/









Автор: Розанов Ю.К.
Теги: электротехника электрические машины и аппараты электронно-и аппаратостроение физика электроника энергоатомиздат
ISBN: 5-283-00681-6
Год: 1992




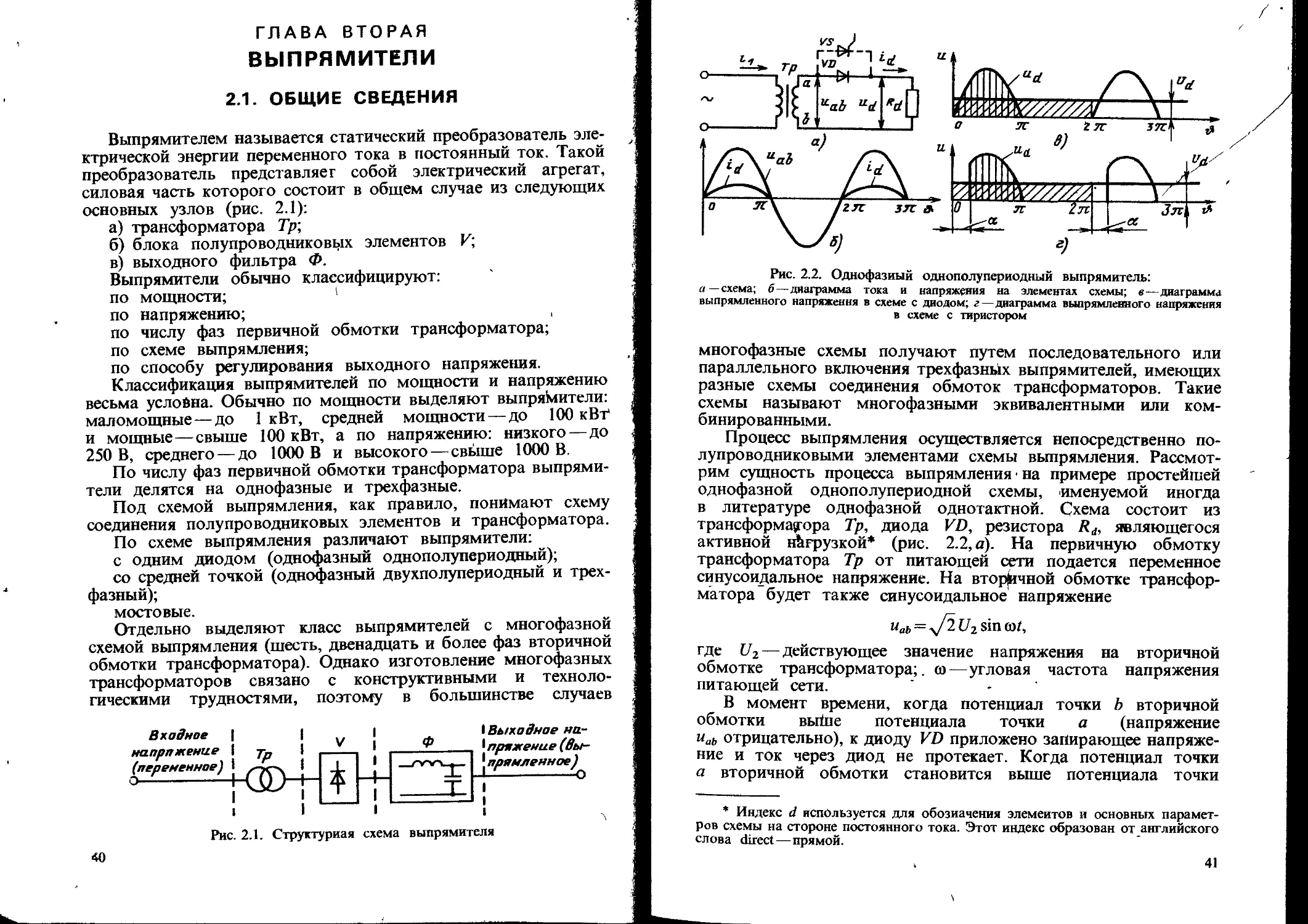
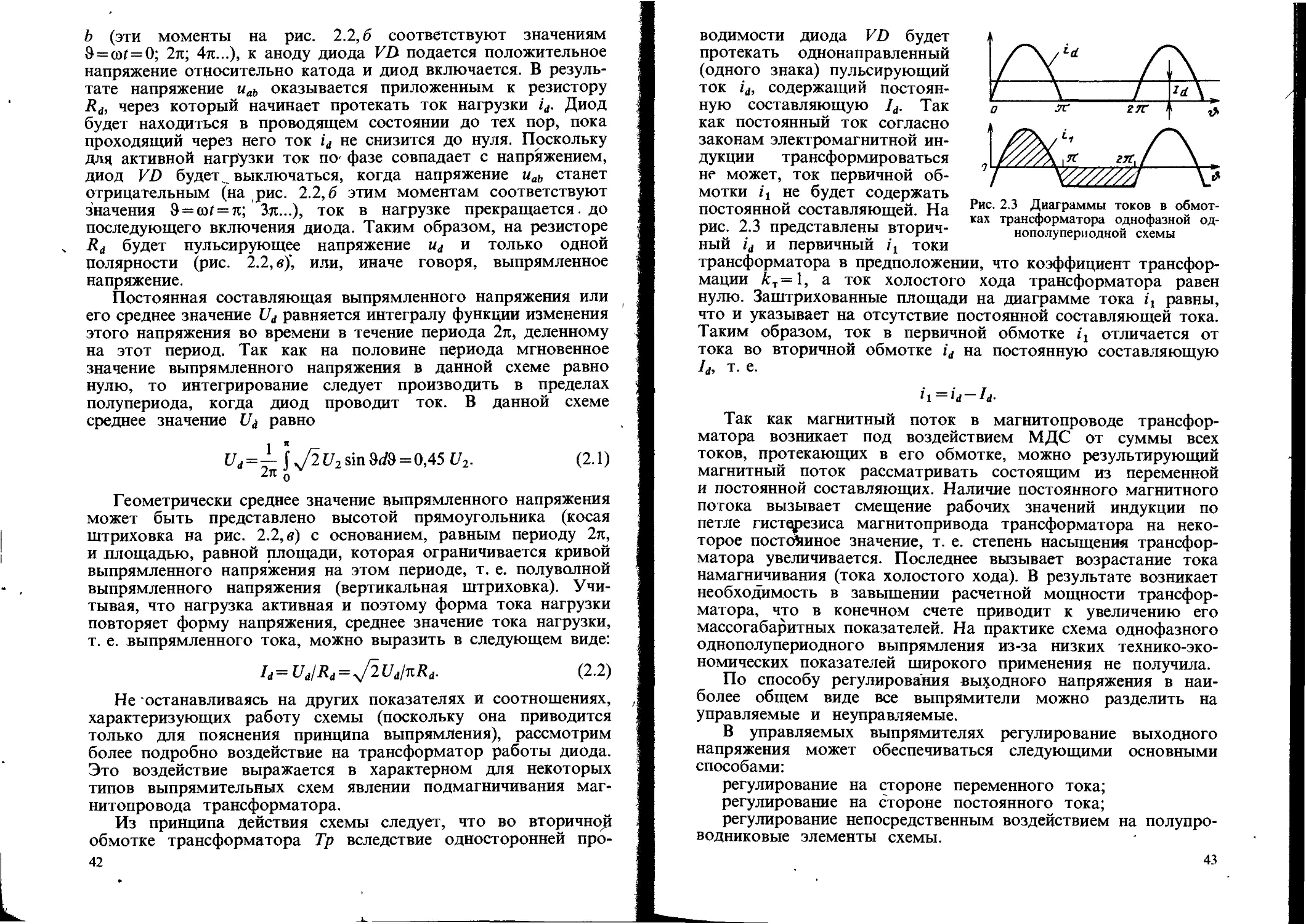
Текст
ББК 31.264.5
Р64
УДК 621.382.001.5
Рецензент доктор техн, наук Ф. И. Ковалев
Розанов Ю. К.
Р64 Основы силовой электроники.— М.: Энерго-
атомиздат, 1992.— 296 с'.: ил.
ISBN 5-283-00681-6
Излагаются принципы преобразования электрической энер-
гии: выпрямления, инвертирования, преобразования частоты
и др. Описаны основные схемы преобразовательных устройств,
способы управления ими и регулирования основных парамет-
ров, показаны области рационального использования различ-
ных типов преобразователей. Рассмотрены особенности кон-
струирования и эксплуатации.
Для инженеров и техников по разработке и эксплуатации
электрических систем, содержащих преобразовательные устрой-
ства, а также занятых испытанием и обслуживанием преоб-
разовательной техники.
2202070500-190 >
Р—--------------80-91
051(01>92
ББК 31.264.5
ISBN 5-283-00681-6
© Автор, 1992
Книга издана при содействии
Консорциума «Электромеханика и силовая электроника»
при Московском энергетическом институте
ПРЕДИСЛОВИЕ
Силовая электроника является постоянно развивающейся
и перспективной областью электротехники. Достижения со-
временной силовой электроники оказывают большое влияние
на темпы технического прогресса во всех развитых индустри-
альных обществах. В этой связи возникает необходимость
для широкого круга научно-технических работников в более
ясном понимании основ современной силовой электроники.
Силовая электроника имеет в настоящее время достаточно
глубоко разработанные теоретические основы, однако автор
не ставил перед собой задачи даже частичного их изложения,
поскольку этим вопросам посвящены многочисленные моногра-
фии и учебники. Содержание настоящей книги и методика
его изложения рассчитаны в первую очередь на инженерно-
технических работников, не являющихся специалистами в об-
ласти силовой электроники, но связанных с применением
и эксплуатацией электронных устройств и аппаратов и жела-
ющих поручить представление об основных принципах работы
электронных устройств, их схемотехнике и общих положениях
по разработке и эксплуатации. Кроме того, большинство
разделов книги может быть также использовано учащимися
различных технических учебных заведений при изучении дис-
циплины, в программу которых входят вопросы силовой
электроники.
Автор благодарен всем товарищам, оказавшим помощь
при подготовке рукописи к печати, а также доктору техн, наук
Ф. И. Ковалеву за ценные замечания, сделанные им при
рецензировании рукописи.
Автор с благодарностью примет все замечания, которые
просит направлять по адресу: 113114, Москва, М-114, Шлю-
зовая наб., 10, Энергоатомиздат.
Автор
ВВЕДЕНИЕ
В электронной технике выделяют силовую и информацион-
ную электронику. Силовая электроника первоначально возникла
как область техники, связанная преимущественно с преоб-
разованием различных видов электроэнергии на основе ис-
пользования электронных приборов. В дальнейшем достижения
в области полупроводниковых технологий позволили значи-
тельно расширить функциональные возможности, силовых эле-
ктронных устройств и соответственно области их применения.
Устройства современной силовой электроники, позволяют
управлять потоками электроэнергии не только в целях ее
преобразования из одного вида в другой, но и распределения,
организации быстродействующей защиты электрических цепей,
компенсации реактивной мощности и др. Эти функции, тесно
связанные с традиционными задачами электроэнергетики, опре-
делили и другое название силовой электроники—энергетическая
электроника.
Информационная электроника преимущественно использу-
ется для управления информационными процессами. В част-
ности, устройства информационной электроники являются
основой систем управления и регулирования различными
объектами, в том числе и аппаратами силовой электроники.
Однако несмотря на интенсивное расширение функций
аппаратов силовой электроники и областей их применения
основные научно-технические проблемы и задачи, решаемые
в области силовой электроники, связаны с. преобразованием
электрической энергии.
Электроэнергия используется в разных формах: в виде
переменного тока с частотой 50 Гц*, в виде постоянного тока
(свыше 20% всей вырабатываемрй электроэнергии), а также
переменного тока повышенной частоты или токов специальной
формы (например, импульсной и др.). Это различие в основном
* За исключением США и некоторых других стран, где за основную
принята частота 60 Гц.
4
обусловлено многообразием и спецификой потребителей, а в ря-
де случаев (например, в системах автономного электроснаб-
жения) и первичных источников электроэнергии.
Разнообразие в видах потребляемой и вырабатываемой
электроэнергии вызывает необходимость ее преобразова-
ния. Основными видами преобразования электроэнергии яв-
ляются:
1) выпрямление (преобразование переменного тока в посто-
янный);
2) инвертирование (преобразование постоянного тока в пе-
ременный);
3) преобразование частоты (преобразование переменного
тока одной частоты в переменный ток другой частоты).
Существует - также ряд других, менее распространенных
видов преобразования: формы кривой тока, числа фаз и др.
В отдельных случаях используется комбинация нескольких
видов преобразования. -Кроме того, электроэнергия может
преобразовываться с целью улучшения качества ее параметре^,
например для Стабилизации напряжения или частоты перемен-
ного тока. ।
Преобразование электроэнергии может производиться раз-
личными способами. В частности, традиционным для элект-
ротехники является преобразование посредством электромашин-
ных агрегатов, состоящих из двигателя и генератора, объ-
единенных общим валом. Однако этому способу преобразова-
ния присущ ряд недостатков: наличие подвижных частей, -
инерционность и др. Поэтому параллельно с развитием
электромашинного преобразования в электротехнике большое
внимание уделялось разработке способов статического преоб-
разований* электроэнергии. Большинству таких разработок
основывалось на использовании нелинейных элементов элек-
тронной техники.
Основными ' элементами силовой электроники, ставшими
базой для создания статических преобразователей, явились
полупроводниковые приборы. Проводимость большинства по-
лупроводниковых приборов в существенной мере зависит от
направления электрического тока: в прямом направлении их
проводимость велика, в’ обратном — мала (т. е. полупровод-
никовый прибор имеет два явно выраженных состояния:
открытое и закрытое). Полупроводниковые приборы бывают
неуправляемыми и управляемыми. В последних можно упра-
влять моментом наступления их высокой проводимости (вклю-
чением) посредством управляющих импульсов малой мощ-
ности. Первыми отечественными работами, посвященными
исследованию полупроводниковых приборов и их использова-
нию для преобразования электроэнергии быйи работы акаде-
миков В. Ф. Миткевича, Н. Д. Папелекси и др.
5
В 30-х годах в СССР и за рубежом были распространены
газоразрядные приборы* (ртутные вентили, тиратроны, газотро-
ны и др.). Одновременно с освоением газоразрядных приборов
развивалась теория преобразования электроэнергии. Были раз-
работаны основные типы схем и проведены обширные исследо-
вания электромагнитных процессов, протекающих при выпрям-
лении и инвертировании переменного тока. В это же время
появились первые работы по анализу схем автономных инвер-
торов. В развитии теории ионных преобразователей большую
роль сыграли работы советских ученых И. Л. Каганова,
М. А. Чернышева, Д. А. Завалишина, а также и зарубежных:
К. Мюллер-Любека, М. Демонтвинье, В. Шилинга и др.
Новый этап в развитии преобразовательной техники начался
с конца 50-х годов, когда появились мощные полупровод-
никовые приборы—диоды и тиристоры. Эти приборы, раз-
работанные на основе кремния, по своим техническим харак-
теристикам намного превосходят газоразрядные приборы. Они
обладают малыми габаритами и массой, имеют высокое
значение КПД, обладают быстродействием и повышен-
ной надежностью при работе в широком температурном диапа-
зоне.
Использование силовых полупроводниковых приборов су-
щественным образом повлияло на развитие силовой электро-
ники. Они стали основой для разработки высокоэффективных
преобразовательных устройств всех типов. В этих разработках
были приняты многие принципиально новые схемотехнические
и конструктивные решения.
Освоение промышленностью силовых полупроводниковых
устройств электроэнергии интенсифицировало проведение
в этой области научно-исследовательских работ и создание
новых технологий. С учетом специфики силовых полупро-
водниковых приборов были уточнены старые и разработаны
новые методы анализа схем. Значительно расширились классы
схем автономных инверторов, преобразователей частоты, ре-
гуляторов постоянного тока и многие другие, а также
появились новые виды устройств силовой электроники—ста-
тические контакторы с естественной и искусственной ком-
мутацией, тиристорные компенсаторы реактивной мощности,
быстродействующие аппараты защиты с ограничителями на-
пряжения и др.
Одной из основных областей эффективного использования
силовой электроники стал электропривод. Для электропривода
постоянного тока разработаны тиристорные агрегаты и ком-
плектные устройства, успешно используемые в металлургий,
станкостроении, на транспорте и других отраслях промышлен-
ности. Освоение тиристоров обусловило значительный прогресс
в области регулируемого электропривода переменного тока.
6
Созданы высокоэффективные устройства, преобразующие ток
промышленной частоты в переменный ток ^регулируемой ча-
стоты для управления скоростью электродвигателей.
Для различных областей техники разработано много типов
преобразователей частоты со стабилизированными выходными
параметрами. В частности, для индукционного нагрева металла
созданы высокочастотные мощные тиристорные агрегаты, да-
ющие большой технико-экономический эффект за счет увеличе-
ния ресурса их работы по сравнению с электромашинными
агрегатами.
На основе внедрения полупроводниковых преобразователей
была проведена реконструкция электрических подстанций для
подвижного электротранспорта.
Значительно улучшено качество некоторых технологических
процессов в электрометаллургической и химической отраслях
промышленности за счет внедрения выпрямительных агрега-
тов с глубоким регулированием выходного напряжения и
тока.
Достоинства полупроводниковых преобразователей опреде-
лили их широкое применение в системах бесперебойного
электроснабжения.
Расширилась область применения силовых электронных
устройств в сфере бытовой электроники (регуляторы напряже-
ния и др.).
С начала 80-х годов, благодаря интенсивному развитию
электроники, начинается создание нового поколения изделий
силовой электроники. Базой для него явились разработка
и освоение промышленностью новых типов силовых полу-
проводниковых приборов: запираемых тиристоров, биполярных
транзисторов, МОП-транзисторов и др. Одновременно сущест-
венно повысились быстродействие полупроводниковых прибо-
ров, значения предельных параметров диодов и тиристоров,
развились интегральные и гибридные технологии изготовления
полупроводниковых приборов различных типов, начала широко
внедряться микропроцессорная техника для управления и кон-
троля преобразовательными устройствами.
Использование новой элементной базы позволило прин-
ципиально улучшить такие важнейшие технико-экономические
показатели, как КПД, удельные значения массы и объема,
надежность, качество выходных параметров и др. Определилась
тенденция повышения частоты преобразования электроэнергии.
В настоящее время разработаны миниатюрные вторичные
источники питания малой и средней мощности с промежуточ-
ным преобразованием электроэнергии на частотах сверх-
звукового диапазона. Освоение высокочастотного (свыше
1 мГц) диапазона привело к необходимости решения комплекса
научно-технических проблем по конструированию преобразо-
7
вательных устройств и обеспечению их электромагнитной
совместимости в составе технических- систем. Получаемый за
счет перехода на повышенные частоты технико-экономический
эффект полностью компенсировал затраты на решение этих
задач. Поэтому в настоящее время тенденция создания многих
типов преобразовательных устройств с промежуточным вы-
сокочастотным звеном сохраняется.
Следует отметить, что использование полностью управля-
емых быстродействующих полупроводниковых приборов в тра-
диционных схемах существенно расширяет их возможности
в обеспечении новых режимов работы и, следовательно, но-
вых функциональных свойств изделий силовой электронной
техники.
ГЛАВА ПЕРВАЯ
ОСНОВНЫЕ ЭЛЕМЕНТЫ СИЛОВОЙ
ЭЛЕКТРОНИКИ ,
1.1. СИЛОВЫЕ ПОЛУПРОВОДНИКОВЫЕ ПРИБОРЫ
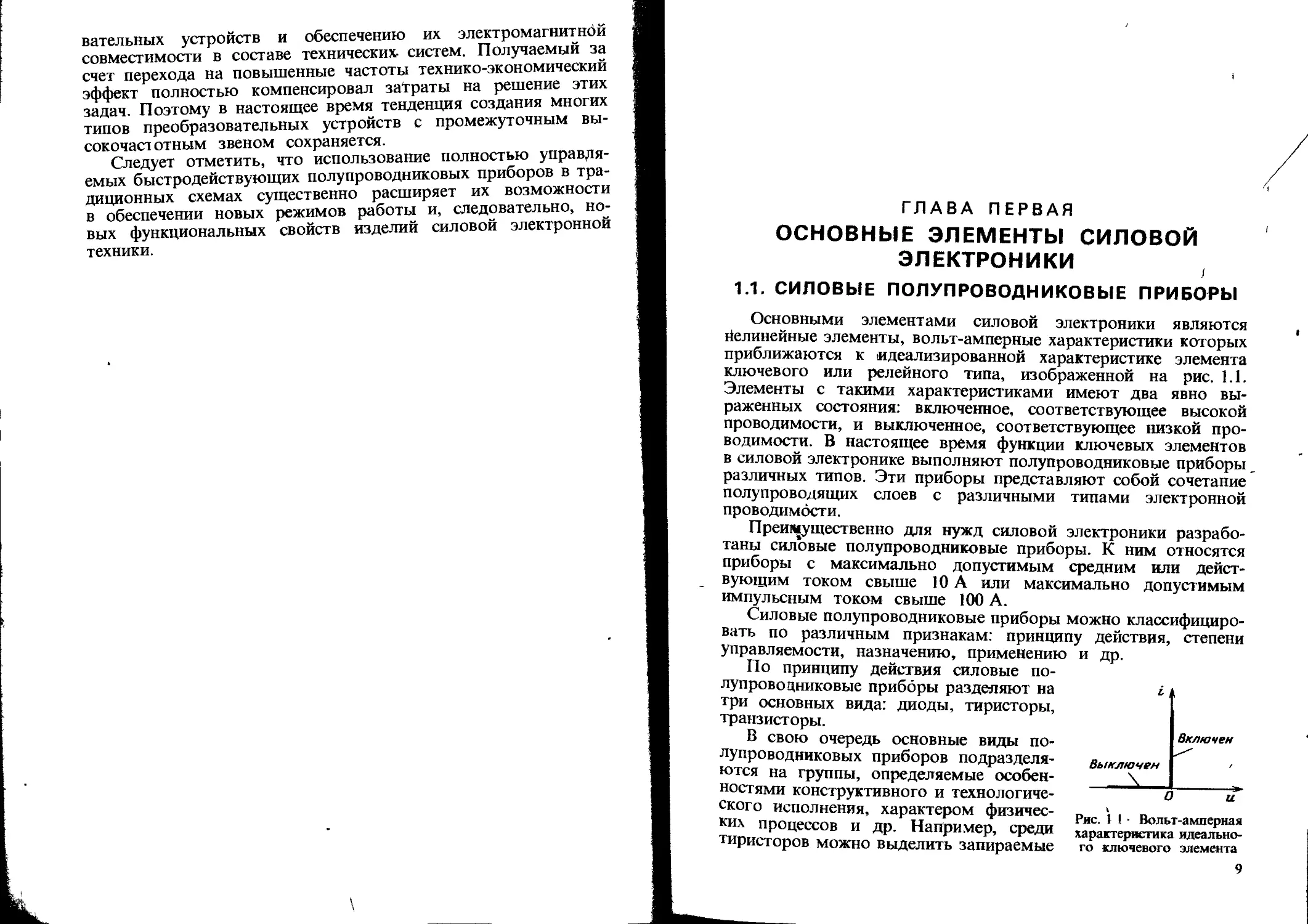
Основными элементами силовой электроники являются
Нелинейные элементы, вольт-амперные характеристики которых
приближаются к идеализированной характеристике элемента
ключевого или релейного типа, изображенной на рис. 1.1.
Элементы с такими характеристиками имеют два явно вы-
раженных состояния: включенное, соответствующее высокой
проводимости, и выключенное, соответствующее низкой про-
водимости. В настоящее время функции ключевых элементов
в силовой электронике выполняют полупроводниковые приборы
различных типов. Эти приборы представляют собой сочетание
полупроводящих слоев с различными типами электронной
проводимости.
Преимущественно для нужд силовой электроники разрабо-
таны силовые полупроводниковые приборы. К ним относятся
приборы с максимально допустимым средним или дейст-
вующим током свыше 10 А или максимально допустимым
импульсным током свыше 100 А.
Силовые полупроводниковые приборы можно классифициро-
вать по различным признакам: принципу действия, степени
управляемости, назначению, применению
По принципу действия силовые по-
лупроводниковые приборы разделяют на
три основных вида: диоды, тиристоры,
транзисторы.
В свою очередь основные виды по-
лупроводниковых приборов подразделя-
ются на группы, определяемые особен-
ностями конструктивного и технологиче-
ского исполнения, характером физичес-
ких процессов и др. Например, среди
тиристоров можно выделить запираемые
и
др.
Включен
Выключен
О
и
Рис. 1 1 • Вольт-амперная
характеристика идеально-
го ключевого элемента
9
тиристоры, фототиристоры, симметричные и асимметричные
тиристоры и др., а среди транзисторов — биполярные, МОП-
транзисторы и др.
Внутри каждой группы приборы могут классифицироваться
по назначению (низкочастотные, высокочастотные, импульсные
я Др ).
В силовой электронике иногда классификацию производят по
степени управляемости прибора, что удобно для выбора
рациональных схем на основе того или иного прибора. Под
признаком управляемости в таких случаях подразумевают
возможность переводить прибор из проводящего состояния
в. непроводящее и обратно посредством воздействия на него
маломощным управляющим сигналом. По степени управляемости
силовые управляемые приборы разделяют на следующие группы:
1) не подностью управляемые приборы, которые можно
посредством управляющего импульса переводить только в про-
водящее состояние, но не наоборот, например широко рас-
пространенные тиристоры;
2) полностью управляемые приборы, которые можно пере-
водить в проводящее состояние и обратно посредством управ-
ляющего импульса (транзисторы или запираемые тиристоры).
Силовые приборы разделяют также внутри отдельных групп
по основным параметрам, например по напряжению или току,
а также по другим характерным признакам.
1.1.1. СИЛОВЫЕ ДИОДЫ
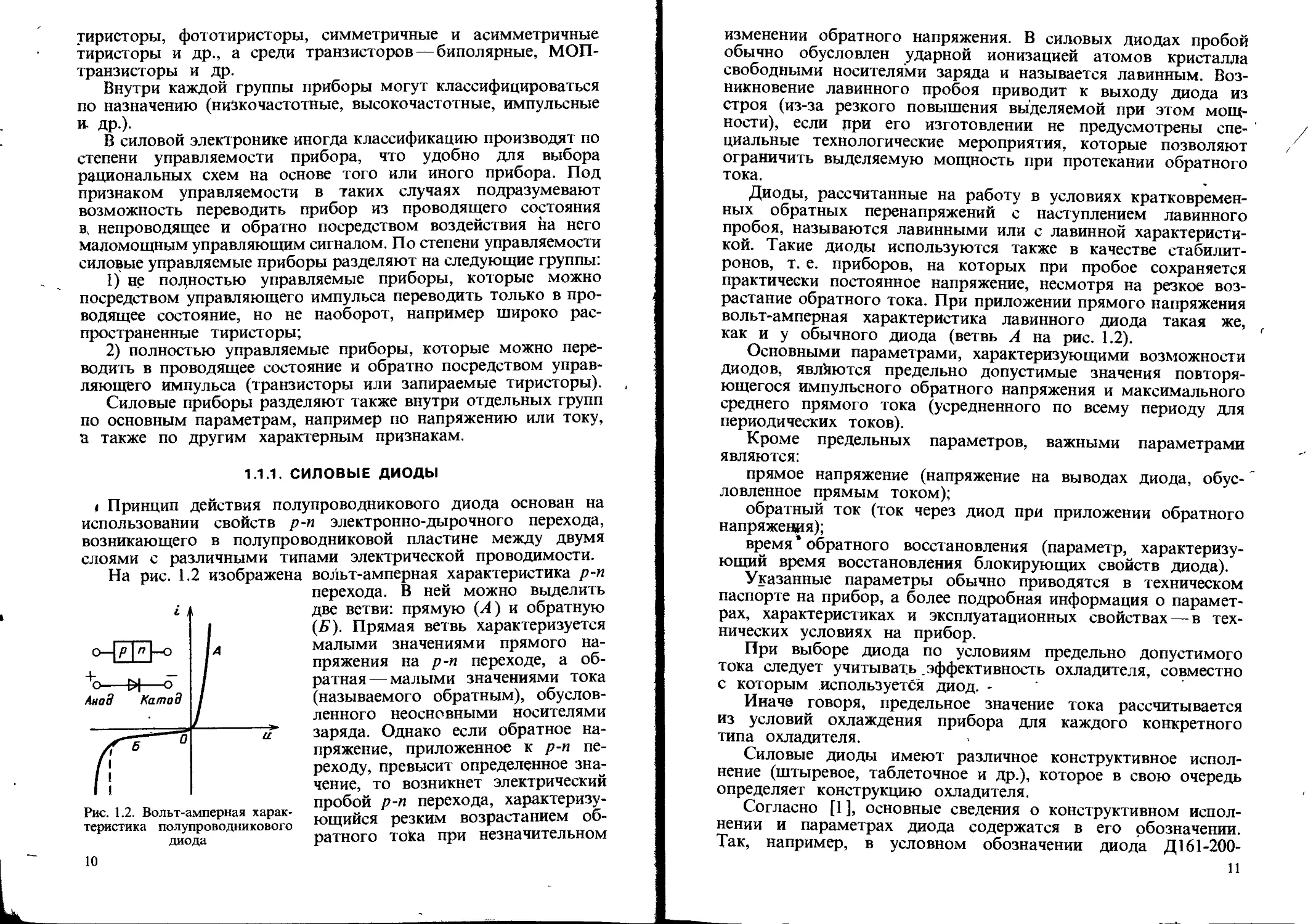
t Принцип действия полупроводникового диода основан на
использовании свойств р-п электронно-дырочного перехода,
возникающего в полупроводниковой пластине между двумя
слоями с различными типами электрической проводимости.
На рис. 1.2 изображена
Рис. 1.2. Вольт-амперная харак-
теристика полупроводникового
диода
вольт-амперная характеристика р-п
перехода. В ней можно выделить
две ветви: прямую (Л) и обратную
(Б). Прямая ветвь характеризуется
малыми значениями прямого на-
пряжения на р-п переходе, а об-
ратная— малыми значениями тока
(называемого обратным), обуслов-
ленного неосновными носителями
заряда. Однако если обратное на-
пряжение, приложенное к р-п пе-
реходу, превысит определенное зна-
чение, то возникнет электрический
пробой р-п перехода, характеризу-
ющийся резким возрастанием об-
ратного тока при незначительном
ю
изменении обратного напряжения. В силовых диодах пробой
обычно обусловлен ударной ионизацией атомов кристалла
свободными носителями заряда и называется лавинным. Воз-
никновение лавинного пробоя приводит к выходу диода из
строя (из-за резкого повышения выделяемой при этом мощ-
ности), если при его изготовлении не предусмотрены спе- '
циальные технологические мероприятия, которые позволяют
ограничить выделяемую мощность при протекании обратного
тока.
Диоды, рассчитанные на работу в условиях кратковремен-
ных обратных перенапряжений с наступлением лавинного
пробоя, называются лавинными или с лавинной характеристи-
кой. Такие диоды используются также в качестве стабилит-
ронов, т. е. приборов, на которых при пробое сохраняется
практически постоянное напряжение, несмотря на резкое воз-
растание обратного тока. При приложении прямого напряжения
вольт-амперная характеристика лавинного диода такая же,
как и у обычного диода (ветвь А на рис. 1.2).
Основными параметрами, характеризующими возможности
диодов, являются предельно допустимые значения повторя-
ющегося импульсного обратного напряжения и максимального
среднего прямого тока (усредненного по всему периоду для
периодических токов).
Кроме предельных параметров, важными параметрами
являются:
прямое напряжение (напряжение на выводах диода, обус-'
ловленное прямым током);
обратный ток (ток через диод при приложении обратного
напряжения);
время * обратного восстановления (параметр, характеризу-
ющий время восстановления блокирующих свойств диода).
Указанные параметры обычно приводятся в техническом
паспорте на прибор, а более подробная информация о парамет-
рах, характеристиках и эксплуатационных свойствах — в тех-
нических условиях на прибор.
При выборе диода по условиям предельно допустимого
тока следует учитывать .эффективность охладителя, совместно
с которым используется диод. -
Иначе говоря, предельное значение тока рассчитывается
из условий охлаждения прибора для каждого конкретного
типа охладителя.
Силовые диоды имеют различное конструктивное испол-
нение (штыревое, таблеточное и др.), которое в свою очередь
определяет конструкцию охладителя.
Согласно [1], основные сведения о конструктивном испол-
нении и параметрах диода содержатся в его обозначении.
Так, например, в условном обозначении диода Д161-200-
п
5-1,25-1,35 буква Д соответствует виду прибора (если диод
имеет лавинную вольт-амперную характеристику в зоне об-
ратного напряжения, то к букве Д добавляется буква Л,
а цифры 161 указывают на определенные конструктивные
признаки. Остальные цифровые обозначения указывают на то,
что максимально допустимый средний прямой ток 200 А,
повторяющееся импульсное обратное напряжение 500 В (5-й
класс прибора по напряжению), пределы изменения импульс-
ного прямого напряжения от 1,25 В до 1,35 В. Информация
о значениях прямого напряжения является важной для диодов,
предназначенных для параллельной работы. Для диодов с нор-
мируемым значением времени обратного восстановления (быст-
ровосстанавливающихся) в обозначение добавляется цифра
4 и указывается группа, соответствующая конкретному значе-
нию времени восстановления. Например, обозначение Д4-
161-200-5-2, в отличие от Д-161-200-5, свидетельствует о том,
что диод нормирован не' только по току (200 А) и классу
обратного напряжения (500 В), но и имеет гарантированное
значение времени обратного восстановления не менее 4 мкс,
что соответствует группе 2 [1].
В настоящее время созданы силовые диоды на токи свыше
1000 А и напряжения свыше 1000 В.
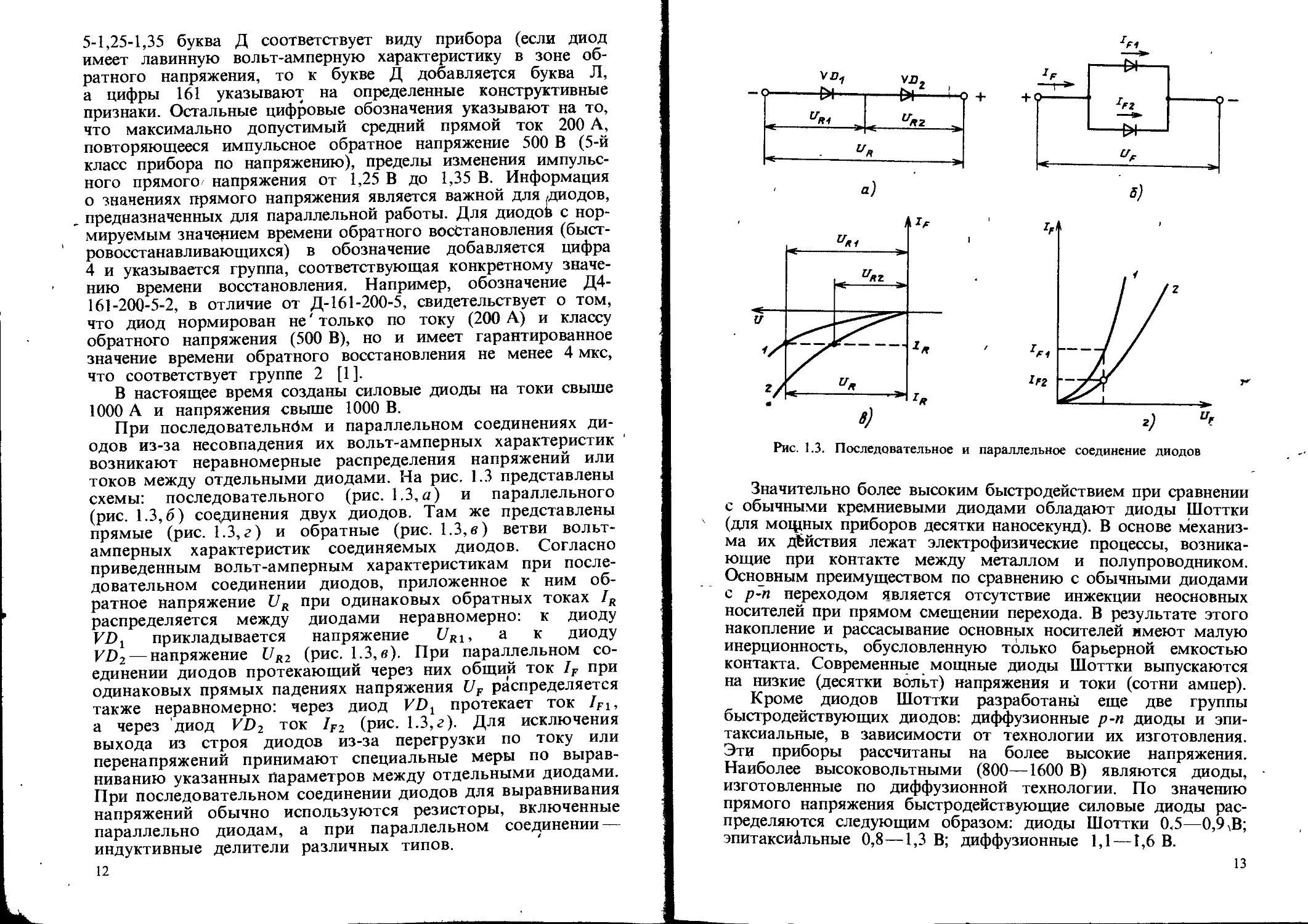
При последовательнбм и параллельном соединениях ди-
одов из-за несовпадения их вольт-амперных характеристик
возникают неравномерные распределения напряжений или
токов между отдельными диодами. На рис. 1.3 представлены
схемы: последовательного (рис. 1.3, а) и параллельного
(рис. 1.3,6) соединения двух диодов. Там же представлены
прямые (рис. 1.3,г) и обратные (рис. 1.3,в) ветви вольт-
амперных характеристик соединяемых диодов. Согласно
приведенным вольт-амперным характеристикам при после-
довательном соединении диодов, приложенное к ним об-
ратное напряжение UR при одинаковых обратных токах IR
распределяется между диодами неравномерно: к диоду
VDr прикладывается напряжение CR1, а к диоду
VD2 — напряжение UR2 (рис. 1.3, в). При параллельном со-
единении диодов протекающий через них общий ток IF при
одинаковых прямых падениях напряжения UF распределяется
также неравномерно: через диод VDr протекает ток ZF1,
а через диод VD2 ток IF2 (рис. 1.3,г). Для исключения
выхода из строя диодов из-за перегрузки по току или
перенапряжений принимают специальные меры по вырав-
ниванию указанных параметров между отдельными диодами.
При последовательном соединении диодов для выравнивания
напряжений обычно используются резисторы, включенные
параллельно диодам, а при параллельном соединении —
индуктивные делители различных типов.
12
Рис. 1.3. Последовательное и параллельное соединение диодов
Значительно более высоким быстродействием при сравнении
с обычными кремниевыми диодами обладают диоды Шоттки
(для мощных приборов десятки наносекунд). В основе механиз-
ма их действия лежат электрофизические процессы, возника-
ющие при контакте между металлом и полупроводником.
Основным преимуществом по сравнению с обычными диодами
с р-п переходом является отсутствие инжекции неосновных
носителей при прямом смещении перехода. В результате этого
накопление и рассасывание основных носителей имеют малую
инерционность, обусловленную только барьерной емкостью
контакта. Современные мощные диоды Шоттки выпускаются
на низкие (десятки вольт) напряжения и токи (сотни ампер).
Кроме диодов Шоттки разработаны еще две группы
быстродействующих диодов: диффузионные р-п диоды и эпи-
таксиальные, в зависимости от технологии их изготовления.
Эти приборы рассчитаны на более высокие напряжения.
Наиболее высоковольтными (800—1600 В) являются диоды,
изготовленные по диффузионной технологии. По значению
прямого напряжения быстродействующие силовые диоды рас-
пределяются следующим образом: диоды Шоттки 0,5—0,9,В;
эпитаксиальные 0,8—1,3 В; диффузионные 1,1 —1,6 В.
13
1.1.2. СИЛОВЫЕ ТРАНЗИСТОРЫ
Биполярные транзисторы. Этот тип приборов длительный
период времени был практически единственным полностью
управляемым силовым полупроводниковым ключевым элемен-
том. Основой биполярного транзистора является трехслойная
полупроводниковая структура, в которой чередуются слои
с электропроводностью р- и л-типа. Наличие в структуре
двух типов полярностей и обусловило термин «биполярный».
Средний слой структуры биполярного транзистора может быть
изготовлен как с электропроводностью р-, так и л-типа (тогда
соответственно транзисторы называются р -л -р или л -р -л типа).
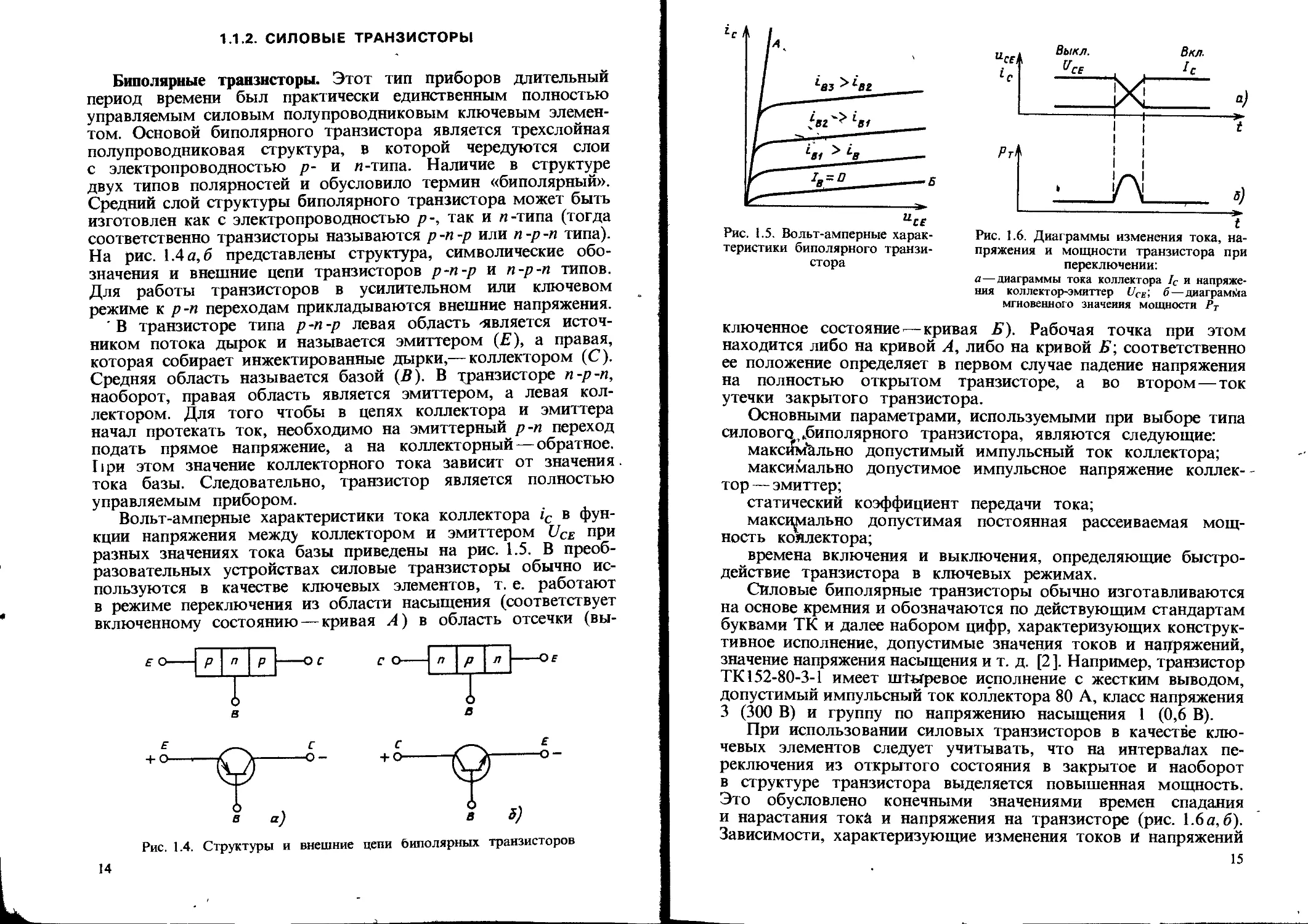
На рис. 1.4 а, б представлены структура, символические обо-
значения и внешние цепи транзисторов р-п-р и п-р-п типов.
Для работы транзисторов в усилительном или ключевом
режиме к р-п переходам прикладываются внешние напряжения.
В транзисторе типа р-п-р левая область -является источ-
ником потока дырок и называется эмиттером (£), а правая,
которая собирает инжектированные дырки,— коллектором (С).
Средняя область называется базой (В). В транзисторе п-р-п,
наоборот, правая область является эмиттером, а левая кол-
лектором. Для того чтобы в цепях коллектора и эмиттера
начал протекать ток, необходимо на эмиттерный р-п переход
подать прямое напряжение, а на коллекторный — обратное.
11ри этом значение коллекторного тока зависит от значения
тока базы. Следовательно, транзистор является полностью
управляемым прибором.
Вольт-амперные характеристики тока коллектора ic в фун-
кции напряжения между коллектором и эмиттером UCe при
разных значениях тока базы приведены на рис. 1.5. В преоб-
разовательных устройствах силовые транзисторы обычно ис-
пользуются в качестве ключевых элементов, т. е. работают
в режиме переключения из области насыщения (соответствует
включенному состоянию — кривая А) в область отсечки (вы-
Рис. 1.4. Структуры и внешние цепи биполярных транзисторов
14
UC£
Рис. 1.5. Вольт-амперные харак-
теристики биполярного транзи-
стора
t
Рис. 1.6. Диаграммы изменения тока, на-
пряжения и мощности транзистора при
переключении:
а—диаграммы тока коллектора 1С и напряже-
ния коллектор-эмиттер U(e; б—диаграмма
мгновенного значения мощности Рт
ключенное состояние—кривая Б). Рабочая точка при этом
находится либо на кривой А, либо на кривой Б; соответственно
ее положение определяет в первом случае падение напряжения
на полностью открытом транзисторе, а во втором—ток
утечки закрытого транзистора.
Основными параметрами, используемыми при выборе типа
силового ^биполярного транзистора, являются следующие:
максимально допустимый импульсный ток коллектора;
максимально допустимое импульсное напряжение коллек- -
тор — эмиттер;
статический коэффициент передачи тока;
максимально допустимая постоянная рассеиваемая мощ-
ность коллектора;
времена включения и выключения, определяющие быстро-
действие транзистора в ключевых режимах.
Силовые биполярные транзисторы обычно изготавливаются
на основе кремния и обозначаются по действующим стандартам
буквами ТК и далее набором цифр, характеризующих конструк-
тивное исполнение, допустимые значения токов и напряжений,
значение напряжения насыщения и т. д. [2]. Например, транзистор
ТК 152-80-3-1 имеет штыревое исполнение с жестким выводом,
допустимый импульсный ток коллектора 80 А, класс напряжения
3 (300 В) и группу по напряжению насыщения 1 (0,6 В).
При использовании силовых транзисторов в качестве клю-
чевых элементов следует учитывать, что на интервалах пе-
реключения из открытого состояния в закрытое и наоборот
в структуре транзистора выделяется повышенная мощность.
Это обусловлено конечными значениями времен спадания
и нарастания тока и напряжения на транзисторе (рис. 1.6 а, б).
Зависимости, характеризующие изменения токов й напряжений
15
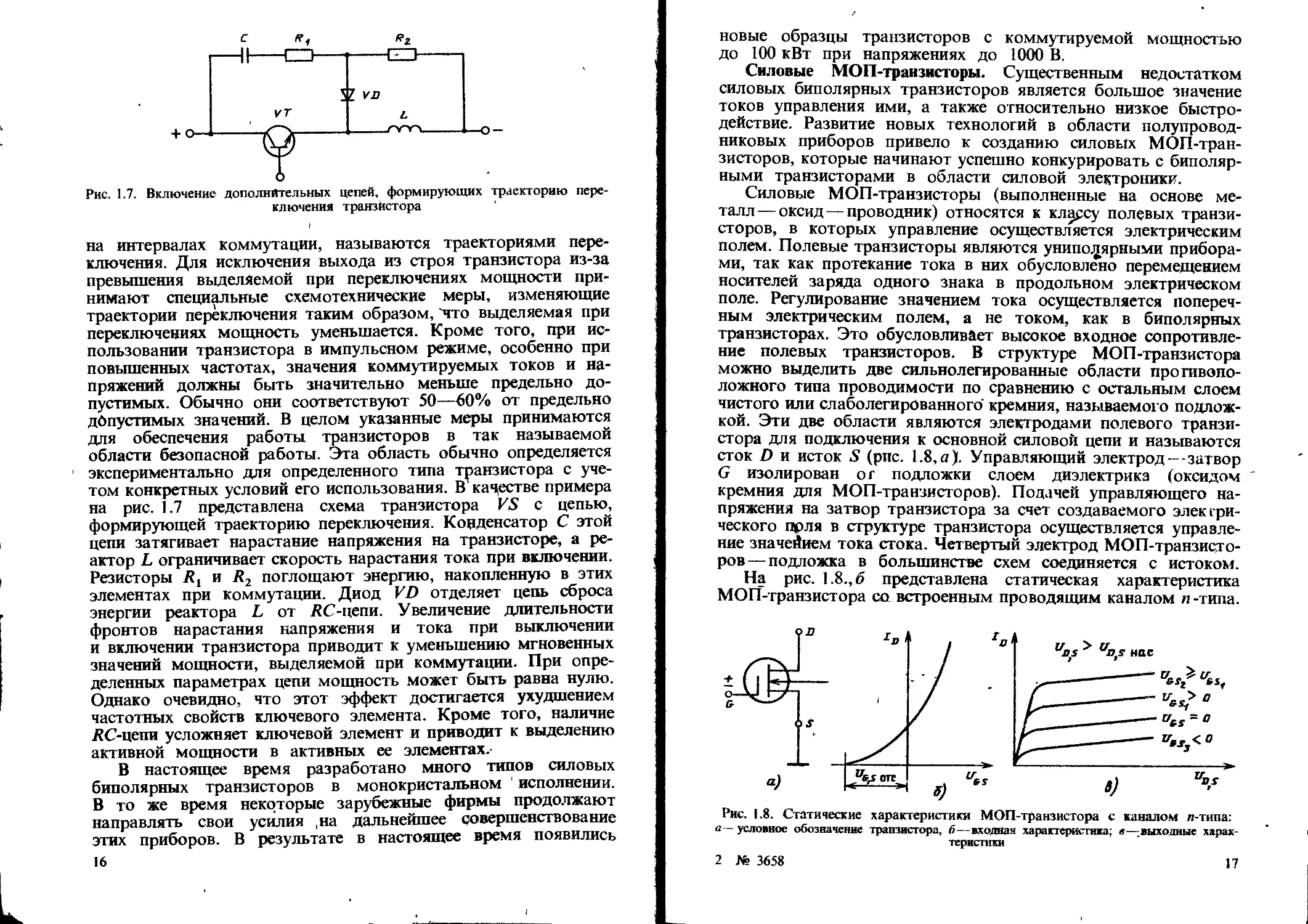
Рис. 1.7. Включение дополнительных цепей, формирующих траекторию пере-
ключения транзистора
на интервалах коммутации, называются траекториями пере-
ключения. Для исключения выхода из строя транзистора из-за
превышения выделяемой при переключениях мощности при-
нимают специальные схемотехнические меры, изменяющие
траектории переключения таким образом, "что выделяемая при
переключениях мощность уменьшается. Кроме того, при ис-
пользовании транзистора в импульсном режиме, особенно при
повышенных частотах, значения коммутируемых токов и на-
пряжений должны быть значительно меньше предельно до-
пустимых. Обычно они соответствуют 50—60% от предельно
допустимых значений. В целом указанные меры принимаются
для обеспечения работы транзисторов в так называемой
области безопасной работы. Эта область обычно определяется
экспериментально для определенного типа транзистора с уче-
том конкретных условий его использования. В1 качестве примера
на рис. 1.7 представлена схема транзистора VS с цепью,
формирующей траекторию переключения. Конденсатор С этой
цепи затягивает нарастание напряжения на транзисторе, а ре-
актор L ограничивает скорость нарастания тока при включении.
Резисторы /?! и Л2 поглощают энергию, накопленную в этих
элементах при коммутации. Диод VD отделяет цепь сброса
энергии реактора L от ЯС-цепи. Увеличение длительности
фронтов нарастания напряжения и тока при выключении
и включении транзистора приводит к уменьшению мгновенных
значений мощности, выделяемой при коммутации. При опре-
деленных параметрах цепи мощность может быть равна нулю.
Однако очевидно, что этот эффект достигается ухудшением
частотных свойств ключевого элемента. Кроме того, наличие
АС-цени усложняет ключевой элемент и приводит к выделению
активной мощности в активных ее элементах.-
В настоящее время разработано много типов силовых
биполярных транзисторов в монокристальном 1 исполнении.
В то же время некоторые зарубежные фирмы продолжают
направлять свои усилия ,на дальнейшее совершенствование
этих приборов. В результате в настоящее время появились
16
новые образцы транзисторов с коммутируемой мощностью
до 100 кВт при напряжениях до 1000 В.
Силовые МОП-транзисторы. Существенным недостатком
силовых биполярных транзисторов является большое значение
токов управления ими, а также относительно низкое быстро-
действие. Развитие новых технологий в области полупровод-
никовых приборов привело к созданию силовых МОП-тран-
зисторов, которые начинают успешно конкурировать с биполяр-
ными транзисторами в области силовой электроники.
Силовые МОП-транзисторы (выполненные на основе ме-
талл— оксид—проводник) относятся к классу полевых транзи-
сторов, в которых управление осуществляется электрическим
полем. Полевые транзисторы являются униполярными прибора-
ми, так как протекание тока в них обусловлено перемещением
носителей заряда одного знака в продольном электрическом
поле. Регулирование значением тока осуществляется попереч-
ным электрическим полем, а не током, как в биполярных
транзисторах. Это обусловливает высокое входное сопротивле-
ние полевых транзисторов. В структуре МОП-транзистора
можно выделить две сильнолегированные области противопо-
ложного типа проводимости по сравнению с остальным слоем
чистого или слаболегирОванногб кремния, называемого подлож-
кой. Эти две области являются электродами полевого транзи-
стора для подключения к основной силовой цепи и называются
сток D и исток 5 (рис. 1.8,а). Управляющий электрод—затвор
G изолирован о г подложки слоем диэлектрика (оксидом
кремния для МОП-транзисторов). Подачей управляющего на-
пряжения на затвор транзистора за счет создаваемого электри-
ческого прля в структуре транзистора осуществляется управле-
ние значейием тока стока. Четвертый электрод МОП-транзисто-
ров— подложка в большинстве схем соединяется с истоком.
На рис. 1.8.,б представлена статическая характеристика
МОП-гранзистора са встроенным проводящим каналом п -типа.
Рис. 1.8. Статические характеристики МОП-транзистора с каналом и-типа:
а— условное обозначение транзистора, б—входаая характеристика; в—выходные харак-
теристики
2 № 3658
17
Из рис. 1.8, в видно, что выходные характеристики МОП-
транзистора подобны выходным характеристикам пентода. Без
подачи напряжений на электроды сопротивление сток—исток
велико и соответствует сопротивлению двух встречно включен-
ных диодов при нулевом смещении. При подаче на затвор
напряжения UG s через проводящий слой будет протекать ток,
если приложить также напряжение между стоком и истоком.
Увеличение последнего приводит к перекрытию проводящего
канала у стока и к насыщению его тока. Дальнейшее увеличение
напряжения UD S практически не влияет на значение выходного
тока 1С.
Полевой транзистор с проводящим каналом р -типа управля-
ется подачей отрицательных напряжений на затвор и сток
относительно истока.
Особенностью МОП-транзисторов является не только вы-
сокое входное сопротивление (что соответствует повышенному
коэффициенту усиления по мощности управления), но и высокое
быстродействие. Время переключения современных МОП-тран-
зисторов лежит в диапазоне единиц наносекунд. Такая скорость
переключения обусловлена тем, что в них практически ис-
ключены токи накопленных зарядов неосновных носителей.
Кроме того, по сравнению с биполярными транзисторами
силовые МОП-транзисторы имеют лучшие выходные харак-
теристики для обеспечения параллельной работы. В то же
время следует отметить большое значение входной емкости
и повышенное сопротивленце в проводящем состоянии МОП-
транзистора.
Повышение коммутируемой мощности силовых МОП-тран-
зисторов потребовало значительных усилий многих разработ-
чиков по исследованию различных структур МОП-транзисторов
и совершенствованию технологии их производства. В настоящее
время благодаря развитию высокоточной технологии полу-
проводников допустимые значения напряжений и токов силовых
МОП-транзисторов существенно возросли. Наиболее типич-
ными являются приборы с коммутируемым током в десятки
ампер и напряжением до 500 В. При этом сопротивление во
включенном состоянии находится в диапазоне 0,2—0,5 Ом.
Отдельные зарубежные фирмы сообщают о разработках на
значительные теки и повышенные напряжения МОП-тран-
зисторов с малым сопротивлением во включенном состоянии.
Так, например, и [3] сообщается о разработке приборов на
токи до 200 А при сопротивлении 0,024 Ом.
Биполярные транзисторы с изолированным затвором. Досто-
инства и недостатки силовых биполярных транзисторов
и МОП-транзисторов обусловили- поиск решений в области
создания новых силовых транзисторов. Работы в этокй направ-
лении, начавшиеся на основе гибридной технологии, в целях
18
объединения двух приборов в одном кристалле в дискретном
виде не принесли значительных успехов. Поэтому были начаты
исследования по обеспечению стандартных функций этих при-
боров в одном кристалле. В результате был создан новый
прибор—биполярный транзистор с изолированным затвором*.
Этот новый тип транзистора сочетает высокое входное со-
противление МОП-транзисторов с высокой токовой нагрузкой
и малым сопротивлением во включенном состоянии биполяр-
ных транзисторов. Структура этого транзистора аналогична
структуре силового МОП-транзистора за исключением того,
что имеет дополнительный слой со стороны стока с соответ-
ствующим типом проводимости [4]. Первые образцы этих
приборов имели относительно низкое быстродействие. Однако
использование специальных технологических операций по упра-
влению временем жизни неосновных носителей позволило
уменьшать время переключения до десятых долей микросекун-
ды. В результате были созданы промышленные образцы
транзисторов на напряжение до 800 В и токи до 50 А,
способные эффективно работать на повышенных частотах.
При этом новые приборы обладают такими положительными
качествами, как малая мощность сигнала управления, способ-
ность выдерживать высокие обратные напряжения и хорошие
температурные характеристики.
Интенсивное освоение промышленностью этих приборов
и тенденция улучшения технических характеристик' позволяют
прогнозировать их лидирующее положение в области силовых
транзисторов.
V . 1.1.3. ТИРИСТОРЫ
Силовыми полупроводниковыми приборами, отличающими-
ся высокими значениями коэффициентов усиления по току
управления (более 1000), а также большими значениями рабочих
токов и напряжений, являются тиристоры. Наиболее распрост-
раненным полупроводниковым прибором в силовой электро-
нике в настоящее время является тиристор. Это по существу
ключевой полупроводниковый прибор с односторонней про-
водимостью и неполной управляемостью, включающийся по
сигналу управления, а выключающийся при спадании прямого
тока до нуля.
Основой тиристора является полупроводниковая структура,
в которой чередуются слои с р- и «-типами проводимости
(рис. 1,9). Прибор имеет три вывода, соответствующих аноду
А, катоду С и управляющему электроду G.
* Insulated Gate Bipolar Transistor (IGBT) (биполярный транзистор с изо-
лированным затвором).
19
I II ш
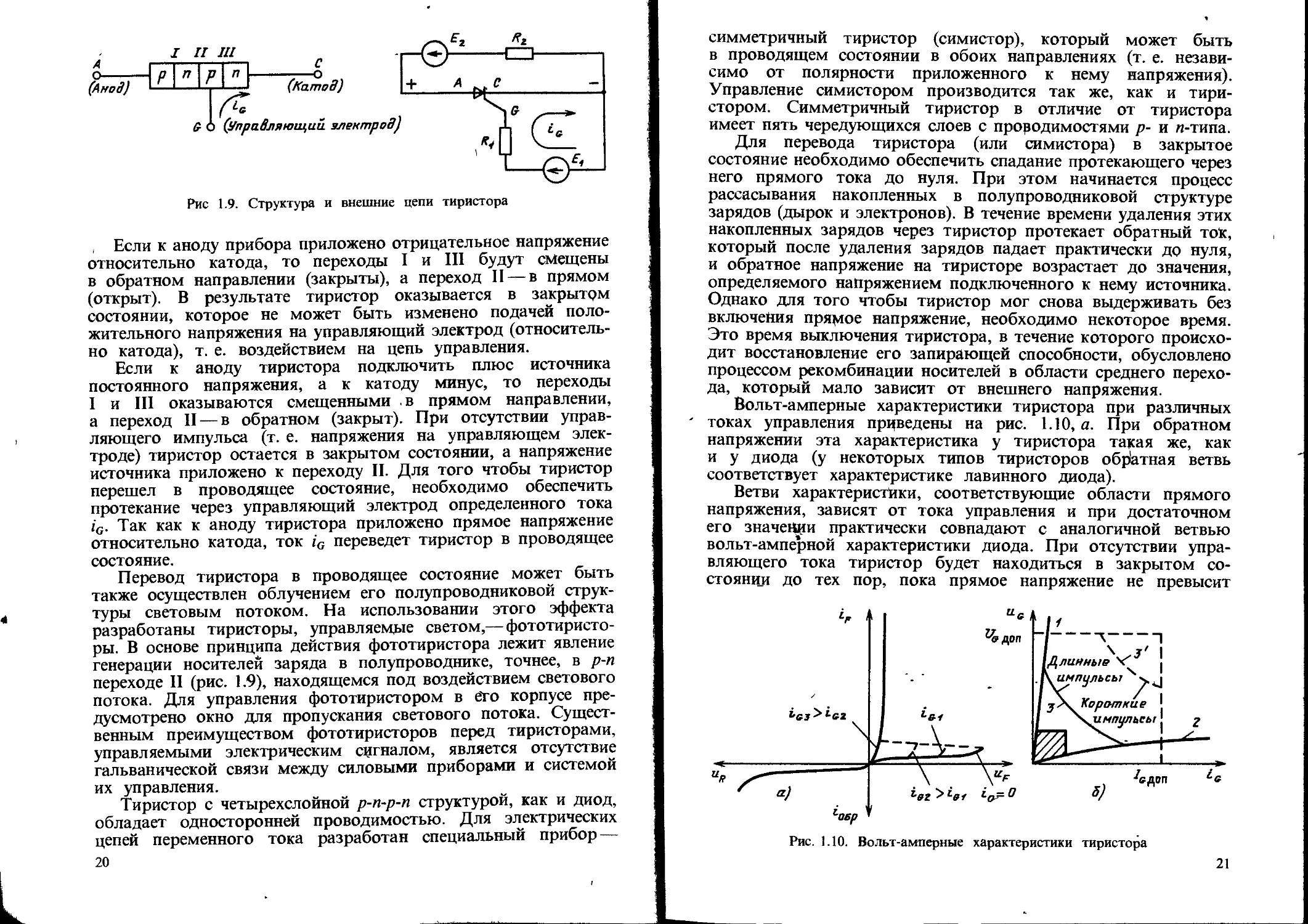
Рис 1.9. Структура и внешние цепи тиристора
, Если к аноду прибора приложено отрицательное напряжение
относительно катода, то переходы I и III будут смещены
в обратном направлении (закрыты), а переход II — в прямом
(открыт). В результате тиристор оказывается в закрытом
состоянии, которое не может быть изменено подачей поло-
жительного напряжения на управляющий электрод (относитель-
но катода), т. е. воздействием на цепь управления.
Если к аноду тиристора подключить плюс источника
постоянного напряжения, а к катоду минус, то переходы
I и III оказываются смещенными в прямом направлении,
а переход II — в обратном (закрыт). При отсутствии управ-
ляющего импульса (т. е. напряжения на управляющем элек-
троде) тиристор остается в закрытом состоянии, а напряжение
источника приложено к переходу II. Для того чтобы тиристор
перешел в проводящее состояние, необходимо обеспечить
протекание через управляющий электрод определенного тока
iG. Так как к аноду тиристора приложено прямое напряжение
относительно катода, ток iG переведет тиристор в проводящее
состояние.
Перевод тиристора в проводящее состояние может быть
также осуществлен облучением его полупроводниковой струк-
туры световым потоком. На использовании этого эффекта
разработаны тиристоры, управляемые светом,— фототиристо-
ры. В основе принципа действия фототиристора лежит явление
генерации носителей заряда в полупроводнике, точнее, в р-п
переходе II (рис. 1.9), находящемся под воздействием светового
потока. Для управления фототиристором в еТо корпусе пре-
дусмотрено окно для пропускания светового потока. Сущест-
венным преимуществом фототиристоров перед тиристорами,
управляемыми электрическим сигналом, является отсутствие
гальванической связи между силовыми приборами и системой
их управления.
Тиристор с четырехслойной р-п-р-п структурой, как и диод,
обладает односторонней проводимостью. Для электрических
цепей переменного тока разработан специальный прибор —
20
симметричный тиристор (симистор), который может быть
в проводящем состоянии в обоих направлениях (т. е. незави-
симо от полярности приложенного к нему напряжения).
Управление симистором производится так же, как и тири-
стором. Симметричный тиристор в отличие от тиристора
имеет пять чередующихся слоев с проводимостями р- и и-типа.
Для перевода тиристора (или симистора) в закрытое
состояние необходимо обеспечить спадание протекающего через
него прямого тока до нуля. При этом начинается процесс
рассасывания накопленных в полупроводниковой структуре
зарядов (дырок и электронов). В течение времени удаления этих
накопленных зарядов через тиристор протекает обратный ток,
который после удаления зарядов падает практически до нуля,
и обратное напряжение на тиристоре возрастает до значения,
определяемого напряжением подключенного к нему источника.
Однако для того чтобы тиристор мог снова выдерживать без
включейия прямое напряжение, необходимо некоторое время.
Это время выключения тиристора, в течение которого происхо-
дит восстановление его запирающей способности, обусловлено
процессом рекомбинации носителей в области среднего перехо-
да, который мало зависит от внешнего напряжения.
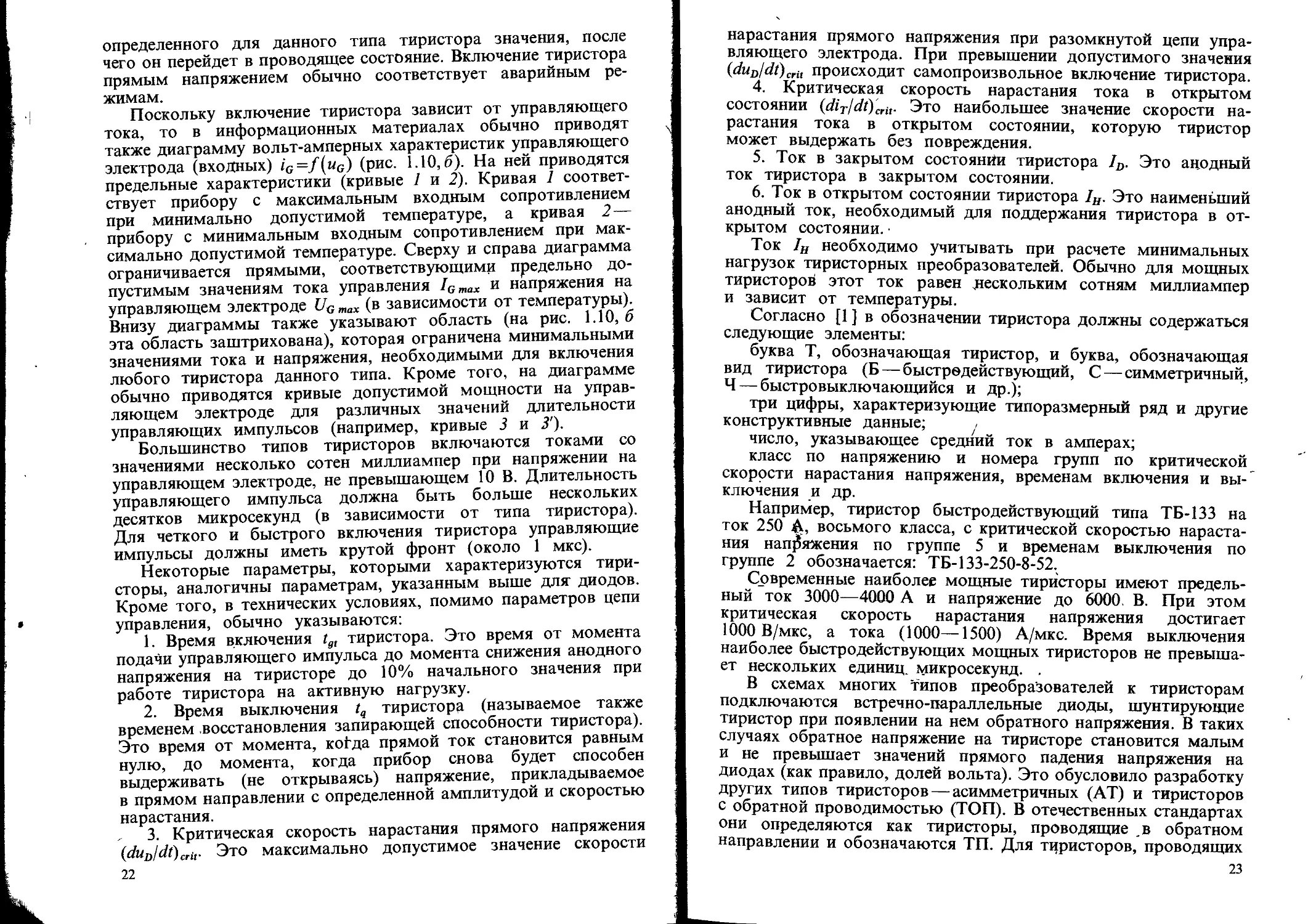
Вольт-амперные характеристики тиристора при различных
токах управления приведены на рис. 1.10, а. При обратном
напряжении эта характеристика у тиристора такая же, как
и у диода (у некоторых типов тиристоров обратная ветвь
соответствует характеристике лавинного диода).
Ветви характеристики, соответствующие области прямого
напряжения, зависят от тока управления и при достаточном
его значении практически совпадают с аналогичной ветвью
вольт-амперной характеристики диода. При отсутствии упра-
вляющего тока тиристор будет находиться в закрытом со-
стоянии до тех пор, пока прямое напряжение не превысит
Рис. 1.10. Вольт-амперные характеристики тиристора
21
определенного для данного типа тиристора значения, после
чего он перейдет в проводящее состояние. Включение тиристора
прямым напряжением обычно соответствует аварийным ре-
жимам.
Поскольку включение тиристора зависит от управляющего
тока, то в информационных материалах обычно приводят
также диаграмму вольт-амперных характеристик управляющего
электрода (входных) ia=f(uG) (рис. 1.10, б). На ней приводятся
предельные характеристики (кривые 1 и 2). Кривая 1 соответ-
ствует прибору с максимальным входным сопротивлением
при минимально допустимой температуре, а кривая 2 —
прибору с минимальным входным сопротивлением при мак-
симально допустимой температуре. Сверху и справа диаграмма
ограничивается прямыми, соответствующими предельно до-
пустимым значениям тока управления IGmax и напряжения на
управляющем электроде UG тах (в зависимости от температуры).
Внизу диаграммы также указывают область (на рис. 1.10, б
эта область заштрихована), которая ограничена минимальными
значениями тока и напряжения, необходимыми для включения
любого тиристора данного типа. Кроме того, на диаграмме
обычно приводятся кривые допустимой мощности на управ-
ляющем электроде для различных значений длительности
управляющих импульсов (например, кривые 3 и 3').
Большинство типов тиристоров включаются токами со
значениями несколько сотен миллиампер при напряжении на
управляющем электроде, не превышающем 10 В. Длительность
управляющего импульса должна быть больше нескольких
десятков микросекунд (в зависимости от типа тиристора).
Для четкого и быстрого включения тиристора управляющие
импульсы должны иметь крутой фронт (около 1 мкс).
Некоторые параметры, которыми характеризуются тири-
сторы, аналогичны параметрам, указанным выше для диодов.
Кроме того, в технических условиях, помимо параметров цепи
управления, обычно указываются:
1. Время включения tgt тиристора. Это время от момента
подачи управляющего импульса до момента снижения анодного
напряжения на тиристоре до 10% начального значения при
работе тиристора на активную нагрузку.
2. Время выключения tq тиристора (называемое также
временем восстановления запирающей способности тиристора).
Это время от момента, коЬда прямой ток становится равным
нулю, до момента, когда прибор снова будет способен
выдерживать (не открываясь) напряжение, прикладываемое
в прямом направлении с определенной амплитудой и скоростью
нарастания.
3. Критическая скорость нарастания прямого напряжения
(duDldt)„ti. Это максимально допустимое значение скорости
22
нарастания прямого напряжения при разомкнутой цепи упра-
вляющего электрода. При превышении допустимого значения
(duDldt)crit происходит самопроизвольное включение тиристора.
4. Критическая скорость нарастания тока в открытом
состоянии (diTldt}ait. Это наибольшее значение скорости на-
растания тока в открытом состоянии, которую тиристор
может выдержать без повреждения.
5. Ток в закрытом состоянйи тиристора ID. Это анодный
ток тиристора в закрытом состоянии.
6. Ток в открытом состоянии тиристора 1Н. Это наименьший
анодный ток, необходимый для поддержания тиристора в от-
крытом состоянии.
Ток 1Н необходимо учитывать при расчете минимальных
нагрузок тиристорных преобразователей. Обычно для мощных
тиристорой этот ток равен нескольким сотням миллиампер
и зависит от температуры.
Согласно [1 ] в обозначении тиристора должны содержаться
следующие элементы:
буква Т, обозначающая тиристор, и буква, обозначающая
вид тиристора (Б — быстродействующий, С—симметричный,
Ч — быстровыключающийся и др.);
три цифры, характеризующие типоразмерный ряд и другие
конструктивные данные; ,
число, указывающее средний ток в амперах;
класс по напряжению и номера групп по критической
скорости нарастания напряжения, временам включения и вы-
ключения и др.
Например, тиристор быстродействующий типа ТБ-133 на
ток 250 А, восьмого класса, с критической скоростью нараста-
ния напряжения по группе 5 и временам выключения по
группе 2 обозначается: ТБ-133-250-8-52.
Современные наиболее мощные тиристоры имеют предель-
ный ток 3000—4000 А и напряжение до 6000. В. При этом
критическая скорость нарастания напряжения достигает
1000 В/мкс, а тока (1000—1500) А/мкс. Время выключения
наиболее быстродействующих мощных тиристоров не превыша-
ет нескольких единиц, микросекунд. .
В схемах многих типов преобразователей к тиристорам
подключаются встречно-параллельные диоды, шунтирующие
тиристор при появлении на нем обратного напряжения. В таких
случаях обратное напряжение на тиристоре становится малым
и не превышает значений прямого падения напряжения на
диодах (как правило, долей вольта). Это обусловило разработку
других типов тиристоров — асимметричных (АТ) и тиристоров
с обратной проводимостью (ТОП). В отечественных стандартах
они определяются как тиристоры, проводящие в обратном
направлении и обозначаются ТП. Для тиристоров, проводящих
23
в обратном направлении и допускающих работу в обратном
направлении в качестве диода, введено обозначение ТД (ти-
ристодиод) [1 ].
Асимметричные тиристоры получаются введением в струк-
туру тиристора дополнительного слоя с проводимостью и-типа.
В результате значение обратного напряжения, выдерживаемого
тиристором без, его включения, значительно снижается (до
нескольких десятков вольт). Однако при этом существенно (в
2—3 раза) уменьшается время выключения тиристора. Такими
же свойст|вами обладает и тиристор с обратной проводимостью,
имеющий' подобно АТ пятислойную структуру и дополнитель-
ное диодное кольцо. Быстродействие тиристоров АТ и ТОП
позволяет использовать их в схемах с повышенными частотами.
Рациональная область использования АТ и ТОП —преоб-
разователи средней мощности.
Запираемые тиристоры (ЗТ). Тиристор имеет принципиальный
недостаток — неполную управляемость. Для его выключения
необходимо обеспечить спад прямого тока до нуля, что
достигается во многих схемах электронных устройств введением
дополнительных узлов принудительной (искусственной) ком-
мутации. Последние выполняются на основе энергонакопитель-
ных устройств (обычно конденсаторов), подключение которых
в соответствующей полярности к проводящему тиристору
создает условия для спадания до нуля прямого тока тиристора.
Эти дополнительные коммутирующие узлы утяжеляют тири-
сторное устройство и значительно ухудшают его технико-
экономические характеристики. Поэтому параллельно с раз-
работкой тиристоров проводились исследования возможности
их выключения по управляющему электроду путем подачи
на него отрицательного управляющего импульса. Однако
положительные результаты этих исследований долгое время
ограничивались созданием относительно небольших по значе-
ниям тока (до нескольких десятков ампер) ЗТ, что ограничивало
их конкурентоспособность по напряжению к силовым тран-
зисторам. В то же время развитие схемотехники преоб-
разовательных устройств постоянно повышало актуальность
решения этой проблемы. В результате интенсификации работ
в этом направлении, а также благодаря достижениям в области
технологии силовых полупроводниковых приборов за последние
десять лет были созданы и постоянно совершенствуются
мощные ЗТ.
Высокие технические характеристики ЗТ достигаются глав-
ным образом за счет изменения структуры ЗТ Но сравнению
со структурой тиристоров. В частности, в структурах ЗТ
обеспечивается высокая проводимость зоны управляющего
элемента, что позволяет более интенсивно блокировать протека-
ние прямого тока при подаче на управляющий электрод
24
отрицательного относи-
тельно катода импульса.
Важную роль в решении
этой задачи сыграло со-
вершенствование техно-
логии полупроводнико-
вых приборов, которое
позволило обеспечить од-
нородность электричес-
ких свойств/ отдельных
слоев структуры и воз-,
можность управления
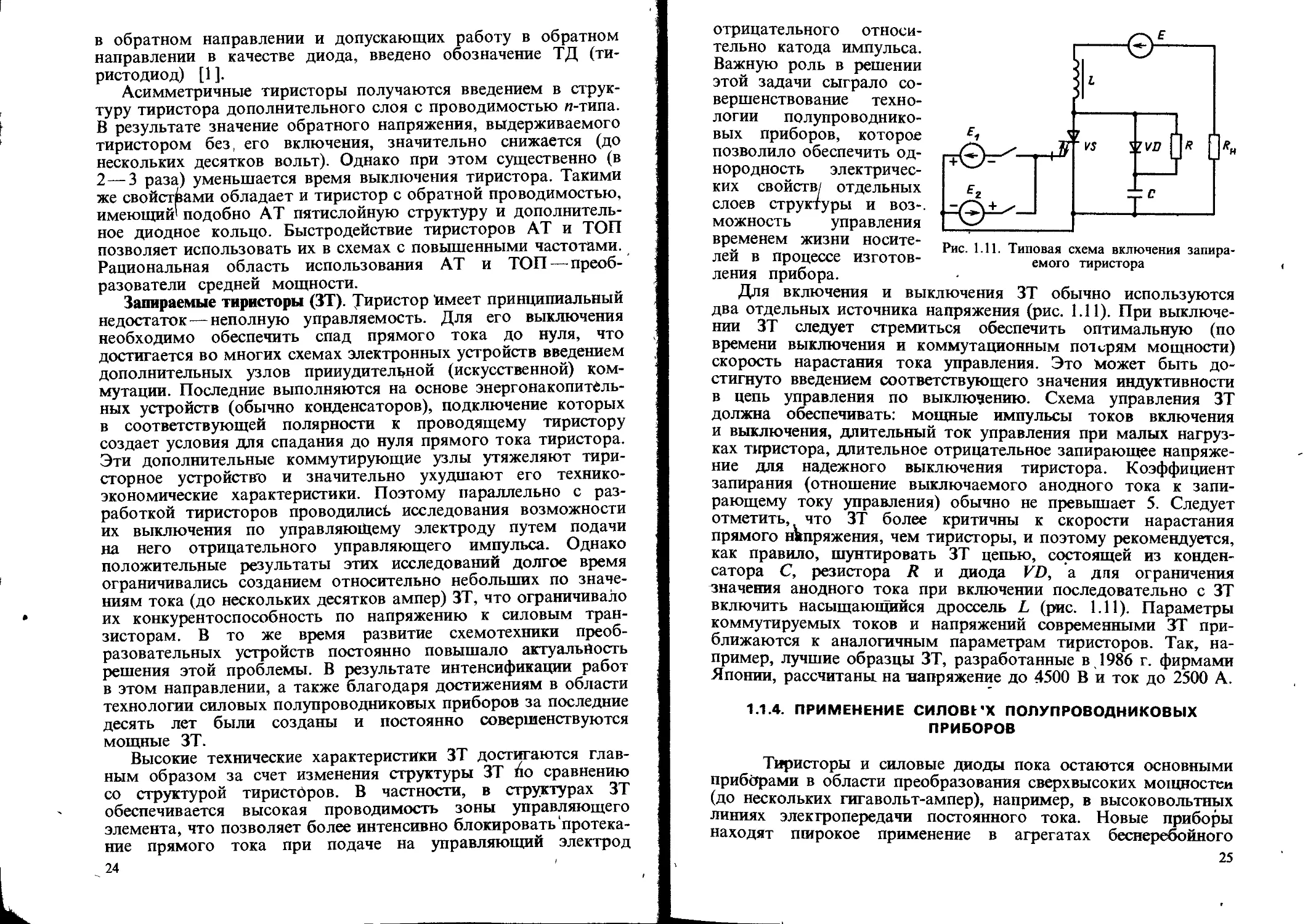
Рис. 1.11. Типовая схема включения запира-
емого тиристора
временем жизни носите-
лей в процессе изготов-
ления прибора.
Для включения и выключения ЗТ обычно используются
два отдельных источника напряжения (рис. 1.11). При выключе-
нии ЗТ следует стремиться обеспечить оптимальную (по
времени выключения и коммутационным потерям мощности)
скорость нарастания тока управления. Это может быть до-
стигнуто введением соответствующего значения индуктивности
в цепь управления по выключению. Схема управления ЗТ
должна обеспечивать: мощные импульсы токов включения
и выключения, длительный ток управления при малых нагруз-
ках тиристора, длительное отрицательное запирающее напряже-
ние для надежного выключения тиристора. Коэффициент
запирания (отношение выключаемого анодного тока к запи-
рающему току управления) обычно не превышает 5. Следует
отметить, что ЗТ более критичны к скорости нарастания
прямого напряжения, чем тиристоры, и поэтому рекомендуется,
как правило, шунтировать ЗТ цепью, состоящей из конден-
сатора С, резистора /? и диода И£), а для ограничения
значения анодного тока при включении последовательно с ЗТ
включить насыщающийся дроссель L (рис. 1.11). Параметры
коммутируемых токов и напряжений современными ЗТ при-
ближаются к аналогичным параметрам тиристоров. Так, на-
пример, лучшие образцы ЗТ, разработанные в 1986 г. фирмами
Японии, рассчитаны на напряжение до 4500 В и ток до 2500 А.
1.1.4. ПРИМЕНЕНИЕ СИЛОВНХ ПОЛУПРОВОДНИКОВЫХ
ПРИБОРОВ
Тиристоры и силовые диоды пока остаются основными
приборами в области преобразования сверхвысоких мощностей
(до нескольких гигавольт-ампер), например, в высоковольтных
линиях электропередачи постоянного тока. Новые приборы
находят широкое применение в агрегатах бесперебойного
25
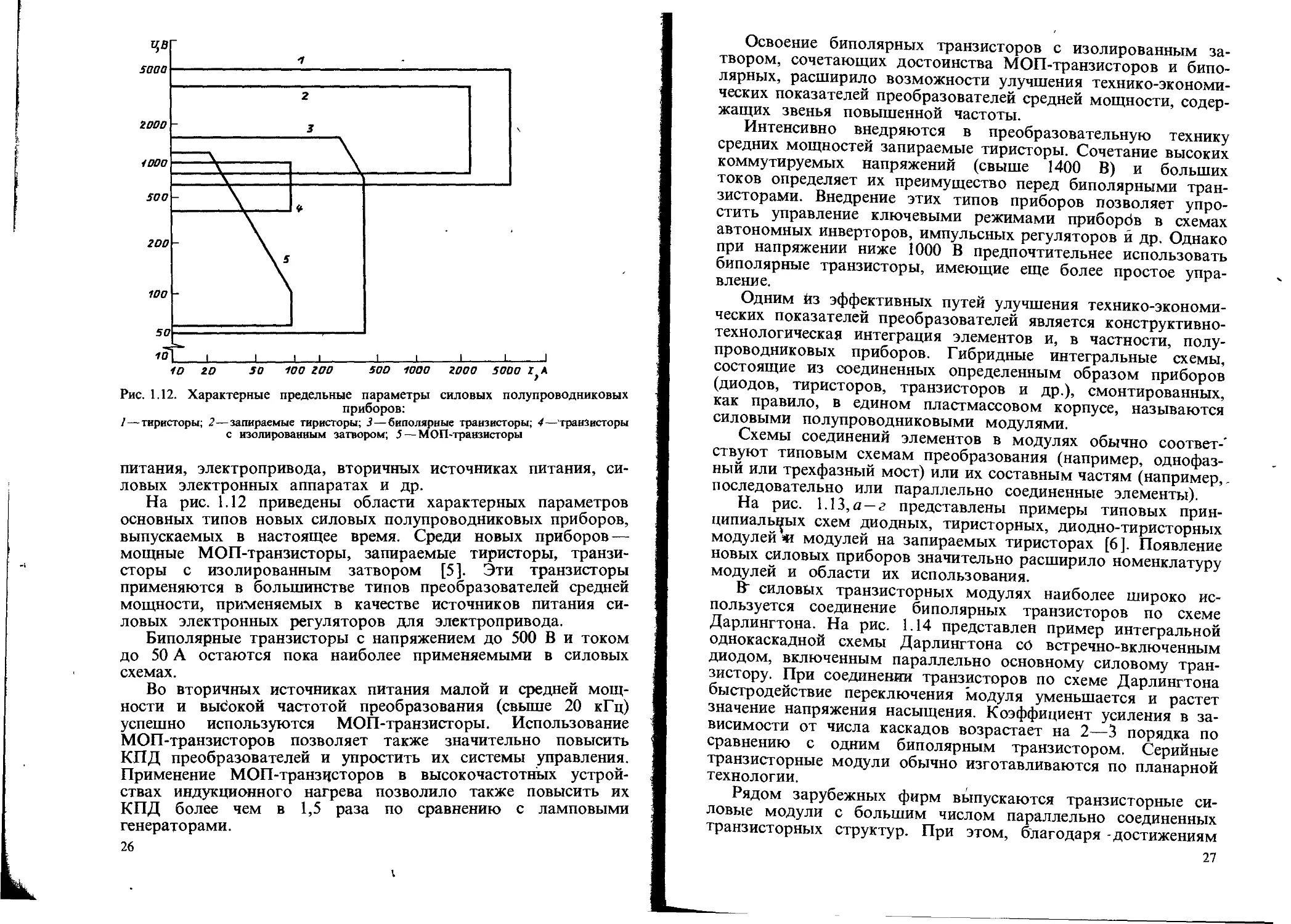
Рис. 1.12. Характерные предельные параметры силовых полупроводниковых
приборов:
/—тиристоры; 2—запираемые тиристоры; 3—биполярные транзисторы; 4—транзисторы
с изолированным затвором; 5—МОП-транзисторы
питания, электропривода, вторичных источниках питания, си-
ловых электронных аппаратах и др.
На рис. 1.12 приведены области характерных параметров
основных типов новых силовых полупроводниковых приборов,
выпускаемых в настоящее время. Среди новых приборов —
мощные МОП-транзисторы, запираемые тиристоры, транзи-
сторы с изолированным затвором [5]. Эти транзисторы
применяются в большинстве типов преобразователей средней
мощности, применяемых в качестве источников питания си-
ловых электронных регуляторов для электропривода.
Биполярные транзисторы с напряжением до 500 В и током
до 50 А остаются пока наиболее применяемыми в силовых
схемах.
Во вторичных источниках питания малой и средней мощ-
ности и высокой частотой преобразования (свыше 20 кГц)
успешно используются МОП-транзисторы. Использование
МОП-транзисторов позволяет также значительно повысить
КПД преобразователей и упростить их системы управления.
Применение МОП-транзисторов в высокочастотных устрой-
ствах индукционного нагрева позволило также повысить их
кпд более чем в 1,5 раза по сравнению с ламповыми
генераторами.
26
Освоение биполярных транзисторов с изолированным за-
твором, сочетающих достоинства МОП-транзисторов и бипо-
лярных, расширило возможности улучшения технико-экономи-
ческих показателей преобразователей средней мощности, содер-
жащих звенья повышенной частоты.
Интенсивно внедряются в преобразовательную технику
средних мощностей запираемые тиристоры. Сочетание высоких
коммутируемых напряжений (свыше 1400 В) и больших
токов определяет их преимущество перед биполярными тран-
зисторами. Внедрение этих типов приборов позволяет упро-
стить управление ключевыми режимами приборбв в схемах
автономных инверторов, импульсных регуляторов й др. Однако
при напряжении ниже 1000 В предпочтительнее использовать
биполярные транзисторы, имеющие еще более простое упра-
вление.
Одним йз эффективных путей улучшения технико-экономи-
ческих показателей преобразователей является конструктивно-
технологическая интеграция элементов и, в частности, полу-
проводниковых приборов. Гибридные интегральные схемы,
состоящие из соединенных определенным образом приборов
(диодов, тиристоров, транзисторов и др.), смонтированных,
как правило, в едином пластмассовом корпусе, называются
силовыми полупроводниковыми модулями.
Схемы соединений элементов в модулях обычно соответ-'
ствуют типовым схемам преобразования (например, однофаз-
ный или трехфазный мост) или их составным частям (например, _
последовательно или параллельно соединенные элементы).
На рис. 1.13, а —г представлены примеры типовых прин-
ципиальных схем диодных, тиристорных, диодно-тиристорных
модулей ад модулей на запираемых тиристорах [6]. Появление
новых силовых приборов значительно расширило номенклатуру
модулей и области их использования.
В" силовых транзисторных модулях наиболее широко ис-
пользуется соединение биполярных транзисторов по схеме
Дарлингтона. На рис. 1.14 представлен пример интегральной
однокаскадной схемы Дарлингтона со встречно-включенным
диодом, включенным параллельно основному силовому тран-
зистору. При соединении транзисторов по схеме Дарлингтона
быстродействие переключения модуля уменьшается и растет
значение напряжения насыщения. Коэффициент усиления в за-
висимости от числа каскадов возрастает на 2—3 порядка по
сравнению с одним биполярным транзистором. Серийные
транзисторные модули обычно изготавливаются по планарной
технологии.
Рядом зарубежных фирм выпускаются транзисторные си-
ловые модули с большим числом параллельно соединенных
транзисторных структур. При этом, благодаря -достижениям
27
Рис. 1.13. Примеры типовых принципиальных схем диодных (а), тиристорных
(б), диодно-тиристорных (в) модулей и модулей на запираемых тиристорах (г)
28
в области обеспечения идентич-
ности . параметров, выравнива-
ющие сопротивления часто ис-
ключаются.
Корпуса силовых полупровод-
никовых модулей, как правило,
представляют собой прямоуголь-
ную конструкцию из пластмассы
с плоским металлическим осно-
ванием. В качестве изоляцион-
ного материала между полупро-
водниками и металлическим ос-
нованием используются различ-
ные керамические материалы
с хорошей теплопроводимостью
Рис. 1.14. Транзисторный однока-
скадный модуль по схеме Дарлинг-
тона
и высоким электрическим
сопротивлением.
«Разумные» мощные приборы — новый вид интегральных
модулей, включающих в себя кроме силовых элементов схемы
управления, защиты, контроля, диагностики и др. Их тех-
нология основывается на монолитной интеграции силовых
и слаботочных структур. Наиболее характерна интеграция
биполярных и полевых транзисторов с напряжением до 1000 В
и токами до десятков ампер и управляющих низковольтных
аналоговых и цифровых логических компонентов, изготовлен-
ных цо КМОП-технологии. Функционально «разумные» ин-
тегральные схемы являются связующим звеном между логиче-
ской схемой внешнего управления и потребителем. «Разумные»
мощные приборы являются идеальными с точки зрения
удовлетворения требований по объединению функций управле-
ния и защиты в одном приборе [7]. В перспективе они могут
получить самое широкое распространение в силовой элект-
ронике и заменить многие типы аппаратов: реле, выключатели,
регуляторы и др. Следует также отметить большие возмож-
ности изменения функциональных свойств «разумных» прибо-
ров по желанию потребителей на основе единой технологии.
1.2. ТРАНСФОРМАТОРЫ И РЕАКТОРЫ
Трансформаторы в силовой электронике широко использу-
ются для изменения уровней переменного напряжения, а также
для Ьбеспечения гальванической развязки отдельных цепей.
ОсновйЬй особенностью использования трансформаторов
в силовой электронике является то, что во многих типах
преобразователей напряжения и токи в обмотках трансфор-
маторов имеют несинусоидальную форму. Не менее широко
в силовой электронике используются различного рода реакторы
(дроссели), которые представляют собой устройства различной
29
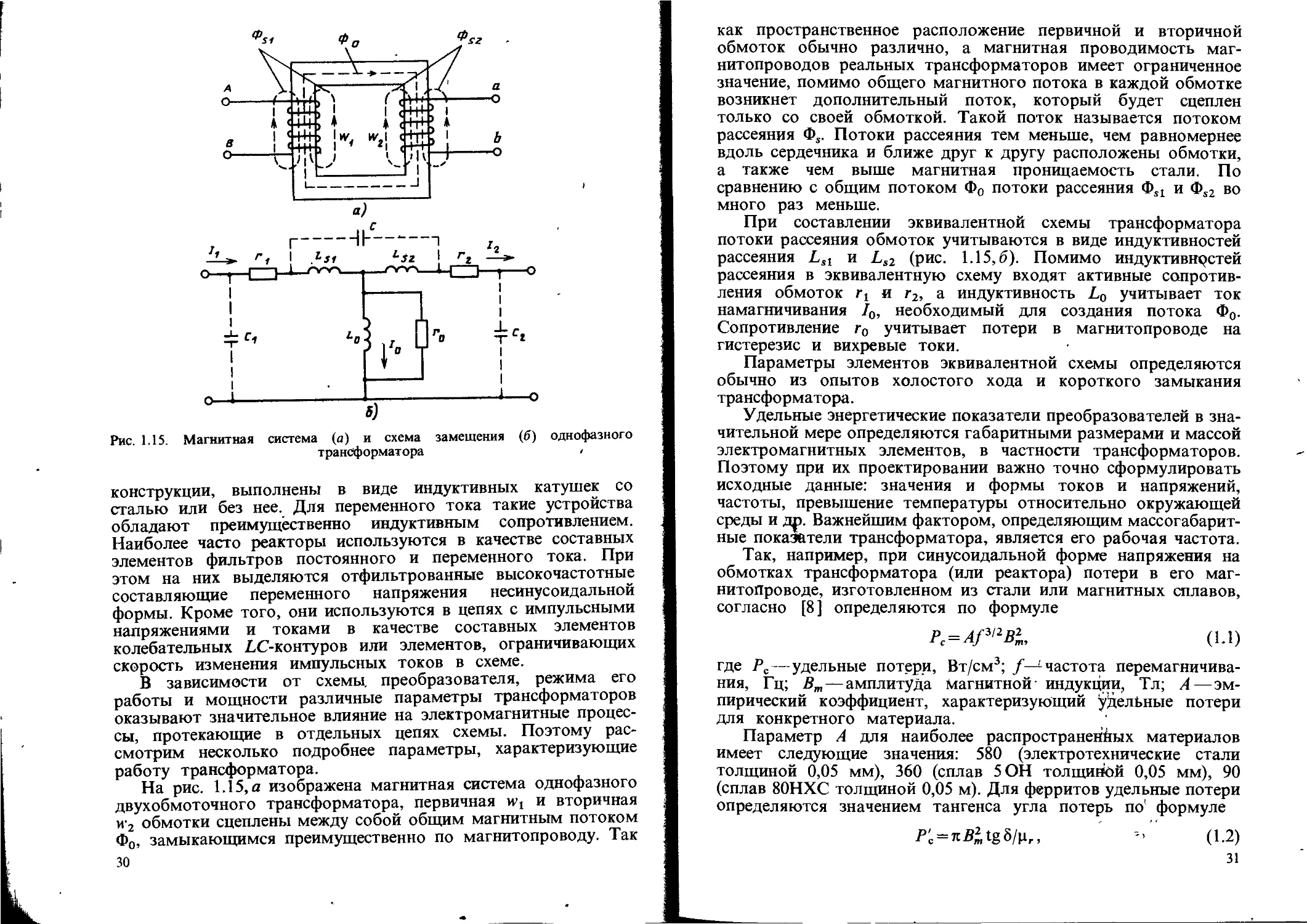
Рис. 1.15. Магнитная система (а) и схема замещения (б) однофазного
трансформатора <
конструкции, выполнены в виде индуктивных катушек со
сталью или без нее. Для переменного тока такие устройства
обладают преимущественно индуктивным сопротивлением.
Наиболее часто реакторы используются в качестве составных
элементов фильтров постоянного и переменного тока. При
этом на них выделяются отфильтрованные высокочастотные
составляющие переменного напряжения несинусоидальной
формы. Кроме того, они используются в цепях с импульсными
напряжениями и токами в качестве составных элементов
колебательных LC-контуров или элементов, ограничивающих
скорость изменения импульсных токов в схеме.
В зависимости от схемы, преобразователя, режима его
работы и мощности различные параметры трансформаторов
оказывают значительное влияние на электромагнитные процес-
сы, протекающие в отдельных цепях схемы. Поэтому рас-
смотрим несколько подробнее параметры, характеризующие
работу трансформатора.
На рис. 1.15, а изображена магнитная система однофазного
двухобмоточного трансформатора, первичная Wj и вторичная
и*2 обмотки сцеплены между собой общим магнитным потоком
Фо, замыкающимся преимущественно по магнитопроводу. Так
30
как пространственное расположение первичной и вторичной
обмоток обычно различно, а магнитная проводимость маг-
нитопроводов реальных трансформаторов имеет ограниченное
значение, помимо общего магнитного потока в каждой обмотке
возникнет дополнительный поток, который будет сцеплен
только со своей обмоткой. Такой поток называется потоком
рассеяния Ф5. Потоки рассеяния тем меньше, чем равномернее
вдоль сердечника и ближе друг к другу расположены обмотки,
а также чем выше магнитная проницаемость стали. По
сравнению с общим потоком Фо потоки рассеяния Ф51 и Фл2 во
много раз меньше.
При составлении эквивалентной схемы трансформатора
потоки рассеяния обмоток учитываются в виде индуктивностей
рассеяния Lsl и Ls2 (рис. 1.15,6). Помимо индуктивностей
рассеяния в эквивалентную схему входят активные сопротив-
ления обмоток и г2, а индуктивность £0 учитывает ток
намагничивания 10, необходимый для создания потока Фо.
Сопротивление г0 учитывает потери в магнитопроводе на
гистерезис и вихревые токи.
Параметры элементов эквивалентной схемы определяются
обычно из опытов холостого хода и короткого замыкания
трансформатора.
Удельные энергетические показатели преобразователей в зна-
чительной мере определяются габаритными размерами и массой
электромагнитных элементов, в частности трансформаторов.
Поэтому при их проектировании важно точно сформулировать
исходные данные: значения и формы токов и напряжений,
частоты, превышение температуры относительно окружающей
среды и др. Важнейшим фактором, определяющим массогабарит-
ные показатели трансформатора, является его рабочая частота.
Так, например, при синусоидальной форме напряжения на
обмотках трансформатора (или реактора) потери в его маг-
нитойроводе, изготовленном из стали или магнитных сплавов,
согласно [8] определяются по формуле
Pc = Af3l2B2m, (1.1)
где Рс — удельные потери, Вт/см3; частота перемагничива-
ния, Гц; Вт — амплитуда Магнитной- индукции, Тл; А — эм-
пирический коэффициент, характеризующий удельные потери
для конкретного материала.
Параметр А для наиболее распространенных материалов
имеет следующие значения: 580 (электротехнические стали
толщиной 0,05 мм), 360 (сплав 5 ОН толщиной 0,05 мм), 90
(сплав 80НХС толщиной 0,05 м). Для ферритов удельные потери
определяются значением тангенса угла потерь по’ формуле
= tgS/p,., (1.2)
31
где цг— относительная магнитная проницаемость.
Формулы (1.1) и (1.2) справедливы для синусоидального
напряжения. При несинусоидальном напряжении удельные по-
тери возрастают, что можно учесть введением коэффициента ун:
= (1-3)
где ун—коэффициент, определяемый при разложении пери-
одической функции в ряд Фурье.
По I ери в меди обмоток при переменном токе любой
формы определяются известным соотношением
(1.4)
где I—действующее значение тока обмотки; г ~ —эквивалентное
сопротивление обмотки.
Сопротивление может быть выражено через омическое
сопротивление Ra и коэффициент kR, учитывающий увеличение
сопротивления на переменном токе:
r~=kRRa. (1.5)
С повышением_ частоты возрастает влияние индуктивностей
рассеяния Lsl и Ls2, а также «паразитных» емкостных связей
С\, С12 и С2 (см. рис. 1.15),
Формулы (1.1) и (1.2) приближенно определяют соотношение
между габаритными размёрами и мощностью трансформатора.
Более точные соотношения, учитывающие влияние частоты,
основаны на введении критериев подобия. В основе системы
таких критериев лежат условия подобия и процессов в каждом
классе электромагнитных элементов, например трансформато-
ров или реакторов. В частности, в [8] получена следующая
зависимость объема магнитопровода Кс трансформатора от
его мощности 5тр и частоты /:
(1.6)
где А7’—превышение температуры, °C; ^„—коэффициент
заполнения окна магииюпровода проводниковым материалом.
Из (1.6) следует, чем выше частота, тем лучше удельные
показатели объема и массы трансформатора. Однако возмож-
ности повышения частоты в этом отношении не беспредельны.
Всегда существует граничная (критическая) частота, превышение
которой не ведет к дальнейшему уменьшению объема элек-
тромагнитного трансформатора. Кроме потерь энергии в маг-
нитопроводе необходимо учитывать также влияние индуктив-
ностей рассеяния обмоток трансформатора, существенно вли-
яющих на коэффициент'передачи напряжения при повышенной
частоте. Так, например, в [8] показано, что для определенного
класса однофазных трансформаторов средней мощности, с уче-
32
том взаимосвязи их параметров, включающих индуктивность
рассеяния, значение граничной частоты может быть определено
из следующего соотношения:
. 1,75 10* /АТ
/r₽=^fc“ s ’ (L7)
ЛЛ р *^тр
где кр—коэффициент, учитывающий способ резки магнитного
материала.
Если принять объем трансформатора на частоте /> = 50 Гц
и при перегреве на 50° С за базовое значение, то с учетом
соотношения (1.7) можно определить, во сколько раз умень-
шится объем трансформатора при увеличении рабочей частоты:
V / ,—V1/4
, (1.8)
где Ио и ' Игр—объемы магнитопроводов при /0 и /гр соот-
ветственно.
Из (1.8) следует, что предельное уменьшение объема
трансформатора при увеличении рабочей частоты1 обусловлено
потерями в магнитопроводе, мощностью и допустимым пе-
регревом.
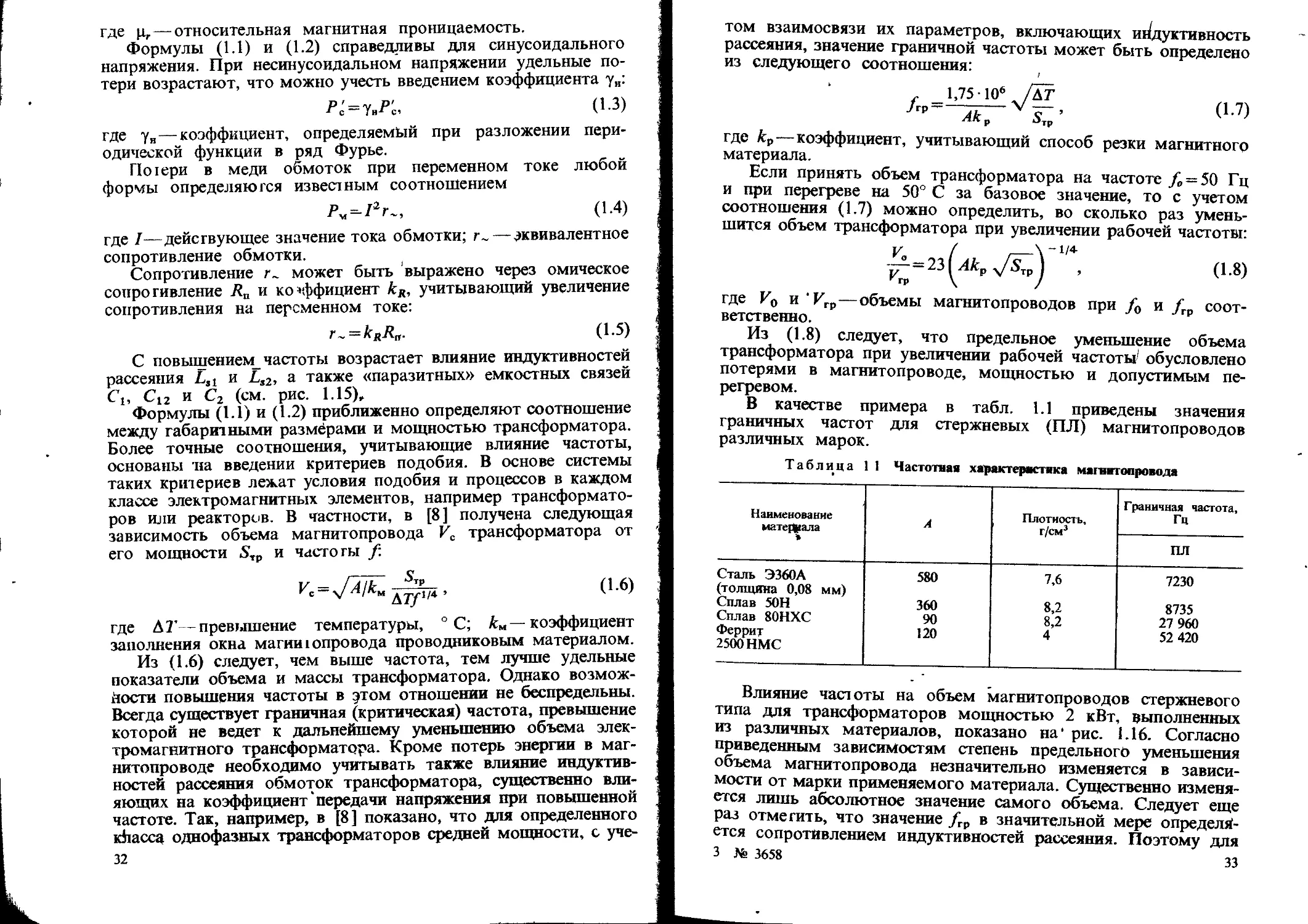
В качестве примера в табл. 1.1 приведены значения
граничных частот для стержневых (ПЛ) магнитопроводов
различных марок.
Таблица 11 Частотная характеристика магннтоаровода
Наименование материала * А Плотность, г/см3 Граничная частота, Гц
ПЛ
Сталь Э360А 580 7,6 7230
(толщина 0,08 мм) Сплав 50Н 360 8,2 8735
Сплав 80НХС 90 8,2 27 960
Феррит 2500 НМС 120 4 52 420
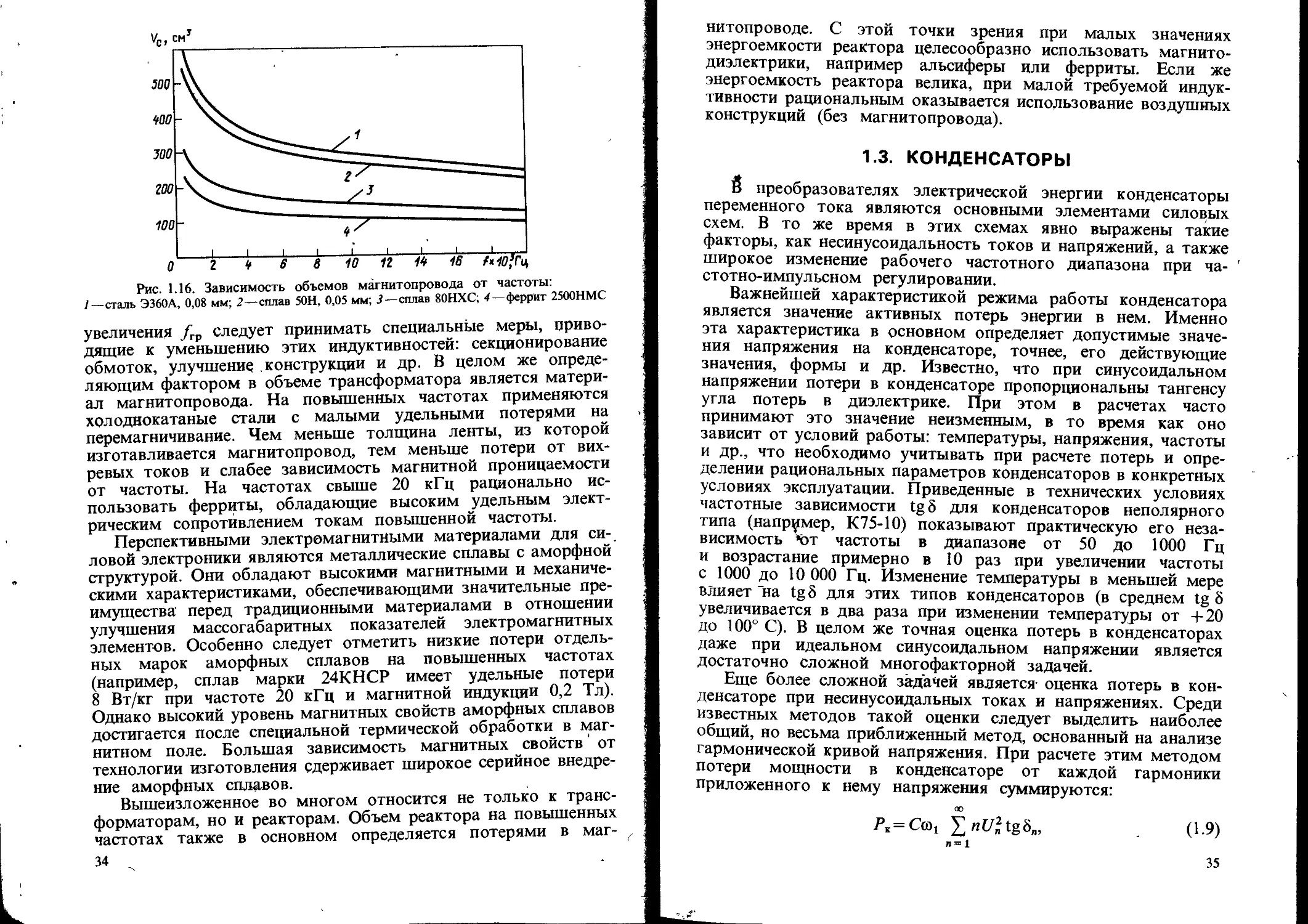
Влияние частоты на объем магнитопроводов стержневого
типа для трансформаторов мощностью 2 кВт, выполненных
из различных материалов, показано на' рис. 1.16. Согласно
приведенным зависимостям степень предельного уменьшения
объема магнитопровода незначительно изменяется в зависи-
мости от марки применяемого материала. Существенно изменя-
ется лишь абсолютное значение самого объема. Следует еще
раз отмегить, что значение ,/гр в значительной мере определя-
ется сопротивлением индуктивностей рассеяния. Поэтому для
3 № 3658 33
Рис. 1.16. Зависимость объемов магнитопровода от частоты:
1—сталь Э36ОА, 0,08 мм; 2—сплав 50Н, 0,05 мм; 3—сплав 80НХС; 4—феррит 2500НМС
увеличения /гр следует принимать специальные меры, приво-
дящие к уменьшению этих индуктивностей: секционирование
обмоток, улучшение конструкции и др. В целом же опреде-
ляющим фактором в объеме трансформатора является матери-
ал магнитопровода. На повышенных частотах применяются
холоднокатаные стали с малыми удельными потерями на
перемагничивание. Чем меньше толщина ленты, из которой
изготавливается магнитопровод, тем меньше потери от вих-
ревых токов и слабее зависимость магнитной проницаемости
от частоты. На частотах свыше 20 кГц рационально ис-
пользовать ферриты, обладающие высоким удельным элект-
рическим сопротивлением токам повышенной частоты.
Перспективными электромагнитными материалами для си-
ловой электроники являются металлические сплавы с аморфной
структурой. Они обладают высокими магнитными и механиче-
скими характеристиками, обеспечивающими значительные пре-
имущества перед традиционными материалами в отношении
улучшения массогабаритных показателей электромагнитных
элементов. Особенно следует отметить низкие потери отдель-
ных марок аморфных сплавов на повышенных частотах
(например, сплав марки 24КНСР имеет удельные потери
8 Вт/кг при частоте 20 кГц и магнитной индукции 0,2 Тл).
Однако высокий уровень магнитных свойств аморфных сплавов
достигается после специальной термической обработки в маг-
нитном поле. Большая зависимость магнитных свойств от
технологии изготовления сдерживает широкое серийное внедре-
ние аморфных сплавов.
Вышеизложенное во многом относится не только к транс-
форматорам, но и реакторам. Объем реактора на повышенных
частотах также в основном определяется потерями в маг-
34
нитопроводе. С этой точки зрения при малых значениях
энергоемкости реактора целесообразно использовать магнито-
диэлектрики, например альсиферы или ферриты. Если же
энергоемкость реактора велика, при малой требуемой индук-
тивности рациональным оказывается использование воздушных
конструкций (без магнитопровода).
1.3. КОНДЕНСАТОРЫ
Й преобразователях электрической энергии конденсаторы
переменного тока являются основными элементами силовых
схем. В то же время в этих схемах явно выражены такие
факторы, как несинусоидальность токов и напряжений, а также
широкое изменение рабочего частотного диапазона при ча- '
стотно-импульсном регулировании.
Важнейшей характеристикой режима работы конденсатора
является значение активных потерь энергии в нем. Именно
эта характеристика в основном определяет допустимые значе-
ния напряжения на конденсаторе, точнее, его действующие
значения, формы и др. Известно, что при синусоидальном
напряжении потери в конденсаторе пропорциональны тангенсу
угла потерь в диэлектрике. При этом в расчетах часто
принимают это значение неизменным, в то время как оно
зависит от условий работы: температуры, напряжения, частоты
и др., что необходимо учитывать при расчете потерь и опре-
делении рациональных параметров конденсаторов в конкретных
условиях эксплуатации. Приведенные в технических условиях
частотные зависимости tg 5 для конденсаторов неполярного
типа (например, К75-10) показывают практическую его неза-
висимость *от частоты в диапазоне от 50 до 1000 Гц
и возрастание примерно в 10 раз при увеличении частоты
с 1000 до 10 000 Гц. Изменение температуры в меньшей мере
влияет "на tgS для этих типов конденсаторов (в среднем tg б
увеличивается в два раза при изменении температуры от +20
до 100° С). В целом же точная оценка потерь в конденсаторах
даже при идеальном синусоидальном напряжении является
достаточно сложной многофакторной задачей.
Еще более сложной задачей является- оценка потерь в кон-
денсаторе при несинусоидальных токах и напряжениях. Среди
известных методов такой оценки следует выделить наиболее
общий, но весьма приближенный метод, основанный на анализе
гармонической кривой напряжения. При расчете этим методом
потери мощности в конденсаторе от каждой гармоники
приложенного к нему напряжения суммируются:
РК = СЮ1 f nl/2tg8„, . (1.9)
п~ 1
35
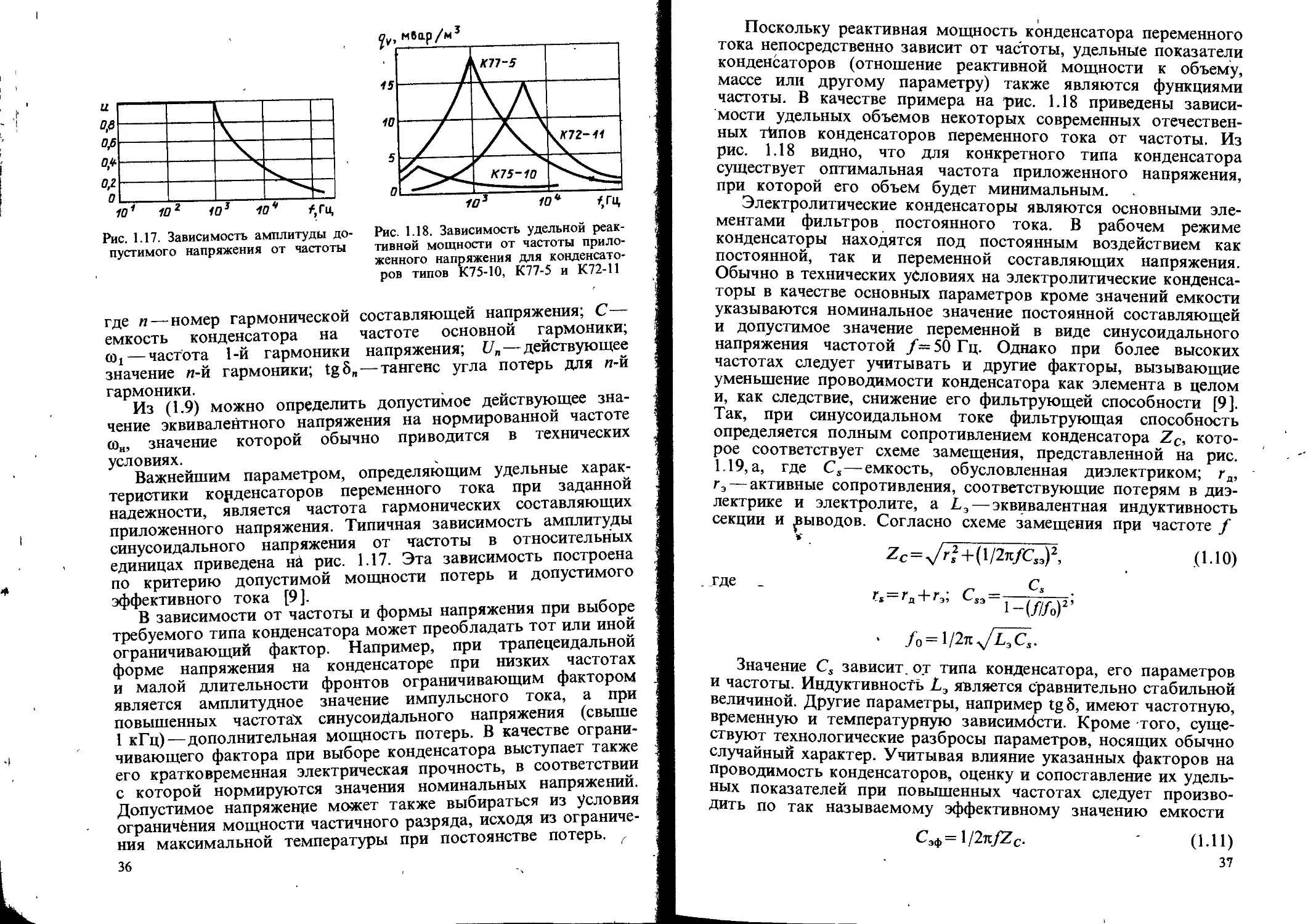
Рис. 1.17. Зависимость амплитуды до-
пустимого напряжения от частоты
Рис. 1Л8. Зависимость удельной реак-
тивной мощности от частоты прило-
женного напряжения для конденсато-
ров типов К75-10, К77-5 и К72-11
где п—номер гармонической составляющей напряжения; С—
емкость конденсатора на частоте основной гармоники;
сщ— частота 1-й гармоники напряжения; Un—действующее
значение и-й гармоники; tg8„ — тангенс угла потерь для п-й
гармоники.
Из (1.9) можно определить допустимое действующее зна-
чение эквивалентного напряжения на нормированной частоте
®н, значение которой обычно приводится в технических
условиях.
Важнейшим параметром, определяющим удельные харак-
теристики корденсаторов переменного тока при заданной
надежности, является частота гармонических составляющих
приложенного напряжения. Типичная зависимость амплитуды
синусоидального напряжения от частоты в относительных
единицах приведена на рис. 1.17. Эта зависимость построена
по критерию допустимой мощности потерь и допустимого
эффективного тока [9].
В зависимости от частоты и формы напряжения при выборе
требуемого типа конденсатора может преобладать тот или иной
ограничивающий фактор. Например, при трапецеидальной
форме напряжения на конденсаторе при низких частотах
и малой длительности фронтов ограничивающим фактором
является амплитудное значение импульсного тока, а при
повышенных частотах синусоидального напряжения (свыше
1 кГц)—дополнительная мощность потерь. В качестве ограни-
чивающего фактора при выборе конденсатора выступает также
его кратковременная электрическая прочность, в соответствии
с которой нормируются значения номинальных напряжений.
Допустимое напряжение может также выбираться из условия
ограничения мощности частичного разряда, исходя из ограниче-
ния максимальной температуры при постоянстве потерь. Л
36
Поскольку реактивная мощность конденсатора переменного
тока непосредственно зависит от частоты, удельные показатели
конденсаторов (отношение реактивной мощности к объему,
массе или другому параметру) также являются функциями
частоты. В качестве примера на рис. 1.18 приведены зависи-
мости удельных объемов некоторых современных отечествен-
ных тйпов конденсаторов переменного тока от частоты. Из
рис. 1.18 видно, что для конкретного типа конденсатора
существует оптимальная частота приложенного напряжения,
при которой его объем будет минимальным.
Электролитические конденсаторы являются основными эле-
ментами фильтров постоянного тока. В рабочем режиме
конденсаторы находятся под постоянным воздействием как
постоянной, так и переменной составляющих напряжения.
Обычно в технических условиях на электролитические конденса-
торы в качестве основных параметров кроме значений емкости
указываются номинальное значение постоянной составляющей
и допустимое значение переменной в виде синусоидального
напряжения частотой /=50Гц. Однако при более высоких
частотах следует учитывать и другие факторы, вызывающие
уменьшение проводимости конденсатора как элемента в целом
и, как следствие, снижение его фильтрующей способности [9].
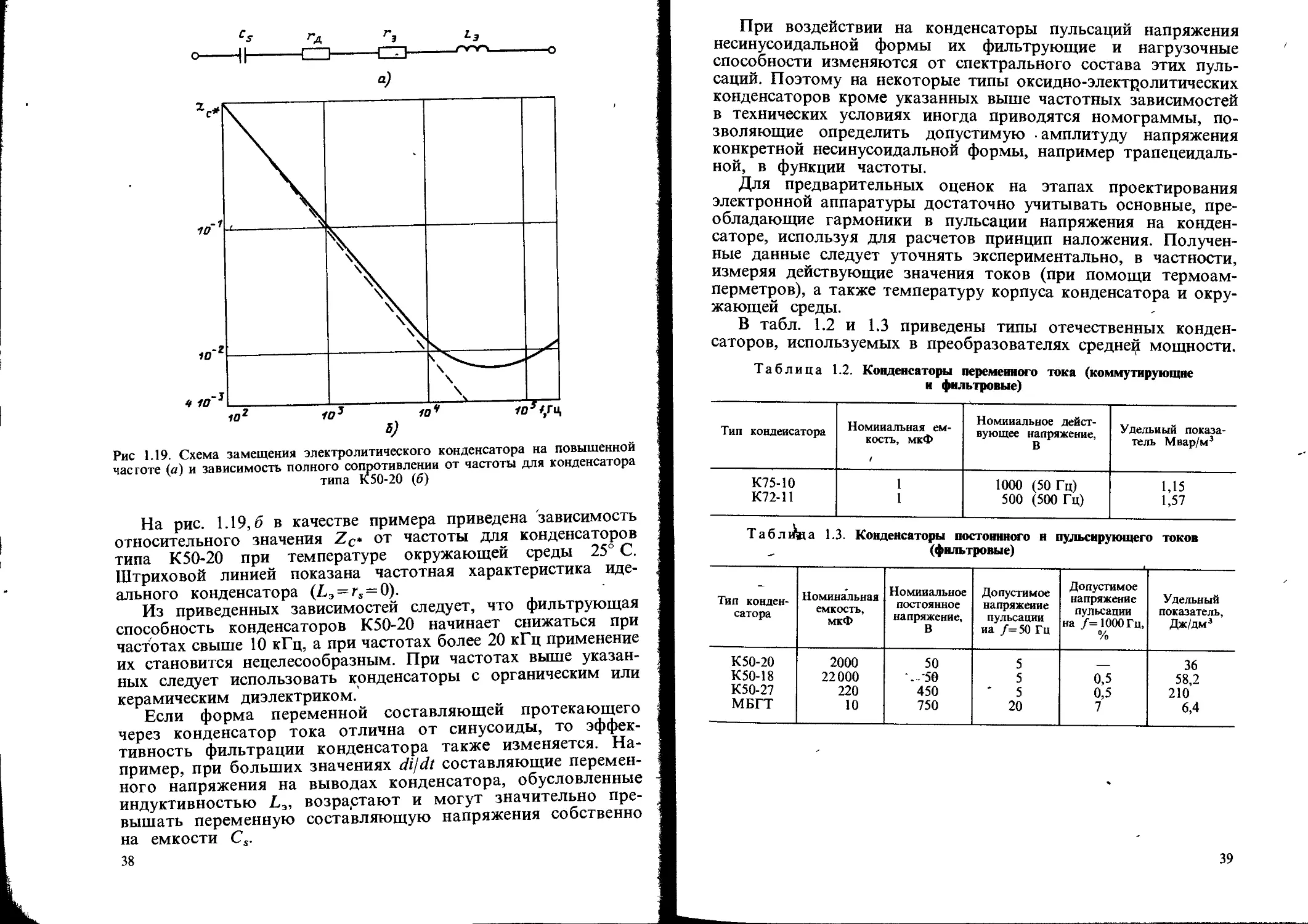
Так, при синусоидальном токе фильтрующая способность
определяется полным сопротивлением конденсатора Zc, кото-
рое соответствует схеме замещения, представленной на рис.
1.19, а, где Cs—емкость, обусловленная диэлектриком; гд,
г3— активные сопротивления, соответствующие потерям в диэ-
лектрике и электролите, a L3 — эквивалентная индуктивность
секции и ^ыводов. Согласно схеме замещения при частоте f
Zc = ^+(\/2nfCS3)2, (1.10)
где - Cs
rs~ra + r3, CS3
• f0 = \/2n^/L~Cs.
Значение Cs зависит, от типа конденсатора, его параметров
и частоты. Индуктивность L3 является сравнительно стабильной
величиной. Другие параметры, например tg 8, имеют частотную,
временную и температурную зависимдсти. Кроме того, суще-
ствуют технологические разбросы параметров, носящих обычно
случайный характер. Учитывая влияние указанных факторов на
проводимость конденсаторов, оценку и сопоставление их удель-
ных показателей при повышенных частотах следует произво-
дить по так называемому эффективному значению емкости
Сэф=1/2лД?с. ' (1.11)
37
Рис 1.19. Схема замещения электролитического конденсатора на повышенной
частоте (а) и зависимость полного сопротивлении от частоты для конденсатора
типа К50-20 (б)
На рис. 1.19,6 в качестве примера приведена зависимость
относительного значения Zc* от частоты для конденсаторов
типа К50-20 при температуре окружающей среды 25° С.
Штриховой линией показана частотная характеристика иде-
ального конденсатора (L3 = rs = 0).
Из приведенных зависимостей следует, что фильтрующая
способность конденсаторов К50-20 начинает снижаться при
частотах свыше 10 кГц, а при частотах более 20 кГц применение
их становится нецелесообразным. При частотах выше указан-
ных следует использовать конденсаторы с органическим или
керамическим диэлектриком.
Если форма переменной составляющей протекающего
через конденсатор тока отлична от синусоиды, то эффек-
тивность фильтрации конденсатора также изменяется. На-
пример, при больших значениях di/dt составляющие перемен-
ного напряжения на выводах конденсатора, обусловленные
индуктивностью L3, возрастают и могут значительно пре-
вышать переменную составляющую напряжения собственно
на емкости Cs.
38
При воздействии на конденсаторы пульсаций напряжения
несинусоидальной формы их фильтрующие и нагрузочные
способности изменяются от спектрального состава этих пуль-
саций. Поэтому на некоторые типы оксидно-электролитических
конденсаторов кроме указанных выше частотных зависимостей
в технических условиях иногда приводятся номограммы, по-
зволяющие определить допустимую амплитуду напряжения
конкретной несинусоидальной формы, например трапецеидаль-
ной, в функции частоты.
Для предварительных оценок на этапах проектирования
электронной аппаратуры достаточно учитывать основные, пре-
обладающие гармоники в пульсации напряжения на конден-
саторе, используя для расчетов принцип наложения. Получен-
ные данные следует уточнять экспериментально, в частности,
измеряя действующие значения токов (при помощи термоам-
перметров), а также температуру корпуса конденсатора и окру-
жающей среды.
В табл. 1.2 и 1.3 приведены типы отечественных конден-
саторов, используемых в преобразователях среднец мощности.
Таблица 1.2. Конденсаторы переменного тока (коммутирующие
и фильтровые)
Тип конденсатора Номинальная ем- кость, мкФ Номинальное дейст- вующее напряжение, В Удельный показа- тель Мвар/м3
К75-10 1 1000 (50 Гц) 1,15
К72-11 1 500 (500 Гц) 1,57
Таблвда 1.3. Конденсаторы постоянного и пульсирующего токов
(фильтровые)
Тип кондеи* сатора Номинальная емкость, мкФ Номинальное постоянное напряжение, В Допустимое напряжение пульсации иа /= 50 Гц Допустимое напряжение пульсации на /=1000 Гц, % Удельный показатель, Дж/дм3
К50-20 2000 50 5 — 36
К50-18 22000 . -50 5 0,5 58,2
К50-27 220 450 ' 5 0,5 210
МБГТ 10 750 20 7 6,4
39
ГЛАВА ВТОРАЯ
ВЫПРЯМИТЕЛИ
2.1. ОБЩИЕ СВЕДЕНИЯ
Выпрямителем называется статический преобразователь эле-
ктрической энергии переменного тока в постоянный ток. Такой
преобразователь представляег собой электрический агрегат,
силовая часть которого состоит в общем случае из следующих
основных узлов (рис. 2.1):
а) трансформатора Тр;
б) блока полупроводниковых элементов К;
в) выходного фильтра Ф.
Выпрямители обычно классифицируют:
по мощности; 1
по напряжению; ,
по числу фаз первичной обмотки трансформатора;
по схеме выпрямления;
по способу регулирования выходного напряжения.
Классификация выпрямителей по мощности и напряжению
весьма условна. Обычно по мощности выделяют выпрямители:
маломощные—до 1 кВт, средней мощности —до 100 кВТ
и мощные—свыше 100 кВт, а по напряжению: низкого—до
250 В, среднего — до 1000 В и высокого—свыше 1000 В.
По числу фаз первичной обмотки трансформатора выпрями-
тели делятся на однофазные и трехфазные.
Под схемой выпрямления, как правило, понимают схему
соединения полупроводниковых элементов и трансформатора.
По схеме выпрямления различают выпрямители:
с одним диодом (однофазный однополупериодный);
со средней точкой (однофазный двухполупериодный и трех-
фазный);
мостовые.
Отдельно выделяют класс выпрямителей с многофазной
схемой выпрямления (шесть, двенадцать и более фаз вторичной
обмотки трансформатора). Однако изготовление многофазных
трансформаторов связано с конструктивными и техноло-
гическими трудностями, поэтому в большинстве случаев
Входное |
напряжение I
(переменное) I
Выходное на-
пряжение (Вы-
прямленное)
-----------О
Рис. 2.1. Структурная схема выпрямителя
40
Рис. 2.2. Однофазный однополупериодный выпрямитель:
а—схема; б—диаграмма тока и напряжения на элементах схемы; в—диаграмма
выпрямленного напряжения в схеме с диодом; г—диаграмма выпрямленного напряжения
в схеме с тиристором
многофазные схемы получают путем последовательного или
параллельного включения трехфазных выпрямителей, имеющих
разные схемы соединения обмоток трансформаторов. Такие
схемы называют многофазными эквивалентными или ком-
бинированными.
Процесс выпрямления осуществляется непосредственно по-
лупроводниковыми элементами схемы выпрямления. Рассмот-
рим сущность процесса выпрямления • на примере простейшей
однофазной однополупериодной схемы, именуемой иногда
в литературе однофазной однотактной. Схема состоит из
трансформатора Тр, диода VD, резистора Rd, являющегося
активной Сгрузкой* (рис. 2.2, а). На первичную обмотку
трансформатора Тр от питающей сети подается переменное
синусоидальное напряжение. На вторичной обмотке трансфор-
матора будет также синусоидальное напряжение
Uab = \f^-Ul sin cot,
где U2 — действующее значение напряжения на вторичной
обмотке трансформатора;. <о—угловая частота напряжения
питающей сети.
В момент времени, когда потенциал точки b вторичной
обмотки вьйпе потенциала точки а (напряжение
иаЬ отрицательно), к диоду VD приложено запирающее напряже-
ние и ток через диод не протекает. Когда потенциал точки
а вторичной обмотки становится выше потенциала точки
* Индекс d используется для обозначения элементов и основных парамет-
ров схемы на стороне постоянного тока. Этот индекс образован от английского
слова direct—прямой.
41
b (эти моменты на рис. 2.2,6 соответствуют значениям
Э = (вГ = О; 2л; 4л...), к аноду диода VD- подается положительное
напряжение относительно катода и диод включается. В резуль-
тате напряжение иаЬ оказывается приложенным к резистору
7?d, через который начинает протекать ток нагрузки id. Диод
будет находиться в проводящем состоянии до тех пор, пока
проходящий через него ток id не снизится до нуля. Поскольку
для активной нагрузки ток по- фазе совпадает с напряжением,
диод VD будет выключаться, когда напряжение иаЬ станет
отрицательным (на рис. 2.2,6 этим моментам соответствуют
значения Э = (ПГ = л; Зл...), ток в нагрузке прекращается, до
последующего включения диода. Таким образом, на резисторе
Rd будет пульсирующее напряжение ud и только одной
полярности (рис. 2.2, в)', или, иначе говоря, выпрямленное
напряжение.
Постоянная составляющая выпрямленного напряжения или
его среднее значение Ud равняется интегралу функции изменения
этого напряжения во времени в течение периода 2л, деленному
на этот период. Так как на половине периода мгновенное
значение выпрямленного напряжения в данной схеме равно
нулю, то интегрирование следует производить в пределах
полупериода, когда диод проводит ток. В данной схеме
среднее значение Ud равно
Ud = ^-]j2U2 sin 3<Z3 = 0,45 U2. (2.1)
Z7t 0
Геометрически среднее значение выпрямленного напряжения
может быть представлено высотой прямоугольника (косая
штриховка на рис. 2.2, в) с основанием, равным периоду 2л,
и площадью, равной площади, которая ограничивается кривой
выпрямленного напряжения на этом периоде, т. е. полуволной
выпрямленного напряжения (вертикальная штриховка). Учи-
тывая, что нагрузка активная и поэтому форма тока нагрузки
повторяет форму напряжения, среднее значение тока нагрузки,
т. е. выпрямленного тока, можно выразить в следующем виде:
Id=Ud/Rd = ^2Ud/nRd. (2.2)
Не останавливаясь на других показателях и соотношениях,
характеризующих работу схемы (поскольку она приводится
только для пояснения принципа выпрямления), рассмотрим
более подробно воздействие на трансформатор работы диода.
Это воздействие выражается в характерном для некоторых
типов выпрямительных схем явлении подмагничивания маг-
нитопровода трансформатора.
Из принципа действия схемы следует, что во вторичной
обмотке трансформатора Тр вследствие односторонней про-
42
водимости диода VD будет
протекать однонаправленный
(одного знака) пульсирующий
ток id, содержащий постоян-
ную составляющую Id. Так
как постоянный ток согласно
законам электромагнитной ин-
дукции трансформироваться
не может, ток первичной об-
мотки не будет содержать
постоянной составляющей. На
рис. 2.3 представлены вторич-
ный id и первичный /j токи
Рис. 2.3 Диаграммы токов в обмот-
ках трансформатора однофазной од-
нополупериодной схемы
трансформатора в предположении, что коэффициент трансфор-
мации £т=1, а ток холостого хода трансформатора равен
нулю. Заштрихованные площади на диаграмме тока z'j равны,
что и указывает на отсутствие постоянной составляющей тока.
Таким образом, ток в первичной обмотке ij отличается от
тока во вторичной обмотке id на постоянную составляющую
Id, т. е.
z 1 — id — Id-
Так как магнитный поток в магнитопроводе трансфор-
матора возникает под воздействием МДС от суммы всех
токов, протекающих в его обмотке, можно результирующий
магнитный поток рассматривать состоящим из переменной
и постоянной составляющих. Наличие постоянного магнитного
потока вызывает смещение рабочих значений индукции по
петле гистерезиса магнитопривода трансформатора на неко-
торое постоянное значение, т. е. степень насыщения трансфор-
матора увеличивается. Последнее вызывает возрастание тока
намагничивания (тока холостого хода). В результате возникает
необходимость в завышении расчетной мощности трансфор-
матора, что в конечном счете приводит к увеличению его
массогабаритных показателей. На практике схема однофазного
однополупериодного выпрямления из-за низких технико-эко-
номических показателей широкого применения не получила.
По способу регулирования выходного напряжения в наи-
более общем виде все выпрямители можно разделить на
управляемые и неуправляемые.
В управляемых выпрямителях регулирование выходного
напряжения может обеспечиваться следующими основными
способами:
регулирование на стороне переменного тока;
регулирование на стороне постоянного тока;
регулирование непосредственным воздействием на полупро-
водниковые элементы схемы.
43
Регулирование способами первой группы осуществляется
введением в схемы выпрямителей, регуляторов переменного
тока. Эти регуляторы позволяют изменять напряжение, по-
ступающее на полупроводниковые элементы, а следовательно,
и выходное напряжение выпрямителя. Регулирование на стороне
постоянного тока осуществляется включением на выходе вы-
прямителя регулятора постоянного тока. Выпрямители с ре-
гулирующими устройствами на стороне постоянного или
переменного тока являются по существу комбинированными
преобразователями,’ так как они помимо собственно выпря-
мительного устройства содержат стабилизаторы или регуля-
торы, которые могут рассматриваться как самостоятельные
устройства преобразовательной техники (см. гл. 4).
Наиболее распространенным способом регулирования яв-
ляется непосредственное воздействие на полупроводниковые
элементы схемы выпрямления. Для этой цели используют
в качестве полупроводниковых элементов, например, тири-
сторы.
Название «управляемые выпрямители» обычно относится
непосредственно к тем выпрямителям, которые собраны на
тиристорах. Принципы действия схем выпрямления на тири-
сторах и диодах во многом подобны. Для примера рассмотрим
схему, изображенную на рис. 2.2, а, заменив в ней диод VD
на тиристор VS. В этом случае ток в нагрузку Rd будет
поступать только с момента включения тиристора VS, определя-
емого моментом подачи управляющего импульса на тиристор.
При этом другим необходимым условием включения тиристора
является положительное значение напряжения иаЬ, когда анод
тиристора имеет положительный потенциал относительно ка-
тода. В рассматриваемом случае последнее условие согласно
рис. 2.2,6 будет иметь место на интервалах: 0—я; 2л—Зя;
4л—5л и др.
Задерживая подачу управляющего импульса на тиристор
на угол а относительно нулевого значения напряжения
иаЬ (соответствующего смене полярности напряжения с от-
рицательной на положительную), можно изменять выпрямлен-
ное напряжение ud. Из рис. 2.2, г видно, что чем больше
угол а, тем позже включается тиристор VS и тем меньше
среднее значение выпрямленного напряжения Ud (на рис. 2.2, г
это соответствует уменьшению заштрихованных площадей).
Очевидно, что значение угла а=0 соответствует режиму работы
схемы с диодом VD (рис. 2.2, в). В дальнейшем работа схемы
будет рассматриваться как частный случай режима схем
управляемых выпрямителей при угле а=0.
Работа выпрямителя и его технико-экономические показа-
тели в основном определяются схемой выпрямления. От схемы
выпрямления зависят:
44 1
а) форма кривой выпрямленного напряжения;
б) форма кривой переменного тока, потребляемого из
питающей сети;
в) внешняя (или нагрузочная) характеристика, т. е. зависи-
мость среднего значения выпрямленного напряжения Ud от
среднего значения тока нагрузки Id,
г) коэффициент мощности выпрямителя %;
д) коэффициент полезного действия т).
Форма кривых выпрямленного напряжения характеризуется
их гармоническим составом. В общем виде выпрямленное
напряжение Ud может быть выражено в виде суммы постоянной
составляющей Ud и переменной (пульсации) и. Постоянная
составляющая представляет собой среднее значение выпрям-
ленного напряжения
Ud = ~] ud(t)dt, (2.3)
1 о
где Т—период повторяемости формы выпрямленного напряже-
ния; wd(r)—мгновенное значение выпрямленного напряжения.
При сравнении различных схем выпрямления используют
коэффициент схемы ксх,. характеризующий связь в неуправля-
емых выпрямителях между действующим значением перемен-
ного напряжения U2, поступающим на полупроводниковые
элементы, и средним значением выйрямленного напряжения Ud:
kcx=Ud/U2. (2.4)
Основными элементами, параметры которых подлежат рас-
чету в схемах выпрямления, являются полупроводниковые
элементы й трансформатор. Исходными данными при расчете
служат выпрямленные напряжение Ud и ток Id (или мощность
Pd и действующее значение переменного напряжения питающей
сети Ui).
Для выбора типа полупроводникового элемента необходимо
определить максимальное Imax, среднее ITAV и действующее
Itrms значения тока, протекающего через него в прямом
направлении, выражаемые обычно через среднее значение
выпрямленного тока Id, а также максимальные значения
напряжения (обратное URmax для диодов, обратное URmax,
прямое UFmax для тиристоров), выражаемые через действующее
значение напряжения U2 вторичной обмотки трансформатора1.
Оценка эффективности использования полупроводникового
прибора в схеме иногда (например, для сравнения ряда
различных схем) производится через коэффициенты использова-
ния приборов по напряжению kv и по току /с,. Эти коэф-
Обозначения приводятся для тиристора в соответствии с [1 ]
45
фициенты определяются как отношения соответствующих мак
симального и действующего значения, к средним:
^17 —' kf-lTRMslId-
(2-5)
Параметры трансформатора в основном определяются его
полной расчетной мощностью ST и коэффициентом трансформа-
ции кт. Расчетную мощность можно представить как полусумму
полных мощностей первичной Si и вторичной S2 обмоток:
Sr=(St-|-S2)/2.
(2.6)
Мощности и S2 определяются через действующие
значения токов Ц и 12 и напряжений [Ц и U2 первичной
и вторичной обмоток:
S1 = C/171;')
S2~U2I2.)
(2.7)
Для более точной оценки параметров трансформатора
необходимо учитывать возможное в некоторых схемах подмаг-
ничивание магнитопровода трансформатора постоянной со-
ставляющей магнитного потока и наличие высших гармоник
тока в его обмотках.
Оценку эффективности использования трансформатора в схе-
ме выпрямления можно производить посредством коэффици-
ента превышения расчетной мощности трансформатора Апр,
определяемого по соотношению
кПр = $т/Р'лн, (2-8)
где P'dB — номинальная мощность выхода выпрямителя.
Мощность PdB в отличие от номинальной мощности PdH,
определяемой как произведение средних номинальных значений
UdH и IdB, соответствует фактической мощности, выделяемой
в нагрузке, и может быть вычислена по выражению
P'dH = -j udiddt, (2.9)
1 о
где t—период повторяемости пульсаций выпрямленного на-
пряжения; ud и id — мгновенные значения выпрямленного на-
пряжения и тока.
Для идеально сглаженного выпрямленного напряжения,
а следовательно, и тока в активной нагрузке значения
PiB и P'dB совпадают; во всех других случаях P'dB> Pdli-
При проведении анализа схем выпрямления необходимо
учитывать, что на их работу оказывает существенное влияние
характер нагрузки. Различают следующие основные виды
нагрузок выпрямителей (с учетом элементов выходного
46
фильтра): активную, активно-индуктивную, активно-емкостную
и нагрузку с противо-ЭДС. Активно-емкостная нагрузка наи-
более характерна для маломощных выпрямителей. Кроме того,
при комплексном анализе работы выпрямителя с учетом его
системы регулирования различают статическую и динамическую
нагрузки. Примером последней может служить двигатель
постоянного тока.
2.2. ОСНОВНЫЕ СХЕМЫ ВЫПРЯМЛЕНИЯ
Для большей ясности изложения прийципов действия раз-
личных схем выпрямления и расчетных соотношений, харак-
теризующих работу их элементов, сначала рассмотрим иде-
ализированные схемы выпрямления. Идеализированными схе-
мами называются схемы, для которых сделаны следующие
допущения:
а) полупроводниковые элементы идеальны, т. е. во включен-
ном состоянии имеют равное нулю сопротивление, а в вы-
ключенном—равную нулю проводимость;
б) продолжительности включения и выключения полупро-
водниковых элементов равны нулю;
. в) сопротивления цепей, соединяющих элементы схемы,
равны нулю;
г) сопротивления обмоток трансформатора (активные и ин-
дуктивные), потери энергии в его магнитопроводе и намаг-
ничивающий ток также равны нулю.
Учет отдельных реальных параметров схем, наиболее су-
щественно влияющих на их работу, будет проведен в § 2.3.
Электромагнитные процессы, протекающие при выпрямлении,
рассматривается для двух видов статической нагрузки: ак-
тивной и активно-индуктивной, которые характерны для боль-
шей части выпрямителей средней и большой мощности.
Особенности работы выпрямителей на емкостную нагрузку
и нагрузку с противо-ЭДС рассматриваются в § 2.5.
2.2.1. ОДНОФАЗНАЯ ДВУХПОЛУПЕРИОДНАЯ СХЕМА
СО СРЕДНЕЙ ТОЧКОЙ
Однофазная двухполупериодная схема со средней точкой
(с нулевым выводом) представлена на рис. 2.4. Двухполупери-
одную схему также называют двухтактной или двухфазной,
поскольку она выпрямляет оба полупериода напряжения.
Особенностью схемы является то, что вторичные полуобмотки
трансформатора относительно его средней точки создают
систему напряжений, сдвинутых относительно друг друга на л.
Рассмотрим работу схемы при активной (ключ К замкнут)
и активно-индуктивной (ключ К разомкнут) нагрузках. Ин-
47
Рис. 2.4 Однофазный двухполупериод-
ный выпрямитель со средней точкой
Рис. 2.5. Диаграммы токов и напряже-
ний на элементах схемы при активной
нагрузке и угле а=0
дуктивности рассеяния и сопротивления обмоток трансфор-
матора учитывать не будем.
Работа схемы на активную нагрузку с углом управления а=0.
Пусть в момент оЛ = 8 = 0, когда потенциал точки а становится
положительным по отношению к точт^е 0 (на схеме это
соответствует знаку плюс без скобок) и, следовательно,
положительным становится напряжение wa0- на тиристор VSi
подается управляющий импульс. Вторичная обмотка трансформа-
тора выполнена таким образом, что точка а соответствует началу
обмотки, а точка b — концу. Поэтому в момент 9 5= О потенциал
точки Ь становится отрицательным по отношению к средней точке
0. Тогда в момент 9 = 0 тиристор VSy включается и напряжение
иа0 оказывается приложенным к нагрузке Rd, по которой начинает
протекать ток id, совпадающий с током ivsl тиристора VSr (рис.
2.5). Значит, отрицательным становится напряжение иьо и на
тиристор VS2 подается обратное (запирающее) напряжение
wrs2 = Wba, которое равно разности напряжений иь0 и we0 двух
полуобмоток. Напряжение иЬа оказывается приложенным к тири-
стору VS2 благодаря тому, что включен тиристор.
Тиристор rSi будет находиться во включенном (проводя-
щем) состоянии до тех пор, пока ток ivsl, протекающий
через него, не станет равным нулю. Так как нагрузка активная,
то момент прохождения тока ivsl будет совпадать с моментом
спада до нуля напряжения иа0. На диаграмме рис. 2.5 этот
момент соответствует Э=". Начиная с момента 9=л напряже-
ние иа0 становится отрицательным, а иьо—положительным
(на рис. 2.4 полярность напряжения для этого полупериода
указана в скобках), и управляющий импульс подается на
тиристор VS2. В результате к нагрузке Rd будет теперь
приложено напряжение иьо, а ток id будет равен току
iVS2 тиристора VS2. Тиристор VS выключается, и к нему
прикладывается обратное напряжение uvi = uab. Спустя полу-
период, начиная с момента 9 = 2л, процесс повторяется: ток
проводит тиристор К5"1, тиристор VS2 выключен и т. д.
В результате поочередной проводимости тока одного на-
правления тиристорами и VS2 на нагрузке появляется
выпрямленное пульсирующее напряжение ud, содержащее посто-
янную и переменную составляющие (см. рис. 2.5).
Среднее значение выпрямленного напряжения
‘ • Ud=- J ^/2U2sin&$ = 2y/2/nU2=0,9U2, (2.10)
n о
где U2—действующее значение напряжения на полу обмотке.
Из формул (2.10) и (2.1) видно, что среднее значение
выпрямленного напряжения Ud в данной схеме в 2 раза
выше, чем в однополупериодной, так как напряжение при-
кладывается к нагрузке каждый полупериод. Соответственно
в 2 раза больше будет и среднее значение выпрямленного тока:
Ъ=Е7£|/Л£| = (2ч/2/л)(С2/ЛД (2.11)
Основные параметры, характеризующие работу тиристоров
KSj и VS2 в схеме (которые совпадают доя обоих тиристоров),
можно вцразить следующими соотношениями:
1. Максимальное значение обратного напряжения на ти-
ристоре
Снятая = 2v//2C72 = 2,82С72- (2.12)
2. Максимальное значение тока тиристора
f
Inax=^U2IRd=^Id=\,51Id. (2.13)
3. Среднее значение тока тиристора равно половине тока
нагрузки, так как в схеме поочередно проводят ток два
тиристора:
/rxr=0,57d. (2.14)
4. Действующее значение тока тиристора
/ 1 « тг
JZ^sin29J9=-/d. . ' (2.15)
V 2я о 3 4
4 № 3658
49
5. Коэффициенты
kV = U Rmaxl U d^= IV, 1 (2 16)
kl—IrRMslId — Kl^. )
6. Действующие значения токов первичной Л и вторичной
12 полуобмоток, выраженные через ток Id,
h=Imax/^2kT = n/2^2Id/kT~l (2 17)
Ii^IrRMS — nl^Ia- J
7. Мощности обмоток трансформатора, учитывая (2.10)
и (2.17), можно выразить следующими формулами:
первичной обмотки
^^Р^, (2.18)
2^2 2^/2 8
где
^dH-^dH?
суммы двух вторичных полуобмоток
S2^2U2I2=^UdKlldB^-=PdB. (2.19)
х/2 4 4^/2
8. Расчетная мощность трансформатора
5T = ^i^=l,48PdH. (2.20)
9. Полная активная мощность в нагрузке P’dlt, вычисленная
по (2.9),
7Г^
(2.21)
10. Соответственно коэффициент превышения расчетной
мощности трансформатора
fcnp = ST/PiB=l,2. (2.22)
Следует отметить, что постоянного подмагничивания маг-
нитопровода трансформатора в данной схеме не будет, если
все обмотки расположить на одном стержне магнитной системы
броневого типа. При стержневой магнитной системе полная
компенсация МДС в трансформаторе достигается специальной
схемой расположения вторичных полуобмоток.
Работа схемы на активную' нагрузку при угле, управления
а>0. Предположим, что начиная с момента 3 = 0 оба тиристора
выключены и ток йе проводят. При этом будем считать, что
потенциал точки а вторичной обмотки положителен относи-
50
Рис 2.6 Диаграммы токов и напряже-
ний на элементах схемы при активной
нагрузке и угле а>0
Рис 2.7 Регулировочные характери-
стики однофазного двухполупериодно-
го выпрямителя:
1- при активной нагрузке, 2—при актив-
но-индуктивной нагрузке
тельно средней точки 0, а точки b — отрицателен (на рис. 2.4
эта полярность указана без скобок). Очевидно, что при такой
полярности напряжений вторичной обмотки к тиристору
будет припожено прямое напряжение uVs\ — ьаь, а к тиристору
KS2— обратное напряжение мГ2 = Иьо (рис. 2.6). Пусть в момент
9 = а (т. ё. с задержкой на угол а относительно момента
перехода напряжения иа0 через нуль) на управляющий электрод
тиристора /Sj подается управляющий импульс, тогда тиристор
К*?! включится и в нагрузке Rd начнет протекать ток il = tVsi
под воздействием напряжения иа0. Начиная с этого же момента
к тиристору VS2 будет приложено обратное напряжение uVS2,
равное разности напряжений иЬа — иЬ0 — иа0 двух вторичных
полуобмоток.
Тиристор VSi будет 'находиться в проводящем состоянии
до тех пор, пока ток, протекающий через него, не спадет
до нуля. Так как нагрузка активная и форма тока, проходящего
через нагрузку (а следовательно, и через тиристор VS^,
повторяет форму напряжения иа0, то тиристор VSt выключится
в момент 9 = л. Поскольку через половину периода полярность
напряжение на вторичной обмотке изменяется на проти-
воположную, то при подаче управляющего импульса на
тиристор VS2 в момент 9 = л±а он включится. Затем указанные
процессы повторяются в каждом периоде.
51
Возможность осуществлять задержку по фазе моментов
включения тиристоров на определенный угол а позволяет
изменять выходное напряжение. Угол а отсчитывают относи-
тельно моментов естественного включения тиристоров (8=0,
к, 2 л...), соответствующих включению диодов в схеме. Из
рис. 2.6 видно, что с увеличением угла а среднее значение
выходного напряжения Ud будет уменьшаться. Аналитически
эта зависимость выражается следующей формулой:
Ud = - f U2 sin 3(/3=U2(1 + cos a). (2.23)
77 a 71
Обозначив через UdQ найденное по выражению (2.10) среднее
значение выпрямленного напряжения для неуправляемого вы-
прямителя (а = 0), получим
_ 1+cosa
О' d — О dO-2--
Среднее значение выпрямленного тока
->_I/1(_^/2(l-i-cosa) U2
d'—Rd~ л ~Rd’
(2.24)
(2.25)
В соответствии с (2.24) изменение угла а от 0 до л приводит
к изменению среднего значения выходного напряжения от
Ud0 до нуля. Зависимость среднего значения выходного
напряжения от угла управления а называется регулировочной
характеристикой. Регулировочная характеристика рассматрива-
емой схемы для случая чисто активной нагрузки представлена
кривой 1 на рис. 2.7.
Максимальные значения прямого и обратного напряжений
при углах a <90° можно выразить в следующем виде:
UFmax = ^2U2sina; )
Сятих = 2х/2 U2. j
(2.26)
Максимальное значение тока тиристора
_у2С/2_ л
max~~Rd 1+casa
(2.27)
Среднее значение тока тиристора, как и для случая ot = O,
будет равно половине тока Id.
Действующие значения токов, протекающих через тиристоры
и обмотки трансформатора, в этом случае зависят от угла
.a. С увеличением угла а интервал проводимости тока тиристора
уменьшается, а отношение действующего значения тока к сре-
днему (коэффициент формы к$) растет. Действующее значение
тока связано со средним значением соотношением
Items —
(2.28)
Действующие
12 полуобмоток,
значения токов первичной Ц и вторичной
выраженные через ток Id
I —к
I — к
(2.29)
Расчетная мощность трансформатора ST также будет за-
висеть от коэффициента к^ и может'быть найдена по формуле
5Т=1,89£Ф = —(2.30)
1+cosa
Из (2.28) и (2.30) видно, что угол а оказывает существенное
влияние на установленные мощности основных элементов
схемы. Поэтому при проектировании расчет элементов произ-
водится из условий работы схемы с максимальным значением
угла а.
Работа схемы на активно-индуктивную нагрузку с углом
управления <х=0. При разомкнутом ключе К (в схеме на
рис. 2.4) в цепь нагрузки включена индуктивность Ld, которая
обычно выполняет роль фильтра переменной составляющей
выпрямленного напряжения. Наличие в цепи нагрузки индук-
тивности Ld существенно изменяет характер электромагнитных
процессов в Ьхеме. Известно, что индуктивность в электриче-
ской цепи является инерционным элементом, в котором
изменение тока происходит с запаздыванием относительно
приложенного напряжения. Так, после начала работы выпрями-
теля нарастание тока id в нагрузке будет происходить постепен-
но и тем медленней, чем больше постоянная времени Td = Ld[Rd.
Рассмотрим более подробно работу схемы в установившемся
режиме, когда среднее за . период значение выпрямленного
тока стало неизменным. В этом случае форма выпрямленного
тока будет зависеть от индуктивности Ld, частоты выпрям-
ляемого напряжения ю и сопротивления Rd. При чисто
активной нагрузке она совпадет с формой выпрямленного
напряжения, а при наличии индуктивности выпрямленный ток
становится более сглаженным и не успевает доходить до нуля
в моменты, когда выпрямленное напряжение становится рав-
ным нулю. При увеличении индуктивности или частоты
переменной составляющей выпрямленного напряжения пуль-
сации выпрямленного тока уменьшаются, а при значениях
53
Рис. 2.8. Диаграммы токов и напряже-
ний однофазного двухполупериодного
выпрямителя при активно-индуктив-
ной нагрузке (io£d=oo) и а=0
Рис. 2.9. Диаграммы токов и напряже-
ний однофазного двухполупериодного
выпрямителя при активно-индуктив-
ной нагрузке (w£d=oc) и а>0
WTj, стремящихся к бесконечности, ток становится идеально
сглаженным. При значениях (0Td, равных 5—10 и более,
расчетные соотношения в схеме будут незначительно отличаться
от случая^ когда (Did = oo или (o/cd = oo. Поэтому при дальнейшем
рассмотрении работы как данной схемы, так и других схем
при активно-индуктивной нагрузке принимается допущение
(£>Ld = оо. В этом случае можно считать, что вся переменная
составляющая выпрямленного напряжения 'выделяется на ин-
дуктивности Ld, а постоянная—на сопротивлении Rd.
На рис. 2.8 представлены диаграммы токов и напряжений
на элементах рассматриваемой схемы при a>Ld = co и ot = O.
Выпрямленное напряжение ud и его среднее значение
Ud остаются такими же, как при активной нагрузке. Основ-
ное отличие заключается в том, что изменяется форма
токов тиристоров, которая при a>Ld = oo становится прямо-
угольной.
В связи С изменением формы токов меняются действующие
и мгновенные значения токов тиристоров, токов в обмотках
трансформатора и соответственно его расчетная мощность.
При (oLd = оо указанные величины принимают следующие
значения.
54
1. Максимальное значение тока тиристора становится
равным среднему значению выпрямленного тока, т. е.
lmax = h- (2.31)
2. Действующие значения токов , тиристоров Itrms
и вторичной полуобмотки и трансформатора /2 будут
равны
lTRMS = Il = Idl\fi- (2.32)
3. Действующее значение тока первичной обмотки
Л = /^т- (2.33)
4. Расчетная мощность трансформатора
ST=l,34PdH. (2.34)
Так как для постоянного тока, не содержащего пульсаций,
действующее и среднее значения равны, то мощности
PdH и Pd'H также равны. Поэтому согласно (2.34) коэффициент
превышения расчетной мощности трансформатора в данном
случае становится равным /спр = 1,34. Таким образом, наличие
достаточно большой индуктивности Ld в цепи нагрузки при-
водит к увеличению расчетной мощности трансформатора, но
улучшает согласно (2.32) использование тиристоров по току.
Работа схемы на активно-индуктивную нагрузку с углом
управления а>0. Наличие индуктивности Ld в цепи постоянного
тока при углах управления а>0 приводит к тому, что после
прохождения напряжения на вторичной полуобмотке через
нуль в находящемся в проводящем состоянии тиристоре
продолжает протекать ток за счет энергии, накопленной
в индуктивности. Например, тиристор KS, продолжает про-
водить ток и после того, как напряжение иа0 станет от-
рицательным (рис. 2.9). При достаточно большой индуктив-
ности этот тиристор будет проводить ток до тех пор, пока
не будет подан управляющий импульс на тиристор FSp
Тогда тиристор VS2 включится, а тиристор VSr выключится.
Тиристор VS2 будет проводить ток, пока снова не будет
подан управляющий импульс на тиристор VS^
Таким образом, несмотря на то, что управляющие импульсы
поступают на тиристор с задержкой на угол а относительно
моментов их естественного включения Э = (0, л, 2л.'..), дли-
тельность протекания тдка через каждый тиристор остается
равной половине периода напряжения питающей сети. При
a>Ld = <x> ток в цепи нагрузки идеально сглажен, а токи
тиристоров имеют прямоугольную форму, но в отличие от
схемы, работающей с углом ot = O, прямоугольники токов
будут сдвинуты относительно выпрямленного напряжения на
угол а. Сдвиг тока относительно напряжения на угол а при-
, 55
водит к появлению в выпрямленном напряжении ud от-
рицательных участков, что вызывает- снижение его среднего
значения Ud. Очевидно, что с ростом угла а площадь
отрицательных участков увеличивается, а следовательно, сре-
днее значение выпрямленного напряжения уменьшается. Сре-
днее значение выпрямленного напряжения является его посто-
янной составляющей и при a>Ld = со выделяется на сопротив-
лении Rd, а переменная составляющая — на индуктивности Ld.
Учитывая, что форма выпрямленного напряжения повторя-
ется в интервале углов от а до л + а, среднее значение
выпрямленного напряжения можно найти по формуле
1 я+“ л- /2
Ud = - f J2 U2 sin SdS = C/2cosa = Udo cos a. (2.35)
л i n
Согласно (2.35) среднее значение выпрямленного напряжения
становится равным нулю при а=л/2. В этом случае в выпрям-
ленном напряжении площади положительного и отрицательного
участков равны между собой и постоянная составляющая
отсутствует. Регулировочная характеристика для активно-ин-
дуктивной нагрузки показана на рис. 2.7.
Если значение and таково,
дуктивности Ld на интервале,
Рис. 2.10. Диаграммы токов и напря-
жений однофазного двухполупериод-
ного выпрямителя при активно-индук-
тивной нагрузке в режиме прерывис-
тых токов
что энергии, запасенной в ни-
когда Wd>0, оказывается недо-
статочно для обеспечения про-
текания тока id в течение по-
ловины периода, то тиристор,
проводящий этот ток, выклю-
чится раньше, чем будет подан
управляющий импульс на дру-
гой тиристор, т. е. ранее мо-
мента, определяемого углом
а. Такой режим работы схемы
при активно-индуктивной на-
грузке называется режимом
с прерывистым выпрямлен-
ным током (рис. 2.10). Сопо-
ставив сначала диаграммы на
рис. 2.10 и 2.9, а потом диа-
граммы на рис. 2.10 и 2.6,
увидим, что при одинаковых
значениях угла а среднее зна-
чение выпрямленного напря-
жения в режиме с прерывис-
тым током будет больше, чем
в режиме с непрерывным то-
ком, благодаря уменьшению
площади отрицательного
56
участка в кривой выпрямленного напряжения, но меньше, чем
при работе выпрямителя на активную нагрузку (отрицательных
участков нет). Поэтому в режимах с прерывистым током
регулировочные характеристики будут находиться между кри-
выми 1 и 2 в заштрихованной области, указанной на рис. 2.7.
Режим работы схемы, когда тркв тиристорах спадает до
нуля точно в момент включения очередного тиристора, называ-
ется граничным. Очевидно, что чем больше угол а, тем
больше должна быть индуктивность Ld, чтобы обеспечить
режим работы схемы с непрерывным током id. Индуктивность,
обеспечивающая при заданных параметрах схемы граничный
режим работы, называется критической. При прерывистом
токе трансформатор и тиристоры схемы работают в более
тяжелом режиме, так как при одном и том же среднем
значении выпрямленного тока действующее значение токов
в элементах схемы увеличивается. Поэтому в мощных выпрями-
телях, работающих с широким диапазоном изменения угла
а, индуктивность Ld обычно выбирают из условия обеспечения
непрерывности выпрямленного тока.
2.2.2. ОДНОФАЗНАЯ МОСТОВАЯ СХЕМА
Работа схемы с углом управления <х=0. Однофазная мо-
стовая схема выпрямления представлена на рис. 2.11. Принцип
действия схемы следующий. Предположим, что ключ К за-
мкнут, т. е. нагрузка активная. В момент 8 = 0 потенциал
точки а становится выше потенциала точки b (на рис. 2.11
соответствующая полярность обозначена без скобок), а на
тиристоры VSi и VS3 подаются управляющие импульсы.
В результате Жатого тиристоры VSi и VS3 включатся. Напряже-
ние иаЬ будет, таким образом, приложено к нагрузке Rd, и по
цепи (вторичная обмотка трансформатора—гиристор KSi—
нагрузка/^—тиристор И53) начнет протекать ток, повторя-
ющий форму питающего напряжения.
Тиристоры VS2 и на этом интервале выключатся
и будут находиться под напряжением вторичной обмотки,
которое по отношению
к ним является обратным.
Например, анод тиристора
VS2 соединен непосредст-
венно с точкой а обмотки,
а катод—с точкой b через
включенный тиристор У Si,
падение напряжения в ко-
тором принято равным ну-
лю. Таким образом, анод
тиристора VS2 будет нахо-
Рис. 2.11. Однофазный мостовой выпря-
митель
57
даться под отрицательным потенциалом по отношению к ка-
тоду. Такое же напряжение будет приложено к тиристору KS4.
‘ В момент 8 = л, т. е. через половину периода, ток в ти-
ристорах VSi и VS2 спадает до нуля и они выключаются,
а тиристоры VS2 и VS4. включаются, поскольку потенциал
точки b становится положительным по отношению к потен-
циалу точки а (полярность указана на рис. 2.11 в скобках)
и на тиристоры поступают управляющие импульсы. Далее
указанные процессы периодически повторяются. Диаграммы
токов и напряжений на элементах схемы будут такими же,
как для однофазного двухполупериодного выпрямителя со
средней точкой (см. рис. 2.5). Отличие заключается только
в том, что амплитуда обратного напряжения на тиристоре
в мостовом выпрямителе будет в 2 раза меньше, чем
в двухполупериодном выпрямителе.
При активной нагрузке работа схемы будет характеризовать-
ся следующими основными соотношениями:
среднее значение выпрямленного напряжения
[7а=^С72; (2.36)
л
коэффициент схемы согласно (2.36)
^ = 2Т2/л; (2.37).
максимальное значение обратного напряжения на тири-
сторах
URmax=^2U2- (2.38)
максимальное значение тока тиристора
Imax “ JlUxIRf, (2.39)
среднее значение тока тиристора
/тлт = /«/2; (2.40)
действующие значенйя токов, проходящих через тиристоры
и обмотки трансформатора:
Itrms = Zd/2; (2-41)
Z2=-^=Zrf; 2^ '1 ТС ( h= 7=Zd. кт2у/2 Соответственно коэффициенты /спр=1; ku — Tt/^; ki = n/4. (2.42) (2.43)
58
При активно-индуктивной нагрузке (a>Ld = оо) форма токов,
протекающих через тиристоры, а следовательно, в обмотках
трансформатора будет прямоугольной (см. рис. 2.8). В этом
случае среднее значение выпрямленного напряжения остается
таким же, как и при активной нагрузке, а коэффициенты
использования элементов схемы принимают следующие значения:
Л7ПР=1,11; kv=~-, *4 = 0,707. (2.44)
Работа схемы с углом управления а>0. Однофазная мо-
стовая схема, работающая с углом а>0, имеет такие же
формы токов и напряжений на ее элементах, как и в однофаз-
ном двухполупериодном выпрямителе со средней точкой (см.
рис. 2.6, 2.9). В зависимости от характера нагрузки — активной
или активно-индуктивной (<aZ.d=oo)— она характеризуется сле-
дующими соотношениями.
1. Средние значения выходного напряжения:
а) при активной нагрузке
1+cosa
Uj—Udo —-—, (2.45)
где Udo—среднее значение выпрямленного напряжения на
выходе схемы при угле ot=O;
б) при активно-индуктивной нагрузке (когда азЬл=со или
имеет такое значение, что выпрямленный ток 1Л непрерывен)
Ud= Cdocosa. (2.46)
Регулировочные характеристики схемы зависят от отноше-
ния a>Ld/Rd и имеют вид, соответствующий рис. 2.7.
2. Максимальные значения напряжений на тиристорах;
а) при активной нагрузке
URmax=
л > (2.47)
UFmax= и2 sin a;
б) при активно-индуктивной нагрузке
Сктах=^<72; | (248)
Upmax = ^2 sill Ct. J
3. Максимальные значения токов тиристоров:
а) при активной нагрузке
imax = ^U2/Rd; (2.49)
б) при активно-индуктивной нагрузке
Imax = Id. (2.50)
59
4. Действующие и средние значения токов тиристоров:
а) при активной нагрузке
Itav = UdflRd', 1 (2 51)
Itrms —кср1тav- )
б) при активно-индуктивной нагрузке
Itav— UdflRd’, ) .
г— ( \Z.jZJ
Itrms = Id/y/2. J
5. Действующие значения токов вторичной обмотки:
а) при активной нагрузке
h = ^Id; (2.53)
б) при активно-индуктивной нагрузке
Z2 = 4 (2-54)
В рассматриваемой схеме расчетная мощность трансфор-
матора увеличивается с ростом угла а при активной нагрузке
и активно-индуктивной в режиме прерывистых токов id.
Поэтому при расчете трансформатора в указанных режимах
работы схемы следует учитывать максимальные значения угла
а и коэффициента кф, подобно тому, как это сделано в (2.30)
для схемы со средней точкой.
2.2.3. ТРЕХФАЗНАЯ СХЕМА СО СРЕДНЕЙ ТОЧКОЙ
Работа схемы с углом управления ot = O. Трехфазную схему
со средней точкой (рис. 2.12) иногда называют трехфазной
однотактной схемой, поскольку выпрямлению подвергается
только одна из полуволн переменного напряжения каждой
фазы. Рассмотрим принцип действия данной схемы для случая,
когда первичные обмотки трансформатора соединены треуголь-
ником, а вторичные—звездой. Первоначально допустим, что
ключ К замкнут, т. е. нагрузка схемы активная. Полученные
соотношения будут потом уточнены для разомкнутого состо-
яния ключа К при допущении (oLd=oo.
В интервале 90<9<9i (рис. 2.13) в проводящем состоянии
находится тиристор i/Sl, соединенный с фазой а. Начиная
с момента потенциал фазы b становится выше потенциала
фазы а и анод тиристора VS2 оказывается под положительным
напряжением относительно его катода. Если в момент на
тиристор yS2 поступает управляющий импульс, он включается,
а тиристор KSi выключается, так как к нему оказывается
приложенным запирающее напряжение иЬа. Ток нагрузки id на-
чинает протекать через тиристор VS2, соединенный с фазой
60
Рис 2 12 Трехфазный выпрямитель со
средней точкой
Рис 2.13 Диаграммы токов и напря-
жений трехфазного выпрямителя со
средней точкой при активной нагрузке
и угле а=0
Ь. Тиристор VS2 будет находиться в проводящем состоянии
в течение 120° до момента Э2, когда потенциал фазы с станет
выше потенциала фазы Ъ и поступит управляющий импульс
на тиристор VS3. В момент Э2 то начнет проводить тиристор
VS3, а тиристор VS2 выключается. Затем в момент Э3 вновь
начнет проводить ток тиристор и далее указанные
процессы будут периодически повторяться.
Очевидно, что каждый тиристор будет проводить ток в течение
одной трети каждого периода (2л/3) напряжения питающей сети.
Остальную тасть периода (4л/3) тиристор выключен и к нему
приложено обратное напряжение. Так, когда выключен тиристор
VSi, к нему на интервале проводимости тиристора VS2 приложено
линейное-напряжение иЬа, а на интервале проводимости тиристора
VS3 — напряжение иса. В результате к тиристору KS\ приложено
обратное напряжение, представленное кривой uvsl.
Среднее значение выпрямленного напряжения найдем путем
интегрирования напряжения на вторичной обмотке трансфор-
матора в интервале повторяемости формы выпрямленного
напряжения:
5
7" Г-
о 6 о /г
f x/2C72sin9^ = ^ £72 = 1,17L72, (2.55)
где U2—действующее значение фазного напряжения на вторич-
ной обмотке трансформатора.
61
Основные параметры, характеризующие работу тиристоров
в схеме, следующие:
коэффициент схемы
^х = з7б/2л; (2.56)
максимальное значение обратного напряжения на тиристоре равно
амплитуде линейного напряжения на вторичных обмотках, т. е.
(2.57)
(2.58)
где U2m — амплитуда фазного напряжения.
Максимальное значение тока тиристора
। I и
Ъ 3^3
Среднее значение тока, протекающего через тиристор, если
учитывать, что каждый тиристор проводит ток одну треть
периода, равно
(2-59)
Поскольку в данной схеме токи вторичных обмоток имеют
пульсирующий характер и содержат постоянные составляющие,
то в магнитной системе трансформатора возникает поток
вынужденного подмагничивания, который может вызвать на-
сыщение магнитопровода трансформатора. Это обстоятельство
вызывает необходимость завышать расчетную мощность транс-
форматора. Что касается токов первичных обмоток, то они
содержат только переменные составляющие, так как постоян-
ные составляющие токов не трансформируются. Поэтому токи
первичных обмоток
будут равны
lAB = (ivsi~ j Л/);
’bc=(iVs2—
(сл ~(lvs3~ з h)-
(2.60)
токов в тиристорах и обмотках трансфор-
Соотношение для
матора, а также его расчетную мощность рассмотрим для
случая работы схемы на активно-индуктивную нагрузку, явля-
ющуюся более характерной для трехфазных и многофазных
схем выпрямления. При активно-индуктивной нагрузке схема
работает так же, как при активной нагрузке, но ток id становится
идеально сглаженным, а токи, проходящие через тиристоры,
принимают'прямоугольную форму. Соответственно прямоуголь-
ными становятся и токи в обмотках трансформатора. В этом
62
случае кривые выпрямленного напряжения ud и обратные напряже-
ния на тиристорах остаются такими же, как и при работе на
активную нагрузку, а значения токов становятся равны
(2.61)
Расчетные мощности первичных и вторичных обмоток равны
S1=3t/1/1H = 2!Lpdij;
зуз I
52 = 36/2/2и = ^Ли,
3,/2 J
(2.62)
где Ui и U.2—действующие значения фазных напряжений
первичной и вторичной обмоток.
Коэффициенты использования элементов схемы принимают
следующие значения:
кпр = 1,345; kv = 2it/3; k^l/^/З. (2.63)
В (?.62) коэффициент кпр приведен без учета влияния
потоков подмагничивания. Реальное его значение больше
и будет зависеть от схемы и конструкции трансформатора.
Работа схемы с углом управления а > 0. В отличие от
схемы неуправляемого выпрямителя или управляемого, но
работающего с углом а = 0, в данном случае управляющие
импульсы приходят на тиристоры поочередно с задержкой
на угол управления а относительно моментов прохождения
через нуль синусоид линейных напряжений вторичных обмоток
трансформатора. Моменты прохождения через нуль синусоид
линейного напряжения соответствуют точкам пересечения си-
нусоид напряжений иа, иь, ис (рис. 2.14). При угле а>0
в зависимости от характера нагрузки и значения угла а в дан-
ной схеме могут иметь место различные режимы работы.
Если угол а изменяется’ в диапазоне от 0 до тс/6, тог как
при активно-индуктивной, так и при чисто активной нагрузке
выпрямленный ток является непрерывным. Среднее значение
выпрямленного напряжения в этой области углов а при
различном характере нагрузки описывается выражением
5я
~S~+a г
Ud = ^~ y/2U2sm3d3 = ^^ t/2cosa = (/«юсовое.
2л v 2л “
Я *
6+a
(2.64)
63
Рис. 2.14. Диаграммы токов и напря-
жений трехфазного выпрямителя со
средней точкой при угле а<л/6
1Л при.иЛа=о
mis»
иа при tUL^=oo
1^=1^ при
I VS, I K?f Г | vs, ( vsn
Рис. 2.15. Диаграммы токов и напря-
жений трехфазного выпрямителя со
средней точкой при углах а=л/6
и а>л/6
При угле а = л/6 кривая мгновенных значений выпрямлен-
ного напряжения доходит в моменты переключения тиристоров
до нуля (рис. 2.15, слева). Такой режим работы называется
гранично-непрерывным. Дальнейшее увеличение угла (а=я/6)
при активной нагрузке приводит к прерыванию выпрямленного
тока id и появлению в выпрямленном напряжении ud участков
с нулевым значением (рис. 2.15, справа). Интервал проводи-
мости тока тиристоров становится меньше 2л/3. Среднее
значение напряжения в этом случае выражается следующим
образом:
При активно-индуктивной нагрузке за счет энергии, запаса-
емой 9 индуктивности Ld, выпрямленный ток id продолжает
протекать в нагрузке и при переходе кривой выпрямленного
о4
напряжения в зону отрица-
тельных значений. Если на-
копленной в индуктивности
Ld энергии окажется доста-
точно, чтобы обеспечить
протекание тока до очеред;
ной коммутации тиристо-
ров, то будет режим работы
с непрерывным током id.
При (oLd = oo режим непре-
рывного тока будет иметь
место при любых углах
а в диапазоне от 0 до п/2.
В этом случае среднее зна-
чение выходного напряже-
ния Ud можно определить
по формуле (2.64). Когда
площади' положительного и
Рис. 2.16. Регулировочные характеристики
трехфазного выпрямителя со средней точ-
кой:
/—при активной нагрузке; 2—при активно-
индуктивной нагрузке
угол а становится равным п/2,
отрицательного участков кривой
выпрямленного напряжения становятся равными, что свидетель-
ствует об отсутствии постоянной составляющей в выпрямлен-
ном напряжении, или, иначе говоря, среднее значение
Ud становится равным нулю.
В соответствии с изложенным в регулировочных харак-
теристиках схемы (рис. 2.16) можно выделить две характерные
зоны изменения угла а. В первой зоне (0<а<п/6) как при
активной, так и при активно-индуктивной нагрузке регулировоч-
ная характеристика соответствует формуле (2.64). Во второй
зоне |^<а<5п/6|- при активной нагрузке характеристика
\6 V /
аналитически описывается формулой (2.65), согласно которой
среднее значение Ud становится равным нулю при угле а = 5п/6.
В режимах работы с непрерывным током id при углах
п/6<а<п/2 и активно-индуктивной нагрузке для регулировоч-
ной характеристики становится справедливой формула (2.64).
Заштрихованная область соответствует семейству регулировоч-
ных характеристик в режимах прерывистого тока id при
различных значениях отношения ioLdjRd.
Токи в .тиристорах и обмотках трансформатора при ак-
тивно-индуктивной нагрузке (<o£d=oo) определяются по соот-
ношениям, приведенным для случая а=0. При активной
нагрузке зависимости, связывающие среднее и действующее
значения токов, существенно усложняются. Поэтому отметим
только тот факт, что с ростом угла управления а интервалы
проводимостей тиристоров уменьшаются, а действующие значе-
ния токов при одних и тех же средних значениях увеличиваются.
Максимальные значения напряжений на тиристорах:
5 № 3658
65
(2.67)
а) при активной нагрузке
UFmax = y/6U2 sin а (а < п/6);
СГтал = У2 С2 sin (а + п/6) (а > п/6); > (2.66)
URmaX = y/^U2',
б) при активно-индуктивной нагрузке (в режиме непрерыв-
ного тока id)
^rm<« = x/6tf2sina;
Ur max — U2 .
2.2.4. ТКЕХФАЗНАЯ МОСТОВАЯ СХЕМА
1 1 i
Работа схемы с углом управления a = 0. Трехфазная мостовая
схема и диаграммыГЛТоясняющие ее работу, показаны на рис.
2.17 и 2.18. Рассмотрим принцип действия схемы для случая
активной нагрузки Тгключ К замкнут). Начиная с момента ток
проводят тиристоры У5; и VS6, а остальные тиристоры
выключены. В этом случае к нагрузке Rd приложено линейное
напряжение маЬ и выпрямленный ток id протекает по контуру:
обмотка фазы а—тиристор VS,—нагрузка Rd—тиристор
VS6 — обмотка фазы Ь. Этот процесс в схеме продолжается до
момента Э2, т- е- в течение времени, соответствующего п/3,
когда потенциал фазы b станет более положительным, чем
потенциал фазы с. Начиная с этого момента напряжение
иЬс становится положительным, т. е. прямым для тиристора VS2.
При подаче в этот момент времени управляющего импульса на
тиристор VS2 он начинает проводить ток, а тиристор VS6
выключается (происходит коммутация между тиристорами VS6
и FS^). Для выключившегося тиристора VS6 напряжение
иаЬ является обратным. В результате в проводящем состоянии
окажутся тиристоры VS, и VS2, а остальные будут выключены.
В момент $з подается импульс на тиристор VS3 и он
включается, а тиристор VSt оказывается в выключенном
состоянии, так как потенциал фазы b становится выше
потенциала фазы а. Далее через интервалы времени, равные
л/3, происходят коммутации следующих тиристорных пар:
VS2 VS4, VS3—VS3, VS4—VS6 и VS^ Таким образом,
в течение периода питающего напряжения имеются шесть
коммутаций через л/3 каждая, причем три из них происходят
в катодной группе тиристоров VSj, VS3 и (имеющих
объединенные катоды) и три — в анодной группе тиристоров
VS4, VS6 и VS2 (имеющих объединенные аноды). Следует
отметить, что нумерация тиристоров в данной схеме носит
не случайный характер, а соответствует порядку их вступления
66
Рис. 2.17. Трехфазный мостовой
выпрямитель
Рис. 2.18. Диаграммы токов и на-
пряжений трехфазного мостового
выпрямителя при угле а=0:
1— VSlt 2—VSi, KS2; 3—VS2,
И53; 4— И53, И$4; 5—Г54, KS5;
6—PS5, PS6
в работу при условии соблюдения фазировки трансформатора,
указанной на рис. 2.17.
Поочередная работа различных пар тиристоров в схеме
приводит к появлению на сопротивлении Rd выпрямленного
напряжения, состоящего из частей линейных напряжений вто-
ричных обмоток трансформатора (см. рис. 2.18). Видно, что
моменты коммутации совпадают с моментами прохождения
через нуль линейных напряжений (когда равны два фазных
напряжения, например иа и мь). Длительность прохождения
тока через каждый тиристор равна 2л/3, остальное время
к нему приложено обратное напряжение, состоящее из частей
соответствующих линейных напряжений.
Постоянная составляющая выпрямленного напряжения (сре-
днее значение) вычисляется для интервала повторяемости
выпрямленного напряжения, равного fc/3:
2/Зя '
Ud = - f = (2.68)
Я J я
п
3
где U2—действующее значение фазного напряжения вторичных
обмоток трансформатора.
Соответственно коэффициент схемы (по отношению к фазному
напряжению вторичной обмотки) имеет значение ксх — 3у/б/п.
67
Выражение (2.68) справедливо для активной и активно-
индуктивной нагрузки. Остальные соотношения приведем для
схемы с активно-индуктивной нагрузкой при coLd=oo. В этом
случае принцип работы схемы не изменяется, но токи в ти-
ристорах и обмотках трансформатора принимают прямоуголь-
ную форму (на рис. 2.18 показаны штриховой линией). Соот-
ветственно выпрямленный ток id и напряжение на сопротив-
лении нагрузки Rd становятся идеально сглаженными.
При a)£d = oo работа тиристоров в схеме характеризуется
следующими параметрами:
максимальное значение обратного напряжения на тиристоре
равно амплитуде линейного напряжения вторичной обмотки
URmax~.fiu2si-, (2.69)
максимальное значение тока тиристора
, (2-70)
среднее значение тока тиристора
= Ш (2.71)
действующее значение тока тиристора
IrRMS — Idlyf^'i (2.72)
действующие значения токов первичных и вторичных об-
моток, а также расчетные мощности обмоток трансформатора
7i=(l/MV2/37d; f (2.73)
Si = s2=S^(i43)Pia-, J
коэффициенты использования элементов схемы
fcu = n/3 = 1,05; fc/ = 0,577; k„p= 1,05. (2.74)'
Следует отметить, что в трехфазной схеме ток в обмотках
трансформатора носит знакопеременный характер и имеет
равные значения в положительный и отрицательный полупери- .
оды (см. рис. 2.18). Это исключает возможность подмагничива-
ния трансформатора, что является одним из существенных
достоинств данной схемы.
Работа схемы с углом управления а>0. В трехфазной
мостовой схеме на тиристоры управляющие импульсы поступа-
ют с задержкой на угол а относительно нурей линейных
напряжений (или моментов пересечения синусоид фазных
напряжений, рис. 2.19).
В результате задержки моментов коммутации тиристоров
на угол а среднее значение выпрямленного напряжения,
образованного из соответствующих частей линейных напряже-
68
Рис. 2.20. Диаграммы токов и напря-
жений трехфазного мостового выпря-
мителя при углах а=л/3 и а>л/3
Рис. 2.19. Диаграммы токрв и напряжений трехфазного мостового выпрямителя
при угде а< л/3:
/—И56, PSt. 2— И5,. vs2- 3— VS2, И53; 4~ VS2, KS4; 5—PS4, ИХ5; 6—PS6
ний, снижается. До тех пор пока кривая мгновенных значений
выпрямленного напряжения ий остается выше нуля (что
соответствует диапазону изменения угла управления 0<а<п/3),
выпрямленной ток id будет непрерывным вне зависимости от
характера Сгрузки. Поэтому при углах 0<а<п/3 среднее
значение выпрямленного напряжения для активной и активно-
индуктивной нагрузки будет равно
2я
3 + ’
ТС J v
я
-з+а
3^/бгг тт
—— и2 cos а = VdQ cos а.
тс
(2-75)
Угол а = л/3 соответствует при активной нагрузке гранично-
непрерывному режиму. При углах а>я/3 и активной нагрузке
в напряжении ud и токе id появляются интервалы с нулевым
значением (рис. 2.20), т. е. наступает режим работы с прерывис-
тым выпрямленным током. Среднее значение выпрямленного
напряжения для этого случая может быть выражено следующим
образом:
69
.
Я
3+a
6t/2sin9^9=tZd0
* I л
1 4-cosl-4-a
(2.76)
Следует отметить, что В режиме с прерывистым током id
для обеспечения работы данной схемы, а также для ее
первоначального запуска на тиристоры схемы следует подавать
сдвоенные управляющие импульсы с интервалом л/3 или
одиночные, но с длительностью большей, чем л/3. Это
объясняется тем, что для образования замкнутой цепи протека-
ния тока id необходимо обеспечить одновременное включение
тиристора анодной группы и тиристора катодной группы.
При активно-индуктивной нагрузке и углах а>л/3, если
<oLd=<x> или отношение <f>LdjRd таково, что обеспечивается
режим непрерывного тока id, среднее значение выпрямленного
напряжения определяется по формуле (2.75). При а = л/2 среднее
значение согласно (2.75) становится равным нулю. На диаграм-
ме рис. 2.20 это соответствует равенству площадей положитель-
ного и отрицательного участков кривой выпрямленного на-
пряжения, что свидетельствует об отсутствии в нем постоянной
составляющей.
Регулировочные характеристики трехфазной мостовой схемы
представлены на р'ис. 2.21. При изменении угла а от 0 до
п/3 регулировочная характеристика для активной и активно-
индуктивной нагрузки описывается формулой (2.75). Начиная
с угла а = л/3 при активной нагрузке, регулировочная харак-
теристика описывается формулой (2.76), согласно которой
среднее значение Ud становится равным нулю при угле а = 2л/3.
При углах а>л/3 и активно-индуктивной нагрузке, обес-
Рис. 2.21. Регулировочные характери-
стики трехфазного мостового выпря-
мителя:
1—при активной нагрузке, 2—при актив-
но-индуктивной нагрузке
лечивающей режим работы
с непрерывным током id, ре-
гулировочная характеристика
аналитически выражается фор-
мулой (2.75). Заштрихованная
область на рис. 2.21 соответ-
ствует семейству регулировоч-
ных характеристик в режиме
с прерывистым током id при
различных значениях (£>LdjRd.
Токи в тиристорах и об-
мотках трансформатора при
активно-индуктивной нагрузке
(<»Ld=oo) определяются из со-
отношений (2.70) — (2.72). Ма-
ксимальные значения напря-
жений на тиристорах при ак-
70
тивно-индуктивной нагрузке в режиме непрерывного тока
равны
UF тах = ^/6 U2 sin а;
Ur пмх = \/б U2.
(2.77)
Расчет действующих и средних значений токов в элементах
схемы при активной и активно-индуктивной нагрузках и в ре-
жиме работы с прерывистыми токами выполняется путем
интегрирования мгновенных значений токов по интервалам
проводимости тиристоров. Ввиду сложности аналитических
выражений примеры таких расчетов здесь не приводятся.
2.2.5. МНОГОМОСТОВЫЕ CXEJVIbl
Среди группы многомостовых схем можно выделить мно-
гомостовые схемы с одним трансформатором И многомостовые
с двумя и более трансформаторами, имеющими разные группы
соединения обмоток. Основное назначение многомостовых
схем—это уменьшение пульсаций выпрямленного напряжения
и улучшение формы тока, потребляемого из питающей сети,
приближение ее к синусоидальной.
На рис. 2.22 представлены два варианта двухмостовых
схем. Первая схема состоит из трехобмоточного трансфор-
матора, соединенного по схеме «звезда / звезда — треугольник»,
и двух трехфазных мостов. Вторая схема имеет два двухоб-
моточных трансформатора, один из которых соединен по
Рис 2 22. Трехфазные двухмостовые выпрямители с параллельным соединением
мостов:
а—с одним трансформатором, б—с двумя трансформаторами
71
Рис. 2.23. Диаграммы токов и напряжений двухмостового неуправляемого
выпрямителя
Рис. 2.24. Трехфазный двухмостовой
выпрямитель с последовательным со-
единением мостов
схеме «звезда/звезда», а другой—по схеме «треугольник-
звезда», и два трехфазных моста.
В обеих схемах вторичные напряжения трансформаторов
сдвинуты по фазе на угол я/6.
Обе схемы работают аналогично. Поэтому остановимся
более подробно на работе одной из них—с двумя трансфор-
маторами. В связи с тем, что первичные обмотки трансфор-
маторов Гр, и Тр2 имеют разные схемы соединений, выпрям-
ленное напряжение одной схемы udl будет иметь пульсации,
сдвинутые по фазе на. угол л/6 относительно пульсаций
выпрямленного напряжения другой схемы (рис. 2.23). Для
уравнивания мгновенных значений выпрямленных напряжений
параллельное соединение мостов производят через уравнитель-
ный реактор УР. В результате суммарное напряжение на
нагрузке будет иметь пульсации, частота которых в 2 раза
выше частоты пульсаций каждой из схем. В данном случае
каждая мостовая схема имеет шесть пульсаций за период,
а суммарное напряжение будет иметь 12 пульсаций за период.
Поэтому данную схему иногда называют 12-фазной*. Разность
мгновенных напряжений воспринимается уравнительным реак-
тором, две обмотки которого расположены на одном маг-
* В этом смысле, т. е. имея в виду число пульсаций за период, трехфазную
мостовую схему иногда называют 6-фазной.
72
нитопроводе. Мгновенные значения выпрямленного напряжения
можно записать в виде
-Hp/2 = «<f2+«p/2, (2.78)
где ир—мгновенное значение напряжения на уравнительном
реакторе.
На рис. 2.23 представлены диаграммы токов (при <oLd=oo>
для 12-фазных схем, из которых видно, что ток, потребляемой
из питающей сети, имеет форму, которая ближе к синусоиде
(показана тонкой линией), чем у однотрансформаторнрй схемы.
Следует отметить, что для нормального функционирования
схемы необходимо выбирать коэффициенты трансформации
трансформаторов Tpt и Тр2 такими, чтобы средние значения
напряжений Udl и Ud2 были р^вны между собой.
На рис. 2.24 представлена двухмостовая схема с последо-
вательным соединением двух мостов. Среднее значение выпрям-
ленного напряжения на нагрузке в данном случае будет равно
Ud=Udl + Ui2> (2.79)
где Udl = Ui2— средние значения напряжения выходе каждого
моста.
Принцип образования 12-фазной схемы выпрямления здесь
также основан на использовании трансформаторов с разными
схемами соединения обмоток. /
Схемы 18- и 24-фазные на практике обычно получаю!
путем параллельного соединения трех и четырех мостов.
2.2.6. ГАРМОНИЧЕСКИЙ СОСТАВ ВЫПРЯМЛЕННОГО
НАПРЯЖЕНИЯ И ПЕРВИЧНЫХ ТОКОВ В СХЕМАХ ВЫПРЯМЛЕНИЯ
Выпрямленное напряжение (см. § 2.1) можно представить
в виде суммы двух составляющих: постоянной, т. е. среднего
значения Ud и переменной представляющей собой перемен-
ное напряжение несинусоидальной формы.
Несинусоидальное напряжение в свою очередь можно предста-
вить в виде суммы гармонических (синусоидальных) напряжений
н~ = У, Umsm(nm<At+§n), (2.80)
1
где п—номер высшей гармоники; /и—число пульсаций в вы-
прямленном напряжении за один период переменного напряже-
ния питающей сети; <о—угловая частота напряжения питающей
сети; Uum—амплитуда n-й гармоники; Э„—начальная фаза
и-й гармоники.
Из (2.80) видно, что частоту составляющих выпрямленного
напряжения можно записать в виде
f=nj\=mnf, - (2.81)
73
где f—частота напряжения питающей cvih; —частота
первой гармоники пульсации.
Например,-при частоте питающей сети /=50Гц частота
первой гармоники пульсации (n—1) будет иметь следующие
значения:
а) 100 Гц для однофазной мостовой схемы (т = 2);
. б) 150 Гц для трехфазнбй схемы с нулевым выводом (т = 3);
в) 300 Гц для трехфазной мостовой схемы (т = 6).
Амплитуда n-й гармоники напряжения для схем, работа-
ющих с углом управления а —0, определяется по формуле [10]
ипт=ил21(т2п2-1). (2.82)
Согласно (2.82) самое большое значение имеет амплитуда
первой гармоники (п=1), а остальные убывают обратно
пропорционально квадрату порядкового номера гармонической
составляющей.
Действующее значение переменной составляющей выпрям-
ленного напряжения можно выразить формулой
и=[ТиП’ (ЭД
V П=1
где Un — действующее значение n-й гармонической состав-
ляющей.
На практике пульсация или содержание переменной со-
ставляющей в выпрямленном напряжении оценивается значе-
нием коэффициента пульсаций кп. Существуют различные
определения коэффициента пульсаций кп, использование ко-
торых зависит от типа измерительной аппаратуры и требова-
ний, предъявляемых, к источнику выпрямленного напряжения.
Наиболее распространенными из этих определений являются
следующие:
fcn=Clm/Cd;
it _max Ud, min .
(2.84)
где Ulm— амплитуда первой гармоники выпрямленного на-
пряжения; udmax, uimin— максимальное и минимальное мгно-
венные значения выпрямленного напряжения.
Разница в значениях коэффициентов пульсаций будет тем
меньше, чем брлее сглаженным является выпрямленное на-
74
пряжение. Например, для трехфазной мостовой схемы
fcn=5,7%; fc'=7%; it "=4,2%.
Задержка подачи на тиристоры управляющих импульсов
относительно моментов естественной коммутации на угол
а приводит к изменению гармонических составляющих в вы-
прямленном напряжении. Из диаграмм выпрямленного напря-
жения, приведенных для рассмотренных схем, видно, что
с ростом угла а увеличивается переменная составляющая
(пульсация растет). В то же время период повторяемости
пульсаций не зависит от угла а.
При условии непрерывности выпрямленного тока id (что
соответствует наиболее распространенному режиму работы
с активно-индуктивной нагрузкой) зависимость между амп-
литудами гармонических составляющих и углом управления
а одинакова для различных схем и дается формулой [13]
I7„m = Ud0cos a 2/(m 2n 2 — 1) ^X+rn^n 2 tg а, (2.85)
где Ud0—среднее значение выпрямленного напряжения
при ос = О.
Формула (2.85) является частным случаем формулы (2.82),
когда а = 0.
Из рассмотренных принципов действия схем выпрямления
следует, что они в большинстве случаев потребляют из
питающей сети несинусоидальный ток. Так, однофазный двух-
полупериодный выпрямитель при активной нагрузке и а=0
потребляет синусоидальный ток (см. рис. 2.5) и высшие гар-
моники тока равны нулю, а при акгивно-индуктивной нагрузке,
когда <aLd = со, ток имеет прямоугольную форму (см. рис. 2.8)
и может б^ть представлен в виде суммы гармонических
составляющих
hO) = ~
itkT
sin Э+-sin 33 + ... -I—sin лЭ
3 n
(2.86)
Из (2.86) видно, что в первичный ток двухполупериодной
схемы (щ = 2) входят только нечетные гармоники. Это следует
из общего закона для порядка высших гармонических состав-
ляющих первичного тока, ’ по которому
п = кт±Х, где к=Х, 2, 3...
Согласно этому закону потребляемый ток содержит, помимо
основной гармоники (первой), высшие, наименьший номер
которых тем выше, чем больше кратность пульсации выпрям-
ленного напряжения т. Если учесть, что амплитуды гар-
монических составляющих 1пт связаны с амплитудой основной
(первой) гармоники Zlm соотношением Inm = Iimln, то увидим,
что с увеличением числа фаз схемы выпрямления (с увеличением
75
числа т) потребляемый из сети ток приближается к синусо-
идальному (так как содержание высших гармоник уменьша-
ется). Снижение содержания высших 'гармоник в первичном
токе в ряде случаев бывает необходимым, так как они
вызывают дополнительные потери и искажают форму кривой
питающего напряжения. Особенно заметно эти эффекты прояв-
ляются при соизмеримости мощностей источника переменного
тока и выпрямителя.
Гармонический состав тока, потребляемого из сети управля-
емым выпрямителем, существенно зависит от характера нагруз-
ки. Если нагрузка активная или активно-индуктивная, но не
обеспечивается режим работы с непрерывным током id, то
с ростом угла а происходит увеличение амплитуд высших
гармойик потребляемого тока (при условии неизменности
амплитуды первой гармоники).
При активно-индуктивной нагрузке и идеально сглаженном
выпрямленном токе (coLd = oo) угол управления а не оказывает
влияния На гармонический состав потребляемого тока. Следует
отметить, что данный вывод справедлив при допущении
о равенстве нулю индуктивных сопротивлений обмоток транс-
форматоров.
2.3. КОММУТАЦИЯ И РЕЖИМЫ РАБОТЫ
ВЫПРЯМИТЕЛЕЙ
2.3.1. КОММУТАЦИЯ ТОКОВ В СХЕМАХ ВЫПРЯМЛЕНИЯ
В § 2.2 процесс перехода тока с одного тиристора на другой
(процесс коммутации) рассматривался как мгновенный. В реаль-
ных схемах из-за наличия в цепи переменного тока индуктивных
сопротивлений, в частности индуктивных сопротивлений обмо-
ток трансформатора, обусловленных в основном потоками
рассеяния в магнитной системе трансформатора, процесс
коммутации имеет определенную длительность.
Эти сопротивления определяются из опыта короткого
замыкания вторичных обмоток трансформатора и при анализе
схем учитываются в виде общих (для каждой фазы) эк-
вивалентных индуктивностей Ls, представляющих собой сум-
марную индуктивность вторичной обмотки и приведенную по
числу витков индуктивность первичной обмотки (см. § 1.1).
Помимо индуктивного сопротивления на процессы ком-
мутации влияет и активное сопротивление обмоток, но его
влияние в нормальных режимах работы значительно меньше.
Поэтому рассматриваем процессы коммутации с учетом только
индуктивных сопротивлений обмоток, щолагая при этом вы-
прямленный ток идеально сглаженным (соГа = оо). Учитывая
одинаковый характер процессов коммутации в различных
76
схемах, остановимся на наи-
более простой схеме выпрям-
ления— однофазной двухполу-
периодной.
На рис. 2.25 представлены
эквивалентная схема однофаз-
ного двухполупериодного вы-
прямителя на тиристорах
и диаграммы напряжений
и токов, поясняющие процесс
коммутации токов. Индуктив-
ные сопротивления обмоток
учтены введением в схему ин-
дуктивностей Ls. Предполо-
жим, что в проводящем со-
стоянии находится тиристор
P'S,. В момент поступает
управляющий импульс на ти-
ристор VS2. , Поскольку по-
тенциал анода тиристора
в этот момент цолджителен
относительно катода, тири-
стор включается.
Начиная с момента оба
тиристора будут включены,
и вторичные полуобмотки
трансформатора оказываются
Рис. 2.25. Процесс коммутации тири-
сторов в однофазном двухполупериод-
ном выпрямителе:
а—эквивалентная схема выпрямителя, б—
диаграммы напряжений , и токов
замкнутыми через них накоротко. Под воздействием ЭДС
вторичных полуобмоток еа и еь в короткозамкнутой цепи
(контуре коммутации) возникает ток короткого замыкания
который является коммутирующим током. Этот ток можно
в любой момент времени, начиная с определить как
сумму двух составляющих—установившейся i'K и свободной
г", которые рассчитываются по следующим соотношениям:
L/2COs(9+a);
(2,87)
;"=x/?£lCosa, (2.88)
U2—действующее значение напряжения вторичной полуоб-
мотки; xs—(nLs.
Результирующий ток короткого замыкания с учетом (2.87)
и (2.88) можно записать в виде
—[cosa—cos(a+3)]. (2.89)
77
Этот ток направлен от полуобмотки b с большим потен-
циалом к полуобмотке а с меньшим потенциалом (на рис. 2.25
указано направление тока iK при включении тиристора VS?
и выключении тиристора VSi). Учитывая, что выпрямленный
ток ia при <nLd= oo в период коммутации остается неизменен-
ным, можно записать для узла О или О' следующее уравнение
токов:
ivsi +/FS2 =Z<f=const, (2.90)
где —среднее значение выпрямленного тока или тока
нагрузки.
Уравнение (2.90) справедливо для любого момента времени.
Пока ток проводит только тиристор KS), получаем ivsi — h
и z>52=0. На интервале одновременной проводимости тири-
сторов VSi и VS? (интервал коммутации тока с тиристора
VSi на тиристор И.У>) ivsi = h — iK и zVs2 = i«. Когда ток будет
проводить только тиристор VS:, получим:
il/S2 = Id', Ivsi=d-
Из рис. 2.25 видно, что в интервале от &i до &2 ток
zrs2 плавно увеличивается, a i^s2 уменьшается. Когда ток
z’rs2 станет равным Id, а ток iySi снизится до нуля, тиристор
VSi выключится и ток нагрузки будет продолжать протекать
только через тиристор VS2.
Длительность интервала коммутации характеризуется обыч-
но углом коммутации у, который может быть определен из
следующего уравнения [10]:
Ц— [cos ос — cos (а + у)]. (2.91)
Обозначив угол коммутации у при угле ое = О через уо,
можно записать
1 -cosyo=/</xJ/v/2I72. (2.92)
Подставляя в исходное уравнение значение уо, получаем
y = arccos[cosa+cosy0—1] —а. (2.93)
Согласно (2.93) с ростом угла а уменьшается угол ком-
мутации у. Физическая сущность этого явления состоит в том,
что с увеличением угла а растет напряжение, под действием
которого развивается ток iK в контуре коммутации и, следова-
тельно, до значения Id он нарастает быстрее.
Следует отметить, что длительность протекания тока в ти-
ристорах по сравнению с идеализированной схемой увеличива-
ется на угол у и становится равной л+у.
Процесс коммутации оказывает непосредственное влияние
на выпрямленное напряжение Ud, так как на интервалах
78
коммутации мгновенное значение выпрямленного напряжения
в указанной схеме снижается до нуля (см. рис. 2.25). В резуль-
тате этого происходит уменьшение среднего значения выпрям-
ленного напряжения на
АС4=-
п
Jllh sin
а
Из (2.92) — (2.94) можно получить
A.Ux-Idxs/n.
(2.94)
(2.95)
Среднее значение выпрямленного напряжения с учетом
(2.95) равно
Ua = UaoCOSu — IaXs/K.)
(2.96)
2.3.2. ВНЕШНИЕ ХАРАКТЕРИСТИКИ ВЫПРЯМИТЕЛЕЙ
Внешней характеристикой выпрямителя называется зависи-
мость выпрямленного напряжения от среднего значения тока
нагрузки, т. е. Ud—f(Id). Внешняя характеристика определяется
внутренним сопротивлением выпрямителя, которое приводит
к снижению выпрямленного напряжения с ростом нагрузки.
Снижение напряжения обусловлено активным сопротивлением
схемы АСК, падением напряжения в тиристорах ALVs и ин-
дуктивным сопротивлением А(7Х, которое проявляется при
процессах коммутации.
Соответственно внешнюю характеристику выпрямителя (при
<nLd=oo) можно записать в виде следующего уравнения:
t7d=CdoCosa-ACR-ACFS-At4. (2.97)
Согласно (2.97) выходное напряжение выпрямителя снижа-
ется по-мере увеличения тока нагрузки Ц за счет внутреннего
падения напряжения. В зависимости от мощности выпрямителя
влияние активных и реактивных элементов схемы в этом
процессе различно. Обычно в маломощных выпрямителях
преобладает влияние активного сопротивления обмоток транс-
форматора, а в мощных— индуктивного сопротивления рас-
сеяния трансформатора.
Следует отметить, что при значениях тока нагрузки, не
превышающих номинальное, внутреннее падение напряжения
выпрямителей, как правило, составляет не более 15—20%
напряжения Udo. Однако при перегрузках и режимах, близких
к короткому замыканию, становится существенным влияние
внутренних сопротивлений схемы. Кроме того, в трехфазных
и многофазных схемах при перегрузках изменяется характер
электромагнитных процессов, влияющих на ход внешней харак-
79
теристики. В качестве примеров ниже рассматриваются внешние
характеристики однофазной и трехфазной мостовых схем
в диапазоне от холостого хода до короткого замыкания при
идеально сглаженном выпрямленном токе (со£<» = оо).
Внешняя характеристика однофазного выпрямителя. Соста-
вляющие падения напряжения удобно представить в от-
носительных единицах, приняв в качестве базисного значения
напряжения
иао^2у/2и2/п.
Тогда относительные падения напряжения
записаны в виде j п
I
2y/2U2
At7x. = 70xs/2V2C/2,
(2.98)
могут быть
(2.99)
где 7?ф = 7?ф1 + Лф2-~эквивалентное активное сопротивление фа-
зы трансформатора; — активное сопротивленце фазы пер-
вичной обмотки, приведенное ко вторичной обмотке; 7?ф2 —
активное сопротивление фазы вторичной обмотки (полуобмотки
в схеме ро средней точкой).
При записи уравнения (2.97) для мостовой однофазной
схемы значения At/rs и At/X, приведенные в (2.99), удваиваются,
так как ток проходит по двум тиристорам одновременно
и в процессе коммутации ток /ж распределяется между двумя
контурами коммутации.
Для записи в относительных единицах уравнения (2.97)
в качестве базисного значения тока используют ток короткого
замыкания схемы (при 7?rf=0), который для схемы со
средней точкой равен
Д,ж = 2У2С/2/х,. (2.100)
Уравнение (2.97) с учетом (2.99) и (2.100) принимает вид
Ud,=cosa—I4
14-—(я-у)
х.
—At/ ys-
(2.101)
На рис. 2.26, а представлено семейство внешних харак-
теристик однофазной схемы со средней точкой (без учета
падений напряжения в тиристорах и активных сопротивлениях)
для различных углов а в диапазоне от холостого хода до
короткого замыкания.
Внешние характеристики трехфазиого мостового выпрямителя.
Если для однофазных выпрямителей внешняя характеристика
описывается одним уравнением во всем диапазоне изменения
80
Рис. 2.26. Внешние характеристики выпрямителей:
а—однофазный двухполупериодвый или мостовой; б— трехфазный мостовой
тока нагрузки, то в трехфазном мостовом выпрямителе
с ростом тока нагрузки изменяются режимы работы схемы.
По характеру протекания электромагнитных процессов в схеме
выделяют три различных режима работы, которые далее
кратко рассматриваются без учета падения напряжения в ти-
ристорах и активных сопротивлениях схемы.
В режиме I внешняя характеристика линейна (рис. 2.26,6),
а порядок работы тиристоров аналогичен рассмотренному
в § 2.2« В этом режиме уравнение внешней характеристики
в относительных единицах имеет вид
* J7d.=cosa—
где
Ud»—Ud/Udo—itUd/(3y/6U2)’t
I^h/I^xtId/(^2U2.)
Режим II возникает с ростом нагрузки при достижении
углом коммутации л/3, после чего рост нагрузки не вызывает
увеличения угла у, который остается равным я/3. Однако
начало процесса коммутации будет происходить с задержкой
на некоторый угол а', называемый дополнительным углом
управления. В этом режиме начало коммутации тиристоров
в одной группе совпадает по времени с концом коммутации
в другой группе. Уравнение внешней характеристики во втором
режиме имеет следующий вид:
4 4
L (2.104)
(2.102)
(2.103)
6 № 3658
81
Уравнение (2.104) представляется дугой эллипса с равными
полуосями (ее продолжение за пределы режима II показано
на рис. 2.26,5 штриховой линией). ' z I
Режим III возникает с ростом нагрузки при появлении
«двойного перекрытия» в работе тиристоров, когда чередуются
одновременные проводимости трех и четырех тиристоров
схемы. В этом режиме угол у снова начинает расти, становясь
больше л/З, а угол а' остается постоянным и равным h/6.
В этом режиме внешняя характеристика вновь становится
линейной и ее уравнение имеет вид
= V3(1при а <л/6; ) (2 105)
C/d« = >x/3[cos(a —л/6) — /<р] при а>л/6. J
Однако не всегда перечисленные режимы будут иметь
место при изменении тока нагрузки от холостого хода до
короткого замыкания. Все три указанных режима могут
возникнуть только при работе с углами управления 0<а<л/6.
При работе с углами л/6<а<л/3 будут режимы I и III. При
а>л/3 возможен только режим III.
2.4. ЭНЕРГЕТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ВЫПРЯМИТЕЛЕЙ И СПОСОБЫ ИХ УЛУЧШЕНИЯ
2.4.1. КОЭФФИЦИЕНТ МОЩНОСТИ И КПД ВЫПРЯМИТЕЛЕЙ
При определении КПД выпрямителя следует учйтывать,
что понятие мощности, выделяемой в цепи нагрузки по-
стоянного тока, может иметь двоякий смысл. С одной
стороны—это мощность Рл, определяемая как произведение
постоянных составляющих (средних значений) выпрямленного
тока 1Л и напряжения Ud или Pd—UdId. С другой стороны,
как отмечалось в § 2.1, действительная полная мощность
P'd, выделяемая в нагрузке, определяется как средняя
мощность от мгновенных значений тока id и напряжения
ud в нагрузке за период повторяемости формы выпрямленного
напряжения или
1 т
P'd=-$udiddt, (2.106)
1 о
где Т—период повторяемости формы выпрямленного напряже-
ния. Разница в значениях этих мощностей обусловлена наличи-
ем пульсаций в выпрямленном напряжении, а следовательно,
и в токе нагрузки. Так, если обозначить пульсации в виде
переменных составляющих Awd и &id, то можно записать
82
\ 1 J
Pd=Pd+-$ &udMddt. (2.107)
I "* 0
j Очевидно, что в случае идеально сглаженного тока нагрузки,
ковда &ud и A id равны нулю, значения мощностей
Рй и P'd совпадают.
На практике мощность P'd при значительных пульсациях
выпрямленного напряжения может быть намного больше Pd.
При определении КПД выпрямителя этот факт необходимо
учитывать. С энергетической точки-зрения -более правильно
расчет КПД вести относительно мощности P’d, хотя иногда
используется и значение Pd, рассматриваемое в некотором
смысле как «полезная» мощность постоянного тока. В послед-
нем случае составляющую мощности &Pd, обусловленную
пульсацией напряжения на нагрузке, относят к дополнительным
потерям.
Основные потери активной мощности имеют место в следу-
ющих частях силовых выпрямителей: в трансформаторе APT,
тиристорах выпрямителя &pvs и во вспомогательных устрой-
ствах (системах управления, защиты, охлаждения, сигнализации
и др.) АРвсп- С учетом этих составляющих для выпрямителя
с малой пульсацией тока id (когда можно считать Pd~Pd)
КПД определяется из следующего соотношения:
' UdId+M\ + bPvs+bPBca' v >
Изготовляемые в настоящее время выпрямители средней
и большой мощности на тиристорах имеют КПД в пределах
от» 0,7 до 0*9.
Коэффициентом мощности в установках переменного гока
называется отношение активной мощности к полной. Коэф-
фициент мощности позврляет определить полную мощность,
потребляемую преобразователем электрической энергии, если
известны активная мощность нагрузки преобразователя и его
КПД. При определении коэффициента мощности выпрямителя
необходимо учитывать несинусоидальность' потребляемого им
из сети тока. На рис. 2.27 представлены диаграммы напряжения
wc питающей сети и тока гс, потребляемого однофазным
управляемым выпрямителем из сети при допущении идеальной
Рис. 2.27. Диаграммы сетевого на-
пряжения и тока, потребляемого
однофазным двухполупериодным
выпрямителем при активно-индук-
тивной нагрузке (mLd — oo)
83
1
сглаженности выпрямленного тока (<o£d = oo) и отсутствия угла
коммутации. Из несинусоидального тока ic может быть
выделена первая гармоника icl, отстающая от напряжения
ис на угол (pi- Соответственно активная мощность Р, потреб-
ляемая выпрямителем, выражается следующей формулой: '
P=HcZclcosq>1, (2.lb9)
где Uc—действующее значение напряжения сети, питаюйдей
выпрямитель; 1с1 — действующее значение первой гармоники
тока, поступающего из сети; <рг—угол сдвига первой гармо-
ники тока по отношению к напряжению питающей сети.
Полная мощность, потребляемая выпрямителем, на ос-
новании общего определения может быть записана в виде
S=UCIC—UC I2ci+ f IL, (2.И0)
V n = 3
где Ic—действующее значение несинусойдального тока, посту-
пающего из сети; 1е„—действующее значение его n-й гармоники.
Коэффициент мощности выпрямителя % — это отношение
активной мощности к полной, и в соответствии с формулами
(2.107) и (2.108) он может быть выражен следующим соот-
ношением:
/..есф. . (21И)
Степень несинусоидальности тока в данном случае харак-
теризуется коэффициентрм искажения V, определяемым как
отношение действующего значения первой (основной) гармо-
ники тока к действующему значению всего тока. С учетом
этого коэффициента (2.111) принимает вид
X = vcos<p!. ' (2.112)
Для несинусоидального режима помимо активной мощности
Р и реактивной мощности Q вводится • понятие мощности
искажения Т, определяемой как
Г= (2.113)
Мощность искажения Т характеризует степень различия
в формах кривых тока и напряжения. Для рассматриваемого
случая форма кривой напряжения питающей сети — синусо-
идальная, а тока—прямоугольная, поэтому мощность Т от-
лична от нуля.
Из рис.'2.27 видно/ что для идеализированной схемы
однофазного выпрямителя (при «>£4=00 и угле коммутации
84
у = 0) ток icl отстает от напряжения ис на угол (pi, равный
углу а. Поэтому коэффициент мощности можно выразить как
, X = vcosa. z (2.114)
В идеализированной схеме трехфазного мостового выпрями-
теле углы а и <р! также равны и коэффициент мощности
определяется по (2.114).
Коэффициенты искажения согласно [10] при прямоугольной
форме Потребляемого тока равны
v = 2x/2/n—для однофазной мостовой схемы;
v = 3/л;—для трехфазной мостовой схемы.
Для более точного определения коэффициента мощности
необходимо учитывать угол коммутации у. В этом случае
coscp! может быть определен в виде
cos а+cos (а+у)
cos<p!=------------ • (2.115)
Угол коммутации у также влияет на коэффициент V, но
в большинстве режимов работы, когда у не превосходит 30°,
это влияние незначительно.
Из вышеизложенного следует, что коэффициент мощности
выпрямителя носит индуктивный характер (выпрямитель по-
требляет из сети реактивную мощность) и в основном
определяется углом управления а.
2.4.2. УЛУЧШЕНИЕ КОЭФФИЦИЕНТА МОЩНОСТИ
УПРАВЛЯЕМЫХ ВЫПРЯМИТЕЛЕЙ
С ростом угла управления а увеличивается реактивная
мощность Q, потребляемая выпрямителем из сети, а его
коэффициент мощности согласно (2.114) становится меньше,
т. е. ухудшается. Это явление снижает технико-экономические
характеристики электрической сети, питающей управляемые
выпрямители. Поэтому на практике часто принимают меры
по повышению коэффициента мощности управляемых выпрями-
телей.
Простейшим способом повышения коэффициента мощности
является установка источников реактивной мощности, например
конденсаторов, на входе выпрямителя. Этот способ не эко-
номичен, так как он связан с введением дополнительного
дорогостоящего оборудования. Другим, сравнительно простым
способом является использование в выпрямителе трансфор-
матора с отпайками на различные напряжения. В этом случае
вместо увеличения угла управления а< при регулировании
выходного напряжения переключают тиристорную схему на
отпайку обмотки трансформатора с более низким напряжением.
Такое переключение вызывает изменение выпрямленного на-
85
Рис. 2.28. Однофазный выпрямитель
с нулевым диодом*
а—схема, б—диаграммы напряжений и то-
ков
Рис. 2.29 Выпрямитель с искусствен-
ной коммутацией тиристоров-
а—схема, б—диаграммы напряжений и то-
ков
пряжения, эквивалентное увеличению угла а. Поскольку пе-
реключение с одного отвода на другой может осуществляться
только дискретно, а не плавно, то данный способ обеспечивает
только грубое регулирование выпрямленного напряжения. Кро-
ме того, наличие переключающих устройств, обычно механиче-
ского типа, снижает надежность и долговечность самого
устройства.
Для повышения коэффициента мощности однофазных вы-
прямителей может быть успешно использована схема с нулевым
диодом (рис. 2.28). Принцип действия такой схемы во многом
подобен принципу действия однофазной двухполупериодной
схемы. Однако наличие нулевого диода изменяет характер 4
электромагнитных процессов, протекающих в схеме. Так, если
в схеме без нулевого диода ток нагрузки id после прохождения *
напряжения ud через нуль в момент Э=л продолжает протекать
через тиристор KS'j (см. рис. 2.10), то нулевой диод И£>0 j
в этот момент включается (потенциал точки становится j
положительным по отношению к потенциалу точки а), а ти- 1
ристор f'S1 выключается. Ток id будет протекать через нулевой 1
диод до тех порг пока не будет подан (с задержкой на угол ]
86 1
а) управляющий импульс на тиристор VS2, после чего VS2
включается, a VDq выключается. На интервале проводимости
диода VDq цепь постоянного тока отключена от трансфор-
матора Тр и ток id в цепи нагрузки поддерживается за счет
энергии, накопленной в сглаживающем реакторе Ld. Отключе-
ние цепи постоянного тока от вторичной обмотки трансфор-
матора предотвращает возврат энергии, запасенной в индук-
тивности Ld, в питающую сеть, уменьшая тем Самым значение
реактивной мощности, потребляемой выпрямителем. На
рис. 2.28 представлен ток первичной обмотки трансформатора
zc, где штриховой линией изображена его первая гармоника,
сдвинутая на угол <рх относительно напряжения питающей
сети ие. Если принять коммутацию тиристоров мгновенной
(у = 0), как это изображено на рис. 2.28, то
a
cos<p«cos~.
(2.116)
Следовательно, благодаря введению дополнительного диода
коэффициент мощности выпрямителя улучшается".
Основным недостатком схемы с нулевым диодом является
увеличение искажения формы тока zc, потребляемого из сети.
Степень искажения формы тока ic пропорциональна углу
а и может быть уменьшена за счет его ограничения.
Повышение коэффициента мощности может быть достиг-
нуто также за счет использования схем с неполным числом
тиристоров. Например, в схеме однофазного мостового вы-
прямителя, содержащего два тиристора и два диода (по два
в одной группе или в одном плече), коэффициент мощности
такой же, как и в схеме с нулевым диодом. Это объясняется
тем, что кривые выходного напряжения и потребляемого тока
в схеме с неполным числом тиристоров и схеме с нулевым
диодом Подобны. Следовательно, первая гармоника потребля-
емого тока сдвинута по фазе относительно сетевого напряжения
на угол <р = а/2, т. е. коэффициент мощности в схеме с неполным
числом тиристоров соответствует (2.116).
Потребление реактивной мощности управляемым выпрями-
телем из> сети зависит от угла а. Если осуществлять регулирова-
ние выходного напряжения за счет опережающего угла а, то
выпрямитель будет работать в режиме с емкостной мощностью,
т. е. генерируя реактивную мощность в сеть [12]. Подобный
режим возможен при такой коммутации тиристоров, когда
ток с тиристора, заканчивающего свою работу, переходит на
очередной тиристор до наступления момента естественной
коммутации, т. е. до а=0. Коммутация тока в указанном
режиме получила название искусственной или принудительной
коммутации. В настоящее время существует много различных
87
способов осуществления искусственной коммутации тиристоров,
часть из которых рассматривается в § 3.2.
На рис. 2.29, а приведена схема трехфазного выпрямителя
с нулевым выводом и устройством искусственной коммутации
тиристоров УК. Устройство позволяет в любой момент
времени выключить каждый из тиристоров, приняв при этом
ток нагрузки 1Л на себя. Предположим, что ток нагрузки
id проводит тиристор VSt. В момент времени 9} (рис. 2.29,6)
УК выключает тиристор VSr и ток нагрузки начинает протекать
через УК. В момент времени Э2, после того как тиристор
VSr восстановит свою запирающую способность, подается
управляющий импульс на тиристор VS2- Далее в момент
времени Э2 происходит принудительное выключение тиристора
VS2, а в момент Э3 — включение тиристора VS3. Так как
включение тиристоров схемы происходит на угол а раньше
моментов естественной коммутации, то ток, потребляемый из
сети, как видно из рис. 2.29, б, будет опережать сетевое
йапряжение также на угол а (если считать коммутацию
мгновенной).
Опережающий ток соответствует емкостному характеру
реактивной мощности выпрямителя, которая определяется
углом а. Основные расчетные соотношения для схем выпрям-
ления, работающих с опережающими углами а, сохраняются
такими же, как и для схем, работающих в режиме с от-
стающими углами а.
Использование искусственной коммутации в ряде случаев
позволяет получить значительный экономический эффект при
сравнительно небольшом усложении выпрямителя в целом.
Искусственная коммутация позволяет значительно расши-
рить область возможных режимов выпрямительных схем,
обеспечивающую в общем случае возможность работы тири-
сторного преобразователя в четырех возможных квадрантах
(см. рис. 3.3). Работа в таких режимах дает возможность
регулировать потоки реактивной мощности между сетью
и преобразователем. Большую перспективу в этом отношении
имеют схемы преобразователей, выполненные на основе запира-
емых тиристоров (ЗТ) (рис. 2.30). При использовании ЗТ режим
искусственной коммутации практически осуществляется вы-
ключением соответствующих ЗТ подачей на них управляющих
импульсов. Однако при этом необходимо учитывать, что сеть, '
питающая выпрямитель, содержит фазовые индуктивности (на
рис. 2.30—La, Lb и £с). Поэтому принудительное выключение^
ЗТ связано с необходимостью сброса энергии, накопленной
в фазовых индуктивностях, в какие-либо накопители, обычно
конденсаторы (на рис. 2.30—СаЬ, и С^,). ,
С другой стороны, алгоритм управления ЗТ VS3—VS6i
должен учитывать энергию, накопленную в реакторе
88
Рис. 2.30. Трехфарный преобразователь на запираемых тиристорах
Например, для того, чтобы обеспечить снижение фазных токов
до нуля при Ld=0, достаточно было бы просто выключить
ЗТ (Й5] — VS6). Однако при Ld^0 такое выключение приведет
к недопустимым перенапряжениям, обусловленным энергией,
запасенной в Ld. Поэтому при Ld^0 для обнуления значений
фазных токов необходимо оставить в проводящем состоянии
по меньшей мере два тиристора из одного плеча, например
VSY и К$4. Включенное состояние этих тиристоров обеспечит
протекание тока Ld реактора Ld в контуре, замкнутом только
на нагрузку 7?н, минуя сеть питания.
Преобразователь, выполненный по такой схеме, является
универсальным в смысле реализации возможных режимов
работы как с отстающими, так и с опережающими углами
управления {11].
2.5. ОСОБЕННОСТИ РАБОТЫ
НА ’ЕМКОСТНУЮ НАГРУЗКУ
ВЫПРЯМИТЕЛЕЙ
И ПРОТИВО-ЭДС
Емкостная нагрузка характерна для выпрямителей, пита-
ющих электронную аппаратуру. Типичными представителями
современной электронной аппаратуры являются различного
рода радиотехнические устройства, вычислительные комплексы,
аппаратура измерений и др.
К источникам питания эле-тронной аппаратуры обычно
предъявляются высокие требования по качеству выходных
параметров. Они должны иметь высокую стабильность на-
пряжения, низкий уровень пульсаций и помех в широком
частотном диапазоне, малую зависимость выходного напряже-
ния от температуры и др.
Для сглаживания пульсаций в маломощных выпрямителях
широко используются емкостные фильтры, обладающие хо-
89
Рис. 2.31. Однофазный двухполупери-
одный выпрямитель с противо-ЭДС
рошими массогабаритными
показателями при условии ис-
пользования их на выходе вы-
прямителей с малыми токами
нагрузки. Наличие емкостного
фильтра обусловливает ем-
костный характер нагрузки
выпрямителя, который суще-
ственно изменяет режим ра-
боты схемы выпрямления.
Поскольку работа выпря-
мителя с емкостным харак-
тером нагрузки сходна с ра-
ботой его на противо-ЭДС,
рассмотрим сначала работу
выпрямителя на противо-ЭДС,
а затем на емкостную нагруз-
ку. Следует отметить, что на-
грузка с противо-ЭДС неха-
рактерна для электронной ап-
в цени нагрузки: паратуры.
а—схема, б-диаграммы выпрямленного ТИПИЧНЫМИ Примерами на-
НаПрЯЖсНИЯ Н ТОКа х т-г^~у
грузки с противо-ЭДС могут
служить аккумуляторная батарея, заряжаемая от выпрямителя,
двигатель постоянного тока и др.
Рассмотрим влияние противо-ЭДС на электромагнитные
процессы в схеме выпрямления на примере однофазной схемы
со средней точкой, в цепь постоянного тока которой включена
аккумуляторная батарея с ЭДС Ео и внутренним сопротив-
лением Rm (рис. 2.31, а). Обычно в подобных схемах в цепь
постоянного тока включается также индуктивность Ld. Пред-
положим, что ключ К замкнут, т. е. индуктивность Ld от-
сутствует. В этом случае ток id в нагрузке начинает протекать,
когда мгновенное значение выпрямленного напряжения ud пре-
вышает ЭДС Ео (рис. 2.31, б), так как только при этом
условии к диодам схемы будет приложено прямое напряжение
и они будут проводить ток.
Ток id, протекающий в этом случае в цепи нагрузки
и являющийся для аккумуляторной батареи зарядным, можно
выразить следующей формулой, приняв за начало отсчета
максимум выпрямленного напряжения:
. _ud—Ео__у/2 t/2cos0—Ео
-**вн -*хвн
(2.117)
Очевидно, что интервал проводимости диодов будет за-
висеть от соотношения амплитуды ' напряжения вторичной
90
обмотки трансформатора ^/2 U2 и противо-ЭДС Ео. Обозначим
половину интервала проводимости полупроводниковых при-
боров через угол 0, который называется углом отсечки тока.
Тогда интервал проводимости диодов А. можно записать в виде
А.=20. (2.118)
Учитывая, что отсчет ведется от максимума выпрямленного
напряжения, можно записать
^/2 172cos0 = Eo,
или
(2.119)
>
0 = arccos —7=—.
V2t/2 J
Подставляя (2.119) в (2.117), получаем следующее выражение
для мгновенного значения тока в нагрузке:
/2
zd=— C2(cos3—cos0).
*'вн
(2.120)
Среднее значение выпрямленного тока (постоянную состав-
ляющую) можно определить из соотношения
1 *
/d = -jzdd0. (2.121)
л о
Подставляя в (2.121) соотношение (2.120), получаем
Ц=- f (cos0—cos0) —2- (sin 0 — 0cos0).(2.122)
ft —0* ft^BH
Для схемы /и-фазного выпрямления уравнение (2.122) при-
нимает -ВИД
Id=™^(sin9-0Cos9), (2.123)
где U$m — амплитуда фазного напряжения вторичной обмотки
трансформатора.
Среднее значение тока, протекающего через диод в однофаз-
ной схеме, равно
7F^ = Zd/2. (2.124)
Максимальное значение обратного напряжения на диоде
URmax = 2y/2U2. (2.125)
Таким образом, с ростом противо-ЭДС длительность
прохождения тока через диоды в течение каждого полупериода
91
(для однофазной двухполупериодной схемы) уменьшается.. Это
приводит к тому, что при равных средних значениях токов,
протекающих через диод, их действующие значения будут
в режиме работы с меньшими углами 0. Это ухудшает
использование диодов по току. Одновременно по тем же
причинам ухудшается использование трансформатора, расчет-
ная мощность которого должна соответствовать работе с ми-
нимальными значениями 0.
Если в цепь постоянного тока включена индуктивность
(ключ К разомкнут), то пульсация выпрямленного тока
уменьшается и при ®Ld=oo становится равной нулю (вся
пульсация напряжения ud оказывается приложенной к индук-
тивности Ld). В этом случае можно записать
- (2-126)
••'вн
где Ud—среднее значение выпрямленного напряжения.
Формула (2.126) справедлива и для управляемых выпрями-
телей при условии ®Ld=cc.
Рассмотрим теперь4 работу трехфазного выпрямителя на
емкость Сн и активное сопротивление /?н. При этом введем
следующие допущения; индуктивность рассеяния и ток намаг-
ничивания трансформатора равны нулю; диоды имеют активное -
постоянное сопротивление RVd (значение, соответствующее
линеаризованной вольт-амперной характеристике диода). На
рис. 2.32, а представлена эквивалентная схема трехфазного вы-
прямителя со средней точкой, в которой указаны активные
сопротивления каждой фазы выпрямителя R$. Сопротивление
/?ф определяется по формуле
Лф = -Лф1 + Лф2 + -^ко, (2.127)
где Лф! —сопротивление фазы первичной обмотки трансформато-
ра, приведенное ко вторичной обмотке; R^2—сопротивление фазы
вторичной обмотки; RVD—сопротивление диодов прямому току.
Рис. 2.32. Трехфазный выпрямитель со средней точкой, работающий на
активно-емкостную нагрузку: 1
а—схема, б—диаграммы выпрямленного напряжения и тока. .;£:
92
Допустим также, что емкость Сн»1/3со /?н.
Это допущение дает возможность пренебречь пульсацией
выпрямленного напряжения на нагрузке ин и считать его
идеально сглаженным. Напряжение на нагрузке (на конден-
саторе) ин в данном случае можно рассматривать как противо-
ЭДС (рис. 2.32,6). Поэтому аналогично (2.117) можно записать
мгновенное значение выпрямленного тока id в следующем виде:
.^U.cosD-u. _ р128)
Лф
где U2—действующее значение фазного напряжения вторичной
обмотки трансформатора.
Среднее значение выпрямленного тока равно среднему
значению тока нагрузки Id, так как в установившемся режиме
среднее значение тока в цепи емкости Сн равно нулю.
Соответственно с учетом (2.119) и (2.123) среднее значение
выпрямленного тока в данной схеме может быть выражено
следующими соотношениями:
Id = - (sin 0 — 0 cos 0);
тс
Совместное решение системы уравнений (2.129) имеет вид
tgO- 0 = л/?ф/(3/?н). (2.130)
Уравнение (2.130) является исходным для приближенного
расчета выпрямителей с емкостной нагрузкой. Для решения
его, например, можно использовать графоаналитический метод,
изложенный в [12].
2.6. СГЛАЖИВАЮЩИЕ ФИЛЬТРЫ
Для уменьшения пульсаций выпрямленного напряжения на
выходе выпрямителя обычно устанавливают сглаживающие
фильтры. Эффективность .сглаживающего фильтра оценивают
по его способности уменьшать пульсацию, т. е. по значению
коэффициента сглаживания зс.
Коэффициентом сглаживания sc называют отношение ко-
эффициентов пульсаций входного (до фильтра) и выходного
(после фильтра) напряжений:
, sc = k'a/k", (2.131)
где
k'n=U'lm/Ud;
k" = U'{m/Ud;
93
U'lm и U—амплитуды первых гармоник - выпрямленного
напряжения до и после фильтра*.
Требование к значению коэффициента зс фильтра является
основным при проектировании. Помимо этого, к фильтрам
предъявляют требования по массе, габаритам, влиянию на
переходные процессы в динамических режимах (например,
сбросах или набросах нагрузки) и др.
Сглаживающие фильтры можно разделить на два типа:
пассивные и электронные (активные). Пассивные фильтры
обычно состоят из реактивных элементов: реакторов и кон-
денсаторов. Электронные фильтры содержат электронные эле-
менты, например транзисторы. Тип пассивных фильтров яв-
ляется наиболее распространенным.
В зависимости от числа элементов и способа их соединения
различают следующие основные типы пассивных фильтров:
а) простые фильтры — однозвенные (индуктивный фильтр,
емкостный фильтр, Г-образные, П-образные) и многозвенные;
б) сложные фильтры, состоящие обычно из нескольких
звеньев с резонансной настройкой отдельных цепочек.
Рассмотрим некоторые получившие наибольшее распрост-
ранение типы пассивных сглаживающих фильтров, схемы
которых приведены на рис. 2.32. Следует отметить, что
фильтры с индуктивным входом применяются преимущест-
венно в выпрямителях средней и большой мощности, а с ем-
костным— в маломощных при высоком сопротивлении на-
грузки.
Индуктивный фильтр (L-фильтр. рис. 2.33, а) представляет
собой реактор, включенный между схемой выпрямления и на-
грузкой. Напряжение на выходе выпрямителя содержит посто-
янную составляющую Ud $ переменную и~. Пренебрегая измене-
нием этих составляющих от нагрузки, можно заменить ими
полупроводниковую часть схемы выпрямителя, т. е. считать,
что на входе фильтра включены два последовательно со-
единенных источника напряжения: с постоянной ЭДС Ud и пе-
ременной ЭДС и~. Постоянная ЭДС не оказывает влияния на
пульсацию, а в качестве переменной ЭДС можно рассматривать
только ЭДС основной гармоники пульсации Ulm (первой
гармоники переменной составляющей), так как они преимущест-
венно определяют коэффициент пульсации. Тогда согласно
определению коэффициента сглаживания можно записать
sc = k'n/k'n=U'lm/U'[m. (2.132)
Амплитуду переменной составляющей на нагрузке для
/.-фильтра можно выразить в виде соотношения
* Возможно использование и других из указанных в (2.84) определений
коэффициента пульсаций.
94
в)
Рис. 2.33. Схемы выходных фильтров выпрямителей
где —амплитуда переменной составляющей тока нагрузки;
и»!—частота основной гармоники пульсации.
Подставляя (2.113) в (2.132), получаем
y/^l^d)2 + Rd
(2.134)
Из (2.134^ следует, что с приближением к режиму холостого
хода (с увеличением Rd) коэффициент сглаживания стремится
к единице. Поэтому расчет индуктивности фильтра
Ld производят для режима минимальной нагрузки (Rdmax):
Ld=^^J^\. (2.135)
а>!
Емкостный фильтр (С-фильтр, рис. 2.33,.б) представляет
собой конденсатор, включаемый на. выходные шины выпрями-
теля. Емкостные фильтры используются преимущественно в ма-
ломощных выпрямителях. Расчет необходимой емкости кон-
денсатора в микрофарадах при заданном коэффициенте сгла-
живания 5С можно производить по приближенной формуле
C»n5c106/®iMn. (2,136)
Для вычисления более точного значения емкости следует
учитывать внутреннее сопротивление схемы выпрямления, ис-
пользуя методику, указанную §'2.5. *
95
Однозвенный Г-образный ZC-фильтр (рис. 2.33, в) является
наиболее распространенным типом фильтра благодаря своей,
простоте и эффективности.' Для этого фильтра можно записать
TJ' 7"
(2.137)
где Z' и Z" —модули комплексных сопротивлений:
7, J Rd
Z — /(DiZ ,+-—-——
и
у >/_Rd
Подставляя (2.134) в (2.132), получаем
sc = Z'/Z". (2.138)
Обычно выбирают емкость конденсатора так, чтобы
Го]С»- . В этом случае (2.137) принимает вид
Rd
sc = ®iZaC-l. (2.139)
Из (2.138) при заданных sc й «ь находят произведение LdC.
Выбор конкретных значений Ld и С производится из других
требований, предъявляемых к фильтру. Такими требованиями .
обычно являются обеспечение непрерывности тока id или
обеспечение минимума массы, габарита и стоимости. В ряде
случаев при этом принимают во внимание факторы, учиты- ,
вающие влияние параметров фильтра на динамические и ре-
гулировочные характеристики преобразователя, например ам-
плитудно-частотную и фазочастотную характеристики. Кромер
того, следует исключить возможность возникновения резонанс-
ных явлений на частотах, близких к частоте пульсации. Для
этого рекомендуется обеспечить соотнбшение ;
(01>г2тф, (2.140)
где ®ф== 1/^/Z^C—собственная угловая частота фильтра.
Из изложенного следует, что в общем случае выбор
параметров Z и С при рассчитанном значении их произведет
LdC является сложной многофакторной задачей, решен
которой требует применения специальных методов оптимизацЕ
указанных параметров и может быть'реализовано с помощь
ЭВМ.
' Наиболее простым при проектировании с точки зрей
расчета Ld и С является требование по обеспечению непрерь
ности тока характерное для фильтров мощных выпрям
телей. В этом случае Ld рассматривается как критическ
96
значение индуктивности LdKp, обеспечивающее граничный не-
прерывный режим тока id.
Для того чтобы выпрямленный ток id не прерывался,
необходимо выполнение условия
(2.141)
где Id—постоянная составляющая выпрямленного тока.
Индуктивность, при которой имеет место граничный режим
прерывистого и непрерывного токов (т. е. Id — 11т), называется
критической Ld кр. С учетом того, что обычно a)LdKp»1 Ito^C,
индуктивность LiKp может быть определена согласно (2.142)
из следующей приближенной формулы:
Ld,p=-'^-- (2.142)
Емкость С-фильтра определяется далее из рассчитанного
по (2.139) произведения LdC. Полученные значения параметров
фильтра проверяются из выполнения условия (2.140). В случае
невыполнения этого условия следует увеличить емкость С.
П-образный ЕС-фильтр (рис. 2.33, г) можно представить
как составной, состоящий из С-фильтра и Г-образного ЕС-
фильтра. Общий коэффициент сглаживания всего фильтра
можно представить как произведение коэффициентов сглажива-
ния его звеньев
5с = 5с15с2, (2.143)
где 5ci—коэффициент сглаживания С-фильтра; sc2 — коэффици-
ент сглаживания ЕС-фильтра.
Из сложных фильтров рассмотрим фильтр с параллельной
резонансной цепочкой (рис. 2.33, д). Эта цепочка, состоящая
из конденсатора с емкостью Ср и реактора с индуктивностью
Ер, настраивается в резонанс на основную гармонику пульсации
(в общем случае резонансных цепочек может быть несколько,
каждая из которых настроена на определенную гармонику
пульсации). Резонанс на основной гармонике возникает при
условии ой = 1 /y/LpCp. При таком подборе параметров фильтра
резонансная цепочка будет обладать активным сопротивлением
Rp. Сопротивление Rp можно рассчитать, зная добротность
Q реактора Ер и тангенс угла диэлектрических потерь tgS
конденсатора Ср:
= + (2-144)
Q «>1СР
При высокой добротности реактора и малых потерях
энергии в конденсаторе сопротивление Rp становится незна-
чительным и основная гармоника пульсации оказывается
зашунтированной низкоомным сопротивлением. В' результате
7 № 3658 97
этого большая -часть напряжения пульсации будет приложена
к индуктивности Ld, а меньшая—к нагрузке Rd- Коэффициент
сглаживания такого фильтра с достаточной для практики
степенью точности можно определить по формуле
\/(ft>iZ-d)2 + J?p
(2.145)
Из (2.145) следует, что посредством использования резонанс-
ных цепочек можно получить достаточно большой коэффициент
сглаживания. Однако подобного рода фильтры обладают
рядом недостатков, основной из которых — необходимость
подбора (или подстройки) параметров Ср и Lp для достижения
высокой эффективности фильтра.
В маломощных выпрямителях помимо электрических ре-
активных фильтров иногда применяют электронные фильтры,
в частности транзисторные. Принцип действия такого фильтра
основан на нелинейности вольт-амперных характеристик тран-
зистора. Зависимость коллекторного тока 1с от напряжения
эмиттер — коллектор UCe такова, что транзистор обладает
весьма большим сопротивлением переменному току (большим
динамическим сопротивлением).
На рис. 2.34 приведена схема транзисторного П-образного
фильтра. Первое звено фильтра представлено конденсатором
Сф1, а второе, Г-образное, состоит из транзистора УТ и кон-
денсатора Сф2. Ток коллектора транзистора определяется током
эмиттера 1е- Если последний поддерживается постоянным, то
колебания входного напряжения, вызванные, например, пуль-
сацией выпрямленного напряжения, не вызывают изменения
1с (следовательно, и напряжения на нагрузке), а приводят
только к перемещению рабочей точки транзистора по пологой
части его характеристики Ic=f(UcE). Для того чтобы ток
эммитера 1е не изменялся под воздействием пульсаций, в цепь
транзистора введены сопротивление R\ и конденсатор Ci.
Емкость конденсатора Ci выбирается достаточно большой,
чтобы обеспечить постоянство тока 1е при воздействии пуль-
саций. Режим работы транзистора по постоянному току
задается в схеме фильтра со-
противлением в цепи базы Ri-
В рассмотренной схеме тран-
зистор включен последователь-
но с нагрузкой, но существуют
также схемы с параллельным
включением транзистора, прин-
цип действия которых также
.Рис. 2.34. Транзисторный последова- основан на нелинейности сопро-
тельный фильтр тивления транзистора.
98
Рис. 2.35. Структурная схема
активного фильтра
Транзисторные фильтры целесообразно применять для сгла-
живания пульсаций низких частот в маломощных выпрями-
телях. В этих случаях использование их может дать выигрыш
в массе и габаритах выпрямительного устройства.
Основными недостатками транзисторных фильтров по срав-
нению с обычными пассивными являются более высокая
стоимость, трудность обеспечения защиты транзисторов в ава-
рийных режимах и более низкая надежность.
Существует также довольно обширный тип активных
фильтров, принцип действия которых основан на подключении
к выходу выпрямителя (или другого источника) генератора
высших гармоник напряжения, генерируемых в противофазе
с гармоническими составляющими пульсирующего напряжения.
Структурная схема, поясняющая принцип действия этого класса
фильтров, приведена на рис. 2.35.
На выходе выпрямителя В напряжение содержит как
постоянную (7о, так и переменную составляющие. На
выход выпрямителя одновременно поступает в противофазе
переменное напряжение, вырабатываемое активным
фильтром АФ ( — UJ). При равенстве переменных напряжений
выпрямителя и фильтра на нагрузку Н поступит только
постоянная составляющая Со. Функции активного фильтра
может выпрлнять или усилитель мощности, на вход которого
поступают ^сигналы малой мощности с напряжением пуль-
сации, или генератор гармонических составляющих с амп-
литудами, равными амплитудам основных гармонических
составляющих напряжения пульсации. Выходная мощность
активного фильтра определяется напряжением пульсации
и током нагрузки.
2.7. РАБОТА ВЫПРЯМИТЕЛЯ ОТ ИСТОЧНИКА
СОИЗМЕРИМОЙ МОЩНОСТИ
В § 2.2 было показано, что выпрямители потребляют из
питающей сети несинусоидальный ток. Гармонический состав
тока зависит от схемы выпрямления и параметров сглажи-
вающего фильтра. Например, гармонический состав потребля-
емого тока будет существенно различен для одной и той же
схемы выпрямления, работающей с разными типами фильтров:
индуктивным или емкостным.
99
Если мощность сетевого генератора значительно (более
чем на порядок) превышает мощность полностью загруженного
выпрямителя, то несинусоидальность потребляемого им тока
практически не сказывается на напряжении питающей сети.
При соизмеримой мощности генератора и выпрямителя высшие
гармоники тока вызывают искажения сетевого напряжения
тем больше, чем ближе мощность нагрузки к мощности
генератора.
Степень искажения напряжения (его несинусоидальность)
оценивается обычно коэффициентом гармоник по напряжению
7оо
L v2nm
, (2.146)
C'lm
где U im—амплитуда первой гармоники напряжения;
ипт—амплитуда высших (n-го порядка) гармоник.
Значение коэффициента кги регламентируется стандартами
на качество сетевого напряжения и, как правило, не должно
превышать 5%.
Увеличение искажений, связанное с ростом высших гармоник
в сетевом напряжении, приводит к дополнительным потерям
электроэнергии в реакторах и трансформаторах, кабельных
соединениях, генераторе и вызывает сбои в работе электронной
аппаратуры связи, автоматики, вычислительной техники и др.
Поэтому необходимы специальные меры по уменьшению
содержания высших гармоник в сетевом напряжении и сниже-
нию значения коэффициента кги-
Искажения сетевого напряжения от работы выпрямительных
установок возникают в основном за счет падений напряжений
на внутренних сопротивлениях сети, питающей эти установки
(сопротивления генераторов, трансформаторов и др.). Рас-
смотрим подробнее влияние соотношения мощностей источника
и выпрямителя на коэффициент кги-
Выпрямитель в электрической системе обычно рассматри-
вают как генератор гармоник тока. В этом случае он может
быть представлен эквивалентной схемой замещения в виде
источника тока различных гармоник. На рис. 2.36 выпрямитель
замещен источником тока 1„ъ (суммарный ток всех гармоник)
и внутренним активным сопротивлением гвн. Нагрузкой яв-
ляется эквивалентное входное сопротивление питающей сети
Zcn = rc+jnxc, реактивная составляющая которого зависит от
частоты. Согласно схеме замещения ток п-й гармоники в пи-
тающей сети может быть определен в виде
^вн
I СП —
(2.147)
100
Рис 2 36 Схема замещения вы-
прямителя и питающей сети
для определения коэффициента
гармоник по напряжению krV
Рис 2 37 Резонансный фильтр
выпрямителя
Соответственно напряжение на сопротивлении сети от
каждой л-й гармоники тока выпрямителя будет равно
U СП 1_СП Zcn — int
rB„(rc+jnxc)
rm+rB+jnxc‘
(2.148)
Суммарное напряжение от высших гармоник в сети можно
определить, используя принцип наложения, предварительно
рассчитав по (2.148) напряжение от каждой гармоники тока.
Зная содержание высших гармоник в напряжении питающей
сети, можно рассчитать krU по (2.146). В большинстве случаев
расчет ведется для гармоник не выше п= 13, так как амплитуды
токов и напряжений более высоких порядков относительно
невелики, а эквивалентное сопротивление питающей сети
существенно уменьшается за счет влияния емкостей кабеля
и другого оборудования.
Одним цз основных средств снижения влияния высших
гармоническйх на сеть является подключение мощных выпрями-
телей к отдельным секциям шин, питающихся через понижающий
трансформатор. Тогда влияние выпрямителей на других потреби-
телей будет сказываться только на стороне высокого напряжения,
где уровень высших гармонических будет значительно снижен.
Большое значение для снижения уровня высших гармоничес-
ких имеет применение схем выпрямления с пониженным
потреблением реактивной мощности (см. § 2.4). Существенно
уменьшаются высшие гармоники первичного тока при выпол-
нении выпрямителя по многофазной схеме (см. § 2.2).
Существует способ подавления гармонических составля-
ющих, основанный на добавлении в специальную обмотку
трансформатора высших гармоник тока, но находящихся
в противофазе с токами высших гармоник выпрямителя.
В результате ток в сети становится синусоидальным и не
вызывает искажений сетевого напряжения. В качестве источ-
ников токов высших гармоник используют устройства, содер-
жащие генератор высших гармоник с усилителем.
101
Снижение гармонических составляющих токов и напряжений
может быть обеспечено с помощью резонансных £С-фильтров,
настроенных на основной ряд гармоник, присутствующих
в токах выпрямителя (рис. 2.37). Приближенно параметры
каждой резонансной ветви фильтра могут быть рассчитаны '
по формуле
«£о£ф= 1/исоСф, (2.149)
где п — номер гармоники, на которую настраивается данная
резонансная ветвь.
Каждая резонансная ветвь фильтра шунтирует соответст-
вующую гармонику тока, не пропуская ее в сеть.
Перспективным способом уменьшения сетевых искажений
является использование выпрямителей с улучшенным гар- ,
моническим составом входного тока. Входной ток такого i
выпрямителя содержит в качестве основной составляющей ;
первую гармонику, совпадающую по частоте с сетевым
напряжением, а содержание высших гармоник по сравнению
с основной — мало. Подобное улучшение гармонического со- >
става может быть получено за счет, например, широтно-
импульсной модуляции входного тока по синусоидальному I
закону на повышенной частоте. Рассмотрим сущность этого
способа на примере схемы мостового однофазного выпрями-
теля на запираемых тиристорах VSt— VS4 и имеющего входной >
фильтр £фСф (рис. 2.38, а). При этом примем общепринятые
допущения, включающие в себя условие £d=oo, т. е. идеальную i
сглаженность выходного тока id. '
На рис. 2.38, б, в представлены диаграммы изменения се- j
тевого напряжения UAB и входного тока выпрямителя до
фильтра (/ф) и после фильтра (zc). Диаграммы соответствуют ।
установившемуся режиму работы выпрямителя. Запираемые Я
тиристоры включаются и выключаются по сигналам системы Я
управления с повышенной частотой (на порядок или более Я
превышающей частоту сетевого напряжения <ос). Так, например, Я
на интервале О —ток id проводят тиристоры KS, и VS2 Я
и входной ток 1ф равен id; на интервале — тиристор Я
VS2 выключается, a VS4 включается. В результате ток ста- |Я
новится равным нулю, так как ток id минует фазные входные Я
цепи, протекая по .тиристорам VSt и VS4, и выпрямительный |Я
мост оказывается как бы отключенным от сети. Затем снова «Я
включается тиристор VS2, a VS4 выключается и фазный ток|Я
опять становится равным /ф. При принятом допущении Ld~<xr |Я
значение этого тока останется таким же, каким оно былодЯ
на интервале 0 —Зр Изменяя длительность интервала протека* тЯ
ния тока г‘ф по синусоидальному закону, т. е. осуществляяиЯ
модуляцию входного тока по синусоидальному закону, можноЙЯ
снизить содержание высших гармоник во входном токе дв|Я
102 ЗЯ
Рис. 2.38. Однофазный выпрямитель на запираемых тиристорах с широтно-
импульсной модуляцией
очень малых значений, легко подавляемых фильтром ЬфСф.
В результате модуляции сетевой ток ic становится близким
по форме к синусоидальному с заданной точностью. Очевидно,
что параметры фильтра определяются частотой модуляции
и при повышении ее могут стать достаточно малы.
Рассмотренный принцип управления позволяет значительно
расширить возможности схемы и является наиболее перспек-
тивным для преобразователей, используемых в автономных
системах электроснабжения.
юз
ГЛАВА ТРЕТЬЯ
ИНВЕРТОРЫ И ПРЕОБРАЗОВАТЕЛИ
ЧАСТОТЫ
Инвертированием называется процесс преобразования элект-
рической энергии постоянного тока в переменный. Термин «ин-
вертирование» происходит от латинского слова inversio—перево-
рачивание, перестановка. Впервые этот термин в преобразователь-
ной технике был применен для обозначения процесса, обратного
выпрямлению, при котором поток энергии изменяет свое направ-
ление на обратное и поступает от источника постоянного тока
в сеть переменного тока. Такой режим был назван в проти-
воположность выпрямительному режиму инверторным, а преоб-
разователь, осуществляющий процесс передачи энергии от источ-
ника постоянного тока в сеть переменного тока,—инвертором.
Поскольку электрические параметры преобразователя на стороне
переменного тока в этом случае полностью определяются парамет-
рами сети, то такой инвертор называют зависимым или ведомым
сетью. Исторически термин «инвертор» в преобразовательной
технике распространился на все типы статических преобразователей
электрической энергии постоянного тока в переменный.
3.1. ИНВЕРТОРЫ, ВЕДОМЫЕ СЕТЬЮ
Принцип действия инвертора, ведомого сетью, рассмотрим
на примере простейшей схемы, представленной на рис. 3.1, а.
Допустим, что элементы схемы идеальные (см. § 1.2), а внут-
реннее сопротивление аккумуляторной батареи АБ равно нулю.
Если вывод «плюс» батареи АБ соединен с катодом
тиристора VS (как показано на рис. 3.1, а) штриховой линией,
то схема может работать в выпрямительном режиме на
нагрузку в виде противо-ЭДС (см. § 2.5). В этом режиме
включение тиристора VS возможно при условии превышения
ЭДС сети, задаваемой аккумуляторной батареей. На рис. 3.1, б
представлены диаграммы напряжений и тока, иллюстрирующие
работу схемы в выпрямительном режиме. При допущении
равенства нулю внутренних сопротивлений источников перемен-
ного и постоянного токов можно считать, что их напряжения
равны ЭДС, т. е. eab=Uab и Ed=Ud.
При подаче на тиристор управляющего импульса в момент
Э = Э15 определяемый углом управления а, тиристор включается
и из сети в батарею А Б начинает поступать ток id. Благодаря
сглаживающему реактору Ld ток id будет плавно изменяться
во времени: увеличиваясь, пока uab>Ud, и уменьшаясь при
Ud>uab. В момент Э3 (соответствующий равенству заштрихо-
104
ванных площадей на
рис. 3.1, б) ток id становится
равным нулю, а тиристор VS
выключается. Протекание че-
рез тиристор тока id на ин-
тервале от Э2 до 93, когда
обусловлено накопле-
нием электромагнитной энер-
гии в реакторе Ld. Далее рас-
смотренные процессы перио-
дически повторяются, в ре-
зультате чего батарея А Б бу-
дет заряжаться выпрямленным
током id (ток id направлен
навстречу ЭДС Ed).
Для перевода схемы в ин-
верторный режим необходимо
переключить тиристор VS или
батарею А Б так, чтобы катод
тиристора был соединен с вы-
водом «минус» батареи. Рас-
смотрим инверторный режим
более подробно.
Передача энергии от одно-
го источника к другому проис-
ходит тогда, когда ток от
отдающего источника направ-
лен навстречу ЭДС источника,
Рис. 3.1. Однополупериодный инвер-
тор:
а—схема; б и в—диаграммы токов и ва-
пряжевий на элемевтах схемы в выпрями-
тельном и ввверторвом режимах
еаЬ направлена навстречу току
диаграммы напряжений и тока
принимак^щего эту энергию.
В рассматриваемом случае пе-
редача энергии в сеть от акку-
муляторной батареи будет
происходить, когда ЭДС сети
id. На рис. 3.1, в представлены
в элементах схемы для инверторного режима. Если в момент
Эг на тиристор VS подать управляющий импульс, то тиристор
включится, поскольку вплоть до момента Э2 напряжение иаЬ по
абсолютному значению - Меньше напряжения Ud. Под воздей-
ствием разности напряжений Ud — иаЬ в цепи начнет протекать
ток id, противоположный по знаку напряжению сети иаЪ.
Наличие в схеме сглаживающего реактора Ld ограничивает
скорость нарастания этого тока и его максимальное значение.
За счет энергии, накапливаемой в реакторе, ток продолжает
протекать через тиристор после того, как напряжение иаЬ по
абсолютному значению будет больше напряжения Ud и станет
равным нулю в момент Э3, соответствующий равенству
заштрихованных областей на рис. 3.1, в.
105
Схемы зависимых инверторов по существу не отличаются от
схем управляемых выпрямителей. Поэтому они могут рассматри-
ваться как схемы реверсивных преобразователей, способных
передавать электрическую энергию из сети в источник постоянного
тока (выпрямительный режим) и наоборот (инверторный режим).
Учитывая, что схема однополупериодного инвертора из-за
плохих технико-экономических показателей не нашла распрост-
ранения, рассмотрим работу в инверторном режиме однофазной
двухполупериодной схемы со средней точкой и трехфазной
мостовой схемы. Последняя из-за ряда преимуществ получила
наибольшее распространение в инверторах средней и большой
мощности.
При рассмотрении схем будем принимать аналогичные
указанным в § 2.1 допущения об идеальности элементов схемы.
Будем учитывать индуктивность рассеяния трансформатора.
Индуктивность сглаживающего реактора Ld примем равной
бесконечности.
3.1.1. ОДНОФАЗНЫЙ ИНВЕРТОР СО СРЕДНЕЙ ТОЧКОЙ
На рис. 3.2, а представлена схема инвертора, в которой
объединенные между собой катоды тиристоров соединены
с минусом источника постоянного тока.
Предположим, что ток проводит тиристор VS2, а потенциал
точки b вторичной полуобмотки отрицателен по отношению
к средней точке О, т. е. иьо<0. В этом случае энергия от
источника постоянного тока поступает через трансформатор
в сеть. Это обусловлено тем, что ток iys2, проходящий через
полуобмотку трансформатора, направлен навстречу напряже-
нию иь0 на ней. Изменение во времени напряжений на
полуобмотках трансформатора при достаточно большом значе-
нии Ld практически не влияет на ток id. При этом пульсации
напряжения, обусловленные разностью мгновенных значений
напряжений вторичных полуобмоток трансформатора и ис-
точника постоянного тока, будут приложены к реактору Ld.
Для обеспечения инверторного режима угол управления
а должен быть больше л/2. Поэтому обычно при анализе схем угол
управления в инверторном режиме принято отсчитывать в сторону
опережения (влево) относительно сдвинутых на угол а моментов
естественной коммутации в схемах с неуправляемыми диодами
(или относительно угла а=п в схемах с тиристорами). Угол,
исчисляемый по такому принципу, называется углом опережения
и обозначается р. Угол 3 связан с углом а соотношением
р=л-а. (3.1)
В момент на тиристор VS, подается управляющий
импульс. Так как в этот момент анод тиристора имеет
106
Рис. 3.2. Однофазный инвертор со сре-
дней точкой:
а—схема; б—диаграммы токов н напряже-
ний на элементах схемы
IV Ъв I
выпрямитель-
ный режим (ис-
кусственная
коммутация) yfi коммутация)
Выпрямитель -
ный режим (ес-
!ci тественная
ш
Инверторный
режим (искус-
ственная ком-
мутация)
ЧЛ I л ~
I Инверторный
icia\ Iрежим(естес-
__(2У твенная ком-
мутация)
Рис. 3.3. Векторные диаграммы пер-
вых гармоник токов и напряжений для
выпрямительного и инверторного ре-
жимов работы преобразователя
положительный потенциал относительно катода (иаЬ>0), ти-
ристор VSt включается. Вторичные полу обмотки трансфор-
матора оказываются замкнутыми накоротко, в результате
возникает ток короткого замыкания направленный навстречу
току, протекающему через тиристор VS2, т. е. начинается
процесс естественной коммутации, который протекает иден-
тично с рассмотренным в § 2.3. Когда в момент Э2 процесс
коммутации заканчивается (длительность его так же, как
и в выпрямительном режиме, выражается углом у), тиристор
VS2 выключается и к нему прикладывается обратное напряже-
ние uyS2=uab. Тиристор VS2 имеет возможность восстанавливать
свою запирающую способность до тех пор, пока напряжение
иаЬ не изменит свой знак (когда потенциал точки b станет
107
больше потенциала точки а). Угол, соответствующий этому
интервалу времени, называется углом запаса и обозначается
8. Углы Р, у и 8 связаны соотношением
3 = 7 + 8. (3.2)
Тиристор VS, проводит ток до момента Э4. Перед этим,
в момент Э3, управляющий импульс поступает на тиристор
VS2, в результате чего происходит процесс коммутации и ти-
ристор VS2 включается, a VS, выключается. Далее рассмот-
ренные процессы периодически повторяются.
Из характера электромагнитных процессов видно, что они
во многом сходны с процессами, протекающими при работе
выпрямителя на противо-ЭДС. Основное отличие состоит
в том, что в инверторном режиме источник постоянного
напряжения включен с противоположной полярностью относи-
тельно тиристорной группы и отдает энергию в сеть. Так
как управляющие импульсы подаются на тиристоры с опереже-
нием на угол Р относительно сдвинутых на угол л моментов
коммутации, то поступающий в сеть ток ic проходит через
нуль в сторону положительных значений раньше, чем проходит
через нуль напряжение иАВ в сторону отрицательных значений.
Поэтому первая гармоника тока ic t сдвинута относительно
напряжения —иАВ в сторону опережения на угол, приблизи-
тельно равный 0 — у/2, что видно из диаграммы на рис. 3.2, б.
Векторные диаграммы тока Ic t и напряжения для
выпрямительного и инверторного режимов работы преоб-
разователя показаны на рис. 3.3. В выпрямительном режиме
первая гармоника тока сдвинута относительно напряжения
Слв в сторону отставания приблизительно на угол а+у/2
(см. § 2.3).
Из векторной диаграммы видно, что в инверторном режиме
активная составляющая тока /с1а направлена навстречу на-
пряжению сети, что соответствует поступлению в нее активной
мощности. Реактивная составляющая тока /с1р, как и в вы-
прямительном режиме, отстает на аугол л/2 от напряжения
сети. Следовательно, в обоих режимах преобразователь яв-
ляется потребителем реактивной мощности. Напряжение ud на
входе схемы, называемое также противо-ЭДС инвертора, имеет
пульсацию, которая зависит от углов 3 и у и определяется
по тем же соотношениям, что и для выпрямительного режима,
если угол а в них заменить на угол 3- Среднее значение
напряжения ud равно напряжению источника Ud.
Связь между действующим значением напряжения U2 на
вторичной полуобмотке трансформатора (это напряжение за-
висит от напряжения сети переменного тока и коэффициента
трансформации трансформатора) и напряжением Ud источника
постоянного тока подобна выражению для среднего значения
108
выпрямленного напряжения выпрямителя. Для холостого хода
инвертора получим
Udо = Ui cos р. (3.3)
Другие соотношения также подобны приведенным в § 2.2
для случая активно-индуктивной нагрузки однофазного вы-
прямителя.
3.1.2. ТРЕХФАЗНЫЙ МОСТОВОЙ ИНВЕРТОР
На рис. 3.4 представлена схема трехфазного мостового
инвертора на тиристорах и диаграммы токов и напряжений
на ее элементах. В этой схеме,
управляющие импульсы по-
даются на тиристоры с опере-
жением на угол Р относитель-
но моментов времени, соот-
ветствующих началу коммута-
ции тиристоров при работе
схемы в режиме неуправля-
емого выпрямителя (а = 0).
Указанные моменты времени
соответствуют прохождению
через нуль линейных напряже-
ний вторичных обмоток транс-
форматора, т. е. пересечению
синусоид фазных напряжений
иа, иь и и<^ Рассмотрим работу
схемы, счйтая, что ток idt как
и в выпрямительном режиме,
идеально сглажен, т. е. id = Id.
На интервале Эо — 91 под воз-
действием напряжения источ-
ника Ud ток Id проходит через
тиристоры VSi, VS2 и вторич-
ные обмотки трансформатора
(фазы а и с). При этом’мгно-
венное значение противо-ЭДС
инвертора ud (рис. 3.4, б) рав-
но разности напряжений
Uc и иа.
В момент 91, определяе-
мый углом опережения Р, ко-
торый задается системой упра-
вления инвертора, подается
управляющий импульс на ти-
так же как и в однофазной.
Рис. 3.4. Трехфазный мостовой инвер-
тор:
а—схема, 6—диаграммы токов и напряже-
ний на элементах схемы
109
ристор KSj. Этот тиристор включается, в результате чего
фазы а и b вторичных обмоток трансформатора оказываются
замкнутыми накоротко и в них начинает протекать ток
короткого замыкания, направленный навстречу току iySi, про-
текающему через тиристор VSi. Иначе говоря, начинается
процесс коммутации, аналогичный процессу коммутации в трех-
фазной мостовой схеме выпрямителя (см. § 2.3), длительность
которого выражается углом у. Напряжение Ud на интервале
коммутации становится равным напряжению ис минус полусум-
ма напряжений иа и иь. После окончания процесса коммутации
ток будут проводить тиристоры VS2 и USj, а к тиристору
будет приложено обратное напряжение VSi в течение времени,
определяемого углом 8 согласно (3.2).
Далее коммутация тиристоров идет в соответствии с их
нумерацией, указанной на рис. 3.4, а. Длительность проводя-
2п
щего интервала каждого вентиля равна — +у.
Напряжение источника Udo при холостом ходе инвертора
связано с действующим значением фазного напряжения транс-
форматора соотношением
Udo-^- t/2cosp.
Л
(3-4)
Остальные соотношения для инверторного режима подобны
соотношениям, приведенным для данной схемы, работающей
в выпрямительном режиме на активно-индуктивную нагрузку
(§ 2.2).
3.1.3. БАЛАНС МОЩНОСТЕЙ В ИНВЕРТОРЕ, ВЕДОМОМ СЕТЬЮ
При рассмотрении принципа действия инвертора, ведомого
сетью, было сказано, что первая гармоника сетевого тока, который
имеет несинусоидальную форму* сдвинута относительно сетевого
напряжения на угол, примерно равный 0 — у/2. В результате
ведомый инвертор, передавая активную мощность от источника
постоянного тока в сеть, потребляет из нее реактивную мощность.
Рассмотрим баланс мощностей в системе: источник постоянного
тока—инвертор — сеть, полагая КПД инвертора равным единице.
Активная мощность, потребляемая инвертором от источника
постоянного тока, равна
P=UdId, (3.5)
где Ud и Id — напряжение источника и среднее значение тока
на входе инвертора.
Эту же мощность на стороне переменного тока (например,
для однофазной схемы) можно выразить известным соотноше-
по
нием, учитывая, что угол сдвига между первой гармоникой
сетевого тока и напряжением сети примерно равен 0 — у/2
(см. рис. 3.3):
/’= [7c4iCos(p —у/2). (3.6)
Из (3.5) и (3.6) следует
= (3-7)
t/ccos(0—у/2)
Мощность, генерируемая сетью в инвертор, может быть
выражена известным соотношением
Q = Uclel sin(0- у/2) = Рtg(р -у/2). (3.8)
Инвертор потребляет из сети также высшие гармоники
тока. Например, для однофазной схемы со средней точкой
при Ld — оо и пренебрежении углом коммутации у сетевой
ток имеет прямоугольную форму и может быть представлен
следующим гармоническим рядом:
4/1 1 \
iel =-ЦI cos9+-cos39+-cos59 + ...). (3.9)
л \ 3 5 /
Аналогичный вид имеет гармонический состав первичного
тока для схемы, работающей в выпрямительном режиме (§ 2.2).
Степень несинусоидальности тока может быть оценена
через коэффициент искажения v (§ 2.4). Коэффициент v опре-
деляется типом схемы, на него оказывают влияние угол Р,
индуктивность Ld, среднее значение тока Ц и другие, менее
значительные факторы. Мощность искажения Т может быть
выражена боотношением
Г = у/8г-Рг-0г, (3.10)
где S—полная мощность инвертора на стороне переменного
тока.
Полная мощность
S=17C/C, (3.11)
где С’с и /с—действующие значения напряжения сети и сетевого
тока (с учетом высших гармоник).
С учетом высших гармоник коэффициент мощности ин-
вертора
X = vcos(p—у/2). (3.12)
Из изложенного следует, что в сети, потребляющей активную
мощность от инвертора, должны содержаться источники реактив-
ной мощности, например синхронный генератор, конденсаторные
батареи или другие типы источников реактивной мощности.
411
Возможности повышения коэффициента мощности путем
уменьшения угла Р ограничены условиями естественной ком-
мутации тиристоров, согласно которым угол 5 = Р~у должен
быть всегда больше определенного значения 8тш, о чем более
подробно будет сказано ниже. Поэтому для повышения
коэффициента мощности инверторов, ведомых сетью, использу-
ют специальные методы, в частности принудительную (или
искусственную) коммутацию тиристоров, как это делается
с той же целью в выпрямителях (см. гл. 2). Существует
много различных схем, реализующих искусственную комму-
тацию тиристоров. Большие перспективы в этом отношении
имеют схемы на запираемых тиристорах.
Следует отметить, что перевод инвертора в режим работы
с отстающими значениями угла Р приводит к тому, что
из потребителя реактивной мощности он становится ее
генератором. Вернемся снова к векторной диаграмме (см.
рис. 3.3). На представленной плоскости возможных изменений
вектора первой гармоники сетевого тока преобразователя
выделены четыре области, соответствующие прямоугольной
системе координат и обозначенные на рис. 3.3 римскими
цифрами:
1. Область I соответствует изменению угла управления*
а от 0 до л/2, или выпрямительному режиму работы
с потреблением из сети реактивной мощности.
2. Область II соответствует изменению угла а от л/2 до
п (угол Р от л/2 до 0), или инверторному режиму с потреб-
лением из сети реактивной мощности.
3. Область III соответствует изменению угла а от л до
Зл/2, или работе в инверторном режиме с генерацией реак-
тивной мощности в сеть.
4. Область IV соответствует изменению угла а от Зл/2
до "2л, или работе в выпрямительном режиме с генерацией
реактивной мощности в сеть.
При работе преобразователя в режимах, соответствующих
областям I и II, коммутация тиристоров происходит под
воздействием напряжения сети переменного тока (естественная
коммутация).
Для того чтобы обеспечить работу в режимах, соответ-
ствующих областям III и IV, необходимо применять специ-
альные меры для обеспечения коммутации и тиристоров,
которую в данных случаях принято называть искусственной
или принудительной, или же исподьзовать полностью управля-
емые ключевые элементы (например, запираемые тиристоры,
транзисторы и др.).
* Угол коммутации у в рассматриваемых случаях для упрощения принят
равным нулю.
112
3.1.4. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ И РЕЖИМЫ РАБОТЫ
ИНВЕРТОРОВ, ВЕДОМЫХ СЕТЬЮ
При анализе нормальных режимов работы инвертора важно
знать следующие основные его характеристики: входную и огра-
ничительную.
Входная характеристика представляет собой зависимость
входного напряжения инвертора Ud от среднего значения
входного тока Id.
Входное напряжение инвертора при допущении равенства
нулю падения напряжения в тиристорах и активных сопротив-
лениях схемы можно представить в виде суммы двух состав-
ляющих. Первая составляющая входного напряжения — это
напряжение холостого хода Ud0, равное входному напряжению
при мгновенной коммутации, т. е. при у = 0. Второй состав-
ляющей является среднее значение падения напряжения A U
на интервалах коммутации. В отличие от выпрямителей,
у которых падение напряжения АС' вычитается из напряжения
холостого хода, в ведомых инверторах эти составляющие
суммируются:
Ud = Ui0 + bU. (3.13)
Значения Ud0 и At/ для различных схем инверторов могут
быть вычислены по соотношениям, аналогичным приведенным
в гл. 2 для управляемых выпрямителей. Падение напряжения
At/ зависит от входного тока преобразователя, поэтому
выражение (3.13), в которое подставлена зависимость A.U=f(ld),
представляет собой входную характеристику инвертора. Так,
для однофазной двухполупериодной схемы при Ld = oo входная
характеристика имеет вид
t/d=^Z?E2COSp+^. (3.14)
л л
На рис. 3.5 представлены входные характеристики однофаз-
ного инвертора при различных углах Р, построенные по
уравнению (3.14). Видно, что они в отличие от внешних
характеристик выпрямителя, которые представлены на рис.
3.5 в правой полуплоскости, имеют возрастающий характер
(напряжение увеличивается с ростом тока). При этом внешние
характеристики выпрямителя являются продолжением входных
характеристик инвертора при условии равенства углов а и р.
При увеличении входного напряжения Ud растет ток
Id и поэтому увеличивается угол коммутации у, т. е. при
неизменном значении угла опережения Р уменьшается угол
выключения тиристоров. Минимально допустимое значение
угла 3min определяется частотой сетевого напряжения и типом
8 № 3658 113
Рис 3 5- Входные и ограничительная
характеристики инвертора при <o£d=oc
Рис 3 6 Схема реверсивного управле-
ния электрическим двигателем
тиристоров. Из (3.2) следует, что чем больше угол 0 инвертора,
тем больше допустимое значение угла коммутации у, а следова-
тельно, и тока Id.
Предельно допустимое значение тока Ц можно определить
следующим образом.
Пусть рассматриваемая схема работает в выпрямительном
режиме с углом а, численно равным углу дт,„. Внешняя
характеристика выпрямителя при этом значении угла а по-
казана штриховой линией в области выпрямительного режима
на рис. 3.5. Перестроим эту характеристику в область ин-
верторного режима. Она также показана штриховой линией.
Точки пересечения этой характеристики со входными харак-
теристиками инвертора будут определять предельно допусти-
мые по току Id режимы работы инвертора для разных
значений угла 0. Для Ьднофазного инвертора она определяется
уравнением
9 /? Z г
Ud = ^E2cosbmin+^. (3.15)
л л
Так как эта характеристика указывает предельно допусти-
мые режимы работы инвертора, то она называется ограни-
чительной.
Напряжения на шинах постоянного тока преобразователей
при Id — 0 (т. е. на холостом ходу) одинаковы для выпрямитель-
ного и инверторного режимов и зависят от угла 0 (или а).
Эту зависимость обычно называют регулировочной харак-
теристикой. Рассматриваемые преобразователи обладают свой-
ством обратимости, т. е. путем изменения углов управления
114
и переключения полярности источника постоянного тока можно
переходить от выпрямительного режима к инверторному
и наоборот. В выпрямительном режиме энергия поступает от
сети переменного тока в источник (для данного случая—
приемник) постоянного тока.
Это свойство обратимости широко используется в технике,
особенно в области электропривода постоянного тока. Оста-
новимся на этом несколько подробнее.
Предположим, что электрическая машина постоянного тока
М работает в двигательном режиме и питается от тиристорного
преобразователя, работающего в выпрямительном режиме (рис.
3.6). Для эффективного и быстрого торможения двигателя
необходимо, чтобы энергия, накопленная в инерционных частях
машины, по возможности быстрее была передана другому
объекту, например возвращена в сеть переменного тока. Для
этого в схеме рис. 3.6 достаточно переключить контакторы
(А^ замкнуть, а К2 разомкнуть) и перевести углы управления
в область а>л/2, т. е. обеспечить инверторный режим работы
схемы. При этом энергия, накопленная в двигателе, будет
передаваться в сеть, и двигатель будет тормозиться. В тех-
нической литературе такой режим называется режимом реку-
перации.
При работе инверторов, ведомых сетью, могут возникать
аварийные режимы, обусловленные теми же причинами, что
и в выпрямителях (§ 2.3), например пробоем тиристоров,
короткими замыканиями в трансформаторе и др. Однако
специфичным аварийным режимом, характерным для ведо-
мых инверторов, является режим «опрокидывания», обус-
ловленный уменьшением угла б ниже допустимого данным
типом тиристоров угла 5тш. В этом случае тиристоры схемы
не успевают восстановить свою запирающую способность,
когда- напряжение на них становится прямым, и поэтому
остаются в проводящем состоянии. В результате источник
постоянного тока оказывается закороченным через два
тиристора. В трехфазной мостовой схеме протекание аварий-
ного процесса при «опрокидывании» обычно разделяют на
два этапа: первый—замыкание накоротко цепи постоянного
тока, второй—замыкание накоротко всех силовых цепей,
включая цепь переменного тока. Для предотвращения выхода
из строя элементов схемы при такой аварии необходимо
применять быстродействующие средства зашиты, обеспечи-
вающие аварийные отключения инвертора от внешних ис-
точников напряжения. Защита неповрежденных тиристоров
от выхода их из строя часто осуществляется применением
специальных предохранителей с плавкими вставками, обес-
печивающими разрыв цепей прежде, чем аварийные токи
достигнут недопустимых для тиристоров значений.
115
3.2. АВТОНОМНЫЕ ИНВЕРТОРЫ
Автономным (независимым) инвертором называется преоб-
разователь электрической энергии постоянного тока в перемен-
ный, выходные параметры которого (форма, амплитуда и ча-
стота выходного напряжения) определяются схемой преоб-
разователя, системой управления и режимом его работы,
в отличие от инвертора, ведомого сетью, выходные частота
и напряжение которого соответствуют параметрам сети.
Автономный инвертор представляет собой электрическое
устройство, силовая часть которого состоит в самом общем
случае из следующих основных узлов (рис. 3.7): входного
фильтра Фъ собственно инвертора И, содержащего тиристоры,
диоды и коммутирующие элементы, трансформатора Тр и вы-
ходного фильтра Ф2-
Так же как и выпрямители, инверторы различаются по
мощности, напряжению, числу фаз вторичной обмотки транс-
форматора, способу регулирования выходного напряжения, по
схеме инвертирования и другим менее существенным факторам.
Работа автономного инвертора и его технико-экономические
показатели в основном определяются схемой инвертирования,
под которой, как правило, понимают схему соединения ключевых
элементов и элементов для их коммутации, а также трансформа-
тора и в отдельных случаях входного или выходного фильтра
(если последний оказывает непосредственное влияние на процесс
инвертирования). От схемы инвертирования зависят форма
кривой выходного напряжения, форма кривой потребляемого
тока, внешняя (или нагрузочная) характеристика, КПД инвертора,
допустимое изменение коэффициента мощности нагрузки (указы-
ваемого обычно по основной гармонике напряжения на нагрузке),
максимальное (мгновенное) значение тока нагрузки, определя-
ющее для большинства схем порог устойчивой работы инвертора.
В настоящее время не существует единой общепринятой
системы классификации схем автономных инверторов. Наиболее
часто их классифицируют по следующим признакам:
а) по характеру электромагнитных процессов, протекающих
в схеме;
б) по способу коммутации тиристоров или схеме включения
коммутирующих элементов;
в) по схеме преобразования (конфигурации соединений эле-
ментов силовой части).
Иногда при классификации используют и другие, менее
существенные признаки, например способ регулирования выход-
Рис. 3.7. Структурная
схема инвертора
116
Рис. 3.8. Схемы замещения инверторов и диаграммы их выходных параметров:
а—инвертор тока; б—инвертор напряжения
ного напряжения инвертора или принцип подачи управляющих
импульсов на ключевые элементы силовой части.
По характеру протекающих в схеме электромагнитных
процессов автономные инверторы подразделяются на ин-
верторы тока, инверторы напряжения и резонансные инвер-
торы. Такое разделение инверторов весьма условно. За
определяющий признак в этом случае принимается прово-
димость цепи постоянного тока со стороны непосредственно
преобразующей части (например, тиристорной мостовой
схемы) относительно переменной составляющей напряжения.
Рассмотрим это более подробно на примере двух автономных
инверторов, питающихся от источника постоянного напряже-
ния Ud (рис. 3.8).
В- цепи постоянного тока первого инвертора (рис. 3.8, а)
включен реактор с большой индуктивностью. Тогда в интервале
между коммутациями ключевых элементов К^ — Кд ток в ре-
акторе изменяется незначительно. В этом случае ключевые
элементы инвертора изменяют направление (но не мгновенное
значение) тока в нагрузке, так что. последняя питается как
бы от источника тока, что и нашло отражение в соответст-
вующей терминологии — инвертор тока. Нагрузка таких схем
носит, как правило, емкостный характер, так как при индук-
тивной нагрузке из-за скачкообразного изменения тока воз-
никли бы перенапряжения, нарушающие нормальную работу
элементов схемы. В некоторых разновидностях инверторов
тока, рассчитанных на работу с нагрузкой индуктивного
характера, предусматриваются устройства для отвода части
энергии, накопленной в индуктивностях нагрузки.
117
В схеме на рис. 3.8,6 источник постоянного напряжения
подключен непосредственно к ключевым элементам, которые
периодически с изменением полярности подключают это на-
пряжение к нагрузке. В результате нагрузка питается как бы
от источника переменного напряжения. Такая схема клас-
сифицируется как инвертор напряжения. Нагрузка в этом
случае должна носить активный или активно-индуктивный
характер (если на выходе инвертора не установлены фильтры),
так как при емкостном характере нагрузки из-за скачкооб-
разного изменения напряжения имели бы место всплески
токов. Для устранения перенапряжений на элементах схемы
часть энергии, накопленной в индуктивности нагрузки, воз-
вращают в источник постоянного напряжения. Для этого
ключевые элементы шунтируют диодами, включенными «об-
ратно» по отношению к полярности питающего источника.
Такие диоды иногда называют «обратными» диодами (на рис.
3.8,6 они не показаны).
Законы изменения токов в цепи нагрузки инвертора напряже-
ния при определенных условиях подобны законам изменения
узловых потенциалов на шинах нагрузки инвертора тока.
Такое соответствие законов известно в электротехнике как
принцип дуальности (двойственности) цепей. В рассматрива-
емом случае дуальными элементами в схемах инверторов (см.
рис. е 3.8) являются:
а) источник напряжения и источник тока;
б) сопротивление и проводимость нагрузки;
в) индуктивность и емкость.
Используя принцип дуальности, можно результаты анализа
процессов в схеме инвертора одного типа, например инвертора
тока, путем определенных преобразований распространить на
схему инвертора другого типа—инвертора напряжения, и на-
оборот.
Индуктивность сглаживающего реактора Ld в инверторе
тока имеет конечное значение и оказывает существенное
влияние на динамические характеристики инвертора. В част-
ности, чем меньше эта индуктивность, тем меньше всплески
и провалы выходного напряжения при скачкообразных измене-
ниях нагрузки инвертора. В цепи постоянного тока некоторых
инверторов напряжения имеется индуктивность, обеспечива-
ющая коммутацию тиристоров. Поэтому наличие индуктив-
ности в цепи постоянного тока еще не является достаточным
признаком для определения типа схемы (инвертор тока или
инвертор напряжения.) Необходимо знать характер изменения
входного тока инвертора. Как правило, считают, что в ин-
верторах тока входной ток непрерывен или прерывается на
незначительное по сравнению с межкоммутационным интерва-
лом время.
118
По характеру протекания электромагнитных процессов мож-
но выделить еще один тип инверторов, занимающих как бы
промежуточное место между инверторами тока и напряжения,—
резонансные инверторы. В схемах этого типа инверторов
нагрузка входит в состав колебательного контура и ток
в коммутирующих элементах в течение всего интервала их
проводимости носит колебательный характер. Тип резонансных
инверторов также объединяет довольно большое количество
разнообразных типов схем, различающихся конфигурацией,
способом соединения конденсаторов с источником питания
и рядом других признаков. Кроме того, для резонансных
инверторов характерно соединение нескольких инверторов для
получения напряжения высокой частоты (так называемые
многоячейковые инверторы). Количество ячеек тоже служит
признаком для классификации резонансных инверторов.
Наличие или отсутствие в цепи постоянного тока реактора
иногда служит формальным признаком для разделения резо-
нансных инверторов также на инверторы тока и напряжения.
Однако такое разделение резонансных инверторов нецелесооб-
разно, так как характер изменения токов и напряжений на
коммутационных элементах отличен от характера аналогичных
процессов в инверторах тока и напряжения.
Основным элементом многих схем инверторов является
тиристор, который в автономных инверторах требует для
своего выключения принятия специальных мер, обеспечива-
ющих спадание протекающего через него тока до нуля
и задержку подачи прямого напряжения. В автономных
инверторах отсутствие сетевого напряжения (или переменного
напряжение каких-либо других источников) приводит к необ-
ходимости * использовать различные способы принудительной
или искусственной коммутации тиристоров.
Для автономных инверторов характерны следующие спо-
собы искусственной коммутации тиристоров [12].
1. Коммутация посредством конденсатора, подключаемого
другим тиристором (рис. 3.9,а). Предположим, что тиристор
VSX проводит ток, а конденсатор С заряжен с полярностью,
указанной на рисунке. В момент на тиристор VS2 поступает
управляющий импульс и он включается. В результате включе-
ния тиристора VS2 конденсатор оказывается подключенным
к открытому тиристору VSy. Так как открыты оба тиристора,
то возникает ток разряда конденсатора, направленный на-
встречу току тиристора KSt. В цепи разряда конденсатора
отсутствует индуктивность, поэтому ток разряда нарастает
весьма быстро и тиристор практически мгновенно вы-
ключается. Через тиристор VS2 начинает протекать ток
перезаряда конденсатора С и ток нагрузки (определяемый
сопротивлением R2). До тех пор пока конденсатор в'результате
119
Рис. 3.9. Схемы искусственной коммутации тиристоров и диаграммы изменения
токов и напряжений на их элементах
120
перезаряда по цепи Rl — C—VS2 не изменит полярности
напряжения на своих обкладках (момент /2), к тиристору
будет приложено обратное напряжение и он может восстанав-
ливать свою запирающую способность. В момент /3 поступает
управляющий импульс на тиристор VSy, в результате чего
тиристор VSi включается, а тиристор VS2 выключается и т. д.
Рассмотренный способ коммутации характерен для схем ин-
верторов тока.
2. Коммутация посредством подключения к основному
тиристору конденсатора через вспомогательный тиристор (рис.
3.9,6). Пусть конденсатор С заряжен, основной тиристор VS
проводит ток, тиристор VSK выключен. При подаче в момент
управляющего импульса на вспомогательный (или ком-
мутирующий) тиристор VSK он включается и ток разряда
конденсатора С выключает тиристор VS. Далее происходит
перезаряд конденсатора по цепи C—VSK — RB. На интервале
времени от t2 до t2 тиристор VS восстанавливает свою
запирающую способность. Для того чтобы конденсатор С был
заряжен с нужной для следующего включения тиристора VS
полярностью, его необходимо повторно перезарядить. Этот
процесс перезаряда начинается при включении в момент
/3 основного тиристора VS по контуру C—VS—L— VD. Процесс
носит колебательный характер, и длительность его определяется
параметрами L и С. Перезаряд заканчивается в момент /4.
В течение этого процесса ток колебательного контура сум-
мируется в тиристоре VS с током нагрузки. Диод VD
предотвращает дальнейшее протекание процесса перезаряда
(когда ток колебательного £С-контура начинает изменять свое
направление на противоположное), фиксируя тем самым на
обкладка* конденсатора заряд нужной для коммутации ти-
ристора KS полярности.
3. Коммутация за счет подключения к основному тиристору
колебательного LC-контура (рис. 3.9, в). Предположим, что
конденсатор С заряжен, основной тиристор KS открыт, а ком-
мутирующий тиристор и тиристор перезаряда KSn за-
крыты. В момент на тиристор VS2 поступает управляющий
импульс; возникающий при этом ток в колебательном LC-
контуре направлен навстречу току нагрузки тиристора V и вы-
ключает его. Так как скорость' нарастания коммутирующего
тока (тока колебательного контура) ограничена индуктивностью
L, то процесс выключения тиристора VS облегчается (по
сравнению со схемами с конденсаторной коммутацией) за
счет уменьшения максимального значения обратного тока при
выключении. Далее начинается процесс перезаряда конден-
сатора через нагрузку и открытый тиристор VSK. Подготовка
LC-контура для следующего выключения тиристора VS осу-
ществляется путем включения в момент /3 тиристора пере-
121
заряда VSn, в результате чего происходит перезаряд конденсато-
ра до напряжения нужной полярности (к моменту t4) и тиристор
VSn выключается. Способы коммутации тиристоров по схемам
на рис. 3.9,6 и в характерны для инверторов напряжения.
4. Коммутация за счет резонансного характера сопротивления
нагрузки (или сопротивления нагрузки с дополнительно установ-
ленными на выходе инвертора реакторами и конденсаторами).
Пример схемы с коммутацией по указанному способу приведен
на рис. 3.9, г. При подаче в момент управляющего импульса на
тиристор VS он включается и к контуру L — С—RH прикладывает-
ся постоянное напряжение Ud. При соответствующих параметрах
L, С и RH ток в контуре будет иметь колебательный характер,
и при прохождении тока через нуль (момент t4) тиристор VS
выключается. Далее процесс периодически повторяется. Рассмот-
ренный способ характерен для резонансных инверторов.
Разработано большое количество различных схем, реализу-
ющих рассмотренные способы коммутации. Кроме того, суще-
ствует также ряд других способов коммутации тиристоров,
не нашедших широкого применения в схемах автономных
инверторов.
При классификации автономных инверторов по способам
искусственной коммутации иногда различают инверторы с од-
ноступенчатой и двухступенчатой коммутацией. При односту-
пенчатой коммутации выключение одного основного тиристора
обычно связано с включением другого основного тиристора
схемы (например, по схеме на рис. 3.9, а) или же включение
и выключение основного тиристора связаны общим процессом
изменения токов (напряжений) в элементах схемы (например,
в схеме на рис. 3.9, г). При двухступенчатой коммутации
выключение основного тиристора производится посредством
включения вспомогательного (коммутирующего) тиристора,
после чего может быть включен снова тот же или другой
основной тиристор (например, в схемах на рис. 3.9,6 и в).
Отдельные модификации схем с двухступенчатой коммутацией
(например, схема на рис. 3.9, в) можно рассматривать как
аналоги полностью управляемого ключа, который может быть
включен или выключен подачей соответствующих управляющих
импульсов (включение производится путем подачи управля-
ющего импульса на основной тиристор, а выключение—пода-
чей управляющего импульса на коммутирующий тиристор).
В ряде случаев при классификации инверторов (особенно
многофазных) используют принцип связи коммутирующего
устройства с основными тиристорами инвертора. При этом
обычно различают инверторы:
а) с поэлементной коммутацией (к каждому основному
тиристору схемы подключено отдельное коммутирующее
устройство);
122
б) с пофазной или групповой коммутацией (в схеме для
коммутации тиристоров одной фазы или группы тиристоров
используется отдельное коммутирующее устройство);
в) с включением коммутирующего устройства между
фазами;
г) с одним общим коммутирующим устройством на все
основные тиристоры схемы.
Инверторы с конденсаторной коммутацией часто клас-
сифицируются по способу соединения конденсатора с нагрузкой:
параллельный, последовательный или параллельно-последова-
тельный инверторы. Классификация по этому признаку не
является чисто формальной, поскольку способ включения
конденсатора относительно нагрузки определяет зависимость
выходного напряжения инвертора от нагрузки, характер пе-
реходных процессов и другие параметры схемы.
По схеме преобразования, так же как и в выпрямителях,
различают однофазные, трехфазные и многофазные инверторы.
Эти схемы могут быть выполнены без нулевого вывода
и с нулевым выводом в цепи нагрузки или цепи постоянного
тока (схемы со средней точкой).
Основными элементами схем инверторов, параметры ко-
торых подлежат расчету, являются ключевые элементы,
коммутирующие элементы (конденсаторы, реакторы и др.),
трансформатор и фильтры, если последние оказывают непо-
средственное влияние на процесс инвертирования, например
сглаживающий реактор в инверторах тока (в других случа-
ях фильтры рассчитывают отдельно как самостоятельные
звенья).
Исходными данными при расчете схемы обычно являют-
ся входное напряжение и диапазон его изменения, парамет-
ры выходного напряжения, мощность нагрузки и диапазон
ее изменения (как активных, так и реактивных состав-
ляющих).
3.2.1. ИНВЕРТОРЫ ТОКА
Параллельный инвертор тока. Рассмотрим работу инвертора
тока на примере представленной на рис. 3.10, а наиболее
распространенной и изученной схемы однофазного мостового
параллельного инвертора тока (коммутирующая емкость на
выходе инвертора подключена параллельно нагрузке). Примем
следующие основные допущения:
индуктивность сглаживающего реактора £d=oo;
тиристоры «идеальные», т. е. время включения и выключе-
ния их, обратный ток, а также прямое падение напряжения
равны нулю;
потери энергии в элементах схемы отсутствуют;
123
Рис. 3.10. Параллельный инвертор тока:
а—схема; б—диаграммы токов и напряжений на элементах инвертора; в — векторная
диаграмма; г — зависимости выходного напряжения и угла Р от нагрузки
напряжение на нагрузке благодаря включению на выходе
фильтров высших гармоник синусоидальное*.
Предположим, что на интервале от нуля до л в проводящем
состоянии находятся тиристоры VS^ и VS\. В момент Э = л
на тиристоры VS2 и VS3 поступают управляющие импульсы
от системы управления инвертором. При этом напряжение
। на нагрузке (точка М на рис. 3.10,6) равно Z7Hmsin0, гДе
Р—угол сдвига между синусоидами выходного напряжения
мн и выходного тока инвертора /н. Это напряжение является
прямым для тиристоров VS2 и KS3, они включаются и цепь
нагрузки оказывается замкнутой накоротко через все откры-
тые тиристоры схемы. В результате этого возникает раз-
ряд коммутирующего конденсатора Ск. Ток разряда рас-
пределяется по двум контурам. В одном контуре он направлен
навстречу току, протекающему через тиристор KSi, а в дру-
гом— навстречу току, протекающему через тиристор VS4.
* В общем случае выходное напряжение инвертора несинусоидально, но
наличие фильтра позволяет при анализе не учитывать высшие гармоники
выходного напряжения.
124
Когда токи этих тиристоров станут равными нулю, они
выключатся, т. е. завершится процесс коммутации тиристоров.
Поскольку в контурах разряда конденсаторов отсутствуют
индуктивности, этот процесс можно считать мгновенным (у = 0).
После выключения тиристоров КЗ1! и VS4 ток начинает
проходить через тиристоры VS2 и VS3, вследствие чего
направление тока нагрузки скачком изменяется. Напряжение
мн в момент коммутации не изменяется из-за наличия в схеме
конденсатора Ск. К тиристорам и VS4 скачком прикла-
дывается обратное напряжение uvsi = uVS4 = t/Hmsin Р (рис.
3.10, б), и они имеют возможность восстанавливать запирающие
свойства. Для нормальной коммутации необходимо, чтобы
выполнялось условие
P^OHq, (3.16)
где со—угловая частота выходного напряжения; tq—время
выключения тиристора.
В противном случае после прохождения напряжения wH через
нуль произойдет повторное включение тиристоров VSi и VS4,
так как на них будет подано прямое напряжение раньше, чем они
успеют восстановить свою запирающую способность. В резуль-
тате этого возникнет аварийный режим, когда во включенном
состоянии будут находиться одновременно все тиристоры
(«опрокидывание» инвертора, см. § 3.6). Для обеспечения условия
(3.16) необходимо, чтобы вся нагрузка вместе с конденсатором
Ск имела емкостный характер и ток zH опережал напряжение и„.
Так как индуктивность сглаживающего реактора принята
Ld=oo, то^с ij в инверторе идеально сглажен и соответственно
выходной ток zH имеет прямоугольную форму (рис. 3.10,6).
Однако при анализе методом «основной» гармоники учитыва-
ется только первая гармоника этого тока zH1 (показанная на
рис. 3.10,6 штриховой линией). Высшие гармоники этого тока
полагаются отфильтрованными конденсатором Ск и фильтром
на выходе инвертора в соответствии с принятым допущением
о синусоидальности выходного напряжения. Первая гармоника
инвертируемого тока zH1 распределяется между конденсатором
Ск (составляющая zc) и- нагрузкой (составляющая in).
•На рис. 3.10, в представлена векторная диаграмма на-
пряжений и первых гармоник токов на выходе инвертора
при активно-индуктивной нагрузке, из которой видно, что
угол Р имеет положительное значение при условии пре-
обладания емкостного тока 1С над реактивной составляющей
тока нагрузки /н>р.
Используя известные в электротехнике соотношения и век-
торную диаграмму на рис. 3.10, в, угол Р можно выразить
следующим образом:
125
tgP = -^—-tg<pH, (3.17)
т я cos <pH
где Yc = a>C—модуль проводимости конденсатора Сж;
YH=1/ZH—модуль проводимости нагрузки.
Напряжение на нагрузке и необходимую емкость Сж удобно
представить в виде функций параметров нагрузки, полученных
из баланса активных и реактивных мощностей:
Рн=ад=^н/исо8Р; (3.18)
0и = Л1ёР; (3.19)
2и=2с'2н= bH(i)CK-/>Htg<pH, (3.20)
где Ря— активная мощность нагрузки; Qc — реактивная мощ-
ность конденсатора; QK—реактивная мощность нагрузки; —
реактивная мощность, потребляемая инвертором.
Из соотношения (3.20) видно, что реактивная мощность,
потребляемая инвертором, равна разности мощностей конденса-
тора Сж и реактивной (индуктивного характера) мощности
нагрузки. Иначе говоря, рассматриваемый тип инвертора
работает при условии полной компенсации индуктивной состав-
ляющей нагрузки. Поэтому конденсатор Сж в схемах подобного
типа инверторов называют иногда компенсирующим.
Так как_ в рассматриваемом случае учитывается только
первая (основная) гармоника выходного напряжения, то дей-
ствующее значение можно выразить соотношением, использу-
емым при анализе инверторов, ведомых сетью (§ 3.1).
(3.21)
2 у2 cos р
Учитывая (3.17), соотношение (3.21) можно записать в виде
2. /2
соС,
Y„ cos <р„
(3.22)
Зависимость (3.22) является внешней характеристикой ин-
вертора, только в качестве переменного параметра в ней
фигурирует не ток нагрузки, а проводимость нагрузки Ун.
Необходимая емкость Сж как функция параметров нагрузки
в соответствии с (3.20) и (3.17) может быть вычислена по формуле
PH(tgP+tg<pH)
(3.23)
Согласно (3.17) и (3.22) угол Р и выходное напряжение
являются функциями параметров нагрузки и емкости конден-
сатора Сж. На рис. 3.10, г представлена графическая интер-
претация этих зависимостей, из которых видно, что внешняя
126
характеристика параллельного инвертора имеет круто пада-
ющий характер. С ростом нагрузки (т. е. с увеличением
проводимости Ун) уменьшается также значение угла р.
Режим работы тиристоров в схеме характеризуется следу-
ющими соотношениями:
1. Максимальные значения прямого и обратного напряже-
ний на тиристорах:
Up max \/ 2 U„,
Ur max = ^2 UH sin р.
2. Максимальное /тах, среднее ITAV и
Itrms значения токов тиристоров:
(3-24)
(3.25)
действующее
Imax — Id — PdIUd',
lTAv = ldl2 = Pdl2Ui-A
Itrms
=Id!j2.
(3.26)
Если на выходе инвертора установлен трансформатор, то
при расчетах необходимо учитывать коэффициент трансфор-
мации, связывающий напряжение на выходе инвертора
Uab и напряжение на нагрузке UH. В схеме без трансформатора
допустимое минимальное значение выходного напряжения
UKmi„ однозначно определяется из соотношения (3.21) при
подстановке в него максимальных значений входного напряже-
ния Udmax и необходимого значения угла Р, который рас-
считывается по (3.16) с двух- или трехкратным запасом
относительно времени tq, указанного в паспортных данных
тиристоров.*
Соотношения (3.17) — (3.26) получены при предположении
синусоидальности формы кривой выходного напряжения, од-
нако они с достаточной для практики точностью позволяют
произвести расчет однофазного параллельного инвертора тока
и при кривой выходного напряжения, отличной от синусоиды.
Более точные соотношения, характеризующие статический ре-
жим работы параллельного инвертора тока с учетом кон-
кретных параметров схемы и действительной формы кривых
токов и напряжений, можно получить методом мгновенных
значений. Для этого необходимо решить дифференциальные
уравнения для токов и напряжений по схемам замещения на
интервалах проводимости тиристоров VS^ VS4 и VS2, VS3.
Последовательный инвертор тока. Общий емкостный харак-
тер нагрузки может быть получен также посредством включе-
ния коммутирующих конденсаторов последовательно с нагруз-
кой. В этом случае инвертор называют последовательным
(рис. 3.11, а). Соотношение (3.22) для первой гармоники выход-
127
Рис. 3.11. Последовательный инвертор тока и зависимость его выходного
напряжения от нагрузки
ного напряжения параллельного инвертора справедливо и для
последовательного, но угол опережения 0 связан с параметрами
нагрузки формулой
tg₽ = — ------tg<pB. (3.27)
Yc cos <p„
Напряжение на выходе инверторного моста Ua (до ком-
мутирующих конденсаторов Ск) определяется соотношением
(3.21).
Напряжение на нагрузке С7Н будет отличаться от выходного
напряжения инвертора UH на падение напряжения на конден-
саторе Ск и выразится в следующем виде:
9 /? U
(3.28)
71 COS фн
Из (3.28) следует, что напряжение на нагрузке UH в пос-
ледовательном инверторе зависит от коэффициента мощности
нагрузки, но не от ее проводимости. Поэтому при неизменном
коэффициенте мощности cos <рн последовательный инвертор
имеет «жесткую» внешнюю характеристику (рис. 3.11, б). В то
же время рост нагрузки приводит согласно (3.27) к увеличению
угла 0, а следовательно, к увеличению напряжения на выходе
инверторного моста 17и, отделенного от нагрузки последова-
тельными конденсаторами Ск.
Рост напряжения Ua ограничивает допустимые перегрузки
в последовательном инверторе. В области же малых нагрузок
происходит уменьшение угла опережения 0. Это может при-
вести в режимах, близких к режиму «холостого» хода,
к нарушению нормальной коммутации тиристоров вследствие
недопустимого уменьшения угла 0 и нарушения условия (3.16).
Следовательно, благодаря последовательному включению
конденсаторов Ск внешняя характеристика инвертора становит-
ся «жесткой» в отличие от внешней характеристики инвертора
с параллельным включением этих конденсаторов. В основном
128
Рис. 3.12. Параллельно-последовательный инвертор тока и зависимость его
выходного напряжения от нагрузки
же электромагнитные процессы и методика расчета элементов
схем последовательного и параллельного инвертора подобны.
Параллельно-последовательный инвертор тока. Схема парал-
лельно-последовательного инвертора тока представлена на
рис. 3.12, а. Инвертор содержит конденсаторы, включенные
последовательно (Сж1) и параллельно (Ск2) нагрузке. Поэтому
он обладает свойствам как параллельного, так и последователь-
ного инвертора тока. При этом в области малых нагрузок
преобладают свойства параллельного инвертора, в области
больших нагрузок — последовательного.
Используя, как и в предыдущих случаях, метод основной
гармоники, получаем следующее соотношение для угла
-----г I * ।--1------
®СК] у ск1 у Ун
1
cos фн
(3.29)
Из (3.29) следует, что угол Р будет стремиться к л/2 (это
соответствует росту напряжения UB) как при уменьшении
нагрузки до холостого хода, так и при перегрузках, вплоть до
короткого замыкания. Согласно (3.21) напряжение UB на выходе
инверторного моста (до конденсаторов Ск) будет также
увеличиваться с ростом угла р. Однако внешняя характеристика
инвертора, характеризующая изменение напряжения на нагрузке
от ее проводимости, в определенном диапазоне будет сравни-
тельно «жесткой» (рис. 3.12, б), причем этот диапазон нагрузок
будет тем шире, чем выше коэффициент мощности нагрузки.
Инвертор тока с «отсекающими» диодами. В рассмотренных
схемах коммутирующие конденсаторы обеспечивают емкостный
характер нагрузки на стороне переменного тока. Значение
емкости конденсаторов можно уменьшить включением в схему
«отсекающих» диодов (рис. 3.13, а).
9 № 3658 129
Рис. 3.13. Инвертор тока с «отсекающими» диодами:
а—схема; б—диаграммы тока и -напряжения иа элементах схемы
Предположим, что в проводящем состоянии находятся
тиристоры VSi, VS4. и диоды KZ>15 VD*, а конденсаторы
заряжены с полярностью, указанной на рисунке. В этом случае
ток протекает только через нагрузку, а конденсаторы, находясь
в заряженном состоянии, «отсечены» от нагрузки диодами
VD2, VD3. При подаче управляющих импульсов на тиристоры
VS2, VS3 под воздействием разрядного тока конденсаторов
Сж1 и Сж2 происходит процесс коммутации. В результате
тиристоры VS\, VS4 выключаются и ток 1а начинает протекать
по цепи тиристор VS2—конденсатор Сж1—диод
VDl — нагрузка ZH—диод VD4—конденсатор Сж2— тиристор
VS3. Ток Id перезаряжает конденсаторы Сж1, Сж2, и, когда
напряжение на них изменит знак и достигнет значения, равного
выходному напряжению, диоды VD2, VD4 выключаются, а ток
начинают проводить диоды VD2, VD3. В этот момент
изменяется направление тока в нагрузке. Далее аналогичные
процессы периодически повторяются. На рис. 3.13, б представ-
лены диаграммы изменения тока и напряжения на коммутиру-
ющих конденсаторах.
Инверторы, выполненные на основе этой схемы, применя-
ются для питания двигательной нагрузки, имеющей индуктив-
ный характер. При неучете коммутационных процессов дей-
ствующее значение первой гармоники выходного напряжения
будет равно
t7H1=—— —
2J2 COS фн
(3.30)
130
где срн—угол сдвига между первыми гармониками выходного
напряжения и инвертируемого тока.
В рассматриваемой схеме конденсаторы участвуют только
в коммутационных процессах и не рассчитываются на ком-
пенсацию реактивной мощности нагрузки. Поэтому их емкость
определяется временем выключения тиристоров t„ значением
коммутируемого тока и напряжением на них ис, которое
примерно равно ^/1 UH sin фн:
Сж1 = с12^^. (3.31)
Zt/c
Время выключения тиристоров tq в данной схеме будет
соответствовать времени спада напряжения на конденсаторах
до нуля при их перезаряде.
3.2.2. ИНВЕРТОРЫ НАПРЯЖЕНИЯ
В начале настоящей главы дано определение и кратко
описан принцип действия инвертора напряжения. Рассмотрим
работу этого типа схем более подробно на примере однофазной
мостовой схемы, выполненной на полностью управляемых
элементах (например, транзисторах). Следует отметить, что
на характер электромагнитных процессов в схеме существенно
влияет способ соединения активных и реактивных элементов
нагрузки, поэтому рассмотрим работу схемы для двух типич-
ных случаев, когда эти элементы соединены последовательно
или параллельно.
Последовательное включение активно-индуктивной нагрузки.
На рис. ЗЦ4, а представлена схема инвертора на транзисторах
V7\— VT^, зашунтированных в обратном направлении диода-
ми И£>! —KZ>4, которые служат для возврата реактивной
мощности нагрузки в источник постоянного тока*. Примем
следующие допущения:
1) транзисторы и диоды являются «идеальными», т. е. их
сопротивления в открытом состоянии, время включения и вы-
ключения равны нулю;
2) в элементах схемы нет потерь энергии;
3) внутреннее сопротивление -источника постоянного тока
равно нулю.
На рис. 3.14, б представлены диаграммы, иллюстрирующие
работу схемы. Когда открыты транзисторы VTt и КТ4,
напряжение на нагрузке имеет полярность, указанную на
рис. 3.14, а (без скобок), а ток нагрузки нарастает по
* В этом типе схем рационально использование в качестве ключевых
элементов интегральных полупроводниковых модулей с полной управля-
емостью и двухсторонней проводимостью (см. гл. 1).
131
Рис. 3.14. Однофазный инвертор на-
пряжения на транзисторах с последо-
вательным соединением активной
Ан и индуктивной LH составляющих
нагрузки:
а—схема; б — диаграммы токов и напряже-
ний на элементах схемы
Рис. 3.15. Однофазный инвертор на-
пряжения на транзисторах с парал-
лельным соединением активной
RH и индуктивной £н составляющих
нагрузки:
а — схема; б—диаграммы токов н напряже-
ний на элементах схемы
экспоненциальному закону. В момент 9 = п поступают упра-
вляющие импульсы, запирающие транзисторы VTi, VT± и от-
пирающие VT2, VT2. Поскольку ток /н в индуктивности
нагрузки не может измениться скачком, то он продолжает
протекать в том же направлении, но уже не через транзисторы
PTj и ГТ4, а через диоды VD2 и VB2, которые включаются
при выключении транзисторов Vl\ и из-за возникновения
противо-ЭДС индуктивности нагрузки, превышающей напряже-
ние источника питания Ud.
Включение диодов VD2 и VD2 приводит к изменению
знака напряжения нагрузки на противоположное (полярность,
указанная на рис. 3.14, а в скобках). Под воздействием встреч-
ного напряжения ток нагрузки zH, протекающий через диоды
VD2, VD2 в источник питания, будет уменьшаться также по
экспоненциальному закону. При спадании тока i„ до нуля (в
момент 9 = 9i) диоды CD3 и VD2 выключаются и ток нагрузки
132
начинают проводить транзисторы VT2 и VT3, на базах
которых с момента 9 = л присутствует управляющий импульс.
Далее аналогичные процессы периодически повторяются.
Таким образом, на нагрузке будет напряжение прямоуголь-
ной формы. Ток нагрузки будет иметь экспоненциальную
форму, а значение его определится параметрами нагрузки.
Ток через обратно включенные диоды K£>i — VD4 начнет
протекать на интервалах, начала которых совпадают с момен-
тами поступления управляющих импульсов, а длительность
зависит от индуктивности нагрузки. Во время протекания
тока через диоды KDi — VD4 происходит возврат энергии из
нагрузки в источник постоянного тока. Отсутствие диодов
в схеме приводило бы к появлению недопустимых перенап-
ряжений на транзисторах. Диаграмма тока, потребляемого от
источника постоянного напряжения, приведена на рис. 3.14, 6.
На этой диаграмме положительные площади соответствуют
отдаче энергии источником постоянного напряжения, а от-
рицательные — приему.
Закон изменения токов в схеме удобно в данном случае
определить, используя метод мгновенных значений, так как
ток нагрузки в момент коммутации не изменяет своего
значения.
Дифференциальные уравнения для тока нагрузки на ин-
тервалах 90— п и п — 91 имеют следующий вид:
®£н^+/нЛн±17а = 0, (3.32)
где знак nJjioc сответствует интервалу 90—п, а знак минус —
интервалу л— 9^
со = 2л/Т.
Запишем решение уравнения (3.32) в общем виде
/н=±—+ Ае~9/а,х, (3.33)
где x = L„/Rn.
Постоянная интегрированная А определяется из условий
непрерывности тока нагрузки при коммутации и повторяемости
его формы в каждом периоде в установившемся режиме
работы: при 9 = 0
при
Л Лют 5
9 = л ►
Л ± Лют •
У
(3.34)
133
Подставляя (3.34) в (3.33), получаем
г
H,n R„
+1ат—^+Ае~к1вп,
откуда
л_ и*
/?я(1+е_"/“")
С учетом полученного значения А выражение (3.33) можно
записать в следующем виде:
, Ud(, 2е-8/<от \
/H-±/feV 1+е~г/2’/
(3.35)
Средние значения токов транзисторов и диодов можно
найти интегрированием уравнения (3.35) на интервалах Эо — л
и л — Согласно (3.35) токи в элементах инвертора напряже-
ния являются функциями параметров нагрузки, в то время
как в инверторе тока параметры нагрузки определяют форму
и значение выходного напряжения. В рассматриваемой схеме
выходное напряжение имеет прямоугольную форму с амп-
литудой, равной напряжению питания Ud. Разложив кривую
прямоугольной формы в гармонический ряд, получим амп-
литуду первой гармоники выходного напряжения:
4
Uim = -Ud.
л
(3.36)
Из принципа работы рассматриваемого инвертора следует,
что его выходное напряжение не зависит от нагрузки. Если
источник, питающий инвертор напряжения, имеет односторон-
нюю проводимость (например, выпрямитель), то его необ-
ходимо шунтировать конденсатором для приема возвращаемой
из нагрузки энергии.
Параллельное включение активно-индуктивной нагрузки.
Принцип работы схемы при таком способе включения нагрузки
(рис. 3.15, а) аналогичен рассмотренному, но характер элект-
ромагнитных процессов становится другим.
В этом случае ток в нагрузке для каждого полупериода
работы схемы легко определить, используя принцип наложения,
согласно которому ток iK можно представить в виде суммы
двух токов
(337)
Ток iL в установившемся режиме работы инвертора опре-
деляется из условия непрерывности его в моменты коммутации
134
(рис. 3.15,6), когда 4(0) = + 4 (л). На интервале 0-л ток
в индуктивности изменяется по линейному закону
^(0)+-'^». (3.38)
Так как при Э = Э0 = л/2 ток в индуктивности становится
равным нулю, то, подставляя в (3.38) Э = л/2, получаем
Следовательно,
4(0) = -л14/2со£я.
со/..
Ток в активном сопротивлении
iR = ± UdfRn.
Ток нагрузки согласно (3.37)
Диаграмма токов представлена на рис. 3.15,6. Так же как
и в случае последовательного соединения La и Rn, интервал
л —соответствует возврату энергии нагрузки в источник
через встречно включенные диоды VD3 — VD2.
Действующее значение тока нагрузки
/н=1/«/7?н- (3.39)
Выходное напряжение имеет прямоугольную форму, и пер-
вая гармоника его определяется по (3.36).
Следует*, отметить, что в рассматриваемых схемах средние
значения токов, протекающих через транзисторы и диоды,
описываются сложными аналитическими выражениями. Однако
обычно, инверторы напряжения имеют выходные фильтры.
В этом случае можно считать и выходной ток синусоидальным,
а средние значения токов для однофазной мостовой
могут быть определены по следующим формулам:
для транзисторов ЕД — VT4
^У25я(1+со8фя)
2 ’
для диодов VDi — VD4
т ___5. (1 COS фя)
TAV~'nU„ 2 ’
где Sn—полная мощность нагрузки; U„—действующее
ние выходного напряжения; coscpH—коэффициент . мощности
нагрузки.
схемы
(3-40)
значе-
135
Из принципа действия инвертора напряжения следует, что
параметры нагрузки для данного класса схем влияют в ос-
новном на характер изменения токов, в то время как выходное
напряжение остается практически неизменным (при принятых
допущениях).
3.2.3. ИНВЕРТОРЫ НАПРЯЖЕНИЯ НА ТИРИСТОРАХ
Основная проблема использования тиристоров в качестве
ключевых элементов заключается в том, что тиристор, являясь
Рис. 3.16. Инвертор напряжения с ин-
дуктивностью коммутирующего LtCt-
контура в цепи нагрузки:
а — схема; б—диаграммы токов и напряже-
ний на элементах схемы
не полностью управляемым
прибором, нуждается в допол-
нительных средствах, обеспе-
чивающих его выключение
В заданный момент времени.
В инверторах напряжения для
этой цели обычно используют
различные схемы искусствен-
ной коммутации и, в частно-
сти, схему с АС-контуром, ге-
нерирующим короткие им-
пульсы тока для выключения
основных тиристоров. Этот
контур может присутствовать
в схеме в неявном виде, когда
А и С разделены основными
тиристорами силовой схемы,
как, например, в широко из-
вестной схеме Мак-Муррея
(рис. 3.16, а), но в большинст-
ве случаев L и С непосредст-
венно соединены между собой
и отделяются от основной це-
пи вспомогательными комму-
тирующими тиристорами, ко-
торые подключают LC-контур
только на время коммутации.
При рассмотрении работы
инверторов напряжения, выпол-
ненных на тиристорах, обыч-
но выделяют два существенно
различных интервала време-
ни — межкоммутационный
и коммутационный. Первый
определяется частотой пере-
ключения основных тиристо-
ров. Длительность интервала
136
коммутации определяется параметрами £С-контура и значи-
тельно короче интервала между коммутациями.
Форма выходного напряжения и электромагнитные процессы
во внекоммутационные периоды в тиристорных и транзистор-
ных инверторах подобны. Электромагнитные же процессы
в интервалах коммутации зависят от способа коммутации
и параметров схемы.
На рис. 3.16, б представлены диаграммы токов и напряжений
на элементах схемы, в которой контур искусственной ком-
мутации непосредственно связан с силовой цепью. Коммутаци-
онные интервалы Эо — Э2 специально растянуты и не соответ-
ствуют их реальной длительности в сравнении с периодом
изменения выходного напряжения.
Предположим, что перед включением тиристора VS2 ток
проводил тиристор KS1! и конденсатор Сж был заряжен
с полярностью, указанной на рис. 3.16, а без скобок. В момент
9о поступает управляющий импульс на VS2. Так как к тиристо-
ру ТХ'г в этот момент приложено прямое напряжение, то он
включится. В результате этого конденсатор Сж оказывается
замкнутым через включенные тиристоры и VS2 и в цепи
VS2—VSl — Ct возникает разрядный ток iK, направленный
навстречу току г'я, протекающему в это время через тиристор
VSt (индекс «штрих» означает, что рассматривается ток
нагрузки, значение которого приведено к первичной полуобмот-
ке трансформатора). Когда суммарный ток — станет
равным нулю, тиристор K3i выключится. При этом напряжение
на конденсаторе Сж не успеет существенно измениться, посколь-
ку указанный процесс будет протекать практически мгновенно
(на рис. 3J6, б этот интервал времени принят равным нулю,
т. е. соответствует точке 90). После включения тиристора VS2
конденсатор Сж начинает перезаряжаться. В процессе перезаряда
напряжение на конденсаторе уменьшается. При этом индуктив-
ность Аж ограничивает скорость перезаряда конденсатора. Пока
напряжение на конденсаторе сохраняет полярность, соответству-
ющую указанной на рис. 3.16,6 без скобок, к выключенному
тиристору VSr будет приложено обратное напряжение и он
может восстанавливать свою запирающую способность. Мо-
мент, когда напряжение- на конденсаторе становится равным
нулю, обозначен 9t. Время выключения тиристора будет равно
_91~ 90
4 со
2л "
где ®=у.
Начиная с момента напряжение на конденсаторе изменяет
полярность и к моменту Э2 становится равным 2Ud (с
137
полярностью, указанной на рис. 3.16, а в скобках), т. е. оно
становится равным напряжению на двух полуобмотках транс-
форматора (к полуобмотке О—Ь приложено напряжение ис-
точника питания Ud, такое же напряжение трансформируется
на полу обмотку а —О).
В момент Э2 напряжение на обратном диоде VD2 становится
равным нулю (к диоду VD2 приложена разность напряжений
полуобмотки О — Ь и источника питания, которая и становится
равной нулю). Если диод идеальный, то он включается и ток
нагрузки под воздействием противо-ЭДС со стороны индук-
тивности нагрузки начинает протекать через него в источник.
В реальной схеме из-за наличия прямого падения напряжения
в диоде противо-ЭДС, наводимая индуктивной составляющей
нагрузки в полуобмотке О—Ь, должна несколько превышать
напряжение Ud (соответственно напряжение на конденсаторе
будет незначительно превышать 2Ud).
В момент включения обратного диода VD2 перезаряд
конденсатора Сж заканчивается и ток нагрузки i'B, который
протекал через него, начинает протекать через обратный диод
VD2. При этом ток в полуобмотке О —а становится равным
нулю, а в диоде VD2 скачком увеличивается от нуля до i'„.
Следовательно, начиная с момента Э2, т- е- с момента
оканчания коммутации, ток нагрузки протекает через обратный
диод VD2 и полуобмотку О — Ь в источник, постепенно спадая
до нуля так же, как и в схемах, выполненных на полностью
управляемых элементах (см. рис. 3.14 и 3.15). В результате
протекания тока i'n через обратный диод на интервале Э2 —
происходит возврат энергии, накопленный в индуктивности,
нагрузки, в источник питания. В момент Э3 диод VD3
выключается, а тиристор VS2 включается (для этого на его
управляющем электроде должен присутствовать управляющий
импульс), и через него снова начинает протекать изменивший
свое направление ток нагрузки.
Одним из недостатков схемы является эффект постепенного
накопления энергии в индуктивности при коммутациях.
Этот эффект является следствием получения индуктивностью
дополнительной энергии при перезарядке конденсатора Ск.
Дополнительная энергия, получаемая индуктивностью
при коммутации, приводит к появлению тока (на рис. 3.16,6
этот ток не показан), который начинает циркулировать в кон-
туре — VD2 — VS2 — LK и затухание которого будет слабым,
если активные потери в контуре малы. В результате при
последующих коммутациях будут происходить постепенное
увеличение указанного тока и уменьшение времени выключения
тиристоров.
Для устранения эффекта накопления энергии обратные
диоды подключают к отводам первичной обмотки трансфор-
138
Рис. 3.17. Схема инвертора напряжения с отделенными от цепи нагрузки
коммутирующими £,С,-контурами
матора (показано штриховой линией на рис. 3.16, а). В схеме
с отводами части вторичных полуобмоток, включенных между
катодами диодов и анодами тиристоров (обычно 10—20%
общего числа витков полуобмотки), создают противо-ЭДС,
обеспечивающие возврат накопленной в индуктивности энер-
гии в источник питания.
При расчете параметров коммутирующего контура значения
и Ск согласно [13] принимают равными
__tql птах.
К~ l,7Uq ’
к 0,425 Z'H,
(3.41)
гДе I'nmax—максимальное значение коммутируемого тока на-
грузки, приведенное к первичной полуобмотке трансформатора.
На рис. 3.17 представлена схема однофазного инвертора
с коммутирующими £кСк-контурами, отделенными от цепи
нагрузки. * Принудительное выключение основных тиристоров
KSi — К54 происходит при включении вспомогательных тири-
сторов VS1—VS4. Форма выходного напряжения и процессы
в схеме на интервалах между коммутациями такие же, как
и в инверторе на транзисторах (см. рис. 3.14 и 3.15). Поэтому
рассмотрим только процессы на интервалах коммутации. Так
как схема является мостовой однофазной, то процессы, про-
текающие в обойх плечах схемы, подобны и коммутационные
процессы можно рассмотреть на примере работы только
одного плеча (например,' основные тиристоры VSt и VS2,
а вспомогательные—VS'i, VS 2), приняв допущения, сфор-
мулированные выше. Кроме того, будем считать, что ток
в нагрузке за время коммутации не успевает измениться.
Предположим, что ток нагрузки проводит тиристор
VSi,, а конденсатор Ск заряжен с полярностью, указанной
на рис. 3.17 без скобок. В момент t = t0 на вспомогательный
тиристор VS{ подается управляющий импульс, он включается,
и начинается колебательный перезаряд емкости Ск по
139
контуру VS i — Ск — £к — VSr.
Ток в контуре при указанных
допущениях будет
4 = IKm sin сок t, (3.42)
где
^СО х/Ск/^к> ®к 1 /Ск,
(7С0 — начальное напряжение
на конденсаторе.
Диаграммы токов и напря-
жений в схеме на интервале
коммутации представлены на
рис. 3.18. Коммутационные
интервалы здесь, так же как
и в схеме рис. 3.16,6, специ-
ально , растянуты по сравне-
нию с интервалами между
коммутациями.
Параметры контура выби-
раются такими, чтобы амп-
литуда тока контура превос-
ходила ток нагрузки примерно
Рис. 3.18. Диаграммы токов и напря-
жений на элементах схемы рис. 3.17
при коммутации
в 1,5 раза, что соответствует минимуму энергии, необходимой
для коммутации. Когда ток контура 4 достигнет значения
тока нагрузки /н (на рис. 3.18 это соответствует моменту t),
ток в тиристоре VSr спадет до нуля и он выключится. Ток
контура начнет протекать через обратный диод KDi. А в это
время к тиристору KSi будет приложено обратное напряжение,
равное прямому падению напряжения на диоде У£>1. Время
протекания тока через диод VDr должно быть не меньше
времени выключения тиристора tq. К моменту t2 ток диода
И£>! уменьшится до нуля и диод выключится, после чего
ток нагрузки начнет протекать через тиристор VS\ и контур
LKCK, перезаряжая конденсатор Ск. Начиная с этого момента
напряжение на диоде VD2 изменяет свой знак и становится
прямым, так как к нему прикладывается сумма напряжений
конденсатора Ск и источника питания Ud. В результате диод
VD2 включится и через него начнет протекать разность токов
LK Ск-контура и нагрузки. Напряжение на нагрузке к этому
времени изменит свою полярность и станет равным — Ud.
Одновременно начнется уменьшение тока контура 4 по ко-
лебательному закону, сопровождающееся дозарядом* конден-
* Периодический дозаряд конденсатора Сж в определенных режимах может
приводить к значительному возрастанию на нем напряжения, которое обычно
ограничивается наличием активных потерь.
140
сатора Ск. В момент z4 ток в тиристоре KSi становится
равным нулю, он выключается, а ток нагрузки продолжает
протекать через диод VD2. Протекание тока нагрузки через
диод VD2 соответствует возврату энергии, накопленной в ин-
дуктивности нагрузки, в источник питания. После спадания
тока нагрузки до нуля (t = t5) диод VD2 выключается, а ти-
ристор VS2 (на котором в этот момент должен присутствовать
управляющий импульс) включается. В результате изменивший
свое направление ток нагрузки начинает протекать через
тиристор VS2. Конденсатор Ск к этому времени будет заряжен
с полярностью, необходимой для последующей коммутации
тиристора.
Рассмотренная схема с отделенными от цепи нагрузки
коммутирующими контурами обладает рядом преимуществ по
сравнению со схемой, изображенной на рис. 3.16. Это объяс-
няется тем, что вспомогательные тиристоры KSj — VS'4 по-
зволяют выключать основные тиристоры по сигналам системы
управления в требуемый момент времени. В этом отношении
данная схема является аналогом схем, выполненных на пол-
ностью управляемых приборах.
Ориентировочный расчет параметров коммутирующего кон-
тура можно вести по следующим формулам:
~к~0,89^^;
Ud
£ -0,39-^-,
4 max
(3.43)
гДе Цтах—Максимальное значение коммутируемого тока на-
грузки.
Рассмотренный способ коммутации может быть успешно
использован в схемах тиристорных инверторов напряжения
как однофазного, так и трехфазного исполнения. В трехфазном
инверторе к схеме, изображенной на рис. 3.17, добавляется
еще одно плечо, состоящее из основных тиристоров, обратных
диодов и коммутирующего устройства.
3.2.4. РЕЗОНАНСНЫЕ ИНВЕРТОРЫ
В резонансных инверторах коммутация тиристоров проис-
ходит под воздействием колебательного £С-контура. Часть
элементов этого контура обычно непосредственно соединена
с нагрузкой. Схемы резонансных инверторов в основном
используются для получения напряжения высокой частоты.
Чаще всего они имеют однофазное исполнение, так как питают
установки высокой частоты для индукционного нагрева
141
Рис. 3.19. Последовательный резонанс-
ный инвертор:
а—схема; 6—диаграммы токов и напряже-
ний на элементах схемы
уравнением:
и ультразвуковой обработки,
где трехфазный ток не при-
меняется.
Так же как и в инверторах
тока, среди них можно выде-
лить параллельные, последо-
вательные и параллельно-пос-
ледовательные инверторы.
Последовательный резо-
нансный инвертор. Схема пос-
ледовательного резонансного
инвертора является наиболее
распространенной. Принцип
действия последовательного
инвертора и его основные ха-
рактеристики рассмотрим на
примере простейшей однофаз-
ной схемы (рис. 3.19, а).
Допустим, что ток в цепи
L — C—Rh носит колебатель-
ный характер, а частота соб-
ственных колебаний тока
го0 —2п/Г0 совпадает с часто-
той поступления управляющих
импульсов в) = 2п/Т. Когда ток
проводит тиристор VSi, то
цепь подключена к источнику постоянного тока с напряже-
нием Ud и процессы в схеме можно описать следующим
di 1
L-£+c[ i»dt+Reia=Ud.
(3-44)
Решая уравнение (3.44), получаем для интервала 0—п
-f—e a<,‘l2Qsin(d0t,
(3.45)
где
/ 1 Лн
4L2’
Q — a>0L/ Ни-
когда ток 4 спадает до нуля, тиристор выключается
(на рис. 3.19,6 момент спадания тока до нуля соответствует
9 = л, так как в рассматриваемом случае соо = со, т. е. Эп = 0).
Предположим, что тиристор VSt выключается мгновенно.
Тогда, если в этот же момент Э = п поступает управляющий
142
импульс на тиристор К52, он включается и на интервале
п— 2 — п, ток iH будет изменяться по закону
iH = Ucty е~(&~ 2Q Sin ^(Оо f(3.46)
Если бы сопротивление Лн было равно нулю, то в схеме
отсутствовали бы потери энергии и напряжение на конденсаторе
от периода к периоду удваивалось. Наличие нагрузки 7?н огра-
ничивает рост напряжения на конденсаторе на определенном
уровне. В реальных условиях необходимо иметь паузы Эп для
выключения тиристоров KSi и VS2 (рис. 3.19,6) или принять
меры для их принудительного выключения. Поэтому различают
два способа коммутации:
1. Способ «квазиестественной» коммутации, когда время
паузы /п = 9п/®о больше времени выключения tq, т. е. схема
работает с прерывистыми токами (рис. 3.19,6). Для этого
нужно, чтобы ахо)о.
2. Способ принудительной коммутации, когда го>ю0.
В этом случае последовательно с тиристорами VSi и VS2
включают коммутирующие реакторы со связанной магнитной
системой, которые при коммутации создают необходимое
запирающее напряжение на тиристорах.
Действующее значение первой гармоники выходного
напряжения (на сопротивлении /?н) можно записать в сле-
дующем виде:
Если колебательный контур выбран из условия резонанса
на рабочей частоте инвертора и диапазон изменения нагрузки
7?и таков, что затухание в нем мало, т. е.
и
со£«1/о)С
RU4L2«\/LC,
(3.48)
то напряжение на нагрузке близко к синусоидальному, а его
амплитуда практически не зависит от нагрузки («жесткая»
внешняя характеристика). Однако при глубоких изменениях
нагрузки от холостого хода до короткого замыкания инвертор
теряет работоспособность: в первом случае из-за срыва ин-
вертирования, так как электромагнитные процессы в контуре
становятся апериодическими и тиристоры и VS2 не будут
отключаться; во втором—из-за возникновения больших пе-
ренапряжений на индуктивности и емкости контура.
143
Рис. 3.20. Диаграммы токов и напря-
жений на элементах схемы параллель-
ного резонансного инвертора
Рис. 3.21. Двухъячейковый резонанс-
ный инвертор
Параллельный резонансный инвертор. Представленная на
рис. 3.10, а схема параллельного инвертора тока одновременно
является и схемой параллельного резонансного инвертора при
соответствующем выборе параметров реактивных элементов
схемы. Принцип действия резонансного инвертора следующий.
Предположим, что в проводящем состоянии находятся тири-
сторы VS4, а конденсатор С заряжается от источника
постоянного напряжения через индуктивность Ld по колебатель-
ному закону, причем период колебания зарядного тока такой,
что ток спадает до нуля раньше, чем будут поданы управ-
ляющие импульсы на тиристоры VS2 и VS3. На диаграмме
токов и напряжений (рис. 3.20) момент равенства тока в ти-
ристорах обозначен 9t.
До подачи управляющих импульсов на тиристоры VS2,
VS3 на интервале от Oj до Э2 цепи постоянного и переменного
тока отделены друг от друга выключенными тиристорами
и к тиристорам VSt, VS4 приложено обратное напряжение
U =и = . (3.49)
Для того чтобы тиристоры K5i, VS4 выключились, необ-
ходимо, чтобы на интервале от до Э2 напряжение оставалось
отрицательным, а длительность интервала составляла
Э2 —(3.50)
где со—угловая частота следования управляющих импульсов.
144
В момент Э2 поступают управляющие импульсы на ти-
ристоры VS2, VS3, которые включаются. Напряжение на
тиристорах VSt, К54 скачком изменяется до пн(Э2), и далее
начинается перезаряд конденсатора, напряжение на котором
в момент Э3 изменяет знак. Затем процессы в схеме пери-
одически повторяются.
Основные характеристики параллельного резонансного ин-
вертора близки к характеристикам параллельного инвертора
тока, однако в резонансном инверторе, работающем в режиме
прерывистого тока id, можно получить более высокие частоты
выходного напряжения.
Резонансные инверторы, так же как и инверторы тока,
могут выполняться по параллельно-последовательной схеме
(см. рис. 3.12). В этом случае индуктивность выбирается из
условия обеспечения режима работы с прерывистым током
1Л во всем диапазоне изменения нагрузки.
Многоячейковые инверторы. Для получения повышенных
частот иногда используют последовательное или параллельное
соединение однофазных резонансных инверторов. Примером
может служить схема двухъячейкового последовательного ре-
зонансного инвертора, схема которого представлена на
рис. 3.21. На нагрузке в приведенной схеме можно получить
выходное напряжение двойной частоты по отношению к ра-
бочей частоте одной ячейки, т. е. со = 2а)я.
Удвоение частоты в данной схеме получается за счет
поочередного включения пар тиристоров ячеек. Например,
если включены тиристоры VSt, VS2, то затем включаются
тиристоры VS5, VS6, потом К53, VS4 и т. д. В результате
в нагрузку^ поступает напряжение удвоенной частоты. Для
«-ячейкового инвертора частота выходного напряжения
а) = «соя. (3.51)
Многоячейковые схемы могут быть также применены для
повышения суммарной мощности инвертора. В этом случае
мощность нагрузки будет равномерно распределяться между
ячейками за счет одновременного включения соответствующих
тиристоров каждой ячейки.
3.3. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ
Полупроводниковый преобразователь, осуществляющий пре-
образование электрической энергии переменного тока одной
частоты в переменный ток другой частоты, называется преоб-
разователем частоты.
Преобразователи частоты классифицируются по мощности,
напряжению, числу фаз входного и выходного напряжений,
схеме преобразования и т. д. Работа преобразователя и его
10 № 3658 145
технико-экономические характеристики в основном определя-
ются схемой преобразования. От схемы преобразования непо-
средственно зависят:
1) параметры выходного напряжения;
2) коэффициент мощности преобразователя по входу
и выходу;
3) форма кривой переменного тока, потребляемого из
питающей сети;
4) внешняя (нагрузочная) характеристика преобразователя;
5) КПД.
Преобразователи частоты выполняются с фиксированным
соотношением частот входного и выходного напряжений и с пе-
ременным их соотношением или с регулируемой частотой.
Преобразователи с регулируемой частотой нашли широкое
применение в области электропривода для регулирования
скорости асинхронных двигателей.
При классификации преобразователей частоты выделяют
два основных типа:
1) преобразователи с промежуточным звеном постоянного
тока;
2) преобразователи с непосредственной связью питающей
сети и цепей нагрузки, которые в литературе иногда
называются преобразователями с неявно выраженным звеном
постоянного тока.
Преобразователи с непосредственной связью подразделя-
ются на преобразователи с естественной коммутацией тири-
сторов (под воздействием напряжения питающей сети), называ-
емые также циклоконверторами, и преобразователи с искус-
ственной (принудительной) коммутацией тиристоров.
3.3.1. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С ПРОМЕЖУТОЧНЫМ
ЗВЕНОМ ПОСТОЯННОГО ТОКА
Структурная схема преобразователя частоты с промежуточ-
ным звеном приведена на рис. 3.22. Переменное напряжение
1/\ с частотой /i поступает на вход выпрямителя В. Выпрямлен-
ное напряжение сглаживается фильтром Ф и поступает на вход
автономного инвертора АИ, имеющего выходное напряжение
U2 с частотой f2. В преобразователях данного типа частота
выходного напряжения не зависит от частоты питающей сети
и может быть как больше, так и меньше этой частоты.
Схема выпрямителя В обычно выбирается из условий
обеспечения требований по регулированию его выходного
Рис. 3.22. Структурная схема преоб-
разователя частоты с промежуточным
звеном постоянного тока
146
напряжения, влиянию на источник переменного напряжения,
питающий преобразователь, допустимому уровню пульсаций
выпрямленного напряжения и др. Требования к снижению
уровня пульсаций выпрямленного напряжения связаны с вли-
янием их на качество выходного напряжения инвертора,
которое проявляется обычно в виде модуляции (периодического
изменения амплитуды) выходного напряжения инвертора. При
питании преобразователя от промышленной сети выпрямитель
В чаще всего выполняется по трехфазной мостовой схеме.
Для уменьшения пульсаций на выходе выпрямителя обычно
устанавливают фильтр Ф.
Если звено АИ выполнено по схеме инвертора напряжения,
то необходимость в фильтре обусловлена также особенностью
работы инвертора напряжения (см. § 3.2) на активно-индуктив-
ную нагрузку. При такой нагрузке должен происходить возврат
энергии, накопленной в индуктивностях нагрузки, в источник
постоянного тока через обратные диоды. Поскольку в рассмат-
риваемом преобразователе источником постоянного тока явля-
ется выпрямитель, обладающий односторонней проводимо-
стью, то функции приемника возвращаемой энергии выполняет
обычно фильтр, имеющий в таком случае емкостный выход.
Емкость конденсатора, включенного на выходе фильтра, в этом
случае должна рассчитываться не только из условия обеспече-
ния требуемого коэффициента сглаживания пульсаций выпрями-
теля, но и из условия обеспечения требуемого уровня пульса-
ций, вызванных периодическим возвратом энергии из индуктив-
ных элементов нагрузки через обратные диоды инвертора.
Если звено АИ выполнено по схеме инвертора тока, то
фильтр Ф должен иметь индуктивный выход для обеспечения
непрерывности инвертируемого тока (или образования коле-
бательного процесса изменения этого тока в резонансных
инверторах). В этом случае выходная индуктивность фильтра,
как правило, относится непосредственно к инверторному звену
и учитывается при его проектировании в виде индуктивности
сглаживающего реактора Ld. В большинстве случаев в подоб-
ного типа преобразователях фильтр имеет Т-образную струк-
туру, состоящую из Г-образного ГС-фильтра на выходе
выпрямителя и индуктивности сглаживающего реактора Ld на
выходе инвертора.
В зависимости от требований, предъявляемых к преоб-
разователю частоты, звено АИ выполняется по различным
схемам. Преобразователи с фиксированной частотой выходного
напряжения (обычно частоты от 400 Гц до 1 кГц) и с высокими
требованиями к синусоидальности выходного напряжения це-
лесообразно выполнять по схеме инвертора тока. В преоб-
разователях высокой частоты (10 кГц и выше) звено АИ часто
выполняется по схеме резонансного инвертора.
147
В преобразователях с регулируемой в широком диапазоне
частотой выходного напряжения, предназначенных обычно для
питания двигательной нагрузки, звено АИ выполняется, как
правило, по схеме инвертора напряжения. К большинству
таких преобразователей не предъявляются высокие требования
по синусоидальности выходного напряжения. Поэтому инвер-
торное звено в них или не имеет выходного фильтра, или
вводится фильтр небольшой установленной мощности. При
необходимости улучшения синусоидальности кривой выходного
напряжения применяют специальные схемные решения или
широтно-импульсную модуляцию выходного напряжения по
синусоидальному закону (подробнее об обеспечении синусо-
идальности выходного напряжения см. в § 3.5).
3.3.2. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ
С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
Преобразователи частоты с непосредственной связью по
своему схемному исполнению сходны с реверсивными преоб-
разователями (§ 3.1). Основой силовой части таких преоб-
разователей являются встречно-параллельно включенные груп-
пы тиристоров, каждая из которых может работать в вы-
прямительном или инверторном режиме.
Чаще всего такие преобразователи выполняются с естествен-
ной коммутацией тиристоров и поэтому имеют частоту
выходного напряжения меньшую, чем частота питающей сети.
Это обстоятельство обусловило их широкое применение в области
электропривода для частотного регулирования скорости двигате-
лей путем изменения частоты выходного напряжения в диапазоне
низких частот (ниже частоты промышленной сети /=50Гц).
Число фаз входного и выходного напряжений в преобразова-
телях с непосредственной связью является весьма существенным
признаком их классификации, так как оно в значительной мере
определяет структуру построения схемы преобразователя. Сле-
дует отметить, что многофазные преобразователи этого класса
обладают удовлетворительными технико-экономическими харак-
теристиками и получили большое распространение.
Рассмотрим принцип работы преобразователя с непосред-
ственной связью и естественной коммутацией на примере
трехфазно-однофазной схемы (рис. 3.23, а). В схеме преоб-
разователя можно выделить две группы тиристоров: группу
I—катодную (К51, VS2, К53) и II — анодную (VS4, VS5, VS6).
Допустим, что нагрузка ZH — активная. Управляющие импульсы
в процессе работы поступают на тиристоры анодной и катод-
ной групп поочередно. Когда управляющие импульсы, син-
хронизированные но частоте с напряжением питающей сети,
подаются последовательно на тиристоры VSi; VS2, VS2
148
Vf, с “г
Рис. 3.23. Преобразователь частоты с непосредственной связью:
а—схема, б—диаграмма выходного напряжения прн активной нагрузке без паузы между
коммутацией групп I и II
катодной группы, она работает в режиме выпрямления (по
трехфазной схеме со средней точкой), формируя на нагрузке
положительную полуволну напряжения относительно нулевого
вывода трансформатора (рис. 3.23, б). Управляющие импульсы
поступают на тиристоры со сдвигом относительно линейных
напряжений питающей сети на угол а. При работе тиристоров
VS4, И55, VS6 анодной группы на нагрузке относительно
нулевого вывода трансформатора формируется отрицательная
полуволна напряжения. В результате цикличной работы групп
I и II на нагрузке создается переменное напряжение с частотой
основной гармоники /2 более низкой, чем частота питающей
сети fi.
Частота f2 определяется временем, в течение которого
проводят ток тиристоры каждой группы. Изменением угла
а можно регулировать выходное напряжение. Для исключения
постоянной‘составляющей в напряжении на нагрузке времени
работы анодной и катодной групп должны быть равны между
собой. _ На рис. 3.23, б представлена диаграмма выходного
напряжения при активной нагрузке. Из рис. 3.23, б видно, что
тиристоры катодной группы вступают в работу только после
снижения до нуля полуволны напряжения, формируемой анод-
ной группой, и наоборот. Это объясняется тем, что тиристор
находится во включенном, состоянии до тех пор, пока ток,
протекающий через него (в рассматриваемом случае ток
совпадает по фазе с напряжением), не спадет до нуля.
В трехфазно-однофазной схеме тиристоры каждой группы
коммутируют между собой (внутригрупповая коммутация)
через интервал времени, равный л/3. Поэтому без учета
интервала коммутации можно записать следующее выражение
для длительности одной полуволны выходного напряжения:
I 2тс [ 2 л \ тс . ,,,
=з(I 2"+1)’ (3-52)
Z/2 \ J / J
149
где п — число участков синусоид в полуволне; п — 2л/3 — угол,
обусловленный спаданием до нуля заднего фронта полуволны
выходного напряжения.
В общем случае при числе фаз питающей сети, равном
л«1, связь частот выходного и входного напряжений выражется
соотношением
f — 171
2 2n + mi’
где /j и f2— частоты входного и выходного (основной
гармоники) напряжений.
Из (3.53) видно, что частота выходного напряжения/2 может
принимать только дискретные значения при изменении числа
п (и = 1, 2, 3...). Например, при числе фаз питающей сети
wij = 3 и частоте /i = 50Fn частота f2 может принимать
значения 30; 23,5; 16 2/3 Гц и т. д. Для обеспечения плавного
изменения частоты необходима пауза фп между окончанием
работы предыдущей группы и началом работы последующей
группы (рис. 3.23, б). В этом случае связь частот и f2 может
быть выражена соотношением
/1W1K
(3.53)
(3-54)
.
7t(2« + w1) + (pnw1
При активно-индуктивной нагрузке моменты прохождения
через нуль полуволны выходного напряжения не соответствуют
нулевым значениям токов нагрузки, так как индуктивность
нагрузки обуславливает запаздывание тока относительно на-
пряжения. Для того чтобы в этом случае обеспечить протекание
тока из цепи нагрузки в питающую сеть (что соответствует
возврату в сеть энергии, накопленной в индуктивности, т. е.
ее рекуперации), соответствующую тиристорную группу пере-
водят в инверторный режим работы. Например, если группа
тиристоров I работала в выпрямительном режиме с углом
управления а, то, начиная с определенного момента, управ-
ляющие импульсы тиристоров группы I начинают поступать
со сдвигом относительно напряжений питающей сети на угол
Р в сторону опережения. Такое следование импульсов соот-
ветствует инверторному режиму работы тиристоров (см. § 3.1).
Источником постоянного напряжения, под воздействием ко-
торого протекает инвертируемый ток, в данном случае является
нагрузка, а точнее, ее индуктивная составляющая. В результате
инверторного режима работы части тиристоров группы I проис-
ходит возврат в сеть энергии, накопленной в индуктивности,
и снижение тока нагрузки до нуля. Затем система управления
преобразователем обеспечивает паузу <рп, после которой начина-
ет работать в выпрямительном режиме группа тиристоров
150
II, часть из которых переходит в заданный программой
управления момент в инверторный режим. Далее рассмо-
тренные процессы периодически повторяются.
Трехфазно-однофазный преобразователь с непосредственной
связью может быть выполнен также на основе двух групп
тиристоров, каждая из которых имеет конфигурацию мостовой
трехфазной схемы. Существует также много вариантов схем
с непосредственной связью, позволяющих получить на выходе
трехфазную систему напряжений.
Схемы преобразователей с непосредственной связью и есте-
ственной коммутацией тиристоров сравнительно просты (име-
ется в виду силовая часть схемы) и имеют относительно
малые удельные массогабаритные показатели. Существенным
их недостатком является низкое качество выходного напряже-
ния в части гармонического состава, т. е. высокое значение
коэффициента искажения. Кроме того, из принципа действия
подобного типа преобразователей следует, что они могут
использоваться только для получения напряжений более низкой
частоты, чем частота питающей сети.
При необходимости получить на выходе преобразователя
с непосредственной связью напряжение более высокой частоты,
чем частота питающей сети, прибегают к искусственной
коммутации тиристоров.
На рис. 3.24 представлена схема трехфазно-однофазного
преобразователя с непосредственной связью и искусственной
коммутацией, осуществляемой под воздействием конденсатора
Сж, установленного на выходе преобразователя. Принцип
работы схемы следующий. Ток нагрузки попеременно проводят
тиристоры едэупп I, II и III, IV. Внутригрупповая коммутация
тиристоров,* например тиристоров VS1A, VS1B и VS1C
группы 1, происходит под
воздействием напряжения
питающей сети так же,
как и в схемах с есте-
ственной коммутацией.
Конденсатор Сг позволяет
практически мгновенно про-
извести коммутацию между
группами тиристоров (меж-
групповую коммутацию)
и тем самым изменить
полярность тока, поступа-
ющего в нагрузку (вклю-
чающую в себя конденсатор
Сг). При включении сгла-
живающих реакторов
Ld и L'd их индуктивности
Рис. 3.24. Схема преобразователя частоты
с искусственной коммутацией тиристоров
151
в контуре межгрупповой коммутации не участвуют (за ис-
ключением индуктивностей рассеяния), так как коммутирующий
ток конденсатора Сж в каждой полуобмотке реакторов будет
создавать взаимно компенсирующиеся потокосцепления. Ем-
кость конденсатора должна выбираться из тех же условий,
что и для параллельного инвертора тока.
Использование запираемых тиристоров исключает необходи-
мость в элементах искусственной коммутации, упрощая тем
самым схему и повышая технико-экономические показатели.
3.4. РЕГУЛИРОВАНИЕ ВЫХОДНОГО НАПРЯЖЕНИЯ
АВТОНОМНЫХ ИНВЕРТОРОВ
3.4.1. ОБЩИЕ ПРИНЦИПЫ РЕГУЛИРОВАНИЯ
Как правило, в автономных инверторах требуется регули-
рование выходного напряжения, в частности его стабилизация,
при различных возмущающих факторах, главным образом
при изменении входного напряжения и изменении нагрузки.
В зависимости от схемы инвертора можно использовать
различные способы регулирования выходного напряжения.
В самом общем виде эти способы можно разделить на три
группы:
1) регулирование напряжения на входе инвертора;
2) регулирование посредством воздействия на процессы
в инверторе, влияющие на выходное напряжение;
3) регулирование напряжения непосредственно на нагрузке
за счет использования стабилизаторов переменного напряжения
на выходе инвертора.
Способы первой группы основаны на пропорциональности
выходного напряжения инвертора входному. Они применяются,
когда источником постоянного тока является управляемый
выпрямитель. Кроме того, эти способы могут быть ре-
ализованы посредством включения на входе инверторов ре-
гуляторов постоянного напряжения: транзисторных непрерыв-
ного действия (для маломощных инверторов), импульсных и др.
Способы второй группы во многом определяются схемой
инвертора. Например, в инверторах тока значение выходного
напряжения непосредственно связано с нагрузкой. Из этого
следует, что введением регулируемых активных или реактивных
эквивалентов нагрузки на выходе инвертора можно компен-
сировать изменение нагрузки и тем самым регулировать
выходное напряжение инвертора. На этом принципе основано
много различных схем силовых регулирующих устройств
в инверторах тока.
В некоторых типах инверторов регулирование выходного
напряжения можно осуществлять за счет изменения частоты
152
инвертирования. Это прежде всего относится к инверторам
тока и резонансным инверторам, используемым в качестве
промежуточного звена в преобразователях постоянного на-
пряжения (одного напряжения в другое).
В инверторах напряжения регулирование наиболее целесо-
образно осуществлять за счет изменения длительности про-
водящего состояния основных тиристоров схемы, используя
при этом различные способы модуляции напряжения, например
широтно-импульсный. В некоторых случаях рациональным
является способ регулирования, основанный на геометрическом
суммировании выходных напряжений двух или более инвер-
торов, сдвинутых между собой по фазе, изменять которую
можно за счет изменения следования управляющих импульсов.
Этот способ чаще всего используют при регулировании
инверторов напряжения, но он может быть применен и для
инверторов тока.
Способы третьей группы применяются редко, обычно в ин-
верторах небольшой мощности, так как они связаны с ис-
пользованием дополнительных устройств, существенно ухуд-
шающих массогабаритные и технико-экономические характе-
ристики инвертора. Такими устройствами обычно служат
феррорезонансные, тиристорные, индукционные и другие типы
регуляторов переменного тока. Способы регулирования этой
группы могут оказаться приемлемыми только при сравнительно
«жестких» внешних характеристиках самого инвертора, напри-
мер инвертора напряжения. Различные типы регулирующих
устройств, позволяющих реализовать способы первой и третьей
групп, подробно рассматриваются в гл. 4. Поэтому в насто-
ящем параграфе разбираются только способы второй группы.
3.4.2. РЕГУЛИРУЮЩИЕ УСТРОЙСТВА ИНВЕРТОРОВ ТОКА
Выходное напряжение инверторов тока U„ зависит от
параметров нагрузки и дополнительных активных и реактивных
элементов, установленных на выходе инвертора, в частности
коммутирующих конденсаторов Сг (см. § 3.2). Эта зависимость
выражается в общем случае согласно методу основной гар-
моники следующей формулой: *
Un =___
“ ксх cos Р ’
(3.55)
где ксх — коэффициент схемы (см. § 2.2); Ut— входное напряже-
ние инвертора; Р—угол опережения.
Следовательно, выходное напряжение инвертора тока может
регулироваться изменением входного напряжения Ud или угла
р. Если требуется стабилизировать выходное напряжение при
153
неизменном значении входного напряжения Ud, то согласно
(3.55) достаточно обеспечить во всех режимах работы посто-
янство угла р.
Рассмотрим на примере схемы параллельного инвертора
тока способы стабилизации его выходного напряжения при
изменениях нагрузки и неизменном значении входного напряже-
ния Ud. В параллельном инверторе тока (см. § 3.2) в отличие
от инвертора, ведомого сетью, угол р однозначно определяется
параметрами коммутирующего конденсатора Ск и нагрузки
на выходных шинах инвертора. Используя уравнение баланса
реактивных мощностей (3.20), угол р для параллельного (так
же как и для последовательного и параллельно-последователь-
ного) инвертора тока можно выразить соотношением
P = arctg^|^. (3.56)
•* н
Из (3.56) следует, что изменение любой составляющей
суммарной мощности на выходе инвертора приводит к измене-
нию угла р.
Стабилизация угла Р, а следовательно, и выходного на-
пряжения при изменениях нагрузки может осуществляться
двумя существенно различными путями, определяемыми прин-
ципом построения системы управления инвертора. Первый
заключается в том, что управляющие импульсы поступают
на тиристоры инвертора синхронно с выходным напряжением.
При этом фаза их следования соответствует углу опережения
р. Такой способ управления обычно реализуется посредством
привязки моментов формирования управляющих импульсов
непосредственно к кривой выходного напряжения (подробно
системы управления подобного типа рассматриваются в гл. 5).
Инвертор тока, работающий с «жестко» заданным значением
угла р, называют инвертором с зависимым возбуждением
[14] (или инвертором с самовозбуждением) в отличие от
инвертора с независимым возбуждением, у которого частота
и фаза следования управляющих импульсов не связаны с выход-
ными параметрами инвертора и определяются только работой
маломощного задающего генератора системы управления.
Отличительной особенностью инвертора тока, работающего
в режиме с зависимым возбуждением, является изменение
частоты его выходного напряжения при изменении параметров
нагрузки. Изменение частоты при фиксированном значении
угла Р вызывает такое изменение реактивных мощностей
конденсатора С, и нагрузки £>„, при котором баланс мощностей
сохраняется с неизменным значением угла р. Иначе это
явление можно объяснить тем, что сопротивления (или про-
водимости) реактивных элементов на выходе инвертора зависят
154
от частоты выходного напряжения. Поэтому, когда происходит
изменение нагрузки, частота выходного напряжения изменяется
так, что угол Р, являющийся согласно (3.17) аргументом
комплексного сопротивления (или проводимости) на выходе
инвертора, остается постоянным и равным углу, заданному
системой управления.
Если инвертор работает в режиме независимого возбужде-
ния, то изменение нагрузки приводит к изменению угла (3.
Например, уменьшение активной Ря или реактивной Qx со-
ставляющей мощности нагрузки приводит согласно (3.56)
к росту угла |3. Если рассмотреть для этого случая баланс
реактивных мощностей на выходе инвертора, то можно
увидеть, что уменьшение мощности нагрузки (как активной,
так и реактивной ее составляющих) приводит к относительному
увеличению мощности конденсаторов Qt (возникает избыточ-
ность реактивной мощности, генерируемой конденсаторами
CJ. Увеличение мощности нагрузки вызывает обратное яв-
ление, в результате которого происходит уменьшение угла |3.
Для стабилизации (регулирования) угла (J в Инверторах
тока применяют специальные устройства, позволяющие обес-
печить заданный угол Р в различных режимах работы
инвертора. Принцип действия таких устройств основан на
изменении активной, активно-реактивной или реактивной мощ-
ности на выходе инвертора. Поэтому они по существу являются
регуляторами мощности. Стабилизация (регулирование) угла
Р в этом случае осуществляется за счет компенсации изменения
мощности нагрузки. Например, если мощность нагрузки умень-
шилась и возник избыток реактивной мощности конденсаторов,
то согласно (3.56) для обеспечения постоянства угла Р необ-
ходимо уменьшить реактивную мощность конденсаторов или
увеличить мощность, потребляемую дополнительными устрой-
ствами.—регуляторами мощности, которые будут в этом случае
поглощать избыток реактивной мощности, генерируемой кон-
денсаторами. Таким же способом при неизменной нагрузке
можно регулировать угол р, а следовательно, и выходное
напряжение.
Регулирование мощности на выходе инвертора может
использоваться и в цепях регулирования частоты выходного
напряжения, если угол р фиксирован системой управления.
В частности, такие регуляторы мощности используются для
стабилизации частоты в инверторах с комбинированным воз-
буждением [14], принцип управления которыми рассматрива-
ется в § 5.3.
Практическое применение для компенсации изменения мощ-
ности нагрузки нашли тиристорные регуляторы реактивной
и активно-реактивной мощности различных типов. Среди них
наибольшее распространение получило компенсирующее
155
Рис. 3.25. Компенсирующее устрой-
ство, выполненное на основе реактора
со встречно-параллельно включенны-
ми тиристорами
устройство, выполненное на
основе -реактора, включенного
последовательно со встречно-
параллельно соединенными
тиристорами (рис. 3,25, а).
Допустим, что на входе
компенсирующего устройства
имеется синусоидальное напря-
жение, потери энергии в схеме
равны нулю, а тиристоры иде-
альные. Если в момент 90,
находящийся в интервале от
л/2 до л, подать управляющий
импульс на тиристор К51; то
он включится и через индук-
тивность Lo начнет протекать
ток. Этот ток можно пред-
ставить в виде суммы двух
составляющих — свободной
/св (9) и установившейся /у(9):
МЭ)=М»)=М»)+М»)- (3-57)
Установившаяся составляющая
/у(9)= ——cos 9, (3.58)
coL0
где Lo — индуктивность реактора; Un— амплитуда приложен-
ного напряжения.
Свободную составляющую можно определить из закона
коммутации тока в индуктивных цепях, согласно которому
ток в момент коммутации в индуктивности скачком не
изменяется, т. е. в момент 90
/ь(Эо) = 4в(9) + /у(9) = 0. (3.59)
Из (3.58) и (3.59) следует
/св(М=-^Гсо8Э0. (3.60)
coLo
Так как свободная составляющая из-за отсутствия потерь
в схеме не затухает, то /св (9) = /св (90).
При угле управления а=л —90 получим:
/l(9)= — (cos а+cos 9). (3.61)
<dL0
Диаграммы изменений тока и напряжения представлены
на рис. 3.25, б. В момент 9t=n + a ток zL(9) становится
156
равным нулю и тиристор KSj выключается. Затем в момент
времени Э2 подается управляющий импульс на тиристор
KS2 и ток в реакторе начинает протекать в противоположном
направлении.
Ток в реакторе при периодическом следовании управляющих
импульсов имеет периодический характер, и его можно раз-
ложить в гармонический ряд. Действующее значение первой
гармоники тока
2/1 \
1ц=-1т(a—-sin2a , (3.62)
где /т=С7т/св£0.
Из (3.62) следует, что, изменяя угол а в интервале от
О до л/2, получаем изменение действующего значения тока
первой гармоники в диапазоне от 'нуля до 1т. Необходимо
отметить, что увеличение угла а сверх л/2 приведет к тому,
что проводимость соответствующего тиристора станет больше
половины периода. Это вызовет нарушение в симметричности
работы тиристоров KSj и VS2, так как если интервал*
проводимости одного тиристора больше чем л, то второй
к моменту подачи на него управляющего импульса будет
шунтирован первым и не вступит в работу.
Снижение тока IL1 при уменьшении угла а эквивалентно
увеличению индуктивного сопротивления всей цепи компен-
сирующего устройства, что можно выразить соотношением
лхо
Хь j ;
2 a—sin2a
\ 2
(3.63)
где x0 = (£>L0—индуктивное сопротивление реактора Lo на
частоте входного напряжения.
Регулирование компенсирующего устройства приводит к из-
менению потребляемой им реактивной мощности. Следова-
тельно, изменяя угол а, можно компенсировать изменение
мощности нагрузки на выходе инвертора таким образом,
чтобы угол Р оставался на заданном уровне. Для того чтобы
сохранять значение угла' Р, а следовательно, и- выходного
напряжения на заданном уровне во всем диапазоне изменения
нагрузки от холостого хода до максимального значения,
необходимо, чтобы
QLmax^Qc^Pnmax^^max + tg^max), (3-64)
где фтах — максимальное значение угла сдвига между первыми
гармониками напряжения и тока нагрузки;
Q.Lmax — максимальная реактивная мощность, потребляемая
компенсирующим устройством при угле а=л/2.
157
i
3
Отсюда, учитывая (3.64), можно получить следующее coot- i
ношение для определения индуктивности Lo:
L0*l/(i)2C', (3.65)
•
где со—частота выходного напряжения инвертора; Ск—ем- ;
кость, установленная на выходе инвертора. '
Рассматриваемый тип компенсирующего устройства улуч-
шает форму кривой выходного напряжения. Это объясняется
тем, что обычно его расчетная мощность выбирается из
условия полной компенсации мощности конденсатора Qc-
Последняя определяется из условия обеспечения устойчивой
работы инвертора в режимах кратковременных перегрузок,
т. е. с запасом по отношению к номинальной нагрузке.
Поэтому к выходным шинам инвертора оказывается постоянно
подключенной эквивалентная индуктивность компенсирующего
устройства. Наличие же индуктивной нагрузки в параллельном
инверторе существенно улучшает форму его выходного на-
пряжения.
Указанные преимущества обусловили широкое применение
компенсирующих устройств рассматриваемого типа в инвер-
торах тока. В целях улучшения массогабаритных показателей
инверторов тока разработаны их различные модификации.
3.4.3. РЕГУЛИРОВАНИЕ ВЫХОДНОГО НАПРЯЖЕНИЯ
ПОСРЕДСТВОМ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ (ШИМ)
Этот способ регулирования в основном используется в схе-
мах инверторов напряжения. Суть его заключается в изменении
длительности проводящего состояния ключевых элементов
схемы инвертора по определенному закону. Рассмотрим этот
способ на примере однофазной схемы инвертора напряжения,
выполненной на транзисторах (см. рис. 3.15).
Если нагрузка чисто активная, то форма тока повторяет
форму напряжения и широтно-импульсное регулирование вы-
ходного напряжения можно осуществить уменьшением длитель-
ности управляющих импульсов на угол а (рис. 3.26, а).
Действующее значение выходного напряжения инвертора
при таком способе управления транзисторами и чисто активной
нагрузке будет равно
uK=ud
(3.66)
Действующие значения гармонических составляющих выход-
ного напряжения при длительности проводящего состояния
транзисторов Хгг = л —а вычисляются по формуле
158
Рис. 3.26. Широтно-импульсная модуляция в однофазном инверторе напряже-
ния:
а—диаграмма напряжения при активной нагрузке; б—диаграммы тока и напряжения на
выходе инвертора прн активно-индуктивной нагрузке; в—диаграмма управляющих
импульсов, обеспечивающих шунтирование нагрузки; г — диаграмма выходного напряже-
ния инвертора при шунтировании нагрузки
тт 4Ud . и(л-а)
U„ = — sm-Ц—
пп 2
(3.67)
где п — номер гармонической составляющей (и= 1, 3, 5...).
На практике часто требуется стабилизация действующего
значения первой гармоники выходного напряжения при измене-
нии входного в диапазоне от Uimin до Uimax. Для этого
необходимо изменять угол управления от нуля (при Ud=Udmin)
До (при Ud=Udmax):
\ a™x = n-2arcsin^\ (3.68)
Udmax
При этом будет изменяться гармонический состав выходного
напряжения. С увеличением угла а относительное содержание
высших гармоник в кривой выходного напряжения будет
увеличиваться.
Если нагрузка активно-индуктивная, то после выключения
транзисторов ток в нагрузке продолжает в течение некоторого
времени, определяемого кбличеств.ом запасенной энергии в ре-
активных элементах нагрузки, протекать в прежнем направ-
лении через обратно включенные диоды. При включении
обратных диодов выходное напряжение изменяет свой знак
на противоположный (рис. 3.26, б). В момент снижения тока
нагрузки до нуля напряжение на нагрузке вновь становится
равным нулю. Появление отрицательной площадки в кривой
выходного напряжения изменит его гармонический состав.
Для устранения этого нежелательного явления было бы
необходимо на время паузы а шунтировать нагрузку,' например,
159
с помощью двух встречно-параллельно соединенных тран-
зисторов. Однако это усложняет схему. Значительно проще
данная задача решается изменением способа осуществления
широтно-импульсной модуляции.
На транзисторы каждого плеча схемы подаются непрерыв-
ные управляющие импульсы с изменяющейся через промежуток
л полярностью (рис. 3.26, в). Положительная полярность им-
пульса соответствует включению, а отрицательная — выключе-
нию транзистора. Управляющие импульсы одного плеча могут
сдвигаться относительно импульсов другого на угол а. При
таком способе управления на интервале О —30 включены
транзисторы VT\ и КГ4, а начиная с момента Эо на
транзисторы VT4 и VT2 подаются управляющие импульсы. Ток
нагрузки начинает протекать через транзистор VTL и обратный
диод VD2. Это цепь шунтирует нагрузку, и выходное напряже-
ние становится равным нулю. Короткого замыкания на стороне
постоянного тока инвертора при этом не возникает, так как
транзисторы VT3 и КГ4 выключены. Напряжение на выходе
инвертора остается равным нулю в течение всего интервала
Эо —л, соответствующего углу управления а. Когда ток нагруз-
ки спадет до нуля, что приведет к выключению диода VD2,
транзисторы VT3 и УТ4 останутся в закрытом состоянии
и напряжение источника на нагрузку не поступит.
В момент л поступают отпирающие импульсы на транзисторы
ИГ3 и VTt. На транзисторе VT2 в этот момент уже присутствует
управляющий импульс, поэтому транзисторы ИГ2 и VT3 включа-
ются и на нагрузке формируется напряжение прямоугольной
формы, но противоположной полярности. При таком способе
регулирования выходное напряжение инвертора не будет зависеть
от параметров нагрузки и форма его будет соответствовать
работе инвертора с ШИМ на чисто активную нагрузку
(рис. 3.26, г). В связи с этим для данного способа регулирования
остаются справедливыми соотношения (3.66) и (3.67).
Регулирование выходного напряжения посредством ШИМ
применяется и в инверторах, выполненных на транзисторах или
запираемых тиристорах. Однако реализация этого способа
возможна и в схемах на обычных тиристорах, в которых принцип
коммутации позволяет выключить любой из основных тиристо-
ров в нужный момент времени. Примером может служить схема
с импульсной коммутацией, приведенная на рис. 3.18. В этой
схеме при ШИМ управляющие импульсы основных тиристоров
одного плеча следуют со сдвигом на угол а относительно
управляющих импульсов основных тиристоров другого плеча.
Применение ШИМ в трехфазных инверторах напряжения
имеет особенности, связанные со схемой соединения нагрузки
(звезда или треугольник) и способом управления ключевыми
элементами схемы, определяющим длительность их проводя-
160
щего состояния. При этом электромагнитные процессы, про-
текающие в схеме, имеют значительно более сложный характер,
чем в однофазной схеме, и находятся в сильной зависимости
от параметров нагрузки. Если индуктивная составляющая
нагрузки достаточно велика (низкий коэффициент мощности),
то регулирование посредством ШИМ становится затрудни-
тельно.
3.4.4. ГЕОМЕТРИЧЕСКОЕ СЛОЖЕНИЕ НАПРЯЖЕНИЙ
При двух или более инверторах регулирование напряжения
на нагрузке можно осуществить методом суммирования выход-
ных напряжений отдельных инверторов. Такой метод применим
к инверторам различных типов. Однако тип инвертора опре-
деляет особенности реализации метода в каждом конкретном
случае. Поэтому рассмотрим этот метод применительно к ин-
верторам напряжения и тока.
На рис. 3.27, а изображены инверторы и И2, выходные
трансформаторы которых по вторичным обмоткам соединены
последовательно. Предположим, что инверторы выполнены по
схеме однофазных инверторов напряжения без выходных
Рис. 3.27. Геометрическое суммирование выходных напряжений инверторов:
а—блок-схема; б—диаграммы напряжений для двух однофазных инверторов напряжения;
в и г—векторные диаграммы первых гармоник напряжения и тока нагрузки инверторов
11 № 3658 161
фильтров (наличие фильтров не накладывает принципиальных
ограничений на этот метод). Тогда выходное напряжение каждого
из них имеет прямоугольную форму (рис. 3.27, б). Очевидно,
что при таком включении инверторов напряжение на нагрузке
ии будет равно сумме напряжений инверторов и'„ и м". Если
эти напряжения имеют одинаковую частоту (т. е. инверторы
синхронизированы по частоте), но сдвинуты по фазе относительно
друг друга на угол фр, то напряжение на нагрузке w„ будет
иметь ту же частоту, но отличаться по форме и значению.
На тех участках, когда мгновенные значения напряжений
и'и и и’и противоположны по знаку, например на интервале
О —сумма их равна нулю и напряжение wH тоже равно
нулю; когда же эти напряжения совпадают по знаку, например
на интервале — п, они складываются. В результате напряжение
на нагрузке приобретает форму, подобную той, которая получа-
ется в инверторах напряжения, регулируемых по способу ШИМ.
Изменением угла фр можно регулировать выходное напряжение
от нуля (фр = л) до 2С7<,(фр = О).
Для первых гармоник выходных напряжений инверторов
можно составить векторную диаграмму (рис. 3.27, в), из ко-
торой видно, что вектор напряжения 6/н1 равен геометрической
сумме векторов напряжений U’Kl и U'^. Рассмотрим рас-
пределение нагрузки между инверторами, учитывая только
первые гармоники выходных напряжений (индекс 1, обозна-
чающий первую гармонику, далее опускается). Полученные
выводы будут справедливы и для других типов инверторов,
имеющих выходное напряжение, близкое к синусоидальному,
в частности для инверторов тока.
Если напряжения U'„ и 67" равны и сдвинуты между собой
по фазе на угол фр, то напряжение на нагрузке U_„, равное
их геометрической сумме, будет сдвинуто на один и тот же
угол фр/2 относительно векторов U„ и 67". Из векторной
диаграммы на рис. 3.27, г следует, что
67 =267^cos —= 267"cos —. (3.69)
Баланс мощностей в рассматриваемой системе зависит не
только от изменения нагрузки, но и от угла фр. Проследим
влияние угла фр на баланс мощностей на примере такого случая
регулирования, когда стабилизация напряжения U„ происходит
при одновременном изменении напряжений U'„ и 67", амплитуды
которых остаются равными между собой. При последовательном
соединении вторичных обмоток выходных трансформаторов через
них протекает общий ток нагрузки который будем считать
активно-индуктивным, т. е. отстающим от вектора на угол
фн. Если напряжение U'K опережает этот ток на угол
162
'Р' = фр/2 + фн, а напряжение С" отстает на угол Т" = фр/2 —фн,
то инвертор Иг работает в режиме с общим индуктивным
характером нагрузки (ток отстает от напряжения), а инвертор
И2 — в режиме с общим емкостным характером нагрузки (ток
опережает напряжение). Выделив на векторной диаграмме ак-
тивную /л,а и реактивную 7л,р составляющие тока нагрузки 1^,
видим, что каждая из этих составляющих сдвинута относительно
векторов U'„ и С" на угол, отличный от нуля и л/2. Следова-
тельно, взятые в отдельности индуктивная и активная состав-
ляющие результирующей нагрузки являются смешанными нагруз-
ками для каждого из инверторов. Поэтому баланс мощностей
в системе можно выразить следующими соотношениями:
для инвертора И1 л
;.p = 0,5PJ 1-1ёфн tgyj;
и.р = 0,5Ри( tgфи+tg^j;
би~бн.а + би
для инвертора И2
(3.70)
=0,5PJ И^ф^^ к
еи=е;.а+еи.Р=о,5Ри tgv,
здесь мощности с индексом «а» обусловлены активной со-
ставляющей нагрузки, а с индексом «р»—реактивной.
Из (3.7Д) следует, что при угле фр = 0 активная и реактивная
составляющие мощности нагрузки делятся между инверторами
Hi и И2 поровну. С ростом фр инвертор Иг (выходное
напряжение которого опережает ток нагрузки) разгружается
по активной мощности Р'я, но получает дополнительную
загрузку по реактивной мощности Q'H. В то же время для
инвертора И2 (выходное напряжение которого отстает от тока
нагрузки) увеличение фр вызывает обратное действие.
Соотношения (3.70)- справедливы и для инверторов тока.
В частности, если геометрическое-суммирование осуществляется
для параллельных инверторов тока, имеющих компенсирующее
устройство реактивной мощности, то для каждого из них,
учитывая (3.70), можно записать
бс - бк, у - 0,5Рн (tg <ря ± tg )
tg Р=-------------------Г---4 (3.71)
0,5PJ 1 ±tg<pHtg^J
163
где знак плюс соответствует инвертору, работающему с опе-
режающим углом Т', а знак минус — с-отстающим углом Т".
Поддержание угла Р в каждом инверторе на требуемом
уровне при изменении баланса мощностей, вызванном регу-
лированием угла <рр, производится компенсирующим устрой-
ством путем изменения его мощности бку.
Использование метода геометрического сложения выходных
напряжений инверторов в целях регулирования напряжения
на нагрузке в ряде случаев оказывается наиболее целесооб-
разным, особенно в многофазных схемах. В частности, этот
метод может быть успешно применен для многофазных
преобразователей с улучшенной формой кривой выходного
напряжения (с более низким содержанием высших гармоник).
3.5. СПОСОБЫ УЛУЧШЕНИЯ ФОРМЫ ВЫХОДНОГО
НАПРЯЖЕНИЯ ИНВЕРТОРОВ И ПРЕОБРАЗОВАТЕЛЕЙ
ЧАСТОТЫ
3.5.1. ВЛИЯНИЕ НЕСИНУСОИДАЛЬНОСТИ НАПРЯЖЕНИЯ
НА ПОТРЕБИТЕЛЕЙ ЭЛЕКТРОЭНЕРГИИ
Выходное напряжение инвертора в общем случае имеет
несинусоидальную форму. Степень несинусоидальности напря-
жения характеризуется коэффициентом гармоник по напряже-
нию krV, определяемым как отношение корня квадратного из
суммы квадратов амплитуд напряжений высших гармоник
к амплитуде напряжения первой гармоники. В некоторых
случаях несинусоидальность напряжения оценивается коэффици-
ентом искажения ки, определяемым как отношение дейст-
вующего значения первой (основной) гармоники к дейст-
вующему значению всего напряжения. При дальнейшем изложе-
нии для оценки несинусоидальности напряжения будем ис-
пользовать коэффициент krV.
Основными потребителями электроэнергии, критичными
к форме выходного напряжения автономных инверторов,
являются аппаратура связи и других радиотехнических средств,
телеметрические системы, системы контроля и управления
различными технологическими процессами и электронно-вычис-
лительные комплексы.
Несинусоидальность напряжения, питающего такого рода
аппаратуру, приводит прежде всего к появлению помех и сбоев
в работе отдельных элементов, обладающих повышенной
чувствительностью к высокочастотным сигналам. В частности,
приемные и передающие устройства могут оказаться неработо-
способными при высоком уровне высших гармоник питающего
напряжения из-за сильных искажений рабочих сигналов, со-
164
провождающихся высоким уровнем помех. В телеметрической
аппаратуре это приводит к появлению ложной информации
на соответствующих «поднесущих» частотах, девиация (от-
клонение) которых не должна превышать установленных стан-
дартами значений.
Питание несинусоидальным напряжением приводит к допол-
нительным потерям энергии в трансформаторах, конденсаторах,
кабелях и т. д. Так, несинусоидальное напряжение на конденса-
торе вызывает дополнительные потери, которые приводят
к необходимости завышать установленную мощность конденса-
торов, увеличивая при этом массу и габариты аппаратуры.
Несинусоидальность напряжения в трансформаторах вызы-
вает дополнительные потери в обмотках и в стали магнито-
провода. Дополнительные потери энергии в электрооборудова-
нии одновременно сокращают срок службы изоляции и ап-
паратуры в целом.
В системы управления часто входят различного рода
электродвигатели, выполняющие функции исполнительных ме-
ханизмов и следящих элементов. К ним могут предъявляться
особые требования в части постоянства частоты вращения,
вращающего момента и т. д. Питание таких двигателей
несинусоидальным напряжением приводит не только к дополни-
тельным потерям энергии, но и к ухудшению их рабочих
характеристик. Например, в асинхронном двигателе высшие
гармоники прямой последовательности создают полезный мо-
мент, обратной последовательности — тормозной момент, а ну-
левой последовательности — пульсирующее поле. Результиру-
ющий момент на валу двигателя определяется как сумма
моментрв от отдельных гармоник. Моменты, развиваемые
высшими гармониками, незначительны, но в то же время они
ухудшают параметры двигателя за счет дополнительных потерь.
Определяющей в ухудшении характеристик двигателя яв-
ляется третья гармоника. Обычно при питании асинхронных
двигателей достаточно компенсировать третью гармонику в пи-
тающем напряжении. Тогда ухудшение рабочих характеристик
двигателя становится незначительным. Например, cos ср ухуд-
шается на 2—3%, КПД — на 1,5%, а ток двигателя возрастает
на 3%. В то же время уменьшение коэффициента искажения
формы кривой до 5% связано с определенными трудностями.
Однако в некоторых случаях необходима компенсация и более
высоких гармоник.
В связи с отрицательным влиянием высших гармоник на
работу электрооборудования содержание их обычно регламен-
тируется. В частности, рекомендуется значение krV для напряже-
ния промышленных сетей на уровне не более 5%. Такие же
требования предъявляются к выходным напряжениям автоном-
ных инверторов в установках гарантированного питания.
165
Требуемый коэффициент krU в инверторах может быть
обеспечен различными способами. Эти способы Можно раз-
делить на следующие основные группы:
1) использование фильтров для подавления высших гар-
моник напряжения на выходе инвертора;
2) уменьшение содержания высших гармоник в выходном
напряжении непосредственно в процессе преобразования элек-
трической энергии.
3.5.2. ВЫХОДНЫЕ ФИЛЬТРЫ ИНВЕРТОРОВ
В качестве выходных фильтров в инверторах используются
преимущественно электротехнические устройства, схемы кото-
рых представляют собой пассивные четырехполюсники
(рис. 3.28), состоящие из индуктивных и емкостных реактивных
элементов Zt, Z2, Z3, ..., Zn. Основные функции фильтра
заключаются в максимальном уменьшении напряжений высших
гармоник при минимальном ослаблении первой (основной)
гармоники выходного напряжения. В соответствии с этим для
оценки эффективности фильтра используется коэффициент осла-
бления (фильтрации) им n-й гармоники
U'nm
Тс
(3-72)
где U'nm и U„m— амплитуды n-й гармоники на входе (на
выходе инвертора) и выходе (на нагрузке) фильтра соответ-
ственно.
В более общем виде этот коэффициент определяется как
отношение напряжений n-й гармоники на входе и выходе
фильтра, записанных в комплексной форме, и является также
комплексным числом.
С учетом (3.72) коэффициент гармоники по напряжению
на выходе фильтра можно записать в следующем виде:
r“Zy Zj z„Z “I
Г*" hl—I " li.1 о
° вход г----T-----1 I I выход °
фильтра] I | I \фильтра
(подключал П? П? г \ \(роаключо-
опгся. Г* ♦ al И ется
к Выпои I LJ LJ LJ | к нагрихке)
ан Вергаре^ II I ।
О-------1----1-----1 —.....--------О
Рис. 3.28. Схема многозвенного
фильтра в общем случае
Так как фильтр проектиру-
ется из условия максималь-
ного подавления высших гар-
моник, ТО /Гф„»1 для п=£1
и кфп х 1 для п = 1. Соответст-
венно коэффициенты гармоник
по напряжению на входе и
выходе фильтра связаны не-
равенством k'rU>k^v.
166
Существует многообразие различных типов фильтров,
существенно отличающихся друг от друга по своим харак-
теристикам. В самом общем виде они подразделяются на
простые (состоящие из малого количества реактивных эле-
ментов) и сложные или многозвенные. Последние можно
рассматривать как совокупность последовательно включен-
ных простых фильтров (звеньев) с общим коэффициентом
ослабления, равным произведению коэффициентов ослабле-
ния отдельных звеньев. В настоящем параграфе рассмат-
риваются несколько типов фильтров, получивших наиболь-
шее распространение для инверторов. Прежде всего сле-
дует отметить, что тип фильтра во многом определяется
схемой инвертора. Например, если инвертор напряжения
обладает малым выходным сопротивлением, то у инвер-
тора тока оно значительно больше. Соответственно струк-
туры выходных фильтров инверторов тока и напряжения
различны.
В § 3.2 было показано, что форма выходного напряжения
в инверторах напряжения обычно близка к прямоугольной
и, следовательно, содержание высших гармоник относительно
велико. Например, в схеме, представленной на рис. 3.14,
выходное напряжение имеет следующий гармонический
состав:
4 11 1
Пи=-Udrsinv> + -cos3t> + -cos 5г>+ ... +-cosnv|. (3.74)
тг 3 5 п
Из (3.74) видно, что только третья гармоника составляет
более 3Q% основной. Если же выходное напряжение в этой
схеме регулировать по способу ШИМ, то гармонический
состав становится еще хуже. Поэтому фильтры, как правило,
являются основным звеном, определяющим технико-экономи-
ческие показатели инвертора напряжения. Поскольку внутреннее
сопротивление инвертора напряжения мало, то высшие гар-
моники напряжения могут быть выделены только в фильтре,
имеющем последовательные элементы, например Zx, Z2, Z3 ...
(см. рис. 3.28).
Несколько типовых- схем фильтров инверторов напряжения
представлены на рис. 3.29. Схемы этих фильтров могут быть
сведены к схеме замещения, изображенной на рис. .3.30, которая
состоит из двух последовательно соединенных комплексных
сопротивлений Zt и Z2. При такой схеме замещения можно
рассматривать фильтр-как делитель входного напряжения U'.
Одним плечом делителя является сопротивление Z15 а вто-
рым— параллельно соединенные сопротивления Z2 h-Zh. Тогда
выражение для коэффициента фильтрации n-й гармоники
получает общий вид:
167
где Zln, Z2„, ZH„ — комплексные сопротивления фильтра и на-
грузки на частоте n-й гармоники.
Наиболее простым фильтром является однозвенный Г-
образный LC-фильтр (рис. 3.29, а). Принцип действия его
основан на том, что для высших гармоник напряжения
индуктивность представляет большое сопротивление, а ем-
кость— малое. В результате высшие гармоники ослабляются
в большей степени, чем первая (основная) гармоника напряже-
ния. Так, для случая ненагруженного фильтра, когда
ZH отсутствует (режим, соответствующий работе инвертора
на холостом ходу), подставляя в (3.75) параметры фильтра,
получаем
1
---тг
/КО 1 С1 2 2 г /•"'
кф„=----1(a1L1C1,
(3.76)
«(£>! CL
где о»!—угловая частота первой гармоники фильтруемого
напряжения.
Из (3.76) видно, что коэффициент ослабления прямо
пропорционален квадрату порядкового номера гармоники.
168
Точный расчет параметров
фильтра производится из
условия обеспечения заданного
коэффициента krV на нагрузке
и является довольно сложным,
Рис. 3.30. Схема замещения выходных
фильтров инвертора напряжения
так как при этом приходится
учитывать много различных
факторов, включая массогаба-
ритные показатели фильтра. Для ориентировочной оценки
параметров фильтра следует задаться падением напряжения
первой гармоники А17Ь1 на индуктивности от тока наи-
большей нагрузки инвертора Ilimax и определить индуктивность:
(3.77)
В действительности первая гармоника напряжения на ин-
дуктивности фильтра больше, так как через нее протекает
еще первая гармоника тока конденсатора Ct. Далее, задаваясь
коэффициентом ослабления самой большой по амплитуде
гармоники (для напряжения с гармоническим составом (3.74)
это будет третья гармоника), определим из (3.76) емкость
фильтра. Коэффициентом ослабления следует задаваться из
условия обеспечения согласно (3.73) требуемого значения
кги выходного напряжения.
Однозвенный LC-фильтр, являясь наиболее простым по
структуре, обладает, однако, существенными недостатками.
Во-первых, он ослабляет не только высшие гармоники, но
и основную. Это ослабление пропорционально нагрузке ин-
верторами зависит от коэффициента мощности нагрузки. Кроме
того, ослабление амплитуды основной гармоники сопровожда-
ется изменением фазы выходного напряжения фильтра от-
носительно фазы входного. Во-вторых, емкость фильтра
С\ создает дополнительную нагрузку для инвертора, увеличивая
токи, протекающие через основные его элементы. Поэтому
использование такого фильтра целесообразно при незначитель-
ном содержании высших гармоник в инвертируемом напряже-
нии или при сравнительно высоких (10—15%) допустимых
значениях коэффициента krV на нагрузке.
Недостатки, присущие простому LC-фильтру, практически
устранены в фильтре, схема которого представлена на
рис. 3.29,6. Этот фильтр состоит из двух основных звеньев:
последовательной цепи LtCt и параллельной L2C2.
Оба звена настроены в резонанс на частоте основной
гармоники о»!, т. е.
©1^1 — 1 /
®i^2 = 1 / ®i С2.
(3.78)
169
Принимая элементы фильтров идеальными, т.е. не име-
ющими активных потерь, при точном соблюдении условий
резонанса (3.78) можно считать, что первая гармоника выход-
ного напряжения инвертора поступает на нагрузку без амп-
литудных и фазовых искажений. Иначе говоря, коэффициент
ослабления основной гармоники для данного типа фильтра
равен единице. Для высших гармоник сопротивления звеньев
соответственно
Zi =na>1L1 — Ct;]
z2 = —(179)
wo)iC2— l/na>lL2 )
Из (3.79) следует, что если »1/лац С\
и п(о1С2»\/n(£>1L2, то для высших гармоник эффективность
фильтра эквивалентна эффективности простого АС-фильтра
с параметрами и С2. Но, с другой стороны, фильтр не
искажает первой гармоники напряжения и не создает допол-
нительной загрузки инвертора емкостным током фильтра,
поскольку этот ток компенсируется током индуктивности L2.
Приближенная оценка параметров такого фильтра может
быть произведена так же, как и параметров Г-образного,
состоящего из индуктивности L\ и емкости С2 (падение
напряжения \UL1 на индуктивности Lx от тока нагрузки
рекомендуется брать равным 30 —40% номинального значения
гармоники напряжения на выходе инвертора). Соответственно
значения Сг и L2 выбираются из условия обеспечения резонанса
на основной частоте (3.78). Однако наличие в схеме фильтра
емкости Ci и индуктивности L2, предназначенных для устране-
ния искажения фильтром первой гармоники напряжения, при-
водит к удвоению суммарной установленной мощности элемен-
тов фильтра, а следовательно, к значительному увеличению
его массы и габаритов.
Кроме того, последовательный резонансный контур ухуд-
шает динамические характеристики инвертора при коммутации
нагрузки ZH.
Достаточно эффективным фильтром, обладающим удов-
летворительными технико-экономическими показателями, яв-
ляется фильтр, схема которого приведена на рис. 3.29, в.
Фильтр состоит из параллельных с нагрузкой LC-цепей, каждая
из которых настроена в резонанс на частоту соответствующей
гармоники. Цепь Lt С, настроена в резонанс на частоту первой
гармоники напряжения и включена последовательно с нагруз-
кой. Фильтр, собранный по такой схеме, пропускает прак-
тически без ослабления первую гармонику напряжения и шун-
тирует высшие. Количество шунтирующих резонансных цепей
фильтра зависит от требуемого коэффициента гармоник krV
170
в выходном напряжении. Обычно устанавливают резонансные
цепи на третью и пятую гармоники напряжения, а шунтирова-
ние гармоник более высоких частот возлагают на оконечный
конденсатор Сп + 1. Высшие гармоники напряжения инвертора
в основном выделяются на индуктивности Lt. Конденсатор
Сх в фильтре может быть исключен, и тогда его структура
становится сходной со структурой фильтра на рис. 3.29, а,
ослабляющего первую гармонику напряжения.
В § 3.3 отмечалось, что наибольшее распространение среди
схем инверторов тока в настоящее время получила схема
параллельного инвертора тока с компенсирующим устройством,
состоящим из реактора и встречно-параллельно соединенных
тиристоров (см. рис. 3.25, а). Одной из причин этого является
близость формы выходного напряжения в такой схеме к синусо-
идальной без использования дополнительных фильтров. В этом
случае роль фильтра играют коммутирующие конденсаторы
инвертора, емкость которых обычно бывает достаточно боль-
шой, чтобы шунтировать токи высших гармоник. Наличие
же реактора компенсирующего устройства еще более улучшает
форму кривой, так как его индуктивность в совокупности
с емкостью конденсаторов образует колебательный контур на
частоте первой гармоники тока. Этот эффект особенно прояв-
ляется в режимах малой загрузки инвертора, т. е. при слабом
демпфировании колебательных процессов в указанном контуре.
Однако наличие тиристоров в компенсирующем устройстве
(см. рис. 3.25, й) несколько ухудшает гармонический состав
выходного напряжения из-за несинусоидальности потребля-
емого компенсирующим устройством тока. Поэтому в однофаз-
ных инверторах тока при высоких требованиях к синусо-
идальности выходного напряжения предусматривают установку
фильтра, состоящего обычно из одного-двух звеньев, по схеме
рис. 3.31. Каждое из звеньев этого фильтра настраивается
в резонанс на соответствующую гармонику тока.
Весьма важным фактором, влияющим на синусоидальность
выходного напряжения, является также индуктивность
Ld сглаживающего реактора инвертора тока. При определенных
значениях индуктивности этого реактора и емкости конденсато-
ров на выходе, а также параметров нагрузки выходное
напряжение будет синусоидаль-
ным без применения допол-
нительных фильтров. С этой
точки зрения желательно иметь
небольшую индуктивность
входного реактора, обеспечи-
вающую режим работы инвер-
тора, граничный С режимом рИс. 3.31. Схема фильтра инвертора
прерывистого входного тока. тока
171
В трехфазных мостовых схемах инверторов тока могут быть
использованы аналогичные способы улучшения формы выходно-
го напряжения. Но так как инвертируемый ток в них не содержит
гармоник, кратных трем, то эта задача выполняется проще.
Рассмотренные схемы фильтров являются типовыми и не
исчерпывают всего многообразия схем, которые могут быть
использованы в автономных инверторах. При выборе типа
фильтра необходимо также учитывать ряд факторов, непосред-
ственно не связанных с улучшением формы кривой выходного
напряжения. Основным из них является влияние фильтра на
динамические характеристики инвертора, от которых зависит
работа инвертора в переходных режимах (пуск инвертора,
сброс или наброс нагрузки и т. д.) или параллельная работа
его с другими инверторами. Параметры фильтра влияют на
работу отдельных элементов инвертора, например на токи
или напряжения полупроводниковых элементов. Важную роль
в некоторых случаях играют фильтры в обеспечении защиты
собственно инвертора и потребителей при различного рода
авариях. Все эти и ряд других не указанных здесь факторов
необходимо учитывать при проектировании инверторных уста-
новок.
Приведенные выше соотношения для выбора параметров
фильтров могут использоваться только для предварительной
их оценки. , Точный расчет этих параметров связан с ис-
пользованием сложного математического аппарата и примене-
нием современных средств вычислительной техники.
3.5.3. УМЕНЬШЕНИЕ ВЫСШИХ ГАРМОНИК В ВЫХОДНОМ
НАПРЯЖЕНИИ БЕЗ ПРИМЕНЕНИЯ ФИЛЬТРОВ
Наличие фильтров на выходе инверторов, как правило,
существенно ухудшает ряд его технико-экономических показа-
телей. В связи с этим при разработке инверторов уделяется
большое внимание снижению содержания высших гармоник
в выходном напряжении непосредственно в процессе преоб-
разования. С этой целью применяют различные модификации
схем отдельных инверторов, групповое соединение нескольких
инверторов, специальные законы регулирования и т. д. Наи-
более остро этот вопрос возникает для инверторов напряжения,
имеющих явно выраженную несинусоидальную форму выход-
ного напряжения. Поэтому рассматриваемые ниже способы
распространяются преимущественно на такие инверторы.
Наиболее простой способ уменьшения высших гармоник
заключается в использовании выходного трансформатора, име-
ющего отводы на определенные напряжения, которые поочеред-
но подключаются к нагрузке ключевыми элементами инвертора
(на рис. 3.32, а транзисторами VT\ — VTZ и VT\ — VT'3. Ком-
172
Рис. 3.32. Аппроксимация синусоидального напряжения посредством переключе-
ния отпаек в трансформаторе:
а — схема инвертора; б — диаграмма выходного напряжения
мутация транзисторов происходит в следующем порядке.
Предположим, что нагрузка R„ чисто активная и на интервале
О —ток проводит транзистор КТ3, соответственно на нагрузке
будет напряжение U3, равное ил)к^3 (кл3— коэффициент транс-
формации для соответствующей отпайки).. Далее, через про-
межутки времени, равные п/6, поочередно включаются тран-
зисторы VT2 и VT\, и напряжение на нагрузке принимает
значения U2=Udiкх2 и U{ = Udj клХ. Затем коммутация тран-
зисторов V7\—VT3 идет в обратном порядке. В момент
Э5 начинается поочередная коммутация транзисторов VT\ — VT'3
в такой же последовательности. В результате напряжение на
нагрузке имеет ступенчатую форму (рис. 3.32, б), которая может
быть аппроксимирована синусоидой с точностью, зависящей
от количества отпаек (следовательно, и транзисторов в схеме)
и соответствующих им значений коэффициента трансформации.
Например, при трех отпайках, обеспечивающих напряжения
на нагрузке: Ui, U2 = 0,135U1 и (73 = 0,265 i71—коэффициент
1 армоник по напряжению кти не превышает 15%. Основной
недостаток данного способа • заключается в том, что он
применим практически только при активной нагрузке инвер-
тора. При активно-индуктивной нагрузке в момент Э5 ток
нагрузки не изменяет своего направления и для его протекания
необходимо вводить в схему обратные диоды. При этом
форма кривой выходного напряжения изменяется и зависит
от значения индуктивности нагрузки. Устранение этого неже-
лательного эффекта связано с существенным усложнением
схемы инвертора.
Синтезирование выходного напряжения ступенчатой формы
может производиться не только по синусоидальному закону,
но и по трапецеидальному, когда ступенчатой кривой ап-
проксимируется трапеция. Такой закон синтезирования может
быть реализован в различных типах многофазных схем,
а также посредством геометрического сложения напряжений
однофазных инверторов. Примером может служить схема
173
Рис. 3.33. Аппроксимация синусоидальною напряжения посредством суммиро-
вания напряжений инверторов, работающих при равных частотах:
я —блок-схема соединения инверторов, б — диаграммы выходных напряжений инверторов
и напряжения на нагрузке
Рис. 3.34. Аппроксимация синусои-
дального напряжения посредством
суммирования напряжений разных ча-
стот:
а — блок-схема соединения инверторов; б —
диаграмма выходных напряжений инвер-
торов и напряжения на нагрузке
преобразования (рис. 3.33, а), состоящая из п однотипных
однофазных инверторов. Вторичные обмотки выходных транс-
форматоров соединены последовательно и подключены к на-
грузке. На рис. 3.33, б для случая и = 8 показаны выходные
напряжения инверторов, сдвинутые по фазе на углы п/12.
В результате сложения этих напряжений на нагрузке форми-
руется многоступенчатое напряжение, которое можно аппрок-
симировать трапецией. Коэффициент гармоник krV в вы-
ходном напряжении такой формы не превышает 10%. До-
стоинствами схемы являются однотипность инверторов, рав-
номерное распределение нагрузки между ними, относительная
простота системы управления и возможность построения на
этой основе не только однофазных, но и трехфазных преоб-
разователей.
Многоступенчатая форма выходного напряжения может
быть получена путем сложения нескольких напряжений прямо-
174
угольной формы разных частот, определенным образом ори-
ентированных во времени. Это достигается последовательным
соединением инверторов, работающих с частотами /, 3/,
5/, nf. Количество соединенных последовательно инверторов
будет определять степень синусоидальности выходного напря-
жения. Схема такого соединения приведена на рис. 3.34, а.
При питании от общего источника необходимо, чтобы все
инверторы имели трансформаторный выход. Коэффициенты
трансформации отдельных инверторов выбираются так, чтобы
их напряжения соответствовали коэффициентам гармонического
ряда, полученного при разложении напряжения прямоугольной
формы, т. е.
^тз = ^1/3; fcT5 = fcT1/5; ...; fcTn = fcT1/n. (3.80)
Выходное напряжение при этом будет иметь вид, соответ-
ствующий диаграмме на рис. 3.34, б (для трех инверторов).
Выходные трансформаторы ограничивают область примене-
ния рассмотренных способов улучшения формы выходного
напряжения только инверторами, работающими с фиксирован-
ной или мало изменяющейся частотой, поскольку использова-
ние трансформаторов в широком диапазоне частот выходного
напряжения нерационально.
Перспективным способом улучшения гармонического со-
става выходного напряжения является широтно-импульсная
модуляция прямоугольного напряжения по определенному
закону.
Простейшим случаем улучшения гармонического состава
выходного напряжения посредством ШИМ является устранение
третьей ^гармоники в выходном
напряжении однофазного инвер-
тора. Это нетрудно обеспечить
введением фиксированного угла
управления а=тс/3 (§ 3.3). Форма
выходного напряжения инверто-
ра для этого случая показана
на рис. 3.35, а. Гармонический
состав этого напряжения опре-
деляется выражением - ‘
wH= ^^(sin 9 + -sin 59 +
л v 5
+ ^sin 79 + ...). (3.81)
Рис. 3.35. Формы выходного на-
пряжения при различных способах
ШИМ
Переходом к более сложному
закону управления можно исклю-
чить третью и пятую гармоники.
175
Рис. 3.36. Диаграммы формирования синусоидальной ШИМ
На рис. 3.35, б представлена форма выходного напряжения
однофазного инвертора при двухполярной модуляции. При
а! = 26,3° и а2 = 33,3° третья и пятая гармоники будут
равны нулю.
Содержание высших гармоник может быть сведено к ми-
нимуму, если использовать широтно-импульсную модуляцию
интервалов проводимости ключевых элементов схемы по
синусоидальному закону в течение каждого полупериода
(рис. 3.35, в). При таком способе роль выходных фильтров
в обеспечении синусоидальности напряжения сводится к ми-
нимуму, так как относительное содержание высших гармоник
очень мало.
Среди различных способов организации ШИМ следует
отметить ШИМ, реализуемую посредством сравнения эталон-
ной синусоиды с треугольным сигналом, принцип которой
иллюстрируется диаграммами на рис. 3.36. Схематическая ре-
ализация этого принципа достаточно проста при незначитель-
ном ухудшении гармонического состава по сравнению с ре-
ализациями ШИМ на других аналогичных принципах.
Использование микропроцессорной техники позволяет значи-
тельно повысить эффективность ШИМ с программным ис-
ключением высших гармоник.
Перспективным принципом организации синусоидальной
ШИМ является принцип следящих систем [15]. При таком
способе ШИМ отслеживается и минимизируется отклонение
усредненной кривой выходного напряжения от синусоиды
посредством управления состояниями ключевых элементов
инвертора. Этот способ обеспечивает очень низкий • уровень
176
высших гармоник в выходном напряжении. Но главное его
достоинство заключается в том, что синусоидальность выход-
ного напряжения сохраняется и при существенно нелинейной
нагрузке инвертора. Распространенным примером такой нагруз-
ки является выпрямитель соизмеримой с инвертором мощности,
содержащий фильтры из реактивных элементов.
В заключение кратко рассмотрим способ улучшения формы
кривой выходного напряжения в трехфазно-однофазном преоб-
разователе частоты с непосредственной связью, каждая группа
которого выполнена на трехфазной схеме со средней точкой
(см. рис. 3.23).
Обычно нагрузка преобразователя имеет активно-индуктив-
ный характер. При работе преобразователя на активно-ин-
дуктивную нагрузку без перерывов в выходном напряжении
необходимо, чтобы тиристоры каждой группы могли работать
как в выпрямительном, так и в инверторном режимах. Для
того чтобы при переходе от выпрямительного режима к ин-
верторному в выходном напряжении отсутствовал перерыв,
применяют согласованное управление тиристорами. Принцип
этого управления состоит в подаче управляющих импульсов
так, чтобы тиристоры группы I могли работать один полупери-
од в выпрямительном режиме с углом а^п/2, а второй
полупериод—в инверторном с углом а = я—Р^л/2. Группа
II тиристоров в первом полупериоде готова к инверторному
режиму, а во втором полупериоде — к выпрямительному. При
таком управлении между двумя группами могут возникнуть
значительные уравнительные токи. Для их уменьшения углы
а и Р выбирают так, чтобы средние значения напряжений
выпрямительного и инверторного режимов были равны между
собой, т. й соблюдалось равенство а = р. Уравнительный же
ток, обусловленный разностью мгновенных значений напряже-
ний групп, ограничивается реактором, включенным в цепи,
объединяющие обе группы.
Выходное напряжение такого преобразователя в общем
случае несинусоидально. Гармонический состав этого напряже-
ния зависит от ряда факторов: закона изменения углов а и Р,
числа фаз питающей сети и т. д.
Содержание высших- гармоник в выходном напряжении
может быть значительно уменьшено, если углы управления
аир изменять по арккосинусному закону
a = n—P = arccos(A:sin(o2?), (3.82)
где к — отношение амплитуд напряжений на входе и выходе
преобразователя; со2— частота выходного напряжения.
Из (3.82) следует, что при к= 1 углы аир должны изменяться
линейно во времени (т. е. арккосинусная функция в данном
случае превращается в линейную функцию от Э = а>2?) от 0 до я/2.
12 № 3658 177
Рис. 3.37. Обеспечение синусоидальности выходного напряжения в преобразова-
теле частоты с непосредственной связью за счет переменного угла управления:
а—диаграмма выходного напряжения преобразователя, б—закон изменения углов
управления тиристорами преобразователя; в—диаграммы выходных тока н напряжения
178
В течение первого полупериода группа I подготовлена
к работе в выпрямительном режиме и управляющие импульсы
поступают на тиристоры этой группы с углом а, который
принимает значения п/2 — 0 — п/2 (п/2 соответствует прохожде-
нию полуволны выходного напряжения через нуль, а значение
угла а = 0—ее максимуму). Одновременно тиристоры группы
II подготовлены для работы в инверторном режиме с углом
а, который принимает на этом интервале значения п/2 — к — п/2,
что соответствует углам Р, равным п/2 —0 —п/2.
На рис. 3.37, а, б представлены диаграммы выходных на-
пряжений обеих групп тиристоров 17гр1 и 17грП, а также
графические зависимости углов управления от времени.
Так как тиристорные группы имеют одностороннюю прово-
димость тока, то положительная волна тока формируется
тиристорами группы I, а отрицательная — тиристорами группы
II. Поэтому при активно-индуктивной нагрузке в течение
каждого полупериода выходного напряжения ток будут прово-
дить обе группы. Для примера на рис. 3.37, в представлены
кривые первых гармоник тока /1н и напряжения и1н на выходе
преобразователя (в уменьшенном относительно рис. 3.37, а
и б масштабе) при активно-индуктивной нагрузке с коэффициен-
том мощности cos ср. На интервале 0 — 9 имеет место инвертор-
ный режим Па и ток проводят тиристоры группы II, далее ток
начинают проводить тиристоры группы I, работающие в выпря-
мительном режиме 1а на интервале 9j —п. С момента 9 = п
тиристоры группы I переходят в инверторный режим 16 и т. д.
При таком способе управления содержание высших гар-
моник в выходном напряжении значительно уменьшается, так
как его^ форма становится близкой к синусоиде, на которую
наложены пульсации. Последние уменьшаются с ростом ча-
стоты и увеличением числа фаз питающей сети.
Основными недостатками рассмотренного способа управле-
ния являются сложность системы управления и повышение
потребляемой из сети реактивной мощности.
ГЛАВА ЧЕТВЁРТАЯ
РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ
И СТАТИЧЕСКИЕ КОНТАКТОРЫ
При питании большинства потребителей электрической
энергией требуется регулировать определенные ее параметры —
напряжение, ток, частоту и др. Регулированием называется
процесс изменения по заданному закону или поддержание
179
неизменности (стабилизации) какого-либо параметра. Регули-
рование может быть произведено как вручную, так и авто-
матически. В схемах питания наиболее часто требуется ав-
томатическое регулирование напряжения с целью его стаби-
лизаций на заданном уровне при различных возмущающих
воздействиях.
Электрические устройства, осуществляющие стабилизацию
напряжения в пределах широкого диапазона уровней стаби-
лизации, называются регуляторами-стабилизаторами. Если та-
кое устройство предназначено для стабилизации напряжения
в узком диапазоне, то его принято называть стабилизатором.
При дальнейшем рассмотрении устройств, схематическое ис-
полнение которых не налагает существенных ограничений на
диапазон регулирования, именуются регуляторами, а с огра-
ниченными возможностями изменения выходных параметров —
стабилизаторами.
Регуляторы-стабилизаторы напряжения, так же как и ре-
гуляторы-стабилизаторы других параметров электроэнергии,
например тока или частоты, могут рассматриваться как
преобразователи электроэнергии в том смысле, что они
изменяют (преобразуют) ее параметры и качество.
В данной главе рассматриваются преимущественно регу-
ляторы-стабилизаторы напряжения. На выходное напряжение
преобразователя электроэнергии влияют различные факторы:
изменение входного напряжения и тока нагрузки, температура
окружающей среды и др. Поскольку эти факторы вызывают
изменения выходного напряжения, их называют возмущающи-
ми. Точность поддержания напряжения при воздействии раз-
личных возмущающих факторов характеризуется соответст-
вующими параметрами стабилизации.
Основным, обычно наиболее сильным возмущающим фак-
тором является изменение входного напряжения регулятора.
Стабильность выходного напряжения при изменениях вход-
ного характеризуется коэффициентом стабилизации по напряже-
нию kcrU, который определяется следующим выражением:
кети=^.^, (4.1)
С' ВХ V ВЫХ
где [7ВХ— Свых—установленные входное и выходное напря-
жения; АСВХ и АСВЫХ— отклонения входного и выходного
напряжений.
Так как коэффициент kcxV в общем случае зависит от
Свх и (7ВЫХ, то его значение определяют для, конкретного
режима работы (как правило, номинального), т. е. в (4.1)
подставляют номинальные значения Uex>н и С/выхн. Обычно
значение коэффициента kcrV определяется для статического
180
(установившегося) режима работы преобразователя. При опре-
делении качества стабилизации в динамическом режиме вводят
дополнительные параметры оценки качества (время переходного
процесса, его характер и др.).
Влияние на выходное напряжение нагрузки учитывается
внутренним (выходным) сопротивлением преобразователя ZBH:
Z„=^A, (4.2)
где (ЛгЛых)/ — отклонение выходного напряжения, вызванное
изменением нагрузки; А7ВЫХ— изменение тока нагрузки.
Для переменного тока ZBH является комплексной величиной
и определяется в статических режимах работы преобразователя.
Для оценки влияния нагрузки на выходное напряжение в ди-
намических режимах также вводят дополнительные параметры
оценки, учитывающие характер переходного процесса. В преоб-
разователях с выходом на постоянном токе ZBH может быть
выражено как активным, так и комплексным сопротивлением
в переходных режимах в зависимости от целей и метода его
определения. Внутреннее сопротивление ZBH, определенное в ви-
де активного сопротивления в переходном режиме, называют
иногда динамическим или дифференциальным.
Значение сопротивления ZBH также зависит от входного
напряжения и нагрузки преобразователя, и ее определяют для
конкретного режима работы, обычно номинального.
Отклонение выходного напряжения, вызванное изменением
температуры элементов преобразователя, характеризуют ко-
эффициентом стабилизации напряжения по температуре (kcrV\,
измеряемой при неизменных значениях входного напряжения
и тока нагрузки:
= (4.3)
где (АС/вых)т —отклонение выходного напряжения, вызванное
изменением температуры; АТ—изменение температуры окру-
жающей среды (в установившемся тепловом режиме это
соответствует изменению температуры элементов преобразова-
теля).
Обычно к регуляторам-стабилизаторам предъявляются тре-
бования стабильности, чтобы при всех возмущающих факторах
отклонения выходного напряжения от установленного уровня
не превышали значений, определенных для каждого конкрет-
ного случая. Особенно жесткие требования по стабильности
напряжения предъявляются к регуляторам-стабилизаторам на-
пряжения, используемым в цепях постоянного тока, питающих
радиоэлектронную аппаратуру.
181
В настоящей главе помимо регуляторов-стабилизаторов
рассматриваются также различные типы статических контак-
торов. Последние по своему схемному исполнению и элемен-
тной базе сходны с отдельными узлами некоторых типов
полупроводниковых регуляторов-стабилизаторов и других
устройств преобразовательной техники. Поэтому их изучение
также входит в курс преобразовательной техники.
4.1. РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ ПЕРЕМЕННОГО
НАПРЯЖЕНИЯ
Большинство статических регуляторов-стабилизаторов по
составу элементной базы силовой части схемы и принципу
действия можно разделить на две группы: магнитные и магнит-
но-полупроводниковые. В § 4.1 рассматриваются наиболее
распространенные в настоящее время типы регуляторов-стабили-
заторов— магнитно-полупроводниковые. Устройства, использу-
емые обычно для регулирования напряжения в узком диапазоне,
именуются при дальнейшем изложении просто стабилизаторами.
Там же, где рассматриваются устройства для глубокого
регулирования напряжения, это будет оговорено отдельно.
На рис. 4.1, а представлена схема стабилизатора, состоящего
из двух последовательно включенных автотрансформаторов
АТ] и АТП, имеющих разные коэффициенты трансформации.
На магнитопроводах каждого автотрансформатора имеются
обмотки управления и’у1 и иуИ, в которые включены диоды
К/)] — Р7)4 и транзисторы КТ] и VT2. Если какой-либо из
транзисторов открыт, то он закорачивает обе половины
соответствующей обмотки управления. Например, когда открыт
транзистор V7\, то закорачивается обмотка иу| (в одну
полуволну входного напряжения через диод ЕЛ] и транзистор
V7\, а в другую — через диод VD2 и транзистор VTj).
Автотрансформатор с закороченной обмоткой управления име-
Рис. 4.1. Стабилизатор напряжения с транзисторами, шунтирующими обмотки
управления:
а—схема; б—диаграмма выходного напряжения
182
ет меньшее сопротивление, чем автотрансформатор с разомкну-
той обмоткой управления. Это вызывает перераспределение
входного напряжения Ит между автотрансформаторами. В ре-
зультате происходит изменение коэффициента трансформации
кт, связывающего входное и выходное напряжения стабили-
затора (кт- Свых/ UBX). При этом коэффициент трансформации
принимает следующие значения:
на интервале, когда закорочена обмотка wyI,
__ И'ц + И'щ.
win
на интервале, когда закорочена обмотка и>уН,
И’п+И’и
На рис. 4.1, б представлена диаграмма выходного напряже-
ния стабилизатора, поясняющая его работу. На этой диаграмме
на интервале 0 — закорочена обмотка управления и’у1 и вы-
ходное напряжение соответствует коэффициенту трансформации
к'т. На интервале Oj— л транзистор V7\ выключается, a VT2
включается, закорачивая обмотку иу11. В результате выходное
напряжение принимает значение, соответствующее коэффици-
енту к". Далее переключения транзисторов периодически
повторяются на каждом полупериоде выходного напряжения.
Очевидно, что при изменении длительности интервала 0 — Oj
(угла управления а) выходное напряжение изменяется в диа-
пазоне, определяемом коэффициентами к’т и к”. Следовательно,
в стабилизаторе данного типа возможно плавное регулирование
выходного напряжения.
В качестве ключевых элементов, закорачивающих обмотки
управления автотрансформаторов, могут также использоваться
тиристоры. Однако поскольку они являются не полностью
управляемыми элементами, необходимо предусматривать
устройства принудительной коммутации тиристоров.
Скачкообразное изменение коэффициентов трансформации
в стабилизаторе приводит к искажению формы кривой его
выходного напряжения. Улучшение формы кривой может
осуществляться за счет фильтров. Габариты фильтра могут быть
существенно уменьшены, если применить высокочастотную
коммутацию транзисторов, шунтирующих обмотки управления
W’yi и и’у11. Иначе говоря, если в пределах каждого полупериода
изменять коэффициент трансформации многократно (20—30 раз),
то в выходном напряжении будут преобладать высокочастотные
гармонические составляющие, которые легче фильтруются.
Полупроводниковые приборы могут быть использованы
для непосредственной коммутации токов нагрузки при переходе
183
Рис. 4.2 Стабилизатор напряжения с тиристорами, переключающими отпайки
автотрансформатора:
а—схема, б—диаграмма выходного напряжения при активной нагрузке
с одной отпайки трансформатора на другую. На рис. 4.2, а
представлена упрощенная схема стабилизатора, отпайки ав-
тотрансформатора которого переключаются тиристорами VSr,
VS3 и VS2, VS4. Стабилизация выходного напряжения в данной
схеме осуществляется изменением моментов переключения
отпаек автотрансформатора. В положительный полупериод
входного напряжения в проводящем состоянии могут находить-
ся тиристоры VSt или VS2, а в отрицательный—VS3 или
VS4. Коммутация тиристоров в такой схеме происходит под
воздействием напряжения автотрансформатора. Для обеспече-
ния естественной коммутации тиристоров необходимо, чтобы
переключение производилось на отводы с более высоким
потенциалом. Например, в положительную полуволну выход-
ного напряжения сначала включается тиристор VS2, а затем
VSi. В этом случае при включении тиристора VSt образуется
короткозамкнутый контур, в котором развивается ток, направ-
ленный встречно току нагрузки, протекающему через тиристор
VS2. В результате тиристор VS2 выключается и ток начинает
проводить тиристор VSt. Регулирование действующего значе-
ния выходного напряжения может в данной схеме производить-
ся плавно за счет изменения моментов переключения тири-
сторов. На рис. 4.2, б представлена диаграмма выходного
напряжения стабилизатора при чисто активной нагрузке.
При активно-индуктивной нагрузке возникает необходи-
мость в усложнении системы управления тиристорами. Это
объясняется тем, что ток нагрузки будет отставать от напряже-
ния на обмотке автотрансформатора, а выключение тиристоров
происходит в моменты прохождения тока нагрузки через нуль.
Встречно-параллельно включенные тиристоры могут непо-
средственно использоваться в качестве регуляторов-стабилиза-
торов напряжения (рис. 4.3, а). Когда входное напряжение
UBX положительно, подается управляющий импульс на тиристор
VSi Момент подачи управляющего импульса определяется
184 •
Рис. 4 3 Стабилизатор напряжения на встречно-параллельно включенных
тиристорах:
а—схема, б—диаграмма выходного напряжения при активной нагрузке
углом управления а (рис. 4.3, б). В отрицательный полупериод
ток нагрузки проводит тиристор VS2, который также включа-
ется в момент, определяемый углом а.
Выключение тиристоров и KS2 происходит при сниже-
нии протекающего через них тока нагрузки до нуля. Если
нагрузка чисто активная, то форма кривой тока нагрузки
совпадает с кривой входного напряжения. При активно-ин-
дуктивной нагрузке в связи с отставанием тока от напряжения
тиристоры VSr и VS2 будут выключаться позже. В качестве
примера, поясняющего работу такого стабилизатора на нагруз-
ку индуктивного характера, можно привести схему компен-
сатора реактивной мощности (см. рис. 3.25), принцип действия
которой подробно рассмотрен в § 3.4.
Регуляторы-стабилизаторы, выполненные на основе схем
со встречно-параллельно включенными тиристорами, являются
сравнительно простыми и экономичными, имеют малые га-
бариты^ небольшую массу и позволяют регулировать выходное
напряжение в широких пределах. Наиболее существенным
недостатком является значительное искажение формы кривой
выходного напряжения. Кроме того, при необходимости ре-
гулирования выходного напряжения до значений, превышающих
входное напряжение, в схеме обязательно должен присут-
ствовать трансформатор или автотрансформатор.
Используя реактивные элементы (конденсаторы и реакторы)
в сочетании с тиристорами, можно получить бестрансфор-
маторную схему стабилизатора, имеющего выходное напряже-
ние большее, чем входное (рис. 4.4, а). Принцип действия
схемы поясняется векторной диаграммой (рис. 4.4,6).
Входное напряжение t/BX равно геометрической сумме выход-
ного напряжения £7ВЫХ и напряжения на реакторе AJ7L. Если
изменять входной ток /вх, то будут изменяться напряжение
At/L и напряжение {7ВЫХ. При этом выходное напряжение
^вых можно регулировать так, что его значение станет либо
меньше, либо больше С'вх. Угол сдвига <рвх между входным
током 1т и напряжением U„ определяется коэффициентом
185
Рис 4.4. Стабилизатор напряжения с регулируемой индуктивностью:
а- схема, б векторная диаграмма напряжений и токов
мощности нагрузки cos(pH, емкостью конденсатора С и эквива-
лентным значением индуктивности £экв цепи, состоящей из тирис-
торов VSL, VS2 и индуктивности реактора Ь2. Эквивалентное
значение индуктивности этой цепи, в свою очередь, зависит от
угла управления а (см. § 3.4). При изменении угла а от нуля
до тс/2 значение £экв изменяется от бесконечности (когда ток
через L2 равен нулю) до L2 (когда каждый тиристор открыт
в течение полупериода). Следовательно, изменяя угол а, можно
изменять угол фвх, который при этом принимает значения,
соответствующие как индуктивному характеру входного сопротив-
ления (со£экв меньше 1/соС), так и емкостному (со£экв больше 1/соС).
При емкостном угле фвх ток /вх опережает входное напряже-
ние (на рис. 4.4,6 векторы тока и напряжений для этого
случая показаны пунктиром), а при индуктивном — отстает.
Из рис. 4.4, б видно, что при емкостном значении фвх выходное
напряжение С7ВЫХ стабилизатора становится по значению больше
входного [7ВХ, а при индуктивном — меньше. Таким образом,
изменяя угол управления а, можно регулировать выходное
напряжение и, в частности, стабилизировать его при колебаниях
входного напряжения и тока нагрузки.
Основным достоинством рассматриваемой схемы является
малое искажение формы выходного напряжения благодаря
наличию конденсатора С. Однако установленные мощности
конденсатора и реактора L2 относительно велики (в 2—3
раза выше номинальной мощности нагрузки).
4.2. РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ ПОСТОЯННОГО
ТОКА
Регуляторы-стабилизаторы напряжения или других парамет-
ров электроэнергии в цепях постоянного тока выполняются
преимущественно на основе полупроводниковых приборов.
186
Большинство типов регуляторов-стабилизаторов по принципу
действия могут быть разделены на две группы: параметрические
(разомкнутые) и с обратной связью (замкнутые). Последние
могут быть непрерывного и дискретного (импульсного) дей-
ствия.
4.2.1. ПАРАМЕТРИЧЕСКИЕ СТАБИЛИЗАТОРЫ
Параметрические стабилизаторы напряжения являются наи-
более простыми стабилизирующими устройствами, широко
применяемыми в микроэлектронике. Особенно большое рас-
пространение они получили в различного рода электронных
устройствах для стабилизации напряжений питания отдельных
функциональных узлов схемы.
В основе принципа действия параметрических стабилиза-
торов напряжения лежит использование свойств нелинейности
некоторых полупроводниковых приборов: стабилитронов, ди-
одов и пр., вольт-амперная характеристика которых обладает
большой крутизной.
На рис. 4.5, а представлена простейшая схема однокаскад-
ного параметрического ста-
билизатора, выполненного
на стабилитроне VD. Ре-
зистор гб выполняет роль
балластного сопротивления,
ограничивающего ток в ста-
билитроне и воспринима-
ющего избыток напряжения
источнику питания. На
рис. 4.5,^ показаны вольт-
амперные характеристики
стабилитрона (кривая 1)
и нагрузки (прямая 2, про-
веденная под углом
aH = arctgAH). Суммируя их
ординаты, получаем зави-
симость входного тока
1ВХ от выходного напряже-
ния Свых (кривая 3). На том
же графике представлено зер-
кальное отображение
вольт-амперной характери-
стики балластного сопроти-
вления гб (прямая 4, пе-
ресекающая ось абсцисс
в точке, соответствующей
входному напряжению Um,
Рис. 4 5. Параметрический стабилизатор:
а—схема; б—вольт-амперные характеристики
схемы
187
и проведенная под углом a6=arctgr6). Штриховой линией на
рис. 4.5 показано изменение положений прямой 4, вызванное
отклонениями входного напряжения ДС'Ю. При этом изменение
выходного напряжения С'вых будет значительно меньше за
счет нелинейности кривой 3.
Приближенно коэффициент стабилизации в данной схеме
определяется по формуле
k„v*(r6UB„x)/RaUBX, (4.4)
где Ад — динамическое сопротивление стабилитрона.
Для обеспечения нормального режима стабилизации необ-
ходимо, чтобы ток в стабилитроне находился в диапазоне
где и IQXmax—допустимые значения
токов в стабилитроне, которые обычно указываются для
каждого типа стабилитрона.
4.2.2. СТАБИЛИЗАТОРЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
Принцип действия регуляторов-стабилизаторов с непрерыв-
ным регулированием основан на зависимости вольт-амперной
характеристики транзистора от базового тока. Благодаря этому
свойству транзистор можно рассматривать как резистор с ре-
гулируемым сопротивлением, которое определяется током
базы. В качестве регулируемого сопротивления транзистор
(или группа транзисторов) может быть включен последова-
тельно или параллельно с нагрузкой (рис. 4.6) и выполнять
функции основного исполнительного органа в процессе регу-
лирования (стабилизации) выходного напряжения. В схеме на
рис. 4.6, а с ростом входного напряжения сигнал, поступающий
на базу транзистора VT от системы управления СУ стаби-
лизатора, увеличивает сопротивление перехода коллектор —
Рис. 4.6. Схемы стабилизаторов с непрерывным регулированием:
а— последовательное включение регулирующего элемента, б—параллельное включение
регулирующего элемента; в — структурная схема системы управления СУ
188
эмиттер транзистора до такого значения, когда падение
напряжения на транзисторе AUCE не станет равным (с точ-
ностью, обусловленной в основном схемой СУ) изменению
входного напряжения Д(7ВХ. При уменьшении Um сопротивление
транзистора уменьшается и соответственно уменьшается паде-
ние напряжения на нем. Таким образом, регулируя падение
напряжения на транзисторе, можно стабилизировать выходное
напряжение.
В схеме 4.6,6 транзистор VT включен параллельно
нагрузке и дополнительно введено балластное сопротивление
гб. В данной схеме стабилизация выходного напряжения
осуществляется за счет перераспределения входного напряже-
ния С/вх между сопротивлениями гб и гСЕ (сопротивление
между коллектором и эмиттером транзистора VT) при
регулировании гСЕ СУ стабилизатора. С ростом входного
напряжения (7ВХ уменьшается сопротивление гСЕ, а падение
напряжения на сопротивлении гб увеличивается; с уменьше-
нием входного напряжения происходит обратный процесс.
Регулирование падения напряжения на гб позволяет стаби-
лизировать выходное напряжение.
В качестве основного регулирующего элемента обычно
используют мощные силовые транзисторы, которые соединяют
параллельно между собой в количестве, определяемом мощ-
ностью стабилизатора. В настоящее время стабилизаторы
подобного типа выполняются, как правило, на мощности от
долей ватта до нескольких киловатт.
Системы управления стабилизаторов могут иметь различное
схемное исполнение, но в основе их обычно лежит принцип
регулирования систем с замкнутой обратной связью. Такая
система й самом общем виде состоит (рис. 4.6, в) из датчика
выходного напряжения 1, сравнивающего устройства 2 и усили-
теля постоянного тока 3. Принцип регулирования заключается
в следующем. Предположим, что входное напряжение стаби-
лизатора изменилось на ДС'ВХ. В результате начинает изменять-
ся выходное напряжение стабилизатора Свых. Это изменение
регистрируется датчиком выходного напряжения 1. Напряжение
Ua с датчика 1 поступает в звено 2, где сравнивается
с эталонным напряжением £70-. Разность этих напряжений
е поступает в усилитель 3, который усиливает это напряжение
до Д Up. С выхода усилителя напряжение Д£7р подается
непосредственно (или через согласующее устройство) на ис-
полнительный орган 4, в качестве которого, как уже от-
мечалось, используются силовые транзисторы. Действительное
значение выходного напряжения будет несколько отличаться
от установленного значения. Эта разность зависит от коэф-
фициента усиления цепи обратной связи (в основном звена
3). Поскольку в процессе регулирования происходит сравнение
189
выходного и эталонного на-
пряжений, как в приборах для
точного измерения напряже-
ния — компенсаторах, стабили-
заторы подобного типа иногда
называют компенсационны-
ми *.
В простейшей схеме ком-
пенсационного стабилизатора
(рис. 4.7) функции усилитель-
ного и сравнивающего звеньев
выполняет один транзистор
VTJ
Рис 4 7 Схема стабилизатора компен-
сационного типа
VT2, в качестве датчика используется делитель из сопротив-
лений 7?! и А2, а опорное напряжение Uo задается стаби-
литроном VD. Коэффициент стабилизации выходного напря-
жения такого стабилизатора приближенно определяется по
формуле
. 1 .г. U° а 1
777^7
(4.5)
где U о — опорное напряжение стабилитрона
Т?ю2 и Зг — входное сопротивление и коэффициент усиления
по току транзистора УТ2.
Существует много модификаций схем рассмотренного типа,
отличающихся в основном системой управления, в частности
числом транзисторов усилительного звена и использованием
в схеме дополнительных источников питания элементов си-
стемы управления.
На основе рассмотренных принципов регулирования могут
быть также созданы стабилизаторы тока. В схемах стабили-
заторов тока вместо датчика напряжения вводится датчик
выходного тока (или тока нагрузки), который контролирует
отклонение последнего от заданного значения.
Компенсационные стабилизаторы непрерывного действия
могут обеспечить высокий коэффициент стабилизации напряже-
ния (или тока). Кроме того, они по принципу своего действия
снижают пульсацию выходного напряжения, являясь одновре-
менно фильтром для переменной составляющей. Существенным
их недостатком является низкий КПД и, как следствие этого,
плохие массогабаритные показатели.
* Исторически сложилось, что под компенсационным стабилизатором
обычно понимают стабилизатор непрерывного действия В то же время этот
принцип регулирования лежит в основе и других типов стабилизаторов,
например импульсных
190
4.2.3. ИМПУЛЬСНЫЕ РЕГУЛЯТОРЫ
В основе работы импульсных или ключевых регуляторов
напряжения лежит следующий принцип. Предположим, что
нагрузка подключена к источнику напряжения через ключевой
элемент К (рис. 4.8, а), который периодически замыкается
и размыкается. Времена замкнутого (?3) и разомкнутого (?р)
состояний ключа можно автоматически изменять, воздействуя
на него сигналами, поступающими из системы управления
СУ. В результате к нагрузке будет приложено импульсное
напряжение, форма которого соответствует диаграмме, пред-
ставленной на рис. 4.8,6. Очевидно, что среднее значение
напряжения на нагрузке будет зависеть от соотношения времен
замкнутого и разомкнутого состояний ключа К. Согласно
определению среднего значения напряжения можно записать
Ud = ~ LBX(/)J/ = ^= Пвх|ивхА, (4.6)
-* J G + ip -/
о
где Ud— среднее значение напряжения на нагрузке; Т—период
переключения ключа К; f—частота переключения ключа К.
Отношение q = T/t^ называют скважностью работы ключа.
Изменяя скважность q, можно регулировать выходное напряже-
ние на нагрузке. Регулирование напряжения в рассматриваемой
схеме за счет изменения скважности можно рассматривать
как модуляцию входного напряжения ключом К. Возможны
три способа модуляции входного напряжения:
1) широтно-импульсная модуляция (ШИМ), когда время
/3 — переменное, а частота f—постоянная;
2) частотно-импульсная модуляция (ЧИМ), когда время
t3 — постоянное, а частота f—переменная;
Рис 4 8 Импульсный регулятор с последовательным ключевым элементом.
а жБивалентная схема, б—диаграмма выходного напряжения на нагрузке, в—зависи-
мость коэффициента пульсаций от времени разомкнутого состояния ключа
191
3) широтно-частотная модуляция, когда время t3 и частота
f—переменные.
Система автоматического управления ключом может быть
выполнена как с цепью обратной связи (регулирование по
отклонению), так и без цепи обратной связи, с контролем
входного напряжения (регулирование по возмущению). В этих
случаях ключевой регулятор можно считать регулятором
компенсационного типа. Кроме того, существует класс клю-
чевых регуляторов с регулированием релейного типа. В таких
преобразователях сигнал в цепи обратной связи, подаваемый
на исполнительный орган (в данном случае ключ К), изменяется
скачком, когда сигнал рассогласования эталонного и кон-
тролируемого напряжений становится равным нулю. При
расчете ключевых регуляторов чаще всего используются сле-
дующие параметры:
1) среднее значение выходного напряжения Ud = Um(T— tp) / Т,
определяемое по (4.6), и его относительное значение
W=t/d/CBX = (7’-zp)/7’;
2) действующее значение выходного напряжения
и его относительное значение
м=У^=
и„ \ т ’
3) коэффициент формы
и / т~
г ’-'вых / J
ф
4) коэффициент пульсаций
(4-7)
(4.8)
(4.9)
где Ulm — амплитуда первой гармоники кривой выходного
напряжения, которая определяется из разложения в гармоничес-
кий ряд импульсного напряжения.
Коэффициент пульсаций увеличивается с ростом скважности
q, т. е. при увеличении времени разомкнутого состояния ключа /р.
На рис. 4.8, в представлена зависимость кп от tp, из которой
видно, что он может при работе регулятора изменяться
в диапазоне от нуля до двух (или до 200% в процентном
исчислении). Следует отметить, что определение (4.9) не
192
Рис 4 9. Импульсный стабилизатор
с параллельным ключевым элемен-
том
учитывает высшие гармоники в кривой выходного напряжения,
амплитуды которых также существенно увеличиваются с ро-
стом скважности, затрудняя фильтрацию переменной состав-
ляющей в целом.
В некоторых схемах ключевой элемент может быть включен
непоследовательно, параллельно нагрузке, как это показано
на рис. 4.9. Сущность регулирования напряжения в таких
схемах аналогична, но сами схемы и электромагнитные процес-
сы в регуляторах с параллельным ключом значительно от-
личаются от схем и процессов, протекающих в регуляторах
с последовательным ключевым элементом.
Поскольку напряжение после ключевого элемента носит
явно выраженный импульсный характер, в ключевых регуля-
торах устанавливаются фильтры, состоящие из реактивных
элементов — индуктивностей и емкостей. Назначение выходных
фильтров — отфильтровать переменную составляющую напря-
жения, уменьшив тем самым коэффициент пульсаций напряже-
ния, на нагрузке. Помимо выходных фильтров, некоторые
типы регуляторов содержат входные фильтры, предназначенные
для уменьшения пульсаций тока, потребляемого от источника
постоянного тока. В большинстве схем ключевых регуляторов
параметры фильтра определяют характер электромагнитных
процессов, протекающих в схеме, и расчет их имеет свои
особенности.
Остановимся более подробно на основных расчетных соот-
ношениях и процессах, характеризующих работу ключевых
регуляторов. Рассмотрим сначала схему с последовательным
ключевым элементом (например, транзистором) и Г-образным
/.("-фильтром Ф, получившим наибольшее практическое рас-
пространение (рис. 4.10, а).
Предположим, что в момент времени ( = 0 транзистор VT
перешел в открытое состояние. Под воздействием разности
входного напряжения и напряжения на конденсаторе (которое
совпадает с напряжением на нагрузке 17вых) начинает нарастать
ток iL. Полагая транзистор идеальным ключевым элементом,
падение напряжения на котором равно нулю, и пренебрегая
пульсацией напряжения на конденсаторе, которая практически
мала, получаем уравнение
. (4.10)
at
13 № 3658
193
Рис. 4.10. Импульсный регулятор с LC-фильтром.
а—схема, б—диаграммы токов и напряжений в режиме работы с непрерывным током iL,
в — диаграммы тока н напряжения в режиме работы с прерывистым током iL
Из (4.10) следует, что ток iL будет нарастать по линейному
закону
(4.11)
1-а
где zz(0)— ток, проходящий через реактор в момент включения
транзистора.
В момент времени t = происходит выключение тран-
зистора (размыкание ключа). В схему введен диод VD, через
который в момент размыкания ключа начинает протекать
ток iL. При отсутствии диода на разомкнутом ключевом
элементе возникли бы недопустимые перенапряжения, которые
привели бы к выходу его из строя. Переход в проводящее
состояние диода ИО равнозначен закорачиванию входа фильтра
(если считать диод идеальным, падение напряжения на котором
равно нулю). В результате к реактору фильтра прикладывается
напряжение нагрузки £7ВЫХ в направлении, уменьшающем ток
iL, что можно выразить уравнением
Ь^=-ивых. (4.12)
at
Из (4.12) следует, что ток в реакторе начнет убывать по
линейному закону: = где 4,(^1)—ток в момент
G, когда происходит размыкание ключа.
Затем в момент /2 снова происходит включение ключа,
и ток iL начинает увеличиваться.
1Р4
Если к концу интервала разомкнутого состояния ключа
ток iL не успевает снизиться до нуля, то такой режим работы
называют режимом непрерывного тока. На рис. 4.10,6 пред-
ставлены диаграммы токов и напряжений на элементах схемы
в режиме работы с непрерывными токами, который является
для большинства схем основным. Пульсация тока в реакторе
biLJU"~U-^. (4.13)
Пульсацию выходного напряжения Д£7ВЫХ можно определить,
исходя из следующих соображений. В установившемся режиме
работы схемы с нагрузкой Rs средние значения токов в реакторе
и нагрузке равны между собой. Следовательно, среднее значе-
ние тока, протекающего через конденсатор, равно нулю,
и изменение напряжения на нем (т. е. пульсация) определяется
только пульсацией тока iL. Когда ток iL выше среднего
значения 1„, напряжение на конденсаторе увеличивается, а когда
меньше — уменьшается. Учитывая сказанное, можно записать
уравнение баланса электрических зарядов в цепи реактора
и конденсатора в следующем виде:
у^=2ДС7выхС, (4.14)
где Т—период переключения ключевого элемента; &iL/2 —
среднее значение тока, поступающего в конденсатор за время,
равное Г/2, когда напряжение на конденсаторе изменяется на
2ДСВЫХ.
Подставив в (4.14) вместо \iL выражение (4.13) и учтя
(4.6), полечим
(4Л5)
ibqLC
Для получения малых всплесков и провалов выходного
напряжения при скачкообразных' изменениях нагрузки необ-
ходимо индуктивность фильтра выбирать по возможности
малую, а емкость — большую. В этом случае в области малых
нагрузок схема будет - работать в режиме с прерывистыми
токами. На рис. 4.10, в представлена диаграмма тока iL и на-
пряжения на ключевом элементе (транзисторе) в прерывистом
режиме. Когда ток в реакторе спадает до нуля, диод VD
выключается и на ключевом элементе напряжение становится
равным разности входного и выходного напряжений, что
и отражено ступенчатообразной формой кривой напряжения
на транзисторе.
При расчете схемы с последовательным ключевым эле-
ментом, работающей в режиме с непрерывным током
195
iL и регулируемой по способу ШИМ, исходными данными
обычно являются среднее значение- выходного напряжения
регулятора Ud и относительное изменение входного напряжения
Sn= + Д67ВХ/ £7ВХ н,
где Свхн— номинальное значение входного напряжения; AUBX—
абсолютное отклонение входного напряжения (предполагается,
что отклонения вверх и вниз относительно номинального
значения равны).
Учитывая возможности системы управления регулятора,
задаются минимальным значением времени разомкнутого со-
стояния ключа tpmi„ и частотой его переключения /, которые
она может обеспечить. Затем определяют минимальное значе-
ние входного напряжения согласно (4.6) по формуле
U„mi„= -у (4.16)
f I у. min J
Зная относительные значения отклонений входного напряже-
ния от номинального, определяют номинальное входное на-
пряжение
^вх,н=^вхтЬ,/(1-5и). (4.17)
Согласно (4.17) выбирают напряжение регулятора источника
постоянного тока, например выпрямителя с трансформатором,
питающимся от сети с известным напряжением. Максимальное
значение входного напряжения определяется по формуле
С7вх™«=^вх,н(1+8и)- (4-18)
По 17вх определяют максимальное значение времени
разомкнутого состояния ключа /ртах и соответственно диапазон
изменения скважности работы ключа регулятора напряжения:
1
Q min . у.
1 J *р min
(4-19)
1
Qmax <
1 J ip max
Параметры фильтра можно определить по qmaX, используя
выражение (4.15). Следует отметить, что в схеме может быть
применен и многозвенный фильтр, расчет параметров которого
можно производить по формулам, приведенным в § 2.6,
определив предварительно ка по (4.9) при <?№.
196
Рис 4.11. Импульсный регулятор с параллельным ключевым элементом:
а—схема; б—диаграммы изменения магнитного потока и входного тока
Среднее значение тока через регулирующий элемент равно
среднему значению тока нагрузки /н, а максимальное с учетом
пульсации равно
4тях = Л1 +(4-20)
Рассмотрим теперь вариант схемы с параллельным ключевым
элементом (рис. 4.11, а). Схемы подобного типа могут различать-
ся соотношением чисел витков, определяемых отводом от
обмотки реактора фильтра, с которой соединен ключевой
элемент (транзистор VT). Соотношение чисел витков в принципе
не изменяет характер процессов, протекающих в схеме, но влияет
на параметры, характеризующие ее работу. Предположим, что
в момент времени / = 0 транзистор VT включается. Часть
обмотки реактора с числом витков w2 оказывается подключенной
к источнику питания с напряжением Свх, и в ней начинает
нарастать *входной ток регулятора /вх. Для интервала открытого
состояния транзистора VT можно написать следующее уравнение:
^х = ^2~(4.21)
at
где L2— индуктивность части обмотки реактора с числом
витков w2.
Согласно (4.21) ток iBX изменяется линейно и за время
замкнутого состояния ключа нарастает до
1'вх тах (Ч) = »вх тах (о) + ~ t, (4.22)
^2
где iiamaxffi) — максимальный ток в обмотке ю2 в момент
замыкания ключа (в моменты замыкания и размыкания ключа
входной ток изменяется скачком, о чем подробнее говорится
далее).
На интервале замкнутого состояния ключа происходит
накопление энергии в индуктивности L2, а напряжение на
197
выходе регулятора равно напряжению на конденсаторе С,
который разряжается на нагрузку Ан. В момент времени t — tY
происходит размыкание ключа. В результате к обмотке wr,
индуктивность которой равна будет приложено напряжение,
равное разности входного и выходного напряжений. Следова-
тельно, для интервала разомкнутого состояния ключа можно
записать
ит~им=Ц^. (4.23)
at
В рассматриваемой схеме w1>w2, поэтому выходное на-
пряжение больше входного. Следовательно, ток будет умень-
шаться, и в конце интервала разомкнутого состояния ключа
при t~t2 он будет иметь минимальное значение
min (f2) = «вх min (ti)t„ (4.24)
где in min (fi) — минимальный ток iM в момент размыкания
ключа.
Скачкообразное изменение входного тока в моменты ком-
мутации ключа объясняется следующими явлениями. Поскольку
магнитный поток Ф в магнитопроводе реактора скачком
изменяться не может, то в момент размыкания ключа должно
сохраняться равенство магнитодвижущих сил его обмоток,
т. е. при Ф = const
inx max (^1) ^2 ^вх min (^1 ) ВД . (4.25)
Из (4.25) следует, что при включении транзистора VT
(размыкание ключа) ток в обмотке w2 реактора скачком
изменится и станет равным
• /х \ ^вх min ^2 /л
=------• (4.26)
При разомкнутом состоянии ключа весь ток /вх будет
поступать в нагрузку Ан и конденсатор С, а следовательно,
и энергия, накопленная в индуктивности L2, будут передаваться
в нагрузку, частично запасаясь в конденсаторе для поддержания
напряжения на нем в период замкнутого состояния ключа.
Следует напомнить, что в данном случае рассматриваются
установившиеся процессы работы ключа, характер которых
идентичен в течение каждого периода. Поэтому ток iBX „ах (0)
в начале замкнутого состояния ключа с учетом (4.26) можно
выразить соотношением
in max (0) = in max (t2) = . (4.27)
И’З
198
Диаграммы изменения входного тока (в обмотке w2), а также
тока транзистора VT представлены на рис. 4.11,6. Из изложенно-
го следует, что реактор в данной схеме выполняет две основные
функции: ограничивает максимальное значение тока, потребляе-
мого от регулятора источника, являясь таким образом входным
фильтром, и накапливает энергию при замкнутом состоянии
ключа для последующей передачи ее в нагрузку. Последнее
позволяет получать на выходе регулятора более высокое
напряжение, чем входное. Связь входного и выходного напряже-
ний (средних значений), если полагать, что выходное напряжение
достаточно сглажено, выражается следующим соотношением:
Свых=Св/1+^)=СвхГ1+—р-Л (4.28)
Очевидно, что, изменяя скважность q по определенному
закону, можно регулировать выходное напряжение. Параметр
Wi I w2 позволяет при проектировании регулятора согласовывать
значения входного и выходного напряжений. Однако при этом
следует учитывать, что с уменьшением скважности растет
максимальное значение напряжения на ключевом элементе,
которое равно
гт ___/л пп\
'-'птах , >
9 min *
где Ummin — минимальное входное напряжение, определяющее
минимальную скважность qmin.
При проектировании регулятора, рассчитав по (4.27) до-
пустимую скважность qmi„ при заданном значении Ummi„ и зна-
чении и^тдх, определяемом типом выбранного ключевого
элемента, находят параметр ш = и’1/и’2
(4-зо)
V вх min
Затем по заданному максимальному входному напряжению
Ummax определяют максимальное значение скважности q^,
используя формулу
/7 — ^вы> ~ max (^ ~ 1) z j о I \
Чтах jj _jj • V’’”-'1/
^вых ^вхтдх
Расчет параметров реактора в данной схеме можно произ-
водить по методике, приведенной в [18]. При этом обычно
индуктивность L2 рассчитывается из условия обеспечения
непрерывности тока iBX во всех режимах работы регуляторов.
Импульсные регуляторы на большие мощности разраба-
тываются обычно на основе тиристоров, которые выполняют
функции ключевых элементов схемы. При использовании
199
в качестве ключевых элементов тиристоров в схемах регуля-
торов предусматривают устройства -принудительной коммута-
ции. Если регулятор выполнен на запираемых тиристорах, то
необходимость в коммутирующих устройствах отпадает и ра-
бота схемы происходит так же, как и в импульсных тран-
зисторных регуляторах.
Основным достоинством импульсных регуляторов является
высокий КПД, обусловленный малыми потерями энергии
в регулирующем ключевом элементе. Следствием высокого
значения КПД импульсных регуляторов являются их хорошие
массогабаритные показатели. В то же время наличие высокого
уровня пульсаций при регулировании вызывает необходимость
в увеличении коэффициента сглаживания фильтров регулятора.
Однако последнее может быть реализовано при сравнительно
небольшой установленной мощности элементов фильтра, если
повысить рабочую частоту регулятора до рациональных значе-
ний для каждого конкретного случая.
4.2.4. РАЗВИТИЕ СТРУКТУР ИМПУЛЬСНЫХ РЕГУЛЯТОРОВ
Импульсные регуляторы последовательного (рис. 4.10) и па-
раллельного (рис. 4.11) типов обладают рядом присущих
данным схемам недостатков.
Схема с параллельным ключевым элементом может только
повышать напряжение и имеет прерывистый ток, поступающий
в конденсатор выходного фильтра, а схема с последовательным
ключевым элементом понижает напряжение, потребляя пре-
рывистый ток от первичного источника (или входного фильтра).
Эти недостатки могут быть устранены каскадным соединением
указанных типов схем, как это показано на рис. 4.12.
Однако посредством топологических преобразований
(рис. 4.13) из схемы на рис. 4.12 получается схема регулятора
Рис. 4.12. Двухступенчатый (повышающий и понижающий) импульсный регуля-
тор
200
s)
Рис. 4.13. Переход к одноключевой схеме:
а—двухключевая схема, б — одноключевая схема
нового типа, называемая схемой Чука [16]. Простейший
вариант схемы без гальванической развязки входных и выход-
ных цепей представлен на рис. 4.14, а. В этой схеме функцию
ключа в положении В (рис. 4.13,6) выполняет диод VD.
Особенностью схемы является инверсия выходного напряжения
(изменение полярности) относительно входного, возникающая
в процессе преобразования структуры, соответствующей схеме
на рис. 4.12. Из диаграмм на
рис. 4.14,6 видно, что схема мо-
жет работать с непрерывными
входным и выходным токами.
Уменьшение пульсаций токов по-
зволяет уменьшить емкости
входного и выходного фильтров.
Кроме того, в схеме использу-
ются один тиристор и один диод.
Таким образом, сохраняя поло-
жительные свойства схемы, пред-
ставленной на рис. 4.12, новая
Рис. 4.14. Импульсный регулятор f одним
управляемым ключом, обеспечивающий
повышение и понижение входного на-
пряжения
Рис. 4.15. Вариант схемы на рис. 4.14
с одним реактором-
201
схема имеет лучшие энергетические показатели (КПД и удель-
ные значения массы и объема).
В режиме непрерывных токов и i2 средние значения
токов и напряжений схемы связаны следующими соотно-
шениями:
где t3 и гр—времена замкнутого и разомкнутого состояний
транзистора VT соответственно.
Следует отметить, что непрерывность выходного тока
схемы позволяет обеспечить независимость пульсаций на
конденсаторе С2 от нагрузки, значения которых могут быть
определены из соотношения (4.30). Кроме того, новый тип
схемы обладает хорошими динамическими свойствами, что
позволяет обеспечить высокое качество регулирования выход-
ных параметров.
Следующим этапом развития топологии схемы нового типа
является снижение пульсаций входного и выходного тока
практически до нуля и интеграция магнитных компонентов [16].
Первым шагом в этом направлении является объединение
магнитной связью реакторов Lr и L2 (рис. 4.15). Такое
решение вытекает из факта идентичности напряжений на
реакторах Lr и L2 (мгновенные значения напряжений на
них одинаковы). Этот схематический вариант позволяет умень-
шить пульсации токов и i2, а при определенных зна-
Рис. 4.16. Обеспечение гальванической развязки
202
нениях магнитной связи свести пульсации тока i2 практически
к нулю. Другим положительным результатом интеграции
реакторов является общее улучшение массообъемных по-
казателей магнитных компонентов.
Гальваническая развязка входной и выходной цепей может
быть осуществлена введением электромагнитной развязки по-
средством преобразований топологии схемы в соответствии
с рис. 4.16.
Объединение всех магнитных компонентов в один интег-
ральный магнетик при определенных параметрах магнитной
связи между обмотками позволяет обеспечить нулевые значения
пульсаций токов и z2 и гальваническую развязку цепей.
На рис. 4.17 представлены вариант схемы с интегральным
магнетиком и его конфигурация. Коэффициенты магнитной
связи определяются воздушными зазорами [16].
Существует большое количество вариантов схем с интег-
рированными магнетиками, имеющих различное конструктив-
ное исполнение, включая варианты с взаимно ортогональными
магнитными потоками. Ключевые регуляторы с нулевыми
м
*)
Рис 4.17. Обеспечение нулевых пульсаций входного и выходного токов
в импульсном регуляторе:
а—схема; б—конфигурация интегрального магнитного элемента
203
пульсациями входного и выходного токов и интегральным
магнитным компонентом имеют хорошие удельные показатели
объема и массы, а также высокий КПД. В то же время их
разработка и изготовление связаны непростой технологией
магнитного компонента. Следует также отметить трудность
формирования оптимальной траектории переключения тран-
зистора VT из-за высоких скоростей изменения коммутируемых
напряжения и тока. Это обстоятельство налагает определенное
ограничение на эффективное использование высокой рабочей
частоты регулятора.
4.2.5. ТИРИСТОРНО-КОНДЕНСАТОРНЫЕ РЕГУЛЯТОРЫ
ПОСТОЯННОГО ТОКА С ДОЗИРОВАННОЙ ПЕРЕДАЧЕЙ
ЭНЕРГИИ В НАГРУЗКУ
В регуляторах постоянного тока с повышенными значениями
напряжения и тока целесообразно использовать в качестве
ключевых элементов тиристоры.
Существует обширный класс схем импульсных регуляторов
тока, в основе которых лежит принцип периодической передачи
в нагрузку дозированных (определенных по величине) порций
электрической энергии [17]. В частности, энергия может
предварительно запасаться в промежуточном конденсаторе,
а затем посредством колебательного процесса передвигаться
в нагрузку. В этом классе схем наиболее широким диапазоном
регулирования выходного напряжения обладает схема, пред-
ставленная на рис. 4.18 в варианте без гальванической развязки.
Рассмотрим кратко принцип действия этой схемы и основ-
ные расчетные соотношения для нее. Предположим, что
конденсатор Ск заряжен до напряжения UBX + t/BbIX с полярно- |
стью, указанной на рис. 4.18, а без скобок. В момент времени j
t —10 подаются управляющие импульсы на тиристоры И5’1 |
и VS3. При включении этих тиристоров образуется колебатель- j
ный контур £СК (рис. 4.19, а), электромагнитные процессы -
в котором при общепринятых допущениях соответствуют J
дифференциальному уравнению второго порядка. Решение этого |
уравнения позволяет записать следующие соотношения: ’
i1=(2Un+U^sina>ti'\ (43J) •
UL=(2U„ + UBm)cosG)t, J
где a=l/y/LCx.
В процессе перезарядки конденсатора Ск (см. рис. 4.18,6) j
напряжение на реакторе L изменяет свою полярность и нараста-
ет далее, но с противоположной полярностью. Однако, когда
204 ;
j
Рис. 4 18. Тиристорный регулятор с дозированной передачей энергии в нагрузку:
а—схема; б — диаграммы напряжений и токов
напряжение UL достигает выходного напряжения (/вык (в
момент t — t2), включается диод VD, так как на нем появляется
напряжение прямой полярности. Включение диода VD огра-
ничивает дальнейший рост напряжения UL. В результате
с момента t = t2 ток в реакторе изменяется под воздействием
напряжения С/вых. Закон изменения мгновенного значения тока
1l на этом интервале можно найти из эквивалентной схемы,
изображенной на рис. 4.19,6. Ток ц в момент t = t2 скачком
изменяет свое значение до нуля в связи с переходом тока
4 в контур нагрузки, и тиристоры KSj и KS3 выключаются.
205
СК
4h
i
Е
±=г
ЧЬи Ии
%
а) S) б)
Рис. 4.19. Схемы замещения тиристорного регулятора по интервалам прово-
димости тиристоров
На этом интервале электромагнитные процессы описываются
системой уравнений
diL
dt
~dt~
— 1 у •
L
——L и
С ЯяС вых‘
(4.34)
Если регулятор работает в режиме прерывистого тока г4,
то в момент Г=ГЛ i(L) = 0 и диод VD выключается. Схема
замещения приобретает вид,
а уравнения (4.34) вырождаются в одно уравнение
d^BUX_________________________ 1 г г
—Л ~Т в*"-
В момент t — t4 включаются тиристоры У52 и Г54. В даль-
нейшем электромагнитные процессы протекают аналогично
рассмотренным для случая включения тиристоров VS^ и VS3.
Среднее значение выходного напряжения Свык определяется
интегрированием его текущих значений по всем интервалам на
периоде повторяемости, задаваемой частотой переключения ти-
ристоров. Однако для стационарного режима среднее значение
может быть определено проще из уравнения энергетического
баланса активных мощностей, в регуляторе. При принятых
традиционных допущениях идеальности элементов схемы актив-
ные составляющие входной и выходной мощности равны, т. е.
U2
р — ГТ Г _ р
* ВХ '-'ВХ21Ср * ВЫХ п ’
*^н
где /1ср—среднее значение входного тока.
В соответствии с диаграммой на рис. 4.18,6 и с учетом
того, что uL(t2)= — Свых, можно записать
соответствующий рис. 4.19, в,
(4.35)
(4.36)
2
1ср=? Л (t)dt=4fCK(U„ + U,m).
о
(4-37)
206
Из (4.36) и (4.37) получим
U2
-4/СкС7вых[7вх-4/Ск[7в2х = 0. (4.38)
*'н
Решение (4.38) с учетом физической реализуемости имеет вид
t/вых = LRnCJUn(\ + 71 + 1/ЛнСк/). (4.39)
Из (4.39) следует, что среднее значение выходного напряже-
ния в первом приближении при заданных параметрах схемы
и нагрузки прямо пропорционально частоте переключения
тиристоров, т. е. частоте подачи энергии, запасаемой на каждом
интервале в конденсаторе Ск.
Согласно принципу действия рассмотренной схемы нагрузка
регулятора получает питание как бы от источника тока
с ограниченным значением. Это обусловливает существенное
преимущество данной схемы в части ее устойчивости к пе-
регрузкам и короткому замыканию. В рабочем диапазоне
регулирование тока и выходного напряжения осуществляются
по способу частотно-импульсной модуляции (ЧИМ).
4.2.6. КОМБИНИРОВАННЫЕ ПРЕОБРАЗОВАТЕЛИ-РЕГУЛЯТОРЫ
В ряде случаев для стабилизации и регулирования постоянного
напряжения целесообразно использовать несколько различных
типов преобразовательных устройств, объединенных, как правило,
между собой схемно и конструктивно в один преобразовательный
агрегат. Например, если уровни входного и выходного напряже-
ний существенно различаются (в несколько раз и более), то
использую^ преобразователь, выполненный по структуре, изо-
браженной на рис. 4.20. Такой преобразователь состоит из
четырех функционально самостоятельных устройств: автономного
инвертора АИ, трансформатора Тр, выпрямителя В и фильтра
Ф. Согласование уровней входного и выходного напряжений
в основном осуществляется трансформатором, установленным
на выходе инвертора АИ. Для того чтобы уменьшить массу
Рис. 4.20. Структурная схема ста-
билизатора-регулятора постоянно-
го тока с промежуточным инвер-
тором
Рис. 4.21. Стабилизатор постоянного тока с регулировочным устройством
207
и габариты трансформатора, а также уровень частоты высших
гармоник, подлежащих фильтрации фильтром Ф, рабочую частоту
инвертора выбирают по возможности высокой (в транзисторных
преобразователях небольшой мощности эту частоту обычно выби-
рают в диапазоне от единиц до нескольких десятков килогерц).
Функции регулятора-стабилизатора напряжения в преобразователе
могут быть возложены как на инвертор, так и на выпрямитель в
зависимости от принятых принципиальных схем отдельных звень-
ев и конкретных требований к параметрам преобразователя [18].
Использование подобной структуры преобразователя, несмо-
тря на то, что поток преобразуемой электроэнергии проходит
последовательно через несколько устройств, может дать сущест-
венный выигрыш в массе и габаритах и для некоторых типов
преобразователей переменного тока в постоянный. Это может
быть, например, целесообразным, если источником переменного
напряжения является промышленная сеть с частотой 50 Гц,
а выпрямленное напряжение (среднее значение которого в срав-
нении с сетевым мало) должно регудироваться в широких
пределах, имея при этом низкий уровень пульсаций. Традицион-
ная схема для этого случая содержит такие элементы, как
входной согласующий трансформатор, рассчитанный на частоту
/=50 Гц, управляемый выпрямитель и выходной фильтр для
сглаживания пульсаций выпрямленного напряжения. Основные
элементы (в частности, трансформаторное и реакторное обору-
дование) значительно более громоздки, чем соответствующие
элементы в преобразователе, выполненном по следующей
структуре. Здесь напряжение сети поступает непосредственно
(без трансформатора) на неуправляемый выпрямитель, с выхода
которого выпрямленное напряжение подается на регулируемый
автономный инвертор высокой частоты с понижающим транс-
форматором на выходе, и далее вновь выпрямляется и сглажи-
вается оконечным фильтром.
При относительно неглубоких изменениях входного и выход-
ного напряжений (в процессе регулирования) более рациональны-
ми могут оказаться схемы стабилизаторов с регулировочным
устройством (рис. 4.21). В этой схеме последовательно с источни-
ком постоянного напряжения, которое поступает на вход
регулятора-стабилизатора, включен управляемый выпрямитель
В. Этот выпрямитель выполняет. функции регулировочного
устройства, напряжение которого (7Д добавляется к напряжению
основного источника Um. Изменяя Ua, можно регулировать
выходное напряжение Пвых, которое является суммой напряжений
UBX и t/д. Переменное напряжение на вход вольтодобавочного
выпрямителя может поступать либо от независимого источника
переменного напряжения, либо от автономного инвертора АИ,
как это показано на рис. 4.21. Автономный инвертор в этом
случае, как правило, работает на высокой частоте.
208
Преимуществом такою типа схем является то, что расчетная
мощность регулировочного устройства (в данном случае ав-
тономного инвертора АИ и выпрямителя В) меньше общей
мощности нагрузки. Так, в частности, мощность выпрямителя
В примерно равна илЦ, где ZH—номинальный ток нагрузки
стабилизатора. Эта мощность может быть снижена еще
практически в 2 раза, если регулировочное устройство сделать
реверсивным, т. е. способным как добавлять, так и вычитать
напряжение Ua из входного напряжения Un. Последнее можно
реализовать посредством перевода управляемого выпрямителя
В в инверторный режим (зависимого инвертора).
Во многих случаях более рациональными оказываются схемы
с регулированием выходного напряжения автономного инверто-
ра. В этих случаях выпрямитель В выполняется неуправляемым.
Стремление к уменьшению массы и объема преобразователя
обусловило тенденцию роста частоты инверторных звеньев. Однако
переход к рабочим частотам сверхзвукового диапазона выявил ряд
ограничений на повышение частоты. Одним из таких ограничений
являются частотные свойства полупроводниковых приборов и, в
частности, их критичность к допустимым скоростям нарастания то-
ков и напряжений при коммутации. Для более полного использова-
ния частотных свойств приборов эффективными оказались схемы
с резонансными контурами, обеспечивающими гладкое изменение
•оков и напряжений в схеме по законам, близким к гармоническим
на частотах, фиксированных параметрах схемы. В этой связи
интенсивно стали разрабатываться транзисторные импульсные
регуляторы, содержащие в качестве промежуточного звена ин-
верторы резонансного типа (см. пп. 3.2.4). Переход к таким
схемам дозволил успешно для регуляторов малой мощности
увеличить*частоты преобразования свыше 1 мГц и существенно
улучшить технико-экономические показатели таких регуляторов.
В зависимости от типа схемы резонансного инвертора
коммутация тиристоров в них происходит в моменты прохож-
дения тока или напряжения через нуль, что обеспечивает
наиболее благоприятную траекторию их переключения. Следует
также отметить, что такие благоприятные условия коммутации
ключевых элементов одновременно способствуют успешному
решению проблемы электромагнитной совместимости элемен-
тов на высоких рабочих частотах.
4.3. СТАТИЧЕСКИЕ КОНТАКТОРЫ
4.3.1. ТИРИСТОРНЫЕ КОНТАКТОРЫ ПЕРЕМЕННОГО ТОКА
Для коммутации силовых цепей переменного тока раз-
работано много различных типов электрических аппаратов:
автоматические выключатели, электромагнитные контакторы
И № 3658 209
Рис 4 22 Тиристорный контактор с естественной коммутацией
а—схема, б—диаграммы напряжения и тока при включенном контакторе
и др. Большинство из них основано на механическом вза-
имодействии отдельных узлов и деталей. Наличие подвижных
узлов и деталей обусловливает инерционность процессов за-
мыкания и размыкания электрических контактов. Обычно
время включения и выключения таких аппаратов находится
в диапазоне от десятых до сотых долей секунды в зависимости
от типа коммутационного аппарата.
Полупроводниковые ключевые элементы позволяют сущест-
венно повысить быстродействие коммутационных аппаратов.
С этой целью разработан ряд схем, так называемых бескон-
тактных коммутационных аппаратов, выполненных преимуще-
ственно на основе тиристоров. В литературе такие аппараты
часто именуются тиристорными контакторами. Отсутствие
подвижных частей и металлических контактных соединений
делает эти устройства значительно более надежными и быст-
родействующими. Кроме того, как и все схемы с полупровод-
никовыми приборами, они обладают большим сроком службы.
В простейшем исполнении силовая часть однофазного
тиристорного контактора представляет собой два встречно-
параллельно включенных тиристора (рис. 4.22, а) или один
симметричный тиристор. Если тиристоры проводят ток, то
контактор включен, если тиристоры ток не проводят, то
контактор выключен. Так как ток переменный, то одну
полуволну тока проводит тиристор VSX, а другую — тиристор
VS2. Силовая схема такого контактора подобна силовой схеме
регулятора переменного тока, изображенной на рис. 4.3.
Различие между ними заключается в законе управления
тиристорами. В регуляторе управляющие импульсы на тири-
сторы поступают с различными углами управления а, а в кон-
такторе— таким образом, чтобы каждый тиристор проводил
одну или несколько полных полуволн тока либо оба тиристора
были выключены.
Поскольку тиристор является не запираемым по управлению
элементом, то для его выключения необходимо обеспечить
спадание тока до нуля. Если контактор включен в цепи
с активным сопротивлением Zn = R„ (рис. 4.22, а), то моменты
210
прохождения через нуль тока и напряжения совпадают. При
активно-индуктивной нагрузке ток отстает от напряжения,
переход тока с одного тиристора на другой происходит позже
на угол фн, который определяется коэффициентом мощности
нагрузки (рис. 4.22,6). Для того чтобы выключить тиристор
раньше момента прохождения тока коммутируемой цепи через
нуль, необходимо применять искусственную коммутацию ти-
ристоров (см. § 3.2).
В зависимости от того, выключаются тиристоры под
воздействием естественного снижения переменного тока до
нуля или посредством их искусственной коммутации, различают
тиристорные контакторы с естественной коммутацией (ТКЕ)
и искусственной коммутацией (ТКИ). Для того чтобы вы-
ключить ТКЕ, достаточно прекратить подачу управляющих
импульсов на тиристоры. В этом случае максимальное время
выключения тиристора не будет превышать половины периода
выходного напряжения. Например, если прекратить подачу
управляющих импульсов в момент включения очередного
тиристора, то он будет проводить полуволну тока, т. е.
в течение 180°, а другой тиристор уже не сможет включиться
из-за отсутствия управляющего импульса.
При необходимости иметь время выключения меньшим,
чем половина периода выходного напряжения, следует при-
менять ТКИ. Однако в этом случае возникает проблема
отвода энергии, накопленной в индуктивностях нагрузки, при
обесточивании цепи, соединяющей источник электроэнергии
с нагрузкой. Это связано с тем, что согласно основным
законам коммутации ток в индуктивности не может изменяться
скачком. ^Поэтому чем быстрее происходит отключение цепи,
содержаний индуктивность, с током, отличным от нуля, тем
большие перенапряжения возникнут на отключающем аппарате.
Указанные перенапряжения являются следствием наведения
ЭДС в индуктивности, препятствующей изменению значения
тока нагрузки. Для устранения перенапряжений (опасных для
элементов коммутационного аппарата) следует в случае при-
менения ТКИ предусматривать возможность отвода или сброса
энергии, накопленной в индуктивностях нагрузки, в какой-либо
приемник или накопитель электроэнергии. В частности, таким
приемником может служить конденсатор или источник перемен-
ного тока, способный принимать электроэнергию.
На рис. 4.23, а представлена схема ТКИ, в которой
отключение основных тиристоров KS2 производится
с помощью колебательного контура, элементами которого
являются конденсатор Ск и реактор £к. Такие схемы в ли-
тературе иногда называют схемами с параллельной ком-
мутацией. Когда ТКИ включен, то ток нагрузки протекает
в один полу период через тиристор KS\ и диод VDX, а в дру-
ги
Рис. 4.23. Тиристорные контакторы переменного тока с импульсной ком-
мутацией
гой — через тиристор VS2 и диод VD2. Коммутирующий
конденсатор Ск заряжен от маломощного вспомогательного
трансформатора Тр с полярностью, указанной на рис. 4.23,
и отделен от основных тиристоров и диодов коммутирующим
тиристором VS*.
Для выключения основных тиристоров необходимо подать
управляющий импульс на коммутирующий тиристор VSK. При
этом в результате разряда конденсатора Ск в колебательном
контуре возникает ток iK, который будет протекать через тот
основной тиристор, который в этот момент проводит ток,
и будет направлен навстречу этому току. Например, допустим,
что ток нагрузки проводил тиристор VSl. При включении
тиристора VS* через тиристор VSr начинает протекать разность
токов нагрузки 4 и контура 4- Пока ток 4 меньше тока /н,
тиристор KSi будет включен, а диод VD2 выключен, так как
к нему приложено обратное напряжение, обусловленное паде-
нием напряжения на тиристоре VSr. При равенстве токов
in и 4 тиристор VSi выключается, ток 4 продолжает возрастать,
разность токов 4 и ia будет протекать через диод VD. На
интервале проводимости диода VD2 к тиристору К8\ будет
приложено обратное напряжение, равное падению напряжения
на диоде VD2. Когда ток 4 станет меньше тока /в, диод
VD2 выключается, и ток нагрузки iB начинает протекать по
контуру диод VD3 — конденсатор Ск—реактор LK—тиристор
VSK—диод VDi—нагрузка—источник — диод VD3. При этом
212
будет происходить перезаряд конденсатора Ск током нагрузки
iH, и энергия, запасенная в индуктивности нагрузки, будет
переходить в конденсатор Ск. Это обстоятельство вызывает
необходимость существенно завышать его установленную ем-
кость или вводить в схему дополнительные устройства,
поглощающие энергию.
Быстродействие рассмотренного ТКИ при использовании
его для коммутации цепей с активной нагрузкой ограничено
практически только временем выключения тиристоров (обычно
десятки микросекунд). Однако при активно-индуктивной нагруз-
ке это время увеличивается и зависит от параметров схемы
и нагрузки.
Количество основных тиристоров в данном ТКИ может
быть уменьшено до одного, как это показано на рис. 4.23,6.
В этом случае упрощается управление ТКИ, но одновременно
увеличиваются потери в схеме. Последнее объясняется тем,
что при включенном ТКИ ток нагрузки в каждый момент
времени протекает по трем элементам: двум диодам и одному
тиристору. В основном же процессы в обеих схемах сходны.
В многофазных системах статические контакторы обычно
устанавливают отдельно на каждую фазу. При этом некоторые
функциональные узлы фазных контакторов могут быть схемно
и конструктивно объединены.
Существует много различных схем полупроводниковых
контакторов, отличающихся как принципом действия, так
и элементной базой. Большинство из них обладают су-
щественными преимуществами перед электромеханическими
аппаратами в части быстродействия, надежности и срока
службы, д в некоторых случаях имеют и лучшие мас-
согабаритйые показатели. Следует, однако, отметить, что
всем полупроводниковым контакторам присущ один общий
недостаток — невозможность обеспечения полной гальваниче-
ской развязки коммутируемых цепей в отключенном состоянии.
Это объясняется тем, что сопротивление полностью вы-
ключенного полупроводникового прибора всегда имеет ко-
нечное значение, в то же время механические контакты
обеспечивают полный разрыв цепи.
4.3.2. ТИРИСТОРНЫЕ КОНТАКТОРЫ ПОСТОЯННОГО ТОКА
Для включения и отключения (коммутации) цепей по-
стоянного тока, так же как и цепей переменного тока,
разработано много различных типов полупроводниковых ап-
паратов, называемых обычно статическими контакторами или
переключателями. Поскольку основным элементом таких кон-
такторов, предназначенных для коммутации силовых цепей,
является тиристор, то они обычно называются тиристорными
213
Рис. 4.24. Комбинированные контакторы постоянного тока:
а—схема с параллельным включением подвижного контакта; б—схема с последователь-
ным включением подвижного контакта
контакторами или прерывателями. Основные преимущества
тиристорных контакторов в сравнении с электромеханическими
аппаратами указаны в § 4.2. Одной из особенностей тиристор-
ных контакторов постоянного тока является то, что боль-
шинство из них может широко использоваться для преоб-
разования и регулирования напряжения и тока в качестве
основного узла импульсных регуляторов-стабилизаторов, ра-
ботающих на значительно более высоких частотах переключе-
ния, чем тиристорные - регуляторы-стабилизаторы в цепях
переменного тока. В этой связи быстродействие тиристорных
контакторов постоянного тока является важнейшим фактором,
определяющим в значительной мере области их применения.
Однако в некоторых случаях основным требованием к ти-
ристорному контактору является обеспечение минимального
времени его вступления в работу, например, в некоторых
типах установок гарантированного питания. Для этой цели
могут быть использованы комбинированные схемы контактора,
состоящего из тиристора и электромагнитного контактора
обычного типа, изображенные на рис. 4.24. Необходимость
введения электромагнитного контактора в этих схемах обус-
ловлена тем, что необходимо обеспечить выключение тири-
стора. В схеме на рис. 4.24, а выключение тиристора обес-
печивается шунтированием его замыкающим контактом К,
а в схеме на рис. 4.24,6—размыканием размыкающего кон-
такта К. Включение комбинированного контактора осуществ-
ляется подачей управляющего импульса на тиристор VS.
Следовательно, время включения комбинированного контак-
тора с момента поступления команды будет определяться
временем включения тиристора (т. е. при определенных типах
тиристоров измеряться несколькими микросекундами), а время
выключения—временем включения (рис. 4.24, а) или временем
выключения (рис. 4.24, б) электромагнитного контактора (обыч-
но несколько сотых долей секунды).
У большинства типов тиристорных контакторов постоян-
ного тока предусматривается искусственная коммутация ти-
ристоров, для реализации которой разработано много раз-
личных схем. В § 3.2 рассмотрены основные способы искус-
214
ственной коммутации тиристоров в автономных инверторах.
Эти же способы лежат и в основе схем, обеспечивающих
искусственную коммутацию тиристоров в статических контак-
торах. При классификации схем тиристорных контакторов по
способу коммутации тиристоров обычно выделяют такой
признак, как связь включения и выключения основного ти-
ристора контактора общим электромагнитным процессом
в коммутирующем контуре. В этом смысле различают кон-
такторы однооперационные (или с одноступенчатой коммутаци-
ей), двухоперационные и трехоперационные (или с двухступен-
чатой коммутацией).
В однооперационных контакторах включение и выключение
основного тиристора неразрывно связаны общим электромаг-
нитным процессом в коммутирующем контуре (или цепи
нагрузки, если она имеет колебательный характер). В контакто-
рах этого типа подача управляющего импульса на основной
тиристор вызывает его включение, а выключение происходит
вследствие колебательного характера тока, протекающего через
тиристор. Следовательно, включение и выключение тиристора
в таких схемах происходят в течение одной ступени работы
контактора, и управлять моментом выключения тиристора
независимо от момента его включения нельзя.
В контакторах с двухступенчатой коммутацией выключение
основного тиристора можно производить практически незави-
симо от момента его включения. В таких схемах выключение
основного тиристора производится посредством подключения
коммутирующей цепи к основному тиристору через вспомо-
гательный (коммутирующий) тиристор. Поэтому выключение
контактору в таких схемах можно рассматривать как вторую
независим}^) рабочую операцию, которая осуществляется пода-
чей управляющего импульса на коммутирующий тиристор.
Поэтому схемы подобного типа называются двухоперацион-
ными. "Если подготовка коммутационного контура к выключе-
нию основного тиристора связана с дополнительной операцией,
например перезарядом коммутирующей цепи посредством
включения тиристора перезаряда (т. е. введением третьей
операции — подачи управляющего импульса на тиристор пе-
резаряда), то такие схемы принято называть трехоперацион-
ными. Теоретически работа контактора может быть связана
и с еще большим количеством операций подобного типа, но
такие схемы не получили практического применения.
Иногда при классификации схем тиристорных контакторов
используются и другие, менее существенные признаки, например
элементный состав коммутирующей цепи (емкостный или
индуктивно-емкостный), способ включения коммутирующей
цепи (параллельно основному тиристору или нагрузке и др.),
наличие трансформатора, разделяющего цепи основного ти-
215
Рис. 4.25. Тиристорный контактор с конденсаторной коммутацией:
а—схема, б—диаграммы токов и напряжений на элементах схемы; в—схема с до-
полнительным контуром перезаряда
ристора и коммутирующую, количество цепей, содержащих
основные тиристоры (с одной цепью — однофазные, с двумя
цепями — двухфазные и т. д.).
Наибольшее распространение получили схемы тиристорных
контакторов с двухступенчатой коммутацией, которые можно
рассматривать как аналоги полностью управляемых ключевых
элементов, используемых для коммутации электрических цепей.
Поэтому в дальнейшем будем рассматривать только схемы
с двухступенчатой коммутацией основного тиристора, процесс
выключения которого можно отделить от процесса его включе-
ния [12].
На рис. 4.25, а представлена схема простейшего контактора
подобного типа с конденсаторной коммутацией, осуществля-
емой подключением коммутирующего конденсатора Ск парал-
лельно основному тиристору VS. В данной схеме (так же
как и в последующих) нагрузка предполагается активно-
индуктивной (например, обмотка возбуждения двигателя). По-
этому в схеме для протекания тока, обусловленного энергией,
накопленной в индуктивной составляющей нагрузки на ин-
тервале включенного состояния контактора, предусмотрен
обратный диод VD.
Предположим, что конденсатор Ск заряжен с полярностью
напряжения, указанной на рис. 4.25, а. При подаче в момент
времени t0 управляющего импульса на тиристор VS он
включается и на нагрузку подается входное напряжение Um.
Одновременно начинается колебательный процесс перезаряда
конденсатора Ск по контуру Ск— VS— VD—L. Процесс пере-
216
заряда заканчивается в момент /1; когда ток конденсатора
достигает нулевого значения. Диод VDr блокирует дальнейшее
протекание процесса перезаряда, и в результате на конденсаторе
будет напряжение с полярностью, противоположной указанной
на рис. 4.25. Таким образом, коммутирующий конденсатор
оказывается подготовленным к выключению основного тири-
стора VS.
Для выключения основного тиристора VS на коммутиру-
ющий тиристор VSB в момент времени /2 подается управля-
ющий импульс. Включение тиристора VSB приводит к выключе-
нию тиристора VS, так как к нему оказывается подключенным
заряженный конденсатор Ск, разрядный ток которого направлен
навстречу току нагрузки /н, протекающему через тиристор
VS. После выключения тиристора VS ток нагрузки iB начнет
протекать через тиристор VSB и конденсатор Ск, перезаряжая
его. До тех пор пока напряжение на конденсаторе не изменит
свой знак (момент /3), к основному тиристору будет приложено
обратное напряжение и он имеет возможность выключиться.
Процессы, протекающие на интервале перезаряда конден-
сатора, более скоротечны, чем процессы в нагрузке. Можно
считать, что ток нагрузки /н за это время существенно не
изменится. Поэтому процесс изменения напряжения на кон-
денсаторе Ск в процессе перезаряда происходит практически
по линейному закону.
В момент времени Z4 напряжение на конденсаторе Ск до-
стигает значения, равного UBX, и процесс перезаряда прекраща-
ется. Это объясняется тем, что при дальнейшем повышении
напряжения происходит включение обратного диода VD, к ко-
торому приложена разность напряжений входного UBX и кон-
денсатора Uc. В результате ток нагрузки iH начинает протекать
через открытый диод VD (ток, обусловленный накоплением
энергии в индуктивности составляющей нагрузки ZH).
Емкость коммутирующего конденсатора Ск в данной схеме
определяется коммутируемым током нагрузки и входным
напряжением UBX. Учитывая, что процесс перезаряда конден-
сатора Ск на интервале выключения тиристора P'S происходит
по линейному закону, можно определить емкость конденсатора
Ск по формуле
(4.40)
ах
где 4 max—максимальное значение тока нагрузки в момент
выключения тиристора VS', tq — время выключения тиристора
Основным недостатком рассмотренной схемы является уве-
личение длительности коммутационного процесса при выключе-
217
нии в режимах малых нагрузок. Это обусловливается тем,
что длительность перезаряда коммутирующей емкости Ск уве-
личивается с уменьшением тока перезаряда, т. е. тока нагрузки.
Другим недостатком является дополнительная загрузка ос-
новного тиристора VS по току в период подготовки конден-
сатора Ск к коммутации, когда происходит его перезаряд,
вызванный включением тиристора Г5К. Кроме того, в момент
выключения тиристора VS на нагрузке возникает всплеск
напряжения приблизительно двукратной величины относитель-
но значения входного напряжения (рис. 4.25, б).
Зависимость длительности коммутационного процесса от
тока нагрузки можно существенно уменьшить, если в схему
ввести дополнительный контур перезаряда коммутирующего
конденсатора, состоящий из диода VD2 и реактора
L2 (рис. 4.25, в). Наличие дополнительного контура приводит
к тому, что в момент включения коммутирующего тиристора
VS* конденсатор будет перезаряжаться не только током
нагрузки iB, но и током в колебательном контуре
Ck~VSx—VD2 — L2. При этом длительность перезаряда кон-
денсатора не может быть меньше половины периода коле-
бательного процесса в этом контуре при любых токах нагрузки,
включая холостой ход.
Всплески напряжения на нагрузке не всегда могут быть
допустимы. На рис. 4.26, а представлена схема, свободная
от этого недостатка. Чтобы подготовить схему к работе,
необходимо зарядить конденсатор Ск. Для этого подается
управляющий импульс на тиристор И5К, через который
и цепь нагрузки конденсатор заряжается с полярностью,
указанной на рис. 4.26, а. Включение контактора осуществляется
Рис. 4.26. Тиристорный контактор с коммутирующим ZZ.'-контуром:
а—схема; б—диаграммы токов и напряжений на элементах схемы
218
подачей в момент времени t0 (рис. 4.26, б) управляющего
импульса на основной тиристор VS. Одновременно начинается
перезаряд конденсатора Ск по контуру Сж — LK — VD2 — VS.
Когда полуволна перезарядного тока 4 спадает до нуля
(момент времени 4), диод VD2 выключается и конденсатор
Ск оказывается заряженным с полярностью, противоположной
указанной на рис. 4.26, а, т. е. подготовленным для коммутации
тиристора VS.
Для выключения тиристора VS в момент времени t2 подается
управляющий импульс на тиристор VSX. При включении
тиристора KSX начинается колебательный процесс в контуре
Ск — VS— VSX — LX. При этом через тиристор VS будет протекать
разность токов нагрузки 4 и разрядного тока контура 4- Когда
эти токи станут равными (момент времени /3), тиристор VS
выключится. Далее 4 продолжает возрастать, и через диод VDt
будет проходить разность токов 4 и 4- Пока диод VDt проводит
ток, к тиристору VS будет приложено обратное напряжение,
равное прямому напряжению на диоде VDt. На этом интервале
времени тиристор VS выключается. Когда ток 4 снова станет
меньше тока нагрузки 4 (момент времени /Д диод VDr
выключится. Далее происходит дозаряд конденсатора Ск током
нагрузки 4 по цепи VSX — Lx—Сх — ZH до значения входного
напряжения UBX. После этого включается диод VD, шунтиру-
ющий цепь нагрузки (момент времени z5). Так как в момент
времени t5 ток 4 отличен от нуля, то энергия, запасенная
в индуктивности Lx, расходуется на дальнейший рост напряже-
ния на конденсаторе Ск до значения, большего напряжения UBX.
После спадания тока в индуктивности Lx до нуля включается
диод VD2 (момент времени /б) и конденсатор Сх разряжается до
напряжения * несколько меньшего, чем входное напряжение
UBX (момент времени /7). Значения напряжений на конденсаторе
Ск в различные моменты процесса коммутации равны:
в момент времени t6 uc=UBX + iH
в момент времени r7 uc=UBX — ia
(4.41)
Если источник входного напряжения имеет однонаправлен-
ную проводимость (например, выпрямитель), то разряд кон-
денсатора Сх в обратном направлении становится невозможным
и процесс изменения напряжения на конденсаторе заканчивается
в момент времени t6, когда ток индуктивности Lx становится
равным нулю.
Положительными свойствами рассмотренной схемы является
отсутствие перенапряжений не только в цепи нагрузки, но
219
и на тиристорах, к которым прикладывается только прямое
напряжение, практически не превышающее входное напряжение
Um. Кроме того, нарастание и снижение токов в полупровод-
никовых элементах происходят плавно (за исключением на-
растания прямого тока тиристора VS), что улучшает условия
их работы в схеме и уменьшает возможность выхода из строя.
ГЛАВА ПЯТАЯ
СИСТЕМЫ УПРАВЛЕНИЯ
ПРЕОБРАЗОВАТЕЛЬНЫМИ УСТРОЙСТВАМИ
5.1. ОБЩИЕ СВЕДЕНИЯ
Под системой управления (СУ) преобразовательного устрой-
ства в широком смысле понимают совокупность функциональ-
ных узлов и элементов, обеспечивающих:
1) управление ключевыми элементами силовой части преоб-
разователя, осуществляющими процесс преобразования элект-
роэнергии;
2) регулирование выходных параметров преобразователя;
3) включение, отключение преобразователя и распределение
электроэнергии между отдельными потребителями;
4) управление защитными устройствами преобразователя
и его компонентов;
5) выдачу информации о работе преобразователя при
использовании его в автоматизированной системе электро-
питания.
Систему контроля работоспособности преобразователя и его
компонентов также иногда относят к системе управления.
В данной главе рассматриваются характерные узлы и блок-
схемы основной части СУ различных типов тиристорных
преобразователей и некоторых других устройств силовой
электроники.
К основной части относятся функциональные узлы и элемен-
ты, которые обеспечивают управление нелинейными элемен-
тами (например, тиристорами), выполняющими непосредст-
венно функции преобразования и регулирования параметров
электрической энергии. При дальнейшем изложении под СУ
в большинстве случаев понимается ее основная часть.
В тиристорных преобразователях основная функция СУ
заключается в формировании по определенной программе
управляющих импульсов на управляющих электродах тири-
сторов схемы. Требования, предъявляемые к параметрам
220
управляющих импульсов, определяются типом тиристора, схе-
мой, в которой используется тиристор, и режимом его работы.
Для надежного включения тиристора необходимо обеспечить
такие значения тока управления и напряжения на управляющем
электроде, которые соответствуют области гарантированного
включения тиристора с учетом максимально допустимых
значений тока, напряжения и пиковой мощности, выделяемой
на управляющем электроде (см. § 1.1).
В зависимости от схемы, в которой используются тири-
сторы, управляющие импульсы могут иметь различную форму
и длительность. Наиболее распространенная форма управля-
ющих импульсов — прямоугольная. Минимальная длительность
управляющих импульсов определяется временем, необходимым
для нарастания тока в анодной цепи до значения тока
включения тиристора, который обычно в 2—3 раза превосходит
ток выключения. Это время при активном сопротивлении
коммутируемой тиристором цепи практически совпадает с вре-
менем включения тиристора, т. е. находится в диапазоне от
единиц до нескольких десятков микросекунд. Наличие индук-
тивности в анодной цепи может существенно увеличить
минимально необходимую длительность управляющего им-
пульса по сравнению с временем включения тиристора.
Для обеспечения нормальной работы тиристоров в ряде
схем требуются широкие управляющие импульсы, длительность
которых обычно определяется частотой переключения тири-
сторов и особенностями работы схемы. Например, в трех-
фазном мостовом управляемом выпрямителе при работе
в режиме с прерывистым током нагрузки или при запуске
выпрямителе необходимо, чтобы управляющие импульсы при-
сутствовали * одновременно на двух тиристорах: одном из
анодной группы, а другом из катодной. Это обусловлено
необходимостью образования цепи протекания тока нагрузки
id при включении очередной пары тиристоров, которые находят-
ся в выключенном состоянии из-за снижения тока id до нуля.
Одновременное присутствие управляющих импульсов на соот-
ветствующей паре тиристоров анодной и катодной группы
может быть обеспечено, если длительность импульсов будет
больше, чем t=Tlb, где Т—период переменного напряжения
на входе выпрямителя.
В данном случае задача может быть решена и другим
путем. Например, подачей на каждый тиристор сдвоенных
узких управляющих импульсов, первый из которых соответ-
ствует очередному включению тиристора согласно порядку
коммутации тиристоров в схеме, а другой — повторному (в
момент включения очередного тиристора противоположной
группы). Однако во многих схемах формирование широких
импульсов оказывается проще, чем ряда узких, особенно если
221
моменты их формирования должны находиться в зависимости
от режима работы преобразователя.
Основным недостатком управления широкими импульсами
является увеличение объема и массы импульсных трансфор-
маторов в СУ, а также потерь в тиристоре.
Существенным параметром управляющих импульсов явля-
ется также крутизна переднего фронта импульса, которая
влияет на время включения тиристора и допустимую скорость
нарастания прямого тока di^jdt. Для лучшего использования
тиристоров длительность переднего фронта управляющего
импульса должна быть около 1 мкс. Крутизна переднего
фронта управляющего импульса является важным параметром
и для импульсов управления транзисторами, используемыми
в схемах преобразователей в качестве ключевых элементов.
При управлении тиристорами на интервале, когда отсут-
ствуют управляющие импульсы, желательно на управляющие
электроды тиристоров подавать небольшое отрицательное
смещение. Запирающее напряжение позволяет повысить устой-
чивость тиристоров к ложным управляющим импульсам.
В настоящее время СУ тиристорных преобразователей
выполняются на основе полупроводниковых и магнитных
элементов. Из последних преимущественно используются им-
пульсные трансформаторы, применяемые для развязки цепей
СУ и силовой части преобразователя. С развитие^ микроэлек-
троники широкое применение в СУ находят различные типы
гибридных и интегральных полупроводниковых схем (ИС).
По принципу обработки сигналов ИС делятся на аналоговые
и цифровые. В аналоговых ИС выходной и входной сигналы
связаны непрерывной функцией, например линейной. В циф-
ровых ИС (иногда называемых дискретными ИС) входной
и выходной сигналы являются дискретными, например им-
пульсами напряжения.
Среди аналоговых ИС в СУ могут быть успешно ис-
пользованы многоцелевые высококачественные усилители, по-
лучившие название операционных (например, усилители серий
К140 и К544). Из цифровых ИС, применяемых в СУ, следует
отметить схемы транзисторно-транзисторной логики (ТТЛ)
серий К564 и К561, а также схемы на металлоокисных
полупроводниковых (МОП) транзисторах (например, серии
К172). Последние обладают более высокими уровнями напряже-
ния выходного сигнала.
Одним из перспективных путей совершенствования СУ
является использование микропроцессорной техники. Системы
управления, содержащие микропроцессорные комплекты
(МПК), позволяют более эффективно решать задачи регули-
рования выходных параметров и реализовать более глубокий
текущий контроль за работой СУ, а также обеспечить более
222
точную диагностику ее узлов и элементов. Основным же
преимуществом применения МПК является возможность ши-
рокой унификации аппаратных средств СУ. При этом разно-
образие функций обеспечивается разработкой соответствующих
программ управления.
Конструктивно СУ выполняется обычно в виде выдвижных
субблоков, состоящих из печатных плат. Как правило, каждая
печатная плата является функционально определенным узлом
СУ. Соединения между платами, субблоками и силовой частью
осуществляются через разъемы.
Большое внимание при разработке СУ уделяют вопросам
надежности, так как количество элементов СУ значительно
превышает количество элементов силовой части. Поэтому
надежность преобразователя в основном определяется надеж-
ностью его СУ.
Особые требования к узлам СУ предъявляют по помехо-
устойчивости, поскольку они обычно работают в непосредст-
венной близости с силовыми цепями схемы.
5.2. СТРУКТУРНЫЕ СХЕМЫ СИСТЕМ УПРАВЛЕНИЯ
ПРЕОБРАЗОВАТЕЛЬНЫХ УСТРОЙСТВ
В настоящем параграфе рассматриваются некоторые упро-
щенные структуры СУ различных видов преобразовательных
устройств: выпрямителей, преобразователей частоты, автоном-
ных инверторов и др. Общим для всех рассматриваемых
структурных схем является блок питания, обозначенный на
рисунках БП, без указания связей с другими функциональными
узлами СУ. \
5.2.1. СИСТЕМЫ УПРАВЛЕНИЯ ВЫПРЯМИТЕЛЕЙ
И ЗАВИСИМЫХ ИНВЕРТОРОВ
В самом общем виде структуры СУ выпрямителей, зависи-
мых инверторов и других видов тиристорных преобразователей
можно разделить на две группы: многоканальные и одноканаль-
ные. В многоканальных структурах СУ регулирование фазы
управляющих импульсов (т. е. угла управления) производится
в каждом канале управления. Число таких каналов обычно
равно числу тиристоров схемы или числу ее фаз. В одноканаль-
ных структурах СУ регулирование фазы управляющих импуль-
сов производится в одном общем для всех фаз канале
с последующим распределением импульсов по тиристорам
схемы. Подобную классификацию СУ целесообразно проводить
Для многофазных преобразователей, содержащих большое чис-
ло тиристоров. В то же время основной принцип этой
классификации справедлив и для однофазных схем.
223
Рис. 5.1. Система управления однофазного выпрямителя:
а—структурная схема, б—диаграммы напряжений на входе фазосдвигающих устройств
и диаграммы управляющих импульсов, в — одиоканальная структурная схема.
Наиболее распространенной структурой СУ выпрямителей
является многоканальная. Пример СУ с такой структурой
для тиристорного выпрямителя, выполненного по однофазной
схеме со средней точкой, приведен на рис. 5.1, а. Принцип
работы данной СУ основан на формировании управляющих
импульсов, следующих синхронно с сетевым напряжением
иАВ и сдвинутых относительно этого напряжения по фазе на
угол а. В выпрямителях с регулированием по выходному
напряжению (рис. 5.1, б) угол а обеспечивается таким, чтобы
среднее значение выпрямленного напряжения Ud мало от-
личалось от заданного при различных возмущениях, например
колебаниях сетевого напряжения иАВ.
Привязка импульсов к сетевому напряжению осуществляется
входным устройством ВУ. Функции ВУ в данной СУ может
выполнять трансформатор со средней точкой, вторичные
полуобмотки которого создают два синусоидальных напряже-
ния, сдвинутых между собой на угол л. Напряжения с каждой
224
вторичной полуобмотки ВУ поступают на фазосдвигающие
устройства ФУГ и ФУ2. Наиболее просто фазосдвигающие
устройства в данном случае реализуются на принципе вер-
тикально-фазового управления. В частности, схемы могут быть
выполнены так, чтобы обеспечить формирование импульсов
в моменты равенства напряжений, поступающих от ВУ и рав-
ных и^у1 и Мву2 с напряжением Д(7р, поступающим на ФУу
и ФУ2 от автоматического регулятора напряжения АРН
(рис. 5.1, б).
Типовая структурная схема автоматического регулятора
напряжения приведена на рис. 5.1, а. Она состоит из источника
опорного (эталонного) напряжения ИОН, сумматора 1 и усили-
теля 2, включающего в себя в общем случае различные звенья
динамической коррекции системы автоматического регулирова-
ния. В рассматриваемом примере последняя выполнена на
принципе использования обратной связи. Напряжение цепи
обратной связи £7О>С от датчика напряжения ДН поступает
на сумматор 1, на вход которого подается также опорное
напряжение (70. Разность этих напряжений £ (один из сигналов
поступает на сумматор с обратным знаком) подается на вход
усилителя 2. Выходной сигнал усилителя поступает на входы
ФУ и ФУ2 и далее на формирователи управляющих импульсов
ФИГ и ФИ2- Из рис. 5.1, б видно, что А(7р определяет моменты
формирования управляющих импульсов тиристоров, т. е. угол
управления а.
Согласно (2.23) чем больше угол а, тем меньше среднее
значение выходного напряжения выпрямителя. Эта зависимость
позволяет регулировать выходное напряжение, в частности
осуществлять его стабилизацию на заданном уровне при
различных возмущающих воздействиях. Например, если в ре-
зультате возрастания входного напряжения начнет увели-
чиваться выходное напряжение выпрямителя, то усиленный
сигнал рассогласования с будет изменять угол а так,
чтобы восстановить выходное напряжение на заданном
уровне. В результате сигнал в будет стремиться к нулю,
а выходное напряжение к значению, заданному опорным
напряжением (70 и коэффициентом передачи датчика выходного
напряжения ДН.
В соответствии с принципом действия рассматриваемой
системы регулирования установившееся значение напряжения
Ud должно отличаться от заданного, чтобы обеспечить требу-
емые уровень сигнала 8 для определенного значения угла а.
Значение в будет тем меньше, чем выше коэффициент усиления
Цепи регулятора, связывающий значения в и а (зависящий
в данном случае преимущественно от коэффициента усиления
усилителя 2). Поэтому в установившемся режиме новое
значение выходного напряжения будет несколько отличаться
15 № 3658 225
от заданного. Но это отличие при больших значениях коэф-
фициента усиления мало.
Так как компенсация возмущающих воздействий в системах
подобного типа происходит не полностью, а с некоторым
отклонением регулируемого параметра от заданного значения
(называемым в теории автоматического регулирования статиз-
мом), они относятся к статическим системам автоматического
регулирования. Статизм может быть уменьшен за счет увеличе-
ния коэффициента усиления цепи регулирования. Но это может
вызвать неустойчивость процесса регулирования, например
автоколебания. С целью повышения устойчивости системы
регулирования в нее вводят специальные корректирующие звенья,
которые улучшают динамические характеристики системы.
Для пояснения принципа действия одноканальных структур
СУ на рис. 5.1, в приведен другой вариант СУ. Здесь имеется
фазосдвигающее устройство ФУ0, обеспечивающее фиксированный
сдвиг по фазе на угол я сигнала, поступающего на формирователь
импульсов ФИ2. Регулирование угла управления а происходит
только посредством воздействия сигнала от АРН на ФУ\, т. е.
управляющие импульсы синхронизируются по частоте и фазе
относительно одной полуволны сетевого напряжения.
Для однофазных преобразователей одноканальные струк-
туры усложняют СУ и поэтому обычно не используются.
В то же время для многофазных преобразователей применение
одноканальных СУ в некоторых случаях может оказаться
более выгодным.
В § 3.1 было показано, что для обеспечения режима
зависимого инвертирования необходимо формировать управ-
ляющие импульсы с опережением относительно моментов
естественной коммутации тиристоров схемы на угол Р = л —а.
На рис. 5.1, б показаны диапазоны формирования управляющих
импульсов в выпрямительном (I) и инверторном (II) режимах.
Очевидно, что при синусоидальной форме напряжения
иаЬ затруднительно обеспечить фазовый сдвиг способом вер-
тикально-фазового управления одновременно в диапазонах
I и II. Если преобразователь должен работать в обоих
режимах, целесообразно выполнить ВУ на основе генератора
пилообразного напряжения, выходные напряжения которого
мву1 и мву2 синхронизированы с сетевым (на рисунке эти
напряжения, сигнал АС/" от АРН и управляющие импульсы
для инверторного режима показаны штриховой линией). Ис-
пользование для сравнения с сигналом АС/" пилообразного
напряжения позволяет обеспечить регулирование угла а в диа-
пазоне от 0 до л, т. е. как в выпрямительном (0 —л/2), так
и инверторном (л/2 —л) режимах.
Пример многоканальной структуры СУ для трехфазного
управляемого выпрямителя приведен на рис. 5.2, а. Она содер-
э26
Рис 5 2. Многоканальная система управления трехфазного мостового выпрями-
теля:
а — структурная схема, б—диаграммы сетевого напряжения и сдвоенных управляющих
импульсов
жит шесть каналов управления тиристорами. Каждый канал
имеет фазосдвигающее устройство ФУ и формирователь им-
пульсов ФИ. Синхронизация импульсов с сетевым напряжением
осуществляется входным устройством ВУ, которое одновремен-
но производит распределение синхронизирующих напряжений
по каналам. Функции ВУ, в частности, может выполнять
трансформатор, имеющий шесть выходных обмоток, образу-
ющих шестифазную систему напряжений, сдвинутых на угол
л/3 (рис. 5.3). На входы ФУ поступают как синхронизирующие
напряжения от ВУ, так и напряжение ДС/Р от АРН, обес-
печивающего регулирование угла управления а. По принципу
действия рассматриваемая структура аналогична структуре,
изображенной на рис.’5.1, а. Для обеспечения пуска и устой-
чивой работы выпрямителя в режимах с прерывистыми токами
следует формировать широкие управляющие импульсы (боль-
ше, чем л/3) или подавать узкие, но сдвоенные. С этой целью
вводятся дополнительные связи между каналами управления.
Диаграммы следования управляющих импульсов и сетевого
напряжения представлены на рис. 5.2, б.
Недостатком многоканальной структуры является сложность
обеспечения симметрии управляющих импульсов по каналам.
Для этой цели обычно предусматривают подрегулировку
227
I___________________________________________________________________________________________________________________________________________________________I
Рис 5.3. Одноканальная система упра-
вления трехфазного мостового выпря-
мителя
фазовых сдвигов импульсов
при наладке СУ в процессе
производства и при необхо-
димости в условиях эксплуа-
тации. Асимметрия в углах
управления по фазам приво-
дит к появлению низкочастот-
ных пульсаций в выпрямлен-
ном напряжении, которые мо-
гут отрицательно сказываться
на работе потребителя.
Структура СУ, изображен-
ная на рис. 5.3, практически
не имеет этого недостатка, так
как является по существу од-
ноканальной. Она состоит из
задающего генератора ЗГ, напряжение которого синхронизи-
ровано с напряжением питающей сети, пересчетно-распреде-
лительного устройства ПРУ и формирователей импульсов
ФИХ и ФИ2. Частота ЗГ в 6 раз выше частоты питающей
сети; ПРУ осуществляет пересчет частоты выходных импульсов
ЗГ на два и распределение их по ФИГ и ФИ2, один из
которых формирует импульсы, поступающие одновременно на
тиристоры анодной группы выпрямителя, а другой — на ти-
ристоры катодной группы.
Синхронизация работы ЗГ с сетью и стабилизация выпрям-
ленного напряжения осуществляются обратной связью СУ. Для
этого выходное напряжение выпрямителя через датчик напряже-
ния ДН поступает на АРН. Сигнал АСр с выхода АРН поступает
на ЗГ. Характер обратной связи выбирается таким, чтобы при
увеличении напряжения АСР частота ЗГ увеличивалась. При этом
увеличивается угол управления а, что приводит к снижению
выпрямленного напряжения. Этот процесс будет продолжаться
практически до полного устранения разбаланса напряжений
С0,с и Uo (рис. 5.1, а), когда их разность £ станет равной нулю.
Система автоматического регулирования подобного типа
является астатической, т. е. при действующих на выпрямитель
возмущениях, например при колебаниях сетевого напряжения,
выходное напряжение будет оставаться практически неизмен-
ным. Астатический характер системы регулирования, однако,
в данной структуре ограничивает быстродействие СУ при
резких изменениях возмущающих факторов. Следует отметить,
что использование этой структуры СУ в зависимых инверторах
связано с рядом трудностей, приводящих к значительному ее
усложнению.
Достоинствами данного варианта структуры СУ являются
простота, надежность, высокая точность стабилизации выход-
228
ного напряжения в статических режимах, высокая степень
симметрии в следовании управляющих импульсов.
В рассмотренных вариантах структур СУ выпрямителей
в качестве регулируемого параметра указывалось среднее
значение выпрямленного напряжения Ud. При использовании
таких СУ в зависимых инверторах в качестве регулируемого
параметра обычно выбирается ток (среднее значение на стороне
постоянного тока или действующее на стороне переменного
тока инвертора). В этом случае датчик напряжения заменяется
на датчик тока. В режиме стабилизации по току могут также
работать и управляемые выпрямители, например при ис-
пользовании их в качестве зарядных устройств аккумуляторных
батарей. Тогда также необходимо заменить датчик напряжения
на датчик тока, сигнал которого пропорционален среднему
значению выпрямленного тока 1Л.
5.2.2. СИСТЕМЫ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ
С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
Структурные схемы СУ преобразователей частоты с непо-
средственной связью также различаются по способу фазового
управления тиристорами на многоканальные и одноканальные,
а по принципу регулирования выходных параметров—на
статические и астатические. Наибольшее распространение в на-
стоящее время получили многоканальные структуры со статиче-
ской системой автоматического регулирования.
В сравнении со структурными схемами СУ выпрямителей
и зависимых инверторов структуры СУ преобразователей
частоты & непосредственной связью являются значительно
более сложными. Это объясняется тем, что в общем случае
СУ в преобразователях частоты должны реализовать больший
объем-логических операций. В частности, управление тиристор-
ными группами должно производиться с учетом режима
рекуперации реактивной энергии нагрузки в сеть (инверторного
режима), исключения уравнительных токов между тиристор-
ными группами, модуляции выходного напряжения по опре-
деленным законам и др. - Поэтому, учитывая сложность реаль-
ных СУ преобразователей частоты с непосредственной связью,
рассмотрим в качестве примера простейший вариант структуры
СУ трехфазно-однофазного преобразователя, работающего
только на активную нагрузку (рис. 5.4, а) и без модуляции
выходного напряжения по законам, улучшающим его гар-
монический состав.
Каждая из тиристорных групп рассматриваемого преоб-
разователя представляет собой трехфазный управляемый вы-
прямитель, выполненный по схеме со средней точкой. Поэтому
структура СУ этого преобразователя во многом подобна
229
Рис. 5.4. Система управления преобразователем частоты с непосредственной
связью:
а—структурная схема; б—диаграммы выходного напряжения и управляющих импульсов
230
структурам СУ выпрямителей. На тиристоры поступают
управляющие импульсы, синхронизированные с сетью посред-
ством входного устройства ВУ, выходные напряжения кото-
рого распределены по каналам управления тиристоров в со-
ответствии с фазой поступающего на тиристор сетевого
напряжения.
Согласно принципу действия преобразователя одна полувол-
на выходного напряжения формируется тиристорами анодной
группы, а другая — тиристорами катодной группы. Такая
программа работы тиристоров обеспечивается поочередным
блокированием управляющих импульсов каждой группы. Для
этого в структуру СУ введены узлы блокировки (запрета на
формирование) импульсов: узел 1 блокировки импульсов
тиристоров катодной группы и узел 2 блокировки импульсов
тиристоров анодной группы. Сигналы запрета на выходах
этих узлов формируются при поступлении на них соответст-
вующих сигналов от пересчетно-распределительного устройства
ПРУ и датчиков состояния тиристоров ДСТ (дающий ин-
формацию— включен или выключен тиристор). Например, если
на входе узла 1 присутствуют запрещающие сигналы от ПРУ
и ДСТ анодной группы, то на его выходе появляется сигнал
запрета формирования управляющих импульсов тиристоров
катодной группы. В рассматриваемой структуре ПРУ осущест-
вляет деление частоты ЗГ на два и распределение сигналов
ЗГ по узлам блокировки. Частота выходных сигналов ЗГ
соответствует частоте выходного напряжения преобразователя.
Одновременная проводимость тока тиристорами анодной
и катодной групп исключается наличием ДСТ, сигналы которых
запрещают формирование управляющих импульсов тиристоров
соответствующей группы, пока все тиристоры противополож-
ной группы не выключатся. Выходное напряжение преоб-
разователя регулируется автоматическим регулятором напряже-
ния АРН посредством подачи сигнала Д Up на фазосдвигающие
устройства ФУ всех каналов, что обеспечивает необходимое
значение угла управления а при их внутригрупповой ком-
мутации. Частота выходного напряжения может регулировать-
ся, если использовать - ЗГ с регулируемой частотой. На
рис. 5.4, б приведены диаграммы следования управляющих
импульсов и выходного напряжения преобразователя ывых.
5.2.3. СИСТЕМЫ УПРАВЛЕНИЯ АВТОНОМНЫХ ИНВЕРТОРОВ
Системы управления инверторов и их структурные схемы
могут существенно различаться в зависимости от типа ин-
вертора ' и принципов регулирования его параметров. Ниже
рассматриваются примеры упрощенных структурных схем СУ
инверторов тока и инверторов напряжения.
231
Системы управления инверторами тока. В настоящее время
среди различных схем инверторов тока наибольшее распрост-
ранение получила схема параллельного инвертора тока с ком-
пенсирующим устройством, выполненным по схеме, изображен-
ной на рис. 3.32.
СУ такого инвертора обычно должна обеспечивать стаби-
лизацию частоты и значения выходного напряжения. В § 3.4
были рассмотрены основные принципы регулирования выход-
ных параметров инверторов подобного типа. Отмечалось, что •
по принципу синхронизации управляющих импульсов инвер- |
торы тока подразделяются на две группы: I
1) инверторы с независимым возбуждением, управляющие 1
импульсы в которых синхронизируются от задающего гене- |
ратора; |
2) инверторы с зависимым возбуждением, управляющие I
импульсы в которых синхронизируются от выходного напряже- I
ния самого инвертора. 1
При использовании в качестве регулирующего органа компен- I
сирующего устройства (см. рис. 3.32) выделяют третью труп- Я
пу—инверторы тока с комбинированным возбуждением [14]. I
В инверторах этой группы управляющие импульсы одного звена Я
(собственно инвертора или компенсатора) синхронизируются от
задающего генератора, а другого — от выходного напряжения.
Обычно в инверторах тока с комбинированным возбуждением Я
импульсы инвертора синхронизируются от выходного напряже-
ния (так же, как и при зависимом возбуждении), а управляющие
импульсы компенсатора — от задающего генератора. Регулиро- fl
вание выходных параметров в инверторах тока с компенсатора- fl
ми может также выполняться различными способами: воздейст- fl
вием на фазу управляющих импульсов инвертора и воздействи- fl
ем на фазу управляющих импульсов компенсатора. В качестве fl
примеров рассмотрим две типовые структуры СУ однофазного fl
параллельного инвертора тока. Я
На рис. 5.5, а представлена структура СУ инвертора с не- fl
зависимым возбуждением. Управляющие импульсы поступают fl
на тиристоры инвертора KSj — VS4 от формирователей им- Я
пульсов ФИХ — ФИ4. Частота следования этих импульсов Я
задается ЗГ. Если бы компенсатор в схеме отсутствовал, то Я
в установившемся режиме работы фаза выходного напряжения Я
инвертора была бы связана с фазой следования импульсов ^Я
углом р, который зависит только от параметров нагрузки ?Я
ZH и емкости конденсатора Ск. Для того чтобы изменяться
угол Р в целях регулирования выходного напряжения инверторами
(7ВЫ1, необходимо воздействовать на проводимость компен-^И
сатора, т. е. на фазу управляющих импульсов тиристоров ES'i^fl
и VS6 (см. § 3.4). Регулирование этой фазы (угла управлениями
компенсатором а) осуществляется посредством фазосдвига^Н
232
Рис. 5.5. Система управления однофазного инвертора тока с независимым
возбуждением:
а—структурная схема; б—диаграммы управляющих импульсов и выходного напряжения
инвертора
ющих устройств ФУ у и ФУ2- На их входы поступают сигналы
от ЗГ и АРН. Сигналы ЗГ обеспечивают синхронность
управляющих импульсов инвертора и компенсатора, а сигнал
с выхода * АРН определяет фазовый сдвиг между этими
импульсами, т. е. угол а.
По принципу регулирования рассматриваемая СУ является
статической. Отклонение выходного напряжения от заданного
уровня вызывает такое изменение угла а, что происходит
процесс уменьшения этого отклонения до малых значений,
определяемых коэффициентом усиления системы регулирования.
Частота выходного напряжения при такой структуре СУ
зависит только от частоты ЗГ. -
На рис. 5.5, б представлены диаграммы управляющих им-
пульсов и выходного напряжения инвертора. В рассматрива-
емом примере в качестве задающего генератора используется
двухтактный генератор с выходным переменным напряжением
прямоугольной формы. Для формирования управляющих им-
пульсов инвертора используются как положительный, так
и отрицательный импульсы ЗГ.
Структура СУ для инвертора тока с комбинированным
возбуждением представлена на рис. 5.6. Формирование
233
^вЬ/х kVSj kV$z к VSy к VS К vs § k^Sq ^Вых
Рис. 5.6. Система управления однофазным инвертором тока с комбинирован-
ным возбуждением
управляющих импульсов тиристоров инвертора KSj — KS4
происходит синхронно с выходным напряжением с помощью
задатчика углов ЗУ, который обеспечивает неизменность
фазового сдвига между выходным напряжением и пос-
ледовательностью управляющих импульсов инвертора. При
таком способе формирования управляющих импульсов угол
опережения Р не зависит от параметров нагрузки, т. е. инвертор
работает в режиме зависимого возбуждения или самовозбуж-
дения.
В этом режиме изменение нагрузки в инверторе без
компенсатора вызывает изменение частоты выходного напряже-
ния: при сбросе нагрузки частота уменьшается, а при набросе —
увеличивается. Наличие в силовой схеме компенсатора
(рис. 5.5, а) позволяет стабилизировать частоту выходного
напряжения, если на тиристоры VS5 и VS6 подавать управ-
ляющие импульсы, сформированные от ЗГ и не зависящие
от режима работы инвертора. При таком способе управления
изменение частоты выходного напряжения будет приводить
к изменению угла управления компенсатора а. Характер этого
изменения такой, что частота выходного напряжения будет
восстанавливаться до полного совпадения с частотой ЗГ.
Подобная система автоматического регулирования частоты
является астатической.
Для стабилизации выходного напряжения (от изменений
входного напряжения) в СУ введен канал регулирования,
состоящий из датчика напряжения ДН и автоматического
регулятора напряжения АРН. Этот канал является отрицатель-
ной обратной связью между входным и выходным напряжения-
ми инвертора. Он обеспечивает увеличение угла Р при снижении
входного напряжения и уменьшение при его возрастании, т. е.
стабилизирует выходное напряжение на заданном уровне.
234
Рассмотренная структура СУ обеспечивает значительно
более высокое качество выходных параметров как в статичес-
ких, так и динамических режимах работы, чем СУ, структура
которой изображена на рис. 5.5, а.
Структуры СУ резонансных инверторов во многом сходны
со структурами СУ инверторов тока. Следует отметить, что
в некоторых схемах резонансных инверторов стабилизация
выходного напряжения осуществляется изменением частоты
инвертирования. В частности, такой принцип регулирования
используется в резонансных инверторах, выполняющих функции
промежуточного звена в комбинированных преобразователях
постоянного тока (§ 4.3). С этой целью в СУ резонансного
инвертора вводится ЗГ с переменной частотой, которая
регулируется сигналом цепи обратной связи по выходному
напряжению.
Системы управления трехфазных инверторов тока по прин-
ципу действия сходны с рассмотренными и отличаются обычно
числом каналов управления и наличием некоторых допол-
нительных функциональных звеньев.
Системы управления инверторами напряжения. Рассмотрим
СУ тиристорного инвертора напряжения (рис. 5.7, а). В силовой
схеме можно выделить два идентичных плеча с ^^-ком-
мутирующими контурами, каждое из которых состоит из
основных тиристоров К5\, VS2 или VS3, VS4 и вспомогатель-
ных (коммутирующих) тиристоров VS'i, VS'2 или VS’3, VS'4
(подробно см. § 3.2).
Вспомогательные тиристоры управляются короткими им-
пульсами, длительность которых соизмерима с длительностью
интервала коммутации тиристоров в такой схеме (50—100 мкс).
Управляющие импульсы основных тиристоров должны быть
широкими, так как при индуктивном характере нагрузки момент
прохождения тока обратных диодов через нуль будет изменять-
ся при регулировании выходного напряжения или изменении
нагрузки. Поэтому, чтобы очередной силовой тиристор вклю-
чился, необходимо присутствие на нем управляющего импульса.
Однако длительность этого импульса не должна перекрывать
интервал коммутации другого тиристора в одноименном плече.
Импульсы от задающего генератора ЗГГ первого плеча
инвертора поступают на пересчетно-распределительное устрой-
ство ПРУ\, осуществляющее деление частоты ЗГг на два.
С выхода ПРУ\ импульс одновременно поступает на входы
ФИг и ФУ2. Формирователь импульсов ФИХ формирует
короткий управляющий импульс вспомогательного тиристора
VS’i. Фазосдвигающее устройство ФУ2 осуществляет фик-
сированную задержку ДО начала формирования управляющего
импульса основного тиристора VS2, поступающего на него
с выхода ФИ2. Поступление следующего импульса от ЗГХ
235
Рис. 5.7. Система управления однофазного инвертора напряжения:
приводит к формированию управляющих импульсов для ти-
ристоров KS2 и KS15 следующих в таком же порядке. Второе
плечо инвертора управляется аналогично.
Для обеспечения нормальной работы инвертора необходима
синхронизация 31\ и ЗГ2. В приведенной структурной схеме
синхронизация производится через регулируемое фазосдвига-
ющее устройство ФУ, что позволяет производить регулирова-
ние выходного напряжения по принципу широтно-импульсной
модуляции, для чего сигнал mOjC цепи обратной связи по
выходному напряжению подается на ФУ. Значение сигнала
А t/р определяет угол фазового сдвига А0' между управля-
ющими импульсами тиристоров VS\ и VS\ (или VS2 и И5'3),
а следовательно, и длительность паузы между положительными
и отрицательными значениями выходного напряжения (§ 3.4).
Система управления трехфазного инвертора подобного типа
имеет сходную структуру. Основное отличие заключается
в использовании пересчетно-распределительного устройства,
236
осуществляющего сдвиг по фазе управляющих импульсов
основных тиристоров каждого плеча относительно друг друга
на угол, равный а.
5.2.4. СИСТЕМЫ УПРАВЛЕНИЯ РЕГУЛЯТОРОВ-СТАБИЛИЗАТОРОВ
В гл. 4 рассматривались различные типы регуляторов-
стабилизаторов напряжения в цепях постоянного и переменного
токов. Среди них в качестве наиболее перспективных были
Указаны устройства, выполненные на основе силовых полу-
проводниковых приборов. Поэтому в настоящем параграфе
приводятся примеры СУ только полупроводниковых регуля-
т оров-стабилизаторов.
Системы управления регуляторов-стабилизаторов переменного
тока. Для регулирования напряжения в цепи переменного тока
может быть применен компенсатор реактивной мощности,
который используется для регулирования выходного напряжения
237
Рис. 5-8. Система управления регуля-
тора-стабилизатора напряжения
с компенсатором реактивной мощно-
сти:
а—структурная схема; б—диаграммы вы-
ходного напряжения и управляющих им-
пульсов
Рис. 5.9. Система управления регуля-
тора-стабилизатора напряжения с ти-
ристорным переключением отпаек;
а—структурная схема; б — диаграммы вы-
ходного напряжения и управляющих им-
пульсов
238
инвертора тока (см. рис. 4.4, а). Принцип регулирования на-
пряжения в таком регуляторе-стабилизаторе основан на измене-
нии его эквивалентной индуктивности (см. § 4.1). Для этого
необходимо регулировать угол управления а. Вариант стру-
ктурной схемы СУ такого регулятора-стабилизатора приведен
на рис. 5.8, а.
Управляющие импульсы тиристоров VSX и VS2 формиру-
ются формирователями импульсов ФИг и ФИ2. Синхронизация
этих импульсов с выходным напряжением ивых осуществляется
входным устройством ВУ, сигналы с которого поступают на
фазосдвигающие устройства ФУ1 и ФУ2. Одновременно на
эти же устройства поступает сигнал АСР от автоматического
регулятора напряжения АРН. Напряжение определяет фазу
формирования управляющих импульсов относительно входного
напряжения, т. е. угол управления а. Выходное напряжение
ив1И контролируется датчиком ДН, сигнал с которого по цепи
обратной связи поступает на АРН. Диаграммы управляющих
импульсов и выходного напряжения представлены на рис. 5.8, б.
Вариант структурной схемы СУ регулятора-стабилизатора,
выполненного на принципе коммутации тиристорами отводов
от обмотки трансформатора, приведен на рис. 5.9, а. Регули-
рование напряжения в схеме производится посредством измене-
ния угла а, определяющего момент переключения нагрузки
с отвода, соответствующего напряжению СвЫ1, на отвод
с более высоким напряжением Нвых (рис. 5.9, б).
Управляющие импульсы на тиристоры VSt — К54 поступают
с выходов формирователей импульсов ФИ^ — ФЯ4. Синхро-
низация управляющих импульсов производится входным
устройством ВУ. При этом моменты формирования управля-
ющих имйульсов тиристоров VSi и VS2 жестко связаны
с напряжением и соответствуют прохождению его через
нулевые значения (0, л, 2л ...). В то же время управляющие
импульсы тиристоров VS3 и VS4 сдвигаются фазосдвигающим
устройством ФУ на угол а относительно этих моментов. Для
того чтобы обеспечить надежную работу схемы при активно-
индуктивной нагрузке, необходимо, чтобы длительность им-
пульсов соответствовала, диаграммам, представленным на
рис. 5.9. Изменение угла а производится автоматически сиг-
налом АЯР, поступающим от АРН.
Системы управления регуляторов-стабилизаторов постоянного
тока. Регуляторы-стабилизаторы малой мощности преимущест-
венно выполняются на транзисторах, работающих в режиме
непрерывно регулируемого сопротивления. Принцип действия
подобного типа регуляторов-стабилизаторов рассмотрен в § 4.3.
Согласно этому принципу структурную схему СУ в общем
случае можно представить в виде, показанном на рис. 5.10.
Процесс регулирования протекает следующим образом. Сигнал
239
и0,с в цепи обратной связи, по-
ступающей с датчика выходного
напряжения ДН, подается на
сумматор 1. На его другой вход
поступает опорное напряжение
Uo от источника опорного на-
пряжения ИОН. Разность этих
напряжений £ подается на вход
Рис. 5.10. Система управления ре- усилителя, содержащего необхо-
гулятора-стабилизатора постоян- димые корректирующие цепочки
ного тока непрерывного действия ддя ПрИдания устойчивости про-
цессу регулирования. Сигнал ДСР с выхода усилителя подается
на транзистор (или совокупность последовательно-параллельно
соединенных транзисторов), выполняющий функции исполни-
тельного органа в системе регулирования. По принципу
регулирования данная система является статической системой
с отрицательной обратной связью, отрабатывающей до ми-
нимума при различных возмущениях разность напряжений £,
зависящую от коэффициента усиления цепи регулирования.
Последний преимущественно определяется коэффициентом уси-
ления усилителя СУ.
При повышении мощности регулятора-стабилизатора более
рациональным является способ импульсного управления ис-
полнительным органом схемы (§ 4.3). Структурная схема СУ
для импульсного управления, например, транзистором VT (см.
рис. 4.17, а) (или совокупность транзисторов) представлена на
рис. 5.11, а. Включение транзистора производится подачей на
него управляющего импульса от ФИ. Момент формирования
переднего фронта управляющего импульса совпадает с момен-
том равенства сигнала UT, поступающего от генератора
пилообразного напряжения ГПН и напряжения ДСр. Длитель-
ность управляющего импульса соответствует интервалу време-
ни, когда напряжение превышает сигнал Д Ср. Подобная
структура СУ позволяет реализовать pei улирование выходного
240
Рис. 5.11. Система управления регулятора постоянного тока:
а—структурная схема, б—диаграммы напряжений на элементах схемы и управляющих
импульсов
напряжения Uam по способу ШИМ. Частота переключения
транзистора VT в данном случае постоянна и определяется
частотой ГПН. Регулирование выходного напряжения проис-
ходит за счет изменения скважности управляющих импульсов,
которая определяется сигналом ДС7р усилителя.
Если в качестве исполнительного органа регулятора ис-
пользуются тиристоры, то структурная схема СУ, соответст-
вующая регулированию по способу ШИМ^ подобна приведен-
ной на рис. 5.11, а. Основное отличие ее заключается в до-
полнительных каналах формирования управляющих импульсов
вспомогательных (коммутирующих) тиристоров. Это обуслов-
лено необходимостью принудительного выключения основных
тиристоров (§ 4.3).
5.3. МИКРОПРОЦЕССОРНЫЕ СИСТЕМЫ
В ПРЕОБРАЗОВАТЕЛЬНОЙ ТЕХНИКЕ
Современные средства цифровой вычислительной техники
позволяют расширить функции систем управления, регулирова-
ния и контроля состояния преобразователей и за счет этого
улучшить основные технико-экономические показатели послед-
них. Так, например, могут быть улучшены энергетические,
динамические, точностные и надежностные характеристики
преобразователей, а также реализованы более совершенные
системы контроля, защиты и диагностики. При этом может
быть достигнут высокий уровень унификации аппаратных
средств различных типов преобразовательных устройств за
счет возможности их программирования под конкретные
функции if задачи. Основные функции, выполняемые програм-
мируемыми средствами вычислительной цифровой техники
в преобразователях, являются следующие:
1) реализация законов формирования (моментов появления)
управляющих импульсов ключевых элементов преобразователя
(тиристоров, транзисторов и др.);
2) управление режимами работы преобразователя (включе-
ние, отключение, реверсирование и др.);
3) защита основных узлов и элементов при возникновении
внешних или внутренних аварий и повреждений (входных
перенапряжений, перегрузок, коротких замыканий, отказов
отдельных элементов и др.);
4) контроль и диагностика состояния функциональных узлов
и элементов преобразователя (состояние тиристоров, тран-
зисторов, оконечных каскадов в каналах управления, ком-
мутационной аппаратуры, оперативных источников питания
и др.);
5) обмен информацией между преобразователем и другими
объектами или оператором.
16 № 3658 241
Реализация законов следования управляющих импульсов
ключевых элементов, как правило, включает в себя процессы
автоматического регулирования выходных параметров преоб-
разователя. Кроме того, при необходимости может осущест-
вляться формирование заданного гармонического состава вход-
ных и выходных токов и напряжений преобразователя, ко-
эффициента мощности по входу или выходу и другие парамет-
ры. Следует также отметить, что благодаря большим воз-
можностям современных вычислительных цифровых средств
можно реализовать оптимальные законы регулирования с адап-
тацией параметров контуров регулирования к режимам работы.
Перечисленные функции могут осуществляться системами
управления двух иерархических уровней. Система верхнего
уровня реализует управление основными режимами работы
от внешних централизованных пунктов управления, а система
нижнего уровня управляет непосредственно основными элемен-
тами преобразователя, обрабатывая информацию, поступа-
ющую с различных датчиков.
Эффективность использования вычислительных числовых
средств в преобразовательной технике стала реальной с со-
зданием больших интегральных микросхем (БИС) и благодаря
достижениям микроэлектронной технологии, на основе которых
начала интенсивно развиваться микропроцессорная техника.
Микропроцессор (МП) — программно-управляемое устрой-
ство, осуществляющее процесс обработки цифровой инфор-
мации и управление им, построенное на основе одной или
нескольких БИС.
Совокупность микропроцессорных и других микросхем,
совместимых по конструктивно-технологическому исполнению
и предназначенных для совместного использования при по-
строении микропроцессорных систем, называется микропроцес-
сорным комплектом микросхем (МПК). Обычно МПК изготав-
ливается в виде набора типовых корпусов микросхем, имеющих
от 28 до 48 внешних выводов.
На основе МПК могут создаваться микро-ЭВМ, контрол-
леры (устройства управления) и другие средства вычислитель-
ной техники. Комплекс технических средств ЭВМ должен
содержать в своем составе средства обмена данными с пользо-
вателем (например, печатающее устройство, видеодисплей
и др.). Кроме того, для проведения диалога с пользователем
и дальнейшей организации переработки информации ЭВМ
должна иметь внутреннее программное (системное) обеспечение.
В этом смысле МПК в управляющих системах ориентированы
на совместную работу технических устройств и их элементов.
В частности, в преобразователях МПК используются, за
редким исключением, в качестве составной части управляющих
систем и подсистем. В этом смысле более точным для таких
242
устройств и систем будет название микро-УВМ (управляющая
вычислительная машина) или микроконтроллер. Последнее
понятие часто сужают, понимая под микроконтроллером
только устройства чисто логического управления, исключа-
ющего процессы вычисления функций, решения уравнений
и др., необходимые при реализации сложных законов регу-
лирования. В более широком смысле слова микроконтроллер —
это любое устройство управления, выполненное на основе
МПК и ориентированное на совместную работу с другими
техническими устройствами.
5.3.1. ТИПОВЫЕ ОБОБЩЕННЫЕ СТРУКТУРЫ МИКРОПРОЦЕССОРА
Собственно процессор можно функционально представить
в виде двух устройств: операционного и управляющего
(рис. 5.12). Операционное устройство ОУ—устройство, в кото-
ром выполняются арифметические, логические и другие опера-
ции, а управляющее устройство УУ осуществляет управление
этими операциями [19]. Входными сигналами УУ являются как
сигналы, поступающие от других устройств xs+1, xs+2, так
и сигналы обратной связи от ОУ (xt ... xs). Операции в ОУ
осуществляются с определенной тактовой частотой, и каждое
элементарное действие в течение тактового периода называется
микрооперацией. Совокупность микроопераций называется мик-
рокомандой, а набор микрокоманд—микропрограммой.
По способу управления различают два типа МП: со
схемным (аппаратным) управлением и микропрограммным
управлением. В МП первого типа УУ реализуется на основе
микросхем с «жесткой» логикой функционирования, которая
определяется собственно схемой УУ. Такие МП работают
с фиксированными разрядностью и составом команд. Эти
устройства позволяют получить наиболее высокое быстро-
действие, но ограничивают возможности МП, существенно
снижая их универсальность. Управление обработкой данных
в МП первого типа проводится на основе сравнительно
небольшого фиксированного числа команд программы (обычно
Рис. 5.12. Обобщенная структура процессора
243
Вн ШД
Рис. 5.13. Структурная схема микропроцессора с фиксированной разрядностью
45—90 команд). В МП второго типа реализуется принцип
программируемой логики с возможностью наращивания раз-
рядности обрабатываемых слов. Это позволяет расширить
список команд и увеличить их число в 1,5—2 раза по
сравнению с МП первого типа. Кроме того, появляется
возможность повысить универсальность МП за счет изменения
программы логики управления ОУ.
На рис. 5.13 изображена упрощенная структурная схема
МП первого типа (с фиксированной разрядностью) [20]. Ядром
процессора можно счи-гать арифметико-логическое устройство
АЛУ, выполняющее арифметические и логические операции
(сложение, сдвиг, логические И, ИЛИ и др.).
Элементы МП сопрягаются между собой через внутреннюю
шину данных ВШД, рассчитанную на разрядность сигналов
обмена, равную разрядности слов информации МП (в частности,
8-разрядной). Внешние сигналы поступают в МП через внеш-
нюю шину данных ВнШД, такой же разрядности, как и ВШД.
В качестве кратковременной (сверхоперативной) памяти
используются регистры общего назначения РОН. Кроме того,
для кратковременного хранения данных используются:
регистр-аккумулятор А, хранящий результаты операций
АЛУ\
регистр команд РК, указывающий код операции и адрес
операнда;
244
регистр признаков РП, содержащий информацию о состо-
янии МП (признаки переноса, переполнения и др.);
буферные регистры данных БРД и адреса, хранящие
кратковременно данные по обмену информации между МП
и внешними устройствами.
Расшифровку кода очередной операции для управляющего
устройства УУ выполняет дешифратор кода операций
ДгиКОп.
Адрес очередной команды определяется счетчиком команд
СК и регистром адреса РА.
Для организации переходов в работе от одной программы
к другой и обратно, например по специальному запросу от
внешних устройств на прерывание текущей программы, ис-
пользуется стековая память, для которой отводятся специаль-
ные регистры или ячейки оперативной памяти. Последователь-
ность считывания данных из стековой памяти определяется
указателем стека УС, в котором фиксируется номер очередной
незанятой или последней занятой ячейки стека. Порядок
считывания данных здесь обратен порядку их записи.
Для адресации памяти достаточно большой емкости СК
и РА имеют удвоенную по сравнению с РОН разрядность
и связаны в рассматриваемом примере соответственно с 16-
разрядной внешней шиной адресов ША.
Устройство управления в МП первого типа выполнено
в виде «жесткой» схемы и рассчитано на определенную систему
команд. В соответствии с предусмотренными схемой УУ
командами вырабатывается последовательность управляющих
сигналов, частота которых определяется обычно отдельным
внешним генератором тактовых импульсов ГТИ.
Для расширения возможностей МП при решении сложных
задач управления могут использоваться МП второго типа—
модульного исполнения с изменяемой разрядностью и мик-
ропрограммным принципом построения УУ. На рис. 5.14
приведена структурная схема такого типа МП [20].
При такой структуре функции оперативного устройства
выполняет центральный процессор (ЦП), состоящий из модулей
центральных процессорных элементов ЦПЭП малой (2—4)
разрядности. Эти модули имеют общую шину микропрог-
раммного управления, которая объединяет цепи межразрядных
переносов отдельных модулей. Эта структура позволяет рас-
ширить систему внешних связей процессора, так как модули
имеют разделенные шины данных и несколько независимых
входных шин. Разрядность ЦП при такой структуре определя-
ется числом модулей ЦПЭП и их индивидуальной разрядностью.
Управляющее устройство с микропрограммным управле-
нием УМУ позволяет реализовывать требуемые наборы упра-
вляющих команд и, следовательно, имеет значительно более
245
Рис. 5.14. Структурная схема микропроцессора модульного исполнения с при-
меняемой разрядностью
обширную область использования по сравнению с УУ на
основе «жесткой» схемы.
Для запоминания информации в состав микропроцессорных
систем обычно включают модули БИС запоминающих
устройств: оперативное запоминающее устройство ОЗУ, посто-
янное запоминающее устройство ПЗУ или перепрограммиру-
емое запоминающее устройство ППЗУ.
Для хранения, чтения и записи команд с высокой скоростью
работы процессора используются ОЗУ. Обычно модули серий-
ных БИС ОЗУ имеют сравнительно ограниченную емкость
(1 —16 Кбайт) и рассчитаны для хранения исходных и про-
межуточных данных, а также конечных результатов их об-
работки.
Программы записываются в ПЗУ или ППЗУ. Последние
в основном отличаются возможностью обновления (перезаписи)
хранимой информации. Подключение ЦП к ПЗУ и ППЗУ
осуществляется через адресную шину, шину данных и шину
управления.
Микропроцессорное управляющее устройство должно быть
связано с объектом управления. Эта связь осуществляется
через так называемые устройства сопряжения УСО, относящи-
еся обычно к периферийным устройствам. Так, например,
в преобразователях информация о контролируемых параметрах
поступает обычно от датчиков тока, напряжения, фазы и др.
в форме аналоговых сигналов различных уровней, а с МПК—в
246
ПреоВразобатель
Рис. 5.15. Структурная схема связи преобразователя с микропроцессорным
комплектом
цифровом виде. Функции УСО заключаются в согласовании
этих сигналов. На рис. 5.15 представлена упрощенная структура
связи преобразователя с МПК, организующей ввод и вывод
информации в процессе управления. Обычно УСО содержат
аналого-цифровые преобразователи (АЦП), цифро-аналоговые
преобразователи (ЦАП), усилители, коммутаторы и другие
устройства и элементы.
С другой стороны, возникает необходимость организации
взаимодействия периферийных устройств, в частности УСО,
с процессором и ОЗУ. Эти функции возлагаются на интерфейс,
представляющий собой совокупность унифицированных ап-
паратурных, программных и конструктивных средств, реализу-
ющих взаимодействие УСО с ОЗУ и МП. Эта связь может
иметь- радиальную структуру, когда каждое периферийное
устройство напрямую подключается к МП и ОЗУ или
магистральную структуру при наличии общей связующей
шины. Для МПК различных типов выпускаются специальные
интерфейсные БИС (как программируемые, так и непро-
граммируемые), называемые также периферийными адаптерами.
Такие интерфейсные адаптеры включают в себя набор ре-
гистров, систему шин, дешифратор и другие элементы.
Они позволяют кратковременно хранить информацию при
обмене ею между ОЗУ, МП и ПЗУ, определять адрес
соответствующего регистра, реализуя в общем алгоритм
взаимодействия МПК с ПЗУ.
Разработка микропроцессорных систем проводится в не-
сколько этапов: формализация задач управления и составление
алгоритмов их реализации, составление программы и ее
247
отладка, изготовление макета МП, запись программы в макет
и отработка микропроцессорной системы как с имитатором
объекта управления, так и в комплексе с объектом.
Исходные программы для МП чаще всего создаются на
языке Ассемблер и затем после редактирования транслируются
в машинные коды для конкретных типов МП. Для выполнения
этих работ на ЭВМ используют набор специальных вспомо-
гательных программ.
5.3.2. ПРИМЕРЫ ИСПОЛЬЗОВАНИЯ МИКРОПРОЦЕССОРНЫХ
СИСТЕМ УПРАВЛЕНИЯ
В [21] на основе анализа научно-технических публикаций
указаны основные области применения МП в силовой элек-
тронике (табл. 5.1). Значительная часть работ посвящена ис-
пользованию МП в системах управления вентильным элект-
роприводом (ВЭП). В системах ВЭП возникает необходимость
управления и регулирования значительного количества парамет-
ров по сложным законам в различных режимах. На рис. 5.16
представлен вариант упрощенной структуры управления ВЭП.
Информация о параметрах и состоянии аппаратуры электро-
двигателя поступает в МПК через УСО2 от датчиков элек-
тродвигателя ДЭД, а о состоянии преобразователя — от дат-
чиков преобразователя ДСП. При необходимости (например,
Рис. 5.16. Структурная схема управления ВЭП
248
для ВЭП переменного тока) организуется информационный
канал от датчиков состояния сети ДСС. Характерными пе-
ременными состояния, которые контролируются, в ВЭП посто-
янного тока являются: частота и координата положения вала
двигателя, токи якоря и обмотки возбуждения, мгновенные
значения выходного напряжения преобразователя и др. Для
ВЭП переменного тока такими основными параметрами яв-
ляются частота вращения вала двигателя и значения (мгновен-
ное или действующее значение основной гармоники) выходного
напряжения преобразователя и его частоты. Информация
о состоянии сети используется для синхронизации с ней
сигналов управления.
Таблица 5.1. Области использования МПК и преобразователях
Вид преобразователя Функции МПК
Зависимые преобразователи в выпрямительном и инверторном режимах Регуляторы частоты вращения в элект- роприводе постоянного тока. Регуляторы выходного напряжения и тока нагрузки
Зависимые реверсивные преоб- разователи с раздельным управ- лением Регулятор частоты вращения в электро- приводе постоянного тока. Регулятор тока, реализация логики управления комплекта- ми преобразователя
Непосредственные преобразова- тели частоты Генерация синусоидального ведущего сиг- нала, реализация логики управления комп- лектами преобразователя
Регуляторы переменного и пос- тоянного така Регулятор частоты вращения электропри- вода, формирование алгоритма управле- ния, логическое управление
Автономные инверторы напря- жения Регулятор частоты вращения в асинхрон- ном электроприводе, осуществление слож- ных законов ШИМ
Автономные инверторы тока Регулятор частоты вращения в асинх- ронном электроприводе
Для управления ключевыми элементами используют тай-
меры Т, которые позволяют освободить МПК от функции
вычисления временных интервалов формирования сигналов
управления. Для распределения импульсов управления по
ключевым элементам могут использоваться различные типы
цифровых распределителей, входящих в УСО1. Обеспечение
требуемых параметров управляющих импульсов (по длитель-
ности, мощности и др.) осуществляется формирователями
249
17 № 3658
управляющих импульсов традиционного типа (которые также
могут быть отнесены к УСО1).
Информация с датчиков, как правило, поступает в ана-
логовой форме и в таких случаях основными элементами
УСО2 являются АЦП и согласующие уровни сигналов устрой-
ства. Для реализации более точных измерений может ис-
пользоваться центральный МП или ввод дополнительных
процессоров с ограниченной функцией измерения и преоб-
разования контролируемых параметров. В отдельных случаях
сигналы с датчиков могут иметь приемлемые параметры для
непосредственной связи с системой шин СШ центрального
процессора, а также использоваться для организации прерыва-
ний работы МП в целях выполнения наиболее приоритетной
задачи в текущий момент времени.
Выбор режима работы, введение дополнительных ограниче-
ний и различных предписаний могут производиться из внешней
среды ВС (оператора-пользователя или ЭВМ более высокого
уровня) через устройство управления УУ и УСО3.
Преобразователь по своей сущности является дискретным
устройством, и частота переключения ключевых элементов
определяет требования к быстродействию МП. Интервал
повторяемости вычислений ИПВ в МП связан с периодич-
ностью процессов в преобразователе. В частности, в качестве
ИПВ выбирают моменты естественной коммутации тиристоров,
интервалы времени между моментами формирования управля-
ющих импульсов и др.
Наиболее распространенными законами регулирования
в аналоговых системах являются законы, реализующие пропор-
ционально-интегрально-дифференциальные изменения парамет-
ров (так называемые ПИД-регуляторы). В системах с МПК
часто используются эти законы регулирования, но операции
интегрирования и дифференцирования производят в цифровой
форме в МПК. Возможность программного управления ко-
эффициентами усиления и параметрами контуров регулирова-
ния позволяет корректировать их функции режима работы
преобразователя. Например, переход из режима работы с не-
прерывными токами в прерывистый (см. § 3.1) изменяет
передаточную функцию преобразователя по управлению, а в це-
лях сохранения динамических свойств системы в целом при
таком переходе можно изменять коэффициенты передачи
в контуре регулятора. В динамических режимах в целях
улучшения качества переходных процессов также возникает
необходимость коррекции коэффициентов регулятора. Реали-
зация такой возможности в системах с МП программным
способом является основой для создания адаптивных регуля-
торов не только к режимам работы, но и к стохастическим
воздействиям внешней среды, включающей в себя и нагрузку.
250
Для вычисления угла управления используется либо цент-
ральный МП, осуществляющий эту операцию за ИПВ по
записанной в ПЗУ программе, или, как показано на рис. 5.16,
таймер, управляемый МП. При ограниченном быстродействии
МП возможно вместо программы вычисления угла управления
использовать табличные данные, записанные в ПЗУ и соот-
ветствующие конкретному закону формирования управляющих
импульсов.
Микропроцессорное управление в целях унификации ап-
паратных средств систем управления может эффективно ис-
пользоваться и в преобразователях со стабилизированными
выходными параметрами при сравнительно простых законах
регулирования. Например, управление с МПК может ис-
пользоваться в инверторах тока с тиристорно-компенсирующим
устройством [22].
При независимом возбуждении управляющие импульсы
компенсирующим устройством КУ формируются синхронно
с импульсами инвертора, но с фазовым сдвигом на угол
а относительно выходного напряжения (см. пп. 5.2.3). В системе
управления с МПК последовательность формирования управля-
ющих импульсов тиристорами инвертора может задаваться
непосредственно таймером и входящим в него счетчиком Ct.
Для генерации последовательности управляющих импульсов
тиристорами КУ в такой системе используется второй счетчик
С2 таймерного устройства, осуществляющего фазовый сдвиг а.
При этом сигнал рассогласования в контуре обратной связи
преобразуется из аналоговой формы в цифровую. Далее этот
сигнал обрабатывается в соответствии с пропорционально-
интегральным законом регулирования. При этом операция
умножения на постоянные коэффициенты выполняется не
программно, а с помощью записанных в ПЗУ табличных
данных. Полученное число, представляющее регулирующее
воздействие, загружается в счетчик С2 и определяет угол а для
последовательности управляющих импульсов тиристорами КУ.
Микропроцессоры могут быть эффективно использованы
и в традиционных типах схем в целях повышения надежности
их работы. Так, например, в [23] рассматривается применение
однокристального микропроцессора для управления трехфаз-
ным инвертором, выполненным по широко известной схеме
Мак-Мури, вариант которой в однофазном исполнении при-
веден на рис. 3.16. Параметры и С’к коммутирующих
контуров в этой схеме выбираются из условия обеспечения
времени выключения тиристоров VS}— Однако при
кратковременных нерасчетных перегрузках или сбоев в работе
схемы могут возникать аварийные ситуации, обусловленные
одновременной проводимостью основных тиристоров плеча
инвертора (например, тиристоров VSi и что по существу
251
соответствует возникновению режима короткого замыкания
на выходе источника постоянного тока, питающего инвертор.
Использование МПК позволяет управлять тиристорами ин-
вертора с учетом прогноза возникновения такого режима
и при необходимости предотвращать его. Прогноз реализуется
контролем интервала времени от момента начала коммутации
(момента включения вспомогательного тиристора) до момента
появления обратного напряжения на выключаемом основном
тиристоре. На диаграмме, представленной на рис. 3.18, этому
интервалу соответствует интервал времени —10- При недо-
статочном времени приложения обратного напряжения на
основном тиристоре возможно его повторное несанкциониро-
ванное включение, и МПК изменяет последовательно форми-
рование управляющих импульсов для тиристоров. В частности,
если контролируемое время окажется меньше требуемого
значения, производится повторный заряд конденсатора Ск,
и так же повторяется процесс коммутации до того, как будет
сформирован управляющий импульс на включение очередного
основного тиристора.
Силовая схема инвертора связана с МПК простейшим
интерфейсом. Так как инвертор выполнен по трехфазной
мостовой схеме, управление от МПК осуществляется от
12-разрядной шины через два порта. Первый порт управляет
шестью основными тиристорами, а второй порт — шестью
вспомогательными. Управляющие импульсы для тиристоров
вырабатываются МПК программным путем.
После начала формирования управляющего импульса для
очередного вспомогательного тиристора происходит подготовка
данных для включения с заданной частотой следующего по
закону управления основного тиристора. Если результаты
прогноза выключения очередного основного тиристора от-
рицательны, МПК переходит к подпрограмме повторного
подзаряда коммутирующего конденсатора и повторной попытке
коммутации. Такой переход к подпрограммам происходит
циклически четыре раза подряд, при дальнейшей неудачной
коммутации производится аварийное выключение инвертора.
При положительных результатах прогноза об очередной ком-
мутации подготовленные МПК данные, соответствующие за-
кону управления тиристорами инвертора с заданной частотой,
загружаются в таймер и далее формируется управляющий
импульс очередного главного тиристора.
Контроль за появлением обратного напряжения на основных
тиристорах осуществляется схемами регистрации моментов
появления обратного напряжения. Каждая из схем вырабаты-
вает логическую единицу, когда обратное напряжение прило-
жено к соответствующему тиристору. Шесть выходов схем
регистрации соединены через элемент ИЛИ с МПК по одной
252
линии, подключенной к МПК. Отсутствие логической единицы
в этой линии в определенный момент времени вызывает
переход МПК к работе по подпрограмме повторной ком-
мутации.
Эффективно использование микропроцессорного управления
в преобразовательных устройствах с переменными структурой
и алгоритмом управления, например в полупроводниковых
зарядных устройствах емкостных накопителей энергии [24].
В частности, для обеспечения высоких энергетических показа-
телей применяется ступенчатое регулирование входного на-
пряжения по определенному закону в зарядном устройстве,
состоящем из амплитудно-импульсного регулятора входного
напряжения (АИР) и транзисторного токоформирующего эле-
мента (ТФЭ), определяющего значение тока заряда емкости
накопителя. В целях минимизации потерь мощности в ТФЭ
переключение ступеней АИР должно производиться с учетом
ряда факторов: значений входного напряжения устройства,
остаточного напряжения на емкости накопителя и др. Для
реализации алгоритма оптимального управления этими процес-
сами разработана система микропроцессорного управления.
В основу этой системы положен микропроцессорный комплект
КР580. Обмен информацией между процессором и внешними
устройствами осуществляется через интерфейсные устройства,
включающие в себя типовые микросхемы дешифратора, тай-
мера, ЦАП и АЦП и др. Программа записывается в ПЗУ.
После реализации программы начальной установки в ис-
ходное положение элементов устройства и подачи команды
на его работу МПК начинает вычислять время заряда
накопителя и число ступеней выходного напряжения АИР.
Далее по* текущему времени, получаемому с блока таймеров,
МПК рассчитывает по аналитическим выражениям зарядный
ток первой ступени. Вычисленное значение тока сравнивается
с максимально допустимым для этой ступени, записанным
в ПЗУ. Меньшее из этих значений записывается в регистр
СУ зарядным током ТФЭ. Последний будет стабилизировать
заданный ток в процессе заряда емкостного накопителя до
напряжения ступени АИР. В момент равенства этих напряжений
вырабатывается сигнал на блек приоритетных прерываний
и осуществляется переход на соответствующую программу
обслуживания прерывания. По этой программе происходит
оценка номера ступени напряжения АИР и далее переход на
новую ступень напряжения. Алгоритм управления имеет цик-
лический характер. Процесс оканчивается достижением задан-
ного напряжения на емкостном накопителе. При работе
производится автоматическая коррекция временных интервалов
заряда по ступеням, учитывающая остаточное напряжение на
емкости накопителя после разряда.
253
ГЛАВА ШЕСТАЯ
ПРИМЕНЕНИЕ СИЛОВЫХ ЭЛЕКТРОННЫХ
УСТРОЙСТВ
6.1. ОБЛАСТИ РАЦИОНАЛЬНОГО ПРИМЕНЕНИЯ
Наиболее распространенным видом силовых электронных
устройств являются выпрямительные устройства. Они состав-
ляют основу большинства маломощных вторичных источников
питания, используемых в аппаратуре радиоэлектроники и ав-
томатики. Как правило, указанная аппаратура получает эле-
ктропитание от промышленной сети в виде однофазного
переменного тока со стандартными параметрами. В то же
время многие функциональные узлы и элементы этой ап-
паратуры (релейная автоматика, полупроводниковые элементы,
микродвигатели и др.) нуждаются в электропитании посто-
янным током. Преобразование напряжения переменного тока
в постоянный осуществляется чаще всего встроенными в ап-
паратуру вторичными источниками питания, содержащими
понижающие трансформаторы с требуемым числом вторичных
обмоток и однофазными двухполупериодными выпрямителями.
Обычно выпрямители малой мощности выполняются неуп-
равляемыми (на диодах), а стабилизация их выходного на-
пряжения осуществляется по входу или выходу регуляторами-
стабилизаторами (см. гл. 3). Характерными значениями выход-
ных напряжений таких выпрямителей являются 24; 12,5; 5 В
при мощностях от долей до сотен ватт. Для аппаратуры
с большей мощностью потребления рациональней становится
электропитание от трехфазной сети переменного тока. Соот-
ветственно вторичные источники питания для такой аппаратуры
выполняются на основе трехфазных выпрямителей. Экономичес-
ки выгодной схемой выпрямления в этих случаях является
трехфазная мостовая схема. При этом собственно вторичный
источник питания целесообразно разрабатывать в виде от-
дельного конструктивно законченного устройства. В сложных,
разветвленных системах желательно использовать централизо-
ванные вторичные источники питания, рассчитанные на эле-
ктропитание групп однофазных по функциям потребителей.
В области электропривода выпрямительные устройства на
тиристорах широко используются для регулирования скорости
двигателей постоянного тока за счет изменения напряжения
на якоре двигателя или на обмотке возбуждения. Регулирование
может быть осуществлено и сочетанием обоих способов.
Управление реверсом осуществляется изменением полярности
напряжения на якоре двигателя или на его обмотке возбуж-
дения. Изменение полярности производится контактным или
254
бесконтактным способом.
В первом случае используют
различного рода электромеха-
нические переключатели и кон-
такторы постоянного тока,
а во втором — выпрямители
с двумя комплектами тири-
сторов.
На рис. 6.1 представлена
схема бесконтактного пере-
ключения полярности напря-
жения на якоре двигателя (ре-
Рис. 6.1. Схема бесконтактного пере-
ключения полярности напряжения на
якоре двигателя постоянного тока
версирования). Схема с бесконтактным переключением обладает
лучшими показателями в части быстродействия, надежности
и пр. При бесконтактном управлении двигатель получает
питание от выпрямителя Bt или В2 При одновременной
работе обоих выпрямителей между ними возникает уравнитель-
ный ток, для ограничения которого вводятся уравнительные
реакторы УР.
Изменение направлений вращения двигателя можно осущест-
вить выключением тиристоров одного выпрямителя (например,
снятием управляющих импульсов) и включением другого
выпрямителя (например, подачей управляющих импульсов).
Однако перед изменением направления вращения двигателя
его необходимо затормозить. Управляемые выпрямители по-
зволяют осуществить эффективное торможение двигателя по-
средством рекуперации энергии в сеть (см. § 3.1). Для этого
вступающие в работу тиристоры сначала переводятся в ин-
верторньщ режим работы, а после окончания процесса тор-
можения—в выпрямительный режим.
Выпрямительные агрегаты для управления режимами ра-
боты электродвигателей постоянного тока разрабатываются
обычно на средние и большие мощности. Так, например, для
питания электродвигателей приводов прокатных станов раз-
работаны тиристорные агрегаты мощностью свыше 10 МВт.
Большинство выпрямительных агрегатов имеет конструктивное
исполнение в виде металлических шкафов с естественным или
принудительным охлаждением. .Как правило, все они имеют
собственные средства автоматического управления, защиты
контроля и диагностики.
Большое распространение выпрямительные агрегаты для
управления двигателями постоянного тока получили на транс-
порте. Выпрямительные агрегаты устанавливаются либо непо-
средственно на подвижном составе, либо на тяговых подстан-
циях железнодорожного и городского транспорта. Чаще всего
используется трехфазная мостовая схема выпрямления. С под-
станции напряжение постоянного тока подается в контактную
255
сеть железной дороги, причем положительный полюс выпря-
мительного агрегата соединяется с - контактным проводом,
а отрицательный—с рельсами.
При размещении выпрямительных агрегатов непосредст-
венно на подвижном составе обычно к контактной сети
подводится однофазное переменное напряжение, которое по-
ступает на вход выпрямительных агрегатов. Последние выпол-
няются в этом случае по однофазной мостовой схеме или
по схеме со средней точкой.
Следует отметить, что в целях повышения коэффициента
мощности в выпрямителе для транспортного электропривода
обычно используют комбинированный способ регулирования
выходного напряжения: переключение отводов входного транс-
форматора с одновременным фазовым управлением (см. § 2.3).
Перспективной областью применения мощных выпрямителей
являются линии передачи электроэнергии постоянным током
высокого напряжения. Они обладают рядом преимуществ перед
линиями переменного тока. Основным преимуществом является
возможность передачи электроэнергии на большие расстояния,
что технически трудно осуществимо на переменном токе.
Выпрямители для линий электропередачи выполняются на
основе тиристорных высоковольтных блоков. Эти блоки пред-
ставляют собой набор последовательно-параллельно соединен-
ных тиристоров, объединенных по секциям в отдельные модули.
На основе таких модулей можно создавать выпрямители на
напряжения свыше 100 кВ и токи свыше 1000 А.
Постоянный ток широко используется также в электроме-
таллургии и электрохимии для электролиза цветных металлов
и различных химических элементов, управления технологиче-
скими процессами, электрической обработки металлов и др.
Выпрямители, используемые в этих отраслях промышленности,
обычно имеют широкий диапазон регулирования выходного
напряжения с существенно различными номинальными значе-
ниями от нескольких вольт до десятков киловольт.
Например, для питания плазмотронов на предприятиях
цветной металлургии и химической промышленности использу-
ются высоковольтные выпрямители с регулированием выход-
ного напряжения от нуля до номинального значения, равного
8 кВ или 14 кВ в зависимости от типа исполнения.
Для питания гальванических ванн используются выпрями-
тели с напряжением от 3 до 12 В и номинальными токами
от сотен до нескольких тысяч ампер. Спецификой выпрямитель-
ных агрегатов для гальванотехники является низкое значение
выходного напряжения при больших токах. Поэтому они
обычно выполняются по схемам со средней точкой.
Управляемые выпрямители находят широкое применение
для питания электросварочных агрегатов. Особенностью этих
256
выпрямителей является крутопадающий характер внешней
характеристики (зависимости выходного напряжения от нагруз-
ки). Кроме того, выпрямители для сварочных агрегатов должны
обеспечивать регулирование выходных параметров в широком
диапазоне, что позволяет поддерживать горение электрической
дуги в заданном режиме.
При использовании мощных выпрямителей следует учиты-
вать то, что они являются источниками высших гармоник
тока в сеть и вызывают искажение сетевого напряжения.
Особенно явно это проявляется при питании выпрямителя от
первичного источника соизмеримой мощности. Кроме того,
при глубоком регулировании угла управления а существенно
ухудшается коэффициент мощности coscp выпрямителя.
Наиболее эффективным способом устранения этих недостат-
ков управляемых выпрямителей является использование схем
с модуляцией на повышенной частоте первичных токов по
синусоидальному закону с опережающим углом управления а.
Для этого необходимо осуществлять принудительную коммута-
цию тиристоров. Перспективной элементной базой для реализа-
ции указанных принципов являются запираемые тиристоры.
Выпрямительные агрегаты широко используются для пита-
ния систем возбуждения различных генераторов. Например,
для систем возбуждения турбогенераторов разработаны вы-
прямительные агрегаты на токи 3000 А и напряжения до
500 В с водяным охлаждением. Агрегаты выполнены на основе
трехфазной мостовой схемы выпрямления.
Использование электроэнергии на постоянном токе тесно
связано с применением различных типов аккумуляторных
батарей. Для заряда их при эксплуатации разработаны специ-
альные выпрямительные агрегаты, именуемые обычно зарядны-
ми устройствами. Большинство типов этих устройств рассчита-
но на работу со стабилизируемым постоянным током, значение
которого плавно или дискретно устанавливается оператором.
Многие перспективные области техники связаны с применени-
ем импульсных накопительных устройств. Например, в лазерных
установках используются накопители энергии, которая реализу-
ется в форме мощных кратковременных импульсов. Заряд таких
накопительных устройств осуществляется, как правило, от
выпрямителей различного схемотехнического исполнения.
Очень широко используются выпрямители в качестве от-
дельных промежуточных звеньев других видов преобразова-
телей, например преобразователей частоты, преобразователей
постоянного тока в постоянный и др.
Инверторы, ведомые сетью (зависимые), находят основное
применение в системах электропередачи. Так, например, для
передачи электроэнергии из одной энергосистемы в другую,
обладающих значительным различием параметров; в частности
257
по стабильности или номинальным значениям частот, ис-
пользуются так называемые вставки, представляющие собой
высоковольтные выпрямительно-инверторные подстанции. На
этих подстанциях переменное напряжение одной энергосистемы
выпрямляется и в виде постоянного тока подается на зави-
симый инвертор, осуществляющий передачу электроэнергии
постоянного тока в электроэнергию переменного тока другой
энергосистемы.
Обычно такие преобразователи являются реверсивными
в том смысле, что каждый из них может работать как
в выпрямительном, так и инверторном режимах, изменяя
направление потока электроэнергии. При этом качество и ча-
стота переменного напряжения энергосистем могут существенно
различаться.
Такие преобразователи используются в системах электро-
передачи на постоянном токе.
Преобразователи, работающие как в выпрямительном, так
и инверторном режимах, а в общем случае во всех четырех
квадрантах (см. рис. 3.3), рационально использовать в тех-
нических системах, где имеет место изменение направления
потока электроэнергии между источниками переменного и по-
стоянного тока. Например, при подготовке аккумуляторных
батарей обычно проводится зарядно-разрядный цикл (заряд —
разряд — заряд) батареи. Для этой цели эффективно может
быть использовано зарядно-разрядное устройство, в основе
которого лежит схема преобразователя, работающего в вы-
прямительном и инверторном режимах. При заряде постоянный
ток поступает от преобразователя, работающего в выпрями-
тельном режиме, в батарею, а при разряде энергия, запасенная
в батарее, передается в сеть через преобразователь, который
переходит в инверторный режим.
Инверторный режим работы преобразователей широко
используется в транспортном электроприводе, для обеспечения
рекуперации энергии в сеть и при торможении двигателя.
Автономные инверторы находят основное применение в аг-
регатах бесперебойного питания (АБП), обеспечивающих эле-
ктропитание переменным током ответственных потребителей.
Примерами таких потребителей являются:
а) технические средства связи;
б) комплексы автоматического управления сложными тех-
нологическими процессами в металлургии, нефтяной и газовой
промышленности и др.;
в) системы с ЭВМ, предназначенные для обработки, хране-
ния и распределения информации;
г) системы аварийного освещения, контроля и защиты
различных объектов (атомных электростанций, промпредпри-
ятий, медицинских учреждений и др.).
258
Рис. 6.2. Структурные схемы агрегатов бесперебойного питания
Указанные потребители в зависимости от технических
и других требований допускают перерыв в электроснабжении
на очень короткое время (от долей секунды до десятков
секунд) или в некоторых случаях совсем не допускают его.
Источником энергии на время перерыва электроснабжения
(до запуска резервных электростанций) являются накопители
различного рода. В системах бесперебойного питания в качестве
накопителей чаще всего используются аккумуляторные батареи
или электрохимические источники постоянного тока. Для
передачи электроэнергии этих источников потребителям пере-
менного тока широко используются автономные инверторы.
На ри(^. 6.2 представлено несколько упрощенных структур-
ных схем*АБП, содержащих автономные инверторы.
Согласно структуре, изображенной на рис. 6.2, а, нагрузка
Н получает питание непосредственно от энергосети или
резервной электростанции через контактор К2. При отключении
сетевого напряжения в течение времени, необходимого для
запуска резервной электростанции, нагрузка получает питание
от автономного инвертора И через контактор К2- Первичным
источником электроэнергии в этом режиме является аккуму-
ляторная батарея АБ. Восполнение энергии АБ осуществляется
зарядным устройством ЗУ. Время перерыва в электропитании
потребителей при такой структуре определяется временами
срабатывания контакторов и К2.
. На рис. 6.2, б представлена структура АБП, обеспечивающая
безразрывность кривой выходного напряжения на шинах на-
грузки при переходе с сети на резервную электростанцию
и обратно.
При такой структуре нагрузка постоянно получает питание
с выхода автономного инвертора. На вход инвертора поступает
259
питание либо от выпрямителя В (при наличии напряжения
на сетевом вводе), либо от аккумуляторной батареи АВ (при
исчезновении напряжения йа сетевом вводе). В зависимости
от типа используемого в АБП инвертора выпрямитель может
быть управляемым или неуправляемым.
Для проведения регламентных и ремонтных работ АБП
часто предусматривают так называемую обходную сеть с кон-
тактором К2, к которой на этот период времени подключается
нагрузка Н (рис. 6.2, в). Для обеспечения безразрывного пе-
рехода с инвертора на сеть необходимо производить синхро-
низацию сетевого и инверторного напряжений. Обходная сеть
может одновременно выполнять функции резервного источника
электроэнергии.
Поскольку АБП используются для питания ответственных
потребителей, необходимо, чтобы сами АБП имели высокую
надежность. С этой целью применяют резервирование АБП,
которое, в частности, может быть осуществлено по схеме,
представленной на рис. 6.2, г. Для обеспечения высокой надеж-
ности резервируемые агрегаты и устройства системы бес-
перебойного питания выполняются конструктивно независи-
мыми друг от друга при минимуме общих цепей управления
и контроля. Кроме того, чтобы быстродействующие (статичес-
кие) контакторы начали действовать до отклонения выходных
параметров АБП сверх допустимых значений, в резервируемых
агрегатах обычно осуществляется непрерывный контроль его
внутренних параметров, характеризующих состояние тиристо-
ров, функциональных блоков управления и др
В настоящее время на основе автономных инверторов
различных типов разработаны АБП мощностью от единиц
до нескольких сотен киловольт-ампер, значительно отлича-
ющихся по своим технико-экономическим характеристикам.
Освоение промышленностью новых типов силовых быстро-
действующих приборов значительно интенсифицировало работы
в этой области. В результате этих работ созданы АБП
с высокими технико-экономическими показателями.
Автономные инверторы являются необходимой составной
частью автономных электросистем, имеющих первичные ис-
точники электроэнергии с выходом на постоянном токе.
Примером такого источника для автономных систем является
электрохимический генератор, вырабатывающий электроэнер-
гию в виде постоянного тока, поступающей далее на вход
автономного инвертора. Выходные параметры такого инвер-
тора обычно соответствуют параметрам промышленной сети,
а номинальная мощность составляет от единиц до нескольких
десятков киловатт. В системах с электропитанием на постоян-
ном токе автономные инверторы также необходимы для
обеспечения питания электропривода переменного тока. В этих
260
случаях автономные инверторы, как правило, должны иметь
соответствующие технические характеристики (например, обес-
печивать пусковые режимы работы двигателей, частное регу-
лирование скорости и др.).
Большая часть автономных инверторов, особенно для АБП,
имеет выходные параметры, соответствующие аналогичным
параметрам промышленной электросети. Для этих целей в об-
ласти больших мощностей рациональной является схема ин-
вертора тока, имеющего по принципу действия форму напряже-
ния более близкую к синусоидальной, чем другие типы схем.
В то же время появление мощных полностью управляемых
ключевых полупроводниковых приборов открыло хорошую
перспективу использования схем инверторов напряжения с си-
нусоидальной модуляцией выходного напряжения на повышен-
ной частоте по принципу «слежения» за эталонным синусо-
идальным сигналом (см. § 3.2). Схемы с управлением по
принципу «слежения» позволяют сохранять синусоидальность
выходного напряжения при существенно нелинейных нагрузках
и отличаются высокими технико-экономическими показателями.
В настоящее время для инверторов малой и средней мощности
схемы такого типа являются наиболее перспективными [15].
Многие потребители электрической энергии должны полу-
чать электропитание в виде переменного тока с частотой,
отличающейся от 50 Гц. Для электроснабжения таких потреби-
телей применяются преобразователи частоты.
Перспективной областью применения преобразователей ча-
стоты является электропривод переменного тока. Использова-
ние переменного тока в электроприводе длительный период
сдерживалось трудностями, связанными с регулированием ско-
рости асинхронных двигателей. В то же время известно, что
бесколлекторный асинхронный двигатель по надежности и эко-
номичности существенно превосходит двигатели постоянного
тока. Существуют различные способы регулирования скорости
асинхронных двигателей: изменением числа пар полюсов за
счет переключения частей статорной обмотки, изменением
индуктивного сопротивления цепи статора и др. Однако все
эти способы значительно уступают по эффективности и эко-
номичности частотному способу регулирования скорости асин-
хронного двигателя.
Частотный способ основан на изменении частоты подво-
димого к двигателю напряжения. Для того чтобы обеспечить
оптимальный режим работы асинхронного двигателя, необ-
ходимо при изменении частоты пропорционально изменять
и подводимое к двигателю напряжение (w//= const).
Для частотного регулирования скорости двигателей перемен-
ного тока получили распространение преобразователи частоты
с непосредственной связью и естественной коммутацией ти-
261
ристоров. Эти преобразователи позволяют плавно регулировать
выходное напряжение и его частоту в широких пределах
и имеют хорошие технико-экономические показатели. Основ-
ными их недостатками являются ограничения верхнего предела
частоты Выходного напряжения и низкое значение коэффици-
ента мощности. Преобразователи этого типа выполняются на
основе трехфазных схем, в частности, рациональной является
схема «звезда — обратная звезда» с уравнительным реактором.
Диапазон изменения частоты выходного напряжения соответ-
ствует 1—25 Гц. Преобразователи этого типа разрабатываются,
как правило, сериями комплектных устройств на различные
токи и напряжения. Система регулирования их параметров
обычно позволяет реализовать закон частотного управления
двигателем с форсировкой напряжения на низких частотах.
Кроме того, они могут обеспечивать частотный пуск, частотное
торможение с рекуперацией энергии в сеть и реверс привода.
Освоение промышленностью запираемых тиристоров позволяет
существенно улучшить технико-экономические характеристики
этого типа преобразователей за счет реализации режимов
работы схемы в четырех квадрантах и, следовательно, воз-
можности улучшения коэффициента мощности, а также улуч-
шения гармонического состава токов путем широтно-импульс-
ной модуляции на повышенной частоте по синусоидальному
закону. Использование запираемых тиристоров обеспечивает
также принципиальные возможности работы преобразователей
с частотами, превышающими частоту питающей сети.
При необходимости иметь широкий диапазон частотного
регулирования целесообразно использовать преобразователи
с промежуточным звеном постоянного тока. Инверторное
звено в таком преобразователе может работать с частотами,
значения которых существенно превосходят значения частоты
питающей сети.
Большой экономический эффект дает применение статичес-
ких преобразователей частоты для питания электротермических
установок поверхностного и сквозного нагрева. С этой целью
разработаны различные типы преобразователей частоты по
схеме с промежуточным звеном постоянного тока. Инверторное
звено в таких преобразователях рассчитывается на выработку
переменного тока высокой частоты (до 10 кГц и более)
и выполняется, как правило, на основе резонансных схем,
часто в многоячейковом исполнении. Характерные значения
мощности такого типа преобразователей, предназначенных для
индукционного нагрева металла, составляют сотни киловатт.
Переменный ток повышенной частоты используется также
для питания люминесцентных ламп, что дает существенный
экономический эффект за счет уменьшения потерь энергии
в лампах при одновременном увеличении их световой отдачи.
262
Для этого обычно используются преобразователи, выполненные
по трехфазно-однофазной схеме.
Для питания различного рода электронной аппаратуры
часто используется переменный ток с частотой 400 Гц. При
использовании в качестве основного источника электроэнергии
промышленной сети возникает необходимость в преобразова-
теле частоты 50 Гц/400 Гц. Рациональной схемой преобразова-
теля в этом случае также является схема с явно выраженным
звеном постоянного тока и автономным инвертором, тип
которого определяется характером нагрузки и требованиями,
предъявляемыми к качеству выходного напряжения.
Преобразование частоты также широко используется в авиа-
ции. Это обусловлено тем, что значительная часть бортовой
аппаратуры самолетов рассчитана на питание переменным
током повышенной частоты, в частности, распространенной
является частота 400 Гц. В зависимости от структуры системы
электроснабжения в самолетах применяются преобразователи
частоты либо с непосредственной связью, либо с промежуточ-
ным звеном постоянного тока. Преобразователи частоты
с непосредственной связью обычно выполняются на тиристорах.
На вход этих преобразователей подается трехфазное напряже-
ние высокой частоты (свыше 1 кГц) от первичных генераторов,
приводимых во вращение авиадвигателями. Частота выходного
напряжения генераторов изменяется в зависимости от режима
работы авиадвигателей (например, в диапазоне 1,2—2,4 кГц).
С выхода бортовых преобразователей частоты снимается
однофазное или трехфазное напряжение частотой 400 Гц.
В системах электроснабжения, выполненных по структуре
с явно вцраженным звеном постоянного тока, переменное
напряжение*первичных генераторов поступает на выпрямители,
которые обеспечивают питанием потребителей постоянного
тока. Для питания потребителей переменного тока использу-
ются автономные инверторы, выполненные по схемам, обес-
печивающим наилучшие массогабаритные показатели. В ча-
стности, для этих целей могут быть успешно использованы
многофазные схемы с синтезированием синусоидального на-
пряжения посредством геометрического сложения выходных
напряжений нескольких инверторных модулей или ячеек.
Следует отметить, что автономные инверторы в качестве
промежуточного звена используются не только в преобразова-
телях частоты, но и в преобразователях другого типа,
например, постоянного тока в постоянный.
С развитием элементной базы силовой электроники в по-
следние годы существенно расширилась область использования
преобразователей с промежуточным звеном повышенной
частоты, функции которого выполняют автономные инверторы.
Повышение рабочей частоты преобразователя ' позволяет
263
значительно уменьшить массу и габариты преобразователя
в целом. Интенсивно ведутся работы по созданию вторичных
источников питаний малой мощности, в основе которых лежит
структура со звеном повышенной частоты. Наиболее перспек-
тивными схемами автономных инверторов в этом случае
являются схемы инверторов резонансного типа. На основе
резонансных инверторов, работающих на частотах свыше
100 кГц, созданы вторичные источники питания мощностью от
десятков до сотен ватт с высокими технико-экономическими
показателями, такими, как удельные значения массы и габа-
ритов.
6.2. ОБЩИЕ ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
Основные требования, предъявляемые к силовым элект-
ронным устройствам, можно разделить на две группы:
требования к электрическим параметрам;
конструктивно-технические требования.
Требования к электрическим параметрам определяются
видом преобразования электрической энергии и техническими
характеристиками первичного источника электропитания и на-
грузки. Соответственно принято различать требования к выход-
ным и входным параметрам преобразователя.
При питании преобразователя от источника переменного
тока оговариваются не только номинальные значения напряже-
ния и тока, число фаз и частота, но и качество электропитания.
В понятие последнего прежде всего включаются значения
статической и динамической стабильности указанных номина-
лов, коэффициент несинусоидальности напряжения, длитель-
ность и периодичность динамических отклонений. Если пер-
вичный источник имеет мощность, соизмеримую с мощностью
преобразователя, то необходимо указывать требования к гар-
моническому составу входного тока преобразователя, коэф-
фициенту мощности (по основной гармонике напряжения
и тока) и циклограмме режимов работы преобразователя.
Вместо требований к гармоническому составу входного тока
преобразователя можно предъявлять требования к допустимому
искажению напряжения первичного источника. Но при этом
следует указывать значения внутреннего сопротивления источ-
ника или приводить характеристики (например, частотные),
позволяющие идентифицировать первичный источник эквива-
лентным электротехническим звеном (с учетом собственного
регулятора). Для оценки влияния несинусоидальности тока
преобразователя на напряжение источника может использовать-
ся соответствующая математическая модель этого источника,
учитывающая параметры его по выходу. Необходимо отметить,
что при наличии длинных кабельных соединений между
264
источником и преобразователем следует указывать их элект-
рическое сопротивление. Причем в отдельных случаях, напри-
мер когда по кабелям протекают токи высших гармоник,
указываются значения распределенных индуктивностей и ем-
костей кабельных соединений. Пренебрежение' этими парамет-
рами может привести к появлению нежелательных резонансных
явлений на повышенных частотах, приводящих к дополнитель-
ным искажениям напряжения источника. Кроме того, они
могут вызвать дополнительные всплески и провалы напряжения
в динамических режимах работы преобразователя.
Для преобразователя с питанием от источника постоянного
тока также указываются номинальное значение напряжения,
его статическая и динамическая нестабильность, длительность
и периодичность динамических отклонений. Важными парамет-
рами на постоянном токе являются уровень и частота
пульсаций напряжения. При соизмеримости мощностей источ-
ника и преобразователя следует также оговаривать динамичес-
кие значения внутренних сопротивлений источника (с учетом
собственного регулятора и двухсторонней проводимости тока).
Эти значения позволяют оценить влияние пульсаций входного
тока преобразователя на напряжение источника, всплески
и провалы этого напряжения при коммутации тока преоб-
разователя, в частности при сбросах и набросах его нагрузки.
Для преобразователей, выполняющих функции вторичных
источников питания, требования к выходным 'параметрам
аналогичны требованиям к входным. Разница заключается
в том, что входные параметры указываются как исходные
данные, влияние на которые со стороны преобразователя, как
правило, мало, а выходные параметры являются результатом,
синтеза схемотехнических решений при проектировании. В этом
отношении проявляется двойственная природа преобразователя
как вторичного источника питания. Для первичного источника
он сам является нагрузкой, а для потребителей—источником
электроэнергии соответствующего вида и качества.
Разработка преобразователя как источника электроэнергии
определяет, как правило, требование к диапазону регулирования
выходных параметров. Поскольку номинальные значения вы-
ходных параметров являются фиксированными и должны
соответствовать действующим стандартам, возможность регу-
лирования позволяет учесть конкретные технические харак-
теристики потребителей, а также падения напряжений в кабель-
ных соединениях.
Для преобразователей, питающих ответственные потребите-
ли, обычно указываются предельно допустимые отклонения
выходных параметров от номинальных значений во всех
режимах, включая аварийные. Эти требования являются основой
для разработки системы внутренних защит преобразователя.
265
58 № 3658
В отдельных случаях, например при использовании преоб-
разователя в специальных системах электроснабжения, могут
предъявляться требования к времени его готовности принять
нагрузку после подачи команды на включение. При ис-
пользовании преобразователей в качестве составных частей
АБП одним из основных является требование к длительности
перерыва в питании на выходных шинах АБП во всех режимах
работы, включая аварии в самом преобразователе (за счет
его резервирования).
При формировании требований к электрическим параметрам
следует учитывать, что полупроводниковые приборы критичны
к мгновенным значениям токов и напряжений, соответствующих
предельным нормированным значениям для каждого конкрет-
ного типа прибора. Поэтому требования по увеличению даже
кратковременных допустимых перегрузок или перенапряжений
обусловливают необходимость увеличивать количество полу-
проводниковых приборов или переходить к использованию
более мощных, т. е. рассчитанных на большие токи и напряже-
ния. В ряде случаев, например для тиристорных инверторов
с конденсаторной коммутацией, в целях обеспечения перегрузки
необходимо завышать установленную мощность элементов
коммутирующих контуров. В результате для обеспечения даже
кратковременных перегрузок приходится завышать в целом
установленную мощность преобразователя.
Конструктивно-технические требования преимущественно
определяются условиями эксплуатации. Большое влияние на
эти требования оказывает также функциональное место преоб-
разователя— является ли он автономным, конструктивно-фун-
кционально законченным устройством иди же составной частью
электротехнической системы, имеющей общие пункты управле-
ния и отображения информации.
Наиболее распространенным видом конструкции силового
электронного устройства является сборная конструкция блочно-
го типа. Поэтому одним из основных конструктивных требова-
ний является требование взаимозаменяемости составных частей
устройства (конструктивных элементов, узлов, блоков и др.).
В основе разработки конструкции обычно лежит группа
требований к механической стойкости изделия. При этом
указывают все виды возможных при эксплуатации и транспор-
тировке механических воздействий (одиночные удары, вибрация
и др.) и их значения. у
Конструкция должна обеспечивать возможность контроля
электрических параметров в процессе производства и экс-
плуатации при помощи встроенных и (или) внешних средств
контроля. Это требование непосредственно связано с группой
требований по проведению регламентных работ, связанных
с обслуживанием и ремонтопригодностью ) изделия.
266
Для эксплуатации конструкции в условиях повышенной
влажности или непосредственного воздействия воды, а также
при наличии агрессивных компонентов в окружающей среде
обоснованным является требование герметичности изделия,
для выполнения которого может быть эффективно использо-
вана конструкция контейнерного типа (для преобразователей
средней мощности). С учетом влияния окружающей среды
покрытия изделий должны обеспечивать необходимую кор-
розионную х стойкость и сохранять соответствующий деко-
ративный вид. Такие же требования распространяются и на
условия хранения изделий, которые должны указываться
при разработке.
Конструкция должна обеспечивать выполнение общих тре-
бований по безопасности, соответствующих «Правилам устрой-
ства электроустановок» (ПУЭ). В частности, в конструкции
должно быть обеспечено электрическое соединение всех до-
ступных прикосновению металлических токоведущих частей
изделия, которые могут оказаться под напряжением, с элемен-
тами для заземления. В свою очередь, способы и элементы
заземления конструкции должны выполняться с условием
обеспечения постоянства переходных сопротивлений. При этом
сопротивления между заземляющими элементами и доступ-
ными частями аппаратуры не должны превышать определен-
ных, нормированных значений.
Конкретные условия производства, изготавливающего раз-
работанный преобразователь, должны учитываться многочис-
ленной группой технологических требований (например, к мон-
тажу силовой части, печатным платам и др.), которые
приводятся стандартах предприятия.
Комплектующие элементы должны применяться в условиях
и режимах, соответствующих требованиям, указанным в стан-
дартах и. технических условиях.
Ряд требований определяется функциями преобразователя
в составе электротехнической системы или комплекса. Эта
группа требований определяет электрическую стыковку преоб-
разователя с другими компонентами системы: первичным
источником, потребителями» распределительными устройства-
ми, блоками управления и отображения информации. При
этом указываются типы разъемов (с их маркировкой), характер
и уровень сигналов управления и передачи информации,
требования к кабельным соединениям и др. Для преобразова-
телей автономного исполнения, рассчитанного на работу с опе-
ратором, оговариваются требования к контрольно-измеритель-
ным и сигнальным средствам с учетом стандартизованных
требований по метрологии.
Конструктивное исполнение устройства должно также от-
вечать требованиям эргономики и технической эстетики.
267
6.3. ЗАЩИТА В АВАРИЙНЫХ РЕЖИМАХ
Аварии, возникающие при эксплуатации силовых элект-
ронных устройств, в самом общем виде можно разделить на
две группы: внутренние и внешние. Внутренние аварии обус-
ловлены, как правило, отказом или изменением параметров
одного или нескольких элементов устройства, а внешние —
отклонением сверх допустимых значений параметров элект-
роэнергии, питающей устройство. Для предотвращения раз-
вития аварийных процессов в силовых электронных устройствах
предусматриваются различные виды защит. Последние отлича-
ются функциональным назначением и схемотехническим ис-
полнением. Здесь кратко рассматриваются типовые защиты
электронных устройств, преимущественно на примере защит
преобразователей и силовых регуляторов с учетом характерных
для них аварийных режимов работы.
Основой многих вторичных источников питания является
выпрямитель. Внутренние аварии выпрямителя чаще всего бывают
связаны с повреждением тиристоров или нарушениями работы
СУ. Аварии, вызванные выходом из строя тиристоров по причине
электрического или теплового пробоя, являются, как правило,
наиболее тяжелыми, так как сопровождаются протеканием в схеме
больших аварийных токов. Так, пробой одного из тиристоров
трехфазного мостового выпрямителе приводит к возникновению
короткого замыкания (КЗ) между двумя соответствующими
фазами, рассматриваемого обычно как режим внутреннего КЗ.
Максимальные значения аварийных токов в элементах схемы
выпрямителя при этом зависят также от момента возникновения
КЗ (т. е. фазы соответствующей ЭДС). В наиболее неблагоприят-
ном случае значение аварийных токов в цепях неповрежденных
тиристоров достигает двойной амплитуды установившегося тока,
которая появляется при КЗ на выходе согласующего трансформа-
тора. Это значение определяется внутренним сопротивдением
питающей сети и параметрами согласующего трансформатора
и в общем виде может быть выражено соотношением
^фт
(6.1)
где Ефт — амплитудное значение фазной ЭДС сети, питающей
выпрямитель; —суммарные активное и реактивное
сопротивления одной фазы эквивалентной схемы, подключенной
к комплекту тиристоров со стороны переменного тока (с
учетом приведения ко вторичным обмоткам согласующего
трансформатора).
В цепи поврежденного тиристора аварийное значение тока
может достигать еще больших значений.
268
При внешнем КЗ (непосредственною на выходе выпрямителя)
в наиболее неблагоприятных услоовиях, когда отсутствует,
например, сглаживающий реактор ив цепи постоянного тока,
а сопротивление шин мало (т. е. таак называемое глухое КЗ),
максимальные значения аварийных тсюков могут также достигать
двойного значеййя амплитуды установцившегося тока КЗ. При этом
скорость нарастания аварийных током определяется внутренним
сопротивлением первичного источникка, а также сопротивлением
согласующего трансформатора в соэответствии с (6.1). Иначе
протекает аварийный процесс при внешнем КЗ на выходе
выпрямителя, .если сглаживающий реактор входит в контур
короткозамкнутой цепи. Такой режим! наиболее часто встречается
в практике, так как обычно сглаживваютций реактор входит
в состав преобразователя, а не наагрузки, возникновение КЗ
в которой рассматривается. Наличие «индуктивного сопротивления
реактора в цепи КЗ ограничивает скоррость нарастания аварийных z
токов и тем самым облегчает задачу ; защиты от последствий КЗ.
При возникновении внешних илци внутренних КЗ, а также
цри токовых перегрузках элементы виыпрямителей подвергаются
повышенным тепловым и электродиинамическим воздействиям.
Для предотвращения выхода из сттроя оставшихся в работе
полупроводниковых элементов применяются различные защит-
ные средства. (
Следует отметить, что ряд внутренних аварий (например,
нарушение нормальной работы С2У, потеря управляемости
тиристором и др.) не вызывает значчительных изменений токов
в элементах силовых цепей, но приводит к ухудшению
выходных параметров (недопустимьым отклонениям выходного
напряжения, \повь1Шенным уровням^ пульсаций и др.). Если
потребитель критичен к этим «изменениям, то возникает
необходимость его защиты при гадкого рода авариях.
- -К внешним авариям также отноосится появление на входе
сетевых перенапряжений, способньых нарушить нормальную
работу схемы или свести к выходцу из строя ее элементов.
Для исключения этого необходимее предусматривать защиту
от входных перенапряжений.
Основными требованиями к защцитжым средствам сило'вых
электронных устройств в целом и * вы прямителей в частности
являются требования по обеспечению надежности, селектив-
ности и быстродействия. Если перовые два требования харак-
терны для большинства электротехнических устройств, то
требование по быстродействию обусловлено спецификой си-
ловых полупроводниковых прибородв, которые обладают низкой
перегрузочной способностью. Кромме того, выход из строя
этих приборов происходит при превышении допустимых мгно-
венных значений токов и напряжений,, приводящем к наруше-
нию внутренней их структуру.
269
Наиболее простым способом защиты полупроводниковых
приборов является использование предохранителей, выполнен-
ных на основе плавких вставок. Это специальные типы
предохранителей, отличающихся высоким быстродействием.
Такие быстродействующие предохранители обычно предназ-
начены для защиты от токов КЗ, но не перегрузки. Особен-
ностью использования предохранителей является необходи-
мость согласования тепловых эквивалентов плавких вставок
и полупроводниковых приборов. Тепловой эквивалент прибора
определяется по формуле
1п
I2t~li2(t}dt, (6.2)
о
где t„—время протекания тока через прибор; /(?)—функция
изменения тока в приборе.
Для обеспечения надежной защиты полупроводниковых
приборов при аварии необходимо выполнять условие
I2t0<I2tn, (6.3)
где I2t0 и I2tn—тепловые эквиваленты отключения предо-
хранителя и полупроводникового прибора соответственно.
Обычно для эффективной защиты необходимо недогружать
полупроводниковые приборы по току. Некоторые типы пре-
дохранителей, предназначенные для защиты силовых диодов
и тиристоров, имеют средства сигнализации в виде микроперек-
лючателей, срабатывающих при перегорании плавкой вставки.
Основным недостатком защитных устройств, выполненных на
основе предохранителей^ является необходимость в замене
перегоревших вставок, что снижает степень автоматизации
работ при обслуживании. В то же время предохранители
являются практически единственным эффективным защитным
устройством полупроводниковых приборов при их параллель-
ном соединении. Обычно количество параллельно включаемых
приборов выбирается с запасом, обеспечивающим нормальную
работу электронного устройства при выходе из строя одного
из группы параллельно включенных приборов.
Для защиты выпрямителей широко применяются быстро-
действующие автоматические выключатели, обеспечивающие
многократное действие и возможность дистанционного управле-
ния. Автоматические выключатели (автоматы) обычно устанав-
ливаются на входе выпрямителей в цепях, по которым в схему
поступает напряжение питающей сети. Отключение автоматов
при аварийных токах происходит за счет действия их защитных
электромагнитных устройств, срабатывающих при достижении
аварийным током установленного значения. Время отключения
современных быстродействующих автоматов составляет еди-
ницы миллисекунд. Отключение автомата при токах перегрузки
270
производится за счет срабатывания встроенных в -автомат
тепловых защитных устройств. Очевидно, что параметры
защитного автомата должны выбираться из’' условия обес-
печения защиты неповрежденных полупроводниковых приборов
при возникновении аварий. Для повышения эффективности
защиты в мощных выпрямителях иногда используют сочетание
автоматических выключателей и короткозамыкателей. Послед-
ние представляют собой устройства, создающие «глухое» КЗ
металлическими контактами обычно на входе выпрямителя.
Они обладают более высоким быстродействием по сравнению
с коммутационными автоматами и при срабатывании шун-
тируют тиристорные цепи так, что аварийный ток начинает
протекать через контакты короткозамыкателя минуя цепи
тиристоров. Затем происходит срабатывание автомата, от-
ключающего поврежденный выпрямитель от сети.
В управляемых выпрямителях, выполняемых на тиристорах
или других управляемых полупроводниковых приборах, воз-
можно использование других способов защиты, реализуемых
посредством электронных устройств. Основными из них яв-
ляются: блокирование управляющих импульсов тиристоров;
перевод выпрямителя в инверторный режим путем сдвига
управляющих импульсов в тиристорах; принудительное пре-
рывание аварийных токов с помощью коммутирующей емкости.
Электронные защиты наиболее эффективны при внешних
авариях, когда все элементы схемы к моменту возникновения
аварии работают нормально. Обычно в преобразователях
используют как электронные, так и электромеханические
устройства защиты, что позволяет осуществить защиту в об-
ширной области различных аварийных режимов, возникающих
при эксплуатации. Контроль возникновений аварий осуществ-
ляется датчиками соответствующих параметров. На рис. 6.3
представлена обобщенная схема электронных защит различных
типов для управляемого выпрямителя. В этой схеме датчик
тока ДТ контролирует значение тока нагрузки, а параметры
входного и выходного напряжений выпрямителя контролиру-
ются блоками контроля напряжения БКН1 и БКН2 соответ-
ственно. Сигналы об отклонении контролируемых параметров
за допустимые пределы поступают от датчиков на электронный
блок защиты БЗ. Последний формирует команды на включение
соответствующих исполнительных органов защит, выполняемых
также на основе элементной базы электроники.
Наиболее простым способом электронной защиты является
снятие управляющих импульсов • тиристоров выпрямителя.
При поступлении команды от БЗ на блокировку импульсов
в случае возникновения внешней аварии, например КЗ в на-
грузке RK, система управления СУ прекращает подачу упра-
вляющих импульсов на тиристоры выпрямителя. В результате
271
Рис. 6.3. Обобщенная схема электронных защит управляемого выпрямителя
в проводящем состоянии остаются только те из них, которые
к моменту формирования команды проводили ток нагрузки.
При этом прохождении тока через нуль под воздействием
переменного сетевого напряжения эти тиристоры выключаются
и поступление электроэнергии от сети в нагрузку прекращается.
Наличие индуктивности £ф в цепи постоянного тока затягивает
процесс выключения и снижает эффективность этого способа
защиты. В то же время индуктивность £ф ограничивает
скорость нарастания тока в контуре КЗ и тем самым облегчает
реализацию другого способа электронной защиты—перевода
выпрямителя в инверторный режим по сигналу с БЗ путем
сдвига управляющих импульсов в области инвертирования.
В этом случае в зависимости от схемотехнического исполнения
СУ и БЗ ток в короткозамкнутом контуре может быть
ограничен на заданном уровне или снижен до нуля. В последнем
случае энергия, накопленная в £ф, инвертируется в сеть,
а тиристоры выпрямителя выключаются. Значительно большее
быстродействие защиты при выключении тиристоров мржет
быть достигнуто принудительным их выключением (искусствен-
ной коммутацией) посредством подключения предварительно
заряженного в соответствующей полярности конденсатора Сж.
Последний при включении вспомогательного тиристора по
сигналам от БЗ обеспечивает принудительное выключение
тиристоров выпрямителя’. Быстродействие такой защиты опре-
деляется в основном временами формирования сигнала от БЗ
и включения тиристора
Рассмотренные способы электронной защиты не обеспечи-
вают отключения выпрямителя от сети, если для этого не
272
предусмотрены специальные меры, например по срабатыванию
входного автомата, поэтому они неэффективны при внутренних
авариях. Более универсальным способом защиты является
шунтирование выхода тиристорного комплекта выпрямителя
токоограничивающим резистором Ro с низким противлением
(рис. 6.3). При возникновении аварии сигнал с БЗ поступает
на управляющий электрод тирйстора VS2, ^включение которого
шунтирует тиристорный комплект. Этот сйособ защиты особен-
но эффективен при высоких требованиях к выходному напряже^
нию выпрямителя, например, в часта' допустимых перенап-
ряжений, уровня пульсаций и др., возникающих при аварии.
Включение шунтирующего тиристора VS2 исключает влияние
повышенного сетевого напряжения и , аварийных режимов
работы выпрямителя на потребителя. При этом может быть
обеспечено высокое быстродействие защиты непосредственно
потребителя. Далее по мере нарастания тока через сопротив-
ление 7?о шунтирующей цепи увеличиваются фазные токи на
стороне переменного напряжения и происходит срабатывание
сетевого автомата. Очевидно, что уставка по току срабатывания
автомата, тепловой эквивалент тиристоров и сопротивление
Ro должны быть согласованы так, чтобы исключить выход
из строя тиристоров и других элементов схемы. Для ор-
ганизации повторного включения выпрямителя после аварии
при необходимости исцользуются входные автоматы с дистан-
ционным управлением.
В реверсивных преобразователях, работающих как в вы-
прямительном, так и инверторном режимах, необходимо
предусматривать дополнительные защитные устройства. Это
обусловлено^ тем, что для инвертора, ведомого сетью, харак-
терны такие* специфические аварийные режимы, как «опроки-
дывание» инвертора. В этих режимах возникает одновременная
проводимость тиристоров, что приводит к возникновению КЗ
не только между фазами сети переменного тока, но и на
стороне постоянного тока. Причем из-за большого числа
способствующих факторов вероятность возникновения таких
аварий выше по сравнению с внутренними КЗ выпрямителя.
Работа преобразователя в инверторном режиме возможна при
наличии источника электроэнергии на. стороне постоянного
тока. Поэтому в режиме «опрокидывания» инвертора начинает
развиваться ток КЗ не только под воздействием сетевого
напряжения, но и источника постоянного тока. Для отключения
последнего необходимо предусматривать дополнительные за-
щитные устройства, , например автоматический выключатель
на стороне постоянного тока. При необходимости повышения
быстродействия защиты для отключения источника постоянного
тока может быть использован тиристорный контактор посто-
янного тока. Сигнал на срабатывание этого контактора также
, 273
формируется от блока БЗ (рис. 6.3) при поступлении инфор-
мации от аварии от соответствующих датчиков, например
датчика 'тока ДТ.
Основной функцией защитных устройств автономных ин-
верторов является отключение инвертора в аварийном режиме
от источника постоянного тока. В качестве исполнительного
органа защитного устройства могут использоваться как ав-
томаты постоянного тока, так и статические контакторы
(тиристорные или транзисторные). Сигнал на срабатывание
защиты обычно формируется от датчика входного тока
инвертора. Однако такие защиты, являясь эффективными при
внутренних авариях инвертора» не обеспечивают такой важной
функции для защит вторичных источников питания, как
селективное отключение короткозамкнутой цепи при питании
многофидерной нагрузки. Из рис. 6.4 видно, что возникновение
КЗ в любом из фидеров приводит к КЗ на выходных шинах
инвертора (если пренебречь, как правило, незначительным
сопротивлением кабельного соединения). Возникновение КЗ на
выходе инвертора при наличии входной защиты приводит
к отключению инвертора от источника питания. В результате
происходит обесточивание всех потребителей инвертора. Для
исключения этого явления инвертор должен устойчиво работать
на КЗ, развивая в короткозамкнутом контуре ток, значение
которого достаточно для срабатывания фидерной защиты.
Иначе говоря, инвертор должен иметь ограничение по выход-
ному току при КЗ. Таким свойством обладают инверторы
с глубоким (практически до нуля) регулированием выходного
напряжения, например транзисторный инвертор с регулирова-
нием по способу ШИМ (см. § 3.3). Если схемотехника ин-
вертора такова, что не обеспечивает таких свойств, то
необходимо предусматривать в инверторе специальные защит-
ные устройства для селективности защит потребителей.
Способы обеспечения селективности защит в основном
определяются схемой инвертора и поэтому многообразны.
Наиболее общим и простым среди них является способ
повышения полного сопротивления контура КЗ, которого
можно достигнуть за счет реактирования выходных шин или
инвертора в сочетании с повышением частоты инвертирования
или введением в выходные шины нелинейных элементов.
Реактирование выходных шин обеспечивается включением
в выходные шины инвертора последовательно с нагрузкой
реакторов малой индуктивности. При возникновении КЗ по
сигналу с датчика выходного тока частота инвертирования
повышается так, что сопротивление короткозамкнутого крнтура
становится достаточно большим, чтобы обеспечить устойчивую
работу инвертора при выходном токе со значением, необ-
ходимым для срабатывания фидерных защит. Этот способ
274
Рис. 6.4. Структурная схема инвер-
тора с многофндернон нагрузкой
Рис. 6.5. Блок ограничения тока
короткого замыкания
может быть успешно использован в инверторах тока при
незначительном усложнении общей схемы. Введение в выходные
шины инвертора нелинейных элементов также позволяет сни-
жать проводимость фаз инвертора до требуемого значения.
Роль таких элементов могут выполнять, например, тиристоры
VSt, VS2 или электромагнитный контактор К, включенные
параллельно с активным сопротивлением R (рис. 6.5). В нор-
мальном режиме работы тиристоры проводят ток нагрузки
с углом проводимости Х = л (контактор К включен). При
возникновении КЗ инвертор отключается при срабатывании
входных ' защит. После этого производится повторный пуск
инвертора на короткозамкнутый контур, но уже при выключен-
ных тиристорах (или разомкнутых контактах контактора К).
В результате ток короткого замыкания ограничивается со-
противлением R. Этот способ достаточно прост и эффективен
для обеспечения токов срабатывания фидерных защит при
сравнительно незначительном ухудшении массогабаритных по-
казателей преобразователя в целом.
Следует отметить, что обеспечение селективности защит
инвертора тока облегчается наличием на его входе сглажи-
вающего реактора, индуктивность которого снижает скорость
нарастания аварийных токов. Поэтому к быстродействию
защит инверторов напряжения предъявляют более жесткие
требования, реализация которых возможна только на основе
электронных устройств.
Особенностью построения защит силовых электронных
устройств, выполненных на. полностью управляемых приборах,
например транзисторах, является использование возможности
практически мгновенного прекращения их проводимости по
сигналам соответствующих датчиков. Алгоритмы работы
защит определяются схемотехникой устройств и отличаются
многообразием. Например, в транзисторных инверторах, ре-
гулируемых по способу ШИМ и широко используемых
в качестве звена повышенной частоты в преобразователях
постоянного тока, можно выделить три вида защиты по
управлению: ограничение максимального мгновенного, значения
275
тока транзистора, ограничение среднего значения тока в нагруз-
ке (и, следовательно, в транзисторах) и полное выключение
транзисторов.
Максимальное мгновенное допустимое значение тока входит
в группу предельных параметров транзистора и поэтому нельзя
допускать его превышения. Появление несимметрии управля-
ющих импульсов силовыми транзисторами при наличии со-
гласующего трансформатора приводит к его «замагничиванию»
и, как следствие этого, нарастанию тока транзисторов. Задача
защиты — ограничить значение тока посредством изменения
скважности работы транзистора при ШИМ на допустимом
уровне. Для этого в, схеме должны быть предусмотрены
датчики мгновенных значений токов транзисторов.
Ограничение среднего тока может быть осуществлено путем
глубокого зарегулирования выходного напряжения за счет
увеличения скважности работы транзисторов. Схемотехника
преобразователей с ШИМ обычно позволяет сравнительно
просто реализовать такой режим работы.
Наиболее радикальным способом защиты является полное
выключение силовых транзисторов в момент возникновения
аварии. Недостаток этого способа защиты заключается в том,
что он не обеспечивает протекание тока в короткозамкнутом
контуре и, следовательно, срабатывания выходной защиты
при КЗ в нагрузке. С другой стороны, этот способ наиболее
эффективен не только при КЗ в нагрузке, но и других видах
аварий, например при недопустимом повышении входного
напряжения, авариях в СУ и др.
Многообразие силовых электронных устройств и условий
их эксплуатации обусловливает различие в способах защиты
и их схемотехнического исполнения. Однако по сущности
работы они во многом идентичны с рассмотренными.
Отдельно следует отметить наиболее общий для всех
устройств класс защит от кратковременных перенапряжений
в сетях, связанных с электронным устройством. Такие перенап-
ряжения могут вызываться грозовыми разрядами и другими
источниками мощных электромагнитных импульсов. Обычные
энергопоглотительные ЛС-цепи от таких перенапряжений не
эффективны. Поэтому, если по условиям эксплуатации появ-
ляется опасность возникновения таких перенапряжений, на
сетевых вводах силового электронного устройства устанавли-
вают специальные мощные полупроводниковые ограничители
напряжения, имеющие вольт-амперные характеристики, анало-
гичные вольт-амперным характеристикам стабилитронов. Эти
ограничители рассчитаны на поглощение энергии кратков-
ременного импульса, наведенного на вводе напряжения, и огра-
ничение значения его на допустимом элементной базой и схе-
мой устройства уровне.
276
6.4. ЭКСПЛУАТАЦИОННЫЙ КОНТРОЛЬ И
ДИАГНОСТИКА ТЕХНИЧЕСКОГО СОСТОЯНИЯ
Эксплуатация систем электроснабжения, содержащих элек-
тронные устройства, как правило, связана с необходимостью
проведения периодических проверок и контроля их технического
состояния.
Основная задача эксплуатационного контроля — допустить
к работе только исправно функционирующие с заданной
надежностью объекты. При контроле с отбраковкой управление
качеством осуществляется путем замены вышедших из строя
элементов. При контроле с восстановлением проводятся также
операции по настройке и регулировке ремонтируемых узлов
и блоков.
В эксплуатационном контроле можно выделить следующие
виды проверок: правильности функционирования, работоспо-
собности и поиска неисправностей.
Проверка правильности функционирования сводится к кон-
тролю нормальной работы основных узлов в текущий момент
времени. Такой постоянный контроль осуществляется, как
правило, устройствами контроля значений выходных и наиболее
ответственных внутренних параметров преобразователя. Эти
устройства (различного рода датчики) совместно с соответ-
ствующими элементами автоматики обеспечивают обработку
необходимой информации и формируют информацию о со-
стоянии непрерывно контролируемых параметров. Обычно
такие устройства входят в состав контролируемого объекта
как составная часть СУ и защиты.
Проверка работоспособности заключается в оценке воз-
можности выполнения аппаратурой всех функций, предусмот-
ренных рабочим алгоритмом функционирования. Например,
преобразователи, находящиеся в «холодном» резерве, должны
быть периодически проверены на возможность их включения
и обеспечения на выходе электроэнергии требуемого качества.
При проверке работоспособности могут оставаться необнару-
женными неисправности в резервированных цепях, которые
не влияют на выполнение преобразователем его функций.
Поиск неисправностей является основной задачей диагности-
ки технического состояния. Он проводится, как правило, при
выходе устройства из строя либо с целью профилактической
проверки с определенной периодичностью. В результате этого
поиска выявляются дефектные компоненты, подлежащие замене
при проведении ремонтно-восстановительных работ. Профилак-
тические проверки обеспечивают контроль исправности резерв-
ных цепей и устройств, проверку правильности функционирова-
ния подсистемы контроля параметров и средств защиты.
Проведение профилактических проверок позволяет обеспечить
277
допуск к работе на следующий период эксплуатации полностью
исправные устройства, имеющие заданные показатели надеж-
ности.
Силовые электронные устройства часто входят в состав
автономных систем электроснабжения, которые эксплуатиру-
ются в труднодоступных местах. При этом на квалификацию
обслуживающего персонала и время проведения ремонтно-
восстановительных работ налагаются различные ограничения.
В таких случаях ремонтно-восстановительные работы проводят
путем замены конструктивно законченных, легко съемных
блоков и узлов, в которых возникли неисправности, на
исправные блоки и узлы. В связи с этим нахождение узла,
отказавшего в процессе эксплуатации, может быть произведено
при значительно меньшей глубине диагностики, чем в случае •
технологического контроля. При этом недоступные в период
эксплуатации внутренние/и внешние связи преобразователя,
прошедшего технологический контроль с учетом пусконаладоч-
ных работ, можно считать заведомо исправными. Поэтому
объем проверок при диагностике преобразователя в процессе
эксплуатации может быть существенно меньшим, чем при его
технологическом контроле. Преобразователи со звеном повы-
шенной частоты обычно выполняются в блочной конструкции,
поэтому диагностика неисправностей проводится с точностью
до одного-двух конструктивно законченных блоков. Необ-
ходимость обеспечения объективности, скорости и качества
контроля обусловливают необходимость разработки и примене-
ния для эксплуатационного контроля автоматизированных
средств технического диагностирования с использованием в от-
дельных случаях дистанционного управления.
В качестве примера рассмотрим методы диагностики преоб-
разователя переменного тока в постоянный с транзисторным
импульсным регулятором в процессе его эксплуатации. Струк-
турная схема преобразователя представлена на рис. 6.6. Ос-
новными функциональными узлами преобразователя являются
неуправляемый выпрямитель В, сборка силовых транзисторов,
работающих в ключевом режиме, Кл, реактивные фильтры
Ф1 и Ф2, а также СУ.
Конструктивно аппаратура преобразователя размещена
в конструкции, имеющей два выдвижных съемных блока,
в одном из которых расположен силовой транзисторный
регулирующий элемент, в другом — остальные функциональные
узлы. Силовое оборудование — трансформаторно-реакторное,
конденсаторное, тиристорный мост — размещено непосредст-
венно в стойке и не является легкосъемным.
Опыт эксплуатации и статистика отказов преобразователей
этого типа показали высокую надежность таких элементов
силового оборудования, как трансформаторы и реакторы,
278
I------------------------------------1, '
Рис. 6.6. Структурная схема преобразователя с ключевым стабилизатором
конденсаторы фильтров, диоды и др. Это позволяет сделать
вывод о том, что выход из строя преобразователя из-за
неисправности указанного силового оборудования маловероятен
и из эксплуатационных проверок оно может быть исключено.
Следует, однако, отметить, что иногда конденсаторы подключа-
ются к общим шинам через предохранители с плавкими
вставками. В этих случаях состояние предохранителей подлежит
проверке.
Исходя из сказанного выше, диагностика преобразователя
в .процессе его эксплуатации должна обеспечить возможность
нахождения неисправностей двух конструктивно съемных бло-
ков, а также контроль всех функциональных узлов с целью
устранения при их дальнейшей эксплуатации возможной ошиб-
ки. Опыт эксплуатации и статистика отказов с достаточной
для практики точностью позволяет свести эксплуатационный
контроль преобразователя только к проверке исправности
основных функциональных узлов.
Проверка ^справности функциональных узлов источника
оперативного '«питания (ИОП), устройства контроля ИОП
и выходных параметров преобразователя, блока контроля вход-
ной сети, блока контроля импульсов СУ сводится к имитации
на них входных сигналов, обеспечивающих функционирование
проверяемых узлов, и анализу их реакции на внешнее воз-
действие. Имитация таких входных сигналов обеспечивается
специальными элементами, входящими в состав проверяемых
узлов, которые по командам системы контроля (встроенной
или выполненной в виде отдельного конструктивно закончен-
ного изделия) видоизменяют входные цепи, имитируют про-
падание сигнала на их входе, подключают входные цепи
к эталонным источникам, выполняют другие операции.
В рассматриваемом преобразователе проверка СУ ключе-
вого элемента также сводится к ее проверке на функци-
онирование путем подключения к ее выходному каналу блока
контроля параметров импульсов (их амплитуды,
длительности и частоты следования), работоспособность ко-
торого подтверждена предыдущими проверками. Устройства
279
релейной автоматики проверяются по штатным алгоритмам
их работы, которые реализуются в процессе контроля функ-
циональных устройств, при прохождении команд на включение
и выключение преобразователя. Следует отметить, что эти
проверки проводятся при обесточенной силовой части. Со-
стояние же силового транзисторного ключа определяется при
проверке функционирования преобразователя в целом. При
этом срабатывание любой защиты, исправность которой под-
тверждена предшествующими проверками, однозначно свиде-
тельствует о выходе его из строя.
Из сказанного выше следует, что диагностика преобразова-
телей подобного типа с достаточной для практики точностью
может быть сведена к тестовым проверкам, которые заключа-
ются в подаче на проверяемый объект необходимого набора
стимулирующих воздействий и в съеме и обработке однобитной
информации о реакции объекта на поданные воздействия.
Описанные выше виды проверок преобразовательных
устройств, входящих в состав сложных систем электроснаб-
жения, могут быть реализованы, например, с помощью
дистанционной автоматической специализированной системы
контроля, выполненной, в частности, на основе микропроцес-
сорного комплекта.
В сложных электротехнических системах функции управле-
ния и контроля часто возлагаются на единую подсистему
управления и контроля с единым цифровым вычислительным
комплексом (ЦБК). Эта подсистема должна осуществлять
непрерывный или периодический контроль нормального фун-
кционирования других подсистем и при необходимости
осуществлять поиск неисправного модуля или другой фун-
кционально и конструктивно законченной единицы. Рассмот-
рим более подробно реализацию такого принципа контроля
на примере подсистемы, состоящей из п параллельно работа-
ющих модулей преобразователей постоянного тока: 1Ц...П,,
(рис. 6.7).
При нормальном функционировании каждый из преоб-
разовательных модулей берет на себя часть общей нагрузки
в соответствии с заданным уровнем ограничения его выходного
тока. Минимальный и максимальный допустимые уровни
выходного напряжения модуля (до развязывающего диода)
контролируются встроенным в модуль датчиком напряжения.
При возникновении неисправности, вызывающей отклонение
значения выходного напряжения за пределы заданного .диа-
пазона, этот датчик выдает сигнал на отключение неисправного
модуля. При необходимости или с определенной заданной
периодичностью проводится контроль состояния всех модулей.
Централизованная подсистема контроля функционирует следу-
ющим образом. По команде «Опрос», поступающей с ЦБК
280
Рис. 6.7. Структурная схема системы контроля модулей преобразователей
в виде параллельного кода на входной регистр блока автомати-
ки (БА), поступают соответствующие сигналы. Входной регистр
преобразует уровень поступающих кодовых команд определен-
ного разряда в уровень логических сигналов. Эти сигналы
поступают далее на дешифратор, который производит дешиф-
рацию кода команды запроса, усиление сигналов и выдачу
в регистр состояний подсистемы контроля. Сигналы с дешиф-
ратора поступают также на селектор-мультиплексор данных,
включенных в канал передачи информации от контролируемой
подсистемы к ЦВК. Регистр состояний БА осуществляет
преобразование Поступающих команд из логического уровня
в уровень релейного типа и запоминает состояния, установ-
ленные ранее поступившими командами, до получения новых
кодовых команд, от ЦВК.
Информация о состоянии проверяемых модулей поступает
через селектор-мультиплексор на выходной регистр БА и далее
в кодовом виде в ЦВК. Результат кодообмена «запрос —
донесение» обрабатывается ЦВК с выдачей данных на печап»
после окончания проверок. В -результате проверки определяется
исправность каждого модуля в системе параллельно работа-
ющих преобразователей. При проведении периодических про-
верок осуществляется контроль функционирования цепей за-
щиты каждого модуля. Для этого по соответствующим
командам от ЦВК через БА дается возмущение, например
на датчик контроля выходного напряжения, и оценивается
конечный результат такого воздействия. Надежность подси-
стемы контроля обеспечивается введением в нее необходимого
числа резервных каналов.
281
19 № 3658
6.5. ОБЕСПЕЧЕНИЕ ПАРАЛЛЕЛЬНОЙ РАБОТЫ
ПРЕОБРАЗОВАТЕЛЕЙ
Обеспечение параллельной работы преобразователей на
общие шины в системе электропитания позволяет наращивать
ее общую выходную мощность, а также повышать надежность
за счет «глубины» резервирования отдельных преобразователей.
Поэтому технические возможности для параллельной работы
являются существенной и важной характеристикой преоб-
разователей, особенно при использовании их в системах
электропитания.
Следует отметить, что для преобразователей постоянного
тока параллельная работа организуется значительно проще,
чем для преобразователей переменного тока, поскольку ее
обеспечение связано с регулированием одного (реже двух)
параметров среднего значения выходного напряжения (при
необходимости выходного тока). Поэтрму в настоящем разделе
большее внимание уделено параллельной работе преобразова-
телей постоянного тока в переменный.
В зависимости от поставленной задачи требования, предъяв-
ляемые к параллельно работающим преобразователям, раз-
личны. Так, при полном резервировании (один из двух)
достаточно обеспечить устойчивую работу двух преобразова-
телей на общие шины без каких-либо ограничений на рас-
пределение между ними мощности нагрузки. Это вытекает из
принципа полного резервирования, когда максимальная мощ-
ность потребителя не превышает максимально допустимой
мощности одного агрегата. В зависимости от категории
потребителя структура с параллельной работой агрегатов
в целях резервирования может быть заменена структурой
с коммутируемыми по специальной команде выходными ши-
намй одного из агрегатов, работающего в «холодном» или
«горячем» резерве. При частичном резервировании (например,
два из трех) или модульном агрегатировании в целях наращива-
ния мощности распределение последней между параллельно
работающими на общие шины преобразователями не должно
приводить к перегрузке одного преобразователя.
В общем случае можно выделить следующие виды парал-
лельной работы:
а) работа на общие шины с произвольным распределением
мощности (для ^временного тока ее активной составляющей)
между отдельными преобразователями при условии, что мощ-
ность нагрузки не превышает номинальную мощность отдель-
ного преобразователя (иногда такую работу называют не
параллельной, а совместной);
б) работа на общие шины с распределением мощности
нагрузки пропорционально номинальной мощности каждого
282
и
Рис 6.8. Параллельная работа преобразователей постоянного тока:
а—схема с диодной развязкой, б—схема с обратными связями по току нагрузки,
в—внешняя характеристика преобразователей
преобразователя. При одинаковых мощностях преобразователей
распределение нагрузки между ними будет равномерным;
в) работа на общие шины с произвольным распределением
мощности нагрузки между отдельными преобразователями, но
с ограничением загрузки каждого из них на уровне номиналь-
ной (или допустимой) перегрузочной мощности.
Параллельная работа преобразователей переменного тока
связана с рядом дополнительных специфических условий,
которые будут рассмотрены отдельно, так же как и организация
трехфазных систем из однофазных модулей.
Первый вид параллельной работы для преобразователей
постоянного тока реализуется наиболее просто: включением
их на общие шины через разделительные, диоды (рис, 6.8, а).
Последние выполняют преимущественно функции защитных
элементов выходных шин от внутренних коротких замыканий
в отдельном преобразователе. При идентичности выходных
параметров и точной подстройке каналов регулирования
выходного напряжения может быть достигнуто сравнительно
равномерное распределение нагрузки между отдельными
283
преобразователями. Однако практическая реализация рав-
номерности" загрузки в различных режимах эксплуатации
затруднительна. Это обусловлено в основном тем, что
регулируемые преобразователи имеют обычно высокую то-
чность стабилизации выходного напряжения и, следовательно,
малый статизм внешних характеристик. В связи с этим
для рассматриваемого вида работы должно соблюдаться
условие
А»^Ляом> (6-4) I
где ZH— ток нагрузки; ZiHOM— номинальный ток z-ro преоб-
разователя (рис. 6.8, а).
Одним из способов реализации второго вида параллельной ,
работы является введение обратных связей между нагрузкой
и каждым преобразователем (рис. 6^8, б). В этом случае сигнал
с датчика тока нагрузки ДТп делится и распределяется по
каналам обратной связи, сравнивается с сигналом по току
отдельного преобразователя и их разность поступает в систему
регулирования выходного напряжения. В результате оказыва-
ется возможным распределение тока нагрузки между отдель- ,
ными преобразователями согласно значениям токов преоб-
разователей. В частности, может быть достигнуто равномерное
распределение тока нагрузки между работающими преоб-
разователями, когда Статическая точность распределе-
ния будет определяться коэффициентом усиления обратных
связей по току. На практике такие системы обеспечивают
точность распределения не хуже +10% IJn при загрузке j
каждого преобразователя не более 50% ZHOM. Для обеспечения '
устойчивой параллельной работы и исключения режима ав- j
токолебаний необходимо уделять значительное внимание син- .
тезу частотно-зависимых параметров каналов регулирования j
по току. |
Третий вид параллельной работы может быть осуществлен
для преобразователей, имеющих внешнюю характеристику,
подобную изображенной на рис. 6.8, в. Участок 1 внешней
характеристики соответствует режиму работы с «малым»
статизмом. При достижении номинальной нагрузки преоб-
разователь переходит в режим работ с «большим» статизмом
(участок 2). Далее при перегрузках и внешних КЗ преобразова- i
тель переходит в режим работы со стабилизацией выходного <
тока (участок 3) (или происходит отключение преобразователя). \
При параллельной работе преобразователей с такой внешней -
характеристикой их выходные напряжения устанавливаются
равными с точностью, определяемой параметрами установок
(практически в пределах зоны стабилизации). Преобразователи ;
включаются по структуре, соответствующей рис. 6.8, а. Под-
ключенная нагрузка в общем случае распределяется между <
284
Рис. 6.9. Эквивалентная схема параллельно работающих преобразователей (а)
и векторная диаграмма выходных напряжений инверторов (б)
преобразователями неравномерно. Однако по мере достижения
номинальной нагрузки одним из преобразователей он переходит
в режим работы, соответствующий участку 2, и. начинает
снижать свое выходное напряжение. При последующем увеличе-
нии нагрузки ее берет на себя другой преобразователь и так
далее. Такой способ реализации параллельной работы является
наиболее перспективным, так как он не связан с введением
дополнительных обратных связей и не накладывает каких-либо
схемных и структурных ограничений на модульное агрегати-
рование системы.
Переход преобразователя в режим работы с ограничением
по току (участок 2 на рис. 6.8, в) происходит при превышении
выходным током установленного значения ZO>H, когда подключа-
ется контур ограничения тока параллельно главной обратной
связи по напряжению.
Обеспечение параллельной работы модулей переменного
тока, как уже отмечалось, является более сложной задачей,
так как при этом возникает необходимость синхронизации
напряжений параллельно работающих инверторов. На
рис. 6.9, а представлена упрощенная эквивалентная схема двух
параллельно работающих модулей инверторов напряжения
в однофазном исполнении и допущении синусоидальности
выходного-напряжения.
Последнее обычно достигается выходными фильтрами (на
рис. 6.9, а указана индуктивность этих фильтров Д,). При
совпадении векторов С7И1 и С/и2 уравнительный ток между
модулями не развивается (рис. 6.9, б). В случае совпадения
векторов по фазе, но различии по амплитуде развивается
реактивный уравнительный ток 1У. Для модуля с большим
напряжением он эквивалентен индуктивной нагрузке. Значение
этого тока может быть определено по формуле
I - ~Л*А^
2А£ф 2<оЛф
(6-5)
где АС/„ = | С/и1 — U„71 — модуль разности действующих значений
первых гармоник выходных напряжений инверторов;
285
2<о£ф
отдает активную мощность,
AUd—разность средних значений напряжений на входе ин-
вертора; ксх—коэффициент схемы, учитывающий связь между
выходным напряжением U* и средним значением напряжения
на входе инвертора Ud.
При расфазировке векторов Uxi, Гн2 появляется активная
составляющая уравнительного тока между модулями. При
небольших углах расфазировки и равенства напряжений ия1,
ии2 уравнительный ток может быть определен по приближен-
ной формуле
I= (6.6)
У 2Xl
где 9—угол расфазировки.
Модуль, опережающий UH1,
а отстающий по фазе модуль потребляет активную мощность
(со сборных шин). Эти аналогично явлению возникновения
уравнительных токов в параллельно работающих синхронных
генераторах.
Таким образом, для обеспечения параллельной работы
модулей инверторов необходимо регулировать амплитуду вы-
ходных напряжений инверторов и обеспечивать их синхронность
и синфазность. В зависимости от' схемы инвертора эти задачи
решают различными способами. При модульном агрегатирова-
нии целесообразно использовать однофазные модули, выпол-
ненные по схеме инвертора напряжения.
Регулирование значения выходного напряжения в таких
инверторах можно также осуществлять различными способами.
В частности, используется регулирование по входу на стороне
постоянного тока посредством регулятора постоянного напря-
жения (РПН). В этом случае целесообразно использование
дополнительной информационной связи между модулями по
постоянному току. С этой целью в параллельно работающих
модулях применяется дополнительная информационная шина
на стороне постоянного тока, которая позволяет РПН вырав-
нивать выходные напряжения инверторов, а следовательно,
и амплитуду первых гармоник выходных напряжений модулей
инверторов.
Синхронизация инверторных модулей обеспечивает синфаз-
ность коммутационных функций, алгоритм которых в схемах
инверторов напряжения задается пересчетно-распределительным
устройством (ПРУ). На вход ПРУ поступают импульсы от
ЗГ. Для этого модули соединяются специальной системой
синхросвязей. Характерное для систем гарантированного эле-
ктропитания требование сохранения нормальной работы в усло-
виях любой одной неисправности вызывает применительно
к системе синхронизации следующее:
286 '
1. Отсутствие конструктивно объединенных централизован-
ных устройств, что, однако, не исключает возможности пара-
метрического управления.
2. Возобновление работы любого модуля (после устранения
неисправности) в работающей системе без перестановки связей
и скачка фазы.
3. Сохранение связности системы (синфазности вектора)
и ее частоты при срыве генерации или изменении частоты
любого ЗГ, а также при обрыве любой одной синхронизи-
рующей связи.
Синхронизация генераторов ЗГ может осуществляться как
методом фазовой автоподстройки частоты (ФАПЧ), так и пря-
мой импульсной синхронизацией. При прямой синхронизации
в качестве ЗГ используется релаксационная автоколебательная
схема. В этом случае не является обязательным, чтобы частота
синхронизирующего сигнала была больше собственной частоты
ЗГ, как это обычно формулируется для аналогичных устройств.
Отличительной особенностью прямой синхронизации является
уменьшение частоты ЗГ, если цепь синхронизации образует
кольцо с выхода на вход. Кольцо синхронизации при этом
охватывает один или несколько генераторов ЗГ. Таким об-
разом, при прямой синхронизации для сохранения постоянства
частоты системы необходимо постоянно поддерживать либо
замкнутое кольцо синхронизации, либо разомкнутою цепь (при
представлении графом—поддерживать древовидную форму
графа). При прямой синхронизации релаксационного ЗГ имеет
место непосредственное импульсное воздействие на переклю-
чающий элемент генератора, поэтому степень синфазности
синхронизированных генераторов очень высока, она определя-
ется только временными задержками импульсных цепей и клю-
чевых элементов.
При синхронизации способом ФАПЧ в качестве ЗГ ис-
пользуется генератор с плавно перестраиваемой частотой.
Кроме него имеется система регулирования, которая меняет
эту' частоту в зависимости от знака и значения фазового
рассогласования синхросигнала и выходного сигнала ЗГ. Здесь
в отличие от системы прямой синхронизации возможно
использование синхросигнала с частотой, меньшей выходной
частоты ЗГ. Частота ФАПЧ ЗГ при охвате его кольцом
синхронизации будет такой же, что и в автономном (несин-
хронизированном) режиме. Замыкание в кольцо- синхронизации
нескольких статических ФАПЧ ЗГ приводит к установлению
в такой системе частоты, близкой к средней частоте включен-
ных генераторов ЗГ. В структурах с Однонаправленной си-
стемой, как в случае прямой, так и в случае ФАПЧ
синхронизации, вся система ЗГ работает по частоте головного
генератора.
287
Рис. 6.10. Структура системы синхросвязей:
а-—линейка; б—кольцо; в—линейка с обходами; г—кольцо с обходами
Множество возможных структур синхронизации возникает
из-за' противоречивости требований детерминированной надеж-
ности и конструктивной простоты, которые могут быть
сформулированы следующим образом:
а) минимальное число информационных связей между
инверторными модулями;
б) конструктивная тождественность всех модулей;
в) максимальная симметричность системы информационных
связей и зависимых режимов работы модулей;
г) минимальная сложность аппаратурной реализации.
На рис. 6.10 представлено несколько характерных структур
системы синхросвязей для синфазной синхронизации. В этих
структурах нет конструктивно централизованных устройств, и,
следовательно,. они удовлетворяют основному требованию
надежности. Ключи в цепях сигналов предполагаются встро-
енными в каждый модуль. В определенном смысле цент-
рализованным устройством можно считать сборную синхро-
шину, но ее надежность может быть легко обеспечена кон-
структивными мерами. Наиболее полно сформулированным
выше требованиям отвечают варианты: простое кольцо для
ФАПЧ синхронизации (рис. 6.10, б) и кольцо с v обходами
(рис. 6.10, г) или простая линейка (рис. 6.10, а) и лицейка
с обходами (рис. 6.10, в) для прямой синхронизации. Поэтому
рассмотрим эти структуры боЛее .подробно.
В кольце ФАПЧ частота близка к среднему значению
собственных генераторов, поэтому любое изменение собствен-
ной частоты одного ЗГ сказывается на всей системе. При
малом числе генераторов ЗГ в кольце изменение частоты
может-быть значительным. Для определения неисправного ЗГ
можно использовать" комбинацию датчика частоты и датчика
288
/
знака неисправности генератора. Например, если частота
меньше номинальной и фаза данного ЗГ отстает от фазы
поступающего на него синхросигнала, то у данного генератора
занижена собственная частота. Однако этот метод требует
сравнительно большого статизма по фазе для ФАПЧ син-
хронизации.
Кольцо прямой синхронизации (рис. 6.10, б) работает на
частоте генератора с наибольшей собственной частотой. Этот
генератор играет роль ведущего, генерация подстраиваемых
генераторов ЗГ инициируется его синхросигналами. При по-
нижении собственной частоты ведущего ЗГ его функции
переходят к другому ЗГ, не нарушая нормальной работы
кольца. При повышении собственной частоты ЗГ все кольцо
начинает работать на ^той повышенной частоте. При этом
несинфазное отставание последующих генераторов становится
незначительным и его надежное распознавание в условиях
помех технически затруднительно.
Наиболее просто вести борьбу с изменением' частоты
одного ЗГ в структуре линейки (рис. 6.10, в). В ней всегда
имеется ведущий генератор, который однозначно определяет
частоту всех последующих. При отклонении частоты от нормы
подлежит отключению именно этот ведущий генератор. Уход
частоты ведомого ЗГ не сказывается на работе системы, так
как он остается в режиме однофазной синхронизации.
Трехфазная система электроснабжения может быть собрана
из трех однофазных инверторных модулей, сфазированных
между собой соответствующим образом. Выходное напряжение
каждого модуля является фазным и подается на несвязанные
первичные обмртки трехфазного или группу однофазных транс-
форматоров лйбо выходы модулей объединяются непосредст-
венно в трехфазную систему в виде трех или четырех шин.
6.6. ЭЛЕКТРОМАГНИТНЫЕ ПОМЕХИ
Принцип действия большинства полупроводниковых преоб-
разователей основан на переключении существенно нелинейных
элементов с характеристикой релейного типа. Переключение
этих элементов вызывает -скачкообразное изменение токов
и напряжений в электрических цепях преобразователя. В резуль-
тате возникают электромагнитные помехи в широком спектре
частот. Для преобразователей эти явления, особенно ярко
выражены, так как в них электрическая энергия подвергается
многократному преобразованию посредством ключевых элемен-
тов, д режимы работы последних характеризуются значитель-
ными напряжениями (например, в преобразователях с бес-
трансформаторным сетевым входом) и высокой скоростью
переключения из одного состояния в другое.
JSO
Передача электромагнитных помех происходит как по
проводным связям преобразователя _ с другими объектами
электросистемы, так и непосредственно через окружающее
пространство. В возникающей при этом проблеме можно
выделить следующие основные аспекты: появление Шумов
в аппаратуре связи и радиовещании, сбой различного рода
электронной аппаратуры и нарушение нормального функци-
онирования аппаратуры управления и регулирования самого
источника помех — преобразователя.
В настоящее время жесткие регламентирующие нормы
существуют только на уровень радиопомех в контролируемом
частотном диапазоне от 0,15 до 30 МГц. Что же касается вопросов
электромагнитной совместимости источников помех с радиоэлект-
ронной аппаратурой, то здесь не существует стандартизованных
норм. Поэтому окончательная отработка какого-либо преобразо-
вателя с целью обеспечения его электромагнитной совместимости
с аппаратурой проводится экспериментально при комплексных
испытаниях. Следует отметить, что широкое внедрение в совре-
менную технику интегральных микросхем и других чувствитель-
ных электронных элементов обусловливает возросшую актуаль-
ность проблемы борьбы с помехами на начальных этапах
разработки преобразователя и аппаратуры.
Основной причиной образования импульсных помех явля-
ется скачкообразное изменение проводимости ключевого эле-
мента. На спектральный состав помех влияют максимальные
значения напряжения и тока, коммутируемых в схеме, а также
крутизна фронтов переключения, т. е. скорость изменения
проводимости ключевого элемента. Скорость переключения,
в свою очередь, зависит от частотных свойств ключевого
элемента (с учетом дополнительных ЛС-цепей, формирующих
траекторию переключения), «паразитных» индуктивностей и ем-
костей, монтажа и конструкции.
Основным путем проникновения помех в радиоэлектронной
аппаратуре (РЭА) являются подводимые к ней провода.
Электромагнитные помехи могут попадать в эти провода
непосредственно от источника помех либо через распределенные
емкости, разделяющие проводники источника и приемника
помех. В распространении помех играет роль и распределенная
емкость проводников относительно заземленного корпуса.
Связь источника и приемника помех может также осущест-
вляться через общие сопротивления, например через внутреннее
сопротивление общего источника питания.
Внешнее электромагнитное поле любого преобразователя,
входящего в систему электроснабжения РЭА, также наводит
помехи в ее цепях.
Для борьбы с электромагнитными помехами на практике
используются разнесение и ориентация монтажных соединений,
290
экранирование и заземление, фильтрация и другие методы
подавления помех.
Для уменьшения влияния электромагнитных помех как на
собственные функциональные узлы управления преобразова-
телей, так и на питаемую аппаратуру при разработке преоб-
разователей необходимо соблюдать следующие правила выпол-
нения монтажа:
разделять силовые цепи и цепи управления;
их пересечение проводить под прямым углом;
силовые соединения осуществлять проводниками минималь-
ной (с учетом конструктивных возможностей) длины;
разделять цепи переменного и постоянного токов;
трехфазные цепи переменного тока, так же как и двухполюс-
ные цепи постоянного тока, проводить единым жгутом (при
этом происходит уменьшение электромагнитных полей, так
как суммарный ток общего жгута равен нулю).
Кроме указанных основных правил монтажа применяют
различные, специфические приемы с учетом функциональных
задач отдельных узлов. В частности, провода, передающие
сигналы от датчиков в усилители регуляторов, измерительные
устройства и другие высокочувствительные узлы выполняют
в виде свитых (скрученных) пар проводов. При этом благодаря
транспонированию проводов обеспечивается компенсация то-
ков, наведенных в них источниками помех.
Проводную связь и функциональные узлы питаемой РЭА
можно защитить от внешнего электромагнитного поля эк-
ранами—электростатическими, магнитостатическими и элект-
ромагнитными .
Электростатический экран обычно выполняется из медной
или алюминиевой фольги и окружает источник помех. Метал-
лическая оболочка экрана замыкает электрическое поле про-
вода-, ограничивая его распространение в окружающую среду.
Однако эффективность такого экрана существенно зависит от
качества и принципов заземления экрана. Магнитостатический
экран выполняется из магнитных материалов и служит для
уменьшения внешнего магнитного поля. Однако из-за вихревых
токов эффективность его использования в преобразователях
ограниченна. Для экранирования высокочастотных полей мож-
но использовать электромагнитные экраны, защитное действие
которых основано на отражении электромагнитной энергии.
Однако из-за конструктивной громоздкости и дополнительных
потерь активной мощности магнитостатические и электромаг-
нитные экраны в современной преобразовательной технике
используются редко. Например, использование такого рода
экранов может быть целесообразным при разделении внутри
ограниченного объема преобразователя его силовых электро-
магнитных элементов и микросхем.
291
Основным средством подавления помех в преобразователях
является применение электрических фильтров. Существуют
различные типы фильтров, отличающихся элементной базой,
схемой, конструктивным исполнением. В преобразователях
средней мощности наибольшее распространение получили
Г-образные фильтры с проходными конденсаторами. Причем
функции последовательного элемента обычно выполняют мон-
тажные соединения выходных (входных) шин преобразователя.
Если их индуктивности оказываются недостаточными для
эффективного подавления помех, то включают дополнительный
последовательный дроссель. При этом целесообразно помещать
фильтр в заземленный экран. Вследствие различия харак-
теристик конденсаторов разных типов их эффективность как
элементов подавляющих фильтров на различных частотах
может быть различной. Поэтому может оказаться рациональ-
ным использование в фильтре радиопомех конденсаторов
различных типов. ,
Следует отметить, что фильтры радиопомех должны пре-
дусматриваться в схемах преобразователей и рассчитываться
уже на начальных этапах их разработки, однако окончательная
корректировка значений их параметров практически всегда
проводится экспериментально. Причиной этому является боль-
шое количество трудноучитываемых факторов, влияющих на
уровень радиопомех, например разводка монтажа, конструк-
тивная компоновка функциональных узлов, организация зазем-
ления и др.
СПИСОК ЛИТЕРАТУРЫ
1. ГОСТ 20859.1—89 (СТ СЭВ 1135—88). Приборы полупроводниковые силовые
единой унифицированной серин. Общие технические условия.
2. Чебовский О. Г., Моисеев Л. Г., Недошивин Р. П. Силовые полупроводниковые
приборы: Справочник.—2-е над., перераб. н доп. М.: Энергоатомнздат, 1985.
3. Travis В. Discrete power semiconductors//EDN. 1984. Vol. 29, N 18. P. 106—127.
4. Nakagawa A.e.a. 1800V bipolar—mode MOSFET (IGBT)/A. Nakagawa, K. Imamure,
K. Furukawa//Toshiba Review. 1987. N 161. P. 34—37.
5. Chen D. Semiconductors: fast, tough and compact//IEEE Spectrum. 1987. Vol. 24,
N 9. P. 30—35.
6. Силовые полупроводниковые модули за рубежом/В. Б. Зильберштейн, С. В. Ма-
шин, В. А. Потапчук и др.//Электротехническая промышленность. Сер. 05. Силовая
преобразовательная техника. 1988. Выл. 18. С. 1—44.
7. Rischmiiller К. Smatries intelligente Ihstungshalbeitereine neue Halblieter-
generation//Electronikpraxis. 1987. N 6. S. 118—122.
8. Русин Ю. С., Горский A. H., Розанов Ю. К. Исследование зависимости объемов
электромагнитных элементов от частоты//Электротехническая промышленность. Преоб-
разовательная техника. 1983. № 10. С. 3—6.
9. Электрические конденсаторы и конденсаторные установки: Справочник / В. П. Бер-
зан, Б. Ю. Геликман, М. Н. Гураевскнй н др. Под ред. Г. С. Кучинского. М.'. Энерго-
атомиздат, 1987.
10. Полупроводниковые выпрямители / Под ред. Ф. И. Ковалева н Г. П. Мостковой.
М-: Энергия, 1978.
11. Circuit configuration of the GTO converter for superconducting magnetic energy
storage/Toshifumi JSE, James J. Skiles, Kohert L., К. V. Stom, J. Wang//IEEE 19th Power
Electronics Specialists Conference (PESC’88), Kyoto, Japan, April 11 —14, 1988. P. 108—115.
12. Розанов Ю. К. Основы силовой преобразовательной техники. М.: Энергия, 1979.
13. Чижеико И. М., Руденко В. С., Сенько В. И. Основы преобразовательной техники.
М.: Высшая школа, 1974.
14. Чванов В. А. Динамика автономных инверторов с прямой коммутацией. М.:
Энергия, 1979.
15. Ковалев Ф. И., Мустафа Г. М., Барегемян Г. В. Управление по вычисляемому
прогнозу импульсным преобразователем с синусоидальным выходным напряжени-
ем//Электротехническая промышленность. Преобразовательная техника. 1981. №6(34).
С. 10—14.
16. Middelbrook R. D. Isolation and multiple output extensions of a new optimum
topology switching DC — tV — E>C converter//IEEE Power Electronics Specialists Conference
(PESC’78), 1978. P. 256—264.
17. Булатов О. Г.,’» Царенко А. И. Тиристорно-конденсаторные преобразователи. М..
Энергоиздат, 1982. *
18. Розинов Ю. К. Полупроводниковые преобразователи со звеном повышенной
частоты. М.: Энергоатомнздат, 1987.
19. Калабеков А. А. Микропроцессоры и их применение в системах передачи и об-
работки' сигналов. М.: Радио и связь, 1988.
20. Строганов Р. П. Управляющие машины и нх применение. М.: Высшая школа, 1986.
21. Обухов С. Т., Рамвзевич Т. В. Применение микро-ЭВМ для управления вентиль-
ными преобразователями // Электротехническая промышленность. Преобразовательная тех-
ника. 1983. Вып. 3(151). С. 9.
22. Уиравлеине вентильными преобразователями на базе микро-
процессоров/Ю. М. Быков, И. Т. Пар, Л. Я. Раскин, Л. П. Деткин//Электротехническая
промышленность. Преобразовательная техника. 1985. Вып. 10. С. 117.
23. Matsui N., Takeshita Т., Vura М. One—Chip Micro — Computer — Based controller
for the MC Hurray Junerter//IEEE Transactions on industrial electronics, 1984. Vol. JE—31,
N 3. P. 249—254.
24. Булатов О. Г,, Иванов В. С., Панфилов Д. И. Полупроводниковые зарядные
устройства емкостных накопителей энергии. М.: Радио н связь, 1986.
ОГЛАВЛЕНИЕ
Предисловие ...................................................... 3
Введение .......................................................... 4
Глава первая. Основные элементы силовой электроники ........... 9
1.1. Силовые полупроводниковые приборы ........................ 9
1.1.1. Силовые диоды ..................................... 10
1.1.2. Силовые транзисторы ............................... 14
1.1.3. Тиристоры ......................................... 19
1.1.4. Применение силовых полупроводниковых приборов ..... 25
1.2. Трансформаторы и реакторы ............................... 29
1.3. Конденсаторы ............................................ 35
Глава вторая. Выпрямители ........................................ 40
2.1. Общие сведения .......................................... 40
2.2. Основные схемы выпрямления .............................. 47
2.2.1. Однофазная двухполупериодная схема со средней точкой ... 47
2.2.2. Однофазная мостовая схема ......................... 57
2.2.3. Трехфазная схема со средней точкой ................ 60
2.2.4. Трехфазная мостовая схема ......................... 66
2.2.5. Многомостовые схемы ............................... 71
2.2.6. Гармонический состав выпрямленного напряжения и
первичных токов в схемах выпрямления ..................... 73
2.3. Коммутация и режимы работы выпрямителей ................. 76
2.3.1. Коммутация токов в схемах выпрямления ............. 76
2.3.2. Внешние характеристики выпрямителей ............... 79
2.4. Энергетические характеристики выпрямителей и способы их
улучшения .................................................. 82
2.4.1. Коэффициент мощности и КПД выпрямителей ........... 82
2.4.2. Улучшение коэффициента мощности управляемых выпря-
мителей .................................................. 85
2.5. Особенности работы выпрямителей на емкостную нагрузку
и противо-ЭДС .......................1........................ 89
2.6. Сглаживающие фильтры .................................... 93
2.7. Работа выпрямителя от источника соизмеримой мощности .. 99
Глава третья. Инверторы и преобразователи частоты ............... 104
3.1. Инверторы, ведомые сетью ............................... 104
3.1.1. Однофазйый инвертор со средней точкой ............ 106
3.1.2. Трехфазный мостовой инвертор ..................... 109
3.1.3. Баланс мощностей в инверторе, ведомом сетью ....... ПО
294
3.1.4. Основные характеристики и режимы работы инверторов,
• ведомых сетью ........................................ 113
3.2. Автономные инверторы ...................................... 116
3.2.1. Инверторы тока ..................................... 123
3.2.2. Инверторы напряжения .............................. 131
3.2.3. Инверторы напряжения на тиристорах .................. 136
3.2.4. Резонансные инверторы ............................... 141
3.3. Преобразователи частоты ................................... 145
3.3.1. Преобразователи частоты с промежуточным звеном по-
стоянного тока ............................................ 146
3.3.2. Преобразователи частоты с непосредственной связью ... 148
3.4. Регулирование выходного напряжения автономных инверторов 152
3.4.1. Общие принципы регулирования ........................ 152
3.4.2. Регулирующие устройства инверторов тока ............. 153
3.4.3. Регулирование выходного напряжения посредством ши-
ротно-импульсной модуляции (ШИМ) .......................... 158
3.4.4. Геометрическое сложение напряжений .................. 161
3.5. Способы улучшения формы выходного напряжения инверторов
и преобразователей частоты ................................... 164
3.5.1. Влияние несинусоидальности напряжения на потребителей
электроэнергии ............................................ " 164
3.5.2. Выходные фильтры инверторов ........................ 166
3.5.3. Уменьшение высших гармоник в выходном напряжении
без применения фильтров ................................... 172
Глава четвертая. Регуляторы-стабилизаторы и статические контак-
торы .......................................................... 179
4.1. Регуляторы-стабилизаторы переменного напряжения .......... 182
4.2. Регуляторы-стабилизаторы постоянного тока ................ 186
4.2.1. Параметрические стабилизаторы ...................... 187
4.2.2. Стабилизаторы непрерывного действия ................ 188
4.2.3. Импульсные регуляторы .............................. 191
4.2.4. Развитие структур импульсных регуляторов ........... 200
4.2.5. Тиристорно-конденсаторные регуляторы постоянного
тока с дозированной передачей энергии в нагрузку .......... 204
. - 4.2.6._Комбинированные преобразователи-регуляторы ......... 207
4.3. Статические контакторы .................................... 209
4.3.1. Тиристорные контакторы переменного тока ............. 209
4.3.2. Тиристорные контакторы постоянного тока ............. 213
Глава пятая. Системы управлении преобразовательными устройствами 220
5.1. Общие сведения ......................................... 220
5.2. Структурные схемы систем управлейия преобразовательных
устройств ..........-....................................... 223
5.2.1. Системы управления выпрямителей и зависимых инвер-
торов —I.............................................. 223
5.2.2. Системы управления преобразователей частоты с непо-
средственной связью ...................................... 229
5.2.3. Системы управления автономных инверторов ............ 231
5.2.4. Системы управления „ регуляторов-стабилизаторов .... 237
5.3. Микропроцессорные системы в преобразовательной технике... 241
5.3.1. Типовые обобщенные структуры микропроцессора ........ 243
295
5.3.2. Примеры использования микропроцессорных систем уп-
равления .............................................. ' 248
Глава шестая. Применение силовых электронных устройств ........... 254
6.1. Области рационального применения ....................,.. 254
6.2. Общие технические требования ............................ 264
6.3. Защита в аварийных режимах .............................. 268
6.4. Эксплуатационный контроль и диагностика технического состо-
яния ......................................................... 277
6.5. Обеспечение параллельной работы преобразователей ........ 282
6.6. Электромагнитные помехи ................................. 289
Синеок литературы ................................................ 293
Производственно-практическое издание
।
Розанов Юрий Константинович
ОСНОВЫ СИЛОВОЙ ЭЛЕКТРОНИКИ
Зав. редакцией М. П. Соколова
Редактор Н. Л. Пароева
Художественные редакторы: В. А. Гозак-Хозак, А. А. Белоус
Технический редактор Т. Ю. Андреева
Корректор 3. Б. Драковская
ИБ № 2689
Сдано в набор 27.11.91. Подписано в печать 19.03.92 Формат
60 x 88*/i«. Бумага офсетная № 2. Гарнитура Таймс. Печать офсетная.
Усл. печ. л. 18,13. Усл. кр.-отт. 18,61. Уч.-изд. л. 19,26.
Тираж 4000 экз. Заказ 3658. С190
Энергоатомиздат. 113114 Москва, М-114, Шлюзовая наб., 10
Ордена Октябрьской Революции и ордена Трудового Красного Знамени
МПО «Первая Образцовая типография» Министерства печати и ин-
формации Российской Федерации 113054, Москва, Валовая, 28