/








































Текст
Я.Г.Пановко
ВВЕДЕНИЕ В ТЕОРИЮ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ
Я.Г.Пановко
ВВЕДЕНИЕ В ТЕОРИЮ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ
ОГЛАВЛЕНИЕ
Предисловие............................................. 5
Введение ........................................... 7
1. Общие задачи и содержание теории (7). 2. Составле-
ние механической модели; ограничение числа степеней
свободы (10). 3. Составление механической модели; си-
лы, действующие при колебаниях (14). 4. Понятие о фа-
зовой плоскости (18).
Глава I. Свободные колебания..............................22
§ 1. Линейные системы с одной степенью свободы при
отсутствии трения......................................22
1. Основное дифференциальное уравнение и его реше-
ние (22). 2. Метод Ралея (29). 3. Зависимость устойчи-
вости равновесия от коэффициента жесткости (35).
§ 2. Системы с одной степенью свободы при наличии ли-
пейпой восс1анавливагощей силы и трения . . 40
1. Линейное трение (40). 2. Нелинейное трение (45).
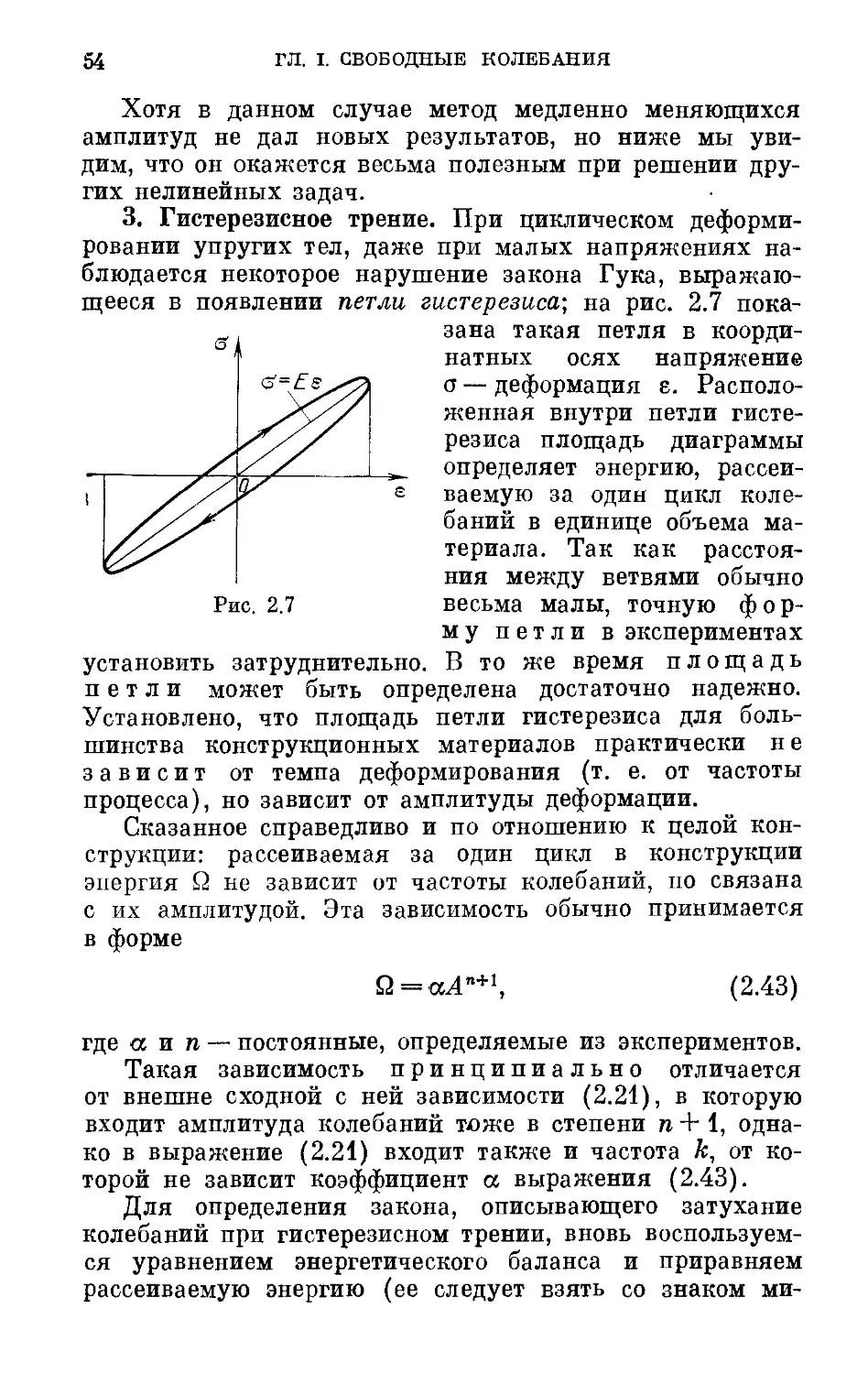
3. Гистерезисное трение (51). 4. Ударное демпфирова-
ние (55).
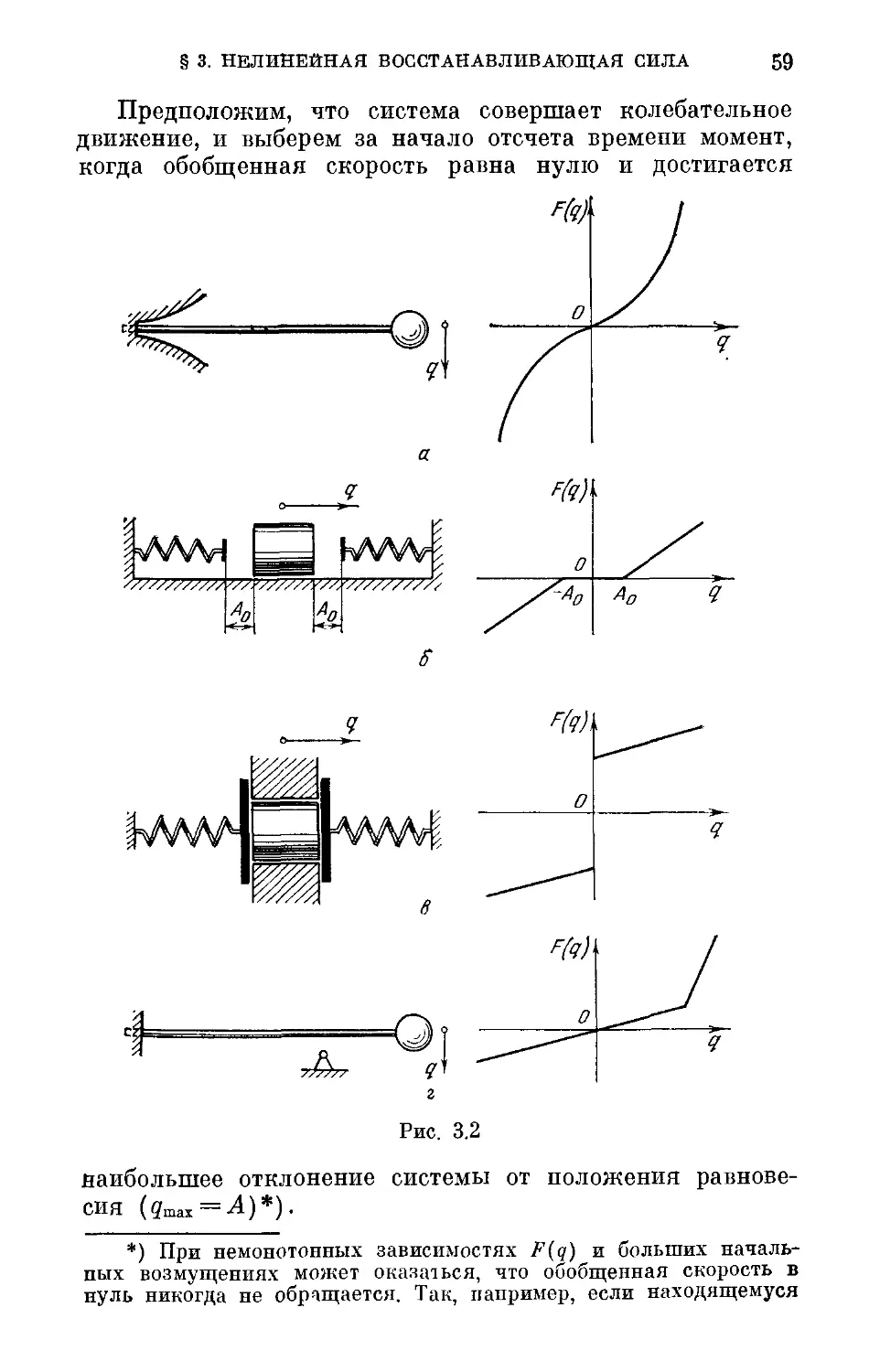
§ 3. Системы с одной степенью свободы при нелиней-
ной восстанавливающей силе.........................57
1. Общие понятия (57). 2. Точные решения (58). 3. При-
ближенные способы (66).
§ 4. Линейные системы с несколькими степенями сво-
боды ..............................................72
1. Способы составления дифференциальных уравнений
движения (72). 2. Решение системы дифференциальных
уравнений (82). 3. Собственные формы (86). 4. Ортого-
нальность собственных форм (89). 5. Роль начальных ус-
ловий (92). 6. Случая кратных и нулевых корней (94).
7. Влияние трения (98).
Глава II. Вынужденные колебания......................101
§ 5. Линейные системы с одной степенью свободы при
отсутствии трения.................................101
1. Основное уравнение при силовом возбуждении (101).
2. Случаи кинематического возбуждения (103). 3 Дей-
ствие гармонической вынуждающей силы (106). 4. Дей-
ствие произвольной вынуждающей силы (110). 5. Дейст-
вие периодической вынуждающей силы (116).
§ 6. Системы с одной степенью свободы при наличии
линейной восстанавливающей силы и трения . . 122
1. Действие гармонической вынуждающей силы (122).
2. Действие произвольной вынуждающей силы (127).
3. Действие периодической вынуждающей силы (128).
4. Комплексная форма решения (132). 5. Влияние не-
линейно-вязкого трения при гармонической вынуждаю-
щей силе (140). 6. Влияние гистерезиса (142). 7. Слу-
чайные колебания (144).
1*
4
ОГЛАВЛЕНИЕ
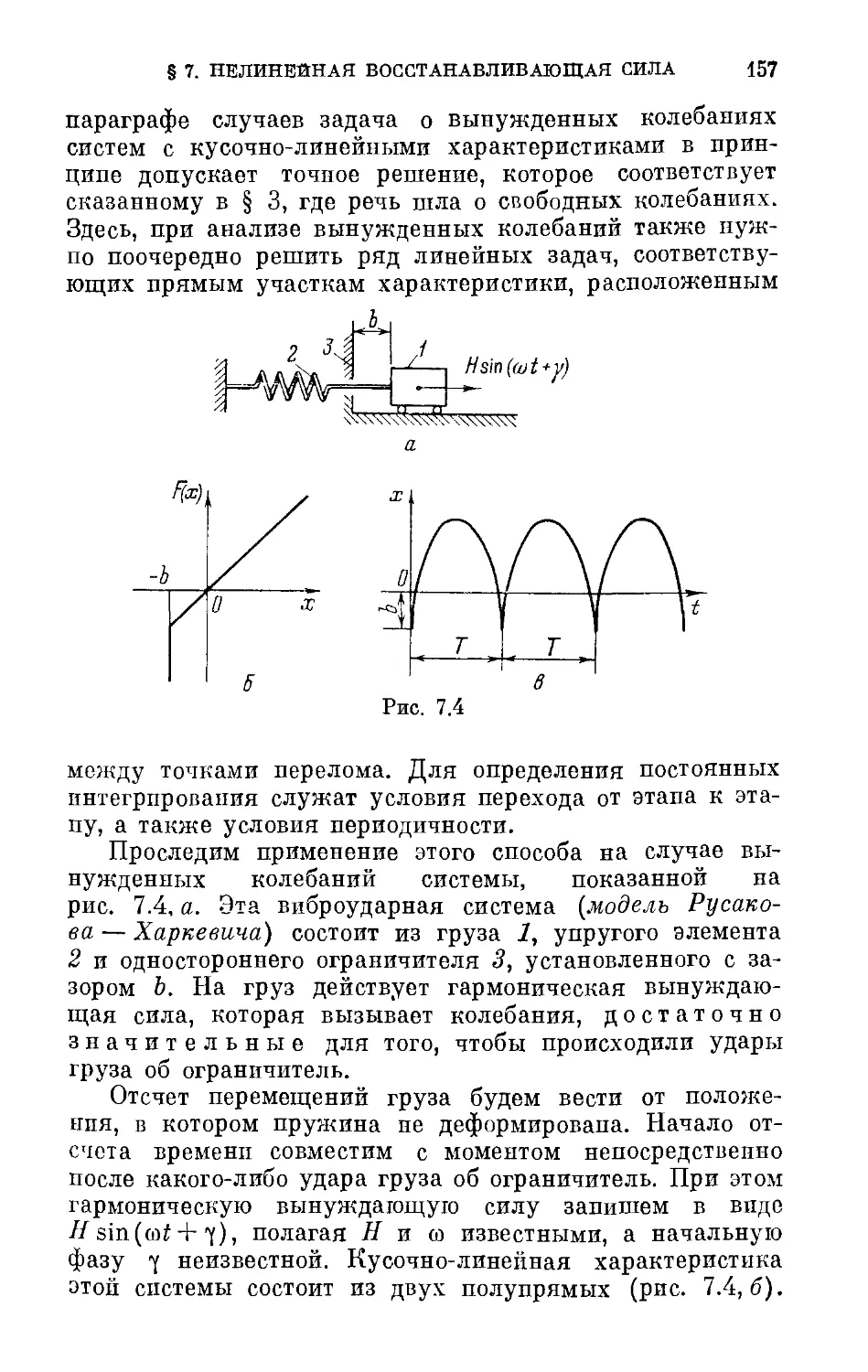
§ 7. Системы с одной степенью свободы при нелиней-
ной восстанавливающей силе.............................148
1. Основные понятия (148). 2. Основные колебания (149).
3. Супергармонические колебания (152). 4. Субгармони-
ческие колебания (154). 5. Способ поэтапного интегри-
рования для кусочно-линейных систем (156).
§ 8. Линейные системы с несколькими степенями сво-
боды ..................................................160
1. Общие уравнения (1€0). 2. Действие вынуждающих
сил, изменяющихся по гармоническому закону; непо-
средственное решение (161). 3 Действие произвольных
вынуждающих сил; разложение по собственным формам
(167). 4. Действие периодических вынуждающих сил
(170).
Глава ПI. Параметрические колебания........................171
§ 9. Общие понятия.....................................171
1. Основное дифференциальное уравнение (171). 2. Па-
раметрические колебания около положения равновесия
(172). 3. Параметрические колебания около стационар-
ного режима движения (174).
§ 10. Параметрическое возбуждение по периодическому
кусочно-постоянному закону........................177
1. Колебания при отсутствии трения (177). 2. Влияние
линейного трения (181).
§11. Параметрическое возбуждение по закону синуса 183
1. Общие сведения (183). 2. Примеры (185).
Глава IV. Устойчивость состояний равновесия и автоколе-
бания .....................................................188
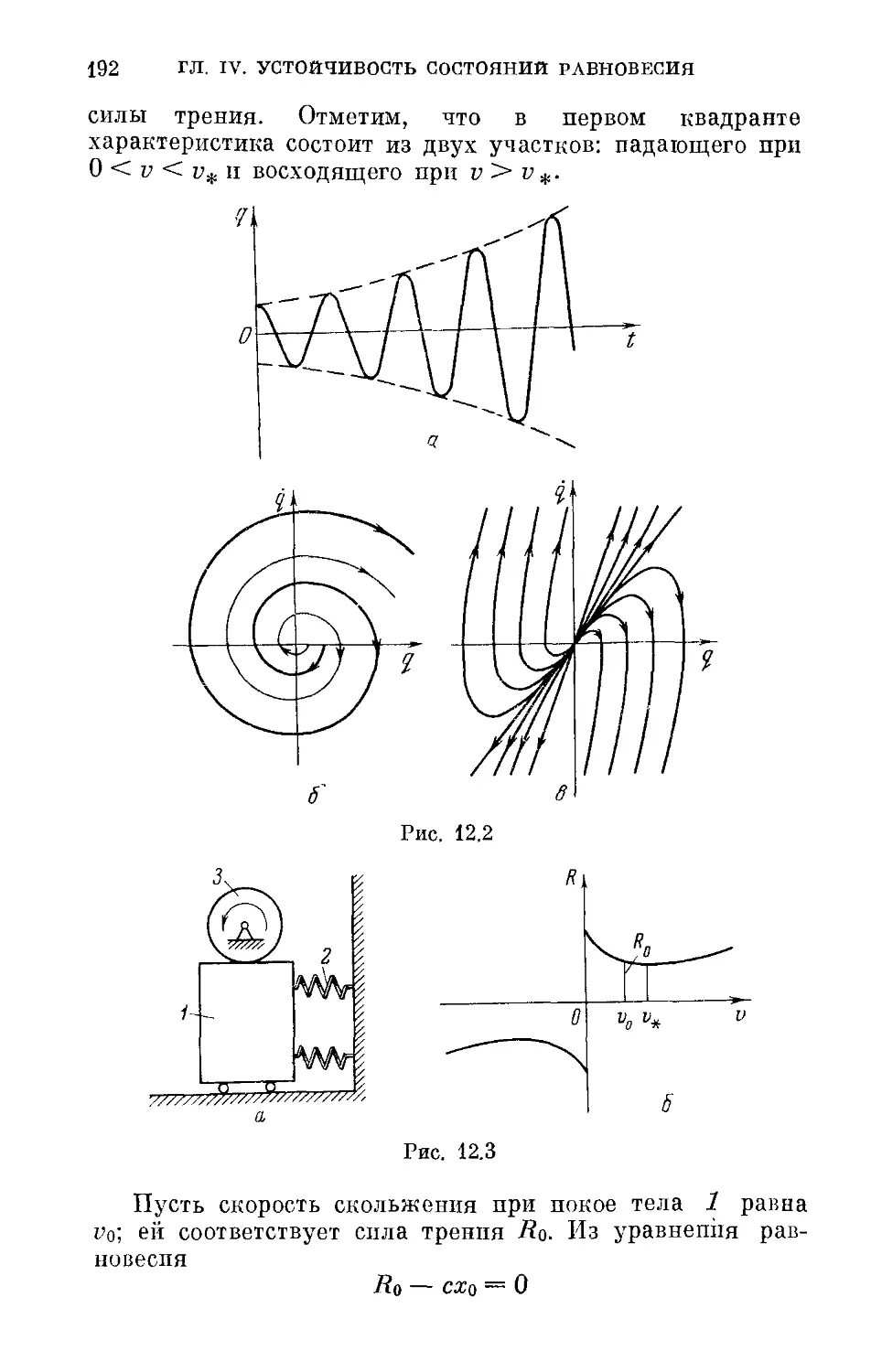
§ 12. Устойчивость состояний равновесия................188
1. Вступительные замечания (188). 2. Системы с одной
степенью свободы (189). 3. Системы с двумя степенями
свободы без трения (193). 4. Системы с двумя степенями
свободы с трением (200).
§ 13. Стационарные режимы и предельные циклы . . 203
1. Общие понятия (203). 2. Способ поэтапного интегри-
рования для кусочно-линейных систем (209). 3 Метод
энергетического баланса (216). 4. Метод малого пара-
метра (218).
§ 14. Переходные процессы и устойчивость стационарных
режимов...................................................222
1. Вступительные замечания (222). 2. Способ поэтап-
ного интегрирования для кусочно-линейных систем (222).
3. Метод энергетического баланса (224). 4. Метод мед-
ленно меняющихся амплитуд (225). 5. Метод точечных
отображений (226). 6. Устойчивость стационарных ре-
жимов (227).
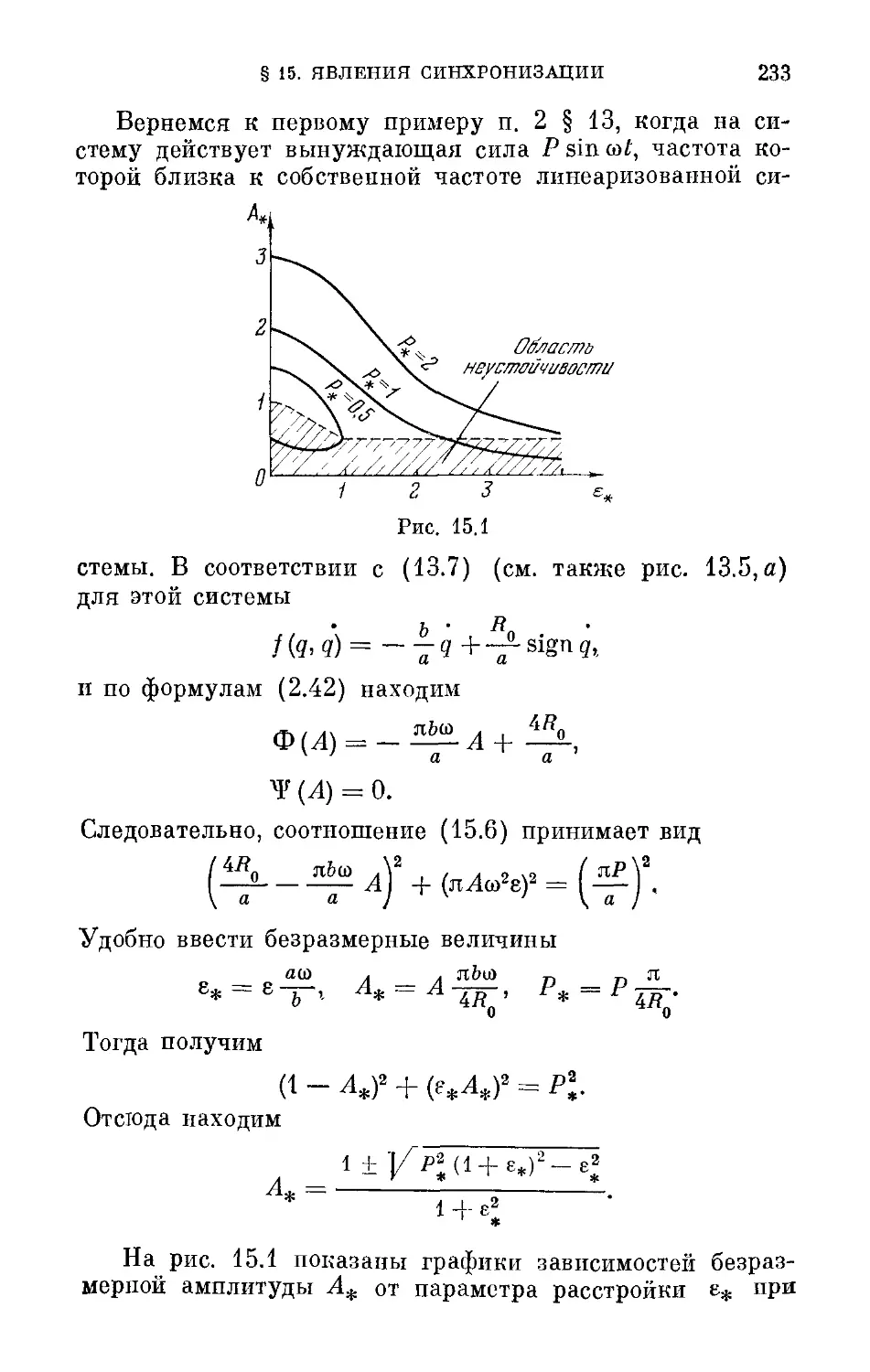
§ 15. Явления синхронизации.............................231
1. Вступительные замечания (231). 2. Синхронизация
квазилинейной автоколебательной системы (231). 3. Син-
хронизация маятника (234).
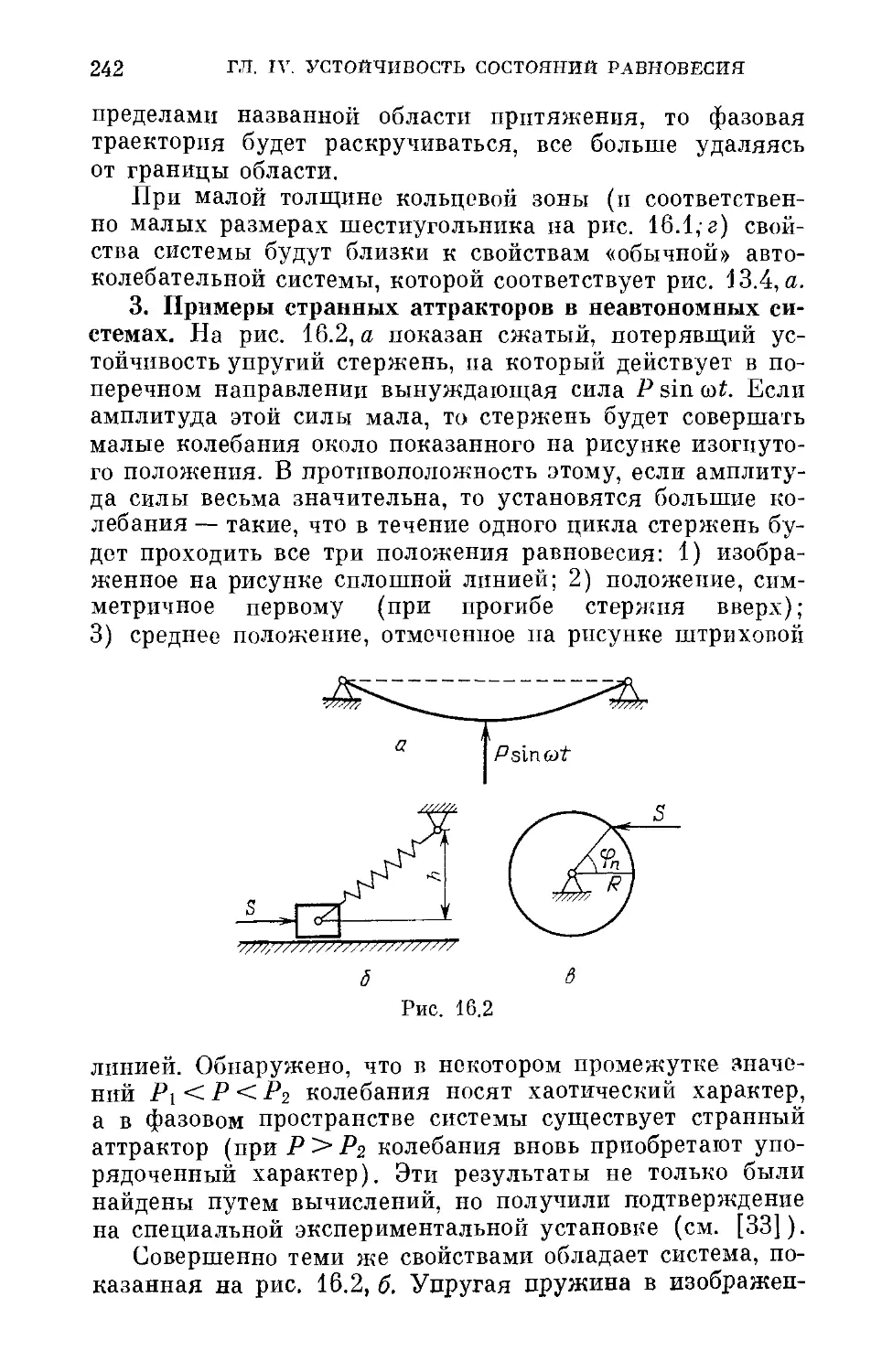
§ 16. Странные аттракторы...............................236
1. Генераторы стохастичности (236). 2. Хаотический ос-
циллятор Неймарка (238). 3 Примеры странных аттрак-
торов в неавтономных системах (242).
Список литературы ..........................................246
Предметный указатель........................................249
ПРЕДИСЛОВИЕ
Предлагаемая читателю книга входит в серию учеб-
ных пособий, выходящих в издательстве «Наука» в каче-
стве дополнений к «Курсу теоретической механики»
Н. В. Бутенина, Я. Л. Лунца и Д. Р. Меркина. Эти до-
полнения рассчитаны на студентов, которые по профилю
подготовки нуждаются в более подробном ознакомлении
с рядом избранных проблем механики: теорией устойчи-
вости движения, теорией механических колебаний, анали-
тической механикой, теорией гироскопов, теорией меха-
нического удара и т. д.
Теория механических колебаний особенно важна для
инженеров, работающих в области машиностроения, при-
боростроения, авиа- и судостроения, промышленного и
транспортного строительства, а также в некоторых дру-
гих областях техники. Каждая из названных областей
ставит перед специалистами ряд ответственных практи-
ческих задач, тесно связанных с проблемой механических
колебаний; хотя постановка этих задач почти всегда об-
ладает заметной спецификой, но все они, в конечном
счете, решаются на основе общих принципов и методов,
составляющих содержание теории колебаний.
Важность теории колебаний общепризнана, и в ряде
ведущих втузов страны эта теория, или более или менее
специализированные ее модификации, является самостоя-
тельным элементом учебного плана, обязательной или
факультативной дисциплиной; во многих других втузах
систематически работают дополнительные семинары по
теории колебаний, привлекающие не только студентов,
но также аспирантов и молодых инженеров.
Настоящая книга предназначена служить учебным по-
собием для любых таких занятий; можно надеяться, что
она окажется полезной и для лиц, приступающих к само-
стоятельному изучению теории механических колебаний.
6
ПРЕДИСЛОВИЕ
Эта теория является частью механики, выделенной
признаком общности рассматриваемых колебательных
явлений. В основном тот же признак использован и при
дальнейшем внутреннем разделении теории в этой книге,
где каждая из четырех глав посвящена колебаниям оп-
ределенного типа (свободные колебания, вынужденные
колебания, параметрические колебания, автоколебания).
В вычислительный аппарат теории механических ко-
лебаний все больше проникают понятия, заимствованные
из теории электрических цепей и теории автоматического
управления (частотные методы, комплексные представ-
ления сил и перемещений), а также матричные методы.
Эти понятия отражены и в настоящей книге, по без осо-
бых подробностей — в конце концов, они имеют смысл
только в области линейных колебаний.
В книге кратко описываются различные приближен-
ные методы анализа нелинейных систем. Каждый из этих
методов вводится в том месте изложения, где впервые он
может оказаться полезным. Поэтому уже в первой главе
можно найти элементарное изложение методов медленно
меняющихся амплитуд, гармонического баланса и др.,
которые обычно излагаются (если вообще излагаются)
лишь в самом конце курса.
По сравнению с другими книгами подобного назначе-
ния здесь относительно большее внимание уделено при-
мерам, значительная часть которых — конечно, в сильно
схематизированном виде — соответствует практическим
ситуациям.
Автор благодарен всем коллегам, которые своими со-
ветами и замечаниями помогли улучшению книги.
Ленинград
октябрь 1989 г. Я. Г. Паповко
ВВЕДЕНИЕ
1. Общие задачи и содержание теории. Сорок лет
назад академик Н. Д. Папалекси писал: «Не будет, веро-
ятно, преувеличением сказать, что среди процессов, как
свободно протекающих в природе, так и используемых в
технике, колебания, понимаемые в широком смысле этого
слова, занимают во многих отношениях выдающееся, ча-
сто первенствующее место».
Можно было бы привести мпожество примеров, иллю-
стрирующих важность колебательных явлений в техни-
ческих устройствах. В одних случаях колебания в р е д-
н ы (именно эти случап впервые привлекли внимание
инженеров к проблемам теории колебаний), в других
случаях они приносят пользу и целенаправленно
применяются в современной технике.
Механические колебания могут причинить значитель-
ный вред. Часто они создают прямую угрозу прочности
весьма ответственным конструкциям, таким, как вало-
проводы, турбинные лопатки, воздушные винты, мосты,
перекрытия промышленных зданпй и т. п.; колебания не-
однократно служили причиной многих аварий, а иногда
и тяжелых катастроф. В других случаях колебания спо-
собны нарушить нормальные условия эксплуатации,—
таковы, например, вибрации станков, мешающие дости-
жению желательной чистоты обработки деталей, или ко-
лебания приборов, установленных на вибрирующем
основании (например, на автомобиле или на самолете),
приводящие к нарушению точности показаний. Наконец,
иногда колебания оказывают вредное физиологическое
действие на лиц, организм которых подвергается дли-
тельным вибрациям (например, работающих с ручным
пневмоинструментом вибрацпонпого типа). Во всех пере-
численных случаях теория колебаний решает задачи
предвидения и, по возможности, предотвращения вред-
ного действия колебаний.
8
ВВЕДЕНИЕ
С другой стороны, ныне все шире применяются раз-
личные технологические процессы, основанные на исполь-
зовании искусственно возбуждаемых колебаний. К таким
процессам относится, например, вибропогружение свай,
при котором свая весьма быстро погружается в грунт под
действием сравнительно небольшой вибрационной нагруз-
ки; другим примером может служить вибротранспорти-
ровка сыпучих материалов, частицы которых перемеща-
ются в одну сторону вдоль колеблющегося лотка («вибро-
конвейера»). С помощью теории колебаний удается не
только вскрыть довольно сложную природу соответствую-
щих физических явлений, но и установить оптимальные
параметры режима колебаний, при которых достигается
наибольшая производительность технологического про-
цесса.
Таким образом, теория механических колебаний слу-
жит научной основой решения множества разнообразных
технических задач большого практического значения.
Часто теорию колебаний разделяют на части по при-
знаку числа степеней свободы механической системы:
сначала рассматривают колебания систем с одной сте-
пенью свободы, затем колебания систем с несколькими
степенями свободы и, наконец, колебания систем с бес-
конечно большим числом степеней свободы (систем с рас-
пределенными параметрами). Такое разделение имеет
определенные методологические основания и долгое вре-
мя было традиционным.
Однако в последнее время наметился иной и, по-види-
мому, более целесообразный принцип, согласно которому
отдельные разделы теории колебаний выделяются по
признаку физического единства рассматриваемых явле-
ний. Следуя этому принципу, даже читатель, знакомый
лишь с началами теории колебаний, легко выделит два
достаточно самостоятельных раздела: исследование сво-
бодных колебаний и исследование вынужденных колеба-
ний. В первом из этих разделов изучаются колебания ав-
тономных систем, происходящие под действием восстанав-
ливающих (и, возможно, диссипативных) сил около со-
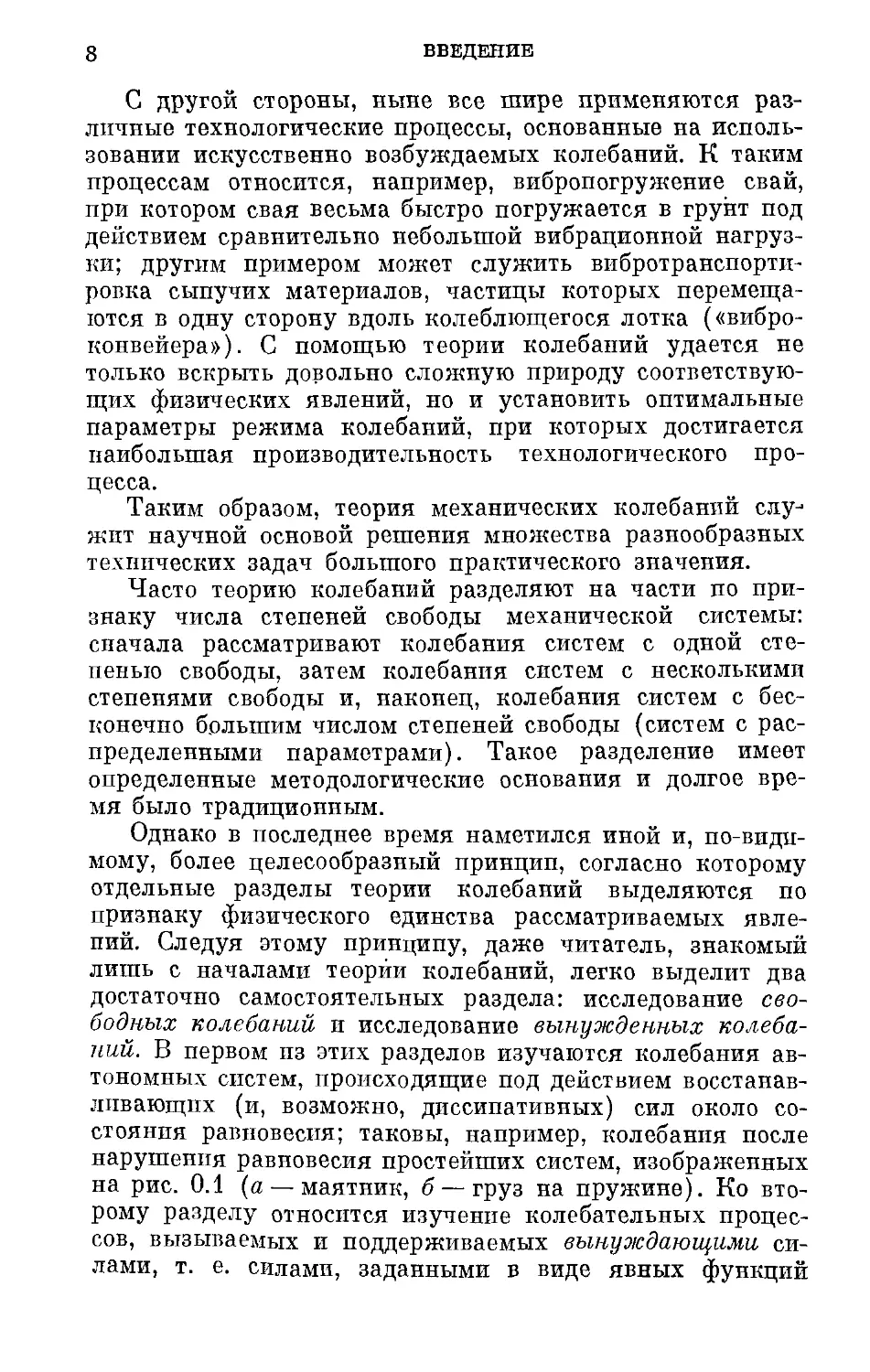
стояния равновесия; таковы, например, колебания после
нарушения равновесия простейших систем, изображенных
на рис. 0.1 (« — маятник, б —груз на пружине). Ко вто-
рому разделу относится изучение колебательных процес-
сов, вызываемых и поддерживаемых вынуждающими си-
лами, т. е. силами, заданными в виде явных функций
ВВЕДЕНИЕ
9
времени и не зависящими от движения системы. Приме-
рами могут служить те же системы — маятник и груз
на пружине, но при действии вынуждающих сил P(t)
(t — время).
В некоторых случаях вынужденные колебания возни-
кают в результате кинематического возбуждения, т. е.
.z^sin cat
Рис. 0.1
е
заданного в виде явной функции времени принудитель-
ного движения какой-либо точки (каких-либо точек) ме-
ханической системы. Такие случаи иллюстрированы
рис. 0.1,3, е; в схеме д колебания маятника вызываются
заданным колебательным движением оси подвеса в гори-
зонтальном направлении, а в схеме е колебания груза
возникают вследствие заданного движения левого конца
пружины.
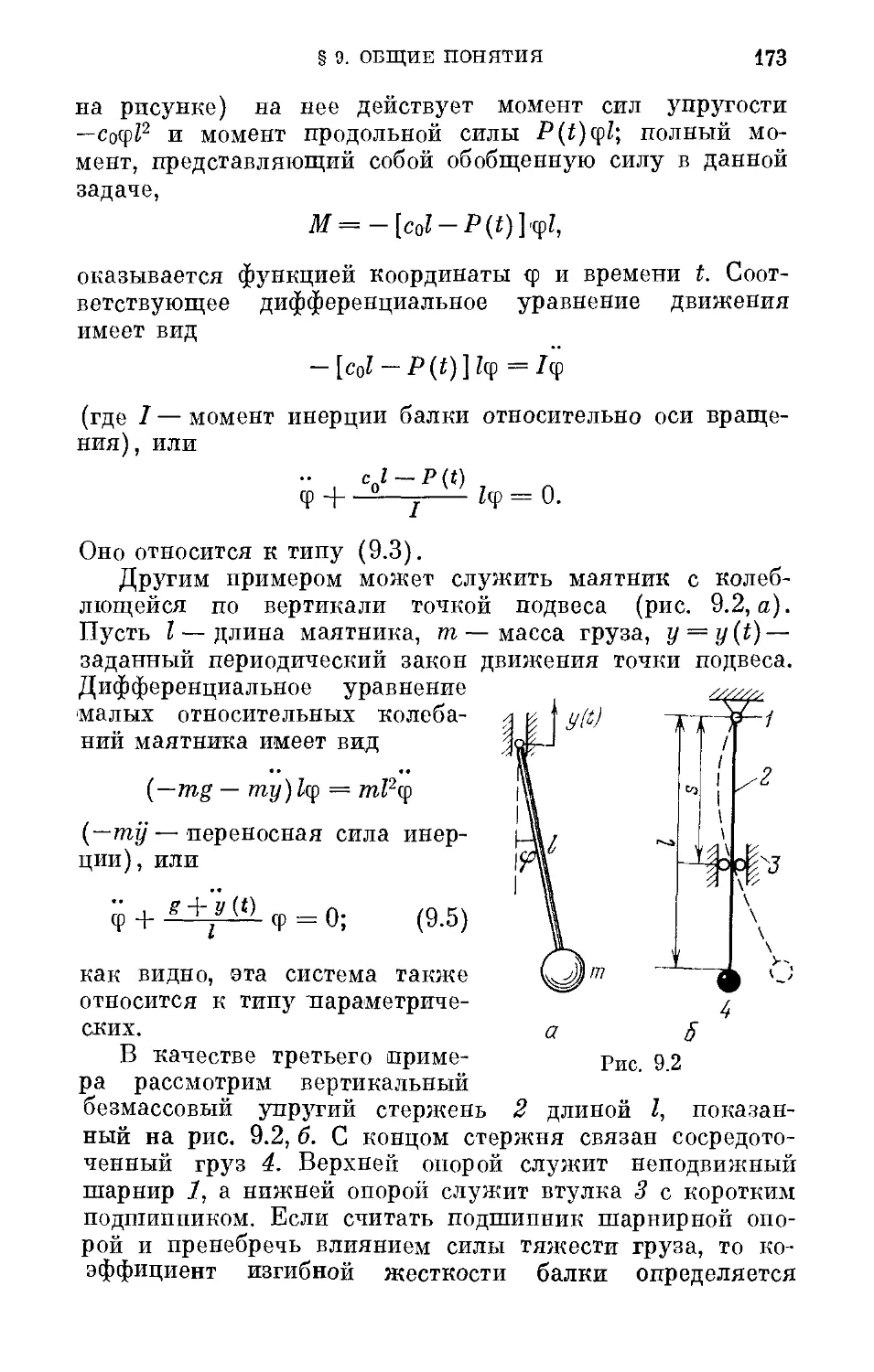
При дальнейшем углублении в проблему механиче-
ских колебаний можно обнаружить существование коле-
бательных явлений иных типов, которые принципиально
отличаются от только что названных.
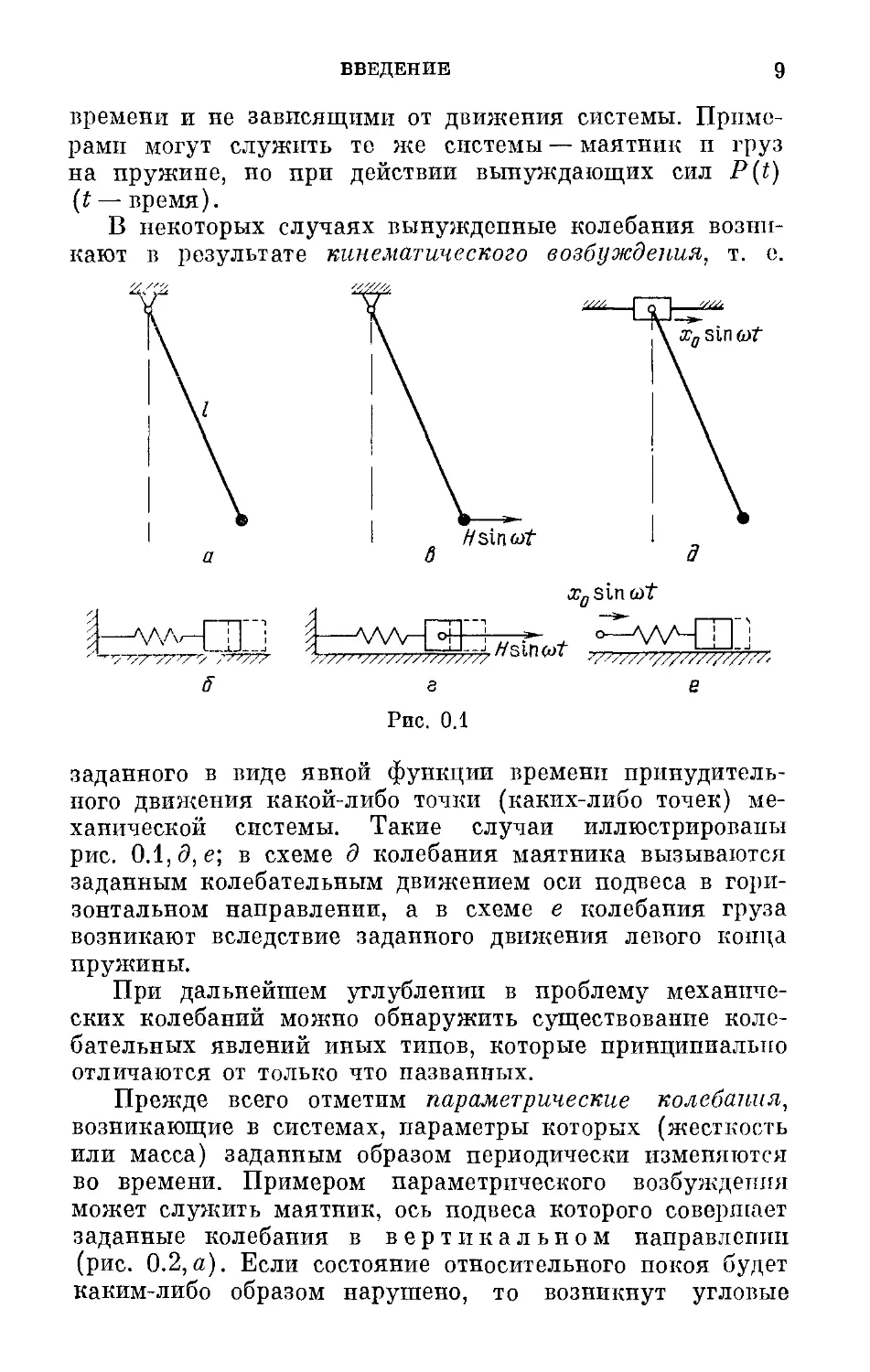
Прежде всего отметим параметрические колебания,
возникающие в системах, параметры которых (жесткость
или масса) заданным образом периодически изменяются
во времени. Примером параметрического возбуждения
может служить маятник, ось подвеса которого совершает
заданные колебания в вертикальном направлении
(рис. 0.2,а). Если состояние относительного покоя будет
каким-либо образом нарушено, то возникнут угловые
10 ВВЕДЕНИЕ
колебания, причем в зависимости от сочетания парамет-
ров системы указанные колебания могут быть как ограни-
ченными, так и неограниченно возрастающими во време-
ни. В последнем случае говорят о параметрическом резонан-
се системы. И по физической сущности, и по математи-
ческому описанию эта задача принципиально отличается
И sin«t от заДачп ° вынужденных колеба-
ниях маятника при заданном
“у “у горизонтальном движении
|\ X оси подвеса (рис. 0.1,3).
। \ । \ Совершенно особое явление
I \ i | \ представляют автоколебания —
I \ ] \ незатухающие стационарные ко-
\ 1 \ лебания, поддерживаемые за счет
I b v 'S ь энергии, которая подводится к сп-
I , <5*— стеме от источников неколебатель-
о S ного характера. При этом силы,
Рис. 0.2 подводимые к системе от источ-
ников энергии, меняются во вре-
мени в зависимости от самого движения системы и при
отсутствии движения равны нулю.
Простой пример автоколебательной системы показан
на рис. 0.2, б — маятник, который при каждом прохожде-
нии через положение равновесия испытывает действие
мгновенного импульса S заданной величины и направлен-
ного в сторону скорости. Такие импульсы могут поддер-
живать незатухающие колебания маятника при наличии
трения в системе. Здесь нужно подчеркнуть, что дей-
ствующие на автоколебательную систему внешние силы
(в данном случае ударные) не являются вынуждающими
силами в обычном смысле этого термина, так как они
не заданы в виде явных функций времени, а управля-
ются самим движением.
К колебательным также относятся системы с пере-
менными параметрами, если эти параметры заданы пери-
одическими функциями координат (а не времени). Иног-
да такие системы называют автопараметрическими.
Физические различия между природой колебаний ука-
занных четырех типов весьма глубоки; в достаточной
мере специфичны и соответствующие математические ме-
тоды исследования. Каждому пз этих типов колебаний
ниже посвящена отдельная глава.
2. Составление механической модели; ограничение
числа степеней свободы. Любая реальная механическая
ВВЕДЕНИЕ
11
система представима в виде бесконечного числа мате-
риальных точек, массы которых бесконечно малы; так
как связи между этими точками не являются абсолютно
жесткими, то число степеней свободы такой системы бес-
конечно велико. Точное решение задач о колебаниях
Деформируемых систем удается получить в замкнутой
форме лишь в немногих, относительно простых случаях
(например, задачи о свободных и вынужденных колеба-
ниях упругих стержней постоянного сечения при равно-
мерном распределении массы по длине стержня). В об-
щем случае это сделать невозможно, и приходится упро-
щать расчетную модель, в частности путем уменьшения
числа степеней свободы. Можно указать три основных
способа образования конечномерных моделей.
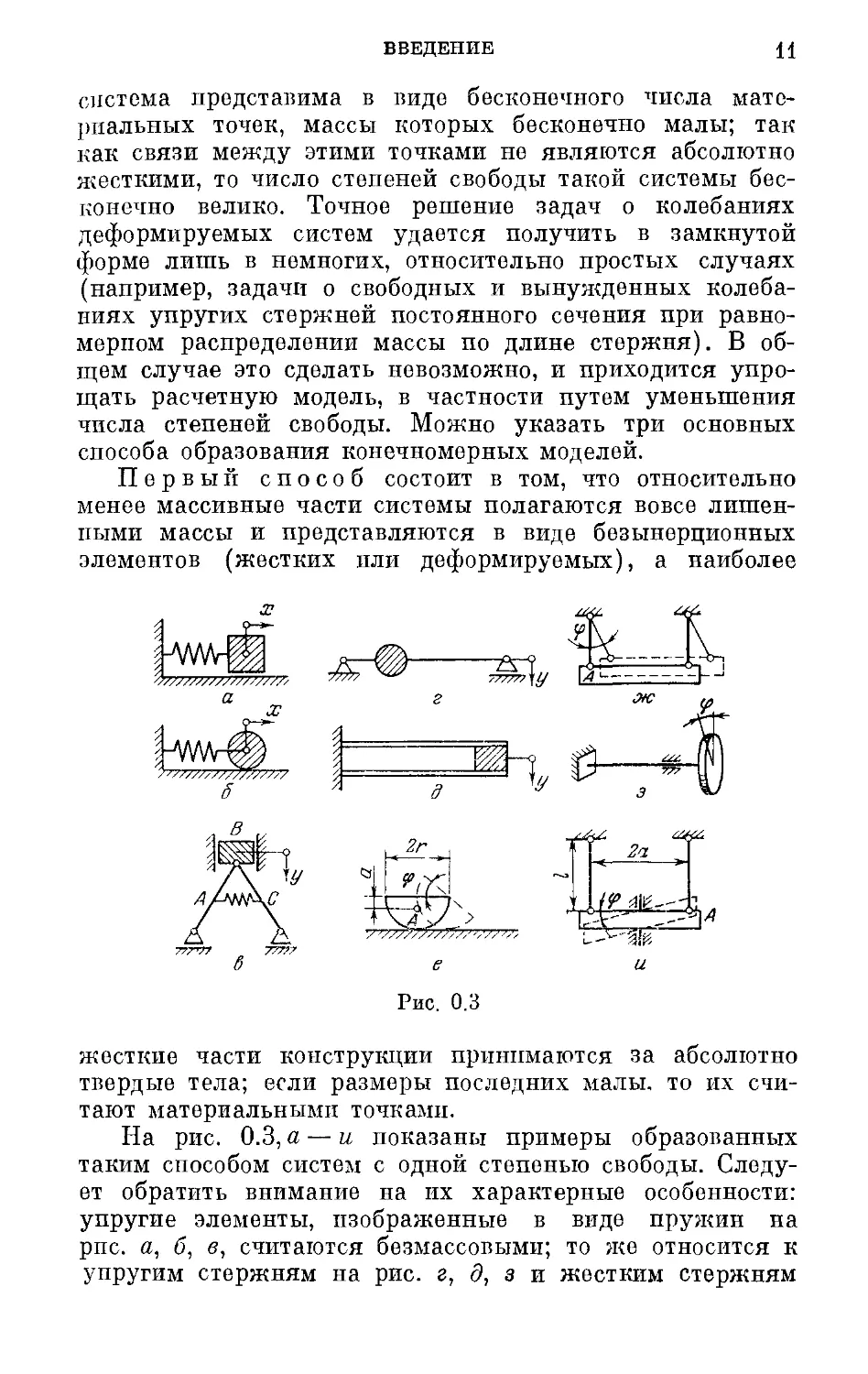
Первый способ состоит в том, что относительно
менее массивные части системы полагаются вовсе лишен-
ными массы и представляются в виде безынерционных
элементов (жестких пли деформируемых), а наиболее
х
Рис. 0.3
жесткие части конструкции принимаются за абсолютно
твердые тела; если размеры последних малы, то их счи-
тают материальными точками.
На рис. 0.3, а — и показаны примеры образованных
таким способом систем с одной степенью свободы. Следу-
ет обратить внимание на их характерные особенности:
упругие элементы, изображенные в виде пружин на
рпс. а, б, в, считаются безмассовыми; то же относится к
упругим стержням на рис. г, д, з и жестким стержням
12
ВВЕДЕНИЕ
на рис. в, ж, и; в схемах на рис. б, е качение не сопро-
вождается скольжением: в схеме на рис. г груз считается
сосредоточенным (материальная точка). Здесь же, а так-
же в схеме на рйс. д горизонтальные перемещения гру-
зов считаются пренебрежимо малыми. В качестве обоб-
щенной координаты принято: на рис. а, б — горизонталь-
ное перемещение, на рис. в, г, д — вертикальное переме-
щение, на рис. е — и — угол поворота.
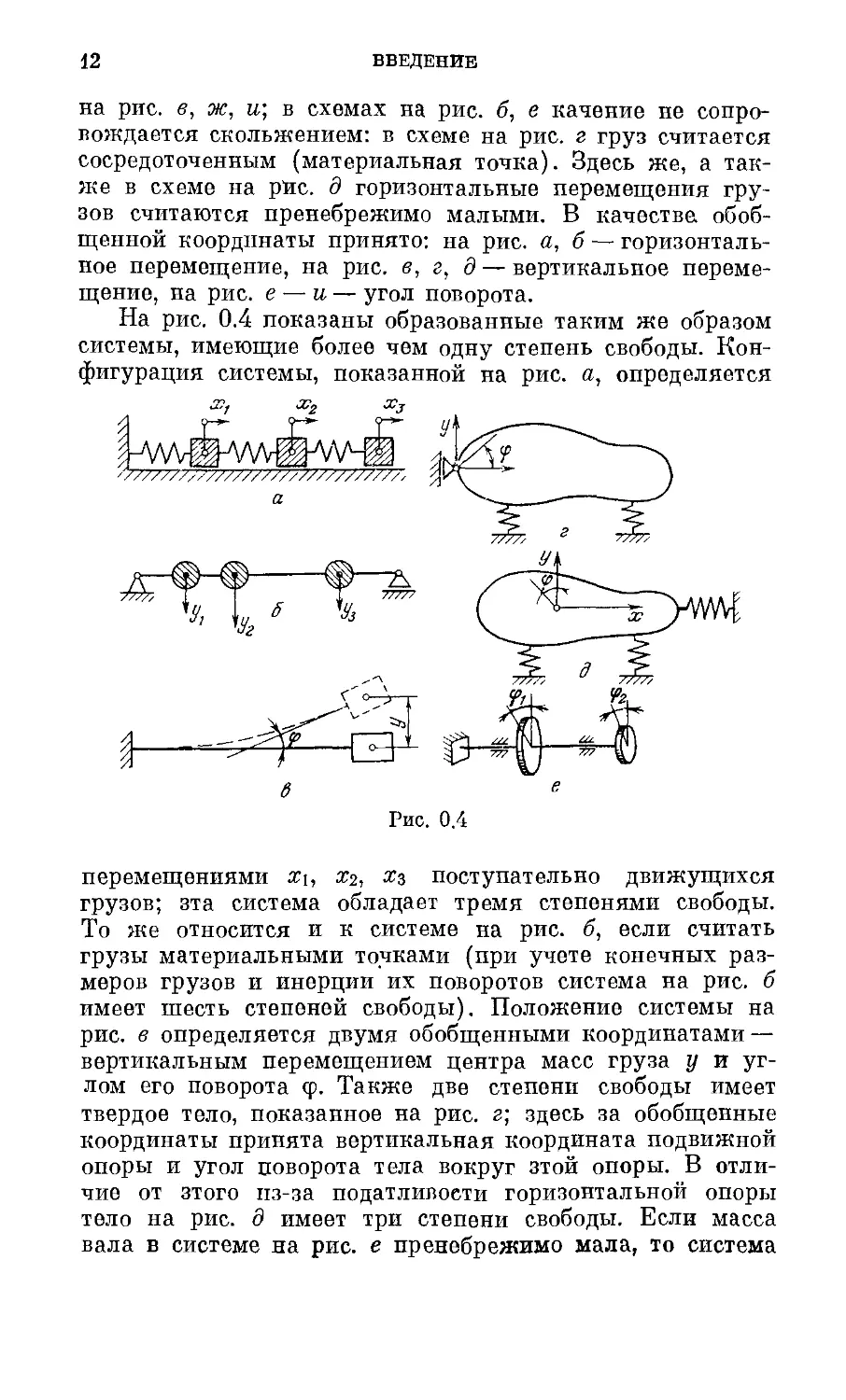
На рис. 0.4 показаны образованные таким же образом
системы, имеющие более чем одну степень свободы. Кон-
фигурация системы, показанной на рис. а, определяется
Рис. 0.4
перемещениями Xi, Х2, жз поступательно движущихся
грузов; зта система обладает тремя степенями свободы.
То же относится и к системе на рис. б, если считать
грузы материальными точками (при учете конечных раз-
меров грузов и инерции их поворотов система на рис. б
имеет шесть степеней свободы). Положение системы на
рис. в определяется двумя обобщенными координатами —
вертикальным перемещением центра масс груза у и уг-
лом его поворота <р. Также две степени свободы имеет
твердое тело, показанное на рис. г; здесь за обобщенные
координаты принята вертикальная координата подвижной
опоры и угол поворота тела вокруг зтой опоры. В отли-
чие от зтого из-за податливости горизонтальной опоры
тело на рис. д имеет три степени свободы. Если масса
вала в системе на рис. е пренебрежимо мала, то система
ВВЕДЕНИЕ
13
обладает двумя степенями свободы; в качестве обобщен-
ных координат на рисунке показаны углы поворота мас-
сивных ДИСКОВ ф1, ф2-
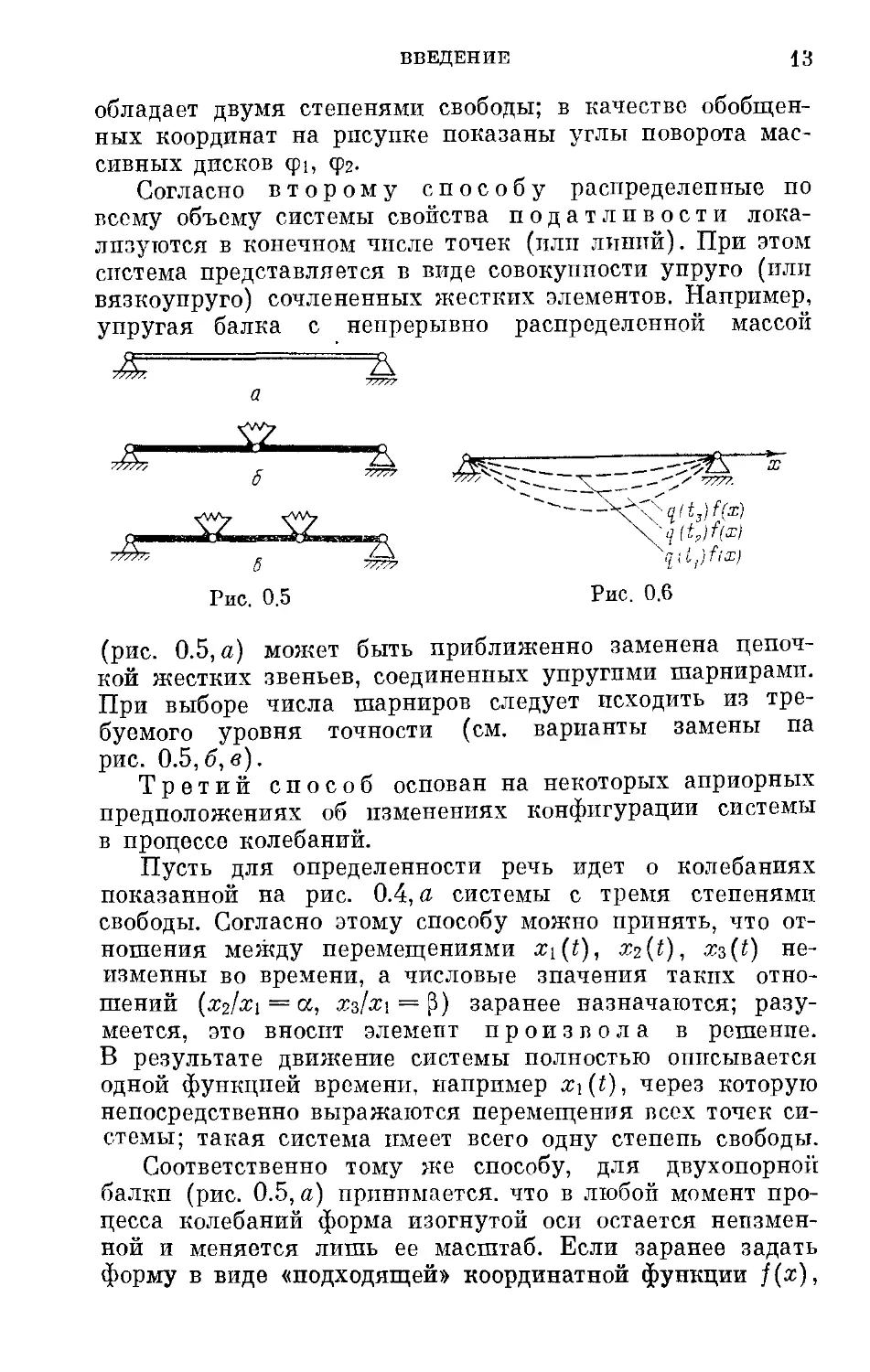
Согласно второму способу распределенные по
всему объему системы свойства податливости лока-
лизуются в конечном числе точек (или линий). При этом
система представляется в виде совокупности упруго (или
вязкоупруго) сочлененных жестких элементов. Например,
упругая балка с непрерывно распределенной массой
а
Рис. 0.6
(рис. 0.5, а) может быть приближенно заменена цепоч-
кой жестких звеньев, соединенных упругими шарнирами.
При выборе числа шарниров следует исходить из тре-
буемого уровня точности (см. варианты замены па
рис. 0.5,б,в).
Третий способ оспован на некоторых априорных
предположениях об изменениях конфигурации системы
в процессе колебаний.
Пусть для определенности речь идет о колебаниях
показанной на рис. 0.4, а системы с тремя степенями
свободы. Согласно этому способу можно принять, что от-
ношения между перемещениями ^i(i), xz(t), a?s(i) не-
изменны во времени, а числовые значения таких отно-
шений («2/^1 = а, хз/х{ = ^) заранее назначаются; разу-
меется, это вносит элемент произвола в решение.
В результате движение системы полностью описывается
одной функцией времени, например x\(t), через которую
непосредственно выражаются перемещения всех точек си-
стемы; такая система имеет всего одну степень свободы.
Соответственно тому же способу, для двухопорной
балкп (рис. 0.5,«) принимается, что в любой момент про-
цесса колебаний форма изогнутой оси остается неизмен-
ной и меняется лишь ее масштаб. Если заранее задать
форму в виде «подходящей» координатной функции /(ж),
14
ВВЕДЕНИЕ
я
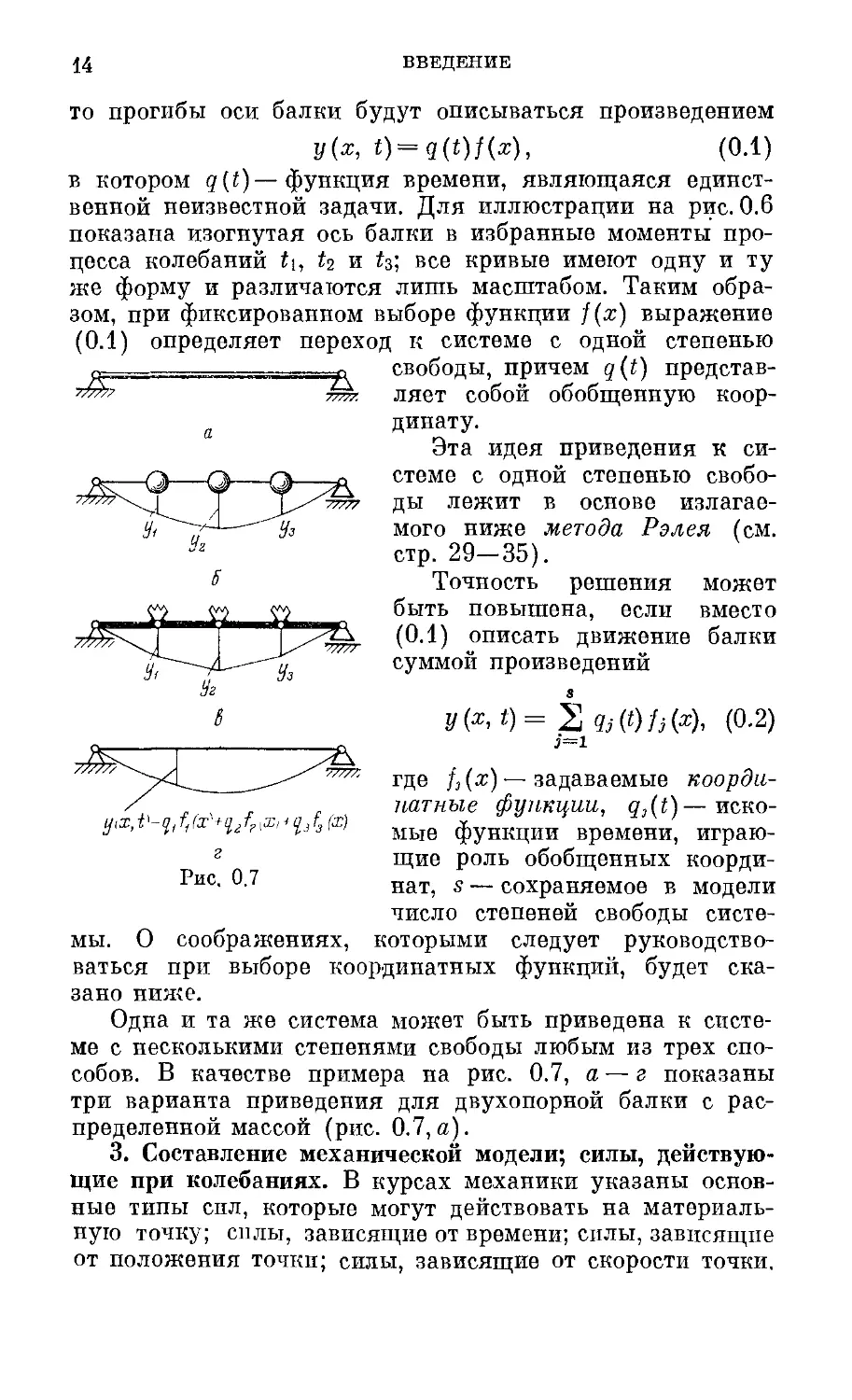
то прогибы оси балки будут описываться произведением
у(ж, (0.1)
в котором q(t)—функция времени, являющаяся единст-
венной неизвестной задачи. Для иллюстрации на рис. 0.6
показана изогнутая ось балки в избранные моменты про-
цесса колебаний ii, h и is; все кривые имеют одну и ту
же форму и различаются лишь масштабом. Таким обра-
зом, при фиксированном выборе функции /(ж) выражение
(0.1) определяет переход к системе с одной степенью
свободы, причем g(i) представ-
ляет собой обобщенную коор-
динату.
Эта идея приведения к си-
стеме с одной степенью свобо-
ды лежит в основе излагае-
мого ниже метода Рэлея (см.
стр. 29-35).
Точность решения может
быть повышена, если вместо
(0.1) описать движение балки
суммой произведений
И*Л)= 2<ъ(Ш4 (0.2)
3=1
где f} (ж) — задаваемые коорди-
натные функции, —иско-
мые функции времени, играю-
щие роль обобщенных коорди-
нат, s — сохраняемое в модели
число степеней свободы систе-
которыми следует руководство-
ваться при выборе координатных функций, будет ска-
зано ниже.
Одна и та же система может быть приведена к систе-
ме с несколькими степенями свободы любым из трех спо-
собов. В качестве примера на рис. 0.7, а — г показаны
три варианта приведения для двухопорной балки с рас-
пределенной массой (рис. 0.7,а).
3. Составление механической модели; силы, действую-
щие при колебаниях. В курсах механики указаны основ-
ные типы спл, которые могут действовать на материаль-
ную точку; силы, зависящие от времени; силы, зависящие
от положения точки; силы, зависящие от скорости точки.
мы. О соображениях,
ВВЕДЕНИЕ
15
В большинстве случаев к этим типам сводятся и те обоб-
щенные силы, которые действуют при колебаниях меха-
нических систем. Рассмотрим их подробнее, ограничи-
ваясь здесь системами с одной степенью свободы.
Обобщенные вынуждающие силы — внешние силы ти-
па Q[t), являющиеся заданными функциями времени;
такие силы служат причиной вынужденных колебаний.
Источники возникновения вынуждающих сил весьма раз-
нообразны: периодически изменяющиеся силы давления
газовой смеси в цилиндрах двигателей внутреннего сго-
рания, инерционные эффекты в вибровозбудителях, пере-
менное притяжение электромагнитов и др. Весьма раз-
личны и законы пх изменения во времени, хотя в прак-
тике наиболее часто встречаются периодические вынуж-
дающие силы. Иногда вынуждающие силы не детермини-
рованы, а представляют собой случайные функции вре-
мени (случайные процессы).
В некоторых случаях возбуждение колебаний задается
кинематически, когда каким-либо точкам системы «пред-
писано» некоторое определенное движение — оно также
может быть детерминированным или случайным процес-
сом. В частности, кинематическим является возбуждение
колебаний автомобиля пли железнодорожного вагона при
движении по неровному пути. Как будет показано ниже,
любое кинематическое возбуждение может быть представ-
лено в виде некоторого эквивалентного силового возбуж-
дения, т. е. заменено действием соответствующих сил.
Обобщенные позиционные силы — силы, зависящие от
положения (конфигурации) системы, т. е. от обобщенных
координат. Среди позиционных сил особое значение име-
ют восстанавливающие силы, т. е. силы, возникающие
при отклонениях системы от положения равновесия и
направленные так, чтобы вернуть систему в это положе-
ние. Именно восстанавливающие силы обусловливают
собственные колебательные свойства механических си-
стем — их способность совершать свободные колебания.
В механических системах с упругими элементами вос-
станавливающие силы возникают вследствие деформиро-
вания этих элементов при колебаниях (упругие силы).
В других случаях роль восстанавливающей силы может
играть сила тяжести (маятник) или архимедова сила
(корабль).
Зависимости восстанавливающих сил от обобщенных
координат, как правило, нелинейны; однако при иссле-
16
ВВЕДЕНИЕ
довании малых колебаний — что во многих случаях до-
статочно — чаще всего допустима линеаризация таких за-
висимостей. Для системы с одной степенью свободы ли-
нейная восстанавливающая сила всегда может .быть
записана в виде
<?(?)=-с?, (0.3)
где q — обобщенная координата, с — обобщенный коэф-
фициент жесткости. Например, если для маятника
(рис. 0.1, а) принять за обобщенную координату угол от-
клонения от вертикали, то
обобщенная сила (момент силы
тяжести) равна —mgl sin q «
« —mglq, т. e.
с = mgl.
Рис. 0.8
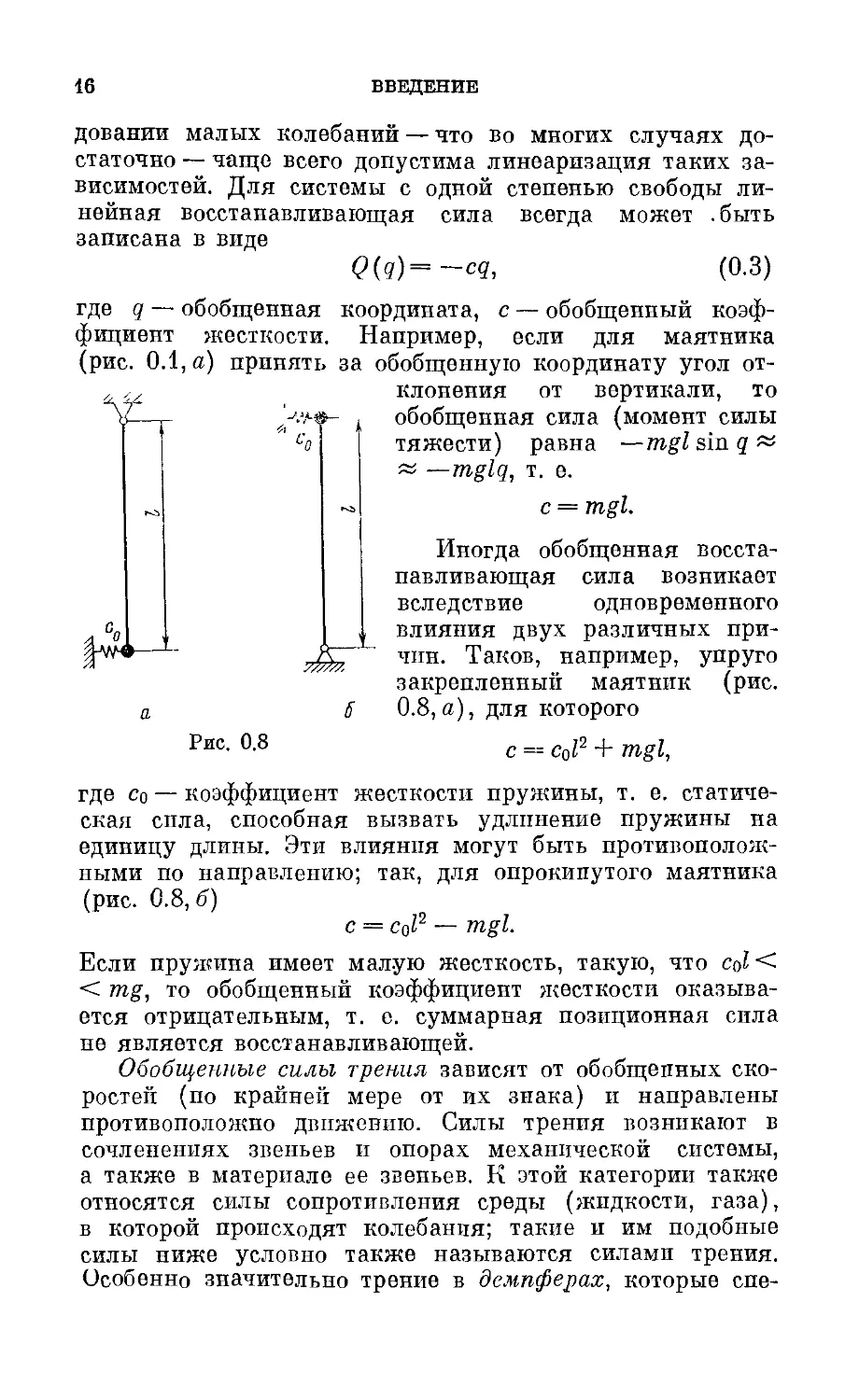
Иногда обобщенная восста-
навливающая сила возникает
вследствие одновременного
,, влияния двух различных при-
чин. Таков, например, упруго
закрепленный маятник (рис.
5 0.8,а), для которого
с = c0Z2 + mgl,
где со — коэффициент жесткости пружины, т. е. статиче-
ская сила, способная вызвать удлинение пружины на
единицу длины. Эти влияния могут быть противополож-
ными по направлению; так, для опрокинутого маятника
(рис. 0.8, б)
с = colz — mgl.
Если пружина имеет малую жесткость, такую, что cqI <
< mg, то обобщенный коэффициент жесткости оказыва-
ется отрицательным, т. е. суммарная позиционная сила
не является восстанавливающей.
Обобщенные силы трения зависят от обобщенных ско-
ростей (по крайней мере от их знака) и направлены
противоположно движению. Силы трения возникают в
сочленениях звеньев и опорах механической системы,
а также в материале ее звеньев. К этой категории также
относятся силы сопротивления среды (жидкости, газа),
в которой происходят колебания; такие и им подобные
силы ниже условно также называются силами трения.
Особенно значительно трение в демпферах, которые спе-
ВВЕДЕНИЕ
17
цпально вводятся в механические системы для гашения
колебаний. Чаще всего силы трения препятствуют раз-
витию колебаний, например, служат причиной затухания
свободных колебаний; механические системы, в которых
действуют такие силы, называются диссипативными.
В некоторых случаях силы трения оказывают противо-
положное действие и возбуждают колебания (в автоко-
лебательных системах — см. главу IV).
Зависимость обобщенной силы трения от обобщенной
скорости наиболее часто представляют в одной из следу-
ющих форм (для диссипативных систем с одной степенью
свободы):
сила линейного трения
Q^=~bq- (0.4)
кулопова сила трения*)
<?(?)=—b signq\ (0.5)
сила нелинейно-вязкого трения, обычно аппроксими-
руемая зависимостью
Q(q} = —Ы?1П sign (0.6)
пли зависимостью
Q[q)= —biq — b3q3 — b5q5 — ... (0.7)
В некоторых системах действуют силы смешанного
характера. Таковы, например, силы <?(</, £), зависящие
от координат и времени, которые нельзя представить в
виде суммы позиционной силы и вынуждающей силы;
эти силы характерны для параметрических систем, о ко-
торых кратко было уже сказано выше. Смешанным ха-
рактером обладают также силы Q(q, q), зависящие от
координат и скоростей и притом непредставимые в виде
суммы позиционной силы и силы трения; иногда такие
силы придают механической системе автоколебательные
свойства.
При составлении механической модели большое зна-
чение имеет разумное пренебрежение несущественными
составляющими сил, а для учитываемых в анализе со-
ставляющих — правильная схематизация их свойств. Так, * 2
*) Здесь имеется в виду простейший вид закона кулонова тре-
пня, в котором не учитывается разница между коэффициентами
трения покоя и трения движения.
2 я. г. Иановпо
18
ВВЕДЕНИЕ
при определении собственных частот механических си-
стем в большинстве случаев допустимо пренебречь дей-
ствием сил трения; ими можно пренебречь и при иссле-
довании вынужденных колебаний в достаточном удале-
нии от резонанса. Аналогично этому, если рассматривают-
ся малые колебания, то часто можно пе учитывать
нелинейность восстанавливающих сил.
Впрочем, подобные упрощения нужно делать осто-
рожно, имея в виду, что, казалось бы, малые влияния
иногда могут явиться причиной важных следствий прин-
ципиального характера. Так, даже весьма малые силы
трения необходимо учитывать при анализе затухания
свободных колебаний, а также при определении резонанс-
ных или околорезонансных амплитуд вынужденных ко-
лебаний. Подобно этому нужно помнить, что даже малые
параметрические силы могут вызвать весьма опасные
колебания типа параметрического резонанса (см. гла-
ву III).
4. Понятие о фазовой плоскости. Обычное описание
движения системы с одной степенью свободы в виде за-
висимости обобщенной координаты от времени q=q(t)
не является единственно возможным. В ряде случаев,
особенно при изучении нелинейных механических коле-
баний, определенными достоинствами обладает представ-
ление движения на фазовой плоскости.
Состояние системы в любой фиксированный момент
времени t определяется парой соответствующих значений
q и q и может быть представлено изображающей (фазо-
вой) точкой в плоской декартовой системе координат
q, q, если откладывать по оси абсцисс обобщенную ко-
ординату q, а по оси ординат — обобщенную скорость q.
Такая плоскость называется фазовой.
В процессе движения рассматриваемой системы вели-
чины q и q изменяются и соответственно меняется поло-
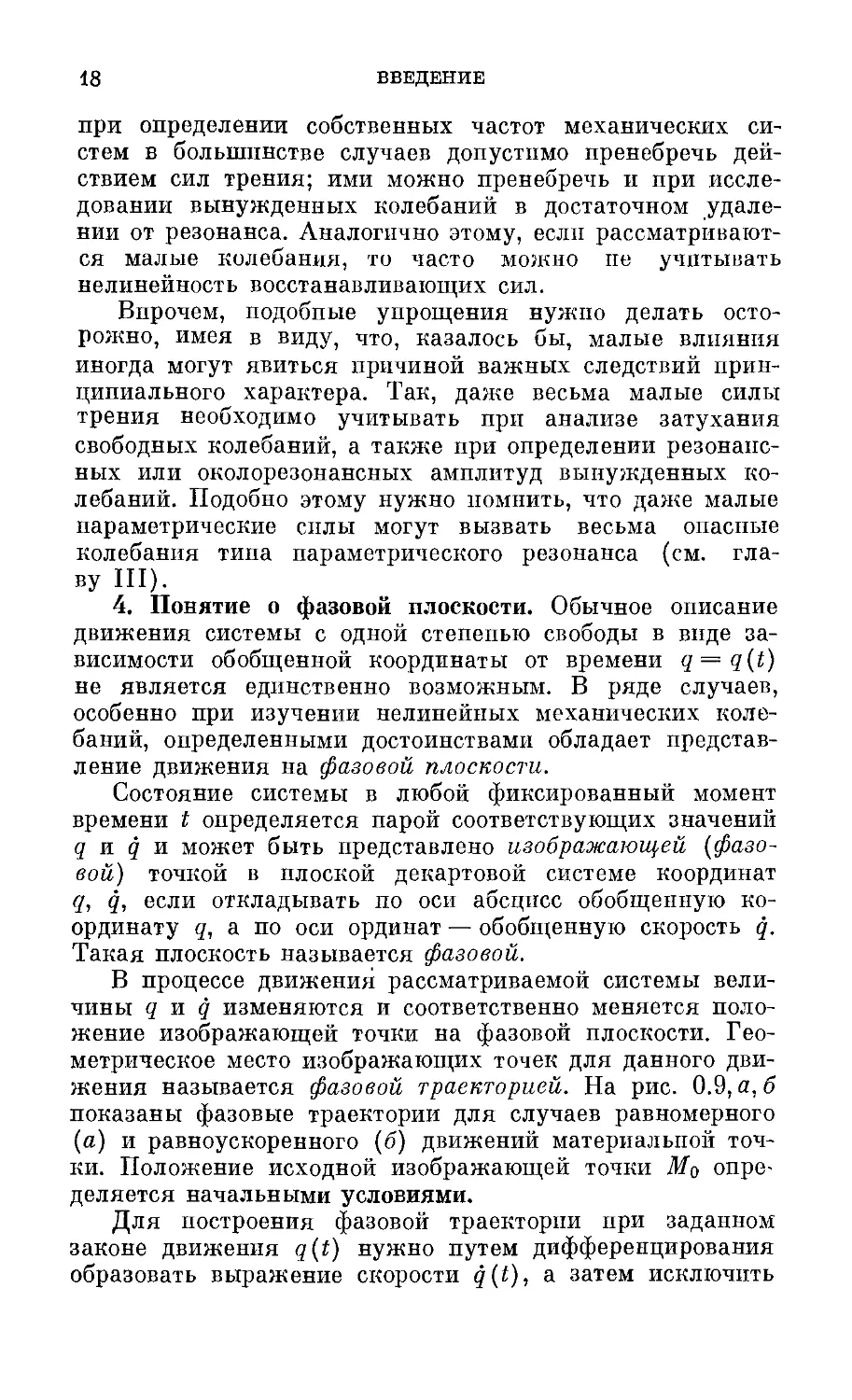
жение изображающей точки на фазовой плоскости. Гео-
метрическое место изображающих точек для данного дви-
жения называется фазовой траекторией. На рис. 0.9, я, б
показаны фазовые траектории для случаев равномерного
(а) и равноускоренного (б) движений материальной точ-
ки. Положение исходной изображающей точки Мо опре-
деляется начальными условиями.
Для построения фазовой траектории при заданном
законе движения q(t) нужно путем дифференцирования
образовать выражение скорости q(t), а затем исключить
ВВЕДЕНИЕ
19
время из двух уравнений:
9 = 9(0, 9 = 9(0- (0-8)
Функция
9 = 9(9) (0.9)
и описывает фазовую траекторию данного движения.
Впрочем, для построения фазовой траектории переход к
явной функции (0.9) не обязателен; фазовую траекторию
можно строить непосредственно по уравнениям (0.8), ко-
торые представляют уравнение фазовой траектории в па-
раметрической форме.
Фазовая плоскость особенно удобна для представления
колебательных процессов, когда координата и скорость
пе выходят за известные пределы; поэтому вся картина
движения даже в течение неограниченного времени зани-
мает ограниченную часть фазовой плоскости. Таковы, на-
пример, свободные гармонические колебания
q = A svo\kt + а),
причем угловая частота к, а также зависящие от началь-
ных условий величины Лиа известны. Для скорости
имеем
q = Ак cos (kt + а). (0.10)
Исключив время из этих двух уравнений, получим урав-
нение фазовой траектории
2
92+|_ = Л2, (0.11)
т. е. уравнение эллипса.
В данном случае вся фазовая плоскость заполнена
бесконечным множеством вложенных друг в друга таких
эллипсов с общим центром в начале координат и отли-
2*
20
ВВЕДЕНИЕ
чающихся друг от друга только параметром А (рис. 0.9, в).
Направления движения изображающих точек вдоль фа-
зовых траекторий показаны на рисунках стрелками. Все
фазовые траектории системы однотипны, а начальные ус-
ловия фиксируют определенный выбор конкретной тра-
ектории.
Совокупность фазовых траекторий описывает все воз-
можные движения данной системы и называется фазовой
диаграммой (фазовым портретом} данной системы. Струк-
тура фазовой диаграммы наглядно характеризует каче-
ственные особенности возможных движений рассматривае-
мой системы.
Следует иметь в виду, что фазовая диаграмма не
только может служить иллюстрацией закона движения,
после того как он найден путем интегрирования диффе-
ренциального уравнения задачи. В принципе фазовая
диаграмма может быть построена непосредственно, по
этому уравнению, без его решения в виде <? = <;(£).
Так, для автономной системы, описываемой нелиней-
ным дифференциальным уравнением
q + k2q = f(q, q), (0.12)
’ da
после замены q = q-^- получается уравнение
dq _ f(q, Q 3.
которое определяет искомую связь между переменными
q и q. В принципе решение этого дифференциального
уравнения первого порядка имеет вид
q = q(q, С), (0.14)
где постоянная С определяется начальным условием
q — qo при q=qo (qo и q0—начальные значения обоб-
щенной координаты и обобщенной скорости). Каждому
значению С соответствует определенная фазовая траек-
тория, а совокупность таких траекторий образует фазо-
вую диаграмму системы.
В некоторых случаях дифференциальное уравнение
(0.13) удается решить аналитически в замкнутой форме;
в частности, к квадратурам приводится случай, когда вы-
ражение f(q, q) не содержит q, и переменные в (0.13)
разделяются. В общем случае для интегрирования урав-
ВВЕДЕНИЕ
21
вопия (0.13) нужно обращаться к ЭВМ. (В свое время
были предложены различные специальные приемы гра-
фического интегрирования названного уравнения; теперь
этими приемами практически не пользуются.)
В состояниях равновесия равны пулю обобщенная
скорость (знаменатель правой части уравнения (0.13)) и
обобщенное ускорение (числитель правой части уравне-
ния (0.13)). Таким образом, в точках фазовой плоскости,
соответствующих состояниям равновесия, производная
dqldq не определена и вместе с этим не определено на-
правление касательной к фазовой траектории. Такие
точки называются особыми точками дифференциального
уравнения. В качественной теории дифференциальных
уравнений устанавливается, что через любую особую точ-
ку проходит либо больше чем одна фазовая траектория,
либо не проходит ни одной. Например, как мы видели
на рис. 0.9, в, через особую точку в начале координат не
проходит ни одна из фазовых траекторий (такая точка
называется особой точкой типа «центр»; ниже будут рас-
смотрены особые точки других типов).
Через всякую регулярную точку фазовой плоскости
(т. е. не особую точку) проходит одна и только одна
фазовая траектория. Изображающие точки, лежащие в
верхней полуплоскости, определяют состояния системы с
положительными значениями обобщенной скорости, т. е.
состояния, которым соответствует возрастание обобщен-
ной координаты, поэтому такая изображающая точка дви-
жется вдоль фазовой траектории слева направо. Соответ-
ственно, изображающая точка, находящаяся в нижней
полуплоскости, движется вдоль фазовой траектории спра-
ва налево. Отсюда также следует, что касательная к фа-
зовой траектории в точках пересечения траектории с
осью q перпендикулярна этой осп.
Глава I
СВОБОДНЫЕ КОЛЕБАНИЯ
§ 1. Линейные системы с одной степенью свободы
при отсутствии трения
1. Основное дифференциальное уравнение и его реше-
ние. Изучение свободных колебаний представляет опре-
деленный интерес в связи с практическими задачами
о движении механической системы после какого-либо воз-
мущения ее состояния равновесия. Однако не только этим
определяется важность темы, которой посвящена настоя-
щая глава. Дело в том, что характеристики свободных
колебаний (собственные частоты и собственные формы)
полностью определяют индивидуальные динамические
свойства механической системы и имеют первостепенное
значение также при анализе ее вынужденных колебаний.
Рассмотрим в общем виде консервативную механиче-
скую систему с одной степенью свободы, для которой
уравнение Лагранжа имеет известную из курса теорети-
ческой механики форму:
dt \dq ) дЧ k ’ 7
Здесь t — время, q — обобщенная координата, q — обоб-
щенная скорость, Т — кинетическая энергия, П — потен-
циальная энергия.
Прежде всего образуем выражение кинетической
энергии:
п п
т =-^ 2 mivi =4 (1-2)
1=1 i=l
где тпг — масса i-й материальной точки, v, — скорость этой
точки. Если г4 — радиус-вектор i-й материальной точки
§ 1. СИСТЕМЫ БЕЗ ТРЕНИЯ 23
определяется только обобщенной координатой q и не
зависит явно от времени, то скорость точки равна
дт1 •
Vi = ~dt = dq'^'
и, следовательно,
г=1 7 i=l 4 * '
Входящая сюда сумма в общем случае является функ-
цией обобщенной координаты q; обозначив
V* (dri\2
(1-3)
г—1
и разлагая последнее выражение в ряд Маклорена в ок-
рестности значения q = 0, получим
4(д) = Л(0) + Л'(0)7 + ^Вг/--Ь ...
Здесь штрихи обозначают производные функции A (q) по
обобщенной координате q.
В этом параграфе рассматривается частный, но прак-
тически очень важный случай малых колебаний
системы около положения ее равновесия; отсчет коорди-
наты q удобно вести от этого положения. При малых зна-
чениях q в разложении можно удержать лишь один пер-
вый член, который обозначим через а; тогда кинетиче-
ская энергия примет вид, сходный с выражением кине-
тической энергии одной материальной точки:
Г =4 а?. (1.4)
Входящий сюда множитель а называют коэффициентом
инерции или инерционным коэффициентом (иногда его
называют также обобщенной или приведенной массой).
Конечно, для определения инерционного коэффициента
нет необходимости каждый раз фактически строить сум-
му (1.3), разлагать ее в ряд Маклорена и затем выде-
лять первый член этого ряда. В зависимости от вида ме-
ханической системы и выбора обобщенной координаты
достаточно любым образом получить выражение кинети-
ческой энергии через квадрат обобщенной скорости; при
24
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
этом значение а определится как коэффициент в выра-
жении (1.4).
Обратимся теперь к определению потенциальной энер-
гии П, которая представляет собой функцию обобщенной
координаты q:
П = П(д). (1.5)
Если, как это чаще всего бывает, потенциальная энергия
обладает свойствами непрерывности и дифференцируемо-
сти, то ее можно разложить в ряд Маклорена в окрестно-
сти значения q = 0:
П = П(0) + П'(0)7-|-^г/-|- ..., (1-6)
где, как и выше, штрихи обозначают дифференцирование
по обобщенной координате q. Постоянному первому чле-
ну этого разложения может быть приписано любое значе-
ние, так как потенциальная энергия определяется с точ-
ностью до произвольного постоянного слагаемого. Поэто-
му удобно положить П(0) = 0. Далее нужно вспомнить
соотношение
П' = —<2, (1.7)
определяющее связь потенциальной энергии с обобщен-
ной силой Q. Так как в положении равновесия обобщен-
ная сила равна нулю, то при отсчете координаты q от
положения равновесия системы производная П'(0) обра-
щается в нуль; при этом разложение (1.6) начнется с
члена, содержащего вторую степень координаты q. Счи-
тая перемещения q малыми, мы сохраним в разложении
(1.6) только упомянутый член, так что окончательно
получим
П = -|е<Л (1.8)
где постоянная
с = П"(0) (1.9)
называется обобщенным коэффициентом жесткости или
квазиупругим коэффициентом.
Знак постоянной с зависит от устойчивости положения
равновесия, от которого ведется отсчет координатй q.
Согласно теореме Лагранжа — Дирихле потенциальная
энергия консервативной системы в положении устойчи-
вого равновесия имеет минимум, т. е. П"(0)>0. Отсюда
следует, что с > 0 вблизи устойчивого положения равно-
весия.
§ 1. СИСТЕМЫ БЕЗ ТРЕНИЯ
25
Для определения обобщенного коэффициента жестко-
сти с в каждом конкретном случае достаточно построить
выражение потенциальной энергии в виде квадратичной
функции обобщенной координаты q, причем отсчет коор-
динаты q следует вести от положения равновесия и при-
нять, что этому положению соответствует нулевое значе-
ние потенциальной энергии. Если окажется, что с < О,
то это будет означать неустойчивость соответствующего
положения равновесия.
Подставив в уравнение Лагранжа (1.1) выражения
(1.4) и (1.8) для кинетической и потенциальной энергии,
получим основное дифференциальное уравнение задачи
о свободных колебаниях:
aq + cq = 0. (1.10)
Иногда, в зависимости от вида механической системы,
может оказаться более удобным не метод Лагранжа, а ка-
кой-либо иной путь составления дифференциального
уравнения задачи; разумеется, что независимо от вы-
бранного способа для рассматриваемых здесь линейных
систем с одной степенью свободы без трения окончатель-
ное дифференциальное уравнение запишется в виде
(1.10).
Введем обозначение
<1Л1)
тогда вместо (1.10) получим
д + *27 = 0. (1.12)
Общее решение этого уравнения имеет вид
q = Ci sin kt + Cz cos kt, (1-13)
причем постоянные C\ и определяются через началь-
ные условия ?(0)= 7о и ?(0) = 7о в виде
Cr=4^ C2 = q0.
Окончательно имеем
q = -у sin kt -ф q0cos kt. (1.14)
Иногда пользуются иной формой записи:
q = A sin(&£ + а), (1-15)
26
ГЛ, I. СВОБОДНЫЕ КОЛЕБАНИЯ
где
+ qli
. kqo
а — arctg
q0
(1.16)
Из выражения (1.15) видно, что движение представляет
собой незатухающие гармонические колебания с ампли-
тудой А и угловой частотой к (рис. 1.1). Подчеркнем, что
амплитуда колебаний опре-
деляется начальными усло-
виями по первой формуле
(1.16), а угловая частота
колебаний зависит только от
параметров системы (см.
t формулу (1.11)) и не зависит
от начальных условий; по
этому признаку величина к
называется собственной ча-
Рис. 1.1 стотой системы. Собственная
частота представляет собой
число свободных колебаний за 2л единиц времени. Пе-
риод свободных колебаний, т. е. длительность одного пол-
ного цикла колебаний, определяется формулой
т,-=2л1/г-.
' с
(1.17)
Пример 1.1. Определить собственную частоту системы
(рис. 1.2), состоящей из упруго закрепленной горизонтально рас-
положенной рейки А, которая лежит на упруго закрепленном од-
нородном цилиндре В и катке С. Считать, что трение между рей-
кой и цилиндром исключает возможность проскальзывания рейки
по цилиндру. Обозначения: mi — масса рейки, тг — масса цилинд-
ра, ci — коэффициент жесткости горизонтальной пружины, с2 —
коэффициент жесткости вертикальной пружины, г — радщ с сече-
ния цилиндра, I — расстояние от оси цилиндра до точки крепле-
§ 1. СИСТЕМЫ БЕЗ ТРЕНИЯ
27
пия вертикальной пружины. Массами пружин и катка С пре-
небречь.
Примем за обобщенную координату горизонтальное переме-
щение какой-либо точки рейки; так как рейка движется поступа-
тельно, то выбор этой точки безразличен. Отсчет координаты х бу-
дем вести от положения равновесия, когда обе пружины не де-
формированы.
При перемещении рейки, равном х, цилиндр поворачивается
па угол <р = х/г. Кинетическая энергия системы равна
1 *2 1 -2
?= Т™/+-2 /2Ф2;
подставив сюда = т2г2/2, <р = х/г, получим
1 • » 1 ’о 1 / 1 \ • 2
T=2V +-^т2Х =y|<mi+’2 х
Отсюда непосредственно видно, что инерционный коэффициент в
данном случае равен
1
°=mj +~2 т2-
Потенциальная энергия определяется деформациями обеих
пружин:
Таким образом, коэффициент жесткости системы равен
Z2
С — С1+ г2С2-
Теперь по формуле (1.11) находим собственную частоту:
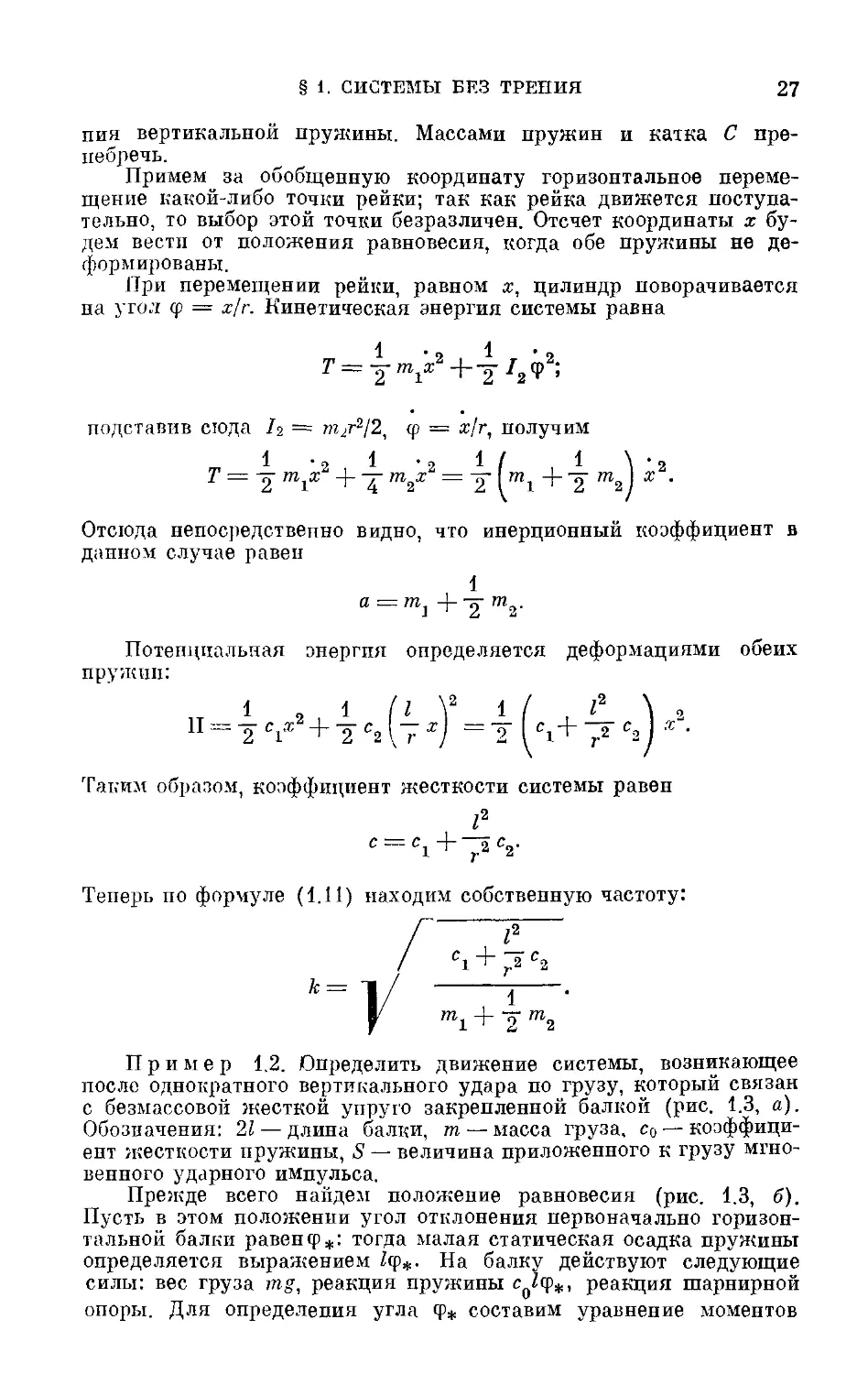
Пример 1.2. Определить движение системы, возникающее
после однократного вертикального удара по грузу, который связан
с безмассовой жесткой упруго закрепленной балкой (рис. 1.3, а).
Обозначения: 21 — длина балки, т — масса груза, с0 — коэффици-
ент жесткости пружины, S — величина приложенного к грузу мгно-
венного ударного импульса.
Прежде всего найдем положение равновесия (рис. 1.3, б).
Пусть в этом положении угол отклонения первоначально горизон-
тальной балки равенф*: тогда малая статическая осадка пружины
определяется выражением /ф*. На балку действуют следующие
силы: вес груза mg, реакция пружины с^ф*, реакция шарнирной
опоры. Для определения угла ф* составим уравнение моментов
28
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
относительно центра шарнирной опоры:
2mgl — c0Z2<p* = 0.
Отсюда находим
2mg
Ф* — с i •
Теперь перейдем к анализу движения и обозначим через <р
угол дополнительного отклонения при движении системы после
Рис. 1.3
удара. Тогда полный угол
отклонения равен <р* + ф,
и полная реакция пружи-
ны составляет cj, (ф„ 4- <р).
Составим дифференци-
альное уравнение враща-
тельного движения жест-
кой системы балка — груз:
— c0Z2 (ф„ 4- Ф) =
d2
= 4mZ2^2 (Ф*4-Ф),
где 4mZ2 — момент инерции
системы. Если раскрыть
скобки в левой части это-
го уравнения, то сумма
первых двух членов соглас-
но (а) окажется равной ну-
лю, и мы получим диффе-
ренциальное уравнение для координаты ф, отсчитываемой от по-
ложения равновесия:
4тф + соф = 0.
(б)
Теперь легко заметить, что предварительное определение рав-
новесного положения оказалось, в сущности, лишней опера-
цией. Можно было поступить проще: заранее опустить из рас-
смотрения силы, действующие в системе, когда она находится в
положении равновесия, и включить в дифференциальное уравне-
ние движения только момент дополнительной реакции с01ф (этот
момент равен — c0Z2<p); при этом сразу получится уравнение (б).
Обычно именно так и поступают в подобных случаях.
Сопоставляя уравнение (б) с основным уравнением (1.10), ви-
дим, что инерционный коэффициент и коэффициент жесткости со-
ответственно равны а = 4т, с = са. Теперь по формуле (1,11) на-
ходим собственную частоту:
Перейдем к формулировке начальных условий, соответствую-
щих движению после приложения ударного импульса S. В момент,
непосредственно следующий за ударом, положение балки остается
§ 1. СИСТЕМЫ БЕЗ ТРЕНИЯ
29
неизменным, следовательно, q>0 = 0. Скорость груза получает мгно-
венное приращение ф01, определяемое из теоремы об изменении
количества движения:
2тф01 — 0 = 5.
Следовательно, начальные условия имеют вид
S
Фо = О- <Ро==2тГ’
Согласно решению (1.14) движение описывается выражением
причем наибольшее отклонение от положения равновесия равно
S__________________________________S
Фтах 2тк1 рЛc^ml ’
а вызванное ударом наибольшее усилие в пружине
,__ „ т / со
соФтах^ ^ |/ т
2. Метод Рэлея. Во введении был пояснен прибли-
женный способ приведения к системе с одной степенью
свободы, основанный па априорных соображениях о кон-
фигурации системы при ее колебаниях. После такого
приведения нужно образовать соответствующие выраже-
ния для потенциальной и кинетической энергии и тем
самым установить значения коэффициента жесткости с
и инерционного коэффициента а. После этого по формуле
(1.11) вычисляется собственная частота.
Рэлей доказал теорему, согласно которой вычисленный
указанным способом результат всегда приводит к пре-
увеличенному значению собственной частоты.
Пусть, например, для системы на рис. 0.4, а дано: массы всех
трех тел одинаковы п равны т, коэффициенты жесткости всех пру-
жин также одинаковы и равны с0. Следуя методу Рэлея, примем
х2 = axi, х3 = |3zi, где а и f — некоторые разумно выбран-
ные числа.
Кинетическая энергия системы выражается через единствен-
ную обобщенную скорость xt:
1 1 1 1
Т = -% т х% у т х% -j- у т х% = у т х% (1 -j- а1 2 ф р2),
30 ГЛ. Г. СВОБОДНЫЕ КОЛЕБАНИЯ
а потенциальная энергия системы — через единственную обобщен-
ную координату xt:
п = т v! +1 % (s - 5)2 + т % (г3 ~ г2)2=
= 4 V1 [1+ (а-1)2 + (₽ - а)2].
Следовательно, коэффициенты уравнения (1.13) в данном случае
равны
а = т(1 + а2 + ₽2); с = с0[1 + (а — I)2 + (р — а)2]
и собственная частота определяется выражением:
к = 1/1 =Д 1 / 1 + (а-1)2 + (Р-а)2
Га т у 1 + а2 + р2
Конечно, этот результат зависит от выбранных значений аир.
Если рассматривать частоту как функцию а и р, то согласно упо-
мянутой теореме Рэлея минимум этой функции определяет истин-
ное значение искомой частоты; по этому поводу см. ниже более
простой пример 1.3.
Остановимся на случае свободных изгибных колеба-
ний балок*). Прогиб у любой точки осп балки с абсцис-
сой х меняется во времени, т. е.
y = t). (1.18)
Согласно основной идее метода Рэлея примем
У = ?(£)/(*). (1-19)
где f(x) — заранее назначаемая функция координа-
ты х, характеризующая форму изогнутой оси балки при
колебаниях, q(t)—некоторая, пока неизвестная, функ-
ция времени.
Так как функция f(x) задается более или менее про-
извольно, то результат решения задачи окажется, как
правило, приближенным (если случайно в качестве f(x)
будет принята истинная форма оси балки при колеба-
ниях, то результат окажется точным).
Форму оси следует выбирать с учетом заданного спо-
соба закрепления балки, которым определяются гранич-
ные условия для функции f{x).
Различаются кинематические и силовые граничные
условия. Рассмотрим эти условия в частных случаях, обо-
значив через х* абсциссу рассматриваемого конца балки.
*) Предполагается, что читатель изучал сопротивление материа-
лов и знаком с теорией изгиба балок при статических нагрузках.
s 1. СИСТЕМЫ БЕЗ ТРЕНИЯ 31
На жестко заделанном конце балки невозмож-
ны прогиб и поворот, т. е.
у(^, i) = 0, -g(^, i) = 0.
Эти равенства должны удовлетворяться в любой мо-
мент времени, что будет иметь место, если входящая в
(1.19) функция / (ж) удовлетворяет условиям
/(я*) —О, Г(^) = о. (1.20)
Здесь штрихом обозначена операция дифференцирования
по координате х. Оба условия (1.20) — кинематические,
т. е. относятся к перемещениям концевого сечения.
Если конец х = шарнирно оперт, то на этом
конце должны тождественно равняться нулю и прогиб и
изгибающий момент *)
у(х*, I) = 0, -|(ж#, 0 = 0.
дх
Отсюда следуют граничные условия для функции /(ж):
/(^) = 0, /"(**) = 0. (1.21)
Первое из этих условий — кинематическое, второе усло-
вие — силовое.
Наконец, на свободном конце х = х* должны рав-
няться нулю изгибающий момент и поперечная сила, т. е.
^2 ^3
^(^, 1) = 0, 1) = 0.
При этом должны удовлетворяться два силовых грани
ных условия:
ГЫ==0, Г(^) = 0. (1.22)
Далее будем полагать, что функция /(ж) выбрана с
учетом тех или иных заданных граничных условий; обра-
тимся к определению кинетической и потенциальной
энергии.
*) Здесь необходимо вспомнить соотношения теории сопротив-
д2у о3у
ления материалов: M = EJ —j, Q = EJ—где М— изгибаю-
дх дх
щий момент, Q — поперечная сила, EJ — жесткость сечения при
изгибе.
32 ГЛ., I. СВОБОДНЫЕ КОЛЕБАНИЯ
Скорость поперечного движения любой точки оси бал-
ки определяется выражением
= g (0 / (*)•
Соответственно кинетическая энергия бесконечно малого
элемента длиной dx равна
~ т (х) dx = у т (х) q2 (t) f2 (х) dx.
Здесь т(х)—интенсивность распределенной массы,
m(x)dx—масса расматрнваемого элемента. Интегрируя
по всей длине I, находим полную кинетическую энергию
балки
i
Т = q m(x)f2(x)dx. (1.23)
о
Сравнивая полученный результат с общим выражением
(1.4) для кинетической энергии, приходим к заключению,
что входящий в (1.23) интеграл представляет собой инер-
ционный коэффициент:
i
а = J т(х) f2 (x)dx. (1-24)
о
Для определения потенциальной энергии нужно ис-
ходить из выражения
которое устанавливается в курсе сопротивления материа-
лов. Подставляя сюда
^2
^ = д(0Г(4
находим
i
П = f ЕJ [f (z)]2 dx.
о
Из сравнения этого результата с выражением (1.8) еле-
§ 1. СИСТЕМЫ БЕЗ ТРЕНИЯ
33
дует, что коэффициент жесткости определяется формулой
i
с = I EJ [/" (х)\Чх. (1.25)
о
После определения коэффициентов а и с по форму-
лам (1.24) и (1.25) собственная частота находится со-
гласно (1.11) в виде
Г~1
Г J EJ (x)\f'(xrfdx
к = | \. (1.26)
I/ J т (х) f2 (х) dx
Можно доказать, что если функция /(ж) удовлетворяет
заданным кинематическим граничным условиям, то при-
ближенный результат (1.26) всегда больше истинного
значения низшей собственной частоты балки.
Метод Рэлея может быть использован для приближен-
ного определения низшей собственной частоты любой си-
стемы с распределенными параметрами — не только ба-
лок, совершающих изгибные колебания, но и стержней
при их продольных или крутильных колебаниях, а так-
же — с соответствующей модификацией — рамных конст-
рукций, пластин и оболочек.
Так, например, в случае продольных колебаний стерж-
ня аналогично сказанному принимается, что продольные
перемещения и(х, t) описываются тем же произведением
(1.19). При этом граничными условиями будут: на сво-
бодном конце f (я*) = 0, на закрепленном конце / (х*) = 0.
При помощи прежних рассуждений можно получить соб-
ственную частоту в виде
/ i
/ \ЕР (х) [f (xtfdx
к = | / °--------------г (1-27)
J т (x)'f (х) dx
где F(x) — площадь сечения стержня.
Пример 1.3. Двухмассовая система (рис. 1.4, а) определя-
ется следующими параметрами: mt = тг = mt cj = сг = с0.
3 я. Г. Пановко
34
ГЛ, I. СВОБОДНЫЕ КОЛЕБАНИЯ
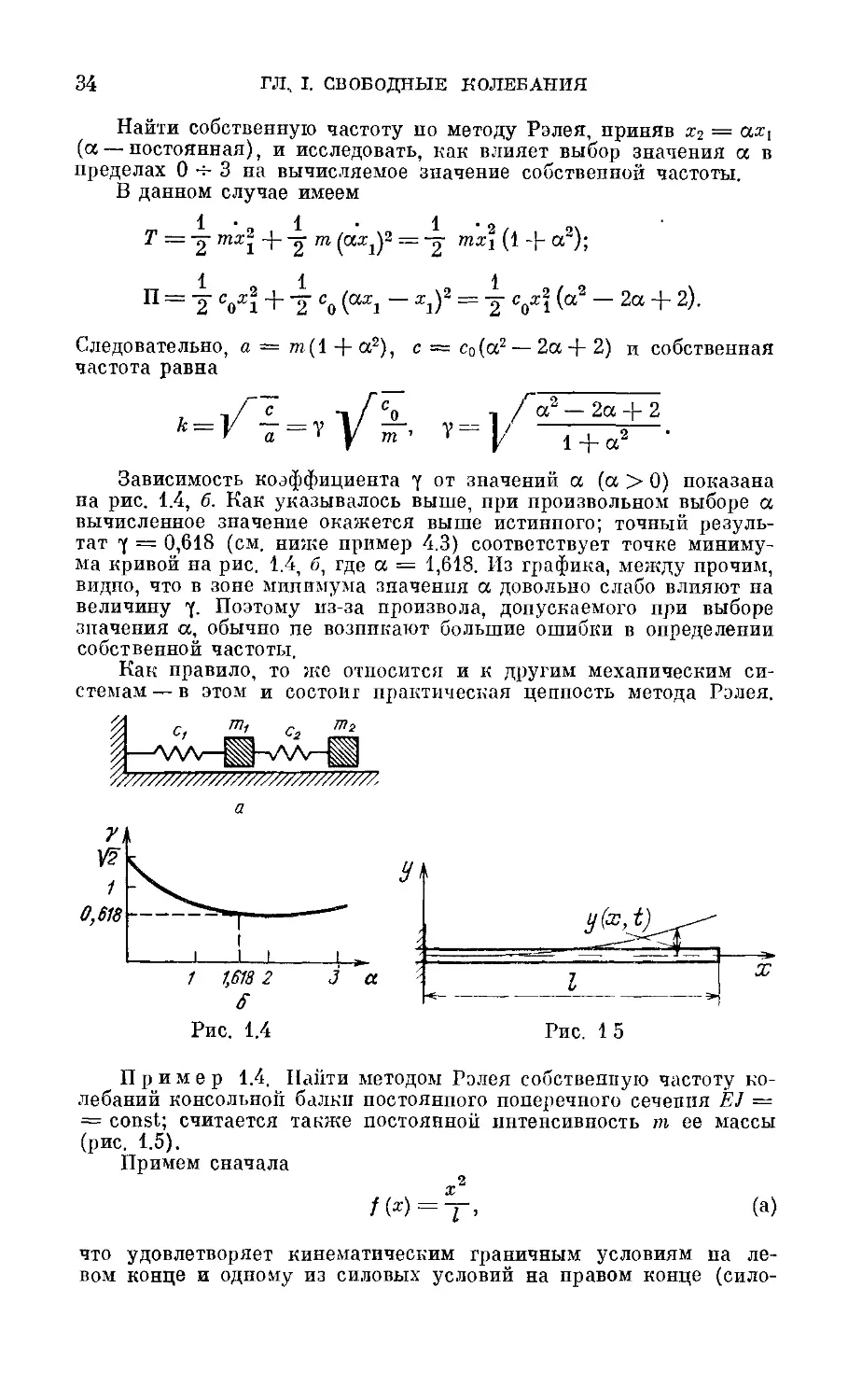
Найти собственную частоту по методу Рэлея, приняв г2 =
(а — постоянная), и исследовать, как влияет выбор значения а в
пределах 0 3 на вычисляемое значение собственной частоты.
В данном случае имеем
1 • 1 • 1 •
Т ~ + ~2 m (cw^)2 mxi (1 а2);
11 1
п = J со4 + "2 со (°“i “ г1)2 = "2 V1 — 2а + 2).
Следовательно, а = т(1 а2), с = со(а2 — 2а + 2) и собственная
частота равна
Зависимость коэффициента f от значений а (а > 0) показана
на рис. 1.4, б. Как указывалось выше, при произвольном выборе а
вычисленное значение окажется выше истинного; точный резуль-
тат у = 0,618 (см. ниже пример 4.3) соответствует точке миниму-
ма кривой на рис. 1.4, б, где а = 1,618. Из графика, между прочим,
видпо, что в зоне минимума значения а довольно слабо влияют на
величину у. Поэтому из-за произвола, допускаемого при выборе
значения а, обычно пе возникают большие ошибки в определении
собственной частоты.
Как правило, то же относится и к другим механическим си-
стемам— в этом и состоит практическая ценность метода Рэлея.
Пример 1.4. Найти методом Рэлея собственную частоту ко-
лебаний консольной балки постоянного поперечного сечеппя EJ =
= const; считается также постоянной интенсивность m ее массы
(рис. 1.5).
Примем сначала
Иг) = Т’ (а)
что удовлетворяет кинематическим граничным условиям па ле-
вом конце и одному из силовых условий на правом конце (сило-
§ 1. СИСТЕМЫ БЕЗ ТРЕНИЯ 35
вое условие /"(О = 0 здесь нарушено!). Подставляя (а) в (1.26),
вычисляем
4,47 1/£7
В качестве формы колебаний лучше принять функцию
2 3 4
/(®) = 2Г-^2 +^з, (6)
которая удовлетворяет всем граничным условиям задачи:
/(0) = 0, f (0) = о,
/"(Z) = о, = 0.
Подставив (б) в формулу (1.26), найдем
3,64 ,/“77
Л -• о I/ ,
Г '
что лишь на 3,4 % отличается от известного точного значения
3. Зависимость устойчивости равновесия от коэффи-
циента жесткости. Во всех рассмотренных выше случаях
речь шла о колебаниях около положения заведомо устой-
чивого равновесия; формальным признаком устойчивости
служит положительность коэффициента жесткости с, рав-
ного значению второй производной П"(0) потенциальной
энергии в положении равновесия. В реальных механиче-
ских системах может оказаться, что с < 0.
При с < 0 основное дифференциальное уравнение
(1.10) можно записать в виде
aq— c*q~O, (1-28)
где с* = |с| — абсолютное значение обобщенного коэффи-
циента жесткости. Решение уравнения (1.28)
q = A sh(k*t +а), (1-29)
где к* = 1/с*1а, описывает монотонное удаление системы
от равновесного положения и свидетельствует о его не-
устойчивости.
Знак коэффициента с зависит от параметров системы,
т. е. в некоторых случаях состояние равновесия может
быть устойчивым или неустойчивым в зависимости от
комбинации значений этих параметров.
3*
36
ГЛ., I. СВОБОДНЫЕ КОЛЕБАНИЙ
Обращаясь к рассмотрению таких случаев, будем счи-
тать, что существует лишь один варьируемый параметр
S системы, при изменении которого может измениться
знак коэффициента жесткости с = с(5). Состояния рав-
новесия устойчивы в той области значений S, в которой
с (S) > 0; при с (5) < 0 состояния равновесия неустойчивы
(случаи «отрицательной жесткости»). Критические зна-
чения параметра S являются корнями уравнения
с(5) = 0. (1.30)
Пример 1.5. Для симметричной системы, изображенной на
рис. 1.6, введем обозначения: G — вес тела, I — момент инерции
тела относительно оси шарнира, с0 — суммарный коэффициент
Рис. 1.6
Рис. 1.7
жесткости обеих пружин, Ъ — высота расположения центра тя-
жести тела, I—высота расположения оси пружин. Найти критиче-
ское значение коэффициента жесткости с0.
При малых значениях угла отклонения тела дифференциаль-
ное уравнение вращательного движения имеет вид
7ф+ (c0i2 —СЬ)Ф = 0.
Таким образом, в данном случае устойчивость равновесия опреде-
ляется знаком разности
с = с01г — Gb.
Критическое значение с0 Кр = Gb/l2.
Пример 1.6. Найти критическое значение силы Р для систе-
мы, изображенной на рис. 1.7, а; весом верхнего стержня прене-
бречь. Коэффициент жесткости спиральной пружины, расположен-
ной внизу стойки, равен с0 (с0 представляет собой упругий момент,
соответствующий повороту стойки вокруг шарнира на угол, рав-
§ 1. СИСТЕМЫ БЕЗ ТРЁНИЯ
37
пый единице). Обозначим: I — высота стойки, Ъ — длина верхнего
стержня, G — вес стойки. Силы, действующие на стойку, при ее от-
клонении на малый угол ср, показаны на рис. 1.7, б.
Запишем дифференциальное уравнение вращательного движе-
ния стойки (для малых отклонений)
Gl G12 -
P^l + Pq>l + -? <р - с0<Р = <Р-
Так как Ъ sin ф = I sin <р, то при малых углах ф и <р можно при-
нять ф = <pZ/&. Таким образом, обобщенный коэффициент жестко-
сти равен
'=‘.Л-иН)-
Отсюда непосредственно видно, что критическое значение силы Р
в соответствии с (1.30) определяется выражением
„ f GZ 1 Г, ( , 1 М"1
Ркр —[со~ 2 Ъ )] ’
При увеличении размера Ь критическое значение Ркр также уве-
личивается.
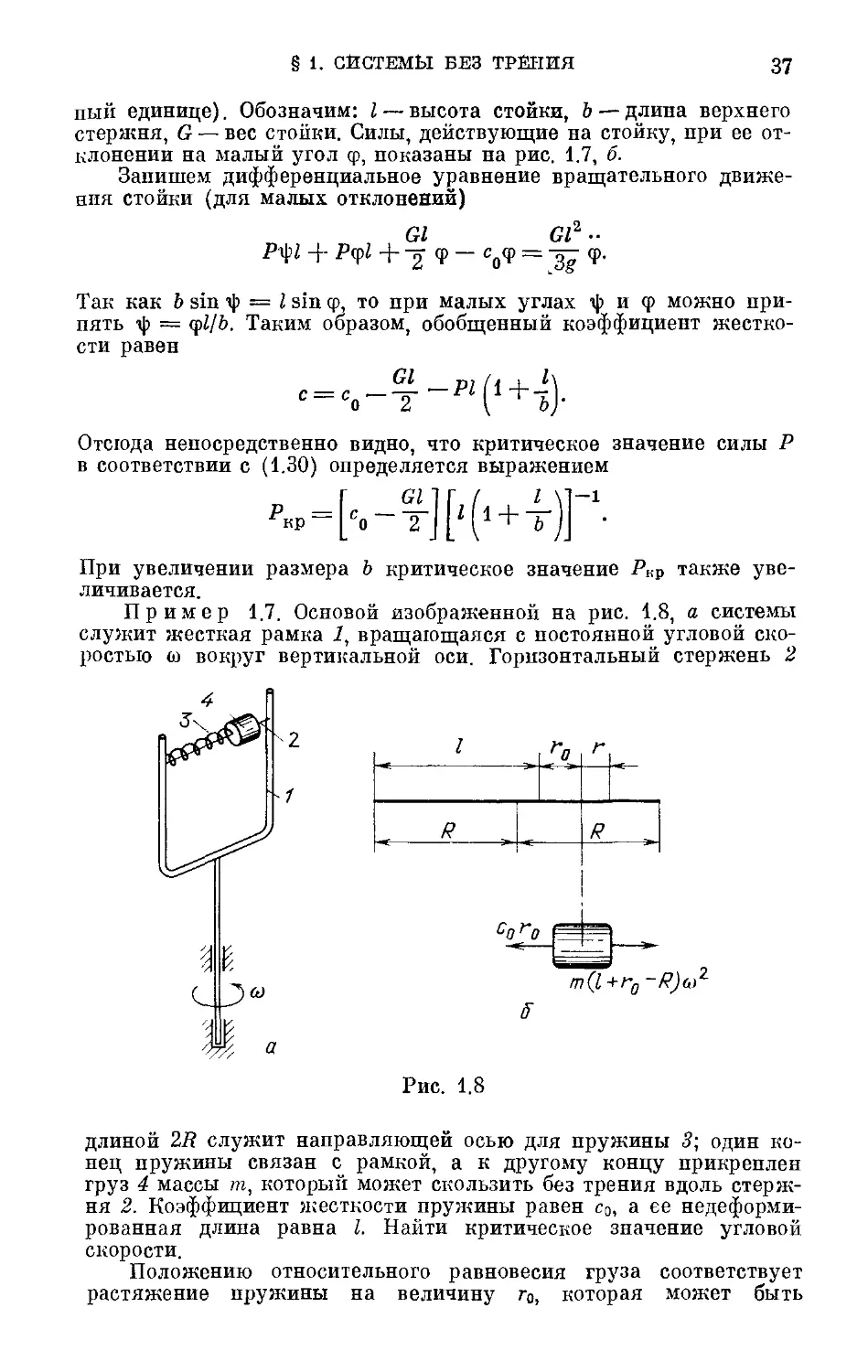
Пример 1.7. Основой изображенной на рис. 1.8, а системы
служит жесткая рамка 7, вращающаяся с постоянной угловой ско-
ростью <о вокруг вертикальной оси. Горизонтальный стержень 2
Рис. 1.8
длиной 2R служит направляющей осью для пружины 3; один ко-
нец пружины связан с рамкой, а к другому концу прикреплен
груз 4 массы т, который может скользить без трения вдоль стерж-
ня 2. Коэффициент жесткости пружины равен с0, а ее недеформи-
рованная длина равна I. Найти критическое значение угловой
скорости.
Положению относительного равновесия груза соответствует
растяжение пружины на величину га, которая может быть
38
ГЛ., I. СВОБОДНЫЕ КОЛЕБАНИЯ
найдена из схемы сил, данной на рис. 1.8, б, т. е. из соотношения
m (J + г0 — Я) со2 = сого. (а)
Устойчивость этого состояния равновесия груза зависит от значе-
ний угловой скорости вращения системы.
Вращение системы примем за переносное движение, тогда
движение груза вдоль стержня будет являться относительным дви-
жением. Обозначив через г дополнительное удлинение пружины
в произвольный момент процесса движения, запишем переносную
силу инерции в виде т (Z + г0 + г — R) со2; тогда дифференциаль-
ное уравнение относительного движения груза примет вид
тг = — с0(г0 + г) + т(1 + г0 + г — Я)<о2,
или, при учете (а),
тг + (с0 — ш<о2) г = 0.
Следовательно, обобщенный коэффициент жесткости равен с —
= с0 — mm2, и критическое значение угловой скорости составляет
Икр — ус^т. Отметим, что оно не зависит от значений I и г0 и сов-
Рис. 1.9
стержня от вертикали (рис.
падает со значением собственной ча-
стоты колебаний груза на пружине
при отсутствии вращения.
При о > икр состояния относитель-
но равновесия груза неустойчивы.
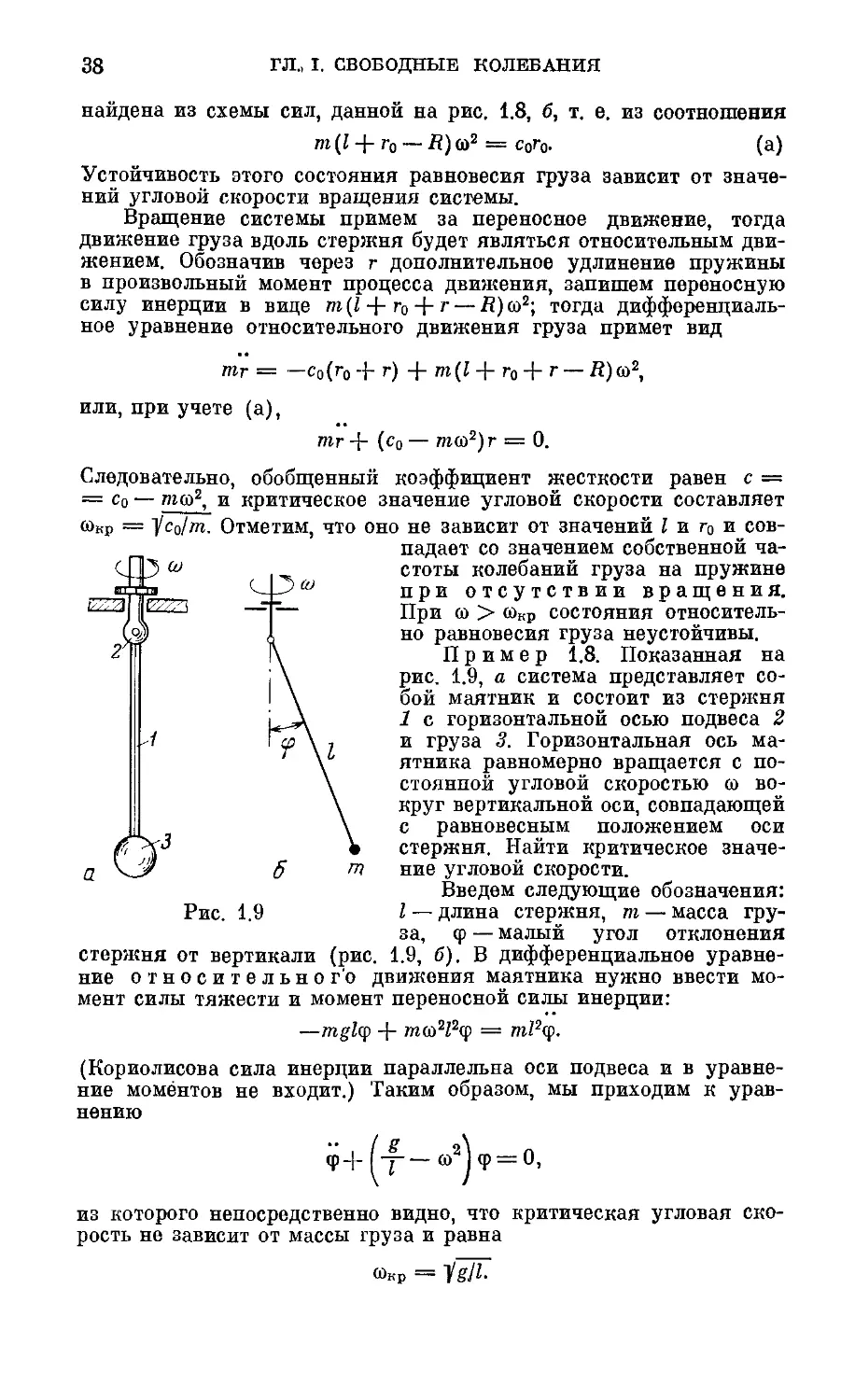
Пример 1.8. Показанная на
рис. 1.9, а система представляет со-
бой маятник и состоит из стержня
1 с горизонтальной осью подвеса 2
и груза 3. Горизонтальная ось ма-
ятника равномерно вращается с по-
стоянной угловой скоростью и во-
круг вертикальной оси, совпадающей
с равновесным положением оси
стержня. Найти критическое значе-
ние угловой скорости.
Введем следующие обозначения:
I — длина стержня, т — масса гру-
за, <р — малый угол отклонения
1.9, б). В дифференциальное уравне-
ние относительного движения маятника нужно ввести мо-
мент силы тяжести и момент переносной силы инерции:
—mgltp + m<o2Z2<p = z»Z2<p.
(Кориолисова сила инерции параллельна оси подвеса и в уравне-
ние моментов не входит.) Таким образом, мы приходим к урав-
нению
ф+ — ®2у ф = 0,
из которого непосредственно видно, что критическая угловая ско-
рость не зависит от массы груза и равна
Икр = fg/Z.
§ 1. СИСТЕМЫ БЕЗ ТРЕНИЯ
39
При со < соКр система устойчива, причем частота свободных ко-
лебаний определяется формулой
а==К"кр-"2-
При <о > <Вкр состояние относительного равновесия не-
устойчиво.
В рассмотренных простых примерах по существу не
было необходимости в составлении дифференциальных
уравнений движения, так как для суждения об устойчи-
вости и для определения критического значения парамет-
ра было достаточно построить выражение с (S). Однако
для систем с несколькими степенями свободы — даже на-
ходящихся под действием только позиционных сил — ис-
следование устойчивости требует предварительного со-
ставления дифференциальных уравнений движения (см.
гл. IV).
Устойчивость состояний равновесия удобно исследо-
вать также с помощью фазовых диаграмм. Отметим, что
их можно построить и не решая заданное дифференци-
альное уравнение движения, т. е. не разыскивая закон
движения g = q(t) в явной форме.
С помощью замены q = из (1.12) получается
дифференциальное уравнение фазовых траекторий
Ц = (1.31)
4 1
После интегрирования мы вновь придем к уравнению
(0.11) и к семейству эллипсов, показанному на рис. 0.9, в.
Если с < 0, то после замены А* = — с/а получим вместо
(1.31) дифференциальное уравнение фазовых траекторий
d'q _
dq д
Его решение имеет вид
Фазовые траектории для этого случая показаны на
рис. 1.10. Они состоят из семейства гипербол и четырех
полупрямых, являющихся асимптотами этих гипербол.
40
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
Заданное возмущение состояния равновесия определя-
ет начальное положение изображающей точки. С течени-
ем времени эта точка будет монотонно удаляться от на-
чала вдоль соответствующей криволинейной. фазовой
траектории: это означает монотонный уход системы от
состояния равновесия. Ис-
ключение составляют изобра-
жающие точки, лежащие на
прямой q = —k*q-, если в
начальный момент задано та-
кое возмущение, что ?(0) =
= —&'*g(0), то система будет
стремиться к состоянию рав-
новесия. Но это не может
Рис. 1.10 изменить оценки состояния
равновесия как неустой-
чивого: достаточно любого сколь угодно малого нару-
шения указанного специально выбранного возмущения,
как система станет неограниченно удаляться от состояния
равновесия. В данном случае отвечающая положению
равновесия особая точка (0, 0) называется седлом.
§ 2. Системы с одной степенью свободы при наличии
линейной восстанавливающей силы и трения
1. Линейное трение. Для изучения свободных колеба-
аий системы с одной степенью свободы при наличии ли-
нейного трения будем исходить из уравнения Лагранжа
d / 5Т \ _ + q (2.1)
dt \dq I дЧ dq
в котором Q* — обобщенная сила линейного трения. Для
ее определения примем, что на каждую точку системы
действует сила линейного трения
Rt = — piVj,
(2.2)
где — коэффициент трения. Вспомнив основное выра-
жение обобщенной силы
§ 2. СИСТЕМЫ С ТРЕНИЕМ
41
и известное соотношение
<?г{ <?v{
будем иметь
п п
V? 5г,- V> Sv,
q* = - 2 = - 2
i=l 7 i=l dq
Но так как
Vi —
dq
2 dq
1 M
2 a- ’
dq
TO
n _ _ V Pi M ___________Pi^i
v* — 2 • • Zi 2 •
i=l vq vq i=l
Входящая сюда сумма
n о „2
Ф = 2 (2<3)
формально сходна с выражением кинетической энергии
и ее называют диссипативной функцией Рэлея. Способ,
использованный выше при построении выражения (1.4)
для кинетической энергии, в данном случае также приве-
дет к компактному выражению
Ф = -^д2, (2-4)
А
где Ь — обобщенный коэффициент вязкости.
Окончательно приходим к следующему выражению
для обобщенной силы трения:
Q* = -™=-b'q. (2.5)
dq
Так как по-прежнему Т = у ад2, П = у ед2, то уравне-
ние Лагранжа (2.1) принимает вид
aq+bq + cq = O. (2.6)
При не слишком больших значениях обобщенного ко-
эффициента вязкости, когда Ь<2Уас, общее решение
42 ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
дифференциального уравнения (2.6) имеет вид
q = е“м(С'1 sin k*t + С2 cos k^t), (2.7)
где
(2.8)
а постоянные Ci и С2 определяются из начальных условий
д(О)=?о, ?(0)=?о
в форме
Другая форма решения имеет вид
q = Ае~м sin (k*t + а), (2.9)
где
G0+4>)2
k2-h2
+ <7о>
tga =
g0/fc2-fe2
?о + Ч
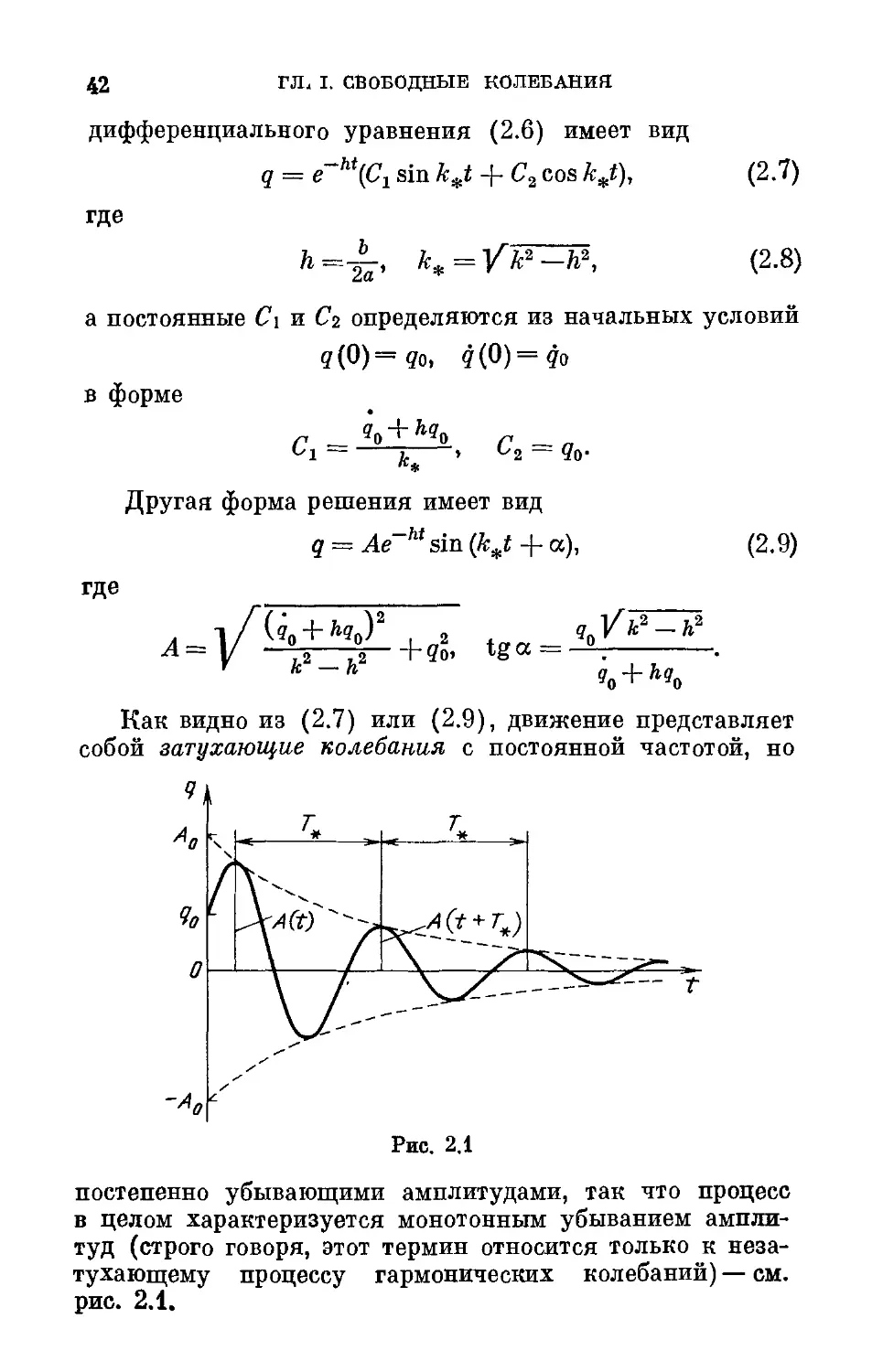
Как видно из (2.7) или (2.9), движение представляет
собой затухающие колебания с постоянной частотой, но
постепенно убывающими амплитудами, так что процесс
в целом характеризуется монотонным убыванием ампли-
туд (строго говоря, этот термин относится только к неза-
тухающему процессу гармонических колебаний) — см.
рис. 2.1.
§ 2„ СИСТЕМЫ С ТРЕНИЕМ
43
Огибающие кривой процесса определяются функциями
Л = ±Лое-Л‘, (2.10)
где Ао — начальная ордината огибающей.
Угловая частота свободных затухающих колебаний
определяется выражением
** = = ^iac2-b\, (2.11)
соответственно длительность одного цикла составляет
2л 4ла
Чаще всего влияние трения на собственную частоту пре-
небрежимо мало, т. е. можно принять к* та к, Т*таТ.
Последовательность максимальных отклонений следу-
ет закону геометрической прогрессии, так как согласно
(2.10) отношение двух последовательных максимальных
отклонений А (£): A (t + Т*), разделенных интервалом
времени Т*, является постоянной величиной, равной ehT*.
Натуральный логарифм этого отношения называется ло-
гарифмическим декрементом; он равен
Л = hT* = . 2яЬ-.- та . (2.12)
Логарифмический декремент служит удобной количест-
венной характеристикой темпа затухания свободных ко-
лебаний.
При достаточно больших_____значениях коэффициента
вязкого трения, когда Ъ > 2Vас, общее решение диффе-
ренциального уравнения (2.6) вместо (2.7) запишется
в виде
7 = + (2.13)
где ______
— Ь + У Ь2 — 4ас
S1-2--------Га •
Постоянные интегрирования определяются через началь-
ные условия выражениями
п -Мо + ?О г ......... ~Мо + %
С/ •< —— V Л — 1
1 S1~S2 S2-Sl
1А
ГЛ., I. СВОБОДНЫЕ КОЛЕБАНИЯ
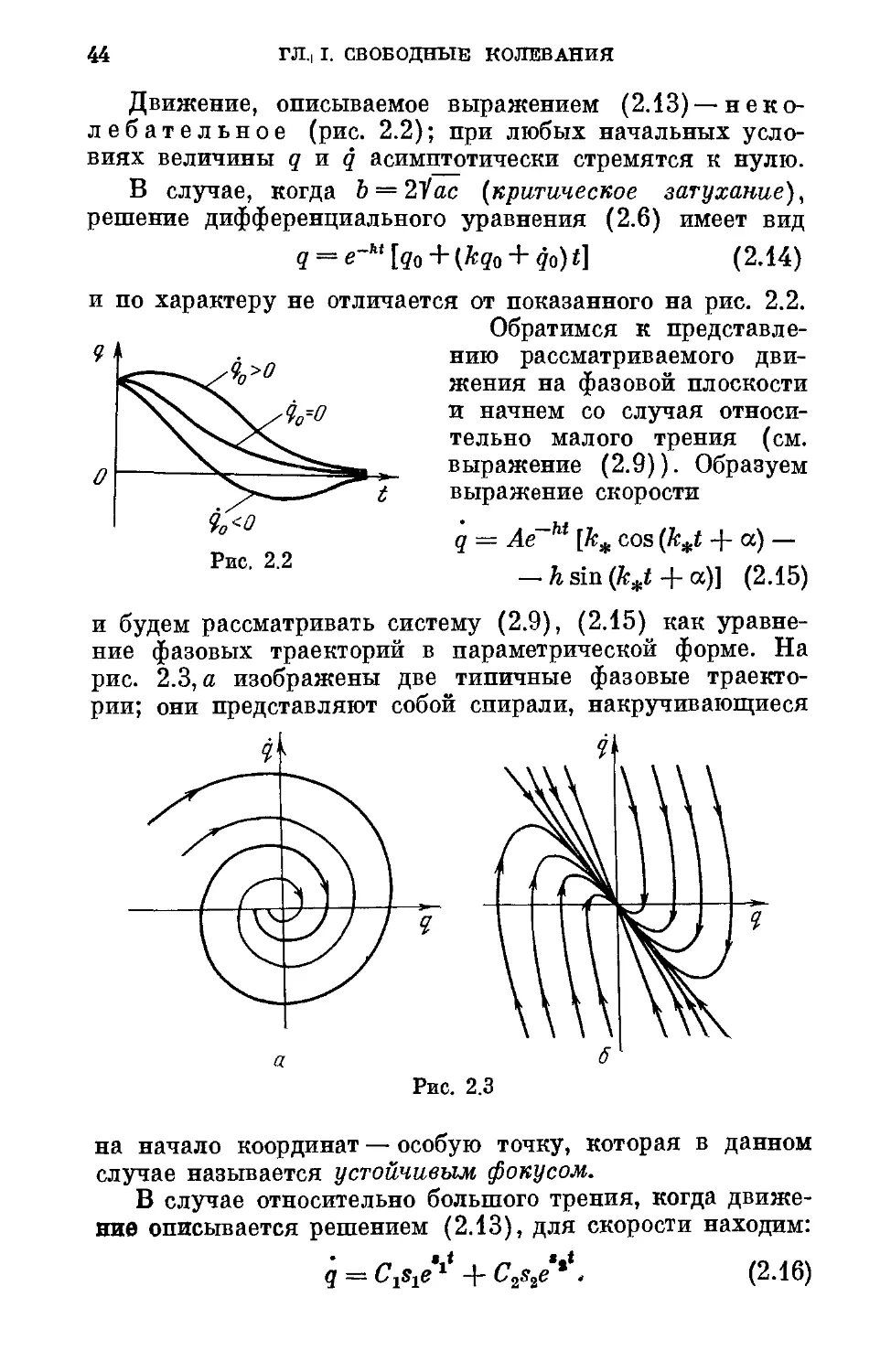
Движение, описываемое выражением (2.13) — не ко-
лебательное (рис. 2.2); при любых начальных усло-
виях величины q и q асимптотически стремятся к нулю.
В случае, когда Ь = 2Уас (критическое затухание),
решение дифференциального уравнения (2.6) имеет вид
g = e~'“[go + (/cgo + ?o)«] (2.14)
и по характеру не отличается от показанного на рис. 2.2.
Обратимся к представле-
нию рассматриваемого дви-
жения на фазовой плоскости
и начнем со случая относи-
тельно малого трения (см.
выражение (2.9)). Образуем
выражение скорости
q — Ae~ht [/с* cos (k*t + а) —
— h sin (k*t a)] (2.15)
и будем рассматривать систему (2.9), (2.15) как уравне-
ние фазовых траекторий в параметрической форме. На
рис. 2.3, а изображены две типичные фазовые траекто-
рии; они представляют собой спирали, накручивающиеся
на начало координат — особую точку, которая в данном
случае называется устойчивым фокусом.
В случае относительно большого трения, когда движе-
ние описывается решением (2.13), для скорости находим:
q = С^е*1* + С2з2е'**. (2.16)
§ 2. СИСТЕМЫ С ТРЕНИЕМ 45
Рассматривая (2.13) и (2.16) как уравнение фазовых тра-
екторий в параметрической форме, приходим к фазовой
диаграмме, показанной на рис. 2.3, б. В данном случае
начало координат является особой точкой типа устойчи-
вый узел.
Пример 2.1. По экспериментальной виброграмме свободных
колебаний некоторой системы с одной степенью свободы установ-
лено, что за один цикл амплитуда уменьшается на 40 %. Оценить,
в какой мере трение в системе повлияло на частоту колебаний.
Прежде всего находим логарифмический декремент
Л = hT. = In = 0,511,
отсюда
0,511 0,511 р
h = -fT = ^r Vk ~h-
Решая это уравнение, находим, что значение h2 весьма мало
по сравнению с к2:
h2 = 0,00661Н
Соответственно частота колебаний
/с* = &2 — /г2 = 0,997&
отличается от собственной частоты системы без трения всего
на 0,3 %.
Из этого примера видно, что даже при заметном затухании
колебаний (почти двукратное уменьшение амплитуды за один
цикл) силы трения незначительно влияют на частоту колебаний.
2. Нелинейное трение. При обработке опытных вибро-
грамм свободных затухающих колебаний чаще всего об-
наруживается, что убывание амплитуд не следует закону
геометрической прогрессии; это служит признаком того,
что трение отличается от линейного.
Нелинейная зависимость сил трения от скорости мо-
жет быть описана различными аналитическими выраже-
ниями. Примем, что обобщенная сила трения Q* про-
порциональна n-й степени скорости, причем показатель
степени n ¥= 1 зависит от конкретных свойств силы тре-
ния; эту зависимость записывают в форме (0.6) или в
эквивалентной форме
^ = -Ь|дГЧ. (2.17)
В таком случае основное дифференциальное уравне-
ние имеет вид
ag + bl$|“~,# + cg=»O. (2.18)
46
ГЛ., I. СВОБОДНЫЕ КОЛЕБАНИЯ
Точное решение этого нелинейного дифференциального
уравнения получить в замкнутой форме невозможно, но
существует ряд способов, позволяющих построить при-
ближенное аналитическое описание движения. Изложим
некоторые из них.
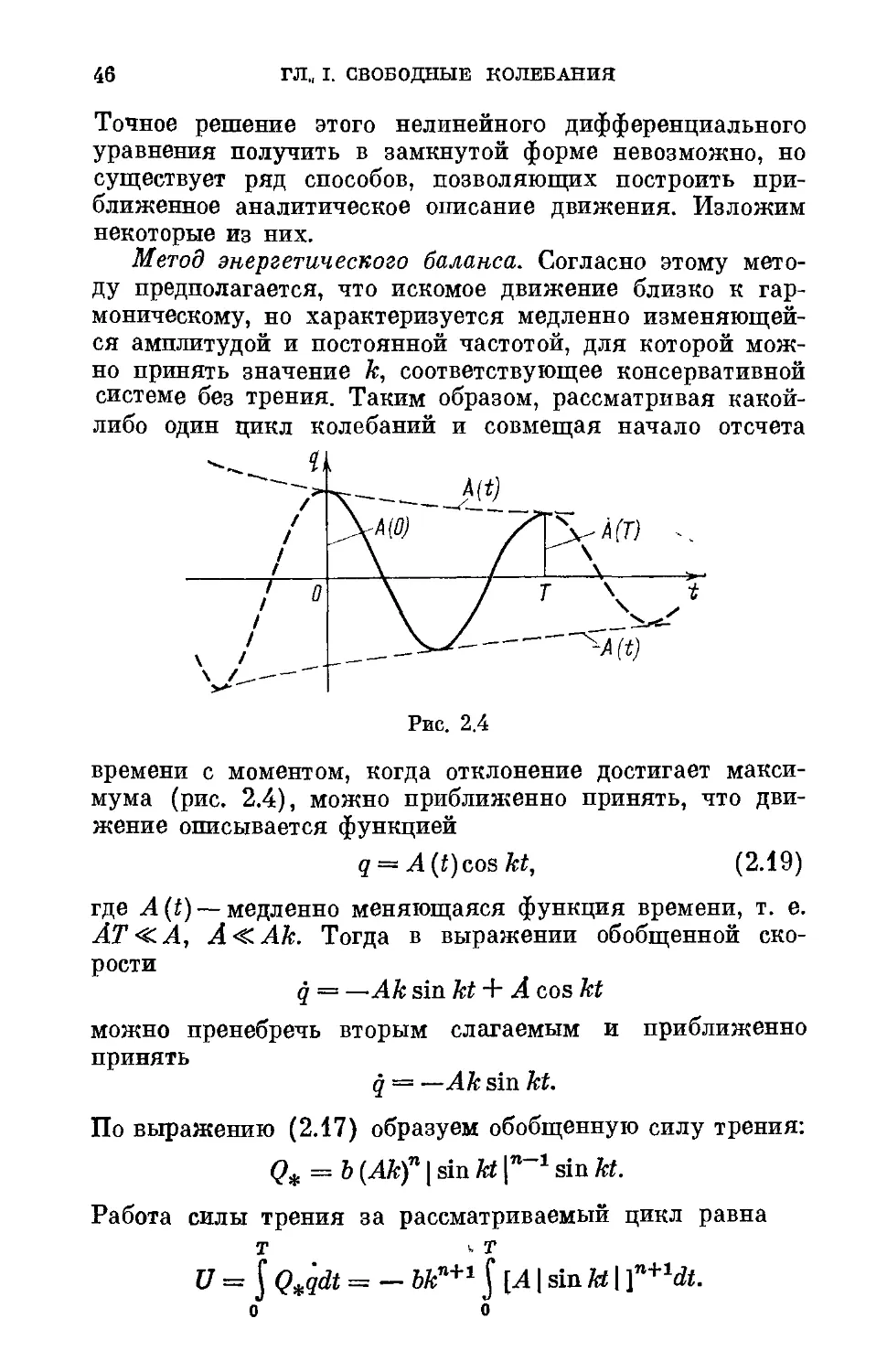
Метод энергетического баланса. Согласно этому мето-
ду предполагается, что искомое движение близко к гар-
моническому, но характеризуется медленно изменяющей-
ся амплитудой и постоянной частотой, для которой мож-
но принять значение /с, соответствующее консервативной
системе без трения. Таким образом, рассматривая какой-
либо один цикл колебаний и совмещая начало отсчета
времени с моментом, когда отклонение достигает макси-
мума (рис. 2.4), можно приближенно принять, что дви-
жение описывается функцией
q = A (t)cos kt, (2.19)
где A(t)— медленно меняющаяся функция времени, т. е.
АТ^А, A<iAk. Тогда в выражении обобщенной ско-
рости
q = —Ak sin kt + A cos kt
можно пренебречь вторым слагаемым и приближенно
принять
q = —Ak sin kt.
По выражению (2.17) образуем обобщенную силу трения:
Q* = b (Ak)n | sin kt I""1 sin kt.
Работа силы трения за рассматриваемый цикл равна
т т
U= ] Q*qdt = — bkn+1 j [А | sin kt | }n+*dt.
о 0
§ 2, СИСТЕМЫ С ТРЕНИЕМ 47
В этом вычислении можно приближенно принять, что в
течение рассматриваемого периода величина А неизменна.
Тогда получим
Т/4 Я/2
U —— 4&(AA)"+1 j sin"+1/ddf =— 4bAn+1kn J sinn+1ipdip.
о о
Входящий сюда интеграл обозначим буквой Z; он выра-
жается через гамма-функцию Г (эйлеров интеграл второго
рода), для которой имеются готовые таблицы:
я^2 2n-Vr (у)
I = I sin”+1i|) dip = —. г . (2.20)
J г т п (п +1) Г (п) ' '
О
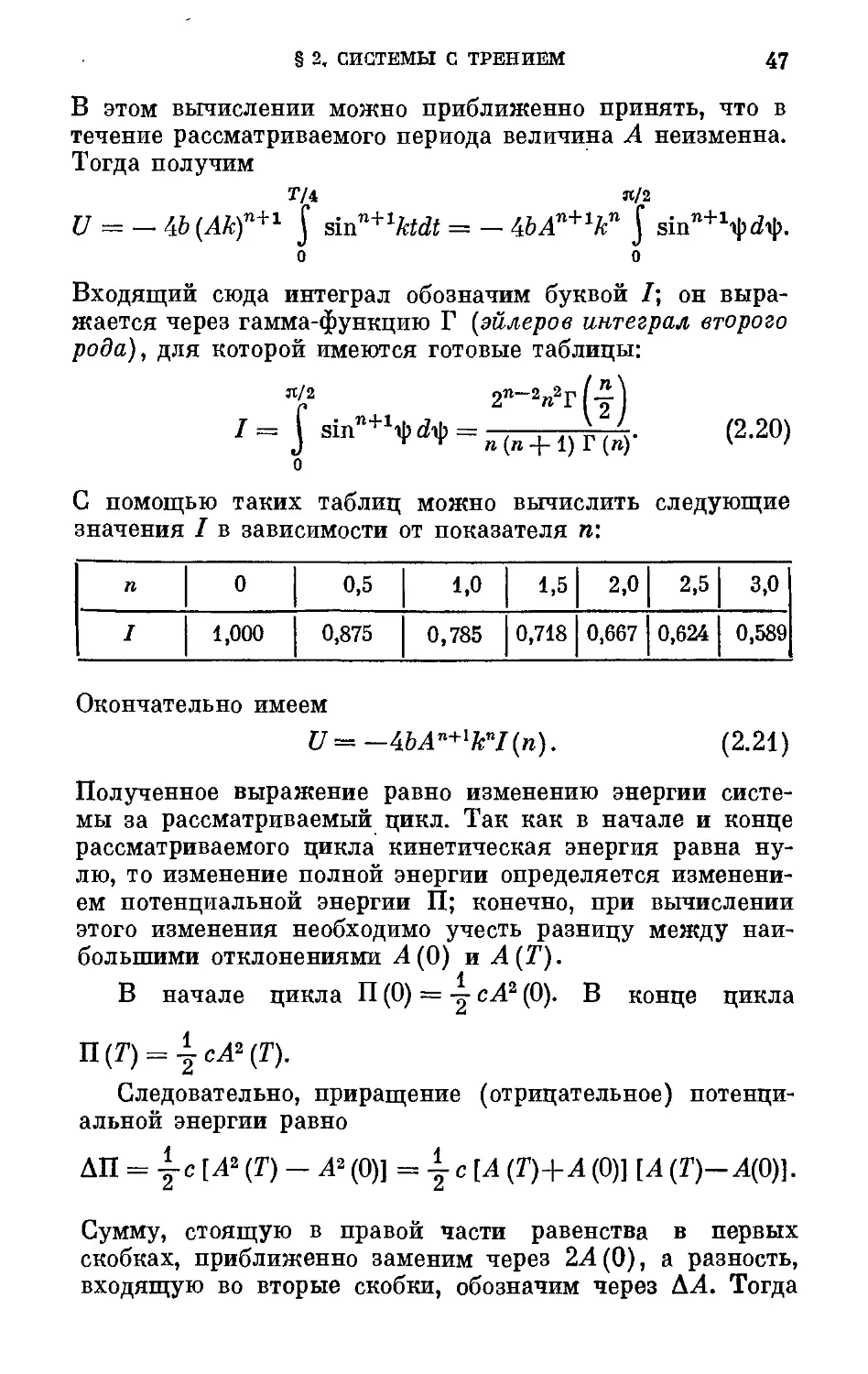
С помощью таких таблиц можно вычислить следующие
значения I в зависимости от показателя п:
п 0 0,5 1,0 1,5 2,0 2,5 3,0
I 1,000 0,875 0,785 0,718 0,667 0,624 0,589
Окончательно имеем
U ——4bAn+iknI(n). (2.21)
Полученное выражение равно изменению энергии систе-
мы за рассматриваемый цикл. Так как в начале и конце
рассматриваемого цикла кинетическая энергия равна ну-
лю, то изменение полной энергии определяется изменени-
ем потенциальной энергии П; конечно, при вычислении
этого изменения необходимо учесть разницу между наи-
большими отклонениями Л (0) и А(Т).
В начале цикла П (0) = -^ с А2 (0). В конце цикла
ЩТ) = ±сА2 (Т).
Следовательно, приращение (отрицательное) потенци-
альной энергии равно
АП = [А2 (Т) - А2 (0)] = 1 с [А (Т)+А (0)] [А (Т)—А(0)].
Сумму, стоящую в правой части равенства в первых
скобках, приближенно заменим через 2А (0), а разность,
входящую во вторые скобки, обозначим через ДА. Тогда
48 ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
будет
ДП = сДДД. (2.22)
(Здесь вместо .4(0) можно написать просто А.) Прирав-
нивая работу (2.21) приращению энергии (2.22), полу-
чаем уравнение в конечных разностях
-4ЪАп+1к”Цп) = сАЬА,
или
ДД = — 46 (п), (2.23)
Это уравнение связывает приращение (отрицательное)
амплитуды за один цикл со значением амплитуды в на-
чале этого цикла. Рассматривая огибающую как непре-
рывную кривую, описываемую дифференцируемой функ-
цией времени A = A(t), приближенно примем
\А = Т^ = ^-~.
dt k dt
Тогда уравнение в конечных разностях (2.23) примет вид
дифференциального уравнения для огибающей:
dA 2bkn+1I (n) .n /9 9M
dt=-------nc-24 • <2-24>
При интегрировании этого уравнения нужно разли-
чать два случая: когда п— 1 и когда 1.
В случае п — 1 (линейное трение) согласно (2.20)
I = п/^l, и уравнение (2.24) принимает форму
^ = ~hA. (2.25)
»»2 »
Здесь h = £- — Решение линейного уравнения (2.25)
имеет вид
Д=Дое-'1', (2.26)
где Ао имеет смысл начальной ординаты огибающей. Та-
ким образом, при п = 1 мы приходим к прежнему (точно-
му) результату (2.10). Хотя это совпадение относится
только к огибающей (из-за различия между к и к* гра-
фики движения будут неодинаковыми), но это убе-
дительно свидетельствует в пользу приемлемости метода
энергетического баланса.
§ 2., СИСТЕМЫ С ТРЕНИЕМ
49
В случае п Ф1 уравнение (2.24) нелинейно, но его
точное решение затруднений не вызывает, так как пере-
менные разделяются:
dA 2bkn+1I (n)
— —-------------at
Ап пс
(2.27)
После интегрирования при начальном условии А{О) — Ао
находим зависимость А (/):
(2.28)
Конкретный вид этой зависимости определяется значени-
ем показателя п.
Прежде всего остановимся на случае, когда п — 2
{квадратическое трение)', при этом из (2.28) получается
А =
_____ло _
4Ь/с3А *
(2.29)
т. е. огибающая имеет вид гиперболы.
С помощью решения (2.28) можно получить огибаю-
щую и для другого важного
частного случая, когда п = 0.
Согласно (2.17) этому слу-
чаю соответствует выражение
= (2.30)
I ? I
определяющее силу кулоно-
ва трения, величина которой
не зависит от величины ско-
рости. Подставив п = 0 в общее решение (2.28), получим
А = А0-
2bk
г г*
ЛС 1
(2.31)
т. е. убывание амплитуд следует линейному закону, а ам-
плитуды образуют арифметическую прогрессию; этот ре-
зультат также соответствует точному решению.
На рис. 2.5 показаны верхние огибающие для трех
указанных выше значений п. Общий вид фазовых траек-
4 Я Г ТТянпвко
50
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
торий такой же, как и в случае линейного трения
(рис. 2.3, а).
Отметим, что при п^1 отношение двух соседних наи-
больших отклонений непостоянно; отсюда можно заклю-
чить, что логарифмический декремент оказывается п е-
ременной величиной, зависящей от амплитуды:
где i — номер рассматриваемого цикла. Если, как это
предполагалось выше, разность АЛ4 = Л;+1—мала по
сравнению с Л;, то можно записать’
Л = щ = in fi _ ^*'1« _
Ji+1 I Ai+1 A
Подставив сюда выражение (2.23), получим зависимость
логарифмического декремента от амплитуды:
д _ 4Ькп1 (п) дп-!
С
Отсюда непосредственно видно, что лишь при п = 1 лога-
рифмический декремент не зависит от амплитуды колеба-
в процессе колебаний. При
п = 2 в процессе затухаю-
щих Колебаний логариф-
мический декремент убы-
вает вместе с убыванием
амплитуды, а при п = О
(кулоново трение), наобо-
рот, он увеличивается с
уменьшением амплитуды.
Зависимости логариф-
мического декремента от
амплитуды колебаний
схематически показаны на
ний и остается неизменным
рис. 2.6.
Метод медленно меняющихся амплитуд. Этот прибли-
женный метод был предложен Ван дер Полем для~ ши-
рокого класса задач о колебаниях систем со слабой не-
линейностью, когда дифференциальное уравнение движе-
ния можно представить в виде
3 + — / (?> ®)я
(2,32)
§ 2. СИСТЕМЫ С ТРЕНИЕМ
51
где /(7, q) — функция, состоящая из относительно малых
нелинейных членов. Например, в задаче о затухающих
свободных колебаниях систем с нелинейным трением
нужно переписать уравнение (2.18) в виде (2.32), по-
ложив
/(?,?) = I q Г1?- (2.зз)
Рассмотрим решение уравнения (2.32) по методу мед-
ленно меняющихся амплитуд для общего случая, а за-
тем вернемся к частному случаю (2.33).
Решение дифференциального уравнения (2.32) разыс-
кивается в виде
g = Hcos(/co£ — ф), (2.34)
но предполагается, что А и ф — функции времени.
В зависимости от свойств вновь введенных функций
A(t) и ф(£) зависимость (2.34) может оказаться более
или менее близкой к гармоническим колебаниям с ча-
стотой ко. При постоянных А и ф выражение (2.34) со-
вершенно точно описывает гармонические колебания.
В случае, когда А и ф — «почти постоянные», т. е. мед-
ленно меняющиеся функции времени, выражение (2.34)
описывает колебания с медленно меняющимися амплиту-
дой и фазой; этот случай типичен для систем со слабой
нелинейностью, в частности для рассматриваемых здесь
систем.
Если подставить выражение (2.34) в основное урав-
нение задачи (2.32), то получится уравнение, содержа-
щее две неизвестные функции А и ф. Для определенно-
сти замены одной функции q двумя функциями А и ф
нужно указать какое-либо дополнительное соотношение
между последними; Ван дер Поль предложил принять в
качестве такого соотношения следующее:
A cos (kot — ф) + Лф sin (kot — ф) = 0. (2.35)
Если теперь продифференцировать выражение (2.34),
то с учетом (2.35) получится весьма простое выражение
для скорости:
q = — к0А sin(7c07 — ф), (2.36)
— такое же, как если бы величины А и ф были посто-
янными. Поэтому и выражение для ускорения окажется
относительно простым и не будет содержать вторых
4*
52
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
производных Лиср:
q = — Ак0 sin (kQt — ф) — Ак% cos (kot — ф) +
+ ЛА'оф cos (kQt — ф). (2.37)
Подставив выражения (2.34), (2.36) и (2.37) в задан-
ное уравнение (2.32), получим уравнение первого по-
рядка
—Ак0 sin ip + ЛА:0ф cos ip = / [A cos ip, —Ako sin ip], (2.38)
где ip = kot — ф.
Из соотношений (2.35) и (2.38) можно найти следую-
щие выражения для производных Л и ф:
Л = — y / [Л cos 1р, — Ак0 sin ip] sin ip,
. i ° (2-39)
Ф = -тг- / [A cos ip, — Ak0 sin ip] cos ip.
A о
До сих пор все выкладки были вполне строгими,
и лишь теперь делается упрощение, вносящее некоторую
приближенность в решение. Предполагая, что рассматри-
ваемая система близка к линейной, мы можем считать,
что переменные Л и ф не успевают получить заметных
приращений за один цикл 2л/ко и что производные Л и
Ф постоянны в течение любого одного цикла. Поэтому,
хотя эти производные выражаются сложными нелинейны-
ми функциями времени (2.39), не повлечет большой
ошибки замена этих функций их средними за период
2л/к0 значениями:
2Л
Л = — 2^" J / (Л cos 1р, — Ак0 sin ip) sin ip dip,
(2-40)
i c
Ф = I / № cos ~ Akg sin ip) cos 1р dip.
° о
Конечно, при интегрировании в правых частях величи-
на Л считается постоянной. Именно эта операция
усреднения составляет существо метода медленно ме-
няющихся амплитуд.
§ 2. СИСТЕМЫ С ТРЕНИЕМ
53
Уравнения (2.40). запишем в более коротком виде:
Л = ; = (2 41)
А 2лк0 ’ ф 2лк0А ' ’
(укороченные уравнения Ван дер Поля), причем
2Я
Ф (Л) = —- j" / (A cos ip, — Ак0 sin ip) sin ip dip,
2« (2.42)
T (Л) = J / (Л cos ip, — ЛА’О sin ip) cos ip dip.
о
Таким образом, нужно прежде всего вычислить интег-
ралы (2.42) в предположении, что А — постоянная вели7
чина. После этого интегрируются дифференциальные
уравнения (2.41); конечно, на этом этапе выкладок уже
признается, что величина А — переменная.
Возвращаясь к задаче о свободных колебаниях систем
с нелинейным трением, образуем с помощью (2.33) вы-
ражения (2.42):
2 Л
Ф (Л) = — I I — у | — Ак0 sin ip |п-1 (— Ак0 sin ip)l sin ipdip=
о v '
„ „ л/2
-------- J sin +1 ip dip,
о
¥(Л) = 0.
Интеграл, входящий в выражение Ф(Л), уже встречался
выше и был обозначен через 7(п) (см. (2.20)); следова-
тельно
Ф(Л) =--------pJ.
Теперь согласно (2.41) получаем укороченное уравнение
• _ 2ЪАпкп~11 (п)
2Т. ----------------- — -
ла
Если теперь заменить а = c/k*f то мы вновь придем к
уравнению (2.24), полученному выше методом энерге-
тического баланса в предположении, что к«к0. Следо-
вательно, дальнейшее решение приведет вновь к уравне-
нию для огибающей (2.28).
54
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
Хотя в данном случае метод медленно меняющихся
амплитуд не дал новых результатов, но ниже мы уви-
дим, что он окажется весьма полезным при решении дру-
гих нелинейных задач.
3. Гистерезисное трение. При циклическом деформи-
ровании упругих тел, даже при малых напряжениях на-
блюдается некоторое нарушение закона Гука, выражаю-
щееся в появлении петли гистерезиса; на рис. 2.7 пока-
зана такая петля в коорди-
натных осях напряжение
о — деформация е. Располо-
женная внутри петли гисте-
резиса площадь диаграммы
определяет энергию, рассеи-
ваемую за один цикл коле-
баний в единице объема ма-
териала. Так как расстоя-
ния между ветвями обычно
весьма малы, точную фор-
му петли в экспериментах
В то же время площадь
может быть определена достаточно надежно.
Установлено, что площадь петли гистерезиса для боль-
установить затруднительно,
петли
шинства конструкционных материалов практически н е
зависит от темпа деформирования (т. е. от частоты
процесса), но зависит от амплитуды деформации.
Сказанное справедливо и по отношению к целой кон-
струкции: рассеиваемая за один цикл в конструкции
энергия Q не зависит от частоты колебаний, по связана
с их амплитудой. Эта зависимость обычно принимается
в форме
й = аЛп+1,
(2.43)
где а и п — постоянные, определяемые из экспериментов.
Такая зависимость принципиально отличается
от внешне сходной с ней зависимости (2.21), в которую
входит амплитуда колебаний тоже в степени п + 1, одна-
ко в выражение (2.21) входит также и частота к, от ко-
торой не зависит коэффициент а выражения (2.43).
Для определения закона, описывающего затухание
колебаний при гистерезисном трении, вновь воспользуем-
ся уравнением энергетического баланса и приравняем
рассеиваемую энергию (ее следует взять со знаком ми-
§ 2. СИСТЕМЫ С ТРЕНИЕМ
55
нус) приращению энергии (2.22) за один период:
—аАп+1 = сАЛА.
Отсюда следует уравнение в конечных разностях
ДА = — — Ап,
С
которое, как и (2.23), можно заменить дифференциаль-
ным уравнением
= _ Ап. (2.44)
dt 2лс ' '
После интегрирования этого уравнения при начальном
условии А(0) = Ао получим
А =------ А° .............. (2.45)
"V а (м — 1)кА” 1
]/ 1 +------
Отметим, что в частных случаях п = 0, п—1, п = 2
здесь вновь получаются результаты, схематически пока-
занные выше на рис. 2.5. Любопытно, что при гистере-
зисном трении также может получиться экспоненциаль-
ная зависимость A(t) (если п=1), которая типична для
случая линейного вязкого трения.
Наконец, укажем, что кулоново трение можно считать
не только частным случаем нелинейного трения (2.17),
но и частным случаем принятой здесь основной зависи-
мости (2.43); в обоих случаях оно характеризуется зна-
чением п = 0.
4. Ударное демпфирование. В некоторых системах ос-
новной причиной затухания колебаний является не не-
прерывное действие сил трения, а мгновенные потери
энергии при соударениях. Рассмотрим случай, ког-
да такие соударения происходят всякий раз, когда систе-
ма проходит через положение равновесия, причем мгно-
венная потеря энергии пропорциональна энергии системы
перед соударением. В этом случае мгновенную потерю
энергии удобно представить через скорость системы v пе-
ред соударением;
Q = bv2, (2.46)
где Ъ — некоторый постоянный коэффициент, имеющий
размерность массы.
56
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
Рассмотрим какой-либо полуцикл колебаний, который
начинается при наибольшем отклонении 4(0).
В течение первой четверти цикла система движется
с постоянной энергией -%сА2ЦУ), и квадрат скорости в
конце этой четверти цикла равен г2 = у42(0). После
этого происходит соударение и вследствие этого — мгно-
венная потеря энергии на величину (2.46); далее систе-
ма начинает движение, обладая энергией
с А2 (0) _ Ъс л2 -0 = сА2 (0) Л _ 2Ь
2 а 2 \ zz
(2-47)
которая остается постоянной в течение всей второй чет-
верти цикла. Поэтому, в момент, завершающий эту чет-
верть цикла, потенциальная
энергия равна величине (2.47):
с42 (772) _ с А2 (0) (. 264
2 ~ 2 Г а)'
Отсюда находим отношение от-
клонений в начале и конце
первого полуцикла:
А (0) _ 1
А (Т/2) ~ yi _ 2Ь/а '
Для следующего полуцикла аналогично можно получить
4(772) _ 1
А (Т) ~ V1 - 2ЬМ‘
Сравнивая наибольшие отклонения 4(0) и А(Т), на-
ходим
4(0) _ 1
4 (Т) ~ 1— 2Ь/а’
т. е. отношение последовательных наибольших отклоне-
ний является постоянной величиной. Отсюда можно за-
ключить, что огибающая кривой затухающих колебаний
представляет собой экспоненту
A =Aoe~ht,
которая характеризуется логарифмическим декрементом
Л = hT = In
1 — 2Ыа
§ 3. НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА
57
При малых отношениях 2Ъ[а можно принять
А~2Ъ/а. (2.49)
Фазовая диаграмма для рассматриваемого процесса пред-
ставлена на рис. 2.8; она состоит из отрезков оси q и
эллиптических дуг.
§ 3. Системы с одной степенью свободы
при нелинейной восстанавливающей силе
1. Общие понятия. В некоторых случаях перемещения
при колебаниях могут быть настолько значительными, что
в разложении потенциальной энергии (1.6) необходимо
учитывать не только член, содержащий q2, но и последу-
ющие члены. Иногда разложение (1.6) вообще не содер-
жит квадратичного члена и начинает-
ся с члена выше второй степени. От-
метим также, что в некоторых систе- \
мах потенциальная энергия, соответ- \
ствующая положению равновесия, не [ \
имеет аналитического минимума и во- t—\
обще непредставима в виде (1.6). | \
Во всех этих случаях обобщенная ' /
восстанавливающая сила нелинейна и |
соответственно, нелинейно дифферен-
циальное уравнение движения. ! -)----------
Простейшим примером может слу-
жить задача о больших колебаниях Рис-
математического маятника (рис. 3.1).
Если принять за обобщенную координату ф угол от-
клонения маятника от вертикали, то переменная высота
h, на которой находится груз, равна
h = Z(1 — cos ф),
соответственно потенциальная энергия определяется вы-
ражением
П = mgh = mgl(i — созф).
При весьма малых значениях ф можно принять
. <р2
COS ф « 1 — -у,
после чего потенциальная энергия оказывается квадра-
тичной функцией обобщенной координаты ф, и мы при-
ходим к линейной задаче.
58 гл.. I. СВОБОДНЫЕ КОЛЕБАНИЯ
Такое представление становится недостаточно точным
при значительных углах отклонения. Для точного реше-
ния нужно подставить в уравнение Лагранжа (1.1)
= mgl sin ф.
Так как кинетическая энергия равна
т __ ml? у?
то согласно (1.1) получится нелинейное дифференциаль-
ное уравнение
Ф + у sin ф = 0.
В более общем случае дифференциальное уравнение
имеет вид
aq + F(q) = Q, (3.1)
где
Г (?) = л~
'J/ dq
представляет собой взятую с обратным знаком обобщен-
ную восстанавливающую силу, являющуюся нелинейной
функцией координаты q.
Зависимость F(q) называют квазиупругой характери-
стикой. или характеристикой жесткости. На рис. 3.2 по-
казаны некоторые нелинейные системы с одной степенью
свободы и соответствующие им характеристики жестко-
сти. Среди приведенных здесь характеристик можно вы-
делить характеристики симметричные (рис. 3.2, а, б, в)
и несимметричные (рис. 3.2, г), характеристики с раз-
рывами (рис. 3.2, в), характеристики гладкие (рис. 3.2, а)
и ломаные (рис. 3.2, б, в, г).
2. Точные решения. В отмеченных выше случаях ис-
следование свободных колебаний сводится к интегрирова-
нию нелинейного дифференциального уравнения (3.1).
Выразив обобщенное ускорение через обобщенную ско-
” • dq
рость q = q получим вместо (3.1) уравнение первого
порядка, связывающее скорость q с координатой q:
« 5 + А? = °- (3.2)
§ 3. НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА
59
Предположим, что система совершает колебательное
движение, и выберем за начало отсчета времени момент,
когда обобщенная скорость равна нулю и достигается
наибольшее отклонение системы от положения равнове-
сия (?тах = -4)*).
*) При немонотонных зависимостях F(q) и больших началь-
ных возмущениях может оказаться, что обобщенная скорость в
нуль никогда не обращается. Так, например, если находящемуся
60
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
Разделяя переменные в уравнения (3.2) и интегрируя
его, имеем
« <?
j q dq = — A J F (q) dq,
0 A
ИЛИ
. 4 A
i = -^F^dq = ~y^dq. (3.3)
A q
Это соотношение выражает закон сохранения энергии1.
кинетическая энергия в произвольный момент равна убы-
ванию потенциальной энергии при переходе системы из
крайнего положения в рассматриваемое. Из (3.3) находим
обобщенную скорость в функции координаты:
/ А
’=S=-]/ Ipw* М
Знак минус перед корнем выбран потому, что в рассмат-
риваемом интервале движения (первый полупериод) обоб-
щенная скорость отрицательна.
Дальнейшее интегрирование соотношения (3.4) дает
время в функции обобщенной координаты q:
Если характеристика восстанавливающей силы симмет-
ричная, т. е. функция F(q) нечетная, то время перехода
системы из крайнего положения (7так = Л) в положение
равновесия (7 = 0) составит четверть периода; следова-
в устойчивом положении равновесия маятнику сообщить достаточ-
но большую начальную скорость v > 2^gl, то начнется безостано-
вочное вращательное движение с неизменным знаком обобщенной
скорости. Впрочем, и в этом ротационном процессе можно заме-
тить колебательные свойства, так как значение обобщенной ско-
рости колеблется около некоторого среднего значения.
§ 3. НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА
61
тельно,
л
7 _ С_________Ад
4 ~J Г-----А------- ’
° ]/
соответственно частота свободных колебаний определяет-
ся формулой
л
к = = я: 2 J ——.. . (3.6)
° V
Изложенное решение не дает возможности найти в
замкнутом виде закон движения q(t), но приводит зада-
чу определения частоты свободных колебаний к квадра-
турам. Во всех случаях для вычислений по формуле
(3.6) эффективно использование ЭВМ, хотя иногда их
можно завершить и в аналитической форме.
Остановимся на частном случае чисто нелинейной ха-
рактеристики, которая не содержит линейного члена,
F(?)=^2n-1, (3.7)
где Рип — постоянные. Последовательно находим
л
= i (л»
я
А _ 1
С_______Ад______ l/'an л 1-п С Ау
»Г ₽
Заменив здесь у2п = ip, получим для входящего сюда ин-
теграла следующее выражение через гамма-функцию:
Окончательно по формуле (3.6) находим
к = 1^п)У]-Ап-\ (3.8)
62
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
где
I* (И) = /лп
(3.9)
Значения (п) даны в следующей таблице:
п 0,5 1 1,5 2 2,5
I* 1,1111 1,0000 0,9149 0,8472 0,7923
Из формулы (3.8) видно, что при п¥=1 частота сво-
бодных колебаний зависит от их амплитуды.
Типичная для нелинейных систем зависимость часто-
ты от амплитуды не позволяет считать частоту парамет-
ром самой системы; поэтому для нелинейных систем
обычно пользуются не термином «собственная частота»,
а термином «частота свободных колебаний».
Как мы видели, даже при сравнительно несложном
виде зависимости (3.7) вычисления частоты приводят к
пеэлементарным функциям. Чаще всего эти вычисления
приходится делать приближенно, так как входящий в
формулу (3.6) интеграл не сводится к табулированным
функциям. Однако в некоторых случаях, когда нелиней-
ная характеристика восстанавливающей силы состоит из
линейных участков (рис. 3.3), можно получить независи-
мое от (3.6) точное решение задачи о свободных колеба-
§ 3. НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА
63
ниях, пользуясь способом поэтапного интегрирования
(припасовывания).
Способ основан на последовательном решении ряда
линейных задач, относящихся к отдельным участкам.
Постоянные интегрирования определяются из начальных
условий, условий перехода от этапа к этапу и условий
периодичности.
Пусть кусочно-линейная характеристика системы сим-
метрична и состоит из п участков, границы которых оп-
ределяются значениями координат qu, q23, • • • (в индек-
сах указаны номера смежных участков, причем нумерация
идет от крайнего участка к началу). Задаваясь, на-
пример, начальными условиями q(O) — A, 7(0) = 0 и ин-
тегрируя линейное дифференциальное уравнение, относя-
щееся к первому этапу, мы сможем найти время дви-
жения на первом этапе ti и соответствующую концу
этапа скорость 712. Принимая известные значения qn и
£12 за начальные условия движения на втором этапе,
можно найти время движения и скорость 723 в конце
этапа. Наконец, на n-м этапе, которому соответствует
проходящий через начало координат участок характери-
стики, можно найти время tn прохождения n-го этапа (от
его начала qn-\,n ДО (7 = 0). В данном случае па этом
можно остановиться, так как ввиду симметричности ха-
рактеристики и симметрии движения сумма найденных
промежутков времени равна четверти периода свободных
колебаний:
т
— ti + ^2 И- • • • + tn-
Отсюда можно определить частоту свободных колебаний:
к = 'Т = 2(4 + *2 + .-.+Ч‘ (ЗЛ0)
В случаях несимметричной характеристики необходи-
мо продолжить определение отрезков времен t„ соответ-
ствующих отрицательным значениям координаты q. Вы-
числения заканчиваются в момент времени, когда обра-
щается в нуль скорость q; сумма вычисленных таким
образом отрезков времени равна полупериоду свободных
колебаний.
Конечно, уже при трех-четырех участках аналитиче-
ские выкладки становятся громоздкими и необходимо
обращаться к машинному счету на ЭВМ.
64
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
Изложенный способ, в принципе, можно применить и
в тех случаях, когда заданная характеристика жесткости
криволинейная; для этого нужно заменить ее ломаной,
составленной из достаточно большого числа прямолиней-
ных отрезков. Поскольку для дальнейших выкладок по-
требуются ЭВМ, здесь уместно напомнить, что с по-
мощью ЭВМ можно
деформированном
организовать и непосредственное вы-
числение частоты свободных колеба-
ний по ранее полученному выраже-
нию (3.6).
Пример 3.1. Найти частоту малых
свободных горизонтальных колебаний
круглого однородного диска, упруго за-
крепленного при помощи пружины с вер-
тикальной осью (рис. 3.4). Качение диска
по горизонтальной плоскости происходит
без скольжения. При вертикальном распо-
ложении оси пружины, т. е. в положении
равновесия, натяжение пружины равно
пулю. Обозначения: R — радиус диска,
т — его масса, I — длина пружины в не-
состояпии, со — ее коэффициент жесткости.
Принимая за обобщенную координату х горизонтальное пере-
мещение центра диска, находим кинетическую энергию:
‘ 2 г' 2
тх lx
Т ~ 2 + 2Т?2'
Подставляя I = т7?2/2, находим
3 *2
Т = — тх,
т. е. инерционный коэффициент равен
3
а = ~2 т.
(а)
Для определения потенциальной энергии пружины прежде все-
го найдем ее удлинение при горизонтальных отклонениях верх-
него конца
AZ = у/2 -|- х2 — I.
Следовательно,
n = 4c0[/z3 + z2-z]2.
Разлагая полученное выражение в ряд и удерживая один первый
член разложения, находим
с ж4
П == -2—
П 8Z2’
§ 3. НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА 65
отсюда следует, что характеристика восстанавливающей силы ч и-
сто кубическая:
о
ОТ сох
F (х) = т— = —й-.
' ' дх 212
Полученное выражение соответствует зависимости (3.7), в которой
нужно положить p = c0/(2Z2), п = 2. Теперь по формуле (3.8) и
таблице значений 7* (п) находим искомую частоту свободных ко-
лебаний диска:
к = 0,8472
]/ з^т = °’4891
Пример 3.2. Найти способом поэтапного интегрирования
связь между амплитудой и частотой свободных колебаний системы
с зазором (рис. 3.2, б). Симметричная кусочно-линейная характе-
ристика системы определяется уравнениями
к (х) = Со (X -|- До) , X <б Ад,
F(x) = 0, —До < х < До,
F (х) = с0(х — До), х > До.
На первом участке при х > До дифференциальное уравнение
движения имеет вид
••
х + — (х — Д ) = 0,
1 mA о) ’
и его общим решением служит выражение
х == С\ sin kgt —|— 6-2 cos kot —|— До,
в котором к0 — }'с0/т (т — масса груза). Постоянные Ct и С2 оп-
ределяются из начальных условий
#(0)=Д, #(0) = 0
и равны
Ct = 0, С2 = Д — До.
Таким образом,
х = Д cos icoi -|- Д 0 (1 — cos kot),
х = — (Д — До) ка sin kot.
Время ti прохождения первого участка найдем из условия, что
при t = t| должно быть х = До:
л
гг=2^-
При этом скорость в конце первого этапа равна
#12 = (Д До) А'о.
Свободное движение на втором участке описывается диффе-
ренциальным уравнением
тх = 0,
5 я Г. Пановко
66 гл I СВОБОДНЫЕ КОЛЕБАНИЯ
имеющим решение
х — Dt 4- Dtt.
Совмещая повое начало отсчета времени с моментом перехода си-
стемы с первого участка на второй, определяем постоянные D\ и
Dt из условий, что х = Ао, х = —(А — Ао) ко при t = 0. Отсюда
следует
Di = Ао, D2 = — (А — Ло) /со,
так что на втором этапе движения
х — Ао — (А — Ло) kot.
Теперь найдем время, необходимое для перехода системы из
положения, характеризуемого координатой ж ,2, в положение, соот-
ветствующее координате х = 0:
t ____________
И" Ао)ко •
Таким образом, частота свободных колебаний равна
2л__________________
~ «1+«2 “ . 2
1+"т-о
3. Приближенные способы. Из-за громоздкости интег-
ралов, входящих в точную формулу (3.6), для определе-
ния частоты свободных колебаний часто пользуются при-
ближенными способами. Конечно, их ценность несколько
упала из-за возможностей, которые ныне предоставляют
современные ЭВМ; однако эти способы до сих пор оста-
ются весьма полезным средством для выявления общего
характера зависимости частоты колебаний от их ампли-
туды, а также для пригкидочных расчетов.
Рассмотрим несколько приближенных способов при-
менительно к случаю симметричной характеристики F(q).
Отметим, что некоторые из них разработаны для значи-
тельно более широкого круга задач, чем рассматриваемые
в этом параграфе, и будут неоднократно встречаться в
последующем изложении.
Простейший способ. Наиболее прост, хотя не всегда
достаточно точен, следующий прием. Примем, что коле-
бания в нелинейной системе с симметричной харак-
теристикой описываются законом
q = A sin(Zc£ + а), (3.11)
подобно тому как это происходит в лпнейпых системах.
Выражение (3.11) является точным решением только
§ 3 НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА 67
тогда, когда характеристика F(q) линейна. В общем слу-
чае подстановка (3.11) в дифференциальное уравнение
(3.1) не обращает его в тождество.
Отметим, что в моменты прохождения через положе-
ние равновесия уравнение (3.1) удовлетворяется выраже-
нием (3.11), и потребуем, кроме того, чтобы уравнение
(3.1) удовлетворялось также в те моменты, когда обоб-
щенная координата q достигает максимума, т. е. равна
А. При этом обобщенное ускорение q также максимально
по модулю:
Qtaan Ah .
Следовательно, в указанные моменты должно выполнять-
ся равенство
-аАк2 + F (4) = О,
т. е.
к‘ = Р-12)
Последнее выражение позволяет легко получить доста-
точно правильное общее представление о связи частоты
к с амплитудой А.
Так, если нелинейная характеристика имеет вид (3.7),
то по формуле (3.12) найдем для частоты выражение
к =
у аА Та 1
которое содержит верную степень амплитуды (см. точное
решение (3.8)), но лишь приближенно определяет зна-
чение коэффициента при Л"-1; если, например, п = 2,
то по формуле (3.8) найдем к = 0,8472 А} а по при-
ближенной формуле к = А (ошибка состав-
ляет 18 %).
Способ прямой линеаризации. Способ основан на не-
посредственной (прямой) замене нелинейной характери-
стики F(q) некоторым эквивалентным линейным выраже-
нием. Так, при симметричной характеристике вместо
F(q) принимается
(?) = cq, (3.13)
где с — коэффициент линеаризации, значение которого
подбирается из следующих соображений. Уклонение за-
5*
68
ГЛ. I СВОБОДНЫЕ КОЛЕБАНИЯ
меняющей характеристики (3.13) от заменяемой харак-
теристики F(q) зависит от координаты q (рис. 3.5):
r(g) = F(g)-cg.
В задачах о колебаниях, очевидно, более существен-
ны уклонения г при больших значениях координаты д;
поэтому в выражении интегрального уклонения естествен-
но «усилить» роль разностей
г при больших значениях
координаты д. Примем за
меру уклонения произведе-
ние
rq=[F(q)~ cq]q
и рассмотрим интегральное
квадратическое уклонение
А
S = J (eg)2 dq,
—А
которое, очевидно, зависит
от выбора параметра с. Для минимизации этого уклоне-
ния воспользуемся условием
dS _
de
(3.14)
из которого и может быть найдено минимизирующее зна-
чение с. После этого задачу можно считать, в сущности,
решенной, так как она приведена к линейному уравнению.
Итак, задача сводится к минимизации интеграла
А
<?= J {[F(g)-cg]g}Mg, (3.15)
— А
т. е. к определению минимизирующего значения с. Вы-
полнив операции, указанные в (3.14) и (3.15), получим
А А
5 F(q)qsdq = i$F(3)qsdq- (ЗЛ6)
— А О
Так, папример, при характеристике (3.7) находим
А
С- ^Jpgejg = A^.
О
§ 3 НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА 69
Соответственно для частоты получится
к= 0,8452 А.
Погрешность этого результата составляет всего 0,23 %.
Идею минимизации интегрального квадратического укло-
нения можно распространить и на случай несимметрич-
ных характеристик.
Метод гармонического баланса. Этот приближенный
метод является одним из наиболее распространенных при
решении многих нелинейных задач теории колебаний.
Применительно к рассматриваемому здесь дифференци-
альному уравнению (3.1), когда F(q)=- — F(—q), его про-
стейший вариант состоит в следующем.
Кам и выше, примем решение этого уравнения в виде
(3.11) и подставим его в левую часть дифференциального
уравнения (3.1). Второе слагаемое F [A sin(kt + а) ] явля-
ется периодической функцией периода 2n/fc, и его можно
разложить в ряд Фурье. Сохранив в этом разложении
один первый член, приближенно имеем
F [Л sin(fcZ + а) ] = bi (Л)sin (kt + а), (3.17)
где bi — коэффициент Фурье, определяемый выражением
2Л
bt = F (Л sin ф) sin ф йф, ф — kt -ф а. (3.18)
о
П одстаповка выражений (3.11) и (3.18) в уравнение
(3.1) приводит к соотношению
-аАк2 + bi (Л) = 0,
из которого следует первое приближение для квадрата
частоты:
(3.19)
Пусть, например, функция F{q) определяется выра-
жением (3.7). Тогда по формуле (3.18) находим
2Л
= —• J М3 sin3 ф sin ф J-ф = -|
о
70
ГЛ I СВОБОДНЫЕ КОЛЕБАНИЯ
т. е.
А:2 = 0,75 —Л2, к = 0,8660 1/А
а та
с ошибкой 2,2 %.
Метод медленно меняющихся амплитуд. Для того что-
бы применить к рассматриваемой задаче изложенный
выше метод медленно меняющихся амплитуд (см.
стр. 50), нужно прежде всего выделить из заданной
функции F (q) линейную часть cq (если функция F(q)
чисто нелинейная, т. е. пе содержит линейного
слагаемого, то метод в принципе неприменим) и предста-
вить дифференциальное уравнение (3.1) в виде (2.32),
положив
(3-20)
(здесь /го= с/а — квадрат собственной частоты линеаризо-
ванной системы). Далее образуются выражения (2.42):
Ф (Л) — — f Г— F д°Ч А'оЛ cos ф! sin гр <7ф, (3.21)
о L J
2Л
Т (Л) = J |~~~ ^ ^ д08 Ч АдЛ cosф1 cos ф йф. (3.22)
о L J
Рассматривая выражение (3.21), можно заметить, что
под знаком интеграла перемножаются четная и нечетная
функции угла ф; в заданном промежутке интегрирования
эти функции ортогональны, так что Ф(Л) = 0. Отсюда,
согласно первому уравнению (2.41), следует Л = 0, или
Л = const — результат, который можно было предвидеть
для рассматриваемой задачи о свободных колебаниях
консервативной системы.
После того, как будет вычислено значение Т (Л), по
второму выражению (2.41) образуется величина ф. Важ-
но отметить, что эта величина постоянная, так что
<р = ф1 + фо и аргумент в решении (2.34) принимает вид
ф = kQt — <р = (ко — ф) t — фо.
§ 3. НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА
71
Таким образом, частота свободных колебаний задан-
ной нелинейной системы определяется выражением
= (3.23)
Пример 3.3. Сопоставить с. точным значением значения
частоты свободных колебаний системы с зазором, найденные про-
стейшим способом и способом прямой линеаризации (рис. 3.2, б).
Характеристика системы описывается выражениями, данными в
начале примера 3.2.
По простейшей формуле (3.12) находим
где /с® = с/т.
Для вычисления по способу прямой линеаризации пужно вос-
пользоваться формулой (3.16), разделив область интегрирования
при х > 0 на два участка. На первом участке
= 0 и интегрирование дает нуль. Поэтому
(О С х sg До) F(х) =
5 С л з ( 5Ло Ао
с = —I с (х — А ) х3 dx — с I 1 — —- ф- —г I,
4’J «' а! 4Д 4Д5/
(б)
/ 5А Л®
к2 = к2 1 — ~ ф- —.
о 4Л : 4д5
На рис. 3.6 показаны завпспмостп (о) и (б),
пый в примере 3.2 результат точного решения.
а также найден-
72 гл. I. СВОБОДНЫЕ КОЛЕБАНИЯ
Пример 3.4. Для системы с кубической характеристикой
F (?) = cq + Р?3
найти частоту свободных колебаний методами гармонического ба-
ланса и медленно меняющихся амплитуд.
Первое приближение по методу гармонического баланса най-
дем по выражению (3.19), подставив туда
2Л
If 3
Ьг = — I (сД sin др -р РД3 sin др) sin др d(p = сД ф рд3.
О
Таким образом, получаем
, , ЗРД2
к2 = к2+ -у—. а)
о ~ 4а ' '
Для решения по методу медленно меняющихся амплитуд на-
ходим по выражению (3.22)
Г ! РД3 cos3 др') 3 лрД3
ЧЧЛ)= j --------------J cos др (Пр = - ——
о
и соответственно по выражению (3.23)
3 рд2
к = А- + -тг -г-,
о 1 8 akQ ’
Как видно, результаты (а) и (б) совпадают с точностью до послед-
него слагаемого в выражении (б).
Здесь, кстати, отметим, что решение (б) становится очевидно
ошибочным, если характеристика системы чисто нелинейная, т. е.
когда с — 0 и соответственно ки = 0. В этом можно видеть напо-
минание о том, что метод медленно меняющихся амплитуд в прин-
ципе применим только к системам с малыми нелинейностями.
§ 4. Линейные системы с несколькими степенями
свободы
1. Способы составления дифференциальных уравнений
движения. Наиболее общий вид дифференциальных урав-
нений движения может быть получен в форме уравне-
ний Лагранжа, которые при консервативных силах име-
ют вид
d !дТ\ дТ _ 6П
dQi~ d(ii'
(4.1)
§ 4. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
73
где Т и II — кинетическая и потенциальная энергии, q, и
q3 — обобщенные координаты и обобщенные скорости,
/ = 1, 2, ..s — номер координаты, s — число степеней
свободы.
Из курса теоретической механики известно, что при
малых движениях голопомной системы со стационарными
связями около положения равновесия кинетическая и по-
тенциальная энергии следующим образом выражаются
через обобщенные координаты:
8 8
т =~ 2 a.jhqjqh, II - у У c}hq3qh. (4.2)
j,k-i j,k~ i
Здесь J = 1, 2, ..., s; к = 1, 2, ..., s; a,h = ак] — инерцион-
ные коэффициенты, c]h = см — квазиупругие коэффициен-
ты, называемые также обобщенными коэффициентами
жесткости.
К выражениям (4.2) можно прийти путем рассужде-
ний, аналогичных изложенным выше при выводе выра-
жении (1.4) и (1.8), относящихся к системе с одной
стопепыо свободы.
Если соответствующее нулевым значениям координат
положение равновесия устойчиво, то потенциальная энер-
гия в этом положении имеет изолированный минимум,
а второе из выражений (4.2) есть положительно опреде-
ленная квадратичная форма. Для этого необходимо и
достаточно, чтобы выполнялись следующие неравенства
(критерий Сильвестра):
сп>0,
сп сы
С21 С22
>0,
Применительно к системам с несколькими степенями сво-
боды эти неравенства имеют тот же смысл, как и усло-
вие с > 0 для системы с одной степенью свободы (см.
§ 1). При выполнении неравенств (4.3) система, выведен-
ная из положения равновесия, совершает свободные ко-
лебания.
Подставив выражения (4.2) в уравнение (4.1), полу-
чим следующую систему линейных однородных диффе-
74
ГЛ I СВОБОДНЫЕ КОЛЕБАНИЯ
ренциальных уравнении с постоянными коэффициентами:
8
2 (a3kqit + CjkQk) = 0, 7 = 1,2,...,$. (4.4)
Конечно, фактическое составление системы уравнений
(4.4) пе обязательно вести по схеме Лагранжа. Во мно-
гих задачах о колебаниях удобно пользоваться более не-
посредственными способами — прямым и обратным.
Согласно прямому способу из системы выделяются со-
средоточенные массы (или твердые тола) и каждая из
них рассматривается как свободная материальная точка
(или соответственно как свободное тело), находящаяся
под действием позиционных (восстанавливающих) сил,
которые выражаются через выбранные обобщенные ко-
ординаты; после этого записываются соответствующие
дифференциальные уравнения движения для материаль-
ных точек (или тел).
Обратный способ противоположен прямому: после от-
деления сосредоточенных масс (или твердых тел) рас-
сматривается оставшаяся безынерционная система жест-
ких и упругих связей, т. о. «безмассовый скелет» систе-
мы, который находится под действием кинетических
Рис 4 1
реакций отделенных частой системы, причем кинетиче-
ские реакции (силы инерции) выражаются через обоб-
щенные ускорения. Затем формулируются статические со-
отношения для перемещений беэмассового (безынерцион-
ного) скелета системы.
§ 4 СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
75
Проследим особенности названных способов на при-
мере системы с двумя степенями свободы, состоящей из
двух тел с массами т\ и пг2, соединенных двумя пружи-
нами, жесткости которых равны и сг (рис. 4.1).
За обобщенные координаты примем горизонтальные
перемещения х\ и х2 грузов, отсчитывая эти перемещения
от состояния равновесия, в котором пружины не дефор-
мированы. Удлинения пружин в процессе движения рав-
ны AZ1 = Xi, Л?2 = Х2 — X].
Основной способ {уравнения Лагранжа}. Прежде все-
го находим кинетическую энергию грузов
т - । 2d
2^2
и потенциальную энергию деформации пружин
с,а? с-,(х,— х\2
П — 1 1 -L. 2 ' 2 I /
~ 2 2
Далее образуем производные, необходимые для подста-
новки в уравнение Лагранжа (4.1):
ОТ • дТ
—— = трху, —— - - т2х.,,
дх^ дх^
d / ОТ \ - d /ОТ \
д; I — I = ш.х,, —(—)== тп.,х2,
(й , 11 dt ’I 2 2’
\ °Х1 / \ Х2 /
<?п , . <?п , ч
= С1Ху — с2 {х2 — xj, = с2 {х2 — xj.
Теперь записываем уравнения (4.1):
m[Xi + axi — с2{х2 — яд) = 0,
(4.5)
т,2Х2 + с2(х2 — Xi) = 0.
Прямой способ. Выделяем грузы и рассматриваем их
как свободные тела под действием сил упругости N\ и N2,
определяемых удлинениями AZi и &12 обеих пружин
(рис. 4.1, б):
Ni — ciAZi = axi,
N2 = c2\l2 = c2 (x2 — xi).
Дифференциальные уравнения движения грузов имеют
вид
пцх! = — Ni + N2,
т2х2 = — N2.
76 гл, I СВОБОДНЫЕ КОЛЕБАНИЯ
Подставив сюда выражения для сил Ni и N2, приходим
к ранее полученной системе уравнений:
тх\ + cixi — 62(2:2 — xi) = О,
ШХ2 + С2 (xz — Х\) = 0.
Обратный способ. Отделяем грузы и рассматриваем
упругий бозмассовый скелет системы под действием ки-
нетических реакций — т\Х\ и — т^хъ (рис. 4.1, в). В этой
схеме первая пружина нагружена сплои —т^ар — rnzxz,
а вторая пружина — силой — т-^х^. Перемещение х\ кон-
ца первой пружины, равное ее удлинению, можно запи-
сать в виде
__ ~ m1r1 — W2У * * * * X2
Перемещение правого конца второй пружины х^ рав-
но сумме удлинений обеих пружин, т. е.
— т х — т.ух.-) —
>v> _ - I 2 2 г 2
Из двух последних соотношений получаем
пг1х1 т.2х2 4_ clxi — 0>
с, •• / с \ (4.6)
— т1х1 4- тн2 1 4—- х2 4~ с2х2 — 0.
ci \ ci ]
Полученные выше по основному и прямому способам
формы записи совпали потому, что при нашем выборе
обобщенных координат кинетическая энергия имеет ка-
ноническую форму.
&
У = 4 2 ед2, (4.7)
7=1
т. е. не содержит произведений скоростей q,qk при j ¥= к.
При этом каждое из уравнений Лагранжа содержит толь-
ко по одному обобщенному ускорению, как это получает-
ся и при пользовании прямым способом. Если обобщен-
ные координаты были выбраны так, чтобы каноническую
форму имела потенциальная энергия
S
п=4 2 сл?- (4-8)
j=i
§ 4 СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
77
то уравнения Лагранжа совпали бы с уравнениями, по-
лученными с помощью обратного способа. Сопоставляя
полученные варианты записи по прямому и обратному
способам, можно сделать следующее общее заключение
относительно структуры дифференциальных уравнений:
при составлении системы уравнений по прямому способу
atJ — 0 при i ¥= /, а при составлении по обратному спосо-
бу с,3 — 0 при г ¥= j. Таким образом, пользуясь прямым
способом, мы приходим вместо (4.4) к системе
8
+ 2 CjhQk = 0 (7 = 1,2,..., s), (4.9)
k=i
а применяя обратный способ — к системе
ajkQh + Cjqj = 0 (7 = 1, 2, ..., s) (4.10)
fe=i
(вместо a„ в уравнениях (4.7) и (4.9) записано а3, так
как второй индекс становится лишним; аналогично,
вместо с3] в уравнениях (4.8) и (4.10) записано Cj).
Принципиально важно, что специальным выбором
обобщенных координат можно придать каноническую
форму как кинетической, так и потенциальной энергии.
Такие координаты (/ = 1, 2, ..., s) называются нор-
мальными или главными. При этом
8 8
г=42 4?, п=42^? (4.И)
5=1 5=1
и уравнения Лагранжа приобретают наиболее простой
вид
«Х + с^ = 0 (/ = 1, 2, ..., s). (4.12)
Каждое из них интегрируется независимо от других. Ко-
роче говоря, при использовании главных координат си-
стема как бы представляет собой совокупность незави-
симых парциальных систем с одной степенью свободы.
Чаще всего заранее трудно указать, какие кинематиче-
ские параметры (или их комбинации) являются глав-
ными координатами, и для перехода к ним требуются
обширные выкладки, объем которых не уступает объему
выкладок при решении задачи в произвольно принятых
(не главных) обобщенных координатах. Поэтому введе-
ние понятия главных координат практически не облег-
чает решение задачи о свободных колебаниях, но весьма
78 ГЛ I СВОБОДНЫЕ КОЛЕБАНИЯ
полезно для углубленного понимания их закономерностей
и для теоретического анализа.
Связь между вариантами записи (4.9) и (4.10) удобно
проследить, исхдя из фундаментального соотношения,
определяющего статические перемещения в упругой ли-
нейной системе общего вида-
(/ = 1, 2, ...,s), (4.13)
s=i
в которой <%,— коэффициент влияния для перемещений,
т. е. значение у-й обобщенной координаты, соответствую-
щее действию статически приложенной k-й обобщенной
силы, равной единице (в строительной механике величи-
ны называют единичными перемещениями). В мат-
ричной форме соотношения (4.13) имеют вид
{q} = [6] {Л, (4.14)
где
{<!} =
к
\ •
(4.15)
представляет собой матрицу-столбец (вектор) обобщенных
координат,
6ц 612 ... 61S
®21 ®22 ^2s
(4.16)
— матрицу коэффициентов влияния для перемещений,
{F} =
(4.17)
— матрпцу-столбец (вектор) обобщенных сил.
Введем матрицу
[6]"1 = [г] =
Г Г г
11 12 ••• 1S
г г г
21 22 23
(4.18)
_rsl rs2 r«s_
§ 4. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ 79
обратную матрице (4.16), и умножим слова матричное
соотношение (4.14) на матрицу (4.18). Тогда получим
[г]{Д = {Л. (4.19)
Для того чтобы выяснить физический смысл элементов
г]к матрицы (4.18), представим себе, что на все точки
системы наложены дополнительные связи, обращающие
в нуль все обобщенные перемещения, кроме перемеще-
ния qk, причем последнему придано значение д* = 1. Тог-
да г]к представит собой реакцию ;-й дополнительной свя-
зи, соответствующую перемещению qk = 1 (в строитель-
ной механике величины г]к называют единичными реак-
циями) .
Из соотношения (4.19) следуют дифференциальные
уравнения прямого метода, а из соотношения (4.14) —
уравнения обратного метода. В самом деле, в задачах
о свободных колебаниях F3 = — т,ц„ так что если ввести
диагональную матрицу
0 . 0 “
[т] = 0 т2 . . 0 , (4.20)
0 0 . • _
то можно записать
{F} = - [т] {#). (4.21)
Подставляя (4.21) в (4.19), получим
[г] {q} = — [m] {q}, (4.22)
т. е. уравнения типа (4.9); после подстановки (4.21) в
(4.14) найдем
{Д =-[б] [тп]{д}, (4.23)
т. е. уравнения типа (4.10).
Хотя уравнения (4.9) и (4.10) в принципе эквива-
лентны, однако объемы операций, связанных с вычисле-
нием коэффициентов, могут оказаться различными.
Прямой способ особенно удобен для систем цеп-
ной структуры, если в таких системах упругие силы
несложно выражаются через перемещения двух соседних
тел. Таковы, например, системы, изображенные на
рис. 4.2. Пусть qs—обобщенная координата, представля-
ющая горизонтальное перемещение у-то груза в схеме на
80
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
рис. 4.2, а или угловое перемещение /-го диска в схеме
на рис. 4.2, б. При этом сумму упругих сил, действующих
на груз (рис. 4.2, а), или сумму упругих моментов, дей-
ствующих на диск (рис. 4.2, б), можно представить в еди-
ной форме:
Qi = - fc-i)+ CJ+1(^+1 - ft), (4.24)
где с} — жесткость упругой связи, расположенной между
грузами (дисками) j — 1 и /; cJ+i — жесткость упругой
Рис. 4.2
связи, расположенной между грузами (дисками) j и / + 1.
Соответственно дифференциальное уравнение движения
/-го груза в схеме а имеет вид
Wjft = -c^Qj - q}-i) + cJ+i (q1+1 - q}), (4.25)
т. e. соответствует форме (4.9). Таким же будет и диф-
ференциальное уравнение движения /-го диска в схеме б,
если заменить инерционный коэффициент ms на момент
инерции диска Ij.
Отметим, что в каждом из уравнений (4.25) содержат-
ся только по три неизвестные функции, а для крайних
грузов (дисков) уравнение будет содержать только две
неизвестные функции. При этом коэффициенты уравне-
ния легко вычисляются по исходным данным задачи.
Применение обратного способа в данном случае приводит
к значительно более сложным уравнениям, так как чис-
ло неизвестных функций, входящих в дифференциаль-
ные уравнения, возрастает с удалением от левого конца
системы, и последнее уравнение содержит все s функций
qi- При расчетах крутильных колебаний валов обычно
пользуются прямым способом.
§ 4, СИСТЕМВ1 С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
81
С другой стороны, для балочных систем с сосредото-
ченными массами удобнее обратный способ. Так, для си-
стемы, показанной на рис. 4.3, а, придем к кинетостати-
чоской схеме па рис. 4.3, б. В данном случае, пользуясь
коэффициентами влияния 6Jfe, получаем уравнения типа
(4.10):
у3 = — т2у2д12 — ... — msijs8ja (J = 1, 2, ..., s),
(4.26)
соответствующие матричному уравнению (4.23). Обрат-
ный способ особенно часто используется в динамике со-
оружений.
Пример 4.1. Составить дифференциальные уравнения сво-
бодных колебаний консоли, несущей на свободном конце груз, об-
ладающий конечным моментом инерции (рис. 4.4, а); считать, что
массой балки можно пренебречь по сравнению с массой груза.
Обозначения: I — длина консоли, EJ — изгибпая жесткость, т —
масса груза, р — его радиус инерции.
Рассматриваемая система имеет две степени свободы, и за
обобщенные координаты удобно выбрать прогиб у и угол поворо-
та ср конца консоли (рис. 4.4, б). Для составления дифференциаль-
ных уравнений движения воспользуемся обратным способом и
рассмотрим изгиб безынерционного скелета, показанного на
рис. 4.4, в.
Внешними силами являются сила инерции груза —ту и мо-
мент сил инерции —тр2ср. Тогда
у = —ту8ц — 7?гр2срб12, <р = —my62i — mp2cp622.
Коэффициенты влияния можно найти методами сопротивления ма-
6 Я. Г, Пановко
82
Г.П I СВОБОДНЫЕ КОЛЕБАНИЯ
териалов, папример с помощью формулы Верещагина. В данном
случае они выражаются следующим образом:
Z3 „ Z2 I
бп~8А’/’ б12 — б21 — 2EJ' °22~ EJ-
Таким образом, дифференциальные уравнения движения прини-
мают вид
•• Z3 ... Z2 •• Z2 Z
5Z7 + тр (р2А7 + & = 0’ т^2£7 + тР 4’7v + (P = 0.
Дальнейший анализ системы см ниже, на стр. 86, 92 и 93.
2. Решение системы дифференциальных уравнений.
Если условия (4.3) устойчивости состояния равновесия
выполнены, то частное решение системы дифференциаль-
ные уравнений (4.26) можно записать в виде
q, — Л3 sin (kt + а) (/ = 1, 2, ..., s). (4.27)
Этими выражениями описывается моногармоничоск1ий ко-
лебательный режим с частотой к, общей для всех коор-
динат q}.
Подставив (4.27) в уравнения (4.4), получим систему
алгебраических уравнений
—Л2ацЛ] — Zc2a12^2 — ... — k2ai3A3 + Сц41 +
+ С12Л2 +... + CisAs = О,
—клач\А\ — к'^а^А^ — ... — к2а.23А3 + С21А1 +
+ С22А2 + ... + с2,Л5 = 0, (4.28)
—k2a,iAi — к2а,2А2 — ... — к2а33А3 + с3[А 1 +
+ С 5 2-4 2 + ... + с33А3 — О,
однородную относительно неизвестных амплитуд А1з
А?, ..., А3. При колебаниях все они не могут равняться
пулю; поэтому, согласно общему свойству однородных си-
стем, должен равняться пулю определитель, составлен-
ный из коэффициентов этой системы:
7 2 ?2 т 2
С11 — ailk C12~ai2k Cls~aisk
C21~a2lk2 C22~a22k2 ••• C2S-a2X
= 0.
(4-29)
csl asik cs2 ‘ as2k
§ 4 СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ 83
После развертывания определителя получится алгебраи-
ческое уравнение s-й степени относительно /с2; напишем
эю частотное уравнение в виде
&0-М2 + Ъ2к* — Ь3к6 + ... + (- l)sM2s = 0; (4.30)
при указанной расстановке знаков все коэффициенты Ъ,
оказываются положительными. Число корней частотного
уравнения равно s; эти корни, обозначаемые далее kf,
/.'2, ks, принято располагать в порядке возрастания.
Для рассматриваемых систем, совершающих движение
около состояния устойчивого равновесия, все эти корпи
вещественны и положительны*). Таким образом, для ча-
стот к определяется s значений:
/ci < kz < к3 < ... < /с8, (4.31)
образующих спектр собственных частот системы. (Отри-
цательные корпи можно не рассматривать, так как соот-
ветствующие им частные решения типа ^4/siii(—kt) по-
просту сливаются с частными решениями A s'mkt.)
Для системы с двумя степенями свободы частотное
уравнение оказывается биквадратным:
(апа22 — а22) к1 — (ацС22 -ф азаси — 2«12с,2) к2 -ф
+ (ОА2- (4-32)
и имеет два положительных корпя ki2 и 7г22, лежащих
в интервалах
, — </т2< + оо.
а11 а22
Если обобщенные координаты — главные, т. е. выбра-
ны так, что «12 = О, С12 = 0, то корни частотного уравне-
ния окажутся равными
Вернемся к рассмотрению общего случая. Каждому
корню kt соответствует частное решение типа (4.27), сле-
довательно, общее решение представит собой сумму
*) Если после решения уравнения (4 30) выяснится против-
ное, то это будет означать нарушение условий (4.3), т. е. неустой-
чивость состояния равновесия.
6*
84 гл I СВОБОДНЫЕ КОЛЕБАНИЯ
таких решений:
q, = sin (kit + сс!) + Aj2 sin (foZ + «2) + • • •
... + A.,, sin (kst + as) (j = 1, 2, ..s),
где букве А теперь приписаны два индекса: первый по-
прежнему обозначает помер координаты, а второй — но-
мер собственной частоты. Коротко решение можно за-
писать в виде
Qi = 2j sin (fat + аг) (/ = 1,2,..., s). (4.33)
i=l
Таким образом, как правило (т. е. при произвольных на-
чальных условиях), изменение каждой из обобщенных
координат следует политармоническому закону, причем
число гармонических составляющих равно числу степе-
ней свободы системы. Отметим, что если собственные
частоты несоизмеримы (как это нередко бывает в реаль-
ных задачах), то процесс, описываемый выражением
(4.33), строго говоря, непериодический.
При близости хотя бы двух собственных частот общий
закон движения оказывается весьма своеобразным. Рас-
смотрим систему с двумя степенями свободы, причем
ki « к?. Тогда, например, для первой обобщенной коорди-
наты имеем
qi = Ац sin (kit + czi) -Ь A12 sin(/c2i + cc2). (4.34)
Если ввести обозначения
4
2?! 2 — ~2 M11 cos ±A12 cos cz2),
I (4-35)
#3,4 = у Ми snl “1 ± 412sin rA>)’
то вместо (4.34) можно записать
q{ — (sin kit + sin k^t) + Z?2(sin kit — sin k^t) +
+ Bz (cos kit + cos kA) + Bi (cos kit — cos kA). (4.36)
Заменяя суммы и разности тригонометрических функций
произведениями таких функций, получим
Qt = 2В1 sin 1 2 t cos 1 2~— t -|- 2 В., sin ZX
к + к к -|- к к. — кп
X cos 1 2 ~ t + 2В3 cos 1-2— t cos — - t —
— 2Bi sin 1 ~t 2 t sin 1 2 t. (4.37)
§ 4 СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
85
Заметим, что функции аргумента —-1 меняются
V kt + к2 .
медленно по сравнению с функциями аргумента —%—
Поэтому вместо (4.37) удобно записать
7i = D\ sin kt + Z>2 cos kt, (4.38)
где
fc, -I- 7c„
к = (4.39)
— среднее значение двух близких частот к\ и к%,
7~, л ( . Д/с \
D1 = 2[Bl cos -у-1 — Z?4 sin — t ,
\ &k Д J (4’4°)
D2 = 2 lB2 sin t + Z?3 cos t\
— медленно меняющиеся периодические функции време-
Мс к, — кг
ни; их частота = —%—"
Окончательно находим вместо (4.34)
qL = A* sin (kt + а*), (4.41)
где ______
А = К Di + Z>2, а* = arctg (4.42)
— медленно меняющиеся функции времени. Таким об-
разом, движение носит синусоидальный характер с
Рис. 4.5
периодически медленно меняющейся амплитудой; график
этого движения показан на рис. 4.5. Период изменения
амплитуды составляет
т — 2?t _ 4?t
* Д/с/2 ку — к2
(4.43)
86
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
и тем больше, чем ближе частоты к\ и к?.. Такие коле-
бания называются биениями.
Движение, соответствующее второй обобщенной коор-
динате 72, также представляет собой биения, но сдвину-
тые по фазе относительно движения q\.
Пример 4.2. Найти собственные частоты для системы, рас-
смотренной выше в примере 4.1.
Подставляя решение (4.27) в найденные рапее дифференци-
альные уравнения (стр. 82), получим однородную систему
(,з \ ,2
7721 0 \ 0 , П
+ 2£7/сЛ2=0’
»2 / 2? \
ztiZ 0 I тр £ 0 । _
2EJ к'А1 + к ~ 1) Л2 = °’
Далее составляем определитель
ml3 2 тр212
ЪЁЗк“~Х ~2ЁТ
ml2 2 тр21 2
2Ё7к ~Ё7 к'
после развертывания которого
получим частотное уравнение
m2PV
12 (AV)2 к
mp2l ml3 \ 9 , ,
~ЁТ + за7/ к +1 °-
Его корни (для р <С 0 имеют вид
к\ =
3EJ
ml3
V И’
к1 =
QEJ
ml3
3. Собственные формы. Если вернуться к системе
уравнений (4.28) и подставить в нее какой-либо i-й ко-
рень частотного уравнения, то одно из уравнений станет
следствием остальных, т. е. независимых уравнений оста-
ется только s— 1; сказанное вытекает из общих свойств
однородных систем алгебраических уравнений. Эти уравне-
ния связывают между собой s амплитуд Ли, Лги .. ., Л8< и
позволяют выразить все амплитуды через какую-либо одну
из них, например через первую. Совокупность отношений
^2г ^зг Лд / г
^2г — Ч t , . .., Xsj — -j (4.
определяет относительные амплитуды рассматриваемой
i-й гармоники, т. е. описывает конфигурацию си-
стемы в процессе свободных колебаний с i-й собствен-
ной частотой; эта конфигурация определена с точностью
§ 4. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОВОДЫ 87
до одного произвольного множителя, т. е. масштаб кон-
фигурации остается неопределенным.
Такие конфигурации системы зависят только от
свойств самой системы и называются собственными фор-
мами', каждому корню частотного уравнения соответству-
ет своя собственная форма, определяемая отношениями
(4.44), т. е. число собственных форм равно числу степе-
ней свободы системы.
Величины Xj, называются коэффициентами собствен-
ных форм', они определяются только параметрами самой
системы (коэффициенты формы по обязательно безраз-
мерные величины, так как обобщенные координаты мо-
гут иметь различную размерность). Так как общий мас-
штаб каждой из собственных форм произвольный, можно
один (любой) коэффициент формы положить равным еди-
нице. Число остальных коэффициентов хл равно s — 1 для
каждой собственной формы, т. о. составляет s(s— 1) для
всех собственных форм.
Общее решение (4.33) с помощью коэффициентов фор-
мы записывается в виде
$
gj = 2 ХцА^ sin (k{t 4- а{)
i=l
(/==!, 2, ..., s, хц = 1; i = l, 2, ..., s), (4.45)
t. e. содержит 2s постоянных (s амплитуд Ан и столько
же начальных фаз а,); для определения этих постоянных
служат 2s начальных условий, выражающих значения
обобщенных координат и обобщенных скоростей в на-
чальный момент.
Если подставить какое-либо i-e частное решение в си-
стему (4.9), то получим следующие соотношения:
Hj/fjXji -|- Pjr^ri 9 (4.46)
Г=1
(7 = 1, 2, ..., s; i= 1, 2, ..., s).
Аналогично, после подстановки г-го частного решения в
систему (4.10) найдем
$
(J 1, 2, ..$; i = 1, 2, ..s).
Эти соотношения будут использованы ниже, в п. 3 § 8.
88
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
Пример 4.3. Найти собственные частоты и собственные фор-
мы для системы, показанной на рис. 4.1, приняв для примера ct =
= с2, гп, = т2 = т. Подставим решения (4.27) в полученные
выше дифференциальные уравнения (4.5), положив q-t = q2 =
= тогда получим
(2с0 — mk2)At — с0Д2 = О,
—co-4j + (Со — тк2)Аг = 0.
Из равенства нулю определителя
% ~ тк2
следует частотное уравнение
с с2
к*-3 mfc2 + A = 0.
т т
Отсюда находим два корпя:
*1,2 ~ 2m (3 -- I/3)’
т. е.
*4= 0,382 *1=2,618^.
Положив хц = xi2 = 1, для определения остальных коэффициен-
тов собственных форм воспользуемся первым из уравнений (а)
(то же можно получить и из вто-
рого уравнения):
Рис. 4.6
0,618.
2с — тк2
*2i=-h^- = w
2с — тк2
0 л
Соответствующие собственные
формы показаны па рис. 4.6, я, б.
Полученные выше общие соотношения можно записать
короче в матричной форме.
Вместо уравнения (4.4) имеем
[«]{g} + [c]{g} = 0, (4.48)
где {д) — матрица-столбец (4.15),
“11 “12 • • • “is
“21 “22 • • • “2S
_ “»i “sa •' • _
(4.49)
§ 4. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ 89
— симметричная матрица инерционных коэффициентов,
[с] = С11 с12 • С21 С22 • С13 • C2S (4.50)
_ Csl CS2 . css _
— симметричная матрица коэффициентов жесткости.
Решение уравнения (4.48) будем искать в виде
где
{q} = {Л} sin {kt + а),
Ai
{Л} = Л2
л
(4.51)
(4-52)
— матрица-столбец амплитуд. Подставляя (4.51) в
(4.48), получаем матричное уравнение
— [а] {Л}/с2 + [с] {Л} == 0, (4.53)
т. е.
([с] —[а] &2){Л} = 0. (4.54)
Отсюда видно, что матрица-столбец {Л} отлична от пуля
только при условии
det ([с] -[а] к2) = 0, (4.55)
которое совпадает с частотным уравнением (4.29). Пере-
urrcaiB равенство (4.53) в виде
[а]-1 [с] {Л} = кЧА}, (4.5G)
замечаем, что {Л} является собственным вектором матри-
цы [а]-1 [с], а к2— собственным значением этой мат-
рицы.
4. Ортогональность собственных форм. Между ампли-
тудами Агп и Ат, определяющими две какие-либо соб-
ственные формы (п и т), существует соотношение, вы-
ражающее важное свойство ортогональности собственных
форм. Установим это соотношение исходя из общей фор-
мы уравнений (4.28) для амплитуд. При к2 = к„ какая-
либо /-я строка этой системы, записанная для и-й ча-
стоты, может быть представлена в впде
к2 2 ajrArn = 2 сдЛт (/ = 1,2,..., s). (4.57)
i=i i=i
90
ГЛ. I. СВОБОДНЫЕ КОЛЕБАНИЯ
Умножив равенство (4.57) на амплитуду А}т и сложив
все уравнения, получим
A'n 21 Ajm 2 ttjrArn = 2 Ajm 2 CjrArn, (4.58)
3=1 r=l j=l r=l
или, после изменения порядка суммирования в обеих ча-
стях равенства,
3 8 S3
кп 21 АГп 21 &JrAim — 21 Am 2 Cjt-Ajm. (4.59)
r=l J—1 r=l J=1
Так как с1Г = crj, можно записать
2 CjrAjm = 2 CtjAjm. (4.60)
з=1 3=1
Но согласно (4.57)
s s
21 CrjAjm — А-m (4.61)
3=1 3=1
следовательно, соотношение (4.59) принимает вид
3 3 S3
А'П 21 Am ^JrAjm — km 2 Am 2 ^JrAjm (4.62)
r=l !=1 r—1 3=1
(при записи правой части мы воспользовались равенст-
вом ar} = ajr). Но, поскольку частоты кп и кт различны,
из равенства (4.62) следует
2 А-т 2 азгА}т = 0. (4.63)
r=l 7=1
Последнее соотношение выражает свойство ортогональ-
ности любых двух и-и и m-й собственных форм.
Свойство ортогональности, выраженное соотношением
(4.63), формулируется более компактно в случаях, когда
а1Г = 0 при у =¥= г. Именно в такой форме обычно получа-
ются инерционные коэффициенты при использовании
прямого способа составления дифференциальных уравне-
ний. При этом соотношение (4.63) упрощается и прини-
мает вид (вместо агг достаточно писать аг)
S
2 ^rArmArn ~ 0. (4.64)
7— 1
§ 4. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОНОДЫ 91
Согласно (4.59) вместо (4.63) можно также записать
jS Arn Cjr-Ajm — 0* (4.65)
r-=l 7-1
Если cjr = 0 при у =И= г, как это получается по обрат-
ному способу, то соотношение (4.65) упрощается:
% сгАгтАгп = 0. (4.66)
Г=1
Отметим, что любую конфигурацию системы можно
разложить по собственным формам колебаний; это свой-
ство окажется полезным при изучении вынужденных ко-
лебаний.
Пусть некоторая мгновенная конфигурация системы
описывается совокупностью значений обобщенных коор-
динат Bi, В2, ..Bs; для этих значений можно записать
В3 = diA.i + d2Aj2 + ... + (j = 1,2,..., s) (4.67)
и рассматривать (4.67) как систему уравнений, опреде-
ляющих коэффициенты линейного преобразования
d\, d2, ..., ds. Для того чтобы найти эти коэффициенты,
пет необходимости решать систему (4.67), удобнее вос-
пользоваться свойством ортогональности собственных
форм. Имея в виду случаи, для которых указанное свой-
ство формулируется в виде (4.65), умножим каждую
строку системы (4.67) на соответствующее ее номеру /
произведение а}А,т (т — номер искомого коэффициента
dm), а затем сложим все строки. Тогда в левой части об-
разуется сумма S BjajAjm, а в правой части — сумма
7=1
вида
s s S
ajAjiAjm -р d2 2 i ajAjsAjm.
Согласно (4.65) среди этих членов отличен от пуля
S
только член dm 2 djAjm, и в результате мы получаем
7=1
компактное выражение
dm = Ц---------• (4.68)
7=1
92
ГЛ I. СВОБОДНЫЕ КОЛЕБАНИЯ
Пример 4.4. Найти собственные формы для системы, рас-
смотренной в примерах 4.1 и 4.2.
Для определения собственных форм образуем отношение
Л2: Л1 из первого уравнения, данного в примере 4.2 (стр. 86):
mZ3 ,
А2 1 ~ 3EJ к
А± I2 '
2EJ
Подставив сюда поочередно найденные выше значения и
получим
Л1 3 Ам 21
*21~~А,.^21' *22~ А,"** ~ 3о2-
11 12
Эти отношения характеризуют обе собственные формы (рис. 4.7,
я, б). Как видно из рисунка, первая собственная форма характе-
ризуется сравнительно малым углом поворота груза, а вторая фор-
ма — относительно небольшим прогибом копца.
Можно убедиться в ортогональности этих форм. Подставим
в условие ортогональности (4.64) я, = т, я2 = тр2, а также най-
. денные отношения Л21/Лц, Л22/Л12. Тогда
получим
|------^^~У тЛп4J2 4 тр2А21Аг,2
° л л Г 2 3 / 2Z \1 п
= 11 Ч1 + Р 2Z (- ^)] - °-
S * 5. Роль начальных условий. Для
рис 7 определения 2s постоянных, входя-
щих в общее решение (4.45), ис-
пользуются значения обобщенных координат д,(0) и
обобщенных скоростей дДО) в момент t = 0. Подставив
эти значения в общее решение (4.45) и в соответствую-
щие выражения для скоростей, получим систему уравне-
ний относительно постоянных Л и и ад
7;(0) = У Ху-гАц sinaj,
7 (4.G9)
q, (0) = У KjiAnki cosa{,
i—1
(/ = 1, 2, ..., s).
Соотношения между амплитудами гармонических со-
ставляющих Ац, А12, ..Ai„ входящих в закон измене-
ния любой координаты q,, зависят от начальных условий.
g 4 СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
93
При произвольно заданных начальных условиях из-
менение любой обобщенной координаты будет происхо-
дить по полигармоническому закону, так что отношения
между обобщенными координатами будут непрерывно
изменяться во времени. По этой причине эксперимен-
тальная запись (виброграмма, осциллограмма) реального
процесса свободных колебаний, как правило, не пред-
ставляет собой синусоиду, характерную для процесса
свободных колебаний системы с одной степенью свободы.
Однако при специальном выборе начальных ус-
ловий можно добиться того, что движение будет описы-
ваться только какой-либо одной, например r-й, со-
ставляющей:
q, = A,r sin (krt + а,) (/ = 1, 2, ...,«). (4.70)
В этом случае отношения между обобщенными коорди-
натами будут оставаться неизменными во времени и со-
ответствуют r-й собственной форме. В частности, для
реализации этого r-го главного колебания достаточно,
чтобы в начальный момент обобщенные скорости равня-
лись нулю, а обобщенным координатам были приданы
значения, определяющие r-ю собственную форму.
Пример 4.5. Найти движение системы, рассмотренной в при-
мере 4 1, если состояние равновесия нарушается приложением к
центру тяжести груза мгновенного импульса S.
В данном случае начальные условия должны быть сформули-
рованы следующим образом:
S
У (0) =0, у (0) = —, <р (0) = 0, <р (0) = 0.
Общее решение имеет вид
у — А и sin (ktt + ai) + А12 sin (k.,t a2),
ср = Л21 sin (4Д + ai) + A22 sin (k2t + a2).
Подставляя сюда пайдепные в примере 4.4 отпошепия амплитуд,
находим
у = Ап sin (/^ + aj + Л12 sin (k2t + a2),
3 21
Ф= 27 Л11 sin (V + ai)~^4i2
sin (k2t + a2).
Для определения четырех неизвестных Ли, Л12, оц, а2 используем
указанные выше начальные условия:
3 , . 2/ .
Лп sin аг + Л12 sin a2 = 0, Лп Sin ai ~ 3p2 Ai2 sln “2 ~ °’
5 3 2Z
ЛиА-1 cos a, + A12k2 cos a2 = —, YlAnki cos ai ~^Ai2k2COS a2 = 0
94 гл I СВОБОДНЫЕ КОЛЕБАНИЯ
Отсюда находим
5Z2 95р2
Л11'Уз^Ж’ Л1г~8гУ^77’ “1“ ’ а2~ •
Следовательно, движение описывается уравнениями
S12 Г 1 9 (?
^y®[Wsinft,i + »^sinM’
$1 [ Уз . , 3 р . 1
Ф=У^Ж~ smV- 4TsmV]
и носит двухчастотный характер.
6. Случаи кратных и нулевых корней. До сих пор,
говоря о корнях частотного уравнения, мы считали их
простыми и не равными нулю. Однако в некоторых слу-
чаях частотное уравнение может иметь как нулевые, так
и кратные корни.
Убедимся в возможности этого на примере механиче-
ской системы с двумя степенями свободы. Из частотного
уравнения (4.32) непосредственно видно, что при выпол-
нении равенства
(°11С22 1 a22('ll 2a12cJ2)2 =
= 4 (с[ ^22 (апа22 ^12) (4 - Z 1)
два корня частотного уравнения будут равны друг другу,
а при выполнении равенства
С11С22 = С12 (4. /2)
один из корней частотного уравнения обращается в нуль.
Не следует думать, что равенства (4.71) или (4.72)
Рис. 4.8
выполняются при каких-то исключительных обстоятель-
ствах; в действительности системы с кратными или ну-
левыми корнями встречаются довольно часто.
В качестве примера рассмотрим свободные колебания
плоской системы с двумя степенями свободы, показанной
на рис. 4.8. Обозначим через ci п а коэффициенты жест-
§ 4. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
95
кости пружин, а через тир — массу и радиус инерции
юла относительно оси, проходящей перпендикулярно
плоскости чертежа через центр тяжести. За обобщенные
координаты примем вертикальное перемещение центра
тяжести тела у и угол поворота тела ф. Тогда кинетиче-
ская и потенциальная энергии запишутся в виде
7’ = ^(p2 + pV),
(г/ + ^Ф)2 S (у - г2Ф)2
~ 2 + 2
Соответственно этому уравнения Лагранжа принимают
форму
ту (ci + с2) у + (Cj?! — с212) ф = О,
(4. /б)
тр2<р 4- (cjl 4- c2Z|) ф 4- (CjZj — c2l2) у = 0.
Теперь предположим, что параметры рассматриваемой
системы удовлетворяют двум простым (и реально осу-
ществимым) соотношениям:
c4i = C2I2, р2 = lih; (4.74)
тогда вместо полученных дифференциальных уравнений
имеем
ту + (ci + с2) у = О,
’.. (4.75)
тф + (ci + с2)ф = 0.
Следовательно, инерционные коэффициенты п обобщен-
ные коэффициенты жесткости в данном случае опреде-
ляются формулами
Я| 1 = а22 = т, Я12 = Я21 = О,
Си = С22 = Щ + С2, С12 = С21 = О
и условие (4.71) выполняется, т. е. обе частоты рассмат-
риваемой системы равны одна другой. Впрочем, это вид-
но непосредственно из уравнений (4.75), так как
Ввиду независимости уравнений (4.75) постоянные ин-
тегрирования одного уравнения не связаны с постоянными
96
ГЛ. I СВОБОДНЫЕ КОЛЕБАНИЯ
интегрирования другого уравнения:
у = Ai sin(fct + ой),
Ф = Л2 sin (kt + а2).
Для определения постоянных At, Л2, он, а2 служат
четыре начальных условия.
В общей теории линейных дифференциальных урав-
нений устанавливается, что обычно (но не всегда!) при
кратных корнях характеристического уравнения в реше-
нии возникают слагаемые типа t sin kt и t cos kt, содер-
жащие аргумент вне знаков тригонометрических функ-
ций; в наших задачах этим корням соответствовали бы
нарастающие колебания. Однако в
рассматриваемых здесь случаях сво-
бодных колебаний консерватив-
ных систем такие слагаемые по-
явиться не могут — это противоре-
чил яу чило бы справедливому для таких
[]М систем закону сохранения механи-
Uy V/ ческой энергии (тем более это отно-
6 сится к диссипативным системам).
Рис. 4.9 Простые примеры систем с одной
пулевой собственной частотой пока-
заны на рис. 4.9, а, б. Подробнее остановимся на систе-
ме, изображенной на рис. 4.9, б и обозначим: с — жест-
кость вала на кручение*), 1\, Z2— моменты инерции
дисков относительно продольной оси системы.
Принимая за обобщенные координаты углы поворота
<Р1 и <р2 дисков относительно некоторого начального по-
ложения (в этом положении вал не закручен), получим
следующие выражения для кинетической и потенциаль-
ной энергии системы:
П_С(Ф2-Ф1)2
1 2 + 2 ’ 11 2
Соответственно этому уравнения Лагранжа имеют вид
71Ф1 — с(ф2 — q>i)= о,
/2Ф2 + с(ф2 — ф1)= О,
(4.76)
*) В сопротивлении материалов устанавливается: с — GJP!l,
тць G — модуль сдвига, Jp — полярный момент инерции сечения
вала, I — длина вала.
§ 4. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
97
т. е.
®11 — 11, а22 = Z2, &12 = а21 = О,
С11 = С22 == С, С12 — С21 = — С.
При этом выполняется условие (4.72) и один из кор-
ней частотного уравнения равен нулю. Действительно,
подставив найденные значения коэффициентов в частот-
ное уравнение, получим
-(Z1C + Z2c)/c2 + Z(Z2^ = 0,
отсюда
Л,-0, (4.77)
Для того чтобы понять физический смысл нулевой
частоты, вернемся к системе дифференциальных уравне-
ний (4.76). Их главная особенность состоит в том, что
опи допускают не только частное решение колебатель-
ного типа
<pi = Ai sin(kt + а), (4 78)
q>2 = H2sin(A:i + а),
но также частное решение вида
ф1 = ф2 = Ci + C2t,
которое описывает равномерное вращение всей системы
как жесткого целого (без скручивания упругого вала).
Этому частному решению и соответствует нулевой корень
частотного уравнения ki = 0.
Частному решению (4.78) соответствует отличная от
нуля частота к2, данная в формуле (4.77), а также опре-
деленное отношение амплитуд колебательного движения
х —— — Ь
21 7/
Таким образом, общее решение представляется в виде
<Р( = Ai sin (kt + а)+ Ci + C2t,
<p2 = Х21И1 sin (kt + a) + Ci + C2t
и содержит четыре постоянные: Ai, a, Ci и С2, опреде-
ляемые из начальных условий.
Движение, описываемое законом (4.79), представля-
ет собой колебания, наложенные па режим равномерно-
7 я. Г. Пановко
(4.79)
98 ГЩ I. СВОБОДНЫЕ КОЛЕБАНИЯ
го вращения. Чисто колебательную составляющую движе-
ния легко выделить путем введения новой переменной
ф = <Р2 — ф1,
которая представляет взаимный угол поворота дисков,
т. е. угол закручивания вала. Если теперь записать
уравнения (4.76) в виде
Фх — (ф2 ~ Ф1) = °’
ф2 + т- (ф2 - Ф1) = О
2
и затем вычесть первое уравнение из второго, то получим
одно дифференциальное уравнение для функции ср:
ф + (т +t^ = °-
\1 2/
Отсюда видно, что колебания угла ср следуют одпочас-
тотному закону
<р = A sin (/ci + а).
Можно сказать, что рассматриваемая система имеет
одну степень свободы, которой соответствует вращение
системы как жесткого тела, и одну колебательную сте-
пень свободы. Аналогично, в более сложном случае, ког-
да с валом связано s дисков, число колебательных степе-
ней свободы равно s — 1.
7. Влияние трения. Дифференциальные уравнения
движения изменятся, если учесть, что при колебаниях
механической системы возникают силы трения. В случа-
ях, когда они линейно зависят от скоростей точек систе-
мы, дифференциальные уравнения движения вместо (4.4)
примут вид
+ а г?2 + • • • + aJSq, + b,\qi + b]2q2 + ... + b,sq, +
+ Cjiffi + c12q2 + ... + cJsqs = 0 (/ = 1,2,..., s) (4.80)
или, в матричной форме,
[н] {£}+[&]{?} +[с] {g> = 0, (4.81)
где матрицы [а] и [с] определяются выражениями
§ 4. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
99
(4.49) и (4.50), а
[£>] =
bn bi2 ••• bi>
621 622 ••• Ь23
^sl ^s2 * ‘ ‘ &ss _
(4.82)
— матрица демпфирования.
Решение уравнений (4.80) следует искать в форме,
отличающейся от (4.27), а именно
q3 = A3eM (/ = 1, 2, ..., s). (4.83)
После подстановки (4.83) в (4.80) получится однородная
система алгебраических уравнений относительно А3;
в матричной форме эта система имеет вид
(L«]X2 — [&]Х + [с]) Ш = 0. (4.84)
Для того чтобы все А3 одновременно не обращались в
нуль, необходимо, чтобы равнялся нулю определитель
системы (4.84); это приводит к характеристическому
уравнению
det( [а]Х2 + [Z>]X + [с] )= 0. (4.85)
Вели все элементы матрицы (4.82) положительные, то
вещественные части всех корней характеристического
уравнения — отрицательны. При этом среди корней урав-
нения (4.85) могут оказаться отрицательные вещест-
венные корни, каждому из которых согласно (4.83)
соответствует монотонное затухающее движение неколе-
бательного характера. Наряду с этим среди корней мо-
гут оказаться и комплексные сопряженные корни
вида X = —а + ф, X' = —а —
ет затухающее колебатель-
ное движение, описываемое
выражением
да = e~at (Вк cos Ск sin fit).
(4.86)
Общее решение (4.80) полу-
чится как результат наложе-
ния всех частных решений.
ф (а>0). Им соответству-
Рис. 4.10
Пример 4.6. Показанная на рис. 4.10 система состоит из
способного перемещаться по горизонтали груза 1 массы тга, двух
упругих пружин 2 и 3 с коэффициентами жесткости с2 и с/ и ли-
нейного демпфера 4, характеризуемого коэффициентом вязкости Ь.
Найти общий характер движения системы, которое возникнет по-
7*
100
ГЛ.( I. СВОБОДНЫЕ КОЛЕБАНИЯ
еле нарушения состояния равновесия груза. Пластинку 5 считать
безынерционной.
Обозначим через xi и х2 отклонения пластинки и груза от по-
ложения равновесия. Тогда для пластинки имеем
—cixi — bxi + с2(х2 — xi) = 0, (а)
для груза —
—сгбчг— xi) - тх2. (б)
Полагая х^ = А^*, х2 = А2е'-‘, получаем однородную систему
(С1 + с2 + —• с2А2 = 0; —c2Ai 4* (с2 4* т№)А2 = 0.
Приравняв нулю определитель
I С1 + с2 + ~ С2 _ п
I О —— Му
I “* С2 с2 +
придем к характеристическому уравнению
лгЬХ3 т (ci 4* с2) X2 4* Ъс2К 4~ С{С2 = 0. (в)
К тому же результату можно было прийти, если исключить
координату xi из уравнений (а) и (б) и записать уравнения
третьего порядка для х2:
mbx2 4- m(ci 4- с2)х2 4- Ъс2х2 4- cic2x2 = 0. (г)
Соответственно порядку уравнения (в) рассматриваемую механи-
ческую систему можно назвать системой с l'/з степенями свободы
(представление о нецелом числе степеней свободы было введено
А. А. Андроновым и относится к вырожденным системам. В нашем
примере достаточно было учесть массу пластинки 5, чтобы система
дифференциальных уравнений имела четвертый порядок; такая
механическая система обладает двумя степенями свободы).
Среди корней характеристического уравнения (в) по крайней
мере один окажется вещественным отрицательным. Чтобы убе-
диться в этом, рассмотрим левую часть уравнения. При X = О она,
очевидно, положительная, а при достаточно больших отрицатель-
ных значениях X опа становится отрицательной. Следовательно,
должен существовать корень Xt = —ai (<%i > 0).
После того как этот корень пайдеп (для вычисления достаточ-
но самой простой ЭВМ), нужно левую часть уравнения (в) разде-
лить на разность X — Xi и решить полученное таким образом квад-
ратное уравнение. При этом найдутся два остальных корня, в об-
щем случае комплексных, вида Х2>3 — —а2 ± ф («2 > 0).
Таким образом, движение груза описывается выражением
Х1 = А1Хе~а1* + (Л12 SiU + Л13 C0S 09’
содержащим три постоянные. Для их нахождения необходимо
указать три начальных условия, определяющих xi(0), х2(0) и
,г2(0) в начальный момент времепи. (Отметим, что начальное зна-
чение xi (0) независимо задать нельзя — опо определяется из со-
отношения (а).)
Глава II
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
§ 5. Линейные системы с одной степенью свободы
при отсутствии трения
1. Основное уравнение при силовом возбуждении.
Рассмотренные в главе I механические системы характе-
ризуются действием позиционных сил, а в некоторых
случаях также диссипативных сил. Эти силы не только
влияют на движение системы, но и сами управляются
этим движением, поскольку они зависят от обобщенных
координат и обобщенных скоростей.
Как указывалось во введении, иную важную катего-
рию образуют вынуждающие силы, т. е. силы внешнего
происхождения, описываемые заданными функциями
времени и не зависящие от движения системы. Колеба-
ния, вызываемые вынуждающими силами, называются
вынужденными. Независимо от физической природы вы-
нуждающих сил мы будем исходить из того, что каждая
из них задана в виде некоторой явной функции времени:
₽, = ₽*(«), (5.1)
где i = 1, 2, ..., п — порядковый номер материальной
точки.
Если механическая система имеет одну степень сво-
боды и приложенные к точкам системы внешние силы
заданы в виде (5.1), то обобщенная вынуждающая сила
определяется из выражения возможной работы
п п .
2 VI дГл
Р»6п= (5-2)
i=l i=l
в виде
п
= (5-3)
i=l
102
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Соответственно уравнение Лагранжа принимает вид (при
отсутствии трения)
dt V? / dq ”1 dq ~
(5-4)
Подставляя сюда выражения (1.4) и (1.8) для кинети-
ческой и потенциальной энергии, приходим к дифферен-
циальному уравнению задачи о вынужденных колебаниях
aq + cq = Q (t), (5.5)
которое будем записывать в виде
q + k2q=
(5-6)
Здесь через к2 = cja по-прежнему обозначен квадрат соб-
ственной частоты рассматриваемой системы.
Рассмотрим, например, действие горизонтальной силы
P(t) на маятник (рис. 5.1, а). Примем за обобщенную
Рис. 5.1
координату угол ср отклонения маятника от вертикали и
обозначим через т массу маятника, а через I — его дли-
ну. Тогда при малых углах отклонения
Т = п = (2 = Р (i) Z (5.7)
и уравнение вынужденных колебаний (5.6) принима-
ет вид
;f + fi’ = TS!. <5-8>
§ 5. СИСТЕМЫ БЕЗ ТРЕНИЯ
103
Иногда удобнее составлять дифференциальное урав-
нение вынужденных колебаний по описанным выше пря-
мому или обратному способам. Пусть, например, в точке
х = I* балки приложена вынуждающая сила P(t)
(рис. 5.1, б); будем считать, что массой балки можно
пренебречь по сравнению с массой т сосредоточенного
груза, закрепленного на конце балки х — I. Для состав-
ления дифференциального уравнения колебаний удобно
воспользоваться обратным способом. Рассматривая балку
под действием силы P(t) и силы инерции — ту, можем
записать
у = Р (t) б (Z, I*) — ту8 (I, Г),
где б (Z, I*) и 6(Z, Z)—соответствующие коэффициенты
влияния, определяемые методами теории сопротивления
материалов,
(3Z- ZJZ2 /з
б(^*)== Цкг-’ б(М = з^.
Таким образом, дифференциальное уравнение колеба-
ний груза запишется в виде
ml3 •• _P(Z)(3/;-Z*)Z|
3EJ У + У &EJ J
Вынужденные колебания балки возникнут и в том
случае, когда вертикальная сила не меняется по модулю
(Р = const), но точка ее приложения движется вдоль
балки. При этом абсцисса I*, а вместе с этим и коэффи-
циент влияния б (Z, I*) становятся функциями времени,
так что дифференциальное уравнение принимает вид (ес-
ли Z;i. = vt):
ml3 •• р (31 - vt) Л2 n.
317^+^=--------3EJ----’ <5-9)
Решение этого уравнения см. ниже в примере 5.5.
2. Случаи кинематического возбуждения. К диффе-
ренциальному уравнению (5.6) сводятся не только зада-
чи о силовом возбуждении, но также задачи о кинема-
тическом возбуждении, когда колебания механической
системы вызываются некоторым заданным (в частности,
колебательным) движением каких-либо ее точек.
Так, например, если к грузу маятника не приложена
сила, но ось шарнира обладает горизонтальной подвиж-
104
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
ностыо и ей заданы колебания ж = ж(£), то они вызо-
вут колебания и самого маятника (рис. 5.1, в). Для того
чтобы получить дифференциальное уравнение абсолютно-
го движения, запишем (сравнить с выражениями .(5.7)):
Т =т(х + /ф)2 , п = тйТф2, = 0. (5>10)
отсюда для угла ф следует уравнение Лагранжа
= (5.Ц)
Как видно, оно совпадает с основным дифференциаль-
ным уравнением (5.8), составленным для случая силово-
го возбуждения, если ввести эквивалентную вынуждаю-
щую силу Q(t) = —тх.
Возможна несколько иная трактовка этой задачи, ес-
ли рассматривать движение маятника как сложное, со-
стоящее из заданного поступательного переносного дви-
жения вместе с шарниром и искомого относительного
вращательного движения. Дифференциальное уравнение
относительного движения следует составлять с уче-
том переносной силы инерции — тх, момент которой со-
ставляет —mix. При этом придем к уравнению моментов
— mg/ф — mix = ml2q>, (5.12)
которое совпадает с уравнением (5.11).
Формально системы, показанные на рис. 5.1, а, в, обладают
различным числом степеней свободы, так как положение системы
на рис. 5.1, в определяется двумя координатами — углом ф и ли-
нейным перемещением х. Но координата х(1) задана, она не «сво-
бодная», так что второй степенью свободы система в сущности не
обладает; «свободной» координатой, т. е. неизвестной функцией
времени, является только угол отклонения ф и, как мы видели,
для его определения достаточно одного дифференциального урав-
нения (5.6).
Конечно, в этой задаче можно составить и второе уравнение
Лагранжа, соответствующее коордипате х. Из такого уравнения
определяется приложенная к оси шарнира сила, необходимая для
создания заданного движения шарнира: впрочем, вопрос об опреде-
лении этой силы может и не возникать.
На рис. 5.2 показаны еще два примера систем с кине-
матическим возбуждением колебаний. В первом случае
вертикальные колебания упруго подвешенного груза 1
вызываются заданными вертикальными колебаниями
платформы 2; во втором случае крутильные колебания
§ 5. СИСТЕМЫ БЕЗ ТРЕНИЯ
105
тел, обо-
4>в№
Рис. 5.2
диска 1 возникают из-за вращательных колебаний опор-
ного диска 2, которые здесь считаются заданными.
В подобных случаях удобнее составлять дифферен-
циальные уравнения относительного движения
значенных на рисунках циф-
рами 1. Результаты решения
такой задачи позволяют сра-
зу определить усилия в уп-
ругих элементах.
Пример 5.1. Составить
дифференциальное уравнение вер-
тикальных колебаний упруго под-
рессоренного груза при безотрыв-
ном движении колеса по неров-
ному участку пути (рис. 5.3). Про-
филь участка задан уравнением
у = h(i — e~v),
где h — предел, к которому стре-
мится высота неровности; 1 — па-
раметр, характеризующий кривиз-
ну профиля. Кроме того, дано:
m — масса груза, I — высота расположения центра тяжести груза
при его относптельном покое, с — коэффициент жесткости упругой
подвески, v — постоянная горизонтальная скорость груза. Разме-
рами колеса пренебречь.
Рассмотрим движение груза относительно поступательно дви-
жущихся осей т], которые жестко
Ось t. совместим с вертикальной осью
ось г] проведем на высоте I,
считая от уровня профиля.
Тогда при движении по не-
ровности абсолютная вер-
тикальная координата нача-
ла подвижной координат-
ной системы определяется
выражением
у* = А(1 — е~?ж) -|-1.
Подставляя сюда х = vt
и дважды дифференцируя
по времени, находим пере-
носное вертикальное уско-
рение
we = —hr(2v2e~ivt
и переносную силу
связаны с центром колеса,
подвески, а горизонтальную
Рис. 5.3
Дифференциальное
за имеет вид
иперции упруго подрессоренного груза
Ie — mhri2v2e~'lvt.
уравнение относительного движения гру-
тгац = —сц -f- mh^2u2e~'!vl;
106
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
приводя его к форме (5.6), имеем
I) -h A2i] = Лу2у2е_1иг.
Решение этого уравнения см. ниже в примере 5.4 (стр. 114—115).
3. Действие гармонической вынуждающей силы. Об-
ратимся теперь к решению основного дифференциального
уравнения (5.6) и начнем со случая, когда обобщенная
вынуждающая сила изменяется по
гармоническому закону. Такова, на-
пример, переменная сила,передавае-
мая на фундамент машиной с не-
уравновешенным ротором (рис. 5.4).
При надлежащем выборе начала от-
счета времени этот закон можно за-
писать в виде
Q = Н sin cof,
где Я и со — амплитуда и частота
вынуждающей силы. Следует иметь
в виду, что во многих случаях
(к ним относится и показанный на
рис. 5.4) амплитуда вынуждающей
силы связана с ее частотой. Решение дифференциального
уравнения
q + k2q = -у- sin cof (5.13)
состоит из двух частей: 1) решения однородного уравне-
ния q + k2q = 0, а именно: Ci sin kt + Сг cos kt; 2) част-
ного решения уравнения (5.13), которое при со ¥= к сле-
дует искать в виде A sin at. Подставив это выражение в
g fl
(5.13), найдем, что А =—т-х-^sincof. Таким образом,
а (к — (о )
решение уравнения (5.13) при произвольных начальных
условиях имеет вид
q — С, sin kt -4- С» cos kt 4—sin at.
а (к — ш )
В случае нулевых начальных условий, полагая д(0)=0,
д(0) = 0, получаем
§ 5. СИСТЕМЫ БЕЗ ТРЕНИЯ
107
Следовательно,
q = (J?' (sin at - "Г sin kt )• (5Л4)
а (к — <в ) \ к )
Полученное решение представляет разность двух гармо-
нических составляющих с различными частотами. В дей-
ствительности этот процесс можно наблюдать лишь в са-
мом начале, так как неучтенные при составлении урав-
нения силы трения вызывают постепенное затухание ко-
лебаний с собственной частотой к (см. ниже § 6). По-
этому по истечении некоторого времени колебания стано-
вятся практически моногармоническими с частотой со.
Если частоты со и к близки между собой, то возник-
нут биения, как и всегда при сложении двух гармо-
нических колебаний (см. § 4, рис. 4.5); однако и в этом
случае с течением времени и постепенным исчезновени-
ем одной из гармоник (с частотой к) движение будет все
больше приближаться к моногармоническому с часто-
той со.
Таким образом, наиболее существенная, стационар-
ная часть процесса (установившиеся вынужденные коле-
бания) описывается первым членом выражения (5.14)
’° .(Л.1 <515>
Амплитуда этих колебаний, происходящих с частотой со,
определяется выражением
знаменатель которого (динамическая жесткость) харак-
теризует эффективную жесткость системы при гармони-
ческом возбуждении. Выражение 1/1с— асо2| определяет
амплитуду вынужденных колебаний при единичной ам-
плитуде вынуждающей силы (амплитудно-частотная ха-
рактеристика, для обозначения которой в технической
литературе пользуются аббревиатурой АЧХ).
Выражению (5.16) можно придать вид
А = ЦЦСТ.
Здесь
И= 11 —со2/*2 | (5Л7)
— коэффициент динамичности, показывающий, во сколь-
108 гл. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
ко раз амплитуда установившихся вынужденных колеба-
ний больше перемещения qQT — Hlc, вызываемого стати-
чески приложенной силой II. Для случая, когда Н не за-
висит от со, зависимость коэффициента динамичности от
отношения частот со/А: представлена графиком на рис. 5.5
(«резонансная кривая»).
Как видно, с возрастанием частоты со от нуля коэф-
фициент динамичности увеличивается и при ы/к -> 1
стремится к бесконечности. При дальнейшем возрастании
частоты коэффициент динамичности постепенно убывает
и при со/А: > У 2 становится меньшим единицы; в этой об-
ласти динамический эффект вынуждающей силы слабее,
чем при ее статическом действии. Этим свойством часто
пользуются в технике, а именно, для уменьшения коле-
баний объектов, подверженных действию гармонических
вынуждающих сил, уменьшают жесткость упругих свя-
зей; при этом собственная частота уменьшается, а вместе
с тем возрастает отношение а/к. Нужно отметить, что
согласно (5.15) при со/А: < 1 перемещения находятся в
фазе с вынуждающей силой, а при ы/к> 1 — в противо-
фазе.
Если Н — Кы2, где К — постоянная (например, в ма-
шинах с неуравновешенными роторами К = Mr, где М —
масса ротора, г — эксцентриситет центра тяжести, см.
рис. 5.4), то согласно формуле (5.16) амплитуда колеба-
ний следующим образом связана с отношением час-
тот ы/А:
К
aj 1 — Zc2/co21
§ 5. СИСТЕМЫ БЕЗ ТРЕНИЯ
109
Соответствующая резонансная кривая показана на
рис. 5.6. В отличие от резонансной кривой на рис. 5.5
при неограниченном возрастании частоты со амплитуда
колебаний стремится не к нулю, а к значению К/а.
Особое состояние системы при и = к называется резо-
нансом-, для этого состояния решением (5.14) пользо-
ваться нельзя, так как оно было получено в предположе-
нии, что и Ф к. В резонансном случае вместо (5.13)
нужно исходить из дифференциального уравнения
q k2q = -^sin kt,
решение которого при нулевых начальных условиях
имеет вид
q = —[kt cos kt — sin /Й].
£iC
Здесь нужно обратить внимание на появление члена
kt cos kt, содержащего время вне знака косинуса, т. е.
неограниченно возрастающего во времени; этот член на-
зывается резонансным (вековым). Ниже, в § 6, будет
установлено, что силы трения ограничивают это возра-
стание, так что амплитуда колебаний остается конечной
и при t -> °°.
Пример 5.2. Вдоль пути синусоидального профиля
. . пх
Уо = Ло8ШТ <а)
(рис. 5.7) с постоянной горизонтальной скоростью v движется уп-
руго подвешенный груз массы т. Определить наибольшее допусти-
мое значение коэффициен-
та жесткости подвески с,
если требуется, чтобы ам-
плитуда абсолютных коле-
баний груза не превосходи-
ла 0,0540.
Подставив в (а) х =
= vt, найдем ординаты
нижнего конца пружины в
функции времени:
. . xvt
yo=A»sm“-
Обозначив через у абсолютное вертикальное перемещение груза,
отсчитываемое от равновесного уравнения, имеем дифференциаль-
ное уравнение —с (у — у0) = ту, или
ту + су = су0.
110
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Отсюда видно, что эквивалентная вынуждающая сила состав-
ляет Р = сА0 sin(iwf/Z), т. е. ее амплитуда равна сА0. Соответст-
венно выражению (5.16) находим амплитуду абсолютных колеба-
ний груза:
4) 4>
. / 03 \21 n2v2m
1 Ь I 1 —----5~
\ к ) I cl2
которая по условиям задачи не должна превосходить значения
О,О54о. Следовательно,
т. е.
0,47ти2
с < —------.
I
Пример 5.3. Для условий предыдущего примера определить
допустимые значения коэффициента жесткости с, если требуется,
чтобы дополнительное усилие в подвеске не превосходило 5 % ста-
тического значения усилия mg.
При прежних обозначениях наибольшая динамическая дефор-
мация подвески равна А — 40, а наибольшее дополнительное уси-
ление в подвеске составляет
с4
с(л~ло)~ i^Z-rr-
По условию должно быть
сАо
|Л2/©2—1| < °’05mg’
где со = nv/l. Отсюда находим, что коэффициент жесткости дол-
жен быть либо достаточно малым, удовлетворяющим неравенству
тпсо2
С< 1 + 204осо2/?',
(при любых значениях безразмерной дроби 20 40<o2/g), либо доста-
точно большим, удовлетворяющим неравенству
тпсо2
С > 1 — 2O4o<o2/g
(при 2O4oco2/g < 1).
4. Действие произвольной вынуждающей силы. Реше-
ние дифференциального уравнения (5.5) при произволь-
но заданной правой части может быть получено с по-
§ 5. СИСТЕМЫ БЕЗ ТРЕНИЯ
111
мощью известного из курса математики метода вариации
произвольных постоянных. Однако более нагляден иной
путь решения, к изложению которого мы и переходим.
Прежде всего рассмотрим вспомогательную задачу.
Пусть в момент t = £ к покоящейся системе приложен
обобщенный мгновенный импульс 5; согласно (1.14) при
t > £ решение имеет вид
q = q (£) cos к (t — £) + ^ sin к (i — %).
Входящие сюда значения обобщенной координаты и обоб-
щенной скорости непосредственно после приложения им-
пульса равны q (£) = 0, q (£) = —. Следовательно, движе-
ние описывается выражением
С
4 = -^sin/c(i-£). (5.18)
Функция
описывающая движение, вызываемое единичным импуль-
сом, называется импульсной реакцией системы.
Теперь будем рассматривать произвольную вынуждаю-
щую силу <2 = <?(£) как беско-
нечную последовательность эле-
ментарных импульсов <2(g)dg,
показанных на рис. 5.8. Под-
ставив в выражение (5.18) S =
==Q(i,')di„ мы найдем колеба-
ния, вызываемые действием од-
ного из таких элементарных
импульсов. Чтобы определить
движение, которое вызывается
заданной силой, необходимо
сложить влияния всех элемен-
тарных импульсов; таким образом, при пулевых началь-
ных условиях находим
t
q =-^ Q ® sin k(t-l)dl. (5.19)
о
Если кроме рассмотренной здесь силы Q = Q(t) в за-
данные моменты времени £i, .., |г (здесь < t) на
112
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
систему действуют конечные мгновенные импульсы
51, S2, ..Sr, то вместо (5.19) будет
Q =
г- t
-о
г
i=l
Наряду с (5.19) существует другой вариант решения,
который иногда оказывается более удобным. Преобразу-
ем (5.19) с помощью правила интегрирования по частям
\ udv = uv — I vdu.
Полагая здесь ()(£) = & и sin k(t — g)dg = dv, находим
du — ()(g)dg и v = -у cos к (t — с). Соответственно (5.19)
преобразуется к виду
q = Лк(|)созЛ(« -1) - (<?© cos л (t _ g)dd Г =
ак L J J Ю
t
Q (О — Q (0)cos kt — © cos к (t — £) d%
о
(5.20)
Этим выражением можно пользоваться только в тех слу-
чаях, когда при 1>0 функция Q(t) не имеет разрывов,
т. е. производная Q(t) конечна на всем промежутке ин-
тегрирования.
Если сила Q(t) претерпевает конечные разрывы АО,
\Q2, , AQr в заданные моменты времени Вь Вг, • • •, S
©<О (см. рис. 5.9), то вме
сто (5.20) будем иметь
3 с
t
-±.^Q(^cosk(t-l)dl-
о
г
---7-2 ^Qi^osk(t —1{).
е
Остановимся на двух важ-
ных частных случаях.
1. Действие кратковременной силы. Пусть
сила Q = Qo внезапно появляется в момент t = 0, дейст-
вует в течение малого промежутка времени t*, а затем
§ 5. СИСТЕМЫ БЕЗ ТРЕНИЯ
ИЗ
внезапно исчезает (рис. 5.10). Если меньше полупе-
риода свободных колебании Т/2, то наибольшее отклоне-
ние системы достигается после исчезновения силы. Тогда
для согласно решению (5.19)
Я = — = sin —sink It — b-Y
о ' '
Наибольшее отклонение равно
•
?max = — ЗИЯЙ,
где а = t*lT. Коэффициент динамичности, равный отно-
шению qm^ к статическому перемещению gCT = Qo/c,
ц — 2 sin ла,
определяется только значением а (рис. 5.11) и не превос-
ходит значения 2.
Нужно заметить, что если постоянная сила действует
в течение малой доли периода свободных колебаний, то
Qo
Ч Ч
Рис. 5.10
действие такой силы во много раз меньше статического;
например, при t*lT — 0,01 можно найти у. = 0,062— ди-
намический эффект в 16 раз меньше статического. Вооб-
ще действие кратковременной силы определяется не
столько ею самой, сколько значением ее импульса. В са-
мом деле,
о
<»
sin kt J Q ©cos k% —
о
1
ак
cos> J<?©sinfcgd£ . (5.21)
о
8 я. Г, Павовко
114
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Так как &g = — g меньше, чем величина у-которую
здесь следует считать малой, то Arg — малое число. Поэто-
му можно принять sin Arg = 0, cos Arg « 1 и вместо (5.21)
получим
sin kt С S sin kt
Q^dl = -ak~^
О
**
где S = J Q (g) c/g— импульс
о
силы.
Таким образом, движение
приближенно определяется
импульсом кратковременной
силы; подробности ее изме-
нения в промежутке време-
ни £* мало влияют на ре-
зультаты.
2. Действие линейно
возрастающей во време-
ни силы Q(t)=fit (i^O);
здесь р есть скорость изменения силы (рис. 5.12, а). По
формуле (5.20) находим
Ч =
г
fit — р J cos к (t — g) c/g
о
₽t ₽ •
-- --------у- sin kt.
С СК
График движения показан на рис. 5.12, б и выражает
сумму линейного и синусоидального слагаемых. Линей-
ное слагаемое представляет изменение обобщенной коор-
динаты, рассчитанное в предположении безынерционности
системы (квазистатическое перемещение), а синусоидаль-
ное слагаемое отражает колебательную часть решения;
амплитуда этих колебаний, равная fi/ck, увеличивается с
возрастанием скорости изменения силы р.
Пример 5.4. Найти относительные колебания груза в си-
стеме, рассмотренной выше в примере 5.1 (стр. 105—106).
Искомое движение должно быть найдено путем решения диф-
ференциального уравнения, составленного выше в примере 5.1.
Из записи этого уравнения видно, что вынуждающая сила (ею слу-
жит переносная сила инерции) равна
Q(t) = .
§ 5. СИСТЕМЫ БЕЗ ТРЕНИЯ
115
Подставляя это выражение в решение (5.19), находим
Y у / ± уи
•f\=h —s--e~^vt -4- -у- sin kt — cos kt
к +?» к к
При достаточно больших значениях времени можно пренеб-
речь первым членом в скобках и рассматривать только процесс
установившихся колебаний:
у2 г2 / Vy \
т) = h —z------~т~ sin kt — cos kt L
' + k k J
Амплитуда этих колебаний равна
4=J^y//i + M2.
\ Л / / ' \ /
В случае, если yv <?; к (что соответствует реальным условиям),
находим
т. е. амплитуда относительных колебаний пропорциональна квад-
рату скорости V2.
Пример 5.5. Найти движение груза, находящегося на конце
консольной балки, если сила Р сохраняет неизменное значение,
но точка ее приложения движется от левого конца балки к пра-
вому с постоянной скоростью и (рис. 5.1, б).
Дифференциальное уравнение движения груза было получе-
но выше в виде (5.9), т. е.
•• 2 Pv2t2 (31 — vt)
у 4-к у =--------—-5----,
* 1 * 2ml3
где к2 == 3EJ/(ml3). Согласно (5.19) имеем при t < l/v:
i f pA2(3z-pS)
mk J 2ml3
0
или, после вычислений,
Pv2
У ~ L 2mk2l3
o,6 6p
— vt3 + 2lt -f-—2* (vt — I -j~l cos kt) — ~ sin kt
к к
Для вертикальной скорости груза находим
3Pv2
У 2тк2!3
2lt — vt2 4" -72 (1
А \
kl
— sin kt — cos kt
8*
116
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Полученным выражениям можно придать следующую форму:
У = Уст
j (т — 1 + cos ат) — — sin ат
У = 7сУСт
3(2т —т2)
2а
з" (1 — а sin ат— cos ат)
где у ст — Р1(тк2) — прогиб конца балки при статическом дейст-
вии приложенной на конце силы Р, а = kl/v и т = vt/l — безраз-
мерные параметры. В момент, когда сила сходит с балки, т = 1 и
мы находим
У^Уст 1
3 (a cos а — sin а)
а3
• 3^ст Га2
-г
и» L "
+ 1 — а sin а — cos а <
Так как в момент исчезновения силы отклонения балки у и ско-
рость у скачков не претерпевают, то последующее движение си-
стемы будет происходить по закону свободных колебаний
у — у, cos кГЛ- sin At
1 к
(с отсчетом времени t от момента, когда сила сходит с балки).
Наибольшее отклонение составит
Вычисления показывают, что оно может превзойти значение ста-
тического прогиба не более чем на 14—15 %.
5. Действие периодической вынуждающей силы. Во
многих технических приложениях возникает задача
о колебаниях, вызываемых действием негармонической,
но периодической силы (рис. 5.13)
= + Т), (5.22)
§ 5. СИСТЕМЫ БЕЗ ТРЕНИЯ
117
где Т — период изменения силы. На стр. 107 в связи со
случаем гармонического возбуждения колебаний было
отмечено, что вследствие неизбежных сопротивлений по-
степенно исчезают колебания, происходящие с собствен-
ной частотой, и можно принять, что по истечении неко-
торого времени обобщенная координата меняется в «рит-
ме» изменения вынуждающей силы по закону (5.15). Те
же соображения позволяют и в рассматриваемом здесь
случае периодического возбуждения ограничиться учетом
только установившихся вынужденных колебаний. Для
решения этой задачи можно воспользоваться двумя
путями.
Первый из них основан на разложении функции (5.22)'
в ряд Фурье:
G vi
Q (0 = -у -|- Zj (Gn cos паЛ //„sin ncoi), (5.23)
коэффициенты которого определяются формулами
Т т
Gn = у- J Q (t) cos nat dt, Hn = у- J Q (t) sin ntat dt (5.24)
о о
(n = 0, 1, 2„. ..).
Записав уравнение (5.5) в виде
aq 4- cq = -у 4- 2 (^n cos sin
n=l
учтем, что система линейна; это значит, что можно
рассмотреть по отдельности действие каждого из слагае-
мых вынуждающей силы и найти установившиеся вынуж-
денные колебания, а затем сложить полученные резуль-
таты:
1 Go Gncos nut -|-Яп5тга<й/
q = ~ + £ 1-nW2
. (5.25)
Таким образом, движение, вызываемое полигармониче-
ской вынуждающей силой, также является полигармони-
ческим. Конечно, отношения между амплитудами гармо-
ник этого движения не равны отношениям между
амплитудами соответствующих гармоник вынуждающей
силы; в частности, может случиться, что какая-либо п-я
118 гл. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
составляющая вынуждающей силы с относительно не-
большой амплитудой вызывает особенно значительные
колебания. Это будет тогда, когда частота па этой гар-
моники близка к собственной частоте к, так как при этом
знаменатель соответствующего члена суммы (5.25) бли-
зок к нулю. При равенстве частот па = к наступает
резонанс (за исключением случаев, когда соответствую-
щие величины Gn и Нп равны нулю).
Описанный способ отчетливо выделяет опасные воз-
можности резонансных режимов, по не очень удобен, так
как приводит к бесконечным рядам, которые не всегда
достаточно быстро сходятся.
Рассмотрим теперь иной способ, который приводит к
замкнутому решению для установившихся вынужден-
ных колебаний. Рассматривая действие периодической си-
лы (5.22), будем разыскивать решение q = q(t), имеющее
тот же период Т, что и у силы, т. е. оно должно удов-
летворять условиям периодичности-.
qO = q(O)=q(T), q0 = q(0) = q(T), (5.26)
где go и jo — обобщенная координата и обобщенная ско-
рость в момент, принимаемый за начало отсчета вре-
мени t. Движение в интервале [О, Г] описывается вы-
ражением
. t
п А Р
q = q0coskt + sin to + J Q(g)sink(t — £)</£, (5.27)
о
которое является обобщением решения (5.19) на случай
ненулевых значений qo и qo-
Для дальнейшего необходимо образовать выражение
обобщенной скорости q. При дифференцировании по вре-
мени t интеграла, входящего в (5.27), должно получить-
ся два слагаемых: первое представляет производную по
верхнему пределу t и равно подынтегральной функции
при £ = t, а второе — результат дифференцирования по t,
входящему как параметр под знак интеграла. Но первое
из этих слагаемых равно нулю и, таким образом,
t
• * 1 г
q = — qQ к sin kt -f- qa cos kt -f- — I Q(Q cos к (t — £) d^.
b
(5.28)
§ 5. СИСТЕМЫ БЕЗ ТРЕНИЯ
119
Для момента времени t = T выражения (5.27) и (5.28)
дают
. т
q (Г) = qQ cos кТ + A sin кТ + ± J Q ® sin к (Т - £) <©
О
(5.29)
т
q (Л = — qok sin кТ + q0 cos кТ -f- -i- J Q © cos к (T —g) <%.
0
Теперь введем сокращенные обозначения для постоянных
величин:
т т
J <? © cos Teg = Со, f Q © sin kl dl = 50 (5.30)
0 0
и перепишем выражения (5.29) в виде
q0 q0 cos кT +-£ sin кТ Са - 50,
q0=- qok sin кТ + qQ cos kT + C-^ Co + So. (5’31)
В левых частях этих соотношений заменено q(T) на qo и
q(T) на qo, как это следует из условий периодичности
решения (5.26). Два соотношения (5.31) представляют
собой простую систему двух алгебраических уравнений
относительно неизвестных qo и qo; решив ее, найдем
1 L ± кТ
кТ
1 I ~ . кТ , с • 1 с . кТ ~ ..г
?о = 2^|C°Ctg’2‘ + 5oJ’ = 2^|5octg-2‘~CoJ- (5-32)
Теперь с помощью выражения (5.27) можно окончатель-
но получить
7 (0 — 2afc ~2 8°) CoS
t
+ ctg - Со\ sin kt + 2 J Q (I) sin к (f - £) dl
' ' о
(5.33)
Это решение представляет движение в промежутке
времени [0, 7], и в него нельзя формально подставлять
t>T. Однако, имея график g(f) для 0 Т, можно
120
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
вследствие периодичности решения без всяких изменений
сместить его в соседние промежутки [Г, 2У], [27, 37],...
Пример 5.6. Панги установившиеся вынужденные колеба-
ния, вызываемые в линейной системе с одной степенью свободы
Рис. 5.14
периодической кусочпо-постоянной вынуждающей силой
Q(t + T) = Q(t) (рис. 5.14):
Т Т
QtW\=\Qa при_0.< t < -g-, Q,(t) = — Qo при < t < T.
Пользуясь разложением в ряд Фурье, по формулам (5.24) на-
ходим
Gn = 0 (в = 0, 1, 2, 3,...);
40
Яп = _2_о «=1,3,5,...); Яп = о «=2,4,6,...),
и согласно (5.25) исследуемые колебания представляются суммой
нечетных гармоник:
оо
— £2? X1 sin'ncot *
9 - n=iX6„.. П [1 - (тко/А)2] ’
При А/со = п (n = 1, 3, 5, ...) наступает резонанс.
Воспользуемся теперь вторым способом решения. Для этого
предварительно вычислим по формулам (5.30):
г, 2Qn . кТ (. кт\ „ 2<?о кТ (. „ кТ\
со=—°sin т I1 -cosт} =- —° Т I1 -cosт}
Теперь выражение (5.33) принимает вид
Как видно, этот результат значительно более удобен для после-
дующих вычислений, чем ряд, полученный выше по первому спо-
собу. Отметим, что и в этой записи сразу можно выделить преж-
нее условие резонанса кТ/4 = пл/2 (n = 1, 3, 5, ...).
§ 5. СИСТЕМЫ БЕЗ ТРЕНИЯ
121
Пример 5.7. Найти наибольшее отклонение линейной систе-
мы с одной степенью свободы от положения равновесия, если на
нее действует периодическая последовательность одпостороппе на-
правленных мгновенных импульсов S, имеющих период чередова-
ния Т, вдвое меньший собственного периода 2л/к.
В данном случае разложение в ряд особенно неэффективно из-
за его медленной сходимости. Воспользуемся вторым способом
Рис. 5.15
решения и примем за начало отсчета времени момент, непосредст-
венно следующий за моментом приложения какого-либо импульса.
По формулам (5.30) пайдем
Со = S, So = 0.
Кроме того, в дапном случае
t
§ Q (|) sin к (f — I) dl = S sin kt.
0
Подставляя его в выражение (5.33) и учитывая, что кТ = л, по-
лучаем
S sin (лt/T)
2ак ’
Наибольшее отклонение равно S/(2a7r), т. е. вдвое меньше,
чем в случае действия однократного импульса. График движения
показан па рис. 5.15, а. Па графике скорости (рис. 5.15, б) ясно
видны разрывы скорости, обусловленные приложением импульсов.
122
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
§ 6. Системы с одной степенью свободы при наличии
линейной восстанавливающей силы и трения
Влияние трения па вынужденные колебания, происхо-
дящие вдали от резонансных режимов, обычно невелико,
и в практических расчетах им чаще всего пренебрегают.
Однако вблизи резонанса учет трения становится необхо-
димым: без этого ошибки в определении амплитуд вы-
нужденных колебаний становятся недопустимо большими.
При произвольно заданной вынуждающей силе анализ
колебаний относительно прост при условии, что трение в
системе — линейное. Значительно сложнее исследование
колебаний систем с нелинейным трением — даже в про-
стейшем случае чисто гармонической вынуждающей силы
приходится довольствоваться лишь приближенным ре-
шением.
1. Действие гармонической вынуждающей силы. Если
трение в системе линейное, то в случае вынужденных ко-
лебаний дифференциальное уравнение (2.6) должно быть
дополнено членом, выражающим действие вынуждающей
силы; здесь примем ее в виде
(?(£) = Я sin (о£, (6.1)
так что получится
aq + bq + cq = Н sin at. (6.2)
Вводя прежние обозначения
h - = V’ <6-3)
приходим к уравнению в следующей форме:
q + 2hq -f- k2q = sin at. (6.4)
Его общее решение имеет вид
q = g—м sin k*t -f- C2 cos k*t) ф-
+ "177 2 ^2 , 2 2 Sin ~ <6-5)
a V (к2 — и2)2 + 4/г2со2
где
к* = Vk2 — h2 (6.6)
есть частота затухающих колебании системы, а угол у,
характеризующий отставание фазы перемещения от фа-
§ 8. СИСТЕМЫ С ТРЕНИЕМ
123
зы силы, определяется выражением
. 2/гсо in гтх
*8? = т2—2-; (6-7)
к — и
постоянные Ci и С2 находятся из начальных условий.
Первая часть полученного решения представляет со-
бой колебания с частотой к*, которые с течением време-
ни затухают и вскоре после начала процесса становятся
практически несущественными. Основное значение имеет
вторая часть общего решения
q = i7z 2 ' Я2\2 2 2 sin № ~ (6.8)
а V (к2 — и2)2 + 4А2и2 V '
описывающая незатухающие установившиеся колебания,
происходящие с частотой возбуждения.
124
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Постепенное установление стационарного колебатель-
ного процесса с частотой со иллюстрировано на рис. 6.1
для трех случаев. В первом случае (рис. 6.1,а), когда
со <К к, в начале движения основные колебания частоты со
сопровождаются затухающими колебаниями большей
частоты. В противоположном случае, когда со > к
(рис. 6.1,6) на основные колебания с частотой о накла-
дываются затухающие колебания с меньшей часто-
той к. Наконец, при близких значениях частот к и о
движение носит характер биений, которые постепенно
затухают (рис. 6.1, в).
Амплитуда установившихся колебаний определяется
выражением
А=— Я
a/(ft2_w2)2+4*W
Отношение амплитуды А к статическому перемеще-
нию 7ст — Н/с равно
(6.10)
и представляет собой коэффициент динамичности. Зависи-
мость коэффициента динамичности от отношения частот
п/к показана на рис. 6.2, а для различных значений 2h)k,
характеризующих демпфирующее действие линейного
трения; эти графики дополняют рис. 5.5, который отно-
сится к системам без трепня.
Максимумы кривых ц((о//с) лишь незначительно сме-
щены влево от значения ю/& = 1; поэтому резонансные
значения динамического коэффициента обычно определя-
ют при со = к по выражению
Мрез='2й'- (6.11)
Согласно (2.12) это значение выражается через логариф-
мический декремент:
Нрез = (6.12)
Иногда резонансное значение коэффициента динамично-
сти называют добротностью системы: чем больше доброт-
ность, тем острее резонансный пик.
§ 8. СИСТЕМЫ С ТРЕНИЕМ
125
126 ГЛ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
В этом параграфе выше предполагалось, что амплиту-
да вынуждающей силы имеет заданное постоянное зна-
чение, не зависящее от частоты со. Если амплитуда Н вы-
нуждающей силы пропорциональна квадрату частоты
(Н = Ка2), то, подобно (6.9), находим
(6.13)
На рис. 6.2, б показаны графики зависимости относи-
тельной амплитуды Аа/К от значений (о//с при различных
значениях отношения 2h)k.
Пример 61. Вертикальная вынуждающая сила (6.1) дей-
ствует на тело массы т, которое оперто на систему пружин и
вязких демпферов (рис. 6.3, а); с — коэффициент жесткости си-
стемы пружин; Ь — коэффициент вязкости демпферов. Определить
Рис. 6 3
амплитуду силы, передаваемой на основание пружинами и демп-
ферами при установившихся вынужденных колебаниях системы.
Искомая сила, передаваемая на основание, определяется вы-
ражением
N — b q + cq,
в котором q — вертикальное перемещение тела, отсчитываемое от
состояния равновесия.
Подставляя сюда согласно (6.8) — (6.10)
рЯ
<7 = — sin (со/ —у),
получаем после замены b = 2hcjk2
N = рЯ
2/гсо
sin (со/ — Y) + —у cos ~~ Y)
к
§ 6. СИСТЕМЫ С ТРЕНИЕМ
127
Максимальное значение силы W равно
^тах = ^]/1+^-2.
Безразмерное отношение Л'тахТ-Л называемое коэффициентом пе-
редачи силы, определяет, во сколько раз наибольшая сила, пере-
даваемая основанию, больше амплитуды заданной вынуждающей
силы; оно равно
На рис. 6.3, б изображен график зависимости коэффициента
передачи силы от отношения ш/А при различных значениях 2h/k.
Полезно заметить, что все кривые, независимо от коэффициента
вязкости /г, пересекаются в точке с координатами (У2; 1); при
ш/А < 1'2 вязкость демпферов способствует унижению общей силы,
передаваемой на основание, а при ш/А > 1'2 (как это бывает в хо-
рошо амортизированных системах)—эту силу увеличивает.
2. Действие произвольной вынуждающей силы. В об-
щем случае, когда вынуждающая сила представляет со-
бой произвольно заданную функцию времени Q(t), сле-
дует исходить из дифференциального уравнения
aq + bq + cq = Q(t), (6.14)
общее решение которого можно получить способом, кото-
рым мы пользовались в § 5 при выводе формулы (5.19).
Пусть к системе в момент £ прикладывается мгновен-
ный импульс величины S. Последующий процесс пред-
ставляет собой затухающие колебания, описываемые вы-
ражением (2.9). Постоянные Лиа определим из условий
в начале движения,— при t = £ должно быть q = 0 и
qo = S/a:
Л _Seh^ , t
A~~ak^’ a——k^l.
Таким образом, движение, вызванное однократным им-
пульсом, описывается законом
q = ~------Sin к* ~ (6Л5)
Рассматривая вынуждающую силу как последователь-
ность элементарных импульсов Q(Z,)d£, и интегрируя
128
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
(6.15), получим для пулевых начальных условий решение
t
Ч = J Q © sin к* (t - I) d%. (6.16)
о
В некоторых случаях удобно пользоваться решением
в ином виде, подобном выражению (5.20). Если функция
Q(t) дифференцируемая, то поступая, как в § 5, получим
Ч = -у (0 — Q (°) e~ht ( cos М + sin k*t
t
- f<? (В) cos к* (t - g) + A sin (t _ J dgl (6.17)
о L J
Если же сила Q(t) претерпевает конечные разрывы
Д<2ь Д<?2, •••в заданные моменты времени gi, |г, • • то
1 (
t
С • г h 1
- J Q® cos/т* (/-g) + ^sin/т* (t - £)] dl -
o L
г
—Ei)[c°s /с* v ~
i=0
gi)+ ±-sin k*(t-&) . (6.18)
6.2. Найти движение системы, вызываемое дейст-
возрастающей во времени силы, график которой
Пример
вием линейно
Рис. 6.4
показан на рис. 5.12, а, учитывая
вязкое сопротивление, характеризуе-
мое коэффициентом h.
В данном случае удобно восполь-
зоваться решением в форме (6.17).
Подставляя Q = р, находим
__ ₽t ре-ht sin k*t
с ск*
Колебания постепенно затухают и
движение приближается к движе-
нию вырожденной безмассовой си-
стемы q = pt/c (рис. 6.4).
3. Действие периодической вынуждающей силы. Если
сила задана в виде периодической функции времени пе-
риода Т, то, как и в § 5 п. 3, вызываемые ею установив-
§ 6 СИСТЕМЫ С ТРЕНИЕМ
129
шиеся вынужденные колебания можно найти двумя
способами.
Чаще всего исходят из того, что периодическую функ-
цию Q(t) можно разложить в ряд Фурье и затем сум-
мировать движения, вызываемые каждой из гармоник.
Тогда па основе решения (6.8) можно, подобно (5.25),
записать для установившихся колебаний
Кроме обозначений, поясненных выше в связи с выраже-
нием (5.25), здесь обозначено:
tg?n =
2&псо
72
к — п со
(6.20)
Как уже указывалось, ряд (6.19) иногда сходится не-
достаточно быстро и для достаточно точного описания
движения приходится учитывать значительное число чле-
нов ряда. От этого недостатка свободен другой способ,
который основан на свойстве периодичности установив-
шегося процесса движения.
Примем некоторый момент за начало отсчета времени
и обозначим, как обычно, go — начальное значение обоб-
щенной координаты, go — начальное значение обобщенной
скорости. Тогда, подобно (5.27) и (5.28), найдем
g = e~ht sin k*t g0 cos k*t^ -f-
t
+ f Ca) esin k* (t - B) dt.
0
q = e~ht n sin k*t -f- g0 cos k*t) -f- (6.21)
+ f C © cos k* (t -В) ЙВ -
b
t
- J-J Q © sin k* (t - B) ^B.
0
Я. Г. Панов ко
130 ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Подставив сюда t = Т, получим выражения для д(Т) и
q(T). Далее в соответствии с условиями периодичности
в левые части вместо q(Т) и q(T) можно подставить со-
ответственно до и qo. Это приводит к двум алгебраиче-
ским относительно qo и до уравнениям:
до (6kT _ cos =
= ак~ S*11
g +М (6-22)
q0 sin к*Т 4- -°—- ° (ehT — cos к*Т) =
= (C* cosk*T 4- 5* sin k*T),
в которых для краткости введены обозначения
т
С* = J Q£)eh\cosk*ld%,
о
Г (6.23)
S* = J Q&e^sink^dt,.
о
Из уравнений (6.22) находим значения до и д0 и, вернув-
шись к первому из выражений (6.21), получаем оконча-
тельное решение задачи:
е-лт
ак* (1 — 2ehT cos к*Т -|- e2ftJ)
X {[^(С* sin к*Т — S* cos к*Т) 4- 5J cos k*t 4-
4- [ehT (C* cos k*T 4- S* sin k*T) — C.,.] sin k*t} 4-
t
+ f Q © sin k* (t - I) dl. (6.24)
о
Уравнение (6.24) описывает закон движения системы в
интервале времени [0, Г]. Этот закон затем повторяется
в следующих интервалах времени: [Г, 2Т], [2Т, ЗГ]
и т. д. Если построен график функции (6.24), то смеще-
нием его на период, два периода и т. д. получим графики
движения для следующих (или предыдущих) интервалов
времени.
§ 6. СИСТЕМЫ С ТРЕНИЕМ
131
В частном случае, когда трение в системе отсутству-
ет, т. е. h = 0, выражение (6.24) переходит в ранее най-
денное выражение (5.33).
Пример 6.3. Найти движение, которое вызывается действи-
ем односторонних периодических импульсов S. Период импульсов
Т и значения коэффициентов а, & и с будем считать заданными.
Совместив начало отсчета времени с моментом, наступающим
сразу после приложения какого-либо импульса, получим по фор-
мулам (6.23), как в примере 5.6, C*~S, S# = 0. При этом вы-
ражение (6.24) приобретает вид
[sin k* (Т — f) + sfiTsin
g ak^ (1 — 2ehT cos k*T + e2hT)
При малом отношении периода Т импульсов к собственному пе-
риоду 2л/к* (высокочастотное возбуждение) зависимость ?(t)
имеет вид, показанный па рпс. 6.5, а; при этом за один период Т
успевает осуществиться лишь часть одного цикла свободных ко-
лебаний и роль вязкого трения относительно невелика. В противо-
положном случае, когда указанное отношение периодов велико
(низкочастотное возбуждение), зависимость q(t) подобна показан-
ной на рис. 6.5, б. Здесь за один период Т происходит более од-
ного цикла свободных колебаний и становится заметной роль вяз-
кого трения.
Особенно важен случай резонанса, когда период Т импульсов
в целое число раз больше периода 2л,/к* свободных колебаний.
Обозначив указанное число буквой г, имеем Т = 2лг/Аг*. В этом
случае sin к*Т = 0, cos к^Т =1 движение описывается выражением
Se~M sin k*t
Я — ak* (1 — e~hT)’
9*
132
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Вспомнив, что однократный импульс вызывает движение
5 _ht
найдем, что в случае резонанса, вызываемого периодическими
ударами, движение описывается тем же выражением, но с допол-
нительным коэффициентом:
1
Множитель 1/(1 — e~hT) харак-
теризует влияние повторений
ударов. Для этого множителя
приближенно можно записать
- _ 1 J__________
Р “ 1 — e-hT hT ~ 2nrh-
Отсюда, между прочим, видно,
что самым опасным является
первый резонанс, когда
г = 1. Зависимость коэффициента 0 от отношения частоты импуль-
сов со = 2л/Г к собственной частоте 1с* показана на рис. 6.6 для
случая h/k = 0,1.
4. Комплексная форма решения. При анализе устано-
вившихся вынужденных колебаний часто пользуются по-
нятиями комплексных величин — комплексной обобщен-
ной силы Q и комплексного обобщенного перемещения
(комплексной координаты) q. Хотя комплексная форма
записи может показаться несколько искусственно!!, но
она очень удобна, в частности, тем, что любые линейные
операции над функциями типа гармонических колебаний
(дифференцирование, интегрирование, решение линейных
уравнений и т. д.) выполняются гораздо проще, когда эти
функции представляются не в виде синусов и косинусов,
а в комплексной форме в виде экспонент (показательных
функций).
Переход к комплексной форме может выполняться по-
разному. Например, при гармоническом возбуждении ко-
лебаний и надлежащем выборе начала отсчета времени
гармоническую вынуждающую силу можно описать вы-
ражением Q — Н sin cot (такой выбор начала отсчета вре-
мени не обязателен; ниже будут рассмотрены иные ва-
рианты). Далее вводится комплексная вынуждающая си-
ла Q = Не““, мнимая часть которой равна заданной вы-
нуждающей силе: Im Q = Q (е'“‘= cos cot + isin cot),
и комплексное перемещение д, мнимая часть которого
§ 6. СИСТЕМЫ С ТРЕНИЕМ
133
представляет собой искомую обобщенную координату:
Img; = g. Таким образом, дифференциальное уравнение
(6.2) можно переписать в виде
Im (aq -ф bq -ф cq) = Im (Heie>t),
а отсюда — перейти к уравнению, связывающему комп-
лексные величины q и Q*):
dq -ф bq -ф cq — Heia,t,. (6.25)
Частное решение этого уравнения имеет вид
q=3.eiat. (6.26)
Подставляя (6.26) в (6.25) и сокращая на общий мно-
житель еш', получаем уравнение относительно комплекс-
ной амплитуды Я, из которого находим
Знаменатель правой части
с = с — асо2 + iba (6.28)
называется комплексной динамической жесткостью. Та-
ким образом, комплексная амплитуда вынужденных ко-
лебаний равна отношению амплитуды гармонической вы-
нуждающей силы и комплексной динамической жестко-
сти системы. Величина, обратная комплексной динамиче-
ской жесткости
W =-------{------ (6.29)
с — аа> ф ibto
представляет собой частотную характеристику (комп-
лексную динамическую податливость) системы. Как вид-
но, частотная характеристика системы определяет комп-
лексную амплитуду вынужденных колебаний при еди-
ничной амплитуде вынуждающей силы.
*) Иногда вместо уравнения (6.25) пишут
aq + bq ф cq = Heia>t,
мысленно подразумевая под q комплексное перемещение и имея
в виду, что затем в найденном выражении q будет удержана толь-
ко его мнимая часть (см. также сноску на стр. 134).
134 ГЛ II ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Комплексная амплитуда (6.27) может быть представ-
лена также в виде экспоненты. Для этого нужно прежде
всего освободиться от мнимости в знаменателе, умножив
числитель и знаменатель (6.27) па выражение с —а®2 —
— iba. Тогда получится
у _ Н [(с —асо2) — гйсо]
(с — аа>2)2 + (6а>)2
Отсюда непосредственно следует, что
£ = Ае~г\ (6.30)
где
И = | Л | = г Н ==, Y = arctg[—^-2]. (6.31)
V (с — аа>2)2 -f- (&а>)2 [с — ао> J
Таким образом, согласно (6.26) и (6.30) комплексное
перемещение определяется в виде
£ = Де-'(6.32)
а его мнимая часть, т. е. искомое перемещение,— в виде
q = A sin (иг! — у). (6.33)
Естественно, полученные результаты совпадают с полу-
ченными выше (см. выражения (6.7) и (6.8)).
Принятый выше выбор начала отсчета времени, ко-
нечно, не имеет принципиального значения. Так, при
другом специальном выборе начала отсчета времени ту
же вынуждающую силу можно записать в виде Q =
= Н cos (at. Тогда комплексные величины вводятся так,
чтобы было Q = Re Q, q = Re <?. Для этих величин вновь
получится уравнение (6.25)*) и останутся справедливы-
ми все соотношения (6.26) — (6.32); лишь вместо (6.33)
естественно получится
q = A cos(at — у).
Наконец, если начало отсчета времени принято про-
извольно, то вынуждающая сила представляется в виде
Н sin (at + ср). Вместо уравнения (6.25) будет
aq Д- bq -f- cq=Hel(-u>t+<f'>
*) В этом случае иногда поступают, как сказано в сноске на
стр 133, но удерживают в решении не мнимую, а действительную
часть.
§ 6. СИСТЕМЫ С ТРЕНИЕМ
135
и вместо частного решения (6.26) нужно принять
д = Аё^1™.
При этом опять окажутся справедливыми выражения
(6.27) — (6.31), но вместо (6.32) получим
д = Ле*(ш'+ф-7>,
а вместо (6.33) —
q = A sin(®£ + ф — 1) •
Как и должно было получиться, общие характеристи-
ки колебаний (амплитуда, частота) совпадают с тем, что
было найдено выше для случая, когда вынуждающая
сила записывалась в виде Яэтий.
Комплексная форма удобна и при анализе действия
произвольной периодической вынуждающей силы, кото-
рую можно представить в виде разложения в ряд Фурье
(5.23). В данном случае к комплексной форме удобно
перейти несколько иначе, чем это было сделано выше.
В каждый член ряда (5.23) подставим
cos nat = (einu>t ф- e-{n<oi), sin nat = (einal — e~inal).
Тогда после перегруппировки слагаемых вынуждаю-
щая сила запишется в виде
G °°
q (t)=-f + 2 4 е"шг+(Gn+
П=1
(6.34)
Входящую сюда сумму можно представить в виде двух
ОС
сумм. Первую из них запишем в виде У Bnein<i>t, где Вп =
п=1
= -п- (Gn— Шп), а вторую — в виде У, B*ne~inu>t, где 5* =
z п=1
= (Gn Шп). Заменив вторую сумму эквивалентным
А
— ОО
выражением У Bnemat, придадим всему разложению
п=—1
(6.34) компактную форму
Q (t) = 5 Bneinu>t, (6.35)
n==—оо
136
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
в которой
Вп =
-^-(Gn-iHn)
~~2 (^п 4~ ^„)
при
при
при
п > 0;
п = 0;
п < 0.
Отметим, что каждое из слагаемых Bnetnat — комп-
лексная величина (кроме вещественного слагаемого Во),
но сумма любой пары слагаемых с номерами п и — п —
вещественна. Соответственно вещественна и вся сумма
(6.35). Совокупность величин |2В„| представляет ампли-
тудный спектр силы Q(t).
Опираясь на представление (6.35), запишем диффе-
рсчщиальное уравнение вынужденных колебаний
aq 4- bq ф- cq = У, Bneina,t (6.36)
П=—оо
и будем разыскивать его решение в виде
7=2 Aneina>t. (6.37)
п== —ОО
Подставляя (6.37) в (6.36) и почленно приравнивая ко-
эффициенты при одинаковых членах e’"“f, входящих в
обе части равенства, найдем комплексные амплитуды
A„ = BnWn. (6.38)
Здесь
rr — 2 iv.ucj
с — a (nct>) ф- ibnco
— частотная характеристика, подобная (6.29), но с за-
меной со на псо. Окончательно имеем
ОО
q = У (6.40)
п=-оо
Отметим, что здесь, как и в (6.36), каждому слагаемому
номера п соответствует комплексно сопряженное слагае-
мое номера — п, так что сумма любой такой пары слагае-
мых вещественна.
Совокупность величин |2Z?,jrn| образует амплитудный
спектр перемещения q(t). Сопоставляя (6.35) и {6.40),
§ S. СИСТЕМЫ С ТРЕНИЕМ
137
можно условно сказать, что амплитудный спектр пере-
мещений «равен» амплитудному спектру вынуждающей
силы, «умноженному» на частотную характеристику си-
стемы. Так как частотная характеристика зависит от
номера п, то соотношения между амплитудами гармоник
перемещения отличаются (чаще всего, существенно отли-
чаются) от соотношений между амплитудами гармоник
вынуждающей силы. Естественно, что, как правило, осо-
бенно значительными оказываются амплитуды тех гармо-
ник перемещения, частота которых близка к собственной
частоте системы.
Один из примеров такого рода показан на рис. 6.7,
который относится к случаю, когда на систему с соб-
ственной частотой к действует периодическая вынужда-
ющая сила с периодом 8л/к. Частоты гармоник этой си-
к к Зк 57с
лы равны -j-; -g-; к', , т. е. частота четвертой
гармоники совпадает с собственной частотой системы.
На рис. 6.7, а показаны амплитуды гармоник вынужда-
ющей силы, а на рис. 6.7, б—амплитуды гармоник пе-
ремещения.
Таким образом, переход к комплексной форме создает
определенные удобства при анализе колебаний, вызывав-
138 ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
мых не только гармонической, но и произвольной перио-
дической вынуждающей силой. Более того, комплексная
форма также позволяет успешно изучать колебания, вы-
зываемые действием непериодических вынуждающих сил
Q(t). Такую силу можно представить в виде интеграла
Фурье
ОО
Q(t) = J (со) е’и< с/со, (6.41)
— ОО
который можно рассматривать как обобщение суммы
дискретных слагаемых, данной в выражении (6.35).
В (6.41) сила Q(t) представлена совокупностью элемен-
тарных гармонических составляющих со всеми частота-
ми, непрерывно распределенными в бесконечных преде-
лах [—°0, °°], причем малому интервалу частот от со до
со + da соответствует элементарная гармоническая со-
ставляющая с амплитудой F(a)da. Соответственно ска-
занному, F(со) можно рассматривать как непрерывный
амплитудный спектр силы Q(t). Для него справедливо
выражение
ОО
= J Q (t) e~ie>t dt, (6.42)
— ОО
которое называется преобразованием Фурье или фуръе-
образом функции Q(t). Фурье-образ /'’(со)—комплексная
функция частоты:
F(co) = Л (со)+iS(co), (6.43)
в которой Л (со) и В(со)—вещественные функции часто-
ты. Поскольку <2(i) — вещественная функция, то из
(6.42) следует, что
ОО оо
Л (со) = I Q (Z) cos coZ dt, В (co) = — | Q (Z)sin coZ dt,
mJv aj aj
— OO —00
(6.44)
а интеграл Фурье (6.41) для Q(t) принимает вид
00 00
Q (i) = 2 J Л (co) cos coZ da — 2 J В (co) sin coZ da. (6.45)
о о
Согласно (6.38) элементарная вынуждающая сила
F(a)eiwtda вызывает колебания той же частоты, а их
§ 6 СИСТЕМЫ С ТРЕНИЕМ
139
амплитуда равна F(со)ТУ(co)cZco. Следовательно, колеба-
ния, вызываемые всеми элементарными воздействиями,
т. е. заданной вынуждающей силой Q(t), определяются
в виде интеграла
q (i) = J F (co) W (co) eiat da, (6.46)
— 00
где ТУ (co)—частотная характеристика (6.29), которая в
данном случае является непрерывной функцией частоты.
Однако перемещение q(t) также можно представить в
виде, аналогичном (6.41):
q(t) — J / (со) eiat da, (6-47)
— оо
где /(со)—амплитудный спектр перемещения. Сопостав-
ляя выражения (6.46) и (6.47), видим, что
/(со) = У(со)ТУ(со). (6.48)
Таким образом, можно сказать, что амплитудный
спектр перемещения равен амплитудному спектру вы-
нуждающей силы, умноженному на частотную характе-
ристику системы.
Рассмотрим пример. Положим, что на линейную си-
стему с одной степенью свободы, начиная с момента
t = 0, действует произвольная вынуждающая сила Q(t),
исчезающая в некоторый заданный момент Т, так что
при i > Т сила равна нулю. Как будет происходить дви-
жение системы после исчезновения силы, т. е. при t > Т?
Перемещения системы при t>T можно определить
с помощью (5.19) в виде
т
q = di =
*0
Г т т -1
= sin kt J Q (|) cos k^ — cos kt J Q (E) sin Zrg d^ .
L о о -
Так как при /<0 и t > Т сила <?(£) равна нулю, то по-
следнее выражение можно записать, формально расширив
140
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
пределы интегрирования:
Ч =
1
ак
sin
cos /т| dt, — cos
^(g)sinH dl
Согласно (6.48) можно записать
g ~ s*11 kt В (к) cos kt].
Здесь А {к) и В {к)—составляющие амплитудного спект-
ра вынуждающей силы, соответствующие частоте св = к.
Амплитуда колебаний величины q(t) определяется вы-
ражением
<7тах = -fp V WW = # I P (к) (6.49)
Отсюда видно, что при любой вынуждающей силе ампли-
туда «остаточных» колебаний зависит только от модуля
величины F(со) при со = к.
5. Влияние нелинейно-вязкого трения при гармони-
ческой вынуждающей силе. Замкнутое решение задачи
о вынужденных колебаниях при произвольных нелиней-
ных силах трения затруднительно даже в простейшем
случае действия моногармонической вынуждающей силы,
когда дифференциальное уравнение движения имеет вид
aq + R(q) + cq = Н cos cot (6.50)
Для приближенного решения этого уравнения вос-
пользуемся методом энергетического баланса, т. е. заме-
ним заданную нелинейную силу R(q) эквивалентной в
энергетическом отношении линейной силой &оф, коэффи-
циент Ъо будем разыскивать из условия равенства ра-
бот, совершаемых обеими силами за один период:
т т
R (q) q dt = b0 qq dt. (6.51)
о о
Далее приближенно примем, что и в общем случае
нелинейного трения стационарный колебательный про-
цесс описывается, как в случае линейного трения, вы-
ражением
q = A sin(coi — 7). (6.52)
При этом уравнение энергетического баланса (6.51) мож-
но записывать для полуперпода колебаний, в течение ко-
§ в. СИСТЕМЫ С ТРЕНИЕМ
141
торого скорость (а вместе с этим и сила R) не меняет
знак. Подставив (6.52) в (6.51), найдем
п
— J R (— Лю sin -ф) A sin ip dip = Л2юЬ0, (6.53)
о
где ip = (nt — у. Отсюда следует формула, определяющая
эквивалентный коэффициент линейного трения:
л
2 J R (— 4<о sin ip) sin ip dip
b.=-------2---------
0 л4<о
Пусть, например, сила трения задана нелинейной
зависимостью (2.17). При этом
/?(?)=
и числитель выражения (6.54) равен
Л Л/2
2 j Ь\— Лю sin ip)" sin ip’dip = — 4Л"Ьюп j sinn+1 ip dip.
о о
Входящий сюда интеграл был выше обозначен через I
(см. § 2, (2,20)), так что окончательно получаем
Ьо^-^Йю)”-1. (6.55)
Аналогично можно определить эквивалентный коэффи-
циент Е>о и в других случаях нелинейного трения.
После того как коэффициент Ьд найден, задача сво-
дится к рассмотрению эквивалентной линейной системы,
движение которой определяется дифференциальным урав-
нением (6.4). Запишем соответствующее этой
ражение (6.9) для амплитуды колебаний,
h = Ь0/2я и с = ak2:
задаче вы-
подставив
(6.56)
Здесь неизвестная амплитуда Л входит не только в ле-
вую часть равенства, но и в правую его часть, так как
коэффициент Ъд зависит от той же амплитуды Л. В связи
с этим соотношение (6.56) следует рассматривать не как
формулу, а как уравнение для определения ампли-
туды А.
142
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Для построения резонансной кривой удобнее разре-
шить уравнение (6.56) относительно а>/к:
а затем, задаваясь значениями А, вычислять £>о(Л) и оп-
ределять соответствующие отношения а/к.
Для определения резонансной амплитуды положим
в (6.56) <й = к; тогда уравнение примет вид
В частности, если коэффициент Ьо определяется форму-
1 п Г л.11
лой (6.55), можно найти Л =т ]/ например, при
п = 2 (7 = 0,667) получим А =
Нужно отметить, что в рассматриваемых задачах амп-
литуда вынужденных колебаний непропорциональ-
на амплитуде силы.
6. Влияние гистерезиса. То же соотношение энерге-
тического баланса может быть положено в основу иссле-
дования вынужденных колебаний при наличии «частот-
но-независимого» гистерезиса. Для этого нужно прирав-
нять площадь петли гистерезиса, определяемую форму-
лой (2.43)
£2 = аЛ»+1.
работе, совершаемой за один период эквивалентной си-
лой линейного трения. Эта работа вдвое больше правой
части соотношения (6.53), вычисленной для полуперио-
да, так что получаем равенство
= лАЬо.
Отсюда находим коэффициент эквивалентного линейного
трения в виде
и уравнение (6.56) принимает вид
(6.57)
§ 6. СИСТЕМЫ С ТРЕНИЕМ
143
Решение этого нелинейного алгебраического уравне-
ния несложно при значениях п = 0 (сухое трение) и
п — 2; для вычислений при иных значениях п удобнее
пользоваться обратной зависимостью
к у 1 3= с А У \ пН )
Для резонансных условий (со = к) из (6.57) сразу нахо-
дим А = j/ пН/а.
Отметим, что гистерезисную силу трения при незату-
хающих гармонических колебаниях удобно описывать
соотношением
r 1 — sisn q- (6-58)
(эллиптическая петля гистерезиса — см. рис. 6.8), кото-
рое соответствует выражению (2.43) для рассеиваемой
за один цикл энергии. Если воспользоваться выражением
(6.58), то можно найти ус-
тановившиеся вынужденные
колебания, не прибегая к
методу энергетического ба-
банса, непосредственно из
дифференциального уравне-
ния движения
v + ^г]/ l-^-signq +
+ k2q — ^-sinorf. (6.59)
Это, казалось бы, сложное, нелинейное уравнение имеет
весьма простое точное решение
q = A sin(cof — у). (6.60)
Для определения Л и у подставим решение (6.60) в
уравнение (6.59), получим
аАп
— Лео2 sin (at — у) + cos (at — у)
-F Лк2 sin (at — у) = ^- sin at. (6.61)
Второй член в левой части записан без множителя sign q,
так как нужная для уравнения смена знака силы тре-
144 ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
ния (при изменении знака скорости) здесь обеспечива-
ется изменением знака косинуса. Преобразуя соотноше-
ние (6.61), получаем
[ л /7 9 9\ I аЛ • 11 1 • ,
Л (л2 — со2) cos у 4--sin у-----sin at —
— |л {к2 — со2) sin у — cos yj cos coZ = 0.
Для тождественного выполнения этого равенства необхо-
димо, чтобы выражения, стоящие в квадратных скобках,
были порознь равны нулю, т. е.
А (к2 — со2) cos у + -2^— sin у =
л л d
А (к2 — со2) sin у — 0^t cos у = 0.
Отсюда находим
Н аД”—1
А ~ , П со2 \а I аЛ”'1 V * tg 7 ла (к2 - со2) ’
С V I кЧ +1 яс J
(6.62)
Заметим, что первое из соотношений (6.62) совпадает с
ранее найденным соотношением (6.57).
7. Случайные колебания*). Всюду выше было при-
нято, что вынуждающие силы заданы как детерминиро-
ванные функции времени. Такая постановка задач тео-
рии вынужденных колебаний приемлема, когда случай-
ные составляющие внешних сил (практически всегда не-
избежные) относительно малы по сравнению с основны-
ми, детерминированными составляющими. Но в ряде при-
кладных задач весьма значительные вынуждающие силы
в принципе не поддаются удовлетворительному детерми-
нистическому описанию и должны считаться случайными
функциями времени. Таковы, например, нагрузки на ра-
бочие органы многих строительных и сельскохозяйствен-
ных машин, ветровые нагрузки на здания и инженерные
сооружения и т. п. Со случайными функциями времени
приходится иметь дело и в некоторых задачах о кинема-
♦) Предполагается, что читатель знаком с основными поня-
тиями теории вероятностей.
§ 6. СИСТЕМЫ С ТРЕНИЕМ
145
тическом возбуждении, например при анализе колебаний
автомобиля, движущегося по неровной дороге, или при
расчетах конструкций на сейсмические нагрузки.
Теория случайных вынужденных колебаний посвяще-
на решению задач следующих четырех типов:
1) отыскание вероятностных характеристик движения
системы по заданным вероятностным характеристикам
внешнего воздействия {прямая задача);
2) отыскание вероятностных характеристик внешних
воздействий по известным (экспериментально найден-
ным) вероятностным характеристикам вибраций {обрат-
ная задача);
3) определение свойств системы (ее оператора и па-
раметров) по известным (экспериментально найденным)
вероятностным характеристикам на входе и выходе си-
стемы {задача идентификации);
4) синтез систем, обладающих заданными свойствами
по отношению к некоторому классу внешних воздействий
{задача синтеза, часто являющаяся задачей оптими-
зации) .
Очень коротко остановимся на первой задаче приме-
нительно к вынужденным колебаниям линейной механи-
ческой системы с одной степенью свободы.
В практических условиях случайные вынуждающие
силы нередко обнаруживают определенную однородность
относительно времени, они колеблются около среднего
неизменного значения, причем ни их средняя амплиту-
да, ни общий характер заметных изменений во времени
не претерпевают. Однородны во времени и некоторые
виды случайного кинематического возбуждения, как, на-
пример, воздействие неровностей дороги на движущийся
по ней автомобиль, конечно, при условии, что на боль-
шом протяжении качество покрытия остается практиче-
ски неизменным, а автомобиль движется с постоянной
скоростью.
Такие воздействия с постоянными вероятностными ха-
рактеристиками относятся к категории стационарных
случайных процессов. В эту категорию входят и резуль-
таты таких воздействий, т. е. вызванные ими колебания
механических систем (имеются в виду колебания около
устойчивого состояния равновеспя).
Из стационарной случайной функции, описывающей
вынуждающую силу, всегда можно выделить и вычесть
ее математическое ожидание, постоянное вследствие ста-
10 я, г. пановко
146 ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
ционарности функции; после этого рассматривается пе-
ременный «остаток»— центрированная случайная функ-
ция Q(t). Выразительной характеристикой ее свойств
служит корреляционная функция — математическое ожи-
дание произведения ()(£)()(£ +т), сомножители которого
относятся к двум моментам времени, разделенным про-
межутком т. Эта функция оценивает степень зависимо-
сти между «сечениями» случайной функции в различ-
ные моменты времени. Если случайная функция действи-
тельно стационарна, то результаты вычислений не могут
зависеть от выбора момента времени t, а будут зависеть
только от абсолютной величины |т|.
В практических случаях корреляционную функцию
Zcq(t) получают путем обработки данных натурных на-
блюдений и часто представляют в виде несложных ана-
литических выражений типа
De~a]xl, De~ax\ De~a^ cospi,
с соответственно подобранными значениями параметров
D, а, р. Отметим, что в ходе такой обработки контроли-
руется сама стационарность изучаемого процесса — по
признаку независимости математического ожидания про-
о о
изведений Q (t)Q (i + т) от выбора значений t. Разумеет-
ся, что для заведомо стационарного случайного процесса
корреляционную функцию можно определять как мате-
матическое ожидание произведения С*(О)^(т). Значение
корреляционной функции при т = 0 представляет собой
математическое ожидание квадрата стационарной случай-
ной функции, т. е. ее дисперсию kQ(0) = D.
При обсуждении детерминированных задач теории
вынужденных колебаний вп. 5 § 5 и п. 5 § 6 колеба-
тельный процесс был представлен в виде суммы гармо-
нических колебаний различных частот. Распределение
амплитуд по различным частотам (дискретный или не-
прерывный амплитудный спектр) дает возможность су-
дить о том, какого рода колебания доминируют в рас-
сматриваемом процессе, какова его внутренняя структу-
ра. Такие спектральные представления могут относиться
и к вынуждающей силе, и к координате системы q(t).
Аналогично этому стационарный случайный процесс
также может быть описан суммой гармонических состав-
ляющих, но их амплитуды будут случайными величина-
§ 6. СИСТЕМЫ С ТРЕНИЕМ
147
ми. Спектром стационарной случайной функции принято
называть распределение дисперсий по всем частотам.
Если спектр непрерывный, то его описывают функцией
5 (со)—спектральной плотностью дисперсии стационар-
ной случайной функции (часто слово «дисперсия» в этом
наименовании опускают). Между спектральной плотно-
стью S(a) и корреляционной функцией &(т) существу-
ют соотношения
ОО
к (т) = J S (со) cos ост da»,
о
оо
S (со) = к (т) cos сот dr,
о
(6.63)
(6.64)
определяющие прямое и обратное косинус-преобразова-
ния Фурье.
Если в (6.63) положить т = 0, то для дисперсии ста-
ционарной случайной функции получится
00
D = к (0) = J S (со) cZco.
о
(6.65)
Таким образом, если корреляционная функция &<?(т)
известна (задана, найдена), то по выражению (6.64)
находится спектральная плотность 5$ (со) и можно пе-
рейти к определению колебаний механической системы,
вызванных действием случайной силы. Здесь основным
является соотношение
5д(со)= |ИИ25«(со), (6.66)
связывающее спектральную плотность колебаний систе-
мы 5д(со) со спектральной плотностью вынуждающей
силы. В этом соотношении W — частотная характеристи-
ка системы, которая для силового возбуждения была да-
на выше выражением (6.29), так что
(с — асо2)2 -|- (Ьсо)2
(6.67)
10*
148
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
После вычисления 5,(®) по выражению (6.66) мож-
но найти дисперсию обобщенной координаты
Dq = \sq(a)da, (6.68)
О
и, наконец, среднеквадратическое значение величины q:
CSq — 1/Dq. (6.69)
§ 7. Системы с одной степенью свободы
при нелинейной восстанавливающей силе
1. Основные понятия. Нелинейность восстанавливаю-
щей силы существенно осложняет анализ колебаний,
и в этом параграфе будет рассмотрено действие только
гармонической вынуждающей силы; даже в этом наибо-
лее простом случае приходится довольствоваться прибли-
женным решением задачи. Характеристику нелинейной
восстанавливающей силы будем считать симметричной:
F(q)=-F(-q), (7.1)
а силы трения — отсутствующими.
При синусоидальном возбуждении дифференциальное
уравнение движения имеет вид
aq + F(q) — Н sin at. (7.2)
Необходимо сразу отметить, что функция
g = ?lsin«)f, (7.3)
описывающая закон движения линейных систем, в дан-
ном случае не является точным решением задачи; если
подставить (7.3) в уравнение (7.2), то оно не может
быть тождественно удовлетворено ни при каком значе-
нии А. Естественно ожидать, что решение будет содер-
жать также высшие гармоники с частотами 2ы, Зса, ...,
а возможно, и низшие гармоники с частотами ы/2,
со/З, ...; ниже мы убедимся, что это в самом деле так.
Колебания с высшими по отношению ы частотами назы-
ваются супергармоническими, колебания с низшими ча-
стотами — субгармоническими, а колебания с частотой
<о — основными.
В первом приближении можно ограничиться исследо-
ванием только основных колебании: они чаще всего наи-
более важны; этому посвящен следующий п. 2. Даль-
§ 7. НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА
149
нейшие уточнения можно получить, исследуя супергар-
монические колебания (см. п. 3) и субгармонические
колебания (см. п. 4).
2. Основные колебания. Для нахождения основных
колебаний приближенно примем закон движения в виде
(7.3) и воспользуемся методом гармонического баланса
(см. выше стр. 69—70). Образуем периодическую функ-
цию F(4sin®f) и, разложив ее в ряд Фурье, ограничим-
ся учетом одного первого члена:
F (A sin at) « bi sin at. (7.4)
Здесь bi определяется выражением (3.18). Подставив
выражение (7.3) в первый член уравнения (7.2) и вы-
ражение (7.4)—во второй член того яге уравнения, по-
лучим приближенное соотношение
гл
— аАа2 4- -i- J F (A sin ip) sin ip dip = Н, (7.5)
о
из которого можно определить амплитуду А.
Пусть, например, характеристика восстанавливающей
силы имеет вид
F(g) = cog + ₽g3. (7.6)
Прежде всего находим
2Л
[ F (4 sin ip) sin ip dip =
о
2Л
= J (с0 A sin ip 4- рЛ3 sin3 ip) sin ip dip = лс0А 4- лрЛ3.
о
При этом уравнение (7.5) принимает форму
4 (Л + 3 _р Я_ Л(Л (7.7)
\ а 1 4 а ) а ' ' '
Для выявления качественных свойств решения куби-
ческого уравнения (7.7) можно воспользоваться графи-
ческим способом; по своей наглядности он, пожалуй,
превосходит аналитическое решение.
Построим график зависимости левой части от ампли-
туды А (см. кривую Рл(^4) на рис. 7.1, а), а также пря-
мую Ра(А), соответствующую правой части; если часто-
150
ГЛ. II ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
та со невелика, то прямая Ра пересечет кривую Рп в
одной точке, абсцисса которой Ai является единственным
вещественным корнем уравнения (7.7). С увеличением
частоты со угол наклона прямой к оси абсцисс будет
возрастать, а значение корня Ai— увеличиваться. Нако-
нец, при достаточно большом значении со = со* прямая Рп
коснется кривой Рп в третьем квадранте (рис. 7.1, б),
Рис. 7.1
а при дальнейшем увеличении со будет пересекать кри-
вую Рл в трех точках (рис. 7.1, в).
Соответственно уравнение (7.8) при со>со* будет
иметь три вещественных корня: А\, Лг, Аз. Изменение
значений этих корней при постепенном увеличении ча-
стоты со показано на рис. 7.2, а; здесь же штриховой
линией показана скелетная кривая, выражающая связь
между частотой и амплитудой свободных колебаний той
же системы.
Полученная амплитудно-частотная зависимость напо-
минает резонансную кривую для линейной системы, од-
нако резонансный пик несколько «деформирован» соот-
ветственно искривлению скелетной линии при жесткой
характеристике. Для системы с мягкой характеристикой
амплитудно-частотная зависимость имеет вид, подобный
рис. 7.2, б.
Хотя полученное решение приближенное, однако оно
дает, по крайней мере качественно, верное представление
об изменении амплитуды вынужденных колебаний с из-
менением их частоты: при достаточно больших значениях
частоты вынуждающей силы решение становится неод-
нозначным и одному значению частоты соответствует три
значения амплитуды А колебаний.
§ 7. НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА
151
Дополнительные исследования (см. ниже § 9) пока-
зывают, что из трех возможных режимов движения при
со > со*
g = Л1 sin q = 42sin cut, q = 43sin a>t, (7.8)
устойчивы первый и второй, а третий режим неустой-
чив,— сколь угодно малые возмущения этого режима
приводят движение системы к первому или второму ре-
жиму. В связи с этим физически осуществимы толь-
ко первый и второй стационарные режимы.
Если постепенно увеличивать от нуля частоту со, то
амплитуды увеличиваются, следуя ветви / (см. рис. 7.2, а).
Если при некотором значении частоты со = соi система
испытывает достаточно большое мгновенное возмущение,
то происходит «срыв» амплитуды на ветвь II (точки п
и га'). Если затем продолжать постепенное увеличение
частоты со, то амплитуда колебаний будет уменьшаться,
следуя кривой II. Если же после срыва амплитуд часто-
ту со уменьшать, то будет происходить плавное возра-
стание амплитуды до точки га". При дальнейшем умень-
шении частоты амплитуда резко увеличивается (точка га'"
152 ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
на ветви I) и затем вновь постепенно уменьшается, сле-
дуя ветви I.
Другое, также приближенное, решение можно полу-
чить по способу прямой линеаризации. Согласно этому
приближенному способу (см. § 3) нелинейная характе-
ристика F (q) заменяется эквивалентной линейной, так
что дифференциальное уравнение (7.2) сразу принимает
вид
aq + cq = Я sin at. (7.9)
Величина с определяется так, как это было пояснено в
§ 3, по формуле (3.16); важно отметить, что в данном
случае она не является параметром системы, а зависит
от амплитуды колебаний. Амплитуда стационарной части
решения линейного дифференциального уравнения (7.9),
как известно, имеет вид
Так как с зависит от амплитуды А, то соотношение
(7.10) следует рассматривать как уравнение для опре-
деления А. Так, при характеристике (7.6) находим по
формуле (3.16)
А
с = i^c°q + qS dq = c»+
О
и (7.10) приобретает вид, подобный (7.7):
4 (с0 + у М2) = V + Л®2‘
Графическое решение этого уравнения в принципе совпа-
дает с данным выше для уравнения (7.7).
Если в системе имеется трение, то обе ветви кривых
смыкаются, как показано на рис. 7.2, в. При постепен-
ном возрастании частоты становится неизбежным срыв
амплитуд при со = <02; в случаях постепенного уменьше-
ния частоты, которое начинается при достаточно больших
ее значениях, срыв амплитуд происходит при ы =
3. Супергармонические колебания. Для того чтобы
отразить в решении супергармонические колебания,
вновь воспользуемся методом гармонического баланса и
положим (для случая симметричной характеристики вос-
станавливающей силы)
q = Ai sin at + 43 sin 3at + ... + A, sin sat. (7.11)
§ 7. НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА 153
В первый член дифференциального уравнения (7.2) под-
ставим (7.11), а во второй член вместо функции
F(Ai sin at + H3sin Sat A ... + Asin sat)
подставим s первых членов ее разложения в ряд Фурье
Я(A sin at + Asin Sat + ... + A sin scaf) «
» bi sin at + b3 sin Sat + ... + bs sin sat, (7.12)
коэффициенты которого
т
2 С
br = у I F (A sin at A A3 sin Sat A .. .
о
... A Asin sat) sin rat dt (r = 1, 2, . .., s) (7.13)
нелинейно зависят от всех амплитуд Ai, А3, ,А„.
Таким образом, подстановка (7.11) в дифференциаль-
ное уравнение (7.2) приводит к соотношению
—А{а2а sin at — 9Л3са2я sin Sat — ... A bx (А, Л3, ...)X
X sin at + b3(A j, Аз, .. ,)sin Sat A ... = Я sin at. (7.14)
Для тождественного выполнения этого равенства нужно
приравнять коэффициенты при каждой из гармоник
sin at, sin Sat, ..., sin scaZ, содержащихся в левой и пра-
вой частях (7.14):
- А щса2 A bi (Л ь А3, ..., А,) = П,
-9Л3аса2АЬ3(Л1, А3, ..., А) = 0, (7.15)
—s2Asaa2 А А (А, Аз, ..., А) = 0.
Из нелинейных уравнений (7.15) можно найти значения
амплитуд Ai, Аз, ..., А3.
Пусть, например, характеристика силы имеет вид
(7.6). Ограничиваясь двумя первыми членами суммы
(7.12), имеем
ТДд) ~ Со(А sin + Л3 sin Sat) A f (A sin at + А3 sin Sat)3.
Далее, по формулам (7.13) находим
ьг=+44- - A^+
L 4 о
As a 6Л1А ЗД
3)
154
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
(к* = с/а) и уравнения (7.15) принимают вид
(&о — м2) А + ~ (^1 — + 2Л|ДХ) = —,
. (7.16)
(&о - М А3 + 4 1 Л3 + 2Л*Л3 + А3) = 0.
Положив в первом уравнении f = 0, приближенно най-
дем выражение для амплитуды основных колебаний:
Сохранив в последних скобках второго уравнения (7.16)
только основное слагаемое-----|-Л3, также приближенно
О
получим амплитуду супергармонических колебаний
А =
3 4а - 9 со2) ‘
т. е. малую величину порядка [}. Если подставить най-
денные первые приближения в отброшенные члены урав-
нения (7.16), то получим улучшенные значения Ai и А-з,
причем поправка для Ai будет иметь порядок [}, а по-
правка для Аз—порядок р2. Этот процесс последователь-
ных приближений можно продолжить и далее.
Важно отметить, что амплитуда супергармонических
колебаний А3 мала сравнительно с амплитудой Ai ос-
новных колебаний (конечно, при условии, что не мала
разность к% — 9ы2).
4. Субгармонические колебания. Ограничимся случаем
симметричной характеристики восстанавливающей силы
вида (7.6) и для нахождения амплитуд субгармонических
колебаний снова воспользуемся методом гармонического
баланса.
Положим, что основную гармонику с частотой и вы-
нуждающей силы сопровождает субгармоника с часто-
той ы/З:
q = Aj sin at 4- А/з sin (7.18)
u
Функция F (a sin at + А/з sin j имеет период 6л/ы,
втрое больший основного периода Т. Разлагая ее в ряд
§ 7, НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА
155
Фурье и ограничиваясь двумя первыми членами, найдем
F sin at + Д/gSin = Zp/gSin-^A Д- br sin at, (7.19)
\ о / о
где
зт
Z>1/3 = 37 J F ( A sin Лi/g sin sin -A dt,
3°T (7.20)
Zp = ччг I F (A1 sin at Д- Л1/3 sin ) sin at dt.
L> \ О /
0
Далее подставляем (7.18) и (7.19) в уравнение (7.2);
сравнивая коэффициенты гармоники и субгармоники в
правых и левых частях, приходим к двум нелинейным
уравнениям.
При характеристике (7.6) эти уравнения имеют вид
(&□ — со2) Лх + А £ (ЗЛ? -р 6Л?/3ЛХ - Л?/3) = 4-
(7-21)
---А/з + (А/з А/зА 4~ 2ЛХЛ1/3) = 0.
Приближенное значение для амплитуды Л] найдем
из первого уравнения (7.21), положив в нем ^=0:
л‘ = 7йЪ)- <722>
Далее, предположив, что Л i/3 =/=(), представим второе
уравнение (7.21) в виде
„ , 4 (9й2 — <в2) а
Л?/3 - Л1/3ЛХ + 2А* -р 1 °27р > = 0.
Отсюда следует выражение амплитуды субгармонических
колебаний
Отметим, что при > 0 для вещественности решения
необходимо выполнение условия
«>3^/1 + -^--^, (7.24)
156
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
т. е. субгармонические колебания возможны лишь при
достаточно больших (относительно основной частоты сво-
бодных колебаний) частотах возбуждения. Если < О,
знак неравенства в (7.24) должен быть изменен на об-
ратный.
С учетом (7.22) приближенно получим
(7.25)
Исходя из первых приближений (7.22) и (7.25), можно
получить с помощью основных уравнений (7.21) даль-
нейшие уточнения значений амплитуд колебаний Ai
и А 1/з.
На рис. 7.3 показаны зависимости амплитуд колеба-
ний Aj и А 1/з от частоты со вынуждающей силы.
Таким образом, субгармонические колебания в систе-
мах с жесткой (мягкой) характеристикой возможны
лишь при достаточно больших (достаточно малых)
значениях частоты со вынуждающей силы; однако если
субгармонические колебания возникают, то их амплиту-
ды могут значительно превосходить амплитуды
основных колебаний, происходящих с частотой со.
В наших выкладках мы не учитывали действие сил
трения; более подробный анализ показывает, что эти
силы не только уменьшают амплитуды субгармонических
колебаний, но способны — при их достаточной интенсив-
ности — полностью подавить субгармонические колебания.
5. Способ поэтапного интегрирования для кусочно-ли-
нейных систем. В отличие от ранее рассмотренных в этом
§ 7. НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА
157
параграфе случаев задача о вынужденных колебаниях
систем с кусочно-линейными характеристиками в прин-
ципе допускает точное решение, которое соответствует
сказанному в § 3, где речь шла о свободных колебаниях.
Здесь, при анализе вынужденных колебаний также нуж-
но поочередно решить ряд линейных задач, соответству-
ющих прямым участкам характеристики, расположенным
i.
Нsin (tot + у)
а
между точками перелома. Для определения постоянных
интегрирования служат условия перехода от этапа к эта-
пу, а также условия периодичности.
Проследим применение этого способа на случае вы-
нужденных колебаний системы, показанной на
рис. 7.4, а. Эта виброударная система (модель Русако-
ва — Харкевича) состоит из груза 1, упругого элемента
2 и одностороннего ограничителя 3, установленного с за-
зором Ь. На груз действует гармоническая вынуждаю-
щая сила, которая вызывает колебания, достаточно
значительные для того, чтобы происходили удары
груза об ограничитель.
Отсчет перемещений груза будем вести от положе-
ния, в котором пружина не деформирована. Начало от-
счета времени совместим с моментом непосредственно
после какого-либо удара груза об ограничитель. При этом
гармоническую вынуждающую силу запишем в виде
Н sin(cof + 7), полагая Н и со известными, а начальную
фазу 7 неизвестной. Кусочно-линейная характеристика
этой системы состоит из двух полупрямых (рис. 7.4,6).
158
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Примем, что при ударе груза об ограничитель ско-
рость груза мгновенно меняется, следуя соотношению
х(0)= -Ях(-О), (7.26)
где R — коэффициент восстановления; аргумент (—0) оз-
начает момент времени, непосредственно предшествую-
щий удару.
Не рассматривая всех возможных движений, иссле-
дуем возможность существования строго периодического
режима периода Т, равного периоду 2л/со вынуждающей
силы. Еще до составления и решения уравнений задачи
можно ожидать, что движение будет происходить в об-
щих чертах так, как показано на рис. 7.4, в; через рав-
ные промежутки времени Т происходят удары об огра-
ничитель, сопровождаемые сменой знака скорости.
Рассмотрим один период движения, в начале которого
z(0) = -6. (7.27)
Кроме того, можно записать следующие условия перио-
дичности:
х(Т) = х(0), (7.28)
х(7’-0) = х(-0). (7.29)
Условия (7.28), (7.29) вместе с условием (7.27) позво-
ляют найти все постоянные, которые войдут в решение
задачи. Исключим скорость х(—0) из (7.26) с помощью
соотношения (7.29); тогда получится связь между ско-
ростями в начале периода и в его конце (т. е. непосред-
ственно перед следующим ударом):
х(0)=—Rx(T— 0). (7.30)
Решение основного дифференциального уравнения,
записанного для интервала движения между двумя уда-
рами,
mx + сх = Н sin(coi + 7),
имеет вид
а? = Схsin+ С2 cos# sm (cof-|-у) . (7.31)
т (к — со J
Отсюда следует, что скорость меняется по закону
х = Crk cos kt — С,A: sin kt + С.°| -• (7.32)
т (к — со )
§ 7. НЕЛИНЕЙНАЯ ВОССТАНАВЛИВАЮЩАЯ СИЛА
159
Из условий (7.27), (7.28) и (7.30) находим
С 4- Н sinY = - Ъ
Сх sin кТ + С2 cos кТ -ф
Н sin (соТ + У) = _ z,
m (к2 — со2) ’
г т. , Яш cos у
^1л Т 772 2
m (к — со
= — R fofccos кТ - C2fcsin кТ + g(DC0S + V) ]
т, (к2 —
В этих трех уравнениях содержатся три неизвестные ве-
личины: постоянные С\ и Сг, а также начальная фаза 7
вынуждающей силы. Пусть, например, 6 = 0; тогда, учи-
тывая, что sin(co7' + 7) = sin 7, cos(co71 + 7) = cos 7, после
решения уравнений найдем
,,___ (1 + Я) „ feT1 <0
tg Y — (1 — R) tg 2 к ’
r _ _ H sin у кТ
/, 2 2\ 9 *
m (к — (й ) *
Н sin у
m (к2 — со2)
С2 = -
Теперь можно записать закон движения, справедливый
для интервала времени 0 < t < Т (на других интервалах
времени движение полностью повторяется):
Н
m (fc2 — со2)
х =
sin (art + Т) — sin -у cos kt —
• • 7 J. A
— sin у sin kt tg —y-
Конечно, приведенное исследование колебаний вибро-
ударной системы недостаточно полно. Во-первых, фор-
мальная возможность режима колебаний с периодом Т
еще не означает его физической осуществимости — для
этого необходимо, чтобы такой режим был устойчивым.
Во-вторых, в подобных системах наряду с изученным ре-
жимом возможны периодические режимы с периодами
вдвое, втрое и т. д. большими (субгармоники), и следо-
вало бы также исследовать их существование и устойчи-
вость. Именно так ставятся и решаются задачи о работе
различных виброударных механизмов.
160
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
§ 8. Линейные системы с несколькими степенями
свободы
1. Общие уравнения. Если на линейную колебатель-
ную систему без трения с s степенями свободы действу-
ют внешние силы, являющиеся заданными функциями
времени, то уравнения Лагранжа принимают вид
® (7 = 1,2, ...,s), (8.1)
где Qj — Qj (t) — обобщенные вынуждающие силы, соот-
ветствующие избранным обобщенным координатам qs.
Пользуясь общими выражениями (4.2) для кинетической
п потенциальной энергии, приходим согласно (8.1) к
следующей системе дифференциальных уравнений:
3
S (ajkQh + Cjhqk) = Qi (j = 1,2,..., s). (8.2)
fe=i
Если обобщенные координаты выбраны так, что ки-
нетическая энергия представляется канонической формой
(4.6), то ajh = 0 при / =# к, и система уравнений (8.2) уп-
рощается:
3
<4Qi + S CikQk = Qi (j ==1,2,..., s). (8.3)
fe=i
К этим уравнениям, каждое из которых содержит по
одному обобщенному ускорению, можно прийти с по-
мощью прямого способа, не пользуясь уравнениями Лаг-
ранжа.
Если при соответствующем выборе обобщенных коор-
динат к канонической форме приводится потенциальная
энергия (сл = 0 при ]Фк), то уравнения (8.2) прини-
мают вид
S аМь + = Qj (J =1,2,..., s). (8.4)
й=1
Каждое из уравнений (8.4) содержит по одной обобщен-
ной координате; эти уравнения можно получить непо-
средственно по обратному способу.
Ниже мы остановимся на некоторых важных типах
зависимостей обобщенных вынуждающих сил Q>(t) от
времени.
§ 8. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ 161
2. Действие вынуждающих сил, изменяющихся по
гармоническому закону; непосредственное решение.
Предположим, что обобщенные вынуждающие силы из-
меняются по гармоническому закону
Qj = Н* sin (cof + б;) (/ = 1, 2, ..s), (8.5)
т. e. имеют одинаковые частоты, но различные амплиту-
ды и фазы. Вместо (8.5) можно записать:
Qi = Н* cos 67 sin at Н* sin 6j cos cot. (8.6)
Далее, можно разделить задачу на две задачи: одна
из них относится к случаю действия синусоидальных
вынуждающих сил
Qi = Я,-sin cof (8.7)
(здесь принято обозначение /7; = 77* cos бj), а вторая —
к случаю действия косинусоидальных вынуждающих
сил
Q} = Gjcos at (8.8)
(где Gj = Н* sin б,). Эти задачи совершенно однотип-
ны, поэтому ограничимся случаем действия синусоидаль-
ных сил (8.7). Тогда уравнения (8.2) запишутся так:
2 (Ш + ^Мй) = Hj sin (of (/ = 1,2,..., s). (8.9)
й=0
Установившееся движение будем разыскивать в виде
q, = A, sin at (/=1, 2, ..., s). (8.10)
В этой записи видно, что все обобщенные координаты
изменяются с единой частотой, равной частоте вынужда-
ющих сил.
Подставляя (8.10) в дифференциальные уравнения
(8.9), приходим к следующей системе алгебраических
уравнений для определения амплитуд колебаний А}:
S
2 (cjh - (оЧй) А = Н5 (/ = 1,2,...,$). (8.11)
й=1
К такой же системе можно прийти, если в (8.9) ввести
правые части 77,е’“! и разыскивать решение в виде q, =
= 4/“‘.
И Я. Г. Пановко
162 ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Решение системы уравнений (8.11) имеет вид
Л = 4 (7 = 1-2, 5). (8.12)
Здесь D — определитель, составленный из коэффициентов
системы (8.11),
D =
Cn-an“2 C12“ai2“2
C2l~a21“2 C22-a22“2
с1з-а1з“2
c2s a2sw
(8.13)
2
2 2
и A3- — определитель, который получается из D путем за-
мены /-го столбца правыми частями системы (8.11). Со-
вокупность значений А, определяет форму вынужденных
колебаний, т. е. конфигурацию системы при ее наиболь-
шем отклонении от состояния равновесия.
Если сравнить полученный определитель D (8.13) с
частотным определителем (4.29), то можно заметить, что
опп совпадают при <о = к. Но в этом случае определи-
тель D обращается в нуль, так как именно из этого ус-
ловия были найдены собственные частоты к\, kz, ..ks.
Однако если D = Q, a Д;¥= 0, то, как это видно из фор-
мулы (8.12), все амплитуды А, становятся неограничен-
ными, т. е. возникает резонанс. Таким образом, мож-
но сказать, что резонанс наступает при совпадении ча-
стоты вынуждающей силы с любой пз собственных
частот.
Возможны и противоположные случаи, когда при оп-
ределенных значениях ® обращаются в нуль некоторые
определители А,- (при этом D¥=0). Тогда амплитуды А}
соответствующих координат qj оказываются равными ну-
лю, что свидетельствует об отсутствии колебаний по этим
координатам. Это явление называется антирезо-
нансом.
Остановимся подробнее на случае системы с двумя
степенями свободы. Из уравнений (8.11) можно полу-
чить следующие формулы для амплитуд Ai и Л г:
____ gl (С22 ~ Я22Ю2) ~ Я2 (С12 ~ ^2^)
(С11 ~ а11“2) (С22 - а22“2) - (С12 - а12“2)2’
Я1 (С12 ~ а22ю2) ~ Я2 (СП ~ а11ю2)
(С11 - V2) (С22 - а22“2) - (С12 - ai2“2)2 ’
(8.14)
§ 8 СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ 163
Положим, далее, что надлежащим выбором координат
достигнуто выполнение равенств «ы = «21 = 0 и, кроме
того, задано th = 0.
При этих условиях выражения (8.14) принимают вид
Л = Я1(С22"а22м2)
1 Gn-aH“2)(a22-a22“2)-^’
(С1Г--аи“2)(С22-а22Ш2)-С122 ’
Условие ]
(си — а12со2) (с22 — а22ю2) — = 0 (8.16)
определяет два резонансных значения частоты возмуща-
ющей силы; они равны собственным частотам к\ и к%
рассматриваемой системы с двумя степенями свободы.
Условие
С22 —«22(О2 = 0 (8.17)
определяет частоту антирезонанса. При этой частоте ко-
лебания, соответствующие первой координате, полностью
отсутствуют, а наибольшее значение второй координаты
согласно (8.15) равно
В этом результате содержится интересная возмож-
ность практической борьбы с колебаниями; ею пользу-
ются в некоторых областях техники. Допустим, что име-
ется некоторая система с одной степенью свободы, под-
верженная действию гармонической вынуждающей си-
лы. Усложнив систему путем добавления дополнительной
массы на упругой связи и подчинив значения жесткости
и массы дополнительной части условию (8.17), можно
добиться устранения вибраций основной части системы;
в этом случае дополнительная часть системы называется
динамическим гасителем колебаний {динамическим виб-
рогасителем) .
Следует иметь в виду, что такой гаситель эффективен
лишь при строгом постоянстве частоты ы возмущающей
силы; в противном случае оп может оказаться даже
вредным. Для смягчения этого недостатка обычно
вводят в систему динамического гасителя силы трения,
11*
164
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
которые делают гаситель «в среднем» полезным в доста-
точно широком диапазоне частот со.
Пример 8.1. На левый груз системы с двумя степенями сво-
боды (рис. 8.1) действует гармоническая вынуждающая сила
Hi sin cof. Найти, при каких соотношениях массы т2 правого груза
и коэффициента жесткости
с2 правой пружины исче-
зают колебания левого гру-
за, т. е. правый груз оказы-
вается динамическим гаси-
телем колебаний. Коэффи-
циент жесткости ci левой
пружины и масса mi лево-
го груза заданы.
Принимая за обобщен-
sin at
Рас. 8.1
ные координаты отклоне-
ния Xi и х2 грузов от положения равновесия, составляем диффе-
ренциальные уравнения движения:
Hi sin (ОС — ciXi + с2(х2 — = mixi,
— с2(х2 — Xi) = т2х2.
Приводя эти уравнения к форме (8.3)
mi^i + (ci + c2)xi — с2х2 = Hi sin we,
пг2х2 — с2%1 + с2х2 = О,
устанавливаем:
ап = mi, (Zi2 = ((21 ~ 6, а22 = т2,
Си = С] -|- с2, с12 = с21 — —с2, с22 = с2.
Согласно условию (8.17) должно быть
с2 — т2ю2 = О,
т. е. искомое соотношение (условие настройки динамического га-
сителя) имеет вид
и не зависит от значений ci и mi. На рис. 8.2 показано изменение
амплитуд Ai и А2 в зависимости от частоты со возмущающей силы.
При построении графиков было принято Hi — 10 II, с: — с2 —
= 10 Н/см, mi = т2 = 1000 кг. При этом собственные частоты
равны ki = 0,618 с-1, к2 = 1,618 с-1, а соответствующая антире-
зонансу частота равна 1 с-1.
Пример 8.2. Найти амплитуды колебаний сосредоточенных
грузов, связанных с двухопорной упругой балкой (рис. 8.3, а).
Массы грузов одинаковые и равны т, жесткость EJ сечения балки
постоянная. На средний груз действует вынуждающая сила
Я sin (of.
Дифференциальные уравнения движения систем этого типа
удобнее составлять с помощью обратного способа. Приняв за обоб-
щенные координаты j/i, у2, у2 - отклонения грузов от положений
§ 8. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ 165
равновесия,— имеем
2/1 — —тп^j/'i6n — ^2^/2612 — ^3^/3613 Ч- Н bin (0^6]2,
2/2 = —т\У\&2\ — т2У&22 — 77232/3623 4“ & sin C0622,
2/3 = —?72ij/i6ji — 77722/2632 — 7/232/3633 + fl sin (O/632,
где 6jj — коэффициенты влияния (единичные перемещения); не
задерживаясь на их вычислении, приведем сразу окончательные
значения:
« 75 « 117
6ц — °33 ~ Р ’ °12 — ®21 ®23 — ®32 ~ Р ’
Л Я —А Л1
°22~ Р ’ °13 - °31 ~ Р ’
где р = 9 • 12962J7/Z3. С учетом этих значений, а также равенств
та] = т2 = т3 = т дифференциальные уравнения приобретают
вид
Ibmijt -ф 117ту? -ф 51mij3 -ф рут = 117Н sin col,
117mi/i -ф 243/ш/2 -ф 117ту3 -ф Ру2 = 243# sin col,
Slmyl -ф 117ту? -ф 7Ьту3 -ф ру3 = 117#sin col.
Теперь можно составить уравнения (8.11) для определения
амплитуд колебаний:
(Р — 75тсо2)/11 — 117тсо2Л2— 51тсо2Л3 = 117#,
—117тсо2Л! + (р — 243тсо2)Л2- 117тсо2Л3 = 243Я,
—51тсо2Л1 — 117ягсо2Лз + (Р - 75тсо2)Л3 = 117#;
отсюда находим
__ _ # __________117
1 — з — р ! _ 369а + 3240а2 ’
_ н 243 — 3240а
Л2 = “(Г 1 — 369а + 3240а2 ’
где а = тсо2/р. Как видно, амплитуды колебаний зависят от харак-
терного параметра а, меняющегося с изменением частоты возбуж-
166
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
дения. При ai = 0,00278 и а2 = 0,11111 знаменатели найденных
выражений обращаются в нуль, т. е. амплитуды колебаний стано-
вятся неограниченными (резонансные состояния, когда частота воз-
буждения совпадает с какой- либо собственной частотой рассматри-
Рнс. 8.3
ваемой системы). На рис, 8.3, б — з показаны формы изогнутой
оси балки при Я/р = 1 и нескольких значениях параметра а (так
как при изменении а значения At и А2 изменяются на несколько
§ 8. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ 167
порядков, кривые построены в различных масштабах). Кривая па
рис. б построена для а = 0 (статическое нагружение). По форме
от пее мало отличается кривая на рис. в, относящаяся к сравни-
тельно небольшому значению параметра а. Кривая на рис. г по-
строена для околорезопансных условий и близка к первой собст-
венной форме. Кривая на рис. д относится к «межрезопапсным»
условиям ai < 0,005 < а2; здесь пужно отметить, что перемещения
находятся в противофазе с вынуждающей силой (подобно зарезо-
нансным режимам систем с одной степенью свободы). Кривая на
рис. е соответствует антирезонансу (при а = 0,075 значение А2
обращается в нуль). На рис. ж показана кривая для частоты, не-
много меньшей, чем вторая собственная частота, а кривая па
рпс. з — для частоты, несколько превосходящей вторую собствен-
ную частоту. Можно показать, что при дальнейшем возрастании
параметра а изогнутая ось в принципе будет такой, как па рис. з.
3. Действие произвольных вынуждающих сил; разло-
жение по собственным формам. В случаях, когда вынуж-
дающие силы изменяются не по гармоническому закону,
целесообразен переход к нормальным (главным) коор-
динатам. При этом вместо системы дифференциальных
уравнений (8.2) или систем (8.3) и (8.4) получается си-
стема независимых дифференциальных уравнений
= (у = 1, 2, . .., s), (8.18)
в которой т); — нормальные координаты, к, — собственные
частоты, Q, — приведенные обобщенные силы. После то-
го как образована система (8.18), дальнейшее решение
сводится к исследованию колебаний ряда независимых
систем с одной степенью свободы (см. и. 4 § 5).
Пусть обобщенные координаты первоначально приня-
ты таким образом, что исходная система дифференциаль-
ных уравнений записывается в виде (8.3). Для требуе-
мого перехода к системе (8.18) нужно предварительно
найти собственные частоты kt и коэффициенты собствен-
ных форм хн. Далее положим
S
qr = 2 ХгЩг- (8.19)
2 = 1
Тогда (8.3) запишется в впде-
S " s S
ai 2 Хцпг + 2 сзг 2 x,iTii = Qj. (8.20)
2 = 1 Г=1 2=1
Изменим порядок суммирования во втором слагаемом:
5 $ S S
2 Cjr 2 ~~ S Л$ S
Г—1 2=1 2=1 Г=1
168
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
и заметим, что входящая сюда сумма по г согласно
(4.46) равна
r=l
Теперь уравнения (8.20) принимают вид
®7 2 Xj-i (щ + ki щ) = Qj. (8.21)
1-1
Умножим каждое из этих равенств на х?„ и затем сло-
жим их:
S S S
2 KjmClj 2 Kji (l| 4“ ^ЧГр) = 2 Qj^jm,
7=1 . i=l j=l
ИЛИ
s s s
2 (h* 4“ 2 = 2 QjKjm. (8.22)
fc=l 7 = 1 7 = 1
Согласно свойству ортогональности собственных функ-
ций (4.65) равны нулю все входящие в левую часть сум-
мы по у, кроме той, в которой индекс i совпадает с ин-
дексом т. Поэтому (8.22) можно записать в виде
S S
(ц?п ~Ь ^тНт) 2 = 2
7 = 1 7=1
Окончательно получаем дифференциальные уравнения в
нормальных координатах
Пт + k2mv\m = Q*m (т = 1, 2, . ... s), (8.23)
где
2
Qm = ------ (яг = 1, 2, . .., з) (8.21)
2 а^т
j=i
есть приведенные вынуждающие силы.
Если обобщенные координаты были выбраны так, что
исходные дифференциальные уравнения записываются в
виде (8.4), то аналогично можно прийти к (8.23),
§ 8. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ 169
причем
кт 2 СЛт
Й = . (8.25)
J = 1
Таким образом, составлению уравнеппй (8.21) долж-
но предшествовать определение собственных форм, т. е.
коэффициентов и собственных частот кт\ затем об-
разуются выражения (8.24) или (8.25), и задача сводит-
ся к интегрированию независимых уравнений (8.23),
каждое из которых описывает движение некоторой си-
стемы с одной степенью свободы. После интегрирования
этих уравнений можно получить выражения для перво-
начально выбранных обобщенных координат qr с по-
мощью соотношений (8.19).
Пример 8.3. На левый груз рассмотренной ранее системы
с двумя степенями свободы (рис. 8.1) действует вынуждающая
сила
<?! = J?! (1 — е-“‘)
(Hi и а — заданные постоянные). Найти движение системы.
Для этой системы при щ = с2 = с, mi = т2 — т в § 4 было
папдено
4 = 0,382^-, *| = 2,618^-,
*21 = 1,618, *22 = —0,618.
По формуле (8.24) находим приведенные вынуждающие силы:
(?, 0,2787/
О =--------—-----= —---------- (1 — е~а()
m-p m-l,6182 т 1 '
„ <?, 0,7277?,
О* =-------1-----—----------L (л__е 'а/)
2 m-|-m-0,618a т
Теперь образуем оба уравнения (8.23):
ц + 0,382-L т] = °’278gl (1 - e~at),
1 т 1 т
ц2 + 2,618 _L Т] = _°’727ЯД (1 -
тп 2 m
170
ГЛ. II. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Решение этих уравнений находим с помощью выражения (5.19):
0,2787/j
0,222Н1
п2 = —-с—
у-ру (sinA:1I + pi cos^i)
₽2
y-j-^(sin*3H ₽2coSy)
Здесь P; = a/ki, p2 = a/k2. Наконец, согласно (8.19) находим
О'?22 \ -a<__
1 + ₽2 /
O,722p2
(sin kJ + pt cos kJ) — (sin kJ + P2 cos kJ) ,
'2
0,278
/ 0,278
1 4 _L P.2
С
IIJ Г
*2 = W + *Л = ~ 0’312~
0,449 _ 0,137 \
I -t ft2 I
0,449 „ 0,137
(sin kJ + pj cos V) + —
(sin^i + Р2 cos*2«) .
4. Действие периодических вынуждающих сил. В слу-
чаях, когда действующие на систему вынуждающие си-
лы изменяются по периодическому закону, возможны два
пути решения задачи — в сущности те же, что и для си-
стем с одной степенью свободы.
Первый путь основан на разложении периодических
вынуждающих сил в ряды Фурье; после такого разло-
жения определяются гармонические движения, вызывае-
мые отдельными гармониками сил (см. выше и. 2 на-
стоящего параграфа), и найденные результаты надлежа-
щим образом складываются.
Второй путь основан на предварительном переходе к
нормальным координатам, как это было изложено в и. 3
этого параграфа. Это приводит к ряду задач о колеба-
ниях систем с одной степенью свободы и позволяет по-
лучить решения в замкнутой форме, как это было изло-
жено в § 5, п. 5.
Хотя в расчетной практике чаще идут по первому пу-
ти (например, при исследовании крутильных колебаний
валов двигателей внутреннего сгорания), однако иногда
предпочтительнее может оказаться второй путь, особенно
в тех случаях, когда тригонометрические ряды, в которые
разложены вынуждающие силы, медленно сходятся.
Глава III
ПАРАМЕТРИЧЕСКИЕ КОЛЕБАНИЯ
§ 9. Общие понятия
1. Основное дифференциальное уравнение. В рассмот-
ренных выше задачах о колебаниях действующие силы
можно было отнести к одной из трех категорий: позици-
онные (в частности, восстанавливающие) силы, завися-
щие только от обобщенных координат q}; диссипативные
силы, определяемые обобщенными скоростями q/, вынуж-
дающие силы, являющиеся заданными функциями вре-
мени t.
Однако существуют силы более сложной природы,
в частности нестационарные позиционные силы, которые
зависят от координат q;, а также от времени t (в явном
виде):
Q> = Qj(qi, q2, ..q,, t) (j = 1, 2, ..., s), (9.1)
и притом так, что их невозможно представить в виде
суммы двух слагаемых, одно из которых зависит только
от координат, а другое — только от времени.
Ограничимся рассмотрением линейных систем с одной
степенью свободы, когда при малых отклонениях от по-
ложения равновесия обобщенная сила определяется вы-
ражением
Q = -cq, (9.2)
причем, в отличие от случаев действия стационарных
восстанавливающих сил, параметр c = c(i) является
функцией времени.
Дифференциальное уравнение движения
aq + с (t) q = 0 (9.3)
содержит переменный коэффициент и описывает пара-
метрические колебания.
172
ГЛ. III. ПАРАМЕТРИЧЕСКИЕ КОЛЕБАНИЯ
Как мы увидим ниже, свойства движения, описывае-
мого уравнением (9.3), существенно отличаются от
свойств свободных колебаний, определяемых дифферен-
циальными уравнениями с постоянными коэффици-
ентами.
Важное значение имеют нередко встречающиеся в
приложениях случаи периодического изменения парамет-
ра, когда
c(t + T) = c(t). (9.4)
Соответствующие этим случаям колебания называются
параметрически возбуждаемыми или, короче, параметри-
ческими. Решением дифференциального уравнения (9.3)
при условии (9.4) мы займемся ниже, но уже здесь от-
метим, что амплитуды параметрических колебаний —
в зависимости от значений постоянных системы — либо
остаются ограниченными,
либо возрастают во вре-
мени. Очевидную опас-
ность представляют коле-
бания с возрастающими
амплитудами; это явление
называют параметриче-
ским резонансом. По неко-
торым признакам, о кото-
Рис. 9.1
рых будет сказано ниже, параметрический резонанс
существенно отличается от «обычного» резонанса и в
определенном смысле опаснее последнего.
2. Параметрические колебания около положения рав-
новесия. Прежде чем обратиться к решению дифферен-
циального уравнения (9.3) и исследованию возможно-
сти параметрического резонанса, рассмотрим некоторые
простые механические системы, колебания которых яв-
ляются параметрическими; в этих случаях часто пара-
метрическими называют и сами системы.
В качестве первого примера рассмотрим симметрич-
ную абсолютно жесткую балку длиной 21 со средней
шарнирно неподвижной опорой п двумя упругими опо-
рами на концах. Коэффициенты жесткости упругих опор
одинаковы и равны со (рис. 9.1). К балке приложена
переменная горизонтальная сила P(t), заданная в виде
периодической функции времени. В положении равнове-
сия ось балки горизонтальна. При малых отклонениях
балки от положения равновесия (см. штриховую линию
§ 9. ОБЩИЕ ПОНЯТИЯ
173
на рисунке) на нее действует момент сил упругости
—соф?2 и момент продольной силы Р(?)ф?; полный мо-
мент, представляющий собой обобщенную силу в данной
задаче,
М = — [со? — Р (?) ] ф?,
оказывается функцией координаты <р и времени ?. Соот-
ветствующее дифференциальное уравнение движения
имеет вид
— [со? — Р(?)]?ф = /ф
(где I — момент инерции балки относительно оси враще-
ния), или
cJ-P(i)
ф+„ о._ ?ф=0.
Оно относится к типу (9.3).
Другим примером может служить маятник с колеб-
лющейся по вертикали точкой подвеса (рис. 9.2, а).
Пусть ? — длина маятника, т—масса груза, у = у (t) —
заданный периодический закон движения точки подвеса.
Дифференциальное уравнение
малых относительных колеба-
ний маятника имеет вид
(—mg — my)lq> — тР<(
(—ту — переносная сила инер-
ции), или
Ф + ф = 0; (9.5)
как видно, эта система также
относится к типу параметриче-
ских.
В качестве третьего приме-
ра рассмотрим вертикальный
безмассовый упругий стержень
2 длиной ?, показан-
ный на рис. 9.2, б. С концом стержня связан сосредото-
ченный груз 4. Верхней опорой служит неподвижный
шарнир 1, а нижней опорой служит втулка 3 с коротким
подшипником. Если считать подшипник шарнирной опо-
рой и пренебречь влиянием силы тяжести груза, то ко-
эффициент изгибной жесткости балки определяется
174
ГЛ Ш ПАРАМЕТРИЧЕСКИЕ КОЛЕБАНИЯ
формулой теории сопротивления материалов
_ 3EJ
~ Z (Z — s)2 ’
где s — расстояние между опорами.
Втулке задано периодическое движение около неко-
торого среднего положения, определяемого расстоянием
so. Состоянию равновесия соответствует положение груза
на вертикали и прямолинейная форма оси стержня.
При возмущении этого состояния груз отклоняется
в сторону, ось балки изгибается, и последующее движе-
ние груза описывается дифференциальным уравнением
х +-----—-----=- х = 0, (9.6)
ml [I — s(Z)]2 ' '
которое также относится к рассматриваемому здесь типу.
Исследование решений подобных дифференциальных
уравнений позволит судить об устойчивости состояния
равновесия, около которого происходят колебания. Если
параметрически возбуждаемые колебания постепенно за-
тухают (или по крайней мере не имеют тенденции к воз-
растанию), то состояние равновесия следует признать
устойчивым; если же колебания происходят с воз-
растающими амплитудами (параметрический резонанс),
то состояние равновесия неустойчиво. Поэтому в по-
добных случаях самым важным является выяснение ос-
новной тенденции параметрических колебаний.
3. Параметрические колебания около стационарного
режима движения. К необходимости исследовать свой-
ства решений дифференциальных уравнений с перемен-
ными коэффициентами приводят также задачи об устой-
чивости стационарных режимов движения. Обычно дело
сводится к следующему.
Допустим, что после решения некоторой задачи о
движении механической системы найден режим движе-
ния, описываемый функцией q=q(t). Для исследования
устойчивости этого режима необходимо предположить,
что он каким-либо образом нарушен и возмущенное дви-
жение описывается функцией q + бд, близкой к функции
q(t); здесь 6q (Z)—вариация функции q(t), т. е. откло-
нение системы от исследуемого режима движения. Если
функция 8q с течением времени возрастает, то исследуе-
мый режим q = q(t) неустойчив; в случае постепен-
ного затухания функции 8q режим q — q(t) устойчив.
§ 9. ОБЩИЕ ПОНЯТИЯ
175
Как оказывается, для функции в ряде случаев
можно получить дифференциальное уравнение типа
(9.3). Характер решения этого уравнения позволяет сде-
лать заключение об устойчивости режима движения
Я = 3(0-
Поясним сказанное примером из области вынужден-
ных колебаний систем с нелинейной восстанавливающей
силой (см. гл. II, § 7). Дифференциальное уравнение
колебаний такой системы имеет вид
aq+F(q)=Q(t), (9.7)
причем F(q) и Q(t)—заданные функции координаты и
времени. Как мы знаем, решение этого уравнения может
быть неоднозначным и возможно существование несколь-
ких стационарных режимов с различными амплитудами
31 = 31(0, 32 = 32(0, Зз = Зз(0-
Так как среди этих режимов физически осуществимы
только устойчивые режимы, то полное решение задачи
о вынужденных колебаниях должно содержать не только
выяснение (точное или приближенное) возможных ре-
жимов, но и анализ их устойчивости.
Для исследования устойчивости какого-либо из най-
денных режимов, например режима qi = qi(t), предпо-
ложим, что он каким-либо образом возмущен и, следова-
тельно, движение системы будет описываться суммой
qi + 6^1; здесь второе слагаемое, 6gi, представляет собой
возмущение функции qi.
Об устойчивости стационарного режима qi = qi(t)
можно судить по характеру изменения во времени воз-
мущения бдь Если выяснится, что при t -> °° возмуще-
ние бщ 0 или остается ограниченным, то возмущенное
движение будет стремиться к стационарному режиму
или оставаться вблизи него; следовательно, последний
устойчив. Если же при t °° вариация 8qi неограничен-
но возрастает, то исследуемый стационарный режим не-
устойчив.
Решение qi(t) должно удовлетворять дифференциаль-
ному уравнению (9.7):
Я31 +F(qi)= Q(t); (9.8)
но тому же дифференциальному уравнению (9.7) долж-
на удовлетворять также функция qi + бг^:
aiji + a8iji + F (qi + 6<?i)= Q(t).
176 ГЛ. Ш. ПАРАМЕТРИЧЕСКИЕ КОЛЕБАНИЯ
Рассматривая малые величины Sqi, мы можем принять
+ 671)^(71)+Г (71)671,
где штрих обозначает дифференцирование по координате
qi, т. е.
aqi + aSqi + F(qi)+ F' (qi)6qi = Q(t). (9.9)
Вычитая уравнение (9.8) из уравнения (9.9), получим
a6qi + F'(qi)6qi = 0. (9.10)
Но так как qi представляет некоторую известную функ-
цию времени (стационарный режим), то и F' (qi) также
является функцией времени, т. е. дифференциальное
уравнение (9.10) есть уравнение типа (9.3).
Пусть, например,
F(q)=$q3, Q(t) = Н sin coi,
и необходимо исследовать устойчивость стационарного
режима
71 = A j sin coi,
который был найден в § 7 гл. II.
В данном случае
F'(q) = 3pg2 = 3fL4iSin2
и для вариации стационарного режима получим диффе-
ренциальное уравнение
a8q -|- (304jsin2 67 = 0, (9.11)
полностью соответствующее уравнению (9.3).
Рис. 9.3
В следующих двух параграфах будут рассмотрены ре-
шения дифференциальных уравнений тина (9.3), кото-
рое запишем в виде
7 + А:2(07 = 0. (9.12)
Однако сразу отметим, что интегрирование этого уравне-
§ 10 ВОЗБУЖДЕНИЕ ПО КУСОЧНО-ПОСТОЯННОМУ ЗАКОНУ 177
ния при произвольной периодической функции А:2 (7)
весьма сложно. Поэтому ниже мы остановимся только
на двух относительно простых случаях, когда изменение
параметра следует периодическому кусочно-постоянному
закону либо закону синуса (в обоих случаях с дополни-
тельным постоянным слагаемым — см. рис. 9.3).
§ 10. Параметрическое возбуждение по периодическому
кусочно-постоянному закону
1. Колебания при отсутствии трения. Рассмотрим слу-
чай, соответствующий случаю рис. 9.3, а. При этом диф-
ференциальное уравнение (9.12) принпмает вид
q+ &о(1± р)з= 0, (10.1)
где ц = АА:2//^.
Ввиду того что в течение каждого полупериода 772 =
= л//со дифференциальное уравнение имеет постоянные
коэффициенты, можно воспользоваться способом припа-
совывания.
Рассмотрим какой-либо период Т изменения коэффи-
циента к2 и совместим с началом этого периода начало
отсчета времени. В первом полупериоде, когда 0 < t <
<Т/2, дифференциальное уравнение (10.1) имеет вид
714 /^(1 1-н)7г = 0, (Ю.2)
а во втором полупериоде T/2<t<T соответственно
будет
72 + ^(1-ц)72 = 0. (10.3)
Дифференциальные уравнения (10.2) и (10.3) с посто-
янными коэффициентами имеют решения
71 = С’1 sin kxt + D\ cos k\t, ,.n
(10.4)
72 = C2 sin k2t + D2 cos k2t,
причем ki = A'0V 1 + p, k2 = AtoY 1 — p. В этих решениях
содержатся четыре постоянные, Ci, Di, С2, D2, для опре-
деления которых необходимы четыре условия. Два ус-
ловия относятся к моменту времени t = 772, общему для
обоих полуперподов; в указанный момент должно быть
<71 (—) = 7з (т)> 71 (т) = (т )• (10-5)
12 я, Г. Пановко
178
ГЛ. III. ПАРАМЕТРИЧЕСКИЕ КОЛЕБАНИЯ
Это дает следующие соотношения:
к'Т к.Т кТ кТ
С± sin ~—|- Dy cos = С2 sin ——|- D2 cos —,
/ клТ к.Т \ / к.Т . кТ\
ку I Cj cos —i-Dy sin -j- I = k21C2 cos —--D2 sin —I.
(10.6)
(Ю.7)
Запишем еще два соотношения:
Хщ(0)= q2(T), ^i(0) = ?2(7’),
в которых А, — некоторое, пока неизвестное число.
Соотношениями (10.7) утверждается, что по истечении
рассматриваемого периода обобщённая координата и
обобщенная скорость изменяются в А, раз. Соответствен-
но этому движение в следующем периоде начнется при
измененных в А раз начальных условиях, т. е. будет
повторять движение в рассматриваемом периоде, но в
измененном в А раз масштабе.
Если |А| > 1, то колебания в каждом следующем пе-
риоде будут усиливаться, а если |А| < 1, то они будут
постепенно затухать. Таким образом, устойчивость или
неустойчивость системы определяется значением мо-
дуля А.
Подставив решения (10.4) в соотношения (10.7), по-
лучим
Wi = С2 sin к2Т + D2 cos к2Т,
kCiki = С2к2 cos к2Т — D2k2 sin к2Т.
Система уравнений (10.6) и (10.8) однородна отно-
сительно постоянных Ci, Z)i, С2, D2 и имеет отличные от
пуля решения только в том случае, если равен нулю оп-
ределитель, составленный
из ее коэффициентов:
(10.8)
. V
Sin —
1 к'т
*1 cos —
0
к}/.
V
COS—2“
V
-- sin- 2“
А.
0
. V
-sm —
- к2т
~ к2 C0S Т
— sin к2Т
— к2 cos к2Т
V
-cos —
t •. к2Т
к2 Sin —
— cos к2Т
к2 sin к2Т
= 0.
Развернув
ное уравнение:
определитель, получим
следующее
квадрат-
%2 - 2Ак + 1 = 0,
(10.9)
§ 10. ВОЗБУЖДЕНИЕ ПО КУСОЧНО-ПОСТОЯННОМУ ЗАКОНУ 179
г. котором для краткости обозначено
кгТ кТ к^ + к* . кТ . кТ
А = COS -Аг- cos -4i-Агп;— sin -2—- sm -Аг~ =
Z 2 -2
= cos ла 1 4- fi cos ла 1 — p —
---T--2--sin лст V4! 4- psin ла ]Л1 — p, (10.10)
V i-p2
причем а = коТ/(2л) есть отношение среднего значения
к0 собственной частоты к частоте пульсации параметра.
Корни уравнения (10.9) следующие:
Xi=4-M2-1, Х2 = Л4-1М2^1. (10.11)
Для того чтобы числа Xi и м были вещественными, как
это предполагается по смыслу решаемой задачи, должно
быть
|А|>1, (10.12)
т. е. либо А > 1, либо А < — 1. Но в обоих этих случаях
модуль одного из корней (10.11) больше единицы:
если А > 1, то Х2 > 1;
если А < — 1, то |Х11 > 1.
Отсюда следует, что если выполнено неравенство (10.12),
то колебания будут с каждым новым периодом увели-
чиваться. Неравенство представляет собой не только ус-
ловие вещественности множителя X, но одновременно и
условие возникновения параметрического резонанса.
Так как значение А зависит от двух постоянных си-
стемы а и р, то их значения полностью определяют ус-
тойчивость системы.
На рис. 10.1 представлена построенная с помощью
условия (10.12) диаграмма устойчивости, по осям кото-
рой отложены значения 4а2 и 2ра2. В незаштрихован-
ных областях значения параметров аир таковы, что
условие (10.12) выполняется, т. е. система неустойчива.
Заштрихованные области диаграммы соответствуют ус-
тойчивым состояниям системы. С помощью такой диа-
граммы можно сразу судить об устойчивости по данным
значениям аир без всяких дополнительных вычис-
лений.
Прежде всего обратим внимание па те зоны областей
неустойчивости, которые расположены вблизи горизон-
12*
180
ГЛ. Ш. ПАРАМЕТРИЧЕСКИЕ КОЛЕБАНИЯ
тальной оси, т. е. соответствуют малым значениям пара-
метра ц. Как видно, в этих зонах 4а2 ~ п2, т. е.
(п = 1, 2, ...) (10.13)
То же можно найти из (10.10), положив р, = 0. В самом
деле,
А = cos2 ла — sin2 hqz== cos 2ла,
т. е. при произвольных значениях а имеем |Л| 1. Ра-
венство 1Л] = 1, соответствующее возникновению пара-
Рис. 10.1
метрического резонанса, возможно при условии, что ар-
гумент 2ла удовлетворяет равенству
2ла — лп (и = 1, 2, ...),
из которого также следует соотношение (10.13).
Таким образом, если выполняется условие (10.13), то
параметрический резонанс возникает при сколь угодно
малой глубине пульсации. При этом основное значение
имеет случай п = 1. когда а = 1/2, т. е. когда среднее
значение собственной частоты вдвое меньше частоты
параметрического возбуждения.
При значительной глубине пульсации и заметном от-
личии ц от нуля параметрический резонанс возникает в
целых областях значений а, расположенных вблизи зна-
чений (10.13); чем больше заданное значение р, тем ши-
ре эти области. По этой причине отстройка от парамет-
§ 10. ВОЗБУЖДЕНИЕ ПО КУСОЧНО-ПОСТОЯННОМУ ЗАКОНУ 181
ричсского резонанса труднее, чем от обычного резонан-
са; параметрический резонанс более опасен, чем обыч-
ный, еще и по той причине, что линейное демпфирование
(которое выше вообще не учитывалось) лишь несколько
суживает области неустойчивости, но неспособно ограни-
чить возрастание амплитуд колебаний в этих областях*).
Пример 10.1. Груз 1 массы т упруго подвешен на цилинд-
рической витой пружине 2 длиной Z; коэффициент жесткости пру-
жины равен с. Разрезная втулка 3 периодически обжимает верх-
нюю часть пружины так, что длительность каждого обжима t* рав-
на длительности интервала между двумя последовательными об-
жимами. Длина деформируемой части пружины при обжиме мало
отличается от длины I (рис. 10.2). Найти наименьшее значение
при котором возникает параметрический резонанс.
Замечая, что период изменения жесткости Т = 2t#, и учитывая
малость глубины пульсации, запишем условие
параметрического резонанса (10.13):
а = 7г07’/(2л) — п/2 (га = 1, 2, .. .).
Подставляя сюда к^ = ~]/с/т, Т —2t*, находим
наименьшее значение 7* соответствует га = 1:
Рис. 10.2
т. е. вчетверо меньше периода свободных колеба-
ний груза.
2. Влияние линейного трения. При наличии вязкого
трения вместо дифференциального уравнения (10.1)
имеем
q 2hq к20 (1 ± ц) q --= 0, (10.14)
в котором по-прежнему h = где 6 — коэффициент
вязкости, а — инерционный коэффициент. Рассуждая, как
п в п. 1, запишем решение для обоих полупериодов:
sin/.'ПDjg cos/ij/,
q2 — C2e sin k2t D2e cos k2t,
*) При действии нелинейно вязких сил трепня амплитуды ко-
лебаний оказываются ограниченными.
182
ГЛ. III. ПАРАМЕТРИЧЕСКИЕ КОЛЕБАНИЯ
где
к* = У kl-h2 = j/(! + Н)йо-й2,
к* = Уk22 — h2 = j/(l - Н) - №.
Условия в момент t = 7/2 имеют вид
или
к*Т к*Т к*Т к*Т
Сх sin —1—р Dj cos —= С2 sin —|—D2 cos (10.15)
/ к*Т * к*т\ / кчТ
Cj ( — h sin -i—p fc^cos -У- I — Z>i I h cos —h
* k5T'\ I ktT * k^\
+ kr sin I = C2 I — h sin ——h k2 cos 1 —
/ k*T * k*T\
— D,_\h cos —к 2 sin -y I.
Далее составляем два условия типа (10.7):
Zgi(0)=g2(7), Mi(0)=72(n,
т, е.
kD1 --- e~hT (С2 sin к2Т • D2 cos k*T),
к (СХ - DJi) = e~hT [С2 (- h sin k2T + к* cos к2Т) -
- D2 (hcosk*2T J- k2 sin/47)]. (10.16)
Четыре уравнения (10.15) и (10.16) образуют систему,
однородную относительно постоянных Ci, D\, Cz, Dz', от-
личные от нуля решения соответствуют случаю, когда
равен нулю определитель, составленный из коэффициен-
тов системы, развернув который, придем, аналогично
(10.9), к квадратному уравнению
k2-2Alk + Bi =0. (10.17)
В каждом конкретном случае по заданным значениям
к0, (д, h, Т можно вычислить значения Ai и Bi, а затем
определить корни Xi и Х2 квадратного уравнения (10.17).
Признаком неустойчивости служит вещественность кор-
§ И ВОЗБУЖДЕНИЕ ПО ЗАКОНУ СИНУСА
183
ной п неравенство |%| > 1 для наибольшего по модулю
корня.
Не останавливаясь на подобном исследовании корней,
заметим, что для их вещественности (т. е. для неустой-
чивости системы) необходимо выполнение условия
|Л1|>УБ1, (10.18)
более жесткого, чем условие |4| >1, полученное выше
для случая отсутствия трения. В частности, при h > 0
и р-’-О условие (10.18) ле выполняется, т. е. парамет-
рический резонанс невозможен. Это означает, что для
возникновения параметрического резонанса необходима
некоторая, достаточно большая, глубина пульсации р.
В целом трение оказывает стабилизирующее дей-
ствие и приводит к некоторому сужению областей не-
устойчивости.
§ 11. Параметрическое возбуждение
по закону синуса
1. Общие сведения. Этот случай изменения параметра
иллюстрирован на рис. 9.3, б. Соответствующее диффе-
ренциальное уравнение движения запишем в виде
q + к20 (1 — р cos cot) q = 0. (11.1)
Как и в § 10, здесь ко — среднее значение собственной
частоты, Ц — относительная глубина пульсации перемен-
ного коэффициента. Дифференциальное уравнение с пе-
ременными коэффициентами (11.1) называется уравне-
нием Матье. Обычно это уравнение записывают в форме
+ (а — 2е cos 2т) q = 0, (11.2)
к которой можно прийти, положив в уравнении (11.1)
2 л
ю1 = 2т, fc20 = ^, р = ^-, (11.3)
Решениями уравнения (11.2) служат специальные функ-
ции, называемые функциями Матье, свойства которых
подробно изучены. Как и в случае рассмотренного в § 10
параметрического возбуждения, эти решения могут быть
или ограниченными, или неограниченно возрастающими.
Выделение соответствующих этим случаям областей пара-
метров а и е приводит к диаграмме устойчивости, кото-
184
ГЛ. Ill ПАРАМЕТРИЧЕСКИЕ КОЛЕБАНИЯ
рая дана в готовом виде на рис. 11.1 (диаграмма Айн-
са — Стретта); она сходна с диаграммой устойчивости,
изображенной на рис. 10.1. Границам между областями
устойчивости и неустойчивости соответствуют периоди-
ческие движения. Диаграмма устойчивости симметрична
относительно оси а, так как знак е в уравнении (11.2)
пе имеет значения.
Если дифференциальное уравнение задачи приведено
к форме (11.2), то по данным значениям а и е с по-
мощью диаграммы устойчивости можно сразу сделать
заключение об устойчивости или неустойчивости систе-
мы. Как и выше, речь может идти либо об устойчивости
состояния равновесия (q — отклонение от этого состоя-
ния), либо об устойчивости некоторого основного движе-
ния (в этом случае под q следует понимать вариацию
координаты).
Для приближенного определения границ между об-
ластями устойчивости и неустойчивости в плоскости па-
раметров а, 8 может быть применен способ гармониче-
ского баланса. На границах первой области неустойчиво-
сти движение должно быть периодическим, причем
период, как мы видели в § 10, вдвое больше периода из-
менения параметра. Но период изменения параметра в
уравнении (11.2) равен л, так что указанное движение
имеет период 2л и его можно представить в виде ряда
q = Ay sin т + Bi cos т + Аз sin Зт + Вз cos Зт + ... (11.4)
Ограничиваясь первыми двумя членами, подставим их
§11. ВОЗБУЖДЕНИЕ ПО ЗАКОНУ СИНУСА
185
сумму и уравнение (11.2); приравнивая нулю коэффици-
енты при sin т и cos т, получаем два однородных урав-
нения
(а—8—1)41 = 0, (а + е—1)51 = 0, (11.5)
пз которых следуют уравнения обеих границ:
апр = 1 + 8, амв = 1 — 8. (11.6)
Эти уравнения можно уточнить, принимая во внимание
большее число членов ряда (11.4).
Приведем без вывода более точные уравнения для
первых четырех областей неустойчивости, обозначая зна-
чения а на границах ге-й области неустойчивости через
пр лег,
&п И
„ПР _____L р2 _1_ _Z_ р4 —
“° 2 1 128
„ПР — J _|_ р-— р2--1, рЗ _ _1_ р4 I
«I1 -Г 8 8 8 64 8 1536 8 + . . .,
Й! = 1 — 8 — у 82 -(- 6^ 83 — 84 — .
«2Р = 4ч4282-^84+..., (11.7)
а2 = 12 &2 + 13824 е4 —
ЛПР 9 _! А р2 I А рЗ t_ 13 4 ।
«3 — J 16 ь I 64 г 20480 Е "Г • • ”
лев ri I 1 о 1 •> । 13
аз =9 + i6S'~ 64е + 20480 е
В заключение заметим, что не учтенное здесь вязкое
трение несколько суживает границы областей неустойчи-
вости, подобно тому как это было пояснено в § 10.
2. Примеры.
Пример 11.1. Найти условия устойчивости вертикального
состояния равновесия обращенного маятника (рис. 11.2,), если точ-
ка его подвеса гармонически колеблется около среднего положе-
ния по .чакону у — A cos оИ с частотой w и амплитудой А. Длипа
маятника равна I.
Понятно, что нрп неподвижной опоре обращенный маятник
неустойчив; однако, как мы сейчас увидим, колебания опорной
точки могут придать устойчивость такому маятнику. Составляя
дифференциальное уравнение относительного движения, необхо-
димо учесть переносную силу инерции —ту — тЛ ю2 cos ы£. Ее
момент составляет —mAсо2/гр со- оЯ, п уравнение моментов запи-
шется в (форме
mg/ф — тп4ы2/ф cos coi = mZ2cp,
186
ГЛ. III. ПАРАМЕТРИЧЕСКИЕ КОЛЕБАНИЯ
т. е.
( g 4со2 \
Ф + I — — + —j— cos at I ф = 0.
Для приведения уравнения к виду (11.2) положим
4g 24
2т = col, а = — —5~, е =— ~г.
а2Г 1
Как видно, в пашем примере оба параметра а и е отрицатель-
ные. Знак е вообще роли не играет (об этом уже говорилось вы-
ше), и главной особенностью рассматриваемой системы является
отрицательность величины а. Как видно из диаграммы устойчиво-
сти на рис. 11.1, устойчивость возможна и при отрицательных зна-
чениях а; действительно, каждому значению е отвечает некоторая,
довольно узкая область значений а < 0. в пределах которой состоя-
ние равновесия устойчиво. Согласно (11.7) эти значения лежат в
инвервале ЯрР <; а < а^ев, т. е.
1 2 , 1 2
— ~2 е <а<1 — е — -g- е
(рис. 11.3). При малых амплитудах колебаний 4, т. е. малых
значениях параметра 8, правое неравенство удовлетворяется при
любых отрицательных значениях а и практически остается лишь
.. 1 2
одно неравенство а>—чу е , т. е.
J_ 2
2 е •
Подставляя сюда выражения а и е, получим условие устойчивости
в виде ____
4со > |2gZ.
Это неравенство определяет нижний уровень максимальной скоро-
сти 4со колебаний точки подвеса, который обеспечивает устойчи-
вость опрокинутого маятника; как видно, указанная скорость долж-
§ И. ВОЗБУЖДЕНИЕ ПО ЗАКОНУ СИНУСА
187
на превышать скорость свободного падения тела с высоты, равной
длине маятника.
Пример 11.2. Исследовать устойчивость режимов стационар-
но движения
q — Ai sin co# (i = 1, 2, 3)
в системе с нелинейной восстанавливающей силой F (q) = [3g3.
Дифференциальное уравнение относительно вариации бд было
составлено выше (см. (9.11)). Запишем его в виде
бд + (ЗаИ? sin2 со#) бд = О,
где коэффициент а равен коэффициенту [3, разделенному на инер-
ционный коэффициент системы. Для того чтобы привести уравне-
ние к форме (11.2), нужно положить
За4? За4?
СО t — Т, Л —- л , £ — п ,
2со2 4с?
Таким образом, в данном случае а = 2е и на диаграмме устойчи-
вости всевозможные пары значений а, е лежат на луче, который
1
выходит из начала координат под углом arctg-^- к оси (см. схему
на рис. 11.4). Поочередная подстановка значений Ai, Л2 и А3 в
Рис. 11.4
выражении а и е приводит к расположению точек, показанному
на рис. 11.4, т. е. точки А{ и Ai соответствуют устойчивым, а точ-
ка А3 — неустойчивым решениям. Этим подтверждается сказанное
в § 7 относительно устойчивости найденных там решений на раз-
личных ветвях резонансной кривой.
Глава IV
УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
И АВТОКОЛЕБАНИЯ
§ 12. Устойчивость состояний равновесия
1. Вступительные замечания. Вопросов устойчивости
состояний равновесия мы уже касались в главе I (см.
стр. 35—40, 44), но поскольку она была посвящена сво-
бодным колебаниям, мы рассматривали только такие
системы, в которых отсутствует приток энергии при их
движении вблизи положения равновесия.
В настоящем параграфе рассматриваются более слож-
ные случаи, относящиеся к автономным системам, при
движении которых возможен приток энергии извне. Эти
случаи связаны с конкретными ситуациями, которые не-
смотря на свой частный характер можно считать доста-
точно типичными. В каждой из рассмотренных здесь за-
дач выделяется один «ответственный» параметр, от кото-
рого зависит устойчивость или неустойчивость соответст-
вующей механической системы, и задача сводится к оп-
ределению критического значения этого параметра, при
котором устойчивость сменяется неустойчивостью.
Во всех изучаемых здесь случаях рассматриваются толь-
ко малые отклонения системы от состояния равновесия,
т. е. анализируются линейные задачи,— этого достаточно
для того, чтобы судить о тенденциях возмущенного дви-
жения и тем самым сделать заключение об устойчивости
(пли неустойчивости) «в малом».
Сначала, в и. 2, на двух примерах обсуждаются во-
просы устойчивости систем с одной степенью свободы,
связанные с аэроупругой неусточивостью типа дивер-
генции и действием сил «отрицательного» трения. Эти
примеры позволяют выявить особые точки фазовой плос-
§ 12. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ 189
кости двух ранее не упоминавшихся типов — неустойчи-
вый узел и неустойчивый фокус.
В п. 3 рассматривается устойчивость систем с двумя
степенями свободы без трения. Первый случай относится
к аэроупругой неустойчивости типа флаттер, а второй
случай — к устойчивости вращающегося вала с эксцен-
трично насаженным диском. В этих случаях задача сво-
дится к анализу знаков вещественных частей корней би-
квадратного характеристического уравнения и поэтому
относительно проста.
Несколько сложнее решается вопрос об устойчивости
систем с двумя степенями свободы при наличии трения,
который приводит к анализу знаков вещественных час-
тей корней полного уравнения четвертой степени. В п. 4
сначала приводится используемый в подобных случаях
критерий Рауса — Гурвица, а
затем рассматривается конкрет-
ный пример (задача Циглера).
2. Системы с одной степенью
свободы.
а) Задача о дивергенции.
Рассмотрим жесткую тонкую
пластинку, упруго опертую
вдоль левого края и шарнир-
но опертую вдоль правого
края. Пластинка находится в
потоке газа (жидкости), скорость v которого направ-
лена вдоль срединной плоскости пластинки в иевоз-
мущенном состоянии равновесия (рис. 12.1). В этом по-
ложении аэродинамические силы равны нулю (если пре-
небречь весьма малой силой трения потока о поверхность
пластинки) и пластинка находится в равновесии под
действием силы тяжести и реакций опор. Пайтп крити-
ческую скорость потока.
При отклонении пластинки возникают аэродинамиче-
ские давления, зависящие от угла отклонения <р. Соот-
ветствующие количественные закономерности устанавли-
ваются в аэрогидродинамике: мы приведем их в готовом
виде. Равнодействующую давлений можно разложить на
составляющие (лобовое сопротивление и подъемную силу)
2 2
Х = У = 7€у^-?(₽1 (12.1)
здесь кх, ку—постоянные аэродинамические коэффицпен-
Рис. 12.1
190 гл. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
ты, р — плотность газа, I — размер пластинки вдоль по-
тока (перпендикулярный плоскости рисунка размер при-
нят равным единице). Точка приложения равнодейству-
ющей аэродинамических давлений находится на расстоя-
нии b от оси шарнира, которое приближенно будем счи-
тать не зависящим от угла ф. Момент сил, возникающих
при отклонении пластинки относительно оси шарнира,
равен
Л/ = -с0?2ф + ХЬф + УЬ,
где со — коэффициент жесткости упругой опоры. Под-
ставляя сюда (12.1), получаем
М = — с0/2ф + кх б/ф2 4- blip.
Обозначим через I момент инерции пластинки относи-
тельно оси шарнира; тогда дифференциальным уравнени-
ем движения будет
/ф + (r0Z — kv = 0
(слагаемое, определяющее момент силы X, опущено как
имеющее второй порядок малости).
Условие устойчивости имеет вид
2
с01-кх^-Ь>0,
а критическое значение скорости равно
/2сТ
(12‘2)
отсюда, в частности, можно видеть, что с увеличением
коэффициента жесткости упругой опоры критическая
скорость увеличивается. Задачи этого типа относятся
к теории аэрогидроупругостщ рассмотренное явление по-
тери устойчивости называется дивергенцией, а выраже-
ние (12.2) определяет скорость дивергенции. В приве-
денном решении явление существенно схематизировано.
б) «Отрицательное трение». Всюду выше, где учиты-
валось наличие зависящих от скоростей сил, мы считали
эти силы диссипативными', будучи направленными проти-
воположно соответствующим скоростям, они способству-
ют демпфированию колебаний. Однако в некоторых ме-
ханических системах развиваются силы, также завися-
§ 12, УСТОЙЧИВОСТЬ СОСТОЯНИЙ! РАВНОВЕСИЯ 191
щие от скоростей, но совпадающие с ними по на-
правлению. Такие силы оказывают дестабилизирующее
действие и способствуют раскачке колебаний, а не их
демпфированию; иногда силы этого тина называют сила-
ми «отрицательного трения».
Прежде всего остановимся на формальной стороне во-
проса и положим, что кроме восстанавливающих сил дей-
ствуют силы, линейно зависящие от скорости и совпада-
ющие с ней по направлению. Тогда вместо (2.6) имеем
дифференциальное уравнение
aq — bq + cq = O (12.3)
(b>0). При прежних обозначениях
решение дифференциального уравнения (12.3) запишет-
ся, подобно (2.9), в форме
= eht sin k*t -|- q0 cos k4.t I,
где постоянные интегрирования выражены через началь-
ные возмущения. Отсюда видно, что при сколь угодно
малых начальных везмущениях qo и qo возникнут коле-
бания, амплитуды которых будут возрастать по показа-
тельному закону (рис. 12.2, а), т. е. состояние равнове-
сия системы неустойчиво. На рис. 12.2, б показана фазо-
вая диаграмма; в этом случае состоянию равновесия со-
ответствует особая точка типа неустойчивый фокус. При
весьма большом трении (большем критического) фазовая
диаграмма принимает вид, показанный на рис. 12,2, в;
начало координат представляет собой особую точку типа
неустойчивый узел.
Примером механической системы, в которой при ко-
лебаниях может возникнуть сила отрицательного трения,
служит система, показанная на рис. 12.3, а. Она состоит
из тела 1, упруго закрепленного на пружинах 2, и бара-
бана 3, который прижат к телу и вращается с постоян-
ной угловой скоростью. Между барабаном п телом дей-
ствует сила сухого трения R, характеристика которой
показана на рис. 12.3, б. В отличие от обычной схемати-
зации, эта характеристика отражает реально наблюдае-
мое влияние значения скорости скольжения на значение
192
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
силы трения. Отметим, что в первом квадранте
характеристика состоит из двух участков: падающего при
О < v < к* и восходящего при v > к*.
Рис. 12.3
Пусть скорость скольжения при покое тела 1 равна
Vo', ей соответствует сила трения Ro- Из уравнеппя рав-
новесия
Ro — cxq — О
§ 12. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
193
можно определить укорочение пружин в равновесном
состоянии системы:
xo = Ro/c. (12.4)
Рассмотрим теперь движение тела около этого состоя-
ния равновесия и обозначим через х дополнительное пе-
ремещение тела. При этом скорость скольжения переста-
ет быть постоянной величиной и выражается разностью
v = Vo — х,
которая определяет также переменную силу трения R,
отличающуюся от номинального значения Ro- При малых
колебаниях, когда скорость х мала по сравнению с Vo,
можно принять
R = Rq-R'.x = (12.5)
Дифференциальное уравнение движения тела запишется
в виде
R — с (хо + х) = тх,
пли, с учетом (12.4) и (12.5),
тх Д- Rox -|- сх -= 0. (12.6)
Отсюда видно, что при когда 7?0>0, колебания
будут затухающими; если же к <14., то Яо<Ои уравне-
ние (12.6) принимает вид (12.3). Таким образом, если
то • состояние равновесия устойчиво; если же
то после любого сколь угодно малого возмущения
в системе происходит самовозбуждение колебаний.
Следует иметь в виду, что наше решение определяет
лишь начальную тенденцию возмущенного движения.
С возрастанием амплитуд колебаний линеаризованное
представление силы трения (12.5) будет становиться все
менее точным, и для полного анализа всего последующе-
го процесса необходимо учитывать действительную нели-
нейность силы трения; об этом см. ниже § 13.
3. Системы с двумя степенями свободы без трения.
Исследование устойчивости состояний равновесия меха-
нических систем с несколькими степенями свободы так-
же состоит в изучении свойств возмущенного движения,
т. е. того движения, которое будет происходить после
произвольного сколь угодно малого нарушения состояния
равновесия. Названные свойства определяются видом
13 я. г. пановко
194
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
корней соответствующего характеристического уравнения.
Если среди корней X = а + ip имеется хотя бы один с
положительной вещественной частью а > 0, то отвечаю-
щее ему движение будет «уводить» систему от состояния
равновесия — либо монотонно (если р = 0), либо в виде
нарастающих колебаний (если р=#0). Поэтому исследо-
вания устойчивости рассматриваемых ниже систем с дву-
мя степенями свободы сводятся к анализу знаков вещест-
венных частей корней.
а) Задача о флаттере. В п. 2а была рассмотрена воз-
можность дивергенции пластинки в потоке газа, причем
принималось, что пластинка
шарнирно закреплена вдоль
одного края, а вдоль другого
края она упруго оперта (см.
выше рис. 12.1). При упру-
гом опирании обоих краев
(рис. 12.4) появляется еще
одна опасность возникнове-
ния неустойчивости, связан-
ная с неконсервативными
свойствами рассматриваемой системы с двумя степенями
свободы.
Обозначим: г/(()—перемещение центра тяжести пла-
стинки, <р (£)—угол поворота пластинки, с\ и с2— коэф-
фициенты жесткости упругих опор, иг/2/12 — момент
инерции пластинки относительно оси, проходящей через
центр тяжести пластинки перпендикулярно плоскости
чертежа, I — длина пластинки вдоль потока, b — расстоя-
ние от точки приложения подъемной силы
2
Y = ky^-lq
до правого края,
= + R2 = c2{y~ -у-)
— упругие силы реакции.
Дифференциальные уравнения возмущенного движе-
ния имеют вид
— Rv — R2 + Y = my,
п I I П i , ir !, I \ mi2 "
^1 “2" H -^2 "У + (& 2 / ~ 12 <P‘
§ 12 УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
195
Подставляя сюда выражения для Y, Ri и 7?з, получаем
однородную систему
у + сиу + = 0,
ф + Сцу + С22ф = о,
в которой
„ С1 + С2 „ (С1 - С2) 1 kV Р»2 7
11 т ’ 12 2т т 2 ’
2Ь).
Сразу отметим, что неравенство сц С21 служит при-
знаком неконсервативности системы; ниже мы непосред-
ственно убедимся в том, что энергия рассматриваемой
системы может с течением времени убывать (при малых
скоростях потока) или возрастать (при достаточно боль-
ших скоростях потока). Принимая частное решение си-
стемы (12.7) в виде
г/ = Л1еи, <р = А2еи,
получаем
Ai (X2 + Сц)+ А2С12 = О,
AjC2i + А2 (X2 + С22) = 0;
отсюда следует характеристическое уравнение
+ % С12
С21 + С22
т. е.
X4 + Х2(сц + С22)+ СцС22 — С12С21 = 0.
Таким образом, корни характеристического уравнения
имеют вид
^1,2,3,4 =
(12.8)
Если разность сцСгг — С12С21 отрицательная, то один
из корней (соответствующий двум знакам плюс) оказы-
вается вещественным и положительным; отвечающее это-
13*
196 гл. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
му корню движение представляет собой апериодический
монотонный уход системы от положения равновесия.
Следовательно, это положение — неустойчивое.
Если же эта разность положительная и удовлетворяет
неравенству
С11С22 С12С21
то корни (12.8) оказываются комплексными:
= а + ip, — а — гр, 1з = —а + ip, I4 = —а — ip,
где а и Р — положительные и вещественные. Первой па-
ре этих корней соответствует движение
у = + Л12Л‘ = Bye3,1 sin (рг + Yj),
<р = Л21Лг + Л22Л* = B2eat sin (Pi + у2),
т. e. колебания с монотонно возрастающими амплитуда-
ми. Отсюда ясно, что в рассматриваемом случае состояние
равновесия также неустойчиво.
Таким образом, для того чтобы рассматриваемая си-
стема после возмущения оставалась в окрестности поло-
жения равновесия (что и принимается здесь за признак
устойчивости), необходимо, чтобы разность СЦС22 — С12С21
удовлетворяла двум неравенствам:
О < СцС-22
(12.9)
При нарушении первого неравенства возникает дивер-
генция (рис. 12.5, а), а при нарушении второго неравен-
§ 12 УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ 197
ства — колебания с возрастающими амплитудами (рис.
12.5, б); такие колебания называются флаттером.
Границам области устойчивости соответствуют знаки
равенств в (12.9). Если подставить в (12.9) выраже-
ния с,„ то можно найти два критических значения
скорости, которая служит параметром, определяющим
устойчивость:
скорость дивергенции
VM = 1 / —---_---—-------
п скорость флаттера
г(2) = 2 1/ * C*ZV2 + 1
V Зрку А ~ С2
Отметим, что при малых жесткостях правой опоры,
. ! I .\ (И
когда с2<С| ——II, критическая скорость пкр оказыва-
ется мнимой, т. е. дивергенция невозможна. Если, на-
против, жесткость левой опоры меньше жесткости пра-
вой опоры, то мнимым становится выражение критиче-
ской скорости Икр, т. е. невозможен флаттер.
Флаттер представляет реальную опасность для мно-
гих конструкций, находящихся в потоке жидкости или
газа (крыло или хвостовое оперение самолета, обшивка
летательного аппарата, лопатка турбины и т. п.).
б) Устойчивость вращающегося вала. Рассмотрим си-
стему, состоящую из вертикального упругого безынерци-
онного вала 1, с серединой которого жестко связан экс-
центрично насаженный диск 2, обладающий горизонталь-
ной плоскостью симметрии. Вал с диском вращается во-
круг вертикальной осп с постоянной угловой скоростью
со (рис. 12.6, а).
Введем координатную систему xyz, равномерно вра-
щающуюся вокруг оси недеформированного вала с угло-
вой скоростью со. Ось х совместим с осью недеформиро-
ванного вала, ось у направим параллельно эксцентриси-
тету е = АС (А — центр сечения вала, С—центр тяже-
сти диска), а ось z— перпендикулярно осям х и у, орты
осей у и z обозначим через i и j соответственно,— см.
рис. 12.6, б. При таком выборе подвижной координатной
198
ГЛ IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
системы относительное движение диска, обусловленное
изгибом вала, окажется поступательным.
Исследуем это относительное движение, обозначив:
г — радиус-вектор центра тяжести диска С, х, у, z — де-
картовы координаты точки С в подвижной координатной
системе, р — радиус-вектор точки крепления А диска к
валу (при этом р + е = т), с—коэффициент жесткости
Рис. 12.6
б
вала (для изображенной схемы с = 482TZ/Z3, где EJ — из-
гибная жесткость сечения вала, I—его длина).
При составлении дифференциальных уравнений отно-
сительного движения центра диска С нужно учесть силу
упругости вала —ср, переносную силу инерции — ты,. и
кориолисову силу инерции — mvc. Сила упругости при-
ложена в точке А, а обе силы инерции — в точке С.
Силу упругости можно записать в виде
— ср = —ст + се = —с [(у — e)j + zk].
Переносная сила инерции равна
— птыс = та2г = та2 (yj + zk).
Для кориолисовой силы инерции последовательно
получим:
-mwc = 2т (vr X <вс) = 2т [ (yj + zk) X <oi] —
= 2имо (zj — yk).
§ 12. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
199
Проекции этих сил на осп подвижной координатной
системы даны в следующей таблице:
Силы Проекции сил
на ось у на ось z
Сила упругости —с (у — е) —CZ
Переносная сила инерции тару maPz
Кориолисова сила инерции 2ma>z —2та>у
Соответственно данным таблицы дифференциальные
уравнения относительного движения центра диска С име-
ют вид
ту = —с (у — е)+ т^у + 2та>1,
mz = — cz + m(o2z — 2та>у.
Подставив сюда /с2 = с/т (к — собственная частота попе-
речных колебаний невращающейся системы), полу-
чим при (о ¥= к
ij — 2coz + (/с2 — (о2) у = к2е,
z + 2 он/ + (к2 — co2)z = 0.
(12.10)
Эта неоднородная система уравнений допускает решение
е п
У* "л 2772 ’ z* = Э;
1 — <о /к
ему соответствует неизменный во
времени изгиб вала во вращающейся плоскости ху. Для
того чтобы исследовать устойчивость этого режима, пред-
положим, что он каким-либо образом был нарушен и воз-
никло возмущенное движение, описываемое функциями.
У — У* z — Z,
где Y(t) и Z(t)—малые отклонения от режима, устой-
чивость которого исследуется. Подставив у, z в (12.10),
получим систему уравнений, которая при учете выраже-
ний у* и z* приводится к однородному виду
У — 2(oZ+ (Л2 — (о2) У = 0,
Z + 2<оУ + (Л2 - <o2)Z = 0.
Полагая, как и выше
Y = Aieu, Z = A2eu,
200
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
получаем однородную относительно Ai и Л г систему урав-
нений:
ЛД2- 2соЛ2А + (Л-2- ш2)Л1 = 0,
А2к2 + 2(оЛД +(/с2 - ш2)Л2 = 0.
Она имеет отличные от нуля корни только в том случае,
когда равен нулю определитель
Г2 _ ш2 -|- х2 - 2оД = 0.
2<оХ — <оы Л"
в результате получим характеристическое уравнение
(к2 — со2 + А2)2 + (2ш А)2 = 0.
При к ¥= (о все корни характеристического уравнения
мнимые':
А1,2,3,4 = ± (к ± (о) I.
Это означает, что при к ¥= (о система устойчива: после
любого начального возмущения она будет совершать гар-
монические колебания с частотами к + (о и к—(о (нуж-
но отметить, что эти частоты отличаются от собственной
частоты колебаний невращающейся системы). Лишь в
особом случае, когда со = к, возникает нулевой (двойной)
корень, которому соответствует неустойчивость системы.
Впрочем, с приближением угловой скорости со к значе-
нию к само значение у* неограниченно возрастает. Угло-
вую скорость (о = к называют критической скоростью;
некоторый диапазон значений угловой скорости, близких
к критическому значению, в эксплуатационных условиях
«запрещается». Важно, что при (о > к система вновь ус-
тойчива!
4. Системы с двумя степенями свободы с трением.
В обоих рассмотренных в и. 3 примерах характеристиче-
ское уравнение оказалось биквадратным и найти его кор-
ни было легко. В более сложных случаях, например для
полного уравнения четвертой степени, определенно кор-
ней оказывается гораздо более трудной задачей. Однако
для суждения о знаках вещественных частей корней нет
необходимости решать характеристическое уравнение,—
Раус и Гурвиц указали условия, которым должны удов-
летворять коэффициенты характеристического уравнения,
для того чтобы вещественные части всех корней были
отрицательными; приведем условия Рауса—Гурвица без
вывода.
§ 12. Устойчивость состояний равновесия
201
Пусть характеристическое уравнение записано в виде
Ь0Кп + Ь^п-' + Ь2Хп~2 + ... + Ьп = 0;
для того, чтобы среди его корней не было ни одного с
положительной вещественной частью, необходимо и до-
статочно выполнение неравенств
&о>О,
"1 и3 U
Й0 Ь2 &4---0
0 b. ь ... о
о Ьо
6,;
В частности, для характеристического уравнения
третьей степени условия Рауса—Гурвица име-
ют вид
&0 > о, bl > 0, Ь2 > 0, Ъз > 0,
bib2-b0b3>Q,
а для уравнения четвертой степени — вид
б0 > 0, bt > 0, Ь2 > 0, Ьз > 0, ^4 > 0,
(12.12)
В качестве примера рассмотрим плоскую систему ти-
па двойного маятника (рис. 12.7)
пирами в точках 0 и 1. Массу
системы будем считать сосредото-
ченной в точках 1 и 2. В точке 2
на систему действует «следящая»
сила Р, направление которой сов-
падает с осью стержня 1—2 при
любых отклонениях системы. Обо-
значим: Ъ и с — коэффициенты
вязкости и жесткости шарниров,
т\ — 2m и тт?2 = m — массы, со-
средоточенные в точках 1 и 2,
I — длина каждого из стерж-
с вязкоупругими шар-
пей, epi и ср2 углы отклонения стержней от положения
равновесия, принимаемые за обобщенные координаты.
Силы тяжести для упрощения задачи учитывать не
будем.
§ 13. СТАЦИОНАРНЫЕ РЕЖИМЫ И ПРЕДЕЛЬНЫЕ ЦИКЛЫ 203
В данном случае условия Рауса— Гурвица (12.12) при-
водят к следующим неравенствам:
1)&>0; 2)P<4|f + ±±_;
3)p<^f + 4i; 4)с2>о.
Первое и четвертое неравенства выполняются автомати-
чески, а из двух остальных неравенств более жестким
является третье. Оно позволяет найти критическое значе-
ние силы
п 41 с , 1 b
кр * 28 I + 2 „цз
и если b = 0, то РЬ1, = 1,464 с/1.
В заключение отметим, что если бы в данной задаче
с самого начала положить Ь = 0 и определять критиче-
скую силу подобно тому, как это было сделано в и. 3
(из анализа биквадратного уравнения), то для критиче-
ской силы получится иное (неверное) значение
Ркр = 2,086 4-.
Это несоответствие составляет содержание так называе-
мого парадокса Циглера, на обсуждение которого
мы здесь останавливаться не будем.
§ 13. Стационарные режимы и предельные циклы
1. Общие понятия. Для суждения об устойчивости со-
стояний равновесия выше мы пользовались линеаризо-
ванными уравнениями, описывающими малые движения
в окрестности этих состояний. Такой анализ позволяет
уловить начальные тенденции возмущенных движений,
но — в случаях неустойчивости — не позволяет просле-
дить дальнейшее развитие процесса движения при возра-
стании отклонений.
Исследование движения «в большом» в принципе не-
возможно с помощью линеаризованных уравнений: нели-
нейные члены уравнений, будучи пренебрежимо малыми
при малых отклонениях системы от состояния равнове-
сия, начинают играть все более заметную роль при уве-
личении отклонений; при этом вид нелинейности суще-
ственно влияет на развитие процесса с возрастанием вре-
§ 13. СТАДИОН \РНЫЕ РЕЖИМЫ И ПРЕДЕЛЬНЫЕ ЦИКЛЫ 203
В данном случае условия Рауса— Гурвица (12.12) при-
водят к следующим неравенствам:
1)^>0; 2)Р<4|^- + 4±з;
4)с2>0.
Первое и четвертое неравенства выполняются автомати-
чески, а из двух остальных неравенств более жестким
является третье. Оно позволяет найти критическое значе-
ние силы
р 41 с , 1 b
Кр ~ 28 I * 2 mZ3
и если b = 0, то Рщ, — 1,464 с/1.
В заключение отметим, что если бы в данной задаче
с самого начала положить Ъ =0 и определять критиче-
скую силу подобно тому, как это было сделано в п. 3
(из анализа биквадратного уравнения), то для критиче-
ской силы получится иное (неверное) значение
- 2,086~.
Это несоответствие составляет содержание так называе-
мого парадокса Циглера, на обсуждение которого
мы здесь останавливаться не будем.
§ 13. Стационарные режимы и предельные циклы
1. Общие понятия. Для суждения об устойчивости со-
стояний равновесия выше мы пользовались линеаризо-
ванными уравнениями, описывающими малые движения
в окрестности этих состояний. Такой анализ позволяет
уловить начальные тенденции возмущенных движений,
но — в случаях неустойчивости — не позволяет просле-
дить дальнейшее развитие процесса движения при возра-
стании отклонений.
Исследование движения «в большом» в принципе не-
возможно с помощью линеаризованных уравнений: нели-
нейные члены уравнений, будучи пренебрежимо малыми
при малых отклонениях системы от состояния равнове-
сия, начинают играть все более заметную роль при уве-
личении отклонений; при этом вид нелинейности суще-
ственно влияет на развитие процесса с возрастанием вре-
204
ГЛ IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
мени. В частности, во многих случаях возрастание коле-
баний постепенно замедляется и движение стремится к
некоторому стационарному режиму — режиму автоколе-
баний. В общих чертах природу этого явления можно по-
нять с помощью качественных соображений, не прибегая
к количественному исследованию.
Рассмотрим, например, колебательную систему с тре-
нием, когда характеристика трения описывается нели-
нейной функцией скорости R (q) = — b{q + bs,q?' (рис.
13.1, а). Дифференциальное
уравнение движения (у рав-
нение Рэлея) имеет вид
aq — b\q + b^cf + сг/ = 0
(13.1)
(а >0, by > 0, Ь3 > 0, с > 0).
При малых отклонениях от
состояния равновесия основ-
ное значение имеет линей-
ный член силы трения,кото-
рый в данном случае оказы-
вает дестабилизирую-
щее действие; из-за этого
состояние равновесия неус-
тойчиво, и сколь угодно ма-
лые начальные возмущения
вызовут постепенно возра-
стающие колебания (об этом
см. выше и связи с уравнени-
ем (12.3)). Но при этом бу-
дет увеличиваться д е м и ф п-
рующее влияние кубиче-
ского члена, так что рост
колебаний станет замедлять-
ся и движение будет стре-
миться к режиму автоколе-
баний, характеризуемому по-
стоянным значением амплитуды; в целом движение бу-
дет развиваться так, как это показано на рис. 13.1, б.
При достаточно больших начальных возмущениях
рассматриваемой системы демпфирующее действие куби-
ческого члена вначале окажется значительнее, чем деста-
билизирующее действие линейного члена, т. е. колебания
§ 13. СТАЦИОНАРНЫЕ РЕЖИМЫ И ПРЕДЕЛЬНЫЕ ЦИКЛЫ 205
в начале процесса будут затухать. Однако с уменьшени-
ем колебаний относительное влияние кубического члена
будет также убывать, т. е. движение станет стремиться
к тому же стационарному режиму, который характеризу-
ется б^алансом противоположных влияний (рис. 13.1, в).
Эти два случая движения удобно иллюстрировать на
фазовой плоскости (рис. 13.2, а). Кривая I соответствует
движению, возникающему после малых начальных воз-
мущений, кривая II — движению, начинающемуся после
значительных возмущений; обе эти кривые описывают
переходный процесс. Замкнутая кривая А, к которой не-
ограниченно приближаются кривые типа I и II, описыва-
ет стационарный режим автоколебаний и является устой-
чивым предельным циклом. Вообще устойчивыми пре-
дельными циклами называются изолированные замкнутые
фазовые траектории, к кото-
рым неограниченно прибли-
жаются все расположенные
в их окрестности другие фа-
зовые траектории.
Сопоставляя демпфирую-
щие и дестабилизирующие
влияния, мы, в сущности,
имели в виду постепенное из-
менение энергии системы
вследствие работы, соверша-
емой различными составля-
ющими силы трения. Деста-
билизирующие слагаемые со-
вершают положительную ра-
боту и увеличивают энергию
системы, а демпфирующие
слагаемые совершают отри-
цательную работу, т. е.
уменьшают энергию систе-
мы. На рис. 13.2, б схемати-
чески показаны вклады обо-
их слагаемых, рассчитанные
Рис. 13.2
за один период: Е+ — приращение энергии, вызываемое
действием линейного слагаемого силы трения, Е_ — абсо-
лютное значение изменения энергии, вызываемого дейст-
вием кубического слагаемого силы трения. Как видно, эти
вклады, и притом в неодинаковой мере, зависят от Ампли-
туды колебаний. При малых амплитудах имеет место нерй-
206
ГЛ IV УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
венство Е+ > Е-, т. е. происходит приток энергии в си-
стему и амплитуды возрастают, пока не будет достигнут
стационарный режим, характеризуемый амплитудой Асг.
Если вследствие больших начальных возмущений колеба-
ния начинаются с амплитудами, большими чем Лст, то
разность Е+ — Е- отрицательная и колебания убывают,
стремясь к тому же стационарному режиму. Возможные
тенденции движения показаны стрелками под осью
абсцисс.
Такими же свойствами обладает и система, описывае-
мая дифференциальным уравнением Ван дер Поля
q — ц(1 — q2)q + q = 0 (13.2)
(р,— постоянная). Положим, что после некоторого мало-
го начального возмущения начинаются колебания с ма-
лыми амплитудами. Пока колебания малы и выполняет-
ся неравенство q'2 < 1, второе слагаемое уравнения (13.2)
оказывает, по-видимому, дестабилизирующее действие, и
колебания будут возрастать. Но с их увеличением ука-
занное неравенство станет нарушаться и коэффициент
при q будет положительным в тех интервалах времени,
в которых q'2 > 1. В этих интервалах времени второе сла-
гаемое левой части (13.2) будет оказывать демпфирую-
щее влияние. При дальнейшем возрастании колебаний
демпфирующее действие будет увеличиваться и движе-
ние системы станет приближаться к стационарному ре-
жиму, которому соответствует взаимная компенсация де-
стабилизирующего и демпфирующего влияний. В целом
процесс установления будет протекать соответственно
рис. 13.1, б и <?, а также рис. 13.2, а и б.
Подобные случаи, когда возрастание колебаний про-
исходит после сколь угодно малых начальных возмуще-
ний состояния равновесия, называются случаями мягко-
го самовозбуждения.
Наряду с этим существуют системы с противополож-
ными свойствами. Такова, например, система, описывае-
мая дифференциальным уравнением
aq + biq — baq2 + cq = 0 (13.3)
(a > 0, bi > 0, &3 > 0, c>0). Здесь знаки слагаемых си-
лы трения противоположны знакам в уравнении (13.1).
Поэтому если начальные возмущения малы, то колеба-
ния будут затухать (начало координат является устойчи-
вым фокусом), но если начальные возмущения достаточ-
§ В СТАЦИОНАРНЫЕ РЕЖИМЫ И ПРЕДЕЛЬНЫЕ ЦИКЛЫ 207
но велики, то амплитуды колебаний будут неограничен-
но увеличиваться. В этом случае фазовая диаграмма
имеет вид, показанный на рис. 13.3, а. Здесь также су-
ществует предельный цикл А, однако он неустойчив,
так как все окрестные фазовые траектории удаляются от
него — либо внутрь, к началу координат, либо вовне
(в зависимости от расположения начальной изображаю-
щей точки). Эти траектории на рис. 13.3, а обозначены
цифрами I и II. Вообще неустойчивыми предельными
циклами называются такие изолированные замкнутые
фазовые траектории, от которых удаляются все располо-
женные в их окрестности другие фазовые траектории.
Кривые, характеризующие приток энергии Е+ и энер-
гетические потери показаны на рис. 13.3, б; здесь же
стрелками показаны тенденции движения при различных
амплитудах колебаний. Такая система может служить
примером системы с жестким самовозбуждением, по-
скольку возрастающие колебания возникают лишь после
Достаточно больших начальных возмущений.
208
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
В более сложных случаях возможно существование
нескольких предельных циклов. Так, для системы, опи-
сываемой дифференциальным уравнением
aq—biq + bsq?‘—b5q5 + cq = 0 (13.4)
(a>0, bi > 0, i>3 > 0, Z>5 > 0, c>0), фазовая диаграмма
имеет вид, показанный на рис. 13.4, а, а энергетические
кривые даны на рис. 13.4, б.
Во всех рассмотренных случаях можно заметить ч е-
редование устойчивых и неустойчивых стационарных
состояний: на рис. 13.2, а неустойчивая особая точка ок-
ружена устойчивым предельным циклом, на рис. 13.3, а
устойчивая особая точка окружена неустойчивым пре-
дельным циклом, на рис. 13.4, а неустойчивая особая
точка окружена устойчивым циклом А\, который в свою
очередь располагается внутри неустойчивого предельного
цикла А2 (для последнего случая на рис. 13.4, б показа-
ны энергетические кривые). Можно сказать, что устой-
чивые состояния равновесия п устойчивые предельные
циклы притягивают к себе лежащие в их окрестностях
фазовые траектории и по этому существенному призна-
ку называются аттракторами (от английского глагола
to attract—притягивать). Ниже, в § 16 будет рассмот-
рен аттрактор иного рода со столь удивительными свой-
ствами, что его называют странным аттрактором.
Каждому аттрактору на фазовой плоскости соответст-
вует определенная область притяжения, причем грани-
цами между этими областями служат неустойчивые пре-
дельные циклы (иногда такие циклы, а также неустой-
чивые состояния равновесия называют репеллерами — от
английского глагола to repel—отталкивать). Эта карти-
на подобна тому, как на земной поверхности границы
между бассейнами рек проходят по линиям водораздела.
При простой структуре фазовой диаграммы, когда су-
ществует единственный аттрактор — устойчивое состоя-
ние равновесия как на рис. 2.3, или устойчивый предель-
ный цикл как на рис. 13.3 — его областью притяжения
служит вся фазовая плоскость. В более сложных случа-
ях стремление возмущенного движения к тому или ино-
му аттрактору зависит от того, в какой из областей при-
тяжения оказалась изображающая точка при начальном
возмущении. Так, для системы с двумя предельными
циклами (рис. 13.4) часть фазовой плоскости, располо-
женная внутри неустойчивого предельного цикла А2, яв-
§ 13. СТАЦИОНАРНЫЕ РЕЖИМЫ И ПРЕДЕЛЬНЫЕ ЦИКЛЫ 209
ляется областью притяжения к аттрактору Alt а часть
фазовой плоскости, расположенную вне предельного цик-
ла Аг, можно считать областью притяжения к беско-
нечности.
Изложенные представления относятся к автономным
системам с одной степенью свободы, но могут быть рас-
пространены на более сложные системы путем перехода
от фазовой плоскости к фазовому пространству более вы-
сокой размерности. В частности, для неавтономных си-
стем с одной степенью свободы пользуются представле-
нием о трехмерном фазовом пространстве, причем коор-
динатами изображающей точки служат величины q, q и
t. Фазовое пространство для автономной системы с дву-
мя степенями свободы оказывается четырехмерным и
т. д. Конечно, в этих и еще более сложных случаях
представления о фазовых диаграммах лишаются просто-
ты и наглядности, которыми обладают эти диаграммы
на фазовой плоскости.
Дальнейшее содержание настоящего параграфа посвя-
щено способам определения стационарных режимов; ана-
лиз устойчивости (неустойчивости) таких режимов, т. е.
выделение аттракторов и репеллеров, рассматривается в
следующем параграфе.
2. Способ поэтапного интегрирования для кусочно-
линейных систем. Как мы видели выше, в нелинейных
системах с кусочно-линейными характеристиками удоб-
но разделить весь процесс движения на последователь-
ность интервалов, в каждом из которых дифференциаль-
ное уравнение линейно и легко решается в замкнутом
виде. Тогда задача сводится к последовательному реше-
нию нескольких дифференциальных уравнений и при-
пасов ы ванию найденных решений путем согласо-
вания значений координаты и скорости на границах ин-
тервалов.
В качестве первого примера рассмотрим систему с
вязким трением, на которую в моменты прохождения че-
рез положение равновесия с положительной скоростью
(q = 0, q > 0) действуют мгновенные импульсы S, на-
правленные в сторону движения (см., например,
рис. 0.2,6). В промежутках времени между двумя после-
довательными импульсами движение системы описыва-
ется дифференциальным уравнением (2.6), решение ко-
торого примем в форме (2.7). Входящие сюда постоянные
определяются условиями в начале рассматриваемого
•14 И Г ТТанлпкп
210
ГЛ IV устойчивость состояний равновесия
и-го промежутка q (0) = 0, q (0) = q+:
Cj = q+ /^*’ ^2 = 0-
Таким образом, для q и q имеем
9 = (?„A*)e-wsin k*t\
. . (13.5)
4 = Япе~Ы (cosk*f — (Ш sin к*Ц-
В последний момент перед приложением очередного
(и+1)-го импульса, т. е. при t —2л/к^, обобщенная ско-
рость равна
п— rr+p—
Vn+i "п
Следовательно, непосредственно после приложения
следующего импульса
= q~+1 + q+e-^h/k. + L. (13.6)
В стационарном режиме, т. е. при движении по пре-
дельному циклу, должно быть 7^+1 == q+; из этого усло-
вия периодичности следует выражение для обоб-
щенной скорости сразу после приложения любого из
мгновенных импульсов:
$ а (1 — е-2яЛЛ*)‘
Соответственно для обобщенной координаты находим
?тах ак* (1 - ’
Энергия, рассеиваемая в рассмотренной системе за
время свободного движения между двумя последователь-
ными импульсами, мгновенно восполняется благодаря
скачку скорости в момент приложения импульса.
Сходными автоколебательными свойствами облада-
ет система, в которой наряду с обычной силой вязкого
трения действует сила отрицательного кулонова трения.
Характеристика трения показана на рис. 13.5, а, так что
дифференциальное уравнение движения имеет вид
aq + bq — Z?osign q + cq = 0. (13.7)
§ 13 СТАЦИОНАРНЫЕ РЕЖИМЫ И ПРЕДЕЛЬНЫЕ ЦИКЛЫ 211
Здесь причиной самовозбуждения колебаний служит
отрицательная сила кулонова трения. При малых откло-
нениях системы от состояния равновесия влияние ука-
занной силы значительнее демпфирующего влияния си-
лы вязкого трения и состояние равновесия неустойчиво.
Однако при дальнейшем развитии колебаний эти влия-
ния сравняются и установится стационарный режим ав-
токолебаний (рис. 13.1, б). После большого начального
отклонения (рис. 13.1, в) постепенно устанавливается тот
же стационарный режим.
Рассмотрим какой-либо интервал процесса, в котором
координата убывает (см. на рис. 13.5, б интервал, от-
меченный числами 0 и 1/2); па этом интервале диффе-
ренциальное уравнение (13.7) принимает форму
aq + bq + cq = — Rq,
и его решение при начальных условиях qo = Ао, go = O
имеет вид
q = (^0 + е~м ^cos k*t + sin k*t] —
Далее находим скорость
/ \ к2
q = — Ло Ч----1 — sin к t
1 \ и с / А2 *
♦
(обозначения соответствуют принятым в § 2). В точке
1/2 скорость обращается в нуль, и этому моменту соот-
ветствует равенство
^1/2 ~
212
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИИ РАВНОВЕСИЯ
причем координата q принимает значение
q = Л1/2 - Аие Г* --^(П е~*). (13.8)
На следующем интервале времени 1/2 — 1 скорость
положительная, и пз уравнения (13.7) имеем
aq + bq + cq =-Rq. (13.9)
Для этого интервала времени при смещенном в точку
1/2 начале отсчета получим
7 = (^1/2 — е~Ы (cos к*1 + 7/7 sil1 + V"’
q = — (^1/2 — J e~M— sin k*t.
*
В состоянии 1, когда q\ = 0,
к j — Л,
координата q равна
— п ( \
q = A = - Л1/2?* + V-11 И- e Ч-
Подставив сюда выражение (13.8), найдем связь меж-
ду двумя последовательными положительными отклоне-
ниями:
2?xh / лД\ 2
л1== ,
(13.10)
причем длительность одного цикла (период автоколеба-
ний) составляет 2л//тФ. В стационарном режиме должно
быть Л1=ЛО = ЛСТ. Отсюда находим
7?„ Ы । Р—nh/k*\2
Лст = —( . (13.11)
С1 С 1 е—2ЛЛ/Л* ' '
При малых значениях отношения h/k* можно принять
2/7,,7с
л —_____________________________!!_
сг itch
В качестве третьего примера рассмотрим систему,
показанную на рис. 13.6, а. Опа состоит пз равномерно
движущегося ведущего звена 1, приводящего через пру-
жину 2 в движение груз 3. Между грузом и поверх-
§ 13 СТАЦИОНАРНЫЕ РЕЖИМЫ И ПРЕДЕЛЬНЫЕ ЦИКЛЫ 213
ностыо, по которой он скользит, развивается сила сухого
трения; характеристика трения имеет вид, показанный
па рис. 13.6,6, и схематически отражает известное из
экспериментов различие меяеду предельной силой тре-
ния покоя и силой трения движения.
Введем обозначения: vq—скорость ведущего звена,
с — коэффициент жесткости пружины, т — масса груза,
R
и к
а о
Рис. 13.6
k=-~lclm, R\ — предельная сила трепня покоя, Rz— си-
ла трения движения.
Очевидно, возможно такое движение рассматриваемой
системы, при котором скорость груза 3 также равна vq.
При этом пружина 2 сжата постоянной силой Р, равной
силе трения движения Rz. Однако, как мы убедимся,
этот режим может оказаться неустойчивым и при опре-
деленных обстоятельствах около него возникают авто-
колебания.
Если скорость и0 мала, то какое-либо случайное пре-
пятствие может оказаться достаточным для остановки
груза на некоторое конечное время.
Ведущее звено, продолжая движение вправо, будет
сжимать пружину до тех лор, пока сила сжатия Р не
сравняется с силой трепня покоя R\. Лишь после этого
произойдет срыв груза, причем сила трения мгновенно
уменьшится до значения Rz- Но сила сжатия пружины
в первый момент начавшегося движения будет по-прежне-
му равна /?i, и, следовательно, равновесие сил, действую-
щих на груз, нарушится.
Совместим с моментом срыва начало отсчета времени
t = 0 и заметим, что в этот момент равны нулю как ко-
ордината х, так и скорость х:
z(0) = 0, i(0) = 0 (13.12)
(отсчет перемещений будем вести от места остановки
груза).
214
ГЛ IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
Рассмотрим теперь процесс последующего движения.
К некоторому моменту времени t > 0 длина пружины из-
менится на отрезок х — vot и соответственно сила упруго-
сти пружины уменьшится до значения
P(t) = R\ — с(х — vot). (13.13)
Таким образом, дифференциальное уравнение движения
груза запишется в виде
7?i — с (х — Vot) — Т?2 = т%,
или
7?,—7?,
х -Ц к2х — k2vat —------.
1 ° 1 т
Решение этого уравнения, удовлетворяющее началь-
ным условиям (13.12), имеет вид
р И. —R
х = vot----^-sin/rf-, —- (1 — cos kt). (13.14)
Первое слагаемое правой части выражает равномерное
движение со скоростью ведущего звена, а остальные сла-
гаемые — дополнительные колебания груза.
Скорость груза меняется ио закону
к (R — R)
х = v0 — vu cos kt ----------——--— sin kt
и в некоторый момент времени может вновь обратиться
в нуль. Условие новой остановки груза приводит к урав-
нению
k<R. — R )
vu — v0 cos kt-L -—-----— sin kt± = 0,
в котором ti — время от момента срыва до момента новой
остановки. Введем безразмерный параметр
ЧД!-Д2)
%
Теперь условие остановки принимает вид
a sin kt\ = cos kt\ — 1.
Решив это уравнение, найдем
sinfci, =-----—cosfcii = -—^2". (13.15)
1 1 + а2 1 1 + а2 '
§ 13 СТАЦИОНАРНЫЕ РЕЖИМЫ И ПРЕДЕЛЬНЫЕ ЦИКЛЫ 215
Модули полученных выражении всегда меньше единицы,
так что из (13.15) всегда следует вещественное значение
fi. Получив это значение Zi, можно по формуле (13.14)
определить координату х груза в момент повой останов-
ки, т. е. путь, пройденный грузом за время t\:
v Р| — 2a”n
X1 = V1 — -f - sin kt J. + -- (1 — COS A-Zj) = n0Zj +
С учетом выражений (13.15) найдем по соотношению
(13.13) силу сжатия пружины в момент остановки:
Z’(Z1) = 2/?2-/?1.
Отсюда видно, что Z3(Zi)<7?i (так как Т?2 </?]). Следо-
вательно, после остановки груз некоторое время будет
оставаться па месте, пока сила сжатия пружины вновь
не достигнет значения предельной силы трепня покоя.
После этого произойдет новый срыв груза и начнется
следующий цикл, полностью совпадающий с предыду-
щим. Таким образом, рассматриваемый процесс представ-
ляет собой стационарные автоколебания.
За время, в течение которого груз покоится, сила
сжатия постепенно возрастает на величину
AP = flI-P(Z1)=2(7?1-Z?2),
и соответствующее дополнительное укорочение пружи-
ны составит
д/ = АР = .
С с
Зтой же величине равен путь, пройденный ведущим зве-
ном за время остановки груза. Следовательно, длитель-
ность состояния покоя груза равна
Z2 ~ — 2 (Д1 ~ (13.1G)
2 % е”о к V ’
(Тот же результат можно найти пз условия n0(Z1 + Z2) —
= £[, выражающего равенство перемещении груза и ве-
дущего звена за один полный цикл рассматриваемого
процесса.)
Таким образом, период автоколебаний определяется
формулой
Т = Z1 т z2,
216 гл. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
для пользования которой сначала нужно найти t\ из вы-
ражений (13.15), а затем t2 из формулы (13.16).
Чем меньше скорость ведущего звена, тем более рез-
ко выражен процесс автоколебаний. Действительно, при
малых значениях и0 безразмерный параметр а становит-
ся весьма большим и из выражения (13.15) следует
приближенно
sin kt, -> 0, cos kt, ->— 1, т. е. t, = ~.
1 1 1 к
Соответственно (13.16) это приводит к следующей фор-
муле для периода автоколебаний:
л + 2а
к
Здесь ясно видно, что роль второго слагаемого в числи-
теле возрастает с уменьшением скорости Ио.
Законы движения при двух различных малых значе-
ниях г?о графически показаны па рис. 13.7, а; па
Гис, 13.7
рис. 13.7, б показаны соответствующие законы изменения
скорости. С уменьшением скорости период автоколеба-
ний растет.
3. Метод энергетического баланса. Этот метод, кото-
рым мы пользовались при исследовании свободных коле-
баний систем с нелинейным трением (п. 2 § 2) позво-
ляет получить приближенное решение задачи о стацио-
нарных автоколебаниях квазилинейных систем, движе-
ние которых описывается дифференциальным уравнением
q + k20q = f(q, q). (13.17)
§ 13 СТАЦИОНАРНЫЕ РЕЖИМЫ II ПРЕДЕЛЬНЫЕ ЦИКЛЫ 217
Здесь, как указывалось, /(g, q)—функция, состоящая из
малых нелинейных членов. Поскольку эти члены малы,
естественно принять к=к0 и искать решение в виде
q = A cos(k0t — ср), (13.18)
где А и ф — постоянные. В этой записи существенно
предположение о том, что частота автоколебаний к
равна собственной частоте линеаризованной системы.
Выражение (13.18) не может строго удовлетворить урав-
нению (13.17): этому мешает правая часть /(g, q), кото-
рая после подстановки (13.18) принимает вид
f^(kut — <р) = f[A cos (kot — ср), — n/cgsin^ — ф)] (13.19)
и тождественно в нуль не обращается. После умноже-
ния на инерционный коэффициент а правая часть будет
представлять собой некоторую неуравновешенную
силу. В соответствии с основной идеей энергетическо-
го метода потребуем, чтобы работа этой силы за период
2л/к0 равнялась нулю. Работа силы а/* на элементар-
ном перемещении dq равна = af*qdt. При учете
соотношений (13.18) и (13.19) условие энергетического
баланса запишется в виде
2n/ft0
— аАк0 / [A cos (kut — ф), — Ак0 sin (kot — ф)] X
о
X sin (kot — ф) dt = 0. (13.20)
Обозначив
kot — ф = ф,
2П
ф (Л) = — [ / (Л cos ф, — Ак0 sin ф) зтф с2ф, (13.21)
о
получим условие для определения стационарной ампли-
туды автоколебаний в виде *)
Ф(Л) = 0. (13.22)
В качестве примера найдем амплитуду автоколеба-
нии для системы, описываемой дифференциальным урав-
*) Отметим, что выражение (13.21) точно совпадает с выра-
жением (2.42), которое было найдено в § 2 методом медленно ме-
няющихся амплитуд Согласно атому методу для определения
шационарных амплитуд также следует положить Ф(Л) = 0.
218
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
пением (13.7); выше эта задача была точно решена спо-
собом поэтапного интегрирования (припасовывания).
В данном случае
/(7- 7) = ~ T-7 + -y’sign?
и
/ (A cos гр, — Акп sin гр) - ° sin ip - [- -p sign (— sin ф),
t. e.
/ (A cos гр, — /1A0 sin ip) =
a 0 sin ip-при 0<ip<n,
АЛЛ Л
—— sin ip-p-при л<1р<2л.
Согласно формуле (13.21) находим
Ф(Л) =
7? \
sin ip ф- ] sin ip dty
Теперь из условия (13.22) находим для амплитуды ав-
токолебаний прежнее выражение (13.11).
4. Метод малого параметра. Как и в методе медлен-
но меняющихся амплитуд, нужно прежде всего выделить
из заданной функции F(q, q) линейную часть и предста-
вить основное дифференциальное уравнение в виде
q + Й = /(7, ?)• (13.24)
Для квазилинейных систем нелинейную функцию
f(q, Я) можно представить в виде ц/*(ц, q), где ц—заве-
домо малый параметр. Однако в подобных случаях мож-
но поступить и по-иному—формально ввести в правую
часть (13.24) множитель р = 1 и записать уравнение
(13.24) в виде
7 ~г Й И/ (7> 7)- (13.25)
Тогда в последующих выкладках буква Ц будет служить
лишь «сигналом малости» того сомножителя, около ко-
§ 13 СТАЦИОНАРНЫЕ РЕЖИМЫ И ПРЕДЕЛЬНЫЕ ЦИКЛЫ 219
торого она стоит; если в этих выкладках возникнут сте-
пени буквы р (т. е. ц2, ц3 и т. д.), то они будут как бы
отмечать величины второго, третьего и т. д. порядков ма-
лости. Разумеется, что при таком формальном введении
параметра ц в окончательных результатах нужно вновь
положить ц = 1.
Согласно основной идее рассматриваемого метода, ре-
шение уравнения (13.25) ищется в виде ряда по степе-
ням малого параметра ц
7(0='М0 + p<Zi(i)+ Н2Ы0+ • • •, (13.26)
в котором </о(7), <71(0, </2(0, ... — пока неизвестные
функции. Поскольку частота искомого процесса движе-
ния, обозначенная ниже через к, может не совпадать с
собственной частотой линеаризованной системы /со, при-
нимается аналогичное разложение
А'о = к2 -ф pyL -ф ц-у2 -ф ..., (13.27)
где 71, 72 — постоянные, также пока неизвестные.
Теперь выражения (13.26) и (13.27) подставляются
в обе части основного уравнения (13.25). Слагаемые по-
лученного равенства будут пропорциональны различным
степеням малого параметра ц, и следовательно, после
группировки слагаемых равенству можно придать вид
D0+nDi +p2D2+... = 0. (13.28)
Здесь Do, Di, D2...— некоторые комплексы выражений,
не содержащие малого параметра. Так как соотношение
(13.28) должно выполняться при любом значении ц, не-
обходимо, чтобы порознь равнялись нулю Do, D\,
D2...
При этом получается система уравнений следующего
вида:
Qo + koQ ~ 0,
Qi + ^o7i = Pi l7o (О’ Qo (ОЬ (13.29)
Q? + ^о72 = р2 [<71(0- 71(01’
Конкретный вид выражений Р\, Р2, ... зависит от то-
го, какова заданная функция j(q, q); конечно, в развер-
нутые выражения Pi, Р2, . . ., войдут также постоянные
71, 72, •••
220
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
Далее последовательно, одно за другим, решаются
уравнения (13.29), причем постоянные 71, 72, ••• опре-
деляются из условия отсутствия в решениях вековых
(резонансных) членов, т. е. таких, которые содержат
время t вне знаков тригонометрических функции; те же
условия позволяют также найти и амплитуду автоко-
лебаний.
Не останавливаясь па обсуждении выкладок в общем
случае, обратимся к задаче об автоколебаниях системы,
описываемой уравнением Ван дер Поля (13.2), которое
запишем в виде
7 + 7 = н(1~72)7. (13.30)
Отметим, что в данном случае А'о ~ 1; поэтому коэффи-
циент при q в левой части уравнения (13.30) нужно
представить в виде (13.27):
1 = к2 + ц'у 1 + р,2 "у 2 + • • •
Ограничиваясь учетом слагаемых до первого порядка ма-
лости, подставим в (13.30)
1 = /с2+|.гу1, <7 = <7о+и<7ь (13.31)
При этом получится
(qo + Ц71) + (/с2 + рф) (70+ H7i) =
= ц[1 -(q0+ Ц71)2] (qo+ Й1),
или, объединяя члены одного порядка малости,
(7о + *27о) + Н Gi + *27i + Т17о — <1о + 7о7о) + • • = 0,
(13.32)
где многоточие обозначает слагаемые второго и высших
порядков малости. Из (13.32) получаем уравнения ви-
да (13.29):
7о + &270 = 0, (13.33)
7i + ^27i = — Yi7o + 70 — 7о7о- (13.34)
Будем вести отсчет времени от момента, когда коорди-
ната q максимальна; искомую амплитуду автоколебаний
обозначим через А. В начальный момент скорость q рав-
на нулю, так что можно записать q(0) = A, <j(0) = 0, пли,
§ 13. СТАЦИОНАРНЫЕ РЕЖИМЫ И ПРЕДЕЛЬНЫЕ ЦИКЛЫ 221
согласно второму соотношению (13.31),
7о(О)+ ц<71(0) = А,
7о(°) + Й1(О) = 0.
Для того чтобы и эти соотношения удовлетворялись при
любых значениях ц, должно быть
<7о(О) = Л, 7о(О) = О, (13.35)
?i(0)=0, д,(0) = 0. (13.36)
Теперь можно записать решение уравнения (13.33),
удовлетворяющее начальным условиям (13.35),
q0 — Acoskt, (13.37)
и затем перейти к уравнению (13.34), которое с учетом
(13.37) получает вид
iji + k2q{ — — у, A cos kt — Ak sin kt + Л3/с sin kt cos2 kt.
1
Сделав замену sin kt cos2 kt — (sin kt sin 3ArZ), окон-
чательно имеем
7i + A’2li =
{ Л2 к \
= — ytA cos kt — Ak (1---—) sin kt -]—— sin 3kt. (13.38)
Для того чтобы в решении этого уравнения отсутство-
вали вековые слагаемые, необходимо, чтобы коэффициен-
ты при cos kt и sin kt равнялись нулю. Первое условие
дает 11 = 0; согласно (13.27) получаем, что к2 = к20 = 1,
т. е. в данном случае частота автоколебаний совпадает с
собственной частотой линеаризованной системы. Теперь
А2 к
из второго условия 1-----— = 0 находим амплитуду ав-
токолебаний А = 2.
Следует обратить внимание на то, что полученная
амплитуда оказалась не зависящей от малого пара-
метра ц, входящего в заданное уравнение (13.30). Одна-
ко отсюда не следует, что его значение вообще несущест-
венно для рассматриваемой системы. Значение Ц опре-
деляет быстроту приближения системы к движению по
предельному циклу — чем больше ц, тем быстрее проис-
ходит это приближение. Кроме того, значецие ц влияет
и па подробности движения по предельному циклу.
222 Г.п IV УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
В самом деле, пз (13.38) при начальных условиях
(13.36) можно найти
А3
щ (3 sin kt — sin 3kt).
Следовательно, с учетом (13.37), получаем
нА3
7 ~ + Р-71 = C(>s — sin
т. е. движение зависит от значения ц.
§ 14. Переходные процессы и устойчивость
стационарных режимов
1. Вступительные замечания. Для анализа переход-
ных процессов также могут быть применены изложен-
ные выше методы; в частности, для кусочно-линейных
систем целесообразно использовать способ поэтапного
интегрирования, а для нелинейных систем со слабой не-
линейностью — энергетический метод или метод медлен-
но меняющихся амплитуд.
Получаемые с помощью указанных методов результа-
ты полезны еще и в том отношении, что они позволяют
исследовать устойчивость стационарных ре-
жимов.
2. Способ поэтапного интегрирования для кусочно-
линейных систем. Идея способа была пояснена выше,
а особенности применения к задачам исследования пе-
реходных процессов можно проследить на примере си-
стемы, описываемой дифференциальным уравнением
(13.7).
Не повторяя прежних выкладок, примем в качестве
исходного соотношение (13.10), которое связывает две
последовательные амплитуды Ао и Ai.
В § 13 при нахождении стационарных режимов
амплитуды полагались неизменными, однако здесь
при определении переходного процесса необходимо учи-
тывать различие между ними.
Введем обозначения
а = (g—nh/k* 1)2, р = е-2ЛЛ/й*. (14.1)
тогда для любой n-й амплитуды можно записать
An = ^An^ + aR0/c. (14.2)
§ 14 ПЕРЕХОДНЫЕ ПРОЦЕССЫ И УСТОЙЧИВОСТЬ
223
С помощью последнего рекуррентного соотношения
можно найти любую амплитуду через предыдущую и,
если потребуется, оцепить быстроту приближения пере-
ходного процесса к стационарному режиму.
Решение может быть существенно упрощено, если,
как и выше (см. § 2, и. 2), вместо дискретной совокуп-
ности ординат рассматривать непрерывную функцию
A(t) (огибающую). Для такого перехода нужно заме-
нить конечную разность АЛ =Ап — A„-t выражением
, , 2л dA
АЛ = ------гг.
к* at
Тогда с помощью (14.2) получим дифференциальное
уравнение для верхней огибающей
2л dA ,п .. . .
После интегрирования найдем при начальном условии
Л = Л (0) при t = 0
(°) - йЧЧ е-й*((1-3)/(2л) (1^)7’ (14-3)
или, с учетом выражения (13.11),
А = [Л (0) — Лст] е-ь**(1-₽)/(2л) 4 лст.
Прп достаточно малых значениях коэффициента вяз-
кого трения h/k* можно принять а « 4, |3~1—2nh/k*.
При этом получится
Л = [Л(0)-ЛС1]е-7“ + ЛС1, (14.4)
где согласно (13.11)
Лст = 2Ruk^/(nch). (14.5)
Для того чтобы убедиться в достаточно высокой точ-
ности последних выражений, рассмотрим пример, поло-
жив, что h.'k* = 0,05. В таблице представлены безразмер-
ные значения первых 15 амплитуд, вычисленных по ре-
куррентной формуле (14.2) н по приближенному урав-
нению (14.4) (для того чтобы найти амплитуды Л„,
нужно внесенные в таблицу числа умножить на величи-
ну Н0/с). Значение Л(0) полагалось равным нулю, а зна-
чения Лст, соответствующие п ->• определялись по вы-
ражениям (13.11) и (14.5).
224
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
Номер амплиту- ды п Значение безразмерной амплитуды сАп/Н»
по формуле (14 2) по уравнению (14.4)
0 0 0
1 3,440 3,433
2 5,952 5,940
3 7,787 7,771
4 9,127 9,109
5 10,106 10,086
6 10,821 10,799
7 11,344 11,320
8 11,725 11,701
9 12,003 11,979
10 12,207 12,182
И 12,356 12,331
12 12,464 12,439
13 12,544 12,518
14 12,602 12,576
15 12,644 12,618
оо 12,758 12,732
3. Метод энергетического баланса. При нахождении
стационарных режимов в § 13 мы исходили пз того, что
сила а/:|! совершает за один период работу, равную ну-
лю. Здесь при исследовании переходных процессов не-
обходимо учесть, что энергия системы за период изме-
няется, так как работа силы at* отлична от нуля; вмес-
то (13.20) имеем
— аАк0 f / [ A cos (kvt — <р), — Аки sin (kut — ср)] X
о
X sin (kQt — q>) dt — АП. (14.6)
Здесь левая часть представляет собой работу названной
силы за один период, а правая часть — приращение
энергии системы за то же время. Это приращение
можно определить по выражению
АП = МАЛ.
Подставляя его в уравнение энергетического баланса
(14.6) и пользуясь формулой (13.21), получим
АЛ = (14.7)
А 2
0
§ 14. ПЕРЕХОДНЫЕ ПРОЦЕССЫ И УСТОЙЧИВОСТЬ 225
Будем рассматривать зависимость Л=Л(£) как не-
прерывную функцию времени; тогда можно приближенно
принять
Л d А
Д4 = -^.
2л dt
Вместо (14.7) получим дифференциальное уравнение
dA _ Ф(Л)
dt ~ 2nkQ ’
(14.8)
совпадающее с укороченным уравнением (2.41). Интег-
рируя это дифференциальное уравнение при начальном
условии Л=Л(0) при i = 0, найдем уравнение огибаю-
щей.
В качестве примера найдем переходный процесс для
системы, рассмотренной в п. 2. В данном случае по фор-
муле (13.21) находим
nbk
Ф(Л) = —+
и дифференциальное уравнение (14.8) приобретает впд
dA _ 4Д0 — лЬкаА
dt 2nkQa *
Отсюда после интегрирования следует прежний резуль-
тат (14.5), справедливый для случаев малого трения.
4. Метод медленно меняющихся амплитуд. Для опре-
деления переходного процесса по этому методу непосред-
ственно используются выведенные в § 2 укороченные
уравнения (2.41).
В качестве примера рассмотрим уравнение Ван дер
Поля (13.30):
q + q=n(i-q2)q.
По первому из уравнений (2.42) находим,
2Л
Ф(4) = -Иу (1 — A2 cos2 ф) (— A sin ф) sin ф t/ф =
о
/ А2 \
= рлЛ (1 - . (14.9)
Теперь составляем уравнение (2.41):
Я. Г. Паиовко
226
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
и интегрируем его при начальном условии А = Ао при
t = 0:
Л = 2Л0(|4-^|е-^ + ^Г1/2.
Отсюда видно, как с течением времени амплитуда от на-
чального значения Ао постепенно приближается к ста-
ционарному значению А = 2 (см. также стр. 221).
Полученное выражение достаточно полно характери-
зует переходный процесс и, в частности, темп его прибли-
жения к стационарному режиму. Поэтому обычно опус-
кают исследование изменения фазы ср (впрочем, это сде-
лать совсем не трудно; в рассматриваемой задаче можно
найти, что ср —0).
5. Метод точечных отображений. Примеры, разобран-
ные в пн. 2—4, показывают, что для описания колеба-
тельных процессов в системах с одной степенью свободы
не обязательно знать закон движения Q = q(t); практи-
чески достаточны рекуррентные соотношения между по-
следовательными амплитудами (см., например, (14.2)).
Как мы видели, для того чтобы связать значения двух
последовательных амплитуд, нужно выделить типовой
промежуток времени, на концах которого отклонения
системы достигают максимума, и скорости равны нулю.
Далее изучается движение на этом промежутке време-
ни и определяется амплитуда А в конце промежутка
через амплитуду А в начале, т. е. образуется соотно-
шение
Л=/(Л), (14.10)
которое можно рассматривать как функциональную за-
висимость А от А. Для зависимости (14.2) график (14.10)
показан на рис. 14.1, я. В данном случае график пред-
ставляет собой прямую, потому что на типовом проме-
жутке времени движение механической системы описы-
вается линейными дифференциальными уравнениями.
В более общем случае график (14.10) оказывается кри-
волинейным, как это показано на рис. 14.1, б.
Для того чтобы найти амплитуду стационарного ре-
жима колебаний (соответствующего предельному циклу),
нужно в (14.10) положить А = А и решить уравнение
Л = /(Л). (14.11)
Графическое решение этого уравнения показано на
рпс. 14.1, в. Здесь кроме графика правой части (14.11),
соответствующего рис. 14.1, б, проведена биссектриса ко-
§ 14. ПЕРЕХОДНЫЕ ПРОЦЕССЫ И УСТОЙЧИВОСТЬ 227
ординатного угла, служащая графиком левой части
(14.11). Абсцисса Аст точки пересечения определяет ис-
комую амплитуду стационарного режима.
Такие графики позволяют не только найти амплитуду
стационарного режима, но и найти переходный процесс.
Для этого пользуются построением Кенигса — Ламерея,
Рис. 14.1
которое состоит в следующем. Задавшись первоначаль-
ным значением амплитуды Ао, нужно отложить его на
оси абсцисс, а затем построить ломаную Ао, Ai, Bi, А2,
В2, ..., как это показано на рис. 14.1, г для случая, когда
начальное отклонение мало (Ао<Аст). Как видно, эта
ломаная в конце концов приводит к точке пересечения
графиков — стационарному режиму. Можно убедиться,
что если Ао > Аст, то переходный процесс постепенно
приближается к тому же стационарному режиму.
6. Устойчивость стационарных режимов. Каждый из
разобранных выше способов определения переходных
процессов дает непосредственную возможность выяснить
устойчивость (неустойчивость) стационарного режима
или состояния равновесия.
Прежде всего остановимся на системе с нелинейным
трением, характеристика которого показана на рис. 13.5, а.
Для этой системы стационарная амплитуда определяет-
ся выражением (13.11) в вцде АС1 =- ех/?0/ [с (1 — 0)], а пе-
ь*
228
ГЛ. IV, УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
реходный процесс — соотношением (14.2). Для того
чтобы проверить устойчивость стационарного режима,
положим, что он некоторым образом нарушен, так что
амплитуда колебаний приобрела значение Лст + До, где
До — начальное возмущение стационарной амплитуды.
Тогда (14.2) можно записать в виде
Лст + Д! ==. р (Лст + До) + aRo/c,
где Д1 — возмущение последующей амплитуды. В даль-
нейшем движении амплитуды колебаний будут подчи-
няться соотношению
Лст + Д„ = § (Лст + Д„-1)+ oRofc, (14.12)
в котором Дп—1 и Д„— два последовательных значения
возмущения амплитуды. Из (14.12) находим
Д„ =' ₽Д„-1.
Отсюда видно, что поскольку [J < 1, то Д„<Д„-1;
убывание возмущений означает, что стационарный ре-
жим устойчив.
Если для той же системы решение найдено методом
точечных отображений, то об устойчивости стационарно-
го режима можно судить с помощью построения Кениг-
са—Ламерея (см. рис. 14.2) в окрестности абсциссы Аст.
Здесь непосредственно видно, что возмущенное движе-
ние постепенно приближается к движению по предель-
ному циклу.
Для системы с двумя продельными циклами (см.
рис. 13.4, а) построение Кенигса — Ламерея в принципе
§ 14. ПЕРЕХОДНЫЕ ПРОЦЕССЫ И УСТОЙЧИВОСТЬ 229
выглядит, как показано на рис. 14.3. Вид ломаных от-
четливо обнаруживает устойчивость первого стационарно-
го режима и неустойчивость второго.
В некоторых случаях имеет смысл изучать не после-
довательность амплитуд, а последовательность (также
дискретную) максимальных значений скорости, такую,
как, например, была найдена выше в виде (13.6). При-
менительно к этой зависимости возмущенное движение
будет описываться соотношением
q+ + Дп = (q+ + Дп-1) +$/а,
в котором Дп-1 и Дп — последовательные значения возму-
щения скорости q+. Учитывая найденное выше значение
q+, из записанного соотношения следует
Д„ = Дп_1е-2лЛ/'1*,
т. е. Дп < Дп-1 — стационарный режим устойчив.
Если стационарный режим найден энергетическим ме-
тодом или методом Ван дер Поля из условия Ф(Л) = 0
(см. выражение (2.42)), то наряду с этим режимом нужно
рассмотреть возмущенный режим, т. е. смежное
движение, характеризуемое амплитудами Лст + бЛ; здесь
6Л — вариация амплитуды, являющаяся некоторой функ-
цией времени. Характер изменения бЛ с течением времени
позволяет судить об устойчивости исследуемого режима.
Поскольку возмущенный режим описывается соотношени-
ем (14.8),— конечно, с заменой А на Лст + бЛ,— имеем
А (Лст + 6Л) = Ф-(-Л^+бЛ) . (14ЛЗ)
Заметим, что
-£(лст + бЛ)==-!Ц^Ц
Ф(Лст + бЛ)« Ф(Лст)+Ф'(Лст)бЛ =Ф'(Лст)бЛ,
поскольку Ф (Лст) = 0.
Таким образом, соотношение (14.13) принимает вид
d(6A) = Ф' (4т)
dt 2л,ко *
Отсюда окончательно находим
Ф'(^ст)*
6Л = бЛое 2яйо г
230
ГЛ IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
где 6ИО — начальное возмущение амплитуды стационарно-
го режима. Если
Ф'(4ст)<0, (14.14)
то возмущения амплитуды будут асимптотически стре-
миться к нулю, т. е. движение будет приближаться к на-
рушенному стационарному режиму и последний является
устойчивым. Если же Ф'(Ист)>0, то возмущения бу-
дут возрастать с течением времени п движение будет все
больше отклоняться от исследуемого стационарного режи-
ма; в этом случае стационарный режим неустойчив.
Таким образом, соотношение (14.14) представляет со-
бой условие устойчивости стационарного режима.
Так, например, для системы, описываемой уравнением
Ван дер Поля (13.30), было найдено выражение Ф(И) в
(3 \
1 —Л21; при
А = Лст = 2 имеем Ф'(2)= — 2цл < 0, т. е. условие устой-
чивости (14.14) выполнено — найденный предельный цикл
устойчив. Иной результат получится, если дифференци-
альное уравнение движения механической системы имеет
вид
aq — bq + Ro sign q + cq = 0. (14.15)
В отличие от условий примера, рассмотренного в начале
п. 2 § 13 (см. уравнение (13.5)), в данном случае деста-
билизирующей является сила отрицательного вязкого тре-
ния, а сила кулонова трения демпфирует колебания.
Приводя уравнение (14.15) к виду (2.32), получим
\ Ъ • л0 .
/ (?, q) = V q ~ a Slgn q-
Теперь по первой из формул (2.42) находим
лЪк ЛИ
ф (Л) =---------------------2- А----2.
' ' а а
Приравняв этот результат нулю, определим амплитуду
стационарных автоколебаний:
47Г
71ст “ л№-
Однако этот режим неустойчивый, так как производная
Ф'(ЛСТ) не удовлетворяет условию (14.14):
а
§ 15. ЯВЛЕНИЯ СИНХРОНИЗАЦИИ 231
При любом возмущении такого стационарного режима
система либо будет стремиться к устойчивому в малом
состоянию равновесия (Л->0), либо неограниченно уда-
ляться от стационарного режима (Л-> <»)—в зависимо-
сти от знака начального возмущения.
§ 15. Явления синхронизации
1. Вступительные замечания. Всюду выше в этой гла-
ве обсуждались явления, происходящие в автономных
системах, когда движение происходит под действием сил,
зависящих только от самого движения. Определенный ин-
терес представляют свойства движения автоколебательной
системы, если на нее действует некоторая заданная вы-
нуждающая сила.
Рассматривая ниже в п. 2 случай действия гармониче-
ской вынуждающей силы, мы установим, что при доста-
точной близости периодов вынуждающей силы и автоко-
лебаний происходит синхронизация — движение происхо-
дит с периодом вынуждающей силы, а автоколебательная
составляющая движения оказывается как бы п о д а в л е-н-
н о й; существенно, что синхронизация происходит при
сколь угодно малой амплитуде вынуждающей силы. Иног-
да явление синхронизации называют захватыванием.
В п. 3 мы рассмотрим иной важный случай синхро-
низации, когда вынуждающая сила действует не на авто-
колебательную систему, а на нелинейную систему, спо-
собную совершать «убегающие» движения.
2. Синхронизация квазилинейной автоколебательной
системы. Рассмотрим случай, когда на квазилинейную ав-
токолебательную систему с одной степенью свободы дей-
ствует гармоническая вынуждающая сила, причем частота
со силы близка к собственной частоте ко линеаризован-
ной системы. Дифференциальное уравнение задачи имеет
вид
Q + k20q f (q, q) + sin at. (15.1)
Поставим задачу определения условий существования пе-
риодических движений с частотой возмущающей силы ю.
Для того чтобы воспользоваться ранее полученными
соотношениями, введем коэффициент расстройки
к2
8 = До.-1, (15.2)
со2
232
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
т. е. примем
к20 = со2 (1 + 8),
считая, что значение 8 мало по сравнению с единицей.
Теперь можно переписать уравнение (15.1) в виде
q + co2q = / (q, q) — eco2g + -у sin (15.3)
и, пользуясь основной идеей метода медленно меняющих-
ся амплитуд, вновь будем разыскивать решение в виде
(2.34), учитывая прежнее условие (2.35). При этом мы
придем к соотношениям типа (2.39), но — соответственно
правой части уравнения (15.3)— они будут иметь несколь-
ко иной вид:
А = — — / [И cos (coi — <р), — Лео sin (оэ£ — <р)] sin (coi — ф)ф-
/>
4- 8(0 A sin (coi — ф) cos (coi — ф) — — sin coi sin (co£ — <p),
Ф = / [A cos (coZ — ф), — Лео sin (tot — ф)] cos (coi — Ф) —
p
— 8(0 cos2 (coi — Ф) + sin coi cos (coi — ф)
Соответственно вместо укороченных уравнений типа
(2.41) получится
___ Ф (Л) __ Р cos ф
2л<и 2асо ’
• __ Ф (Л) есо , Р sin ф ( • )
2лАш 2 ’’’ 2аАа>
В рассматриваемом случае стационарного режима обе
эти производные должны быть равны нулю:
Ф (Л) _ Р cos ф ___ п Ф (Л) есо Р sin ф _ п ,, г г,
2лсо 2асо ’ 2лАа> 2 ’’’ 2аАа> • \ • )
Наибольший интерес представляет значение амплиту-
ды Л. Для его определения исключим фазу ф из уравне-
ний (15.5); тогда получим
/ тгР
Ф2 (Л) + [Ч' (Л) - лЛсо28]2 = (• (15.6)
График получаемой отсюда зависимости Л = Л (в) иногда
называют резонансной кривой.
§ 15. ЯВЛЕНИЯ СИНХРОНИЗАЦИИ
233
Вернемся к первому примеру п. 2 § 13, когда на
стему действует вынуждающая сила Р sin wf, частота
торой близка к собственной частоте линеаризованной
си-
ко-
си-
стемы. В соответствии с (13.7) (см. также рис. 13.5, а)
для этой системы
ъ • R
/(?, q) = sign9t
п по формулам (2.42) находим
ф(Л) = _^.Л+1\
4 7 а а
V (Л) = 0.
Следовательно, соотношение (15.6) принимает вид
/_ л&ш Л2 (лЛйА5)2 = (^Р\\
\ а а ] 4 7 \ а /
Удобно ввести безразмерные величины
р — р аш л _____________ д р _ р л
8* ~ 8 Ь ' л* ~ Л 4Л0 ’ р 4Яо-
Тогда получим
(1 - +(г^)2=
Отсюда находим
1 ± О + е*)2- е2
Аф
.2
На рис. 15.1 показаны графики зависимостей безраз-
мерной амплитуды А* от параметра расстройки е* при
234
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
трех значениях безразмерной силы: Р* = 0,5; 1; 2. За-
штрихованной области соответствуют неустойчивые реше-
ния, когда синхронизация не осуществляется (само ис-
следование устойчивости здесь опущено).
3. Синхронизация маятника. Рассмотрим маятник
с вертикально колеблющейся точкой подвеса (см.
рис. 9.2, а), движение которой задано законом
у — A sin <at. (15.7)
В главе III мы исследовали малые колебания такого
маятника около положения равновесия; в частности, от-
мечалось, что в этой системе нижнее положение равно-
весия может оказаться неустойчивым, а верхнее положе-
ние — устойчивым.
Здесь мы не будем заниматься изучением малых ко-
лебаний, а исследуем возможность непрерывного
вращения маятника, поддерживаемого колебаниями оси.
Вращение со средней угловой скоростью и, равной час-
тоте колебаний оси, и представляет явление синхрони-
зации в рассматриваемой системе: возмущающее воздей-
ствие (колебания оси) «навязывает» свой ритм движе-
нию системы.
Таким образом, предполагаемый стационарный син-
хронизированный режим описывается законом
<p = a>i — а, (15.8)
где <р — угол отклонения маятника, а — начальный
сдвиг фаз.
Обратимся к составлению дифференциального урав-
нения относительного движения, а затем с помощью это-
го уравнения выясним, возможен ли режим движения
(15.8). В уравнение моментов относительно колеблю-
щейся оси введем момент силы тяжести — mgl sin q и
момент линейного трения —Ьф. Кроме того, в уравнение
моментов следует ввести также момент переносной силы
инерции. Эта сила и является причиной синхронизации;
она направлена по вертикали, и ее проекция на ось у
равна
—ту — mA a2 sin at.
Момент переносной силы инерции относительно оси ма-
ятника составляет mAco2Zsin(p sin at. Таким образом,
дифференциальное уравнение относительного движения
§ 16. СТРАННЫЕ АТТРАКТОРЫ
235
(15.9)
маятника запишется в виде
mF<p — — mgl sin ср — bq> + mA a21 sin (p sin cot
Для проверки возможности синхронизированного вра-
щения маятника попробуем подставить (15.8) в диффе-
ренциальное уравнение (15.9):
ml sin(wf — а) (Исо2 sin at — g)= ba. (15.10)
Так как здесь левая часть переменна, а правая часть
постоянна, то полученное соотношение тождественно не
удовлетворяется. Это означает, что функция (15.8) не
является точным решением дифференциального уравне-
ния (15.9), т. е. что равномерное вращение маятника
невозможно.
Однако можно принять (15.8) в качестве приближен-
ного решения задачи и, отказавшись от требования
о тождественном выполнении равенства (15.9), ограни-
читься более слабым требованием о выполнении его
в среднем. Именно в этом можно видеть применение той
же идеи, которая лежит в основе метода медленно ме-
няющихся амплитуд. Найдя среднее значение левой час-
ти соотношения (15.10)
2Л/й)
J sin (at — а) (И®2 sin at — g)dt = т1^ш cos а>
о
приравняем его правой части того же соотношения. Пос-
ле этого получим
(15.11)
(15.12)
2b
cos а = —.
mlAa
Выражение (15.11) позволяет найти сдвиг фаз; но еще
более важно, что из этого выражения следует условие
синхронизации (захватывания)
—Гл~ < 1-
тЛАы
Как видно, чем больше дебаланс маятника ml и мак-
симальная скорость колебаний оси маятника, тем
легче осуществляется синхронизация. Важный фактор,
который может воспрепятствовать синхронизации,— это
трение в системе, характеризуемое коэффициентом Ь;
чем больше трение, тем труднее достигается синхро-
низация.
236
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
§ 16. Странные аттракторы
1. Генераторы стохастичности. До недавнего времени
считалось, что единственной причиной случайных коле-
баний механических систем служат те или иные внешние
(«входные») воздействия — случайные вынуждающие си-
лы (см., например, стр. 144—148), случайное кинемати-
ческое возбуждение, случайное изменение параметров си-
стемы в процессе ее движения и т. п. При этом механи-
ческая система представляется как некий трансформатор
стохастичности, преобразующий случайность на входе
в случайность на выходе; полагается как бы очевидным,
что с исчезновением случайности на входе и стремлени-1
ем к нулю дисперсии входного воздействия исчезает слу-
чайность и на выходе, а дисперсия на выходе также стре-
мится к нулю. Соответственно изучение случайных коле-
баний сводится к определению связи между вероятност-
ными характеристиками выхода с вероятностными харак-
теристиками входа (см., например, соотношение
(6.66))*).
Однако совсем недавно выяснилось, что иногда слу-
чайные колебания могут происходить в полностью детер-
минированных механических системах, которые таким
образом оказываются уже не трансформаторами, а гене-
раторами стохастичности. Колебания в таких системах
непредсказуемы в точном смысле этого слова, но допу-
скают описание с помощью вероятностных характе-
ристик.
Возникновение стохастичности в детерминированной
системе — поразительный факт, возможность которого
трудно согласуется с традиционными представлениями.
Тем не менее эта возможность твердо установлена как
средствами строгой теории, так и убедительными экспе-
риментами; выяснено также, в каких случаях механиче-
ская система может оказаться генератором стохастично-
сти (отметим, в частности, что генераторы стохастично-
сти — это всегда нелинейные системы, но, разумеется, не
любые). Обнаружение генераторов стохастичности по его
значению для науки и практики справедливо уподобляют
открытию регулярных автоколебаний.
*) Такая трактовка возникновения стохастичности относится
к динамическим системам любой природы — электромеханическим,
радиотехническим, биологическим, экономическим и т. п.
g 16. СТРАННЫЕ АТТРАКТОРЫ
237
С появлением нового понятия несколько расширились
представления о типах аттракторов в фазовом простран-
стве. Прежде считалось, что в фазовом пространстве лю-
бой динамической (в частности механической) системы
могут существовать аттракторы только двух описанных
выше типов — устойчивые особые точки (устойчивый фо-
кус, устойчивый узел) и устойчивые предельные циклы.
Теперь установлено, что наряду с ними в некоторых слу-
чаях существуют аттракторы особого рода — не точки или
линии, а некоторые сплошные зоны фазового про-
странства, к которым притягиваются фазовые траектории,
находящиеся в окрестности таких зон; эти зоны принято
называть странными аттракторами.
Фазовые траектории, начинающиеся в области притя-
жения странного аттрактора, постепенно приближаются к
нему, причем изображающая точка, попав в зону странно-
го аттрактора, далее уже не выходит из нее, по вместо
повторяющегося движения, типичного для предельного
цикла, совершает в этой зоне хаотическое движение, ли-
шенное свойства повторяемости. В понятии странного ат-
трактора причудливо сочетаются свойства неустойчивости
и устойчивости. С одной стороны, движение изображаю-
щей точки в зоне странного аттрактора неустойчиво,
с другой стороны, условно можно сказать, что система
в зоне странного аттрактора обладает свойством устой-
чивости в целом: если после некоторого на-
чального возмущения изображающая точка вышла за
пределы странного аттрактора, но остается в области его
притяжения, то фазовая траектория вернется в эти пре-
делы (тем более, если изображающая точка после началь-
ного возмущения не выведена за пределы странного ат-
трактора, то она и далее будет оставаться в этих пределах).
Дальнейшее изложение посвящено разбору конкрет-
ных примеров.
В п. 2 рассматривается простейший и весьма нагляд-
ный пример, когда странный аттрактор обнаруживается
на фазовой плоскости; в некотором смысле — это исклю-
чительный случай, потому что, как правило, странные
аттракторы возможны при условии, что фазовое про-
странство системы имеет размерность не менее
трех.
В п. 3 приводятся примеры странных аттракторов в
трехмерном фазовом пространстве (для неавтономных си-
стем с одной степенью свободы).
238
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
2. Хаотический осциллятор Неймарка. В § 13 (стр. 209)
была рассмотрена предельно упрощенная модель ча-
сов — упругая система с вязким трением, автоколебатель-
ные свойства которой определяются действием мгновен-
ных конечных импульсов, прикладываемых к системе в мо-
менты ее прохождения через положение равновесия с по-
ложительной скоростью. Рассматриваемый здесь аттрактор
Неймарка возможен применительно к упругой системе, об-
ладающей противоположными свойствами — ее движение
сопровождается действием непрерывной силы отрица-
тельного вязкого трения и конечных мгновенных им-
пульсов, направленных против движения. Импульсы при-
кладываются в моменты, когда система подходит к положе-
нию q = 0 с достаточно большой положительной скоростью
q~ v (v—заданное значение скорости, знаки «+» и «—»
п другие обозначения соответствуют сказанному в § 13).
Так как при q~ < v импульсы не возникают, то, после
сколь угодно малого начального возмущения состояния
равновесия, под действием отрицательного трения будут
происходить разрастающиеся колебания, причем qn+i =
= qn e2nh/h* (здесь h>0 соответствует дифференциальному
уравнению q — 2hq + k2q =0 для системы с отрицательным
трением). Разрастание колебаний будет происходить до
тех пор, пока в конце некоторого n-го цикла колебаний
скорость qn достигнет значения v (или превзойдет это
значение). Тогда на систему воздействует импульс S,
п скорость мгновенно уменьшится до значения
q£ = qn — S/a,
которое окажется начальным для последующего (п+1)-го
цикла. В конце (п+1)-го цикла скорость станет равной
’ - _ ‘ + 2Л/1/Й*
Уп+1 — уп "
При достаточно большом значении импульса S этот
результат окажется меньшим, чем к, т. е. вновь возникнет
описанный выше процесс разрастания колебаний в от-
сутствие демпфирующих импульсов, который будет про-
исходить до тех пор, пока q~ < v. После того как будет
выполнено условие q~ v, произойдет новое скачкообраз-
ное уменьшение скорости и т. д. В целом можно ожидать,
что установится процесс, внешне напоминающий
§ (6. СТРАННЫЕ АТТРАКТОРЫ
239
биения, когда этаны возрастания амплитуд чередуются
с этапами их убывания. Как будет показано на численном
примере, эти представления верпы, по обнаруживаемые
в системе «биения» не обладают свойством периодич-
ности.
Отметим, что в рассматриваемой системе возможен
стационарный режим движения (предельный
цикл), которому соответствует равенство <?n+i = Qn = Уст
Подставляя сюда найденные выше выражения, найдем
7СТ а (е2яЛ/й* — 1) '
Однако этот предельный цикл неустойчив, в чем можно
убедиться, в частности, с помощью построения Кенигса —
Ламерея. То же построение позволит обнаружить и стран-
ный аттрактор в рассматриваемой системе. Для этой цели
будем исходить из точечного преобразования
q+e™h/h*
'„+ 2ЛЙ/Й»
У с
— при q V,
при q < и,
которое показано на рис. 16.1, а. Здесь предположено, что
импульс 5 достаточно большой и точка С (соответствую-
щая неустойчивому стационарному режиму) расположена
выше точки А, т. е. д(г> v. (Отметим, что при малых зна-
чениях 5 точка С может оказаться ниже точки А, по в
этом случае странный аттрактор не существует.) На
рис. 16.1, б буквой D отмечено произвольно принятое на-
чальное значение скорости q и показан первый (восходя-
щий) марш лестницы Кенигса — Ламерея DE, На
рис. 16.1, в показан следующий (нисходящий) марш лест-
ницы Кенигса — Ламерея ЕЕ, и в общих чертах становит-
ся ясным дальнейшее развитие процесса колебаний с по-
следовательным чередованием маршей вверх — вниз, од-
нако подчеркнем, что такое чередование не означает
установление периодического процесса и что значения q
не могут быть меньше ординаты точки В и больше орди-
наты точки А. Соответственно этому зона странного ат-
трактора определяется шестиугольником, заштрихован-
ным на рис. 16.1,г, а область его притяжения располага-
ется в промежутке значений 0 < q < qCI. Если движение
240
ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ РАВНОВЕСИЯ
системы начинается вне отмеченной зоны притяжения,
когда начальная скорость превосходит значение <)„, то
ступени лестницы Кенигса — Ламерея будут неограни-
ченно уходить вправо вверх.
Иллюстрируем сказанное прямыми вычислениями для
случая, когда hjk* = 0,01517, и = 2 м/с, S'/а = 0,21 м/с.
Рис. 16.1
При этих данных координаты точек, лежащих в зоне
странного аттрактора, находятся в пределах от 1,79 м/с
(уровень нижней границы зоны) до 2 м/с (уровень верх-
ней границы зоны); теми же числовыми пределами огра-
ничены значения абсцисс названных точек. Точка С, оп-
ределяющая неустойчивый предельный цикл, расположе-
на относительно близко к зоне странного аттрактора, обе
ее координаты равны 2,1 м/с. В качестве начального зна-
чения скорости qo принято 1,6 м/с. В таблице приводят-
ся результаты вычислений пятидесяти последовательных
значений скорости q+. Хотя вычисления выполнялись
с точностью до десяти знаков после запятой, для эконо-
§ 16. СТРАННЫЕ АТТРАКТОРЫ
241
мии места в таблицу внесены значения q+ после округ-
ления до трех знаков после запятой. Из-за этого значе-
ния при п = 2, 3, .. 7 выглядят совпадающими со зна-
п * н- 9 п п 7„+ п п «п п
1 1,760 1 11 1,967 21 1,987 31 1,807 41 1,836
2 1,936 12 1,954 22 1,976 32 1,988 42 1,810
3 1,920 13 1,939 23 1,963 33 1,977 43 1,991
4 1,9021 1 14 1,923 24 1,950 34 1,965 44 1,980,
5 1,882 15 1,906 25 1,935 35 1,951 45 1,968,
6 1,860 16 1,886 26 1,918 36 1,936 46 1,955.
7 1,836 17 1,865 27 1,900 37 1,920 47 1,940
8 1,809 18 1,842 28 1,880 38 1,902 48 1,924
9 1,990 19 1,816 29 1,858 39 1,882 49 1,906
10 1,979 20 1,997 30 1,833 40 1,860 50 1,887
чениями при п = 36, 37, ..., 41. В действительности этого
совпадения нет. (Подробнее об этом см. вп. 4.) Углублен-
ное изучение этого аттрактора показывает, что при t 00
марши лестницы Кенигса — Ламерея плотно заполняют
всю заштрихованную на рис. 16.1, г зону.
Фазовую диаграмму рассматриваемой системы можно
представить себе, если взять за основу изображенную на
рис. 13.4, а фазовую диаграмму автоколебательной систе-
мы и заменить здесь линию Ai (устойчивый предельный
цикл) кольцевой зоной конечной толщины.
Прежде всего отметим, что начало координат на фа-
зовой плоскости — неустойчивый фокус. Главная отличи-
тельная особенность фазовой диаграммы — упомянутая
кольцевая зона, которая и является странным аттракто-
ром. Наконец, существенным элементом фазовой диаг-
раммы является неустойчивый предельный цикл — зам-
кнутая линия, окружающая в некотором поколении зону
странного аттрактора (см. кривую Л 2 на рис. 13.4, а) и
служащая границей области притяжения к странному ат-
трактору. Фазовые траектории, начинающиеся внутри
этой области, не только притягиваются к странному ат-
трактору, но, можно сказать, «втягиваются» в него. Ока-
завшись внутри зоны странного аттрактора, изображаю-
щая тонка не выходит из нее и далее совершает здесь
хаотическое движение. Если после достаточно большого
возмущения начальная изображающая точка оказалась за
16 я. г. Пановко
242 ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ равновесия
пределами названной области притяжения, то фазовая
траектория будет раскручиваться, все больше удаляясь
от границы области.
При малой толщине кольцевой зоны (и соответствен-
но малых размерах шестиугольника на рис. 16.1,- г) свой-
ства системы будут близки к свойствам «обычной» авто-
колебательной системы, которой соответствует рис. 13.4, а.
3. Примеры странных аттракторов в неавтономных си-
стемах. На рис. 16.2, а показан сжатый, потерявщий ус-
тойчивость упругий стержень, па который действует в по-
перечном направлении вынуждающая сила Р sin <ot. Если
амплитуда этой силы мала, то стержень будет совершать
малые колебания около показанного на рисунке изогнуто-
го положения. В противоположность этому, если амплиту-
да силы весьма значительна, то установятся большие ко-
лебания — такие, что в течение одного цикла стержень бу-
дет проходить все три положения равновесия: 1) изобра-
женное на рисунке сплошной линией; 2) положение, сим-
метричное первому (при прогибе стержня вверх);
3) среднее положение, отмеченное на рисунке штриховой
Psinwt
в
линией. Обнаружено, что в некотором промежутке значе-
ний Pi< Р <Р‘2 колебания носят хаотический характер,
а в фазовом пространстве системы существует странный
аттрактор (при Р> Рг колебания вновь приобретают упо-
рядоченный характер). Эти результаты не только были
найдены путем вычислений, но получили подтверждение
на специальной экспериментальной установке (см. [33]).
Совершенно теми же свойствами обладает система, по-
казанная на рис. 16.2, б. Упругая пружина в изображен-
§ 16. СТРАННЫЕ АТТРАКТОРЫ
243
ном на рисунке недеформированном состоянии имеет
длину Z, большую h, так что система обладает тремя
положениями равновесия. Система испытывает действие
мгновенных импульсов S, прикладываемых к грузу с пе-
риодом Т. Дифференциальное уравнение движения гру-
за вдоль горизонтальной направляющей имеет вид
тх + кх + с (а — х)
-__________I
. — х)2 -|- Л2
— 1 = 56 (Z — пТ).
(16.1)
Здесь обозначено: тп — масса груза, х — его координата,
отсчитываемая от изображенного на рис. 16.2, б положе-
ния равновесия, к — коэффициент линейного трения меж-
ду грузом и направляющей, с — коэффициент жесткости
пружины, a = VZ2 — h2— проекция размера I на горизон-
тальное направление.
Отметим, что при малых отклонениях груза от поло-
жения равновесия, когда х < а, уравнение допускает ли-
неаризацию и принимает вид
тх + кх -|--з- — z, 56 (t — пТ).
ь П—1
Подробный анализ здижения после решения диффе-
ренциального уравнения (16.1) на ЭВМ приводит к сле-
дующим заключениям. При малых значениях 5 происхо-
дят малые колебания вблизи показанного на рисунке по-
ложения равновесия, затем в некотором диапазоне значе-
ний 5 колебания носят хаотический характер, а при еще
больших значениях импульса вновь устанавливаются пе-
риодические колебания, но очень большой амплитуды.
Еще один пример системы, в фазовом пространстве
которой возможен странный аттрактор, показан на
рис. 16.2, в. Она представляет собой свободно вращающий-
ся на оси массивный ротор, к фиксированной точке кото-
рого с заданным периодом Т прикладываются горизонталь-
ные мгновенные конечные импульсы 5. Пусть непосред-
ственно перед и-м ударом положение ударяемой точки
определяется углом <р„, а угловая скорость ротора равна
и,,. Вследствие приложения импульса угловая скорость
приобретает мгновенное приращение (5/Z/Z) sin ср„ (/-мо-
мент инерции ротора относительно оси вращения) и перед
16*
244 ГЛ. IV. УСТОЙЧИВОСТЬ СОСТОЯНИЙ равновесия
(п+1)-м ударом состояние ротора будет определяться
углом ф„+1 и угловой скоростью (£>„+i:
фп+i =фп + (On+iT1, (On+1 = (On + (577/Z)sin Ф„.
С помощью этих рекуррентных соотношений можно про-
следить развитие процесса во времени. Как установлено,
в определенном (довольно узком) диапазоне значений
SR/I значения образуют хаотическую последователь-
ность, причем хаотизации движения не могут помешать
силы трения, хотя соответствующий диапазон значений
SR/I окажется несколько иным.
4. Заключительные замечания. Среди различных спо-
собов выявления странных аттракторов в конкретных ди-
намических системах одним из основных следует считать
численное интегрирование соответствующих дифференци-
альных уравнений. Именно так были получены резуль-
таты, приведенные в табл, на с. 240. Там было отмечено,
что вычисления производились с точностью до десятого
знака после запятой, но для большей компактности пред-
ставленной таблицы в нее внесены значения скорости,
округленные до третьего знака. При этом особо подчер-
кивалось, что совпадение некоторых табличных значений
скорости (например, при п — 7 и п = 41)—лишь кажу-
щиеся и поэтому последующие значения скорости (в том
же примере начиная с п = 8 и п = 42) расходятся уже
в третьем знаке. Тем самым обнаруживается некая не-
упорядоченность движения, которую можно трактовать
как признак хаотичности и наличия странного аттракто-
ра (разумеется, это признак недостаточно убедителен,
хотя бы потому, что вычислениями охвачены лишь пер-
вые пятьдесят шагов процесса).
Допустим теперь, что в процессе вычислений какие-то
два значения скорости при п = п\ и п = П2 точно совпа-
ли. Тогда движение на интервале между шагами п\ и пъ
представляет собой некий, возможно весьма длительный
цикл, который затем будет повторяться. Такая повторяе-
мость, казалось бы, свидетельствует об упорядоченности
и отсутствии хаоса. Однако когда вычисления выполня-
ются с конечным числом знаков, то раньше или позже
совпадение обязательно произойдет. Так, например, при
неизменном значении целой части результата и учете де-
вяти знаков после запятой можно получить не более
десяти различных результатов, следовательно, совпадение
неизбежно произойдет не позже чем через миллиард
§ 16. СТРАННЫЕ АТТРАКТОРЫ 245
шагов. Таким образом, при вычислениях на ЭВМ всякое
движение рассматриваемого типа формально выглядит
как упорядоченный процесс. Нужно предупредить чита-
теля, что к этому заключению следует относиться с ос-
торожностью. С практической точки зрения колебатель-
ное движение, цикличность которого обнаруживается лишь
после десятков или сотен миллионов шагов, естественно
трактовать как случайный процесс. С теоретической же
точки зрения существование цикла вообще остается недо-
казанным из-за ограниченной точности вычислений.
СПИСОК ЛИТЕРАТУРЫ
Среди многих книг, специально посвященных общим вопросам
теории механических колебаний, в первую очередь следует от-
метить:
1. Бабаков И. М. Теория колебаний.— 2-е изд.— М.: Нау-
ка, 1965.
2. Б и д е р м а н В. Л. Теория механических колебаний.— М.:
Высшая школа, 1980.
3. Ми гул ин В. В., Медведев В. И., Му с те ль Е. Р„
Пары г ин В. Н. Основы теории колебаний.— М.: Наука,
1988.
4. С т р е л к о в С. П. Введепие в теорию колебаний.— 2-е изд.
М.: Наука, 1964,
Этим вопросам посвящены также переводные книги:
5. Ден Гартог Дж. П. Механические колебания.— 2-е изд.—
М.: Физматгиз, 1960.
6. Т и м о ш е н к о С. П. Колебания в инженерном деле.— М.:
Наука, 1967.
7. К и н Н. Тонг. Теория механических колебаний.— М.: На-
ука, 1963.
8. Ц з е Ф. С., Морзе И. Е., Хинкл Р. Т. Механические ко-
лебания.— М.: Машиностроение, 1966.
Проблемам нелинейных колебаний специально посвяще-
ны книги:
9. Л н д р о н о в А. А., В и т г А. А., X а й к и н С. Э. Теория
колебаний.— 2-е изд.— М.: Физматгиз, 1959.
10. Б о г о л ю б о в Н. Н., Митропольский Ю. А. Асимп-
тотические методы в теории нелинейных колебаний.— М.: Физмат-
гиз, 1963.
И. Булгаков Б. В. Колебания,—М.: Гостехпздат, 1954
(значительная часть книги относится к проблемам линейных ко-
лебаний).
СПИСОК ЛИТЕРАТУРЫ
247
12. Б у т е н и н Н. В., Н е й м а р к 10, И., Ф у ф а е в Н. А. Вве-
дение в теорию нелинейных колебаний.— 2-е изд.— М.: Наука, 1987.
13. Малкин И. Г. Некоторые задачи теории нелинейных ко-
лебаний,— М.: Гостехиздат, 1956.
14. М и тропо льс кий Ю. А. Проблемы асимптотической
теории нестационарных колебаний.— М_: Наука, 1964.
Более краткое изложение этой темы можно найти в книгах:
15. Б л а к ь е р О. Анализ нелинейных систем/Пер. с англ.—
М.: Мир, 1969.
16. Б у т е н и н Н. В. Элементы теории нелинейных колеба-
ний.— Л.: Судпромгиз, 1962.
17. Каннингхэм В. Введение в теорию нелинейных си-
стем/Пер. с англ.— М.: Энергоиздат, 1962.
18. Теодорчик К. Ф. Автоколебательные системы.— 3-е
изд.— М.: Наука, 1965.
19. Ха яс и Т. Нелинейные колебания в физических систе-
мах,— М.: Мир, 1968.
Вопросы, связанные с параметрическими колебаниями и дина-
мической неустойчивостью колебательных систем, изложены в
книгах:
20. Б о л о т и н В. В. Динамическая устойчивость упругих
систем.— М.: Гостехиздат, 1956.
21. Болотин В. В. Неконсервативные задачи упругой ус-
тойчивости.— М.: Физматгиз, 1961.
Другим современным задачам теории нелинейных колебаний
посвящены книги:
22. Шмидт Г. Параметрические колебания.— М.: Мир, 1978.
23. Блехман И. И. Синхронизация в природе и технике.—
М.: Наука, 1981.
24. В у л ь ф с о н И. И., К о л о в с к и и М. 3. Нелинейные за-
дачи динамики машин,—Л.: Машиностроение, 1968,
25. Ганиев Р. Ф_, Кононенко В. О. Колебания твердых
тел,— М.: Наука, 1976.
26. Коловский М. 3. Нелинейная теория виброзащитных
систем.— М.: Наука, 1966.
27. Кононенко В. О. Колебательные системы с ограничен-
ным возбуждением.— М.: Наука, 1964.
Проблемы случайных колебаний разбираются в книгах:
28. Болотин В. В. Случайные колебания упругих систем.—
М.: Наука, 1979.
248
СПИСОК ЛИТЕРАТУРЫ
29. Светлицкий В. А. Случайные колебания,—М.: Маши-
ностроение, 1976.
30. Случайные колебания/Пер. с англ. Под ред. С. Крендел-
ла.— М.: Мир, 1967.
О странных аттракторах см. [3], а также в книгах:
31. Н е й м а р к Ю. И., Ланда П. С. Стохастические и хао-
тические колебания.— М.: Наука, 1986.
32. Р а б и н о в и ч М. И., Т р у б е ц к о в Д. И. Введение в тео-
рию колебаний и волн,— М.: Наука, 1984.
33. Ш у с т е р Г. Детерминированный хаос/Пер. с англ.— М.:
Мир, 1988.
Общим вопросам теории механических колебаний, а также раз-
личным практическим аспектам проблемы вибраций посвящен ше-
ститомный справочник:
34. Вибрация в технике/Под ред. В. Н. Челомея,— М.: Маши-
ностроение, 1979.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автоколебания 10
— стационарные 215
Автоколебательные системы 17
Автопараметрические системы
10
Амплитуда 26
— комплексная 133
Амплитудно-частотная характе-
ристика 107
Амплитудный спектр 136, 137
Антирезонанс 162
Аттрактор 208
— странный 208, 236—244
Аэрогидроупругость 190
Балочная система 81
Биения 86
Вековой член 109
Вектор собственный 89
Виброгаситель динамический
163
Вибротранспортировка 8
Возбуждение кинематическое 9
Восстанавливающие силы 5
Вынуждающие силы 9, 101
Вынужденные колебания 8, 101
Гамма-функция 47
Гаситель колебаний динамиче-
ский 163
Генераторы стохастичности 235
Гистерезис 54, 142
Главные координаты 77, 167
Граничные условия 30
Движение относительное 104,
105
Декремент логарифмический 43
Детерминированные функции
времени 144
Диаграмма Айнса — Стретта 184
— устойчивости 179
— фазовая 20
Дивергенция 188
Динамическая жесткость 107
---комплексная 133
Динамический гаситель колеба-
ний 163
Диссипативная функция Рэлея
41
Диссипативные силы 17, 190
Дифференциальное уравнение
для огибающей 48
Добротность (системы) 124
Единичные перемещения 78
— реакции 79
Жесткое самовозбуждение 207
Жесткость динамическая комп-
лексная 133
— отрицательная 36
Задача идентификации 145
— обратная 145
— о дивергенции 189
— о флаттере 194
— оптимизации 145
— прямая 145
— синтеза 145
— Циглера 189, 202
Закон сохранения энергии 60
Затухание критическое 44
Затухающие колебания 42
Захватывание 231
Значение критическое парамет-
ра 36
— собственное матрицы 89
250
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Изгибные колебания 30
Изображающая точка 18
Импульсная реакция 111
Импульсы периодические 131
Инерционный коэффициент 23
Интеграл Фурье 138
Интегральное квадратическое
уклонение 68
Интегрирование поэтапное 63,
156
Каноническая форма 76
Квадратическое трение 49
Квазиупругая характеристика
58
Квазиупругий коэффициент 24
Кинематические граничные ус-
ловия 30
Кинематическое возбуждение 9
Колебания вынужденные 8
— затухающие 42
— изгибные 30
— моногармонические 107
— основные 148
— параметрические 10
— продольные 33
— свободные 8
— субгармонические 148, 154
— супергармонические 148, 152
— установившиеся вынужден-
ные 107
Комплексная амплитуда 133
— динамическая жесткость 133
--- податливость 133
— обобщенная сила 132
Комплексное обобщенное пере-
мещение 132
Координатные функции 14
Координаты главные 77, 167
— нормальные 77
Корреляционная функция 146
Коэффициент влияния для пе-
ремещений 78
— восстановления 158
— динамичности 107, 124
— инерционный 23
— квазиупругий 24
— обобщенный вязкости 41
жесткости 24
— передачи силы 127
— расстройки 231
— собственных форм 87
— эквивалентный линейного
трения 141
Кривая скелетная 150
Критерий Рауса — Гурвица 201
— Сильвестра 73
Критическая угловая скорость
200
Критическое затухание 44
— значение параметра 36
Кулоново трение 49
Линеаризация прямая 67
Лобовое сопротивление 189
Логарифмический декремент 43
Масса обобщенная 23
— приведенная 23
Математическое ожидание 145
Матрица депфирования 99
— жесткости 89
— инерции 89
Метод гармонического баланса
69
— малого параметра 218
— медленно меняющихся амп-
литуд 50, 225
— Рэлея 14, 29—35
— точечных отображений 226
— энергетического баланса 46,
140, 216, 224
Модель Русакова — Харкевича
157
Моногармонические колебания
107
Мягкое самовозбуждение 206
Нестационарные позиционные
силы 171
Неустойчивый предельный цикл
207
— узел 189, 191
— фокус 189, 191
Нормальные координаты 77, 167
Область притяжения 208
Обобщенная масса 23
— сила линейного трения 40
Обобщенные вынуждающие си-
лы 15
— позиционные силы 15
— силы трения 16
Обобщенный коэффициент вяз-
кости 41
---жесткости 24
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
251
Обратный способ составления
системы уравнений 74
Однородная система 82
Ортогональность собственных
форм 89
Основной способ составления
системы уравнений 75
Особые точки 21
Осциллятор хаотический Ней-
марка 236
Относительное движение 104,
105
Отрицательная жесткость 36
«Отрицательное трение» 180
Парадокс Циглера 203
Параметрические колебания 9
Параметрический резонанс 10,
172
Перемещения единичные 78
Переходный процесс 205
Период колебаний 26
Периодические импульсы 131
Периодическое изменение пара-
метра 172
Петля гистерезиса 54
Плоскость фазовая 18
Плотность спектральная 147
Подъемная сила 189
Портрет фазовый 20
Построение Кенигса — Ламерея
227, 228
Поэтапное интегрирование 156
Преобразование Фурье 138
Приведенная масса 23
Приведенные вынуждающие
силы 167
Припасовывание 63, 209
Продольные колебания 33
Процесс переходный 205
Прямая линеаризация 64
Прямой способ составления сис-
темы уравнений 74
Реакции единичные 79
Реакция импульсная 111
Режим стационарный 211
Резонанс 109, 131
— параметрический 10, 172
Репеллер 208
Ротационное движение 60
Самовозбуждение 193
— жесткое 207
— мягкое 206
Свободные колебания 8
Седло 40
Сила кулонова трения 49
— обобщенная линейного тре-
ния 40
— подъемная 189
— чисто кубическая 65
Силовые граничные условия 30
Силы восстанавливающие 15
— вынуждающие 9
— диссипативные 17, 190
— нестационарные позицион-
ные 171
— обобщенные вынуждающие
15
— приведенные вынуждающие
167
— смешанного характера 17
Система балочная 81
— однородная 82
Системы автоколебательные 17
Скелетная кривая 150
Скорость дивергенции 190, 197
— критическая 200
— флаттера 197
Собственная форма 87
— частота 26
Собственное значение 89
Собственный вектор 89
Сопротивление лобовое 189
Спектр собственных частот 83
Спектральная плотность 147
Способ построения системы
уравнений обратный 74
— — основной 75
— — •--прямой 74
— поэтапного интегрирования
63, 156, 209
— прямой линеаризации 67
Способы приближенного опреде-
ления частоты свободных ко-
лебаний 66
Среднеквадратическое значение
148
Стационарные случайные функ-
ции 145
Стационарный режим 211
— — неустойчивый 227
— — устойчивый 227
Странный аттрактор 208, 236—
244
Субгармоника 154
252
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Субгармонические колебания
148, 154
Супергармонические колебания
148, 152
Точка изображающая 18
Точки особые 21
Траектория фазовая 18, 39
Трение квадратическое 49
— кулоново 49
— линейное 40
— «отрицательное» 190
Угловая частота 26
Узел неустойчивый 189, 191
— устойчивый 44
Уклонение интегральное квад-
ратичное 68
Уравнение в конечных разно-
стях 48
— Ван дер Поля 220
— дифференциальное для оги-
бающей 48
— Лагранжа 75
— Матье 183
— Рэлея 204
— частотное 83
Условие синхронизации 235
— устойчивости 230
Условия граничные 30
— кинематические граничные
30
— начальные 63
— перехода 63
— периодичности 63, 118, 210
— силовые граничные 30
Устойчивость вращающегося ва-
ла 197
— равновесия 35
— стационарных режимов 222,
227
Устойчивый предельный цикл
205
— узел 44, 237
— фокус 44, 237
Фазовая диаграмма 20
— плоскость 18
— траектория 18, 39
Фазовый портрет 20
Флаттер 194
Фокус неустойчивый 189, 191
— устойчивый 44
Форма вынужденных колебаний
166
— каноническая кинетической
энергии 76
— — потенциальной энергии 76
— решения комплексная 132
— собственная 87
Функции времени детермини-
рованные 144
---случайные 144
— координатные 14
— Матье 183
Функция диссипативная Рэлея
41
— корреляционная 146
— центрированная 146
Фурье интеграл 138
— преобразование 138
Хаотический осциллятор Ней-
марка 236
Характеристика амплитудно-
частотная 107
— жесткости 58
— квазиупругая 58
— частотная 133
Центрированная функция 146
Цикл предельный 205
---неустойчивый 207
---устойчивый 205
Частота собственная 26
— угловая 26
Частотная характеристика 133
Частотное уравнение 83
Эйлеров интеграл второго рода
47
Эквивалентный коэффициент
линейного трения 141