/














































































































































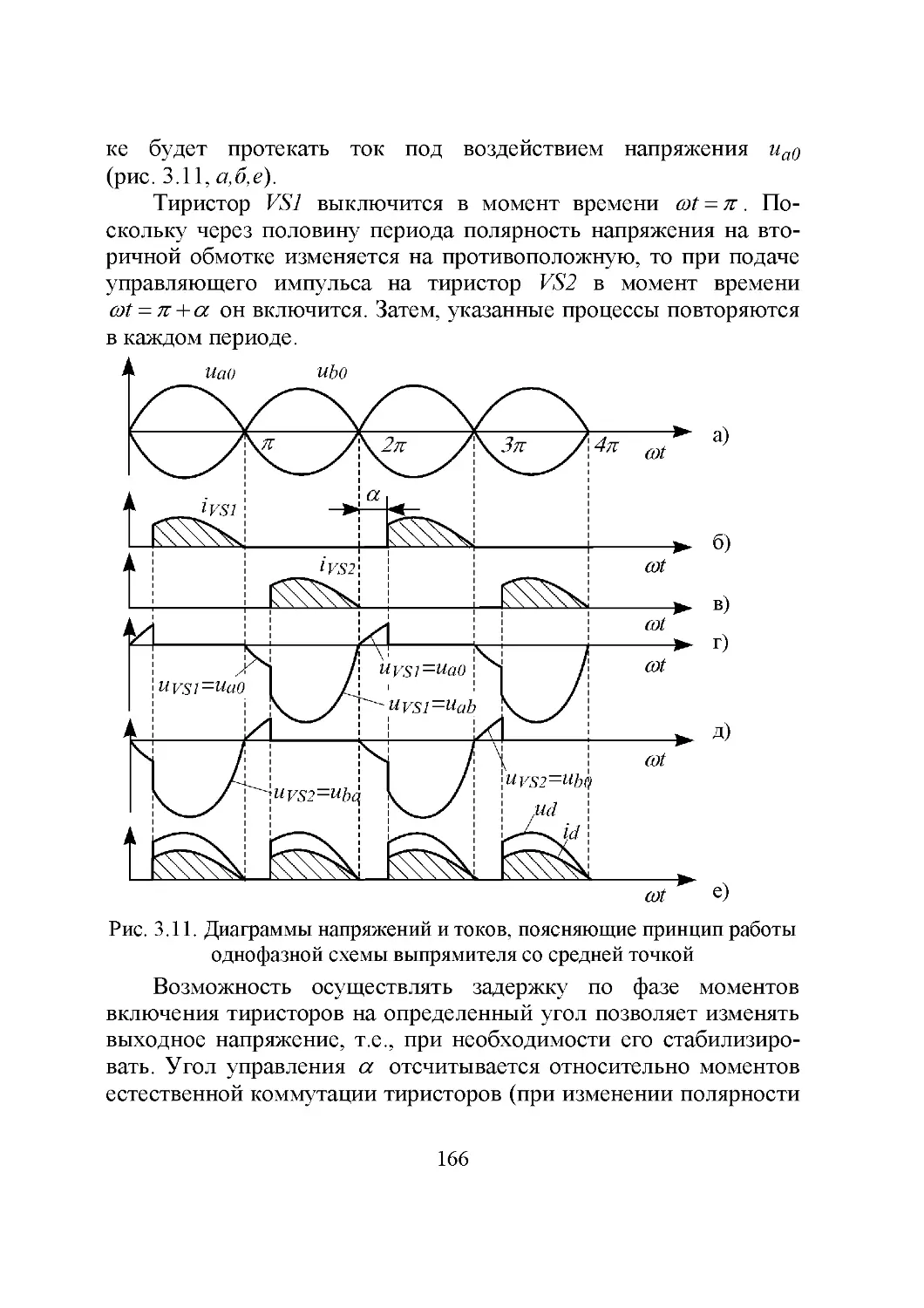




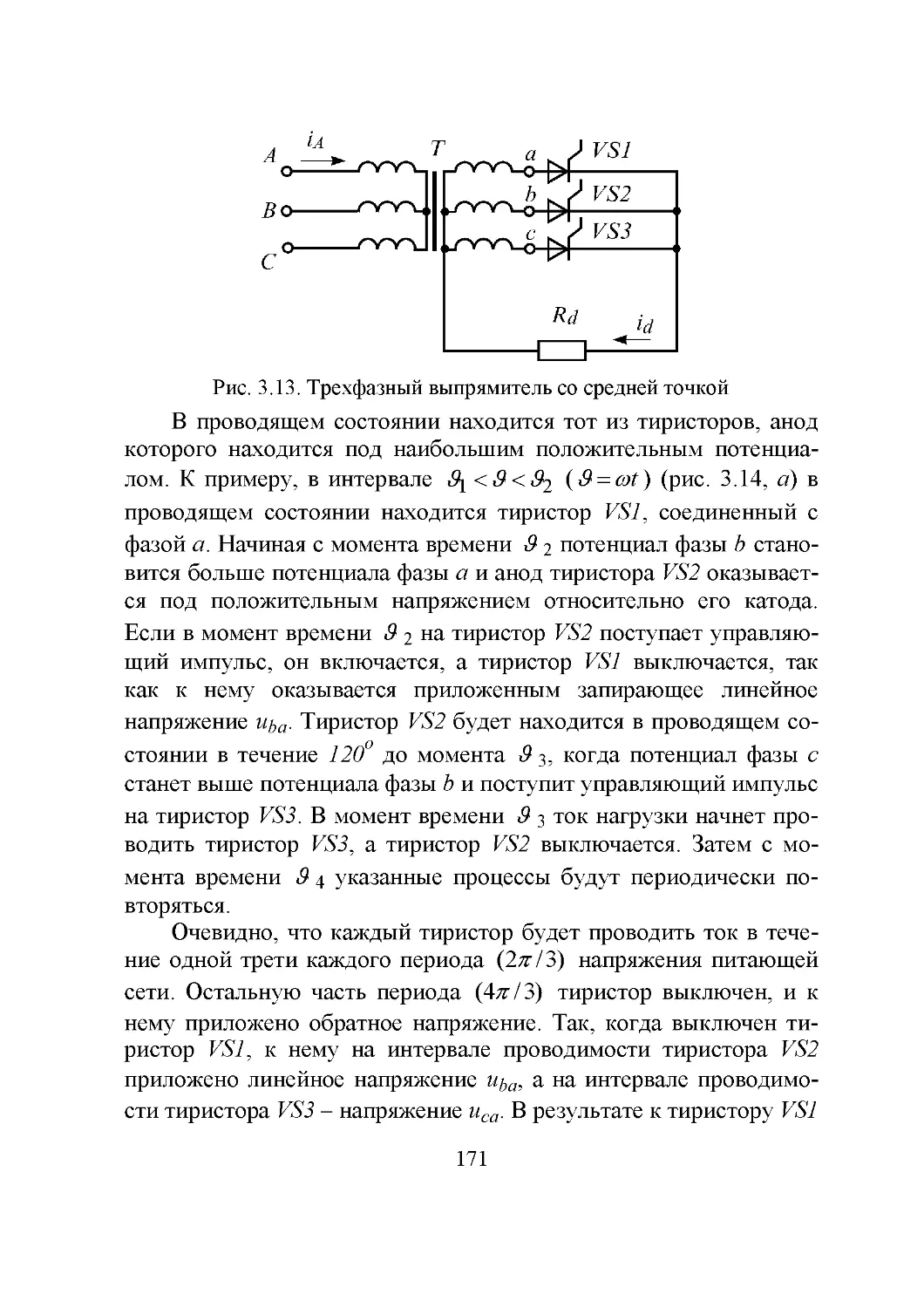




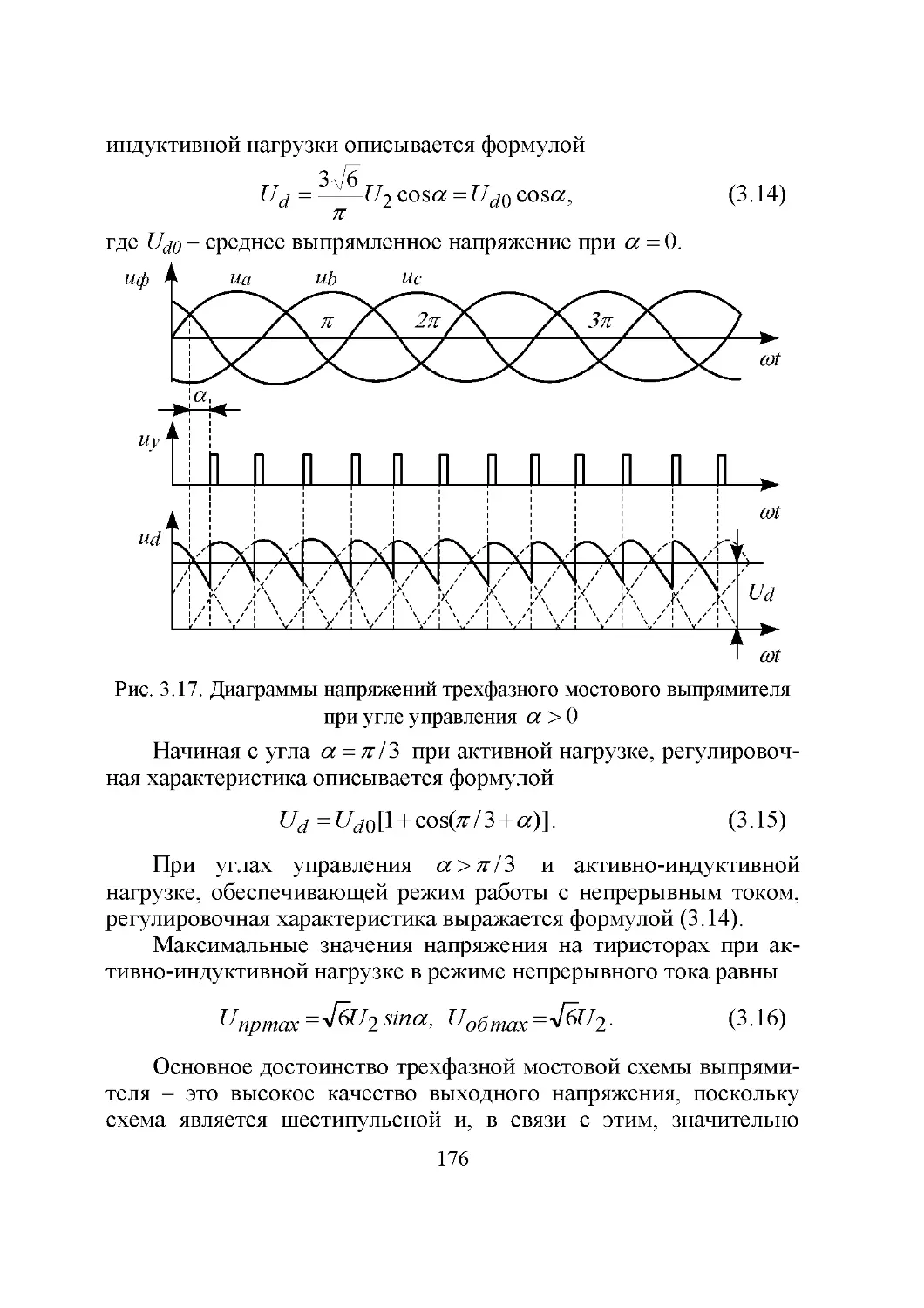














































































































































Текст
К р а с н о д а р 2001
СИСТЕМЫ АВТОНОМНОГО
ЭЛЕКТРОСНАБЖЕНИЯ
Под редакцией к.т.н.,
проф. Н.И. Богатырева
К р а с н о д а р 2001
1
УДК 621.31.03+621.314
Системы автономного электроснабжения: монография /
О.В. Григораш, Н.И. Богатырев, Н.Н. Курзин; под ред.
Н.И. Богатырева. – Краснодар: Б/И, 2001, 333 с.
Рецензенты: заслуженный деятель науки и техники РФ,
д.т.н., профессор, зав. кафедрой «Электротехники» Кубанского
ГТУ Б.Х. Гайтов; д.т.н., профессор кафедры "Применение электрической энергии" Кубанского ГАУ В.П. Чайкин
Авторы: О.В. Григораш, Н.И. Богатырев, Н.Н. Курзин
В монографии приводится анализ структурных схем и основных эксплуатационно-технических характеристик эксплуатируемых стационарных и передвижных систем автономного электроснабжения (САЭ) средней мощности (до 200 кВт) и рассматриваются перспективы их развития. Основное внимание уделено
перспективным бесконтактным генераторам электроэнергии, привод которых осуществляется от высокоскоростных двигателей,
статическим преобразователям электроэнергии, особенностям работы, проектирования, синтезу структуры САЭ и ее оптимизации.
Монография предназначена для научных и инженернотехнических работников, специалистов в области проектирования
САЭ, и может быть полезна студентам вузов соответствующих
специальностей.
2
ОСНОВНЫЕ ПРИНЯТЫЕ СОКРАЩЕНИЯ
АБ - аккумуляторная батарея;
АВ - автоматический выключатель;
АГ - асинхронный генератор;
АД - адиабатный двигатель;
АИМ - амплитудно-импульсная модуляция;
АИЭ - автономный источник электроэнергии;
АСГ - асинхронизированный синхронный генератор;
БВГ - бесконтактные высокоскоростные генераторы;
БЭМ - бесконтактная электрическая машина;
ВАХ - вольт-амперная характеристика;
ВГ - вентильный генератор;
ВПД - высокоскоростной приводной двигатель;
ГПТ - генератор постоянного тока;
ГТД - газотурбинный двигатель;
ДД - дизельный двигатель;
ДС - двигатель Стирлинга;
ДЭС - дизель-электрическая станция;
ИТП - инверторно-трансформаторный преобразователь;
КПД - коэффициент полезного действия;
КЗ - короткое замыкание;
КСПД - комбинированный свободно-поршневой двигатель;
МГП - массогабаритные показатели;
МДС - магнитодвижущая сила;
НПЧ - непосредственный преобразователь частоты;
НПЧЕ - НПЧ с естественной коммутацией силовых вентилей;
НПЧР - НПЧ с регулируемым углом сдвига фаз на входе;
ПД - приводной двигатель;
ПМ - постоянные магниты;
ПНП - преобразователь напряжения постоянного тока;
ПЭ - преобразователь электроэнергии;
САЭ - система автономного электроснабжения;
СБ - солнечные батареи;
СГ - синхронный генератор;
СГВВ - СГ с вращающимися выпрямителями;
СГПМ - СГ с постоянными магнитами;
СГЭ - система гарантированного электроснабжения;
3
СУ - система управления;
СЭС - система электроснабжения;
ТВП - трансформаторно-выпрямительный преобразователь;
ТВМП - трансформатор с вращающимся магнитным полем;
УМП - унифицированный модульный преобразователь;
ФУ - функциональный узел;
ЦСУ - центральная система управления;
ШИМ - широтно-импульсная модуляция;
ШГП - шина гарантированного питания;
ЭВМ - электронно-вычислительная машина;
ЭДС - электродвижущая сила;
ЭМГ - электромеханические генераторы;
ЭХГ - электрохимические генераторы.
4
ВВЕДЕНИЕ
Во всем мире интенсивно развиваются компьютерные системы связи и обработки информации, автоматические системы
управления технологическими процессами и целыми производственными комплексами. Потребители электрической энергии относятся к разным категориям. Цена нарушений нормальных режимов работы ответственных потребителей, связанных с отклонением показателей качества электроэнергии, с внезапными перерывами электроснабжения, из-за аварийных ситуаций чрезвычайно
высока. Поэтому в настоящее время важная роль отводится стационарным и передвижным (транспортным, бортовым и т.д.) системам автономного электроснабжения (САЭ), являющимися источниками электроэнергии ответственных потребителей.
САЭ практически выполняют функции систем гарантированного электроснабжения (СГЭ) ответственных потребителей. Как
известно, основными функциональными узлами (ФУ) САЭ являются приводные двигатели, генераторы и преобразователи электроэнергии (ПЭ). В качестве преобразователей электроэнергии
используются как электромашинные, так и статические преобразователи, которые могут выполнять функции выпрямителей, инверторов, конверторов. Причем стационарные САЭ содержат как
электромашинные, так и статические преобразователи, а передвижные системы, как правило, выполняются на статических преобразователях. В САЭ часто применяются аккумуляторные батареи (АБ), которые выполняют функции аварийных или резервных
источников электроэнергии.
ФУ САЭ определяют основные критерии эффективности системы (энергетические показатели, массогабаритные показатели
(МГП), показатели надежности, стоимости и качества электроэнергии). Как правило, в качестве энергетического показателя используется значение коэффициента полезного действия (КПД),
МГП – удельной массы, а с показателей надежности - наработка
до первого отказа.
Эксплуатируемые в настоящее время САЭ имеют ряд существенных недостатков, основными из которых являются непродолжительное время непрерывной и необслуживаемой работы,
относительно низкий КПД и большая масса источников и в осо5
бенности ПЭ, последние иногда превышают массу и объем питаемых ими потребителей.
Основными причинами сложившегося положения являются
следующие:
при разработке новых технических решений САЭ используются устаревшие структурно-схемные разработки;
в крайне медленном внедрении достижений отечественной
науки и электротехники, в том числе не используются достижения
в параллельных отраслях, к примеру, развитие бортовых САЭ
прогрессирует в сравнении с передвижными наземными САЭ;
в недостаточном использовании накопленного зарубежного
опыта в организации автономного электроснабжения.
В настоящее время проводятся работы по совершенствованию
конструкции САЭ с целью улучшения энергетических, массогабаритных и эксплуатационно-технических характеристик функциональных узлов. Проанализировав перспективы дальнейшего развития САЭ, связанные с совершенствованием конструкции дизельных двигателей, применением асинхронизированных синхронных генераторов (СГ), бесконтактных СГ с вращающимися
выпрямителями, вентильных генераторов с возбуждением от постоянных магнитов и статических преобразователей с промежуточным высокочастотным преобразованием, можно сделать вывод
о предполагаемом улучшении критерием эффективности САЭ.
Однако для существенного улучшения характеристик САЭ необходимы новые принципы и методы их конструирования, заключающиеся не только в совершенствовании отдельных функциональных узлов, блоков и элементов, но и в создании принципиально новой системы в комплексе.
В монографии рассматривается одно из перспективных
направлений развития САЭ – построение САЭ осуществлять на
базе высокочастотных источников электроэнергии, привод которых осуществляется от высокоскоростных приводных двигателей
(ВПД), унифицированных ПЭ, способных пропускать потоки
энергии в обеих направлениях и по модульному принципу с адаптивным изменением структуры, в зависимости от режима работы.
Высокая частота вращения ВПД (6000 об/мин и более) и соответственно повышенная частота напряжения генерируемая бесконтактным генератором, позволят значительно снизить массу и габа6
риты самих генераторов и ПЭ (за счет уменьшения массы трансформаторов и фильтров преобразователей, а также уменьшения
числа полупроводниковых приборов), повысить показатели
надежности и электромагнитной совместимости ФУ, обеспечить
улучшенное качество напряжения постоянного тока и повысить
быстродействие систем защиты и стабилизации параметров электроэнергии САЭ. Кроме того, предлагается использовать в составе
ПЭ трансформаторов с вращающимся магнитным полем (ТВМП),
что в свою очередь позволит повысить надежность преобразователей и уменьшить уровень электромагнитных помех в САЭ.
В первой главе «Общие сведения о системах автономного
электроснабжения» рассматриваются основные требования,
структурные схемы и классификация САЭ. Проводится анализ
характеристик эксплуатируемых дизельных двигателей, генераторов, электромашинных и статических ПЭ. Рассматриваются показатели качества электроэнергии, особенности выбора параметров
электроэнергии, этапы и особенности проектирования (выбора
коммутационных устройств, рекомендации по защите от аварийных режимов, способы борьбы с электромагнитными помехами)
САЭ.
Во второй главе «Автономные источники электроэнергии»
проведен анализ перспективных автономных источников электроэнергии (АИЭ) раскрыты их достоинства, недостатки и современные требования предъявляемые к автономным генераторам электроэнергии. Рассматриваются принципы работы, конструкция и
основные характеристики перспективных АИЭ, выполненных на
базе ВПД и бесконтактных генераторов электроэнергии, а также
особенности работы высокоскоростных генераторов. Предложена
методика упрощенного расчета КПД и массы бесконтактных высокоскоростных генераторов. Рассмотрены особенности работы,
достоинства и недостатки СГ с постоянными магнитами (СГПМ),
асинхронных генераторов с конденсаторным возбуждением (АГ) и
вентильных генераторов (ВГ). Предлагаются структурно-схемные
решения АИЭ на базе АГ. Предлагается, как один из вариантов, в
качестве основных или резервных источников электроэнергии в
СГЭ использовать нетрадиционные источники: ветроэнергетические станции или микрогидроэлектростанции, выполненные на
базе бесконтактных генераторов.
7
В третьей главе «Статические преобразователи электроэнергии» рассмотрены основные требования предъявляемые к ПЭ,
особенности работы и схемные решения, в том числе систем
управления, непосредственных преобразователей частоты (НПЧ) с
естественной (НПЧЕ) и искусственной (НПЧР – с регулируемым
углом сдвига фаз) коммутацией силовых вентилей, однофазных и
трехфазных выпрямителей, инверторов и конверторов. Предлагаются новые технические решения статических ПЭ, выполненных
на базе трансформаторов с вращающимся магнитным полем
(ТВМП). Рассмотрены перспективы развития полупроводниковых
приборов.
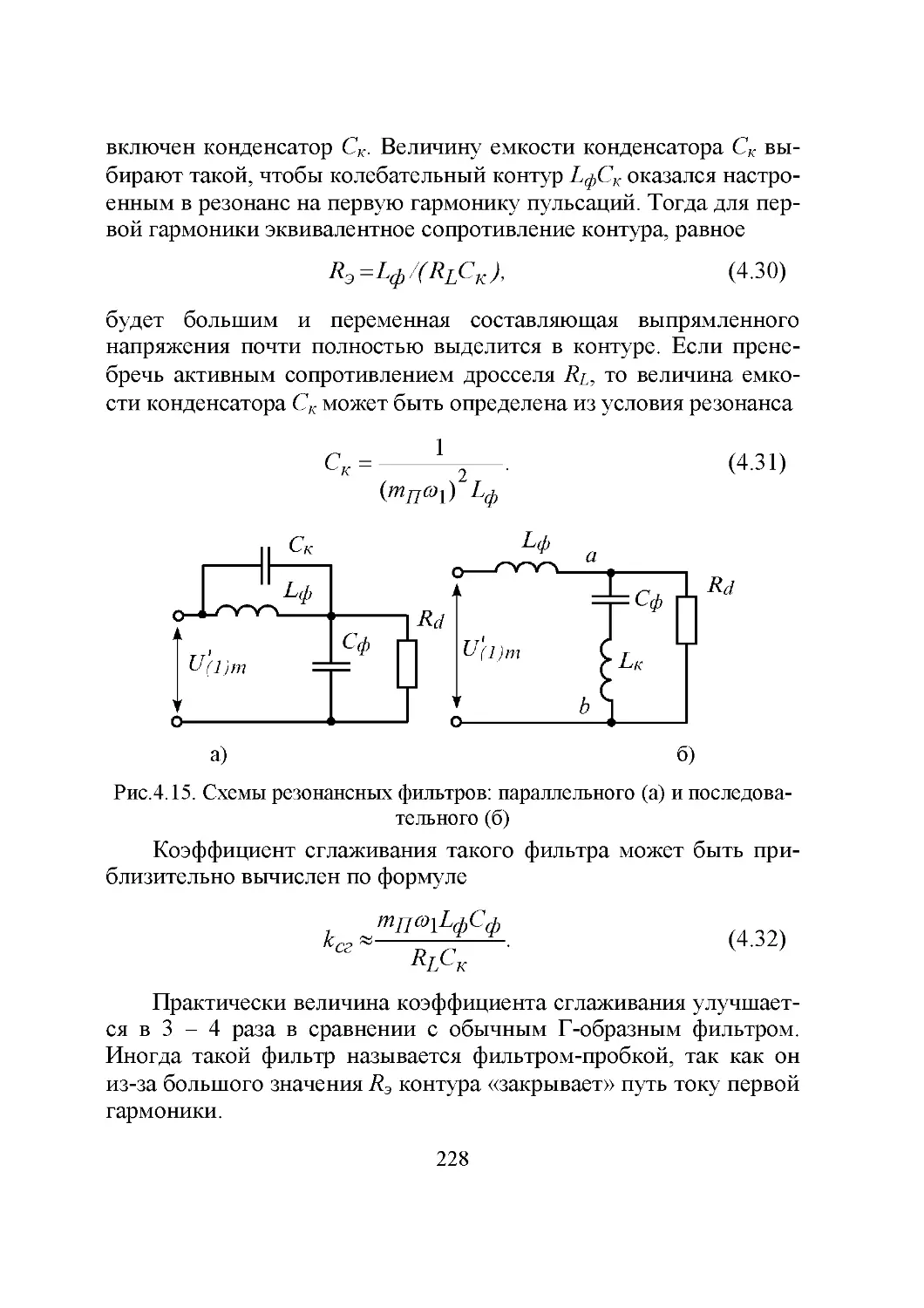
В четвертой главе «Способы улучшения качества выходного
напряжения статических преобразователей электроэнергии»
проводится анализ гармонического состава и показателей качества
выходного напряжения НПЧ в широком диапазоне изменения частоты питающего напряжения, рассмотрены схемные решения
выходных фильтров НПЧ и их особенности. Рассмотрены способы
улучшения качества выходного напряжения инверторов, выпрямителей и конверторов.
В пятой главе «Математическое моделирование основных
функциональных узлов системы автономного электроснабжения»
рассмотрены основы теории математического моделирования источников и ПЭ, методы расчета электромагнитных процессов в
силовых цепях ПЭ. Приведены схемы замещения и математические модели ПЭ. Приведена схема замещения и результаты исследований математической модели АИЭ на базе АГ. Рассмотрены
вопросы точности математического моделирования.
В шестой главе «Синтез и выбор оптимальной структуры
системы автономного электроснабжения» рассматриваются вопросы модульного агрегатирования основных ФУ САЭ, особенностей параллельной работы ПЭ. Предлагается новое схемное решение унифицированного модульного ПЭ (УМП). Рассматриваются
особенности проектирования модульных САЭ. Предлагается методика оценки эффективности САЭ и основные способы выбора
оптимальной ее структуры.
8
ГЛАВА1
ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ АВТОНОМНОГО
ЭЛЕКТРОСНАБЖЕНИЯ
1.1 Состав и требования к системам автономного
электроснабжения
САЭ в настоящее время нашли широкое применение. Кроме
функции гарантированного источника электроэнергии для ответственных потребителей они обеспечивают электроснабжение потребителей в труднодоступных районах, в том числе, при возникновении аварийных ситуаций.
САЭ представляет собой комплекс электротехнических
устройств, взаимодействующих между собой в сложном процессе
производства, преобразования, передачи и распределения электрической энергии с заданными параметрами между потребителями. В САЭ в качестве источника электроэнергии используется
АИЭ, который не имеет связи с внешней энергосистемой источниками электроэнергии которой являются атомные, тепловые и другие электростанции. Тип и количество АИЭ, преобразователей
электроэнергии и резервных источников САЭ определяются требованиями потребителей электроэнергии.
АИЭ генерирует электроэнергию в виде трехфазного напряжения переменного тока промышленной частоты, источником
электроэнергии в этом случае является дизель-электрическая
станция (ДЭС), либо в виде напряжения постоянного тока, когда
источником являются генератор постоянного тока или аккумуляторные батареи.
Необходимость включения ПЭ, их, как правило, называют
вторичными источниками электроэнергии, в состав САЭ вызвана
тем, что большинство потребителей электроэнергии требуют для
своего питания электроэнергию с параметрами, отличными от тех,
которые генерируют АИЭ.
Практически в САЭ возникает необходимость в следующих
преобразованиях электроэнергии:
1) в выпрямлении – преобразовании напряжения переменного
тока в напряжение постоянного;
9
2) в преобразовании частоты – преобразовании напряжения
переменного тока одной частоты в напряжение переменного тока
другой частоты;
3) в инвертировании – преобразовании напряжения постоянного тока в напряжение переменного тока;
4) в конвертировании - преобразовании напряжения постоянного тока одного уровня в напряжение в постоянного тока другого
уровня;
5) в преобразовании фаз - с однофазной (трехфазной) системы в симметричную многофазную систему.
На рис. 1.1. показана структурная схема связи источников
электроэнергии с потребителями через преобразовательные
устройства.
Преобразователи САЭ выполняются на мощности от нескольких сотен ватт до нескольких киловатт, поэтому их относят к
классу силовых устройств преобразовательной техники.
Рис. 1.1. Структура связи источников с потребителями
электроэнергии
Важной особенностью работы преобразовательной техники
является то, что кроме преобразования электроэнергии преобразователи выполняют функции стабилизации параметров электроэнергии.
10
К критериям эффективности САЭ предъявляются следующие
основные требования:
1. Высокая надежность и непрерывность (бесперебойность)
электроснабжения. Здесь под надежностью понимается способность
системы обеспечивать потребителей электроэнергией требуемого
качества в течение заданного время (включая и время хранения) и в
заданных условиях эксплуатации. Бесперебойность электроснабжения – это такое обеспечение потребителей электроэнергией, при котором в случае аварийных режимов в системе электроснабжение потребителей не нарушается или имеется перерыв на время включения
резерва. Надежность САЭ, как правило, оценивается двумя показателями: вероятностью безотказной работы Р(t) и значением среднего
времени наработки на отказ Т;
2. Высокое качество электрической энергии, которое характеризуется стабильностью показателей, длительностью и характером переходных процессов. Причем, ограничения на качество
электроэнергии САЭ непрерывно повышаются. Увеличение количества ответственных потребителей, а также соизмеримость их
мощности с мощностью АИЭ САЭ, кроме того, обострило проблему электромагнитной совместимости. Электронное оборудование, в частности компьютеры, в процессе эксплуатации оказываются под воздействием различных электромагнитных помех,
большая часть которых распространяется по цепям питания, поэтому обеспечение качества электроэнергии источником ограниченной мощности является одной из наиболее важных и сложных
задач, особенно для ответственных потребителей, которые весьма
чувствительны к параметрам электроэнергии.
С другой стороны требования к качеству электроэнергии потребителей непосредственно влияют на конструктивные и схемные решения, а также МГП и стоимость АИЭ и ПЭ.
3. Минимальная масса и габариты при обеспечении максимальной мощности. Во многих случаях, в особенности для передвижных (транспортных), в том числе бортовых (авиационных)
САЭ, критерии массы считаются приоритетными, и, как правило,
они оцениваются показателем удельной массы.
4. Высокие энергетические показатели, которые, оцениваются значением КПД. КПД определяет эффективность преобразования энергии и потери, по которым рассчитывается система охла11
ждения основных функциональных узлов, блоков, элементов
САЭ. При оптимизации САЭ критерии массы и КПД являются
противоречивыми, так как увеличение КПД, как правило, сопровождается увеличением массы. (Простейший пример - проводник
с током, потери в котором тем меньше, чем больше его сечение и
масса).
5. Максимально автоматизированные (необслуживаемые или
с минимальным обслуживанием) и должны иметь большой срок
службы. Причем структура САЭ должна быть ремонтопригодной
и предусматривать возможность дальнейшего развития и модернизации.
6. Низкая стоимость, т.е. затраты на изготовление и эксплуатацию системы в течении заданного времени работы при заданной
надежности должны быть минимальными. Требования по стоимости обычно находятся в противоречии с рассмотренными выше
требованиями, но не могут не учитываться при проектировании
перспективных САЭ.
1.2 Структурные схемы и классификация САЭ
В настоящее время известно большое число структурных решений САЭ. На рис. 1.2 представлена обобщенная структурная
схема стационарных и транспортных САЭ, где обозначены: дизель-электрическая станция - ДЭС; аккумуляторные батареи - АБ;
статические преобразователи - выпрямители В1 и В2, инвертор И,
конвертор К; электромашинные преобразователи – двухмашинный, выполненный на базе двигателя постоянного тока М1 и синхронного генератора СГ1 и трехмашинный преобразователь, выполненный на базе двигателя переменного и постоянного тока соответственно М2 и М3, и синхронного генератора СГ2; шины гарантированного электроснабжения переменного Ш1 и постоянного Ш2 токов.
В основном режиме работы стационарных САЭ питание потребителей электроэнергией обеспечивается по основному вводу
«Внешняя сеть 1» или дополнительному вводу «Внешняя сеть 2»,
как правило, передвижные системы также имеют аналогичные
вводы. Дизель-электрическая станция ДЭС является резервным
источником электроэнергии, аккумуляторные батареи АБ - ава12
рийный источник. Для повышения надежности электроснабжения
резервные источники, полупроводниковые и электромашинные
преобразователи имеют резерв однотипных источников и преобразователей.
Рис. 1.2. Обобщенная структурная схема САЭ
Когда источниками питания для потребителей электроэнергии является внешняя сеть или ДЭС (включены контакторы К1
или К2 или К3), и соответственно, контактор К6. Потребители постоянного тока получают питание от шины Ш2, а переменного от
шины Ш1. В этих режимах аккумуляторные батареи АБ находятся
в режиме непрерывного подзаряда от выпрямителя В2. Для обеспечения бесперебойности электроснабжения, при исчезновении
напряжения на двух внешних вводах, на время запуска ДЭС (30 –
13
50 с) потребители переменного тока получают питание от двухмашинного преобразователя электроэнергии М1 – СГ1, питание
которого, как и потребителей постоянного тока, осуществляется
от аккумуляторных батарей АБ. Длительность перерыва электроснабжения потребителей переменного тока в этом случае определяется временем запуска двухмашинного преобразователя и находится в пределах 2 – 3 с.
Если же потребители электроэнергии не допускают разрыва
кривой питающего напряжения, то применяются структуры САЭ с
использованием трехмашинных преобразователей. Потребители
переменного тока в этом случае получают питание от постоянно
вращающегося трехмашинного преобразователя М2 – М3 – СГ2.
При этом, в нормальном режиме работы привод синхронного генератора СГ2 осуществляется асинхронным двигателем М2, а при
прекращении электроснабжения от шины Ш1 привод СГ2 осуществляется двигателем постоянного тока М3 источником питания которого являются аккумуляторные батареи АБ.
Иногда в САЭ с двухмашинными преобразователями используются инерционные маховики, которые размещаются на валу
между электрическими машинами. В этом случае при прекращении электроснабжения от внешней сети за счет массы маховика
обеспечивается непрерывное электроснабжение потребителей в
интервале времени необходимом для запуска ДЭС.
СГЭ на базе статических преобразователей превосходят САЭ
на базе электромашинных преобразователей по многим показателям. Источниками электроэнергии для потребителей переменного
тока в таких системах являются инверторы (см. рис. 1.2).
Типовые структурные схемы передвижных САЭ, выполненных на базе статических преобразователей электроэнергии представленны на рис. 1.3, где обозначено: ПД – приводной двигатель;
Г – генератор электроэнергии; ШГП1 и ШГП2 – шины гарантированного питания переменного и постоянного тока соответственно;
ТВБ – трансформаторно-выпрямительный блок; ИТБ – инверторно-трансформаторный блок; ПНП – преобразователь напряжения
постоянного тока; АБ – аккумуляторные батареи. Особенностью
конструкции данных схем является отсутствие вводов электроснабжения от внешних источников электроэнергии, но они могут
быть предусмотрены. Надежность работы таких систем повыша14
ется за счет дополнительных резервных АИЭ и ПЭ (на рис. 1.3 не
показаны).
а)
б)
Рис. 1.3. Структурные схемы передвижных САЭ
АИЭ САЭ (рис. 1.3, а) генерирует переменный ток промышленной частоты, резервным источником электроэнергии является
генератор постоянного тока Г, привод которого, как правило,
осуществляется от коробки отбора мощности ходового двигателя.
Инверторно-трансформаторный блок ИТБ работает при отключении АИЭ, т.е. когда источником электроэнергии являются аккумуляторные батареи АБ или генератор постоянного тока Г. ТВБ2
выполняет функции зарядного устройства.
АИЭ САЭ (рис. 1.3, б) является источником напряжения постоянного тока. В зависимости от величины генерируемого
напряжения постоянного тока САЭ может иметь преобразователь
напряжения постоянного тока ПНП, выполняющего функции зарядного устройства.
15
На рис. 1.4 приведена классификация САЭ.
Рис. 1.4. Классификация САЭ
Основным классификационным признаком принято назначение САЭ: для стационарных и передвижных объектов. Другими
классификационными признаками являются типы используемых
основных, резервных и аварийных источников, преобразователей
электроэнергии. Кроме того, САЭ могут классифицироваться по
схемам подключения к потребителям электроэнергии (централизованные, децентрализованные и комбинированные), разделению
их по роду тока, перерывах в электроснабжении, типу коммутационной аппаратуры и т.д.
Централизованная схема подключения САЭ (рис. 1.5, а) обес16
печивает централизованное преобразование, стабилизацию и распределение электроэнергии для питания потребителей. Такое подключение САЭ применяется при большом разнообразии потребителей электроэнергии, которые отличаются по потребляемой
мощности, величине напряжения, роду тока, в том числе наличии
ответственных потребителей, и для которых важным показателем
является обеспечение надежного функционирования.
а)
б)
Рис. 1.5. Централизованная (а) и децентрализованная (б) схемы
подключения САЭ к потребителям электроэнергии
К достоинствам такой системы электроснабжения следует отнести: возможность оптимизации структуры системы электроснабжения потребителей как при нормальной, так и при аварийной работе, в том числе обеспечивать электроэнергией ответственных потребителей в ненормальных режимах работы путем
адаптивного изменения структуры цепей питания и постепенного
отключения групп потребителей согласно заданного приоритета
нагрузок; возможность проведения технического обслуживания и
ремонтных работ без перерыва в электроснабжении; возможность
без дополнительных монтажных работ увеличить отдаваемую
мощность.
К недостаткам централизованной схемы подключения САЭ
следует отнести несколько больший объем монтажных работ при
установке, большую длину кабельных линий передач, и как следствие, меньшую защищенность от воздействия электромагнитных
помех.
Децентрализованная схема подключения САЭ значительно
упрощает конструкцию системы автономного гарантированного
17
электроснабжения и предполагает ее установку возле каждого потребителя (рис. 1.5, б). Такие схемы подключения применяются
при электроснабжении потребителей, не имеющих постоянного
расположения, а также при большом удалении их друг от друга.
К достоинствам децентрализованного подключения САЭ следует отнести: возможность наращивать мощность путем параллельного включения однотипных систем; возможность установки
САЭ непосредственно в месте расположения потребителя, что в
свою очередь несколько упрощает вопросы наладки и регулировки; меньше длина кабальных линий. Основными недостатками
рассмотренного способа подключения САЭ являются: большие
эксплуатационные расходы и большая общая стоимость.
Комбинированное подключение САЭ к потребителям занимает промежуточное положение между выше рассмотренными способами.
1.3 Основные показатели функциональных узлов
эксплуатируемых САЭ
Эксплуатируемые САЭ, как правило, проектировались с учетом требований их потребителей к параметрам электроэнергии и
наличию тех АИЭ и ПЭ, которыми располагала отечественная
промышленность на момент создания требуемых систем. Это приводило к несогласованию характеристик АИЭ и ПЭ, большим потерям электроэнергии и низким эксплуатационно-техническим
показателям системы в целом.
Оценку эксплуатируемых САЭ возможно провести по совокупности характеристик основных ее ФУ.
Приводные дизельные двигатели, применяемые в стационарных и передвижных САЭ, обладают высокой степенью автоматизации, однако имеют относительно большую удельную массу в
пределах 10 – 15 кг/кВт при обеспечении выходной мощности
синхронных генераторов (СГ) 30 – 500 кВт. КПД дизельных двигателей находится в пределах 27 – 35 %; эффективный расход
топлива составляет 200 – 300 г/кВт ч; время необслуживаемой
работы не превышает 500 ч; ресурс работы для двигателей с частотой вращения вала n = 1500 об/мин не превышает 20000 ч, а
для двигателей с частотой вращения вала n = 3000 об/мин – 10000
18
ч. Дизельные двигатели являются неэкономичными, так как независимо от величины и характера нагрузки имеют стабильное значение оборотов вала.
Преимущественно в АИЭ САЭ применяются СГ с частотой
вращения ротора 1500 об/мин, которые обеспечивают генерирование переменного тока частотой 50 Гц и напряжением 400 В. КПД
СГ мощностью от 30 до 500 кВт составляет 87 – 92 %, а удельная
масса – 7 – 12 кг/кВт. Включение СГ на параллельную работу относительно сложная и ответственная операция, требующая дополнительную регулирующую и контролирующую аппаратуру.
Анализируя основные характеристики дизельных двигателей
и СГ можно сделать вывод, что КПД АИЭ мощностью до 500 кВт
не превышает 35 % , а удельная масса с учетом блоков автоматического управления превышает 20 кг/кВт. Ресурс работы АИЭ
определяется ресурсом работы дизельных двигателей.
Генераторы постоянного тока (ГПТ), которые применяются в
САЭ в качестве резервных источников электроэнергии, мощностью до 10 кВт имеют КПД 85 – 90 %, а удельную массу 10 –
15 кг/кВт.
Электромашинные преобразователи стационарных САЭ из-за
наличия инерционных вращающихся частей обеспечивают высокую стабильность выходной электроэнергии при колебаниях
входной. К основным недостаткам этих преобразователей можно
отнести: наличие подвижных частей, что ограничивает ресурс работы и снижает надежность; длительное время переходных режимов при изменении нагрузки, что при этом приводит к снижению
качества напряжения; низкий КПД (для двухмашинных преобразователей не превышает 75 %, а для трехмашинных - 60 %).
Удельная масса электромашинных преобразователей находится в
пределах 20 - 25 кг/кВт (мощностью 5 – 10 кВт) для двухмашинных преобразователей и 20 – 30 кг/кВт (мощностью 30 – 50 кВт)
для трехмашинных преобразователей.
Статические преобразователи электроэнергии по своим характеристикам выглядят предпочтительнее в сравнении с электромашинными преобразователями. Они имеют более высокий
КПД 75 – 92 %, повышенную надежность работы и высокое быстродействие систем регулирования и стабилизации параметров
электроэнергии, практически мгновенно включаются в работу.
19
Основной недостаток статических преобразователей электроэнергии – превышение показателей удельной массы и объема аналогичных показателей питаемых ими потребителей. В зависимости
от мощности преобразователей, значения которой могут быть от
нескольких сот ватт до нескольких десятков киловатт, удельная
масса статических преобразователей находится в пределах 3 –
75 кг/кВт.
1.4 Оценка качества напряжения
Многообразие структурных решений передвижных САЭ значительно шире, чем стационарных систем электроснабжения.
Кроме того, к передвижным САЭ предъявляются высокие требования по МГП, которые, как известно, являются приоритетными в
сравнении с другими критериями эффективности системы.
При проектировании САЭ необходимо учитывать условия работы (прежде всего – климатические) и особенности эксплуатации. Так для передвижных систем электроснабжения характерны
повышенные динамические и вибрационные нагрузки, возникают
проблемные вопросы электромагнитной совместимости устройств
из-за компактного размещения оборудования.
Чем ниже требования по качеству электроэнергии САЭ, тем
лучше МГП, проще и надежнее соответственно система. Поэтому
при выборе параметров электроэнергии проектируемой САЭ
необходимо учитывать требования потребителей по качеству
электроэнергии. Кроме того, ГОСТ 13109 – 97 установил два вида
норм качества электроэнергии: нормально допустимые и предельно допустимые. При этом показатели качества определяются за N–
е количество наблюдений за период, равный 24 ч.
Качество электроэнергии оценивается следующими основными показателями для цепей с Uн = 380 В:
1. Отклонение напряжения. Значение установившегося отклонения напряжения Uу на зажимах потребителей нормально
допустимые 5% и предельно допустимые 10% от номинального
значения напряжения цепи. Для определения отклонения напряжения в начале определяется действующее значение напряжения
основной гармоники по формуле
20
1
U (1) (U AB(1) U ВС(1) UСА(1) ),
3
U y
U (1) U н
Uн
100%.
(1.1)
(1.2)
Погрешность вычисления действующего значения напряжения первой гармоники U(1) по формуле (1.2) не превышает 0,1%.
2. Колебания напряжения. Колебания напряжения характеризуется показателем размаха изменения напряжения Ut, которое
зависит от частоты повторения изменений напряжения f за минуту. Так при f = 2 – 20 Гц размах изменения напряжения не должен
превышать 4% от номинального значения напряжения, а при
f = 20 – 300 Гц – 1 %.
Размах изменения напряжения в процентах вычисляется по
формуле
U t
U m U m 1
100%,
Uн
(1.3)
где Um и Um+1 – значения следующих один за другим экстремумов, определенных на каждом полупериоде основной частоты.
3. Несинусоидальность напряжения. Несинусоидальность напряжения характеризуется коэффициентом искажения синусоидальности кривой КU, нормально допустимые значения, которого равны 3%, а предельно допустимые - 12%. Значения коэффициента
искажения вычисляются c учетом действующих значений напряжений i – х гармоник Ui по формуле
40
U i
КU i 2
U (1)
2
100%.
(1.4)
4. Несимметрия напряжений. Несимметрия напряжений характеризуется коэффициентом несимметрии напряжений по обратной последовательности К2U. Нормально допустимые и пре21
дельно допустимые значения, которого в точках присоединения к
электрической цепи равны 2% и 4% соответственно. Значение коэффициента несимметрии напряжений по обратной последовательности определяется по формуле
9
[(U 2(1)n / U1(1)n ) 100]
К 2U n 1
N
2
,
(1.5)
где U2(1)n и U1(1)n - действующие значения напряжений обратной и
прямой последовательности соответственно основной частоты
трехфазной системы напряжений при n-ом наблюдении.
При этом число наблюдений N должно быть не менее 9.
5. Отклонение частоты. Отклонение частоты напряжения
переменного тока характеризуется показателем отклонения частоты f. Нормально допустимые и предельно допустимые значения
отклонения частоты равны 0,2 и 0,4 Гц соответственно. Отклонение частоты определяется по формуле
15
f
fn
n 1
N
fн ,
(1.6)
где fн – номинальное значение частоты.
Число наблюдений N должно быть не мене 15 за 20 с.
6. Провал напряжения. Провал напряжения характеризуется
длительностью провала напряжения tП. Предельно допустимое
значение длительности провала равно 30 с. Вычисляется длительность провала по формуле
t П tк tн ,
(1.7)
где tн и tк – начальный и конечный момент времени провала
напряжения.
22
1.5 Выбор параметров электроэнергии
Повышение автономности функционирования передвижных
САЭ, улучшение их МГП при жестких требованиям к ним по качеству электроэнергии и надежности электроснабжения потребителей возможно на основе использования на передвижных агрегатах малогабаритных систем с рациональной структурой построения и оптимальными параметрами электроэнергии по сравнению с
существующими, что во многом зависит от правильного выбора
перспективных приводных двигателей и генераторов АИЭ, ПЭ и
коммутационной аппаратуры.
От параметров электроэнергии зависят характеристики САЭ,
поэтому при выборе рода тока и соответственно источника необходимо учитывать следующие факторы.
Системы переменного тока имеют компактные электрические машины, преобразователи электроэнергии и коммутационные устройства. Число фаз в системах переменного тока САЭ
обычно равно m = 3, но в преобразовательных блоках используются как одно – так и многофазные системы. Трехфазная система
обладает высокой симметрией и позволяет создавать вращающееся магнитное поле, необходимое для электрических машин и специальных трансформаторов, при минимальной числе проводников. Трехфазные системы выполняются трех – или четырехпроводными (с учетом нулевого провода). Для обеспечения требуемой надежности САЭ число проводов может дублироваться. Основные их недостатки – относительная сложность параллельной
работы генераторов и преобразователей, повышенные значения
токов и сечения проводов при заданной активной мощности (из-за
cos < 1), дополнительные потери электроэнергии на реактивных
элементах, повышенные помехи.
Системы постоянного тока имеют относительно малые значения сечения проводов, пониженные значения падения напряжения в системе, достаточно просто реализуются системы стабилизации напряжения генераторов и их параллельная работа, невысокий уровень помех. Однако основными их недостатками являются:
усложненная коммутация цепей и преобразование электроэнергии.
Системы постоянного тока выполняются двух - или однопроводными с использованием корпуса установки для замыкания тока. В
23
последнем случае уменьшается расход материалов, но надежность
однопроводных систем относительно низкая.
Выбор номинального напряжения Uн определяется рядом
факторов. Низкие значения Uн приводят к большим токам (при
постоянных значениях мощности) и потерям, сопровождаются
трудностями регулирования и стабилизации параметров электроэнергии. При высоких значениях напряжения возникают проблемы с изоляцией проводников, с техникой безопасности и т.п.
Для постоянного тока типичные значения ПЭ Uн = 5 – 36 В,
генераторов Uн = 115 - 460 В, для переменного тока ПЭ и генераторов Uн = 380/220 В (линейное/фазное). Значение Uн оказывает
значительное влияние на массу распределительных устройств и
относительно слабо – на массу электрических машин и трансформаторов. Рост номинального напряжения в цепи снижает рабочие
токи и массу проводов, но в электрических машинах он приводит
лишь к увеличению числа витков обмоток при сохранении объема
проводников. Так, рабочее значение электродвижущей силы
(ЭДС) и ток в машине (трансформаторе) определяются по формулам
Е WfB m Пc , I jПпр ,
(1.8)
где W – число витков обмотки; f – частота тока; Bm – магнитная
индукция; Пс – сечение стального магнитопровода; j – плотность
тока; Ппр – сечение провода.
Поскольку активное сечение обмотки
Поб WПпр ,
(1.9)
S mEI fjBm Пс Поб ,
(1.10)
то расчетная мощность
(где m – число фаз) не зависит от числа витков W и соответственно
напряжения Uн, если объем изоляции сохраняется.
В настоящее время активно исследуются системы постоянного тока повышенного напряжения (Uн > 400 В), обеспечивающие
улучшение характеристик, в том числе массы питающей цепи
24
примерно на 70%, но не решены проблемы с коммутационными
устройствами системы.
Выбор частоты тока. Определяющим фактором при выборе
частоты тока АИЭ, являются требования потребителей электроэнергии, однако, необходимо учитывать, что с одной стороны при
больших значениях частоты f возрастают потери в электротехнической стали генераторов, трансформаторов и дросселей, а с другой стороны уменьшается их масса. Кроме того, известно, что частота тока зависит от частоты вращения вала приводного двигателя n и числа пар полюсов генератора р (1.11).
f
pn
.
60
(1.11)
И, как видно из уравнения машинной постоянной (постоянной Арнольда) (1.12), чем больше частота вращения ротора электрической машины, тем меньше габаритные размеры ее активной
2
части ( D l ).
2
D l
S
,
AB n
(1.12)
где D – диаметр активной части статора генератора; l – длина активной части машины; S – расчетная мощность; = 0,8 – 0,9 – коэффициент учитывающий особенности конструкции магнитной
системы; А – линейная нагрузка; В - магнитная индукция в воздушном зазоре; n – частота вращения вала ротора.
Повышение частоты тока целесообразно осуществлять не за
счет увеличения числа пар полюсов р, потому, что в этом случае
увеличиваются габариты генератора электроэнергии, а за счет повышения частоты вращения n. Но в этом случае предъявляются
высокие требования к подшипникам электрической машины, от
которых зависит ресурс работы генератора.
Хотя в настоящее время потребители переменного тока стационарных и передвижных САЭ требуют электроэнергию с частотой 50 Гц, но возможны варианты применения АИЭ генерируемых
напряжение с частотой тока 400 – 1200 Гц (из практики эксплуатации бортовых (авиационных) САЭ) с последующим преобразованием параметров электроэнергии за счет преобразовательных
25
устройств. В этом случае значительно улучшаются характеристики САЭ в особенности, если в основу составляют потребители постоянного тока.
Выбор мощности АИЭ при изменяющейся нагрузки САЭ
обычно осуществляется с учетом графика нагрузки S(t). За расчетную мощность принимают максимальное среднеквадратичное
значение Sр за время Т, равное периоду выхода АИЭ на установившийся режим, т.е.
T
1 2
Sp
S (t )dt.
T0
(1.13)
Мощность САЭ определяется по Sр с учетом потерь и требуемого резервирования. Предельные значения мощности АИЭ и соответственно САЭ оцениваются с учетом ограничений, диктуемых
прочностными характеристиками материалов, технологическими
факторами, МГП.
При совместной работе нескольких АИЭ необходимо согласование их характеристик. Если параллельную работу источников
напряжения постоянного тока реализовывать относительно просто, то параллельная работа СГ требует большого числа согласованных каналов регулирования. Эти проблемы решаются намного
проще при использовании асинхронных генераторов (АГ).
1.6 Особенности проектирования САЭ
При проектировании САЭ необходимо учитывать некоторые
особенности, которые зависят от характеристик выбранных электротехнических устройств и их элементов.
Охлаждение электрооборудования САЭ определяет допустимые токовые нагрузки и непосредственно влияет на МГП системы. Характерные значения плотности тока j для медных проводов
2
составляют: 3 – 5 А/мм при естественном охлаждении, 8 –
2
16 А/мм при принудительном воздушном охлаждении, 20 –
2
25 А/мм при жидкостном охлаждении.
26
1.6.1 Выбор коммутационных устройств
Для коммутации силовых цепей в САЭ часто используются
электромагнитные контакторы и автоматические выключатели.
4
Эти аппараты позволяют коммутировать токи до 10 А при
напряжения до 1000 В, имеют низкое переходное сопротивление и
о
могут работать при температурах 500 – 600 С. Основными их недостатками являются: при коммутации цепи возникает искровой
разряд или электрическая дуга, имеют низкое быстродействие
(время коммутации tк = 0,01 – 0,02 с) и относительно большую
массу и габариты.
Перспективы совершенствования коммутационной аппаратуре связаны с разработкой бесконтактных аппаратов, выполненных
на базе полупроводниковых приборов. Основные достоинства таких аппаратов в сравнении с контактными: большой срок службы;
бездуговая коммутация силовой цепи; высокое быстродействие
-5
-3
(tк = 10 – 10 с); большие допустимые механические перегрузки
(при трясках и вибрациях); простота обслуживания. Вместе с тем
они имеют следующие недостатки: относительно большие потери
электроэнергии, в том числе наличие токов утечки при отключенном состоянии (десятки миллиампер); имеют меньшую перегрузочную способность по току и очень чувствительны даже к кратковременным перенапряжениям; отсутствует видимый разрыв цепи.
В настоящее время проводятся работы по внедрению комбинированных коммутационных аппаратов. Комбинированные аппараты позволяют эффективно использовать в одной конструкции
достоинства контактных и бесконтактных коммутационных аппаратов. В таких устройствах ток в нормальных режимах работы
протекает через механические контакты, а бесконтактные элементы осуществляют только коммутацию силовой цепи.
1.6.2 Защита и управление САЭ
Защита САЭ от аварийных режимов работы обычно содержит
несколько систем: максимально токовую защиту, защиту от недопустимых отклонений напряжений и частоты. Система защиты
может органически сопрягаться с соответствующими датчиками,
27
регуляторами и коммутационными устройствами, образуя единый
компактный блок.
Аварийные режимы работы, возникающие при эксплуатации
ПЭ, в самом общем виде можно разделить на две группы: внутренние и внешние.
Внутренние аварии обусловлены, как правило, отказом или
изменением параметров одного или нескольких элементов преобразователя (нарушение коммутационных свойств полупроводникового прибора, т.е. потерю его способности удерживать обратные
напряжения; нарушение запирающих свойств полупроводниковых
приборов в прямом направлении; пропуск включения отдельных
полупроводниковых приборов и т.д.). Внешние аварии обусловлены отклонением сверхдопустимых значений параметров электроэнергии питающей сети и аварийными режимами потребителей
электроэнергии (перегрузки по току, короткие замыкания (КЗ) и
т.д.).
Как известно, выпрямители являются самым распространенным типом преобразователя во вторичных источниках электроэнергии. Поэтому важно рассмотреть особенности его работы в
аварийных режимах.
В выпрямителях внутренние аварийные режимы работы сопровождаются возникновением повышенных значений токов и
перенапряжений на всех силовых элементах. Внутренние аварии
выпрямителя чаще всего бывают связаны с повреждением полупроводниковых приборов или нарушениями работы СУ. Аварии,
вызванные выходом из строя полупроводниковых приборов по
причине электрического или теплового пробоя, являются, как правило, наиболее тяжелыми, так как сопровождаются протеканием в
силовой схеме больших аварийных токов. Так, пробой одного из
тиристоров трехфазного мостового выпрямителя приводит к возникновению КЗ между двумя соответствующими фазами. При
этом максимальные значения аварийных токов в элементах силовой схемы выпрямителя зависят также от момента возникновения
КЗ, т.е. фазы соответствующего напряжения. В наиболее неблагоприятном случае значение аварийных токов в цепях неповрежденных тиристоров достигает двойной амплитуды установившегося
тока, которая появляется при КЗ на выходе согласующего трансформатора. Это значение определяется внутренним сопротивлени28
ем питающей сети и параметрами согласующего трансформатора
и в общем виде может быть определено по формуле
I mК
U mф
R 2 (L )
2
,
(1.14)
где Umф – амплитудное значение фазного напряжения; R и L суммарные активное и реактивное сопротивления одной фазы эквивалентной схемы, подключенной к комплекту тиристоров со
стороны переменного тока (с учетом приведения ко вторичным
обмоткам согласующего трансформатора).
В цепи поврежденного тиристора выпрямителя аварийное
значение тока может достигать значительно больших значений.
Внешние аварийные режимы в выпрямителях, как со стороны
нагрузки, так и со стороны источника электроэнергии, вызывают
ухудшение формы кривых выпрямленного напряжения и тока, а
также напряжения и тока потребляемого выпрямителем из сети. В
общем это приводит к перегрузке полупроводниковых приборов
по току и может привести к их пробою.
При возникновении внешних и внутренних КЗ, а также при
токовых перегрузках элементы схемы выпрямителей подвергаются повышенным тепловым и электродинамическим воздействиям.
Полупроводниковые приборы весьма чувствительны к перегрузкам по току, что связано с технологическими особенностями
их изготовления и эксплуатации. Необходимо, поэтому, предусматривать в преобразователе защиту полупроводниковых приборов не только от токов КЗ, но и от токов перегрузки. Защиту от
повышенных значений тока можно осуществлять с помощью различных устройств в зависимости от характера перегрузки. Если
перегрузки возникают при наличии в схеме достаточно больших
индуктивных сопротивлений, ограничивающих нарастание тока в
течение нескольких периодов, необходимую защиту можно выполнять в виде плавких предохранителей и контакторов. Можно
также применять защиту, в которой используются запирающие
характеристики управляемых полупроводниковых приборов.
Если перегрузка полупроводникового прибора возникает при
наличии незначительных индуктивных сопротивлений в схеме (КЗ
29
на выходе преобразователя или внутреннего КЗ вследствие пробоя
полупроводникового прибора), в результате чего повышенный ток
достигает максимального значения в течение одного полупериода,
необходимо применять быстродействующие защитные устройства, способные прервать ток прежде, чем он достигнет опасного
значения, т.е. в течение небольшой доли периода.
Перенапряжения на полупроводниковых приборах преобразователей могут возникать не только в аварийных, но и в нормальных режимах. Силовые цепи полупроводниковых приборов,
как правило, содержат реактивные элементы – дроссели, конденсаторы, индуктивности рассеяния трансформаторов и питающей
сети. При коммутациях полупроводниковых приборов в контурах,
образуемыми этими реактивными элементами, возникают колебательные процессы. Вследствие этого на элементах схемы могут
возникнуть значительные коммутационные перенапряжения,
представляющие опасность не только для полупроводниковых
приборов, но и для других элементов преобразователя. Поэтому
для уменьшения перенапряжений в контурах с вентилями необходимо предусматривать низкоомные цепи, способные быстро поглотить энергию свободного режима, либо другие специальные
меры, способствующие уменьшению амплитуды переходного
процесса.
Перенапряжения в цепях с полупроводниковыми приборами
возникают также при различного рода включениях, отключениях
и переключениях в схемах, которые имеют контакторы, реле и
другие коммутационные устройствами. Для уменьшения таких
перенапряжений необходимо обеспечить правильный выбор местоположения коммутационных элементов и соответствующую
последовательность их переключения, выбор оптимальной скорости прерывания тока, использование специальных устройств, снимающих эти перенапряжения.
В инверторах все виды аварийных режимов приводят к опрокидыванию инвертора, т.е. к тяжелому аварийному режиму. Поэтому для предотвращения аварийных режимов работы преобразователей в их конструкции должны быть предусмотренны специальные защитные устройства.
Основные требования к защитным средствам силовых полупроводниковых преобразователей в целом являются условия по
30
обеспечению надежности, селективности и быстродействия. Если
первые два требования характерны для большинства электротехнических устройств, то требование по быстродействию обусловлено спецификой работы силовых полупроводниковых приборов,
имеющих низкую перегрузочную способность и выход из строя
которых происходит при превышении допустимых мгновенных
значений токов и напряжений.
Наиболее простым способом защиты полупроводниковых
приборов является использование быстродействующих плавких
предохранителей. Такие предохранители обычно предназначены
для защиты от токов КЗ, но не перегрузки. Особенностью использования быстродействующих предохранителей является необходимость согласования тепловых эквивалентов плавких вставок и
полупроводниковых приборов. Тепловой эквивалент полупроводникового прибора определяется по формуле
tп
I 2t i 2 ( t )dt ,
(1.15)
0
где tп – время протекания тока через полупроводниковый прибор;
i(t) – функция изменения тока в полупроводниковом приборе.
Для обеспечения надежной защиты полупроводниковых приборов при КЗ необходимо выполнить условие
I 2to I 2t п ,
2
2
(1.16)
где I to и I tп – тепловые эквиваленты отключения предохранителя
и полупроводникового прибора соответственно.
Обычно для эффективной защиты необходимо недогружать
полупроводниковые приборы по току. Основным недостатком защитных устройств, выполненных на базе предохранителей, является необходимость в замене перегоревших вставок, что снижает
степень автоматизации преобразователя. В то же время предохранители являются практически единственным эффективным защитным устройством полупроводниковых приборов при их параллельном соединении. Как правило, количество параллельно
включаемых приборов (чаще транзисторов) выбирается с запасом,
31
обеспечивающим нормальную работу преобразователя при выходе из строя одного из группы параллельно включенных полупроводниковых приборов.
Для защиты полупроводниковых преобразователей широко
применяются быстродействующие автоматические выключатели
(АВ), обеспечивающие многократное срабатывание и возможность дистанционного управления. АВ обычно устанавливаются
на входе преобразователей и подключают, таким образом, источник питания к преобразователю. Отключение АВ в аварийных режимах при токах КЗ происходит за счет действия их защитных
электромагнитных устройств. Время отключение современных
быстродействующих АВ составляет единицы миллисекунд. Отключение АВ при токах перегрузки осуществляется за счет срабатывания встроенных тепловых защитных устройств.
Наиболее эффективными в настоящее время являются электронные защиты. А наиболее простым способом электронной защиты является снятие управляющих импульсов с силовых приборов управляемых преобразователей. Контроль, за параметрами
электроэнергии осуществляется соответствующими датчиками.
При поступлении команды от датчиков системы управления (СУ)
преобразователем практически мгновенно прекращает подачу импульсов на управляющие электроды полупроводниковых приборов.
В то же время наличие на выходе преобразователей дросселей
фильтров несколько затягивает процесс выключения. Поэтому для
повышения быстродействия системы защиты в полупроводниковых преобразователях иногда используются схемы принудительной (искусственной) коммутации силовых приборов. Как правило,
такие схемы содержат конденсаторы и полупроводниковые ключи. Посредством включения полупроводникового ключа, по команде СУ, предварительно заряженные конденсаторы, с соответствующей полярностью, подключаются к полупроводниковым
приборам ускоряя процесс их выключения. Однако применение
схем принудительной коммутации значительно ухудшают показатели надежности, массогабаритные и энергетические показатели
преобразователя.
Многообразие силовых преобразователей электроэнергии и
условий их эксплуатации обуславливает различие в способах за32
щиты и схемотехнического исполнения самой системы защиты.
Значительно повышается эффективность защиты преобразователей при использовании в качестве их исполнительного органа статических контакторов (тиристорных или транзисторных) и комбинированных электрических аппаратов (контакторы которых содержат электромагнитные и статические устройства).
Управление САЭ, в основном сводится, к локальному регулированию параметров электроэнергии источников и преобразователей, а перекоммутация цепей осуществляется оператором в зависимости от режимов работы и требований со стороны потребителей. В настоящее время известны технические решения СУ САЭ,
где реализованы не только простые функции управления, но и
осуществляется оптимизация режимов работы САЭ как при нормальной, так и при аварийной работе, а также система управления
способна сохранить работоспособность САЭ для всех запланированных ненормальных режимов путем адаптивного изменения
структуры цепей и постепенного отключения групп потребителей
согласно заданным приоритетам нагрузок. Такое гибкое и глубокое регулирование реализовано на основе цифровых СУ.
Сигналы от датчиков параметров электроэнергии САЭ преобразуются в цифровую информацию и поступают к цифровым регуляторам функциональных узлов (микропроцессорам). Регулятор
в соответствии с заложенной в него программой перерабатывает
информацию и генерирует необходимые цифровые сигналы, которые преобразуются в аналоговые и через усилители воздействуют
на функциональные узлы.
Локальные цифровые СУ регуляторов связаны между собой и
с центральной СУ (ЦСУ) управляющей мультиплексными линиями связи в виде коаксиального кабеля, витой пары проводов. По
мультиплексной линии передаются закодированные пакеты данных в режиме разделения времени, содержащие адреса соответствующих терминальных устройств и режим обмена информации.
Таким образом, все функциональные узлы САЭ по цепям управления объединяются в единый комплекс, способный обеспечить
оптимальные режимы работы отдельных устройств или САЭ в
целом по заданному алгоритму с возможным участием оператора
(в диалоговом режиме).
Цифровые СУ САЭ могут обеспечить защиту системы при
33
аварийных режимах. Они также весьма эффективны и как системы
контроля за состоянием оборудования, поскольку легко позволяют
проверять реакцию датчиков и регуляторов на отработанные инициирующие сигналы.
Таким образом, использование цифровых элементов, в перспективе ЭВМ, и мультиплексный линий является основой реализации новых поколений СУ для различных САЭ.
1.6.3 Электромагнитные помехи и способы борьбы с ними
Принцип действия полупроводниковых преобразователей,
основанный на переключении существенно нелинейных элементов, вызывает появление электромагнитных помех. Электромагнитные помехи возникают из-за скачкообразного изменения токов
и напряжений в электрических цепях преобразователя. Передача
электромагнитных помех происходит как по проводным связям
преобразователя с другими устройствами САЭ, так и непосредственно через окружающее пространство. В возникающей при
этом проблеме можно выделить следующие основные аспекты:
появление шумов в аппаратуре связи, сбой работы различного рода электронной аппаратуры и нарушение нормального функционирования СУ и защиты самого источника помех – преобразователя.
При оценке электромагнитных помех, создаваемых полупроводниковыми преобразователями, пользуются понятием электромагнитной совместимости основных функциональных узлов САЭ.
Понятие «электромагнитная совместимость» перенесено в силовую преобразовательную технику из радиотехники. Под электромагнитной совместимостью принято подразумевать способность
источников, преобразователей и потребителей электроэнергии работать совместно так, с учетом неблагоприятных, но всегда возникающих при такой работе явлениях, чтобы обеспечить выполнение задач электроснабжения с заданным качеством электроэнергии.
Уровень электромагнитных помех в основном зависит от
принципа работы преобразователя. Но в общем случае уровень
электромагнитных помех в САЭ непрерывно изменяется под воздействием самых разнообразных возмущений, которые могут быть
разделены на три группы:
34
случайные изменения параметров электроэнергии на выходе
источника и входе полупроводниковых преобразователей;
случайные изменения величины и характера нагрузки;
случайные изменения параметров в системе управления.
Первая группа возмущений в САЭ, в том числе СГЭ, связана с
изменением параметров электроэнергии внешней сети и в особенности резервной дизельной станции. В силу различных обстоятельств
параметры электроэнергии даже в нормальных режимах работы могут изменяться случайным образом в пределах от 90% до 110% от
номинальных значений. Так, к примеру, выходное напряжение СГ, в
ряде случаев отличается существенно от синусоидального из-за конструктивных особенностей генератора, а именно питанием обмотки
возбуждения от полупроводникового выпрямителя.
С другой стороны, входные токи преобразователей существенно несинусоидальны (в особенности в преобразователях с
естественной коммутацией силовых вентилей) и представляют
собой импульсные последовательности сложной формы, что весьма нежелательно для электромашинных генераторов, а также
трансформаторов и других устройств, питающихся с общей шины.
Таким образом, с одной стороны источники электроэнергии
могут генерировать напряжение с некоторым искажением формы,
которое затрудняет управление преобразователями, что может
привести к нарушениям алгоритмов управления полупроводниковыми приборами и чаще всего, к аварийным ситуациям в системе.
А с другой стороны сами преобразователи потребляют несинусоидальный ток и также вносят искажения в форму напряжения источника. Здесь необходимо отметить, что чем больше преобразователей работает с общей шины источника, тем больше вносятся
искажения в форму питающего напряжения.
Во второй группе возмущений различают два режима изменения нагрузки: большие изменения и малые (в пределах 10%).
При больших изменениях нагрузки, а они бывают очень редко
(на несколько десятков процентов от номинального значения изменяется напряжение источника электроэнергии), как правило,
когда источник имеет соизмеримую мощность с потребителями,
СУ преобразователями восстанавливают напряжение в течение
нескольких секунд, если не срабатывает защита.
35
Малые изменения нагрузки наблюдаются непрерывно, так как
включение и отключение потребителей электроэнергии происходит с небольшим перерывом во времени. Параметры выходных
фильтров также вносят определенные погрешности при изменениях нагрузки. Кроме того, увеличение числа потребителей электроэнергии с импульсным потреблением мощности повышает уровень электромагнитных помех.
Третья группа возмущений возникает в СУ преобразователей.
Разброс параметров электрических элементов, в особенности
транзисторов, стабилитронов, диодов, используемых в СУ,
несимметрия синхронизирующего (опорного) сигнала, по причине
искажения напряжения источника питания, неточности в измерении контролируемого (ведущего) сигнала, из-за изменений параметров нагрузки. Все рассмотренные причины приводят к изменениям углов управления преобразователями, которые являются
случайными функциями времени.
Анализируя рассмотренные случайные возмущения, возможно определиться с учетом достижений в электротехнике с направлениями научных исследований по уменьшению уровня электромагнитных помех и, соответственно, повышения уровня электромагнитной совместимости источников, преобразователей и потребителей электроэнергии САЭ.
При изучении спектрального состава выходного напряжения и входного тока преобразователей электроэнергии, используемых в САЭ, позволит еще на стадии проектирования отрабатывать вопросы электромагнитной совместимости, т.е. заложить необходимые запасы мощности в АИЭ, предусмотреть, с
учетом вопросов оптимизации, как выходные, так и входные
фильтры в преобразователях. Но уже сейчас можно сделать вывод, что чем меньше силовых полупроводниковых приборов в
составе преобразователя, тем меньше уровень электромагнитных помех в САЭ в целом.
Для борьбы с электромагнитными помехами на практике используются разнесение и ориентация монтажных соединений,
экранирование и заземление, фильтрация и другие методы подавления помех.
Для уменьшения влияния электромагнитных помех, как на
собственные функциональные узлы управления преобразователей,
36
так и на питаемые потребители при проектировании преобразователей необходимо соблюдать следующие правила выполнения
монтажа:
разделять силовые цепи и цепи управления;
пересечение силовых цепей и цепей управления проводить
под прямым углом;
силовые соединения осуществлять проводниками минимальной (с учетом конструктивных возможностей) длины;
разделять цепи переменного и постоянного токов;
трехфазные цепи переменного тока, так же как и двухполюсные цепи постоянного тока, проводить единым жгутом (при
этом происходит уменьшение электромагнитных помех, так как
суммарный ток общего жгута равен нулю).
Кроме указанных основных правил монтажа применяют различные специфические приемы с учетом функциональных задач
отдельных узлов. В частности, провода, передающие сигналы от
датчиков в усилители регуляторов, измерительные устройства и
другие высокочувствительные узлы, выполняют в виде свитых
(скрученных) пар проводов. При этом, благодаря транспонированию проводов, обеспечивается компенсация токов, наведенных в
них источниками помех.
Проводную связь и функциональные узлы питаемой радиоэлектронной аппаратуры можно защитить от внешнего электромагнитного поля экранами – электростатическими, магнитостатическими и электромагнитными.
Электростатический экран обычно выполняется из медной
или алюминиевой фольги и им окружают источник помех. Металлическая оболочка экрана замыкает электрическое поле провода,
ограничивая его распространение в окружающую среду. Из-за
конструктивной громоздкости и дополнительных потерь активной
мощности магнитостатические и электромагнитные экраны в современных полупроводниковых преобразователях используются
редко. Как правило, использование такого типа экранов целесообразно при разделении внутри ограниченного объема преобразователя его силовых электромагнитных элементов и схем СУ.
Основным средством подавления электромагнитных помех в
преобразователях является применение Г - образных фильтров
37
радиопомех. При этом целесообразно помещать фильтр в заземленный экран.
Следует отметить, что фильтры радиопомех преобразователей
должны рассчитываться уже на начальных этапах их разработки,
однако окончательная корректировка значений параметров фильтров практически всегда проводится экспериментально. Причиной
этому является большое количество трудноучитываемых факторов, влияющих на уровень помех, например разводка монтажа,
конструктивная компоновка функциональных узлов, организация
заземления и др.
1.6.4 Этапы проектирования САЭ
Разработка САЭ, как и любого устройства, должна проходить
последовательно через все этапы научно-исследовательских и
опытно-конструкторских работ.
Традиционно процесс проектирования САЭ от получения
технического задания на систему до разработки рабочей документации и серийного (массового) производства состоит из следующих этапов:
1) формирование технического задания на САЭ. Здесь осуществляется выбор АИЭ, ПЭ, коммутационных аппаратов и др.
устройств, разрабатываются схемы подключения ПЭ к АИЭ и
другим системам, при необходимости;
2) определение основных показателей САЭ по ее критериям
эффективности;
3) разработка электрических схем устройств САЭ, необходимых для выпуска рабочих чертежей;
4) корректировка технических решений, электрических схем
и рабочих чертежей по результатам испытаний.
Одной из главных задач этапа предварительного проектирования САЭ является обоснование структуры системы, в том числе,
применяемых в этой структуре ФУ и их параметров. Основными
факторами, определяющими целесообразность выбора структурно-схемного решения САЭ, являются предполагаемые условия, в
том числе, режимы функционирования и требования, предъявляемые потребителями по параметрам электроэнергии.
Выбор наилучшего (оптимального) варианта структуры САЭ из
множества принципиально возможных, на практике осуществляется
38
на основании сравнительного анализа характеристик и показателей
проектируемых систем. Обычно для многих САЭ на первых этапах
разработки задаются основными электрическими параметрами и основными показателями критериев эффективности (для передвижных
САЭ, прежде всего МГП, показатели надежности и КПД), другие
характеристики относятся к ограничениям или часть показателей
может не приниматься во внимание вообще. Такой принцип проектирования с одной стороны упрощает процесс разработки, а с другой
стороны не позволяет создавать высокоэффективные САЭ. Однако,
когда стоит задача о разработке САЭ, как правило, проектировщику
известны требования потребителей к параметрам электроэнергии,
условия их эксплуатации, поэтому в этом случае несколько упрощается задача по созданию оптимальной системы.
Создание же универсального структурно-схемного решения
САЭ, которое было бы востребовано известными потребителями
электроэнергии во всем своем многообразии, практически не
представляется возможным. Так как такие системы содержали бы
избыточное число ФУ и устройств, обеспечивающих работу САЭ.
Здесь представляется целесообразным разбить структурные решения САЭ на несколько групп, и для этих групп создавать универсальные схемы систем электроснабжения (СЭС).
Так, к примеру, для передвижных САЭ в первую группу должны
входить САЭ, которые предназначены для электроснабжения потребителей в основном постоянным током (потребляемая энергия постоянного тока, которыми составляет 70% и более от установленной
мощности САЭ). Очевидно, что такие системы должны содержать
АИЭ постоянного тока, а в качестве ПЭ должны использоваться конверторы с промежуточным высокочастотным преобразованием электроэнергии (на сегодня преобразователи этого типа имеют относительно высокие показатели по критериям эффективности). Однако
значительно лучшие показатели эффективности, в этом случае, будут
иметь САЭ, в которых применяются высокочастотные АИЭ. Поскольку основу САЭ будут составлять трансформаторновыпрямительные ПЭ (ТВП), и повышение частоты питающего
напряжения приведет к значительному улучшению МГП трансформаторов, фильтров, уменьшится число полупроводниковых приборов
выпрямителей, повысится КПД ПЭ и САЭ в целом и уменьшится
уровень электромагнитных помех.
39
Ко второй группе следует отнести САЭ, которые предназначены для электроснабжения потребителей в основном переменным током (потребляемая энергия переменного тока, которыми
составляет 70% и более от установленной мощности САЭ). Здесь
АИЭ должны генерировать напряжение промышленной частоты,
за исключением тех случаев, когда основу составляют потребители с повышенной частотой напряжения.
В третью группу должна входить САЭ, где потребляемая
мощность на постоянном и переменном токе примерно равномерно распределяется между потребителями. В этом случае необходимо проводить более глубокую оптимизацию САЭ с учетом требований потребителей по качеству электроэнергии и бесперебойности электроснабжения, а также обеспечения высоких показателей критериев эффективности системы.
В общем случае основными этапами методики комплексной
оптимизации структурно-схемного решения САЭ должны быть
следующие:
1. Оценка потребителей по параметрам электроэнергии, в том
числе по мощности, уровню напряжения, роду тока, показателям
качества электроэнергии, в особенности для ответственных потребителей.
2. Оценка критериев эффективности известных и перспективных решений АИЭ, ПЭ, коммутационной аппаратуры и других
устройств системы и их выбор.
3. Разработка структурно-схемного решения системы, с учетом обеспечения гарантированного бесперебойного электроснабжения ответственных потребителей, здесь же создание резерва,
при необходимости, АИЭ и ПЭ, в том числе устройств, блоков и
элементов.
4. Разработка функциональной схемы системы. Здесь необходимо предусмотреть все возможные взаимосвязи, с учетом нормального (основного) режима работы и предполагаемых других, в
том числе аварийных режимов. Проводится оценка системы по
удельной массе, КПД, надежности, стоимости. Эти показатели являются важными при оценке системы в основном режиме ее
функционирования, поскольку они являются определяющими при
оценке эффективности САЭ.
5. Исследование электромагнитных процессов, в том числе
40
электромагнитной совместимости и уровня электромагнитных помех. Исследования проводятся с использованием математического
моделирования. На практике, иногда есть возможность создать
физическую модель перспективного образца, что позволяет в результате с высокой степенью достоверности провести исследования.
6. Выбор математических методов решения оптимизационной
задачи. Здесь же определяются основные критерии оптимизации.
7. Анализ полученных результатов и выработка практических рекомендаций.
41
ГЛАВА2
АВТОНОМНЫЕ ИСТОЧНИКИ ЭЛЕКТРОЭНЕРГИИ
2.1 Перспективы развития автономных источников
Основные показатели АИЭ представлены в табл. 2.1. Предпочтительнее характеристики имеют электромеханические генераторы (ЭМГ). В настоящее время они являются наиболее универсальным источником электроэнергии как переменного, так и постоянного тока с широким диапазоном мощностей и напряжений. Кроме того, ЭМГ имеют хорошие МГП, КПД, а также высокую степень отработанности технологий изготовления. Однако из-за
наличия вращающихся частей они характеризуются средним
уровнем ресурса.
Таблица 2.1 – Основные показатели АИЭ
ЭХГ
Диапазон
мощности,
кВт
4
1 – 10
1 – 100
АБ
0,1 – 10
10 – 100
СБ
0,1 – 100
10 - 300
Тип
АИЭ
ЭМГ
Напряжение,
В
4
КПД
0,8 – 0,9
0,4 – 0,7
10 - 10
10 – 100
Удельная
масса,
кг/кВт
0,2 – 12
5 – 50
0,002 – 0,01
0,6 – 0,9
(кг/кДж)
0,1 – 0,25 10 - 100
Электрохимические генераторы (ЭХГ) имеют сравнительно
высокий КПД и ресурс, основные их недостатки: плохие МГП и
сложность регулирования параметров электроэнергии.
Аккумуляторные батареи (АБ) применяются в САЭ в основном как резервные или аварийные источники, как и ЭХГ имеют
средний уровень ресурса и относительно высокую стоимость.
Солнечные батареи (СБ) получают энергию непосредственно
из окружающей среды, имеют большой ресурс, но плохо приспособлены для высокодинамических режимов, не работают без солнечного света и имеют высокую стоимость.
Таким образом, как видно с табл. 2.1, основу перспективы для
использования в качестве источника электроэнергии составляют
ЭМГ.
42
Приводные двигатели ЭМГ определяют основные эксплуатационно-технические характеристики АИЭ, в том числе и ресурс
работы.
Общий обзор разработок ведущих отечественных и зарубежных фирм показывает, что главными направлениями развития
двигателестроения в ближайшее время остаются совершенствование и оптимизация рабочего процесса, повышающего эксплуатационно-технические характеристики дизельных двигателей (ДД),
которые осуществляют привод ЭМГ. Кроме того, значительное
внимание уделяется совершенствованию газотурбинных двигателей (ГТД), развитию и внедрению двигателей Стирлинга (ДС) и
адиабатных двигателей (АД).
В настоящее время в США налажен серийный выпуск ДС,
КПД которых достигает 0,35. Показатели ДС – экономичность,
компактность и удельная мощность – практически такие же, как у
современных ДД. Кроме того, ДС имеет ряд преимуществ: практически полное отсутствие вибрации и шума, вследствие непрерывности (а не вспышками, как в ДД) процесса горения топлива в
ДС и хорошей сбалансированностью цилиндров; возможность использования в ДС любого источника энергии, включая солнечную
энергию, ядерного реактора и даже радиоизотопов. Основными
недостатками ДС являются относительная сложность конструкции, высокая стоимость производства и более сложная система
регулирования, чем у ДД.
Весьма перспективны АД, экономическая эффективность работы которых может быть повышена до уровня, практически недостижимого для ДД. Расчетные исследования на физических моделях показывают, что КПД АД может доходить до 0,59, а анализы патентов прогнозируют его до 0,64, при этом ожидаемый расход топлива – не более 150 г/кВт ч. Кроме того, показатели
удельной массы АД на 15 – 20% лучше, чем у ДД. Однако, создание АД ставит перед конструкторами многочисленные проблемы,
которые исходят с их основных недостатков: низкая надежность
керамических материалов (хрупкость), высокая токсичность отработавших газов, высокая стоимость.
Основные энергетические характеристики АИЭ определяют
их генераторы электроэнергии. Автономная электроэнергетика
предъявляет ряд специфических требований к генераторам АИЭ,
43
основными из которых являются:
1) высокая стабильность и точность поддержания параметров
электроэнергии (амплитуды, частоты и формы генерируемого
напряжения) в условиях действия таких дестабилизирующих факторов, как переменная частота вращения приводного двигателя
(ПД), изменяющаяся величина и характер нагрузки, параллельная
работа с другими источниками;
2) минимальная масса и габариты при растущей потребности
увеличения установленной (расчетной) мощности;
3) высокая надежность работы и КПД;
4) минимальная стоимость и эксплуатационные расходы.
В последние годы в автономной энергетике нашли применение весьма перспективные ЭМГ переменного тока – асинхронизированные синхронные генераторы (АСГ), представляющие собой
синтез собственно электрической машины и силовых статических
преобразователей электроэнергии.
АСГ могут устойчиво работать во всех требуемых по условиям эксплуатации режимах, в том числе и переменных частотах
вращения ПД. При этом требования к приводам АСГ то точности
стабилизации частоты вращения значительно снижены в сравнении с требованиями, предъявляемыми к приводам традиционных
СГ. Области устойчивости АСГ, при прочих равных условиях,
всегда больше областей устойчивости СГ, особенно в режимах
глубокого потребления реактивной мощности.
Обмотка фазного ротора АСГ питается от преобразователя
частоты током, изменяющимся с частотой, пропорциональной
скольжению, при этом АСГ, являясь индуктивной нагрузкой для
преобразователя частоты, существенно ослабляет токи высших
гармоник преобразователя, а изменение частоты вращения ротора
не приводит к изменению частоты вращения магнитного поля и,
соответственно, частоты тока выходного напряжения генератора.
Форма кривой выходного напряжения АСГ искажена и отличается от синусоидальной, что обусловлено пространственной несинусоидальностью кривой поля в воздушном зазоре, несинусоидальностью тока возбуждения и сильными электромагнитными
помехами из-за коммутаций полупроводниковых приборов преобразователя частоты.
Кроме того, АСГ имеет следующие недостатки: невозмож44
ность установки демпферных контуров на роторе; большая установленная масса; сложность СУ, и соответственно пониженные
значения показателей надежности генератора в целом.
Перспективным бесконтактным ЭМГ является синхронный
генератор с вращающимися выпрямителями (СГВВ). В отличии от
традиционных генераторов, у которых ток в обмотку возбуждения
подается через кольцевой щеточный контакт, в СГВВ питание обмотки возбуждения осуществляется от специального возбудителя,
обеспечивающего бесконтактную передачу энергии от ротора к
статорной обмотке генератора электромагнитным путем. При этом
на обмотку ротора передается электрическая энергия переменного
тока, и возбудитель питает обмотку возбуждения через установленный на роторе вращающийся выпрямитель. В качестве возбудителя могут использоваться вращающийся трансформатор, асинхронный или синхронный возбудитель.
Отечественной промышленностью освоен выпуск СГВВ
мощностью 10 – 2500 кВА, частотой вращения ротора 750 –
1800 об/мин, имеющие КПД 0,82 – 0,95 и удельную массу 3,6 –
18 кг/кВт.
Общие недостатки СГВВ связаны с относительно сложной
силовой электрической схемой и наличием на роторе обмоток,
полупроводниковых приборов, защитных элементов, фильтров и
т.п., что снижает надежность его работы, ограничивает предельно
допустимые частоты вращения ротора и температуры.
Для существенного улучшения характеристик САЭ необходимы новые методы и принципы их конструирования. Одно из
перспективных направлений позволяющим значительно улучшить
характеристики САЭ является применение в составе АИЭ высокоскоростных приводных двигателей (ВПД) ГТД или комбинированных свободно-поршневых двигателей (КСПД), частота вращения которых находится в пределах 6000 – 24000 об/мин.
Высокие частоты вращения ВПД и соответственно повышенная частота напряжения переменного тока, позволяет значительно
снизить габариты и вес генераторов и ПЭ, повысить качество
напряжения постоянного тока и повысить быстродействие систем
защиты и стабилизации параметров электроэнергии САЭ. Кроме
того, уменьшение числа полупроводниковых приборов ПЭ приве45
дет к повышению надежности и КПД САЭ, а также уменьшению
уровня электромагнитных помех.
Современные ГТД имеют КПД не превышающее значение
0,25, а удельную массу 1 – 3 кг/кВт. Развитие ГТД зависит от
уровня разработки отдельных его элементов с применением новых
материалов. Можно предположить, что успехи в совершенствовании металлокерамических и керамических материалов будут способствовать дальнейшему развитию ГТД.
Одним из перспективных направлений является использование в САЭ КСПД. КСПД относят к классу ГТД, так как они содержат свободно-поршневой генератор газа (компрессор) и газовую турбину.
Конструктивный чертеж АИЭ на базе КСПД и бесконтактного генератора электроэнергии показан на рис. 2.1.
Принцип работы КСПД. Топливо подается через форсунку 6 в
цилиндр двигателя 7, при его воспламенении в цилиндре двигателя создается высокое избыточное давление, в результате чего
поршни 10 перемещаются в сторону буферных цилиндров 12. Через всасывающие клапана 2 в компрессор 1 поступает свежий воздух. Отработавшие газы через выпускные окна 5 по трубопроводу
устремляются на лопатки турбины 17, которая начинает вращаться с высокой частотой. Буферные цилиндры 12 являются амортизаторами поршней компрессора 11 из-за наличия в них сжатого
воздуха поступающего из баллона 13. Поэтому когда давление
воздуха в буферных цилиндрах будет выше, чем давление отработавших газов в цилиндре двигателя, поршни двигателя устремляются навстречу друг другу. В этот момент времени закрываются
всасывающие клапана 2 и открываются нагнетающие клапана 3,
свежий воздух поступает в продувочный рессивер и через продувочные окна 9 устремляется в цилиндр двигателя 7.
Регулирование частоты движения поршня двигателя осуществляется за счет изменения количества топлива поступающего
через форсунку в цилиндр двигателя или за счет изменения давления воздуха в буферных цилиндрах.
В сравнение с эксплуатируемыми в настоящее время дизельными двигателями КСПД согласно литературным источникам
имеет следующие преимущества:
46
Рис. 2.1. Конструктивный чертеж АИЭ, на базе КСПД, где обозначено:
1 – компрессор; 2 – клапан всасывающий; 3 – клапан нагнетающий; 4 –
выпускной коллектор; 5 – выпускные окна; 6 – форсунка; 7 – дизельный
цилиндр; 8 - продувочный ресивер; 9 – продувочные окна; 10 – дизельный поршень; 11 – компрессорный поршень; 12 – буферный цилиндр;
13 – баллон сжатого воздуха; 14 – направляющие стержни; 15 – нагнетающий клапан сжатого воздуха; 16 – магнитный подшипник; 17 – турбина; 18 – генератор электроэнергии
1) работают на любых сортах топлива, включая мазут и сырую нефть;
2) обладают способностью экономичной работы на малых
нагрузках;
3) отсутствие кривошипно-шатунного механизма и механизма
газораспределения повышает их надежность и ремонтопригодность;
4) имеет относительно высокий КПД (до 40%, а при изготов47
лении поршней на керамической основе может достигнуть до 50%);
5) имеет хорошие МГП, удельная масса равна 3,5 – 5,5 кг/кВт
(при генерируемой мощности генератором 100 кВт диаметр компрессора не превышает 700 мм, а длина 1800 мм);
6) имеет большой ресурс работы (более 50000 ч).
Однако, предельно допустимая частота вращения вала (турбины) ВПД и, соответственно, ресурс работы АИЭ в основном
ограничены показателями подшипников и механической прочностью ротора генератора электроэнергии. Поэтому с ВПД должны
использоваться бесконтактные электрические машины (БЭМ), обладающие повышенной надежностью и имеющие улучшенные
характеристики в сравнении с контактными генераторами электроэнергии. БЭМ в перспективе составляют основу развития автономной электроэнергетики в диапазоне мощностей от десятков
ватт до сотен киловатт. К таким электрическим машинам относятся СГ с постоянными магнитами (СГПМ) и асинхронные генераторы с конденсаторным возбуждением (АГ).
Стандартные подшипники качения, применяемые в авиационных АИЭ, рассчитаны на п = 6000 - 12000 об/ мин. Для высокоскоростных подшипников при интенсивном масляном охлаждении
частота вращения может достигать 20000 - 30000 об/мин.
Однако, значительное повышение частоты вращения ротора
БЭМ и турбины ВПД, и повышение ресурса их работы соответственно возможно при переходе к бесконтактным опорам - газовым и магнитным.
Газовые опоры делятся на газостатические и газодинамические. Газостатические опоры основаны на непрерывном поддуве
сжатого газа под цапфу вращающегося вала, благодаря чему цапфа удерживается в подвешенном состоянии силами давления газа
(принцип «газовой подушки»). Для реализации таких опор требуется специальная система сжатого газа.
В газодинамических опорах, применяемых в малых машинах,
используется самозасасывание газа из окружающей среды за счет
аэродинамических профилей на вращающихся торцах опор. Под
небольшим избыточным давлением газ направляется под цапфу и
удерживает ее в подвешенном положении. Однако при неподвижном роторе цапфа ложится на твердую опору, поэтому при пусках
и остановках возникают большие силы трения.
48
Газовые опоры могут выполняться комбинированными – при
пуске опора работает как газостатическая, а при достижении необходимой частоты вращения переходит в газодинамический режим. Рабочие зазоры в газовых опорах составляют 0,001 – 0,1 мм.
Магнитные опоры, называемые так же магнитными подшипниками, основаны на взаимодействии постоянных магнитов или
электромагнитов. На валу и на статоре размещаются магниты, создающие такую комбинацию силы отталкивания (для однополярных полюсов) и притяжения (для разнополярных полюсов), что
ротор удерживается в подвешенном состоянии и не касается статора. Особый импульс развития таких опор получен в связи с созданием высококоэрцитивных постоянных магнитов на основе
редкоземельных материалов. Часть магнитов в опорах обычно выполняется в виде электромагнитов с обмотками, позволяющими
регулировать силы подвеса.
На рис. 2.2. показана упрощенная схема магнитного подшипника. На статоре 2 консольно закреплены три катушки: кольцевая
4 и две сегментные 5 и 6. На конце вала ротора размещена обойма,
внутри которой имеются магнитопровод и кольцевой радиально
намагниченный постоянный магнит 3, создающий радиальное
магнитное поле в области обмотки 4 и аксиальное поле в области
обмоток 5 и 6. Благодаря этому на катушки статора действует осевая и радиальные силы. Они обеспечивают магнитный подвес ротора, характеристики которого можно изменять, регулируя токи в
обмотках 4,5,6.
В реальных конструкциях магнитных подшипников применяется несколько постоянных магнитов и кольцевых катушек, а также дополнительные сегментные катушки (обычно сдвинутые на
о
90 относительно основных), обеспечивающие устойчивость ротора при боковых перегрузках.
Газовые и магнитные опоры обеспечивают частоту вращения
п= 30000 - 100000 об/мин при пренебрежимо малых потерях и
больших сроках службы. К их недостаткам относится малая жесткость подвески, плохая работоспособность при динамических
2
нагрузках, относительно низкая грузоподъемность (до 100 Н/см ),
возможность появления неустойчивых колебаний ротора, сложность регулирования и стабилизации. Однако, достоинства бес49
контактных опор стимулируют их применение в БЭМ малой мощности и в энергетических установках, работающих в сложных
окружающих условиях. Так, например, при разработке в США
проектов газотурбинных установок для космических станций с
электрическими мощностями от 10 до 100 кВт предлагается использование газовых подшипников в главном блоке, содержащем
генератор, компрессор, турбину, вращающуюся с частотой до
40000 об/мин.
Рис. 2.2. Магнитный подшипник: 1 – вал; 2 – статор; 3 – постоянный
магнит; 4 – кольцевая обмотка; 5, 6 – сегментные обмотки
Конструкция компрессора КСПД в перспективе предполагает
возможность разработки линейных генераторов. Линейные движения ротора будет обеспечивать компрессорный поршень 11 (см.
рис. 2.1.), а статорные обмотки, в этом случае, должны быть размещены за объемом буферного цилиндра 12. Здесь при проектировании основной проблемой будет обеспечения герметичности
буферного цилиндра.
2.2 Основные ограничения для бесконтактных генераторов с
приводом от высокоскоростных двигателей
При разработке бесконтактных генераторов электроэнергии
для АИЭ, привод которых осуществляется ВПД, вводятся ограничения, связанные с предельными частотами вращения или окруж50
ными скоростями ротора (определяемыми его прочностью), с максимальными электромагнитными нагрузками, а также в ряде случаев с электромеханической постоянной, характеризующей быстродействие БЭМ и др. Дополнительные особенности бесконтактных высокоскоростных генераторов (БВГ) для АИЭ проявляются
также при выборе геометрического фактора , определяемого по
формуле
= l / D,
(2.1)
где l и D – длина воздушного зазора и внутренний диаметр статора
генератора.
Перед тем как рассмотреть влияние перечисленных факторов
на потери, КПД, массу и мощность БВГ рассмотрим основные
расчетные уравнения. Расчетная мощность машины определяется
по формуле
S mEI.
(2.2)
Действующее значение ЭДС определяется по формуле
E 4,44 k B kобW1 fФ,
(2.3)
где kВ 1,11 – коэффициент формы синусоидальной кривой магнитной индукции в зазоре; kоб 0,96 – обмоточный коэффициент,
учитывающий распределение и укорочение обмотки; W1 – число
витков обмотки фазы; f = рn / 60 – частота тока; р – число пар полюсов; n – частота вращения ротора; Ф = B l - магнитный
поток; = D/(2р) – полюсное деление; р 0,64 - расчетный коэффициент полюсного перекрытия; m – число фаз.
Величина линейной нагрузки генератора, т.е. величина тока,
приходящегося на единицу длины окружности зазора машины,
А = N I1 /(D ),
(2.4)
где N = 2 W1 m – полное число проводников обмотки статора (так
как каждый виток имеет две активные стороны, а в каждой фазе
W1 витков); I1 – ток в обмотке статора.
Тогда, с учетом записанных выражений, формула (2.2) приво51
дится к основному расчетному уравнению электрической машины
S knAB D
3
(2.5)
или
D3
S
,
kAB n
(2.6)
где
2
k (kBkоб р ) / 60,
(2.7)
А – линейная нагрузка; В - магнитная индукция в воздушном зазоре.
Предельно допустимые значения частоты вращения nmax
определяются показателями подшипников или прочностными характеристиками ротора. В подшипниках nmax зависит от механических нагрузок (грузоподъемности подшипников), вида смазки,
срока службы. Предельные частоты вращения известных технических решений подшипников рассмотрены в п. 2.1.
Окружная скорость ротора max должна соответствовать
прочностным характеристикам ротора БВГ. Если БВГ оптимизируется по удельной массе, что является типичной задачей для передвижных САЭ, и частота тока жестко не фиксируется, то ограничения, связанные с прочностью ротора, могут приближенно
учитываться соотношением вида
C
nmax п ,
D
(2.8)
где Сп – постоянная, определяемая прочностными свойствами материала ротора; - показатель зависящий от его конструктивного
исполнения (наличия консульных выступов, вида бандажей и т.д.).
Чем сложнее конструкция ротора, тем больше значение . Если ротор имеет форму сплошного цилиндра, то в этом случае
прочность ротора может характеризоваться предельной окружной
скоростью max независимо от диаметра D. Так как
52
max
Dnmax
60
,
(2.9)
то для сплошного ротора при заданном значении max, согласно
(2.8), имеем = 1. Для роторов более сложной конструкции > 1,
так как прочность ротора снижается и значения nmax должны быть
меньше.
В БЭМ, привод которых осуществляется от ВПД, роторы, как
правило, имеют повышенной прочности бандажи, поэтому можно
принять 1 и определить nmax по заданному значению max с
помощью (2.9). Тогда с учетом kB kоб 1 из (2.6) следует
D
S
.
AB max
(2.10)
Таким образом, для БВГ, работающих с предельными механическими нагрузками, вид основного расчетного уравнения изменяется.
Ограничение на электромагнитные нагрузки определяет выбор предельных значений А и В, обеспечивающих минимальные
размеры генератора.
С ростом линейной нагрузки А снижается ЭДС Е, а следовательно, уменьшается выходное напряжение генератора за счет реакции якоря. Кроме того, ограничения на линейную нагрузку А по
тепловым режимам обмотки статора должны согласовываться с
плотностью тока j, которая при заданных размерах статора линейно связана с А. Часто тепловые нагрузки электрических машин
характеризуют произведением А j. Для машин средней мощности
2
4
с самовентиляцией j = 4 – 10 А/мм , А = (1,5 – 3) 10 А/м, для машин с принудительным воздушным охлаждением j = 10 –
2
4
16 А/мм , А = (2 – 5) 10 А/м, для машин с жидкостным охлажде2
4
нием j = 20 – 30 А/мм , А = (6 - 10) 10 А/м.
Магнитная индукция в зазоре имеет характерные значения
В = 0,5 – 1 Тл и не может быть существенно увеличена из-за
чрезмерного насыщения стали в зубцовой зоне статора.
Произведение kАВ называют иногда коэффициентом исполь53
-1
зования машины, а обратное его значение (kАВ) = СА – машинной постоянной Арнольда.
Одно и тоже значение коэффициента использования можно
получить при умеренных значениях А и повышенных В или,
наоборот, при повышенных А и относительно низких В. В первом
случае электрическая машина имеет увеличенный магнитопровод,
а во втором относительно большой объем обмоток. Обычно БЭМ
относятся ко второму типу машин, имеющих пониженный объем
магнитопровода и, соответственно, меньшие значения удельной
массы.
Ограничения на геометрический фактор, входящий в основное расчетное уравнение, связаны в первую очередь с характером
замыкания магнитного потока. СГПМ и АГ имеют радиальный
поток. Для машин с радиальным потоком ограничения на величину определяются главным образом прочностными требованиями, и может меняться в относительно широких пределах. Однако, существует рациональное значение , зависящее от числа пар
-0,5
полюсов. Например, для синхронных машин = 0,8 р , для
-2/3
асинхронных = 1,6 р .
При проектировании БЭМ необходимо также учитывать, что
при малых значения ( 0,3) снижается относительно полезный
объем машины по сравнению с объемом конструктивных элементов, лобовых частей обмоток и т.п., а при больших значениях
( > 3 – 4) их сложно реализовывать из-за увеличенных прогибов
вала и возможного совпадения частоты вращения n с критическими значениями nкр, соответствующими резонансным явлениям. В
правильно спроектированной машине n и nкр должны существенно
различаться (более чем на 30%). Критические значения частоты
вращения грубо оцениваются следующим образом: nкр30/ у ,
где у – статический прогиб вала под действием силы тяжести ротора, определяемый по известным формулам механики. Значение
у составляет порядка 10% величины рабочего воздушного зазора
-5
. Если, к примеру, у = 0,01 мм = 10 м, то nкр 9500 об/мин, что
может быть близким к рабочим значениям частоты вращения для
АИЭ. Очевидно, что при заданном диаметре D значение у тем
54
больше, чем больше .
Для уменьшения резонансных эффектов и снижения значений
nкр в высокоскоростных машинах часто применяют упругие опоры, в которых подшипник сопрягается со статорной расточкой с
помощью специальных упругих элементов (эластичных прокладок, стальных упругих колец и т. п.).
2.3 Потери и КПД бесконтактных высокоскоростных
генераторов
Потери электрической энергии в БВГ разделяются на основные и добавочные. Добавочные потери – это все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС,
колебаниями индукции вследствие зубчатого строения статора и
другими причинами. Как правило, для генераторов мощностью до
1000 кВт приближенно добавочные потери Рдоб принимают равными 0,5% мощности машины.
Основные потери БВГ состоят из электрических потерь в обмотке статора, магнитных потерь статора (потерь в электротехнической стали), механических потерь и поверхностных потерь.
Для того, чтобы определить основные потери и КПД БВГ
предлагается методика упрощенного расчета, которая с высокой
точностью позволяет провести оценку эффективности проектируемого генератора. Исходными данными для расчетов являются:
мощность генератора – S; номинальное напряжение - Uн; частота
вращения ротора - n; число пар полюсов - p; число зубцов статора
– Z; геометрический фактор - ; внутренний диаметр статора генератора – D, определяется по (2.10); плотность тока в обмотке статора – j1; значения параметров электромагнитной нагрузки А и В;
коэффициент мощности нагрузки - cosн.
Электрические потери в обмотке статора
Рэл mI12r1, Вт,
где r1 – активное сопротивление обмотки статора.
Рабочий ток фазы в обмотке статора
55
(2.11)
I1 S / mUн .
(2.12)
Для определения активного сопротивления r1 необходимо
определить число витков в обмотке статора W1, сечение провода
обмотки П1 и среднее значение длины витка Lср.
Число витков обмотки
Uн
,
2ukоб fB рl
W1
(2.13)
где u = 0,7…0,9 – коэффициент, учитывающий относительное
снижение напряжения на нагрузке; В 0,8 Тл – магнитная индукция в воздушном зазоре.
Подставив в (2.13) значения коэффициентов и с учетом того,
что f = рn / 60 , = D/(2р) получим
W1
17,5U н .
,
nВ Dl
(2.14)
Сечение провода обмотки статора
2
П1 I1 / а1 j1, мм ,
(2.15)
где а1 – число параллельных ветвей обмотки фазы.
Среднее значение длины витка обмотки
Lср 2,5(1,9 D l ).
(2.16)
Тогда с учетом (2.14) – (2.15) активное сопротивление обмотки можно определить по формуле
r1
мW1Lср
6
П1 10
, Ом,
(2.17)
-9
где м = 24,410 Омм- удельное сопротивление меди.
Магнитные потери в статоре
1,5
Рст 2 с Вс 2 ( f / 400) М с , Вт,
56
(2.18)
где с – удельные потери в электротехнической стали, к примеру,
для марки стали 79НМ они составляют 2,5 – 5,5 Вт/кг; Вс = (1,2 –
1,6) Тл – магнитная индукция стали; Мс – масса стали статора.
Приближенно масса стали может быть определена по формуле
М с mc k пl( Dн 2 D 2 ), кг ,
4
(2.19)
3
где mс = 7800 кг/м - удельная масса стали; kп = 0,8 – 0,9 - коэффициент, учитывающий объем паза статора; Dн = kD D – наружный диаметр статора генератора; kD = 1,3 – 1,9 – коэффициент,
зависящий в основном от числа полюсов генератора.
Механические потери Рмех определяются потерями на трение в подшипниках и потерями на вентиляцию, при использовании вентилятора и для n < 6000 об/мин определяются по формуле
3
Рм ех 3,68 10 р(
max
40
)
3
l , Вт.
(2.20)
Для n > 6000 об/мин основной вклад в механические потери
вносит вентилятор. Эти потери могут оцениваться по формуле
3 2 3
Рм ех 8 10 n D , Вт.
(2.21)
Поверхностные потери Рп в наружном цилиндре ротора
возникают из-за колебания индукции вследствие зубчатого строения статора
1,5
2
Рп 23Dl pn ( DВо ) / Z , Вт,
(2.22)
где Во = (0,2 – 0,3) Тл.
Подставив в (2.22) известные значения коэффициентов получим
3
1,5
Рп 18,26D l n
/ Z , Вт.
(2.23)
Как видно из формул (2.13) – (2.23), потери в БВГ в основном
57
определяют размеры активной части генератора D и l, которые во
многом зависят от значений S и n.
Коэффициент полезного действия генератора
S cos н
,
S cos н Р
(2.24)
где Р = Рдоб+Рэл+Рст+Рмех+Рп – сумма всех потерь генератора.
На рис. 2.3 показаны графики зависимостей основных потерь
БВГ от частоты вращения n для генераторов мощностью 10, 50 ,
200 кВА с параметрами: линейное напряжение Uн = 380 В; = 1,5;
2
А = 35000 А/м; В = 0,7 Тл; р = 1; Z = 30; j1 = 12 А/мм .
Индексы в обозначениях потерь соответствуют типу потерь и
мощности генераторов. На рис. 2.3 не показаны зависимости для
потерь в стали, поскольку они не превышают 1% от мощности
БВГ. Из рис. 2.3 видно, что в зависимости от мощности генератора, потери зависят от частоты вращения n и с ее увеличением они
перераспределяются между собой. Так для БВГ мощностью
10 кВА при значениях n < 20000 об/мин основную долю потерь
составляют электрические потери Рэл10, а при n >20000 об/мин –
механические Рмех10 и поверхностные Рп10 потери. Для БВГ
мощностью 50 и 200 кВА значения частоты вращения, при которой
происходит перераспределение потерь, составляют 14000 и 10000
об/мин соответственно.
Таким образом, при частотах вращения n > 10000 об/мин механические Рмех и поверхностные Рп потери БВГ средней мощности, являются основными потерями генераторов, от которых
зависит максимальная (предельная) мощность БВГ, с учетом
обеспечения высокого КПД и минимальной массы.
58
Рис. 2.3. Графики зависимостей основных потерь БВГ от частоты
вращения n
Кроме того, как видно из рис. 2.4, при значениях
n >24000 об/мин КПД у БВГ уменьшается, и тем значительнее, чем
больше мощность генераторов. Индексы КПД на рис. 2.4 соответствуют мощности БВГ. С учетом того, что графики = f (n) на рис.
2.4 построены при числе пар полюсов р = 1, то при р > 1 суммарные потери в БВГ еще больше увеличатся, и очевидно, что КПД
БВГ будет уменьшаться при меньших значениях n.
59
Рис. 2.4. Графики зависимостей КПД БВГ от частоты вращения n
2.4 Удельная масса и предельная мощность бесконтактных
высокоскоростных генераторов
На основе формул, рассмотренных в п. 2.2, можно осуществить оценку удельной массы машины mР, которая является важнейшим показателем генераторов АИЭ.
Полную массу генератора М можно выразить через массу активных материалов МА как М = kк МА, где kк = 1,4 – 1,7 – конструктивный коэффициент, учитывающий массу конструктивных
элементов (подшипниковых щитов, корпуса и т.п.). В свою очередь масса активных материалов
М А (k Dн2l ) / 4,
3
(2.25)
где = 8000 кг/м - средняя плотность активных материалов на
статоре и роторе; k 0,8 - коэффициент плотности, характеризующий заполнение машины активными материалами на длине.
При записи (2.25) предполагалось, что объем активных материалов, расположенных за пределами длины l (например, лобовых
частей обмоток), частично компенсирует различные полости в
статоре и роторе на длине l.
60
Таким образом,
3
М 1,4( / 4)k D 2k D .
(2.26)
С учетом (2.25) и (2.26) удельную массу генератора можно
определить по формуле
mP (1,4k D 2k ) /(4kAB n),
(2.27)
откуда следует, что для снижения удельной массы БВГ необходи2
мо, во-первых, минимизировать произведение kD k, что связано
с реализацией оптимальных конструктивных исполнений машины,
а во-вторых, иметь максимально допустимые электромагнитные
нагрузки А и В и частоты вращения n.
Если бесконтактные генераторы предназначены для работы с
предельными механическими нагрузками, то в соответствии с
(2.10) и (2.26) получаем значения минимальной его удельной массы при максимальных оборотах
1/ 2
mP min [1,4k D 2k ( S / )
nmax 60(max )
3/ 2
] /[4( р AB max )
1/ 2
[ р AB /(S )]
.
3/ 2
],
(2.28)
(2.29)
В этом случае с ростом расчетной мощности S максимальная
частота вращения nmax уменьшается, а значение удельной массы
mPmin может увеличиваться. Естественно, эти закономерности
проявляются при достаточно слабой зависимости АВ от S, что
обычно имеет место для генераторов средней и большой мощности.
Записанные выше формулы не только показывают характерные зависимости между основными параметрами БВГ, но могут
использоваться и для предварительной оценки возможностей
применения различных типов БЭМ в определенных условиях эксплуатации.
По заданной скорости max, непосредственно связанной с допустимыми механическими напряжениями в роторе, можно оце61
нить предельные мощности электромеханических генераторов
электроэнергии. Выражая D из (2.9) и подставляя результат в (2.5),
получаем
2
3
2
Sпр (k Bkоб р 60 / )AB ( max / n ).
(2.30)
На этапе проектирования, с учетом известных формул, можно
построить графики зависимости предельной мощности Sпр от nmax
и определить МГП БВГ. Так для предельной мощности генератора
Sпр = 150 кВА при = 100 м/с, nmax 14000 об/мин,
D 0,12 м, mmin 130 кг (см. рис. 2.5).
Удельная масса БВГ, работающих с предельными окружными
скоростями, может возрастать с увеличением их размеров и возникает ситуация, когда вместо одной машины с повышенной
мощностью целесообразно иметь две машины с той же суммарной
мощностью. Это связано с тем, что при фиксированной скорости
max по мере увеличения диаметра активной части машины D приходится снижать n, и возрастание мощности S, согласно (2.5), происходит медленнее, чем рост массы.
С другой стороны, как видно из (2.30), чем больше частота
вращения n, тем меньше предельная мощность генератора. Это
очевидно с физической точки зрения, так как увеличение частоты
вращения при заданной линейной скорости должно сопровождаться уменьшением размеров электрической машины (см.
рис. 2.5).
Целесообразно проектирование АИЭ осуществлять в составе
САЭ, поскольку иногда выгоднее занизить основные критерии
эффективности БВГ, для того чтобы улучшить, к примеру, МГП
ПЭ и САЭ в целом, за счет повышенной частоты генерируемого
напряжения АИЭ, которая получается путем увеличения числа пар
полюсов генератора.
Таким образом, для повышения эффективности проектирования БВГ на начальных этапах проектирования необходимо проводить предварительную оценку основных критериев эффективности БЭМ. Рассмотренная выше методика упрощенного расчета и
графики показывают характерные особенности зависимостей
между основными параметрами БВГ и могут использоваться для
62
предварительной оценки возможностей применения различных
типов БВГ на начальных этапах проектирования для заданных
условий эксплуатации, т.е. в составе конкретных структурных решений САЭ.
Рис. 2.5. Графики зависимостипредельной мощности БВГ
Sпр от максимальной частоты
вращения ротора nmax и зависимости значений внутреннего
диаметра статора D и минимальной массы
генератора
mmin от Sпр. При исходных
данных: Uн = 380 В; = 1,5;
А = 35000 А/м; В = 0,7 Тл;
2
j1 = 12 А/мм ; р =1
Из рассмотренных типов БВГ широкие перспективы раскрываются перед СГПМ и АГ, поэтому целесообразно рассмотреть
особенности их работы.
2.5 Синхронные генераторы с постоянными магнитами
СГПМ просты в конструкции, имеют высокий КПД, надежны в возбуждении, малоинерционны в переходных процессах,
имеют хорошие выходные характеристики.
63
В настоящее время известно большое разнообразие конструкций СГПМ. Среди них следует отметить торцовую конструкцию
(ротор с тангенциальным намагничиванием), которая помимо
прочих достоинств СГПМ имеет следующие: жесткий и короткий
ротор, выдерживающий высокие скорости вращения; небольшая
масса вращающихся частей при достаточном моменте инерции (за
счет большего диаметра); простота и технологичность конструкции; удобство встраивания в конструкцию первичного двигателя
(постоянные магниты (ПМ) рассредотачиваются на вращающихся
частях двигателя, а статор располагается рядом с ними). По оценкам, для торцовой конструкции СГПМ достижима окружная скорость до 400 м/с и расчетная мощность до 100 кВА и более.
Особенностью конструкции торцового СГПМ (рис. 2.6, а) является наличие вращающихся вокруг неподвижного полого вала 1
дисковых роторов 2, на которых расположены полюса системы
возбуждения 3, представляющие собой кольцевые секторы, изготовленные из материала ПМ. Полюса располагаются на ярме 4 –
тонком кольце из электротехнической стали, предназначенном для
замыкании силовых линий магнитного потока полюсов. Рядом с
ротором расположен тороидальный статор 5, отделенный от ротора аксиальным (торцовым) воздушным зазором. На торцовой поверхности статора находятся радиальные пазы, в которых укладываются трехфазные обмотки статора 6. Статор жестко связан с неподвижным валом 1, на котором посредством подшипников 7 крепятся роторы генератора. Дисковые роторы связаны между собой
силовыми шпильками 8. Выводы обмоток статора 9 проходят через полый вал на распределительную коробку СГ 10. Привод роторов осуществляется через специальные пазы 11, размещенные
на одном из них. Вал приводного двигателя, соответственно имеет
специальные крепления, обеспечивающие зацепление с ротором
через пазы 11. (На рис. 2.6,а расстояние между роторами 2 и статором 5 увеличено, с целью рассмотрения конструкции магнитной
системы торцевых СГПМ).
Возможно применение одно - и многопакетных конструкций
статора торцовых СГПМ (когда ротор с открытыми с двух сторон
полюсами расположен между пакетами статора). Если применить
в торцовых СГПМ с двумя роторами кольцевую (тороидальную)
одно- или многофазную обмотку (как на рис. 2.6, а), то улучшает64
ся использование обмоточной меди по сравнению с ранее известными конструкциями торцовых СГПМ. В частности, для применения в составе АИЭ перспективен торцовый СГПМ с трехфазной
симметричной распределенной обмоткой. Расчетно-конструктивные проработки показывают, что суммарная длина лобовых частей кольцевых обмоток примерно в 4 - 6 раз меньше длины активных частей, в то время как у известных конструкций СГ это
отношение имеет значения порядка 2 - 3.
а)
б)
Рис.2.6. Конструкция магнитной системы торцевого СГПМ:
1 – вал; 2 – ротор; 3 - полюса системы возбуждения, 4 - ярмо, 5 – статор;
6 – обмотка; 7 – подшипник; 8 – силовые шпильки; 9 – вывод обмотки;
10 – распределительная коробка; 11 – пазы крепления к приводному двигателю
Рассмотренная конструкция генератора имеет более простую
технологию изготовления и сборки, чем другие СГПМ и позволяет
легко получать системы с любым количеством фаз и с большим
количеством полюсов, что особенно важно для источников элек65
троэнергии повышенной частоты (порядка 400 Гц и выше). Следует учесть, что возможно применение ПМ в форме кольцевых секторов как с аксиальным намагничиванием (рис. 2.6, а), так и с тангенциальным намагничиванием (рис. 2.6, б). В последнем случае
при равном количестве магнитов в системе возбуждения частота
тока будет вдвое выше, следовательно, масса статора будет
уменьшаться.
Широкие перспективы в создании СГПМ открывает промышленное освоение производства магнитотвердых материалов интерметаллических соединений редкоземельных элементов с кобальтом, используемых для ПМ систем возбуждения СГПМ, размещаемых на роторе генератора. Использование редкоземельных
материалов улучшает МГП генераторов. Однако сдерживающим
фактором в применении указанных материалов является их относительно высокая стоимость.
В настоящее время основным материалом для магнитов систем возбуждения СГПМ служат металлокерамические сплавы
типа альни, альнико и, реже, бариевые ферриты, механическая
прочность которых в 3 – 6 раз выше литых роторов из магнитотвердых ферритов.
Таким образом, особенностью СГПМ является зависимость
их мощности от объема (массы) и качества (энергетических показателей) материала ПМ, используемых в системе возбуждения. На
рис. 2.7 приведены зависимости S = f (V), рассчитанные для материалов типа альнико марки ЮНДК35Т5АА (1, 4), редкоземельных
марки КС37 (2, 5), сплава фенебор Nd2Fe14В (3, 6) при коэффициенте мощности нагрузки 0,8, числе пар полюсов р = 4, частоте
вращения ротора n = 6000 об/мин (прямые 1 – 3) и 10000 об/мин
(прямые 4 – 6).
СГПМ обычного исполнения при интенсивном воздушном
охлаждении, частотах вращения n = 8000 – 12000 об/мин и мощностях 20 – 60 кВА имеют КПД 0,89 – 0,91 и удельную массу 1,2 –
1,6 кг/кВт. В США разработаны СГПМ мощностью 110 кВА с
удельной массой 0,15 кг/кВА.
Одно из перспективных направлений в разработке бесконтактных генераторов электроэнергии связано с отказом от традиционного выполнения электрической машины в виде самостоя66
тельного конструктивного агрегата. Так, к примеру, ПМ СГПМ
крепят непосредственно на валу компрессора турбореактивного
авиадвигателя, а якорь размещают на корпусе авиадвигателя в
наиболее удобном для этой цели месте. По расчетам подобный
СГПМ при мощностях 60 – 120 кВА, частоте вращения
n = 6000 об/мин и канальном охлаждении якоря будет иметь
удельную массу не более 0,3 кг/кВА. Такая компоновочная схема
СГПМ является перспективной, целесообразной и экономически
обоснованной.
Важная особенность СГПМ в сравнении с СГ с электромагнитным возбуждением – сложность регулирования и стабилизации
выходного напряжения.
Рис. 2.7. Зависимость мощности СГПМ (S) от объема (V) постоянных
магнитов
Один из возможных способов стабилизации напряжения
СГПМ – введение во внешнюю электрическую цепь генератора
емкостных элементов, способствующих появлению продольно
намагничивающей реакции якоря.
67
Конденсаторы, обеспечивающие емкостный характер нагрузки, включаются последовательно в цепь нагрузки (рис. 2.8, а) или
через повышающий трансформатор, который позволяет уменьшить массу конденсатора за счет увеличения их рабочего напряжения и снижения тока (рис. 2.8, в), возможно также включение
конденсаторов в цепь генератора по схеме «звезда» (рис. 2.8, б) и
по схеме «треугольник» (рис. 2.8, г), в первом случае к конденсаторам прикладывается фазное напряжение, а во втором – линейное.
а)
б)
в)
г)
Рис. 2.8. Схемы включения стабилизирующих конденсаторов в цепь
СГПМ
Известные способы регулирования и стабилизации напряжения СГПМ связаны с применением относительно тяжелых и громоздких по отношению к генератору внешних дополнительных
устройств (конденсаторов, дросселей, трансформаторов, полупроводниковых приборов). Можно обеспечить достижение поставленной цели путем использования в СГПМ дополнительной подмагничивающей обмотки постоянного тока, изменяющей степень
насыщения стального магнитопровода и изменяющей таким образом внешнюю магнитную проводимость по отношению к посто68
янному магниту.
Дополнительная обмотка укладывается в те же пазы статора
генератора, что и основная обмотка. Вариант схемы стабилизации
напряжения СГПМ, в конструкции которого имеется обмотка
подмагничивания, приведен на рис. 2.9. В состав регулятора входят: измерительный элемент ИЭ, состоящий из схемы выпрямления, регулировочного реостата Rр, конденсаторного фильтра С и
стабилитрона VD1, выполняющего функции источника опорного
напряжения; исполнительный орган ИО, в качестве которого используется обмотка подмагничивания ОП и выпрямитель на диодах VD2 и VD3 с трансформатором напряжения ТV; усилитель У,
выполненный на базе магнитного усилителя МУ с рабочей обмоткой Wр и обмоткой управления Wу.
Рис. 2.9. Схема регулирования напряжения СГПМ
Работа регулятора. В измерительном элементе ИЭ происходит
сравнение напряжения конденсатора С, которое пропорционально
напряжению генератора, с опорным напряжением стабилитрона
VD1. Напряжение на выходе измерительного элемента определяется как разность двух напряжений
UИЭ = UС - UVD1.
69
(2.31)
Если величина напряжения UС > UVD1, то в обмотке управления магнитного усилителя МУ увеличится ток управления Iу, увеличится значение тока в рабочей обмотке усилителя, а, следовательно, и в обмотке подмагничивания. При этом магнитная проницаемость спинки статора и рабочий магнитный поток генератора уменьшаются, соответственно уменьшается и напряжение генератора G до номинального значения. Если же под действием
нагрузки напряжение СГПМ уменьшается, то ток в обмотке подмагничивания ОП будет автоматически уменьшаться, а напряжение генератора будет увеличиваться.
2.6 Асинхронные генераторы
В течение последних лет, как в нашей стране так и за рубежом, теоретические исследования и практический опыт показывают перспективы применения самовозбуждающихся АГ в качестве АИЭ средней мощности (до 200 кВт) с приводом от ВПД.
Применение АГ долгое время сдерживалось, в основном, по
двум причинам: из-за отсутствия малогабаритных силовых конденсаторов, обеспечивающих возбуждение генератора и компенсацию реактивной мощности нагрузки, а так же из-за сложности
стабилизации выходного напряжения.
Разработанные в последние годы конденсаторы имеют удельную массу, не превышающую 0,1 кг/кВА, с развитием устройств
бесконтактного управления емкостью, с использованием полупроводниковых элементов и интегральных микросхем, а также с появлением ВПД с улучшенными эксплуатационно-техническими
характеристиками практически снимаются ограничения по использованию АГ в стабилизированных по напряжению АИЭ.
Целесообразно рассмотреть особенности работы и основные
преимущества АГ в сравнении с бесконтактными СГ.
При вращении ротора АГ в обмотке статора потоком остаточного магнетизма индуцируется остаточная ЭДС Еост (рис. 2.10),
которая создает в конденсаторах ток Iс. Этот ток, протекая по обмотке статора, усиливает его магнитный поток, в результате чего
индуцируемая в генераторе ЭДС ЕГ = UГ и токи конденсаторов
увеличиваются.
70
а)
б)
Рис. 2.10. Схема АИЭ на базе ВПД и АГ (а), характеристика холостого
хода АГ и вольт-амперная характеристика конденсаторов (б)
Иногда начало процесса самовозбуждения АГ обеспечивается
путем разряда на обмотку статора предварительно заряженной
конденсаторной батареи.
Для того чтобы ток Iс обеспечивал при переходном процессе
подмагничивание АГ, необходимо, чтобы выполнялось условие
U Г UС 0.
(2.32)
Переходный процесс при самовозбуждении АГ продолжается
до тех пор, пока UГ = UС (рис. 2.10, б точка А), т.е. пока вольтамперная характеристика (ВАХ) АГ не пересечется с ВАХ конденсаторов.
Когда сопротивление нагрузки Zн уменьшается ВАХ АГ
опускается (пунктирная кривая рис. 2.10, б), а ВАХ конденсаторов
поворачивается к оси ординат (пунктирная прямая рис. 2.10, б).
Точка А смещается в положение точки В и, соответственно,
напряжение АГ UА уменьшается до значения UВ (рис.2.10, б). В
этом случае для получения требуемого напряжения емкость конденсаторов должна быть увеличена, чтобы скомпенсировать реактивную энергию потребляемую нагрузкой.
При определении удельной массы АГ, предназначенного для
работы с автономной нагрузкой, необходимо учитывать как собственно массу генератора, так и конденсаторного блока.
В общем случае емкость конденсаторов, обеспечивающих са71
мовозбуждение генератора на холостом ходу и компенсацию реактивной мощности нагрузки, определяется по формуле
С
mPн (tg Г tg Н )
,
2 fU c 2
(2.33)
где Рн – мощность, отдаваемая генератором; Uс – напряжение на
конденсаторах; f - частота тока; Г и Н – углы сдвига фаз между
напряжениями и токами генератора и нагрузки; m - число фаз.
Мощность конденсатора АГ можно определить по формуле
Qc
mUc 2
2fmСm c 2 .
Xc
(2.34)
На рис. 2.11 представлены зависимости емкости С блока конденсаторных батарей и их массы МС от мощности Р АГ при частотах генерируемого напряжения 50, 200, 400 и 800 Гц соответственно. Как видно из рис. 2.11, с повышением частоты генерируемого напряжения значительно уменьшается масса конденсаторов
АГ. Так, для Р = 50 кВт при частоте f = 50 Гц масса конденсаторов МС 16 кг, а при f = 800 Гц - МС 2 кг. Кроме того, с учетом
выражения (2.33) и рис. 2.12, можно сделать вывод о том, что емкость конденсаторных батарей АГ и, соответственно, их масса зависят и от коэффициента мощности нагрузки. В общем случае для
мощности АГ, находящейся в пределах 10 – 50 кВт и
n > 12000 об/мин, удельная масса собственно генератора не превышает 1 кг/кВт, а удельная масса конденсаторов при f = 400 Гц
mС 0,05 кг/кВт. Таким образом, полная удельная масса АГ с
приводом от ВПД имеет порядок mАГ = 1 – 1,1 кг/кВт, что позволяет сделать вывод о хороших удельных характеристиках генератора. Удельная масса АГ при мощностях 50 – 100 кВт и при частоте вращения ротора 20000 - 24000 об/мин уже составляет 0,4 0,6 кг/кВт. Таким образом, полная удельная масса АГ (с учетом
массы конденсаторов возбуждения) имеет порядок 0,5 0,8 кг/кВт. При этом КПД АГ находится в пределах 0,91 – 0,93.
Принципы и технические решения регуляторов напряжения
АГ аналогичны с СГПМ, т.е. стабилизация напряжения осуществ72
ляется за счет регулирования реактивной мощности, поступающей
в АГ от конденсаторов, схемы подключения которых к обмоткам
генератора приведены на рис. 2.7. Изменение реактивной мощности конденсаторов осуществляется за счет изменения реактивного
тока, протекающего через конденсаторы, пропорционально изменению напряжения. Величина реактивного тока изменяется изменением времени открытого состояния силовых полупроводниковых ключей, которые к конденсаторам подключаются последовательно или параллельно.
Рис. 2.11. Зависимости емкости конденсаторных батарей и их массы от
мощности АГ. Тип конденсаторов К75 при cosн = 0,8
Широкий диапазон требований потребителей электроэнергии
обуславливает многообразие вариантов структурных схем САЭ.
Практический интерес представляют три структурно-схемных решения САЭ АИЭ, которые выполнены на базе ВПД и АГ
(рис. 2.13). В схемах рис. 2.13 применяются аккумуляторные батареи (АБ), предназначенные для обеспечения гарантированного
электроснабжения ответственных потребителей.
В схеме рис. 2.13, а АИЭ является источником напряжения
постоянного тока. Здесь функции стабилизации напряжения вы73
полняет трехфазная схема управляемого выпрямителя В. Применяемые в САЭ конверторы с промежуточным высокочастотным
преобразованием К1 и К2 имеют хорошие показатели удельной
массы и качества выходного напряжения. Целесообразность применения рассмотренной схемы, с точки зрения основных критериев ее эффективности (КПД, МГП), будет в том случае когда потребляемая энергия постоянного тока будет составлять 70% и более от установленной мощности САЭ.
Рис. 2.12. Зависимости емкости конденсаторов АГ серии К75 от значений
коэффициента мощности нагрузки. Для cosн = 0,6: прямая 1 соответствует f = 400 Гц, прямая 2 – f = 800 Гц; cosн = 0,8: прямая 2 –
f = 400 Гц, прямая 3 – f = 800 Гц; cosн = 1,0: прямая 3 – f = 400 Гц,
прямая 4 – f = 800 Гц
АИЭ рис. 2.13, б является источником напряжения переменного тока промышленной частоты. В схеме АИЭ отсутствует блок
конденсаторов, обеспечивающий компенсацию реактивной мощности нагрузки, так как непосредственный преобразователь частоты (НПЧ) выполняет функции, как стабилизации напряжения так
и частоты. Компенсация реактивной мощности нагрузки осуществляется за счет изменения угла сдвига фаз на входе НПЧ с
искусственной коммутацией силовых вентилей (принцип работы
НПЧ с регулируемым углом сдвига фаз на входе рассматривается
74
а)
б)
в)
Рис.2.13. Структурные схемы САЭ на базе АГ:
АИЭ - автономные источники электроэнергии; ВПД – высокоскоростной
приводной двигатель; АГ – асинхронный генератор; БВ и БК - блоки
конденсаторов возбуждения и компенсации реактивной мощности
нагрузки соответственно; ШГП – шина гарантированного питания; АБ –
аккумуляторная батарея; К – конверторы; И – инвертор; НПЧ – непосредственный преобразователь частоты; В – выпрямители; 1…4 – выводы для подключения нагрузки
75
в гл. 3). Критерии эффективности САЭ повышаются, когда потребляемая энергия переменного тока составляет основную долю
от ее установленной мощности.
АИЭ рис. 2.13, в является источником напряжения переменного тока повышенной частоты. Блоки компенсации БК1 и БК2,
кроме функции обеспечения компенсации реактивной мощности
нагрузки, выполняют функции входных фильтров ПЭ. Повышенная частота генерируемого напряжения позволяет значительно
улучшить МГП выпрямителей, улучшить качество напряжения
постоянного тока и быстродействие систем защиты и стабилизации параметров электроэнергии, как преобразователей, так и АИЭ.
Основной недостаток схем САЭ рис. 2.13, б, в это отсутствие
технического решения по обеспечению гарантированного электроснабжения потребителей электроэнергии переменного тока.
Схемы АИЭ на рис. 2.13, а, б имеют ниже КПД и худшие МГП в
сравнении с схемой АИЭ на рис. 2.13, в. Однако, это не является
основными аргументами, ради которых необходимо отказываться
от тех или иных рассмотренных технических решений АИЭ. Здесь
определяющим фактором являются критерии эффективности
САЭ, в целом определяемые требованиями потребителей и, прежде всего, к качеству электроэнергии, непрерывности электроснабжения и мощности потребляемой электроэнергии на постоянном и
переменном токе.
Современные системы регулирования напряжения АГ обеспечивают стабильное значение выходного напряжения даже при
значительных изменениях частоты вращения приводного двигателя (1 : 2). Кроме того, АГ имеют следующие преимущества в
сравнении с СГ:
а). При КЗ в цепи нагрузки происходит развозбуждение АГ,
что не требует установки дополнительной защиты генератора;
б). При работе АГ на несимметричную нагрузку, короткозамкнутая стержневая система магнитосимметричного ротора выполняет роль полной демпферной обмотки, вследствие чего качество электроэнергии, вырабатываемой АГ, обеспечивается на достаточно высоком уровне и в несимметричных режимах нагрузки.
Результаты испытаний при пофазной несимметрии нагрузки показывают, что в АГ мощностью 75 кВт (n=12000 об/мин), доходящей до 25% от номинального тока, максимальная несимметрия
76
линейных напряжений не превышает 2,6% номинального значения. Для АГ мощностью 75 кВт и при частоте вращения
8000 об/мин – 4%. Время восстановления напряжения после короткого замыкания равно 0,98 с;
в). Для АГ повышенной частоты, у которых частота тока вырастает за счет увеличения частоты вращения ротора, более
устойчивое возбуждение после замыканий. Кроме того, самовозбуждение таких генераторов происходит даже при наличии определенной нагрузки, подключенной к зажимам генератора. Так,
время самовозбуждения АГ мощностью 75 кВт (n=12000 об/мин),
до номинального напряжения составляет 0,7 с. Точность поддержания напряжения при изменении нагрузки от холостого хода до
номинального значения, равно 0,66%. От АГ, работающего на холостом ходу можно запустить асинхронный двигатель мощностью
11 кВт, максимальное понижение напряжения при этом до 20%,
время пуска - 0,8 с. При набросе и сбросе номинальной нагрузки с
коэффициентом мощности 0,8, величина максимальной просадки
равна 8,6%, а всплеск - 9,2% - номинального напряжения. Коэффициент нелинейных искажений напряжения АГ мощностью
160 кВт, под нагрузкой равен 0,66%;
г). Включение на параллельную работу СГ – сложная и ответственная операция, которая требует при одинаковом порядке чередования фаз, равенства напряжений на зажимах генераторов и
частоты вырабатываемого тока. Если разность вращения валов
приводных двигателей достаточно велика, то даже при наличии
большого синхронизирующего момента вращающийся ротор может не втянуться в синхронизм в первом после включении цикле
качаний без проворота. Толчки уравнительного тока и уравнительной мощности сопровождаются провалами напряжений и могут оказать отрицательное воздействие как на работу самих генераторов, так и на работу потребителей, а иногда привести к нарушению устойчивости и выпадении СГ из синхронизма.
В тоже время, включение АГ на параллельную работу такой
же мощности носит устойчивый характер, не требует сложной дополнительной аппаратуры, а синхронизация генераторов сводится
только к выравниванию их частот и напряжений. Даже при значительных рассогласованиях частот вращения роторов генераторов в
системе устанавливается частота тока, равная среднему значению
77
частот токов генераторов, включенных на параллельную работу.
При этом, конденсаторы возбуждения играют роль фильтров и
способствуют исчезновению биений напряжений и длительных
переходных процессов после включения на параллельную работу.
В многоагрегатных системах простыми и надежными структурно-схемными решениями, возможно оптимизировать систему
по МГП, ресурсу, надежности и другим технико-экономическим
показателям. Эта возможность обусловлена тем, что с одной стороны блок возбуждения АГ на холостом ходу может быть функционально разобщен с блоком компенсации реактивной мощности
нагрузки, а с другой стороны, эти блоки простыми переключениями могут быть подключены к любому АГ многоагрегатной системы САЭ, резервируя друг друга. (На рис. 2.14 приведены варианты схем включения на параллельную работу АГ).
Однако достоинства АГ могут быть потеряны при использовании в генераторном режиме асинхронных двигателей промышленного исполнения. Такие машины имеют низкий КПД, большую
массу и габариты.
Вернуть АГ конкурентоспособность, как АИЭ, может асинхронная машина, специально проектируемая для работы в генераторном режиме на высоких частотах вращения приводного двигателя. Так, например, коэффициент насыщения магнитной цепи
высокоскоростного АГ должен находиться в пределах 2,8 - 4, что
позволит повысить его КПД и улучшить рабочие характеристики.
Повышение коэффициента насыщения может быть обеспечено за
счет изменения размеров зубцов и ярма ротора, а также за счет
использования новых материалов для магнитной системы. Стабилизация и качество напряжения АГ зависят не только от коэффициента насыщения, но и от обмоточных данных электрической
машины. Параметры обмоток рассеяния АГ должны быть в пределах Х1=Х2' < 0,08 - 0,1, а величина активных сопротивлений обмоток должна составлять R1 = R2 = 0,01 - 0,03.
Улучшение МГП АГ можно обеспечить за счет повышенных
электромагнитных нагрузок с применением высокоэффективных
систем охлаждения, исходя из опыта эксплуатации авиационных
АГ, линейная нагрузка генератора должна находится в пределах
А=30000 - 40000 А/м. а магнитная индукция в воздушном зазоре
78
B = 0,5 - 0,7 Тл. Кроме того, высокоскоростные АГ должны иметь
относительное значение длины статора = 0,5 - 0,55 для обеспечения малых значений номинального скольжения.
а)
б)
Рис. 2.14. Структурные схемы включения АГ на параллельную работу:
АГ – асинхронные генераторы; БВ – блоки конденсаторов, обеспечивающих самовозбуждение генераторов; БК – блоки конденсаторов, обеспечивающих компенсацию реактивной мощности нагрузки; ПЭ – преобразователи электроэнергии; Н – нагрузка; ШГП – шина гарантированного
питания
Таким образом, широкие перспективы раскрываются перед
бесконтактными генераторами электроэнергии переменного тока
АГ и СГПМ, обладающих повышенной надежностью, высокими
динамическими качествами, малыми массами и габаритными размерами за счет повышенных механических, электромагнитных и
тепловых нагрузок, возможностью работать в нестандартных
окружающих условиях. Поэтому их значимость в электроэнергетике быстро возрастает. Существенно улучшить характеристики
79
рассмотренных генераторов можно за счет применения систем
интенсивного охлаждения, новых материалов (на основе редкоземельных материалов, высокопрочных сплавов, сверхпроводников), бесконтактных опор в виде магнитных и газовых подшипников.
Однако, применение высокочастотных источников электроэнергии требует разработки новых технических решений вторичных источников (преобразователей) электроэнергии, так как рассмотренные генераторы генерируют напряжение с повышенной
частотой тока, что, с одной стороны, приводит к улучшению массогабаритных характеристик САЭ, а с другой стороны, современные потребители электроэнергии в основном требуют ток промышленной частоты, т.е. 50 Гц.
2.6.1 Схемные решения источников питания с
асинхронными генераторами
Для практической реализации источников с АГ разработаны
несколько технических решений [92, 98]. Они предназначены для
понижения давления газа в магистральных трубопроводах и получения электрической энергии.
Сущность технического решения поясняется чертежом. На
рис. 2.15 изображен общий вид устройства: разрез герметической
камеры с турбиной, генератором и проходными изоляторами. На
рис. 2.16, 2.17, 2.18 изображены электрические схемы включения
АГ.
Герметическая камера 1 содержит входной 2 и выходной 3
патрубки для движения газа. Турбина 4 с помощью муфты 6 выходным валом 5 соединена с валом 7 АГ 8. С помощью стоек 9
генератор 8 закреплен в герметичной камере 1. Проходные изоляторы 10 соединяют обмотку статора 11 АГ 8 с конденсаторами
возбуждения 12 и 13 (рис. 2.16, 2.17, 2.18). Статорная обмотка 11
соединена с силовым выпрямителем 14, "+" и "-" которого соединен с электролизной установкой 15 или инвертором тока 16, последний соединяется с линией электропередачи А,В,С.
Устройство для утилизации энергии газа работает следующим
образом. Газ высокого давления поступает через входной патрубок 2 к турбине 4, проходит через турбину, создает вращающий
момент и с пониженным давлением проходит между герметиче80
ской камерой и корпусом АГ, далее к выходному патрубку 3 и в
магистрали газопровода. В процессе снижения давления возникает
эффект Джоуля-Томпсона, газ охлаждается и охлаждает АГ 8, что
повышает общий КПД системы. При достижении определенной
скорости вращения турбины 4 АГ 8 самовозбуждается от конденсаторов 12 (рис. 2.16 ). Напряжение АГ через проходные изоляторы 10 подается на силовой выпрямитель 14, выпрямляется и выпрямленное напряжение "+" и "-" подается на электролизную
установку 15, где получают кислород и водород. Выход выпрямителя 14 можно использовать и для других целей. Если имеется рядом с газопроводом линия электропередачи, то на выход выпрямителя 14 присоединяется инвертор 16 (рис. 2.18), который преобразует постоянный ток выпрямителя 14 в переменный ток необходимой частоты. Тогда мощность АГ отдается в сеть и расходуется
по токоприемникам, подключенным к этой сети.
Рис. 2.15. Устройство для снижения давления газа в магистральных
газопроводах
В зависимости от характера и диапазона изменения нагрузки,
конденсаторная батарея 13 (рис. 2.16, 2.17) может подключаться
параллельно к обмотке статора 11 или последовательно. Эта батарея конденсаторов необходима для компенсации реактивной составляющей нагрузки и подключается параллельно, если нагрузка
изменяется в небольших пределах (рис. 2.16) и последовательно,
если нагрузка изменяется в больших пределах (рис. 2.17 и 2.18) .
81
Рис. 2.16. Схема источника с параллельной системой
возбуждения АГ
Рис. 2.17. Схема источника с параллельно-последовательной системой
возбуждения АГ
При работе асинхронного генератора возникают следующие
потери.
Рм1, Рм2- – активные потери;
Рст1, Рст2 – потери в стали статора и ротора;
Рмех – потери механические;
Рдоб – добавочные потери;
Рв.р. – потери в возбуждающих и регулирующих устройствах.
Суммарные потери
Р=Рм1+Рм2+Рст1+ Рст2+ Рмсх+ Рдоб+ Рв.р
82
(2.35)
Рис. 2.18. Схема источника с АГ и преобразователем частоты
Потери в обмотках статора и ротора, обусловленные протекающими по этим обмоткам токами, соответственно определяются:
Pм1 m1I12 r1 ,
Pм2 m2 I 22 r2 m1I 22 r2 .
(2.36)
где m1, m2 – число фаз статора и ротора;
I1, I2 – ток фазы статора и ротора;
r1, r2 – сопротивление фазы статора и ротора;
I 2 , r2 – приведенные ток и сопротивление ротора к обмотке
статора.
Потери в стали статора определяются как сумма потерь в зубцах Рz1, спинке статора Рj1 и пульсационных потерь Рпульс:
Рст=Рz1+Pj1+Pпульс ,
Pz1 kт [ kг г f1 / 400 kв в ( f1 / 400 )2 ] Bz21ср M z1 ,
(2.37)
Pj1 kт [ k г г f1 / 400 kв в ( f1 / 400 )2 ] B 2j1M j1 ,
(2.38)
Pпульс kт в ( f z1Bп1 / 100 )2 M z1 ,
где kт –технологический коэффициент;
83
(2.39)
kт 2 для зубцов статора и kт 1,4 для ярма статора;
т и в – коэффициенты, зависящие от марки стали и толщины листа;
kг– коэффициент, учитывающий неравномерность распределения магнитной индукции по толщине листа, при частоте 200-400
Гц магнитная индукция практически не изменяется по толщине
листа и поэтому можно принять kг = 1;
Bz1ср и Вj1 – магнитные индукции соответственно в зубце и в
спинке статора;
Вп1 – амплитуда пульсации магнитной индукции в зубцах статора.
Bп1 z 2Bzсс /( 2t z1min ),
где z 2
( bщ1 / )2
5 bщ2 /
(2.40)
;
Мz1 и Мj1 – масса зубцов и спинки статора.
Пульсационные потери Рпульс возникают вследствие зубчатого строения ротора.
Для расчета потерь в стали ротора можно применить те же
формулы, что и для статора; в этих формулах, однако, вместо f1
необходимо подставить частоту тока ротора f2. Так как частота f2
мала, то потери в роторе при нормальной частоте вращения обычно малы, вследствие чего этими потерями обычно пренебрегают.
К механическим относятся потери от трения в подшипниках и
вентиляционные потери. Относительное значение механических
потерь зависит от частоты вращения и мощности генератора. При
уменьшении частоты вращения и увеличении мощности асинхронного генератора относительное значение механических потерь уменьшается. У асинхронных генераторов при частоте 200400 Гц и мощности от 0,5 до 5 кВт относительные значения механических потерь Рмех/Рном= 0,1–0,03.
Потери от трения в подшипниках качения асинхронных машин, потери трения о воздух и потери на вентилятор можно подсчитать по известным формулам. Величину механических потерь
84
для асинхронных генераторов можно принимать от 0,03–0,02 до
0,015 – 0,01 от номинальной активной мощности. Первые величины потерь характерны для генераторов мощностью, измеряемой
единицами кВА, а вторые—для генераторов мощностью в десятки
кВА частотой 400 Гц.
Добавочные потери обусловлены высшими гармониками
МДС, пульсациями главного магнитного потока, наличием массивных деталей в конструкции и. др. Добавочные потери обычно
принимаются равными 0,01 от активной мощности генератора.
Потери Рвр складываются из потерь в конденсаторах Рк и потерь в цепи регулирования Рр. Потери в конденсаторах определяются углом диэлектрических потерь tg:
Pк Pвtg 2 10 6 m1 f1CкU c2tg .
(2.41)
Если конденсаторы соединены в звезду, то Uс=Uф1, а если в
треугольник, то Uс= 3 Uф1. Но так как при заданной реактивной
мощности конденсаторов Pв емкость их уменьшается в три раза,
то потери в конденсаторах получаются одинаковыми.
Величина угла потерь tg возрастает с увеличением частоты.
В диапазоне частот 400 – 1000 Гц это возрастание небольшое. Для
конденсаторов К75-10 величина tg при температуре 100° С не
превышает 0,008; для конденсаторов К71-4 при температуре 85 °С
tg 0,002; для конденсаторов МБГЧ при температуре 70 °С
tg 0,015.
Предлагаемое устройство для утилизации энергии газа имеет
следующие преимущества:
1. Турбина и генератор помещены в герметическую камеру,
поэтому нет необходимости в их герметизации. Для этих целей
пригодные серийные машины.
2. Асинхронные генераторы с короткозамкнутым ротором допускает частоту вращения ротора до 15000 об/мин, поэтому они
могут соединяться "вал" в "вал" непосредственно с высокоскоростными турбинами.
3. Асинхронный генератор на повышенную частоту тока и
высокоскоростная турбина позволяют изготавливать энергетический блок с высокими удельными массогабаритными показателя85
ми 0,8-1,0 кг/кВт, что особенно важно для удаленных районов
страны, где пролегают трассы трубопроводов.
4. Предлагаемое техническое решение позволяет расширить
область применения АГ. Его можно использовать, как автономный
источник для электролизной установки, освещения, обогрева помещений, теплиц, катодной защиты и т.д. Или в режиме рекуперации энергии, если имеется рядом линия электропередачи, при
этом используется инвертор тока, синхронизируемый сетью.
5. Асинхронный генератор может работать в широком диапазоне скоростей, поэтому предлагаемое устройство можно использовать в газопроводах с различным перепадом давления. При этом
просто решается вопрос регулирования давления на выходе – путем изменения нагрузки на генераторе.
Асинхронные генераторы можно использовать с любыми
приводными двигателями : дизельными и карбюраторными. Одно
из технических решений по использованию АГ дано на рис. 2.19.
Большой проблемой при использовании АГ является вопрос стабилизации напряжения при подключении нагрузки соизмеримой с
мощностью генератора.
Схема для стабилизации напряжения АГ [95] содержит асинхронный генератор GA (рис. 2.19), приводимый во вращение двигателем внутреннего сгорания DVS. К статору асинхронного генератора GA подключены батарея некоммутируемых конденсаторов
C1-C3, батарея коммутируемых конденсаторов C4-C6 и группа
пусковых конденсаторов C7-C9. Параллельно пусковым конденсаторам C7-C9 включен трехфазный электронный ключ VS1-VS3. В
нулевой точке батареи коммутируемых конденсаторов C4-C6
включена схема широтно-импульсного управления UZ, вход которой соединен с выходом измерительного трансформатора TA.
Блок управления AD с одной стороны соединен с фазами генератора GA, а с другой стороны – с управляющими электродами симисторов VS1-VS3.
Устройство для автоматического регулирования напряжения
асинхронного генератора работает следующим образом. После
запуска приводного двигателя DVS асинхронный генератор GA
самовозбуждается от батареи некоммутируемых конденсаторов
C1-C3. Напряжение асинхронного генератора GA поступает на
блок управления AD. Блок управления подает сигнал на включе86
ние трехфазного электронного ключа VS1-VS3. Последний включается и подает напряжение к нагрузке А, В. С. На холостом ходу
работы генератора батарея коммутируемых конденсаторов C4-C6
отключена. При подключении нагрузки напряжение на генераторе GA уменьшается, и схема широтно-импульсного управления
AD изменяет ток, который пропорционально снижению напряжения увеличивает емкостный ток батареи коммутируемых конденсаторов C4–C6, тем самым восстанавливая напряжение на асинхронном генераторе GA. При подключении двигательной нагрузки, соизмеримой с мощностью генератора GA, возрастает ток в
Рис. 2.19. Схема стабилизации напряжения АГ автономного источника
цепи, напряжение генератора GA резко снижается, т.к. емкости
батареи коммутируемых конденсаторов C4-C6 недостаточно для
компенсации реактивной составляющей нагрузки. Сигнал от
трансформатора тока TA увеличивается, и блок управления AD
отключает электронный ключ VS1-VS3, при этом нагрузка оказывается включенной последовательно с пусковыми конденсаторами
C7-C9. Последние компенсируют индуктивную составляющую
пускового тока и восстанавливают напряжение на зажимах генератора GA. После запуска двигательной нагрузки соизмеримой
87
мощности ток в цепи нагрузки уменьшается, это приводит к тому,
что блок управления AD подает сигнал на включение трехфазного
электронного ключа VS1-VS3, который включается и шунтирует
группу пусковых конденсаторов C7-C9. Дальнейшее питание
нагрузки происходит через электронный ключ VS1-VS3, а регулирование напряжения осуществляется схемой широтно-импульсного управления UZ.
Точность поддержания напряжения – 2,5%.
Использование данного устройства для автоматического
регулирования напряжения асинхронного генератора позволяет
в автономном источнике питания небольшой мощности запускать двигатели единичной мощности, равной мощности генератора. Это особенно важно в полевых условиях и для источников
гарантированного электроснабжения. Например, электростанция мощностью 4 кВт с напряжением сети 220/127 В и частотой
тока 200 Гц может питать любой электрифицированный инструмент, используемый для ремонта железнодорожных путей
(сверлилки, шлифовалки, костылезабивщики, рельсорезки, вибраторы, гайковерты и т.д. единичной мощностью от 0,6 до
4 кВт).
При использовании АГ в системах АИЭ важную роль занимает вопрос надежного самовозбуждения АГ после коротких
замыканий или длительных перерывов в работе.
Для повышения надежности АИЭ с АГ предлагается техническое решение [97].
Автономный источник с асинхронным генератором
(рис. 2.20), содержит асинхронный генератор GA, конденсаторы
возбуждения C1-C3, устройство стабилизации напряжения DD,
приводной двигатель DVS, систему зажигания, состоящую из
катушки зажигания LD с первичной обмоткой W1 и контактом
прерывателя SB2, кнопку управления SB1, выпрямительный
диод VD2, накопительный конденсатор C4, релейный элемент
динистор VD1, размыкающие контакты KV1.1, катушку реле
KV1.
Асинхронный генератор соединен с конденсаторами возбуждения C1-C3 и устройством стабилизации напряжения DD. Два
зажима первичной обмотки катушки зажигания соединены через
88
замыкающие контакты кнопки управления SB1: одним зажимом с
"минусом" накопительного конденсатора C4, другим зажимом – с
анодом выпрямительного диода VD2, катод которого соединен с
"плюсом" накопительного конденсатора и с анодом релейного
элемента динистора VD1, причем катод динистора и "минус"
накопительного конденсатора через размыкающие контакты
KV1.1 реле соединены с двумя фазами В и С асинхронного генератора, к которым присоединена обмотка реле KV1.
Рис. 2.20. Схема автономного источника с принудительным
возбуждением АГ
Работает схема следующим образом. Если произошло развозбуждение генератора или он долго не работал, т.е. нет остаточного
намагничивания, генератор не возбудится. При нажатии кнопки
управления SB1, ЭДС первой обмотки W1 катушки зажигания LD,
89
через выпрямительный диод VD2 начнет заряжать накопительный
конденсатор C4. При определенном напряжении на конденсаторе
C4 откроется релейный элемент – динистор VD1, и конденсатор
разрядится на две фазы В и С генератора. При этом возникает
электромагнитный момент, который создает начальное возбуждение для генератора. Последний возбудится и напряжение его будет приложено к катушке реле KV1. Реле сработает и разомкнет
свои контакты KV1.1, автоматически отключив накопительный
конденсатор C4 от обмоток статора GA. При этом положении
кнопки управления SB1 не будет влиять на работу асинхронного
генератора.
Главное преимущество предлагаемого автономного источника с асинхронным генератором – возможность возбуждения генератора в любых условиях (без постороннего источника), что повышает надежность особенно в полевых условиях.
Для стабилизации и регулирования частоты АГ разработан
простой и надежный регулятор [96]
Он предназначен для регулирования частоты вращения электростанций с асинхронными генераторами и конденсаторным самовозбуждением. Технический результат заключается в повышении точности регулирования частоты выходного тока генератора.
Предлагаемый регулятор частоты электроэнергетической
установки можно использовать как на вновь проектируемых, так и
на электроагрегатах, находящихся в эксплуатации и имеющих
центробежные регуляторы оборотов.
На рис. 2.21. представлена функциональная схема регулятора
частоты электроэнергетической установки.
Регулятор частоты электроэнергетической установки содержит асинхронный генератор GA с выходными зажимами А, В, С, к
которым подключены конденсаторы возбуждения C1-C3, устройство стабилизации напряжения DD и статор синхронного двигателя CD, вал которого соединен со входом центробежного регулятора оборотов ВW, а его выход – с устройством подачи топлива AA,
приводного двигателя DVS, который соединен с валом асинхронного генератора GA.
Регулятор частоты электроэнергетической установки работает
следующим образом. После запуска приводного двигателя DVS,
асинхронный генератор GA самовозбуждается от емкости конден90
саторов возбуждения C1-C3, напряжение стабилизируется устройством стабилизации DD и подается на статор синхронного двигателя CD, последний вращает центробежный регулятор оборотов ВW
со скоростью определяемой частотой генератора GA. В соответствии с этим устройство подачи топлива AA дозирует расход.
Рис. 2.21. Схема автономного источника с регулятором частоты АГ
На холостом ходу скорость вала синхронного двигателя CD и
центробежного регулятора оборотов BW пропорциональна частоте тока асинхронного генератора GA.
При увеличении нагрузки на зажимах А, В, С АГ, увеличивается его скольжение, частота тока уменьшается, уменьшается скорость вращения вала синхронного двигателя CD, центробежный
регулятор воздействует на устройство подачи топлива AA, увеличивается подача топлива и увеличивается скорость приводного
двигателя DVS, частота тока АГ возрастает.
Стабильность частоты определяет статизм центробежного регулятора BW, т.е. синхронный двигатель CD вращает регулятор со
скоростью, строго пропорциональной частоте питающего тока.
Достоинством предлагаемого устройства является простота
реализации и точность регулирования частоты выходного тока.
Используя известные [94-97] технические решения, разработан ряд автономных источников с АГ на мощность 2-10 кВА.
Один из вариантов источника показан на рис. 2.22.
Автономный источник (рис. 2.22) содержит АГ 1, приводной
двигатель 3, топливный бак 4, блок стабилизации напряжения 2
раму 5.
91
Рис. 2.22. Автономный источник с АГ
2.6.2 Источники питания сварочной дуги с АГ
В стационарных и передвижных системах автономного электроснабжения важную роль играет оперативность ремонта оборудования и его эксплуатация.
При эксплуатации и ремонте техники в полевых и стационарных условиях сварочные работы занимают большой объем. Для
этих целей используют стационарные и автономные сварочные
агрегаты.
Автономные и мобильные сварочные агрегаты, прежде всего
должны обладать высокими массо-габаритными показателями.
Этим требованиям отвечают источники питания сварочной дуги с
АГ [1-9, 12-16] разработанные в Кубанском госагроуниверситете.
Другим требованием для источников питания сварочной дуги
является обеспечение надежного зажигания и устойчивого горения дуги. Дуговой разряд возникает тем легче, чем выше напря92
жение между электродом и изделием. Однако, по требованиям
техники безопасности, это напряжение ограничивается на уровне
80-90 В, а для надежного зажигания не может быть ниже 55 В.
Устойчивое горение дуги возможно лишь в том случае, если
внешняя характеристика источника круче вольтамперной характеристики дуги. Поэтому при ручной дуговой сварке внешняя характеристика источника должна быть крутопадающей, с тем, чтобы при коротких замыканиях ток не превышал в полтора раза рабочий ток.
В случае сварки под слоем флюса или в среде защитных газов
источники должны иметь жесткие или возрастающие внешние характеристики. В любом случае устойчивый процесс сварки достигается способностью источника за время не более 0,05с восстанавливать напряжение от нуля до номинального и стабилизировать
сварочный ток.
Очень важно, чтобы во время сварки происходило меньшее
разбрызгивание и угар расплавленного металла. Это свойство
наилучшим образом реализуется при индуктивности сварочной
цепи более 2-2,5 мГ и скорости изменения тока не более 1015 кА/с.
Для реализации указанных положений предлагаются следующие источники питания с АГ. Источник питания сварочной дуги, имеющий жесткую или падающую характеристику [5], показан
на рис. 2.23. Асинхронный генератор повышенной частоты тока
GА вращается приводным двигателем внутреннего сгорания DVS
и возбуждается от конденсаторов С1-С3. Напряжение генератора
GА подается на обмотки W1, W2 трансформатора ТV. Эти обмотки соединены в « звезду ». В нулевой точке обмотки W2 включены конденсаторы регулирования С4-С6, выход которых через выпрямитель VD1-VD6 соединяется с регулятором емкостного тока
UZ. Понижающая обмотка W3 через трансформатор тока ТА соединен с силовым выпрямителем VD7-VD12, а последний – со
сварочными электродами. Выход трансформатора тока через потенциометр R1 соединен со входом регулятора UZ. В качестве регулятора UZ используется ШИР с силовым регулирующим транзистором. В зависимости от положения потенциометра R1 возможны следующие режимы: ползунок R1 находится в крайнем
правом положении – в этом случае максимальный ток; ползунок
93
R1 находится в левом положении, что соответствует режиму минимального сварочного тока. В другом положении R1 ток можно
менять от максимального до минимального. При этом значение
пределов тока определяется конструктивными данными генератора, двигателя, трансформатора.
Рис. 2.23. Источник питания с жесткой или падающей характеристиками
В режиме максимального тока (когда через UZ проходит максимальный ток) при возникновении дуги мощность генератора
передается через обмотки W1-W3 трансформатора ТV. За счет того, что одна обмотка W1 подключена параллельно генератору GА,
а он находится в режиме насыщения, то при изменении сопротивления дуги (или тока нагрузки) напряжение остается неизменным
или незначительно уменьшается, т.е. внешняя характеристика источника жесткая или падающая.
В режиме сварки малым током срабатывает обратная связь по
току и ШИР уменьшает скважность импульсов, уменьшается емкостной ток С4-С6, генератор уменьшает напряжение и в конечном итоге уменьшается и автоматически поддерживается на заданном уровне сварочный ток.
94
Степень жесткости внешней характеристики зависит от параметров схемы и, в частности, от соотношения витков обмоток W1
и W2. Чем больше число витков обмотки W1, тем мягче характеристика и наоборот.
Современные ведущие фирмы по производству сварочных агрегатов предлагают универсальные источники питания, которые
работают в режиме источника сварочного тока и как источник питания электроинструмента. Обычно используются на одном агрегате два генератора: сварочный и небольшой генератор для питания электроинструмента. Такая конструкция с двумя генераторами
оправдана на больших мощностях.
Источник питания с универсальной характеристикой и одним
генератором [7] приведен на рис. 2.24. Источник состоит из приводного двигателя DVS, соединенного с асинхронным генератором GА, который возбуждается от батареи конденсаторов С1-С3.
К статору GА присоединена первичная обмотка трансформатора
ТV, в нулевой точке которой имеется батарея конденсаторов С4С6. Выход С4-С6 через выпрямитель VD1-VD6 соединен с широтно-импульсным регулятором (ШИР) UZ. Управление ШИР
осуществляется от R1 и R2, которые реализуют обратную связь по
напряжению и току. На зажимах первичной обмотки трансформатора ТV установлен переключатель SB, позволяющий переключать обмотку со "звезды" на "треугольник" и соединять разъем
ХS1 со статором GА.
Возможны два режима работы источника. В режиме сварки
переключатель SB ставится в верхнее по схеме положение. При
этом первичная обмотка трансформатора W1 соединена в "звезду"
и последовательно с генератором GА и конденсаторами С4-С6,
что позволяет получить крутопадающую характеристику. Потенциометром R2 задается сварочный ток. В левом положении – минимальный, в правом положении ползунка – максимальный.
При замыкании электрода ХР с изделием изменяется ток
трансформатора ТV и емкостной ток от С4-С6 поступает на статор
GА, последний переходит в режим насыщения. При размыкании
электрода ХР возникает электрическая дуга, происходит процесс
сварки. За счет обратной связи от ТА происходит автоматическое
изменение емкостного тока С4-С6 блоком ШИР, что позволяет
стабильно поддерживать заданный параметр сварочного тока.
95
Рис. 2.24. Источник питания с универсальными характеристиками
В режиме питания осветительной или двигательной нагрузки
ее подключают к разъему ХS1 ( если двигатель инструмента или
лампа имеют параметры 220 В) или к разъему ХS2 (если параметры токоприемников рассчитаны на напряжение 40 В). Переключатель SB ставят в положение по схеме – нижнее, при этом первичная обмотка соединяется в "треугольник", одновременно к зажимам GА подключается разъем ХS1 и конденсаторы С4-С6, что
приводит к увеличению жесткости внешней характеристики. Потенциометром R1 устанавливают необходимое напряжение
(обычно это делается один раз при настройке схемы). При включении ручного инструмента напряжение уменьшается. Соответственно уменьшается и сигнал обратной связи с потенциометра
R1, UZ увеличивает скважность импульсов, возрастает действующее значение тока VD1-VD6, возрастает емкостной ток С4-С6,
который компенсирует реактивную составляющую тока нагрузки
96
и реакцию ротора GA, что позволяет увеличить напряжение на
зажимах GA до заданного на ХХ при некотором статизме характеристики.
В предлагаемом источнике питания используются асинхронный генератор, рассчитанный на частоту тока 200 Гц, с короткозамкнутым ротором, который имеет большую надежность и прост
в эксплуатации. Понижающий трансформатор ТV также рассчитан
на частоту тока 200 Гц и имеет практически в 4 раза меньшие массогабаритные показатели, чем на частоте тока 50 Гц.
Параллельно-последовательное включение конденсаторов в
источниках питания сварочной дуги, при переходных процессах
приводят к резонансу напряжения, что отрицательно сказывается
на элементах схемы. Для устранения этих недостатков разработана схема [14]
Принципиальная схема источника питания приведена на
рис. 2.25. Приводной двигатель внутреннего сгорания DVS жестко
соединен с валом ротора асинхронного генератора GA. Емкость
конденсаторной батареи С1-С3 подключена к статору генератора
GA через нормально замкнутые контакты КМ1.2 и служит для
возбуждения асинхронного генератора на холостом ходу. Емкость
конденсаторной батареи С4-С6 подключена к статору асинхронного генератора GA через первичную обмотку W1 трансформатора TV и необходима для компенсации реактивной мощности
трансформатора. Напряжение асинхронного генератора, пониженное трансформатором, снимается с его вторичной обмотки W2 и
через выпрямитель VD1-VD6 подается на сварочный электрод ХР.
Это же напряжение посредством делителя на R2 и стабилитрона
VD7 подается на катушку реле КМ2, имеющее замыкающий контакт КМ2.1. Между двумя фазами асинхронного генератора GA и
через симисторы VS1 и VS2 включено сопротивление R1.
Электрическая схема источника работает следующим образом.
После запуска приводного двигателя внутреннего сгорания
генератор GA возбуждается от емкости С1-С3 конденсаторной
батареи. Катушка контактора КМ1 подобрана таким образом, что
при возбуждении генератора на холостом ходу контактор КМ1 не
срабатывает.
На холостом ходу, когда не замкнут электрод ХS, индуктивное сопротивление первичной обмотки W1 трансформатора вели97
ко, и емкостной ток от емкости батареи С4-С6 конденсаторов не
поступает на генератор GA.
Рис. 2.25. Источник питания сварочной дуги с защитой от резонанса
При замыкании электрода ХР через выпрямительный мост
VD1-VD6 замыкается вторичная обмотка W2 трансформатора.
Тем самым уменьшается индуктивное сопротивление первичной
обмотки W1 трансформатора, что влечет за собой возрастание емкостного тока емкости батареи конденсаторов С4-С6, который поступает на статор асинхронного генератора. Это вызывает возрас98
тание напряжения на генераторе GA, контактор КМ1 срабатывает
и переключает емкость конденсаторной батареи С1-С3 параллельно емкости С4-С6 батареи конденсаторов. Это дает возможность
использовать всю емкость конденсаторной батареи непосредственно для компенсации нагрузки трансформатора.
При размыкании электродов и увеличении напряжения между
ними возникает электрическая дуга, происходит процесс сварки.
Так как нагрузка электрической дуги носит практически активный
характер, то за счет насыщения асинхронного генератора (при коротком замыкании) происходит стабилизация сварочного тока при
изменении напряжения на дуге.
Когда процесс сварки прекращается, напряжение на генераторе уменьшается, и контактор КМ1 возвращается в первоначальное
состояние, т.е. емкость батареи С1-С3 конденсаторов подключается параллельно обмотке статора, и генератор работает на холостом
ходу.
Иногда при переходных процессах возникает резонанс напряжения. При этом чрезмерно увеличивается напряжение на генераторе и емкости, на выходе выпрямителя. При увеличении напряжения на выходе выпрямителя VD1-VD6 через делитель R2 оно прикладывается к обмотке реле КМ2 и стабилитрону VD7. Последний
открывается, через него проходит ток, и реле КМ2 срабатывает, замыкает свой контакт КМ2.1 в цепи управляющего электрода симистора VS1. При этом открываются оба симистора VS1 и VS2, подключая к статору генератора GA активное сопротивление R1, которое выводит всю систему из зоны резонанса. При исчезновении резонанса напряжение выпрямителя VD1-VD6 уменьшается, стабилитрон VD7 запирается, и реле КМ2 возвращается в исходное положение. Симисторы VS1 и VS2 отключают сопротивление R1 от
генератора GA. Источник питания работает на холостом ходу.
За последние годы на кафедре электрических машин и электропривода Кубанского ГАУ разработано несколько типов источников питания сварочной дуги с асинхронным генераторов. Внедрение их в производство сталкивается с трудностью регулирования тока возбуждения. Это связано с тем, что асинхронные генераторы самовозбуждаются от конденсаторов, а ток возбуждения
может достигать 30-60 % от номинального и его необходимо регулировать в трех фазах. Поэтому ток и мощность регулирующих
99
элементов становятся соизмеримы с мощностью генератора, а это
снижает КПД всего устройства.
Для устранения указанных недостатков предложено несколько технических решений [1, 4]. На рис. 2.26 дана принципиальная
схема регулирования тока сварочного агрегата с асинхронным генератором, где реализуется идея электромеханического каскада.
Схема содержит приводной двигатель внутреннего сгорания DVS,
асинхронный генератор GA, двигатель постоянного тока ММ,
конденсаторы возбуждения С1-С3, понижающий трансформатор
ТU, силой выпрямитель VD1-VD6, конденсаторы регулирования
сварочного тока С4-С6, выпрямитель управления VD7-VD12.
Рис. 2.26. Регулирование тока сварки по схеме электромеханического
каскада
Схема работает следующим образом. Приводной двигатель
DVS, генератор GA и двигатель постоянного тока (ДПТ) ММ
жестко соединены между собой. После запуска DVS, GA возбуждается от емкости конденсаторов С1-С3. Напряжение GA понижается трансформатором ТU и после выпрямителя VD1-VD6 подается на сварочные электроды ХР. Одновременно через первичную
100
обмотку ТU и конденсаторы С4-С6 это напряжение выпрямляется
VD7-VD12 и подается на якорь ММ ДПТ. Обмотка возбуждения
LМ через реостат R1 и преобразователь напряжения UZ1 соединена со статором генератора GA. На холостом ходу ( когда электроды ХР не замкнуты ) сопротивление первичной обмотки ТU велико и по якорю ММ проходит небольшой ток, ДПТ работает на ХХ.
В процессе сварки индуктивное сопротивление обмоток ТU
уменьшается и за счет дополнительного емкостного тока от С4-С6
напряжение GA увеличивается, следовательно, будет увеличиваться и сварочный ток. Емкостной ток будет ограничиваться величиной тока, потребляемого ДПТ ММ, а величина последнего
зависит от развиваемого момента. Учитывая, что ДПТ механически связан с GA и DVS, скорость вращения у них постоянная, то
при изменении величины тока возбуждения в обмотке LМ будет
изменяться и потребляемый якорем ММ сварочный ток. Это следует из уравнений электромеханической характеристики
= (U-IR)/(kФ);
(2.42)
и уравнение механической характеристики:
2
= U/(kФ) – MR(kФ) ,
(2.43)
где U – напряжение на якоре, В;
-1
– скорость вращения якоря, с ;
I – ток якоря, А;
R – сопротивление якорной цепи, Ом;
Ф – магнитный поток, Вб;
М – момент, Нм;
М=kФI;
k=рN/(2) – конструктивный коэффициент, зависящий от
конструктивных параметров машины;
р – число пар полюсов;
N – число активных проводников цепи якоря;
– число параллельных ветвей обмотки якоря.
При увеличении тока возбуждения ММ сварочный ток
уменьшается и наоборот. С другой стороны, электрическая энергия, передаваемая через конденсаторы С4-С6, возвращается ДПТ
на вал DVS, тем самым повышая КПД всей системы и экономя
101
топливо. Момент ДПТ пропорционален току якоря, на больших
токах сварки он будет преобразовывать больше электрической
энергии в механическую.
При практической реализации схемы необходимо учитывать
следующие рекомендации. Силовой выпрямитель VD1-VD6 рассчитываются из условия номинального тока сварки, ДПТ выбирается из условия, что его номинальная мощность должна соответствовать 30-40 % от мощности генератора, скорость вращения –
соответствовать скорости DVS или превышать ее, номинальное
напряжение соответствовать напряжению GA с учетом выпрямителя VD7-VD12.
Другой способ и устройство регулирования сварочного тока
основаны на изменении скорости вращения приводного двигателя
за счет регулирования подачи топлива [8]. На рис. 2.27 дана принципиальная схема сварочного агрегата, а на рис. 2.28 – чертеж
устройства подачи топлива. Схема содержит приводной двигатель
DVS с устройством подачи топлива, асинхронный генератор GA,
конденсаторы возбуждения С1-С3, понижающий трансформатор
ТV, конденсаторы регулирования сварочного тока С4-С6, силовой
выпрямитель VD1-VD6, два электромагнита ВМ1, ВМ2 серводвигатель ММ, аккумулятор GВ, два усилителя: DА1 с задержкой на
отключение, DА2 – без задержки, трансформатор тока ТА.
Устройство подачи топлива (рис. 2.28) содержит серводвигатель 1,
на валу которого закреплена шестерня 2, входящая в зацепление с
рейкой 3, катушка электромагнитов 4 и 5 (ВМ1 и ВМ2) подвижные якоря этих магнитов 8 и 9, перемещающиеся в корпусе 7, возвратную пружину 6, карбюратор или топливный насос 11 и заслонку 10.
Схема работает следующим образом. После запуска DVS он
работает на минимально возможных оборотах. Генератор не возбужден, и агрегат потребляет мало топлива. При замыкании электродов ХР катушка 5 (ВМ1) через диод VD7 запитывается от GВ.
Якорь 9 втягивается в катушку 5 и открывает заслонку 10 на такой
угол, при котором DVS развивает номинальные обороты. При номинальных оборотах генератор GА возбуждается, и во второй обмотке ТV появляется ток, трансформатор тока ТА выдает сигнал
на усилитель DA1 и DA2. DA1 через свой силовой элемент (транзистор) удерживает электромагнит 5 (ВМ1), одновременно DA2
102
Рис. 2.27. Схема регулирования сварочного тока изменением подачи
топлива DVS
Рис. 2.28. Устройство регулирования подачи топлива двигателя
внутреннего сгорания
103
включает катушку 4 электромагнита ВМ2. Якорь 8 перемещает
шток 12 через якорь 9 до упора с рейкой 3. Заслонка 10 поворачивается на некоторый угол, увеличивается подача топлива и, следовательно, сварочный ток. Если необходимо увеличить ток сварки,
замыкают контакт SB, и серводвигатель перемещает рейку влево.
Для уменьшения сварочного тока контакт SB замыкают в другое
положение, и серводвигатель ММ перемещает рейку 3 вправо,
уменьшается подача топлива и, как следствие, сварочный ток. На
выбранной величине сварочного тока переводят контакт SB в
нейтральное положение. При обрыве сварочной дуги прекращается сигнал от трансформатора тока ТА, электромагнит 4 (ВМ1)
обесточивается, якорь 8 возвращается в положение, при котором
скорость двигателя будет номинальной, а катушка 5 остается под
напряжением некоторое время, т.к. DА1 имеет задержку на отключение 1-3 мин., т.е. время на замену электрода. Если процесс
сварки не будет продолжаться, DA1 отключит катушку 5 (ВМ1) и
DVS перейдет в режим холостого хода под воздействием пружины
6.
Таким образом, предлагаемая схема позволяет регулировать
сварочный ток, изменяя подачу топлива, автоматически переходить от режима холостого хода к номинальному и наоборот. Все
это, кроме удобства в эксплуатации, позволяет экономить топливо
при проведении сварочных работ.
Дальнейшее развитие способов регулирования возбуждения
АГ и в частных случаях сварочного тока реализовано в следующих технических решениях [16, 34, 35]
На рис. 2.29 представлена схема источника питания сварочной дуги [16]. Ротор асинхронного генератора GA жестко соединен с валом приводного двигателя DVS. Возбуждается генератор
от емкости конденсаторной батареи С1-С3. Первичная обмотка
W1трансформатора TU1 с одной стороны подключена статору
GA, а с другой присоединена к дополнительной батарее конденсатора С4-С6, к которой подключены резисторы R1-R3 и электронный ключ VS1-VS3 со схемой управления UZ. Вторичная обмотка
W2 трансформатора TU1 включена на выпрямитель VD1- VD6 с
датчиком сварочного тока RS и сварочными электродами ХР.
Электрическая схема работает следующим образом.
Приводной двигатель DVS вращает ротор генератора GA, ко104
торый возбуждается от емкости конденсаторной батареи С1-С3.
Напряжение GA подается на схему управления и первичную обмотку W1 трансформатора TU1, проходит эту обмотку и через
конденсаторы С4-С6 замыкается на активном сопротивлении резисторов R1-R3. Напряжение вторичной обмотки W2 выпрямляется VD1-VD6 и через датчик сварочного тока RS подается на сварочные электроды ХР.
Рис. 2.29. Схема регулирования тока сварки электронным коммутатором
На холостом ходу, когда сварочные электроды не замкнуты,
сопротивление обмоток W1 и W2 трансформатора TU велико и
емкость конденсаторной батареи С4-С6 не оказывает влияния на
режим работы генератора.
Схема источника позволяет регулировать ток от минимального до максимального.
Допустим, в схеме управления регулятор тока установлен на
отметке 20А (минимально допустимый ток). При замыкании сварочных электродов ХР замыкается цепь выпрямителя, соответственно, и вторичная обмотка W2 трансформатора TU. Полное
сопротивление трансформатора TU уменьшается, поэтому возрастает ток от емкости конденсаторной батареи С4-С6, который
ограничивается резисторами R1-R3. Генератор при этом увеличивает свое напряжение. При размыкании электродов ХР возникает
105
электрическая дуга, идет процесс сварки. Электронный ключ VS1VS3 при этом в работе не участвует.
Допустим, регулятор тока (указатель) в схеме управления UZ
установлен на отметке 300А (максимальный ток для определенной
конструкции). Электронный ключ VS1-VS3 замыкается и шунтирует резисторы R1-R3. При замыкании сварочных электродов ХР замыкается цепь выпрямителя VD1- VD6, соответственно и вторичная обмотка W2 трансформатора TU, при этом увеличивается емкостной ток конденсаторной батареи С4-С6, и генератор работает в
режиме насыщения. При размыкании электродов ХР происходит
процесс сварки. За счет первоначального насыщения магнитной
системы генератора (при КЗ) дуга горит устойчиво и стабильно.
Электронный ключ VS1-VS3 находится во включенном состоянии.
Промежуточный режим. Регулятор тока (указатель) в схеме
управления UZ установлен, допустим, на отметке 150А. Электронный ключ VS1-VS3 при этом замкнут, и вся батарея конденсаторов
С4-С6 подключена к обмотке W1 трансформатора TU. При замыкании электродов ХР сопротивление трансформатора TU уменьшается,
возрастает емкостной ток от батареи конденсаторов С4-С6, соответственно увеличивается ток в сварочной цепи и в датчике сварочного
тока RS. При достижении тока 150 А схема управления UZ отключает электронный ключ VS1-VS3, при этом включается последовательно с емкостью конденсаторной батареи С4-С6 активное сопротивление резисторов R1-R3, ток в первичной цепи генератора GA начинает
уменьшаться, уменьшается ток и во вторичной цепи. Датчик тока RS
регистрирует это изменение и схема управления UZ включает электронный ключ VS1-VS3, емкостной ток начинает расти, возрастает и
ток в сварочной цепи.
Таким образом, электронный ключ постоянно включается и
отключается в момент перехода синусоиды в каждой фазе через
ноль. За счет инерционности всей системы происходит поддержание тока на заданном уровне (150 А). При размыкании электродов
сопротивление трансформатора TU увеличивается, происходит
процесс сварки, при этом электронный ключ продолжает включаться, поддерживая ток сварки 150 А. Точность поддержания тока зависит от чувствительности схемы управления и составляет 35 % от заданного.
Предлагаемый источник питания сварочной дуги по сравне106
нию с известным позволяет плавно регулировать сварочный ток в
широком диапазоне, а также производить дистанционную его регулировку. Кроме того, предлагаемый источник питания сварочной дуги устраняет резонансные явления при переходных процессах, т.к. присутствует активное сопротивление в цепи емкости.
Ступенчатое регулирование возбуждения и тока сварки можно осуществить по схеме (рис. 2.30.)
Рис. 2.30. Схема дискретного регулирования тока сварки
Автономный сварочный агрегат содержит приводной двигатель DVS типа УД-25 или аналогичный (может использоваться и
вал отбора мощности транспортного средства), асинхронный генератор с короткозамкнутым ротором GA, конденсаторы возбуждения С1-С3 и регулируемые конденсаторы С4-С21, согласующий
трансформатор TU, силовой выпрямитель VD1-VD6, сварочные
электроды ХР, бесконтактные коммутирующие устройства VS1VS15, источник собственных нужд UZ2, дешифратор UZ1, многопозиционный выключатель SB.
107
В качестве асинхронного генератора может использоваться любой асинхронный двигатель, рассчитанный на частоту тока 50400 Гц. Лучше использовать генератор на повышенную частоту, при
этом снижается масса и габариты конденсаторов, так как емкостная
реактивная мощность конденсаторов определяется по формуле:
Qс= U c2 C ,
(2.44)
где Uc – напряжение на конденсаторах; В;
-1
– угловая частота, с ;
С – емкость конденсаторов, мкФ.
При повышении частоты тока снижается и габарит согласующего трансформатора, обмоточные данные которого определяются следующим образом:
W1
U ф1 104
4 ,44B A fS A
,
(2.45)
где Uф1 – фазное напряжение на первичной обмотке, В;
ВА – допустимая индукция в магнитопроводе (зависит от качества трансформаторного железа), Тл;
f – частота питающего тока, Гц;
2
SA – сечение магнитопровода, см .
Таким образом, увеличение частоты тока в 4 раза с 50 до
200 Гц, снижает число витков первичной и вторичной обмоток
практически в 4 раза.
Вторичная обмотка трансформатора выбирается из условия
нагрузки фазного тока:
Iф= 2 / 3 Id =0,817Id ,
где Id – действующее значение тока сварки, А;
Ток диода средний
Iv.ср =0,333Id;
Конденсаторы С4-С21 выбираются из условия:
2
Qс.доп.= I Хс,
108
(2.46)
где I – ток генератора, А;
Хс – емкостное сопротивление конденсаторов, Ом.
Для генератора мощностью 7,5 кВА, частотой тока 200 Гц
элементы схемы имеют следующие данные:
конденсаторы возбуждения: С1-С3 – 24 мкФ на фазу;
конденсаторы регулирования: С19-С21 – 8 мкФ;
конденсаторы регулирования: С4-С6 – 1,0 мкФ;
конденсаторы регулирования: С7-С9 – 2,0 мкФ;
конденсаторы регулирования: С10-С12 – 4 мкФ;
конденсаторы регулирования: С13-С15 – 8 мкФ;
конденсаторы регулирования: С16-С18 – 16 мкФ.
Коммутирующие устройства состоят из симистров ТС2-25-5 и
диодов КД105.
Дешифратор UZ1 и многопозиционный переключатель SB
специальной конструкции.
Изменяя положение переключателя SB можно изменять емкость с дискретностью 1 мкФ и получать семейство внешних характеристик. Внешние характеристики для некоторых значений
емкости приведены на рис. 2.31
Рис. 2.31. Внешние характеристики источника питания сварочной дуги
при различных емкостях С4-С21
Для упрощения конструкции вместо бесконтактных элементов
можно использовать реле. Опытный образец сварочного блока с реле
показан на рис. 2.32 (внешний вид), а на рис. 2.33 монтаж блока.
109
Рис. 2.32. Внешний вид сварочного блока
Рис. 2.33. Блок управления без кожуха 1 - реле; 2 - согласующие трансформаторы; 3 - силовой выпрямитель; 4 - дешифратор; 5 - выводы для
подключения сварочных проводов
110
Рис. 2. 34. Опытный образец сварочного агрегата с АГ
Опытный образец сварочного агрегата имеет следующие характеристики:
Номинальный сварочный ток, А ....................................... 130
Предел регулирования сварочного тока, А ................. 20-180
Номинальная продолжительность нагрузки, ПН% ......... 60
Номинальное рабочее напряжение, В ............................... 25
Напряжение холостого хода, В.......................................... 70
Генератор, тип .............................. асинхронный трехфазный
-1
Скорость вращения генератора, мин ............................. 6000
Частота тока генератора, Гц............................................... 200
Напряжение генератора, В .............................................. 230/130
Номинальная мощность генератора, кВА ..................... 6,0
Приводной двигатель, тип .............................................. УД-25
-1
Скорость вращения вала, мин ...................................... 3000
Номинальная мощность, кВА ......................................... 5,88
Топливо ...................................................... бензин А-72, А-76
Габаритные размеры, мм............................... 1140615730
Масса, кг ........................................................................... 165
111
Качество сварочного шва зависит от частоты питающего тока.
Увеличение частоты тока до 200 - 400 Гц, кроме снижения МГП,
улучшает условия горения дуги.
Предлагаются два типа сварочных асинхронных генераторов
[6, 7]. Первый вариант сварочного асинхронного генератора (САГ)
представлен на рис. 2.35. Схема содержит САГ GА с обмотками
возбуждения W1 - W2 и рабочей обмоткой W3, согласующий
трансформатор TU с первичной W4 и вторичной W5 обмотками,
конденсаторы возбужденияС1 и С2, приводной двигатель DVS и
сварочные электроды ХР.
Рис. 2.35. Схема принципиальная трехобмоточного сварочного асинхронного генератора
САГ GА конструктивно выполнен как трехфазный. Только
обмотки возбуждения имеют большое число витков (но меньшее
сечение проводов) и рассчитаны на напряжение 400-600 В. Рабочая обмотка W3 имеет меньшее число витков и рассчитывается на
напряжение сварки, а сечение обмотки – на номинальный сварочный ток. Емкость конденсаторов возбуждения выбирается из расчета возбуждения генератора и компенсации реактивной составляющей реакции ротора и нагрузки..
Схема работает следующим образом. Приводной двигатель
DVS (это может быть ДВС или вал отбора мощности транспортного
средства) вращает САГ GА. Последний возбуждается от емкости
конденсаторов С1, С2. Напряжение обмоток возбуждения трансформируется на рабочую обмотку W3 и через вторичную обмотку
W5 трансформатора ТU поступает на сварочные электроды ХР.
На холостом ходу сопротивление (индуктивное) обмотки W5
трансформатора ТU велико и САГ работает от последовательно
112
включенных конденсаторов С1, С2. При замыкании сварочных
электродов ХР уменьшается реактивное сопротивление обмоток
W4 и W5 трансформатора ТU, и последовательно включенные
конденсаторы С1, С2 оказываются подключенными (через малое
сопротивление обмотки W4) к нулевой точке генератора GА. Получается параллельное подключение конденсаторов С1, С2 к обмоткам возбуждения W1 и W2. Энергия конденсаторов С1, С2
возрастает, и САГ GА выходит в режим насыщения, при этом возрастают напряжения на обмотках и ток в сварочной цепи. Этот ток
ограничивается сопротивлением обмоток W3 и W5.
При размыкании электродов ХР возникает электрическая дуга, идет процесс сварки. За счет первоначального насыщения САГ
(при к.з.) происходит стабилизация сварочного тока.
По окончании процесса сварки сопротивление обмотки W4
возрастает и конденсаторы С1, С2 оказываются подключенными
последовательно с обмотками возбуждения генератора, емкостный
ток уменьшается и САГ переход на режим Х.Х.
Конструктивно опытный образец САГ изготовлен на базе АД.
Статор АД был перемотан, и скорость вращения составила
6000 об/мин. Трансформатор TU выполнен на витом магнитопро2
воде типа ПЛ сечением 28 см .
При изменении емкости возбуждения от 60 до 120 мкФ сварочный ток изменяется от 50 до 210 А при устойчивом горении
дуги. Частота тока изменяется от 200 до 192 Гц (за счет скольжения) при постоянной скорости вращения ротора.
Более простая конструкция однофазного сварочного асинхронного генератора приведена на рис. 2.36. САГ GА имеет рабочую обмотку W2 и обмотку возбуждения W1. Возбуждается от
емкости конденсатора С2. Ток нагрузки проходит через первичную обмотку W3 трансформатора TU и подается на сварочные
электроды ХР Первичная обмотка W3 трансформатора TU последовательно с конденсатором С1 включена на зажимы обмотки
возбуждения W1 САГ GА.
Схема работает следующим образом: приводной двигатель
вращает ротор САГ GА. САГ за счет остаточного намагничивания
ротора самовозбуждается от емкости конденсатора С2. Напряжение обмотки возбуждения W1 трансформируется на рабочую обмотку W2 и через вторичную обмотку W4 трансформатора TU по113
дается на сварочные электроды ХР.
Рис. 2.36. Схема принципиальная двухобмоточного однофазного сварочного асинхронного генератора
Возможны три режима работы: холостой ход, короткое замыкание, процесс сварки.
В режиме холостого хода цепь разомкнута, индуктивное сопротивление трансформатора TU и обмотки W3 велико. Поэтому
емкость конденсатора С1 не оказывает существенного влияния на
параметры САГ GA.
При замыкании электродов ХР возникает ток в цепи, при этом
полное сопротивление трансформатора TU уменьшается и за счет
емкости конденсатора С1 САГ GA переходит в зону насыщения.
Вторичная обмотка W4 трансформатора TU ограничивает ток короткого замыкания.
При размыкании сварочных электродов ХР возникает электрическая дуга, идет процесс сварки. Сопротивление в сварочной
цепи увеличивается, соответственно увеличивается сопротивление
и первичной обмотки W3 трансформатора TU. За счет первоначального насыщения (при КЗ) магнитной системы генератора и
дальнейшего увеличения сопротивления при сварке происходит
стабилизация сварочного тока за счет емкости конденсатора С1,
что положительно влияет на качество сварки.
При обрыве дуги сопротивление трансформатора возрастает и
генератор переходит в режим ХХ. Далее процесс повторяется.
Обычно такие САГ выполняют на частоту тока 200-400 Гц,
что снижает массу конденсаторов, а с другой стороны при повышении частоты улучшаются условия горения дуги.
Опытный образец сварочного агрегата с асинхронным генератором на 400 Гц представлен на рис. 2.37
114
а)
б)
Рис. 3.37. Вариант сварочного агрегата: а) вид со стороны силового агрегата; б) вид со стороны блока управления
1 – приводной двигатель УД-25М1; 2 – универсальный генератор; 3 –
блок управления; 4 – рама; 5 – бензобак; 6 – ручки для транспортировки
А блок управления со снятым кожухом дан на рис. 3.38.
115
Рис. 3.38. Вариант сварочного блока
2.7 Бесконтактный генератор постоянного тока
В настоящее время вследствие интенсивного развития полупроводниковых приборов появляется возможность замены контактных коллекторных ГПТ на бесконтактные ГПТ, выполненных
на базе БЭМ и полупроводниковых преобразователей. В бесконтактных ГПТ – вентильных генераторах (ВГ) преобразователем
электроэнергии является полупроводниковый выпрямитель, который может быть реализован на базе неуправляемых или управляемых вентилей, а в качестве генератора электроэнергии могут использоваться СГПМ или АГ.
ВГ постоянного тока не только конкурентоспособны с коллекторными генераторами, но и могут использоваться в условиях,
исключающих применение коллекторных машин (в высокоскоростных установках с магнитными подшипниками, при низком
давлении, в присутствии агрессивных сред и т.п.).
116
С другой стороны совместная работа СГПМ, АГ с управляемым полупроводниковым выпрямителем упрощает их общую
проблему по стабилизации напряжения.
Особенности работы ВГ. Для выпрямления тока генераторов
переменного тока, как правило, применяются схемы трехфазных
выпрямителей со средней точкой и мостовая (рис. 2.39).
а)
б)
Рис. 2.39. Схемы вентильных генераторов на базе трехфазных выпрямителей со средней точкой (а) и мостовой схемы (б)
Процесс коммутации вентилей выпрямителей близок по своей
физической природе к начальному этапу двухфазного короткого
замыкания генератора, т.е. существует промежуток времен (угол
коммутации), когда оба вентиля находятся во включенном состоянии. Это происходит из-за наличия индуктивности в цепи. Ток в
отключаемом вентиле спадает от средневыпрямленного значения
Id до 0, а во включенном вентиле нарастает от 0 до Id.
Рассмотрим основные зависимости для схемы выпрямителя
со средней точкой. Для неуправляемого выпрямителя, когда угол
управления = 0, угол коммутации определяется по формуле
cos 1 2 X к I d /( 6U ).
117
(2.47)
Для управляемого выпрямителя
(2.48)
cos( ) cos 2 X к I d /( 6U ),
где Хк = Lк – индуктивное сопротивление обмотки фазы во время коммутации; U – действующее значение фазного напряжения.
Как видно из (2.48) с ростом угла управления угол коммутации уменьшается. При этом напряжение на коммутирующих вентилях равно полусумме напряжений отключающейся и включающейся фазы. К примеру, при коммутации вентилей в фазах А и В
uVS 0,5(u А uB ).
(2.49)
Коммутация вентилей происходит с периодичностью 2 /3,
поэтому среднее значение потерь выпрямленного напряжения
U к (3 / 2 ) X к I d .
(2.50)
Среднее значение выпрямленного напряжения ВГ при использовании выпрямителя со средней точкой
Ud
3 6
3
U cos
X к Id .
2
2
(2.51)
Формула (2.51) описывает внешнюю характеристику выпрямителя со средней точкой. Чем больше Хк, тем меньше значения
выходного напряжения Ud. Кроме того, увеличение угла управления также приводит к уменьшению Ud.
По характеру выпрямленного напряжения мостовая схема
(рис. 2.39, б) эквивалентна шестифазной со средней точкой. Мостовая схема выпрямителя обеспечивает лучшее использование
ЭДС генератора, так как каждая фаза в ней работает 2/3 периода
(по 1/3 для каждой полуволны напряжения) в отличие от схемы со
средней точкой, где каждая фаза включена только 1/3 периода.
Рассмотрим основные зависимости для мостовой схемы выпрямителя ВГ. Потери выпрямленного напряжения
U к (3 / ) X к I d .
(2.52)
При значении угла коммутации < /3 внешняя характери118
стика выпрямителя описывается формулой
Ud
3 6
U cos
3
X к Id .
(2.53)
Внешняя характеристика в режиме > /3 становится более
крутопадающей, и описывается формулой
Ud (
9 2
U )(1 X к I d / 2U ).
(2.54)
Из-за того, что в ВГ каждая фаза якорной обмотки работает с
перерывами и переключение токов фаз на внешнюю цепь сопровождается процессами коммутации, его мощность снижается по
сравнению с мощностью базового генератора переменного тока.
Поэтому целесообразно на этапе проектирования АИЭ провести
предварительный анализ степени использования базового генератора переменного тока. Для выявления физической сущности процессов, определяющих степень использования базового генератора при получении от него электроэнергии постоянного тока, как
правило, принимают следующие допущения: вентили включаются
с задержкой на угол ; токи имеет прямоугольную форму и сдвинуты относительно момента подачи сигнала включения вентиля на
угол /2; напряжение базового генератора имеет синусоидальную
форму.
Основные расчетные соотношения для мостовой схемы выпрямителя. Действующее значение тока, соответствующее прямоугольной формы фазного тока
I I d 2 / 3.
(2.55)
Активная мощность одной фазы
Рф (3 / )UI cos( / 2).
тока
(2.56)
Расчетная мощность фазы базового генератора постоянного
РГ UI .
119
(2.57)
Таким образом, при работе на выпрямитель коэффициент использования генератора
kИС Рф / РГ (3 / ) cos( / 2).
(2.58)
Из (2.58) видно, что регулирование выпрямителя и процесс
коммутации вентилей ухудшают использование базового генератора. При = = 0 коэффициент использования генератора имеет
максимальное значение, что составляет kИС = 3/ = 0,955.
Основные расчетные соотношения для схемы выпрямителя со
средней точкой. Действующее значение тока
I I d / 3.
(2.59)
Активная мощность одной фазы
Рф (3 / 2 )UI cos( / 2).
(2.60)
Коэффициент использования генератора
kИС (3 / 2 ) cos( / 2).
(2.61)
Следовательно, мощность ВГ и коэффициент использования
базового генератора для схемы выпрямителя со средней точкой в
2 раз меньше, чем для мостовой схемы. В любом случае расчетная (типовая) мощность ВГ должна быть в 1/kИС раз больше реальной развиваемой им мощности.
Характерной особенностью работы ВГ с регулируемыми выпрямителями является тот факт, что увеличение угла управления
приводит к росту его реактивной мощности (хотя нагрузка постоянного тока потребляет всегда только активную мощность).
Это связано с тем, что увеличение угла управления вызывает
большое смещение по фазе первой гармоники тока по отношению
к напряжению генератора. Поэтому приближенно можно считать,
что ВГ работает с коэффициентом мощности
cos cos( / 2).
(2.62)
Таким образом, ВГ помимо активной мощности вырабатывает
120
реактивную мощность Q, тем большую, чем больше углы и .
Приближенно реактивную мощность ВГ можно определить по
формуле
Q mUI sin .
(2.63)
2.7.1 Вентильные генераторы совмещенной конструкции
На кафедре электрических машин и электропривода Кубанского ГАУ разработан ряд вентильных генераторов совмещенной
конструкции (СК)[9, 93, 94].
На рис. 2.40 показана схема источника переменного тока с ВГ
СК.
Источник питания переменного тока на базе бесконтактного
синхронного генератора выполнен с совмещенными магнитными
и электрическими цепями. Генератор содержит на магнитопроводе
статора многофазную якорную обмотку W1, к свободным концам
которой через выпрямитель VD1-VD6 подключена обмотка возбуждения возбудителя W2. Параллельно обмотке возбуждения
возбудителя подключен выход дискретного регулятора UZ1 тока
возбуждения с регулирующим элементом VT1 выполненным,
например, на транзисторе. Вход дискретного регулятора тока возбуждения соединен с датчиком регулируемого параметра и конденсаторами С1-С3 которые включены на выход якорной обмотки
W1 генератора.
На магнитопроводе ротора расположена многофазная электрически совмещенная обмотка W3 замкнутая через однополупериодный выпрямитель VD7-VD9. Электрически совмещенная обмотка W3 выполняет одновременно функции обмотки якоря возбуждения и обмотки возбуждения генератора.
Источник питания переменного тока работает следующим образом.
При вращении ротора генератор в электрически совмещенной
обмотке W3 за счет остаточной индукции в генераторе наводится
ЭДС. Постоянная составляющая выпрямленного тока роторной
обмотки W3 создает намагниченную силу и поток возбуждения
генератора, в результате чего в якорной обмотке W1 наводится
переменная ЭДС. Через обмотку возбуждения возбудителя W3
121
протекает выпрямленный ток, который усиливает поток возбуждения генератора.
Процесс
самовозбуждения
ограничивается
нелинейностью
магнитной проводимости магнитопровода. Наличие конденсаторов
С1-С3 включенных на выход якорной обмотки W1 генератора, ускоряет и обеспечивает надежность
самовозбуждения генератора, а так
же улучшает форму кривой выходного напряжения, так как через них
замыкаются высшие гармонические
составляющие напряжения генератора. Одновременно они являются
нагрузкой для генератора на холостом ходу. Если напряжение на выходе якорной обмотки W1 генератора превышает номинальное значение, то дискретный регулятор
UZ1 своим регулирующим элементом VT1 шунтирует обмотку W2
возбуждения, что приводит к снижению напряжения на выходе до
номинальной величины.
При подключении к источнику
питания переменного тока двигаРис. 2.40. Вентильный
тельной нагрузки, соизмеримой
генератор совмещенной
мощности, возникают большие
конструкции
пусковые токи, что приводит к резкому снижению выходного напряжения. При этом ток, протекающий по обмотке возбуждения W2
возбудителя, резко возрастает и осуществляет форсировку возбуждения генератора. В случае переформировки возбуждения в
работу вступает регулятор UZ1 тока возбуждения, регулирующий
элемент VT1 которого уменьшает ток возбуждения.
Конструкция опытного образца вентильного генератора дана
на рис. 2.41, а внешний вид на рис. 2.42.
122
Рис. 2.41. Конструкция вентильного генератора
1 - крышка генератора; 2 - вал; 3 - подшипник, устанавливаемый в горловине крышки; 4 - пакет сердечника ротора; 5 - электрически совмещенная обмотки ротора; 6 - диод типа ВА-20; 7 - корпус генератора; 8 - пакет
сердечника статора; 9 - обмотка якоря генератора; 10 - обмотка возбуждения возбудителя; 11 - стяжные шпильки; 12 - вентилятор; 13 - кожух;
14 - диск-охладитель вращающегося выпрямителя
Рис. 2.42. Внешний вид вентильного генератора совмещенной
конструкции
Источник питания переменного тока на базе бесконтактного
синхронного генератора с совмещенными магнитными и электрическими цепями обладает улучшенными динамическими свой123
ствами и качеством электроэнергии и предназначен для замены
синхронных машин с бесщеточной системой возбуждения.
Вентильный генератор с улучшенными энергетическими характеристиками [93] дан на рис. 2.43.
Рис. 2.43. Вентильный генератор с улучшенными энергетическими характеристиками
Принципиальная схема вентильного бесконтактного синхронного генератора содержит следующие элементы. Индуктор 1
генератора содержит обмотку возбуждения возбудителя W1, основную обмотку W2 с трехфазным выпрямителем VD1-VD6 в нулевой точке, выход которого соединен с обмоткой возбудителя
W1. Дополнительная обмотка индуктора W3 соединена с трехфазным выпрямителем VD7-VD12, а выход последнего плюсовым
выводом соединен трехфазным выпрямителем VD1-VD6 непосредственно, а минусы соединены через силовой элемент, например, транзистор VT1, импульсного регулятора тока возбуждения
UZ, вход которого А, В, С соединен с выходом основной обмотки
W2 индуктора 1. Электрически совмещенная обмотка возбуждения и возбудителя W4 якоря 2 через выпрямитель VD13-VD15 замыкается на нулевую точку.
124
Дополнительная обмотка W3 индуктора выполняется на число пар полюсов, равное числу пар полюсов основной обмотки, но
смещена в пространстве на 90 эл. градусов. По напряжению дополнительная обмотка W3 генератора согласована с сопротивлением обмотки возбуждения возбудителя W1. Вход А, В, С импульсного регулятора тока возбуждения соединен с выходом основной обмотки индуктора W2, тем самым реализуется отрицательная обратная связь по выходному напряжению.
Вентильный бесконтактный синхронный генератор работает
следующим образом. Приводной двигатель вращает якорь 2 генератора со скоростью, определяемой числом пар полюсов и заданной частотой генератора. За счет остаточного намагничивания
магнитной системы якоря в обмотках W3 и W2 наводится ЭДС.
ЭДС обмотки W3 выпрямляется выпрямителем VD7-VD12 и через
открытый транзистор VT1 замыкается на обмотке возбуждения
возбудителя W1. Создается магнитный поток, замыкающийся на
якоре и пересекающий совмещенную обмотку возбуждения и возбудителя W4. В ней наводится ЭДС, выпрямляется выпрямителем
VD13-VD15, появляется постоянная составляющая тока, которая
создает основной поток возбуждения. Генератор самовозбуждается и напряжение возрастает на основной обмотке W2 индуктора.
При достижении определенной величины напряжения, сигнал обратной связи управляет работой импульсного регулятора тока возбуждения UZ, а последний уменьшает длительность открытого
состояния транзистора VT1, тем самым ограничивая ток возбуждения и напряжение холостого хода на обмотке W2.
При подключении нагрузки, в основной обмотке индуктора
W2 протекает ток, который выпрямляется трехфазным выпрямителем VD1-VD6 и замыкается в обмотке возбуждения возбудителя
W1, при этом возрастает поток от этой обмотки, возрастает МДС и
ЭДС совмещенной обмотки возбуждения и возбудителя W4. Последняя создает дополнительный поток и компенсирует реакцию
нагрузки, напряжение на нагрузке восстанавливается.
При значительном снижении напряжения на выходе основной
обмотки W2, снижается сигнал обратной связи на входе А, В, С
импульсного регулятора тока возбуждения UZ, что приводит к
увеличению длительности закрытого состояния транзистора VT1
и как следствие – увеличение тока через обмотку W1 от дополни125
тельной обмотки W3 индуктора. В этом случае реализуется отрицательная обратная связь по напряжению.
При снятии нагрузки с зажимов основной обмотки W2 индуктора с одной стороны снижается ток в обмотке возбуждения возбудителя W1, с другой стороны снижается и размагничивающее
действие нагрузки.
В любом случае, независимо от вида нагрузки, дополнительный поток регулирует силовой транзистор VT1 и происходит стабилизация напряжения на нагрузке.
В отличие от известных генераторов, предлагаемый вентильный бесконтактный синхронный генератор обладает следующими
достоинствами.
1. При подключении нагрузки происходит прямое токовое
компаундирование. При подключении двигательной нагрузки
происходит форсирование тока возбуждения за счет пускового
тока асинхронного двигателя . В этом случае реализуется обратная
связь по току нагрузки.
2. При увеличении тока от электрически совмещенной обмотки возбуждения и возбудителя W4 одновременно с возрастанием
ЭДС в основной обмотке W2 возрастает ЭДС и в дополнительной
обмотке W3 индуктора, что приводит к возрастанию амплитуды
тока через транзистор VT1 и обмотку возбуждения W1.
В этом канале реализуется внутренняя положительная обратная связь по току нагрузки.
3. Описанная выше отрицательная обратная связь по напряжению увеличивает устойчивость работы всей системы.
2.7.2 Лабораторный стенд для исследования синхронных,
асинхронных и вентильных генераторов
Для исследования макетных и опытных образцов генераторов
различной конструкции во всех режимах, разработан и изготовлен
специальный стенд [91]. Конструктивно стенд состоит из рамы, на
которой закреплен двигатель постоянного тока (ДПТ) и исследуемый генератор (рис. 2.44, а, б ). Момент от ДПТ к генератору передается через клиноременную передачу или через эластичную
муфту.
Для регулирования и стабилизации скорости генератора используется схема автоматического управления ДПТ (рис. 2.45).
126
Схема содержит управляемый выпрямитель VS1 - VS6, блок
управления БУ, регулятор скорости R1, тахогенератор G, переключатель режима работы SB1.
а)
б)
Рис. 2.44. Конструкция универсального стенда для исследования синхронных и асинхронных генераторов различной мощности: а) - момент
передается через клиноременную передачу; б) - момент на генератор передается через эластичную муфту. 1 - рама; 2 - тахогенератор; 3 приводной двигатель типа 2ПН132МУХЛ4; 4 - исследуемый генератор; 5
- клиноременная передача
127
Рис. 2.45. Блок управления приводным двигателем и измерительные
приборы: 1 - блок управления БУ; 2 - тиристоры силовые VS1-VS6 - Т6320-7; 3 - задатчик (регулятор) скорости R1; 4 - переключатель режима
работы SB1; 5 - блок коммутации и защиты
Схема запитана от разделительного трансформатора с линейным напряжением 230 В. На выходе управляемого выпрямителя
VS1 - VS6 действующее напряжение регулируется от 0 до 300 В,
что позволяет стабилизировать скорость с диапазоном D = 750.
В качестве приводного двигателя М используется ДПТ типа
2ПН132МУХЛ4 со следующими паспортными данными:
-1
-1
Рн = 10,5 кВт; Uн = 220 В; nн = 3000 мин ; nmax = 4000 мин ;
н = 84 %; Rя=0,14 Ом; Rдоб = 0,044 Ом; Rв=111 Ом.
Тахогенератор G формирует сигнал обратной связи и сигнал
для визуального контроля за скоростью по прибору P.
При исследовании источника в динамических режимах требуется жесткая характеристика приводного электродвигателя
(например синхронного или ДПТ) с датчиком угла положения и
сложной схемой управления.
Для корректных исследований, весьма важно иметь электромеханическую систему с наиболее линейными зависимостями.
Этим условиям отвечает привод постоянного тока.
128
Для двигателя постоянного тока независимого возбуждения в
общем случае справедливо:
u i я r Ldi я / dt kФ
М kФ I я
,
M M c Jd / dt
uв i в rв L в di в / dt
(2.64)
где r rя rдп rко rдоб – полное активное сопротивление якорной цепи;
L Lя Lдп Lко – полная индуктивность якорной цепи;
kФ E – электродвижущая сила вращения якоря;
k pN /( 2a ) – конструктивный коэффициент двигателя;
p', N, a – соответственно число пар полюсов, активных проводников и параллельных ветвей обмотки якоря;
– механическая угловая скорость двигателя;
Ф – магнитный поток возбуждения двигателя;
rв – активное сопротивление обмотки возбуждения;
М, Мс – соответственно момент, развиваемый двигателем и
момент статического сопротивления;
J- момент инерции привода.
При расчетах электромеханических свойств ДПТ обычно используют произведение с=kФ.
Совместное решение уравнений системы (2.64) относительно
скорости и момента М при с = const, Mc = const приводит к уравнениям:
dt 2
,
2
d M 1 dM
1
1 J d
M
M c
T яTм c dt
dt 2 T я dt T яTм
d 2
1 d
1
1 u r
M c
2
T я dt T яTм T яTм c c
(2.65)
где u / c 0 – угловая скорость идеального холостого хода;
129
rM c / c 2 c – статический перепад скорости;
Jdu /( cdt ) M дин – динамическая составляющая момента;
Tя L / r - электромагнитная постоянная якорной цепи;
Tм Jr / c 2 - электромеханическая постоянная времени.
Уравнения (2.65) в операторной форме при нулевых начальных условиях записываются в виде:
1
1
1 U ( p ) r
p ( p )
( p )
M c ( p )
Tя
T яT м
T яT м c
c2
. (2.66)
1
1
1 J
2
p M ( p ) pM ( p )
M ( p )
pU ( p ) M c ( p )
Tя
T яT м
T яTм c
p 2 ( p )
Передаточная функция ДПТ независимого возбуждения при
возмущении по управлению:
W ( p )
( p )
kд
2 T
U ( p ) T яTмр
м р 1
;
(2.67)
– при возмущении по нагрузке:
W ( p )
( p )
rk д2
M c ( p ) T яTм p 2 Tм р 1
,
(2.68)
где kд 1/ c .
Из последних уравнений рассчитывается характеристика
установившегося режима работы ДПТ независимого возбуждения,
а из (2.64) в установившемся режиме (при статической электрической нагрузке):
U
r
(2.69)
Ic .
c
c
Откуда с учетом выражения для момента M cI следует
уравнение статической механической характеристики:
130
U
r
.
(2.70)
Mc
c
c2
Динамические характеристики ДПТ НВ строятся при предварительном приведении уравнения (2.66) к типовому характеристическому уравнению реального колебательного звена, например
для (2.67):
( p )
1/ c
,
U ( p ) T 2 P 2 Tp 1
(2.71)
где T TяTм ;
Tм / Tя – коэффициент демпфирования.
Зная величины Тя и Тм можно построить быстродействующую
систему управления испытательным стендом.
При работе управляемого выпрямителя на силовую цепь, содержащую в общем случае источник противо-э.д.с., активное сопротивление и индуктивность, уравнение внешней характеристики
Ud=f(Id) можно представить в виде :
m
U d Ed max cos U B0 0 Lф Rф 1 I d ,
2
(2.72)
где – угол коммутации тиристоров.
Угол зависит от выпрямленного тока Id и поэтому внешняя
характеристика выпрямителя не является линейной.
Если 4 / m , то уравнение (2.72) упрощается и принимает
вид:
m
U d Ed max cos U В0 0 Lф Rф I d .
2
(2.73)
Величина 0 Lфm /( 2 ) эквивалентна активному сопротивлению преобразователя. Полное активное сопротивление выпрямителя определяется как Rэ m /( 2 )0 Lф Rф , тогда:
131
U d Ed max cos U В0 Rэ I d .
(2.74)
В режиме непрерывного тока, операторное уравнение выпрямителя относительно Id при работе на активно-индуктивную
нагрузку Rн и Lн имеют вид:
u ( p)
,
Tc pI d ( p ) I d ( p ) d
Rн Rэ
где Tс
(2.75)
Lн Lф
– постоянная времени выпрямителя с учетом паRн Rэ
раметров силовой цепи.
При питании обмотки возбуждения ДПТ напряжением независимого источника Тc=Тв :
Tв
Lв Lф
rв Rэ
,
(2.76)
где Lв, rв – индуктивность и активное сопротивление цепи возбуждения.
Передаточная функция выпрямителя при входном воздействии Ed(р) и выходной величине Eн(р)=c(p) имеет вид:
Eн ( p )
1
,
2
Ed ( p ) TмT я p Tм p 1
(2.77)
L Lф
; Tя
.
r Rэ
c2
При небольших отклонениях нагрузки силовая схема выпрямителя может быть представлена в виде двух последовательно
включенных апериодических звеньев с постоянными времени:
где Tм J
r Rэ
T /( 20 ) и Tн Lн / Rн .
(2.78)
Появление звена T объясняется изменением проводимости
тиристора при воздействии гармонического входного сигнала.
132
Если пренебречь электрической постоянной якорной цепи,
передаточная функция выпрямителя с двигателем может быть записана в виде:
Eн ( p )
1
.
E d ( p ) Tм p 1
(2.79)
Система импульсно-фазового управления является наиболее
распространенной в современных электроприводах. Инертность
системы импульсно-фазового управления можно условно принять
порядка 0,01 с. Считая выпрямитель практически безинерционным, относительно электромеханической системы создан лабораторный стенд, отвечающий условиям эксперимента.
Для этих целей разработано относительно простое техническое решение, позволяющее иметь "синхронную" скорость вращения ДПТ [91].
Новизна и преимущество схемы заключается в том, что тиристоры выпрямителя VS1-VS6 (рис. 2.47) управляются от цифровой
системы импульсно-фазового управления (СИФУ) (рис. 2.48).
Диаграммы, поясняющие работу одного канала, приведены на рис.
2.49.
В СИФУ входит узел синхронизации, аналого-импульсный
преобразователь АИП, счетчики фаз СЧА, СЧВ, СЧС, узел защиты, генератор частотного заполнения ГЧЗ и усилители управляющих сигналов А, В и С.
Узел синхронизации выполнен на транзисторах разной структуры (p-n-p и n-p-n). На вход подается сигнал от сети (кривая "б"
рис. 2.49,а) через согласующий трансформатор. Узел синхронизации формирует прямоугольные импульсы "в" и "г" и после суммирования на выходе получаем импульсы синхронизации "д" с частотой 100 Гц при переходе синусоидального сигнала "б" через
"ноль". Сигналы синхронизации управляют работой счетчиков и
усилителей.
Аналого-импульсный преобразователь АИП преобразует аналоговый сигнал задатчика скорости и сигнал обратной связи от
тахогенератора G в прямоугольные импульсы определенной частоты "е". Причем, чем больше сигнал на входе АИП, тем выше
частота на выходе АИП. Сигнал АИП поступает на входы счетчи133
Рис. 2.47. Схема для регулирования и стабилизации скорости и частоты
исследуемых генераторов.
134
Рис. 2.48. Структурная схема системы импульсно-фазового
управления тиристорами испытательного стенда
135
а)
б)
Рис. 2.49. Диаграммы, поясняющие работу одного канала системы импульсно-фазового управления выпрямителем стенда
ков СЧА, СЧВ и СЧС. Счетчики СЧА, В и С при каждом переходе
через нулевое значение синхронизирующего напряжения сбрасываются в нулевое состояние отрицательными синхроимпульсами
136
"д". При определенном числе счетных импульсов, счетчики СЧА,
В и С устанавливаются в единичное состояние "ж", сигнал единичного состояния поступает на входы усилителей А, В и С, разрешается прохождение сигналов управления "е" от генератора частотного заполнения. На управляющие входы 1' - 12' тиристоров
VS1 - VS6 (рис. 2.47) подаются от своего усилителя сигналы
управления "з", последние открывают тиристор, и в каждой фазе
наблюдаем выходной сигнал "и".
При увеличении нагрузки скорость ДПТ снижается, уменьшается сигнал обратной связи, автоматически изменяется угол открытия тиристоров, и напряжение возрастает. Но в этом случае
вся система работает с определенным статизмом, и частота тока
генератора будет понижаться.
Для абсолютно жесткой внешней характеристики стенда,
кроме аналогового сигнала от тахогенератора G используется
сигнал синхронизации от синусоидального напряжения испытуемого генератора (рис. 2.47). В этом случае схема работает следующим образом. На первом этапе блок управления БУ синхронизируется от питающей сети А, В, С через переключатель SB1. Задатчиком скорости R1 увеличивается выходное напряжение и, соответственно, скорость вращения генератора G. Скорость (частота)
контролируется по тахометру P. При частоте генератора, равной
частоте сети (50 Гц), переключатель SB1 переключается в нижнее
по схеме положение. На вход БУ поступает синусоида от исследуемого генератора с отстающей фазой между ними (кривая "б", рис.
2.49, б).
При увеличении нагрузки на генераторе, увеличивается момент
сопротивления на валу ДПТ, последний затормаживается и угол
между кривой напряжения сети и генератора увеличивается, автоматически увеличивается угол открытия тиристоров (рис. 2.49, б),
напряжение на ДПТ возрастает пропорционально фазе отставания,
возрастает момент, и привод работает с синхронной скоростью. Так
как электромеханическая постоянная ДПТ на два - три порядка выше
быстродействия СИФУ, то стенд работает устойчиво даже при подключении к генератору соизмеримой нагрузки.
Общий вид испытательного комплекса представлен на
рис. 2.50.
137
Рис.2.50. Общий вид испытательного комплекса при исследовании статических и динамических характеристик генератора при подключении
нагрузки с различными коэффициентами мощности: 1 - силовой агрегат;
2 - нагрузочные устройства; 3 - измерительные приборы; 4 - электронный
регулятор возбуждения; 5 - источник питания 380/220, 220/127 В.
2.8 Нетрадиционные источники электроэнергии
Возросший в последнее время интерес к нетрадиционным источникам электроэнергии связан с целым комплексом причин, основными из которых являются ограниченность природных запасов
138
топлива, остро возникшая проблема загрязнения окружающей
среды, отрицательные экологические последствия традиционной
энергетики, перерывы в электроснабжении потребителей от внешней сети.
Широкие перспективы раскрываются перед нетрадиционными
источниками электроэнергии при использовании их в качестве резервных источников электроэнергии стационарных САЭ. К таким
источникам электроэнергии относятся, прежде всего, малые электростанции, использующие энергию ветра и воды, т.е. ветроэнергетические станции (ВЭС) и микрогидроэлектростанции (МГЭС). На
практике, как правило, ВЭС используются в качестве основных источников электроэнергии, а ДЭС являются резервными.
Современные ВЭС эффективно работают при скоростях ветра
4 – 17 м/с. Кроме того, ВЭС эффективно используется в регионах со
средней годовой скоростью ветра 3 – 5 м/с. Общая мощность ВЭС,
применяемых в России, не превышает 10 МВт. В тоже время в Великобритании она составляет 30 МВт, в Дании – 300 МВт, в США
– 1500 МВт. Годовые ветровые потоки на территории России позволяют значительно увеличивать мощность автономных электроэнергетических станций, получаемую от энергии ветра.
Наиболее отработанные и приемлемые для европейских условий в настоящее время являются ВЭС мощностью 200 – 250 кВт
датского производства, общий ресурс которых составляет 100000
ч. (20 лет), стоимость 250 – 260 тыс.дол., прибыль при 20 летнем
ресурсе около 320 тыс.дол.
Экономичность малой ветро- и гидроэнергетики повышается
при переходе на использование в ВЭС и МГЭС типовых проектов
и унифицированных узлов, а также при применении компактного
серийного отечественного ветро-, гидро- и электроэнергетического оборудования. Так как в сложившихся экономических условиях
применение зарубежных станций и комплектующих практически
не выгодно, из-за относительно высокой их стоимости с учетом
транспортных, эксплуатационных и других расходов.
Частоты вращения ветродвигателя ВЭС и турбины МГЭС
практически находятся в одних и тех же пределах (в основном до
80 об/мин), поэтому ВЭС и МГЭС могут иметь однотипные редукторы скорости и соответственно генераторы электроэнергии.
Как известно, мощность источника электроэнергии ВЭС зави139
сит в основном от скорости ветра и диаметра ветроколеса
(рис. 2.51), а у МГЭС она зависит от расхода и напора воды
(рис. 2.52).
Рис. 2.51. Графики зависимости мощности ВЭС (Р) от скорости ветра (V)
и диаметра ветроколеса (Д), при коэффициенте использования ветра
3
= 0,42 и плотности воздуха р = 0,125 кг/м
Как видно из рис. 2.51, исходя из конструктивных и эксплуатационно-технических характеристик, целесообразно создавать
ВЭС с небольшими габаритами ветроколеса, а повышение ее
установленной мощности получать за счет включения на параллельную работу типовых конструктивных решений ВЭС.
Рис. 2.52. Графики зависимости мощности МГЭС (Р) от расхода (Q) и
напора (Н) воды при КПД станции = 0,25
140
МГЭС целесообразно создавать в горной местности, так как
на равнинной местности для достижения необходимо напора Н
(рис. 2.52) необходимо создавать водоемы с большой площадью. В
горной же местности несложными конструктивными решениями
возможно создать станции с улучшенными эксплуатационнотехническими характеристиками в сравнении со станциями, проектируемыми на равнинной местности.
В качестве источников электроэнергии на ВЭС в настоящее
время нашли широкое применение СГ и АГ. Последние выполняются на базе асинхронных двигателей.
Используемые технические решения систем управления АГ
на ВЭС значительно усложняют конструкцию силовой части системы управления источником, за счет применения автономных
инверторов, дополнительных резисторов в силовой цепи согласующего трансформатора. Значительно увеличивается масса источника при использовании автоматического балластного стабилизатора частоты, выполненного на базе полупроводниковых приборов и блоков активных сопротивлений.
В качестве источников электроэнергии на ВЭС и МГЭС могут
быть использованы рассмотренные выше бесконтактные генераторы электроэнергии.
Одним из эффективных способов улучшения характеристик
источника на базе БЭМ является увеличение их числа пар полюсов (для генераторов переменного тока) за счет изменения обмоточных данных статора и несколько увеличив передаточное число
механического редуктора так, чтобы в номинальном режиме генераторы генерировали напряжение с частотой не ниже 300 Гц.
Рассмотренные изменения в конструкции приводят к незначительному уменьшению КПД АИЭ, но в этом случае появляется
возможность эффективного использования в качестве стабилизатора напряжения и частоты тока НПЧ. (Принцип и особенности
работы НПЧ рассмотрены в гл. 3).
Кроме того, появляется возможность улучшения эксплуатационных характеристик ВЭС, за счет размещения системы стабилизации напряжения и частоты не в машинном отделении ВЭС, а
стационарно на подстанции, к которой подключены ВЭС и
нагрузка.
На рис. 2.53 представлен один из вариантов САЭ, выполнен141
ный на базе ВЭС. В состав схемы входят: ВЭС1 и ВЭС2 – ветроэнергетические станции, содержащие приводные двигатели ПД1 и
ПД2, имеющие ветроколесо и редуктор скорости, асинхронные
генераторы АГ1 и АГ2 с блоками возбуждения БВ1 и БВ2; подстанция, содержащая общие шины для подключения ВЭС, непосредственный преобразователь частоты НПЧ, трансформатор с
вращающимся магнитным полем ТВМП, принцип работы ТВМП
рассмотрен в гл. 3), распределительное устройство РУ и резервную дизельную электростанцию ДЭС.
Рис. 2.53. Функциональная схема САЭ на базе ВЭС и АГ
Работа САЭ. Асинхронные генераторы АГ1 и АГ2 подключаются к общим шинам подстанции только после их возбуждения,
которое обеспечивают конденсаторы блоков возбуждения БВ1 и
БВ2. НПЧ стабилизирует напряжение генераторов и преобразует
частоту генерируемого напряжения до значений промышленной.
Для повышения показателей надежности преобразователя НПЧ
выполнен с однофазным выходом. ТВМП, кроме осуществления
гальванической развязки источников с нагрузкой, осуществляет
функции преобразования однофазного напряжения в многофазное,
которое подключается к нагрузке через РУ.
142
Для обеспечения надежности электроснабжения САЭ на подстанции могут быть предусмотрены высокочастотные источники
электроэнергии, которые подключаются к общим шинам или дизельные станции ДЭС подключающие к нагрузке через РУ.
Кроме того, для компенсации реактивной мощности нагрузки
на подстанции могут быть размещены блоки конденсаторов, подключаемые к общим шинам ВЭС.
На рис. 2.54 представлена функциональная схема САЭ на базе
ВЭС с ВГ. В состав схемы входят: ветроэнергетические станции
ВЭС1 и ВЭС2, содержащие генераторы постоянного тока ВГ1 и
ВГ2; подстанция содержит инвертор И, трансформатор с вращающимся магнитным полем ТВМП и распределительное устройство
РУ.
Рис. 2.54. Функциональная схема САЭ на базе ВЭС и ВГ
Генераторы ВГ1 и ВГ2 генерируют напряжение постоянного
тока. Выводы источников через разделительные диоды подключены к общим шинам подстанции. Разделительные диоды предназначены для защиты ГПТ от аварийных режимов работы системы,
в том числе параллельно работающих генераторов, а в случаях
неодновременного возбуждения генераторов они защищают не
возбудившийся генератор от двигательного режима работы. Инвертор И осуществляет преобразование напряжения постоянного
143
тока в однофазное напряжение переменного тока, а трансформатор с вращающимся магнитным полем ТВМП осуществляет его
преобразование в многофазную систему и обеспечивает стабилизацию напряжения за счет использования в первичной обмотке
трансформатора дросселя управления с обмоткой подмагничивания. Через распределительное устройство РУ напряжение подключается к нагрузке. В РУ так же может быть предусмотрен вход
для подключения резервной ДЭС.
В рассмотренных САЭ (рис. 2.53 и рис. 2.54) вместо ВЭС могут применяться МГЭС. Особенностью МГЭС является то, что
САЭ, с их использованием, содержат в основном одну станцию.
Кроме того, при мощностях меньших 500 кВт, в конструкции
станции применяются нерегулируемые турбины, что позволяет
исключить сложный и громоздкий регулятор частоты вращения.
Таким образом, повышение числа пар БЭМ переменного тока
и увеличение передаточного числа механического редуктора также раскрывают перспективы перед БЭМ для использования их в
качестве АИЭ нетрадиционной энергетики.
144
ГЛАВА 3
СТАТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ ЭЛЕКТРОЭНЕРГИИ
3.1 Основные требования к преобразователям
электроэнергии
ПЭ преобразуют энергию АИЭ в постоянный или переменный ток с заданным уровнем напряжения и соответствующим качеством. Кроме того, ПЭ в большинстве случаев обеспечивают
стабилизацию параметров электроэнергии.
Постоянное развитие элементной базы ПЭ происходит в
направлении достижения более высоких показателей функциональных характеристик. Требования, которым должны отвечать
современные ПЭ, можно условно разбить на функциональные,
электрические, конструктивные и эксплуатационные.
Функциональные требования включают в себя требования к
выполнению определенных функций или условий, как правило, не
выражающихся в виде численного значения. К ним относятся:
обеспечение гальванической развязки между входом и выходом;
возможность дистанционного включения и отключения; возможность включения на параллельную работу; ремонтопригодность;
обеспечение быстрой замены блоков или элементов при неисправности и т.д. Эти требования не оказывают существенного
влияния на энергетические характеристики и МГП преобразователей, их реализация не составляет трудностей. Современные ПЭ,
как правило, разрабатываются с учетом этих требований, поскольку они повышают степень их универсальности.
Электрические требования содержат требования к параметрам электроэнергии. В процессе работы СУ ПЭ должны обеспечивать стабилизацию параметров электроэнергии в заданных пределах при изменениях показателей качества электроэнергии АИЭ и
изменениях величины и характера нагрузки, а также обеспечивать
свою защиту при отклонениях указанных параметров за допустимые пределы. Кроме того, должна обеспечиваться работоспособность ПЭ при возникновении электромагнитных помех в цепях
АИЭ и электрических нагрузок.
К конструктивным, с одной стороны, относятся требования к
145
необходимой стойкости при воздействии различных эксплуатационных факторов (температуры, влаги, вибрации, агрессивных сред
и др.), а с другой – требования к обеспечению механического сочленения с несущими конструкциями устройства. Кроме того, к
конструктивным относятся требования по созданию необходимых
условий и разработке различных способов отвода тепла, которое
образуется за счет внутренних потерь. Наряду с указанными требованиями конструкция ПЭ должна обеспечивать возможность
контроля электрических параметров в процессе эксплуатации и
технического обслуживания.
В эксплуатационных требованиях отражены требования к показателям надежности ПЭ и, прежде всего, к безотказной работе
на протяжении всего срока эксплуатации (25 – 50 тыс.ч).
Таким образом, современные ПЭ должны иметь не только повышенные показатели критериев эффективности, но и отвечать
основным перечисленным выше требованиям.
Несмотря на то, что в последние годы существенно улучшились показатели статических ПЭ, основные научно-технические
проблемы силовой электроники, связанные с преобразованием
электроэнергии, в настоящее время еще не решены.
Одно из направлений, улучшающих МГП ПЭ, которое в
настоящее время нашло широкое применение, – это использование в статических преобразователях промежуточного высокочастотного преобразования. При использовании промежуточного
высокочастотного преобразования на частоте 16 – 20 кГц трансформаторы с мощностью 2 – 25 кВт имеют удельную массу 0,1 –
0,3 кг/кВт. Весьма перспективными для использования в САЭ являются ПЭ, выполненные на базе трансформаторов с вращающимся магнитным полем (ТВМП). Такие преобразователи имеют
повышенную надежность работы и ниже уровень электромагнитных помех. Основные перспективы совершенствования статических преобразователей электроэнергии связаны с разработкой
полностью управляемых компактных полупроводниковых приборов, обладающих малыми потерями и высоким быстродействием.
Перспективным является применение в САЭ АИЭ с повышенной
частоты тока, что позволит значительно улучшить показатели статических ПЭ.
146
3.2 Преобразователи напряжения переменного тока
3.2.1 Непосредственные преобразователи частоты
Поскольку АИЭ на базе ВПД и БЭМ генерируют напряжение
повышенной изменяющейся частоты, то для ее стабилизации и
понижения до уровня требуемого потребителями электроэнергии
необходимо в составе САЭ применять преобразователи частоты.
Непосредственные преобразователи частоты (НПЧ) для таких целей являются идеальным средством.
НПЧ в сравнении с преобразователями частоты с промежуточным звеном постоянного тока имеет ряд преимуществ: высокий КПД (в пределах 0,88 – 0,92) вследствие однократности преобразования электроэнергии; лучшие МГП (при мощности 30 –
50 кВт удельная масса составляет 2,5 – 3,5 кг / кВА); высокая
надежность, перегрузочная способность и простота силовой схемы, что определяется естественной коммутацией вентилей; возможность независимого плавного регулирования частоты и
напряжения; высокое быстродействие и малое время переходных
процессов.
Кроме того, НПЧ способны пропускать поток энергии в обоих
направлениях и обеспечивать стабилизацию параметров электроэнергии при значительных изменениях частоты вращения ВПД (2 :
1).
Для эффективного использования повышенной частоты, генерируемой АИЭ, НПЧ целесообразно использовать в составе САЭ,
где они выполняют функции преобразования и стабилизации той
части электроэнергии, которая необходима только потребителям
переменного тока. Это позволит значительно улучшить МГП системы в целом.
Выходные LC-фильтры являются неотъемлемой частью НПЧ.
Выбор схемы выходного фильтра диктуется требованиями и режимами работы нагрузки и гармоническим составом выходного
напряжения преобразователя. Однако, существует и обратная зависимость: параметры фильтра определяют выходной ток вентильных комплектов НПЧ, они обуславливают в некоторых режимах появление прерывистых токов.
Выбор фильтров НПЧ обусловлен выполнением ряда требо147
ваний: обеспечение требуемого гармонического состава на выходе
фильтра; фильтр не должен вносить заметных ослаблений амплитуды основной гармоники; ограничение фазового сдвига, вносимого фильтром; обеспечение максимального КПД и минимальных
МГП.
Выходные фильтры НПЧ в значительной степени определяют
МГП преобразователей. Поэтому, чтобы масса и габариты этих
фильтров были небольшими, кратность частот напряжений преобразователя (fВХ / fВЫХ) должна быть не менее восьми для трехпульсных силовых схем и не менее четырех – для шестипульсных
схем.
Второй особенностью работы НПЧ является наличие коммутационных перенапряжений, что приводит к искажению формы
кривой напряжения генератора электроэнергии. При совместной
работе АГ и НПЧ исключается необходимость установки входного
фильтра НПЧ, так как в его качестве могут использоваться конденсаторы, предназначенные для компенсации реактивной мощности АГ.
СУ НПЧ формирует кривую выходного напряжения, у которой мгновенное значение изменяется в среднем по синусоидальному закону. Наибольшая амплитуда желаемой составляющей такой кривой зависит только от конфигурации силовой цепи и не
зависит от примененного способа управления, т.е., желаемая составляющая выходного напряжения не зависит от типа НПЧ. Амплитудное значение выходного напряжения НПЧ может быть
определено по формуле
3 3
(3.1)
U выхm S
U вхм ,
2
где Uвхм – амплитудное значение входного фазного напряжения;
S – число трехпульсных групп.
3.2.1.1 НПЧ с естественной коммутацией силовых вентилей
НПЧ с естественной коммутацией силовых вентилей (НПЧЕ)
широко применяются в САЭ для преобразования напряжения
входной частоты в напряжение более низкой выходной частоты.
Принцип формирования выходного напряжения НПЧЕ рассмотрим на примере работы трехфазно-однофазной схемы
148
(рис. 3.1, а) на активную нагрузку. Преобразователь содержит две
группы тиристоров: катодная группа (VS1, VS2, VS3) и анодная
группа (VS4, VS5, VS6). Управляющие импульсы, синхронизированные по частоте с напряжением питающей сети, в процессе работы поступают на тиристоры анодной и катодной групп поочередно. Положительный полупериод выходного напряжения формируется при поочередной подаче управляющих импульсов на
тиристоры катодной группы, а отрицательный – при подаче
управляющих импульсов на тиристоры анодной группы. Управляющие импульсы поступают на тиристоры со сдвигом относительно точек естественной коммутации (точек пересечения фазных напряжений питающей сети) на угол (рис. 3.1, б).
В результате цикличной работы двух групп вентилей НПЧЕ
на нагрузке формируется переменное напряжение с частотой f2
более низкой, чем частота питающей сети f1. Изменением угла
регулируется выходное напряжение преобразователя. Если не
учитывать потери в тиристорах и трансформаторе, то выходное
напряжение на нагрузке
U 2 ( m1 2U1ф sin( / m1 )cos ) / ,
(3.2)
где m1 – число фаз питающей сети;
U1ф – фазное напряжение питающей сети.
Частота выходного напряжения f2 зависит от числа фаз питающей сети и от числа участков синусоид в полуволне, которое
определяется числом n, и при отсутствии паузы между полупериодами низкой частоты определяется по формуле
(3.3)
f 2 f1m1 /(2n m1).
Таким образом, частота f2 регулируется дискретно. Для плавного регулирования частоты выходного напряжения преобразователя необходимо вводить паузу tп между выключением и включением тиристоров анодной и катодной групп преобразователя
(рис.3.1, в). Длительность паузы должна быть не меньше времени
восстановления запирающих свойств вентилей. В этом случае выходная частота
(3.4)
f 2 f1m1 /[ ( 2n m1 )1tп m1 ].
При работе преобразователя на активно-индуктивную нагруз149
ку энергия, накопленная в магнитном поле нагрузки, может быть
возвращена обратно в питающую сеть. Для рекуперации
Рис. 3.1. Трехфазно-однофазная схема НПЧ (а), диаграммы напряжений
и токов при активной (б) и активно-индуктивной (в) нагрузке
электрической энергии (передачи в питающую сеть) тиристоры
анодной и катодной групп переводятся в инверторный режим работы. Т.е., когда выходное напряжение и ток нагрузки имеют одноименную полярность, тиристоры НПЧЕ работают в выпрями150
тельном режиме (время tв рис. 3.1, в), а когда разноименную – в
инверторном режиме (время tи рис. 3.1, в). Перевод групп вентилей из выпрямительного режима в инверторный осуществляется
системой управления при увеличении угла управления до знао
чений, больших 90 .
Рассмотренная схема трехфазно-однофазного НПЧЕ со средней точкой имеет относительно малые удельные МГП и сравнительно несложную СУ. Существенным недостатком схемы является низкое качество выходного напряжения.
На рис. 3.2, а представлена схема трехфазно-однофазного
НПЧЕ, выполненная на базе мостовых схем. Схема имеет две
группы тиристоров (два комплекта): первая группа (мостовая схема на тиристорах VS1 – VS6) - преобразователь, формирующий
положительный тип кривой выходного напряжения, а вторая
группа (мостовая схема на тиристорах VS7 – VS12) – преобразователь, формирующий отрицательный тип кривой выходного
напряжения.
Особенностью работы НПЧ на базе мостовых схем является
поочередное формирование ими кривых выходного напряжения
положительного и отрицательного типов. Напряжением положительного типа uПТ называется напряжение, получающееся в том
случае, когда в момент подключения к выходу входное напряжение uвх всегда положительнее в сравнении с желаемой синусоидальной кривой выходного напряжения (рис. 3.2, б точка А соответствует значению входного напряжения точка В - желаемому
выходному напряжению). Напряжением отрицательного типа uОТ
называется напряжение, при котором в момент подключения к
выходу входное напряжение более отрицательно, чем желаемое
выходное uжел (рис. 3.2, б точка С соответствует значению входного напряжения точка D – желаемому выходному напряжению).
СУ преобразователем осуществляет раздельное управление
вентильными группами, т.е. при формировании импульсов управления для тиристоров первой группы, вторая группа исключена из
работы и наоборот. Естественная коммутация тиристоров преобразователя обеспечивается за счет того, что кривая напряжения
положительного типа формируется каждый раз, когда мгновен151
а)
б)
в)
г)
Рис. 3.2. Трехфазно-однофазный НПЧЕ на базе мостовых схем (а) и диаграммы напряжений и тока, поясняющие принцип его работы (б, в, г)
152
ный выходной ток (ток нагрузки iн) положителен, а кривая напряжения отрицательного типа – каждый раз, когда мгновенный выходной ток отрицателен (рис. 3.2, в,г).
На рис. 3.3 показана силовая схема НПЧ с трехфазным выходом. Работа схемы с нулевым проводом (связь преобразователя с
нагрузкой показана пунктирной линией) аналогична работе схемы
с однофазным выходом со средней точкой (см. рис. 3.1, а). Здесь
каждый в отдельности вентильный комплект ВК1 – ВК3 преобразователя участвует в формировании выходного напряжения для
одной из фаз нагрузки.
Рис. 3.3. Силовые схемы НПЧ с трехфазным выходом без нулевого провода и с нулевым проводом (пунктирные линии)
При работе схемы без нулевого провода выходное напряжение преобразователя формируется из участков входных линейных
напряжений. При этом вентильные комплекты ВК1 и ВК2 участвуют в формировании напряжения на нагрузке Zab, комплекты
ВК2 и ВК3 - на нагрузке Zbc, комплекты ВК1 и ВК3 – на нагрузке
Zac.
В сравнении со структурными схемами СУ выпрямителей и
инверторов структуры СУ преобразователей частоты с непосредственной связью являются более сложными. Это объясняется тем,
153
что в общем случае СУ НПЧ должны реализовывать большой объем логических операций. Функции СУ НПЧ сводятся к следующему:
1) формирование алгоритмов переключений и интервалов
проводимости вентилей с целью получения требуемой формы и
частоты выходного напряжения, в том числе обеспечения естественной или искусственной коммутации силовых вентилей преобразователя;
2) управление вентильными комплектами (группами) силовой
схемы преобразователя с целью обеспечения энергообмена источника электроэнергии с нагрузкой;
3) выполнение функций включения, в том числе на параллельную работу, и отключения, в том числе с целью защиты в аварийных режимах работы.
В соответствии с рассмотренными функциями СУ содержит
ряд функциональных узлов, каждый из которых выполняет определенную задачу (операцию). Важное место среди функциональных узлов СУ НПЧ отводится устройствам, формирующим ведущий и опорный сигналы.
Как известно, ведущий сигнал несет информацию об амплитуде, частоте и форме выходного сигнала, являясь эталоном выходного напряжения преобразователя. Опорный сигнал несет информацию о фазе напряжения источника электроэнергии.
Для улучшения качества выходного напряжения (гармонического состава) НПЧ в качестве опорного сигнала в их СУ используются косинусные синхронизирующие кривые, а в качестве ведущего - синусоидальный сигнал. Принцип работы СУ по формированию управляющих импульсов состоит в следующем. При равенстве ведущего и опорного сигналов формируются управляющие импульсы для тиристорных ключей силовой схемы преобразователя. Причем, выходное напряжение преобразователя синтезируется из участков тех же напряжений, из которых синтезируется опорное напряжение. Такой способ формирования выходного
напряжения позволяет постоянно осуществлять регулирование
угла управления, т.е. на каждом участке формирования выходного
напряжения углы имеют разные значения. В этом случае повышается точность задания углов управления и улучшается гармонический состав выходного напряжения.
154
На рис. 3.4, а показана принципиальная электрическая схема
блока косинусной синхронизации, в состав которой входит трехфазный трансформатор Т и три блока синхронизации БС1 – БС3,
выполненные на транзисторных ключах. Работа блока косинусной
синхронизации рассмотрена на примере блока синхронизации
БС1. Векторные диаграммы напряжений вторичных обмоток
трансформатора этого блока показаны на рис. 3.4, б, в, а на
рис. 3.4, г – е показаны диаграммы напряжений, поясняющие
формирование синхронизирующих косинусных кривых положительного uПТ и отрицательного uОТ типов.
Напряжение вторичной обмотки трансформатора uа1 через
диоды VD1 и VD2 прикладывается к транзисторам VT1 и VT2. К
эмиттер-базе транзистора VT1 прикладывается суммарное напряжение соединенных встречно обмоток b2 и с2 – ub2c2, которое ото
стает на угол 90 от напряжения uа1 (рис. 3.4, б), а к базе транзистора VT2 прикладывается суммарное напряжение соединенных
о
встречно обмоток с3 и b3 - uc3b3, которое опережает на угол 90
напряжение uа1 (рис. 3.4, в). Таким образом, транзистор VT1 открыт при положительной полярности управляющего напряжения
ub2c2, а транзистор VT2 открыт при отрицательной полярности
управляющего напряжения uc3b3. В результате на выходе блока
БС1 формируются косинусные синхронизирующие кривые положительного типа uПТ (на рис. 3.4, е показаны сплошной линией).
Для формирования косинусных синхронизирующих кривых
отрицательного типа необходимо использовать дополнительные
блоки синхронизации, аналогичные блокам БС1 – БС3. Однако
при этом необходимо изменить подключение источников управляющих сигналов транзисторов. Например, к управляющему входу транзистора VT1, дополнительного блока, подключить напряжение uc3b3, а к транзистору VT2 - ub2c2. В результате на выходе
блока косинусной синхронизации будут формироваться кривые
напряжения отрицательного типа uОТ (на рис. 3.4, е показаны
пунктирной линией).
155
а)
б)
в)
г)
д)
е)
Рис. 3.4. Принципиальная электрическая схема блока косинусной синхронизации (а) и диаграммы напряжений, поясняющие принцип его работы (б – е)
156
На рис.3.5. показана структурная схема СУ трехфазнооднофазного НПЧЕ (рис. 3.2, а), силовая часть которого содержит
два вентильных комплекта.
Рис. 3.5. Структурная схема системы управления НПЧЕ
Задающий генератор ЗГ является источником ведущего синусоидального сигнала uЗГ (рис. 3.6, а) требуемой частоты выходного
напряжения преобразователя. Регулирование напряжения осуществляется за счет сложения в сумматоре С сигнала u, который
поступает от измерителя отклонения напряжения ИО и обратно
пропорциональный по величине напряжению на нагрузке uн, с сигналом uЗГ. Результирующий сигнал с выхода сумматора поступает
на первые входы компараторов К1 и К2. На вторые входы этих
компараторов поступают косинусные синхронизирующие кривые
положительного и отрицательного типов (рис. 3.6, а от 0 до - положительного, а от до 2 - отрицательного типа) от блока синхронизации БС, являющегося источником опорного сигнала. При равенстве ведущего и опорного сигналов на выходе компараторов
формируются управляющие сигналы uу1 и uу2 (рис. 3.6, б).
Для обеспечения естественной коммутации силовых вентилей
НПЧЕ импульсы управления в зависимости от полярности тока
нагрузки iн подаются на соответствующие управляющие электроды силовых вентилей преобразователя через логические элементы
И1 и И2 и распределители импульсов РИ1 и РИ2. При положи157
тельной (отрицательной) полярности тока нагрузки на одном из
выходов датчика тока ДТ формируется сигнал iП ( io ), по которому
срабатывает логический элемент И1 (И2), и на выходе
а)
б)
в)
г)
Рис.3.6. Диаграммы, поясняющие принцип работы СУ НПЧЕ
НПЧЕ формируется желающая составляющая напряжения uжел из
кривой напряжения положительного (отрицательного) типа uПТ
(uОТ ) (см. рис. 3.6, в).
3.2.1.2 НПЧ с регулируемым углом сдвига фаз на входе
Недостатком НПЧЕ является также то, что угол сдвига фаз на
входе преобразователя неизменно отстающий, т.е. независимо от
угла управления силовыми вентилями преобразователь для источника электроэнергии является активно-индуктивной нагрузкой.
Поэтому, при совместной работе НПЧЕ с автономным высокоча158
стотным генератором электроэнергии для компенсации реактивного тока между НПЧЕ и генератором необходимо подключать
конденсаторы, которые значительно увеличивают массу АИЭ.
Как известно, если на выходе НПЧ будет формироваться
только кривая напряжения положительного типа uПТ (см. табл. 3.1
и рис. 3.6, в), входной ток преобразователя будет отставать от
фазного напряжения, а если же на выходе преобразователя формировать только кривую напряжения отрицательного типа uОТ (см.
табл. 3.1 и рис. 3.6, в), входной ток преобразователя будет опережать фазное напряжение. Таким образом, перемещая участки
формирования кривых положительного и отрицательного типа
относительно полярности тока нагрузки НПЧ, способен регулировать величину угла сдвига фаз на входе преобразователя. Такое
регулирование может обеспечиваться только за счет искусственной коммутации силовых вентилей преобразователя, и такой тип
преобразователей получил название НПЧ с регулируемым углом
сдвига фаз на входе (НПЧР).
Отличительной конструктивной особенностью схемы НПЧР в
сравнении с НПЧЕ является наличие в силовой части, цепей обеспечивающих искусственную коммутацию силовых вентилей и в
способе регулирования напряжения.
НПЧР позволяют независимо от характера нагрузки изменять
о
о
угол сдвига фаз на входе преобразователя от - 90 до + 90 .
Для того чтобы отключить тиристор, необходимо снизить его
ток до нуля или приложить к нему обратное напряжение в течение
некоторого промежутка времени (обычно порядка десятков микросекунд), чтобы он смог восстановить свою запирающую способность в прямом направлении. На рис. 3.7 иллюстрируется одна из
широко применяемых схем искусственной коммутации тиристоров.
Для наглядности предполагается, что в каждом случае коммутирующая цепь присоединена непосредственно к отключающему тиристору НПЧ. На практике коммутирующая цепь, как правило, присоединяется к силовой схеме преобразователя (рис. 3.2, а).
Тиристор VS (рис. 3.7, а) является главным отключающим
элементом и в исходном положении открыт и через него протекает
ток нагрузки iн. Конденсатор С заряжен с указанной полярностью.
Для отключения тиристора VS коммутирующий тиристор VS1
159
включается в момент времени to. Тиристор VS2 также включается
в это время. Обратное напряжение заряженного конденсатора
прикладывается к тиристору VS, вследствие этого ток iн начинает
проходить через конденсатор.
Таблица 3.1 – Сдвиг фаз между напряжением и током на входе
НПЧ при различных комбинациях типа кривой напряжения и полярности выходного тока
Тип
кривой Полярность
Угол
сдвига
фаз
напряжения
выходного тока
на входе
положительная
отстающий
Положительный
отрицательная
опережающий
положительная
опережающий
Отрицательный
отрицательная
отстающий
б)
в)
г)
д)
а)
Рис.3.7. Схема цепи искусственной коммутации (а) и диаграммы напряжений и токов, поясняющие принцип ее работы (б – д)
Одновременно через дроссель L на конденсатор С начинает
протекать «циркулирующий» ток i1. Вследствие прохождения тока
через конденсатор напряжение на нем начинает уменьшаться и к
160
моменту t1 достигает нуля. Промежуток времени от to до t1 - это
время, восстановления запирающих свойств тиристора. Токи iн и
i1 продолжают протекать через конденсатор С и заряжают его до
напряжения противоположной полярности (в прямом направлении
для тиристора VS). Предположим, что в момент времени t2 напряжение на конденсаторе достигает такого уровня, что разность этого напряжения между отключаемой и включаемой фазами имеет
такую полярность, что ток нагрузки может быть переведен из отключающей цепи во включающую фазу.
Без «циркулирующего» контура скорость изменения напряжения на коммутирующем конденсаторе была бы в точности пропорциональна выходному току, и при относительно малых значениях тока нагрузки процесс коммутации занял бы значительное
время. А при перезарядке конденсатора через индуктивность гарантируется, что время коммутации не может превысить максимум, определенный собственным периодом колебаний LС - контура.
Однако, здесь следует отметить, что для подготовки к следующей коммутации необходимы дополнительные цепи по восстановлению напряжения на коммутирующем конденсаторе до его
исходного значения и полярности.
Таким образом, основной недостаток НПЧ с искусственной
коммутацией: наличие дополнительных силовых цепей, обеспечивающих искусственную коммутацию силовых вентилей, и относительно сложная система управления. Эти недостатки ухудшают
МГП и КПД преобразователя, и понижают его показатели надежности.
На рис. 3.8. показана структурная схема СУ трехфазнооднофазного НПЧР.
Принцип работы СУ НПЧР. Сигнал напряжения постоянного
тока u, пропорциональный значению отклонения напряжения на
нагрузке uн, поступает от измерителя отклонения ИО на один из
входов компаратора К3, на второй вход которого поступает синхронизированный с питающей сетью сигнал от генератора пилообразного напряжения ГПН. При равенстве сигналов u и uГПН на
выходе компаратора формируется импульсный сигнал (рис. 3.9, в
и г), который поступает на вход генератора типа кривой ГТК. На
161
второй вход ГТК поступает сигнал от датчика тока ДТ о полярности тока нагрузки iн (рис. 3.9, а и б). В результате генератор ГТК
формирует сигналы управления (рис. 3.9, д и е), определяющие
Рис. 3.8. Структурная схема системы управления НПЧР
участки для формирования на выходе преобразователя кривых
напряжений положительного uПТ и отрицательного uОТ типов соответственно.
Таким образом, при изменении напряжения на нагрузке изменяется значение отклонения напряжения u, например, до значе’
ния u (рис. 3.9, в, пунктирная прямая). Это приводит к смещению участков формирования кривых uПТ и uОТ относительно фазы
тока нагрузки iн (рис. 3.9, в, д и е, сигналы, показанные пунктирной линией) и, соответственно, к изменению угла сдвига фаз на
входе преобразователя. Изменение угла сдвига фаз на входе преобразователя позволяет осуществлять компенсацию реактивной
мощности нагрузки, источником питания которой является, к
примеру, высокочастотный бесконтактный асинхронный генератор.
162
а)
б)
в)
г)
д)
е)
Рис. 3.9. Диаграммы, поясняющие принцип работы СУ НПЧР
3.2.2 Выпрямители
Из всех типов ПЭ выпрямители являются самыми распространенными преобразователями. Практически выпрямитель
состоит из двух ПЭ: трансформатора, обеспечивающего согласование напряжения АИЭ с напряжением потребителей, и блока полупроводниковых вентилей, осуществляющих функцию преобразования напряжения переменного тока в напряжение постоянного
тока, а при использовании управляемых вентилей, кроме того,
осуществляют стабилизацию выходного напряжения.
Особенности работы трансформаторов. Как известно, кроме преобразования напряжения до требуемых значений, трансформаторы выполняют функцию гальванической развязки цепей
источников электроэнергии и цепей с нагрузкой. Режимы работы
трансформаторов в выпрямителях отличаются от режимов работы
трансформаторов при линейной нагрузке. Это обуславливается, в
основном, характером нагрузки для трансформатора, которая в
выпрямителях нелинейная.
Нелинейная нагрузка обуславливает несинусоидальные токи,
напряжения и магнитные потоки в трансформаторе. Магнитные
163
потоки рассеяния в трансформаторе оказывают существенное влияние на характер электромагнитных процессов в выпрямителях.
Потоки рассеяния учитываются индуктивным и активным сопротивлениями обмоток x и r соответственно.
Особенности расчета трансформаторов различной мощности
зависят от соотношения между параметрами x и r. В выпрямителях малой мощности индуктивное сопротивление обмоток трансформатора значительно меньше активного сопротивления. Поэтому при расчете таких преобразователей из-за малой величины x/r
= 0,3 потоками рассеяния пренебрегают, что значительно упрощает расчет.
Для трансформаторов выпрямителей большой мощности, когда x / r= 7 – 8, потоки рассеяния оказывают влияние на характер
электромагнитного процесса, поэтому при расчете пренебрегают
величиной активного сопротивления.
В выпрямителях средней мощности реактивное и активное
сопротивление обмоток, соизмеримые по величине, поэтому при
расчетах учитывают оба параметра.
Для выпрямителей существуют два типа трансформаторов. К
первому типу относятся трансформаторы, во вторичных обмотках
которых за период изменения входного напряжения ток протекает
только в одном направлении. Вторичные обмотки таких трансформаторов включаются последовательно с вентилями, поэтому
ток в обмотках содержит постоянную составляющую. Для компенсации постоянной намагничивающей силы необходимо на одном стержне магнитопровода располагать вторичные обмотки, в
которых токи, одинаковые по форме, протекают в противоположных направлениях. В результате потоки рассеяния между вторичными обмотками становятся минимальными.
Ко второму типу относятся трансформаторы, у которых по
вторичным обмоткам ток протекает дважды за период, причем за
каждый полупериод в противоположных направлениях. В таких
трансформаторах не нужно осуществлять компенсацию намагничивающей силы на стержнях магнитопровода и практически они
не отличаются от обычных силовых трансформаторов. Они применяются в однофазных и трехфазных мостовых схемах выпрямителей. Трехфазные мостовые схемы выпрямителей нашли широкое распространение в САЭ.
164
3.2.2.1 Однофазные схемы
Широкое распространение в блоках питания СУ преобразовательных устройств получили однофазные двухполупериодные
схемы выпрямителей со средней точкой (с нулевым выходом) и
мостовая (рис. 3.10).
а)
б)
Рис. 3.10. Однофазные схемы выпрямителей: со средней точкой (а) и
мостовая (б)
Особенностью схемы со средней точкой (рис. 3.10, а) является то, что вторичные полуобмотки трансформатора относительно
его средней точки создают систему напряжений, сдвинутых отноо
сительно друг друга на угол 180 . Работа схемы. Предположим,
что начиная с момента t 0 оба тиристора выключены. При
этом потенциалы в точках а и b вторичной обмотки трансформатора имеют полярность, как указано на рис. 3.11, а без скобок. В
момент времени t на управляющий электрод тиристора VS1
подается управляющий импульс. Тиристор включится, и в нагруз165
ке будет протекать ток под воздействием напряжения uа0
(рис. 3.11, а,б,е).
Тиристор VS1 выключится в момент времени t . Поскольку через половину периода полярность напряжения на вторичной обмотке изменяется на противоположную, то при подаче
управляющего импульса на тиристор VS2 в момент времени
t он включится. Затем, указанные процессы повторяются
в каждом периоде.
а)
б)
в)
г)
д)
е)
Рис. 3.11. Диаграммы напряжений и токов, поясняющие принцип работы
однофазной схемы выпрямителя со средней точкой
Возможность осуществлять задержку по фазе моментов
включения тиристоров на определенный угол позволяет изменять
выходное напряжение, т.е., при необходимости его стабилизировать. Угол управления отсчитывается относительно моментов
естественной коммутации тиристоров (при изменении полярности
166
напряжения когда t , 2 , 3 ...). Из рис. 3.11, е видно, что с
увеличением угла управления среднее значение выходного
напряжения выпрямителя будет уменьшаться. Аналитически эта
зависимость выражается следующей формулой:
1
2U 2 sin tdt
2
(3.5)
U (1 cos ).
2
Среднее значение выпрямленного тока
U
2 (1 cos ) U 2
(3.6)
Id d
,
Rd
Rd
где U2 – действующее значение напряжения на вторичной полуобмотке.
Угол управления оказывает существенное влияние на установленные мощности основных элементов схемы выпрямителя.
Поэтому при проектировании расчет элементов осуществляется из
условий работы схемы с максимальным значением угла управления. При этом расчетная мощность трансформатора может быть
найдена по формуле
(3.7)
SТ Pd /(1 cos ).
Основными недостатками однофазной схемы выпрямителя со
средней точкой являются: двойное максимальное обратное напряжение на вентилях и наличие двух катушек во вторичной обмотке
трансформатора, что усложняет его конструкцию и увеличивает
массу и габариты преобразователя в целом.
Однофазная мостовая схема (рис. 3.10, б) содержит трансформатор и выпрямительный мост, содержащий четыре вентиля,
которые попарно соединены в две группы: катодную (вентили VS1
и VS2) и анодную (вентили VS3 и VS4). Принцип работы схемы. К
примеру, при положительной полуволне питающего напряжения
uаb (полярность на схеме указана без скобок) на тиристоры VS1 и
VS3 подаются управляющие импульсы. В результате этого тиристоры включатся. Напряжение uаb будет, таким образом, приложено к нагрузке Rd, и по цепи «+»а VS1 Rd VS3 «-»b будет протекать ток, повторяющий форму питающего напряжения
(рис. 3.12). Тиристоры VS2 и VS4 на этом интервале отключены и
будут находиться под напряжением вторичной обмотки, которое
Ud
167
по отношению к ним является обратным.
В момент времени t , т.е. через половину периода, ток в
тиристорах VS1 и VS3 уменьшится до нуля, и они выключаются, а
тиристоры VS2 и VS4 включаются, при подачи сигнала управления
на управляющие электроды тиристоров, поскольку потенциал
точки b становится положительным по отношению к потенциалу
точки а (на рис. 3.10, б полярность указана в скобках) и на тиристоры поступают управляющие импульсы. Ток через нагрузку в
этом случае будет протекать по цепи «(+)»b VS2Rd VS4
«(-)»а.
Далее указанные процессы периодически повторяются. Диаграммы напряжений и токов на элементах схемы будут такими же,
как для однофазного выпрямителя со средней точкой. Отличие
заключается только в том, что амплитуда обратного напряжения
на тиристорах в мостовом выпрямителе будет в два раза меньше,
чем в однофазном выпрямителе со средней точкой.
Диаграммы токов и напряжений при работе мостовой схемы
на активно-индуктивную нагрузку показаны на рис. 3.12.
Наличие индуктивности в цепи постоянного тока приводит к
тому, что после прохождения напряжения на вторичной обмотке
через нуль, находящихся в проводящем состоянии тиристорах
продолжает протекать ток за счет энергии, накопленной в индуктивности. Например, тиристоры VS1 и VS3 продолжают проводить
ток и после того, как напряжение uab станет отрицательным
(рис. 3.12, б). При достаточно большой индуктивности эти тиристоры будут проводить ток до тех пор, пока не будет подан управляющий импульс на тиристоры VS2 и VS4. Если же энергии, запасенной в индуктивности на интервале отрицательной полуволны
напряжения uab, оказывается недостаточной для обеспечения протекания тока в нагрузке и управляющий сигнал не будет подан на
тиристоры VS2 и VS4, то тиристоры VS1 и VS3 выключатся. Такой
режим работы схемы при активно-индуктивной нагрузке называется режимом с прерывистым выпрямленным током.
При прерывистом токе трансформатор и тиристоры схемы
работают в более тяжелом режиме, так как при одном и том же
среднем значении выпрямленного тока действующее значение токов в элементах схемы увеличивается. Кроме того, прерывистый
168
ток может приводить к сбоям работы электроприемников преобразователя. Поэтому в мощных выпрямителях, работающих в широком диапазоне изменения угла управления, индуктивность выходных фильтров, с учетом индуктивности нагрузки, обычно выбирают из условия обеспечения непрерывности выпрямленного
тока.
а)
б)
в)
г)
д)
е)
ж)
Рис. 3.12. Диаграммы токов и напряжений на элементах мостовой схемы
выпрямителя при его работе на активно-индуктивную нагрузку
Сдвиг тока относительно напряжения на угол приводит к
появлению в выпрямленном напряжении ud отрицательных участков, что вызывает снижение его среднего значения Ud
169
(рис. 3.12, ж). Очевидно, что с ростом угла управления площадь
отрицательных участков увеличивается, а, следовательно, среднее
значение выпрямленного напряжения уменьшается.
В зависимости от характера нагрузки мостовая схема выпрямления характеризуется следующими параметрами.
1. Средние значения выходного напряжения:
а) при активной нагрузке
(3.8)
U d U d 0 (1 cos ) / 2,
где Ud0 – среднее значение выпрямленного напряжения на выходе
схемы при угле 0 .
б) при активно-индуктивной нагрузке
(3.9)
U d U d 0 cos.
2. Максимальные значения напряжения на тиристорах:
а) при активной нагрузке
(3.10)
U об max 2U 2 , U п р max ( 2 / 2 )U 2 sin ,
где Uобmax – максимальное значение обратного напряжения;
Uпрmax – максимальное значение прямого напряжения.
б) при активно-индуктивной нагрузке
(3.11)
U об max 2U 2 , U пр max 2U 2 sin .
3. Максимальные значения токов тиристоров:
а) при активной нагрузке
(3.12)
I max 2U 2 / Rd ,
б) при активно-индуктивной нагрузке
(3.13)
I max I d .
Основные недостатки мостовой схемы выпрямителя: относительно низкая надежность работы, из-за наличия 4-х вентилей в
силовой схеме; повышенные потери электроэнергии, из-за того,
что в схеме постоянно включены два вентиля.
3.2.2.2 Трехфазные и многофазные схемы
Трехфазная схема выпрямителя со средней точкой представляет
собой сочетание трех однополупериодных выпрямителей, питающихся тремя симметричными напряжениями, сдвинутыми по фазе на
о
угол 120 , и работающих на одну общую нагрузку (рис. 3.13).
170
Рис. 3.13. Трехфазный выпрямитель со средней точкой
В проводящем состоянии находится тот из тиристоров, анод
которого находится под наибольшим положительным потенциалом. К примеру, в интервале 1 2 ( t ) (рис. 3.14, а) в
проводящем состоянии находится тиристор VS1, соединенный с
фазой а. Начиная с момента времени 2 потенциал фазы b становится больше потенциала фазы а и анод тиристора VS2 оказывается под положительным напряжением относительно его катода.
Если в момент времени 2 на тиристор VS2 поступает управляющий импульс, он включается, а тиристор VS1 выключается, так
как к нему оказывается приложенным запирающее линейное
напряжение uba. Тиристор VS2 будет находится в проводящем соо
стоянии в течение 120 до момента 3, когда потенциал фазы с
станет выше потенциала фазы b и поступит управляющий импульс
на тиристор VS3. В момент времени 3 ток нагрузки начнет проводить тиристор VS3, а тиристор VS2 выключается. Затем с момента времени 4 указанные процессы будут периодически повторяться.
Очевидно, что каждый тиристор будет проводить ток в течение одной трети каждого периода (2 / 3) напряжения питающей
сети. Остальную часть периода (4 / 3) тиристор выключен, и к
нему приложено обратное напряжение. Так, когда выключен тиристор VS1, к нему на интервале проводимости тиристора VS2
приложено линейное напряжение uba, а на интервале проводимости тиристора VS3 – напряжение uca. В результате к тиристору VS1
171
приложено обратное напряжение, представленное кривой uVS1
(рис. 3.14, д).
а)
б)
в)
г)
д)
е)
ж)
Рис. 3.14. Диаграммы токов и напряжений трехфазного выпрямителя со
средней точкой при угле 0
В рассмотренной схеме управляющие импульсы подаются на
тиристоры поочередно. Угол управления отсчитывается от точек естественной коммутации (точек соответствующих пересечению фазных напряжений в моменты времени 1, 2, 3 и т.д.).
Основным недостатком схемы трехфазного выпрямителя со
средней точкой является наличие вынужденного намагничивания
трансформатора и, связанное с ним, увеличение тока в первичной
172
обмотке.
Широкое распространение в силовой преобразовательной
технике получила трехфазная мостовая схема выпрямителя
(рис. 3.15). В схеме отсутствует подмагничивание трансформатора. Мостовая схема состоит из шести вентилей, три из которых
(VS1, VS3, VS5) соединены катодами и образуют катодную группу,
а три (VS2, VS4, VS6) соединены анодами и образуют анодную
группу (рис. 3.15). Диаграммы токов и напряжений, поясняющие
работу схемы при работе выпрямителя на активную нагрузку и
угле управления 0 показаны на рис. 3.16.
Рис.3.15. Трехфазный мостовой выпрямитель
Из шести вентилей схемы в любой момент включены только
два, один из которых с наибольшим положительным потенциалом
на аноде находится в катодной группе, а другой с наименьшим
отрицательным потенциалом в анодной группе. При этом ток в
нагрузке протекает под действием линейного напряжения трансформатора.
Рассмотрим работу схемы в соответствии с временными диаграммами.
На интервале от 1 до 2 наибольшее положительное значение напряжения имеет фаза А (uа) и наименьшее отрицательное
значение имеет фаза В (ub). В соответствии с принципом работы
схемы открытыми будут тиристоры VS1 и VS4 к нагрузке Rd прикладывается линейное напряжение uab и выпрямленный ток id будет протекать по контуру "" а VS 1 Rd VS 4 ""б .
173
Рис. 3.16. Диаграммы токов и напряжений трехфазного мостового выпрямителя при угле 0
174
Начиная с момента времени 2 потенциал фазы b станет более положительным, чем потенциал фазы с. При подаче в этот момент времени управляющего сигнала на тиристор VS6 он включается, а тиристор VS4 выключается. Для выключившегося тиристора VS4 напряжение uab является обратным. В результате в проводящем состоянии окажутся тиристоры VS1 и VS6, а ток через
нагрузку в интервале от 2 до 3 будет протекать по контуру
"" а VS 1 Rd VS 6 ""c
В интервал времени от 3 до 4 происходит переключение
тиристоров в катодной группе с VS1 на VS3. Далее через интервалы времени, равные / 3 , происходит поочередная коммутация
тиристоров анодной и катодной групп. Алгоритм попарной работы тиристоров схемы выпрямителя можно представить следующей схемой
Поочередная работа различных пар тиристоров в схеме приводит к появлению на нагрузке Rd выпрямленного напряжения,
состоящего из частей линейных напряжений вторичных обмоток
трансформатора (см. рис. 3.16). Видно, что время коммутаций
совпадает со временем прохождения через нуль линейных напряжений (когда равны два фазных, что соответствует точкам естественной коммутации). Длительность протекания тока через каждый тиристор равна 2 / 3 , остальное время к нему приложено обратное напряжение, состоящее из частей соответствующих линейных напряжений.
Рассмотрим работу схемы с углом управления 0 . Управляющие импульсы на тиристоры поступают с задержкой на угол
относительно моментов пересечения фазных напряжений (точек естественной коммутации).
В результате задержки моментов коммутации тиристоров
среднее значение выпрямленного напряжения, образованного из
соответствующих частей линейных напряжений, уменьшается (см.
рис. 3.17).
При угле управления находящегося в пределах 0 / 3
регулировочная характеристика для активной и активно175
индуктивной нагрузки описывается формулой
3 6
Ud
U 2 cos U d 0 cos ,
где Ud0 – среднее выпрямленное напряжение при 0.
(3.14)
Рис. 3.17. Диаграммы напряжений трехфазного мостового выпрямителя
при угле управления 0
Начиная с угла / 3 при активной нагрузке, регулировочная характеристика описывается формулой
U d U d 0[1 cos( / 3 )].
(3.15)
При углах управления / 3 и активно-индуктивной
нагрузке, обеспечивающей режим работы с непрерывным током,
регулировочная характеристика выражается формулой (3.14).
Максимальные значения напряжения на тиристорах при активно-индуктивной нагрузке в режиме непрерывного тока равны
U пр max 6U 2 sin , U об max 6U 2 .
(3.16)
Основное достоинство трехфазной мостовой схемы выпрямителя – это высокое качество выходного напряжения, поскольку
схема является шестипульсной и, в связи с этим, значительно
176
уменьшены масса и габариты сглаживающего фильтра. Основной
недостаток: относительно низкая надежность работы, из-за применения шести вентилей в схеме выпрямителя.
Для повышения качества выходного напряжения и улучшения
формы кривой потребляемого тока из сети применяют многофазные (комбинированные) схемы выпрямителей, которые называют
многомостовыми.
Широкое распространение получили трехфазные мостовые
схемы выпрямления с одним трансформатором при различных
группах соединения вторичных обмоток и параллельным соединением выпрямительных мостов (рис. 3.18). Трансформатор имеет
две группы вторичных обмоток, включенные на две мостовые
схемы выпрямления. Причем, одна из этих обмоток соединена в
«звезду», а вторая – в «треугольник».
Рис.3.18. Трехфазный двухмостовой выпрямитель
Схемы 18- и 24-фазные на практике получают путем параллельного соединения трех и четырех мостов.
Основные расчетные параметры рассмотренных схем выпрямителей, в том числе и однофазной однополупериодной схемы,
приведены в приложении.
177
3.3 Преобразователи напряжения постоянного тока
3.3.1 Инверторы
Инверторы применяются в САЭ для преобразования напряжения постоянного тока в напряжение переменного тока. Источниками электроэнергии инверторов, как правило, являются генераторы
напряжения постоянного тока или аккумуляторные батареи.
Силовые схемы инверторов, выполненные на базе тиристоров
с использованием компенсирующих устройств, имеют большую
массу и габариты, и низкие значения КПД. Силовые схемы инверторов на транзисторах более выгодно отличаются, по критериям
эффективности, от тиристорных схем.
На рис. 3.19 показаны трехфазная мостовая схема автономного инвертора на транзисторных ключах и диаграммы токов и
напряжений поясняющие принцип его работы. Электромагнитные
процессы в трехфазных инверторах зависят от характера нагрузки,
способа соединения обмоток трансформатора (на рис. 3.19, а
трансформатор не показан) и способа управления силовыми ключами.
Принцип работы трехфазного инвертора. Кривые выходного
напряжения (рис. 3.19, б), как правило, формируются при перео
ключении транзисторов с углом проводимости равном 180 . В любое время одновременно открыты три транзистора разных фаз, что
обеспечивает независимость формы кривой выходного напряжения на нагрузке при изменении ее параметров. К примеру, на интервале от 0 до /3 включены транзисторы VT1, VT4, VT5. При
этом линейные напряжения на нагрузке равны uab = Ud,
ubc = -Ud, uca = 0 (рис. 3.19, б). Ток от источника питания через
нагрузку будет протекать по цепям
На интервале от /3 до 2 /3 включены транзисторы VT1,
VT4, VT6. Линейные напряжения на нагрузке равны uab = Ud,
ubc =0, uca = -Ud (рис. 3.19, б). Ток от источника питания через
нагрузку будет протекать по цепям
178
а)
б)
Рис. 3.19. Схема трехфазного АИН (а), диаграммы токов и напряжений,
поясняющие принцип его работы (б)
179
Дальнейшее переключение транзисторов приводит к формированию на выходе преобразователя трехфазных напряжений
прямоугольной формы. Первые гармоники этих напряжений сдвинуты друг относительно друга на угол 2 /3.
Как видно из алгоритма переключения транзисторов инвертора (рис. 3.19, б), при формировании трехфазной системы выходного напряжения в мостовой схеме инвертора возможны шесть независимых сочетаний открытых состояний транзисторов:
1) VT1,VT4,VT5; 2) VT1,VT4,VT6; 3) VT1,VT3,VT6;
4) VT2,VT3,VT6; 5) VT2,VT3,VT5; 6) VT2,VT4,VT5.
Каждому сочетанию соответствует своя эквивалентная схема.
Для случая открытого состояния тиристоров VT1,VT4,VT5 соответствуют эквивалентные схемы, показанные на рис. 3.20.
Из эквивалентных схем (рис. 3.20) видно, что при соединении
нагрузки звездой каждая фаза включена либо параллельно другой
фазе и последовательно с третьей, либо последовательно с двумя
другими фазами, соединенными параллельно. Поэтому к каждой
фазе прикладывается напряжение, равное Ud / 3 или 2Ud /3 (при
равных сопротивлениях нагрузки). При соединении нагрузки треугольником к каждой фазе нагрузки прикладывается напряжение
о
источника питания, либо в течение 60 фаза оказывается замкнутой сама на себя, т.е. фазное напряжение имеет прямоугольную
форму с определенной скважностью.
При соединении нагрузки звездой действующее значение
фазного напряжения
Uф
1 2
uф ( )d 2 ( U d / 3 ).
2 0
(3.17)
Действующее значение тока нагрузки
I ф I л ( 3 / 2 )I o A,
где
180
(3.18)
2
3 1 a
,
I o U d / Rн , А 1
2k 1 a a 2
k R /( L ) , a e k / 3 .
н
(3.19)
н
а)
б)
Рис. 3.20. Эквивалентные схемы трехфазного автономного инвертора при
соединении нагрузки звездой (а) и треугольником (б)
Среднее значение тока в цепи источника питания
2
I d (2 / 3) I o A .
(3.20)
Активная мощность нагрузки
2
Pd U d I d (2 / 3)U d I o A .
(3.21)
Полная мощность нагрузки
S н 3U ф I ф ( 2 / 3 )U d I o A.
(3.22)
Коэффициент мощности нагрузки
cos н Pd / S н А.
(3.23)
При соединении нагрузки в треугольник действующее напряжение на нагрузке
181
U ф U л 2 / 3U d .
(3.24)
3.3.2 Конверторы
Как известно, конверторы это устройства, осуществляющие
преобразование напряжения постоянного тока одного уровня в
напряжение постоянного тока повышенной или пониженной величины (в сравнении с входным напряжением). Конструктивно конверторы содержат три преобразователя: инвертор - преобразующий постоянное напряжение в переменное напряжение; трансформатор - осуществляющий согласование напряжения источника
с напряжением нагрузки; выпрямитель – преобразующий напряжение переменного тока в напряжение постоянного тока.
На рис. 3.21, а показана широко распространенная схема конвертора. Основными функциональными узлами преобразователя
являются: входной фильтр Ф1; высокочастотный инвертор И, выполненный на двух силовых транзисторах; трансформатора ТV со
средней точкой; выпрямитель В; выходной фильтр Ф2.
Принцип работы преобразователя. СУ конвертором поочередно формирует импульсы управления для транзисторов VT1 или
VT2. Если, к примеру, для формирования положительной полуволны выходного напряжения на вторичной обмотке W2 трансформатора ТV, открыт транзистор VT1, то ток источника питания
преобразователя будет протекать по цепи
«+»Uвх L1 W11 КЭVT1 «-»Uвх
При формировании отрицательной полуволны выходного
напряжения на вторичной обмотке трансформатора ТV система
управления конвертором открывает транзистор VT2, и направление тока в первичной обмотке трансформатора ТV изменится, т.к.
ток источника питания будет протекать по цепи
«+»Uвх L1 W12 КЭVT2 «-»Uвх
Таким образом, во вторичной обмотке трансформатора W2,
будет протекать переменный ток, и индуцировать в ней переменную ЭДС и переменное напряжение, первая гармоника которого
изменяется по синусоидальному закону u1И (рис. 3.21, б).
Стабилизация выходного напряжения конвертора осуществляется широтно-импульсным методом, за счет изменения времени от182
крытого состояния силовых транзисторов. Как видно из рис. 3.21, б
между импульсами выходного напряжения инвертора существует
пауза tП. При изменении величины выходного напряжения преобразователя система управления осуществляет изменение длительности
паузы, так, к примеру, если выходное напряжение конвертора
уменьшилось, то система управления преобразователем уменьшит
длительность паузы между импульсами, тем самым увеличит значение выходного напряжения преобразователя.
а)
б)
Рис. 3.21. Схема конвертора (а) и диаграммы напряжений на выходе инвертора (б)
На рис. 3.22, а представлена принципиальная силовая электрическая схема конвертора, выполненного на базе резонансного
инвертора. В схему выпрямителя, выполненного на диодах VD1 и
VD2, включен обратный диод VD0 для разгрузки диодов выпрямителя по току, однако его наличие не влияет принципиальным образом на работу рассматриваемого преобразователя.
183
а)
б)
в)
Рис. 3.22. Схема конвертора на резонансном инверторе (а) и диаграммы
напряжений и токов, поясняющие принцип его работы (б) и (в)
Принцип работы конвертора. Колебательный контур в преобразователе образуется коммутирующим конденсатором Ск и дросселем L выходного фильтра. Так как этот дроссель включен в цепь
постоянного тока, в зависимости от параметров схемы возможны
184
два различных установившихся режима: прерывистого и непрерывного токов в дросселе L выходного фильтра. Диаграммы токов
и напряжений в этих режимах представлены на рис. 3.22, б и в соответственно.
К примеру, в исходном состоянии конденсатор Ск разряжен.
В момент времени t = tо подается управляющий сигнал на тиристор VS1, и он открывается. В результате начинается заряд конденсатор с положительным потенциалом, как указано на
рис. 3.22, а. Ток заряда будет протекать по цепи
«+»Uвх VS1 Ск W1 «-»Uвх
Когда конденсатор зарядится, закроется тиристор VS1. Система управления включит тиристор VS2. И источником питания
для нагрузки будет энергия, накопленная конденсатором Ск. Ток
разряда, которого будет протекать по цепи
«+»Ск VS2 W1 «-»Ск
В результате заряда и разряда конденсатора ток в первичной
обмотке трансформатора будет изменять направление, тем самым
индуцировать во вторичной обмотке трансформатора переменную
ЭДС, которая выпрямителем со средней точкой на диодах VD1 и
VD2 преобразуется в напряжение постоянного тока.
Когда оба тиристоры закрыты, источником питания для
нагрузки является энергия, накопленная в дросселе L и конденсаторе С.
3.4 Преобразователи на базе трансформаторов с
вращающимся магнитным полем
Несмотря на то, что в последние годы существенно улучшились эксплуатационно-технические характеристики статических
преобразователей САЭ, основные научно-технические проблемы,
связанные с преобразованием электроэнергии, в настоящее время
еще не решены. Одной из основных задач здесь является уменьшение уровня электромагнитных помех, создаваемых полупроводниковыми приборами.
Как известно, электромагнитные помехи в САЭ имеют место,
как при аварийных, так и при нормальных режимах работы и воз185
никают они из-за скачкообразного изменения токов и напряжений
в электрических цепях преобразователей. Передача электромагнитных помех в САЭ происходит, как по проводным связям, так и
непосредственно через окружающее пространство. При этом может происходить сбой в работе различного рода электронной аппаратуры, нарушение нормального функционирования систем
управления и защиты источников и самих преобразователей электроэнергии.
Одно из перспективных направлений, в решении задачи
уменьшения уровня электромагнитных помех, за счет применения
в составе преобразователей электрической энергии трансформаторов с вращающимся магнитным полем (ТВМП).
Применение ТВМП в составе преобразователей электроэнергии позволит уменьшить число полупроводниковых приборов,
упростить СУ и повысить показатели надежности преобразователей электроэнергии и САЭ в комплексе.
Чтобы оценить преимущества преобразователей, выполненных на базе ТВМП, целесообразно рассмотреть устройство и
принцип их работы.
На рис. 3.23, а показан один из вариантов конструктивного
решения ТВМП с однофазным входом и однофазным выходом. На
рис.3.23, б, в показаны электрическая схема ТВМП и векторные
диаграммы, поясняющие принцип его работы, в том числе регулирования выходного напряжения. ТВМП содержит две первичные
обмотки А1х1, А2х2, вторичную обмотку В1у1, тороидальную часть
и сердечник магнитопровода 1 и 2 соответственно (рис. 3.23, а).
Причем, первичные обмотки размещены на тороидальной части
магнитопровода сдвинуты одна относительно другой в пространстве на 90 эл. град и подключены между собой через фазосдвигающий конденсатор Сф, который обеспечивает сдвиг фаз напряжео
ний U11 и U12 относительно друг друга на угол 1 = 90 (рис. 3.23,
б, в), а вторичная обмотка ТВМП размещена на сердечнике.
Напряжение на вторичной обмотке трансформатора определяется
геометрическим сложением векторов напряжений U11 и U12, и для
угла 1 будет определяться вектором напряжения U21 (рис.3.23, в).
В этом случае МДС первичных обмоток равны, т.е. векторы магнитной индукции обмоток равны, образуют сим186
а)
б)
в)
Рис. 3.23. Трансформатор с вращающимся магнитным полем: а) – конструктивная схема магнитной системы; б) – принципиальная электрическая схема; в) – векторные диаграммы, поясняющие принцип работы
метричную систему и, кроме того, вращающееся магнитное поле
является круговым. Если же, к примеру, уменьшить емкость фа187
зосдвигающего конденсатора Сф, то и уменьшится угол сдвига фаз
между векторами напряжений U11 и U12, т.е. 2 < 1, результирующее напряжение будет увеличиваться и определяться вектором
напряжения U22 (рис. 3.23, в). Но в этом случае вращающееся магнитное поле будет иметь форму эллипса, поэтому для увеличения
диапазона регулирования выходного напряжения ТВМП необходимо, чтобы вторичная обмотка размещалась по оси О’-О” (рис.
3.23, а).
Таким образом, рассмотренная конструкция ТВМП позволяет
несложными техническими решениями обеспечивать стабилизацию выходного напряжения. Если же применить такой трансформатор в составе преобразователя напряжения переменного тока в
напряжение постоянного тока (выпрямителя), то можно уменьшить число полупроводниковых приборов, применяемых для стабилизации напряжения постоянного тока и упростить СУ преобразователей. Один из вариантов технического решения функциональной схемы такого преобразователя представлен на рис. 3.24.
На рис. 3.25 показаны диаграммы напряжений, поясняющие принцип его работы.
Источник напряжения постоянного тока работает следующим
образом. Входное однофазное напряжение переменного тока Uвх
поступает на первичные обмотки ТВМП. Первичные обмотки
наводят вращающееся магнитное поле в магнитопроводе трансформатора, вызывающее действие ЭДС во вторичной его обмотке.
Величина напряжения U2 (рис.3.24) регулируется системой управления СУ через блок коммутации БК так, что при воздействии дестабилизирующих факторов выходное напряжение преобразователя Uвых, выпрямленное неуправляемым выпрямителем В и отфильтрованное фильтром Ф, остается неизменным.
СУ работает следующим образом. С выхода преобразователя
сигнал, пропорциональный величине выходного напряжения Uвых,
являющийся ведущим для системы стабилизации, через делитель
напряжения ДН поступает на один из входов формирователя импульсов ФИ (рис. 3.25, б UДН). На второй вход формирователя импульсов поступает сигнал UГПН от источника опорного сигнала –
генератора пилообразного напряжения ГПН (рис.3.25, б), работа
188
Рис. 3.24. Функциональная схема преобразователя напряжения переменного тока на базе ТВМП
которого синхронизирована с входным напряжением источника
напряжения Uвх (рис. 3.25, а). Когда сигнал UГПН > Uвх формирователь импульсов ФИ формирует импульсы UФИ (рис. 3.25, в), которые поступают на один из входов логических элементов И1 и
И2 (рис. 3.24). На вторые входы логических элементов поступает
сигнал от датчика полярности напряжения ДПН. При положительной полуволне входного напряжения Uвх срабатывает логический
элемент И1 и сигнал управления UуVT1 (рис. 3.25, д) через усилитель импульсов У1 поступает на управляющий электрод транзистора VT1 (рис. 3.24), при отрицательной полуволне Uвх срабатывают соответственно элементы И2 и У2 и управляющий сигнал
UуVT2 поступает на управляющий электрод транзистора VT2 (рис.
3.25, е). Угол управления транзисторами 1 соответствует номинальному режиму работы. К примеру, напряжение Uвых уменьшилось. Уменьшится напряжение на выходе делителя напряжения
189
ДН, уменьшится угол управления транзисторами до величины,
равной 2 (рис. 3.25, ж, з), увеличится время открытого состояния
транзисторов VT, VT2 и, соответственно, увеличится напряжение
во вторичной обмотке ТВМП (рис. 3.23, в), а значит, увеличится
напряжения на выходе преобразователя Uвых.
а)
б)
в)
г)
д)
е)
ж)
Рис. 3.25. Диаграммы напряжений, поясняющие принцип работы системы управления преобразователя напряжения переменного тока
Использование блока коммутации на базе транзисторных
ключей и предложенной системы стабилизации напряжения выгодно отличает предлагаемую схему выпрямителя от известных,
так как повышается надежность работы источника напряжения
постоянного тока и быстродействие СУ.
На рис. 3.26 и рис. 3.27 представлены соответственно функциональная схема конвертора, выполненная на базе высокочастотного резонансного инвертора ВРИ, ТВМП, выпрямителя со
средней точкой В, и диаграммы напряжений, поясняющие принцип ее работы.
Принцип работы конвертора. Входное напряжение Uвх источника напряжения постоянного тока поступает на вход высокочастотного резонансного инвертора ВРИ (рис. 3.26). К примеру, в
190
Рис. 3.26. Функциональная схема конвертора, выполненного на базе высокочастотного резонансного инвертора, ТВМП и выпрямителя со средней точкой
а)
б)
в)
г)
Рис. 3.27. Диаграммы напряжений, поясняющие принцип работы
конвертора
исходном состоянии конденсатор инвертора С1 разряжен. Для
формирования положительной полуволны выходного напряжения
инвертора Uаб система управления СУ формирует управляющий
импульс для транзистора VT1 он открывается, и конденсатор инвертора С1 начинает заряжаться от источника входного напряжения Uвх таким образом, что его выводы будут иметь потенциалы,
191
указанные знаками на рис. 3.26. Ток заряда конденсатора инвертора С1 будет протекать через первичные обмотки ТВМП и фазосдвигающий конденсатор С2. Для формирования отрицательной
полуволны выходного напряжения инвертора СУ закрывает транзистор VT1 и открывает транзистор VT2. В этом случае конденсатор инвертора C1 будет являться источником питания для нагрузки, и его ток разряда будет протекать по первичным обмоткам
трансформатора и фазосдвигающего конденсатора С2 в обратном
направлении.
Таким образом, по первичным обмоткам ТВМП протекает переменный ток, вызывающий действие вращающегося магнитного
поля и, соответственно, ЭДС во вторичных обмотках, которые
размещены на сердечнике трансформатора. Схема выпрямителя со
средней точкой В преобразует напряжение переменного тока в
напряжение постоянного тока, а выходной фильтр Ф сглаживает
пульсации, обеспечивая требуемое качество выходного напряжения Uвых преобразователя.
Работа СУ конвертора. С выхода конвертора сигнал пропорциональный величине выходного напряжения Uвых, являющийся
ведущим, через делитель напряжения ДН поступает на один из
входов формирователя импульсов ФИ (рис. 3.27, а UДН). На второй
вход формирователя импульсов поступает сигнал UГОС от генератора опорного сигнала ГОС (рис. 3.27, а). Когда сигнал
UГОС > UДН, формирователь импульсов ФИ формирует импульсы
управления, которые через распределитель импульсов РИ и усилители импульсов У1, У2 поступают на управляющие электроды
соответствующего транзистора VT1 или VT2. Работа распределителя импульсов РИ синхронизирована с опорным напряжением
генератора UГОС, для обеспечения формирования положительной и
отрицательной полуволн выходного напряжения ВРИ Uаб. Угол
управления транзисторами 1 (рис. 3.27, б) соответствует номинальному режиму работы конвертора. Если, к примеру, выходное
напряжение конвертора Uвых уменьшится, то уменьшится напряжение на выходе делителя напряжения UДН и уменьшится угол
управления транзисторами до величины 2, а значит увеличится
192
выходное напряжение резонансного инвертора Uаб (рис. 3.27, в, г)
и, соответственно, увеличится выходное напряжение конвертора
Uвых.
Выходной фильтр Ф конвертора кроме функции обеспечения
требуемого качества выходного напряжения, выполняет функции
накопителя электрической энергии и в моменты времени, когда
существует пауза между работой транзисторов инвертора, фильтр
накопленную электроэнергию отдает в нагрузку. Контур для протекания тока от фильтра в нагрузку, когда закрыты транзисторы,
создается обратным диодом VD.
Использование в составе конвертора высокочастотного резонансного инвертора на транзисторных ключах, ТВМП, двухполупериодной схемы неуправляемого выпрямителя со средней точкой, обратного диода, включенного между выпрямителем и выходным фильтром, а также предложенной системы стабилизации
напряжения выгодно отличает предлагаемый источник напряжения постоянного тока от известных, так как повышается надежность его работы.
Таким образом, конструкция и принцип работы ТВМП позволяют создавать преобразователи электрической энергии с улучшенными эксплуатационно-техническими характеристиками.
Кроме того, важным преимуществом ТВМП является то, что он
позволяет из однофазного напряжения переменного тока получать
многофазную систему напряжений, в том числе трехфазную симметричную. В этом случае на сердечнике магнитопровода размещается несколько вторичных обмоток с соответствующим пространственным сдвигом одна относительно другой. Такое техническое решение ТВМП позволяет исключать из состава САЭ
трехфазные преобразователи, выполненные на полупроводниковых приборах, а трехфазную систему напряжений получать с помощью однофазных полупроводниковых преобразователей и
ТВМП с однофазным входом и трехфазным выходом. Принципиальные силовые схемы таких преобразователей представлены на
рис. 3.28.
193
а)
б)
Рис. 3.28. Принципиальные силовые электрические схемы преобразователей на базе ТВМП: инвертор с трехфазным выходом (а) и однофазнотрехфазный непосредственный преобразователь частоты (б)
Преобразователь напряжения постоянного тока в трехфазное
переменное, выполнен на базе однофазной мостовой транзисторной схемы инвертора (рис. 3.28, а), а непосредственный преобразователь частоты (НПЧ) - на базе однофазной мостовой шестипульсной схемы (рис. 3.28, б). В схеме НПЧ (рис. 3.28, б) показан
блок искусственной коммутации БИК, который в схемах преобразователей частоты с естественной коммутацией вентилей не применяется. ТВМП в рассмотренных схемах, кроме обеспечения
194
гальванической развязки и преобразования однофазного напряжения переменного тока в трехфазную симметричную систему
напряжений, позволяют изменять уровень выходного напряжения
в сравнении с входным. Особенностью работы ТВМП с однофазным входом и многофазным выходом является обеспечение стабилизации выходного напряжения, которую можно осуществлять
непосредственно силовыми полупроводниковыми приборами или
за счет дросселя с обмоткой подмагничивания, включаемого в силовые цепи между полупроводниковыми преобразователями и
ТВМП (рис. 3.29). ТВМП могут применяться не только в силовых
схемах преобразователей электроэнергии, но и в составе их СУ,
повышая при этом их показатели надежности.
Таким образом, применение трансформаторов с вращающимся магнитным полем в составе преобразователей электрической
энергии является одним из перспективных направлений развития
преобразовательной электротехники, позволяющим уменьшить
уровень электромагнитных помех и, кроме того, повысить показатели надежности как преобразователей, так и САЭ в комплексе.
Рис. 3.29. Функциональная схема выпрямителя с многофазной симметричной системой вторичных обмоток ТВМП: ДУ – дроссель управления; БВ – блок вентилей
3.5 Перспективы развития силовых полупроводниковых
приборов
Методы и средства, обеспечивающие преобразование и стабилизацию параметров электроэнергии, охватываются научно195
техническим направлением, которое в отечественной литературе
получило название преобразовательной техники. Поскольку основными элементами преобразовательной техники являются полупроводниковые приборы, в международной практике оно определяется как силовая электроника, т.е. как направление электроники, которое связано с силовой преобразовательной техникой.
Создание полупроводниковых приборов для силовой электроники началось в 1953 г., когда стало возможным получение
кремния высокой чистоты и формирование кремниевых дисков
больших размеров. В 1955 г. был впервые создан полупроводниковый управляемый прибор, имеющий четырехслойную структуру
и получивший название "тиристор".
Одновременно с созданием тиристора начались исследования,
направленные на обеспечение его выключения по управляющему
электроду. Главная проблема состояла в обеспечении быстрого
рассасывания носителей зарядов в базовых областях.
Первые подобные тиристоры появились в 1960 г. в США. Они
получили название Gate Turn Off (GTO). В нашей стране они
больше известны как запираемые или выключаемые тиристоры.
В середине 90-х годов был разработан запираемый тиристор с
кольцевым выводом управляющего электрода. Он получил название Gate Commutated Thyristor (GCT) и стал дальнейшем развитием GTO-технологии.
Запираемый тиристор – полностью управляемый полупроводниковый прибор, основанный на классической четырехслойной структуре. Включают и выключают его подачей положительного и отрицательного импульсов тока на электрод управления.
Различие в структурах приборов заключается в ином расположении горизонтальных и вертикальных слоев с n- и р-проводимостями.
Наибольшему изменению подверглось устройство катодного
слоя n. Он разбит на несколько сотен элементарных ячеек, равномерно распределенных по площади и соединенных параллельно,
чтобы обеспечить равномерное снижение тока по всей площади
полупроводниковой структуры при выключении прибора.
Основное исполнение тиристоров GTO – таблеточное с четырехслойной кремниевой пластиной, зажатой посредством термокомпенсирующих молибденовых дисков между двумя медными
196
основаниями, обладающими повышенными тепло- и электропроводностью. С кремниевой пластиной контактирует управляющий
электрод, имеющий вывод в керамическом корпусе. Прибор зажимается контактными поверхностями между двумя половинами
охладителей, изолированных друг от друга и имеющих конструкцию, определяемую типом системы охлаждения.
Основной недостаток GTO заключается в больших потерях
энергии в защитных цепях прибора при его коммутации. Повышение частоты увеличивает потери, поэтому на практике тиристоры
GTO коммутируются с частотой не более 250 – 300 Гц.
Основной особенностью тиристоров GCT, по сравнению с приборами GTO, является быстрое выключение, которое достигается как
изменением принципа управления, так и совершенствованием конструкции прибора. Быстрое выключение реализуется превращением
тиристорной структуры в транзисторную при запирании прибора,
что делает прибор нечувствительным к эффекту du/dt.
Изменение конструкции GCT связано с тем, что динамические процессы, возникающие в приборе при выключении, протекают на один – два порядка быстрее, чем в GTO. Так, если минимальное время выключения и блокирующего состояния для GTO
составляет 100 мкс, для GCT эта величина не превышает 10 мкс.
Скорость нарастания тока управления при выключении GCT составляет 3000 А/мкс, GTO – не превышает 40 А/мкс.
Чтобы обеспечить высокую динамику коммутационных процессов, изменили конструкцию вывода управляющего электрода и
соединение прибора с формирователем импульсов системы управления. Вывод выполнен кольцевым, опоясывающим прибор по
окружности. Кольцо проходит сквозь керамический корпус тиристора и контактирует: внутри с ячейками управляющего электрода; снаружи – с пластиной, соединяющей управляющий электрод с
формирователем импульсов.
Сейчас тиристоры GTO производят несколько крупных фирм
Японии и Европы: "Toshiba", "Hitachi", "Mitsubishi", "ABB",
"Eupec". Параметры приборов по напряжению UDRM: 2500 В,
4500 В, 6000 В; по току ITGQM (максимальный повторяющийся
запираемый ток): 1000 А, 2000 А, 2500 А, 3000 А, 4000 А, 6000 А.
Тиристоры GCT выпускают фирмы "Mitsubishi" и "ABB".
Приборы рассчитаны на напряжение UDRM до 4500 В и ток
197
ITGQM до 4000 А.
В настоящее время тиристоры GCT и GTO освоены на российском предприятии ОАО "Электровыпрямитель" (г. Саранск).
Выпускаются тиристоры серий ТЗ-243, ТЗ-253, ТЗ-273, ЗТА-173,
ЗТА-193, ЗТФ-193 (подобен GCT) и другие с диаметром кремниевой пластины до 125 мм и диапазоном напряжений UDRM 1200 –
6000 В и токов ITGQM 630 – 4000 А.
Параллельно с запираемыми тиристорами и для использования в комплекте с ними в ОАО "Электровыпрямитель" разработаны и освоены в серийном производстве быстровосстанавливающиеся диоды для демпфирующих (снабберных) цепей и диоды
обратного тока, а также мощный импульсный транзистор для выходных каскадов драйвера управления (система управления).
Следующим крупным достижением в технологии жестко
управляемых GTO (HD GTO) тиристоров стала идея управляемых
приборов, базирующихся на новом "запираемом тиристоре с интегрированным блоком управления (драйвером)" (англ. Integrated
Gate-Commutated Thyristor (IGCT)). Благодаря технологии жесткого управления равномерное переключение увеличивает область
безопасной работы IGCT до пределов, ограниченных лавинным
пробоем, т.е. до физических возможностей кремния. Не требуется
никаких защитных цепей от превышения du/dt. Сочетание с улучшенными показателями потерь мощности позволило найти новые
области применения в килогерцовом диапазоне. Мощность, необходимая для управления, снижена в 5 раз по сравнению со стандартными GTO, в основном за счет прозрачной конструкции анода. Новое семейство приборов IGCT, с монолитными интегрированными высоко мощными диодами было разработано для применения в диапазоне 0,5 – 6 МВА. При существующей технической
возможности последовательного и параллельного соединения
приборы IGCT позволяют наращивать уровень мощности до нескольких сотен мегавольт - ампер.
При интегрированном блоке управления катодный ток снижается до того, как анодное напряжение начинает увеличиваться.
Это достигается за счет очень низкой индуктивности цепи управляющего электрода, реализуемой при помощи коаксиального соединения управляющего электрода в сочетании с многослойной
платой блока управления. В результате достигнуто значение ско198
рости выключаемого тока 4 кА/мкс. При напряжении управления
UGK = 20 В, когда катодный ток становится равным нулю, оставшийся анодный ток переходит в блок управления, который имеет
в этот момент низкое сопротивление. За счет этого потребление
энергии блоком управления минимизируется.
Работая при "жестком" управлении, тиристор переходит при
запирании из p-n-p-n состояния в p-n-p режим за 1 мкс. Выключение происходит полностью в транзисторном режиме, устраняя
всякую возможность возникновения триггерного эффекта.
Для максимальной помехоустойчивости и компактности блок
управления окружает IGCT, формируя единую конструкцию с
охладителем, и содержит только ту часть схемы, которая необходима для управления непосредственно IGCT. Как следствие,
уменьшено число элементов управляющего блока, снижены параметры рассеяния тепла, электрических и тепловых перегрузок.
Поэтому, также существенно снижена стоимость блока управления и интенсивность отказов. IGCT, с его интегрированным
управляющим блоком, легко фиксируется в модуле и точно соединяется с источником питания и источником управляющего
сигнала через оптоволокно.
Основной производитель IGCT фирма "ABB". Параметры тиристоров по напряжению UDRM: 4500 В, 6000 В; по току ITGQM:
3000 А, 4000 А.
Быстрое развитие в начале 90-х годов технологии силовых
транзисторов привело к появлению нового класса приборов – биполярные транзисторы с изолированным затвором (IGBT Insulated Gate Bipolar Transistors). Основными преимуществами
IGBT являются высокие значения рабочей частоты, КПД, простота
и компактность схем управления (вследствие малости тока управления).
Появление в последние годы IGBT с рабочим напряжением до
4500 В и способностью коммутировать токи до 2500 А привело к
вытеснению запираемых тиристоров (GTO) в устройствах мощностью до 1 МВт и напряжением до 3,5 кВ.
Международный консорциум "Энергосбережение" (МКЭ), созданный ведущими предприятиями электротехнической промышленности Украины, России и Белоруссии в 1995 г., основываясь на
199
зарубежном опыте и собственных исследованиях, разработал и
освоил серийное производство на ряде заводов СНГ серии энергосберегающих электроприводов РЭН мощностью от 3,5 до 1000
кВт, построенных по схеме автономного инвертора напряжения
(АИН).
Выпускаемые сегодня IGBT допускают 8 – 10-кратный относительно номинального ток в режиме КЗ в течение 10 – 20 мкс.
Максимально допустимые напряжения, приложенные к переходу
IGBT, лежат в пределах 1200 – 4500 В при токе до 2500 А. Характерное время выключения IGBT составляет 1 мкс.
Таблица 3.1 – Характеристики современных мощных силовых
ключей с двусторонним теплоотводом
Тип
Преимущества
Недостатки
Области применеприбора
ния
1
Традиционный
тиристор
(SCR)
GTO
2
Самые
низкие
потери во включенном состоянии.
Самая высокая перегрузочная способность. Высокая
надежность. Легко
соединяются параллельно и последовательно
Способность
к
управляемому запиранию. Сравнительно
высокая
перегрузочная
способность. Возможность последовательного соединения. Рабочие
частоты до 250 Гц
при напряжении
до 4 кВ.
3
4
Высокие потери
во
включенном
состоянии. Очень
большие потери в
системе управления. Сложные системы управления
и подачи энергии
на
потенциал.
Большие потери
на переключение.
Электропривод;
статические компенсаторы реактивной мощности;
системы бесперебойного питания;
индукционный
нагрев
Не способен к
принудительному
запиранию
по
управляющему
электроду. Низкая
рабочая частота.
200
Привод постоянного тока; мощные
источники
питания; сварка;
плавление
и
нагрев; статические компенсаторы; ключи переменного тока
Продолжение таблицы 3.1
1
IGCT
IGBT
2
Способность
к
управляемому запиранию.
Перегрузочная способность та же, что и
у GTO. Низкие потери во включенном состоянии и
на переключении.
Рабочая частота –
до единиц, кГц.
Встроенный блок
управления (драйвер). Возможность
последовательного соединения.
Способность
к
управляемому запиранию. Самая
высокая рабочая
частота
(до
10 кГц). Простая
неэнергоемкая
система управления. Встроенный
драйвер.
3
4
Не выявлены из-за Мощные источниотсутствия опыта ки питания (инэксплуатации
верторная и выпрямительная
подстанции линий
передач постоянного тока); электропривод (инверторы напряжения
для преобразователей частоты и
электроприводов
различного назначения)
Очень
высокие Электропривод
потери во вклю- (чопперы); систеченном состоянии. мы бесперебойного питания; статические компенсаторы и активные
фильтры; ключевые
источники
питания
Общая характеристика приводов серии РЭН дана в таблице 3.2.
Блоки вторичного питания приводов серии РЭН способны
получать питание как от входной трехфазной цепи, так и из звена
постоянного тока. Они сохраняют работоспособность при изменении входного напряжения в пределах от – 40 до +30% номинального, обеспечивают высокую жесткость внешних характеристик
(менее 5%), мягкую коммутацию выходных транзисторов (что исключает импульсные помехи), высокий (70% и более) КПД, широкий температурный диапазон работы (–25…+60С), защиту от то201
ковых перегрузок с самовосстановлением и защиту от КЗ.
Типовое
исполнение
Ток на входе,
А
мощПолная
ность, кВА
Ток на выходе,
А
Допустимый
перегрузки, А
Масса, кг
3,5
5,5
7,5
11
15
22
37
55
75
90
110
160
200
250
320
630
800
1000
РЭН 3
РЭН 5
РЭН 7
РЭН 11
РЭН 15
РЭН 22
РЭН 37
РЭН 55
РЭН 75
РЭН 90
РЭН 110
РЭН 160
РЭН 200
РЭН 250
РЭН 320
РЭН 630
РЭН 800
РЭН 1000
6,3
14
16
22
30
44
74
106
145
175
215
318
397
477
614
1230
1850
2470
5,1
9
11
16
20
30
50
70
100
120
140
210
260
320
400
800
1200
1600
6,9
15
18
24
32
47
76
112
147
178
216
316
395
480
605
1210
1820
2420
7,6
17
20
26
35
52
84
123
162
196
238
348
435
528
675
1350
2025
2700
8
13
13
20
25
25
50
60
60
70
250
280
350
390
450
900
1350
1800
Номинальный режим
работы электропривода
202
ток
мощНоминальная
электроность
двигателя, кВт
Таблица 3.2 – Серия IGBT преобразователей частоты
ГЛАВА4
СПОСОБЫ УЛУЧШЕНИЯ КАЧЕСТВА ВЫХОДНОГО
НАПРЯЖЕНИЯ СТАТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
ЭЛЕКТРОЭНЕРГИИ
4.1 Оценка качества выходного напряжения НПЧ
Применение НПЧ для стабилизации частоты и напряжения генераторов электроэнергии, привод которых осуществляется от ВПД,
позволяет улучшить эксплуатационно-технические характеристики
АИЭ в сравнении с другими традиционными техническими решениями устройств управления высокочастотных источников.
Как известно, в некоторых случаях, частота вращения вала
ВПД изменяется в широких пределах, к примеру, в бортовых
САЭ, частота вращения ВПД изменяется в диапазоне 2:1. Кроме
того, с целью повышения экономичности и ресурса работы ВПД,
стационарных и транспортных АИЭ целесообразно уменьшать
частоту вращения вала двигателя при малых нагрузках. Поэтому
важным является вопрос исследования качества выходного
напряжения НПЧ в различных режимах работы АИЭ.
Как известно, при использовании НПЧ в составе АИЭ представляют интерес два типа преобразователей: с естественной коммутацией силовых вентилей (НПЧЕ) и с регулируемым углом
сдвига фаз на входе (НПЧР).
Эффективным способом определения качества выходного
напряжения НПЧ является применение метода гармонического
анализа с использованием переключающих функций.
Как видно из рис. 4.1, длительность переключающих функций
h1 – h6 (участков кривых входного напряжения, из которых формируется выходное напряжение) на интервале формирования периода выходного напряжения uвых изменяется во времени. В этом
одна из особенностей расчета гармонического состава выходного
напряжения НПЧ. Поскольку каждая переключающаяся функция
имеет период 2, т.е. является периодичной, то она может быть
разложена в ряд Фурье.
Как известно, выходное напряжение uвых НПЧ образуется из
кривых положительного uПТ и отрицательного типа uОТ (рис. 4.1),
203
поэтому можно записать выражение
uвых(t ) u ПТ (t ) uОТ (t ).
(4.1)
Рис. 4.1. Диаграммы напряжений, показывающие каким образом осуществляется реализация модулирующей функции МФ в шестипульсной
силовой схеме НПЧ, где обозначено: косинусные синхронизирующие
кривые положительного и отрицательного типов fПТ и fОТ соответственно; желаемая составляющая выходного напряжения uжел
Напряжения uПТ(t) и uОТ(t) можно представить через входные
напряжения и соответствующие переключающие функции
uПТ(t) = hП11(t) uВХ1 + hП12(t) uВХ2+ ... + hП mn (t) uВХ m
,
(4.2)
uОТ(t) =hО11(t) uВХ1 + hО12(t) uВХ2+ ... + hО mn(t) uВХ m
где hПТ(t) и hОТ(t) – переключающие функции для формирования
204
кривых напряжений uПТ и uОТ; m – число фаз входного напряжения преобразователя; n – число фаз выходного напряжения преобразователя.
Эта система уравнений для трехфазной системы входных
напряжений может быть записана в следующей форме:
u ВХ1 (t )
u ПТ (t ) H ПТ (t )
u ВЫХ (t )
u ВХ 2 (t ) ,
uОТ (t ) H ОТ (t ) u
ВХ 3 (t )
(4.3)
где НПТ(t), НОТ(t) - матрицы переключающих функций положительного и отрицательного типов соответственно.
При этом входные напряжения являются симметричными синусоидальными функциями времени и определяются выражением:
u ВХ1 (t )
sin(2 / 3 ВХ t )
u ВХ 2 (t ) U ВХm sin(4 / 3 ВХ t ) ,
u ВХ 3 (t )
sin(2 ВХ t )
(4.4)
где UВХm - амплитудное значение входного напряжения.
Длительность переключающих функций определяется промежутками времени между точками пересечения модулирующей
функции МФ с серией периодически повторяющихся синхронно с
частотой входного напряжения косинусных кривых fПТ и fОТ (см.
рис. 4.1).
Для упрощения расчетов косинусные синхронизирующие
кривые представляются линейными функциями. Выражения для
линейных функций косинусных кривых положительного типа, для
шестипульсной схеме преобразователя, имеют вид:
f ПТ1 (t ) / 3 ВХ t
f ПТ 2 (t ) 2 / 3 ВХ t
..................................
f ПТ 6 (t ) 2 ВХ t
(4.5)
линейные функции для косинусных кривых отрицательного типа
205
соответственно равны:
f ОТ1 (t ) ВХ t / 3
f ОТ 2 (t ) ВХ t 2 / 3
..................................
f ОТ 6 (t ) ВХ t 2
(4.6)
Модулирующая функция задается выражением:
МФ(t)=arcsin(r sinВЫХ t),
(4.7)
где r =UЖЕЛ /UВЫХ m - относительное значение выходного напряжения; UЖЕЛ - желаемая составляющая выходного напряжения;
Uвых т- наибольшее возможное амплитудное значение выходного
напряжения.
Пересечение модулирующей функции с линейной функцией
fПТ1(t) получается в момент времени t, определяемый выражением:
arcsin(r sinВЫХ t)= /3-ВХ t,
(4.8)
r sinВЫХ t=sin( /3 -ВХ t).
(4.9)
т.е. когда
Таким образом, точки пересечения синусоидального задающего напряжения r sinВЫХ t с косинусными синхронизирующими
кривыми для соответствующих фаз являются искомыми моментами времени, в которые должны изменяться переключающие
функции, соответствующие модулирующей функции МФ. Таким
образом, определяется длительность всех переключающих функций.
Далее для определения гармонического состава выходного
напряжения uВЫХ переключающие функции, описываемые соответствующими функциями входного напряжения, раскладываются
в ряд Фурье.
Общие выражения для определения коэффициентов ряда
Фурье для переключающих функций имеют вид:
206
1
t
t
(cos(
k ) cos(
k )
2k t
3 2
3 2
1
t
t
(cos(
k ) cos(
k ))
2k t
3 2
3 2
,
1
t
t
bki
(sin(
k ) sin(
k ))
t 2k
3 2
3 2
1
t
t
(sin(
k ) sin(
k ))
2k t
3 2
3 2
аki
(4.10)
где - угол сдвига фаз между соответствующими фазами входных
напряжений; k - номер гармоники; t =ti - ti-1 - время, определяющее длительность i - й переключающих функций.
Для определения гармонического состава выходного напряжения НПЧ необходимо определить суммарное значение коэффициентов ряда Фурье переключающих функций за период изменения выходного напряжения:
N
Аk аki
k 1
(4.11)
N
Bk bki
k 1
По известным значениям Ak и Bk определяются основные показателей качества выходного напряжения НПЧ:
амплитуду k-й гармоники выходного напряжения:
2
2
UВЫХk=UВХ m Аk Вk ;
(4.12)
относительное значение амплитуд высших гармоник:
ВЫХk=UВЫХk /UВЫХ1,
(4.13)
коэффициент несинусоидальности выходного напряжения:
2
U ВЫХk
К Н k 2
U ВЫХ 1
207
100% ,
(4.14)
Для расчета основных показателей качества выходного
напряжения НПЧ был разработан алгоритм, по которому разработана программа расчета показателей качества в среде визуального
программирования Delphi 5.0 .
Как видно из рис. 4.2 коэффициент несинусоидальности выходного напряжения НПЧ в основном зависит от кратности частот
Рис. 4.2. Зависимости коэффициента несинусоидальности КН от кратности частот fвх / fвых для трех (1) и шестипульсной (2) схем НПЧ при
r = 0,7– 0,9
преобразователя fВХ / fВЫХ, пульсности силовой схемы и относительного значения выходного напряжения r. Значения r позволяют
определять эффективный диапазон регулирования выходного
напряжения преобразователя частоты. Так установлено, что диапазон оптимальных значений r, обеспечивающий высокое качество выходного напряжения НПЧ, находится в пределах
0,7 < r < 0,9. Кроме того, результаты расчетов показывают, что
при всех разнообразных ситуациях, которые могут возникать при
работе НПЧ от АИЭ, значение коэффициента несинусоидальности
незначительно зависит от типа кривой, формирующей на выходе
преобразователя, в зависимости от полярности тока нагрузки. Однако, относительные значения амплитуд высших гармоник имеют
разные значения и зависят как от кратности частот, пульсности
208
силовой схемы преобразователя, так и от относительного значения
выходного напряжения преобразователя (рис. 4.3 - 4.5). Причем,
чем ниже кратность частот преобразователя, тем преобладающее
значение имеют высшие гармоники (рис. 4.3), и, соответственно,
ниже качество выходного напряжения НПЧ. Важной особенностью работы НПЧ является наличие в составе выходного напряжения как нечетных, так и четных высших гармоник.
а)
б)
Рис. 4.3. Относительные значения амплитуд высших гармоник. Прямая
слева от номера гармоники для трехпульсной, прямая пунктирная справа
- для шестипульсной схем НПЧ. fвх / fвых = 4, r = 0,9 (а), r = 0,7 (б)
Как было сказано выше, частота вращения ВПД может изменяться в пределах 2 : 1, что соответствует изменению частоты
напряжения, к примеру, с 400 до 200 Гц, в этом случае важным
является показатель относительного значения амплитуды высших
209
а)
б)
Рис. 4.4. Относительные значения амплитуд высших гармоник. Прямая
слева от номера гармоники для трехпульсной, прямая пунктирная справа
- для шестипульсной схем НПЧ. fвх / fвых = 8, r = 0,9 (а), r = 0,7 (б)
Рис. 4.5. Относительные значения амплитуд высших гармоник. Прямая
слева от номера гармоники для трехпульсной, прямая пунктирная справа
- для шестипульсной схем НПЧ. fвх / fвых = 12, r = 0,9
210
гармоник для расчета и выбора выходного фильтра. На рис. 4.6
представлены графики зависимости относительного значения амплитуды высших гармоник для fвых = 50 Гц, и fвх = 200, 300 и
400 Гц, что соответствует кратности частоты fвх / fвых = 4, 6 и 8. Из
рис. 4.6. видно, что для fвх = 200 Гц основные искажения в форму
выходного напряжения вносят 3, 12, 14 гармоники, для fвх = 300 Гц
– 5, 8, 9, для fвх = 400 Гц - 2, 4, 6.
Рис. 4.6. Графики зависимости относительного значения амплитуды
высших гармоник от номера гармоник для fвых = 50 Гц, fвх1 = 200 Гц,
fвх2 = 300 Гц, fвх3 = 400 Гц
Таким образом, при проектировании выходных фильтров
АИЭ на базе НПЧ необходимо учитывать возможные предельные
режимы их совместной работы, для эффективного уменьшения
уровня высших гармоник в выходном напряжении преобразователя с целью обеспечения требуемого качества электроэнергии для
потребителей.
4.2 Выходные фильтры НПЧ
ГОСТ 13109-97 установил нормально допустимые значения
несинусоидальности выходного напряжения, которые не должны
превышать 3%, а предельно допустимые – 12%. Трехпульсные схемы НПЧ при кратностях частот fВХ / fВЫХ > 18, а шестипульсные при
кратностях частот fВХ / fВЫХ > 6 отвечают этим требованиям.
Однако выходные Г-образные LC-фильтры являются неотъемлемой частью НПЧ, которые предназначены для обеспечения
211
непрерывности кривой выходного напряжения, и они в значительной степени определяют МГП преобразователя, что особенно
важно для транспортных САЭ.
Выбор схемы выходного фильтра НПЧ диктуется рядом требований: обеспечение требуемого гармонического состава выходного напряжения на выходе фильтра; обеспечение жесткости
внешней характеристики (т.е. фильтр не должен вносить заметных
ослаблений амплитуды основной гармоники); обеспечение максимального КПД и минимальных МГП.
Как известно, частота выходного напряжения НПЧ изменяется случайным образом, в результате чего спектральный состав выходного напряжения преобразователя не остается постоянным.
Поэтому рекомендуемые в ряде работ параллельные многозвенные LC-фильтры, каждое из звеньев настроенное в резонанс на
фиксированную частоту, здесь неприменимы. Однако ввиду стабильности основной выходной частоты с успехом могут применяться резонансные фильтры (рис. 4.7).
Рис. 4.7. Выходной фильтр НПЧ
Последовательная резонансная цепь L1C1 (рис. 4.7) настроена
в резонанс с основной частотой fвых, обеспечивая минимально
возможное сопротивление для токов этой частоты и максимально
возможное сопротивление для всех остальных гармоник. Параллельная резонансная цепь L2C2, напротив, представляет собой
максимально возможное сопротивление для основной частоты fвых
и минимально возможное сопротивление для частот высших гармоник. В результате выходное напряжение преобразователя с частотой fвых выделяется только на нагрузке, обеспечивая максимально возможный коэффициент передачи напряжения. В то же
время напряжение остальных гармоник выделяется на цепочке
L1C1, и загрузка элементов преобразователя токами этих гармо212
ник невелика.
Известно, что для обеспечения потребителей трехфазным
напряжением применяются НПЧ с трехфазным выходом, содержащих три вентильных комплекта, как правило, каждый из которых содержит по 6 вентилей. НПЧ с трехфазным выходом имеют
сложную систему управления, практически для формирования
каждой фазы выходного напряжения свой блок управления. При
этом наличие уравнительных токов и таких дестабилизирующих
факторов, как нестабильная частота входного напряжения, изменяющаяся величина и коэффициент мощности нагрузки требуют
согласованной работы трех блоков пофазного управления, что
приводит к усложнению системы управления НПЧ. В связи с этим
ограничения, накладываемые системой управления на работу вентилей НПЧ, приводят к ухудшению качества выходного напряжения преобразователя и, соответственно, к увеличению МГП выходных фильтров и электрических потерь в них.
Поэтому для повышения КПД преобразователя частоты и его
надежности работы необходимо низкочастотную трехфазную систему выходного напряжения получать за счет использования
НПЧ с однофазным выходом и однофазнотрехфазного трансформатора с вращающимся магнитным полем ТВМП (рис. 4.7).
Поскольку выходной фильтр НПЧ оказывает влияние на гармонический состав выходного напряжения преобразователя, целесообразно для оптимизации параметров проводить проектирование выходных фильтров, используя математическое моделирование электромагнитных процессов в системе НПЧ – фильтр.
4.3 Способы улучшения качества выходного напряжения
инверторов
Одним из важных вопросов является вопрос улучшения формы кривой выходного напряжения автономных инверторов.
Наиболее просто получить синусоидальное выходное напряжение,
применяя фильтры. Основная функция фильтра инвертора, как и
НПЧ, заключается в максимальном уменьшении напряжений
высших гармоник при минимальном ослаблении первой (основной) гармоники выходного напряжения. В соответствии с этим
для оценки эффективности фильтра используется коэффициент
213
ослабления (фильтрации) им n-й гармоники
Кфn = U1nm / U2nm ,
(4.15)
где U1nm и U2nm - амплитудные значения n-й гармоники на входе и
выходе фильтра соответственно.
Степень несинусоидальности выходного напряжения инвертора также оценивается коэффициентом несинусоидальности.
Так как фильтр проектируется из условия максимального подавления высших гармоник, то Кфn >> 1 для n 1 и Кфn 1 для
n=1. Соответственно коэффициенты несинусоидальности напряжения на входе и выходе фильтра связаны неравенством КН1 > КН2.
В отличие от НПЧ форма выходного напряжения инверторов
близка к прямоугольной, содержание высших гармоник также относительно велико, но только третья гармоника составляет более
30 % основной амплитуды напряжений остальных гармоник с ростом их номера уменьшаются.
В параллельном инверторе тока фильтрацию, обеспечивающую получение близкого к синусоиде выходного напряжения,
можно осуществить коммутирующим конденсатором и дросселем
в цепи источника напряжения постоянного тока, т.е. внутренней
фильтрацией. В этом случае инвертор имеет относительно большую установленную мощность колебательного контура.
В инверторах напряжения синусоидальность выходного
напряжения обеспечивается с помощью внешних Г-образных LCфильтров (рис. 4.8). Параллельный элемент фильтра увеличивает
общий ток нагрузки инвертора, последовательный – увеличивает
потери выходного напряжения от тока нагрузки, проходящего через него.
Для случая ненагруженного фильтра - режим холостого хода,
параметры простого LC-фильтра (рис. 4.8, а) можно определить по
формуле
2
2
КФn n (2f ) L1C1.
(4.16)
Из (4.16) видно, что коэффициент фильтрации прямо пропорционален квадрату порядкового номера гармоники.
Для ориентировочной оценки параметров фильтра следует за214
даться падением напряжения первой гармоники UL1 на индуктивности L1 от тока наибольшей нагрузки инвертора Iнmax и определить индуктивность
L1
U L1
2 f I н max
(4.17)
.
а)
б)
в)
г)
Рис. 4.8. Схемы выходных фильтров инверторов напряжения
В действительности первая гармоника напряжения на индуктивности фильтра больше, так как через нее протекает еще первая
гармоника тока конденсатора С1. Далее, задаваясь коэффициентом фильтрации для ослабления самой большой по амплитуде
гармоники (третьей) из (4.16) определяется емкость фильтра.
К основным существенным недостаткам простых LC – фильтров (рис.4.8, а) относятся:
Во-первых, он ослабляет не только высшие гармоники, но и
основную. Это ослабление пропорционально нагрузке инвертора и
зависит от коэффициента мощности нагрузки. Кроме того, ослабление амплитуды основной гармоники сопровождается изменением фазы выходного напряжения фильтра относительно фазы его
входного напряжения.
Во-вторых, емкость фильтра С1 создает дополнительную
нагрузку для инвертора, увеличивая токи, протекающие через основные его элементы.
Резонансные контуры в последовательном и параллельном
215
элементах позволяют частично компенсировать указанные недостатки. Последовательный контур L1C1 (рис. 4.8, б), настроенный
в резонанс на основную частоту, сводит до минимума падение
напряжения от тока основной частоты. Параллельный резонансный контур (рис. 4.8, в), представляющий большое сопротивление
току основной частоты и малое – току высших частот, служит для
уменьшения дополнительной нагрузки на основной частоте.
Наилучшими фильтрующими свойствами обладают полосовые
фильтры (рис. 4.8, г), передающие в нагрузку первую гармонику
практически без ослабления и максимально ослабляющие высшие
гармоники. Оба звена фильтра настраиваются в резонанс на частоте основной гармоники 1 =2f1 , т.е.
1L11/ 1С1 ,
(4.18)
1L2 1/ 1С 2.
Принимая элементы фильтров идеальными, т.е. не имеющими
активных потерь, при соблюдении условий резонанса (4.18) можно считать, что первая гармоника выходного напряжения инвертора поступает на нагрузку без амплитудных и фазовых искажений.
Таким образом, коэффициент ослабления основной гармоники для
данного типа фильтра равен единице.
Для высших гармоник сопротивления звеньев соответственно
Z1 n1L11/ n1C1 ,
(4.19)
Z 2 1/(n1С 2 1/ n1L2).
Из (4.19) следует, что если будут выполняться условия
n1L1 1/ n1C1,
(4.20)
n1С 2 1/ n1L2,
то для высших гармоник эффективность фильтра эквивалентна
эффективности простого LC-фильтра (рис. 4.8, а). Но, с другой
стороны, фильтр не искажает основной (первой) гармоники выходного напряжения и не создает дополнительной загрузки инвертора емкостным током фильтра, поскольку этот ток компенсируется током индуктивности L2 (рис. 4.8, г).
Приближенная оценка параметров фильтра, показанного на
рис. 4.8, г, может быть произведена так же, как и параметров
216
фильтра, представленного на рис. 4.8, а. Однако наличие в схеме
фильтра емкости конденсатора С1 и дросселя L2, предназначенных для устранения искажения фильтром первой гармоники
напряжения, приводит к удвоению суммарной установленной
мощности элементов фильтра, а следовательно, к значительному
увеличению его МГП. Кроме того, последовательный резонансный контур ухудшает динамические характеристики инвертора
при работе на нагрузку.
Для обеспечения более высоких коэффициентов фильтрации
применяют многозвенные фильтры. Коэффициент фильтрации
увеличивается с увеличением количества звеньев в фильтре. Однако, в большинстве фильтров потребность в ослаблении гармоник удовлетворяется не более чем двумя звеньями. Поэтому, если
коэффициент фильтрации меньше 26, то применяют, как правило,
однозвенный фильтр, а если больше, то многозвенный.
Выходные фильтры инверторов, как правило, значительно
ухудшают их массогабаритные и энергетические показатели. В
связи с этим при разработке инверторов существенное внимание
уделяется снижению содержания высших гармоник в выходном
напряжении непосредственно в процессе преобразования. С этой
целью применяют различные модификации схем инверторов и
специальные законы регулирования, построенные на дискретных
принципах работы силовых ключей. Дискретные принципы работы силовых переключающих элементов позволяют использовать
модуляционные методы, предполагающие в общем случае регулирование формирующих импульсов кривых выходного напряжения
по частоте, длительности и амплитуде.
В настоящее время получили развитие и серийно выпускаются инверторы напряжения, для которых наиболее остро стоит вопрос по улучшению гармонического состава выходного напряжения, из-за его несинусоидальной формы. Поэтому методы амплитудно-импульсной (АИМ) и широтно-импульсной (ШИМ) модуляции кривых выходного напряжения рассматриваются применительно к автономным однофазным инверторам напряжения.
Одна из простых схем инвертора с АИМ представлена на
рис. 4.9, а, выполненная на базе многообмоточного трансформатора Т, имеющего выводы обмоток на определенные напряжения,
217
которые поочередно подключаются к нагрузке транзисторными
ключами. В результате на нагрузке формируется ступенчатое
напряжение (рис. 3.19, б). На рис. 4.9, б представлена кривая выходного напряжения при работе инвертора на активную нагрузку.
Под каждой из ступеней выходного напряжения (U1, U2, U3) обозначен транзистор обеспечивающий ее формирование. Как видно
из рисунка транзисторы VT1 – VT3 работают при формировании
положительной полуволны, а VT4 – VT6 – отрицательной полуволны выходного напряжения преобразователя.
а)
б)
Рис. 4.9. Схема трансформаторного инвертора с АИМ (а) и форма
кривой его выходного напряжения (б)
На рис. 4.10, а представлена схема инвертора с АИМ, выполненная на базе мостовой схемы с несколькими источниками питания, обеспечивающие различный уровень напряжения на нагрузке.
На рис. 4.10, б показаны импульсы выходного напряжения при
активной нагрузке. Положительные импульсы (положительная
полуволна выходного напряжения) формируются при включении
тиристоров инвертора VS1 и VS3, а отрицательные (отрицательная
218
полуволна выходного напряжения) - при включении тиристоров
VS2 и VS4. кроме того, под каждым импульсом соответствующей
амплитуды обозначены ключи силовой схемы, обеспечивающие
протекание тока от источников напряжения к нагрузке.
а)
б)
Рис. 4.10. Схема мостового инвертора с АИМ (а) и форма кривой его выходного напряжения (б)
При работе на активно-индуктивную нагрузку в силовую
схему инверторов с АИМ необходимо вводить обратные диоды.
При этом форма кривой выходного напряжения изменяется и зависит от значения индуктивности нагрузки. Устранение этого нежелательного эффекта связано с существенным усложнением силовой схемы инвертора. В общем случае основное достоинство
инверторов с АИМ – это относительно высокое качество выходного напряжения в сравнении с инверторами с ШИМ, а недостаток –
сложная силовая схема, что значительно ухудшает массогабаритные показатели и показатели надежности преобразователя.
Силовые схемы инверторов с ШИМ также содержат обратные
219
диоды (рис. 4.11), но в общем случае они проще схем инверторов
с АИМ. Отличаются инверторы с ШИМ от низкочастотных инверторов усложненным алгоритмом работы силовых ключей, а, следовательно, и несколько усложненной системой управления.
а)
б)
в)
Рис.4.11. Силовые схемы инверторов с ШИМ: а – мостовая; б – полумостовая; в – с нулевой точкой
В зависимости от изменения полярности ШИМ импульсов в
течение полупериода выходного напряжения инвертора различают
однополярную и двухполярную модуляции (рис. 4.12).
а)
б)
Рис. 4.12. Форма выходного напряжения инверторов, при однополярной
(а) и двухполярной (б) ШИМ
Закон изменения длительности импульсов в течение каждого
220
полупериода определяет следующие основные принципы формирования кривой выходного напряжения инверторов с ШИМ.
1.Оптимальная ШИМ. Изменение длительности модулированного импульса на периоде частоты выходного напряжения таково, что в кривой выходного напряжения отсутствуют гармоники, близкие к основной. Критерием оптимальности служит число
отсутствующих гармоник, которое определяется числом импульсов в полупериоде выходного напряжения.
2.ШИМ по синусоидальному закону. Длительность модулированного импульса изменяется по синусоидальному закону. Этот
вид модуляции подразделяют на два: ШИМ 1-го рода при фиксированном положении переднего фронта импульса, определяемом
значением несущей частоты, изменяется во времени положение
заднего фронта; ШИМ 2-го рода при изменяемом во времени переднем фронте модулируемого импульса остается в фиксированном положении, определяемом значением несущей частоты, задний фронт.
3.Прямая ШИМ. Осуществляется в результате сложения и
дальнейшего преобразования напряжений прямоугольной формы
двух высокочастотных инверторов, работающих на близких частотах.
4.Прямая синхронизированная ШИМ. Осуществляется так же,
как и прямая ШИМ, но с синхронизацией двух суммируемых высокочастотных напряжений, при широком диапазоне изменения
частоты выходного напряжения.
Наиболее универсальной является мостовая схема инвертора
(рис. 4.11, а), которая может быть использована для реализации
одно- и двухполярной ШИМ. Полумостовая и схема с нулевой
точкой (рис. 4.11, б, в) могут быть использованы для реализации
только двухполярной ШИМ.
При проведении сравнительного анализа инверторов с АИМ и
ШИМ можно сделать следующие выводы.
Если задаться примерно одинаковыми значениями параметров выходного напряжения на нагрузке, числом переключений
силовых ключей и мощностью инверторов, то в случае применения АИМ по сравнению с ШИМ при разработке структуры преобразователя инвертор – фильтр будем иметь в 2,5 раза меньшие
установленные мощности фильтра, т.е. инверторы с АИМ имеют
221
лучшее качество выходного напряжения.
Особенно значительны преимущества АИМ перед ШИМ при
малом числе коммутаций силовых цепей инвертора, так как с увеличением числа коммутаций они в целом равнозначны. Обладая
достаточно простыми алгоритмами формирования импульсных
напряжений, чем методы ШИМ, методы АИМ в связи с переключением силовых ключей инвертора через кратные промежутки
времени периода выходной частоты позволяют строить сравнительно несложные системы управления. В то же время использование методов ШИМ связано с применением несложных силовых
схем инвертора, а необходимое повышение качества выходного
напряжения достигается усложнением системы управления и увеличением числа переключений силовых ключей, т.е. силовые
ключи инверторов с ШИМ переключаются с частотой, значительно превышающей частоту выходного напряжения. Силовая схема
инверторов с АИМ является более сложной, причем сложность ее
возрастает с увеличением числа ступеней формируемого импульсного напряжения.
Поэтому, несмотря на преимущества АИМ перед ШИМ по
ряду сравнительных показателей, особенно при малом числе переключений силовых ключей за период выходной частоты, в каждом
техническом проекте возможно применение любого из рассмотренных методов АИМ и ШИМ, так как окончательный выбор того
или иного вида модуляции, как правило, проводят с учетом сложности силовой схемы инвертора, от которой, прежде всего, зависят
массогабаритные и энергетические показатели, надежность и стоимость преобразователя электроэнергии.
Сложность аналитического описания гармонического состава
выходного напряжения инверторов затрудняет разработку точных
методов расчета параметров их выходных фильтров. В то же время, если учесть дискретность ряда возможных параметров реальных элементов фильтра, практическая ценность таких методик с
высокой точностью анализа гармонических составляющих незначительна.
222
4.4 Выходные фильтры выпрямителей и конверторов
Сглаживающие фильтры применяются для сглаживания пульсаций выпрямленного напряжения до уровня, который требуется
по условиям эксплуатации потребителей электроэнергии.
Однако, сглаживающий фильтр уменьшает не только переменную составляющую, но и уменьшает постоянную составляющую выпрямленного напряжения. Поэтому основным требованием, предъявляемым к сглаживающему фильтру, является не только
максимально возможное уменьшение переменной составляющей,
но и минимальное уменьшение постоянной составляющей выпрямленного напряжения.
К фильтрам предъявляются и ряд других требований:
а) не должно быть искажений фильтром формы тока нагрузки.
Такие искажения могут возникнуть при быстрых периодических
изменениях нагрузки (например, импульсный характер ее работы)
вследствие того, что реактивные элементы фильтра препятствуют
быстрым изменениям напряжения и тока;
б) собственная частота колебаний фильтра, должна быть
меньше всех частот переменных составляющих выпрямленных
напряжений и токов, потому что в противоположном случае могут
иметь место резонансные явления и связанное с этим возрастание
амплитуды пульсаций выпрямленного напряжения;
в) переходные процессы в фильтрах, возникающие во время
включения и выключения выпрямителя, не должны вызывать значительных повышений напряжения и тока;
г) фильтры должны иметь малую массу и габариты, высокий
КПД и высокие показатели надежности.
Сглаживающие фильтры выпрямителей классифицируются по
нескольким признакам:
По типу используемых элементов. Фильтры подразделяются
на пассивные и активные. Пассивные фильтры состоят из реактивных элементов: дросселей и конденсаторов. Активные фильтры выполняются на базе полупроводниковых приборов: транзисторов, тиристоров.
По схеме построения. В зависимости от числа элементов и
способа их соединения различают следующие фильтры: простые
(состоящие из одного элемента); однозвенные (Г-образные, П223
образные, Т-образные); многозвенные (состоящие из нескольких
однозвенных фильтров); сложные (состоящие из нескольких звеньев с резонансной настройкой отдельных цепочек).
Оценку сглаживающего действия фильтра проводят по величине его коэффициента сглаживания
k сг
U (1 )m / U d
U ( 1 )m / U d
kф ,
(4.21)
где U (1 )m , U d - амплитуда основной гармоники пульсаций и постоянная составляющая напряжения на входе фильтра;
U(1)m, Ud - амплитуда основной гармоники пульсаций и постоянная составляющая напряжения на выходе фильтра;
U / U - коэффициент передачи постоянной составляюd
d
щей напряжения с входа фильтра на его выход, характеризующий
потерю напряжения на фильтре;
U (1 )m / U ( 1 )m kф - коэффициент фильтрации, который устанавливает, во сколько раз уменьшается амплитуда пульсаций основной гармоники на выходе фильтра по сравнению с амплитудой
пульсаций на его входе.
Величина коэффициента передачи для фильтров выпрямителей средней и большой мощности 0,960,99 , для фильтров
малой мощности 0,910,95 .
Пренебрегая потерями в фильтре принимают kсг kф .
Расчет фильтра сводится к определению параметров фильтра
по величине коэффициента фильтрации kф.
Индуктивный фильтр представляет собой дроссель, включенный последовательно с нагрузкой (рис. 4.13, а). Расчет индуктивности фильтра Lф осуществляют для режима минимальной
нагрузки (Rdmax):
R
Lф d max kсг 2 1.
1
(4.22)
Емкостной фильтр представляет собой конденсатор, вклю224
ченный параллельно нагрузке (рис. 4.13, б). Расчет необходимой
емкости конденсатора в микрофарадах при заданном коэффициенте сглаживания осуществляется по приближенной формуле
Cф ( kсг 106 ) /( 1Rd k п ).
а)
б)
(4.23)
в)
Рис. 4.13. Схемы сглаживающих фильтров выпрямителей
Сравнивая L-фильтр и С-фильтр, необходимо отметить, что
при наличии подключенного параллельно нагрузке конденсатора в
момент включения выпрямителя будет наблюдаться большой
начальный ток, который затем уменьшается по мере заряда конденсатора, что создает тяжелый режим работы для вентилей выпрямителя. Это является существенным недостатком такого фильтра и делает эффективным его использование лишь при малых токах. Введение дросселя, наоборот, ограничивает начальный ток в
фазах выпрямителя, чем создает легкие условия работы вентилей,
и тем самым позволяет значительно увеличить ток нагрузки.
Однозвенный Г-образный LC-фильтр (рис. 4.13, в) является
наиболее распространенным типом фильтра благодаря своей простоте и эффективности. При расчете фильтра, как правило, выбирают емкость конденсатора так, чтобы выполнялось условие
1C 1/ Rd .
(4.24)
В этом случае коэффициент сглаживания
kсг ( mП )2 LфСф 1.
(4.25)
При расчете фильтра величина kсг (kф) обычно задана, поэтому требуется по известным значениям угловой частоты напряжения источника питания 1 и числу пульсаций в выпрямленном
225
напряжении mП определить произведение LфСф:
LфСф
kсг 1
( mП 1 )2
.
(4.26)
На рис. 4.14 приведена зависимость произведения LфСф от коэффициента сглаживания kсг.
Рис. 4.14. Зависимость LфСф = f (kсг ) для трех значений m
Дальнейший расчет фильтра сводится к выбору значений индуктивности Lф и емкости Сф по найденному их произведению.
Однако, прежде чем провести выбор параметров фильтра, необходимо проверить, не совпадает ли собственная частота фильтра ”
с частотой основной гармоники пульсации mП1 . При совпадении этих частот в фильтре получим резонанс напряжений, при котором на реактивных сопротивлениях (а значит, и на выходе
фильтра) выделяются максимально возможные значения напряжения резонансной частоты. В результате в нагрузке получается не
ослабление, а увеличение пульсаций. Чтобы не вызвать резонанс
напряжений на второй или третьей гармониках пульсаций необходимо, чтобы выполнялось условие
о
m
4
1
.
П 1 или LфСф
2
2
LфСф
(mП 1 )
(4.27)
С точки зрения сглаживания пульсаций безразлично, как бу226
дут выбраны величины индуктивности Lф и емкости Сф в пределах данного произведения, поэтому окончательный их выбор осуществляется с учетом их экономичности, обеспечения минимума
массы и габарита, обеспечения непрерывности тока нагрузки и т.д.
Для обеспечения непрерывности тока в нагрузке необходимо,
чтобы выполнялось условие
1Lфкр
1
,
1Cф
(4.28)
где Lфкр – критическая индуктивность, при которой имеет место
граничный режим прерывистого и непрерывного тока.
Критическая индуктивность может быть определена из следующей приближенной формулы:
Lфкр
U (1 )m Rd max
1U d
.
(4.29)
Емкость Сф определяется из формулы (4.26). Полученные
значения параметров фильтра проверяются из выполнения условия (4.27). В случае невыполнения этого условия следует увеличить емкость Сф.
Г-образные фильтры целесообразно применять, когда требуется
обеспечить
коэффициент
сглаживания
пульсаций
kсг >20 –24.
Многозвенные фильтры состоят из последовательно включенных однозвенных фильтров. Коэффициент фильтрации многозвенного фильтра определяется как произведение коэффициентов
фильтрации отдельных звеньев. Вопрос о выборе числа звеньев
решается с экономической точки зрения так, чтобы стоимость
фильтра была наименьшей. Исходя из этого, на практике применяют двухзвенные фильтры при требуемом значении коэффициента фильтрации КФ > 50, а трехзвенные фильтры при КФ > 200.
Для улучшения сглаживающих свойств иногда в LC-фильтрах
используются явления параллельного или последовательного резонанса. На рис. 4.15, а показан фильтр, в котором в отличие от
обычного Г-образного фильтра, параллельно индуктивности Lф
227
включен конденсатор Ск. Величину емкости конденсатора Ск выбирают такой, чтобы колебательный контур LфСк оказался настроенным в резонанс на первую гармонику пульсаций. Тогда для первой гармоники эквивалентное сопротивление контура, равное
Rэ Lф /( RLCк ),
(4.30)
будет большим и переменная составляющая выпрямленного
напряжения почти полностью выделится в контуре. Если пренебречь активным сопротивлением дросселя RL, то величина емкости конденсатора Ск может быть определена из условия резонанса
Ск
1
2
(mП 1 ) Lф
(4.31)
.
а)
б)
Рис.4.15. Схемы резонансных фильтров: параллельного (а) и последовательного (б)
Коэффициент сглаживания такого фильтра может быть приблизительно вычислен по формуле
kсг
mП 1LфСф
R LC к
.
(4.32)
Практически величина коэффициента сглаживания улучшается в 3 – 4 раза в сравнении с обычным Г-образным фильтром.
Иногда такой фильтр называется фильтром-пробкой, так как он
из-за большого значения Rэ контура «закрывает» путь току первой
гармоники.
228
На рис. 4.15, б последовательно с конденсатором Сф включен
дополнительный дроссель Lк. Его величину выбирают такой, чтобы последовательный контур СфLк оказался настроенным в резонанс на основную частоту пульсаций (первую гармонику). Величину индуктивности Lк определяют из условия последовательного
резонанса
Lк
1
2
(mП 1 ) Сф
.
(4.33)
В результате резкого уменьшения сопротивления между точками фильтра а и b для тока первой гармоники произойдет перераспределение падения напряжения этой гармоники на различных
участках цепи выпрямителя, причем на сопротивлении нагрузки
пульсации окажутся ослабленными в 3 – 4 раза по сравнению с
обычными Г-образными LС-фильтрами.
Приближенное значение коэффициента сглаживания может
быть определено из выражения
m L
kсг П 1 к .
Rк
(4.34)
Наряду с положительными свойствами резонансных фильтров, увеличением коэффициента сглаживания, следует отметить
и их общий недостаток – зависимость сглаживающих свойств от
изменения частоты пульсаций и изменения тока нагрузки, приводящего к изменению подмагничивания дросселя Lк, и, как следствие, к изменению его индуктивности.
Пассивные фильтры выпрямителей просты и надежны в эксплуатации, однако их масса и габариты оказывают существенное
влияние на общую массу и габариты выпрямителей. Кроме того, с
ростом тока нагрузки габариты дросселя фильтра значительно
возрастают. При этом в результате насыщения сердечника дросселя постоянной составляющей выпрямленного тока индуктивность
его уменьшается, и фильтрующие свойства фильтра ухудшаются.
Активные фильтры не содержат сглаживающих дросселей и
выполняются на базе полупроводниковых приборов. На рис. 4.16
229
приведена схема активного фильтра выполненного на базе транзистора. Принцип действия такого фильтра основан на нелинейности вольт-амперных характеристик транзистора. Зависимость коллекторного тока от напряжения эмиттер-коллекторного перехода
такова, что транзистор обладает весьма большим сопротивлением
переменному току.
Рис.4.16. Активный сглаживающий фильтр выпрямителя на базе транзистора
Если ток коллектора поддерживается постоянным, то колебания входного напряжения, вызванные, например, пульсацией выпрямленного напряжения, не вызывают его изменения (следовательно, и напряжения на нагрузке), а приводит только к перемещению рабочей точки транзистора. Для того чтобы ток коллектора
не изменялся под воздействием пульсаций, в цепь транзистора
введены сопротивление R1 и конденсатор С1. Емкость конденсатора С1 выбирается достаточно большой, чтобы обеспечить постоянство коллекторного тока при воздействии пульсаций. Режим
работы транзистора VT1 по постоянному току задается в схеме
фильтра сопротивлением R2 в цепи базы.
В рассмотренной схеме транзистор включен последовательно
с нагрузкой, но известны схемы с параллельным включением
транзистора, принцип действия которых также основан на нелинейности сопротивления транзистора.
Активные фильтры целесообразно применять для сглаживания пульсаций низких частот в маломощных выпрямителях. Только в этом случае активные фильтры имеют преимущества перед
пассивными фильтрами в массе и габаритах выпрямительного
устройства.
Основными недостатками активных фильтров, в сравнении с
230
обычными пассивными, являются высокая их стоимость, низкая
надежность работы и трудность обеспечения защиты транзисторов
в аварийных режимах работы выпрямителей.
Практика проектирования выпрямителей и инверторов показывает, что коэффициент пульсаций напряжения постоянного тока
и коэффициент несинусоидальности напряжения переменного тока близки по своим значениям согласно своим определениям и
физическому смыслу. Поэтому на этапе проектирования для оценки выходных фильтров преобразователей рассмотренные формула
расчета фильтров выпрямителей могут применяться и для расчета
фильтров инверторов и НПЧ.
231
ГЛАВА 5
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ОСНОВНЫХ
ФУНКЦИОНАЛЬНЫХ УЗЛОВ СИСТЕМ АВТОНОМНОГО
ЭЛЕКТРОНАБЖЕНИЯ
5.1 Основы теории математического моделирования
Ввиду больших затрат на реальное физическое моделирование проектируемого устройства большое значение имеют методы
вычислительного эксперимента, неотъемлемой частью которых
является математическое моделирование физических процессов.
Как известно, математическая модель – это система дифференциальных и алгебраических уравнений, позволяющая определить с требуемой точностью необходимые характеристики исследуемого устройства в различных режимах его работы. Система
уравнений составляется с использованием электрических схем
замещения исследуемого устройства, которые содержат электрические элементы (резисторы, конденсаторы, катушки индуктивности, источники напряжения и т.д.) с необходимыми для исследований параметрами.
Математическое моделирование применяют на этапе проектирования устройства. В процессе математического моделирования решаются следующие задачи:
- выбор схемы замещения устройства и параметров элементов;
- расчет мгновенных значений токов и напряжений элементов
схемы замещения;
- анализ электромагнитных процессов в силовых цепях при
работе устройства в нормальных (установившихся) и аварийных
режимах, в том числе, определение длительности переходных
процессов;
синтез структуры схемы и выбор параметров элементов;
расчет характеристик проектируемого устройства;
разработка систем защиты и управления.
Применение электронно-вычислительной техники (ЭВМ) при
решении перечисленных задач имеет исключительно важное значение в связи с необходимостью анализа электромагнитных про232
цессов для большого количества как самих схем, применяемых в
САЭ, так и их возможных вариантов, большой стоимостью и трудоемкостью проведения экспериментальных исследований на
опытных образцах. В настоящее время проектируют источники и
преобразователи электроэнергии САЭ единичной мощности от
сотен Вт до сотен кВт. Экспериментальное исследование
устройств такой мощности практически невозможно. Поэтому актуальность математического моделирования очевидна.
При составлении схем замещений исследуемого устройства
для упрощения расчетов принимают ряд допущений.
Основным допущением, относящимся ко всем элементам
САЭ, является фазная симметрия напряжения. Второе допущение
– это линейность параметров реактивных элементов схемы замещения устройства. Рассмотренные допущения позволяют с высокой степенью достоверности проводить исследования физических
процессов в исследуемых устройствах, что подтверждается практикой расчетов и экспериментов.
Кроме того, при исследовании электрических машин (трансформаторов) используют общепринятые допущения и ограничения, связанные с понятием «идеализированная машина»: машина
не насыщена, потери в стали отсутствуют; фазные обмотки симметричные и сдвинуты на угол 120о; МДС обмоток и магнитные
потери распределены синусоидально вдоль окружности воздушного зазора; ротор симметричен.
При математическом моделировании преобразователей электроэнергии принимают допущения: коммутация полупроводниковых приборов происходит мгновенно; ток и напряжение полупроводникового прибора изменяются скачком.
То есть при проектировании преобразователей электроэнергии и расчете электромагнитных процессов, протекающих в цепях
нагрузки преобразователей, используются модели, отражающие
реакцию силовых полупроводниковых приборов (диодов, транзисторов, тиристоров и т.д.) на входное воздействие. Эти модели
простые и позволяют существенно уменьшить объем вычислительной работы при анализе и синтезе. К таким функциональным
моделям относятся кусочно-линейные, которые принимают тогда,
когда заданную точность расчетов можно достигнуть при замене
реальной нелинейной вольт-амперной характеристики вентиля
233
(пунктирные линии на рис. 5.1) ее кусочно-линейной аппроксимацией (сплошные линии на рис. 5.1).
Замена нелинейной вольт-амперной характеристики ее кусочно-линейной аппроксимацией основывается на том, что вентиль
находится либо в закрытом состоянии (участок 1 на рис. 5.1, а),
либо в открытом (участок 2). На участке 3, он находится в течение
короткого времени коммутации. Поэтому довольно значительная
погрешность его воспроизведения не влияет в целом на точность
расчетов, определяемую точностью воспроизведения основных
рабочих состояний вентиля.
а)
б)
в)
Рис. 5.1. Кусочно-линейные аппроксимации вольт-амперной характеристики и схемные модели диодов, где обозначено: RVDо и RVDз - резисторы сопротивлений диода в открытом и закрытом положении; S - ключ,
замкнутое состояние которого соответствует включению диода
Ключевые модели силовых полупроводниковых приборов отражают их функционирование как ключа-преобразователя с двумя
состояниями (открыт, закрыт), переход между которыми осуществляется мгновенно. При этом, когда полупроводниковый
ключ закрыт, его сопротивление устремляется к бесконечности, а
когда открыт – равно 0,01 Ом. Адекватность рассмотренных моделей реальным силовым полупроводниковым приборам следует
из того, что для преобразователей, в которых силовые полупроводниковые приборы работают в ключевом режиме, коэффициент
234
преобразования энергии имеет порядок, равный 0,9 – 0,99, а длительность времени коммутации для большинства преобразователей не превышает 0,1 для низкочастотных и 0,01 для высокочастотных систем от периода их работы, т.е. влияние коммутационных процессов в силовых полупроводниковых приборах на процессы в силовых цепях после коммутации незначительно.
Применение рассмотренных схем замещения полупроводниковых приборов при моделировании преобразователей приводит к
тому, что структура преобразователей не изменяется, а изменяются параметры резисторов, соответствующие открытому или закрытому состоянию полупроводникового прибора в моменты
коммутации вентилей согласно алгоритму для соответствующего
типа преобразователя.
5.2 Методы расчета электромагнитных процессов в
силовых цепях преобразователей
Расчет силовых цепей преобразователей с известными моментами коммутации полупроводниковых приборов, описываемых
линейными дифференциальными уравнениями, порядок и значение коэффициентов которых изменяются в моменты коммутации
полупроводниковых ключей, может осуществляться по двум основным методам: численными и численно-аналитическими.
Численные методы расчета электромагнитных процессов
ориентированы на применение электронно-вычислительных машин, поэтому их представляют в виде последовательности законченных этапов, наиболее важными из которых являются формирование уравнений схемы замещения преобразователя и их решение.
Применение рассмотренных моделей полупроводниковых
приборов (рис. 5.1) уменьшает порядок системы дифференциальных уравнений и позволяет выполнять формирование системы
уравнений схемы замещения один раз, а затем при коммутациях
полупроводниковых приборов только изменять коэффициенты
этой системы, что требует небольших вычислительных затрат.
Формирование уравнений схемы замещения преобразователя
зависит от того, какие переменные выбраны в качестве независимых.
При выборе в качестве независимых переменных токов неза235
висимых контуров схемы формирование уравнений производят
методом контурных токов. Достоинством данного метода является
простота учета индуктивных элементов и небольшая трудоемкость
формирования системы уравнений схемы по выбранной системе
независимых контуров. Однако, выбор системы независимых контуров является относительно сложной задачей.
Метод узловых потенциалов используют при выборе в качестве независимых переменных потенциалов узлов схемы относительно некоторого базисного узла. Выбор системы независимых
переменных и формирование уравнений можно осуществить с небольшими вычислительными затратами. Однако, при описании
закрытых полупроводниковых приборов их проводимости
устремляются к нулю, что приводит к плохой обусловленности
матрицы схемы и снижению точности расчетов.
Методами контурных токов и узловых потенциалов можно
сформировать описания схемы в виде системы только алгебраических уравнений. Для этого в схеме замещения преобразователя
проводят замену реактивных элементов безреактивными двухполюсниками, содержащими резисторы, источники напряжения и
тока. Схемы замещения в виде безреактивных двух- и четырехполюсников можно построить для произвольных соединений R-, L-,
C – элементов, что позволяет уменьшить размерность системы
решаемых уравнений, особенно при расчете преобразователей с
различными по структуре Г- Т-, П-образными фильтрами и
нагрузками, имеющими сложные схемы соединения элементов.
Использование вместо полной более простой эквивалентной
схемы преобразователя может рассматриваться как макромоделирование схем. Один из способов формирования макромодели преобразователя состоит в том, что вначале проводят разностную аппроксимацию уравнений отдельных ветвей и замену их эквивалентными двухполюсниками, содержащими проводимости и источники тока, а затем полученную схему сворачивают на основании теоремы об эквивалентном генераторе. Однако, макромодель
схемы преобразователя не избавляет от необходимости расчета
токов и напряжений в исследуемой цепи для определения моментов коммутации полупроводниковых ключей и параметров макромодели.
Эквивалентная замена схемы двухполюсным элементом со236
кращает размерность вклада ее уравнений в полную систему уравнений, но в общем случае система уравнений в однородном координатном базисе, получаемая методом контурных токов или узловых потенциалов, является избыточной. Поэтому часто в качестве
независимых выбирают переменные состояния: напряжения на
конденсаторах и токи в индуктивностях. Описанные схемы получают в виде системы дифференциальных уравнений первого порядка в нормальной форме (5.1) и связанной с ней системы алгебраических уравнений (5.2).
Система уравнений схемы преобразователя на каждом i – м
интервале имеет вид:
x (t) Ai x( t ) Bi fT ( t ) f o Ф( x ,t );
(5.1)
y(t ) A'i x(t ) B'i fT (t ) f o , ti 1 t ti ,
(5.2)
где x (t) – вектор переменных состояний, x (t) = dx(t)/dt;
fT(t)fo = f(t) – вектор воздействующих источников; fo – вектор амплитуд воздействий; y(t) – вектор выходных переменных; Ai, Bi,
A’i, B’i – матричные коэффициенты; ti-1 и ti – моменты времени
начала и окончания i – го интервала.
Формирование системы уравнений переменных состояния заключается в разделении системы уравнений схемы, составленной
по законам Кирхгофа, на дифференциальные и алгебраические и
последующем приведении дифференциальных уравнений к нормальному виду и связано со значительным объемом преобразований. По трудоемкости формирования системы уравнений метод
переменных состояния, обеспечивающий получение уравнений в
гибридном координатном базисе, превосходит методы контурных
токов и узловых потенциалов. Однако систему дифференциальных
уравнений получают в нормальной форме, что упрощает решение
уравнений и является преимуществом метода.
Для контроля состояния полупроводниковых ключей в процессе расчета необходимо определять токи открытых и напряжения закрытых ключей, что приводит к расширению базиса переменных. В таких случаях систему формируют в полном координатном базисе, содержащем токи и напряжения всех элементов
237
цепи, а затем ее разделяют на систему дифференциальных уравнений относительно токов и систему алгебраических уравнений относительно напряжений.
Другие координатные базисы, широко используемые при расчете электромагнитных процессов при формировании уравнений
схем преобразователей, используют реже по следующим причинам.
Алгоритмы формирования уравнений схемы замещения в
рассмотренных и других координатных базисах основаны на матричных и топологических методах. В этом случае схему преобразователя представляют направленным графом, а для ее описания
применяют матричный аппарат. Изменение структуры схемы приводит к перестройке топологических матриц. Так, замыкание идеального ключа в схеме соответствует слиянию двух строк матрицы инциденций, составленной до этого замыкания. В случае использования в алгоритме формирования матрицы инциденций появляется необходимость повторения, в большинстве случаев полного, всех матричных преобразований при каждом изменении
структуры схемы. Кроме того, отсутствует наглядная связь между
изменением структуры схемы и изменением ее матричного описания.
Эти причины приводят к ограничению применения тех координатных базисов, при формировании уравнений в которых необходимо провести много матричных преобразований, и разработке
специальных процедур изменения описания схемы преобразователя при изменении структуры. Одной из них является процедура
расчета, основанная на разбиении цепи с ключами на такие части,
при переключении полупроводниковых ключей которых необходимо переформировать уравнения только той части, в которой
произошло переключение. Очевидно, что это приводит к существенному уменьшению трудоемкости формирования уравнений и
особенно необходимо при исследовании схем преобразователей с
большим числом элементов.
Использование сигнальных графов и формулы Мезона для
расчета процессов в преобразователях лежит в основе метода
обобщенного операторного графа. Вершинам графа соответствует
операторное изображение токов и напряжений, а ветвям – операторные сопротивления или проводимости элементов. Сигнальный
238
операторный граф составляют для исходного состояния схемы,
поэтому переход к графу, отражающему состояние схемы на конкретном межкоммутационном интервале, осуществляют приравниванием к нулю передач закрытых ключей и удалением ветвей с
нулевыми передачами и узлов с нулевыми сигналами. Следовательно, изменение структуры схемы совпадает с преобразованиями ее сигнального операторного графа, которые выполняются достаточно просто.
В качестве независимых в этом методе можно выбирать любые переменные. Их операторные изображения Хq(p) на каждом
шаге расчета формируют по сигнальному операторному графу на
основании принципа наложения
N rq
1
qs g sr ,
(5.3)
s
где - определитель графа; gsr и qs – передача пути от s – й к r –й
вершине и соответствующее этому пути алгебраическое дополнение.
Мгновенные значения переменных находят по теореме о связи начального значения оригинала с конечным значением изображения.
Эффективным средством уменьшения в целом трудоемкости
формирования уравнений преобразователя при расчете на ЭВМ
длительных процессов является учет периодического повторения
структур схемы преобразователя. Описание этих структур запоминается и при необходимости рассчитать ранее встречавшую
структуру из памяти ЭВМ извлекаются готовые уравнения.
Таким образом, в основе методов составления уравнений схемы преобразователя лежат матричные преобразования. Так как
при изменении структуры схемы все преобразования повторяют
заново, то объем вычислений при большой числе переключений
полупроводниковых ключей резко растет. Отсутствует наглядная
связь между преобразованием структуры схемы и изменением ее
описания. Отмеченные трудности устраняются при использовании
специальных процедур формирования топологических матриц или
сигнальных графов.
Для решения уравнений схемы замещения преобразователя
239
применяют методы численного интегрирования дифференциальных уравнений и методы решения алгебраических уравнений.
Использование того или иного метода численного интегрирования определяется требованиями достижения устойчивости и заданной точности вычислений при наименьшей трудоемкости. Основным фактором, оказывающим влияние на эти характеристики
вычислительного процесса при расчете преобразователей, является жесткость системы дифференциальных уравнений. Свойство
жесткости отражает большой разброс постоянных времени схемы
преобразователя, т.е. наличие «быстрых» и «медленных» переменных, описывающих процессы существенно различной длительности. При этом выделяют некоторый пограничный слой пс
такой, что процессы при t < пс определяются группой малых постоянных времени, а при t > пс – больших и характером внешнего
воздействия.
Традиционно для решения дифференциальных уравнений,
описывающих процессы в преобразователях, используют явные и
неявные методы численного интегрирования.
Из явных методов используют:
метод Эйлера
xk 1 xk hx k ;
(5.4)
два метода Рунге – Кутта второго порядка, чаще называемых
метод Хена
xk 1 xk ( К1 К "2 ) / 2,
(5.5)
где K1 hФ( xk , tk ); K "2 hФ( xk K1, tk h);
и модифицированный метод Эйлера – Коши
xk 1 xk1 К 2 ,
(5.6)
где K 2 hФ( xk K1 / 2, tk h / 2);
метод Рунге – Кутта третьего порядка
xk 1 xk ( К1 4К 2 К "3 ) / 2,
где K "3 hФ( xk K1 2K 2 , tk h);
240
(5.7)
метод Рунге – Кутта четвертого порядка
xk 1 xk ( К1 2К 2 2К3 К 4 ) / 6,
(5.8)
где K3 hФ( xk K 2 / 2, tk h / 2); K 4 hФ( xk K3 , tk h);
метод Кутта – Гилла
'''
'''
xk 1 xk [ К1 2(1 ) К 2 2(1 ) К 3 К 4 ] / 6,
(5.9)
где 0,5 - весовой коэффициент;
'''
K 3 hФ( xk ( 0,5) K1, tk h / 2);
'''
'''
K 4 hФ( xk К 2 (1 ) К 3 , tk h);
6) метод Кутта - Мерсона
'
'
xk 1 xk ( К '1 4К 4 К 5 ) / 2,
'
'
(5.10)
/
где K 1 hФ( xk , tk ) / 3; K 2 hФ( xk K 1, tk h / 3);
'
/
/
K 3 hФ( xk ( K 1 K 2 ) / 2, tk h / 3) / 3;
'
/
/
'
/
/
K 4 hФ( xk (3K 1 9K 3 ) / 8, tk h / 2) / 3;
/
K 5 hФ( xk (3K 1 9K 3 12K 4 ) / 2, tk h) / 3,
простую оценку локальной погрешности
'
л ( K 1 (9K
/
имеющий
/
'
3 K 5 ) / 2 4K 4 ) / 5;
(5.11)
7) метод Рунге – Кутта - Фельберга
*
*
*
*
*
xk 1 xk 0,12К 2 0,52К 3 0,51К 4 0,18K 5 0,04K 6 , (5.12)
*
где K 2 hФ( xk K1 / 4, tk h / 4);
*
*
K 3 hФ( xk (3K1 9K 2 ) / 32, tk 3h / 8);
*
*
*
K 4 hФ( xk (1932K1 7200K 2 7296K 3 ) / 2197, tk 0,9h);
*
*
*
*
K 5 hФ( xk 2K1 8K 2 7,2K 3 0,2K 4 ),tk h);
241
*
*
*
*
*
K 6 hФ( xk 0,3K1 2K 2 1,4K 3 0,45K 4 0,3К 5 ),tk h / 2),
имеющий такую же простую, как метод Кутта – Мерсона, оценку
локальной погрешности
л ( 209K1 2253K*3 2197K*4 1505K5* 2736K*6 ) / 75240, (5.13)
но отличающийся от него более высоким порядком точности.
Явные методы численного интегрирования наиболее часто
используют совместно с методом переменных состояния. Они
позволяют решать системы дифференциальных уравнений первого порядка, приведенных к нормальной форме (5.1), характеризуются простотой алгоритма и небольшой трудоемкостью вычислений на одном шаге. Недостатком этих методов является ограничение на величину шага интегрирования, порядок которого для сохранения устойчивости процесса вычислений в общем случае не
превышает порядка минимальной постоянной времени схемы.
Из неявных методов численного интегрирования используют:
одношаговый метод Эйлера
xk 1 xk hx k 1 ;
(5.14)
одношаговый метод трапеций
x k 1 x k h( x k x k 1 ) / 2;
(5.15)
двухшаговый метод Шихмана
4
1
2
x k 1 x k x k 1 hx k 1 .
3
3
3
(5.16)
Неявные методы численного интегрирования свободны от
присущего явным методам недостатка – ограниченная величина
шага интегрирования, так как она в них не влияет на устойчивость
вычислений. Шаг устанавливается исходя из требований точности
расчета и может намного превышать шаг, максимально достижимый в явных методах. Недостатком этих методов является необходимость решения на каждом шаге системы алгебраических, в
общем случае, нелинейных уравнений. Так как при t < пс шаг интегрирования устанавливается, исходя из требований точности
242
расчета, и достаточно мал, а длительность интервала t > пс из-за
малого промежутка между соседними коммутациями в большинстве случаев незначительна, то возможность уменьшения объема
вычислений, заложенная в неявных методах, при расчете электромагнитных процессов в преобразователях полностью не реализуется.
В настоящее время существуют комбинированные методы
численного интегрирования. В таких методах последовательно
чередуются шаги интегрирования неявным и явным методами,
причем длительность шагов одинаковы и выбираются по условиям
точности неявных методов. Достоинством комбинированных методов является уменьшение объема вычислений по сравнению с
использованием только явных или неявных методов. Однако, при
расчете процессов в преобразователях, когда необходимо уточнять
моменты коммутации полупроводниковых приборов и для этого
дробить шаг, они уступают явным методам.
Одним из путей упрощения задачи решения жесткой системы
дифференциальных уравнений, положенным в основу принципа
квазистационарности производных, является выделение при t > пс
почти линейных алгебраических связей компонентов ее решения и
замена ее другой системой с уменьшенным на число этих связей
порядком. Это возможно, в том числе, когда постоянные времени
1 2 ... k k 1 ... l можно разделить на две группы
1,..., k и k 1,..., l , и так как компоненты решения, соответствующие малым постоянным времени 1,..., k , при t > пс практически не оказывают влияния на характер решения.
Для решения жестких систем можно применять системные
методы, использующие представление решения дифференциального уравнения в виде функций от матриц
x(t H ) e
A(t H )
tH
x(0) e
0
которое приводят к виду
243
A(t )
Bfo d ,
(5.17)
x(t H ) e
AН
H
x(t ) e
0
A(t )
Bfo d ,
(5.18)
что позволяет свести задачу интегрирования к вычислению на
каждом шаге интегрирования Н матричной экспоненты и интеграАН
ла от нее. Определение е на достаточно протяженном интервале
с помощью разложения в степенной ряд требует учета слишком
большого числа членов. Поэтому интервал Н разбивают на части h
= Н/2N так, чтобы обеспечить с заданной точностью представлеАh
АН
ние е малым числом членов степенного ряда. Затем значение е
находят по рекуррентной формуле
2
r 1 r ,
r
(5.19)
где r exp(2 Ah), r 0,..., N , описывающей последовательное
удвоение шага h.
Интеграл в уравнении (5.18), как и матричную экспоненту,
вычисляют по рекуррентным формулам. Интервал интегрирования Н не зависит от характера решения и может быть сколь угодно
большим, так как требуемую точность обеспечивают соответствующим выбором шага h. Однако, его величина при расчете
электромагнитных процессов в преобразователе ограничена промежутком времени между двумя соседними коммутациями полупроводниковыми приборами.
Повысить эффективность решения системы дифференциальных уравнений схемы преобразователя можно на основе проблемной адаптации. Применительно к методам численного интегрирования она заключается в использовании для решения одной и той
же системы как явных (на участках быстрого изменения решения
(t < пс)), так и неявных (на участках t > пс) методов. Такой подход обеспечивает возможность выбора по соответствующим критериям на каждом шаге расчета метода, обеспечивающего минимальный объем вычислений. При этом возможно или раздельное
использование методов, или объединение их в комбинированные
формулы типа
244
xk 1 xk h[1Ф( xk , t k ) 2Ф( xk 1, t k 1 )
3Ф(tk bh, xk bhФ( xk , tk ))],
(5.20)
из которой получают модифицированный метод Эйлера – Коши:
1 0; 2 0; 3 1; b 1/ 2;
метод Хена:
1 1/ 2; 2 0; 3 1/ 2; b 1;
неявный метод Эйлера:
1 0; 2 1; 3 0;
неявный метод трапеций: 1 1/ 2; 2 1/ 2; 3 0.
Критерий адаптации на основе формулы (5.20) состоит в следующем. Если выполняется условие
н
h hmin ,
н
(5.21)
где hmin - минимальное значение шага для неявного метода, то
выбирается явный метод интегрирования, иначе – неявный.
Алгоритм расчета электромагнитных процессов на основе
этого критерия начинает работать с явного метода интегрирования, который устанавливает шаг интегрирования в соответствии с
принятой оценкой погрешности. Этот шаг запоминается, после
чего переходят на неявный метод интегрирования, позволяющий
увеличить шаг независимо от минимальной постоянной времени
цепи. Расчет неявным методом проводится до момента переключения полупроводниковых ключей или до момента, когда перестает выполняться условие (5.21) и т.д.
Проблемная адаптация требует тщательной формулировки
критериев выбора методов, обеспечивающих повышение эффективности расчета в целом. В рамках проблемной адаптации можно
объединить рассмотренные выше и другие методы численного
интегрирования. Критерии выбора позволяют использовать на
каждом шаге решения наиболее эффективный метод интегрирования и уменьшить трудоемкость расчета процессов в преобразователях на ЭВМ.
Основой методов численного решения уравнений схем замещения преобразователей на ЭВМ является метод припасовывания.
Проверка токов и напряжений полупроводниковых приборов для
перехода от одного межкоммутационного интервала к другому и
245
припасовывание граничных значений осуществляется на каждом
шаге расчета. Для нахождения установившегося режима нужно
просчитать весь переходный режим, потому что воспользоваться
условиями периодичности переменных, как это проводится в аналитических методах, нельзя. Учитывая, что численные методы
решения системы дифференциальных уравнений схемы замещения преобразователя несложны в реализации на ЭВМ, целесообразно использовать их совместно с аналитическими методами расчета преобразователей для построения эффективных алгоритмов
расчета установившихся режимов работы преобразователей.
Важное достоинство аналитических методов – возможность
расчета установившихся процессов без расчета предшествующих
им переходных. Однако, для составления системы разностных
уравнений необходимо определить аналитические решения уравнений состояния на интервалах постоянства структуры схемы
преобразователя, что усложняет расчет при исследовании схем
высокого порядка. Достоинством численных методов расчета является простота исследования схем высокого порядка. Но рассчитать установившиеся процессы этими методами можно только после расчета предшествующих им переходных процессов.
При расчете электромагнитных процессов в силовых цепях
преобразователей объем вычислений на одном межкоммутационном интервале определяется трудоемкостью решения одной из
систем (5.1 -5.2): в аналитических методах – с помощью явных,
неявных и других формул интегрировния, причем трудоемкость
численного метода намного ниже, чем аналитического. Трудоемкость в целом расчета численными методами определяется тем,
что на всех интервалах всех периодов переходного процесса необходимо численно решить системы уравнений состояния (5.1 – 5.2),
трудоемкость в целом расчета аналитическими методами – тем,
что необходимо аналитически решить системы (5.1 – 5.2) на всех
интервалах только одного периода и однократно решить систему
разностных уравнений.
Так как основной объем вычислений в численных методах
приходится на расчет всех периодов переходного процесса, а в
аналитических – на аналитическое решение систем уравнений состояния одного периода, то, очевидно, целесообразно совместить
указанные методы таким образом, чтобы трудоемкость расчета
246
установившихся процессов уменьшилась. Совмещение элементов
аналитических и численных методов лежит в основе численноаналитических методов расчета электромагнитных процессов.
В настоящее время нашел применение численноаналитических метод «временных цепных схем», основанный на
применении понятий теории цепных схем. При исследовании этим
методом n-й период работы преобразователя разбивают на КТ интервалов, на каждом из которых записывают из решения уравнений схемы выражение для искомых величин в виде
x(tk ) ( k ) x(tk 1) 0 ( k ),
(5.22)
где x(t k ) и x(tk 1 ) - значения переменных состояния схемы в конце tk и начале tk-1 k-го интервала, k tk tk 1; ( k ) и 0 ( k ) матричный и векторный параметры на k-м интервале n – го периода.
Затем вычисляются удлиненные матричный (t КТ ) и векторный 0 (t КТ ) параметры
(t КТ ) Р ( КТ ) ( КТ 1)... (1),
0 (t КТ ) Q 0 ( КТ ) ( КТ ) 0 ( КТ 1 ) ...
... ( КТ ) ( К 1 )... ( 2 ) 0 (1 ).
Т
(5.23)
(5.24)
Выражения (5.23) и (5.24) позволяют записать, с учетом, что
t КТ t0 T , систему разностных уравнений
x(t0 Т ) Рx(t0 ) Q,
(5.25)
Уравнение (5.25) решается известными методами.
Нахождение удлиненных параметров по выражениям (5.23) и
(5.24) можно свести к умножению матриц следующим образом
247
~
( КТ )
( t КТ )
КТ ~
= ( ).
0 ( t КТ ) 1
(5.26)
Уравнение (5.22) строят на основе аппроксимации уравнений
состояния по одношаговым формулам численного интегрирования
дифференциальных уравнений. Применяя к уравнению (5.1) явную формулу метода Эйлера (5.14), получают
x(tk 1) ( I k Ai ) x(tk ) k Bi fT (tk ) f 0 ,
(5.27)
где I – единичная матрица.
Применяя неявную формулу метода Эйлера (5.14), получим
x(tk 1) ( I k Ai )
1
1
x(tk ) k ( I k Ai ) Bi fT (tk 1) f 0 ,
(5.28)
Применяя формулу метода трапеций (5.15), получают
1
x(t k 1 ) ( I ( k / 2) Ai ) ( I ( k / 2) Аi ) x(t k )
1
( k / 2)(I ( k / 2) Ai ) Bi [ fT (t k ) fT (t k 1 )] f 0 ,
(5.29)
откуда выделяют матричный ( k ) и векторный 0 ( k ) параметры уравнения (5.22).
Данный метод позволяет находить начальные условия переменных состояния схем замещения с переменной структурой в
переходном и установившемся режимах, не требует построения
аналитических решений уравнений схемы, может применяться для
анализа цепей с непрерывно изменяющимися параметрами.
5.3 Схемы замещения и математические модели
преобразователей электроэнергии
5.3.1 Мостовая схема замещения и общие соотношения
Широкое распространение в САЭ получили преобразователи
электроэнергии, как инверторы, так и выпрямители, выполненные
на мостовых схемах. На рис. 5.2. представлена мостовая схема замещения преобразователя, в которой полупроводниковые прибо248
ры заменены резистивными элементами (в соответствии с допущениями, рассмотренными в п. 5.1).
Определив положительное направление входного i1 и выходного i2 токов, а также токов iR1, iR2 в соответствующих плечах моста независимо от типа преобразователя для рассматриваемой
схемы замещения справедливы следующие уравнения.
Входное U1 и выходное U2 напряжения преобразователя
определяются с использованием выражений:
R1 R 2
R1R 2
U1 U 2
i2
;
R 2 R1
R 2 R1
(5.30)
R 2 R1
2 R1R 2
U 2 U1
i2
.
R1 R 2
R1 R 2
Входное сопротивление мостовой схемы
( R1 R 2) Rн 2 R1R 2
U
RВХ 1
.
i1
R1 R 2 2 Rн
(5.31)
Рис. 5.2. Схема замещения полупроводникового преобразователя
Модель активной нагрузки. При работе преобразователей в
процессе модуляции (регулирования) с постоянством мощности в
процессе работы нагрузка изменяется. Этот режим можно учесть
при синусоидальном воздействии, когда напряжения и токи
нагрузки связаны соотношениями:
U н (t ) U max (sin t 1) / 2;
(5.32)
iн (t ) Pн / U н (t ) U max I min / U н (t ),
U
I
где н min н min - глубина модуляции (регулирования).
U н max I н max
249
На основании зависимостей (5.32) сопротивление нагрузки
2
2
U
(5.33)
Rн (t ) max (sin t 1) .
4 I min
Обозначив отношение U max / I min Rmax , тогда зависимое
сопротивление нагрузки можно определить по формуле
2
2
R
Rн (t ) н max (sin t 1) .
4
(5.34)
Подставив в (5.34) простейшие гармонические составляющие
получим
2
R
Rн (t ) н max (3 4 sin t cos 2t ).
8
(5.35)
5.3.2 Модель инвертора
Ток на входе инвертора и ток нагрузки определяются из выражений
i1 U 2
2 Rн R1 R 2
; i2 U 2 / Rн .
Rн ( R 2 R1)
(5.36)
В режиме максимального выходного напряжения (относительная длительность импульсов = 1) инвертора сопротивления
резисторов R1, R3 и R2, R4 поочередно изменяют свое значение от
RЗ до RО, т.е. в зависимости от закрытого или открытого состояния
полупроводникового прибора, тогда
R1 R3 1/ 2[ RO (1 f (t )) RЗ (1 f (t ))]; RO при f(t) = 1
(5.37)
R2 R4 1/ 2[ RO (1 f (t )) RЗ (1 f (t ))]; RЗ при f(t) = -1
Коммутационная функция инвертора КИ, устанавливающая
связь между входным и выходным напряжениями определяется с
учетом уравнений (5.30)
КИ
Rн ( R 2 R1)
U2
.
U1 Rн ( R1 R 2) 2 R1R 2
(5.38)
Подставив в (5.38) значения сопротивлений схемы замещения
250
из (5.37), получим
КИ
f (t ) Rн ( RЗ RО )
.
Rн ( RЗ RО ) 2 RЗ RО
(5.39)
Числитель уравнения (5.39) по абсолютной величине всегда
меньше знаменателя, что отражает факт снижения выходного
напряжения по отношению к входному. Пренебрегая током утечки
полупроводниковых приборов (приняв RЗ = ) и разделив числитель и знаменатель уравнения (5.38) на RЗ, получим
К И f (t )
Rн
f (t ).
Rн 2 RO
(5.40)
Как и следовало ожидать, снижение уровня выходного
напряжения пропорционально КПД инвертора. Если предположить также, что RО = 0, тогда КИ = f (t), т.е. приходим к известной
коммутационной функции инвертора с идеальными ключевыми
элементами без потерь.
Подставив в уравнение выходного напряжения инвертора
(5.30) значения сопротивлений (5.37), получим уравнение внешней характеристики инвертора
U 2 U1
f (t )(RЗ RО )
2 RЗ RO
i2
U Э f (t ) i2 RЭ ,
RЗ RО
RЗ RO
(5.41)
в котором второе слагаемое отражает падение напряжения в цепи
протекания тока нагрузки. Величина эквивалентного сопротивления RЭ в этой цепи определяется как сумма двух сопротивлений
RО, каждое из которых шунтировано сопротивлением RЗ. Коэффициент, определяющий из соотношения (RЗ - RО ) / (RЗ + RО) характеризует снижение эквивалентного напряжения UЭ по отношению
к входному за счет делителя, образованного плечами моста схемы
замещения.
Пренебрегая токами утечками (RЗ = ) получим известное
упрощенное уравнение
U 2 U1 f (t ) i2 2RO .
251
(5.42)
5.3.3 Модель выпрямителя
Мостовая схема выпрямителя может быть представлена схемой замещения по рис. 5.1 с учетом того, что входное напряжение
является переменным и поэтому коммутация полупроводниковых
приборов определяется входным напряжением, а сопротивления
приборов определяется по формулам
R1 R3 R'R" sign(U1);
(5.43)
R2 R4 R' R" sign(U1).
Подставив (5.43) в (5.30) по аналогии со схемой инвертора,
определим коммутационную функцию выпрямителя
КВ
RН ( RЗ RО )
UН
sign(U1 )
.
U1
RН ( RЗ RО ) 2 RЗ RО
(5.44)
Сравнивая коммутационные функции инвертора и выпрямителя, можно сделать вывод, что коммутационные функции отличаются лишь видом записи разрывной функции. В частности, если
на входе выпрямителя действует синусоидальное напряжение с
максимальной длительностью полуволны ( = 1), то
sign(sin t ) sign[ f (t )] f (t ),
и коммутационные функции инвертора и выпрямителя полностью
совпадают.
Уравнение внешней характеристики для резистивной схемы
замещения выпрямителя аналогично (5.41)
R RО
2RЗ RO
U Н U1sign(U1 ) З
iН
U Э sign(U1 ) iН RЭ , (5.45)
RЗ RО
RЗ RO
или без учета токов утечки полупроводниковых приборов
U Н U1sign(U1) iН 2RО .
(5.46)
5.3.4 Схема замещения и модель трансформатора
преобразовательных устройств
Схемы замещения трансформаторов напряжения работающих
совместно с преобразователями могут существенно видоизменяться в зависимости от типа преобразователя, вида импульсной мо252
дуляции, необходимости учета нелинейных свойств магнитного
материала и т.п.
При фиксированной рабочей частоте и синусоидальном
напряжении трансформатор можно представить электрической
цепью из двух индуктивно связанных катушек (обмоток) с потерями, для которой справедливы уравнения
di
di
U1 R1i1 L1 1 В 2 ,
dt
dt
(5.47)
di2
di1
U 2 R2i2 L2
В
,
dt
dt
где В – величина взаимной индукции; L1 и L2 – индуктивности катушек; R1 и R2 – сопротивления, отражающие потери в катушках.
Учитывая, что коэффициент трансформации КТ = W1 / W2 не
равен единице, то уравнения (5.47) можно представить в следующем виде
di
d ( i i' )
U1 R1i1 ( L1 К Т В ) 1 К Т В 1 2 ,
dt
dt
(5.48)
di'2
d (i1 i'2 )
U '2 R'2 i'2 ( L'2 КТ В)
КТ В
,
dt
dt
2
2
где i'2 i2 / КТ , U '2 U 2 / КТ , R'2 R2 / КТ , L'2 L2 / КТ - параметры вторичной цепи трансформатора, приведенные к первичной
обмотке.
Схема замещения трансформатора, для которой справедлива
система уравнений (5.48), представлена на рис.5.2, а. Элементы
этой схемы имеют традиционные наименования: LS1 - индуктивность рассеяния первичной обмотки трансформатора, L'S 2 - приведенная индуктивность рассеяния вторичной обмотки трансформатора, L - индуктивность намагничивающего контура могут
быть измерены и определены из уравнений
(5.49)
LS1 L1 KT B, L'S 2 L2 KT B, L KТ B.
Степень магнитной связи контуров принято характеризовать
величиной коэффициента связи
253
КС
В
L1L2
(5.50)
.
С увеличением мощности трансформатора становится заметным влияние запасания электрической энергии в емкостях между
слоями обмоток и между различными обмотками. Существенно
возрастает вклад паразитных емкостей в электромагнитные процессы при прямоугольной форме питающего напряжения. Этот
эффект может быть учтен введением в схему замещения дополнительных емкостей. Однако в этом случае увеличивается порядок
дифференциальных уравнений описывающих схему замещения
трансформатора, в особенности, когда трансформатор трехфазный, что затрудняет проводить исследования электромагнитных
процессов в системе трансформатор-преобразователь или преобразователь-трансформатор.
а)
б)
в)
г)
Рис. 5.2. Схемы замещения трансформаторов полупроводниковых преобразователей
В ряде случаев на этапе проектирования новых технических
решений преобразователей электроэнергии можно воспользоваться допущением о незначительном вкладе индуктивностей рассеяния обмоток трансформатора. Кроме того, электрическая энергия
конденсатора пропорциональна квадрату напряжения, поэтому
254
основная ее часть запасается в обмотке высшего напряжения. Такое допущение позволяет емкостные элементы схемы замещения
заменить одной эквивалентной емкостью, подключенной параллельно обмотке высшего напряжения.
В результате двухконтурная схема замещения трансформатора (рис. 5.2, а) преобразуется в две простейшие схемы замещения:
для повышающего трансформатора - рис. 5.2, б; для понижающего
трансформатора – рис. 5.2, в. На рис. 5.2 г приведена упрощенная
схема замещения высокочастотного трансформатора с приведенной индуктивностью рассеяния к первичной цепи, которая позволяет оценить влияние трансформатора на процессы в полупроводниковом преобразователе.
Эквивалентная емкость CS в первом приближении определяется по формуле:
2
CS (C0 C2 ),
(5.51)
где 2 С0 – эквивалентная емкость двухслойной обмотки.
В свою очередь
С0 0 l h / ,
(5.52)
где – диэлектрическая постоянная изоляции;
9
0 1/(4 9 10 ) Ф/м; l – средняя длина окружности обмоток;
h – высота обмотки; – расстояние между обмотками.
Коэффициент приведения в (5.52) = 1 / КТ соответствует до-
пущению единичного коэффициента связи между обмотками. В
общем случае неидеальной связи = КС / КТ . Следует отметить,
что емкость трансформатора и индуктивность рассеяния существенным образом зависят от конструкции и расположения обмоток трансформатора. Индуктивность рассеяния может быть рассчитана по упрощенной формуле
2
2
LS 0W V / h ,
где V – объем, заключенный между катушками.
255
(5.53)
5.4 Схема замещения и результаты исследований математической модели автономных источников на базе асинхронного генератора
Перспективным является направление использования в САЭ
бесконтактных АГ, привод которых осуществляется от ВПД (см.
гл.2), в качестве АИЭ. Причем, АИЭ с использованием АГ с конденсаторным возбуждением может генерировать напряжение переменного тока как повышенной, так и промышленной частоты, а
также быть источником напряжения постоянного тока. В первом
случае АИЭ является источником электроэнергии с повышенной
частотой напряжения (400 – 800 Гц), во втором случае он работает
совместно с НПЧЕ с естественной коммутацией силовых вентилей, а в третьем - с выпрямителем (т.е. работает в режиме вентильного генератора). Применение рассмотренных АИЭ на базе
АГ в каждом конкретном случае позволит изменять структуру
САЭ в зависимости от требований потребителей улучшать тем
самым их эксплуатационные и технические характеристики, и повышать эффективность САЭ в целом.
Перспективы высокочастотных АГ в САЭ связаны с изучением их совместной работы с НПЧ и выпрямителями в различных
режимах работы. Одними из важных задач здесь являются: исследование переходных процессов, протекающих как при самовозбуждении, так и при работе генератора на изменяющуюся, как по
величине, так и по характеру нагрузку; исследование влияния
совместной работы с полупроводниковыми преобразователями на
рабочие характеристики АГ.
Таким образом, актуальным является вопрос исследования
совместной работы АИЭ двух систем АГ-НПЧЕ и АГ-В.
Как известно, важным вопросом математического моделирования является выбор схемы замещения АИЭ. С учетом рассмотренных ранее допущений для анализа электромагнитных процессов, исследуемых двух систем АИЭ, воспользуемся трехфазной Тобразной схемой замещения АГ, полученную из традиционной
однофазной, и схемой замещения полупроводниковых преобразователей, выполненной на резисторах (рис. 5.4).
256
257
Рис. 5.4. Схема замещения АИЭ, где обозначено: АГ – асинхронный генератор; НПЧ – непосредственный преобразователь частоты, выполненный на вентильных комплектах ВК1 и ВК2;
Ф – выходной Г-образный LC – фильтр; Н – активно-индуктивная нагрузка
В состав схемы замещения АИЭ (рис. 5.4) входят трехфазная
схема замещения АГ, однофазная схема НПЧЕ, выходной Гобразный LC – фильтр и активно-индуктивная нагрузка. Рассматриваемая схема замещения АИЭ позволяет так же исследовать систему АГ-В, в этом случае один из вентильных комплектов (ВК1
или ВК2) силовой схемы НПЧЕ выводится из работы (путем присваивания больших значений сопротивлений вентилям), а второму
задается алгоритм работы выпрямителя. Описание системы дифференциальных и алгебраических уравнений схема замещения
АИЭ целесообразно осуществлять методом переменных состояний с использованием теории графов. В этом случае математическая модель АИЭ представляется компонентными уравнениями,
отражающими свойства элементов в ветвях схемы замещения и
топологическими уравнениями, отражающими особенности взаимосвязи этих ветвей (способ их соединения).
Компонентные уравнения выражают зависимость между током и напряжением для элемента схемы, в общем виде такие зависимости для различных типов линейных элементов имеют вид
i R ( t ) RuR ( t ) ,
u L ( t ) Ldi L ( t ) / dt ,
(5.54)
iC ( t )CduC ( t ) / dt .
Топологические уравнения – это уравнения, которые строятся
по законам Кирхгофа. Для получения топологических уравнений
строится граф схемы замещения (рис.5.5). Как известно, деревом
графа называют совокупность его ветвей, в которой оказываются
представленными все узлы, но при этом не образуется ни одного
замкнутого контура (жирные кривые на рис. 5.5). Ветви, входящие
в выбранное дерево называют ребрами, а не входящие ветви в состав дерева называют хордами. Стрелки ветвей графа соответствуют выбранному положительному направлению тока (напряжения) в элементах, причем эти направления выбираются произвольно. Сечением графа называют замкнутую кривую, которая
однократно пересекает ветви некоторой совокупности ветвей графа. Если такая кривая пересекает одно ребро, то такое сечение
называют главным (пунктирная кривая вокруг узла 22 рис. 5.5).
Рис. 5.5. Граф схемы замещения АИЭ
Как правило, уравнения по первому закону Кирхгофа формируются относительно узлов или относительно главных сечений.
На основании принципа нейтральности заряда, втекающего внутрь
выделенной сечением части схемы за некоторое время, равно количеству заряда, вытекающего из этой области за то же время.
Т.е., алгебраическая сумма токов относительно сечения равна нулю. Если схема замещения содержит n узлов, то число независимых уравнений равно n – 1. Систему уравнений, составленную по
первому закону Кирхгофа, представляют в матричной форме, откуда выделяется матрица главных сечений , определяющая
259
связь между векторами токов ребер Ip и токов хорд Iх, т.е. Ip = Iх. Как правило, строки матрицы принадлежат ребрам, столбы –
хордам графа. Из матрицы также вытекает система уравнений
по второму закону Кирхгофа. Элементы столбцов матрицы являются коэффициентами, линейно связывающими напряжение
хорд Ux, соответствующих столбцов, с напряжением ребер Uр и
для
произвольной
схемы
имеют
зависимость
Ux = T Uр, где T транспонированная матрица .
Система топологических уравнений схемы замещения, записанная по законам Кирхгофа в матричной форме, имеет вид
1
0 0
0
t
Ip
0 I x
= 0,
1 U p
U x
(5.55)
где 1 – единичная матрица сечений ветвей дерева, получаемая из
структурной матрицы схемы замещения с помощью алгоритма
Гаусса-Жордано.
Матрицу главных сечений разбивают на подматрицы и для
произвольной схемы представляют следующим образом
Хорды
Ребра
Rx
U UR x
C CRx
R p R p Rx
L
I
UL UI
CL CI
R p L R p I
(5.56)
где U – строки источников напряжения; C – строки емкостных ребер; Rp – строки резистивных ребер; Rx – строки резистивных хорд;
L – столбцы индуктивных хорд; I – столбцы источников тока.
Для получения системы дифференциальных и алгебраических
уравнений в (5.55) вводятся параметры линейных безреактивных и
реактивных компонентов. В матричной форме записи система
дифференциальных уравнений математической модели АИЭ име260
ет вид (5.57), а система алгебраических уравнений - (5.58).
U C 4 1 / C 4
U C 5 1 / C 5
= 1 / C 6 [CR CL ],
U C 6
U 1 / C 7
C
7
I L30 1 / L30
I L31 1 / L31
=
1 / L32 [RL LL ],
I
L
32
I
1 / L36
(5.57)
L36
I L33
1 / L33
I
L34 1 / L34
I
1
/
L
35
L
35
I
= 1 / L36 [-ТEL-ТCL-ТRL-ТLL ].
L37
1
/
L
38
I L38
1 / L39
I L39
I
1 / L 40
L 40
Далее выразив алгебраические переменные, входящие в состав дифференциальных уравнений через реактивные компоненты
схемы замещения, система дифференциальных уравнений приводится к форме записи Коши, решение которой осуществляется методом Рунге-Кутта.
261
U C 4
U R18
U C 5
I R8
U R 20 U
C6
I
I
U
L33
R 21
R9
U C 7
I R10 I L34
U R 22
U
U R17
I
I
R 23
L35
R11
Т
Т
. (5.58)
U L30 - CR - R L
RL ,
I
I
U
R 24
L
38
R
12
U L31
I R13 I L39
U R 25 U
L32
U
I
I
R 26
R14 L 40
U L36
I R15
U R 27
U
U R19
R 28
U R 29
С помощью математической модели АИЭ получены графики
зависимостей параметров схемы замещения от времени в динамических и статических режимах работы систем АГ-В и АГ-НПЧЕ в
относительных единицах с учетом, того что приведенное относительное значение параметра
П = Х / Мх ,
(5.59)
где Х – электрический параметр; Мх – масштабный коэффициент.
Значения независимых масштабных коэффициентов были приняты равными для напряжения МU = 220, для сопротивления резисторов МR = 1, для индуктивности дросселей МL = 10-4 , для емко-4
сти конденсаторов МC = 10 . Масштабные коэффициенты между
собой связаны следующими зависимостями
МU M R M I , М t M R M C , М t M L / M R , М f 1/ M t . (5.60)
В результате исследований полученных зависимостей сделаны ряд выводов учитывающих особенности работы исследуемых
систем АИЭ: АГ - НПЧЕ; АГ - В. При этом параметры схемы замещения АИЭ были рассчитаны для мощности источника 5 кВт.
1. Для АГ выпрямитель и НПЧ являются нагрузкой, поэтому
262
от угла сдвига фаз между током и напряжением на входе преобразователей зависит мощность конденсаторов, необходимых для
компенсации реактивной мощности нагрузки.
Установлено, что при изменениях характера нагрузки выпрямителя от активно-емкостной до активно-индуктивной, и при угле
управления = 0, выпрямитель ведет себя по отношению к АГ
как активно-емкостная нагрузка. При этом входной ток выпрямителя опережает фазное напряжение АГ в пределах = 1 – 15 эл.
град. С увеличением угла управления выпрямитель становится для
АГ активно-индуктивной нагрузкой (рис. 5.6). Независимо от характера нагрузки, подключенной к выходу НПЧЕ, преобразователь частоты с естественной коммутацией вентилей ведет себя по
отношению к АГ как активно-индуктивная нагрузка, при этом амплитуда модулирующей функции не значительно влияет на величину угла сдвига фаз на входе преобразователя. Так, при изменении амплитуды модулирующей функции на 30 – 35 %, угол сдвига
фаз изменяется на 3 – 4 эл. град.
Рис.5.6. Зависимости коэффициента мощности на входе преобразователей: а) - от угла управления для выпрямителей; б) – от коэффициента
мощности нагрузки
Как видно из рис. 5.6 при совместной работе АГ с НПЧЕ тре263
буется значительная мощность конденсаторов, обеспечивающих
компенсацию реактивной мощности нагрузки в сравнении с автономным источником, выполненным на базе АГ и выпрямителя.
2. Важным показателем совместной работы исследуемых систем является длительность переходных процессов. На рис. 5.7
приведены зависимости времени переходного процесса от коэффициента мощности нагрузки при включении исследуемых АИЭ в
работу. Как следует из кривых, длительность переходных процессов автономной системы АГ – В (кривые 1) больше, чем системы
АГ - НПЧЕ (кривые 3). При подключении выходных фильтров
преобразователей время переходных процессов увеличивается
(кривые 2 – для выпрямителя, кривые 4 – для НПЧЕ). Таким образом, автономная система АГ – В, имеет время длительности переходных процессов в 2-3 раза больше, чем система АГ - НПЧЕ. Параметры выходных фильтров вносят существенное увеличение
времени переходных процессов.
Рис.5.7. Зависимости времени переходного процесса преобразователей
электроэнергии от коэффициента мощности нагрузки
3. При изменении частоты генерируемого напряжения АГ в
пределах 300 – 400 Гц для снижения влияния выходных фильтров
на амплитудные значения токов и напряжений силовых полупроводниковых приборов, во время переходных процессов, но с учетом обеспечения требуемого качества выходного напряжения
264
АИЭ, параметры выходного фильтра выпрямителя должны находится в пределах L*В = =3 - 6, C*В = 0,7 – 1,5, для НПЧЕ соответственно L*НПЧЕ = 8 – 24, C*НПЧЕ = 2 - 4 .
Для оценки достоверности результатов математического моделирования были проведены экспериментальные исследования.
АГ выполнен на базе асинхронного двигателя серии 4А с измененными обмоточными данными. Привод АГ осуществлялся
двигателем постоянного тока, а частота вращения ротора генератора 6000 об/мин обеспечивалась за счет шкивов с кратностью в
диаметрах 1:4. В качестве преобразователя использовался трехфазный выпрямитель (схема Ларионова). Параметры АГ: мощность – 5 кВт; число пар полюсов - 4; фазное напряжение 220 В;
частота тока 400 Гц.
Полученные осциллограммы экспериментальных исследований имеют те же характерные изменения, что и расчетные, полученные с помощью математической модели.
Оценка достоверности полученных результатов, т.е. соответствия математической модели реальному объекту осуществлялась
по усредненным значениям рассогласования динамических характеристик математической и физической модели. Данная задача
решалась с помощью метода статистической оценки точности, а
доверительный интервал определялся на основании критерия
Стъюдента.
Данные статистической обработки результатов математической модели и экспериментальных исследований дали совпадение
доверительных граней, расхождение которых не превышало
10 %.
Проведенные экспериментальные исследования подтверждают достоверность полученных теоретических выводов не только
при исследовании системы АГ-В, но и при исследовании системы
АГ-НПЧЕ т.к. математическая модель и метод описания системы
остается одним и тем же.
Таким образом, результаты исследований совместной работы
систем АГ –В и АГ – НПЧЕ позволят повысить эффективность
конструкторских работ при проектировании перспективных АИЭ.
265
5.5 Точность математического моделирования
Прежде чем остановится на точности математического моделирования целесообразно рассмотреть понятия точности вообще,
приближенного значения величин и погрешности.
Понятие точность означает близость двух значений одной и
той же величины () – действительного и измеренного, номинального и фактического, теоретического и практического, желаемого
и достигнутого. Первое из этих двух значений называется точным
(Т), второе – приближенным (П). Значение Т надо рассматривать как оригинал, а значение П – как его модель.
Мерой точности приближенного значения П служит отклонение его от Т , называется погрешностью. Чем меньше отличается приближенное значение П от Т, тем оно точнее. В зависимости от того, в каких единицах выражается погрешность, она
называется абсолютной или относительной.
Абсолютная погрешность П Т - это разность между
П и Т, выраженная в единицах измерения величины.
Относительная погрешность / Т / П – это
разность между П и Т, выраженная через значения П или Т
принятые за единицу измерения. Очень часто относительная погрешность выражается в процентах
( /Т ) 100 ( / П ) 100 .
Если - величина, которая может принимать различные значения, ограниченные по модулю, т.е. max , то мерой приближения П к Т может служить относительная погрешность
/ max .
Погрешность представляет собой искажения результатов
действий, операций, процессов, осуществляемых человеком,
например, измерения, вычисления, изготовления объектов и т.д.
Систематическая погрешность – это искажение результатов
некоторой операции, остающееся неизменным при повторном ее
выполнении в неизменных условиях.
Случайная погрешность – это искажение результатов некоторой операции, принимающее различные случайные значения при
266
многократном выполнении ее в неизменных условиях.
Грубая погрешность – это искажение результата некоторой
операции, превышающее допустимое значение, вызванное серьезной ошибкой, допущенной при однократном ее выполнении.
В зависимости от того, какой – систематической, случайной
или грубой – является абсолютная погрешность , такой же будет и относительная погрешность .
Полной характеристикой систематической погрешности является закон изменения ее (ti ) в зависимости от тех или
иных независимых переменных ti, характеризующих условия, в
которых выполняется соответствующая операция. Располагая рассмотренной зависимостью, можно прогнозировать значение систематической погрешности в заданных условиях и исключить ее
влияние на результат, введя соответствующую поправку.
Погрешность математического моделирования вызывают два
фактора: неточность математических зависимостей (функций,
уравнений, выражений) и неточность численных значений различных величин, связанных этими зависимостями. Математическое моделирование – это, прежде всего, составление математического описания различных материальных объектов, т.е. логическое расчетное моделирование с целью определения основных
свойств физического объекта с помощью соответствующих уравнений. Точность расчетного моделирования связана с понятием
аппроксимации.
Аппроксимация – это замена значений различных величин и
математических выражений приближенными, обычно более простыми.
В случае приближенного выражения некоторой функции f(х)
функцией fa(x) f(x) первая из них называется аппроксимируемой
(приближенной), вторая – аппроксимирующей (приближающей).
Точность приближения характеризует погрешность аппроксимации
f a f a ( x) f ( x) f a ( x).
(5.59)
Аппроксимация уравнения
F ( y, xi , t j , D j ) 0
267
(5.60)
уравнением
Fа ( yа , xi , t j , D j ) 0
(5.61)
означает аппроксимацию функции F и y функциями Fа и yа. В
этом случае точность аппроксимации характеризуется погрешностью
ya ya ( xi , t j ) y( xi , t j ) ya ( xi , t j ).
(5.62)
Математическое описание любого материального (физического) объекта всегда сопровождается некоторой его идеализацией.
Возникающая при этом погрешность реализации представляет погрешность первичной аппроксимации.
268
ГЛАВА6
СИНТЕЗ И ВЫБОР ОПТИМАЛЬНОЙ СТРУКТУРЫ
СИСТЕМЫ АВТОНОМНОГО ЭЛЕКТРОНАБЖЕНИЯ
6.1 Модульное агрегатирование САЭ
Как известно, агрегатирование - это метод создания нового
оборудования путем компоновки стандартных и унифицированных устройств, блоков, элементов. Модульный принцип построения САЭ наряду с агрегатированием и унификацией является
весьма перспективным, поскольку позволяет обеспечить высокую
надежность работы системы, за счет резервирования основных
функциональных узлов и блоков (элементов); при необходимости
он позволяет достаточно просто увеличивать установленную
мощность источников, преобразователей и накопителей электроэнергии путем включения работающих модулей на параллельную
работу с аналогичными функциональными модулями. Кроме того,
модульные системы сократят время их проектирования, изготовления оборудования, упростят задачу по изменению структуры
САЭ в зависимости от требований потребителей. Значительный
технико-экономический эффект достигается при эксплуатации
модульных САЭ за счет сокращения времени на устранение неисправностей, поскольку несправные модульные блоки автоматически заменяются на рабочие.
Очевидно, что понятие модуля для САЭ должно отличаться
от общепринятых в радиотехнике. Поскольку САЭ состоит из основных функциональных узлов: источников, преобразователей и
накопителей электроэнергии, от работоспособности которых зависит выполнение задач по электроснабжению потребителей электроэнергии. Поэтому основные модули системы целесообразно
создавать на их основе, которые также должны быть выполнены
по модульному принципу, т.е. содержать в модульном исполнении
функциональные блоки, устройства, элементы.
Таким образом, функциональный модуль, узел САЭ - это
устройство, выполняющее функции источника, преобразователя,
накопителя электроэнергии, конструкция которого позволяет однотипными устройствами увеличивать установленную мощность
269
путем включения их на параллельную работу. Модульные блоки и
устройства функциональных модулей САЭ выполняют функции
коммутационных аппаратов, распределительных устройств, фильтров, устройств защиты и стабилизации параметров электроэнергии. Модульный элемент - датчик, полупроводниковый элемент
или группа приборов и т.д. Конструктивное модульное исполнение устройства, блока, элемента подразумевает в первую очередь
компактность построения и размещения с целью удобства эксплуатации (несложными техническими операциями производить
быструю замену при неисправностях, в том числе автоматическую, удобство осуществления технического обслуживания или
ремонта).
При проектировании САЭ необходимо учитывать, что на
структуру системы и, соответственно, на основные ее характеристики оказывают влияние, в основном, два фактора, определяемые
потребителями электроэнергии:
допустимое время перерыва в электроснабжении;
показатели качества электроэнергии.
Если потребители электроэнергии ответственные и практически необходимо, чтобы отсутствовал перерыв в электроснабжении, в этом случае увеличивается количество резервных источников и ПЭ и соответственно усложняется структура САЭ. Кроме
того, как известно, чем выше требования к качеству электроэнергии, тем сложнее конструкция ПЭ, в том числе их СУ, обеспечивающих стабилизацию параметров электроэнергии.
В общем случае задача синтеза структуры САЭ должна в себя
включать:
1) выбор принципов построения и разработку структуры системы с учетом требований потребителей по допустимому времени перерыва в электроснабжении;
2) определение необходимого уровня резервирования основных функциональных узлов (блоков, элементов) с учетом обеспечения требуемой надежности работы системы;
3) обеспечение совместимости модулей и рациональное их
распределение при нормальной и аварийной работе системы,
обеспечивающее наиболее эффективные взаимосвязи.
Для решения первой задачи необходимо решить вопрос разделения САЭ на модули. Предложенное выше разделение САЭ на
270
функциональные модули и модульные устройства, блоки, элементы позволит повысить эффективности системы, и, прежде всего,
ее эксплуатационно-технических характеристик.
Создание единого по структуре функционального модуля
АИЭ для САЭ является нецелесообразным, поскольку источники в
САЭ должны генерировать не только переменный ток промышленной частоты, а иногда целесообразно, чтобы они генерировали
напряжение повышенной частоты или повышенное напряжение
постоянного тока, что позволило бы улучшить основные критерии
эффективности за счет оптимизации структуры САЭ.
Поэтому необходимо разрабатывать несколько типов функциональных модулей АИЭ, отличающихся по технологии изготовления, параметрам электроэнергии и имеющие типовые значения мощности. СУ, защиты, контроля и регулирования параметров
выходного напряжения функциональных модулей автономных
источников должны быть построены по локальному принципу
(самостоятельно осуществлять стабилизацию параметров электроэнергии), но иметь общую связь с ЦСУ САЭ, основная функция
которой, подача команды на включение резерва или на параллельную работу источников.
На рис. 6.1 показан один из вариантов модульного исполнения АИЭ на базе КСПД и бесконтактного генератора электроэнергии.
Конструктивно КСПД состоит из двух блоков: компрессора и
газовой турбины. Основной недостаток КСПД - неэкономичная
работа в режиме малых нагрузок. Поэтому конструктивное построение АИЭ целесообразно осуществлять на двух модулях –
компрессорном и турбогенераторном, причем, для обеспечения
экономичной и надежной работы автономный источник должен
содержать несколько компрессорных и турбогенераторных моделей. При уменьшении нагрузки можно отключать один компрессорный и, соответственно, турбогенераторный модули. Кроме того, возможность отключения отдельных модулей во время работы
силовой установки позволяет проводить их техническое обслуживание или замену. Вопрос увеличения установленной мощности
АИЭ решается путем включения на параллельную работу рассмотренных силовых модулей.
271
Рис. 6.1. Функциональный модуль АИЭ на базе КСПД и БЭМ: КМ1 КМ2 – компрессорные модули; ТГМ1 – ТГМ3 – турбогенераторные модули; Т – высокоскоростная турбина; Г – бесконтактный генератор электроэнергии; ШГП – шина гарантированного питания
Создание единого по структуре модуля преобразователя электроэнергии - унифицированного модульного преобразователя
(УМП) и построение на их основе САЭ является практически разрешимой задачей.
6.1.1 Унифицированный модульный преобразователь
электроэнергии
Ввиду многообразия структур САЭ, которые обусловлены
требованиями потребителей, необходимо решение проблемы унификации и модульного построения САЭ с целью улучшения их
эксплуатационно-технических характеристик, основных критериев эффективности, в том числе показателей надежности.
Создание единого по структуре УМП является перспективным направлением в развитии САЭ. Унифицированный преобразователь представляет собой комплектное устройство, содержащее
модульные блоки управляемых полупроводниковых ключей, коммутационных аппаратов и других элементов, обеспечивающих его
272
работу (автотрансформаторы, фильтры и т.д.). СУ УМП способна
управлять его работой по нескольким алгоритмам таким образом,
что преобразователь может работать в режимах выпрямителя, инвертора, конвертора или преобразователя частоты.
УМП повысят эффективность САЭ за счет оптимизации режимов работы, как при нормальной, так и при аварийной работе,
сохранения ее работоспособность для всех запланированных ненормальных режимов путем адаптивного изменения структуры
цепей и постепенного отключения групп потребителей согласно
заданного приоритета.
На рис. 6.2 представлена функциональная схема УМП, который в своем составе содержит модульный блок системы управления СУ, модульный блок коммутации БК, первый и второй модульные блоки фильтров Ф1 и Ф2, первый А, В, С и второй Х, Y, Z
комплекты шин, нулевой вывод 0, модульные блоки однофазных
согласующих трансформаторов Т1 – Т4, модульные блоки полупроводниковых ключей ПК1 – ПК4, содержащие транзисторы VT1
и VT2. На рис. 6.2 показаны также первые и вторые выводы преобразователя 1, 2, 3 и 4, 5, 6 соответственно, контакты К1.1 – К6.1
контакторов модульного блока коммутации БК, управляющие выводы системы управления и управляющие входы полупроводниковых ключей, а также выводы для подключения системы управления САЭ СУСАЭ и распределительное устройство САЭ РУ. РУ
осуществляет связь УМП с источником напряжения и нагрузкой
посредством СУСАЭ.
Система управления СУ УМП, выполнена на микропроцессорной технике и содержит несколько программ, обеспечивающих
работу по преобразованию и стабилизации напряжения нескольких типов преобразователей. Причем, стабилизация напряжения,
функции контроля параметров электроэнергии, защиты и оперативных переключений через модульный блок коммутации БК
осуществляются на локальном уровне, а выбор типа преобразователя (режима работы) УМП осуществляет СУ САЭ.
Принцип работы УМП.
В режиме выпрямителя. СУ САЭ через распределительное
устройство РУ к первым выводам 1, 2, 3 преобразователя подключает трехфазный источник электроэнергии переменного тока.
273
Рис. 6.2. Унифицированный модульный преобразователь
274
Модульный блок первого фильтра Ф1 в этом режиме может быть
исключен из схемы преобразователя. Через шины А, В, С и контакты К1.1 – К3.1, коммутация которых осуществляется модульным блоком коммутации БК, напряжение источника питания подключается к первичным обмоткам модульных блоков трансформаторов Т1 – Т3. Трансформаторы осуществляют согласование
напряжения источника питания с нагрузкой, т.е. преобразуют его
до требуемого для нагрузки уровня. Далее напряжение переменного тока прикладывается к блокам полупроводниковых ключей
ПК1 – ПК3, которые преобразуют его в напряжение постоянного
тока и которое прикладывается к шинам Х и Y. Модульный блок
второго фильтра Ф2 сглаживает пульсации выпрямленного
напряжения, обеспечивая требуемое его качество для нагрузки,
которая подключается к выводам 4 и 5 преобразователя через РУ.
Стабилизация напряжения осуществляется системой управления
СУ за счет изменения угла управления полупроводниковых ключей относительно времени, определяемое пересечением фазных
напряжений источника питания. К входным выводам преобразователя может подключаться однофазный источник напряжения переменного тока.
В режиме инвертора. Источник напряжения постоянного тока
подключается ко вторым выводам 4, 5 преобразователя и через
модульный блок второго фильтра Ф2 и шины Х, Y напряжение
прикладывается к модульным блокам основных полупроводниковых ключей ПК1 – ПК3, которые осуществляют преобразование
напряжение постоянного тока в симметричную трехфазную систему напряжений переменного тока, которая через шины А, В, С,
и модульный блок первого фильтра Ф1 прикладывается к первым
выводам 1, 2, 3, к которым подключается нагрузка.
Модули Т4 и ПК4 для рассмотренных режимов являются резервными и включаются в работу к соответствующей фазе источника питания, в случае, неисправности какого-либо из основных
модулей преобразователя. Кроме того, в режиме инвертора УМП
может формировать однофазную систему напряжения переменного тока, при этом в работе задействуются только полупроводниковые ключи ПК1 и ПК2.
В режиме непосредственного преобразователя частоты необходимы дополнительные модульные блоки полупроводниковых
275
ключей, эмиттерные выводы которых подключаются к шине Y, а
коллекторные – к шине Х, при этом каждый из модульных блоков
полупроводниковых ключей подключается к соответствующей
шине А, В, С. Модульные блоки согласующих трансформаторов в
этом режиме исключены из работы. Высокочастотное напряжение
источника питания подключается через РУ к выводам 1, 2, 3 преобразователя и через фильтр Ф1 и шины А, В, С к модульным блокам полупроводниковых ключей, которые преобразуют систему
трехфазных напряжений в однофазную и понижают его частоту до
требуемых значений для нагрузки, которая подключается к выводам 4, 5 преобразователя. При этом фильтр Ф2 обеспечивает требуемое качество преобразованного напряжения. При необходимости получения трехфазной низкочастотной системы напряжения в
конструкции УМП должна быть предусмотрена дополнительная
шина Z с шинами Х, Y (см. рис. 6.2). В этом случае несколько изменяется алгоритм работы системы управления СУ.
В режиме конвертора последовательно включаются два УМП,
при этом первый работает в инверторно-трансформаторном режиме, а второй – в режиме выпрямителя. Причем, инвертор генерирует напряжение с повышенной частотой (до 10 кГц). Здесь стабилизацию напряжения можно осуществлять как за счет изменения
угла управления транзисторов высокочастотного инвертора, так и
за счет изменения угла управления транзисторов выпрямителя.
При необходимости наращивания установленной мощности
или повышения надежности УМП его конструкция позволяет подключать к шинам А, В, С и Х, Y, Z типовых по мощности модульных блоков.
Таким образом, УМП позволяют выполнять функции четырех
типов преобразователей электроэнергии. Однако, практически нецелесообразно, чтобы один преобразователь имел такое многообразие функций, т.к. это ухудшает его критерии эффективности и
характеристики САЭ в целом.
В настоящее время существуют два основных пути улучшения характеристик САЭ. Первый предполагает использование источников электроэнергии постоянного тока повышенного напряжения, а второй – использование высокочастотных источников
электроэнергии. Тогда, в первом случае САЭ должна содержать
УМП, работающие в режимах конверторов и инверторов, а во 276
втором - УМП должны работать в режимах выпрямителя и НПЧ.
Практически для УМП должен быть разработан комплект стоек, в которых предусмотрены ячейки для размещения компактных
модульных блоков преобразователей. В зависимости от требований
потребителей необходимо осуществлять установку модульных
блоков в соответствующие ячейки, набирая при этом требуемую
оптимальную структуру САЭ. Управление УМП по стабилизации
параметров электроэнергии должны осуществлять локальные СУ, а
установку их режимов работы СУ САЭ. Для удобства проектирования, изготовления и эксплуатации модули целесообразно строить
в едином стиле. Это означает, что определенная часть выводов
разъемов с конкретным указанием гнезд должна отводиться соответственно для цепей питания, входных и выходных информационных и управляющих сигналов, дополнительных входов, контрольных точек и т.д. С целью недопущения ошибочной установки
модуля в нештатное место в конструкции модуля должна быть
предусмотрена защита – ключ, обеспечивающий механическую
стыковку модулей только при совпадении ответных частей.
6.1.2 Структурные схемы модульных САЭ
Использование модулей накопителей электроэнергии (аккумуляторных батарей, молекулярных накопителей и т.д.) в САЭ
позволило бы, при необходимости, изменять их схему подключения (последовательно или параллельно), тем самым увеличивать
напряжение или мощность системы, согласуя эти величины со
схемой подключения требуемого количества УМП.
Распределительные устройства САЭ также должны быть выполнены на типовых модульных блоках, причем, на базе бесконтактных полностью управляемых полупроводниковых ключей
или комбинированных электрических аппаратов. Модульные
блоки распределительных устройств должны содержать шины, к
которым через управляемые коммутационные аппараты осуществляется подключение нагрузки к соответствующему источнику или преобразователю. На рис. 6.3 показан один из вариантов
модульного блока распределительного устройства, где обозначено: ШИ – шина источника; МК1-МК4 – модульные блоки комму277
тационных устройств; К1-К5 – полупроводниковые ключи; ШН1ШН4 – шины нагрузки; iУ1- iУ5 - управляющие сигналы ЦСУ.
Рис. 6.3. Структурная схема модульного блока распределительного
устройства
САЭ является сложным производственным комплексом, для
эффективной реализации которого необходима не только новая
элементная база, но и необходимо использование централизованного управления системой, реализацию которого необходимо
осуществлять с помощью ЭВМ. Центральная СУ (ЦСУ) на базе
современных ЭВМ способна обеспечивать не только простые
функции управления АИЭ и преобразовавтелями электроэнергии
во всех режимах функционирования системы, но и осуществлять
оптимизацию режимов электроснабжения как при нормальной,
так и при аварийной работе САЭ путем адаптивного изменения
структуры силовых цепей, в том числе отключать неисправные
модули и включать в работу резервные, и постепенно отключать,
278
при необходимости, группы потребителей электроэнергии, согласно заданному их приоритету. ЦСУ, кроме того, в процессе работы источников и преобразователей электроэнергии способна
проводить анализ показателей качества электроэнергии и, по результатам этого анализа, вносить нужные изменения в СУ источниками и преобразователями.
Структурная схема модульной САЭ приведена на рис.6.4, где
обозначено: НЭ - накопители электроэнергии; АИЭ - автономные
источники электроэнергии; СУИ - система управления автономным источником; УМП1 - УМПn - унифицированные модульные
преобразователи; СУ1 - СУn - системы управления преобразователями; РУ1- РУn - распределительные устройства; ЦСУ - центральная система управления.
ЦСУ выполняет функции контроля параметров электроэнергии и осуществляет коммутационные операции через распределительные устройства изменения структуру системы и режимы работы. Функции стабилизации и регулирования параметров электроэнергии осуществляют локальные СУ источников и преобразователей. ЦСУ не связана по каналам обработки информации с локальными СУ, а по каналам контроля информации они имеют общие связи. Такое взаимодействие микро-ЭВМ с ЦСУ позволит
повысить быстродействие и надежность работы всей СУ САЭ.
Таким образом, построение САЭ по модульному принципу с
использованием функциональных модулей источников, преобразователей, накопителей электроэнергии и модулей распределительных устройств, а также с возможностью САЭ с помощью
ЦСУ изменять свою структуру обеспечивает несколько положительных ее свойств одновременно:
1) высокую надежность, вследствие того, что при отказе любого из модуля включается в работу резервный или изменяется
структура системы, обеспечивая гарантированное электроснабжение, что важно для ответственных потребителей;
2) регулирование мощностью генерируемой АИЭ и распределение согласно заданному приоритету нагрузок, позволяет увеличить ресурс ее работы, в том числе экономичность работы приводных двигателей;
3) техническое обслуживание или замена неисправных моду279
лей может осуществляться без перерыва в электроснабжении потребителей.
Рис. 6.4. Структурная схема модульной САЭ
6.1.3 Особенности проектирования модульных САЭ
Для обеспечения требуемой надежности работы системы
должна быть решена вторая задача синтеза структуры САЭ, которая предполагает определение необходимого уровня резервирования функциональных модулей.
280
Модульное агрегатирование САЭ может осуществляться по
двум основным принципам, обеспечивающим полное или частичное резервирование источников и преобразователей электроэнергии.
При полном резервировании максимальная мощность потребителя не превышает максимально допустимой мощности одного
питающего агрегата, т.е. один агрегат находится в работе, а второй
и, может быть, последующие – в резерве. В этом случае вопросы
обеспечения параллельной работы и наращивания установленной
мощности агрегатов исключаются. Основное достоинство данного
принципа – высокая надежность, а недостаток – относительно
большая масса и габариты системы в целом.
При частичном резервировании допустимая мощность одного агрегата меньше максимальной мощности потребителя. При
необходимости наращивания мощности в работу включается один
из резервных агрегатов. Частичное резервирование предполагает
построение трехфазных преобразователей на основе однофазных
модулей. Главное достоинство данного принципа – улучшенные
массогабаритные характеристики системы. Если при полном резервировании в случае выхода из строя трехфазного модульного
агрегата в работу включается аналогичный агрегат, то в случае
частного резервирования при неисправности одного из однофазных модулей трехфазного агрегата вместо него включается резервный однофазный модуль.
Следует отметить две особенности частичного резервирования:
распределение мощности не должно приводить к перегрузке
одного из работающих агрегатов, поэтому рабочие и резервные
агрегаты должны быть одной мощности;
необходимо обеспечить параллельную работу источников и
преобразователей электроэнергии.
Эффективность эксплуатации САЭ при ее модульном агрегатировании очевидна, однако, при проектировании передвижных
САЭ целесообразно использовать оба принципа построения модульной системы. При этом принцип частичного резервирования
необходимо применять для выпрямителей и преобразователей постоянного тока, а принцип полного резервирования – для инверторов и преобразователей частоты (в данном случае незначительно
281
увеличивается масса системы, поскольку эти преобразователи в
САЭ выполняются небольшой мощности).
В стационарных САЭ, к которым не предъявляются высокие
требования по массогабаритным показателям, необходимо использовать принцип полного резервирования основных узлов системы.
Решение третьей задачи предусматривает, прежде всего,
необходимость обеспечения электрической, конструктивной,
электромагнитной совместимости функциональных модулей САЭ,
а также их рациональное распределение, обеспечивая наиболее
эффективные взаимосвязи.
Под электрической совместимостью модулей понимается
возможность их совместного использования по следующим параметрам: мощности, входному и выходному напряжению. Под конструктивной совместимостью понимается взаимосопрягаемый
набор несущих конструкций и разъемных соединений модулей,
позволяющий осуществлять рациональную компоновку аппаратуры. Под электромагнитной совместимостью модулей понимается
возможность их совместного функционирования в составе модульной системы в условиях взаимно создаваемых ими электромагнитного поля и помех (см. п. 1.6).
Модульное построение САЭ предусматривает также необходимость информационной и программной совместимости СУ,
контроля и регулирования параметров выходного напряжения модулей. Под информационной совместимостью понимается единство информационных сигналов по их виду, количеству, системе
кодирования и т.д. Под программной совместимостью понимается
унификация системы команд и программно-аппаратная организация СУ.
Принцип работы УМП позволяет рационально использовать
преобразовательные модули в САЭ, обеспечивая при этом эффективные взаимосвязи в системе электроснабжения в целом. Поскольку важной особенностью работы УМП является их способность пропускать потоки электроэнергии в обоих направлениях.
На рис. 6.5 представлен вариант структурной схемы САЭ, выполненной на базе высокочастотных источников электроэнергии
ВЧИ1 и ВЧИ2, трансформаторно-выпрямительных блоков ТВБ1 и
ТВБ2, унифицированных преобразователей электроэнергии УМП1
282
и УМП2. На рис. 6.5 показаны также блок накопителей электроэнергии БНЭ, шина переменного тока промышленной частоты
Ш1, шина переменного тока повышенной частоты Ш3, шина
напряжения постоянного тока Ш2 и выводы для подключения
нагрузки 1 – 7.
Рис. 6.5. Структурная схема САЭ на базе УМП
При питании потребителей электрической энергии от внешней сети УМП1 работает в режиме выпрямителя, а УМП2 – в режиме высокочастотного инвертора, блок накопителей БНЭ находится в режиме подзаряда (пунктирной линией на рис. 6.5 показаны направления передачи электроэнергии от УМП). Когда электроснабжение потребителей осуществляют высокочастотные источники электроэнергии ВЧИ1 и ВЧИ2, блок БНЭ продолжает работать в предыдущем режиме, а преобразователи УМП1 и УМП2
переходят работать в режим преобразователя частоты и выпрямителя соответственно. В случае, когда основным источником электроэнергии является БНЭ, УМП1 продолжает работать в режиме
преобразователя частоты, а УМП2 снова переходит работать в режим высокочастотного инвертора.
При модульном агрегатировании САЭ необходимо учитывать
283
способы подключения ПЭ к источнику и нагрузке, поскольку способ подключения зависит от параметров электроэнергии источника и преобразователя.
На практике используются следующие способы взаимного
включения преобразовательных модулей к источнику и нагрузке:
все модули подключены параллельно к источнику электроэнергии
и работают параллельно на общую нагрузку (рис. 6.6, а); модули
включены между собой последовательно по цепям их питания,
соединены с источником электроэнергии и работают параллельно
на общую нагрузку (рис. 6.6, б); модули подключены параллельно
к источнику питания, а их выходные напряжения суммируются
для питания общей нагрузки (рис. 6.6, в); модули включены последовательно по цепям питания, а их выходные напряжения суммируются для питания общей нагрузки (рис. 6.6, г).
Первый из отмеченных способов включения преобразовательных модулей (рис. 6.6, а) используется при сравнительно низких
значениях напряжения питания UП для распределения суммарной
мощности нагрузки между синхронно и синфазно работающими
модулями, когда напряжение, прикладываемое к каждому полупроводниковому прибору любого отдельно взятого модуля, не превышает предельно допустимого значения этого параметра.
Подобное
исполнение
мощных
преобразовательных
устройств из маломощных преобразовательных модулей известно
в практике давно – параллельная работа выпрямителей, инверторов, стабилизаторов на общую нагрузку. Основная проблема, которую приходится решать, заключается в выравнивании токов
нагрузок, а, следовательно, и уровней преобразуемой электроэнергии между параллельно работающими модулями.
Второй способ включения преобразовательных модулей
(рис. 6.6, б) используется, когда питающее UП напряжение превышает верхнюю границу, при которой обеспечивается допустимое
значение напряжения на закрытых полупроводниковых приборах
каждого отдельно взятого модуля. В данном случае напряжение
питания UП распределяется между последовательно включенными
модулями, в результате на входе каждого из них действует напряжение, равное UП /N, где N – число используемых мо284
а)
б)
в)
г)
д)
Рис. 6.6. Схемы включения преобразовательных модулей к источнику и
нагрузке
дулей. Примером подобного исполнения является подключение
трех инверторов, схема которых приведена на рис. 6.7. Здесь три
аналогичных высокочастотных транзисторных инвертора мостового типа, представляющих собой три регулируемых преобразовательных модуля, работающих синфазно с частотой преобразования электроэнергии, равной нескольким килогерцам, соединены
последовательно по цепям питания и подключены к общему источнику электроэнергии.
285
Нагрузкой каждого модуля служит одна из трех идентичных
первичных обмоток силового высокочастотного трансформатора.
Общая выходная обмотка этого трансформатора нагружена на выпрямитель с фильтром LC – типа. Конденсаторы С1 – С3 выравнивают напряжения на входах инверторных модулей.
Параллельное подключение преобразовательных модулей к
источнику электроэнергии и суммирование их выходных напряжений на общей нагрузке (рис. 6.6, в) является одним из распространенных способов построения высоковольтных преобразовательных устройств. Устройство управления модулями, как правило, выполненных в одноканальном варианте, обеспечивает синхронность работы всех стабилизирующих устройств.
Рис. 6.7. Модульная структура преобразователя напряжения постоянного
тока на трех инверторах
Включение преобразовательных модулей по схеме рис. 6.6, г
может быть использовано при построении преобразователей, питающихся от источников электроэнергии со сравнительно высоким напряжением и обеспечивающих высокое постоянное или переменное напряжение.
286
При построении структуры САЭ на базе преобразовательных
модулей возможны кроме перечисленных способов также их различные комбинации в виде последовательно-параллельного включения модулей. Так, в схеме на рис. 6.6, д при открытых транзисторах преобразовательные модули инверторов соединены по
входу параллельно, а при закрытых транзисторах открываются
диоды, и все модули соединяются по входу последовательно.
Рассмотренные способы подключения преобразовательных
модулей к источнику и нагрузке обеспечивают получение следующих нескольких положительных свойств одновременно:
1) высокую надежность вследствие того, что несколько преобразовательных модулей могут быть включены как функционально избыточные и, при отказе одного или двух, их функции
выполняют оставшиеся преобразовательные модули;
увеличение выходной мощности или входного напряжения
без необходимости параллельного или последовательного подключения силовых транзисторов и введения в связи с этим
устройств выравнивания токов или напряжений между транзисторами как при их открытом, так и при закрытом состоянии;
возможность минимизации, так, к примеру, в преобразователях с промежуточным высокочастотным преобразованием при
разделении его на маломощные модульные преобразователи частота может быть увеличена до сотен килогерц, благодаря чему
уменьшаются масса и габариты реактивных элементов (трансформаторов, дросселей, конденсаторов);
унификацию модулей, так как было описано выше, при параллельном их соединении по выходу увеличивается в несколько
раз выходная мощность, при последовательном соединении по
выходу увеличивается в несколько раз выходное напряжение, а
при последовательном соединении по входу увеличивается входное напряжение.
При организации системы управления преобразовательными
модулями с частичным их отключением или переключением их
соединения с последовательного на параллельное и обратно, в
процессе изменения тока нагрузки или входного напряжения
обеспечивается работа каждого модульного преобразователя с
нагрузкой по току или входному напряжению, близкому к номинальному, благодаря чему сохраняется высокий КПД преобразо287
вательных модулей в целом при изменении их нагрузки или входного напряжения в широком диапазоне.
При модульном построении САЭ, кроме вопросов резервирования, повышения надежности преобразователей, решаются вопросы адаптации структур преобразователей к изменениям условий их эксплуатации и режимов работы и, как следствие, экономии электроэнергии.
При питании однофазных модульных блоков преобразователей переменного тока от источника трехфазного напряжения для
исключения несимметричных режимов работы других потребителей, в том числе преобразователей, необходимо осуществлять их
подключение к разным фазам (рис. 6.8). В случае же неисправности одного из модульных преобразователей резервный преобразователь Пр включается в работу к соответствующим фазам.
Рис. 6.8. Схема подключения преобразовательных модулей к источнику
трехфазной системы
6.2 Параллельная работа преобразователей
Важным вопросом модульного агрегатирования САЭ является обеспечение параллельной работы ПЭ на общие шины.
Параллельная работа полупроводниковых преобразователей
широко применяется на практике как для резервирования, в целях
повышения надежности САЭ, так и для наращивания выходной
мощности.
В трехфазных СЭС переменного тока может использоваться
принцип построения трехфазного преобразователя на основе од288
нофазных.
В САЭ важным требованием при резервировании является
обеспечение необходимого качества напряжения на выходных
шинах при появлении, как правило, одной любой неисправности в
системе. Это требование обуславливает включение в состав САЭ
дополнительных схем автоматики, что особенно трудно реализуется в системах переменного тока.
Для выпрямителей и конверторов параллельная работа на общую нагрузку осуществляется значительно проще, чем для инверторов и преобразователей частоты, поскольку ее обеспечение связано с регулированием в основном одного параметра – среднего
значения выходного напряжения.
В зависимости от задач требования, предъявляемые к параллельно работающим преобразователям, различны. Так, при полном резервировании по принципу «один из двух» достаточно
обеспечить устойчивую работу двух преобразователей на общие
шины, без каких-либо ограничений на распределение между ними
мощности нагрузки. Это вытекает из принципа полного резервирования, когда максимальная мощность потребителя не превышает максимально допустимой мощности одного преобразователя. В
зависимости от важности потребителей электроэнергии структура
с параллельной работой преобразователей в целях резервирования
может быть заменена структурой с коммутируемыми по специальной команде выходными шинами одного из преобразователей,
работающего в «холодном» или «горячем» резерве.
При частичном резервировании, к примеру, по принципу «два
из трех», или в целях наращивания мощности распределение последней между параллельно работающими на общие шины преобразователями не должно приводить к перегрузке одного преобразователя.
В общем случае можно выделить следующие виды параллельной работы:
работа на общие шины с произвольным распределением
мощности между отдельными преобразователями при условии,
что мощность нагрузки не превышает номинальную мощность
одного преобразователя (иногда такой вид работы называют не
параллельной, а совместной);
работа на общие шины с распределением мощности нагрузки
289
пропорционально номинальной мощности каждого преобразователя, но не более последней. При одинаковых мощностях преобразователей распределение нагрузки между ними будет равномерным;
работа на общие шины с произвольным распределением
мощности нагрузки между отдельными преобразователями, но с
ограничением загрузки каждого из них на уровне номинальной
(или допустимой перегрузочной) мощности.
6.2.1 Параллельная работа выпрямителей и конверторов
Первый вид параллельной работы для выпрямителей и конверторов реализуется наиболее просто: включением их на общие
шины через разделительные диоды (рис. 6.9, а). Последние выполняют преимущественно функции защитных элементов выходных шин от внутренних коротких замыканий в каждом отдельном
преобразователе П1, П2, … Пi. При идентичности выходных параметров и точной настройке каналов регулирования выходного
напряжения может быть достигнуто сравнительно равномерное
распределение нагрузки между отдельными преобразователями.
Однако, практическая реализация равномерности загрузки в различных режимах эксплуатации затруднительна в связи с тем, что
регулируемые преобразователи имеют обычно высокую точность
стабилизации выходного напряжения и, следовательно, малую
статическую погрешность регулирования. В связи с этим, для рассматриваемого вида параллельной работы преобразователей
должно соблюдаться условие
I н I iн ,
(6.1)
где Iн – ток нагрузки; Iiн – номинальный ток i –го преобразователя.
В простейшем случае, когда система состоит из двух преобразователей, равномерное распределение между ними нагрузки может быть достигнуто введением взаимных (перекрестных) связей
по току. Однако, стабилизация работы такой системы является
сложной задачей. Следует отметить, что разработаны в настоящее
время простые способы распределения нагрузки в таких структурах, обеспечивающие их хорошую устойчивость в динамических
режимах. В качестве делителя тока используются реакторы с под290
магничиванием, что позволяет получить высокую надежность
всей системы при небольших экономических затратах. Недостатками таких способов параллельной работы преобразователей являются ухудшение качества выходных параметров при коммутациях нагрузки и ухудшение массогабаритных показателей систем
в целом.
а)
б)
Рис. 6.9. Обобщенная структурная схема параллельно работающих преобразователей с диодной развязкой (а), и внешняя характеристика преобразователей (б)
Одним из способов реализации второго вида параллельной
работы является введение обратных связей между нагрузкой и
каждым преобразователем (рис. 6.10) В этом случае сигнал с датчика тока нагрузки ДТН делится и распределяется по каналам обратной связи, сравнивается с сигналом, пропорциональным значению тока каждого отдельного преобразователя, а затем поступает
в качестве возмущающего воздействия в системы регулирования
выходного напряжения преобразователей П1, П2, …, Пi. В результате оказывается возможным распределить ток нагрузки между
отдельными преобразователями согласно значениям токовых
установок распределителя или датчиков токов преобразователей.
В частности, может быть достигнуто равномерное распределение
тока нагрузки между работающими преобразователями, когда Ii
=Iн / i. Статическая точность распределения токов нагрузки будет
определяться коэффициентом усиления обратных связей по току.
На практике такие системы обеспечивают точность распределения
в пределах 10%(IН /i ) при загрузке каждого преобразователя более 50%IН. Для обеспечения устойчивой параллельной работы и
291
исключения режима автоколебаний необходимо уделять значительное внимание синтезу частотно-зависимых параметров каналов регулирования по току.
Рис. 6.10. Структурная схема параллельно работающих преобразователей
с обратными связями по току общей нагрузки
Третий вид параллельной работы может быть реализован для
преобразователей, имеющих внешнюю (нагрузочную) характеристику, подобную изображенной на рис. 6.9, б. Участок 1 внешней
характеристики соответствует режиму стабилизации выходного
напряжения с малой статической погрешностью регулирования.
При достижении номинальной нагрузки значений Uном , Iном преобразователь переходит в режим работы с большим статизмом
(участок 2). Далее при перегрузках и внешних коротких замыканиях преобразователь переходит в режим работы со стабилизацией выходного тока (участок 3), или происходит отключение преобразователя. При параллельной работе преобразователей с такой
внешней характеристикой их выходные значения напряжения
устанавливаются равными с точностью, определяемой параметрами уставок. При подключении преобразователей по схеме рис. 6.9,
а нагрузка в общем случае распределяется неравномерно. Однако,
по мере достижения номинальной нагрузки одним из преобразователей, он переходит в режим работы, соответствующий участку 2,
и начинает снижать свое выходное напряжение. При последующем увеличении нагрузки ее берет на себя другой преобразователь и т.д.
Такой способ реализации параллельной работы является
наиболее эффективным, так как он не связан с введением допол292
нительных обратных связей и не накладывает каких-либо схемных
и конструктивных ограничений на систему параллельно работающих преобразователей.
6.2.2 Параллельная работа инверторов и преобразователей
частоты
Обеспечение параллельной работы инверторов и преобразователей частоты на общую нагрузку, как уже отмечалось, является
более сложной задачей, так как при этом возникает необходимость
синхронизации напряжений параллельно работающих преобразователей. На рис. 6.10, а представлена упрощенная схема замещения двух параллельно работающих преобразователей в однофазном исполнении и допущении синусоидальности выходного
напряжения. Последнее обычно достигается выходными фильтрами (на рис. 6.11, а указана индуктивность этих фильтров Lф).
При совпадении векторов UП1 и UП2 уравнительный ток Iу
между преобразователями не развивается (рис. 6.11, б). В случае
совпадения векторов по фазе, но различии по амплитуде развивается реактивный уравнительный ток Iу. Для преобразователя с
большим напряжением он эквивалентен индуктивной нагрузке.
Значение этого тока может быть определено по формуле
а)
б)
Рис. 6.11. Схема замещения параллельно работающих преобразователей
(а) и векторная диаграмма их выходных напряжений (б)
Iу
U П
2 X Lф
К СХ U d
,
2LФ
(6.2)
где UП = UП1 – UП2 – модуль разности действующих значений
293
первых гармоник выходных напряжений преобразователей;
Ud – разность средних значений напряжений на входе преобразователей;
КСХ – коэффициент схемы, учитывающий связь между выходным напряжением преобразователя и средним значением
напряжения на входе преобразователя.
При расфазировке векторов UП1 и UП2 появляется активная
составляющая уравнительного тока между преобразователями.
При небольших углах расфазировки и равенстве напряжений
UП1= UП2 уравнительный ток может быть определен по приближенной формуле
Iу
U П1tg К СХ U d tg
,
2X L
2LФ
(6.3)
где - угол расфазировки.
Преобразователь, опережающий UП1, отдает активную мощность, а отстающий по фазе преобразователь потребляет активную
мощность (с общих шин). Эти явления аналогичны явлениям возникновения уравнительных токов в параллельно работающих синхронных генераторах.
Таким образом, для обеспечения параллельной работы преобразователей необходимо регулировать амплитуду выходных
напряжений преобразователей и обеспечивать их синхронность и
синфазность. В зависимости от схемы преобразователя эти задачи
решаются различными способами. Технически проще решаются
вопросы обеспечения параллельной работы при использовании
однофазных преобразователей.
Целесообразно регулирование значения выходного напряжения в автономных инверторах осуществлять за счет использования
регуляторов постоянного напряжения, т.е. регуляторов размещенных на входе инверторов. В этом случае необходима информационная связь между преобразователями по постоянному току для
выравнивания входных напряжений инверторов, а, следовательно,
и амплитуды первых гармоник выходных напряжений преобразователей.
Синхронизация работы преобразователей частоты осуществ294
ляется за счет синхронизации работы задающих генераторов их
систем управления.
6.3 Оценка эффективности САЭ
Во время эксплуатации САЭ мощность потребителей постоянного и переменного тока изменяется в широких пределах. Поэтому АИЭ и ПЭ должны работать в режимах, обеспечивающих
максимальное и минимальное потребление мощности. Кроме того,
если учесть, что потребители отличаются не только по потребляемой мощности и роду тока, а и по частоте (для переменного тока)
и величине напряжения, то можно создать большое число структурных решений САЭ, обеспечивающих генерирование требуемой
электроэнергии. Очевидно, что из большого числа структур систем электроснабжения всегда возможно отобрать структуры
САЭ, имеющие лучшие, в сравнении с другими техническими решениями показатели критериев эффективности.
Таким образом, при создании новых технических решений
САЭ необходимо оценивать их по критериям эффективности
(МГП, КПД, надежности, качеству электроэнергии, стоимости) и
осуществлять выбор оптимального варианта, который определяется техническими задачами.
Оптимизация САЭ, обычно, осуществляется на локальном и
системном уровнях. Первый связан с улучшением показателей
отдельных функциональных узлов, а второй – с синтезом оптимальных структур САЭ в целом. Эти уровни взаимосвязаны и
предусматривают корректировку показателей эффективности схемотехнических решений, как отдельных блоков, элементов, так и
всей системы приближая структурно-схемное решение САЭ к оптимальному варианту.
Целесообразно на стадии проектирования и, главным образом, для передвижных систем, в начале осуществить оценку САЭ
по основным критериям эффективности МГП и КПД. Исходными
данными для оценки САЭ являются: количество шин гарантированного электроснабжения (здесь учитывается род тока его частота, уровень напряжения и мощность потребителей); известные
технические решения эксплуатируемых и перспективных ПД, генераторов и ПЭ. Далее строится обобщенная схема электроснаб295
жения. С учетом известных режимов работы, в том числе их времени, можно определить массу и КПД, как АИЭ и преобразователей, так и возможных вариантов структурного решения САЭ в целом. При этом удельная масса САЭ определяется по формуле
n
k
i 1
j 1
М САЭ S АИЭi (mПДi m Гi ) S ПЭjmПЭj М РИ ,
(6.4)
где SАИЭi и SПЭj – мощность автономного i-го источника и j-го преобразователя электроэнергии соответственно; n и k – количество источников и преобразователей соответственно; mПДi и mГi – значения
удельных масс приводного двигателя и генератора; mПЭj – удельная
масса преобразователя; МРИ – масса резервного источника.
Выражение (6.4) не учитывает массу коммутационной аппаратуры и других элементов системы, но оно позволяет аргументировано проводить сравнительную оценку структурных решений
САЭ.
Поскольку САЭ работает в нескольких режимах, обусловленных, прежде всего, изменением источника электроэнергии, и как
следствие работающих преобразователей электроэнергии, то КПД
САЭ для одного режима работы, только с учетом потерь в АИЭ и
преобразователях, определяется по формуле
САЭр АИЭсПЭ ,
(6.5)
где АИЭ – КПД автономного источника, работающего в расчетном
режиме; сПЭ – суммарное КПД преобразователей электроэнергии
расчетного режима, которое определяется по формуле
k
S ПЭj
сПЭ
j 1
k
k
j 1
j 1
,
(6.6)
S ПЭj Pj
где Рj – потери электроэнергии j-го преобразователя.
Практически определив значения КПД САЭ для всех ее режимов работы, определяющим является значение КПД основного
296
режима, имеющего наибольший временной интервал эксплуатации системы.
На рис. 6.12 представлен один из вариантов обобщенной
структурной схемы САЭ, обеспечивающей гарантированное электроснабжение потребителей по четырем шинам. Здесь нужно отметить, что структура САЭ и ее сложность зависят от количества
шин, в том числе гарантированного электроснабжения. На примере обобщенной схемы (рис. 6.12) проведем оценку массогабаритных (массы) и энергетических (КПД) показателей АИЭ, ПЭ и возможных вариантов САЭ в целом. В рассматриваемой схеме показаны две системы АИЭ, отличающиеся ПД, а именно в АИЭ1 привод генераторов осуществляется двигателями с частотой вращения
n = 1500 об/мин, а в АИЭ2 – ВПД с частотой вращения n = (6000 –
12000) об/мин. На рис. 6.12 показаны также три канала генерирования электроэнергии: 1 – переменного тока промышленной частоты; 2 – постоянного тока; 3 – переменного тока повышенной
частоты.
Кроме того, на рис. 6.12 обозначено: приводные двигатели ДД
– дизельный двигатель, АД – адиабатный двигатель, ДС – двигатель
Стирлинга, КСПД – комбинированный свободно-поршневой двигатель, ГТД – газотурбинный двигатель; ОВ1 –ОВ2 – общие валы
приводных двигателей и генераторов; резервный источник АБ – аккумуляторные батареи; коммутационные аппараты Q1 – Q9; статические преобразователи электроэнергии В1 – В3 – выпрямители, И1
– И3 – инверторы; К1 – К2 – конверторы; НПЧ1 – НПЧ2 – непосредственные преобразователи частоты; УПЭ – унифицированный
преобразователь электроэнергии; шины гарантированного электроснабжения переменного тока промышленной частоты Ш1, повышенной частоты Ш2, постоянного тока с двумя уровнями напряжения Ш3 и Ш4 соответственно; выводы для питания групп потребителей I, II и III.
На рис. 6.12 показан также вывод для подключения внешней
сети, что позволит, при появлении такой возможности, повысить
уровень гарантированного электроснабжения из-за наличия дополнительного источника электроэнергии.
Когда основным источником электроэнергии является один из
автономных источников системы АИЭ1, генерирующих электроэнергию переменного тока промышленной частоты по каналу 1, то
297
для обеспечения электроэнергией потребителей включается коммутационное устройство Q1. Преобразователи В1, И2 и К1
Рис. 6.12. Обобщенная схема САЭ
обеспечивают потребителей электроэнергией с требуемыми параметрами. Резервными источниками являются генератор постоянного тока ГПТ и аккумуляторные батареи АБ. Для их подключения
включаются соответственно аппараты Q5, Q4 и Q2, и отключается
Q1. Инвертор И1 в этом случае является источником питания для
потребителей, подключенных к шине Ш1 и для преобразователей
В1, И2, К1 соответственно.
298
Если же основным источником питания являются генераторы
постоянного тока ГПТ или ВГ (см. рис. 6.12 канал 2), то в этом случае
целесообразно для электроснабжения потребителей применить преобразователи К2, И3 и НПЧ1. Для чего включается коммутационное
устройство Q6. Резервный источник - АБ включается коммутационным устройством Q5. В рассматриваемой схеме электроснабжения
может быть предусмотрен дополнительный резервный источник переменного тока. Для его подключения включается Q3 и выпрямитель
В2 обеспечивает потребителей и преобразователи требуемой электроэнергией (Q6 в этом режиме отключен).
Ниже будет показано, что если электроснабжение потребителей осуществляется по каналу переменного тока повышенной частоты (см. рис. 6.12 канал 3), в основном режиме, то САЭ имеет
лучшие показатели в сравнении с рассмотренными схемными решениями СЭС. Важной особенностью, в этом случае, является использование унифицированного преобразователя электроэнергии
УПЭ. Применение УПЭ в САЭ не потребует дополнительного
преобразователя, в случае включения резервного источника постоянного тока коммутационным устройством Q7 (в этом режиме
Q8 и Q9 в выключенном положении).
В табл. 6.1 приведены средние значения КПД и удельной массы приводных двигателей, генераторов электроэнергии, АИЭ в целом, ПЭ и САЭ для основного режима функционирования системы.
Показатели АБ не учитывались, потому что они аналогичны для
всех рассмотренных систем. Кроме того, мощность АИЭ находится
в пределах 50 – 70 кВт, а потребляемая мощность шинами гарантированного электроснабжения равна Ш1 = 20 кВт, Ш2 = Ш3 = Ш4
= 5 кВт. Система выполнена на стабилизированных ПЭ. Поскольку
показатели СГПМ и АГ примерно одинаковы, то в табл. 6.1 приведены варианты АИЭ только с использованием АГ. Конверторы выполнены на базе промежуточного высокочастотного звена (частота
преобразования находится в пределах 5 – 10 кГц).
Как видно из табл. 6.1 САЭ, выполненные на базе ВПД, имеют преимущества по показателям КПД и удельной массы в сравнении с САЭ, АИЭ которых выполнены на базе ДД и СГ.
Следующим этапом проектирования необходимо осуществить
расчет показателей качества выходного напряжения ПЭ (по методике предложенной в гл.4). Далее, на основании требований
299
300
потребителей к качеству электроэнергии, осуществляется расчет и
выбор выходных, при необходимости входных, фильтров. При
этом учитываются результаты математического моделирования по
исследованию электромагнитных процессов (см. гл. 5).
Когда полностью известен состав спроектированной САЭ,
проводится расчет основных показателей надежности нового технического решения САЭ. Показатели надежности являются важным эксплуатационным показателем САЭ. К числу наиболее широко применяемых критериев, по которым оценивается надежность системы, относятся:
вероятность безотказной работы в течение определенного
времени Р( t );
средняя наработка до первого отказа Тср;
интенсивность отказов ( t );
коэффициент готовности КГ.
Вероятность безотказной работы Р( t ) численно показывает
степень объективной возможности отсутствия отказа в заданном
интервале времени и для одного элемента определяется из выражения
Р(t ) е
(t )
.
(6.7)
Интенсивность отказа элемента ( t ) определяется экспериментально в номинальных режимах работы элемента и нормальных условиях окружающей среды. При расчетах, как правило,
значения интенсивности отказов элементов берутся из справочных
данных. В табл. 6.2 приведены средние значения интенсивностей
отказов элементов, широко применяемых в САЭ.
Средняя наработка до отказа одного элемента с интенсивностью его отказов связаны следующей зависимостью
Тср = 1 / ( t ).
301
(6.8)
303
304
305
Для определения надежности составляется схема замещения
САЭ, в состав которой входят функциональные узлы системы, основные устройства, блоки, от которых зависят показатели надежности. Как известно, схема имеет последовательное соединение
элементов, если отказ функционального узла наступает при отказе
одного из элементов и параллельное - при резервировании работы
элементов функционального узла (устройства, блока). При последовательном соединении элементов вероятность безотказной работы определяется по формуле
n
Р(t ) П Рi (t ),
i 1
(6.9)
где i – номер элемента; n – число элементов.
При параллельном соединении элементов вероятность безотказной работы определяется по формуле
n
Р(t ) 1 П (1 Рi (t )).
i 1
(6.10)
Ориентировочное значение вероятности безотказной работы
САЭ определяется как произведение вероятностей безотказной
работы ее функциональных узлов, в том числе устройств, блоков.
Окончательный расчет вероятности безотказной работы САЭ
и средней наработки до отказа выполняется тогда, когда известны
реальные режимы работы его функциональных узлов и элементов.
АИЭ, ПЭ, устройства, блоки САЭ находятся обычно в различных режимах работы. Это влияет на надежность, как САЭ в
целом, так и отдельных ее устройств. На практике для уточнения
показателей надежности применяют поправочные коэффициенты
интенсивности отказов, позволяющие учесть влияние различных
факторов на надежность САЭ.
В общем случае интенсивность отказов элементов схемы замещения САЭ зависит от следующих основных факторов: электрического режима работы элемента; давления, температуры и
влажности окружающей среды; вибрационных воздействий; механических ударов.
Электрический режим, в котором работает элемент, характеризуется коэффициентом нагрузки kн, представляющим собой от306
ношение действительной нагрузки к номинальной для данного
элемента по техническим условиям. Поправочным коэффициентом, учитывающим значение коэффициента нагрузки, считают
электрический параметр, оказывающий решающее влияние на работоспособность элемента. Например, нагрузка для резисторов –
рассеивающая мощность, для конденсаторов – номинальное
напряжение, для транзисторов – мощность, рассеиваемая на коллекторе, для диодов – обратное напряжение и допустимый ток.
Как правило, для упрощения расчета надежности значение
коэффициента нагрузки принимают равным 1.
Интенсивность отказов элементов при эксплуатации в реальных условиях равна номинальной интенсивности отказов, умноженной на поправочные коэффициенты ki. В табл. 6.3 и 6.4 приведены значения поправочных коэффициентов.
Таблица 6.3 – Поправочные коэффициенты в зависимости от воздействия
механических факторов
Условия эксплуатации
Вибрация, k1
Ударные нагрузки, k2
Стационарные
Корабельные
Транспортные
Железнодорожные
Самолетные
1,04
1,3
1,35
1,4
1,46
1,03
1,05
1,08
1,1
1,13
Таблица 6.4 – Поправочные коэффициенты в зависимости от влажности
и температуры k3, высоты над уровнем моря k4
Влажность, Температура, k3
о
%
С
Высота, k4
км
Высота,
км
k4
60 – 70
90 – 98
98 – 108
0–2
2–5
5–8
8 – 15
15 – 25
25 – 40
1,28
1,34
1,42
20 – 40
20 – 25
30 – 40
1,0
2,0
2,5
1,03
1,12
1,18
Таким образом, после определения интенсивностей отказов
элементов схемы замещения САЭ, с учетом поправочных коэффициентов определяются вероятности безотказной работы элементов, функциональных узлов и в целом системы, а также наработка
до ее первого отказа.
Учитывая резервирование работы ФУ САЭ важным показателем надежности САЭ является бесперебойность электроснабже307
ния потребителей, в особенности ответственных, которая оценивается значением коэффициента готовности КГ. Как правило, считают, что время восстановления работоспособности ФУ равно
времени включения его резерва, поэтому значение коэффициента
готовности ФУ определяется по формуле
КГ
Т срФУ
Т срФУ tв кл
РФУ (t ),
(6.11)
где tвкл – время включения резервного ФУ.
Последним этапом проектирования является определение
стоимости разработанной САЭ, которая определяется по формуле
ССАЭ СО СЭ ,
(6.12)
где СО – стоимость оборудования; СЭ – эксплуатационные расходы.
Стоимость оборудования (ФУ, устройств, блоков и т.д.) для
оценочных расчетов в первом приближении можно вычислить по
формуле
N
СО Рi Сi ,
i 1
(6.13)
где Рi и Ci – мощность и удельная стоимость соответственно i-го
оборудования;
N – количество оборудования САЭ.
Затраты на эксплуатационные расходы для различного оборудования происходят в различное время. Поэтому при использовании экономических показателей их необходимо привести к одному времени - началу эксплуатации. В общем случае эксплуатационные расходы определяются по формуле
t
СЭ
СУД СО
(1 Е Н )
t
CC ,
(6.14)
где Сtуд – удельные эксплуатационные затраты за время эксплуатации t;
ЕН – нормативный коэффициент;
сс – коэффициент, учитывающий изменение срока службы.
308
6.4 Выбор оптимальной структуры САЭ
6.4.1 Простейшие способы выбора структуры САЭ из
множества альтернатив
Основные трудности при разработке САЭ связаны с определением диапазона оптимальных значений критериев ее эффективности. В то же время именно этот момент является ключевым, поскольку от правильности выбора этого диапазона зависят эксплуатационно-технические характеристики будущей САЭ.
Оптимизация САЭ одновременно по рассмотренным в п. 6.3
критериям эффективности, с определением диапазона их оптимальных значений, практически неразрешимая задача.
Поэтому один из простых путей выбора оптимального варианта САЭ предусматривает при разработке системы, использовать
накопленный опыт проектирования, выбрать наилучшие варианты
структурно-схемных решений САЭ, и с учетом известных значений критериев эффективности ФУ, коммутационных аппаратов и
других устройств системы, провести сравнительную оценку выбранных вариантов по методике предложенной в п. 6.3.
Под оптимизацией конкретного технического решения понимают обобщение экстремума числовой функции, которое формулируется так: решение эффективно, если любой из характеризующих его критериев можно улучшить лишь за счет ухудшения
остальных. Иллюстрацией правила является приведенный на
рис. 6.13 пример сравнения двух вариантов САЭ по трем критериям эффективности: КПД , массе М и стоимости С.
В отличие от других систем, к примеру, стационарные и передвижные САЭ не имеют главного показателя качества (критерия
эффективности). Поэтому для рассматриваемых САЭ некорректно
использовать перевод всех критериев, кроме одного, главного, в
разряд ограничений. Качество САЭ может оцениваться положением некоторой точки а в трехмерном пространстве (рис. 6.13). А
проекции этой точки на оси критериев эффективности характеризуют их значения. Если все показатели качества приведены к нормированному виду, т.е. уменьшение любой компоненты улучшает
оценку системы, то глобальный показатель качества характеризуется вектором S, соединяющим начало координат с точкой а.
309
Рис. 6.13. Сравнение двух вариантов схем САЭ по трем критериям эффективности КПД , массе М и стоимости С
На каждый из критериев эффективности САЭ могут быть
наложены ограничения (min, Мmax, Сmax), по которым определяется удовлетворяет ли данная САЭ техническому заданию на проектирование или нет. Так, САЭ по положению точки а1 не удовлетворяет техническому заданию по показателю стоимости С1.
Ограничение пространства показателей дает возможность выбора
из реализуемых САЭ допустимых, т.е. удовлетворяющих ограничениям по критериям эффективности. Каждой совокупности характеристик соответствует множество схемных решений САЭ,
качество которых характеризуется векторами S1 – Sn.
Еще один известный способ основан на применении многопараметрической (глобальной) оптимизации САЭ, используя обобщенный критерий вида:
F Ax X B yY C z Z ...,
(6.15)
где X, Y, Z – критерии эффективности САЭ; Ax, By, Cz – весовые
коэффициенты, определяющие значимость частных критериев.
Минимизация функции F обеспечивается за счет всех критериев эффективности (X, Y, Z, …), однако выбор весовых коэффи310
циентов (Ax, By, Cz …), как правило, не является строго обоснованным и опирается на использование субъективных факторов, в
том числе при использовании экспертных оценок. Кроме того,
значения критериев эффективности зависят друг от друга.
Оптимизация САЭ может осуществляться по различным критериям эффективности. Простейший подход – оптимизировать
систему по одному или двум критериям, считая фиксированными
остальные. Так, к примеру, необходимо оптимизировать САЭ, содержащую АИЭ переменного тока и три шины, для подключения
потребителей. Причем, шина Ш1 переменного тока промышленной частоты, а шины Ш2 и Ш3 постоянного тока с разным уровнем напряжения (рис. 6.14, а). САЭ может быть выполнена на
преобразователях электроэнергии ПЭ1 и ПЭ2 или ПЭ1 и ПЭ3. Как
правило, после предварительного расчета, строятся графики зависимостей массы и КПД преобразователей от мощности, соответственно М = f (Р) и = f(Р), как показано на рис. 6.14, б.
Графики (рис. 6.14, б) позволяют наглядно провести анализ
массы и КПД систем ПЭ1-ПЭ2 и ПЭ1-ПЭ3, и определить преимущества одной из них. Очевидно, что если АИЭ генерирует переменный ток повышенной частоты, то по МГП и КПД САЭ будет
иметь значительные преимущества при использовании в ее структуре преобразователей ПЭ1 и ПЭ2.
Более полный результат при оптимизации САЭ, с учетом всех
критериев эффективности, можно получить, используя метод компромиссов или последовательных отклонений (уступок), суть, которого заключается в следующем: в начале фиксируются все критерии эффективности (согласно функции F (6.15)), кроме одного,
который оптимизируется (ХХmin). Затем, назначается допустимое отклонение от критерия Хmin в заданных пределах и находится
следующий критерий эффективности Ymin. Далее задается допустимое отклонение от Ymin, при котором находится последующий
критерий эффективности Zmin и т.д.
Наилучшие результаты обычно дает оптимизация по функции
F с перебором характерных значений весовых коэффициентов и
использованием ограниченных решений, в которых нельзя одновременно улучшить все критерии эффективности.
311
а)
б)
Рис. 6.14. Структурная схема САЭ (а) и графики зависимости массы и КПД
преобразователей от мощности соответственно М = f (Р) и = f(Р) ( б)
Интересным является вариант введения общего экономического критерия САЭ, в котором все частные критерии выражаются
с помощью стоимостных эквивалентов или соответствующих затрат. В этом случае оптимизация САЭ может проводиться на достаточно строгой основе. Однако колебания стоимостных критериев в настоящих экономических условиях позволяют использовать такой подход в весьма ограниченных случаях.
6.4.2 Применение графов при синтезе структур САЭ
Эффективность решения задачи синтеза структур сложных
САЭ возможно только на основе полной и логически строгой систематизации всех альтернативных вариантов структур, удовлетворяющих по своим характеристикам требованиям потребителей
электроэнергии.
Описание структур САЭ может проводиться с использованием графов, в которых вершинами являются виды энергии (по роду
тока, его частоте и уровню напряжения), а ребрами графа являются ФУ САЭ или наоборот: вершины – ФУ САЭ, а ребра – виды
энергии. Графы удобны при описании любых структур САЭ, в том
числе с многоступенчатым преобразованием электроэнергии.
Графы кодируются матрицами инциденций. Каждая структура
САЭ состоит из набора цепей или маршрутов между возможными
источниками электроэнергии Э i, в том числе и ПЭ, и заданными
параметрами потребителей электроэнергии Э j. Для нахождения
оптимальных или близких к ним вариантов каждому элементу
312
САЭ (вершине или ребру) приписывается определенная числовая
характеристика (масса, стоимость, вероятность отказа или обобщенный критерий F), называемая мерой, и затем, выбирается
маршрут (цепь) от Э i до Э j с минимальной суммой выбранного
показателя.
Для примера на рис. 6.15 приведены структурные схемы двух
альтернативных САЭ. Основной исходной энергией Э01 является
механическая энергия от приводных двигателей ПД, а резервным
источником энергии Э02 является аккумуляторная батарея АБ.
01
В схеме САЭ рис. 6.15, а энергия Э с помощью вентильного
генератора ВГ преобразуется в энергию постоянного тока Э1, поступающую на шину Ш1 и далее к потребителям Э1. Двойная индексация энергии на шинах рис. 6.15 указывает на источник (показатель степени) и на потребитель электроэнергии (индекс). Трансформаторно-инверторный преобразователь ТИП преобразует
1
2
энергию постоянного тока Э1 в энергию переменного тока Э2 на
шине Ш2, с которой осуществляется электроснабжение потребителей и трансформаторно-выпрямительного преобразователя
2
3
ТВП1, преобразующего энергию Э2 в Э3 , которая конвертором К
4
преобразуется в энергию Э4 .
В схеме на рис. 6.15, б энергия Э01 бесконтактным асинхронным генератором АГ преобразуется в энергию переменного тока
нестабильной повышенной частоты, которая преобразователем
частоты ПЧ преобразуется в энергию стабильной промышленной
1
частоты на шине Ш2. Энергия постоянного тока Э1 с шины Ш1
от АБ поступает на шину Ш2 через преобразователь ТИП. Преобразователь ТВП2 предназначен для электроснабжения потребителей и подзаряда АБ.
Как ВГ, так и АГ могут использоваться в качестве стартеров
для запуска ПД. На рис. 6.16 приведены графы для обеих схем
САЭ (сплошной линией для схемы рис. 6.15, а, пунктирной линией для схемы рис. 6.15, б).
313
а)
б)
Рис. 6.15. Структурные схемы альтернативных САЭ
В табл.6.5 описана матрица инциденций графа схемы
рис.6.15, а (т.е. описывающая по существу его структуру). Знак
«+» в обозначении источников и преобразователей соответствует
основному режиму работы, а знак «-» - обращенному режиму
(стартерному для генераторов, зарядному для АБ).
314
Рис. 6.16. Графы структурных схем САЭ
Таблица 6.5 – Матрица инциденций графа схемы САЭ
Ребра
ВГ+ ВГ- АБ+ АБ- Ш1 ТИП Ш2 ТВП1 Ш3 К
Узлы
01
+1 -1
Э
02
+1 -1
Э
1
Э1
-1
+1
-1
+1
1
2
+1
+1
Э2
3
+1
+1
Э3
4
Ш4
+1
+1
Э4
315
а)
б)
Рис. П1. Однофазный выпрямитель: а) двухполупериодная схема; б) диаграмма напряжений и токов
б)
а)
в)
Рис. П2. Однофазный мостовой выпрямитель: а) схема; б) и в) диаграммы напряжений и токов на элементах схемы
317
а)
б)
в)
г)
Рис. П3. Трехфазный выпрямитель с нулевой точкой: а) схема;
б) – г) диаграммы напряжений и токов на элементах
318
б)
в)
г)
а)
д)
е)
Рис. П4. Трехфазная мостовая схема выпрямителя: а) схема;
б) – е) диаграммы напряжений и токов на элементах
319
а)
б)
в)
г)
д)
Рис. П5. Трехфазная мостовая схема выпрямителя: а) схема;
б) – д) диаграммы напряжений и токов на элементах
320
Рис. П6. Условно – двенадцатифазная схема выпрямления с последовательным (а) и па
раллельным (б) соединением трехфазных мостовых выпрямителей и ее временные
диаграммы токов и напряжений (в - л)
ЛИТЕРАТУРА
1. А.с. 1022279 СССР, МКИ Н 02Р9/46. Автономный источник
электрической энергии. / Н.И. Богатырев, В.С. Змитрович и др. (СССР). №3404788/24-07; Заявл. 02.03.82; Опубл. 07.06.83. Бюл. №21.
2. А.с. 1107973 СССР, МКИ В 23К9/00. Источник питания сварочной дуги. / Н.И. Богатырев. (СССР). -№3580706/25-27; Заявл. 20.04.83;
Опубл. 15.08.84. Бюл. №30.
3. А.с. 1129040 СССР, МКИ В 23К9/00. Источник питания сварочной дуги. / Н.И. Богатырев, М.И. Богатырев, В.М. Исаенко и др. (СССР). №3442531/25-27; Заявл. 24.05.82; Опубл. 15.12.84. Бюл. №46.
4.
А.с. 1159736 СССР, МКИ В 23К9/00. Источник питания сварочной дуги. / Н.И. Богатырев (СССР). -№3716478/25-27; Заявл. 29.03.84;
Опубл. 07.06.85. Бюл. №21.
5. А.с. 1196169 СССР, МКИ В 23К9/00. Источник питания сварочной дуги. / Н.И. Богатырев (СССР). -№3353974/25-27; Заявл. 11.11.81;
Опубл. 23.12.85. Бюл. №47.
6. А.с. 1199514 СССР, МКИ В 23К9/00. Источник питания сварочной дуги. / Н.И. Богатырев (СССР). -№3776670/25-27; Заявл. 30.07.84;
Опубл. 07.12.85. Бюл. №45.
7. А.с. 1232409 СССР, МКИ В 23К9/00. Источник питания. / Н.И.
Богатырев (СССР). -№3779935/25-27; Заявл. 13.08.84; Опубл. 23.05.86.
Бюл. №19.
8. А.с. 1299726 СССР, МКИ В 23К9/00. Источник питания сварочной дуги. / Н.И. Богатырев, М.И. Богатырев, Ю.П. Бойко и др. (СССР). №3978322/25-27; Заявл. 20.11.85; Опубл. 30.03.87. Бюл. №12.
9. А.с. 1644356, МКИ Н 01Р9/30. Источник питания переменного
тока. / В.В. Гуща, Н.И. Богатырев (СССР). -№4416583/24–07; Заявл.
26.04.88; Опубл. 23.04.91. Бюл. №15.
10. А.с. 1652970 СССР, МКИ G05F1/46. Стабилизирующий источник напряжения постоянного тока / В.А. Атрощенко, О.В. Григораш и др.
(СССР). № 46880991/07; Заявл. 06.03.89; Опубл. 30.05.91. Бюл №20.
11. А.с. 1707731 СССР, МКИ H02P13/00. Многофазный полупроводниковый преобразователь постоянного напряжения в переменное с
промежуточным звеном повышенной частоты./ В.А. Атрощенко, О.В.
Григораш (СССР).–№ 48343006/07; Заявл.09.04.90; Опубл. 23.01.92. Бюл.
№ 3.
12. А.с. 727363 СССР, МКИ В 23К9/00. Источник питания сварочной дуги /Н.И. Богатырев, Л.Н. Горохов, Б.И. Жидков и др. (СССР). 322
№2645325/25-27; Заявл. 17.01.78; Опубл. 15.04.80. Бюл. №14.
13. А.с. 957405 СССР, МКИ Н 02Р9/46. Устройство для стабилизации напряжения асинхронного генератора. / Н.И. Богатырев, Б.И. Жидков,
В.С. Змитрович и др. (СССР). -№3228796/24-07; Заявл. 04.01.81; Опубл.
07.09.82. Бюл. №33.
14. А.с. 975274 СССР, МКИ В 23К9/00. Источник питания для дуговой сварки. / Б.И. Жидков, Н.И. Богатырев (СССР). -№3315660/25-27;
Заявл. 13.07.81; Опубл. 23.11.82. Бюл. №43.
15. А.с. 975274 СССР, МКИ В 23К9/00. Источник питания сварочной дуги. / Н.И. Богатырев, М.И. Богатырев, Б.И. Жидков и др. (СССР). №3380362/25-27; Заявл. 14.01.82; Опубл. 23.04.83. Бюл. №15.
16. А.с. 975274 СССР, МКИ В 23К9/00. Источник питания сварочной дуги. / Н.И. Богатырев (СССР). -№3380380/25-27; Заявл. 14.01.82;
Опубл. 23.04.83. Бюл. №15.
17. Акимов Н.Н., Ващуков Е.П., Прохоренко В.А., Ходоренок Ю.П.
Резисторы, конденсаторы, трансформаторы, дроссели, коммутационные
устройства РЭА: Справочник. – Минск.: Беларусь, 1994. – 592 с.
18. Атрощенко В.А., Гречко Э.Н., Кулешов Ю.Е. Системы электроснабжения переменного тока с полупроводниковыми преобразователями.
– Краснодар.: Флер-1, 1997. – 204с.
19. Атрощенко В.А., Григораш О.В. Модульное агрегатирование
систем автономного электроснабжения. //Промышленная энергетика. –
1996. – № 4. – С. 20 – 23
20. Атрощенко В.А., Григораш О.В. Непосредственный преобразователь частоты с улучшенными техническими характеристиками для систем автономного электроснабжения. // Электротехника. –1997. –№ 11.–
С. 56 – 60
21. Атрощенко В.А., Григораш О.В., Ланчу В.В. Автономные источники электроэнергии: состояние и перспективы. // Промышленная
энергетика. 1995. –№ 6. С. 42 –45
22. Атрощенко В.А., Григораш О.В., Ланчу В.В. Автономные специализированные источники электроэнергии. // Промышленная энергетика. –1994.– № 3. С. 22 – 25
23. Атрощенко В.А., Григораш О.В., Ланчу В.В. Современное состояние и перспективы развития систем автономного электроснабжения. //
Промышленная энергетика. –1994. –№5. – С. 33 – 36
24. Атрощенко В.А., Григораш О.В., Мирошниченко А.В. К вопросу проектирования перспективных систем автономного электроснабжения. // Промышленная энергетика. –1997. –№ 5. –С. 22 – 25
25. Атрощенко В.А., Григораш О.В., Педько М.Н. К вопросу о мо323
дульном построении систем автономного электроснабжения. // Промышленная энергетика. –1998. –№ 9. –С. 18 – 22
26. Атрощенко В.А., Григораш О.В., Семякин В.В., Ланчу В.В.
Оценка эффективности и выбор оптимальной структуры систем автономного электроснабжения. // Промышленная энергетика – 1997.– № 6. –С. 24
– 27
27. Атрощенко В.А., Лысенко М.П., Орлов А.В., Петрушкин В.Ф.
Резервное и гарантированное электроснабжение. (Проблемы, методы и
технические средства). - Краснодар.: Флер-1, 1998. 118 с.
28. Атрощенко В.А., Сингаевский Н.А., Кабанков Ю.А. Силовая
преобразовательная техника систем электроснабжения. – Краснодар:
КВВКИУРВ, 1999. –332 с.
29. Бахян С.К.Симонян М.И..Яламов В. Ф. Высокоскоростные
асинхронные генераторы в автономных стабилизированных источниках
питания. // Электротехника.– 1981. –№ 2. –С. 7 – 12
30. Бернас С., Цек З. Математическое моделирование элементов
электроэнергетических систем: Пер. с польск. – М.: Энергоатомиздат,
1982. –312 с.
31. Бертинов А.И., Мизюрин С.Р., Бочаров В.В. и др. Перспективы
развития автономных систем генерирования переменного тока стабильной
частоты. // Электричество. –1988.– № 10.–С. 16 – 25
32. Бизиков В.А., Обухов С.Г., Чаплыгин Е.Е. Управление непосредственными преобразователями частоты. – М.: Энергоатомиздат, 1985.
–128 с.
33. Богатырев Н.И, Темников В.Н., Белашов В.А. Электрические
характеристики синхронного генератора мощностью 3 кВА // Применение
энергосберегающих технологий в агропромышленном комплексе. -Тр.
/КубГАУ; Вып. 331(359).- Краснодар, 1993.– С.39 – 44.
34. Богатырев Н.И, Темников В.Н., Вронский О.В., Зайцев Е.А.
Определение мощности универсального автономного источника для питания средств электромеханизации //Повышение эффективности электрификации сельскохозяйственного производства. - Тр. /КубГАУ; Вып.
360(388).- Краснодар, 1997.– С.9-19.
35. Богатырев Н.И., Жидков Б.И., Огарь Ю.С. Автономный сварочный агрегат с асинхронным генератором тока повышенной частоты
//Автоматическая сварка. -Киев. –1988. –№1. – С. 44-47.
36. Богатырев Н.И., Зайцев Е.А. Обоснование универсального источника питания соизмеримой мощности. // Физико-механические проблемы создания новых технологий а агропромышленном комплексе. –
Сб.науч.тр. I Рос. науч.-практ. конф. Т.1. –Ставрополь, 2001. – С.43-46.
324
37. Богатырев Н.И., Зайцев Е.А. Обоснование частоты автономного
источника для АПК. // Применение электрических устройств в АПК. – Тр.
/КубГАУ; Вып. 381(409).- Краснодар, 2000.– С.24-35.
38. Богатырев Н.И., Креймер А.С. Анализ ветроэнергетического потенциала Краснодарского края. // Применение электрических устройств в
АПК. – Тр. /КубГАУ; Вып. 381(409).- Краснодар, 2000. – С.7-11.
39. Богатырев Н.И., Курзин Н.Н., Вронский О.В., Темников В.Н.
Анализ регулятора возбуждения универсального автономного источника
питания // Повышение эффективности электрификации сельскохозяйственного производства. -Тр. /КубГАУ; Вып. 360(388).- Краснодар, 1997.–
С.26-35.
40. Богатырев Н.И., Мельников Д.В. Конвертор с промежуточным
звеном повышенной частоты. //Физико-механические проблемы создания
новых технологий а агропромышленном комплексе. – Сб.науч.тр. I Рос.
науч.-практ. конф. Т.1. –Ставрополь, 2001. – С.86-88.
41. Богатырев Н.И., Темников В.Н., Зайцев Е.А., Вронский О.В. Лабораторный стенд для исследования синхронных и асинхронных генераторов. //Применение электрических устройств в АПК. – Тр. /КубГАУ;
Вып. 381(409).- Краснодар, 2000. –С.65-74.
42. Бояр-Созанович С. П. Параллельная работа синхронного и
асинхронного генераторов небольшой мощности. // Энергетик. – 1989. –№
9.–С. 4 – 8
43. Бояр-Созанович С. П., Волошин Н.П. О процессе работы самовозбуждающего асинхронного генератора с емкостным возбуждением. //
Известия Вузов, Энергетика. –1985. –№ 11. –С. 17 – 22
44. Бут Д.А. Бесконтактные электрические машины: Учеб. пособие
для вузов.– М.: Высш. шк., 1990. –416 с.
45. Бут Д.А. Синтез автономных электроэнергетических систем. //
Электричество. –1994. –№ 1. – С. 3 – 4
46. Быков Ю.М. Непосредственные преобразователи частоты с автономным источником энергии. – М.: Энергия, 1977. – 144 с.
47. Быков Ю.М., Василенко В.С. Помехи в системах с вентильными
преобразователями. – М.: Энергоатомиздат, 1986. –152 с.
48. Быстров Ю.А., Мироненко И.Г. Электронные цепи и устройства: Учеб. пособие для электротехн. и энерг. вузов. – М.: Высш. шк.,
1989, 287 с.
49. Гончарук А.И. Расчет и конструирование трансформаторов:
Учеб. Для техникумов. – М.: Энергоатомиздат, 1990. –256 с.
50. Горб С. И., Вишневский Л. В. ,Мироненко К П. Сравнительный
анализ устойчивости параллельной работы асинхронных и синхронных
325
дизель-генераторов. // Двигателестроение.– 1986. –№ 7.– С. 19 – 23
51. Горбачев Г.Н., Чаплыгин Е.Е. Промышленная электроника:
Учебник для вузов / Под ред. В.А. Лабунцова. – М.: Энергоатомиздат,
1988. – 320 с.
52. Горский А.Н., Русин Ю.С., Иванов Н.Р., Сергеева Л.А. Расчет
электромагнитных элементов источников вторичного электропитания. –
М.: Радио и связь, 1988. –176 с.
53. Гречко Э.Н., Тонкаль В.Е. Автономные инверторы модуляционного типа. – Киев.: Наукова думка, 1983. – 304 с.
54. Григораш О. В. Высокоскоростные асинхронные генераторы в
системах автономного электроснабжения: Сб. рефератов деп. рукописей.
Вып-14, сер. Б, инв. № В 1662, 1990.
55. Григораш О. В. Научно-методическое обеспечение разработки
системы автономного электроснабжения с улучшенными техникоэкономическими показателями на базе комбинированных свободнопоршневых двигателей и асинхронных генераторов: Диссертация на соиск. уч. степ. к.т.н. – Краснодар.: КВВКИУРВ, 1992. –145 с.
56. Григораш О.В. Автономные преобразователи напряжения
повышенной надежности. // Промышленная энергетика. –1999. –№ 8. – С.
14 – 17
57. Григораш О.В. К вопросу использования непосредственных
преобразователей частоты для стабилизации напряжения асинхронных
генераторов с высокоскоростными приводными двигателями. //
Промышленная энергетика. –1995. –№ 8. – С. 34 – 37
58. Григораш О.В. Преобразователи электроэнергии на базе
трансформаторов с вращающимся магнитным полем для систем
автономного электроснабжения. // Промышленная энергетика. – 1997. – №
7. – С. 21 – 24
59. Григораш О.В. Современное состояние и перспективы применения асинхронных генераторов в автономной энергетике. // Промышленная энергетика. 1995.– № 3. – С. 29 – 32
60. Григораш О.В. Стабилизированные преобразователи напряжения постоянного тока повышенной надежности. // Электротехника. –1998.
–№3. –С. 24 – 27
61. Григораш О.В., Вайнер Е.Г. Перспективный источник электроэнергии на базе торцевых синхронных генераторов с возбуждением от
постоянных магнитов. // Промышленная энергетика. – 2000. –№ 10. –С. 30
– 33
62. Григораш О.В., Дацко А.В., Мелехов С.В. К вопросу электромагнитной совместимости основных функциональных узлов систем авто326
номного электроснабжения. // Промышленная энергетика. 2001. – № 2. –С.
44 – 47
63. Григораш О.В., Дацко А.В., Мелехов С.В. Способы борьбы с
электромагнитными помехами // Энергосберегающие технологии и процессы в АПК. – Краснодар, КГАУ, 2000, –С. 52 – 53.
64. Григораш О.В., Педько М.Н., Мельников Д.В. Преобразователи
электрической энергии систем автономного электроснабжения. Учебн.
пособие. – Краснодар, КВИ, 2001. –124 с.
65. Григораш О.В., Смык В.А., Педько М.Н., Мелехов С.В. Проектирование силовых полупроводниковых преобразователей электрической
энергии: Учебн. пособие. – Краснодар: КВИ, 2000. –132 с.
66. Григораш О.В., Стрелков Ю.И. Нетрадиционные автономные
источники электроэнергии. // Промышленная энергетика. – 2001.– № 4. –
С. 37 – 40
67. Григораш О.В., Стрелков Ю.И., Педько М.Н. Силовая преобразовательная техника: Учеб. пособие.: – Краснодар: КВИ, 2000. –140 с.
68. Григоренко П.Г., Дерменжи П.Г., Кузьмин В.А., Мнацаканов
Т.Т. Моделирование и автоматизация проектирования силовых полупроводниковых приборов. – М.: Энергоатомиздат, 1988. – 280 с.
69. Гук Ю.Б. Анализ надежности электроэнергетических установок.
– Л.: Энергоатомиздат, 1988. – 224 с.
70. Джюджи Л., Пелли Б. Силовые полупроводниковые преобразователи частоты. /Пер. с англ. – М.: Энергоатомиздат, 1983. – 400 с.
71. Жемеров Г.Г. Влияние непосредственных преобразователей частоты на питающую сеть. // Электричество. –1981. –№ 11. – С. 9 – 14
72. Жуйков В.Я., Сучик В.Е., Андриенко П.Д., Еременко М.А. Автоматизированное проектирование силовых электронных схем. – Киев:
Тэхника, 1988. –184 с.
73. Жуков В. Г. Газотурбинные установки со свободнопоршневыми генераторами газа в энергетике – М.: Энергия, 1971. – 186 с.
74. Забродин Ю.С., Павлов Ф.В. Автономные инверторы и преобразователи частоты. – М.: МЭИ, 1982. – 104 с.
75. Змитрович В.С., Горельченко З.П., Богатырев Н.И. Математическая модель сварочного агрегата с асинхронным генератором
//Применение энергосберегающих технологий в агропромышленном комплексе. -Тр. /КубГАУ; Вып. 331(359).- Краснодар, 1993. – С.28-35.
76. Кадель В.И. Силовые электронные системы автономных объектов. – М.: Радио и связь, 1990. –224 с.
77. Калабеков Б.А., Лапидус В.Ю., Малафеев В.М. Методы автоматизированного расчета электронных схем в технике связи. – М.: Радио и
327
связь, 1990. –272 с.
78. Кобзев А.В., Михальченко Г.Я., Музыченко Н.М. Модуляционные источники питания РЭА. – Томск.: Радио и связь, 1990. –336 с.
79. Ковалев Ф.И. Тенденции развития силовой электроники. //
Электротехника. –1991. –№ 6. –С. 3 – 9
80. Кожарский Г.В., Орехов В.И. Методы автоматизированного
проектирования источников вторичного электропитания. – М.: Радио и
связь, 1985. –184 с.
81. Копылов И.П. Математическое моделирование электрических
машин. – М.: Высш. шк., 1987. –248 с.
82. Кункин В.Р. Перспективы применения газотурбинных двигателей в передвижной энергетике. // Двигателестроение. –1986. –№ 2. – С. 15
– 19
83. Ландехов Е.Н., Столбов М.С. Технология предпроектных исследований тепловых двигателей. // Двигателестроение. –1991. –№ 8 - 9. –
С. 27 – 31
84. Лебедев А.Н. Моделирование в научно-технических исследованиях. – М.: Радио и связь, 1989. –224 с.
85. Лищенко А. И. .Лесник В. А. .Фаренюк А. П. Исследование рабочих характеристик асинхронных генераторов с емкостным возбуждением. // Техническая электродинамика. –1983. –№ 3.– С. 3 – 12
86. Майэель Л.М.,Сосенко Ю. К, Филонов С. П. Повышение удельной мощности свободно-поршневых генераторов газа. // Электромашиностроение. –1972. –№ 6. –С. 17 – 21
87. Мамоконянц Л.Г., Шакарян Ю.Г. Асинхронизированные синхронные генераторы: состояние, проблемы, перспективы. // Электричество. –1994. –№ 3. –С. 3 – 12
88. Моин В.С. Стабилизированные транзисторные преобразователи. – М.: Энергоатомиздат, 1986. –376 с.
89. Огарь Ю.С., Жидков Б.И., Богатырев Н.И Бензоагрегаты нынешнего дня //Путь и путевое хозяйство. -1990. -№10. –С. 18-20.
90. Патент RU2024171, МКИ Н02М5/22. Устройство для управления непосредственным преобразователем частоты / В.А. Атрощенко, О.В.
Григораш и др. (РФ) – №5008965/07; Заявл. 12.08.91; Опубл. 30.11.94;
Бюл. № 22.
91. Патент RU2136013,МКИ G 01R31/34. Электрофицированный
стенд для исследования асинхронных и синхронных генераторов. /Н.И.
Богатырев, Е.А. Зайцев, О.В. Вронский и др. (РФ) -№97105355/09; Заявл.
03.04.97; Опубл. 27.08.99; Бюл. №24.
92. Патент RU2138743,МКИ F 25Р1/04.Устройство для утилизации
328
энергии газа. /Н.И. Богатырев, О.В. Вронский, В.Г. Григулецкий и др.
(РФ) -№97118065/06; Заявл. 30.10.99; Опубл. 27.09.99; Бюл. №27.
93. Патент RU2145546,МКИ Н 02К19/38. Автономный бесконтактный синхронный генератор. /Н.И. Богатырев, В.Н. Темников, О.В. Вронский и др. (РФ) -№97119560/09; Заявл. 26.11.97; Опубл. 10.02.00; Бюл. №4.
94. Патент RU2145763, МКИ Н 02К19/36. Генератор переменного
тока с комбинированным возбуждением. /Н.И. Богатырев, Н.Н. Курзин,
О.В. Вронский и др. (РФ) -№98113046/09; Заявл. 02.07.98; Опубл. 20.02.00;
Бюл. №5.
95. Патент RU2145767, МКИ Н 02Р9/46. Устройство для автоматического регулирования напряжения асинхронного генератора. /Н.И. Богатырев, Е.А. Зайцев, В.Н. Павлов и др. (РФ) -№98121646/09; Заявл.
24.11.98; Опубл. 20.02.00; Бюл. №5.
96. Патент RU2151460, МКИ Н 02Р9/44, 9/04. Регулятор частоты
электроэнергетической установки. /Н.И. Богатырев, О.В. Вронский, Е.А.
Зайцев и др. (РФ) -№98110296/09; Заявл. 20.05.98; Опубл. 20.06.00; Бюл.
№17.
97. Патент RU2151461, МКИ Н 02Р9/46, 9/08, 9/04. Автономный
источник с асинхроннвм генератором. /Н.И. Богатырев, О.В. Вронский,
Е.А. Зайцев и др. (РФ) -№98110762/09; Заявл. 08.06.98; Опубл. 20.06.00;
Бюл. №17.
98. Патент RU2151971, МКИ F 25В11/00. Газотурбогенератор. /Н.И.
Богатырев, О.В. Вронский, Н.Н. Курзин и др. (РФ) -№97118075/06; Заявл.
30.10.97; Опубл. 30.10.00; Бюл. №28.
99. Половко А.М., Маликов И.М., Жигарев А.Н., Зарудний В.И.
Сборник задач по теории надежности. – М.: Советское радио, 1972. –408 с.
100. Полупроводниковые приборы. Диоды выпрямительные, стабилитроны, тиристоры: – Справочник /Гитцевич А.Б., Зайцев А.А., Мокряков В.В. и др.; под ред. Голомодова А.В. – М.: КубК-а, 1996. –528 с.
101. Птицын О.В., Григораш О.В. Генераторы переменного тока. Состояние и перспектива. // Электротехника. –1994. –№ 9. – С. 3 – 8
102. Радин В. И., Быков Ю. М. , Василенко B.C. Электромагнитные
случайные процессы в автономных системах электроснабжения. // Электричество. – 1981. –№ 11. – С. 12 – 16
103. Рогожин Г. М. ,Савоськин А. Д. , Кононов Б. Т. .Козыренко В.
П. Автоматизация систем электроснабжения. МО СССР, 1985. – 414с.
104. Розанов Ю.К. Основы силовой электроники. – М.: Энергоатомиздат, 1992. – 296 с.
105. Розанов Ю.К. Полупроводниковые преобразователи со звеном
повышенной частоты. – М.: Энергоатомиздат, 1987. – 184 с.
329
106. Ромаш Э.М., Драбович Ю.И., Юрченко Н.Н., Шевченко П.Н.
Высокочастотные транзисторные преобразователи. – М.: Радио и связь,
1988. –288 с.
107. Руденко В.С., Сенько В.И., Чиженко И.М. Основы преобразовательной техники. – М.: Высш. школа, 1980. – 424 с.
108. Сборник задач по теории надежности. /Под ред. Половко А.М. и
Маликова И.М. – М.: Советское радио, 1972. – 408 с.
109. Сигорский В.П., Петренко А.И. Алгоритм анализа электронных
схем. – М.: Сов. радио, 1976. –608 с.
110. Сипайлов Г.А., Лоос А.В. Математическое моделирование электрических машин. – М.: Высш. школа, 1980. –176 с.
111. Тимашев С.В., Кузьмин М.А., Чилин Ю.Н. Оптимизация энергетических систем орбитальных пилотируемых станций. – М.: Машиностроение, 1986. –232 с.
112. Торопцев Е Д. Авиационные асинхронные генераторы - М,
Транспорт, 1970. – 204 с.
113. Флоренцев С.Н. Состояние и перспективы развития приборов
силовой электроники на рубеже столетий. // Электротехника. –1999. –№ 4.
– С. 16 – 20
114. Фришман КС., Прохорова Г. А. .Эвентов С. 3. Проектирование
автономных асинхронных генераторов. // Электротехника. –1988. –№ 1. –
С. 7 – 12
115. Чебовский О.Г., Моисеев Л.Г., Недошивин Р.П. Силовые полупроводниковые приборы: Справочник. – 2-е изд., перераб. и доп. – М.:
Энергоатомиздат, 1985, –400 с.
116. Электрические аппараты низкого напряжения: Учебник / О.В.
Григораш, Н.И. Богатырев, Н.Н. Курзин, Г.В. Тельнов; Под ред. Н.И. Богатырева. – Краснодар: Б/И, 2000. –313 с.
117. McMurray W. Effcient snubber for voltage source GTO inverter //
EEE Trans. Power Electron. 1987. Vol PE-2. №3. P. 264 – 272
118. Menzies W., Steimer P., Steinke J.K. File – Level GTO Inverters for
Large Induction Motor Drives // IEEE Trans. Industry Application. 1994. Vol.
30, № 4. P. 938 – 944
119. Nagano T. e.a. A snubber-less GTO // Conf. Rec. IEEE PESC. 1982.
P. 383 – 387
120. Undelend N.M. Snubber forpulse width modulation bridge converters
with power transistors or GTO // Int. Power Electr. Conf. (IEPCD). Tokio. P.
313 – 323
330
СОДЕРЖАНИЕ
ОСНОВНЫЕ ПРИНЯТЫЕ СОКРАЩЕНИЯ ............................................... 3
ВВЕДЕНИЕ .................................................................................................... 5
Г Л А В А 1 ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ АВТОНОМНОГО
ЭЛЕКТРОСНАБЖЕНИЯ .............................................................................. 9
1.1 Состав и требования к системам автономного
электроснабжения ...................................................................................... 9
1.2 Структурные схемы и классификация САЭ .................................... 12
1.3 Основные показатели функциональных узлов эксплуатируемых
САЭ ........................................................................................................... 18
1.4 Оценка качества напряжения ............................................................ 20
1.5 Выбор параметров электроэнергии .................................................. 23
1.6 Особенности проектирования САЭ ................................................. 26
1.6.1 Выбор коммутационных устройств .............................................. 27
1.6.2 Защита и управление САЭ ............................................................. 27
1.6.3 Электромагнитные помехи и способы борьбы с ними ................ 34
1.6.4 Этапы проектирования САЭ .......................................................... 38
Г Л А В А 2 АВТОНОМНЫЕ ИСТОЧНИКИ ЭЛЕКТРОЭНЕРГИИ ..... 42
2.1 Перспективы развития автономных источников ............................ 42
2.2 Основные ограничения для бесконтактных генераторов с
приводом от высокоскоростных двигателей ......................................... 50
2.3 Потери и КПД бесконтактных высокоскоростных генераторов .. 55
2.4 Удельная масса и предельная мощность бесконтактных
высокоскоростных генераторов ............................................................. 60
2.5 Синхронные генераторы с постоянными магнитами ..................... 63
2.6 Асинхронные генераторы ................................................................. 70
2.6.1 Схемные решения источников питания с асинхронными
генераторами ............................................................................................ 80
2.6.2 Источники питания сварочной дуги с АГ..................................... 92
2.7 Бесконтактный генератор постоянного тока ................................. 116
2.7.1 Вентильные генераторы совмещенной конструкции ................ 121
2.7.2 Лабораторный стенд для исследования синхронных,
асинхронных и вентильных генераторов ............................................. 126
2.8 Нетрадиционные источники электроэнергии ................................ 138
Г Л А В А 3 СТАТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
ЭЛЕКТРОЭНЕРГИИ ................................................................................. 145
3.1 Основные требования к преобразователям электроэнергии ....... 145
3.2 Преобразователи напряжения переменного тока ......................... 147
331
3.2.1 Непосредственные преобразователи частоты ........................... 147
3.2.1.1 НПЧ с естественной коммутацией силовых вентилей ........... 148
3.2.1.2 НПЧ с регулируемым углом сдвига фаз на входе .................. 158
3.2.2 Выпрямители ............................................................................... 163
3.2.2.1 Однофазные схемы ................................................................... 165
3.2.2.2 Трехфазные и многофазные схемы ......................................... 170
3.3 Преобразователи напряжения постоянного тока ......................... 178
3.3.1 Инверторы..................................................................................... 178
3.3.2 Конверторы ................................................................................... 182
3.4 Преобразователи на базе трансформаторов с вращающимся
магнитным полем .................................................................................. 185
3.5 Перспективы развития силовых полупроводниковых приборов 195
Г Л А В А 4 СПОСОБЫ УЛУЧШЕНИЯ КАЧЕСТВА ВЫХОДНОГО
НАПРЯЖЕНИЯ СТАТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
ЭЛЕКТРОЭНЕРГИИ ................................................................................ 203
4.1 Оценка качества выходного напряжения НПЧ ............................ 203
4.2 Выходные фильтры НПЧ ............................................................... 211
4.3 Способы улучшения качества выходного напряжения
инверторов ............................................................................................. 213
4.4 Выходные фильтры выпрямителей и конверторов ...................... 223
Г Л А В А 5 МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ УЗЛОВ СИСТЕМ
АВТОНОМНОГО ЭЛЕКТРОНАБЖЕНИЯ ............................................ 232
5.1 Основы теории математического моделирования ....................... 232
5.2 Методы расчета электромагнитных процессов в силовых цепях
преобразователей .................................................................................. 235
5.3 Схемы замещения и математические модели преобразователей
электроэнергии ...................................................................................... 248
5.3.1 Мостовая схема замещения и общие соотношения .................. 248
5.3.2 Модель инвертора ........................................................................ 250
5.3.3 Модель выпрямителя ................................................................... 252
5.3.4 Схема замещения и модель трансформатора
преобразовательных устройств ............................................................ 252
5.4 Схема замещения и результаты исследований математической
модели автономных источников на базе асинхронного генератора . 256
5.5 Точность математического моделирования .................................. 266
Г Л А В А 6 СИНТЕЗ И ВЫБОР ОПТИМАЛЬНОЙ СТРУКТУРЫ
СИСТЕМЫ АВТОНОМНОГО ЭЛЕКТРОНАБЖЕНИЯ ....................... 269
6.1 Модульное агрегатирование САЭ ................................................. 269
332
6.1.1 Унифицированный модульный преобразователь
электроэнергии ....................................................................................... 272
6.1.2 Структурные схемы модульных САЭ ......................................... 277
6.1.3 Особенности проектирования модульных САЭ ........................ 280
6.2 Параллельная работа преобразователей ........................................ 288
6.2.1 Параллельная работа выпрямителей и конверторов .................. 290
6.2.2 Параллельная работа инверторов и преобразователей частоты293
6.3 Оценка эффективности САЭ .......................................................... 295
6.4 Выбор оптимальной структуры САЭ ............................................. 309
6.4.1 Простейшие способы выбора структуры САЭ из множества
альтернатив ............................................................................................ 309
6.4.2 Применение графов при синтезе структур САЭ ........................ 312
ПРИЛОЖЕНИЕ ..................................................................................... 316
ЛИТЕРАТУРА ........................................................................................... 322
333
Григораш Олег Владимирович,
Богатырев Николай Иванович,
Курзин Николай Николаевич
СИСТЕМЫ АВТОНОМНОГО
ЭЛЕКТРОСНАБЖЕНИЯ
МОНОГРАФИЯ
Редактор Н.И. Богатырев
Отпечатано с готового авторского оригинал-макета.
Компьютерная верстка Силяева Н.В.,
Зайцев Е.А.
Подписано в печать 17.12.2001
Бумага офсетная формат 60х84/32
Тираж 300 экз. Учет.-изд.л. – 20,8 п.л.
Заказ № 13450-А5.
Отпечатано в типографии КубГАУ
350044, Краснодар, Калинина, 13
334