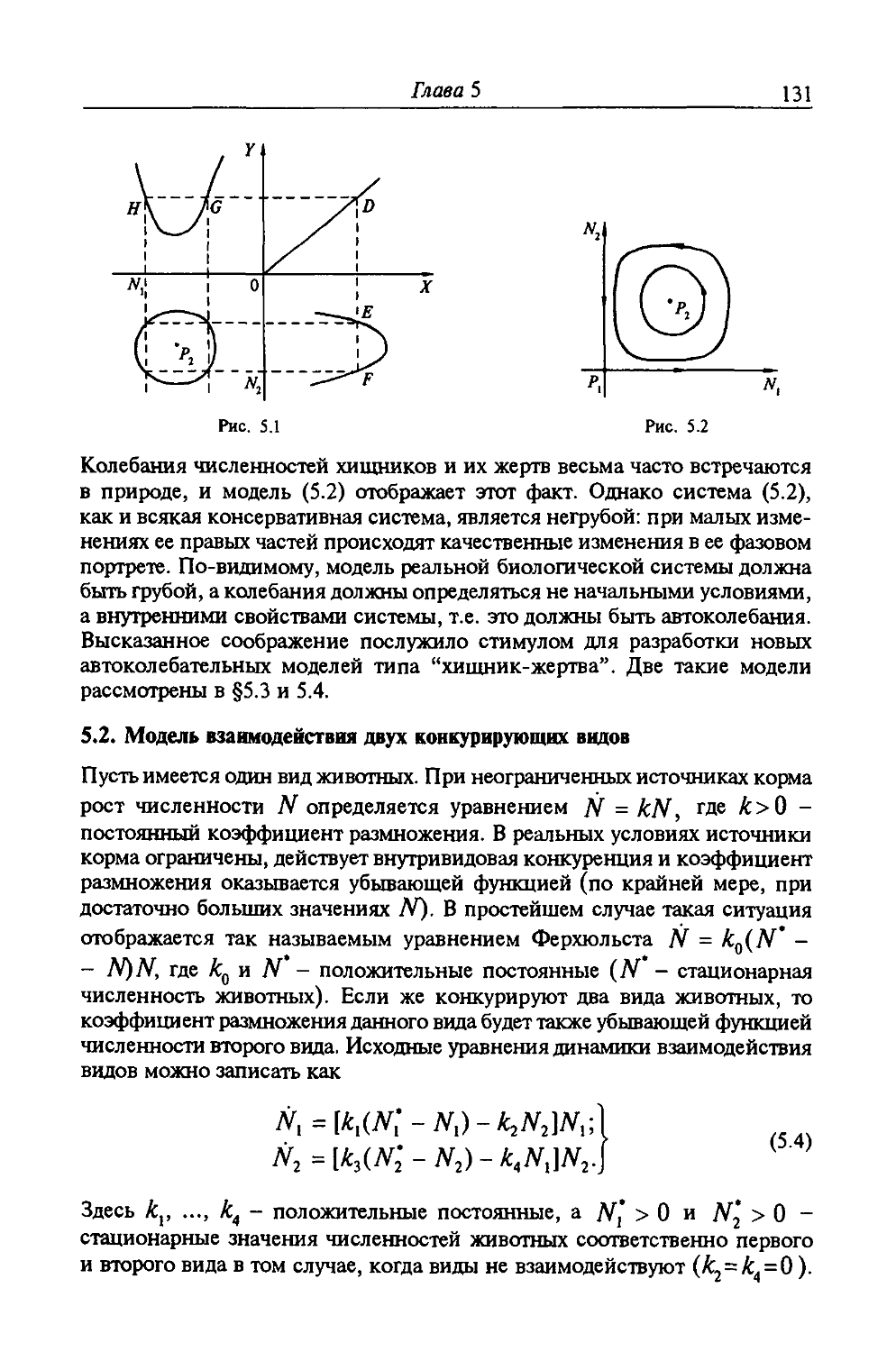
5.1 Модель Вольтерра "хищник-жертва" - 129-131c.
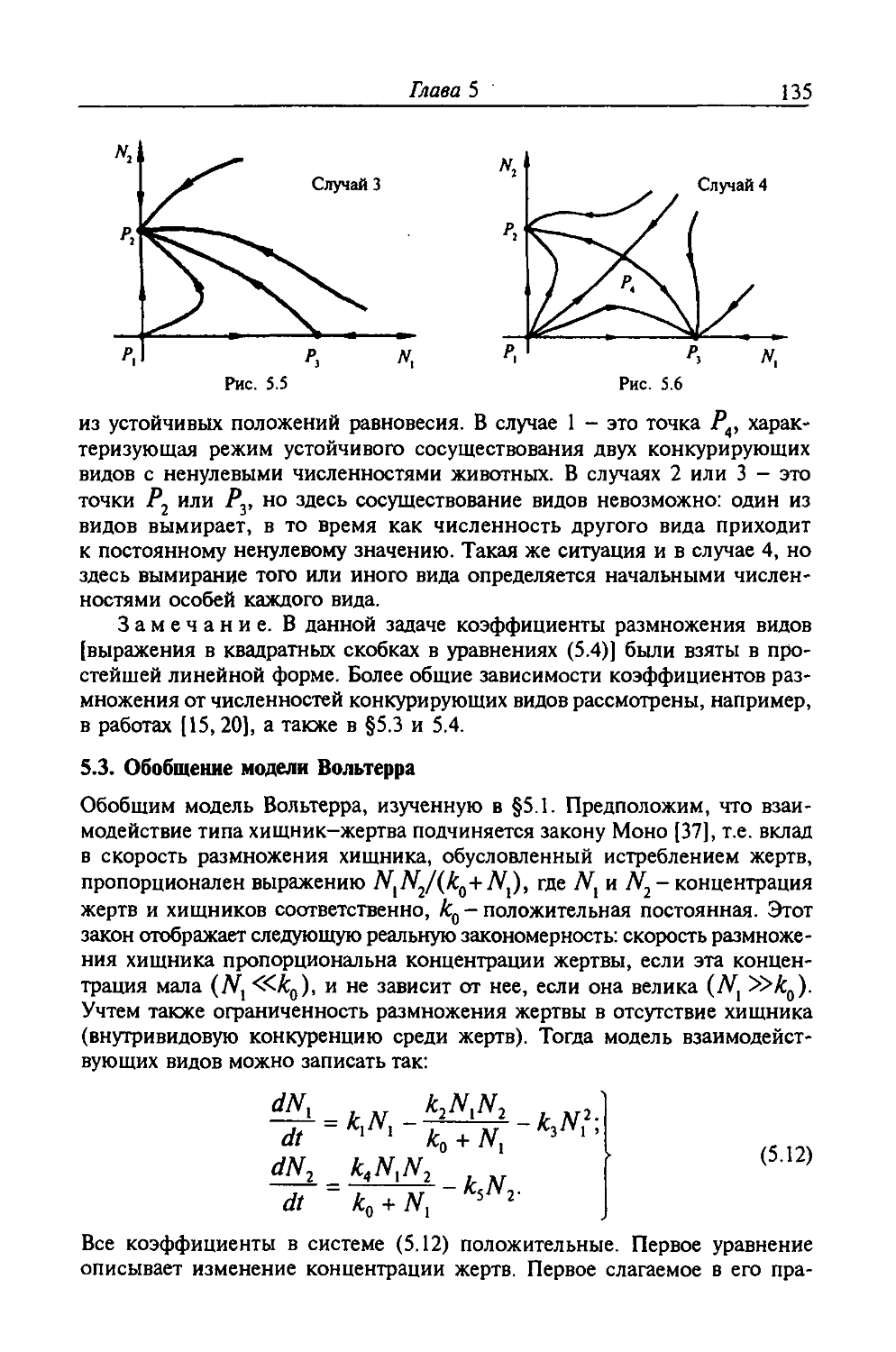
5.2 Модель взаимодействия двух конкурирующих видов - 131-135c.
5.3 Обобщения модели Вольтерра - 135-141c.
5.4 Модель Колмогорова "хищник-жертва" - 141-144c.
Задачи-144-145c.
ЧАСТЬ 2 КОЛЕБАНИЯ НЕЛИНЕЙНЫХ АВТОНОМНЫХ СИСТЕМ:
КОЛИЧЕСТВЕННЫЕ МЕТОДЫ - 146-262c.
Введение -146-147c.
Глава 6 Метод точечных преобразований - 148-165c.
6.1 Функция последования. Точечное преобразование. Неподвижная точка - 148-
149c.
6.2 Устойчивость подвижной точки. Диаграмма Ламерея и теорема Кёнигса - 149-
153c.
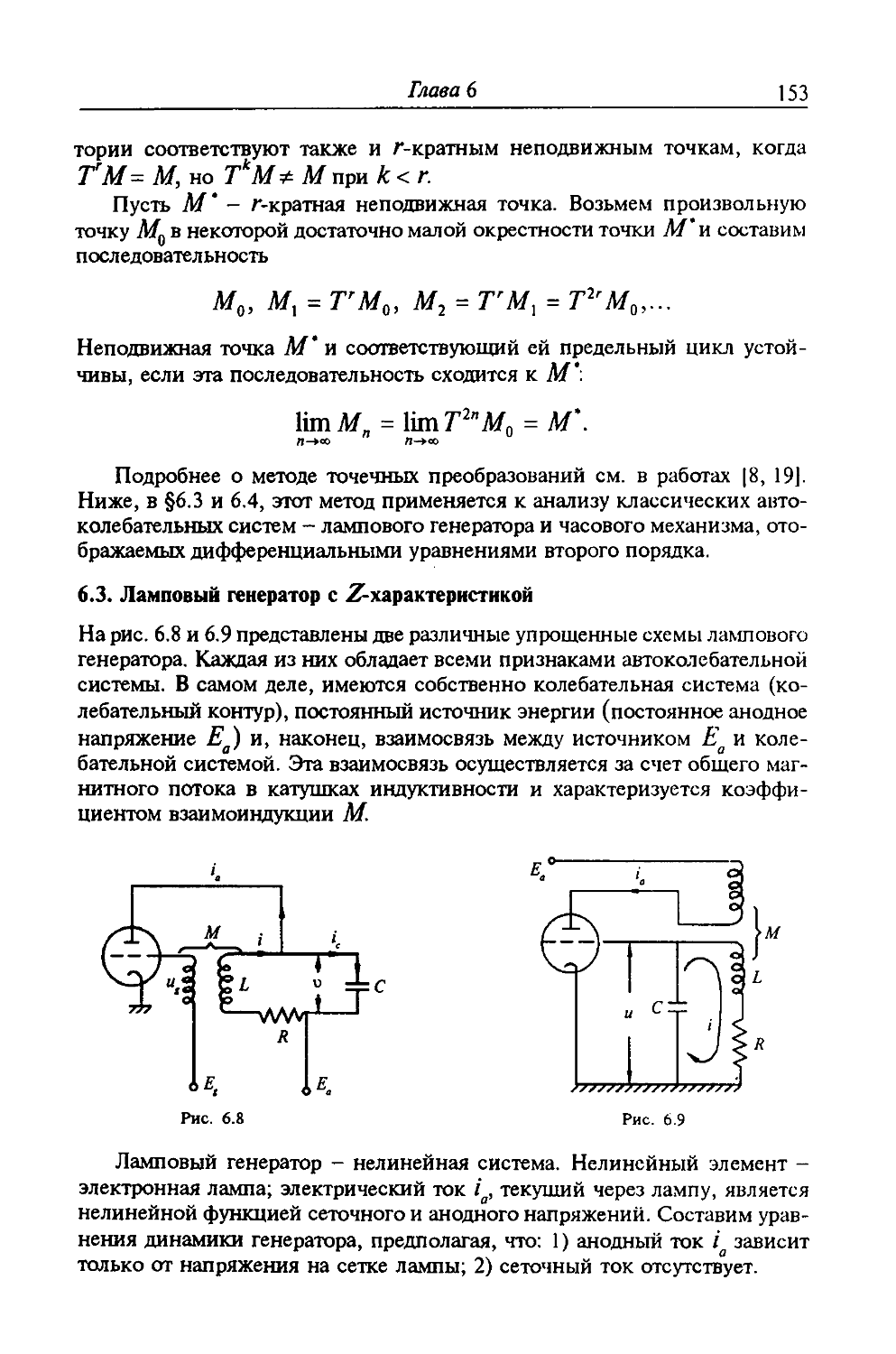
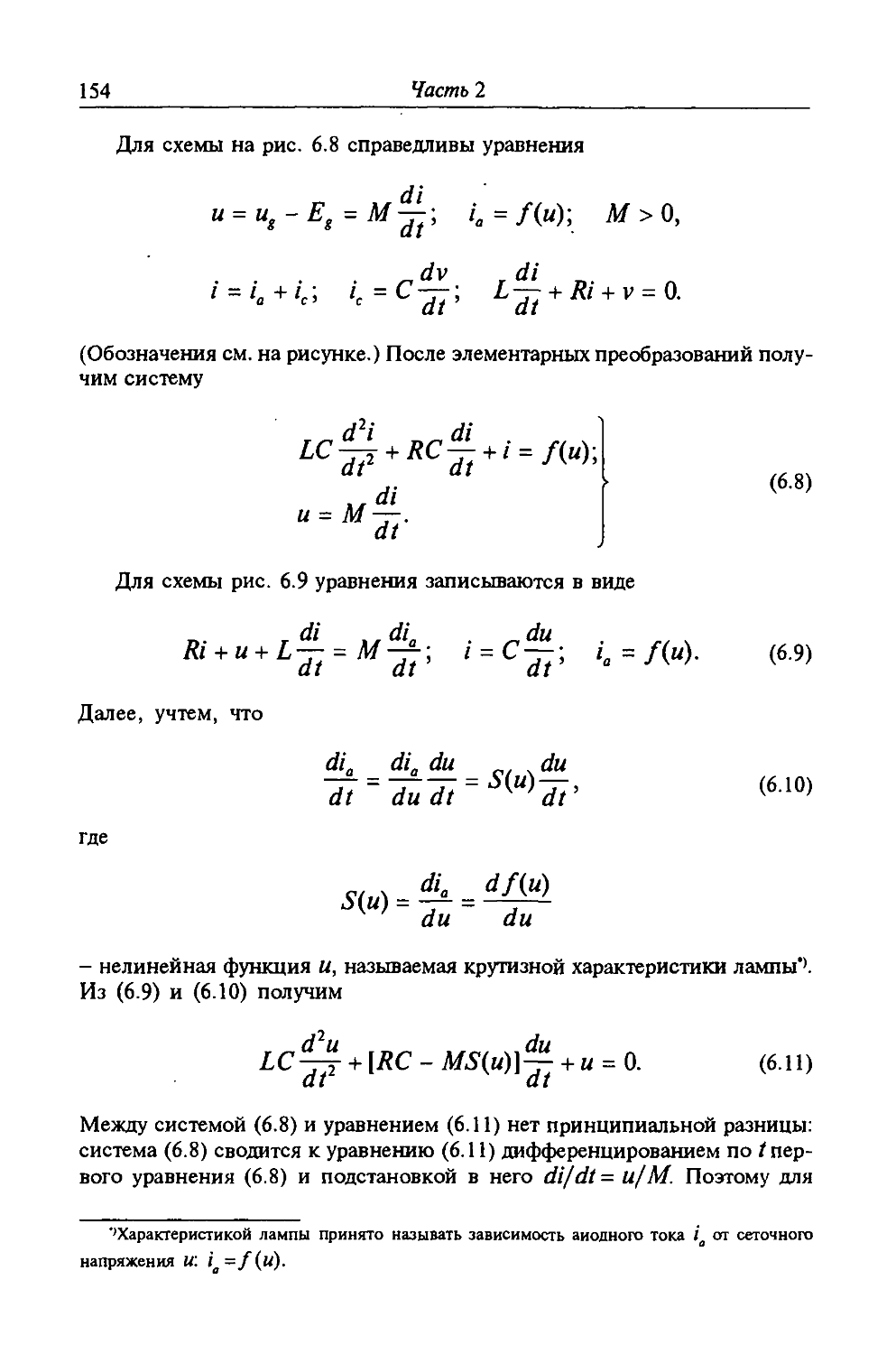
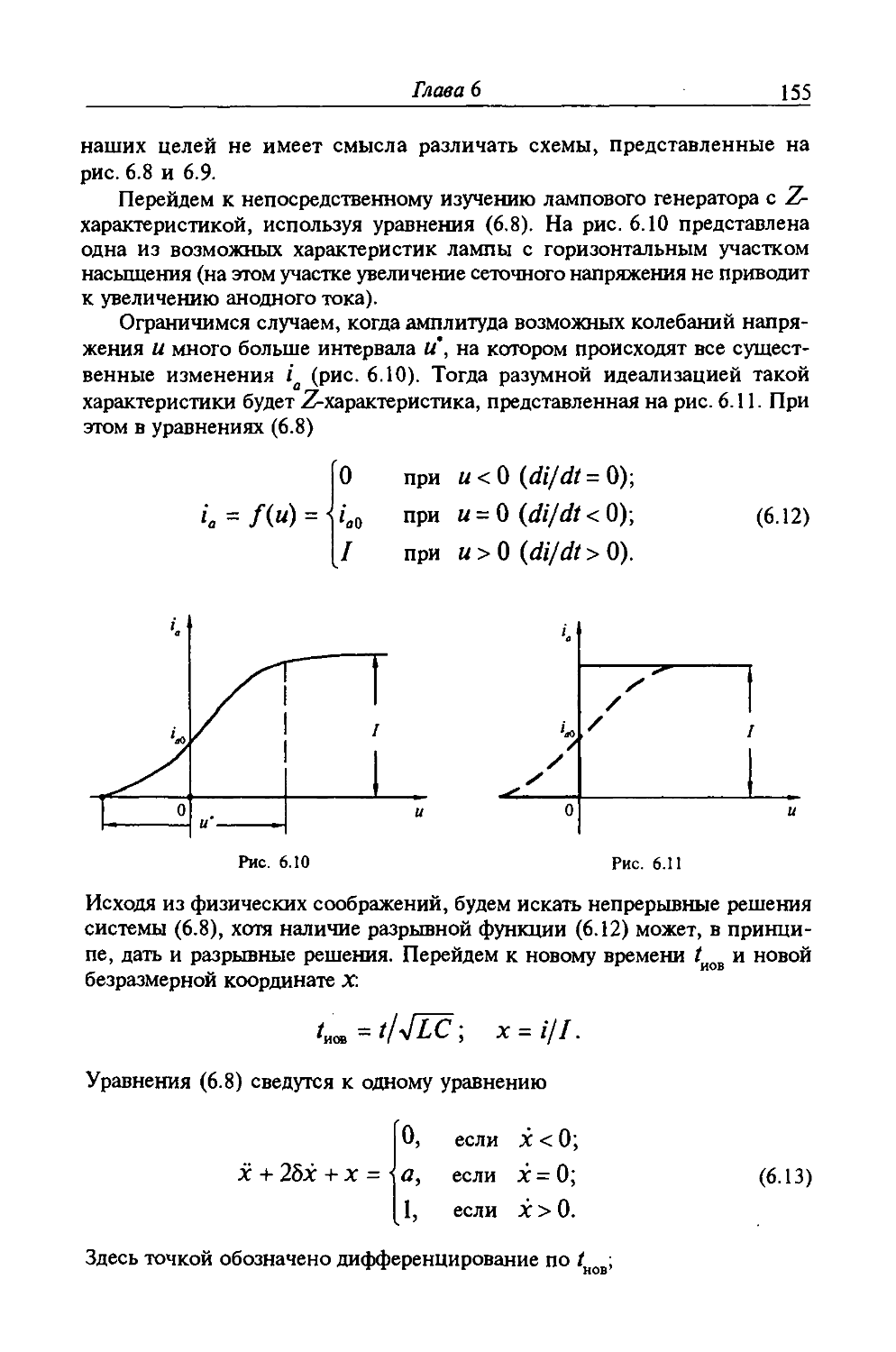
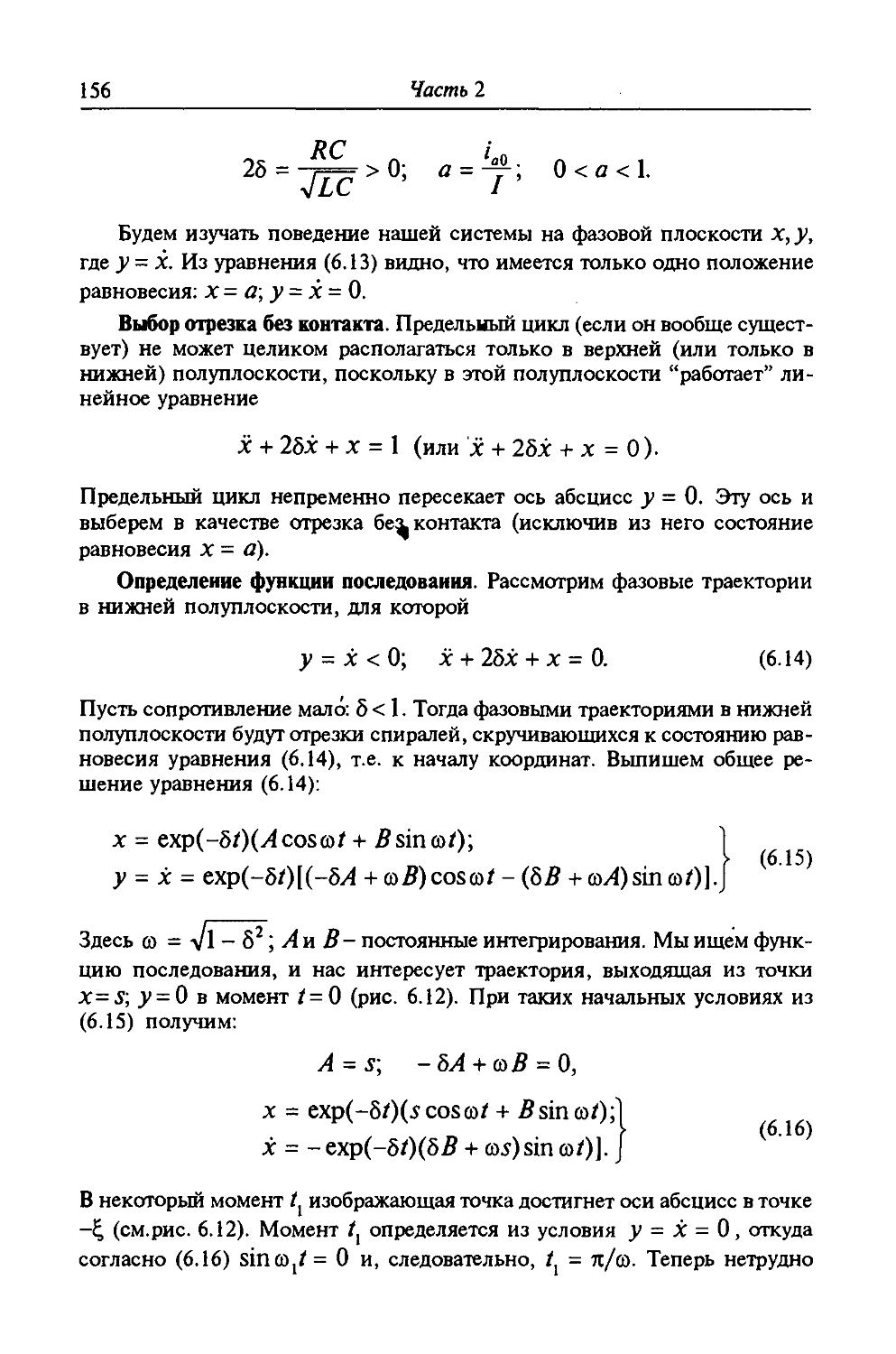
6.3 Ламповый генератор с Z-характеристикой -153-159c.
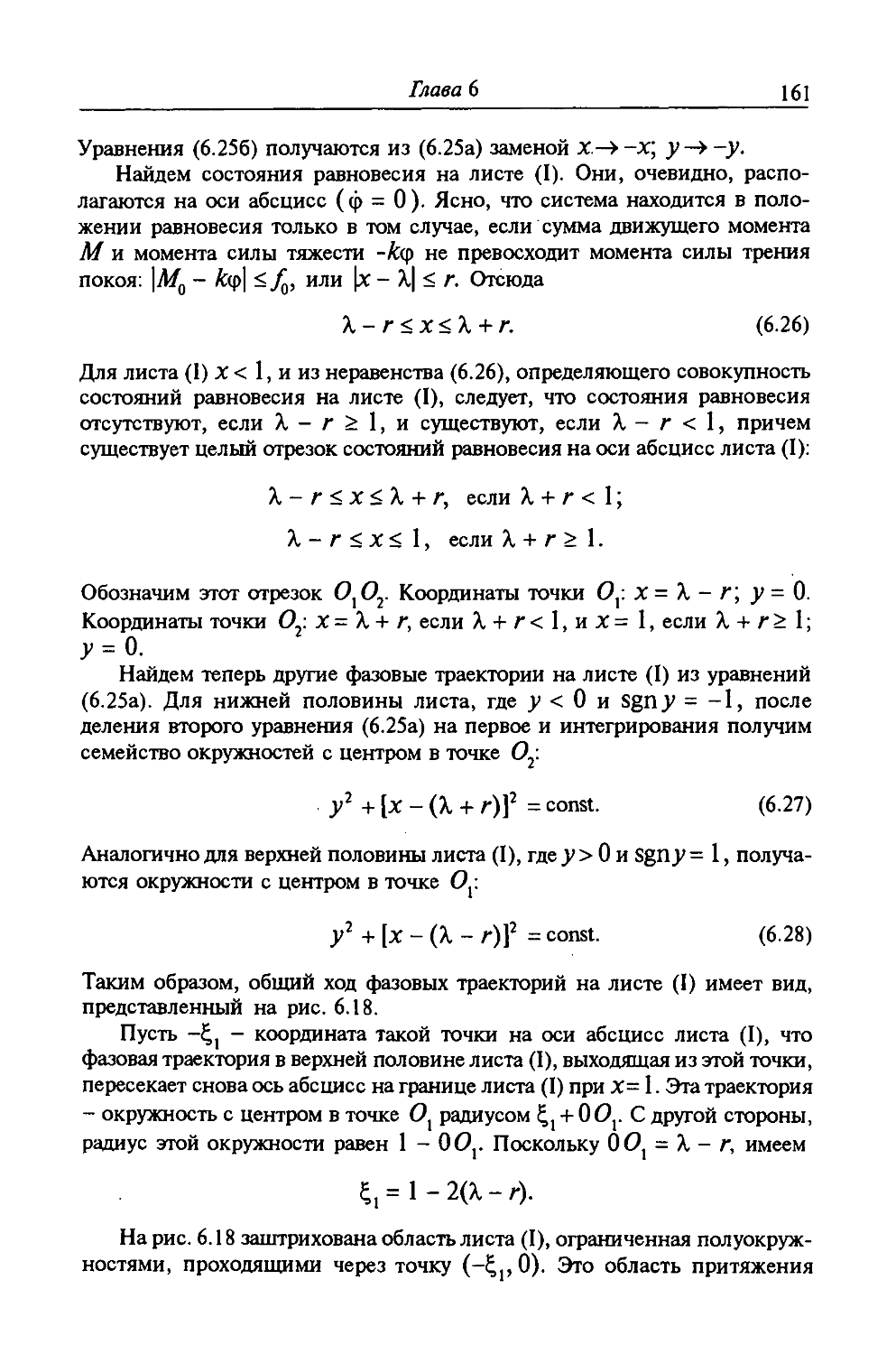
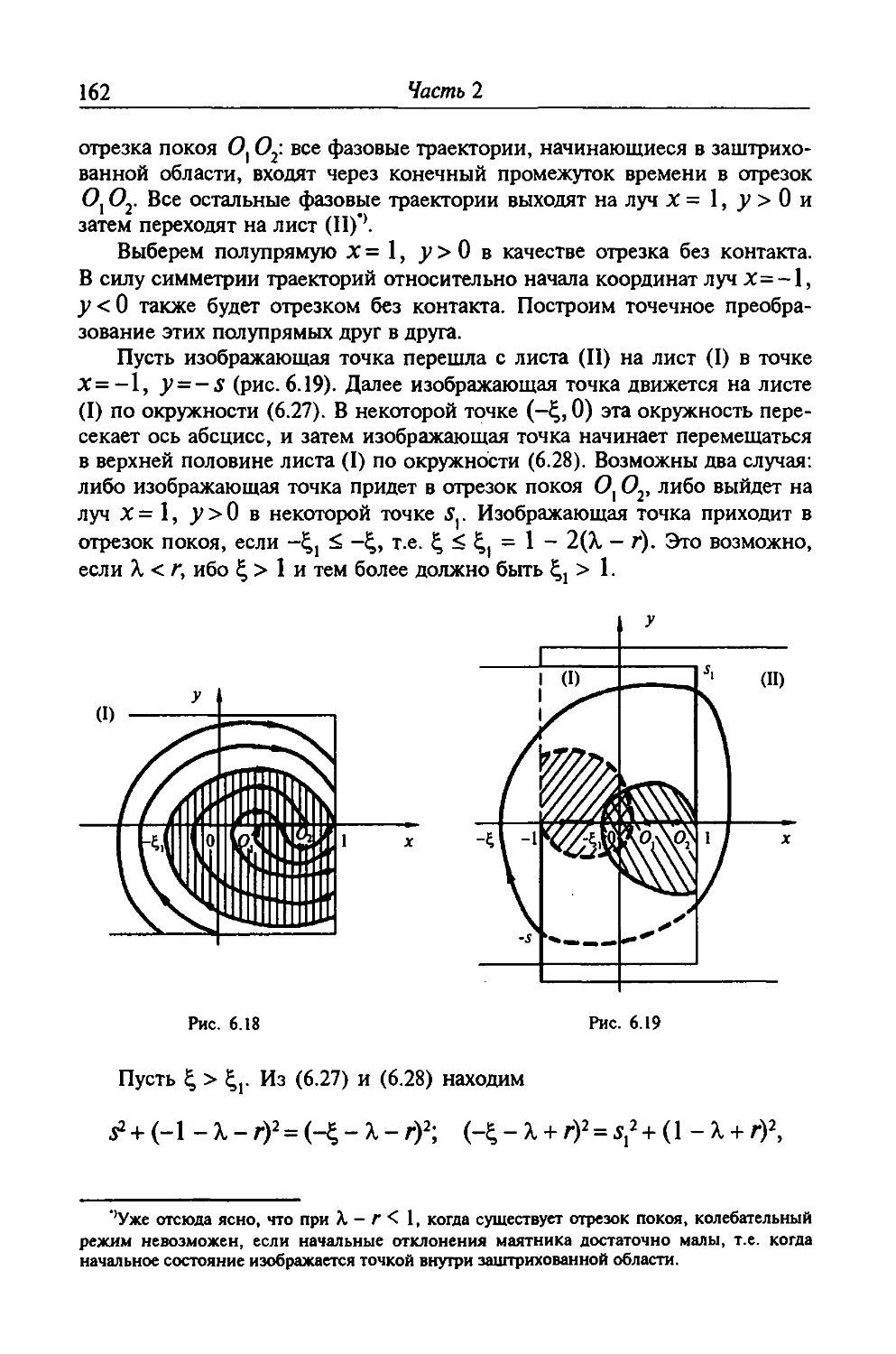
6.4 Упрощенная модель часов с сухим трением -159-164c.
6.5 Дополнительные замечания о методе точечных преобразований -164-165c.
Глава 7 Метод Пуанкаре -166-173c.
7.1 Теорема Пуанкаре для автономных динамических систем -166-167c.
7.2 Основные положения метода Пуанкаре -167-171c.
7.3 Примеры применения метода Пуанкаре -171-172c.
7.4 О практических возможностях метода Пуанкаре -172-173c.
Глава 8 Метод Ван-дер-Поля -174-194c.
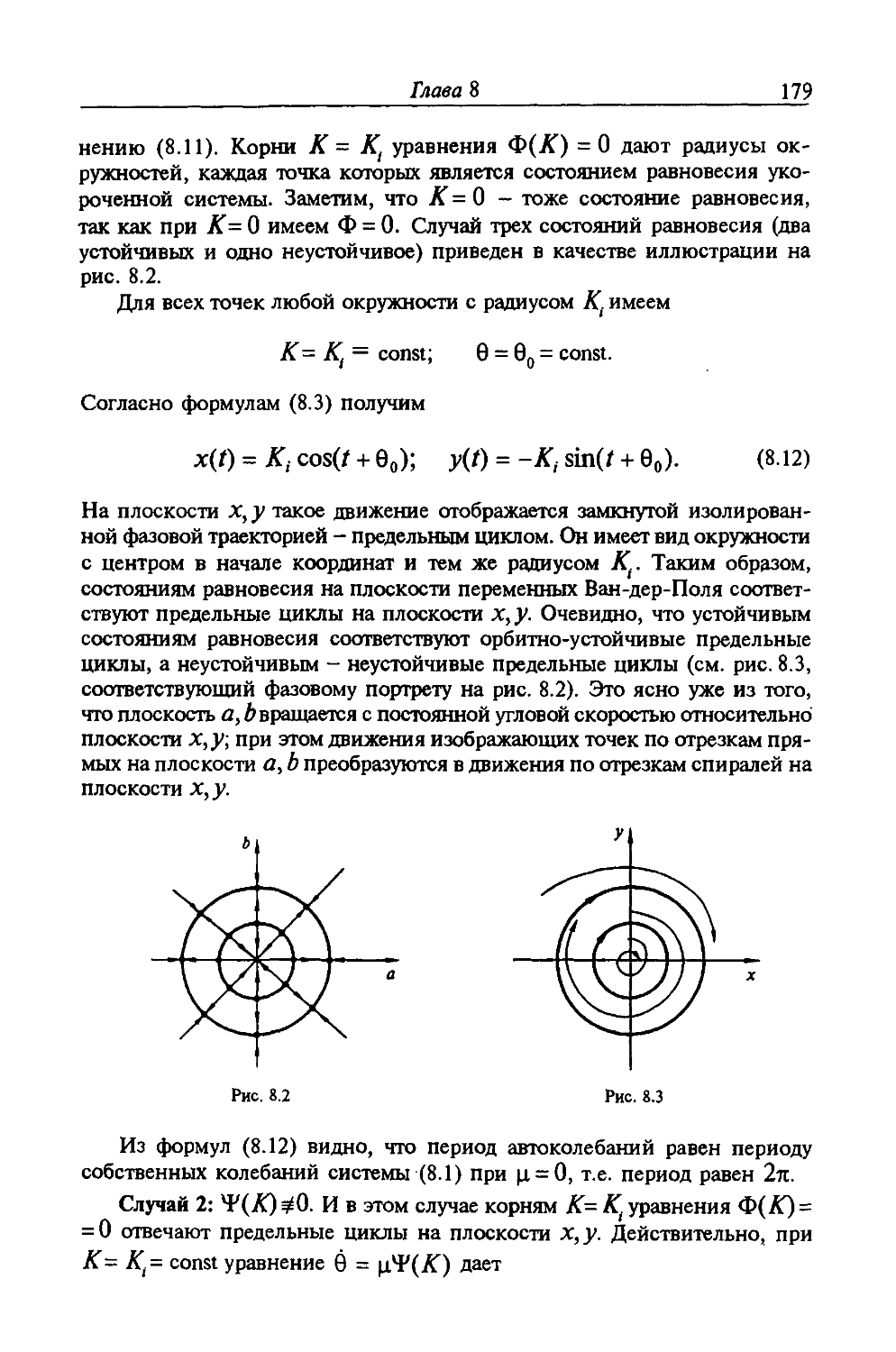
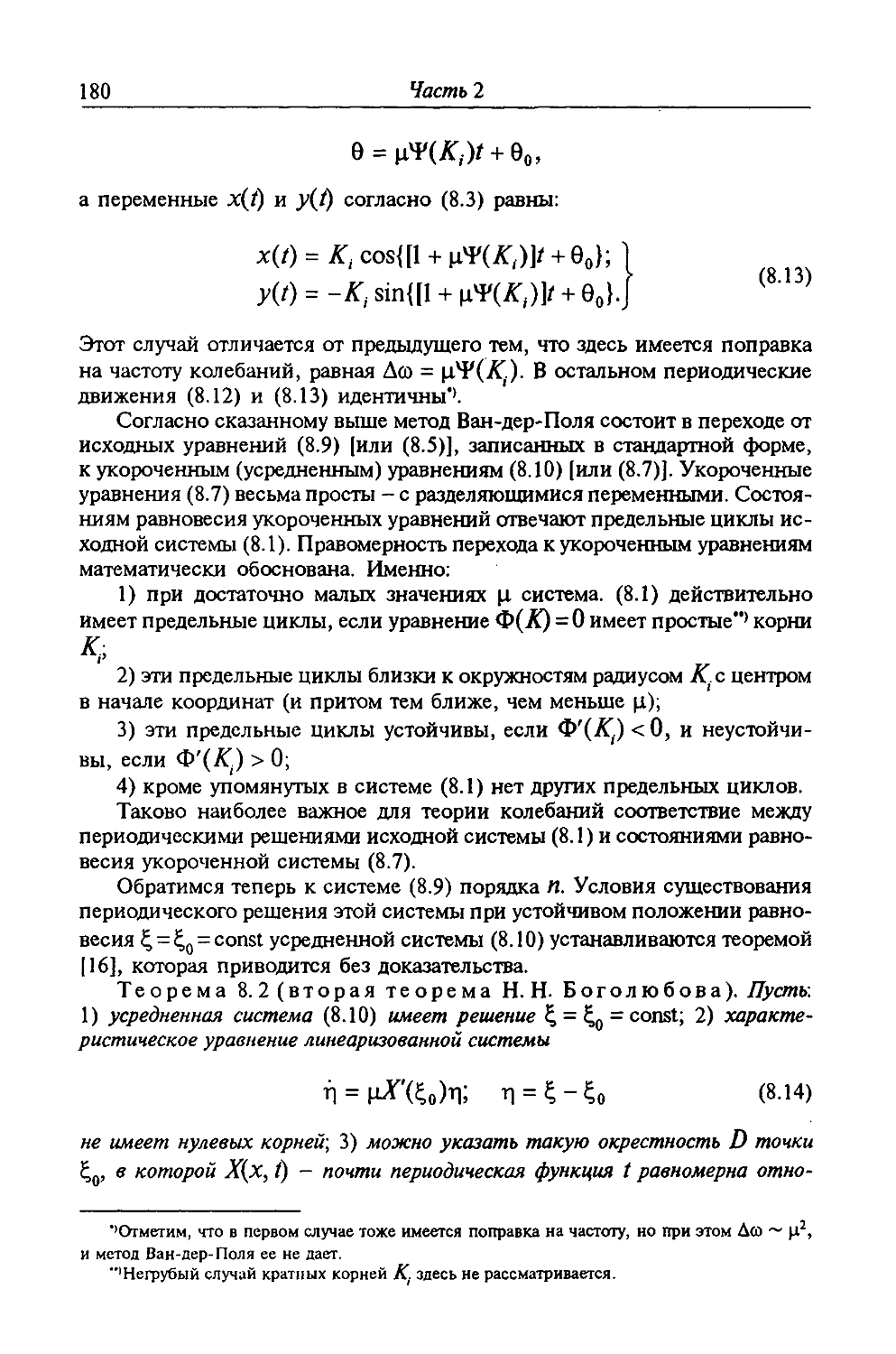
8.1 Основные положения метода Ван-дер-Поля -174-182c.
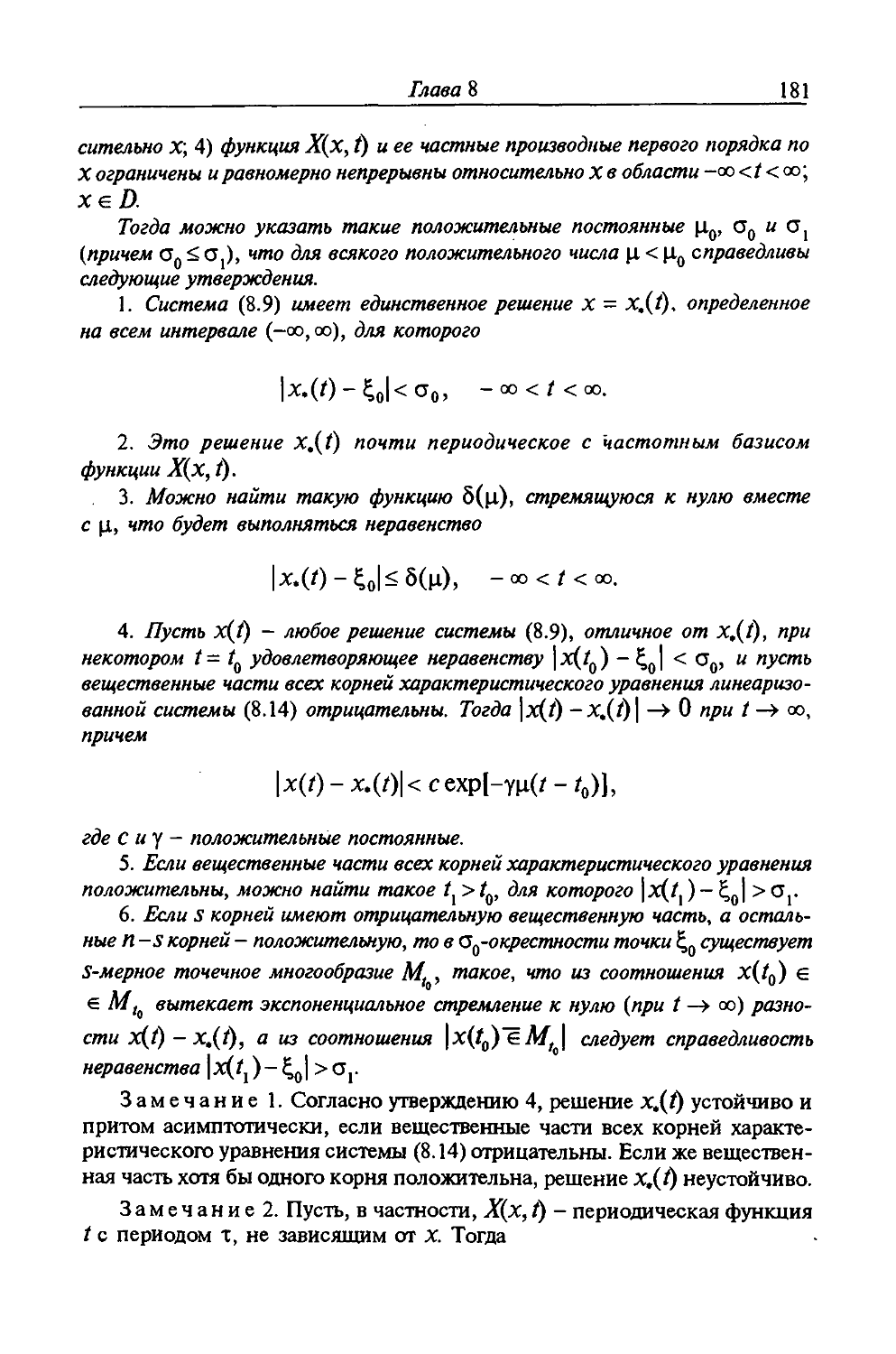
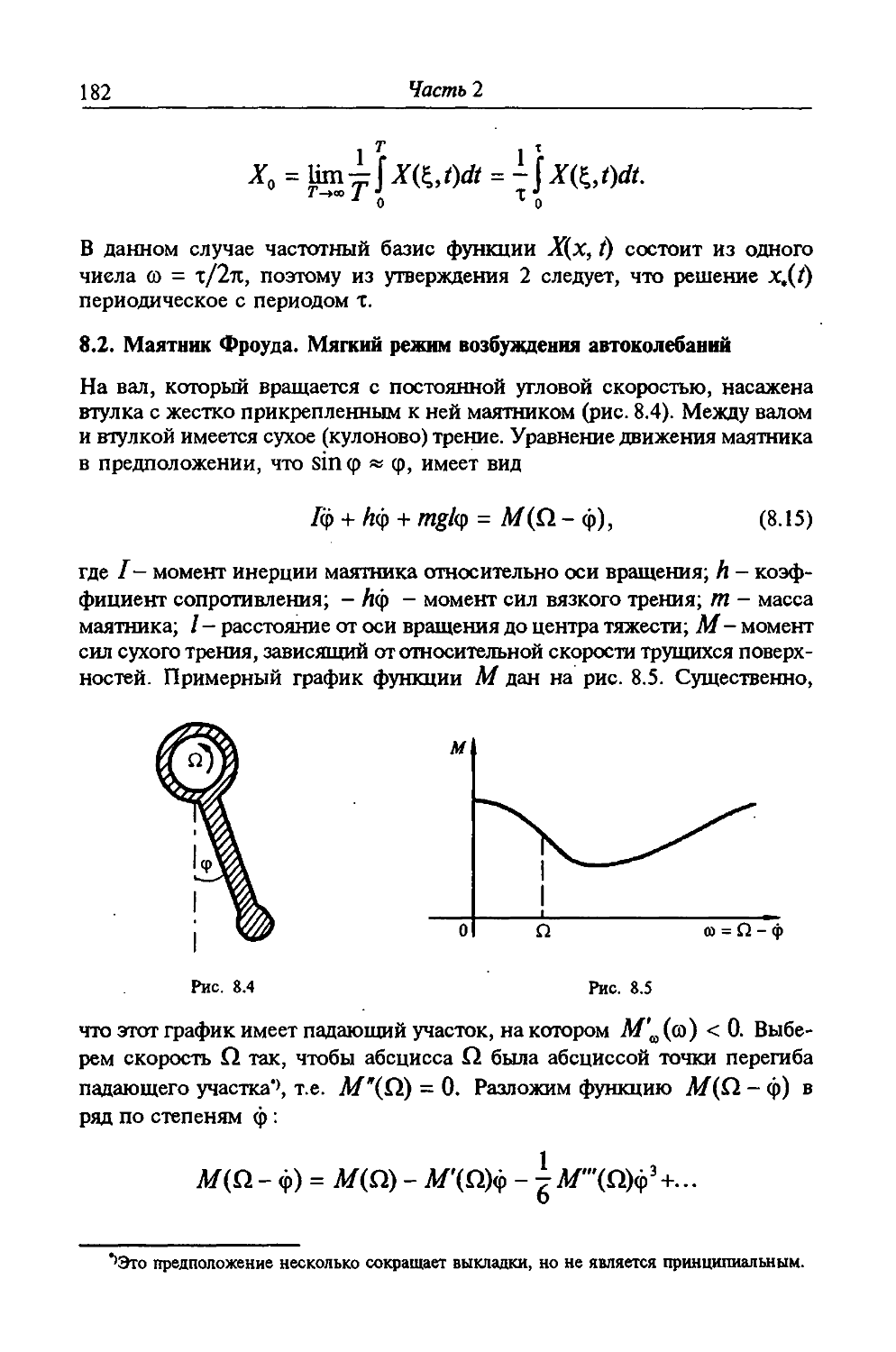
8.2 Маятник Фроуда. Мягкий режим возбуждения автоколебаний -182-187c.
8.3 Маятник Фроуда. Жесткий режим возбуждения автоколебаний - 188-192c.
8.4 Сравнение методов Пуанкаре и Ван-дер-Поля - 192c.
Задачи-193-194c.
Глава 9 Метод Каменкова - 195-202c.
Глава 10 Асимптотический метод Крылова и Боголюбова - 203-219c.
10.1 Постановка задачи для системы с одной степенью свободы - 203-204c.
10.2 Построение решений - 204-2 Юс.
10.3 Явные формулы первого и второго приближений для системы с одной
степенью свободы - 210-211c.
10.4 Установившиеся колебания и их устойчивость - 212c.
10.5 Системы n-го порядка. Постановка задачи - 212-214c.
10.6 Первое приближение для системы n-го порядка - 214-216c.
10.7 Второе и высшие приближения - 216-218c.
10.8 Пример: решение уравнения Ван-дер-Поля - 218-219c.
Глава 11 Теория бифуркаций и расчеты автоколебаний - 220-234c.
11.1 Опасные и безопасные границы области устойчивости - 220-223c.
11.2 Приближенный расчет автоколебаний - 223-231c.
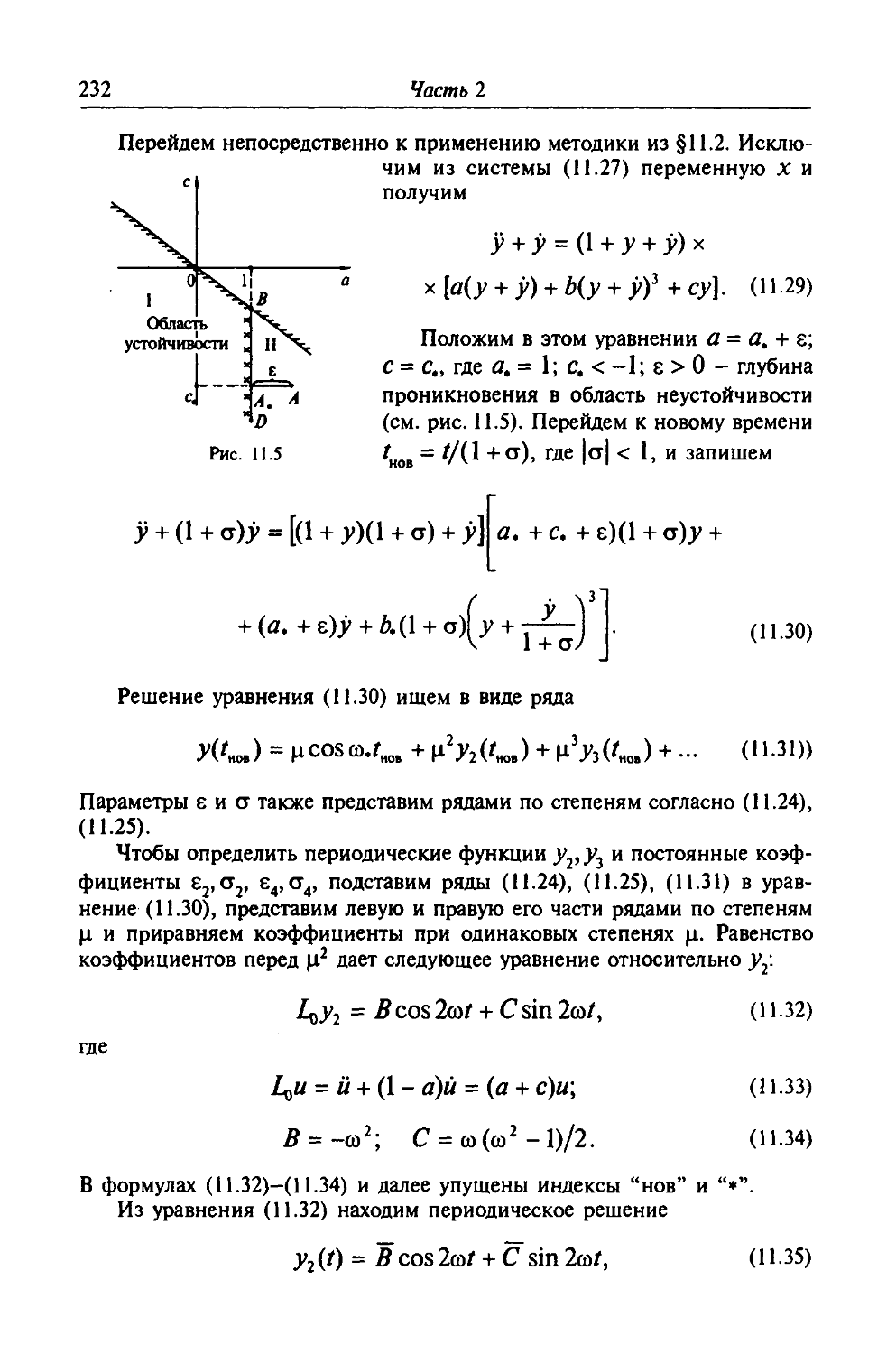
11.3 Модель реактора с нелинейной зависимостью реактивности от мощности -
231-234c.
Глава 12 Метод гармонической линеаризации - 235-245c.
12.1 Исходные положения метода - 235-238c.
12.2 Об устойчивости периодических решений - 238-240c.
12.3 Примеры расчета автоколебаний методом гармонической линеаризации - 240-
245c.
Задачи // Элементы теории колебаний
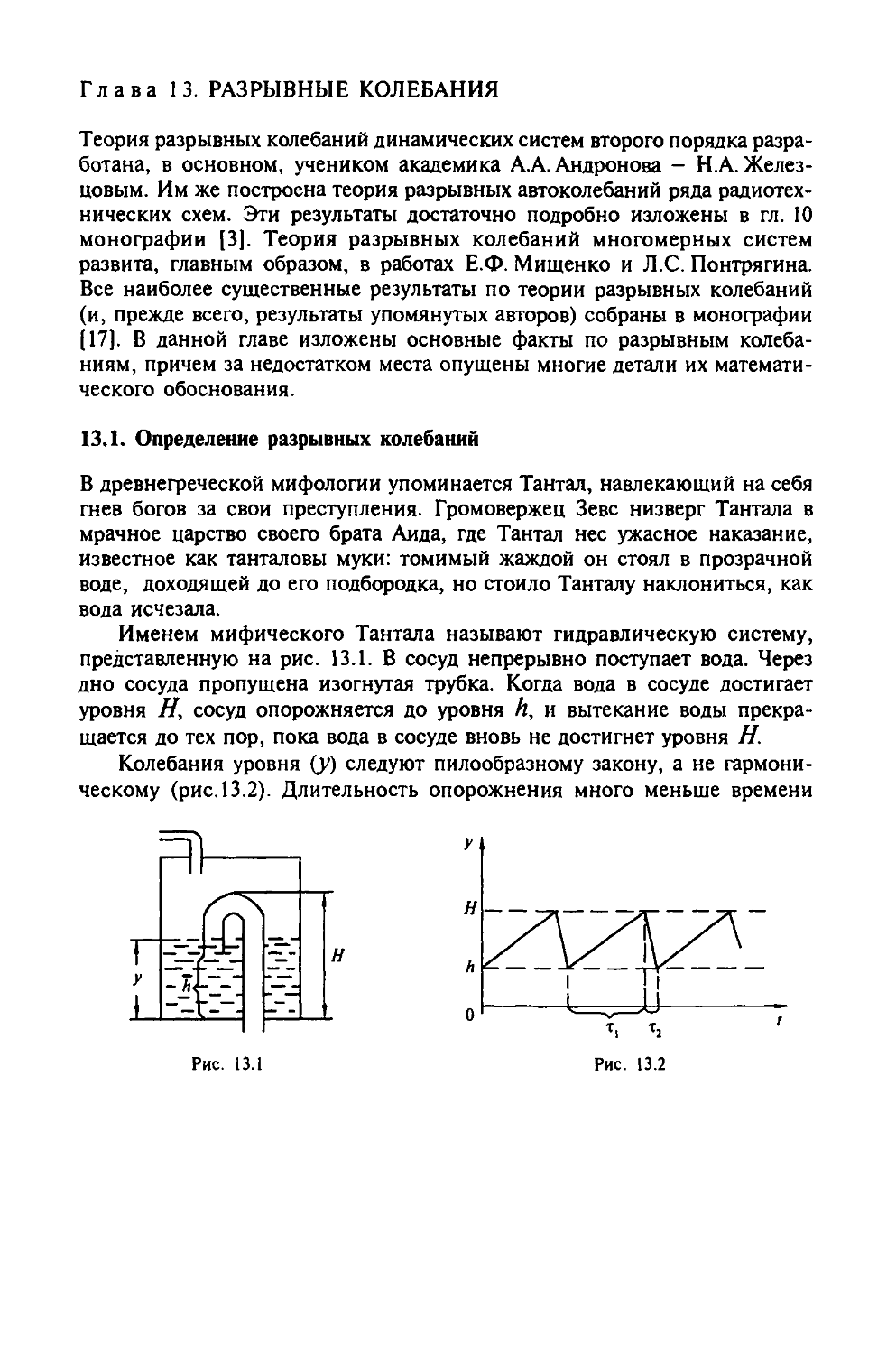
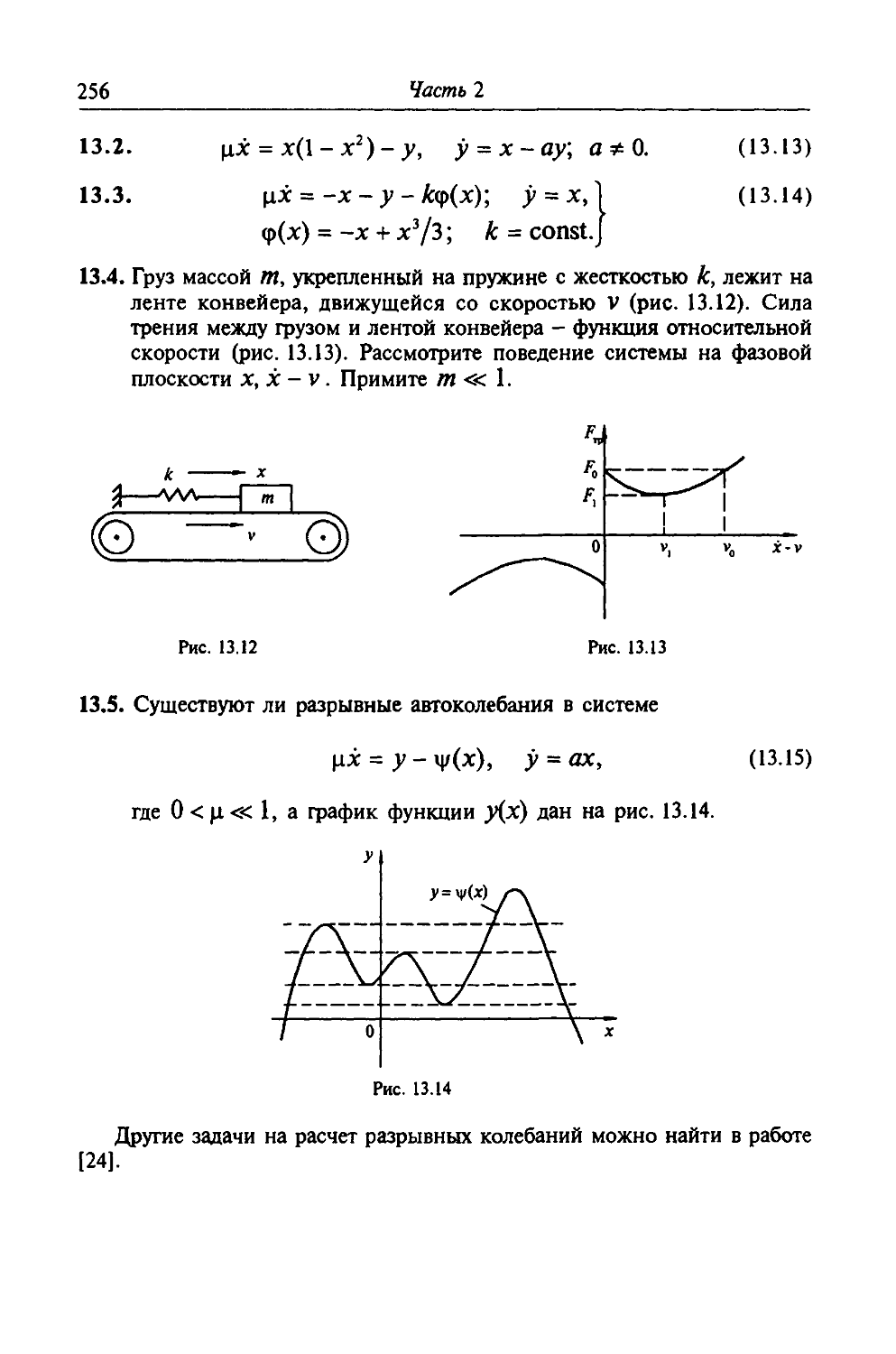
Глава 13 Разрывные колебания - 246-256c.
13.1 Определение разрывных колебаний - 246-247c.
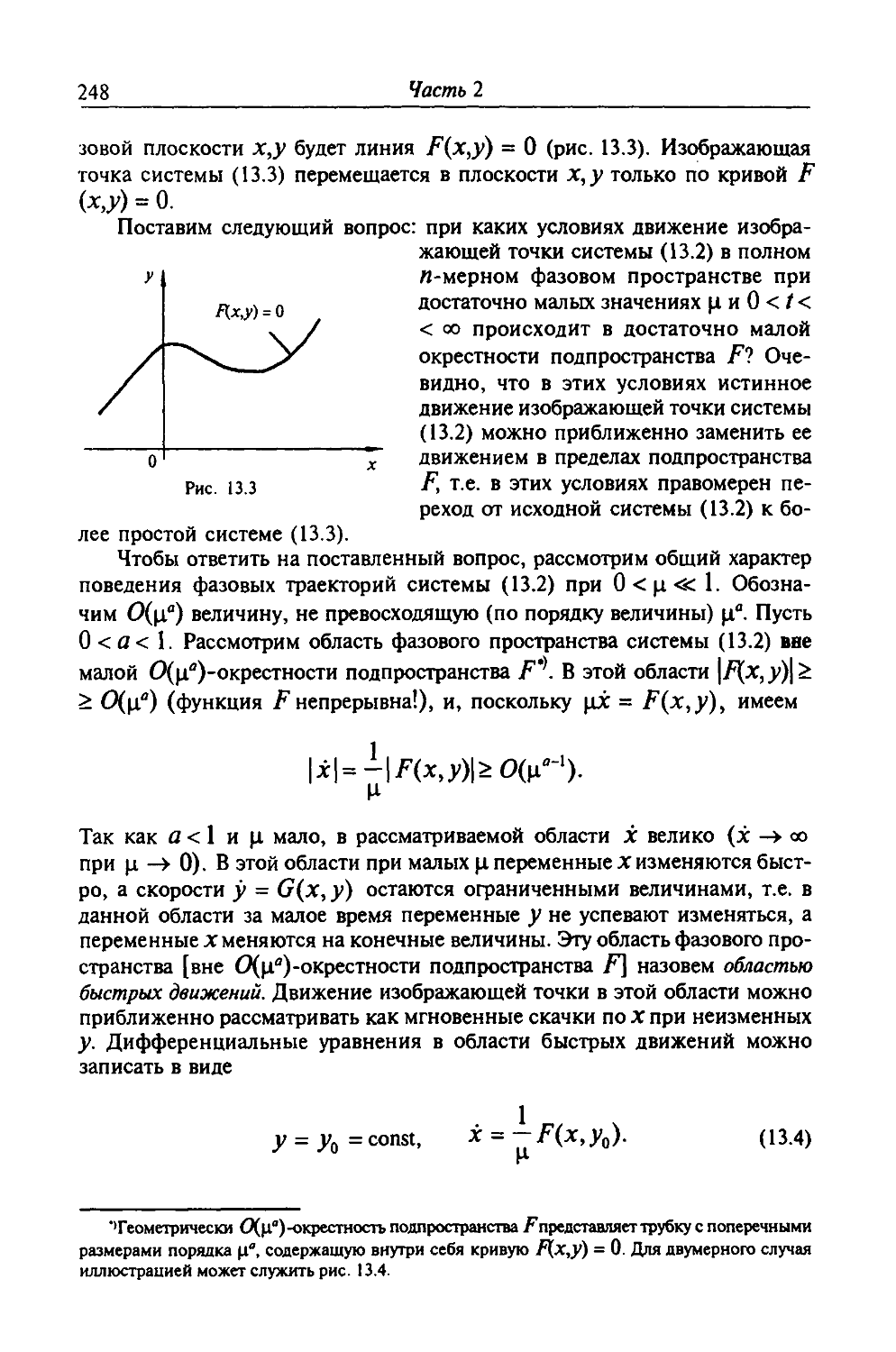
13.2 "Быстрые" и "медленные" движения - 247-250c.
13.3 Условия несущественности малого параметра - 250-251c.
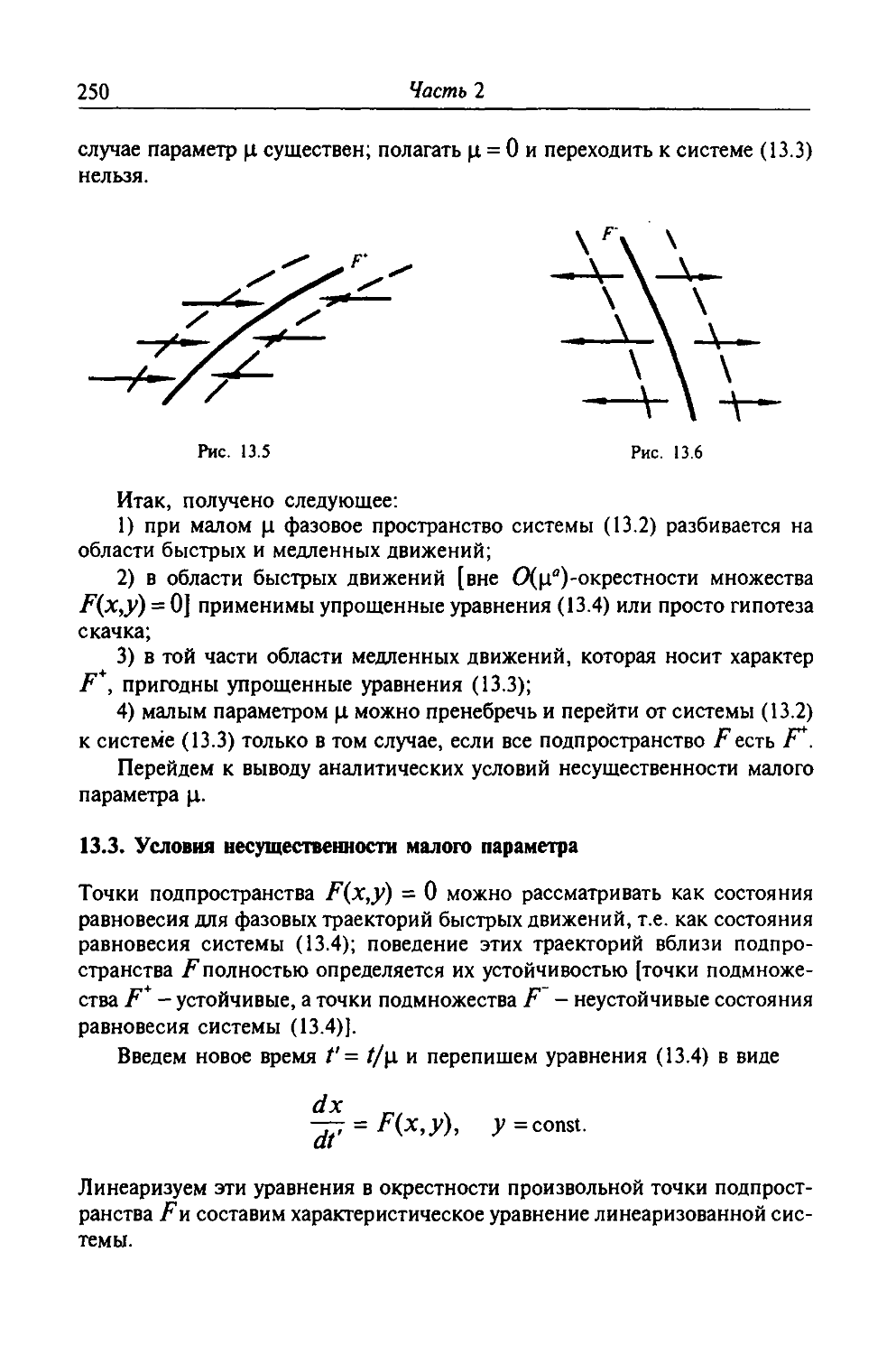
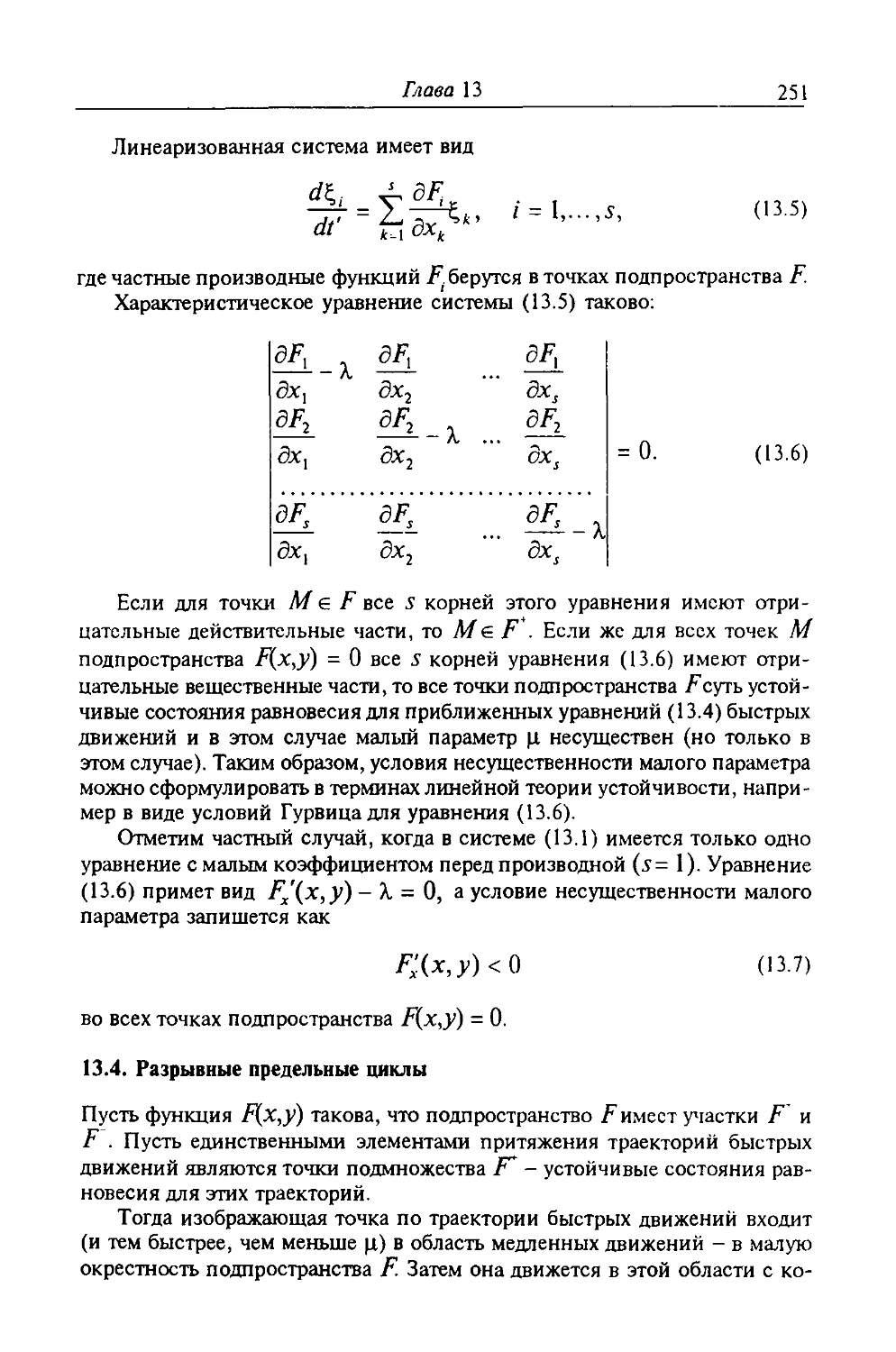
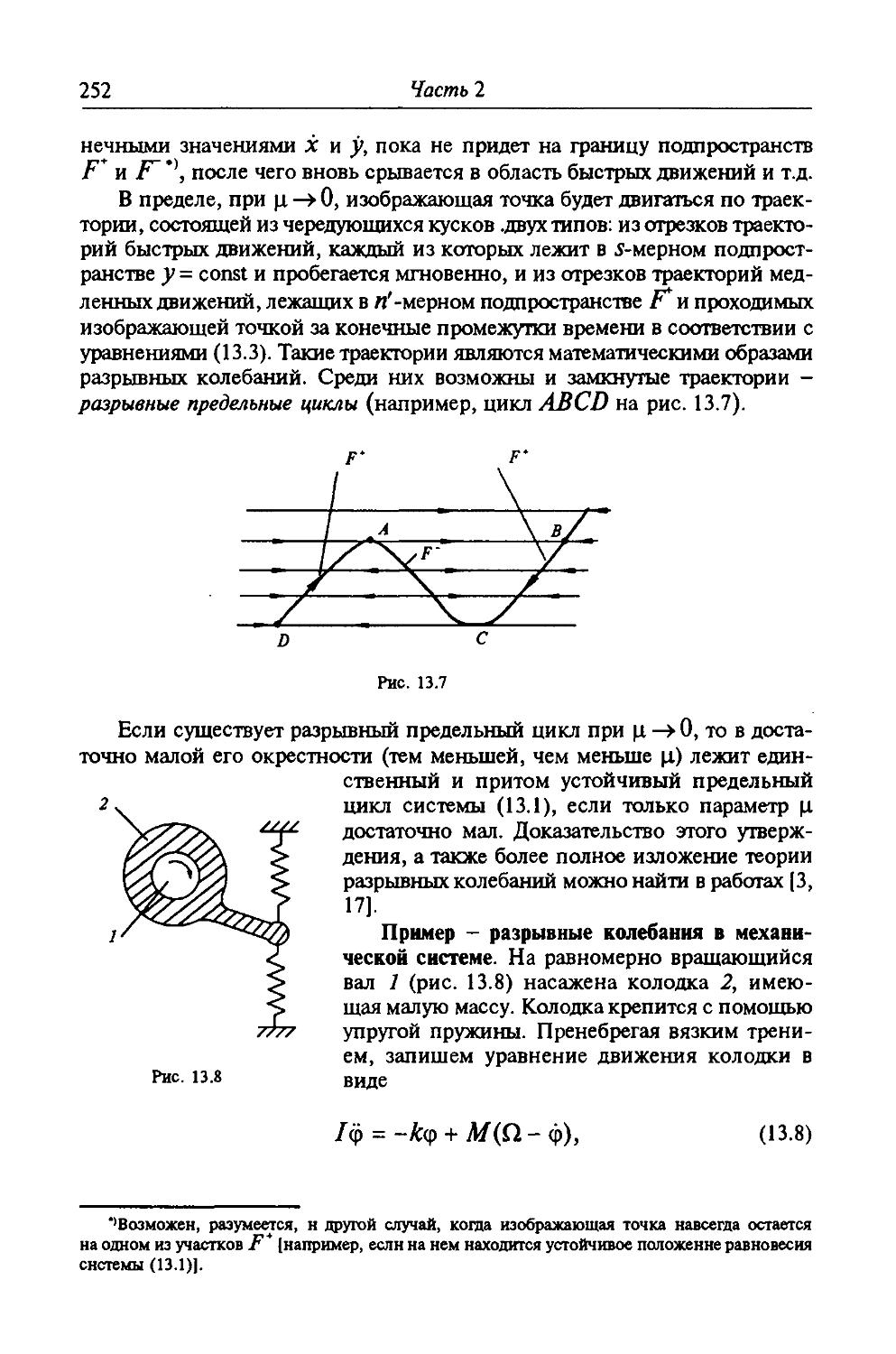
13.4 Разрывные предельные циклы - 251-255c.
Задачи - 255-256c.
Глава 14 Стохастические автоколебания - 257-261c.
Заключение к части 2 - 262c.
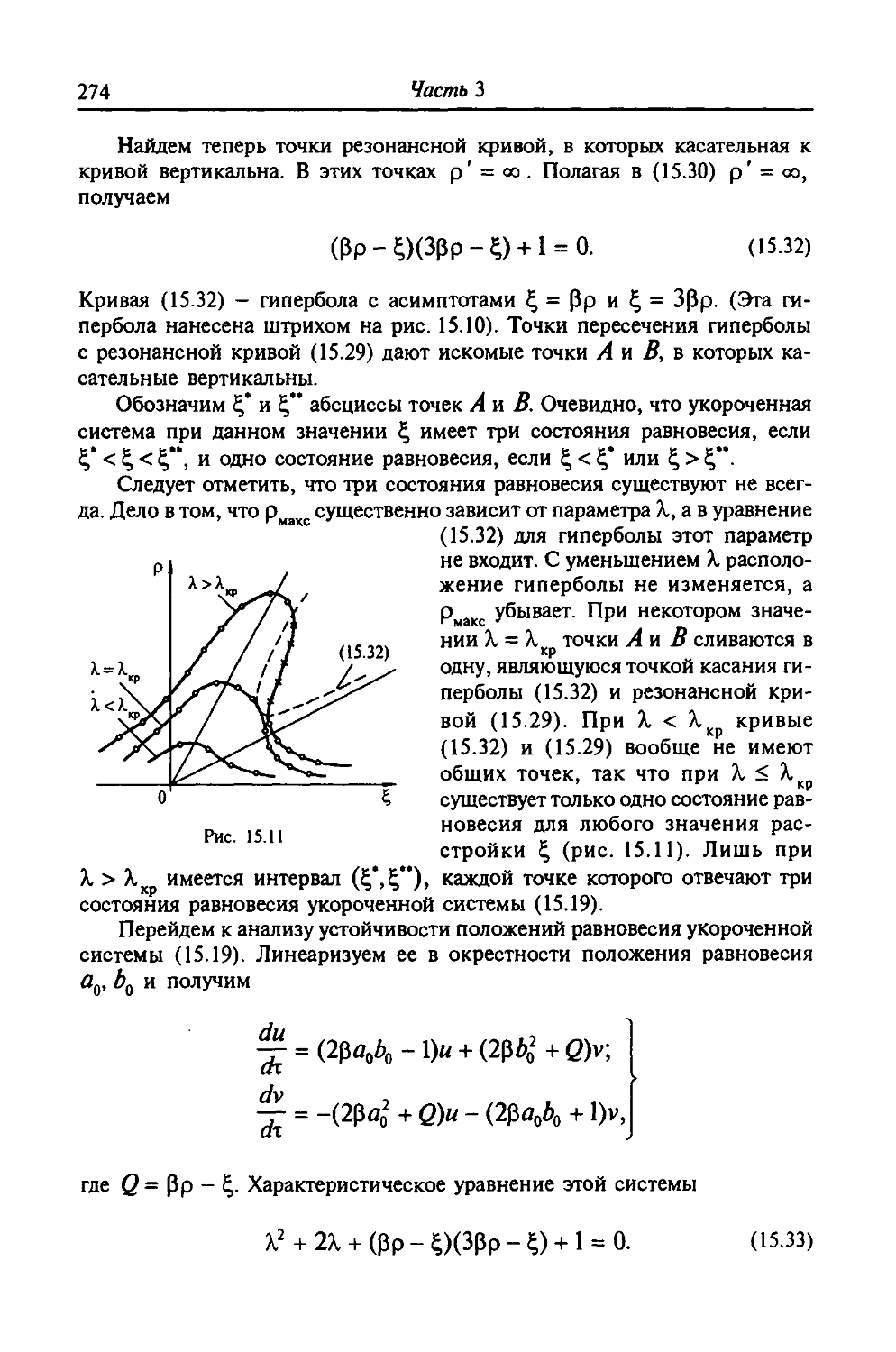
ЧАСТЬ 3 КОЛЕБАНИЯ НЕАВТОНОМНЫХ СИСТЕМ - 263-326c.
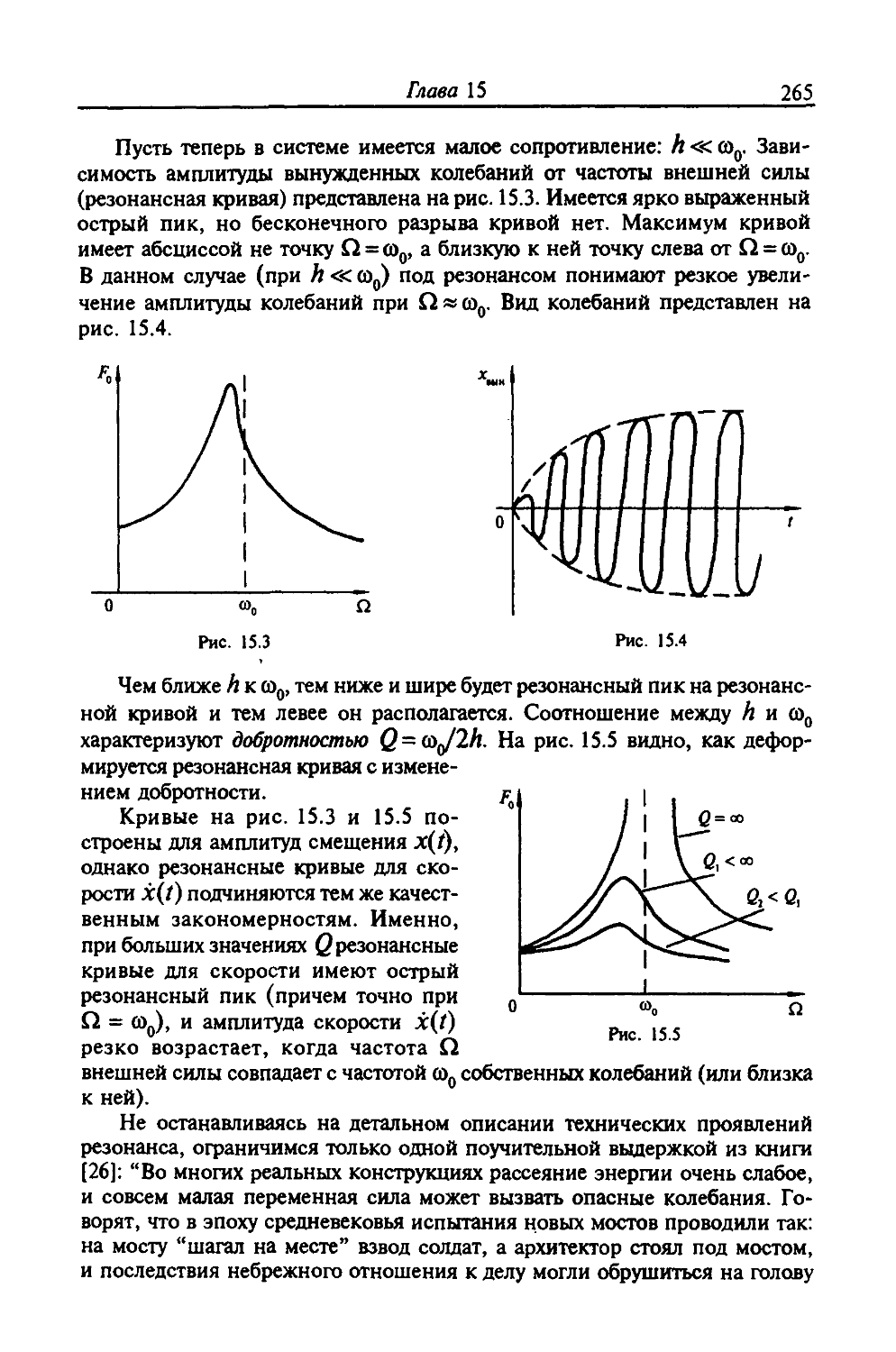
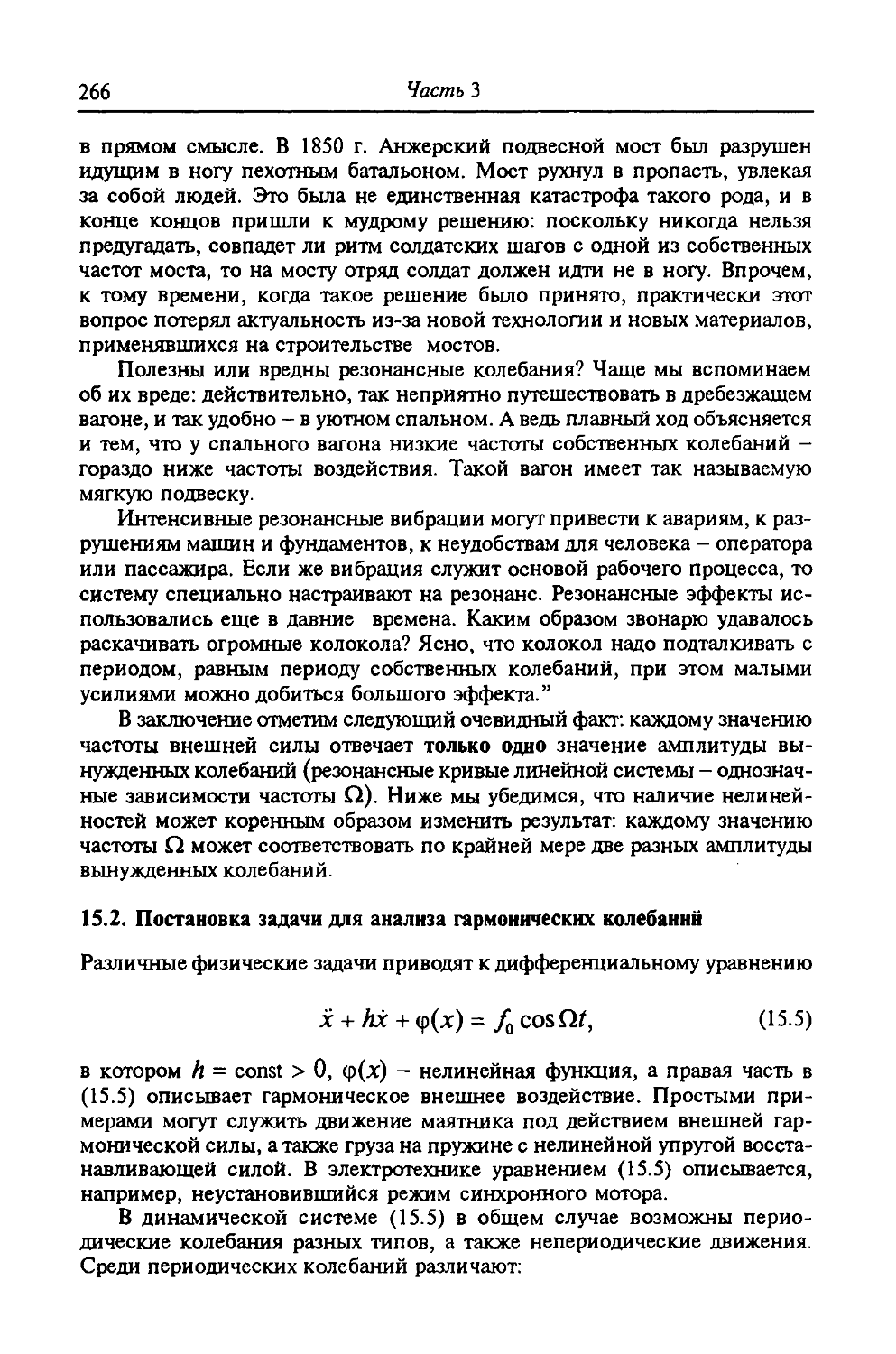
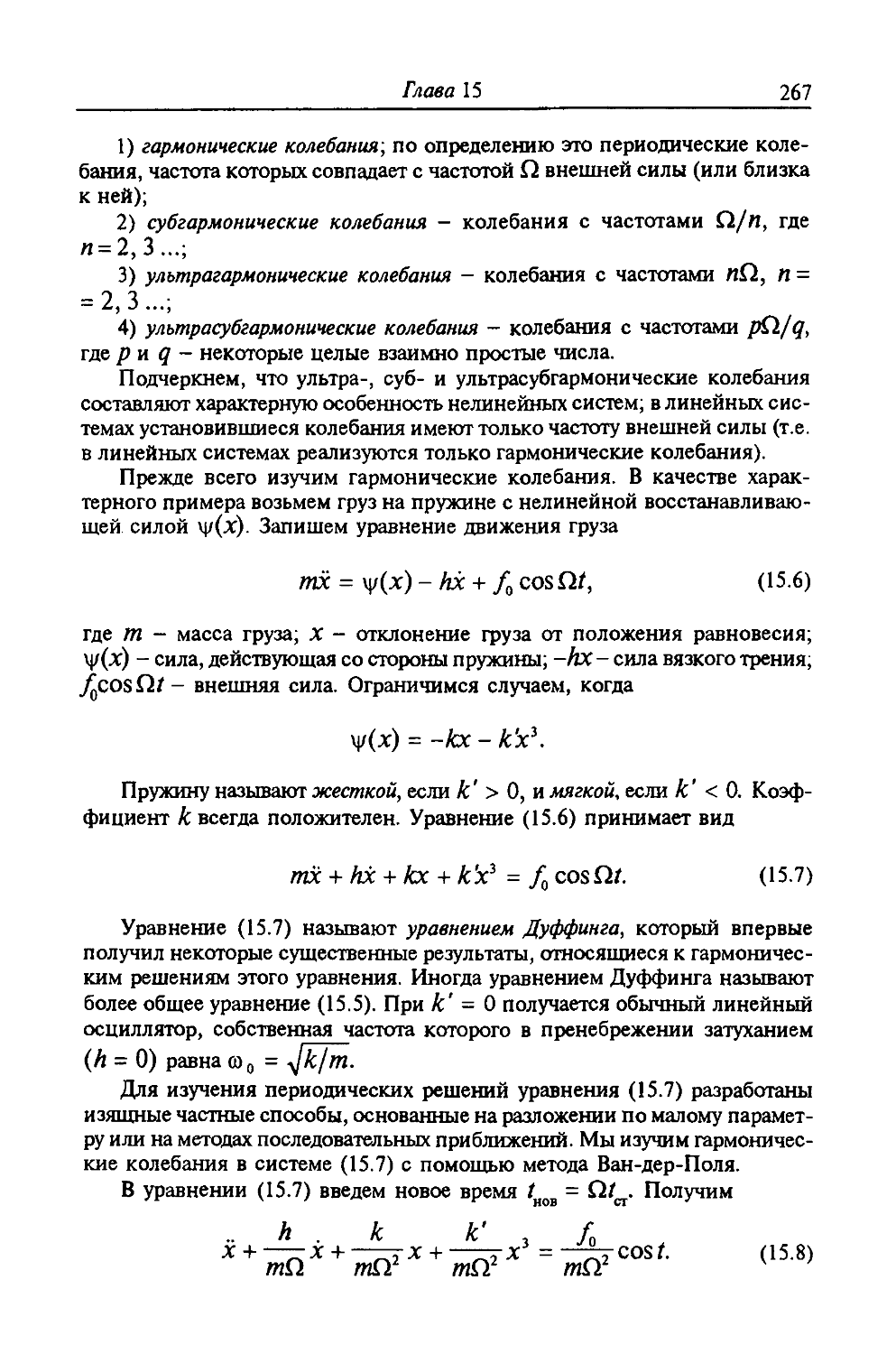
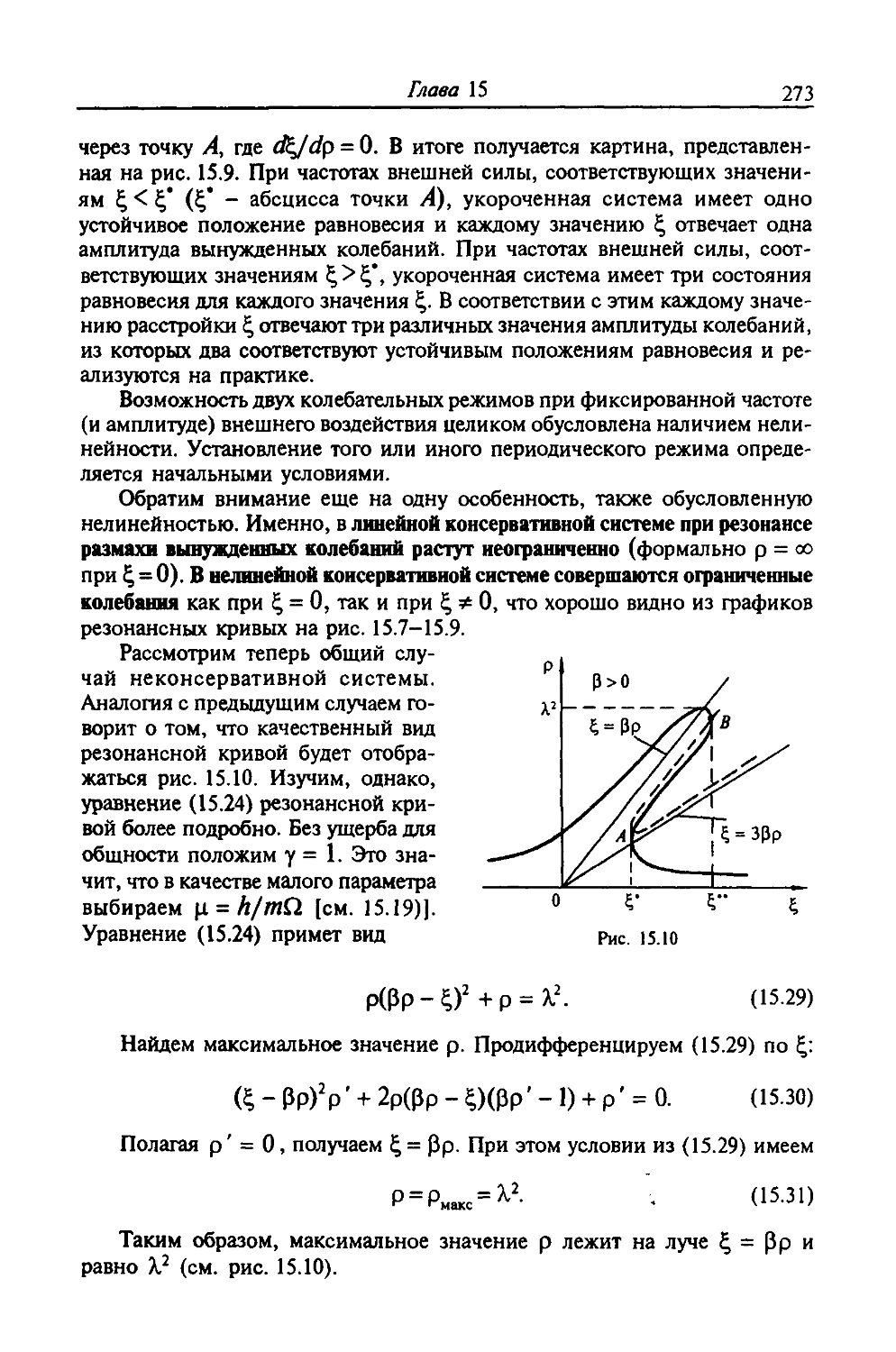
Глава 15 Вынужденные колебания системы с нелинейной восстанавливающей
силой. Уравнение Дуффинга - 263-288c.
15.1 Вынужденные колебания в линейной системе с одной степенью свободы -
263-266c.
15.2 Постановка задачи для анализа гармонических колебаний - 266-268c.
15.3 Применение метода Ван-дер-Поля. Вывод уравнения резонансной кривой -
268-270c.
15.4 Построение резонансных кривых. Анализ устойчивости периодических
режимов - 270-275c.
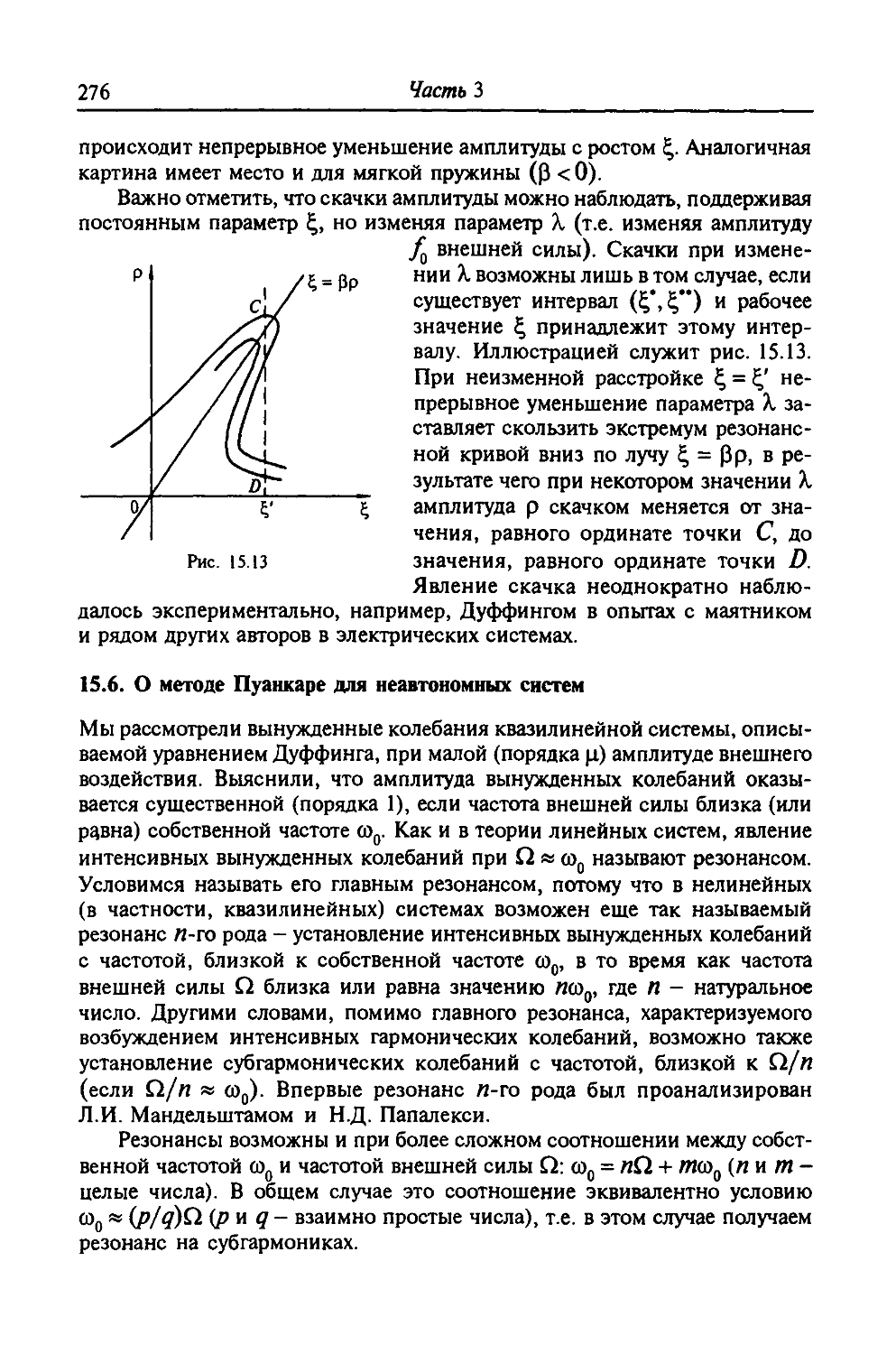
15.5 Явление скачка - 275-276c.
15.6 О методе Пуанкаре для неавтономных систем - 276-278c.
15.7 Нерезонансные вынужденные колебания - 278-280c.
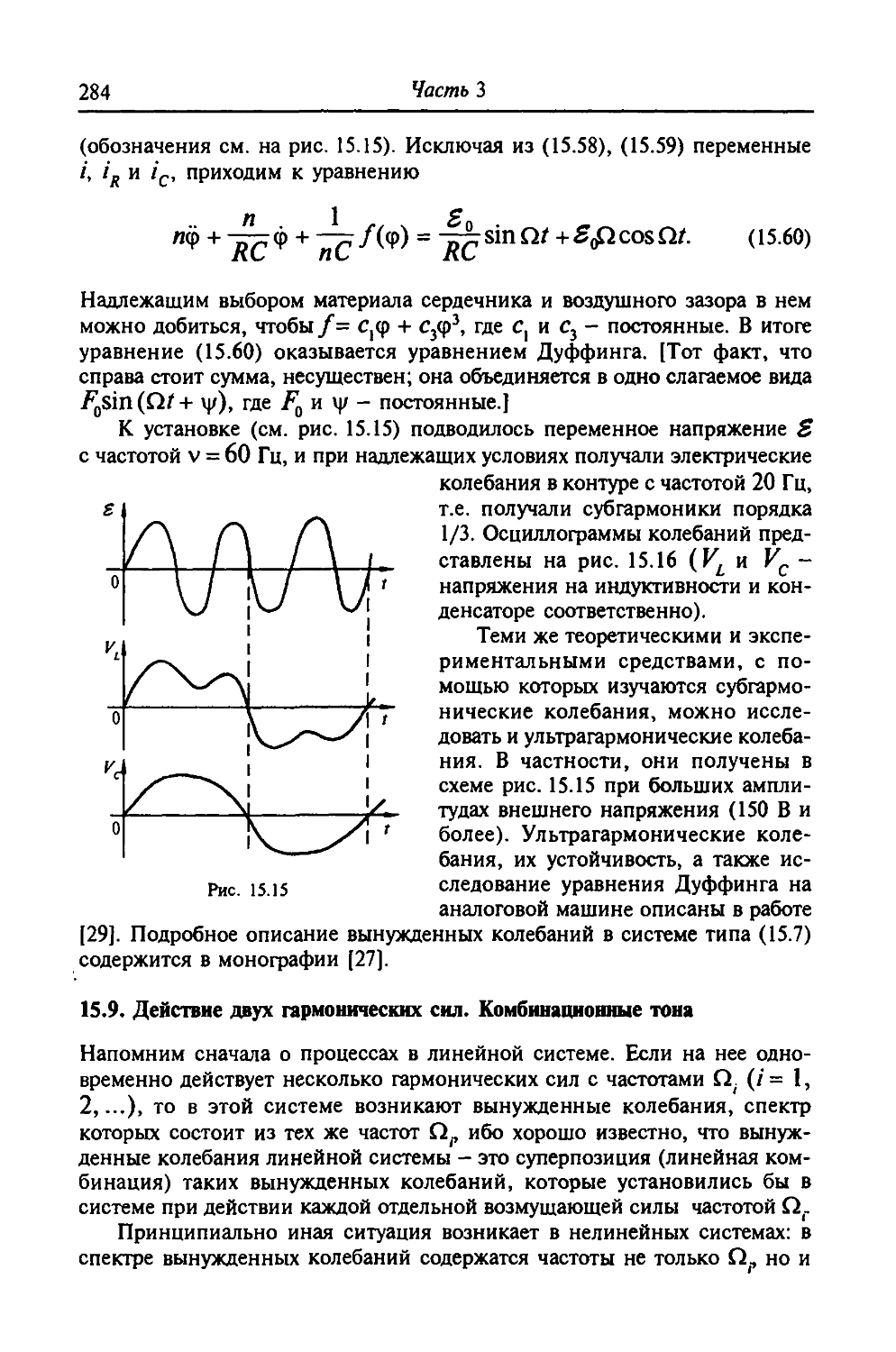
15.8 Субгармонические колебания - 280-284c.
15.9 Действие двух гармонических сил. Комбинационные тона - 284-287c.
Задачи - 288c.
Глава 16 Автоколебательная система при периодическом внешнем воздействии.
Явление захватывания - 289-297c.
16.1 Постановка задачи - 289-290c.
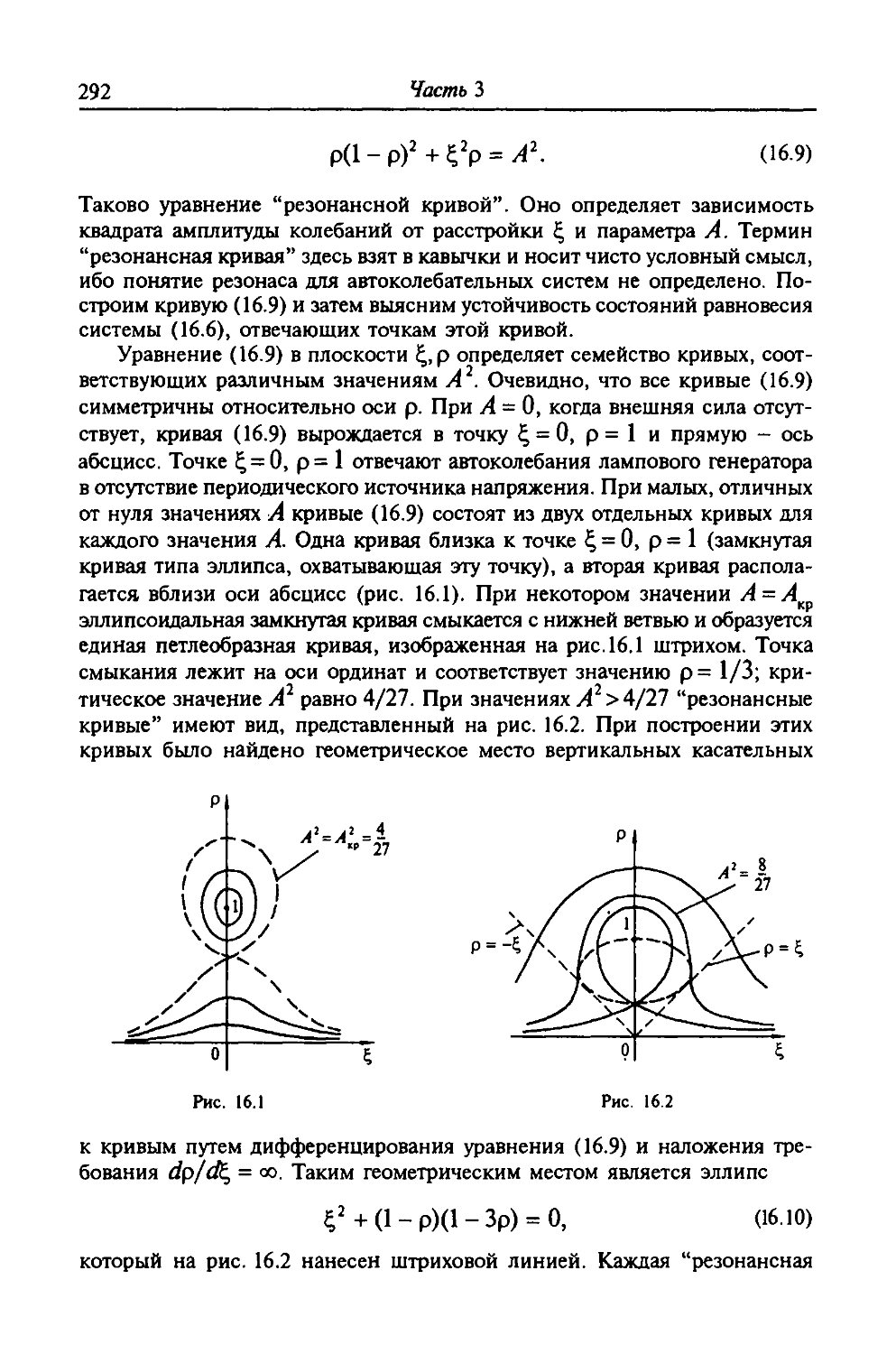
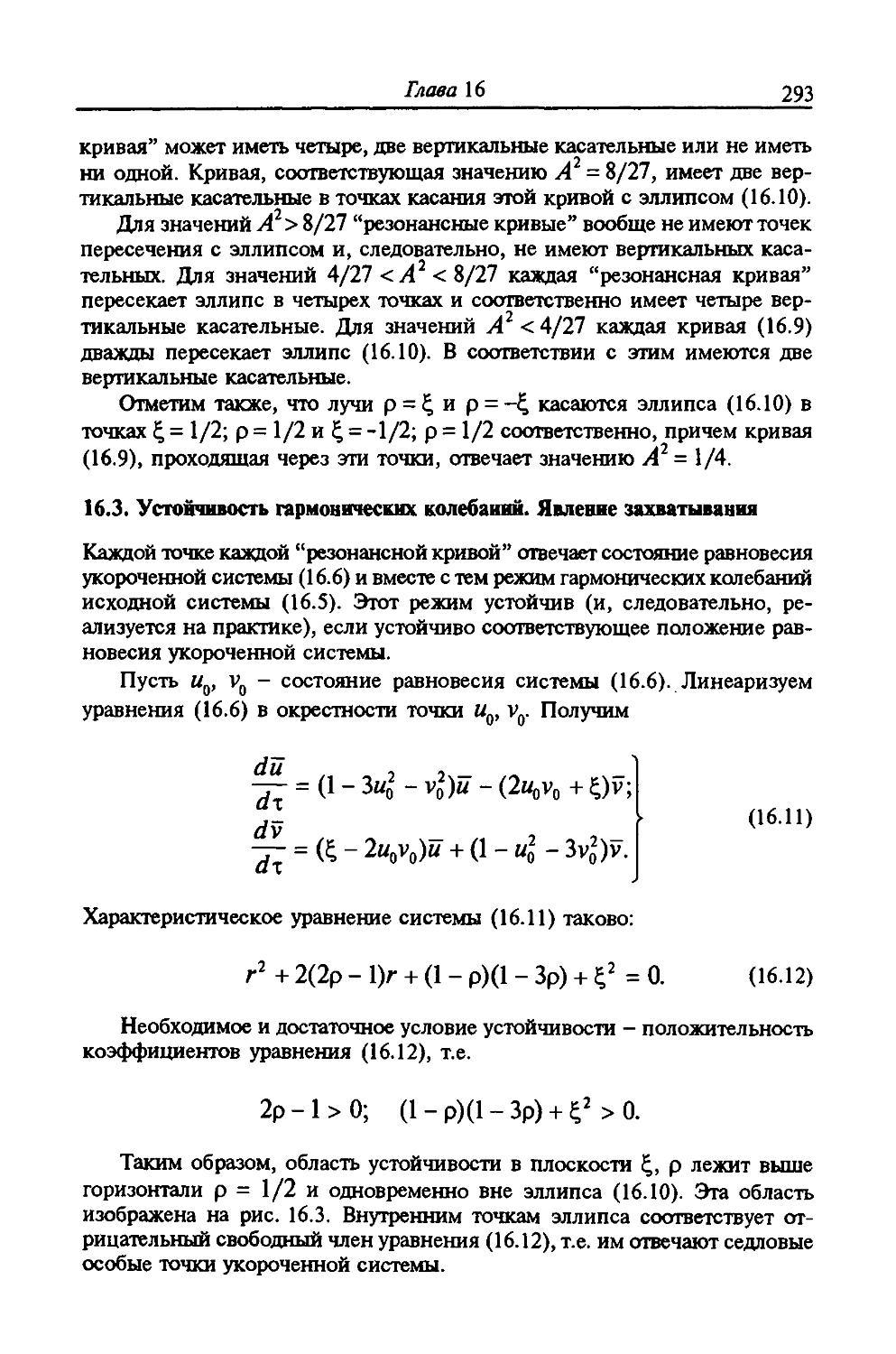
16.2 Построение "резонансных кривых" - 291-293c.
16.3 Устойчивость гармонических колебаний. Явление захватывания - 293-295c.
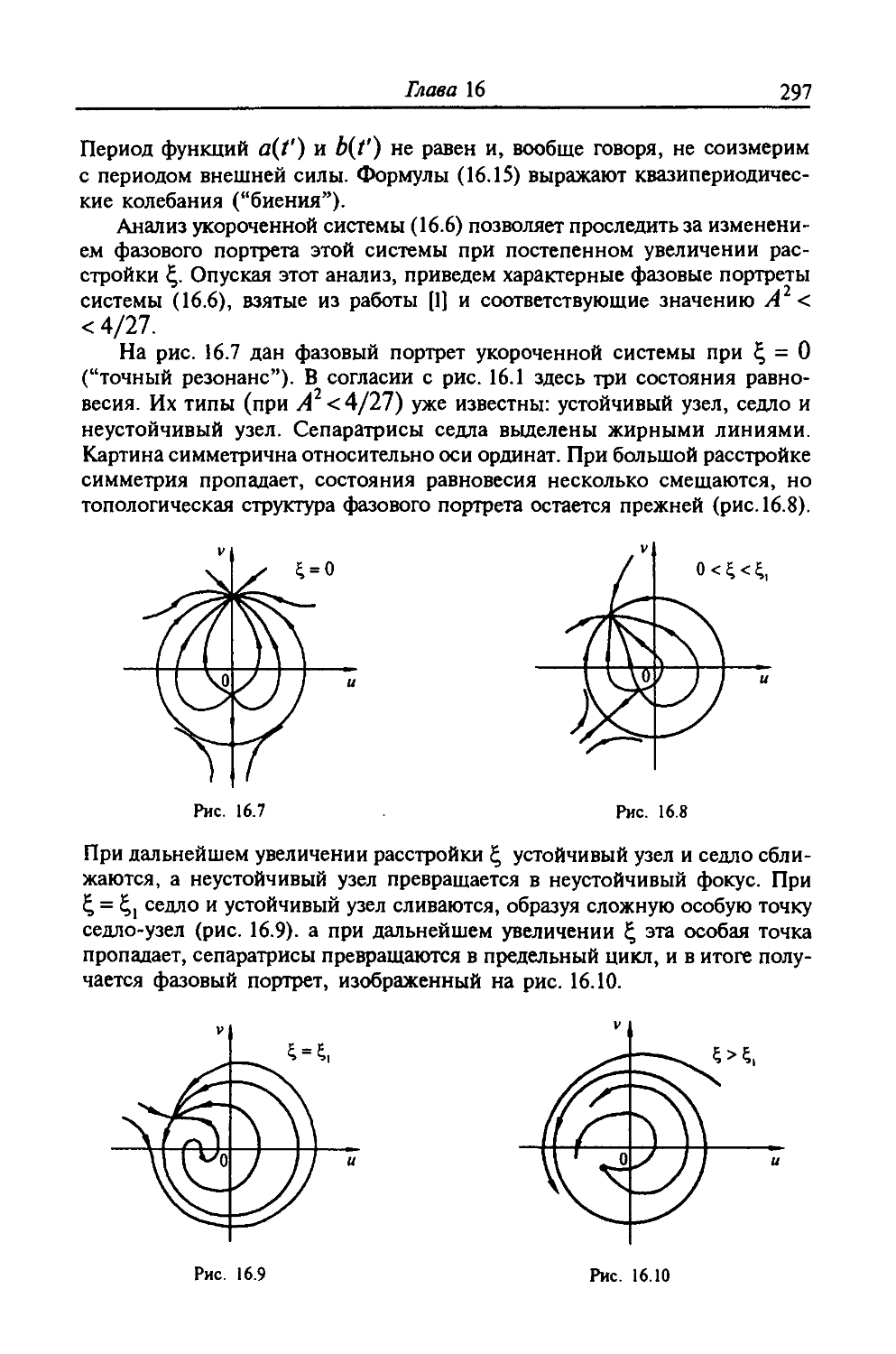
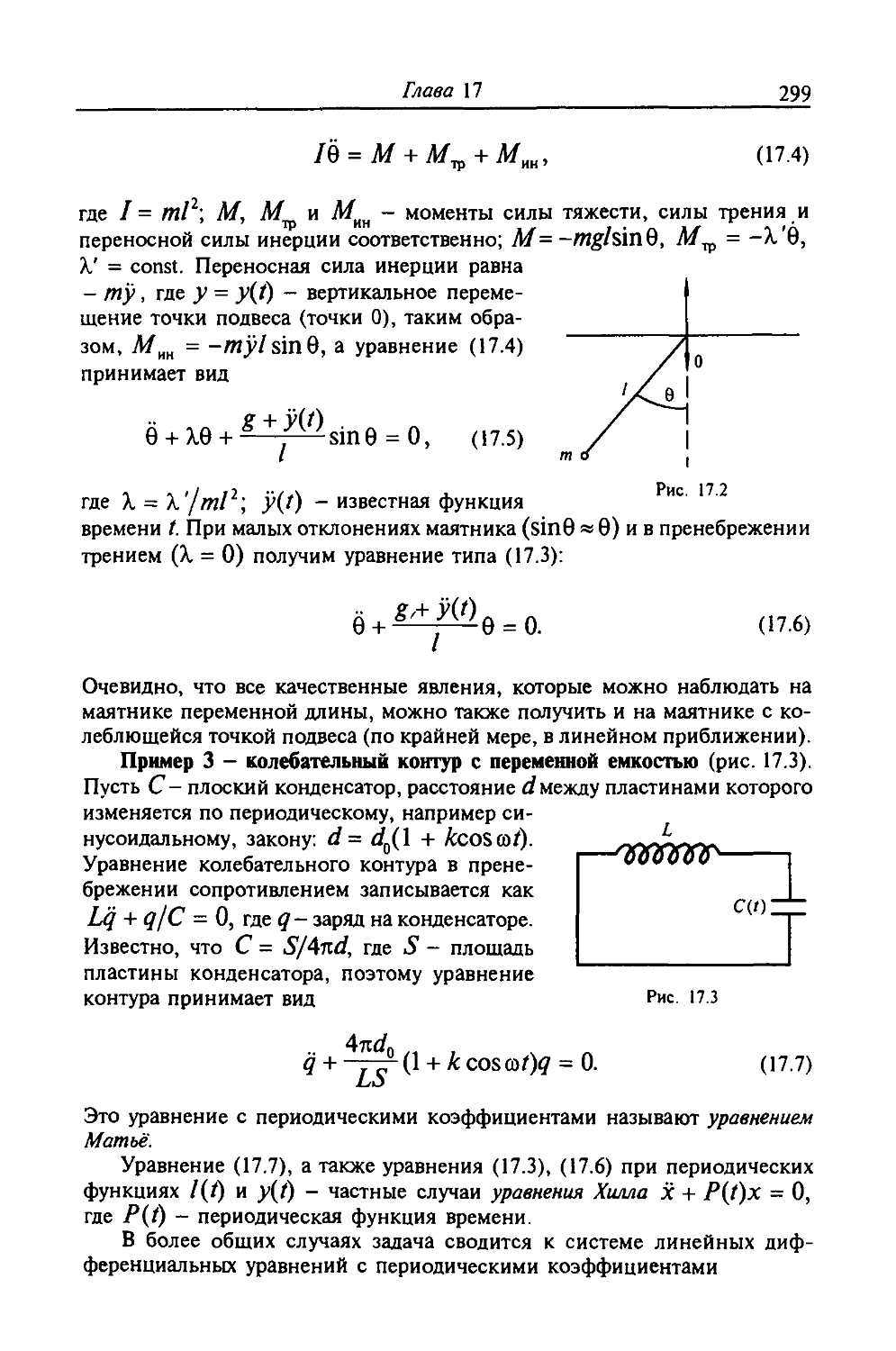
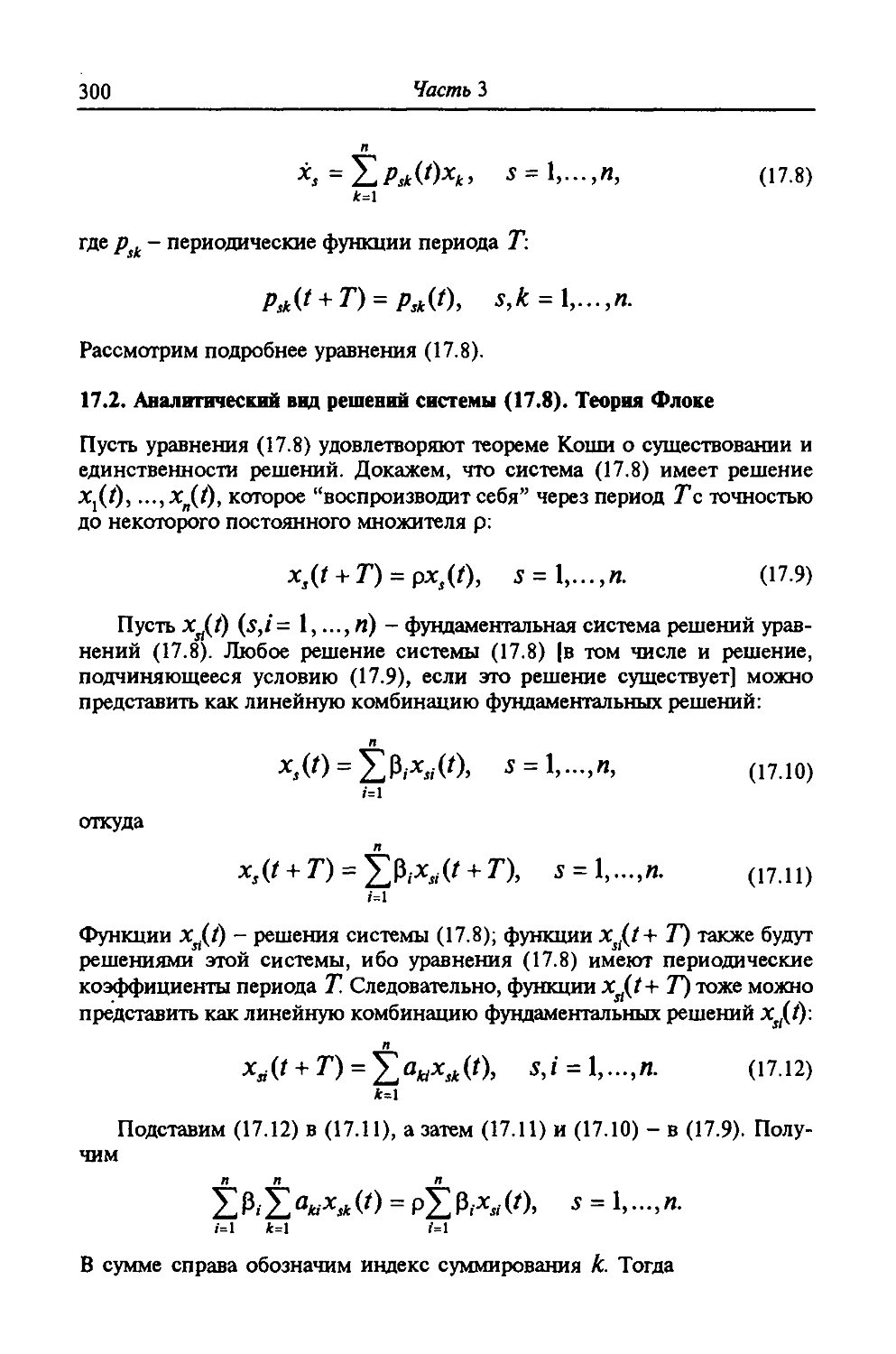
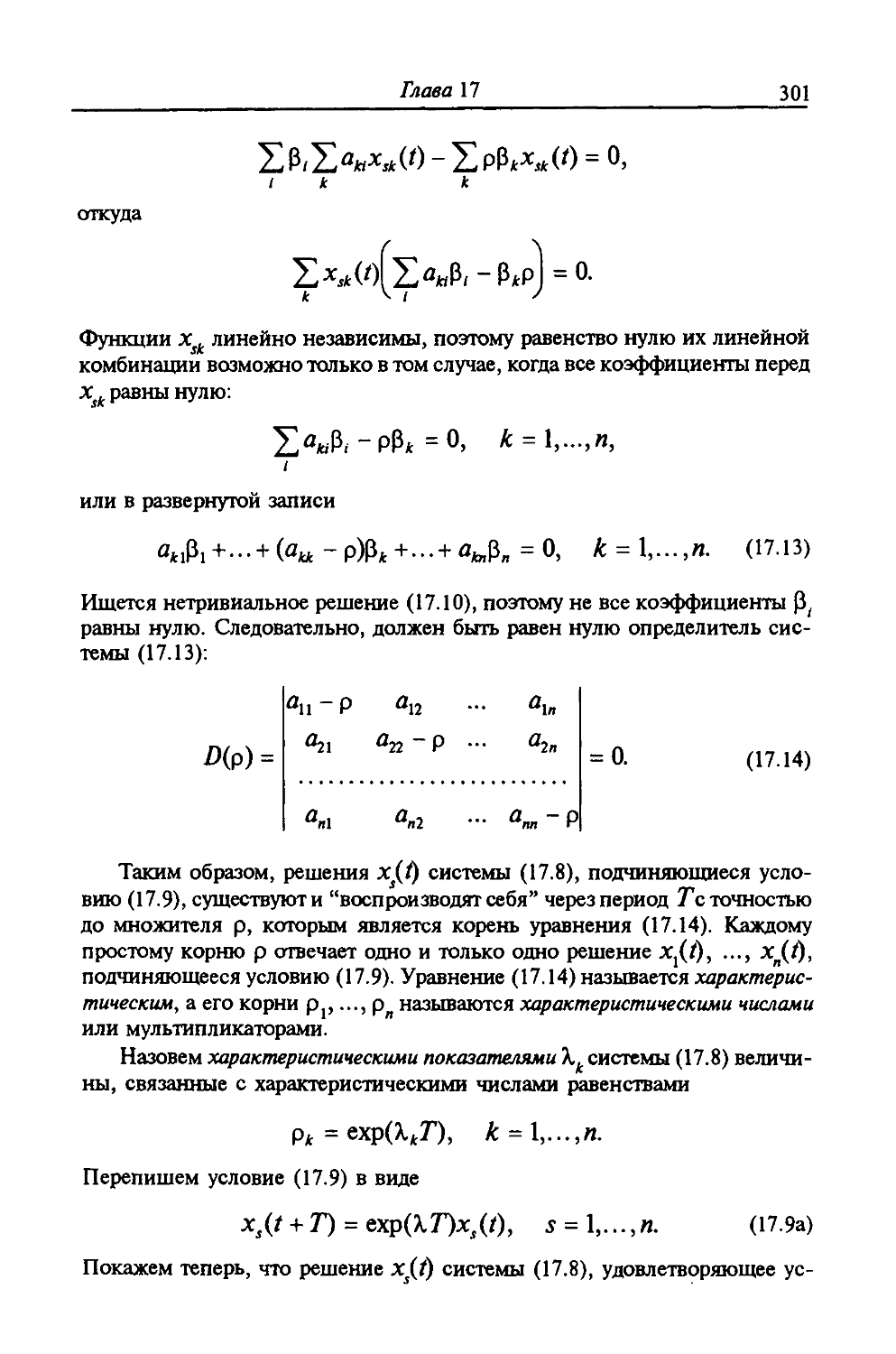
16.4 Анализ движений при больших значениях расстройки - 295-297c.
Глава 17 Параметрические колебания - 298-326c.
17.1 Физические примеры - 298-300c.
17.2 Аналитический вид решений системы A7.8). Теория Флоке - 300-302c.
17.3 Устойчивость. Параметрический резонанс - 302-305c.
17.4 Системы второго порядка - 305-307c.
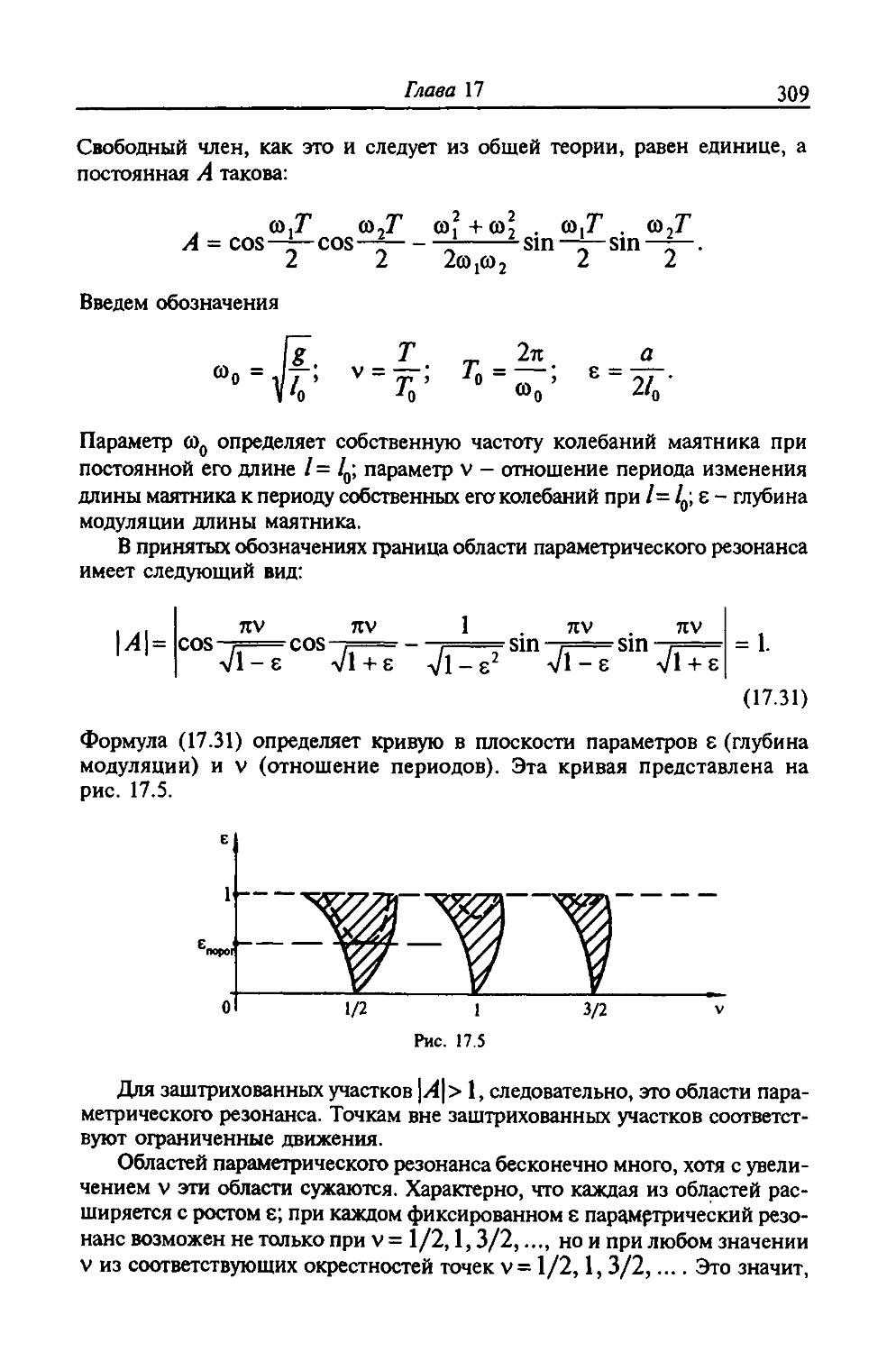
17.5 Параметрические колебания маятника при скачкообразном изменении его
длины-307-311c.
17.6 Обращенный маятник с вибрирующей точкой подвеса. Опыты П.Л. Капицы и
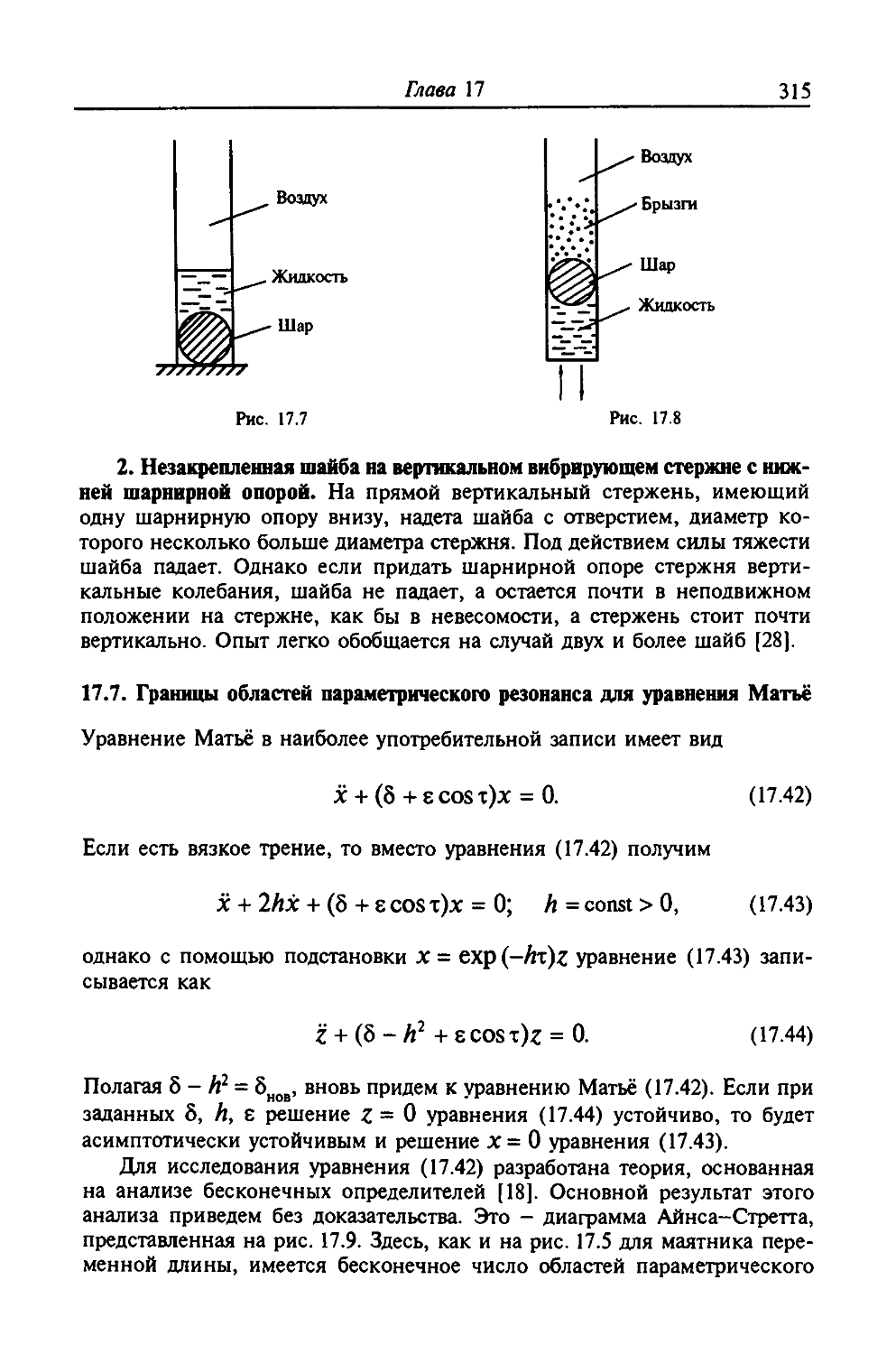
В.Н.Челомея-311-315c.
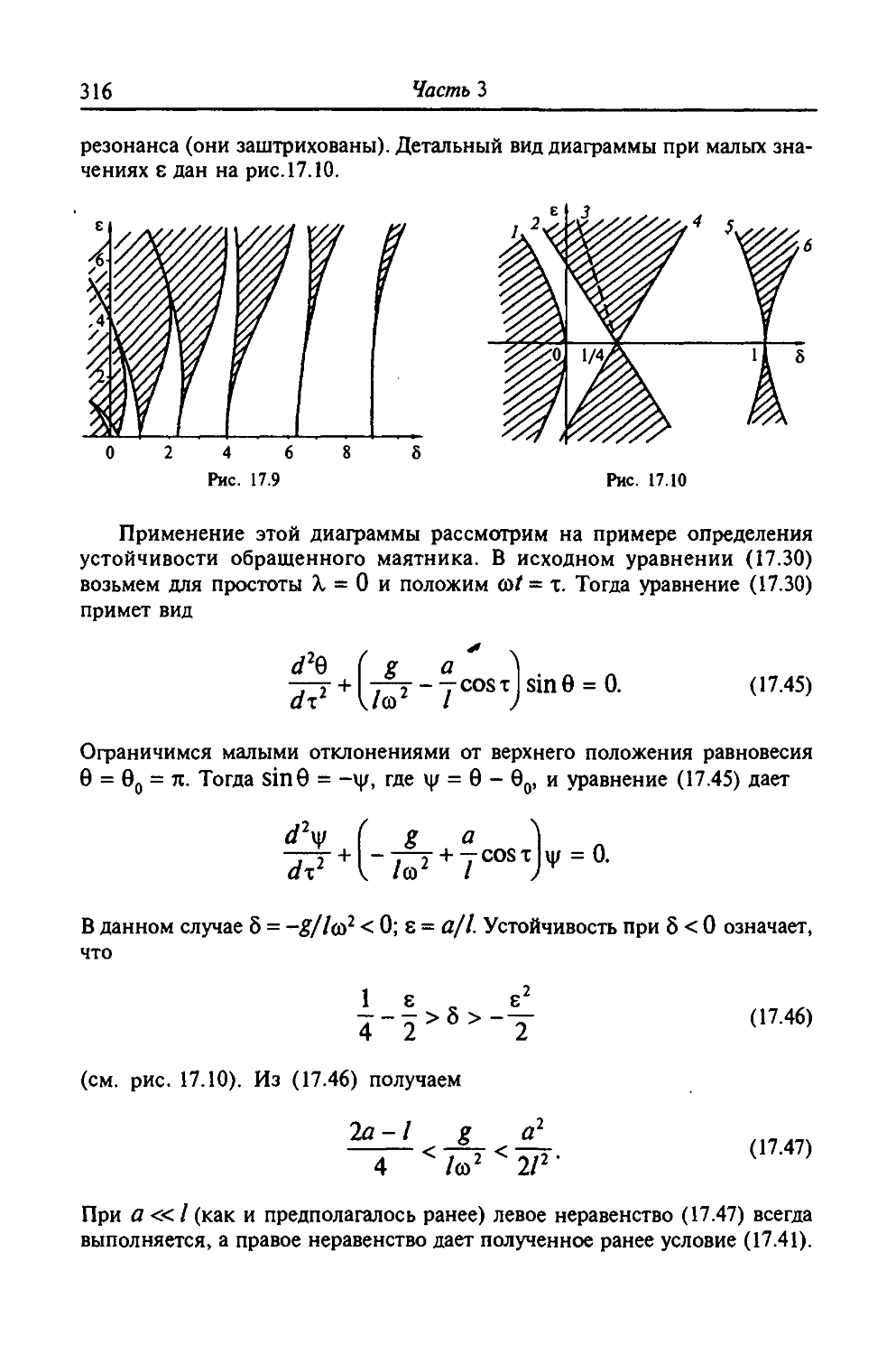
17.7 Границы областей параметрического резонанса для уравнения Матьё - 315-
316c.
17.8 Влияние нелинейностей на ограничение параметрических колебаний - 317-
323c.
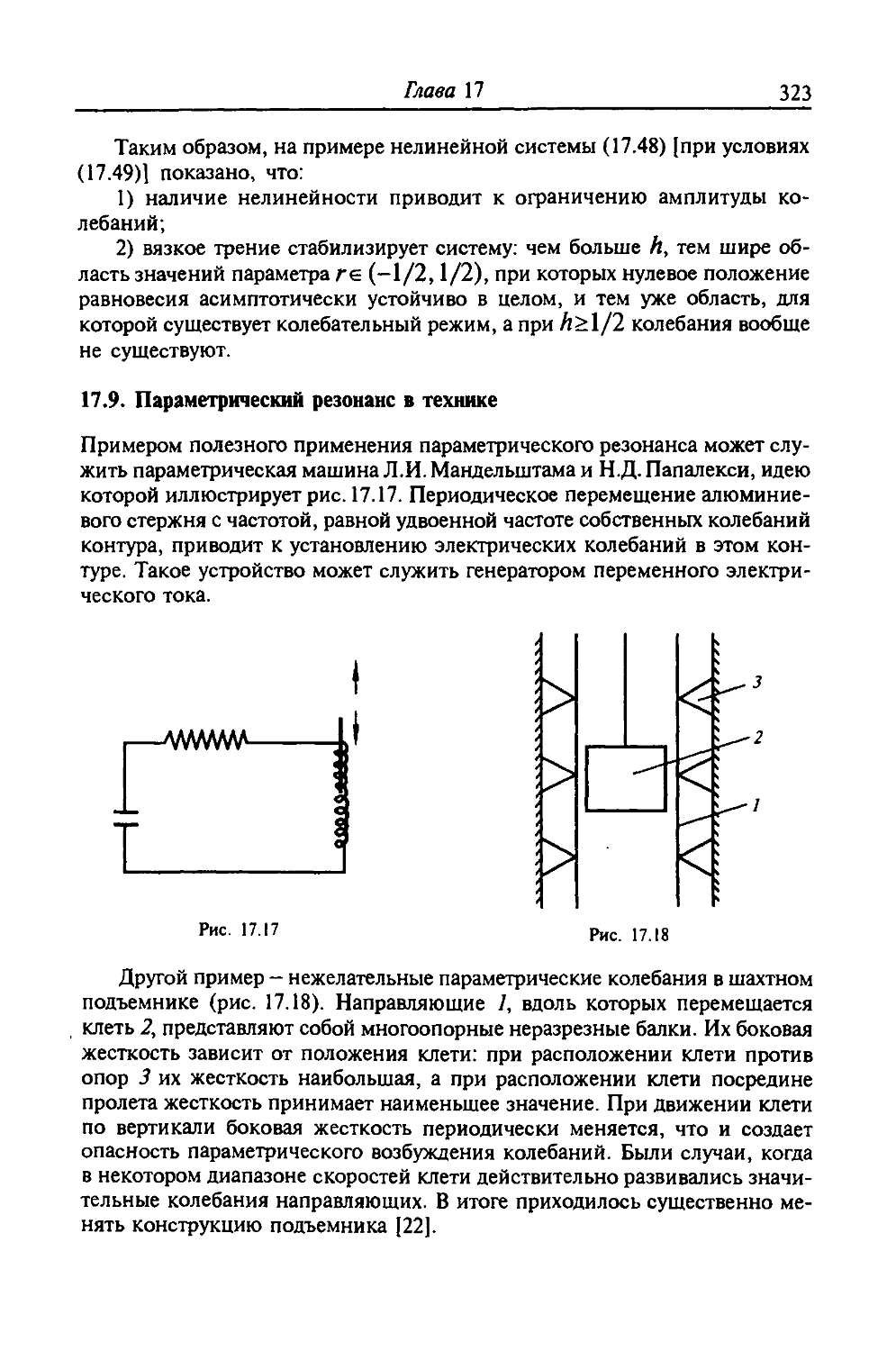
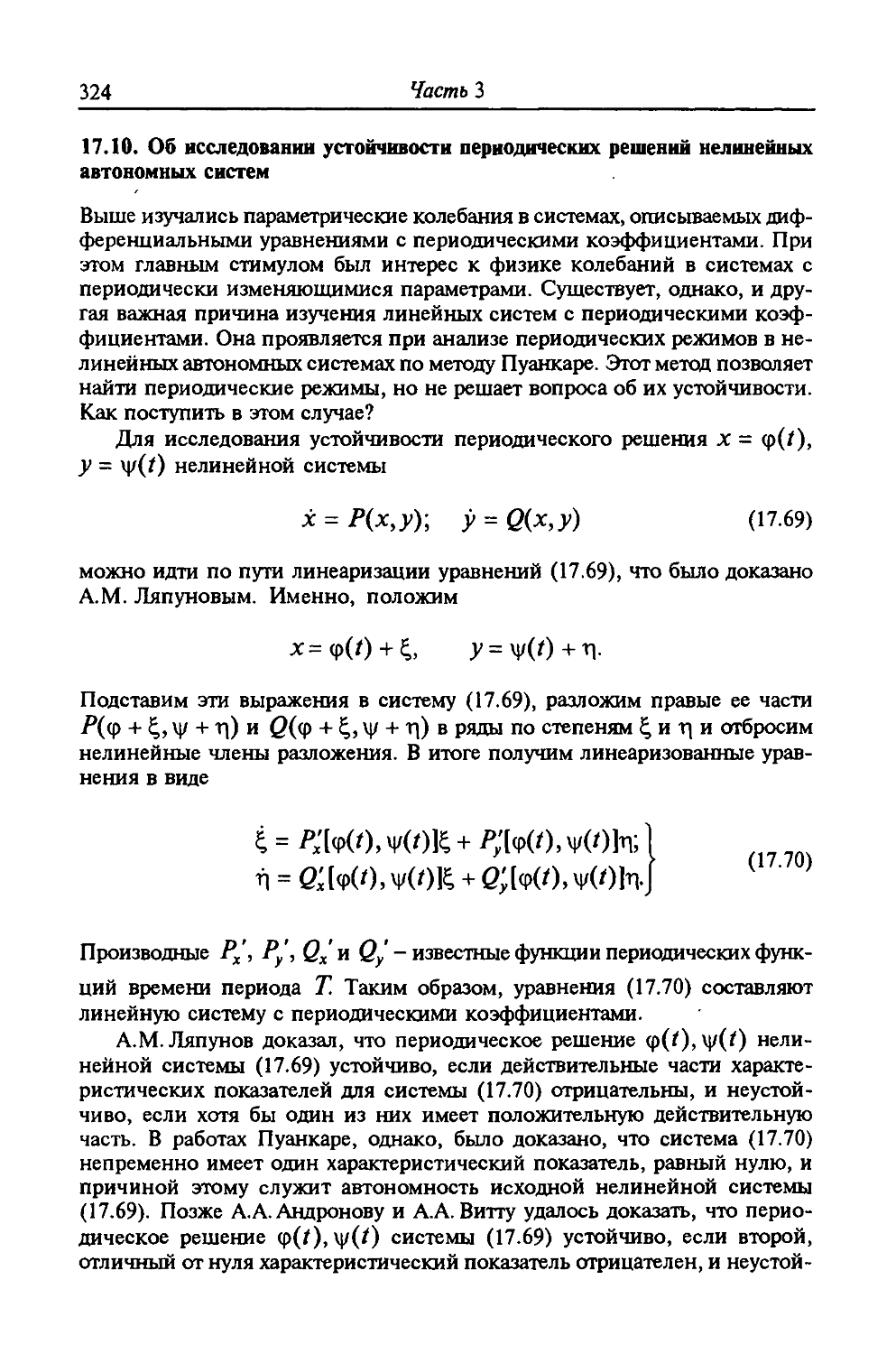
17.9 Параметрический резонанс в технике - 323c.
17.10 Об исследовании устойчивости периодических решений нелинейных
автономных систем - 324-325c.
Заключение к части 3 - 325-326c.
ПРИЛОЖЕНИЯ - 327-383c.
Приложение 1 О положении равновесия с чисто мнимыми характеристическими
корнями - 326-329c.
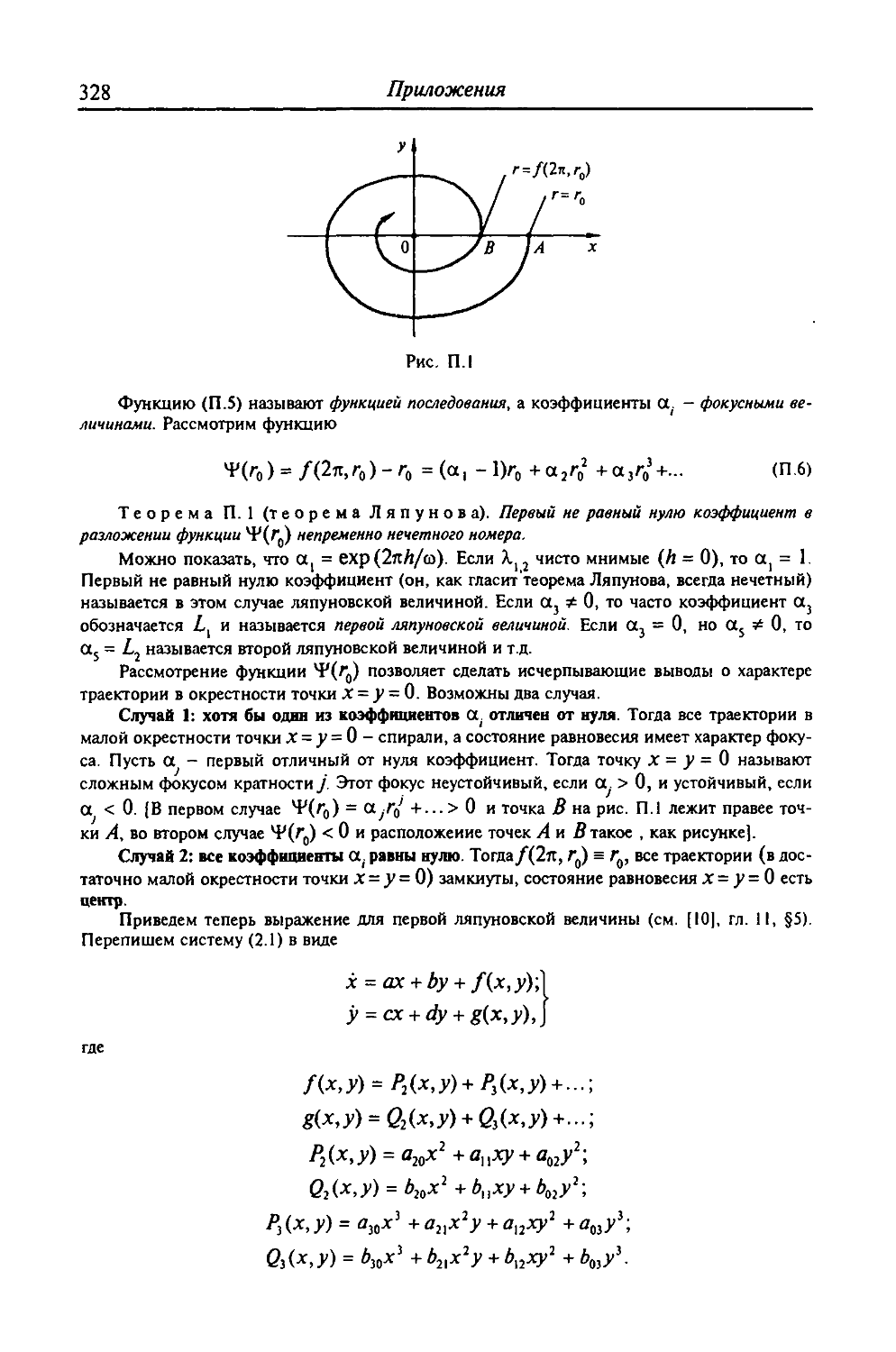
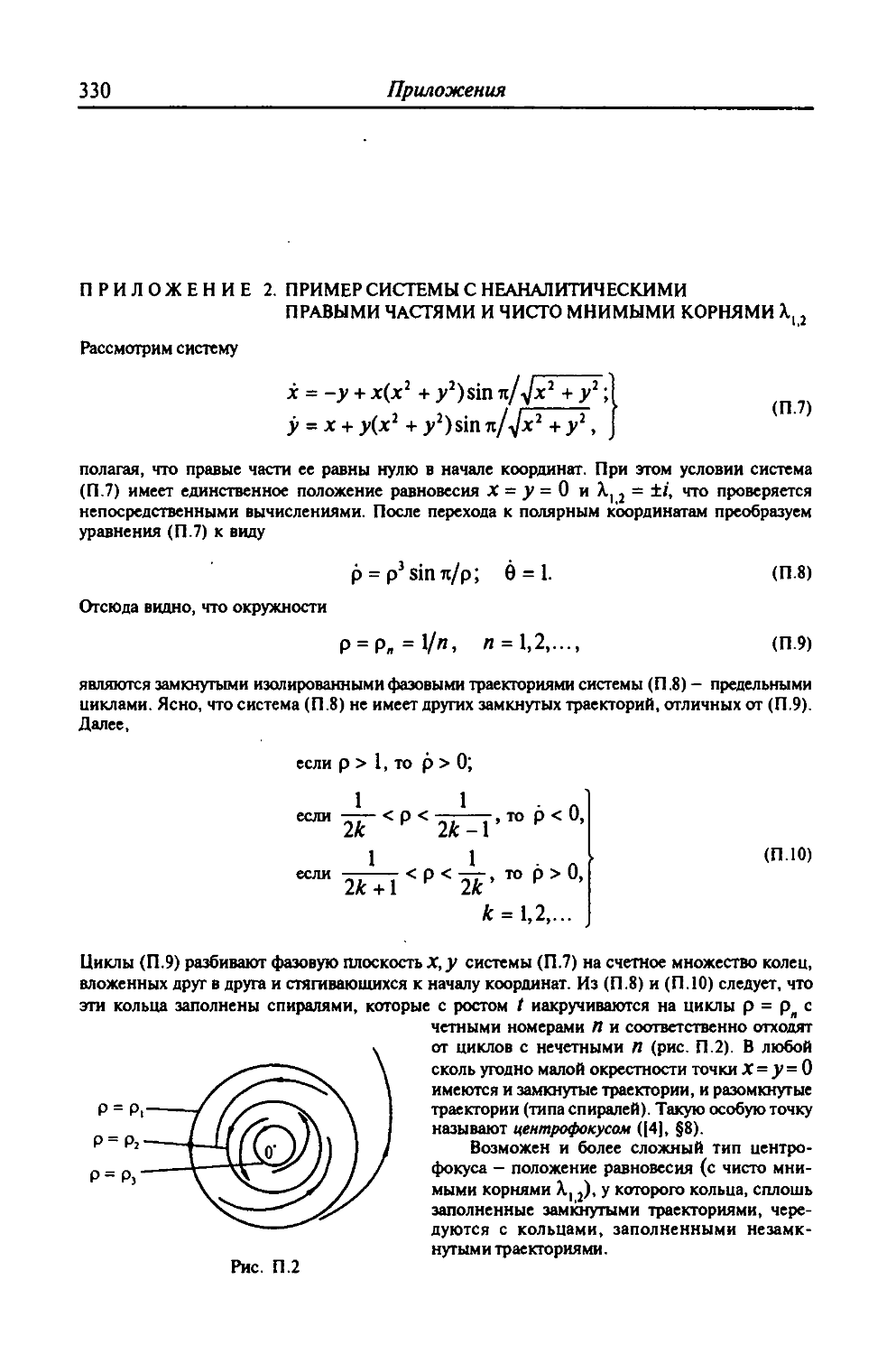
Приложение 2 Пример системы с неаналитическими правыми частями и чисто
мнимыми корнями ? 1,2
Приложение 3 Вычисление индексов простых особых точек - 331-332c.
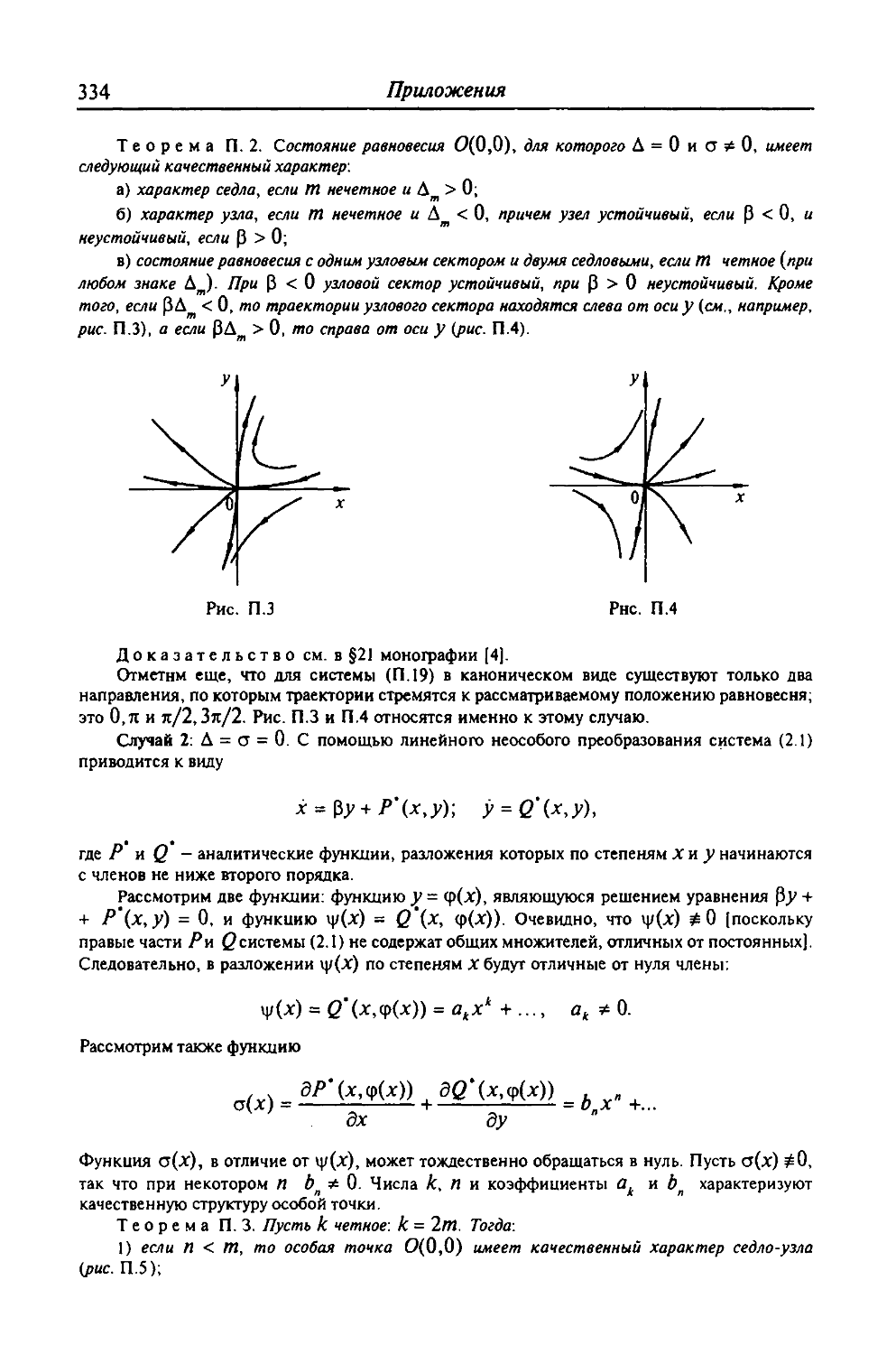
Приложение 4 Сложные особые точки с нулевыми характеристическими корнями -
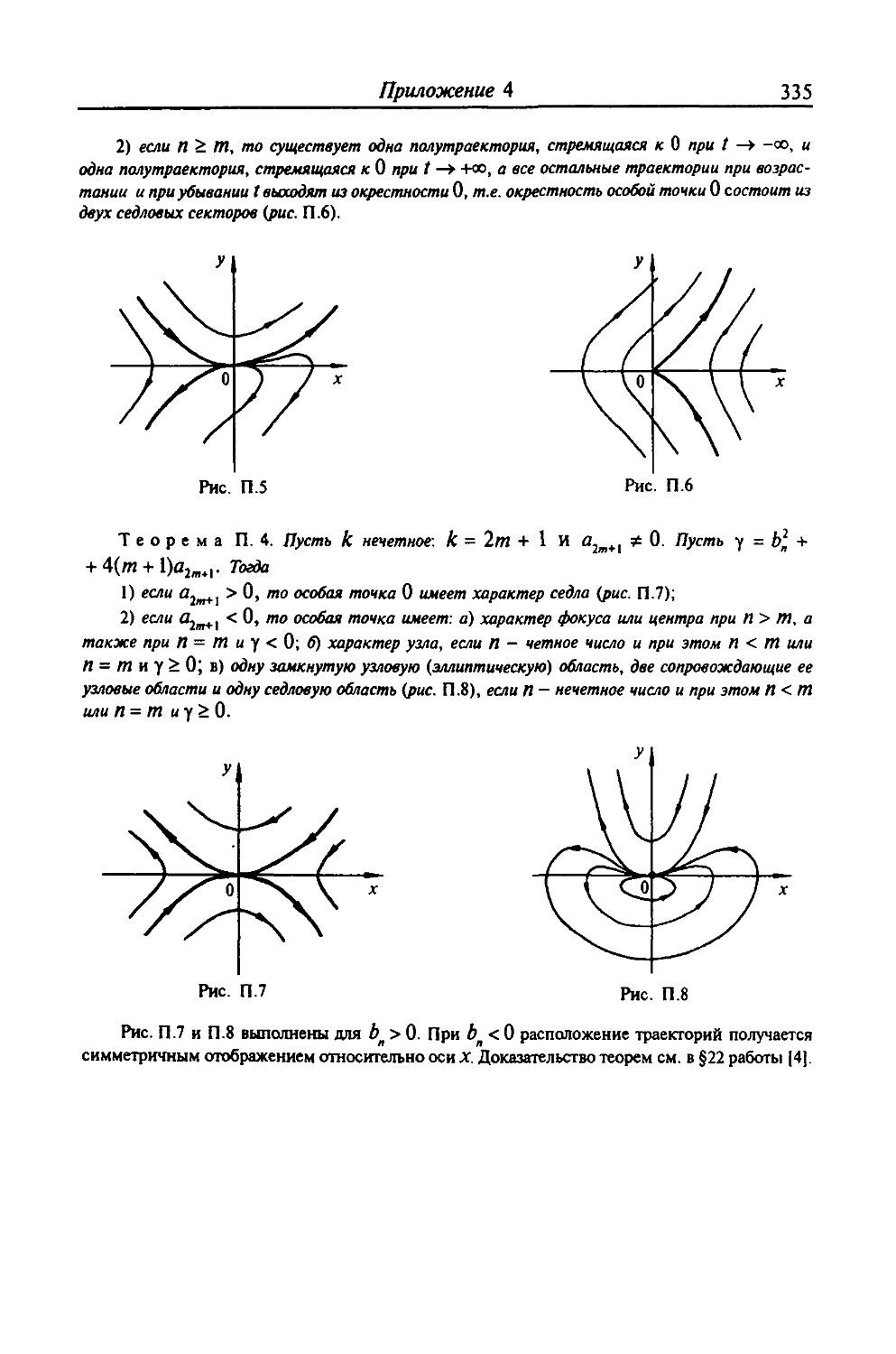
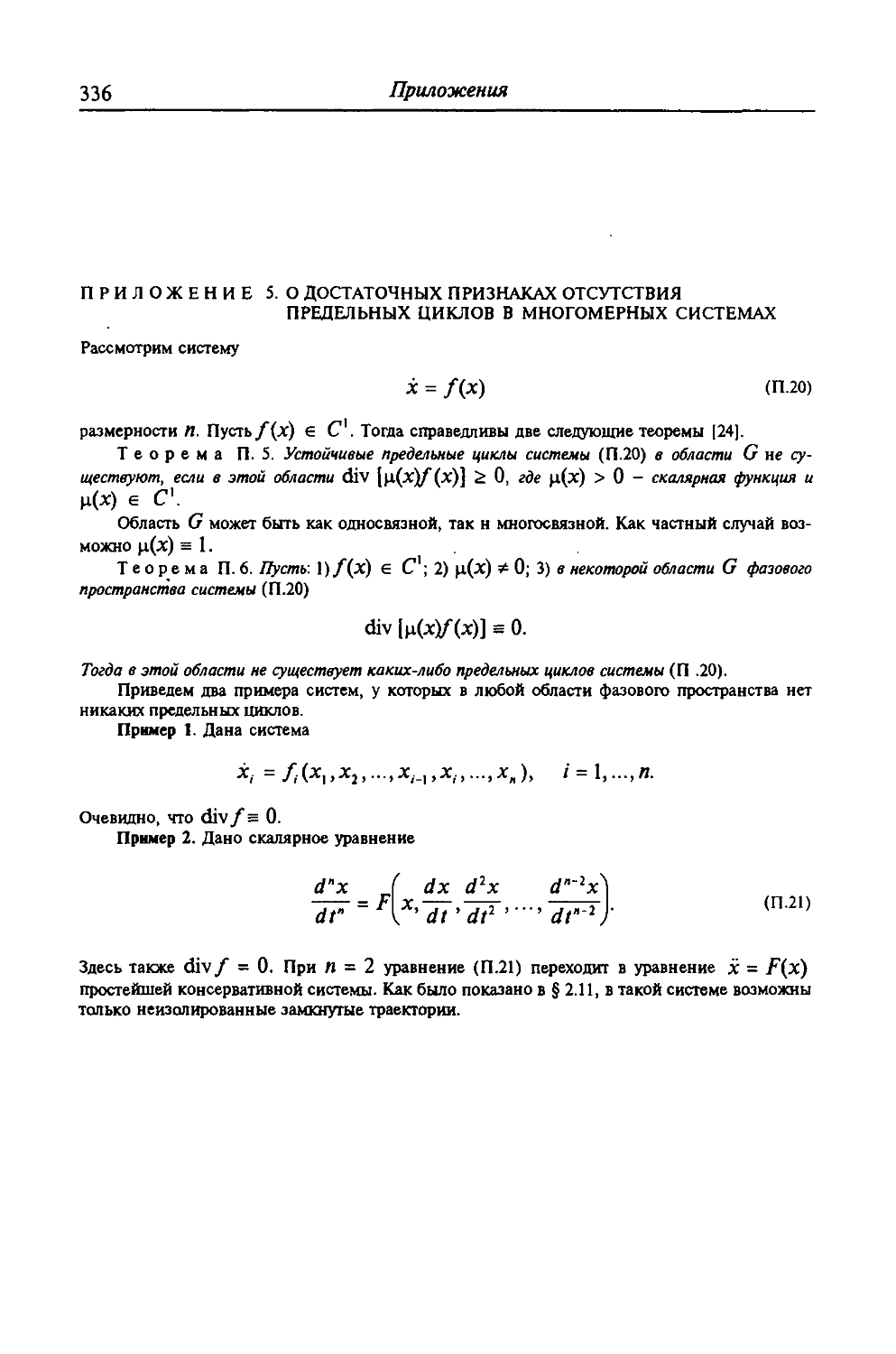
333-335c.
Приложение 5 О достаточных признаках отсутствия предельных циклов в
многомерных системах - 336c.
Приложение 6 Системы с цилиндрической фазовой поверхностью - 337c.
Приложение 7 О неоднозначности отыскания функций uk, Ak и Bk - 338-339c.
Приложение 8 Проекционные (прямые) методы в расчетах вынужденных
колебаний существенно нелинейных систем - 340-343c.
Приложение 9 Результаты локального изучения положений равновесия и
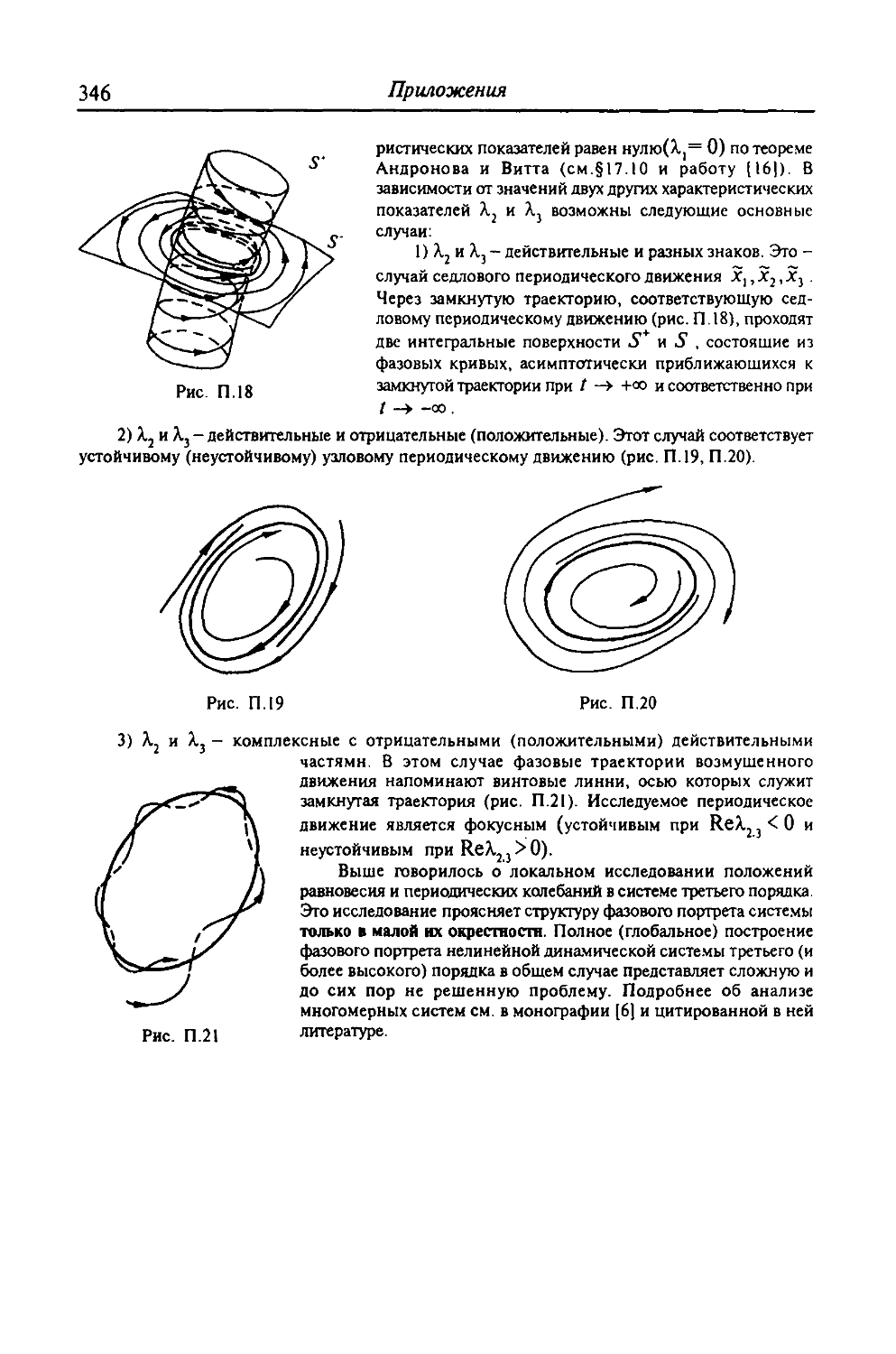
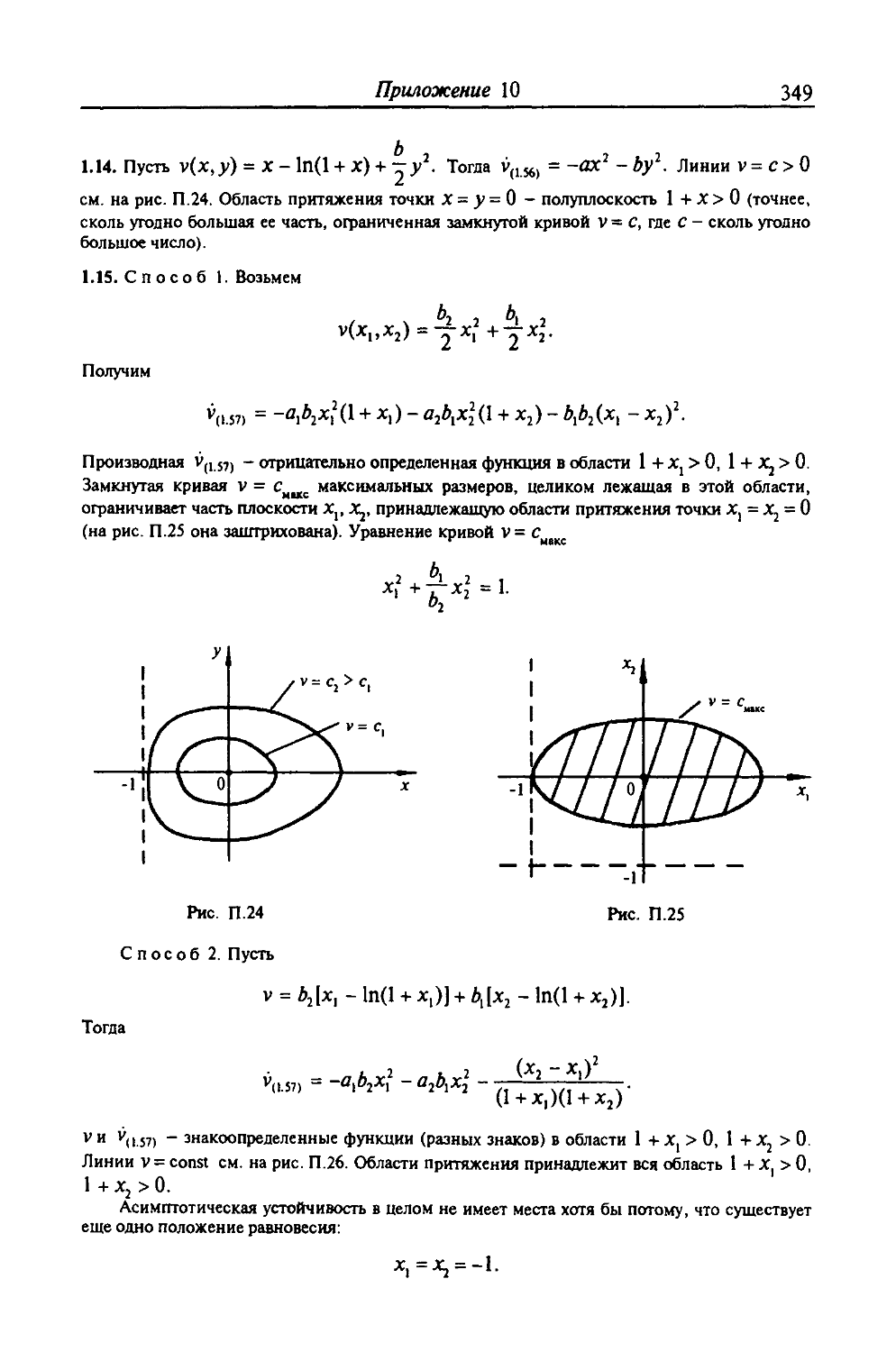
периодических движений в нелинейных системах третьего порядка - 344-346c.
Приложение 10 Ответы на задачи, указания и решения - 347-383c.
Список литературы - 384-388c.
Предметный указатель - 389-391c.
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Автор книги — профессор Нижегородского государственного университета Вадим
Демьянович Горяченко A934— 1990) хорошо известен как крупный специалист в области
нелинейной теории динамических систем. Четыре монографии автора составляют
весомый вклад в создание научных основ исследований динамики ядерных реакторов.
Значительный интерес представляют также его работы в области математической
экологии.
Предлагаемая книга - это итог долголетней работы автора по созданию и
совершенствованию курса теории нелинейных колебаний для студентов математиков-
прикладников и механиков механико-математического факультета Нижегородского
университета.
Выбор материала, способ изложения теоретических положений, тесная связь
теории с прикладными исследованиями вполне отражают стиль и подход к этим
вопросам автора, воспитанного на традициях Нижегородской (Горьковской) школы
теории колебаний, основанной академиком А.А.Андроновым еще в начале 30-х годов
нынешнего столетия. Одной из основных заложенных в книгу идей является идея
толкования предмета теории колебаний как ветви прикладной математики - эффек-
эффективного инструмента для исследования динамики систем из различных областей, как
то: механики, физики, химии, медицины, социологии...
Особое значение в связи с этим приобретают включенные в книгу специальные
главы, посвященные анализу динамики ядерных реакторов и динамики
сосуществования видов. Несомненно, что изложенные в этих главах результаты
оригинальны и представляют не только методический, но и самостоятельный позна-
познавательный интерес.
Необходимо отметить наличие в книге многочисленных примеров и заданий для
самостоятельной проработки, многие из которых сопровождаются необходимыми
указаниями, пояснениями и даже подробными решениями, а также не очень
обширным, но тщательно отобранным списком литературы.
Автор понимал, что значение нелинейной теории колебаний в анализе различных
явлений в недалеком будущем возрастет многократно, и он продолжал дальнейшую
работу над книгой.
Первое издание, которое вышло в свет уже после безвременной кончины автора,
хорошо было встречено научной и педагогической общественностью.
Во второе издание вошли изменения и дополнения. Включены новая глава A1),
два приложенияFи9), замечаниях главе 14, дополнены главы 1 и 2. Существенно
увеличено число задач, рисунков, примеров.
Устранены погрешности и опечатки, замеченные в первом издании.
Широта охвата темы, объем и необходимая строгость изложения позволяют
рассматривать книгу не только как хорошее учебное пособие к начальным курсам
динамики систем, теории колебаний и математического моделирования, но и как
Предисловие ко второму изданию
оригинальную монографию, книгу-справочник, отражающую большинство вопро-
вопросов классической ("достохастической") теории колебаний.
Последнее делает книгу интересной не только студентам, аспирантам и
преподавателям, но и достаточно широкому кругу инженерно-технических работников
и специалистов, занятых разработкой и исследованием математических моделей
динамики систем различной природы.
А. В. Сергиевский
ПРЕДИСЛОВИЕ
Теория колебаний - живая, развивающаяся, многоплановая дисциплина,
которая находит эффективное применение в различных отраслях естест-
естествознания и техники. Не удивительно, что у нас в стране издано большое
количество очень хороших монографий, посвященных различным сторонам
теории колебаний - математическим методам, физике колебаний, при-
приложениям в технике и т.д. Учебных пособий по теории колебаний зна-
значительно меньше. Как и монографии, они охватывают далеко не все
разделы современной (особенно нелинейной) теории колебаний, причем
большинство из них предназначено лицам с достаточно высокой мате-
математической подготовкой и, как правило, уже знакомым с элементами
теории нелинейных колебаний. Таковы, в частности, следующие учебные
пособия:
Бутенин Н.В., Неймарк Ю.И., Фуфаев Н.А. Введение в теорию
нелинейных колебаний. М.: Наука, 1976 A-е изд.); 1987 B-е изд.);
Зубов В.И. Теория колебаний. М: Высшая школа, 1979;
Веретенников В.Г. Устойчивость и колебания нелинейных систем. М.:
Наука, 1984;
РабиновичМ.И., ТрубецковД.И. Введение в теорию колебаний и волн.
М.: Наука, 1984.
В основу предлагаемого учебного пособия положен курс лекций по
теории колебаний, который в течение 20 лет читался на механико-
математическом факультете Горьковского (ныне Нижегородского) уни-
университета студентам - механикам и математикам-прикладникам. Основное
внимание уделено нелинейным колебаниям, поскольку по линейным
(малым) колебаниям имеется учебная литература, написанная на высоком
уровне, например:
Мандельштам Л.И. Лекции по колебаниям. М.. Наука, 1972;
Бабаков И.М. Теория колебаний. М.: Наука, 1968;
Яблонский А.А., Норейко С.С. Курс теории колебаний. М: Высшая
школа, 1975;
Стрелков СП. Введение в теорию колебаний. М: Наука, 1964.
К тому же сведения по малым колебаниям излагаются в курсах
теоретической механики.
Учебное пособие рассчитано на лиц, впервые приступающих к изу-
изучению теории нелинейных колебаний, не знакомых с качественной теорией
дифференциальных уравнений и обладающих обычными, "общеобра-
"общеобразовательными" сведениями в области обыкновенных дифференциальных
уравнений. (С этой точки зрения данное пособие можно рассматривать
как введение к упомянутым выше более серьезным руководствам.)
Предисловие
Поскольку не было возможности уделить большое внимание и физике
колебаний, и методам их исследования, основной упор сделан на изло-
изложение методов теории нелинейных колебаний и некоторых их приложений.
Такой подход вряд ли нуждается в оправданиях, но все-таки в его поддержку
сошлемся на известное высказывание Лейбница: "На свете есть вещи по-
поважнее самых прекрасных открытий - это знание метода, которым они
были сделаны".
Пособие написано в традициях горьковской (нижегородской) школы
теории нелинейных колебаний - школы академика А.А. Андронова. Оно
состоит из трех частей.
Первая часть (гл. 1-5) посвящена качественному исследованию не-
нелинейных автономных динамических систем. Здесь основное внимание
уделено методам и приемам качественного анализа на фазовой плоскости.
Знакомство с этими методами создает необходимую базу всего после-
последующего "колебательного" образования. Прикладные задачи, которым
полностью посвящены гл. 4 и 5, относятся к моделям ядерной энергетики
и математической экологии, т.е. к таким актуальным областям, которые
не освещались в учебной литературе по теории колебаний. Приложения
качественных методов к традиционным для теории колебаний областям -
механике и радиотехнике - можно найти в трудах А.А. Андронова и его
учеников*', а также в большинстве упомянутых выше учебных пособий.
Во второй части (гл. 6-14) кратко изложены все основные методы
расчета периодических колебаний (и, прежде всего, автоколебаний) в
нелинейных автономных системах: метод точечных преобразований; методы
малого параметра, включая метод Каменкова и асимптотический метод
Крылова и Боголюбова; метод гармонической линеаризации, который был
и остается распространенным средством инженерных расчетов колебатель-
колебательных систем, и, наконец, метод исследования разрывных колебаний. Все
эти методы предназначены для расчета периодических, упорядоченных
автоколебаний. Как известно, в детерминированных динамических сис-
системах существуют еще и неупорядоченные, хаотические (стохастические)
автоколебания; краткие, вводные сведения о них приведены в гл. 14.
Третья часть данного пособия (гл. 15-17) посвящена неавтономным
системам. Сначала рассмотрены вынужденные колебания в нелинейной
диссипативной (гл. 15) и автоколебательной (гл. 16) системах, а в заклю-
заключительной гл. 17 изложена теория параметрических колебаний. В гл. 15
основное внимание обращено на влияние, которое оказывает нелинейность
на характер вынужденных колебаний. В гл. 16 изложены результаты
А.А. Андронова и А.А. Витта, относящиеся к теории принудительной син-
синхронизации (захватывания) автоколебательной системы. В обеих главах
анализ ограничен квазилинейными системами. В гл. 17 подчеркнуты
характерные особенности параметрического резонанса, его отличия от
"обычного" резонанса при вынужденных колебаниях. Многие вопросы
"'Соответствующие работы приведены в списке литературы к первой части.
Предисловие
теории колебаний неавтономных систем остались нерассмотренными. Это
вполне оправдано для учебного пособия данного объема. Однако в заклю-
заключении к третьей части перечислены наиболее существенные из нерас-
нерассмотренных вопросов и указана литература для их изучения.
Изложение математических методов сопровождается соответствующими
примерами, часть которых представляет самостоятельный интерес. Кроме
того, в конце ряда глав приведены задачи для самостоятельной работы,
для большинства из них в Приложении 10 даны указания и даже подробные
решения, но спешить заглядывать туда не следует; в целях самоконтроля
полезно прорешать их самостоятельно.
Можно надеяться, что представленный в данном пособии материал
послужит основой для изучения достижений теории колебаний и волн -
качественной теории многомерных систем, нелинейных колебаний в
системах с последействием, нелинейных волн в распределенных системах
и др.
ВВЕДЕНИЕ
B.I. Теория колебаний - ветвь прикладной математики
Одно из основных направлений современной прикладной математики -
использование математических методов в теоретических исследованиях
технических систем, в естествознании и экономике. Работа в этом направ-
направлении слагается из нескольких этапов:
1) знакомства с исследуемым объектом (или процессом);
2) создания идеализированного, упрощенного представления об объек-
объекте и отбрасывания несущественных его свойств;
3) составления математической модели объекта на основе сделанных
идеализации и допущений;
4) исследования этой модели численными или аналитическими сред-
средствами;
5) получения содержательных технических или физических выводов о
работе и свойствах исследуемого объекта (или процесса), выдачи реко-
рекомендаций.
Этот путь прикладной математики общепризнан [1,2]. Это общий и
традиционный путь всего теоретического естествознания - теоретической
физики, теоретической биофизики и др. Характерной особенностью при-
прикладной математики наших дней является большой удельный вес при-
применения ЭВМ, вычислительных методов и программирования при решении
прикладных задач. Однако не утратили своего значения аналитические и
численно-аналитические методы анализа упрощенных моделей (хотя бы
потому, что на ЭВМ нужно идти "с раскрытыми глазами", предварительно
выяснив, что же в принципе может происходить с исследуемым объектом,
на что делать упор при машинных расчетах). Поэтому этапы 3 и 4 разумно
расчленить следующим образом:
За, 4а) составление и анализ упрощенных моделей с целью выяв-
выявления качественных закономерностей работы исследуемого объекта и,
может быть, получения некоторых приближенных количественных резуль-
результатов; формирование интуиции исследователя;
36, 46) составление и решение на ЭВМ достаточно подробных и
сложных моделей установки для получения необходимых количественных
результатов.
Этапы За, 4а имеют целью понимание, этапы 36, 46 ставят своей
целью число.
Теория колебаний и, особенно, ее основы, излагаемые ниже, харак-
характеризуются, главным образом, этапами За, 4а. Эта теория занимается
составлением и исследованием (упрощенных) математических моделей
динамики систем различной физической природы.
Введение \ \
Согласно сказанному теорию колебаний (теорию динамики систем)
можно определить как ветвь прикладной математики, которая с единых
математических позиций (едиными математическими методами) изучает
динамику объектов различной природы (с особым упором на исследование
периодических процессов).
В.2. Краткие исторические сведения
Теория колебаний родилась в недрах механики. Условно ее зарождение
ориентировочно можно отнести к XVII в. и связать с появлением работ
Г. Галилея и X. Гюйгенса о колебаниях маятника и динамике часов.
В трудах Ж. Лагранжа (конец XVIII в.) содержалась уже достаточно общая
теория малых (линейных) колебаний. Долгое время теория колебаний
оставалась частью теоретической механики, и до сих пор она связана
неразрывными узами со своей родительницей - механикой'1.
Следующий важный этап в теории колебаний - это знаменитый трактат
"Теория звука" Дж. У. Рэлея |4]. Как справедливо отмечается в моно-
монографии [5], Рэлей вовлек в колебательное рассмотрение не только ла-
гранжеву механику, но и акустику, электричество, теплоту. Он обнаружил
аналогию между маятником и электрическим томсоновским контуром,
разрядником, резонатором, органной трубой, музыкальным инструмен-
инструментом, разгадал секрет поющего пламени и опыта Рийке. Он обнаружил во
всем этом многообразии великую колебательную общность, заложил
основы "колебательной взаимопомощи", когда изучение явлений в одной
области помогает разгадать их в другой. Такой подход хорошо усвоил и
пропагандировал акад. Л.И. Мандельштам - учитель акад. А.А. Андронова,
основоположника горьковской школы теории нелинейных колебаний.
В конце XIX в. А.М. Ляпунов заложил основы современной теории
устойчивости движения. В это же время благодаря трудам А. Пуанкаре и
А.М. Ляпунова была разработана качественная теория обыкновенных
дифференциальных уравнений. Тем самым образовался математический
фундамент, на котором можно было строить теорию нелинейных колебаний,
основанную на анализе нелинейных дифференциальных уравнений. К не-
некоторым нелинейным задачам астрономии и небесной механики А. Пу-
Пуанкаре и А.М. Ляпунов применили свои результаты уже в конце XIX и
начале XX в., но все-таки истинное рождение и интенсивное развитие те-
теории нелинейных колебаний следует отнести, по-видимому, к 20-30-м
годам нашего столетия. Решающий вклад в развитие теории внесли
отечественные физики и математики - А.А. Андронов, Н.Н. Боголюбов,
Л.И. Мандельштам, Н.Д. Папалекси и др. Большая роль в развитии теории
нелинейных колебаний принадлежит и горьковской школе - сотрудникам,
ученикам и последователям А.А. Андронова.
Толчком к развитию науки о нелинейных колебаниях послужили за-
запросы практики - те задачи, которые ставили бурно развивающиеся радио-
¦' В частности, раздел "Динамика точки" курса теоретической механики есть не что иное,
как введение в теорию колебании [3].
12 Введение
техника, теория автоматического регулирования, ряд отраслей машино-
машиностроения. Эти задачи были принципиально неразрешимы при линейном
подходе - сведении к теории малых колебаний - и требовали новых, не-
нелинейных постановок и методов.
В настоящее время теория нелинейных колебаний имеет развитую,
мощную математическую базу и характеризуется внедрением в самые разно-
разнообразные сферы науки и техники - от таких, теперь уже традиционных
для теории колебаний, областей, как механика и радиотехника, до ядерной
энергетики, экологии, биофизики и др.
В.З. Динамические системы и их классификация
Ниже рассмотрены колебания в динамических системах. Под дина-
динамическими понимаются системы различной природы - механические,
электрические, биологические и др., процессы в которых отображаются
дифференциальными уравнениями. Разнообразие природы и соответ-
соответственно разнообразие вопросов, подлежащих исследованию, приводят к
различным дифференциальным уравнениям, описывающим те или иные
процессы или системы. По виду дифференциальных уравнений динамичес-
динамические системы можно подразделить на три класса:
1) системы с сосредоточенными параметрами, или, коротко, сосре-
сосредоточенные системы;
2) системы с отклоняющимся аргументом, наиболее распространенные
из которых - системы с запаздыванием;
3) системы о распределенными параметрами, или распределенные
системы.
Сосредоточенные системы - это системы, описываемые обыкновенными
дифференциальными уравнениями с единственной независимой пере-
переменной - временем /. В частности, все механические системы с конечным
числом степеней свободы - это сосредоточенные системы.
Системы с отклоняющимся аргументом также отображаются обык-
обыкновенными дифференциальными уравнениями, но искомые функции и
их производные входят в уравнения при различных значениях аргумента.
Так, например, динамическая система первого порядка с постоянным
запаздыванием определяется уравнением
x(t) = f(x(t),x(t - т),/), т = const > 0.
Распределенные системы - это системы с бесконечным числом степеней
свободы, описываемые дифференциальными (или, может быть, интегро-
дифференциальными) уравнениями в частных производных. Соответст-
Соответствующими примерами могут служить процессы, изучаемые математической
физикой: колебания струны и мембраны, диффузия, распространение теп-
тепла и др.
Далее, в зависимости от постановки задачи и принятых идеализации
динамическая система может отображаться как линейными, так и нели-
Введение 13
нейными дифференциальными уравнениями. В первом случае динами-
динамическую систему называют линейной, во втором - нелинейной.
Наконец, опять-таки в зависимости от вида дифференциальных урав-
уравнений динамические системы разделяются на автономные и неавтономные.
Автономные динамические системы отображаются дифференциальными
уравнениями, в которые время t явно не входит. Такими уравнениями
описываются свободные (собственные) колебания динамической системы,
обусловленные начальным отклонением системы от положения равно-
равновесия'1.
Неавтономные системы - это динамические системы, в уравнениях
движения которых содержится время /в явном виде. Такими уравнениями
отображаются вынужденные движения, обусловленные зависящими от вре-
времени внешними воздействиями.
Помимо приведенной выше классификации динамических систем по
виду дифференциальных уравнений, в теории колебаний принята и другая
классификация, которая также будет использована в дальнейшем, - клас-
классификация по характеру возможных движений в системе. Именно, дина-
динамические системы разделяются на консервативные, диссипативные, авто-
автоколебательные и прочие.
Консервативные системы - динамические системы, в которых со-
сохраняется полная энергия. Консервативные системы описываются урав-
уравнениями Гамильтона; это системы без трения, в них нет необратимых
превращений энергии движения в тепло. Пример - обычный маятник в
пренебрежении трением. В консервативных системах возможны пери-
периодические колебания с амплитудой, определяемой начальными условиями.
Диссипативные системы - динамические системы, в которых любое
движение заканчивается в одном из устойчивых положений равновесия.
В таких системах возможны только затухающие движения, которые сопро-
сопровождаются рассеянием энергии. Пример - маятник или груз на пружине в
среде с сопротивлением.
Автоколебательные системы — динамические системы, в которых
устанавливается один и тот же периодический режим при любых начальных
условиях из некоторого множества начальных условий. Примеры - часовой
механизм, ламповый генератор электромагнитных колебаний"*.
В.4. Типы колебаний
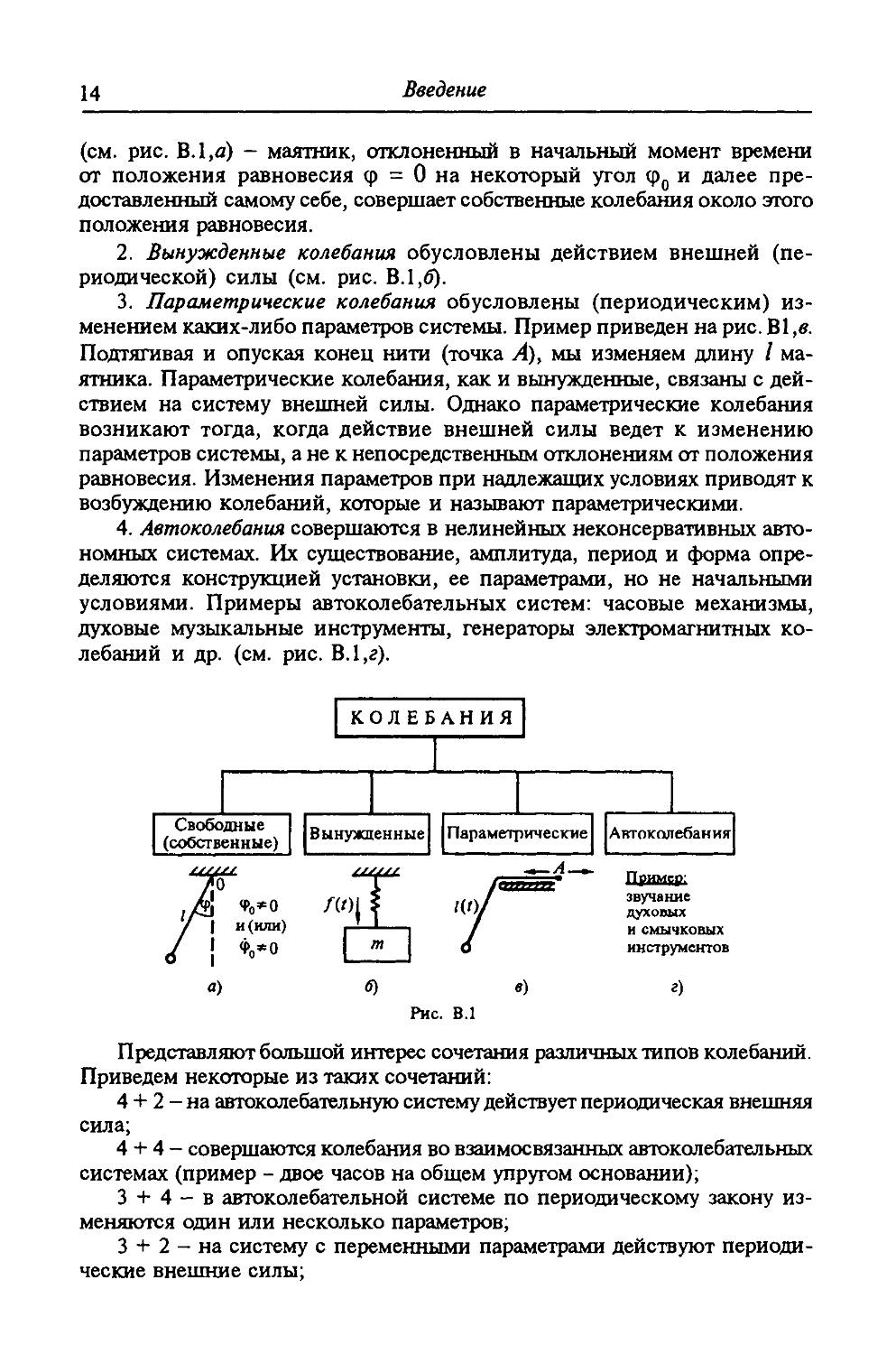
Все колебания можно условно разделить на четыре типа (рис. В. 1).
1. Свободные (собственные) колебания обусловлены начальными от-
отклонениями от положения равновесия. Один из многих примеров
*> Здесь и далее термин положение (или состояние) равновесия используется в обобщенном
смысле. Например, стационарный режим работы энергетической установки или режим
сосуществования видов с постоянными численностями особей каждого вида также
рассматриваются как положения равновесия.
"' Разумеется, во всех трех определениях предполагаются автономные системы, т.е. не
подверженные действию переменных внешних сил.
14
Введение
(см. рис. В.1,я) - маятник, отклоненный в начальный момент времени
от положения равновесия ф = 0 на некоторый угол ф0 и далее пре-
предоставленный самому себе, совершает собственные колебания около этого
положения равновесия.
2. Вынужденные колебания обусловлены действием внешней (пе-
(периодической) силы (см. рис. В. 1,6).
3. Параметрические колебания обусловлены (периодическим) из-
изменением каких-либо параметров системы. Пример приведен на рис. В1 ,в.
Подтягивая и опуская конец нити (точка А), мы изменяем длину / ма-
маятника. Параметрические колебания, как и вынужденные, связаны с дей-
действием на систему внешней силы. Однако параметрические колебания
возникают тогда, когда действие внешней силы ведет к изменению
параметров системы, а не к непосредственным отклонениям от положения
равновесия. Изменения параметров при надлежащих условиях приводят к
возбуждению колебаний, которые и называют параметрическими.
4. Автоколебания совершаются в нелинейных неконсервативных авто-
автономных системах. Их существование, амплитуда, период и форма опре-
определяются конструкцией установки, ее параметрами, но не начальными
условиями. Примеры автоколебательных систем: часовые механизмы,
духовые музыкальные инструменты, генераторы электромагнитных ко-
колебаний и др. (см. рис. В.1,г).
КОЛЕБАНИЯ
Свободные
(собственные)
Вынужденные
Параметрические
Автоколебания
/ | и(или)
У ' %*0
О | «
а)
в)
Пример:
звучание
духовых
и смычковых
инструментов
г)
Рис. В.1
Представляют большой интерес сочетания различных типов колебаний.
Приведем некоторые из таких сочетаний:
4 + 2 - на автоколебательную систему действует периодическая внешняя
сила;
4 + 4 - совершаются колебания во взаимосвязанных автоколебательных
системах (пример - двое часов на общем упругом основании);
3 + 4 - в автоколебательной системе по периодическому закону из-
изменяются один или несколько параметров;
3 + 2 - на систему с переменными параметрами действуют периоди-
периодические внешние силы;
Введение
15
2 + 3 + 4 - на автоколебательную систему действуют непосредственно
периодические внешние силы и одновременно происходит периодическое
изменение ее параметров.
В.5. Простейшие примеры. Свободные колебания линейной системы
с одной степенью свободы
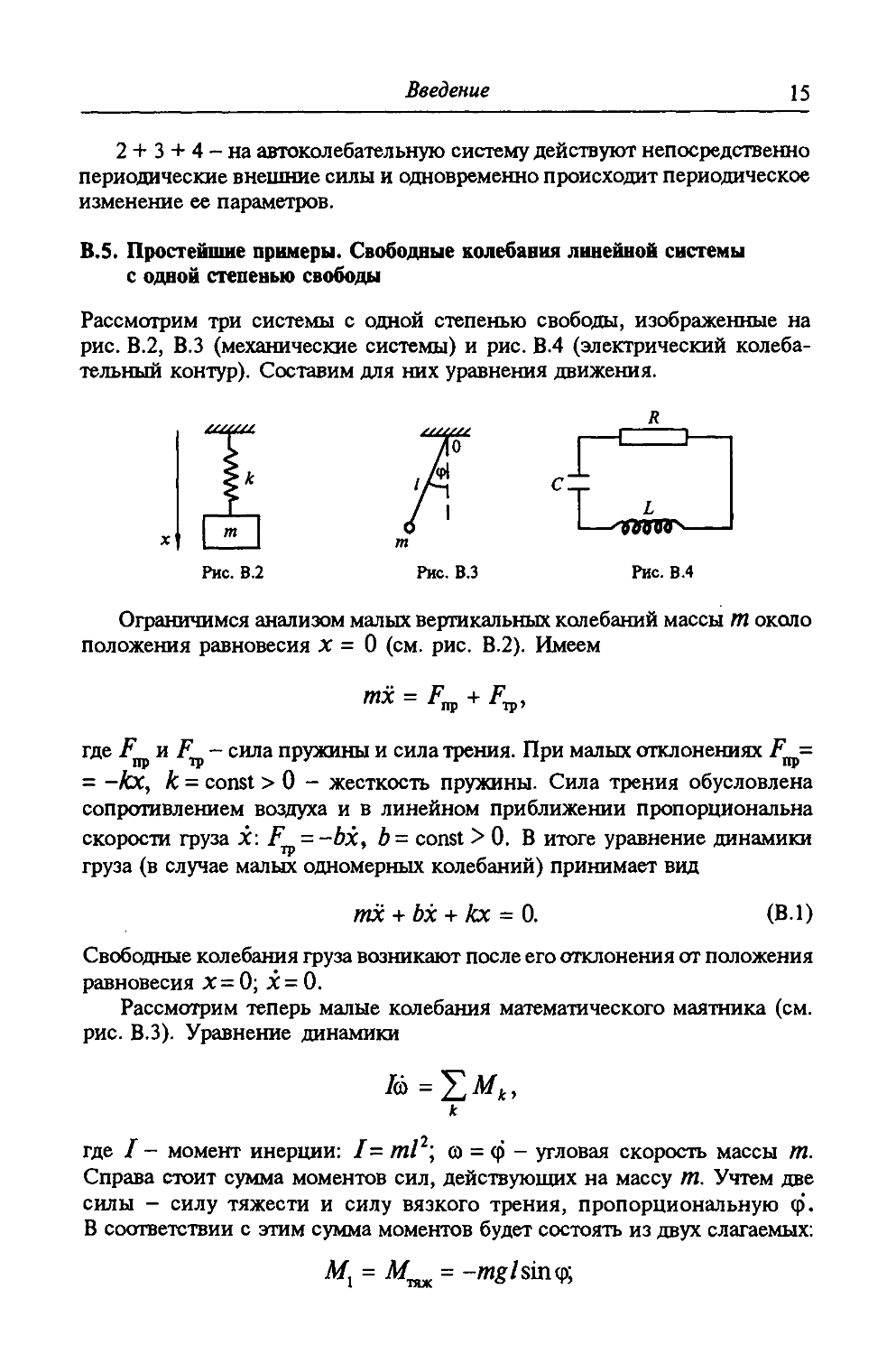
Рассмотрим три системы с одной степенью свободы, изображенные на
рис. В.2, В.З (механические системы) и рис. В.4 (электрический колеба-
колебательный контур). Составим для них уравнения движения.
т
I—'toQob >
Рис. В.2
Рис. В.З
Рис. В.4
Ограничимся анализом малых вертикальных колебаний массы Ш около
положения равновесия X = О (см. рис. В.2). Имеем
где F и F - сила пружины и сила трения. При малых отклонениях F =
= -кх, к = const > 0 - жесткость пружины. Сила трения обусловлена
сопротивлением воздуха и в линейном приближении пропорциональна
скорости груза X: F = -bx, b= const > 0. В итоге уравнение динамики
груза (в случае малых одномерных колебаний) принимает вид
тх + Ъх + кх = 0.
(В.1)
Свободные колебания груза возникают после его отклонения от положения
равновесия х= 0; х= 0.
Рассмотрим теперь малые колебания математического маятника (см.
рис. В.З). Уравнение динамики
где / - момент инерции: /= ml2; со = ф - угловая скорость массы т.
Справа стоит сумма моментов сил, действующих на массу т. Учтем две
силы - силу тяжести и силу вязкого трения, пропорциональную (р.
В соответствии с этим сумма моментов будет состоять из двух слагаемых:
Мх = М1ЯЖ = -mglsinqr,
16 Введение
М2 = М^ = -Ьф, b - const > 0,
g-ускорение силы тяжести. Все моменты взяты относительно оси, про-
проходящей через точку 0 подвеса маятника перпендикулярно плоскости чер-
чертежа. Таким образом, уравнение динамики записывается в виде
т/2ф = -Ьф - mgl sin q>.
Рассматриваются малые колебания, следовательно, siri(p«(p. Тогда окон-
окончательно имеем
Ъ R
ф + —Ф + тф 0 <в2)
ml2 I
Составим теперь уравнение динамики колебательного контура (см.
рис. В.4). Пусть q - заряд на конденсаторе. По определению электричес-
электрический ток в контуре равен q. Напряжения на сопротивлении R, индуктив-
индуктивности L и конденсаторе С соответственно равны Rq, Lq и q/C. Сумма
этих напряжений равна нулю, поскольку внешние источники питания
отсутствуют:
0. (B.3)
Рассмотрим еще простейшую модель динамики ядерного реактора.
Пусть N- плотность нейтронов в момент / и Т— среднее время жизни
одного поколения нейтронов. Спустя это время плотность нейтронов бу-
будет равна kN\ по определению к - коэффициент размножения нейтронов.
Изменение плотности нейтронов за единицу времени есть
dN_=W-_N_=k-1
dt Т Т К }
В стационарном состоянии к- 1. В простейшем случае, которым мы и
ограничимся, к- 1 - линейная функция изменения температуры 0 реак-
реактора:
= -а@-0о), (В.5)
Т
где а = const, a 0O - стационарное значение температуры.
Учтем, что выделение тепла за 1 с пропорционально плотности нейт-
нейтронов, и предположим, что отвод тепла (за 1 с) происходит в среду с
постоянной температурой 0. Тогда уравнением для 0 будет
</0 -
-— = AN-X(&-®). (B.6)
at
Введение 17
Здесь т и с- масса и удельная теплоемкость ядерного топлива; А=const>
> 0; X - коэффициент теплопередачи от ядерного топлива с температурой
© к охлаждающей среде с температурой 0.
В стационарном состоянии N= NQ> 0 и Q = &0 >&, гае NQ опреде-
определяется специальными физическими расчетами и здесь предполагается из-
известной величиной, а ©0 определяется уравнением
AN0-X(®0-&) = 0. (B.7)
В уравнениях (В.4)-(В.6) введем новое "безразмерное" время
и перейдем к новым безразмерным переменным
x_N~No. ..__*_,« ^ч_0^©о
No ' ' AN0^ ~*' в0-в'
После элементарных преобразований уравнения (В.4)-(В.6) примут вид
х = -vy(l + х); у = х- у. (В.8)
Здесь v - безразмерный параметр:
тс /Л —ч
Точкой отмечается дифференцирование по /нов.
Очевидно, что в новых переменных состояние равновесия есть X - 0;
у = 0. При малых отклонениях от него X = -vy, и система (В.8) приво-
приводится к одному линейному уравнению
у + у + vy = 0. (В.9)
С точки зрения теории колебаний между рассмотренными системами
(в случае малых колебаний) и соответственно между уравнениями (В.1)-
(В.З), (В.9) нет принципиальной разницы. Все четыре системы - линей-
линейные осцилляторы с затуханием, описываемые линейным уравнением
у + 2hy + <а\у = 0. (В. 10)
Соответствие между коэффициентами h и со0, с одной стороны, и
параметрами систем (ВЛ)-(В.З), (В.9), с другой стороны, дает табл. В.1.
18
Введены
7
Таблица В. 1. Соотношение между коэффициентами
и параметрами систем, описываемых уравнением (В. 10)
Система
Груз на пружине
Маятник
Колебательный контур
Реактор
Уравнение
(В.1)
(В.2)
(В.З)
(В.9)
У
X
Ф
9
У
2А
Ь/т
Ъ/тР
R/L
1
шо
к/т
g/l
1/LC
V
Уравнение (В. 10) описывает свободные колебания линейной системы
с одной степенью свободы. Коэффициент А называют коэффициентом
затухания, асоо- циклическая частота свободных колебаний в отсутствие
затухания (при h = 0).
Решение уравнения (В. 10) и соответственно свободные колебания в
системе будут различными в зависимости от коэффициента затухания h и
частоты а0. Возможны три случая.
Первый случай - трение отсутствует: А = 0. Получаем простейшую
линейную консервативную систему. Ее уравнение
имеет периодическое решение
y{t) =
Bsin(o0t = Kcos(a0t
Здесь Аи В (или К и ф) - постоянные интегрирования, определяемые из
начальных условий для у и у.
Итак, при h - 0 свободными колебаниями будут гармонические коле-
колебания с частотой со0 (с периодом Т- 2п/(й0) и амплитудой К, определя-
определяемой начальными условиями.
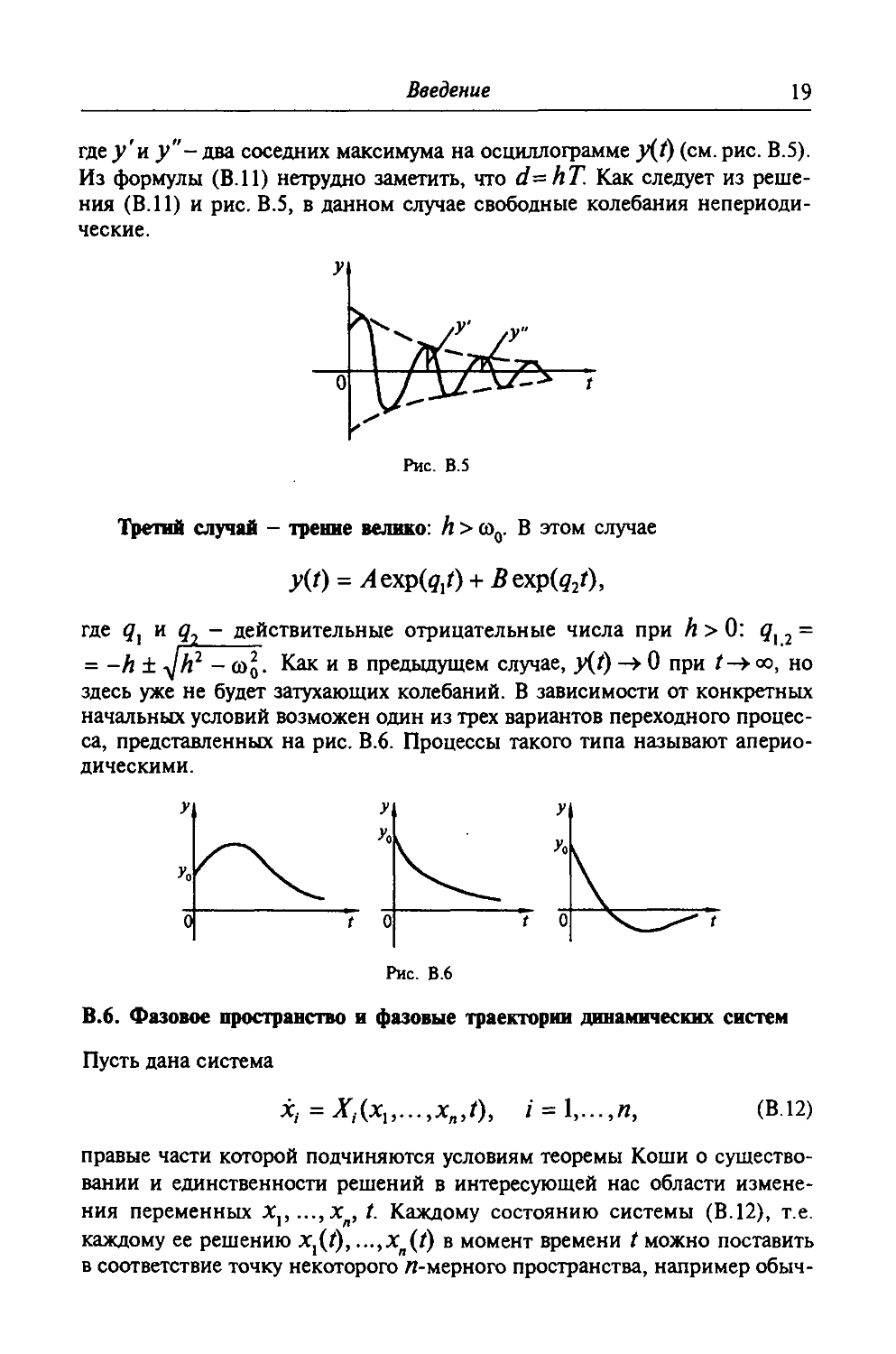
Второй случай - трение мало: h < <в0. В этом случае общим решением
уравнения (В. 10) будет
y(t) = cxp(-ht)(Acosat + i?sin со/) =
= К ехр(-А/) cos(co/ + ср).
(В.11)
Здесь Аи В (К и ф) имеют прежний смысл, а со = уш0 - А . Решение
(В.11) определяет затухающий колебательный процесс (рис. В.5). Рассто-
Расстояние между двумя соседними максимумами равно Т= 2тг/(В. Величину Т
иногда называют условным периодом. Скорость затухания колебаний обыч-
обычно характеризуют логарифмическим декрементом d, который по опреде-
определению находится из соотношения
у"" '
Введение
19
где у'и у"- два соседних максимума на осциллограмме y{t) (см. рис. В.5).
Из формулы (В. 11) нетрудно заметить, что d-hT. Как следует из реше-
решения (В. 11) и рис. В.5, в данном случае свободные колебания непериоди-
непериодические.
Рис. В.5
Третий случай - трение велико: h>a>0. В этом случае
y(t) =
где qy и q7 - действительные отрицательные числа при h > 0: qx 2 =
= -h ± д/А2 -(Од. Как и в предыдущем случае, _у@ ->0 при /->оо, но
здесь уже не будет затухающих колебаний. В зависимости от конкретных
начальных условий возможен один из трех вариантов переходного процес-
процесса, представленных на рис. В.6. Процессы такого типа называют аперио-
апериодическими.
1 0
Рис. В.6
В.6. Фазовое пространство и фазовые траектории динамических систем
Пусть дана система
X,. =Xi(x1,...,xn,t),
= l,...,л,
(В.12)
правые части которой подчиняются условиям теоремы Коши о существо-
существовании и единственности решений в интересующей нас области измене-
изменения переменных хр...,хл, /. Каждому состоянию системы (В.12), т.е.
каждому ее решению х,(/), ...,xn(t) в момент времени / можно поставить
в соответствие точку некоторого /J-мерного пространства, например обыч-
20
Введение
ного евклидова пространства Е". Обратно, каждой точке этого простран-
пространства соответствует определенное состояние х,(/), ...,Xn(t) системы (В. 12)
в момент /. Такое пространство называется пространством состояний,
или фазовым пространством, а точка, представляющая в этом простран-
пространстве состояние системы, - изображающей, или представляющей, точкой.
Фазовое пространство выбирается таким образом, чтобы соответствие
между его точками и состояниями системы было взаимно однозначным и
непрерывным.
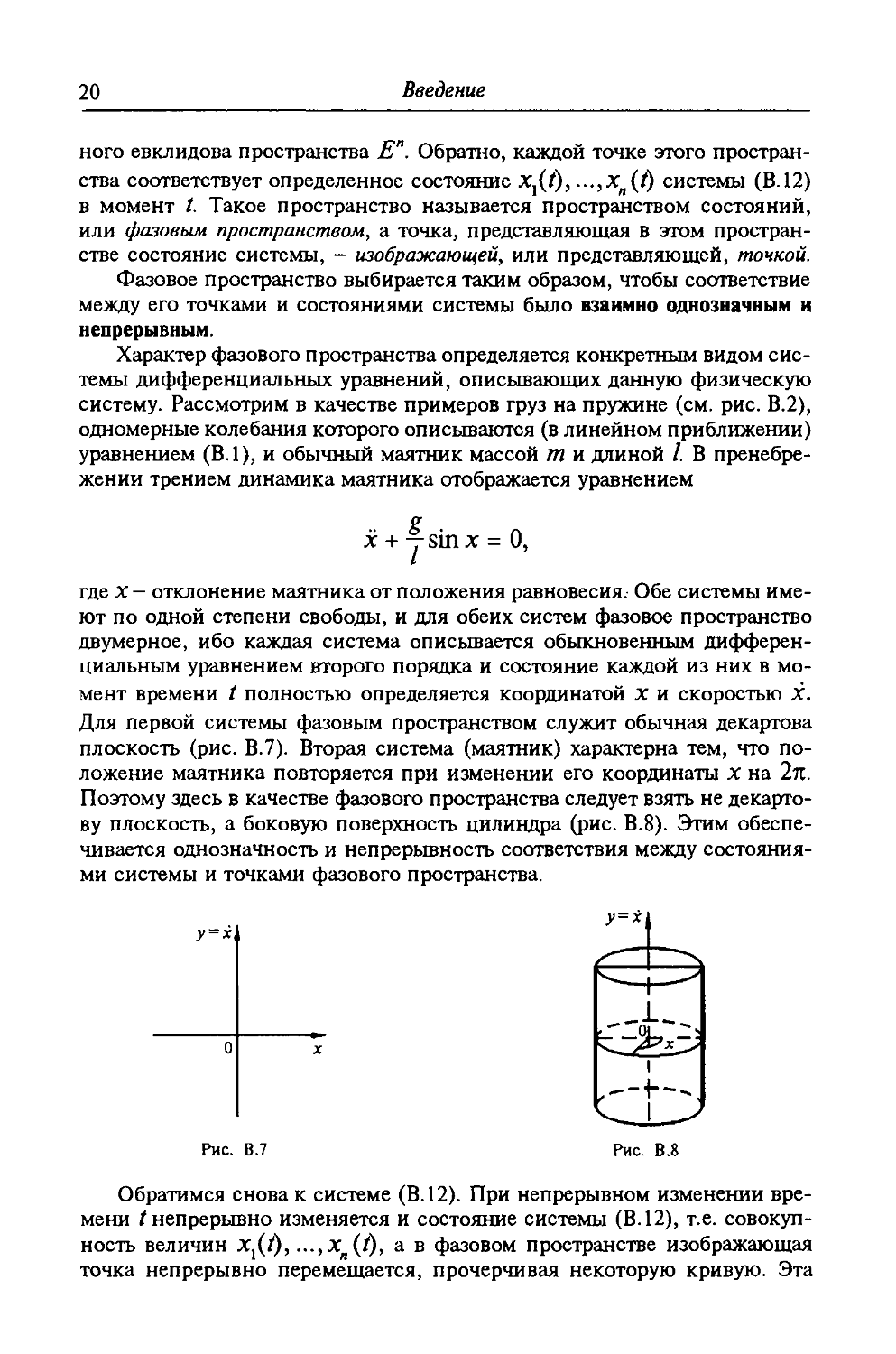
Характер фазового пространства определяется конкретным видом сис-
системы дифференциальных уравнений, описывающих данную физическую
систему. Рассмотрим в качестве примеров груз на пружине (см. рис. В.2),
одномерные колебания которого описываются (в линейном приближении)
уравнением (В. 1), и обычный маятник массой т и длиной /. В пренебре-
пренебрежении трением динамика маятника отображается уравнением
g
x + ysinx = 0,
где X— отклонение маятника от положения равновесия. Обе системы име-
имеют по одной степени свободы, и для обеих систем фазовое пространство
двумерное, ибо каждая система описывается обыкновенным дифферен-
дифференциальным уравнением второго порядка и состояние каждой из них в мо-
момент времени / полностью определяется координатой X и скоростью X.
Для первой системы фазовым пространством служит обычная декартова
плоскость (рис. В. 7). Вторая система (маятник) характерна тем, что по-
положение маятника повторяется при изменении его координаты X на 2тс.
Поэтому здесь в качестве фазового пространства следует взять не декарто-
ву плоскость, а боковую поверхность цилиндра (рис. В.8). Этим обеспе-
обеспечивается однозначность и непрерывность соответствия между состояния-
состояниями системы и точками фазового пространства.
у = х,
Рис. В.7
Рис. В.8
Обратимся снова к системе (В. 12). При непрерывном изменении вре-
времени /непрерывно изменяется и состояние системы (В. 12), т.е. совокуп-
совокупность величин -?)(/), ...,Xn(f), а в фазовом пространстве изображающая
точка непрерывно перемещается, прочерчивая некоторую кривую. Эта
Введение
21
кривая называется фазовой траекторией. Решение х{ = х1 (/),..., Хп = Хп (t)
системы (В. 12) есть параметрическое задание этой траектории (параметром
служит время t). Траектория, прочерчиваемая изображающей точкой при
изменении / от -оо до +оо, называется целой фазовой траекторией. Часть
целой траектории, соответствующая значениям t> /0, где tQ > 0 - фикси-
фиксированный начальный момент времени, называется положительной полу-
полутраекторией, а часть целой траектории, соответствующая интервалу -оо<
< t<tQ, - отрицательной полутраекторией.
Ниже используются только положительные
полутраектории; их будем называть фазо-
фазовыми траекториями.
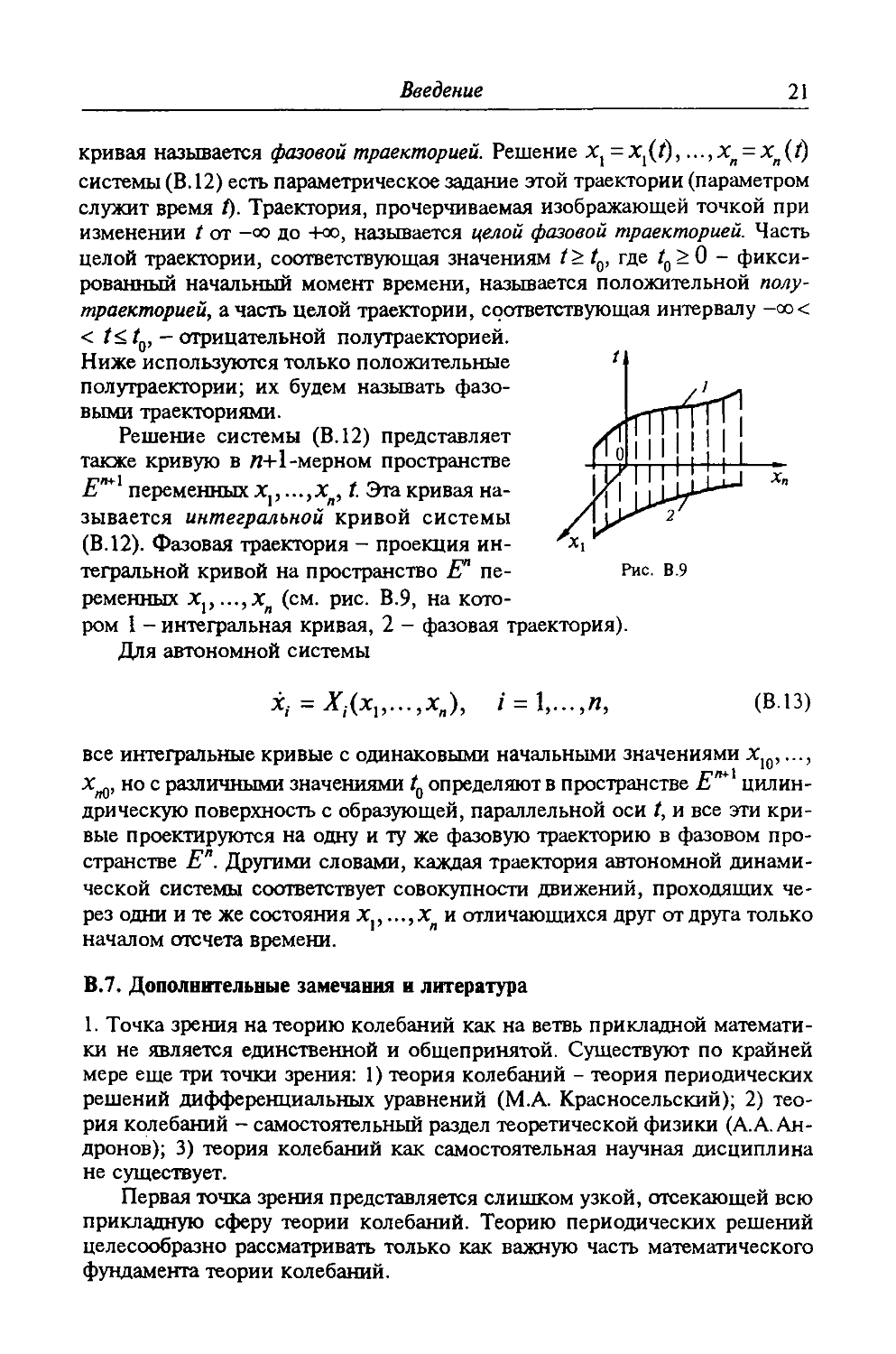
Решение системы (В. 12) представляет
также кривую в ж-1 -мерном пространстве
Е"*х переменных xv ...,ХЛ, t. Эта кривая на-
называется интегральной кривой системы
(В. 12). Фазовая траектория - проекция ин-
интегральной кривой на пространство Е" пе- Рис. в.9
ременных xv..,,xn (см. рис. В.9, на кото-
котором 1 - интегральная кривая, 2 - фазовая траектория).
Для автономной системы
X, =
...,*„), 1 = 1,...,Л,
(В.13)
все интегральные кривые с одинаковыми начальными значениями х,0,...,
Хм, но с различными значениями /J, определяют в пространстве Е"* цилин-
цилиндрическую поверхность с образующей, параллельной оси t, и все эти кри-
кривые проектируются на одну и ту же фазовую траекторию в фазовом про-
пространстве Е". Другими словами, каждая траектория автономной динами-
динамической системы соответствует совокупности движений, проходящих че-
через одни и те же состояния X,, ••-,*„ и отличающихся друг от друга только
началом отсчета времени.
В.7. Дополнительные замечания и литература
1. Точка зрения на теорию колебаний как на ветвь прикладной математи-
математики не является единственной и общепринятой. Существуют по крайней
мере еще три точки зрения: 1) теория колебаний - теория периодических
решений дифференциальных уравнений (М.А. Красносельский); 2) тео-
теория колебаний - самостоятельный раздел теоретической физики (А.А.Ан-
(А.А.Андронов); 3) теория колебаний как самостоятельная научная дисциплина
не существует.
Первая точка зрения представляется слишком узкой, отсекающей всю
прикладную сферу теории колебаний. Теорию периодических решений
целесообразно рассматривать только как важную часть математического
фундамента теории колебаний.
22 Введение
Вторая точка зрения весьма привлекательна и во времена Л.И. Ман-
Мандельштама и А.А. Андронова C0-40-е годы) хорошо отражала существо-
существовавшую тогда ситуацию: в сфере действия теории колебаний находились,
в основном, физические процессы и системы. Однако в настоящее время
эта сфера расширилась и вышла далеко за физико-технические рамки (хи-
(химическая кинетика, медицина, экология и др.). По этой причине кажет-
кажется предпочтительным аналогичное андроновскому, но несколько более
широкое толкование теории колебаний как ветви прикладной математи-
математики, а не теоретической физики.
Приверженцы третьей точки зрения говорят примерно следующее: "Да,
колебательные явления действительно существуют в различных областях
техники и науки. Но в радиотехнике (или, например, в энергетике) эти
колебания изучают специалисты-радиотехники (или энергетики), воору-
вооруженные соответствующими знаниями из теории дифференциальных урав-
уравнений. Какая же здесь теория колебаний?" Такие люди явно недооцени-
недооценивают удивительную общность колебательных процессов в разнородных яв-
явлениях природы и соответственно общность методов и приемов их иссле-
исследования. Такая двойная общность и позволяет выделить учение о колеба-
колебаниях в самостоятельную научную дисциплину.
2. В работе [6] предложено (но здесь не используется) весьма широ-
широкое понятие динамической системы, охватывающее не только детермини-
детерминированные системы, описываемые дифференциальными уравнениями, но
и стохастические, а также такие системы, как автоматы и дискретные
машины, описываемые средствами алгебры логики, графами, марковс-
марковскими цепями и др. Ограничимся следующей цитатой:
"Математическая модель динамической системы S основывается на
понятии состояния X, под которым понимается описание системы S в
некоторый момент времени, и на понятии оператора Т, определяющего
изменение этого состояния X во времени. Оператор ^указывает процеду-
процедуру, выполняя которую можно по описанию x(f) в момент времени / най-
найти описание x(t+Af) той же системы в некоторый следующий момент
времени t+At.... Состояние X системы Sможно рассматривать как точку
некоторого пространства Ф, называемого фазовым пространством систе-
системы S. Изменению состояния X отвечает в фазовом пространстве Ф движе-
движение соответствующей точки, которая называется изображающей. При этом
движении изображающая точка описывает кривую, называемую фазовой
траекторией. Фазовое пространство Ф и оператор /'составляют математи-
математическую модель динамической системы" [6, с. 9].
Таково определение математической модели динамической системы.
Его следует дополнить требованием взаимно однозначного и взаимно не-
непрерывного соответствия между состояниями системы и точками фазово-
фазового пространства. Специального определения динамической системы в [6]
не дается. По-видимому, оно считается первоначальным, исходным.
3. Галилео Галилей A564-1642) - основоположник современного на-
научного естествознания. Вместе с тем Галилей - прародитель теории коле-
колебаний.
Введение 23
В 1583 г., наблюдая за колебаниями люстры в Пизанском соборе и
сравнивая период колебаний с биением собственного пульса, Галилей
установил, что период колебаний люстры не зависит от амплитуды коле-
колебаний (закон изохронности малых колебаний маятника). Это открытие
послужило основанием для создания часов и было первым важным откры-
открытием Галилея, которому в ту пору было около 20 лет. Галилей доказал
также, что период колебаний маятника пропорционален корню квадрат-
квадратному из его длины и не зависит от материала груза маятника.
К сожалению, в своих экспериментах Галилей не был достаточно ак-
аккуратен и необоснованно распространил свойство изохронности на коле-
колебания при больших отклонениях угла маятника. Позднее Гюйгенс дока-
доказал, что при больших отклонениях изохронные колебания совершает не
круговой, а только циклоидальный маятник.
Научная биография Галилея достаточно полно отражена в работах
[7-9].
4. Христиан Гюйгенс A629-1695) - голландский физик, механик,
математик и астроном.
В области механики и теории колебаний разработал теорию упругого
удара, теоретически установил закон сохранения количества движения и
закон сохранения кинетической энергии при упругом ударе. Замечатель-
Замечательно, что в своей теории удара Гюйгенс постулирует и использует принцип
относительности: скорость равномерного и прямолинейного движения сис-
системы, в которой рассматривается удар, не влияет на процесс соударения.
Гюйгенс поясняет: "Так, например, когда пассажир некоторого корабля,
движущегося с постоянной скоростью, приводит к соударению два рав-
равных шара с равными по отношению к нему и частям корабля скоростями,
то они должны отскочить с равными же по отношению к нему скоростя-
скоростями, точно так же, как это имеет место для стоящего на берегу и соударя-
ющего те же шары с равными скоростями". (Основные результаты Гюй-
Гюйгенса по теории удара были опубликованы после его смерти в 1703 г.)
В теории колебаний маятника и динамике часовых механизмов Гюй-
Гюйгенс отправлялся от работ Галилея. Так, Галилей установил, что для обыч-
обычного кругового математического маятника длиной /период T~yfl. Гюй-
Гюйгенс получил полную и правильную формулу для периода колебаний: Т=
= 2n^l/g. Галилей утверждал, что колебания такого маятника изохрон-
изохронны, но Гюйгенс установил, что это справедливо только для малых коле-
колебаний. В общем случае колебания кругового маятника неизохронные.
Изохронными являются только колебания циклоидального маятника.
Гюйгенс рассмотрел и более трудную задачу о колебаниях физического
маятника. Он определил центр колебаний физического маятника и его
период. При этом знаменателен принцип, которым пользуется Гюйгенс
и который отражает уровень знаний того времени о законе сохранения
энергии: "Если любое число весомых тел приходит в движение благодаря
их тяжести, то общий центр тяжести этих тел не может подняться выше,
чем он был в начале движения". И далее: "Если бы изобретатели новых
24 Введение
машин, напрасно пытающиеся построить вечный двигатель, пользовались
этой моей гипотезой, то они легко бы сами осознали свою ошибку и
поняли, что такой двигатель нельзя построить механическими средствами".
Гюйгенс сконструировал первые маятниковые часы со спусковым
механизмом A656 г.) и разработал их теорию A673 г.).
Гюйгенсу принадлежит замечательное экспериментальное открытие
синхронизации хода двух часов, подвешенных на общем упругом основа-
основании (на легкой балке). В эксперименте Гюйгенса двое маятниковых ча-
часов "висели на одной и той же балке, покоящейся на двух опорах. Оба
маятника двигались всегда в противоположные стороны, и колебания их
так точно совпадали, что никогда и ни насколько не расходились. Ти-
Тиканье обоих часов было слышно в одно и то же мгновение. Если искусст-
искусственно нарушить это совпадение, то оно само восстанавливалось в корот-
короткое время". Сначала Гюйгенс "был поражен этим странным явлением,
но, наконец, после внимательного исследования нашел, что причина
лежит в незаметном движении самой балки. Колебания маятника сооб-
сообщают некоторое движение и самим часам, как бы тяжелы они ни были.
А это движение передается балке, и если маятники сами не двигались
в противоположных направлениях, то теперь это произойдет с необходи-
необходимостью". Это один из наиболее ярких примеров синхронизации автоколе-
автоколебательных систем.
Из других результатов в области механики укажем на вывод формулы
а = Vх/R центростремительного ускорения.
Основные работы Гюйгенса по механике собраны в книге [14], откуда
и взяты приведенные цитаты. Дополнительные сведения о жизни и твор-
творчестве X. Гюйгенса см. в работах [7, 8, 15].
5. Выше отмечалось многообразие математических моделей (уравне-
(уравнений) динамики, но уместно добавить, что математические модели со-
составляются после неизбежного упрощения, схематизации реальной сис-
системы. Естественно, возникает вопрос о том, до какой степени можно
идеализировать свойства системы и все-таки получать удовлетворитель-
удовлетворительные результаты. Он обсуждается во введении классической монографии
[10].
6. В последние годы в литературе по динамике систем появилось до-
дополнительное деление динамических систем на стационарные и нестацио-
нестационарные. Под стационарными понимают системы с постоянными пара-
параметрами, а к нестационарным относят системы с переменными во време-
времени параметрами. Параметры (длина маятника, масса груза, емкость коле-
колебательного контура и т.п.) входят в уравнения динамики как коэффици-
коэффициенты, поэтому стационарные системы отображаются дифференциальны-
дифференциальными уравнениями о постоянными коэффициентами, а нестационарные си-
системы описываются уравнениями с переменными коэффициентами. Для
дальнейшего изложения вполне достаточно деления систем на автоном-
автономные и неавтономные, а деление на стационарные и нестационарные сис-
системы не используется.
Введение
25
7. Определение консервативной системы, данное выше, представ-
представляется весьма узким: оно пригодно для механических систем, но не годит-
годится для систем иной природы, например экологических, биофизических и
др. С точки зрения теории колебаний разумно руководствоваться не по-
постоянством полной энергии, а особенностями качественного поведения
системы. На таком пути в гл. 2 монографии [10] дано иное, более общее
определение консервативной системы, в котором за необходимый при-
признак консервативности принимается существование у системы аналити-
аналитического интеграла (см. также §2.11.)
8. Выше было очень кратко рассказано о линейной системе с одной
степенью свободы. Подробному изложению свободных колебаний в та-
такой системе посвящена гл.1 монографии [10]. Теория колебаний линей-
линейных систем с произвольным числом степеней свободы обстоятельно изло-
изложена, например, в [11-13].
Задачи
8.1. Каково фазовое пространство системы
х =/(sinx, cosffij'); у = g(cosx, sin coy),
у которой правые части/и ?суть периодические функции по обеим
переменным?
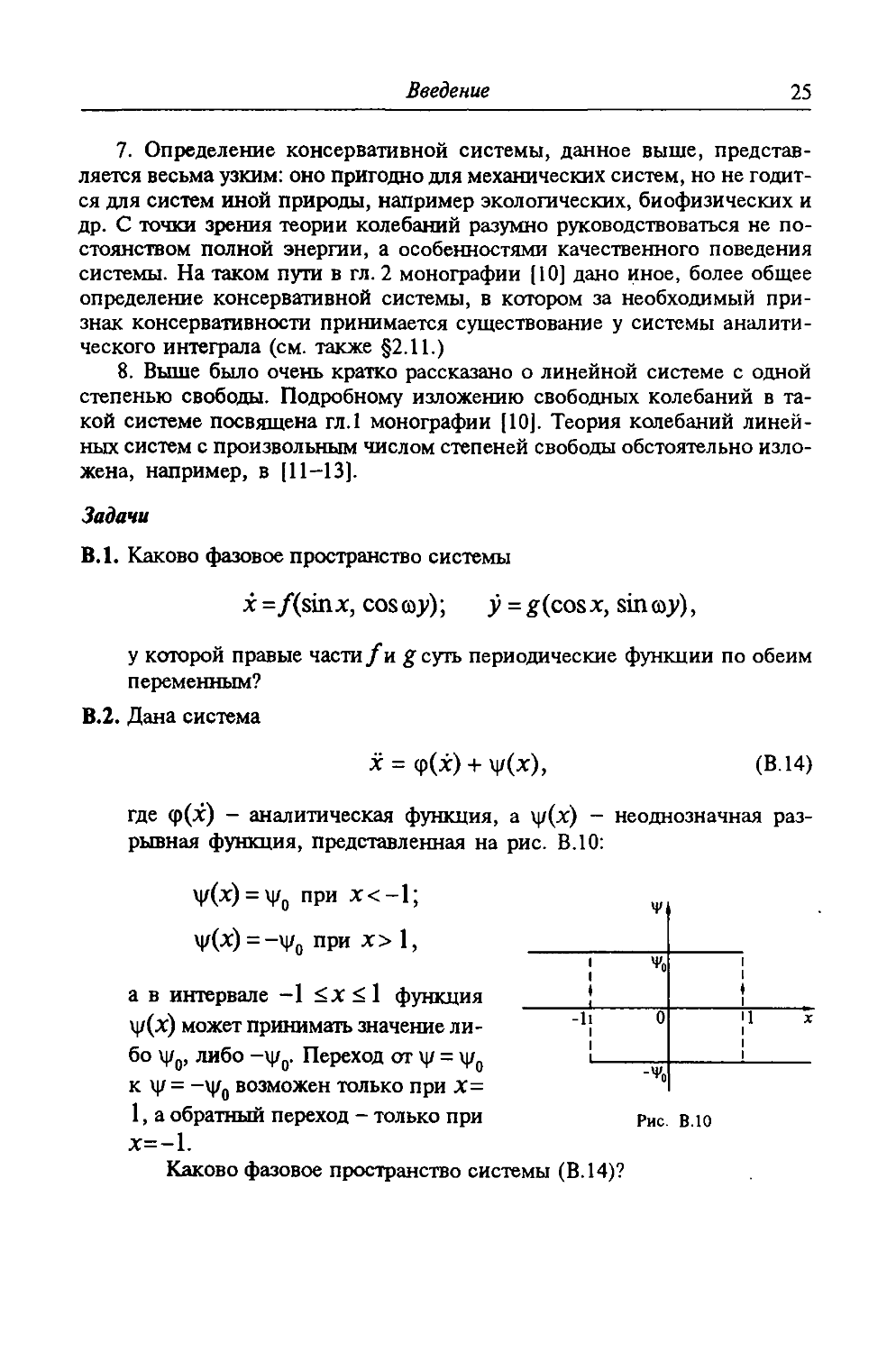
8.2. Дана система
х = Ф(х)
(В. 14)
где ф(х) - аналитическая функция, а \|/(х) - неоднозначная раз-
разрывная функция, представленная на рис. В.10:
-И
Y(/(X) = V|/0 При
v|/(x) = -x\i0 при x> 1,
а в интервале -1 <x < 1 функция
\)/(x) может принимать значение ли-
либо V|/o, либо -\\iQ. Переход от V|/ = v|/0
к \\i = -у0 возможен только при X-
1, а обратный переход — только при
х=-1.
Каково фазовое пространство системы (В. 14)?
-ч»,
Рис. В.10
Ч а с т ь 1. КОЛЕБАНИЯ НЕЛИНЕЙНЫХ АВТОНОМНЫХ СИСТЕМ:
КАЧЕСТВЕННЫЕ МЕТОДЫ
Глава 1. УСТОЙЧИВОСТЬ ПОЛОЖЕНИЙ РАВНОВЕСИЯ
АВТОНОМНЫХ ДИНАМИЧЕСКИХ СИСТЕМ
Основы современной теории устойчивости были заложены великим рус-
русским математиком и механиком А.М. Ляпуновым A857 -1918) в его знаме-
знаменитой докторской диссертации [29], впервые опубликованной в 1892 г.
До сих пор идеи этой работы питают исследователей и позволяют им по-
получать весьма ценные новые результаты в области теории устойчивости и
теории колебаний. Наиболее существенные из них принадлежат отечест-
отечественным ученым.
В данной главе кратко излагаются основные определения и теоремы,
принадлежащие А.М. Ляпунову, а также новые результаты, имеющие боль-
большое значение в анализе колебаний и устойчивости динамических систем.
1.1. Положения равновесия. Определения устойчивости
Рассмотрим автономную динамическую систему
х, =Х,(х1,...,х„), / = 1,...,й, A.1)
или в векторной форме
х = Х(х).
Положения равновесия системы A.1) определяются из условия равенства
нулю всех производных по времени: х, =... = Хп = О, или X - 0. Таким
образом, состояние равновесия отображается точкой фазового простран-
пространства, координатами которой х10,..., хп0 служит решение системы
Х1(х1,...,х„) = 0, / = 1,...,л. A.2)
Каждая такая точка - целая фазовая траектория, ибо состояние равно-
равновесия есть решение системы A.1) при -оо</<+оо. Без ущерба для общно-
общности примем, что Х@) = 0, т.е. начало координат х= 0 - состояние равно-
весия'*. Устойчивость решения х= 0 будем понимать в смысле Ляпунова.
Сформулируем основные определения.
Определение 1.1. Решение X = 0 системы A.1) называется устой-
устойчивым (по Ляпунову), если для любого числа е>0 (как бы мало оно ни
было) можно указать другое число б = 5(е)>0, такое, что для всех реше-
"' Этого всегда можно добиться переходом к новым координатам у = X - Х^, где
состояние равновесия системы A.1).
Глава 1 27
ний х(/) системы A.1), для которых в начальный момент /= /0 выполня-
выполняется условие
ъ, A.3)
при всех t> tQ будет справедливо неравенство
|х(/)|| < е. A.4)
Если же упомянутое выше число 5 указать невозможно, то решение х= О
неустойчиво.
В этом определении ||х[| - расстояние (в фазовом пространстве) от
точки X до начала координат х= 0. Фазовым пространством системы A.1)
считаем обычное л-мерное евклидово пространство Е" с нормой
|M = max{|x1|,...,|xJ} A.5)
или
||х||2=(х1Ч...+ хУ2. A.6)
Нормы A.5) и A.6) эквивалентны; различие заключается лишь в не-
несущественных деталях геометрической интерпретации: равенство |х| = С
определяет поверхность Л-мерного куба с длиной ребра 2с и с гранями,
параллельными осям координат, а равенство ||х||2 = с определяет Л-мерную
сферу с центром в точке х= 0 и радиусом, равным с.
Определение 1.2. Решение Х=0 системы A.1) называется асим-
асимптотически устойчивым, если оно устойчиво и если в определении 1.1
можно указать такое число 8, что для всех решений x(t) системы A.1),
подчиняющихся условию х(/0) < 6, выполняется равенство
limx(/) = 0. A.7)
Таким образом, асимптотическая устойчивость решения х= 0 означа-
означает одновременное выполнение двух условий: условия устойчивости по
Ляпунову и условия A.7). Подчеркнем, что одного предельного условия
A.7) еще недостаточно для асимптотической устойчивости. Можно при-
привести примеры, когда условие A.7) выполнено для любых начальных воз-
возмущений, но тем не менее положение равновесия неустойчиво. (Рассмот-
(Рассмотрите с этой точки зрения задачу 1.1.)
Геометрический смысл данных определений заключается в следую-
следующем. Состояние равновесия х=0 системы A.1) устойчиво, если при
любых (сколь угодно малых) размерах е-окрестности точки X = 0 суще-
существует такая 6-окрестность этой точки, что фазовая траектория, выходя-
выходящая в момент /= /0 из любой точки 5-окрестности, никогда не выйдет за
28 Часть 1
пределы е-окрестности. Если к тому же каждая такая траектория при /—>
—> оо неофаниченно приближается к началу координат, то состояние равно-
равновесия х=0 устойчиво асимптотически.
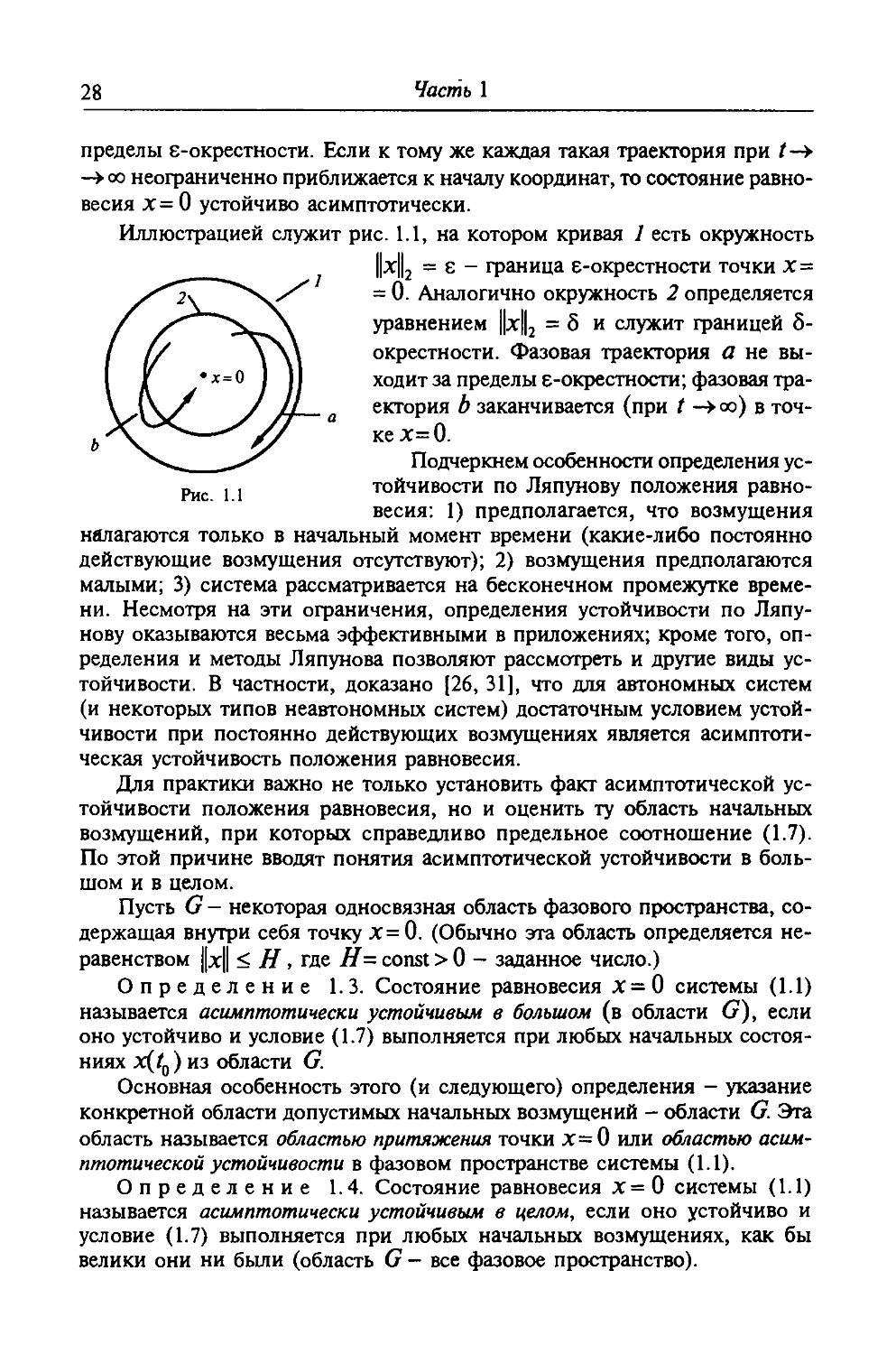
Иллюстрацией служит рис. 1.1, на котором кривая 1 есть окружность
||х||2 = 8 — фаница е-окрестности точки х=
= 0. Аналогично окружность 2 определяется
уравнением ||х|2 = 5 и служит фаницей 8-
окрестности. Фазовая траектория а не вы-
выходит за пределы Е-окрестности; фазовая тра-
траектория b заканчивается (при t —> оо) в точ-
точке х= 0.
Подчеркнем особенности определения ус-
Рис [ j тойчивости по Ляпунову положения равно-
равновесия: 1) предполагается, что возмущения
налагаются только в начальный момент времени (какие-либо постоянно
действующие возмущения отсутствуют); 2) возмущения предполагаются
малыми; 3) система рассмафивается на бесконечном промежутке време-
времени. Несмофя на эти офаничения, определения устойчивости по Ляпу-
Ляпунову оказываются весьма эффективными в приложениях; кроме того, оп-
определения и методы Ляпунова позволяют рассмотреть и другие виды ус-
устойчивости. В частности, доказано [26, 31], что для автономных систем
(и некоторых типов неавтономных систем) достаточным условием устой-
устойчивости при постоянно действующих возмущениях является асимптоти-
асимптотическая устойчивость положения равновесия.
Для практики важно не только установить факт асимптотической ус-
устойчивости положения равновесия, но и оценить ту область начальных
возмущений, при которых справедливо предельное соотношение A.7).
По этой причине вводят понятия асимптотической устойчивости в боль-
большом и в целом.
Пусть G — некоторая односвязная область фазового пространства, со-
содержащая внутри себя точку х=0. (Обычно эта область определяется не-
неравенством |х|| < Н, где Н= const > 0 - заданное число.)
Определение 1.3. Состояние равновесия Х= О системы A.1)
называется асимптотически устойчивым в большом (в области G), если
оно устойчиво и условие A.7) выполняется при любых начальных состоя-
состояниях х(/0) из области G.
Основная особенность этого (и следующего) определения - указание
конкретной области допустимых начальных возмущений - области G. Эта
область называется областью притяжения точки Х=0 или областью асим-
асимптотической устойчивости в фазовом пространстве системы A.1).
Определение 1.4. Состояние равновесия х= 0 системы A.1)
называется асимптотически устойчивым в целом, если оно устойчиво и
условие A.7) выполняется при любых начальных возмущениях, как бы
велики они ни были (область G - все фазовое пространство).
Глава 1 29
Последнее определение весьма полезно в тех случаях, когда в исследу-
исследуемой системе начальные возмущения могут оказаться большими и (или)
их трудно либо нецелесообразно заранее оценить.
Основными подходами к исследованию устойчивости являются: 1) вто-
второй, или прямой, метод Ляпунова; 2) теория устойчивости по первому
приближению; 3) частотная теория абсолютной устойчивости нелинейных
регулируемых систем. Первые два подхода, наиболее общие и распростра-
распространенные в прикладных задачах, излагаются ниже применительно к авто-
автономным сосредоточенным системам. Частотные критерии абсолютной ус-
устойчивости подробно изложены в литературе по теории автоматического
регулирования, в частности в монографиях [7, 14].
1.2. Второй метод Ляпунова
Наиболее универсальным методом исследования устойчивости был и ос-
остается второй метод Ляпунова. Кроме того, он находит применение и для
других задач динамики (для доказательства ограниченности решений, отыс-
отыскания периодических режимов и др.). Дадим краткое изложение этого
метода для автономных динамических систем.
Пусть система A.1) допускает нулевое решение ДО) = 0 и в области
|х|| < Н, Н - const > 0, подчиняется теореме Коши о существовании и
единственности решений.
Введем в рассмотрение функции v(xp ...,хп), которые в некоторой
окрестности начала координат
\\x\\<h<H A.8)
обладают следующими свойствами: 1) V - однозначная функция; 2) част-
частные производные dv/дх., i= \,...,n, непрерывны; 3) v@,..., О) = 0.
Определение 1.5. Функция V, обладающая свойствами 1,2,3,
называется знакоопределенной в области A.8) (положительно определен-
определенной или отрицательно определенной), если она в области A.8) принима-
принимает значения только одного знака и обращается в нуль только в начале
координат.
Примеры: 1) функция v(xl,xi,X)) = Х* + х* + х* - положительно определенная во всем
фазовом пространстве;
2) функция v(xt,X2, Х^) = xf + X* + xj - xf - положительно определенная в области
A.8) при достаточно малом значении А.
Определение 1.6. Функция V, обладающая свойствами 1, 2, 3,
называется знакопостоянной (положительной или отрицательной), если
она в области A.8) принимает значения только одного знака, но обраща-
обращается в нуль и при х* 0.
Пример: функция у(х,,л:2,л:3) = xf + (х2 + ХгУ - знакопостоянная (положительная);
она обращается в нуль не только в начале координат, но и во всех точках фазового простран-
пространства, удовлетворяющих условиям X, = 0; Х2 = -Х}.
30 Часть 1
Определение 1.7. Функция v называется знакопеременной, если
она не является ни знакоопределенной, ни знакопостоянной. Другими
словами, как бы ни было мало h, функция V в области A.8) может при-
принимать как положительные, так и отрицательные значения.
Пример знакопеременной функции: v(x^, Xv X,) = xj2 - xj - xj.
Общих критериев знакоопределенности функций не существует. За-
Задача несколько упрощается, если V - однородная форма переменных X,,
..., Хп. Известно, что любая форма переменных Хр ..., Хп нечетного по-
порядка есть функция знакопеременная; знакоопределенной может быть только
форма четного порядка C1]. Для простейшей формы, а именно для квад-
квадратичной формы, необходимые и достаточные условия знакоопределен-
знакоопределенности дает критерий Сильвестра [27].
В приводимых ниже теоремах Ляпунова фигурирует производная по
времени функции V, составленная в силу уравнений A.1) (вычисленная
вдоль траекторий системы A.1)]. Эта производная равна
Очевидно, что v(]1) - функция переменных JC,, •••>¦*„, обращающаяся в
нуль при Xj =... = Хп = 0.
Теорема 1.1 (первая теорема Ляпунова). Если для системы
A.1) можно найти знакоопределенную функцию v(x), производная которой
по времени, составленная в силу этой системы, есть функция знакопосто-
знакопостоянная, знака, противоположного с V, или тождественно равна нулю, то
нулевое решение системы A.1) устойчиво.
Доказательство. Без ущерба для общности примем, что V -
положительно определенная функция в области A.8) и в этой же области
Пусть е - произвольное положительное число, меньшее h, и пусть / -
точный нижний предел функции V при
И = е, 0-П)
так что
v(x) > I при \\x\\ = 8. A.12)
Очевидно, что / > 0, так как / - точный нижний предел положительной
непрерывной функции.
Рассмотрим теперь произвольное решение х(/) уравнений A.1) с на-
начальными условиями из области
Глава 1 31
\\x(to)\\ = \\хо\\ < 5. A.13)
В качестве 5 выберем число настолько малое, чтобы было 6 < 6 и
V(XO)</. A.14)
Такой выбор числа 8 возможен, так как V непрерывна и v@) = 0.
Пусть x{t) - решение системы A.1) при выбранных таким путем на-
начальных условиях. Подставим это решение в функцию V; в силу A.10)
получим
V(x(t)) < V(XO) < / A.15)
для всех /, при которых x(t) лежит в области ||х|| < h ¦ Поскольку 6<е и
х0 < 5, в силу непрерывности x(i) будет выполняться неравенство
|х(/)|<8, A.16)
по крайней мере при значениях t(t>t0), достаточно близких к начальному
моменту /„.
Покажем, что условие A.16) не нарушается ни при каких t > tQ, что и
завершит доказательство. Допустим противное. Пусть неравенство A.16)
нарушается. Это значит, что существует такой момент времени t- T, при
котором хотя бы одна из величин |х(| достигнет значения е (т.е. ||х||=е), а
при этом согласно A.12) v(xG")) >/. Но это неравенство невозможно,
так как множество ||х|| = Е лежит в области ||х|| < А, ибо б < h, а в этой
области всюду выполняется противоположное условие A.15).
Таким образом, для всех решений системы уравнений A.1), для кото-
которых выполняется условие |.х(/0)||= ||хо|| <5, будет при всех t> tQ выпол-
выполняться неравенство ||х(/)) <е, что и означает по определению устойчивость
решения х=0.
Приведем без доказательства вторую теорему Ляпунова, в которой
формулируются условия асимптотической устойчивости нулевого решения
системы A.1).
Теорема 1.2 (вторая теорема Ляпунова). Если для системы
A.1) можно найти знакоопределенную функцию v(x), производная которой
по времени, составленная в силу этой системы, есть функция, также зна-
коопределенная, знака, противоположного с V, то нулевое решение систе-
системы A.1) устойчиво асимптотически.
Замечание 1. Знакоопределенные функции V, удовлетворяющие
требованиям первой или второй теоремы Ляпунова, называют функция-
функциями Ляпунова.
Замечание 2. Достоинство приведенных теорем заключается в
решении вопроса об устойчивости без непосредственного решения исход-
32 Часть 1
ных нелинейных уравнений. (Это характерная особенность и других мето-
методов теории устойчивости.)
Замечание 3. Теоремы Ляпунова содержат возможность оценки
-«Жасти притяжения точки х=0 и, следовательно, возможность решить
вопрос об асимптотической устойчивости в большом.
1.3. Второй метод Ляпунова (продолжение). Геометрическая интерпретация
знакоопределенных функций. Оценка области притяжения
Пусть v(x) - положительно определенная функция в области A.8), и
пусть / - точный нижний предел функции v(x) на границе этой области.
Рассмотрим поверхности
v(x) = c, A.17)
где С - положительное число. При С = 0 имеем V = 0 и в силу знако-
знакоопределенности V получаем х=0, т.е. при С = 0 поверхность A.17)
вырождается в точку — начало координат.
Покажем, что при любом С < I поверхность A.17) замкнута и окружает
начало координат. В самом деле, рассмотрим любую непрерывную
кривую, выходящую из начала координат и идущую к границе области
A.8). Проследим за изменением функции V вдоль этой кривой. В начале
кривой v=0, а в конце ее v> /. Функция V, как всякая знакоопределенная
функция, непрерывна и однозначна, следовательно, в некоторой точке
рассматриваемой кривой функция V необходимо принимает значение С,
если только С < I. Таким образом, любая непрерывная кривая, идущая из
начала координат к границе области A.8), пересекает поверхность V= С
при любом с < I. Это и означает, что поверхности V = с замкнуты и ок-
окружают начало координат. Эти поверхности не пересекаются, так как V -
однозначная функция.
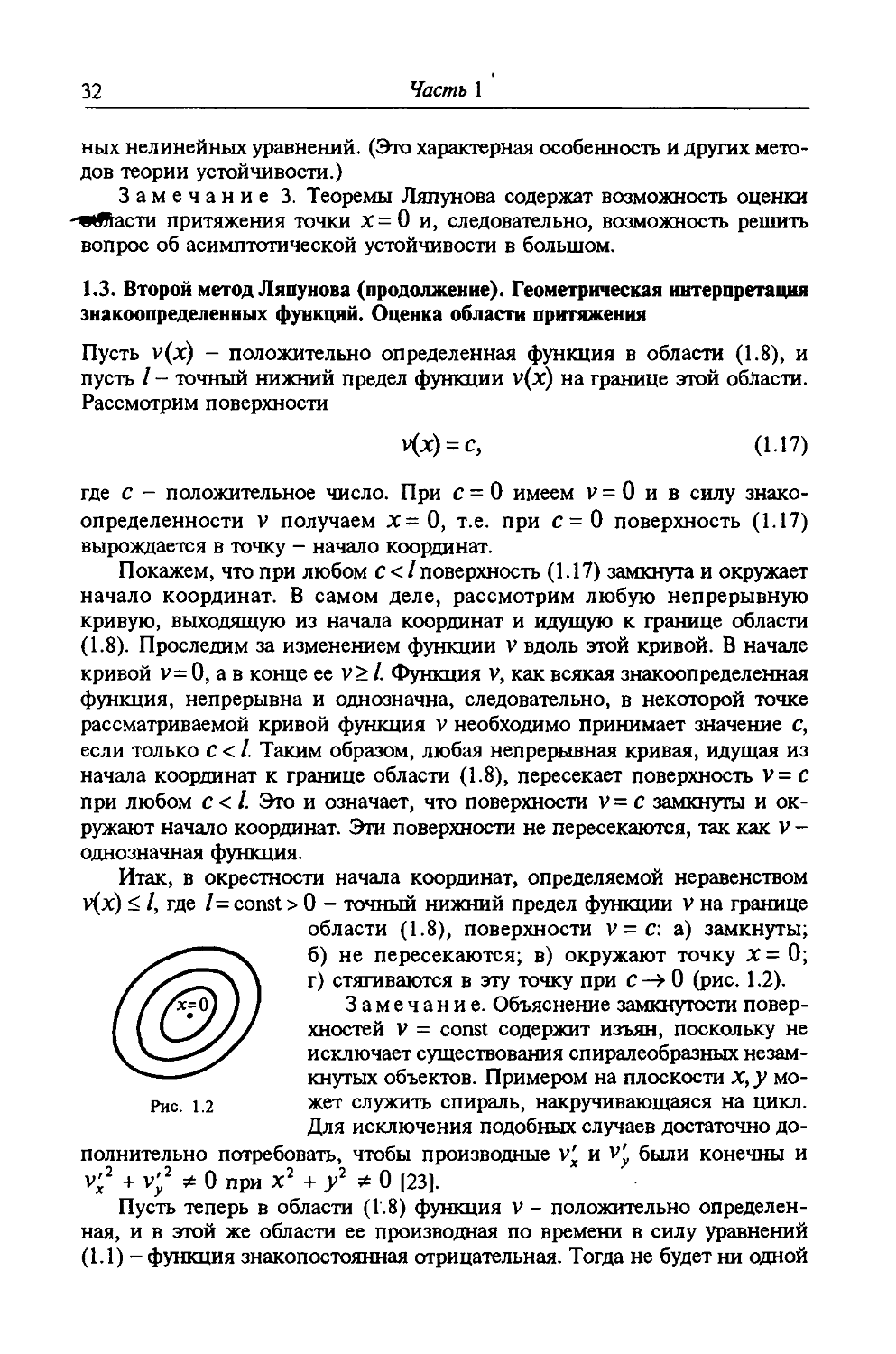
Итак, в окрестности начала координат, определяемой неравенством
v(x) < I, где I- const > 0 - точный нижний предел функции V на границе
области A.8), поверхности v = с: а) замкнуты;
б) не пересекаются; в) окружают точку Х = 0;
г) стягиваются в эту точку при с—> 0 (рис. 1.2).
Замечание. Объяснение замкнутости повер-
поверхностей v = const содержит изъян, поскольку не
исключает существования спиралеобразных незам-
незамкнутых объектов. Примером на плоскости X, у мо-
Рис. 1.2 жет служить спираль, накручивающаяся на цикл.
Для исключения подобных случаев достаточно до-
дополнительно потребовать, чтобы производные v^ и v^ были конечны и
v;2 + v;2 Ф 0 при х2 + у2 * 0 B3].
Пусть теперь в области A.8) функция V - положительно определен-
определенная, и в этой же области ее производная по времени в силу уравнений
A.1) - функция знакопостоянная отрицательная. Тогда не будет ни одной
Глава 1 33
фазовой траектории, которая начиналась бы в области \>(х) < I (являю-
(являющейся частью области ||дс|| < h и пересекала бы какую-либо из поверхнос-
поверхностей V = с изнутри наружу, ибо в точке такого пересечения функция V
имела бы положительное значение производной vA1). Таким образом,
если изображающая точка в начальный момент времени находилась внут-
внутри какой-либо поверхности v=c<l, то она и в дальнейшем останется
внутри этой поверхности. Отсюда следует справедливость первой теоре-
теоремы Ляпунова.
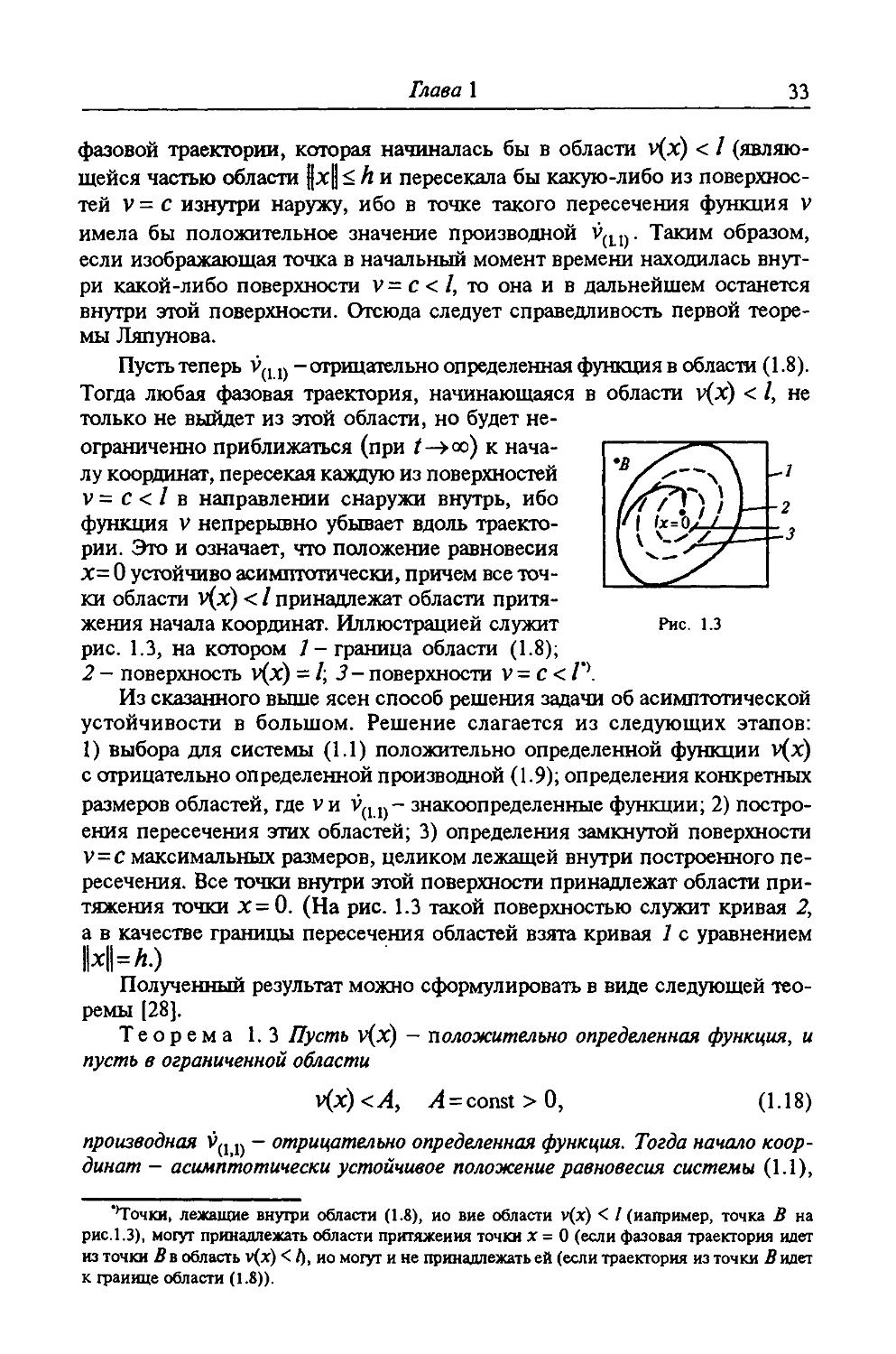
Пусть теперь vA ц -отрицательно определенная функция в области A.8).
Тогда любая фазовая траектория, начинающаяся в области v(x) < /, не
только не выйдет из этой области, но будет не-
неограниченно приближаться (при /—>оо) к нача-
началу координат, пересекая каждую из поверхностей
v = с < I в направлении снаружи внутрь, ибо
функция V непрерывно убывает вдоль траекто-
траектории. Это и означает, что положение равновесия
х- О устойчиво асимптотически, причем все точ-
точки области v(x) < / принадлежат области притя-
притяжения начала координат. Иллюстрацией служит Рис. 1.3
рис. 1.3, на котором 1 -граница области A.8);
2 - поверхность v(x) = /; 3- поверхности V = С <П.
Из сказанного выше ясен способ решения задачи об асимптотической
устойчивости в большом. Решение слагается из следующих этапов:
1) выбора для системы A.1) положительно определенной функции v(x)
с отрицательно определенной производной A.9); определения конкретных
размеров областей, где Уи vAц- знакоопределенные функции; 2) постро-
построения пересечения этих областей; 3) определения замкнутой поверхности
V=С максимальных размеров, целиком лежащей внутри построенного пе-
пересечения. Все точки внутри этой поверхности принадлежат области при-
притяжения точки Х= 0. (На рис. 1.3 такой поверхностью служит кривая 2,
а в качестве границы пересечения областей взята кривая 1 с уравнением
\\x\\=h.)
Полученный результат можно сформулировать в виде следующей тео-
теоремы [28].
Теорема 1.3 Пусть v(x) — положительно определенная функция, и
пусть в ограниченной области
v(x)<A, v4 = const>0, A.18)
производная v(, 1} - отрицательно определенная функция. Тогда начало коор-
координат — асимптотически устойчивое положение равновесия системы A.1),
'•Точки, лежащие внутри области A.8), но вне области v(x) < / (например, точка В на
рис.1.3), могут принадлежать области притяжения точки х = 0 (если фазовая траектория идет
из точки В в область v(x) < /), но могут и не принадлежать ей (если траектория из точки В идет
к границе области A.8)).
34
Часть 1
и каждое решение этой системы, начинающееся в области A.18), неограни-
неограниченно приближается к началу координат при / —> со.
Пример 1. Рассмотрим систему уравнений
Исследуем устойчивость положения равновесия X = у = О этой системы. Возьмем поло-
положительно определенную функцию V = (Лг +)г)/2,.
Имеем
4119)
= хх + уу = (х2 + у2)\ — + jp -1
A.20)
т.е. производная функции V по времени, вычисленная в силу уравнений A.19), есть функ-
функция отрицательно определенная внутри области, ограниченной эллипсом
V2
У.
Ь2
A21)
По теореме 1.2 решение х = у = 0 асимптотически устойчиво. Линии v (x,y) = const
в данном случае являются окружностями с центром
в начале координат. Окружность V = С максимальных
размеров, целиком лежащая внутри эллипса A.21),
описывается уравнением
где Ь — малая полуось эллипса (рис. 1.4). Любая
фазовая траектория, начинающаяся внутри окружности
Рис. 1.4 A.22), неограниченно приближается (при / —» оо) к
состоянию равновесия х = у = 0, т.е. круг х2 + у* <
2 принадлежит области притяжения точки X = у = 0.
Пример 2. Исследуем устойчивость нулевого решения системы
х = -ах([ + х) + Ь(у - х);
у = х-у, а>0, Ь>0.
A23)
Возьмем положительно определенную (при всех х, у)
функцию V = (х2 + Й)^)/2 и вычислим ее производ-
производную по времени на траекториях системы A.23). Полу-
Получим
¦41-23)
Рис. 1.5
х2A + х)-Ь(х-уJ. A.24)
Производная A.24) - отрицательно определенная
функция в полуплоскости 1 + X > 0, следовательно,
решение X = у = 0 асимптотически устойчиво. Часть
полуплоскости 1 +Х>0, ограниченная эллипсом X2 +
+ by2 = 1 (рис. 1.5), принадлежит области притяжения
точки х = у = 0.
Глава 1 35
Замечание. Очевидно, что с помощью функций Ляпунова далеко
не всегда выделяется полная область притяжения исследуемого состояния
равновесия. Как правило, удается получить только часть ее - большую
или меньшую в зависимости от того, насколько удачно выбрана функция
Ляпунова.
Сформулируем теперь теорему об асимптотической устойчивости в це-
целом.
Теорема 1.4. Если для системы A.1) молено найти функцию V,
подчиняющуюся во всем фазовом пространстве требованиям второй теоре-
теоремы Ляпунова, и если
limv(x) = oo, A.25)
|х|-»<о
то нулевое решение системы A.1) асимптотически устойчиво в целом.
Не останавливаясь на доказательстве этого утверждения, отметим, что
условие A.25) обеспечивает выбор любого сколь угодно большого числа
А>0 в условии A.18).
Пример. Докажем, что нулевое решение системы
х = -у - х2"*1; у = х-у2т*\ A.26)
где т и п - натуральные числа, асимптотически устойчиво в целом. В самом деле, выберем
v(x,y) = X2 + у2 и получим
v - -Of у2"*2 + v2m*2\
Очевидно, что функции V и vA26> энакоопределенные (противоположного знака) во всей
плоскости X, у и v-> оо при X2 + у2 -> оо. Все условия теоремы 1.4 выполнены.
В практических задачах редко удается построить функцию Ляпунова
со знакоопределенной производной по времени; чаще удается подобрать
функцию V со знакопостоянной производной v . При этом в соответствии
с теоремой 1.1 доказывается только устойчивость по Ляпунову нулевого
решения, тогда как в действительности это решение часто бывает устой-
устойчивым асимптотически. Характерный пример - линейный осциллятор
x + 2hx + &lx = 0.
Очевидно (см. Введение), что при h > 0 решение Х=0; Х- 0 устойчи-
устойчиво асимптотически.
Рассмотрим теперь устойчивость этого же решения вторым методом
Ляпунова. Перейдем к эквивалентной системе
х = у; у =-2hy - (й20х. A.27)
Выберем функцию Ляпунова в виде v = (o)qX2 + у2)/2 и получим
2 < 0.
36
Часть 1
const
Ясно, что производная v(l27) является не отрицательно определенной, а
только знакопостоянной отрицательной: она обращается в нуль не только
в начале координат, но во всех точках оси абсцисс плоскости X, у. По
теореме 1.1 имеем устойчивость по Ляпунову, в действительности - асим-
асимптотическую устойчивость решения Х=у = 0. Геометрически это выража-
выражается в том, что фазовые траектории системы A.27) пересекают эллипсы
V= (© \х2 + у2)/2 - const в направлении
снаружи внутрь, и только в точках оси
абсцисс имеет место касание фазовых тра-
траекторий и эллипсов v= const (рис. 1.6),
что, разумеется, "не мешает" любой фа-
фазовой траектории неограниченно (при
/ —> оо) стремиться к началу координат.
Многочисленные примеры такого рода
побудили провести специальный анализ,
в результате которого было выяснено, что
требования к функции V в теоремах об
асимптотической устойчивости можно ослабить. Именно, справедлива
Теорема 1.5(теорема Барбашина и Крас овс кого ).
Теоремы 1.2—1.4 остаются в силе, если производная v^ не знакоопределен-
ная, а только знакопостоянная функция {знака, противоположного с х>), но
совокупность точек фазового пространства, где V(U) = 0, не содержит це-
целых фазовых траекторий системы A.1), отличных от тривиального реше-
решения. {Другими словами, не существует нетривиального решения x(t) системы
A.1), для которого равенство v(x(t)) = 0 возможно при всех /.]
Доказательство теоремы 1.5 см. в работах [26, 31].
Пример. Докажем, что нулевое решение системы
Рис. 1.6
= у-ху2;
у =-х3
A.28)
асимптотически устойчиво в целом.
Пусть
Тогда
= -х V-
Очевидно, что v(x,y) — положительно определенная функция, а ее производная - знакопо-
знакопостоянная отрицательная функция на всей плоскости X, у. Условие A.2S) выполнено:
V -> оо при X2 + у7 —> оо. Производная V(] 3J) обращается в нуль на осях координат плоско-
плоскости X, у, однако на этом множестве нет целых фазовых траекторий системы A.28), отличных
от точки X — у = 0. В самом деле, допустим, что существует решение X = x(f) = О,
у = y(f) $ 0. Непосредственная подстановка в A.28) показывает, что возможно лишь
y(t) = 0. Точно так же убеждаемся, что не существует решения x{t) $ 0, y(t) = 0.
Глава 1 37
На основании теорем 1.4 и 1.5 заключаем, что решение X = у = О асимптотически устойчиво
в целом.
Остановимся теперь на условиях устойчивости. Из геометрической
интерпретации теорем Ляпунова следует, что положение равновесия х=0
системы A.1) неустойчиво, если в достаточно малой окрестности точки
х=0 функция v и ее производная v(U) одного знака, поскольку все фазо-
фазовые траектории, начинающиеся в этой окрестности, пересекают поверх-
поверхности v=const изнутри наружу; изображающие точки удаляются от начала
координат. Более широкие результаты дают две классические теоремы
Ляпунова, которые приведем без доказательства.
Теорема 1.6. Если для системы A.1) можно найти функцию v(x),
такую, что производная V(U) есть функция знакоопределенная, а сама фун-
функция V не будет знакопостоянной, знака, противоположного с v{{{), то
решение х = О системы A.1) неустойчиво.
Теорема 1.7. Если существует функция v(x), такая, что в области
A.8) производная V(U) имеет вид v^n) =Xv+w(x), где X — положительная
постоянная, a W или тождественно обращается в нуль, или представляет
знакопостоянную функцию, и если в последнем случае функция V не является
знакопостоянной, знака, противоположного с W, то решение X = 0 систе-
системы A.1) неустойчиво.
Существенным обобщением теоремы 1.6 служит следующая теорема
Четаева.
Теорема 1.8. Пусть в некоторой окрестности Q начала координат
заданы область С11 и функция v(x), такие, что: 1) функция v(x) и ее пер-
первые частные производные непрерывны в С2,; 2) v(x) = 0 на той части грани-
границы области Q,, которая лежит внутри ?2; 3) функции v(x) и v(U)(x)
положительны в Q,; 4) начало координат является граничной точкой Q, (на
рис. 1.7 область Q, заштрихована).
Тогда положение равновесия х = 0 системы A.1) неустойчиво.
Действительно, в силу положительнос-
положительности производной v(i 1) в й, изображающая
точка при / > tQ будет перемещаться из на-
начальной точки Хо = х(/0) только в направле-
направлении возрастания v(x), удаляясь от границы
v=0 области Q,, пока не достигнет грани- Y'lLPttTTT7 ~^v = c >0
цы Q (см. рис. 1.7). Точка х„ в области Q, V^-W ' ' ^ ~ '
может располагаться сколь угодно близко к
точке х=0, и согласно определению начало PlfC , 7
координат неустойчиво.
Заметим, что теорема 1.8 Четаева переходит в теорему 1.6 Ляпунова,
если в условии 3 теоремы 1.8 предположить, что производная v(, () - поло-
положительно определенная функция во всей области fi.
38
Часть 1
Пример 1. Рассмотрим нулевое решение системы
х = ауг + Ьхь\ у = ахг+Ьу*; Ь>0.
Возьмем функцию V = X* - у*. Очевидно, что V > 0 в области
A.29)
В этой же области VA29) = 4А(х - у ) > 0. В данном примере областью Q, служит область
A.30) (на рис. 1.8 она заштрихована), а область Q - вся фазовая плоскость X, у. По теоре-
теореме 1.8 решение X = у = 0 неустойчиво.
Пример 2. Исследуем нулевое решение системы
= х,3
2x,x22; хг = х,х2.
A.31)
Возьмем функцию v(x,,x2) = X, - х\. Для нее vA3|) = Xt. Эта производная положитель-
положительна при Xj > 0 и любых значениях Х^. Функция V положительна в области х, > х\. Теорема
Четаева выполнена, точка X, = Х2 = 0 неустойчива. Область П, представлена на рис. 1.9.
у=-х
Xi
Рис. 1.8
1.4. Устойчивость по первому приближению
Пусть
Рис. 1.9
A-32)
есть положение равновесия системы A.1) [и, следовательно, нелинейные
правые части Xt этой системы подчиняются равенствам Xt (xl0, •••)^я0) =
= 0, /= 1, ..., л]. Пусть функции Xt в некоторой окрестности состояния
равновесия A.32) разлагаются в ряды Тейлора. Тогда систему A.1) можно
переписать в виде
**=
. , A.33)
1=1,..., п.
Индекс "(Г указывает на значение соответствующей производной в точке
A.32), а Xi - ряды по степеням х;-хп (/= 1, ..., п), начинающиеся
членами не ниже второго порядка.
Глава 1
39
В системе A.33) отбросим нелинейные члены Xt, введем новые пе-
переменные
и обозначим
дхк
(?(. - отклонения от состояния равновесия, pjk - константы, зависящие от
параметров системы). Система A.33) преобразуется в линейную систему
с постоянными коэффициентами
4, =
A.34)
Система A.34) называется системой уравнений первого приближения или
линеаризованной системой. Переход от нелинейных уравнений A.1) к ли-
линеаризованным уравнениям A.34) называется линеаризацией уравнений
A.1) в окрестности состояния равновесия A.32).
Уравнение
D(X) =
Р\\ ~
Рг\
Рп
Рп ~
Ри
Pin
J'n\
= 0
A.35)
называется характеристическим уравнением линеаризованной системы
A.34).
С помощью второго метода Ляпунов получил необходимые и достаточ-
достаточные условия, при которых вопрос об устойчивости состояния равновесия
исходной нелинейной системы A.1) решается рассмотрением корней ха-
характеристического уравнения A.35) линеаризованной системы A.34).
Именно, справедливы следующие теоремы Ляпунова об устойчивости по
первому приближению.
Теорема 1.9. Если все корни характеристического уравнения A.35)
линеаризованной системы A.34) имеют отрицательные действительные ча-
части, то состояние равновесия A.32) системы^ A.1) асимптотически устой-
устойчиво, каковы бы ни были нелинейные члены X,.
Теорема 1.10. Если среди корней характеристического уравнения
A.35) линеаризованной системы A.34) имеется хотя бы один корень с поло-
положительной действительной частью, то состояние равновесия A.32) систе-
системы A.1) неустойчиво при любом выборе нелинейных членов X,.
40
Часть 1
Теорема 1.11. Если характеристическое уравнение A.35) линеаризо-
линеаризованной системы A.34) не имеет корней с положительными действительны-
действительными частями, но имеет корни с действительными частями, равными нулю,
то вопрос об устойчивости состояния равновесия A.32) решается именно
нелинейными членами X, ¦
Доказательство этих теорем см., например, в монографии [31]. Для
анализа знаков действительных частей корней характеристического урав-
уравнения существуют хорошо разработанные методы и критерии (см., на-
например, [14]), не требующие непосредственного решения характеристи-
характеристического уравнения. Они разделяются на две группы - на алгебраические и
частотные. Характерным и весьма распространенным представителем пер-
первой группы служит критерий Гурвица, а наиболее общим представителем
второй группы является метод 2)-разбиений, специально предназначен-
предназначенный для выделения областей устойчивости в пространстве параметров ис-
исследуемой системы. Оба эти метода кратко излагаются ниже.
Критерий Гурвица. Развернем определитель в A.35) и получим харак-
характеристическое уравнение с левой частью в виде полинома П-тл степени
относительно (X):
D(X) = a0
а„ = 0,
A.36)
где aQ,..., ап - действительные коэффициенты, зависящие от параметров
системы.
Пусть а0 > 0. Составим определители
A,=
i —
fl^; A2 =
<hn-\ <h*-i
a, a0
a3 B2
0
<Нп-Ъ
0 .
0 .
a, a0
C3 Oj
a5 a4
.. 0
.. 0
an
0
где «^=0, если k> П.
Теорема 1. 12(критерий Гурвица). Доя того чтобы все корни
уравнения A.36) (при действительных значениях ак, к = 0, 1, ...,п, и при
а0 > 0) имели отрицательные действительные части, необходимо и доста-
достаточно, чтобы удовлетворялись неравенства
Д,>0, Д2>0,...,Дв_1>0;
ап>0.
A.37)
Глава 1 41
Полезно отметить, что необходимое условие отрицательности действи-
действительных частей всех корней уравнения A.36) заключается в положитель-
положительности всех его коэффициентов: Ок>0; к = 0, 1,..., П.
Выпишем условия Гурвица для двух частных случаев.
1. п = 2; ао>О; а,>0; а2>0. A.38)
Таким образом, для квадратного уравнения положительность его коэффи-
коэффициентов служит и необходимым, и достаточным условием отрицательно-
отрицательности действительных частей обоих его корней.
2. л = 3; о0>0; о,>0; я2>0; а3>0; а1о2-с0а3>0. A.39)
[Получите самостоятельно условия A.38) и A.39) непосредственно из
неравенств A.37).]
Прнмер. Характеристическое уравнение линеаризованной системы имеет вид Щ.%) =
= Я.3 + АХ2 + ВХ + 1 = 0. Составьте условия устойчивости ее нулевого решения в зависимос-
зависимости от параметров Аи В.
Решение. Непосредственно из A.39) получаем следующие необходимые и достаточ-
достаточные условия устойчивости: А > 0; В > 0; АВ > 1.
Метод Z)-разбиений. Коэффициенты а0, ..., пп характеристического
уравнения A.36) обычно зависят'1 от параметров системы а,,..., а^, ко-
которые могут быть как действительными, так и комплексными. Разобьем
пространство параметров на области, каждой точке которых соответствует
характеристическое уравнение, имеющее к корней в правой полуплоско-
полуплоскости @ < к< п). Обозначим их символом D(k). Область D@) есть область
устойчивости. Разбиение пространства параметров на области, соответ-
соответствующие одному и тому же числу корней характеристического уравнения
в правой полуплоскости, называется D-разбиением пространства парамет-
параметров C5].
Переходу в пространстве параметров через границы областей Щк)
соответствует переход корней через мнимую ось Х = /со (-оо< со <+оо).
Таким образом, граница Дразбиения есть отображение мнимой оси плос-
плоскости корней на пространство параметров системы. Построение границы
?)-разбиения состоит в замене X = /со в уравнении A.36) с последующим
изменением действительного параметра со от -оо до +оо.
2)-разбиение плоскости одного комплексного параметра. Пусть уравне-
уравнение A.36) содержит один параметр а, линейно входящий в коэффициен-
коэффициенты af Тогда уравнение A.36) можно переписать в виде а = Р(Х). Считая
а комплексным числом, положим Л. — /со и разделим действительную и
мнимую части. Получим уравнение
ах(а) = Re/>(/©); а (со) = Im/'(/со) (а = ах + /а ),
''Ниже эта зависимость предполагается линейной.
42
Часть 1
определяющее при изменении со от -оо до -К» границу /)-разбиения. Если
перемещаться по этой D-кривай в направлении от со = -оо до со = +оо и
штриховать эту кривую слева, то переход ее с заштрихованной стороны на
незаштрихованную соответствует переходу корня уравнения A.36) через
мнимую ось из левой полуплоскости в правую. По этому правилу опреде-
определяется претендент на область устойчивости [область D(k) с наименьшим
индексом к]. Для ответа на вопрос, является ли претендент действитель-
действительно областью ЩР)> надо знать расположение корней характеристического
уравнения хотя бы в одной точке плоскости а, определяя индексы к ос-
остальных областей по правилу штриховки.
Пример. Построить D-разбиение плоскости комплексного параметра а для уравнения
X3 + aV + X2 - <хХ + 1 = 0.
A.40)
Решение. Полагая X = /со, а = а^ + /а. подставим эти соотношения в A.40) и,
отделяя действительную и мнимую части, получим зависимости
со
+ со2
CD2 -1
со3 +со
Меняя параметр СО от -оо до +оо, на плоскости а постро-
построим .D-кривую, заштриховав ее левую сторону при увеличе-
увеличении со (рис.1.10).
Покажем, что область с минимальной отметкой есть
действительно jD@) - область устойчивости. В самом
деле, для точки А на рис 1.10, где а = -1/2, уравнение
A.40) имеет пару мнимых корней о.{2 = ±/ и один действи-
действительный отрицательный корень. При сколь угодно малом
переходе из точки А в область-претендент мнимые корни
преобразуются в комплексно-сопряженные корни с
отрицательной действительной частью (согласно направле-
рнс j 10 нию штриховки), а третий корень остается по-прежнему
отрицательным. Таким образом, область IXfi) определе-
определена. Далее по направлению штриховки однозначно определяются области D(l) и .0B).
/^-разбиение плоскости двух действительных параметров. Пусть коэф-
коэффициенты уравнения A.36) линейно зависят от двух действительных па-
параметров Ц и V, так что его можно представить в виде
A.41)
R(X) = 0.
Полагая в A.41)
X = ad, P(ia) = ?,(©) + <А(ю),
Q('g>) - Qi((o) + iQi(a), R(b) = Л,((й) +
и разделяя действительную и мнимую части, получаем
Глава 1
43
Из системы A.42) находим в параметрической форме уравнения
= A2/A,
A42)
A-43)
где
д =
Рх Qx
Rx Qx
R2 Q2
A, =-
R2
Уравнения A.43) определяют границу /^-разбиения плоскости \х, V. Фун-
Функции Pv Qv i?( - четные функции со, а )°2, 62> ^ ~ нечетные функции
со, поэтому Д, А,, А2 - нечетные функции со, а ц. = ц(со2), v = v(@2).
Таким образом, граница /)-разбиения определяется полностью при изме-
изменении со от 0 до -К» и регулярная граница штрихуется дважды: один раз
при изменении со от 0 до +оо и второй раз от -со до 0 (слева при Д>0
и справа при Д<0). При переходе с одной стороны границы /^-разбиения
на другую два корня характеристического уравнения пересекают мнимую
ось плоскости корней.
Помимо регулярной Х)-кривой, определяемой формулами A.43), гра-
граница /)-разбиения содержит еще так называемые особые прямые, соот-
соответствующие тем значениям о, при которых А = Aj=Aj=0 [так что формулы
A.43) дают при этих значениях о не точку, а целую прямую]. Доказано,
что особые прямые существуют при со = 0 (ап = 0) и при со = <ю(а0 = 0).
Их следует штриховать одинарной штриховкой так, чтобы заштрихован-
заштрихованные и незаштрихованные стороны /)-кривой и особой прямой были обра-
обращены друг к другу- Особые прямые при других значениях со = со* штрихуют
в том случае, если А(со) при со = со* меняет знак. Штриховка осуществ-
осуществляется по тем же правилам, как и при со = 0 и © = оо, но только двойная.
Если Д(со') не меняет знака, то особая прямая не штрихуется и не прини-
принимается во внимание. После нанесения штриховки область устойчивости
выделяется так же, как и при /^-разбиении, по комплексному параметру.
Пример. Провести ./^-разбиение плоскости двух действительных параметров для харак-
характеристического уравнения
A.44)
Решение. Полагая в A.44) X. = /со и разделяя действительную и мнимую части,
находим
v(-co2 +1) +1 = 0; ц(-со3 +ш) +со = 0.
A.45)
44
Часть 1
Отсюда Д = -соA - со2J; Ц = -1/A - CD2); v = -1/A - СО2). Особые прямые ц = О при
co=oohv+1=0 при со =0;A, = Aj = A = 0 при со* = ±1. Но при этих значениях уравнения
A.4S) противоречивы. Построим регулярную и особые ветви кривой ?)-разбиения (рис. 1.11).
С0=оо
-1
^=1-0 \
Рис.
: Л© ,
-1
Л4
l.ii
^Гоо=1+0
DB)
DO)
Положим в A.44) ц = -1; v = 0 (точка А на рис. 1.11) и получим уравнение к3 - 1 =
= 0, корни которого Х} = 1, Х2} = (-1 ± /v3)/2. Следовательно, точка А принадлежит об-
области Д1). Далее штрихуем регулярную и особые прямые по сформулированным выше пра-
правилам, находим две области устойчивости ДО) и остальные области - Д1), Д2), ДЗ).
1.5. Заключение
Сравним второй метод Ляпунова и теорию устойчивости по первому при-
приближению.
1. В практическом использовании второй метод Ляпунова значитель-
значительно сложнее, чем способы исследования устойчивости по первому при-
приближению, ибо общих рецептов построения функций Ляпунова не су-
существует. Теория устойчивости по первому приближению сводит вопрос
об устойчивости к чисто алгебраической задаче - к анализу расположения
корней характеристического уравнения в комплексной плоскости корней,
а для этой цели разработаны различные стандартные приемы [14,33].
2. Теория первого приближения не решает вопроса об устойчивости
при нулевых или чисто мнимых корнях, в то время как второй метод Ля-
Ляпунова пригоден и в этих случаях.
3. Если в положении равновесия функции Xt не дифференцируемы,
то линеаризация невозможна и, следовательно, невозможно применение
теории первого приближения. Однако второй метод Ляпунова применим
и в этом случае.
4. Второй метод Ляпунова позволяет решить вопрос об устойчивости
в большом, т.е. позволяет оценить область притяжения положения равно-
равновесия. Теория первого приближения такой оценки не дает.
Задачи
1.1. Фазовый портрет системы дан на рис. 1.12.
Будет ли положение равновесия х=у=0 устойчивым? Асимптоти-
Асимптотически устойчивым?
Глава 1
45
Рис. 1.12
1.2.
2) v(x, у) = (sin x - sin уJ;
3)
4)
6) v(x) = 1 -cos*.
Являются ли эти функции знакоопределенными? знакопостоянны-
знакопостоянными? Если да, то в какой области?
1.3. Дано уравнение
х + hx + ф(х) = 0, A.46)
где h = const > 0, а ф(х) - аналитическая функция, подчиняющаяся
условиям ф@) = 0; х<р(х) > 0 при х * 0. [График функции ф(х)
проходит через начало координат и располагается в первом и третьем
квадрантах плоскости х,<р].
С помощью второго метода Ляпунова исследуйте устойчивость по-
положения равновесия х=0; х = 0 системы A.46); используя механи-
механическую аналогию, составьте функцию Ляпунова (выбрав в качестве
таковой полную энергию соответствующей механической системы);
затем с помощью теорем 1.4, 1.5 докажите асимптотическую устой-
устойчивость в целом положения равновесия Х=0; х = 0.
1.4. Докажите, что нулевое решение системы
у = ЬухА; а>0, Ь>0,
х = -аху*;
A.47)
устойчиво. Объясните, почему оно не является асимптотически ус-
устойчивым.
1.5. Исследуйте устойчивость нулевого решения системы
х = -ау + ах-у/д
у = ах + ay-Jx2
¦2 + У;
A.48)
46 Часть 1
1.6. х = ах3 + by; y = -cx + dy3; ad>0,bc>0.
Исследуйте устойчивость нулевого решения.
В задачах 1.7-1.13 требуется доказать асимптотическую устойчивость в
целом нулевого решения.
1.7. х = у-Зх-х3; у = 6х-2у. A.49)
1.8. х = -ау - Ьх2я+1; у = сх - dy2m+l, A.50)
а, Ь, с, d> 0; тип- натуральные числа.
1.9. х = -ау - Ьф); у = -у + ф), A.51)
а> 0, b> 0; функция <р(х) - та же, что и в задаче 1.3.
1.10. bx = 2y-ax-xs-}
у = -3х-у5; A.52)
а > 0, b>0. \
1.11. х + хгх + х3 = 0. A.53)
1.12. х + х3 + (х2 + 1)х = 0. A.54)
1.13. х + R(x)x + х3 + 2х = 0, R(x) > 0 при всехх A.55)
В задачах 1.14-1.20 исследуйте асимптотическую устойчивость в боль-
большом нулевого решения.
1.14. х = -{ 1
х);
у = х - у, а > 0, Ъ > 0.J
1 1С Г — —/7 у (I + У I
х2 = -я2х2A + Xj) + Ьг(х{ - х2);}- A.57)
1.16. х = -^ + ох + (Зх2 + 2/)х;1
j> = х + ау + (Зх2 + 2у2)у. J
Рассмотрите два случая: 1) а>0; 2) а<0.
1.17. х + Зх(х2 + Л;2х2 - а2) + к2х = 0. A.59)
Рассмотрите два случая: 1) C>0; 2) Р<0.
1.18. Исследуйте устойчивость решения Х=у = 0 системы A.23) с помо-
помощью функции Ляпунова v(x,y) = х - In A +х) + b[y-\n(l +y)].
Сравните полученные результаты с результатами из §1.3.
Глава 1 47
1.19. х = у + х(а + у)(х2 + у2 - р);
A.60)
р>о.'
1.20. х = 2/-Xs; у = -х-у3 +у5. A-61)
В задачах 1.21, 1.22 примените теорему Четаева и докажите
неустойчивость нулевого решения.
1.21. х = -х - ху; у = уъ-х2. A.62)
1.22. х = х- xv4; у = у-х2у\ A.63)
1.23. Исследуйте устойчивость нулевого решения систем
х = -ау-х\ у = Ьх-уъ; A.64)
х = -ау + хг ,у = Ьх + у3, A-65)
где а и Ъ одного знака. Убедитесь, что характеристическое уравнение
для систем A.64) и A.65) одно и то же и имеет пару чисто мнимых
корней. С помощью второго метода Ляпунова докажите, что нулевое
решение системы A.64) асимптотически устойчиво в целом, в то
время как нулевое решение системы A.65) неустойчиво.
1.24. Линеаризируйте уравнение A.46) и на основе характеристического
уравнения линеаризированной системы решите вопрос об устойчи-
устойчивости состояния равновесия х= 0; х=0 в зависимости от знаков h и
1.25. При надлежащих идеализациях [3] уравнение динамики лампового
генератора имеет следующий вид:
LCu + [RC - MS(u)]u + и = 0, A.66)
где U - переменное напряжение на сетке лампы, S(u) - крутизна
характеристики лампы; функцию S(u) можно аппроксимировать так:
S(u) = SQ(\ - U2); SQ, R, С, L, М- положительные постоянные.
Получите условие самовозбуждения (неустойчивости) лампово-
лампового генератора.
1.26. Исследуйте устойчивость положения равновесия механической сис-
системы, описываемой уравнением
ф), Г,к,П>0,
M(Q. - ф) - аналитическая функция ф в окрестности ф = 0.
В задачах 1.27-1.30 получите условия устойчивости нулевого реше-
решения, используя теорию устойчивости первого приближения.
48
Часть 1
1.27. х = [\|/(х) - b]x + у;
y = bx-y;
Z-ax-cz.
1.29. x = -sinax + b(y - x);
у = a(l - e') + ?(x -y) + c(z - y);\
Z = -az + c(y- z), b>0,c>0.
1.30. x + otx + x2 + x + sin x = 0.
Помимо нулевого решения, рассмотрите также решение
х = я; х = 0; х = 0.
A.67)
A.68)
A.69)
A.70)
Для следующих систем найдите все положения равновесия и иссле-
исследуйте их устойчивость.
A.71)
A.72)
A.73)
A.74)
1); у = ху-2.
1.32. х = 1пA - х + у2); у = х - у - 1.
1.33. х = 3 - д/4 + х2 +у; у = 1п(х2 - 3).
1.34. х = ех - еу; у = уЗх + у2 - 2.
Глава 2. КАЧЕСТВЕННЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ
НЕЛИНЕЙНЫХ АВТОНОМНЫХ СИСТЕМ
С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Математическим аппаратом теории колебаний служит теория дифферен-
дифференциальных уравнений, в частности качественная теория, создателями ко-
которой являются А.М. Ляпунов A857-1918) и А. Пуанкаре A854-1912).
Труды этих ученых послужили основой, на которой в 1920-1930 гг. созда-
создавалась теория нелинейных колебаний.
Особая роль здесь принадлежит родоначальнику горьковской школы
теории колебаний акад. А.А. Андронову A901-1952), который вместе со
своими сотрудниками и учениками успешно развивал идеи Ляпунова и
Пуанкаре, разрабатывая новые методы теории нелинейных колебаний.
В данной и следующей главах кратко излагаются качественные мето-
методы и приемы анализа нелинейных динамических систем на фазовой плос-
плоскости. Эти методы в значительной мере связаны с именами Ляпунова,
Пуанкаре, Андронова и составляют необходимую основу для изучения
новейших разделов теории колебаний многомерных динамических систем.
2.1. Состояния равновесия систем с одной степенью свободы.
Их типы и устойчивость
Рассмотрим автономную динамическую систему
х = Р(х,у); y = Q(x,y). B.1)
Пусть состояния этой системы взаимно однозначно и непрерывно соот-
соответствуют точкам фазовой плоскости х, у. Нелинейные функции Р и Q
будем считать аналитическими на всей плоскости х, у.
Положениями равновесия системы B.1) являются те точки фазовой
плоскости, в которых X = у = 0, т.е. решения системы
Р(х,у) = 0; Q(x,y) = 0. B.2)
Полагая, что Ри Q не имеют общего множителя, обращающегося в нуль
в некоторой точке фазовой плоскости, разделим одно из уравнений B.1)
на другое. Получим дифференциальное уравнение первого порядка
dy _ Q(x,y)
dx Р{х,у)у A3)
50 Часть 1
которое теряет смысл в особых точках этого уравнения, где Р(х,у) — 0;
Q(x,y) = 0. Таким образом, особые точки уравнения B.3) суть состоя-
состояния равновесия системы B.1).
Очевидна связь между фазовыми траекториями системы B.1) и интег-
интегральными кривыми уравнения B.3): каждая фазовая траектория является
либо интегральной кривой, либо ее частью. Например, интегральная кри-
кривая, проходящая через особую точку, всегда состоит из нескольких фазо-
фазовых траекторий. Это ясно уже из того, что состояние равновесия (особая
точка) само является целой фазовой траекторией.
Интегральные кривые уравнения B.3) не пересекаются, так как Р и
Q подчиняются условиям теоремы Коши о существовании и единствен-
единственности решения. Исключения могут составить только особые точки, в ко-
которых, вообще говоря, эти условия нарушаются. Таким образом, через
каждую неособую точку плоскости X, у проходит одна и только одна ин-
интегральная кривая уравнения B.3).
Из сказанного следует, что нахождение интегральных кривых уравне-
уравнения B.3) дает одновременно и разбиение фазовой плоскости на траекто-
траектории, но не дает никаких указаний о направлении движения изображающей
точки, так как время / исключено. Направление движения изображаю-
изображающей точки определяется из уравнений B.1).
* * *
Состояния равновесия (особые точки) классифицируются по каче-
качественному поведению фазовых траекторий в малых окрестностях этих то-
точек. Это обстоятельство позволяет ограничиться анализом линеаризованных
уравнений B.1).
Пусть Хо, у0 - исследуемое состояние равновесия системы B.1). Тог-
Тогда P(xo,yQ) = O; Q(xo,yQ) = O. Перейдем к новым переменным X = X - Хо;
у = у - у0 и разложим правые части системы B.1) в ряды по степеням X
и у. Получим
X = Р(ХО,УО) + Р;(ХО,УО)Х + Р;(ХО,УО)У + Pj)
У = Q(xo,yo) + Qx(xo,yo)x + Q'y(x0,y0)y + Q.)
Здесь P uQ - нелинейные члены разложения. Введем обозначения
Рх(хо > Уо) = й> Py(xo,yQ) = Ь,
учтем, что P(xQ,y0) - 0; Q(xQyyQ) = 0, и отбросим нелинейные члены Р
и Q . Получим линеаризованную систему в виде
х = ах + by; у = сх + dy. B.4)
Глава 2
51
Характеристическое уравнение системы B.4) записывается в виде
X2-(a + d)X + ad-bc=O. B.5)
• Допустим, что корни этого уравнения не равны и отличны от нуля.
Подстановкой
t, = ах + ру; т| = ух + Ьу
приведем систему B.4) к каноническому виду
i = Х?; ц = Х2г\,
где A.J и А,2 - постоянные, подлежащие определению.
Имеем
4 = осе + ру = а(ах + by) + р(сх + dy) =
B.6)
B.7)
i\ = ух + 5у = у(ах + by) + 5(cx + dy) =
= Х2-ц = Х2(ух + 8у).
Отсюда, приравнивая коэффициенты перед X и перед J^, получим две
линейные системы
а(а - Х{) + рс = 0; ab
у(а -
= 0; b + 8(d - Х2) = 0.
Эти системы дают нетривиальные решения для а, Р и у, 6 только в том
случае, если X, и Х2 - корни уравнения
а-Х с
Ь d-X
= Х2 ~(а + d)X + ad-bc = 0,
т.е. Х1 и Х2 в B.7) - корни характеристического уравнения B.5).
Первая система определяет отношение а/Р, а вторая - отношение
у/5. По предположению А,, * Х2, следовательно,
а р
у 5
т.е. детерминант преобразования B.6) отличен от нуля. Это гарантирует
52 Часть 1
разрешение равенств B.6) относительно X и у , чем обеспечивается вза-
взаимная однозначность преобразования B.6).
Рассмотрим теперь поведение фазовых траекторий системы B.7) на
плоскости ?, Т| при различных значениях %х и Хг
1. Корни А., и Х2 действительны и одного знака. Из B.7) имеем
откуда
Г) = С|?|9; С = const; 9 = А,2/А,,. B.9)
Пусть для определенности А,2 > А., и, следовательно, q > 1. Тогда интег-
интегральные кривые B.9) - параболического типа (рис. 2.1).
Каждому значению С соответствует своя ин-
интегральная кривая. Ось ординат и ось абсцисс -
\\ I i тоже интегральные кривые, отвечающие значе-
\ Iу ниям С- оо и С= О соответственно. Начало ко-
^,1^/ __ ординат - особая точка, в которой все интеграль-
интегральные кривые касаются оси абсцисс. Особая точка,
представленная на рис. 2.1, называется узлом.
Нетрудно определить направление движения
Рис. 2.1 изображающей точки по интегральной кривой.
При А., < О, А,2 < 0 изображающая точка с те-
течением времени приближается к началу координат, что видно из B.7).
В этом случае имеем устойчивый узел, а состояние равновесия ? = г\ = О
асимптотически устойчиво. Если же А., > О, А.2 > 0, то изображающая
точка по соответствующей параболе удаляется (с ростом /) от начала ко-
координат; в этом случае особую точку (?, = Т) = 0), являющуюся неустойчи-
неустойчивым положением равновесия, называют неустойчивым узлом.
При переходе на плоскость исходных переменных X, у параболы на
рис.2.1 деформируются, но качественный характер поведения интегральных
кривых не изменится, ибо преобразование B.6) - линейное и ?t 0 •
у 8
В данным случае каждая интегральная кривая проходит через состоя-
состояние равновесия и состоит из трех фазовых траекторий (рис. 2.2). Суще-
Существенно, что за конечное время изображающая
точка, находящаяся на ветви II или III, не достиг-
\н HI, нет состояния равновесия I, ибо в точке 0 наруши-
^ч-*- . -*/'^ лись бы условия единственности решения.
0 Примером физической системы, в которой со-
Рис. 2.2 стояние равновесия характеризуется устойчивым
узлом, может служить груз на пружине в среде
Глава 2
53
с большим вязким трением. В самом деле, в случае малых вертикальных
колебаний груза уравнение динамики и характеристическое уравнение за-
записываются в виде
Ь к
mx + bx + kx = 0; X2+ — X + — = 0.
т т
Корни Х1 и А,2 будут действительными отрицательными, если коэффициент
Ъ вязкого трения достаточно велик.
2. Корни Хх и Х2 действительны и разных знаков. В этом случае из
системы B.7) получим
dx\
л
B.10)
После интегрирования найдем т||?|?- С те- интегральные кривые явля-
являются кривыми гиперболического типа (рис. 2.3). Начало координат - особая
точка, через которую в данном случае проходят только две интегральные
кривые - координатные оси (соответствующие значению С= 0).
Направление движения изображающей точки по каждой кривой уста-
устанавливается непосредственно по уравнениям B.7). На рис. 2.3 для ^t>0,
Х2 < 0 эти направления обозначены стрелками.
Такую особую точку называют седлом, а интегральные кривые, про-
проходящие через нее, - сепаратрисами седла.
Очевидно, что седловая особая точка определяет неустойчивое поло-
положение равновесия.
Как и в предыдущем случае, при переходе на плоскость исходных пе-
переменных х, у качественный характер поведения фазовых траекторий не
изменится (рис. 2.4). Легко показать (см.[3, гл. 5, §2]), что угловые ко-
коэффициенты кх и к2 сепаратрис седла определяются как корни уравнения
(a-d)k-c=0.
Рис. 2.3
Рис. 2.4
Рис. 2.5
54 Часть 1
Пример. Покажем, что верхнее (неустойчивое) положение равновесия обычного маятника
характеризуется седловой особой точкой. В самом деле, в пренебрежении трением имеем
/л/2ф = mgl sin ф
(обозначения см. на рис. 2.5). Линеаризованное уравнение имеет вид
ф-уФ = 0,
а корни характеристического уравнения действительны и разных знаков: Х[2 =±-Jg/l.
3. Корни Я., н Х2 комплексно-сопряженные. В данном случае Я., = А + /со,
X2 = h- /со. По-прежнему можно перейти к уравнениям B.7) с помощью
линейного преобразования B.6), но теперь 4 и ц будут комплексно-соц-
ряженными: ? = и + iv, r\ = и - iv. Эти формулы представляют дополни-
дополнительное линейное преобразование от действительных переменных X, у к
действительным переменным и и V. Из первого уравнения системы B.7)
получим й + iv = (h + /co)(w + iv), откуда
m = Aw-cov; v = (au + hv. B.11)
Удобно перейти к полярным координатам р и 0: M = pcos0, v=psin9.
После элементарных преобразований уравнения B.11) принимают вид
р = Ар; ё = со. B.12)
После деления первого уравнения на второе имеем dp/dQ = (A/co)p, откуда
р = Сехр(А9/со). B.13)
Таким образом, в данном случае интегральными кривыми будут логариф-
логарифмические спирали B.13) (рис. 2.6). Качественно такой же вид имеют ин-
интегральные кривые и на плоскости х,у. Такая осо-
особая точка называется фокусом. Отметим, что че-
через нее не проходит ни одна интегральная кривая.
Из уравнения р = Ар видно, что при Re А,, 2 =
= А < 0 изображающая точка неограниченно при-
приближается (по соответствующей спирали) к нача-
началу координат. В данном случае начало координат
- асимптотически устойчивое положение равно-
весия, а особая точка называется устойчивым фо-
фокусом. При Re A.J 2 = А > 0 имеем неустойчивое
положение равновесия и соответственно особая точка называется неус-
неустойчивым фокусом.
Простым физическим примером состояния равновесия типа устой-
устойчивого фокуса служит положение равновесия груза на пружине в среде
с малым вязким трением.
Глава 2 55
Пусть теперь Re А,, 2 = h = 0. Из B.13) получаем
р2 = «2 + V2 = const,
т.е. фазовыми траекториями на плоскости U, V будут окружности с центром
в начале координат, которым на плоскости X, у соответствуют эллипсы.
Здесь мы имеем совокупность замкнутых непере-
непересекающихся кривых, окружающих состояние
равновесия (рис. 2.7). Такая особая точка на-
называется центр. Состояние равновесия, харак-
характеризуемое этой особой точкой, устойчиво по
Ляпунову, но асимптотическая устойчивость не
имеет места.
Замкнутая фазовая траектория - геометри-
геометрический образ периодического движения: изоб-
изображающая точка, совершив полный обход по Рис. 2.7
замкнутой кривой, возвращается в ту же самую
точку фазового пространства, т.е. состояние системы через конечное вре-
время, равное периоду колебаний, повторяется.
Физическими примерами систем, в которых состояние равновесия
характеризуется особой точкой типа центр, могут служить:
а) электрический колебательный контур в пренебрежении сопротив-
сопротивлением, описываемый уравнением q + q/LC = 0;
б) груз на пружине в пренебрежении трением в случаях малых верти-
вертикальных колебаний (тх + кх = 0).
Из теоремы 1.11 Ляпунова следует, что в данном случае, когда корни
характеристического уравнения чисто мнимые, положение равновесия в
исходной системе B.1) может быть или не быть центром - в зависимости
от нелинейных правых частей Р и Q. Справедливы следующие теоремы
[4, 10].
Теорема 2.1 (теорема Ляпунова). Пустьх=у=0 — положение
равновесия системы B.1), и пусть корни характеристического уравнения,
составленного для него, чисто мнимые.
Тогда необходимое и достаточное условие того, что точка х=у=0 есть
центр, заключается в существовании аналитического интеграла системы
B.1) в окрестности этой точки.
Теорема 2. 2. Если точка х = у = 0 не является центром (при чисто
мнимых корнях характеристического уравнения), то она имеет характер
фокуса: все траектории в достаточно малой окрестности точки Х—у-0 —
спирали (см. Приложение 1).
Теорема 2.2 существенным образом использует аналитичность правых
частей системы B.1). Если же Р и Q - неаналитические функции, то
возможны случаи, когда в любой сколь угодно малой окрестности точки
х=у = 0 есть и замкнутые траектории, и спирали (см. Приложение 2).
Приведем два примера, в каждом из которых характеристическое урав-
уравнение линеаризованной системы имеет чисто мнимые корни (убедитесь
56 Часть 1
в этом самостоятельно), но в первом примере точка Х=у = 0 оказывается
не центром, а точкой типа устойчивого фокуса; во втором примере поло-
положение равновесия х=у-0- центр.
Пример 1.
•Л 7S Г BИ)
у = х - у(х2 + у2).
Перейдем в системе B.14) к полярным координатам:
откуда р = l/V2/ + С . Видно, что р -> 0 при / -> оо, т.е. все траектории стремятся к
положению равновесия - началу координат. Здесь особая точка X = у = 0 типа устойчивого
фокуса.
Пример 2.
х = -A + х)у; у = ах; а > 0. B.15)
Покажем, что в области 1 + X > 0 система B.15) имеет аналитический интеграл и, следова-
следовательно, точка X = у = 0 - центр. Умножим первое уравнение на ах/A + х), а второе - на у
и сложим эти уравнения. Получим
ахх
1 + х
откуда
у1
а\х - 1пA + х) 1 + ?— = const, B.16)
где первое слагаемое - положительно определенная функция X, а все равенство B.16) - пер-
первый интеграл системы B.15) (для 1 + х > 0 и любых у). В окрестности точки X = у = 0
кривые B.16) замкнутые, т.е. точка X = у = 0 - центр.
Теперь подведем итоги.
В зависимости от корней к[ и Х2 характеристического уравнения B.5)
линеаризованной системы B.4) исходная системы B.1) может иметь (при
ad- bc^O) шесть различных типов положения равновесия.
1. Устойчивый узел. Х^ и Хг - действительные отрицательные величи-
величины. При задании ненулевых начальных условий в линеаризованной системе
имеет место апериодически затухающий процесс. Состояние равновесия
асимптотически устойчиво.
2. Неустойчивый узел. А,, и Х2 - действительные положительные вели-
величины. При отклонении от положения равновесия в линеаризованной си-
Глава 2
57
стеме имеет место апериодически нарастающий переходный процесс. Со-
Состояние равновесия неустойчиво.
3. Седло. Хх и Х2 - действительные величины разных знаков. Пере-
Переходный процесс здесь также характеризуется апериодическим уходом от
неустойчивого состояния равновесия.
4. Устойчивый фокус. А., и Х2 - комплексные числа и Re X, 2< 0. Со-
Состояние равновесия асимптотически устойчиво. Переходный процесс в
линеаризованной системе носит характер затухающих колебаний.
5. Неустойчивый фокус. Х1 и Х2~ комплексные числа и Re X., 2 > 0.
Состояние равновесия неустойчиво. При малых отклонениях от положе-
положения равновесия в системе совершаются нарастающие колебания.
6. Центр. Х{ и Х2 - мнимые. Состояние равновесия устойчиво по
Ляпунову. При задании малых начальных отклонений в системе соверша-
совершаются периодические колебания, амплитуда которых определяется началь-
начальными условиями'1.
Первые пять типов состояний равновесия являются грубыми. Это зна-
значит, что их характер не меняется при достаточно малых изменениях пра-
правых частей системы B.1) и их первых производных (т.е. коэффициентов
а, Ь, с и d). Шестой тип (как и состояния равновесия при ad- bc = 0,
которые здесь не рассматривались) является негрубым: при сколь угодно
малом изменении правых частей системы B.1) или их первых производ-
производных происходит качественное изменение типа состояния равновесия (стро-
(строгие определения грубых и негрубых состояний равновесия см. в моно-
монографиях [5, 9]).
Представим наглядно связь между характером корней Xv X2 и типами
состояний равновесия. Пусть а = -(а + d), A = ad- be. Тогда характери-
характеристическое уравнение B.5) перепишется в виде
Х2 + аХ + А = 0 B.17)
Разным значениям а и А отвечают разные корни Х{ и Х2 и, следователь-
следовательно, разные типы состояний равновесия. Несложный анализ уравнения
B.17) приводит к результатам, представленным на рис. 2.8. Видно, что:
о-' = -4Д
Устойчивые фокусы
Цсшры
о—о ¦
Неустойчивые фокусы
Рис. 2.8
"> Это относится к линеаризованной системе. В исходной нелинейной системе B.1)
в зависимости от вида правых частей положение равновесия может быть либо центром, либо
точкой типа фокуса.
58 Часть 1
а) при любом А < 0 имеем седловую особую точку;
б) при а = 0 и любом Л > 0 получаем особую точку типа центр;
в) при а > 0 и Д > 0 состояние равновесия асимптотически устойчиво
и является либо устойчивым узлом (если а2 -4Д >0), либо устойчивым
фокусом (если а2 - 4Д < 0);
г) при с < 0 и Д > 0 состояние равновесия неустойчиво (неустойчи-
(неустойчивый узел, если а2 - 4Д > 0, и неустойчивый фокус, если а2 - 4Д < 0).
2.2. Замкнутые фазовые траектории
Наряду с положениями равновесия замкнутые фазовые траектории играют
исключительно важную роль в теории колебаний, поскольку они ото-
отображают периодические движения реальных систем.
Замкнутые фазовые траектории бывают изолированными и неизоли-
неизолированными.
Определение 2.1. Замкнутая фазовая траектория называется
изолированной, если существует такая достаточно малая (кольцеобразная)
ее окрестность, внутри которой нет других зам-
^._ ^ кнутых фазовых траекторий. (На рис. 2.9 гра-
граница этой окрестности обозначена штриховыми
линиями.)
Определение 2.2. Замкнутая фазовая
траектория называется неизолированной, если в
сколь угодно малой (кольцеобразной) ее окре-
окрестности находятся другие замкнутые фазовые
"*¦ — —•"" траектории.
Определение 2.3. Замкнутая изолиро-
Рис. 2.9 ванная фазовая траектория называется предель-
предельным циклом.
Предельные циклы бывают устойчивыми и неустойчивыми.
Определение 2.4. Предельный цикл называется орбитно-устойчи-
вым, если существует такая его окрестность, что все фазовые траектории,
начинающиеся в этой окрестности, неограниченно приближаются (при
t —> +<х>) к предельному циклу.
Определение 2. 5. Предельный цикл называется неустойчивым,
если в любой сколь угодно малой его окрестности начинается хотя бы одна
фазовая траектория, не приближающаяся к нему при / —> -к».
Орбитно-устойчивый предельный цикл изображен на рис. 2.10. На
рис. 2.11, 2.12 приведены неустойчивые предельные циклы, а на рис.2.13
изображен фазовый портрет системы с двумя предельными циклами - ус-
устойчивым и неустойчивым.
Рис.2.10 показывает, что каковы бы ни были начальные условия, изоб-
изображающая точка по соответствующей фазовой траектории неограниченно
приближается к предельному циклу (траектория "наматывается" на устой-
устойчивый предельный цикл). Это значит, что с течением времени в такой
системе устанавливаются периодические колебания, амплитуда которых
Глава 2
59
не зависит от начальных условий, а определяется размерами предельного
цикла. Последние, в свою очередь, полностью определяются параметра-
параметрами системы. В системе с фазовым портретом, данным на рис.2.13, также
устанавливаются периодические колебания, отображаемые устойчивым
предельным циклом. Установление их происходит при любых начальных
данных, соответствующих точкам вне неустойчивого предельного цикла.
Как уже говорилось во введении, периодические колебания с амплиту-
амплитудой, не зависящей от начальных условий (по крайней мере, для некото-
некоторой достаточно широкой области их задания), суть автоколебания.
Рис. 2.10
Рис. 2.11
Рис. 2.12
Рис. 2.13
Таким образом, устойчивые предельные циклы — геометрические образы
автоколебаний. Амплитуда автоколебаний полностью определяется вну-
внутренними свойствами системы, ее параметрами. Примеры автоколе-
автоколебательных процессов: работа часового механизма, звучание духовых и
струнных музыкальных инструментов, периодические колебания в лам-
ламповом генераторе и т.д.
Термин автоколебания ввел в научную литературу А.А. Андронов. Он
же был первым, кто установил связь устойчивых предельных циклов'* с
автоколебаниями физических систем 11,3]. Ниже будут изучаться автоколе-
автоколебательные системы различной природы, а сейчас ограничимся только од-
одним абстрактным примером системы с устойчивым предельным циклом.
Пример. Система
х = -у + хA -х2 - у2);
у = х + уA - х2 - у2)
B.18)
*> Как абстрактные математические образы они уже содержались в работах А. Пуанкаре.
60
Часть 1
имеет периодическое решение
= cos(/-O; У = sin (/-/„),
B.19)
где /„ - произвольная постоянная. Решение B.19) представляет собой параметрические урав-
уравнения предельного цикла X2 + у* = 1 системы B.18). Покажем, что этот цикл единственный
и устойчивый.
Возьмем положительно определенную функцию
v{x,y) = X2 + у2 и вычислим ее производную
Получим
'B.18)
= 2хх + 2уу = 2(х2 + у2)A - х2 - у2).
Рис 214
ВИДНО, ЧТО VB.|8) <0 ПРИ X2 + У2 > 1и VB.l8) > 0
при X2 + у2 < 1. Это значит, что все окружности X2 +
+ у2 = С2 > 1 пересекаются фазовыми траекториями
снаружи внутрь, а все окружности X2 + у2 + С2 < 1
пересекаются изнутри наружу, т.е. все фазовые траек-
траектории системы B.18) неограниченно приближаются к
предельному циклу X2 + у2 = 1 (рис. 2.14).
Неустойчивые предельные циклы не имеют непосредственного физи-
физического содержания, так как соответствующие им неустойчивые колеба-
колебания на практике не существуют. Однако на фазовой плоскости системы
B.1) они могут быть. Неустойчивые предельные циклы, как и сепаратрисы
седел, играют роль разделяющих кривых, по разным сторонам которых
фазовые траектории имеют различное поведение.
Неизолированные замкнутые фазовые траектории отображают перио-
периодические колебания, амплитуда которых определяется начальными усло-
условиями (и только ими). Таковы колебания в консервативных системах,
например колебания маятника в пренебрежении всеми видами трения (см.
также §2.11).
Замечание 1. К определению устойчивости предельного цикла мож-
можно подойти по-иному, основываясь на классических определениях Ляпу-
Ляпунова. Именно, пусть динамическая система B.1) имеет предельный цикл.
Ему соответствует периодическое решение x=<p(t),y=\\i(t), (ф и 1|/- пе-
периодические функции времени f). Оно называется устойчивым по Ляпу-
Ляпунову, если для любого числа е > 0, как бы мало оно ни было, можно ука-
указать другое число б > 0, такое, что для любого другого решения x(t), y{t)
системы B.1), удовлетворяющего в начальный момент (/0^0) условиям
при любых t>tu выполняются неравенства
Если к тому же |х(/) - ф(/)| —> 0, \y(t) - \|/(/)| ~~* 0 ПРИ t—> а>, то решение
ф@> ЧКО называется асимптотически устойчивым.
Глава! 61
Данное определение и определение орбитной устойчивости не тожде-
тождественны: определение Ляпунова более жесткое, ибо оно включает в себя
требование орбитной устойчивости и, кроме того, требует близости изоб-
изображающих точек на траектории и на предельном цикле в каждый момент
времени. В дальнейшем будем пользоваться понятием орбитной устой-
устойчивости.
Замечание 2. Устойчивость предельного цикла, соответствующего
периодическому решению х = ф(/), y = y(t) с периодом Т, определяется
знаком величины
Именно, предельный цикл устойчив при h < О и неустойчив при h > О
[3]. При h = О вопрос об устойчивости остается открытым.
2.3. Индексы особых точек и замкнутых фазовых траекторий -
индексы Пуанкаре
Индексы, о которых пойдет речь ниже, позволяют сформулировать неко-
некоторые общие законы совместного существования положений равновесия
различных типов и замкнутых фазовых траекторий.
Рассмотрим фазовую плоскость динамической системы
х = Р(х,у); y = Q(x,y),
где Ри Q - аналитические функции во всей фазовой плоскости.
Возьмем на фазовой плоскости какую-нибудь простую замкнутую кри-
кривую N (рис. 2.15), не проходящую через состояния равновесия системы
B.1). Возьмем на этой кривой произвольную точку S. Через эту точку
проведем вектор, совпадающий с направлением
касательной к проходящей через эту точку фазо-
вой траектории. Будем перемещать точку .5" вдоль
кривой Nb направлении против движения часо-
часовой стрелки. Вектор касательной к фазовой тра-
траектории будет непрерывно поворачиваться. Когда д
точка 5* сделает один полный обход контура N и
вновь займет исходное положение, этот вектор, Рис. 2.15
естественно, займет прежнее положение. Пол-
Полное приращение угла поворота вектора при таком обходе составит 2nj, где
j — целое число. Направление вращения вектора считается положитель-
положительным, если он поворачивается против часовой стрелки - в направлении
обхода контура N. Если же вектор поворачивается по часовой стрелке, то
угол поворота вектора принимается отрицательным. Таким образом, число
j может быть как положительным, так и отрицательным. Если вектор не
сделал ни одного полного оборота, тс>У= 0.
62 Часть 1
Существенно, что число У не зависит от формы замкнутой кривой N.
В самом деле, пусть кривая TV непрерывно деформируется, но по-преж-
по-прежнему остается простой замкнутой кривой и не проходит в процессе деформа-
деформации через особые точки, т.е. число особых точек внутри кривой достает-
достается неизменным. При такой непрерывной деформации кривой TV угол, на
который поворачивается вектор при одном полном обходе контура, тоже
может изменяться только непрерывно. Но этот угол может принимать толь-
только дискретный ряд значений. Следовательно, он вообще не изменяется.
Таким образом, все другие замкнутые кривые, если они содержат внутри
себя те же особые точки, что и кривая N, дадут то же самое число/
Целое число у называют индексом замкнутой кривой по отношению
к векторному полю.
Напомним, что в данном случае векторное поле определяется уравнени-
уравнениями B.1); в точке Х,у направление вектора поля есть arctg[ Q(x,y)/P(x,y)],
а индекс у замкнутой кривой N выражается криволинейным интегралом:
<120)
Это — криволинейный интеграл от полного дифференциала. Известно,
что если внутри области, охватываемой кривой N, вдоль которой ведется
интегрирование, подынтегральные функции и их производные существу-
существуют и непрерывны, то этот интеграл равен нулю. В данном случае рас-
рассматривается система B.1) с аналитическими правыми частями Р и Q.
Непрерывность подынтегральных функций в B.20) и их производных мо-
может нарушаться только в особых точках, где одновременно Р- 0 и (?= 0.
Пусть внутри замкнутой кривой нет состояний равновесия системы B.1).
Тогда очевидно, что у = 0.
Итак, индекс замкнутой кривой, внутри которой нет особых точек,
равен нулю. Геометрически этот факт очевиден
(рис. 2.16). При однократном обходе замкнутого
контура вектор вернется в исходное положение,
не сделав ни одного оборота.
Определение 2.6. Назовем индексом особой
точки индекс простой замкнутой кривой, ох-
~N ватывающей эту и только эту особую точку.
Р„с 2.16 Вычисление индексов простых особых точек,
для которых A=.ad- Ьсф 0, приводит к следую-
следующим результатам (см. Приложение 3).
1. Для седловон особой точки у =-1. Геометрически этот факт виден
из рис.2.17: при обходе контура N против часовой стрелки вектор совер-
совершает один оборот по часовой стрелке.
2. Для узла, фокуса и центра у = +1. Простейшей геометрической
иллюстрацией (для узловой особой точки) может служить рис. 2.18.
Глава 2
63
Характерно, что индекс один и тот же (j=+l) и для устойчивых, и
для неустойчивых узлов и фокусов. Другими словами, индекс особой
¦N
= -1
У=+1
Рис. 2.17
Рис. 2.18
точки не учитьшает направления движения по фазовым траекториям. Ин-
Индексы сложных особых точек (при А = 0) могут быть отличными от ±1.
Например, для сложной особой точки седло-узел индексу = 0 (рис. 2.19).
Рассмотрим теперь замкнутую фазовую траекторию, которая, как уже
говорилось, служит геометрическим образом периодического движения.
Индекс такой замкнутой кривой, являющейся фазовой траекторией, ра-
равен +1 (рис. 2.20): направление вектора в каждой точке совпадает с на-
направлением касательной к фазовой траектории. При однократном обходе
вдоль траектории вектор поворачивается на угол 2л в положительном на-
направлении.
Рис. 2.19
Рис. 2.20
Рассмотрим, наконец, простую замкнутую кривую, содержащую внут-
внутри себя конечное число особых точек, например три (рис. 2.21). Покажем,
что индекс такой кривой равен алгебраической
сумме индексов этих особых точек. В самом
деле, область внутри кривой N можно разделить
на соответствующее число подобластей, каждая
из которых содержит только одну особую точку.
Сумма индексов всех особых точек получается
сложением изменений угла вектора при обходе
против часовой стрелки замкнутых границ всех
подобластей. Но изменения угла при движении Рис 2.21
64 Часть 1
по внутренним границам между подобластями будут входить в сумму дважды
и с противоположными знаками, так как эти границы проходятся дважды
и в противоположных направлениях (см. рис. 2.21). Суммарное изменение
угла равно только изменению угла при обходе контура N. Это значит, что
сумма индексов особых точек равна индексу замкнутой кривой N, окружаю-
окружающей эти особые точки.
Теперь подведем итоги:
1) индексы узла, фокуса и центра равны +1;
2) индекс седловой особой точки равен -1;
3) индекс замкнутой кривой, не содержащей внутри себя особых то-
точек, равен нулю;
4) индекс замкнутой кривой, являющейся замкнутой фазовой траек-
траекторией системы B.1), равен +1;
5) индекс замкнутой кривой, охватывающей несколько особых то-
точек, равен сумме индексов этих точек.
Сформулируем следствия, которые вытекают из теории индексов и
дают законы совместного существования замкнутых фазовых траекторий
и состояний равновесия различных типов.
Следствие 1. Внутри замкнутой фазовой траектории находится по
крайней мере одна особая точка, ибо индекс такой траектории равен +1, а
индекс замкнутой кривой, внутри которой нет особых точек, равен нулю.
Следствие 2. Если внутри замкнутой фазовой траектории находит-
находится только одна особая точка, то эта точка - не седло и не какая-либо
другая точка с индексом, отличным о/и +1.
Следствие 3. Если внутри замкнутой фазовой траектории находит-
находится несколько простых особых точек, то их число всегда нечетное, причем
число седел на единицу меньше числа остальных особых точек.
В заключение еще раз подчеркнем, что изложенная теория индексов
справедлива только для системы B.1) с аналитическими правыми частя-
частями. Напомним также, что выше были изучены типы особых точек и их
индексы при условии А* 0, где А - свободный член характеристического
уравнения линеаризованной системы. Положения равновесия, для кото-
которых А = 0, кратко рассмотрены в Приложении 4.
2.4. Критерии отсутствия замкнутых фазовых траекторий
Нелинейные системы - слишком трудный объект для исследования, и
теория предлагает лишь некоторые достаточные условия отсутствия замк-
замкнутых фазовых траекторий. Эти условия тем не менее оказываются полез-
полезными во многих практических задачах.
По-прежнему будем рассматривать нелинейную автономную систему
B.1)
х = Р(х,у); у = Q(x,y),
где Р и Q — аналитические функции на всей фазовой плоскости Х,у.
Глава 2 65
Критерий Дюлака для односвязной области. Пусть
функция F{x,y) - непрерывная вместе с первыми частными производными.
Пусть в некоторой односвязной области G на фазовой плоскости системы
B.1) выражение
(fP) + (fQ) B.21)
ох ду
не меняет знака и не равно нулю тождественно.
Тогда в этой области не существует замкнутых контуров, целиком со-
составленных из фазовых траекторий системы B.1) (и, следовательно, не
существует замкнутых траекторий).
Доказательство. Воспользуемся формулой Грина
dxdy = | F(Pdy - Qdx). B.22)
Допустим противное: замкнутый контур, целиком составленный из фазо-
фазовых траекторий, существует. В формуле B.22) справа будем брать интег-
интеграл именно по этому контуру. В силу уравнений B.1) этот интеграл равен
нулю (ибо Pdy- Qdx= 0). Следовательно, двойной интеграл слева также
равен нулю. Но в таком случае подынтегральное выражение, т.е. сумма
B.21), должно непременно менять знак где-нибудь внутри контура, что
противоречит формулировке критерия.
Частный случай критерия Дюлака, когда F{x,y) = 1, называется кри-
критерием Бендиксона.
Пример 1. По критерию Бендиксона докажем отсутствие замкнутых фазовых траекторий
в фазовом портрете линейного осциллятора
Х + 2пх +а>1х = 0, h >0 -const.
Решение. Перепишем исходное уравнение в виде системы
х = у = Р(х, у); у = -Ihy - <л\х = Q(x,y)
и по критерию Бендиксона получим, что D = -2А < 0 на всей фазовой плоскости.
Убедитесь в отсутствии замкнутых фазовых траекторий и у нелинейного осциллятора
X + 2h(x)x + f(x) = 0, если А(х) одного знака при всех X
Пример 2. Дана динамическая система
B.23)
66
Часть 1
в которой а,, а2, а и Р - положительные параметры. Покажем, что в области х > О, у > О
отсутствуют замкнутые фазовые траектории. Воспользуемся критерием Дюлака и выберем
*•/., ,Л _! + «*(* + ?)
Непосредственное дифференцирование дает
дх
ду
Отсюда ясно, что в данном случае сумма B.21) отрицательна при всех X > О, у > 0. Следо-
Следовательно, в области положительных значений х и у замкнутые фазовые траектории системы
B.23) не существуют.
Критерий Дюлака для кольцеобразной области. В двух-
двухсвязной (кольцеобразной) области G система B.1) не может иметь более
одной замкнутой фазовой траектории или более одного замкнутого конту-
контура, составленного из траекторий, если в этой области выражение B.21),
где F= F(x,y) - функция, непрерывная вместе с первыми производными G,
не меняет знака и не равна нулю тождественно.
В формулировке критерия речь идет о замкнутых траекториях, охва-
охватывающих внутреннюю границу кольцевой об-
области G, из критерия Дюлака для односвязной
области ясно, что в области G не может быть
замкнутых фазовых траекторий, которые непре-
непрерывной деформацией можно стянуть в точку без
выхода из области.
Доказательство. Допустим, что систе-
система B.1) имеет в кольцевой области G две зам-
замкнутые фазовые траектории (или два замкнутых
контура, составленных из траекторий), которые
охватывают внутреннюю границу С2 области G, (На рис. 2.22 эти кривые
обозначены цифрами 1 и 2.) Траектории / и 2 образуют кольцевую об-
область а, для которой по формуле Грина имеем
Я ^ (FP) + -^ (Щ dxdy = f F(Pdy - Qdx).
Справа интегрирование ведется по кривым 1 и 2. Поскольку эти кривые -
фазовые траектории системы B.1) и, следовательно, на них Pdy- Qdx=
= 0, криволинейный интеграл равен нулю. Поэтому
Рис. 2.22
что противоречит требованию знакопостоянства подынтегрального выра-
выражения в области а, которая является частью области G. Следовательно,
Глава 2 57
в области G не может быть более одной замкнутой фазовой траектории
системы B.1).
Можно доказать [24], что при выполнении условий критерия Дюлака
для /Я-связной области G в ней не может существовать более Ш - 1 кон-
контуров, целиком составленных из фазовых
траекторий системы B.1). Например, в че-
тырехсвязной области, представленной на
рис. 2.23, таких контуров может быть не
более трех.
В статье [24] даны также некоторые
признаки отсутствия предельных циклов в
многомерных системах. Эти признаки
сформулированы в Приложении 5. О кри-
критерии Дюлака для систем с цилиндричес- Р 2-23
кой фазовой поверхностью см. в Приложении 6.
Сформулируем теперь несколько простых критериев отсутствия замк-
замкнутых фазовых траекторий, которые являются прямым следствием теории
индексов Пуанкаре.
1. Если в системе B.1) не существует особых точек, то в ней не может
быть и замкнутых фазовых траекторий.
2. Если в системе B.1) существует только одна особая точка с индек-
индексом, отличным от+\ (например, седло), то в этой системе не может быть
замкнутых фазовых траекторий.
3. Если в системе B.1) имеются только простые особые точки и если
через все точки с индексом +1 проходят интегральные кривые, уходящие в
бесконечность, то такая система не допускает замкнутых фазовых траек-
траекторий.
4. Если система B.1) обладает несколькими особыми точками, сумма
индексов любой комбинации которых не равна +1, то в такой системе нет
замкнутых фазовых траекторий.
Напомним, что все эти утверждения относятся к динамической систе-
системе B.1) с аналитическими правыми частями.
2.5. Об отсутствии фазовых траекторий, уходящих в бесконечность
Рассмотрим систему
X = Х(х), B.24)
где Я-мерная вектор-функция Х(х) подчиняется обычным требованиям,
обеспечивающим существование и единственность решений системы B.24).
Пусть в фазовом пространстве системы B.24) имеется такая сфера
|x|j= R, где R> 0 - достаточно большое число, что все фазовые траекто-
*' Допустив противное, мы получили бы пересечение замкнутой траектории с траекто-
траекторией, уходящей в бесконечность, что невозможно.
68 Часть 1
рии системы B.24) пересекают эту сферу в направлении снаружи внутрь.
Очевидно, в этом случае нет решений, уходящих в бесконечность при
/—> оо. Если же имеется хотя бы одна траектория, пересекающая сферу
|х|2 = R изнутри наружу при любом сколь угодно большом значении R, то
имеется решение, неограниченно возрастающее при t —> оо. Дадим следу-
следующее определение.
Определение 2. 7 B8]. Система B.24) предельно ограничена, если
найдутся не зависящее от выбора решений число R> О и для каждого ре-
решения x(t) число Т> О, такие, что неравенство [х(/)|2 < R справедливо
при всех t>T.
Таким образом, предельная ограниченность означает, что все реше-
решения системы B.24) навсегда "погружаются" в сферу конечного радиуса,
причем момент погружения может зависеть, а размеры этой сферы не
зависят от выбора конкретного решения x(t).
По определению в предельно ограниченной системе невозможны нео-
неограниченно нарастающие движения, поэтому критерии предельной огра-
ограниченности являются одновременно критериями отсутствия траекторий,
уходящих в бесконечность.
Сформулируем теорему, решающую вопрос о предельной ограничен-
ограниченности на основе второго метода Ляпунова.
Теорема 2. 3. Пусть в фазовом пространстве системы B.24) имеет-
имеется некоторое замкнутое ограниченное множество М, и пусть Л/д - дополне-
дополнение этого множества (рис. 2.24). Пусть, далее, v(x) - положительно
определенная функция во всем фазовом простран-
^ s^S y/\s стве, причем V —> оо при |х| —> оо, а производная
' ^B.24) строго отрицательна для всех X е М :
vB 24) < -е < О, е > 0 - const.
Тогда система B.24) предельно ограничена.
Справедливость этой теоремы довольно-таки
Рис. 2.24 ясна из геометрического смысла функций Ляпу-
Ляпунова. Именно, во всем фазовом пространстве вне
М фазовые траектории пронизывают замкнутые поверхности V = С в на-
направлении снаружи внутрь, приближаясь к границе множества М. Такое
приближение происходит с конечной скоростью, ибо vB 24) ^ -е, так что
для каждой траектории существует конечный момент времени t-T, ъ
который траектория входит внутрь множества М, где и остается при всех
t>T.
Строгое доказательство теоремы 2.3 вместе с некоторыми ее обобще-
обобщениями можно найти в монографии [28]. В ней, в частности, доказано,
что требование знакоопределенности функции v(x) в теореме 2.3 можно
заменить менее жестким требованием v(x) e С1.
Замечание 1. В определении предельной ограниченности вместо
сферы можно подразумевать любое замкнутое ограниченное множество,
Глава 2
69
Рис. 2.25
частными конфигурациями которого могут быть сфера, л-мерный куб,
эллипсоид и т.д. По существу, это и было сделано в формулировке теоре-
теоремы 2.3.
Замечание 2. У любой предельно ограниченной системы отсутству-
отсутствуют фазовые траектории, уходящие в бесконечность, но не любая систе-
система, у которой нет таких траекторий, является
предельно ограниченной. Примером может слу-
служить динамическая система, фазовый портрет
которой представлен на рис. 2.25. Согласно оп-
определению эта система не является предельно
ограниченной, хотя ни одна ее фазовая траек-
траектория не уходит в бесконечность.
Замечание 3. В математической ли-
литературе часто называют диссипативными дина-
динамические системы, которые подчиняются опре-
определению 2.7 предельной ограниченности. Наше определение диссипа-
тивности несколько иное; оно требует, чтобы любое движение системы
стремилось к одному из ее устойчивых положений равновесия.
2.6. Поведение траекторий на бесконечности
В §2.5 был сформулирован достаточный признак отсутствия уходящих в
бесконечность траекторий, основанный на идеях второго метода Ляпуно-
Ляпунова и пригодный для систем л-го порядка весьма общего вида. Здесь мы
изложим схему исследования фазовых траекторий "на бесконечности" толь-
только для системы B.1) при условии, что Р и Q - многочлены. Однако, в
отличие от изложенного в §2.5 критерия, эта схема дает исчерпывающую
информацию о поведении фазовых траекторий в бесконечно удаленных
точках фазовой плоскости.
Рассмотрим сферу единичного радиуса, касающуюся плоскости X, у в
начале координат (рис. 2.26) - так называемую сферу Пуанкаре. Каждой
Рис. 2.26
точке М плоскости х,у поставим в соответствие две точки сферы, кото-
которые лежат на прямой, проходящей через центр сферы и точку М. На
окружность большого круга, параллельного плоскости X, у, отображаются
70 Часть 1
бесконечно удаленные точки плоскости. Эту окружность назовем эквато-
экватором. Интегральные кривые плоскости перейдут в соответствующие кри-
кривые сферы, причем седла, узлы и фокусы сохранят тот же вид. Однако на
экваторе сферы появятся дополнительные особые точки. (Часто это будут
сложные особые точки. Краткие сведения о них см. в Приложении 4.)
Геометрическое рассуждение, подробно изложенное в [4, §13], пока-
показывает, что преобразование
1 U
х = ~; У = ~ B.25)
позволяет изучить особые точки, лежащие на экваторе, за исключением
тех точек, которые соответствуют "концам" оси у. Для исследования этих
концов нужно положить
V 1
х = -~> У = ~- B.26)
Преобразования B.25) и B.26) называют преобразованиями Пуанкаре.
Бесконечно удаленным точкам плоскости х,у отвечает значение Z - 0.
Применим преобразование B.25) к системе B.1) и получим
(\ B27)
По предположению правые части Р и Q системы B.1) - многочлены.
Если привести правые части системы B.27) к общему знаменателю, то
получим
где Р" и Q* - тоже многочлены. Эта система [как и система B.27)) не
определена при ?=0. Перейдем в ней к "новому времени" т по формуле
дх - Z'ndt и получим
~^P'(u,z); ^ = Q'(u,z). B.29)
Система B.29) определена уже и при Z= 0.
Если 2*0, то траектории систем B.28) и B.29) совпадают. При этом,
когда П четное, при переходе от B.28) к B.29) направление движения
Глава! 71
изображающих точек не меняется, а при П нечетном оно меняется на про-
противоположное для ?<0. Все особые точки на экваторе (за исключением
особых точек, соответствующих "концам" оси у) определяются из урав-
уравнений
Р\и,0) = 0; Q'(u,O) = 0.
Рассмотрим теперь окрестности точек экватора, отвечающих бесконечно
удаленным концам оси у (это точки D и D на рис. 2.26). Применим пре-
преобразование B.26) к системе B.1) и получим
После приведения правых частей к одному знаменателю эту систему пере-
перепишем в виде
. P"(v,z). . Q"(v,z)
-I» ' ~ ~ -« '
где Р и Q — многочлены. Наконец, после замены dx = z~mdt получим
^ = P"{v,z); |^ = е>,г). B.зо)
Анализ систем B.29) и B.30) в окрестности ?=0 позволяет определить
поведение траекторий в окрестности всех точек экватора. Обычно Q и
Q содержат Z множителем, т.е. ось Z (на плоскостях и, Z и v, z) состоит
из положений равновесия и из траекторий. Поэтому, как правило, эква-
экватор также состоит из положений равновесия и из траекторий.
Чтобы соответствие между точками плоскости X, у и точками сферы
Пуанкаре было однозначным, рассмотрим только одну (нижнюю) полу-
полусферу вместе с экватором. На экваторе диаметрально противоположные
точки рассматриваются как отождествленные. Спроектируем ортогональ-
ортогонально нижнюю полусферу на плоскость х,у. Получим отображение этой полу-
полусферы на круг К единичного радиуса с центром в точке S (см. рис. 2.26).
Экватор отобразится в граничную окружность Г круга К, а траектории на
сфере - в некоторые линии, называемые траекториями в круге К. Между
точками круга К и точками исходной плоскости X, у существует взаимно
однозначное соответствие.
72
Часть 1
Далее поступаем следующим образом (см. [4, §13]).
1. Находим все положения равновесия Д(и(.,0) системы B.29).
2. Для каждой точки Д(И(.,0) строим соответствующие ей две точки
В) и Д на окружности Г. Они лежат на пересечении Г с прямой у- их.
Ниже принимается, что абсцисса точки Д положительна, а Д отрица-
отрицательна.
3. На плоскости и, z строим полуокрестности а+ и ст точки Д. так,
как это показано на рис. 2.21,а.
4. Полуокрестность ст+ и расположенные в ней траектории отображаем
на полуокрестность а точки В, в круге К в соответствии с тем, как это ука-
зано на рис. 2.27, а полуокрестность а - на полуокрестность а точки Д .
у=и,х
а)
Рис. 2.27
5. Если п - нечетное число, то при отображении ст на 8 направле-
направления на траекториях меняем на противоположные.
6. Исследуем расположение траекторий системы B.30) в окрестности
точки D@,0). Полуокрестность а+ точки D (рис. 2.28,а) отображаем
Рис. 2.28
Глава 2
73
на полуокрестность а+ точки D в круге К в соответствии о тем, как это
указано на рис. 2.28,5, а полуокрестность а - на полуокрестность а точки
б'.
7. Если пг - нечетное число, то при отображении полуокрестности а
на а направления на траекториях меняем на противоположные.
Прамер [4]. Рассмотрим поведение на бесконечности траектории системы
х = хC -х -ау); у = у{-\ + х + у); а>\.
С помощью формул B.25) получим
и = [2и + (а + l)u7 - 4uz]/z; Z = 1 + аи - Ъг.
Далее, полагая (к = Vх dt, найдем, что
— = 2и + (а + 1)и2 - 4иг; — = Z + auz - Зг2.
а\ а\
На оси Z = 0, соответствующей экватору сферы Пуанкаре, эта система имеет два положе-
положения равновесия: С@,0) - неустойчивый узел и 2?(-2/(д + 1),0) - устойчивый узел
(рис. 2.29).
Рис. 2.29
Для исследования окрестностей точек D и D воспользуемся формулами B.26). Получим
систему
v = |4vz - 2v2 - (а + l)v]/z; Z = Z - v -1.
После замены dx = Z~'dt придем к уравнениям
dv 2
dx ~
Для этой системы точка D@fi) является устойчивым узлом
(рис. 2.30)
При обоих преобразованиях Пуанкаре мы имели dx =
= Z'ldt, т.е. в данной задаче т = п - 1 - нечетное число.
Поэтому в окрестностях точек В\ С и /)' в круге К направ-
направление движения изображающих точек следует сменить на
противоположное. В итоге получим расположение траекто-
траекторий вблизи окружности Г (вблизи экватора), изображенное
на рис. 2.31. Наличие устойчивых положении равновесия Рис. 2.30
74
Часть 1
В, D и С на Г говорит о том, что исходная система уравнений имеет фазовые траектории,
уходящие (с ростом /) в бесконечность.
У ~
2.7. Оценка местоположения предельных циклов
Выше отмечалось, что вопрос о существовании автоколебаний сводится
к вопросу о существовании устойчивого предельного цикла соответствую-
соответствующей системы уравнений. Размеры предельного цикла определяют ампли-
амплитуду автоколебаний, а время прохода изображающей точкой по циклу -
период автоколебаний. В связи с этим возникают вопросы о существо-
существовании, количестве, устойчивости и местоположении предельных циклов
на фазовой плоскости системы B.1). Сформулируем без доказательства
некоторые результаты качественной теории.
Определение 2.8. Назовем гладким циклом однократного пересече-
пересечения простую гладкую замкнутую кривую С со следующими свойствами:
1) на кривой С нет состояний равновесия системы B.1); 2) во всех точках
кривой С, кроме, может быть, конечного числа, траектории не имеют с
ней касания и либо все входят внутрь области, ограниченной кривой С,
либо все выходят из этой области.
Теорема 2. 4. Пусть С - цикл однократного пересечения, a G -
ограниченная им область {принадлежащая области определения системы B.1)).
Пусть выполняются следующие условия: 1) все траектории, пересекающие
С, при возрастании t входят в G, 2) в области G имеется единственное
положение равновесия типа неустойчивого узла или фокуса; 3) в области G
имеется лишь конечное число замкнутых траекторий системы B.1).
Тогда число расположенных в G устойчивых предельных циклов системы
B.1) на единицу больше числа неустойчивых и, следовательно, существует
по крайней мере один устойчивый предельный цикл.
Теорема 2. 5. Пусть G - двухсвязная (кольцеобразная) область,
ограниченная двумя циклами однократного пересечения С1 и С2, не содержа-
содержащая состояний равновесия и имеющая конечное число замкнутых траекто-
траекторий. Если все траектории, пересекающие Сх и С2, при возрастании t входят
в G (выходят из G), то число устойчивых предельных циклов внутри G на
единицу больше (меньше) числа неустойчивых предельных циклов. (Следова-
Глава 2 75
телъно, в области G существует по крайней мере один устойчивый {неус-
{неустойчивый) предельный цикл.)
Доказательство теорем 2.4 и 2.5 см. в работе [4]''. Регулярных приемов
отыскания границ области G не существует, однако во многих случаях
могут оказаться эффективными идеи второго метода Ляпунова. Именно,
основываясь на геометрическом смысле функций Ляпунова, а также на
теореме о предельной ограниченности, нередко удается построить коль-
кольцевую область G, о которой идет речь в теореме 2.5 (или же цикл С, о
котором говорится в теореме 2.4). Дополнительные разъяснения см. в
§2.8 и 2.13.
2.8. Топографическая система Пуанкаре. Кривые контактов
Пусть дана система B.1)
х = Р(х,у); y = Q(x,y),
и пусть х=у = 0 - положение равновесия этой системы.
Пусть v = v(x,y) - положительно определенная функция. Линии V =
= о 0 замкнуты, не пересекаются, окружают начало координат (см. гл.1).
Vi) = v'x(x,y)P(x,y)+v'y(x,y)Q(x,y). B.31)
Следуя Пуанкаре, семейство v= с замкнутых кривых назовем топографи-
топографической системой и отметим, что геометрическое место точек, в которых
vBЛ) = 0, является одновременно геометрическим местом точек, в кото-
которых кривые топографической системы касаются фазовых траекторий. Дей-
Действительно, наклон касательной к кривой топографической системы есть
- v'x/v'y, а наклон касательной к траектории равен Q(x,y)/P(x,y). Как
следует из B.31), при vBЛ) = 0 эти наклоны равны.
Геометрическое место точек, в которых кривые топографической сис-
системы касаются траекторий, называется кривой контактов. Уравнение этой
кривой
Vx(x,y)P(x,y) + v'y(x,y)Q(x,y) = 0. B.32)
Далее, предельный цикл (если он существует) пересекает кривую кон-
контактов, так как он непременно касается каких-то кривых топографичес-
топографической системы.
Отсюда следует, что если кривая контактов не имеет действительных
ветвей, то предельные циклы не существуют.
*> Достаточно доказать только теорему 2.5. Теорема 2.4 сводится к теореме 2.5, если прове-
провести окружность С малого радиуса с центром в положении равновесия и рассмотреть кольцеоб-
кольцеобразную область с внутренней границей С'и внешней границей С.
76
Часть 1
Кривая
контактов
Пусть кривая контактов не имеет вет-
ветвей, уходящих в бесконечность (рис. 2.32).
Тогда предельный цикл может лежать толь-
только между крайними кривыми топографи-
топографической системы, касающимися кривой
контактов. (На рис. 2.32 это внутренняя
кривая v= с, и внешняя кривая v= cr)
Можно утверждать, что существует по
крайней мере один предельный цикл (а в
общем случае - нечетное число), если меж-
между кривыми V = Cj и V = с2 нет состояний
равновесия и если производная vBЛ) имеет разные знаки на кривых v= C^
и v = с2.
В этом случае выполнены условия теоремы 2.5, a v=Cj и v= с2 -
циклы однократного пересечения, о которых говорится в этой теореме.
\
Рис. 2.32
Пример, х = у = Р(х,у);
B.33)
Система B.33) имеет единственное положение равновесия v = у = 0. Возьмем v = (х* +
+ у*)/2 и получим
VB,3,
Очевидно, что vB 33) = 0 в точках эллипса
+ у2 = 1
B.34)
и в точках оси абсцисс у = 0.
Рис. 2.33
При пересечении эллипса ^с.зз) изменяет знак; при
пересечении оси у = 0 знак VB 3J) не меняется. Во втором
случае говорят, что контакт ложный, и его не рассматрива-
рассматривают.
Ясно, что VB.jj) < 0 вне эллипса B.34) и ''(гзз) > 0
внутри эллипса B.34). Остальное ясно из рис. 2.33. На этом
рисунке /- эллипс Зхг+у2= 1; 2 - окружность v=c,:
Х2+у2= 1/3; 3-окружность V=C2: X2+y2=\. Существу-
Существует по крайней мере один устойчивый предельный цикл. Он
располагается внутри кольцевой области, ограниченной ок-
окружностями 2 и 3.
2.9. Понятие грубости динамической системы
Всякий аппарат, всякая физическая система или техническое устройство
обладают определенной нечувствительностью к малым изменениям их па-
параметров. Например, замена перегоревшей радиолампы в телевизоре прак-
практически не повлияет на его работу, хотя ясно, что двух тождественных
ламп не существует. Исходя из этого А.А. Андронов заключил, что и диф-
дифференциальные уравнения, претендующие на описание реальных систем,
Глава 2 77
должны обладать аналогичным свойством: общий качественный характер
решений этих уравнений должен быть нечувствителен к малым изменени-
изменениям самих уравнений. Так возникло новое для математики и теории коле-
колебаний понятие грубых динамических систем. Грубость динамической
системы можно рассматривать как устойчивость качественного поведения
ее фазовых траекторий по отношению к малым изменениям правых частей
уравнений B.1). Строгое определение грубости [применительно к систе-
системе B.1)] было дано А.А. Андроновым и Л.С. Понтрягиным и заключается
в следующем CJ.
Определение 2. 9. Динамическая система, описываемая уравне-
уравнениями B.1), называется грубой, если существует такое малое число 5 > О,
что все динамические системы, отображаемые уравнениями
х = Р(х,у) + р(х,у); у = Q(x,y) + q(x,y),
в которых аналитические функции р и q удовлетворяют неравенству
\рШ+\р'х\+\р;\+\д'х\+\я'у\<ь>
имеют качественно одинаковый характер поведения фазовых траекторий.
Установлены [3] необходимые и достаточные условия грубости систе-
системы B.1). Они заключаются в отсутствии: 1) положений равновесия, для
которых А = 0, и положений равновесия, для которых а = 0 при А > 0;
2)предельных циклов, для которых
3) сепаратрис, идущих из седла в седло.
Перенесение понятия грубости на многомерные системы встретило за-
затруднения. Выяснилось, что грубые системы могут быть весьма сложны-
сложными; в пространстве параметров многомерной динамической системы могут
существовать целые области негрубых систем. (Подробнее см. в книге
[11, гл. 3] и цитированной в ней литературе.)
2.10. О фазовом портрете динамической системы
Из сказанного выше ясно, что исследование поведения динамической
системы сводится к анализу структуры разбиения фазового пространства
на фазовые траектории, т.е. к анализу взаимного расположения фазовых
траекторий. Картина этого расположения и составляет фазовый портрет
исследуемой системы.
Построение фазового портрета для систем типа B.1) в значительной
мере опирается на методы и приемы, изложенные выше. Однако даже
*> Напомним, что <р = <р(/), у = V|/(/) - периодическое решение (с периодом 7), соот-
соответствующее предельному циклу.
78 Часть 1
для систем второго порядка [типа B.1)] такое построение представляет
сложную и до конца не решенную проблему. Тем не менее известно, что
решающую роль в построении фазового портрета играют так называемые
особые траектории: 1) особые точки; 2) предельные циклы; 3) сепаратри-
сепаратрисы седел [4,10]. Полная информация об этих трех типах траекторий дос-
достаточна для выявления основных качественных особенностей фазового
портрета системы B.1).
Качественному исследованию нелинейных систем с помощью постро-
построения и анализа фазовых портретов на фазовой плоскости посвящены §2.11-
2.14 и гл. 4, 5. Построение фазовых портретов для моделей динамики
различных физических систем можно найти также в монографиях [6, 10,
18, 37].
2.11. Простейшая консервативная система
Консервативными мы назвали такие динамические системы, в которых
сохраняется полная энергия. Это лишь разумная идеализация реальных
систем, в которых процесс рассеяния энергии происходит столь медленно,
что на ряд вопросов можно ответить, полагая неизменной сумму потен-
потенциальной и кинетической энергии. Простейшая нелинейная консерва-
консервативная система отображается уравнением
X = f{x). B.35)
К этому уравнению при соответствующих идеализациях сводятся разнооб-
разнообразные физические системы. Ограничимся двумя примерами.
Пример 1. Простой маятник без трения массой т и длиной / описывается уравнением
B.36)
о
т1гх + mglsinx = 0 или х = -ySinx,
гае Х- отклонение маятника от вертикали.
Промер 2. В колебательном контуре без сопротивления между обкладками конденсатора
помещен диэлектрик (например, сегнетова соль), диэлектрические свойства которого зави-
зависят от напряженности электрического поля. При этом емкость конденсатора - функция заря-
заряда q: С = С(д). По закону Кирхгофа
. B37)
Ясно, что уравнения B.36) и B.37) - частные случаи уравнения B.35) *'
Будем считать, что/С*) - аналитическая функция X при всех X. Поло-
Положим х = у и перейдем от уравнения B.35) к эквивалентной ему системе
*) Очевидна механическая интерпретация из непосредственно уравнения B.3S): оно опи-
описывает одномерные колебания груза единичной массы, подвешенного на пружине с нелиней-
нелинейной восстанавливающей силой Д)
Глава 2 79
X = У, у = Дх). B.38)
Рассмотрим поведение фазовых траекторий системы B.38). После исклю-
исключения времени получим уравнение
dy f(x)
-Г = ^А B.39)
dx у
Состояния равновесия системы B.38) [особые точки уравнения B.39)]
найдем из условий
/(х) = 0; у=0. B.40)
Пусть Х( - корни уравнения/(х) = 0. Тогда координатами состояния рав-
равновесия будут Х = х, у = 0, /= 1, 2, ... .
Если известна совокупность интегральных кривых на фазовой плоско-
плоскости системы, то нетрудно охватить всю картину возможных движений при
различных начальных условиях. В данном случае это сделать легко, так
как переменные в B.39) разделяются и из B.39) легко находится первый
интеграл:
у + К(х) = А, B.41)
где
X
V(x) = -J f(u)du. B.42)
о
По физическому смыслу V- потенциальная энергия системы, у2/2 - ее
кинетическая энергия, h - полная энергия. Постоянная h определяется
начальными условиями.
При заданном значении h уравнение B.41) определяет интегральную
кривую рассматриваемой системы - кривую равной энергии на фазовой
плоскости X, у. Если для данного значения h нет действительных значе-
значений X и у, удовлетворяющих уравнению B.41), значит, полная энергия
системы не может иметь такого значения.
Отметим следующее: 1) интегральные кривые симметричны относи-
относительно оси абсцисс фазовой плоскости х,у, так как замена у на -у не
изменяет уравнения B.41); 2) положения равновесия системы B.38) на-
находятся на оси абсцисс (у= 0); 3) ось абсцисс - геометрическое место
точек, где касательные к интегральным кривым вертикальны [см. урав-
уравнение B.39)]; 4) геометрическое место точек, в которых касательные к
интегральным кривым горизонтальны, - это вертикали X = хр где X. -
корни уравнения /(х) = 0.
80
Часть 1
Принято называть изоклиной геометрическое место точек, в которых
касательные ко всем интегральным кривым имеют одинаковый наклон,
т.е. образуют одинаковые углы с осью абсцисс. В данном случае ось
абсцисс и прямые x=xi - изоклины вертикальных и горизонтальных каса-
касательных соответственно.
По предположению функция /(х) аналитическая. Тем же свойством
обладает и функция V(x), с которой будем работать в дальнейшем. Уч-
Учтем, что Vx(x) = -f{x). В положениях равновесия, где/(х) = 0, произ-
производная V^ также равна нулю, т.е. в положениях равновесия системы B.38)
потенциальная энергия V(x) имеет экстремум - либо максимум, либо
минимум, либо точку перегиба с горизонтальной касательной. Рассмот-
Рассмотрим все три случая, ограничиваясь поведением фазовых траекторий вбли-
вблизи положений равновесия.
Случай 1: в положении равновесия функция V(x) имеет минимум. В ма-
малой окрестности положения равновесия х = х. график V(x) имеет вид,
представленный на рис. 2.34,а. Построение фазового портрета в этой ок-
окрестности легко проводится графическим способом на основе формулы
B.43)
получаемой непосредственно из B.41). Будем давать различные значения
А и строить интегральные кривые на фазовой плоскости X, у/V2 .
Пусть У(х^) = А„. Возьмем А = AQ. Формула B.43) дает только одно
действительное значение для у, а именно у = 0 при х = хг В этом случае
интегральная кривая вырождается в точку х=
= X., у = 0, являющуюся положением равно-
равновесия системы B.38). Возьмем теперь А = А, >
>А0. Когда х последовательно возрастает от
х=адо х=х. (рис. 2.34,о), разность А- У(х)
увеличивается от нуля до положительной
величины A,- V{x.y, при этом переменная
у/у/2 растет от нуля до ^/А, - F(x;) ; а затем
при возрастании х до р разность А, - V(x^,
следовательно у, убывает до нуля. В итоге на
фазовой плоскости (рис. 2.34,6) получаем
замкнутую интегральную кривую, которая со-
согласно вышеизложенному симметрична отно-
Рис. 2.34 сительно оси абсцисс, имеет горизонтальные
касательные при X = Х(. и вертикальные каса-
касательные в точках пересечения этой кривой с осью абсцисс. При X < а и
х> Р действительные значения у не существуют и, следовательно, при
этих значениях X не существует интегральная кривая (для А = Aj). Ана-
Аналогично проводится построение для всех других значений А>А0 (например,
Глава 2
81
для h = hv см. рис. 2.34). Для значений A <hQ интегральные кривые не
существуют, что хорошо видно из формулы B.43) и рис. 2.34.
Итак, в окрестности минимума потенциальной энергии V(x) все ин-
интегральные кривые замкнутые. Мы получили особую точку типа центр,
т.е. устойчивое по Ляпунову положение равновесия. В системе, описы-
описываемой уравнениями B.38) (или B.35)), совершаются периодические
колебания с амплитудой, определяемой начальными условиями (значе-
(значением И).
Направление движения изображающей точки легко устанавливается
непосредственно по уравнениям B.38): в верхней полуплоскости
у = X > 0, следовательно, X возрастает, а в нижней полуплоскости, где
у = X < 0 , изображающая точка перемещается в направлении уменьше-
уменьшения координаты X.
Случай 2: в состояния равновесия функция V(x) имеет максимум (рис.
2.35,д). Поступим, как и в предыдущем случае: при фиксированном
значении h для каждого Xсоставим разности A— V(x), определим у/у]2
и построим интегральную кривую. Получается картина, изображенная на
рис.2.35,5. В данном случае имеем седловую особую точку, т.е. неустой-
неустойчивое положение равновесия системы B.38). Сепаратрисам седла отвечает
значение h-h0 (см. рис. 2.35,а). Направление движения изображающей
точки по траекториям определяется, как и в предыдущем случае, по урав-
уравнениям B.38).
Случай 3: в состоянии равновесия функция V(x) имеет точку перегиба
(рис. 2.36,а). Интегральные кривые строятся по тем же геометрическим
мотивам, что в предыдущих случаях. В итоге получается сложная особая
точка, называемая точкой возврата, которая является неустойчивым по-
положением равновесия (рис. 2.36,6.)
Рис. 2.3S
Рис. 2.36
82
Часть 1
Рассмотрев поведение фазовых траекторий в малых окрестностях поло-
положения равновесия консервативной системы B.38), мы дали тем самым
элементарное доказательство двух важных теорем механики (применитель-
(применительно к консервативной системе с одной степенью свободы).
Теорема Лагранжа-Дирихле. Если в состоянии равновесия
потенциальная энергия есть минимум, то состояние равновесия устойчиво.
Обратная теорема Ляпунова. Если в состоянии равновесия
потенциальная энергия не есть минимум, то состояние равновесия неустой-
неустойчиво.
Изложенный выше прием графического построения интегральных кри-
кривых пригоден не только для анализа малых окрестностей положений равно-
равновесия, но и для изучения характера движения на всей фазовой плоскости,
коль скоро задана функция V(x) для всех X. Примером может служить
рис. 2.37, на котором по заданному графику V(x) построен весь фазовый
портрет динамической системы B.38). Не излагая деталей построения всех
интегральных кривых, отметим на этом примере существенную роль се-
сепаратрис, т.е. интегральных кривых, проходящих через седловые особые
точки (на рис. 2.37 сепаратрисам отвечают значения И = А, и h = h2).
Именно, сепаратрисы разделяют фазовую плоскость на области с ка-
качественно различным поведением интегральных кривых. Так, на рис. 2.37
сепаратриса, соответствующая значению h = hp отделяет область фазовой
плоскости без замкнутых фазовых траекторий от области, где имеются
замкнутые фазовые траектории. При начальных условиях, соответствующих
точкам внутри этой области, устанавливаются периодические колебания,
которые отображаются интегральными кривыми, лежащими в этой области.
V= A,
Рис. 2.37
Напомним характерное свойство консервативных систем (которое,
в частности, видно из рис. 2.34 и 2.37). Именно, если в фазовом портре-
портрете консервативной системы существуют замкнутые фазовые траектории,
Глава 2 83
то они неизолированные, их бесконечно много, они сплошь заполняют
определенную область фазового пространства.
Амплитуда периодических колебаний, соответствующих таким траек-
траекториям, зависит от начальных условий (и только от них).
А чем определяется период (или частота) колебаний?
В линейной консервативной системе
Х + (й20Х = 0 B.44)
частота ш0 собственных колебаний зависит только от параметров системы,
например,
со о = yfkjm - для груза на пружине,
со 0 = yjg/l - для математического маятника,
ш 0 = 1/vZC - для колебательного контура.
Существенно, что в системе B.44) частота колебаний не зависит от их
амплитуды. Такие колебания называются изохронными.
В нелинейной консервативной системе (в частности, в системе
X = /(*)) в общем случае свойство изохронности не соблюдается: период
и частота колебаний определяются не только параметрами системы, но и
амплитудой колебаний. Колебания, период которых зависит от их ампли-
амплитуды, называются неизохронными.
В качестве примера рассмотрим плоский математический маятник без
трения. Уравнение динамики
JC + у Sin JC = 0. B.45)
Соответствующие выкладки показывают [12, §38), что период колебаний
1+1 i)sin 2 Лтъ)sul f +-j <246>
где x0 - амплитуда колебаний (начальное угловое отклонение маятника).
Из B.46) видно, что чем больше х0, тем больше период колебаний. Та-
Таким образом, математический маятник свойством изохронности не обла-
обладает. При малых размахах колебаний можно принять sin (xJ2) » xji
и учесть в B.46) только два первых члена. В итоге получим приближен-
приближенное выражение периода
84 Часть 1
Вклад от второго слагаемого, содержащего XQ) не очень велик. Так, для
хо = ЗО° имеем хЦ\в « 0,017 и Г«1,017Г0, где То = 2n,JI/g~; для х0 =
= 45° Т*1,МТ0.
Чтобы колебания маятника были изохронными, необходимо умень-
уменьшать его длину с увеличением угла отклонения маятника от положения
равновесия. При этом материальная точ-
точка будет двигаться не по дуге окружности
-" (кривая 1 на рис. 2.38), а по некоторой
2д кривой 2, которая оказывается циклои-
f дой, обращенной вогнутостью вверх.
А/о// Докажем это утверждение. Рассмотрим
2а tyfif циклоиду EOF (см. рис. 2.38). Длина дуги
z\ ! ° ОМ = S циклоиды, как известно, равна
/=4а/Ф
Е
S = -J&az,, где О - радиус образующего
Рис. 2.38 круга. Найдем закон движения тяжелой
точки (массой тп) по вертикальной цик-
циклоиде. Для этого обратимся к интегралу энергии и учтем, что в однородном
поле тяжести потенциальная энергия V- mgz + const. Получим
-у + gZ = h = const. B.48)
Пусть в начальном положении MQ координата Z=Z0, а начальная,скорость
равна нулю. Тогда h = gzoa из B.48) получим
v2 = 2g(Z«-Z). B.49)
Учтем, что V = S и что при движении из начального положения Мо рас-
расстояние s= ОМ убывает (v = S < 0). Тогда из B.49) найдем
S = -j2g(Zo - Z). B-50)
Из равенства s = *J&az следует, что Z = S2/8a, поэтому уравнение B.50)
принимает вид
В уравнении B.51) разделяем переменные и после интегрирования полу-
получаем
B.52)
Глава 2 85
Начальные условия: S = SQ при /= О, следовательно, С- arccosl = 0.
Теперь из B.52) окончательно имеем
U/. B.53)
4fl
Следовательно, для циклоидального маятника
\4
т.е. период Т'не зависит от амплитуды колебаний (и начальных условий).
Таким образом, циклоидальный маятник совершает изохронные колеба-
колебания.
Из формулы B.53) видно, что движущаяся точка М достигнет поло-
положения 0 (где 5=0) по истечении промежутка времени
от начала движения. Этот промежуток времени не зависит от начального
положения точки, поэтому если взять на циклоиде ряд точек и заставить
их падать по циклоиде при нулевой начальной скорости, то они придут в
точку 0 все одновременно (свойство таутохронности).
В заключение отметим следующее. Для многих систем (биологичес-
(биологических, экономических и др.) понятие энергии (кинетической, потенциаль-
потенциальной, полной) лишено смысла, а между тем их динамическое поведение
качественно совпадает с поведением консервативных механических сис-
систем, и на фазовой плоскости наблюдается одинаковое качественное пове-
поведение фазовых траекторий. Поэтому возникает потребность в определении
консервативной системы, не связанном с какими-либо механическими
понятиями. В гл. 2 работы [3] предложено принять за необходимый при-
признак консервативности существование аналитического интеграла вида
ЩХ>У) = С гДе И ~ аналитическая функция переменных X к у. Этому
условию удовлетворяет, в частности, гамильтонова система
. дН . дН
* = —; у = —г- B-54)
ду дх
с аналитическим интегралом Н- const.
Предложено C, 10] следующее определение консервативной системы.
Определение 2. 10. Пусть для системы B.1)
х = Р(х,у); y = Q(x,y)
86 Часть 1
существует такой интегрирующий множитель М(х,у), который во всей
области определения системы B.1) обладает свойствами: l)M(x,y) * 0;
2) М(х,у) - аналитическая функция переменных X и у; 3) система B.1)
после умножения правых частей на М(х,у) и перехода к "нелинейному"
времени х по формуле dx- dt/M(x,y) становится гамильтоновой:
Тогда система B.1) называется консервативной.
2.12. Диссипативные системы
Диссипативной мы назвали динамическую систему, любое движение
которой при / -> оо стремится к одному из ее устойчивых состояний
равновесия. Из этого определения сразу же вытекают следующие два
свойства диссипативных систем: 1) отсутствие замкнутых фазовых
траекторий и соответственно отсутствие периодических колебаний; 2) от-
отсутствие фазовых траекторий, уходящих (при / —> оо) в бесконечность,
т.е. отсутствие неограниченно нарастающих движений.
Диссипативность механических или электромеханических систем имеет
простой физический смысл. Именно, диссипативность означает, что
полная энергия системы с течением времени убывает*'. Причиной такого
убывания являются действующие в системе неконсервативные силы, ко-
которые носят характер сил трения и препятствуют движению.
Если для системы с одной степенью свободы можно составить функцию
Лагранжа L, то уравнение динамики этой системы записывается в виде
d
где д - обобщенная координата, а Ф - обобщенная сила, которая в случае
диссипативной системы носит характер силы трения и, следовательно,
Ф<7 < 0 при q*Q. Умножим уравнение B.55) на q и после элементарных
преобразований получим
¦' Слово "диссипация" в переводе означает рассеяние, причем именно рассеяние энергии.
Глава 2 87
причем равенство нулю возможно только при q - О, т.е. в состоянии равно-
равновесия. Напомним, что W - g(dL/dg) - L= const есть интеграл энергии
в случае консервативной системы (при Ф = 0). Для обычных систем Не-
Неполная энергия и, как видно из B.56), она убывает.
Пример. Груз единичной массы, подвешенный на пружине с нелинейной восста-
восстанавливающей силой -f(x), при учете силы вязкого трения -Ах описывается уравнением
Х + Лх+ /(*) = 0, B.57)
в котором/@) = 0, а X = 0 - положение равновесия. Полная энергия системы
1 о
В силу уравнения B.57) легко получаем
W = -Ах2 <; 0.
Энергия убывает, система диссклатквна.
Согласно сделанному определению диссипативными могут быть систе-
системы самой различной природы (биологические, теплофизические, эконо-
экономические и т.д.). Для таких систем обычно невозможно сформулировать
физические признаки диссипативности и составить функцию Лагранжа.
Вопрос о диссипативности таких систем можно пытаться решать с по-
помощью второго метода Ляпунова, оценивая области притяжения устойчи-
устойчивых положений равновесия. В частности, если удастся доказать, что поло-
положение равновесия рассматриваемой системы асимптотически устойчиво
в целом, то, очевидно, данная система является диссипативной.
Во многих случаях вопрос о диссипативности системы удается решить,
доказав отсутствие в ее фазовом портрете замкнутых фазовых траекторий
и фазовых траекторий, уходящих в бесконечность.
2.13. Автоколебательные системы
Явления автоколебаний часто встречаются в природе и технике. Напри-
Например, автоколебательными системами являются все духовые и смычковые
музыкальные инструменты, генераторы электрических колебаний, часо-
часовые механизмы и др.
Все перечисленные системы совершают автоколебания, т.е. устойчи-
устойчивые периодические колебания, амплитуда которых зависит от свойств са-
самой системы и не зависит, как уже говорилось, от начальных условий,
по крайней мере, для широкого класса начальных условий. Например, в
обычных ходиках отклонение маятника на малую величину не приводит к
установлению колебаний. Ходики пойдут (автоколебания установятся),
если мы отклоним маятник на любой угол, больший некоторого конечно-
конечного значения. При этом амплитуда колебаний маятника определяется не
начальным его отклонением, а внутренним устройством, параметрами ча-
часового механизма.
88 Часть 1
Перечислим характерные особенности автоколебательной системы.
Прежде всего укажем, что автоколебательная система состоит из трех ос-
основных элементов:
а) собственно колебательной системы (маятник в ходиках, колеба-
колебательный контур в ламповом генераторе и т.д.);
б) источника энергии (поднятая гиря в ходиках, поток воздуха в сви-
свистке или органной трубе и т.д.);
в) взаимосвязи между колебательной системой и источником энер-
энергии.
Собственно колебательная система обладает трением или сопротивле-
сопротивлением и, в отличие от консервативной системы, она в этом смысле пред-
представляет реальную физическую систему с рассеянием энергии.
Источник энергии - постоянный. Если бы этот источник был перио-
периодической функций времени, то, безусловно, были бы в системе вынуж-
вынужденные периодические колебания. Специфика автоколебательной системы
в том и заключается, что в ней совершаются незатухающие периодичес-
периодические колебания именно с постоянным источником энергии.
Взаимосвязь между источником энергии и собственно колебательной
системой весьма своеобразна. Энергия, отдаваемая источником, зависит
от состояния системы; действие источника энергии оказывается периоди-
периодическим, причем период колебаний и те порции энергии, которые отбира-
отбирает система за один период для восполнения своих энергетических потерь,
определяются внутренними свойствами системы.
Чтобы пояснить оказанное, рассмотрим принцип работы часового ме-
механизма. Рис. 2.39 поясняет один из простейших вариантов маятниковых
часов. На оси А подвешен маятник, снабжен-
снабженный изогнутым равноплечим рычагом 1 - ан-
анкером (маятник на рисунке не показан). На
оси В расположено ходовое колесо 2, кото-
которое приводится в движение гирей. Гиря под-
подвешена на цепи, цепь перекинута через зуб- .
чатое колесо, также расположенное на оси
В. Анкер и ходовое колесо сцеплены благо-
Рис. 2.39 даря взаимодействию палетт 3 с зубьями хо-
ходового колеса 2. Если сцепление отсутству-
отсутствует, то анкер и маятник под воздействием начального толчка будут совершать
свободные затухающие колебания, а ходовое колесо будет вращаться, пока
гиря не достигнет своего низшего положения. Естественно, никаких ав-
автоколебаний не происходит. Однако в сцепленном состоянии изображен-
изображенная на рис. 2.39 система становится автоколебательной. В самом деле,
рассмотрим поверхности а и b палетт. Поверхности а представляют со-
собой поверхности круговых цилиндров, осью которых является ось А. Ког-
Когда зуб ходового колеса находится в контакте с любой из поверхностей а,
он не создает момента вращения маятника (направление силы, действую-
действующей на а, проходит через ось А маятника). При контакте зуба с поверх-
поверхностью а ходовое колесо не поворачивается, и гиря неподвижна. По-
Глава 2 89
верхности Ь плоские. Когда зуб ходового колеса скользит по ним, возни-
возникает момент сил относительно оси А маятника. Под действием этого мо-
момента анкер отклоняется по часовой стрелке на рис. 2.39, когда зуб каса-
касается поверхности b левой палетты, и против часовой стрелки на рис. 2.39,
когда зуб касается правой палетты. В эти промежутки времени ходовое
колесо поворачивается на некоторый угол, а гиря опускается.
Таким образом, когда зуб ходового колеса контактирует с поверхностью
Ь одной из палетт, маятник получает короткие толчки влево или вправо.
Длительность этих толчков коротка по сравнению с периодом собственных
колебаний маятника. Палетты и зубья ходового колеса конструируются
так, что толчки совершаются в момент, когда маятник проходит верти-
вертикальное положение и, что особенно существенно, толчки направлены по
ходу движения маятника: это позволяет компенсировать затухание в сис-
системе.
Следует обратить особое внимание на то, что момент М, действующий
на анкер со стороны ходового колеса, - это не внешнее воздействие, не
заданная функция времени. Момент Мопределяется конструкцией часов,
внутренним механизмом взаимодействия колебательной части системы
(маятника с анкером) и постоянным источником (поднятой гирей). Таким
образом, этот момент - функция не времени, а положения ф маятника и,
в общем случае, его скорости ф: М = Л/(ф,ф). (Здесь и ниже не учитыва-
учитывается зависимость М от состояния ходового колеса, что справедливо для
многих типов часовых механизмов.) Для рассмотренной конструкции М-
нелинейная функция, которая обладает следующими свойствами: 1) М*-
* 0 только в малой окрестности точки ф = 0; 2) М> 0 при ф > 0; 3) М<
< 0 при ф < 0. Уравнение движения записывается в виде
Уф = -mgl sin ц> + М(ф,ф) + Мтр(ф, ф), B.58)
где У- момент инерции вращающихся частей; первое слагаемое в правой
части - момент силы тяжести, М - момент сил трения. Этот момент
учитывает трение на оси А, трение поверхностей палетт о зубья ходового
колеса, а также сопротивление воздуха.
Ограничимся частным случаем уравнения B.58), который тем не ме-
менее позволяет обнаружить автоколебания в часовом механизме. Примем,
что угол отклонения маятника от положения равновесия не слишком ве-
велик, так что БШф и ф. Учтем только вязкое трение, полагая М^ - -Аф,
где h - достаточно малое положительное число. Рассмотрим так называ-
называемую ударную модель часов. Это значит, что момент М считается равным
нулю при всех ф * 0, но при ф = 0 скорость ф получает конечное прира-
приращение, равное а (удар). Тогда идеализированная (ударная) нелинейная
модель часов примет вид
Уф + Аф + rngly = 0, если ф * 0;1
Фпоок = Фпсрсд + я, если Ф = 0.J B59)
90
Часть 1
Если бы не было ударов, в системе совершались бы затухающие ко-
колебания (при достаточно малом значении А), а состояние равновесия было
бы устойчивым фокусом. Пусть d - логарифмический декремент затуха-
затухания, определяемый равенством td = <$'/ф", т.е. отношением двух со-
соседних максимумов ф (рис. 2.40). Пусть для простоты удар происходит
один раз за период в момент, когда ф = 0 и ф > 0. Пусть непосредствен-
непосредственно после очередного удара ф = ф,(рис. 2.41).
Рис. 2.40
Рис. 2.41
Спустя один период, к моменту следующего удара, скорость ф соста-
вит Фпереа = 9ie"d- В этот момент происходит удар, и скорость скачком
возрастает на величину а, так что сразу же после удара ф = фпосле =
= <pxt~d + а. Если периодическое движение установилось, то фпосле = ф1э
или yxQ~d + а = ф,, откуда
ф, = a/(l-t'd). B.60)
Таким образом, в системе действительно совершаются периодические
колебания с амплитудой изменения скорости, определяемой из B.60).
Этим колебаниям соответствует замкнутая фазовая траектория на плоско-
плоскости ф, ф (рис. 2.42), причем такая траектория единственная, так как фор-
формула B.60) дает единственное значение для амплитуды скорости. Эта
траектория - устойчивый предельный цикл.
Рис. 2.42
Рис. 2.43
Глава 2 91
Аналогично рассматривается и случай двух ударов за период. Замкнутая
фазовая траектория для этого случая представлена на рис. 2.43. Здесь про-
проявляется принципиальное отличие автоколебательных систем от диссипа-
тивных и консервативных систем. В диссипативных системах незатухающие
колебания невозможны по определению (см. §2.12). В консервативных
системах (см. §2.11) возможны периодические колебания и, следователь-
следовательно, возможны замкнутые фазовые траектории в фазовом пространстве этих
систем. Однако там всегда был континуум неизолированных замкнутых
кривых. Отметим еще, что в любых линейных системах замкнутые изоли-
изолированные траектории также невозможны.
Таким образом, к характерным свойствам автоколебательных систем,
которые перечислялись выше и в которых отражены физические особен-
особенности этих систем, следует добавить еще два свойства, отражающих спе-
специфику автоколебательных систем с математической точки зрения: 1) ав-
автоколебательная система - нелинейная динамическая система; 2) среди
фазовых траекторий автоколебательной системы существует по крайней
мере один устойчивый предельный цикл.
2.14. Примеры качественного исследования автоколебательных систем
Рассмотрим два примера динамических систем, фазовые портреты которых
содержат устойчивые предельные циклы, и, стало быть, эти системы яв-
являются автоколебательными. В первом примере рассматривается уравнение
Ван-дер-Поля, которым отображается (при соответствующих идеализациях)
динамика лампового генератора и ряда других автоколебательных систем
[3], во втором - динамическая система, к которой приводится задача о
синхронизации лампового генератора при ее решении методом Ван-дер-
Поля [8].
Пример 1. Доказательство существования устойчивого предельного цикла для уравнения
Ван-дер-Поля B8]. Это уравнение имеет вид
X + ц(х2 - 1)х + X = 0, ц > 0. B.61)
Удобно перейти от уравнения B.61) к эквивалентной ему системе
У = -Х; X = у + Ы X - — \. B.62)
Единственное положение равновесия X = у ~ 0 системы B.62) неустойчиво, ибо при любом
ц > 0 корни
характеристического уравнения линеаризованной системы имеют положительные действитель-
действительные части.
Применим к системе B.62) второй метод Ляпунова. Именно, возьмем положительно
определенную функцию V, = (хг + уг)/2 и определим (dv{/dt)B62). Получим
92
Часть 1
B.62)
Отсюда видно, что {dvjdf)(lil) > О, если X2 < 3. Это значит, что любая траектория
системы B.62) имеет направление наружу из окружностей
= -{x* +
= const,
если их радиус меньше v3 (рис. 2.44).
Возьмем теперь положительно определенную функцию
~[у - h{x)f + ^-.
Пусть функция Н(х) обладает следующими свойствами: а) А@) = 0; б) Л(х) = С > 0
при дг а а > 0; в) h(x) = -с при х s -а; г) h(x) - однозначная непрерывная монотонная функция
при -а < х < а, например прямая (рис. 2.45). Вычислим производную dv^/dt в силу урав-
уравнений B.62). Имеем
B.62)
= -h'(x)[y-h(x)
h(X-i|
Рис. 2.44
Пусть |х| > а. При этом h'{x) = 0, следовательно,
Рис. 2.45
l
2«)
Отсюда ясно, что при |х| > а производная (dv2 /dt)^i2) строго отрицательна, если число а
выбрано достаточно большим. При |д:| < а знак производной (dv2 /dt){2f>2) определяется
первым слагаемым, пропорциональным А' (х), если \у\ велико: |^| > b,mtb- достаточно
большое число. При этом первое слагаемое и, следовательно, (<Л>2 /di)B62) будут отрица-
отрицательными. Таким образом, существует прямоугольник
Глава 2
93
С.
\х\<,а; \у\йЬ B.63)
достаточно больших размеров, вне которого V2 > 0 и (dv^df)^^^ 0. Добавим еще, что
функция v2 - положительно определенная во всей плоскости X, у и v2 -> оо при X2 + у2 -> <ю.
Следовательно, выполнены все требования теоремы 2.3
о предельной ограниченности. С геометрической точки У
зрения выполнение этих требований означает, что все
замкнутые линии v2 = const достаточно больших разме-
размеров [охватывающие прямоугольник B.63)] пересекаются
фазовыми траекториями системы B.62) в направлении
снаружи внутрь (рис. 2.46).
Таким образом, построена двухсвязная, кольцеоб-
кольцеобразная область, удовлетворяющая теореме 2.5. Внешней
границей С, этой области служит кривая v2 = const боль-
больших размеров, а внутренней - окружность X2 + у2 = 3
(см. рис. 2.46). Следовательно, уравнение Ван-дер-Поля
B.61) имеет устойчивый предельный цикл, а в систе- Рис. 2.46
ме, описываемой этим уравнением, совершаются автоко-
автоколебания. Предельный цикл охватывает окружность X2 + уг = 3, следовательно, амплитуда
автоколебании превосходит V3 .
Замечание 1. Существование устойчивого предельного цикла следует уже из доказа-
доказательства предельной ограниченности системы B.62), поскольку эта система имеет единствен-
единственное положение равновесия типа неустойчивого узла или фокуса (см. теорему 2.4).
Дополнительное введение функции v, позволило дать грубую оценку амплитуды А автоколеба-
автоколебаний (А > V3 ) для любых значений ц > 0. Ниже для 0 < ц « 1 доказано, что А « 2.
Замечание 2. Из проведенного доказательства с очевидностью следует, что уравне-
уравнение Ван-дер-Поля имеет неустойчивый предельный цикл, если |i < 0.
Замечание 3. Обобщением уравнения B.61) служит уравнение
х +sinx = nxcosnx,
B.64)
в котором И - натуральное число''. Фазовым пространством системы B.64) служит боковая
поверхность цилиндра. В работе [34] строго доказано, что при 0 < ц « 1 система B.64) не
содержит предельных циклов, охватывающих фазовый цилиндр, и содержит п - 1 предельных
циклов, не охватывающих этот цилиндр и окружающих неустойчивое положение равновесия
X = 0, х = 0"'. Например, при и = 4 будут существовать три предельных цикла (рис. 2.47).
Прамер 2 [4, 8]. Построим фазовый портрет системы
при условии
х = ах + by - х(х2 + у2) = Р(х,у);
y = cx + dy- Хх2 + у2) = Q(x,y)
(а-ау + 4Ьс < 0.
B.65)
B.66)
чПри Sin* и X, COS ПХ = 1 - п 2Х 2/2, /1X/V2 = у уравнение B.64) переходит в уравнение
Ван-дер-Поля у' + у = \иу/{\ - у7).
"'Анализ устойчивости точки X = 0, X = 0 проведите самостоятельно. Доказательство
основного утверждения (о числе предельных циклов) требует сведений, выходящих за рамки
данного пособия, и поэтому здесь не приводится.
94
Часть 1
Рис. 2.47
При выполнении неравенства B.66) система B.65) имеет единственное положение равнове-
равновесия - начало координат. Докажем теперь, что у системы B.65) отсутствуют решения, уходя-
уходящие (при / —> оо) в бесконечность. С этой целью умножим первое уравнение на X, второе -
на у и сложим эти уравнения. Получим
±-4-(х2 + у2) = ax2+(b + c)xy + dy2-
2 at
у2?.
B.67)
Выберем в качестве функции V, фигурирующей в теореме 2.3, v{x,y) = (х 2 + у 2)/2. Из
B.67) видно, что VB.65) *• 0» если *2 + У2 достаточно велико. Выберем в качестве множества
Мкруг X2 + у1 < R , где /? столь велико, что на окружности X2 + у2 = R производная
B.67) отрицательна. Согласно теореме 2.3 система B.65) предельно ограничена и, следова-
следовательно, у нее нет неограниченно растущих решений.
Случай 1: а + d > 0. Начало координат - неустойчивый фокус, и согласно теореме 2.4
система B.65) имеет по крайней мере один устойчивый предельный цикл. Покажем, что этот
цикл единственный. Применим критерий Дюлака для кольцевой области G, внешней грани-
границей которой служит окружность большого радиуса R, а внутренней - окружность сколь угодно
малого радиуса, окружающая начало координат. Возьмем функцию
F(x,y) =
1
by2 -ex2 +(a -d)xy
B.68)
Ясно, что при условии B.66) параметры Ъ и С имеют разные знаки и 4\Ьс | > (а - d) .
Отсюда следует, что квадратичная форма в B.68) знакоопределенная во всей фазовой
плоскости, и, стало быть, функция f{x,y) однозначна, непрерывна и дифференцируема во
всех точках области G. Имеем
дх
ду
by2 -ex2 +(a-d)xy
Очевидно, что выражение не меняет знака в любой кольцевой области G вокруг начала
координат. Согласно критерию Дюлака система B.65) имеет не более одного предельного
цикла, а из сказанного выше следует существование по крайней мере одного устойчивого
предельного цикла. Таким образом, в случае 1 имеется единственный устойчивый предельный
цикл. Фазовый портрет дан на рис. 2.48.
Случай 2: а + d < 0. Система B.65) по-прежнему предельно ограничена, но теперь
начало координат - устойчивый фокус. Очевидно, что в этом случае число предельных циклов
Глава 2
95
должно быть не менее двух, но это невозможно по критерию Дюлака. Следовательно,
предельных циклов нет совсем (рис. 2.49).
Рис. 2.48
Рис. 2.49
Задачи
В задачах 2.1-2.21 требуется исследовать типы и устойчивость положений
равновесия в зависимости от входящих в уравнения параметров. Кроме
того, в задачах B.12)—B.21) решите вопрос о существовании замкнутых
фазовых траекторий (ЗФТ)
2.1. ах = х2 + у - 1; у = ху. B.69)
2.2. х = А - (В + 1)х + х2у; у = Вх - х2у. B.70)
2.3. х = -ах(\ + х) - Ь(х - у); у = х-у. B.71)
2.4. х = (ах - Ьу)(\ + х); у = х-у. B.72)
2.5. х = (х - \)(у - 1); у = ху-а. B.73)
2.6. х = х2A-рх)-ху; > = -у(\ - х); р > 0. B.74)
2.7. х = (х/2) - лу/(а + х) - рх2; а > 0; р > 0, 1
j = ху/(а + х) - у/2; яJсф > 1; ?Jсф < 1.J
2.8. х = 1 - ху; у = ру[(х - A + q)l(q + у)]; q > 0. B.76)
2.9. ах = 1пA - х + /); у = х - у - 2. B.77)
2.10. х = хA - у - D); y = y(x-D); D>Q(D*l). B.78)
2.11. Z>x = хA - х2) - у; у = х-2у. B.79)
2.12. х - (ех - 1)х + а(ех - 1) = 0. B.80)
2.13. x + 2flx + 2sinx = 0. B.81)
2.14. x + xsirHx + aCe* - 1) = 0. B.82)
2.15. х + R(x)x + f(x) = 0; /@) = 0; R(x) > 0. B.83)
2.16. bx = -у; у = -ay + e* - 1. B.84)
2.17. x = x + b(ty - cosy);
у = 3x - 2y - sin у - x3. B.85)
2.18. x = ax + sin у -a; y = sh(x-l). B.86)
2.19. x = (y - l)x; у = ax + у + у2. B.87)
96
Часть 1
Указание. Убедитесь, что ось X = 0 состоит из фазовых траекто-
траекторий; установите также направление пересечения траекториями оси
абсцисс.
2.20. х + (х2 + х2 - 4)х = 0.
2.21. х = 2ху; у = 1 - х2 + у2.
B.88)
B.89)
2.22. Определите индекс цикла без контакта, т.е. индекс замкнутой кри-
кривой, на которой отсутствуют положения равновесия системы B.1) и
которую не касается ни одна фазовая траектория.
2.23. Определите индексы сложных особых точек, представленных на
рис. 2.50-2.56.
Рис. 2.50
Рис. 2.51
Рис. 2.52
Рис. 2.53
Рис. 2.54
Рис. 2.55
Рис. 2.56
Глава 2
97
2.24. Существуют ли предельные циклы в системах
\) х = \-ху\ у = х, B.90)
2) х = Х2A + у2); у = х + у. B.91)
2.25. Существуют ли замкнутые фазовые траектории, охватывающие на-
начало координат, у следующих систем:
х = [ф) + ау](\ + Ьх + у2)}
у = х-су; Ф@) = 0,а > 0; j
B.92)
B.95)
У=УКУ) + Ь2Кх-у); \ B.93)
ф@) = v|/@) = 0; 6,6, > 0.|
В задачах 2.26-2.28 требуется построить фазовые портреты. Предвари-
Предварительно убедитесь, что перед вами консервативные системы.
2.26. х = -у{\ + х); у = X. B.94)
2.27. х = у; ay = ib- x)/(l
а > 0; Ь > 0; 1 + х > 0.
2.28. х = fix). График потенциальной энергии см. рис. 2.57. (Точка .Л -
точка перегиба с горизонтальной касательной).
2.29. Постройте фазовый портрет для обыч-
обычного маятника без трения.
2.30. Рассмотрите одномерные колебания
груза единичной массы на пружине с
нелинейной восстанавливающей силой
У(х) = -2х+4ах3 в пренебрежении тре-
трением. Постройте фазовые портреты си-
системы для жесткой (а < 0) и мягкой
(а > 0) пружин. *"с- 2•"
2.31. С помощью критерия Бендиксона докажите, что в обычном линей-
линейном осцилляторе
B.96)
невозможны периодические движения при А^О. Проведите анало-
аналогичное доказательство и для более общего уравнения
х + R(x)x + f{x) = 0,
где R(x) > 0 при всех X.
B.97)
98 Часть 1
2.32. Докажите, что система
х = хA - х2 - у2) -ау;у = уA -х2 -у2) + ах + А B.98)
предельно ограничена. Докажите также, что эта система не может
иметь более одного предельного цикла.
2.33. х = -х/(х) + у; у = у\а- /(*)]. B.99)
Существуют ли периодические решения при х>0, у>0, если
_Дх) -монотонно возрастающая функция при Х>0?
2.34. X + f(x, Х)Х + X = 0. B.100)
Докажите, что эта система автоколебательная, если/@,0) <0
и f(x,y) > 0 при х2 + у2 > г2.
В следующих задачах 2.35-2.56 требуется построить фазовые портреты
систем.
2.35. х = -ху; у = у(х- 1). B.101)
Является ли система B.101) грубой? Устойчивы ли ее положения
равновесия?
2.36. X = ху; у = у2 - X2. B.102)
Является ли система B.102) грубой? Чему равен индекс особой точ-
ких = ^ = 0?
2.37. х = 2х-х2; у = -у + ху. B.103)
Является ли система B.103) грубой?
2.38. х = 4х(у - 1); у = ху(х + 1). B.104)
2.39. х = -уA + х); y = x-by;b>0. B.105)
(можно ограничиться областью 1 + X > 0).
2.40.х = х(а - Ъх - у); у = у(х -1);
а>0;Ь>0. B106)
2.41. u = mA-h-v); v = vB-4u-v). B.107)
В этой и следующих задачах можно ограничиться областью «>0;
v>0.
2.42. й - мB - Ъи - v); v = v(l-«-v). B.108)
2.43. й = иA - и - bv); v = vA-v-3m). B.109)
2.44. х = а/A + у)-х\ у = а/(\ + х) - у; а>0 B.110)
(можно ограничиться областью X > 0; у > 0).
2.45. х + F(x) + ax = 0; F@) = 0. B.111)
Случай 1: F(y) - монотонная функция при всех у = X.
Случай 2: yF{y) > 0 при .у*0 и о 0.
2.46. х = -2ху + а; у = 2ху - у; а > 0. B.112)
Глава 2 99
2.47. х = -\ix + ху; у = I - vy - х2; ц, v > 0. B.113)
2.48. х = axg(r2) -у; у = byg(r2) + х. B.114)
График функции g(r2) см. на рис. 2.58; Г2 = X2 + у2; й>0; b > 0.
2.49. х = х-у-ах(х2 + у2); B]15)
у = х + у - ау(х2 + у2).
2.50. х = у2кЛ + Ьхх[\ - а(х2к + у2к)}; 1
y = -x2k-l+b2y[\-a(x2k+y2k)l\ B116)
а, Ьу Ьг> 0; к - натуральное число.
2.51. х = у-х(ах2 + у2 -1); 1
^ = -ох-^(ах2+/-1), fl>0.J BЛ17)
2.52. х + (х2 + &2х2 - а2)л: + к2х = 0. B.118)
2.53. х + (Зх2 + х2 - \)х + х = 0. B.119)
2.54. х = у + х(а + >>)(х2 + у2 - (З2); 1
>> = -x + (aj>-x2)(x2+y2-C2).J B-120)
2.55. х + Bх2 + х4 - 1)х + х3 = 0. B.121)
2.56. х = -у + ах + (Зх2 + 2у2)х-]
/о 2 -, 2ч Г B.122)
j> = х + aj' + (Зх + 2у2)у. J v ;
2.57. х = -?у + Ых2 +у2)-х; 1
^ = ^x-px(x2+/)-^ + Lj B123)
Докажите, что эта система предельно ограничена и не имеет перио-
периодических решений.
2.58. х = \хх - 2у - а2х(х2 + /J;1
> = 2х + ^-^(х2+/J.} B124)
Определите тип и устойчивость положения равновесия X = у - 0 в
зависимости от значений \х. Докажите, что при ц > 0 существует
устойчивый предельный цикл.
И в заключение - две устные задачи.
2.59. 1. Материальная точка движется без трения по параболе, которая
вращается с постоянной угловой скоростью Q (рис. 2.59).
2. Между стенками камеры 1, заполненной воздухом, и поршнем 2
(рис. 2.60) действует сила вязкого трения.
3. Шкив 1 (рис. 2.61) перемещается с постоянной скоростью, обус-
обусловленной вращением валов. На шкиве находится груз 2, соединен-
соединенный пружиной 3 с неподвижной стенкой. Между шкивом и грузом
100
Часть 1
действует сила сухого трения. В каких из этих трех систем возможны
автоколебания?
0
'.;"¦¦¦?.:¦
''. '•* • .*¦• *'
f \
Рис. 2.58
^'/.•'•ч*'-. •¦'¦*/•
Рис. 2.59
Рис. 2.60
2.60. ...И стало слышно, как над крышей
Тоскливо воют провода. .
Н.Рубцов. Конец.
... Только ветер гудит в проводах,
Тускло звезды мерцают.
Песня из кинофильма "Два бойца ".
Все ли правильно сказано о проводах и ветре?
Рис. 2.61
Глава 3. БИФУРКАЦИИ ДИНАМИЧЕСКИХ СИСТЕМ ВТОРОГО
ПОРЯДКА
Данная глава является кратким, элементарным введением в теорию би-
бифуркаций, которая изучает качественные изменения в поведении решений
динамической системы при изменении ее параметров. Теория бифуркаций
обязана своим рождением трудам А. Пуанкаре. Исключительно важные
для приложении типы бифуркаций подробно изучены А.М. Ляпуновым.
Громадное значение теории бифуркации для приложений отчетливо по-
понимал А.А. Андронов, который еще в 1931 г. на Всесоюзной конферен-
конференции по колебаниям в связи с развитием теории нелинейных колебаний
ставил "вопрос о полной теории бифуркаций для неконсервативного
случая" |2]. Более того, им получены основополагающие результаты по
бифуркациям в системах второго порядка. В частности, А.А. Андронову
принадлежит заслуга открытия бифуркации рождения предельного цикла
из положения равновесия в случае пары чисто мнимых корней характе-
характеристического уравнения и обнаружение связи этой бифуркации с ляпунов-
скими величинами.
Обширные результаты по теории бифуркаций динамических систем на
плоскости изложены в монографиях E,10]. Развитие теории бифуркаций,
в особенности теории рождения периодических движений для систем выше
второго порядка, было выполнено учеником А.А. Андронова Н.Н. Баути-
ным [9] и Э. Хопфом [32].
3.1. Бифуркации и бифуркационное значение параметра
Всякая реальная физическая система или техническое устройство харак-
характеризуется некоторыми физическими параметрами, например массой,
коэффициентом трения, индуктивностью и т.п. Уже на ранних стадиях
проектирования, когда происходит выбор основных параметров будущей
установки, возникает задача исследования ее динамики в зависимости от
этих параметров. Такое исследование позволяет выбрать параметры, обес-
обеспечивающие работоспособность и требуемые динамические характеристики
устройства. Наряду с количественными задачами на этой стадии иссле-
исследования имеют крайне важное значение качественные вопросы - об устой-
устойчивости стационарных режимов, о наличии (или отсутствии) автоколеба-
автоколебаний и т.п. Но параметры реальной установки не могут сохраняться абсо-
абсолютно неизменными: в процессе ее эксплуатации они неизбежно меняются
(хотя, может быть, весьма медленно), и это обстоятельство также застав-
заставляет исследовать динамику установки в зависимости от ее параметров.
С математической точки зрения такое исследование означает, прежде
всего, изучение изменения качественного характера решений уравнений
102
Часть 1
динамики установки в зависимости от параметров, входящих в правые
части уравнений. Ограничимся системой с одной степенью свободы и
только одним параметром (при нескольких параметрах рассмотрение
аналогично). Будем изучать систему
х = Р(х,у,а); у = Q(x,y,a),
C.1)
где Р и Q - аналитические функции переменных X, у и параметра а
в интересующей нас области фазовой плоскости X, у и области изменения
а. Сначала рассмотрим два простых примера, представляющих частные
случаи системы C.1).
Пример 1. Изучим колебания маятника с пружиной, закрепленной на оси вращения
(рис. 3.1). Пренебрежем трением и примем линейной восстанавливаюшую силу пружины.
Уравнение динамики маятника запишется в виде
l2d2x
ml —j- = -mgl sm x - kx,
C.2)
где к - жесткость пружины; g - ускорение силы тяжести. Остальные обозначения см. на
рис. 3.1. Пусть х = -Ji/It и а = k/mgl. Тогда уравнение C.2) примет вид
= -sinx-oue =
C3)
Точкой отмечается дифференцирование по т. Это уравнение при всех а имеет положение
равновесия х = X = 0, которое устойчиво (центр), если а > -1, и неустойчиво (седло),
если а < -1. Остальные положения равновесия X = Хо Ф 0 определяются из уравнения
а = -sinXp/Xj, и отображаются точками кривой на рис.3.2. Крестиками отмечены точки,
соответствующие седлам, а кружочками - точки, отвечающие центрам. (Разумеется,
физический смысл имеют только точки правой полуплоскости а, Хд.) Тип точки X = Хо
[и далее - весь фазовый портрет системы C.3)] определяется по методике, изложенной в
§2.11, т.е. по виду функции
ос
К(х) = -J f(u,a)du = 1 - cosx + — х2.
о 2
Росярсйзвигроанашз^йте график функции 04) СЕмосгоятельно.]
C.4)
Рис. 3.1
Рис. 3.2
Глава 3
103
Из рис.3.2 хорошо видно, что число положений равновесия системы C.3) существенно
зависит от а. Так, при а > а0 имеется одно (нулевое) положение равновесия типа центра.
При а < а„ по мере уменьшения параметра а к этому положению равновесия прибавляется
еще четыре: два типа седла и два типа центра. Фазовые портреты для а = ctj > а0 и а = а2 <
< а„ приведены на рис.3.3 и 3.4. Качественное изменение фазового портрета системы C.3)
при непрерывном изменении параметра а происходит при значениях а, являющихся корнями
уравнения da/dx0 = 0. В частности, значение а = а0 на рис. 3.2 есть первый (максимальный)
корень этого уравнения.
Рис. 3.3
Пример 2. Построим фазовый портрет системы
Рис. 3.4
х = х - у - оис(х2 + у2)\\
у = х + у-ау{х2 + у2).]
Возьмем функцию Ах,У) = X2 + у2. На траекториях системы C.5) имеем
у,,.» = 2хх + 2уу = 2(х2 + у2)\1 - а(х2 + у2)].
C.5)
C.6)
Пусть сначала а < 0. Из C.6) видно, что: 1) начало координат X = у = 0 - неустойчивое
положение равновесия; 2) все фазовые траектории пересекают окружности V = X2+y2 = c
в направлении изнутри наружу при любом О 0. Фазовый портрет см. на рис. 3.5.
Пусть теперь а > 0. Положение равновесия X = у = 0 по-прежнему неустойчиво, так
как в достаточно малой его окрестности функция V и ее производная C.6) одного знака. Но
теперь в направлении изнутри наружу пересекаются фазовыми траекториями только те
окружности V = const, которые лежат внутри круга X2 + у2 < 1/а. Все другие окружности
v = const, охватывающие этот круг, пересекаются фазовыми траекториями в противоположном
направлении - снаружи внутрь, так как на них производная V(, S) отрицательна. По теореме
2.5 отсюда следует, что система C.5) имеет устойчивый предельный цикл. Ясно, что этот
цикл единственный и его уравнение есть X2 + у2 < 1/а, так как он расположен в сколь
угодно узкой кольцеобразной окрестности окружности X2 + у2 < 1/а. Фазовый портрет для
а > 0 представлен на рис. 3.6. Как видно из рис. 3.5 и 3.6, при переходе через значение
а = 0 происходит качественное изменение фазового портрета системы C.5).
Рис. 3.5
Рис. 3.6
104 Часть 1
Рассмотренные примеры показывают, что при изменении параметра
меняется и поведение фазовых траекторий. Последние изменения могут
заключаться в чисто количественных изменениях размеров и расположения
траекторий, но могут приводить к существенным, качественным измене-
изменениям структуры фазового портрета (в частности, при а = а0 в примере 1
и при а = 0 в примере 2). В связи со сказанным значения параметров
разделяют на обыкновенные и бифуркационные.
Определение 3.1. Значение а = а„ называется обыкновенным
значением параметра, если существует число е>0, такое, что для всех
значений а, удовлетворяющих условию |а - ocj <e, топологическая струк-
структура разбиения фазовой плоскости на траектории одинакова.
Определение 3.2. Значение а = а0 называется бифуркационным
значением параметра, если при сколь угодно близких к а0 значениях а <
< а0 и а > а0 фазовые портреты системы C.1) качественно различны.
Очевидно, что в примере 1 бифуркационными значениями параметра
а служат корни уравнения da/dxQ = 0. Все остальные значения параметра
а - обыкновенные. В примере 2 единственным бифуркационным значе-
значением параметра а служит а = 0.
Определение 3.3. Изменение качественной структуры фазового
портрета при переходе через бифуркационное значение параметра назовем
бифуркацией.
Доказано, что в системах B.1), C.1) с аналитическими правыми
частями качественная картина поведения фазовых траекторий определяется
особыми траекториями, к которым относятся: 1) положения равновесия;
2) предельные циклы; 3) незамкнутые траектории, у которых хотя бы
одна полутраектория является сепаратрисой какого-нибудь положения
равновесия [4]. Отсюда ясно, что бифуркация характеризуется рождением
или исчезновением положений равновесия, сменой их типов, рождением
или исчезновением предельных циклов, качественным изменением в
расположении сепаратрис седел.
3.2. Простейшие бифуркации, не связанные с рождением
предельных циклов
1. При сделанных предположениях относительно системы C.1) индекс
замкнутой кривой
, 1 rPdQ-QdP
J-2nl P2+Q2
есть аналитическая функция параметра а. Отсюда следует, что при не-
непрерывном изменении а индекс этой кривой не изменяется, так как он
является целым числом (если только на самой кривой N не появляются
положения равновесия). Отсюда вытекает, что одно положение равно-
равновесия, для которого j ¦*¦ 0, не может родиться или исчезнуть при непре-
непрерывном изменении параметра. Так, простая особая точка с индексом +1
Глава 3
105
(например, узел) может исчезнуть только после предварительного слияния
с седлом. Рис. 3.7 иллюстрирует сказанное: при а < а0 (или а > а0)
имеются две простые особые точки 0, и О2. При достижении параметром
а бифуркационного значения а = а„ точки Ох и Ог сливаются, образуя
сложную особую точку О типа седло-узел, которая исчезает при а > а0
(или а < а0).
Изменяя параметр а в противоположном направлении, получим сле-
следующее: при а > а0 (или а < а0) в окрестности точки О нет ни одного
положения равновесия; при <х = а0 появляется седло-узел (из "уплотнения
траекторий"); при а < а„ (или а > а0) седло-узел разделяется на узел О,
и седло Ог
Легко сообразить, что бифуркации, сопровождающиеся слиянием осо-
особых точек, характеризуются обращением в нуль (при а = а„) свободного
члена А характеристического уравнения Х,2+аХ.+Д=0, составленного для
точки О. Действительно, особые точки на плоскости х,у - это точки
пересечения кривых Р(х,у) = 0 и Q(x,y) = О (рис. 3.8). При а = а0,
когда точки О, и О2 сливаются, эти кривые касаются друг друга в точке О
(рис. 3.9).
о
о
е=о
Рис. 3.8 Рис. 3.9
Пусть Хо, у0 - координаты этой точки. Тогда в точке О
dy P;(xo,yo) a. dy Q^xo,yo)
_
dx P;(xo,yo)
a
b'
__
dx Q'y(x0,yu)
c
d'
следовательно, А = ad - be = 0.
106
Часть 1
2. Другой тип бифуркации - смена устойчивости фокуса без рождения
предельного цикла, когда бифуркационному значению параметра а соот-
соответствует консервативная система.
Пусть при а = а0 положение равновесия О является центром, при
а < а0 - устойчивым фокусом, а при а > а0 - неустойчивым фокусом.
Тогда при непрерывном возрастании параметра а от значений а < а0 к
а > а0 фазовый портрет может изменяться так, как это показано на
рис. 3.10, т.е. смена устойчивости фокуса происходит без рождения пре-
предельного цикла. Простейший пример такой бифуркации дает линейная
система х = ах + у; у = -х + ау. При переходе от отрицательных зна-
значений а к положительным получается смена качественных структур, пред-
представленная на рис. 3.10 и, разумеется, без рождения предельного цикла.
а<а0
Рис. 3.10
3. Как уже упоминалось, бифуркации могут заключаться в качествен-
качественном изменении расположения сепаратрис седел. Укажем здесь одну такую
возможность - разделение сепаратрисы без рождения предельного цикла,
когда значению сх = ос0 соответствует консервативная система. Именно,
при <х<а0 сепаратрисы V и L" седла О расположены так, как показа-
показано на рис. 3.11. С ростом параметра а ветви L'и //"сближаются, а при
а = а0 они сливаются, образуя петлю L, причем все траектории внутри
петли замкнуты. При дальнейшем возрастании параметра а петля L
расщепляется на две сепаратрисы Z»,, и Lv но они расположены уже не
так, как L' и L" "'. При этом ни при а > а0, ни при а < а0 предельный
цикл не рождается.
а>о0
Глава 3 107
3.3. Бифуркации, связанные с рождением предельных циклов
3.3.1. Рождение предельного цикла из сложного фокуса. Пусть А., 2=А(а)±
±/(й(а) - корни характеристического уравнения, составленного для
положения равновесия О системы C.1). Пусть при a=ct0 h = h(aQ) - 0,
а со = со(ао) * 0, т.е. Х{2- чисто мнимые корни. Выше говорилось, что
в этом случае для нелинейной системы C.1) точка О может быть либо
центром, либо особой точкой типа фокуса - так называемым сложным
фокусом. Пусть точка О - сложный фокус, и пусть для него первая ляпу-
новская величина Z,, отлична от нуля. (Определение и способ вычисления
L, см. в Приложении 1). При а*а0 - действительная часть А., 2 отлична
от нуля, т.е. при ос*а0 точка О - обычный простой фокус. Для опре-
определенности примем, что h<0 при а<а0 и А>0 при а>а0.
В зависимости от знака Lv т.е. в зависимости от того, устойчив или
неустойчив сложный фокус, возможны следующие смены качественных
структур (см. [3] и [5, гл. 9]).
1. Z-j <0, т.е. сложный фокус устойчив. В этом случае при всех а <
<а0, достаточно близких к <х0, существует устойчивый фокус О(а) и не
существует ни одной замкнутой фазовой траектории. При сх=а0 этот фокус
преобразуется в устойчивый сложный фокус О(а0). При переходе через
значение <х0 (при всех а>а0, близких к а0) появляется устойчивый пре-
предельный цикл, а фокус О делается простым неустойчивым (рис. 3.12).
a>ct0
2. Zj>0, т.е. сложный фокус неустойчивый. В этом случае при всех
а<а„, достаточно близких к а0, существует устойчивый фокус О, ок-
окруженный неустойчивым предельным циклом. При а—>а0 этот цикл сжи-
сжимается, и при ot=a0 он "влипает" в положение равновесия О, являющееся
неустойчивым сложным фокусом. При <х>а0 фокус становится простым
неустойчивым (А(а)>0). При а>ао в окрестности О нет предельных
циклов (рис.3.13).
''Из рис.3.11 видно, что эта бифуркация сопровождается еще одной бифуркацией: второе
положение равновесия О' претерпевает изменение в соответствии с рис. 3.10.
108
Часть 1
Очевидно, что при обратном изменении а смена качественных структур
происходит в обратном порядке. Очевидно также, что значения а0, при
которых фокус делается сложным, отвечают равенству а = -(а + d) = 0.
а<а„
а>а0
Рис. 3.13
3.3.2. Рождение предельных циклов из сложного предельного цикла. Пусть
при ot=a0 система C.1) имеет "полуустойчивый" (двойной) предельный
цикл. Тогда возможны два случая смены качественных структур (см. [5,
гл. 10]).
1. При a<a0 замкнутые траектории отсутствуют. При a=a0 появляется
"полуустойчивый" предельный цикл (из уплотнения траекторий), который
при ot>a0 разделяется на два предельных цикла - устойчивый и неустой-
неустойчивый (рис. 3.14).
<* = «„
Рис. 3.14
о>о0
2. При a<a0 существуют .два предельных цикла, из которых один
устойчивый, а другой неустойчивый. В случае a—>aQ эти циклы сбли-
сближаются и при a=a0 сливаются в "полуустойчивый" двойной предельный
цикл, который при a>a0 исчезает.
Если известно, что у системы C.1) при a = a0 существует двукратный,
"полуустойчивый" предельный цикл, то, как только что было сказано,
вопрос о возможной смене качественных структур решается без труда.
Однако теория не может предложить общих методов установления факта
рождения такого цикла и, следовательно, рождения пары предельных цик-
циклов - устойчивого и неустойчивого. Поэтому качественное исследование
конкретной динамической системы часто приходится проводить с точ-
точностью до четного числа предельных циклов.
Глава 3
109
3.3.3. Рождение предельного цикла из петли сепаратрисы. Пусть сепа-
сепаратриса L седла 0(xo,-yo) образует петлю при а = ао (рис. 3.15 и 3.16).
Назовем седловой величиной ос выражение
ас = P;(xQ,y0,<x0) + Q^(x0,y0,a0).
Возможны две смены качественных структур (см. [5], гл. 11).
1. Пусть ас<0 (ас>0). При всех а<а0 (но достаточно близких к а0)
поведение сепаратрисы такое, как на рис. 3.15.
Если а-»а0, сепаратрисы L'n ? "сближаются, и при а=а0они сливаются
в одну петлю L. При а>ос0 сепаратриса L разделяется на две сепаратрисы
Z,, и L2 с другим взаимным расположением, чем L' и L", а из петли
рождается единственный устойчивый (неустойчивый) предельный цикл.
2. При а<а„ существует единственный предельный цикл - устойчи-
устойчивый, если СТс<0, и неустойчивый, если Ос>0. На него накручивается од-
одна из сепаратрис седла О (см. рис. 3.16). При а—><х0 сепаратрисы седла
Vи L"сближаются, при а = а0 они сливаются и образуют петлю L,
в которую "влипает" предельный цикл S. При ct>a0 сепаратриса L раз-
разделяется на две сепаратрисы без рождения предельного цикла.
а<а0
3.3.4. Рождение предельного цикла из сепаратрисы положения равновесия
седло-узел при его исчезновении. Пусть при некотором значении параметра
а система C.1) имеет седло Ох и две выходящие из этого седла сепаратрисы
стремятся к одному и тому же узлу Ог Пусть также при увеличении а
по
Часть 1
седло и узел сближаются и при некотором значении а = а0 сливаются в
одну сложную особую точку седло-узел О (рис. 3.17). Тогда одна из се-
сепаратрис (L) этого седла-узла, выходящая из седла-узла, будет вновь
входить в него. Если при дальнейшем увеличении а сложная особая точка
седло-узел исчезает, то непременно появляется предельный цикл. Он ле-
лежит в сколь угодно малой окрестности сепаратрисы L, если а близко к
а„. Этот цикл устойчив, если ас<0, и неустойчив, если ас>0. 1В данном
случае в выражение C.8) для ас входят координаты х0, у0 седла-узла.]
Рис. 3.17
3.3.5. Рождение предельного цикла из бесконечности. Пусть в системе
C.1) при ot=a0 бесконечность устойчива, т.е. все траектории вне окруж-
окружности достаточно большого радиуса уходят в бесконечность. Пусть далее
при a>a0 (или a<a0) бесконечность неустойчива: все траектории из
бесконечности идут внутрь окружности большого радиуса, т.е. система
C.1) предельно ограничена. Тогда при a>a0 (или a <a0) может суще-
существовать устойчивый предельный цикл, который при a —»a0уходит в бес-
бесконечность (см. пример 2 из §3.1). Система C.5) не имеет предельного
цикла при a=ao=O. Этот цикл рождается из бесконечности при переходе
через значение а = 0 и описывается уравнением X2 + у2 = I/a.
3.3.6. Рождение предельного цикла из замкнутой неизолированной траек-
траектории консервативной системы. Математическая теория бифуркаций такого
типа изложена в § 33 монографии |5]. Здесь мы ограничимся только
указанием на уравнение Ван-дер-Поля как на характерный пример системы,
в которой эта бифуркация происходит. Действительно, при ц = 0 это
уравнение имеет вид х + X - 0 ; фазовый портрет - континуум замкнутых
неизолированных траекторий-окружностей, охватывающих начало коорди-
координат плоскости X, X. При переходе от ц = 0 к |д*0 неизолированные
траектории исчезают, но рождается, как это было показано в § 2.14,
изолированная замкнутая траектория - предельный цикл (устойчивый или
неустойчивый в зависимости от знака параметра д).
Для системы C.1), содержащей один параметр а, пространством па-
параметров служит прямая, а бифуркационные значения a - точки, разби-
разбивающие эту прямую на области, в каждой из которых изменение параметра
а не приводит к качественному изменению фазового портрета. Если
система C.1) содержит два параметра а, и а2, то пространством параметров
Глава 3
111
будет плоскость, разделенная на области одинакового поведения траекторий
системы с помощью бифуркационных кривых. [В частности, такими
кривыми будут д, (ара2) = 0 и а, (а,,а2) = 0, где д/ и а, - свободный
член и коэффициент перед X в характеристическом уравнении, состав-
составленном для /-го положения равновесия системы C.1); /= 1, ..., /и; т -
число положений равновесия.] Зная структуру разбиения фазового про-
пространства для какой-нибудь точки плоскости а,,а2, можно, непрерывно
перемещаясь в этой плоскости, найти структуру фазового пространства
для любой другой точки плоскости параметров. При этом нужно знать
лишь характер бифуркации, которая происходит в фазовом пространстве
при переходе той или другой бифуркационной границы.
Таким образом, качественное исследование конкретной динамической
системы предполагает одновременное исследование двух пространств -
пространства параметров данной системы и пространства ее состояний
(фазового пространства). Исчерпывающее решение задачи заключается,
очевидно, в разбиении пространства параметров на области качественно
различного поведения фазовых траекторий и фазового пространства на
траектории для параметров из каждой такой области.
Задачи
3.1. х = х(а-х2). C.7)
Определите количество и устойчивость положений равновесия в
зависимости от параметра а. Проанализируйте фазовое пространство.
Постройте бифуркационную диаграмму, аналогичную рис. 3.2.
3.2. На рис. 3.18, 3.19 даны бифуркационные диаграммы автоколебатель-
автоколебательных систем - зависимости размеров А предельного цикла от параметра
а (крестиками и кружочками отмечаются неустойчивые и устойчивые
циклы; А = О — нулевое положение равновесия). Укажите бифурка-
бифуркационные значения параметров. В чем заключаются бифуркации?
Рис. 3.18
Рис. 3.19
Глава 4. КАЧЕСТВЕННЫЕ МЕТОДЫ В ДИНАМИКЕ
ЯДЕРНЫХ РЕАКТОРОВ
Данная и следующая главы посвящены некоторым приложениям качест-
качественных методов теории нелинейных колебаний. Выбраны сравнительно
новые области приложений - ядерные реакторы и биологические системы.
Содержательные примеры из других областей (в основном, радиофизики
и механики) можно найти в монографиях [3, 10].
В §4.1 и 4.2 рассмотрены упрощенные модели динамики, которые
иллюстрируют материал, изложенный в гл.1 и 2. В §4.3 дано полное ис-
исследование более общей модели, представляющей не только иллюстра-
иллюстративный, но и самостоятельный физический интерес. Еще более сложные
и более содержательные модели динамики реакторов рассмотрены в мо-
монографии [18].
4.1. Реактор с постоянным отводом тепла A6]
Рассмотрим простейшую модель динамики гомогенного ядерного реактора,
описываемого уравнениями
dN PN dT хт кт
где N- мощность реактора; Т- температура ядерного топлива; / - время
жизни одного поколения нейтронов; m и с - масса и удельная теплоемкость
топлива. Величина р, называемая реактивностью реактора, равна р =
={к— \)/к, где к- коэффициент размножения нейтронов. В стационарном
режиме к = 1 и р = 0. Первое уравнение системы D.1) - уравнение
кинетики реактора в простейшей ("точечной") идеализации; второе -
уравнение теплового баланса топлива. Здесь рассматривается простейший
случай, когда отводимая от реактора мощность постоянна и равна
стационарному значению Nv Пусть реактивность линейно зависит от
температуры топлива (это наиболее распространенный случай):
р = -а(Т -То), а = const > 0. D.2)
Величину -а принято называть коэффициентом реактивности по темпе-
температуре топлива.
Проведем качественное исследование систем D.1), D.2). Перейдем
к новым переменным X = (N - NQ)/N0; у = Т - Тй, исключим р
и представим исходные уравнения в виде
Глава 4
113
dx
a
тс dy
D.3)
Непосредственно из D.3) видно, что: 1) вертикаль Х--\ есть фазовая
траектория системы; 2) имеется единственное положение равновесия
х=у=0; 3) фазовые траектории при х<-1 не замкнутые (поскольку в
области х<-1 отсутствуют положения равновесия). Покажем, что система
D.3) консервативная и все ее траектории в области х>-1 замкнуты.
Перепишем уравнения D.3) в виде
1 dx
xdt
a
тс dy
~N~0~dt
и перемножим эти уравнения. Учитывая, что
получим первый интеграл
1 ,2
v(x, у) = х - 1пA + х) + —у = const,
где г = lNQ/amc. Замкнутые кривые v = const, сплошь заполняющие
полуплоскость 1 +Х > 0, являются фазовыми траекториями системы D.3).
Направление движения изображающих точек по фазовым траекториям ус-
устанавливается без труда непосредственно по уравнениям D.3). Фазовый
портрет системы дан на рис. 4.1.
Рис. 4.1
Замечание 1. Мощность N реактора неотрицательна, поэтому
1 +ЛС>О, т.е. на фазовой плоскости х,у физическое содержание имеют
только точки полуплоскости х>-1.
114 Часть 1
Замечание 2. Если ввести новое время х = tN0/mc и новую
переменную ?=1пA +х), то уравнения D.3) преобразуются к системе
Точкой обозначено дифференцирование по т. Эта система эквивалент-
эквивалентна уравнению ri + f(z) = 0, которое описывает простейшую консерва-
консервативную систему (см. §2.11). Анализ графика потенциальной энергии
| f(u)du приводит (для 1 +Х>0) к фазовому портрету на рис. 4.1.
Таким образом, система D.1), D.2) консервативная, с единственным
положением равновесия N= Л^о; Т=То (х=у=0), которое характеризуется
особой точкой типа центр.
4.2. Реактор с отводом тепла, пропорциональным температуре [16]
Если в §4.1 теплоотвод от реактора принимался постоянным, то теперь
рассмотрим более реалистический случай: теплоотвод линейно зависит от
температуры. Уравнения динамики реактора:
dN a
~dT=-r
D.4)
где к - коэффициент теплоотдачи_от ядерного топлива к охлаждающей
среде с постоянной температурой Т. Остальные обозначения те же, что и
в §4.1.
Проведем качественное исследование системы D.4). Преобразуем
уравнения D.4) к виду
х = --уA + х) = Р(х,у);\ D5)
y = x-qy = Q(x,y). J
Здесь д = k/NQ > 0; Л^о - Стационарное значение мощности, соответст-
соответствующее температуре TQ. Остальные обозначения заимствованы из § 4.1.
Система D.5) имеет два положения равновесия: /^@,0) и Р2(-1,
-\/а)- Очевидно, что точка Р{ характеризует стационарный режим ре-
реактора на ненулевой мощности Л^о, а точка Р2 соответствует погашенному
реактору, стационарная мощность которого тождественно равна нулю (на-
(напомним, что равенство Х=-\ означает А^=0). Характеристическое урав-
уравнение для Р, имеет вид \2 + q'k+ l/r = 0, причем q>0 и г>0. Следо-
Следовательно, Рх - устойчивый фокус либо устойчивый узел. Корни характе-
Глава 4
115
ристического уравнения, составленного для Р2, таковы: А^ = \/qr>Q и
к2 = -q <0. Следовательно, Р2 - седло.
Заметим, что вертикаль х=-1 фазовой плоскости х,у состоит из трех
фазовых траекторий: седловой точки Р2 и двух сепаратрис, по которым
изображающие точки стремятся с ростом t к Р2 [это хорошо видно из
второго уравнения системы D.5) при хэ-1]. Две другие сепаратрисы
выходят из точки Р2 в области 1 +Х<0 и 1 +х>0. Для выяснения полной
качественной картины воспользуемся вторым методом Ляпунова и возьмем
функцию v из §4.1:
x) + — у2.
Эта функция - положительно определенная во всей полуплоскости
1 + х>0. Ее производная по времени в силу системы D.5) равна
XX
Vs)~l
г'
q_
г'
D.6)
Ясно, что на траекториях системы D.5) производная v неположительна,
причем множество Мточек, где v = 0, не содержит целых фазовых траек-
траекторий, отличных от точки х=у=0. В самом деле, это множество таково:
у s 0; х - любое,
D.7)
но при условии D.7) из D.5) следует, что X = 0, т.е. множество Мсодержит
только одну целую траекторию - тривиальное решение Р,@,0) системы
D.5). Согласно теореме Барбашина и Красовского (см. гл. 1) нулевое
решение системы D.5) асимптотически устойчиво, а областью его притя-
притяжения служит все подпространство 1 +х>0.
На основании изложенного составлен фазовый портрет системы D.5)
(рис. 4.2). Направление движения изобра-
изображающих точек по фазовым траекториям
установлено непосредственно из урав-
уравнений D.5). [Например, из первого урав-
уравнения D.5) видно, что в верхней полу-
полуплоскости X < 0, т.е. с течением времени
координата х убывает.] Таким образом,
система D.5) [и D.4)] является диссипа-
тивной.
Замечание 1. Вывод о дис-
сипативности системы D.5) легко полу-
получить с помощью следующей механичес-
механической аналогии. Заменой z = ln(l +x) уравнения D.5) сведем к системе
У
1
/
¦ ¦
\\(
S ' 1 1 /
Рис. 4.2
116 Часть 1
ri = -у\ У = -ЧУ + f(z)\ f(z) = ez - 1,
а затем - к одному дифференциальному уравнению
r'i + qrz + f(z) = О,
которое можно трактовать как уравнение движения груза массой г, подве-
подвешенного на пружине с нелинейной восстанавливающей силой -f(z) и
находящегося в среде с вязким трением, пропорциональным скорости
перемещения груза (коэффициент трения равен qr). Очевидно, что данная
система диссипативна. Полная энергия груза, равная
1 z
v = -ri2+\f(u)du, D.8)
может только убывать, т.е. V < 0. Дифференцируя функцию D.8) по т и
переходя к переменным X и у, получим равенство D.6). Такую аналогию
можно рассматривать как один из способов "угадывания" функции Ляпу-
Ляпунова с тем, чтобы далее провести строгое решение задачи.
Замечание 2. Другой способ решения этой же задачи состоит в
доказательстве отсутствия замкнутых фазовых траекторий системы D.5) с
помощью критерия Дюлака. Полагая F(x,y) = l/(l+x) имеем
при всех X,у из области 1 + х> 0. Отсутствие замкнутых траекторий и
полная информация о положениях равновесия позволяют однозначно по-
построить фазовый портрет системы D.5).
4.3. Реактор с мощностным и температурным коэффициентами
реактивности [18]
4.3.1. Постановка задачи. Исходные уравнения. Обобщим модель D.4). При-
Примем, что реактивность р реактора зависит не только от температуры Т,
но и непосредственно от мощности реактора:
P/Y ДА
- = а, —-— - а(Г - То).
Тогда уравнения динамики реактора запишутся в виде
dN
dt
N - Nn
а, ——— - а(Г - То)
*L=N -k(T-T).
N;
D.9)
Глава А
117
Обозначения те же, что и в системе D.4). Система D.4) получается из
D.9) как частный случай при условиях оц = 0 и а > 0.
Системе D.9), несмотря на кажущуюся ее простоту, отведено немало
места в литературе по динамике реакторов [43,45], причем основное вни-
внимание сосредоточено на исследовании асимптотической устойчивости
в большом стационарного решения N= No, Т= То при а1 > 0 и а > 0.
Интерес к системе D.9) не случаен, ибо ее анализ позволяет выявить
влияние соотношения между мгновенным (а,) и инерционным (а) ко-
коэффициентами реактивности на динамику реактора. Однако такую задачу
можно решить до конца только с помощью полного качественного иссле-
исследования системы D.9), что и было сделано в работе [18]. Далее будем
следовать этой работе. Пусть
х =
N-Nn
Nn
_k_
me
me
mcN0
Тогда система D.9) примет вид
(ах- by)(l + x) =
x-y = Q(x,y).
D.10)
D.11)
D.12)
Дальнейшая задача заключается в качественном исследовании системы
D.12).
4.3.2. Анализ положений равновесия. Система D.12) имеет два положе-
положения равновесия: Р{@,0) и J*2(-l,-l), причем Р1 описывает стационар-
стационарный рабочий режим, а Р2 характеризует погашенный реактор (см. D.10)].
Для исследования типов точек jP, и Р2 линеаризуем в их окрестности урав-
уравнения D.12) и составим характеристические уравнения. Получим
для Р, X2 + A - а)Х + Ь - а = 0,
для Р2 (X + 1)(Х + а - Ь) = 0.
Из этих уравнений следует, что при
b < а точка Рх - седло, а Р2 -
устойчивый узел. Если же b > а, то Р
- седло. При этом Рх - устойчивый
узел (или фокус), если а < 1; Р -
центр, если 0=1; Р, - неустойчивый
узел (или фокус), если а>\. Таким
образом, плоскость параметров а, Ь
разбивается (рис. 4.3) на области с раз-
различными типами положений равнове- Рис. 4.3
Ь=а
118
Часть 1
сия Pj и Рг Эти области и соответствующие им типы точек Р} и Р2
представлены в таблице 4. Г*. Из нее, в частности, видно, "что стацио-
стационарный режим реактора асимптотически устойчив при значениях па-
параметров из областей /и //, где Ь> а и а< 1.
Тот факт, что при 0=1 и Ь> а точка Р1 остается центром и в нели-
нелинейной системе D.12), ниже доказан строго.
Таблица 4. 1. Типы особых точек Р{ и Р2 в зависимости от параметров а и Ь
Область
/
II
III
IV
V
Параметры
b > а; а <, 0 \
Ь> а; 0 < а< 1 /
Ь>а=\
Ь> а>\
b < a
•Р,@,0)
Устойчивый узел
или устойчивый фокус
Центр
Неустойчивый узел
или неустойчивый
фокус
Седло
/»,(-1,-1)
Седло
Седло
Седло
Устойчивый
узел
4.3.3. Фазовый портрет системы D.12) в области /. Рассмотрим систему
D.12) на фазовой плоскости X, у. Прежде всего, отметим, что вертикаль
х=— 1 есть интегральная кривая исследуемой системы. Отметим также,
что прямая Х-у - изоклина горизонтальных касательных, а прямая
ах- by = 0 и вертикаль X- -1 - изоклины вертикальных касательных
к интегральным кривым. Напомним еще, что УУ> 0, и поэтому с точки
зрения физики представляет интерес только полуплоскость 1 +х>0.
Докажем, что положение равновесия Рх асимптотически устойчиво
при любых начальных возмущениях из области 1 +х>0. С этой целью
возьмем положительно определенную в этой области функцию
v(x, у) = х - 1пA + х) +
В силу системы D.12) имеем
"D.12)
= х[ах -
2{Ь - а)
vx)].
D.13)
D.14)
Поскольку а<0, функция ЯХ-1пA +х) имеет знак -X, то есть производ-
производная D.14) - знакоотрицательная функция, обращающаяся в нуль при
х=0 и любом у. Однако при x(t) = 0 из первого уравнения системы D.12)
следует >>(/) = 0; согласно теореме Барбашина и Красовского (см. гл. 1)
#)В областях / и // - один и тот же тип положений равновесия, но, как будет показано
далее, различны фазовые портреты системы D.9) из-за качественно различного характера
расположения сепаратрисы седла Ру
Глава 4 119
точка Pv асимптотически устойчива, а ее областью притяжения, как это
видно из D.13), D.14), служит вся область 1 +Х>0. (Точнее, областью
притяжения служит подобласть v(x,y)<С внутри полуплоскости 1 +х>0,
но число о 0 может быть взято сколь угодно большим, и, следовательно,
подобласть v<c может составлять сколь угодно большую часть этой по-
полуплоскости. Аналогичное замечание относится и к выводу об устойчивости
точки Pv сделанному в §4.2.) Фазовый портрет системы D.12) качественно
совпадает о фазовым портретом, представленным на рис. 4.2.
4.3.4. Отсутствие замкнутых фазовых траекторий. Докажем, что во
всех областях плоскости а, Ь, за исключением области ///, система D.12)
не имеет замкнутых фазовых траекторий*'. Воспользуемся критерием
Дюлака, в котором положим
Получим
дХ ду D.15)
= F(x,y)[(n - bm)y + (a + am- п)х -l + a].
Выберем постоянные m и п так, чтобы п - bm = 0 и Q + am - п = 0, т.е.
положим m = a/(b-a);n = ab/(b- а). Тогда всюду в области 1 + х> 0
выражение D.15) будет одного знака, если только а* Ь и аф\. Это
и доказывает отсутствие замкнутых фазовых траекторий системы D.12)
при любых значениях а и Ь, кроме значений, удовлетворяющих равенствам
а = Ь и 0=1. [Эти значения бифуркационные; непосредственного фи-
физического интереса они не представляют, поэтому случай 0 = 6 не рас-
рассматривается совсем, а случай 0=1 (область ///) исследуется для того,
чтобы подробно показать изменение свойств системы D.12) при переходе
из области II, где стационарный режим реактора асимптотически устойчив,
в область IV, где этот режим неустойчив.]
4.3.5. Поведение фазовых траекторий на бесконечности. Проведя замену
х= v/z', y=l/z, перейдем от рассмотрения бесконечно удаленных концов
оси у к анализу точек на экваторе сферы Пуанкаре (см. §2.6). Вместо
системы D.12) получим уравнения
''Для области 1 этот вопрос уже был решен выбором фушщии Ляпунова D.13).
120
Часть 1
которые после дополнительного умножения на Z и замены dtH0B = z Xdx
примут вид
dv
<#„„„
= vz(l - v) + (v + z)(av - b);
dz
= Z\\-v). D.17)
Рассмотрим положение равновесия V= Z= 0 системы D.16). Следуя
методике, изложенной в §2.6 и Приложении 4, получим, что v = z = 0 -
сложная особая точка седло-узел, причем
положительная полуось 0z плоскости V, z
заключена внутри гиперболических ("сед-
ловых") секторов. На экваторе сферы
Пуанкаре точке V = z = 0 отвечают точки
А и Ах у "концов" оси у (рис. 4.4). Точке
А соответствуют траектории верхней по-
полуплоскости V, Z (гиперболические секто-
секторы), а точке Ах - траектории нижней полу-
полуплоскости V, Z (параболический сектор).
Направление движения изображающих
точек ясно непосредственно из уравнениий
D.17), но в окрестности точки А1 оно ме-
меняется на обратное, поскольку правые части системы D.16) домножались
на Z (см. §2.6).
Для исследования остальных особых точек на экваторе сферы Пуанкаре
сделаем замену X = l/z', У = u/z и от уравнений D.12) перейдем к системе
D.18)
После умножения на Z из D.18) получим (при dtHOB = z dx)
du
= u(\ + z)(bu -a)
dz
= z(\ + z)(bu - a). D.19)
При Z = 0 система D.19) имеет два положения равновесия: В(и=а/Ь,
Z=0) и C(u=0,z=0). Первое из них отвечает точкам В и ВХ, а второе
- точкам С и С, на экваторе сферы Пуанкаре (см. рис. 4.4). Исследова-
Исследование точки В по методике из §2.6 и Приложения 4 приводит к выводу, что
Глава 4 121
В - сложная особая точка седло-узел, а поведение фазовых траекторий в
окрестостях точек В и Вх такое, как показано на рис. 4.4.
Для точки С корни характеристического уравнения равны X, = Х2=-а,
т.е. С- асимптотически устойчивое положение равновесия системы D.19)
типа узла при всех а > 0. Вблизи точки С на экваторе фазовые траектории
стремятся к С при / —> +оо, а от точки Сх они отходят [направление
движения сменено на обратное, так как правые части системы D.18)
домножались на z\-
Важно отметить, что качественный характер поведения фазовых траек-
траекторий в малых окрестностях точек А, В, С, Ах, Вх, С, остается одним и
тем же при любых значениях параметров а и b из областей II-IV.
4.3.6. Фазовый портрет системы D.12) для параметров из областей
II-IV. Точкам А и Ах на рис. 4.4 отвечают бесконечно удаленные точки
вертикалей Х- const, в частности вертикали Х=-1, являющейся сепаратри-
сепаратрисой седла Рг Отметим еще, что устойчивость точки С и стремление одной
фазовой траектории к точке В (см. рис. 4.4) говорят о том, что каковы бы
ни были значения а и Ъ из областей II-IV, на фазовой плоскости Х,у
имеются траектории, уходящие в бесконечность (при 1 + X > 0).
Сначала построим фазовый портрет системы D.12) для параметров из
области ///. Положим 0=1; Ь > 1 и перейдем к новой переменной и =
= 1пA + х). После исключения у из D.12) получим одно уравнение
й-(е" - 1)й + (Ь - \)(еи - 1) = 0.
Полагая п = V, придем к эквивалентной данному уравнению системе
u=v; v = (eu-l)(v-b + l),
откуда
Интегрируя последнее уравнение, найдем уравнение семейства интеграль-
интегральных кривых
v + (Ь - Y)\n\v + 1 - b\- eu +u=const. D.20)
Перейдем в D.20) к первоначальным переменным. Учитывая, что
и = 1пA + х); v = и - = -by + х,
1 i A.
122
Часть 1
получим
х)\х - by + 1 - b\
D.21)
Каждому значению с>0 отвечает интегральная кривая D.21) исследуемой
системы. В частности, при С=F-1)*~' имеем точку Р,@,0), а при с=0
получаем прямые 1 + х = О нх-Ьу=Ь- 1, являющиеся сепаратрисами
седла РТ Вторая из этих сепаратрис параллельна прямой В1В на рис. 4.4,
т.е. эта сепаратриса идет в точку В на экваторе сферы Пуанкаре. Выше
прямой х- by= b— 1 имеем континуум замкнутых траекторий, охватываю-
охватывающих точку /*, (для них С б @, (b- ly*'); ниже этой прямой располагают-
располагаются незамкнутые траектории гиперболического типа. На сфере Пуанкаре
они идут в точку С на экваторе. Фазовый портрет системы D.12) дан на
рис. 4.5 и 4.6. Последний из этих рисунков дает проекцию полусферы
Пуанкаре на плоскость X, у.
'A
У
-^
A
ц
/1С x
J
Рис. 4.5
Рис. 4.6
Таким образом, на границе между областями //и /^система D.12) -
типичная консервативная система с положением равновесия Рх типа центр.
При переходе из области ///в область //замкнутые фазовые траектории
превращаются в скручивающиеся спирали, а при переходе в область IV
спирали становятся раскручивающимися. Фазовые портреты для пара-
параметров из областей //и IVпредставлены соответственно на рис. 4.7 и 4.8.
Их обоснование уже дано выше (отсутствие замкнутых траекторий, тип и
устойчивость точки Ру характер точек В и С на экваторе сферы Пуанкаре
и уход фазовых траекторий в бесконечность).
Замечание 1. При переходе из области //в область IVпроисходит
одна из бифуркаций, о которых говорилось в гл. 3, - смена устойчивости
фокуса Р, без рождения предельного цикла.
Замечание 2. Для параметров из области //проведенное исследова-
исследование не исключает и такой возможности: сепаратриса седла Р2 скручивается
к точке Pv а в бесконечность (к точке В на экваторе) идет одна из не-
Глава 4
123
замкнутых траекторий, лежащих ниже этой сепаратрисы. Если это так,
то с точки зрения физики реактора реализуется более благоприятный случай:
область притяжения точки Р} окажется шире, чем при уходе сепаратрисы
в бесконечность.
Рис. 4.7
Рис. 4.8
4.3.7. Фазовый портрет системы D.12) для параметров из области V.
Ограничимся случаем, когда й>0; Ь>0. (При других значениях а и b из
области К рассуждения аналогичны.) Изоклинами ах-by-О и х=у полу-
полуплоскость 1 +х>0 разбивается на четыре области с различными знаками
производных X и у (рис. 4.9). Уравнение для угловых коэффициентов кх
и к2 сепаратрис седла Pv имеет вид
Ьк2 - A + а)к + 1 = О
(см. §2.1). Нетрудно найти, что
1 + а + УA + аJ - 46
гъ
1 + а - У(Г+~дJ - 46
Тъ
Взаимное расположение сепаратрис и изоклин в окрестности седла Р. дано
на рис. 4.9. Из этого расположения, а также из знаков х и у в соответст-
соответствующих областях следует, что сепаратрисы 1,2,3 и 4 никогда не покинут
углов у40х, ВОу, Р20Е и COD соответственно. Этим и определяется в
данном случае фазовый портрет системы D.12) (рис. 4.10).
4.3.8. Некоторые выводы.
1. Динамика ядерного реактора с мощностным и температурным ко-
коэффициентами реактивности определяется параметрами а и Ь, пропор-
пропорциональными этим коэффициентам [см. D.11)].
2. Для параметров а и Ь из области / (см. рис. 4.3) стационарный
рабочий режим реактора, характеризуемый точкой Р,@,0), асимптота-
124
Часть 1
чески устойчив при любых физически реализуемых начальных возмущениях
(подчиняющихся условию N>0 , т.е. 1 +х>0).
3. Если мощностной коэффициент реактивности положителен (о>0),
то как бы ни был он мал и как бы ни был велик по абсолютной величине
отрицательный температурный коэффициент реактивности, всегда можно
указать такие начальные возмущения мощности и температуры реактора,
которые выходят из области притяжения стационарного режима и приводят
к неограниченному росту мощности и температуры. На рис. 4.7 такие
начальные состояния принадлежат области, расположенной ниже сепарат-
сепаратрисы седла Рг
4. В тех случаях, когда положительный мощностной коэффициент
реактивности преобладает (область /Кна рис. 4.3 или область Ксправа от
оси ординат), а также при большом положительном температурном ко-
коэффициенте (область Рслева от оси ординат) стационарный режим реактора
неустойчив. При этом мощность и температура реактора либо неог-
неограниченно возрастают (см. рис. 4.8 и 4.10), либо реактор оказывается
погашенным (при начальных условиях из заштрихованной на рис. 4.10
области).
5. Каковы бы ни были параметры а и b реактора и начальные возму-
возмущения стационарного режима, автоколебательные режимы в реакторе не-
невозможны.
ax-by=O
Рис. 4.9
Рис. 4.10
4.4. Об учете запаздывающих нейтронов
Выше было использовано уравнение кинетики реактора в виде
dN pN
dt
I '
D.22)
В действительности небольшая часть нейтронов (их называют запазды-
запаздывающими) рождается не в момент распада ядра урана, а несколько позже
- из осколков деления ядер урана. Пусть Р - доля запаздывающих ней-
Глава 4 125
тронов, а С и X - концентрация и постоянная распада ядер-излучателей
запаздывающих нейтронов. Тогда уравнение кинетики D.22) следует заме-
заменить уравнениями
щ=_хс+ёлг. D.23,
at I at I
Доля запаздывающих нейтронов невелика (Р = 0,0064), но их роль весьма
значительна, так как благодаря им становится возможным регулирование
энергетических ядерных реакторов (подробнее см. в монографии [44]).
С одной стороны, постоянная распада равна X « 0,1 с1, и это значит'1,
что характерное время изменения переменной С порядка 10 с. С другой
стороны, характерное время изменения плотности N нейтронов, равное
отношению А,/Р, для реальных аппаратов составляет сотые доли секунды.
В связи с этим для р<Р (а этот случай особенно интересен при эксплуата-
эксплуатации энергетических реакторов) оказывается справедливой приближенная
форма уравнений кинетики
D.24)
/ at I
Обе модели кинетики - D.22) и D.24) - используются в практических
расчетах. Уравнение D.22) бывает справедливым |16] для реакторов с
циркулирующим (жидким или газообразным) ядерным топливом. В них,
как правило, большая часть запаздывающих нейтронов испускается не в
активной зоне, а во внешнем контуре циркуляции и, следовательно, не
участвует в реакции деления. Модель D.24) широко используется |17,
43,44] в расчетах динамики обычных реакторов с неподвижным (твердым)
топливом.
Уравнения D.24) с теми же уравнениями для реактивности р, что и в
предыдущей задаче из §4.3, приводят к системе
* 1т И"»
'-ТУ mc—-N-k(T-T}
анализ которой более сложен и более трудоемок, нежели исследование
предыдущих моделей. Этот анализ, опирающийся на теорию бифуркаций,
подробно изложен в работе |18]. Некоторые частные случаи системы D.25)
предлагаются ниже как задачи для самостоятельной работы.
''В действительности в ядерном реакторе имеется несколько групп излучателей запазды-
запаздывающих нейтронов, но здесь, как часто принято в динамике реакторов A8,43], используется
только одна (эквивалентная) группа.
126 Часть 1
В данной главе, включая и приводимые ниже задачи, рассматриваются
нелинейные модели динамики, не содержащие на фазовой плоскости
каких-либо предельных циклов и не являющиеся автоколебательными
системами. Это не значит, что в ядерных реакторах невозможны автоко-
автоколебательные режимы, хотя они там достаточно редки и, как правило,
нежелательны. Причиной возникновения автоколебаний обычно служат
транспортные запаздывания, распределенность параметров, нелинейная
зависимость реактивности от переменных реактора и др. Качественный (и
отчасти количественный) анализ нелинейных моделей динамики реакторов
с учетом некоторых из перечисленных факторов изложен в работах |18,
19]. Этот анализ в значительной мере использует теорию рождения перио-
периодических решений и позволяет выявить условия существования автоколе-
автоколебательных режимов в ядерных реакторах.
Задачи
4.1. Обобщим модель D.4), полагая, что реактивность реактора зависит
от температуры Т'по закону
^ = -а}(Т-Т0) + а2(Т-Т0J. D.26)
Уравнения для N» достаются прежними:
^f = jN; mc^=N-fc(T-T), D.27)
а,, а2, /, т, с, к, Т и То > Т - положительные постоянные.
Проведите полное качественное исследование системы D.26),
D.27) для N>0.
4.2. [48]. Как и в предыдущей задаче, мощность реактора опишем урав-
уравнением dN/dt = pN //. Предположим, что реактивность р зависит
только от положения у регулирующих стержней реактора: р//= ф(у).
Предположим также, что система автоматического регулирования
мощности реактора отрабатывает сигнал ошибки, заданный в виде
U = А °
где А и Ах - положительные постоянные, а Л^о > 0 - стационарная
мощность реактора. Уравнение перемещения регулирующих стержней
возьмем в виде dy/dt = -/(«)• После замены X = (N - NQ)/N0
уравнения динамики реактора запишутся в форме
dx dy
— = A + хЫу); -jt = "/(^ + ЫУ))> D-28)
Глава А
127
где В = АХ1. Нелинейные функции ц>(у) и /(и) подчиняются
следующим условиям:
Д0) = Ф@) = 0;
и/(и) > О при и ф 0; уу(у) > 0 при у * 0;
/Дм) > 0 при всех и; <р'у(у) > О при всех у.
D.29)
D.30)
D.31)
Проведите качественное исследование системы D.28) в области
\+х>0 (N>0).
4.3. Учтите запаздывающие нейтроны и возьмите уравнения кинетики реак-
реактора в виде D.23). Пусть реактивность - линейная функция мощности:
Nn
8 = const > 0.
Постройте фазовый портрет системы D.23), D.32).
4.4. Обобщите предыдущую задачу, положив
D.32)
Р = -
D.33)
где ф - нелинейная функция, пред-
представленная на рис. 4.11.
Постройте фазовый портрет сис-
системы D.23), D.33).
4.5. Рассмотрите реактор с постоянным от-
отводом тепла при учете запаздывающих
нейтронов с помощью уравнений ки-
Рис. 4.11
нетики D.24). В этом случае исходные уравнения динамики реактора
записываются в виде
l
- = -а(Т - То); mc—=N-NQ; a > 0.
D.34)
Проведите качественное исследование системы D.34). Сравните полу-
полученный результат с исследованием, проведенным в §4.1, и убедитесь,
что запаздывающие нейтроны оказывают стабилизирующее влияние
(по крайней мере, для модели реактора с постоянным отводом тепла).
4.6. Проведите качественное исследование системы D.25) при а > 0
и а, < 0.
Глава 5. КАЧЕСТВЕННЫЕ МЕТОДЫ В ДИНАМИКЕ
БИОЛОГИЧЕСКИХ СИСТЕМ
В данной главе показана эффективность применения качественных методов
теории колебаний к анализу динамики взаимодействия двух видов организ-
организмов. Рассматриваются такие случаи, когда можно не учитывать возрастную
структуру и неоднородность распределения организмов в пространстве.
Предполагается.что размножающие свойства каждого вида определяются
только численностью видов. В итоге математические модели динамики
представляют нелинейные системы второго порядка, допускающие под-
подробное исследование на фазовой плоскости.
Воздействие одного вида на другой оценим как положительное (+)>
отрицательное (-) или нейтральное @) в зависимости от того, возрастает,
убывает или остается неизменной численность популяции одного вида в
присутствии другого вида [36,41]. В итоге получается пять типов взаимо-
взаимодействия.
1. Конкуренция (--). Присутствие каждого вида неблагоприятно
сказывается на скорости размножения особей другого вида.
2. Симбиоз (+ +) - сожительство организмов двух видов, приносящее
взаимную пользу.
3. Взаимодействие (-+) - хищник-жертва, паразит-хозяин, траво-
ядные-растения и т.п.
4. Взаимодействие (+ 0) охватывает все случаи, когда один вид создает
условия, благоприятные для существования другого вида, но не испытывает
каких-либо воздействий с его стороны.
5. Взаимодействие (- 0), когда лишь один вид оказывает влияние
(и притом отрицательное) на другой вид.
Ниже проводится качественное исследование динамики взаимодействия
типов 1 (конкуренция) и 3 (хищник-жертва). Остальные типы взимо-
действия можно рассмотреть аналогичным образом, причем математические
модели динамики взаимодействий типа 4 и 5 обычно представляют частные
случаи моделей, отображающих взаимодействия 1 и 3.
В § 5.1 и 5.2 подробно изучаются два варианта математической модели:
E1)
где Nl и N2 - искомые переменные; а, Р, у и а, Ь, с - параметры
(некоторые из них могут быть равны нулю). К системе E.1) или ее частным
вариантам приводят задачи химической кинетики [42], математической
Глава 5 129
экологии [15,46], теории колебаний оптических квантовых генераторов
[47] и связанных ламповых генераторов [30], а также ряд других задач дина-
динамики систем. В задачах химической кинетики iV, и N2- концентрации
реагирующих веществ; в задачах экологии эти переменные означают числен-
численности взаимодействующих популяций; в динамике мазеров Л', и N2 характе-
характеризуют интенсивность первой и второй мод колебаний, а в теории
связанных генераторов N{ и N2 определяют квадраты амплитуд колебаний
первого и второго генератора соответственно. В связи с этим анализ,
проведенный в §5.1 и 5.2, может представить дополнительный интерес.
В §5.3 и 5.4 рассмотрены модели "хищник-жертва", являющиеся ти-
типичными автоколебательными системами. Отметим, что в §5.4 дано изло-
изложение известной работы А.Н. Колмогорова [25], которая с точки зрения
качественной теории представляет особый интерес, в ней впервые про-
проведено качественное исследование модели "хищник-жертва" без детали-
детализации правых частей уравнений.
5.1. Модель Вольтерра "хищник-жертва" [13]
Рассмотрим простейшую модель типа "хищник-жертва", которая не учи-
учитывает внутривидовую конкуренцию и предполагает неограниченное ко-
количество пищи для жертв. Эта модель состоит из уравнений
Nt = (*, - *2#2)#,; N2 = (-&з + kANx)N2, E-2)
где Nr - численность жертв; N2 - численность хищников; kv ..., к4 -
положительные параметры. В отсутствие хищников численность жертв
неограниченно возрастает: Дг1 > 0, если N2 = 0. В отсутствие жертв хищ-
хищники вымирают: М2 < 0 при всех /, если Л', = 0. Очевидно, что имеют
смысл только неотрицательные значения переменных N{ и N2, поэтому
в данной главе изучается поведение фазовых траекторий только внутри
первого квадранта фазовой плоскости N., ЛС и на положительных полуосях
Щ и Щ.
В дальнейшем символом Pt(A,B) обозначается /-е положение равно-
равновесия исследуемой системы, имеющее абсциссу А и ординату В.
В данном случае существуют два положения равновесия. Линеаризация
системы E.2) в окрестности каждого из них и последующее составление
характеристических уравнений дают: /",@,0) - седло; Р2(к3/к4, kjk2) -
центр. Точка Рх определяет положение равновесия, которое характеризует-
характеризуется полным истреблением жертв (Nt = 0) и вымиранием хищников (N2 =
= 0). Точка Р2 отображает стационарный режим сосуществования хищни-
хищников и их жертв с некоторыми ненулевыми численностями.
Покажем, что система E.2) консервативная. Составим первый инте-
интеграл системы и построим ее фазовый портрет. Умножим первое уравнение
E.2) на k^/Nx, а второе - на kJN2 и сложим эти уравнения. Получим
130Часть 1
Умножим теперь первое уравнение на кА, а второе - на к2 и снова сложим
эти уравнения. Получим
Л4ЛГ, + k2N2 = -к2кгЫ2 + kxkANy
Следовательно,
Проинтегрировав последнее уравнение, найдем первый интеграл системы
E.2):
e-k,Nle-bNlNk)Nkt ^const. E.3)
Исследуем вид интегральных кривых. Для этого перепишем уравнение
E.3) в виде
и построим кривые
X = N2k>e~k>N>; Y = N;k>ek<N\
Искомая интегральная кривая определится соотношением Y- СХ. Возьмем
две взаимно перпендикулярные прямые и отложим на них OX, 0Np 0Y
и 0Л^, как показано на рис. 5.1. Во втором и четвертом квадрантах постро-
построим кривые Y- YiNJ и Х= X(N2). В первом квадранте проведем прямую
Y= CXk возьмем на ней произвольную точку D. Проведем из нее две
прямые, параллельные ОХ и 0Y. Пусть Е, F, G, Н — точки пересечения
этих прямых с кривыми X(N2) и Y^N^. Из точек Evi /"проведем прямые,
параллельные ОХ, а из точек GnH- прямые, параллельные 0 Y. Точки
пересечения этих прямых принадлежат интегральной кривой У= СХ. Гео-
Геометрическое место таких точек, когда точка D скользит по прямой Y =
= СХ, и есть искомая интегральная кривая при данном значении константы
С. Нетрудно видеть, что все интегральные кривые замкнуты, кроме одной,
соответствующей координатным осям. Фазовый портрет дан на рис. 5.2,
из которого хорошо видно, что система E.2) - типичная консервативная
система. Изменение численности обоих видов происходит по периоди-
периодическому закону с амплитудой колебаний, определяемой начальными
значениями Nt и Nr
Глава 5
131
п
N,
Л
Рис. 5.1
Рис. 5.2
Колебания численностеи хищников и их жертв весьма часто встречаются
в природе, и модель E.2) отображает этот факт. Однако система E.2),
как и всякая консервативная система, является негрубой: при малых изме-
изменениях ее правых частей происходят качественные изменения в ее фазовом
портрете. По-видимому, модель реальной биологической системы должна
быть грубой, а колебания должны определяться не начальными условиями,
а внутренними свойствами системы, т.е. это должны быть автоколебания.
Высказанное соображение послужило стимулом для разработки новых
автоколебательных моделей типа "хищник-жертва". Две такие модели
рассмотрены в §5.3 и 5.4.
5.2. Модель взаимодействия двух конкурирующих видов
Пусть имеется один вид животных. При неограниченных источниках корма
рост численности N определяется уравнением N - kN, где к>0 -
постоянный коэффициент размножения. В реальных условиях источники
корма ограничены, действует внутривидовая конкуренция и коэффициент
размножения оказывается убывающей функцией (по крайней мере, при
достаточно больших значениях N). В простейшем случае такая ситуация
отображается так называемым уравнением Ферхюльста N = ^0(N' -
- N)N, где к0 и N' - положительные постоянные (N* - стационарная
численность животных). Если же конкурируют два вида животных, то
коэффициент размножения данного вида будет также убывающей функцией
численности второго вида. Исходные уравнения динамики взаимодействия
видов можно записать как
l = [kl(N'l-Nl)-kiNi\Nii
E.4)
Здесь kv ..., кА - положительные постоянные, a N'} > 0 и ,/Vj > 0 -
стационарные значения численностеи животных соответственно первого
и второго вида в том случае, когда виды не взаимодействуют (к2=кА = 0).
132 Часть 1
Преобразуем систему E.4), полагая
b = k2N'2, с = k3N'2, d = kAN\.
Получим
x = (a - ax - by)x = P(x, j/);l
y = (c-cy-dx)y = Q(x,y).j
Биологический смысл имеют неотрицательные значения ^иЛ^и поло-
положительные значения параметров системы E.5), поэтому дальнейшая задача
заключается в качественном исследовании системы E.5) для Х>0, У^О,
а>0, Ь>0, с>0, d>0.
Прежде всего найдем и исследуем положения равновесия системы E.5).
Они определяются из уравнений
(а-ах- by)x=0; (c-cy-dx)y = O,
откуда получаем четыре положения равновесия:
Р,@,0); Р2@,1); /»,A,0); Р4(х0,У0),
где
с(а - b) a(c - d)
хо=——гт; ^о=~^—гт- E-6)
0 ac-bd' *° ac-bd v
В дальнейшем будем говорить, что положение равновесия Р( не сущест-
существует, если оно не располагается в первом квадранте плоскости X, у или на
положительных полуосях координат.
Положение равновесия Рх соответствует случаю, когда оба вида живот-
животных вымерли. Положения равновесия /*2и Р3 характеризуют стационарные
состояния, в которых существует только один вид животных. Наконец,
точка РА характеризует наиболее интересный стационарный режим - сов-
совместное существование обоих видов животных.
Линеаризуем систему E.5) в окрестности каждого положения равно-
равновесия. Для точки Рх линеаризованная система принимает вид
*> = &>; Л = сп-
Корни характеристического уравнения этой системы равны
А., = а> 0; \ = о 0.
Глава 5 133
Следовательно, Р, - неустойчивый узел при любых положительных
значениях параметров.
Для точки Р2 линеаризованные уравнения таковы:
i = (а - Ь)\, х\ = -а\-сх\.
Корни характеристического уравнения
X, = -с < 0; Х2 = а-Ь. E.7)
Аналогично находим корни А., и Х2 для точки Рг:
X, = -а < 0; \ = c-d. E.8)
Теперь линеаризуем систему E.5) в окрестности положения равновесия
РА. Получим
t = -ах? - Ьхоц, г] = -dy& - суог\.
Характеристическое уравнение этой системы записывается в виде
X2 + (ах0 + суо)Х + х^0(ас -bd) = O. E.9)
Пусть точка РА существует: xQ>0; yQ>0 (условия существования сформу-
сформулированы ниже). Тогда дискриминант 5 уравнения E.9) положителен:
5 = (ах0 - суо)г + Abdx^ > 0.
Следовательно, корни уравнения E.9) действительные. Коэффициент пе-
перед X положителен, поэтому РА - устойчивый узел, если ас- bd>0, либо
седло, если ac-bd<§.
В зависимости от параметров а, Ь, с, d возможны четыре случая.
Случай 1:
a>b, od. E.10)
Для точки Р2 корни характеристического уравнения действительные и
разных знаков [см. E.7)], следовательно, Р2 -седло. Из E.8) видно, что
Рг - тоже седло. Далее, из E.10) следует ac-bd > 0. Из E.6) видно, что
в данном случае положение равновесия Р4 существует, и согласно E.9)
Р4 - устойчивый узел.
Случай 2: а> b, c<d. Положение равновесия Р4 не существует, так
как х0 и у0 имеют разные знаки [см. E.6)]. Из выражений E.7), E.8)
видно, что Р2 - седло, а Ръ - устойчивый узел.
Случай 3: a<b, od. Как и в предыдущем случае, положение равно-
равновесия Р4 не существует, а из формул E.7) и E.8) следует, что Р2 - устой-
устойчивый узел, Р3 - седло.
134
Часть 1
Случай 4:
a<b, c<d.
E.11)
Из E.7) и E.8) видно, что Р2 и Ръ - устойчивые узлы. Далее, из E.11)
вытекает неравенство ac-bd<0, следовательно, х„>0, уо>О [см. E.6)
и E.11)]. Таким образом, положение равновесия Рл существует, а посколь-
поскольку свободный член в уравнении E.9) отрицателен, РА - седло.
Полученные результаты сведены в табл. 5.1.
Таблица 5. 1. Твпы положений равновесия в зависимости от параметров системы E.S)
Случай
1
2
3
4
Соотношения между
параметрами
а > Ь, с > d
а> b, c< d
а < Ь, о d
а< Ь, с< d
Неустойчи-
Неустойчивый узел
Неустойчи-
Неустойчивый узел
Неустойчи-
Неустойчивый узел
Неустойчи-
Неустойчивый узел
Седло
Седло
Устойчи-
Устойчивый узел
Устойчи-
Устойчивый узел
Л<1.о>
Седло
Устойчи-
Устойчивый узел
Седло
Устойчи-
Устойчивый узел
Устойчивый
узел
—
—
Седло
Непосредственно из уравнений E.5) видно, что: 1) оси координат
фазовой плоскости х,у состоят из фазовых траекторий системы E.5);
2) решения системы E.5) при х>0, у>0 ограничены, поскольку х < О
при всех х>\ и у <0 при всех у> 1.
Теперь воспользуемся критерием Дюлака. Возьмем F(x,y) = 1/ху.
Получим D=-a/y— c/x<0 при всех х>0, у>0. Таким образом, система
E.5) не имеет замкнутых фазовых траекторий, расположенных в первом
квадранте плоскости х,у.
После того, как выяснены расположение и типы состояний равно-
равновесия, доказано отсутствие замкнутых фазовых траекторий и неограниченно
нарастающих решений, можно однозначно построить фазовые портреты
системы E.5) для всех четырех случаев, перечисленных в табл. 5.1. Эти
портреты даны на рис. 5.3—5.6. Из рисунков видно, что система E.5) -
типичная диссипативная система: любое ее движение заканчивается в одном
л
Случай 1
Случай 2
Р,
N,
Рис. 5.3
Глава 5
Рис. 5.5
Рис. 5.6
из устойчивых положений равновесия. В случае 1 - это точка /*4, харак-
характеризующая режим устойчивого сосуществования двух конкурирующих
видов с ненулевыми численностями животных. В случаях 2 или 3 - это
точки Р2 или Ру но здесь сосуществование видов невозможно: один из
видов вымирает, в то время как численность другого вида приходит
к постоянному ненулевому значению. Такая же ситуация и в случае 4, но
здесь вымирание того или иного вида определяется начальными числен-
численностями особей каждого вида.
Замечание. В данной задаче коэффициенты размножения видов
[выражения в квадратных скобках в уравнениях E.4)] были взяты в про-
простейшей линейной форме. Более общие зависимости коэффициентов раз-
размножения от численностей конкурирующих видов рассмотрены, например,
в работах [15,20], а также в §5.3 и 5.4.
5.3. Обобщение модели Вольтерра
Обобщим модель Вольтерра, изученную в §5.1. Предположим, что взаи-
взаимодействие типа хищник-жертва подчиняется закону Моно [37], т.е. вклад
в скорость размножения хищника, обусловленный истреблением жертв,
пропорционален выражению N{N2/(kQ+Nl), где Л^, и N2 - концентрация
жертв и хищников соответственно, к0 - положительная постоянная. Этот
закон отображает следующую реальную закономерность: скорость размноже-
размножения хищника пропорциональна концентрации жертвы, если эта концен-
концентрация мала (Nt «&0), и не зависит от нее, если она велика (Nl »к0).
Учтем также офаниченность размножения жертвы в отсутствие хищника
(внутривидовую конкуренцию среди жертв). Тогда модель взаимодейст-
взаимодействующих видов можно записать так:
dt
dN2
dt
kN
E.12)
Все коэффициенты в системе E.12) положительные. Первое уравнение
описывает изменение концентрации жертв. Первое слагаемое в его пра-
136 Часть 1
вой части дает скорость размножения жертвы, второе слагаемое - ско-
скорость уничтожения жертвы хищниками, последнее слагаемое характеризует
уменьшение скорости размножения жертвы в результате внутривидовой
конкуренции. Второе уравнение системы E.12) определяет изменение
концентрации хищников. Скорость dNJdt этого изменения состоит из
скорости роста числа хищников из-за истребления ими жертв (первое сла-
слагаемое) за вычетом скорости естественной их убыли (смертности), ото-
отображаемой вторым слагаемым. В уравнениях E.12) положим
x=k4Nt\ y=k2N2; x =
и перейдем к системе
х = ах - — Ьх ;
k=kokA
У =
1
к + х
ху 1 E13)
в которой точкой обозначено дифференцирование по новому времени т.
Параметры а, Ь, с и к положительные. По биологическому содержанию
задачи переменные X и у неотрицательные.
Положения равновесия системы E.13):
Р2
где
,0); Р2(а/Ь,0); ,ад
ск аA - с) - Ьск
У к
Для точки Рх корни характеристического уравнения равны А,, = а > О
и Х2 = -с < 0, следовательно, Р, - седло при любых положительных
значениях параметров.
Линеаризуем систему E.13) в окрестности точки Рг Получим
• „ а . fl(l - с) - Ьск
t, = -at, - 77 Ч> Ц = Гг "Л-
bk + а ' bk + а '
Корни характеристического уравнения этой системы равны
1 - А.п. , а{\-с)-Ьск
Глава 5 137
Пусть <p = fl(l- с)- bck. Очевидно, что /^-устойчивый узел, если
ф<0, и седло, если ф>0.
Рассмотрим теперь положение равновесия Рг(хй,у0), описывающее ре-
режим сосуществования хищников и их жертв с конечными (ненулевыми)
численностями. Пусть о 1. Из формул для Хо, у0 хорошо видно, что
Хо < О, уй < О, т.е. точка Р3 не существует. Пусть теперь с < 1. Тогда
ХО>О, а знак у0 определяется знаком ф. Из условия ф = 0 находим
E.14)
Очевидно, что ф<0 (и >>0<0), если b>b0, и ф>0 (и j>0>0), если b<bQ.
Последнее неравенство дает необходимое и достаточное условие существо-
существования положения равновесия Ру
Линеаризуем (при с< 1) систему E.13) в окрестности точки Ръ и со-
составим характеристическое уравнение линеаризованной системы. Получим
-ibu-.O. E.15)
(к + ху
Свободный член уравнения E.15) положителен (и, следовательно, Рг не
седло), а знак коэффициента перед X определяется знаком выражения
которое равно нулю при
b = bQ0 = ° ~ . E.16)
Учитывая, что С< 1, и сопоставляя выражения E.14) и E.16), убеждаемся,
Пусть 0<b<bQQ. При этом \(/<0, следовательно, коэффициент перед
X в уравнении E.15) отрицателен, и точка Ръ - неустойчивый фокус (или
узел). Если же bm<b<b0, то vj/>0, а точка Р3 - устойчивый фокус (или
узел). Таким образом, с точки зрения существования и устойчивости поло-
положения равновесия Р3 при с< 1 возможны три качественно различных случая
(рис. 5.7).
Очевидно, что значения Ь~Ьй и Ь=Ь(т являются бифуркационными.
В полном четырехмерном пространстве параметров^?, Ь, с, к соотношения
b=bQ и b=bQQ определяют бифуркационные поверхности. (Бифуркацион-
(Бифуркационной поверхностью является также и поверхность С= 1.)
138
Часть 1
ф > 0; \\i < 0
Ф > 0; у > О
Ф<0
I Р. - неустойчивый узел I Р. - устойчивый узел I P, не существует
I I I
01
». I
II
Рис. 5.7
Все данные о положениях равновесия Р{, Р2, Р3 сведены в табл. 5.2
Таблица 5. 2. Типы положений равновесия в зависимости
от параметров системы (S.13)
Случай
1
2
3
Соотношения между
параметрами
о 1,Ь>0
или с < 1, * > Ьо
c<l,bw<b<b0
c<l,Q<b<bM
Седло
Седло
Седло
Рг(а/Ь,0)
Устойчи-
Устойчивый узел
Седло
Седло
-
Устойчивый
узел (фокус)
Неустойчивый
узел (фокус)
Из уравнений E.13) хорошо видно, что оси координат (как и в преды-
предыдущей задаче из §5.2) состоят из фазовых траекторий системы. Направле-
Направление движения изображающих точек по осям устанавливается непосредствен-
непосредственно из E.13): по оси 0у изображающие точки идут в седло Р}) а по оси Ох
изображающие точки стремятся к положению равновесия Рг
Теперь покажем, что ни одна фазовая траектория, начинающаяся
в первом квадранте плоскости х, у, не уходит в бесконечность. С этой
целью построим семейство прямых х+у=с и изучим направление пе-
пересечения этих прямых фазовыми траекториями при достаточно больших
значениях с . Сложим уравнения E.13) и получим
d_
di
— (х + у) = ах-Ьх2 -су.
Отсюда видно, что d(x+y)/dx<0, если сумма х+у велика. Это значит,
что фазовые траектории системы E.13) будут пересекать линии Х+у=с
при любых достаточно больших значениях С так, чтобы изображающие
точки перемещались от линий, соответствующих большим значениям с,
к линиям с меньшими значениями, т.е. так, как это показано на рис. 5.8.
Отсюда следует отсутствие фазовых траекторий, уходящих в бесконечность.
Для значений параметров, соответствующих первой строке табл. 5.2,
точка Р} не существует, поэтому не существуют и предельные циклы,
лежащие в первом квадранте. Это обстоятельство вместе с полученной
Глава 5
139
выше информацией о фазовых траекториях однозначно определяет фазовый
портрет системы E.13) (рис. 5.9).
Рис. 5.8
Рис. 5.9
Два других случая, соответствующих второй и третьей строкам табл.
5.2 (областям // и III на рис. 5.7), удобно рассмотреть после допол-
дополнительного преобразования системы E.13). Умножим каждое уравнение
E.13) на к+х и перейдем к новому "нелинейному" времени /нов по формуле
dtmb = dz/(k + x). Эта процедура допустима; она не приводит к качест-
качественным изменениям фазового портрета при X > О, поскольку к > О,
и сумма к + х строго больше нуля*'. Далее, перенесем начало координат
в точку Ру полагая
и =
х - х,
о .
V =
У~Уо
В плоскости и, V представляет интерес подпространство
1 + и>0; l + v>0,
E.17)
соответствующее положительным значениям Хну. После элементарных
преобразований уравнения E.13) примут вид
где
du
dv
dt^
= A + u){-qu - yov - foco« ) = -P(">
= kcu{\ + v) = Q(u,v),
= (a-bk- 2bxo)xo =
- l).
E.18)
E.19)
'»См. также гл. I монографии [ 10], где данный прием назван изменением параметризации.
140
Часть 1
Очевидно, что q> 0 для параметров из области //(см.рис. 5.7 и табл. 5.2)
и q < 0 при значениях параметров из области ///.
Докажем, что для области // замкнутые фазовые траектории системы
E.18) [и, следовательно, ( 5.13)] не существуют. Этим однозначно опреде-
определится фазовый портрет системы E.13) в области //. Воспользуемся крите-
критерием Дюлака и возьмем функцию /"в виде
Имеем
D = F(u,v)[-q-b(m + 2)x0V - myov + (kcl-mq-q-2bx20)u].
Знак D полностью определяется знаком выражения в квадратных скоб-
скобках. Пусть /и = 0 и kcl-q- 2bx\ = 0, т.е. l=l{ = (q+ 2bx\ )/kc. Тогда
v)
Л_, q + 2Ьх1иг
1 + и
E.20)
Из E.20) видно, что для параметров из области II, где q > 0, значение D
отрицательно во всей области E.17). Следовательно, система E.18) в
области E.17) и система E.13) в области х> 0; у> 0 не имеют предель-
предельных циклов (рис. 5.10).
Рассмотрим теперь параметры системы E.13), принадлежащие области
///. Согласно доказанному точка Рг - неустойчивый фокус или узел и
бесконечность также неустойчива. Следовательно, система E.13) имеет
по крайней мере один устойчивый предельный цикл, целиком лежащий в
первом квадранте плоскости Х,уи охватывающий точку Ру На рис. 5.11
дан фазовый портрет для случая, когда этот цикл единственный.
Рис. 5.10
Рис. 5.11
Таким образом, при значениях параметров из области ///система E.13)
автоколебательная; концентрации хищников и их жертв совершают коле-
колебания, амплитуда которых, в отличие от колебаний, описываемых моделью
Глава 5 141
Вольтерра E.2), определяется параметрами системы, но не начальными
условиями.
Обсудим вопрос о единственности предельного цикла. Рассмотрим
границу Ь = bw между областями II и III. В этой точке корни характери-
характеристического уравнения E.15) чисто мнимые. По формуле из Приложе-
Приложения 1 вычислим первую ляпуновскую величину Lx для системы E.18) при
b-bw (при этом, очевидно, <7=0). Получим
Это значит (см. §3.3), что при Ь-b^ точка Рг - устойчивый сложный
фокус, а при переходе из точки Ью в область III из него рождается один
устойчивый предельный цикл и точка Рг становится простым неустойчивым
фокусом (см. рис. 5.11). Сказанное заведомо справедливо для значений b
из области III, близких к Ьж. Однако остается неизученной возможность
рождения .других предельных циклов из уплотнения траекторий, если точка
Ь отстоит достаточно далеко от Ь^. В этом заключается неполнота данного
исследования.
Замечание. Система E.13) при а= 1 - с рассмотрена в монографии
I37.J. Исследование было ограничено доказательством существования
устойчивого предельного цикла для параметров из области III.
5.4. Модель Колмогорова "хнщник-жертва"
В работе [25] А.Н. Колмогоров впервые предложил изучать модели взаимо-
взаимодействующих видов, не расшифровывая детально вид правых частей урав-
уравнений динамики и ограничиваясь лишь некоторыми качественными со-
соображениями. Следуя Колмогорову, рассмотрим систему
N, = *,(#,)#, - ДЛГ,)#2; N2 = k2(N,)N2, E.22)
где iVj - концентрация жертв, N2 - концентрация хищников. Функции
kv k-ViL определены, непрерывны и непрерывно дифференцируемы
при jVj > 0; N2>0. Как и в модели Вольтерра, здесь не учитывается
взаимодействие хищников друг с другом: коэффициент размножения хищ-
хищников к2 и число жертв L, истребляемых одним хищником в единицу
времени, не зависят от Л^. Однако, в отличие от модели Вольтерра, в
уравнениях E.22) не делается никаких специальных допущений отно-
относительно конкретного вида функций кх, к2 и L. Постановка задачи
ограничивается лишь следующими качественными предположениями:
dk,
^- < 0, *,@) > 0 > *,(«>) > -оо; E.23)
142 Часть 1
dk
V2
, *2@)<0<А:2(оо); E.24)
Д/V,) > 0 при TV, > 0; ДО) = 0 E.25)
(в работе [25] рассмотрен также случай ДО) > 0).
Неравенства E.23) говорят о том, что коэффициент размножения жертв
в отсутствие хищников монотонно убывает с ростом численности жертв,
переходя от положительных значений к отрицательным (таким путем учи-
учитывается внутривидовая конкуренция среди жертв). Неравенства E.24)
указывают на тот факт, что с ростом численности жертв коэффициент
размножения хищников возрастает, переходя от отрицательных значений
(когда пища для хищников недостаточна) к положительным. Модель
Вольтерра E.2) получается как частный случай из E.22) при k.(Nx) =
= const > 0, ДЛ^) = k2Nv кг= const > 0, k2(Nx ) = -кг + kANx, т.е. в
модели Вольтерра не выполнено требование отрицательности kx(Nx) при
больших значениях N{.
Найдем положения равновесия системы E.22). Их два или три: Рх@,0),
Р2(А, 0), где А определяется из уравнения кх(А) = 0, и Рг(В, С), где В
и С определяются из уравнений к2(В) = 0, к{(В)В - L(B)C = 0. Точка
Рг размещается в первом квадранте лишь в случае к{(В) > 0, т.е. при
В<А.
Исследуем типы точек Рр составляя для них линеаризованные урав-
уравнения. В точке Рх получим
Корни характеристического уравнения Х} = kt@) и Х2 = к2@) действи-
действительные и разных знаков, так что точка Р{ - седло. Сепаратрисы седла -
оси координат.
В точке Р2{А,0) линеаризованные уравнения имеют вид
- L{A)%
ц = к2(А)г\.
Корни характеристического уравнения А., = кх\А)А, "К2 - кг{А). Ес-
Если В<А, то \, <0, Х2>0 и Р2~ седло. Если же В>А, то X, <0, Х2 <0
и Р2- устойчивый узел.
В точке Р3(В,С) при В<А получаем линеаризованные уравнения
Глава 5
143
где ст = -кх(В)- к1'(В)В + L'(BY?. В характеристическом уравнении
А.2+аХ+А=0 свободный член Д = Ck^(B)L(B) > О, поэтому Ръ - фокус
или узел. Устойчивость определяется знаком а: положение равновесия Р3
асимптотически устойчиво при а > 0 и неустойчиво при а < 0. В итоге
получаем результаты, сведенные в табл. 5.3. •
Таблица 5. 3. Возможные типы положений равновесия системы E.22)
Случай
1
2
3
Соотношения между
параметрами
В>А
В < А, о > 0
В < А, о < 0
Седло
Седло
Седло
Р2(А,0)
Устойчи-
Устойчивый узел
Седло
Седло
Рг(В,С)
—
Устойчивый
узел (фокус)
Неустойчивый
узел (фокус)
При сделанных допущениях траектории не могут уходить в бесконеч-
бесконечность, ибо численность жертв лимитирована (даже в отсутствие хищников)
и тем самым лимитирована численность питающихся ими хищников. Таким
образом, осталось только решить вопрос о существовании предельных
циклов.
В случае 1 у системы E.22) внутри первого квадранта нет положений
равновесия, следовательно, нет и замкнутых фазовых траекторий. Фазовый
портрет системы будет таким же, как на рис. 5.9.
В случае 2 при общем виде функций кр kv и L трудно решить вопрос
о существовании или отсутствии четного числа предельных циклов, окру-
окружающих точку Рг (очевидно, что нечетное число исключено). Укажем
только, что если предельные циклы отсутствуют, то фазовый портрет будет
таким же, как на рис. 5.10.
Наконец, в случае 3 непременно существует устойчивый предельный
цикл, поскольку решения системы E.22) ограничены, а единственное
положение равновесия, лежащее внутри первого квадранта (точка Р3) -
неустойчивый узел или фокус. В том случае, когда этот цикл единствен-
единственный, фазовый портрет имеет тот же вид, что и на рис. 5.11. Таким обра-
образом, в случае 3 численности жертв и хищников совершают автоколебания
вокруг ненулевого положения равновесия Ру
Замечание 1. Кроме упомянутых выше работ [15, 20,25], качест-
качественному исследованию динамики взаимодействующих видов (без дета-
детализации правых частей уравнений динамики) посвящена также гл. 3 моно-
монографии [39]. В конце главы дополнительно прокомментированы некоторые
работы зарубежных авторов, посвященные этому же подходу.
Замечание 2. Во многих работах, в том числе в [25, 39, 46], от-
отмечается важность учета возрастной структуры взаимодействующих видов
(в упрощенном варианте - учета запаздывания в размножении особей).
В частности, А.Н. Колмогоров [25] справедливо указывает, что аппарат
144 Часть 1
обыкновенных дифференциальных уравнений несовершенен, поскольку
часто заметные изменения численностей "происходят за промежутки
времени, соизмеримые с длительностью жизни отдельных особей, что
делает неизбежным учет возрастного состава популяций. Например, как
бы мы ни усовершенствовали вольтерровскую теорию в рамках описания
динамики популяции уравнениями типа N, = Fi(Nx,...,Nп), /=1,...,л,
применение ее к объяснению трех-, четырехлетних циклов колебания чис-
численности птиц, отмеченных в наблюдениях Северцева, остается не впол-
вполне оправданным из-за только что указанного обстоятельства". Запаздывание
в размножении особей может, таким образом, внести заметные изменения
в динамику, например может послужить причиной автоколебаний числен-
численности взаимодействующих видов. Рассмотрение моделей с запаздыванием
времени здесь не проводится. Обзор работ по анализу таких моделей и
список соответствующей литературы приведены в статьях [21, 22].
Замечание 3. Выше рассмотрены некоторые качественные задачи
динамики только экологических систем*», но, разумеется, приложения
качественных методов ими не ограничиваются. Эти методы нашли при-
применение в динамике роста клеточных популяций, в исследовании процессов
эволюции и развития и во многих других задачах современной биологии.
О всех этих приложениях можно получить достаточно полное представление
по монографиям [37, 38] и приведенной в них литературе.
Задачи
5.1. Модели типа E.2) применяются [37] для описания взаимодействия
двух антагонистических видов микроорганизмов, находящихся в про-
проточном культиваторе. Это могут быть какие-либо бактерии и их враги
- бактериофаги. В безразмерных переменных уравнения динамики
имеют вид
x = x(\-D-y); y = y(x-D), E.26)
где X и у - численности жертв и хищников соответственно; D > О -
отношение скорости протока к коэффициенту при скорости размно-
размножения хищника [37]. Постройте фазовый портрет системы E.26).
5.2. Обобщим модель Вольтерра E.2), приняв во. внимание внутривидовую
конкуренцию среди жертв. С этой целью первое уравнение системы
E.2) заменим первым уравнением системы E.4). В итоге модель
"хищник-жертва" примет вид
N, = [*,« - TV,) - k2N2]Ni; N2 = (-*3 + k4N,)N2, E.27)
где по-прежнему Л^ — концентрация жертв, a N2 — концентрация хищ-
хищников; кх,...,кА и N\ — положительные параметры.
''Здесь уместно указать монографию [401 > целиком посвященную математическому
моделированию экологических систем.
Часть 2. КОЛЕБАНИЯ НЕЛИНЕЙНЫХ АВТОНОМНЫХ СИСТЕМ:
КОЛИЧЕСТВЕННЫЕ МЕТОДЫ
ВВЕДЕНИЕ
С точки зрения теоретического анализа периодических колебаний авто-
автономные системы удобно разделить на следующие типы: 1) линейные;
2) кусочно-линейные; 3) квазилинейные; 4) нелинейные с малым пара-
параметром перед (старшей) производной; 5) существенно нелинейные.
Линейные системы отображаются, как уже говорилось, линейными
дифференциальными уравнениями.
Кусочно-линейные системы - это нелинейные системы, которые со-
содержат в качестве нелинейных правых частей кусочно-линейные функции
искомых переменных (примеры см. в §6.3 и 6.4).
Квазилинейные системы содержат малый параметр перед нелинейностями
и переходят в линейные системы, если этот параметр обращается в нуль.
Например,
х + х = [if(x,x), 0 < ц « 1.
Системы четвертого типа содержат малый параметр не перед нелиней-
нелинейностями, а перед производной, например,
\ix = P(x,y), y = Q(x,y), 0<ц«1.
Под существенно нелинейными системами будем понимать нелинейные
системы, не являющиеся кусочно-линейными и не содержащие малых
параметров. Такие системы целесообразно разделить на два типа: а) не-
нелинейные консервативные; б) нелинейные неконсервативные.
Предложенное деление"' динамических систем удобно потому, что
каждому типу систем соответствует свой метод (или группа методов) расчета
периодических колебаний.
Линейные системы исследуются точными методами теории линейных
дифференциальных уравнений.
Для кусочно-линейных систем хорош метод точечных преобразований
(гл. 6).
Квазилинейные системы исследуются методами малого параметра: мето-
методом Пуанкаре (гл. 7), методом Ван-дер-Поля (гл. 8), методом Каменкова
(гл. 9), асимптотическим методом Крылова-Боголюбова-Митропольского
(гл. 10).
*' Оно не является единственно возможным. Например, под существенно нелинейными
часто понимают все нелинейные системы без малого параметра либо системы, не допускающие
линеаризации (таковы, в частности, кусочно-линейные системы).
Введение 147
В системах, отображаемых нелинейными уравнениями с малым пара-
параметром при старших производных, могут устанавливаться разрывные авто-
автоколебания, теория которых достаточно хорошо развита (гл. 13).
Периодические колебания в существенно нелинейных консервативных
системах можно рассчитывать методом Ньюкома-Линдстеда-Ляпунова
путем разложения искомого периодического решения в ряд по степеням
амплитуды искомых колебаний |18]. Метод ограничен случаем достаточно
малых амплитуд. При расчете больших амплитуд колебаний следует об-
обращаться к численным методам.
Расчеты периодических колебаний в существенно нелинейных некон-
неконсервативных системах можно проводить: 1) методом гармонической ли-
линеаризации (гл. 12), если есть основание полагать, что искомые колебания
близки к синусоидальным: x{t)^A^+As,in(at; 2) на основе теории бифур-
бифуркации рождения предельного цикла, если в пространстве параметров сис-
системы рабочие значения параметров располагаются вблизи границы области
устойчивости (гл. 11)'\ В остальных случаях приходится прибегать либо к
обобщению метода гармонической линеаризации, представляя искомое
решение отрезком ряда Фурье из п слагаемых, либо к непосредственному
использованию численных методов.
''В этом случае, по существу, вводится малый параметр - расстояние от рабочей точки до
границы.
Глава 6. МЕТОД ТОЧЕЧНЫХ ПРЕОБРАЗОВАНИЙ
Излагаемый материал разбит на три части. Сначала даны основные оп-
определения метода, затем получены условия устойчивости предельного цикла
и в заключение показано, как можно изучать автоколебательные системы
с помощью метода точечных преобразований. Метод излагается приме-
применительно к системам второго порядка. Для более общих систем развернутое
изложение метода см. в работе |19].
6.1. Функция последования. Точечное преобразование. Неподвижная точка
На фазовой плоскости системы
х = Р(х,у), y^Q(x,y) F.1)
проведем отрезок без контакта, т. е. такой отрезок, в каждой точке кото-
которого фазовые траектории системы F.1) пересекают его, не касаясь. Про-
Проведем отрезок так, чтобы на нем не было состояний равновесия системы
F.1). (Все сказанное ниже остается справедливым, если берется не пря-
прямолинейный отрезок, а дуга без контакта - простая гладкая кривая, которая
пересекает фазовые траектории, но ни в одной точке не касается их.)
Пусть А и В - концевые точки отрезка без контакта (рис. 6.1). Пусть
S - координата точек этого отрезка. Рассмотрим фазовую траекторию,
проходящую через точку S. Возможны два
случая.
1. Пройдя через точку S в момент
времени /, фазовая траектория вновь пере-
пересечет отрезок АВ в некоторой точке I (см.
рис. 6.1). В этом случае говорят, что точка
S имеет последующую I на отрезке без
Рис 6' контакта.
2. Прошедшая через точку S траектория
больше не пересекает отрезок АВ, и тогда говорят, что точка S не имеет
последующих на отрезке без контакта.
Очевидно, что значение координаты последующей точки зависит от
значения s, т.е. S - функция от ?
s = f(s). F.2)
Эта функция называется функцией последования; она выражает закон неко-
некоторого точечного преобразования отрезка без контакта в себя, т. е. она
переводит точки этого отрезка (s) в другие точки ( S ) этого же отрезка.
Глава 6 149
Геометрически очевидно, что функция последования существует тогда,
когда отрезок без контакта пересекает траектории, имеющие характер
спиралей (см. рис. 6.1), или замкнутые траектории (рис. 6.2, 6.3). Оче-
Очевидно также, что если некоторому значению S соответствует замкнутая
траектория, то s = f(s) = S, т.е. точка и ее последующая совпадают (см.
рис. 6.2).
Рис. 6.2 Рис. 6.3
Определение 6.1. Точки отрезка без контакта, преобразующиеся
сами в себя, называются неподвижными точками точечного преобразования
F.2).
Таким образом, замкнутым фазовым траекториям соответствуют не-
неподвижные точки, а отыскание таких траекторий можно свести к опреде-
определению функции последования f(s) и отысканию тех значений S, для ко-
которых
f(s) = 5. F.3)
Если отрезок без контакта пересекает континуум замкнутых траекторий
(см. рис. 6.3), то имеется целый отрезок неподвижных точек, а функция
последования имеет вид S = S. Если же имеется предельный цикл, т.е.
изолированная замкнутая траектория, то и соответствующая ему неподвиж-
неподвижная точка будет изолированной, т.е. в достаточно малой ее окрестности
(на отрезке без контакта) нет других неподвижных точек. Если S = Sv ...
..., S = Sm - корни уравнения F.3), то имеется Ш предельных циклов,
проходящих через точки sv ..., Sm отрезка без контакта.
6.2. Устойчивость неподвижной точки. Диаграмма Ламерея и теорема Кёнигса
Введем теперь понятие устойчивости неподвижной точки, свяжем устой-
устойчивость неподвижной точки с устойчивостью предельного цикла и получим
условия устойчивости неподвижной точки.
Пусть имеется отрезок без контакта АВ и неподвижная точка s',
соответствующая предельному циклу L (рис. 6.4). Рассмотрим фазовую
траекторию и точки ее пересечения sk с отрезком АВ в некоторой е-окрест-
ности предельного цикла L. Составим последовательность
S, St = /E), S2 = /(s,),..., Sn = /($_,),... F.4)
150
Часть 2
Рис. 6.4
Для другой фазовой траектории будет
другая последовательность F.4) точек Sk, но
существенно следующее: если предельный
цикл L устойчив, то все фазовые траекто-
траектории, начинающиеся в некоторой 6-окрест-
6-окрестности предельного цикла, неограниченно
приближаются к нему при f -> «>, а все
последовательности F.4) из некоторой ок-
окрестности точки s' сходятся к неподвижной
точке S* (как при s<s*, так и при S >5*).
Определение 6. 2. Неподвижная
точка 5* устойчива, если существует такая
ее окрестность на отрезке без контакта, что
все последовательности F.4) с начальными точками S из этой окрестности
сходятся к неподвижной точке 5*.
Ясно, что устойчивому предельному циклу соответствует устойчивая
неподвижная точка точечного преобразования. Это соответствие является
взаимным.
Определение 6. 3. Неподвижная точка s' неустойчива, если в
любой сколь угодно малой ее окрестности найдется хотя бы одна точка S,
такая, что последовательность F.4) не сходится к s'. Очевидно, что
неустойчивая неподвижная точка соответствует неустойчивому предельному
циклу, ибо существование в сколь угодно малой окрестности точки s'
последовательности F.4), не сходящейся к s', говорит о наличии в сколь
угодно малой окрестности предельного цикла фазовой траектории, не стре-
стремящейся к нему при / -> оо. Отыскание неподвижных точек и определение
их устойчивости не представляют труда, если только известна функция
последования/(.у). На плоскости s,S построим график функции после-
дования f(s) и проведем биссектрису S = S координатного угла (рис.
6.5). Точки пересечения биссектрисы с графиком функции последования
суть неподвижные точки точечного преобразования. (На рис. 6.5 таких
Рис. 6.5
Глава 6 151
точек две: S = s' и S = s".) Для отыскания последующей точки по данной
точке S из точки S на оси абсцисс восстановим перпендикуляр до пересе-
пересечения с графиком f(s), затем из полученной точки пересечения проведем
прямую, параллельную оси абсцисс, до пересечения с биссектрисой. Абс-
Абсцисса полученной точки дает значение последующей sv Далее таким же
приемом определяется следующая точка последовательности F.4), т.е.
точка s2, и т.д.
Если последовательность точек S, Sv Sy... сходится к неподвижной
точке, то неподвижная точка устойчива; в противном случае - неустойчи-
неустойчива. На рис. 6.5 неподвижная точка s" устойчива, а точка 5* неустойчива.
Диаграмма на рис. 6.5 называется диаграммой Ламерея. Она позволяет
не только найти неподвижную точку и определить ее устойчивость, но и
оценить размеры области ее притяжения. (На рис. 6.5 для точки s" такой
областью служит луч S > s'.) Таким образом, диаграмма Ламерея дает
условия устойчивости в большом. Условие устойчивости неподвижной
точки s' в малом (без оценки области притяжения) дается следующей
теоремой.
Теорема Кёнигса. Неподвижная точка 5 = s' точечного преобра-
преобразования s = f(s) устойчива, если
и неустойчива, если
ds
ds
F.5)
F.6)
s-s
Доказательство. Линеаризуем функцию s = f(s) в окрестности
точки s' и построим "лестницу Ламерея". Линеаризованная функция после-
дования равна
f(s) = f(s') + ft'(s')(s-s'). F.7)
Пусть теперь выполнено неравенство F.5), и пусть для определенности
fs'(s') > 0 (все другие случаи рассмотрите самостоятельно). Тогда "лест-
"лестница Ламерея" будет вести к точке 5 = 5* (рис. 6.6), т.е. неподвижная
точка устойчива.
В большинстве практических задач функция последования получается
в параметрической форме: S = Ф(х); J = ^(t), t - параметр. Разумеется,
метод точечных преобразований применим и в этом случае. Неподвижная
точка 5* ищется, как обычно, из уравнения s — s, т.е. Ф(х) = ЧР(т).
Если х = т* - корень этого уравнения, то s' = Ф(т*) = 4'(х*). По теореме
Кёнигса неподвижная точка устойчива, если
152
Часть 2
ds
ds
s=s'
4V(O
ФДт*)
и неустойчива при обратном неравенстве. На рис. 6.7 приведен пример
диаграммы Ламерея. По заданному значению S=SQ определяют графически
соответствующее значение х = х0, затем восстанавливают перпендикуляр
до пересечения с кривой Ч'(т) и находят последующую S, = x?(x0). Беря
эту точку за исходную, ищут последующую для 5,, для чего проводят го-
горизонталь 5 = 5, до пересечения с кривой Ф(т) и тем самым определяют
т - т,, а затем и 52 = ^(т,) и т.д.
Рис. 6.6
Рис. 6.7
Выводы. Задача отыскания предельных циклов может быть сведена к
отысканию функции последования/E) и затем к нахождению неподвижных
точек точечного преобразования отрезка без контакта (из уравнения F.3)].
Предельный цикл устойчив, если устойчива соответствующая неподвижная
точка, и неустойчив, если неподвижная точка неустойчива. Условие устой-
устойчивости неподвижной точки дает теорема Кёнигса или диаграмма Ламерея.
Замечание. Приведенные выше понятия легко обобщаются на
системы П-го порядка. Именно, рассмотрим «-мерное фазовое про-
пространство такой системы. Построим в нем поверхность S без контакта и
введем на ней некоторую систему координату, • ¦•>У„, (т<П-1). Зададим
на S некоторую точку М- М(у{,...,ут) и рассмотрим фазовую траекторию,
проходящую через эту точку. Пусть через конечное время траектория вновь
пересечет поверхность S в некоторой точке М(у1,...,ут). Тогда точка М
называется последующей для точки М. Преобразование, устанавливающее
однозначное соответствие между точками поверхности 5 и их последую-
последующими, называется точечным преобразованием, или отображением, поверх-
поверхности S в себя. Это преобразование записывают в виде М = ТМ, где Т-
оператор точечного преобразования.
Точка МНазывается неподвижной, если М - М. Неподвижным точ-
точкам отвечают замкнутые фазовые траектории. Замкнутые фазовые траек-
Глава 6
153
тории соответствуют также и Г-кратным неподвижным точкам, когда
Т'М= М, но ТкМ* Мпщк< г.
Пусть М' - г-кратная неподвижная точка. Возьмем произвольную
точку Мо в некоторой достаточно малой окрестности точки М' и составим
последовательность
Мо, Л/, = ГМ0, М2 =
= Т2гМ0,...
Неподвижная точка М' и соответствующий ей предельный цикл устой-
устойчивы, если эта последовательность сходится к Л/':
Подробнее о методе точечных преобразований см. в работах |8, 19].
Ниже, в §6.3 и 6.4, этот метод применяется к анализу классических авто-
автоколебательных систем - лампового генератора и часового механизма, ото-
отображаемых дифференциальными уравнениями второго порядка.
6.3. Ламповый генератор с Z-характеристикой
На рис. 6.8 и 6.9 представлены две различные упрощенные схемы лампового
генератора. Каждая из них обладает всеми признаками автоколебательной
системы. В самом деле, имеются собственно колебательная система (ко-
(колебательный контур), постоянный источник энергии (постоянное анодное
напряжение Ед) и, наконец, взаимосвязь между источником Ед и коле-
колебательной системой. Эта взаимосвязь осуществляется за счет общего маг-
магнитного потока в катушках индуктивности и характеризуется коэффи-
коэффициентом взаимоиндукции М.
Рис. 6.9
Ламповый генератор - нелинейная система. Нелинейный элемент -
электронная лампа; электрический ток /а, текущий через лампу, является
нелинейной функцией сеточного и анодного напряжений. Составим урав-
уравнения динамики генератора, предполагая, что: 1) анодный ток /о зависит
только от напряжения на сетке лампы; 2) сеточный ток отсутствует.
154 Часть 2
Для схемы на рис. 6.8 справедливы уравнения
u = ug-Eg = M%-; /„=/(«); М > О,
* * а/
1 ~ la +lc> 1с ~ jt> dt+ l+V - .
(Обозначения см. на рисунке.) После элементарных преобразований полу-
получим систему
-.
Для схемы рис. 6.9 уравнения записываются в виде
Далее, учтем, что
F.8)
F-9)
dt
где
F.10)
Siu) = =
du du
- нелинейная функция и, называемая крутизной характеристики лампы*'.
Из F.9) и F.10) получим
[RC - MS(u)]j- + u = 0.
F.11)
Между системой F.8) и уравнением F.11) нет принципиальной разницы:
система F.8) сводится к уравнению F.11) дифференцированием по /пер-
/первого уравнения F.8) и подстановкой в него di/dt- u/M. Поэтому для
''Характеристикой лампы принято называть зависимость анодного тока 1а от сеточного
напряжения и: i =/(и).
Глава 6
155
наших целей не имеет смысла различать схемы, представленные на
рис. 6.8 и 6.9.
Перейдем к непосредственному изучению лампового генератора с Z-
характеристикой, используя уравнения F.8). На рис. 6.10 представлена
одна из возможных характеристик лампы с горизонтальным участком
насыщения (на этом участке увеличение сеточного напряжения не приводит
к увеличению анодного тока).
Ограничимся случаем, когда амплитуда возможных колебаний напря-
напряжения U много больше интервала U, на котором происходят все сущест-
существенные изменения ia (рис. 6.10). Тогда разумной идеализацией такой
характеристики будет Z-характеристика, представленная на рис. 6.11. При
этом в уравнениях F.8)
при w<0 (di/dt=O);
при и = 0 (di/dt < 0);
при «>0 (di/dt>0).
F.12)
'«¦
'„0
0
Г
и
Рис. 6.10
Рис. 6.11
Исходя из физических соображений, будем искать непрерывные решения
системы F.8), хотя наличие разрывной функции F.12) может, в принци-
принципе, дать и разрывные решения. Перейдем к новому времени /нов и новой
безразмерной координате X:
Уравнения F.8) сведутся к одному уравнению
(О, если х < 0;
я, если х = 0;
1, если х > 0.
F.13)
Здесь точкой обозначено дифференцирование по /
нов'
156 Часть 2
Uj a = ~~r\ \) < a
Будем изучать поведение нашей системы на фазовой плоскости X, у,
где у = X. Из уравнения F.13) видно, что имеется только одно положение
равновесия: X = а; у = X = 0.
Выбор отрезка без контакта. Предельный цикл (если он вообще сущест-
существует) не может целиком располагаться только в верхней (или только в
нижней) полуплоскости, поскольку в этой полуплоскости "работает" ли-
линейное уравнение
х + 25х + х = 1 (или х + 25х + х = 0).
Предельный цикл непременно пересекает ось абсцисс у = 0. Эту ось и
выберем в качестве отрезка без. контакта (исключив из него состояние
равновесия х = а).
Определение функции последовання. Рассмотрим фазовые траектории
в нижней полуплоскости, для которой
,у = х<0; х + 25х + х = 0. F.14)
Пусть сопротивление мало: 6 < 1. Тогда фазовыми траекториями в нижней
полуплоскости будут отрезки спиралей, скручивающихся к состоянию рав-
равновесия уравнения F.14), т.е. к началу координат. Выпишем общее ре-
решение уравнения F.14):
х = exp(-5/)(/lcosco/ + В sine»/); 1
у = х = ехр(-5/)[(-&4 + co5)cosco/ - (ЬВ + aA)sin co/)].j
Здесь и = \1 - 52; А и В- постоянные интегрирования. Мы ищем функ-
функцию последования, и нас интересует траектория, выходящая из точки
X=S; у = 0 в момент /=0 (рис. 6.12). При таких начальных условиях из
F.15) получим:
А = s; -8A + aB = 0,
х = exp(-8/)(scosco/ + В sin со/);]
f F.16)
х = - exp(-5/)Ei? + as) sin со/)]. J
В некоторый момент /, изображающая точка достигнет оси абсцисс в точке
-? (см.рис. 6.12). Момент /, определяется из условия у = X = 0, откуда
согласно F.16) sin со,/ - 0 и, следовательно, /, = я/со. Теперь нетрудно
Глава 6
157
определить и абсциссу -?. Имеем -\ = х(/,) = -SCXp (-бтс/ю) или
F.17)
Здесь у = 5д/ю.
у=х
О а 1
Рис. 6.12
Рассмотрим теперь фазовые траектории в верхней полуплоскости, где
>> = х>0; х + 25х + х = \. F.18)
Непосредственно из F.18) видно, что фазовыми траекториями будут куски
спиралей, скручивающихся к точке X = 1; у - 0. Нас интересует траек-
траектория, выходящая из точки Х= -?; у = 0. Сменим начало отсчета времени,
предположив, что при /=0 изображающая точка имела координаты X--t,;
у = 0'\ Решим уравнение F.18) при начальном условии
jc = -% = -jexp(-y); у = х = 0 при t- 0.
В результате этого решения найдем время tv в течение которого изображаю-
изображающая точка перемещалась в верхней полуплоскости, и значение абсциссы
S точки пересечения фазовой траектории с осью X (см. также рис. 6.12):
t2 = тс/со; 1 = 1 + A + ?)ехр(-у). F.19)
Из F.19) и F.17) получаем выражение для функции последования:
s = 1 + ехр(-у) + s exp(-2y) s f(s). F.20)
По сути дела, мы осуществили два точечных преобразования: точки
правой полуоси абсцисс преобразованы в левую полуось [по формуле
F.17)], а затем левая полуось была преобразована в правую [по формуле
F.19)]. Функции, которые переводят одну дугу без контакта в другую
"'Это допустимо, ибо исходная система автономна, а для наших целей важно знать только
длительность "путешествия" изображающей точки по верхней и по нижней полуплоскостям.
158
Часть 2
(а не в себя), называются функциями соответствия. В данной задаче тако-
таковыми функциями служат функции F.17) и F.19), которые можно рассмат-
рассматривать как параметрическое задание точечного преобразования полуоси
у = 0; X > 0 в себя (параметром является %). К счастью, задача настолько
проста, что параметр ^ исключается без труда, в результате чего получается
функция последования F.20) в явной форме. Однако в большинстве прак-
практических задач исключение параметра невозможно, поскольку s и s ока-
оказываются сложными трансцендентными функциями параметра.
Определение неподвижной точки. Неподвижные точки находим из
условия F.3), т.е. из равенства
5 = 1 + ехр(-у) + SQXp(-2y).
Отсюда видно, что существует единственная неподвижная точка s = s' =
= 1/[1-ехр(-у)], которая является устойчивой, ибо по теореме Кёнигса
ds
= ехр(-2у) < 1.
Такой же результат получается и с помощью диаграммы Кёнигса-Ламе-
рея, представленной на рис. 6.13. Следовательно, существует единствен-
единственный и притом устойчивый предельный цикл (рис. 6.14), который отобра-
отображает автоколебательный режим работы лампового генератора.
1+ехр(-у)
у=х
s =f(s)
Рис. 6.13
Рис. 6.14
Определение периода и амплитуды автоколебаний. Период автоколе-
автоколебаний равен времени прохода изображающей точкой по предельному циклу:
Под амплитудой разумно понимать величину А = (/ + %')/2, где 5* - ко-
координата неподвижной точки, а 4* = s'e\p(-y) (см. также рис. 6.14).
Имеем:
Глава в 159
.1г. . , Ч1 1 1 + ехр(-у) 1 Y
A = -[s ^exp(Y)] cth
Таким образом, задача полностью решена: найден предельный цикл,
доказана его устойчивость, определены период и амплитуда автоколебаний.
6.4. Упрощенная модель часов с сухим трением [3]
Уравнение движения часового механизма можно представить в виде
/ф + &siri(p= Л/(ф,ф)+ Л/^Сф.ф). F.21)
Здесь ф - координата анкера (и связанного с ним маятника); /- момент
инерции; М - движущий момент, обусловленный воздействием зубьев
ходового колеса на палетты анкера; М - момент сил трения. Слагаемое
ksinq>, где A:=const > 0, определяет момент силы тяжести. Будем счи-
считать, что амплитуда возможных колебаний не слишком велика, так что
8Шф«ф, однако в отличие от ударной модели, рассмотренной в §2.13,
учтем сухое трение (в основном, это трение между палеттами и зубьями
ходового колеса). Трением о воздух пренебрежем, так что М^ - момент
сил только сухого трения. График зависимости М от скорости ф пред-
представлен на рис. 6.15 (сплошная кривая). Однако в данной задаче примем,
что
Мп, = -/08ВПф, F.22)
т.е. будем аппроксимировать момент сил сухого трения кусочно-линей-
кусочно-линейной функцией ф (штриховая кривая на рис. 6.15).
Момент М примем постоянным по абсолютной величине, но учтем,
что в некоторых часовых механизмах имеет место следующее: при ф <-ф0
с зубом ходового колеса контактирует только правая палетта (М= MQ>0),
при ф>ф0 - только левая палетта (М- -MQ < 0), а при -фо< Ф<Ф0
может контактировать любая палетта. В этом случае зависимость М от ф
двузначная (рис. 6.16). Зависимостью момента М от скорости ф прене-
пренебрежем [3]. При сделанных предположениях уравнение динамики часового
механизма записывается как
/ф + ?ф = -/oSgrkp ± М. F.23)
Введем новые переменные
и безразмерные параметры часов
160
Часть 2
r=fo/kq>o.
Тогда уравнение F.23) перепишется в виде системы
х = у; y = -x-rsgny-(-l)"\.
F.24)
F.25)
Здесь и ниже точкой помечается дифференцирование по новому времени
т; п - номер палетты: П = 1 - правая палетта, П = 2 - левая палетта.
Рис. 6.15
-А/„
Рис. 6.16
В соответствии с двузначной зависимостью движущего момента М от
угла ф в качестве фазовой поверхности выберем так называемую плоскость
с наложениями, состоящую из двух полуплоскостей (I) и (II), наложенных
друг на друга (рис. 6.17). Точки такой
двулистной поверхности и состояния
системы F.25) находятся во взаимо-
взаимооднозначном и непрерывном соответ-
соответствии.
Для точек листа (I): Х< 1 (ф < ф0);
п = 1 (М= Мо). Для точек листа (II):
х>-\ (ф>-ф0); /1 = 2 (М=-Мо).
Переход изображающей точки с листа (I)
на лист (II) происходит при Х- 1 (ф -
= ф0), обратный переход - с листа (II)
на лист (I) - совершается при X = -1
(ф = -ф0). При этом абсцисса и ордината изображающей точки остаются
неизменными.
Рассмотрим поведение фазовых траекторий системы F.25). Отметим,
что фазовые траектории на листе (I) симметричны с фазовыми траек-
траекториями на листе (II) относительно начала координат. В самом деле,
имеем:
для листа (I) х = у\ у = -х- г Sgn у + X; F.25а)
для листа (П) х = у, у - -х - г sgn у - X. F.256)
У
1
1
(I) I
-lj 0
(И)
1 X
Рис. 6.17
Глава 6 161
Уравнения F.256) получаются из F.25а) заменой X—> -х; у —> -у.
Найдем состояния равновесия на листе (I). Они, очевидно, распо-
располагаются на оси абсцисс (ф = 0). Ясно, что система находится в поло-
положении равновесия только в том случае, если сумма движущего момента
М и момента силы тяжести -kq> не превосходит момента силы трения
покоя: \MQ - Ахр| </0, или \х - Х\ < г. Отсюда
Х-г<Х<Х + г. F.26)
Для листа (I) X < 1, и из неравенства F.26), определяющего совокупность
состояний равновесия на листе (I), следует, что состояния равновесия
отсутствуют, если X - г > 1, и существуют, если X - Г < 1, причем
существует целый отрезок состояний равновесия на оси абсцисс листа (I):
Х-г<х<Х + г, если X + г < 1;
X - г < X < 1, если X + г > 1.
Обозначим этот отрезок ОХОТ Координаты точки О{: X = X - Г\ у - 0.
Координаты точки О,: X = X + /*, если Х + Г<\,н Х= 1, если X + Г > 1;
Найдем теперь другие фазовые траектории на листе (I) из уравнений
F.25а). Для нижней половины листа, где у < 0 и Sgn}> = -1, после
деления второго уравнения F.25а) на первое и интегрирования получим
семейство окружностей с центром в точке 0^.
у7 + [х - (X + Г)]2 = const. F.27)
Аналогично для верхней половины листа (I), где у > 0 и Sgn>> = 1, получа-
получаются окружности с центром в точке О.:
У2 + [х - (X - г)]2 = const. F.28)
Таким образом, общий ход фазовых траекторий на листе (I) имеет вид,
представленный на рис. 6.18.
Пусть -?, - координата такой точки на оси абсцисс листа (I), что
фазовая траектория в верхней половине листа (I), выходящая из этой точки,
пересекает снова ось абсцисс на границе листа (I) при Х= 1. Эта траектория
- окружность с центром в точке Ох радиусом ?, + O0r С другой стороны,
радиус этой окружности равен 1 - 0О{. Поскольку 0Ох = X - г, имеем
На рис. 6.18 заштрихована область листа (I), ограниченная полуокруж-
полуокружностями, проходящими через точку (-?,,0). Это область притяжения
162
Часть 2
отрезка покоя О, О2: все фазовые траектории, начинающиеся в заштрихо-
заштрихованной области, входят через конечный промежуток времени в отрезок
О, ОТ Все остальные фазовые траектории выходят на луч х = 1, у > О и
затем переходят на лист (II)*'.
Выберем полупрямую х = 1, у > О в качестве отрезка без контакта.
В силу симметрии траекторий относительно начала координат луч Х=-1,
у<0 также будет отрезком без контакта. Построим точечное преобра-
преобразование этих полупрямых друг в друга.
Пусть изображающая точка перешла с листа (II) на лист (I) в точке
x = -l,.y=-s (рис. 6.19). Далее изображающая точка движется на листе
(I) по окружности F.27). В некоторой точке (-?,, 0) эта окружность пере-
пересекает ось абсцисс, и затем изображающая точка начинает перемещаться
в верхней половине листа (I) по окружности F.28). Возможны два случая:
либо изображающая точка придет в отрезок покоя О, О2, либо выйдет на
луч х= 1, ^>0 в некоторой точке 5,. Изображающая точка приходит в
отрезок покоя, если -?, < -?, т.е. ^ < ^( = 1 — 2(А, - г). Это возможно,
если А. < г, ибо 4 > 1 и тем более должно быть ?, > 1.
(I)
Рис. 6.18
Рис. 6.19
Пусть ?, > %у Из F.27) и F.28) находим
"'Уже отсюда ясно, что при X - Г < 1, когда существует отрезок покоя, колебательный
режим невозможен, если начальные отклонения маятника достаточно малы, т.е. когда
начальное состояние изображается точкой внутри заштрихованной области.
Глава 6
163
откуда
s2 =
s2 =
F.29)
Формулы F.29) осуществляют точечное преобразование полупрямой
х=-1, у <0 в полупрямую х= 1, у >0. Эти формулы даны в парамет-
параметрическом виде (параметром служит Е).
Тот же самый вид имеют и формулы точечного преобразования луча
х= 1, у >0 в луч х = —\, у < 0, ибо фазовые траектории на листе (II)
симметричны траекториям на листе (I) относительно начала координат.
Поэтому и предельный цикл (если он существует) будет симметричным,
а соответствующая ему неподвижная точка S* определится из условия
s'=5, =S. Формулы F.29) при S2 = S2 = S* дают единственную непод-
неподвижную точку s' при
§ = ?* = Х/г F.30)
и при условии 4 = ^* > 4г Отсюда следует, что А. > г. В этом случае су-
существует и предельный цикл (достаточно большого размера). Именно этот
случай изображен на рис. 6.19.
Построение зависимостей S2 и 5, от ^ приводит к диаграммам Ламерея,
представленным на рис. 6.20. При X > г имеется единственная и притом
устойчивая неподвижная точка F.30). Устойчивость наглядно видна из
рис.6.20,а и теоремы Кёнигса:
ds2
ds2
5=5
+ Х-г
+ Х + г
V
а)
б)
Рис. 6.20
164 Часть 2
При X < г неподвижная точка отсутствует (рис. 6.20,6).
Все сказанное выше относилось к случаю, когда X - г < 1 и имеются
отрезки устойчивых состояний равновесия. При этом, если Х> г, уста-
устанавливается автоколебательный режим при достаточно больших отклоне-
отклонениях маятника (изображающая точка в начальный момент времени лежит
вне заштрихованных областей на рис. 6.19). Если же X - г> 1, то состояния
равновесия (отрезки покоя) не суще-
ствуют, заштрихованные области на
рис. 6.18 и 6.19 отсутствуют, но и в
г этом случае X > г, следовательно, су-
существуют устойчивый предельный цикл
и автоколебательный режим, который
устанавливается при любых начальных
значениях Хп X.
Полученные результаты объединяет
— рис. 6.21. Плоскость параметров г, X
и г разбивается на три области, соответст-
Рис. 6.21 вующие трем различным режимам ра-
работы часового механизма:
/: Х<Г; существуют отрезки покоя (Х-Г<\)\ автоколебаний нет;
//: X > Г, имеются отрезки покоя; возбуждаются автоколебания при
условии, что начальные значения X и у -X достаточно велики;
///: здесь также Х>Г, состояния равновесия отсутствуют, ибо Х-г> 1;
автоколебания возбуждаются при любых начальных условиях.
Возбуждение автоколебаний при начальных условиях конечной ве-
величины называется жестким режимом возбуждения.
Возбуждение автоколебаний при любых (даже сколь угодно малых)
начальных условиях называется мягким режимом возбуждения.
Согласно этим определениям, области //и ///- области жесткого и
мягкого режима соответственно.
Напомним, что параметр X характеризует движущий момент, а пара-
параметр Г - момент силы трения [см. F.24)]. Условие X < г (область I)
означает, что движущий момент мал, а сила трения велика. В этом случае
автоколебаний нет. Если Х>г, но Х-г<\, то автоколебания уже
возможны, но только при достаточно больших начальных возмущениях
(жесткий режим). Наконец, при Х-г> 1, когда движущий момент велик,
автоколебания устанавливаются при любых начальных условиях (мягкий
режим).
6.5. Дополнительные замечания о методе точечных преобразовании
Метод точечных преобразований разработан одновременно с качествен-
качественной теорией дифференциальных уравнений в трудах А. Пуанкаре.
В частности, А. Пуанкаре использовал отрезок (либо поверхность) без
контакта и функцию последования при исследовании поведения фазовых
траекторий на плоскости и на торе [26] и при решении задач небесной
Глава 6 165
механики. Д. Биркгоф [6] продолжил рассмотрение точечных преобразова-
преобразований, порождаемых фазовыми траекториями на секущей поверхности
в фазовом пространстве динамической системы. У Д. Биркгофа такой
подход стал основным в математическом исследовании нелинейных ди-
динамических систем. Спустя некоторое время, независимо от работ А. Пу-
Пуанкаре и Д. Биркгофа, идея секущей поверхности и точечных преобра-
преобразований возникла вновь при отыскании периодических решений в кусочно-
линейных системах (метод припасовывания, или сшивания). При этом
исследовать устойчивость найденных решений не удавалось. Принци-
Принципиальный шаг был сделан А.А. Андроновым в 1944 г., когда он сформу-
сформулировал общетеоретические основы метода точечных преобразований в
теории нелинейных колебаний. Благодаря А.А. Андронову метод сшивания
решения соединился с методом секущей поверхности А. Пуанкаре и обрел
математическую базу в теории точечных преобразований и методе непод-
неподвижной точки.
А. А. Андронов и его ученики решили методом точечных преобразований
целый ряд актуальных нелинейных задач теории автоматического регулиро-
регулирования, долгое время остававшихся неприступными. В частности, была
решена знаменитая задача Вышнеградского о регуляторе прямого действия
с учетом сухого трения A,2]. Тем не менее следует признать, что прак-
практическое применение этого метода сопряжено с рядом трудностей, главная
из которых - отыскание функции последования. В связи с этим метод
точечных преобразований обычно находил применение в исследованиях
динамики кусочно-линейных систем, т.е. таких нелинейных систем, фазовое
пространство которых состоит из областей, в каждой из которых уравнения
динамики линейны. В таких областях довольно легко определяется ход
фазовых траекторий и в итоге строится функция последования.
Рассмотренные выше упрощенные модели лампового генератора и часового
механизма как раз являются кусочно-линейными. В настоящее время бла-
благодаря работам Ю. И. Неймарка и его учеников возможности метода точечных
преобразований значительно расширены. Он стал важным инструментом
в решении общих вопросов теории нелинейных колебаний и был применен
к анализу конкретных систем нового типа, например виброударных,
марковских, цифровых и др. [19].
Глава 7. МЕТОД ПУАНКАРЕ
7.1. Теорема Пуанкаре для автономных динамических систем
Метод Пуанкаре служит для отыскания периодических решений нели-
нелинейных динамических систем, содержащих малый параметр (I и имеющих
периодическое решение при \х = 0. Характерный пример такой системы -
уравнение
Х + Х = ц/(х,х), G.1)
в котором \х - малый положительный параметр: 0 < \х « 1. При [X = 0
уравнение G.1) имеет периодические решения при любых ненулевых на-
начальных условиях. Если же ц * 0, то простые примеры показывают, что
периодические решения, вообще говоря, не существуют. Может ока-
оказаться, однако, что такие решения существуют для некоторых нелиней-
ностей и при определенных начальных условиях. Задача заключается в
отыскании условий, при которых системы типа G.1) имеют периодические
решения*'.
Математической основой метода Пуанкаре служит
Теорема Пуанкаре. Пусть правые части системы
X, = ^(х,,...,Хп,ц), I = 1,...,л , G.2)
являются аналитическими функциями переменных Xlf...,Xn и параметра (а.
для достаточно малых значений ц. Пусть, далее, уравнения G.2) при [1 = 0
имеют периодическое решение x^ty^t), /=1,...,/!, с периодом Т.
Тогда справедливы следующие утверждения.
1. Решение системы G.2) при ц * 0, соответствующее начальным ус-
условиям
и записываемое в виде
х=х^,ар...,ап,\х), i=l,...,n, G.3)
''Уравнение G.1) - характерный пример квазилинейных систем, т.е. таких систем, которые
содержат малый параметр ц перед нелинейными функциями и которые обращаются в линей-
линейные системы при (J. = 0.
Глава 7 167
будет аналитическим относительно а,,...,ал и \ь для достаточно малых
значений этих величин^.
2. Решение G.3) будет периодическим с периодом Т = Т + а(|л), если
величины а,ар...,аи можно найти из условий периодичности
xi(T')=xi(O), i = l,...,n, G.4)
как аналитические функции Ц, обращающиеся в нуль при ц = 0.
Укажем на два обстоятельства.
1. Согласно первому утверждению теоремы решение системы G.2)
можно представить в виде рядов по степеням параметра |л:
*,(/) = ф.(/) + Цфя(/) + Ц2фл(/) + ...
2. Имеется П условий периодичности G.4) и п + 1 параметров, под-
подлежащих определению: а,а,,...,ая. Однако система G.2) автономна,
поэтому начало отсчета времени можно выбирать произвольно; в частности,
его всегда можно выбрать так, чтобы одно из чисел а(. было равно нулю.
7.2. Основные положения метода Пуанкаре
Изложим метод Пуанкаре для уравнения G.1). Согласно теореме Пуан-
Пуанкаре решение x(t) этого уравнения можно искать в виде
x(t) = xo(t) + цх,(/) + ix2x7(t) + ... G.5)
Напомним, что наша цель - нахождение периодических решений урав-
уравнения G.1). Из G.5) и G.1) ясно, что *„(/) - решение уравнения G.1)
при ц = 0, т.е. периодическое решение линейного уравнения х + х = 0.
Однако функции Х,(/), X2(t) и т.д., вообще говоря, не будут периоди-
периодическими функциями времени |даже при периодической функции x(t) в
G.5)]. Дело в том, что решение x(t) имеет частоту, зависящую от |д., а
xo(t) имеет частоту, равную единице и, следовательно, не зависящую от
(I. Устранить такой разбаланс с помощью периодических функций х((/),
вообще говоря, невозможно. Пример:
• ,Л ч • й2/2 . и3/3
sin(l + (д.)/ = sin/ + |j./cos/- -——sin/ --т-j-cos/+....
В практических задачах всегда приходится ограничиваться конечным и,
как правило, небольшим числом членов ряда G.5), которые, как мы убе-
убедились, не дают периодическую функцию.
''Смысл этого утверждения: решение системы G.2) - аналитическая функция начальных
условий, если последние задаются вблизи периодического решения ср,(О системы G.2) при
Ц = 0 (т.е. если а, малы). К тому же это решение - аналитическая функция ]Х , если ц мало.
168 Часть 2
Чтобы обойти возникшие затруднения, введем новое время х = со/,
где со - искомая частота периодического решения x(t) уравнения G.1),
зависящая от ц. В этом новом масштабе времени период искомых коле-
колебаний равен 2п (частота равна единице), т.е. в новом времени частота и
период искомых колебаний не зависят от ц.
Частоту со ищем в виде ряда
G.6)
я=1
Очевидно, что со = 1 есть циклическая частота периодического решения
уравнения х + X = 0. Это решение называют порождающим. Представим
со2 также рядом по (д.:
оО
©2=l + Xn"*V G.7)
л=1
После перехода к новому времени уравнение G.1) записывается как
d2x '( dXt G.8)
После подстановки G.6) и G.7) в G.8) получим уравнение G.1) в виде
dx
G.9)
л=1
решение которого будем искать в виде ряда
х(х) = хо(х) + цх,(т) + ц2х2(х)+..., G.10)
но теперь, как следует из G.9), период функции х(х) равен 2к, т.е.
периоды функций х(х) и хо(х) равны. Поэтому мы вправе искать ко-
коэффициенты х,(т), Х2(х),... как периодические функции х с периодом
2л.
Представим в виде ряда по ц и нелинейную функцию/
.CO^J = /о(т) + fy/Л-с), G.Ц)
где
Глава 7
169
После подстановки G.10) и G.11) в уравнение G.9) имеем
dx2
dx2
X0+[VC1+ \12X7+... =
dx2
\L2fx+... .
G.12)
Приравнивая члены при одинаковых степенях \х, получаем систему рекур-
рекуррентных уравнений:
d\
dx2
d\
dx2
+ х0 = 0;
x a d2x°
¦х,--П17?Г
/o = ^l<
rfx2
G.13)
Решение первого уравнения:
хо(х) =
Согласно сделанному выше замечанию положим В = 0. Это значит, что
за начало отсчета времени т = 0 выбирается такой момент, в который
= A; dxo(O)/dx = 0. Итак,
G.14)
хо(х) =Acosx,
где постоянная А подлежит определению.
Подставим G.14) во второе уравнение G.13). Получим
d2x
2 + хх =
cos x + f(A cos x, - A sin x) = F] (x).
170 Часть!
Решение этого уравнения имеет вид
т
лг,(х) = ЛГ,(т) + J /",(w)sin(x - u)du,
о
где Хх = /IjCOSt + i?,sinx - общее решение однородного уравнения, а
второе слагаемое - интеграл Дюамеля. Таким образом,
c, (т) = Ах cos х + /?, sin х + П, ^J sin(x - и) cos шй/ +
G.15)
+ J f(A cos u, - A sin u) sin(x - u)du.
о
Теперь воспользуемся условиями периодичности
После подстановки в эти равенства выражения для X, из G.15) имеем
2*
j f(A cos и, - A sin ы) sin «c?w = 0;
о
1 2я
Q, = - — J /(Л cos «, - A sin «) cos ы<Л/.
izA
G.16)
Первое уравнение системы G.16) позволяет найти значения А и тем
самым определить решения XQ - /4cosx, около которых возникают периоди-
периодические решения в исходной системе при малых значениях (Д.. С точностью
до членов порядка ц значение А, найденное из G.16), дает амплитуду
колебаний в нелинейной системе G.1). Второе уравнение G.16) дает по-
поправку на частоту колебаний, так что в первом приближении
со2 «l
Изложенный процесс можно продолжить для получения приближений бо-
более высокого порядка, но вычисления становятся более трудоемкими.
Замечание. В том случае, когда система G.1) консервативная,
имеем/=/(х) и X + Х = \х/(х). При этом первое уравнение в G.16)
обращается в тождество, поскольку интегрируется нечетная периодичес-
периодическая функция по периоду 2к. Так и должно быть, потому что амплитуда
колебаний в консервативной системе определяется начальными данными,
Глава! 171
а они никак не входят в G.16). Второе уравнение в G.16) дает зависимость
Qj = С1Х(А), и в итоге определяется взаимосвязь между частотой колебаний
(О и амплитудой колебаний А: со2 « 1 + цЛДЛ). Последняя формула
отражает хорошо известную неизохронность колебаний в нелинейных кон-
консервативных системах, т.е. изменение частоты колебаний при изменении
их амплитуды.
7.3. Примеры применения метода Пуанкаре
Пример 1. Уравнение Ван-дер-Поля. Ранее, в §2.11, для уравнения Ван-дер-Поля было доказано
существование устойчивого предельного цикла при любом положительном значении ц. Здесь
мы рассмотрим уравнение Ван-дер-Поля
x + \i(x2-\)x + x = 0 G.17)
в предположении, что параметр ц мал @ < ц •« 1), но при этом покажем, что предельный
цикл единственный, и определим конкретные его размеры. В данной задаче
t, - Asinz) = (\ - A2 cos2 i)(-Asini).
Первое из равенств G.16) дает
in
JA - A2 cos2 u)Asin2 udu = О,
откуда 71/4A - А2/А) = 0 и А = 2. Второе условие G.16) дает Q, = 0.
Таким образом, при малых значениях ц уравнение Ван-дер-Поля с точностью до членов
порядка ц имеет один предельный цикл, радиус которого А = 2, а частота соответствующих
колебаний равна собственной частоте системы при ц = 0 (поскольку С1{ = 0).
Если получить второе приближение, то из него можно видеть, что <в2 да 1 - ц2 /8, т.е.
имеется поправка на значение частоты порядка ц2, а амплитуда колебании остается прежней:
А = 2.
Важно отметить, что условия периодичности можно удовлетворить иным способом.
Разъясним это на примере уравнения Ван-дер-Поля. Вместо вычисления интегралов G.16)
заново рассмотрим уравнение для Х,(т). Имеем:
dx
—— + х, = ПХА cos х + f(A cos т, - A sin x) =
= Q,i4cosx - /4sinx + Л'sin т cos2 x;
sin т cos2 x = - (sin Зх + sin x);
4
——r-+*i = Q,/lcosx + A sinx +—sin3x. G.18)
dx v 4 / 4
Уравнение G.18) описывает линейную консервативную колебательную систему с собственной
частотой, равной единице, находящуюся под воздействием гармонических внешних сил
172 Часть 2
с частотами со = 1 и со = 3. Чтобы решение Х^т) не содержало непериодических членов,
описывающих резонанс, слагаемые в правой части G.18), содержащие COS т и sin т, должны
отсутствовать: ?},Л = 0 и А 3/4 - А = 0, откуда Q, = 0 и /4 = 2. При таком учете периодичности
можно не переходить к новому времени т..
Пример 2. Колебания математического маятника. Пусть / - длина маятника, X - угол
отклонения от вертикали. Запишем уравнение движения в пренебрежении трением:
^ + ^SinX = 0. G.19)
dx I
Имея в виду небольшие, но конечные амплитуды, примем sin X и х-Я?/6. Перейдем к
новому времени tm = -Jg/l t и положим ц = 1/6. Получим х + X = (IX3, т.е. в данном
случае f(x,x) = X3. Из G.16) найдем
П, =—- f /Г cos4 udu = -- A7.
1 ттЛ 1 d.
Таким образом, частота колебаний маятника в первом приближении определяется равенством
Вернемся к старому масштабу времени, учтем, что ц = 1/6, и окончательно получим
приближенную зависимость частоты колебании а> от амплитуды А:
CO » — 1 -
7.4. О практических возможностях метода Пуанкаре
Метод Пуанкаре, или метод малого параметра, - математически обоснован-
обоснованный метод, позволяющий отыскивать периодические движения в нелиней-
нелинейных динамических системах, содержащих малый параметр ц перед нели-
нелинейностью и допускающих периодическое решение при ц = 0.
Несомненным достоинством метода служит возможность отыскания
решения (по крайней мере, в принципе) с любой точностью - до О(|а"),
где П - любое натуральное число. Метод Пуанкаре применим к системам
с любым конечным числом степеней свободы, как к автономным, так и
неавтономным (здесь этот метод был изложен только для автономных систем
второго порядка).
К сожалению, существует несколько причин, ограничивающих прак-
практические возможности метода Пуанкаре: 1) метод Пуанкаре позволяет найти
периодическое решение, но не рассматривает вопроса об устойчивости
найденного решения; для анализа устойчивости требуется дополнительное
исследование, выходящее за рамки метода: 2) метод Пуанкаре не позволяет
анализировать процесс установления периодического режима; 3) этот метод
пригоден только для систем с аналитическими правыми частями.
Обратим внимание еще на одно обстоятельство, весьма существенное
для приложений. Именно, с помощью метода Пуанкаре определяются
Глава 7 173
периодические решения лишь при достаточно малых значениях параметра
\1. Однако в прикладных задачах теории колебаний встречаются некоторые
конечные значения ц. При этом сходимость рядов по ц, как правило, не
исследуется, поскольку такое исследование оказывается трудоемким и
неэффективным. К тому же обычно ограничиваются одним-двумя (редко
- тремя) членами разложения. Все это вместе взятое говорит о том, что
строгость метода Пуанкаре отнюдь не означает строгости решения этим
методом прикладной задачи. Поэтому полученные методом Пуанкаре
результаты целесообразно дополнить контрольными расчетами на ЭВМ
или физическим экспериментом. Подчеркнем еще, что трудность решения
вопроса о том, какие именно значения параметра можно считать малыми,
относится и к другим методам, имеющим дело с малым параметром и
рассматриваемым в гл. 8-10.
В заключение отметим, что в данной главе метод Пуанкаре изложен
весьма кратко. Остались в стороне вопросы математического обоснования
метода и его применения к более сложным системам, нежели динамическая
система G.1). Более обстоятельное изложение этого метода и примеры его
практического применения можно найти в работах 118,25], а также в гл. 15
данной книги - применительно к простейшим неавтономным квазилиней-
квазилинейным системам.
Глава 8. МЕТОД ВАН-ДЕР-ПОЛЯ
Метод, рассматриваемый в данной главе, предложенный голландским
инженером Ван-дер-Полем, затем был обобщен и развит академиком
Л. С. Понтрягиным. С помощью этого метода изучены различные авто-
автоколебательные системы второго порядка, в частности исследованы квази-
квазилинейные модели динамики ламповых генераторов. Автор метода и его
последователи не дали методу математического обоснования; это сделали
советские академики Л.И. Мандельштам и Н.Д. Папалекси в конце 20-х
годов. Метод Ван-дер-Поля имеет достаточно большое самостоятельное
значение, но кроме этого его можно считать той основой, на которой
выросли мощные асимптотические методы теории нелинейных колебаний,
разработанные советскими математиками Н.М. Крыловым, Н.Н. Боголю-
Боголюбовым, Ю.А. Митропольским и др. (см. гл. 10).
8.1. Основные положения метода Ван-дер-Поля
Возьмем систему уравнений
x = y + iip(x,y); y = -x + w(x,y), (8.1)
в которой ц - малый безразмерный положительный параметр: 0<ц<scl.
Рассмотренное выше уравнение G.1) и эквивалентная ему система
х = у; у = -х + \if{x,y) (8.2)
служат частным случаем системы (8.1 )*'.
При \ь = 0 уравнения (8.1) переходят в линейную систему х = у; у =
- -X, решением которой будет
х = Kcos(t + Q); у = -К s\n(t + 9) (8.3)
или в другой записи
х = acost + bsint; у = -asint + bcost. (8.4)
''Все последующие результаты справедливы и в том случае, когда р, q, /являются ана-
аналитическими функциями параметра ц. При этом в окончательных формулах нужно брать р,
/
Глава 8
175
Здесь AT и 6 (а и Ь) - постоянные, определяемые начальными условиями.
п уеть ц * 0, но достаточно мало: ц <с 1. Будем искать решение уравне-
уравнений (8.1) по-прежнему в виде (8.3) |или (8.4)], но теперь А'и 9 (или а
и Ь) - некоторые пока неизвестные функции времени. Другими словами,
величины А' и 9 (или а и Ь) суть новые
зависимые переменные, которые называют
переменными Ван-дер-Поля. Формулы (8.3)
[или (8.4)] связывают исходные переменные
Хтлус новыми переменными А'и 6 (или а и
Ь).
Из формул (8.4) хорошо видно, что
плоскость a, b переменных Ван-дер-Поля
вращается с постоянной угловой скоростью,
равной единице, по отношению к фазовой
плоскости Х,у вокруг общего начала коор-
координат (рис. 8.1). Неподвижная на плоскости Рис. 8.1
а, Ь точка А, для которой К = AJ, = const,
0 =90 = const прочерчивает окружность в плоскости Х,у. Эта окружность
имеет центром начало координат, а ее радиус равен KQ.
Будем работать в переменных АГи 9. Подставив (8.3) в (8.1), получим
I":
Отсюда
К cos(/ + 9) - АГ9 sin(/ + 9) = \ip,;
- К sin(/ + 9) - AT9 cos(f + 9) = \iq,;
p. = p[K cos(t + Q),-K sin(/ + 9)];
q. = q[K cos(t + в)-К sin(t + в)].
К - \xp. cos(/ + 9) - \xq. sin(/ + 9);
0 = - -?¦/>. sin(/ + 9) - ^rq. cos(/ + 0). [
(8.5)
Уравнения (8.5) описывают нелинейную неавтономную систему, правые
части которой - периодические функции (с периодом 2я) по отношению
к явно входящему времени /. Видно, что А"~ ц и 9 ~ ц, т.е. К и 0 -
медленно изменяющиеся функции времени (они меняются несущественно
за время порядка периода изменения правых частей, т.е. за 2я). Это
обстоятельство позволяет усреднить правые части в (8.5) по явно входящему
времени. Поясним процесс усреднения.
Разложим периодические правые части в (8.5) в ряд Фурье по явно
входящему времени t
176
Часть 2
К = ц(Ф + Ф, sin/ + ф, COS/+...);
9 = цС? + % sin / +у, cos/+...)•
После замены времени 1 = [it имеем
dK
——
ах
(В
dK *, ^ ¦ т т
—— = O + O.sin —+ 9,cos—+...;
ах ц д
т т
' + ЧКвт — + vi/.cos—+...
(8.6)
При малых значениях |1 все слагаемые, за исключением Ф и 4х, - быстро
изменяющиеся (быстро осциллирующие) величины. Переменные К и 6
не успевают реагировать на эти высокочастотные воздействия и ведут себя
приблизительно так, как если бы этих членов не было совсем. Поэтому
при малых значениях ]Х быстро осциллирующие члены в (8.6) можно от-
отбросить, заменив систему (8.6*) укороченной системой
К = цФ; в =
(8.7)
Функции \хФ и у№ суть первые члены разложения Фурье правых частей
системы (8.5):
Ф = — f [p. cos(/ + 9) - q. sin(f + 9)] dt;
2% t
2%
= -¦=-] 4rsin(/ + 9) + ^-cos(/ + 9) Л.
Интегрирование ведется по явно входящему времени /, поэтому при инте-
интегрировании А'и 9 следует считать постоянными. Принимая во внимание
это обстоятельство, учитывая периодичность подынтегральных функций
и полагая / + 9 = и, получаем
Ф = Ф(/0 = — j (/». cosu - 9. sin w) rf«;
(8.8)
р. = p(Kcos и, -Ksinu); q. - q(Kcosu, -Ksinu).
Глава 8
177
Итак, исходная система (8.1) заменена другой, тоже нелинейной, но су-
существенно более простой системой - укороченной системой (8.7), в кото-
которой функции ФиТ зависят только от А'и определяются согласно (8.8).
При переходе к укороченным уравнениям было применено рассужде-
рассуждение, которое, однако, не может заменить строгого математического обосно-
обоснования такого перехода. Для систем второго порядка это обоснование было
дано Л.И. Мандельштамом и Н.Д. Папалекси |3]; позднее Н.Н. Боголюбовым
и другими авторами были получены более общие результаты. Именно,
для системы
где X =
X =
IX'
и..
х = nX(x,t),
, доказана
(8.9)
Теорема 8. 1 (первая теорема Н.Н. Боголюбова). Пусть
вектор-функция Х(х, t) удовлетворяет следующим условиям:
1) для некоторой области D фазового пространства системы (8.9) можно
указать такие положительные постоянные М иХ, что для всех t> tQ и для
любых точек X, X1 и х" из D выполняются неравенства
\X(x,t)\< M; \X(x',t) - X(x",t)\< X\x' - х"\;
2) равномерно по отношению к X е D существует предел
1 Т
Пусть ?,(f) — решение усредненной системы уравнений
(8.10)
и пусть начальные условия для систем (8.9) и (8.10) совпадают:
Тогда для любого (сколь угодно малого) числа 8 > 0 и любого (сколь угодно
большого) числа L>0 найдется такое значение |Л0(е, L) > 0, что при любом
значении ц из интервала @, |Л0) будет выполняться условие
\x(t)-Ut)\<s
при всех t из интервала 0 < / < L/\i.
178 Часть!
Попросту говоря, решения систем (8.9) и (8.10), начинающиеся из
одной и той же точки, будут сколь угодно близки в течение сколь угодно
длительного промежутка времени, если ц сколь угодно мало и если правые
части системы (8.9) подчиняются условиям 1 и 2 теоремы.
Доказательство теоремы 8.1 можно найти в монографии [7].
В данном случае системой (8.9) служат уравнения (8.5), а усредненной
системой (8.10) являются уравнения (8.7).
Отметим, что практическая трудность метода состоит не столько
в получении усредненной (укороченной) системы (8.10), сколько в при-
приведении исходных уравнений динамики к стандартному виду (8.9). Для
системы (8.2) это удалось сделать без труда с помощью замены (8.3).
В более сложных моделях задача может оказаться существенно сложнее.
Для многих классов нелинейных систем процесс их приведения к стан-
стандартной форме изложен в монографиях [7,16]. Применительно к системам
с двумя степенями свободы этот процесс подробно описан в работе [8].
Теперь обратимся к анализу укороченной системы (8.7). Первое урав-
уравнение в (8.7) содержит только К. Корни уравнения Ф(А') = 0 являются
состояниями равновесия динамической системы с 1/2 степенью свобо-
свободы
К = »Ф(К). (8.11)
Состояние равновесия К= Kt устойчиво, если Ф'(^) <0, и неустойчиво,
если Ф'(-^) > 0- Любое другое движение К= K(t) определяется непосред-
непосредственным интегрированием уравнения (8.11):
dK
где Ко - значение К при / = tQ. Отсюда и определится К:
K=K[n(t-t0)).
Перейдем ко второму уравнению системы (8.7): 9 = 1x4/(К). Возможны
два случая.
Случай 1: ^(К) = 0. Следовательно, 9 = 80 = const. Теперь нетрудно
представить картину фазовых траекторий на плоскости переменных Ван-
дер-Поля. Решение укороченной системы таково:
K=K(t), 9 = 90 = const.
Все интегральные кривые суть прямые, проходящие через начало координат
и наклоненные под всевозможными углами 9 = 9„. Движение изобража-
изображающей точки вдоль каждой из них происходит одинаково - согласно урав-
Глава 8
179
нению (8.11). Корни К = К( уравнения Ф(К) = О дают радиусы ок-
окружностей, каждая точка которых является состоянием равновесия уко-
укороченной системы. Заметим, что К= О - тоже состояние равновесия,
так как при К= О имеем Ф = 0. Случай трех состояний равновесия (два
устойчивых и одно неустойчивое) приведен в качестве иллюстрации на
рис. 8.2.
Для всех точек любой окружности с радиусом К{ имеем
К= Kf = const; 9 = 0О = const.
Согласно формулам (8.3) получим
= К; cos(t + е„); y(t) = -
+ е0).
На плоскости X, у такое движение отображается замкнутой изолирован-
изолированной фазовой траекторией - предельным циклом. Он имеет вид окружности
с центром в начале координат и тем же радиусом К.. Таким образом,
состояниям равновесия на плоскости переменных Ван-дер-Поля соответ-
соответствуют предельные циклы на плоскости Х,у. Очевидно, что устойчивым
состояниям равновесия соответствуют орбитно-устойчивые предельные
циклы, а неустойчивым - неустойчивые предельные циклы (см. рис. 8.3,
соответствующий фазовому портрету на рис. 8.2). Это ясно уже из того,
что плоскость а, Ь вращается с постоянной угловой скоростью относительно
плоскости х,у; при этом движения изображающих точек по отрезкам пря-
прямых на плоскости Д, b преобразуются в движения по отрезкам спиралей на
плоскости х,у.
Рис. 8.2
Рис. 8.3
Из формул (8.12) видно, что период автоколебаний равен периоду
собственных колебаний системы (8.1) при Ц = 0, т.е. период равен 2%.
Случай 2: Ч(КL0. И в этом случае корням К= Ktуравнения Ф(АГ) =
= 0 отвечают предельные циклы на плоскости л:,^. Действительно, при
К= Kt= const уравнение 9 = цЧ/(Л') дает
180 Часть 2
а переменные x(f) и y(j) согласно (8.3) равны:
Этот случай отличается от предыдущего тем, что здесь имеется поправка
на частоту колебаний, равная Асо = \№(К.). В остальном периодические
движения (8.12) и (8.13) идентичны'».
Согласно сказанному выше метод Ван-дер-Поля состоит в переходе от
исходных уравнений (8.9) [или (8.5)], записанных в стандартной форме,
к укороченным (усредненным) уравнениям (8.10) [или (8.7)]. Укороченные
уравнения (8.7) весьма просты — с разделяющимися переменными. Состоя-
Состояниям равновесия укороченных уравнений отвечают предельные циклы ис-
исходной системы (8.1). Правомерность перехода к укороченным уравнениям
математически обоснована. Именно:
1) при достаточно малых значениях ц система. (8.1) действительно
имеет предельные циклы, если уравнение Ф(К) = 0 имеет простые"» корни
2) эти предельные циклы близки к окружностям радиусом К( с центром
в начале координат (и притом тем ближе, чем меньше ц);
3) эти предельные циклы устойчивы, если Ф'(^) < 0, и неустойчи-
неустойчивы, если Ф'(К) > 0;
4) кроме упомянутых в системе (8.1) нет других предельных циклов.
Таково наиболее важное для теории колебаний соответствие между
периодическими решениями исходной системы (8.1) и состояниями равно-
равновесия укороченной системы (8.7).
Обратимся теперь к системе (8.9) порядка п. Условия существования
периодического решения этой системы при устойчивом положении равно-
равновесия ? = ?0 = const усредненной системы (8.10) устанавливаются теоремой
[16], которая приводится без доказательства.
Теорема 8.2(вторая теорема Н. Н. Боголюбова). Пусть:
1) усредненная система (8.10) имеет решение ? = ?0 = const; 2) характе-
характеристическое уравнение линеаризованной системы
Л = цЛТDо)л; Л = ?-?о (8.14)
не имеет нулевых корней; 3) можно указать такую окрестность D точки
%0, в которой Х{х, /) — почти периодическая функция t равномерна отно-
''Огметим, что в первом случае тоже имеется поправка на частоту, но при этом Дсо ~ ц2,
и метод Ван-дер-Поля ее не дает.
"'Негрубый случай кратных корней К. здесь не рассматривается.
Глава 8 Ш
сительно X; 4) функция Х(х, t) и ее частные производные первого порядка по
X ограничены и равномерно непрерывны относительно X в области -<х> < / < оо;
xeD.
Тогда можно указать такие положительные постоянные \х0, а0 и а,
(причем <з0 < Oj), что для всякого положительного числа (J. < |Д0 справедливы
следующие утверждения.
1. Система (8.9) имеет единственное решение X - X,(t), определенное
на всем интервале (-ао, оо), для которого
2. Это решение х.(/) почти периодическое с частотным базисом
функции X(x,i).
3. Можно найти такую функцию 5(ц), стремящуюся к нулю вместе
с ц, что будет выполняться неравенство
\x.(t)-Z,0\<b(\i), -oo</<oo.
4. Пусть x{t) - любое решение системы (8.9), отличное от x,(t), при
некотором t= tQ удовлетворяющее неравенству \ х(/0) — ^01 < OQ, и пусть
вещественные части всех корней характеристического уравнения линеаризо-
линеаризованной системы (8.14) отрицательны. Тогда |х(/) — Х.(/)| —> 0 при t —> оо,
причем
где Сиу- положительные постоянные.
5. Если вещественные части всех корней характеристического уравнения
положительны, можно найти такое /j >/0, для которого |x(/j) — ^0| > CJj.
6. Если s корней имеют отрицательную вещественную часть, а осталь-
остальные n-s корней - положительную, то в о^-окрестности точки ?0 существует
S-мерное точечное многообразие Mt, такое, что из соотношения x(tQ) e
е М,о вытекает экспоненциальное стремление к нулю (при t —> оо) разно-
разности x(t) - x,(t), а из соотношения \x{to)~eMt\ следует справедливость
неравенства \х(^)- ?0| >с,.
Замечание 1. Согласно утверждению 4, решение x,(t) устойчиво и
притом асимптотически, если вещественные части всех корней характе-
характеристического уравнения системы (8.14) отрицательны. Если же веществен-
вещественная часть хотя бы одного корня положительна, решение х,(/) неустойчиво.
Замечание 2. Пусть, в частности, Х(х,/) - периодическая функция
/ с периодом т, не зависящим от X. Тогда
182
Часть 2
В данном случае частотный базис функции Х(х, /) состоит из одного
чиела со = х/2п, поэтому из утверждения 2 следует, что решение X,(t)
периодическое с периодом т.
8.2. Маятник Фроуда. Мягкий режим возбуждения автоколебаний
На вал, который вращается с постоянной угловой скоростью, насажена
втулка с жестко прикрепленным к ней маятником (рис. 8.4). Между валом
и втулкой имеется сухое (кулоново) трение. Уравнение движения маятника
в предположении, что SllKp « ф, имеет вид
(8.15)
/ф + Аф + mglq> = M(Q. - ф),
где /- момент инерции маятника относительно оси вращения; А - коэф-
коэффициент сопротивления; - Аф - момент сил вязкого трения; ТП - масса
маятника; / - расстояние от оси вращения до центра тяжести; М - момент
сил сухого трения, зависящий от относительной скорости трущихся поверх-
поверхностей. Примерный график функции М дан на рис. 8.5. Существенно,
М
Рис. 8.4
Рис. 8.5
что этот график имеет падающий участок, на котором М'а (со) < 0. Выбе-
Выберем скорость D, так, чтобы абсцисса Q. была абсциссой точки перегиба
падающего участка"*, т.е. М"(О) = 0. Разложим функцию М(С1 - ф) в
ряд по степеням ф :
- ф) = М{С1) -
*>Это предположение несколько сокращает выкладки, но не является принципиальным.
Глава 8
183
Ограничимся приведенными членами, т.е. будем аппроксимировать ха-
характеристику момента сил сухого трения полиномом третьей степени. При
этом уравнение движения маятника записывается как
/ф + Лф + mgl<p = M(Q) - М'(
Маятник имеет положение равновесия
(8.16)
Ф =
М(П)
mgl '
ф = 0
1см. (8.15) или (8.16)]. В уравнении (8.16) перейдем к новой переменной
v|/ = ф - ф0, т.е. рассмотрим отклонения маятника от положения равновесия
ф0. Перейдем также к новому времени х = rt, где Г = (mgl/Г) . После
элементарных преобразований получим уравнение (8.16) в виде
=J
I
Ir Ir ) dx 6
Предположим, что рассматриваемая система близка к линейной консер-
консервативной, т.е.
h \М\п)\ г\М'"(Щ
т « 1; —;— « 1; г « 1.
Ir Ir I
Первое неравенство говорит о малости коэффициента вязкого трения,
а два следующих неравенства говорят о том, что момент сил сухого трения
мало отличается от постоянного (| М'\ и | М'"\ малы).
Пусть (J. = h/Ir - малый параметр, характеризующий близость данной
системы к линейной консервативной. Тогда уравнение (8.17) перепишется
в виде
dx2
dy (dy
-"Ix-Kdx-
(8.18)
где
М'(п)
г2 M'"(Ci)
(8.19)
Очевидно, что уравнение (8.18) имеет тот же вид, что и G.1).
184 Часть 2
Исследуем динамику маятника Фроуда методом Ван-дер-Поля. С этой
целью для уравнения (8.18) определим правые части укороченной системы,
т.е. определим функции Ф(А) и Ч^А) в соответствии с формулами (8.8).
С учетом, что в данном случае
имеем
2я
Ф{К) - -— f [-a(-K sin и) - $(-K sin «K]sin udu =
К
2я0
Непосредственный подсчет функции Ч'(АГ) дает *?(К) =0 и, сле-
следовательно, 9 = 60 = const. Определим состояния равновесия укороченной
системы, т.е. найдем корни К. уравнения Ф(К) = 0. Получим
(8.21)
Второе состояние равновесия (при К = К^) будет существовать только
в том случае, если а и Р имеют разные знаки. Устойчивость или неустой-
неустойчивость состояния равновесия определится знаком производной
в этом состоянии равновесия.
Рассмотрим различные случаи, сразу отметив, что в них интегральными
кривыми на плоскости переменных Ван-дер-Поля будут прямые 9=const,
проходящие через начало координат.
Случай 1: а < 0; Р < 0. Здесь имеется только одно состояние равно-
равновесия: Кх = 0. Оно неустойчиво, так как Ф'@) = -а/2 > 0. На фазовой
плоскости \у, vj/ имеется единственное неустойчивое положение равновесия
ц/ = ц/ - 0 типа неустойчивого фокуса (рис. 8.6). Предельные циклы от-
отсутствуют, колебания маятника неограниченно нарастают.
Случай 2: а > 0; Р < 0. В этом случае существуют оба положения
равновесия, причем Кх - 0 - устойчивое положение равновесия, ибо
Ф'@) = -а/2 < 0. Для К = К^ получаем Ф\К2) = а > 0, т.е. второе
Глава 8
185
положение равновесия неустойчиво. На фазовой плоскости \\i, vj/ ему соот-
соответствует неустойчивый предельный цикл радиусом А^ (рис. 8.7). Со-
Совокупность точек внутри этого цикла образует область притяжения асимпто-
асимптотически устойчивого положения равновесия v|/ = vj/ = 0 (соответствующего
корню Kj = 0). При любых начальных условиях, отображаемых точками
внутри этого цикла, маятник Фроуда совершает затухающие колебания.
Однако для начальных условий, соответствующих точкам плоскости ц/, vj/
вне предельного цикла, опять получается неограниченный рост колебаний
маятника.
Рис. 8.6
Рис. 8.7
Случай 3: а > 0; Р > 0. Единственное состояние равновесия К{ = 0
устойчиво, так как Ф '@) < 0. Колебания маятника затухают, каково бы
ни было начальное его отклонение от положения равновесия. Фазовый
портрет представлен на рис. 8.8.
Случай 4: а < 0; Р > 0. Здесь имеется два состояния равновесия
укороченной системы, из которых первое (Л", = 0) неустойчиво, а второе
(К = К}) устойчиво, так как
ф '@) = - а/2 > 0; Ф'(К2) = а < 0.
На фазовой плоскости исходных переменных v|/, vj/ имеется устойчивый
предельный цикл (рис. 8.9), к которому асимптотически приближаются
все фазовые траектории системы (8.18). Наличие устойчивого предельного
цикла (радиусом К^) означает, что маятник Фроуда совершает автоколеба-
186
Часть 2
ния, амплитуда которых равна К^ (с точностью до членов порядка р.).
Автоколебания, как видно из рис. 8.9, возникают при любых начальных
условиях, т.е. здесь имеет место мягкий режим возбуждения автоколебаний.
Рис. 8.8
Рис. 8.9
const > О
Согласно (8.21) амплитуда автоколебаний зависит от параметров а и
р. Эта зависимость (при фиксированном Р > 0) представлена на рис. 8.10.
При а < 0 имеются неустойчивые состояния равновесия К- 0 (они по-
помечены крестиками) и автоколебания, амплитуда которых тем больше,
чем больше |а|. С уменьшением |а| амплитуда автоколебаний уменьшается;
предельный цикл на рис. 8.9 стягивается в точку при а —» -0 (поскольку
К^ —> 0). При а = 0 он сливается с неустойчивым состоянием равновесия
и передает ему свою устойчивость. При
последующем увеличении положитель-
положительных значений а автоколебаний не
будет; при а > 0 существуют только
устойчивые положения равновесия
К=0, помеченные на рис. 8.10 кру-
кружочками. Если же менять параметр а
от положительных значений к отри-
отрицательным, то при переходе через нуль
возникнут автоколебания, амплитуда
которых, начиная от нуля, непрерывно
увеличивается при непрерывном росте |а|. Такой характер возникновения
автоколебаний называется мягким режимом возбуждения.
Рис. 8.10
Глава 8 187
Таким образом, в термин мягкий режим вкладывают два смысла: воз-
возбуждение автоколебаний в зависимости от начальных условий (см. §6.4)
и возбуждение автоколебаний при непрерывном изменении какого-либо
параметра системы (в данном случае - параметра а).
При переходе через значение а = 0 происходит качественная смена
фазового портрета системы (8.18) (см. рис. 8.8 и 8.9), поэтому а = 0 -
бифуркационное значение параметра а. Все другие значения а являются
обыкновенными. Диаграмма, представленная на рис. 8.10, называется
бифуркационной диаграммой мягкого режима возбуждения автоколебаний.
Метод Ван-дер-Поля позволяет не только находить периодические дви-
движения, но и определять процесс установления колебаний. Рассмотрим
этот вопрос на примере маятника Фроуда. Укороченные уравнения имеют
вид
e = eo= const.
Умножим первое уравнение на -1К~ и получим линейное уравнение отно-
относительно К'2'-
Отсюда
К'2 = -^- + сехр(цах); К=
Для переменных vj/и vj/ имеем
cos(t + 60)
v|/(x) = К cos(x + 8) =
у/- Зр7Dа) + с ехр(цах)'
... .. . . Л. -sin(x +80)
\|/(т) = -К sin(x + 9) = . ° .
V- зр/Dа) + с ехр((шт)
Здесь 90 и С - две произвольные постоянные, определяемые из начальных
условий. В данном случае устойчивый предельный цикл и соответствую-
соответствующие ему автоколебания маятника Фроуда имеют место при а < 0, Р > 0 и
согласно формулам (8.22) при х —> оо
V(x) = V- 4ос/Cр) cos(x + Go); vj/(x) = -yj- 4ot/Cp) sin(x + eo).
Таковы автоколебания маятника, уже полученные ранее.
188 Часть 2
8.3. Маятник Фроуда. Жесткий режим возбуждения автоколебаний
В первых двух случаях, рассмотренных в §8.2, мы обнаружили неогра-
неограниченное нарастание колебаний. Однако при больших размахах колебаний
функцию М(С1 - ф) уже нельзя аппроксимировать полиномом третьей
степени; нужно учитывать члены разложения более высокого порядка.
Будем аппроксимировать характеристику момента сил сухого трения
полиномом пятой степени:
М(П - ф) = М(п) - ЩП)ф - \ М'"(П)ч>3 - -J-
6 120
Член с четвертой производной умышленно опущен, ибо при составлении
укороченной системы (при усреднении) он исчезает.
Сохраним все прежние предположения и обозначения. Введем параметр
У " 120А
и предположим, что г3\М^(?1)\« I. В результате получим уравнение
движения маятника в виде
vj/ + \\i - n(-ocvj/ - p\j/3 - y\j/5). (8.23)
(Точкой отмечается дифференцирование по новому времени т = rt.)
Определим правые части укороченной системы. Для функции Ф(А)
имеем
1 2я
Ф(К) = — \[-a(-Ksmu)-?(-Ksinuy-y(-Ksinuy]sinudu =
2
поскольку
2и 2*
Jsin2 udu = n; Jsin4 udu - —к; Jsin6 м</м = -ж.
О 0 0
Функция *?(К) = 0, так как она пропорциональна интегралу (по периоду
2л:) от нечетной периодической функции. Следовательно, и здесь 9=90=
= const. Таким образом,
Глава 8
189
(8.24)
Ограничимся случаем, когда Р<0, так как именно в этом случае полу-
получался неограниченный уход от положения равновесия. Параметр у считаем
положительным. (Случай у<0 предлагается для самостоятельного разбора.)
Рассмотрим состояния равновесия укороченной системы, т.е. изучим
корни уравнения Ф(.АГ) = 0. Один из них К= К{ = 0. Остальные корни
находим из уравнения
(8.25)
(Представляют интерес положительные действительные корни уравнения
(8.25), а таких не более двух.]
Уравнение (8.25) определяет параболу в плоскости а, К1 (рис. 8.11).
Несложный анализ показывает, что эта парабола пересекает ось ординат в
двух точках: в начале координат и в точке а = 0, К2 = -6р/Eу). Верти-
Вертикальная касательная к этой параболе проходит через точку касания А с
координатами
9 Р
а=а, =——;
40 у
3 р
--
5 у
Рис. 8.11
Каждая точка параболы (8.25) и каждая точка оси абсцисс - состояния
равновесия укороченной системы. Выясним устойчивость этих состояний
по знаку производной
190
Часть 2
В состоянии равновесия К= А", = 0 (точки оси абсцисс на рис. 8.11)
имеем ф' = - а/2. Следовательно, состояние равновесия К= 0 устойчиво
при а>0 и неустойчиво при а<0.
Далее, из выражения для Ф '(К) видно, что парабола
(8.26)
отделяет на плоскости а, л область, где Ф' > 0, от области, где Ф' < 0.
На рис. 8.11 эта парабола нанесена штриховой линией. Внутри нее Ф' > 0.
Существенно, что парабола (8.26) проходит через точку А и, следова-
следовательно, все точки ветви 0А параболы (8.25) являются неустойчивыми сос-
состояниями равновесия. Остальные точки параболы (8.25) суть устойчивые
состояния равновесия укороченной системы. Из рис. 8.11 хорошо видно,
что:
а) при а > а. имеется только одно устойчивое состояние равновесия
К=0;
б) при 0 < а < а, существуют три состояния равновесия: устойчивое
.АГ= 0; неустойчивое, соответствующее точкам ветви 0А параболы (8.25),
и устойчивое, соответствующее точкам на ветви АВ этой параболы;
в) при а < 0 имеется два состояния равновесия: неустойчивое К- 0
и устойчивое - для точек верхней ветви АВ параболы (8.25).
Вид фазовой плоскости для а > оц показан на рис. 8.12. Каковы бы
ни были начальные условия, маятник совершает затухающие колебания.
Состояние равновесия \|/ = \j/ = 0 асимптотически устойчиво в целом.
Вид фазовой плоскости для 0 < а < otj показан на рис. 8.13. Здесь
имеется асимптотически устойчивое положение равновесия V|/ = \j/ = 0,
неустойчивый предельный цикл и устойчивый предельный цикл большего
радиуса. Для всех начальных условий, отображаемых точками внутри неус-
неустойчивого предельного цикла, колебания маятника затухающие. При на-
начальных условиях, соответствующих любым точкам вне этого цикла, ус-
Рис. 8.12
Рис. 8.13
Глава 8
191
танавливаются автоколебания с амплитудой, равной радиусу устойчивого
предельного цикла. В этом случае имеем жесткий режим возбуждения
автоколебаний маятника Фроуда.
Наконец, при а <0 на фазовой плоскости \|/, vj/ имеется единственный
устойчивый предельный цикл и неустойчивое положение равновесия
\j/ = vj/ = 0 (рис. 8.14). В этом случае устанавливаются автоколебания
при любых начальных условиях (мягкий режим).
Бифуркационными значениями параметра а в данном случае будут
значения а = 0 и а = а,, так как именно при переходе через эти значения
происходят качественные изменения фазового портрета (см.рис. 8.12-8.14).
В случае кубической характеристики момента сил сухого трения было
только одно бифуркационное значение а = 0 и существовал только мягкий
режим возбуждения колебаний.
(8.25)
Рис. 8.14
Рис. 8.15
Рассматриваемый случай существенно отличается от случая кубической
характеристики и в другом отношении. Это отличие сразу проявится,
если мы проследим за возникновением и срывом автоколебаний при мед-
медленном и непрерывном изменении параметра а. При больших значениях
а > 0 маятник находится в покое. В этом состоянии он будет находиться
и при уменьшении а вплоть до а = 0. При а = 0 возникнут колебания
конечной амплитуды, т.е. амплитуда автоколебаний изменится скачком
от нуля до конечного значения К. (рис. 8.15). Такой режим возбуждения
автоколебаний называют жестким. Это еще один смысл, который вкла-
вкладывают в термин "жесткий режим". При дальнейшем уменьшении а
(а <0) амплитуда автоколебаний непрерывно возрастает. При обратном
изменении параметра а, т.е. при увеличении а от отрицательных значений
к положительным, амплитуда автоколебаний постепенно уменьшается, а
при а = cXj происходит срыв автоколебаний: амплитуда колебаний скачком
уменьшается от конечного значения К„ до нуля (см. рис. 8.15). Система
вновь возвращается в асимптотически устойчивое положение равновесия
vj/ = vj/ = 0.
Таким образом, при непрерывном изменении параметра а возникно-
возникновение и прекращение автоколебаний происходит скачкообразно (в смысле
изменения их амплитуд) и притом при различных значениях параметра а.
192 Часть 2
Этот параметр часто называют коэффициентом возбуждения, а диаграмму
на рис. 8.11 принято называть бифуркационной диаграммой жесткого ре-
режима возбуждения автоколебаний.
Примечание. В данной главе метод Ван-дер-Поля изложен для квази-
квазилинейных систем, близких к линейным консервативным. Обобщение
метода и его распространение на динамические системы, близкие к нели-
нелинейным гамильтоновым, см. в гл. 11 монографии [10] из списка литера-
литературы к части 1 и в гл. 3 монографии [18].
8.4. Сравнение методов Пуанкаре и Ван-дер-Поля
Сопоставим практические возможности методов Ван-дер-Поля и Пуанкаре.
Метод Пуанкаре позволяет найти периодическое решение исследуемой
системы, в принципе, с любой точностью (до членов порядка \х"), тогда
как метод Ван-дер-Поля ограничивается только первым приближением
(членами порядка ц). Однако с помощью метода Ван-дер-Поля не только
определяются периодические решения, но и сразу же решается вопрос об
их устойчивости (по анализу устойчивости состояний равновесия укоро-
укороченной системы). В этом заключается существенное практическое преи-
преимущество метода Ван-дер-Поля перед методом Пуанкаре.
Укажем два других достоинства метода Ван-дер-Поля: 1) определение
процесса установления колебаний, что было проиллюстрировано в §8.2;
2) применение метода к системам с неаналитическими (например, разрыв-
разрывными) правыми частями. Последняя возможность вытекает из того факта,
что правые части Ф и *F укороченной системы (8.7) [или вектор-функция
Хо в системе (8.10)] имеют смысл, если существуют интегралы, опреде-
определяющие эти функции; при этом, очевидно, подынтегральные выражения,
т.е. правые части исходный системы, могут быть и неаналитическими
(см., например, задачу 8.3).
В связи со сказанным выше становится ясной потребность в других
методах отыскания периодических решений, которые совмещали бы
достоинства методов Пуанкаре и Ван-дер-Поля. Именно, речь идет о
методах, которые для систем типа (8.1), (8.9) позволяли бы находить
периодические решения, в принципе, с любой точностью и одновременно
решали бы вопрос об их устойчивости. Такие методы разработаны рос-
российскими математиками и излагаются в гл. 9 и 10. В гл. 9 изложен метод
Г. В. Каменкова, использующий для отыскания периодических решений
идеи метода функций Ляпунова; гл. 10 посвящена асимптотическому
методу, разработанному Н.М. Крыловым и Н.Н. Боголюбовым и полу-
получившему дальнейшее развитие в трудах Ю.А. Митропольского и др.
Следует, однако, оговориться, что в первом приближений оба метода
дают результаты, совпадающие с результатами метода Ван-дер-Поля,
поэтому к упомянутым методам следует обращаться лишь в тех случаях,
когда решение в первом приближении по каким-либо причинам оказы-
оказывается недостаточным.
Глава 8
193
Задачи
8.1. Возможны ли автоколебания маятника Фроуда, если кривая зави-
зависимости М = М((й) монотонная (рис. 8.16,а,б) или постоянная
(рис. 8.16,в)?
М
м
м
а)
б)
Рис. 8.16
в)
8.2. Исследуйте уравнение Ван-дер-Поля (при 0 < ц. « 1) методом Ван-
дер-Поля.
8.3. Исследуйте динамическую систему, описываемую уравнением
)], (8.27)
в котором р = const > 0; 0 < ц «: 1,
1 при у > 0;
Ау) =
[0 при у < 0.
8.4. Уравнение динамики лампового генератора при аппроксимации ха-
характеристики лампы полиномом третьей степени имеет вид [3]
х + х = ц[-1 + as(x)]x,
(8.28)
где s(x) = 1 + рх - X2. Постройте фазовый портрет системы и
бифуркационную диаграмму (по параметру а) при 0 < ц « 1.
8.5. Рассмотрите уравнение (8.28) при а > 0 и
s(x) =
(8.29)
Постройте в плоскости х,х фазовый портрет системы. Составьте
бифуркационную диаграмму [по параметру у = (а - 1)/а].
Рассмотрите два случая: р2 < 0 и C, > 0.
8.6. Определите амплитуду А и период Тавтоколебаний, возникающих в
системе
x + k2x = \i\(a2 -Х2)х-ух\ 0 < ц « 1.
(8.30)
194 Часть 2
8.7. х + х = \if(x); 0 < ц « 1, (8.31)
/О при х<\;
/(x) = |l при х>1.
Найдите зависимость частоты колебаний от амплитуды.
8.8. х + х = ^-ax + -JC3 +yx5j, (8.32)
О < ц « 1; у > 0.
Постройте фазовый портрет и бифуркационную диаграмму по пара-
параметру а.
Глава 9. МЕТОД КАМЕНКОВА
Рассмотрим нелинейную автономную систему второго порядка
х = -Ху + iLX(x,y,n) = -\у + \1Х^х,у) + \i2X2(x, у)+..
0<ц« 1.
Здесь Хк и Yk (к = 1,2, ...) - многочлены от X, у любой степени тк,
обращающиеся в нуль при х = у = 0. Предположим, что х = у = 0 -
единственная особая точка системы (9.1) и что правые части - абсолютно
сходящиеся ряды по ц во всей интересующей нас области изменения
переменных X, у и параметра р..
Отметим, что рассмотренное ранее уравнение G.1) или эквивалент-
эквивалентная ему система (8.2)
х = у, у = -x + \jf(x,y)
есть частный случай системы (9.1) при
Удобно исследовать систему (9.1) в полярных координатах. Положим
x = rcos9; y = rsinQ (r2 = х2 + у2). (9.2)
После подстановки (9.2) в (9.1) получим
rcosG - rsinG -8 = -Arsin94- \xX' + la2^*^-...;]
rsine + rcosee = Arcose + \iY' + A2У2*+..., J
где
X'k = ^(/-cose^sine); Yk = Yk(rcosQ,rsine).
Разрешим последнюю систему относительно г и 9 • Получим
196 Часть 2
где
1
Fk(r,Q) = (у; cose - х; sin в) / г]
Ясно, что Rkvi Fk- многочлены относительно г с коэффициентами, зави-
зависящими от sin 6 и cos 9:
Rk(r,Q) = rRkl(Q) + r2Rki(Q)+...+r^Rkmt(eyt\
Fk(r,Q) = Fk0(Q) + rFki(Q)+...+r»*-lFkmk_l(Q). j <9-4a>
Прежде всего, найдем необходимые и достаточные условия существова-
существования периодических решений системы (9.1) [или 9.3)] во всех случаях, когда
этот вопрос полностью решается членами первого порядка ц. Для решения
поставленной задачи рассмотрим функцию Ляпунова, определяемую урав-
уравнением
г = V + ц(и,К + щ/г+...+итущ), (9.5)
где ик- ик(в), к=\, ..., /И,, - подлежащие определению непрерывные
периодические функции 0 с периодом 2л. Очевидно, что V= V(r,Q). Из
(9.5) ясно, что V - положительно определенная функция при достаточно
малом значении ц ( V—> г > 0 при ц -> 0).
Напомним, что линии V = const являются замкнутыми, непересе-
непересекающимися, вложенными друг в друга и окружающими начало координат
Г= 0. Именно, цикл V= с, лежит внутри цикла V= с2 при с, < сг
Вычислим теперь производную по времени функции Уна траекториях
системы (9.3). Дифференцируя уравнение (9.5) по /, получаем
г = v
+ v++ v
dQ dQ dQ
Соберем члены с К и выразим г и 0 из системы (9.3):
Глава 9197
^]. (9.6)
Из формулы для Rk с учетом (9.5) получим
R, = rRu(Q) +... + г-Л^О) = [V + м(щУ +... + u
Подставим это выражение для Л, в (9.6) и введем обозначения
Pk=Rik-X-jj±-, k = lr../nlt (9.7)
Я = 1 + ц(ц + 2Ги2+...+гщУт1-\). (9.8)
(В дальнейшем предполагается, что ц настолько мало, что всегда /Г> 0.)
Тогда равенство (9.6) перепишется в следующем виде:
V2P2(Q)+...+Vm'Pmi(Q)] + О(ц2). (9.9)
Займемся теперь выбором функций и^. Подберем их так, чтобы все функ-
функции Рк, определяемые согласно (9.7), были постоянными величинами.
Обозначим эти постоянные gk. При этом, как следует из уравнений (9.7),
uk = ^[Rlk(Q)-gk]dQ + Ck, к = 1,..., гщ. (9.10)
Потребуем к тому же, чтобы функции ик были периодическими (с периодом
2тг), для чего необходимо и достаточно выполнения следующих равенств:
о
Отсюда получаем конкретные выражения для констант gk:
(9.11)
198 Часть 2
Постоянные Ск представим так, чтобы все функции ик обращались в нуль
при каком-либо определенном значении б0, например при 0О = 0.
Таким образом, равенство (9.9) примет вид
...+*„
(9.12)
rjxegk(k = 1,...,тх) находятся из (9.11).
Рассмотрим выражение
y (9.13)
Учитывая выражения (9.11) для gk и формулу (9.4а) для Rk, получаем
НУ) = ~ j[VRn(u)
Принимая во внимание формулу (9.4) и выражения для Х'к и Yk , имеем
j 2л
L(V) = — [ \ХХ (V cos u,V sin и) cos и +
2К о (9.14)
+ У, (V cos u,V sin и) sin м]</и.
Рассмотрим теперь алгебраическое уравнение относительно V
¦ О. (9.15)
Допустим, что оно имеет т < /я, положительных различных корней
Кр..., Vm. Тогда уравнение (9.15) можно переписать в виде
L(V) = F*°(Fi - V)k>(V2 - V)k*...(Vm - Vf"A(V) = 0, (9.16)
где kj - кратность корня V; A(V) - многочлен, степень которого равна
тх~ kQ- кх- ... -кт. Этот многочлен не обращается в нуль и, следова-
следовательно, сохраняет постоянный знак для всех V> 0.
Докажем, что каждому положительному корню V нечетной кратности
соответствует по крайней мере одно периодическое решение исходной сис-
системы (9.1). Пусть
Глава 9
o<vl<v2<...<vm.
Выберем два положительных числа е, и в2 согласно неравенствам
199
Рассмотрим замкнутые кривые
V=V.+sl
(9.17)
V=V.-e2
(9.18)
(штриховые кривые на рис. 9.1). Покажем, что все фазовые траектории
системы (9.1) пересекают замкнутые кривые (9.17) и (9.18) в различных
направлениях (при достаточно малом р. и нечетном к).
Рис. 9.1
В самом деле, для цикла V= V. +s, имеем
., -Vj- e,)*'"
*'"
O(n2). (9.19)
Для цикла V= V - e2 получим
-VJ+
X - V,
j - 62)]
(9.20)
При достаточно малом (i знак производной V^ 3) определяется только пер-
первым слагаемым (порядка \х). Выражения в квадратных скобках в (9.19) и
(9.20) имеют разные знаки: - efy < 0, a g*> > 0; все остальные сомно-
сомножители в квадратных скобках как в (9.19), так и в (9.20) совпадают по
200
Часть 2
знаку. Таким образом, знаки 1^93) на циклах (9.17) и (9.18) различны.
Это и означает, что фазовые траектории системы (9.1) пересекают циклы
(9.17) и (9.18) в противоположных направлениях (рис. 9.2 и 9.3). Сле-
Следовательно, в кольцеобразной области, ограниченной кривыми (9.17) и
(9.18), имеется хотя бы один предельный цикл (устойчивый на рис. 9.2 и
неустойчивый на рис. 9.3.)
Рис. 9.2
Рис. 9.3
Таким образом, условие существования периодических решений сис-
системы (9.1) можно установить по членам порядка |i. Это условие заключается
в том, что уравнение Д V) = 0 имеет по крайней мере один положительный
корень V нечетной кратности.
Можно строго доказать [12], что при положительном корне четной
кратности вопрос о наличии или отсутствии периодического движения в
системе (9.1) невозможно решить с помощью только членов первого
приближения по ц. В этом случае требуется рассмотрение членов более
высокого порядка по \х.
Полученные результаты сформулируем в виде следующей теоремы.
Теорема 9. 1. Если система уравнений (9.1) такова, что уравнение
ЦV) = —- f [Хх (V cos u,V sin и) cos и +
2% %
+ Kj(V cos u,V sin u) sin u]du - 0
имеет k положительных корней нечетной кратности, то каждому из этих
корней соответствует по крайней мере один предельный цикл [и соответ-
соответственно периодическое решение системы (9.1)].
Если же уравнение L( V) = 0 имеет положительные корни четной крат-
кратности, то вопрос о существовании периодических решений, отвечающих этим
корням, членами первого порядки по \х. не решается.
Перейдем к исследованию устойчивости периодических решений.
Пусть V= V - положительный корень нечетной кратности к = 2к- 1.
Этому корню отвечает периодическое движение. Устойчиво ли оно?
Глава 9 Ш
Чтобы ответить на этот вопрос, перепишем Z( V) в виде
L(V) = (Vj-VJk-'P(V), (9.21)
а равенства (9.19) и (9.20) примут вид
Щ9Л) = -\is]k-lP(Vj + 6.) + 0(ц2); (9.19а)
HVm) = ixe\k-lP(Vj - е2) + О(ц2). (9.20а)
Заметим, прежде всего, что P(Vj + ?,) и P(Vj - е2) имеют один и тот
же знак [функция Р{ V) не обращается в нуль и не меняет знака в интервале
P(Vj + б,) > 0, P(Vj - г2) > 0 (9.22)
получим К(93) > 0 на цикле V = Vf - е2 [см. (9.20аIи ^93) < 0 на цикле
V = V, + е, [см. (9.19а)], т.е. имеем случай, представленный на рис.9.2.
Периодическое движение, отвечающее корню ?„ устойчиво.
Для выполнения неравенств (9.22) достаточно, чтобы
P(Vj) > 0. (9.23)
Из равенства (9.21) найдем, что
где а - совокупность членов, пропорциональных разности V.— V. Отсюда
ясно, что неравенство (9.23) эквивалентно условию
d2k'lL(V)
\ <0 иК=^. (9.24)
Таково условие устойчивости периодического движения, соответствующего
положительному корню V уравнения L{ V) = 0 нечетной кратности.
Аналогично убеждаемся, что это движение неустойчиво, если
(9.25)
202 Часть 2
Выше был рассмотрен вопрос о существовании и устойчивости пре-
предельных циклов в системе (9.1) [или (9.3)], однако ничего не было сказано
о форме и размерах этих циклов, а также о связи с методом Ван-дер-Поля
применительно к уравнению G.1). При достаточно малых значениях \х все
эти вопросы разрешаются без труда. В самом деле, числа Sj и е2 можно
брать сколь угодно малыми, поэтому приближенным уравнением предель-
предельного цикла, соответствующего корню V., можно считать V =¦ V.. Далее,
V» Г при \х. —> 0, что хорошо видно из уравнения (9.5). Следовательно,
при малых значениях |д предельный цикл V ¦=¦ V близок к окружности
радиусом V с центром в точке х = у = 0 (тем ближе, чем меньше \х).
Отметим еще, что применительно к уравнению G.1) [или системе (8.2)]
уравнения Ф(К) = 0 и L(K) = 0 эквивалентны и, следовательно, равны
их корни К и V. Отсюда ясно, что в случае простых корней (а именно
этим случаем мы ограничились в предыдущей главе) условия (9.24) и
(9.25) совпадают с неравенствами Ф'(Кj) < 0 иФ'(А^) > 0 соответст-
соответственно.
Существенно, что метод Каменкова позволяет отыскивать периоди-
периодические решения и с более высокой точностью - порядка ц", где п> 1 -
натуральное число. В этом случае функция Ляпунова выбирается из урав-
уравнения
где иь - непрерывные периодические функции 6, подлежащие определе-
определению.
Изложенный метод допускает обобщения на системы более высокого
порядка и на системы, не обращающиеся в линейные при ц. = 0. Кроме
того метод позволяет, вообще говоря, проследить и процесс установления
автоколебаний. Обо всех этих обобщениях см. работу [12]. Сжатое изложе-
изложение метода Каменкова содержится также в монографии [18].
Глава 10. АСИМПТОТИЧЕСКИЙ МЕТОД КРЫЛОВА И БОГОЛЮБОВА
10.1. Постановка задачи для системы с одной степенью свободы
Возьмем исходное уравнение динамики в виде
2 х), A0.1)
где ц - малый положительный параметр**.
При ц = 0 решением уравнения A0.1) будет x{t) = CCOS\|/, где \j/ =
-at+Q. Амплитуда а и фаза 9 - постоянные величины, зависящие от
начальных условий. Другими словами, при (J. = 0 величины а и \|/ опре-
определяются уравнениями
а = 0; \|/ = со.
При ц* 0 производная а отлична от нуля, а щ вообще говоря, зависит от
а. Поэтому будем искать общее решение уравнения A0.1) в виде
Х= OCOSV)/ + |Д.Ы,(о, \|/) + Ц2«2(О, VJ/) + —, A0.2)
где и{(а, v|/), U2(a, v|/), ... - периодические функции угла ц/ с периодом
2тс; величины а и V(/ - функции времени, определяемые дифференци-
дифференциальными уравнениями
A03)
Если будут найдены функции ик(а, у), Ак(а) и Вк(а), к =1,2,..., то
задача сведется к интегрированию весьма простой системы A0.3) с разде-
разделяющимися переменными.
Далее будет видно, что практически доступным оказывается вычис-
вычисление только двух-трех членов разложений в A0.2), A0.3), хотя принци-
принципиальных затруднений при отыскании большего числа членов не суще-
существует. Поэтому поставим задачу более осторожно: требуется найти такие
функции ик(а, \|/), Ак(а) и Вк(а), к =1,2, ..., т, чтобы выражение
nM,(fl,\|/) + ... + [xmum(a,\\i), A0.4)
''Or коэффициента <в2 можно было бы освободиться, положив <'вов= со/ и цнов =
204 Часть 2
в котором функции времени fl и \|/ определяются уравнениями /Я-го при-
приближения
удовлетворяло уравнению A0.1) с точностью до величин порядка малости
1
В принятой постановке задачи пока еще невозможно однозначно оп-
определить функции
ик(а,у), Ак(а), Вк(а), к=1,2,...,т, A0.6)
(см. Приложение 7). Для однозначности их определения следует нало-
наложить на них дополнительные условия. В качестве таковых примем усло-
условия отсутствия первой гармоники в выражениях u,(fl, ц>), и2(о, \|/), ... ,
т.е. положим
2л 2я
juk(a,\\i)cos\\i a\i = 0; ]uk(a,\]f)sin\\tdy = 0, A0.7)
о о
к =1,..., т.
С физической точки зрения выполнение этих условий означает, что искомой
переменной а является амплитуда первой, основной гармоники колеба-
колебаний. [Ряды Фурье функций и,, и2, ... не содержат членов с cosvj/ и sinvj/;
в формуле A0.4) колебания X с основной частотой отображаются только
первым слагаемым flCOSvj/.]
Итак, постановка задачи такова:
требуется найти решение x(f) уравнения A0.1) с точностью до цт+| на
интервале времени порядка по крайней мере 1/ц. Решение ищется в виде
разложения A0.4), в котором а и ц> определяются согласно A0.5) при
условиях A0.7). Прежде всего требуется определить коэффициенты A0.6)
этих разложений, после чего задача сводится к более простой — интегри-
интегрированию уравнений A0.5) с разделяющимися переменными.
10.2. Построение решений
Продифференцируем A0.2) по /. Получим
. ( ди, 2ди7
х = \ cosvi/ + u—L + a —L + ... \a
{ v * да Р да '
Глава 10
205
х = а\ cosu/
¦¦( ¦
+ v|> - a sin \\i + ц
дЩ 2 дщ_
да да
ди, 2 ди2 )
.2( д2и, 2 д2и2
а2\ |х—f+ ц —т-
да2 да1
N
+ law - sin \\i + \i + ц
даду
¦ + ...+
+ ... .
Из первого равенства A0.3) найдем, что
vj/2 =
= со2
A0.8)
Теперь в выражение для X подставим разложения A0.3) для а и Ь ; в
выражение для X - величины A0.9). Выпишем полученные выражения
по степеням ц. В результате найдем
( , п • ЗиЛ
х = -аса sin ц/ + ш >4, cos \j/ - аВх sin vj/ + со -г-1- +
,f ^ _ . ди, ди, диЛ
+ ц A cos у - аВ2 sin vj/ + Л, -r-L + 2?I -r-L + <a-r-^ +...; A0.10)
V да ' дц/ дц>)
206 Часть 2
д2и
х = -аа>2 cos \j/ + щ- 2соД sin \\i - 2(aBiacos\\i +co2 ——j
Д -т1 - аВ] - 1<йаВА cos у -
sin \\i
Отсюда следует, что левую часть уравнения A0.1) можно представить в
виде
2 ( л л ¦ л „ 2Э\ 2 1
х + са х = щ- 2соД sin у - 2coa.fi, cos v|/ + со —— + to и, +
+ ц Д —г- - аВ{ - 2а>аВ2 cos \j/ -
- 2соЛ, + 2/1,5, + оД —г- sin
V 2 ' ' ' da)
Зобу
Запишем теперь правую часть уравнения A0.1) также в виде разложения
по степеням ц:
|д/(х,х) = ц/[(ц,а,1|/),
или с учетом выражения A0.2) для X и выражения A0.10) для X в виде
, л:) = \if{a cos vj/.-aco sin ц/) + ц2 j uxf'x(a cos vj/,-aco sin v|/) +
+ Д cos у - aBx sin \j/ + со —- l/^'a cos v|/,-oco sin y) \ +... (ю. 13)
Глава 10
207
Для того чтобы выражение A0.2) удовлетворяло исходному уравнению
A0.1) с точностью до величин порядка малости ц*1, необходимо при-
приравнять коэффициенты при одинаковых степенях ц в правых частях A0.12)
и A0.13) до членов /я-го порядка включительно. В результате получим
следующие т уравнений:
д2ик
(О
+ ик = fkA + 2а>Ак sin у + 2®аВк cos ц/, A0.14)
к = 1,.. •, /и,
функции f0, fv ..., /„_, таковы:
/о = /о (а> v) = /О2 cos \j/,-fl(n sin у);
/i = /i (л, v) = и,/;(о cos \)/,-0(o sin у) +
(л n • диЛ ...
+1 у4, cos\\i - аВх sin ц» + ©-^-L |/^(оcos ц/,-о©sin'
„•) ^ dA,
11 ^
cos\j/+
da
sin у —
A0.15)
Легко видеть, что каждая из функций fk есть периодическая функция
переменной \\i с периодом 2я, зависящая от а. Явное выражение функции
^будет известно, если будут найдены выражения для А.(а), В.(а) и u.(a,\\i)
до к-го номера включительно.
Приступим к отысканию этих функций (собственно, первоначально
поставленная задача в этом и состоит).
Чтобы определить Ах(а), Вх(а) и и,(а,ц/) из первого уравнения сис-
системы A0.14), рассмотрим разложения Фурье для функций fo(a,y) и
()
hn(a) sin ny\,
n-\
w, (a, \\i) = v0(a) + J] [v,,(o) cos m\> + wn(a) sin my].
Л-1
A0.16)
Теперь подставим эти выражения в первое уравнение системы A0.14).
208 Часть 2
Получим
00
<й\(а) + Х<°2A ~ и2 Ж (a) cos my + wn(a)sin n\\i] =
л=1
A0.17)
л*2
+ [gi (я) + 2<oaBl ] cos ц> + [А, (а) + 2оЦ ] sin vj/.
Приравняем коэффициенты при одинаковых гармониках в A0.17).
В результате имеем
vo(«)=go(fl)/<°2; A017а)
v-(a) = ^tS); ^(с) = ^а^'Л = 2'3'"-; A017б)
g, (а) + 2(йаВх = 0; Л, (а) + 2соД = 0. A0.17в)
Функция fQ известна: f0 = /(ocos x(/, -aosin ц/). Следовательно, ко-
коэффициенты Фурье go,gvg2, — и Ар А2,... этой функции также известны.
Отсюда ясно, что равенства A0.17в) дают искомую величины Ах и Bv а
равенства A0.17а) и A0.176) - все коэффициенты ряда Фурье функции
и,, за исключением первых гармоник v,(fl) и wt(a). Однако в силу до-
дополнительных условий A0.7) эта функция и не содержит первой гармоники:
v,(e) = 0; w,(fl) = O.
Следовательно, функция «,(fl,\j/) также определена:
СО @ я=2 1 — /7
Итак, величины их(а,\у),Ах(а) нВ^а) полностью определены. Тем са-
самым определено и явное выражение функции/^(о,\|/) [см. второе равенство
A0.15)].
Разложим функцию /J(a,\y) в ряд Фурье:
00
А(<*,4>) = gol)(a) + ^Sn] (о) cos пц) + h(nl)(a)sin пц>].
Далее будем действовать аналогично предыдущему этапу, на котором оп-
определялись wpy4, и 2?,. Именно, воспользуемся вторым уравнением A0.14).
Подставим в него разложение Фурье для функции /| и разложение Фурье
Глава 10 209
для «2(fl,vj/) и приравняем в этом уравнении коэффициенты при одина-
одинаковых гармониках. В результате найдем
A0.19)
g\u(a) + 2ааВ2 = 0;Л,A)(о) + 2<оаА2 = 0;
со2 co2t2 1-я2
Равенства A0.19) полностью определяют функции А2,В2 и иг
Таким образом, получается процесс для последовательного однознач-
однозначного определения функций ик, Лк,Вк, к = 1,..., т.
Рассмотрим первое приближение
n«1(c,v|/), A0.20)
где
a = \\Ai{a); vj; =co + цД(я). A0.21)
Заметим, что из первого уравнения A0.21) следует
Да = a(t) - а@) - \xtAit
а из второго уравнения A0.21) имеем
Д(\|/ - со/) = [v@ - со/] - ф@) ~ ц/Д,
где Д и 5, - некоторые средние значения ^(fl) и /?,(я) на интервале
@, /). С одной стороны, ясно, что промежуток времени, на котором а
и у - (at получат конечные приращения, должен быть порядка \/\х.
С другой стороны, уравнения первого приближения A0.21) получаются
из исходных разложений A0.3) отбрасыванием членов порядка малости ц2
(и более высокого порядка), а такая ошибка в значениях первых произ-
производных а и Ц> дает ошибку порядка ц2/ (за время /) в значениях самих
функций а и vj/. Следовательно, в том интервале времени, в течение
которого а и vy - cat успеют заметно отойти от своих начальных значений
(это интервал порядка 1/ц), погрешности в значениях а и \|/ будут
величинами порядка ц, а не ц2: \i2t ~ |i2/(i = Ц- (Нас интересуют именно
такие длительные интервалы времени, когда можно считать, что процесс
установления колебаний уже завершился.)
Таким образом, на интервале времени порядка I/ц получается ошибка
порядка ц при определении а и ц>. По этой причине в выражении A0.20)
не имеет смысла сохранять член |aM,(fl!,v)/), поскольку погрешность фор-
формулы A0.20) как с учетом этого члена, так и при отбрасывании его будет
по порядку величины одной и той же - порядка ц. По этой причине в
качестве первого приближения разумно брать упрощенное выражение
210 Часть 2
A0.22)
где
а = \iAy(a); vj/ = со + \iBx(a). A0.23)
Рассуждая совершенно аналогично, можно показать, что во втором при-
приближении нет смысла удерживать член ц2и2(а,ц/), так что уравнениями
второго приближения будут
ци{(а,\\1); A0.24)
10.3. Явные формулы первого и второго приближений для системы с одной
степенью свободы
Приведем здесь явные формулы для y4|(fl),y42(a),5,(a),52(fl) и M,(a,\y).
Из A0.17в) имеем
Согласно A0.16) А, и g{ - коэффициенты разложения в ряд Фурье функции
f0 = /(flCOS \\), -flcosin у), т.е.
1 2л
Ах (а) - - -— \f{a cos \y,- aco sin у) sin ycty;
2лсо j
2лсо
1 и
В{ (а) = f f{a cos ц/,- осо sin
A0.26)
Обратите внимание, что уравнения первого приближения A0.22),
A0.23), A0.26) полностью совпадают с уравнениями, найденными по
методу Ван-дер-Поля. Это значит, что в первом приближении, с точ-
точностью до членов порядка ц, асимптотический метод Крылова и Бого-
Боголюбова дает тот же результат, что и метод Ван-дер-Поля.
Получим формулы второго приближения, т.е. составим выражения
для А2,В2 и иу Согласно A0.18) имеем
СО СО „-2
где gn и hn - известные коэффициенты ряда Фурье для функции f0 =
= /(tfCOSvj/, -coasimj/). Именно:
Глава 10
211
1 2я
gn(a) = — \ f (acos\\1,-(ааsin ц/) cos n\\ia\f,
n о
1 2я
/гл(д) = — f/(acos у,- aco sin y)sin
71
A0.28a)
A0.286)
Таким образом, явное выражение для H,(flr,v|/) составлено.
Наконец, из A0.19) и A0.15) найдем явный вид А2 и В2:
где А,A) и g,A) - коэффициенты ряда Фурье функцииyj(fl,V(/), определяе-
определяемой вторым равенством A0.15). Окончательный вид А^ и В2 таков:
2оД ' ' ' da
r'x {a cos \\1,-аоз sin \\i)
+ Ax cos \\i - aBx sin у + ca —- x
x fl(a cos v|/,-acosin y) sin
, Л dA,}
1
2raoa
2n
a da
Щ (a> 4>)fx(a cos v|/,-oo) sin vj/) +
Зи,
+1 Ax cos v</ - aBx sin v|/ + са ^-i- x
V dvj/J
x /Да cos v)/,-oco sin y) cos
A0.29)
Итак, второе приближение составляют формула A0.24) для х, урав-
уравнения A0.25) для а и Ц/, формулы A0.27), A0.28а), A0.286), дающие
выражение для w,, и формулы A0.29) для А2 и Вг
212 Часть 2
10.4. Установившиеся колебания и их устойчивость
Для любого (л-го) приближения закон изменения размахов колебаний ос-
основной гармоники определяется уравнением
а = Ф(а), A0.30)
где Ф(а) = цА1(а) + ... + ц"Ап(а). Это уравнение - с разделяющимися
переменными, его нетрудно проинтегрировать, но для отыскания амп-
амплитуд установившихся колебаний это излишне; искомые амплитуды опре-
определяются (как и в методе Ван-дер-Поля) из уравнения Ф(о) = 0. Пусть
а=а0-простой корень этого уравнения. Линеаризуем A0.30) в окрестности
точки о=а0 и составим характеристическое уравнение. Его единственный
корень равен Х = Ф'(а0). Отсюда ясно, что установившиеся колебания
с амплитудой а0 будут устойчивыми, если Ф'(я0)<0, и неустойчивыми,
если Ф'(а0)>0.
Очевидно, что при достаточно малых значениях ц знак Ф' определяется
знаком цД'(доо)» °оо ~ амплитуда установившихся колебаний в первом
приближении.
Случай кратных корней уравнения Ф(я) = 0 (не являющийся акту-
актуальным в прикладных задачах) требует специального рассмотрения, которое
здесь не проводится.
Развернутое изложение метода и примеры его применения см. в мо-
монографиях G, 16].
10.5. Системы л-го порядка. Постановка задачи
Рассмотрим систему «-го порядка, записанную в стандартной форме,
, 0 < |Л « 1. A0.31)
Здесь X - вектор-столбец с компонентами хр ...,Хл, а Х- вектор-функция
с компонентами Xv...,Xn; t - время. Предположим, что правые части
системы A0.31) - периодические функции по отношению к явно входя-
входящему времени / с периодом 2л, так что
Х{х, t) = X ехр(Ш)** (*)• A0.32)
к
В векторно-матричной форме формулы дифференцирования сложных
функций
dt Ы
можно записать следующим образом:
Глава 10 213
dF(x,t) dF (dx д\Р, Л
—Lj-i = — + \F(x, t),
dt dt {dt dx)
где dF/дх трактуется как матрица ||9/^/5х?||, приложенная к вектору
dx/dt, a (dx/dt-д/дх) - как операторное скалярное произведение
?i dt dxq
Пусть, далее, функция F[x,t) - сумма вида
^(х, 0 = Z ехр(Ш)^ (х).
Введем обозначения
~ ч -г-, ехр(Ш) _ . ч ~. . V-,
F(x, 0 = Z k Fk (x); F(x, 0 = 2-
Обозначим M(F) результат усреднения функции F(x,f) по явно входя-
входящему времени /при постоянном векторе х. Очевидно, что M(F)= F0(x).
В принятых обозначениях
G.1 ~ ОГ
-—-= г, -—- = г-М\г).
at at
Перейдем к отысканию приближенных решений системы A0.31). По-
Поскольку производные X пропорциональны малому параметру ц, естест-
естественно считать X медленно изменяющимися величинами. Поэтому пред-
представим х как суперпозицию плавно изменяющегося члена 4 и суммы малых
быстро колеблющихся (по сравнению с 4) членов. В первом приближении
можно принять х= 4 в правой части уравнения A0.31), и тогда, учитывая
выражение A0.32), запишем
х = ц?ехр(ВДМ4) = Ц*оФ + цЕехР('ВД^)- (Ю.ЗЗ)
Последняя сумма описывает высокочастотные, быстрые воздействия (что
становится очевидным при переходе к новому времени т = \it). Полагая,
что эти синусоидальные колебательные воздействия вызывают лишь малые
вибрации X около 4, и пренебрегая ими, приходим к усредненной системе
i = ЦХО&). A0.34)
214 Часть 2
Чтобы получить второе приближение, необходимо учесть в выражении
для X и колебательные члены. Именно, учтем в A0.33) слагаемые
цехр {ikt)Xk(Q), которые вызывают в решении X колебания вида
\\.tKp(ikt)Xk(?)/ik, и придем к приближенному выражению
Подставим это выражение в правую часть уравнения A0.31) и найдем
х = цЛГ (§ + ц* G, /),/) = ]хМ{Х(^ + цХ& /),/)} + Y,
где К- совокупность быстро осциллирующих членов. Пренебрегая влия-
влиянием последних на изменение х, получим уравнение второго приближения
в виде
или, с точностью до величин второго порядка малости включительно,
(ю.35)
Приведенные рассуждения, на основе которых были по лучены урав-
уравнения A0.34) первого приближения и уравнения A0.35) второго прибли-
приближения, нестроги. Однако этим рассуждениям можно придать вполне
обоснованную форму. Применительно к уравнениям первого приближения
это сделано в §10.6; подробнее см. в монографиях [7,16].
10.6. Первое приближение для системы п-ю порядка
Положим в уравнениях A0.31)
. (Ю.36)
Выражения A0.36) рассматриваются здесь не как приближенное решение
системы A0.31), а как формулы замены переменных, в которых ^ - новые
неизвестные.
Продифференцируем по /формулы A0.36):
. • дХ ¦ дХ
х = ^ + ц~аГ^ + ц1Г A037)
Глава 10 215
Учтем, что
и подставим A0.36) и A0.37) в уравнения A0.31). Получим
или
1, (Ю.38)
где Е— единичная матрица. Умножим уравнение A0.38) слева на обратную
матрицу
(?)
и для новых неизвестных % запишем уравнение
)]. A0.40)
Разложим выражение A0.39) в ряд по степеням ц:
[г-. дХ I ,-, ЗА' Л/ 2\
ц"аГ = ц"аГ+ A041)
и, используя A0.41), уравнение A0.40) перепишем в виде
Пренебрежем в правой части этого уравнения величинами второго и более
высокого порядка малости и получим уравнения первого приближения,
или усредненную систему A0.34):
216 Часть 2
В качестве первого приближения к искомому решению возьмем X = ?,,
где ? - решение усредненной системы A0.34). Выражение A0.36), в котором
?, определяется из A0.34), принято называть улучшенным первым прибли-
приближением.
Подставляя улучшенное первое приближение A0.36) в точные урав-
уравнения A0.31), можно убедиться, что оно удовлетворяет им с точностью
до величин второго порядка малости.
Очевидно, что М(х(^,1)) = А^(?), следовательно, уравнения A0.34)
получаются из точных уравнений A0.31) путем усреднения последних по
явно входящему времени /. При этом переменные трактуются как пос-
постоянные.
Вопрос об установившихся периодических решениях и их устойчивости
решается тем же путем, что и в §10.4. Именно, положению равновесия
4 = §о системы A0.34) отвечает периодическое решение системы A0.31),
устойчивость которого определяется корнями характеристического уравне-
уравнения линеаризованной (в окрестности точки 4 = 4о) системы A0.34):
= 0, A0.42)
где Е - единичная матрица. Если все корни уравнения A0.42) имеют
отрицательную действительную часть, то решение ?, = ^ и соответствующее
ему периодическое решение системы A0.31) асимптотически устойчивы.
Если же уравнение A0.42) имеет хотя бы один корень с положительной
действительной частью, то упомянутые решения неустойчивы.
10.7. Второе и высшие приближения
Во втором приближении решение системы A0.31) ищется в виде
где 4 - новая неизвестная, определяемая соотношением
i = liX0(?>) + »2P(>0. A0.44)
Функции Д^, /) представляются суммами
щ, о = Z ецк/ад D), (ю.45)
к
т.е. Д?, /) - подлежащие определению периодические функции явно
входящего времени / (с периодом 2я). Выбор функций Р(Е,) и Д4» 0
производится в процессе построения решения (с точностью до ц2). Этот
процесс мы опускаем (см. монографию [16]), а здесь сформулируем только
окончательный результат:
Глава 10 2Г7
вторым приближением служит выражение
X = t + iiX&,t), A0.46)
в котором Е, определяется из уравнения
, ')J| W
Иначе говоря, второе приближение имеет форму улучшенного первого
приближения, где 4 подчиняется уравнению не первого, а второго при-
приближения - уравнению A0.35).
Аналогично для получения ТП-хо приближения следует рассмотреть
выражение
X = ? + ц/1($, t) + ... + ^Fm{%, t), 10.47)
где
**G.') = Х>хр(л>/)/^), A0.48)
а переменная ? - решение уравнения
Подставляя выражение A0.47) в исходные уравнения A0.31) и приравни-
приравнивая коэффициенты при одинаковых степенях ц до m-го порядка вклю-
включительно, подбирают /*jD,/), ..., FJt,,t) и Р,D), •••, ^„D) так> чтобы
выражение A0.47) удовлетворяло исходным уравнениям с точностью до
величин порядка малости цт+|. Если затем рассматривать выражение
A0.47) как формулу замены переменных, преобразующую неизвестную X
к новой неизвестной 4, то для новой переменной получим точное уравнение
вида
4 = цад+...+цтад) + цт''/г(?,/,ц), (Ю.50)
в котором справа стоят "интегрируемая часть" и "возмущение" \xm+^R,
являющееся величиной порядка цт+|.
За /и-е приближение решения уравнений A0.31) можно принять выра-
выражение
в котором ^ определяется из уравнений A0.49).
В приложениях, в основном, используются первое и иногда второе
приближения. Высшие приближения в конкретных задачах обычно не
218
Часть 2
применяются; трудности практического использования данного метода рез-
резко возрастают с каждым новым приближением.
Отметим, что попытка рассмотреть выражение A0.47) при т~>оо
оказывается безрезультатной: ряды A0.47), вообще говоря, расходятся [7,
16]. Практическая ценность метода определяется асимптотическими свой-
свойствами этих рядов для фиксированного т при ц—>0. При малом ц и
фиксированном т выражения A0.47) дают достаточно точное предста-
представление решения исходных уравнений A0.31) для достаточно длинного ин-
интервала времени.
10.8. Пример: решение уравнения Ван-дер-Поля
Уравнение Ван-дер-Поля
X + ц(х2 - \)х + X = 0
A0.51)
с помощью замены переменных
х - Azv$>{t + в); х = -A sin(r + 9)
приводится к системе уравнений в стандартной форме
А3
A0.52)
т С1" т)" тcos2(/+0)
т
cos4(/+е)
4
2
4
8
A0.53)
Усредняя правые части уравнений A0.53) по явно входящему времени /,
получаем уравнения первого приближения
1
A0.54)
Очевидно, что А{ = 0 при Ах = 2. Таким образом, согласно первому при-
приближению в системе A0.51) устанавливаются периодические колебания с
амплитудой Ах = 2.
В соответствии с изложенным для улучшенного первого приближения
находим
где Ах и 0, определяются из A0.54).
Глава 10
219
Для установившегося колебательного режима (при А1 = 2) из A0.55)
имеем
A = 2-^-si
е = е, + ^ cos2(/ + е,) + ? cos4(/ + е,).
Подставив эти выражения в первую формулу A0.52), запишем
+ jsin4(/ + Gj) + cos / + 0, + -^cos2(/ + 9,) + -^cos4(r + 0,) .
Разложим это выражение в ряд по степеням ц, сохранив только члены
первого порядка малости. Тогда получим улучшенное приближение для
установившихся колебаний в виде
), e=const.
Во втором приближении А и 0 определяются из A0.55), где Ах и 9, дол-
должны быть найдены из уравнений второго приближения
л -i^i-fi 4L1. • 2A 4L 1А>)
Глава 1 1. ТЕОРИЯ БИФУРКАЦИЙ И РАСЧЕТЫ АВТОКОЛЕБАНИЙ
В прикладных задачах далеко не всегда получаются уравнения с "готовым"
малым параметром. Часто приходится прибегать к дополнительным допу-
допущениям, которые позволяют ввести малый параметр и преобразовать ис-
исходные уравнения к квазилинейной форме. Рассмотрим, например, нели-
нелинейное уравнение без малого параметра
х + х = ф(х,х), A1.1)
в котором ф - аналитическая в окрестности начала координат функция,
причем ее разложение в ряд Маклорена не содержит линейных членов:
<р(х,х) = а2Ох2 + аихх + а02х2 + aJoxi+... A1.2)
Если ограничиться только анализом колебаний малой амплитуды, то в
A1.1), A1.2) можно положить x=\iy, где ц- малый положительный па-
параметр, ау~ 1. Тогда уравнение A1.1) станет квазилинейным типа G.1):
где 0 < ц « 1; / = а20у2 + апуу + а02у2 + n%,j>3+...
На самом деле вопрос сложнее, поскольку уравнения динамики со-
содержат, как правило, параметры и нелинейные колебания малой амплитуды
будут существовать отнюдь не при любых значениях этих параметров. Ре-
Решение задачи о расчете автоколебаний достаточно малой амплитуды можно
получить, исходя из бифуркационной теории Ляпунова-Пуанкаре-Анд-
Ляпунова-Пуанкаре-Андронова. Общая схема такого решения (без строгого математического обосно-
обоснования) дается в §11.2, а в §11.3 приводится подробный пример ее исполь-
использования.
Излагаемые в §11.2 и 11.3 вопросы тесно связаны с анализом динамики
системы при параметрах, взятых вблизи границы области устойчивости
положения равновесия, поэтому сначала (§ 11.1) кратко излагаются общие
результаты теории Н.Н. Баутина о поведении нелинейной системы вблизи
границы области устойчивости.
11.1. Опасные и безопасные границы области устойчивости
Н.Н. Баутин рассмотрел нелинейные сосредоточенные системы в наиболее
распространенных с практической точки зрения случаях, когда на границе
области устойчивости характеристическое уравнение линеаризованной сис-
системы имеет пару мнимых корней либо один нулевой корень. Развивая
Глава 11 221
основополагающие результаты А.М.Ляпунова, Н.Н. Баутин показал, что
в этих случаях поведение динамической системы вблизи границы области
устойчивости определяется ее поведением на самой границе. Сформули-
Сформулируем основные качественные результаты [5].
Пусть а - совокупность параметров системы
Х = Х(х,а), A1.4)
где X - вектор искомых переменных, а X - аналитическая по всем аргу-
аргументам вектор-функция. Пусть а = а0 - точка границы области устой-
устойчивости, для которой характеристическое уравнение линеаризованной сис-
системы имеет пару мнимых корней. Справедливы следующие утверждения.
Утверждение 11.1. Пусть при а = а0 рассматриваемое состояние
равновесия системы A1.4) асимптотически устойчиво. Тогда при переходе
точки а из области устойчивости в область неустойчивости через граничную
{бифуркационную) точку а0 состояние равновесия из асимптотически
устойчивого становится неустойчивым, однако изображающая точка в
фазовом пространстве системы A1.4) остается в малой окрестности
состояния равновесия, тем меньшей, чем ближе а к а0. При обратном
изменении а, когда состояние равновесия опять становится асимптотически
устойчивым, изображающая точка снова возвращается к этому состоянию.
Система ведет себя обратимо.
Утверждение 11.2. Пусть при а = а0 состояние равновесия не-
неустойчиво. Тогда при переходе точки а из области устойчивости в область
неустойчивости состояние равновесия из асимптотически устойчивого
становится неустойчивым. При этом изображающая точка отбрасывается
от состояния равновесия на достаточно далекое расстояние, сколь бы ни
были близки точки а и а0. При обратном изменении параметров изо-
изображающая точка не возвращается в состояние равновесия, когда оно опять
становится устойчивым. Система ведет себя необратимо.
Пусть при а = а„ характеристическое уравнение линеаризованной
системы имеет один нулевой корень. Тогда справедливо
Утверждение 11.3. При а = <х0 состояние равновесия неустойчиво.
Изображающая точка уходит от положения равновесия. Система ведет себя
необратимо при переходах через точку ао'>.
Таким образом, если на границе области устойчивости положение рав-
равновесия асимптотически устойчиво, то вблизи этой границы (независимо
оттого, находятся параметры в области устойчивости или неустойчивости)
система может рассматриваться практически как устойчивая.
Если же на границе области устойчивости положение равновесия не-
неустойчиво и если параметры системы находятся вблизи от границы (без-
(безразлично - в области устойчивости или неустойчивости), то всегда найдутся
''Строго говоря, для справедливости всех трех утверждений нужно сделать еще одно
допущение, обычно выполняемое в прикладных задачах: на границе области устойчивости
первая ляпуновская величина должна быть отлична от нуля, т.е. на границе рассматриваются
простейшие из негрубых состояний |5).
222 Часть 2
малые (сколь угодно малые при достаточной близости к границе) начальные
возмущения, которые с течением времени будут нарастать, так что сос-
состояние системы будет значительно отличаться от равновесного.
Границы областей устойчивости, на которых положение равновесия
асимптотически устойчиво, называются безопасными, а границы, на
которых оно неустойчиво, - опасными.
Утверждение 11.4. При переходе в пространстве параметров через
безопасную границу из области устойчивости в область неустойчивости в
системе устанавливается вполне определенный автоколебательный режим
(рождается единственный устойчивый предельный цикл), причем амплитуда
автоколебаний (размеры предельного цикла) по мере удаления от границы
непрерывно увеличивается от нуля (мягкий режим возникновения автоколеба-
автоколебаний).
Это утверждение было доказано Н.Н. Баутиным [5] для сосредоточенных
систем второго, третьего и четвертого порядков. Обобщение на
сосредоточенные системы произвольного порядка дано Э.Хопфом [15].
При переходе в область неустойчивости через опасную границу в
исследуемой установке могут возникнуть движения следующих типов:
1) автоколебания с конечной амплитудой даже при значениях пара-
параметров, сколь угодно близких к границе области устойчивости, - жесткий
режим возникновения автоколебаний;
2) ограниченные, неупорядоченные, хаотические колебания - так на-
называемый автостохастический процесс;
3) чрезмерно большие возмущения стационарного режима, а теорети-
теоретически - уход в бесконечность;
4) уход к другому (устойчивому) состоянию равновесия.
Понятия опасной и безопасной границ имеют полезное прикладное
содержание и во многих случаях правильно отражают реальную ситуацию.
Чаще всего работа установки при параметрах, близких к безопасной
границе, вполне допустима (отклонения от стационарного режима малы),
в то время как выбирать параметры вблизи опасной границы действительно
опасно, поскольку возможны чрезмерно большие отклонения от стацио-
стационарного режима. Вместе с тем следует подчеркнуть относительный характер
этих понятий. Так, граница, опасная по Баутину, может оказаться безопас-
безопасной в сугубо практическом смысле. (Таков, например, случай, когда
уход от стационарного состояния происходит весьма медленно и может
быть легко устранен оператором.) Наоборот, граница, безопасная по
Баутину, может оказаться в практическом отношении опасной (когда,
например, при переходе параметров в область неустойчивости амплитуда
автоколебаний растет непрерывно, но с большой скоростью).
Таким образом, выяснение характера границ областей устойчивости -
необходимый этап расчетов динамики, если невозможно обеспечить боль-
большой запас устойчивости установки. Однако понятия опасной и безопасной
границ не следует абсолютизировать; анализ характера границ целесообраз-
целесообразно дополнять количественными расчетами динамики при параметрах из
области неустойчивости.
Глава 11 223
Отыскание стационарных режимов установок и соответствующих им
положений равновесия математической модели обычно не представляет
труда. Границы областей их устойчивости находятся стандартным способом
- из решения задачи устойчивости по линеаризованным уравнениям ди-
динамики (см. гл. 1). Вопрос о принадлежности границы к опасной или
безопасной сводится к решению задачи устойчивости в критических случаях
(т.е. при значениях параметров на границе области устойчивости). Эта
сугубо нелинейная задача в наиболее важных для приложений случаях была
решена А.М. Ляпуновым и его последователями. Современная теория
бифуркаций дает ответ на вопрос о характере границы области устойчивости
для многих классов нелинейных систем. Здесь отметим только, что для
системы A1.4) произвольного конечного порядка справедливо
Утверждение 11.5. Точка а0 границы области устойчивости,
соответствующая паре чисто мнимых корней характеристического уравнения,
принадлежит безопасному участку, если первая ляпуновская величина L{ в
этой точке отрицательна; при этом согласно утверждению 11.4 переход в
пространстве параметров в область неустойчивости приводит к мягкому
режиму возникновения автоколебаний. Если же при а = а0 L{>0, то точка
<х0 принадлежит опасному участку границы.
Ляпуновская величина для систем второго порядка выражается через
коэффициенты системы формулой из Приложения 1. Для систем третьего
и четвертого порядков выражения Ll даны Н.Н. Баутиным, но здесь они
не приводятся из-за их громоздкости. В излагаемой ниже методике пред-
предварительное знание выражения Z, не требуется; по существу, Z, отыски-
отыскивается в процессе построения периодического решения (см. §11.3).
11.2. Приближенный расчет автоколебаний
Результаты Н.Н.Баутина и Э.Хопфа позволяют решить вопрос о типе гра-
границы области устойчивости в пространстве параметров (опасная или без-
безопасная) и о рождении периодических решений при переходе через эту
границу. Однако упомянутые результаты не дают возможности провести
конкретный расчет рождающихся периодических режимов. Иной подход
предложен в работе Ю.С. Колесова [13], в равной мере пригодный и для
обычных сосредоточенных систем, и для систем с последействием (в част-
частности, с запаздываниями во времени). Развитая в [13] теория дает алгоритм
определения типа границы области устойчивости, причем в тех случаях,
когда граница безопасная и, следовательно, режим возбуждения автоко-
автоколебаний мягкий, эта теория позволяет также провести приближенный
аналитический расчет автоколебаний - определить их амплитуду, частоту,
постоянную составляющую. В основе данной теории лежат результаты
А.Пуанкаре и А.М.Ляпунова [14], а также Э.Хопфа [15].
Итак, пусть динамика исследуемой системы отображается одним обык-
обыкновенным дифференциальным уравнением «-го порядка
224 Часть 2
AL5)
в котором х - искомая переменная, /- время, а,,...,<хт - действительные
параметры.
Пусть X = О - положение равновесия и, следовательно,
Пусть также/- аналитическая функция в интересующей нас области
изменения всех своих аргументов, включая и параметры a,,...,am. Для
наглядности (и только!) примем, что в уравнении A1.5) фигурируют два
параметра: а, и а2.
Допустим, что уравнение A1.5) линеаризовано в окрестности поло-
положения равновесия х = О и составлено характеристическое уравнение
P(k,al,aJ) = 0. A1.6)
Пусть в результате анализа устойчивости точки х= О по уравнению A1.6)
построена фаница области устойчивости в плоскости а,, а2. Точкам этой
границы отвечают нулевые либо чисто
мнимые корни уравнения A1.6). Рассмот-
Рассмотрим только ту часть границы, которой
отвечает пара чисто мнимых корней урав-
уравнения A1.6) (все остальные корни - с
отрицательными действительными частя-
частями). Таков, например, участок CD фа-
ницы, изображенный на рис. 11.1.
Исследуем динамику установки для
значений параметров из области неустой-
Рис ill ' чивости (например, для точки В с коорди-
координатами a,=a| + e; a2=a2). Изла-
Излагаемая ниже методика аналитического исследования периодических режи-
режимов предполагает близость параметров к фаничным, и мы примем это
предположение; в частности, отрезок е на рис. 11.1 считаем достаточно
малым. В точке А, принадлежащей фанице, два корня уравнения A1.6)
чисто мнимые: Я., 2 = ±/со.. При переходе из точки А в точку В эти корни
преобразуются в пару комплексно-сопряженных корней
Х12 = й(е) ± /со(е), А(е) > 0, A1.7)
причем А@) = 0 и со@) = со.. В линеаризованной системе этим корням
отвечают нарастающие колебания вида
x{t) = AT exp[A(E)/]cos(co(e)/ + cp), A1.8)
Глава 11
225
где К к ф - постоянные. Можно предположить, что при достаточно боль-
больших размахах колебаний окажется существенным ограничивающее влияние
нелинейностей, так что вместо неограниченного роста колебаний, отобра-
отображаемых формулой A1.8), установятся ограниченные периодические колеба-
колебания (автоколебания). Пусть реализовалась именно эта возможность*'. Как
будет зависеть амплитуда автоколебаний от параметра е? Возможны два
случая.
1. В точке А амплитуда автоколебаний равна нулю, и по мере ухода
от границы в область неустойчивости амплитуда непрерывно растет. Дру-
Другими словами, амплитуда автоколебаний - непрерывная функция пара-
параметра Б, стремящаяся к нулю при е-»0 (рис. 11.2). Это мягкий режим
возбуждения автоколебаний (см. также §8.2 и, в частности, рис. 8.10).
2. В точке А амплитуда автоколебаний равна нулю, но при увеличе-
увеличении параметра б она скачком изменяется до некоторого конечного значения
(рис. 11.3). Это жесткий режим возбуждения автоколебаний (см. также
§8.3, в частности рис. 8.15).
Рис. 11.2 Рис. 11.3
Допустим, что реализуется первый случай. В итоге исходная задача
формулируется следующим образом:
провести расчет автоколебаний в случае мягкого режима их возбуждения'^
при значениях параметров, близких к граничным (число Б мало).
Из сказанного ясно, что при малых значениях г будет малой и амплитуда
автоколебаний (см. рис. 11.2). Это значит, что при малом значении е
периодическое решение x(t) уравнения A1.5) можно представить в виде
*@ = МО» (П.9)
где ц - малый положительный параметр, характеризующий амплитуду
автоколебаний, a y{t) - неизвестная периодическая функция времени,
причем y(t) ~ 1.
ф) Другие возможности характеризуются, например, установлением автостохастических
колебаний или уходом решения х{1) в бесконечность.
"'Вопрос о том, действительно ли имеет место мягкий режим возбуждения автоколебаний,
выясняется автоматически в процессе решения поставленной задачи.
226 Часть 2
Очевидно, что е и ц связаны непрерывной зависимостью, причем
ц -> 0, если s -> 0: е = е(ц) и е@) = 0. Будем считать эту зависимость
аналитической и представим ее в виде ряда
В равенстве A1.9) X и у - периодические функции. Это значит, что
замена ц на -ц не является существенной и означает лишь смену фазы
колебаний переменной х (или у); значение 8, как и значение амплитуды
колебаний, должно при этом остаться неизменным. Следовательно, е -
четная функция ц, т.е. s, =s3 =... = 0 и
е=82ц2 + е4ц4+... A1.10)
Это утверждение строго доказано [13,15]. В практических задачах параметр
8 мы находим сами, выбирая точку В в области неустойчивости, а параметр
ц и коэффициенты б2, е4,... в ряду A1.10) подлежат определению в со-
соответствии со схемой, излагаемой ниже. Подставим A1.9) и A1.10) в
уравнение A1.5), положив в нем
а, = а\ + s; а2 = а2. A1.11)
Учтем, что/- аналитическая функция своих переменных и, следовательно,
/- аналитическая функция параметра ц. Разложив правую часть уравнения
A1.5) по степеням параметра ц, поделим его на ц и получим*'
dny ( dy y
fyaa)+llf+»f+ A1.12)
где^ - линейная функция переменных у, dy/dt,..., d"~ly/df~l;f2 - квадра-
квадратичная функция и т.д.
Следуя Пуанкаре [14], попытаемся искать периодическое решение y(t)
уравнения A1.12) в виде ряда по степеням параметра ц:
y(t) =
или
Первый член ряда A1.13) - функцию yQ(t) - называют (см. гл. 7) порожда-
"'Напомним, что X = 0 - решение уравнения A1.5), следовательно, /= 0 при X = 0. Это
значит, что разложение функции /по степеням параметра ц начинается с члена, содержащего
ц в первой степени.
Глава 11 227
ющим решением. В данном случае оно определяется из уравнения A1.12)
при ц = 0, т.е. из линейного уравнения
0Ш)
Согласно предположению характеристическое уравнение A1.6), состав-
составленное для A1.15) при а, = <х\ и а2 = а'2, имеет пару мнимых корней
±/со„ а все остальные корни - с отрицательными действительными час-
частями. Корням ±/@. отвечает периодическое решение
с точностью до постоянного положительного множителя, который [при
переходе к A1.14)] можно включить в параметр \i.
Итак, в равенстве A1.13) слева стоит искомая периодическая функция
y(t) с частотой, зависящей от параметра е и, следовательно, от параметра
ц, а справа - ряд по степеням |i, в котором первый член yo(t) - перио-
периодическая функция частоты со., не зависящей от ц. В практических задачах
мы в состоянии учесть в ряду A1.13) только конечное (и, как правило,
небольшое) число членов. При таком подходе каждый член должен быть
периодической функцией времени /. Однако функции yx(t), y2(t),... не
будут периодическими, и, следовательно, любой конечный отрезок ряда
в A1.13) не представит периодическую функцию yo(t). Причина кроется
в упомянутом различии в частотах колебаний функций y(t) и yo(t) (см.
§7.2). Чтобы добиться периодичности членов ряда A1.13), изменим мас-
масштаб времени таким образом, чтобы в новом масштабе частота искомых
колебаний не зависела от ц. Разумеется, единица измерения нового вре-
времени будет зависеть от параметра ji, который пока не определен.
Итак, введем новое время
ст), A1.16)
где новый параметр а достаточно мал и зависит от ц:
|а|<1; а = а(ц); а@) = 0. A1.17)
Естественно рассматривать параметр а как аналитическую функцию ц:
Параметр а характеризует период колебаний нелинейной системы
A1.5), а точнее, его отличие от периода 2п/(й, колебаний линеаризованной
системы. Простые соображения говорят о том, что параметр а не должен
изменяться при замене ц на -ц (подобно тому, как не должен изменяться
228 Часть 2
при такой замене параметр 8, о чем уже говорилось выше). Следовательно,
положим
а = а2ц2 + с4ц4+... A1.18)
(Правомерность представления A1.18) математически обоснована в работе
[13].) В дальнейшем будем выбирать коэффициенты <т2,<т4,... и е2, е4,...
таким образом, чтобы функции .У,(9), У2(О), ... в радах
wi (в) + }
были периодическими.
Определим функцию ^„(в). Перейдем в уравнении A1.5) к новому
времени 6 согласно формуле A1.16). Сделаем также замену A1.9) и после
деления на (I получим
*W) _ л .-vJ „/пч ! *У l d У
a dQ A + a)" </9"~'
A1.20)
Порождающее уравнение, т.е. уравнение для отыскания ,У0(9), получается
из A1.20) при ц-»0. При этом у->У0, е-> 0, а -> 0, /->/[ [см.
уравнение A1.12)], так что
A1.21)
Уравнения A1.21) и A1.15) совпадают (с точностью до обозначения незави-
независимой переменной), и, таким образом, .У0(9) = COSC0.9.
Итак, согласно изложенному подход к приближенному отысканию пе-
периодических решений уравнения A1.5) при значениях параметров, близких
к границе области устойчивости, состоит в следующем.
1. Выбираются параметры на той части границы области устойчивости,
которая отвечает паре чисто мнимых корней характеристического уравне-
уравнения (точка А на рис. 11.1).
2. Совершается переход в область неустойчивости изменением одного
из параметров на малое число 8 (переход из точки А в точку В, см.
рис. 11.1).
3. В исходном уравнении A1.5) изменяется масштаб времени согласно
формуле A1.6), и тем самым совершается переход от уравнения A1.5) к
уравнению
Глава 11 229
1 dnx Г
AL22)
4. Искомая переменная х и параметры е » а представляются в виде
рядов по степеням параметра ц:
х(9) = цсо8ю.е + ц2х2(е) + ц3х3(е)+...; A1.23)
е = е(ц) = е2ц2 + 84ц4+...; A1.24)
a = а(ц) = о2ц2 + ст4ц4 + ... A1.25)
5. Ряды A1.23)—A1.25) подставляются в уравнение A1.20), после чего
приравниваются члены при одинаковых степенях параметра ц. В результате
получается совокупность рекуррентных линейных неоднородных дифферен-
дифференциальных уравнений с постоянными коэффициентами. Из этих уравнений
определяются функции Х2(9), Х3(9), ..., а из условий их периодичности
находятся коэффициенты 82,сг2, 84,ст4 и т.д., причем для отыскания каждой
пары коэффициентов 8^, ск получаются линейные алгебраические урав-
уравнения. Конкретно, равенство коэффициентов при ц удовлетворяется
тождественно; приравнивание коэффициентов при ц2 дает линейное неод-
неоднородное уравнение для Х2, откуда и находится функция х2 = Х2(9) как
периодическое решение этого уравнения. Затем приравниваются
коэффициенты при ц3 и получается уравнение для ху Требование
периодичности решения *3(9) приводит к алгебраическим уравнениям
для 82 и а2, определив которые, находим Х3(9), после чего составляем
уравнение для х4(9), приравнивая коэффициенты при ц4 и т.д. В общих
чертах здесь повторяются выкладки и рассуждения, характерные для метода
Пуанкаре. Детали станут ясными из примера в §11.3.
Подчеркнем, что характер границы и устойчивость рождающегося
периодического решения определяют знак коэффициента 82 в разложении
A1.24), который, стало быть, выполняет роль первой ляпуновской вели-
величины. Действительно, пусть в малой окрестности точки е = 0 область
устойчивости будет при 8 < 0, а область неустойчивости - при 8 > 0. Это
значит, что й(е) < 0 при 8 < 0 и А(е) > 0 при 8 > 0, т.е. в точке 8 = 0
имеем А.' = (dh/de)tm0 > 0- Пусть при этом е2 > 0. Тогда при малых
значениях е>0 существует периодическое решение х « J^COS@.9, где
ц «.у]е/е2 > 0 [см. A1.23) и A1.24)]. Это решение, как можно строго
доказать [13], устойчиво. Бифуркационная диаграмма для этого случая
дана на рис. 11.4,а, где по оси ординат отложены значения амплитуды А
периодических колебаний, точки отмечают устойчивые состояния равно-
равновесия и амплитуды устойчивых колебаний (автоколебаний), а крестиками
отмечены неустойчивые состояния равновесия и амплитуды неустойчивых
230
Часть 2
периодических решений. Из рис. 11.4,а видно, что в области е>0 (области
неустойчивости стационарного состояния) рождаются автоколебания с
непрерывной зависимостью амплитуды от параметра е. Это мягкий режим
возбуждения автоколебаний, а точка 6 = 0 определяет безопасную границу
области устойчивости. Если же е2 < 0 (при А.' > 0), то при малых е > 0
периодические решения не существуют [см. 11.24], но имеется периоди-
периодическое решение при 8 < 0, так как при этом существует ц « ^/s/e2 > 0.
Это решение неустойчиво (рис. 11.4,6). В данном случае точка е = 0
определяет опасную границу области устойчивости. На рис. 11.4,в и г
приведены бифуркационные диаграммы для h,' < 0. Здесь получается
мягкий режим возбуждения автоколебаний при 82<0 (рис. 11.4,г).
Рис. 11.4
Изложенная методика приближенного отыскания периодических реше-
решений для одного дифференциального уравнения A1.5) применима и в том
случае, когда исходной математической моделью динамики является систе-
система уравнений
где \ц(— нелинейные функции с теми же свойствами, что и функция /в
уравнении A1.5). В этом случае также используют замену времени A1.16)
и затем ищут периодическое решение х.(9) в виде рядов по степеням вспо-
вспомогательного параметра ц:
х,.@) = цв|. cos(co.9 + <р,) + \i2x2i(Q) + ц3х3,.(в)+..., A1.26)
/ = 1,...,л; о, =1; ф, =0.
Глава И 23J
Постоянные а и <р определяются в результате подстановки в линеаризо-
линеаризованную систему ее решений axos(a>.0 + (p.). Параметры еио по-преж-
по-прежнему представляются рядами A1.24) и A1.25). Ряды A1.24) - A1.26)
подставляются в исходные уравнения с новой независимой переменной
9. Далее, как и для одного уравнения, приравниваются коэффициенты
при (Л2, ц3 и т.д. Получаются системы неоднородных линейных диффе-
дифференциальных уравнений, для которых необходимо выписать условия перио-
периодичности их решений (ибо все функции Xki в A1.26) должны быть
периодическими периода 27г/соф).
11.3. Модель реактора с нелинейной завнсимостью реактивности от мощности
Рассмотрим следующие уравнения динамики ядерного реактора:
х = (ах + Ьхг + су)(\ + х);1
у = х-у. J
Как и выше (см. §4.3), X - относительное изменение мощности реактора,
а переменная у определяет отклонение температуры от стационарного
значения. В частном случае, при Ь = 0, система A1.27) преобразуется в
уравнения D.12). В §4.3 было доказано, что в динамической системе,
отображаемой этими уравнениями, автоколебательные режимы невозмож-
невозможны (предельные циклы не существуют). Если же Ь&0\ то, как будет
видно из дальнейшего, при соответствующих значениях параметров а, Ь
h с автоколебания существуют.
Не претендуя на исчерпывающий анализ системы A1.27), ограничимся
исследованием периодических колебаний в этой системе, которые про-
происходят вокруг состояния равновесия Х=у=0, отображающего основной
стационарный режим работы.
Характеристическое уравнение для точки х=у=0:
P(X,a,c) = V + (l-a)X-(a+c) = O. A1.28)
Граница /^-разбиения плоскости а, с дана на рис. 11.5. На части вертика-
вертикали а=\, помеченной двойной штриховкой (например, в точке А., см.
рис. 11.5), уравнение A1.28) имеет чисто мнимые корни, которые преоб-
преобразуются в комплексно-сопряженные корни А±/ю при переходе вправо, в
область неустойчивости (например, при переходе из точки А. в точку А.)
''Нелинейная зависимость коэффициента размножения от переменной х может быть
обусловлена, например, нелинейными свойствами регулятора мощности реактора.
"'Обратите внимание, что помимо положений равновесия х = у = 0 (рабочий режим) и
х=у=-\ (погашенный реактор) система A1.27) при Ь*0 может иметь еще два нетривиальных
положения равновесия и соответственно реактор может иметь еще два стационарных режима.
232
Часть 2
Перейдем непосредственно к применению методики из §11.2. Исклю-
Исключим из системы A1.27) переменную л: и
получим
х [а(у + у) + Ь(у + уУ + су]. A129)
Положим в этом уравнении а = а. + е;
с = с„ где а. = 1; с, < -1; е > 0 - глубина
проникновения в область неустойчивости
(см. рис. 11.5). Перейдем к новому времени
t = t/{\ +а), где |ст| < 1, и запишем
а. +с. + е)A + а)у +
0
1
Область Ц
устойчивости Ц
1 *
Рис.
а
В
N.
Ii*S.
е
D
11.5
у = [A
+ (a.+e)y + b.(l + a){y
Решение уравнения A1.30) ищем в виде ряда
y(tHOt) = ncOSco./H01> + i
A1.30)
(H-3D)
Параметры е и а также представим рядами по степеням согласно A1.24),
A1.25).
Чтобы определить периодические функции У2,Уг и постоянные коэф-
коэффициенты Б2,а2, 84,ст4, подставим ряды A1.24), A1.25), A1.31) в урав-
уравнение A1.30), представим левую и правую его части рядами по степеням
ц и приравняем коэффициенты при одинаковых степенях ц. Равенство
коэффициентов перед ц2 дает следующее уравнение относительно к:
где
= В cos 2@/ + С sin 2<d/,
и = и + A - а)й = {а + с)«;
= -со2;
= со(со2-1)/2.
A1.32)
A1.33)
A1-34)
В формулах A1.32)—A1.34) и далее упущены индексы "нов" и "*".
Из уравнения A1.32) находим периодическое решение
y2(t) = В cos2co/ + С sin 2co/,
A1.35)
Глава 11 233
где
В =1/3; С =A-ю2)/6ю. (П.36)
Выражения для В, См В, С даны после дополнительных преобразова-
преобразований, учитывающих, что согласно A1.28) со2 + 1 + с. = О (при условии,
что с. <-1).
Теперь приравняем коэффициенты перед ц3 и получим уравнение для
г = s2 - 2со2ст2 - Ъагуг + A - (о2)у2 +-тЬA + со2) cosco/ -
3
Г 3
- е2 + A-со2)>>2 + 2у2 +-6A +со2)
со sin со/+
+ A - 3co2)-cos3co/ - C - со2)-со sin Зсо/. A1.37)
Оператор Lo по-прежнему определяется равенством A1.33), а функция
у2 дается равенством A1.35).
Ищется периодическое решение y(t), и, следовательно, функция
y^t), определяемая из A1.37), также должна быть периодической. Это
возможно только в том случае, если правая часть не содержит слагаемых,
пропорциональных sin со/ и COS со/, т.е. отсутствует резонанс''.
Согласно сказанному подставим в уравнение A1.37) выражение A1.35)
для y2(t) и соберем в правой части члены, содержащие sinco/, и члены,
пропорциональные COS©/; приравняем нулю коэффициенты перед sin со/
и перед cos со/ и получим систему линейных алгебраических уравнений
относительно постоянных е2 и а2. Решим эту систему и найдем
3.,, 2ч A + со2J
еЬA + (о2); ст / ¦ A1.38)
е2=ЬA + (о); ст2 =
Допустим, что b < 0, тогда, по крайней мере при достаточно малых значе-
значениях параметра е, уравнение A1.29), а следовательно, и уравнения A1.27)
имеют периодическое решение [см. A1.31)]:
у * ^cosco./HOB + Ц2^(/нов), A1.39)
где ц » ^ф~2 [см.A1.24)] и/нов = t/{\ + а) « //A + ст2е/е2)[см. A1.25)].
Решение A1.39) устойчиво, ибо в данном случае 82>0 [см. A1.38)] и
Л.' > 0 [см. рис. A1.5)]. Бифуркационная диаграмма качественно повто-
"'Напомним, что линейная система Loyy = 0 имеет собственную частоту колебаний, рав-
равную со.
234
Часть 2
ряет рис. \\А,а. Дополнительной количественной иллюстрацией служит
рис. 11.6, на котором представлена зависимость приближенного выражения
амплитуд автоколебаний ц от параметра е: / - аналитический результат
(формула ц « ^г/е2 )\ 2 - численный расчет на ЭВМ. Количественное
различие, возрастающее с глубиной "проникновения" рабочей точки А в
область неустойчивости (с ростом е), объясняется тем, что теория пригодна
только при достаточно малых значениях параметра 8.
и
0,2
0,1
0
0,1
^—
0,2
0,3
0,4
^^
2
0,5 ?
Рис. 11.6
Пусть теперь Ь>0. Из A1.38) видно, что е2 < 0, т.е. г и е2 имеют
разные знаки, действительные значения ц не существуют, вопрос об авто-
автоколебаниях при параметрах из области неустойчивости остается открытым.
Бифуркационная диаграмма в малой окрестности 6 = 0 (и ц = 0) имеет
вид, представленный на рис. 11.4,5.
Итак, приходим к следующим выводам.
Граница BD (см. рис. 11.5) области устойчивости нулевого решения
системы A1.27) является опасной при' Ь > 0 и безопасной при b < 0.
В последнем случае при переходе параметров через границу BD из области
устойчивости в область неустойчивости в системе возбуждаются автоко-
автоколебания, причем режим возбуждения мягкий. Приближенное аналити-
аналитическое выражение автоколебаний дается формулами A1.38), A1.39), спра-
справедливыми при достаточно малых значениях параметра е.
Глава 12. МЕТОД ГАРМОНИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
Метод гармонической линеаризации создан и развит российскими уче-
учеными. Идея метода принадлежит Н.М. Крылову и Н.Н. Боголюбову [7].
Существенный вклад в развитие метода внес Л.С. Гольдфарб [11], давший
геометрическую интерпретацию метода. Необходимо отметить также работы
Е.П. Попова и И.П. Пальтова [23] и Е.П. Попова [21], в которых метод
гармонической линеаризации был обобщен, развит и применен к разно-
разнообразным конкретным задачам теории регулирования и управления.
В настоящее время метод гармонической линеаризации является широ-
широко распространенным приближенным способом отыскания периодических
режимов в нелинейных динамических системах. Он основан на том обсто-
обстоятельстве, что, несмотря на наличие нелинейностей, установившиеся ко-
колебания в системе при определенных условиях оказываются близкими к
гармоническим.
12.1. Исходные положения метода
Рассмотрим дифференциальное уравнение
Q(X)x+R(X)F(x,Xx) = O, A2.1)
где X - символ дифференцирования по времени /: X. s d/dt; Q(X) и R(X)
- полиномы относительно X (степень этих полиномов не оговаривается);
F- нелинейная функция переменных X и X (Хх = х).
Поясним обозначения на примере уравнения Ван-дер-Поля
X + ф2 - 1)х + х = 0. A2.2)
Здесь
Q(X) = X2 - цХ +1; R(X) = 1; F(x, Хх) = \хх2х. A2.3)
В гл. 7-10 основным было предположение о близости исходной нели-
нелинейной системы к линейной консервативной [например, в A2.2) было
ц.«: 1]. В данном методе используется принципиально иное допущение:
искомое периодическое решение системы A2.1) близко к синусоидальному:
х я Ао + Л sin©/; х = Хх « Аю cos©/. A2.4)
236 Часть 2
Задача заключается в отыскании амплитуды колебаний А, частоты со
и постоянной составляющей AQ.
Опыт исследования нелинейных систем показывает, что во многих
случаях колебания действительно близки к виду A2.4). Например, такими
были колебания маятника Фроуда (см. гл. 8) и колебания в системе A2.2)
при малых значениях ц (см. гл. 7)'1. Возможны, однако, и качественно
иные, несинусоидальные, колебания'*', и тогда предлагаемый метод непри-
непригоден, по крайней мере, для количественных оценок.
Составим уравнения для отыскания величин Ао, А и со. С этой целью
подставим A2.4) в уравнение A2.1). Получим
Q(O)AO + Q(k)A sin at + R(X)F(A0 + A sin at, Aa cos at) = 0. A2.5)
Функция Fb уравнении A2.5) - периодическая функция tc периодом
2я/со. Разложим ее в ряд Фурье:
F(A0 + A sin at, Aa cos at) = Fo + F{ sin at + Fx cos ©/+..., A2.6)
где
1 2lt
Fo = — f F(A0 + A sin u, Aa cos u)du; A2.7)
/*, = — f F(AQ + A sin u, Aa cos ы) sin udu; A2.8)
71 о
1 2r
/j = — f F(A0 + A sin м, Лео cos u) cos м*/ы. A2.9)
n о
В формулах A2.7)—A2.9) принято и = at. В разложении A2.6) учтем,
что
cos at = —— sin at = — sin at.
со d t со
Подставив A2.6) в уравнение A2.5), получим
Q@)A0 + R@)F0 + Q(X)A sin at + R(x{ /; + Fl —) sin at+... = 0.
A2.10)
¦'В обоих случаях было Ао = 0.
"'Примером могут служить разрывные колебания, которым посвящена гл.13.
Глава 12 237
Многоточие объединяет члены с sin 2©/, sin Зсо/ и т.д. Отбросим их.
Затем приравняем нулю порознь члены, не содержащие sin со/ (постоян-
(постоянные), и члены с sin со/'.
0, A2.11)
( X ~\
Q(X)A sin со/ + R(X)\ Fx + — Fx I sin со/ = 0.
Последнее уравнение удобно переписать в виде
Q(X)x + R(x{g + — х)х' = 0, A2.12)
\ со /
F 1 2г
q = д(А0,А,(й) = -j = — ]F(A0 + Asm и, Аа cos и) sin udu; A2.13)
А пА 0
F 1 ^х
q' = q'(A0,A,(n) = -j = — {/"(^о + /4sinM,y4cocosM)cosMi/M.A2.l4)
/I JM 0
Сравним уравнения A2.1) и A2.12). Нелинейность Fb уравнении A2.1)
оказалась замененной линейным (относительно х') выражением (q +
+ q'X/a>)x'. Такая замена называется гармонической линеаризацией нелиней-
нелинейности, а линейное (относительно д:") уравнение A2.12) - гармонически
линеаризованным уравнением нелинейной системы A2.1). Величины q и q1
называются коэффициентами гармонической линеаризации. Уравнение
+ — л] = 0 A2.15)
со /
называется характеристическим уравнением гармонически линеаризованной
системы.
Если существует синусоидальное решение /4sin со/линейной системы
A2.12), то ее характеристическое уравнение A2.15) имеет пару чисто мни-
мнимых корней ±/со. Поэтому положим в A2.15) X = /со и выделим действи-
действительную и мнимую части:
ЯеЛ/(/со) = /(со,?(Л0,Л,со),?'(Ло»Л,со)) = 0; A2.16)
Im Л/(/со) е /2(со,?(Л0,Л,со),?'(Л0>Л,со)) = 0. A2.17)
238 Часть 2
Уравнения A2.11), A2.16) и A2.17) составляют систему алгебраических
уравнений для отыскания величин Ао, А и со.
Замечание 1. Обратите внимание на то, что гармоническая линеари-
линеаризация не имеет ничего общего с обычной линеаризацией нелинейной систе-
системы.
Замечание 2. Члены разложения в ряд Фурье функции F{AQ +
+ /4sinco/, Aocosco/), содержащие частоты 2со, Зсо, .... отброшены не
потому, что они малы, а потому, что согласно сделанному предположе-
предположению они вносят малую поправку к A2.4).
Замечание 3. К нелинейной функции /"никаких требований, кроме
существования интегралов A2.7)—A2.9), не предъявляется; она может быть,
например, разрывной или неоднозначной. Для многих типовых нелиней-
ностей коэффициенты q и q' подсчитаны и приведены в литературе по
теории автоматического регулирования [21-23].
Замечание 4. Метод пригоден для систем с запаздыванием, со-
содержащих х(() и x(t- т), где х- искомая переменная, а т = const > 0 -
запаздывание.
Замечание 5. Без каких-либо принципиальных затруднений метод
переносится на системы с несколькими нелинейными функциями [21].
Замечание 6. Если колебания заметно отличаются от синусои-
синусоидальных, то искомое решение можно брать в виде суммы
х = Ао + А{ sin со/ + А2 sinBcor + ф2) + ...+ Ап sin(«co/ + срл). A2.18)
Далее проводится прежняя идея: сумма A2.18) подставляется в уравнение
A2.1) и отбрасываются все члены с частотами (п + 1)со, (п + 2)со и т.д.
Выкладки, разумеется, усложняются. Подробнее об этом см. в моногра-
монографии [21].
Замечание 7. Метод пригоден и для исследования неавтономных
систем [21-23]. Если, например, изучается неавтономная нелинейная сис-
система
Q(X) + R{X) F{x,lx) = S{X)f(t)
при заданном внешнем воздействии/(/) = /JSinco/, то одночастотное перио-
периодическое решение (одночастотные вынужденные колебания) ищется в виде
х = y4sin(co/+ ф), где со - известная частота внешнего воздействия; А -
искомая амплитуда, а ф - неизвестная фаза вынужденных колебаний.
12.2. Об устойчивости периодических решений
После того как величины Ад, А и со определены, необходимо решить
вопрос об устойчивости найденного периодического решения A2.4). Огра-
Ограничимся симметричными колебаниями (Ао = 0) и проведем следующее
нестрогое рассуждение [21].
Глава 12 239
Пусть в некоторый начальный момент времени произошли малые из-
изменения амплитуды А автоколебаний на величину АА и частоты со на вели-
величину Дсо. Такие начальные возмущения решения
A2.19)
приводят к выражению
x(t) = (A + AA)exp(?,t)sm(<si + Дсо)/, A2.20)
которое описывает колебательный переходный процесс вблизи гармони-
гармонического решения A2.19). Для устойчивости этого решения необходимо,
чтобы в выражении A2.20) АА и 4 имели разные знаки. В этом случае
при положительном АА размахи колебаний уменьшаются, а при отри-
отрицательном АА они увеличиваются, стремясь к значению А. Переход от
A2.19) к A2.20) означает преобразование пары мнимых корней ±/со и
уравнения A2.15) в комплексные корни 4±/(со + Дсо). В связи с этим в
характеристическом уравнении A2.15) положим Х = 4±/(со + Дсо), заменим
А на А + АА и разделим действительные и мнимые части. Получим
Re M(k) = 4 + /(© + Дсо),Л + Д/4,со + Дсо) =
= \|/,(у4 + Д/4,со + Дсо,4) = 0;
Im М(Х) = 4 + /(со + Дсо), А + АА, со + Дсо) = [
= у2(А + ДЛ,со + Дсо,4) = 0.
Полагая АА, Дсо и 4 малыми величинами, разложим функции \j/, и ц/2 в
ряд Тейлора и ограничимся нелинейными членами разложения:
ЗА
До* ^ 4 = 0. A2.22)
\ Э4 ;
Здесь к = 1,2, а индекс " указывает на значение производной в точке
(А, со, 4 = 0). Исключим Дсо из A2.22) и получим
Как уже говорилось, для устойчивости решения A2.19) требуется, чтобы
АА и 4 были разных знаков, поэтому критерий устойчивости принимает
вид
240 Часть 2
i5kU (п.23,
где все производные берутся при АА = Дсо = t, = 0.
Несколько других критериев устойчивости, основанных на сведениях
из теории регулирования, приведены в монографии [21].
12.3. Примеры расчета автоколебаний методом гармонической линеаризации
12.3.1. Уравнение Ван-дер-Поля. Найдем автоколебания в системе, описы-
описываемой уравнением A2.2). Напомним, что здесь F(x,x) = цхк2 и не
обязательно \i« 1. Сначала определим Fo по формуле A2.7):
1 2*
Fo = — ГцЛсо cos и- (Ао + A sin uJdu =
2л о
2я
\{A\ cos и + 2А0А sin и cos и + A2 sin2 и cos u)du =0.
Из A2.11) следует, что А0 = 0. Подсчитаем q и q' (при А0 = 0):
sin2 и • Аса cosu sin иdu = 0;
, 1 ? ,, . , , цсоу4
q =—т цЛ sin и-лсосов udu = —-—.
пА ' 4
Запишем характеристическое уравнение гармонически линеаризован-
линеаризованной системы. Учтем, что Q(X) = X2 - цА. + 1 и R(X)= 1. Получим
Л/(А,) = ^2 +т(^2 — 4)Л, + 1 = 0. A2.24)
4
Пусть Я, = /со. Тогда
Л/(/со) = -со2 + 1 + /со(у42 - 4) = 0,
откуда А = 2 и со = 1.
Глава 12 24]
Теперь решим вопрос об устойчивости найденных колебаний. Подста-
Подставим в A2.24) А = 2 + ДА и X = ? + /A + Асо). Выполним необходимые
преобразования и получим уравнения A2.22) в следующем виде:
-2Дсо = 0 при к=\,
2? + цД/4 = 0 при к = 2.
Из первого уравнения следует Д© = 0, а из второго уравнения хорошо
видно, что найденное решение устойчиво, если ц > 0 (^ и АА разных
знаков), и неустойчиво, если ц<0 (^ и АА имеют одинаковые знаки).
Итак, согласно методу гармонического баланса в системе A2.2) со-
совершаются симметричные (Ао = 0) гармонические автоколебания с часто-
частотой со = 1 и амплитудой А = 2 при любом положительном значении пара-
параметра ц. Напомним, что для 0 < ц «1 этот же результат был получен
методом Пуанкаре (см. гл. 7).
Специальное исследование, которое здесь опушено, показывает, что
в системе A2.2) автоколебания действительно близки к синусоидальным,
если параметр ц достаточно мал. Если же ц» 1, то автоколебания также
существуют, но их форма резко отличается от синусоидальной; при этом в
системе A2.2) совершаются так называемые разрывные колебания (см.
гл. 13).
Замечание. В системах, где нелинейности - полиномы относительно
х и х , можно определять параметры периодического решения непосред-
непосредственной подстановкой х = Ао + /fcinco/ в исходное уравнение. Покажем
это на примере уравнения Ван-дер-Поля. Подставив A2.4) в A2.2), по-
получим
- Аа>2 sin со/ + \iA(n cos со/ (А% + 2АА0 sin ю/ +
+ A2 sin2 о/ -1) + Ао + Л sin cof = 0. A2.25)
Преобразуем произведения тригонометрических функций в суммы, ис-
используя формулы
2sin ©/cosa>t = sin 2©/;
sin2 (otcosat = —(cos©/ - cos3©/).
Отбросим члены, содержащие 2ю/ и 3©/. Из A2.25) получим
( А}
Ао + (А - v4w2)sin©/ + цЛ©1 А\ -1 + — I cos©/ = 0,
242
Часть 2
откуда
А-А<а2=0;
т.е. А0 = 0; А = 2; (д = 1. Такой метод (его называют методом гармонического
баланса) может быстрее привести к цели, но оставляет открытым вопрос
об устойчивости найденного синусоидального решения.
12.3.2. Автоколебания в следящей системе. Рассмотрим следующее уравне-
уравнение динамики следящей системы [22]:
Здесь 7j и Т2 - положительные параметры, Дх) - нелинейная функция,
представленная на рис. 12.1. В данной задаче
R(X)=\.
a) F(x)
Рис. 12.1
Поскольку (?@) = 0, из уравнения A2.11) получим Fo = 0, т.е..
2п
Легко сообразить, что при этом и Ао = 0. Действительно, функция
Дх) нечетная, и если AQ = 0, то функция F(Asinu) - нечетная перио-
периодическая функция переменной и (рис. 12.1,в), следовательно, Fo = 0.
Если же А0*0, то функция F(A0 + Asinu) будет иметь качественно тот
Глава 12 243
же вид, что и кривая на рис. 12.1,в, но теперь 5", * S2 и, следовательно,
Подсчитаем коэффициенты ди д' гармонической линеаризации. Ясно,
что
2л
1
д' = —- f F(Asmu)cosudu = О,
пА J
так как интегрируется по периоду нечетная периодическая функция.
Далее,
: 0. A2.27)
тел 0
Учтем, что
/ХЛ sin м) =
0<М<Г,;
tx ^U<t2; A2.28)
t2 < U < п
(значения t{ и /2 указаны на рис. 12Л,б,в). После подстановки A2.28) в
A2.27) получим
A2.29)
Формула A2.29) получена в предположении, что амплитуда А автоколе-
автоколебаний (если они вообще существуют) превосходит значение Ь. Если же
А < Ь, то непосредственный расчет дает д(А) - к. Однако в этом случае
влияние нелинейности никак не проявляется, ибо все время f[x) = кх.
Поэтому автоколебания с амплитудой А<Ь не существуют. (Это видно
также из последующего изложения.) Гармонически линеаризованное урав-
уравнение имеет вид
а характеристическое уравнение таково:
М(Х) = ТхТгХъ + {Тх + Т7 )Х2 + X + д(А) = 0. A2.30)
Подставим в A2.30) X - /щ и запишем два уравнения
д(А) - (Тх - T2W = 0; со - Г, 7>3 = 0.
244 Часть 2
Из второго уравнения определим частоту периодического решения
C0 = l/V7j7^, A2.31)
а из первого уравнения
( /ТуТ A2.32)
Используя готовый график функции q(A), построенный по формуле
A2.29), найдем амплитуду периодическо-
q го решения, как показано на рис. 12.2.
. Для определения устойчивости най-
найденного периодического решения в урав-
i + i| i~rv нении A2.30) положим А, = ? + /(со + Дсо),
Т' ^ ¦ '^ где со определяется из A2.31), и заменим
А на А + ДА Удерживая только члены,
* А линейные относительно Д/4, Дсо и 4> по-
Рис. 12.2 лучим уравнения A2.22), в которых
'M = (dq/dA\, V'ta = -2соG] + T2)f ц>'ч = 3; 1
Индекс " указывает на значение производной в невозмущенном сос-
состоянии, т.е. в точке (А, со). Учитывая, что (dq/dA)Q < 0 (см. рис. 12.2),
и подставляя производные A2.33) в условие устойчивости A2.23), находим
Критерий A2.23) удовлетворяется, следовательно, имеют место авто-
автоколебания. Условия существования автоколебаний с очевидностью следуют
из рис. 12.2: 1/71, + \/Т2 < к.
Задачи
12.1. Изучите методом гармонической линеаризации систему A2.26) для
нелинейной функции F{x), представленной на рис. 12.3.
12.2. Исследуйте методом гармонической линеаризации уравнение ди-
динамики маятника Фроуда (см. гл. 8):
х + X = ц(-схх - рх3). A2.34)
Глава 12
245
12.3. Найдите периодические режимы в системе
х + х = -ах-рх3 -ух5,
A2.35)
где Р < 0; у > 0. Исследуйте устойчивость найденных решений.
12.4. Проведите расчет автоколебаний в системе
х) = 0,
где Р - положительный параметр и
[-1, еслих>0;
0, еслих<0.
График функции F см. на рис. 12.4.
-1
Рис. 12.3
Рис. 12.4
A2.36)
12.5. Исследуйте нелинейную систему A2.26) при нелинейной функции
Дх), представленной на рис. 12.5.
Рис. 12.5
Глава 13. РАЗРЫВНЫЕ КОЛЕБАНИЯ
Теория разрывных колебаний динамических систем второго порядка разра-
разработана, в основном, учеником академика А.А. Андронова - Н.А. Желез-
цовым. Им же построена теория разрывных автоколебаний ряда радиотех-
радиотехнических схем. Эти результаты достаточно подробно изложены в гл. 10
монографии [3]. Теория разрывных колебаний многомерных систем
развита, главным образом, в работах Е.Ф. Мищенко и Л.С. Понтрягина.
Все наиболее существенные результаты по теории разрывных колебаний
(и, прежде всего, результаты упомянутых авторов) собраны в монографии
[17]. В данной главе изложены основные факты по разрывным колеба-
колебаниям, причем за недостатком места опущены многие детали их математи-
математического обоснования.
13.1. Определение разрывных колебаний
В древнегреческой мифологии упоминается Тантал, навлекающий на себя
гнев богов за свои преступления. Громовержец Зевс низверг Тантала в
мрачное царство своего брата Аида, где Тантал нес ужасное наказание,
известное как танталовы муки: томимый жаждой он стоял в прозрачной
воде, доходящей до его подбородка, но стоило Танталу наклониться, как
вода исчезала.
Именем мифического Тантала называют гидравлическую систему,
представленную на рис. 13.1. В сосуд непрерывно поступает вода. Через
дно сосуда пропущена изогнутая трубка. Когда вода в сосуде достигает
уровня Н, сосуд опорожняется до уровня h, и вытекание воды прекра-
прекращается до тех пор, пока вода в сосуде вновь не достигнет уровня Н.
Колебания уровня (у) следуют пилообразному закону, а не гармони-
гармоническому (рис. 13.2). Длительность опорожнения много меньше времени
У
Рис. 13.1
Глава 13 247
наполнения сосуда (т2 <к т,), если диаметр выходной (изогнутой) трубы
достаточно велик.
Колебания, при которых идет чередование быстрых и медленных из-
изменений переменных, называют разрывными (или релаксационными).
Рис. 13.2 дает один из примеров именно таких разрывных колебаний.
Обратимся еще раз к танталову сосуду. Это типичная автоколебательная
система, так как в ней, во-первых, существует колебательный режим
при постоянном расходе поступающей в сосуд воды и, во-вторых, ампли-
амплитуда колебаний зависит только от конструкции системы. Полагают, что
танталов сосуд является первой в истории техники автоколебательной сис-
системой.
Разрывные колебания находят широкое применение в современной
радиотехнике, радиолокации, приборостроении. Встречаются они и в
механических системах. В частности, при известных условиях разрывные
колебания совершают тела, испытывающие большое трение, но обладаю-
обладающие малой массой.
С математической точки зрения разрывные колебания могут возбуж-
возбуждаться в системах, описываемых дифференциальными уравнениями с
малыми коэффициентами при старших производных по времени. Рассмот-
Рассмотрим подробнее такие системы.
13.2. "Быстрые" и "медленные" движения
Рассмотрим динамическую систему /1-го порядка
()
yt =GJ(xl,...,xs,yi,...,yn.), s + n' = n,
или в векторной форме
\ix=F(x,y), y = G(x,y), A3.2)
где (i - малый положительный параметр.
Предположим, что функции /"и С ограничены и дифференцируемы
во всей интересующей нас области фазового пространства системы A3.1).
Функции Fn (/могут зависеть и от ц., но так, что стремятся к конечным
пределам при ц —> 0.
При |д = 0 система A3.2) сводится к уравнениям
F(x,y) = 0, y = G(x,y). A3.3)
Это система порядка п' < Л. В полном фазовом пространстве п измерений
системы A3.2) состояния системы A3.3) располагаются в подпространстве
F, определяемом равенствами F(x,y) = 0 и имеющем п' измерений. Так,
если система A3.2) имеет второй порядок, то подпространством i^Ha фа-
248
Часть 2
зовой плоскости х,у будет линия F(x,y) = 0 (рис. 13.3). Изображающая
точка системы A3.3) перемещается в плоскости X, у только по кривой F
(х,у) = 0.
Поставим следующий вопрос: при каких условиях движение изобра-
изображающей точки системы A3.2) в полном
Л-мерном фазовом пространстве при
достаточно малых значениях ц и 0 < t<
< оо происходит в достаточно малой
окрестности подпространства /"? Оче-
Очевидно, что в этих условиях истинное
движение изображающей точки системы
A3.2) можно приближенно заменить ее
движением в пределах подпространства
F, т.е. в этих условиях правомерен пе-
переход от исходной системы A3.2) к бо-
более простой системе A3.3).
Чтобы ответить на поставленный вопрос, рассмотрим общий характер
поведения фазовых траекторий системы A3.2) при 0 < ц «. 1. Обозна-
Обозначим 0(ца) величину, не превосходящую (по порядку величины) ц°. Пусть
О < а < 1. Рассмотрим область фазового пространства системы A3.2) вне
малой О(ц°)-окрестности подпространства /"*. В этой области |Дх,>>)|>
> 0(\л") (функция /"непрерывна!), и, поскольку \хх = F(x,y), имеем
Рис. 13.3
Так как а < 1 и \i мало, в рассматриваемой области X велико (х -» оо
при \л —> 0). В этой области при малых ц переменные х изменяются быст-
быстро, а скорости у = G^x,^) остаются ограниченными величинами, т.е. в
данной области за малое время переменные у не успевают изменяться, а
переменные X меняются на конечные величины. Эту область фазового про-
пространства [вне 0{\1а)-окрестности подпространства F] назовем областью
быстрых движений. Движение изображающей точки в этой области можно
приближенно рассматривать как мгновенные скачки по х при неизменных
у. Дифференциальные уравнения в области быстрых движений можно
записать в виде
У = Уо = const>
x = -F(x,y0).
Г"
A3.4)
'•Геометрически О(ц°) окрестность подпространства /"представляет трубку с поперечными
размерами порядка ц", содержащую внутри себя кривую Р(х,у) = 0. Для двумерного случая
иллюстрацией может служить рис. 13.4.
Глава 13
249
Следовательно, в этой области исходные уравнения A3.2) заменяются
приближенными уравнениями A3.4) (или гипотезой скачка), но не систе-
системой A3.3). Система A3.3) может правильно отображать динамику только
внутри малой 0(ц")-окрестности подпространства F, где скорости изме-
изменения X и у конечны. Эту окрестность назовем областью медленных дви-
движений.
0(ц°)-окрестность
Рис. 13.4
Возможны два случая.
Случай 1. Все траектории быстрых движений идут (при возрастании
/) внутрь О(ц°)-окрестности подпространства F. Это значит, что изобра-
изображающая точка, находившаяся вне этой окрестности, по соответствующей
траектории быстрого движения попадает в область медленных движений и
далее двигается внутри этой области с конечными скоростями х и у.
Иначе говоря, спустя малый промежуток времени (тем меньший, чем
меньше ц) изображающая точка оказывается в области медленных дви-
движений и вступают в силу приближенные уравнения A3.3). В этом случае
можно вообще отказаться от детального рассмотрения быстрых движений
по уравнениям A3.1) или A3.4) и постулировать, что изображающая точка
скачком переходит в соответствующую точку Л'-мерного подпространства
F, в котором "работают" уравнения A3.3).
Очевидно, что в этом случае малый параметр ц является несуществен-
несущественным, а динамику исходной системы A3.2) можно описывать уравнениями
A3.3) (плюс скачки - быстрые движения).
Подпространство F или его часть, к которой подходят траектории
быстрых движений, обозначим F* (рис. 13.5). Таким образом, малый пара-
параметр ц несуществен, и переход к системе A3.3) правомерен, если все
подпространство /"есть F*.
Случай 2. По крайней мере, часть подпространства /"(назовем ее F ,
рис. 13.6) обладает тем свойством, что фазовые траектории быстрых дви-
движений идут изнутри малой окрестности /"наружу, в область быстрых дви-
движений, где применимы приближенные уравнения A3.4), но не A3.3).
Это значит, что существуют движения исходной системы A3.2), которые
начинаются из состояний, совместных с уравнениями A3.3), но не опи-
описываются ими [а отображаются уравнениями A3.4) или A3.2)). В этом
250
Часть 2
случае параметр ц существен; полагать ц = 0 и переходить к системе A3.3)
нельзя.
Рис. 13.5
Рис. 13.6
Итак, получено следующее:
1) при малом |i фазовое пространство системы A3.2) разбивается на
области быстрых и медленных движений;
2) в области быстрых движений [вне 0(ц")-окрестности множества
F(x,y) = 0] применимы упрощенные уравнения A3.4) или просто гипотеза
скачка;
3) в той части области медленных движений, которая носит характер
F , пригодны упрощенные уравнения A3.3);
4) малым параметром ц можно пренебречь и перейти от системы A3.2)
к системе A3.3) только в том случае, если все подпространство /"есть F*.
Перейдем к выводу аналитических условий несущественности малого
параметра \х.
13.3. Условия несущественности малого параметра
Точки подпространства F(x,y) = 0 можно рассматривать как состояния
равновесия для фазовых траекторий быстрых движений, т.е. как состояния
равновесия системы A3.4); поведение этих траекторий вблизи подпро-
подпространства /"полностью определяется их устойчивостью [точки подмноже-
подмножества F* - устойчивые, а точки подмножества F - неустойчивые состояния
равновесия системы A3.4)].
Введем новое время /'= //ц и перепишем уравнения A3.4) в виде
— = F(x,y),
у = const.
Линеаризуем эти уравнения в окрестности произвольной точки подпрост-
подпространства Fu составим характеристическое уравнение линеаризованной сис-
системы.
Глава 13
251
Линеаризованная система имеет вид
df
L-' F)Y "**'
A3.5)
где частные производные функций ^.берутся в точках подпространства F.
Характеристическое уравнение системы A3.5) таково:
дхх
dF2
дхх
dFs
дх2
dF2
дх2
dFs
OF,
dxs
dF2
dxs
dFs
дх.
дх.
oxs
= 0.
A3.6)
Если для точки М е F все S корней этого уравнения имеют отри-
отрицательные действительные части, то М € F . Если же для всех точек М
подпространства F{x,y) = 0 все S корней уравнения A3.6) имеют отри-
отрицательные вещественные части, то все точки подпространства Fcyrb устой-
устойчивые состояния равновесия для приближенных уравнений A3.4) быстрых
движений и в этом случае малый параметр ц несуществен (но только в
этом случае). Таким образом, условия несущественности малого параметра
можно сформулировать в терминах линейной теории устойчивости, напри-
например в виде условий Гурвица для уравнения A3.6).
Отметим частный случай, когда в системе A3.1) имеется только одно
уравнение с малым коэффициентом перед производной (s = 1). Уравнение
A3.6) примет вид Fx'(x,y) - А. = 0, а условие несущественности малого
параметра запишется как
F;.(x,y)<0 A3.7)
во всех точках подпространства F(x,y) = 0.
13.4. Разрывные предельные циклы
Пусть функция F{x,y) такова, что подпространство F имеет участки F и
F . Пусть единственными элементами притяжения траекторий быстрых
движений являются точки подмножества F* - устойчивые состояния рав-
равновесия для этих траекторий.
Тогда изображающая точка по траектории быстрых движений входит
(и тем быстрее, чем меньше ц) в область медленных движений - в малую
окрестность подпространства F. Затем она движется в этой области с ко-
252
Часть 2
нечными значениями X и у, пока не придет на границу подпространств
FviF" *', после чего вновь срывается в область быстрых движений и т.д.
В пределе, при ц —> О, изображающая точка будет двигаться по траек-
траектории, состоящей из чередующихся кусков .двух типов: из отрезков траекто-
траекторий быстрых движении, каждый из которых лежит в 5-мерном подпрост-
подпространстве у = const и пробегается мгновенно, и из отрезков траекторий мед-
медленных движений, лежащих в л'-мерном подпространстве F* и проходимых
изображающей точкой за конечные промежутки времени в соответствии с
уравнениями A3.3). Такие траектории являются математическими образами
разрывных колебаний. Среди них возможны и замкнутые траектории -
разрывные предельные циклы (например, цикл ABCD на рис. 13.7).
F*
F'
/
/ -А
/
/
\
ч
\ .,
\в/
V
/
У
Рис. 13.7
Если существует разрывный предельный цикл при \1 —> О, то в доста-
достаточно малой его окрестности (тем меньшей, чем меньше ц) лежит един-
единственный и притом устойчивый предельный
цикл системы A3.1), если только параметр ц
достаточно мал. Доказательство этого утверж-
утверждения, а также более полное изложение теории
разрывных колебаний можно найти в работах [3,
17].
Пример - разрывные колебания в механи-
механической системе. На равномерно вращающийся
вал 1 (рис. 13.8) насажена колодка 2, имею-
имеющая малую массу. Колодка крепится с помощью
упругой пружины. Пренебрегая вязким трени-
трением, запишем уравнение движения колодки в
виде
Рис. 13.8
/ф = -&ф + М(С1 - ф),
A3.8)
"'Возможен, разумеется, и другой случай, когда изображающая точха навсегда остается
на одном из участков F* [например, если на нем находится устойчивое положение равновесия
системы A3.1)].
Глава 13
253
где /- момент инерции колодки; (р - угол ее поворота; к - коэффициент
упругости системы; ?1 - постоянная угловая скорость вала; М - момент
сил сухого трения, зависящий от относительной скорости О — ф вращаю-
вращающихся частей (рис. 13.9).
м
П-ю
Рис. 13.9
Перепишем уравнение A3.8) в виде системы
/со = -
Л/(П-со).
A3.9)
Эта система имеет единственное положение равновесия ф = ф0, со = О,
где ф0 определяется равенством -&ф0 + M(Q.) = 0. Легко убедиться, что
это положение равновесия неустойчиво, если
М'(П) < 0.
A3.10)
В дальнейшем предполагается, что условие A3.10) выполнено. Оно озна-
означает наличие падающего участка на характеристике сухого трения и оказы-
оказывается существенным для возбуждения автоколебаний.
Воспользуемся изложенной теорией, полагая момент инерции колодки
малым параметром (/= ц). При малом значении /движения в системе
распадаются на два типа, существенно отличающихся друг от друга.
1. В состояниях, в которых момент сил пружин (~к(р) уравновешен
или почти уравновешен моментом Мсилы трения, колодка имеет сравни-
сравнительно небольшие ускорения со , несмотря на малость I. Другими словами,
при |—/кр |«| М(?1 - со) | совершаются медленные движения. Подпространство
F таково:
Дсо,ф) = -top + М(п - со) = 0.
A3.11)
2. В состояниях, когда моменты силы трения и силы пружин не урав-
уравновешивают друг друга, ускорение <й велико (и тем больше, чем меньше
/). Этим состояниям на фазовой плоскости ф, со соответствуют точки вне
малой окрестности линии A3.11). Это область быстрых движений, когда
быстро изменяется угловая скорость ю (oi> —> оо при / -> 0 ), в то время
254
Часть 2
как сама скорость со = ф конечна. При / —> 0 область быстрых движений
будет заполнена фазовыми траекториями, близкими к прямым ф = const.
В соответствии со сказанным получаем (для / —> 0) разбиение фазо-
фазовой плоскости на траектории (рис. 13.10) и графики изменения угла ф и
скорости со (рис. 13.11). На рис. 13.10 кривая F= Дсо,ф) = 0 построена
по уравнению A3.11) с учетом зависимости М- M(Q-(?>) (см. рис. 13.9.)
Участки F* и F на линии Дсо, ф) = 0 находятся без труда. В самом
деле, участки F* - это совокупность точек на линии F= 0, где выполнено
условие несущественности малого параметра, т.е. где dF/dd) < 0, а для
участков F должно быть dF/dca > 0. Из A3.11) находим, что
dF/da=-M'(u-G>),
т.е. участки F , где dF/d® > 0, отвечают падающим участкам кривой М.
Остальная часть кривой A3.11) принадлежит подмножеству F . На
рис. 13.10 на линии F=0 отмечено также направление движения изобра-
изображающей точки в согласии с уравнениями A3.9): переменная ф возрастает
при со > 0 и убывает при со < 0.
\
N
@
0
А
D
У
\
ч
ф
с
ч
Рис. 13.10
Рис. 13.11
Из рис. 13.10 видно, что колодка совершает автоколебания, так как имеется
разрывный предельный цикл ABCD. Автоколебания слагаются из периоди-
периодически повторяющихся быстрых и медленных движений. Быстрым движе-
движениям отвечает прохождение изображающей точкой участков ВС и DA, a
медленным - участков АВ и CD.
Участок АВ соответствует движению колодки, захваченной валом: ко-
колодка вращается вместе с валом с угловой скоростью Q. При этом пру-
пружины деформируются, момент упругой силы возрастает, но вместе с тем
увеличивается и момент силы трения покоя, оставаясь все время равным
моменту силы пружин. Когда момент упругой силы достигает Л/о- макси-
максимального момента силы трения покоя (точка В на рис. 13.10), происходит
Глава 13 255
резкое изменение скорости колодки и по величине, и по направлению
при почти неизменных положении колодки и растяжении пружин (переход
изображающей точки из точки В в точку С). Далее происходит непрерывное
изменение скорости и координаты колодки, пока изображающая точка не
придет по траектории CD в точку D, соответствующую минимуму харак-
характеристики сухого трения {М- Л/,). В этот момент скорость скачком из-
изменяется до значения Q, и вновь начинается медленное движение колодки.
Из рис. 13.11 видно, что колебания ф носят пилообразный характер.
Линейное нарастание ф, при котором со=?1, сменяется "криволинейным"
уменьшением угла ф, соответствующим движению изображающей точки
по участку CD (см. рис. 13.10).
Для окончательного решения задачи следует вычислить амплитуду А и
период Т автоколебаний. За амплитуду колебаний координаты ф при-
принимается половина полного изменения ф, т.е.
А = {М0-М1)/2к.
Пренебрежем длительностью быстрых движений, и тогда Т= Т{+ 7
(рис. 13.11). Промежуток Т1 соответствует случаю ф = Q. = const, откуда
dt - dq>/Q и Тх - (MQ - M^/kCl. Величина Т2, равная времени про-
прохождения изображающей точкой участка CD на рис. 13.10, определяется
из уравнений медленных движений
- &ф + М(€1-®) = 0, ф = со.
Из первого уравнения найдем, что kd<p = -M'(Q, - (o)tffco, а из второго
уравнения получаем dt = Лр/еэ. Следовательно,
1 Л/'(П-со) ,
dt - da,
к со
откуда
к
ш
где сос и соD - угловые скорости в точках Си D соответственно. Вычислив
Tv найдем и период автоколебаний Т.
Задачи
В задачах 13.1-13.3 требуется построить (для 0 < |i«: 1) фазовые порт-
портреты динамической системы и исследовать возможность разрывных авто-
автоколебаний.
13.1. \ix = x{\-x2)-y, у = х. A3.12)
256
Часть 2
13.2.
13.3.
цх = х(\ - х2) - у, у - х- ау; а * 0.
цх = -х-у- кр(х); у = хА
<р(х) = -х + х3/3; к = const./
A3.13)
A3.14)
13.4. Груз массой т, укрепленный на пружине с жесткостью к, лежит на
ленте конвейера, движущейся со скоростью V (рис. 13.12). Сила
трения между грузом и лентой конвейера - функция относительной
скорости (рис. 13.13). Рассмотрите поведение системы на фазовой
плоскости х, х - v. Примите и« 1.
Рис. 13.12
Рис. 13.13
13.5. Существуют ли разрывные автоколебания в системе
\LX = y-\y(x), y = ax, A3.15)
где 0 < ц « 1, а график функции у(х) дан на рис. 13.14.
У
7
7
/ 0
у=ч(х) г\
Рис. 13.14
[24].
Другие задачи на расчет разрывных колебаний можно найти в работе
Глава 14. СТОХАСТИЧЕСКИЕ АВТОКОЛЕБАНИЯ
Помимо периодических колебаний, в частности периодических автоко-
автоколебаний, отображаемых устойчивыми предельными циклами, в нелиней-
нелинейных динамических системах возможны незатухающие ограниченные дви-
движения совершенно иного типа - непериодические, неупорядоченные, хао-
хаотические колебания. Существенно, что эти колебания совершаются в сис-
системах, не подверженных действию случайных внешних сил; они происходят
в автономных системах, обусловлены действием неслучайных источников
энергии, их установление в конечных пределах не зависит от начальных
условий, поэтому они представляют собой своеобразные автоколебания,
называемые стохастическими. Таким колебаниям соответствует бесконечно
долгое блуждание изображающей точки в ограниченной области фазового
пространства.
Строго доказано [4], что для систем на фазовой плоскости с аналити-
аналитическими правыми частями подобные движения невозможны; с течением
времени изображающая точка неограниченно стремится к устойчивому по-
положению равновесия, либо к устойчивому предельному циклу, либо уходит
в бесконечность. Стохастические процессы в детерминированных двумер-
двумерных автономных нелинейных системах возможны только при неаналити-
неаналитических правых частях уравнений динамики. Ограничимся простым при-
примером из работы B0].
Рассмотрим механическую систему - осциллятор с подкачкой энергии
за счет "отрицательного трения"*' и сбросом энергии путем встречного
удара. В отсутствие ударов движение осциллятора определяется уравнением
х - 25х + (п20х = 0. A4.1)
"Отрицательное трение" возьмем малым: 0 < 5 < а>0. Будем считать,
что: 1) ударное воздействие заключается в скачкообразном уменьшении
скорости X на постоянную величину р> 0; 2)удары происходят в моменты,
когда X = 0 и х > О, если только х > а > 0; 3)удары не совершаются,
если х < а. Таким образом,
~Р = -^после при х = 0; х > а > 0, A4.2)
''Примером системы с "отрицательным трением" служит маятник Фроуда (см. §8.2), где
"отрицательное трение" (отрицательность параметра а) было обусловлено наличием падающего
участка характеристики момента сил сухого трения.
258
Часть 2
гДе *пер«я и ^посяе ~ значения скорости X непосредственно перед ударом и
после него.
Построим точечное преобразование положительной полуоси х в себя.
Для х < а, когда удары не совершаются, фазовая траектория представляет
раскручивающуюся спираль (рис. 14.1), а точка х и ее последующая х на
полуоси х > 0 связаны простой зависимостью: х - xed, где d - логариф-
логарифмический декремент. Если же х > а и совершаются удары, то фазовая
траектория будет более сложной (рис. 14.2). Очевидно, что х,
(см. рис. 14.2) связаны зависимостью
после И X перел
перед
X после ^ X пемя г> '
перед
Рис. 14.1 Рис. 14.2
Перейдем к привычным обозначениям, полагая хтеред = s\
и обозначая функцию последования f(s). Тогда
перед
= S
s = f(s) =
если 0 < s < а',
Us - p)ed, если s>a.
A4.3)
Таким образом, точечное преобразование полуоси X > 0 в себя дается раз-
разрывной функцией последования A4.3),
график которой представлен на рис. 14.3.
Видно, что при s' < S < s" последую-
последующее значение s также заключено в пре-
пределах от S' до s". Поэтому, если началь-
начальное значение X заключено в пределах от
s' до s", все последующие значения
скорости х остаются в этих же пределах.
Как видно из рис. 14.3, последователь-
последовательность точек точечного преобразования
A4.3) носит сложный, нерегулярный,
хаотический характер.
о
a f
Рис. 14.3
s=x
Глава 14
259
На рис. 14.4 приведен пример электрической системы с таким же меха-
механизмом образования стохастических колебаний, как и в системе A4.1),
A4.2). Система представляет электрический контур с отрицательным со-
сопротивлением (R < 0). Сброс энергии в контуре происходит благодаря
подключенной к контуру неоновой лампочке. Она загорается и потребляет
энергию, как только напряжение U достигнет порогового значения U3
(рис. 14.5). Как и в предыдущем примере, здесь можно построить график,
связывающий последовательные значения тока / в контуре. При соответ-
соответствующем подборе параметров схемы этот график будет качественно похож
на график рис. 14.3.
Рис. 14.4
Рис. 14.5
В системах третьего и более высокого порядка стохастические автоко-
автоколебания могут устанавливаться и при аналитических правых частях системы.
Оказывается, для этого нужно, чтобы: 1) в фазовом пространстве системы
существовала ограниченная область, в которую все фазовые траектории
входят; 2) в этой области все фазовые траектории были неустойчивыми.
Другими словами, в фазовом пространстве системы стохастические авто-
автоколебания отображаются ограниченным притягивающим множеством,
состоящим только из неустойчивых траекторий. Такое притягивающее
множество называют странным (иногда стохастическим) атрактором в
отличие от обычных, "нестранных" атракторов - устойчивых состояний
равновесия и устойчивых предельных
циклов.
С математической точки зрения
совместимость неустойчивости всех
траекторий странного атрактора с тем,
что это - именно атрактор, т.е. огра-
ограниченное притягивающее множество,
объясняется следующим образом. Об-
Образующие странный атрактор траек-
траектории не могут быть неустойчивыми
одновременно по всем направлениям
- это привело бы к неограниченности
фазового объема, в котором находятся
неустойчивне траектории (рис. 14.6). Рис. 14.6
L>t,
260
Часть 2
Расположение фазовых траекторий, составляющих странный атрактор, в
ограниченном фазовом объеме возможно лишь в случае, когда траектории
неустойчивы по одним направлениям, но являются устойчивыми (притя-
(притягивающими) по другим направлениям - траектории седлового типа. На
рис. 14.7 дан пример такой траектории. Направление / устойчивое, а
направление // неустойчивое. Пусть все такие траектории обращены
"наружу" атрактора своими притягивающими направлениями. Тогда, хотя
и весьма грубо, можно представить все притягивающее множество из не-
неустойчивых траекторий.
Рис. 14.7
Примером системы со странным атрактором служит система третьего
порядка
х = -gx + ау;
y = -xz + rx-y;
Z = xy-bz,
A4.4)
в которой стохастические колебания были обнаружены Э.Лоренцом в
1963 году при исследовании термоконвекции в подофеваемом снизу слое
жидкости. Для <т= 10, г=28, 6=8/3 была рассчитана траектория странного
атрактора системы A4.4) - атрактора Э.Лоренца (рис. 14.8). Видно, что
траектория делает один оборот справа, затем несколько оборотов слева,
снова оборот справа и т.д. нерегулярным образом. Траектория распо-
Рис. 14.8
Глава 14 261
латается вблизи некоторой поверхности, пересечение которой с секущей
плоскостью Z - const представляет разрывную кривую. Внешне создается
впечатление, что траектория располагается надвух поверхностях, переходя
случайным образом с одной поверхности на другую. В действительности
атрактор имеет более сложную, так называемую канторовскую структуру
- бесконечное число тесно прижатых друг к другу "листов", причем между
двумя любыми листами есть промежутки, не относящиеся к атрактору.
Интересно отметить, что в самых разнообразных неконсервативных
системах переход к нерегулярному поведению при изменении параметров
совершается лишь несколькими способами. Эти способы перечислены в
работе A0], а здесь только напомним, что подобная ситуация наблюдалась
и для периодических автоколебаний: лишь небольшое число бифуркаций
приводит к рождению предельного цикла (см. гл. 3).
Математическая теория стохастических колебаний, основанная на ре-
результатах качественной теории многомерных динамических систем, развита
еще недостаточно; она в значительной мере дополняется численными
расчетами на ЭВМ. Подробное изложение аналитических и численных
результатов исследования стохастических колебаний выходит за рамки
данного пособия, поэтому ограничимся сказанным и добавим только не-
несколько небольших замечаний.
Замечание 1.В физических и численных экспериментах невозможно
воспроизвести, повторить индивидуальный стохастический процесс, по-
поскольку начальные условия в этих экспериментах задаются с конечной
точностью, а все фазовые траектории, составляющие странный атрактор,
- неустойчивые, разбегающиеся.
Замечание 2. Стохастические колебания возможны и в простых
неавтономных системах с периодическими правыми частями или пара-
параметрами, например в двух следующих системах:
х + Их + A - bcosQt)x + хг = 0, И > 0, A4.5)
(в частности, при И = 0,9, Ъ = 17, П = 2,04);
х - Их + (о20х + х3 = bcosQt, h > 0. A4.6)
Замечание 3. В настоящее время делаются попытки объяснить
переход ламинарных течений в турбулентные установлением автостохас-
автостохастических колебаний в жидкости.
Подробное изложение и развитие всех рассмотренных здесь вопросов
можно найти в работах A0,27,28] и цитированной в них литературе. Доба-
Добавим еще к этим работам статьи [9, 29], в которых дано увлекательное
популярное изложение явлений "хаоса" в детерминированных системах.
262 Часть 2
Заключение к части 2
В заключение сделаем некоторые замечания о вычислительных методах и
применениях ЭВМ в теории колебаний. Методы расчета периодических
режимов, изложенные в части 2, были разработаны и эффективно исполь-
использовались еще в "домашинные" времена - до широкого внедрения ЭВМ в
практику расчетов динамики нелинейных систем. В настоящее время со-
сочетание методов теории колебаний с вычислительными методами и про-
программированием открывает новые возможности в исследованиях нели-
нелинейных процессов. Так, благодаря современным достижениям компьютер-
компьютерной алгебры*' многие аналитические преобразования (зачастую весьма гро-
громоздкие) можно переложить на ЭВМ. В частности, разработаны програм-
программы для выполнения следующих аналитических процедур: составления урав-
уравнений Лагранжа второго рода; линеаризации уравнений динамики;
исследования асимптотической устойчивости положений равновесия и др.
Алгоритмизированы и представлены в комплексе программ и некоторые
асимптотические метода теории колебаний. В частности, эти программы
позволяют отыскивать периодическое решение системы дифференциальных
уравнений методом Пуанкаре, определять периодическое решение и пере-
переходные процессы методом Боголюбова - Митропольского и т.п.
В гл. 11 было кратко рассказано о расчете автоколебаний на основе
теории бифуркаций, сопровождающихся рождением предельных циклов
(см. также гл.З). Такие расчеты для многомерных систем весьма трудоемки,
и в этом направлении разными авторами получены важные результаты по
численному изучению бифуркаций рождения предельного цикла и прило-
приложениям к задачам гидродинамики, биофизики и др."'
Наконец (и это очевидно), колебательные явления можно изучать также
с помощью традиционных методов численного интегрирования дифферен-
дифференциальных уравнений.
''Климов Д.М., Руденко В Л. Методы компьютерной алгебры в задачах механики. М.:
Наука, 1989 (АН СССР. Институт проблем механики. On. редактор академик А.Ю. Ишлннскнй).
"'Хэссард Б., Казарннов Н., Вэи И. Теория и приложения бифуркации рождения цикла.
М: Мир, 1985. (См. также литературу, цитированную в этой монографии.)
ЧАСТЬ 3. КОЛЕБАНИЯ НЕАВТОНОМНЫХ СИСТЕМ
В гл. 15-17 изучаются колебания в линейных и нелинейных системах (как
правило, невысокого порядка), находящихся под действием периодических
внешних сил. В главе 15 рассматривается действие синусоидальной внеш-
внешней силы на диссипативную систему - нелинейный осциллятор с рас-
рассеянием энергии. В гл. 16 исследуется синусоидальное воздействие на
автоколебательную систему (в качестве характерного примера взят лам-
ламповый генератор с симметричной кубической характеристикой). Наконец,
в гл. 17 изучаются параметрические колебания, т.е. колебания, обуслов-
обусловленные периодическими изменениями параметров системы.
Перечисленные вопросы следует рассматривать как необходимые на
первоначальном этапе изучения вынужденных колебаний, но они, разуме-
разумеется, ни в коей мере не охватывают всей обширной области динамики
неавтономных систем. Поэтому в заключении к части 3 дан краткий пе-
перечень необсуждавшихся вопросов и сделаны указания на соответствующую
литературу, где с ними можно ознакомиться детально.
Большинство конкретных нелинейных задач решено в квазилинейной
трактовке с помощью методов Ван-дер-Поля и Пуанкаре.
Г л а в а 15. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМЫ
С НЕЛИНЕЙНОЙ ВОССТАНАВЛИВАЮЩЕЙ СИЛОЙ.
УРАВНЕНИЕ ДУФФИНГА
15.1. Вынужденные колебания в линейной системе с одной степенью свободы
Если на линейную систему с одной степенью свободы действует внешняя
сила/(/), то движение x(t) описывается уравнением
х + Ihx + со \х = /(/), A5.1)
где соо - циклическая частота собственных колебаний в отсутствие трения;
A=const>0-коэффициент трения. Решение x(t) уравнения A5.1) склады-
складывается из общего решения однородного уравнения и частного решения
неоднородного уравнения A5.1). Это частное решение и описывает вы-
вынужденное движение системы, обусловленное внешней силой/(/), а не
начальными условиями.
Если трение мало (А < ©0), то вынужденное движение определяется
выражением [24]
*шн@ = f/(w)exp(/u/)sinco(/ - u)du, A5.2)
03 л
264
Часть 3
в котором со = yjcal — h2. Если трение велико (А>со0), то
^^—- f/(w)exp(A«)sh co(/ - u)du. A5.3)
Здесь со = -у/А2 - ©о. Представляет интерес частный случай, когда /(/)
- периодическая, в частности синусоидальная, функция времени: f(t) =
= fosin Qt, где f0 - амплитуда, аи- частота внешнего воздействия.
Напомним основные результаты, относящиеся к этому случаю [они полу-
получаются из A5.2), A5.3)].
Рассмотрим сначала консервативную систему: Й = 0. Уравнение дви-
движения записывается в виде
х + (о20х = /osinfi/.
В системе совершаются как собственные колебания с частотой со0,
так и вынужденные с частотой Q. Амплитуда вынужденных колебаний
равна
F0=fJ(a>l-Q2).
A5.4)
Формула A5.4) дает зависимость амплитуды вынужденных колебаний от
частоты Q внешней силы (рис. 15.1). Видно, что Fo—>оо, если Q—>со0.
Явление, которое наступает при совпадении частоты внешнего воздей-
воздействия с частотой собственных колебаний (при Q=co0), называется резонан-
резонансом, а кривую на рис. 15.1 называют резонансной кривой.
В случае консервативной системы амплитуда вынужденных колебаний
при Ф=ооо обращается в бесконечность. Несложный анализ решения A5.2)
для этого случая показывает, что хвын ~ /sin w0/, т.е. при резонансе про-
происходит неограниченное нарастание размахов колебаний с течением време-
времени (рис. 15.2). Таков физический смысл условия F0 = ao при П = cofl.
Рис. 15.1
Рис. 15.2
Глава 15
265
Пусть теперь в системе имеется малое сопротивление: А «: ш0. Зави-
Зависимость амплитуды вынужденных колебаний от частоты внешней силы
(резонансная кривая) представлена на рис. 1S.3. Имеется ярко выраженный
острый пик, но бесконечного разрыва кривой нет. Максимум кривой
имеет абсциссой не точку fi = co0, а близкую к ней точку слева от ?2 = соо.
В данном случае (при h «co0) под резонансом понимают резкое увели-
увеличение амплитуды колебаний при Q «со0. Вид колебаний представлен на
рис. 15.4.
П
Рис. 15.3
Рис. 15.4
Чем ближе h к ©0, тем ниже и шире будет резонансный пик на резонанс-
резонансной кривой и тем левее он располагается. Соотношение между А и оо0
характеризуют добротностью Q = (aJ2h. На рис. 15.5 видно, как дефор-
деформируется резонансная кривая с измене-
изменением добротности.
Кривые на рис. 15.3 и 15.5 по-
построены для амплитуд смешения x(t),
однако резонансные кривые для ско-
скорости x(t) подчиняются тем же качест-
качественным закономерностям. Именно,
при больших значениях Q резонансные
кривые для скорости имеют острый
резонансный пик (причем точно при
Q = <й0), и амплитуда скорости х(/)
резко возрастает, когда частота Q
внешней силы совпадает с частотой со0 собственных колебаний (или близка
к ней).
Не останавливаясь на детальном описании технических проявлений
резонанса, ограничимся только одной поучительной выдержкой из книги
[26]: "Во многих реальных конструкциях рассеяние энергии очень слабое,
и совсем малая переменная сила может вызвать опасные колебания. Го-
Говорят, что в эпоху средневековья испытания новых мостов проводили так:
на мосту "шагал на месте" взвод солдат, а архитектор стоял под мостом,
и последствия небрежного отношения к делу могли обрушиться на голову
Рис. 15.5
266 Часть 3
в прямом смысле. В 1850 г. Анжерский подвесной мост был разрушен
идущим в ногу пехотным батальоном. Мост рухнул в пропасть, увлекая
за собой людей. Это была не единственная катастрофа такого рода, и в
конце концов пришли к мудрому решению: поскольку никогда нельзя
предугадать, совпадет ли ритм солдатских шагов с одной из собственных
частот моста, то на мосту отряд солдат должен идти не в ногу. Впрочем,
к тому времени, когда такое решение было принято, практически этот
вопрос потерял актуальность из-за новой технологии и новых материалов,
применявшихся на строительстве мостов.
Полезны или вредны резонансные колебания? Чаще мы вспоминаем
об их вреде: действительно, так неприятно путешествовать в дребезжащем
вагоне, и так удобно - в уютном спальном. А ведь плавный ход объясняется
и тем, что у спального вагона низкие частоты собственных колебаний -
гораздо ниже частоты воздействия. Такой вагон имеет так называемую
мягкую подвеску.
Интенсивные резонансные вибрации могут привести к авариям, к раз-
разрушениям машин и фундаментов, к неудобствам для человека - оператора
или пассажира. Если же вибрация служит основой рабочего процесса, то
систему специально настраивают на резонанс. Резонансные эффекты ис-
использовались еще в давние времена. Каким образом звонарю удавалось
раскачивать огромные колокола? Ясно, что колокол надо подталкивать с
периодом, равным периоду собственных колебаний, при этом малыми
усилиями можно добиться большого эффекта."
В заключение отметим следующий очевидный факт: каждому значению
частоты внешней силы отвечает только одно значение амплитуды вы-
вынужденных колебаний (резонансные кривые линейной системы - однознач-
однозначные зависимости частоты Q). Ниже мы убедимся, что наличие нелиней-
ностей может коренным образом изменить результат: каждому значению
частоты Q. может соответствовать по крайней мере две разных амплитуды
вынужденных колебаний.
15.2. Постановка задачи для анализа гармонических колебаний
Различные физические задачи приводят к дифференциальному уравнению
x + hx + y(x) = f0cosQt, A5.5)
в котором h = const > 0, ф(х) - нелинейная функция, а правая часть в
A5.5) описывает гармоническое внешнее воздействие. Простыми при-
примерами могут служить движение маятника под действием внешней гар-
гармонической силы, а также груза на пружине с нелинейной упругой восста-
восстанавливающей силой. В электротехнике уравнением A5.5) описывается,
например, неустановившийся режим синхронного мотора.
В динамической системе A5.5) в общем случае возможны перио-
периодические колебания разных типов, а также непериодические движения.
Среди периодических колебаний различают:
Глава 15 267
1) гармонические колебания; по определению это периодические коле-
колебания, частота которых совпадает с частотой Q внешней силы (или близка
к ней);
2) субгармонические колебания - колебания с частотами Q/п, где
«-2,3...;
3) ультрагармонические колебания - колебания с частотами пС1, П -
= 2,3...;
4) ультрасубгармонические колебания - колебания с частотами pCl/q,
где р и q - некоторые целые взаимно простые числа.
Подчеркнем, что ультра-, суб- и ультрасубгармонические колебания
составляют характерную особенность нелинейных систем; в линейных сис-
системах установившиеся колебания имеют только частоту внешней силы (т.е.
в линейных системах реализуются только гармонические колебания).
Прежде всего изучим гармонические колебания. В качестве харак-
характерного примера возьмем груз на пружине с нелинейной восстанавливаю-
восстанавливающей силой \)/(х). Запишем уравнение движения груза
тх = y(x)-hx + f0cosut, A5.6)
где т - масса груза; X - отклонение груза от положения равновесия;
\\i(x) - сила, действующая со стороны пружины; -hx - сила вязкого трения;
- внешняя сила. Ограничимся случаем, когда
= -кх - к'хъ.
Пружину называют жесткой, если к' > 0, и мягкой, если к' < 0. Коэф-
Коэффициент к всегда положителен. Уравнение A5.6) принимает вид
тх + hx + кх + к'хг =/0cosQ/. A5.7)
Уравнение A5.7) называют уравнением Дуффинга, который впервые
получил некоторые существенные результаты, относящиеся к гармоничес-
гармоническим решениям этого уравнения. Иногда уравнением Дуффинга называют
более общее уравнение A5.5). При к' - 0 получается обычный линейный
осциллятор, собственная частота которого в пренебрежении затуханием
(Л = 0) равна ш 0 = yjk/m.
Для изучения периодических решений уравнения A5.7) разработаны
изящные частные способы, основанные на разложении по малому парамет-
параметру или на методах последовательных приближений. Мы изучим гармоничес-
гармонические колебания в системе A5.7) с помощью метода Ван-дер-Поля.
В уравнении A5.7) введем новое время / = Q/ . Получим
нов ст
г х + jx + jx =^r
тп n?r тп2 тСг
" """' A5.8)
268 Часть 3
Здесь / - новое время, точкой отмечается дифференцирование по новому
времени.
Исследуем уравнение A5.8) при следующих предположениях: 1) трение
мало; 2) нелинейность упругой силы мала; 3)амплитуда,/? внешней силы
мала; 4)частота О. внешней силы близка к собственной частоте ю0, т.е.
разность П - а>0 мала; 5) все перечисленные величины имеют один и тот
же порядок малости.
Пусть \х - малый положительный параметр, физический смысл кото-
которого пока не конкретизируем. В соответствии с принятыми допущениями
запишем
где у, X, Р' - величины порядка единицы, а 0 < ц <к 1. Далее,
05.11)
Теперь уравнение AS.8) можно представить в виде
X + X = \lf(x,X,t), A5.12)
где
f(x,x,t) = &-$'x3 -yX + Xcost. A5.13)
15.3. Применение метода Ван-дер-Поля. Вывод уравнения резонансной кри-
кривой
Перепишем уравнение A5.12) в виде системы
х = у, у= -x + nf(x,y,t). A5.14)
Следуя методу Ван-дер-Поля, ищем решение этой системы в виде
х = acost + bsint; у = -asint + boost, A5.15)
где а и Ь - неизвестные функции времени (переменные Ван-дер-Поля).
После подстановки A5.15) в систему A5.14) получим
in/ = 0; -asinf + ^cos/ = ц/*, A5.16)
Глава 15
269
где
/* = /(acos/ + bsint, - asint + bcost, /).
Из уравнений A5.16) найдем
а - -ц/* sin /; b = ц/' cos /.
A5.17)
Правые части системы A5.17) - периодические функции явно входящего
времени / с периодом 2л. Параметр ц мал, следовательно, а и b - мед-
медленно меняющиеся функции времени; изменением этих функций в течение
одного периода можно пренебречь, и в соответствии с методом Ван-дер-
Поля правые части в точных уравнениях A5.17) можно заменить их сред-
средними значениями за период. В результате получим укороченную систему
2я
' О
2л
A5.18)
которая является нелинейной и автономной, в то время как исходная сис-
система A5.14) [или A5.17)] нелинейная и неавтономная.
Используя выражение A5.13) для функции/ определим правые части
в A5.18):
? +Ь2)-уа = А(а,Ь);
+Ь2)-уЬ + Х = В(а,Ь),
A5.19)
где т = ц//2 и р = Зр'/4.
Напомним, что состояниям равновесия укороченной системы отвечают
периодические движения исходной системы. Именно, наличие состояния
равновесия а0, Ьо системы A5.19) означает существование установившихся
колебаний с амплитудой (а2 +602I/2 в исходной системе A5.14). Эти
колебания устойчивы и реализуются на практике, если состояние равно-
равновесия а0, Ьо устойчиво.
Все состояния равновесия системы A5.19) определяются из уравнений
- ЗД + $ЬЛа1 + &?) - уа0 = 0; A5.20)
A5.21)
270 Часть 3
Пусть р - квадрат амплитуды вынужденных колебаний: р = а% + Z>02. Поль-
Пользуясь уравнениями A5.20), A5.21), найдем уравнение для определения р.
Умножим A5.20) на -До, A5.21) - на bQ и сложим эти уравнения. Получим
Ь0 = ур/Х. A5.22)
Умножим теперь A5.20) на bQ, A5.21) - на aQ и снова сложим полученные
уравнения. Найдем, что
0 A5.23)
Из A5.22) и A5.23) имеем
2 уу
0-1 + % = р = -?- +?
откуда после умножения на А,2 и деления на р получим
O2 + Y2P = XI. A5.24)
(При делении на р теряется корень р = 0, но этот корень не интересен,
так как значению р = 0 отвечает не периодический режим, а нулевое
решение системы без внешнего воздействия.)
Из формул A5.9)—A5.11) хорошо понятен физический смысл всех вели-
величин, входящих в уравнение A5.24). Именно, у>0 - параметр, характери-
характеризующий вязкое трение; при у=0 имеем консервативную систему; Х>0 -
параметр, характеризующий амплитуду внешней силы; Х=0 означает от-
отсутствие внешнего воздействия. Параметр Р характеризует нелинейность
восстанавливающей силы пружины. При Р = 0 рассматриваемая система
будет обычным линейным осциллятором. Параметр Р положителен для
жесткой пружины (к'>0) и отрицателен для мягкой пружины (к' <0).
Наконец, параметр ?, который обычно называют относительной рас-
расстройкой, характеризует частоту П внешней силы.
Уравнение A5.24) есть уравнение резонансной кривой рассматриваемой
нелинейной системы, ибо оно дает зависимость квадрата амплитуды вынуж-
вынужденных колебаний р от частоты внешней силы (точнее, от относительной
расстройки ?).
15.4. Построение резонансных кривых. Анализ устойчивости периодических
режимов
Прежде всего рассмотрим вынужденные колебания в нелинейной консер-
консервативной системе (у = 0). В этом случае уравнение A5.24) резонансной
кривой имеет вид
// A5-25>
Глава 15
271
Для построения этой кривой в плоскости ^, р строятся кривые % = рр и
4 = + А,Д/р (рис. 15.6); сложив абсциссы этих кривых, получим резонанс-
резонансную кривую A5.25) (рис. 15.7 и 15.8).
Каждой точке резонансной кривой
отвечают состояние равновесия укорочен-
укороченной системы A5.19) и периодические
колебания в исходной системе A5.12).
Имеются в виду именно вынужденные ко-
колебания; амплитуды собственных колебаний
отображаются ординатами точек прямой
^ = Рр. В эту прямую вырождаются резо-
резонансные кривые при X = О, т.е. при отсут-
отсутствии внешнего воздействия. Однако на
практике реализуются только устойчивые
периодические режимы, которые отвечают устойчивым состояниям рав-
равновесия укороченной системы. Устойчивость этих состояний и надлежит
рассмотреть.
Заметим, что в данном случае Ьо — 0. В самом деле, при у = 0 из
A5.20) имеем либо Ь0 = 0, либо 4 = РР> н0 последнее отвечает свободным,
а не вынужденным колебаниям.
Линеаризация уравнений A5.19) при ?„ = 0 дает
A5.26)
Учитывая, что а
темы A5.26) в виде
= р, запишем характеристическое уравнение сис-
сисA5.27)
272
Часть 3
Ограничимся случаем р > 0. Очевидно, что при
рР < 4
A5.28)
корни г, 2 уравнения A5.27) будут действительными и разного знака. Сле-
Следовательно, состояния равновесия укороченной системы при условии
A5.28) неустойчивы и характеризуются седловыми особыми точками. При
?>ЗРр и 4 < Рр корни уравнения A5.27) чисто мнимые, т.е. линеа-
линеаризованная система A5.26) имеет устойчивые положения равновесия типа
центр.
Покажем, что такого же типа положения равновесия имеют место и в
исходной нелинейной системе A5.19) (при у=0). В самом деле, из A5.19)
после исключения х получим уравнение
db
dx
которое не изменяется при замене Ь на -Ь. Это обстоятельство означает,
что интегральные кривые симметричны относительно оси Ь=0, на которой
как раз и находятся положения равновесия укороченной системы (при
у=0). Отсюда вытекает, что положения равновесия - центры (см. заклю-
заключительное замечание к Приложению 1).
В плоскости у»р проведем лучи ? = РР и ? = 3рр (рис. 15.19). Точки
резонансной кривой A5.25), расположенные внутри угла, образованного
этими лучами, соответствуют седлам, а
остальные участки резонансной кривой
отвечают центрам - устойчивым
положениям равновесия укороченной
системы.
Покажем, что луч ? = 3рр проходит
через точку А (см. рис. 15.9), в которой
dtjdp = 0. Действительно, в точке пе-
пересечения луча с кривой A5.25) выпол-
выполняется равенство ЗРр = Рр + Х,/-у/р, от-
откуда р = (Я,/2рJ/3. Кроме того, из
A5.25) имеем
3>0
Рис. 15.9
Для точки Л, где d^/dp = 0, получаем Р - (X/2)pi/2 = 0, откуда опять-
таки р = (А,/2рJ/3. Таким образом, луч ? = ЗРр действительно проходит
Глава 15
273
через точку А, где dtjdp = 0. В итоге получается картина, представлен-
представленная на рис. 15.9. При частотах внешней силы, соответствующих значени-
значениям ? < ?' (? - абсцисса точки А), укороченная система имеет одно
устойчивое положение равновесия и каждому значению ?, отвечает одна
амплитуда вынужденных колебаний. При частотах внешней силы, соот-
соответствующих значениям t, > ?*, укороченная система имеет три состояния
равновесия для каждого значения Ъ,. В соответствии с этим каждому значе-
значению расстройки 4 отвечают три различных значения амплитуды колебаний,
из которых два соответствуют устойчивым положениям равновесия и ре-
реализуются на практике.
Возможность двух колебательных режимов при фиксированной частоте
(и амплитуде) внешнего воздействия целиком обусловлена наличием нели-
нелинейности. Установление того или иного периодического режима опреде-
определяется начальными условиями.
Обратим внимание еще на одну особенность, также обусловленную
нелинейностью. Именно, в линейной консервативной системе при резонансе
размахи вынужденных колебаний растут неограниченно (формально р = оо
при % = 0). В нелинейной консервативной системе совершаются ограниченные
колебания как при 4 = 0, так и при Z, * 0, что хорошо видно из графиков
резонансных кривых на рис. 15.7-15.9.
Рассмотрим теперь общий слу-
случай неконсервативной системы.
Аналогия с предыдущим случаем го-
говорит о том, что качественный вид
резонансной кривой будет отобра-
отображаться рис. 15.10. Изучим, однако,
уравнение A5.24) резонансной кри-
кривой более подробно. Без ущерба для
общности положим у = 1. Это зна-
значит, что в качестве малого параметра
выбираем \L = h/mQ. [см. 15.19)]. ° 5*
Уравнение A5.24) примет вид Рис. 15.10
р
X2
р>о
'/Ж
/?
У//
—
/
¦?r+p = fc\ A5.29)
Найдем максимальное значение р. Продифференцируем A5.29) по ?:
D — ррJр' + 2р(Рр — ^)(Рр' — 1) + р' = 0. A5.30)
Полагая р' = 0, получаем t, = pp. При этом условии из A5.29) имеем
P = PMa*c=*-2- '. A5.31)
Таким образом, максимальное значение р лежит на луче ? = Рр и
равно X1 (см. рис. 15.10).
274
Часть 3
Найдем теперь точки резонансной кривой, в которых касательная к
кривой вертикальна. В этих точках р' = со . Полагая в A5.30) р' = оо,
получаем
A5.32)
Кривая A5.32) - гипербола с асимптотами ?, = рр и 4 = 3Cр. (Эта ги-
гипербола нанесена штрихом на рис. 15.10). Точки пересечения гиперболы
с резонансной кривой A5.29) дают искомые точки А к В, в которых ка-
касательные вертикальны.
Обозначим 4* и 4" абсциссы точек А и В. Очевидно, что укороченная
система при данном значении ^ имеет три состояния равновесия, если
4* < 4 < 4**> и одно состояние равновесия, если 4 < 4* или 4 > ?**•
Следует отметить, что три состояния равновесия существуют не всег-
всегда. Дело в том, что рмакс существенно зависит от параметра А,, а в уравнение
A5.32) для гиперболы этот параметр
не входит. С уменьшением X. располо-
расположение гиперболы не изменяется, а
Рмакс убывает. При некотором значе-
значении X = Хк точки А а В сливаются в
одну, являющуюся точкой касания ги-
гиперболы A5.32) и резонансной кри-
кривой A5.29). При X < X кривые
A5.32) и A5.29) вообще не имеют
общих точек, так что при X < X
существует только одно состояние рав-
равновесия для любого значения рас-
расстройки ^ (рис. 15.11). Лишь при
X > X имеется интервал (?*,4")> каждой точке которого отвечают три
состояния равновесия укороченной системы A5.19).
Перейдем к анализу устойчивости положений равновесия укороченной
системы A5.19). Линеаризуем ее в окрестности положения равновесия
а0, Ьо и получим
Рис. 15.1
dv
— =
где Q = Рр - ?,. Характеристическое уравнение этой системы
A5.33)
Глава 15
275
Сравнивая выражение свободного члена в A5.33) с уравнением A5.31),
видим, что для точек резонансной кривой, лежащих внутри гиперболы
A5.31), свободный член характеристического уравнения A5.33) отри-
отрицателен, следовательно, эти точки отображают неустойчивые положения
равновесия (седла). Все остальные точки резонансной кривой A5.29) от-
отвечают устойчивым положениям равновесия укороченной системы, ибо
для них все коэффициенты в A5.33) положительны.
Итак, во всех случаях, когда состояние равновесия укороченной сис-
системы единственно, оно непременно устойчиво и, следовательно, ус-
устойчивы и реализуются на практике соответствующие периодические дви-
движения исходной системы.
Если же А,> А, и 4*<4<4"> укороченная система имеет три положения
равновесия, из которых одно неустойчиво и два устойчивы. Соответственно
им исходная система имеет три различных амплитуды вынужденных ко-
колебаний при одном и том же значении расстройки ? из интервала D*,^**)-
Колебания с одной из этих амплитуд неустойчивы и на практике не ре-
реализуются. При значениях 4 вне интервала (?,', ?,") существует один
устойчивый периодический режим, и в этом отношении поведение нели-
нелинейной системы A5.7) не отличается от линейного случая, когда к' = 0.
15.5. Явление скачка
Резонансная кривая для X > Х.кр (воспроизведенная на рис. 15.12) позволяет
обнаружить еще одну характерную особенность в поведении системы, обу-
обусловленную нелинейностью.
Пусть при неизменной амплитуде внешней силы (А. = const) медленно
и непрерывно изменяется частота внешней силы (т.е. параметр %). Будем
наблюдать за изменениями амплитуды
р происходящих в системе гар-
гармонических колебаний. Рассмотрим,
например, случай жесткой пружины
(р>0). Пусть расстройка 4 достаточно
велика (соответствующая точка на
резонансной кривой лежит правее
точки 4, см. рис. 15.12). По мере того
как ? уменьшается, амплитуда р не- """"
прерывно возрастает, пока не будет до-
стигнута точка / (см. рис. 15.12).
Дальнейшее уменьшение 4 вызовет
скачок амплитуды от значения р, со-
соответствующего точке /, до значения, отвечающего точке 2 на рис. 15.12.
При дальнейшем уменьшении ? амплитуда р монотонно уменьшается.
При изменении ? в обратном направлении амплитуда колебаний непрерывно
возрастает до максимального значения, затем уменьшается до значения р
в точке 3, далее скачком падает до значения р в точке 4, после чего
р>0
Рис. 15.12
276
Часть 3
У
X
Рис. 15.13
\
происходит непрерывное уменьшение амплитуды с ростом %. Аналогичная
картина имеет место и для мягкой пружины (р < 0).
Важно отметить, что скачки амплитуды можно наблюдать, поддерживая
постоянным параметр ?, но изменяя параметр А, (т.е. изменяя амплитуду
fQ внешней силы). Скачки при измене-
изменении X возможны лишь в том случае, если
существует интервал D*,^**) и рабочее
значение ^ принадлежит этому интер-
интервалу. Иллюстрацией служит рис. 15.13.
При неизменной расстройке ? = ^' не-
непрерывное уменьшение параметра А. за-
заставляет скользить экстремум резонанс-
резонансной кривой вниз по лучу 4 = Рр> в ре-
результате чего при некотором значении X
амплитуда р скачком меняется от зна-
значения, равного ординате точки С, до
значения, равного ординате точки D.
Явление скачка неоднократно наблю-
наблюдалось экспериментально, например, Дуффингом в опытах с маятником
и рядом других авторов в электрических системах.
15.6. О методе Пуанкаре для неавтономных систем
Мы рассмотрели вынужденные колебания квазилинейной системы, описы-
описываемой уравнением Дуффинга, при малой (порядка ц) амплитуде внешнего
воздействия. Выяснили, что амплитуда вынужденных колебаний оказы-
оказывается существенной (порядка 1), если частота внешней силы близка (или
равна) собственной частоте со0. Как и в теории линейных систем, явление
интенсивных вынужденных колебаний при С1«соо называют резонансом.
Условимся называть его главным резонансом, потому что в нелинейных
(в частности, квазилинейных) системах возможен еще так называемый
резонанс я-ro рода - установление интенсивных вынужденных колебаний
с частотой, близкой к собственной частоте <о0, в то время как частота
внешней силы Q близка или равна значению П(О0, где п — натуральное
число. Другими словами, помимо главного резонанса, характеризуемого
возбуждением интенсивных гармонических колебаний, возможно также
установление субгармонических колебаний с частотой, близкой к fi/й
(если С1/п « 0H). Впервые резонанс «-го рода был проанализирован
Л.И. Мандельштамом и Н.Д. Папалекси.
Резонансы возможны и при более сложном соотношении между собст-
собственной частотой ю0 и частотой внешней силы Q: @0 = nQ + ПКй0 {п и т -
целые числа). В общем случае это соотношение эквивалентно условию
<о0 « (p/q)Q (рн q- взаимно простые числа), т.е. в этом случае получаем
резонанс на субгармониках.
Глава 15 277
Частные случаи:
1)/я = 0;/!=1- главный, или основной, резонанс;
2) Ш = -1,-2,...; П = 1 - резонанс на субгармониках (резонанс /7-го
рода);
3) т = 0; п = 2, 3,... - резонанс на ультрагармониках.
При теоретическом изучении главного резонанса выше применен метод
Ван-дер-Поля. Для анализа резонансов п-го рода часто используют метод
Пуанкаре. Он удобен также и для анализа вынужденных нерезонансных
колебаний, т.е. вынужденных колебаний нелинейной системы, когда ча-
частота Q внешней силы не равна и не близка к значениям лсо0, где п = 1,
2, 3, ..., а ©0 — частота собственных колебаний системы. В связи с этим
изложим основы метода Пуанкаре для неавтономных систем. (Его приме-
применение для расчета нерезонансных колебаний см. в §15.7, а для иссле-
исследования субгармонических колебаний - в §15.8.)
Теорема Пуанкаре (для случая вынужденных колебаний). Рас-
Рассмотрим нелинейную систему
X, = /;(/,*,,...,*„,ц), / = 1,...,Л. A5.34)
Пусть: 1) функции Ft - периодические функции явно входящего времени t
известного периода; в дальнейшем предполагается, что период равен 2л и,
следовательно, частоты внешнего воздействия - натуральные числа; 2) все
F. - аналитические функции переменных х,, ..., Хп в некоторой области
изменения последних и параметра ц для достаточно малых его значений;
3) при ц = 0 система A5.34) имеет периодическое решение
Х,=ф,@, / = 1,.-,И, A5.35)
того же периода 2я, что и функции Fr
Тогда: 1) при начальных условиях
х,.@) = ф,.@) + а/, / = 1,...,«, A5.36)
система A5.34) будет иметь решение
х, =х,(/,а,,...,ал,ц), / = 1,...,л, A5.37)
аналитическое относительно а,, ¦••,<*„ и ц при достаточно малых значениях
этих величин, обращающееся в A5.35) при ц = 0;
2) решение A5.37) системы A5.34) будет периодическим периода 2п,
которое можно разложить в ряды по степеням параметра ц, обращающимся
в A5.35) при ц = 0, если все а, можно определить из условий периодичности
функций A5.37)
V, =х,Bл,а1,...,ая,ц)-х;(О,а1,...,ал,ц) = О A5.38)
278 Часть 3
и если при этом ct(. = (Х(.(ц) будут аналитическими функциями параметра \х
при достаточно малых ц и сс(. = 0 при ц = О (/ = 1,...,«).
При выполнении условий теоремы Пуанкаре решение A5.37) предста-
вимо в виде
х, = ф,(/) + цф„(О + ц2ф,2 (/) + ..., A5.39)
где ф/р фд, ... - непрерывные периодические функции периода 2я.
Далее, если выполнены условия A5.38), то <Xj = ... = ал = 0 при ц = 0.
В самом деле, при ц = О
Ч/, = x,.Bti) - х,@) = ф,Bя) - ф,@) - а,. = О,
но ф,Bя) = ф(@), следовательно, а. = 0. Таким образом, функции \\ij
разлагаются в ряды по степеням а,,..., а , ц, исчезающие при а, = ... =
0
V/ = Ъщ +bi2a2+.. . + Ь1п<х„ +с,ц+...= 0, i = \,...,п.
Из теории неявных функций известно, что если
A = det{^}*0, A5.40)
то из уравнений A5.38) можно найти все а,, как функции ц с указанными
выше свойствами. В квазилинейных системах составление определителя
Д и последующее отыскание периодического решения не представит труда
- по крайней мере, в нерезонансных случаях. Иллюстрацией служит ре-
решение следующей задачи.
15.7. Нерезонансные вынужденные колебания
Пренебрежем вязким трением и запишем уравнение Дуффинга в виде
+ |jJt\ A5.41)
где jo. - малый параметр. Правая часть уравнения A5.41) - периодическая
функция / единичной частоты.
Предположим, что собственная частота ©0 не равна целому числу (нере-
(нерезонансный случай), и будем искать периодические вынужденные колебания
в виде ряда
x(t) = ф(/) + цф, (/) + ц2ф2 @+--
Подставим этот ряд в A5.41) и сравним коэффициенты при одинаковых
степенях ц слева и справа. Получим рекуррентные уравнения
Глава 15 279
Ф + ©оФ = Fsin t\ ф,+а>оф, =ф3; ф2 + ©оф2 = Зф2ф, ...
Общее решение первого (порождающего) уравнения таково:
<p(t) = Acos<n0t + Bsm<uot + ——-. A5.42)
co0 — i
Постоянные Аи В найдем из условий периодичности
<рB*)-ф@) = 0; фBл)-ф@) = 0,
которые с учетом A5.42) дают
A(cos 2moo -1) + В sin 2жо0 = 0; 1
- A sin 2лсо0 + B(cos 2тссо0 -1) = 0.J
Определитель Д однородной системы A5.43) отличен от нуля, поскольку
частота со0 отлична от целого числа:
Д = (cos27tco0 -1J + sin2 2жоо * 0.
Следовательно, А- В= 0, и порождающим решением будет периодическая
функция
Ц A5.44)
не содержащая никаких произвольных параметров.
Подставим A5.44) в уравнение для ф1 и после элементарных преобразо-
преобразований получим
C sin f ~ Sin 3/)'
4(ш2-1K
Общее решение этого уравнения записывается как
F3sin3t
= Д cosco0/ + Bl sincoo/
4(со2-1L 4(ш2-1K(ш2-9)'
Условия периодичности для ф, выражаются теми же однородными уравне-
уравнениями A5.43) с Д ?t 0. Следовательно, и здесь А{ = 2?, = 0. Ограничиваясь
первым приближением, получим единственное периодическое решение
уравнения A5.41) в виде
280 Часть 3
©о
3/sin/
^r(«2-i)j(»j-9)] A545)
Из решения A5.45) вытекают два вывода.
1. Наличие нелинейности в исходном уравнении A5.41) обусловило
возбуждение ультрагармонических колебаний с частотой, равной 3; правда,
в данном случае амплитуда этих колебаний мала - порядка ц.
2. Периодическое решение A5.44) порождающего линейного уравнения
и периодическое решение A5.45) квазилинейного уравнения A5.41) нахо-
находятся в определенном соответствии: первое решение близко ко второму
при малом ц и непрерывно переходит во второе при ц —> 0. Таково
типичное положение при Д * 0.
Иная ситуация складывается при Д = 0. Указанное выше соответствие
не выполняется: линейная порождающая система даже при малом ц не
воспроизводит с достаточной точностью все колебательные свойства квази-
квазилинейной системы. Последняя оказывается существенно нелинейной сис-
системой.
Пусть Д = 0 и т - ранг определителя Д. Тогда из уравнений A5.38)
можно найти т величин a,,...,affl, выразив их через ц, и остальные
п - т величин ост+],...,ал, которые, вообще говоря, могут принимать
произвольные значения. В итоге решения A5.37) будут зависеть от одного
или нескольких произвольных параметров. Такой случай встречается, на-
например, когда уже в порождающем решении содержатся произвольные
постоянные. Именно так происходит в анализе резонансных колебаний,
и задача заключается в таком подборе этих постоянных, при котором в
окрестности порождающего решения существует искомое периодическое
решение исходной системы. В конечном счете дело сводится к удов-
удовлетворению условий периодичности функций Фй@ в рядах A5.39). Спо-
Способы, которыми это достигается, могут быть различны. Один из них приме-
применен в §15.8. Другие способы см. в [20, гл. 1,2] и [15, гл. 2]. Напомним
еще раз, что в рамках метода Пуанкаре вопрос об устойчивости периоди-
периодических колебаний остается открытым.
15.8. Субгармонические колебания
Выше упоминалось, что в нелинейных осцилляторах под действием внеш-
внешней силы могут возбуждаться субгармоники, т.е. колебания с частотами
соя = С1/п, п — 2,3,..., где Q - частота внешнего воздействия. Это явление
называется также делением частоты. Оно было открыто Гельмгольцем и
описано в его книге по физиологической акустике [31]. Гельмгольц уста-
установил, что иногда человек воспринимает звуки, частоты которых не со-
Глава 15 281
держатся в приходящей звуковой волне и составляют п-ю часть от частоты
звукового сигнала (л - целое число). Гельмгольц объяснил это явление
нелинейными свойствами барабанной перепонки.
Не претендуя на полный анализ субгармонических колебаний, рас-
рассмотрим только субгармоники порядка 1/3 (частота вынужденных колебаний
составляет 1/3 частоты внешней силы). Ограничимся консервативным слу-
случаем: h = 0. Нелинейность считаем малой: к' мало. Представим урав-
уравнение A5.7) в форме
х + coqX + цх3 = Fsin Зсо/, A5.46)
где Зсо = С1 - частота внешней силы;
а>1 = к/т; F = fo/m; \х = к'/т; 0 < ц « 1.
Предположим также, что разность со — со0 мала (порядка \х). Наша цель -
показать, что решение уравнения A5.46) содержит составляющую с час-
частотой со, т.е. приближенное решение имеет вид
х(/) = До sin со/ + аг sin Зсо/. A5.47)
Покажем, что aQ Ф 0, более того, найдем приближенную зависимость
ао = ао(®)>те- построим резонансную кривую для субгармонических коле-
колебаний порядка 1/3.
Для отыскания а0 и аг воспользуемся методом Пуанкаре. Учитывая
малость ц, представим x(t) и со2 рядами по степеням ц:
О(ц3); A5.48)
со2, = со2 - цЦ +0(ц2). A5.49)
Подставив A5.48) и A5.49) в A5.46), запишем
х0 + со2дс0 + ц(х, + со2х, - П,х0 + х03) + 0(ц2) = Fsin Зсо/. A5.50)
За порождающее возьмем решение уравнения
х0 +со2хо = Fsm3(nt, A5.51)
получающегося из A5.50) при Ц = 0, которое имеет вид
*о(О = °о sin ^ + A) cos со/ + аъ sin Зсо/.
Здесь последнее слагаемое - частное решение неоднородного уравнения
A5.51). Непосредственная его подстановка в A5.51) дает
282 Часть 3
аъ = ¦?,. A5.52)
Дальнейшие выкладки могли бы показать, что член Z>0coSco/ не влияет на
окончательный результат, поэтому сразу примем Ьо = 0, так что
хо(*) = а0 sin со/ + аг sin Зсо/, A5.53)
где О3 определяется из A5.52).
Учтем теперь в A5.50) члены порядка ц и получим уравнение для х,(/):
х, + со2х, - Q,x0 + x\ = 0. A5.54)
Из A5.53) и A5.54) находим
х\ + со2*, = Q,(a0 sin со/ + аъ sin Зсо/) - (а0 sin со/ + a, sin Зсо/K =
3 2 3 3 Л .
" 4 °о + 4 <V*3 - 2 аз J«o sm со/ +
1 , 3 2 3
1 , 3 2 3 з! . ,
a3 + 4а° 2°° 3 ~ 4°3JSm ('555)
+ - аоа3 (а0 - аг) sin 5со/ + - о33 sin бсо/ + — о0а33 sin 7co/.
Это уравнение обычной линейной консервативной системы, собствен-
собственная частота которой равна со. На эту систему действуют гармонические
внешние силы различных частот, в том числе и частоты со [первое слагаемое
в правой части A5.55)]. Это значит, что решение х,(/) уравнения A5.55)
содержит непериодическое слагаемое вида /sin со/ (резонанс). Решение
будет периодическим только в том случае, когда член с sinco/ в правой
части A5.55) отсутствует, т.е. когда
Следовательно,
со2 » со2, + рП, = ©о + 4 ^(°о " аоаъ + 2аз)- <15-56)
Теперь подставим A5.52) в A5.56) и получим
Глава 15
283
со6 -со4с0о =
128
1-4-
+ 32-
A5.57)
Эта формула выражает зависимость амплитуды а0 субгармонических
колебаний (порядка 1/3) от частоты со. Эта зависимость представлена на
рис. 15.14.
Можно доказать, что точки, в которых касательная имеет положи-
положительный наклон, соответствуют неустойчивым решениям, но мы на этом
останавливаться не будем. Из рис. 15.14 видно, что субгармонические
колебания возбуждаются при частотах внешней силы Q = Зсо > Зсомин.
Минимальное значение со легко вычисляется из A5.57):
21ц/-2
Субгармонические колебания в системах типа A5.7) или A5.5) изуча-
изучались экспериментально. В частности, много опытов было проведено на
электрической схеме, изображенной на рис. 15.15 [26]. В этой схеме
гармоническим внешним воздействием служит переменное напряжение
S = S0SinQt. Нелинейным элементом является катушка индуктивности
со стальным сердечником.
00000
Рис. 15.14
Рис. 15.15
Ток /через катушку и магнитный поток ф связаны нелинейной зависи-
зависимостью
«'=/(ф), A5.58)
где И - число витков катушки. Уравнения Кирхгофа для схемы рис. 15.15
имеют вид
1
Щ
i> = RiR =SosinQt, RiR = - \icdt; i = iR + ic A5.59)
284
Часть 3
(обозначения см. на рис. 15.15). Исключая из A5.58), A5.59) переменные
/', iR и /с, приходим к уравнению
-^~
sinQ/+5,р cos Q/. A5.60)
Надлежащим выбором материала сердечника и воздушного зазора в нем
можно добиться, чтобы/= Cf<p + С3ф3, где с, и С3 - постоянные. В итоге
уравнение A5.60) оказывается уравнением Дуффинга. {Тот факт, что
справа стоит сумма, несуществен; она объединяется в одно слагаемое вида
Fosin (Qt + у), где Fo и V|/ - постоянные.]
К установке (см. рис. 15.15) подводилось переменное напряжение S
с частотой v = 60 Гц, и при надлежащих условиях получали электрические
колебания в контуре с частотой 20 Гц,
т.е. получали субгармоники порядка
1/3. Осциллограммы колебаний пред-
представлены на рис. 15.16 (VL и Vc -
напряжения на индуктивности и кон-
конденсаторе соответственно).
Теми же теоретическими и экспе-
экспериментальными средствами, с по-
помощью которых изучаются субгармо-
субгармонические колебания, можно иссле-
исследовать и ультрагармонические колеба-
колебания. В частности, они получены в
схеме рис. 15.15 при больших ампли-
амплитудах внешнего напряжения A50 В и
более). Ультрагармонические коле-
колебания, их устойчивость, а также ис-
исследование уравнения Дуффинга на
аналоговой машине описаны в работе
[29]. Подробное описание вынужденных колебаний в системе типа A5.7)
содержится в монографии [27].
15.9. Действие двух гармонических сил. Комбинационные тона
Напомним сначала о процессах в линейной системе. Если на нее одно-
одновременно действует несколько гармонических сил с частотами Qi (/ = 1,
2,...), то в этой системе возникают вынужденные колебания, спектр
которых состоит из тех же частот Qp ибо хорошо известно, что вынуж-
вынужденные колебания линейной системы - это суперпозиция (линейная ком-
комбинация) таких вынужденных колебаний, которые установились бы в
системе при действии каждой отдельной возмущающей силы частотой Пг
Принципиально иная ситуация возникает в нелинейных системах: в
спектре вынужденных колебаний содержатся частоты не только Qp но и
1 \J
0
У<\ —^
0
Рис. 15.15
Глава 15
285
ntQ.t, где п. - целые числа. Колебания с частотами ]Г Я,Ц > иногда
i 1
называют комбинационными тонами.
Рассмотрим воздействие двух гармонических сил на ту же нелинейную
систему, на примере которой исследовались субгармонические колебания.
Исходное уравнение
х + ®20х + цх3 = Fx
+
cosf22/.
A5.61)
Здесь 0 < ц <sc 1; Fv F2 и П,, fi2 - амплитуды и частоты внешних сил
соответственно. Анализ уравнения A5.61) будет нестрогим, а основная
его цель состоит в доказательстве существования комбинационных тонов,
т.е. колебаний с частотами niQl + n?lv где Пх и Пг - целые числа.
При ц. = 0 уравнение A5.61) становится линейным, а вынужденные
колебания имеют вид
x(t) -
cosQ,/ + А2
Пусть теперь (Д. * 0. Обозначим ц =
решение уравнения A5.61) в виде
x(t) = Л,
^,
где 0 < Р <к 1, и будем искать
A5.62)
где А1иА-- подлежащие определению амплитуды; у - искомая функция
времени. Подставим A5.62) в A5.61) и затем выполним в A5.61) следую-
следующие преобразования: заменим ц на Р © \ и перенесем все члены в левую
часть A5.61); вычислим X3, возведя в куб сумму, стоящую справа в A5.62);
степени синусов и косинусов выразим через первые степени синусов и
косинусов (естественно, уже других, аргументов); ограничиваясь первым
приближением, отбросим все члены, содержащие параметр Р в степени
выше первой; соберем отдельно члены, содержащие cosfi,/, cosQ2t, и
все остальные члены. В итоге получим
= 0,
A5.63)
где
©3 -:
,2
3
'41
41
A2-F2;
286 Часть 3
+ 2Cl2)t +
+ A] cos3?ty + A\ cos3n2/|.
Равенство A5.63) должно вьтолняться при всех t, следовательно, 4^ = 0,
*F2 = 0, Ф = 0. Первые два равенства позволяют найти Ах и А2, а из
условия Ф = 0 можно определить у.
Ограничимся анализом нерезонансного случая, т.е. предположим, что
собственная частота «>0 не равна и не близка ни частоте Clv ни частоте
С12, так что разности ©Ц - П2 и ©jj - fi?, много больше 0. При таком
предположении (и при условии Р « 1) из уравнений Ч'^О, Т2 = 0
получим следующие приближенные выражения для амплитуд Ах и А^.
1 =
F F
7Т ' Л = —j
т.е. при сделанных оговорках Аг и А2 имеют такой же вид, как в линейном
случае.
Рассмотрим теперь уравнение Ф = 0. Перепишем его в виде
у + © 20у = Рп cosBQ, + Q2) / + P2l cosBn, - Q.2) t +
+ Pn cos(n, + 2Q.2)t + Pn cos(n, - 2П2)/ +
+ До cos ЗШ + A, cos ЗШ, A5.64)
где
-_I 2j3- P --- *Аг
4 ' 4
Уравнение A5.64) - линейное неоднородное уравнение второго порядка
с постоянными коэффициентами. Его частное решение, описывающее
вынужденные колебания, имеет следующий вид:
= Р21 cosBQ, + Q2)t P2i 005B^! - Cl2)t ^
G>l-Bnl + n2J oj-c^-n,J
Pn cos(fi, + 2П2) / Р12 cos(fi, - 2Q2) /
+ +
Глава 15 287
A565>
Подставив выражения для Av А2 и y(t) в A5.62), получим искомое
решение (с точностью до Р). Из A5.65) видно, что это решение имеет
смысл при условии, что собственная частота о0 не лежит вблизи частот
2П, +П2; 2П, -fi2; Q, + 2П2; ft, -2П2; ЗП,; ЗП2. A5.66)
В противном случае член $у в A5.62) нельзя считать малой величиной
порядка р.
Таким образом, в отличие от линейной системы здесь имеется свое-
своеобразный эффект: возмущающие силы вызывают не только колебания
с частотами этих сил, но также дополнительные колебания с частотами
A5.66) - комбинационные тоны. В зоне звуковых частот это может при-
привести к нежелательным явлениям. Так, в громкоговорителе восстанав-
восстанавливающая сила мембраны нелинейна. При возбуждении двух различных
тонов (посредством периодических электромагнитных сил) с частотами
Qj и С12 возникнут не только колебания с частотами П, и О.2, но и ком-
комбинационные тоны. Если эти тоны также лежат в области слышимости,
то передаваемая по громкоговорителю музыка будет ими искажена. Ана-
Аналогичной причиной объясняется другое явление, изученное Гельмгольцем.
Именно, человеческое ухо, испытывающее действие двух тонов с частотами
С1. и Q,, воспринимает не только их, но и тоны с круговыми частотами
2П,, 2Clv Q, + Q2 и Q, - Q,2, что объясняется нелинейной упругой ха-
характеристикой барабанной перепонки.
Вывод. Вынужденные колебания линейной системы слагаются из ко-
колебаний тех же частот, что и частоты внешних воздействий (хотя амплитуда
и фаза вынужденных колебаний данной частоты в общем случае отличается
от амплитуда и фазы колебаний той же частоты внешней силы). Спектр
вынужденных колебаний в нелинейной системе содержит не только частоты
внешних воздействий, но и дополнительные частоты (комбинационные
тоны). Этот вывод справедлив и для систем с П степенями свободы.
В заключение еще раз перечислим особенности вынужденных колеба-
колебаний в диссипативной системе, обусловленные нелинейностью. Эти особен-
особенности таковы: 1) существование участков многозначности резонансной
кривой и соответственно возможность двух амплитуд вынужденных гармо-
гармонических колебаний при одной и той же частоте внешней силы; 2) явле-
явление скачка амплитуды вынужденных колебаний при непрерывном изме-
изменении частоты внешней силы; 3) то же явление при непрерывном из-
изменении амплитуды внешней силы; 4) возникновение суб-, ультра- и
ультрасубгармонических колебаний; 5) ограниченная амплитуда вынуж-
вынужденных колебаний в консервативной системе даже при точном резонансе,
когда ?, = О (соо = ft); 6) наличие комбинационных частот (тонов) при
действии нескольких синусоидальных внешних сил.
288 Часть 3
Задачи
15.1. Исходя из формулы A5.24), постройте резонансную кривую линейной
неконсервативной системы.
15.2. Докажите, что частота © собственных колебаний нелинейной
консервативной системы и амплитуда колебаний взаимосвязаны. За
основу рассуждений возьмите формулу A5.24) при А, = 0, у = 0, но
при этом под разностью 1 - ц? следует понимать отношение
к/та2 - ©о/со2.
15.3. Привлекая качественные методы из гл. 2, докажите, что система
A5.19): а) предельно ограничена; б) не содержит замкнутых фазовых
траекторий; в) если имеет единственное положение равновесия, то
оно непременно устойчиво.
15.4. Дано уравнение
х + cuqX + цх2 = Fl cosQj/ + F2 cosQj/, 0 < ц « 1.
Докажите существование комбинационных тонов в спектре вынуж-
вынужденных колебаний.
Глава 1 6. АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА
ПРИ ПЕРИОДИЧЕСКОМ ВНЕШНЕМ ВОЗДЕЙСТВИИ.
ЯВЛЕНИЕ ЗАХВАТЫВАНИЯ
16.1. Постановка задачи
При действии периодической внешней силы на автоколебательную систему
возникает явление, которое называют принудительной синхронизацией или
захватыванием. Это явление состоит в том, что при достаточно малой
разности между частотой внешней силы и частотой автоколебаний ус-
устойчивое периодическое движение в системе приобретает частоту внешней
силы; внешняя сила навязывает свой темп автоколебательной системе,
"захватывает" систему. Теория этого явления, прежде всего, должна отве-
ответить на вопрос, какова величина интервала захватывания, т.е. какова
наибольшая разность частот, при которой еще происходит захватывание.
Если эта разность велика, то оказывается (и ниже это будет показано),
что захватывание уже не имеет места, и в системе наступает режим квази-
квазипериодического движения с двумя основными частотами, из которых одна
- частота Q внешней силы, а другая - измененная частота автоколеба-
автоколебательной системы: x(t) = a(f)cos Clt + b(f)sin fit, где a(t) и b(t) - пе-
периодические функции /, период которых не равен и, вообще говоря, не
соизмерим с периодом колебаний внешней силы.
Действие периодической внешней силы на автоколебательную систему
рассмотрим на характерном примере - ламповом генераторе с гармо-
гармоническим источником напряжения в колебательном контуре. Исходное
уравнение динамики такой системы записывается в виде
d2u du
LC-^ + [RC - MS(u)\— + и = S0cosut, A6.1)
где L, Rn С - индуктивность, сопротивление и емкость колебательного
контура; М - коэффициент взаимоиндукции; 50иЙ- соответственно
амплитуда и частота внешнего источника напряжения; и - переменная
составляющая напряжения на сетке лампы; S(u) - крутизна характеристики
лампы. Характеристику возьмем кубической и симметричной, так что
S(u) = S0(l-u2/u*), A6.2)
где SQ - стационарное значение крутизны в рабочей точке, а и0 - поло-
положительная константа, имеющая размерность напряжения (в дальнейшем
конкретное значение UQ не понадобится).
290 Часть 3
В отсутствие внешней силы (So = 0) имеем нелинейную автономную
систему с единственным положением равновесия и = и = 0. Анализ устой-
устойчивости по уравнениям A6.1), A6.2) при ?0 - 0 показывает, что оно
неустойчиво, если
MS0-RC>0. A6.3)
Неравенство A6.3) называют условием самовозбуждения генератора. Счи-
Считаем это условие выполненным.
Сократим число параметров в уравнениях A6.1), A6.2). С этой целью
перейдем к новой безразмерной переменной Хи новому времени /':
I MSn U . _
Подставив A6.2) в A6.1), получим
A6.4)
Здесь ©q = \/LC, а точкой помечено дифференцирование по /'.
Будем считать разность MSQ - R С малой и примем в качестве малого
параметра (j. величину
Частоту Q внешней силы полагаем близкой к частоте й0, так что
- малая величина порядка \i; ? < 1 - расстройка.
Амплитуду ?0 внешней силы также будем считать малой, настолько
малой, что коэффициент перед COS/' в уравнении A6.4) можно рассматри-
рассматривать как малую величину порядка ц. Обозначим этот коэффициент \хХ.
Тогда уравнение A6.4) преобразуется в уравнение Ван-дер-Поля
A6.5)
В отсутствие внешней силы (X = 0) получим автономную автоколеба-
автоколебательную систему, фазовый портрет которой содержит единственный устой-
устойчивый предельный цикл (см. гл. 2). Перейдем к анализу уравнения A6.2).
Глава 16 291
16.2. Построение "резонансных кривых"
Уравнение A6.5) при малом \1 описывает нелинейную динамическую сис-
систему, близкую к гармоническому осциллятору, к которой можно применить
метод Ван-дер-Поля. Положим
х = a(t')cost' + b(t')sint'; I
у = х = -a(t')sint' + b(t')cost',j
и составим укороченные уравнения. После стандартных выкладок получим
укороченную систему в виде
dv A66)
— = v(l - u2 - v2) + ?h + A = Q(w, v),
ax
где Ы = a/2; V = A/2; т = \xt'/2; A - X/2. В A6.6) всего два параметра:
расстройка ?, характеризующая разность между частотой С1 внешней ЭДС
и собственной частотой а>0, и параметр А, характеризующий амплитуду
внешней силы.
Состояния равновесия укороченной системы определяют периодичес-
периодические режимы исходной системы: если M0=fl0/2; vo=AQ/2- состояние равно-
равновесия системы A6.6), то (Wq + v^I/2 - половина амплитуды колебаний
в исходной системе. В связи с этим рассмотрим состояния равновесия
системы A6.6). Они находятся из уравнений
vo(l - ul - v02) + ?u0 = A.)
Умножим первое уравнение на и0, а второе - на v0 и после сложения
уравнений получим
vo=-p(l-p)/A, A6.7)
где р = и2 + Vq - квадрат половины амплитуды колебаний. Теперь умно-
умножим первое уравнение на -VQ, а второе - на UQ и вновь сложим эти уравне-
уравнения. В результате имеем
ио=-?,р/А. A6.8)
Наконец, возведем в квадрат равенства A6.7) и A6.8) и после их сложения
получим соотношение для нахождения р:
292
Часть 3
рA - рJ + ?2р = А2. A6.9)
Таково уравнение "резонансной кривой". Оно определяет зависимость
квадрата амплитуды колебаний от расстройки 4 и параметра А. Термин
"резонансная кривая" здесь взят в кавычки и носит чисто условный смысл,
ибо понятие резонаса для автоколебательных систем не определено. По-
Построим кривую A6.9) и затем выясним устойчивость состояний равновесия
системы A6.6), отвечающих точкам этой кривой.
Уравнение A6.9) в плоскости ^, р определяет семейство кривых, соот-
соответствующих различным значениям А2. Очевидно, что все кривые A6.9)
симметричны относительно оси р. При А = 0, когда внешняя сила отсут-
отсутствует, кривая A6.9) вырождается в точку ? = 0, р= 1 и прямую - ось
абсцисс. Точке ? = 0, р= 1 отвечают автоколебания лампового генератора
в отсутствие периодического источника напряжения. При малых, отличных
от нуля значениях А кривые A6.9) состоят из двух отдельных кривых для
каждого значения А. Одна кривая близка к точке ?, = 0, р = 1 (замкнутая
кривая типа эллипса, охватывающая эту точку), а вторая кривая распола-
располагается вблизи оси абсцисс (рис. 16.1). При некотором значении А = А
эллипсоидальная замкнутая кривая смыкается с нижней ветвью и образуется
единая петлеобразная кривая, изображенная на рис. 16.1 штрихом. Точка
смыкания лежит на оси ординат и соответствует значению р = 1/3; кри-
критическое значение А2 равно 4/27. При значениях А2 > 4/27 "резонансные
кривые" имеют вид, представленный на рис. 16.2. При построении этих
кривых было найдено геометрическое место вертикальных касательных
Рис. 16.2
к кривым путем дифференцирования уравнения A6.9) и наложения тре-
требования dp/dE, = оо. Таким геометрическим местом является эллипс
Z? + A - р)A - Зр) = 0, A6.10)
который на рис. 16.2 нанесен штриховой линией. Каждая "резонансная
Глава 16 293
кривая" может иметь четыре, две вертикальные касательные или не иметь
ни одной. Кривая, соответствующая значению А = 8/27, имеет две вер-
вертикальные касательные в точках касания этой кривой с эллипсом A6.10).
Для значений А2 > 8/27 "резонансные кривые" вообще не имеют точек
пересечения с эллипсом и, следовательно, не имеют вертикальных каса-
касательных. Для значений 4/27 <А2< 8/27 каждая "резонансная кривая"
пересекает эллипс в четырех точках и соответственно имеет четыре вер-
вертикальные касательные. Для значений А2 <4/27 каждая кривая A6.9)
дважды пересекает эллипс A6.10). В соответствии с этим имеются две
вертикальные касательные.
Отметим также, что лучи р = ? и р = -? касаются эллипса A6.10) в
точках Ъ, = 1/2; р = 1/2 и ^ = -1/2; р = 1/2 соответственно, причем кривая
A6.9), проходящая через эти точки, отвечает значению А = 1/4.
16.3. Устойчивость гармонических колебаний. Явление захватывания
Каждой точке каждой "резонансной кривой" отвечает состояние равновесия
укороченной системы A6.6) и вместе с тем режим гармонических колебаний
исходной системы A6.5). Этот режим устойчив (и, следовательно, ре-
реализуется на практике), если устойчиво соответствующее положение рав-
равновесия укороченной системы.
Пусть и0, VQ - состояние равновесия системы A6.6). Линеаризуем
уравнения A6.6) в окрестности точки И„, Vo. Получим
— = A - Ъщ - vQ)u - Bm0v(
0
dv
A6.11)
— = (?, - 2u0vQ)u + A - u02 - 3vo2)v.
Характеристическое уравнение системы A6.11) таково:
г2 + 2Bр - 1)г + A - р)A - Зр) + %2 = 0. A6.12)
Необходимое и достаточное условие устойчивости - положительность
коэффициентов уравнения A6.12), т.е.
2р - 1 > 0; A - р)A - Зр) + ?2 > 0.
Таким образом, область устойчивости в плоскости ?, р лежит выше
горизонтали р = 1/2 и одновременно вне эллипса A6.10). Эта область
изображена на рис. 16.3. Внутренним точкам эллипса соответствует от-
отрицательный свободный член уравнения A6.12), т.е. им отвечают седловые
особые точки укороченной системы.
294
Часть 3
Составим дискриминант уравнения A6.12):
При Д<0 корни уравнения A6.12) - комплексные, а особые точки
укороченной системы - типа фокуса (устойчивого при р > 1/2 и неус-
неустойчивого при р < 1/2). Аналогично при Д > 0 получаются устойчивые
или неустойчивые узлы. Таким образом, прямые р = ^ и р = -? служат
границей, разделяющей на плоскости ?, Р точки, отвечающие узлам и
фокусам.
Р ''^ Неустойчивые фокусы
Рис. 16.3
Теперь вернемся к рассмотрению "резонансных кривых" (одна из них
изображена штриховой линией на рис. 16.3). Из изложенного ясно (см.
также рис. 16.2), что при А2>8/27 для каждого значения частоты внешней
силы (для каждого значения ?) возможен только один вид колебаний.
Эти колебания будут устойчивыми для тех значений %, для которых р >
> 1/2, и неустойчивыми, если р< 1/2. Если же А2 < 8/27, то при больших
значениях \ будет один, и притом неустойчивый, периодический режим
(см. рис. 16.1-16.3). При малых значениях расстройки t, возможны и три
различных режима, из которых один - с наибольшей амплитудой - будет
непременно устойчивым, а один - с минимальной амплитудой - неус-
неустойчивым. Колебания со средним значением р могут быть устойчивыми
для тех значений А2, при которых "резонансная кривая" пересекает эллипс
дважды, причем абсцисса нижней точки пересечения расположена между
4 = 1/2 и \ = 1/V3 (см. рис. 16.3)
Итак, устойчивые гармонические колебания всегда существуют, если
расстройка ? достаточно мала. Обратим внимание на то, что частота ко-
колебаний определяется расстройкой ^, т.е. частота колебаний генератора
совпадает с частотой внешней силы. Получается, что генератор, соверша-
совершающий в отсутствие внешней силы автоколебания с собственной частотой'1,
''Еще раз напомним, что эти автоколебания отображаются точкой
рис. 16.1-16.3.
О, р = 1 на
Глава 16 295
начинает колебаться с иной частотой, равной частоте внешней силы. Это
явление и называется принудительной синхронизацией лампового генера-
генератора, или захватыванием.
Дополнительной иллюстрацией к сказанному может служить рис. 16.4.
Для "резонансной кривой", представленной на этом рисунке, синхро-
синхронизация осуществляется при расстройках 4 из интервала -?, <?<?,.
Р = 1/2 I |
Рисунки 16.1-16.4 позволяют сделать следующие выводы:
1) чем больше амплитуда внешней силы (т.е. чем больше значение
А2), тем шире частотный интервал, внутри которого имеет место захваты-
захватывание;
2) любой, сколь угодно малый внешний гармонический сигнал будет
синхронизовать генератор, но интервал синхронизации сокращается с
уменьшением амплитуды этого сигнала (с уменьшением параметра А).
Таковы два основных результата теории захватывания, полученные
А.А. Андроновым и А.А. Виттом [1].
16.4. Анализ движений при больших значениях расстройки
Выясним характер движений в автоколебательной системе при значениях
расстройки 4, лежащих вне интервала захватывания (-?,, ?,)¦ С этой целью
проведем качественное исследование укороченной системы A6.6) на фа-
фазовой плоскости U, V и докажем, что система A6.6) имеет единственный
и притом устойчивый предельный цикл.
Прежде всего отметим, что при рассматриваемых значениях расстройки
\ в системе A6.6) имеется единственное и притом неустойчивое положение
равновесия типа неустойчивого фокуса или узла (см. рис. 16.3, 16.4).
Докажем теперь, что система A6.6) предельно ограничена. Действи-
Действительно, возьмем V(u,v) = (и2 + v2)/2 и получим
Се, =(«2+v2)(l-«2-v2) + /iv. A6.13)
Из A6.13) видно, что при достаточно больших значениях суммы
и2 + v2 производная V(l6 6) строго отрицательна, и, следовательно, система
296
Часть 3
A6.6) предельно ограничена. Геометрически этот результат означает, что
существует окружность и2 + V2 = R2 доста-
достаточно большого радиуса R, которую фазо-
фазовые траектории системы A6.6) пересекают
в направлении снаружи внутрь (рис. 16.5).
Таким образом, существует односвязная
область, в которую все фазовые траектории
входят и внутри которой находится единст-
единственное положение равновесия типа неустой-
неустойчивого узла или фокуса. Значит, в этой об-
области находится по крайней мере один ус-
устойчивый предельный цикл (см. §2.7).
Рис. 16.5
Воспользуемся теперь критерием Бендиксона и получим
A6.14)
Внутри окружности и2 + V2 = 1/2 это выражение положительно, следова-
следовательно, все предельные циклы лежат вне этой окружности, т.е. в кольце-
кольцеобразной области, внешней границей которой является окружность и2 +
+ V2 = R2, где R достаточно велико, а внутренней границей служит ок-
окружность и2 + V2 = 1/2. Применим критерий Бендиксона для этой кольце-
кольцеобразной области. Получим опять-таки равенство A6.14). В рассматривае-
рассматриваемой области всюду D < О, следовательно, в этой области система A6.6)
имеет не более одного предельного цикла.
Но согласно доказанному выше система
A6.6) в этой области имеет по крайней мере
один устойчивый предельный цикл. Таким
образом, имеется единственный и притом
устойчивый предельный цикл системы
A6.6), который охватывает окружность
и2 + V2 = 1/2. Фазовый портрет системы
A6.6) представлен на рис. 16.6. Установив-
Установившееся движение укороченной системы - это
периодическое движение, соответствующее
устойчивому предельному циклу; таким об-
образом, переменные Ван-дер-Поля а(?) и b(t) - периодические функции
времени.
Решение исходного уравнения A6.5) имеет вид
Рис. 16.6
x(t') = a(t') cos Г + b(t') sin /'; |
x(t') = -fl(/')sin /' + b(t') cos t'.\
A6.15)
Глава 16
297
Период функций a(t') и b(t') не равен и, вообще говоря, не соизмерим
с периодом внешней силы. Формулы A6.15) выражают квазипериодичес-
квазипериодические колебания ("биения").
Анализ укороченной системы A6.6) позволяет проследить за изменени-
изменением фазового портрета этой системы при постепенном увеличении рас-
расстройки ?,. Опуская этот анализ, приведем характерные фазовые портреты
системы A6.6), взятые из работы [1] и соответствующие значению Аг <
< 4/27.
На рис. 16.7 дан фазовый портрет укороченной системы при ^ = О
("точный резонанс"). В согласии с рис. 16.1 здесь три состояния равно-
равновесия. Их типы (при А2 < 4/27) уже известны: устойчивый узел, седло и
неустойчивый узел. Сепаратрисы седла выделены жирными линиями.
Картина симметрична относительно оси ординат. При большой расстройке
симметрия пропадает, состояния равновесия несколько смещаются, но
топологическая структура фазового портрета остается прежней (рис. 16.8).
Рис. 16.7
Рис. 16.8
При дальнейшем увеличении расстройки ^ устойчивый узел и седло сбли-
сближаются, а неустойчивый узел превращается в неустойчивый фокус. При
Ь, = 4, седло и устойчивый узел сливаются, образуя сложную особую точку
седло-узел (рис. 16.9). а при дальнейшем увеличении ? эта особая точка
пропадает, сепаратрисы превращаются в предельный цикл, и в итоге полу-
получается фазовый портрет, изображенный на рис. 16.10.
Рис. 16.9
Рис. 16.10
Глава 17. ПАРАМЕТРИЧЕСКИЕ КОЛЕБАНИЯ
17.1. Физические примеры
Во многих случаях внешнее воздействие на колебательную систему заклю-
заключается в периодическом изменении одного из ее параметров (длины маят-
маятника, емкости колебательного контура и т.п.). Возникновение колебатель-
колебательного процесса из-за периодического изменения параметров называется
параметрическим возбуждением колебаний, а колебания называются пара-
параметрическими.
Дифференциальные уравнения движения содержат параметры в коэф-
коэффициентах, поэтому параметрические колебания описываются дифферен-
дифференциальными уравнениями с периодическими коэффициентами.
Приведем примеры систем с переменными (периодическими) пара-
параметрами.
Пример 1 - маятник переменной длины (рис. 17.1). Подтягивая и от-
отпуская конец нити (точка А), мы изменяем длину / маятника. В пренеб-
пренебрежении трением уравнение движения маят-
— ника имеет вид
jt M, A7.1)
где / = ml2 - момент инерции, М =
Рис. 17.1 = - mgkinQ - момент силы тяжести. Оба
момента берутся относительно оси 0, пер-
перпендикулярной плоскости чертежа. Длина / = /(/) - функция времени.
Подставим в уравнение A7.1) значения /и М'.
т12в + 2m//0 + mgl sin 9 = 0. A7.2)
Полагая малыми изменения длины / и отклонения маятника, отбросим
второе слагаемое в уравнении A7.2) и положим Sin 9 « 9. Тогда после
сокращения на ml2 получим линеаризованное уравнение маятника
0 + ?@)//(') = 0. A7.3)
Пример 2 - маятник с вибрирующей точкой подвеса (рис.17.2). Уравне-
Уравнение движения маятника
Глава 17
299
где / = ml2; М, М и М - моменты силы тяжести, силы трения и
переносной силы инерции соответственно; М = -mglsmv, M^ = -К У,
X' = const. Переносная сила инерции равна
- ту, где у = y(f) - вертикальное переме-
перемещение точки подвеса (точки 0), таким обра-
образом, Л/ин = -/wy/sinO, а уравнение A7.4)
принимает вид
A7.5)
Рис. 17.2
где X = X'/ml2; y(t) - известная функция
времени t. При малых отклонениях маятника (sin0 и 6) и в пренебрежении
трением (X = 0) получим уравнение типа A7.3):
A7.6)
Очевидно, что все качественные явления, которые можно наблюдать на
маятнике переменной длины, можно также получить и на маятнике с ко-
колеблющейся точкой подвеса (по крайней мере, в линейном приближении).
Пример 3 - колебательный контур с переменной емкостью (рис. 17.3).
Пусть С- плоский конденсатор, расстояние dмежду пластинами которого
изменяется по периодическому, например си-
синусоидальному, закону: d = do(\ + kcosat).
Уравнение колебательного контура в прене-
пренебрежении сопротивлением записывается как
Lq + д/С = 0, где д- заряд на конденсаторе.
Известно, что С = S/And, где S - площадь
пластины конденсатора, поэтому уравнение
контура принимает вид
I—ЪЖТПГ 1
Рис. 17.3
= 0.
A7.7)
Это уравнение с периодическими коэффициентами называют уравнением
Матьё.
Уравнение A7.7), а также уравнения A7.3), A7.6) при периодических
функциях /(/) и y(t) - частные случаи уравнения Хилла х + P(t)x = 0,
где P(t) - периодическая функция времени.
В более общих случаях задача сводится к системе линейных диф-
дифференциальных уравнений с периодическими коэффициентами
300 Часть 3
л@**» S = l,...,n, A7.8)
*=i
где psk - периодические функции периода Т:
Рассмотрим подробнее уравнения A7.8).
17.2. Аналитический вид решений системы A7.8). Теория Флоке
Пусть уравнения A7.8) удовлетворяют теореме Коши о существовании и
единственности решений. Докажем, что система A7.8) имеет решение
*,(/), ...,Xn{t), которое "воспроизводит себя" через период 7" с точностью
до некоторого постоянного множителя р:
x3(t + T) = pxs(t), s = l,...,n. A7.9)
Пусть xJJ) (s,i= 1,..., п) - фундаментальная система решений урав-
уравнений A7.8). Любое решение системы A7.8) [в том числе и решение,
подчиняющееся условию A7.9), если это решение существует] можно
представить как линейную комбинацию фундаментальных решений:
п
X, @ = Z М* @, S = l,...,n, A7.10)
откуда
Xs(t + Т) = ?РЛД/ + Т), S = 1.....Л A7.11)
(=1
Функции xj^t) - решения системы A7.8); функции Xsj(t+ T) также будут
решениями этой системы, ибо уравнения A7.8) имеют периодические
коэффициенты периода Т. Следовательно, функции xjj+ T) тоже можно
представить как линейную комбинацию фундаментальных решений Xsl(t):
анх,Л*), S,i = l,...,n. A7.12)
JUl
Подставим A7.12) в A7.11), а затем A7.11) и A7.10) - в A7.9). Полу-
Получим
В сумме справа обозначим индекс суммирования к. Тогда
Глава 17
301
) = о,
/ *
откуда
Функции XJ/fc линейно независимы, поэтому равенство нулю их линейной
комбинации возможно только в том случае, когда все коэффициенты перед
Xjk равны нулю:
= 0,
или в развернутой записи
A7.13)
Ищется нетривиальное решение A7.10), поэтому не все коэффициенты 0.
равны нулю. Следовательно, должен быть равен нулю определитель сис-
системы A7.13):
а
21
лп\
Лп2
= 0.
A7.14)
Таким образом, решения Xs(t) системы A7.8), подчиняющиеся усло-
условию A7.9), существуют и "воспроизводят себя" через период Тс точностью
до множителя р, которым является корень уравнения A7.14). Каждому
простому корню р отвечает одно и только одно решение Х,(/), ..., *„(/)>
подчиняющееся условию A7.9). Уравнение A7.14) называется характерис-
характеристическим, а его корни р(,..., рл называются характеристическими числами
или мультипликаторами.
Назовем характеристическими показателями Хк системы A7.8) величи-
величины, связанные с характеристическими числами равенствами
рк=ехр(\кТ), к = 1,...,П.
Перепишем условие A7.9) в виде
xs(t + Т) = ехр(ХГК@, s = 1 л. A7.9а)
Покажем теперь, что решение Xs(t) системы A7.8), удовлетворяющее ус-
302 Часть 3
ловию A7.9), имеет вид
Л0, s = l,...,n, A7.15)
где X - один из характеристических показателей, а Ф^ - некоторые периоди-
периодические функции периода Т. Дли этого достаточно показать, что ФД/) =
= exp (-Xf)xs(t) есть периодическая функция периода Т. Действительно,
ФД/ + Т) = xs(t + T)exp[-Ht
= ехр(Х7Х@ехрК(' + Щ = x,(t)exp(-\t) = Ф,(/).
Пусть все корни уравнения A7.14) простые, т.е. имеется П различных
корней Рр ..., ря и соответственно п различных характеристических по-
показателей Х{, ..., Хп. При этом будет п линейно независимых решений
вида A7.15):
@, s = \,...,п,
так что общее решение системы A7.8) запишется в виде
)> s = l,...,n, A7.16)
где Ск - произвольные постоянные, Хк - характеристические показатели,
Фй@ - периодические функции периода Т.
Формула A7.16), дающая основной результат теории Флоке, выражает
общее решение системы линейных дифференциальных уравнений A7.8) с
периодическими коэффициентами для случая простых корней уравнения
A7.14).
Если уравнение A7.14) имеет кратные корни, то часть слагаемых в
формуле A7.16) заменится на Psk(t)exp(Xkt), где Psk(t) - полином от-
относительно / с периодическими коэффициентами периода Т. Этот поли-
полином имеет степень не выше г - 1, где г - кратность корня, и содержит г
произвольных постоянных. Подробный разбор этого случая можно найти
в монографии [16J.
17.3. Устойчивость. Параметрический резонанс
В общем случае корни р^ уравнения A7.14) комплексные, поэтому и ха-
характеристические показатели Хк также будут комплексными: Хк = ак+ iyk.
По определению р^ = ехр(ХкТ), поэтому
k=l,...,n. A7.17)
Глава 17 303
Допустим, что все характеристические показатели Хк имеют отрицатель-
отрицательные действительные части (все \рк\ меньше единицы). Тогда все решения
системы A7.8) стремятся к нулю при / —> оо. В системе совершаются
затухающие колебания. Если некоторые характеристические показатели,
соответствующие простым корням рк, являются чисто мнимыми, а осталь-
остальные показатели имеют отрицательные действительные части, то в системе
будут совершаться ограниченные периодические (или квазипериодические)
движения.
Определение 17.1. Назовем состояние равновесиях, = ... = *, = 0
системы A7.8) устойчивым, если все ее решения ограничены.
Согласно определению устойчивость имеет место, если все Re Xk =
= ак < 0 и все чисто мнимые корни - простые. Если хотя бы у одного
характеристического показателя положительная действительная часть, то
система имеет неограниченно возрастающее (при / -> +оо) решение. В
этом случае нулевое решение системы A7.8) неустойчиво по определению.
Итак, положение равновесия X, - ... = Хп = 0 может быть как ус-
устойчивым, так и неустойчивым. Пусть оно неустойчиво. Это значит, что
если систему вывести из положения равновесия, то возникнут колеба-
колебания, размахи которых возрастают. Это свойство - рост колебаний с течени-
течением времени - придает всему процессу характер резонанса. В связи с этим
нарастание размахов колебаний при периодическом изменении параметров
системы называют параметрическим возбуждением колебаний или пара-
параметрическим резонансом.
Формула A7.16) общего решения позволяет установить одно сущест-
существенное различие между параметрическим возбуждением и обычным
резонансом при вынужденных колебаниях. Именно, пусть начальные усло-
условия для системы A7.8) нулевые. Тогда все постоянные Ск в A7.16) равны
нулю и х,(t) = ...= xn(t) = 0. Это значит, что каковы бы ни были амплитуды
и частоты периодического изменения параметров системы, колебания будут
отсутствовать. Пример - качели. Раскачивание качелей всегда начинается
после некоторого первоначального отклонения от вертикали. Только после
этого, приседая и распрямляясь в нужные моменты времени, вы сможете
постепенно увеличивать размахи колебаний. Обычный резонанс, как из-
известно, заключается в существенном возрастании амплитуды вынужденных
колебаний системы при совпадении частоты внешней силы с одной из
собственных частот системы. Разумеется, в этом случае начальные условия,
определяющие собственные колебания, не имеют значения.
Итак, получена общая форма решения системы A7.8) и выявлено важ-
важное различие между вынужденными и параметрическими колебаниями.
Эти результаты удалось получить без решения характеристического уравне-
уравнения A7.14) и анализа входящих в него величин а^ Однако без знания
этих величин невозможно определить корни рк и знаки ReX.^, следователь-
следовательно, невозможно решить вопрос о наличии (или отсутствии) параметричес-
параметрического резонанса.
304
Часть 3
Рассмотрим уравнение A7.14). Известно, что система решений Xsk{t)
будет фундаментальной, если определитель Вронского W{i), составленный
из функций xsk(f), отличен от нуля:
Известно также, что при любом / справедливо равенство
A7.18)
Выберем в качестве xJJ) решение системы A7.8) при начальных усло-
условиях
[1, если s = к,
[0, если S * к.
A7.19)
Тогда Щ0) = det {х^@)} = 1 и Щ() = 0 при любом t, т.е. выбранные
таким путем величины Xsk(t) составляют фундаментальную систему реше-
решений уравнений A7.8).
Положим теперь в A7.12) /=0. С учетом A7.19) получим
= 0. A7.20)
5,1=1,..., Л.
Характеристическое уравнение A7.14) перепишется в виде
хп(Т)-р хп(Т) ...
Д(р)= *2i Xn "Р
хш(т) ХАТ) ••• х
Уравнение A7.20) можно переписать как
р" + А,р"~ +... +у4._,р + у4.«= 0.
Свободный член этого уравнения определяется без труда. В самом деле,
полагая в A7.18) t- T, получим
Глава 17 305
Сравнивая ДО) с W(T), видим, что ДО) = ЩТ) и
Ап = (-1)" ДО) = (-1)" exp
о
A7.21)
Как определить остальные коэффициенты Ар...,А^ Из A7.20) вид-
видно, что достаточно найти фундаментальную систему решений только для
одного момента времени /= Т, как будут полностью определены все Ак и,
следовательно, все корни рк. Как правило, аналитическое решение этой
задачи невозможно, однако существуют приближенные способы ее решения
A6]. В основе каждого из них лежит тот или иной бесконечный процесс,
приводящий (после конечного числа шагов) к приближенному результату
с достаточно малой ошибкой. Величины XsJ(T) можно определить и в
результате непосредственного численного решения системы A7.8) с по-
помощью ЭВМ на интервале 0 < /< Т при начальных условиях A7.19).
Практические результаты по расчету параметрических колебаний в зна-
значительной степени относятся к системам второго порядка, на которых и
остановимся подробнее.
17.4. Системы второго порядка
Рассмотрим линейную динамическую систему
У + Рх(ОУ + Рг(*)У = 0, A7.22)
где px(t) и p2(t) - периодические функции периода Т. Заменой
у = хсЩ--
уравнение A7.22) сводится к уравнению Хилла
X + p(t)x = 0, A7.23)
в котором функция
также является периодической периода Т. Положим Х=Х,, х = Х2 и сведем
уравнение A7.23) к системе
X, = Х2; Х2 = -p(t)xv A7.24)
Характеристическое уравнение этой системы имеет вид
306 Часть 3
р2 + Л,р + А2 = 0. A7.25)
Воспользуемся формулой A7.21). В данном случае Pn(t) = Р22@ = 0.
следовательно, А1=\. Положим теперь Ах - -2А и перепишем уравнение
A7.25) в виде
1=0. A7.26)
Корни уравнения A7.26): р12 = А ± V А2 - 1 . Условия устойчивости:
|р,|<1;|р2|<1.
1. Пусть А> 1. Корни Pj и р2 действительные и положительйые,
причем один из них больше единицы, следовательно, нулевое решение
уравнения A7.23) неустойчиво. В системе, описываемой уравнением
Хилла, возбуждаются параметрические колебания.
2. Пусть А<-\. Корни р, и р2 по-прежнему действительные, причем
оба корня отрицательные и один из них по модулю больше единицы.
Следовательно, и в этом случае происходит параметрическое возбуждение
колебаний. Отличие от предыдущего случая состоит только в том, что
через период ^решение воспроизводит себя с точностью до отрицательного
множителя, т.е. здесь получается периодичность с периодом 2Т, а не Т.
3. Пусть -1 <А< 1. Корни Pj и р2 будут комплексными: р12 - А±
± /\1 - А2 . Видно, что |р,| = |р2| = 1, следовательно, характеристические
показатели А., и \2 - чисто мнимые. Это значит, что решения уравнения
A7.23) ограничены, параметрический резонанс отсутствует.
4. Пусть А = 1. Тогда Pj = р2 = 1.
5. Пусть, наконец, А = -\. При этом р, = р2 = -1. В обоих последних
случаях имеются кратные корни, а нулевое решение неустойчиво, по-
поскольку общим решением уравнения A7.23) будет
x(t) = (С, + С2/)ф(/) ехр(М), и x(t) -> оо при / -> оо для С2 * 0.
В итоге приходим к следующему выводу.
Параметрическое возбуждение колебаний наступает при А > 1. При
\А\< 1 решения ограничены и параметрический резонанс невозможен.
Условие
И |=1 A7.27)
дает границу области параметрического резонанса в пространстве парамет-
параметров системы A7.24).
В рассматриваемом случае А2=1, откуда |р,| |р2| = 1. Следовательно,
действительные части характеристических показателей равны по величине
и противоположны по знаку: ReA., = a; ReX2 = -а. При а = 0 решения
Глава 17
307
ограничены, при а Ф 0 происходит параметрическое возбуждение коле-
колебаний. Оно наступает при А> 1 и А<-1, а в обоих этих случаях корни р,
и р2 действительные. Следовательно, А., и А.2 тоже действительные: Х1=а
и Х2=-а. Таким образом, общее решение уравнения Хилла
х@ = C,O,(r)exp(V) + С2Ф2@ехр(Х20
в случае параметрического резонанса принимает вид
С2Ф2(/)ехр(-а0.
x(t) = С.Ф
Второе слагаемое быстро (по экспоненте) затухает, поэтому на практике
x(t) = C^,(/)exp(<xf). Отсюда видно, что максимальные значения фун-
функции x(t) возрастают по закону геометрической прогрессии, знаменатель
которой равен exp(ajT) [ибо периодическая функция Ф,(/) имеет период
Т\.
При обычном резонансе в линейной консервативной системе x(t) ~
~ /sinQ/, т.е. размахи вынужденных колебаний растут со временем линей-
линейно, по закону арифметической профессии. Таково второе отличие пара-
параметрического резонанса от обычного резонанса при вынужденных колеба-
колебаниях консервативной системы.
Рассмотрим задачу, в которой простыми аналитическими средствами
удается определить точное значение коэффициента А. Эта задача позво-
позволит обнаружить еще одно важное отличие параметрического резонанса от
обычного резонанса при вынужденных колебаниях.
17.5. Параметрические колебания маятника при скачкообразном
изменении его длины
Уравнение малых колебаний маятника вокруг нижнего положения равно-
равновесия уже получено в §17.1: ё + gQ/l(t) = 0. График изменения длины
l(t) представлен на рис. 17.4.
/
'о
0
г—
т
t
Рис. 17.4
308
Часть 3
В данном случае уравнение колебаний преобразуется к виду
8 +
/0 -а/2
= 0, если 0</<^;
A7.28)
Введем обозначения
S
/о " в/2
-,Л2.
= О
1>
и будем искать непрерывные решения уравнения A7.28), которые воспро-
воспроизводят себя через период Тс точностью до постоянного множителя р.
Решение уравнения A7.28) можно записать так:
6 =
0, =
sin©,/ при
|02 = А2 cos<»2/ + В2 sinco2/ при T/2<t<, Т.
Условия "воспроизводства" через период Т:
е2G) = рв,(О); ё2(Г) = рб,(О).
Условия непрерывности решения при t - 7/2:
в,(Г/2) = 92(Г/2);
A7.29)
A7.30а)
A7.306)
После подстановки решения A7.29) в условия A7.30а) и A7.306) по-
получим систему линейных однородных алгебраических уравнений относи-
относительно постоянных Ах, А2, Bv BY Поскольку ищется нетривиальное ре-
решение, определитель системы следует приравнять нулю:
COS
- со, sin
р
о
2
. со.71
in I
sin—1—
2
со.77
СО, COS—1—
2
0
Р
-cos
со2 sin-
Q2T
-sin
GHT
- 0iJ COS ¦
со,Г
-cosco2r -sinco2r
a>2 sin a>2T -co2cosco2r
= 0.
Развернув определитель, получим квадратное уравнение
р2 - 2Ар + 1 = 0.
Глава 17
309
Свободный член, как это и следует из общей теории, равен единице, а
постоянная А такова:
A =
2
2@,@2
sin
sin
Введем обозначения
V
е =
21 -
Параметр о>0 определяет собственную частоту колебаний маятника при
постоянной его длине / = /0; параметр v - отношение периода изменения
длины маятника к периоду собственных его колебаний при /= /0; е - глубина
модуляции длины маятника.
В принятых обозначениях граница области параметрического резонанса
имеет следующий вид:
\А\ =
cos
ЯУ
nv . яу
sin I sin ¦—
= 1.
A7.31)
Формула A7.31) определяет кривую в плоскости параметров е (глубина
модуляции) и у (отношение периодов). Эта кривая представлена на
рис. 17.5.
1/2 1
Рис. 17.5
3/2
Для заштрихованных участков \А\> ^следовательно, это области пара-
параметрического резонанса. Точкам вне заштрихованных участков соответст-
соответствуют ограниченные движения.
Областей параметрического резонанса бесконечно много, хотя с увели-
увеличением v эти области сужаются. Характерно, что каждая из областей рас-
расширяется с ростом б; при каждом фиксированном ? параметрический резо-
резонанс возможен не только при v = 1/2,1,3/2,..., но и при любом значении
у из соответствующих окрестностей точек v= 1/2,1,3/2,.... Это значит,
310
Часть 3
что для получения параметрического резонанса совсем не обязательно до-
добиваться совпадения частоты собственных колебаний с частотой изменения
параметра системы (при этом v= 1). Здесь и проявляется третье отличие
от обычного резонанса: существует бесконечно много областей параметри-
параметрического резонанса и именно областей, а не точек (см. рис. 17.5).
Различия между параметрическим и "обычным" резонансами сведены
в таблицу.
Таблица. Характеристики резонавсов
Тип резонанса
Обычный
резонанс
в линейной
консерватив-
консервативной системе
Параметричес-
Параметрический резонанс
Начальные условия
Не играют роли
Необходимы
ненулевые началь-
начальные условия
Закон нарастания колебаний
0
Эк
X
0
Линейный:
споненциа
ль
!
ный:
\
t
Соотношения частот
Необходимо
равенство
0) = @
совет» внеш. сипы
Равенство частот
не нужно; имеются
области параметри-
параметрического резонанса
Мы рассмотрели задачу о колебаниях маятника без учета рассеяния
энергии. Наличие трения "смазывает" явление, уменьшая размеры об-
областей неустойчивости (см. штриховые кривые на рис. 17.5). Области
параметрического резонанса, соответствующие все большим значениям
v, начинаются все выше и выше, а при достаточно больших v такие области
вообще отсутствуют.
Из рис. 17.5 хорошо видно, что для возникновения параметрического
резонанса в дисенпативной системе необходимо, чтобы амплитуда а изме-
изменения параметра (глубина модуляции) была больше некоторого порогового
значения, различного для разных областей параметрического резонанса.
Наличие областей параметрического резонанса (и, следовательно, не-
неограниченного роста колебаний) даже при рассеянии энергии связано не
с физикой задачи, а с принятыми идеализациями — с решением задачи в
линейной постановке. Наличие нелинейностей неизбежно приводит к ог-
ограниченным по амплитуде параметрическим колебаниям (см. §17.8).
С энергетической точки зрения объяснение параметрического возбуж-
возбуждения колебаний маятника состоит в следующем. Будем поддергивать груз
вверх (т.е. укорачивать длину маятника) каждый раз, когда маятник прохо-
проходит вертикальное нижнее положение равновесия, в котором натяжение
Глава 17 ЗП
нити максимально, и опускать груз (увеличивать длину /), когда маятник
достигает своего крайнего (левого или правого) положения, т.е. когда
скорость движения маятника и натяжение нити минимальны'*. Такой режим
изменения длины приводит к увеличению энергии маятника. Из-за трения
происходит рассеяние энергии, но тем не менее размахи колебаний маят-
маятника возрастают, если трение достаточно мало.
17.6. Обращенный маятник с вибрирующей точкой подвеса.
Опыты П.Л. Капицы и В.Н.Челомея
Мы подошли к весьма экзотическому моменту теории параметрических
колебаний. Как показано выше, вертикальное нижнее положение равно-
равновесия маятника (обычно устойчивое) оказывается неустойчивым при со-
соответствующем периодическом изменении его длины. Тот же эффект может
быть достигнут и при вибрациях точки подвеса маятника постоянной дли-
длины. Возникает вопрос: не будет ли устойчивым при таких вибрациях верти-
вертикальное верхнее (обычно неустойчивое) положение равновесия маятника?
Теоретически и экспериментально доказано, что это возможно: при до-
достаточно большой частоте перемещения точки подвеса обращенный маятник
оказывается устойчивым. Изложим теорию этого явления [19].
Пусть вертикальное перемещение точки подвеса происходит по закону
y(J) = a sin со/. Тогда исходным уравнением движения будет [см. уравне-
уравнение 17.5)]
х ,а ?-aeo2sinco/.
е + хе + sin е = о. (п.з2)
Сделаем дополнительное предположение: пусть колебания точки под-
подвеса совершаются с малой амплитудой а и с большой частотой со:
ц = -«1; *=_!-~1,
/ со а
где со 0 = jg/l - частота свободных колебаний маятника с неподвижной
точкой подвеса.
Перейдем к безразмерному времени т = со/ и перепишем уравнение
A7.32) в виде
^ + (A-Tsin4sin6 = 0. A7.33)
со dx W© / )
В уравнении A7.33) скомбинируем параметры так, чтобы было ясным
"'Очевидно, в таком режиме v = Т/То= 1/2.
312 Часть 3
вхождение малого параметра. Очевидно, что
8 ._|®0 1 1.2. .2. ^ л ^ /... о „ Л*
/со V со У со 2ш0
Теперь перепишем уравнение A7.33) в виде
: 0. A7.34)
Здесь и дальше точкой отмечается дифференцирование по т. Задача заклю-
заключается в исследовании устойчивости верхнего положения равновесия маят-
маятника 9 = тг; 9 = 0 по уравнению A7.34).
Воспользуемся методом Ван-дер-Поля. Для его применения необходимо
перейти от уравнения A7.34) к эквивалентной системе в стандартной форме
вида
х2 =\iX2(xux2,t,\i).
В данной задаче такой переход возможен благодаря следующей замене
переменных f 19]:
6 = cp-nsintsincp; A7.35)
9 = цП - ц cost sin ф. A7.36)
Продифференцируем по X уравнение A7.35) и сравним с A7.36):
9 = ф - iiisinTCoscp -ф - ц cost sin ф = д?}- ц cost sin cp,
откуда
O(ll2). A7.37)
Продифференцируем по т уравнение A7.36):
9 = цП-цсовтсовфф + цзтхзтф. A7.38)
Теперь в уравнение A7.34) подставим значения 9 из A7.35), 6 из A7.36)
и 9 из A7.38). [При этом в A7.38) вместо производной ф подставим ее
выражение A7.37)]. Затем из A7.34) найдем производную С1:
Глава 17 313
Q, = (цП cos t cos ф)/A - ц sin x cos <p) -
- cos x sin ф) - k2\i sin^ - ц sin x sin ф) +
+ sin xlsinfa - ц sin x sin ф) - sin ф] = ц(- sin2 x cos ф sin ф -
- к2 sin ф-
Ограничимся анализом первого приближения и удержим только члены
порядка ц. Тогда из A7.37) и последнего уравнения получим
A7.39)
i
+ 2a cos x sin ф + Q cos x cos ф.
Составим укороченную систему, усредняя правые части в A7.39) по явно
входящему времени х:.
ф = j
втфСОЗф + Л:2 8Шф + 2аП L|
Положение равновесия 9 = п, 8 = 0 в новых переменных определяется
точкой ф = тс; С1 = 0. Линеаризуем уравнения A7.40) в окрестности этой
точки и составим характеристическое уравнение. Получим
Необходимое и достаточное условие устойчивости записывается в виде
Вспоминая выражение для к, найдем
откуда
ош > yf2gl. A7.41)
Таково условие устойчивости обращенного маятника. Неравенство A7.41)
можно интерпретировать следующим образом. ^]2gl есть скорость свобод-
314
Часть 3
ного падения тела с высоты, равной длине / маятника. Произведение flco
- максимальная скорость колебаний точки 0 маятника*'. Неравенство
A7.41) гласит, что максимальная скорость колебаний точки опоры должна
превышать скорость свободного падения тела с высоты /.
Итак, верхнему положению равновесия маятника можно придать устой-
устойчивость путем вибрации основания с достаточно большой частотой [под-
[подчиняющейся условию A7.41)]. Наглядной демонстрацией этого явления
служит установка П.Л. Капицы [10], изображенная на рис. 17.6. На оси
небольшого электромотора / с большим числом оборотов эксцентрически
насажен шариковый подшипник 2, к обойме подшипника присоединена
тяга 3, которая приводит в колебание рычаг 4. Один конец рычага
вращается в неподвижной опоре, а на другой подвешивается стержень
маятника 5так, чтобы он мог свободно качаться. При надлежашем подборе
параметров маятника и частоты со обращенный маятник устойчив. Если
ему сообщить толчок в сторону, то он начинает качаться, как обычный
маятник. Колебания затухают, и маятник снова устанавливается в верти-
вертикальном верхнем положении.
Рис. 17.6
Обращенный маятник с вибрирующей точкой подвеса - простой и
весьма характерный пример системы, в которой неустойчивому положению
равновесия придается устойчивость с помощью вибраций достаточно вы-
высокой частоты. Существуют и другие парадоксальные примеры систем, в
которых с помощью вибраций стабилизируется неустойчивое (или же де-
дестабилизируется устойчивое) состояние равновесия. Показательны следую-
следующие опыты В.Н. Челомея [28].
1. Тяжелый шар в вибрирующей жидкости. В цилиндрический сосуд,
заполненный жидкостью, помещают сплошной шар из материала с удель-
удельным весом, превышающим удельный вес жидкости. Шар опускается на
дно сосуда (рис. 17.7). После этого сосуд подвергают вертикальным (до-
(достаточно интенсивным) колебаниям. При этом шар в сосуде всплывает
(рис. 17.8). Наблюдалось и обратное явление: предмет, легкий по сравне-
сравнению с жидкостью, при вибрациях тонул. Во всех случаях система под
действием вибраций стремилась занять положение, близкое к состоянию
с максимальной потенциальной энергией.
'¦Напомним, что у = asinatt, следовательно, у = acocosco/ и у = дсо.
Глава 17
315
Воздух
¦'•*••".
^^ Воздух
^^ Брызги
^ Шар
.. Жидкость
Рис. 17.8
Рис. 17.7
2. Незакрепленная шайба на вертикальном вибрирующем стержне с ниж-
нижней шарнирной опорой. На прямой вертикальный стержень, имеющий
одну шарнирную опору внизу, надета шайба с отверстием, диаметр ко-
которого несколько больше диаметра стержня. Под действием силы тяжести
шайба падает. Однако если придать шарнирной опоре стержня верти-
вертикальные колебания, шайба не падает, а остается почти в неподвижном
положении на стержне, как бы в невесомости, а стержень стоит почти
вертикально. Опыт легко обобщается на случай двух и более шайб B8).
17.7. Границы областей параметрического резонанса для уравнения Матьё
Уравнение Матьё в наиболее употребительной записи имеет вид
x + (8 + 8COSx)x = 0. A7.42)
Если есть вязкое трение, то вместо уравнения A7.42) получим
х + Ihx + (8 + s cos x)x = 0; h - const > 0,
A7.43)
однако с помощью подстановки X = ехр(—hx)z уравнение A7.43) запи-
записывается как
Z + E - А2 + s cos x)z = 0.
A7.44)
Полагая 5 - И2 = 5Н0В, вновь придем к уравнению Матьё A7.42). Если при
заданных 8, A, s решение Z = 0 уравнения A7.44) устойчиво, то будет
асимптотически устойчивым и решение х= 0 уравнения A7.43).
Для исследования уравнения A7.42) разработана теория, основанная
на анализе бесконечных определителей [18]. Основной результат этого
анализа приведем без доказательства. Это - диаграмма Айнса-Стретта,
представленная на рис. 17.9. Здесь, как и на рис. 17.5 для маятника пере-
переменной длины, имеется бесконечное число областей параметрического
316
Часть 3
резонанса (они заштрихованы). Детальный вид диаграммы при малых зна-
значениях 8 дан на рис. 17.10.
0 2 4 6 8 8
Рис. 17.10
Применение этой диаграммы рассмотрим на примере определения
устойчивости обращенного маятника. В исходном уравнении A7.30)
возьмем для простоты X = 0 и положим оо/= т. Тогда уравнение A7.30)
примет вид
d2Q ( g a
"гт + ~гт~Tc°st sin0 = 0.
ах Uco / )
A7.45)
Офаничимся малыми отклонениями от верхнего положения равновесия
в = 60 = п. Тогда sin 9 = -vj/, где ц/ = 6 - 80, и уравнение A7.45) дает
d2\ii
а
В данном случае 8 = -g/la>2 < 0; е = а/1. Устойчивость при 5 < 0 означает,
что
1 е
A7.46)
(см. рис. 17.10). Из A7.46) получаем
1a-l g
/со2 < 2/2 •
A7.47)
При а«1 (как и предполагалось ранее) левое неравенство A7.47) всегда
выполняется, а правое неравенство дает полученное ранее условие A7.41).
Глава 17 317
17.8. Влияние велвнейвостей на ограничение параметрических колебаний
Рассмотрим вопрос о влиянии нелинейностей на примере обобщенного
уравнения Матьё
x + h'x + (,b + ecosx)x + k'x3 = О, A7.48)
которое описывает параметрические колебания при учете вязкого трения
(второе слагаемое) и кубической нелинейности (последнее слагаемое
слева). Будем считать, что постоянные коэффициенты е, И и к' малы и
одного порядка малости:
0<е = ц,«1; А' = цА; Л, ~1; k' = \ixk; \k\~\. A7.49)
Коэффициент вязкого трения положителен, поэтому А, > 0, а параметр
к может быть любого знака. Значения параметра 5 будем брать из первой
области неустойчивости для б > 0 (см. рис. 17.10). Точнее, будем считать,
что рабочие значения параметров лежат на произвольной прямой 3 внутри
первого заштрихованного клина (см. рис. 17.10), т.е.
5 = --те = --ц,г. A7.50)
Параметр г (наклон прямой 3) может быть как положительным, так и
отрицательным, причем \г\ < 1/2.
Подставим A7.49) и A7.50) в уравнение A7.48) и получим
х + -тх = \ix(rx - xcosx - foe3 - hxx).
Пусть т/2 = /; Л/2 = А; 4ц, = ц. Тогда
x + x = \i(rx-xcos2t-kx3-Их), A7.51)
где точкой отмечено дифференцирование по новому времени / и 0 < ц «1.
Исследуем уравнение A7.51) методом Ван-дер-Поля. Положим
х = acost + bsint; у = х =-asint + bcost A7.52)
и составим укороченную систему
2л 2л
A7.53)
318 Часть 3
где
/ = /(*> y,z) = rx-x cos 2/ - кхг - Ну;
/* = f(a cos / + b sin /, - a sin / + b cos t).
После вычисления интегралов в A7.53) имеем
^ = qb(a2 + b2) -ah-[r + ^jb = P(a,b);
db ( \\ \ <17-54)
—, = -qa(a2 + b2) + [r - ^ja -bh = Q(a,b),
где /' = Ц//2; q = 3&/4. В систему A7.54) входят три параметра: q, h и г.
Параметры q и h характеризуют соответственно нелинейность системы и
вязкое трение. Параметр г связан с глубиной модуляции 8 и параметром
8 равенством A7.50); 8 и б зависят от частоты со изменения параметра (см.
§17.7), и, таким образом, параметр г характеризует частоту а>.
Пусть а = а0; Ь = Ьо - положение равновесия укороченной системы
A7.54). Тогда согласно методу Ван-дер-Поля р = а\ + b\ - квадрат ам-
амплитуды периодических колебаний в исходной системе A7.51) (с точностью
до членов порядка (I). Учитывая сказанное, перейдем к отысканию поло-
положений равновесия укороченной системы и построению графика "резо-
"резонансной кривой" р = р(/*). Из равенств
P(ao,bo) = O; Q(ao,bo) = O
легко находим
bo(qp-г-1/2) = aoh; A7.55)
ао(-др + г-1/2) = boh. A7.56)
Отсюда видно, что у системы A7.54) существует, прежде всего, положение
равновесия ао = Ьо = 0. Существуют также и ненулевые положения рав-
равновесия, причем одновременно отличны от нуля и а0, и bQ.
Рассмотрим ненулевые положения равновесия. Перемножим уравнения
A7.55), A7.56):
qp + r--j = h2. ¦ A7.57)
Раскроем скобки, сделаем элементарные преобразования и убедимся, что
Глава 17
319
кривая A7.57), представляющая зависимость р = р(г), состоит из двух
прямых
А2; A7.58)
~tf. A7.59)
Эти прямые представлены на рис.17.11. Абсциссы точек А и В соответ-
соответственно равны - .Jl/4 - А2 и дД/4 - А2 , a tga =
-1/2
A7.59)
' A7.59)
I /
A7.58)
I/
4
/all
\
В 1/2 г
-1/2
q<0
I
1/2 /¦
Рис. 17.11
Линеаризуем уравнения A7.54) в окрестности точки а0, bQ. Получим
Jp - h)u + (qp-r-1/2 + 2bjq)v;
jp = (r-l/2-qp- 2qal)u - (A + 2aoboq)v.
A7.60)
Характеристическое уравнение системы A7.60):
2hl + h2 + (да - г + i
>- Г -— +
Случай 1: д0 = />0 = 0. При этом р = 0 и
ОД = Х2 + 2h\ + А2 +г2 - 1/4 = 0.
A7.61)
A7.62)
320 Часть 3
Точка а0 - Ьо - 0 - седло, если А2 +Г2 - 1/4 = 0, и устойчивый узел,
если А2 +г2 - 1/4 > 0 (напомним, что \г\ < 1/2). На рис.17.11 нулевое
положение равновесия обозначается точками оси абсцисс. Точки, соот-
соответствующие седлам, отмечены крестиками, а участки, соответствующие
устойчивым узлам, - точками.
Случай 2: aQ * 0, bQ* 0. Учтем равенство A7.57) и получим
2q\
D(X) = X2+2hX + 2q\qp2 -rp + ^-y^-J = 0. A7.63)
Вопрос об устойчивости решает знак свободного члена. Перепишем его в
виде
A7.64)
где а = др - г\, р = аЦЬ1. После деления равенств A7.55) на A7.56)
получим р = A - 2а)/A + 2а) и, подставив в A7.64) это выражение,
найдем, что свободный член равен 4G ра. Для прямой A7.58) имеем
а = qp - г = д/1/4 - А2 > 0,
следовательно, точкам этой прямой соответствуют устойчивые положения
равновесия (устойчивые узлы или фокусы) при q> 0 (см. рис. 17.11,а) и
неустойчивые (седла) при q < 0 (см. рис. 17.11,6). Для прямой A7.59)
а < 0; здесь будут седла для q > 0 и устойчивые узлы (либо фокусы) для
q < 0 (см. рис. 17.11,6).
Таким образом, при любых г е (-1/2,1/2) укороченная система
A7.54) имеет устойчивые положения равновесия. Покажем, что любое
решение a(t'), b{t') этой системы (отличное от равновесного) стремится
к устойчивому положению равновесия - нулевому либо ненулевому.
Любая фазовая траектория автономной неконсервативной системы на
плоскости стремится (при /—> оо) либо к устойчивому предельному циклу,
либо в бесконечность, либо к устойчивому положению равновесия.
Предельных циклов система A7.54) не имеет, так как по критерию
Бендиксона dP/da + dQ/db = -2А < 0 на всей плоскости р, Ь.
Покажем, что ни одна траектория системы A7.54) не уходит в беско-
бесконечность. Перейдем на сферу Пуанкаре [2, 4], полагая в A7.54) а = \/z\
Ь = u/Z- После элементарных преобразований получим
п = -q(l + и7J + (г + 1/2)hY + (г - 1/2)г2;1
J
Глава 17 321^
Очевидно, на экваторе сферы (при Z = 0) система A7.65) не имеет ни
одной особой точки. Далее, после замены а = v/z, b = l/z придем к
системе
v = q(l + v2J - (г + l/2)z2 - (г - l/2)vV;l
A3 J
которая при Z = 0 также не содержит особых точек. Таким образом, на
экваторе сферы Пуанкаре нет ни одной особой точки. Все фазовые траек-
траектории системы A7.54) идут из бесконечности к одному из устойчивых
положений равновесия, существование которых уже доказано. В соот-
соответствии с этим решения исходной системы A7.51) стремятся к ограни-
ограниченному периодическому решению Х- a0cost' + bQS\nt' (либо к положению
равновесия X = X = 0, если fl0 = b0 = 0).
В заключение найдем координаты положений равновесия системы
A7.54) и построим ее фазовый портрет. Ограничимся случаем д>0 (при
q<0 рассуждения аналогичны). Равенства A7.58) и A7.59) определяют
квадрат амплитуды колебаний р = а2 + Z>2. После подстановки значения
р = р, из A7.58) в A7.55) найдем
|тот же результат дает подстановка р = Pj в A7.56)]. Положения равновесия
на плоскости а, Ь получаются как точки пересечения окружности р = р, с
прямой A7.67). Из рис. 17.11 ясно, что это устойчивые положения равно-
равновесия; далее, при тех же параметрах q, r и h равенство A7.59) определяет
другое значение р = р2, подстановка которого в A7.55) [или A7.56)] дает
прямую
Ьп h
A7.68)
-r-1/2-
Ее пересечения о окружностью р = р2 определяют другие, неустойчивые,
положения равновесия укороченной системы A7.54). При -1/2 < г <
< -у1/4 - h2 система A7.54) имеет только одно положение равновесия
в начале координат (см. рис. 17.11,а). Оно асимптотически устойчиво
в целом, и в этом случае периодические колебания в системе A7.51)
отсутствуют. Тот же вывод получается при любом значении параметра г,
если только трение достаточно велико: h > 1/2. [В этом случае прямые
A7.58), A7.59) на плоскости г, р существуют; все точки оси асбцисс
для re (-1/2, 1/2) соответствуют устойчивым нулевым положениям].
11 Элементы теории колебании
322
Часть 3
Фазовый портрет см. на рис. 17.12. Если h < 1/2 и —^/1/4 - А2 < г <
< -\]l/4 - Л , то имеется три положения равновесия (рис. 17.13), а при
-1/2 <r< -V1/4 - А2 либо Л ;> 1/2
Рис. 17.12
- Л2 < г < 1/2 существуют пять положений равновесия (рис. 17.14).
1/4 - h' < г < 1/2
= P,
A7.67)
Рис. 17.13 Рис. 17.14
Соответствующие этим случаям фазовые портреты даны на рис. 17.15 и 17.16.
Рис. 17.15
Рис. 17.16
Глава 17
323
Таким образом, на примере нелинейной системы A7.48) (при условиях
A7.49)] показано, что:
1) наличие нелинейности приводит к ограничению амплитуды ко-
колебаний;
2) вязкое трение стабилизирует систему: чем больше h, тем шире об-
область значений параметра re (-1/2,1/2), при которых нулевое положение
равновесия асимптотически устойчиво в целом, и тем уже область, для
которой существует колебательный режим, а при Л>1/2 колебания вообще
не существуют.
17.9. Параметрический резонанс в технике
Примером полезного применения параметрического резонанса может слу-
служить параметрическая машина Л.И. Мандельштама и Н.Д. Папалекси, идею
которой иллюстрирует рис. 17.17. Периодическое перемещение алюминие-
алюминиевого стержня с частотой, равной удвоенной частоте собственных колебаний
контура, приводит к установлению электрических колебаний в этом кон-
контуре. Такое устройство может служить генератором переменного электри-
электрического тока.
—WWVW-
Рис. 17.17
Рис. 17.18
Другой пример - нежелательные параметрические колебания в шахтном
подъемнике (рис. 17.18). Направляющие /, вдоль которых перемещается
клеть 2, представляют собой многоопорные неразрезные балки. Их боковая
жесткость зависит от положения клети: при расположении клети против
опор 3 их жесткость наибольшая, а при расположении клети посредине
пролета жесткость принимает наименьшее значение. При движении клети
по вертикали боковая жесткость периодически меняется, что и создает
опасность параметрического возбуждения колебаний. Были случаи, когда
в некотором диапазоне скоростей клети действительно развивались значи-
значительные колебания направляющих. В итоге приходилось существенно ме-
менять конструкцию подъемника [22].
324 Часть 3
17.10. Об исследовании устойчивости периодических решений нелинейных
автономных систем
Выше изучались параметрические колебания в системах, описьшаемых диф-
дифференциальными уравнениями с периодическими коэффициентами. При
этом главным стимулом был интерес к физике колебаний в системах с
периодически изменяющимися параметрами. Существует, однако, и дру-
другая важная причина изучения линейных систем с периодическими коэф-
коэффициентами. Она проявляется при анализе периодических режимов в не-
нелинейных автономных системах по методу Пуанкаре. Этот метод позволяет
найти периодические режимы, но не решает вопроса об их устойчивости.
Как поступить в этом случае?
Для исследования устойчивости периодического решения X = ф(/),
у = \(/(/) нелинейной системы
х = Р(х,у); y = Q(x,y) A7.69)
можно идти по пути линеаризации уравнений A7.69), что было доказано
А.М. Ляпуновым. Именно, положим
Подставим эти выражения в систему A7.69), разложим правые ее части
Дф + ?, у + г\) и Q((p + ?,, \\i + Т|) в ряды по степеням ? и г\ и отбросим
нелинейные члены разложения. В итоге получим линеаризованные урав-
уравнения в виде
i = РМО, чКОК + дао, v@to; 1
Производные Рх', Ру', Qx' и Qy' - известные функции периодических функ-
функций времени периода Т. Таким образом, уравнения A7.70) составляют
линейную систему с периодическими коэффициентами.
А.М. Ляпунов доказал, что периодическое решение фG),у(/) нели-
нелинейной системы A7.69) устойчиво, если действительные части характе-
характеристических показателей для системы A7.70) отрицательны, и неустой-
неустойчиво, если хотя бы один из них имеет положительную действительную
часть. В работах Пуанкаре, однако, было доказано, что система A7.70)
непременно имеет один характеристический показатель, равный нулю, и
причиной этому служит автономность исходной нелинейной системы
A7.69). Позже А.А. Андронову и А.А. Витту удалось доказать, что перио-
периодическое решение ф(/), v@ системы A7.69) устойчиво, если второй,
отличный от нуля характеристический показатель отрицателен, и неустой-
Глава 17 325
чиво, если он положителен. Если же и он равен нулю, то уравнения
A7.70) первого приближения не решают вопроса об устойчивости периоди-
периодического решения системы A7.69). Конкретное выражение для этого
показателя таково [2]:
A7.7D
Все сказанное выше, за исключением формулы A7.71), справедливо
и для систем Л-го порядка. В частности, справедливы и результаты
А.А. Андронова и А.А. Витта, известные как теорема Андронова и Витта
116]. Случай Л=3 кратко рассмотрен в Приложении 9.
Заключение к части 3
В гл. 15-17 изложены некоторые основные сведения по теории колебаний
неавтономных, главным образом, нелинейных систем. Выбор материала
продиктован несколькими причинами: трудностью его усвоения, важно-
важностью и своеобразием явлений, вносимых нелинейностями в процесс вы-
вынужденных колебаний, недостаточной полнотой изложения данных воп-
вопросов в учебной литературе и др. Из-за ограниченного объема многие
важные вопросы динамики неавтономных систем не были рассмотрены.
Дадим краткий их перечень с соответствующими литературными ссылками.
В гл. 15 исследована нелинейная (и очень кратко - линейная) дисси-
пативная система только с одной степенью свободы. Осталась в стороне
вся теория вынужденных колебаний в линейных системах с двумя и П
степенями свободы. Эта теория подробно изложена в лекциях Л.И. Ман-
Мандельштама [17], в уже упоминавшейся книге С.П.Стрелкова B4] и в учебных
пособиях [3,21]. Краткий анализ нелинейных систем с п степенями свободы
дан в гл. 5 справочника [8] и в цитированной в нем литературе по меха-
механическим колебаниям (в той же главе можно найти дополнительные све-
сведения и по колебаниям нелинейной системы с одной степенью свободы).
Теория неавтономных квазилинейных систем с двумя степенями свободы
разработана Н.В. Бутениным [5,6] и получила дальнейшее развитие в
зарубежных работах [9].
В гл. 16 мы ограничились системой с одной степенью свободы и
изложили теорию захватывания (принудительной синхронизации) авто-
автоколебательной системы. Добавим, что захватывание возможно не только
на частотах, близких к собственной частоте автоколебаний, но и на суб-
или ультрагармониках (см., например, монографию [27] и гл. 5 в моно-
монографии [13]). Анализ динамики не одной, а двух взаимосвязанных
автоколебательных систем, находящихся под действием внешних синусо-
синусоидальных сил, дан в работе [9].
В гл. 15 и 16 рассматривались исключительно квазилинейные системы.
Разумеется, для практики представляют интерес и существенно нелинейные
системы - без малого параметра перед нелинейностями. Вынужденные
326 Часть 3
колебания в таких системах (как диссипативных, так и автоколебательных)
рассмотрены в монографиях [12, 25, 27]. Исследование в них проводится
приближенными методами, в частности методом гармонического баланса,
с широким привлечением АВМ. См. также Приложение 8.
В гл. 17 изложена теория параметрических колебаний. Дополнительные
сведения по параметрическим колебаниям в нелинейных системах и ли-
линейных системах с медленно меняющимися параметрами содержатся в
учебном пособии A1]. Обстоятельное изложение теории параметрических
колебаний с обширными приложениями к задачам механики дано в моно-
монографиях [30, 31].
В данном пособии совершенно не рассматривалась динамика систем
при случайных внешних воздействиях. Вынужденные и параметрические
колебания линейных систем при таких воздействиях изложены в части 3
справочника [7]. Методы исследования нелинейных систем при случайных
воздействиях изложены в гл. 2 справочника [8] и цитированной в нем
литературе. Исследованию автоколебательных систем при случайных воз-
воздействиях посвящена монография [14] и часть 2 монографии [13]. Добавим,
что нерегулярные, хаотические колебания возможны в детерминированных
нелинейных системах (например, в системах, описываемых уравнением
Дуффинга) даже в тех случаях, когда внешние силы являются периодичес-
периодическими функциями времени. Об этом кратко говорилось в гл. 14 данного
пособия; подробнее см. в литературе, которая цитировалась в той главе.
Мы ограничились только ссылками на литературу учебного, справоч-
справочного и монографического характера. Решения многих тонких и интересных
вопросов математической и прикладной теории колебаний разбросаны в
различных журнальных статьях, число которых непрерывно увеличивается
и обзор которых здесь дать невозможно.
ПРИЛОЖЕНИЯ
ПРИЛОЖЕНИЕ 1.0 ПОЛОЖЕНИИ РАВНОВЕСИЯ С ЧИСТО МНИМЫМИ
ХАРАКТЕРИСТИЧЕСКИМИ КОРНЯМИ
Пусть система B.1) имеет канонический вид
у = ах + ку + у(х, у) = Q{x, y).
Здесь Л и со - действительная и мнимая части характеристических корней: Хх 7 = h ± /со; ср и
vy - ряды поХяу, сходящиеся в некоторой окрестности начала координат: <р= Р^ + Рг + ...',
Ч> = Qj + б3 + •••> где Pt = Р,(х,у) и ??, = Q,(x,J>) - однородные многочлены по X и у
степени / (/ = 2,3,...).
Перейдем в (П.1) к полярным координатам X = Г cos 9, у = Г sin 6. Получим
(П.2)
г =
= Лг + г ^^ (cos 8, sin 8)cos9 + ??2(cos9,sin б) sin9]+...;
9 =ю +— [ц/(г cos 9, г sin 9) cos 9-cp(r cos 9, г sin 9) sin 9] =
= со + r\Q2 (cos 8,sin 9) cos 9 - P2 (cos 9,sin 9) sin 9]+...
Заметим, что со * 0, следовательно, при малых г имеем 6*0. Отсюда ясно, что любая
полупрямая 9 = const во всех достаточно близких к началу координат точках не имеет контакта
(т.е. не имеет точек касания) с траекториями системы (П.1). Это значит, что траектории
имеют характер спиралей или замкнутых кривых и, следовательно, справедлива теорема 2.2.
Исключим теперь t из (П.2):
dr/dd = R(r,Q). (П.З)
Функция R{r, 0) - периодическая по 0 с периодом 2я и аналитическая при всех 9 и всех
достаточно малых Г Кроме того, R(Q, 0) ж 0, т.е. г = 0 - решение уравнения (П.З).
Пусть Г = /@, /],) - решение уравнения (П.З), принимающее значение Го при 9 = 0
(очевидно, что точка Л = Г^ 9 = 0 лежит на положительной полуоси х). Поскольку функция
/@, Г„) - аналитическая функция 9 и rQ, то в некоторой малой окрестности точки Го = 0
справедливо представление функции/сходящимся рядом:
г = /(9, г0) = и, (9)г0 + и2 (9)г02 +... (П.4)
(Здесь мы учли, что/(9, 0) = 0, так как Г= 0 - решение уравнения (П.З)].
Положим в (П.4) 9 = 2я и получим значение r=fBn, r0), соответствующее следующе-
следующему после начальной точки пересечению траектории с положительной полуосью Х (рис. П.1):
/ro) = a1ro+a2ro2+a3ro3 +..., (П.5)
где а. = М,Bя).
328
Приложения
У
,/•„)
Рис. П.1
Функцию (П.5) называют функцией последования, а коэффициенты а.. - фокусными ве-
величинами. Рассмотрим функцию
л, го)-го =(а, -
+а3г03+...
(П.6)
Теорема П.1 (теорема Ляпунова). Первый не равный нулю коэффициент в
разложении функции *?{г^) непременно нечетного номера.
Можно показать, что а( = ехрBяЛ/(й). Если А.J чисто мнимые (А = 0), то а, = 1.
Первый не равный нулю коэффициент (он, как гласит теорема Ляпунова, всегда нечетный)
называется в этом случае ляпуновской величиной. Если а} * 0, то часто коэффициент <х3
обозначается ?, и называется первой ляпуновской величиной. Если а} = 0, но а5 * 0, то
а5 = L2 называется второй ляпуновской величиной и т.д.
Рассмотрение функции *?(г^) позволяет сделать исчерпывающие выводы о характере
траектории в окрестности точки ДГ = у = 0. Возможны два случая.
Случай 1: хотя бы одни из коэффициентов а. отличен от нуля. Тогда все траектории в
малой окрестности точки X = у = 0 - спирали, а состояние равновесия имеет характер фоку-
фокуса. Пусть а - первый отличный от нуля коэффициент. Тогда точку X = у = 0 называют
сложным фокусом кратности/ Этот фокус неустойчивый, если а. > 0, и устойчивый, если
а < 0. (В первом случае ^(/b) = ajro +••¦> 0 и точка В на рис. П.1 лежит правее точ-
точки /4, во втором случае Ч(г0) < 0 и расположение точек А и В такое , как рисунке].
Случай 2: все коэффициенты а. равны нулю. Тогда/Bл, Го) = Го, все траектории (в дос-
достаточно малой окрестности точки X = у = 0) замкнуты, состояние равновесия X = у = 0 есть
центр.
Приведем теперь выражение для первой ляпуновской величины (см. [10], гл. II, §5).
Перепишем систему B.1) в виде
g(x,y),
g(x,y) = Q2(x,y) + Q}(x,y)+...;
P2(x,y) = a2Ox2 +anxy + amy2;
Q2(x,y) = b2Ox2 + buxy + bO2y2;
Рг(х,у) =
Qy(x,y) =
+ a2lx2y + anxy2
b2tx2y + bnxy2 + b0}y3.
Приложение 1 329
Пусть параметры системы B.1) таковы, что а = -(a + d) = 0uA = ad-bc>0. Тогда
- 2ac(bj2 - амд02)
-b\2a20b10 + bnbw) + (be - 2аг)(ЬпЬт ~апа^)\-
- (a2 + bc)[i(cb03 - ba}0) + 2a(an + *12) + (can - bb2x)]).
Если Lx = 0, то следует определять вторую ляпуновскую величину Lr Выражение для L7
можно найти в гл. И, §5 работы [10).
В заключение отметим, что для наличия центра достаточно (но не необходимо), чтобы
интегральные кривые уравнения
dy/dx = Q(x,y)/P(x,y)
имели ось симметрии, проходящую через исследуемую особую точку. В частности, ось сим-
симметрии существует, если это уравнение, к которому сведена система (П.1), не меняется от
замены X на-.X (или Хна-у).
330
Приложения
ПРИЛОЖЕНИЕ 2. ПРИМЕР СИСТЕМЫ С НЕАНАЛИТИЧЕСКИМИ
ПРАВЫМИ ЧАСТЯМИ И ЧИСТО МНИМЫМИ КОРНЯМИ \
Рассмотрим систему
х = -у + х(х2 + y2)sin n/
у = х + у(х2 + у1) sin я/-/*2 + у2,
1.2
(П.7)
полагая, что правые части ее равны нулю в начале координат. При этом условии система
(П.7) имеет единственное положение равновесия х = у = 0 и Я., 2 = ±/, что проверяется
непосредственными вычислениями. После перехода к полярным координатам преобразуем
уравнения (П.7) к виду
Отсюда видно, что окружности
р = p3sin7t/p; 9 = 1.
= р„=1/л, « = 1,2,...,
(П.8)
(П.9)
являются замкнутыми изолированными фазовыми траекториями системы (П.8) - предельными
циклами. Ясно, что система (П.8) не имеет других замкнутых траекторий, отличных от (П.9).
Далее,
если р > 1, то р > 0;
А: = 1,2,...
(П.10)
Циклы (П.9) разбивают фазовую плоскость Х,у системы (П.7) на счетное множество колец,
вложенных друг в друга и стягивающихся к началу координат. Из (П.8) и (П. 10) следует, что
эти кольца заполнены спиралями, которые с ростом / накручиваются на циклы р = рл с
четными номерами П и соответственно отходят
от циклов с нечетными П (рис. П.2). В любой
сколь угодно малой окрестности точки X = у = 0
имеются и замкнутые траектории, и разомкнутые
Р = Р, —/ //^ ^ \ | траектории (типа спиралей). Такую особую точку
называют центрофокусом ([4), §8).
Возможен и более сложный тип центро-
фокуса — положение равновесия (с чисто мни-
мнимыми корнями X, 2), у которого кольца, сплошь
заполненные замкнутыми траекториями, чере-
чередуются с кольцами, заполненными незамк-
незамкнутыми траекториями.
Рис. П.2
Приложение 3 331
ПРИЛОЖЕНИЕ 3. ВЫЧИСЛЕНИЕ ИНДЕКСОВ ПРОСТЫХ ОСОБЫХ ТОЧЕК
Вычислим индекс j особой точки. Будем считать, что Д = ad - be * 0. Без ущерба для
общности примем за особую точку начало координат фазовой плоскости X, у. Имеем:
где/и g- ряды, начинающиеся с членов не ниже второго порядка по X и у. Прежде всего
докажем, что при вычислении у нелинейные члены f и g можно отбросить. Так как индекс
j не зависит от формы кривой, в качестве кривой ./V возьмем окружность достаточно малого
радиуса р с центром в особой точке - начале координат. Подставим в B.20) выражения для
Р и Q из (П.11) и затем перейдем в B.20) к полярным координатам X = pCOSф, у = psincp.
Получим
_ J_^AdBBdA + F(p,<f)d<p
J~2n{ А>+В7+С(р,<р) ' ' '
А = acos<p + ?sin<p; В = ccosy + dsirup.
Здесь Fa G- степенные ряды по р, начинающиеся с членов с первой степенью р: F ~ р;
G ~ р. Определенный интеграл в правой части (П.12) - непрерывная функция р при
достаточно малых р, которую обозначим /(р). В силу непрерывности /(р) при малых
р имеем Ит/(р) = /@). Но индекс j не зависит от р при малых р, следовательно,
У = / (р)/2я = J @)/2я. Таким образом, нелинейные члены F\i G (и соответственно/и g)
можно отбросить при вычислении индекса особой точки.
Возвращаясь к старым координатам X и у, можем теперь записать
¦ _ АО) _ 1 t (а* + ЬуЩсх + dy) - (сх + dy)d(ax + by)
J 2n 2%l (ax + byJ+(cx + dyJ " ( '
Здесь N - любая простая замкнутая кривая, охватывающая начало координат. В качестве
такой кривой выберем эллипс
(ах + byO +(cx + dyI = 1. (П.н)
Тогда знаменатель под интегралом в (П.13) будет равен единице, а числитель после раскры-
раскрытия скобок окажется равным A(xdy - ydx), следовательно,
?f(xefyydx). (П.15)
In ы
Известно, что криволинейный интеграл в (П.15) дает удвоенную площадь S, ограниченную
332 Приложения
кривой N. В данном случае это площадь, ограниченная эллипсом (П.И) и равная S = я/|Д|.
Следовательно,
Для седловой особой точки Д<0иу=-1; для узла, центра и фокуса Д > 0 и, стало быть,
Приложение 4 333
ПРИЛОЖЕНИЕ 4. СЛОЖНЫЕ ОСОБЫЕ ТОЧКИ С НУЛЕВЫМИ
ХАРАКТЕРИСТИЧЕСКИМИ КОРНЯМИ D)
Сложные особые точки не отражают стационарных состоянии реальных физических сисгем,
но знание их необходимо в связи с анализом поведения фазовых траекторий на бесконечности,
решением вопросов бифуркаций в конкретных системах и исследованием ряда других задач
качественной теории нелинейных колебаний. В связи о этим приведем результаты анализа
некоторых типов сложных положений равновесия при Д = 0.
Рассмотрим систему B.1)
х = Р(х,у); y = Q{x,y),
где Р и Q - аналитические функции, не имеющие общего множителя, отличного от
константы. Пусть начало координат - положение равновесия этой системы [/'@,0) = 0,
G@,0) = 0], и пусть
= 0. (П.17)
_|Л(,) /у@,0)
А~Ь/@,0) 0/@,0)
Следовательно, хотя бы один из характеристических корней равен нулю. Здесь рассмотрим
такие положения равновесия, когда в разложениях по степеням Хну функций Р(х,у) и
Q(x,y) хотя бы один из линейных членов не равен нулю, т.е.
| />до,о)| +1 р;(о,о)\ +1 е;(о,о)| +1 <2/(о,о)| * о. (п.ш
Напомним, что характеристическое уравнение имеет вид X2 + оХ + Д = 0, где а =
= -7^@,0) - Q^@,0). Далее рассматриваются два случая: 0*0, когда один характерис-
характеристический корень равен нулю, и а = 0, когда оба корня равны кулю.
Случай 1: Д = 0, сг * 0. В этом случае систему B.1) с помощью линейного неособого
преобразования можно представить в каноническом виде
х = Р'(х,у); y = ?>y + Q'(x,y), (П.19)
где Р * 0, а разложения функций Р и Q по степеням X и у начинаются с членов не ниже
второго порядка.
Пусть у = ц>(х) - решение уравнения fly + Q\x,y) = 0. Подставим эту функцию в Р'
и обозначим \у(х) = Р (х,ф(х)). По предположению функции Р и Q не имеют общего
множителя, отличного от постоянного, поэтому Р (х,<р(х)) * 0. Следовательно, в разложении
функции Ц/(х) по степеням X заведомо будут отличные от нуля члены:
где Дт * 0 и т > 2 [поскольку разложение Р (х,у) по степеням X и у начинается с членов не
ниже второй степени]. Справедлива
334 Приложения
Теорема П. 2. Состояние равновесия 0@,0), для которого Д = 0 и а Ф 0, имеет
следующий качественный характер:
а) характер седла, если ТП нечетное и Дм > 0;
б) характер узла, если т нечетное и Ат < 0, причем узел устойчивый, если Р < 0, и
неустойчивый, если C > 0;
в) состояние равновесия с одним узловым сектором и двумя седловыми, если ТП четное (при
любом знаке &„)¦ При Р < 0 узловой сектор устойчивый, при Р > 0 неустойчивый. Кроме
того, если рДт < 0, то траектории узлового сектора находятся слева от оси у (см., например,
рис. П.З), а если РД > 0, то справа от оси у (рис. П.4).
Рис. П.З Рис. П.4
Доказательство см. в §21 монографии [4].
Отметим еще, что для системы (П. 19) в каноническом виде существуют только два
направления, по которым траектории стремятся к рассматриваемому положению равновесия;
это 0,я и я/2, Зл/2. Рис. П.З и П.4 относятся именно к этому случаю.
Случай 2: Д = а = 0. С помощью линейного неособого преобразования система B.1)
приводится к виду
х = $у + Р'(х,у); y = Q'(x,y),
где Р и Q - аналитические функции, разложения которых по степеням Хну начинаются
с членов не ниже второго порядка.
Рассмотрим две функции: функцию у = ф(х), являющуюся решением уравнения Ру +
+ Р\х,у) = 0, и функцию ц/(х) = Q\x, (р(х)). Очевидно, что у(х) $0 (поскольку
правые части Ри Qсистемы B.1) не содержат общих множителей, отличных от постоянных].
Следовательно, в разложении \\)(х) по степеням X будут отличные от нуля члены:
ak*0.
Рассмотрим также функцию
дР(хМх)) , dQjxMx)) b xn ,
дх ду
Функция а(х), в отличие от vy(x), может тождественно обращаться в нуль. Пусть о(х) фО,
так что при некотором П Ьп * 0. Числа к, П и коэффициенты Qk и Ьп характеризуют
качественную структуру особой точки.
Теорема П.З. Пусть к четное: к = 2т. Тогда:
1) если п < т, то особая точка О@,0) имеет качественный характер седло-узла
(рис. П.5);
Приложение 4
335
2) если п > Ш, то существует одна палутраектория, стремящаяся к 0 при t —> -со, и
одна полутраектория, стремящаяся к 0 при t —> -ко, а все остальные траектории при возрас-
возрастании и при убывании t выходят из окрестности О, т.е. окрестность особой точки О состоит из
двух седловых секторов {рис. П.6).
Рис. П.5
Рис. П.6
Теорема П. 4. Пусть к нечетное, к = 1т + 1 И Я2/я+, * 0. Пусть у =
+ 4(/Я + l)a2mt]. Тогда
1) если O2m+i > 0> то осо^ая точка 0 имеет характер седла (рис. П.7);
2) гели O2m+i < 0» wo особая точка имеет: а) характер фокуса или центра при П > т, а
также при п = т иу <0; б) характер узла, если п — четное число и при этом п < т или
п = т и у > 0; в) одну замкнутую узловую (эллиптическую) область, две сопровождающие ее
узловые области и одну седловую область (рис. П.8), если п - нечетное число и при этом п<т
илип = т иу>0.
Рис. П.7
Рис. П.8
Рис. П.7 и П.8 выполнены для Ьп > 0. При Ьп < 0 расположение траекторий получается
симметричным отображением относительно оси X. Доказательство теорем см. в §22 работы |4|.
336 Приложения
ПРИЛОЖЕНИЕ 5. О ДОСТАТОЧНЫХ ПРИЗНАКАХ ОТСУТСТВИЯ
ПРЕДЕЛЬНЫХ ЦИКЛОВ В МНОГОМЕРНЫХ СИСТЕМАХ
Рассмотрим систему
X = fix) (П.20)
размерности п. Пусть/(х) е С1. Тогда справедливы две следующие теоремы [24J.
Теорема П. 5. Устойчивые предельные циклы системы (П.20) в области G не су-
существуют, если в этой области div |ц(хУ(х)] ^ 0, где |i(x) > 0 - скалярная функция и
И(*) е С.
Область G может быть как односвязной, так и многосвязной. Как частный случай воз-
возможно ц(х) = 1.
Теорема П.6. Пусть: \)f(x) е С ; 2) \х(х) * 0; 3) в некоторой области G фазового
пространства системы (П.20)
0.
Тогда в этой области не существует каких-либо предельных циклов системы (П .20).
Приведем два примера систем, у которых в любой области фазового пространства нет
никаких предельных циклов.
Пример 1. Дана система
Очевидно, что div/= 0.
Пример 2. Дано скалярное уравнение
d"x ( dx d2x dn-2x]
(П.21)
Здесь также div/ = 0. При И = 2 уравнение (П.21) переходит в уравнение jc = F(x)
простейшей консервативной системы. Как было показано в § 2.11, в такой системе возможны
только неизолированные замкнутые траектории.
Приложение 6
337
ПРИЛОЖЕНИЕ 6. СИСТЕМЫ С ЦИЛИНДРИЧЕСКОЙ ФАЗОВОЙ
ПОВЕРХНОСТЬЮ
Как упоминалось во Введении, для двумерной системы маятникового типа (например, для
уравнения в + Ьв + (g//) sin 0 = 0 ) в качестве фазового пространства следует брать не
плоскость, а боковую поверхность цилиндра, чем и удовлетворится требование о взаимно
однозначном и непрерывном соответствии между состояниями системы и точками фазового
пространства. В общем случае уравнения динамики такой системы можно представить в виде
y = Q(x,y),
(П.22)
где Р и Q - периодические функции по 9 периода 2тс и непериодические функции у'\
Уравнениями типа (П.22) описываются не только механические системы маятникового
типа, но и электромеханические системы, такие как синхронный электромотор или генератор
переменного тока, работающий в общую сеть параллельно с другими машинами. К этому же
классу динамических систем относятся модели динамики фазовой автоподстройки частоты и
ряд других нелинейных систем.
Качественное исследование системы (П.22) состоит в изучении основных элементов
фазового портрета - особых точек, сепаратрис и предельных циклов. Но замкнутые фазовые
траектории (в частности, предельные циклы) на фазовом цилиндре могут быть двух типов:
охватывающие и не охватывающие цилиндр. Для изучения замкнутых траекторий второго
типа пригодны все методы и результаты, изложенные выше для систем на фазовой плоскости.
Отыскание предельных циклов, охватывающих цилиндр, можно проводить с помощью
точечного преобразования какой-либо образующей цилиндра 6 =
90 в себя. Если через точки некоторого отрезка образующей в = 90
проходят фазовые траектории, охватывающие цилиндр (рис. П. 9),
то эти точки имеют последующие на том же отрезке, и можно
пытаться построить функцию последования у = f(y) данного
точечного преобразования. (Как и в случае фазовой плоскости,
вычисление функции последования наиболее просто проводится для
кусочно-линейных систем.) Неподвижные точки у', определяемые
уравнением у = f(y), являются точками пересечения
замкнутых фазовых траекторий, охватывающих цилиндр, с
образующей 9 = 90. Согласно теореме Кенигса предельный цикл
устойчив, если | f'(y')\ < 1, и неустойчив, если | f'(y')\ > 1.
При исследовании фазового портрета систем с цилиндрической
фазовой поверхностью известную пользу может принести критерий Дюлака; если
сформулированные в гл. 2 условия критерия Дюлака выполнены в некоторой области,
заключенной между двумя замкнутыми кривыми, охватывающими фазовый цилиндр, то
в этой области не существует замкнутых фазовых траекторий, не охватывающих цилиндра, и
не может быть более одной замкнутой фазовой траектории, охватывающей цилиндр.
Примеры анализа конкретных систем с цилиндрической фазовой поверхностью даны в
гл. 7 монографии [3]. Дополнительные сведения о таких системах см. в гл. 12 работы [10].
Рис. П.9
"'Если Р и Q - периодические функции обоих аргументов, то систему (П.22) естественно рассматривать
не на цилиндре, а на торе.
12 Элементы теории колебаний
338 Приложения
ПРИЛОЖЕНИЕ 7. О НЕОДНОЗНАЧНОСТИ ОТЫСКАНИЯ
ФУНКЦИЙ ик, Ак и Вк
Допустим, что найдены какие-то выражения для функций ик, Ак и Вк. Возьмем теперь про-
произвольные функции
0,D), 0,D), ...,-р,D), Р2D), ...
и сделаем в A0.2) и A0.3) замену переменных
а = b
После подстановки (П.23) в A0.2) получим
х = (* + ца, + ц2а2 +...)cos(q> + цр, + ц2р2 +...) + ци,(д,ч/) + ц2и,(в,ч/) +...
Учтем, что
cos((p + nP, +ц2р2 +...) = cos ф-цР, (ft) sin ф+...;
и, (а, у) = и, [а(Ь, ц), \|/<q>, А, ц)] = и, D,ф) + 0(ц).
Таким образом,
, , , . (П.24)
Далее,
dAJb)
Ак = АИ4,ц)) = ^4D) + ц_^о4D) +0(я2). (П.25)
Теперь из первого уравнения A0.3) с учетом (П.23) и (П.25) получаем
. ; da.tb) ? j dct.Jb) ?
Отсюда
l ddD)/d4
Приложение 7 339
Правую часть уравнения (П.26) разложим в ряд по степеням параметра ц и найдем, что
b = \iAl(b) + цл —-—a,(i) + A2(b) - АХ(Ь)—-— | + О(ц3). (П.27)
Аналогично можно получить и уравнение для <р:
ф = « + ц2?, (Ь) + ц2 \^Р- Р, (Ь) + В2 (Ь) - -^^ В, ф)] + О(ц3).. (П.28)
[ do do J
Уравнения (П.24), (П.27), (П.28) имеют тот же вид, что и уравнения A0.2), A0.3), но с
иными выражениями коэффициентов A0.6). Это обстоятельство доказывает неоднозначность
выбора функций ик, Акк Вк(к = 1,2, ...) без наложения на них дополнительных условий.
340 Приложения
ПРИЛОЖЕНИЕ 8. ПРОЕКЦИОННЫЕ (ПРЯМЫЕ) МЕТОДЫ
В РАСЧЕТАХ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ
СУЩЕСТВЕННО НЕЛИНЕЙНЫХ СИСТЕМ
Метод Галеркнна. Область применения метода значительно шире задачи отыскания пе-
периодических решений, но мы ограничимся только этой задачей.
Пусть дана система
в которой X и /- векторы одинаковой размерности. Вектор-функция / периодична по /
с периодом Т. Требуется найти периодическое решение этого уравнения с тем же периодом.
С этой целью введем в рассмотрение полную систему линейно-независимых ортонормированных
периодических функций периода Т
Vi (О, V2 (/),..., у. (О, ••• (П.ЗО)
Эти функции принято называть координатными или базисными.
Условие полноты заключается в том, что каждая функция v|///) системы (П.ЗО) может
быть сколь угодно точно аппроксимирована линейной комбинацией X*-ic*^*O при
достаточно большом Л.
Условие ортогональности заключается в выполнении соотношений
г
о
Систему функций (П.ЗО) называют ортонормированной, если дополнительно к (П.31) вы-
выполняются равенства
^Jy2@* = 1. * =1.2,... (П.32)
* о
Т— периодическую функцию х(/) можно представить рядом
где функции 4>k(t) принадлежат (П.ЗО), а коэффициенты ак определяются равенствами
e*=4rj*e)vt(')tf. *=i,2,...
•» о
[Здесь и далее ак — векторы той же размерности, что и x(t)\. Ряд (П.ЗЗ) называют рядом
Фурье функции x(t) по ортонормированной системе функций (П.ЗО).
Искомое Т- периодическое решение системы (П.29) представим приближенно в виде
конечной суммы
f (П.35)
Приложение 8 341
Функция Xm(t) не является точным решением системы (П.29), поэтому разность
t) A1.36)
не равна тождественно нулю. Возникает задача минимизации (в некотором смысле) разности
(П.36) за счет подходящего выбора коэффициентов ак Следуя методу Галеркина, будем
подбирать коэффициенты ак таким образом, чтобы разность (П.36) была ортогональна (на
отрезке 0 < / < Т ) каждой из функций vy/l) системы (П.ЗО), У = 1, ••., Ш.
]y{f.ak^k(t),t)Wj{t)dt = О, J = 1, .... m. (П.37)
Таким образом, получаем систему уравнений для определения коэффициентов пк прибли-
приближенного решения (П.35).
Отметим следующее. Приближенное решение Хт при т —> оо стремится к
X. = Ze*V*@- (П.38)
Если ряд (П.38) сходится и допускает почленное дифференцирование, то функция у(х„, t)
ортогональна каждой функции vy.(/) системы (П.ЗО), а так как система (П.ЗО) полная, то
у(х^, f) = 0. Это значит, что Х^ - решение системы (П.29) и притом периодическое решение,
поскольку все функции vj/.(/) периодические.
Определение всех коэффициентов ак из системы (П.37), а затем предельный переход в
(П.35) при т —> оо редко осуществимы, поэтому обычно ограничиваются лишь конечным и
притом небольшим числом т. В этом случае условие полноты функций (П.ЗО) отпадает.
Без ущерба для общности можно принять Т = 2л. Аппроксимируем решение системы
(П.29) с помощью тригонометрического полинома
О m
xm = — + X (я* cos kt + bk sin kt). (П.39)
Подставим это выражение в (П.36) и затем составим уравнения (П.37). Получим
2я
(П.40)
о
Fk(a) = kbk --]f(xm{t),t)cosktdt = 0;
л о
Ft(a) ^kak+- jf(xm(t),t)sinktdt = 0,
где а = (а0, а,, bv av bv ..., am, bm). Такова система (в общем случае нелинейная)
отыскания коэффициентов ак, Ьк приближенного решения (П.39).
Вопрос об устойчивости найденных методом Галеркина периодических решений внутри
самого метода не решается. Более подробные сведения о методе см. в работах [8, 12].
Промер - гармонические колебания * системе Дуффннга. Для сопоставления с ранее
полученными результатами возьмем уравнение Дуффинга в виде A5.12), A5.13):
х + х - цD* - Р'*3 - ух + Xcost) = 0.
(Здесь, однако, мы не требуем, чтобы параметр ji был мал.) Ограничимся первым
приближением метода Галеркина и будем искать периодические колебания в виде
342 Приложения
x(t) да х, = a, cost +1\ sin / = /4cos(/ + x), (П.41)
где A2 - a\ + b2; tg x = - bx /a,.
Для определения ?, и 6, запишем два уравнения вида (П.37)
2л
О
2*
/2 s J[x, + х, -цE^1 -Р'*3 -y*i +X cos/)] sin/Л = 0.
о
Подставляя (П.41) и выполняя интегрирование, получаем
- ?я, + pa, (a2 + b2) + ybx = X.; (П.42)
¦A2)-ya=0. 6 =-В'. (П.43)
Уравнения (П.42), (П.43) совпадают с уравнениями A5.21) и A5.20) соответственно. Как и
выше, из (П.42), (П.43) находим уравнение
р(Рр - ^J + у2р = X.2, (П.44)
определяющее р = А7 - квадрат амплитуды вынужденных гармонических колебаний. Из
(П.43) легко найти и фазу х вынужденных колебаний:
tgX = -*,/<*, =у/(?-Рр2). (П.45)
Если трение отсутствует {у = 0), то, как видно из (П.45), х = 0 и х = я. т.е. вынужден-
вынужденные колебания либо совпадают по фазе с возмущающей силой, либо противоположны ей *'.
В методе Галеркина коэффициенты ак в конечной сумме (П.34) определялись из условий
ортогональности (П.Зб). Однако эти коэффициенты можно искать и другими способами. Кратко
остановимся на двух из них.
Метод наименьших квадратов. В этом методе коэффициенты ак выбирают так, чтобы
минимизировать среднюю квадратическую ошибку
т
I(ai,...,am) = j\y(xm,tj)\2dt (П.46)
о
или величину
N
J(axr..flm) = ?c,| y(xm,tj) |2. (П.47)
В формулах (П.46), (П.47) у по-прежнему определяется из (П.35), Хт - из (П.36); Су - под-
подходящим образом определенные весовые коэффициенты, приданные N точкам /,, ..., tN
из [0, 71- В частности, можно взять равноотстоящие точки и положить с, = ... = CN = 1.
*) Это хорошо видно непосредственно из (П.40) и (П.41). Именно, при у - 0 уравнение (П.40) не
изменяется при замене t на -t, следовательно, и решение х, должно обладать этим же свойством, пня чего
в формуле (П.41) необходимо принять *, = 0 и искать решение в виде дс, = ±А cos t.
Приложение 8 343
Коэффициенты ак определяются из т условий
a/ 3J
—— = 0 или -— = 0, к = \,...,т (П.48)
дак дак
Метод тригонометрической коллокацни. Периодическое решение периода 2л ищется
в виде тригонометрического полинома (П.39), неизвестные коэффициенты которого
ак =(ati'-'akn)> bk=(bku...,bh,)
находятся из условий точного удовлетворения дифференциальному уравнению (П.29) в вы-
выбранных точках
j J 0\N\ N
Согласно методу для определения коэффициентов ак, Ьк получаем систему алгебраических
уравнении
Выбор в качестве узлов коллокации равноотстоящих точек t обеспечивает сходимость к точному
решению [8].
344
Приложения
ПРИЛОЖЕНИЕ 9. РЕЗУЛЬТАТЫ ЛОКАЛЬНОГО ИЗУЧЕНИЯ ПОЛОЖЕНИЙ
РАВНОВЕСИЯ И ПЕРИОДИЧЕСКИХ ДВИЖЕНИЙ
В НЕЛИНЕЙНЫХ СИСТЕМАХ ТРЕТЬЕГО ПОРЯДКА
В §2.1 были изучены положения равновесия нелинейной системы второго порядка.
Классификация их типов проводилась в соответствии с поведением траекторий в малой
окрестности исследуемого положения равновесия. Такой же подход применим и к нелинейной
системе третьего порядка
с аналитическими правыми частями.
Пусть Xw Хад, Хм - координаты положения равновесия. Составим характеристическое
уравнение линеаризованной (в окрестности хю, Xw x^) системы. Рассмотрим его корни
р(, р2, р3, поскольку ими и определяется поведение фазовых траекторий в малой окрестности
точки (х|0, Хэд, Хзд). Возможны следующие основные случаи 16).
1. Корни Р|, р2, р, - действительные отрицательные (положительные) числа. Положение
равновесия в этом случае называется устойчивым (неустойчивым) узлом и изображено на
рис. П.10 (и соответственно на рис. П.11).
Рис. П.10
Рис. П. 11
2. Один из корней действительный, два других комплексные, причем все корни имеют
отрицательные (положительные) действительные части. Положение равновесия в этом случае
называется устойчивым (неустойчивым) фокусом (рис. П.12, П.13).
Рис. П.12
Приложение 9
345
3. Один из корней действительный, два других комплексные, причем знаки действи-
действительного корня и действительных частей двух других корней разные. Положение равновесия в
этом случае является особой точкой типа седло-фокус (рис.П.14, П. 15).
Рис. П. 14
4. Все корни действительные и разных знаков. Этот случай соответствует двум типам
особых точек седло-узел (рис. П.16, П.17).
Рис. П.16
Рис. П.17
Пусть теперь ЗС|(/),*2(О>*з(О~ периодическое решение периода Ттой же системы
третьего порядка. Линеаризуем ее в окрестности X,, Х2, Зс3 и придем к линейным уравнениям
с периодическими коэффициентами - уравнениям типа A7.8), A7.70). Составим характерис-
характеристическое уравнение линеаризованной системы. Это будет уравнение A7.20) при Л = 3:
хп(Т) хи(Т)
„(Т)-р ха(Т)
х}2(Т) х}3(Т)-р
= 0.
Напомним, что ХлG) (s,к — 1,2,3) - фундаментальная система решений линеаризован-
линеаризованных уравнений A7.8), отвечающая начальным условиям A7.19)
1, если s = к;
О, если S * к.
Пусть р,, р2, р3 - корни характеристического уравнения и Х.р Х.2, Х3 - характеристи-
характеристические показатели [pt = exp(A.47), A= 1,2,3, см.§17.2]. Доказано, что один из характе-
346
Приложения
ристических показателей равен нулю(^!= 0) по теореме
Андронова и Витта (см.§17.10 и работу [16|). В
зависимости от значений двух других характеристических
показателей Х2 и Х.} возможны следующие основные
случаи:
1) Х-2 и X.j- действительные и разных знаков. Это -
случай седлового периодического движения Х]гХ2,Х} .
Через замкнутую траекторию, соответствующую сед-
ловому периодическому движению (рис. П. 18), проходят
две интегральные поверхности S и S , состоящие из
фазовых кривых, асимптотически приближающихся к
Рис П 18 замкнутой траектории при / —> +°о и соответственно при
/ -» -оо.
2) А.2 и Х3- действительные и отрицательные (положительные). Этот случай соответствует
устойчивому (неустойчивому) узловому периодическому движению (рис. П. 19, П.20).
Рис. П. 19
Рис. П.20
3) X.j и Х} - комплексные с отрицательными (положительными) действительными
частями. В этом случае фазовые траектории возмущенного
движения напоминают винтовые линии, осью которых служит
замкнутая траектория (рис. П.21). Исследуемое периодическое
движение является фокусным (устойчивым при ReX2 3 < 0 и
неустойчивым при ReA.23>0).
Выше говорилось о локальном исследовании положений
равновесия и периодических колебаний в системе третьего порядка
Это исследование проясняет структуру фазового портрета системы
только в малой их окрестности. Полное (глобальное) построение
фазового портрета нелинейной динамической системы третьего (и
более высокого) порядка в общем случае представляет сложную и
до сих пор не решенную проблему. Подробнее об анализе
многомерных систем см. в монографии [6] и цитированной в ней
Рис. П.21 литературе.
Приложение 10
347
ПРИЛОЖЕНИЕ 10. ОТВЕТЫ НА ЗАДАЧИ, УКАЗАНИЯ И РЕШЕНИЯ
ВВЕДЕНИЕ
8.1. Фазовое пространство - боковая поверхность тора (рис. П.22).
8.2. Фазовое пространство - совокупность полуплоскостей (I) и (И), частично наложенных
друг на друга (рис. П.23). Переход изображающей точки с листа (I) на лист (II) происходит
при х = 1. Обратный переход - с листа (II) на лист (I) - совершается при х = -1. При этом
абсцисса и ордината изображающей точки остаются неизменными (см. также § 6.4).
(I)
-1
У
0
(И)
1 X
Рис. П.22
Рис. П.23
ГЛАВА 1
1.1. Положение равновесия неустойчиво.
1.2. I) V - положительно определенная функция в области |.х| < л; \у\ < я; 2) V - зна-
знакопостоянная положительная функция на всей плоскости X, у; 3) V - положительно
определенная функция, по крайней мере, в области \х\ < 1; \у\ < 1; 4) V - знакопеременная
функция; 5) V - знакопостоянная положительная функция на всей плоскости X, у; 6) V -
положительно определенная функция на отрезке |х| < 2п.
1.3. Система, эквивалентная уравнению A.46):
х = у; y = -hy-q>(x).
Функция Ляпунова - полная энергия системы:
(п W)
(П..49)
(п W) y ~ знакопостоянная отрицательная функция. Далее необходимо применить
теоремы 1.4 и 1.5.
1.4. v(x,y) = bx* +ay*; V(U7) = 0. По теореме 1.1 точка X = у = 0 - устойчива.
Асимптотическая устойчивость исключена, поскольку все точки координатных осей плоскости
348 Приложения
X, у (в том числе и сколь угодно близкие к началу координат!) являются положениями
равновесия системы A.47).
1.5. Пусть v(x,y) = х2 + у2. Тогда 1>а 48) = 2а(х2 + у1 K/2. При а < О решение X = у = О
асимптотически устойчиво в целом, при а > О решение неустойчиво.
Замечание. Обратите внимание, что при а> О X2 + у7 —> 0 при / —> оо. В самом
деле, пусть Jx2 + у2 = г. Тогда Г = аг2, откуда
r = re/[l-er0(/-fe)],
где Го = г(/0). Видно, в частности, что Г2 -> 0 при / -> оо (хотя решение Х = у= 0 неус-
неустойчиво!).
1.6. Пусть V = ОС2 + by2. Тогда V = 2аос4 + 2W/. Отсюда нулевое решение:
1) неустойчиво, если С, b, a, d > 0;
2) асимптотически устойчиво в целом, если С > 0, А > 0, а < 0, */ < 0;
3) тоже асимптотически устойчиво в целом, если С, b, a, d < 0;
4) неустойчиво, если С < 0, Ь < 0, а > 0, <У > 0.
Замечание. Теория первого приближения не позволяет решить задачу, так как корни
характеристического уравнения чисто мнимые.
1.7. Пусть v(x,у) = Ъх2 + у2/2. Тогда
1.8. Возьмите vfo.y) = сх2 + ау2.
1.9. Пусть
v(x,y) = -y2 +\<p(u)du.
z о
Тогда
Va.su = -ау2-Ьр2(х),
откуда и следует асимптотическая устойчивость в целом нулевого решения.
1.10. Возьмите v(x,y) =-rfcc2 +y2.
1.11. Возьмите v(x,y) = —X* +~ХУ2, где у = х. Получите VOs3) = -X2y2. Далее при-
примените теоремы 1.4 и 1.5.
1.12. Возьмите v(x,у) = Х2/2 + 1пA + у2), определите vA1S) и воспользуйтесь теоремами
1.4и1.5(_у = х).
1.13. Возьмите в качестве функции Ляпунова "полную энергию" системы A.55):
*¦ о Z
Далее поступайте так же, как в задачах 1.11 и 1.12.
Приложение 10
349
1.14. Пусть v(x,y) = х - ln(l + х) + -уг. Тогда va54) = -ах2 - by2. Линии v = о 0
см. на рис. П.24. Область притяжения точки х = у=0 - полуплоскость 1 + X > 0 (точнее,
сколь угодно большая ее часть, ограниченная замкнутой кривой V = С, где С - сколь угодно
большое число).
1.15. Способ 1. Возьмем
Получим
= ~-X2
+ х,)-
+ x2)-
-x2J.
Производная vA57) - отрицательно определенная функция в области 1 + X, > 0, 1 + Х2 > 0.
Замкнутая кривая V = Снас максимальных размеров, целиком лежащая в этой области,
ограничивает часть плоскости X,, Xj, принадлежащую области притяжения точки X, = Х2 = 0
(на рис. П.25 она заштрихована). Уравнение кривой V = с
Y2 4. -L V2 - 1
Рис. П.24
Способ 2. Пусть
v =
Рис. П.25
х,)]
+ х2)].
Тогда
- "А*] ~ ¦
v и ^1.57) ~ знакоопределенные функции (разных знаков) в области 1 + X, > 0, 1 + Х2 > 0.
Линии v = const см. на рис. П.26. Области притяжения принадлежит вся область 1 + X. > 0,
1 + Х2 > 0.
Асимптотическая устойчивость в целом не имеет места хотя бы потому, что существует
еще одно положение равновесия:
350
Приложения
1.16. Пусть V = X2 + у2. Тогда
v,l58)=2(x2+>'2)Cx2+2/+a).
(П.50)
Отсюда следует, что нулевое решение неустойчиво, если a > 0, и асимптотически устойчиво
при a < 0. Функция (П.50) отрицательно определенная внутри эллипса 3.x2 + 1у2 = | а |.
и все точки круга V = X2 + у2 < |а|/3 принадлежат области притяжения точки X = у = 0
(рис. П.27).
= const
у
Рис. П.26 Рис. П.27
1.17. Уравнение A.59) перепишем в виде системы
х = у; у = -к2х~Ру(у2+к2х2-а2).
Пусть v(x,y) = к2х2 + у2. Тогда
ЧП.51)
= -$-2у2(у2 +к2х2 -а2).
(П.51)
(П.52)
Случай 1: P > 0. В малой окрестности начала координат V > 0 (и v = 0 в точках оси
абсцисс). Точка X = у = 0 неустойчива.
Случай 2: Р <0. Производная (П.52) - знакопостоянная отрицательная функция
внутри эллипса V = к2Х2 + у2 = а2, однако на оси абсцисс, где v(n 5|, = 0, отсутствуют
целые фазовые траектории системы (П.51). Следовательно, выполнены требования теоремы
1.5 и решение X = у = 0 устойчиво асимптотически. Из (П.52) следует, что область, ог-
ограниченная эллипсом v=k2x2+y2 = a2, принадлежит области притяжения точки Х = у=0.
1.18. Решение аналогично решению задачи 1.15 вторым способом. Вывод: область 1 + х > 0;
1 + у > 0 принадлежит области притяжения точки х = у = 0.
1.19. Пусть V = X2 + у2. Тогда
vd60) = а(* + У >(х + У ~Р/-
Отсюда следует, что точка X = у = 0 неустойчива, если а < 0, и асимптотически устойчива,
если а > 0. "Круг" X2 + у1 < Р принадлежит области притяжения начала координат.
1.20. Возьмем V = (х2 + у*)/2. Тогда
"A61)
= -х" -у" +у°.
(П.53)
Производная (П.53) - отрицательно определенная функция в полосе | у | < 1, а "круг" X2 +
+ у2 < 1 принадлежит области притяжения точки X = у = 0.
Приложение 10
351
1.21. v(x,y) = (y2 -Х2)/2\у1Ш) = у2 +Х2). Все
требования теоремы Четаева выполнены; область О - вся
плоскость Х,у, а область Q, дана на рис. П.28.
1.22. Первый способ: V = X2 - у 2\
^A.63) = 2(Х2 -у2). Второй способ: V = X2y2\
VA6J) = 2х2у2B-уА -Х2у2). Под областью П,
можно подразумевать любую малую окрестность начала
координат, лежащую в любом квадранте плоскости Х,у.
1.23. Корни характеристического уравнения равны
А., 2 = ±i-Jab. Вопрос об устойчивости решается с
помощью функции v(x,у) = Ьх2 + ау2.
1.24. Характеристическое уравнение: Хг + hX + <р'@) = 0. Необходимые и достаточные
условия асимптотической устойчивости: А > 0; <р'@) > 0.
1.25. Речь идет о неустойчивости решения и = 0; И = 0. Характеристическое уравнение:
Рис. П.28
(RC-MSo)X+\=0.
Условие неустойчивости: RC- MS0 < 0.
1.26. Положение равновесия <р = <р0 = М(С1)/к; ф = 0. Характеристическое уравнение:
Если М'(?1) > 0, система асимптотически устойчива; если Л/'(П) < 0, система неустойчива.
1.27. Характеристическое уравнение:
{X + с){Х2 + 11 + Ь - у@)]Х - ч/@)} = 0.
Ответ: С>0; у@) < 0; 1 + Ь - V|/@) > 0.
1.28. Характеристическое уравнение:
X3 - ЗсЛ2 + ЗсЛ - а3 + 1 = 0.
Ответ: согласно критерию Гурвица а < -1/2.
1.29. Характеристическое уравнение:
(X + а)[Х2 + 2(а + Ь + с)Х + <? + 2аЪ + 2ас + ЪЬс] = 0.
Ответ: а > 0.
1.30. Решение X = 0 асимптотически устойчиво, если а > 1, и неустойчиво, если а < 1.
Решение X = п неустойчиво .
1.31. ^,A,2) и РгB,\) неустойчивы.
1.32. Рх [C + -у/5 )/2, A + &)/2] неустойчиво; Р2 [C - S)/2, A - S)/2] асимптоти-
асимптотически устойчиво.
1.33. />,B,1) асимптотически устойчиво, /J(-2,1) неустойчиво.
1.34. />(!,!) неустойчиво; /^(-4,-4) асимптотически устойчиво.
352
Приложения
ГЛАВА 2
2.1. Ответ см. в табл. П.1.
Таблица П.1
а
а >0
а <0
Р@,1)
Седло
Центр
Неустойчивый узел
Седло
Л(-1.°)
Устойчивый узел
Седло
Тот факт, что Р, - центр (при а < 0), следует:
1) из существования мнимых корней характеристического уравнения;
2) из того, что уравнение
dy_
dx
аху
х + у -1
(П.
не изменяется при замене X на —X, т.е. ось ординат, на которой расположена точка /*,,
является осью симметрии интегральных кривых уравнения (П.54) (см. Приложение 1).
Другое доказательство того, что Pt — центр, состоит в получении первого интеграла
системы B.69) в окрестности /*, (точнее, в области у > 0). В самом деле, положим и = X1,
V= \ny и преобразуем уравнение (П.54) к линейному уравнению
a du ,
2 dv
решение которого U = u(v) представляет искомый первый интеграл.
2.2. Положение равновесия Хо = Л;уа= В/А - устойчивый узел (или фокус), если А - В +
+ 1 > 0, и неустойчивый узел (или фокус), если А - В + 1 > 0.
2.3. Ответ см. в табл. П.2. Области I - IV представлены на рис. П.29.
Таблица П. 2
р,
Р,@,0)
PjH.-t)
i
Устойчивый узел
(фокус)
Седло
II
Неустойчивый узел
(фокус)
Седло
III
Седло
Неустойчивый узел
(фокус)
IV
Седло
Устойчивый узел
(фокус)
а-\
2.4. См. гл. 4, п. 4.3.2.
Рис. П.29
Ь=-а-\
Приложение 10
353
2.5. См. табл. П.З.
Таблица П.З
Р,
Р2(а,1)
а < 0
Седло
Устойчивый узел
(фокус)
0 <а < 1
Седло
Неустойчивый узел
(фокус)
а> 1
Неустойчивый узел
Седло
2.6. Pj(O,O) - сложная особая точка (свободный член характеристического уравнения для
Р, равен нулю). О положениях равновесия Р2 и Ру см. табл. П .4.
Таблица П. 4
р,
ЛО.1-Р)
р<1/2
Неустойчивый узел
(фокус)
Седло
1/2 < р < 1
Устойчивый узел
(фокус)
Седло
р>1
Седло
Устойчивый узел
Замечание. Легко видеть, что Р, - неустойчивое положение равновесия. Именно,
ось абсцисс (у г 0) состоит из фазовых траекторий системы B.74). Движение изображающих
точек по этой оси происходит в соответствии с уравнением X = и2A - (Зх) (см. рис. П.30).
Имеется фазовая траектория, выходящая из Рх (и идущая в Р}), следовательно, точка Р,
неустойчива.
1/р
Рис. П.30
2.7. Рх @, 0); Р2 A/2 Р, 0); /»} (а, аA - 2аР)): а) при 2оф > 0 Р, - седло; /»2 - устой-
устойчивый узел; Р% — седло; б) при 2оф < 1 Рх - седло; Рг — седло; Рг - неустойчивый узел
(фокус), если 6а.р < 1, и /*3 - устойчивый узел (фокус), если 6оф > 1.
2.8. Р,A,1) - седло, если р < 0. Если же р > 0, то РA,1) - устойчивый узел (фокус)
при 1 + q- р > 0 и неустойчивый узел (фокус) при 1 + q - р < 0.
2.9. Ответ см. в табл. П.5.
Таблица П. S
р,
а > 0
Седло
Устойчивый узел
(фокус)
-1 <а <0
Неустойчивый узел
(фокус)
Седло
а <-1
Устойчивый узел
(фокус)
Седло
2.10. Р, @, 0) - устойчивый узел, если D > 1, и седло, если Z) < 1. Р2 (Д 1 - D) -
седло, если D > 1, и центр, если 2) < 1. (Для Рг при Z) < 1 корни X, 2 = ±-jD(D - 1) -
чисто мнимые, а из уравнения с разделяющимися переменными
354 Приложения
dy y(x-D)
dx x(l-y-D)
легко определяется первый интеграл.)
2.11. Pl (О, 0) - седло, если Ь > 0, и устойчивый узел, если * < 0. Р2(\/-Д ,l/2-j2),
jP3(- l/-\/2 , - 1/2л/2) - устойчивые узлы (или фокусы) при Ь > 0 и седла при b < 0.
2.12. Р@, 0) при а < 0 - седло. Согласно теории индексов ЗФТ отсутствуют. Если а > 0,
то корни \{ 2 чисто мнимые, а из B.12) получаем уравнение с разделяющимися переменными
du _ (expx- \)(y-a) _ .
—-— у — %
интефируя которое находим первый интеграл. Следовательно, Р@, 0) - центр при а > 0.
2.13. Рх @, 0) - устойчивый узел (или фокус), если а > 0, и неустойчивый узел (или
фокус), если а < 0. Р2 (л, 0) - седло. При а * 0 ЗФТ отсутствуют (согласно критерию
Бендиксона). При а = 0 существует совокупность неизолированных ЗФТ ( см. задачу 2.29).
2.14. /"(О, 0) - седло при а < 0 и центр (в линеаризованной системе) при а > 0. Однако
по критерию Бендиксона в системе B.82) ЗФТ не существуют. Следовательно, при а > 0
точка Р@, 0) - сложный фокус.
2.15. Р@, 0) - седло, если /'@) > 0, и устойчивый узел (фокус), если /'@) < 0. По
критерию Бендиксона D = -R{x) < 0 при всех X, у, т.е. ЗФТ отсутствуют.
2.16. Р@,0) - седло, если Ъ < 0; устойчивый узел (фокус), если Ъ > 0, а > 0; неустойчивый
узел (фокус), если Ъ > 0, а < 0. По критерию Бендиксона периодические движения
отсутствуют, если а * 0. Если же а = 0, то система B.84) - консервативная, корни харак-
характеристического уравнения чисто мнимые, система B.84) имеет первый интеграл уг/2 +
+ Ь(ехр X - х) = const, следовательно, Р@, 0) - центр при а = 0.
2.17. Р@, 0) - седло, если 1 + Ь > 0, и устойчивый узел (фокус), если 1 + Ь < 0. По
критерию Бендиксона D = -1 - COS у <, 0, следовательно, ЗФТ не существуют.
2.18. Р{ A, 0) - седло. Р2 A, я) - узел (или фокус), притом устойчивый, если а < 0,
и неустойчивый, если а > 0. По критерию Бендиксона D = а - const, следовательно, при
а * 0 ЗФТ не существуют. Однако они существуют при а = 0, поскольку в этом случае /^ -
центр [корни характеристического уравнения, составленного для Pv мнимые, и существует
первый интеграл системы B.86); он легко находится интегрированием уравнения dy/dx =
= sh(x-
2.19. Pl @, 0) - седло; Р2 @, -1) - устойчивый узел; Рг (-2/fl, 1) - неустойчивый узел.
Далее определяем направление пересечения фазовыми траекториями оси абсцисс (рис. П.31).
Если ЗФТ существует, то она охватывает точку Ръ и только ее и не пересекает ни оси абсцисс,
ни оси ординат, которая состоит из фазовых траекторий системы B.87).
Итак, достаточно рассмотреть области
х<0, у> 0 при а>0; (П.55)
х > 0, у > 0 при а < 0. (П.56)
Возьмем в критерии Дюлака F(x,y) = l/ху и получим
Приложение 10
355
Очевидно, что D< 0 всюду в области (П.55) и D> 0 всюду в области (П.56), следовательно,
ЗФТ не существуют. (Они отсутствуют и при а = 0 хотя бы потому, что при а = 0 не
существует положения равновесия Ръ.)
а > О
л
\ \ \
\\ \ о
Л
У,
0
р,
Л
р,
/
0
>
лг
Рис. П.31
2.20. Р{ @, 0) - седло; Р2 B, 0) и Рг (-2, 0) - центры, поскольку корни характеристичес-
характеристических уравнений, составленных для Р2 и Ру мнимые; ось абсцисс, на которой расположены эти
точки, есть ось симметрии интегральных кривых уравнения
х(х2 + у2 - 4)
dx
(П.57)
(это уравнение не изменяется при замене у на -у).
Замечание. Для уравнения B.88) легко получить и первый интеграл: положим в
(П.57) и = х2, V = >'2 и перепишем (П.57) в виде dv/du + V = 4 - и, откуда и получаем
первый интеграл (v + и - 5)ехр и = С.
2.21. /*,(!, 0) и /^(-1,0)-центры, ибо для этих точек корни kt 2 мнимые, а интегральные
кривые уравнения
dx
1ху
симметричны относительно оси абсцисс.
Замечание. Как и в предыдущей задаче, полагая X2 = и и у2 = V, легко построить
первый интеграл системы B.89).
2.22. у = +1.
2.23. Рис. 2.50: j = 0; рис. 2.51: j = -2; рис. 2.52: j = +2; рис. 2.53: у = +1; рис. 2.54: j = +1;
рис. 2.55: у = +1; рис. 2.56:,/ =+3.
2.24. Не существуют, поскольку система B.90) не имеет положений равновесия, а в системе
B.91) производная не меняет знака.
2.25. Не существуют, что видно из направлений пересечения осей координат фазовыми
траекториями.
2.26. Состояние равновесия единственное: х = у = 0. Вертикаль X = -1 - фазовая траекто-
траектория системы B.94), по которой изображающая точка движется сверху вниз (в соответствии с
уравнением у = -1). Слева от вертикали х = -1 фазовые траектории незамкнутые (нет
особых точек). Ось абсцисс - изоклина вертикальных касательных, ось ординат - горизон-
горизонтальных.
356
Приложения
Пусть 1 + X > 0. Из B.94) имеем
dy
откуда получим
dx A + х)у'
у2/2 + х - In A + х) = const.
(П.58)
Кривые (П.58) замкнутые. Их фазовый портрет см. на рис. П.32. Таким образом, система
B.94) консервативная с положением равновесия @,0) типа центр.
2.27. Система B.95) - консервативная система вида X = f(x), где
г, . 1 Ъ-Х
/(*) = —¦ .
а \ + х
Положение равновесия единственное: X = Ь; у = 0. Далее,
= "I" -т-^du = -lx - A + 4) ln(l + x)).
о a \ + u a
Рис. П.32
Рис. П.ЗЗ
График функции (П.59) и фазовый портрет системы B.95) см. на рис. П.ЗЗ.
2.28. См. рис. П.34.
2.29. Уравнение движения маятника
(П.59)
V(x)
Потенциальная энергия равна V{x) = (g/l)(\ - COS*). График Щх) и построенный по
нему фазовый портрет см. на рис. П.35.
2.30. Уравнение динамики х = -2х + 4аху. Потенциальная энергия груза равна V(x) =
= Х2( 1 - ах2). Если а > 0, то существуют три положения равновесия с абсциссами - l/V2a ;
0; l/v2a . График функции У(х) и фазовый портрет системы при а > 0 даны на рис. П.36.
Если же а < 0, то положение равновесия единственное: X = 0; х = 0. Функция У(х) для
последнего случая и фазовый портрет приведены на рис. П.37.
Приложение 10
357
V=h,
А =
Рис. П.34
/К
Рис. П.36
Рис.
V
V
0
X
(?
V \о
П.35
У
X
X
Рис. П.37
2.31. Для B.96) D = -А = const; для B.97) D = -R(x) < 0 при всех X и у. Следовательно,
в системах B.96), B.97) периодические движения невозможны.
2.32. Пусть V = (х2 + у2)/2. Тогда
У<2.$8) = (*2 + У2)A -X2 - у2) + Ау. (П.60)
Из (П.60) ясно, что vB М) < 0, если X2 + у2 S Л2, где R - достаточно большое число.
Следовательно, система B.98) предельно ограничена. Далее, по критерию Бендиксона
= А±-(х2+у2) .
Отсюда следует, что не существует предельных циклов внутри окружности X2 + у2 = 1/2 и
может существовать не более одного цикла, охватывающего эту окружность (см. также §16.4).
358
Приложения
2.33. По критерию Дюлака при F= l/xy
< 0 при х> О, у > 0.
2.34. Точка Х> 0, у = х = 0- неустойчивый узел (или фокус). Пусть, далее, V = (х2 +
+ У2)/2. Тогда VB100) = -f(x,y)y2. Очевидно,что VB100) < 0 при X2 +у2 > R1 > Г2, т.е.
фазовые траектории системы B.100) пересекают окружность X2 + у2 = R2 снаружи внутрь. По
теореме 2.4 внутри этой окружности лежит хотя бы один устойчивый предельный цикл.
2.35. Все точки оси абсцисс - положения равновесия. Ось ординат состоит из фазовых тра-
траекторий. Вертикаль X = 1 - изоклина горизонтальных касательных. Учитывая знаки X , у и
dy/dx в различных точках плоскости X, у получим фазовый портрет, представленный на
рис. П.38. Положения равновесия (xQ, 0) устойчивы по Ляпунову при Хо< 1 и неустойчивы
при Хд > 1. Система B.101) негрубая [хотя бы потому, что свободный член характеристического
уравнения, составленного для (х0, 0), равен нулю].
2.36. Система (П. 102) негрубая (отсутствуют линейные члены, а единственное положение
равновесия /)@, 0) - сложная особая точка с индексом j = +2. Непосредственный анализ
поля направлений дает фазовый портрет, представленный на рис. П.39.
у=-х
*>—<
>
((
1
N
= дг
Рис. П.38
Рис. П.39
2.37. /",((), 0) и Р2B, в) - седла. Непосредственно из B.103) видно, что оси координат
и вертикаль Х= 2 состоят из фазовых траекторий; направление движения изображающих точек
показано на рис. П.40. Система B.103) негрубая, так как имеется сепаратриса Pv Py идущая
из седла в седло.
2.38. Положение равновесия Р(-1, 1) - седло. Все точки оси ординат - также положения
равновесия. Ось абсцисс состоит из фазовых траекторий системы B.104). С учетом поля
направлений, построенного по анализу знаков х , у , получаем фазовый портрет, приведен-
приведенный на рис. П.41.
Рис. П.40
Рис. П.41
Приложение 10
359
2.39. См. §4.2 и рис. 4.2.
2.40. Информация о положениях равновесия приведена в табл. П.6.
Таблица П.6
а,Ь
а > b
а < b
Л(о.о)
Седло
Седло
Рг(а/Ь,0)
Седло
Устойчивый узел
/»,(!, в-Л)
Устойчивый узел
(фокус)
-
Далее воспользуемся критерием Дюлака при F(x,y) = l/xy. Получим D = -Ь/у < 0 для всех
положительных X и у. Следовательно, ЗФТ в первом квадранте плоскости Х,у не существуют.
[При а < Ь этот вывод очевиден: в первом квадранте отсутствуют положения равновесия
системы B.106)].
Учитывая сказанное и принимая во внимание, что оси координат состоят из фазовых
траекторий системы B.106), получим фазовые портреты, представленные из рис. П.42 (для
а > Ь) и на рис. П.43 (для а < Ь).
Рис. П.42
2.41. ^,@,0) - неустойчивый узел; ?,@,2) и />,A,0) - устойчивые узлы; />4A/3,2/3)
- седло. Предельных циклов нет по теории индексов. Непосредственно из B.107) видно,
что: 1) оси координат состоят из фазовых траекторий; 2) нет фазовых траекторий, уходящих
(при и > 0, V > 0) в бесконечность, так как и < 0 и V < 0 ,если и и (или) V велики
Фазовый портрет дан на рис. П.44.
2.42. />,@,0) - неустойчивый узел; Р2@, 1) и ^B/3,0) - седла; Р4( 1/2, 1/2) - устой-
устойчивый узел. Отсутствие фазовых траекторий вытекает из критерия Дюлака при F- \/uv.
Фазовый портрет приведен на рис. П.45.
р р
Рис. П.44
2.43. Случай 1:Ь<1. Имеем P^Ofi) - неустойчивый узел; ^2@, 1) - седло; />,( 1, 0)
- устойчивый узел. Ответ - на рис. П.46.
Случай 2: Ь>1. При этом P^Ofi)-неустойчивый узел; />2@, 1) и Р}A,0) - ус-
устойчивые узлы; Pt[(b- 1)/C6- 1), 2/C6- 1)] -седло. Фазовый портрет см. на рис. П.44.
360
Приложения
У
Л'
0
\
Рис.
л
П.46
Р -
х
а
2.44. Отметим, что замена X на у и у на X не изменяет
уравнений B.110). Это значит, что фазовые траек-
траектории системы симметричны относительно бис-
биссектрисы координатного угла, которая сама является
интегральной кривой. Единственное положение
равновесия Р(хо,уо) лежит на пересечении изоклин
горизонтальных [у = а/(] + х)] и вертикальных [х =
= а/(\ +у)\ касательных (рис. П.47). Линеаризован-
Линеаризованная система имеет вид
а
"П.
(П.61)
В силу упомянутой симметрии Хо = у0 и, следовательно,
А - 9. . _ в _ *0
Характеристическое уравнение системы (П.61) есть X + 2Х+ I- b =0. Его корни действи-
действительные и отрицательные: Х] 2 = -1 ± Ь. Таким образом, Р(хо,уо) - устойчивый узел.
Далее, по критерию Бендиксона получаем D = -2, следовательно, система B.110) не
имеет ЗФТ. Она не имеет также траекторий, уходящих в бесконечность. Это видно непо-
непосредственно из B. ПО): при больших значениях х получаем X < 0, а при больших значениях у
из второго уравнения B.110) следует у < 0. Добавим еще, что оси координат пересекаются
фазовыми траекториями так, как это показано на рис. П.47. Фазовый портрет приведен на
рис. П.48.
Рис. П.47
Рис. П.48
2.45. Случай 1. По Бендиксону D= -F' (у) одного знака при всех X, у (у = х), сле-
следовательно, замкнутых фазовых траекторий нет. Характеристическое уравнение для точки
Х = у = 0: X1 + F'@)X+ а = 0. Отсюда: 1) при О<0 -седло; 2) при О>0, Р@)>0-
устойчивый узел (фокус); 3) при а > 0, F' @) < 0 - неустойчивый узел (фокус).
С л у ч а й 2. Возьмем функцию V = ах2/2 + у2/2. Имеем vam> = -F(у)у < 0. По
теореме 1.5 точка X = у = 0 асимптотически устойчива в целом .
2.46. Р(\/2, а) - устойчивый фокус. Ось у = 0 - фазовая траектория системы B.112).
Характерные направления перемещения изображающих точек см. на рис. П.49. По критерию
Дюлака при /"= \/у получаем D = -2, т.е. ЗФТ не существуют. Фазовый портрет приведен
на рис. П.50.
Приложение 10
36 i
\
I
Рис. П.49 Рис. П.50
2.47. Положения равновесия и их типы сведены в табл. П.7.
Таблица П. 7
ЦУ
ЦУ>1
ЦУ < 1
/ДО> 1/v)
Устойчивый узел
Седло
/»2(Vl-nvtti)
-
Устойчивый узел
(фокус)
/>3М1-цу,ц)
-
Устойчивый узел
(фокус)
Непосредственно из B.113) видно, что ось X = 0 состоит из фазовых траекторий. Это об-
обстоятельство позволяет взять в критерии Дюлака F= \/х, что дает D = -v/x Следовательно.
ЗФТ не существуют. Фазовый портрет для цу > 1 приведен на рис. П.51, а для цу < 1 - на
рис. П.52.
V -I
Рис. П.51
Рис. П.52
2.48. Возьмем положительно определенную функцию v(x, у) = (л:2 + у2)/2 и построим
кривые V = с - совокупность концентрических окружностей с центром в точке х = у = 0,
которая является единственным положением равновесия системы B.114). Особо выделим
окружности с радиусами Г, и Г} (рис. П.53). В силу уравнений B.114) получим
vau4)=(ax2+by2)g(r2).
(П.62)
По условию g(r2) < 0 при 0 < Г < Гг следовательно, функция (П.62) отрицательно опре-
определенная, начало координат - асимптотически устойчивое положение равновесия, а все
окружности v= с при с < г2 пересекаются фазовыми траекториями в направлении снаружи
362
Приложения
внутрь. (Одна из таких окружностей с радиусом С, < Г( показана на рис. П.53.) Далее, в
кольце /"!</•< Г2 g(r2) > 0 и, следовательно, vB М4) > 0. !>го значит, что все окружности
V= С, лежащие в этом кольце, пересекаются фазовыми траекториями изнутри наружу (такова,
например, окружность радиуса С2 на рис. П.53). Наконец, при Г > Гг vBU4) < 0, следо-
следовательно, все окружности радиусом, большим Г2, пересекаются фазовыми траекториями в
направлении снаружи внутрь (например, окружность радиуса С} на рис. П.53). Отсюда, в
частности, следует, что все решения системы B.114) ограничены.
Теперь рассмотрим две кольцевые области. Одна из них заключена между окружностями
радиусов С! и С2, другая - между окружностями с радиусами С2 и Су Эти области не содержат
положений равновесия системы B.114). В первую область фазовые траектории не входят (а
только покидают ее), следовательно, внутри нее находится неустойчивый предельный цикл.
Выбирая Сх и С3 сколь угодно близко к г{, убеждаемся, что этот цикл единственный: X2 + у7 =
= г2 . Аналогично получаем, что во второй области находится единственный устойчивый
цикл х2 + у2 = Г2. Других предельных циклов нет. Фазовый портрет см. на рис. П.54.
Рис. П.53
Рис. П.54
2.49. См. §3.1 и рис. 3.5. 3.6.
2.50. Выбрав функцию V = Х2к + у2к, докажите, что система B.116) имеет единственное и
притом неустойчивое положение равновесия Х = >>= 0 и единственный устойчивый предельный
цикл V = 1/д.
2.51. Возьмите V = ах2 + у2 и примените те же рассуждения, что и в задачах 2.48—2.50.
Фазовый портрет приведен на рис. П.55.
2.52. Возьмите V = к2х2 + у2 (у = х). Уравнение единст-
единственного предельного цикла записывается в виде к2х2 +у2 =
= ос2. Фазовый портрет такой же, как на рис. П.55.
2.53. Р@,0) - неустойчивый фокус. Возьмем V = X2 + у2,
где у = Х, и получим VBH9) = 2у2A-3х2 -у2). Отсюда
следует, что окружность X2 +у2 = R достаточно большого
радиуса R пересекается фазовыми траекториями в направ-
направлении снаружи внутрь (и касание происходит только там,
где у= 0), см. рис. П.56. Из сказанного следует существо-
существование устойчивого предельного цикла. Далее по критерию
Бендиксона D = 1 - Зх2 - 3_у2. Следовательно, этот цикл охватывает окружность X2 + у2 =
1/3 и является единственным (рис. П.57).
2.54. Пусть V = х2 + у2. Тогда
Рис. П.55
М2.12О)
(П.63)
Приложение 10
363
Анализ формулы (П.63) приводит к следующим выводам: 1) если (J > 0, то фазовые портреты
имеют вид представленных на рис. П.58 для а < 0 и на рис. П.59 для а > 0, 2) если Р < 0,
то положение равновесия X = у = 0 асимптотически устойчиво в целом, если а < 0 и не-
неустойчиво, если а > 0. ЗФТ отсутствуют.
Рис. П.56
Рис. П.58
2.55. Пусть V = х4 + 2у2. Тогда
Рис. П.59
Отсюда следует, что имеются единственное неустойчивое положение равновесия X = у = 0
и единственный устойчивый предельный цикл X4 + 2у2 = 1.
2.56. P(Q,Q) - единственное состояние равновесия. Пусть V = X2 + у2. Тогда
2у2 + а).
(П.64)
1. а > 0. ЗФТ отсутствуют, точка Р@,0) неустойчива.
2. а < 0. Производная (П.64) положительна вне эллипса
и отрицательна внутри него. Построим окружности
v = x2+y2=\a\/2,
(П.65)
(П.66)
v = x'+y' = | ос |/3, (П.67)
см. рис. П.60. Внутри меньшей окружности и вне большей окружности предельных циклов
нет, но по теореме 2.5 существует по крайней мере один неустойчивый предельный цикл,
лежащий в кольце, образованном окружностями (П.66) и (П.67). Покажем, что этот цикл
364
Приложения
единственный. По критерию Бендиксона D = 2Fх2 + Ау2 + а). Эллипс 6хг + 4у2 + а = О
лежит целиком внутри меньшей окружности, значит, внутри рассматриваемого кольца знак
D сохраняется. Таким образом, предельный цикл единственный (рис. П.61).
(П.66)
(П.65)
Рис. П.60
Рис. П.61
2.57. Предельная ограниченность устанавливается выбором функции V = X2 + у2 (vBI2J) =
= -(х2 + у2) + \у < О, если сумма Х2+у2 достаточно велика). Отсутствие ЗФТ устанавли-
устанавливается по критерию Бендиксона (D = —2).
2.58. Р@,0) - неустойчивый фокус при ц > 0 и устойчивый фокус при ц < 0. Если же
ц = 0, то корни X, 2 чисто мнимые, поэтому возьмем V = X2 + у2 и при ц = 0 получим
van4) = -2(a2x2+b2y2)(x2+y2J.
Отсюда получаем, что при (i = 0 точка Р@,0) - асимптотически устойчивое положение
равновесия (типа сложного фокуса).
Пусть ц > 0. Вновь возьмем V = X2 + у2 и получим
vai24)
+у2)-2(а2х2 +Ь2у2)(х2 +у2J.
vB.j24) < 0> если сумма X2 + у2 велика. Геометрически это означает, что любая окружность
V = X2 + у2 = Л2 достаточно большого радиуса R пересекается фазовыми траекториями в
направлении снаружи внутрь. По теореме 2.4 внутри этой окружности находится устойчивый
предельный цикл.
2.59. Рис. 2.59 - консервативная система, рис. 2.60 - диссипативная система и рис. 2.61 -
автоколебательная система.
2.60. В песне из кинофильма - неточность. Правильно было бы сказать, что провода гудят
под действием ветра.
ГЛАВА 3
3.1. Фазовое пространство представлено на рис. П.62, а бифуркационная диаграмма - на
рис. П.63.
х.\
а<0
а>0
Г
, = ¦**
-х, = -\
Рис. П.62
Рис. П.63
Приложение 10
365
3.2. Рис. 3.18: а = 0. При переходе через значение а = 0 меняется устойчивость нулевого
положения равновесия и рождается (либо исчезает) устойчивый предельный цикл.
Рис. 3.19: а = 0 и а = а,. При переходе через значение а = 0 меняется устойчивость
нулевого положения равновесия и рождается (либо исчезает) устойчивый предельный цикл.
При а = а. происходит слияние и исчезновение (либо, наоборот, рождение) двух предельных
циклов.
ГЛАВА 4
4.1. В уравнениях D.26), D.27) положим
N-Nn к .„ _
X = ¦
'о .
к_
тс
где No - стационарное значение мощности, которой соответствует температура TQ. Получим
(П.68)
Задача заключается в построении фазового портрета этой системы для 1 + х ^ 0.
Система (П.68) имеет три положения равновесия: ^,@,0), Р2(-1,-1), Рг(Ь/с,Ь/с).
Точка Рх характеризует стационарный режим работы на мощности NB при температуре TQ.
Второе положение равновесия определяет погашенный реактор (JV = 0) , а точка Ру отобра-
отображает некоторый стационарный режим с мощностью и температурой, отличными от Л^ и 7^.
Информация о точках Р, дана в табл. П.8.
Таблица П. 8
Случай
1
2
3
4
5
6
Параметры
«>0; с>0
Ь>0; с<0;\с\<Ь
b>Q;c<0;\c\>b
b < 0; с < 0
6<0;|6|>c>0
«<0; о\Ь\
Я,@,0)
Устойчивый узел
(фокус)
Устойчивый узел
(фокус)
Устойчивый узел
(фокус)
Седло
Седло
Седлб
/V-L-0
Седло
Седло
Устойчивый узел
Устойчивый узел
Устойчивый узел
Седло
Р,(Ь/с,Ь/с)
Седло
-
Седло
Устойчивый узел
(фокус)
-
Устойчивый узел
(фокус)
Примем во внимание, что: 1) вертикаль X = -1 есть интегральная кривая, по которой
изображающие точки стремятся к положению равновесия -P2(-l,-l); 2) система (П.68) не
содержит ЗФТ. Справедливость первого утверждения следует непосредственно из (П.68), а
второе утверждение - из критерия Дюлака при F(x,y) = 1/A + X).
Фазовые портреты даны на рис. П.64-П.69.
При С = 0 получаем частный случай задачи, которая была рассмотрена в §4.3. В этом
случае фазовый портрет системы имеет тот же вид, что и на рис. П.65, если Ъ > 0, либо на
рис. П.68, если Ь < 0.
4.2. Существуют два положения равновесия системы D.28): /^@,0) и Р2(-1,у0), где
^0>0 - единственный корень уравнения А + В<р(у) = 0. Точка Р, отображает стационарный
режим работы реактора на мощности N0>Q, а точка Рг характеризует погашенный реактор.
Приложения
Случай 1
Случай 2
Рис. П.64
Случай 4
Случай 5
Рис.
П.67
У
-1
р
\
У
ж-
(
Случай 6
Рис. П.68
Рис. П.69
Характеристическое уравнение для /*, имеет вид
X2 + Ву\ + Ац1 = О,
где \|/ = f'(O)(p'(O) > 0. Отсюда ясно, что /*, - устойчивый фокус (либо узел). Корни
характеристического уравнения для Рг: \^ = фСУ0) > 0; Х2 = -5\|/ < 0, т.е. /^ - седло.
Приложение 10
367
Докажем теперь, что областью притяжения точки Р{ служит вся область 1 + Х> 0. (Тем
самым будет доказано, что в этой области нет ЗФТ и нет траекторий, уходящих в бесконеч-
бесконечность.) Возьмем положительно определенную (в области 1 +Х>0) функцию
Получим
*<«.«>
- f(Ax)].
Согласно D.31) функция/возрастающая, поэтому разность в квадратных скобках имеет тот
же знак, что и В(р(у), т.е. производная VD 2g) совпадает по знаку с выражением -Вц>2(у).
Следовательно, VD 28)< 0 в области 1 + X > О всюду, за исключением точек у = О, X -
любое. Однако из второго уравнения D.28) и свойств функции/(м) следует, что при y(t) = О
система D.28) не имеет решений, отличных от тривиального, и согласно теореме Барбашина
и Красовского решение /^(OjO) устойчиво асимптотически, а его областью притяжения служит
все подпространство 1 +Х>0.
Исключим теперь время /из уравнений D.28). Получим
dy__
dx
Изоклинами вертикальных касательных к интегральным кривым этого уравнения служат
вертикаль Х = -\ и совокупность точек, где (р(у) = 0, т.е. ось абсцисс. Изоклины горизон-
горизонтальных касательных определяются условием/= 0, т.е. уравнением
Ах + Щу) = 0.
(П.69)
Эту кривую нетрудно построить на фазовой плоскости х, у, коль скоро задан график функции
(р(у). Если, например, этот график имеет вид, представленный на рис. П.70, то кривая
(П.69) будет задана рис. П.71. Фазовый портрет системы D.28) дан на рис. П.72.
Рис. П.70
4.3. Пусть
N-N,
х =
о .
Рис. П.71
Рис. П.72
где Л^о > 0, Со > 0 - решения исходных уравнений, записанных для стационарного режима.
В новых обозначениях эти уравнения примут вид
368
Приложения
+ x) + z -x;
(П.70)
Здесь точкой обозначено дифференцирование по т; /( >0, 8, >0.
Система (П.70) имеет два положения равновесия: /*,((), 0) - устойчивый узел и
/>2(-1,-1) - седло.
По физическому смыслу переменные Nn С положительны, следовательно,
+ X > 0; 1 + Z > 0.
(П.71)
Из (П.70) видно, что все фазовые траектории (за исключением точки Р7) входят в
область (П.71). Покажем, что в этой области нет предельных циклов и вся область (П.71) есть
область притяжения точки Ру.С этой целью возьмем функцию
/, , 1 ,
*(х,у) = +х +-z
и получим
К(П.7О)
Эта производная - отрицательно определенная функция в области (П.71). Пусть V= СЫ1ХС-
замкнутая кривая максимальных размеров [из семейства v(x,y)=const], целиком расположенная
в области (П.71) (рис. П.73). Если бы существовал предельный цикл, он непременно пересекал
бы линию V = Смакс, что невозможно: изображающая точка, попав внутрь области V < Смик,
неограниченно приближается к началу координат.
А
-1
Л
\
г.
Z
\
\
.—
/
/
г _)
)
у
Г
...с.
X
х с
\
-1
Z
а
и
^Ч л:
\
Рис. П.73
Рис. П.74
Отметим, наконец, что ни одна фазовая траектория, начинающаяся в области (П.71),
не уходит в бесконечность: на сторонах АВ и ВС квадрата больших размеров (см. рис. П.73)
производные х (на ВС) и Z (на АВ) отрицательны, что видно непосредственно из уравнений
(П.70). Этим и определяется фазовый портрет системы (П.70), представленный на рис. П.74.
4.4. С помощью обозначений, принятых в задаче 4.3, перепишем исходные уравнения в виде
Ьхх = -
= X-Z,
(П.72)
где у(х) = ф(л:)/р. Система (П.72) имеет три положения равновесия: /^(О.О), Рг(-1,-1),
Р}(х„Х,). Точки Р, и Рг имеют тот же смысл, что и в задаче 4.1, a Pi определяет стационарный
режим реактора на мощности Л^. > No [х. = (N.~ No)/No > 0]. Анализ типов положений
Приложение 10
369
равновесия дает следующее: Pf - устойчивый узел, Р2 - седло, Рг - также седло, поскольку
Ч»'(*.)<0.
Покажем, что система (П.72) не имеет предельных циклов. Прежде всего отметим, что
фазовые траектории пересекают стороны квадрата АР}ВР2 на фазовой плоскости х, Z так,
как показано на рис. П.75. Это следует непосредственно из уравнений (П.72). Стало быть,
если предельный цикл существует, то он непременно лежит внутри этого квадрата. (Он не
может охватывать квадрат, поскольку индексу любой замкнутой кривой, охватывающей квадрат
АР}ВР2, равен алгебраической сумме индексов точек PvPyPy т. е. j = -1.) Возьмем
теперь функцию V из предыдущей задачи и получим
Внутри квадрата АР,ВРг эта производная - отрицательно определенная функция, а замкнутая
кривая V = CHa|((. семейства V = const, вписанная в этот квадрат и имеющая максимальные
размеры, целиком содержит внутри себя хотя бы один из отрезков Ох, ОД 0Е, ОС (на
рис. П.75 это - отрезок 0*,). Следовательно, предельный цикл должен пересекать кривую
V= Смык, что невозможно. Таким образом, предельные циклы системы (П.72) не существуют.
Фазовый портрет системы дан на рис. П.76.
x=Z
N
Л
4.5. В уравнениях D.34) положим
x = (N-N0)/N0;
Рис. П.76
= Т-Тй; т = /X;
Получим
у = ах; г = х- z\ -а.у(\ + х) + z -х = 0.
(П.73)
Модель D.34) справедлива только при Р > р (см. § 4.4). Отсюда 1 + ау > 0. Кроме того, как
и в предыдущей задаче, принимаем 1 + Z > 0. Таким образом, дальнейший анализ системы
(П.73) будет проводиться только для области
1 + ау > 0; 1 + z > 0.
(П.74)
Система (П.73) имеет единственное положение равновесия Х = у= Z =0 типа устойчивого
узла (или фокуса). Исключим из (П.73) переменную X. Получим
+ а.у
(П.75)
370
Приложения
Рис. П.77
X =
Получим
N-N,
0.
Применим к системе (П.75) критерий Дюлака. Полагая
f{y, Z) = A + ау)/A + г), имеем D = -<ха/A +
+ ?) < 0. Таким образом, предельные циклы в области
(П.74) не существуют. Этим и определяется фазовый
портрет системы (П.73) (рис. П.77). Положение равно-
равновесия ДО, 0) асимптотически устойчиво, и областью
его притяжения служит все подпространство (П.74).
Напомним, что в отсутствие запаздывающих
нейтронов положение равновесия не было асимп-
асимптотически устойчивым (см. §4.1).
4.6. Решим эту задачу, не пренебрегая производной
dN/dt в первом уравнении. Положим в системе D.2S)
т Т. г_С~Со. fl_
I
х{ ^- х -2-
ay = х- by.
(П.76)
В соответствии с физическим смыслом переменных будем считать, что 1+Х>0;
Докажем, что положение равновесия Х=у=Z = 0 системы (П.76) асимптотически устойчиво
и областью его притяжения служит все подпространство 1 + X > 0; 1 + ? > 0. Такое доказатель-
доказательство составит, очевидно, полное решение задачи.
Умножим первое уравнение системы (П.76) на х/A + х), второе уравнение - на
l/{\ + z)K третье уравнение - на ay/f> и сложим эти уравнения. Получим
(П.77)
где
v = Цх - 1пA + х)) + ±lz - ln(i + z)) + ^у2;
К 2р
а г «г (х- ZJ
Р Р A + х)A + z)
Функция (П.77) положительно определенная в упомянутой области.
Пусть а, < 0. Тогда производная (П.77) - отрицательно определенная функция в области
1+Х>0; 1+г>0. Отсюда следует, что точкаX=у = z = 0 асимптотически устойчива, и
область
= v(x,y,z)<C,
(П.78)
где С- сколь угодно большое число, принадлежит области ее притяжения. [Очевидно, что
область (П.78) составляет тем большую часть области 1+Х>0; 1+?>0, чем больше С]
Пусть а, = 0. Тогда производная (П.77) - функция знакопостоянная: W- 0 при у = 0;
X = Z Однако это множество не содержит целых фазовых траекторий системы (П.76)
Приложение 10
371
(за исключением точки Х = у = Z — 0)- Согласно теореме (I.S) начало координат и в этом
случае асимптотически устойчивое с областью притяжения (П.78).
ГЛАВА 5
5.1. В соответствии с биологическим смыслом переменных ограничимся областью X > 0;
у> 0. При D> 0 в этой области существует только положение равновесия ^@,0) - ус-
устойчивый узел. Фазовый портрет см. на рис. П.78.
При D < 1 система E.26) представляет собой
частный случай системы E.2) при /V, = X; N2 = у,
Л, = -1 - D; къ = D, к2=кА= 1. Фазовый портрет
аналогичен портрету, представленному на рис. 5.2.
5.2. Введем новое время т = &,/, новые переменные
X = kJIJky у = кгМ2/кг и положительные параметры
а = к^\/кг; b - kjk^. Тогда уравнения E.27)
перепишутся в виде B.106) и далее см. решение зада-
чи240' Рис. П.78
5.3. Пусть Nx =X\N2 = у. Оси X = 0, у = 0 - интегральные прямые этой системы, поэтому
она не имеет замкнутых траекторий, которые пересекали бы оси координат. Однако у системы
E.1) нет и таких замкнутых траекторий, которые не пересекают координатные оси. В самом
деле, применим к системе E.1) критерий Дюлака, полагая F(x,y) = ДС*~'.у'~|, где к и /-
пока не определенные постоянные. Получим
D = хк -у- '[(Р + Jtp + lb)x +(ky + lc+c)y +
Возьмем в качестве knl решение системы уравнений
P + /fcp + #>=0; ky+lc+C=0,
la].
. р(у-с).
т.е.
Р У
Ь с
Получим, что D = F(x,y)a/b * О и имеет одинаковый знак в пределах каждого квадранта
фазовой плоскости, если только а = Са(Ь - Р) + Рй(у - с) Ф 0. Следовательно, система
E.1) при а * 0 не имеет ЗФТ и, стало быть, не является автоколебательной. Исключение
составляет случай о = 0 (см. гл. 5, §9 в [3]).
5.4. Ответим на поставленный вопрос, исследуя условия существования и устойчивости
положения равновесия Рг внутри первого квадранта плоскости X, у. [Здесь существуют так-
также и точки Pj и Р2 — положения равновесия системы
E.28), расположенные на осях координат, см.
рис. П.79]. Точка Р} находится на пересечении кривой
f(x,y) с вертикалью X = D. Рассмотрим три возможных
расположения этой вертикали, обозначенных на рисунке
цифрами /, 2 и 3. При положении / точка Рг
отсутствует, следовательно, предельные циклы не
существуют, и автоколебания невозможны.
При положениях 2 и 3 точка Р} существует (на
рис. П.79 - PJA и /*ЗБ соответственно). Характеристи-
Характеристическое уравнение Р} записывается как
Рис. П.79
372
Приложения
V У J
(П.79)
Индексом "О" отмечается значение соответствующей величины в точке Ру Свободный член в
(П.79) положителен, так как Х„ > 0, у0 > О и по условию задачи (д//дуH < 0. Выясним
знак коэффициента перед X, для чего найдем наклон касательной к кривой f(x, у) = 0
в точке Ру Имеем
dy_
dx
(д//дхH
(д//дуH
В точке PJA dy/dx < 0, следовательно, (ду/дх)а < 0. Коэффициент перед X положителен,
точка /*ЗА устойчива. Предельные циклы либо не существуют, либо их имеется четное число.
Для точки Р^Б имеем dy/dx > 0, следовательно, (д//дхH > 0, коэффициент перед X
отрицателен, а точка Р}Ъ - неустойчивый фокус или узел. По условию задачи все решения
системы E.28) ограничены, значит, существует по крайней мере один устойчивый предель-
предельный цикл, охватывающий точку Ргъ. В этом случае автоколебания непременно существуют.
5.5. Система E.29) имеет два положения равновесия: Р{@,0) - седло и P2(NIO, Nla), где
Характеристическое уравнение для Р2 записывается в виде
?¦] = 0.
N.
Рис. П.80
Все коэффициенты в этом уравнении положительны,
следовательно, Рг - устойчивый фокус или узел.
Применим теперь к системе E.29) критерий
Дюлака, выбрав F(Nr N2) = l/JV,./^. Получим
D = -кг N.IN? < 0, следовательно, система E.29)
не имеет ЗФТ.
Наконец, непосредственно из системы E.29)
видно, что ось абсцисс есть интегральная прямая -
сепаратриса седла Ру видно также, что положительная
полуось ординат пересекается фазовыми траекториями
в направлении слева направо. Фазовый портрет
приведен на рис. П.80.
ГЛАВА 8
8.1. Нет, поскольку во всех этих случаях М'(Q) > 0 и а > 0, а устойчивый предельный
цикл, как это показано в гл. 8, существует только при а < 0.
8.2. Уравнение Ван-дер-Поля
JC + ц(х2 - \)х + X = 0.
Для него Ф(К) = К/2- К3/8; Ч?(К) = 0. Существуют два положения равновесия
укороченной системы: /Г, = 0 и К2 = 2. Далее, Ф'(К) = 1/2-3 AT2/8 , следовательно,
Приложение 10
373
Ф'@) > 0, Ф'(К = 2) < 0. Таким образом, су-
существуют единственный устойчивый предельный
цикл - окружность радиусом, равным 2, и един-
единственное неустойчивое положение равновесия
х — 0; х = 0 . Фазовый портрет представлен на
рис. П.81.
8.3.
2
Рис. П.81
Из уравнения Ф(А) = 0 находим К= К{ = 2р/л; Ф'(.К,) = -1/2. Таким образом, суще-
существует единственный устойчивый предельный цикл и соответственно автоколебания с
амплитудой 2р/л.
8.4.
8
Состояния равновесия укороченной системы: А", = 0, Кг = 2-^(а - 1) / а . Далее, Ф'@) =
= (а - 1)/2; Ф (А^) = 1 - а. Отсюда следует, что: 1) К= А", — устойчивое положение
равновесия при а< 1 и неустойчивое при а > 1; 2) К= К^- устойчивое положение рав-
равновесия при а > 1 и неустойчивое при а < 1; 3) при 0 < а < 1 положение равновесия
К= К} не существует. Бифуркационную диаграмму см. на рис. П.82, а фазовые портреты -
на рис. П.83.
Рис. П.82
0<а<1
Рис. П.83
374
Приложения
8.5. В данном случае
Дх,х) = (-1
2 + ар3х3 -ах4)*,
Здесь и далее принято, что а > О, Р = Рг
Уравнение Ф(Х)=0 имеет корень К= К = §, а другие корни определяются из уравнения
= Y + Рр-2р2 =0,
(П.80)
в котором у = (а - 1)/а; р = К /4. По физическому смыслу р - квадрат половины
амплитуды автоколебаний, и, естественно, представляют интерес только положительные корни
уравнения (П.80). Графики <р(у,р) = 0 даны на рис. П.84.
Р>0
Т„ О
a)
Рис. П.84
Теперь перепишем производную Ф' в виде Ф'(Ю = <*V)/(y,p), где
А
Р
"А
с
V"
р<о
у
^(YjP) = ¦^" + "гРр-5р . (П.81)
Кривая \|/(у, р) = 0 - парабола, проходящая через начало координат и через точку А,
в которой касательная к кривой (П.80) вертикальна (см. штриховые кривые на рис. П.84).
Координаты точки А: У = У0 = -РУ8; р = ро=р/4. В той части плоскости у, р, где располо-
расположена ветвь АВ на рис. П.84,о и ветвь ОБ на рис.П.84,б, функция V|/ < 0, следовательно, Ф'
< 0 и, таким образом, точки этих ветвей отображают устойчивые положения равновесия
укороченной системы. Точкам ветви ОА отвечают неустойчивые положения равновесия,
поскольку для них \|/ > 0 и Ф' > 0.
Определим теперь устойчивость положения равновесия К] = 0. Очевидно, Ф @) =
= ау/2, т.е. Ф'@) > 0 при у > 0 (точка АГ= 0 неустойчива) и Ф'@) < 0 при у < 0 (точка
К= 0 устойчива). Таким образом, получаются бифуркационные диаграммы, представлен-
представленные на рис. П.85. Это типичные бифуркационные диаграммы жесткого (C > 0) и мягкого
(Р < 0) режимов. Фазовые портреты системы представлены на рис. П.86-П.88, причем
Приложение 10
375
рис. П.86 -дляу<у(|)Р>0идляу<0>Р<0; рис. П.87 - для у0 < у< 0, Р >0; рис. П.88
- для у > 0. Бифуркационные значения параметра у: у = 0 и у=у0.
Рассмотренная задача описывает динамику лампового генератора при аппроксимации
характеристики лампы полиномом пятой степени [3].
С
а)
Р>0
Р<0
Рис. П.85
Рис. П.86
Рис. П.87
Рис. П.8
8.6. Положим tmt = kt и цно8= цД. Получим X + X = цн0,/(х,х), где f(x,x) =
= (а2 - Хг)х - ух3 I к (точкой отмечается дифференцирование по /нов).
Подсчет функций Ф(Л) и Ч(А) дает
Корни уравнения Ф(Л) = 0: /4, = 0 и /^ = 20, при этом Ф'(^) = -а2 < 0. Таким образом, в
исследуемой системе действительно устанавливаются автоколебания с амплитудой А = 2а.
Период автоколебаний равен Т= 2л/@, где
8.7. Согласно методу Ван-дер-Поля, частота периодических колебаний равна @= 1
где А - амплитуда колебаний, а ^(А) - правая часть второго уравнения укороченной
системы (см. гл.8):
2«
2пА
\ ДА cos и) cos и du.
376
Приложения
Из рис. П.89 ясно, что
2*
osudt
J
и Г, 2'{ ц
= --^Zl\ Jcos«rf«+ )cos,udu\ = -—rsin«,.
№
l
/(АсжиУ
\l j x 0
«, «j 2я
2n
и
Рис. П.89
Учтем, что AcobU^ = 1, и окончательно получим
Ц /.
8.8.
Ч'(ДГ) = 0.
Уравнение Ф(А) = 0 дает K=Kt-0 и
(П.82)
5v
Ф'@)= -а/2. В точках кривой (П.82) Ф'(К) = AT2 +-J-AT4 > 0. Результаты см. на
рис. П.90, П.91.
(П.82)
Рис. П.90
Приложение 10
377
а<0
а>0
Рис. П.91
ГЛАВА 12
12.1. Как и в примере из §12.3, убеждаемся, что ^ = 0. Вычислим коэффициенты гармо-
гармонической линеаризации q и q', используя рис. П.92. Получим q' = 0, a
1 Г"! "' 1 2
q = — \sinudu- jsinudu =—(cosh,-cosы2).
Рис. П.92
Учтем, что И, =71 ~UV A&inul = b, и получим
4
"ри А>Ь'
Характеристическое уравнение записывается в виде
М(\) = 772Х3 + G; + Т2)\г + Я. + д(А) = 0.
Отсюда имеем
=0;
Im Л/(/ш) е v2 = ш - Г,Г2со3 = 0;
(П.83)
(П.84)
378
Приложения
По формуле (П.83) построим график
д=д(А) и графически определим амплитуду А
(рис. П.93). Если G",+ Г2)/7'1712>4/яA + *2),
то колебания не существуют. Если же
( Г, + 7)/ 7", Т2 < 4/я( 1 + А2), то существуют два
значения амплитуды колебаний А1 и А2, каждое
из которых превосходит b (см. рис. П.93).
Проведем расчет устойчивости периодичес-
Рис. П.93 ких колебаний. Положим в (П.84) А = Ап+ АА
разделим действительную и мнимую части и удержим только линейные (относительно АА,
Дсо и !;) члены. Получим
Я
4АA+Л2)
0
А
К
+ 61 А, А
Wu = Я\Л„), V'to = -
4/'2, =0, v'to=-2, ч
Условие устойчивости с учетом (П.85) примет вид
), V'4 = -2;
(П.85)
Отсюда ясно, что устойчивыми будут только колебания с амплитудой А2.
12.2. Перепишем исходное уравнение в виде
0. (П.86)
Пусть X = Д, + A sin со/; х = Хх = А<а COS со/. Тогда
F(Xx) = AW cos3 со/ = -y43co3(cos3co/ + 3cosco/).
4
Эта функция не содержит постоянной составляющей, т.е. ^0 = 0. Из уравнения Q@)AA +
+ R@)F0 = 0 следует, что А0 = 0. Далее, 0=0, q< = C /4)со3/42, так что
, ВА.З 3 о=0
Рсо4
откуда
ReA/(/co) =
со342
= 0.
Следовательно,
со = 1; А = д/^а,
Колебания возможны только в том случае, если а и Р имеют разные знаки.
(П.87)
Приложение 10
379
Расчет устойчивости проводим по тому же способу, что и в предыдущей задаче. В итоге
получаем уравнения
-2Дш = 0, \а$АА+ % = <).
4
Условия устойчивости: АА и ^ - разных знаков, следовательно, (J > 0.
Вывод: автоколебания устанавливаются при Р > 0; а < 0. Амплитуда и частота авто-
автоколебаний определяются из (П.87).
12.3. Исходное уравнение (а2 + аХ + 1 )х + F(Xx) = 0. Пусть X = /4„ + A sin @/. Тогда
F(Xx) = рЛ3со3 cos3 со/ + уА'<о$ cos5 cat.
Эта функция не содержит постоянной составляющей Fo = 0. [В этом можно убедиться
непосредственными тригонометрическими преобразованиями либо вычислением Fo по формуле
A2.7)). Таким образом, Ао = 0. Далее,
Положим А. = /со . Разделив действительную и мнимую части, найдем со = @. = 1 и
-уЛ4 =0.
(П.88)
График этого уравнения приведен на рис. П.94. Исследуем устойчивость колебаний, полагая
X = ^ + /'A + Дсо); А = А, + АА, где А. - положительный корень уравнения (П.88). Работаем
по методике из §12.2. С учетом (П.88) получим
- 2Дсо = 0; \ + ^ (Зр
= 0.
Для устойчивости необходимо и достаточно, чтобы ? и АА были разных знаков, поэтому из
последнего уравнения находим условие устойчивости А] > -ЗР / 5у . Все точки параболы
(П.88), лежащие выше штриховой горизонтали,
отображают устойчивые периодические режимы
(помечены точками), а точки ниже этой па-
параболы, помеченные крестиками, дают неустой-
неустойчивые периодические колебания.
Замечание. Обратите внимание на пол-
полное совпадение с результатами решения методом
Ван-дер-Поля ( см. § 8.3).
12.4. В данной задаче постоянная составляющая
отлична от нуля: Ft = -1/2. Находим AQ = Р/2.
Далее, q = 0, как интеграл по периоду
нечетной периодической функции, a q' - -2/пА. Затем по обычной схеме определяем @=1;
А =2р/я. Итак,
Р 2Р .
х = — + —sin/.
2 я
380 Приложения
Анализ устойчивости этого решения приводит к уравнениям
4рДсо=0; 4Р^
откуда 4|34 + пАА = 0, т. е. ? и АА имеют разные знаки. Следовательно, периодическое
решение устойчиво.
12.5. А^ = 0, поскольку Дх) - функция, симметричная относительно начала координат.
Подсчет q и q дает q = 4a/nA; q' = 0. Характеристическое уравнение записывается в виде
T,T2\J +(Tt +T2)X2 +k + 4a/rtA = 0.
Отсюда после соответствующих преобразований найдем
1 г. А=А -4 Т*Т'а
Исследование устойчивости периодических колебаний приводит к уравнениям
\ + со. G; + Г2) Дсо + Bй / тЫ.2 )АА = 0;
Исключим из них До) и получим уравнение
l 2 ?АА = 0,
коэффициенты в котором положительны, следовательно, условие устойчивости (? и АА -
разных знаков) выполнено.
ГЛАВА 13
13.1. Положение равновесия единственное: JC=>>=0. Множество F=0: у=ХгA-Хг); график
см. на рис. П.95; 3FI дх = 1 - Зх2 . При |дс| < 1 / VJ имеем dF I дх > 0 , следовательно,
участок ЛСна рис. П.95 - это участок F~. Ос-
Остальная часть кривой F=0 есть множество F*.
Существует разрывный предельный цикл
ABCD, следовательно, в системе устанав-
устанавливаются разрывные автоколебания.
13.2. Возможны три случая.
1. 0<fl< 1. Прямая G = х-ау = 0 зани-
занимает положение / на рис. П.96. Фазовый портрет
см. на рис. П.95.
2. 1 < а< 3/2. На рис. П.96 прямая С=0
р J, пс занимает положение 2. В этом случае имеется
три неустойчивых положения равновесия О,,0 и
О2; с точностью до этого обстоятельства фазовый портрет такой же, как на рис. П.95.
3. fl>3/2 Прямая G=0 занимает положение 3. Фазовый портрет см. на рис. П.97.
Автоколебания отсутствуют. Любое движение стремится к одному из устойчивых положений
равновесия - О, или О2.
13.3. Положение равновесия единственное: Х=у=0. Линия F=0 определяется уравнением
у=-х-1ар(х) = (к-1)х--х\ (П.89)
\d
. \
\
\
—1\
\
N.
У
j
/
У
А
/
1
/
{)
Rx.y) = 0
С /
\
\
в\
Приложение 10
381
У
. \
\D
\
\
\
\ у
\ /
1 А
с
/ \
{ \
0 \
\
\
А
Рис. П.96
а участки F* и /""-знаком производной
Рис. П.97
= k-\-kx\
X
(П.90)
Построение кривой (П.89) и анализ знаков производной (П.90) приводит к фазовым пор-
портретам, представленным на рис.П.98-П.1ОО. При к>\ (см. рис. П. 100) имеется разрывный
предельный цикл ABCD, которому отвечают разрывные автоколебания.
V
^
У
/ \
/ °
/
1
/
*<о
iF=0
1
/
\ / х
ЧУ
Рис. П.98
Рис. П.99
V
\
¦ \
\
¦ V >
\.
\ >
А
У
0
/
f
к>\
С
/ \
\
\
Рис. П. 100
13.4. Уравнение движения запишем в виде
382
Приложения
Положение равновесия: X = Х^ = F (v)/k, X = 0. Характеристическое уравнение: т\2 +
+ /"^(vJA. + к = 0. Отсюда имеем, если V > V,, то F'w(v) > 0 и положение равновесия
устойчиво. Если же V< V,, то F' (v)< 0 и положение равновесия неустойчиво.
Подпространство F=0 есть линиях = Fw(y- v) /к (см. рис. П. 101 и П. 102). Рис. П. 101
составлен для неустойчивого положения равновесия, и в этом случае существует разрывный
предельный цикл ABCD, а рис. П. 102 соответствует случаю устойчивого положения равно-
равновесия. Здесь предельные циклы (и автоколебания груза) невозможны. Точкой О, обозначено
положение равновесия. Участки F* hF~ определяются по знаку производной dF/dy = —F^.
Для /"^ > 0 получается участок F+, а для F^ < 0 - участок F'. На рис. П. 101 и П. 102
участки F~ заштрихованы. Направление движения изображающей точки по участку F
определяется по равенству х = у ¦
/•=о\ у=*
С D
0
<
о,
/
Ч
v>v
X
Рис. П. 101
Рис. П. 102
В
ZY
7 V
V77Y
13.5. F(x,y) =у- \|/(;с); F'x= -у'(х). Участки F* те, на которых \J/'(*) > 0; остальные -
участки F'. Положение равновесия Р един-
единственное, расположенное на пересечении кри-
кривой у= \у(х) с осью ординат. Фазовый порт-
портрет для а < 0 см. на рис. П. 103. Существует
разрывный предельный цикл ABCD, и,
следовательно, существуют автоколебания.
При а > 0 участки F* останутся теми же
{F и F'x от а не зависят), но направление
*х~ движения изображающих точек по ним
изменится на противоположное. Предельного
цикла (и автоколебаний) не будет.
Рис. П.103
ГЛАВА 15
15.1. При Р = 0 из A5.24) получим р = А.2/(^2 + у2) (см. рис. П.104).
15.2. Итак, й)„2/со2 = 1 - ц?, откуда ОJ = С002/( 1 - ц^)- Учтем малость ц и равенство ? = Рр,
которому подчиняются собственные колебания (см.§15.4). Получим
(П. 91)
Из (П.91) видно, что частота со собственных колебаний зависит от амплитуды колебаний
(от р). Дня жесткой упругой силы (р > 0) частота растет с увеличением амплитуды колеба-
колебаний; для мягкой упругой силы (Р < 0) частота уменьшается при возрастании амплитуды
Приложение 10
383
(рис. П.105). В линейном случае, при Р = 0, частота собственных колебаний, равная
зависит от параметров системы и не зависит от амплитуды колебаний.
0H
Рис. П.104
Рис. П.105
15.3. а)Пусть V= (fl2 + Р)/2. Тогда V,l5.,9) = ~(а2 +Ь2) + ХЬ. Ясно, что при fl2 + Р > \г
эта производная отрицательна, следовательно, система A5.19) предельно ограничена, б) По
критерию Бендиксона D = -2, следовательно, ЗФТ не существуют, в) Пусть положение
равновесия единственное. В силу а) Р - не центр (нет ЗФТ) и не седло, так как индекс
положения равновесия равен +1 . Следовательно, Р- узел или фокус и притом устойчивый
[иначе существовал хотя бы один устойчивый предельный цикл, что невозможно в силу б)].
15.4. Решение задачи повторяет соответствующие выкладки из §15.9. Ответ:
x(t) = Д COSH,/ +
где Р = цсод2 - малый параметр, а функция
со2
Pj>(/),
P2cos2Ci2t
Здесь А{, A}, Pl2, Po, Pf, Рг - постоянные. Таким образом, в спектре вынужденных коле-
колебаний содержатся комбинационные частоты Clt — С1г и П( + С12 и ультрагармоники 2Q,
2П
и 2ПГ
''Согласно а) это положение равновесия лежит внутри окружности о2 + Л2 = Л2 достаточно большого
радиуса, которую траектории пересекают снаружи внутрь и индекс которой равен +1.
СПИСОК ЛИТЕРАТУРЫ
К Введению
1. Самарский А.А. Вычислительный эксперимент в задачах технологии // Вестн. АН СССР.
1984. №3. С. 77-88.
2. Самарский АЛ. Проблемы использования вычислительной техники и развитие информа-
информатики // Вестн. АН СССР. 1985. №3. С. 57-69.
3. Бухгольц Н.Н. Основной курс теоретической механики. Ч. 1 М.: Наука, 1972. Гл. 6.
4. Стретт Дж. (Лорд Рэлей). Теория звука: Пер. с англ. / Под ред. СМ. Рытова. М.:
Гостехтеориздат, 1955.
5. Неймарк Ю.И., Коган Н.Я., Савельев В.П. Динамические модели теории управления.
М.: Наука, 1985.
6. Бутенин Н.В., Неймарк Ю.И., Фуфаев Н.А. Введение в теорию нелинейных колебаний.
М.: Наука, 1987.
7. Кудрявцев П.С. История физики. Т. 1. М.: Учпедгиз, 1956.
8. Спасский Б.И. История физики. Ч. 1. М.: Высшая школа, 1977.
9. Шмутцер Э., Шютс В. Галилео Галилей: Пер. с нем. М.: Мир, 1987.
10. Андронов А. А., Витт А.А., Хайкин С.Э. Теория колебаний. М.: Физматгиз, 1959.
11. Бабаков И.М. Теория колебаний. М.: Наука, 1968.
12. Мандельштам Л.И. Лекции по колебаниям. М.: Наука, 1972.
13. Стрелков СП. Введение в теорию колебаний. М.: Наука, 1964.
14. Гюйгенс X. Три мемуара по механике. М.: Изд-во АН СССР, 1951.
15. Франкфурт У.И., Френк A.M. Христиан Гюйгенс. М.: Изд-во АН СССР. 1962.
К Части 1
1. Андронов А.А. Предельные циклы Пуанкаре и теория колебаний / А.А.Андронов.
Собрание трудов. М.: Изд-во АН СССР, 1956. С. 32-33.
2. Андронов А.А. Математические проблемы теории автоколебаний. Там же. С. 85-124.
3. Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний. - 2-е изд. М: Физматгиз,
1959.
4. Андронов А.А., Леонтович Е.А., Гордон И.И., Майер А.Г. Качественная теория
динамических систем второго порядка. М.: Наука, 1966.
5. Андронов А.А., Леонтович Е.А., Гордон И.И., Майер А.Г. Теория бифуркаций
динамических систем на плоскости. М.: Наука, 1967.
6. Базыкнн А.Д. Математическая биофизика взаимодействующих популяций. М.: Наука,
1985.
7. Барабанов А.Т., Катковник В.Я., Нелепин Р.А. и др. Методы исследования нелинейных
систем автоматического управления. М.: Наука, 1975.
8. Баутин Н.Н. К теории синхронизации // ЖТФ. 1939. Т. 9. С. 510.
9. Баутин Н.Н. Поведение динамических систем вблизи границ области устойчивости. -
2-е изд. М.: Наука, 1984.
10. Баутин Н.Н., Леонтович Е.А. Методы и приемы качественного исследования динами-
динамических систем на плоскости. М.: Наука, 1976.
11. Бутенин Н.В., Неймарк Ю.И., Фуфаев Н.А. Введение в теорию нелинейных колебаний.
М.: Наука, 1987.
12. Бухгольц Н.Н. Основной курс теоретической механики. Ч. 1. М.: Наука, 1972.
13. Вольтерра В. Математическая теория борьбы за существование. М.: Наука, 1976.
14. Воронов А.А. Устойчивость, управляемость, наблюдаемость. М.: Наука, 1979.
15. Гинзбург Л.Р., Лившиц Е.С. Математические модели элементарных биоценозов //
Список литературы 385
Управление и информация. 1974. Вып. 10. С. 76. (Владивосток: Дальневост. научн. центр
АН СССР, Ин-т автоматики и процессов управления).
16. Горяченко В.Д. Методы теории устойчивости в динамике ядерных реакторов. М.:
Атомиздат, 1971. Гл. 3.
17. Горячевко В.Д. Методы исследования устойчивости ядерных реакторов. М.: Атомиздат,
1977. Гл. 6.
18. Горяченко В.Д. Качественные методы в динамике ядерных реакторов. М.: Энерго-
атомиздат, 1983.
19. Горяченко ВД., Золотарев С.Л., Колчнн В.А. Исследование ядерных реакторов
качественными методами. М.: Энергоатомиздат, 1988.
20. Горяченко В.Д. К динамике взаимодействия двух видов // Биохимия и биофизика .
1976. Вып. 4. С. 57. (Горький: Горьк. ун-т им. Н.И. Лобачевского).
21. Горяченко В.Д. К динамике взаимодействия популяций как объектов с запаздыванием
//Динамика биологических систем. 1977. Вып. 1. С. 32. (Горький: Горьк. ун-т им. НИ. Ло-
Лобачевского).
22. Горяченко В.Д. Математические модели динамики двух взаимодействующих видов
как объектов с последействием // Прикладная биофизика микробов. 1984. С. 76. (Горький:
Горьк. ун-т им. Н.И. Лобачевского).
23. Еругнн Н.П. Книга для чтения по общему курсу дифференциальных уравнений.
Минск: Наука и техника, 1970.
24. Жуков В.П. Исследование периодических режимов в нелинейных системах // Докл.
АН СССР. 1981. Т. 25, №2. С. 302.
25. Колмогоров А.Н. Качественное изучение математических моделей динамики популя-
популяций // Проблемы кибернетики. 1972. Вып. 25. С. 100. (М.: Наука).
26. Красовский Н.Н. Некоторые задачи теории устойчивости движения. М: Физматгиз,
1959.
27. Курош А.Г. Курс высшей алгебры. - 8-е изд. М.: Физматгиз, 1963.
28. Ла-Саляь Ж., Лефшец С. Исследование устойчивости прямым методом Ляпунова.
М.: Мир, 1964.
29. Ляпунов А.М. Общая задача об устойчивости движения. М.-Л.: Гостехиздат, 1950.
30. Майер А.Г. К теории связанных колебаний двух самовозбужденных генераторов //
Учен. зап. ГГУ. 1935. Вып. 2. С. 3.
31. Малыш И.Г. Теория устойчивости движения. - 2-е изд. М.: Наука, 1966.
32. Марсден Дж., Мак-Кракен М. Бифуркация рождения цикла и ее приложения: Пер.
с англ. / Под ред. Н.Н. Баутина и Е.А. Леонтович. М.: Мир, 1980.
33. Меркни Д.Р. Введение в теорию устойчивости движения. М.: Наука, 1971.
34. Морозов АД. О предельных циклах и хаосе в уравнениях маятникового типа// Прикл.
матем. и мех. 1989. Т. 58, №4.
35. Неймарк Ю.И. Динамические системы и управляемые процессы. М.: Наука, 1978.
Гл. 2.
36. Одум Ю. Основы экологии: Пер. с англ. М.: Мир, 1975.
37. Романовский Ю.М., Степанова Н.В., Чернавскнй Д.С. Математическое моделирование
в биофизике. М.: Наука, 1975. Гл. 8.
38. Романовский Ю.М., Степанова Н.В., Чернавский Д.С. Математическая биофизика.
М.: Наука, 1984.
39. Свирежев Ю.М., Логофет Д.О. Устойчивость биологических сообществ. М.: Наука,
1978.
40. Смит Дж.М. Модели в экологии: Пер. с англ. М.: Мир, 1976. Гл. 2.
41. Уильямсон М. Анализ биологических популяций: Пер. с англ. / Под ред. Ю.М. Сви-
режева. М.: Мир, 1975.
42. Франк-Каменецкнй Д.А. Диффузия и теплопередача в химической кинетике. М.:
Наука, 1967.
43. Хетрик Д. Динамика ядерных реакторов. М: Атомиэдат, 1975. Гл. 7.
44. Шульц М. Регулирование энергетических ядерных реакторов: Пер. с англ. М.: Изд-
во иностр. лит., 1957.
45. Devooght J., Smets H.B. Determination of stability domains in point reactor dynamics /
Nucl. Sci. Eng. 1967. V. 28, №2. P. 226.
386 Список литературы
46. Goel N.S., Maitra S.C., MontroU E.W. On the Volterra and other nonlinear models of
interacting populations // Rev. Modern Phys. 1971. V. 43, №2. Pt 1. P. 231.
47. Lamb W.E., Jr. Theory of an optical maser // Phys. Rev. 1964. V. 134, №6A. P. A1429.
48. Marinesco M., Popov V.M. Sur l'application de la seconde methode de Liapounov a
l'etude des systemes de reglage des automatique des reacteurs nucleaires // Eleclronique nucleaire
(C.R. Colloque internet., Paris, 1958). 1959. V. 2. P. 29.
К Части 2
1. Андронов А.А., Майер А.Г. Задача Мизеса в теории прямого регулирования и теория
точечных преобразований поверхностей // Андронов А.А. Собр. тр. М.: Изд-во АН СССР,
1956. С. 225.
2. Андронов А-А., Майер А.Г. О задаче Вышнеградского в теории прямого регулирования.
Там же. С. 246-249.
3. Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний. М.: Физматгиз, 1959.
4. Андронов А.А., Леонтович Е.А., Гордон И.И., Майер А.Г. Качественная теория
динамических систем второго порядка. М.: Наука, 1966.
5. Баутин Н.Н. Поведение динамических систем вблизи границ области устойчивости. -
2-е изд. М.: Наука, 1984.
6. Биркгоф Дж.Д. Динамические системы. М.: Гостехиздат, 1941.
7. Боголюбов Н.Н., Митропольский Ю.А. Асимптотические методы в теории нелинейных
колебаний. М.: Физматгиз, 1958. Гл. 6.
8. Бутеннн Н.В., Неймарк Ю.И., Фуфаев Н.А. Введение в теорию колебаний. М.: Наука,
1976. Гл. 4.
9. Гапонов А.В., Рабинович М.И. Хаотическая динамика простых систем // Природа.
1981. №2. С. 54.
10. Гапонов-Грехов А.В., Рабинович М.И. Нелинейная физика. Стохастичность и струк-
структуры: Препринт №87 / Институт прикладной физики АН СССР. Горький, 1983.
11. Гольдфарб Л.С. О некоторых нелинейностях в системах регулирования // Автоматика
и телемеханика. 1947. №2. С. 63.
12. Каменков Г.В. Избранные труды в двух томах. Том 2: Устойчивость и колебания
нелинейных систем. М: Наука, 1972. Гл. 11.
13. Колесов Ю.С., Швитра Ю.И. Автоколебания в системах с запаздыванием. Вильнюс:
Мокслас, 1979.
14. Малкин И.Г. Методы Ляпунова и Пуанкаре в теории нелинейных колебаний. М.:
Гостехиздат, 1949.
15. Марсден Дж., Мак-Кракен М. Бифуркация рождения цикла и ее приложения: Пер.
с англ. / Под ред. Н.Н. Баутина и Е.А. Леонтович. М.: Мир, 1980.
16. Митрополъский Ю.А. Метод усреднения в нелинейной механике. Киев: Наукова
думка, 1971.
17. Мищенко Е.Ф., Розов Н.Х. Дифференциальные уравнения с малым параметром и
релаксационные колебания. М.: Наука, 1975.
18. Моисеев Н.Н. Асимптотические методы в нелинейной механике. М: Наука, 1969.
19. Неймарк Ю.И. Метод точечных отображений в теории нелинейных колебаний. М.:
Наука, 1972.
20. Неймарк Ю.И. Физические механизмы и самоорганизация стохастических колебаний
// Динамика систем. Межвуз. сб. Горький. 1979. С. 115.
21. Попов Е.П. Прикладная теория процессов управления в нелинейных системах. М.:
Наука, 1973.
22. Попов Е.П. Теория нелинейных систем автоматического регулирования и управления.
М.: Наука, 1979.
23. Попов Е.П., Пальтов И.П. Приближенные методы исследования нелинейных автомати-
автоматических систем. М.: Физматгиз, I960.
24. Постников Л.В., Королев В.И., Тарантович Т.М., Мельникова В.А., Вышкинд С.Я.
Сборник задач по теории колебаний. М.: Наука, 1978.
25. Проскуряков А.П. Метод Пуанкаре в теории нелинейных колебаний. М.: Наука,
1977.
Список литературы 387
26. Пуанкаре А. О кривых, определяемых дифференциальными уравнениями. М.-Л.:
Гостехиздат, 1954.
27. Рабинович М.И. Стохастические автоколебания и турбулентность / Усп. физ. наук.
1978. Т. 125. Вып. 1. С. 123.
28. Рабинович М.И., Трубецков Д.И. Введение в теорию колебаний и волн. М.: Наука,
1984. Гл. 22.
29. RueUe D. Strange attractors//The Mathematical Intelligencer. 1980. V. 2, №3. P. 126.
К Части 3
1. Андронов А.А., Витт А.А. К теории захватывания Ван-дер-Поля // Андронов А.А.
Собр. тр. М: Изд-во АН СССР, 1956. С. 51-64.
2. Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний. М: Физматгиз, 1959.
3. Бабаков И.М. Теория колебаний. - 2-е изд. М.: Наука, 1965.
4. Баутин Н.Н., Леонтович Е.А. Практические методы и приемы качественного
исследования динамических систем на плоскости. М.: Наука, 1976.
5. Бутенин Н.В. Элементы теории нелинейных колебаний. Л.: Судпромгиз, 1962.
6. Бутенин Н.В., Неимарк Ю.И., Фуфаев Н.А. Введение в теорию нелинейных колебаний.
М.: Наука, 1987.
7. Вибрации в технике: Справочник: В 6 т. Т. 1. Колебания линейных систем. М.:
Машиностроение, 1978.
8. Вибрации в технике: Справочник: В 6 т. Т. 2. Колебания нелинейных механических
систем. М.: Машиностроение, 1979.
9. Дельшамбр. О вынужденных колебаниях системы двух колебательных контуров типа
Ван-дер-Поля в условиях гироскопической связи // Периодич. сб. переводов "Механика".
1973. №2. С. 26.
10. Капица ПЛ. Динамическая устойчивость маятника при колеблющейся точке подвеса
// ЖЭТФ. 1951. Т. 21. Вып. 5.
11. Королев В.И., Мельников В.А., Островский Л.А. Колебания в системах с переменными
параметрами: Учеб. пособие. Горький, 1981.
12. Крюков Б.И. Вынужденные колебания существенно нелинейных систем. М.: Машино-
Машиностроение, 1984.
13. Лайда П.С. Автоколебания в системах с конечным числом степеней свободы. М.:
Наука, 1980.
14. Малахов А.Н. Флуктуации в автоколебательных системах. М.: Наука, 1968.
15. Малкин И.Г. Методы Ляпунова и Пуанкаре в теории нелинейных колебаний. М.-Л.:
Гостехиздат, 1949.
16. Малкин И.Г. Теория устойчивости движения - 2-е изд. М.: Наука, 1966. Гл. 5.
17. Мандельштам Л.И. Лекции по колебаниям. М.: Наука, 1972.
18. Меркни Д.Р. Введение в теорию устойчивости движения. М.: Наука, 1971.
19. Митропольский Ю.А. Метод усреднения в нелинейной механике. Киев: Наукова
Думка, 1971.
20. Моисеев Н.Н. Асимптотические методы нелинейной механики. М.: Наука, 1969.
21. Пановко Я.Г. Введение в теорию механических колебаний. М.: Наука, 1971.
22. Пановко Я.Г., Губанова И.И. Устойчивость и колебания упругих систем. М.: Наука
1967. Гл. 6.
23. Стокер Дж. Нелинейные колебания в механических и электрических системах. М.:
Изд-во иностр. лит., 1952. Гл. 4.
24. Стрелков СП. Введение в теорию колебаний. М.: Наука, 1964.
25. Тондл А. Автоколебания механических систем. М.: Мир, 1979.
26. Фролов К.В. Вибрация - друг или враг? М.: Наука, 1984.
27. Хаяси Т. Нелинейные колебания в физических системах. М.: Мир, 1968.
28. Челомей В.Н. Парадоксы в механике, вызываемые вибрациями // Докл. АН СССР.
1983. Т. 270, №1. С. 62-67.
29. Шемшшиска-Ступницка В. Высшие гармонические колебания в нелинейных системах
с одной степенью свободы с вынуждающей силой // Периодич. сб. переводов "Механика".
1969. №6. С. 11.
388 Список литературы
30. Шмидт Г. Параметрические колебания. М.: Мир, 1978.
31. Якубович В.А., Старжинский В.М. Линейные дифференциальные уравнения с
периодическими коэффициентами и их приложения. М.: Наука, 1972.
32. Helmholtz H. Sensation of Tone. London, 1895.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автоколебания 14, 220, 223, 242
- близкие к синусоидальным 233
- разрывные 246, 252
- стохастические 257
Автоколебательная система 13,87,91,289
Автономная динамическая
система 13, 26, 49, 146, 324
Аянса-Сгретта диаграмма 315
Амплитуда 18, 158
Аналитический интеграл 55
Асимптотическая
устойчивость 27,31,33,39,60
- - в большом 28, 32
- - в целом 28, 35
Асимптотические методы 146, 174, 192, 203
Атрактор странный 259
Бендиксона критерий 65
Бифуркационная диаграмма 187, 230
Бифуркационное значение
параметра 101, 104
Бифуркация 101, 104, 107, 220
Ван-дер-Поля уравнение 91, 171, 218, 240
Вольтерра модель
"хищник-жертва" 129, 135
Вторая ляпуновская величина 328
Второй (прямой) метод Ляпунова 29, 32, 44
Вынужденные колебания 14, 263
Галеркина метод
Гамильтонова система
Гармоническая внешняя сила
- линеаризация
Гармонические колебания
340
13
266
237
266
Границы области устойчивости 220,222
- безопасные 222
- опасные 222
- параметрического резонанса 306,315
Грубая динамическая система 76, 77
Грубые положения равновесия 77
Движения быстрые 248
- медленные 249
Диаграмма Айнса-Сгретта 315
-бифуркационная 187,230
- Ламерея (Кёнигса-Ламерея) 149. 151
Динамическая система
Диссипативная система
Дуффинга уравнение
Дюлака критерий
Жесткий режим
12, 22, 91
13, 86
263, 267
65, 66, 337
164, 188
Замкнутая
траектория 58, 60, 64, 67, ПО, 119
Запаздывание, системы
с запаздыванием 12
Запаздывающие нейтроны 124
Захватывание 289, 293, 295
Знакоопрелеленная функция 29
Знакопеременная функция 30
Знакопостоянная функция 29
Изображающая точка 20
Изоклина 80
Изолированная (замкнутая)
траектория 58, 149
Изохронность, изохронные
колебания 23, 83
Индексы Пуанкаре 61
Интегральная кривая 21
Интервал синхронизации
(захватывания) 289
Каменкова метод 195
Капицы эксперимент 311, 314
Качественное исследование 49, 91, 112, 117
Качественные методы 26,49, 112, 128, 146
Квазилинейные системы 146, 166,263
Квазипериодические движения
(колебания) 289. 297
Кёнигса теорема 151
Классификация динамических систем 12
Колебания вынужденные 14, 263, 273, 278
- гармонические 266, 267, 293
- нерезонансные 278
-параметрические 14, 298, 307, 317
- разрывные 246
- резонансные 264
- свободные (собственные) 13,15,264
- системы с нелинейной восстанавливаю-
восстанавливающей силой 263
- стохастические 257
-субгармонические 267.280
390
Предметный указатель
- ультрагармонические 267
- ультрасубгармонические 267
Коллокаций метод 343
Колмогорова модель "хищник-жертва" 141
Комбинационные тона (частоты) 284
Консервативные
системы 13, 78, 82, 83, 86, 270, 273
Корни характеристического уравнения 51
Коэффициент размножения 112
- гармонической линеаризации 237
- реактивности 116
Кратный предельный цикл 108
Критерий Бендиксона 65
- Гурвица 40
-Дюлака 65, 66, 337
Кусочно-линейные системы 146
Ламерея (Кёнигса-Ламерея) диаграмма 149
Линеаризация 39, 235, 237
- гармоническая 235
Линеаризованные системы
(уравнения) 39, 50
Линейные системы 13, 146
Ляпунова второй (прямой) метод 29, 32
- теоремы второго
метода 30,31,33,35,36,37
- - об устойчивости по первому
приближению 38, 39, 40
Ляпуновская величина 328
Малый параметр 166, 250
Маятник математический 172
- обращенный, с вибрирующей
точкой подвеса 311
-Фроуда 182, 188,257
Метод Ван-дер-Поля 174,192,268
- Галеркина 340
- гармонической линеаризации 235, 240
- /^-разбиений 41
- Каменкова 195
-коллокаций 343,441
- Крылова и Боголюбова
асимптотический 203
- Крылова-Боголюбова-
Митропольского 146, 203
-Ляпунова 29, 32
- малого параметра 146, 172
- наименьших квадратов 342
-Пуанкаре 166, 172, 192, 276
- точечных преобразований
(отображений) 148, 164
Мягкий режим 164, 182, 186, 222, 223, 225
Направление движения (изображающих
точек) 50,52,81
Необходимые и достаточные условия
центра 55
Неподвижная точка (точечного
преобразования) 148, 149, 150, 152
Нерезонансные вынужденные колебания 278
Неустойчивые положения равновесия 26, 57
- предельные циклы 58, 108, 110
Область быстрых движений 24S
- медленных движений 249
- параметрического резонанса 306
- притяжения 28, 32
- устойчивости 28
Обращенный маятник 311
Ограниченность решений 68
Орбитная устойчивость 58
Особые точки 50, 56
- траектории 78
Отрезок без контакта 148, 156
- покоя 162, 164
Параметрические
колебания 14, 298, 307, 317
Параметрический
резонанс 302, 303, 315, 323
Первая ляпуновская величина 107,328
Первое приближение 38,39,44,216
--улучшенное 216
Переменные Ван-дер-Поля 175
Петля сепаратрисы 107, 109
Поверхность без контакта 152, 164
Показатели характеристические 301
Положение равновесия 26
Положительная полутраектория 21
"Полуустойчивый" предельный цикл 108
Предельная ограниченность решений 68
Предельный цикл 58, 74, 107, 108, 200,
222, 251, 336
--разрывный 251,252
Принудительная синхронизация 289, 295
Проекционные (прямые) методы 340
Простая особая точка 67, 105, 331
Пространство фазовое 19
Пуанкаре индексы 61
-метод 166, 172
- теорема 166
Расстройка 291, 295
Резонанс при вынужденных колебаниях 264
- параметрический 302
- л-го рода 276, 277
Резонансные кривые 264, 268, 270, 291
Рождение (исчезновение) предельных
циклов 107
Седло
53, 57, 62
Предметный указатель
391
Седло-узел ПО
Сепаратриса седла 53
Синхронизация принудительная 295
Система укороченная 176
Скачок амплитуды (вынужденных
колебаний) 275
Сложная особая точка 81,96, 105, 107, 333
Собственные (свободные) колебания 13, 15
Стохастические колебания 257
Субгармоника, субгармонические
колебания 280
Сфера Пуанкаре 69
Теорема Андронова и Витта 325
- Барбашина и Красовского 36
-Кёнигса 149, 151
- Ляпунова вторая 31
- Ляпунова первая 30
- Пуанкаре 166. 277
- существования предельных циклов 200
- устойчивости по первому
приближению 39, 40
- Четаева 37
Теоремы второго метода
Ляпунова 30, 31, 33, 35, 36 , 37
Теория Флоке
Типы особых точек
Точечное преобразование
(отображение)
Точка изображающая
- неподвижная 149,
- особая
Траектория фазовая
- - замкнутая
- - изолированная
(неизолированная)
- - особая
- - целая
300
50, 56
148, 152, 164
20
152, 158, 337
50, 56
19,21, 58
58
58
78
21
Угловые коэффициенты
(сепаратрис седел) 53
Узел устойчивый (неустойчивый) 52, 56, 62
Ультра-, ультрасубгармонические
колебания 267
Уравнение Ван-дер-Поля 91, 171, 218, 240
- гармонически линеаризованное 237
-Дуффинга 263, 267
-Матьё 299,315
-характеристическое 39,237,301
- Хилла 299
-Ферхюльста 131
Устойчивость асимптотическая 27,31,33,60
- - в большом 28. 32
- - в целом 28
- неподвижной точки
орбитная
- периодических режимов
- периодического решения
- положений равновесия
- по Ляпунову
- предельного цикла 58
238
, 59
58,
238.
,270,
, 74,
149
179
270
324
26
26
222
Фазовая плоскость 49
-траектория 19, 21, 58
Фазовое пространство 19,20
Фазовый портрет 77, 113, 115, 118, 121,
123, 130, 134, 140
Флоке теория 300
Фокус устойчивый (неустойчивый) 54,57,62
- сложный 107
Фроуда маятник 182,188,257
Функция знакоопределенная 29
Функция знакопеременная 30
Функция знакопостоянная 29
Функция последования 148, 156,328
Характеристика (радиолампы) 153
Характеристические числа 301
- показатели 301
Характеристическое уравнение 39, 237, 301
Хилла уравнение 299
Целая фазовая траектория 21
Центр 55, 57, 62
Центрофокус 330
Цилиндрическая фазовая поверхность 337
Челомея опыты 311, 314, 315
Четаева теорема (неустойчивости
движений) 37