/
































































































































































































































































































































































































Автор: Семенов Б.Ю.
Теги: электротехника электроника силовая электроника
ISBN: 978-5-91359-097-8
Год: 2011




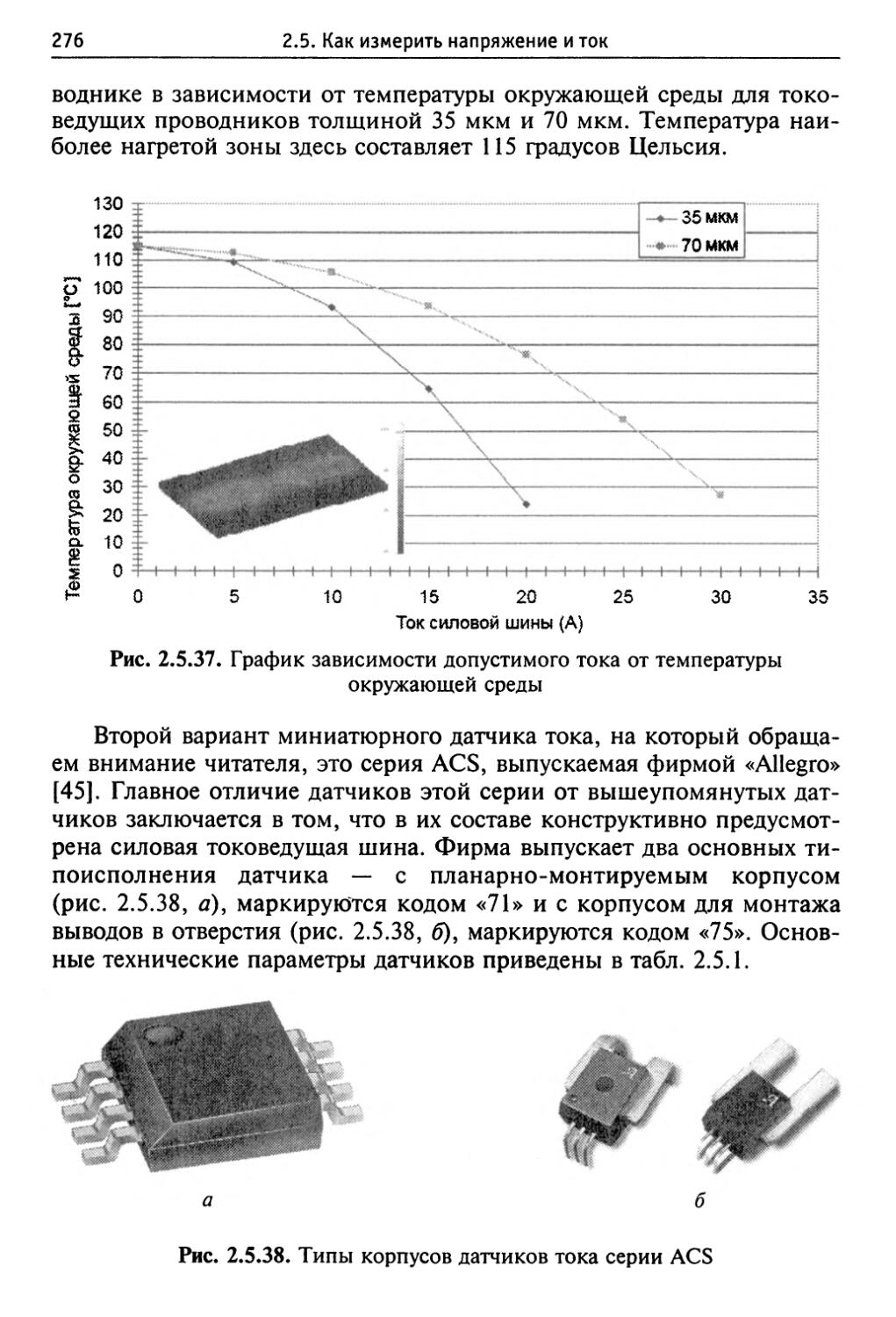
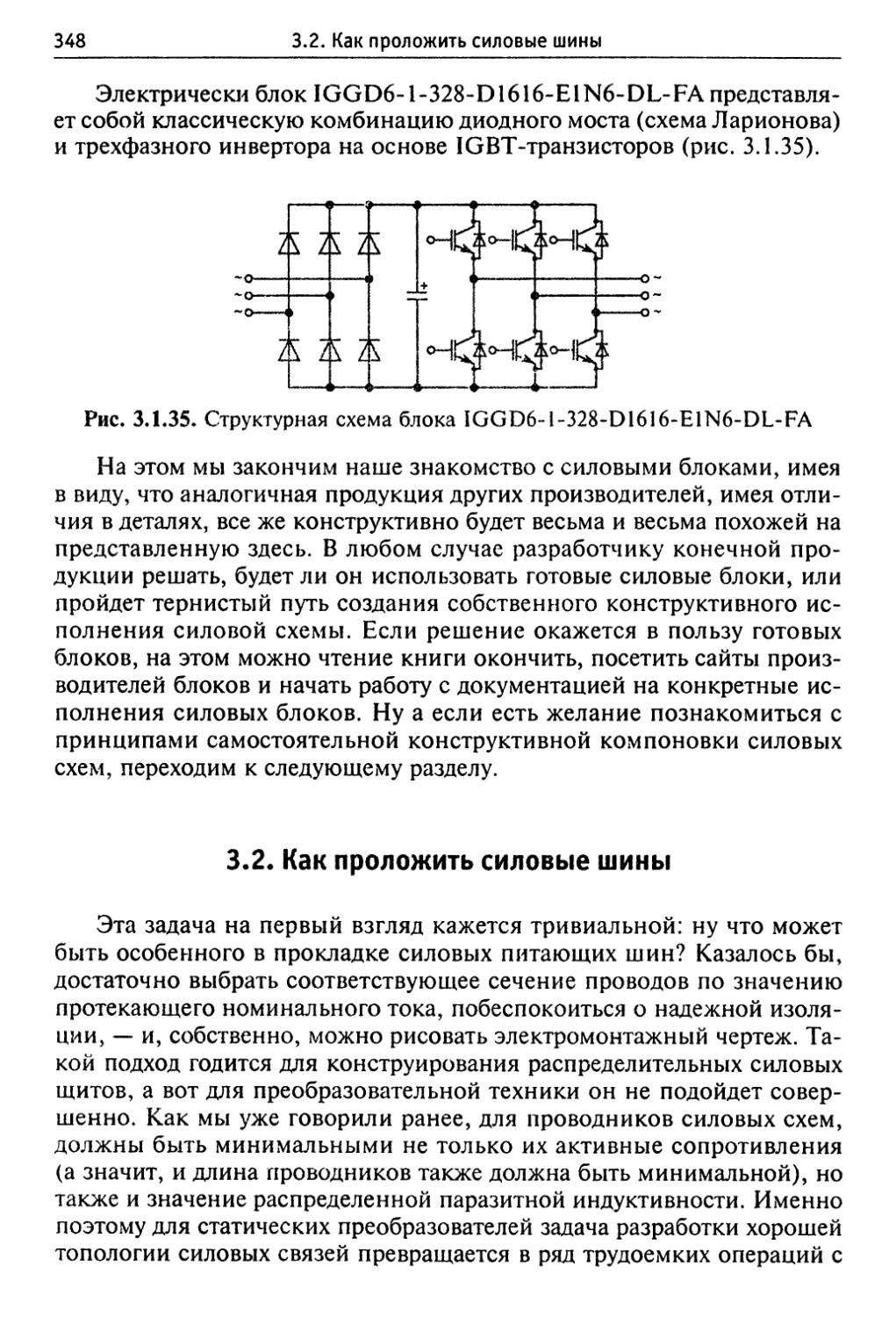
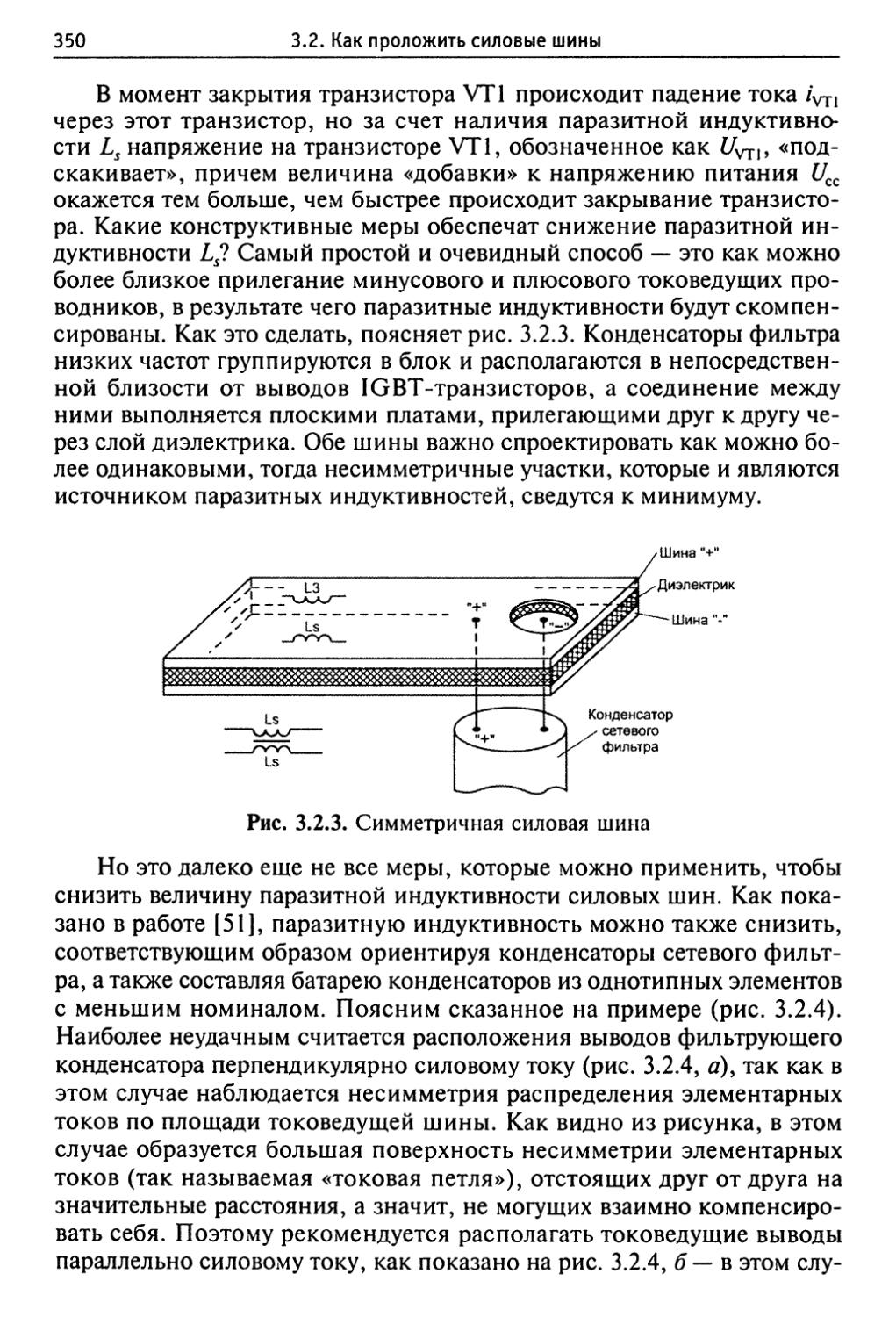
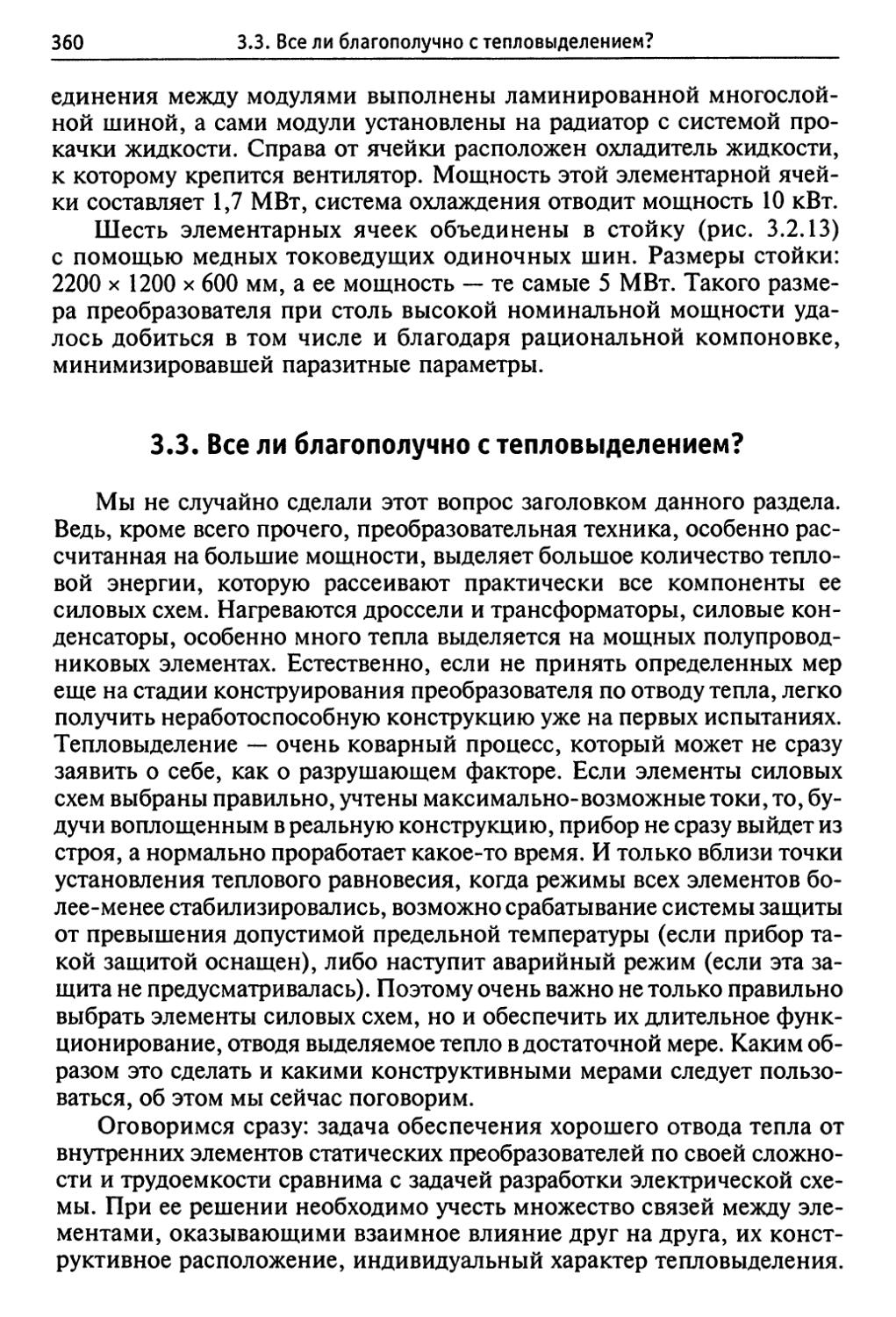
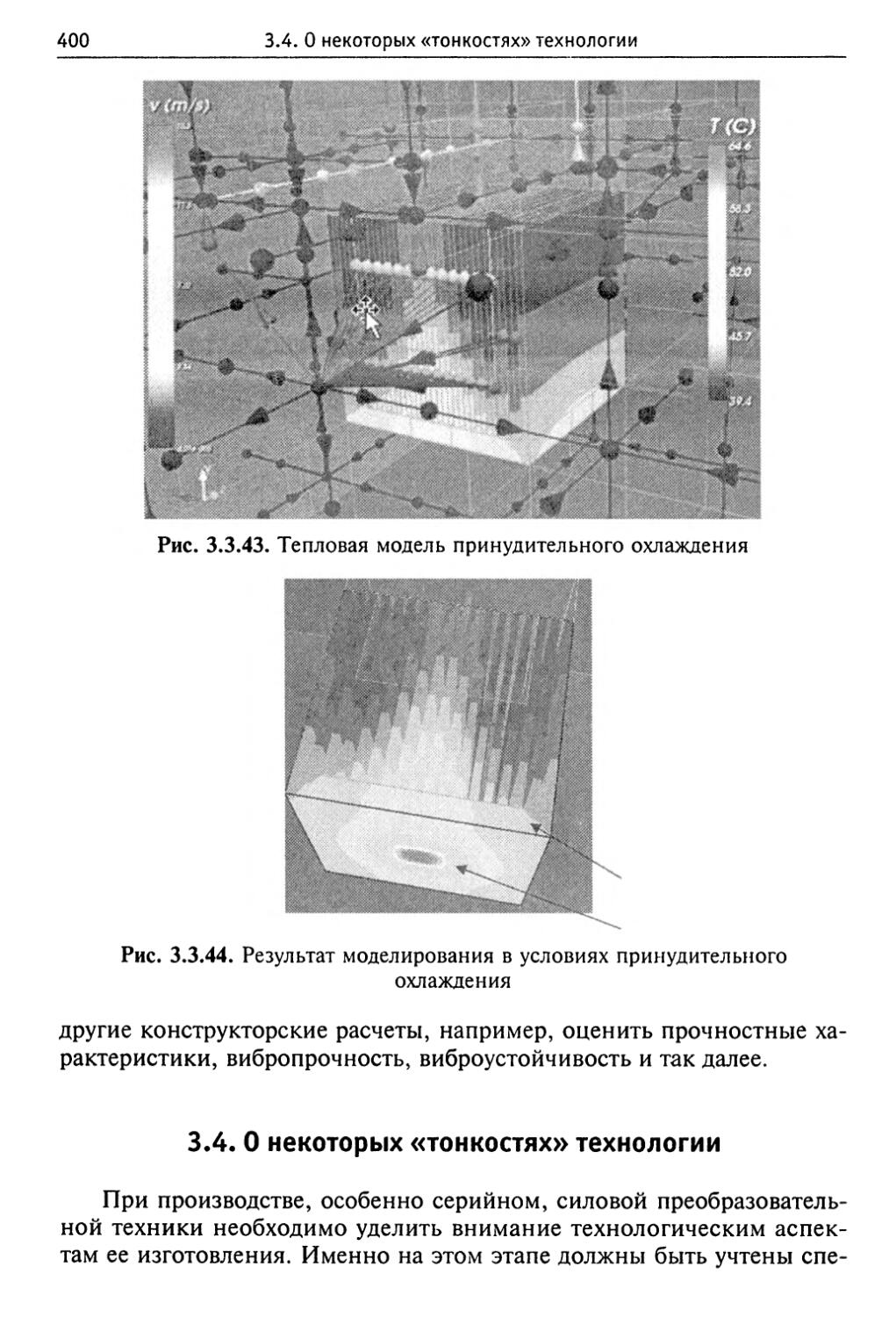
Текст
Серия «Компоненты и технологии»
Б. Ю. Семенов
СИЛОВАЯ ЭЛЕКТРОНИКА:
ПРОФЕССИОНАЛЬНЫЕ РЕШЕНИЯ
Москва
СОЛОН-ПРЕСС
ДМК Пресс
2011
УДК 621.38
ББК 32.85
сзо
Семенов Б. Ю.
СЗО Силовая электроника: профессиональные решения. — М.:
СОЛОН-ПРЕСС, 2011. — 416 с: ил. (Серия «Компоненты и
технологии»)
ISBN 978-5-91359-097-8 (СОЛОН-ПРЕСС)
ISBN 978-5-94074-711-6 (ДМК Пресс)
Силовая электроника — специфическая область инженерного знания,
где многое определяется не столько сугубо теоретическими знаниями,
сколько опытом, эрудицией, живым поиском путей проектирования
надежной электронной техники. Пути решения той или иной технической
проблемы силовой электроники могут быть весьма нетрадиционными,
хотя существует ряд правил, без соблюдения которых точно ничего
работоспособного разработать невозможно. Данная книга призвана помочь
включиться в процесс разработки, конструирования и эксплуатации
статических преобразователей электроэнергии на основе современных
полупроводниковых силовых элементов. Книга адресована
инженерно-техническим специалистам, занятым в процессе разработки, модернизации и
ремонта изделий силовой электроники, студентам высших и средних
учебных заведений, а также всем, кто интересуется проблемами
преобразовательной техники.
КНИГА - ПОЧТОЙ
Книги издательства «СОЛОН-ПРЕСС» можно заказать наложенным платежом (оплата
при получении) по фиксированной цене. Заказ оформляется одним из трех способов:
1. Послать письмо с пустым конвертом по адресу: 123001, Москва, а/я 82.
2. Оформить заказ можно на сайте www.solon-prcss.ru в разделе «Книга — почтой».
3. Заказать по тел. (495) 254-44-10, (499) 252-36-96 или по e-mail: kniga@coba.ru.
Бесплатно высылается каталог издательства по почте. Для этого присылайте конверт
с маркой по адресу, указанному в п. 1.
При оформлении заказа следует правильно и полностью указать адрес, по которому
должны быть высланы книги, а также фамилию, имя и отчество получателя.
Желательно указать дополнительно свой телефон и адрес электронной почты.
Через Интернет Вы можете в любое время получить свежий каталог издательства
«СОЛОН-ПРЕСС», считав его с адреса www.soIon-press.ruAat.doc.
Интернет-магазин размещен на сайте www.soIon-press.ru.
По вопросам приобретения обращаться:
Тел: (495) 254-44-104, (499) 795-73-26
Сайт издательства СОЛОН-ПРЕСС: www.solon-press.ru
E-mail: kniga@coba.ru
обработал: jtp
ISBN 978-5-91359-097-8 (СОЛОН-ПРЕСС) | солОН-ПРЕсЙш 1
ISBN 978-5-94074-711-6 (ДМК Пресс) © ДМК Пресс, 2011
Моей жене Юлии Семёновой
посвящаю эту книгу
ОТ АВТОРА
Электроэнергетика в современном мире заняла столь прочное
место, что мы уже просто не представляем, каким образом можно
обойтись без электрической энергии в цивилизованном обществе,
насыщенном техническими средствами, облегчающими нам жизнь.
Соответственно, задачи преобразования электроэнергии сегодня столь
широки и разнообразны, что в этом направлении работает огромное
количество разработчиков-инженеров, великое множество фирм
поставляет на рынок всевозможные преобразователи напряжения, тока,
частоты с колоссальными диапазонами мощностей — начиная от
долей ватт и заканчивая тысячами мегаватт. Поэтому вполне
естественно, что преобразователи электроэнергии сегодня можно встретить во
всех отраслях промышленности, на транспорте, в быту. Современное
промышленное производство немыслимо без частотных
преобразователей скорости вращения электродвигателей. Не обойтись без
преобразователей и на современном электротранспорте: здесь уже широко
применяют асинхронные электродвигатели, которые вращаются
статическими преобразователями, питаемыми от традиционных
транспортных сетей постоянного тока. Широкий класс преобразовательной
техники составляют источники питания собственных нужд,
встраиваемые в аппаратуру самого разного назначения. Даже в бытовых
условиях часто можно встретить преобразователи электроэнергии, хотя
их присутствие в бытовой технике для неспециалиста незаметно.
К примеру, производители современных автоматических стиральных
машин с широкими программными режимами стирки, полоскания и
отжима, стремящиеся повысить показатели долговечности и
надежности, стремятся применять для вращения двигателей частотные
преобразовательные блоки, которые управляют вращением барабана.
Как известно, исторически область преобразовательной техники
разделилась на два крупных направления: направление вращающихся
преобразователей и направление статических преобразователей. До
недавнего времени вращающиеся преобразователи занимали в техни-
ке подавляющее положение, поскольку для их реализации не
требовалось сложной электронной элементной базы, а статическим
преобразователям небольших мощностей отводилась скромная ниша
специальных применений, и при этом они несли клеймо «ненадежных»,
«сложных», «дорогих». И причины этого заключались вовсе не в
порочности идеи статического преобразования электроэнергии, а в том,
что для реализации статических преобразователей требовалась особая
элементная база, которая появилась не так давно.
Но не будем бросать «камень в огород» вращающихся
преобразователей — ведь они, обладая чрезвычайной простотой и надежностью,
десятками лет обеспечивали работу технических средств. И, тем не
менее, недостатки вращающейся техники очевидны: это небольшой
межремонтный ресурс, а значит, частая необходимость проведения
регламентных работ, высокая шумность, невозможность быстрого
ремонта после поломки или истечения межремонтного интервала,
трудности с диагностикой исправного состояния, низкий коэффициент
полезного действия (КПД), низкий коэффициент мощности,
связанный с работой асинхронных двигателей, которые непосредственно
подключены к питающей сети. Комплекс этих задач решали
обычными методами, проектируя специальные агрегатные помещения для
размещения преобразователей, а также создавая специализированные
диагностические комплексы. Однако задачу полнофункциональной
диагностики вращающихся преобразователей до сих пор в полной
мере решить не удалось — слишком много факторов определяют
работоспособность вращающейся техники. А это означает лишь одно:
диагностика и ремонт вращающихся преобразователей была и
остается нетривиальной задачей, связанной с наличием
высококвалифицированного персонала, обладающего, кроме базовых технических
знаний, еще и опытом работы. Понятно, что число таких
высококвалифицированных людей всегда ограничено, и они достаточно высоко
оценивают свои услуги.
Ситуация коренным образом изменилась с появлением на рынке
электронных компонентов управляемых силовых транзисторов IGBT
и MOSFET. На основе этих компонентов были разработаны
статические преобразователи электроэнергии, свободные от указанных выше
недостатков вращающихся преобразователей. Удалось на несколько
порядков снизить уровень излучаемого шума (что позволило
размещать преобразователи в обычных производственных помещениях),
создать развитую комплексную систему диагностики исправного
состояния с применением микропроцессорных систем, построить
приборы по модульному принципу, обеспечивающему быструю замену
отказавшего узла, руководствуясь стандартной процедурой и
минимальным набором инструментов, повысить КПД и коэффициент
мощности. Необходимость в высококвалифицированном эксплуата-
ционном персонале, если и не отпала совсем, то значительно
снизилась — ведь блочную замену отказавшего узла можно поручить даже
стажеру, мало-мальски знакомому с техникой и умеющему работать
отверткой. Конечно, первые образцы статических преобразователей
оказались не столь надежны, как от них этого ожидали, и часто
выходили из строя. Но на сегодняшний день технологии их производства
стали столь совершенными, что, остановившись перед проблемой
выбора того или иного класса преобразователя, разработчики отдают
предпочтение именно статическим решениям, так как они
действительно позволяют реализовать надежное функционирование
питаемых ими устройств и значительно снизить эксплуатационные расходы
при высоком уровне надежности. Другими словами, эра энерго- и
ресурсосбережения, основой наступления которой послужили
статические преобразователи, — это именно то время, в которое мы с вами и
живем.
Наша книга не ставит своей целью провести всеобъемлющий
анализ общемировых тенденций развития преобразовательной техники,
поскольку материалы на эту тему можно без труда разыскать и в
технических журналах, и в других книгах, и в сети Интернет. Мы
посвящаем книгу рассмотрению специальных технических вопросов,
связанных с разработкой статических преобразователей в объеме
схемотехнических и конструктивных решений. Хотя, конечно, мы не раз
обратимся к общим вопросам там, где это окажется уместным. Как
показывает практический опыт автора, занимающегося разработкой и
поставкой потребителям преобразовательной техники, уровень
отечественных работ в этой области значительно отстает от зарубежных, как
по технике, так и по объемам применения. Поэтому отечественные
разработчики систем питания зачастую закладывают в свои проектные
схемы зарубежные модели статических преобразователей (если,
конечно речь не идет о специальной технике), вынуждая заказчика тратить
дополнительные средства на закупку, обслуживание, вызов
зарубежных специалистов-эксплуатационников, приобретение оригинальных
запасных частей за рубежом. Конечно, нельзя сказать, что в нашем
отечестве это направление электронной техники никак не
представлено в плане разработки, однако следует констатировать:
проектирование статических преобразователей у нас пока остается уделом
избранных специалистов, которые неохотно делятся профессиональными
секретами с начинающими работать на этом поприще. Поэтому целью
данной книги в основном является знакомство начинающих
разработчиков с основными принципами построения промышленных
статических преобразователей электроэнергии, со специальной элементной
базой силовой электроники, с основными трудностями, которые могут
возникнуть при разработке, и с путями решения проблем.
Задачи, решаемые силовой электроникой, как мы уже говорили,
столь широки, что в одной, даже очень большой, книге невозможно
рассказать о всех ее направлениях подробно. Предыдущие авторские
издания [1] и [2] были посвящены общему обзору элементной базы, а
также коснулись схемотехнического построения маломощных
источников питания на основе чопперных, бустерных, инвертирующих,
пуш-пульных, полумостовых и однофазных мостовых схем. Кроме
этого, в названных изданиях автор рассказал о такой нетрадиционной
«профессии» силовой электроники, как построение электронных
балластов. Небольшой разговор состоялся и о построении инверторной
сварочной техники.
В этой книге мы будем говорить о мощных преобразовательных
схемах, питаемых преимущественно от трехфазных сетей переменного
тока, с однофазным или трехфазным выходом. Поговорим мы и об
элементной базе, использующейся при проектировании таких
преобразователей, а также об их конструктивном исполнении, рассмотрим
типовые ошибки, встречающиеся при проектировании
преобразователей и наметим пути их устранения. Кроме этого, наш разговор будет
обращен к современным методам построения управляющей части
статических преобразователей.
Силовая электроника — достаточно специфическая и сложная
область инженерного знания. Очень многое определяется здесь не
столько теоретическими знаниями, сколько опытом, полученным в
процессе выполнения собственных разработок, изготовления
макетных и опытных образов, живого поиска путей улучшения технических
характеристик разработок. Пути решения той или иной технической
проблемы силовой электроники могут быть весьма
нетрадиционными, хотя, конечно, существует ряд правил, без соблюдения которых
точно ничего работоспособного разработать невозможно.
Автору хочется надеяться, что эта книга послужит неплохой
отправной точкой для тех читателей, кто решил связать свою
профессиональную жизнь с разработкой силовой электронной техники.
Б. Ю. Семенов.
Апрель 2009 г.
Глава 1
СИЛОВЫЕ СХЕМЫ ПРЕОБРАЗОВАТЕЛЬНОЙ ТЕХНИКИ
1.1. Преобразовательная техника
в современном мире
Попробуйте, уважаемые читатели, представить современный мир
без электроэнергетики, и вам, вне всякого сомнения, станет грустно.
Ибо на ум приходит картина из позапрошлого века: паровые машины,
керосиновые лампы, гужевые повозки, конки. В этом мире, лишенном
устройств получения и преобразования электроэнергии, мы не увидим
на улицах ни автомобилей, ни трамваев, ни троллейбусов, ни
«электричек», ни электрических фонарей. Мы не обнаружим в нем ни
компьютеров, ни телефонов, ни радиоприемников с телевизорами. Огромное
количество важных и полезных вещей станут ненужными только лишь
потому, что их нечем будет питать. Отсюда мы без труда сможем
заключить, что наличие электрической энергии — это необходимое
условие для решения подавляющего большинства современных задач,
которые ставит перед нами жизнь в нашем времени.
Практика XX в. показала, что электричество является наиболее
удобным и универсальным видом энергии, который имеет смысл
вырабатывать, передавать на большие расстояния и преобразовывать в
другие виды энергии (механическую, тепловую и т. д.). Именно
поэтому электроэнергетика заняла в нашей современной жизни столь
прочное место. Но процесс выработки электроэнергии является
достаточно сложным в техническом отношении, так что просчеты в этой
области часто приводят к катастрофическим последствиям.
Например, в результате техногенной катастрофы, случившейся в Москве
весной 2005 г., когда произошло отключение электроэнергии в части
районов города, только в одних лифтах было заблокировано 1500
человек, не говоря уже о прекращении подачи электроэнергии в
системы обеспечения больниц, на дорожные светофоры, насосные станции
подачи воды, холодильники. В декабре 2008 года в Каракасе, столице
Венесуэлы, в результате короткого замыкания был полностью
обесточен город, из-за чего жизнь в нем полностью парализовало. Властям
пришлось вызволять людей из застрявших лифтов, закрывать метро и
эвакуировать пассажиров. К счастью, нефтеперегонные заводы в
пригородах Каракаса были оснащены собственными генераторами, так
что техногенных катастроф не произошло. По подсчетам
специалистов, энергетическая катастрофа, случившаяся в 2003 г. в Нью-Йорке
и продолжавшаяся 29 часов, обошлась США в 1 млрд долларов.
Один из существенных просчетов сегодняшнего времени, не
приводящий к техногенным катастрофам, но, тем не менее, заставляющий
задуматься специалистов —- это невнимательное отношение к
расходованию энергетических ресурсов. С детства нам знаком призыв «выходя —
гасите свет». И эти слова нельзя назвать пустыми. Понятно, что любой
производитель товара вынужден закладывать цену затраченных
энергетических ресурсов (в том числе израсходованных «вхолостую», для
работы малоэффективного оборудования) в стоимость своей продукции,
а значит, растет ее цена и снижается конкурентоспособность на рынке
аналогичных товаров. Именно поэтому во всем мире все больше и
больше внимания уделяется проблемам энергосбережения, то есть
повышения эффективности использования вырабатываемой энергии. Если до
настоящего времени вопросы, связанные с расширением производства,
решались простым увеличением потребления энергии, строительством
новых электростанций, то сейчас перспективные фирмы стремятся
использовать новое энергосберегающее оборудование, направляя на его
приобретение значительную долю капиталовложений. Экономические
расчеты показывают, что новые энергосберегающие технологии очень
быстро окупаются по затратам, а рентабельность производства столь же
стремительно растет.
Данные современных статистических исследований показывают,
что около 65 % электрической энергии в мире потребляется
электродвигателями различного назначения, например, насосами,
вентиляторами, тягловыми электродвигателями электротранспорта.
Классические нерегулируемые приводные электродвигатели на сегодняшний
момент практически исчерпали свои возможности по повышению
коэффициента полезного действия (КПД). Мощной альтернативой
нерегулируемому электроприводу является использование так называемого
энергосберегающего регулируемого электропривода. При использовании
этой технологии электродвигатель подключается не непосредственно к
сети переменного тока, а к специальному устройству с названием
«статический преобразователь электроэнергии». Статический
преобразователь — это электронное силовое устройство, которое позволяет
задать частоту вращения электродвигателя, причем не только вручную,
но и автоматизированным способом, получая управляющий сигнал от
компьютера, оснащенного специализированной программой.
По оценкам исследователей рынка преобразовательной техники,
на сегодняшний момент в индустриально-развитых странах достигнуто
соотношение между нерегулируемым и регулируемым
электроприводом порядка 1 : 1, и вскоре регулируемый (частотный) электропривод
будет превалировать над нерегулируемым. Интересно отметить, что по
данным Института электроэнергетики США, в период с 1985 по 1995 г.
была проведена реконструкция 60-ти энергоблоков
теплоэлектростанций, где было установлено около 300 частотно-регулируемых устройств
электропривода в диапазоне мощностей от 630 до 4500 кВт. Годовой
экономический эффект от внедрения новых технологий выразился в
экономии 1 млрд кВт • ч электрической энергии. Те же данные в
отношении России, к сожалению, гораздо менее скромны: регулируемый
привод составляет не более 5 % от общих объемов приводной техники.
Это означает, что промышленное производство в нашей стране до сих
пор живет «по старинке», особо не заботясь о повышении
эффективности использования энергии, или только мечтая об этом в условиях
отсутствия свободных средств на модернизацию. Тем не менее, и у нас
наметились положительные сдвиги. Например, в период с 1995 по
2005 г. специалисты ОАО «ВНИИЭ» внедрили на ряде
теплоэлектростанций 28 частотно-регулируемых преобразователя в диапазоне
мощностей от 500 до 4000 кВт, что экономит до 100 млн кВт • ч в год [3].
Аналогичная ситуация складывается в области электротранспорта.
Кроме проблем энергосбережения, здесь существенным является
надежная работа тяглового электродвигателя, поскольку, если
ориентироваться на статистические данные, 50 % неисправностей
электровозов, троллейбусов, вагонов метро и трамваев связаны именно с
неисправностью электродвигателя. Традиционно в этой области техники
используются коллекторные двигатели постоянного тока, частоту
вращения которых невозможно регулировать простыми и надежными
методами. Применение асинхронных двигателей переменного тока
(АТЭД) с частотным регулированием позволяет не только коренным
образом пересмотреть идеологию конструирования
электротранспорта, но существенно сократить процент отказов, связанных с выходом
из строя электродвигателей, расширить диагностические
возможности, предупредить развитие отказов на ранней стадии. Более того,
асинхронные электродвигатели при той же мощности, что и
синхронные постоянного тока, имеют в 1,5 (в среднем) раза сниженные
габариты.
Еще одна область применения частотно-регулируемого
электропривода — это лифтовое хозяйство и подъемное оборудование
(тельферы, лебедки, краны). Ежегодное потребление энергии в данной
отрасли у нас в стране составляет 1 млрд кВт • ч. Поэтому становится
понятным, насколько она энергоемка и какой экономический эффект
можно достигнуть бт применения преобразовательной техники, если
учесть, что, применив частотные преобразователи, можно снизить
энергопотребление электрооборудования лифтов на 40...60 %. Кроме
того, использование «частотников» повышает комфортность движения
кабин, обеспечивает бесшумность движения и высокую точность
позиционирования при остановке [4].
А теперь давайте оценим перспективы использования
регулируемого электропривода в лифтовом хозяйстве с точки зрения емкости
рынка потребления этой технологии. По оценкам, приведенным на сайте
компании «Лифт-Комплект» [5], в одной только Москве в настоящее
время находится в эксплуатации около 120 тысяч пассажирских и
грузовых лифтов, «львиная доля» которых уже выработала 25-летний
ресурс, и число таких устаревших лифтов растет с каждым годом. Нужно
ли говорить, что такие лифты не только подлежат ремонту по правилам
технической эксплуатации как выработавшие заложенный ресурс, но
даже — исходя из простого здравого смысла — становятся
потенциально-опасными для жизни и здоровья людей. Здравый смысл также
подсказывает, что полная замена оборудования окажется намного более
затратной задачей, чем разумная модернизация, особенно в условиях
экономического кризиса.
Применение регулируемого электропривода в лифтовом хозяйстве
позволяет снизить эксплуатационные расходы и повысить
межремонтный период. Так, классический электродвигателями необходимо
заменять (или, по крайней мере, проводить его капитальный ремонт)
раз в 5—10 лет, а двигатель, управляемый преобразователем,
прослужит без замены весь 25-летний ресурс. К тому же, отпадает
необходимость использования двухскоростного двигателя, вместо которого
применяется односкоростной электродвигатель, обладающий
меньшими габаритами и стоимостью.
Статические преобразователи для реализации регулируемого
электропривода могут работать как с электродвигатели с ротором коротко-
замкнутого типа, так и сопрягаться с высокоскоростными
синхронными электродвигателями. Пуск электродвигателей в любом случае
осуществляется плавно, с исключением электродинамических
нагрузок в его обмотках и ударных нагрузок в механизмах привода, в
результате чего увеличивается срок службы как электродвигателя, так и
сопрягаемого с ним оборудования. Появляется возможность
отказаться от технически сложных механических редукторов и вариаторов,
обеспечить работу на пониженных частотах вращения с уменьшением
циклических динамических и вибрационных нагрузок на
подшипники, элементы крепления, фундаменты электродвигателей. Остановка
электроприводного агрегата за счет рекуперативного электрического
торможения обеспечивает возврат электроэнергии в питающую сеть.
Коэффициент полезного действия устройств частотно-регулируемого
электропривода может достигать 98 %. По оценкам специалистов,
применение частотно-регулируемого электропривода может
обеспечить экономию электроэнергии порядка 50 % по сравнению с
нерегулируемым вариантом.
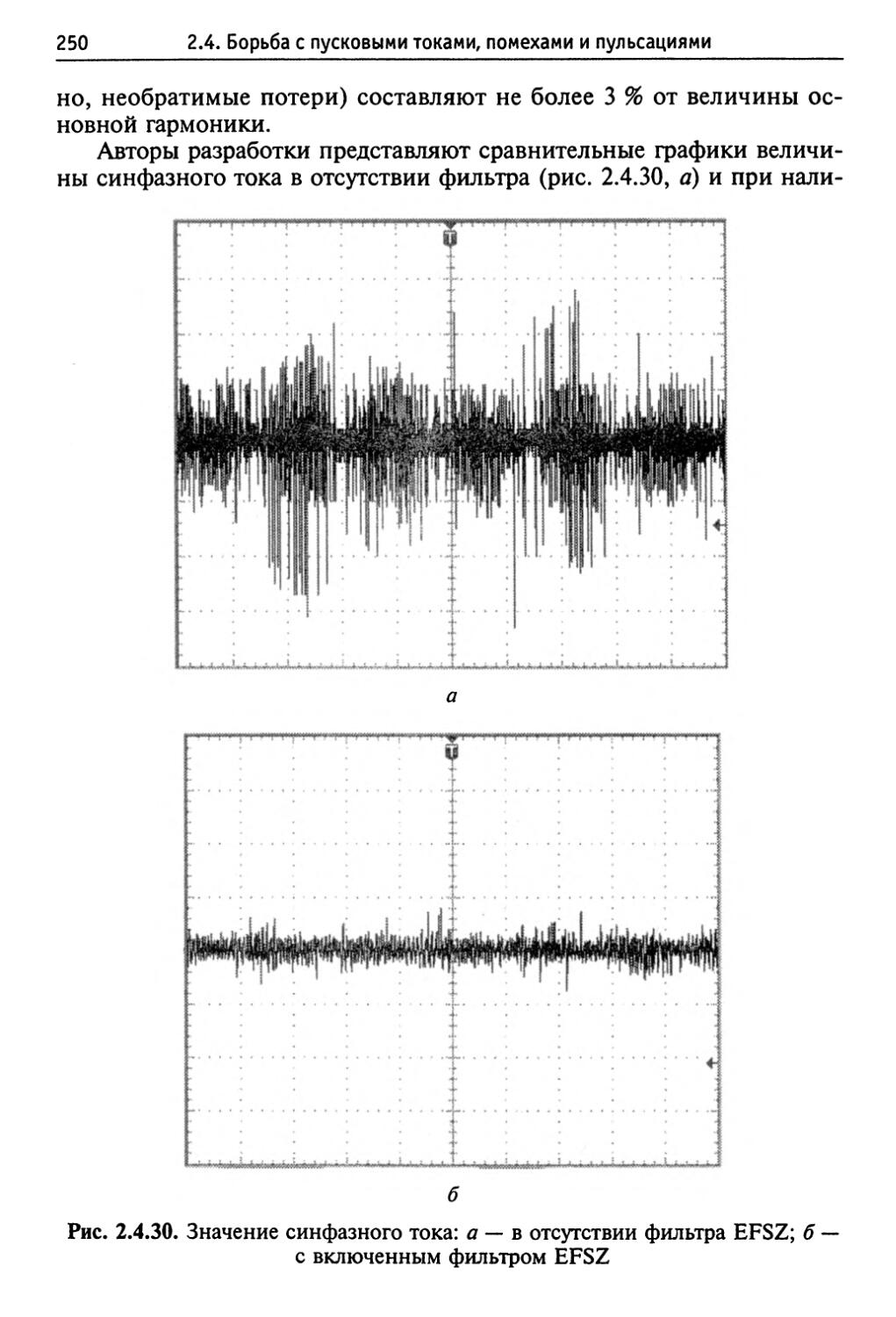
Большие неприятности потребителю электроэнергии может
доставить нестабильность ее электрических параметров. В этом случае го-
ворят о «качестве» электроэнергии, стремясь с помощью
соответствующих технических средств обеспечить стабильность по величине
напряжения, частоты, синусоидальности и т. д. Большое количество
потребителей, включенных в сеть переменного тока, оказывает
существенное влияние на параметры электрического напряжения и тока.
Один из характерных бытовых примеров — включение мощной
нагрузки и связанные с ним «просадки» напряжения, выражающиеся в
мигании осветительных ламп. Другая весьма неприятная ситуация
связана с атмосферными явлениями, и, в частности, с грозовыми
разрядами, попадающими в промышленные сети. Очень часто грозовой
разряд выводит из строя персональные компьютеры, не имеющие
автономных источников питания. Причем выход из строя «персоналок»
может быть как невосстанавливаемым, так и временным, требующим
простой перезагрузки, но, тем не менее, связанным с частичной или
полной потерей данных («зависания» или сбои). По статистике,
средние потери рабочего времени в США по причине выхода из строя
«персоналок» из-за фактора «качества» электроэнергии составляют
около 9 %. Чтобы защититься от подобных факторов нестабильности
питающих напряжений и свести до минимума безвозвратные потери
электронной техники, широко используются статические
преобразователи электроэнергии, называемые «источниками бесперебойного
питания» (ИБП). Источники бесперебойного питания, или, как их
называют, «бесперебойники», в своем составе имеют электронную
схему, формирующую выходное напряжение с заданными параметрами
стабильности и частоты, не зависящими от параметров входного
напряжения. Кроме этого, в составе ИБП всегда имеется аккумулятор,
который питает ИБП (а, соответственно, и нагрузку) в моменты
пропадания сетевого напряжения. На основе ИБП разрабатываются так
называемые «системы гарантированного электропитания» (СГЭ),
которые обеспечивают качественной электроэнергией многокомнатные
офисные помещения и даже целые предприятия. Структура систем
гарантированного электропитания может быть самой разнообразной, но
их ядром всегда выступают статические преобразователи.
Проектирование систем СГЭ сегодня становится все более и более актуальной
задачей, поскольку растет число производств, в которых используется
непрерывный цикл работы. Таким образом, СГЭ может обеспечить
как поддержание параметров питания в период между отказом
основного питания и переходом на резервные источники, так и
предоставление времени на завершение процесса при отсутствии резерва.
Огромный класс задач обеспечения электропитанием связан с
преобразованием напряжения трехфазной сети 380 В или однофазной сети
220 В частотой 50 Гц в напряжения переменного тока повышенной
частоты или напряжения постоянного тока. Традиционно эти задачи
решались с помощью электромашинных преобразователей вращающе-
гося типа (ЭМП). Специалистам хорошо известны вращающиеся
преобразователи серий ATT, АТО, АТП, ЭМУ, которые поставлялись
десятилетиями и до сих пор продолжают эксплуатироваться на
различных промышленных объектах и объектах специального назначения.
Существенными недостатками вращающихся преобразователей, кроме
низкого КПД (не более 60 %) и коэффициента мощности (0,6...0,7),
следует назвать высокий уровень цзлучаемого шума, значительное
время, затрачиваемое на ремонт и обслуживание. Кроме того, опыт
последнего десятилетия показал, что отсутствие потребности в
электромашинных преобразователях, связанное с сокращением строительства
новых объектов, привело к утрате производственных технологий и
полному сворачиванию их производства у нас в стране. Именно поэтому,
когда потребность в связи с ростом производства в преобразователях
возросла, на первый план вынужденно (что оказалось весьма кстати)
вышли статические преобразователи.
Каковы преимущества статических преобразователей
электроэнергии по сравнению с электромашинными? Во-первых, повышенный
КПД, составляющий в среднем 85...95 %. Во-вторых, значительно
сниженные габариты, сокращение которых является следствием
повышения КПД: так как рассеиваемые тепловые потери меньше, нет
необходимости в наращивании размеров радиаторов силовых элементов и
тепловыделяющих элементов. В-третьих, поскольку статические
преобразователи разрабатываются на основе электронной элементной базы, в
их составе можно применять программируемые элементы
(специализированные микроконтроллеры), что позволяет разрабатывать
совершенную систему управления и диагностики. В-четвертых, статические
преобразователи легко могут быть построены на основе блочно-модульно-
го принципа с быстрой заменой отказавших узлов. Преимущества
такого построения очевидны: при отказе одного из блоков не
потребуется демонтаж прибора целиком, необходимо лишь заменить
отказавший блок на исправный за несколько минут и ввести преобразователь в
строй. Более того, можно наращивать суммарную мощность
преобразователей, обеспечив их синхронную параллельную работу. В-пятых,
статические преобразователи не нуждаются в сложной пускорегулирую-
щей аппаратуре, которая традиционно является сцутником ЭМП,
занимает много места и размещается внутри дополнительных громоздких
электрощитов. По своей сути, статический преобразователь внешне
представляет собой «черный ящик», который легко разместить в
удобном месте, доступном для проведения регламентных работ.
Обратим внимание читателя еще на одно немаловажное
обстоятельство: в условиях дефицита электроэнергетических ресурсов
ведущие промышленные страны стремятся, наряду с традиционными,
осваивать и неохваченные источники энергии. Так, например, в Европе с
успехом научились использовать энергию ветра. Собственно, идея эта
не нова: для ее реализации на валу электрогенератора устанавливается
лопастная вертушка, которую вращает поток набегающего воздуха, и
генератор преобразует механическую энергию в электрическую.
Однако в прикладном смысле идея долгое время оставалась
нереализованной, поскольку ее массовому использованию сопутствовали
непреодолимые трудности в виде нестабильности электрических параметров
вырабатываемой энергии, временной нестабильности воздушного потока.
Только с появлением статических преобразователей ветроэнергетика
стала серьезной отраслью электроэнергетики, и доказательством этому
служит огромное количество «ветряков», покрывших территорию
современной Европы, Образовался рынок ветроэнергетического
оборудования, лидирующее положение на котором занимает Германия, по
территории страны разбросано около 17 тысяч «ветряков», а 70 %
производимого оборудования поставляется на экспорт — в США,
Великобританию, Испанию, Китай. В общемировом масштабе количество
ветроэлектростанций ежегодно увеличивается на 25 %, и если в 1991 г.
только в одной Германии производилось около 100 МВт в год, то к
2007 г. эта цифра достигла 23 000 МВт, что в экономическом
отношении выражается в экономии 1 млрд евро на традиционных источниках
энергии и мерах по снижению выброса углекислого газа в атмосферу.
Доля ветроэнергетики в экономике Германии пока невелика — всего
7...8 %, но мощные работы в этом направлении позволят довести через
10 лет эту цифру до 20 % [6].
Основной принцип работы современного «ветряка» — это
подключение электрогенератора к специальному стабилизирующему
преобразователю, который формирует с высокой точностью выходные
параметры напряжения и тока, а также запасает энергию в
аккумуляторной батарее на случай отсутствия ветряного потока. Несколько
ветряков, таким образом, могут объединяться в сеть для повышения
выходной мощности, образуя ветроэлектростанцию. Мировой опыт
эксплуатации ветроэлектростанций показал, что уже сегодня эти
источники энергии могут надежно питать небольшие города без
использования других источников энергии. Поэтому, в связи с бурным
ростом рынка ветроэнергетического оборудования, в номенклатуре
ведущих фирм-производителей силовой элементной базы появляются
электронные компоненты и готовые статические преобразователи,
ориентированные исключительно на применение в
ветроэнергетических установках. К сожалению, наша страна и здесь значительно
отстает от мирового опыта, в целом, однако, осознавая необходимость
вести работы в этом направлении. Сегодня в Калининградской
области уже работает экспериментальный «ветряк», на очереди — освоение
просторов Ленинградской области. Не исключено, что отечественные
разработчики преобразовательной техники вскоре приступят к
реализацией этой задачи, используя передовой мировой опыт.
Мы кратко назвали основные области применения статических
преобразователей в современной технике и можем переходить к
рассмотрению основных схем построения и конструктивных исполнений
названных преобразователей. Но предупреждаем читателя:
номенклатура их столь широка, что едва ли нам удастся рассмотреть все
возможные исполнения, поэтому затронем главные и наиболее
характерные технические реализации, которые помогут сориентироваться в
необъятном мире преобразовательной техники.
1.2. Калейдоскоп статических преобразователей
В этой главе мы поговорим об общих принципах построения
статических преобразователей, об их силовых схемах, о конструктивном
исполнении различных типов приборов, выпускаемых отечественными и
зарубежными фирмами, о методах их управления и о дополнительных
функциональных сервисных узлах, имеющихся в составе современной
преобразовательной техники.
Современный рынок статических преобразователей настолько
широк, настолько много предложений поступает от производителей
этой продукции, что у человека, впервые столкнувшегося с выбором
конкретного прибора для реализации своих задач, может возникнуть
чувство беспомощности. Интернетовские поисковые системы в ответ
на запрос выдают сотни ссылок на сайты производителей,
специализированные выставки насыщены стендами, где наперебой предлагают
приобрести разнообразную преобразовательную технику. Как вообще
сориентироваться в подобном разнообразии продукции? Какой
именно преобразователь выбрать? Чем все-таки отличаются приборы с
очень близкими техническими характеристиками, произведенными
разными фирмами кроме того, что они имеют разные фирменные
планки производителя? Насколько надежным в эксплуатации будет
применение того или иного прибора? К счастью, эти опасения быстро
исчезнут, если удастся разобраться в общих принципах построения и
функционирования силовой преобразовательной техники.
Начнем с преобразователей, использующихся для построения
частотно-регулируемого электропривода и основных силовых схем,
использующихся для их реализации. Наибольшее распространение
среди схем данного класса преобразовательной техники получили так
называемые схемы двухзвенного преобразования. На рис. 1.2.1 показана
в самом общем виде двухзвенная преобразовательная схема с
указанием формы напряжений, формируемых каскадами этой схемы.
Двухзвенные схемы преобразуют питающее напряжение в
напряжение питания электродвигателя в два этапа. На первом этапе произ-
Рис. 1.2.1. Двухзвенная схема преобразования
водится выпрямление сетевого напряжения UBX в напряжение 11выпр
неуправляемым (или управляемым) выпрямителем, в качестве
которого выступает диодный мост (или тиристорно-диодный мост), а
затем сглаживается емкостным или индуктивно-емкостным фильтром.
Получаемое в результате постоянное напряжение Ud на втором этапе
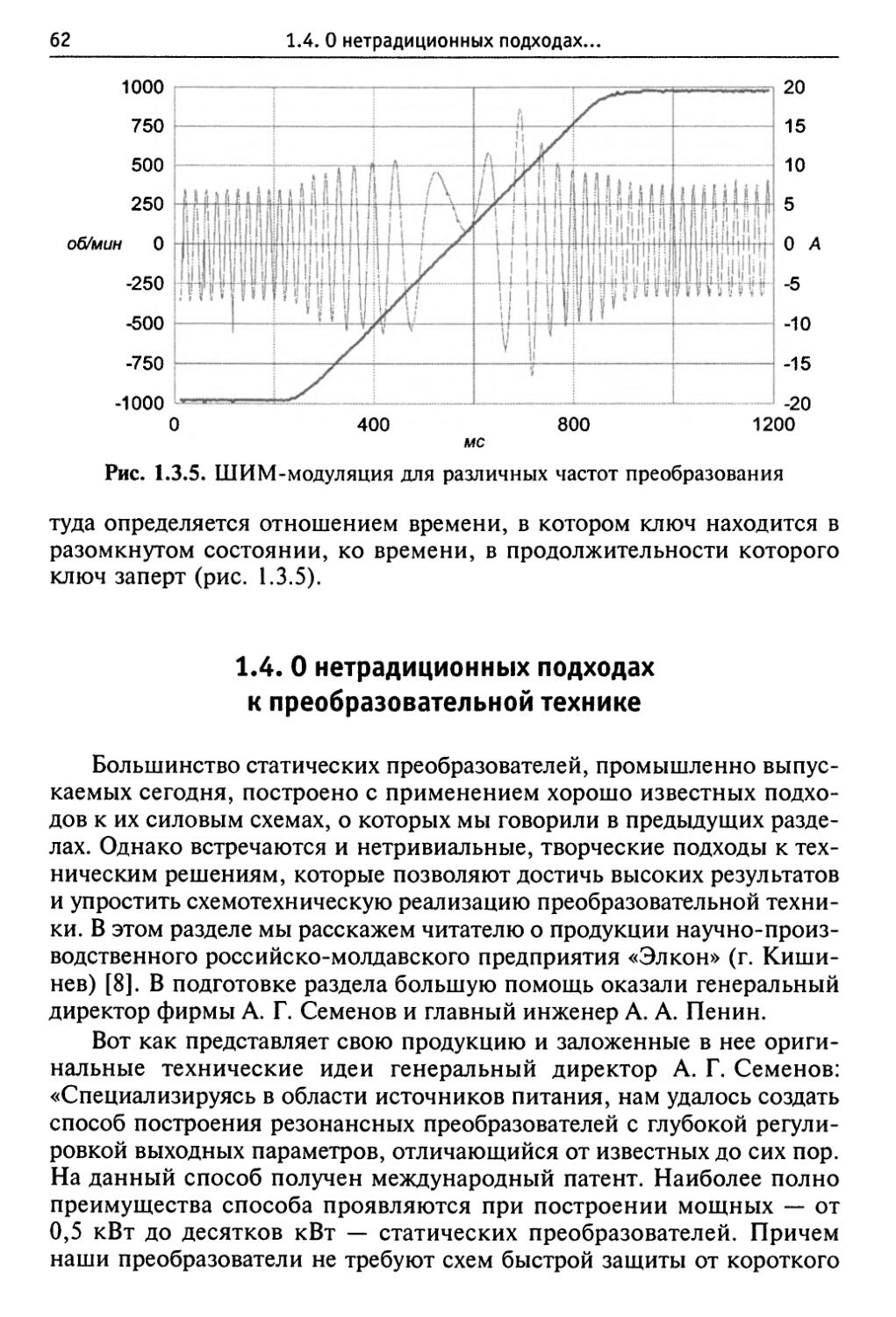
преобразуется с помощью «инвертора» в широтно-модулированные
импульсы с амплитудой £/вых, которые поступают на обмотки
электродвигателя. Поскольку двигательные обмотки имеют индуктивный
характер реактивного сопротивления, ток в обмотках (7ВЫХ) получается в
результате усреднения близким к синусоидальному.
Наиболее интересный узел статического преобразователя — это
инвертор. В качестве основных коммутационных элементов для
инвертора долгое время использовались тиристоры с неполным управлением
(включаемые по управлению, или SRC-тиристоры). Сегодня их
заменили тиристоры с полным управлением типа GTO, IGCT, SGCT. Но
наиболее перспективным на сегодняшний момент все-таки является
использование биполярных транзисторов с изолированным затвором
(IGBT). К сожалению, с помощью IGBT на сегодняшний момент
удается строить статические преобразователи с верхней границей
мощностей порядка нескольких сотен кВт. Если речь идет о диапазонах
мощностей в тысячи кВт, приходится применять известные читателю
тиристоры. Но тенденции развития силовой элементной базы позволяют
сделать прогноз о возрастании доли IGBT в составе сверхмощных
статических преобразователей и о появлении новых разработок мощных
высоковольтных IGBT, способных полностью заменить тиристоры.
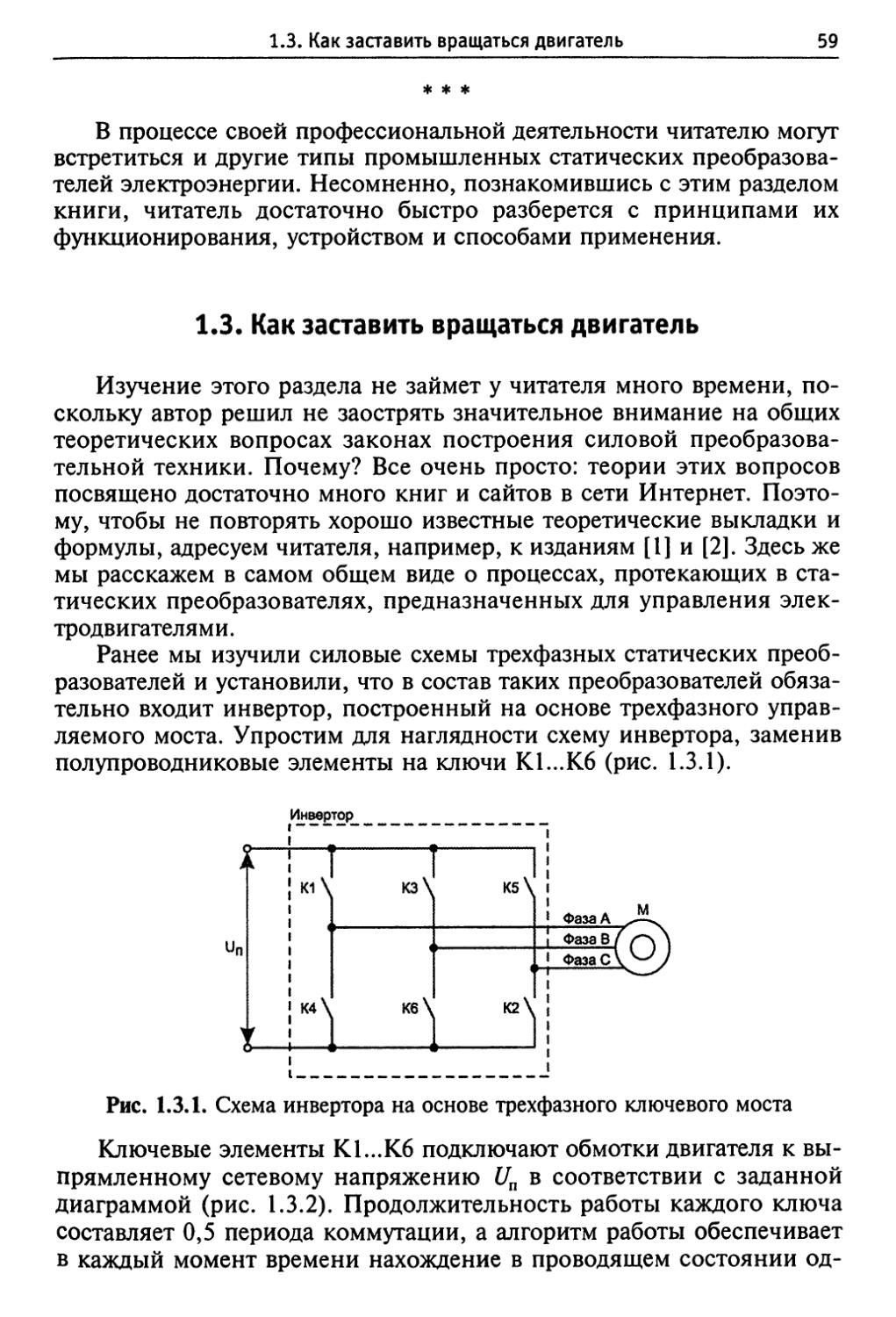
На рис 1.2.2 показана структурная схема преобразователя на
основе SRC-тиристоров. Элементы VS1—VS6 включены по схеме
управляемого выпрямителя, элемент VS7 выполняет функцию
коммутатора, запирающего элементы VS8—VS13, работающие в инверторе.
Конденсаторы CI—СЗ компенсируют индуктивный характер нагрузки. На
основе данной схемы выпускалось большое количество
преобразователей в диапазоне мощностей от 600 до 13 ООО кВт с номинальными
Рис. 1.2.2, Преобразователь на основе SRC-тиристоров
выходными напряжениями до 14 ООО В. Такие преобразователи
использовались на железнодорожном транспорте для управления
тяговыми электродвигателями тепловозов и электровозов.
К сожалению, классические SRC-тиристоры не могут работать на
высоких частотах коммутации, из-за чего не удается повысить частоту
преобразования и уменьшить гармонические искажения выходных
сигналов преобразователей. Так, в среднем, значение гармонических
искажений выходных сигналов подобных преобразователей
составляет 10 % для выходного тока и напряжения. Насколько важно
обеспечить минимальные гармонические искажения выходного напряжения
и тока статических преобразователей для электропривода?
Оказывается, гармонические искажения увеличивают потери электроэнергии в
двигателях и могут оказать разрушающее воздействие на
электрическую изоляцию его обмоток.
Более перспективным на сегодняшний момент является замена
тиристоров SRC-типа на запираемые тиристоры GTO и IGCT,
поскольку, кроме повышенных частот коммутации, эти элементы управляемы
по выключению. На рис. 1.2.3 показана схема высоковольтного
частотного преобразователя, в которой применяются IGCT-тиристоры.
На входе преобразователя в данном случае устанавливается трансфор-
Рис. 1.2.3. Преобразователь на основе IGCT-тиристоров
матор Т1 с двумя вторичными группами обмоток — для повышения
выходного напряжения. Выпрямление осуществляется двумя
трехфазными диодными мостами (VD1—VD12), включенными
последовательно. Выпрямленное напряжение фильтруется элементами LI—L4, R1—
R2, CI—С4. Элементы VS1—VS12 составляют управляемый инвертор.
На выходе преобразователя установлен LC-фильтр L5—L7, С5—С7,
который подавляет высшие гармоники напряжения и исключает
повреждение обмоток электродвигателей.
Вновь вернемся к рис. 1.2.1 и обратим внимание на сглаживающие
(накопительные) конденсаторы, работающие в звене преобразования
переменного тока частоты 50 Гц в постоянное напряжение, питающее
звено инвертора. Емкость этих конденсаторов в классических
преобразовательных схемах должна быть достаточно большой, чтобы
обеспечить хорошее сглаживание выпрямленного тока, а также его
поддержание при возникновении скачков и провалов сетевого напряжения.
В среднем, величина этих конденсаторов выбирается из соотношения
порядка 500 мкФ на 1 кВт выходной мощности. Отсюда следует, что
типовой статический преобразователь представляет собой емкостную
нагрузку со стороны подачи сетевого напряжения питания. Данное
обстоятельство приводит к появлению в питающей сети высших
гармоник тока, которые неблагоприятно влияют на сеть. Для питающей
сети наиболее желательным считается подключение нагрузок
активного характера, поэтому с помощью некоторого усложнения
схемотехнического построения выходного каскада статического преобразователя
удается приблизить потребление тока к активному характеру, то есть
обеспечить коэффициент мощности прибора близким к 1.
На рис. 1.2.4 показана модифицированная схема входного звена
статического преобразователя [7], в состав которого включен так на-
Рис. 1.2.4. Модифицированная схема входного звена статического
преобразователя
Рис. 1.2,4. Модифицированная схема входного звена статического
преобразователя
зываемый «бустер» — повышающий управляемый преобразователь на
основе IGBT-ключей.
Бустер выполнен по симметричной схеме. В его состав включены
индуктивные элементы LI, L2, транзисторные ключи VT1, VT2,
обратные диоды VD7, VD8, выпрямительные диоды VD9, VD10 и
сглаживающие конденсаторы CI, С2. Основные функции бустера здесь две:
во-первых, балансируется напряжение положительной и
отрицательной полярностей относительно нейтрального проводника, что
исключает появление в выходном переменном напряжении статического
преобразователя постоянной составляющей из-за несимметрии
управляющих воздействий, и во-вторых, что важно также отметить, поскольку
конденсаторы CI, С2 фильтра отделены от питающей сети элементами
бустера, реактивная составляющая мощности будет «курсировать»
между нагрузкой, инвертором, емкостями фильтра, и не сможет
проникнуть на вход преобразователя, а значит — и в питающую сеть. Именно
поэтому питающая сеть оказывается защищенной от высокочастотных
гармоник тока.
Дальнейшее совершенствование схем входного звена
преобразователей привело к замене неуправляемых диодных выпрямителей
(диодных мостов) на управляемые выпрямители, выполненные на основе
IGBT-ключей. Эти схемы позволяют обеспечить коэффициент
мощности преобразователей порядка 0,99, то есть для питающей сети
такие преобразователи могут стать практически активной нагрузкой. На
рис. 1.2.5 показана схема входного звена статического преобразователя
с управляемым выпрямителем.
В составе управляемого выпрямителя «работают» диоды VD1—
VD6, транзисторы VT1—VT6, входные дроссели LI—L3. Кроме этого,
имеется специальная схема уравнителя напряжения, построенная на
транзисторах VT7—VT8, диодах VD7—VD8. Сглаживающий фильтр —
элементы L4, CI, С2. Управляемый выпрямитель выполняет функции
регулирования напряжения постоянного тока на входе инвертора,
управления мощностью за счет ограничения выходного тока. Кроме
того, управляемый выпрямитель обеспечивает рекуперативный обмен
энергией с питающей сетью. Уравнитель напряжения симметрирует
напряжение постоянного тока на шинах подачи питания на инвертор
для исключения появления постоянной составляющей в выходном
сигнале.
Рис. 1.2.5. Управляемая схема входного звена
Появление так называемых гибридных силовых схем статических
преобразователей электроэнергии связано с исследованиями,
направленными на снижение их масс и габаритов с одновременным
снижением влияния на питающую сеть. В этих схемах вместо фильтрующих
конденсаторов большой емкости (а значит — и значительных габаритов)
применяются узлы активных фильтров гармоник. Принцип работы
активного фильтра гармоник таков: на входе преобразователя
устанавливается электронная схема, состоящая из датчиков тока, напряжения,
ключевых элементов (IGBT-транзисторов) и сигнального
микроконтроллера. Алгоритм управления фильтром построен таким образом,
чтобы обеспечить воздействия, позволяющие скомпенсировать внешние
возмущения типа скачков и провалов напряжения. Вследствие этого,
потребление тока от сети происходит в режиме, близком к активному, а
выходное напряжение, питающее инвертор, оказывается более
стабильным. Как правило, активные фильтры гармоник работают параллельно с
первичным звеном преобразователя.
На рис. 1.2.6 показана возможная гибридная структура входного
звена статического преобразователя, содержащего в своем составе
активный фильтр гармоник. Как видно из рисунка, гибридная схема
представляет собой параллельное соединение классической силовой
Рис. 1.2.6. Гибридная структура входного звена
схемы с бустерным звеном и активного фильтра гармоник, в составе
которого работают элементы VD7, VD8, VD9, VD10, VT1, VT2, L1.
Таких фильтров в схеме должно быть три, то есть на каждую фазу
«работает» свой фильтр (на рисунке показано внутреннее устройство
только одного силового канала).
В том случае, если крайне важно обеспечить минимальное
значение гармонических составляющих в нагрузке, гибридная схема
реализуется так, как показано на рис. 1.2.7.
Неуправляемый выпрямитель VD1—VD6 здесь построен по
традиционной схеме трехфазного моста. Регулирование напряжения на
входе инвертора выполняется звеном чопперного типа на элементах
VT1, VD7, VD8, CI, С2, L1. Инвертор также включен в классической
схеме трехфазного моста на элементах VT8—VT13, VD15—VD19.
Управляемый активный фильтр гармоник — элементы VT2—VT7,
VD9—VD14, L2—L4, СЗ—С5. Выходные сигналы инвертора и актив-
Рис. 1.2.7. Гибридная схема для питания нагрузки
ного фильтра суммируются в трансформаторе Т1, к выходу которого
подключается нагрузка (например, электродвигатель).
Интересной с точки зрения отказа от габаритных конденсаторов
фильтра является идеология матричного построения силовой схемы
статического преобразователя, приведенная на рис. 1.2.8. Схема
построена с использованием девяти двунаправленных силовых ключей,
которые подключают любую из трех фаз питающего напряжения к
любым трем фазам нагрузки. Управляются ключи специальными
трехфазными последовательностями, сформированными
микроконтроллером. Накапливаемая в нагрузке энергия транслируется в питающую
сеть с помощью оригинального рекуперативного узла. Интересно
отметить, что матричная структура преобразователя позволяет как
повысить, так и понизить частоту выходного напряжения по сравнению с
частотой питающей сети, что не всегда удается в классических тири-
сторных структурах. Другая важная особенность матричной
структуры — возможность сохранения работоспособности преобразователя в
целом при отказе одной из ячеек двунаправленных ключей за счет
перестройки алгоритма управления исправных ячеек.
А теперь мы поговорим о некоторых типичных промышленных
образцах статических преобразователей, которые производятся ведущими
Рис. 1.2.8. Матричная схема статического
преобразователя
мировыми фирмами и находят широчайшее применение в названных
выше технических областях. Начнем с рассказа о маломощных
преобразователях, использующихся для управления электродвигателями. На
рис. 1.2.9 представлена линейка универсальных компактных приборов
серии Sinamics G100, поставляемых фирмой «Siemens». Фирма
позиционирует эту линейку как ряд универсальных и недорогих приборов,
работающих в диапазоне мощностей нагрузки от 0,12 до 3,0 кВт с
питанием от однофазной сети переменного тока напряжением 200...240 В.
Интерфейс управления преобразователями имеет как аналоговую, так и
цифровую части, что позволяет использовать их как в системах с
ручным управлением, так и в автоматизированных системах, оснащенных
микроконтроллерами и другими программно-аппаратными
средствами. Кроме того, ко всем преобразователям серии может быть
подключена выносная дистанционная панель управления, которую можно
устанавливать в удобном для оператора месте. Настройка режимов работы
преобразователя (временная характеристика плавного пуска,
характеристика торможения, цикл работы и т. д.) выполняется посредством
встроенной клавиатуры и жидкокристаллического дисплея, или при
помощи персонального компьютера, который подключается к
специальному конфигурационному разъему. Чтобы установить одинаковый
режим работы для нескольких приборов, достаточно выполнить
настроечную операцию один раз, и затем перенести конфигурационную
информацию на другие преобразователи. Специальное программное
обеспечение для персонального компьютера поставляется в комплекте
с преобразователем. Нужно сказать, что подобный метод
конфигурирования современных преобразователей не является какой-то уникальной
технологией, принятой на вооружение только фирмой «Siemens», — по
этому пути идут практически все фирмы-производители, заботящиеся о
конкурентоспособности своей продукции.
Рис. 1.2.9. Приборы серии Sinamics G100
Технические характеристики
преобразователей Sinamics G100 достаточно высоки: выходная
частота регулируется в пределах от 0 до 630 Гц,
КПД составляет 94 %, а коэффициент
мощности — около 0,95. Максимальное расстояние от
преобразователя до двигателя — 25 м. Узел
защиты преобразователя обеспечивает нормальное
функционирование при превышении в 1,5 раза
номинального выходного тока в течение 60 с.
Кроме этого, обеспечивается автоматический
перезапуск и выход на установленный ранее
режим при перерывах первичного питания
преобразователя (все настройки хранятся в
энергонезависимой памяти).
Второй пример типового ряда
преобразователей широкого применения для управления
электродвигателями небольшой мощности
представлен на рис. 1.2.10. Это линейка SYSDrive 3G3PV, производимая
фирмой «Отгоп». Номинальная выходная мощность
преобразователей выбирается из ряда мощностей (в кВт): 1,2; 1,6; 2,7; 3,7; 5,7; 8,8;
12,0; 17,0; 22,0-27,0; 32,0; 44,0; 55,0; 69,0; 82,0; 110,0; 130,0; 160,0.
Питание осуществляется от трехфазной сети переменного тока
200...240 В или 380...400 В (в зависимости от исполнения конкретного
прибора). Максимальная выходная частота составляет 120 Гц при
разрешающей способности регулировки до 0,01 Гц. КПД приборов
лежит в диапазоне 90...98 % (с ростом мощности приборов КПД
увеличивается). Интерфейс управления — аналоговый или цифровой.
Управление в цифровом виде может осуществляться по
стандартизированным промышленным сетевым информационным протоколам
DeviceNet, Profibus, Modbus. Основные функции, обеспечиваемые
этими преобразователями: возможность перезапуска и
восстановления режима при сбоях первичного питания, обнаружение перегрузки
по величине вращающего момента электродвигателя, настраиваемое
время разгона и торможения, коррекция вращающего момента
двигателя при переменной нагрузке, торможение двигателя постоянным
током, автоподстройка параметров.
В дополнительную комплектацию, состав которой определяется
при заказе приборов, могут входить модули расширения (прибор
измерения параметров работы, аналоговые дистанционные пульты
управления), специальные модули (модуль торможения, блок
тормозного резистора, дроссель постоянного тока, дроссель переменного
тока, цифровые панели управления с жидкокристаллическими
дисплеями, фильтр подавления электромагнитных помех, плата сетевых
протоколов). Таким образом, разработчик сам определяет необходи-
Рис. 1.2.10. Прибор
серии SYSDrive
3G3PV
мость наличия тех или иных модулей, и производит их заказ, экономя
финансовые средства на том, в чем нет необходимости.
На рис. 1.2.11 показана местная панель управления
преобразователями серии SYSDrive 3G3PV. Объем диагностической информации,
выводимый на нее, можно оценить как достаточно большой.
Конечно, разные фирмы считают необходимым по-своему компоновать эту
панель и делать доступными разные объемы информации о
техническом состоянии приборов, однако общемировая тенденция
направлена на расширение этих объемов. Другими словами, современный
статический преобразователь — это не просто ящик с кнопками «пуск» и
«стоп», а прибор, предоставляющий диагностическую информацию
оператору в таком объеме, который позволяет не только в полной
мере оперативно контролировать функционирование, но также
быстро определить характер неисправности. Таким образом, разработчики
преобразовательной техники сегодня должны обращать внимание как
на схемотехническое построение силовой схемы, обеспечивающей
основную функцию прибора, но и продумать способы представления
диагностической информации для пользователя, причем реализовать
эту задачу в удобной и понятной форме.
Рис. 1.2.11. Местная панель управления SYSDrive 3G3PV
Интересным для читателя станет знакомство с продукцией фирмы
«Leroy-Somer». Линейка преобразователей Powerdrive, производимых
этой фирмой, обеспечивает работу с асинхронными двигателями в
диапазоне мощностей от 45 до 800 кВт.
Внешний вид этих преобразователей показан на
рис. 1.2.12. В данном случае преобразователи
размещены в конструктиве стоечного
исполнения, с местным постом управления на лицевой
панели. Технические характеристики линейки
Powerdrive следующие: первичное напряжение
питания — трехфазное, частотой 50 Гц, в
диапазоне от 400 до 480 В; выходное напряжение —
регулируемое, в диапазоне частот от 0 до 400 Гц.
Преобразователи обеспечивают подключение к
цифровой шине управления по
информационным протоколам SM-Devicent, SM-CANopen,
SM-Profibus, SM-Interbus, SМ-Ethernet.
Интересной особенностью этих преобразователей
является также возможность конфигурирования их
режимов и диагностирования с помощью GSM-
модема, то есть используя возможности сотовых
телекоммуникаций. Зачем это нужно? Дело в
том, что сервисный центр с
квалифицированными специалистами может находиться в
значительном отдалении от места эксплуатации
приборов, и для оперативного получения
диагностической информации «из первых рук», минуя
дезинформирующие потери, связанные с
недостаточной квалификацией обслуживающего
персонала, наиболее логично воспользоваться способом
непосредственного считывания параметров с прибора. Ну а передать их по
радиоканалу — дело современной техники.
Уверенно заняла место в группе лидеров рынка
преобразовательной техники фирма «Mitsubishi Electric», выпустив линейку
статических преобразователей серии FR (рис. 1.2.13). При всем при том,
фирма создала несколько серий преобразовательной техники, объединив
их общим наименованием, создав, по сути, узнаваемый
специалистами брэнд. Серия FR-S 500ЕС представляет собой ультракомпактное
исполнение приборов для управления двигателями в диапазоне
мощностей 0,2...3,7 кВт, с питанием от однофазной сети напряжением
200...240 В или от трехфазной сети напряжением 380...480 В.
Серия FR-E 500Е позволяет управлять двигателями с
номинальной мощностью до 7,5 кВт, при этом инженеры фирмы реализовали в
этой серии такую оригинальную идею, как «мягкая широтно-им-
пульсная модуляция», существенно снижающую характерный
свистящий шум двигателя. Также оптимизирован ток обмоток двигателя на
этапах разгона и торможения.
Рис. 1.2.12. Прибор
серии Powerdrive
Рис. 1.2.13. Приборы серии FR
Значительно расширен диапазон выходных мощностей для серии
FR-A 500. Максимальная мощность двигателя в этой серии —
450 кВт, а заложенные алгоритмы управления реализуют высочайшую
стабильность и равномерность вращения, реализован режим
управляемого торможения при резком снятии напряжения питания.
Значительный интерес для обеспечения энергосберегающих
технических решений может представлять серия FR-F 700. Здесь
реализованы специальные алгоритмы управления, которые, по оценкам
специалистов фирмы, позволяют сохранить до 57 % энергии,
затрачиваемой на разгон и торможение.
В качестве дополнительной опции все преобразователи могут
обеспечивать управление через сетевые информационные протоколы
Profibus, DeviceNet, CC-Link и CANopen. Фирма обращает внимание
потребителей и на высочайшие надежностные параметры своей
продукции: все статические преобразователи сохраняют свою
работоспособность даже при двукратной перегрузке. Еще одна интересная
техническая подробность: преобразователи могут автоматически
настраиваться на работу под конкретный двигатель. Таким образом,
пользователю достаточно лишь ввести значение номинальной
мощности двигателя и запустить режим автонастройки, а преобразователь
сам измерит все необходимые параметры, выберет оптимальный
режим. Коррекция режимов будет происходить и в процессе
эксплуатации в автоматическом режиме.
Опциональный состав оборудования, предназначенного для
комплектации регулируемого электропривода, здесь — типовой,
использующийся многими другими фирмами. Мы покажем структуру
комплектации такой системы на примере серии FR, имея в виду, что для
большинства изделий других фирм этот опциональный состав будет
аналогичным или совсем незначительно
отличаться. На рис. 1.2.14 представлена
опциональная комплектация
преобразователя в порядке установки элементов
системы. На входе системы управления
электроприводом устанавливается
автоматический выключатель (1),
обеспечивающий максимальную защиту питающей
сети от коротких замыканий. Далее
следует сетевой дроссель переменного тока
(2), уменьшающий гармонические
искажения питающего напряжения. Опция
(3) — фильтр радиопомех. В данном
случае этот фильтр конструктивно выполнен
в виде «подложки» преобразователя (4),
что очень удобно, так как незначительно
увеличивает габариты системы и хорошо
компонуется при размещении прибора
в месте его работы. Опция (5) — дроссель
постоянного тока, устанавливаемый
между выпрямителем и инвертором
преобразователя. Опция (6) — выходной
(моторный) дроссель уменьшающий
гармонические искажения на выходе
преобразователя и обеспечивающий двигатель
(7) более качественным питанием. При
проектировании системы опциональные
элементы (1), (2), (3), (5), (6) могут
исключаться частично (или полностью),
если разработчик сочтет, что в них нет
необходимости для обеспечения
заданных требований.
Несколько слов об опциональных
дистанционных пультах управления. В
фирменной номенклатуре вариантов
исполнения таких пультов содержится большое
количество, и разработчик системы может
выбрать подходящий по простоте
управления и разумной достаточности
диагностической информации. Наиболее полным вариантом является пульт с
10-ю клавишами и 4-строчным жидкокристаллическим дисплеем, на
который в текстовом режиме выводится информация о работе
прибора, наименования параметров, сообщения о нарушении нормальной
работы. Так как продукция фирмы поставляется во многие страны,
Рис. 1.2.14. Опциональный
состав оборудования
возможно оперативно выбрать язык
отображения (по крайней мере, в меню
есть все основные европейские языки).
Особое внимание
фирма-производитель акцентирует на средствах
программного конфигурирования с
помощью оригинального пакета VFD Setup.
Этот пакет устанавливается на
обычный персональный компьютер и
подключается к приборам по интерфейсу
RS-485 (рис. 1.2.15). В окне программы
предусмотрено отображение и ввод
уставок, осциллографирование сигналов,
вывод аварийных сообщений.
Интеллектуальная система диагностики
неисправности позволяет не только
получить код ошибки, но даже указать место неисправности и выдать
рекомендации по ее устранению.
Отлично известна всем разработчикам силового оборудования
фирма «АВВ». Автоматические выключатели, производимые этой
фирмой, хорошо зарекомендовали себя в эксплуатации, поэтому
широко используются многими отечественными предприятиями. Но эта
фирма знаменита также своей высоконадежной преобразовательной
техникой. Мы не можем обойти вниманием ее продукцию, поскольку
она оригинальна и продвигается на рынок под наименованием
«мультидрайв», а серия имеет индекс ACS800.
Что представляет собой технология «мультидрайв»? Взгляните на
рис. 1.2.16. Здесь используется общая шина постоянного тока,
которая позволяет применить один фидер питания и одно общее устрой-
Рис. 1.2.16. Принцип технологии «мультидрайв» фирмы «АВВ»
Рис. 1.2.15. Связь
с программным обеспечением
ство торможения с выпрямителем, к которому подключается
несколько инверторов.
Преимущества такого построения системы, состоящей из
нескольких двигателей, включенных в единый технологический процесс,
очевидны. Во-первых, сокращается количество кабеля, необходимого для
подключения приборов. Во-вторых, налицо экономия места,
отведенного под установку приборов. В-третьих, уменьшается количество
приборов системы, а значит, повышается ее надежность.
Фирма рекомендует использовать технологию «мультидрайв» там,
где есть необходимость в быстром обмене информацией между
статическими преобразователями и стремительной перестройке их
режимов, например, при обеспечении строго-равномерного натяжения
длинного полотна бумагоделательной машины.
Знакомая нам опциональная идеология построения частотного
электропривода здесь также нашла свое воплощение (рис. 1.2.17). Для
Рис. 1.2.17, Опциональное построение приводов «мультидрайв»
комплектования системы «мультидрайв» поставляются следующие
составные части: инверторы, диодные выпрямители (DSU), активные
выпрямители на IGBT-транзисторах (ISU), тиристорные
выпрямители (TSU), блоки динамического торможения (DBU), дополнительные
секции управления.
Диодные выпрямители (DSU) должны питаться от специального
трансформатора с тремя обмотками, реализующего 30-градусный сдвиг
между напряжениями этих обмоток. Таким способом реализуется так
называемая 12-пульсная схема выпрямления. Более удачна с точки зрения
величины коэффициента мощности активная схема выпрямления на
основе IGBT-транзисторов (ISU), так как коэффициент мощности такой
схемы близок к 1, но по стоимости она дороже диодного выпрямителя.
Технические характеристики преобразователей серии
«мультидрайв»: диапазон входных напряжений (в зависимости от
исполнения) — трехфазное напряжение величиной 380...415 В, 380...500 В или
525...690 В; частота питающей сети — 48...63 Гц; коэффициент
мощности — 0,93 (для диодных выпрямителей) и 0,98 (для активных
выпрямителей на IGBT-транзисторах); КПД — 98 %; выходная
частота — регулируемая в пределах от 0 до 300 Гц; нелинейность
регулировки скорости —• 4 % в случае отсутствия датчика обратной связи по
частоте, и 1 % в случае установленного датчика обратной связи; шаг
регулирования частоты — 0,01 %.
До сих пор мы не касались моментов, связанных с
дистанционным управлением статических преобразователей. Настало время
познакомить читателя с типовым дистанционным управляющим
интерфейсом на примере приборов серии «мультидрайв». Отметим, что
интерфейсы управления других преобразователей могут незначительно
отличаться в части наличия или отсутствия других сигнальных входов
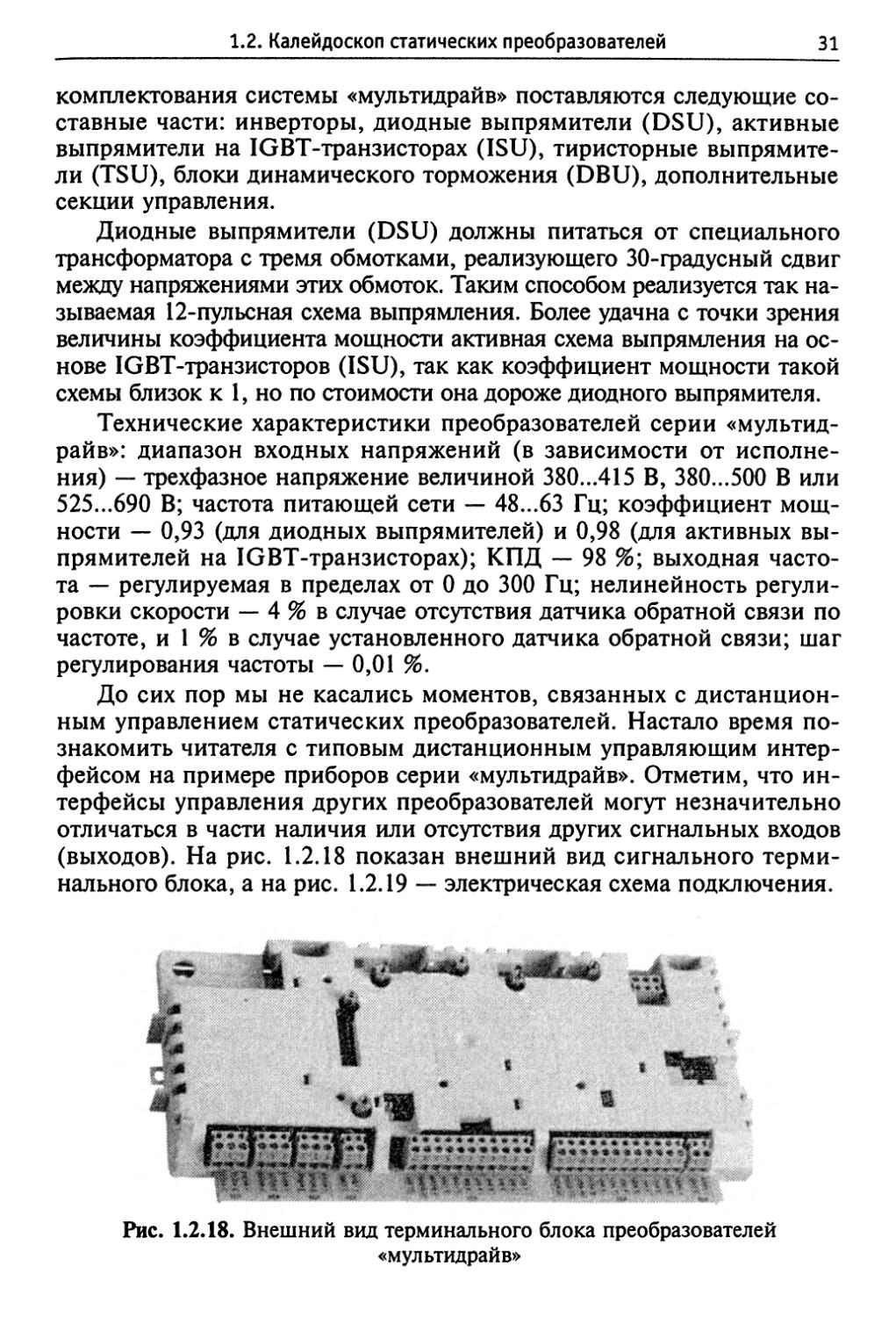
(выходов). На рис. 1.2.18 показан внешний вид сигнального
терминального блока, а на рис. 1.2.19 — электрическая схема подключения.
Рис. 1.2.18. Внешний вид терминального блока преобразователей
«мультидрайв»
Рис. 1.2.19. Схема подключения преобразователей «мультидрайв»
Как видно из рис. 1.2.18, терминальный блок представляет собой
набор клеммников «под винт», к которым подключаются сигнальные
провода. Пользователю рекомендуется соблюдать указания в
отношении экранировки проводов и их длины (если таковые рекомендации
имеются в технических описаниях конкретных преобразователей),
иначе нормальная работа статического преобразователя будет
нарушаться внешними электромагнитными помехами.
Теперь обратимся к схеме подключения (рис. 1.2.19).
Потенциометр, подключенный к контактам 1—4 терминального блока Х21,
предназначен для регулировки скорости вращения двигателя.
Разрешающая способность этого входа — 12 бит. Контакты 5—6 и 7—8 —
два дополнительных входа, предназначенных для регулировки
скорости. Эти входы — так называемые «токовые интерфейсы 4...20 мА», их
разрешающая способность — 11 бит. К выводам 9—10 подключен
стрелочный (или цифровой) прибор-тахометр, показывающий
скорость вращения двигателя (в об/мин), а к выводам 11—12 —
подключен прибор измерения тока обмоток двигателя.
Терминальный блок Х22 предназначен для подключения кнопок
дискретного управления преобразователем. Сюда подключаются
кнопки «пуск/стоп», «вперед/назад», «выбор ускорения/замедления»,
«выбор фиксированной скорости». Терминальные блоки Х25—Х27
предназначаются для обеспечения сигнализации, в частности, о
готовности к работе, о нормальной работе и об отказе преобразователя.
Внутренние коммутационные контакты этих терминальных блоков —
так называемые «релейные сухие контакты».
Как обычно, в комплекте поставки имеется панель
дистанционного управления типа J400. Пользоваться ей очень просто, поскольку
форма представления информации хорошо продумана с
эргономической точки зрения. Важной особенностью устройства панели является
процедура интерактивной настройки с подсказками. При выполнении
операций наладки на буквенно-цифровом индикаторе панели
последовательно выводится ряд вопросов, на которые оператор должен
ответить вводом требуемых параметров. Объемы отображения
информации тоже достаточно высоки: это скорость вращения двигателя,
частота вращения, ток обмоток, номинальный крутящий момент, текущая
потребляемая мощность, напряжение шины постоянного тока
инвертора, выходное напряжение, температура радиатора охлаждения
силовых элементов, наработка прибора, расход электроэнергии (в кВт • ч).
Отказы прибора фиксируются во внутренней памяти, информация о
последних 64 отказах (или аварийных остановках) с указанием даты и
времени отказа (остановки) может быть выведена на индикатор.
Алгоритм функционирования панели позволяет настроить объемы
долгосрочного вывода информации индивидуально, сгруппировать их так,
как удобно пользователю.
Приводы «мультидрайв» оснащаются модулями сопряжения с
промышленными информационными протоколами Fieldbus, Profibus,
DeviceNet, CANopen, ControlNet, Modbus, Ethernet, InterBus, LonWorks,
что позволяет их использовать в большинстве автоматических систем
управления. Модули сопряжения сконфигурированы опционными, то
есть оснащение ими производится по заказу с указанием конкретной
комплектации. На рис. 1.2.20 показан внешний вид модулей
сопряжения с промышленными шинами.
Рис. 1.2.20. Модули сопряжения с промышленными
цифровыми шинами
Откликом на стремительное внедрение коммуникационных
технологий и огромные возможности по обеспечению надежного
функционирования преобразовательной техники является возможность
подключения статических преобразователей «мультидрайв» к сети
Интернет. С этой целью разработан опционный модуль EthernetNET А01,
программное обеспечение которого интегрируется в состав обычного
WEB-браузера. Пользователь, у которого имеется персональный
компьютер, может подключиться к глобальной сети в любой точке
земного шара и осуществлять контроль работы электропривода, его
диагностику и настройку. Также можно получать текущие данные по
нагрузке привода, его наработке, энергопотреблении. Подобным способом
производитель может дистанционно обслуживать свою продукцию во
всем мире, не выезжая на место установки преобразователя.
Отдельный класс преобразовательной техники составляют
сверхмощные высоковольтные статические преобразователи. Эти
устройства представляют собой крупногабаритные шкафы и используются,
главным образом, в электроэнергетике. Примером таких
преобразователей с номинальной мощностью 40 МВт могут служить приборы
серии Silcovert S, производимые фирмой «ASIRobicom» (рис. 1.2.21).
Схемотехническое построение преобразователей — классическое: в
своем составе они имеют выпрямительную секцию, звено постоянного
тока и инвертор переменного тока. Выпрямитель представляет собой
управляемый мост на тиристорах, инвертор также спроектирован на
основе тиристорного моста. Поскольку этот класс преобразователей
обладает высоким тепловыделением, здесь зачастую недостаточным
оказывается применение принудительного воздушного охлаждения. Поэтому
для мощных статических преобразователей и, в частности, для
преобразователей серии Silcovert S спроектирована сложная система водяного
охлаждения. Вода, предназначенная для циркуляции в первичном
охлаждающем контуре, деионизируется и в нее добавляется гликоль (при
работе преобразователя в условиях минусовых температур).
Циркуляция воды в первичном контуре происходит по замкнутому циклу.
Вторичный контур охлаждения здесь
комбинированный, воздушно-водяной. Он спроектирован с
использованием как вентиляторов, так и водяных
насосов. Во вторичном контуре применяется уже
проточная техническая вода. На рис. 1.2.22
показана конструкция водяного охладителя силового
элемента.
Основные технические характеристики
преобразователя серии Silcovert S: номинальная
выходная мощность — от 1 до 40 МВт; входное
питающее напряжение — трехфазное, 900...6000 В;
частота питающего напряжения — 50...60 Гц;
регулировка выходной частоты — в пределах от
0 до 120 Гц; КПД — 98,5 %; поддержка
промышленных информационных протоколов пе-
Рис. 1.2.21. Преобразователь серии Silcovert S
Рис. 1.2.22.
Конструкция
водяного охладителя
редачи данных Profibus, Modbus. Встроенные защиты: максимальная
токовая защита двигателя, защита от перенапряжений и от снижения
напряжения, при отказе системы охлаждения, при перегреве силовых
элементов, при коротких замыканиях.
А теперь мы расскажем о некоторых отечественных серийных
образцах статических преобразователей, использующихся для
построения регулируемого электропривода, а также для других возможных
применений.
В номенклатуре продукции НТЦ «Вектор» (г. Иваново) имеется
серия статических преобразователей ЭПВ четырех исполнений. Первое
исполнение предназначается для управления общепромышленными
асинхронными двигателями без датчиков положения, к которым не
предъявляются повышенные требования к быстродействию и точности
регулирования скорости. Второе исполнение используется в
высококачественном асинхронном электроприводе, третье исполнение
применяется для высококачественного синхронного привода. И, наконец,
четвертое исполнение разработано для применений, требующих
повышенного быстродействующего реагирования на управляющие воздействия.
Технические данные преобразователей серии ЭПВ: номинальный
диапазон мощностей двигателя — 2,2...75,0 кВт; входное напряжение
питания — трехфазное, 380 В, частотой 48...63 Гц; выходная частота
регулируется в пределах от 0 до 400 Гц.
На рис. 1.2.23 представлена функциональная схема
преобразователей серии ЭПВ. Основу приборов составляет силовой модуль,
который преобразует сетевое трехфазное напряжение в выходное
напряжение переменной амплитуды и частоты, которое подается на
электродвигатель. В составе силового модуля работают типовые узлы:
трехфазный неуправляемый мостовой выпрямитель по схеме
Ларионова, емкостной фильтр звена постоянного тока, трехфазный
мостовой инвертор на основе IGBT-транзисторов, устройство сброса
энергии при торможении (УСЭ) с внешним балластным резистором,
драйверы управления IGBT-транзисторами инвертора, узел формирования
сигналов защит, узел первичного заряда емкостного фильтра.
Преобразователь оснащен разветвленной датчиковой системой с
гальваническими развязками входных и выходных цепей, обеспечивающей
формирование сигналов обратных связей (стабилизационных
сигналов). Датчик напряжения VD, состоящий из резистивного делителя и
изолирующего усилителя, отслеживает величину напряжения в звене
постоянного тока. Датчики CD1 и CD2, установленные в выходных
фазах преобразователя, выдают информационные сигналы о
выходных токах инвертора. Датчик температуры, состоящий из терморези-
Рис.Л.2.23. Функциональная схема преобразователя серии ЭПВ
стора и изолирующего усилителя, контролирует температуру
радиатора силового блока. Терморезистор РТС предназначается для контроля
перегрева двигателя.
Блок питания формирует вторичные напряжения для
обеспечения функционирования управляющей части преобразователя.
Система управления преобразователем построена на основе двух
микроконтроллеров: MB90F598 (производитель — «Fujitsu») и ADMC401
(производитель — «Analog Devices»). Первый микроконтроллер
является служебным и выполняет загрузку программ управления,
обеспечивает коммуникационную связь с дистанционным пультом,
поддерживает интерфейсы управления и реализует часть функций защиты
от возникновения аварийных режимов. Второй микроконтроллер
формирует алгоритмы управления преобразователем, обрабатывает
сигналы датчиков, а также реализует функции быстродействующих
защит.
Интерфейсный модуль предназначается для обеспечения
внешнего управления преобразователем и информационного обмена с
системами автоматизированного управления. Он имеет: два канала
аналогового потенциального управления 0...10 В и два канала токового
управления 4...20 мА с разрешающей способностью 16 бит;
аналоговые выходы мониторинга внутреннего состояния прибора, вход
подключения датчика температуры электродвигателя; логические входы
приема дискретных сигналов управления от устройств автоматики,
определяемые пользователем; импульсные выходы для подключения
стрелочных измерительных приборов; транзисторные (с открытым
коллектором) выходы для подключения внешних устройств
автоматики и мониторинга; релейные (типа «сухой контакт») выходы; драйвер
цифровой шины информационного протокола CANopen; драйвер
цифровой шины RS-232 (RS-485) с поддержкой информационного
протокола Modbus.
Система защит преобразователя условно разделена на две группы:
быстродействующую и медленную. В первую группу входят:
максимально-токовая защита преобразователя, защита от превышения
максимальной температуры кристаллов модулей IGBT, защита от
недопустимых отклонений питающего напряжения, защита от аварии узла
сброса энергии, защита от ошибок системы управления.
Максимальная токовая защита преобразователя построена по
двухуровневому принципу. Первый уровень защиты обеспечивается
программно, путем сравнения мгновенных значений токов выходных
фаз с максимально-возможным током IGBT-модулей. Второй уровень
максимальной токовой защиты направлен на контроль степени
насыщения IGBT-модулей и реализуется средствами драйверов силовых
ключей. О том, как эта функция реализуется схемотехнически, мы
детально поговорим в следующей главе.
Защита от превышения температуры кристаллов IGBT-модулей
реализуется математически, на основе заложенной в память
микроконтроллера программной модели поведения силового прибора.
Регулярно выполняемый расчет статических и динамических потерь на
силовых элементах, мгновенного значения перегрева каждого из шести
ключей трехфазного моста позволяет оценить температуру кристалла,
и при ее превышении выдать сигнал на отключение преобразователя.
Исходными данными для расчета являются выходные фазные токи
прибора, постоянное выпрямленное напряжение звена постоянного
тока, температура корпуса IGBT-модуля и скважность сигналов
ШИМ-модулятора.
Сигналом для защиты от недопустимого повышения или
снижения напряжения питания служит информационный сигнал,
снимаемый с датчика напряжения, установленного в звене постоянного тока.
Порог срабатывания защиты от превышения напряжения установлен
равным 700 В, а порог срабатывания защиты при понижении
напряжения — около 15 % от номинального значения входного напряжения.
Защита от аварии узла сброса энергии выполняется путем
контроля загрузки балластного резистора. Уставка защиты по этому
параметру математически рассчитывается исходя из данных, введенных при
настройке прибора: кратности перегрузки по мощности резистора,
текущего напряжения в звене постоянного тока, сопротивления и
мощности подключенного балластного резистора.
В диагностической системе преобразователя имеется еще несколько
условий срабатывания защит по ошибкам в системе управления:
отклонения напряжения вторичного питания цепей управления сверх
допустимых пределов, сбоя в процессорном ядре, ошибки аналогово-цифрового
преобразования сигналов датчиков, ошибки энергонезависимой памяти
хранения настроек, ошибки тестирования датчиков, ошибки управления
по промышленному сетевому протоколу, неисправности часов реального
времени, разряда батареи питания часов реального времени.
Вторая группа защит носит долговременный характер, так как в
данном случае движение к возникновению аварийной ситуации
происходит медленно. Наименования этих защит: температурная защита
преобразователя, температурная защита двигателя, время-токовая
защита двигателя.
Температурная защита преобразователя реализуется на основе
сигналов датчиков температуры, установленных в силовых модулях
инвертора и выпрямителя. При достижении температуры корпуса
любого из модулей значения 90 °С преобразователь переходит из режима
«готов» в режим «аварийный», а при превышении температуры
значения 95 °С происходит блокировка и останов привода.
Температурная защита двигателя может быть включена, если в
управляемый двигатель встроен датчик температуры (РТС-термистор).
Принцип работы этой защиты аналогичен принципу работы
температурной защиты преобразователя, с той лишь разницей, что
температурная уставка срабатывания может быть скорректирована
пользователем.
Наиболее интересна для разработчика преобразовательной техники
(с точки зрения ее реализации) время-токовая защита двигателя. Ее
уставки программируются 5-ю параметрами, устанавливаемыми при
настройке прибора. Порог активизации защиты зависит от значения
установленного номинального тока двигателя и в заводских настройках
составляет 100 % (параметр вводится в процентах от номинального тока).
При достижении тока двигателя указанной величины преобразователь
переходит из режима «готов» в режим «аварийный» и осуществляет
временной контроль состояния перегрузки, ожидая ее снятия. Время
контроля состояния перегрузки рассчитывается исходя из измеренных
текущих значений тока фазы статора двигателя, порогового значения тока
фазы статора, нормированного времени действия перегрузки (по
умолчанию установлено значение 30 с) и нормированной кратности тока
перегрузки (по умолчанию — 1,5). Если в течение расчетного времени ток
двигателя не снижается, происходит отключение преобразователя.
Все аварийные состояния, приводящие к срабатыванию защит,
фиксируются в энергонезависимой памяти преобразователя.
Внешний вид преобразователей серии ЭПВ приведен на рис. 1.2.24.
При разработке системы управления на основе нескольких
преобразователей ЭПВ с двигателями, работающими в режиме генератора,
Рис. 1.2.24. Внешний вид преобразователей серии ЭПВ
или в напряженном динамическом режиме с высокоинерционной
нагрузкой, производитель рекомендует использовать рекуперативный
блок, который будет возвращать накопленную энергию в питающую
сеть. Это техническое решение напрямую связано с технологиями
энергосбережения, так как не только позволяет экономить
электроэнергию, но и решить проблемы с электромагнитной совместимостью,
так как потребляемый от сети ток в случае применения рекуператора
близок к синусоидальному, а значит, и коэффициент мощности
системы близок к 1.
На рис. 1.2.25 показана схема подключения рекуператора к
нескольким преобразователям. Необходимым условием надежной
работы рекуператора является согласование его с инверторами по нагрузке.
Читателю имеет смысл подробнее познакомиться с устройством и
работой рекуперативного блока, так как в ближайшем будущем
использование этих устройств силовой техники станет повсеместным. Итак,
функциональная схема рекуператора ЭПВ-Р, выпускаемого той же
фирмой, что и преобразователи ЭПВ, приведена на рис. 1.2.26. Мы не
Рис. 1.2.25. Подключение инверторов к рекуперативному блоку
Рис.Л.2.26. Функциональная схема рекуператора ЭПВ-Р
будем подробно останавливаться на описании схемы управления этим
устройством, а остановимся на принципе построения силовой схемы.
Основа рекуперативного блока — шестиключевой трехфазный
мост, построенный с применением IGBT-транзисторов, управляемых
по специальному алгоритму. Входные фазы рекуператора через
входной дроссель подключаются к питающей сети, а выходные клеммы,
формирующие постоянный ток, — к звену постоянного тока
инвертора. Выходное напряжение рекуператора стабилизируется системой
управления на заданном уровне при изменении напряжения
питающей сети и колебаниях тока нагрузки.
На рис. 1.2.27 показаны диаграммы фазных сетевых токов и
фазных сетевых напряжений в режиме потребления энергии (а) и в
режиме рекуперации (б). Из графика а видно, что ток фазы питающего на-
Рис. 1.2.27. Режим потребления энергии (а), режим рекуперации (б)
пряжения (Ia) и напряжение фазы (Ua) совпадают по фазе основной
гармоники, при этом выходное напряжение сохраняется при набросе
(левая часть графика) и сбросе (правая часть графика) нагрузки.
Режим рекуперации энергии показан на рис. 1.2.27, б. Из
представленного графика видно, что при переходе двигателя из режима
потребления энергии в генераторный режим фаза тока относительно
фазы напряжения «переворачивается».
В составе рекуператора установлен
пропорционально-интегрирующий (ПИ) регулятор в контуре управления величиной напряжения и
два пропорционально-интегрирующих регулятора в контурах
управления активной и реактивной составляющих тока. Входным сигналом
регулятора напряжения является уровень постоянного напряжения Udc, в
соответствии с величиной которого формируется значение активной
составляющей потребляемого тока Ixv Величина реактивной
составляющей потребляемого тока 1у1 вычисляется из величины тока Ixz и
тангенса угла сдвига между током и напряжением. При нулевом сдвиге
между током и напряжением рекуператор осуществляет обмен с
питающей сетью только активной составляющей энергии. Имеющийся в
составе рекуператора узел ориентации запоминает текущие
мгновенные значения напряжений трехфазной сети (по каждой фазе в
отдельности), и исходя из этих данных, вычисляет текущее угловое положение
вектора Aug, а также его амплитуду U и угловую частоту (рис. 1.2.28).
Рис. 1.2.28. К пояснению алгоритма работы рекуператора
Преобразователь координат (№ 1) выполняет преобразование
фазных токов статора АБС в систему координат XY ортогонального типа,
ориентированную по вектору напряжения. Далее, преобразователь
координат (№ 2) трансформирует подвижную систему координат XY в
неподвижную UV, синхронизированную с фазой А входного сетевого
напряжения. Далее, векторный модуль преобразует полученный
сигнал в широтно-модулированные импульсы управления силовыми
ключами инвертора.
Технические характеристики рекуперативных блоков приведены в
табл. 1.2.1.
Таблица 1.2.1. Основные характеристики рекуперативных блоков
Типоисполнение рекуперативного блока
эпв-р-тппт-
32-380-600
эпв-р-тппт-
63-380-600
ЭПВ-Р-ТППТ-1
100-380-600 !
Номинальный выходной ток, А
32,0
63,0
100,0
Максимальный выходной ток, А
64,0
126,0
180,0
Ток срабатывания
максимально-токовой защиты, А
80,0
160,0
195,0
Суммарная допускаемая мощность
нагрузки, кВт
15,0
30,0
55,0
Номинальное напряжение
питающей сети, В
380 (+10/-15 %)
Частота питающей сети, Гц
48...63
Номинальное выходное постоянное
напряжение, В
600 |
Диапазон изменения выходного
напряжения, В
580...650
Точность стабилизации выходного
напряжения, %
Менее 5
Номинальная частота модуляции,
Гц
5000
Диапазон изменения частоты
модуляции, Гц
3500... 10 000 с шагом 500
КПД в режиме потребления тока
при номинальной нагрузке, %
94,0
Габаритные размеры, мм
230 х 400 х 230
410 х 500 х 250
Охлаждение
Принудительное, воздушное
Реализованы следующие виды защит: от коротких замыканий по
выходу, от замыканий силовых шин на корпус, максимально-токовая
защита, защита от перенапряжений, защита от исчезновения или
недопустимого понижения напряжения сети, защита от сбоя
синхронизации с сетью, защита от недопустимых отклонений напряжений
цепей питания узла управления, защита от перегрева инвертора, защита
от сбоев в системе управления.
Как мы уже говорили ранее, рост стоимости электрической
энергии вынуждает принимать меры к ее экономии. Отечественная фирма
«Электровыпрямитель» обратила внимание на значительное по
масштабам расточительности потребление электроэнергии установками
наружного освещения и разработала статический преобразователь, на
основе которого можно спроектировать систему наружного
освещения высокой экономичности.
В настоящее время экономия электроэнергии систем наружного
освещения осуществляется весьма примитивным способом:
ответственные службы просто отключают подачу электроэнергии в светлое
время суток, то есть на 4—5 часов. Довод, приводимый специалистами
ОАО «Электровыпрямитель» в пользу применения своей
энергосберегающей продукции, достаточно весомый: пасмурная погода
способствует повышению аварийности на дорогах и, кроме того, отключение
освещения в пасмурное время суток противоречит требованиям СНиП
25-03—95. Поскольку сегодня в системах наружного освещения
используются ртутные и натриевые лампы типов ДРЛ и ДНаТ, имеющие
достаточно сложный пусковой режим, связанный с необходимостью
преодоления пусковых сверхтоков, прогрева до выхода на
номинальный режим, в состав описываемых преобразователей потребовалось
включить программируемый микроконтроллер, который формирует
не только пусковые и продолжительные стабилизационные режимы,
но и диагностирует исправное состояние преобразователей.
Специально для обеспечения энергосберегающих режимов
наружного освещения ОАО «Электровыпрямитель» выпускает линейку
преобразователей ПН-ТТЕ с номинальной мощностью из ряда 16,5 кВА,
33 кВА, 41,6 кВА, 52,8 кВА. Питание осуществляется от трехфазной
сети 380 В 50 Гц с нейтральным проводником. Выходное фазное
напряжение в пусковом режиме составляет 200 В, в номинальном
продолжительном режиме — 220 В, в режиме энергосбережения — 175 В
(для натриевых ламп типа ДНаТ) и 195 В (для ртутных ламп типа
ДРЛ). Переход в режим энергосбережения может осуществляться как
по внешней команде, так и по внутреннему таймеру,
отсчитывающему время с момента включения преобразователя.
Интересной особенностью преобразователя является независимое
управление выходными фазными напряжениями, что, в конечном
итоге, позволяет частично обеспечить работоспособность
преобразователя (а значит, и системы освещения) в условиях отказа двух фаз.
Даже если преобразователь полностью выйдет из строя, система
освещения не будет обесточена, поскольку в составе прибора имеется так
называемый байпас, который подключит осветительную сеть
непосредственно к питающей сети. Естественно, система диагностики пре-
образователя позволяет дистанционно
передавать все сигналы технического состояния
на пульт диспетчера.
На рис. 1.2.29 показан внешний вид
преобразователя серии ПН-ТТЕ.
Интересной особенностью схемотехнического
построения прибора является наличие в нем
счетчика электрической энергии, по
показаниям которого можно непосредственно
оценить экономический эффект.
Цикл работы прибора показан на
рис. 1.2.30. В момент TQ осуществляется
включение преобразователя. Далее, в
промежутке от Т0 до Т{9 длящемся примерно
1...2 с, происходит зажигание ламп. После
этого преобразователь отрабатывает цикл от
Тх до Г2, связанный со снижением
выходного напряжения и ограничением тока накала
ламп. Этот цикл необходим для
стабилизации горения ламп и длится примерно 2
минуты. После разогрева на протяжении
промежутка времени от Т2 до Т2 преобразователь выводит режим питания
ламп на номинальный уровень 220 В, а на промежутке времени Т3— ТА
происходит термическая стабилизация ламп. Далее, на длительном
промежутке Г4— Т5 система освещения функционирует с
номинальным потреблением электроэнергии.
С момента Т5, когда преобразователь получает команду на переход
в экономичный режим, происходит снижение напряжения, которое
Рис. 1.2.29. Внешний вид
преобразователя серии
ПН-ТТЕ
Рис. 1.2.30. Цикл работы преобразователей ПН-ТТЕ
осуществляется до момента Т6. Начиная с этого момента напряжение
на выходе преобразователя устанавливается (в зависимости от типа
лампы) равным 195 или 175 В.
Поговорим и о другой преобразовательной продукции названной
отечественной фирмы. Серия преобразователей ПЧ-ТТП,
выпускаемых ОАО «Электровыпрямитель», предназначена для управления
частотой вращения синхронными низковольтными электродвигателями.
Данная серия преобразователей построена на основе тиристоров.
Одиночный преобразователь может быть использован для
поочередного или группового пуска нескольких электродвигателей, при этом
пуск осуществляется плавно, с токами, значение которых
существенно меньше номинальных значений. Плавный пуск значительно
снижает нагрев поверхности ротора и динамические нагрузки на
поверхность статора, что в «разы» увеличивает ресурс электродвигателя.
Применение преобразователей ПЧ-ТТП позволяет снять
ограничения на количество частотных пусков в единицу времени.
Производитель гарантирует возможность 15 безаварийных пусков в течение
часа и более 2000 пусков в течение года без проведения на двигателе
регламентных работ. Реально, конечно, это число во много раз
больше. Кроме этого, рекуперативный узел, имеющийся в составе
преобразователя, возвращает энергию в питающую сеть при торможении.
В составе преобразователей ПЧ-ТТП реализован режим точной
стационарной синхронизации с питающей сетью, что гарантирует
надежный разгон двигателя без токовых бросков и механических ударов.
Рекуперативное торможение двигателя может быть произведено с
любой частоты вращения до полной остановки. Темп рекуперативного
торможения задается оператором.
Немаловажным фактором при проектировании системы подачи
питания на преобразователи является значительно сниженные
требования к высоковольтному фидеру, поскольку при пуске
электродвигателей не наблюдается «просадки» напряжения в сети. Пусковой ток в
фидерах при применении статических преобразователей ПЧ-ТТП
снижается в 5—10 раз по сравнению с прямым пуском
электродвигателей (в традиционном включении). Также разгруженный двигатель,
управляемый агрегатом ПЧ-ТТП, потребляет всего 20...30 %
номинальной мощности, что также обосновывает целесообразность его
применения с экономической точки зрения.
В комплект поставки преобразователей ПЧ-ТТП входят: токоогра-
ничивающий реактор, силовой блок управления (шкаф ввода питания
и тиристорный шкаф), сглаживающий реактор и шкаф управления.
Принцип действия преобразователя — классический, ранее нами опи-
санный: трехфазное питающее напряжение подается на токоограничи-
тельный реактор трехфазного типа, изготовленный в виде отдельно
устанавливаемого устройства, который, как мы уже знаем, выполняет две
функции — ограничение тока преобразователя в аварийных режимах и
уменьшение влияния преобразователя на питающую сеть.
Изготовитель счел целесообразным ввести в состав комплекта поставки
отдельный шкаф подачи питания, в котором разместил приборы измерения
входных и выходных параметров преобразователя, защиты его от
коммутационных перенапряжений между фазами и относительно «земли».
В этом шкафу находятся трансформаторы тока, напряжения и
защитные RC-цепи.
Сглаживающий реактор, включаемый между управляемым
выпрямителем и инвертором, расположен в звене постоянного тока. Его
функция — дополнительное сглаживание пульсаций тока,
формируемых выпрямителем. Конструкция сглаживающего реактора предельно
проста: он содержит две симметричные обмотки L1 и L2.
Тиристорный шкаф включает в себя управляемый сетевой
выпрямитель и выходной инвертор тока. Диапазон регулировки выходной
частоты преобразователя, обеспечиваемый схемой управления
инвертором тока, составляет 3...50 Гц. Обеспечивается также плавный
разгон двигателя до синхронной с питающей сетью частоты вращения в
условиях заданной оператором темпа или в условиях максимального
темпа, определяемого номинальным потребляемым током
преобразователя.
Наиболее проста конструкция шкафа управления: в нем
размещаются средства управления преобразователем, измерительные приборы
и устройства сигнализации. Внешний вид серии преобразователей
ПЧ-ТТП показан на рис. 1.2.31.
Рис. 1.2.31. Внешний вид преобразователей ПЧ-ТТП
Преобразователь обеспечивает следующие основные виды защит:
от снижения напряжения питания собственных нужд ниже 0,8 от
номинального значения; от повышения напряжения на выходе
преобразователя выше 1,1 от номинального значения; при появлении
перенапряжений относительно «земли» на входе преобразователя выше
допустимого уровня (по тех. документации — более 1,2 от номинального
значения); при появлении перенапряжений на выходе
преобразователя относительно «земли» выше амплитуды линейного напряжения
(по тех. документации — более 1,2 от номинального значения); от
повышения тока более 2-кратного значения номинального тока нагрузки;
интегральную токовую защиту в соответствии с законом I2t>
дифференциальную токовую защиту; защиту от поражения электрическим током
при открывании дверей шкафов; защиту от короткого замыкания при
пробое более одного тиристора в силовом блоке; при фиксации
сигнала отключения, поступившего от схемы защиты электродвигателя.
Система сигнализации преобразователя достаточно развита и
включает в себя аварийную и предупредительную части, а также
обобщенный сигнал о неисправности. Все вышеперечисленные аварийные
состояния отображаются в удобном для диагностирования виде.
Кроме этого, преобразователи сигнализируют о пробое хотя бы одного
тиристора силового блока, о наличии напряжения питающей сети, о
включенном и отключенном состоянии.
Технические данные серии преобразователей ПЧ-ТТП: диапазон
напряжений питания — 6300... 15 750 В; номинальный диапазон
мощностей — 1040...21 800 кВА; диапазон номинальных выходных
токов — 100...800 А; диапазон номинальных выходных напряжений —
6000... 15 750 В; коэффициент полезного действия (КПД) — не ниже
0,97; коэффициент мощности в номинальном режиме — не ниже 0,85;
диапазон рабочих температур — 1...35 °С.
Очень близкой по своему назначению является серия
высоковольтных преобразователей частоты ВПЧА для синхронных
высокооборотных электродвигателей и асинхронных электродвигателей с ко-
роткозамкнутым ротором. Эта серия построена с применением
транзисторов IGBT в силовом блоке. Как и в предыдущем случае, в
силовой схеме преобразователя выпрямление сетевого напряжения
выполняется управляемым выпрямителем на тиристорах, а вот в
инверторе напряжения применены более современные IGBT-приборы.
Конструктивно преобразователь ВПЧА выполнен в виде
функционально-законченных сборочных единиц, размещаемых в отдельных
шкафах, причем силовые схемы могут быть скомпонованы как
комплексно для всех трех фаз, так и узлы управления каждой фазы могут
размещаться в отдельных шкафах. Входные реакторы также
компонуются либо отдельным устройством, либо встраиваются в
выпрямительный шкаф. Преобразователи серии ВПЧА обеспечивают плавный
пуск электродвигателей и их устойчивую работу в случае резко
меняющихся нагрузок (вентиляторы, насосы, компрессоры); плавную
регулировку выходного напряжения и частоты в диапазоне от 2,5 до
55 Гц; синусоидальный характер выходного напряжения с
гармоническими искажениями не более 5 % в номинальном режиме работы.
Реализованы следующие виды защит: от коротких замыканий в
нагрузке и внутренних коротких замыканий, при срабатывании
защиты мгновенный ток короткого замыкания не превышает номинальных
значений при штатной работе; от токовой перегрузки тиристоров
управляемого выпрямителя и транзисторов IGBT-инвертора; от
импульсных и длительных перенапряжений на силовых элементах; при
нарушении питания собственных нужд; от перегрева силовых
элементов при отказе системы принудительного воздушного охлаждения.
Световая сигнализация преобразователя отображает следующие
состояния: наличие или отсутствие напряжения питающей сети;
наличие или отсутствие питания собственных нужд; наличие или
отсутствие напряжения на выходе; готовность к работе; номинальная работа;
срабатывание защиты инвертора.
Дополнительные функциональные устройства преобразователей
ВПЧА включают в себя пульты местного и дистанционного
управления, буквенно-цифровой индикатор отображения функциональной
информации о величине выходного напряжения и частоты.
Дистанционное задание сигнала управления может осуществляться как
токовым сигналом 4...20 мА, так и по цифровой линии связи с
интерфейсом RS-485.
Основные технические характеристики преобразователей серии
ВПЧА: напряжение силовой питающей сети — 6300 В; частота
питающей сети — 50 Гц; номинальная выходная мощность — 500... 1250 кВт;
номинальное выходное напряжение — 6000 В; число фаз выходного
напряжения — 3; номинальный выходной ток — 60... 165 А; точность
поддержания выходной частоты — не хуже 0,5 %; коэффициент
полезного действия (КПД) — не хуже 0,93.
Следующие четыре преобразователя, выпускаемые ОАО
«Электровыпрямитель», предназначены для использования в серийно
выпускаемых отечественных электровозах ВЛ-200, ВЛ-85, ВЛ-80С,
ВЛ-65, ВЛ-40П, ЭП-200, ЭП1. Применение этих агрегатов позволяет
экономить до 15 % электроэнергии за счет рекуперации (возврата
энергии в питающую сеть при торможении), увеличить на 10 % силу
тяги электровозов. Немаловажным также является сокращение
частоты замены тормозных колодок. По оценкам производителя
преобразователей, экономия на подобных регламентных работах может
достигнуть 12 тонн металла в год для одного электровоза. Кроме того, за
счет бесконтактного регулирования частоты вращения увеличивается
ресурс тяговых электродвигателей. На рис. 1.2.32 показан внешний
вид статических преобразователей для управления движением
электровозов.
Рис. 1.2.32. Внешний вид статических преобразователей для управления
движением электровозов: а — преобразователь выпрямительно-инверторный
ВИП-4000-УХЛ2; б — преобразователь выпрямительно-инверторный
ВИП-5600-УХЛ2; в — силовая преобразовательная установка СПУ-5700-У2;
г — преобразователь М-ОМП-3500-У2
Преобразователь типа ВИП-4000-УХЛ2 (рис. 1.2.32, а)
предназначен для выпрямления однофазного переменного тока частотой 50 Гц и
преобразования его в постоянный ток, предназначенный для питания
двух тяговых электровозных двигателей постоянного тока в режиме тяги
и для преобразования постоянного тока в однофазный переменный
ток частотой 50 Гц в режиме рекуперативного торможения электровоза.
Такие же функции выполняет преобразователь ВИП-5600-УХЛ2
(рис. 1.2.32, б). Технические характеристики этих двух типов
статических преобразователей приведены в табл. 1.2.2.
Таблица 1.2.2. Технические характеристики преобразователей ВИП
Тип преобразователя
ВИП-4000-УХЛ2
ВИП-5600-УХЛ2
Номинальное входное напряжение, В
1570
1570
Номинальное выходное напряжение, В
1400
50
Номинальная выходная мощность, кВт
4000
5600
КПД, не менее
98,5
98,6
Силовая преобразовательная установка типа СПУ-5700-У2
(рис. 1.2.32, в) выполняет другую функцию: она преобразует
однофазный ток частотой 50 Гц в трехфазный ток с регулированием частоты
для питания тяговых вентильных электродвигателей и трехфазный ток
переменной частоты в однофазный ток частоты 50 Гц в режиме
рекуперативного торможения. Номинальная мощность преобразователя
составляет 5700 кВт при КПД не менее 97 %. Номинальное выходное
линейное напряжение — 1100 В, номинальный ток фазы — 580 А.
Диапазон регулирования частоты — 0...210 Гц. Габаритные размеры
преобразователя — 1940 х 1120 х 2000 мм.
Примером преобразователя, предназначенного для модернизации
эксплуатируемых в настоящее время электровозов типа ВЛ-80,
является преобразовательный комплекс М-ОМП-3500-У2. Этот комплекс
обеспечивает замену «один-в-один», подключаясь к установленному
на электровозах оборудованию без необходимости внесения в это
оборудование каких-либо изменений.
При модернизации выполняются следующие операции:
осуществляется замена механических коммутаторов на гораздо более надежные
полупроводниковые с бесконтактным регулированием; исключается
электромашинный фазорасщепитель.
В состав преобразовательной установки входят: силовой блок
В-ОПП-3200 для питания четырех коллекторных тяговых
электродвигателей, два шкафа для питания асинхронных двигателей
вентиляторов, двух компрессоров и маслонасоса, три блока питания БП схем
управления преобразовательной установки.
* * *
В заключение этого раздела приведем несколько примеров
специализированных статических преобразователей небольшой мощности,
использующихся в конкретных отраслях промышленности и
транспорта. Первый пример — статический преобразователь, выпускаемый ОАО
«Электровыпрямитель» для комплектации новых отечественных
железнодорожных вагонов. Статический преобразователь М-ПТЕ-22-У1
(рис. 1.2.33) обеспечивает пассажирский вагон не только
электроснабжением промышленной частоты 50 Гц для нужд пассажиров (питание
электробритв, зарядки мобильных телефонов и т. д.), но также питает
установки кондиционирования вагона: электродвигатели
компрессоров и вентиляторов. При общей выходной мощности 24 кВА
преобразователь имеет габариты 1900x700x700 мм, построен по блочно-модульно-
му принципу (что, как мы знаем, облегчает его ремонт в случае отказа) и
герметичное исполнении корпуса. Устанавливается преобразователь в
подвагонном пространстве, что, естественно, делает его доступным
«всем ветрам», но для охлаждения силовых элементов по этой причине
не требуется дополнительных принудительных мер — охлаждение
осуществляется набегающим потоком воздуха, образующимся при
движении вагона.
Рис. 1.2.33. Внешний вид преобразователя М-ПТЕ-22-У1
Структурная схема преобразователя включает в себя входную
коммутационно-защитную аппаратуру, три входных повышающих
преобразователя постоянного напряжения, три трехфазных инвертора,
три выходных фильтра, выходную защитную аппаратуру, аппаратуру
управления, диагностики и контроля параметров, аппаратуру
сигнализации.
Технические характеристики преобразователя М-ПТЕ-22-У1:
входное номинальное напряжение — 110 В; диапазон изменения
входного напряжения — 90... 145 В; линейное выходное напряжение
канала 1 — 97...308 В; линейное выходное напряжение канала 2 —
220...242 В; линейное выходное напряжение канала 3 — 220...242 В;
коэффициент искажения синусоидальной формы кривой — не более
5 %; выходная частота — 49...51 Гц.
Существует область специализированной техники, к
функционированию которой предъявляются повышенные требования в виде
обеспечения надежной работы в условиях повышенной влажности,
тряски, ударов, высоких значений магнитных и электрических полей,
воздействия разнообразных излучений. К таким видам техники
прежде всего относится военная техника, горнорудное оборудование,
оборудование, устанавливаемое на верхних палубах кораблей и судов.
В этих специфических областях также требуется большое количество
разнообразных преобразовательных устройств.
Примером преобразователей, обеспечивающих надежное
функционирование в самых жестких условиях, может служить линейка
приборов СПТ (трехфазного типа) и СПО (однофазного типа),
производимых ООО «Источник» (г. Калуга). Внешний вид этих приборов
приведен на рис L2.34.
Рис. 1.2.34. Внешний вид преобразователей типа СПТ и СПО
Эти преобразователи получают питание от двух независимых
фидеров трехфазной сети 380 В частотой 50 Гц (основной и резервной),
и преобразуют его в однофазное или трехфазное (в зависимости от
типоисполнения прибора) напряжение 230 В частотой 400 Гц. В схеме
приборов предусмотрен трансформатор гальванической развязки ме-
жду первичной питающей сетью и выходами подключения нагрузки.
Также имеется возможность местного и дистанционного управления
включением/отключением, сигналы управления и обратные
диагностические сигналы о неисправности могут быть переданы по
интерфейсу RS-422. Особенность данных преобразователей в том, что они
могут питать не только асинхронные двигатели, но и решать большое
количество других задач, в том числе обеспечивать питание нагрузки
типа «емкостной выпрямитель» с величиной активной мощности на
выходе до 0,8 от номинальной.
В приборах реализованы следующие виды защит: максимальная
токовая защита питающих сетей от перегрузок и коротких замыканий,
защита от перегрева силовых элементов, защита от недопустимого
снижения входного напряжения, быстродействующая защита от пиковых
выходных токов перегрузки и токов короткого замыкания. На момент
написания этой книги производитель выпускает исполнения
преобразователей с номинальной мощностью 8 и 25 кВА, готовится
расширение типового ряда в меньшую сторону до 2 кВА и в большую — до
50 кВА.
Другие технические характеристики преобразователей СПТ и
СПО: точность установки выходного напряжение — не более 1 %;
суммарная нестабильность выходного напряжения — не более 4 %;
разность линейных напряжений при холостом ходе и симметричной
нагрузке — не более 2 % (для трехфазного варианта); коэффициент
несинусоидальности выходного напряжения — не более 5 %; время
установления напряжения на выходе — не более 5 с; коэффициент
мощности — не менее 0,8; КПД — не менее 80 %.
Еще один типовой ряд статических преобразователей СТО и СТТ
для спецприменений выпускается научно-производственной фирмой
«ЭПРО» (г. Санкт-Петербург). Этот ряд включает в себя статические
преобразователи трехфазного переменного тока 380 В частотой 50 Гц в
трехфазный переменный ток напряжением 230 В и частотой 400 Гц с
рядом мощностей 2, 4, 8 и 12 кВА, а также в однофазный переменный
ток напряжением 230 В частотой 400 Гц с рядом мощностей 2, 4, 8 кВА.
Преобразователи выпускаются в соответствии с техническими
условиями ИДВГ.435324.010 ТУ, внешний вид приборов показан на рис. 1.2.35.
Технические характеристики этих преобразователей в целом
соответствуют техническим характеристикам преобразователей,
выпускаемых ООО «Источник», поэтому в данном случае имеет смысл обратить
внимание читателей на способ обеспечения двухсетевого питания
приборов. Зачем в спецаппаратуре применяется двухсетевое питание?
И где его можно встретить? В основном такой способ питания
применяется на объектах, критичных к пропаданию питающего
напряжения — именно поэтому для обеспечения функционирования таких
объектов прокладывают два фидера питания: основной и резервный.
В штатном режиме приборы питаются от основного фидера, однако
при нарушении основного питания все приборы должны быть
переключены на резервный фидер, проложенный, например, от
автономного дизель-генератора.
Рис. 1.2.35. Внешний вид преобразователей типа СТО и СТТ
При решении задачи переключения каждый конкретный
потребитель должен решить, важно ли ему поддерживать питание в момент
переключения, или же короткий перерыв не отразится на работе его
аппаратуры. В этом случае говорят о необходимости «бесперебойности
питания», или отсутствия такой необходимости. Учитывая эти
ситуации, разработчики выпустили на рынок два принципиально разных
исполнения приборов типа СТО и СТТ: с контакторным
автоматическим переключателем сетей (АПС), с приоритетом основного питания
(исполнение А), и с диодной развязкой в звене постоянного тока, с
бесперебойным питанием потребителей при переключении питания
(исполнения ДР и ГР). Отличие исполнения ГР от исполнения ДР не
принципиально и заключается в наличии у исполнения ГР
гальванической развязки основной и резервной сетей питания 380 В 50 Гц, в то
время как у исполнения ДР такой развязки нет. Функциональная
схема АПС исполнения А приведена на рис. 1.2.36, я, схема АПС
исполнений ДР и ГР — на рис. 1.2.36, б.
В случае применения контакторов (исполнение А, рис. 1.2.36, а)
все оказывается достаточно тривиальным: при пропадании
напряжения основной сети контактор К1 размыкается и по прошествии
времени 0,5... 1,0 с замыкается контактор К2 резервной сети. Напряжение
выпрямляется диодным мостом VD1...VD6, который «работает» как от
основной, так и от резервной сети.
Схема бесперебойного питания (исполнения ДР и ГР, рис. 1.2.36,
б) — сложнее. Здесь контакторы К1 и К2 могут выполнять такую же
функцию, как и в исполнении А, то есть переключать сеть, а могут
находиться в постоянном включенном состоянии. Бесперебойность
питания обеспечивается при одновременном наличии напряжений
основной и резервной сети, которые выпрямляются двумя отдельными
Рис. 1.2.36. Реализация автоматического переключения сетей:
а — исполнение А; б — исполнения ДР и ГР
трехфазными диодными мостами VD1...VD6 и VD7...VD12. Далее
выпрямленные напряжения постоянного тока суммируются диодами
VD13...VD16. Конечно, наличие суммирующих диодов ведет к
дополнительным тепловым потерям при протекании через них силовых
токов, а значит, и к некоторому снижению КПД, но все-таки это — плата
за «бесперебойность».
В процессе своей профессиональной деятельности читателю могут
встретиться и другие типы промышленных статических
преобразователей электроэнергии. Несомненно, познакомившись с этим разделом
книги, читатель достаточно быстро разберется с принципами их
функционирования, устройством и способами применения.
1.3. Как заставить вращаться двигатель
Изучение этого раздела не займет у читателя много времени,
поскольку автор решил не заострять значительное внимание на общих
теоретических вопросах законах построения силовой
преобразовательной техники. Почему? Все очень просто: теории этих вопросов
посвящено достаточно много книг и сайтов в сети Интернет.
Поэтому, чтобы не повторять хорошо известные теоретические выкладки и
формулы, адресуем читателя, например, к изданиям [1] и [2]. Здесь же
мы расскажем в самом общем виде о процессах, протекающих в
статических преобразователях, предназначенных для управления
электродвигателями.
Ранее мы изучили силовые схемы трехфазных статических
преобразователей и установили, что в состав таких преобразователей
обязательно входит инвертор, построенный на основе трехфазного
управляемого моста. Упростим для наглядности схему инвертора, заменив
полупроводниковые элементы на ключи К1...К6 (рис. 1.3.1).
Рис. 1.3.1. Схема инвертора на основе трехфазного ключевого моста
Ключевые элементы К1...К6 подключают обмотки двигателя к
выпрямленному сетевому напряжению Un в соответствии с заданной
диаграммой (рис. 1.3.2). Продолжительность работы каждого ключа
составляет 0,5 периода коммутации, а алгоритм работы обеспечивает
в каждый момент времени нахождение в проводящем состоянии од-
Рис. 1.3,2. Диаграмма работы инвертора в схеме с управляемым
выпрямителем
ного ключа верхней группы и двух ключей нижней группы (либо
одного ключа нижней группы и двух ключей — верхней). В этом случае
в любой момент времени ток будет протекать по всем трем фазным
обмоткам двигателя. Частота вращения двигателя здесь определяется
частотой коммутации ключей К1...К6, а величина выходного
напряжения — режимом работы управляемого выпрямителя.
Главные недостатки описднного способа регулировки частоты
вращения следующие: ступенчатая форма выходного напряжения
статического преобразователя и низкий коэффициент мощности. Поэтому
такой способ в настоящее время используется крайне редко, а
основной метод регулировки на сегодняшний момент — это метод широт-
но-импульсного регулирования. Применение метода широтно-им-
пульсной модуляции (ШИМ) позволяет корректировать не только
величину напряжения на выходе, но и форму напряжения (в среднем за
период). Об этом методе мы и поговррим далее.
Обратимся к простейшей модели фазы электродвигателя,
состоящей из активного сопротивления Rm, индуктивного сопротивления
Рис. 1.3.3. Простейшая модель фазы электродвигателя
статорной обмотки Lm и ЭДС статорной обмотки Ет. При питании от
статического преобразователя к фазе прикладывается внешнее
напряжение Um (рис. 1.3.3).
Проведя элементарные математические операции, можно
показать, что передаточная функция Wm{p) обмотки электродвигателя
может быть записана в следующем виде:
(1.3.1)
где
(1.3.2)
Тт — постоянная времени обмотки двигателя.
Вид передаточной функции двигателя в точности совпадает с
видом передаточной функции фильтра низких частот. В случае, если
частота переключения инвертора значительно выше частоты среза
этого фильтра, модулируемое инвертором напряжение будет
преобразовано в средний ток фазы, по виду совпадающий с законом
модуляции. То есть, модуляция напряжения по синусоидальному закону
будет преобразована обмоткой электродвигателя в ток, близкий к
синусоидальному (рис. 1.3.4).
Рис. 1.3.4. Фильтрация тока фазы в режиме ШИМ
Как мы уже говорили ранее, ключевые элементы переключаются
циклически таким образом, чтобы обеспечить сдвиг сигналов между
фазами 120° друг относительно друга. Несущая частота ШИМ
модуляции зависит от длительности срабатывания ключей, а средняя ампли-
Рис. 1.3.5. Ш И М-модуляция для различных частот преобразования
туда определяется отношением времени, в котором ключ находится в
разомкнутом состоянии, ко времени, в продолжительности которого
ключ заперт (рис. 1.3.5).
1.4. О нетрадиционных подходах
к преобразовательной технике
Большинство статических преобразователей, промышленно
выпускаемых сегодня, построено с применением хорошо известных
подходов к их силовым схемах, о которых мы говорили в предыдущих
разделах. Однако встречаются и нетривиальные, творческие подходы к
техническим решениям, которые позволяют достичь высоких результатов
и упростить схемотехническую реализацию преобразовательной
техники. В этом разделе мы расскажем читателю о продукции
научно-производственного российско-молдавского предприятия «Элкон» (г.
Кишинев) [8]. В подготовке раздела большую помощь оказали генеральный
директор фирмы А. Г. Семенов и главный инженер А. А. Пенин.
Вот как представляет свою продукцию и заложенные в нее
оригинальные технические идеи генеральный директор А. Г. Семенов:
«Специализируясь в области источников питания, нам удалось создать
способ построения резонансных преобразователей с глубокой
регулировкой выходных параметров, отличающийся от известных до сих пор.
На данный способ получен международный патент. Наиболее полно
преимущества способа проявляются при построении мощных — от
0,5 кВт до десятков кВт — статических преобразователей. Причем
наши преобразователи не требуют схем быстрой защиты от короткого
замыкания на выходе, так как в них практически не возникает режима
разрыва токов в любом режиме. Также устранена возможность
возникновения сквозных токов. Поскольку физически (без обратных связей)
преобразователи являются источниками тока, то появилась
возможность перенести конденсатор фильтра сетевого выпрямителя на выход
преобразователя, что позволило достигнуть значения коэффициента
мощности на уровне 0,92...0,96 в зависимости от характера нагрузки,
не усложняя схему коррекцией коэффициента мощности. Частота
резонансного контура остается постоянной, а это дает возможность
эффективной фильтрации излучений преобразователей по всем
направлениям. Практическая реализация осуществлена в виде источников
тока для электрохимической защиты от коррозии мощностью 600,
1500, 3000 и 5000 Ватт. КПД этих приборов, измеренный при работе в
номинальных режимах, составляет 0,93...0,95. Источники
противокоррозионной защиты прошли сертификационные испытания, идет их
внедрение — все это подтверждает жизненность идеи».
В чем заключается новизна этого подхода к проектированию
преобразовательной техники, мы и поговорим далее. Как читатели уже
хорошо знают, в настоящее время приборы и устройства силовой
электроники, разрабатываемые для профессионального применения,
достаточно успешно оптимизируются по таким критериям, как масса,
габаритные размеры, надежность, стоимость. Эти требования
неуклонно ужесточаются, то есть современный заказчик уже не хочет
приобретать просто преобразователь, за ценой которого он не постоит.
Заказчику нужны приборы с минимальными габаритами и массой, но
при этом — с высоким КПД, высокой надежностью и низкой
стоимостью [9]. С целью улучшения потребительских свойств изделий
приходится прибегать к известным мерам: повышать рабочие частоты
преобразования, уменьшать потери мощности на силовых элементах,
снижать или исключать динамические перегрузки в силовой части
схемы. Зачастую эти меры противоречат друг другу, и для достижения
определенных результатов разработчик идет на некоторый (порой
даже весьма непростой) компромисс [10]. Поэтому дальнейшая
оптимизация параметров преобразовательной техники возможна только на
новые принципы построения этих устройств. Резервы старых
принципов уже в значительной степени, к сожалению, исчерпаны.
Чтобы читателю понять, чем принципиально отличается способ
регулирования напряжения, предлагаемый фирмой «Элкон», от
других способов регулировки, какая новизна заключена в этом способе,
напомним о классическом построении преобразователей. Типовые
преобразователи постоянного напряжения в постоянное
(преобразователи DC/DC типа) строятся, как известно, по схеме: первичное
звено, преобразующее постоянное напряжение в переменное высокой
частоты; вторичное звено, осуществляющее преобразование перемен-
ного напряжения высокой частоты в постоянное напряжение. В
составе таких преобразователей традиционно имеется регулятор,
управляющий величиной выходного постоянного напряжения, или
поддерживающий его на требуемом уровне.
Высокочастотное преобразование постоянного тока в переменный
и обратно может осуществляться при помощи различных схем, но
если говорить о двухтактных прототипах, то в этом случае обычно
называют два типа: схемы с прямоугольной формой тока силовых
ключей и резонансные с синусоидальной (или квазисинусоидальной)
формой тока ключей [11].
Эффективность работы преобразователей в значительной степени
определяется динамическими коммутационными потерями на силовых
элементах при коммутации номинальных значений токов. Опыт
разработки преобразовательной техники даже небольшой мощности
(порядка 100 Вт) показывает, что снизить эти потери удается в основном за
счет использования коммутационных силовых элементов с низким
временем переключения (переход от тиристоров к IGBT-транзисто-
рам) и за счет формирования правильной траектории их
переключения. Существующая на сегодняшний момент элементная база,
конечно, обладает достаточно высокими динамическими характеристиками,
но, тем не менее, эти характеристики далеки от идеальных. Поэтому
очень часто технологические ограничения служат причиной появления
значительных перенапряжений на элементах силовой схемы, а значит,
и снижается надежность статического преобразователя в целом [12].
Формирование правильной траектории переключения —
немаловажная задача, которая также в значительной степени может снизить
коммутационные перенапряжения. Этот метод обеспечивает так
называемую «мягкую» коммутацию путем перераспределения энергии
между собственно силовой частью коммутационного элемента (в качестве
которого обычно выступает транзисторный ключ), и формирующим
элементом. Уменьшение потерь происходит за счет возврата
накопленной ими энергии. Напомним, что известными представителями
формирующих элементов являются всевозможные RCD-цепи, гасящие
резисторы, снабберы. Практика разработки серийно-способных
промышленных статических преобразователей показывает, что при создании
устройства с номинальной мощностью в сотни-тысячи Ватт
приходиться буквально сражаться за каждый Ватт эффективной мощности,
максимально снижать тепловые потери [13].
Еще одна проблема относится к необходимости наличия
быстродействующей защиты от коротких замыканий (КЗ) в нагрузке.
Проблема состоит, главным образом, в том, что слишком
быстродействующая защита становится весьма подверженной ложным
срабатываниям, отключая преобразователь даже тогда, когда никакой опасности
для него не возникает. Слишком медленная защита устойчива к лож-
ным срабатываниям, но едва ли защитит прибор. Отсюда вывод:
разработчикам приходится прикладывать много сил, чтобы
спроектировать оптимальное защитное устройство.
В связи с вышеизложенным, классический высокочастотный
преобразователь на сегодняшний момент оказывается в некоторой
степени непригодным для удовлетворения современных требований,
предъявляемых к силовой преобразовательной технике. Естественно,
возникает желание поиска новых способов построения силовых схем.
В последнее время инженеры обратили внимание на так называемые
«резонансные» силовые схемы преобразовательной техники, как на
устройства со значительными потенциальными возможностями. В
резонансных преобразователях принципиально меньше динамические
потери, они создают гораздо меньше помех, поскольку переключение
происходит не прямыми фронтами, богатыми гармониками, а с гладкой
формой сигнала, близкой к синусоидальной [12], [14]. Резонансные
преобразователи более надежны, им не требуется быстродействующая
защита от КЗ в нагрузке, потому как ограничение тока КЗ происходит
естественным образом. Правда, из-за синусоидальной формы тока
несколько возрастают статические потери в ключевых силовых элементах,
но поскольку резонансные преобразователи не столь требовательны к
динамике переключения силовых элементов, здесь могут быть
использованы «медленные» IGBT-транзисторы класса «standard», у которых
напряжение насыщения меньше, чем у «быстрых» IGBT-приборов
класса «warp speed». Можно даже использовать уже основательно забытые
биполярные и СИТ-приборы, хотя, на взгляд автора книги, об этих
приборах лучше не вспоминать.
С точки зрения построения силовой схемы резонансные
преобразователи получаются очень простыми и надежными. Однако до сих пор
они не смогли вытеснить обычные полумостовые и мостовые
преобразователи из-за принципиальных проблем с регулированием выходного
напряжения [11]. Обычные преобразователи используют принцип
регулирования на основе широтно-импульсной модуляции — этот метод
хорошо отработан и не вызывает технически непреодолимых
сложностей. В резонансных же преобразователях использование ШИМ и
других специальных методов управления (например, частотного
регулирования — за счет изменения частоты коммутации) приводит к
увеличению динамических потерь, которые в некоторых случаях становятся
соизмеримыми или даже превышающими аналогичные потери в
классических статических преобразователях. Использование
формирующих цепей (RCD, снабберов и т. д.) оправдывает себя в ограниченном
диапазоне частот и при очень небольшой глубине регулирования.
Встречается несколько более эффективный способ, основанный на
значительном уменьшении частоты коммутации, приводящей к
уменьшению среднего тока нагрузки, а значит, и выходной мощности. Но
этот способ частотного регулирования также можно записать в разряд
компромиссов, а значит, считать недостаточно удовлетворяющим
современным требованиям [15].
И все же резонансные преобразователи оказались настолько
заманчивыми по своим перечисленным выше достоинствам, что было
придумано еще несколько способов повысить КПД и глубину регулирования.
Увы, и эти идеи показали себя недостаточно эффективными.
Использование дополнительного импульсного регулятора, устанавливаемого на
выходе, приводит к необходимости использования еще одного звена
преобразования, а значит, снижает общий КПД [15]. Известна также
конструкция с переключением витков высокочастотного
трансформатора, но это решение значительно усложняет схему преобразователя,
повышает его стоимость. Итог — невозможность использования этих
технических решений в областях широкого потребления.
Из сказанного выше читатель может сделать вывод, что основная
проблема, мешающая широкому распространению резонансных
преобразователей, кроется в создании эффективного способа глубокого
регулирования выходного напряжения. Если эту проблему удастся
решить, устройства силовой электроники получат «второе дыхание»
своих технических решений, а статические преобразователи на основе
новых принципов регулирования смогут получить распространение в
новых и уже освоенных областях техники.
Специалистам «Элкона» удалось в значительной степени
продвинуться в исследованиях способов регулирования резонансных
преобразователей путем уменьшения частоты коммутации. Именно данный
способ был взят за основу, так как в нем сохраняется главное
достоинство резонансной схемы — коммутационные переключения при
нулевом силовом токе. Изучение процессов, происходящих в обычном
резонансном преобразователе, позволило уточнить его схему и найти
более эффективный механизм регулирования в широком диапазоне
нагрузок и приемлемом диапазоне частот. Помимо этого, удалось
достигнуть одинаковых значений амплитуд токов силовых транзисторов
как в режиме номинальной нагрузки, так и в режимах КЗ, отсутствия
сквозных токов через силовые транзисторы даже при максимальной
частоте коммутации, «мягкой» нагрузочной характеристики, гораздо
более приемлемой, чем у классической резонансной схемы.
Обращаем внимание читателя, что полная, пригодная к
воспроизводству, схема модернизированного резонансного преобразователя
является предметом «ноу-хау» предприятия «Элкон», однако,
изложенные далее основные принципы работы преобразователя помогут
специалистам разобраться в сути предложенных усовершенствований
и даже разработать собственную схему.
Итак, предлагаемый способ регулирования предназначается для
реализации мощных, дешевых и эффективных регулируемых высоко-
частотных транзисторных резонансных преобразователей напряжения
различного применения. Это могут быть сварочные преобразователи,
установки индукционного нагрева, радиопередающие устройства,
стабилизаторы и т. д. Способ имеет прототип [10], в котором создается
колебание с собственным периодом Т0 и периодом коммутации силовых
ключей Тк; используется емкостной и индуктивный накопители
энергии с потреблением от источника постоянного напряжения, передачи
части энергии в нагрузку с выпрямителем; регулирование напряжения
осуществляется за счет расстройки от резонанса с периодом
собственных колебаний Т0 частоты коммутации ключей Гк, близкой к Т0.
Как уже было сказано выше, расстройка приводит к
значительному увеличению тепловых потерь и в целом снижает надежность
преобразователя, так как при расстройке утрачивается главное
достоинство резонансной схемы — коммутация при нулевых силовых токах.
Все это приводит к тому, что изложенный в прототипе способ
целесообразно использовать только в маломощных преобразователях.
Специалистами «Элкон» исследован более близкий к решению
поставленной задачи прототип [16], в котором также создается колебание
с собственным периодом Т0 и периодом коммутации ключей Гк, но в
данном случае Тк > Г0. В составе схемы используется емкостной и
индуктивный накопители энергии с потреблением от источника
постоянного напряжения и передачей части энергии в нагрузку с
выпрямителем. Выходное напряжение регулируется за счет изменения периода
коммутации Тк. Однако здесь избыток энергии емкостного накопителя
возвращается обратно в источник питания за счет разряда емкостного
накопителя через нагрузку, а ограничение фронтов импульсов тока
силовых ключей осуществляется с помощью дополнительных
индуктивных накопителей. Этот способ сохраняет главное достоинство
резонансных преобразователей — возможность коммутации силовых
ключей при нулевых токах.
К сожалению, описанный прототип также обладает рядом
недостатков. Одним из принципиальных недостатков является увеличение
тока ключей в случае возникновения перегрузок и КЗ в цепи нагрузки
при номинальной или максимальной частоте. Почему? При этом
способе регулирования индуктивные элементы запасают большое
количество энергии, и она не успевает полностью вернуться в источник
питания за небольшой период (Тк- Т0)/2. Еще один недостаток схемы —
принудительное прекращение тока через ключи, несмотря на то, что
фронт коммутации жестко задан. Поэтому здесь возникает
необходимость разработки сложной схемы защиты силовых ключей при
нулевых токах.
Оценив все недостатки вышеперечисленных способов, инженеры
фирмы «Элкон» разработали устройство, с помощью которого можно
реализовать стратегию глубокой регулировки выходного напряжения
при сохранении достоинств резонансных схем. Это устройство
представляет собой типовой резонансный полумостовой преобразователь с
емкостным делителем напряжения (емкостным накопителем энергии)
и индуктивным накопителем, включенных последовательно с
нагрузкой между стойкой транзисторного полумоста и средним выводом
емкостного делителя. Дополнительные индуктивные накопители
включаются в ветви или в контура каждого ключевого элемента.
В новом способе регулировки можно найти аналогии с
прототипами, опубликованными в [10] и [16]: здесь также создаются колебания
с собственным периодом TQ и периодом коммутации Гк, причем
Тк > Т0. От прототипов заимствованы емкостной и индуктивный
накопитель с потреблением от источника постоянного напряжения и
передаче части энергии в нагрузку с выпрямителем, осуществляется
возврат избытка энергии емкостного накопителя обратно в источник,
регулировка напряжения выполняется за счет изменения Тк. Новизна
способа состоит в том, что одновременно с первыми колебаниями
создаются вторые колебания с собственным периодом Т0 и периодом
коммутации Гк, с использованием того же емкостного накопителя и
второго индуктивного накопителя с потреблением энергии от
емкостного накопителя, передачей энергии в нагрузку с выпрямителем.
Главной особенностью предложенного способа является
одновременное протекание токов первого и второго колебаний через ключевые
элементы таким образом, что суммарный ток через них не
прерывается, что и позволяет возвращать энергию индуктивных накопителей на
максимальной частоте даже при возникновении КЗ. При этом
амплитуда тока ключевых элементов остается на уровне номинальных значе-
Рис. 1.4.1. Общий вид силовой схемы резонансного преобразователя
ний. Этот способ «работает» во всем диапазоне периодов
коммутации Тк, что успешно решает проблемы резонансного преобразования.
Устройство, показанное на рис. 1.4.1, содержит управляющий
задающий генератор (УЗГ), выходы которого соединены с затворами
силовых ключей IGBT-типа (VT1 и VT2), образующих полумостовую
стойку (плечо полумоста). Средняя точка соединения ключей VT1 и
VT2 через емкостной накопитель (резонансный конденсатор) С1
подключена к одному из выводов трансформаторно-выпрямительного
устройства (ТР-ВЫПР) с нагрузкой на выходе. Индуктивные накопители
(резонансные дроссели) L1 и L2 соединены последовательно. Их общая
точка соединения подключена к другому выводу трансформаторно-вы-
прямительного устройства. Источник питающего напряжения Un
соединен с нижним выводом дросселя L1 и эмиттером транзистора VT2.
Верхний вывод дросселя L2 соединен с коллектором транзистора VT1.
На рис. 1.4.2 показаны графики, отражающие работу резонансного
преобразователя. Задающий генератор УЗГ вырабатывает парафазные
управляющие импульсы, показанные на рис. 1.4.2. Длительность
управляющих импульсов составляет 7^/2, а их период регулируется (обозначен
как Тк). Эти управляющие импульсы по очереди открывают транзисторы
VT1 и VT2. В установившемся режиме работы преобразователя, в момент
времени t{> подается импульс управления на транзистор VT2, при этом
через него начинает протекать синусоидальный импульс тока 1{,
показанный на рис. 1.4.2, в, — так называемые «первые колебания».
Одновременно с ним через антипараллельный (оппозитный) диод VD1
транзистора VT1 продолжает протекать ток 12 — «вторые колебания».
На рис. 1.4.3 показан первый такт работы схемы, отражающий
поведение ее элементов а промежутке времени f,.../2. Резонансный
конденсатор С1 с напряжением U5, график которого приведен на
рис. 1.4.2 г), перезаряжается через трансформаторно-выпрямительную
нагрузку (ТР-ВЫПР). Первый резонансный дроссель L1 накапливает
энергию. В то же время резонансный конденсатор С1 разряжается
через второй резонансный дроссель L2 с напряжением £/8, график
которого приведен на рис. 1.4.2, д. Дроссель L2 накапливает энергию в
соответствии с полярностью, указанной на графике.
На рис. 1.4.4 показан второй такт работы схемы, отражающий ее
поведение во временном промежутке t2...ty Резонансный конденсатор
С1 продолжает перезаряжаться через
трансформаторно-выпрямительную нагрузку и первый резонансный дроссель L1. Также конденсатор
С1 перезаряжается через второй резонансный дроссель L2, который
уже отдает энергию в соответствии с указанной полярностью.
На рис. 1.4.5 показан третий такт работы схемы, отражающий ее
поведение на временном промежутке /3.../4. Резонансный конденсатор
С1 продолжает заряжаться через трансформаторно-выпрямительную
нагрузку и первый резонансный дроссель L1 с напряжением U7, по-
Рис. 1.4.2. Графики, отражающие работу резонансного преобразователя
Рис. 1.4.3. Первый такт работы схемы
казанным на рис. 1.4.2, е. В то же время резонансный конденсатор С1
уже заряжается от второго резонансного дросселя L2, который
продолжает отдавать энергию в соответствии с указанной полярностью.
Рис. 1.4.4. Второй такт работы схемы
Рис. 1.4.5. Третий такт работы схемы
На рис. 1.4.6 показан четвертый такт работы схемы, отражающий
ее поведение на временном промежутке /4.../5. Резонансный
конденсатор С1 продолжает заряжаться через
трансформаторно-выпрямительную нагрузку и первый резонансный дроссель L1, который уже отдает
энергию в соответствии с указанной на рисунке полярностью. В то же
время резонансный конденсатор С1 продолжает заряжаться от
второго резонансного дросселя L2.
На рис. 1.4.7 показан пятый такт работы схемы, отражающий ее
поведение на временном промежутке t5...t6. Резонансный конденсатор
С1 продолжает заряжаться через трансформаторно-выпрямительную
нагрузку и первый резонансный дроссель L1.
Рис. 1.4.6. Четвертый такт работы схемы
Рис. 1.4.7. Пятый такт работы схемы
На рис. 1.4.8 показан шестой такт работы схемы, отражающий ее
поведение во временном промежутке /6.../7. Резонансный конденсатор
С1 уже отдает энергию через трансформаторно-выпрямительную
нагрузку и первый резонансный дроссель L1 в источник питания Un.
Ток 1Х при этом меняет свое направление.
На рис. 1.4.9 показан седьмой такт работы схемы во временном
промежутке /7.../8. Импульс управления подается на транзистор VT1,
при этом начинает протекать синусоидальный импульс тока /2
согласно рис. 1.4.2, в через указанный транзистор («вторые колебания»).
Также продолжает протекать ток 1Х через антипараллельный диод VD2
транзистора VT2 — «первое колебание». Резонансный конденсатор С1
отдает энергию через трансформаторно-выпрямительную нагрузку и
первый резонансный дроссель L1 в источник питающего напряжения
Un и во второй резонансный дроссель L2.
На рис. 1.4.10 показан восьмой такт работы схемы, отражающий
ее поведение на временном промежутке /8.../9. Резонансный
конденсатор С1 и первый резонансный дроссель L1 отдают энергию через
Рис. 1.4.10. Восьмой такт работы схемы
трансформаторно-выпрямительную нагрузку в источник питающего
напряжения Un, а резонансный конденсатор С1 отдает энергию еще и
во второй резонансный дроссель L2.
На рис. 1.4.11 показан девятый такт работы схемы, отражающий
ее поведение на временном промежутке t9..Jl0. Все накопители отдают
свою энергию.
На рис. 1.4.12 показан десятый такт работы схемы, отражающий
ее поведение в промежутке tiQ...tn. Идет перезаряд резонансного
конденсатора С1 за счет энергии второго резонансного дросселя L2.
На рис 1.4.13 показан заключительный такт работы схемы,
отражающий ее поведение в промежутке времени tn...t{. Идет разряд
резонансного конденсатора С1, далее процессы повторяются.
Обращаем внимание читателя, что на интервале времени /6.../7
происходит возврат энергии в источник, поскольку ток 1Х меняет свое
направление, а отрицательная амплитуда тока /, определяется
нагрузкой преобразователя. Именно этот факт определяет дополнительные
преимущества описываемого устройства — амплитуда тока через
ключи не увеличивается вплоть до короткого замыкания в нагрузке. Так-
Рис. 1,4.11. Девятый такт работы схемы
Рис 1.4.12. Десятый такт работы схемы
Рис 1.4.13. Заключительный такт работы схемы
же полностью отсутствует проблема «сквозных токов», что упрощает и
повышает надежность схем управления ключевыми элементами.
Отпадает и проблема создания быстродействующих защит для
предотвращения режима КЗ.
Представленная идея была положена в основу опытных образцов
и серийных изделий, которые в настоящее время производит
«Элкон». К примеру, преобразователь напряжения с выходной
мощностью 1,8 кВт, спроектированный для станции катодной защиты
подземных трубопроводов, получает питание от однофазной сети
переменного тока 220 В 50 Гц. В нем применены силовые транзисторы
IGBT типа IRG4PC30UD класса ultra-fast со встроенным оппозитным
диодом, емкость резонансного конденсатора С1 составляет 0,15 мкФ,
индуктивности резонансных дросселей L1 и L2 — по 25 мкГн. Период
собственных колебаний 7j> составляет 20 мкс, коэффициент
трансформации трансформатора — 0,5 (что определяет диапазон
номинальной нагрузки 0,8...2,0 Ом). Для минимального значения периода
коммутации Гк, равного 13 мкс (при частоте коммутации 77 кГц) и
нагрузке 1 Ом амплитуды токов /. и 12 соответственно составляют плюс
29 А и минус 7 А. Для нагрузки 0,5 Ом амплитуды токов 1Х и /2
составили соответственно плюс 29 А и минус 14 А. В случае КЗ эти
значения составляют плюс 29 А и минус 21 А, средний ток через нагрузку
составляет 50 А, то есть проявляется эффект ограничения тока КЗ.
На рис. 1.4.14 показано семейство регулировочных характеристик
резонансного преобразователя. Важно отметить, что во всем диапазоне
Рис. 1.4.14. Регулировочные характеристики преобразователей «Элкон»
частоты коммутации переключающие импульсы подаются при нулевом
силовом токе. Как пишут авторы идеи, все результаты были
первоначально проверены в системе схемотехнического моделирования
OrCAD 9.1, затем воплощены в макете, и только после этого запущены
в серию.
Для сравнения, на рис. 1.4.15 представлено семейство
регулировочных характеристик аналогичного по мощности классического
резонансного преобразователя. Минимальный период коммутации Тк
увеличен из-за возникновения сквозных токов, и в данном случае
составляет 14 мкс (при частоте коммутации 72 кГц). Для этой
номинальной частоты выполняется условие режима коммутации в нуле
токов. Для сопротивления нагрузки 1 Ом амплитуда тока нагрузки
равна 30 А, для сопротивления 0,5 Ом амплитуда равна уже 58 А.
В случае КЗ амплитуда тока через транзисторы становится уже более
100 А, причем коммутация силовых транзисторов происходит уже не в
нуле токов, а средний ток нагрузки превышает 180 А. Таким образом,
как было указано ранее, в данном случае возникает необходимость в
быстродействующей защите от КЗ для исключения выгорания
силовых транзисторов и предупреждения аварийной ситуации.
Участок регулирования «А» характеризует режим коммутации в
нуле токов. Но практический интерес представляет только участок
регулирования «Б», когда частота коммутации меньше номинальной в
Рис. 1.4.15. Регулировочные характеристики классического резонансного
преобразователя
два и более раз. Можно отметить, что глубина регулирования
указанным способом для классического преобразователя значительно
меньше, чем в преобразователях «Элкон», а необходимость работы на
более низкой частоте коммутации ухудшает энергетические показатели
классического преобразователя. Таким образом, преобразователи
«Элкон» обладают практически приемлемыми регулировочными
характеристиками и диапазоном изменения частоты коммутации.
Учитывая «мягкую» нагрузочную характеристику, возможно
регулирование выходного напряжения на фиксированной частоте за счет
фазового управления двумя преобразователями, соединенными
параллельно по переменному напряжению. Этот вариант проверен на
макете мощностью 1,2 кВт (рис. 1.4.16). Выходное напряжение при таком
способе регулирования можно легко изменять от нулевого до
максимального. Полученные результаты позволяют предположить, что
статические преобразователи, использующие новый способ резонансного
преобразования, найдут более широкое применение во всех областях
техники, где используются классические статические преобразователи
с номинальной мощностью на десятки и более кВт.
И в заключение — немного о серийной продукции «Элкон», которая
выпускается на основе технических решений, описанных выше. Это:
• станции катодной защиты мощностью 0,6 кВт, 1,5 кВт, 3,0 кВт и
5,0 кВт; КПД этой продукции в номинальном режиме работы
составляет не хуже 93 %;
• источники тока для ручной дуговой сварки (рис. 1.4.17)
мощностью 3,0 кВт и 5,0 кВт с питанием от однофазной сети 220 В 50 Гц;
• источники тока для ручной дуговой сварки мощностью 7,0 кВт с
питанием от трехфазной сети переменного тока 380 В 50 Гц;
Рис. 1.4.16. Макет преобразователя с фазовым
управлением
Рис. 1.4.17. Внешний вид
источников тока «Элкон»
для сварки
• источники для нагрева кузнечных заготовок мощностью 7,0 кВт
с питанием от однофазной сети переменного тока 220 В 50 Гц;
• преобразователи для высоковольтных солнечных батарей
мощностью 5,0 кВт с входным напряжением от 200 до 650 В и
выходным напряжением 400 В; при модуляции выходного
напряжения преобразователя по синусоидальному закону частотой
100 Гц и последующем распределении полуволн осуществляется
передача энергии от солнечной батареи в промышленную сеть
220 В 50 Гц.
Расскажем чуть подробнее о сварочной аппаратуре «Элкон». Эта
аппаратура создана на основе усовершенствованного резонансного
преобразователя, а высокий КПД позволяет получить экономию
электроэнергии порядка 20...30 % по сравнению с традиционными сварочными
аппаратами. Разработка велась исходя из принципа максимальной
простоты пользования ими в разнообразных условиях (дома, в цеху, на
улице). Испытания показали, что разработанные агрегаты в полной мере
отвечают требованиям надежности и неприхотливости.
Конструктивно агрегат «Е1соп-150Р», рассчитанный на
номинальную мощность 3,0 кВт гораздо меньше двух других агрегатов
(«Е1соп-200Р» с номинальной мощностью 5,0 кВт и «Е1соп-350Р» с
номинальной мощностью 7,0 кВт), но и его возможности по отдаче
непрерывного тока существенно ограничены. Если время непрерывной
работы для аппарата составляет 3 минуты, то 2 минуты после этого он должен
«отдохнуть», остыть. Другие сварочные агрегаты по своим размерам
существенно больше (за счет увеличенных размеров радиаторов
охлаждения силовых элементов), однако они могут работать круглые сутки без
ограничений.
В составе сварочных преобразователей предусмотрена схема
защиты от перегрева силовых элементов. Но схемы защиты от КЗ в них
нет — по принципу своего действия они нечувствительны к режиму
КЗ. Падающая вольт-амперная характеристика реализуется
физическими принципами построения прибора.
1.5. Мягкий старт — залог долголетия и надежности
До сих пор мы говорили о применении для управления вращением
электродвигателей достаточно сложных по своему устройству
статических преобразователей, которые обеспечивают полный набор
функций: плавный старт по заранее определенному закону, плавное
торможение, изменение частоты вращения после выхода на номинальный
режим работы и т. д. Было сказано много слов в пользу частотных
преобразователей, приведены их примеры и обрисованы открывающиеся
перспективы применения. Однако здесь нам придется несколько
огорчить читателя: не всегда такое решение оправдано с экономической
точки зрения, поскольку в ряде случаев достаточно обеспечить только
плавный пуск (или плавное торможение) электродвигателя. Решить
эту конкретную задачу позволит стоящий несколько в стороне класс
статических преобразователей, называемый «софт-стартерами», или
устройствами плавного пуска (УПП). В настоящее время практически
все выпускаемые промышленностью УПП имеют функцию
энергосбережения. Почему? Простейшие расчеты показывают, что если бы
электродвигатель смог работать с максимальным КПД во всех
режимах, включая пусковые, то реальная экономия электроэнергии
составила бы цифру порядка 40 %. К сожалению, максимальный КПД
асинхронного электродвигателя обеспечивается только при его работе
на номинальную нагрузку, и резко падает, если нагрузка снижается.
Вкратце напомним читателю о недостатках классических способов
запуска электродвигателей. При выполнении так называемого
«прямого пуска», когда статорная обмотка электродвигателя непосредственно
подключается к питающей сети, возникает бросок тока, многократно
(до 10 крат) превышающий номинальные значения. В этом случае
включение двигателя сопровождается ощутимым механическим
толчком и резким нагревом изоляции статорных обмоток. Механический
крутящий момент за доли секунды может достигнуть 1,5—2,0-кратной
величины по сравнению с номинальным. Опыт эксплуатации
электродвигателей в таких режимах показывает, что дополнительные пусковые
нагрузки ведут к превышению допустимой температуры обмоток и к
снижению прочности их изоляции. Кроме того, резкие механические
нагрузки ударного характера приводят к преждевременному износу как
самих электродвигателей, так и нагрузок их валов: насосных агрегатов,
редукторов, различных трансмиссий. А это, в свою очередь, вызывает
нестабильную работу и даже поломку оборудования. Прямой пуск
электродвигателей обладает еще одним существенным недостатком: в
моменты включения происходит падение напряжения в питающей сети
из-за больших пусковых токов, что может оказать самое негативное
влияние на другое оборудование, которое подключено к этой сети.
Именно по данной причине энергетические службы коммунальных
хозяйств разрешают для бытовых сетей прямой пуск двигателей
мощностью не более 6 кВА.
Достаточно широкое распространение получил метод снижения
пусковых токов посредством переключения обмоток двигателя
«звезда—треугольник». Суть этого метода в следующем: первоначально
обмотки двигателя соединяются по схеме «звезда». Именно в таком
соединении обмоток пусковой ток может быть уменьшен в три раза по
сравнению с прямым пусковым током. Далее, по прошествии 5...15 с,
когда двигатель выходит на номинальную скорость вращения, с помо-
щью механического переключателя (контактора) обмотки двигателя
переключаются в схему «треугольник». К сожалению, в этот момент
коммутации также происходит токовый скачок и возникает
механический удар, хотя его величина меньше, чем в условиях прямого пуска.
Еще один классический метод пуска электродвигателей —
автотрансформаторный. Суть этого метода в том, что двигатель
подключается к различным отводам автотрансформатора, стартуя при подаче
пониженного напряжения и далее увеличивая его по мере разгона. Скачки
тока и механические удары здесь еще меньше, чем в случае применения
метода «звезда—треугольник». Однако автотрансформаторный метод
рекомендовалось применять в основном для двигателей, у которых
невозможно осуществить коммутацию «звезда—треугольник», а также для
мощных двигателей. Стоимость такой системы пуска в практической
реализации оказалась достаточно высокой, поэтому
автотрансформаторный метод не получил сколько-нибудь серьезного распространения.
В ряде случаев и по сей день можно встретить иные технические
решения, обеспечивающие облегченный режим пуска электродвигателей,
использующие изменение сопротивления статорных обмоток в
процессе разгона, или включающие некоторые устройства, устанавливаемые
на вращающиеся механические части двигателей. Мы не будем
говорить об этих методах, так как они выходят за рамки тематики книги.
Каковы характеристики наиболее распространенных механизмов,
использующихся в промышленности? Центрифуги — имеют большие
инерционные массы, из-за чего их раскручивание происходит
достаточно долго. При прямом пуске центрифуг их двигатели
продолжительное время находятся под воздействием пусковых токов,
испытывая большие динамические воздействия. Вентиляторы — очень
похожи по своим характеристикам на центрифуги, имея незначительные
отличия в динамике установления номинальных нагрузок.
Классические вентиляторные установки часто проектируются с применением
метода переключения «звезда—треугольник», поскольку прямой пуск
приводит к очень быстрой поломке подшипников и приводных
ремней. Дробилки — еще более тяжелый вариант эксплуатации
электродвигателей, поскольку при пуске эти устройства должны сразу
преодолеть номинальное значение крутящего момента. Положение
осложняется еще и тем, что очень часто дробилки работают на открытом
воздухе, при пониженных температурах, которые увеличивают
вязкость масляной смазки вращающихся частей, создавая
дополнительный механический момент, который электродвигателю надо
преодолевать. То же самое относится к механическим мельницам, мешалкам
вязких сред и т. д.
Особый вид нагрузки — у подъемных механизмов и кранов. Мало
того, что двигатель крана должен обеспечивать реверс (изменение
направления вращения), в момент реверса, как и в момент прямого пус-
ка, если эти операции выполняются резко, возникает опасное
раскачивание груза из-за его инерционности. Не менее важно снизить
пусковые нагрузки и в двигателях насосов — даже если приняты все
классические меры по снижению пусковых нагрузок, применен метод
«звезда—треугольник», все равно при пусках насосов можно наблюдать
гидравлические удары в трубопроводах, которые в ряде случаев
являются причиной их разрыва.
Ленточный транспортер — еще один достаточно
распространенный вид механизма, который сегодня можно встретить не только на
производстве, но также и в повседневной жизни, например, в
супермаркетах — для подачи покупок к кассам. Резкие рывки ленты при
пуске могут легко привести к падению и опрокидыванию
установленных на нее товаров. Кому понравится, например, постоянно
падающие с ленты кассового транспортера хрупкие товары — стеклянные
бутылки, пластиковые контейнеры?
Весьма значительный класс механизмов составляют дерево- и
металлообрабатывающие станки, ручной инструмент, а также швейные
машины. Всех их объединяет характерная «двухрежимность»
работы — режим холостого хода и режим номинальной нагрузки. Причем
переход из режима в режим выполняется достаточно часто.
Оптимизация режима холостого хода этих механических устройств позволит
сэкономить значительное количество электроэнергии.
На рис. 1.5.1 приведены типовые кривые тока статора и крутящего
момента электродвигателей в режиме прямого пуска (7), в режиме
переключения «звезда—треугольник» (2), в автотрансформаторном
режиме (3) и — внимание! — в режиме питания от софтстартера (4).
Очевидно: софтстартер позволяет избавиться от пусковых
сверхтоков и избежать механических рывков. Однако следует запомнить, что
обычный софтстартер не может обеспечить регулировку частоты
вращения двигателя в установившемся режиме, не позволяет
реверсировать направление вращения двигателя, не увеличивает момент
вращения относительно номинального. Другими словами, софтстартер —
это «урезанный» вариант частотного статического преобразователя.
Каково его устройство?
Самый главный элемент софтстартера (УПП), с помощью
которого осуществляется регулировка выходных параметров, — это
симметричный тиристор (симмистор). Включение симмисторов в различных
исполнениях УПП различное: симмисторы могут включаться в
разрыв одной, двух и трех фаз. Двигатели, в которых возможно
выполнить соединение фаз по схемам «треугольника» и «звезды», позволяют
включить симмисторы не в питающие фазы, а в разрывы обмоток,
что снижает рабочий ток элементов в 1,73 раза. Наиболее удачными
являются УПП с регулирующими элементами во всех трех фазах,
поскольку такое построение УПП не вызывает перекоса тока фаз в мо-
Рис. 1.5.1. Сравнительные характеристики тока статора
и крутящего момента
менты старта и торможения, реализует режим плавного и
динамического торможения. Но это не означает, что однофазное и двухфазное
регулирование не используется в имеющихся на рынке УПП.
На рис. 1.5.2 показаны силовые схемы УПП. В случае
однофазного регулирования (рис. 1.5.2, а) происходит перекос фазных токов,
что ведет к ухудшению теплового режима обмоток, подключенных к
нерегулируемым фазам. Поэтому однофазное регулирование не
рекомендуется использовать в режимах длительного пуска, плавного
торможения и ограничения пускового тока. Эта силовая схема
предпочтительна только для двигателей мощностью до 10 кВт и только для
смягчения механических ударных нагрузок.
Силовая схема двухфазного УПП показана на рис. 1.5.2, б. Такая
схема реализует режим ограничения пускового тока, но, к сожалению,
не может обеспечить симметрии фазных токов на протяжении времени
плавного пуска. Поэтому данную схему также имеет смысл применить
только для двигателей мощностью до 250 кВт с целью смягчения
ударных нагрузок.
И, наконец, наиболее универсальное УПП с трехфазным
регулированием показано на рис. 1.5.2, в. Считается, что это техническое
Рис. 1.5.2. Силовые схемы УПП: а — однофазное регулирование;
б — двухфазное регулирование; в — трехфазное регулирование
решение наиболее совершенно, так как ограничение тока происходит
в данном случае симметрично для всех трех фаз. Именно с
применением этого технического решения строится подавляющее
большинство УПП, серийно выпускаемых промышленными предприятиями.
Как мы уже знаем, любой статический преобразователь, кроме
силовой схемы, содержит также схему управления. УПП не является
исключением — в составе софтстартеров также обязательно присутствует
схема управления включением симмисторов, типовой принцип
действия которой поясняет рис. 1.5.3.
В установившемся режиме работы УПП на обмотки двигателя
поступает «полная» синусоида питающего напряжения. В режиме
плавного пуска синусоида «урезается» от момента ее перехода через нуль до
заданной схемой управления времени «альфа» (а, угла открытия
силовых элементов). Можно рассчитать, что при частоте напряжения
питания 50 Гц параметр а будет изменяться от 10 мс до нуля. В режиме
плавного торможения параметр а меняется в обратном направлении —
от нуля до 10 мс.
Рис. 1.5.3. К пояснению работы схемы управления УПП
Схемы управления УПП могут иметь функцию гарантированного
ограничения пусковых токов, когда задействуется обратная связь от
датчиков тока, расположенных в фазных питающих проводниках.
Таким образом, при достижении режима ограничения тока (в режиме
разгона) схема управления автоматически заблокирует уменьшение
параметра а на время стабилизации тока на заданном уровне, после
чего блокировка будет снята. Следует отметить, что функция
гарантированного ограничения пускового тока встречается не во всех УПП,
поэтому при выборе конкретного типоисполнения имеет смысл
поинтересоваться о наличии такой функции.
В ряде случаев двигатель должен преодолевать пусковое
механическое сопротивление при старте из состояния полного покоя.
Двигатель как бы нужно «толкнуть», и уже после толчка можно
включать режим плавного разгона. Для этого в составе УПП иногда
предусматривается функция boost-поддержки, работа которой отражена
на рис. 1.5.4.
Нетрудно заметить, что при наличии функции boost-поддержки в
питающей сети наблюдается токовый скачок, как и в случае прямого
пуска. Однако этот токовый скачок действует очень короткое время
(доли секунды), что безопасно для питающей сети и никак не сказы-
Рис. 1.5.4. Функция boost-поддержки
вается на работе смежного оборудования, подключенного к этой же
сети.
Очень важный момент, связанный с электромагнитной
совместимостью (об электромагнитной совместимости мы еще будем подробно
говорить в нашей книге), для УПП решается очень просто. Несмотря на
то, что резкое включение и отключение симмисторов обычно
сопровождается значительными электромагнитными помехами, практически все
УПП, работающие в связке с двигателями, у которых имеется
индуктивное сопротивление обмоток, фактически образуют очень маленький
электромагнитный фон, соответствующий установленным нормам.
Индуктивное сопротивление обмоток «гасит» крутые фронты импульсов,
и, более того, схема управления УПП проектируется таким образом,
чтобы «привязаться» к моментам перехода напряжения сети через нуль.
Как известно, в открытом состоянии на симмисторе падает
напряжение порядка 5 В, что приводит при протекании через него тока
к разогреву силового прибора и необходимости облегчения его
теплового режима посредством дополнительных радиаторов. Но существует
еще один метод, называемый байпасным, который достаточно
широко применяется в УПП для снижения тепловых потерь в
установившемся режиме работы. Принцип байпасного метода показан на
рис. 1.5.5.
Рис. 1.5.5. Простейший байпас
Параллельно УПП подключаются контакты мощного контактора
КМ1, который на время плавного пуска (или торможения) находится
в разомкнутом состоянии. В момент, когда симмисторы УПП
полностью открыты, что обычно наблюдается при выходе электродвигателя
на режим продолжительной работы, контакты КМ1 замыкаются,
шунтируя симмисторы и облегчая их тепловой режим. Эти
контакторы обычно выбираются из расчета отсутствия протекания через них
пусковых токов и, как правило, не входят в комплект поставки УПП.
Любое устройство силовой электроники характеризуется наличием
у него развитой системы защит. Не исключение здесь и УПП. В
настоящее время софтстартеры оснащаются также интеллектуальной
системой эксплуатационной диагностики, которая не позволит
перегрузить как само УПП, так и управляемый им двигатель.
Основная защитная функция УПП — это обеспечение защиты от
сверхтоков. Если потребляемый ток превышает заданную уставкой
аварийную величину, УПП отключит вводной и байпасный
контакторы, а также «закроет» симмисторы. Другая опасная ситуация
складывается, когда двигатель работает в режиме перегрузки, но без
возможности мгновенного повреждения. В этом случае система защиты
может просто остановить двигатель без размыкания входного контактора.
Особое внимание также уделяется тепловой защите оборудования от
перегревов. С этой целью в УПП встраиваются узлы контроля
температуры обмоток двигателя и температуры радиаторов силовых
элементов. Алгоритм работы этого узла может быть различным (как правило,
его определяет фирма-производитель при разработке УПП), более или
менее эффективным.
Функция отслеживания недогрузки по потребляемому току
обычно работает следующим образом: УПП определяет момент снижения
тока потребления ниже заданной величины и выдает сигнал на
отключение контакторов.
Классическими защитными функциями являются отключение при
снижении напряжения сети ниже заданного уровня с регулируемой
временной задержкой отключения, отключение при повышении
напряжения сети, отключение при обрыве фазы, отключение при
рассогласовании фаз. Дополнительно могут отслеживаться: неправильное
подключение обмоток двигателя, внутренний разрыв обмоток,
неправильная коммутация силовых симмисторов, их разрыв или
замыкание, дисбаланс потребляемых токов, превышение тока утечки на
заземление. Интересная функция — ограничение количества
включений-отключений в единицу времени (для некоторых типов двигателей
это очень важно).
А теперь мы поговорим о конкретных образцах УПП, выпускаемых
промышленностью. Один из характерных образцов софтстартера,
имеющего все необходимые типовые функции, выпускается ООО НПП
«Горизонт» (г. Екатеринбург) с индексом ППД-1. Габаритный чертеж
устройства приведен на рис. 1.5.6.
Как видно из рисунка, УПП представляет собой прибор навесного
исполнения с лицевой панелью, на которой установлен пульт
управления. К боковым стенкам корпуса подходят шины приема питания
от сети, подачи питания на электродвигатель и подключения байпас-
ного контактора. Также на лицевой панели установлены малогабарит-
Рис. 1.5.6. Габаритный чертеж ППД-1
ные клеммы для подключения дистанционных органов управления и
линии цифровой связи с интерфейсом RS-485.
На рис. 1.5.7 показана укрупненная структурная схема
организации плавного пуска электродвигателя с использованием ППД-1.
Рис. 1.5.7. Структурная схема питания с использованием ППД-1
В данной схеме присутствуют следующие типовые узлы:
автоматический выключатель подачи питания на силовые клеммы УПП (QF1),
автоматический выключатель подачи питания на схему управления
УПП (QF2), байпасный контактор (К1), кнопки дистанционного
управления «Пуск» (SB1) и «Стоп» (SB2), лампа дистанционной
сигнализации «Авария» (HLI). В составе УПП имеются: силовые симми-
сторы (VS1...VS6), измерительные трансформаторы тока фаз
электродвигателя (ТА 1...ТАЗ), контроллер управления УПП.
УПП осуществляет постоянный контроль сигналов «Пуск» и
«Стоп», при поступлении той или иной команды (на включение или
отключение) запускается процедура ее выполнения. В процессе
выполнения процедуры плавного пуска осуществляется измерение угла
открытия симмисторов, и это значение может быть выведено на
буквенно-цифровой индикатор.
УПП имеет все необходимые функции защиты от неноминальных
режимов работы двигателя. С этой целью в схеме УПП установлены
измерительные трансформаторы тока ТА 1...ТАЗ. Сигнал с
трансформаторов тока оцифровывается аналогово-цифровым преобразователем
(АЦП), имеющимся в составе контроллера управления, затем
оцифрованное значение перемножается с коэффициентом передачи
измерительной цепи К (этот параметр вводится вручную при настройке
УПП) — и таким образом получается значение тока обмоток двигателя.
Это рассчитанное значение может быть выведено на
буквенно-цифровой индикатор. К слову, если разработчик сочтет целесообразным
использовать внешние измерительные трансформаторы (например,
обладающие большей точностью измерения), это окажется несложной
задачей: в данном УПП предусмотрен режим измерения коэффициента
передачи автоматическими методами. Понятно, что величина тока
обмоток обрабатывается путем сравнения с внутренними уставками, и по
результату сравнения принимается решение о срабатывании защиты.
В составе УПП имеется узел контроля времени разгона двигателя.
Если это время превышает установленное значение, происходит
сравнение текущего тока обмоток двигателя с номинальным значением.
В случае превышения номинального значения тока выдается сигнал
«Авария». Если же ток равен или меньше номинального, УПП
продолжает функционирование в нормальном режиме.
Еще одна важная функция — защита от короткого замыкания фаз
питающей сети. Данная защита работает как на этапе разгона
двигателя, так и после срабатывания байпасного контактора. Близкими по
функциональному признаку являются защиты от обрыва одной из фаз
и от перекоса фаз. Срабатывание защиты от перекоса фаз происходит
тогда, когда фазные токи отличаются по величине более чем на 30 %.
Срабатывание защиты от перекоса возможно только при замкнутом
байпасном контакторе.
Время-токовая защита необходима для защиты электродвигателя от
перегрева. Эта защита основывается на том факте, что нагрев обмоток
двигателя происходит тем быстрее, чем больше превышение тока его
обмоток по сравнению с номинальным. В данном случае время работы
двигателя определяется из трех значений токов, измеренных в процессе
функционирования УПП. Если измеренное значение тока не
превышает номинальное (плюс допуск на колебание номинального значения),
двигатель может работать неограниченно долго. В случае превышения
номинального значения запускается отсчет времени включения
защиты. Это время тем меньше, чем больше превышение тока по сравнению
с номинальным значением.
Пример удачно выполненного инженерного решения —
софтстартер типа ASTATplus, серийно выпускаемый фирмой «GE power» (от-
деление всемирно-известной фирмы «General Electric»). Внешний вид
софтстартеров этой серии показан на рис. 1.5.8.
Эта линейка УПП предназначается для управления вращением
двигателей трехфазного типа мощностью до 850 кВт с питанием от сети
с напряжением до 500 В. Управление софтстартерами осуществляется с
цифровой панели (рис. 1.5.9), имеется также встроенный интерфейс
цифровой связи, с помощью которого можно дистанционно управлять
УПП, а также получать всю необходимую диагностическую
информацию.
Начальное напряжение софтстартера может быть задано в
диапазоне 30...95 % от номинального, пусковой ток — в диапазоне 1...7 крат
от номинального, стартовый момент — 10...90 % от пускового
значения. Функция boost-поддержки («запуск с толчком») обеспечивает
первоначальное значение напряжения 95 % от номинала в диапазоне
времени от 0 до 999 мс (устанавливается вручную, через панель
управления). Время разгона может быть задано в диапазоне от 1 до 99 с в
стандартном режиме (по критерию величины пускового тока) или в
линейно-нарастающем режиме. Время торможения также
регулируется в пределах от 1 до 120 с (стандартные функции: выбег, мягкий
останов, линейное снижение скорости). Управление байпасным
контактором — прямое, без необходимости установки промежуточных реле.
Обращаем внимание читателя: это УПП имеет режим «медленная
скорость вперед» с поддержкой значений 7 и 14 % скорости от
номинальной, а также реверсивный режим «медленная скорость назад» с
поддержкой 20-процентного скоростного режима. Перезапуск при
неудачном старте может быть установлен в пределах от 0 до 4-х попыток
с временем перезапуска от 1 до 99 с. Мониторинг осуществляется в
объеме контроля тока двигателя, линейных напряжений,
потребляемой мощности, коэффициента мощности и временных промежутков.
Рис. 1.5.8. Софтстартеры типа
ASTATplus
Рис 1.5.9. Панель управления
ASTATplus
На рис. 1.5.10 приведена типовая схема зключения ASTATplus.
Контактор DC1 — элемент необязательный, так как он
непосредственно не участвует в плавном пуске двигателя. Однако специалисты
фирмы рекомендуют использовать этот контактор в целях
обеспечения гальванической развязки от питающей силовой сети в
отключенном состоянии, что повышает электробезопасность устройства.
Функции «Пуск» и «Стоп» УПП реализованы классически — с помощью
кнопок, подключенных к контактам 56 и 57 УПП. Кроме этого, в
цепи кнопки «Стоп» имеется контакт теплового реле защиты
двигателя FT1. Релейные выходы («сухие контакты») 23—24 и 33—34
программируются пользователем в соответствии с выполняемыми
функциями и могут непосредственно управлять байпасными
контакторами. Контакты SG, TD, RD — цифровой интерфейс. К контактам 5 и 6
Рис. 1.5.10. Типовая схема включения ASTATplus
подключается терморезистор раннего обнаружения нагрева обмоток
двигателя (вместо него можно установить перемычку, если такая
защита не требуется). Контакты 7 и 8 — место подключения тахогенера-
тора, являющегося датчиком линейного разгона/торможения.
Очень важно отметить, что УПП типа ASTATplus имеет функцию
время-токовой защиты, выбираемой в соответствии с требуемым
классом: IEC-10, IEC-20, NEMA-10, NEMA-20 и NEMA-30. Эти
классы отличаются видом время-токовой характеристики, наклоном
линий, поэтому здесь для примера мы приводим характеристику типа
NEMA-30 (рис. 1.5.11). Классы защиты задаются через меню
управления УПП.
Рис. 1.5.11. Характеристика типа NEMA-30 для ASTATplus
Пуск можно выполнить в «холодном» состоянии, то есть после
длительного простоя, либо в «горячем» — при многократном
цитировании. Соответственно, от этого зависит и вид время-токовой
характеристики отключения.
Среди устройств плавного пуска могут встретиться и весьма
малогабаритные варианты, как, например, УПП типа Altistart-01 от
«Schneider Electric» (рис. 1.5.12), которое рекомендуется применять
для управления двигателей с мощностью не более 5,5 кВт.
О внешних размерах этого УПП как о малогабаритных можно
судить даже по тому, что данное УПП предназначено для установки на
DIN-рейку. Тем не менее, это устройство имеет все необходимые для
такого класса устройств функции и органы управления: потенциометр
регулировки времени пуска (поз.1), потенциометр настройки
начального уровня напряжения пуска в зависимости от начального момента
Рис. 1.5.12. Внешний вид УПП типа Altistart-01
(поз. 2), входы подачи напряжения питания цепей управления (поз. 3).
Кроме того, имеются органы индикации: зеленый светодиод
«устройство под напряжением», желтый светодиод «двигатель питается от
номинального напряжения». Элементы связи с «внешним миром»: два
дискретных входа «пуск» и «стоп», дискретный вход функции
boost-поддержки, дискретный выход сигнализации окончания времени пуска,
релейный выход «сухой контакт» для сигнализации неисправности
питания УПП или остановки двигателя.
И в завершение раздела приведем пример мощного устройства
плавного пуска типа SSM, выпускаемого фирмой «АВВ» и
предназначенного для управления двигателями с мощностью до 22 МВт
(рис. 1.5.13). Как видно из рисунка, в данном случае это — крупный
секционированный шкаф напольного исполнения. Более того,
поскольку риск понести огромные финансовые затраты на
восстановление отказавшего двигателя здесь несоизмерим с риском выхода из
строя двигателей небольшой мощности, такие УПП вынужденно
оснащаются очень сложной системой диагностики исправного состояния.
Составляющими узлами этого УПП являются: пульт управления и
программирования режимов работы; отсек низковольтной
аппаратуры, гальванически развязанный с силовой частью; встроенные
измерительные трансформаторы; механический разъединитель ножевого
типа, рассчитанный на возможность разрыва цепи при полном токе
нагрузки и блокирующий открытие дверей УПП при подаче
напряжения на силовую схему; специальный контур заземления; силовые
предохранители со световой индикацией перегорания; вводной
вакуумный контактор; байпасный контактор; тиристорные модули с
гальванической оптической развязкой цепей управления и драйверные
платы управления тиристорами; дополнительная плата подключения
датчиков режимов двигателя; датчики тока утечки на «землю».
Рис. 1.5.13. Внешний вид УПП типа SSM
УПП позволяет подключить до 12 датчиков, контролирующих
состояние двигателя. Это, в основном, тепловые датчики, установленные
на переднем подшипнике, по краям и в середине статора сверху, по
краям и в середине статора снизу, на заднем подшипнике, на крышках
подшипников и в непосредственной близости от корпуса двигателя
(контроль температуры окружающей среды).
В связи с тем, что УПП вынуждено обрабатывать значительное
количество сигналов датчиков, разработчики создали специальную
тепловую модель функционирования двигателя. Результаты
моделирования «упаковываются» в комплексную переменную, которая
сохраняется в специальном динамическом регистре нагрева. Более того, УПП
имеет специальную память теплового состояния двигателя, которая не
«обнуляется» даже после пропадания питания. После возобновления
подачи первичного питания схема управления считывает показания
часов реального времени, встроенных в УПП, и корректирует
динамический регистр нагрева с учетом времени, прошедшего с момента
пропадания питания.
Тепловая модель учитывает время-токовую характеристику
нагрева двигателя, несимметрию фазных токов, скорость охлаждения,
по-разному выполняя контроль на этапах «разгон», «торможение»,
«работа с байпасным контактором». Только таким образом удается
обеспечить максимальную защиту мощного электродвигателя.
Глава 2
ЭЛЕМЕНТНАЯ БАЗА
ПРЕОБРАЗОВАТЕЛЬНОЙ ТЕХНИКИ
2.1. Берем за основу MOSFET и IGBT
Без всякого преувеличения можно сказать, что появившиеся не
слишком давно транзисторы типа MOSFET и IGBT, составляют
сегодня основу силовой преобразовательной техники. Более того, без
использования этих типов транзисторов немыслима разработка
сколько-нибудь надежного статического преобразователя, отвечающего
современным требованиям. Поэтому данную главу, посвященную
основной элементной базе силовой электроники, мы начнем с
рассказа именно об этих электронных элементах.
Полевые транзисторы появились в силовой схемотехнике
значительно позже своих старших собратьев — биполярных транзисторов.
Тем не менее, сегодня они стремительно оттесняют «биполярники» на
второй план, обоснованно стремясь занять лидирующее положение в
классах силовой преобразовательной техники, работающих с
напряжениями до 300 В. Чем принципиально транзистор MOSFET отличается от
биполярного транзистора? Полевой транзистор по принципу
управления — не токовый, а потенциальный прибор. Для того, чтобы перевести
полевой транзистор из открытого состояния в закрытое и наоборот,
нужно приложить к затвору (относительно истока) определенное
напряжение. При этом ток в цепи затвора протекает только в моменты
коммутации, то есть очень незначительный промежуток времени: для
поддержания открытого состояния этому транзистору ток не нужен —
управление осуществляется электрическим полем.
Транзисторы типа MOSFET по сравнению с биполярными
транзисторами имеют множество неоспоримых преимуществ, среди
которых основными являются следующие:
• поскольку MOSFET управляется не током, а электрическим
полем, это обстоятельство позволяет значительно упростить схему
управления и снизить затрачиваемую на управление мощность;
• в полевых транзисторах отсутствует так называемая инжекция
неосновных носителей в базовую область, поэтому они могут
переключаться с гораздо более высокой скоростью;
• поскольку полевые транзисторы термоустойчивы, то есть с
ростом температуры увеличивается сопротивление их канала, это
позволяет реализовывать параллельное соединение MOSFET для
увеличения нагрузочной способности;
• в полевых транзисторах отсутствует вторичный пробой, поэтому
область их безопасной работы шире, чем у биполярных
транзисторов.
Впрочем, и у транзисторов MOSFET имеются некоторые
недостатки. Вкратце назовем их:
• в открытом состоянии канал транзистора MOSFET представляет
собой активное сопротивление (ЛЛоп), которое невелико только у
транзисторов с допустимым напряжением «сток—исток» (Udsmax)
не более 250...300 В, а далее, с повышением этого допустимого
напряжения, наблюдается его значительный рост, что заставляет
соединять приборы параллельно, ограничивать ток,
приходящийся на один транзистор, то есть «недогружать» прибор;
• существенный недостаток транзисторов MOSFET связан с
технологией их изготовления, поскольку до настоящего времени
технологически не удается изготовить их без некоторых
паразитных элементов, одним из которых является внутренний
паразитный биполярный транзистор;
• наличие паразитных межэлектродных емкостей вызывает
эффект «торможения» транзистора при переключении, и чем
мощнее транзистор, тем сложнее обеспечить его быстродействующее
переключение.
В справочной документации по полевым транзисторам MOSFET в
символическом обозначении транзистора часто встречается символ
диода, включенного параллельно цепи «сток—исток», как показано на
рис. 2.1.1.
Некоторые разработчики ошибочно считают этот диод
специально встраиваемым защитным элементом, называя его
быстродействующим диодом Шоттки. Действительно, графическое начертание уж
Рис. 2Л.1. Обозначение паразитных диодов в технической
документации
очень похоже на упомянутый диод, и в подавляющем большинстве
случаев в силовых преобразовательных схемах существует
необходимость шунтирования транзисторов быстрыми диодами. Но, к
сожалению, в данном случае появление диода связано с технологией
изготовления мощных «полевиков». Почему — к сожалению? Потому, что
характеристики этого паразитного диода, называемого integral reverse
p-n junction diode (интегральный обратный диод p-n-перехода),
применительно к использованию в схемах преобразовательных устройств
оставляют желать лучшего. Другими словами, встроенный диод
оказывается слишком медленным, поэтому приходится затрачивать
дополнительную энергию на его закрывание, что ведет к нагреву
транзистора в целом.
Ведущие мировые производители элементной базы постоянно
ведут небезуспешную борьбу за улучшение характеристик
быстродействия обратных диодов, и их влияние становится все менее заметным,
однако подавляющее большинство выпускаемых на сегодняшний
момент полевых транзисторов все еще имеют паразитные диоды с
достаточно большим временем обратного восстановления. Кстати, на
самом деле встроенный диод получается из технологического
биполярного транзистора, включенного параллельно силовым электродам
полезного полевого транзистора так, как показано на рис. 2.1.2.
Рис. 2.1.2. Паразитный диод в составе полевого транзистора
Из представленного рисунка видно, что база биполярного
транзистора VT подключена к технологическому основанию, на котором
расположен p-n-переход. Это технологическое основание называется
подложкой. Между подложкой и истоком имеется некоторое
омическое сопротивление R, между подложкой и стоком — паразитный
конденсатор С. Емкость этого конденсатора, к счастью, невелика, но ее
величины окажется достаточно для включения паразитного
транзистора при условии быстрого спада или роста напряжения «сток—исток».
Произойти такое явление может, например, при коммутации токов
большой величины. Чем это грозит для электрической схемы, понять
нетрудно: в тот момент, когда мы считаем транзистор закрытым, он
вновь открывается, что зачастую может стать предпосылкой к
возникновению сквозных токов и выгоранию силовой схемы.
Для обеспечения нормальной работы полевого транзистора
производители элементной базы должны принимать меры к исключению
паразитного биполярного транзистора уже на стадии изготовления.
Подключение подложки к истоку технологической проводящей
перемычкой удается гарантированно исключить опасность
неконтролируемого поведения паразитного элемента. Однако так появляется
паразитный диод с очень средними динамическими свойствами.
Справедливости ради отметим, что диоды Шоттки в составе
транзисторов MOSFET все-таки встречаются, однако это никак не
связано с улучшением технологии их изготовления. Данный диод,
показанный на рис. 2.1.2, в, просто встраивается на этапе сборки
транзисторов как отдельный бескорпусной элемент. При работе транзистора в
конкретной схеме диод Шоттки «берет» на себя обратный ток,
поскольку открывается быстрее, чем технологический паразитный диод.
Мнение о полевом транзисторе как о безынерционном приборе,
который может переключаться практически мгновенно, к сожалению,
часто бытует среди начинающих разработчиков, однако оно в
значительной степени ошибочно. Конечно, сравнивая биполярный и
полевой транзисторы по своим динамическим характеристикам, легко
признать MOSFET почти идеальным прибором для силовых
преобразовательных схем. В действительности полевой транзистор
затрачивает некоторое время на включение, а также на выключение.
Существование задержки обусловлено наличием паразитных емкостей, которые
показаны на рис. 2.1.3.
Рис. 2.1.3. Паразитные емкости в составе полевого транзистора
На рисунке эти емкости условно показаны постоянными, но в
реальном приборе каждая емкость состоит из нескольких более мелких,
с разным характером поведения. Кроме того, величина этих емкостей
сильно зависит от напряжения между их «обкладками»: она велика
при малом напряжении «сток—исток», и быстро уменьшается с его
ростом. На рис. 2.4.1 показан характер изменения межэлектродных
емкостей с ростом напряжения «сток—исток» для маломощного тран-
зистора типа IRF740, а на рис. 2.1.4, б — для
мощного транзистора типа FB180SA10.
Чтобы наглядно продемонстрировать
степень влияния паразитных емкостей на скорость
переключения транзистора, представим его в
виде, изображенном на рис. 2.1.5. Согласно
приведенному рисунку, транзистор работает в
режиме ключа, коммутируя нагрузку с
сопротивлением RH. Входная емкость транзистора
представлена элементом Свх.
Чтобы гарантированно открыть транзистор,
необходимо зарядить его входную емкость до
напряжения 12... 15 В. Сделать этот процесс
достаточно быстрым — задача непростая, поскольку
быстрому заряду емкости будет мешать так
называемый эффект Миллера. Производители транзисторов затрачивают на
борьбу с влиянием эффекта Миллера достаточно много
интеллектуальных сил и финансовых средств, так как чем сильнее этот эффект будет
подавлен, тем выше окажется скорость переключения транзистора.
Наличие эффекта Миллера обуславливает существование емкости
Cgd9 которая образует отрицательную обратную связь между входом и
выходом транзистора. Сам прибор в этом случае нужно рассматривать
как усилительный каскад, выходной сигнал которого снимается с
нагрузки RH в цепи стока. В таком каскаде выходной сигнал будет
инвертирован относительно входного сигнала. Обратная связь в виде
конденсатора С d настолько сильно уменьшает амплитуду входного
Рис. 2.1.5.
К пояснению
влияния эффекта
Миллера
Рис. 2.1.4. Зависимость величины межэлектродных емкостей от величины
напряжения «сток—исток»: а — для IRF740; б — для FB180SA10
сигнала, что по отношению к нему входная емкость транзистора
оказывается больше, чем она есть на самом деле:
(2.1.1)
где Ку — коэффициент усиления каскада.
Определить коэффициент усиления каскада на полевом
транзисторе можно по известной простой формуле:
(2.1.2)
где S — крутизна транзистора (приводится в справочных данных).
Простой расчет красноречиво свидетельствует о том, насколько
сильно эффект Миллера оказывает влияние на величину входной
емкости. Пусть С^ = 35 пФ, Cgd = 6 пФ, S= 250 мА/В, RH = 200 Ом. Тогда
величина емкости Сцх, рассчитанная с учетом формул (2.1.1) и (2.1.2),
составит 341 пФ. Другими словами, эффект Миллера способен свести
к нулевым очевидные преимущества скорости переключения полевых
транзисторов. Но, к счастью, сегодня этот эффект значительно
минимизирован в серийно выпускаемых транзисторах и не вызывает
серьезных опасений.
А теперь поговорим о режиме переключения силовых приборов
как об основном режиме их работы в составе преобразовательной
техники. Учитывая это, нам просто необходимо рассмотреть специфику
процессов, происходящих в транзисторах MOSFET при их работе в
силовых схемах.
На рис. 2.1.6 показан типовой полевой транзистор, работающий в
ключевом режиме.
Рис. 2.1.6. К расчету времени переключения транзистора MOSFET
Напряжение Ug, прикладываемое к затвору транзистора VT от
импульсного генератора, имеет вид, изображенный на рис. 2.1.7, а.
В цепь затвора включен резистор с небольшим сопротивлением Rg9
который мы в дальнейшем будем называть затворным резистором.
При подаче прямоугольного импульса от источника Ug сначала
происходит заряд емкости Cgc (участок «1» на рис. 2.1.7, б). Но транзистор в
это время закрыт — он начнет открываться только при достижении
напряжения Ugc некоторого значения, называемого пороговым
напряжением (что видно из рис. 2.1.7, в. Величина порогового напряжения
в справочной документации обозначается как Ugsithy Типичное
значение порогового напряжения для полевых транзисторов составляет
2...S В.
Рис. 2.1.7. Временные диаграммы коммутационных процессов в транзисторах
типа MOSFET
Легко заметить, что имеет место временная задержка включения
транзистора. Время, затрачиваемое на этот процесс, носит название
времени задержки включения (turn-on delay time) и обозначается в
технической документации как /rf(on).
При достижении Ugs порогового уровня «срабатывает» эффект
Миллера, входная емкость резко увеличивается, что иллюстрируется
участком «2» на рис. 2.1.7, 5, а значит, скорость открытия транзистора
замедляется. «Медленный» участок будет длиться до тех пор, пока
транзистор полностью не откроется, или, другими словами, пока
сопротивление открытого p-n-перехода не достигнет значения ЛЛ(0П). На
протяжении времени открытия транзистора наблюдается падение
напряжения Uds до минимально-возможной величины. Процесс
открывания занимает время, называемое в технической документации
временем нарастания (rise time) и обозначаемое как tr После того, как
транзистор полностью откроется, обратная связь обрывается и
входная емкость снова становится равной Cgs (участок «3» на рис. 2.1.7, б).
В результате на затворе установится напряжение равное напряже-
нию генератора Ug. На участке «4» транзистор находится в состоянии
длительного статического насыщения.
Процесс выключения транзистора протекает в обратном порядке
(участки «5», «6», «7» на рис. 2.1.7, б. На участке «5» происходит
снижение напряжения до порогового уровня, занимающее время ^(ofi).
Это время носит название времени задержки выключения (turn-off
delay time). На участке «6» снова вступает в действие эффект
Миллера, замедляющий процесс выключения, и напряжение «сток—исток»
становится равным Un. Время, затрачиваемое на этот процесс,
называется временем спада (fall time) и обозначается как tf.
Иногда в технической документации, особенно в отечественной,
не приводятся отдельно время задержки включения, время
нарастания, время спада и время задержки выключения, а даются суммарные
параметры. Например, время включения tUKJl и время выключения /вык.
В табл. 2.1.1 приводятся для сравнения временные параметры для
некоторых распространенных типов транзисторов MOSFET.
Таблица 2.1.1. Временные параметры некоторых транзисторов MOSFET
Тип MOSFET
tn нс
'</(оП> НС
/у, НС
'вкл' НС
'выю НС
IRF740
10
35
24
22
45
46
1RFP250
16
86
70
62
102
132
IRF9510
10
27
15
17
37
32
2П912А
—
—
—
—
30
30
КП922А
—
—
—
—
60
70
IRFBE20
8
17
58
27
—
—
IRFBG30
12
25
89
29
—
—
FB180SA10
45
351
181
335
—
—
FA57SA50LC
32
152
108
118
—
—
Необходимо оговориться, что поскольку время коммутационных
процессов в транзисторах MOSFET связано с процессом
заряда—разряда паразитных емкостей, на временные параметры существенное
влияние будет оказывать величина резистора Rg — чем больше его
сопротивление, тем большее время придется затрачивать на
коммутацию. Поэтому производители указывают, при какой величине Rg и Ug
приводятся справочные данные. Пользоваться ими нужно лишь при
первоначальном выборе элементов, повторное вычисление
разработчику требуется производить, исходя из режима работы в конкретной
схеме.
Итак, в результате процесса включения импульс тока стока
задерживается относительно импульса управления на время /вкл, а выключение
транзистора растягивается на время /вык. Время коммутации напрямую
связано с величиной тепловых потерь на полупроводниковом приборе:
чем быстрее мы сможем переключать транзистор, тем меньше будет
тепловых потерь на нем, тем лучшие показатели КПД схемы мы получим и
тем меньшие габариты охлаждающих конструкций следует ожидать.
К сожалению, из-за сложного характера процесса заряда затвора и
нелинейности паразитных емкостей мы не в праве считать время
заряда входной емкости математическим методом, приемлемым для
обычной интегрирующей RC-цепи. Дело в том, что простая RC-цепь
подчиняется экспоненциальному закону нарастания и спада токов и
напряжений, в то время как изменение реального напряжения имеет
более сложный характер. Поэтому известные производители полевых
транзисторов не рекомендуют пользоваться в расчетах значениями
паразитных емкостей. Имеется иной путь расчета времени
переключения, связанный с переходом к интегральной характеристике,
называемой зарядом затвора.
Заряд затвора определяется из следующей формулы:
(2.1.3)
где ig(f) — функция тока затвора.
Какой физический смысл выражения (2.1.3)? Интегрирование,
как обычно, приводит к необходимости суммировать произведения
тока затвора на протяжении коротких промежутков времени, в
течение которых ток можно условно считать постоянным. В результате
мы получаем так называемое «количество электричества», которое
надо передать входной емкости транзистора, чтобы открыть (или
закрыть) его. Мы можем сделать это быстро, тогда нам необходимо
обеспечить большой зарядный ток, либо затянуть время открытия за
счет уменьшения зарядного тока.
Зная величину заряда затвора (которую приличные
фирмы-производители указывают в технической документации), легко вычислить
время включения (выключения) транзистора MOSFET. Эти величины
определяются так:
(2.1.4)
Но как определить величину заряда затвора для транзистора
конкретного типа? Естественно, из технической документации, в которой
обычно приводится значение, называемое «общим зарядом затвора»
(total gate charge). Кроме этого, производители приводят также
кривую заряда затвора (рис. 2.1.8).
Рис. 2.1.8. Типичные кривые заряда затвора транзисторов MOSFET: а —
IRFP250; б- IRL3103D1; в - FBI80SA10
Рис. 2.1.9. Сравнительные характеристики заряда RC-цепочки и входной
емкости затвора MOSFET
На рисунке 2.1.9 показаны характеристики, отражающие
изменение тока затвора ig в процессе коммутации транзистора и
сравнительное изменение тока заряда стандартной интегрирующей RC-цепочки.
В реальных схемах силовой преобразовательной техники
затворами транзисторов управляют специальные устройства, называемые
драйверами. Мы будем говорить о рекомендуемых для применения в
составе силовой преобразовательной техники драйверах чуть позже, а
сейчас обратим внимание читателя на то обстоятельство, что при
разработке схемы управления транзисторами всегда важно определить
мощность, которую нужно израсходовать на управление транзистором.
Используя значение величины заряда затвора, нетрудно рассчитать
среднюю величину мощности драйвера:
где / — частота коммутации.
Как показывает практика, обычно эта мощность составляет сотые
доли процента от мощности силовой части схемы (при условии
использования транзисторов MOSFET или IGBT, рассказ о которых —
впереди).
Разработчику силовой преобразовательной техники очень часто
приходится сталкиваться с так называемыми аварийными режимами
работы, когда возникает короткое замыкание или нарушается
электрический контакт (происходит разрыв цепи). В аварийных режимах,
как правило, наблюдается резкое и неконтролируемое изменение
токов и напряжений, в результате чего прибор может просто выйти из
строя. Поэтому очень важно спроектировать узел управления
преобразователем так, чтобы силовые элементы (которые, как правило,
являются дорогостоящими изделиями) не были подвержены опасности
выхода из строя в аварийном режиме. К одной из таких предпосылок
потенциально-аварийных режимов можно отнести выбор слишком
большого сопротивления затворного резистора. Покажем на примере,
какими будут последствия в этом случае.
Как видно из рис. 2.1.6, паразитные емкости Cgd и Cgs образуют
емкостной делитель напряжения. Если сопротивление затворного
резистора велико, а изменение напряжения «сток—исток» в единицу
времени (скорость нарастания) происходит быстро, то, сделав
некоторые допущения (которые мы здесь опустим, так как они сами по себе
не очень интересны), можно прийти к интересному соотношению:
(2.1.5)
(2.1.6)
где (dUJdi) — предельная скорость изменения напряжения «сток-
исток» в единицу времени; /ком — время коммутации.
Резкое изменение напряжения «сток—исток» может возникнуть в
разных ситуациях, например, при первоначальном включении
питания силовой цепи самого ключевого транзистора, или при включении
другого элемента схема, работающего в связке с данным
транзистором. Покажем, насколько опасна для силового транзистора слишком
высокая скорость коммутации. Для расчета примем типовое
соотношение Cgd/Cgs= 1/4, dUJdt= 250 В/мкс, /ком= 1 мкс. Тогда С^=50 В,
что составляет значительно более высокую величину по сравнению с
безопасной зоной порогового напряжения, и, мало того, выше
предельно-безопасного уровня напряжения на затворе. Следовательно,
транзистор может, во-первых, самостоятельно открыться наведенным
напряжением в тот момент, когда мы даже и не пытались подавать на
него открывающий импульс управления, а во-вторых, он может
просто выйти из строя из-за пробоя затвора высоким напряжением.
Борьба с эффектом самопроизвольного открывания может вестись
несколькими способами. Во-первых, сопротивление затворного
резистора /^должно быть достаточно малым, тогда оно будет шунтировать
емкость С^, ослабляя влияние (dUJdt). Типичное значение Rge
реальных схемах обычно не превышает нескольких сотен Ом. Иногда
применяют защитную схему, состоящую из параллельного соединения
конденсатора и затворного резистора, подключая ее между стоком и
истоком.
Следующие способы защиты затвора полевых транзисторов
направлены не на предотвращение эффекта самопроизвольного открытия под
действием наведенного тока, а на сохранение целостности затвора и
исключения его пробоя. Понятно, что с помощью схемотехнических
решений можно остановить процесс лавинообразного нарастания тока и
защитить силовые цепи «сток—исток» от выгорания. Но «спасать» от
потенциального пробоя нужно и затворы. Два наиболее часто
встречающихся варианта защиты показаны на рис. 2.1.10. Вариант «а»
реализовать очень просто — достаточно установить в схему стабилитрон VD с
напряжением стабилизации порядка 18...22 В, то есть на безопасном
для затвора уровне. При возникновении аварийной ситуации
стабилитрон «съест» перенапряжение, и затвор транзистора не будет пробит.
В качестве фиксирующего элемента возможно также применить более
Рис. 2.1.10. Схемы ограничения напряжения на затворе
современные сапрессоры, разработанные и выпускающиеся
специально для этих целей.
Второй вариант, называемый активной защитой от наведенных
токов, изображен на рис. 2.1.10, б. Здесь конденсатор С достаточно
большой емкости заряжен от источника постоянного напряжения Ua (в
качестве этого источника обычно выступает устройство питания
драйвера управления). К затвору транзистора VT конденсатор С подключен
через обратносмещенный диод VD. При превышении напряжения на
затворе величины UR диод VD откроется и наведенный ток не пробьет
затвор, так как «стечет» в конденсатор С, немного его подзарядив.
При разработке силовых схем статических преобразователей
первостепенными являются меры по защите силовых транзисторов от
теплового пробоя. Поскольку полевые транзисторы MOSFET не
имеют вторичного пробоя, в расчетах тепловых режимов вполне можно
руководствоваться значениями максимальной температуры и
максимальной рассеиваемой мощности. Полная мощность, выделяющаяся
на транзисторе в режиме его переключения, определяется из
выражения:
где Рп — полная рассеиваемая мощность;
Рпер — потери мощности при переключении;
Рпр — потери на активном сопротивлении канала открытого
транзистора;
^упР ~~ потери на управление в цепи затвора;
Pyt — потери мощности за счет утечки в закрытом состоянии.
Потери мощности, вызванные током утечки (Р^) пренебрежимо
малы (если, конечно, транзистор исправен), поэтому их вообще нет
смысла учитывать. Кроме того, поскольку одно из главных преимуществ
полевого транзистора — крайне малые потери в цепи его управления
(Рупр), — поэтому и значение потерь на управление можно исключить из
расчетов. С учетом проведенных допущений формула (2.1.7) для расчета
полных потерь приобретает следующий удобный вид:
Потери проводимости Рпр являются основной составляющей
потерь в полевом транзисторе. Эти потери можно вычислить, зная
эффективное (действующее) значение тока стока:
(2.1.7)
(2.1.8)
(2.1.9)
где Z^on) — сопротивление транзистора в открытом состоянии
(справочный параметр).
Здесь необходимо сделать некоторое уточняющее отступление и
напомнить читателю, что расчет рассеиваемой мощности выполняется
в целях обеспечения теплового режима силовых транзисторов. Этот
расчет пригодится при проектировании охлаждающих радиаторов
транзисторов (за подробностями можно обратиться к изданиям [1]
и [2]). Очень важный параметр, без которого не удастся
спроектировать охлаждающий элемент, — это так называемое тепловое
сопротивление «кристалл—корпус» Rthjc транзистора. Исследования показали,
что это сопротивление в значительной степени зависит от частоты
переключения транзистора, а также от скважности управляющих
импульсов, определяемой отношением времени открытого состояния к
полному периоду коммутации. В технических условиях на
транзисторы обычно приводятся так называемые нормированные переходные
характеристики теплового сопротивления «кристалл—корпус»
(transient thermal impedance junction-to-case). Как видно из рис. 2.1.11,
вследствие инерционности тепловых процессов при больших частотах
переключения и малой скважности тепловое сопротивление
«кристалл—корпус» значительно снижается. В любом случае разработчику
нужно произвести оценку этого сопротивления по графику, чтобы не
проектировать радиатор охлаждения силовых элементов «на глазок».
Читателю следует знать, что показанные на рис. 2.1.11 графики
включаются в основной набор параметров, представляемых
фирмами-производителями на силовую элементную базу. Если при выборе
элементной базы разработчик столкнется с тем, что эти графики в
документации отсутствуют, такой фирме-производителю лучше не доверять и ее
продукцию не использовать в своих разработках.
С учетом графиков 2.1.11 тепловое сопротивление «кристалл-
корпус» определяется по следующей формуле:
(2.1.10)
где Zjc(f, D) — переходной коэффициент сопротивления «кристалл-
корпус»;
Ле(/С) — тепловое сопротивление «кристалл—корпус» в режиме
больших скважностей управляющих импульсов или на постоянном
токе.
На рис. 2.1.11 есть еще одна кривая, называемая single pulse
(одиночный импульс). Снимается она для одиночного
(неповторяющегося) импульса тока. Такой режим работы обычно используется для
защитных схем и схем запуска, которые срабатывают один раз. В этом
случае, как правило, тепловыделение невелико и силовому элементу
радиатор не требуется.
Но вернемся к тепловым потерям. Гораздо сложнее дело обстоит с
потерями переключения. Если нагрузка полевого транзистора чисто
Рис. 2.1.11. График зависимости нормированного теплового сопротивления
от частоты и скважности импульсов: а — IRFP250; б — IRL3103D1; в —
FB180SA10
активная, потери на переключение невелики, и ими зачастую можно
просто пренебречь. Однако активная нагрузка — случай в силовой
преобразовательной технике редкий. Гораздо чаще транзисторы
статических преобразователей «работают» на нагрузки с сильно
выраженной реактивной (индуктивно-емкостной) составляющей, что
характеризуется несовпадением максимумов токов и напряжений. Кроме
того, в транзисторах, работающих в двухтактных схемах (сюда
включаются полумостовые, мостовые и трехфазные схемы), возникают
специфические потери обратного восстановления оппозитных диодов.
Мы сразу обратимся к методикам расчета динамических потерь в
двухтактных схемах, поскольку именно на их основе строится мощная
преобразовательная техника.
Но прежде, чем приступить к рассказу о методике расчета
динамических потерь, еще раз напомним читателю о наличии паразитного
диода в составе полевого транзистора. Как уже было сказано выше,
этот диод не отличается хорошими динамическими характеристиками,
имеет большое время обратного восстановления. Поэтому его влияние
на тепловой режим будет значительным и, зная это, производители
приводят в технической документации всю необходимую информацию
по его параметрам.
В двухтактной схеме необходимо рассматривать влияние
индуктивности L на остальные элементы схемы. Следует помнить, что
реально индуктивность L — это индуктивность намагничивания
первичной обмотки высокочастотного трансформатора (если проектируемое
устройство — статический преобразователь для питания типовых
нагрузок), или индуктивность обмотки двигателя (если разрабатывается
регулируемый частотный электропривод).
Обратимся к рис. 2.1.12 и рассмотрим коммутационные процессы,
происходящие в представленной типовой схеме. Первоначально (что
Рис. 2.1.12. Коммутационные процессы в полумостовых схемах
отражено на рис. 2.1.12, б) ключ VT1 замкнут, поэтому происходит
передача энергии к индуктивности L. Если данная индуктивность
представляет собой первичную обмотку трансформатора, то ток
намагничивания не очень заметен на фоне тока реакции вторичной
обмотки (если во вторичной цепи трансформатора «висит» номинальная
нагрузка). Если же величина индуктивности достаточно велика, что
наблюдается в устройствах частотного регулирования
электродвигателей, индуктивный ток будет ярко-выраженным. Далее, как показано
на рис. 2.1.12, в, ключ VT1 размыкается, но ток в индуктивности L,
стремясь сохранить свою величину, замыкается через паразитный
диод VD2, который коммутирует один из выводов индуктивности к
«земле», а другой ее вывод по-прежнему останется присоединенным к
средней точке конденсаторов С1 и С2. Напряжение, прикладываемое
к выводам индуктивности L, заставляет ток iL быстро падать к
нулевому значению. Замыкание ключа VT2 повторяет процесс, но уже в
другой части полумоста (рис. 2.1.12, г). На первый взгляд, никаких ком-,
мутационных токовых бросков не наблюдается — так оно и было бы,
если бы схемы состояли из идеальных элементов. Однако в реальных
схемах коммутационные броски возникают, и вот почему. Связано
это именно с неидеальным характером элементов. Реальные
трансформаторы имеют индуктивности рассеяния, межвитковые и
межобмоточные емкости, паразитные емкостные связи с другими
составляющими схем. Сочетание индуктивностей и емкостей образует
колебательную систему (резонансный контур), которая накапливает
энергию и производит выбросы напряжения с большой амплитудой
(рис. 2.1.13). На этом рисунке показана диаграмма напряжения в
точке соединения обмотки трансформатора и средней точки плеча
полумоста реальной силовой схемы. При отсутствии переключений в этой
точке имеется потенциал, равный половине питающего напряжения.
Коммутационный выброс и последующие колебания происходят при
Рис. 2.1.13. Колебательный процесс в обмотке трансформатора
размыкании ключевого элемента. Понятно, что амплитуда выбросов
не может стать больше напряжения питания или потенциала «земли»,
так как оппозитные диоды будут открываться и «разряжать» выбросы
на источник питания. И все же, если энергия колебательного
процесса достаточно велика, он может не закончиться к моменту
следующего открытия ключевого элемента. Коммутация при протекании тока
через обратный диод приведет к ситуации так называемого «тяжелого
переключения», когда силовой транзистор будет кратковременно
находиться в режиме «сквозных токов». Чтобы «погасить» эти выбросы,
параллельно первичной обмотке трансформатора включают RC-цепь
с последовательно соединенными конденсатором и резистором.
Только что мы рассмотрели так называемый «облегченный»
режим работы транзистора в двухтактных схемах, когда управляющие
импульсы поступают на затворы VT1 и VT2 симметрично, и в
моменты начала коммутации токи через оппозитные диоды не проходят.
Рассчитать мощность потерь переключения в данном случае
несложно. Для каждого транзистора, работающего в полумостовой или
мостовой схеме со стандартной трансформаторной нагрузкой, она может
быть рассчитана по формуле
(2.1.11)
где idmax —- максимальный ток стока.
Встречается и другой случай, когда транзисторы вынуждены
работать в «тяжелом» режиме переключения. Этот случай обычно
рассматривают в устройствах частотного управления двигателями, имеющими
значительную индуктивность обмоток. Здесь длительность открытого
состояния «верхнего» (VT1) и «нижнего» (VT2) ключевых элементов
полумоста и моста могут быть неравными: в предельном случае
открывающие импульсы одного из силовых ключей вообще исчезают. В
случае несимметрии управляющих импульсов ток в индуктивной нагрузке
не меняет своего направления, а это значит, что, например, после
выключения транзистора VT2 ток iL (рис. 2.1.12 в) будет протекать через
его оппозитный диод. Следовательно, выключение транзистора VT1
пройдет в режиме кратковременного короткого замыкания, так .как
диод VD2 не сможет мгновенно восстановить запертое состояние. Чем
дольше оппозитный диод будет задерживать восстановление запертого
состояния, тем больше тепла выделится на транзисторе. Поэтому для
расчета потерь переключения в «тяжелом» режиме необходимо
учитывать как динамические потери переключения транзистора, так и
потери на обратное восстановление оппозитных диодов. Рассчитать потери
переключения здесь поможет следующая формула:
(2.1.12)
где Qrr — заряд обратного восстановления оппозитного диода
(справочный параметр).
Также следует знать, что заряд обратного восстановления
оппозитного диода (согласно рис. 2.1.14) незначительно зависит от
прямого тока, протекающего через диод после отключения транзистора, но
в значительной степени определяется величиной изменения прямого
тока во времени на этапе обратного восстановления, то есть
величины производной тока. На практике это означает, что замедление
коммутационного процесса, вызывающего обратное восстановление,
может снижать заряд, а значит, и выделяемую энергию. Следовательно,
в режиме «тяжелого» переключения необходимо замедлять процесс
открывания полевых транзисторов. Снизить скорость открывания
может ограничение тока затвора с помощью увеличения затворного
резистора, а также шунтирование переходов «сток—исток» транзисторов
RC-цепями, ограничивающими скорость переключения. Правда, при
этом растут коммутационные динамические потери переключения.
Рис. 2.1.14. Зависимость заряда обратного восстановления диода от скорости
коммутационного процесса
Довольно часто в практике разработки статических
преобразователей встречаются случаи, когда нужно коммутировать ток, значение
которого выше предельного тока одиночного транзистора. И если
выбрать более мощный прибор оказывается затруднительно, можно
просто включить параллельно несколько приборов, рассчитанных на
меньшие токи. Тогда общий ток будет равномерно распределяться по
отдельным транзисторам. Для параллельного их соединения нужно
иметь приборы с близкими значениями порогового напряжения. Как
правило, транзисторы одного типа имеют очень близкие значения
порогового напряжения, поэтому крайне нежелательно выбирать для
параллельной работы транзисторы разных типономиналов. А еще лучше
вообще взять транзисторы из одной производственной партии,
изготовленных в единых условиях.
Чтобы обеспечить равномерный прогрев линейки транзисторов, их
нужно устанавливать на общий радиатор и, по возможности, ближе
друг к другу. Необходимо также помнить, что через два параллельно
включенных транзистора можно пропускать в два раза больший ток, не
снижая нагрузочной способности одиночных приборов, но при этом
входная емкость, а значит, и заряд объединенного затвора, возрастают
в два раза. Соответственно, схема управления параллельно
соединенными транзисторами должна обладать возможностью обеспечить
заданное время коммутации.
Но и здесь есть свои особенности, свои «хитрости». Если
соединить затворы полевых транзисторов непосредственно, можно
получить весьма неприятный эффект «звона» при выключении — оказывая
влияние друг на друга через затворы, транзисторы будут произвольно
открываться и закрываться, не подчиняясь сигналу управления. Чтобы
исключить «звон», на выводы затворов рекомендуется надевать
небольшие ферритовые трубочки, предотвращающие взаимное влияние
затворов, как показано на рис. 2.1.15, а.
Данный способ встречается сегодня очень редко (так как
технология производства ферритовых трубок достаточно сложна). Более
простой и доступный схемотехнический прием показан на рис. 2.1.15, б,
Рис. 2.1.15. Параллельное включение MOSFET: а — с гасящими
ферритовыми трубками; б — с затворными резисторами
заключающийся в установке в цепях каждого затвора одинаковых
резисторов сопротивлением в десятки—сотни Ом. Величина затворных
резисторов обычно выбирается из соотношения:
(2.1.13)
где Qg — величина заряда затвора для одного транзистора.
После этого необходимо определить величину тока, которую
обеспечивает устройство управления затворами транзисторов. Этот ток
определяется из условия действия напряжения Ug на параллельно
соединенные затворные резисторы. То есть величину Rg9 полученную из
формулы (2.1.13), необходимо при вычислениях уменьшить во
столько раз, сколько транзисторов включается параллельно.
Очень важно выполнить связи между электродами транзисторов
как можно короче, минимизировав паразитные индуктивности
монтажа. Плохая топология проводников может привести к чрезмерному
перенапряжению и неконтролируемому переключению. Возможное и
наиболее часто встречающееся расположение параллельно
включаемых транзисторов MOSFET показано на рис. 2.1.16.
Рис. 2.1.16. Вариант параллельного включения транзисторов MOSFET
Транзисторы VT1...VT4 установлены на общий радиатор
максимально близко друг к другу, что обеспечивает их равномерный
прогрев. Силовые шины, которые могут быть выполнены как печатными,
так и объемными проводниками (например, медной полосой или
луженым проводом), подключены к стоку и истоку всех транзисторов.
Затворные резисторы Rg можно расположить над силовыми шинами.
Закрепляются транзисторы на радиаторе с помощью винтов и
прижимных пружин. Иногда для улучшения теплового контакта между
корпусами радиаторов используется следующая технология:
транзисторы крепятся своими теплоотводящими пластинами к общей полосе
из меди (или ее сплавов), а она, в свою очередь, привинчивается к
радиатору, предварительно смазанному в месте контакта теплопроводя-
щей пастой. И, конечно, следует обеспечить электрическую изоляцию
отдельных групп транзисторов во избежание коротких замыканий в
тех местах, где они по электрической схеме не должны существовать.
На рис. 2.1.17 приведен внешний вид варианта конструктивного
узла трехфазного управляемого моста, составленного из параллельно
включенных транзисторов MOSFET, а на рис. 2.1.18 — электрическая
схема соединения транзисторов. Радиатор имеет сквозные каналы,
через которые он принудительно продувается потоком воздуха.
При разработке силовых схем статических преобразователей
определенную проблему всегда представляет защита от перегрузок и токов
Рис. 2.1.17. Радиатор с параллельно включенными MOSFETb схеме
трехфазного моста
Рис. 2.1.18. Схема соединения транзисторов в трехфазный мост при их
параллельной работе
короткого замыкания (КЗ). Обычно в маломощных преобразователях
эта проблема решается следующим образом: в цепь истока
транзистора включается небольшое активное сопротивление, напряжение с
которого подается на компаратор, отключающий схему управления
затвором в случае превышения силового тока установленных пределов.
В более мощных устройствах применяют специальные шунты,
токовые трансформаторы или датчики на основе эффекта Холла,
имеющие гальваническую развязку с силовыми цепями. Мы будем
говорить о таких способах обеспечения защиты в последующих главах, а
сейчас расскажем о способе защиты, который можно реализовать,
применяя специальные типы силовых транзисторов.
Сразу оговоримся, что использование внешних датчиков для
контроля токов представляется далеко не всегда оптимальным решением,
поскольку на резистивном датчике тока теряется мощность (а значит,
падает КПД), силовые цепи становятся более протяженными, трудно
обеспечить необходимый компромисс между быстродействием схемы
защиты и степенью чувствительности к ложным срабатываниям. Но
есть более простой и эффективный способ организации токовой
защиты.
Как известно, технология изготовления мощных полевых
транзисторов такова, что его кристалл состоит из множества мелких ячеек,
через которые в открытом состоянии протекают параллельные токи,
суммирующиеся на истоке. Токи равномерно распределяются между
ячейками, поэтому, обособив некоторое количество ячеек и сделав от
них токовый отвод, можно, измеряя его величину, судить о величине
полного тока, протекающего через прибор. Такие транзисторы
называются приборами со считыванием тока (hex sense MOSFET).
Внешний вид транзистора с функцией считывания тока, размещенного в
корпусе типа ТО-220, показан на рис. 2.1.19, там же приведено его
условное обозначение в схемах. Выпускаются транзисторы со считыва-
Рис. 2.1.19. Внешний вид и условное обозначение транзистора MOSFET со
считыванием тока
нием тока и в других корпусах, о которых мы не упоминаем в этой
книге. Разные фирмы по-разному маркируют такие приборы.
Например, фирма international Rectifier» обозначает их индексом «С»
(начальная буква слова current), например, IRC740, IRCZ44, IRCP450.
В номенклатуре фирмы «Philips» эти транзисторы имеют
наименования BUK7105, BUK7905, BUK7107.
Практически полевой транзистор со считыванием тока состоит из
двух параллельных полевых транзисторов, называемых «силовым» и
«считывающим». Стоки обоих транзисторов объединены, а вот силовой
и считывающий истоки — разные. Силовой исток обозначается
традиционной буквой S, считывающий — словосочетанием current sense (CS).
Имеется еще один специфический вывод, обозначаемый в технической
документации как kelvin source и называемый кельвин-выводом. Этот
вывод подключен к истоку силового транзистора таким образом, чтобы
исключить влияние основного тока на считываемый ток.
Главным параметром такого транзистора в части контроля
протекающих токов является отношение тока, протекающего через вывод
истока (силового тока) и тока, протекающего через считывающий
элемент:
(2.1.14)
где г — коэффициент считывания тока (current sensing ratio);
id — величина силового тока;
ic — величина считывающего тока.
Конечно, результат, полученный из расчетов по формуле (2.1.14),
будет слегка отличаться от истины, поскольку ток стока является
суммой силового и измерительного токов. Но это обстоятельство не
следует считать принципиальным, поскольку считывающий транзистор
используется не для точного измерения протекающего тока, а для
приблизительной фиксации состояния перегрузки. Для серийно
выпускаемого транзистора типа IRC740 коэффициент считывания тока
составляет примерно 2660...2940.
Чтобы обеспечить правильное считывание тока, между выводами
current sense и kelvin source включается небольшое сопротивление
(рис. 2.1.20), сигнал с которого можно усилить, подать на схему
стабилизации или отключения при перегрузке.
Одной из проблем управления стандартными полевыми
транзисторами является необходимость наличия напряжения величиной около
10... 15 В для гарантированного их открытия. Конечно, никаких
трудностей не возникает, если схема управления питается указанным
напряжением. Но если управляющая схема построена на основе
логических элементов или микроконтроллера с питанием 5 В, и других
источников питания в схеме нет? Вот для таких случаев разработаны и
Рис. 2.1.20. Подключение датчика тока
серийно выпускаются транзисторы с логическим уровнем управления
(logic-level gate drive), затворы которых можно непосредственно
подключать к выходам цифровых микросхем. Фирма international
Rectifies, выпускающая транзисторы с логическим уровнем управления,
маркирует эту продукцию индексом L (logic), например, IRLZ44,
IRLZ544. Данные транзисторы MOSFET практически ничем не
отличаются от стандартных приборов, кроме сниженного
максимально-допустимого напряжения «затвор—исток» и иной характеристики заряда
затвора (рис. 2.1.21).
Мы уже говорили о том, что при разработке схемотехники
статических преобразователей всегда много внимания уделяется схемам
защиты от перегрузок. И даже появление достаточно устойчивых к
аварийным режимам полевых транзисторов полностью не решило проблему
защиты от перегрузок. Как показывает практика, обезопасить схему от
Рис. 2.1.21. Кривая заряда затвора MOSFET с логическим уровнем
управления на примере IRLZ44NL
потенциального пробоя с помощью простых схемотехнических
методов не слишком трудно, однако защита от теплового и токового пробоя
требует гораздо более сложных решений. Революционным шагом на
пути создания отказоустойчивых элементов стал разработанный
фирмой international Rectifier» набор транзисторов MOSFET со
встроенной системой самоконтроля — так называемых интеллектуальных
ключей (intelligent power switch). Эти транзисторы маркируются индексом
IPS, например, IPS0151, IPS511. Доля их производства среди
выпускаемых на сегодняшний момент транзисторов MOSFET по-прежнему
невелика, но они все-таки находят свое применение в
преобразовательной технике.
На рис. 2.1.22 схематически показаны основные узлы таких
транзисторов, предназначенных как для управления нагрузкой,
подключенной к стоку (так называемый «транзистор нижнего плеча»), так и
нагрузкой, подключенной к истоку («транзистор верхнего плеча»).
Рис. 2.1.22. Интеллектуальный MOSFET: а — для управления нагрузкой
в стоке; б — для управления нагрузкой в истоке
Оба типа транзисторов управляются входным логическим сигналом
напряжением 5 В.
Схема контроля состояния транзистора нижнего плеча (рис. 2.1.22, а)
постоянно «следит» за температурой кристалла и за величиной
протекающего тока. При превышении температуры порога 165 °С, а также
при превышении тока стока определенного значения схема контроля
отключает транзистор вне зависимости от состояния сигнала
управления.
В интеллектуальном MOSFET верхнего плеча, кроме входа
управления IN, имеется также диагностический выход DG (выход статуса),
по состоянию которого можно не только судить о режиме работы
транзистора, но и диагностировать возможные неисправности. Так, в
нормальном режиме работы, сигнал с выхода DG повторяет входной
сигнал управления. При обрыве нагрузки на выходе DG будет
установлена логическая «единица», при превышении температуры порога
165 °С, а также при превышении тока стока определенного значения
на выходе DG будет установлен логический «нуль». Температурная
защита имеет некоторый гистерезис, формируемый схемой контроля.
Это означает, что восстановить функционирование транзистора в
нормальном режиме удастся только после снижения температуры
кристалла до 158 °С.
В последнее время достаточно динамично улучшаются
характеристики классических трехэлектродных MOSFET. Сегодня на
отечественном рынке электронных компонентов можно встретить
представителей так называемого пятого поколения транзисторов MOSFET,
выпускаемых фирмой «International Rectifies. В маркировке этих
транзисторов присутствует буква «N», например, IRFZ44N, но их
достаточно легко спутать с более старой модификацией, такой буквы не
имеющих — IRFZ44. Размер кристалла полупроводника у
транзисторов пятого поколения в среднем меньше на 10...20 %, снижено также
сопротивление канала в открытом состоянии (Rds(on)), уменьшена
величина заряда затвора (Qg), в несколько раз снижен заряд обратного
восстановления ({?„.) паразитного диода.
В области маломощных высокочастотных преобразовательных
устройств электропитания сегодня наблюдается тенденция к
значительному сокращению их габаритных размеров, повышению КПД, а также
применением целого ряда мер к обеспечению рациональной
компоновки в составе электронных приборов. Достигнуть такого положительного
результата в значительной степени позволяет сокращение габаритов
элементной базы (прежде всего — силовой), комбинационные
сочетания нескольких элементов в одном корпусе. Ярким представителем
подобной комбинационной элементной базы является серия FETKY
MOSFET (рис. 2.1.23). Технология этой серии следующая: вместе с
транзистором корпусируется диод Шоттки (schottky diode), причем та-
Рис. 2.1.23. Комбинированные MOSFET транзисторы: а — FETKY MOSFET
IRF7521D1; б - Dual FETKY MOSFET IRF7901D1
ким образом, чтобы обеспечить соединение этих элементов согласно
типовых и широко применяемых схем высокочастотных
преобразователей. На рис. 2.1.23, б показана специализированная транзисторная
сборка типа Dual FETKY, содержащая два MOSFET транзистора и диод
Шоттки. Такая сборка незаменима при построении синхронных схем
вторичных источников электропитания [2]. Пример применения
компонента IRF7901D1 серии Dual FETKY MOSFET показан на рис. 2.1.24.
Достаточно большой класс MOSFET транзисторов составляют
конструктивные модули, предназначенные для работы с большими
токами. К примеру, модуль типа FB180SA10 (рис. 2.1.25),
выпускаемый фирмой international Rectifies, представляет собой одиночный
транзистор в корпусе SOT-227. Технические характеристики
позволяют эксплуатировать модуль при напряжении до 100 В и токе до 180 А.
При этом сопротивление канала в открытом состоянии (Rds{on))
составляет всего 0,0065 Ом.
Рис. 2.1.24. Пример применения IRF7901D1
Но все-таки общемировые тенденции развития силовой
элементной базы сегодня таковы: фирмы-производители отказываются от
выпуска мощных модулей на основе MOSFET и расширяют
номенклатуру полевых транзисторах в стандартных корпусах широкого
применения. А нишу мощных ключевых модулей стремительно занимают
транзисторы IGBT, о которых мы далее будем говорить в этом разделе.
Рис. 2.1.25. Транзистор MOSFET FB180SA10 в корпусе SOT-227
С достаточно большим запозданием на рынок отечественных
силовых полупроводников поступили транзисторы MOSFET собственного
производства, являющиеся очень близкими аналогами транзисторов,
выпускаемых ведущими зарубежными фирмами. Производятся они
УП «Завод «Транзистор« (г. Минск) [17], ОАО «ВЗПП-Сборка» (г.
Воронеж) [18], ОАО «ФЗМТ» (г. Фрязино) [19]. Наверняка читатели
встретят в номенклатуре и других отечественных предприятий новые
полевые транзисторы. Но их доля, по сравнению с продукцией
названных предприятий, пока невелика.
В табл. 2.1.2 приведены некоторые типы транзисторов,
выпускаемых УП «Завод «Транзистор». Эти транзисторы реально
поставляются, их можно приобрести без всяких проблем. Ошибок производства,
связанных несовершенством технологии, становится все меньше, а
цена отечественных аналогов остается ниже зарубежных прототипов.
Теперь обратимся к продукции ОАО «ВЗПП-Сборка» (табл. 2.1.3).
Это предприятие специализируется на выпуске транзисторов MOSFET
с повышенной стойкостью к внешним воздействиям, более высокой
надежностью. Данные транзисторы рекомендуется использовать при
разработке изделий специальной техники, так как они поставляются в
высокопрочных металлокерамических корпусах (рис. 2.1.26), цены на
которые значительно выше цен на пластмассовые корпуса широкого
потребления.
Таблица 2.1.2. Некоторые MOSFET транзисторы, выпускаемые
УП «Завод «Транзистор»
Обозначение
Аналог
Uds тах»
в
Ом
А
Ugs тах»
в
Л Вт
Тип
Корпус
КП723А
IRFZ44
60
0,028
50
±20
150
п-канал
TO-220J
КП723Б
IRFZ45
60
0,035
50
±20
150
п-канал
ТО-220 |
КП723В
IRFZ40
50
0,028
50
±20
150
п-канал
ТО-220
КП723Г
IRLZ44
60
0,028
50
±10
150
п-канал
ТО-220
КП726А
BUZ90A
600
2,0
4,0
±20
75
п-канал
ТО-220
КП726Б
КП727А
BUZ90
600
50
1,6
0,1
_.4rL
14
±20
±20
75
40
п-канал
п-канал
ТО-220
ТО-220
BUZ71
КП727Б
IRFZ34
60
0,05
30
±20
88
п-канал
ТО-220
КП727В
IRLZ34
60
0,05
30
±10
60
п-канал
ТО-220
КП728П
—
700
5,0
3,0
±20
75
п-канал
ТО-220
КП728С1
-
650
4,0
3,0
±20
75
п-канал
ТО-220
КП728Е1
-
600
3,0
3,3
±20
75
п-канал
ТО-220
КП728Л1
—
550
3,0
4,0
±20
75
п-канал
ТО-220
КП731А
IRF710
400
3,6
2,0
±20
36
п-канал
ТО-220
КП731Б
IRF711
350
3,6
2,0
±20
36
п-канал
ТО-220
КП731В
IRF712
400
5,0
1,7
±20
36
п-канал
ТО-220
КП737А
IRF630
200
0,4
9,0
±20
74
п-канал
ТО-220
КП737Б
IRF634
250
0,45
8,1
±20
74
п-канал
ТО-220
КП737В
IRF635
250
0,68
6,5
±20
74
п-канал
ТО-220
КП737Г
IRL630
200
0,4
9,0
±10
74
п-канал
ТО-220
КП739А
IRFZ14
60
0,2
10
±20
43
п-канал
ТО-220
КП739Б
IRFZ10
50
0,2
10
±20
43
п-канал
ТО-220
КП739В
IRFZ15
60
0,32
8,3
±20
43
п-канал
ТО-220
КП740А
IRFZ24
60
0,1
17
±20
60
п-канал
ТО-220
КП740Б
IRFZ20
50
0,1
17
±20
60
п-канал
ТО-220
КП740В
IRFZ25
60
0,12
14
±20
60
п-канал
ТО-220
КП741А
IRFZ48
60
0,018
50
±20
190
п-канал
ТО-220
Продолжение табл. 2.1.2
Обозначение
Аналог
Uds max*
В
Ом
Л/maxi
А
Ugs max*
в
Л Вт
Тип
Корпус
КП741Б
IRFZ46
50
0,024
50
±20
150
п-канал
ТО-220
КП742А
STH75N06
60
0,014
75
±20
200
п-канал
ТО-218
КП742Б
STH80N05
50
0,012
80
±20
200
п-канал
ТО-218 1
КП743А
IRF510
100
0,54
5,6
±20
43
п-канал
ТО-220
КП743Б
IRF511
80
0,54
5,6
±20
43
п-канал
ТО-220
КП743В
IRF512
100
0,74
4,9
±20
43
п-канал
ТО-220 J
КП744А
IRF520
100
0,27
9,2
±20
60
п-канал
ТО-220
КП744Б
IRF521
80
0,27
9,2
±20
60
п-канал
ТО-220
КП744В
IRF522
100
0,36
8,0
±20
60
п-канал
ТО-220
КП744Г
IRL520
100
0,27
9,2
±10
60
п-канал
ТО-220
КП745А
IRF530
100
0,16
14,0
±20
88
п-канал
ТО-220 1
КП745Б
IRF531
80
0,16
14,0
±20
88
п-канал
ТО-220
КП745В
IRF532
100
0,32
12,0
±20
88
п-канал
ТО-220 J
КП745Г
IRL530
100
0,16
15,0
±10
88
п-канал
ТО-220
КП746А
IRF540
100
0,077
28,0
±20
150
п-канал
ТО-220
КП746Б
IRF541
80
0,077
28,0
±20
150
п-канал
ТО-220
КП746В
1RF542
100
0,1
25,0
±20
150
п-канал
ТО-220
КП746Г
IRL540
100
0,077
28,0
±10
150
п-канал
ТО-220
КП747А
IRFP150
100
0,055
41,0
±20
230
п-канал
ТО-218
КП748А
IRF610
200
1,5
3,3
±20
36
п-канал
ТО-220
КП748Б
IRF611
150
1,5
3,3
±20
36
п-канал
ТО-220
КП748В
IRF612
200
2,4
2,6
±20
36
п-канал
ТО-220
КП749А
IRF620
200
0,8
5,2
±20
50
п-канал
ТО-220
КП749Б
IRF621
150
0,8
5,2
±20
50
п-канал
ТО-220
КП749В
IRF622
200
1,2
4,0
±20
50
п-канал
ТО-220
КП750А
IRF640
200
0,18
18,0
±20
125
п-канал
ТО-220
КП750Б
IRF641
150
0,18
18,0
±20
125
п-канал
ТО-220
КП750В
IRF642
200
0,22
16,0
±20
125
п-канал
ТО-220
Продолжение табл. 2.1.2
Обозначение
Аналог
Uds max,
в
Ом
Id max*
А
Ugs max,
в
Л Вт
Тип
Корпус
КП750Г
IRL640
200
0,18
18,0
±10
150
п-канал
ТО-220
КП751А
IRF720
400
1,8
3,3
±20
50
п-канал
ТО-220
КП751Б
IRF721
350
1,8
3,3
±20
50
п-канал
ТО-220
КП751В
IRF722
400
2,5
2,8
±20
50
п-канал
ТО-220
КП752А
IRF730
400
1,0
5,5
±20
74
п-канал
ТО-220
КП752Б
IRF731
350
1,0
5,5
±20
74
п-канал
ТО-220
КП752В
IRF732
400
1,5
4,5
±20
74
п-канал
ТО-220
КП753А
IRF830
500
1,5
4,5
±20
74
п-канал
ТО-220
КП753Б
IRF831
450
1,5
4,5
±20
74
п-канал
ТО-220
КП753В
IRF832
500
2,0
4,5
±20
74
п-канал
ТО-220
КП771А
STP40N10
100
0,04
40,0
±20
150
п-канал
ТО-220
КП771Б
—
100
0,055
35,0
±20
150
п-канал
ТО-220
КП775А
2SK2498A
60
0,009
50,0
±20
200
п-канал
ТО-220
КП775Б
—
55
0,009
50,0
±20
200
п-канал
ТО-220
КП775В
—
60
0,011
50,0
±20
200
п-канал
ТО-220
КП776А
IRF740
400
0,55
10,0
±20
125
п-канал
ТО-220
КП776Б
IRF741
350
0,55
10,0
±20
125
п-канал
ТО-220
КП776В
IRF742
400
0,8
8,3
±20
125
п-канал
ТО-220
КП776Г
IRF744
350
0,63
8,3
±20
125
п-канал
ТО-220
КП777А
IRF840
500
0,85
8,0
±20
125
п-канал
ТО-220
КП777Б
IRF841
450
0,85
8,0
±20
125
п-канал
ТО-220
КП777В
IRF842
500
1,1
7,0
±20
125
п-канал
ТО-220
КП778А
IRFP250
200
0,085
30,0
±20
190
п-канал
ТО-218
КП779А
IRFP450
500
0,4
14,0
±20
190
п-канал
ТО-218
КП780А
IRF820
500
3,0
2,5
±20
50
п-канал
ТО-220
КП780Б
IRF821
450
3,0
2,5
±20
50
п-канал
ТО-220
КП780В
IRF822
500
4,0
2,2
±20
50
п-канал
ТО-220
КП781А
IRFP350
400
0,3
16,0
±20
190
п-канал
ТО-218
1кП783А
IRFP3205
55
0,008
70,0
±20
200
п-канал
ТО-220
Окончание табл. 2.1.2
Обозначение
Аналог
Uds max,
В
^Л(оп)»
Ом
/(/max,
А
шах»
в
Л Вт
Тип
Корпус
КП784А
IRF9534
-60
0,14
-18,0
±20
88
р-канал
ТО-220
КП785А
IRF9540
-100
0,2
-19,0
±20
150
р-канал
ТО-220
КП786А
BUZ80A
800
3,0
4,0
±20
100
п-канал
ТО-220
КП787А
BUZ91A
600
0,9
8,0
±20
150
п-канал
ТО-220
КП789А
BUZ111A
55
0,008
80,0
±20
250
п-канал
ТО-220
Таблица 2.1.3. Некоторые серийные MOSFET транзисторы, выпускаемые
ОАО «ВЗПП-Сборка»
Обозначение
Аналог
Uds max,
В
^Л(оп),
Ом
/(/max,
А
max,
В
Вт
Тип
Корпус
2П707В2
IRFFT30
800
3,0
4,1
±20
125
п-канал
КТ-28А-2.01
2П767В2
IRFY240C
200
0,18
16,0
±20
100
п-канал
КТ-28А-2.01
2П769В2
IRFY140C
100
0,077
14,0
±20
75
п-канал
КТ-28А-2.01
2П769В5
IRFY140C
100
0,077
14,0
±20
100
п-канал
КТ-97А
2П770К2
IRFY440C
500
0,85
8,0
±20
100
п-канал
КТ-28А-2.01
2П770К5
1RFY440C
500
0,85
8,0
±20
100
п-канал
КТ-97А
2П782Ж2
IRFM054
60
0,04
16,0
±20
100
п-канал
КТ-28А-2,01
2П782Ж6
1RFY044
60
0,04
45,0
±20
125
п-канал
КТ-97В
2П790А4
1RFM150
100
0,055
30,0
±20
120
п-канал
КТ-43А-01.01
2П790А6
1RFM150
100
0,055
30,0
±20
150
п-канал
КТ-97В
2П793А4
IRFM250
200
0,085
25,0
±20
130
п-канал
КТ-43А-01.01
2П793Б6
IRFM240
200
0,12
20,0
±20
125
п-канал
КТ-97В
2П794А6
IRFM350
400
0,3
15,0
±20
150
п-канал
КТ-97В
2П794Б6
ОМ60195А
400
0,3
10,0
±20
100
п-канал
КТ-97В
2П795А4
IRFM450
500
0,4
14,0
±20
150
п-канал
КТ-43А-01.01
2П795А6
IRFM450
500
0,4
14,0
±20
150
п-канал
КТ-97В
2П795Б6
IRFM440
500
0,6
10,0
±20
125
п-канал
КТ-97В
2П767В5
IRFY240C
200
0,18
16,0
±20
100
п-канал
КТ-97А
2П768К6
IRFM340
400
0,55
9,0
±20
150
п-канал
КТ-97В
Рис. 2.1.26. Металлокерамические корпуса: а — КТ-28А-2.01; б —
КТ-43А-01.01; в - КТ-97А; г - КТ-97В
Важно отметить, что ОАО «ВЗПП-Сборка» освоило выпуск
транзисторов MOSFET со считыванием тока. Номенклатура этих
транзисторов приведена в табл. 2.1.4, а внешний вид показан на рис. 2.1.27.
Таблица 2.1.4. Транзисторы MOSFET со считыванием тока, выпускаемые ОАО
«ВЗПП-Сборка»
[
Обозначение
Аналог
Uds max,
В
Я<Й(ОП)>
Ом
/(/max, А
Ugs тах» В
Ру Вт 1 Тип
Корпус J
2П7146А
IRC530
100
0,16
14,0
±20
65 !п-канал
КТ-56А
[2П7146Б
IRC630
200
0,4
9,0
±20
— t- "•
65 1п-канал
КТ-56А
„ „ а
[2П7146В
IRC634
250
0,45
8,1
±20
65 Iп-канал
КТ-56А
2П7147А
IRC540
100
0,077
25,0
±20
100 |п-канал
КТ-56А'
2П7147Б
IRC640
200
0,18
16,0
±20
100 !п-канал
KT-56AJ
|2П7147В
IRC644
250
0,28
14,0
±20
100 |п-канал
КТ-56А!
Рис. 2.1.27. Внешний вид транзисторов со считыванием тока
в корпусе КТ-56А
В номенклатуре фирмы имеются транзисторные силовые модули
типа МТКП, представляющие собой заключенный в корпус типа
ТО-244 (рис. 2.1.28) одиночный транзистор. Модули МТКП
допускают работу с напряжением «сток—исток» до 200 В и продолжительным
током стока до 200 А. Как и в предыдущем случае, эти модули
являются близкими аналогами серии IRFK4Hxx, некогда производимых фир-
Рис. 2.1.28. Внешний вид модулей серии МТКП
мой international Rectifies (в настоящее время фирма сняла эти
изделия с производства).
Номенклатура транзисторов MOSFET, производимых ОАО
«ФЗМТ», не столь широка, как номенклатура упомянутых выше фирм,
однако эти транзисторы также выпускаются в категории качества,
пригодной для разработки изделий спецтехники. В табл. 2.1.5 приведена
основная номенклатура MOSFET производства ОАО «ФЗМТ». Эти
транзисторы изготовлены в корпусах, пригодных для поверхностного
монтажа. При желании ознакомиться с более подробной информацией имеет
смысл обратиться непосредственно к сайту фирмы [19].
Таблица 2.1.5. Некоторые серийные MOSFET транзисторы, выпускаемые ОАО
«ФЗМТ»
Обозначение
Аналог
Uds max,
в
Д<й(оп)>
Ом
^</max» А
Ugs max, В
Л Вт
Тип
Корпус |
2П7160А
—
30
0,006
46,0
±20
125
п-канал
КТ-97С
2П7160Б
—
100
0,048
20,0
±20
75
п-канал
КТ-97А
2П7160В
—
200
0,08
35,0
±20
125
п-канал
КТ-97В
2П7160Г
—
400
0,2
23,0
±20
150
п-канал
КТ-97С
2П7160Д
—
500
0,23
20,0
±20
150
п-канал
КТ-97С
2П7160Е
—
60
0,008
35,0
±20
150
п-канал
КТ-97В
2П7160Ж
—
100
0,036
20,0
±20
100
п-канал
КТ-97А1
2П7160И
—
200
0,055
35,0
±20
150
п-канал
КТ-97С;
2П7151А
30
0,02
20,0
±20
50
п-канал
'КТ-97А-
Собственно, вот и все главные сведения, которые нужно знать
разработчику, чтобы применять в разработках транзисторы MOSFET. А
теперь мы перейдем к знакомству с основным ключевым элементом,
занявшим лидирующее положение в мощной преобразовательной
технике, — к рассказу о транзисторе типа IGBT. Появление транзисторов
IGBT решило существовавшую десятилетиями проблему обеспечения
мощных высоковольтных силовых схем простым и надежным
ключевым элементом, обладающим высоким быстродействием, малыми
затратами энергии на управление, устойчивостью к многократным
токовым перегрузкам и полной управляемостью (при включении и
выключении), а также открыло громадные перспективы для создания
высоконадежных статических преобразователей.
Ранее мы называли транзисторы MOSFET почти идеальными
приборами для использования в изделиях силовой электроники. Сейчас
настало время повторить одну существенную оговорку, также
сделанную нами выше: справедливость слов об идеальности транзисторов
MOSFET не ставится под сомнение, если рабочее напряжение силовых
цепей преобразователей не превышает 250...300 (максимум — 400) В.
При дальнейшем повышении рабочего напряжения приходится
выбирать транзисторы с более высокой величиной напряжения
«сток—исток», а это означает, что нам будет затруднительно найти в
номенклатуре серийно выпускаемых приборов такой типономинал, который при
высоких допустимых напряжениях «сток—исток» будет иметь низкое
сопротивление канала в открытом состоянии, и, соответственно,
высокий ток стока. Максимальная величина допустимого напряжения
«сток—исток» большинства серийных транзисторов MOSFET сегодня
составляет порядка 800 В, но сопротивление канала в открытом
состоянии у них измеряется уже единицами Ом. Справедливости ради
отметим, что иногда все-таки можно встретить приборы с допустимым
напряжением «сток—исток» порядка 1000... 1200 В, но это — опять же
«штучный товар», не находящий практического применения, а потому
потихоньку исчезающий с рынка силовых полупроводников. Как же
поступить разработчику в случае разработки высоковольтного
мощного статического преобразователя? Опять возвращаться к биполярным
транзисторам? Ни в коем случае!
Оказывается, на этапе изготовления транзистора возможно
объединить такие преимущества биполярных приборов, как большая
допускаемая величина напряжения «коллектор—эмиттер», и полевых
транзисторов — как минимальные затраты энергии на управление.
Объединение этих замечательных свойств происходит благодаря
специально разработанным технологическим приемам, в результате чего
получается биполярный транзистор с изолированным затвором.
Ведущие мировые фирмы разработали множество технологических
приемов получения таких транзисторов, с различными внутренними струк-
турами, однако на сегодняшний день наибольшее
распространение получили комбинированные
транзисторы эпитаксильной структуры РТ (punch-
through) и однородной структуры NPT (non-
punch-through). Сегодня данные транзисторы
объединены общим наименованием IGBT
(insulated gate bipolar transistor), произносящимся на
слух как «ай-джи-би-ти» (рис. 2.1.29). Именно в
структуре типа IGBT наиболее удачным образом
удалось соединить положительные свойства чистых полевых и
биполярных приборов, работающих в ключевом режиме.
Давайте вспомним, что на этапе производства полевых транзисторов
MOSFET в их структуре обязательно появляется паразитный
биполярный транзистор, который не находит практического применения, а
зачастую просто ухудшает положительные динамические свойства
полевого транзистора. Проведенные исследования показали, что возможно
ввести в структуру транзистора несколько новых элементов, благодаря
которым он превратится в совершенно новый прибор с уникальными
свойствами, а паразитный элемент как бы исчезнет во внутренней
структуре и не будет влиять на динамические процессы, протекающие в
силовой цепи. На рис. 2.1.30 условно показано внутреннее устройство
IGBT транзистора, причем на рис. 2.1.30, а приведены все
«технологические» элементы, появляющиеся на этапе изготовления. Здесь мы видим
знакомый нам входной транзистор типа MOSFET VT1, цепь
«сток—исток» которого зашунтирована паразитным биполярным р-п-р-транзи-
стором VT3 с резистором Rb в его собственной цепи «база—эмиттер».
Новые элементы — биполярный транзистор структуры n-p-n VT2 и
полевой транзистор с управляющим p-n-переходом VT4. Последний
транзистор выполняет роль динамического сопротивления, которое
уменьшается во включенном состоянии и пропускает ток через базовую
область транзистора VT2.
Рис. 2.1.29.
Условное обозначение
транзистора IGBT
Рис. 2.1.30. К пояснению принципа действия IGBT транзистора
Первый шаг к упрощению эквивалентной схемы IGBT транзистора
сделан на рис. 2.1.30, б, где транзистор VT4 заменен условным
резистором с переменным сопротивлением Rmod. Теперь, взглянув на схему,
можно увидеть, что образовавшаяся структура из биполярных
транзисторов VT2 и VT3 может иметь положительную обратную связь, так как
ток коллектора VT2 самым непосредственным образом влияет на ток
базы VT3, и наоборот. Вообще данная структура сильно напоминает
4-х слойную тиристорную структуру, а значит, возможно появление
неприятного эффекта защелкивания этой p-n-p-n-структуры, что часто
наблюдалось в первых образцах IGBT приборов. К чему может
привести защелкивание, долго объяснять не нужно — транзистор теряет
управление в открытом состоянии, и силовая схема может просто
выйти из строя.
Исследованию эффекта защелкивания 4-х слойных структур IGBT
транзисторов было посвящено множество научных работ, и сегодня
этот весьма неприятный эффект, благодаря развитию технологий
производства, можно считать ушедшим в историю данных приборов.
Производители научились с ним успешно бороться, управляя величиной
Rb и Rmod, а также коэффициентами усиления VT2 и VT3 на стадии
изготовления. Исследования также показали, что устойчивость 4-х
слойных структур к защелкиванию снижается при увеличении скорости
изменения напряжения «коллектор—эмиттер» в единицу времени, то
есть защелкивание проявляется в моменты коммутации ключей в
силовой схеме, а значит, можно принять меры по ограничению скорости
нарастания токов. Добавим, что ведущие мировые
фирмы-производители транзисторов IGBT («International Rectifier», «IXYS», «Motorola»,
«Intersil», «Semikron», «Mitsubishi*, «Еирес», «Dynex» и др.)
гарантируют отсутствие «защелкивания» биполярных структур, поэтому в их
технической документации часто приводится упрощенная
эквивалентная схема IGBT приборов, показанная на рис. 2.1.30, в.
На рис. 2.1.31 представлен разрез внутренней структуры типового
IGBT прибора. Биполярный транзистор образуется здесь слоями р+
(эмиттер), п (база), р (коллектор), а полевой транзистор — слоями
полупроводника п (исток), п+ (сток) и металлической пластиной
(затвор). Полупроводниковые слои р+ и р имеют внешние выводы, с
помощью которых транзистор подключается к электронной схеме.
Для разработки статических преобразователей электроэнергии на
основе транзисторов IGBT нет необходимости подробно знакомиться
с параметрами составных элементов полупроводникового прибора.
Достаточно представить IGBT прибор в виде обычного трехэлектрод-
ного элемента, имеющего типовые параметры и характеристики,
которые можно получить из технической документации конкретного ти-
пономинала. Именно поэтому мы более не будем останавливаться на
рассмотрении различных внутренних структур IGBT приборов, а пе-
рейдем к вопросам практического использования этих транзисторов в
устройствах преобразовательной техники.
В первую очередь разработчика устройств силовой электроники
должен интересовать следующий вопрос: «Какое положение по
быстродействию, то есть скорости включения и выключения, занимает
транзистор IGBT по сравнению с транзисторами MOSFET и
классическими биполярными транзисторами?» Однозначно можно сказать,
что транзистор MOSFET переключается быстрее транзистора IGBT,
но в случае сравнения с биполярным транзистором нельзя сделать
утвердительный вывод в пользу того или иного прибора, и вот почему.
Ограничение скорости переключения биполярных транзисторов с
изолированным затвором, как и простых биполярных транзисторов,
определяется конечным временем жизни неосновных носителей в их
базовых областях. Если включение транзисторов происходит
достаточно быстро, то необходимость выделения некоторого времени на
рассасывание неосновных носителей в базовой области замедляет процесс
восстановления их непроводящего состояния (выключения). Для
IGBT, процесс выключения которого в целом похож на аналогичный
процесс для транзистора типа MOSFET, значительная задержка
выключения связана с так называемым «токовым хвостом», когда
остаточный ток коллектора продолжает совершать колебательные
движения, приближаясь к нулевому значению. Причина «токового хвоста»
кроется в накоплении заряда базовой областью и его постепенном
рассасывании при окончательном переходе внутреннего MOSFET в
режим отсечки. Чем опасен «токовый хвост»? Тем, что он ведет к
увеличению тепловых потерь и требует увеличения так называемого
«мертвого времени» (dead time) для полумостовых и мостовых силовых схем
в промежутках между фазами проводимости ключевых элементов.
Фирмы-производители элементной базы сделали немало усилий
для оптимизации процессов рассасывания неосновных носителей в
базовой области IGBT приборов, однако эта задача оказалась настолько
Рис. 2.1.31. Внутренняя структура IGBT транзистора
противоречивой по воздействующим факторам, что решать ее
пришлось комплексно, то есть не только улучшать технологию
производства, но и применять схемотехнические ухищрения. Конечно,
производители элементной базы могли бы оставить разработчикам
преобразовательной техники возможность управления процессами
рассасывания неосновных носителей, если бы вывели наружу базу
внутреннего биполярного транзистора VT2. Но этот путь снизил бы
потребительские качества транзисторов: слишком сложно тогда было бы
применять их в конкретных схемах. К тому же, как оказалось,
выигрыш от такого решения не столь значителен, поэтому этот базовый
вывод традиционно делают недоступным извне. Кроме этого, удалось
выработать особые технологические приемы, позволяющие ускорить
процесс рекомбинации носителей базовой области, среди которых —
снижение коэффициента усиления транзистора VT2.
К сожалению, в процессе оптимизации переключающих свойств
IGBT приборов возникло еще одно существенное противоречие:
снижение коэффициента усиления в значительной степени уменьшает
«токовый хвост», но увеличивает напряжение насыщения открытого
транзистора, а значит, и статические потери в открытом состоянии (потери
проводимости). Увеличение коэффициента усиления, наоборот,
снижает напряжение насыщения, но приводит к росту «токового хвоста», а
значит, и к росту потерь переключения (динамических потерь).
Чрезмерное же увеличение коэффициента может привести к резкому
повышению вероятности возникновения защелкивания. До некоторой
степени с опасным эффектом удается бороться, варьируя сопротивления Rb
и Rmod. Но перечисленные проблемы интересуют только
производителей, а разработчикам преобразовательной техники важны только
результаты их решения.
Что можно уверенно сказать в отношении переключающих свойств
IGBT приборов, имеющихся на рынке? Оказывается, что создать IGBT
прибор «для всех времен и народов» принципиально невозможно —
слишком много противоречий и взаимоисключающих факторов влияет
на их характеристики. Поэтому частотный диапазон возможных
применений IGBT приборов был поделен на несколько участков, для
которых и были созданы «свои» приборы с оптимизированными
параметрами. На взгляд автора, наиболее удачное деление провела фирма
«International Rectifier», исключив ситуации, связанные как со
слишком большим, так и со слишком маленьким количеством «скоростных»
участков. В результате деления были определены всего лишь 4 класса,
маркируемые соответствующими буквами в обозначении серийных
приборов и рассчитанные на следующие диапазоны частот
коммутации:
• W (warp speed) — 75... 150 кГц;
• U (ultra speed) — 10...75 кГц;
• F (fast speed) — 3...10 кГц;
• S (standard speed) — 1...3 кГц.
Поэтому на вопрос о сравнении скоростей переключения IGBT и
биполярных транзисторов теперь можно ответить следующее: IGBT
транзисторы класса S уступают биполярным приборам по
быстродействию, класс F сравнивается с ними, а классы U и W обладают более
высокими показателями быстродействия. По данным табл. 2.1.6 хорошо
видно, что с повышением быстродействия IGBT транзисторов одного
типа уменьшаются динамические потери (показаны в виде энергии
выключения), но уменьшается и возможная токовая нагрузка на прибор.
Таблица 2.1.6. Сравнение разных классов транзистора типа IRG4PC40
Транзистор IGBT |
Класс
Напряжение
насыщения «коллектор-
эмиттер», В
I
| Максимальный
| ток коллектора, А
Энергия ВЫ- ;
ключения, 1
мДж |
IRG4PC40S I
standard speed
1,32
i 3i,o
6,5 J
IRG4PC40F
fast speed
1,50
! 27,0
1,81 I
IRG4PC40U
ultra speed
1,72
20,0
0,35
IRG4PC40W !
warp speed
2,05
| 20,0
0,23
Некоторые другие ведущие фирмы-производители IGBT
транзисторов предпочитают не делить частотный диапазон на классы, а просто
указывают оптимальные частоты применения своей продукции.
Встречаются и такие фирмы, которые вообще не указывают рабочих частот
для IGBT приборов, а приводят только временные и энергетические
характеристики, по которым можно опосредованно определить, в каком
частотном диапазоне применять тот или иной транзистор. Это, конечно,
неудобно для оперативной оценки, но вполне достаточно для
правильного применения в схеме. Часто значительную полезную информацию
могут дать фирменные информационные листы по применению
(application notes). Все это говорит о том, что устоявшихся типовых
подходов к классификации IGBT транзисторов пока не выработано, и
начинающие разработчики порой теряются во всем этом многообразии фирм
и их предложений — что лучше применять? Но разработчики, имеющие
опыт разработки, знают, что продукция ведущих фирм по своим
электрическим характеристикам имеет много перекрестных аналогов,
поэтому на первый план в серийном производстве выходят вопросы
надежности, долговечности, стоимости. На взгляд автора, при оценке
динамических характеристик новой элементной базы имеет смысл — хотя
бы для выработки собственных классификационных признаков —
ориентироваться на рамки указанных четырех классов.
Теперь рассмотрим более подробно процессы, происходящие при
коммутации IGBT транзисторов, используя такую же методику, кото-
Рис. 2.1.32.
Паразитные
емкости в составе
транзистора IGBT
рая применялась нами для транзисторов MOSFET,
то есть при условии подачи на затвор
прямоугольных импульсов с высокой крутизной фронтов и
спадов. Но вначале предупредим читателя, что в
составе IGBT прибора также имеются паразитные
межэлектродные емкости, которые «затягивают»
динамические процессы (рис. 2.1.32). Далее мы
увидим, что в транзисторе IGBT также действует
эффект Миллера, предпосылкой к возникновению
которого является емкость Cgc.
Обратимся теперь к рис. 2.1.33, на котором
показана схема исследования коммутационных
процессов. Эта схема аналогична приведенной
для транзистора MOSFET. Результаты замеров
показаны на рис. 2.1.34. При подаче от генератора
управляющего импульса (рис. 2.1.34, а) через
затворный резистор Rg начинает заряжаться входная
емкость внутреннего полевого транзистора
(рис. 2.1.34, б), но напряжение
«коллектор-—эмиттер» (рис. 2.1.34, в) не уменьшается и ток в цепи
«коллектор—эмиттер» пока не начинает течь.
Участок (1), носящий название времени задержки
включения (turn-on delay time) продолжается до
тех пор, пока напряжение Uge не достигнет
напряжения открывания внутреннего полевого
транзистора. На участке (2) происходит перезаряд емкости Миллера и
открывание транзистора. Время, затрачиваемое на этот процесс, носит
название времени нарастания (rise time). В цепи «коллектор—эмиттер»
появляется ток. На участке (3) происходит заряд входной емкости до
напряжения Ug, на участке (4) транзистор IGBT полностью открыт.
Открытое состояние транзистора может продолжаться неограниченно
долго — пока не будет подан на затвор закрывающий импульс.
Выключение транзистора (перевод в режим отсечки) начинается
на участке (5), когда напряжение на затворе снижается до порогового
уровня за время задержки выключения (turn-off delay time). Надеемся,
что пока читатель не заметил каких-либо отличий поведения IGBT
транзистора от транзистора MOSFET. Но — внимание! — сейчас эти
отличия появятся. В начале участка (6), когда проявляется процесс
увеличения напряжения (рис. 2.1.34, в), ток коллектора какое-то
время сохраняет свое значение из-за протекания процесса рассасывания
неосновных носителей, затем резко спадает почти до нуля, что
занимает промежуток времени, называемый временем спада (fall time).
Однако на этом процесс выключения транзистора не заканчивается,
поскольку внутренние процессы рекомбинации неосновных носите-
Рис. 2.1.33.
К исследованию
коммутационных
процессов IGBT
Рис. 2.1.34. Временные диаграммы коммутационных процессов в
транзисторах IGBT
лей еще продолжаются. На участках (7) и (8), показанных на
рис. 2.1.34, г), наблюдается «токовый хвост», характеризуемый
непериодическими колебаниями коллекторного тока.
Следует отметить, что кривые заряда затвора для транзисторов
одной серии, но разных классов, примерно одинаковы, что также
свидетельствует о том, что динамические свойства IGBT приборов
определяются их биполярной составляющей, а не полевой. Для
иллюстрации этого факта на рис. 2.1.35 приведены кривые заряда затворов
транзисторов, включенных в табл. 2.1.6.
У транзисторов IGBT, как и у транзисторов MOSFET, отсутствует
участок вторичного пробоя, характерный для биполярных транзисто-
Рис. 2.1.35. Кривые заряда затвора для транзисторов серии IRG4PC50
ров. Кроме того, с повышением температуры напряжение насыщения
«коллектор—эмиттер» у IGBT приборов уменьшается, в то время как
сопротивление канала транзисторов MOSFET растет. Перегружать
IGBT транзистор по напряжению «коллектор—эмиттер» не
допускается, но по току он выдерживает в среднем 5...10-кратные
кратковременные (неповторяющиеся) перегрузки. Область безопасной работы IGBT
приборов определяется максимальной температурой
полупроводникового кристалла, типовое значение Tj которого составляет 150 °С.
Область безопасной работы транзистора IGBT определяется по
максимальному импульсному току коллектора (pulsed collector current) и
максимальному напряжению «коллектор—эмиттер» (collector-to-emitter
voltage) — при эксплуатации в пределах диапазона рабочих частот. На
рис. 2.1.36 представлена область безопасной работы транзистора
IRG4PC40U. Площадь под кривой обозначена как safe operating area —
эта площадь и является областью допустимых режимов работы
транзистора (в различных сочетаниях токов и напряжений). Хорошо видно,
что IGBT транзистор выдерживает пиковые (неповторяющиеся)
токовые перегрузки вплоть до предельных значений напряжения
«коллектор—эмиттер».
Еще раз повторимся, что эксплуатировать IGBT транзистор
определенного класса можно только в том диапазоне частот, для которого
он предназначен. Точнее, использовать более высокочастотные
классы на низких частотах допустимо (хотя это расточительно — чем
выше класс, тем больше стоимость прибора), а вот «разгонять»
медленные IGBT транзисторы не рекомендуется. Вообще, если быть до
конца точными, то теоретически использовать медленный прибор на
Рис. 2.1.36. Область безопасной работы транзистора IGBT типа IRG4PC40U
высоких частотах возможно, но практически придется сильно снизить
величину допустимого предельного длительного тока, и, к тому же,
большая часть энергии израсходуется на потери переключения, что
понизит КПД схемы. «Оно вам надо?» — как говорится...
И все же, какова нагрузочная способность IGBT приборов в
различных диапазонах частот? Как точно определить, на каких частотах
допускается «работать» без снижения максимального значения тока
коллектора, а где придется его снизить? В технической документации на этот
счет приводится график, называемый типовой зависимостью тока
нагрузки от частоты (typical load current vs frequency). Для наглядности на
рис. 2.1.37 данные графики объединены в одной координатной сетке
для четырех классов упомянутых в этом разделе транзисторов.
Рис. 2.1.37. Сравнительные частотные характеристики IGBT транзисторов
разных классов на примере IRG4PC50
В силу сложности своего внутреннего устройства транзисторы IGBT
требуют более тщательного и глубокого анализа информации,
содержащейся в технической документации. И здесь очень важно иметь как
можно более подробную техническую информацию «от производителя».
Ведущие зарубежные фирмы давно научились не экономить на
информационной поддержке и бесплатно предоставлять разработчику
огромное количество параметров, графиков режимов, примеров типовых
применений, чего не скажешь, к сожалению, о фирмах отечественных с их
скудными рекламными материалами. Поэтому мы воспользуется
технической информацией, предоставляемой фирмой «International Rectifies.
Кстати, эта фирма не без основания гордится тем, что наиболее полно
обеспечивает разработчиков справочной информацией.
Итак, предварительный отбор IGBT транзисторов проводится по
величине постоянного тока коллектора (continuous collector current),
обозначаемого как Ic. Эта величина нормируется при нормальной
температуре корпуса (25 °С) и при повышенной температуре (100 °С).
Для более детального анализа можно использовать график
зависимости величины допустимого постоянного тока коллектора от
температуры корпуса (case temperature), показанный на рис. 2.1.38. Кристалл
IGBT транзистора также боится перегрева, как и кристалл любого
другого полупроводникового прибора, поэтому разработчику следует
обеспечивать его номинальный тепловой режим и выбирать
допустимый ток исходя из условий работы транзистора в схеме.
Второй параметр, на который следует обратить внимание
разработчику, — это допустимое рабочее напряжение «коллектор—эмиттер»
(collector-to-emitter voltage), обозначаемое Uces. Как правило, этот
параметр у реальных IGBT транзисторов может составлять 600, 1200,
2400 и более Вольт (анонсированные последние серийные разработки
Рис. 2.1.38. Зависимость постоянного тока коллектора IGBT от температуры
корпуса
допускают работу с напряжениями до 6500 В). Нужно всегда помнить,
что приборы IGBT разрабатывались именно для высоковольтных
применений, а значит, они «перекрывают» огромный диапазон
существующих на сегодняшний момент статических преобразователей. Но
применять транзистор с допустимым напряжением
«коллектор—эмиттер» 600 В для построения первичных каскадов преобразователей,
питаемых от трехфазной сети 380 В 50 Гц не рекомендуется — слишком
мал запас по напряжению. С учетом того, что после выпрямления на
транзисторы поступает номинальное постоянное напряжение 540 В,
запас в 60 Вольт действительно оказывается минимальным и
недопустимым. В то же время высоковольтные IGBT, спроектированные на
напряжение 1700 В и выше, здесь также использовать неразумно.
Поэтому для большинства статических преобразователей, питаемых от
промышленной трехфазной сети, используют IGBT транзисторы с
рабочим напряжением «коллектор—эмиттер» 1200 В. Таких приборов в
номенклатурах выпуска ведущих фирм — большинство. И еще
необходимо запомнить, что с повышением температуры полупроводникового
кристалла допустимое напряжение «коллектор—эмиттер» снижается.
В технической документации также может встретиться так
называемое максимально допустимое напряжение «эмиттер—коллектор»
(emitter-to-collector breakdown voltage), обозначаемое как Uecs. Этот
параметр характеризует способность транзисторов IGBT выдерживать
приложение обратного напряжения «эмиттер—коллектор». Поясним, что
для транзисторов MOSFET такой проблемы не существует, поскольку в
них имеется паразитный обратный диод, который при приложении
обратного напряжения открывается и «гасит» обратное напряжение.
В транзисторе IGBT изначально нет паразитного обратного диода (если
только обратный диод не встраивается специально на этапе
изготовления), поэтому нужно защищаться от пробоя обратным напряжением
дополнительными средствами (например, включением внешнего
обратного диода). Это обстоятельство можно расценить как дополнительное
преимущество IGBT транзистора перед транзистором MOSFET.
Во-первых, фирмы-производители предлагают огромное количество приборов
с обратными диодами, обладающими отличными динамическими
свойствами. Во-вторых, — самим выбрать подходящий по электрическим и
конструктивным параметрам внешний обратный диод. Конечно, второй
вариант менее надежен, так как электрические связи между диодом и
выводами транзистора необходимо выполнять как можно более
короткими, иначе эта мера также окажется малоэффективной.
Обратим внимание на рис. 2.1.39, на котором показано плечо
полумоста с транзисторами VT1 и VT2, а также внешними обратными
диодами VD1 и VD2. Имеется также некоторая индуктивность
нагрузки L и паразитная индуктивность монтажа Ls. При выключении
транзистора VT2 ток нагрузки будет замыкаться через диод VD1. Этот ток
непостоянен, поэтому он характеризуется
определенной скоростью спада (diL/dt),
что вызывает бросок напряжения на
паразитной индуктивности Ь5. Напряжение на
коллекторе VT1 становится меньше
напряжения на эмиттере. При значительной
величине индуктивности монтажа, а также
большой скорости спада тока это
напряжение может пробить цепь «коллектор-
эмиттер», поскольку типовое значение Uecs
у реальных приборов IGBT составляет
всего 15...20 В.
Ранее мы уже упоминали напряжение
насыщения «коллектор—эмиттер»
(collector-to-emitter saturation voltage). Величина этого напряжения
определяет статические тепловые потери на транзисторе. Напряжение
насыщения Uce(on) в некоторой степени зависит от величины протекающего
коллекторного тока. Например, для транзистора типа IRG4PC40U оно
равно 1,72 В для протекающего тока 20 А, и 2,15 В — для тока 40 А.
В технической документации принято нормировать значения Uce(on) для
температуры 25 °С и 150 °С.
Динамические характеристики транзисторов IGBT, как мы уже
говорили, «закладываются» на этапе их изготовления. Конечно, в
технической документации имеются данные о величине заряда затвора
транзисторов IGBT, обозначаемого как Qgi и эта величина пригодится
для проектирования схемы управления (драйвера), или его выбора из
имеющихся на рынке готовых вариантов. Но однозначно
использовать величину заряда затвора для оценки потерь переключения по
методике, приведенной в рассказе о транзисторах MOSFET, для
транзисторов IGBT нельзя. Такая ситуация складывается потому, что
транзистор IGBT имеет сложную внутреннюю структуру, а также сложный
характер выключения с «токовым хвостом».
Для оценки потерь переключения транзисторов IGBT
используется другой метод, основанный на энергетических потерях
переключения. В обеспечение этого метода из справочных данных нужно взять
три параметра: энергию потерь при включении Еоп (turn-on switching
losses), энергию потерь при выключении Eo(t (turn-off switching losses),
суммарную энергию потерь Ets (total switching losses). Общую энергию
потерь можно также определить по простой формуле
(2.1.15)
Энергия Еоп измеряется в промежутке между 5-процентного
нарастания тока коллектора до 5-процентного спада напряжения «коллек-
Рис 2.1.39. К пояснению
эффекта появления
тор—эмиттер» от своих начальных установившихся значений.
Энергию спада измеряют на интервале времени 5 мкс с момента
5-процентного нарастания напряжения «коллектор—эмиттер». Понятно, что по
прошествии указанного времени «токовый хвост» гарантированно
прекращается. Для сравнения в табл. 2.1.7 приведены значения
энергии переключения для упомянутых выше транзисторов IGBT.
Таблица 2.1.7. Энергия переключения разных классов транзистора IRG4PC40
Транзистор
ЮВТ
Класс
Энергия потерь
включения, мДж
Энергия потерь
выключения, мДж
Общая энергия
переключения, мДж
IRG4PC40S
standard speed
0,45
6,5
6,96
IRG4PC40F
fast speed
0,37
1,81
2,18 J
IRG4PC40U
ultra speed
0,32
0,35
0,67 J
IRG4PC40W
warp speed
0,11
0,23
0,34 |
В реальных схемах преобразовательной техники ток затвора
задается специальным затворным резистором Rg. Влияние его сопротивления
на величину суммарной энергии потерь отражает график, приведенный
на рис. 2.1.40, который также часто приводится в технической
документации. Из графика хорошо видно, что в случае «медленных» IGBT, где
вклад «токового хвоста» велик (рис. 2.1.40, я), величина затворного
резистора мало влияет на потери переключения. Для приведенного
графика при изменении сопротивления Rg в пять раз (при сохранении
уровня управляющего напряжения) общая энергия потерь меняется ме-
Рис 2.1.40. Зависимость суммарной энергии переключения от величины
затворного резистора: а — для транзистора IRG4PC40S; б — для транзистора
IRG4PC40W
нее чем на 10 %. Поэтому при проектировании схемы управления
«медленным» транзистором IGBT рекомендуется выбрать по графику
максимальное значение сопротивления затворного резистора. Этим мы
гарантированно обезопасим транзистор от случайного защелкивания.
В случае использования «быстрых» IGBT картина меняется
коренным образом: при изменении сопротивления затворного резистора в те
же пять раз общая энергия потерь меняется почти в 3 раза (рис. 2.1.40, б),
поэтому сопротивление резистора придется выбрать исходя из
минимизации потерь, учитывая меры по снижению опасности защелкивания
(слишком малая величина затворного резистора может вызвать это
пресловутое «защелкивание»).
Если в составе IGBT предусмотрен обратный защитный диод,
динамические характеристики которого, в отличие от паразитного оппозит-
ного диода транзисторов MOSFET, намного лучше, то в технической
документации отдельно указывается энергия потерь обратного
восстановления этого диода. Если IGBT не имеет оппозитного диода, потери
вычисляются для внешнего диода отдельно, исходя из его конкретных
характеристик. К примеру, для транзистора IRG4PC40F (с
отсутствующим обратным диодом) суммарная энергия потерь составляет 2,18 мДж,
а для транзистора IRG4PC40FD (со встроенным обратным диодом)
суммарная энергия потерь имеет немного большее значение — 2,96 мДж.
Как и в случае транзистора MOSFET, тепловые потери в
транзисторе IGBT складываются из статических потерь в открытом
состоянии (Рпр), динамических потерь переключения (Рпер), потерь
управления (Рупр) и потерь за счет утечки в закрытом состоянии (Р^).
Мощность потерь переключения при периодической коммутации может
быть определена через энергию потерь за один период по формуле:
где Г — период коммутации;
Uce{t) — напряжение «коллектор—эмиттер» в процессе периода
коммутации;
Ш) "~ ток коллектора в процессе периода коммутации.
Статические потери Рпр составляют часть полной мощности
потерь, которая может быть рассчитана по формуле (2.1.16). При
расчетах мы должны учесть, что напряжение «коллектор—эмиттер» здесь
является величиной примерно постоянной и равной напряжению
насыщения Uce(on), а значит, его можно вынести за знак интеграла:
(2.1.16)
(2.1.17)
где т — время нахождения транзистора IGBT в проводящем состянии.
Формулу (2.1.17) можно привести к виду:
(2.1.18)
где Iavg — среднее значение тока за период.
Собственно, задача упростилась — значение напряжения
насыщения «коллектор—эмиттер» мы смело можем брать из технической
документации на конкретный транзистор. Тем не менее, при этом стоит
сделать одно небольшое, но очень важное уточнение: чтобы не
завышать расчетную величину статических потерь по сравнению с
реальными, необходимо выбрать значение Uce(on) исходя из конкретной
рабочей величины тока (об этом мы говорили выше). Поправка,
конечно, окажется небольшой, но учесть это значение полезно, поскольку в
ряде случаев, например, при эксплуатации транзистора в режиме
недогрузки, это позволит уменьшить размеры радиаторов.
А теперь рассчитаем потери переключения Рпер. Воспользоваться
формулой (2.1.16) так же, как это мы сделали при расчете статических
потерь, нам не удастся, поскольку — повторимся — динамика
включения и, особенно, отключения IGBT транзистора достаточно
сложная. Но, к счастью, производители элементной базы стремятся
измерять эти потери на этапе изготовления транзисторов и приводить их в
технической документации в виде параметра, называемого энергией
переключения Els (мы говорили об этом чуть выше). Таким образом,
при наличии справочных данных, потери переключения могут быть
рассчитаны по очень простой формуле:
И все же одна немаловажная особенность расчетов по формуле
(2.1.19) имеется, поэтому ее нужно учесть, чтобы воспользоваться
приведенной формулой «с умом». Дело в том, что энергия потерь
переключения IGBT транзистора — величина непостоянная, однако для
конкретного типа транзистора она может быть достаточно жестко
определена графическим способом (рис. 2.1.41). Поэтому, рассчитывая
потери переключения, вначале следует определиться с величиной
энергии переключения Els по графикам, приводимым в технической
документации.
Оценка теплового режима транзистора IGBT является отправной
точкой для принятия решения о разработке дополнительного
радиатора охлаждения. В технической документации все необходимые
данные для такой оценки есть: приведены тепловые сопротивления
«кристалл—корпус», «корпус—радиатор», «кристалл—среда», имеется
графически представленная зависимость нормированного теплового
сопротивления «кристалл—корпус» от частоты следования импульсов
(2.1.19)
Рис. 2.1.41. Зависимость энергии переключения от величины тока коллектора
для транзистора IRG4PC40S
и их скважности (этот график мы подробно рассмотрели в части,
посвященной транзисторам MOSFET).
А теперь возвратимся к разговору о параллельной работе силовых
полупроводниковых приборов с целью распределения мощной
токовой нагрузки между однотипными маломощными приборами, и
выясним, насколько возможно реализовать стремление разработчиков к
параллельному включению нескольких IGBT приборов? Можно ли
обойтись без токовыравнивающих резисторов в эмиттерных цепях,
как это делается в случае применения классических биполярных
транзисторов? Ведущие мировые производители силовой элементной
базы, в частности, такие как «International Rectifier», «Еирес» и другие,
провели независимые подробные исследования режимов работы
параллельно-включенных IGBT транзисторов и установили, что IGBT
транзисторы более подвержены несимметрии токов при параллельной
работе, чем транзисторы MOSFET. Однако в случае выполнения
несложных схемотехнических и конструктивных мероприятий на этапе
разработки преобразователей параллельно включенные IGBT гораздо
лучше симметрируются, чем классические «биполярники», а поэтому
их можно включать без токовыравнивающих сопротивлений в
эмиттерных цепях.
Транзисторы IGBT одного типа и класса (по сути — с одним
наименованием) можно соединять параллельно и без токовыравнивающих
резисторов, и это означает, что мы избавляемся от бесполезных потерь
мощности на их активном сопротивлении, повышаем КПД схемы.
Особенно важно в этом случае создать для всех параллельно-включенных
транзисторов одинаковый температурный режим, то есть обеспечить их
равномерный (симметричный) прогрев. На рис. 2.1.42 показан результат
исследования нагрева параллельно включенных транзисторов. Кривая
Рис. 2.1.42. К исследованию возможности параллельной работы IGBT
(1) отражает поведение абсолютно согласованных по тепловому режиму
приборов (случай идеальный, на практике встречающийся редко),
кривая (2) — поведение приборов, установленных на общий радиатор
конечных размеров, кривая (3) — установленных на разные радиаторы.
Хорошо видно, что установка транзисторов на общий радиатор
(симметрично, в максимальной близости друг от друга) создает тепловой
режим, близкий к идеальному. Токовая загрузка транзисторов,
предполагаемых к параллельной работе, не должна превышать 80...90 % от
номинального тока коллектора одиночного прибора. Другими словами, мы
должны обеспечить некоторый «токовый запас» на несимметрию
распределения токов при параллельной работе.
Второе условие нормальной работе параллельно включенных IGBT
приборов — минимально-возможная длина связей между
одноименными силовыми и управляющими цепями. Это условие продиктовано тем
обстоятельством, что протяженные связи обладают высокой
паразитной индуктивностью. При протекании тока индуктивность
накапливает энергию, что является причиной опасных выбросов напряжения при
резком изменении величины токов (именно в таком режиме
коммутации и работают силовые схемы статических преобразователей). В
результате названных процессов транзисторы могут быть рассимметриро-
ваны по коллекторным токам, причем тем больше, чем выше частота
коммутации. Свести к минимуму влияние паразитных индуктивностей
позволит конструктивный узел, показанный на рис. 2.1.43.
И, наконец, последняя важная рекомендация относится к цепям
управления. Соединять непосредственно затворы параллельно
включаемых IGBT приборов нельзя, так как в процессе коммутации может
возникнуть «звон» тока в управляющей части транзисторов, который
приведет к неконтролируемой коммутации. Источник «звона» — это
паразитные эмиттерные индуктивности. Защищаются от «звона» уже
Рис. 2.1.43. Вариант параллельного включения IGBT
знакомым нам по транзисторам MOSFET способом: включением
затворных резисторов Rg и развязкой цепей «эмиттер силовой» и «эмиттер
управляющий» согласно рис. 2.1.44. О выборе затворных резисторов мы
уже говорили выше. Добавим только, что эмиттерные резисторы Re,
связывающие схему управления с приборами IGBT, должны иметь
небольшое сопротивление — порядка 0,1 Ом. Эти резисторы
подключаются непосредственно к эмиттерам транзисторов VT1 и VT2,
желательно как можно ближе к месту их входа в корпус приборов. Впрочем, если
обеспечена гальваническая развязка между схемой управления и
затворами IGBT транзисторов, а также на корпусах IGBT приборов имеются
специальные конструктивные выводы «эмиттер управляющий»,
резисторы Re можно не устанавливать.
Теперь необходимо сделать краткий обзор той продукции,
которую можно встретить в прайс-листах организаций, торгующих
электронными компонентами для силовой преобразовательной техники, в
номенклатурных каталогах и просто в магазинах электронных компо-
Рис. 2.1.44. Разводка цепей управления параллельно включенных
транзисторов IGBT
нентов. Конечно, этот обзор не сможет вместить все многообразие
производимых в мире IGBT транзисторов и модулей на их основе, но,
надеемся, он в чем-то поможет читателям, которые собираются
заняться разработкой преобразовательной техники на перспективной
элементной базе.
Публикации в отечественных научно-технических журналах,
относящиеся к практике использования транзисторов IGBT, а также
реальные предложения на рынке силовой преобразовательной техники,
красноречиво свидетельствуют, что в последнее время стремительно
увеличивается число отечественных разработчиков, которые освоили
принципы работы с силовыми электронными компонентами, активно
применяют их при создании промышленных серийно-способных
изделий. Однако ситуация с ценообразованием элементной базы
значительно осложнена тем, что производство отечественных IGBT
приборов очень долго находилось в стадии подготовки и значительно отстало
от общемирового. Сегодня отечественный производитель
«выбрасывает» на рынок образцы, аналоги которых были давно освоены
зарубежными фирмами, и в настоящее время снимаются с производства в
пользу более совершенных разработок. Но как бы там ни было, рынок
наполняется вполне работоспособными IGBT транзисторами
отечественного производства.
Основная доля производства IGBT транзисторов падает на
мощные модульные сборки, в которых размещается от 1 до 10 (и даже
более) одиночных транзисторов, сгруппированных в типовые схемы
(чоппер, полумост, мост, трехфазный мост и т. д.). Кроме того,
модули могут включать в себя сопутствующие элементы
преобразовательных схем, например, быстровосстанавливающиеся силовые диоды,
выпрямительные мосты. Большой класс IGBT модулей составляют
так называемые «интеллектуальные модули» в которые, наряду с
силовыми ключами, встраиваются различные защитные схемы (датчики
температуры, тока, напряжения) и драйверы управления затворами.
На рис. 2.1.45 показаны некоторые типовые схемы включения
транзисторов IGBT в модульной продукции.
Схемы «а», «е», «ж» содержат одиночные транзисторы, однако в
вариантах «е» и «ж» возможно построение чопперных преобразователей
прямого и инвертированного типа. Схема «б» наиболее часто
встречается в преобразовательной технике, поскольку представляет собой
типовой полумост, на основе которого можно строить любую силовую
схему — полномостовую, трехфазную и т. д. Схема «в» — полный мост,
а схема «д» — законченный трехфазный мост. Схемы «и», «к» —
комбинированные. В практике разработки статических преобразователей
могут также встретиться и другие комбинации элементов «транзистор-
диод», порой весьма и весьма экзотические. Когда разработчик
проходит этап выбора элементной базы, у него появляется естественное же-
Рис. 2.1.45. Некоторые типовые схемы включения IGBT модулей
лание использовать комбинированный вариант силового модуля, в
составе которого уже имеются все необходимые компоненты, однако на
этом этапе нужно всегда «держать в голове», что комбинированный
вариант, заманчивый с точки зрения уменьшения габаритов и
сокращения номенклатуры элементной базы, имеет и обратную сторону: при
эксплуатации изделия может сложиться ситуация, требующая замены
вышедшего из строя комбинированного модуля редкого исполнения.
Спустя какое-то время после ввода в эксплуатацию преобразователя
модуль может быть просто снят с производства, и подобрать ему
подходящую по габаритам и характеристикам замену не удастся. Поэтому
все-таки имеет смысл ориентироваться на широко востребованные
схемы типа мостов или полумостов —- адекватная замена в этом случае
найдется гарантированно.
Одной из новых разработок НТЦ «СИТ» [20] (г. Брянск) является
силовой модуль типа КМ435А (Б, В), рассчитанный на номинальное
напряжение «коллектор—эмиттер» 1200 В и номинальные токи
коллектора 200, 300 и 400 А. В составе модуля также имеется
быстродействующий оппозитный диод, подключенный к IGBT транзистору по
схеме рис. 2.1.45, а). Внешний вид модуля представлен на рис. 2.1.46.
Габаритные размеры модуля — 64 х 106 х 35 мм. Конечно, данный
модуль не может претендовать на лавры «последнего слова в области
силовой элементной базы», однако эта разработка — одна из
немногих, которую можно применять в специальной аппаратуре с
повышенными требованиями к внешним воздействиям.
Серийный выпуск большой номенклатуры IGBT модулей
общепромышленного исполнения налажен в ОАО «Электровыпрямитель»
[21] (г.Саранск). Без преувеличения можно сказать, что это
предприятие — ведущее в России по выпуску IGBT модулей. Продукция ОАО
«Электровыпрямитель» по своей номенклатуре и техническим
параметрам может соперничать с аналогичной продукцией ведущих
зарубежных фирм, таких, как «Mitsubishi», «International Rectifier», «Еирес»,
«Semikron». Более того, отечественные модули спроектированы
полностью взаимозаменяемыми с зарубежными прототипами, и поэтому их
можно просто устанавливать на штатные места, не опасаясь
неправильных подключений.
Наиболее популярными на сегодняшний день являются приборы,
размещенные в корпусе типа DOUBLE-INT-A-PAK (рис. 2.1.47).
Подобным образом «корпусируются» два транзистора, соединенных по
схеме полумоста и шунтированных быстрыми оппозитными диодами.
Основание модуля, представляющее собой металлическую пластину,
изолировано от токоведущих электродов, поэтому модуль можно за-
Рис. 2.1.46. Внешний вид
модуля КМ435А
Рис. 2.1.47. Модуль IGBT в корпусе
типа DOUBLE-INT-A-PAK
креплять на радиаторе без электроизоляционных подложек. Крепление
модуля к радиатору осуществляется с помощью четырех болтов через
отверстия, расположенные по углам. Три мощных электрода, имеющих
винтовые прижимные соединения, предназначены для подключения
силовых шин. Сбоку выведены электроды управления. «Разводка»
силовых шин очень удобная: точка соединения коллектора первого
транзистора и эмиттера второго транзистора выведена с края модуля, что в
значительной степени помогает рационально скомпоновать
конструкцию статического преобразователя. Токовая нагрузка
полупроводниковых элементов в корпусах DOUBLE-INT-A-PAK обычно не превышает
400...500 А.
Для сравнения в табл. 2.1.8 приведены основные динамические
характеристики серии IGBT модулей типа М2ТКИ-200-12, рассчитанных
на номинальное рабочее напряжение 1200 В и номинальный ток
коллектора 200 А. Модули конструктивно размещены в корпусе типа
DOUBLE-INT-A-PAK. При этом модули с индексом «Н» представляют
собой исполнение с низкими статическими потерями, модули с
индексом «Ч» — с низкими динамическими потерями, а модули с индексом
«К» — новые, изготовленные с применением перспективной
технологии «Trenchgate». Выпускаются также модули с индексом «Т» — с
повышенной устойчивостью к термоциклам, то есть к частому изменению
температуры.
Таблица 2.1.8. Основные динамические данные модулей М2ТКИ-200-12
| Модуль
fd(on)>
МКС
tn мкс
МКС
tfy мкс
£оП, мДж
£оГТ, мДж
K:e(sat)> В
1М2ТКИ-200-12Ч
0,1
0,09
0,53
0,06
19
15
3,7 J
М2ТКИ-200-12Н
0,05
0,05
0,57
0,04
22
23
2,6
М2ТКИ-200-12К
0,25
0,09
0,55
0,18
15
35
2,15 [J
Не уступает в популярности названному выше и корпус INT-
А-РАК (рис. 2.1.48). Так же, как и в предыдущем случае, здесь «кор-
пусируются» два транзистора и два диода с
соединением по схеме полумоста. Данный
корпус позволяет размещать в нем
транзисторы, рассчитанные на номинальный ток
коллектора до 200 А.
К примеру, в корпусе типа INT-A-PAK
размещен модуль типа М2ТКИ-50-12 с
номинальным током 50 А и рабочим
напряжением 1200 В. Сравнительные
технические характеристики модулей этой серии
приведены в табл. 2.1.9.
Рис. 2.1.48. Модуль IGBT
в корпусе INT-A-PAK
Таблица 2.1.9. Основные динамические данные модулей М2ТКИ-50-12
Модуль
'*оп)> МКС
'</(оЛ)> МКС
/у, МКС
K*(sat)> В
М2ТКИ-50-12Ч
0,225
0,59
0,07
3,2
М2ТКИ-50-12Н
0,11
0,3
0,07
2,1
М2ТКИ-50-12К
0,315
0,52
0,09
1,7 1
Интерес для разработчика могут также представлять модули
(рис. 2.1.49), обеспечивающие значение сопротивления изоляции
между электродами и термоподложкой не менее 20 кВ. Габаритные и
присоединительные размеры корпуса соответствуют международным
стандартам, а конструкция защищена патентами.
Широкое распространение получила серия низкопрофильных
корпусов типа ECONOPACK, впервые выпущенная на рынок фирмой
«Siemens» (рис. 2.1.50). Размеры корпуса модификации «3»,
представленного на рисунке, составляют 122 х 62 х 7 мм, то есть почти в два раза
тоньше, чем корпусов DOUBLE-INT-A-PAK и INT-A-PAK. Коренное
отличие этого модуля от других заключается в том, что он
предназначается для статических преобразователей, силовые цепи которых
выполнены методом печатного монтажа (или методом низкопрофильных
объемных токоведущих шин). На первый взгляд может показаться, что
печатные проводники не смогут выдержать токовую силовую нагрузку,
составляющую для модулей ECONOPACK порядка 200 А. Но
специалисты «Siemens» провели исследования и установили, что плоские
печатные проводники могут выдерживать токовую нагрузку до 25 А/мм2,
поскольку поверхность проводника большая и хорошо рассеивает
тепло. Важно лишь не допускать при разработке топологии печати «узких»
мест. Силовые выводы на корпусе ECONOPACK сделаны достаточно
Рис. 2.1.49. Корпуса с
повышенным
сопротивлением изоляции
Рис. 2.1.50. Модуль IGBT в
корпусе типа ECONOPACK
тонкими, но за счет того, что каждый вывод состоит из трех
параллельных проводников, обеспечивается протекание больших токов и их
равномерное растекание по токоведущим печатным проводникам.
Другим преимуществом корпуса ECONOPACK является
чрезвычайно низкое значение паразитной индуктивности выводов и
внутренних контактных перемычек. Выводы цепей питания сделаны с
двух сторон, что облегчает параллельное соединение модулей.
На рис. 2.1.51 показан вариант соединения двух корпусов
ECONOPACK в целях увеличения нагрузочной способности
инвертора статического преобразователя. На шины с обозначением «Р» и «N»
подается постоянное напряжение, а к выводам «U», «V», «W» —
подключаются фазы трехфазной нагрузки.
Рис. 2.1.51. Параллельное соединение модулей типа ECONOPACK
Менее пока распространен, но более перспективен с точки зрения
оптимального соотношения электрических и габаритных характеристик,
а также обеспечения тепловых режимов корпус типа ECONOPACK+,
разработанный фирмой «Еирес» (рис. 2.1.52).
Толщина модуля в этом корпусе составляет всего лишь 17 мм, что
позволяет обеспечить эффективный режим охлаждения и сократить
размеры радиатора. Напряжение постоянного тока подводится к
модулю с одной стороны, а с другой (противоположной) снимаются
фазные напряжения. Примерная компоновка инвертора с
использованием корпуса модуля типа ECONOPACK+ показана на рис. 2.1.53.
Слева располагается конденсаторный блок, в котором шины
постоянного питания выполнены наложением одна на другую через
изоляционную прокладку (наподобие многослойного бутерброда). Модуль
установлен на радиатор, продуваемый потоком воздуха от вентилятора.
Сверху на модуль установлена плата драйвера.
Рис. 2.1.52. Модуль IGBT в корпусе типа ECONOPACK+
Рис. 2.1.53. Компоновка инвертора с использованием модуля ЕсопоРАСК+
А теперь мы поговорим о том, какие направления на сегодняшний
момент являются «передним краем» области создания новых
модификаций транзисторов IGBT. Поскольку рассматриваемый нами тип
транзистора находит применение в направлениях электронной
техники, где необходимо управлять большими токами при высоком
напряжении, актуальной остается задача повышения максимально-допустимого
напряжения «коллекор—эмиттер». Если работы в этом направлении
пойдут успешно, то в ближайшем будущем IGBT смогут полностью
вытеснить мощные высоковольтные тиристоры, которые традиционно
применяются в электроэнергетическом оборудовании, где, как
известно, напряжения измеряются десятками киловольт, а токи — десятками
тысяч ампер.
На сегодняшний день серийные транзисторы IGBT успешно
«взяли планку» на уровне 6,5 кВ напряжения «коллекор—эмиттер». Такие
напряжения могут очень легко приводить к поверхностным утечкам
токов, пробою диэлектриков и появлению разных видов
электрического разряда, поэтому корпуса для высоковольтных IGBT должны
иметь особую конструкцию. На рис. 2.1.54 показан корпус типа IHM,
разработанный фирмой «Еирес». Это — довольно большой «кирпич» с
размерами 190 х 140 х 48 мм.
Рис. 2.1.54. Высоковольтный модуль IGBT в корпусе типа IHM
Значительный интерес для разработчика силовой
преобразовательной техники может представлять продукция ЗАО «Электрум АВ» [22]
(г. Орел). Эта отечественная фирма — пример динамично
развивающегося предприятия малого бизнеса, сумевшего выйти на мировой
уровень качества продукции и стремительно завоевывающего
отечественный рынок силовой электроники. Конечно, номенклатура
выпускаемых ею типовых модулей пока не сравнялась с номенклатурой ведущих
зарубежных фирм, но вполне достаточна для обеспечения
подавляющего большинства задач разработки преобразовательной техники.
Фирмой выпускается несколько типономиналов транзисторов IGBT,
размещенных в корпусах DOUBLE-INT-A-PAK и INT-A-PAK по
схемам рис. 2.1.45 «б», «е», «ж», с маркировками М10, МИ, М12,
работающие при напряжении «коллектор—эмиттер» до 1200 В и токами
коллектора до 200 А (номинальные значения токов выбираются из ряда
50 А, 75 А, 100 А, 150 А, 200 А). Здесь мы еще раз напомним читателю,
что, как показала практика разработки преобразовательной техники,
именно эти исполнения модулей наиболее хорошо востребованы.
Интерес для разработчика также может представлять выпуск серии моду-
лей МККН со встроенными драйверами управления (об этих модулях
мы поговорим в разделе, посвященном драйверам). Вообще, если
говорить о тенденциях развития продукции «Электрум АВ», то фирма
расширяет номенклатуру интеллектуальных модулей, поскольку этот
сегмент отечественного рынка пока никем не занят.
Кстати, если уж мы упомянули интеллектуальные модули, то
уместным будет вспомнить фирму «Mitsubishi Electric» [23]. Конечно, в
номенклатуре этой фирмы имеется большое количество типовых
модулей, с типономиналами которых читатель сможет ознакомится, если
заглянет на сайт. А принципиальная схема
интеллектуального модуля типа MG800J2YS50A
показана на рис. 2.1.55, корпус — на рис. 2.1.56.
Номинальные параметры модуля: напряжение
«коллектор—эмиттер» до 600 В, ток
коллектора — до 800 А. Из принципиальной схемы
модуля видно, что входящие в состав транзисторы
IGBT выполнены с токовым отводом (схемой
считывания тока) и блокировкой затворов по
сигналу превышения номинального тока
силовой цепи. Таким образом, в модуле уже на
этапе его изготовления появляется схема защиты
от аварийных режимов, что, конечно,
способствует повышению его надежности. Дополни-
Рис. 2.1.55.
Принципиальная
схема модуля
Рис. 2.1.56. Корпус модуля MG800J2YS50A
тельный элемент защиты, встраиваемый в модуль на этапе
изготовления, — это терморезистор.
Как читатель уже успел заметить, внешне все модули IGBT
представляют собой достаточно прочные конструкции. Но, тем не менее,
при установке их в преобразователь необходимо соблюдать ряд правил
по монтажу, чтобы не нарушить внутреннюю структуру и не
подвергнуть модуль механическому разрушению. При монтаже контактные
поверхности модулей и охладителей должны быть ровными и чистыми,
с шероховатостью не более 2,5 мкм. Теплопроводящая паста наносится
на сопрягаемые поверхности с помощью валика, а никак не
размазывается пальцами. Считается, что теплопроводящий компаунд нанесен в
достаточном количестве, если вокруг смонтированного модуля
равномерно выдавлено его небольшое количество. Крепление модулей к
охладителю обязательно нужно осуществлять стальными винтами с
использованием плоских пружинных шайб, нормировать усилие затяжки
с помощью специального ключа (как правило, производитель
указывает усилие, допускаемое для безопасной затяжки)... Впрочем,
конструктивное оформление статических преобразователей мы рассмотрим
далее, в соответствующей главе. А здесь, в завершение этого раздела,
расскажем о перспективных разработках силовой элементной базы,
ведущихся как у нас в стране, так и за рубежом.
Согласно исследованиям отечественных специалистов в области
создания новой элементной базы силовой электроники, отчет о
которых приведен в [24] и [25], выпускаемые сегодня транзисторы IGBT,
при их неоспоримых преимуществах, обладают также и рядом
существенных недостатков. Исследователи подвергли анализу режим
насыщения транзисторов IGBT и сравнили его с режимом насыщения
обычных биполярных транзисторов. Оказалось, что в режиме
насыщения классические биполярные транзисторы проявляют себя гораздо
лучше транзисторов IGBT по величине напряжения насыщения: у
первого класса приборов напряжение насыщения составляет доли вольта,
в то время как у IGBT транзисторов оно достигает нескольких вольт.
Также в число существенных недостатков были внесены опасность
защелкивания четырехслойных структур и невысокая стойкость к
ионизирующему излучению (что существенно для специальных
применений). Кроме всего прочего, исследователи отмечают, что на пути
дальнейшего совершенствования технологии производства отечественных
IGBT приборов встал так называемый «российский фактор» —
существенная отсталость производственных мощностей, не позволяющая
производить экономически выгодные современные приборы, как это
могут позволить себе ведущие мировые фирмы, обладающие
достаточными финансовыми средствами. Следовательно, необходим поиск
альтернативных технических решений, которые позволят создавать
отечественные управляемые ключи на существующей технологической базе.
Но вернемся к анализу недостатков IGBT транзисторов. Почему
эти приборы имеют столь высокое значение напряжения насыщения?
Вновь обратимся к рис 2.1.30 а), на котором показана внутренняя
структура IGBT прибора. Даже несложный теоретический расчет
показывает, что транзистор VT2 в данной схеме «работает» в активной
зоне, реально не достигая состояния глубокого насыщения,
характерного для биполярных транзисторов в ключевом режиме. Базовая
область этого транзистора принципиально не может получить
напряжение, отрицательное по отношению к коллектору, а это — признак
именно активного состояния. Различными технологическими
приемами можно лишь приближаться к насыщенному состоянию, но никак
не гарантируется его надежное обеспечение.
В связи с поиском путей преодоления названных недостатков
внимание отечественных исследователей было обращено на порядком
забытую схему комбинированного полупроводникового устройства,
основанную на каскодном соединении низковольтного мощного
MOSFET транзистора с высоковольтным транзистором биполярного
типа. За основу была взята предложенная в 80-х гг. XX века схема
СИ-тиристора с управлением от мощного MOSFET, которая не была
реализована в промышленном производстве из-за непреодолимых
технологических трудностей, существовавших на тот момент.
Отечественные авторы решили разделить кристаллы СИ-тиристора и MOSFET
транзистора, создав гибридный прибор с двумя кристаллами,
пригодный для самого заурядного отечественного производства. На
рис. 2.1.57 показана эквивалентная схема нового прибора, которая
отличается от схемы, приведенной на рис. 2.1.30, я, наличием диода VD1,
который создает на затворе транзистора VT4 положительный
потенциал, образуя «подпорный» источник напряжения для транзистора VT2 и
тем самым вводя его в режим глубокого насыщения. Кроме этого, в
данном случае исчезает паразитная тиристорная структура,
образованная транзисторами VT2 и VT3.
Рис. 2.1.57. Эквивалентная схема КСМТ (H-IGBT) транзистора
В целях проверки характеристик разработанного силового прибора,
названного исследователями КСМТ (комбинированный составной
СИТ-МОП транзистор), или H-IGBT, были изготовлены опытные
образцы и проведены их исследования. Оказалось, что частотный
диапазон КСМТ не хуже, чем у обычных IGBT транзисторов. При одианковых
временах включения и выключения КСМТ действительно имеет
меньшее напряжения насыщения в открытом состоянии. Более того, не
существует никаких физических препятствий созданию КСМТ модулей
на напряжения до 6,5 кВ (и даже выше), и на номинальные токи 1 кА и
более. С увеличением допустимого напряжения «коллектор—эмиттер»
преимущества КСМТ по сравнению с типовыми структурами IGBT
проявляются все более существенно. А вот в области малых токов и
напряжений КСМТ не имеют никакого выигрыша.
Исследователи приводят таблицу характеристик опытного образца
КСМТ типа М2ТКС-50-12, изготовленный ЗАО «Контур» и имеющий
следующие основные технические параметры: номинальный ток — 50 А,
максимальное значение напряжения «коллектор—эмиттер» — 1200 В.
Для сравнения приведены аналогичные данные по серийному IGBT
модулю типа CM50DY-24H, выпускаемого фирмой «Mitsubishi Electric»
[23]. Данные сведены в табл. 2.1.10.
Таблица 21.10. Сравнительные характеристики КСМТ типа М2ТКС-50-12
и IGBT типа CM50DY-24H
Модуль
'фиф МКС
/,., мкс
tfy мкс
£оп, мДж £off, мДж
*ce(sat)' В
CM50DY-24H
0,045
0,06
0,225
0,325
40 1 120
2,7
М2ТКС-50-12
0,045
0,125
0,46
0,25
60 I 115
1,6 I
Внешний вид КСМТ приведен на рис. 2.1.58. Слева расположен
опытный образец модуля М2ТКС-50-12, а справа — модуль CM50DY-
24Н, размещенный в аналогичном корпусе.
Исследователи не без основания утверждают, что создан новый
силовой модуль, пригодный для производства на отечественном оборудо-
Рис. 2.1.58. Внешний вид КСМТ М2ТКС-50-12 в сравнении с IGBT
CM50DY-24H
вании, параметры которого во многом лучше параметров обычных
IGBT транзисторов, производимых ведущими зарубежными фирмами.
Таким образом, новый прибор уже в ближайшем будущем может
составить конкуренцию классическим IGBT приборам при условии
освоения его промышленного производства.
2.2. Когда «deadtime» перестает быть проблемой
В этом небольшом разделе мы поговорим о простом решении
такой серьезной проблемы, возникающей при использовании
полумостовых и мостовых силовых схем, как пробой силовых элементов в
результате действия «сквозных» токов. В предыдущем разделе мы
подробно говорили о том, что силовые транзисторы IGBT и MOSFET
(как, впрочем, и любые другие управляемые ключевые элементы)
имеют конечное время переключения из состояния отсечки в проводящее
состояние и наоборот. Последствия возникновения «сквозных» токов
практически всегда фатальны — они в подавляющем большинстве
случаев приводят к выходу из строя преобразовательной техники.
Поэтому разработчики уделяют достаточно много внимания мерам по
недопущению возникновения подобных аварийных режимов, прибегая к
различным схемотехническим ухищрениям, порой весьма и весьма
сложным, чтобы ввести гарантированную паузу между моментом
закрывания одного ключевого элемента и открыванием второго. Автору
этой книги однажды пришлось (в силу некоторых причин) реализовы-
вать схему цифрового формирования защитной паузы «мертвое время»
(«deadtime») на отечественных дискретных элементах «жесткой
логики». В результате задача была решена с использованием 16 корпусов
микросхем, которые размещались на отдельной печатной плате. Вот
такова «цена вопроса» защиты от сквозных токов.
Значительно упростить задачу формирования защитной паузы
«мертвое время» позволяют микросхемы IXDP630 и IXDP631,
производимые американской фирмой «IXYS» [26]. Эта фирма, кроме всего
прочего, специализируется на производстве компонентов для силовой
преобразовательной техники: в ее номенклатуре есть транзисторы
MOSFET, биполярные транзисторы с изолированным затвором IGBT,
диоды FRED с малым временем обратного восстановления, диоды-са-
прессоры защиты от высоковольтных индуктивных выбросов
напряжения, мощные тиристоры и т. д. Именно поэтому специалисты фирмы
не понаслышке знают о проблемах силовой электроники и стремятся
выпускать продукцию, отвечающую всем современным требованиям.
В оригинальной технической документации эти микросхемы имеют
наименование «inverter interface and digital deadtime generator for 3-phase
PWM controls*, что относит их к классу цифровых интерфейсных схем с
генератором паузы «мертвое время» для трехфазных схем с широт-
но-импульсной модуляцией (ШИМ) управляющих сигналов. Уточним:
в трехфазных схемах возможности микросхем используются наиболее
полно, но их также с легкостью можно применить для управления
мостовых и полумостовых однофазных схем. Преимущество цифрового
(таймерного) формирования защитной паузы «мертвое время»
очевидно — этот способ гарантирует помехоустойчивое формирование
«мертвого времени» со стабильной длительностью и его регулировки в
широких пределах. Кроме этого, в составе микросхемы имеются узлы,
позволяющие легко организовать защитное отключение силовых каскадов
статического преобразователя при возникновении аварийных
ситуаций, таких, как короткое замыкание (КЗ), перегрузка, снижение
напряжения питания.
На рис. 2.2.1 показана функциональная схема внутреннего
устройства микросхем IXDP630 и IXDP631. Как видно из рисунка, микросхема
Рис. 2.2Л. Функциональная схема микросхем IXDP630 и IXDP631
состоит из трех идентичных ячеек DTG (deadtime generator), а также
единого цифрового тактового генератора OSC. Ячейки DTG имеют
индивидуальные входы управления каналами R, S, Т (сигналы DATA IN R,
DATA IN S, DATA IN T), индивидуальные входы отключения каналов R,
S, T (сигналы ENABLE ENAR, ENABLE ENAS, ENABLE ENAT),
групповой вход отключения каналов R, S, T (сигнал OUTPUT ENABLE
OUTENA), вход отключения тактовой частоты (сигнал RESET).
Тактовый генератор имеет вывод подключения времязадающих компонентов
(сигнал OSCIN) и внешний вход тактовой частоты (сигнал OSCOUT).
Диаграммы, отражающие процесс функционирования микросхемы,
приведены на рис. 2.2.2. Эти диаграммы показывают работу только
канала R, поскольку остальные каналы (S и Т) функционируют аналогично.
Вначале рассмотрим диаграмму, показанную на рис. 2.2.2, а. После
установки сигнала RESET в высокое (high) состояние сигналы CLK
тактового генератора OSC поступают на схему отсчета импульсов в
узлах DTG, выходные сигналы RU и RL находятся в состоянии низкого
(low) уровня. После установки сигналов OUTENA и ENAR
включаются выходы RU и RL, начинается отработка сигнала управления,
поступающего на вход IN R. При установке входного сигнала в высокое
состояние происходит установка высокого уровня на выходе RU, а на
выходе RL сохраняется низкий уровень. При переходе сигнала IN R в
низкий (low) уровень, на выходе RU устанавливается низкий уровень
и запускается процедура формирования паузы «мертвое время», для-
Рис. 2.2.2. Функциональные диаграммы микросхем IXDP630 и IXDP631
щаяся 8 тактов генератора OSC. По окончании временного интервала
выходной сигнал RL приобретает высокий уровень. Далее, при
изменении входного сигнала на выводе IN R, процедура формирования
паузы «мертвое время» повторяется.
На рис. 2.2.2, б показана процедура отработки сигналов OUTENA и
ENAR. Из диаграммы видно, что реакция микросхемы на эти сигналы
одинаковая: при установке OUTENA и ENAR в низкое (low) состояние
происходит сброс сигналов RU и RL в низкое состояние. Диаграмма
также иллюстрирует реакцию процедуры отработки паузы «мертвое
время» на шум (noise), который наводится на входной управляющий сигнал
по выводу IN R: при наличии переключений сигнала пауза «мертвое
время» затягивается. Вместе с тем, сигналы OUTENA и ENAR не запускают
эту процедуру.
В последнее время значительное внимание уделяется модульному
принципу наращивания мощности преобразовательной техники, при
реализации которого необходимая мощность прибора обеспечивается
параллельной синхронной работой одинаковых преобразовательных
ячеек. При проектировании силовых ячеек с применением
описываемых микросхем очень полезным может оказаться сигнал генератора
OSCOUT. Этот сигнал может синхронизировать работу генераторов
нескольких параллельно включенных IXDP630 или IXDP631, если
один из корпусов будет выбран «ведущим», а остальные —
«ведомыми». Сигнал OSCOUT «ведущей» микросхемы в таком случае
достаточно подключить ко входам OSCIN «ведомых» микросхем.
Поговорим об электрических и конструктивных параметрах
микросхем IXDP630 и IXDP631. Оба наименования изготавливаются на
основе технологии КМОП с низким энергопотреблением (1 мА собственного
потребления тока), питаются стандартным напряжением 5 В, что
позволяет легко сопрягать их как с другими типономиналами микросхем
«жесткой логики», так и с микроконтроллерами (а также с ПЛИС).
Выходные токи управления допускаются до 25 мА на один вывод, поэтому к
выходам микросхем можно непосредственно подключать драйверные
микросхемы с оптической развязкой (например, HCPL3120), на входе
которых имеется светодиод. Но вообще-то рекомендованное
номинальное значение выходных токов составляет 8... 10 мА. Входные каскады
микросхем оснащены триггерами Шмита, что повышает их
помехоустойчивость. Согласно фирменной спецификации, максимальное
напряжение питания микросхем составляет 7 В, и его, как показала
практика работы с микросхемой, ни в коем случае нельзя превышать (даже
кратковременно) — микросхема однозначно выйдет из строя.
До сих пор мы говорили о микросхемах IXDP630 и IXDP631 как об
идентичных, имея в виду их функциональные возможности. Но
отличия все-таки есть, и они заключаются в способе формирования
тактового сигнала. В первом случае используется частотозадающая RC-це-
почка, а во втором — кварцевый резонатор (или генератор). Понятно,
что применение кварцевого элемента значительно повышает
временную стабильность формирования паузы «мертвое время». Частота
генератора задается в диапазоне от 0,001 до 16 МГц для исполнения
IXDP630 и в пределах от 0,1 до 24 МГц для исполнения IXDP631.
Выпуск микросхем осуществляется в пластиковых корпусах DIP-18,
обеспечивающих работу в диапазоне температур от минус 40 до +85 °С.
Расположение выводов показано на рис. 2.2.3.
Относительно процедуры выбора частотозадающих элементов
производитель предоставляет следующую техническую информацию. Для
микросхем исполнения IXDP630 необходимо включение всего двух
компонентов частотозадающей «обвязки»: конденсатора Cosc и
резистора Rosc. Схема подключения частотозадающих элементов показана на
рис. 2.2.4.
Производитель предупреждает, что при выборе тактовой частоты
более 1 МГц температурная нестабильность отработки паузы «мертвое
время» может достигать 5 %. Кроме этого, при колебаниях
напряжения питания микросхемы в диапазоне 4,5...5,5 В также будет
наблюдаться нестабильность частоты генерации в пределах 5 %. Не
рекомендуется использовать номинал резистора Rosc сопротивлением менее
Рис. 2.2.3. Расположение выводов микросхем IXDP630 и IXDP631
Рис 2.2.4. Подключение частотозадающей цепи к IXDP630
1 кОм, так как в противном случае возрастет чувствительность схемы к
дестабилизирующим факторам (температура, колебания напряжения
питания). Нижний вывод конденсатора Cosc необходимо соединить с
выводом 9 микросхемы по наиболее краткому пути, а также
рекомендуется максимально сократить длину связи между элементами и
выводами 10 и 11 микросхемы для минимизации паразитной монтажной
индуктивности.
Рассчитать величину частотозадающих элементов можно по
следующим формулам, которые производитель приводит в технической
документации. Частота генерации fosc в диапазоне до 1 МГц
определяется по формуле
а в диапазоне более 1 МГц по формуле
(2.2.1)
(2.2.2)
Однако можно воспользоваться и графическими данными,
приведенными в той же технической документации и определить номиналы
частотозадающих элементов без математических вычислений.
Номограмма для определения Rosc и С05С приведена на рис. 2.2.5.
Рис. 2.2.5. Номограмма для определения RoSC и CQi
Рассчитывая (или определяя) номиналы элементов
частотозадающей цепи, следует помнить, что величина паузы «мертвое время»
составляет длительность, равную 8 тактам задающего генератора.
На рис. 2.2.6 показана схема подключения частотозадающих
элементов к микросхеме IXDP631, там же указаны рекомендуемые
номиналы «обвязки». Кстати, и в этом случае производитель рекомендует
осторожно отнестись к топологии печатной платы и сократить до
минимума длину электрических связей.
Наиболее перспективной на сегодняшний момент является
идеология максимального использования покупных изделий высокой
интеграции при разработке и изготовлении статических
преобразователей. В результате такого подхода удается обойтись без разработки и
изготовления трудоемких и наукоемких узлов, но, тем не менее,
создавать высокотехнологичные и конкурентоспособные образцы
преобразовательной техники. Далее мы будем говорить о таких
комбинированных элементах силовой электроники, как драйверы управления
силовыми ключами, где упомянем, что в большинстве из выпускаемых
на сегодняшний момент драйверах уже предусмотрены узлы задания
паузы «мертвое время». Ну а если по каким-либо причинам
использовать готовый драйвер не удастся, то описываемые в этом разделе
микросхемы уж точно выручат разработчика.
Не следует забывать, что преобразовательная силовая техника
всегда являлась источником сильных электромагнитных помех. Особенно
остро проблема помехоустойчивости стоит в отношении
высокочастотных статических преобразователей, так как при переключении силовых
элементов с высокой частотой и крутизной фронтов возникают
выбросы электромагнитной энергии, наводимой на малосигнальные
управляющие цепи. Авторский опыт применения микросхемы IXDP630
говорит о том, что при встраивании ее в схему управления важно принять
дополнительные меры по обеспечению помехоустойчивости.
Сигнальные выводы R, S, Т желательно «подтянуть» к «общему» проводнику
управляющей схемы через резисторы сопротивлением 5,1...10,0 кОм,
Рис. 2.2.6. Подключение частотозадающей цепи к IXDP631
а входы отключения (в силу того, что смена уровней сигнала на них
происходит редко) — также «подтянуть» на «общий» через
блокировочные конденсаторы емкостью 820... 1000 пФ.
Областью возможного применения микросхем может служить
разработка мощных регулируемых источников постоянного тока,
преобразователей частоты, формирующих выходные сигналы различной
формы, источников бесперебойного питания с синусоидальным
выходным сигналом. В частности, эта микросхема используется для
серийного производства ряда статических преобразователей частоты с
входным напряжением 3 х 380 В 50 Гц и выходным напряжением
3 х 220 В 400 Гц мощностью 6 кВА. Такие преобразователи
стремительно завоевывают области специальной техники, так как
поставляются взамен вращающихся преобразователей серий АТО и АТТ.
В разработанном статическом преобразователе СТТ-6-400,
функциональная схема которого показана на рис. 2.2.7, оказалось
достаточным сформировать модулированный по синусоидальному закону
ШИМ-сигнал (трехфазного вида, со сдвигом 0, 120 и 240
электрических градусов) посредством синхронизированных по фазе генераторов
пилообразного напряжения ГПН1...ГПНЗ, генераторов
синусоидального напряжения ГСН1...ГСНЗ, компараторов КП1...КПЗ, и подать его
на входы микросхемы IXDP630. К выходам микросхемы подключены
Рис. 2.2.7. Функциональная схема преобразователя СТТ-6-400
драйверы с опторазвязками типа HCPL-3120 (на рисунке не показаны),
которые управляют полумостовыми IGBT транзисторными сборками
VT1...VT6. На выходе IGBT сборок включены Г-образные LC-фильтры
L1C1, L2C2, L3C3 (Ф2) подавления высокочастотной ШИМ-мо-
дуляции и трансформатор гальванической развязки Т1 типа
ТСВМ-6,3-0,4-74.ОМ5 220/230 В (производится ОАО «Электрозавод»).
Внутренняя управляющая схема преобразователя охвачена
необходимыми обратными связями по выходному току и напряжению, а также
по напряжению питающей сети, что обеспечивает стабильность
поддержания выходных параметров на заданном уровне. Сигнал
отключения по короткому замыканию в нагрузке подается на вход OUTENA
микросхемы IXDP630, а сигнал отключения по перегрузке — на
объединенные электрически выводы ENAR, ENAS, ENAT. Сигнал RESET
жестко установлен на высокий уровень.
Другой статический преобразователь с номинальной выходной
мощностью 12 кВт типа СРТ-12 (рис. 2.2.8) предназначен для
поставки взамен вращающихся электромашинных преобразователей серий
ЭМУ, АТПР. Преобразователь трансформирует переменное
трехфазное напряжение 3 х 380 В 50 Гц в постоянное напряжение с
номинальным значением ±230 В, которое регулируется от нулевого значения в
обе стороны. Отличительной особенностью такого преобразователя
является, во-первых, высокая линейность регулировки статической
характеристики, составляющая не более 1,5 %, а во-вторых, низкий
уровень пульсаций выходного тока — не более 0,02 %. Нагрузка
преобразователя — активно-индуктивная.
Рис 2.2.8. Внешний вид
преобразователя СРТ-12
Рис 2.2.9. Внешний вид
преобразователя СТТ-6-400
В этом преобразователе также используется микросхема IXDP630,
но включенная с управлением R и S. Вход Т подсоединен к «общему»
проводу схемы и для управления не используется. Сам
преобразователь построен по схеме автогенераторного мостового инвертора со
стабилизацией значения выходного тока. Применение в нем
описываемой микросхемы позволило в процессе разработки избежать многих
аварийных ситуаций, связанных с выходом из строя дорогостоящих
транзисторных ключей.
2.3. Драйверы для управления силовыми элементами
В этом разделе мы подробно поговорим о таких специфических
узлах силовой электроники, как драйверы управления мощными
ключевыми элементами, и, в частности, силовыми транзисторами MOSFET
и IGBT. Как показывает практика, качественные технические
показатели драйверных узлов в значительной степени определяют надежность
функционирования статических преобразователей. Почему? Дело в
том, что надежная работа электронной техники может быть обеспечена
только качеством элементной базы, заложенной при ее
проектировании, а также физическим исполнением этой элементной базы. Иными
словами, чем меньше номенклатура и количество элементов в составе
электронного устройства, тем надежнее его работа. Кроме того,
немаловажным для обеспечения надежности является замена дискретных
элементов на узлы, выполненные в интегральном (или хотя бы
гибридном) исполнении. Хорошо известно, что с появлением интегральных
микросхем резко сократилось число незащищенных межэлементных
электрических связей, а поэтому стало меньше причин к
возникновению отказов. Красноречивое тому свидетельство — стремительное
уменьшение масс и габаритов персональных компьютеров при росте их
производительности и функциональных возможностей.
К сожалению, узлы силовой преобразовательной техники в
большинстве случаев слабо интегрируются, что ведет к дополнительным
сложностям при ее разработке, производстве и эксплуатации. Однако
и в этой области наметились существенные сдвиги, впрочем, в
основном касающиеся схем управления. Разработаны и применяются
специализированные интегрированные микроконтроллеры,
формирующие управляющие последовательности, осуществляющие плавный
пуск, стабилизацию, различные виды защит. Однако следует
признать, что элементы силовой части преобразовательной техники по
настоящее время разрабатываются на основе дискретной базы,
поэтому в конечном итоге качество функционирования разработки зависит
не только от качества элементной базы, но также и от того, насколько
квалифицированно разработчик соединит эти элементы, насколько
полно он учтет влияние паразитных параметров.
Проектируя схему управления силовыми транзисторными
сборками, опытный разработчик отлично знает, что:
а) необходимо обеспечивать «плавающий» потенциал управления
«верхним» силовым ключом в полумостовой схеме;
б) крайне важно создать быстрое нарастание и спад управляющих
сигналов, поступающих на затворы силовых элементов для снижения
тепловых потерь на переключение;
в) необходимо обеспечить высокую величину импульса тока
управления затворов силовых элементов для быстрого перезаряда входных
(затворных) емкостей;
г) в подавляющем большинстве случаев нужна электрическая
совместимость входной части драйвера со стандартными цифровыми
сигналами ТТЛ/КМОП (как правило, поступающих от
микроконтроллеров).
Достаточно продолжительное время разработчики были
вынуждены проектировать схемы драйверов управления на дискретных
элементах. Эти схемы, в зависимости от квалификации и опыта
разработчиков, получались более или менее удачными, но, скорее, все-таки
«менее». Первым важным событием на пути интеграции драйверов
управления стало появление микросхем серий IR21xx и IR22xx (а
затем их более современных модификаций IRS21xx, IRS22xx),
разработанных фирмой «International Rectifier». Эти микросхемы сегодня
нашли широчайшее применение в маломощной преобразовательной
технике, поскольку отвечают всем вышеназванным требованиям. Редкий
опытный разработчик силовой преобразовательной техники не имеет
опыта применения данных микросхем — настолько они популярны.
Но прежде чем рассказать об этих драйверных микросхемах,
поясним, в чем заключаются их замечательные свойства, благодаря которым
они стали столь популярными у разработчиков. Дело в том, что схема
управления силовыми ключами всегда строится так, что ее выходной
сигнал (в виде широтно-модулированных импульсов) задается
относительно «общего» проводника схемы. Как видно из рис. 2.3.1, а, на
котором показан полумостовой силовой каскад, для ключевого транзистора
VT2 этого вполне достаточно — сигнал «Упр.2» можно непосредственно
подавать на затвор (базу) транзистора через формирователь G2, так как
его исток (эмиттер) связан с «общим» проводником схемы, и управление
осуществляется относительно «общего» проводника.
Но как быть с транзистором VT1 который работает в верхнем плече
полумоста? Если транзистор VT2 находится в закрытом состоянии, а
VT1 открыт, на истоке VT1 присутствует напряжение питания £/пит.
Поэтому для коммутации транзистора VT1 необходимо гальванически
развязанное с «общим» схемы устройство G1, которое четко будет переда-
Рис. 2.3.1. К пояснению проблемы управления силовыми ключами в
полумостовых схемах
вать импульсы схемы управления «Упр.1», не внося в сигналы
искажений. Классическое решение этой проблемы состоит во включении
управляющего трансформатора Т1 (рис. 2.3.1, б), который, с одной
стороны, гальванически развязывает управляющие цепи, а с другой —
передает коммутационные импульсы. Не случайно это техническое решение
считается «классикой жанра»: оно известно не одно десятилетие. Мы не
будем в подробностях рассматривать этот метод, так как он безнадежно
устарел, а желающие познакомиться с ним подробнее без труда разыщут
литературу по проектированию сигнальных трансформаторов.
Мы обратимся к сравнительно новому способу управления
силовыми транзисторными ключами, называемому бутстрепным.
Собственно, способ этот был разработан достаточно давно (первые
рекомендации по его использованию можно найти в литературе, изданной
в начале 80-х гг. XX в.), однако широкое распространение в
практических конструкциях он получил после появления драйверных
микросхем, поскольку его реализация на дискретных элементах достаточно
сложна. Сразу отметим, что бутстрепный метод возможно
эффективно использовать только для транзисторов MOSFET и IGBT, которые
требуют ничтожных затрат мощности в цепи управления.
Микросхемы IRS2110 и IRS2113, выпускаемые фирмой «International Rectifier»,
построены именно с применением бутстрепной схемотехники,
выпускаются в стандартных корпусах для монтажа в отверстие и
поверхностно-монтируемые. Внешний вид микросхем показан на рис. 2.3.2.
Рис. 2.3.2. Внешний вид драйверных микросхем IRS2110 и IRS2113
Входным сигналом служит сигнал микросхемы управления
стандартной амплитуды логического уровня, причем с помощью
напряжения, подаваемого на вывод Vdd, можно обеспечить совместимость с
классической 5-вольтовой «логикой», и более современной 3,3-вольто-
вой. На выходе драйвера имеются напряжения управления «верхним» и
«нижним» силовыми транзисторами. 6 драйвере приняты меры по
обеспечению необходимых управляющих уровней, создан эквивалент
гальванической развязки (псевдоразвязка), имеются дополнительные
функции — вход отключения, узел защиты от понижения напряжения
питания, фильтр коротких управляющих импульсов.
Как видно из структурной схемы (рис. 2.3.3), драйвер состоит из
двух независимых каналов, которые предназначены для управления
верхним и нижним плечом полумостовых схем. На входе драйвера
предусмотрены формирователи импульсов, построенные на основе
триггеров Шмита. Входы Vcc и Vdd предназначены для подключения
питающего напряжения силовой и управляющей частей схемы, «земляные»
шины силовой части и управляющей части развязаны (разные «общие»
выводы — Vss и СОМ). В подавляющем большинстве случаев эти
выводы просто соединяют вместе. Предусмотрена также возможность
раздельного питания управляющей и силовой части для согласования
входных уровней с уровнями схемы управления. Вход SD — защитный.
Выходные каскады построены на комплиментарных полевых
транзисторах. В составе микросхемы имеются дополнительные устройства,
обеспечивающие ее устойчивую работу в составе преобразовательных
схем: это устройство сдвига уровня управляющих сигналов (Vdd/Vcc
level shift), устройство подавления коротких импульсных помех (pulse
filter), устройство задержки переключения (delay) и детектор
пониженного напряжения питания (UV detect).
Рис. 2.3.3. Функциональные узлы микросхем IRS2110 и IRS2113
Типовая схема включения драйверов приведена на рис. 2.3.4.
Конденсаторы С1 и СЗ — фильтрующие. Фирма-производитель
рекомендует располагать их как можно ближе к соответствующим выводам.
Конденсатор С2 и диод VD1 — бутстрепный каскад, обеспечивающий
питание схемы управления транзистора «верхнего» плеча.
Конденсатор С4 — фильтр в силовой цепи. Резисторы R1 и R2 — затворные.
Эти резисторы также «спасают» драйвер от такого неприятного
явления, как защелкивание выходных силовых каскадов микросхемы (не
путать с защелкиванием в IGBT транзисторах!). Явление
защелкивания выходных каскадов мы разберем чуть позже.
Рис. 2.3.4. Типовая схема включения IRS2110 и IRS2113
Иногда управляющий широтно-модулированный сигнал может
быть сформирован не по двум управляющим входам отдельно, а подан
на один вход в виде меандра с изменяющейся скважностью. Такой
способ управления может встретиться, например, в преобразователях,
формирующих синусоидальный сигнал заданной частоты. В этом
случае достаточно задать паузу «мертвое время» между закрытием одного
транзистора полумоста и открытием второго. Такой драйвер со
встроенным узлом гарантированного формирования паузы «мертвое время»
в номенклатуре фирмы «International Rectifier* имеется — это
микросхема IRS2111. Микросхема выпускается в 8-выводном корпусе DIP
(или SOIC). Структурная схема приведена на рис. 2.3.5.
На структурной схеме видно, что драйвер имеет встроенные узлы
формирования паузы «мертвое время» (deadtime) для верхнего и
нижнего плеч полумоста. Согласно документации производителя,
величина «мертвого времени» задана на уровне 650 не (типовое значение),
что вполне достаточно для управления полумостами, состоящими из
мощных MOSFET транзисторов. К сожалению, заданная величина
«мертвого времени» не подлежит корректировке извне, поэтому
использовать этот драйвер для управления транзисторами IGBT в целом
не представляется возможным (ну разве что удастся найти экземпляры
с небольшой длительностью остаточного токового «хвоста»).
Рис. 2.3.5. Функциональные узлы микросхемы IRS2111
Так как драйверы, выпускаемые фирмой international Rectifies,
широко известны и активно применяются разработчиками силовой
техники, мы не будем подробнее останавливаться на других типах
драйверных микросхем этой фирмы, а приведем их основные
наименования (реально номенклатура выпуска значительно шире), которые,
на взгляд автора книги, наиболее интересны для отечественных
разработчиков (табл. 2.3.1). Желающие подробностей могут обратиться к
оригинальной документации на сайте производителя [27].
Таблица 2.3. L Параметры некоторых драйверных микросхем серии IRS
Наименование
Тип
корпуса
Назначение
^в
/о7/(Г, А
^оп> НС
W, нс
Пауза, 1
нс
IRS2101
DIP-8,
SOIC-8
Драйвер верхнего
и нижнего ключей
600
0,13/0,27
160
150
- |
IRS2103
DIP-8,
SOIC-8
Драйвер верхнего
и нижнего ключей
600
0,13/0,27
680
150
520 |
IRS2104
DIP-8,
SOIC-8
Драйвер
полумостовой схемы
600
0,13/0,27
680
150
520 |
IRS2106
DIP-8,
SOIC-8
Драйвер верхнего
и нижнего ключей
600
0,29/0,6
300
280
—
IRS2108
DIP-8,
SOIC-8
Драйвер верхнего
и нижнего ключей
600
0,29/0,6
300
280
-
IRS2109
DIP-8,
SOIC-8
Драйвер
полумостовой схемы
600
0,12/0,25
750
200
540
IRS2113
DIP-14
SOIC-16
Драйвер верхнего
и нижнего ключей
600
2,0/2,0
139
120
—
Очень важный параметр любого драйвера — это максимальный ток
включения/отключения (10+/10~). От величины этого тока зависит
скорость переключения силового прибора, которая, как мы уже знаем,
определяется величиной емкости затворов. К величайшему сожалению,
драйверы фирмы international Rectifier* не удается использовать при
разработке мощной преобразовательной техники (их удел
—преобразователи мощностью до 2...3 кВт). Почему? Во-первых, недостаточные
для управления мощными силовыми приборами максимальные токи
перезаряда входных (затворных) емкостей. Во-вторых, отсутствие
гальванической развязки между управляющей и силовой частями драйвера.
В-третьих, возможное возникновение эффекта защелкивания
(блокировки) выходных комплиментарных структур драйвера из-за наличия
наведенных токов.
При проектировании схем управления обычно считается, что
выходной каскад управляющих драйверов состоит из двух
комплиментарных полевых транзисторов VT1 и VT2 (рис. 2.3.6), который
усиливает ток управления затвором силового ключа и имеет очень низкий
выходной импеданс.
В действительности, благодаря специфике технологии
изготовления выходных комплиментарных каскадов (рис. 2.3.7), кроме
управляющих полевых транзисторов МР1 и MN1 в структуре кристалла
имеются паразитные биполярные транзисторы QP1, QP2, QN1, QN2,
которые образуют паразитную тиристорную р-п-р-п-структуру.
Теперь нам необходимо вспомнить, что в полевых транзисторах не
последнюю роль играет эффект Миллера. Мы уже выяснили, что если
транзистор коммутируется слишком быстро, а сопротивление цепи
управления велико, напряжение на затворе может «подскакивать» на
значительную (и даже опасную) величину. Затвор, присоединенный к
выходу драйвера, прикладывает это наведенное напряжение к тири-
сторной p-n-p-n-структуре. Если приложенное напряжение окажется
выше напряжения питания управляющего каскада всего-навсего на
0,3 В (величина напряжения «база—эмиттер» биполярного транзистора
в открытом состоянии), наступает эффект «опрокидывания» паразит-
Рис. 2.3.6. Условное обозначение выходного каскада
драйверной микросхемы
Рис. 2.3.7. Реальная структура выходного каскада драйверной микросхемы
ной тиристорной структуры, вывод питания замыкается на «общий»
схемы. Защелка не может восстановиться автоматически, пока не будет
снято питание с микросхемы, и выходной каскад драйвера выгорает. Та
же самая ситуация может возникнуть, если на выход драйвера будет
наведено напряжение, на 0,3 В ниже потенциала «общего» схемы, как
показано на рис. 2.3.8. Величина «затекающего» на выход драйвера тока
определяется скоростью переключения транзистора — чем скорость
больше, тем и ток больше. Максимальное значение «затекающего»
тока, при котором драйвер работает устойчиво, для разных микросхем
управления может быть разным. Для микросхем серии IRS этот
наведенный ток не должен превышать 0,5 А. Повысить устойчивость
микросхем управления к защелкиванию от наведенных токов можно двумя
способами, и оба они связаны с ограничением скорости переключения
транзисторов. Первый способ заключается в применении снаббера
(специальной цепочки пассивных компонентов, замедляющей
динамические процессы переключения). Второй — в установке между
Рис. 2.3.8. К пояснению защелкивания выходного каскада драйвера
от «затекающих токов»
управляющим выводом драйвера и затвором ключевого транзистора
небольшого сопротивления, ограничивающего наведенный ток. В этом
случае наводимый ток будет замыкаться через емкости Cgd и С^, не
«затекая» в микросхему управления. Величина резистора Rg не должна
быть слишком большой, чтобы делитель напряжения, образованный
указанными емкостями, не способствовал самопроизвольному
открытию силового транзистора. В фирменной документации на драйверные
микросхемы серии IRS указывается максимальный ток, который
может «выдать» на управляющий вывод конкретный тип микросхемы.
Если при выборе резистора микросхему использовать по току не более
чем на 70—80 % от максимального значения тока, то в большинстве
случаев эффект защелкивания проявляться не будет.
Второй причиной, которая может привести к защелкиванию
драйвера, обычно является плохая разводка печатных проводников
(рис. 2.3.9). Рассмотрим пример неудачной и удачной разводки. На
рис. 2.3.9, а показано нижнее плечо полумостового каскада. Общий
вывод микросхемы управления подключен не непосредственно к
истоку силового транзистора, а так, что ток управления и силовой ток
протекают по одному проводнику. Любой проводник, как мы знаем,
обладает паразитной индуктивностью (в данном случае обозначим ее как
Lnap). При достаточно быстром изменении падения напряжения на
транзисторе (Uds) во времени, скачок напряжения на паразитной
индуктивности может «завернуть» точку «А» схемы выше напряжения
питания микросхемы управления, типичное значение которого со-
Рис. 2.3.9. Примеры неудачной (а) и удачной (б) топологии печатной платы
ставляет 15 В. Это, как мы уже знаем, может привести к
защелкиванию выходной структуры драйвера.
К счастью, паразитные транзисторы в выходном каскаде
драйверной микросхемы обладают очень плохими частотными свойствами,
поэтому, если энергия импульсного броска невелика (амплитуда импульса
может быть большой при условии малости его длительности),
защелкивание может и не произойти — паразитная тиристорная структура
просто не успеет отреагировать на такой импульс. Опытным путем
установлено, что при длительности наведенного импульса до 1 мкс вероятность
защелкивания весьма мала.
Обезопасить свою разработку от защелкивания, вызванного
плохим монтажом, возможно. Для этого необходимо разрабатывать
топологию печати по следующему правилу: вывод «общий» микросхемы
управления должен быть непосредственно присоединен к истоку
мощного ключевого транзистора, а затем эта точка присоединяется к
отрицательной клемме сетевого блокировочного конденсатора
сглаживающего фильтра (рис. 2.3.9, б).
А теперь мы поговорим о бутстрепном методе управления силовыми
ключами, реализованном в большинстве драйверных микросхем фирмы
«International Rectifier». Поможет нам в этом рис. 2.3.10. Итак, заряд,
накапливаемый в бутстрепном конденсаторе Сь, имитирует «плавающий»
источник питания, который обеспечивает энергией ту половину
драйвера, которая относится к «верхнему» плечу силового транзистора.
Поскольку драйвер построен на полевых элементах, суммарная мощность,
расходуемая на управление, незначительна и может быть быстро
пополнена из источника питания. В динамическом режиме работы
«плавающий» источник заменяется конденсатором соответствующей емкости,
подзаряжающимся от источника питания драйвера.
Когда транзистор «нижнего» плеча проводит ток, исток транзистора
«верхнего» плеча оказывается замкнутым на «общий» провод, и бутст-
репный диод VDb, открываясь, заряжает конденсатор Сь (рис. 2.3.11, я).
Рис. 2.3.10. К расчету номиналов бутстрепного каскада
Рис. 2.3.11. Пояснение работы бутстрепного каскада
Далее, когда транзистор «нижнего» плеча закрывается и начинает
открываться транзистор «верхнего» плеча, диод VDb оказывается
подпертым потенциалом питания силовой схемы, и схема управления
«верхним» плечом питается исключительно разрядным током конденсатора
Сь (рис. 2.3.11 б). Таким образом, бутстрепный конденсатор постоянно
«гуляет» между «общим» схемы и проводником силового питания Uin.
Величина бутстрепной емкости должна быть выбрана расчетным
путем. Слишком маленькая емкость может разрядиться раньше
времени и закрыть транзистор «верхнего» плеча. Слишком большая емкость
может не успевать заряжаться. Основные факторы, влияющие на разряд
бутстрепной емкости: величина заряда затвора силового транзистора
Qg, ток потребления выходного каскада драйвера в статическом режиме
Iqbs, циклическое изменение заряда драйвера QIS (составляет 5 нКл для
600-вольтовых драйверов и 20 нКл для 1200-вольтовых), ток утечки
затвора Igss, ток утечки Icbs бутстрепного конденсатора Q. Минимальный
заряд бутстрепного конденсатора определяется из выражения:
(2.3.1)
Разработчики рекомендуют применять в бутстрепных схемах
конденсаторы с возможно малым током утечки (идеальный вариант —
танталовые конденсаторы). Кроме того, величина тока утечки затвора
мала, поэтому перечисленные факторы учитывать нет смысла — их
вклад минимален. С учетом выражения (2.3.1) мы можем записать
расчетную формулу для определения емкости бутстрепного конденсатора:
(2.3.2)
где ил — напряжение питания схемы управления;
Uf — падение напряжения на бутстрепном диоде (типовое
значение - 0,8...1,0 В);
/ — частота коммутации.
Полученное значение бутстрепной емкости является
минимальным. Чтобы минимизировать риск от ненадежной работы схемы,
разработчики рекомендуют умножить полученный результат на
коэффициент 10... 15.
Бутстрепный диод должен выдерживать обратное напряжение не
менее, чем (Uin+ Ucc). Кроме того, он должен иметь возможно
меньший обратный ток и хорошие характеристики обратного
восстановления. Рекомендуемое время обратного восстановления бутстрепного
диода не должно превышать 100 не
Обратимся теперь к другим зарубежным фирмам, выпускающим
драйверные микросхемы для построения преобразовательной техники
небольшой мощности. Фирма «ONSemiconductor» [28] представлена
на рынке силовой электроники линейкой драйверов в интегральном
Рис. 2.3.12. Структурная схема драйвера МС33153
исполнении. По мнению автора книги, наиболее интересными типо-
номиналами из этого рада являются МС33153 (одиночный драйвер
IGBT транзистора) и МС33152 (высокоскоростной сдвоенный драйвер
транзисторов MOSFET). Рассмотрим их подробнее.
Структурная схема драйвера одиночного IGBT транзистора (single
IGBT gate driver) типа MC33153 приведена на рис. 2.3.12. Микросхема
выпускается в 8-выводном корпусе типа DIP-8 или SOIC-8,
обеспечивая ток управления транзистором при его открывании 1 А, а при
закрывании — 2 А. Номинальное напряжение питания — 15 В.
Задержка выходного управляющего сигнала при переходе его из низкого
состояния в высокое и обратно — 300 не.
Управляющий вход микросхемы — вывод 4, схема выходного
каскада драйвера подключена к выводу 5. Кроме этого, в составе драйвера
имеется ряд устройств, обеспечивающих защиту силового транзистора
от аварийных режимов. Во-первых, это устройство токовой защиты
(вывод 1 — current sense input, вывод 2 — kelvin GND). Во-вторых, —
устройство контроля состояния насыщения транзистора (вывод 8 —
fault blanking/desaturation input). Предусмотрен также выходной сигнал,
с помощью которого можно определить возникновение аварийного
состояния силового транзистора и вывести его на устройство
сигнализации или диагностики (вывод 7 — fault output). Встроенное устройство
контроля напряжения питания (underground lockout) отключает
драйвер при снижении напряжения питания ниже 11 В.
На рис. 2.3.13 показан вариант применения драйвера с
использованием функции контроля насыщения IGBT транзистора в открытом
состоянии. В целях обеспечения помехоустойчивости в схему введен
конденсатор СЫапк небольшой емкости. Вывод управления и диагностиче-
Рис. 2.3.13. Использование сигнала «fault blanking»
Рис. 2.3.14. Использование сигнала «current sense»
ский вывод гальванически развязаны со схемой драйвера оптронными
схемами.
Тем не менее, более точным методом диагностирования токовой
перегрузки IGBT транзистора является использование «кельвин-вы-
вода». К сожалению, далеко не все силовые приборы имеют такой
дополнительный диагностический вывод (мы об этом говорили). Цепь
Рис. 2.3.15. Структурная схема драйвера МС33152
передачи токового сигнала в данном случае — это резистивный шунт
и сглаживающий RC-фильтр.
Вторая интересная драйверная микросхема, выпускаемая фирмой
«ONSemiconductor», — МС33152. Ее структурная схема приведена на
рис. 2.3.15. Два идентичных канала драйвера обеспечивают ток
управления силовыми транзисторами до 1,5 А. задержка управляющего
сигнала при переключении составляет 120 не. К сожалению, данная
микросхема имеет ограниченные сервисные защитные функции,
отслеживая только напряжение питания.
На рис. 2.3.16 показан вариант применения драйвера МС33152
совместно с известной микросхемой ШИМ-контроллера типа TL494
(TL594) для построения пуш-пульного двухтактного
высокочастотного преобразователя.
Второй метод обеспечения гальванической развязки сигналов
управления «верхнего» и «нижнего» плечей полумостовых силовых
схем — оптический. Этот метод не слишком подходит для управления
высокочастотными силовыми схемами на основе транзисторов
MOSFET с частотами преобразования 100 кГц и выше, но с успехом
Рис. 2.3.16. Вариант использования драйвера МС33152
применяется на частотах 10...50 кГц, то есть при использовании в
качестве ключевых силовых элементов транзисторов IGBT. Идея метода
достаточно очевидна: входной управляющий ШИМ-сигнал
модулирует ток светодиода оптопары, а выходной элемент формирует входной
сигнал драйвера, который питается от собственного источника,
гальванически развязанного с управляющей схемой преобразователя
(рис. 2.3.17).
Метод опторазвязки очень удобен сточки зрения организации
«сигнального» и «силового» общих проводников схемы, поскольку
«сигнальный» общий провод можно полностью гальванически отделить от
«силового» общего проводника, а значит, выполнить полную развязку
силовой части статического преобразователя и силовой схемы. Таким
образом, исключается «затекание» силовых токов в цепи управляющих
сигналов малой мощности. К сожалению, опторазвязки вносят
значительные временные задержки в транслируемые сигналы, поэтому далеко
не все выпускаемые промышленностью оптроны общего применения
подойдут для организации такого способа управления силовыми
элементами преобразовательной техники.
Для построения драйверов с оптической гальванической
развязкой желательно применить специально разработанные
комбинированные драйверы, в составе которых имеются, во-первых,
согласованные по временным параметрам оптопары, а во-вторых, выходные
каскады, которые могут подключаться непосредственно к затворам IGBT
транзисторов через токоограничительные резисторы.
Примером удачного драйвера с опторазвязкой может служить
микросхема HCPL-3120, выпускаемая фирмой «Agilent technologies* [29], и
рядом других зарубежных фирм (например, драйверы типа PS9552,
PS9552L1, PS9552L2, PS9552L3 фирмы «NEC»). Близкими
аналогами этой микросхемы являются HCPL-J312 и HCNW-3120,
незначительно отличающиеся по своим электрическим характеристикам от
HCPL-3120.
Внутренняя структура микросхемы HCPL-3120 показана на
рис. 2.3.18. Со стороны подачи управляющего сигнала имеется светоди-
Рис. 2.3.17. Принцип опторазвязки
Рис. 2.3.18. Структура микросхемы HCPL-3120
од, а со стороны собственно узла драйвера — фотодиод. Выходной
каскад драйвера оснащен тотемным транзисторным каскадом, в котором
верхнее плечо образует биполярный транзистор, а нижнее — полевой.
Микросхема обеспечивает пиковый ток управления затворами
транзисторов 2 А (в режиме установки высокого и низкого уровня сигналов),
что позволяет в ряде случаев использовать ее без дополнительных
усилительных каскадов. Питание драйвера находится в диапазоне от 15 до
30 В. Немаловажным параметром также является напряжение
гальванической развязки оптопары. В данном случае оно составляет не менее
2500 В, что позволяет использовать микросхему при проектировании
статических преобразователей, питаемых от трехфазной сети 3x380 В
50 Гц. К слову, напряжение гальванической развязки HCPL-J312
составляет 3700 В, а для HCNW-3120 - все 5000 В.
Обратим внимание на временные параметры драйвера с оптораз-
вязкой. На рис. 2.3.19 показана типовая временная диаграмма,
иллюстрирующая сигнальные задержки при прохождении управляющего
сигнала.
Согласно документации производителя, оценка осуществляется
при подаче управляющего прямоугольного сигнала частотой 10 кГц с
50-процентной скважностью при изменении тока светодиода от 7 до
16 мА. Затвор транзистора имитируется RC-цепью с эквивалентной ем-
Рис. 2.3.19. Оценка временных параметров HCPL-3120
костью 10 нФ и затворным резистором 10 Ом. При этом время задержки
включения (tplh) составляет 0,3 мкс, время нарастания (tr) — 0,1 мкс,
время спада (/у) — 0,1 мкс, время задержки (tphl) — 0,5 мкс. Следует
отметить, что задержки сопоставимы с аналогичными параметрами IGBT
транзисторов.
Другой широко распространенный вариант драйвера с оптической
развязкой — микросхема TLP250, производимая фирмой «Toshiba»
[30], (рис. 2.3.20).
Основные технические параметры микросхемы: питание — 10...
...35 В, выходной ток управления — 1,5 А, напряжение изоляции
оптопары — 2500 В, время включения/выключения — 0,5 мкс.
В ряде случаев разработчик вынужден при проектировании
ориентироваться только на отечественную элементную базу, и в этом случае
он столкнется практически с полным отсутствием интегральных
драйверов. Тем не менее, ОАО «Протон» [31] все же разработало и
выпустило на рынок один-единственный интегральный драйвер типа 5П122А,
который по своей цоколевке соответствует TLP250. Правда, по
электрическим параметрам у отечественного драйвера дело обстоит
значительно хуже — выходной ток управления у него всего 200 мА, а
напряжение питания — не более 20 В. Будем надеяться, что в ближайшем
будущем номенклатура отечественных драйверов с опторазвязкой будет
расширена.
А теперь мы поговорим о драйверах, предназначенных для
управления мощными статическими преобразователями, построенными на
дискретных элементах, но с применением вышеназванных
драйверных микросхем. К слову, при разработке автором схем статических
преобразователей с выходной мощностью 6 и 12 кВт, было принято
решение применить драйверы, составленные из дискретных
элементов, поскольку на момент разработки в наличии не оказалось
подходящих драйверов в интегральном исполнении. На рис. 2.3.21 показана
Рис. 2.3.20. Структура микросхемы TLP250
электрическая принципиальная схема драйвера, используемого в
составе преобразователя трехфазного сетевого напряжения 380 В 50 Гц в
напряжение трехфазного вида 220 В 400 Гц с выходной мощностью
6 кВт.
Основой схемы служит оптоэлектронный драйвер D2 типа
HCPL-3120, обеспечивающий гальваническую развязку схемы
управления от силовой схемы. В целях реализации гальванической развязки
питания драйвера установлен модульный DC/DC преобразователь D1 с
входным номинальным напряжением 15 В и выходным напряжением
24 В. Разработчикам, которые захотят использовать схему в своих
проектах, необходимо учесть, что указанный на рис. 2.3.21 модульный
DC/DC преобразователь обеспечивает электрическую прочность
изоляции между входом и выходом не менее 1500 В по переменному
напряжению частоты 50 Гц и не менее 3500 В по постоянному напряжению.
В условиях работы преобразователя DC/DC в составе реального
прибора между входом и выходом этого источника гарантированно будет
присутствовать напряжение 540 В (выпрямленное напряжение трехфазной
сети 380 В 50 Гц), а если принять во внимание возможные
коммутационные выбросы напряжения на паразитных индуктивностях, то и все
1000 В.
Рис. 2.3.21. Первый вариант драйвера на дискретных элементах
Стабилитрон VD1 формирует отрицательное напряжение минус
5 В, «подпирающее» затвор IGBT транзистора в закрытом состоянии.
Резистор R2 задает ток перезарядки затвора, резистор R3 снижает
импеданс затвора и предотвращает самопроизвольное открытие IGBT
прибора в моменты коммутации.
Описываемый драйвер сопрягается с IGBT сборкой типа
GA125TS120U. Конструктивно он представляет собой печатную плату
с лепестками «под пайку», с размерами 70 х 70 х 25 мм.
Осциллограмма выходного напряжения драйвера при работе
преобразователя на реальную номинальную активно-индуктивную нагрузку
(трехфазные высокоскоростные вентиляторы) приведена на рис. 2.3.22.
Частота управляющего ШИМ-сигнала выбрана равной 10 кГц.
Рис. 2.3.22. Осциллограмма выходных сигналов драйвера
Фиксируется хорошая крутизна фронтов и малая величина
выбросов напряжения, возникающих вследствие прохождения силовых
коммутационных процессов, что свидетельствует о достаточно
высоком качестве функционирования драйвера и обеспечении им
основной функции управления.
Теперь настало время влить ложку дегтя в бочку меда, то есть
рассказать о недостатках такого драйвера. Во-первых, его габаритные
размеры оказались достаточно большими: для комплектования
преобразователя, имеющего в своем составе трехфазный управляемый мост,
необходимо шесть таких драйверных плат (по две на управление каждым
IGBT модулем). Все бы ничего, но когда плата сопоставима по
габаритным размерам с самим IGBT модулем, это обстоятельство в
значительной степени осложняет компоновку силового инвертора, сокращает
возможности доступа к отдельным узлам для регулировки, ремонта
и т. д. Во-вторых, описываемый драйвер не имеет никаких
функциональных узлов защиты от возникновения аварийных режимов, а значит,
силовую схему преобразователя придется «нагружать»
дополнительными датчиками, обнаруживающими перегрузку, короткое замыкания,
выход силовых транзисторов из состояния насыщения. Кроме этого,
сигналы датчиков должны схемотехнически обрабатываться для
принятия решений об отключении или о переводе в режим ограничения.
Драйвер, схема которого приведена на рис. 2.3.23, имеет два
идентичных гальванически развязанных канала. Питание каналов
осуществляется высокочастотным преобразователем прямоходового типа на
основе микросхемы D7. На элементах D1...D4 построен монитор для
схемы защиты от провалов питающего напряжения. Зачем он нужен?
Дело в том, что IGBT транзистор, как и любой другой транзистор
биполярного типа, может переходить из области насыщения в активную
область работы, что ведет к значительному повышению рассеяния
тепла на нем и, как следствие, выходу из строя. Работающий в условиях
Рис. 2.3.23. Второй вариант драйвера на дискретных элементах
стабильного питающего напряжения преобразователь однозначно
обеспечит ключевой режим коммутации, а вот при кратковременных
провалах сетевого напряжения (особенно при питании его схем
управления от быстро сбрасывающих выходное напряжение
высокочастотных источников напряжения собственных нужд) легко может
наступить отказ. Введенный в схему драйвера монитор отслеживает
напряжение его питания и вырабатывает сигнал отключения при
снижении этого напряжения ниже опасного уровня.
Описываемый здесь драйвер осуществляет управление IGBT
сборками полумостового типа CM200DY-24A (производитель — фирма
«Mitsubishi electric»), обладающими достаточно большой входной
емкостью затвора, поэтому потребовалось умощнить выход драйвера
транзисторными усилителями тока на элементах VT1...VT4. Таким
образом, схемотехнически удалось обеспечить импульсный ток
управления не ниже 5 А.
Конструктивно драйвер размещен на плате с размерами
80 х 80 мм, что говорит о почти двукратном сокращении габаритов по
сравнению с ранее описанным вариантом (см. рис. 2.3.21). К
сожалению, в этом случае также просматривается ряд недостатков как
схемотехнического, так и технологического характера. Главный технологи-
ческий недостаток вызван необходимостью использования
трансформатора Т1 собственного изготовления. Трансформатор разработан в
малогабаритном исполнении, магнитопроводом служит ферритовый
сердечник броневого типа. Как было уже сказано ранее,
межобмоточная изоляция трансформатора должна обеспечивать стойкость к
испытательному напряжению не менее 1500 В, что реализовать достаточно
сложно, если изготовитель лишен возможности выполнить
качественную вакуумную пропитку трансформаторной катушки.
Рассмотрим теперь схемотехнические недостатки. Они
выражаются в отсутствии отдельных полезных защитных функций, которыми
ведущие мировые производители «нагружают» свои драйверы, исходя
из опыта эксплуатации силовой техники. Для пояснения обратимся к
рис. 2.3.24. Как показывает практика, более эффективный вариант
управления IGBT транзисторами заключается в раздельном задании
токов заряда и разряда входных затворных емкостей. На рис. 2.3.24
токи заряда и разряда задаются резисторами R1 и R2 (для «верхнего»
плеча), а также резисторами R3 и R4 (для «нижнего» плеча). Кроме
того, значительное внимание уделяется контролю величины
напряжения насыщения транзисторов. Схемотехнически эта часть имеет
электрические связи «контроль 1» и «контроль 2», подключающие
коллекторы транзисторов к драйверным узлам контроля. Оправдана ли эта
идея? Несомненно, и вот почему. Разработчикам силовой техники
хорошо известно, что достаточно трудно обеспечить незамедлительное
аварийное отключение силовой части преобразователя при
возникновении токовой перегрузки. Классический метод контроля основан на
применении датчика тока на основе эффекта Холла (датчика Холла)
или резистивных шунтов, сигнал с которых обрабатывается
электронной схемой защиты. Но, как показала мировая практика, в качестве
такого датчика можно использовать непосредственно силовой переход
«коллектор—эмиттер» IGBT транзистора, отслеживая величину
напряжения насыщения на нем (мы об этом уже говорили).
Рис. 2.3.24. Структура драйвера с дополнительными функциями
В полумостовых преобразовательных схемах необходимо также
принимать специальные меры по предотвращению возникновения
«сквозных» токов вследствие одновременного открытия транзисторов
«верхнего» и «нижнего» плеча. Эта функция в составе интегральных
драйверов также легко реализуема, причем величину «мертвого
времени» (паузы между моментами коммутации VT1 и VT2) можно
регулировать с помощью внешних элементов (резисторов или конденсаторов).
На отечественном рынке электронных компонентов сегодня в
достаточном количестве присутствует широкая номенклатура импортных
интегральных драйверов, обеспечивающих все перечисленные выше
функции, и даже некоторые другие второстепенного свойства, о
которых мы здесь просто не упоминаем. Учитывая это, производители
преобразовательной техники общепромышленного исполнения не тратят
попусту времени на разработку уникальных драйверов, а просто
покупают готовые. Но разработчикам специальной техники, особенно тем,
кто работает в рамках госзаказов, жить в данном изобилии ничуть не
легче: спецтехника традиционно должна содержать только
отечественную комплектацию, изготовленную для работы в жестких условиях
(например, с приемкой «5»). Почему не легче — объясняется просто:
одних принципиально-важных отечественных элементов пока не
разработано, другие находятся на стадии разработки, и неизвестно, когда
закончится их освоение в серийном производстве. Поэтому в ряде
случаев разработчики спецтехники просто вынуждены использовать
элементы общепромышленного исполнения, поставляемые с приемкой
«1» (приемкой ОТК), но фактически — по своим параметрам —
удовлетворяющие жестким условиям эксплуатации. Заметим также, что
отечественные элементы могут быть интересны и производителям
коммерческой электроники с точки зрения сокращения расходов на
приобретение и снижения конечной себестоимости продукции.
Одним из интересных и перспективных шагов на пути
интегрирования силовой элементной базы можно считать появление отечественных
драйверов управления IGBT транзисторами и транзисторными
сборками. Технические характеристики поставляемых драйверов находятся на
уровне (а в чем-то даже и превосходят) лучших зарубежных разработок
аналогичного плана. О зарубежных драйверах мы будем говорить в этом
разделе чуть ниже, а сейчас расскажем об отечественной продукции, и в
частности, о модульных интегральных драйверах, серийно
изготавливаемых ЗАО «Электрум АВ» [22] (г. Орел). Номенклатура драйверов,
производимых этой фирмой, чрезвычайно широка: выпускаются
драйверы управления одиночными силовыми ключами, драйверы
управления полумостами, в бескорпурном исполнении (в виде печатной платы)
и в защитных корпусах с размерами не более 60 х 46 х 12,5 мм,
оснащенные широким набором сервисных функций, со встроенными DC/DC
преобразователями и без них (с обеспечением их внешнего подключе-
ния). Фирмой также выпускаются драйверы IGBT с гальванической
развязкой цепи управления и питания, с рабочим напряжением до 4500 В и
рабочими токами силовых цепей ключевых приборов до 2000 А, с
частотами коммутации до 100 кГц. В составе этих драйверов можно встретить
следующие сервисные узлы, выполняющие защитные функции:
• контроль напряжения насыщения «коллектор—эмиттер»
силовых транзисторов;
• регулировка порога отключения по напряжению насыщения
«коллектор—эмиттер»;
• регулировка длительности запрета контроля напряжения
насыщения на время активного состояния управляемого транзистора
в диапазоне от 2,8 до 100 мкс;
• гарантированный запрет контроля напряжения насыщения
управляемого транзистора при нахождении его в активной фазе
(при переключениях) на минимальное время 1 мкс;
• регулировка времени переключения силового транзистора;
• номинальный контроль внутренних питающих напряжений
(мониторинг питания);
• блокировка управления при возникновении аварийного режима;
• автосброс схемы управления по управляющему сигналу;
• наличие инверсных и прямых входов управления драйверами;
• плавное аварийное отключение управляемого транзистора за
время 7 мкс;
• блокировка одновременного включения транзисторов
«верхнего» и «нижнего» плеч полумоста;
• встроенные DC/DC преобразователи;
• регулировка величины «мертвого времени»;
• управление с помощью сигналов стандартных уровней ТТЛ/
КМОП;
• внешняя сигнализация о возникновении аварийного режима;
• раздельное задание токов управления затворами силовых
транзисторов в фазах включения и отключения.
Конечно, обо всех исполнениях драйверов в этой книге мы
поговорить не сможем, поэтому рассмотрим технические характеристики
и устройство некоторых типономиналов в защитных корпусах.
Внешний вид драйверов показан на рис. 2.3.25, а типовая структурная
схема приведена на рис. 2.3.26.
В составе драйверов имеются следующие основные схемные узлы:
схема согласования уровней управляющих сигналов, схема
управления затворами транзисторов, схема питания. Соответственно, по
признаку назначения выводы драйвера можно скомпоновать в
функциональные группы:
• входы управления переключением («вхГ», «вх2+», «вхГ»,
«вх2~») — принимают от схемы управления статическим преоб-
Рис. 2.3.25. Внешний вид драйверов, производимых ЗАО «Электрум АВ»
Рис. 2.3.26. Типовая структурная схема драйверов ЗАО «Электрум АВ»
разователем модулированные ШИМ-сигналы; подача может
осуществляться как в прямом виде (входы со значком «+»), так и
в инвертированном виде (входы со знаком «-»);
• вход принудительной блокировки управления переключением
(«БЛОК»);
• статусные выходы аварии управляемых транзисторов «верхнего»
и «нижнего» плеча («СП», «СТ2»);
• выходы управления затворами транзисторов «верхнего» и
«нижнего» плеча по высокому и низкому уровню («ВыхГ», «ВыхГ»,
«Вых2+», «Вых2~»);
• входы настройки времени переключения каналов драйвера
(«Сз1», «Сз2»);
• входы контроля напряжения насыщения силовых транзисторов с
настройкой порога и времени блокировки каналов («ИКнастр1»,
«ИКнастр2»);
• выходы встроенных источников питания каналов силовой части
драйвера («+Епит1», «"ЕпитЬ, «+Епит2», «~Епит2»);
• входы питания интерфейсной (входной) части схемы («ипит»,
«Общий»).
На взгляд автора, наибольший интерес для применения в
конкретных разработках преобразовательной техники представляют драйверы
серии МД2ХХП-Б, поскольку они выполнены в защитном корпусе, а
также имеют наиболее оптимальный набор сервисных функций:
• контроль напряжения насыщения силового транзистора;
• запрет контроля напряжения насыщения на время переключения;
• контроль снижения напряжения питания ниже 11 В;
• блокировка управления при возникновении аварийной
ситуации;
• наличие входов раздельного управления «верхним» и «нижним»
плечом полумоста;
• наличие собственного источника питания гальванически
развязанных цепей;
• плавное аварийное отключение силовых транзисторов.
Структурная схема драйвера серии МД2ХХП-Б показана на
рис. 2.3.27.
Входной сигнал управления поступает на выводы 4 и 8 драйвера,
обозначенные на структурной схеме как «Управление 1» и
«Управление 2». Обратите внимание: драйвер не имеет инвертированных
управляющих входов, а «возвратным» общим проводником служит вывод 9.
Выводы 2 и 3 отведены под питание схемы. К выводам 14, 15, 16, 17,
18, 19 подключаются внешние емкости, которые выполняют функцию
сглаживающих для внутренних источников питания. Управление
затворами IGBT транзисторов — раздельное. К выводам 12 и 21
драйвера подключаются резисторы, ограничивающие ток открытия затворов,
Рис. 2.3.27. Структура драйверов серии МД2ХХП-Б
а к выводам 13 и 20 — резисторы, ограничивающие токи закрытия.
Контроль насыщения силовых транзисторов выполняется через
выводы 10 и 23. К выводам И и 22 подключаются конденсаторы, задающие
время блокировки контроля насыщения транзисторов. С помощью
резисторов, подключаемых к выводам 5 и 7, осуществляется настройка
величины «мертвого времени» между переключениями транзисторов.
Вывод 6 — сигнализация о возникновении аварийного состояния.
В цепи контроля насыщения силовых транзисторов могут
включаться диоды VD1, VD2 (или последовательно включаемые цепочки
диодов), которые снижают пороговое напряжение контроля в
соответствии с формулой:
(2.3.3)
где Umc — порог напряжения насыщения;
п — количество последовательно включенных диодов.
Диоды должны использоваться с обратным напряжением не ниже
1000 В и временем обратного восстановления не более 100 нс,
например, типа UF4006.
Настройка «мертвого времени» осуществляется резисторами RJdl
и Rtd2, номиналы которых можно рассчитать из соотношения для
величины «мертвого времени» ttd.
(2.3.4)
где Rtd — сопротивление соответствующего резистора.
В формулу (2.3.4) номинал резистора Rtd нужно подставлять в
кОм, тогда величина «мертвого времени» ttd будет вычислена в мкс.
Еще один настраиваемый параметр драйвера — время задержки
срабатывания защиты, которое может быть отрегулировано
величиной конденсатора Стс. Рассчитать время задержки срабатывания
защиты tmc можно по формуле:
(2.3.5)
Подстановка величины Стс осуществляется в пФ, тогда время
задержки tmc получится в мкс. Минимальное значение Стс для данного
типа драйвера составляет 100 пФ.
Каким образом «работает» схема контроля напряжения
насыщения открытого транзистора? Идея здесь достаточно простая: в случае
возникновения короткого замыкания (КЗ) или перегрузки в силовой
цепи напряжение на открытом транзисторе резко возрастает, что и
отслеживается соответствующей схемой контроля (выводы 10 и 23),
запирающей силовой транзистор. Диаграммы работы схемы контроля
напряжения насыщения приведены на рис. 2.3.28. Обратите
внимание: снижение напряжения на затворе выполняется не мгновенно, а
плавно — в целях исключения скачка напряжения на затворе от
наведенных токов коллекторной цепи.
Рис. 2.3.28. Диаграмма работы схемы контроля насыщения
Основные электрические данные драйвера следующие:
• диапазон напряжения питания — 13,5... 16,5 В;
• устойчивость к испытательному напряжению изоляции —
4000 В;
• импульсный ток управления силовыми транзисторами (в
зависимости от исполнения) — 1,5 А; 5,0 А; 8,0 А;
• ток потребления по питанию — не более 200 мА;
• рабочий диапазон температур — минус 40...+100 °С.
На рис. 2.3.29 приведена рекомендуемая электрическая схема на
основе данного драйвера, которая была опробована в процессе
авторских разработок преобразователя с номинальной выходной
мощностью 12 кВт.
Напряжение 15 В, питающее драйвер, поступает на контакты 1—
2 платы. Управление осуществляется сигналами с контактов 3—4
относительно «общего» сигнального контакта 5. На контакты 6—7 выведен
сигнал «авария» в виде замыкаемого «сухого» контакта твердотельного реле,
который транслируется на схему управления статическим
преобразователем. Контакты 8—9—10 предназначены для управления IGBT
транзистором «верхнего» плеча полумоста, а контакты 11—12—13—для управления
«нижним» IGBT транзистором полумоста. Конденсаторы С1...С5 —
блокировочные по питанию, а конденсаторы С6, С7 устанавливают время
запрета контроля напряжения насыщения силовых транзисторов.
Резисторы Rl, R2 задают «мертвое» время, которое в данном случае установлено
равным 5 мкс. Резисторы R4...R7 — затворные. Диоды VD1...VD4
снижают величину контролируемого напряжения насыщения.
В результате использования драйвера МД250П-Б вместо схем,
построенных на дискретных элементах, удалось существенно (почти в
два раза) уменьшить конструктивную высоту узла в сборе, отказаться
от трудоемких операций по намотке трансформаторов, повысить
надежность преобразователей и в более полной мере оснастить
разрабатываемые приборы средствами защиты от аварийных режимов.
Чуть выше мы говорили о том, что отечественные драйверы,
предназначенные для работы в составе специальной техники, просто-на-
Рис. 2.3.29. Принципиальная схема драйвера на основе модуля МД250П-Б
просто отсутствуют, что ставит ее разработчиков в весьма невыгодное
положение по сравнению с разработчиками техники
общепромышленного применения. И, тем не менее, работы в данном направлении
специалистами ЗАО «Электрум АВ» ведутся: практически закончена
разработка интегрального многокристального быстродействующего
модуля с гальванической развязкой, предназначенного для
управления и защиты транзисторами MOSFET и IGBT с
предельно-допустимыми напряжениями между силовыми выводами до 1700 В. В составе
этого драйвера (проектная маркировка — 2005ХХ1) имеются узлы
защиты от перегрузок, КЗ и недостаточного уровня напряжения на
затворах, а в случае срабатывания защиты обеспечивается «мягкое»
отключение силовых транзисторов. Этот драйвер не имеет встроенных
источников питания цепей с гальванической развязкой, что
заставляет разработчика предусмотреть такие источники в своей схеме.
Конечно, данное обстоятельство увеличит общие габариты драйвера, но
поскольку для спецтехники пока более ничего лучшего не
разрабатывается, придется смириться с этим обстоятельством.
Следующим интересным шагом на пути внедрения принципов
интегрального исполнения силовой техники становится отказ от
традиционных IGBT (MOSFET) транзисторов в пользу
интеллектуальных модулей большой степени интеграции, в которые уже встроены
драйверы со всеми необходимыми защитными функциями, а их
характеристики согласованы наилучшим образом. Такие компоненты
уже имеются в номенклатуре «Электрум АВ». Сейчас мы и обратимся
к таким компонентам, раскроем подробнее их устройство.
Силовые модули М13 являются комбинированными силовыми
приборами и предназначены, во-первых, для преобразования
переменного однофазного или трехфазного напряжения в постоянное
напряжение питания силовых цепей IGBT транзисторов, и, во-вторых,
собственно для управления приводных систем на основе электродвигателей
различных типов: постоянного тока, коллекторных, вентильных, вен-
тильно-индукторных, асинхронных. Дополнительно в составе модулей
имеются встроенная схема драйверов затворов транзисторов, схема
контроля тока силовой цепи, схема защиты от короткого замыкания в
силовой цепи, схема защиты от перегрева (на основе встроенного
термодатчика), схема защиты от одновременного включения транзисторов
верхнего и нижнего плеча, схема защиты от сквозных токов. В
некоторых типономиналах модулей имеется также схема контроля зарядного
тока входных конденсаторных цепей, схема контроля напряжения
силовой цепи постоянного тока и встроенные элементы защиты от
коммутационных перенапряжений (диод с малым временем обратного
восстановления и транзистор), которые неизбежно возникают в цепях
питания постоянного тока.
Основные технические характеристики модулей серии М13 (в
зависимости от исполнения):
• диапазон коммутируемых токов — 10 А; 30 А; 50 А; 100 А;
• диапазон коммутируемых напряжений — 40 В; 60 В; 100 В;
200 В; 400 В; 600 В; 1200 В;
• напряжение изоляции «модуль—корпус» — 3750 В;
• диапазон рабочих температур — минус 40...+85 °С;
• время задержки сигнала при включении — 1,4 мкс;
• время задержки сигнала при отключении — 0,7 мкс;
• температура отключения модуля — 120 °С;
• номинальное напряжение питания управляющей части — 15 В;
• управление — логические сигналы 0/5 D/
На рис. 2.3.30 показана структурная схема модуля М13А4, имеющая
в своем составе только трехфазный управляемый мост. На рис. 2.3.31
приведена схема модуля М13А5, в составе которой также имеются
диодный мост (выпрямитель сетевого напряжения) и схема ограничения
зарядного тока (дополнительный IGBT транзистор и диод).
Рис. 2.3.30. Структурная схема модуля М13А4
На отечественном рынке можно встретить также предложения
драйверов от ОАО «Электровыпрямитель» [21], правда, номенклатура их
значительно более скудная, нежели производимых ЗАО «Электрум АВ».
Рис. 2.3.31. Структурная схема модуля М13А5
Тем не менее, и эти драйверы используются разработчиками
преобразовательной техники достаточно часто, поэтому мы вкратце
расскажем и о них.
Драйвер ДЖИЦ.ЗО 1411.125 разработан для управления одиночным
IGBT транзистором с током силовой цепи от 800 до 1200 А и с
допустимым напряжением «коллектор—эмиттер» 1200 В. Драйвер,
структурная схема которого приведена на рис. 2.3.32, имеет следующие
основные узлы:
• узел защиты от короткого замыкания и перегрузки силовых
сборок с помощью плавного аварийного отключения;
• узел замедления спада тока при выключении (введен в целях
защиты от опасных индуктивных выбросов);
• узел защиты затворов IGBT транзисторов от перенапряжений;
• узел оптической изоляции входных и выходных цепей;
• узел питания внутренней схемы с гальванической развязкой от
цепей управления;
Рис. 2.3.32. Структурная схема драйвера ДЖИЦ.301411.125
• узел сигнализации о возникновении аварийного состояния и об
аварийном отключении;
• узел сигнализации о снижении питания внутренних схем
драйвера;
• узел индикации уровня выходного напряжения.
Драйвер имеет несколько сигнальных входов и выходов. Вход
сброса (RES) аварийного состояния драйвера активизируется низким
уровнем логического сигнала длительностью не менее 2 мкс. Этот
сигнал сбрасывает сигнал аварийного запирания модуля (FL) и
разрешает управление от входного сигнала силовым транзистором (IN).
Входы VDD и GND предназначены для подключения источника
питания схемы управления. На эти входы подается напряжение 5 В. В то
же время на входы VAC подается меандр частотой 40 кГц и
напряжением 40 В для питания выходных цепей драйвера (что, конечно, не
слишком удобно для разработчика, так как нужно включать в состав
схемы преобразователя формирователь этого меандра).
Выходной сигнал VC сигнализирует о состоянии питания
выходных цепей драйвера. При снижении напряжения ниже 25 В сигнал
устанавливается в состояние логической единицы. Еще один сигнал
аварийного состояния драйвера — сигнал FL. Если спустя
промежуток времени 4 мкс после подачи низкого уровня напряжения на вход
IN напряжение между коллектором и эмиттером IGBT транзистора
не принимает значение ниже 5,5 В, то этот сигнал принимает
низкий логический уровень. Таким образом, осуществляется контроль
состояния насыщения силового транзистора. Выводы Е, G, С
соответственно подключаются к эмиттеру, затвору и коллектору
управляемого транзистора.
Основные электрические характеристики драйвера ДЖИЦ.301411.125:
• ток включения (отключения) затворов — 7 (14) А;
• выходное напряжение управления затворами — +15/—8 В;
© задержка сигналов управления — 0,3 мкс;
• напряжение изоляции между входом и выходом — 2,5 кВ.
Габаритные размеры платы драйвера — 110 х 60 х 18 мм.
Конструктивно драйвер выполнен таким образом, что позволяет
осуществить установку непосредственно на типовой силовой модуль. Один
край платы драйвера крепится непосредственно на силовой модуль, а
второй — к металлическим стойкам.
Функциональная схема драйвера ДЖИЦ.301411.125 (а также и
других драйверов, производимых ОАО «Электровыпрямитель»)
приведена на рис. 2.3.33.
Рис. 2.3.33. Функциональная схема драйвера
ОАО «Электровыпрямитель»
Напряжение питания через разъемный соединитель Х2 и
трансформатор гальванической развязки Т1 поступает на схему
выпрямления RECTI. Схема выпрямления формирует однополярное
напряжение 18 В и двуполярное напряжение ±6 В. Компаратор СОМР1 при
номинальных значениях сформированных напряжений поддерживает
низкий уровень сигнала на выходах оптопары F3. При высоком
уровне сигнала на входе управления IN формируется высокий уровень на
выходе оптопары F1. Это является условием включения генератора
тока GT2 и отключения генераторов тока GT1 и GT3. Напряжение на
конденсаторе С2 имеет отрицательный знак, и через буферный
усилитель А1 это напряжение поступает на затвор управляемого
транзистора. Открытый ключ KL4 поддерживает отрицательное значение
напряжения на входе компаратора СОМРЗ. В случае поступления на
вход IN низкого значения управляющего сигнала генератор тока GT2
переводится в отключенное состояние, а генераторы GT1 и GT3
включаются. Конденсатор С2 быстро заряжается до положительного
значения напряжения, которое через усилитель А1 поступает на
затвор управляемого силового транзистора и открывает его.
При возникновении условия перегрузки силового модуля
(напряжение на насыщенном силовом транзисторе выше нормы),
напряжение на конденсаторе СЗ превышает допустимый порог, и импульс,
сформированный компаратором СОМРЗ, включает триггер,
выполненный на компараторе СОМР2 с положительной обратной связью.
После этого замыкаются ключи KL1 и KL3, отключаются генераторы
тока GT1 и GT3. Конденсатор С2 разряжается через резистор R1, в
результате чего формируется «мягкое» отключение силового
транзистора. Выход драйвера из состояния защиты осуществляется подачей
низкого уровня на вход RES, который через оптопару F4 возвращает
триггер СОМР4 в исходное состояние.
Одной из особенностей применения драйверов ОАО
«Электровыпрямитель» является необходимость использования в ряде случаев
дополнительного устройства, называемого адаптером. Функциональная
схема типового адаптера приведена на рис. 2.3.34. Адаптер служит,
во-первых, для умощнения сигналов управления затворами
транзисторов, а во-вторых, содержит некоторые узлы, дополнительно
защищающие IGBT модули от аварийных режимов. Диоды V6 и V7
«обрезают» выбросы напряжения на затворах, тем самым предотвращая
опасные режимы в процессе коммутации транзисторов. Двухтактный
каскад на транзисторах V3 и V4 увеличивает ток управления
затворами. Защитная цепочка R7, V9, V10 защищает IGBT модуль от опас-
Рис. 2.3.34. Функциональная схема адаптеров ОАО «Электровыпрямитель»
ных выбросов напряжения на коллекторе при запирании транзистора,
приоткрывая последний на время выброса.
На рис. 2.3.35 показан внешний вид драйвера ДЖИЦ.687252.054,
представляющий собой одноканальный вариант с током управления
до 5 А и размерами платы 100 х 45 х 17 мм. Незначительно отличается
от приведенного драйвер ДЖИЦ.687253.321, который выполнен в
двухканальном варианте с двумя независимыми идентичными
каналами. Размеры платы этого драйвера — 100 х 90 х 17 мм.
Рис. 2.3.35. Внешний вид драйвера ДЖИЦ.687252.054
На рис. 2.3.36 приведен внешний вид адаптера ДЖИЦ.687252.085,
установленный непосредственно на силовой модуль. Данный адаптер
по своим характеристикам согласован с драйверами и позволяет
увеличить ток управления до 15 А.
Еще одно отечественное предприятие, которое изготавливает
качественные драйверы для управления IGBT модулями, — это НПО
«Энергомодуль» [32] (г.Троицк, филиал в г. Чебоксары). В номенклатуре выпуска
фирмы содержатся одноканальные драйверы типа 1ДР-Х- 12-Т2, двухка-
нальные полумостовые драйверы типа 2ДР-Х-12-Т2 и 6-канальные
драйверы управления трехфазными мостовыми схемами типа 6ДР-Х-12. На
рис. 2.3.37 показан внешний вид драйвера типа 2ДР-Х-12-Т2, имеющего
габаритные размеры 60 х 70 х 21 мм,анарис.2.3.38—схема подключения
драйвера 2ДР-Х-12-Т2 к полумостовой силовой IGBT сборке.
Драйвер имеет следующие основные технические и
функциональные характеристики:
• вход типа ТТЛ с переключением уровня логической единицы
(5,0 В или 3,3 В) с инверсией, обеспечивающей подачу
открывающего импульса на затвор транзистора при низком уровне
входного сигнала драйвера;
Рис. 2.3.36. Внешний вид
адаптера ДЖИЦ.687252.085
Рис. 2.3.37. Внешний вид
двухканального драйвера типа
2ДР-Х-12-Т2
• оптическую развязку по входам для обоих каналов с
испытательным напряжением не менее 3500 В;
• трансформаторную развязку питающих напряжений драйвера с
испытательным напряжением изоляции не менее 4000 В;
• величину уровней выходного напряжения управления —
• защиту от пониженного напряжения питания с пороговым
напряжением 12 В;
• защиту от перегрева радиатора охлаждения силовых элементов
(предлагается как опция, для обеспечения которой в радиатор
должен быть встроен дополнительный терморезистор);
• защиту от переполюсовки (неправильного подключения
полярности) питающего напряжения;
• защиту от переполюсовки входного сигнала;
• защиту IGBT транзисторов от аварийных режимов посредством
контроля напряжения насыщения;
• подавление синфазных помех по входам обоих каналов драйвера;
• подавление паразитных коротких открывающих импульсов.
Описываемые драйверы имеют также встроенную функцию
регулировки «мертвого времени», значение которого может быть
оставлено по умолчанию (3 мкс), либо подкорректировано заказчиком
исходя из конкретных условий работы драйвера.
В составе драйвера имеется 4 единичных светодиодных
индикатора HL1...HL4, которые помогут оперативно провести диагностику
исправного состояния. Зеленый цвет свечения индикаторов HL3 и HL4
показывает наличие питающего напряжения выходных каскадов
драйвера (+15 и минус 8 В). Красное свечение светодиодов HL1 и
HL2 означает наличие управляющих сигналов на выходах драйвера.
+ 15/-8 В;
А теперь обратимся к рис. 2.3.38, на котором показана схема
подключения драйвера к силовому модулю. При появлении сигнала FLT
драйвер отключает силовые ключи по заложенной процедуре
ограничения тока и переходит в нерабочий режим остановки. Для перевода
драйвера в режим «работа» необходимо подать от внешней
управляющей схемы нулевой уровень на вход RST. Для автоматического
перевода драйвера из стопового режима в режим «работа» разработчику
необходимо просто соединить входы RST и IN. Производители
драйвера рекомендуют обеспечить временную задержку между появлением
сигнала FLT относительно сигнала RST не более 1,8 с, так как в
противном случае можно ожидать наступление аварийного режима
перегрева силового IGBT модуля.
Рис. 2.3.38. Схема подключения драйвера типа 2ДР-Х-12-Т2
На рис. 2.3.39 показана внутренняя блок-схема 6-канального
драйвера типа 6ДР-Х-12. Все, что относилось к описанию работы
предыдущего драйвера типа 2ДР-Х-12-Т2, справедливо и для данного
драйвера.
Собственно, вот, пожалуй, и все то основное, что необходимо
сказать об отечественных драйверных разработках. Теперь мы
перейдем к рассказу о драйверах, производимых ведущими зарубежными
фирмами. В частности, мы поговорим о драйверах фирмы «Semikron»
[33] и о драйверах фирмы «CT-Concept» [34]. Фирма «Semikron»
подразделяет выпускаемые драйверы на три основные серии, в
значительной степени отличающиеся друг от друга своим конструктивным
исполнением:
• серия SKYPER Driver core;
• серия SKHI-DRIVE PCB-mountable;
• серия SKHI-DRIVE Plug-and-play.
Основные параметры драйверов названных серий приведены в
табл. 2.3.2.
Рис. 2.3.39. Блок-схема 6-канального варианта драйвера типа 6ДР-Х-12
Таблица 2.3.2. Основные параметры драйверов фирмы «Semikron»
Типономинал драйвера
Число
каналов
Напряжение
силовой цепи, В
Напряжение
управления
затвором, В
Выходной
пиковый
ток, А
Частота
ключения, кГц
Напряжение
изоляции, В
SKYPER Driver Core |
Skyper32 (R)
2
1700
+15/-7
15
50
4000 [
Skyper32Pro (R)
2
1700
+15/-7
15
50
4000
SKHI-DRIVE PCB-mountable
SKHI-21-A-(R)
2
1200
+15/0
8
50
2500
SKHI-21-A/B-(R)
2
1200
+15/-7
8
50
2500
SKHI-22-A/B-H4-(R)
2
1700
+15/-7
оо
50
4000 J
SKHI-24-(R)
2
1700
+15/-8
15
50
4000 1
SKHI-61-(R)
6
900
+15/-6,5
2
50
2500
SKHI-71-(R)
7
900
+15/-6.5
2
50
2500
SKHI-DRIVE Plug-and-play
SKHI-10/12-(R)
1
1200
+15/-8
9,6
100
2500
SKHI-10/17-(R)
1
1700
+15/-8
9,6
100
4000
SKHI-23/12-(R)
2
1200
+15/-8
4,8
100
2500
SKHI-23-17-(R)
2
1700
+15/-8
4,8
100
4000 J
SKHI-26-W
2
1600
+15/-8
10
100
4000
SKHI-27-W
2
1700
+15/-8
30
10
4000 1
Внешний вид драйверов серии SKYPER Driver Core приведен на
рис. 2.3.40. Это — печатная плата с размерами 66 х 67 х 19 мм.
Драйверы предназначены для управления IGBT транзисторами,
включенными по мостовой схеме. Они имеют в своем составе встроенный и
Рис. 2.3.40. Внешний вид драйверов серии SKYPER Driver Core
гальванически развязанный источник питания для силовой драйвер-
ной части, схему снижения напряжения питания для силовой драй-
верной части, схему защиты от коротких выбросов напряжения (short
pulse suppression), схему защиты от снижения напряжения питания
(under-voltage protection), блокировку одновременного включения
транзисторов «верхнего» и «нижнего» плеча (drive interlock),
динамическую защиту от воздействия коротких импульсов (dynamic short
circuit protection) на вход контроля насыщения цепи «коллектор-
эмиттер», узел аварийного управления (failure management),
раздельное задание токов открывания и зарывания затворов управляемых
транзисторов.
На рис. 2.3.41 показана типовая схема включения драйверов серии
SKYPER Driver Соте. Питание драйвера осуществляется от однопо-
лярного источника напряжением 15 В, управление драйвером
происходит через выводы INPUT ТОР и INPUT ВОТ, также драйвером
формируется выходной диагностический сигнал ERROR OUT. С
остальными элементами обвязки читатели уже знакомы, поэтому
дополнительных пояснений мы приводить не будем, за исключением
некоторых подробностей в отношении цепи мониторинга насыщения
силового транзистора, расчет элементов которой приведен ниже.
Рис. 2.3.41. Типовая схема включения драйвера серии SKYPER
Driver Core
На рис. 2.3.42 показана цепь мониторинга насыщенного
состояния управляемых транзисторов. Номиналы элементов этой цепи оп-
ределяются исходя из контролируемой величины напряжения
насыщения VCEsat и времени блокировки контроля tbl по формуле
Рис. 2.3.42. К расчету элементов цепи мониторинга насыщения
Подстановка величин в приведенные формулы (2.3.6) и (2.3.7)
следует осуществлять в соответствии с указанными в квадратных
скобках единицах.
Внешний вид драйверов серии SKHI-DRIVE PCB-mountable
приведен на рис. 2.3.43. Эти драйверы представляют собой
функционально-законченные модули, помещенные
в защитный корпус с габаритными
размерами 55 х 55 х 16 мм. Монтаж драйверов
выполняется на дополнительной печатной
плате, конструктивное исполнение
которой разрабатывается под конкретный
силовой модуль.
В своем составе драйверы имеют пол- рис# 2.3.43. Внешний вид
ностью законченные узлы управления си- драйверов серии
ловыми транзисторами, встроенный гальва- SKHI-DRIVE
нически развязанный источник питания, схему мониторинга
аварийного состояния. На рис. 2.3.44 показана функциональная схема
драйвера. Интересной особенностью схемы является возможность
задания защитной паузы «мертвое время» при переключении
транзисторов «верхнего» и «нижнего» плеча дискретно, с помощью установки
сигналов высокого или низкого уровня на выводах Р5, Р6, Р9 (TDT1,
SELECT, TDT2). При этом осуществляется выбор временного
интервала (в мкс) из ряда 0,0; 1,3; 2,3; 3,3; 4,3. Схема подавления коротких
управляющих импульсов позволяет заблокировать прохождение на
выход драйвера импульсов длительностью менее 500 нс. Встроенная
схема мониторинга внутреннего напряжения питания отслеживает
номинальное напряжение питания 15 В, и при снижении его ниже
13 В устанавливает сигнал ошибки ERROR драйвера. Также
отслеживается состояние насыщения силового транзистора через выводы S1 и
S2. При возникновении аварии выполняется сигнализация
посредством обработки сигнала, снимаемого с выхода ERROR.
Рис. 2.3.44. Функциональная схема драйверов серии SKHI-DRIVE
PCB-mountable
Предусмотренная в схеме RC-цепочка RCE> ССЕ предназначена для
регулировки времени блокировки мониторинга состояния насыщения
управляемого транзистора. Выбор номиналов этих элементов
осуществляется исходя из величины напряжения насыщения управляемого
IGBT транзистора VCEsat и времени блокировки контроля tbl по
следующим соотношениям:
(2.3.8)
(2.3.9).
Третий вид драйверов серии SKHI-DRIVE Plug-and-play
представляет собой модули на основе печатной платы, устанавливаемой в
непосредственной близости от управляемого IGBT модуля и
подключаемой к модулю с помощью проводов. Внешний вид одноканального
драйвера этой серии показан на рис. 2.3.45.
Рис. 2.3.45. Внешний вид драйверов серии SKHI-DRIVE Plug-and-play
В целях облегчения применения своих драйверов
фирма-производитель разработала для них технологию «plug-and-play» («подключай и
работай»), которая выражается в наличии на драйверных платах
перемычек типа «джампер». Устанавливая посредством переключений
джамперов необходимый режим работы, можно применять один и тот
же драйвер в различных преобразователях (что важно в
промышленном производстве с точки зрения унификации комплектующих
элементов и сокращения их номенклатуры), а также сократить время на
сборку и настройку преобразователя (что также важно при создании
промышленной конкурентоспособной продукции).
На рис. 2.3.46 приведена функциональная схема одноканального
драйвера SKHI 10/12. Набор функций у него — стандартный, поэтому
не будем вновь описывать их, а упомянем элементы, задействованные
Рис. 2.3.46. Функциональная схема драйверов серии SKHI-DRIVE
Plug-and-play
для обеспечения технологии «подключай и работай». Как видно из
схемы, этих элементов здесь три: джамперы Л, J2, J3. Джампер Л
предназначен для установки режима управления входной логической
схемой от 5-вольтовой, либо от 15-вольтовой КМОП-логики.
Джампер J2 устанавливает режим управления затворами IGBT
транзисторов: здесь возможны режимы задания раздельных токов открывания и
закрывания, либо одинаковых токов управления. Назначение джампе-
ра J3 — подключение внешнего или внутреннего нагрузочного
резистора для сигнала сброса драйвера.
Фирма «CT-Concept» [34] специализируется на выпуске драйверов
различных исполнений для управления IGBT сборками средней и
большой мощности. Уникальной особенностью этой фирмы является
выпуск номенклатуры драйверов, рассчитанных для установки на
модули от ведущих производителей силовой электроники — «Dynex»,
«Infineon-Еирес», «Mitsubishi-Electric». Впрочем, драйверы могут
устанавливаться и на аналогичные модули, производимые другими
фирмами, поскольку в целом корпуса IGBT модулей сегодня имеют
высокую степень унификации. Интересно также отметить, что часть
драйверов фирмы «СТ-Concept» имеют оптоволоконный интерфейс связи
со схемой формирования ШИМ-сигналов. Все драйверы этой фирмы
выпускаются по технологии «plug-and-play».
Основная номенклатура драйверов, производимых в настоящее
время «СТ-Concept», приведена в табл. 2.3.3. Драйверы
классифицированы по величине допустимого напряжения в силовой цепи.
Таблица 2.3.3. Номенклатура драйверов фирмы «CT-Concept»
Типономинал
драйвера
Ток силовой цепи
IGBT сборки, А
Количество
каналов
Тип входного
интерфейса
Тип корпуса
IGBT модуля
" ~~ 1
Для IGBT модулей на напряжение 1200 В \
2SD316EI-150
150
2
Электрический
EconoDUAL 1
6SD312EI-150
150
6
Электрический
ЕсопоРАСК+ |
2SD316EI-225
225
2
Электрический
EconoDUAL
6SD312EI-225
225
6
Электрический
ЕсопоРАСК+ |
2SD316EI-300
300
2
Электрический
EconoDUAL |
6SD312EI-300
300
6
Электрический
ЕсопоРАСК+ |
2SD316EI-450
450
2
Электрический
EconoDUAL [
6SD312EI-450
450
6
Электрический
ЕсопоРАСКч- |
2SB315A-800
800
2
Электрический
130 x 140 мм |
2SB315B-800
800
2
Оптический
130 x 140 мм |
2SB315A-1200
1200
2
Электрический
130 х 140 мм |
2SB315B-1200
1200
2
Оптический
130 х мм
1SD418F2-2400
2400
1
Оптический
190 х 140 мм |
1SD536F2-2400
2400
1
Оптический
190 х 140 мм |
1SD536F2-3600
3600
1
Оптический
190 х мм
Для IGBT модулей на напряжение 1700 В
2SD316EI-150
150
2
Электрический
EconoDUAL [
6SD312EI-150
150
6
Электрический
ЕсопоРАСК+ |
2SD316EI-225
225
2
Электрический
EconoDUAL
6SD312EI-225
225 6
Электрический
ЕсопоРАСК+ |
2SD316EI-300
300 2
Электрический
EconoDUAL j
6SD312EI-300
300 6
Электрический
ЕсопоРАСКн- |
2SD316EI-450
450 2
Электрический
EconoDUAL
6SD312EI-450
450 | 6
Электрический
EconoPACK+ |
2SB315A-800
800 ! 2
Электрический
130 x 140 мм |
Окончаниение табл. 2.3.3
Типономинал
драйвера
Ток силовой цепи
IGBT сборки, А
Количество
каналов
Тип входного
интерфейса
Тип корпуса
IGBT модуля
2SB315B-800
800
2
Оптический
130 х 140 мм
2SB315A-1200
1200
2
Электрический
130 х 140 мм
2SB315B-1200
1200
2
Оптический
130 х 140 мм
1SD418F2-2400
2400
1
Оптический
190 х 140 мм
1SD536F2-2400
2400
1
Оптический
190 х 140 мм
1SD536F2-3600
3600
1
Оптический
190 х 140 мм
Для IGBT модулей на напряжение 2500 В
1SD536F2-1200 | 1200
1
Оптический
190 х 140 мм
1SD418F2-1500 | 1500
1
Оптический
190 х 140 мм
1SD536F2-1500 | 1500
1
Оптический
190 х 140 мм
Для IGBT модулей на напряжение 3300 В
1SD418F2-800
800
1
Оптический
130 х 140 мм
1SD536F2-800
800
1
Оптический
130 х 140 мм
1SD536F2-800
800
1
Оптический
190 х 140 мм
1SD536F2-1200
1200
1
Оптический
190 х 140 мм
1SD536F2-1200
1200
1
Оптический
190 х 140 мм
1SD536F2-1500
1500
1
Оптический
190 х 140 мм
Для IGBT модулей на напряжение 4500 В
1SD312F2-400
400 | 1
Оптический
130 х 140 мм
1SD312F2-600
600 | 1
Оптический
130 х 140 мм
1SD312F2-900
900 | 1
Оптический
190 х 140 мм
Для IGBT модулей на напряжение 6500 В
1SD210F2-200
200
1
Оптический
73 х 140 мм
1SD210F2-400
400
[ . . .........
1
Оптический
130 х 140 мм
1SD210F2-600 | 600
л
1
Оптический
190 х 140 мм
Приведем краткое описание
некоторых драйверов из номенклатуры фирмы
«СТ-Concept». На рис. 2.3.47 показан
внешний вид драйвера 2SD315AI. Драйвер
имеет два канала и предназначается для
управления IGBT транзисторами,
включенными по полумостовой схеме.
Основные технические характеристики данного
драйвера:
• диапазон напряжений силовой цепи Рис Ш1л Висшний вид
модуля - 1200... 1700 В; драйвера 2SD315AI
• максимальный ток управления
затворами — ±15 В;
• напряжение электрической изоляции — 4000 В;
• встроенная гальванически развязанная схема питания;
• частота управляющего сигнала — до 100 кГц;
• встроенные узлы мониторинга питания и контроля насыщения
силового транзистора;
• гальванически изолированный выход сигнализации об аварии;
• электрический интерфейс управления;
• потребляемая мощность — не более 6 Вт;
• диапазон рабочих температур — минус 40...+85 °С;
• номинальное напряжение питания — 15 В;
• время задержки включения — 300 не;
• время задержки выключения — 350 не.
Структурную схему драйвера в этой книге мы не приводим, так
как она мало отличается от описанных ранее, а заинтересованного
читателя адресуем на сайт фирмы.
Более интересный вариант драйвера (в основном тем, что по ходу
чтения этой книги читатель сталкивается с ним впервые)
сконструирован, во-первых, для непосредственной установки на управляемый
модуль, а во-вторых, имеет оптоволоконный интерфейс управления,
который позволяет в значительной
степени улучшить помехоустойчивость
драйвера и разместить схему формирования
управляющих последовательностей в
любом удобном месте статического
преобразователя, хорошо защищенном от
электромагнитных помех. В данном случае
также можно не заботиться о сокращении
длины связей между схемой управления и
драйвером. 2.3.48. Внешний вид
Как видно из рис. 2.3.48, драйвер кре- драйвера с оптическим
пится непосредственно к штатным кре- управлением
пежным резьбовым отверстиям, расположенным на стандартном
IGBT модуле. На переднем плане располагаются два разъема
оптического интерфейса: один из них является входным, обеспечивающим
управление драйвером (FOL input), а второй — выходной, статусный
(FOL status output). Расположенный справа от оптических
интерфейсов электрический разъем предназначается для подачи на драйвер
напряжения питания 15 В. По выходному интерфейсу драйвер
особенностей не имеет. Именно применение подобных драйверов позволяет
превратить обычный IGBT модуль в интеллектуальный.
Завершая наш рассказ о разновидностях современных драйверов,
следует упомянуть так называемые IPS-драйверы, в составе которых
имеется мощная система диагностики исправного состояния, а также
программируемый микроконтроллер, определяющий стратегию работы
и защиты управляемого IGBT транзистора. Применение IPS-драйверов
оправдано в случае, если выход из строя IGBT модуля ведет к большим
финансовым потерям, например, есть смысл их установки в
преобразователи для тяговых двигателей электротранспорта.
IPS-драйверы позволяют индивидуально задать функции
цифровой фильтрации входных сигналов управления, обеспечить
многократное плавное отключение по многоуровневым критериям, легко
перенастраивать силовую схему при изменении условий эксплуатации
и обеспечить многоуровневую стратегию управления затворами
транзисторов в условиях последовательного подключения затворных
резисторов на протяжении цикла управления.
Примером IPS-драйвера может служить типономинал 1IPSD70PW17-
60А, производимый фирмой «IN-Power» [35]. Внешний вид платы
драйвера показан на рис. 2.3.49. Следует сказать, что фирмой
выпускаются драйверы на номинальное напряжение силовой цепи до 6500 В в
одноканальном и двухканальном исполнении.
Основные технические характеристики драйвера 1IPSD70PW17-60A:
• номинальное напряжение питания — 15 В;
• минимальное напряжение запуска — 12 В;
• выходное напряжение управления — ±15 В;
• выходной ток управления затворами — до ±70 А;
• максимальное напряжение силовой цепи — 1700 В;
• испытательное напряжение изоляции — 6000 В;
• частота переключения — до 100 кГц;
• задержка включения — 400 нс;
• задержка выключения — 400 нс;
• время плавного выключения — 1...2 мкс.
На рис. 2.3.50 показана функциональная схема драйвера. В составе
цифрового блока управления имеется программный фильтр, который
позволяет устранить возможные высокочастотные колебания входного
сигнала. Также цифровой блок управления контролирует аварийные
Рис. 2.3.49. Внешний вид IPS-драйвера 1IPSD70PW17-60A
Рис. 2.3.50. Функциональная схема драйвера 1IPSD70PW17-60A
информационные сигналы, обрабатывает их и принимает решение по
защите от аварийных режимов. При прохождении переднего фронта
сигнала управления цифровой фильтр выдает команду на запрет
контроля аварийного состояния и анализирует форму входного сигнала.
Если во входном сигнале высокочастотные колебания не
обнаруживаются, то после истечения времени 2 мкс включается выходной драйвер-
ный усилитель и активизируется схема контроля аварийного состояния.
Если же происходит обнаружение высокочастотных колебаний, фильтр
автоматически увеличивает постоянную времени, одновременно
анализируя причину возникновения колебаний.
Интересной особенностью драйвера является 4-х уровневый
контроль напряжения насыщения открытого силового транзистора с
оптимизированным временем контроля насыщения. Уровни контроля
насыщения следующие: 1 — 2,5 В (10 мкс); 2 — 4,0 В (5 мкс); 3 —
7,0 В (3 мкс); 4 — 10 В (2 мкс). Время обнаружения можно изменить
программно, а уровни контролируемого напряжения задаются аппа-
ратно, с помощью резисторов. В составе драйвера имеется панель
диагностики уровня напряжения насыщения, построенная на основе
светодиодных индикаторов. Следует отметить, что алгоритм
отключения драйвера также задается программно.
Разъем программирования драйвера установлен непосредственно
на плате и соединяется с компьютером посредством входящего в
комплект поставки кабеля через USB-порт или параллельный порт.
Изменять программное обеспечение драйвера можно не только на
стадии сборки преобразователя, но и когда драйвер уже установлен в
прибор, то есть в процессе его эксплуатации.
Несколько слов о конструктивном исполнении IPS-драйверов на
номинальное напряжение силовых цепей 6500 В. Обратите внимание
на рис. 2.3.51, на котором показана плата драйвера 1IPS70PW65-105.
Рис. 2.3.51. Высоковольтное исполнение драйвера 1IPS70PW65-105
Овальные вырезы в печатной плате — это дополнительные
электроизоляционные воздушные барьеры, с помощью которых
обеспечивается электрическая прочность изоляции гальванически развязанных
цепей до 10 500 В.
Примером IPS-драйвера может быть анонсированная фирмой
«Semikron» разработка типа SKYPER 52 с цифровой обработкой
управляющей информации. На рис. 2.3.52 показан внешний вид платы
драйвера типа SKYPER 52, а на рис. 2.3.53 — структурная схема этого
драйвера.
Рис. 2.3.52. Внешний вид драйвера SKYPER 52
На момент выхода книги вся представленная информация по
новому драйверу носит статус предварительной. Фирма-производитель
позиционирует эту разработку как драйвер нового поколения,
основанный на полномасштабной цифровой обработке сигналов,
поступающих не только от контролируемого транзистора, но также и от
сопутствующих датчиков (тока, напряжения, температуры). Входы
датчиков имеют гальваническую развязку с выходными сигналами, что,
по мнению специалистов фирмы, позволит разработчикам отказаться
от дорогостоящих датчиков с гальванической развязкой и упростить
силовую схему.
Технические характеристики датчика: работа с допустимым
напряжением «коллектор—эмиттер» силового транзистора до 1700 В; 2
гальванически развязанных канала управления для подключения
транзисторов «верхнего» и «нижнего» плеча; пиковый ток затвора до
50 А; номинальное напряжение управления затворами — до ±15 В;
частота переключения — до 100 кГц; устойчивость к
нарастанию/спаду напряжения силовой цепи — до 4 кВ/мкс; совместимость с управ-
лением от стандартных логических сигналов напряжением 5 В и
3,3 В; напряжение питания — 24 В постоянного тока; диапазон
рабочих температур — от минус 25 до +85 °С.
Рис. 2.3.53. Структурная схема драйвера SKYPER 52
Внутренняя схема драйвера имеет в своем составе выводы
диагностического интерфейса (diagnostic I/O), совместимого с CAN, выводы
основного интерфейса управления (совместимого с LVDS-логикой),
выводы функции «мягкой интеллектуальной защиты» (intelligent soft
turn-off), графический интерфейс GUI для визуализации процесса
настройки драйвера, интерфейс для подключения датчиков (sensor signal
insulated transmission). Дополнительная цифровая обработка
управляющих сигналов позволяет компенсировать температурную
зависимость работы статического преобразователя, а также исключить
факторы, связанные с временным старением компонентов. Функция
контроля аварийного состояния силовых транзисторов традиционна и
выражается в непрерывной оценке напряжения насыщения открытого
транзистора, а также стратегии «мягкого» отключения, подобранной
индивидуально для любого типа силового прибора (эти параметры
могут быть сконфигурированы в широких пределах через интерфейс
пользователя). Реализована интересная функция задания
индивидуальной стратегии отключения, согласно которой, в случае выявления
аварийного режима отключение может выполняться как по команде с
управляющего устройства, так и автоматически, в соответствии с
заложенным в драйвер алгоритмом. Схема диагностики запоминает не
только параметр, по которому произошло отключение, но и
фиксирует его конкретное значение в динамике, что может служить огромным
подспорьем в дальнейшем анализе возникшей аварийной ситуации.
2.4. Борьба с пусковыми токами, помехами
и пульсациями
В составе статических преобразователей для систем
электроснабжения, питаемых от сетей однофазного переменного тока 220 В 50 Гц
и трехфазного переменного тока 380 В 50 Гц традиционно
используется входное звено, осуществляющее преобразование переменного
сетевого напряжения в постоянное, которое затем трансформируется
посредством управляемого высокочастотного звена в переменное
напряжение импульсной формы. С момента появления
высокочастотных преобразователей входное звено по своему схемотехническому
построению не претерпело существенных изменений: традиционно
оно представляет собой каскадное соединение выпрямителя
(мостового или трехфазного, управляемого или неуправляемого) и
сглаживающего емкостного или индуктивно-емкостного фильтра.
Разработка таких схем, что называется, «в лоб», может привести к появлению
зарядных сверхтоков, во много раз превышающих рабочие токи
потребления. Поэтому разработчики силовой преобразовательной
техники применяют меры разной степени сложности для полного
исключения пусковых сверхтоков или их снижения до безопасных
значений. Поговорим подробнее об этих мерах.
В случае разработки маломощных высокочастотных статических
преобразователей (с выходной мощностью не более 200...300 Вт),
входное звено, питаемое от однофазной сети, сроится по хорошо
известной простейшей схеме, показанной на рис. 2.4.1.
Переменное напряжение 220 В 50 Гц здесь выпрямляется диодным
мостом VD1...VD4, пульсации выпрямленного напряжения
сглаживаются емкостным фильтром на основе конденсатора С. Поскольку
включение преобразователя в питающую сеть может произойти не
только в момент, когда сетевое напряжение близко к нулевому, но и
на его амплитуде, зарядный ток конденсатора С может легко вывести
из строя диодный мост, то есть вызвать эффект токового пробоя, если
не приняты меры по ограничению этого сверхтока. Понятно, что
ограничение зарядного тока в условиях близкого к нулевому импедансу
конденсатора С, может происходить только за счет активного
сопротивления токоведущих проводников (которое крайне мало), а это
значит, что, по сути, никакой защиты от аварийного режима в таком
случае быть не может. Чтобы все-таки исключить возникновение
аварийного режима, в состав входного звена вводится резистор R с
небольшим сопротивлением, ограничивающим зарядный ток. Этот
способ защиты широко используется в промышленных
преобразователях, даже несмотря на то, что в рабочем режиме резистор R вынужден
рассеивать тепловую энергию, а значит, несколько снижает КПД пре-
образователя в целом. Методы расчета номинала резистора R хорошо
известны, и с ними можно познакомиться, например, в [1] и [2].
Коэффициент полезного действия (КПД) схемы, показанной на
рис. 2.4.1, можно повысить, если применить вместо линейного
резистора R нелинейный термистор, сопротивление которого меняется в
зависимости от температуры. Что дает применение термистора? При
первоначальном пуске токовый импульс разогревает термистор, и его
сопротивление резко возрастает, обеспечивая снижение пускового тока.
В установившемся режиме потребления тока термистор
восстанавливает свое малое сопротивление (охлаждается), и тепловые потери
уменьшаются.
Рис. 2.4.1. Входное звено маломощных преобразователей
При разработке мощной преобразовательной техники
существенной становится проблема отвода выделяемого тепла, поэтому
разработчики стремятся максимально снизить тепловыделение, зачастую —
ценой значительного усложнения схемы построения. Соответственно,
описанный выше метод снижения пусковых токов здесь приходится
модифицировать. Рассмотрим подробнее такие модификации.
На рис. 2.4.2 приведена модифицированная схема ограничения
пусковых сверхтоков, часто применяемая в составе преобразователей
с номинальной выходной мощностью более 1 кВт. Как видно из
схемы, в составе первичного звена имеется уже знакомый нам
ограничительный резистор R, но, кроме этого, также введены дополнительные
элементы: контактор К1 подачи сетевого напряжения 3 х 380 В 50 Гц;
реле К2, шунтирующее токоограничительный резистор R; датчик
контроля выходного напряжения ДН. При первоначальном
включении замыкается контактор К1 и конденсатор С заряжается через ре-
Рис. 2.4.2. Схема ограничения пусковых токов на основе контактора
зистор R. При этом величина напряжения Uc на конденсаторе С
контролируется датчиком напряжения ДН. Когда напряжение Uc
достигает величины, необходимой для запуска звена высокочастотного
инвертора, замыкается реле К2, шунтируя резистор R, что
обеспечивает снижение тепловых потерь в установившемся режиме работы.
Каковы недостатки данной схемы? Во-первых, в состав звена
вводятся контакторы и реле с мощными контакторами, которые должны
допускать прохождение тока не ниже номинальной потребляемой
величины. Во-вторых, появляется дополнительная электронная схема на
основе датчика напряжения ДН, которая должна алгоритмически
отрабатывать задачу пуска и принимать решение об отключении
контактора К1, если напряжение на конденсаторе С не достигнет требуемой
величины за заданное время (напряжение питающей сети не
соответствует номинальному в меньшую сторону), или в процессе работы
произошел выход питающего напряжения за номинальные пределы.
Кроме этого, электронная схема должна обеспечить задержку
повторного пуска после отключения преобразователя, в противном случае
преобразователь может выйти на режим питания с разомкнутым реле
К2, а это однозначно приведет к недопустимому разогреву токоогра-
ничительного резистора R. Тем не менее, описанная схема в
авторском варианте использована при разработке серийного статического
преобразователя трехфазного напряжения 380 В 50 Гц в трехфазное
напряжение 220 В 400 Гц мощностью 6 кВА. В процессе шестилетней
эксплуатации узел ни разу не отказал и зарекомендовал себя по
параметру надежности с лучшей стороны.
Более сложная (но и более эффективная) схема ограничения
сверхтоков, использованная при разработке преобразователя
постоянного тока мощностью 12 кВт, приведена на рис. 2.4.3.
Рис. 2.4.3. Схема ограничения пусковых токов на основе IGBT транзистора
Эта схема ограничения сверхтоков кардинально отличается от
описанных выше, так как построена на основе чопперного регулятора
напряжения [1]. В ней используется IGBT транзисторная сборка VT1
типа CM200DY-24A (производитель — «Mitsubishi Electric») со
встроенными ультрабыстрыми диодами. Дроссели LI, L2 и конденсатор С2
образуют фильтр пульсаций выпрямленного напряжения.
Конденсатор С1 защищает схему от выбросов напряжения при работе. Кроме
того, в схеме имеются: датчик тока ДТ типа LA55P и датчик
напряжения ДН типа LV25P (производитель — ОАО «Твелем»), драйвер ДР
управления «верхним» транзистором IGBT-сборки (производитель —
ЗАО «Электрум АВ»), схема управления СУ.
В момент включения преобразователя в сеть транзистор VT1.1
переводится в проводящее состояние, начинается заряд конденсатора С2.
При достижении пускового тока некоторого установленного значения,
схема управления СУ прерывает ток, который далее начинает
снижаться до другого установленного значения, транзистор VT1.1 вновь
переводится в проводящее состояние, и процесс повторяется. Причем
цикличность этого процесса продолжается до тех пор, пока не сработает
датчик напряжения ДН, свидетельствующий о достижении напряжения
на конденсаторе С2 уровня, необходимого для запуска
высокочастотного инвертора. Датчик ДН через схему управления блокирует
транзистор VT1.1 в открытом состоянии, и далее происходит запуск
высокочастотного инвертора. Главное достоинство этой схемы очевидно: с ее
помощью можно достичь значения пускового тока, не превышающего
значения потребляемого номинального тока в установившемся режиме
работы (естественно, за счет увеличения времени заряда конденсатора
С2). К сожалению, и данное схемотехническое решение оказалось
достаточно сложным с точки зрения своей реализации: в состав
преобразователя пришлось ввести ряд непростых функциональных узлов,
которые используются по прямому назначению преимущественно в момент
первоначального пуска, и в дальнейшем не несут никакой
функциональной нагрузки. Кроме того, схема по рис. 2.4.3 в процессе
эксплуатации показала себя гораздо менее надежной, чем схема по рис. 2.4.2.
Можно построить входное звено статического преобразователя с
применением тиристора в качестве ключевого элемента,
шунтирующего зарядный резистор. На рис. 2.4.4 показан вариант такого звена,
достаточно хорошо известный разработчикам силовой техники. Но
это — не самое лучшее техническое решение, так как тиристор имеет
4-слойную структуру, из-за чего падение напряжения на нем тоже
велико, а значит, рассеивается дополнительная тепловая энергия.
Возможно ли найти скрытые возможности традиционных
элементов входных цепей статических преобразователей, чтобы обеспечить
надежную защиту от сверхтоков? Давайте обратимся к рис. 2.4.5, на
котором состав входного звена мощного статического преобразовате-
Рис. 2.4.4. Вариант входной цепи с использованием тиристора в качестве
ключевого элемента
Рис 2.4.5. Входное звено мощного преобразователя
ля обозначен подробнее. В составе звена имеется, во-первых, сетевой
дроссель L1, ограничивающий распространение высокочастотных
гармоник в питающую сеть и гасящий коммутационные
перенапряжения. Кроме этого, в составе силовой схемы предусмотрен помехо-
подавляющий фильтр (ППФ) модульного исполнения,
задерживающий высшие гармоники помех (радиопомехи). Элементы фильтра
подавления пульсаций выпрямленного напряжения L2, С тривиальны, а
потому не требуют пояснений.
Использовать ППФ в качестве ограничителя пусковых токов не
получится, так как эта функция ему не свойственна, а вот близкие к
этой задаче функции выполняют дроссели L1 и L2. Их, как оказалось,
можно «нагрузить» еще и на выполнение задачи ограничения
пусковых токов. Вот здесь необходимо сделать небольшое «лирическое»
отступление и сказать несколько добрых слов в адрес сетевых
дросселей, выпускаемых фирмой «Elhand» [36]. Внешний вид наиболее
интересных в данном случае типов дросселей показан на рис. 2.4.6, а—д.
Зачем вообще нужны сетевые дроссели? Это — очень важный
элемент силовой схемы мощного статического преобразователя, который
служит буфером между питающей сетью и самим преобразователем.
Сетевой дроссель выполняет несколько очень существенных функций:
он повышает коэффициент мощности статического преобразователя в
среднем на 30...35 %, не прибегая к сложным схемотехническим
ухищрениям; подавляет высшие гармоники входного тока преобразователя,
возникающие в неуправляемом выпрямителе; выравнивает линейные
напряжения на входе преобразователя при некотором перекосе фаз
Рис. 2.4.6. Внешний вид некоторых типовых дросселей фирмы «Elhand»
питающего напряжения; подавляет быстрые изменения напряжения
на входе преобразователя вследствие коммутационных воздействий
стороннего оборудования на питающую сеть; снижает скорость
нарастания токов короткого замыкания. Тот, кто мало-мальски сталкивался
с силовой техникой, знает, что питающее сетевое напряжение под
влиянием работы высокочастотных преобразователей, потребляющих
ток от сети в импульсном режиме, подвержено искажениям. Сетевые
дроссели призваны гасить эти помехи и снижают риск попадания
гармоник в питающую сеть. Более того, если в качестве силовых ключей
используются тиристоры, сетевые дроссели гарантированно
обеспечивают защиту их от лавинного нарастания тока проводимости вплоть до
момента переключения [37].
Мы уже говорили ранее, что любой статический преобразователь
характеризуется определенным значением коэффициента мощности,
связанным с его схемотехническим построением. За счет чего
снижается коэффициент мощности? За счет появления реактивной
составляющей потребляемой мощности и увеличения потребления полной
мощности по сравнению с активной. В потребляемом от сети токе
появляются, кроме основной, высшие гармоники — 5, 7, 11, 13, 17, 19.
В соответствии с известным соотношением коэффициент мощности:
где 1{ — ток основной гармоники;
/5, /7, /и — токи гармоник высших порядков.
Нетрудно заметить, что чем больше действующие значения
высших гармоник тока, тем меньше коэффициент мощности, и тем
больше влияние статического преобразователя на питающую сеть. Однако
здесь есть одно важное обстоятельство, которое нас выручает:
реактивное сопротивление, присутствующее в питающей сети (это могут быть
различные реактансы трансформаторов питающих подстанций),
может существенно подавлять высшие гармоники. К сожалению,
трансформаторных реактансов далеко не всегда хватает для эффективного
подавления гармоник, поэтому приходится для преобразователей эти
реактансы увеличивать, искусственно вводя сетевые дроссели.
Выбрать соответствующий дроссель фирмы «Elhand» для
установки в разрабатываемый преобразователь достаточно просто. Главным
условием выбора является соотношение индуктивности подводящих
проводов (с учетом реактанса питающего генератора или
трансформатора) Ls и собственно индуктивности сетевого дросселя Ld:
(2.4.2)
где UT — величина напряжения на силовом приборе в момент его
коммутации, В;
diT/dt — крутизна нарастания тока проводимости силового
прибора, А/с.
Оценить параметры UT и diT/dt в случае использования IGBT
приборов несложно — эти данные можно получить из анализа величины
выпрямленного питающего напряжения, а также скорости нарастания
тока при переключении, который определяется характером нагрузки
преобразователя (активная, индуктивная, комбинированная) и
скорости коммутации IGBT приборов.
Значительно сложнее оценить значение Ls, так как заранее
неизвестно, как будет питаться преобразователь, от какого источника,
какой длины окажутся питающие проводники, какой будет их длина и
конфигурация. Поэтому фирма «Elhand» рекомендует в любом случае
устанавливать в разрабатываемый преобразователь сетевой дроссель,
ориентируясь по величине тока, потребляемой от сети. С этой целью,
для облегчения такого выбора, специалисты «Elhand» разработали
типовой ряд трехфазных дросселей типа ED3N. Некоторые типономи-
налы из этого ряда приведены в табл. 2.4.1.
Основным проектировочным критерием здесь является
допустимое падение напряжения на дросселе в нагруженном состоянии,
которое не должно превышать нескольких процентов от номинального
напряжения сети:
(2.4.3)
где UL — падение напряжения на дросселе;
/— частота напряжения сети;
Таблица 2.4.1. Некоторые типономиналы дросселей ED3N
Тип
Параметры, мГн/А
Длина, мм
Ширина, мм
Высота, мм
Масса, кг
ED3N
8,5/3,3
125
85
105
2,3
0,5/70
230
170
200
18
0,15/150
240
190
207
24
0,05/400
340
200
295
47
0,03/800
360
245
360
78
Ld — проектная индуктивность дросселя;
/ — номинальный ток обмотки дросселя.
Следует отметить, что фирма «Elhand» выпускает также моторные
трехфазные дроссели ряда ED3S, предназначенные для обеспечения
непрерывности протекания тока в обмотках двигателей [38], а также
однофазные дроссели компенсации гармоник частоты 100 Гц и 300 Гц
типа ED1N и ED1W. Трехфазные моторные дроссели типа ED3S, в
принципе, можно использовать в качестве сетевых, а однофазные
типа ED1N и ED1W — в качестве сглаживающих элементов сетевых
LC-фильтров.
Конечно, дроссели как таковые, являются достаточно
тривиальными элементами, которые можно изготавливать в условиях даже
очень небольших производственных фирм. Почему же все-таки
рекомендуется ориентироваться на покупные дроссели? Ответ очень
прост: действительно, теоретически разработать и изготовить любой
дроссель несложно, однако не будем забывать о трудозатратах на
изготовление, о технологической стороне вопроса, о длительных сроках
эксплуатации преобразовательной техники, которая зачастую
вынуждена функционировать в жестких климатических и механических
условиях среды. Дроссели промышленного изготовления, в частности,
поставляемые фирмой «Elhand», полностью отвечают этим
требованиям: они производятся фирмой со специализированной отработанной
технологией, имеют низкую стоимость, прочны механически,
пропитаны вакуумным способом (что позволяет сохранить высокое
сопротивление изоляции в условиях повышенной влажности), оснащаются
удобными для монтажа клеммами, оптимизированы по габаритам.
К сожалению, на момент выхода этой книги из печати полные
отечественные аналоги таких дросселей отсутствовали, что ставит в
затруднительное положение отечественных разработчиков спецтехники.
Но вернемся к вопросу использования сетевых дросселей для
ограничения пусковых токов. Автором книги с помощью
компьютерного моделирования в пакете MicroCAP 7.0 была проанализирована
реальная схема входной части статического преобразователя мощностью
12 кВт, с сетевым дросселем ED3N и дросселями подавления
пульсации 300 Гц типа ED1W, показанная на рис. 2.4.7.
Рис. 2.4.7. Схема входного звена с использованием дросселей «Elhand»
Дроссель L1 — сетевой, дроссели L2, L3 входят в состав LC-фильт-
ра. Диодный мост типа 160МТ120КВ (производитель — international
Rectifier»), емкостная часть фильтра составлена из 12 конденсаторов
типа B43586-A5687-Q (производитель — «Epcos») с эквивалентной
емкостью 1020 мкФ. Фильтр радиопомех, в силу его незначительного
влияния на процесс ограничения сверхтоков, из модели исключен.
Результаты моделирования показаны на рис. 2.4.8. Из
представленного графика видно, что пусковой ток, протекающий через диоды
VD1...VD6, не превышает допустимого для диодов, а переходный
процесс длится не более 10 мс, что не приведет к срабатыванию
установленного на входе преобразователя автоматического выключателя типа
АК-50Б (максимальная токовая защита) с номинальным током 25 А и
уставкой 121н.
Рис. 2.4.8. Результаты моделирования пусковых токов
Таким образом, сетевой дроссель L1 выполняет две функции: в
момент включения он совместно с дросселями L2 и L3 защищает
диодный мост от возникновения сверхтоков, а в режиме
продолжительной работы осуществляет подавление высокочастотных гармоник.
Процесс массового внедрения статических преобразователей
электроэнергии остро поставил проблему их электромагнитной
совместимости (ЭМС) с другими техническими средствами — такими,
например, как средства радиоприема, радиосвязи, беспроводного
мониторинга и т. д. Чуть выше мы кратко обмолвились о том, что плохо
спроектированные статические преобразователи однозначно являются
источниками значительных электромагнитных помех, излучаемых в
широкой полосе частот. Поэтому, чтобы исключить влияние
преобразовательной техники на другие технические средства, необходимо
уделить внимание снижению так называемых кондуктивных
(распространяемых по проводникам) и излучаемых в пространство помех, тем
более, что их допускаемые уровни регламентируются государственными
и международными стандартами.
Давайте определим общие принципы локализации источников
помех, чтобы следовать им при разработке собственных преобразователей
электроэнергии. Этот общий подход может быть сведен к следующим
мерам:
а) подавление источника помехи — осуществляется созданием
оптимальной конструкции прибора, уменьшением длины
межэлементных связей, сокращением площади заземленных контуров,
гальванической развязкой цепей питания;
б) экранирование — весьма эффективный способ ослабления
любых излучений, выполняется путем применения металлических
экранов, токопроводящих напылений, заключением в экранирующие
оболочки токоведущих проводников;
в) фильтрация — наиболее часто используемый способ для
подавления кондуктивных помех, реализуется путем установки в разрывы
токоведущих цепей фильтров подавления высокочастотных гармоник.
При разработке мероприятий по снижению электромагнитных
помех очень важно правильно локализовать их источники и связанные с
ними параметры: характер распространения помехи, ее длительность и
регулярность (периодичность), форму помехи, энергетический спектр,
частотную область излучения. Для статических преобразователей
наиболее актуальной является задача борьбы с кондуктивными помехами,
то есть такими помехами, которые распространяются по токоведущим
проводникам. Эффективная борьба с кондуктивными помехами
начинается с их классификации по далее приведенным признакам.
Познакомимся с ними.
По характеру распространения кондуктивные помехи делятся на:
а) симметричные — напряжение помехи прикладывается между
фазным и нейтральным силовыми проводниками;
б) несимметричные (общего вида) — напряжение помехи
прикладывается между фазным (нейтральным) силовым проводником и
«землей» (заземляющим проводником).
По длительности и регулярности помехи подразделяются на:
а) непрерывные (стационарные) — возникающие при
продолжительной работе высокочастотных ключевых инверторов;
б) кратковременные — имеющие нестационарный характер и
возникающие в различных переходных режимах, например, при
включении или отключении нагрузок;
в) регулярные — возникающие при переходе статических
преобразователей из одного режима работы в другой, например, в режим
перегрузки;
г) случайные — не имеющие отношения к функционированию
преобразователя и возникающие под действием случайных внешних
факторах, например, при грозовых разрядах.
По форме генерируемой помехи существует следующее деление:
а) моносинусоидальные — имеющие в своем составе одну гармонику;
б) полисинусоидальные — имеющие в составе ограниченное
число гармоник;
в) импульсные — обладающие непрерывным гармоническим
спектром.
По энергетическому спектру:
а) узкополосные — обладающие узким спектром с максимумом на
частоте основной гармоники преобразования;
б) широкополосные — имеющие широкий спектр излучения.
По области частот:
а) низкочастотные — на частотах ниже 9 кГц;
б) высокочастотные — в полосе частот от 9 до 150 кГц;
в) радиочастотные — на частотах более 150 кГц.
Обычно при проектировании статических преобразователей
рассматривают ряд типовых ситуаций, позволяющих в значительной
степени снизить уровень помех. Одной из таких ситуаций является
правильная реализация заземления прибора. Если проводники системы
заземления выбраны неправильно, также неверно осуществлено
подключение проводника к контуру заземления преобразователя, это
может послужить либо дополнительным источником помех, либо свести
«на нет» все меры по их снижению, предпринятые посредством
установки фильтров. Традиционный подход к заземлению строится только
на необходимости обеспечить электробезопасность при работе с
приборами, однако в случае высокочастотной преобразовательной техники
контур заземления обеспечивает еще и единый опорный потенциал.
Исключение высокочастотных помех, генерируемых инверторами и
наводимых в питающих проводниках — другая немаловажная защита по
обеспечению электромагнитной совместимости. С этой целью на входе
статического преобразователя обычно устанавливают сетевой фильтр
электромагнитной совместимости (ЭМС), который реализуется на
основе каскадного Г- или П-образного соединения емкостных и индук-
тивных элементов. Конденсаторы, устанавливаемые в фильтрах между
фазным проводником и проводником заземление (Y-конденсаторы),
снижают несимметричные помехи, а конденсаторы, устанавливаемые
между фазными проводниками (Х-конденсаторы), снижают помехи
симметричного типа. Кроме этого, в составе фильтров ЭМС часто
можно встретить дроссели (в том числе и многообмоточные), которые
включаются в разрыв фазных проводников. Согласное включение
дроссельных обмоток приводит к подавлению несимметричных помех, а
встречное — симметричных. Следует обратить внимание разработчиков
силовой преобразовательной техники на то, что проектирование
фильтров ЭМС — задача достаточно трудоемкая, поэтому имеет смысл
применять (где это, конечно, возможно) покупные фильтры, разработанные и
серийно поставляемые специализированными фирмами. К счастью,
изготовлением и поставкой таких фильтров занято большое количество
фирм, поэтому недостатка в выборе подходящего по электрическим
параметрам и габаритам изделия не будет. Для справки, с помощью
фильтров ЭМС типовых конструктивных исполнений удается снизить помехи
почти в 1000 раз в диапазоне 0,5... 10,0 МГц. На более высоких частотах
их эффективность падает, поэтому приходится, где такое подавление
помех важно, прибегать к более сложным техническим решениям.
Статические преобразователи, как правило, представляют собой
существенно нелинейную нагрузку для питающей сети, а это значит,
что в питающей сети, как правило, появляются искажения синусоиды
напряжения. Наиболее характерным случаем в трехфазных сетях
следует считать появление 5-й и 7-й гармоники тока, поскольку типовые
схемы выпрямления сетевого напряжения имеют в своем составе
трехфазные мосты (обычно построенные по схеме Ларионова). С учетом
того, что другие потребители сетевого напряжения могут быть не
рассчитаны на наличие в сети высокого уровня гармоник, кратных
основной, включенный в сеть статический преобразователь будет оказывать
на них негативное влияние, которое может привести к авариям.
Именно поэтому действующие стандарты ограничивают величину
допустимого значения гармоник на уровне 9 % (в оценочных нормах величина
первой гармоники принята за 100 %) для 5-й гармоники и 5,25 % для
7-й гармоники.
Каким образом осуществляется выбор фильтра подавления
электромагнитных помех? Подход к этой задаче индивидуален в каждом
конкретном случае, но все-таки возможно выделить некоторые общие
принципы. Обычно необходимо учесть электрические характеристики
преобразовательных схем, требования по степени подавления помех,
частотные характеристики фильтруемых цепей (частоты среза,
частоты ослабления и другие характерные параметры), условия
эксплуатации и конструктивные ограничения, связанные с возможностью
установки того или иного фильтра в прибор.
Наиболее часто встречаются следующие типовые фильтрующие
схемы:
а) фильтр С-типа (рис. 2.4.9, а) — представляет собой
стандартный проходной конденсатор, шунтирующий помеху на «землю»;
такой фильтр можно применять в случаях, если источник сигнала (в
том числе — силовое питание) и нагрузка имеют достаточно высокий
импеданс; крутизна спада частотной характеристики такого фильтра
составляет 20 дБ/дек;
б) фильтр Г-типа (рис. 2.4.9, б) — фильтр LC-типа, имеет
крутизну спада около 40 дБ/дек, применяется при существенно
различающихся импедансах источника сигнала и нагрузки, а именно — при
низкоомной нагрузке;
в) фильтр П-типа (рис. 2.4.9, в) — другой вариант LC-фильтра,
представляющий собой комбинацию фильтров С-типа и Г-типа;
применяется при наличии примерно равных по величине высоких импе-
дансов источника и нагрузки; крутизна спада частотной
характеристики фильтра составляет 60 дБ/дек;
г) фильтр Т-типа (рис. 2.4.9, г) — применяется в случае низких
импедансов источника и нагрузки; крутизна спада характеристики
данного фильтра составляет 60 дБ/дек.
Рис. 2.4.9. Типовые схемы фильтров подавления ЭМП
Достаточно часто в схемах преобразовательной техники можно
встретить комбинации указанных выше простых фильтров,
соединенных каскадно, например, включенные друг за другом два Т-фильтра
или два П-фильтра. Каскадное соединение применяется в случае,
если необходимо достичь более эффективного подавления помех в
области низких частот диапазона помех, а также получить более
высокую крутизну спада частотной характеристики.
А теперь — о промышленных образцах фильтров, которых, как мы
уже говорили, выпускается огромное количество. Различаются они
как электрическими характеристиками, так и конструктивным
исполнением, поэтому в рамках нашей книги едва ли удастся рассказать о
всем многообразии представленных типономиналов, порой весьма и
весьма экзотических. Мы обратимся к наиболее характерным
образцам.
Достаточно большую номенклатуру фильтров подавления
электромагнитных помех выпускает фирма «Epcos» [39]. Эти фильтры можно
применять в составе статических преобразователей с номинальными
мощностями от единиц киловатт до десятков киловатт, поскольку
диапазон номинальных токов разных исполнений фильтров составляет от 4
до 50 А. На рис. 2.4.10 показан внешний вид фильтра B84143-A25-R105,
рассчитанного на эксплуатацию в составе статических
преобразователей, питаемых от трехфазной сети переменного тока 380 В 50 Гц.
Номинальный фазный ток фильтра составляет 25 А. Конструктивно все
элементы электрической схемы фильтра размещены в металлическом
экранирующем корпусе. С противоположных сторон корпуса закреплены
терминальные контактные зажимы «под винт». Для справки, данный
фильтр был применен автором в составе серийного статического
преобразователя на мощность 12 кВт и показал себя с лучшей стороны,
надежно подавляя электромагнитные помехи.
Рис. 2.4.10. Внешний вид фильтра B84143-A25-R105
На рис. 2.4.11 показана электрическая схема фильтра. К
сожалению, производитель не счел нужным указать на ней номиналы
входящих элементов (как это иногда делают другие производители
модульных фильтров), поэтому можно сказать лишь то, что данная схема
представляет собой П-образный тип LC-фильтра. Конденсаторы,
стоящие слева от индуктивного элемента (они включены по схеме
Рис. 2.4.11. Электрическая схема фильтра B84143-A25-R105
«звезда»), предназначены для подавления симметричных помех, а
стоящие справа — для несимметричных. На контакты, обозначенные
как LINE, подается сетевое напряжение, а нагрузка (преобразователь)
подключается к контактам LOAD.
На рис. 2.4.12 приведена частотная характеристика описываемого
фильтра, измеренная для случаев подавления симметричных и
асимметричных помех. Из нее видно, что з случае применения данного
фильтра удается достичь подавления электромагнитных помех в
среднем на 20 дБ в диапазоне 10... 100 кГц (обычно в этом диапазоне
лежат частоты основной гармоники, генерируемой высокочастотными
инверторами), а максимальный уровень подавления лежит на частоте
200-300 кГц, составляя 80 дБ. Интересно также отметить: в диапазоне
1...100 МГц наблюдается равномерное спадание частотной
характеристики, связанное с влиянием паразитных конструктивных индуктив-
ностей и емкостей (индуктивности монтажа, межобмоточные
дроссельные емкости и т. д.).
Нельзя не упомянуть еще одного производителя,
специализирующегося на выпуске фильтров подавления электромагнитных помех —
швейцарскую фирму «Schaffner» [40]. Номенклатура ее изделий столь
широка, что мы не сможем остановиться на каждом наименовании, а
для примера упомянем серию типа FN612. Фильтры этой серии
предназначены для работы в диапазоне номинальных токов до 100 А и могут
эксплуатироваться как в цепях постоянного тока, так и переменного с
частотой основной гармоники напряжения до 400 Гц.
Рис. 2.4.12. Частотная характеристика фильтра B84143-A25-R105
На рис. 2.4.13 показан внешний вид
фильтра типономинала FN-612-3 с
номинальным током 3 А. Как и в предыдущем
случае, конструктивно фильтр
представляет собой металлическую коробку, внутри
которой расположены элементы
электрической схемы. Фирма предлагает
несколько исполнений терминальных выводов
подключения: «под винт», «под пайку» и
«под гайку».
Внутренняя электрическая схема
фильтра приведена на рис. 2.4.14.
Производитель указывает следующие номиналы элементов, входящих в
схему: R - 1 МОм, Сх - 0,1 мкФ, Су - 2200 пФ, L - 2 мГн.
Рис. 2.4.13. Внешний вид
фильтра FN612-3
Рис. 2.4.14. Электрическая схема фильтра FN612-3
Частотная характеристика фильтра показана на рис. 2.4.15.
Измерение частотной характеристики проводилось производителем в
следующих условиях: кривая А — подавление симметричной помехи при
нагружении входа и выхода сопротивлением 50 Ом, кривая В —
подавление несимметричной помехи при нагружении входа и выхода
сопротивлением 50 Ом, кривая С — подавление симметричной помехи при
нагружении входа сопротивлением 0,1 Ом и выхода сопротивлением
50 Ом, кривая D — подавление несимметричной помехи при
нагружении входа сопротивлением 0,1 Ом и выхода сопротивлением 50 Ом.
Рис. 2.4.15. Частотная характеристика фильтра FN612-3
Достаточно большой класс используемых компонентов
подавления электромагнитных помех составляют так называемые проходные
фильтры, построенные по типовым С- и П-схемам. Применение этих
фильтров целесообразно в тех случаях, когда есть необходимость
жесткого подавления ЭМП в диапазонах от 10 МГц и выше. К примеру,
внешний вид фильтра типа FN7560-10-M3 с номинальным током
10 А, выпускаемого той же фирмой «Schaffnen>, показан на рис. 2.4.16,
а), а его электрическая схема — на рис. 2.4.16, б). Как видно из этого
рисунка, проходной фильтр представляет собой цилиндрический
корпус, в торцах которого встроены терминальные выводы, один из
которых подключается к источнику, а другой — к нагрузке.
Электрический контакт с «землей» обеспечивается гайкой, с помощью которой
фильтр крепится к корпусу преобразователя.
Рис. 2.4.16. Проходной фильтр типа FN7560-10-M3
Наверняка у читателей сейчас возник вопрос: «А почему нельзя
обойтись обычным конденсатором, подключив его к токоведущему
проводнику и к корпусу?» Теоретически, конечно, это сделать можно,
и зачастую такие решения встречаются в реальных приборах. Однако,
поскольку на столь высоких частотах ЭМП начинают в значительной
степени проявляться разнообразные паразитные параметры простых
конденсаторов (паразитная индуктивность выводов и т. д.),
эффективность такого способа подавления помех окажется невысокой и
даже может вовсе отсутствовать. Поэтому и пришлось разработать
такие конструкции фильтров, которые позволяют обеспечить
непрерывность экранировки корпусов, свести к минимуму влияние паразитных
параметров, выполнить удобное подключение источников и нагрузок.
Частотная характеристика фильтра FN7560-10-M3 показана на
рис. 2.4.17. Из нее видно, что фильтр эффективно работает даже на
частотах подавления порядка 1 ГГц.
В случаях, когда эффективность подавления ЭМП в области
низких частот работы проходных фильтров необходимо повысить,
применяют комбинированные схемы П-типа. На рис. 2.4.18 показаны
Рис. 2.4.16. Проходной фильтр типа FN7560-10-M3
Рис. 2.4.17. Частотная характеристика фильтра FN7560-10-M3
Рис. 2.4.18. Проходной фильтр типа FN7661-16-M4
внешний вид (рис. 2.4.18, а) и электрическая схема (рис. 2.4.18, 6)
фильтра типа FN7661-16-M4.
Из частотной характеристики данного фильтра (рис. 2.4.19) видно,
что его эффективная работа обеспечивается начиная с частоты 1 МГц.
К сожалению, и здесь приходится в очередной раз констатировать
факт, что отечественная промышленность значительно отстает от об-
Рис. 2.4.19. Частотная характеристика фильтра FN7661-16-M4
щемировых фирм в производстве фильтров подавления радиопомех.
Когда автору этой книги была поставлена задача заменить в своих
разработках импортные фильтры радиопомех на их отечественные
аналоги, ему не удалось подобрать готовые варианты, и пришлось
разрабатывать фильтры самостоятельно, на основе дискретных
элементов. Тем не менее, все-таки кое-что из отечественной серийной
комплектации подобрать удалось. В качестве примера отечественных
проходных фильтров имеет смысл упомянуть продукцию ОАО «Гири-
конд» (г.Санкт-Петербург) [41]. Фирма выпускает следующую
номенклатуру проходных фильтров С-типа, приведенную в табл. 2.4.2.
Рабочие токи данных фильтров не превышают 25 А.
Таблица 2.4.2. Номенклатура проходных фильтров ОАО «Гириконд»
Тип фильтра
Диапазон частот
помехоподавления
Номинальное
напряжение, В
Номинальная
емкость, мкФ
Б23Б-1М, Б23Б-2М
10кГц...Ю ГГц
50, 250, 500
68 пФ...6,8 мкФ 1
Б24
700 кГц... 10 ГГц
100, 250
43 пФ...0,01 мкФ |
Б25-1, Б25-2, Б25-3
1 кГц... 10 ГГц
50, 80, 160, 250, 500
68пФ...10мкФ |
Б25-4
25 кГц... 10 ГГц
50, 80, 100, 250
470 пФ...0,33 мкФ [
Для примера на рис. 2.4.20 показан внешний вид фильтров типа
Б23Б с внутненней электрической схемой, а на рис. 2.4.21 —
зависимость степени подавления помех от частоты. График, представленный
на рис. 2.4.21, составлен для девяти типоисполнений фильтров,
различающихся значением емкости.
Рис. 2.4.20. Внешний вид и электрическая схема фильтров типа Б23Б
Рис. 2А.21. График зависимости степени подавления от частоты для фильтра
Б23Б
Очень часто в состав входных цепей преобразователей включается
дополнительный силовой элемент, называемый линейным реактором
(line reactor) или моторным дросселем. Линейный реактор
представляет собой обычный трехобмоточный дроссель, включаемый в силовую
схему статического преобразователя. Мы уже говорили о том, что этот
элемент, будучи установленным на входе преобразователя, выполняет
функции снижения влияния на питающую сеть. Но еще одна важная
его функция — это снижение гармоник, кратных основной гармонике
напряжения питания.
Включение трехфазного выпрямителя по схеме Ларионова с
емкостным фильтром на выходе непосредственно в питающую сеть крайне
нежелательно, поскольку потребление тока от сети (рис. 2.4.22) здесь
характеризуется наличием коротких импульсов, богатых высшими
гармониками. Но если мы обратимся к рис. 2.4.23, на котором показана форма
тока в той же схеме, но при условии установки между сетью и входом
выпрямителя линейного реактора, то заметим, что суммарный фазный ток
Рис. 2.4.22. Форма фазных токов при отсутствии линейного реактора
Рис 2.4.23. Форма фазных токов при наличии линейного реактора
стал близким к синусоидальному, а значит, уменьшился уровень
гармонических искажений и повысился коэффициент мощности.
В качестве практических рекомендаций по проектированию
мощных статических преобразователей электроэнергии разработчику
можно посоветовать придерживаться следующих типовых структурных
схем их построения для обеспечения требуемого уровня подавления
электромагнитных помех: по рис. 2.4.24, а — для частотного
управления асинхронными двигателями, и по рис. 2.4.24, б, — для остальных
Рис. 2.4.24. Рекомендуемые структурные схемы снижения ЭМП
применений. В любом случае результат снижения электромагнитных
помех достигается комбинированным способом последовательного
включения фильтра подавления ЭМП и линейного дросселя на входе
преобразователя.
Одним из наиболее сложных в плане подавления
электромагнитных помех является случай применения статических преобразователей
для управления асинхронными двигателями, и вот почему. Как
правило, электродвигатель подключается к преобразователю посредством
кабеля, длина которого может составлять десятки метров. Поскольку
форма напряжения в этом кабеле имеет характер широтно-модулиро-
ванных импульсов высокой частоты, неизбежно появление помех.
Рассмотрим типовую схему управления электродвигателем (рис. 2.4.25)
детально, чтобы определить источники помех и выработать
рекомендации по их минимизации.
Рис. 2.4.25. Минимизация помех в схемах управления электродвигателями
Как мы уже упомянули раньше, фильтр радиопомех традиционно
имеет конденсатор подавления синфазных помех, который
подключается к корпусу прибора и замыкает ток помехи на «землю». С другой
стороны, наличие между проводниками и экранной плеткой силового
кабеля связи с электродвигателем образует контур протекания тока
следующей конфигурации: «конденсатор фильтра радиопомех» —
«паразитная емкость кабеля» — «корпус прибора» — «корпус двигателя».
В этом контуре, благодаря наличию силовых токов высокой частоты
Лл Iv> Iw (выходных токов преобразователя), наводится так называв-
мый синфазный ток /см (другое его название — ток нулевой
составляющей). Этот ток протекает по внутренней стороне экрана кабеля,
поскольку сопротивление экрана, как правило, намного меньше
сопротивления заземления. Наличие синфазного тока, таким образом,
является неизбежным при работе частотного электропривода,
поэтому контур протекания этого тока должен иметь надежные
электрические контакты в местах соединения разнородных составляющих
контура (например, в месте соединения экрана кабеля с корпусом
преобразователя и с корпусом двигателя), чтобы ток циркулировал внутри
контура и не выходил за его пределы. Именно так можно значительно
минимизировать величину излучаемых электромагнитных помех.
При разработке статических преобразователей для реализации
асинхронного электропривода особое внимание нужно уделить
конструктивным мерам, позволяющим обеспечить надежное электрическое
соединение экранов кабелей с корпусами. Велико искушение здесь
поступить традиционным способом скрутки жил экрана и
подключить его к корпусному лепестку, однако этого делать не следует, так
как в месте подключения неизбежно образуется участок с высоким
сопротивлением, который нарушит непрерывность экранирования и
будет служить источником помех. Следует учитывать, что протекание
высокочастотных токов характеризуется наличием скин-эффекта,
вытесняющего токи к поверхности проводника. Поэтому место
подключения экрана к корпусу должно иметь как можно большую площадь
соприкосновения. Выручит здесь применение токопроводящего
обжимного сальника ввода кабелей (рис. 2.4.26, а) или использование
крепежного хомута (рис. 2.4.26, б).
Рис 2.4.26. Способы правильной заделки экранной оплетки
Какие кабели следует использовать для подключения
электродвигателей? Однозначно нельзя использовать неэкранированные четы-
рехпроводные кабели, так как четвертый проводник не сможет
выполнить условие непрерывности экранировки. Ведущие мировые
производители рекомендуют применять кабели, конфигурация сечения
которых показана на рис. 2.4.27, я. Допускается также использование
Рис. 2.4.27. Рекомендуемые сечения кабелей подключения
электродвигателей
Рис. 2.4.28. Конструкция кабеля подключения электродвигателя
кабелей с сечением, показанным на рис. 2.4.27, б. Проводник
защитного заземления РЕ в этом случае можно проложить вне кабеля.
Однако наиболее предпочтительная конструкция силового кабеля
показана на рис. 2.4.28.
Здесь мы сделаем одну небольшую оговорку, сообщив читателю,
что синфазный ток — далеко не такое безобидное явление, с которым
можно и нужно мириться, то есть не искать пути его полного
подавления. Дело в том, что между корпусом двигателя и его вращающейся
частью также имеется паразитная емкость, создающая путь протекания
части синфазного тока. Опыт эксплуатации двигателей с частотным
управлением показал, что, протекая по цепи «вал двигателя» —
«опорные подшипники вала» — «корпус», синфазный ток приводит к
ускоренному выходу из строя опорных подшипников, связанному как с
различными электрохимическими процессами, так и с переменной
площадью контакта, когда через малое сечение проходит большой ток
и локально разогревает трущиеся поверхности, создает на них дефекты.
Кроме этого, наличие синфазных токов однозначно приводит к
невозможности выполнения некоторых современных норм безопасности,
связанных с использованием устройств защитного отключения (УЗО).
Авторы работы [42] попытались устранить саму возможность
протекания синфазных токов, и эта задача им удалась путем некоторого
усложнения выходной силовой схемы. В результате была разработана
Рис. 2,4.29. Принципиальная схема фильтров нулевой последовательности
типа EFSZ
так называемая серия фильтров нулевой составляющей типа EFSZ.
Принципиальная схема таких фильтров приведена на рис. 2.4.29.
Как видно из схемы, к привычному фильтру добавлены некоторые
элементы, которые обеспечивают устойчивую работу преобразователя
в переходных режимах. Более того, представленный фильтр, кроме
снижения синфазного тока, выполняет еще функцию классического
фильтра синусоидального напряжения. В составе схемы имеются: Ml
и М2 — моторные реакторы; L1...L6 — одиночные дроссели; С1...СЗ,
С0 — высоковольтные конденсаторы; RO, R1...R3 — компенсирующие
резисторы. Общий принцип работы фильтра такой: в цепь протекания
синфазного тока включается цепь с большим импедансом и
вспомогательной цепью протекания паразитного тока, что значительно снижает
составляющую синфазного тока в двигателе. Необходимое условие
работоспособности фильтра EFSZ — индуктивность Ml должна быть
много больше индуктивности L1...L3, а емкость С0 — много меньше
емкости С1...СЗ. Синфазный ток замыкается через цепь Ml—С0—R0,
дополнительное ограничение синфазного тока происходит при
помощи моторного дросселя М2. Дроссели L1...L3 совместно с
конденсаторами С1...СЗ и резисторами R1...R3 образуют фильтр составляющих
фазных токов, резисторы R0, R1...R3 ограничивают развитие
неконтролируемого переходного процесса. Дроссели L4...L6 должны иметь
большое значение индуктивности, их функция — снижение
постоянной составляющей на конденсаторах С1...СЗ.
Испытания показали, что данный фильтр существенно подавляет
высшие гармоники выходного напряжения инвертора, а на его выходе
появляется практически синусоидальное напряжение, а между
напряжением на входе фильтра и на его выходе практически нет фазового
сдвига. Падение напряжения на элементах фильтра (и, соответствен-
но, необратимые потери) составляют не более 3 % от величины
основной гармоники.
Авторы разработки представляют сравнительные графики
величины синфазного тока в отсутствии фильтра (рис. 2.4.30, а) и при нали-
Рис. 2.4.30. Значение синфазного тока: а — в отсутствии фильтра EFSZ; б —
с включенным фильтром EFSZ
чии фильтра (рис. 2.4.30, б). Например, для инвертора с
номинальным выходным током 15 А, вследствие перекоса фаз на выходе
инвертора и наличия паразитных емкостей в соединительном кабеле и
двигателе появляется значительная нулевая составляющая тока,
которая достигала в эксперименте значения 4,3 А. Применение фильтра
EFSZ дало практически 8-кратное ограничение синфазного тока, а
амплитуда выбросов тока не превышала 0,6 А. Дополнительно
проведенные исследования по регистрации ухудшений, связанных с
точностью регулирования оборотов двигателя, показали, что эти ухудшения
столь незначительны, что ими просто можно пренебречь.
В составе статических преобразователей, кроме силовых кабелей,
имеется большое количество сигнальных кабелей, которые передают
управляющие и диагностические сигналы. Естественно, помехи,
возникающие в силовых кабелях, могут наводиться на сигнальные
кабели и в значительной степени (вплоть до возникновения аварийных
режимов) нарушать работу приборов. Поэтому нелишне будет
привести рекомендации и в отношении сигнальных проводников.
Как правило, сигнальные проводники также экранируются, а
общие принципы обеспечения непрерывности экранировки для них те
же: заземление экранов выполняется с двух сторон. Если по
каким-либо причинам заземлить сигнальный кабель не удастся, то
лучше вообще его не заземлять.
Еще один тип сигнального кабеля, который широко используется
при разработке статических преобразователей, — это так называемая
«витая пара». В некоторой степени витая пара является аналогом
экранированного кабеля, так как поверхность, подверженная воздействию
электромагнитных помех, у него значительно меньше, чем у двух
отдельных проводников. При использовании витой пары необходимо
обеспечить как можно меньшую протяженность нескрученных
участков (эта ситуация обычно возникает в местах подключения кабелей).
Комбинированный вариант сигнального кабеля — «витая пара в
экране» и «витая пара в двойном экране» (рис. 2.4.31) — встречается
реже и является достаточно дорогостоящим способом защиты от
воздействия электромагнитных помех. Поэтому такой вариант
применяют в случае крайне неблагоприятной электромагнитной обстановки
внутри прибора и наличии высокого уровня помех (как создаваемых
прибором, так и внешних).
Рис. 2.4.31. Экранированные витые пары
Способ совместной прокладки кабелей разных типов в приборе
также может серьезно повлиять на работоспособность преобразователя.
Разработчикам имеет смысл придерживаться здесь общих
рекомендаций. Силовые кабели должны быть проложены как можно дальше от
сигнальных кабелей, причем минимальное расстояние между ними
должно составлять порядка 20 см. Если такой возможности нет, или она
сильно ограничена, необходимо приложить все усилия к тому, чтобы
проводники хотя бы не шли параллельно на участках более 30 см.
Пересечение кабелей желательно выполнять под углами, близкими к 90
градусам. Здесь также могут выручить металлические крепежные
конструкции большой площади: прокладывать силовой кабель можно по одной
стороне металлического листа-перегородки, а сигнальный — с другой.
Аналоговые и цифровые сигналы управления необходимо
передавать по разным экранированным кабелям. Сигналы релейного
управления контакторами и механическими переключателями допустимо
передавать в одном экранированном кабеле с цифровыми управляющими
сигналами, если их амплитуда не превышает значения 48 В.
Естественно, для каждого сигнала необходимо проложить свою «витую пару». В то
же время крайне не рекомендуется передавать по одному кабелю
сигналы постоянного тока до 24 В и переменного напряжением 220 (380) В.
Недорогим и эффективным способом борьбы с
электромагнитными помехами внутри прибора является использование ферритовых
трубчатых фильтров (рис. 2.4.32). Применение таких фильтров в
совокупности с другими мерами снижения помех, о которых мы говорили
выше, позволяет уменьшать их влияние непосредственно на входах и
выходах составных частей преобразователей, если подключение к ним
осуществляется не с помощью экранированных разъемных
соединителей, а посредством клеммных колодок. Токоведущий провод
продевается сквозь ферритовый фильтр, образуя одну петлю, как показано
Рис. 2.4.32. Использование ферритовых трубчатых фильтров
на рис. 2.4.32. Сигнальные и питающие цепи должны фильтроваться
разными трубчатыми фильтрами. Располагать их нужно в
максимальной близости к клеммам устройства.
2.5. Как измерить напряжение и ток
Прежде чем дать развернутый ответ на вопрос, содержащийся в
заголовке, давайте разберемся, зачем специалисту в области силовой
преобразовательной техники уделять этой проблеме достаточно много
внимания. Первая мысль, которая придет нам в голову при ответе на
вопрос «зачем», — это мысль о необходимости визуального контроля
параметров токов и напряжений, формируемых статическими
преобразователями. Другими словами, человек, эксплуатирующий
преобразовательную технику, не должен лишаться возможности оценить эти
основные параметры в любой момент времени и принять после
соответствующей ситуационной оценки решение, например, перевести прибор в
другой режим работы или вообще отключить его. Самый простой
вариант здесь — это установка на лицевую панель статического
преобразователя измерительных приборов (стрелочных или цифровых) Вариант
посложнее: оцифровка параметров напряжения и тока встроенным
аналого-цифровым преобразователем и передача их в цифровом виде по
стандартному протоколу на централизованное устройство контроля.
Возможны и другие варианты, облегчающие контроль
работоспособности приборов. В любом случае задачи эти тривиальны, а значит, любой
инженер справится с ними без труда. Наш разговор не об этом.
Гораздо важнее вспомнить, что стабилизация и регулирование
параметров статических преобразователей, внутренняя автоматизированная
диагностика режимов его работы невозможна без элементов обратной
связи, в составе которых обязательно присутствуют узлы, измеряющие
напряжения и токи. Ранее мы уже говорили о том, что электрические
схемы статических преобразователей содержат как сильноточные
силовые цепи, так и сигнальные управляющие цепи, токи в которых могут
отличаться на несколько порядков. Соответственно, необходимо
обеспечить гальванические развязки между этими цепями, чтобы в
максимальной степени исключить влияние силовых цепей на управляющие
сигналы. Как обеспечить такие требования с помощью достаточно
простых мер — об этом мы поговорим в текущей главе.
Практически невозможно представить современный силовой
статический преобразователь электроэнергии, в котором не окажется ни
одного датчика тока и напряжения. Более того, реализовать надежное
и функциональное изделие силовой электроники без этих самых
датчиков — задача практически невыполнимая. Датчики тока и напряже-
ния просто необходимы: они отслеживают величину входного
питающего напряжения, потребляемый ток, осуществляют формирование
сигналов для узлов стабилизации выходных параметров,
диагностируют различные аварийные режимы типа короткого замыкания,
перегрузки, выхода параметров тока и напряжения за допустимые пределы.
Напомним, что классический способ измерения токов
заключается во включении в измеряемую цепь резистора с небольшим активным
сопротивлением, или, как его традиционно называют, — шунта. Такой
способ годится для применения и в сигнальных цепях, и в силовых.
Однако в том случае, если шунт является переходным элементом
между силовой и сигнальной цепями, может возникнуть неприятная
ситуация, связанная с затеканием силового тока в измерительные цепи,
что приводит не только к возникновению дополнительной
погрешности измерения, но может стать причиной аварийного выхода из строя
преобразователя. На рис. 2.5.1 эта ситуация иллюстрируется наглядно.
Хорошо видно, что измерительное напряжение Um является итогом
суммы силового тока /с и измерительного тока icc. Кроме того, в схеме
обязательно присутствует паразитная индуктивность шунта Ьш, а также
паразитная индуктивность подводящих проводов (на рисунке она не
показана). Падение напряжения на этих паразитных элементах также
включается в измеренное напряжение Um,
формируя ошибку измерения. Названные
недостатки прямого измерения токовых сигналов
привели к тому, что этот способ при разработке
мощной преобразовательной техники практически
не используется.
Подавляющее число схем статических
преобразователей ныне строится с применением
бесконтактных датчиков тока (и напряжения),
основанных на эффекте Холла. Эффект Холла
был открыт в 1879 г., но из-за значительной
температурной и электрической
нестабильности его реальное использование стало
возможным только сегодня, когда в состав
измерительного тракта с датчиком Холла стали
включать электронные схемы стабилизации.
На рис. 2.5.2 поясняется физический
смысл действия эффекта Холла.
Полупроводниковая пластина помещается в магнитное
поле, создаваемое проводником с током.
Магнитный поток В формирует силу Лоренца,
Рис. 2.5.2. действующую на подвижные заряды, находя-
К пояснению эффекта щиеся в пластине полупроводника, что ведет к
Холла изменению их числа на концах пластины. Та-
Рис. 2.5.1.
К пояснению
недостатков
измерительного шунта
ким образом, на концах пластины образуется разность потенциалов
UH, величина которой пропорциональна величине протекающего тока.
Эта разность потенциалов называется напряжением Холла. Величина
разности потенциалов может быть рассчитана из соотношения:
(2.5.1)
где # — константа Холла, зависящая от материала полупроводника;
d — толщина пластины,
ic — величина тока управления;
В — магнитная индукция.
Существует несколько типов датчиков тока, в основе которых
заложено использование элемента Холла. Первый тип датчика
называется датчиком прямого усиления. Принцип его действия показан на
рис. 2.5.3.
Рис. 2.5.3. Датчик прямого усиления на основе элемента Холла
В основе датчика лежит кольцевой ферромагнитный магнитопро-
вод, в зазоре которого установлен элемент Холла. Через окно магни-
топровода проходит проводник с измеряемым током ip. Силовые
линии магнитного поля с величиной индукции В замыкаются внутри
магнитопровода. Ток управления датчиком /с генерируется
встроенным токовым генератором с высокой стабильностью. Измеряемый
сигнал UH усиливается электронной схемой и подается на выход
датчика. С учетом всех констант, входящих в математическое выражение,
описывающее физические процессы в датчике, величина выходного
напряжения будет линейно зависеть от величины протекающего
силового тока:
(2.5.2)
где z — константа датчика.
Датчики прямого усиления могут измерять как постоянные, так и
переменные токи. Они сравнительно просты по схемам своего по-
строения, выдерживают значительные токовые перегрузки и
отличаются небольшим собственным потреблением тока. Немаловажным для
серийного производства статических преобразователей также является
их низкая стоимость. Разработчику следует запомнить, что датчики
прямого усиления формируют выходной сигнал в виде напряжения.
В ряде случаев, однако, от датчика тока требуется формирование
выходного токового сигнала, пропорционального измеряемому току.
Для решения этих задач разработан другой тип датчика, называемый
компенсационным. На рис. 2.5.4 показан принцип действия
компенсационного датчика Холла.
Рис. 2.5.4. Датчик компенсационного типа на основе элемента Холла
Отличие его от датчика прямого усиления заключается в наличии
дополнительной компенсационной обмотки, размещенной на
кольцевом магнитопроводе. Сформированный датчиком Холла сигнал
преобразуется в ток компенсации /5, который подается в обмотку
компенсации. Магнитное поле, образуемое током компенсации, стремится
свести к нулевому магнитный поток в магнитопроводе. По величине
тока компенсации можно судить о величине измерительного тока в
соответствии со следующей зависимостью:
где Np — число витков проводника с силовым током, проходящих
через окно магнитопровода датчика;
Ns — число витков компенсационной обмотки.
Понятно, что число витков обоих обмоток — это конструктивный
параметр, который задается при разработке датчика, и не может быть
каким-то образом изменен при его использовании в качестве
элемента силовой схемы преобразователя. То есть, их отношение — есть
константа, а значит, выходной ток компенсационного датчика будет
прямо пропорционален измеряемому току, то есть изменяться по
линейному закону.
В чем преимущество датчиков компенсационного типа перед
датчиками прямого усиления? Так как компенсационные датчики
работают в режиме нулевой индукции магнитопровода, это позволяет
исключить влияние нелинейности ферромагнетика и значительно повысить
точность преобразования. К другим достоинствам компенсационных
датчиков относятся: малый температурный дрейф, малое время
отклика, широкий диапазон частот, возможность работы в режиме выдачи
выходного сигнала тока и сигнала напряжения. К недостаткам
компенсационных датчиков относят увеличенные габариты (по сравнению с
датчиками прямого преобразования) и более высокую стоимость.
В подавляющем большинстве случаев технические параметры
названных двух типов датчиков должны устроить разработчиков
стандартной преобразовательной техники. Ну а если разработчика все же
не удовлетворяют быстродействие, температурная стабильность
датчика компенсационного типа? Тогда придется обратить внимание на
модифицированные компенсационные датчики С-типа, позволяющие
с высокой точностью измерить, кроме всего прочего, и
дифференциальные силовые токи. Устройство компенсационных датчиков С-типа
показано на рис. 2.5.5.
Измерительный узел датчика С-типа составляют два идентичных
кольцевых магнитопровода с равным количеством витков компенса-
Рис. 2.5.5. Компенсационный датчик С-типа
ционных обмоток, включенных последовательно. Генератор
прямоугольных импульсов формирует двуполярный меандр, который
подается на обмотку компенсации и складывается с компенсирующим
током. Средняя точка компенсационных обмоток подключена к
фильтру нижних частот, который сглаживает ток компенсации.
Триггер меняет полярность выходного сигнала генератора при
возникновении насыщения в магнитопроводах. Таким образом, гистерезисная
кривая магнитопроводов становится симметричной с высокой
степенью точности, а ток в одной из обмоток компенсации — строго
пропорциональным измеряемому току в соответствии с выражением
(2.5.3). Далее токовый выходной сигнал преобразуется с помощью
конвертора «ток—напряжение» в выходной сигнал датчика.
Преимущество компенсационных датчиков С-типа по сравнению
со стандартными компенсационными датчиками очевидно: если
последние обеспечивают работу в частотном диапазоне до 150 кГц при
типовой нелинейности 0,5...1,0 %, то датчики С-типа позволяют
работать в диапазоне до 500 кГц при типовой нелинейности до 0,1 %.
И, наконец, при необходимости обеспечения очень жесткой
температурной стабильности, помехозащищенности и линейности,
можно применить компенсационные датчики IT-типа (рис. 2.5.6).
Как и в предыдущем случае, компенсация магнитного потока в
магнитопроводах осуществляется с помощью обмоток компенсации.
Однако в данном случае в схеме предусмотрен специальный узел детектора
Рис. 2.5.6. Компенсационный датчик ГГ-типа
нулевого потока, имеющий два магнитопровода. Эти магнитопроводы
конструктивно установлены так, чтобы обеспечивать нулевой поток в
главном (измерительном) магнитопроводе. Если в основном магнито-
проводе поток отличен от нулевого, компенсационные
магнитопроводы входят в насыщенное состояние несимметрично, что приводит к
появлению двух асимметричных токов с разным гармоническим
составом, причем один из магнитопроводов всегда будет находиться в менее
насыщенном состоянии, чем второй. При суммировании двух токовых
сигналов результирующий сигнал окажется насыщенным только
гармониками измерительного тока. Компенсационные датчики 1Т-типа
позволяют обеспечить температурную стабильность порядка 0,00003 %
на градус Цельсия и линейность около 0,001 %. Для сравнения, у
компенсационных датчиков С-типа этот параметр составляет 0,01 % на
градус Цельсия.
Конструктивно датчики представляют собой защищенные корпуса
произвольной формы с окнами, сквозь которые продевается
проводник с измеряемым током. Мы поговорим о конструкциях и
технических параметрах типовых датчиков чуть позже, а сейчас обратим
внимание читателя на так называемые гибкие датчики тока, появившиеся
совсем недавно. Производителем таких датчиков является
швейцарская фирма «LEM» [43]. На рис. 2.5.7 показано конструктивное
исполнение гибкого датчика.
Рис. 2.5.7. Гибкий датчик тока
Гибкий датчик представляет собой катушку, равномерно
намотанную вокруг гибкого цилиндра. Кроме этого, в диаметральном сечении
цилиндра проложен центральный проводник. Датчик выполнен
разъемным, и вот почему: зачастую шинопроводы мощных
преобразователей представляют собой достаточно сложную в конфигурационном
отношении конструкцию, и традиционные датчики расположить в
таком случае очень и очень трудно. Поэтому гибкий датчик может быть
разомкнут и намотан на шинопровод подобно тому, как наматывается
обычный провод. Остается только закрепить его с помощью,
например, гибких нейлоновых хомутиков, замкнуть и подключить к
измерительной электронной схеме. В настоящее время гибкие датчики,
впрочем, являются пока экзотикой, поэтому мы далее не будем
останавливаться на их технических характеристиках, а перейдем к
рассмотрению конкретных исполнений традиционных датчиков,
выпускаемых фирмой «LEM» и получивших широчайшее распространение
в приборах преобразовательной техники.
Датчик типа LA55-P/SP1 представляет собой стандартный вариант
компенсационного датчика и широко используется в составе
преобразовательной техники (рис. 2.5.8). Конструктивно он представляет
собой пластиковый прямоугольный корпус с размерами 37 х 27 х 15 мм.
Через прямоугольное окно продевается шинопровод, в котором
протекает измеряемый ток.
Данный датчик имеет исполнение с гибкими выводами, с
помощью которых он впаивается в печатную плату. Номинальный
диапазон измеряемых токов датчика составляет ±100 А, при этом точность
преобразования — не хуже 0,65 % при питании двуполярным
источником с напряжением ±15 В. Номинальный выходной ток датчика —
25 мА, частотный диапазон измерения — до 200 кГц.
Особое внимание следует обратить на фазировку измеряемого и
измерительного токов датчика. С целью однозначного задания
направлений токовых сигналов на корпусе датчика нанесена стрелка.
При протекании измеряемого тока в направлении стрелки выходной
ток датчика будет положительным.
Подключение датчика выполняется по рис. 2.5.9. Обратите
внимание: датчик сам по себе не имеет вывода для подключения «средней»
точки двуполярного напряжения питания. Эта «средняя» точка
связана только с правым (по схеме)выводом нагрузочного резистора Rm.
Небольшие конструктивные отличия имеет компенсационный
датчик типа LA205-S, предназначенный для измерения токов в диапазоне
Рис. 2.5.8. Внешний вид
датчика типа LA55-P/SP1
Рис 2.5.9. Подключение датчика
LA55-P/SP1
±300 А (рис. 2.5.10). Габаритные размеры этого датчика — 66 х
х 57 х 57 мм. Номинальный выходной ток — 100 мА, точность
преобразования — не хуже 0,8 %, работа обеспечивается в диапазоне частот до
100 кГц.
Датчик типа LF2005-S (рис. 2.5.11) позволяет измерять достаточно
большие токи — до ±3000 А. Соответственно, подросли и габариты
датчика по сравнению с двумя предыдущими. В данном случае они
составляют 170 х 135 х 61 мм. Номинальный выходной ток датчика —
400 мА, точность преобразования — не хуже 0,3 %, частотный
диапазон номинальной работы — до 150 кГц.
Наконец, еще один датчик этой конструкции — LT4000-S —
предназначен для измерения токов в диапазоне ±6000 А(рис. 2.5.12). Как видно
из рисунка, этот датчик представляет собой массивную конструкцию,
оснащенную ребреными поверхностями для лучшей теплоотдачи, а
также имеющую мощные крепежные лапы. Такая конструкция датчика
отнюдь не случайна: номинальный выходной сигнал датчика составляет
800 мА, что, конечно, приводит к значительным тепловым потерям на
элементах внутренней электронной схемы. Кроме того, силовая
техника, в которой протекают столь значительные токи, имеет массивные то-
коведущие части, что заставляет устанавливать механически
защищенное оборудование. Других особенностей этот датчик не имеет.
Другое конструктивное исполнение датчиков тока показано на
примере датчика LT200-T/SP96 (рис. 2.5.13), работающего в
диапазоне токов ±200 А. Если по электрическим параметрам он соответствует
датчикам компенсационного типа, и не требует дополнительных
пояснений с этой стороны, то на его внешний вид (конструкцию)
следует обратить внимание. Датчик предназначается для объемного монта-
Рис. 2.5.10. Внешний вид датчика
типа LA205-S
Рис. 2.5.11. Внешний вид датчика
типа LF2005-S
жа, поэтому он имеет ламельные контакты питания (под пайку) и
контакты подключения нагрузочного резистора. Но — что самое
интересное — измерительный шинопровод встроен в корпус датчика и
оснащен отверстиями, к которым подключается токоведущая шина
(плоская или обычная проводная).
Любая электронная техника, предназначенная для серийного
производства, должна отвечать требованиям технологичности, то есть, в
числе прочего, содержать в себе как можно меньшее количество
элементов, а состав имеющихся элементов должен стремиться к максимальной
однотипности, то есть к сокращению их номенклатуры. Кроме этого,
применяемые элементы должны быть сконструированы так, чтобы их
было удобно устанавливать при серийном производстве — это служит
залогом сокращения трудоемкости, а значит, и себестоимости
продукции. Датчик в этой цепочке — не исключение,
хотя унифицировать его для всех классов задач
весьма и весьма сложно. И все же
фирмы-разработчики предпринимают определенные шаги в
направлении унификации. Примером удачной
унифицированной разработки может служить
датчик LTS25-NP (рис. 2.5.14), который, к тому
же, специально адаптирован для применения в
преобразовательной технике, оснащенной
микроконтроллерами.
В корпус датчика встроены три
независимых шинопровода, которые впаиваются в
печатную плату и могут быть соединены токове-
дущими дорожками таким образом, чтобы
обеспечить необходимый измерительный диа-
Рис. 2.5.12. Внешний вид
датчика типа LT4000-S
Рис. 2.5.13. Внешний вид датчика
типа LT200-T/SP96
Рис. 2.5.14. Внешний
вид датчика типа
пазон. Традиционное окно, через которое пропускают токоведущий
проводник, здесь выполняет роль дополнительного. С помощью этого
окна, при необходимости, сузить диапазон измеряемых токов.
Электрическая структурная схема датчика LTS25-NP приведена на
рис. 2.5.15, а на рис. 2.5.16 — выходная характеристика. Нетрудно
заметить, что выходной сигнал датчика представляет собой
напряжение, величина которого составляет 2,5 В при отсутствии измеряемого
тока. Почему этот вариант удобен для обработки сигнала встроенным
АЦП микроконтроллера? Ответ предельно прост: большинство
микроконтроллеров имеет в своем составе именно однополярные АЦП с
опорным напряжением порядка 5 В. Поэтому для измерения двупо-
лярных токов выходной сигнал необходимо сдвигать ровно на
половину измерительного диапазона. В данном случае этот сдвиг
обеспечивается автоматически.
А теперь настало время рассказать о самой интересной особенности
датчика, то есть о принципах коммутации его измерительных шинопро-
Рис. 2.5.15. Структурная схема датчика LTS25-NP
Рис. 2.5.16. Выходная характеристика датчика LTS25-NP
водов. На рис. 2.5.17 показаны варианты разводки печатных
токоведущих проводников для разных режимов использования датчиков.
Вариант «а» — для измерения токов в диапазоне ±24 А, вариант «б» — для
токов ±12 А, вариант «в» — для токов ±8 А. В варианте «п> используется
дополнительный проводник, три витка которого пропущены через
вспомогательное окно датчика, таким образом, в варианте «г» диапазон
измеряемых токов сужается до ±4 А. И последний вариант,
представленный на рис. 2.5.17, — вариант «д» — предназначен для измерения
дифференциального тока, то есть разницы между втекающим по шино-
проводу и вытекающим по дополнительному проводнику тока.
Рис. 2.5.17, Варианты использования датчика LTS25-NP
На рис. 2.5.18 показан пример использования датчиков LTS25-NP
в составе статического преобразователя для частотного управления
электродвигателем. В этом примере один и тот же датчик тока
используется в трех различных режимах включения: для защиты от
токов короткого замыкания на входе преобразователя, для измерения
фазных токов электродвигателя и для измерения дифференциальных
токов в шинопроводе постоянного тока.
Как вариант датчика тока с расщепленной первичной шиной
можно привести типономинал LAH50-P (рис. 2.5.19) с диапазоном
измеряемого тока от 0 до 50 А. Это — обычный датчик тока
компенсационного типа с двуполярным питанием и нулевым выходным током при
отсутствии измеряемого тока. Более того, датчик не имеет
дополнительного окна, через которое можно пропустить вспомогательные
витки токоведущих проводов. Однако его шинопровод расщеплен на три
части, что все-таки позволяет снижать коэффициент преобразования в
2 и 3 раза.
Рис. 2.5.18. Вариант использования датчика LTS25-NP
Рис. 2.5.19. Внешний
вид датчика типа
LAH50-P
Упомянем мы и датчики напряжения,
выпускаемые фирмой «LEM», в основе
которых лежит использование все того же
эффекта Холла. На самом деле преобразовать
датчик тока в датчик напряжения очень просто:
достаточно первичную измерительную цепь
датчика тока соединить последовательно с
активным сопротивлением известной
величины. Понятно, что ток в этой цепи будет
определяться приложенным к ней
напряжением, поэтому вычислить коэффициент для
прямого пересчета тока в напряжение
никакого труда не составит. Единственная
неприятность, с которой мы столкнемся, если
захотим использовать датчик тока в качестве
основы датчика напряжения, — это
необходимость иметь значительный ток в
первичной (измерительной) цепи, чтобы на выходе
датчика получить номинальный сигнал.
Поэтому первичная (измерительная) обмотка
датчиков напряжения выполняется с
большим количеством витков — таким вот
образом снижается номинальный входной ток.
На рис. 2.5.20 показан внешний вид
датчика напряжения типа LV25-P/SP20. Как
следует из рисунка, датчик напряжения внешне
очень похож на датчик тока, разве что он не
имеет окна для протяжки шинопровода.
К слову, как мы убедились ранее, некоторые
исполнения датчиков тока вообще невозможно по внешнему виду
отличить от датчиков напряжения, поскольку в них встроены токове-
дущие шины. Номинальный входной сигнал упомянутого датчика
напряжения составляет всего 10 мА. При этом выходной ток датчика
достигает 25 мА. Питание датчика осуществляется двуполярным
напряжением ±15 В, ошибка преобразования составляет 0,8 %.
На рис. 2.5.21 приведена типовая схема подключения датчика
LV25-P/SP20. Резистор R1 выбирается с учетом номинального тока
измерительной обмотки и величины измеряемого напряжения.
Допустимая величина измеряемого напряжения у данного датчика
составляет 500 В. Это ограничение связано с его конструктивным
исполнением (датчик монтируется на печатную плату).
Близкими характеристиками обладает датчик типа LV100/SP83
(рис. 2.5.22), но допускаемое значение измерительного напряжения
для него гораздо больше: оно составляет 2500 В.
Рис. 2.5.20. Внешний
вид датчика
напряжения типа
LV25-P/SP20
Рис. 2.5.22. Внешний вид
датчика напряжения
LV100/SP83
Места установки датчиков
напряжения и тока в преобразовательной технике
обычно выбираются с учетом
минимально-возможного уровня помех, удобства
монтажа (и демонтажа), отсутствия
вблизи корпусов датчиков значительно
нагревающихся элементов. В ряде случаев —
таких, например, как работа
преобразователей в условиях сильных постоянных
магнитных полей — может потребоваться
магнитная экранировка корпусов
датчиков. Выполнить экранировку можно с
помощью замкнутого пермаллоевого или
стального экранирующего корпуса, в который помещается
соответствующий датчик.
На рис. 2.5.23 показан фрагмент конструкции реального
статического преобразователя с размещенными датчиками тока типа
LA55-P/SP1 и датчиками напряжения типа LV25-P/SP20.
Было бы несправедливым в этом разделе обойти вниманием
разработчиков специальной техники и не рассказать об отечественных
датчиках, обладающих аналогичными характеристиками. Взамен
датчиков фирмы «LEM» можно с успехом использовать отечественные
серийные датчики тока, напряжения и даже активной мощности,
поставляемые ФГУП «НИИЭМ» (г. Истра) [44]. Продукция этой фирмы
поставляется для отраслей промышленности, занятых обеспечением
отечественных космических программ, поэтому датчики выполнены
по самым жестким требованиям, обеспечивающим их высочайшую
надежность при приемлемой стоимости. Фирма выпускает достаточно
много разнообразных исполнений датчиков, и за получением
подробной информации мы рекомендуем обратиться на сайт, а здесь
расскажем лишь о нескольких интересных исполнениях.
Рис. 2.5.21. Подключение датчика LV25-P/SP20
Рис. 2.5.23. Размещение датчиков Холла в реальном преобразователе
На рис. 2.5.24 приведен внешний вид датчика измерения
постоянного и переменного тока типа ДТХ-5-30, а на рис. 2.5.25 — варианты
коммутации силовых выводов датчика для измерения тока 5 А
(вариант «а»), 10 А (вариант «б»), 15 А (вариант «в»), 30 А (вариант «г»).
Номинальный выходной сигнал датчика — 30 мА (для всех вариантов
включения первичной цепи); нелинейность выходной
характеристики — не более 0,1 %; напряжение питания — ±15 В; габаритные
размеры — 33 х 33 х 22 мм.
Конструктивно датчик ДТХ-5-30 предназначен для установки на
панель с печатными токоведущими проводниками и подключается к
ним с помощью пайки. Настройка датчика по необходимой величине
выходного напряжения осуществляется подбором нагрузочного
резистора на его выходе в диапазоне допустимых значений от 20 до 230 Ом.
Рис. 2.5.24. Внешний вид датчика ДТХ-5-30
Рис 2.5.25. Варианты коммутации первичной цепи датчика ДТХ-5-30
Конструктивное исполнение датчиков серии ДТХ-50, ДТХ-100,
ДТХ-150, ДТХ-200, показанное на рис. 2.5.26, не имеет никаких
принципиальных особенностей по сравнению с аналогичной
конструкцией, применяемой фирмой «LEM». Все эти датчики
представляют собой типовой ряд, предназначенный для измерения (в
зависимости от исполнения) токов величиной 50, 100, 150, 200 А. Габаритные
размеры — 58 х 48 х 30 мм.
Для измерения токов значениями 300 А, 500 А, 750 А, 1000 А,
1500 А, 3000 А разработаны и поставляются датчики типа ДТХ-300,
ДТХ-500, ДТХ-750, ДТХ-1000, ДТХ-1500, ДТХ-3000. Внешний вид
датчиков показан на рис. 2.5.27. Габаритные размеры датчиков —
120 х ПОх 125 мм.
Из номенклатуры датчиков измерения напряжения упомянем
датчик типа ДНХ (рис. 2.5.28). Этот датчик предназначен для измерения
как постоянного, так и переменного напряжения в диапазоне от 50 до
600 В. Входной номинальный ток датчика составляет 10 мА,
номинальный выходной ток — 40 мА (по заказу возможно изготовление
Рис. 2.5.26. Внешний вид датчика Рис 2.5.27. Внешний вид
ДТХ-200 датчика ДТХ-1500
Рис. 2.5.28. Внешний вид датчика ДНХ
датчика со стандартным интерфейсом «токовая петля» 4...20 мА, либо
с непосредственной выдачей среднеквадратического значения «true
rms»). Нелинейность выходной характеристики — не более 0,1 %,
питание — двуполярное, ±15 В, напряжение изоляции — не менее
4000 В, габаритные размеры — 74 х 53 х 39 мм.
Входной токозадающий резистор первичной измерительной цепи
размещается вне корпуса датчика, а измерительная цепь подключается
к двум резьбовым шпилькам на корпусе. Остальные выводы датчика —
обычные штыревые, предназначенные для пайки в печатную плату.
Более подробно имеет смысл поговорить о датчиках мощности типа
ДИМ-200, выпускаемых ФГУП «НИИЭМ», поскольку по ходу книги
мы впервые встречается с подобным типом датчиков. Внешний вид этой
серии показан на рис. 2.5.29. Предназначены датчики для измерения
активной мощности, потребляемой нагрузкой, в цепях переменного тока
частотой 50 Гц, а также в цепях постоянного тока. Выходные значения
передаются по токовому интерфейсу типа 0...20 мА, либо по интерфейсу
«токовая петля» 4...20 мА. Основные технические характеристики
датчиков ДИМ-200: диапазон измеряемых мощностей — 0...200 кВт;
диапазон входных напряжений — 20...380 В; диапазон входных токов —
20...600 А; коэффициент мощности — 0,3... 1,0; основная погрешность
измерения — не более 2 % (справедлива при гармонических искажениях
входного переменного сигнала не более 5 %); габаритные размеры —
69 х 91 х 99 мм.
Рис. 2.5.29. Внешний вид датчиков ДИМ-200
На выходе датчика Холла здесь формируется напряжение,
пропорциональное произведению мгновенных значений тока и
напряжения, то есть мгновенным значениям активной мощности. Далее
сигнал усиливается и интегрируется для получения среднего значения
активной мощности. Если требуется измерение значения активной
мощности в трехфазной системе (например, на входе статического
преобразователя), то токовые выходы трех датчиков подключаются к
общему нагрузочному резистору, что дает сумму значений активных
мощностей по всем трем фазам. Для измерения малых значений
мощностей через токовое окно датчика тока можно пропускать несколько
витков токоведущей шины, естественно, учитывая результат
соответствующим поправочным коэффициентом.
Основные представители номенклатуры классических датчиков,
при всех их достоинствах все-таки являются достаточно габаритными
изделиями. Наметившиеся в последнее время тенденции к
сокращению габаритов преобразовательной техники заставляют
производителей элементной базы разрабатывать новые, более миниатюрные,
компоненты, экономящие внутреннее пространство приборов при
безусловном сохранении высоких технических характеристик. Для таких
применений фирма LEM разработала датчик тока типа FHS-40/SP600
открывающий серию «Minisens» и позволяющий измерять токи до
100 А, но при этом обладающий минимальными размерами — датчик
размещен в корпусе SOIC-8.
Так как данный тип датчика не имеет сквозного отверстия, через
которое пропускается токоведущий проводник с измеряемым током,
его чувствительность определяется расстоянием от токоведущего
проводника до элемента Холла (рис. 2.5.30). Чувствительность датчика
определяется из выражения:
(2.5.4)
где г — расстояние от элемента Холла до проводника.
Датчик Холла оснащен специальным концентратором магнитного
потока, что позволило исключить из конструкции датчика кольцевой
магнитный сердечник.
На рис. 2.5.31 приведен график
зависимости чувствительности (в мВ/А) в
зависимости от расстояния между проводником и
чувствительным элементом (в мм). Из него
следует, что датчик должен быть
достаточно точно установлен относительно
токоведущего проводника, иначе его показания
будут неточными. Впрочем, современные
методы изготовления электронных
приборов позволяют достаточно точно
позиционировать элементы автоматизированным
способом.
Структурная схема датчика FHS-40/
SP600 приведена на рис. 2.5.32. Питание к
Рис. 2.5.30. Определение
чувствительности датчика
FHS-40/SP600
Рис. 2.5.31. Зависимость чувствительности датчика FHS-40/SP600 от
расстояния до чувствительного элемента
Рис. 2.5.32. Структурная схема датчика FHS-40/SP600
датчику поступает на выводы Vc и 0V. Его диапазон лежит в пределах
4,75...5,5 В, что согласуется с питанием большинства стандартных
микроконтроллеров. Диапазон измеряемых частот лежит до частоты
100 кГц. В составе датчика предусмотрено два выхода: выход V0UTFast
передает сигнал непосредственно с выхода датчика тока, с задержкой
информации не более 3 мкс, а выход V0UT транслирует сигнал,
прошедший через фильтр высокочастотных помех. Фильтр позволяет снизить
помехи в диапазоне частот выше 100 кГц, а выход VOUTFast можно
использовать для диагностики возникновения короткого замыкания и
связанного с этим появления сверхтоков. Константы основных
параметров датчика (коэффициент передачи, полярность выходного
сигнала) сконфигурированы во внутренней энергонезависимой памяти.
Типовое значение линейности характеристики датчика во всем
диапазоне измеряемых частот не превышает 0,5 %, номинальный
выходной сигнал — 2000 мВ. Через вывод STANDBY осуществляется
перевод датчика в дежурный режим со сниженным энергопотреблением,
что важно для его применения в системах аккумуляторного
(автономного) питания. Датчик имеет 6 конструктивных исполнений,
рассчитанных на номинальные значения токов из ряда 5 А, 10 А, 20 А, 40 А,
80 А, 100 А. Рабочий диапазон датчика: -40...+115 градусов Цельсия.
Наиболее интересным при применении датчика является
реализация методов его установки в разрабатываемый прибор, а именно — на
печатную плату с силовыми токоведущими проводниками. На
рис. 2.5.33, а показано расположение датчика на печатной плате (РСВ).
Датчик располагается над токоведущей шиной, по которой проходит
измеряемый ток /р, создающий магнитное поле с индукцией В. Токове-
дущий проводник может располагаться как со стороны установки
датчика (рис. 2.5.33, б), так и с противоположной стороны (рис. 2.5.33, в).
Это — очень важный момент, поскольку от взаимного расположения
токоведущего проводника и датчика будут зависеть его показания, а
также величина испытательного напряжения электрической изоляции
между силовой шиной и измерительными цепями. Очевидно, при
установке датчика на сторону платы, противоположную токоведущей шине,
напряжение изоляции повышается, однако снизится чувствительность.
Рис. 2.5.33. Установка датчика FHS-40/SP600 на печатную плату
На рис. 2.5.34 показаны типовые зависимости между расстоянием
от датчика до токоведущего проводника, а также его ширины, и
чувствительности датчика. Во всех трех случаях толщина токоведущего
проводника составляет 70 мкм. Почему наблюдается зависимость
чувствительности от ширины проводника? Как датчик, так и токоведу-
щий проводник имеют конечные размеры и не могут быть
представлены точечными моделями. Рекомендуемые нормы установки должны
быть обеспечены технологически.
Рис. 2.5.34. Зависимость чувствительности датчика FHS-40/SP600 от
расположения относительно токоведущего проводника
Чтобы оценить достоинства описываемого датчика,
фирма-производитель выпустила серию готовых к использованию макетных плат с
установленными на них по всем правилам датчиками и
сконфигурированными силовыми токоведущими проводниками. Эти макетные
платы носят наименования KIT4, KIT5, KIT6, KIT7, KIT8, KIT9,
KITH, KIT12. Упомянутые макетные платы с наименованиями KIT11
и KIT 12 несут на себе по два датчика, остальные платы — одиночные.
На рис. 2.5.35, я—е представлен внешний вид макетных плат
KIT4-KIT9. Вариант KIT4 (рис. 2.5.35, а — это вариант расположения
датчика и токоведущего проводника на одной стороне платы. Вариант
KIT5 — расположение элементов с разных сторон платы. В макетной
плате KIT6 использована объемная токоведущая перемычка.
Варианты KIT7 и KIT8 — особые: в них токоведущая шина выполнена таким
образом, чтобы силовой ток прошел через датчик несколько раз, в
результате чего магнитная индукция, созданная отдельными витками,
должно складываться, чем повышается чувствительность датчика для
измерения небольших значений токов. Вариант KIT9 похож на
вариант KIT4, только токоведущая шина здесь усилена.
Рис. 2.5.35. Варианты исполнения макетных плат KIT
Все макетные платы KIT используют единую идеологию
построения: печатный монтаж датчика выполнен с учетом рекомендаций по
помехозащищенности, приведенных в технической документации (к
выводам питания подключены блокировочные конденсаторы,
применена рекомендованная конфигурация «общего проводника»). Выводы
токоведущей шины металлизированы, измерительные цепи и цепи
питания имеют разъемные соединители (контактные группы).
Непосредственно на печатной плате указано положительное направление
измеряемого тока.
Разработчикам силовой техники приходится постоянно учитывать
такое немаловажное обстоятельство, как нагрев токоведущих
проводников. И если объемные проводники можно выполнить любого
необходимого сечения, то с печатными проводниками дело обстоит
намного сложнее: нужное сечение может быть обеспечено только за счет
ширины проводника. Конечно, для печатных проводников можно
увеличивать плотность тока до 25 А/мм2, но эта цифра все-таки
конечна. Учитывая это обстоятельство, разработчики макетных плат KIT
провели тепловые исследования и привели их результаты в
сопроводительной документации. Для примера приведем данные по макетной
плате KIT4.
На рис. 2.5.36 показана тепловая модель распределения
температуры токоведущего проводника толщиной 70 мкм при температуре
окружающей среды 85 градусов Цельсия и протекании тока 10 А.
Видно, что наиболее нагретая зона наблюдается под основанием
датчика, а температура проводника в этой зоне составляет 105 градусов
Цельсия.
Рис. 2.5.36. Тепловая модель токоведущего проводника макетной платы KIT4
Также для разработчика будет полезным оценить возможность
применения KIT в разных температурных диапазонах. График
рис. 2.5.37 показывает допустимое значение тока в токоведущем про-
воднике в зависимости от температуры окружающей среды для
токоведущих проводников толщиной 35 мкм и 70 мкм. Температура
наиболее нагретой зоны здесь составляет 115 градусов Цельсия.
Рис. 2.5.37. График зависимости допустимого тока от температуры
окружающей среды
Второй вариант миниатюрного датчика тока, на который
обращаем внимание читателя, это серия ACS, выпускаемая фирмой «Allegro»
[45]. Главное отличие датчиков этой серии от вышеупомянутых
датчиков заключается в том, что в их составе конструктивно
предусмотрена силовая токоведущая шина. Фирма выпускает два основных ти-
поисполнения датчика — с планарно-монтируемым корпусом
(рис. 2.5.38, а), маркируются кодом «71» и с корпусом для монтажа
выводов в отверстия (рис. 2.5.38, б), маркируются кодом «75».
Основные технические параметры датчиков приведены в табл. 2.5.1.
Рис. 2.5.38. Типы корпусов датчиков тока серии ACS
Таблица 2.5.1. Основные параметры датчиков серии ACS
Тип датчика
Диапазон
рабочих
температур, °С
Нелинейность, %
Измеряемый
номинальный
ток, А
Типовая
чувствительность,
мВ/А
ACS712ELCTR-05B-T
-40...+85
±1,50
±5,0
185,00
ACS712ELCTR-20A-T
-40...+85
±1,50
±20,0
100,00
ACS712ELCTR-30A-T
-40...+85
±1,50
±30,0
66,00
ACS713ELCTR-20A-T
-40...+85
±1,50
0...20Д)
185,00
ACS713ELCTR-30A-T
-40...+85
±1,50
о...зо,о
133,00
ACS714ELCTR-05B-T
-40...+85
±1,50
±5,0
185,00
ACS714ELCTR-20A-T
-40...+85
±1,50
±20,0
100,00
ACS714ELCTR-30A-T
-40...+85
±1,50
±30,0
66,00
ACS714LLCTR-05B-T
-40...+150
±1,50
±5,0
185,00
ACS714LLCTR-20A-T
-40...+150
±1,50
±20,0
100,00
ACS714LLCTR-30A-T
-40...+150
±1,50
±30,0
66,00
ACS715ELCTR-20A-T
-40...+85
±1,50
0...20,0
185,00
ACS715ELCTR-30A-T
-40...+85
±1,50
0...30,0
133,00
ACS715LLCTR-20A-T
-40...+150
±1,50
0...20,0
185,00
ACS715LLCTR-30A-T
-40...+150
±1,50
о...зо,о
133,00
ACS750LCA-050
-40...+150
±5,00
±50,0
40,00
ACS750SCA-050
-20...+85
±5,00
±50,0
40,00
ACS750LCA-075
-40...+150
±5,00
±75,0
19,75
ACS750SCA-075
-20...+85
±5,00
±75,0
19,75
ACS750ECA-100
-40...+150
±5,00
±100,0
19,75
ACS750SCA-100
-20...+85
±5,00
±100,0
19,75
ACS752SCA-050
-20...+85
±4,00
±50,0
40,00
ACS752SCA-100
-20...+85
±4,40
±100,0
20,00
ACS754LCB-050-PFF
-40...+150
±1,50
±50,0
40,00
ACS754SCB-050-PFF
-20...+85
±1,50
±50,0
40,00
ACS754LCB-100-PFF
-40...+150
±1,50
±100,0
20,00
ACS754LCB-100-PSF
-40...+150
±1,50
±100,0
20,00
Окончание табл. 2.5.1
I Диапазон ра-
Тип датчика | бочих темпе-
| ратур, вС
Нелинейность, %
Измеряемый
номинальный
ток, А
Типовая
чувствительность,
мВ/А
ACS754SCB-100-PFF | -20...+85
±1,50
±100,0
20,00
ACS754LCB-130-PFF | -40...+150
±1,50
±130,0
15,00
ACS754LCB-130-PSF 1 -40...+150
±1,50
±130,0
15,00
ACS754SCB-130-PFF | -20...+85
±1,50
±130,0
15,00
ACS754SCB-130-PSF
-20...+85
±1,50
±130,0
15,00
ACS754KCB-150- PFF
-40...+125
±1,30
±150,0
13,30
ACS754KCB- 150-PSF
-40...+125
±1,30
±150,0
13,30
ACS754KCB-150-PSS
-40...+125
±1,30
±150,0
13,30
ACS754SCB-150-PSF
-20...+85
±1,30
±150,0
13,30
ACS754SCB-150-PSS
-20...+85
±1,30
±150,0
13,30
ACS754SCB-200-PFF
-20...+85
±1,20
±200,0
10,00
ACS754SCB-200-PSF
-20...+85
±1,20
±200,0
10,00
ACS755LCB-050-PFF
-40...+150
±2,80
0...50.0
60,00
ACS755SCB 050-PFF
-20...+85
±2,80
0...50.0
60,00
ACS755LCB-100- PFF
-40...+150
±2,80
0... 100,0
40,00
ACS755SCB- 100-PFF ! -20...+85
±2,80
0...100.0
40,00
ACS755LCB-130-PFF | -40...+150
±0,85
0... 130,0
30,00
ACS755LCB-130-PSF | -40...+150
±0,85
0... 130,0
30,00
ACS755SCB-130-PFF | -20...+85
±0,85
0...130Д)
30,00
ACS755SCB-130-PSF | -20...+85
±0,85
0...130.0
30,00
ACS755KCB-150-PSF | -40...+125
±0,95
0...150,0
26,00
ACS755SCB- 150-PSF | -20...+85
±0,95
0...150,0
26,00
ACS755SCB-200-PSF | -20...+85
±0,80
0...200Д)
20,00
ACS756SCA-050B-PFF-T | -20...+85
±1,80
±50,0
40,00
ACS756SCA-100B-PFF-T | -20...+85
±1,80
±100,0
20,00
ACS756KCA-050B-PFF-T | -40...+125
±1,80
±50,0
40,00
В качестве примера рассмотрим подробнее типономиналы ACS712
и ACS754, имея в виду, что внутреннее устройство и схемы
подключения остальных датчиков аналогичны указанным. Итак, на рис. 2.5.39,
а приведена схема подключения датчика ACS712, а на рис 2.5.39, б -—
схема подключения датчика ACS754.
Рис. 2.5.39. Схема подключения: а — датчика ACS712; б — датчика ACS754
Типовыми компонентами схемы являются блокировочные
конденсаторы питающего напряжения CBYP, конденсатор выходного фильтра CF
и (для датчика ACS754) резистор выходного RC-фильтра RF. Номиналы
этих элементов рекомендуется выбрать такими, как указаны на схемах, а
в случае использования датчика ACS754 номиналы RC-фильтра следует
рассчитать исходя из требований по скорости измерения тока.
На рис. 2.5.40 показана структурная схема датчика ACS712. Через
выводы IP+ и IP- проходит измеряемый ток. К датчику Холла
подключается схема генератора стабильного тока, а также схемы
температурной компенсации, настройки чувствительности и нулевого
выходного тока. Последний усилительный каскад выполняет роль
согласующего между фильтром высокочастотных гармоник и внешней
схемой обработки сигнала.
Для сравнения, на рис. 2.5.41 приведена структурная схема
датчика ACS754. Дополнительных комментариев эта структурная схема не
требует, так как построена с применением типовых узлов.
Рис. 2.5.40. Структурная схема датчика ACS712
Рис. 2.5.41. Структурная схема датчика ACS754
Каким образом применять описанные датчики для измерения
токов? Казалось бы, здесь нет никаких особенностей — датчик
включается в цепь с измеряемым током, и на этом все хитрости
заканчиваются. Именно так поступают, когда номинальный ток в измеряемой
цепи не превышает номинального тока датчика. А если — превышает?
Тогда датчик может измерять часть тока с технологического отвода,
показанного на рис. 2.5.42.
Согласно рис. 2.5.42, силовой ток 1Ш разбивается на два: ток
датчика Isens и основной ток Ishunr Очевидно, что:
Задача разработчика состоит в том, чтобы рассчитать значения
протекающих токов по конфигурации токоведущих проводников.
Выполнить эту задачу поможет рис. 2.5.43.
Рис. 2.5.42. Технологический отвод тока
(2.5.5)
Рис. 2.5.43. К расчету параметров технологического отвода тока
На рис. 2.5.43 показан установленный датчик тока с планарным
расположением выводов, что не мешает распространить
нижеприведенную теорию на датчики другого конструктивного исполнения.
Итак, обозначив конструктивные параметры токоведущих
проводников (длина, ширина, высота), найдем значения тока датчика:
(2.5.6)
где
(2.5.7)
и
(2.5.8)
В формулах (2.5.7) и (2.5.8):
Rshunt — сопротивление участка протекания основного тока;
Rsense — сопротивление участка протекания тока датчика;
^primary — сопротивление токоведущего проводника датчика;
рс — удельное сопротивление медного проводника;
Wshunt, Wsense — ширина проводников основной цепи и цепи
датчика тока;
Т — толщина токоведущих проводников.
Исходя из этих соотношений мы можем вывести значение
необходимой ширины проводника протекания основного тока:
(2.5.9)
В заключение этого раздела приведем некоторые примеры
применения миниатюрных датчиков тока. Согласно технической
документации, представленные датчики являются однополярными
приборами. Чтобы обеспечить измерение двуполярных (например,
переменных) токов, датчики должны быть включены встречно-параллельно,
как показано на рис. 2.5.44.
Схема включения датчиков должна быть дополнена элементами,
показанными на рис. 2.5.45. В составе этой схемы предусмотрены
фазовращатель, инвертор и сумматор. График, иллюстрирующий работы
схемы обработки сигналов, приведен на рис. 2.5.46.
И, наконец, об использовании датчиков в составе многослойных
шинопроводов. Зачем нужны эти самые многослойные шинопроводы,
почему разработчики силовой преобразовательной техники все более
и более обращают внимание на использование именно таких конст-
Рис. 2.5.44. Встречно-параллельное включение датчиков
Рис. 2.5.45. Схема преобразования двуполярного сигнала
Рис. 2.5.46. К пояснению работы схемы преобразования двуполярного
сигнала
руктивных решений силовых проводников, — об этом мы подробно
поговорим в следующей главе, а сейчас приведем пример того, как
миниатюрные датчики могут легко встраиваться в токоведущие слои
шинопроводов (рис. 2.5.47).
Рис. 2.5.47. Встраивание миниатюрных датчиков в многослойные
шинопроводы
Конфигурация шинопровода выбрана таким образом, что
сопротивление слоев 2, 4, 6 равно сопротивлению слоев 1, 3, 5. В нечетные
слои встроены датчики таким образом, чтобы обрабатывать двуполяр-
ные сигналы. Между слоями токопроводящими проложены
изоляционные слои, а датчики помещаются в вырезах изоляции.
2.6. Несколько слов о моточных изделиях
О принципах проектирования моточных изделий,
использующихся в приборах силовой электроники (сюда входят дроссели, реакторы,
трансформаторы) написано достаточно книг, поэтому мы не будем
здесь повторяться и подробно разъяснять читателю, что такое
идеальные и реальные индуктивные элементы, как вычислять поле в магни-
топроводах, как рассчитать в них тепловые потери, как выбрать
подходящее сечение обмоточных проводов, какие бывают
конструктивные исполнения этих элементов и т. д. Обо всем об этом можно
прочитать, например, в [1] и [2]. Наш рассказ посвятим лишь
перспективным ферромагнитным материалам и изделиям на их основе,
которые целесообразно использовать при проектировании мощных
статических преобразователей, а также расскажем о новой технологии
компактной «намотки» трансформаторов и дросселей.
Далеко не всякие ферромагнитные материалы могут быть
использованы в силовой электронике для намотки трансформаторов и
дросселей, тем более высокочастотных. Назовем основные свойства
материалов, которые являются «пропуском» в область силовой
преобразовательной техники:
• материал должен легко намагничиваться и размагничиваться, то
есть обладать магнитомягкими свойствами (обладать узкой
петлей гистерезиса, малой коэрцитивной силой, большими
значениями начальной и максимальной магнитной проницаемости);
• материал должен обладать большой индукцией насыщения, что
позволит разработчику максимально уменьшить габариты и
массу индуктивных элементов;
• материал должен обладать возможно меньшими потерями на пе-
ремагничивание и вихревые токи;
• материал должен иметь слабую зависимость магнитных свойств
от механических напряжений типа растяжения и сжатия;
• материал должен в максимальной степени сохранять магнитные
характеристики при изменении температуры, влажности, иметь
временную стабильность характеристик.
В большинстве электротехнических справочников магнитные
материалы для изготовления дросселей и трансформаторов
классифицируются по трем основным группам:
а) проводниковые — электротехнические стали и сплавы (сюда
также входят пермаллои);
б) полупроводниковые — различные типы ферритов;
в) диэлектрические — магнитодиэлектрики (МО-пермаллои).
Применение материалов, относящихся к разным группам, имеет
свои особенности. При изготовлении электромагнитных элементов,
работающих на частотах от 50 Гц до 10 кГц, используют
электротехнические стали, на частотах от 5... 10 до 20...30 кГц —
электротехнические сплавы, на частотах от нескольких кГц и выше — ферриты и
магнитодиэлектрики. Отдельные виды электротехнических сплавов
так называемого микронного проката работают на частотах до
нескольких сотен кГц. Но в любом случае надо помнить, что верхняя
частота эффективной работы материала ограничена потерями в нем
на перемагничивание (на гистерезис) и на вихревые токи.
Рассматривать подробно достоинства и недостатки
электротехнических сталей не имеет никакого смысла, поскольку они в основном
используются в низкочастотной преобразовательной технике — в
сетевых трансформаторах и сглаживающих дросселях фильтров,
рассчитанных на частоты в диапазоне 50...400 Гц. Конечно, обычные сетевые
низкочастотные трансформаторы тоже используются в
преобразовательной технике — для обеспечения питания собственных нужд. Но их
теория хорошо известна, а потому выходит за рамки данной книги.
Кроме того, электротехнические стали совершенно не годятся для
проектирования высокочастотных индуктивных элементов.
Электротехнические сплавы типа пермаллоя, имея значительную
чувствительность к механическим ударам, до недавнего времени были не слишком
популярны у разработчиков силовой преобразовательной техники.
Однако теперь технология изготовления изделий на основе пермаллоя
сделала значительный прогрессивный шаг, появились доступные и
надежные магнитопроводы, стойкие к внешним воздействиям.
В отличие от электротехнических сталей, в основе которых
содержится только небольшое количество кремния (не более 4 %), пермаллои
представляют собой сложные по структуре сплавы с примесью хрома,
никеля, кобальта и других металлов, что и обуславливает их
замечательные свойства. Наиболее известны такие марки пермаллоев, как 79НМ,
81НМА. Эти материалы выпускаются в виде ленты толщиной от
0,005 мм до 2,5 мм, обладают начальной магнитной проницаемостью
порядка 10 ООО, максимальной магнитной проницаемостью около 200 000,
индукция насыщения пермаллоев составляет около 0,75 Тл. Главная
проблема практического применения пермаллоев состоит в том, что
промышленность выпускает ограниченный типоряд готовых
сердечников и магнитопроводов из этих материалов. К тому же далеко не всякое
предприятие обладает необходимым оборудованием для изготовления
качественных магнитопроводов из пермаллоевой ленты. Но это вовсе не
означает, что нужно отказываться от использования
электротехнических сплавов. Сегодня в области проектирования силовой
преобразовательной техники стремительно растет интерес к использованию таких
электротехнических сплавов, как аморфные магнитомягкие сплавы.
Они отличаются от сплавов кристаллического типа, к которым
относятся пермаллои, улучшенными магнитными и механическими
свойствами, высоким собственным электрическим сопротивлением (что
снижает потери на вихревые токи), малыми потерями на гистерезис. Величина
вихревых токов, возникающих в аморфных магнитомягких сплавах, в
3...5 раз меньше, чем у кристаллических сплавов. И, что немаловажно,
промышленность наладила выпуск широкой номенклатуры изделий из
аморфных сплавов, отличающихся низкой стоимостью.
Ведущим отечественным предприятием по производству изделий
из аморфных магнитомягких сплавов является НПО «Гаммамет»
(г.Екатеринбург) [46]. Наиболее серьезно преуспело это предприятие
в выпуске кольцевых магнитопроводов с наружным диаметром до
600 мм, и высотой, кратной 5 мм. Выпускаются также П-образные
магнитопроводы и магнитопроводы прямоугольного (стержневого)
типа. Изделия из аморфного сплава марок ГМ работают в диапазоне
температур от минус 60 до +125 °С. Выпускаются две разновидности
изделий из аморфных материалов: размещаемые в защитных
контейнерах из полипропилена и в комбинированных контейнерах. Изделия
могут быть поставлены и без контейнеров, но этот вариант очень
неудобен для потребителя — ему в этом случае придется выполнять
изоляцию магнитопровода самостоятельно. Верхняя граница рабочей
частоты материала, как указано в фирменных технических условиях,
составляет около 200 кГц. Магнитные свойства наиболее
распространенных марок сплава ГМ приведены в табл. 2.6.1.
Таблица 2.6.1. Основные параметры аморфных сплавов типа ГМ
[ Марка материала
ц„, о.е.
Umax. о.е.
Ис, А/м
ГМ412А
1,12
10 000
600 000
1,2
ГМ414
1,15
60 000
300 000
1,0
ГМ440А
1,5
1000
200 000
4,0
ГМ501
0,43
150 000
600 000
0,15
ГМ503А
0,58
5000
150 000
0,2
ГМ515А
0,95
150
250 000
1,5
ГМ11ДС
0,32
70 000
150 000
0,4
ГМ14ДС
0,8
20 000
50 000
2,0
ГМ32ДС
0,75
7000
200 000
2,0
гмзздс
0,4
3000
600 000
0,5
ГМ42ДС
0,75
20 000
25 000
2,0
ГМ43ДС
0,4
35 000
40 000
0,5
ГМ45ДС
0,7 1200
1250
2,5
ГМ54ДС-1000
0,8 1000
1100
3,0
ГМ54ДС-700
0,8 700
760
3,0
ГМ54ДС-500
0,8
500
540
3,0
ГМ54ДС-350
0,8
350
370
3,0
ГМ54ДС-250
0,8
250
260
3,0
ГМ54ДС-200
0,8
200
215
3,0
ГМ54ДС-140
0,8
140
150
3,0
ГМ54ДС-90
0,8
90
96
4,0
|гМ54ДС-60
0,8
60
64
4,0
ГМ54ДС-40
0,8
40
42
4,0
J ГМ54ДС-30
0,8
30
31
4,0
На рис. 2.6.1 и рис. 2.6.2 приведены кривые намагничивания
материалов марок ГМ32ДС и ГМ54ДС.
Рис. 2.6.1. Кривая намагничивания материала ГМ32ДС
Рис. 2.6.2. Семейство кривых намагничивания материала ГМ54ДС
с проницаемостью 30... 1000
Особое внимание следует обратить на магнитопроводы из
материала ГМ54ДС. Эти магнитопроводы, имеющие неферромагнитный
зазор, могут быть использованы для намотки мощных дросселей,
«работающих» в режиме подмагничивания постоянным током и с
меняющимися однополярными токами.
Теперь вкратце поговорим о ферритах. Эти материалы наиболее
часто используются в силовой преобразовательной технике. Они
представляют собой поликристаллические многокомпонентные
соединения, изготавливаемые по особой технологии, общая химическая
формула которых MeFe203 (где Me — какой-либо ферромагнетик,
например, Mn, Zn, Ni). Являясь полупроводниками, ферриты обладают
высокими значениями собственного электрического сопротивления,
превышающего сопротивление сталей в 50 и более раз. Именно это
обстоятельство позволяет применять ферриты в индуктивных элементах,
работающих на высоких частотах, без опасения резкого возрастания
потерь на вихревые токи. Наибольшее распространение в силовой
преобразовательной технике получили отечественные марганец-цинковые
ферриты марок НМ и никель-цинковые ферриты марок НН. При
выборе между этими марками предпочтение следует отдать ферритам марок
НМ, поскольку они имеют более высокую температуру Кюри
(температуру, при которой ферромагнетики теряют свои ферромагнитные
свойства), что позволяет эксплуатировать их при более высоких
температурах нагрева индуктивных элементов. Потери на гистерезис у
марганец-цинковых ферритов на порядок меньше, чем у никель-цинковых.
Ферриты марок НМ обладают высокой стабильностью к воздействию
механических нагрузок. Однако электрическое сопротивление
ферритов марок НМ меньше, чем ферритов марок НН, поэтому последние
могут эксплуатироваться на более высоких частотах.
Отметим из наиболее часто встречающихся никель-цинковые
ферриты марок 2000НН, 1000НН, 600НН, 200НН, 100НН. Верхней
границей рабочей области частот для них является 5—7 МГц. Марганце-
во-цинковые нетермостабильные высокопроницаемые ферриты марок
6000НМ, 4000НМ, 3000НМ, 2000НМ, 1500НМ (рис. 2.6.3), 1000НМ
используются в частотном диапазоне до нескольких сот кГц в
интервале температур от минус 60 до +100 °С, когда термостабильность не
является определяющим параметром. В противном случае можно
использовать термостабильные ферриты марок 2000НМЗ, 2000НМ1,
1500НМЗ, 1500НМ1, 1000НМЗ, 700НМ. Вдобавок к свойству
термостабильности, эти марки обладают меньшими потерями на вихревые
токи и расширенным диапазоном частот эффективной работы (от 0,3
до 1,5 МГц). В средних и особенно в сильных полях (где индукция
превышает 0,1 Тл) хорошо применять ферриты марок 4000НМС,
3000НМС, 2500НМС1, 2500НМС2. Лучшими представителями в этой
группе являются ферриты типов 2500НМС1 и 2500НМС2.
Рис. 2.6.3. Кривая намагничивания феррита 1500НМЗ при различных
температурах и частотах: / — 20 кГц; 2—50 кГц; 3 — 100 кГц
Таблица 2.6.2. Параметры ферритов марок 2500НМС1 и 2500НМС2
Параметр
Обозн.
Ед. измерения
2500HMC1
2500HMC2 !
Начальная магнитная
проницаемость
(Я-0,2Тл,/- 16 кГц)
Цн
4500
(при 20 °С)
4100
(при 120 °С)
4500 1
(при20°С)
4100 |
(при 120 °С) |
Критическая частота
/с
МГц
0,4
0,4 |
Удельные объемные
магнитные потери
1(Я-0,2Тл,/- 16 кГц)
Psp
мкВт/см3 Гц
10,5
(при 25 °С)
8 7
(при 100 °С)
8,5
(при25°С) !
6,0
(при 100 вС) |
Магнитная индукция
(при Я =240 А/м)
В
мТл
290
330 |
Остаточная магнитная
индукция
Вг
мТл
100
90
Температура Кюри
Тс
°С
>200
>200
Плотность
—
г/см3
1
1
Удельное электрическое
сопротивление
9с
Ом-м
4,9
4,9
I Коэрцитивная сила
А/м
16
16
Применение ферритов марок 2500НМС и 2500НМС1 (рис. 2.6.4)
позволяет уменьшить массу и габариты трансформатора
соответственно на 8 % и 15 % по сравнению с типовыми ферритами марок
2000НМ, а при сохранении прежних типоразмеров — увеличить мощ-
Рис. 2.6.4. Кривая намагничивания феррита 2500НМС1 при частоте 20 кГц
ность на 20 %. Конечно, эти оценки сугубо условны, так как в
расчетах участвует слишком много факторов, в том числе и
конструктивных, но в среднем ожидаемые показатели могут быть такими, какие
здесь приведены. Этот пример свидетельствует о том, насколько
важен выбор типа ферромагнетика при проектировании индуктивных
элементов для преобразовательной техники.
В табл. 2.6.3 приведены параметры наиболее часто встречающихся
отечественных ферритов марок НМ и НН.
Таблица 2.6.3. Параметры наиболее часто встречающихся ферритов марок НН и НМ
Марка
цн> о.е.
Мтах> О.е.
/с МГц
ВпТл
Яс, А/м
2000HM3
1700...2500
3500
0,35...0,4
0,5
200
0,12
25
2000НМ1
1700...2500
3500
0,38...0,4
0,5
200
0,12
25
1500HM3
1200... 1800
3000
0,35...0,4
1,5
200
0,08
16
1500НМ1
1200... 1800
3000
0,35...0,4
0,7
2000
—
16
2000НМ
2000
3500
0,38...0,4
0,45
200
0,12
24
100НН
80...120
850
—
7,0
120
—
15
400НН
350...500
1100
0,25
3,5
ПО
0,12
64
600НН
500...800
1600
0,31
1,5
ПО
0,14
32
юоонн
800...1200
3000
0,27
0,4
110
0,15
20
В настоящее время у разработчиков силовой преобразовательной
техники становятся все более популярными импортные изделия из
ферритов. Они в достаточном количестве присутствуют на
отечественном рынке, их можно без труда приобрести и заменить на аналоги,
производимые разными фирмами. Как показывает практика,
ферриты, выпускаемые ведущими зарубежными фирмами (например, фирма
«Epcos» считается одним из лидеров производства изделий из
ферритов), в значительной степени превосходят по своим характеристикам
отечественные ферриты, главным образом, в отношении пониженных
потерь на гистерезис и на вихревые токи. Кроме того, номенклатура
конфигураций магнитопроводов, изготавливаемых из этих ферритов,
значительно более широка. В табл. 2.6.4 приведены параметры
наиболее популярных марок, выпускаемых фирмой «Epcos» [39].
Таблица 2.6.4. Параметры ферритов, выпускаемых фирмой «Epcos»
Марка
Материал
MHi o.e.
Вт,Тл
Hc, А/м
К1
Ni-Zn
80
0,31
380
мзз
Mn—Zn
750
0,4
80
N22
Mn—Zn
2300
0,28
18
N27
Mn—Zn
2000
0,5
22
N41
Mn—Zn
2800
0,49
22
N48
Mn—Zn
2300
0,42
26
N49
Mn—Zn
1300
0,46
18
N67
Mn—Zn
2100
0,48
22
N72
Mn—Zn
2500
0,48
15
N87
Mn—Zn
2200
0,48
16
Еще одно обстоятельство в пользу применения импортных
ферритов, производимых фирмой «Epcos», — наличие свободно
распространяемой программы Ferrite Magnetic Design Tools, которая
визуализирует магнитные характеристики всех предлагаемых материалов,
позволяет построить множество полезных для разработчика графиков,
отражающих поведение ферритов в разных эксплуатационных
условиях, например, при разной температуре и рабочей частоте.
Поговорим теперь о магнитодиэлектриках. Эти материалы
разработаны на основе мелокопомолотых порошков, обладающих
магнитными свойствами, и связующего диэлектрического материала на
основе полистирола. В магнитодиэлектриках частицы магнетика
отделены друг от друга диэлектрической средой, являющейся одновременно
электрической изоляцией и механической связкой всей системы.
Магнитная проницаемость магнитодиэлектриков невелика (от
нескольких единиц до сотен относительных единиц). Благодаря
большому размагничивающему фактору параметры магнитодиэлектриков
мало зависят от внешних полей. В области силовой
преобразовательной техники можно встретить две основные группы
магнитодиэлектриков: альсиферы и пресспермы.
Альсиферы — широко применяемый вид магнитодиэлектриков,
основу магнитного наполнения которых составляет тройной сплав А1—
Si—Fe (алюминий—кремний—железо). Отечественной
промышленностью выпускаются 6 марок альсиферов с относительной
проницаемостью от 22 до 90, предназначенных для работы в интервале температур
от минус 60 до +120 °С. Буквы в названии марок означают: ТЧ —
тональная частота; ВЧ — высокая частота; К — с компенсированным
температурным коэффициентом магнитной проницаемости. Основные
параметры альсиферов приведены в табл. 2.6.5. На графике рис. 2.6.5
приведены кривые намагничивания альсиферов марок ТЧ-60, ТЧ-32,
ВЧ-22.
Рис. 2.6.5. Кривые намагничивания альсиферов: 1 — ТЧ-60; 2 — ТЧ-32;
3 - ВЧ-22
Таблица 2.6.5. Параметры отечественных альсиферов
Марка
м
5„-1<Р
/, МГц
Маркировка
ТЧ-90
79...91
3,0
0,02
Синий
ТЧ-60
56...63
2,0
0,07
Черный
ТЧК-55
48...5S
2,0
0,07
Красный
ВЧ-32
28...33
1,2
0,2
Белый
ВЧ-22
19...24
2,0
0,7
Зеленый
ВЧК-22
19...24
2,0
0,7
Желтый
5Н — коэффициент потерь на гистерезис.
Коэффициент потерь на гистерезис у альсиферов остается
постоянным лишь при слабых полях. При повышении напряженности поля
он снижается и в полях порядка 1500...2000 А/м падает до 0,1 своего
начального значения. Такая зависимость объясняется следующими
физическими принципами: в слабых полях площадь петли
гистерезиса альсиферов растет пропорционально третьей степени
напряженности внешнего поля (Н), а в сильных — медленнее.
Пресспермы — магнитодиэлектрики, производимые на основе так
называемого мо-пермаллоя. Изготавливают их из мелкопомолотого
металлического порошка высоконикилевого пермаллоя, легированного
молибденом. Пресспермы обладают повышенной магнитной
проницаемостью, низким уровнем гистерезисных потерь. Отечественной
промышленностью разработаны 10 марок пресспермов (5 нетермокомпен-
сированных и столько же — термокомпенсированных). Параметры
некоторых представителей приведены в табл. 2.6.6. В обозначении
термокомпенсированных пресспермов добавляется буква «К». Цифра в
обозначении марки — это значение номинальной магнитной
проницаемости. Верхняя рабочая частота мо-пермаллоевых магнитопроводов
составляет 100 кГц.
На рис. 2.6.6 приведены кривые намагничивания пресспермов
наиболее распространенных марок.
Таблица 2.6.6. Параметры отечественных мо-пермаллоев
Марка
/с, кГц
°с
5н-Ю3
МП-60
100
-60...+85
55
1,5
МП-100
100
-60...+85
100
2,0
МП-140
100
-60...+85
140
2,0
МП-250
100
-60...+85
250
3,0
а) б)
Рис. 2.6.6. Кривые намагничивания пресспермов (а), кривые изменения
проницаемости от напряженности внешнего поля (б): 1 — МП-250; 2 —
МП-140; 3 - МП-100; 4 - МП-60
К сожалению, изделия на основе мо-пермаллоя имеют достаточно
высокую стоимость из-за высокого содержания в них никеля,
являющегося дорогостоящим материалом. Появление материалов типа
МРР, High Них и Kool М и изделий на их основе, поставляемых ЗАО
«ЛЭПКОС» [47] позволило удешевить технологию производства маг-
нитопроводов и, соответственно, в конечном итоге снизить стоимость
изготовления индуктивных элементов. Наиболее интересны в
представленной номенклатуре магнитопроводы, изготавливаемые из
материалов марок High Flux и Kool М.
Магнитопроводы, производимые на основе материала High Flux,
представляют собой сердечники кольцевого типа. Для изготовления
сердечников используется смесь, состоящая из 50 % никеля и 50 %
порошкового железа, что позволило достигнуть индукции насыщения
значения 1,5 Тл. Для сравнения: стандартная индукция насыщения
отечественных пермаллоев составляет 0,75 Тл, а у ферритов она
вообще не превышает в лучшем случае 0,45 Тл. Относительная магнитная
проницаемость материала High Flux лежит в диапазоне 14... 160.
Применять изделия на основе этих материалов имеет смысл в условиях
высокого подмагничивания постоянными токами, например, для
дросселей выходных фильтров постоянного тока.
Несколько хуже обстоит дело с величиной индукции насыщения у
материала Kool М — 1,05 Тл. Однако это все равно выше, чем у
стандартных мо-пермаллоев. Кроме того, в номенклатуре производимых
изделий из этого материала имеются сердечники Ш-типа, которыми
можно заменить обычные ферритовые Ш-образные сердечники и
разработать моточные изделия меньших габаритов, не опасаясь
перегревов вследствие потерь на гистерезис и вихревые токи (этот материал
обладает очень низким уровнем потерь).
Материал МРР имеет еще более низкую индукцию насыщения,
составляющую 0,75 Тл, что уже сравнивается с аналогичным
параметром для мо-пермаллоя. Тем не менее, относительная магнитная
проницаемость этого материала находится в диапазоне 14...550, потери на
порядок меньше, и, вдобавок ко всему, индуктивные элементы,
изготовленные с применением этого материала, обладают высокой
стабильностью индуктивности даже после намагничивания постоянным
током большого значения.
Изделия из упомянутых выше ферромагнитных материалов,
изготавливающиеся промышленностью, используются в качестве
полуфабрикатов для намотки трансформаторов и дросселей. Номенклатура
выпускаемых электротехнических изделий столь широка, что в рамках
данной книги вряд ли удастся рассказать обо всехтипономиналах.
Впрочем, такой необходимости и нет — существует достаточное количество
справочников, доступны материалы из «всемирной паутины». Поэтому
коротко напомним основные виды изделий, с которыми обычно имеют
дело при разработке преобразовательной техники: кольцевые
магнитопроводы (ring cores), стержневые сердечники круглого сечения (rod
cores), стержневые сердечники прямоугольного сечения (plate cores),
броневые чашечные магнитопроводы (pot cores), броневые III-образные
магнитопроводы (E-cores), броневые магнитопроводы типа KB (RM
cores). Эти типы магнитопроводов давно освоены также и
отечественной промышленностью, налажено их серийное производство.
В заключение раздела имеет смысл рассказать об одной
интересной конструктивной идее, которая может пригодиться при разработке
малогабаритных исполнений статических преобразователей
небольшой мощности. Речь идет об индуктивных элементах с
минимально-возможной высотой. Идея достаточно простая (показана на
рис. 2.6.7): обмотка индуктивного элемента проектируется не с
применением всем известного эмалированного медного провода, а
вытравливается на многослойной печатной плате. Слои платы имеют
переходные отверстия и стыкуются таким образом, чтобы обеспечить
необходимое количество витков в обмотках.
Рис. 2.6.7. Обмотка в виде печатных проводников
На рис. 2.6.8 показан пример послойной разводки слоев
трансформаторных обмоток. Слой 1 (layer 1) и слой 10 (layer 10)
предназначены для соединения обмоток с терминальными контактами
индуктивного элемента, с помощью которых он включается в
электрическую схему. Слои 2, 3, 8, 9 образуют первичную обмотку, слои 4 и
7 — вторичную, слои 5 и 6 — еще одну вторичную обмотку.
Как показывает опыт разработки «печатных» преобразователей,
однослойный печатный проводник «держит» нагрузку до 12 А, однако
ее можно повысить, включив параллельно несколько слоев. Рабочая
Рис. 2.6.8. Пример послойной разводки обмотки
частота «печатных» статических преобразователей составляет около
500 кГц — именно на таких частотах можно ограничиться
несколькими витками.
2.7. «Рассыпуха» силовой электроники
Этим словом в среде разработчиков электронной техники обычно
именуют комплектующие изделия, которые считаются тривиальными,
то есть давно известными и применяющиеся широко. Обычно таким
элементам в литературе не уделяют достаточного внимания. Это
прежде всего выпрямительные диоды и диодные модули, конденсаторы,
резисторы и т. д. Быть может, нам тоже имеет смысл поддаться
всеобщей тенденции и отослать читателя к сайтам производителей и тор-
гующим фирмам? Давайте все-таки не будем спешить: разговор этот
не только возможен, но и принципиально важен, поскольку
работоспособность статических преобразователей электроэнергии в
значительной степени зависит от того, какие именно элементы, входящие в
класс «рассыпуха», будут выбраны при проектировании.
Разговор об этих тривиальных компонентах мы начнем с силовых
электролитических конденсаторов. Традиционно этот элемент
используется во входном звене силовой схемы статических
преобразователей в качестве фильтра пульсаций сетевого напряжения (рис. 2.7.1).
Рис. 2.7.1. Фильтрующие конденсаторы в составе статического
преобразователя
Обкладки конденсатора (катод и анод) изготавливаются из
алюминиевой ленты, между обкладками проложена специальная
электролитическая бумага, пропитанная жидким электролитом. Одна из
обкладок имеет очень тонкий слой окисла алюминия, появляющегося в
результате электролитического окисления и являющегося диэлектриком.
Этот оксидный слой имеет свойство односторонней проводимости, но
в определенном направлении приложения электрического потенциала
он обладает отличными диэлектрическими свойствами, а также малой
толщиной, что позволяет изготавливать конденсаторы больших
емкостей с небольшими размерами. Устройство обычного
электролитического конденсатора графически иллюстрировано на рис. 2.7.2.
В связи с вышесказанным, подавляющее большинство
выпускаемых промышленностью электролитических конденсаторов являются
полярными элементами, и при их включении в схему нужно
соблюдать соответствующую полярность. Если обе алюминиевые полосы
имеют на своей поверхности слой окисла, конденсатор станет
неполярным. Такие конденсаторы тоже серийно выпускаются, но приме-
Рис. 2.7.2. Устройство электролитического конденсатора
няют их значительно реже полярных. Например, фирма «Нкапо»
выпускает неполярные электролитические конденсаторы серий ENR и
ENA, имеющие диапазон емкостей от 0,47 до 1000 мкФ и рабочими
напряжениями до 160 В с температурным диапазоном от минус 40 до
+85 °С. Номенклатура отечественных конденсаторов серии К50-68Н,
выпускаемых отечественным ОАО «Элеконд» (г.Сарапул) [48],
скромнее: от 2,2 мкФ до 22 мкФ в диапазоне напряжений от 16 до 50 В (в
том же самом диапазоне рабочих температур).
Емкость алюминиевого электролитического конденсатора может
приближенно быть вычислена из следующей формулы для
плоскопараллельного конденсатора, известного из школьного курса физики:
(2.7.1)
где е — диэлектрическая проницаемость материала диэлектрика;
S — площадь диэлектрика;
d — толщина диэлектрика.
Очевидно, чтобы достигнуть более высокой емкости
конденсатора, диэлектрическая проницаемость и площадь диэлектрика должны
быть как можно больше, а толщина диэлектрика — как можно
меньше. В табл. 2.7.1 показаны значения диэлектрических постоянных и
толщина материалов, использующихся в различных типах
конденсаторов.
Но здесь появляется одна существенная техническая проблема:
чем тоньше диэлектрик, тем меньше напряжение его пробоя. В случае
электролитического конденсатора толщину диэлектрика можно
снижать, рассчитывая ее на определенное максимальное рабочее
напряжение и снижая габариты конденсатора. Но чем толыие оксидная
пленка, тем более жесткие требования предъявляются к механической
стойкости и к их надежности, долговечности, сроку службы.
Таблица 2.7.1. Диэлектрическая характеристика материалов
Тип конденсатора
Диэлектрик
Диэлектрическая
проницаемость
Толщина
диэлектрика, мкм
Алюминиевый
электролитический конденсатор
Оксид
алюминия
7...10
0,0013...0,0015
Танталовый
электролитический конденсатор
Оксид тантала
24
0,001...0,0015
Пленочный конденсатор
(металлизированный)
Полиэстерная
пленка
3,2
0,5...2,0
Керамический конденсатор
(с высокой диэлектрической
проницаемостью)
Титанат бария
500...20 ООО
5,0
Керамический конденсатор
(термокомпенсированный)
Оксид титана
15...250
5,0
Создание оксидной пленки происходит с помощью
гальванического травления в хлориде алюминия при пропускании переменного
(АС) или постоянного (DC) тока, либо попеременного чередования
АС и DC токов. Существует два основных типа травления:
поверхностное травление, являющееся в основном продуктом АС электролиза
(выполняется для конденсаторов с низким значением допустимого
рабочего напряжения), и туннельное травление, получающееся в
результате DC электролиза (применяется для конденсаторов со средним
и высоким значением допустимого напряжения). Затем диэлектрик
помещается в раствор борной кислоты для очистки поверхностей.
Зачем в электролитическом конденсаторе присутствует
электролит? Не проще было бы окислить обкладки и проложить между ними
сухую бумагу, свернув затем этот «бутерброд» в трубочку?
Оказывается, так делать нельзя. Конденсатор, изготовленный подобным
способом, будет иметь небольшую и очень нестабильную емкость, так как
обкладки получатся отстоящими друг от друга достаточно далеко,
прилегать они будут неравномерно. Поэтому бумага пропитывается
специальным электролитом — жидкостью, проводящей ток. Одна из
алюминиевых обкладок в результате пропитки становится вторичным
катодом, а собственно катод получается из бумаги, пропитанной
электролитом. Таким образом, в качестве диэлектрика выступает
оксидный слой, и достигается высокая емкость конденсатора.
К электролитической жидкости для пропитки конденсаторной
бумаги предъявляются следующие основные требования: во-первых, она
должна обладать хорошими токопроводящими свойствами;
во-вторых, восстанавливать дефекты оксидного слоя; в-третьих, — не обра-
зовывать химической реакции с фольгой анода и катода;
в-четвертых, — не должна создавать давление внутри оболочки конденсатора
при нормальной работе. С учетом приведенных требований
разработаны разные типы электролитических жидкостей для работы при
разных напряжениях и разных температурах.
Несколько слов о точности выдержки номинальных параметров
конденсаторов. Стандартный допуск емкости электролитических
конденсаторов обычно составляет ±20 % (группа М) и даже 50 %, однако
выпускаются конденсаторы с более жестким допуском ±10 % (группа
К), которые следует использовать обоснованно, то есть там, где это
действительно необходимо.
Возможно, читатель уже задал себе вопрос — к чему все эти
рассказы о технологии производства электролитических конденсаторов?
Дело в том, что чистота материала обкладок, качество
электролитической жидкости, плотность прилегания пропитанной бумаги к
обкладкам — все это влияет на так называемые эквивалентные параметры
конденсаторов. И если во многих случаях для применения того или
иного «электролита» достаточно произвести его выбор по значению
номинальной емкости и номинального напряжения, то при
разработке силовой преобразовательной техники этого явно недостаточно.
Необходимо принимать во внимание еще ряд параметров, о которых мы
далее поговорим.
Итак, в группу основных параметров электролитических
конденсаторов включаются: эквивалентное последовательное сопротивление
(ESR) и тангенс угла потерь (tg б). Эти параметры определяют, по
сути, полный импеданс конденсатора (Z), составляющие
эквивалентной схемы которого приведены на рис. 2.7.3.
На рис. 2.7.3 обозначены: С — собственная емкость конденсатора;
г — сопротивление утечки электролита; R — эквивалентное
последовательное сопротивление; L — эквивалентная последовательная
индуктивность.
Рис. 2.7.3. Эквивалентная схема конденсатора
На низких частотах (в диапазоне 0,05... 1,00 кГц) эквивалентная
последовательная индуктивность L обычно не учитывается в силу
своей незначительности, и ESR имеет чисто активный характер.
Такой случай обычно встречается при использовании конденсаторов для
фильтрации низкочастотных пульсаций напряжения. Тангенс угла
потерь в этом случае определяется по формуле
(2.7.2)
Отметим, что сопротивление R обусловлено, главным образом,
сопротивлением фольги обкладок и внешних выводов, а
индуктивность L (в некоторых случаях она обозначается как ESL) -—
паразитной индуктивностью обкладок. Характер поведения различных
составляющих полного сопротивления конденсатора в зависимости от
частоты приведен на рис. 2.7.4.
Рис. 2.7.4. Характер поведения Хс, Z, Xl, R от частоты
Из графика хорошо видно, что падение полного сопротивления
конденсатора происходит до определенной частоты, после чего
падение замедляется, стабилизируется на определенном уровне, близком к
активному сопротивлению, и начинает расти. Рост полного
сопротивления происходит вследствие наличия индуктивности L. Именно
поэтому электролитические конденсаторы плохо «работают» в качестве
фильтров на высоких частотах, и их приходится дополнительно
шунтировать неполярными конденсаторами.
При выборе электролитических конденсаторов достаточное
внимание нужно уделять токам утечки. Причина их появления кроется в
неидеальном характере поляризации электролита, наличии влаги в
диэлектрике, наличии неудаленных соединений хлора и
металлических примесей. Величина тока утечки может быть уменьшена только
на этапе изготовления конденсатора, и с улучшением уровня
технологии его доля становится все меньше и меньше, однако полностью
токи утечки исключить не удается. Более того, токи утечки
прогрессируют во времени, они зависят от величины приложенного
напряжения, температуры окружающей среды. Если есть необходимость
длительного хранения электрического заряда, имеет смысл обратить вни-
мание на значение этого параметра и осуществить выбор типа
конденсатора по величине тока утечки (к примеру, для бутстрепных
конденсаторов драйверов это очень важно).
Мы уже знаем, что в алюминиевых электролитических
конденсаторах применяется жидкий электролит, который, как любая другая
жидкость, обладает вязкостью и проводимостью. На эти параметры
внешняя среда оказывает существенное влияние. Электрическая
проводимость электролита увеличивается с увеличением температуры и
снижается при ее понижении. Рассмотрим влияние температуры на
емкость конденсатора, тангенс угла потерь, ESR, полное
сопротивление и ток утечки.
Емкость алюминиевых электролитических конденсаторов
увеличивается при увеличении температуры и, соответственно,
уменьшается при ее падении. Связь между значением емкости и температурой
окружающей среды приведена на рис. 2.7.5.
Рис. 2.7.5. Типовая зависимость емкости от температуры
Эквивалентное последовательное сопротивление (ESR), а
следовательно, и тангенс угла потерь, и полное сопротивление (Z)
изменяются при изменении температуры и частоты. Наиболее типичный
характер изменения тангенса угла потерь для электролитических
конденсаторов показан на рис. 2.7.6. Хорошо видно, что с ростом частоты
растут и потери.
Электролитические конденсаторы ограничены в режимах работы с
пульсирующими токами. Проще говоря, пульсация напряжения на
выводах конденсатора не должна превышать величины, задаваемой в
Рис. 2.7,6. Типовая зависимость тангенса угла потерь от частоты
технической документации. Дело в том, что обычно пульсации
связаны с циклическим характером работы конденсатора в режиме
«заряд-разряд». Протекающие в это время реактивные токи выделяют на
сопротивлении ESR тепло — конденсатор разогревается. Поэтому
крайне необходимо рассчитывать величину фактического реактивного
тока и сравнивать ее с допустимой на данный тип конденсатора.
Понятно, что конденсаторы с проволочными выводами допускают
сравнительно небольшие величины токов, а вот для работы в мощных
силовых устройствах специально выпускаются конденсаторы с
резьбовыми втулками и прижимными винтами.
Иногда для увеличения допустимого напряжения
электролитические конденсаторы включают последовательно. Так однозначно
придется поступить при разработке силовой схемы преобразователя с
питанием от трехфазной сети переменного тока 380 В 50 Гц.
Амплитудное значение напряжения на конденсаторах входного фильтра в этом
случае может достигать 540 В, в то время как найти «электролит» с
допускаемым напряжением более 450 В крайне сложно. Хотя, в
принципе, некоторые фирмы выпускают электролитические конденсаторы на
номинальное напряжение 550 В, однако число таких фирм можно
пересчитать по пальцам, и в случае необходимости ремонта вышедшего
из строя преобразователя подобрать адекватную замену из
номенклатуры других фирм окажется сложнее. На рис. 2.7.7 показан вариант
последовательно-параллельного включения конденсаторов. Чтобы
сбалансировать конденсаторы по токам утечки, включаются дополни-
тельные выравнивающие резисторы RVSr> ве~
личина которых рассчитывается по
эмпирической формуле:
Рис. 2.7.7.
Последовательно-параллельное
включение конденсаторов
Рис. 2.7.8. Внешний вид
конденсаторов В43566 и
В43586
Если в указанную формулу подставить
емкость конденсатора в мкФ, то
рассчитанная величина резистора будет в кОм.
В качестве примера рассмотрим
несколько типономиналов электролитических
конденсаторов, применяющихся для
построения силовых схем статических
преобразователей. На рис. 2.7.8 показан внешний
вид серий конденсаторов типа В43566 и
В43586, производимых фирмой «Epcos». Эти
конденсаторы специально спроектированы
для применения в статических
преобразователях электроэнергии и отвечают всем
требованиям, предъявляемым к конденсаторам
такого класса. Во-первых, конденсаторы
имеют мощные выводы для подключения
силовых шин, оснащенные винтовыми
зажимами, что позволяет соединять их в
блоки, накладывая сверху плоскую токоведущую шину (в том числе и
многослойную). Во-вторых, конструктивно они спроектированы так,
чтобы обеспечить минимальные значения паразитных ESR и ESL.
В-третьих, сроки службы конденсаторов достаточно велики (фирма
гарантирует работоспособность в течение 250 тыс. часов при
температуре +40 °С), что, конечно, является большим подспорьем для
создания долговечного статического преобразователя. Опытные
разработчики электронной аппаратуры знают, что электролитические
конденсаторы традиционно являются одним из самых недолговечных
электронных компонентов — они «сохнут» и теряют свою емкость.
Поэтому любые шаги, направленные на продление их сроков службы,
заслуживают особого внимания.
Приведенные типы конденсаторов выпускаются на диапазон
номинальных напряжений 350...450 В, выдерживают перегрузку по
напряжению не более 10 % от номинального. Диапазон емкостей конденсаторов
составляет 470...6800 мкФ. Выводы конденсаторов выдерживают
максимальные переменные значения токов (в зависимости от исполнения ти-
пономинала) от 30 до 70 А. Средние значения ЕБЕдля конденсаторов
составляют: 15 нГн для исполнений диаметром 51,6 мм; 20 нГн для испол-
нений 79,6 и 91 мм. Значения ESR для каждого номинала конденсатора
разные. Например, для типономинала 680 мкФ с номинальным
напряжением 450 В это значение составляет 350 мОм, а для типономинала
3300 мкФ на то же номинальное напряжение — 70 мОм (измерения
проведены для частоты 100 Гц). Характеристика зависимости ESR от
частоты показана на рис. 2.7.9. На представленном графике кривая «а»
относится к конденсаторам с диаметром 76,9 и 91 мм, кривая «Ь» — к
конденсаторам с диаметром 64,3 мм, кривая «с» — к конденсаторам с диаметром
51,6 мм. График нормирован к значению ESR на частоте 100 Гц.
Рис. 2.7.9. Зависимость ESR от частоты для конденсаторов
В43566 и В43586
Так как конденсаторы «работают» в режиме перезарядки
силовыми токами значительной величины, их конструкция выполнена таким
образом, чтобы обеспечить при необходимости надежное охлаждение
корпуса. На рис. 2.7.10 показано, что конденсатор при необходимости
может устанавливаться на теплоотвод через изолирующую теплопро-
водящую прокладку.
Второй пример конденсатора типа К50-77, выпускаемого ОАО
«Элеконд», показан на рис. 2.7.11. Конденсаторы выпускаются в
диапазоне номинальных емкостей от 1000 до 100 000 мкФ и обеспечивают
работу в диапазоне напряжений от 16 до 450 В (также в зависимости от
конкретного типоисполнения). Значение ESL в данном случае
составляет для всех типов порядка 115 нГн, то есть почти на порядок выше,
чем у описанных выше конденсаторов. Полное сопротивление
типономинала К50-77 с номинальной емкостью 1500 мкФ и номинальным
напряжением 450 В (ближайший аналог конденсаторов, производимых
«Epcos»), измеренное на частоте 10 кГц,
составляет 70 мОм. Конструктивно конденсатор имеет
несколько исполнений, в том числе и с резьбовой
шпилькой, рассчитанной на крепление дна
алюминиевого стакана. Другие исполнение
предполагает крепление конденсатора посредством
дополнительного хомута, охватывающего корпус
(хомуты могут поставляться вместе с конденсатором).
И, тем не менее, несмотря на достаточно средние
технические характеристики, конденсатор может
служить примером удачной отечественной
разработки, которую возможно применять в
преобразовательной технике.
Разработчикам имеет смысл обратить
внимание на продукцию фирмы «Evox-Rifa» [49] —
именно как на специализированного
производителя конденсаторов различных назначений, в том числе и для силовой
электроники. Эта фирма обладает богатыми техническими
традициями, ее продукция отличается высоким качеством изготовления и
эксплуатационной надежностью. В частности, для фильтрации
низкочастотных пульсаций выпрямленного напряжения питания силовых схем
статических преобразователей, в частности, для фильтрации
низкочастотных пульсаций выпрямленного напряжения питания силовых схем
статических преобразователей «Evox-Rifa» выпускает конденсаторы
серий РЕН169 с номинальным диапазоном емкостей от 68 до 330 ООО мкФ
с напряжениями от 10 до 450 В и РЕН200 с номинальным диапазоном
емкостей qt 100 до 330 000 мкФ с напряжениями от 25 до 550 В.
Обратите внимание: в номенклатуре этой фирмы (одной из немногих) есть
исполнения электролитических конденсаторов с номинальным рабочим
напряжением 550 В.
Рис. 2.7.10. Установка конденсатора на теплопроводящую прокладку
Рис. 2.7.11.
Внешний вид
конденсатора типа
К50-77
На рис. 2.7.12 показан внешний вид конденсатора РЕН200.
Алюминиевый стакан конденсатора заключен в пластмассовый
электроизоляционный корпус, на торцах этого цилиндрического корпуса с
одной стороны размещаются резьбовые токоведущие выводы, а с
другой — резьбовая шпилька для крепления конденсаторов в приборе.
Фирмой выпускаются также исполнения конденсатора без резьбовых
шпилек (что, как мы говорили, неудобно для применения в мощной
преобразовательной технике).
Рис. 2.7.12. Внешний вид конденсатора РЕН200
Для сравнения электрических характеристик с ранее
упомянутыми конденсаторами упомянем типоисполнение конденсатора
PEH200YJ368M с номинальным напряжением 450 В и номинальной
емкостью 680 мкФ. Оказывается, что ESR этого конденсатора,
измеренное на частоте 100 Гц, составляет всего 86 мОм, a ESL — порядка
16 нГн. Сравните эти значения с такими же значениями,
приведенными для других конденсаторов и убедитесь, что продукция «Evox-Rifa»
наиболее отвечает требованиям к электронным компонентам,
предназначенным для создания статических преобразователей.
Разнообразие типономиналов конденсаторов, производимых
зарубежной промышленностью, может поставить начинающего
разработчика в тупик или привести к необходимости просмотра огромного
количества технических документов, преследуя выбор необходимого ти-
поисполнения. Поэтому некоторые фирмы, заботящиеся об экономии
времени разработчика, предоставляют ему автоматизированные
средства подбора требуемого элемента. В частности, уже не раз упомянутая
фирма «Epcos» предоставляет бесплатно-распространяемую программу
ALCap, которая, по сути, является поисковой системой по всем типо-
номиналам конденсаторов, производимых этой фирмой (рис. 2.7.13).
Программа осуществляет мгновенный подбор типономинала
конденсатора с учетом требуемой емкости и рабочего напряжения,
максимальной рабочей температуры, необходимости принудительного
охлаждения потоком воздуха, способа монтажа (объемный или печатный).
В нижней части окна формируется перечень конкретных
типономиналов. Таким образом, разработчик будет ограничен просмотром
дополнительной информации только по этим типономиналам.
Рис. 2.7.13. Окно программы ALCap
А теперь мы поговорим об элементах, с помощью которых
силовые преобразовательные схемы защищаются от опасных паразитных
индуктивных выбросов напряжения. Мы еще не раз упомянем о том,
что любая схема силового статического преобразователя
электрической энергии требует серьезной конструктивной проработки,
связанной с компактным размещением силовых элементов, минимизацией
электрических связей между ними. Почему? Давайте вспомним, что
силовые транзисторы подвержены потенциальному пробою, и если
входное (коммутируемое) напряжение, подаваемое на силовую часть
транзистора, легко рассчитать, то с перенапряжениями,
возникающими на паразитных индуктивностях схемы, дело обстоит гораздо хуже.
Даже первый (обычно — не слишком удачный) опыт проектирования
статического преобразователя позволяет разработчику убедиться в
том, что паразитные выбросы напряжения — далеко не безобидное
явление. Чтобы убедиться в этом, проведем небольшие теоретические
выкладки. Для этого нам потребуется вычислить собственную
индуктивность прямого проводника по формуле:
(2.7.4)
где / — длина проводника, см;
d — диаметр проводника, см;
Ls — индуктивность проводника, мкГн.
Для проводника круглого сечения диаметром 1 мм и длиной 2 см
собственная индуктивность, вычисленная по формуле (2.7.4),
составляет 10... 12 нГн. Много это или мало? Чтобы оценить влияние этой
индуктивности, рассмотрим схему полумоста с транзисторами IGBT в
качестве ключевых элементов (рис. 2.7.14). В этой схеме имеются
паразитные индуктивности шин питания LJ2 (для простоты будем
считать «нижнюю» и «верхнюю» паразитные индуктивности примерно
одинаковыми), которые при коммутации ключевых элементов и
прохождении коммутационного тока is накапливают энергию. Расчет
величины накопленной энергии можно выполнить по формуле
(2.7.5)
Если в силовой схеме присутствует так называемая снабберная
емкость С5Л, то накопленная энергия будет переходить из
индуктивности в снабберную емкость, подзаряжая ее.
Рис. 2.7.14. К пояснению необходимости наличия
снабберных элементов
Суммарный уровень напряжения между коллектором и эмиттером
силового транзистора определяется из выражения:
(2.7.6)
Из формулы (2.7.6) видно, что при отсутствии снабберной емкости
суммарный уровень напряжения даже при минимальном значении
паразитной индуктивности может иметь опасный уровень. В реальных
схемах индуктивность Ls может иметь достаточно большую величину,
и вдобавок неправильное подключение снабберного конденсатора
сведет к нулевому ожидаемый результат его использования (если
конденсатор будет подключен длинными проводами или неправильно выбран
его тип).
Типичный характер поведения напряжения «коллектор—эмиттер»
силовых транзисторов при отключении показан на рис. 2.7.15. Из
рисунка хорошо видно, что в моменты коммутации возникает значи-
тельный индуктивный выброс напряжения, который легко может
вызвать потенциальный пробой силового транзистора.
Рис. 2.7.15. Характер поведения напряжения «коллектор—эмиттер» при
наличии паразитной индуктивности шин питания
Эффективно защититься от возникновения подобных аварийных
ситуаций, связанных с наличием индуктивных выбросов, позволяют
пассивные способы защиты, а именно — установка снабберных
цепочек непосредственно на выводы силовых элементов. Варианты
традиционных снабберных цепочек показаны на рис. 2.7.16. Точками «А»,
«В», «С» эти цепочки подключаются к точкам схемы рис. 2.7.14.
Рис. 2.7.16. Варианты снабберных цепочек
Наиболее простым вариантом считается снаббер на основе
неполярного конденсатора с малой собственной паразитной
индуктивностью (рис. 2.7.16, а). Снаббер RC-типа может быть применен в случае,
когда возникают паразитные колебания за счет резонанса токов с
индуктивностью подводящих шинопроводов (активное сопротивление
вносит необходимое затухание в контур). Варианты в и г — так
называемые RCD-цепи, которые оказываются схемотехнически более
сложными, но и более эффективными, «работающими» по-разному на
разных полуволнах колебательных процессов. Впрочем, в подавляю-
щем большинстве случаев удается обойтись именно простыми снаб-
берными конденсаторами, не усложняя силовую схему другими
возможными решениями. Как мы уже сказали ранее, снабберные
конденсаторы должны устанавливаться в непосредственной близости от
силовых выводов ключевых модулей. Желательна установка таких
конденсаторов на каждый силовой модуль, как показано на рис. 2.7.17.
Рис. 2.7.17. Установка снабберных конденсаторов на модули
Каким образом можно сократить до минимальной длину выводов
снабберных конденсаторов? К счастью, разработчикам нет
необходимости ломать голову над этой задачей, так как ведущие мировые
фирмы выпускают широкую номенклатуру таких конденсаторов,
крепление которых уже спроектировано с учетом их крепления на модулях
(рис. 2.7.18).
Рассмотрим особенности крепления подробнее, а поможет нам в
этом рис. 2.7.19. Собственно, внешних особенностей корпуса снаб-
берный конденсатор не имеет. Интерес представляют его выводы,
которые изготавливаются в виде широких пластин с отверстиями.
Межцентровые расстояния рассчитаны таким образом, чтобы
конденсаторы имели возможность устанавливаться на стандартные модули.
Естественно, для разных типоразмеров модулей выпускаются разные
типоразмеры снабберных конденсаторов.
А теперь мы упомянем некоторые основные параметры типовых
снабберных конденсаторов: диапазон рабочих напряжений —
1000...2000 В; диапазон номинальных емкостей — 0,1...3,0 мкФ;
среднее значение ESL — 12... 15 нГн; устойчивость к скорости изменения
напряжения — до 900 В/мкс; среднее значение ESR — 2,5...5,0 мОм.
Для примера, не раз уже встречавшаяся на страницах этой книги
фирма «Epcos» выпускает снабберные конденсаторы серии B32656S,
фирма «Evox-Rifa» — конденсаторы серий ERA480, фирма «CDE
Cornell Dubilier» — конденсаторы серии SCD, фирма «Camel
technology* — конденсаторы серии SND, и т. д. Типовые снаббеерные
конденсаторы, выпущенные разными фирмами, в целом отличаются по
а
Рис. 2.7.18. Типовое промышленное крепление снабберного конденсатора к
силовому модулю
Рис 2.7.19. Внешний вид снабберного конденсатора
своим характеристикам незначительно, поэтому мы их не будем
рассматривать подробно.
Значительно реже в номенклатуре выпуска мировых фирм
встречаются элементы для построения RCD-снабберов. И, тем не менее,
такие элементы можно приобрести. Примером таких
комбинированных снабберов могут служить элементы, выпускаемые фирмой «CDE
Cornell Dubilier» [50] в серии SCD. Внешний вид модуля показан на
рис. 2.7.20, а внутренняя схема — на рис. 2.7.21. Модули SCD
выпускаются двух типов — Р-типа и N-типа. Подключение их в конкретных
схемах преобразователей показано на рис. 2.7.22.
Теперь поговорим о токовых выбросах в силовых схемах
статических преобразователей электроэнергии, связанных с конечным време-
Рис 2.7.20. Внешний вид RCD-модуля серии SCD
Рис. 2.7.21. Внутренняя схема RCD-модуля N-типа и Р-типа
Рис. 2.7.22. Использование RCD-модуля в конкретных схемах
нем восстановления силовых элементов и способах защиты от
перегрузок по току. Рассматривая функционирование полумостовых схем,
в учебной литературе часто считается, что диоды, шунтирующие
силовые транзисторы, идеальны по своим характеристикам, то есть они
мгновенно начинают проводить электрический ток и мгновенно
восстанавливают свои запирающие свойства. Эту ситуацию, вне всякого
сомнения, идеализировать неправильно, так как поведение реальных
диодов в подобном включении далеко от идеального случая. Иными
словами, диодам приходится затрачивать некоторое время (а значит, и
энергию) на включение и отключение. Чтобы построить реальную
картину токовых перегрузок, возникающих в полумостовых схемах с
так называемым «тяжелым переключением», для начала рассмотрим
работу простой ключевой схемы, работающей на активную нагрузку
RH, подключив эту нагрузку непосредственно к стоку транзистора VT,
как показано на рис. 2.7.23.
Когда транзистор VT находится в состоянии отсечки, ток в цепи
его затвора равен нулю, и напряжение «сток—исток» равно входному
напряжению Um. Это состояние схемы соответствует точке «1» на
графике рис. 2.7.24. Открывание транзистора VT означает перемещение
из точки «1» графика в точку «5» по штрихпунктирной линии, где
напряжение на открытом транзисторе становится равным нулю.
Рис. 2.7.24. График, отражающий коммутационные процессы в схеме с
реальным разрядным диодом
Рис. 2.7.23. К анализу токовых выбросов в силовых схемах
Совершенно по-другому протекают коммутационные процессы в
схеме полумоста с реальными разрядными диодами. И происходит это
потому, что все p-n-переходы реальных диодов при прохождении
через них прямого тока накапливают на границе областей
проводимости электрический заряд. Поэтому диод не сможет «закрыться» до тех
пор, пока все накопленные носители заряда не исчезнут, не
«рассосутся». На исчезновение носителей затрачивается время, которое в
справочных данных назвается временем обратного восстановления
(мы уже упоминали этот параметр по ходу нашей книги). Таким
образом, открываясь, транзистор VT должен «перехватить» ток нагрузки,
который до этого момента проходил через разрядный диод. Однако в
силу того, что диод VD не может сразу восстановить свои
запирающие свойства, ток диода становится равным разнице тока нагрузки и
тока силовой цепи открывающегося транзистора.
В прямом направлении падение напряжения на стандартном
диоде составляет 1...2 В (исключение составляют диоды Шоттки, у
которых прямое падение составляет около 0,6 В), поэтому исток
транзистора оказывается практически подключенным к «общему» силовой
схемы. Ток в индуктивном элементе не может резко увеличить свое
значение, следовательно, ток силовой цепи транзистора iD быстро
вырастает до значения ipk (линия «1»—«3» на рис. 2.7.24). Хорошо, если
транзистор допускает кратковременное протекание значительного
пикового тока, который в случае использования диода с большим
временем обратного восстановления может в несколько раз превышать
рабочий ток. А если — нет? Тогда транзистор однозначно выйдет из
строя. Запомним это обстоятельство.
Что произойдет дальше? Дальше начнется процесс
«рассасывания» носителей заряда в диодной структуре, ток резко упадет по
кривой «3»—«4»—«5» до номинального продолжительного значения,
определяемого сопротивлением нагрузки. Процесс включения диода
гораздо менее инерционен, поэтому мы вполне можем рассматривать
включающийся диод как безынерционный элемент. Включение
разрядного диода однозначно происходит по кривой «5»—«6»—«1».
Чтобы снизить пиковый ток восстановления диода /рк, а значит и
ток в цепи «сток—исток» транзистора, необходимо выбирать для
силовой схемы обратные (разрядные) диоды с минимальным временем
обратного восстановления (peak recovery time). Тогда процесс
обратного восстановления будет проходить по линии «2»—«4», минуя точку
«3». Из предыдущих разделов мы уже знаем, что очень часто
разрядные диоды с отличными динамическими свойствами встраиваются в
корпуса IGBT модулей, поэтому при выборе конкретного исполнения
модуля необходимо обращать внимание на динамические параметры
обратных диодов.
Идеально подходят для силовых схем так называемые диоды
Шоттки. Отличие диодов Шоттки от других диодов состоит в том, что
они производятся по оригинальной технологии, и в их структуре
практически отсутствуют неосновные носители заряда, которые как
раз и влияют на величину времени обратного восстановления. На
сегодняшний день в номенклатуре фирм можно встретить диоды
Шоттки, допускающие прямой ток через себя порядка 240 А, например,
249NQ150 производства фирмы international Rectifier». Другое
преимущество диодов Шоттки — более низкое падение напряжения в
открытом состоянии, что делает их незаменимыми в низковольтных
схемах.
К сожалению, диоды Шоттки имеют существенный недостаток:
максимальное обратное напряжение у самых лучших представителей
этого класса силовых приборов не превышает величину 150 В. Более
того, в подавляющем большинстве случаев вы едва ли встретите диоды
Шоттки встроенными в корпуса мощных силовых модулей. Что
предпринять в таком случае? К счастью, разработана технология
производства специальных ультрабыстрых диодов, называемых
гексагональными эпитаксильными диодами со сверхбыстрым временем обратного
восстановления. Например, диоды серии Hexfred, производимые
фирмой international Rectifier», имеют величину допустимого напряжения
в закрытом состоянии до 1200 В, а по своим свойствам обратного
восстановления могут легко соперничать с диодами Шоттки.
Познакомимся с характеристиками ультрабыстрых диодов
поподробнее. На рис. 2.7.25 показана типовая кривая обратного
восстановления ультрабыстрого диода. В момент открывания ключевого
транзистора VT начинается спадание тока диода, затем ток достигает
нулевого значения, меняет знак и далее достигает значение irrm,
называемого в технической документации пиковым током обратного
восстановления (peak reverse recovery current). Процесс нарастания
тока обратного восстановления занимает время называемое
временем роста обратного тока восстановления. После этого ток спадает до
Рис. 2.7.25. К расчету заряда обратного восстановления диодов
нулевого значения за время tb9 называемое временем спада обратного
тока восстановления. Полное время trr обратного восстановления
диода (reverse recovery time) определяется по формуле
(2.7.7)
Конечно, в технической документации обычно приводятся данные
по суммарному времени обратного восстановления, пиковому току
обратного восстановления, и по этим данным теоретически можно
рассчитать тепловые потери, возникающие в процессе обратного
восстановления диода. Однако на практике пользоваться этими данными для
расчета тепловых потерь неудобно, так как величина пикового тока
обратного восстановления и время восстановления зависят от величины
приложенного обратного напряжения. Производители диодов
рекомендуют для определения тепловых потерь обратного восстановления
пользоваться величиной заряда обратного восстановления (reverse
recovery charge), обозначаемого символом Qrr Величину заряда
обратного восстановления можно получить непосредственно из технической
документации на конкретный диод или рассчитать по приближенной
формуле
(2.7.8)
Тепловые потери обратного диода в полумостовых силовых схемах
складываются из статических потерь проводимости и потерь
обратного восстановления. Статические потери вычислить несложно: они
будут определяться величиной прямого падения напряжения Uf на
открытом диоде, средним током проводимости и длительностью
протекания тока в открытом состоянии, отнормированному к периоду
коммутации.
С потерями обратного восстановления сложнее. Поскольку к
диоду прикладывается большое обратное напряжение в то время, когда
через него течет прямой ток, диоду нужно рассеивать большую
мощность. Функция изменения тока во времени носит сложный характер
(рис. 2.7.25), поэтому нам придется вычислять мгновенную мощность
на очень коротких промежутках времени, а потом получившиеся
результаты просуммировать.
Итак, энергия тепловых потерь определяется суммой
произведений тока через диод на напряжение, приложенное к нему, на
протяжении времени протекания тока. Поскольку к диоду прикладывается
напряжение величиной Um9 энергия переключения будет
определяться по формуле
(2.7.9)
Если мы внимательнее присмотримся к формуле (2.7.9), то
обнаружим, что интеграл здесь есть заряд обратного восстановления
диода, который может быть вычислен по формуле (2.7.8) или взят из
справочных данных. С учетом приведенных выражений, можно
вычислить мощность потерь обратного восстановления:
(2.7.10)
где / — частота коммутации.
Полные тепловые потери, как обычно, определяются суммой
статических и динамических потерь по формуле
(2.7.11)
В табл. 2.7.2 приведены основные параметры некоторых
ультрабыстрых диодов.
Таблица 2.7.2. Параметры некоторых ультрабыстрых диодов фирмы «International
Rectifier*
111' .ттт-ттт- II -
Типономинал диода
Ur> В
|>А
trr, НС
Корпус ]
HFA04TB60
600
4
42
ТО-220 ]
HFA04TB120
1200
6
26
ТО-220 |
HFA08TB60S
600
оо
55
ТО-247
HFA15PB60
600
15
60
ТО-247 |
HFA25PB60
600
25
60
ТО-247
HFA30PA60C
600
30
60
ТО-247
HFA50PA60C
600
50
60
ТО-247
HFA70NH60
600
70
120
D-67
Мировые производители силовой элементной базы выпускают
столь большую номенклатуру ультрабыстрых диодов, что
рассматривать их в рамках данной книги просто не имеет смысла, а читатели
без труда найдут для своих разработок подходящие диоды без
дополнительных авторских «наводок». Расскажем лишь о перспективах
отечественного производства этих важных для силовой электроники
компонентов. К примеру, ОАО «ВЗПП-Сборка» [18] выпускает
значительное количество ультрабыстрых диодов, аналоги которых
производятся «International Rectifier». Диапазон токов этих диодов
ограничивается значениями 20...25 А, поэтому в случае необходимости
использования более мощных диодов имеет смысл обратить внимание
на продукцию ОАО «Электровыпрямитель» [21]. Эта уже знакомая
нам фирма поставляет на рынок диодные быстровосстанавливающие-
ся модули типа SFRD в полумостовом включении (анод первого дио-
да подключен к катоду второго) и в одиночном включении.
Полумостовые диодные сборки маркируются как М2ДЧ, а одиночные — как
МДЧ. Время обратного восстановления диодов и диодных сборок не
превышает 0,2...0,3 мкс при номинальных рабочих токах до 300 А.
Кратко упомянем такие всем известные элементы, как
стандартные диодные мосты. Оказывается, при разработке силовых схем
статических преобразователей эти элементы играют чрезвычайно важную
роль: диодный мост — это одно из важнейших звеньев силовой
преобразовательной схемы, и при выходе его из строя неработоспособным
становится весь преобразователь. Кроме того, до настоящего времени
разработчику приходилось закладывать в свои разработки
выпрямительные диоды в одиночном исполнении, соединяя их, например, по
трехфазной схеме выпрямления Ларионова. Понятно, что при таком
подходе разработчик сильно проигрывает в габаритах этого узла.
Специально для применения в силовой преобразовательной
технике разработаны компактные диодные мосты, включающие в себя
четыре диода (однофазная схема) и шесть диодов (трехфазная схема). На
рис. 2.7.26 показан внешний вид трехфазного диодного моста типа
160МТ120КВ, выпускаемого фирмой international Rectifier». Диодный
мост выдерживает значение продолжительного номинального тока до
160 А, а также значение пикового пускового тока до 1500 А. Диоды
моста рассчитаны на значение обратного напряжения до 1200 В.
Интерес для разработчика силовой преобразовательной техники
могут также представлять диодные мосты, производимые ЗАО «Элек-
трум АВ» [22]. Номенклатура их достаточно широка: выпускаются
Рис. 2.7.26. Диодный модуль типа 160МТ120КВ
Рис. 2.7.27. Диодные модули типа Мб
мосты как для монтажа на печатную плату (в том числе и в
трехфазном варианте), так и для объемного монтажа. К примеру, мосты
типоразмера Мб (рис. 2.7.27) производятся на номинальные токи 63 А,
100 А, 160 А, 200 А, 250 А с рабочим напряжением до 1200 В
(исполнение 12) и до 1600 В (исполнение 16). Диоды выдерживают
пятикратную токовую перегрузку.
2.8. Электронные предохранители
Защитить статические преобразователи электроэнергии от
аварийных режимов работы всегда достаточно сложно, поскольку в
подавляющем большинстве случаев развитие аварийной ситуации носит
лавинообразный характер. Необходимо очень быстро диагностировать
аварию и без промедления запустить механизм адекватной ее
локализации. Одной из характерных аварийных ситуаций, возникающих в
высокочастотных инверторах, является возникновение токов
короткого замыкания (токов КЗ) вследствие потери управления силовыми
ключами или их пробоя. Другой характерный пример аварийной
ситуации — короткое замыкание в нагрузке статического
преобразователя. И если в первом случае статический преобразователь сам выходит
из строя, а значит, его нужно оперативно отключать от питающей
сети посредством плавких предохранителей или автоматических
выключателей для выполнения ремонта, то во втором случае
неисправная нагрузка просто выводит из строя вполне исправный прибор.
Поэтому преобразователь можно спасти, отключив неисправную
нагрузку быстродействующим защитным устройством.
Не так давно на рынке силовых компонентов появились
устройства, называемые электронными предохранителями (ЭП). Другое их
название — модули коммутации и контроля тока (МККТ). В
прайс-листах фирм-поставщиков эти устройства могут называться как ЭП, так
и МККТ, но важно запомнить, что речь идет об устройствах,
выполняющих аналогичные функции. Конечно, продукция разных фирм
может отличаться набором дополнительных сервисных функций,
принципами управления и сигнализации, но основное назначение
этих устройств одинаково — они обеспечивают быстродействующую
защиту первичной (питающей) сети или выходов источников питания
от перегрузок и коротких замыканий. Кроме того, ЭП (МККТ) могут
выполнять функцию защиты нагрузок.
На рис. 2.8.1 показан габаритный чертеж ЭП типа ЭП8-06,
выпускаемого ЗАО «Электрум АВ». Представленный ЭП позволяет
пропускать через себя токи до 10 А, срабатывает при превышении
номинального тока значения 1,1 от номинала. Время срабатывания защиты по
превышению номинального тока — не более 30 мкс. После
срабатывания ЭП блокируется, и повторное его включение возможно только
после снятия напряжения со входа на время не менее 1 с.
Рис. 2.8.1. Внешний вид электронного предохранителя типа ЭП8-0,6
Структурная схема, отражающая внутреннее устройство
предохранителя, показана на рис. 2.8.2. Источником сигнала отключения ЭП
служит резистивный шунт. Сигнал с шунта отслеживается схемой
управления. Основным ключевым элементом выступает транзистор
Рис. 2.8.2. Внутреннее устройство ЭП8-0,6
типа MOSFET, затвор которого подключен все к той же схеме
управления. Если сигнал с шунта превышает значение уставки срабатывания,
транзистор MOSFET запирается, нагрузка обесточивается, а ЭП
устанавливается в режим самоблокировки. К дополнительной функции
ЭП, которую можно задействовать, например, для определения
сработавшего ЭП при их значительном количестве, является сигнал
«авария». В данном случае сигнал «авария» формируется открытым
состоянием встроенного биполярного транзистора, в эмиттерную цепь
которого можно включить как светодиодный индикатор, так и какой-либо
коммутационный элемент типа реле (или твердотельного реле).
Значительно более функционально оснащены модули МККТ,
которые также выпускает ЗАО «Электрум АВ». Эти модули
обеспечивают непрерывный контроль протекания тока в нагрузке с выдачей
статусного сигнала СТ1 по критерию /> 0,3/ном, отключение нагрузки
при коротком замыкании и перегрузке с выдачей статусного сигнала
по критерию /> 1,1 /ном, защиту транзистора MOSFET (или IGBT)
встроенного силового ключевого элемента от перегрузки или
перегрева с выдачей статусного сигнала СТЗ по критерию превышения
температуры значения 100... 110 °С. Структурная схема
модифицированных модулей МККТ показана на рис. 2.8.3.
Рис. 2.8.3. Структурная схема модифицированных модулей МККТ
В отличие от описанного выше модуля ЭП8-0,6, питающегося от
напряжения нагрузки, данный типоряд МККТ требует отдельного
внешнего источника питания. Модули МККТ можно включать и
отключать по внешнему неинвертированному сигналу (Упр+) или
инвертированному сигналу (Упр-). При срабатывании защиты по
перегрузке или короткому замыканию повторное включение модуля путем
снятия и установки сигнала управления возможно за время не менее
4 мс от момента срабатывания защиты.
В табл. 2.8.1 приведены все возможные состояния сигналов
МККТ, возникающие в процессе их функционирования.
Таблица 2.8.1. Сигнализация и управление модулей МККТ
CT1
CT2
стз
Состояние
«0»
«1»
«1»
«I >>
Выключено
«1»
«1»
«1»
«1»
Включено (/< 0,3/ном) j
«1»
«о»
«1»
«1»
Включено (/> 0,3/ном)
«1»
«1»
«0»
«1»
Выключено (КЗ или перегрузка по току)
«1»
«1»
«1»
«0»
Выключено (перегрев силового элемента) j
Структура условного обозначения МККТ показана на рис. 2.8.4.
Номенклатура выпускаемых МККТ содержит несколько десятков
исполнений (и постоянно расширяется), основные параметры которых
выбираются из следующего ряда. Для модулей МККТ с силовыми
Рис. 2.8.4. Структура условного обозначения модулей МККТ
транзисторами типа MOSFET: напряжение коммутируемой сети —
24 В, 48 В, ПО В, 220 В; номинальный коммутируемый ток
(максимальный импульсный коммутируемый ток) — 2(10) А, 5(25) А, 10(50)
А, 20(100) А, 30(120) А, 40(180) А, 60(240) А, 80(300) А, 100(360) А,
120(480) А, 160(600) А, 200(750) А, 250(900) А, 300(1200) А. Для
модулей МККТ с силовыми транзисторами типа IGBT: напряжение
коммутируемой сети — 380 В, 540 В; номинальный коммутируемый ток
(максимальный импульсный коммутируемый ток) — аналогично
исполнениям с транзисторами MOSFET.
Модули имеют два конструктивных исполнения, показанных на
рис. 2.8.5. Исполнение типа «а» предназначено для подключения
питающих и управляющих токоведущих проводников сечением от 0,5 до
2,5 мм2, исполнение типа «б» — для проводников сечением от 0,08 до
0,5 мм2.
Рис. 2.8.5. Конструктивные исполнения модулей МККТ
Модули МККТ выпускаются в четырех классах с разными
время-токовыми характеристиками (рис. 2.8.6). Классы модулей
отражают временные параметры их срабатывания в процессе возникновения
перегрузок и коротких замыканий. Класс «0» — самый
быстродействующий, класс «30» — самый медленный. Для класса «0» время
срабатывания защиты по критерию /> 1,5/ном составляет 5 мс, по критерию
^> 3/НОм — 1>5 мс, по критерию /> 4/ном — 10 мкс.
Конечно, зачастую разработчики преобразовательной техники
предпочитают конструировать схемы отключения нагрузки
самостоятельно, не прибегая к использованию готовых ЭП (МККТ). И, тем не
менее, познакомившись с этими замечательными элементами, имеет
Рис. 2.8.6. Время-токовые характеристики модулей МККТ
смысл включить их в свой арсенал при выполнении современных
высокотехнологичных проектов — ведь применение готовых модулей
позволяет резко сократить номенклатуру электронных компонентов
и, в конечном итоге, снизить себестоимость серийной продукции.
Глава 3
СЕКРЕТЫ УДАЧНОГО КОНСТРУИРОВАНИЯ
«Век живи — век учись» — гласит одна известная народная
мудрость. А вторая народная мудрость добавляет, что «нет предела
совершенству». Особенно часто эти мудрые мысли приходят в голову
работающим над созданием силовой преобразовательной техники, и вот
почему. Как правило, разработка статических преобразователей
разбивается на два крупных этапа: схемотехнический и конструктивный.
Все, о чем мы говорили до этого момента, относилось к этапу
схемотехническому. Сейчас мы допускаем, что уже произведен выбор
силовой схемы, подобрана элементная база, разработаны электрические
схемы, даже проведено макетирование «на столе» с хорошими
результатами. Самое время заняться конструированием прибора,
пригодного для промышленного серийного производства: выбрать оболочку
(корпус), скомпоновать в объеме корпуса элементы, проложить
монтажные провода. Что в этом процессе может быть проще? Казалось,
любой конструктор, мало-мальски освоивший проектирование
обычных силовых электрических щитов с релейной автоматикой,
выполнит эту работу на «раз-два». Но именно так можно «загубить на
корню» отличную электрическую схему статического преобразователя,
спроектировав некое подобие электрического щита, которое, пока его
не включили, кажется вполне работоспособным изделием... К
сожалению, итог такого подхода к конструированию серийного
преобразователя всегда печален: как правило, собранный по этим чертежам
преобразователь работать не будет. И только после получения
негативного опыта разработчики начинают думать, а что же, собственно,
произошло? В принципе, ничего из ряда вон выходящего не
случилось: преобразовательная техника окажется работоспособной только
тогда, когда схемотехнические решения получат правильное
конструктивное оформление с учетом всех паразитных связей,
возникающих при том или ином расположении узлов, а также удастся
реализовать меры по отводу тепла.
Общемировой опыт конструирования преобразовательной
техники, накопленный к настоящему моменту, весьма и весьма обширен.
Существует множество подходов к выполнению компоновок, большое
количество конструктивных решений. К сожалению, найти
информацию о типовых конструктивных решениях узлов статических
преобразователей гораздо сложнее, чем об их схемотехнике, о режимах
функционирования элементной базы. Производители серийных
изделий вовсе не горят желанием делиться своими конструктивными
«ноу-хау», ограничиваясь лишь общими рекомендациями. Именно
поэтому большинству отечественных разработчиков силовой
преобразовательной техники приходится черпать информацию о
конструктивном построении удачных образцов буквально из фотографий
составных частей. Учитывая это обстоятельство, мы постараемся в этой главе
в качестве информационного материала привести фотографии
некоторых удачных узлов современных статических преобразователей.
Надеемся, что эта информация поможет начинающему конструктору
освоить принципы построения преобразовательной техники и создавать на
базе готовых решений свои уникальные работоспособные
конструктивы. Кроме того, в этой главе читатель найдет еще много другой
полезной информации, без которой конструирование преобразовательной
техники может превратиться в цепь неудач и разочарований.
3.1. Об использовании готовых
силовых блоков
Прогрессивные тенденции конструирования электронной техники
сегодня базируются на мощном идеологическом принципе:
«Используй готовое». В области преобразовательной техники разработчики
стараются также использовать готовые элементы, блоки, узлы, сборки и —
по возможности — не заниматься их изготовлением на собственном
производстве. Жизнь показала, что производством комплектующих
элементов должны заниматься специализированные фирмы,
сотрудники которых смогут оптимизировать их параметры наилучшим образом.
Понятно, что мало кому придет в голову мысль вкладывать огромные
средства в разработку и собственное производство IGBT-модулей (если
только, конечно, это не фирмы типа «Siemens» или «Mitsubishi»,
которые производят собственные комплектующие элементы), если их
потребность составляет тысяча-другая в месяц. Никто не станет
разрабатывать собственный управляющий микроконтроллер — слишком это
дорогостоящая задача. Ну и так далее...
Вообще процесс унификации в области силовой электроники идет
довольно-таки туго: создать готовые для применения типовые силовые
схемы в законченных вариантах, при великом разнообразии требуемых
габаритных размеров не так просто. Однако не так давно производители
силовой элементной базы сделали попытку (весьма и весьма удачную)
создания унифицированных силовых блоков. Эти унифицированные
блоки в подавляющем большинстве случаев относятся к узлам мощных
инверторов и устройств плавного пуска (УПП). Они содержат, кроме
силовых IGBT-транзисторов и тиристоров, также устройства
охлаждения (радиаторы), снабберные элементы, фильтрующие конденсаторы,
датчики тока, датчики напряжения, а в ряде случаев — установленные и
подключенные драйверы управления. Очевидно, что даже при
существующем многообразии силовых преобразовательных схем некоторые из
них используются чаще и даже заняли положение наиболее
рекомендуемых к применению типовых решений. Именно эти типовые решения,
оформленные в виде готовых модулей, могут значительно снизить
затраты как на разработку и изготовление серийной силовой техники, так
и на ее обслуживание. Более того, если появляется необходимость
«слепить» какой-то преобразователь, что называется, «по-быстрому», для
решения конкретной индивидуальной задачи, готовый силовой блок
также выручит.
На рис. 3.1.1 показан внешний вид силового блока БК2Т-
1400-1,1-П на рабочий ток 1400 А и рабочее напряжение 1100 В,
производимого ОАО «Электровыпрямитель». Этот силовой блок построен на
основе мощных тиристоров, поэтому основное его применение
найдется в устройствах плавного пуска (УПП). Конструктивно блок
представляет собой две несущие платы, между которыми «зажаты»
радиаторы охлаждения тиристоров и вентилятор принудительного
охлаждения. Тиристоры использованы таблеточного типа. В верхней части
силового блока располагаются драйверы управления тиристорами и
клеммы-пластины для подключения силовых шин. Габаритные
размеры блока: 500 х 400 х 400 мм, масса — около 40 кг.
Силовой блок типа БВ2Д-1500-0,4-П (рис. 3.1.2) представляет
собой последовательное соединение двух мощных диодов с выводом от
их средней точки. Блок работает с токами до 1500 А и напряжением
400 В, имеет принудительное охлаждение посредством вентилятора,
установленного в торце блока. Три таких идентичных блока,
соединенных по схеме выпрямления Ларионова, могут быть использованы
как трехфазный выпрямительный мост, устанавливаемый во входном
Рис. 3.1.1. Внешний вид силового
блока БК2Т-1400-1Д-П
Рис. 3.1.2. Внешний вид
силового блока БВ2Д-1500-0,4-П
звене статических преобразователей. Размеры одного блока — 360 х
х 250 х 780 мм, масса — 50 кг.
Еще одно интересное конструктивное решение — силовой блок
БВ12МТ-800-0,4-П, представляющий собой реверсивный трехфазный
мост с номинальным током 800 А и номинальным напряжением 400 В.
Как видно из рис. 3.1.3, в нижней части блока располагаются радиаторы,
продуваемые воздухом от трех вентиляторов. К верхней поверхности
радиаторов прикреплены собственно силовые модули (они электрически
изолированы от радиаторов — эта мера обеспечивается конструктивным
исполнением силовых модулей). Электрический межмодульный монтаж
выполнен медными шинами с защитным электроизоляционным
покрытием. Конфигурация составляющих элементов шин достаточно простая
(полоски, уголки, Т-образные элементы), поэтому в единую
конструкцию они собраны с применением электрических болтовых соединений.
Снабберные конденсаторы закреплены сбоку, электрические связи
выполнены проводным монтажом. Размеры блока — 600 х 600 х 250 мм,
масса — 60 кг.
Силовой блок типа БКЗМ2Т-600-0,4-П (рис. 3.1.4) — комплексное
решение на основе трех симмисторов с номинальным током фазы до
600 А и номинальным напряжением 400 В. Габаритные размеры
блока — 600 х 300 х 200 мм, а масса — не более 20 кг. Конструктивно блок
состоит из трех однотипных радиаторов с тиристорами,
размещенными на продольных планках. С торцов радиаторов установлены
вентиляторы принудительного охлаждения, сверху — клеммники сигналов
управления.
Рис. 3.1.3. Внешний вид силового Рис. ЗЛ.4. Внешний вид силового
блока БВ12МТ-800-0,4-П блока БКЗМ2Т-600-0,4-П
Если говорить о тепловых режимах упомянутых блоков с точки
зрения их оптимальной реализации, то, как утверждает
производитель, все тепловые режимы оптимизированы наилучшим образом,
тщательно проработана конструкция радиаторов, элементов
принудительного охлаждения, тепловые потоки не создают «воздушных
мешков». Это — еще один аргумент в пользу применения готовых
силовых блоков, ведь зачастую разработчики силовой преобразовательной
техники, работающие, что называется, «с нуля», за недостатком
квалификации выполняют тепловые расчеты своих конструкций очень
приблизительно, а потом затрачивают массу усилий на исправление
ошибок в готовых изделиях, когда что-то поправить «в лучшем виде»
уже практически невозможно. Специализированные же фирмы могут
позволить себе потратить достаточно времени на трехмерное
моделирование распределения тепла в различных режимах работы и не
перекладывать эту задачу на потребителя. Для примера, на рис. 3.1.5
приведена картина распределения тепла в радиаторе силового блока БКЗ
в режиме отказа вентилятора (что соответствует режиму естественного
охлаждения). Из диаграммы видно, что перепад температур по
глубине радиатора составляет не более 10 °С, что говорит о хорошо
спроектированном узле охлаждения. Таким образом, данный блок не выйдет
из строя из-за перегрева при отказе охлаждающего узла — это
доказано компьютерным моделированием и результатами испытаний,
которые оказались очень близкими к моделированным данным.
А теперь мы рассмотрим некоторые конструкции силовых блоков,
поставляемых известным лидером производства компонентов силовой
электроники — фирмой «Semikron» [33]. В номенклатуре производимых
блоков присутствуют: диодные блоки, тиристорные блоки, блоки на
основе IGBT-модулей и всевозможные их комбинационные сочетания.
Блок типа SKS1900B6U представляет собой блок неуправляемых
выпрямительных диодов, включенных по схеме Ларионова (рис. 3.1.6).
Рис. 3.1.5. Диаграмма Рис. 3.1.6. Внешний вид блока
распределения тепла в радиаторе SKS1900B6U
блока БКЗ
Габаритные размеры блока показаны на рис. 3.1.7, а схема соединения
элементов — на рис. 3.1.8.
Радиаторы здесь используются не только как элементы
охлаждения силовых модулей, но также и как элементы несущих конструкций:
к ним крепятся снабберные конденсаторы и элементы защиты от
возникновения коротких замыканий. Межэлементные связи выполнены
гибкими перемычками, у основания блока имеются проушины, по-
Рис. 3.1.7. Габаритные размеры блока SKS1900B6U
средством которых блок встраивается в статический преобразователь.
Номинальная работа блока может быть обеспечена даже при условии
естественного воздушного охлаждения. Электрические параметры
блока SKS1900B6U: номинальный ток до 1900 А при номинальном
напряжении до 670 В.
Технические решения, использованные в блоке SKS290FB6U,
показаны на рис. 3.1.9 и рис. 3.1.10, а схема внутренних соединений — на
рис. 3.1.11. Основу этого блока также составляет радиатор, он же
выполняет роль несущей конструкции. Сбоку к радиатору прикреплен
вентилятор охлаждения и клеммы подключения фаз сетевого
напряжения. Сверху установлены диодные сборки. Все электрические со-
Рис 3.1.8. Схема соединения
элементов блока SKS1900B6U
Рис. 3.1.9. Внешний вид блока
SKS290FB6U
Рис. 3.1.10. Габаритные размеры блока SKS290FB6U
Рис. 3.1.11. Схема соединений
элементов блока SKS290FB6U
Рис 3.1.12. Внешний вид блока
SKS780FB6U
Рис. 3.1.13. Габаритные размеры блока SKS780FB6U
единения выполнены плоскими шинами и гибкими перемычками.
Номинальные эксплуатационные параметры блока: ток до 290 А при
напряжении до 670 В.
Компоновка блока SKS780FB6U с использованием центробежного
вентилятора показана на рис. 3.1.12, габаритные размеры — на
рис. 3.1.13, а схема соединения элементов — аналогично показанной
на рис. 3.1.11. Какова особенность этой конструкции и в чем ее
«изюминка»? Специалистам фирмы за счет применения плоских
элементов (радиатора и вентилятора) удалось создать плоский, а значит, и
удобный для компоновки блок, который можно разместить ближе к
задней стенке прибора, а ближе к лицевой панели скомпоновать узел
управления. Кроме того, центробежный вентилятор в силу своей
конструкции более равномерно обдувает ребра протяженного радиатора,
что позволяет эффективнее отводить выделяющееся тепло.
Следующая крупная линейка силовых блоков построена на основе
типовых тиристорных схем (управляемые шестифазные мосты и
встречно-параллельные схемы для УПП). На рис. 3.1.14 представлен
внешний вид тиристорного модуля SKS250FB6C, на рис. 3.1.15 — его
габаритные размеры, а на рис. 3.1.16 — схемы соединения элементов.
Конструкция блока типовая и уже нам известная: несущий радиатор с
элементами крепления. Но, кроме силовых элементов, сбоку
установлена печатная плата со схемой управления трехфазным выпрямителем
(или схемой управления встречно-параллельными тиристорами).
Плата установлена именно сбоку, а не сверху — это конструктивное
решение не допускает прогрев платы восходящими от радиатора потоками
горячего воздуха. Кроме того, компоновка блока обеспечивает
короткие электрические связи с управляющими электродами тиристоров,
что важно с точки зрения помехозащищенности. Номинальные
электрические параметры блока: рабочий ток до 250 А при рабочем
напряжении до 670 В.
Рис. 3.1.14. Внешний вид блока SKS250FB6C
Другой вариант компоновки тиристорного блока воплощен в типо-
номинале SKKT92P23/120F и показан на рис. 3.1.17, а его габаритные
размеры — на рис. 3.1.18. Обдув радиатора выполняется снизу, а сверху
Рис. 3.1.16. Схемы соединений элементов блока SKS250FB6C
Рис. 3.1.17. Внешний вид блока SKKT92P23/120F
Рис. 3.1.18. Габаритные размеры блока SKKT92P23/120F
установлены силовые тиристоры с платами снабберных элементов.
Номинальные параметры этого блока: ток до 160 А при напряжении до
400 В. Блок можно крепить к рейке DIN-типа.
Тиристорный блок SKS380NB6C, показанный на рис. 3.1.19 и
рис. 3.1.20, очень похож на ранее представленный отечественный
блок (рис. 3.1.4) — то же расположение радиаторов, такие же
межэлементные связи. Нюанс этой конструкции — использование
конструктивного вывода тиристора в качестве токоведущей шины. Эти тири-
сторные выводы просто крепятся к плоской силовой токоведущей
шине.
Практически тот же самый вариант (блок типа SKS780FB6C), но
оснащенный вентиляторами принудительного охлаждения, показан
на рис. 3.1.21 и рис. 3.1.22.
Последний конструктивный вариант тиристорного блока
SKS1830FB6C, который мы упомянем в нашей книге, представлен на
рис. 3.1.23 и рис. 3.1.24. Это — достаточно мощный блок с
номинальным током до 1830 А. Именно поэтому все соединения в данном
блоке выполнены плоскими медными шинами.
Рассмотрим теперь конструктивное исполнение блоков на основе
мощных IGBT-транзисторов. Как показывает практика
конструирования преобразовательной техники, компоновка силовых инверторов на
основе IGBT-транзисторов вызывает у разработчика наибольшие
трудности. Почему? Ранее мы уже говорили, что работоспособность
этих узлов зависит, кроме всего прочего, и от того, каким образом
удастся уменьшить многочисленные паразитные параметры (в
основном их появление связано с протяженностью токоведущих связей).
На рис. 3.1.25 представлен внешний вид комбинированного блока
типа SKS15FB2CI03V12 на основе силовых IGBT-транзисторов,
предназначенного для построения однофазного инвертора. Основа бло-
Рис. 3.1.19. Внешний вид блока SKS380NB6C
Рис. 3.1.20. Габаритные размеры блока SKS380NB6C
Рис. 3.1.21. Внешний вид блока SKS780FB6C
Рис. 3.1.22. Габаритные размеры блока SKS780FB6C
Рис. 3.1.23. Внешний вид блока SKS1830FB6C
922
Рис 3.1.24. Габаритные размеры блока SKS1830FB6C
ка — радиатор с плоскими ребрами, на который, собственно, и
установлены IGBT-модули, а также драйверы управления силовыми
сборками. Сбоку к блоку подстыкован вентилятор. Блок предназначается
для построения инверторов с номинальным током до 15 А при
рабочем напряжении до 450 В.
Все электрические соединения в блоке выполнены методом
печатного монтажа (в том числе и силовые шины). Рисунок 3.1.26 поясняет
внутреннее устройство блока.
Рис. 3.1.25. Внешний вид блока SKS15FB2CI03V12
Рис. 3.1.26. Структурная схема блока SKS15FB2CI03V12
Блок питается постоянным напряжением, которое поступает на
контакты POS и NEG. К силовым шинам питания подключены
симметрирующие резисторы RS1 и RS2, а также фильтрующие
конденсаторы С1...С4. Конденсаторы CS1 и CS2 — снабберные,
установленные в непосредственной близости от выводов силовых транзисторных
сборок. Драйверы управления IGBT-транзисторами имеют разъемные
соединители CN1 и CN2.
Более сложный вариант блока типа SKS50FB6U, рассчитанного на
рабочие токи до 50 А, представлен на рис. 3.1.27. Его несущая
конструкция традиционна — это радиатор, на котором закреплены
транзисторные сборки (рис. 3.1.28). Межмодульный монтаж выполнен также
печатным способом. Все токоведущие связи скомпонованы на печат-
Рис. 3.1.27. Внешний вид блока SKS50FB6U
Рис. 3.1.28. Габаритные размеры блока SKS50FB6U
ной плате, которая крепится к силовым модулям сверху. На этой же
плате установлены и снабберные конденсаторы. Сбоку к блоку
прикреплены платы драйверов управления.
Структурная схема блока SKS50FB6U приведена на рис. 3.1.29.
В составе блока уже имеется трехфазный неуправляемый диодный
мост, фильтрующие и снабберные конденсаторы, а также четыре
полумостовых IGBT-модуля, что позволяет строить однофазные и
трехфазные инверторы. Обратите внимание: между диодным мостом и
фильтрующими конденсаторами в шине плюсового силового питания
имеется перемычка, которую можно снять и установить вместо нее
схему ограничения пусковых токов. Эту схему придется выносить за
Рис. 3.1.29. Структурная схема блока SKS50FB6U
пределы блока, но размещать в непосредственной близости к нему —
опять же для уменьшения паразитных индуктивностей.
Вдвое увеличена токовая нагрузка для блока SKS100FB6U
(рис. 3.1.30). Претерпела изменение и конструкция блока — для его
охлаждения применен компактный центробежный вентилятор.
Соединения выполнены методом печатного монтажа и при помощи плоских
шин (в тех местах, где печатный монтаж «не проходит» по токовым
нагрузкам). Фильтрующие конденсаторы расположены сбоку и
прикреплены к плоской металлической площадке. Габаритные размеры блока
приведены на рис. 3.1.31.
На рис. 3.1.32 показана схема соединений блока SKS100FB6U. Из
нее видно, что в его составе не применено никаких оригинальных
Рис. 3.1.30. Внешний вид блока SKS100FB6U
Рис. 3.1.32. Структурная схема блока SKS100FB6U
схемотехнических решений — все они типовые, описанные в нашей
книге: трехфазный неуправляемый диодный мост, фильтрующие
конденсаторы, IGBT-модули с драйверами управления и датчики
напряжения, установленные на выходе. Из технической документации на
этот блок можно узнать, что фильтрующие конденсаторы здесь
применены производства фирмы «Epcos», а датчики — от фирмы «LEM».
Иными словами, элементная база силовых блоков также тривиальна,
известна и описана нами в соответствующих разделах, а потому в
процессе работы над этой книгой у автора постоянно возникало
недоумение: почему отечественные фирмы практически не поставляют на
рынок столь удобные полуфабрикаты для статических
преобразователей? В крайнем случае, отечественный производитель принимает
заказы на «эксклюзив», разрабатываемый «под конкретного заказчика».
Естественно, тут не может и речи идти об анализе рынка, создании
унифицированных рядов и исполнений широкого применения.
Читатели, мало-мальски знакомые с сегодняшним состоянием дел в
области проектирования и производства электронной аппаратуры, знают,
что такие разработки «под заказ» обычно длятся очень и очень долго,
да и цена их оказывается заоблачной. Не проще ли действительно в
такой ситуации отказываться от обращения к контрагенту, а
разрабатывать статический преобразователь «от и до» силами одной фирмы?
Но это — небольшое лирическое отступление. Вернемся к продукции
фирмы «Semikron».
Что называется, «передний край» разработок (на момент написания
этой книги) силовых блоков заключен в типономинале IGGD6-
1-328-D1616-E1N6-DL-FA(phc. 3.1.33). Пока этот продукт представлен
в номенклатуре фирмы как «предварительный», то есть не прошедший
все необходимые испытания. От предыдущих разработок, по мнению
специалистов фирмы, этот блок отличается высокой компактностью,
возможностью простого встраивания в приборы и увеличенным
временем жизненного цикла (то есть —- высокой надежностью).
Рис. 3.1.33. Внешний вид блока IGGD6-1-328-D1616-E1N6-DL-FA
На рис. 3.1.34 показано проектное трехмерное изображение нового
блока. Из нее видно, что сбоку к радиатору охлаждения силовых
элементов подстыкован центробежный радиатор, «улитка» которого может
Рис. 3.1.34. Проектная трехмерная модель блока
IGGD6-1-328-D1616-E1N6-DL-FA
быть развернута на 180° (так, как удобно конструктору прибора, в
который блок встраивается) — то есть расположение барабана может быть
как «верхнее», так и «нижнее». А сам блок представляет собой
«бутерброд» из нескольких слоев: радиатор, диодные модули и IGBT-модули,
печатная соединительная плата, блок конденсаторов. Обратите
внимание: конденсаторы сетевого фильтра заключены в несущий гнутый
корпус, к которому также крепятся драйверы управления силовыми
транзисторами. Интересная особенность представленной новинки
заключается в том, что для обдува фильтрующих конденсаторов (поскольку они
находятся «сверху») предусмотрен специальный маломощный
вентилятор осевого типа. Наличие его в блоке продиктовано тем
обстоятельством, что восходящие от радиатора потоки горячего воздуха разогревают
фильтрующие конденсаторы, ухудшая их электрические параметры и
снижая срок службы. Чтобы продлить жизненный цикл конденсатора
(и обеспечить тем самым увеличенный ресурс блока в целом, как
заявлено производителем в качестве преимущества новой разработки), они
охлаждаются вентилятором, который выбрасывает за пределы блока
нагретый воздух.
Электрически блок IGGD6-1-328-D1616-E1N6-DL-FA
представляет собой классическую комбинацию диодного моста (схема Ларионова)
и трехфазного инвертора на основе IGBT-транзисторов (рис. 3.1.35).
Рис. 3.1.35. Структурная схема блока IGGD6-1-328-D1616-E1N6-DL-FA
На этом мы закончим наше знакомство с силовыми блоками, имея
в виду, что аналогичная продукция других производителей, имея
отличия в деталях, все же конструктивно будет весьма и весьма похожей на
представленную здесь. В любом случае разработчику конечной
продукции решать, будет ли он использовать готовые силовые блоки, или
пройдет тернистый путь создания собственного конструктивного
исполнения силовой схемы. Если решение окажется в пользу готовых
блоков, на этом можно чтение книги окончить, посетить сайты
производителей блоков и начать работу с документацией на конкретные
исполнения силовых блоков. Ну а если есть желание познакомиться с
принципами самостоятельной конструктивной компоновки силовых
схем, переходим к следующему разделу.
3.2. Как проложить силовые шины
Эта задача на первый взгляд кажется тривиальной: ну что может
быть особенного в прокладке силовых питающих шин? Казалось бы,
достаточно выбрать соответствующее сечение проводов по значению
протекающего номинального тока, побеспокоиться о надежной
изоляции, — и, собственно, можно рисовать электромонтажный чертеж.
Такой подход годится для конструирования распределительных силовых
щитов, а вот для преобразовательной техники он не подойдет
совершенно. Как мы уже говорили ранее, для проводников силовых схем,
должны быть минимальными не только их активные сопротивления
(а значит, и длина проводников также должна быть минимальной), но
также и значение распределенной паразитной индуктивности. Именно
поэтому для статических преобразователей задача разработки хорошей
топологии силовых связей превращается в ряд трудоемких операций с
электрическими и конструктивными расчетами. Поясним на примере,
почему так происходит и обозначим общие подходы к созданию
приемлемой топологии.
На рис. 3.2.1 показан полумостовой каскад, работающий на
индуктивную нагрузку. Для простоты пренебрежем значением паразитной
индуктивности фильтрующего конденсатора С и выводов силовых
транзисторов VT1 и VT2, оставив только паразитную распределенную
индуктивность Ls силовых шин. Все перенапряжения и режимы,
близкие к аварийным, появляются благодаря наличию тока ion открывания
транзистора VT1 и тока закрывания /^того же транзистора. Чтобы
понять характер этих режимов, обратимся к рис. 3.2.2.
Рис. 3.2.1. К пояснению влияния паразитных параметров
Рис. 3.2.2. Коммутационные процессы в полумостовой схеме
В момент закрытия транзистора VT1 происходит падение тока iVTl
через этот транзистор, но за счет наличия паразитной
индуктивности Ls напряжение на транзисторе VT1, обозначенное как Uyj\,
«подскакивает», причем величина «добавки» к напряжению питания Ucc
окажется тем больше, чем быстрее происходит закрывание
транзистора. Какие конструктивные меры обеспечат снижение паразитной
индуктивности Lp. Самый простой и очевидный способ — это как можно
более близкое прилегание минусового и плюсового токоведущих
проводников, в результате чего паразитные индуктивности будут
скомпенсированы. Как это сделать, поясняет рис. 3.2.3. Конденсаторы фильтра
низких частот группируются в блок и располагаются в
непосредственной близости от выводов IGBT-транзисторов, а соединение между
ними выполняется плоскими платами, прилегающими друг к другу
через слой диэлектрика. Обе шины важно спроектировать как можно
более одинаковыми, тогда несимметричные участки, которые и являются
источником паразитных индуктивностей, сведутся к минимуму.
Рис. 3.2.3. Симметричная силовая шина
Но это далеко еще не все меры, которые можно применить, чтобы
снизить величину паразитной индуктивности силовых шин. Как
показано в работе [51], паразитную индуктивность можно также снизить,
соответствующим образом ориентируя конденсаторы сетевого
фильтра, а также составляя батарею конденсаторов из однотипных элементов
с меньшим номиналом. Поясним сказанное на примере (рис. 3.2.4).
Наиболее неудачным считается расположения выводов фильтрующего
конденсатора перпендикулярно силовому току (рис. 3.2.4, я), так как в
этом случае наблюдается несимметрия распределения элементарных
токов по площади токоведущей шины. Как видно из рисунка, в этом
случае образуется большая поверхность несимметрии элементарных
токов (так называемая «токовая петля»), отстоящих друг от друга на
значительные расстояния, а значит, не могущих взаимно
компенсировать себя. Поэтому рекомендуется располагать токоведущие выводы
параллельно силовому току, как показано на рис. 3.2.4, б — в этом слу-
Рис. 3.2.4. К пояснению наличия «токовой петли»
чае площадь «токовой петли» может быть сокращена в три раза, а,
соответственно, в три раза упадет и величина паразитной индуктивности
токоведущих проводников. Но это — еще не предел. Если «набрать»
необходимую емкость из нескольких конденсаторов меньшей емкости,
расположив их выводы также параллельно направлению силового тока
(рис. 3.2.4, в), эта мера позволит снизить площадь «токовой петли» еще
в два раза по сравнению с вариантом «б». Таким образом, только за
счет правильного расположения фильтрующих конденсаторов и их
разбивки на батарею, удастся уменьшить паразитную индуктивность в
6 раз! На рис. 3.2.5 показан принцип сборки силового узла
статического преобразователя с применением симметричной силовой шины.
А можно ли еще каким-то образом понизить значение паразитной
индуктивности? Оказывается —- можно! Только для этого необходимо
применить так называемую многослойную силовую шину (laminated bus
bar). Такие шины только недавно появились на рынке компонентов
силовой электроники, а поэтому отечественными разработчиками они
используются пока в очень ограниченном объеме, но в ближайшем
будущем без них невозможно будет создавать конкурентоспособную
компактную преобразовательную технику с токами силовых цепей в диапа-
Рис. 3.2.5. Применение симметричной силовой шины
зоне 30...3000 А. Физически многослойная силовая шина представляет
собой спрессованные специальным диэлектриком слои силового
питания и выходные шины, причем таким образом, чтобы «плюсовой» и
«минусовой» силовые слои чередовались друг с другом (рис. 3.2.6).
В итоге силовой ток распределяется равномерно между слоями, а
верхние слои экранируют внутренние, не давая электромагнитным помехам
выходить наружу. Кроме этого, в случае применения многослойных
силовых шин их основные параметры (активное сопротивление,
распределенная последовательная индуктивность, распределенная межслой-
ная емкость, проводимость изолятора) уже заранее известны, так как
измерены на заводе-изготовителе, и конструктору не придется «ломать
голову» над построением адекватной модели паразитных параметров, а
просто взять необходимые данные из технической документации. Надо
ли говорить, что все параметры многослойных шин оптимизированы
наилучшим образом, так как выполняются специалистами.
Рис. 3.2.6. Конструкция многослойной силовой шины
К сожалению, применение многослойных шин имеет свою
неприятную обратную сторону. Эти изделия представляют собой продукт
высоких технологий, изготавливаемый на специальном оборудовании
[52], [53], [54], [55] и с применением специальных материалов
(эпоксидные наполнители с высоким значением напряжения изоляции,
специально обработанные марки медных листов и сплавов на основе
меди с обеспечением высокой механической прочности [56]). На
сайтах фирм-производителей имеются специальные интерактивные
формы, с помощью которых можно сделать заказ на эту продукцию,
указав число слоев, конфигурацию, электрические характеристики. Увы,
позволить себе разместить заказ на такие высокотехнологичные шины
могут только фирмы с большими объемами выпуска однотипной
продукции, остальным же придется довольствоваться серийными
вариантами, «подгоняя» под них компоновку силовой схемы. Понятно, что
особенно актуальной эта проблема является для отечественного
производства. К сожалению, автору на момент работы над книгой не
удалось найти ни одной отечественной фирмы, которая занимается
изготовлением ламинированных шин, поэтому данный сегмент рынка у
нас в стране остается неохваченным. Но, тем не менее, осваивать эту
технологию придется всем, кто хочет удержаться на рынке
преобразовательной техники, а значит, можно предположить, что средства в
отечественное производство ламинированных многослойных шин будут
вложены.
На рис. 3.2.7 показан внешний вид многослойных
ламинированных шин достаточно простой конфигурации. Современные технологии
позволяют изготавливать также шины с достаточно сложной
топологией, в том числе и пространственной — многочисленными изгибами,
поворотами, отводами. Можно даже сказать, что в чем-то процесс
создания топологии силовых шин приближается к процессу
проектирования печатных плат, когда разработчик создает топологию печатной
платы, а затем в электронном виде направляет файлы в производство,
где они воплощаются в реальную продукцию автоматизированным
способом.
Рис. 3.2.7. Внешний вид многослойных силовых шин
Учитывая, что за ламинированными шинами большое будущее,
приведем основные параметры, которые необходимо рассчитать для
квалифицированного заказа их у производителя. При расчете
основных параметров ламинированной многослойной шины удобно
обратиться к рис. 3.2.8.
Рис. 3.2.8. К расчету основных параметров многослойной ламинированной
шины
Итак, исходными данными для шины являются:
а) активное погонное сопротивление шины (в Ом/мм),
рассчитанное по известной формуле (для температуры 20 °С):
(3.2.1)
где р — удельное сопротивление материала шины (выбирается из
таблиц для материалов, предлагаемых производителем шины), Ом • мм;
А — сечение проводящего слоя шины, мм2.
Сечение проводящего слоя шины (в мм2) рассчитывается исходя
из максимально-возможного тока шины /тах, числа слоев шины N по
формуле
(3.2.2)
б) активное погонное сопротивление при максимальной рабочей
температуре:
(3.2.3)
где — сопротивление при максимальной рабочей температуре;
71 — нормальная температура (типовое значение — 20 °С);
72 — максимальная рабочая температура;
а — коэффициент теплового изменения сопротивления материала
проводника.
в) падение постоянного напряжения на шине (в Вольтах):
(3.2.4)
где / — длина шины.
г) значение распределенной емкости шины, пФ:
(3.2.5)
где е — относительная диэлектрическая проницаемость материала
диэлектрика;
w — ширина шины;
d — расстояние между «плюсовой» и «минусовой» токоведущими
шинами;
д) распределенная паразитная индуктивность шины, нГн:
Характеристический импеданс шины очень важен для решения
задач снижения электромагнитных помех: поскольку этот импеданс
«действует» только на переменном токе, через него замыкаются все
высокочастотные составляющие коммутационных токов, импульсные
выбросы с малой длительностью. По сути, импеданс «съедает» эти помехи.
Чтобы завершить разговор о ламинированных шинах, приведем
пример, красноречиво свидетельствующий о перспективах
применения ламинированных многослойных шин в преобразовательной
технике. Обратимся к рис. 3.2.9, на котором показаны: многослойная
шина (рис. 3.2.9, я), двухпроводная шина с круглыми проводниками
(3.2.6)
е) характеристический импеданс, Ом:
(3.2.7)
Рис. 3.2.9. К сравнению вариантов исполнения токоведущих шин
(расположенные рядом монтажные провода, рис. 3.2.9, б) и
двухпроводная шина с разнесенными круглыми проводниками (рис. 3.2.9, в).
Все три случая рассчитаны для протекания постоянных токов одной
величины. В табл. 3.2.1 сведены основные расчетные параметры.
Таблица 3.2.1. Сравнение разных вариантов токоведущих шин
Вариант исполнения токоведущей шины
С, пФ
Ly нГн
2Ь, Ом
Ламинированная многослойная шина
5
15,3
1,7
Бифилированные монтажные провода
32
686,0
160,0
Разнесенные монтажные провода
13
2,36
338,0
На рис. 3.2.10 показан график частотной зависимости значения
характеристического импеданса для варианта многослойной шины
(кривая «1»), двух расположенных рядом монтажных проводов
(кривая «2») и разнесенных монтажных проводов (кривая «3»). Хорошо
видно, что многослойная ламинированная шина «работает» на
несколько порядков эффективнее других вариантов во всем диапазоне
частот, которые актуальны для преобразовательной техники.
Рис. 3.2.10. Сравнение поведения импедансов при изменении частоты
До этого момента мы сознательно упростили ситуацию с описанием
паразитных параметров силовой схемы статических преобразователей,
чтобы рассказать о наиболее удачных вариантах создания топологии
токоведущих силовых проводников. Сейчас мы расширим количество
«паразитов», добавив их к схеме рис. 3.2.1. В результате у нас поучится
схема, показанная на рис. 3.2.11. И не исключено, что в результате
конструкторской проработки полной силовой схемы будет установлено,
что какой-либо из элементов не сможет обеспечить нормальное
функционирование преобразователя по величине своего паразитного
параметра (даже если на этапе разработки электрической схемы элемент
считался удовлетворительны), а значит, разработчику придется
провести дополнительный поиск и найти адекватную замену. Поэтому не
стоит впадать в панику, если эта проблема появляется только на стадии
конструирования -— такие ситуации в области разработки статических
преобразователей случаются часто, к ним просто нужно привыкнуть.
Рис. 3.2.11. Полная схема паразитных параметров
Итак, полная схема паразитных параметров. Выглядит она на
первый взгляд удручающей, а руки так и тянутся запустить какую-нибудь
программу схемотехнического моделирования. Но давайте прежде
всего разберемся, «что есть что» в этой схеме — так нам проще будет
найти исходные данные для моделирования.
Конденсаторы С1 и С2 составляют входной сетевой фильтр, а их
последовательное включение выполнено с целью обеспечить
безопасное рабочее напряжение. Как мы выяснили в предыдущей главе, эти
конденсаторы имеют также паразитное активное сопротивление
(ESR), обозначенное здесь как RC1 (для конденсатора С1) и RC2 (для
конденсатора С2). Кроме того, нам также уже знакомы паразитные ин-
дуктивные составляющие (ESL), обозначенные как LC1 и LC2. Взяв
также из справочных данных величину тангенса угла потерь (tg 5), можно
рассчитать величину эквивалентного импеданса конденсатора на
любой частоте f:
(3.2.8)
Естественно, импеданс конденсатора должен быть как можно
более низким, тогда и перенапряжения, возникающие на силовых
транзисторных ключах, окажутся меньше. Но, как мы только что сказали,
снизить величину паразитной индуктивности конденсаторов можно,
только заменив конденсатор на другой тип, с более низким значением
индуктивности. Вариант номер два, также рассмотренный нами
ранее, — установка снабберных конденсаторов на силовые модули.
Именно поэтому при проектировании топологии силовых шин
конструктору имеет смысл оставить место под установку снабберных
конденсаторов, если в процессе испытаний величина перенапряжений
будет выше допустимой. Впрочем, лучше всего не экономить на этом
полезном элементе и потребовать от разработчика электрической
схемы их установки до разработки топологии.
Двигаемся дальше по схеме, минуя паразитную распределенную
индуктивность силовых шин Ls, о которой мы говорили в этом самом
разделе. Оставшиеся паразитные индуктивности и емкости являются
принадлежностью силовых модулей, и приличные производители
силовой элементной базы эти паразитные параметры указывают в
технической документации. Индуктивности L
evti и ^£уу2 — так называе-
мые «истоковые» (эмиттерные) паразитные индуктивности, которые
при высокой скорости коммутации будут мешать быстрой
перезарядке входных затворных емкостей. Чтобы исключить их влияние, в
мощных силовых модулях предусматривается специальный вывод
управляющего эмиттера (истока), а значит, никаких конструктивных
мер по снижению данных паразитных параметров конструктору
принимать не нужно — за него это сделали производители силовых
модулей. Коллекторные индуктивности LCVT1 и LCVT2, анодные и катодные
индуктивности LCVD1, LAvdi> LCVD2, LAVD2 особой опасности не
представляют. Они, как правило, имеют небольшую величину. Емкости
Озк1> ССЕ1, Cgci> CGK2, ССЕ2, CGC2, CVD1, CVDl также относятся к
внутренним паразитным элементам силовых транзисторов, и разработчик
силовой схемы никак на них повлиять не сможет, но в сочетании с
коллекторными и эмиттерными индуктивностями эти емкости
вызывают опасные колебательные процессы, из-за чего имеет смысл
проводить моделирование схемы с их учетом.
Надеемся, что с методами снижения паразитных параметров в
силовых схемах читатель разобрался (хотя бы в первом приближении).
И в заключение этого раздела представим компоновочную схему
статического преобразователя мощностью 5 МВт с жидкостным
охлаждением. На рис. 3.2.12 показана элементарная ячейка преобразования,
состоящая из полного моста на основе четырех IGBT-модулей. Со-
Рис. 3.2.12. Элементарная ячейка преобразователя мощностью 5 МВт
Рис 3.2.13. Компоновочная схема преобразователя мощностью 5 МВт
единения между модулями выполнены ламинированной
многослойной шиной, а сами модули установлены на радиатор с системой
прокачки жидкости. Справа от ячейки расположен охладитель жидкости,
к которому крепится вентилятор. Мощность этой элементарной
ячейки составляет 1,7 МВт, система охлаждения отводит мощность 10 кВт.
Шесть элементарных ячеек объединены в стойку (рис. 3.2.13)
с помощью медных токоведущих одиночных шин. Размеры стойки:
2200 х 1200 х 600 мм, а ее мощность — те самые 5 МВт. Такого
размера преобразователя при столь высокой номинальной мощности
удалось добиться в том числе и благодаря рациональной компоновке,
минимизировавшей паразитные параметры.
3.3. Все ли благополучно с тепловыделением?
Мы не случайно сделали этот вопрос заголовком данного раздела.
Ведь, кроме всего прочего, преобразовательная техника, особенно
рассчитанная на большие мощности, выделяет большое количество
тепловой энергии, которую рассеивают практически все компоненты ее
силовых схем. Нагреваются дроссели и трансформаторы, силовые
конденсаторы, особенно много тепла выделяется на мощных
полупроводниковых элементах. Естественно, если не принять определенных мер
еще на стадии конструирования преобразователя по отводу тепла, легко
получить неработоспособную конструкцию уже на первых испытаниях.
Тепловыделение — очень коварный процесс, который может не сразу
заявить о себе, как о разрушающем факторе. Если элементы силовых
схем выбраны правильно, учтены максимально-возможные токи, то,
будучи воплощенным в реальную конструкцию, прибор не сразу выйдет из
строя, а нормально проработает какое-то время. И только вблизи точки
установления теплового равновесия, когда режимы всех элементов
более-менее стабилизировались, возможно срабатывание системы защиты
от превышения допустимой предельной температуры (если прибор
такой защитой оснащен), либо наступит аварийный режим (если эта
защита не предусматривалась). Поэтому очень важно не только правильно
выбрать элементы силовых схем, но и обеспечить их длительное
функционирование, отводя выделяемое тепло в достаточной мере. Каким
образом это сделать и какими конструктивными мерами следует
пользоваться, об этом мы сейчас поговорим.
Оговоримся сразу: задача обеспечения хорошего отвода тепла от
внутренних элементов статических преобразователей по своей
сложности и трудоемкости сравнима с задачей разработки электрической
схемы. При ее решении необходимо учесть множество связей между
элементами, оказывающими взаимное влияние друг на друга, их
конструктивное расположение, индивидуальный характер тепловыделения.
Работать над решением такой задачи «врукопашную», как это делалось
на протяжении предшествующих десятилетий, просто нереально,
учитывая современные требования, предъявляемые к габаритам
современных статических преобразователей. К счастью, все основные
расчетные методики ныне формализованы и представлены разработчику в
виде специализированных программных продуктов. Мы обязательно
расскажем об этих программах теплового моделирования далее, а
сейчас познакомимся в самом общем виде с принципами тепловых
расчетов, с их основами. Они помогут провести первоначальную проработку
тепловых режимов элементов внутри корпуса.
Итак, предположим, что в распоряжении конструктора уже
имеется электрическая схема статического преобразователя, выполнена
компоновка прибора, элементы расставлены по своим местам,
оптимизированы электрические связи. Теперь можно приступить к
тепловому расчету существующей компоновки. С чего начать?
Перво-наперво необходимо разработать тепловую модель преобразователя,
составив ее из тепловых моделей отдельных частей (лучше всего, если
это будут элементарные модели, теория которых хорошо разработана).
Конечно, полную тепловую модель создать практически невозможно,
поэтому в расчетах пользуются упрощенными тепловыми моделями, в
которых тепловыделяющие элементы, охладители, несущие
конструкции заменяются типовыми эквивалентами со стандартными
характеристиками.
Отвлечемся ненадолго от конструирования статического
преобразователя и представим себе в самом общем виде механизм
теплообмена (рис. 3.3.1), пользуясь обобщенной моделью. Имеется некоторая
равномерно прогретая поверхность «1» с температурой 7), вблизи
которой расположена другая равномерно прогретая поверхность «2» с
температурой 7}, причем температура поверхности «1» выше
температуры поверхности «2». В соответствии с законами физики, между
этими поверхностями будет происходить перенос тепловой энергии:
тепловой поток Pt устремится от поверхности «1» к поверхности «2» таким
образом, что первая поверхность будет остывать, а вторая — нагре-
Рис 3.3.1. Обобщенная модель теплообмена
ваться. Этот процесс будет происходить до тех пор, пока процесс
теплообмена не стабилизируется, то есть временного изменения
температур больше не произойдет. Такое состояние называется тепловым
равновесием, и для него можно записать следующее соотношение:
(3.3.1)
где R0 — так называемое тепловое сопротивление между нагретыми
поверхностями.
Формула (3.3.1) должна напомнить читателю закон Ома для
участка цепи, если вместо разницы температур подставить разность
электрических потенциалов, вместо теплового потока — силу
электрического тока, а вместо теплового сопротивления — сопротивление
электрическое. Конечно, это только аналогия, и не более, но она
позволяет понять физический смысл происходящих процессов
теплообмена. Мало того, при расчете тепловых схем можно заимствовать
методы электротехники. К символам, обозначающим тепловые
величины, чтобы не спутать их с электрическими, обычно добавляется
индекс «th» (thermo).
Для тех читателей, кто сталкивается с тепловыми расчетами
впервые, имеет смысл пояснить, что такое тепловое сопротивление, на
простом примере. Хорошо известно, что в схемах с мощными
регулирующими транзисторами очень важно обеспечить хорошее прилегание
транзистора к радиатору. От того, насколько плотно прижат
транзистор к радиатору, зависит температура его нагрева. Если транзистор
прижат к ровной и чистой поверхности радиатора, он будет
прогреваться равномерно и хорошо «отдавать» выделяющуюся тепловую
энергию. Ну а если поверхность радиатора неровная, замасленная, не
исключено, что силовой транзистор раскалится докрасна, в то время
как радиатор останется чуть теплым. Интерпретируют описанный
факт следующим образом: ровная и чистая поверхность имеет низкое
тепловое сопротивление, а неровная и грязная — высокое.
Правильное определение тепловых сопротивлений — важнейшая
задача тепловых расчетов, поскольку от того, насколько точно это будет
сделано, зависит результат моделирования процессов тепловыделения.
Теперь мы переходим к составлению простейшей тепловой модели
силового полупроводникового прибора, например, одиночного
транзистора MOSFET. Обратимся к рис. 3.3.2. Кристалл полупроводника «j»
(junction) установлен на теплопроводящую подложку
(неизолированную от полупроводника или изолированную), которая связана с
корпусом прибора «с» (case). Полупроводник имеет температуру 7},
предельное значение которой указывается в технической документации на
конкретный полупроводниковый прибор. Корпус нагрет до температуры
Гс, которая не равна 7}, а значит, между полупроводником и корпусом
Рис. 3.3.2. Тепловая модель полупроводникового элемента на радиаторе
имеется некоторое тепловое сопротивление, в технической
документации обозначаемое как Rthjc (тепловое сопротивление
«кристалл—корпус»). Типовое значение этого параметра производитель приводит в
своей техдокументации.
Далее: корпус полупроводника в целях отвода тепла должен
прилегать к радиатору «s» (silk heat), имеющему температуру Ts, которая также
не равна Тс. Отсюда можно сделать вывод, что между корпусом и
радиатором также имеется тепловое сопротивление, обозначаемое как RJhcs
(тепловое сопротивление «корпус—радиатор»). Величину этого
теплового сопротивления найти в справочных данных сложнее — она зависит
не столько от типа полупроводника, сколько от состояния
прилегающих поверхностей «радиатор—корпус», от наличия или отсутствия
изоляционных прокладок, теплопроводящих паст, чистоты обработки
поверхностей. Обычно здесь пользуются таблицами типовых вариантов.
Тепловая энергия в радиаторе не накапливается. Куда же она
девается? Рассеивается в окружающую среду «а» (ambient), имеющую
температуру Tai которая не равна Ts. И мы снова заключаем, что между
радиатором и окружающей средой имеется тепловое сопротивление
Rthsa (тепловое сопротивление «радиатор—среда»). Как правило,
радиаторы статических преобразователей напрямую контактируют с
воздухом, теплопроводность которого изначально невысока. Воздушная
зона вблизи радиатора прогревается, впрочем, довольно-таки неплохо,
но вот конвекционные потоки естественного происхождения
медленно удаляют нагретый воздух, заменяя его более холодным. Поэтому
довольно часто, чтобы снизить тепловое сопротивление «радиатор-
среда», радиатор обдувают принудительно, с помощью вентилятора.
А вот если по каким-либо причинам принудительная вентиляция
нежелательна, от нее приходится отказываться, устанавливая либо
крупный радиатор, либо переходить к водяному охлаждению. Для
снижения теплового сопротивления (а значит, повышения теплоотдачи) по-
верхность радиатора стремятся сделать как можно больше — ее ребрят,
покрывают в черный цвет электрохимическим способом.
Водяное (жидкостное) охлаждение силовых элементов
производится следующим типовым способом: силовые модули устанавливаются на
металлическую пластину, в толще которой проложены либо трубки
(рис. 3.3.3), либо отфрезерованы каналы (рис. 3.3.4), по которым под
давлением протекает охлаждающая жидкость. Такие детали сегодня
выпускаются в готовом виде рядом фирм, поэтому их использование не
вызовет у конструктора особых трудностей. Удобство готового узла
водяного охлаждения состоит еще и в том, что для него
фирма-производитель приводит типовую кривую зависимости теплового сопротивления
от скорости потока протекающей жидкости (рис. 3.3.5), а также перепа-
Рис. 3.3.3. Модуль жидкостного
охлаждения с трубками
Рис. 3.3.4. Модуль жидкостного
охлаждения с фрезерованными
каналами
Рис. 3.3.5. Зависимость теплового сопротивления и давления жидкости
от скорости потока жидкости
да давления на входе и на выходе проточной трубы от той же скорости
потока жидкости. Обычно эти графики совмещаются в одной сетке.
Тепловое сопротивление может нормироваться как в °С/Вт (в
отечественной литературе), так и в °К/Вт (в зарубежной документации).
Представленный график относится к узлу охлаждения, показанному на рис. 3.3.3,
для которого тепловое сопротивление стороны установки трубок и
обратной стороны пластины — разные, что и отражено на данном графике.
Но вернемся к расчетным тепловым моделям. Читатели должны
уяснить себе, что расчет теплового сопротивления
«радиатор—среда» — это отдельная инженерная задача с достаточно большим
количеством факторов, подлежащих учету. Здесь играет роль и
конфигурация радиатора, и его расположение в приборе, и наличие (отсутствие)
принудительного охлаждения. Чтобы нам было легче решать данную
задачу, составим простейшую тепловую модель схемы рис. 3.3.2,
показанную на рис. 3.3.6.
Для чего мы построили эту модель? Главная ее цель —
определение фактической температуры кристалла полупроводника, которая не
может быть безграничной. Согласно формулы (3.3.1), с учетом
приведенной модели, температура кристалла может быть вычислена по
следующей формуле:
где Рп — мощность потерь, выделяемая полупроводниковым элементом.
Мощность потерь в полупроводнике мы уже научились
рассчитывать в предыдущих главах, а предельная температура окружающей
среды Та — это параметр, который априори должен быть задан в
техническом задании на проектирование. Действовать «на глазок» здесь
ни в коем случае нельзя — слишком дорого может обойтись ошибка.
Ну а если к единому радиатору крепятся несколько
полупроводниковых приборов? Такая ситуация отнюдь не редка, а даже —
тривиальна. Обычно нет смысла устанавливать диодные мосты, силовые
транзисторные сборки и обратные диоды на разные охладители, поскольку
это неконструктивно. Гораздо лучше установить их на один радиатор и
модифицировать расчетную тепловую схему так, как показано на
рис. 3.3.7.
Рис. 3.3.6. Расчетная модель тепловых режимов
(3.3.2)
Рис. 3.3.7. Расчетная модель в случае установки нескольких
полупроводниковых приборов на одном радиаторе
В технической документации на конкретный силовой прибор
обычно указываются значения тепловых сопротивлений «кристалл—корпус»
и «корпус—радиатор». И если при выполнении расчетов мы
подставляем в формулы значение теплового сопротивления «кристалл—корпус» в
том виде, в котором оно приведено в документации, то с тепловым
сопротивлением «корпус—радиатор» нужно обращаться очень
осторожно, и вот почему. Данное значение приводится для случая идеального
прилегания контактной поверхности силового прибора к радиатору.
В реальных случаях поверхность радиатора имеет некоторую
шероховатость, неровности. Установка силовых приборов на радиатор также
может быть сопряжена с неравномерностью усилий затяжки крепежных
элементов, из-за чего реальное тепловое сопротивление
«корпус—радиатор» может увеличиться в разы по сравнению с идеальным случаем.
Поэтому на практике используют специальные мягкие прокладки,
теплопроводную пасту, позволяющие сгладить неровности и обеспечить
равномерный контакт поверхностей. В ряде случаев прокладка между
корпусом силового прибора и радиатором имеет принципиальное
значение — ее установка выполняется для электрической изоляции
силового прибора от радиатора. В любом случае прокладка (или слой тепло-
проводящей пасты) имеет свое тепловое
сопротивление, которое необходимо приплюсовать к
тепловому сопротивлению «корпус—радиатор»
(рис. 3.3.8), обозначенное как Rthp.
Как вычислить тепловое сопротивление
прокладки (пасты)? Для этого необходимо
использовать тепловую модель неограниченной
плоской однородной стенки, поскольку толщи-
Рис. 3.3.8. Учет тепло-
проводящей
прокладки (пасты)
на прокладки (или толщина слоя теплопроводной пасты) намного
меньше ее длины и ширины. Формула для вычисления теплового
сопротивления Rlh_p следующая:
(3.3.3)
где др — толщина прокладки (слоя теплопроводящей пасты);
X — коэффициент теплопроводности материала, Вт/м • °С;
Sp — площадь одной стороны прокладки (слоя теплопроводящей
пасты).
Коэффициенты теплопроводности можно найти в справочниках
по электротехническим материалам, а также у поставщиков. Для
примера в табл. 3.3.1 приведены данные по некоторым материалам,
которые наиболее часто используются при производстве силовой
преобразовательной техники.
Таблица 3.3.1. Теплопроводность некоторых электротехнических материалов
Материал
Коэффициент теплопроводности, Вт/м • eC; |
Паста КПТ-8
0,7...0,8
Паста АлСил-3
1,7...2,0
Паста Arctic Silver 5
8,7
Паста Collaborator Liquid Pro
82
Паста EINano S27Z-2
2000
Полимертилсиликсан
0,12...0,16 j
Герметик «Эластосил 11-01»
0,7...1,0
Слюда
о,4з...о,б ;
Текстолит
0,23...0,33
Гетинакс
0,18...0,25
Стеклотекстолит
0,17...0,18
Материал «Номакон-GS»
2...2J ,
Отдельно следует упомянуть современные изоляционные
материалы с высокой теплопроводностью. Один из таких материалов с маркой
«Номакон-GS» (КПТД-2) [57] выпускается в Белоруссии по ТУ РБ
145766608.003—96. Теплопроводность данного материала в несколько
раз превосходит теплопроводность классической слюды, на
протяжении десятилетий применявшейся для изоляции силовых приборов от
радиаторов, а механические характеристики не идут ни в какое
сравнение с характеристиками слюды. «Номакон-GS» — эластичный матери-
Рис. 3.3.9. Преимущества
применения эластичных
изоляционных прокладок
ал, который, подобно резине, облегает
при прижиме все неровности и
выравнивает поверхности соприкосновения, не
трескается и не рвется (при аккуратном
обращении), в то время как слюда может
просто расколоться, если ее «пережать».
На рис. 3.3.9 показано, что происходит с
сопрягаемыми поверхностями при
применении твердого изолятора и изолятора
на основе эластичных полимеров.
Некоторые конструкторы силовой
преобразовательной техники, впервые
подержав этот материал в руках, с сомнением относятся к возможности
выполнения им своих функций, так как внешне он напоминает жесткую
резину. Создается впечатление, что «резинка» просто расплавится в
работающем приборе, однако это далеко не так: материал изготавливается
методом прессовки керамических порошков со связующей каучуковой
основой с армирующим стекловолокном, что позволяет ему сохранять
свойства в диапазоне температур от минус 60 до +250 °С.
На рис. 3.3.10 показаны типовые прокладки, которые можно
приобрести у фирмы. Эти прокладки рассчитаны на установку под
стандартные корпуса полупроводниковых компонентов. Кроме того,
фирма выпускает материал в виде листов, так что при отсутствии в
номенклатуре фирмы необходимых готовых прокладок, их можно изготовить
самостоятельно (особенно это относится к прокладкам под мощные
полупроводниковые модули).
Рис. 3.3.10. Типовые варианты прокладок, производимых фирмой «Номакон»
Ряд зарубежных фирм также выпускают эластичные теплопрово-
дящие прокладки для силовых полупроводниковых приборов,
поэтому при необходимости приобрести такую деталь для изготовления
статического преобразователя не составит никакого труда. Как
правило, фирмы просто указывают тепловое сопротивление конкретной
прокладки в каталоге (в °К/Вт или в °С/Вт). Например, в среднем (по
данным нескольких фирм-производителей), тепловое сопротивление
прокладки для корпуса типа ТО-3 составляет 0,8 °К/Вт. Это значение
обеспечивается при нормированном усилии прижима
полупроводникового прибора к радиатору.
Обратим внимание на правильный выбор таких параметров, как
тепловое сопротивление «кристалл—корпус» и «корпус—радиатор»
(это сопротивление в документации разных фирм может называться
по-разному, например, «case-to-silk», «contact thermal resistanse»,
«контактное тепловое сопротивление» — в любом случае, прежде чем
производить расчеты, нужно разобраться, к чему относится параметр).
Некоторые фирмы (особенно грешит этим отечественный
производитель) почему-то не считают необходимым указывать в своих
справочных данных тепловое сопротивление «корпус—радиатор»,
предполагая, видимо, что разработчик имеет под рукой массу справочной
литературы, из которой мгновенно «вытащит» необходимое значение.
Такой подход — в корне неправильный, поскольку значение теплового
сопротивления «корпус—радиатор» у разных производителей может
варьироваться исходя из технологии производства корпусов. Имеет
смысл также упомянуть приводимый в технической документации
интегральный параметр «тепловое сопротивление кристалл-окружающая
среда» («junction-to-ambient») Rthja. Этот параметр используют в
расчетах тогда, когда полупроводниковый элемент предполагается
использовать без теплоотводящего радиатора. Кстати, если в технических
данных отсутствует значение теплового сопротивления
«корпус—радиатор», велик соблазн вычесть из Rthja значение Rthjc, чтобы получить
Rthcs. Однако такой подход в корне неверный, поскольку этим
тепловым сопротивлениям соответствуют разные законы теплообмена.
Резюмируем: весь набор тепловых сопротивлений Rthjc, RthC5, Rthja должны
быть измерены производителем и приведены в технической
документации. В крайнем случае возможно воспользоваться данными близких
аналогов, но тогда возрастет вероятность допустить фатальную
расчетную ошибку и не обеспечить требования по допустимым перегревам.
В табл. 3.3.2 приведены тепловые сопротивления для некоторых
типов серийных силовых полупроводниковых приборов.
Фирмы-производители много внимания уделяют снижению
внутренних тепловых сопротивлений полупроводниковых приборов, и
достигли в этом весьма неплохих результатов. Учитывая это
обстоятельство, существенной задачей при конструировании статического преобра-
Таблица 3.3.2. Тепловые сопротивления силовых транзисторов в стандартных
корпусах
1 т
Тип транзистора
Корпус
Тепловое сопротивление, вС/Вт
Rthjc
Rthcs
Rth ja
[2П7172А
ТО-254 (КТ-97В)
1,20
—
60,0
|КП7173
ТО-220АВ (КТ-28-2)
1,78
—
—
|2П7154АС
2П7154БС
2П7154ВС
Металлокерамический корпус
с полосковыми
безындуктивными выводами
0,16
I2E715A
2Е715Б
КТ-9МИ
1,25
—
— i
I2M410A
[2М410В
5-выводной и 10-выводной
металлокерамический корпус
0,25
—
—
2М410Б
2М410Б1
2M410B1
2М410Г1
0,36
2П771А91
D2Ppak (КТ-90)
1,00
—
62,5
IRF510
ТО-220АВ (КТ-28-2)
3,50
0,50
62,0 |
IRL530N
ТО-220АВ (КТ-28-2)
1,90
0,50
62,0 |
IRF840
ТО-220АВ (КТ-28-2)
1,00
0,50
62,0 j
1RF250
ТО-247АС
0,65
0,24
40,0 ;
IRFP460
ТО-247АС
0,45
0,24
40,0
IRFP044
ТО-247АС
0,83
0,24
40,0
IRG4BC30S
ТО-220АВ (КТ-28-2)
1,20
0,50
80,0 \
IRG4BC40W
ТО-220АВ (КТ-28-2)
0,77
0,5
80,0
GA50TS120U
INT-A-PAK
0,1
— j
IGBT
0,44
встроенный диод
0,70
GA150TD120U
DUAL INT-A-PAK
0,1
—
IGBT
0,16
встроенный диод
0,20
GA500TD60U
DUAL INT-A-PAK
0,1
—
IGBT
0,08
встроенный диод
0,20
CM200DY-24H
DUAL INT-A-PAK
0,045
—
IGBT
0,085
встроенный диод
0,18
1
Окончание табл. 3.3.2
I Тип транзистора
Корпус
Тепловое сопротивление, °С/Вт
Rthjc
Rth cs
Rth ja
SKM800GA126D
SEMITRANS-4
0,038
-
IGBT
0,042
встроенный диод
0,09
SEMiX 303GD12T4C
SEMiX-33c
0,014
—
IGBT
0,095
встроенный диод
0,18
зователя будет решение вопроса отвода тепла от силового элемента
посредством радиатора. Данную задачу конструктору придется решать
самостоятельно, так как производитель полупроводника уж никак не
может знать, каковы реальные условия эксплуатации его продукции.
Чтобы правильно решить задачу охлаждения силового элемента, нам
необходимо рассмотреть основные законы теплообмена, и уже в
соответствии с ними строить тепловую модель элемента охлаждения.
Собственно, задача обеспечения теплового режима сводится к
снижению теплового сопротивления «радиатор-окружающая среда» (Rth_sa),
или обеспечения такой его величины, которая позволит удерживать
максимально-возможную температуру полупроводникового элемента
ниже допустимой. Исследования показали, что распространение
тепловой энергии происходит тремя путями: конвекцией, излучением и кон-
дукцией. Классический вариант конвективного теплообмена — это
обдув вентилятором процессора персонального компьютера. Тепловая
энергия от радиатора переходит к частицам воздуха, нагревая его, а
вентилятор уносит нагретый воздух, привлекая воздух охлажденный. В
качестве теплообменной приточно-вытяжной среды может выступать
также вода, масло и другие текучие жидкости. Очень часто при
разработке преобразовательной техники рассматривают простейший случай
естественной конвекции, когда воздух без посторонней помощи
циркулирует около радиатора благодаря естественному перепаду давлений.
Энергия переносится здесь теплоносителем.
Конвективный теплообмен между нагретой твердой поверхностью
и газообразной (жидкой) средой в общем случае подчиняется закону
Ньютона — Рихмана:
где Рп — тепловая мощность рассеяния;
(3.3.4)
Ss — эффективная площадь поверхности радиатора;
а* — коэффициент конвективного теплообмена между радиатором
и средой.
Если внимательно посмотреть на формулу (3.3.4), а также
обозначить
(3.3.5)
то в общем виде мы получим уже известное нам уравнение теплового
равновесия (3.3.1), в котором участвует тепловое сопротивление
«радиатор—окружающая среда» Rthsak. Индекс «к» показывает, что это
тепловое сопротивление — не полное, а только относящееся к
конвективной составляющей.
Для построения тепловой модели необходимо определить
значение коэффициента конвективного теплообмена о^, физический
смысл которого следующий: это мощность, рассеиваемая единицей
поверхности радиатора, при условии, что разность между
температурой радиатора и температурой окружающей среды составляет 1 °С.
Мы не будем углубляться в вопросы определения коэффициента
конвективного теплообмена, адресовав читателя, например, к изданию
[2], в котором решение этой задачи рассмотрено подробнее. Скажем
лишь, что значение этого коэффициента зависит от многих
факторов, среди которых основными являются: габаритные размеры
радиатора, его конструкция, расположение в приборе, наличие
принудительного обдува.
Рассмотрим теперь закон передачи тепловой энергии излучением.
Вы никогда не задумывались о том, что между Землей и Солнцем не
циркулирует никаких воздушных потоков, и, тем не менее, тепловая
энергия, излученная Солнцем, каким-то образом достигает Земли.
Объясняется это тем, что тепловая энергия может переноситься способом
излучения.
Закон передачи тепловой энергии излучением по форме
представления очень похож на закон конвективного теплообмена:
(3.3.6)
где а,_ коэффициент теплообмена, определяемый излучением.
По аналогии с формулой (3.3.5) здесь мы можем ввести понятие
теплового сопротивления «радиатор—окружающая среда» для случая
излучения (RthsJ:
(3.3.7)
Определение коэффициента теплообмена излучением в общем
виде выполняется по формуле
(3.3.8)
где е5 — приведенная степень черноты поверхности излучения;
Фм — коэффициент облученности;
f(Ta9 Ts) — переходная температурная функция, значение которой
определяется разностью температур окружающей среды и радиатора.
Коэффициент приведенной степени черноты показывает,
насколько хорошо поверхность излучает тепловую энергию. Пояснить
физический смысл данного коэффициента можно на простом примере:
черная и матовая поверхность намного лучше нагревается (и,
соответственно, излучает), чем поверхность, отполированная до блеска. По этой
причине правильно спроектированные радиаторы окрашены (или
покрыты химическим способом) в цвет, близкий к черному. Для справки,
степени черноты различных поверхностей сведены в табл. 3.3.3.
Таблица 3.3.3. Степень черноты разных поверхностей
Тип поверхности
Приведенная степень черноты
Алюминий с полированной поверхностью
0,04...0,06
Алюминий с окисленной поверхностью
0,2...0,31
Силуминовое литье
0,31...0,33
Анодированный в черный цвет алюминий
0,85...0,9
Окисленная латунь
0,22
Металлическая поверхность, окрашенная в цвет,
близкий к черному
0,92...0,96
Металлическая поверхность, окрашенная черным
матовым лаком
0,96...0,98
Анализируя данные, представленные в табл. 3.3.3, можно сказать,
что простейшая операция по покрытию радиатора, изготовленного из
силуминового сплава, в черный цвет, дает снижение теплового
сопротивления при излучении почти в три раза.
Коэффициент облученности ср5Д показывает, какая часть,
излученная поверхностью радиатора, «уходит» в окружающую среду, а
какая — возвращается обратно. Ситуация с возвратом энергии обычно
происходит в случае использования радиаторов с ребрами (типичный
вариант, использующийся при проектировании статических
преобразователей), когда потоки энергии переходят с ребра на ребро. Как
правило, современные радиаторы имеют конструкцию с высокими
ребрами, близко стоящими друг к другу, поэтому в этом случае
рассчитать коэффициент облученности можно по приблизительному
соотношению:
(3.3.9)
где а — расстояние между ребрами;
х — высота ребра.
Конечно, необходимо учесть, что излучение с крайних ребер будет
происходить с коэффициентом облученности, равным 1.
Переходная температурная функция f(Ta, Ts) для инженерных
расчетов вполне сгодится в полуэмпирическом виде:
(3.3.10)
результат функции получится в Вт/(м2 • °С), если значения температур
подставлять в градусах Цельсия.
Наконец, третий вид теплообмена — кондуктивный. Этот вид
теплообмена возникает за счет свойства теплопроводности твердых
веществ. Типичный случай кондуктивного теплообмена наблюдается
тогда, когда речь идет о тепловых сопротивлениях «переход—корпус»,
«корпус—радиатор». Теплопроводящие подложки передают тепловую
энергию именно в соответствии с законом кондуктивного
теплообмена, поскольку размеры теплопроводящего материала в направлении
распространения теплового потока много меньше его остальных
размеров. Иными словами, толщина прокладки гораздо меньше ее длины
и ширины, а значит, на гранях прокладки тепло практически ре
рассеивается, переходя от корпуса к радиатору.
Кондуктивный теплообмен подчиняется закону Фурье:
(3.3.11)
Если перелистать книгу на несколько страниц назад и обратиться к
формуле (3.3.3), то окажется, что все величины, входящие в формулу
(3.3.11), нам хорошо знакомы. Однако модель кондуктивного
теплообмена используется не только для учета теплового сопротивления
изоляционных прокладок. В некоторых случаях — там, где применение
принудительной вентиляции прибора применить невозможно — кон-
дуктивные свойства металлов используются для проектирования
корпусов-радиаторов. В этом случае сам корпус прибора служит теплоотво-
дом, площадь его поверхности покрывается ребрами. Рассчитать
тепловой режим корпуса-теплоотвода — задача не простая, приведенными
здесь соотношениями не обойтись. Решать эту задачу придется с приме-
нением методов компьютерного моделирования тепловых процессов, о
которых мы далее поговорим.
Конечно, приведенные модели теплообмена являют собой модели «в
чистом виде». В реальности все три модели «работают» одновременно,
поэтому учет тепловых сопротивлений разной природы должен
производиться по принципу их параллельного соединения (подобно тому, как в
электрической схеме «работают» параллельно соединенные резисторы).
Такой теплообмен в специальной литературе называется «сложным».
Мы не будем останавливаться на вопросах проектирования
радиаторов охлаждения силовых элементов, так как инженерные
методики для решения этой задачи разработаны хорошо, и их можно без
труда найти в соответствующей литературе по теплотехнике. Но,
конечно, сегодня более перспективным является применение покупных
радиаторов на основе разнообразных профилей, выпускаемыми
многими фирмами, в том числе и отечественными. Действительно,
далеко не каждый производитель может позволить себе содержать
литейную технологию, а изготавливать радиаторы с помощью
механообработки, то есть методом фрезерования — это попусту тратить и время,
и деньги.
Число разнообразных профилей, выпускаемых некоторыми
фирмами, составляет несколько тысяч наименований, поэтому даже при
желании мы не сможем сделать даже выборочный их обзор. Здесь
конструктору придется действовать на собственное усмотрение, имея
в виду, что лучше применять профили, выпускаемые рядом фирм —
тогда при необходимости (снятие с производства, удорожание)
серийная продукция будет быстро перестроена на поставщика близкого
аналога.
Одной из поставочных позиций фирмы «Semikron» [33] как раз и
являются радиаторные профили. На рис. 3.3.11 показан внешний вид и
размеры профиля типа Р4, который можно использовать для установки
силовых элементов «под гайку», то есть со шпилькой, посредством
которой полупроводниковый прибор крепится к радиатору. Типовое
тепловое сопротивление «радиатор—окружающая среда» профиля
составляет 0,29 °С/Вт.
Другой вид радиаторного профиля типа U3 (рис. 3.3.12) позволяет
«зажать» силовой элемент (например, тиристор «таблеточного» типа)
между двумя половинками, обеспечив отвод тепла с обоих граней.
При использовании такого профиля радиатор получается очень
компактным и удобным для монтажа. Типовое сопротивление
«радиатор—окружающая среда» — 0,19 °С/Вт.
Фирма «Aavid Thermalloy Ltd» [58] специализируется на выпуске
радиаторов, а также полуфабрикатов для конструирования
охлаждающих узлов статических преобразователей, поэтому в ее номенклатуре
можно встретить огромное количество разнообразных вариантов.
Рис. 3.3.11. Внешний вид (а) и размеры (б) профиля типа Р4
Профиль типа 0S496, показанный на рис. 3.3.13, являет собой
классический радиатор с оребреной поверхностью. Его тепловое
сопротивление — 0,09 °С/Вт.
Чем интересен профиль 0D452, представленный на рис. 3.3.14?
Обратите внимание на форму поверхностей его ребер: они не гладкие, а
волнистые, неровные. Вот таким простым методом удается увеличить
поверхность охлаждения и снизить тепловое сопротивление
«радиатор—окружающая среда». Оно у данного профиля составляет всего 0,06 °С/Вт.
Типичный вариант профиля-корпуса OS 160, обеспечивающего
кондуктивное охлаждение силовых полупроводниковых приборов,
показан на рис. 3.3.15. К профилю достаточно прикрепить боковые
стенки, а также верхнюю крышку — и готов вполне приличный
корпус-радиатор, тепловое сопротивление которого — 0,25 °С/Вт.
Крепление силовых элементов к профилям-радиаторам может
осуществляться также элементарно. На рис. 3.3.16 показано крепление
транзисторов в корпусе ТО-220 к типовому профилю 78370, а на
рис. 3.3.17 — к профилю 78110. Для крепления применяются
специальные пружинные клипсы, которые «держат» элементы не хуже
классических винтов.
А что можно сказать о производстве радиаторов в нашем отечестве?
Конечно, отечественное производство пока серьезно отстает от
зарубежного как по номенклатуре производимой продукции, так и по ее
качеству. Но, тем не менее, на рынке охладителей уже работает несколько
фирм, о которых мы расскажем, упомянув интересные образцы.
Рис. 3.3.13. Профиль типа 0S496
Рис. 3.3.16. Крепление силовых транзисторов к профилю типа 78370
Рис. 3.3.17. Крепление силовых транзисторов к профилю типа 78110
Фирма «Лигра» (г. С.-Петербург) [59] специализируется на выпуске
различных профилей радиаторов, а также литых игольчатых радиаторов.
Для примера, на рис. 3.3.18 показан профиль типа АВ3424, который
можно использовать в статических преобразователях с малой глубиной.
К сожалению, фирма не представляет данные по тепловым
сопротивлениям, а значит, все расчеты разработчику придется вести
самостоятельно (впрочем, отечественного разработчика этим не испугаешь).
Небольшое количество типовых профилей для изготовления
радиаторов выпускает хорошо знакомая нам фирма «Электрум АВ». Для
примера, на рис. 3.3.19 приведен чертеж профиля типа Охл271, а на
рис. 3.3.20 — кривая зависимости теплового сопротивления «радиатор-
окружающая среда» этого профиля от габаритных размеров (и времени
прогрева). Кривая «1» — без принудительного охлаждения;
кривая «2» — с охлаждением потоком воздуха 3 м/с; кривая «3» — 6 м/с;
кривая «4» — 12 м/с.
Похожие профили выпускает также знакомое нам предприятие
ОАО «Электровыпрямитель». Профиль, близкий по конструкции к
Охл271 (рис. 3.3.19), здесь носит наименование 054 и 055 (разная
Рис. 3.3.18. Профиль типа АВ3424
маркировка в зависимости от длины). Тепловое сопротивление
находится в пределах 0,33...0,55 °С/Вт (для случая естественного
охлаждения) и в диапазоне 0,118...0,167 °С/Вт — для принудительного
охлаждения.
Профиль типа 0193 предназначается для высокоэффективного
охлаждения силовых приборов «таблеточной» конструкции. На рис. 3.3.21
показан внешний вид данного профиля. Его размеры — 300 х 300 х
х 275 мм, при этом силовой элемент «зажимается» между двумя
идентичными пластинами. Тепловое сопротивление радиатора составляет
0,1 °С/Вт при обдуве воздухом со скоростью 0,03 м/с.
А теперь мы перейдем к такому немаловажному вопросу, как
внутрикорпусная вентиляция и обозначим некоторые основные
соотношения, используемые при построении модели и расчете
теплообмена внутри корпуса статических преобразователей.
Как мы уже сказали ранее,
естественная вентиляция корпуса обеспечивается
таким свойством воздушной среды, как
разная ее плотность (а, соответственно, и
удельный вес) при разных температурах.
Так, при 20 °С средняя плотность воздуха
составляет 1,2 кг/м3, в то время как
плотность при 100 °С — уже 0,96 кг/м3.
Нагретый воздух устремляется вверх, создавая
«тягу» воздушного потока. Поэтому все
новые и новые массы холодного воздуха
Рис. 3.3.19. Габаритные
размеры профиля Охл271
Рис. 3.3.20. Кривая теплового
сопротивления радиатора Охл271
Рис. 3.3.21. Внешний вид
профиля 0193
занимают место нагретых, удаляя тепло с
радиаторов силовых элементов. В ряде
случаев естественной конвекции вполне
достаточно для поддержания безопасного
теплового режима радиаторов. Когда
тепловыделение велико, и естественного
притока холодного воздуха уже недостаточно
для обеспечения теплового режима,
объемы «прокачиваемой» воздушной среды
искусственно увеличивают путем ее
нагнетания принудительно, то есть при
помощи вентилятора.
Рассмотрим типичное построение
корпуса статического преобразователя
(рис. 3.3.22) в условиях естественной
вентиляции. Как правило, корпус
преобразователя выполняется таким, чтобы точка забора
воздуха и точка его выброса в окружающую
среду находились как можно дальше по
высоте друг от друга. Специальными
конструктивными мерами обеспечивается
отсутствие возможности попадания капель
жидкости внутрь прибора — например, грибки,
жалюзи и т. д. Входное и выходное отверстия целесообразно закрыть
фильтрами очистки воздуха (простейший фильтр — сетка), которые
предотвращают попадание внутрь прибора пыли и других мелких частиц.
Тепловой напор, то есть перепад давления между входным и
выходным воздушными отверстиями определяется по расстоянию между
этими отверстиями и плотностями входящего и выходящего воздуха
по формуле
Рис. 3.3.22. Теплообмен в
корпусе статического
преобразователя
(3.3.12)
Объем воздуха, проходящий через входное вентиляционное
отверстие с площадью Sinp в единицу времени, может быть определен по
формуле
(3.3.13)
где kinp — коэффициент расхода воздуха, зависящий от
конструктивного исполнения входного отверстия (для прикидочных расчетов
рекомендуется принять его значение в пределах 0,7...0,8);
g— ускорение свободного падения.
И, наконец, мощность, отводимая из корпуса посредством
естественного конвективного теплообмена, рассчитывается по формуле
(3.3.14)
где Тшр и Тош — соответственно температура входящего и выходящего
воздуха;
Cajr — удельная теплоемкость воздуха при нормальном
атмосферном давлении.
Можно легко рассчитать, что для преобразователя с высотой
корпуса 450 мм и диаметром входного отверстия 120 мм при разнице
температур воздуха 30 °С удастся отвести порядка 200 Вт тепловой
мощности только за счет естественной конвекции, обеспечив
нормальный режим работы силовых элементов. Много это или мало? Для
оценки представим преобразователь с выходной мощностью 2 кВт и
КПД порядка 0,93. Если же мы захотим разместить в этом корпусе
преобразователь с увеличенной мощностью, то естественной
вентиляции однозначно будет недостаточно, и мы будем вынуждены
прибегнуть к принудительному способу.
Суть принудительного способа вентиляции заключается в том, что
мы искусственно увеличиваем объем приточного воздуха V!np, тем
самым ускоряя теплообмен и быстрее отводя выделяющуюся тепловую
энергию (что видно из формулы 3.3.14). Принудительная вентиляция
позволяет на порядок улучшить теплообмен, а значит, и сократить
габариты прибора при сохранении номинальной мощности. Однако есть
у принудительного способа вентилирования оборотная сторона: для
питания вентиляторов необходимо затратить дополнительную
энергию, вентиляторы шумят, ресурс их невысок. И, тем не менее,
принудительная вентиляция — пожалуй, единственный способ сокращения
габаритов статических преобразователей. Учитывая сказанное,
приведем основные технические характеристики промышленных
вентиляторов, которые потребуются при проектировании системы
принудительного охлаждения.
На рис. 3.3.23 показан внешний вид вентиляторов типа
W2G110-AK43-31 и W1G110-AG07-05. Для первого вентилятора:
номинальная мощность — 15 Вт, питание — 24 В. Для второго
вентилятора: номинальная мощность — 16 Вт, питание — 48 В. Зависимость
объемов перекачиваемого воздуха в единицу времени от
аэродинамического давления приведены на рис. 3.3.24 (кривая «1» — для первого типа
вентилятора, кривая «2» — для второго). Здесь нужно иметь в виду, что
любой корпус имеет так называемое аэродинамическое сопротивление.
Поясним на примере, что это такое. Допустим, мы установили
вентилятор в ящик, у которого имеется только входное отверстие. Тогда
воздух будет нагнетаться в корпус без его выброса наружу (левая верти-
кальная линия графика 3.3.24), повысится внутреннее давление, а
значит, и аэродинамическое сопротивление. Толку от такой вентиляции
не будет никакого. Поэтому аэродинамическое сопротивление
необходимо снижать, таким образом компонуя прибор, чтобы потоки воздуха
беспрепятственно выходили наружу — эффективность вентиляции
повысится. Наибольшая эффективность работы вентилятора
представлена нижней горизонтальной линией на рис. 3.3.24 — эта ситуация
аналогична работе вентилятора на открытом воздухе.
На характеристику давления, создаваемую вентиляторами,
значительное влияние оказывает даже такая, казалось бы, безобидная вещь,
как конструкция защитной сетки воздухозабора (в технической
литературе она носит название перфорации). Оказывается, даже
мелкоячеистая сетка может значительно понизить создаваемое давление,
поэтому в современных статических преобразователях эту сетку
заменяют простым крупноячеистым ограждением.
В последнее время у конструкторов преобразовательной техники
вошло в моду использовать центробежные
вентиляторы, которые создают в несколько
раз более высокое давление при тех же
массо-габаритных показателях, что и осевые
вентиляторы. Пример применения
центробежного вентилятора в
сборке-полуфабрикате для построения узла охлаждения
силовых элементов приведен на рис. 3.3.25.
Применение вентиляторов для
охлаждения статического преобразователя —
задача, которая в каждом конкретном случае
должна решаться индивидуально. Так, на-
Рис. 3.3.23. Внешний вид
вентиляторов осевого типа
Рис. 3.3.24. Кривые зависимости
объемов перекачиваемого воздуха от
величины аэродинамического давления
Рис 3.3.25. Пример
применения центробежного
вентилятора
пример, на основе нескольких вентиляторов можно построить
систему «один приточный — два вытяжных», «два приточных — один
вытяжной», а также различные комбинации трех и более одиночных
вентиляторов. Мы оставляем эти вопросы за рамками книги,
поскольку познакомили читателя с основами принудительного
вентилирования, и с более сложными схемами, их достоинствами и
недостатками он сможет ознакомиться в специальной литературе по
конструированию.
В завершение этого раздела мы наметим некоторые ориентиры
для тех, кто хочет воспользоваться современными способами
выполнения тепловых расчетов и расскажем кратко о компьютерном
моделировании тепловых процессов. Действительно, традиционно
тепловые расчеты выполнялись, как это называется, с помощью ручки и
листа бумаги, используя некоторые упрощенные модели. Понятно,
что такие модели не исключали просчетов, связанных с локальными
перегревами отдельных компонентов, поэтому при испытаниях
опытных образцов изделий приходилось выполнять доработки,
корректировать документацию. По подсчетам специалистов [60], в среднем,
расчет тепловых режимов «врукопашную» имеет погрешность порядка
35 %, что, конечно, не вполне отвечает современным требованиям по
точности проектирования. Сегодня, когда жизнь выдвигает
необходимость работать «с колес», то есть не тратить время на многочисленные
испытания, а сразу запускать разработки «в серию», компьютерное
моделирование позволит учесть все «тонкости» модели и исключить
просчеты (или, в крайнем случае, свести их к минимуму).
Как справедливо отмечено в [60], повышение точности
моделирования тепловых режимов может быть достигнуто только за счет
разбиения моделируемой системы на более мелкие участки, что
сопряжено с усложнением математических процедур. Общий принцип этого
подхода таков: прибор разбивается на элементарные прямоугольные
области, геометрические центры которых носят название «тепловых
узлов». Температура в тепловых узлах предполагается постоянной (в
пределах областей). Также вводятся элементарные тепловые потоки, а
также элементарные тепловые сопротивления между узлами, что, как
мы уже знаем, позволяет построить электрическую аналогию тепловой
схемы, которая в этом случае становится трехмерной.
Беда всех «рукопашных» расчетов состоит еще и в том, что они не
учитывают динамику переходных тепловых процессов. Иными
словами, учет только тепловых сопротивлений хорошо описывает
стационарные режимы работы прибора, когда все его элементы прогреты,
нагрузка не меняется, входное напряжение стабильно и т. д. Здесь
невозможно построить картину поведения элементов, например, в
моменты разгона сопрягаемого двигателя, торможения, перехода с
режима на режим. Иногда характер работы статического преобразователя
может быть чисто переходным, например, циклирование пусков с
остановками электродвигателей, разные кратковременные однократные
режимы (яркий пример — работа сварочного преобразователя). В
какой-то мере учесть характер переходных процессов позволяют
графики нормированного переходного сопротивления «кристалл—корпус»
Zthjc, о которых мы говорили в разделе, посвященном силовым
транзисторам MOSFET и IGBT. Однако это далеко не все, что нужно учесть
для качественного расчета — ведь прогрев корпусов силовых
элементов, а также радиаторов происходит не мгновенно. С учетом этого
обстоятельства в тепловую модель, предназначенную для компьютерного
анализа, вводятся динамические параметры (рис. 3.3.26).
Рис 3.3.26. Усложненная тепловая модель, учитывающая динамические
параметры
В модифицированной расчетной модели производится учет
значений теплоемкости (тепловой массы) кристалла, корпуса и охладителя
(С,лу, Cthc9 Cths). Электрическим аналогом этих элементов служат
конденсаторы. Таким образом, расчет тепловых схем может быть
произведен методами электротехники.
Обратимся теперь к программным продуктам, предоставляемым
фирмами-производителями силовой элементной базы. Эти продукты
обычно ориентированы на применение элементной базы,
производимой конкретной фирмой — силовым транзисторам и диодам,
радиаторам, вентиляторам. Оно и понятно: любая фирма стремится
продвинуть на рынок свою продукцию, и при этом дать разработчику как
можно более удобные средства применения своих изделий.
Компания «Semikron» предоставляет для пользователя серию
интерактивных программных продуктов [61] для создания типовых схем
статических преобразователей электроэнергии, выбора элементной
базы, расчета электрических и тепловых параметров, а также
формирования типовых рекомендаций по обеспечению теплового режима.
Данная серия программ «работает» только на сайте фирмы (к
сожалению), и воспользоваться ей могут те, кто имеет доступ в Интернет.
На рис. 3.3.27 показано главное окно программы [64], из которого
производится выбор необходимого расчета. Расчет «step-by-step design»
предназначается для пошагового выбора силовой схемы статического
преобразователя и оценки тепловых режимов элементов, расчет «ready
Рис. 3.3.27. Главное окно программных продуктов «Semikron»
assembled stack» предназначен для выбора готового силового модуля,
расчет «device proposal* позволяет провести оперативное сравнение
преимуществ и недостатков силовых модулей разных серий, выбрать
наиболее оптимальный для решения поставленной задачи, расчет «driver select
tool» направлен на выбор драйвера управления силовыми модулями. Мы
обратимся к расчету «ready assembled stack» и опишем его подробнее.
Первый шаг расчета — выбор силовой преобразовательной схемы
(рис. 3.3.28), или ее части. Здесь можно осуществить выбор вариантов
типа: однофазный выпрямительный мост, однофазный частично-
управляемый выпрямительный мост, однофазный полностью
управляемый тиристорный мост, трехфазный выпрямительный мост,
трехфазный частично-управляемый тиристорный мост, трехфазный
полностью управляемый тиристорный мост, тиристорный ключевой
элемент, трехфазный тиристорный ключевой элемент, полномостовой
ключевой каскад, трехфазный ключевой каскад, чоппер верхнего
плеча (buck), чоппер нижнего плеча (boost). Для примера мы выберем
Рис. 3.3.28. Окно выбора силовой преобразовательной схемы
полномостовой ключевой каскад, рассчитанный на формирование
синусоидального выходного напряжения.
Далее следует окно ввода исходных данных (рис. 3.3.29), в котором
отражаются, во-первых, основные режимы работы преобразователя, а
также параметры перегрузки (коэффициент перегрузки и ее
длительность).
Вслед за окном исходных данных следует окно выбора
конструктивного исполнения силового модуля (рис. 3.3.30), где из
выпадающего списка необходимо выбрать желаемое типосиполнение силового
модуля, а также ввести корректирующие коэффициенты для расчета
мощности потерь. Ввод коэффициента коррекции необходим в случае
отсутствия так называемого «жесткого» переключения силового
прибора, когда возникает кратковременный его режим работы, близкий к
короткому замыканию (КЗ).
Выбор условий охлаждения модуля производится в отдельном
окне (рис. 3.3.31). В примере задано параллельное включение трех
IGBT модулей, принудительный способ охлаждения потоком воздуха с
объемом 80 м3/ч. Радиатор также выбран готовым, типа Р14-120.
Кстати, пользователь может самостоятельно задать параметры теплоотвода.
Теперь все необходимые данные для проведения основного
расчета имеются, и программа формирует таблицу результатов вычислений
(рис. 3.3.32). Эта таблица содержит несколько разделов, данные в ко-
Рис. 3.3.29. Окно задания исходных данных
Рис. 3.3.30. Окно выбора типоисполнения силового модуля
Рис. 3.3.31. Окно выбора условий охлаждения
Рис. 3.3.32. Окно результатов моделирования (начало)
Рис. 3.3.32. (окончание)
торых сгруппированы в соответствии с последовательностью их
задания, а также с назначением. Исходные данные отражают выбранную
силовую схему, тип преобразования, основные требуемые
электрические характеристики и максимальные режимы работы. Далее
приведена выборка из технической документации на конкретный
примененный модуль и параметры системы охлаждения. Эти данные были
выбраны нами, здесь они приводятся для справки.
Следующие разделы включают результаты работы программы:
рассчитанные потери тепловой мощности в режиме номинальной
работы, в режиме перегрузки и в режиме перегрузки с минимальной
частотой преобразования (для заданной в примере схемы), а
представленный график показывает переходные тепловые характеристики
в динамике — для режима перегрузки и режима нормальной работы.
Также в составе выходных данных программы имеются: график
зависимости максимальных токов IGBT сборок и антипараллельных
диодов от частоты переключения; суммарные тепловые потери на
элементах от величины выходного тока, температура кристаллов в
зависимости от величины выходного тока, величина суммарных потерь в
зависимости от частоты переключения, температура кристаллов в
зависимости от частоты переключения, ток силовых элементов в
зависимости от коэффициента мощности.
Вторая программа расчета тепловых характеристик транзисторов
типа MOSFET представлена фирмой international Rectifier* под
названием HEXRISE [62]. В отличие от программного обеспечения
фирмы «Semikron», инсталляционный файл можно скачать с сайта и
работать с программой в автономном режиме, однако для ее корректной
работы необходимо, чтобы на компьютере был установлен Microsoft
Access 2000. Эта программа позволяет произвести динамический
расчет изменения температуры кристалла при разной форме тока,
проходящего через его силовую цепь. Здесь применена обычная процедура
линейной экстраполяции функции тока на элементарных участках,
для которых вычисляется значение текущего теплового сопротивления
(с учетом тепловой массы) и мгновенная тепловая мощность. Далее
вычисляются мгновенные значения температуры кристалла в виде
температурных приращений, которые суммируются на элементарных
участках. В расчетах также используется линейная экстраполяция
нормированного значения теплового сопротивления «переход—корпус»
Zthjc. Следует учесть, что адекватные результаты работы программы
можно ожидать только в линейной области нормированного теплового
сопротивления «переход—корпус», поэтому прежде чем производить
расчеты, нужно справиться с этим графиком, приведенным в
технической документации.
Программа позволяет производить расчеты для нескольких типовых
режимов работы полевых транзисторов. В первом режиме работы, назы-
ваемом «режимом одиночного импульса», период работы транзистора,
складывающегося из его времени включенного и выключенного
состояния, — меньше предельного времени линейной области сопротивления
«переход—корпус», внешний теплоотвод отсутствует, а максимальная
температура кристалла складывается из начальной температуры и
температуры в конце периода работы. Второй режим работы — «режим
повторяющихся импульсов в линейной области теплового
сопротивления». Для него характерно постепенное нарастание температуры
кристалла при отсутствии внешнего теплоотвода. Третий режим работы —
«режим повторяющихся импульсов с периодом, выходящих за
линейную область теплового сопротивления». Здесь максимальная
температура кристалла нарастает с каждым периодом, но учитывается влияние
внешнего теплоотвода. И, наконец, четвертый режим работы — «режим
повторяющихся импульсов в установившемся тепловом равновесии».
В данном режиме температура кристалла не растет от периода к периоду,
поэтому данный режим хорошо описывает продолжительный
стационарный процесс работы силового ключа. Естественно, при расчете
необходимо таким образом задать время анализа, чтобы наблюдать
отсутствие нарастания температуры кристалла от периода к периоду.
На рис. 3.3.33 показано главное окно программы HEXRISE. Слева
имеется форма для ввода параметров исследуемого транзистора, пи-
Рис. 3.3.33. Главное окно программы HEXRISE
Рис. 3.3.34. Расчетная форма тока
Рис. 3.3.35. Расчетная выделяемая тепловая мощность
ковых токов силовой цепи, а также параметров тока. Сверху —
кнопки выбора формы тока. Расчет происходит при нажатии на кнопку
calculate now. Результаты расчета при данных, введенных в примере,
показаны на рис. 3.3.34 (форма тока), рис. 3.3.35 (выделяемая
мощность) и рис. 3.3.36 (температура кристалла).
Рис 3.3.36. Расчетная температура кристалла
Еще один свободно распространяемый программный продукт под
названием «Melcosim» выпускается компанией «Mitsubishi Electric*.
На момент написания этой книги на сайте фирмы доступна версия
4.03, которой мы и воспользуемся. Главное окно программы показано
на рис. 3.3.37.
Начинать расчет необходимо с задания исходных данных силовой
схемы: напряжения питания силовой цепи постоянного тока (Vcc),
выходного тока (1о), частоты преобразования (fc) и минимальной
выходной частоты (fo), коэффициента мощности (PF), глубины
модуляции (Modulation ratio) или скважности управляющих импульсов в
режиме чоппера (duty), максимальной рабочей температуры кристалла
(ТО- Естественно, данные расчеты справедливы для конкретного типа
модуля, который нужно выбрать из выпадающего списка в меню
Module. В данном примере мы выбрали модуль типа CM200DY-12NF.
Рис. 3.3.37. Главное окно программы «Melcosim»
Затем мы должны выбрать условия модуляции из вариантов: 3-фазная
модуляция (З-Arm), 2-фазная модуляция векторного типа (2-Агт) или
режим управления чоппером (chopper).
В верхней части окна справа отобразятся значения тепловых
сопротивлений для выбранного типа модуля, а под ним (после выбора в
меню пункта calculate) — выделяемая мощность на всех участках
тепловой модели и значения температур для этих участков.
Данные могут быть выведены в виде графиков. Для этого в меню
graph/waveform select нужно задать параметры для горизонтальной оси
X (Х^), левой вертикальной оси Y (Ylaxis) и правой вертикальной оси
Y (У2^). Программа предлагает следующие варианты.
Для Xaxis:
• output current Icp (A) — пиковый выходной ток в Амперах;
• switching frequency (Hz) — частота коммутации в кГц;
• time (s) — временная шкала в секундах (и их долях).
Для Ylaxis:
• Tj (IGBT) & Tj (diode)__Ave — средняя температура кристалла
IGBT транзистора и антипараллельного диода;
• power (IGBT&diode) — выделяемая тепловая мощность на IGBT
транзисторе и антипараллельном диоде, Вт;
• max current (IGBT&diode) — максимальный ток IGBT
транзистора и антипараллельного диода, А;
• ATjc (IGBT) & ATjc (diode) — разница температур
«кристалл—корпус» для IGBT транзистора и антипараллельного диода.
Для Y2axis — аналогично Yl^.
На рис. 3.3.38 и рис. 3.3.39 приведены графики расчета некоторых
параметров для модуля CM200DY-12NF в режимах, оговоренных
рис. 3.3.37. На рис. 3.3.38 показаны графические зависимости Tj
(IGBT) & Tj (diode)_Ave и ATjc (IGBT) & ATjc (diode) от пикового
выходного тока. На уровне 125 °С показана линия аварийного состояния
модуля.
Рис. 3.3.38. Зависимость Tj (IGBT) & Tj (diode)_Ave и ATjc (IGBT) & ATjc
(diode) от пикового выходного тока
На рис. 3.3.39 представлены графики тех же параметров, но в
частотной области. Мы видим, что в заданном диапазоне частот обеспе-
чивается нормальное функционирование модуля при
продолжительном токе 100 А.
Рис. 3.3.39. Зависимость Tj (IGBT) & Tj (diode)_Ave и ATjc (IGBT) & ATjc
(diode) от частоты модуляции
Обращаем внимание читателя, что результаты расчетов можно
сохранить в виде файла и пользоваться ими многократно.
В завершение этого раздела упомянем коммерческий продукт
Qfin, разработчиком которого является фирма «Qfinsoft» [65]. Этот
продукт поставляется фирмой в трех версиях: базовая (basic) — для
расчетов радиаторов, охлаждаемых воздухом; стандартная (standard) —
для расчетов любых типов радиаторов и теплообмена узлов печатных
плат; расширенная (advanced) — для проведения расчетов и
оптимизации любого уровня, в том числе на уровне прибора.
На рис. 3.3.40 показано главное окно программы Qfin версии 4.0.
Цифрами обозначены:
1 — панель инструментов, команд и вызова окон; 2 — менеджер
проекта, включающий в себя иерархически построенную структуру
(материалы, замкнутые объемы, вентиляционные окна, радиаторы,
вентиляторы); 3 — панель готовых компонентов (в соответствии с вы-
Рис. 3.3.40. Главное окно программы Qfin
бранным пунктом из менеджера проекта программа представляет
список расчетных моделей, которые могут быть задействованы в проекте);
4 — окно объемного представления проекта; 5 — панель команд
управления трехмерной моделью (отсюда можно выбрать проекции видов
объемной модели, скопировать картинку в буфер обмена данными или
сохранить готовую модель на диск); 6 — окно вывода системных
сообщений (отсюда пользователь может узнать об обнаруженных
несоответствиях).
На рис. 3.3.41 показан результат моделирования рассеяния
тепловой мощности 70 Вт на радиаторе по истечении 63 секунд с момента
начала выделения мощности полупроводниковым элементом. Хорошо
видно, что радиатор прогревается неравномерно, что подтверждается
реальными законами теплообмена.
На рис. 3.3.42 представлена конструкция сложного радиатора
охлаждения процессора, для которого в условиях принудительного
воздушного охлаждения была построена модель, показанная на рис. 3.3.43.
Вентилятор в данном случае установлен сбоку и продувает воздух
между ребрами. На рис. 3.3.44, представляющим собой результат объемно-
Рис. 3.3.41. Результаты теплового моделирования радиатора
в программе Qfin
Рис 3.3.42. Радиатор охлаждения процессорного модуля
го моделирования, видно, что прогрев радиатора также происходит
неравномерно.
Существует также ряд других серьезных коммерческих продуктов,
позволяющих провести качественное тепловое моделирование. К этим
продуктам относится пакет SolidWorks, с помощью которого можно
выполнить полный цикл разработки конструкции статического
преобразователя, и не только построить тепловую модель, но также сделать
Рис. 3.3.43. Тепловая модель принудительного охлаждения
Рис. 3.3.44. Результат моделирования в условиях принудительного
охлаждения
другие конструкторские расчеты, например, оценить прочностные
характеристики, вибропрочность, виброустойчивость и так далее.
3.4. О некоторых «тонкостях» технологии
При производстве, особенно серийном, силовой
преобразовательной техники необходимо уделить внимание технологическим
аспектам ее изготовления. Именно на этом этапе должны быть учтены спе-
цифические технологические приемы, которые позволят исключить
большой процент брака на выходе готовой продукции. Конечно, мы
не будем здесь упоминать такие стандартные технологические
приемы, как необходимость входного контроля поступающих на сборку
электронных компонентов и механических деталей, чистоту отмывки
печатных плат, надежность пайки, необходимость покрытия
влагозащитными лаками критичных к воде узлов, общую культуру
производства. Эти меры очевидны, и на любом предприятии, производящем
серийную электронную технику, они включены в систему качества.
Мы поговорим о тех специфических требованиях, которые
необходимо ввести в процесс изготовления мощных статических
преобразователей.
В предыдущем разделе мы упоминали о том, что силовые
полупроводниковые компоненты, как правило, устанавливаются на
элементы их охлаждения, которые не только обеспечивают
механическую прочность преобразовательной схемы, но еще и обеспечивают
нормальный тепловой режим. Поскольку сопрягаемые поверхности
(подложка полупроводникового компонента и радиатор) имеют
некоторую шероховатость, обеспечить хороший тепловой контакт простым
прижимом силовых компонентов к радиаторам, как правило, не
удается. Не поможет здесь и затяжка крепежных винтов «до отказа».
Более того, эта «затяжка», ограничиваемая только физическими
возможностями, конкретного сборщика и применяемого им инструмента,
чревата повреждением самих полупроводниковых модулей. Поэтому
для обеспечения хорошего теплового контакта применяют теплопро-
водящие пасты, заполняющие неровности поверхностей.
Казалось бы, что может быть проще процесса нанесения
теплопроводящей пасты на сопрягаемые поверхности? Мы ведь ежедневно
намазываем маслом бутерброды! Так за чем же тогда дело стало?
С помощью пластины намазываем на поверхность модуля теплопро-
водящую пасту из баночки, или выдавливаем ее из тюбика, как крем,
прижимаем модуль к радиатору, затягиваем винты, убираем тряпкой
выдавленную из-под модулей пасту и... Стоп! Такой подход
действительно годится лишь за обеденным столом, а в производстве (или
ремонте) преобразовательной техники нужно поступать совершенно
иначе. Почему? Оказывается, если поступать таким способом, тепло-
проводящая паста ляжет на поверхность неровно, в ней образуются
пустоты, что нисколько не уменьшит тепловое сопротивление между
модулем и радиатором. Более того, там, где образуются пустоты, в
процессе работы модуля возникнут локальные перегревы — а это
прямой путь к растрескиванию керамической подложки полупроводника
при циклическом воздействии температур. Пример неудачно
нанесенной термопасты показан на рис. 3.4.1. На этом рисунке хорошо видны
локальные пустоты.
Рис. 3.4.1. Пример неудачно нанесенной термопасты
К сожалению, некоторые отечественные фирмы не в должной
степени внимания относятся к данной технологической особенности
монтажа силовых полупроводниковых приборов. Автору книги лично
доводилось видеть, как сборщики, не мудрствуя лукаво, размазывают
теплопроводящую пасту пальцами и до отказа затягивают крепежные
винты модулей. В результате часто приходится разбирать уже готовые
силовые блоки, менять почему-то (а мы теперь знаем — почему)
сгоревшие модули, снова намазывать их пастой и снова затягивать винты
«до хруста суставов».
На самом деле преодолеть эту, казалось бы, «патовую» ситуацию
весьма несложно. Во-первых, необходимо обеспечить обработку
сопрягаемой поверхности радиатора с шероховатостью не более 6 мкм
(в идеале шероховатость по Ra лучше выдержать на уровне 2,5 мкм) и
плоскостностью не хуже 30 мкм. Во-вторых, равномерно нанести
теплопроводящую пасту тонким слоем, значение которого лежит в
пределах 20...50 мкм. В-третьих, при установке модуля на радиатор нужно
соблюсти максимальную параллельность его первичного прижатия.
И, в-четвертых, затянуть крепежные болты ключом с нормированным
усилием (оснащенным механизмом «трещотки»), следуя
рекомендациям по последовательности затяжки, обычно приводимым в
технической документации на конкретный модуль.
Каким образом равномерно нанести теплопроводящую пасту на
сопрягаемую поверхность силового модуля? Как осуществлять
контроль качества нанесения? Самый простой способ нанесения — это
воспользоваться обрезиненным валиком и равномерно «раскатать»
пасту по поверхности. Данная работа требует определенного навыка и
периодического контроля толщины наносимого слоя. Осуществить
контроль толщины нанесенного слоя можно с помощью несложного
приспособления, которое выпускается промышленно, и его можно
приобрести у дилеров электронных компонентов. Внешний вид двух
исполнений контрольного приспособления показан на рис. 3.4.2.
Рис. 3.4.2. Приспособления для контроля толщины слоя термопасты
Данное приспособление ставится ребром на сопрягаемую
поверхность модуля с нанесенной термопастой, затем его прижимают к
модулю и проводят по поверхности. По остаткам пасты на зубцах (они
отстоят от базовой поверхности приспособления на нормированную
величину, указанную рядом с зубцом) можно судить о толщине нанесенного
слоя. Результат правильного нанесения термопасты после снятия
модуля с радиатора показан на рис. 3.4.3. Мы видим равномерно
распределенную пасту, отсутствие пустот.
Приведенный способ нанесения термопасты годится для
единичного и мелкосерийного производства, а также для ремонта
преобразователей в условиях объекта, на котором он эксплуатируется. Если же
Рис.т3.4.3. Результат правильного нанесения термопасты
производство преобразовательной техники выходит за рамки
мелкосерийного, необходимо — в целях обеспечения стабильности
технологического процесса — использовать другие, более совершенные методы.
В этом случае производители элементной базы рекомендуют
пользоваться трафаретной печатью. На рис. 3.4.4 показано приспособление
для трафаретной печати. В его составе имеется жесткое крепление для
силового модуля при его установке контактной поверхностью вверх.
Сверху на модуль опускается трафарет с нормированной толщиной и
перфорацией в виде ячеек круглой (шестигранной) структуры. На
трафарет должен быть заранее нанесен тонкий слой пасты, а нанесение
термопасты на модули выполняется мягким шабером подобно тому,
как выравнивают стены обычной строительной смесью.
В результате на поверхности модуля образуется структура,
показанная на рис. 3.4.5. Для лучшего растекания пасты при прижиме
Рис. 3.4.4. Приспособление для трафаретной печати
Рис. 3.4.5. Результат трафаретной печати
ячейки выполнены с разным диаметром. К слову, некоторые
фирмы-производители силовых компонентов решили не перекладывать
задачу нанесения термопасты на плечи производителей конечного
продукта, а поставляют модули с уже нанесенной ячеистой
структурой. Понятно, что обращаться с такими модулями в процессе
доставки и производства нужно крайне бережно, чтобы не испортить
тонкую структуру слоя пасты.
Теперь — о механическом монтаже силовых модулей. Для
крепления любых силовых модулей, особенно крупногабаритных,
необходимо использовать стальные винты высокой твердости (например,
стальные) с плоскими и стопорными шайбами. Использование латунных
винтов крайне нежелательно, так как с течением времени они могут
«течь» — изменять свою геометрию, что приведет к дополнительным
механическим напряжениям и возможному растрескиванию
внутренней структуры модулей. Затяжка крепежных винтов должна
осуществляться по схеме, которую производители, как правило, приводят в
своей технической документации. Операция затяжки выполняется в
несколько проходов ключом с нормированным крутящим моментом.
В первый проход производится с усилием, составляющим 10 % от
номинального, во второй — с усилием 30—40 %, третий проход является
финишным, с номинальным крутящим моментом. Между проходами
очень желательно выдержать паузы, составляющие несколько минут,
для улучшения процесса растекания
теплопроводящей пасты.
Классическая схема затяжки модуля типа
EconoDUAL-З, производимого фирмой «Infi-
пеоп», показана на рис. 3.4.6. Затяжка
выполняется в последовательности 1-2-3-4, при этом на
первом этапе затягивающее усилие составляет
0,5 Н • м, на втором — 2 Н • м, а на третьем
(финишном) — не более 3...6 Нм. Более сложный
вариант для корпуса типа ЕсопоРАСК+ приведен
на рис. 3.4.7. Здесь затяжка происходит по схеме
1 —2—3—4—5—6—7—8 с теми же усилиями.
Наиболее сложный вариант — монтаж модуля в
корпусе PrimePACK, приведенный на рис. 3.4.8.
Здесь операция крепления подчиняется схеме 1—
2-3-4-5-6-7-8-9-10-11-12-13-14.
Демонтаж модулей в случае необходимости
выполняется в обратном порядке.
Поговорим еще об одной ошибке, иногда
встречающейся при конструировании
статических преобразователей. Корни ее скрываются в
том обстоятельстве, что с виду силовые модули
Рис. 3.4.6. Монтаж
модуля в корпусе
EconoDUAL-3
Рис. 3.4.8. Монтаж модуля в корпусе PrimePACK
представляют собой крупногабаритные конструкции с мощными
выводами, обладающими, на первый взгляд, значительной механической
прочностью. Именно поэтому некоторые конструкторы пытаются
использовать эти мнимые «монолиты» в качестве опорных точек
крепления, например, конденсаторных блоков, мощных шин питания,
трансформаторов и дросселей. Запомните: выводы силовых модулей
выполнены мощными не для того, чтобы к ним «навешивали» конструктивные
массы, а исключительно для обеспечения нагрузочных электрических
режимов. Поэтому конструктору необходимо здесь обеспечить только
электрический контакт, а меры по креплению сопрягаемых узлом
следует принимать вне модуля.
Величина механических усилий, прикладываемых к выводам
модулей, обычно нормируется в технической документации. На рис. 3.4.9
показаны типовые значения усилий для модуля в корпусе PrimePACK — на
растяжение, сжатие, кручение, а на рис. 3.4.10 — те же данные для
модуля в корпусе типа SKiM.
Обеспечение нормальных механических усилий в данном случае
лежит целиком на конструкторе, разрабатывающим статический
преобразователь, поэтому более или менее удачные решения зависят только от
Рис. 3.4.9. Нормирование механических усилий для модуля в корпусе
PrimePACK
Рис. 3.4.10. Нормирование механических усилий для модуля в корпусе SKiM
его квалификации, опыта, технических знаний. Большую помощь в
поиске типовых решений может оказать и документация, предоставляемая
фирмами-производителями. Например, на рис. 3.4.11 показано типовое
техническое решение для выходных контактов модуля в корпусе
EconoDUAL-З. Механическое напряжение, создаваемое проводом
большого сечения, снимается медным токоведущим уголком, а основное
усилие здесь испытывает изолятор, прикрепленный к радиатору.
Другое решение — создание токоведущей консоли, как показано
на рис. 3.4.12.
В заключение раздела мы поговорим о самом неприятном — о
последствиях выхода из строя силовых полупроводниковых приборов. Не
секрет, что даже отлично спроектированные и изготовленные статиче-
Рис. 3.4.11. Вариант снятия механических усилий с выводов модуля
Рис. 3.4.12. Токоведущая консоль
ские преобразователи выходят из строя на этапе эксплуатации: из-за
нарушения режимов работы, различных нештатных ситуаций типа
попадания влаги, повреждения защитных оболочек,
неквалифицированных мероприятий по их обслуживанию. Как это не покажется
странным, но разработчик преобразователя должен принять меры к
минимизации последствий отказов даже в случае выхода из строя схем защиты.
Опыт анализа отказов, проведенных производителями силовой
элементной базы, показывает, что в случае пробоя силовых ключевых
элементов ток короткого замыкания повреждает всю внутримодуль-
ную «разводку», разрушается алюминиевая металлизация кристаллов,
выгорает проволока, с помощью которой кристаллы подключаются к
внешним выводам. Как правило, внутреннее пространство модулей
заполняется желеобразным защитным компаундом, и возникающая
электрическая дуга сжигает как сам компаунд, так и корпусные
элементы. Образующиеся продукты горения выбрасываются наружу под
высоким давлением (поскольку корпус силового прибора
загерметизирован), зачастую разламывая корпус модуля. В результате могут
быть повреждены другие близкостоящие компоненты (порой —
весьма дорогостоящие), и при ремонте их также придется заменить. Вот
поэтому разработчику следует оценить вариант возможного выброса
продуктов горения и не размещать в этой зоне (насколько возможно)
какие-либо электронные элементы.
Неплохим, но малоиспользуемым методом локализации
последствий выхода из строя силовых модулей является включение между
блоком конденсаторов и ключами инвертора никоиндуктивных
предохранителей типа fuse-IGBT, как показано на рис. 3.4.13. Конструкция
Рис. 3.4.13. Применение fuse-IGBT
Рис. 3.4.14. Внутреннее устройство fuse-IGBT
fuse-IGBT показана на рис. 3.4.14. Предохранитель состоит из
нескольких параллельно соединенных шин для снижения паразитной
индуктивности. Сверху на него надет защитный кожух, исключающий
выброс расплавленного металла наружу. Применять такие
предохранители рекомендуется на частотах преобразования не более 5...6 кГц.
Л итератуpa
[1] Семенов Б. Ю. Силовая электроника для любителей и
профессионалов. — М.: Солон-Р, 2001.
[2] Семенов Б. Ю. Силовая электроника: от простого к
сложному. — М.: Солон-пресс, 2005.
[3] Лазарев Г. Высоковольтные преобразователи для
частотно-регулируемого электропривода. Построение различных систем. URL:
http://www.news.elteh.ru/arh/2005/32/10.php
[4] Экономическая эффективность использования
преобразователей частоты в лифтовом хозяйстве. URL: http://www.vfd.com.ua/
content/view/65/31/
[5] Технологии энергосбережения на службе лифтового хозяйства
Москвы. URL: http://www.lift21.ru
[6] Ветроэнергетика Германии. URL: http://ru.wikipedia.org
[7] Климов В. П. Современные направления развития силовых
преобразователей переменного тока. URL: Сайт
http://www.tensy.ru/articlel3.html
[8] Сайт фирмы «Элкон». URL: http://www.elconmd.net
[9] Мещеряков В. М. Силовая электроника — эффективный способ
решения проблем региональной программы
«Энергоресурсосбережение» // Электротехника. 1996. № 12.
[10] РомашЭ. М., Драбович Ю. И., Юрченко Н. Н.,
Шевченко П. Н. Высокочастотные транзисторные преобразователи. — М.:
Радио и связь, 1988.
[И] Гончаров А. Ю. Серийно выпускаемые транзисторные
преобразователи электроэнергии // Электроника: Наука, Технология,
Бизнес. 1998. № 2.
[12] Ковалев Ф. И., Флоренцев С. Н. Силовая электроника: вчера,
сегодня, завтра // Электротехника. 1997. № 11.
[13] Дмитриков В. Ф. Новые высокоэффективные отечественные
источники электропитания с бестрансформаторным входом. URL:
http://www.add.ni/r/konkurs/st.18.htm
[14] Патанов Д. А. Общие проблемы снижения коммутационных
потерь в инверторах напряжения. URL: http://www.add.ru/konkurs/
avtst8.html
[15] Белов Г. А. Высокочастотные транзисторно-транзисторные
преобразователи постоянного напряжения. — М.: Энергоатомиздат,
1987.
f 16] Патент PCT. WO94/14230, 23.06.94, Н02М 3/335.
[17] Сайт унитарного предприятия «Завод «Транзистор» URL:
http://www.transistor.by
[18] Сайт ОАО «ВЗПП-Сборка». http://www.vzpp-s.ru
[19] Сайт ОАО «ФЗМТ». http://www.fzmt.ru
[20] Сайт НТЦ «СИТ», http://www.sitsemi.ru
[21] Сайт ОАО «Электровыпрямитель», http://www.elvpr.ru
[22] Сайт ЗАО «Электрум АВ». http://www.electrum-av.com/
[23] Сайт фирмы «Mitsubishi Electric». http://www.mitsubishi.com
[24] Бономорский О. И., Воронин П. А. Новый класс силовых
полупроводниковых модулей — модули H-IGBT. Доклад на IX
симпозиуме «Электротехника 2030» 29—31 мая 2007 г.
[25] Бономорский О., Воронин П., Куканов В., Щепкин Н.
Сравнительные экспериментальные исследования модулей IGBT и модулей
на основе комбинированных СИТ-МОП транзисторов // Силовая
электроника. 2004. № 1.
[26] Сайт фирмы «IXYS». http://www.ixys.com
[27] Сайт фирмы «International Rectifier*, http://www.irf.com
[28] Сайт фирмы «ONSemiconductor». http://www.onsemi.com
[29] Сайт фирмы «Agilent Technologies*, http://www.agilent.com
[30] Сайт фирмы «Toshiba». http://www.toshiba.com
[31] Сайт ОАО «Протон», http://www.proton-orel.ru
[32] Сайт НПО «Энергомодуль», http://www.energomodul.ru
[33] Сайт фирмы «Semikron». http://www.semikron.com
[34] Сайт фирмы «СТ-Concept». http://www.igbt-driver.com
[35] Сайт фирмы «In-Power Systems*, http://www.inpower-sys.com
[36] Сайт фирмы «Elhand». http://www.elhand.com.pl
[37] Лукевски М. Сетевые дроссели. Статья с сайта фирмы «Elhand»
[38] Лукевски М. Моторные дроссели. Статья с сайта фирмы
«Elhand»
[39] Сайт фирмы «Epcos». http://www.epcos.com
[40] Сайт фирмы «SchafTner». http://www.schaffner.com
[41] Сайт ОАО «Гириконд». http://ww.giricond.ru
[42j Гузиньски Я., Кжеминьски 3. Выходной фильтр инвертора
напряжения. Статья с сайта фирмы «Elhand». http://www.elhand.com.pl
[43] Сайт фирмы «LEM». http://www.lem.com
[44] Сайт ФГУП «НИИЭМ». http://www.niiem.ru
[45] Сайт фирмы «Allegro». http://www.allegrosystems.com
[46| Сайт НПП «Гаммамет». http://www.gammamet.ru
[47] Сайт ЗАО «ЛЭПКОС». http://www.ferrite.ru
[48] Сайт ОАО «Элеконд». http://www.elecond.ru
[49] Сайт фирмы «Evox-Rifa». http://www.evox-rifa.com
[50] Сайт фирмы «CDE Cornell Dubilier». http://www.cde.com
[51] Колпаков А. И. Об уважительном отношении к силовой
электронике // Силовая электроника. 2007. № 1.
[52] Колпаков А. И. Многослойная шина и модули Semistack от
Semikron // Силовая электроника. 2004. № 1.
[53] Сайт фирмы «Methode». http://www.methode.com
[54] Сайт фирмы «Eldre». http://www.busbar.com
[55] Сайт фирмы «Bussco». http://www.bussco.com
[56] Сайт фирмы «Rogers corporation*. http://www.rogersco
rporation.com
[57] Сайт фирмы «Номакон». http://www.nomacon.by
[581 Сайт фирмы «Aavid Thermalloy Ltd». http://www.aavidther
malloy.com
[59] Сайт фирмы «Лигра». http://ligra.narod.ru
[60] Потапов Ю. Тепловое моделирование // EDA expert. 2002.
№ 10.
[61] Колпаков А. Полезный софт от компании Semikron // Силовая
электроника. 2006. № 1.
[62] Колпаков А. Расчет тепловых режимов MOSFET-транзисторов
с помощью программы HEXRISE // Компоненты и технологии. 2002.
№ 5.
[63] Фукалов P. MELCOSIM — эффективный инструмент для
вычисления потерь и теплового расчета // Силовая электроника. 2006.
№4.
[64] Сайт интерактивной программы «SemiSel». http://semisel.semi
kron.com
[65] Сайт фирмы «Qfinsoft». http://www.qfin.net
ОГЛАВЛЕНИЕ
От автора 3
Глава 1. СИЛОВЫЕ СХЕМЫ ПРЕОБРАЗОВАТЕЛЬНОЙ
ТЕХНИКИ 7
1.1. Преобразовательная техника в современном мире 7
1.2. Калейдоскоп статических преобразователей 14
1.3. Как заставить вращаться двигатель 59
1.4. О нетрадиционных подходах к преобразовательной
технике 62
1.5. Мягкий старт — залог долголетия и надежности 78
Глава 2. ЭЛЕМЕНТНАЯ БАЗА ПРЕОБРАЗОВАТЕЛЬНОЙ
ТЕХНИКИ 95
2.1. Берем за основу MOSFET и IGBT 95
2.2. Когда «deadtime» перестает быть проблемой 162
2.3. Драйверы для управления силовыми элементами 171
2.4. Борьба с пусковыми токами, помехами и пульсациями . . . 225
2.5. Как измерить напряжение и ток 253
2.6. Несколько слов о моточных изделиях 284
2.7. «Рассыпуха» силовой электроники 297
2.8. Электронные предохранители 322
Глава 3. СЕКРЕТЫ УДАЧНОГО КОНСТРУИРОВАНИЯ 328
3.1. Об использовании готовых силовых блоков 329
3.2. Как проложить силовые шины 348
3.3. Все ли благополучно с тепловыделением? 360
3.4. О некоторых «тонкостях» технологии 400
Литература 411
Серия «Компоненты и технологии»
Семенов Борис Юрьевич
Силовая электроника:
профессиональные решения
Ответственный за выпуск
В. Митин
Макет и верстка
С. Тарасов
Обложка
Е. Холмский
ООО «СОЛОН-ПРЕСС»
123242, Москва, а/я 20
Телефоны:
(499) 254-44-10, (499) 795-73-26
E-mail: Solon-Avtor@coba.ru
По вопросам приобретения обращаться:
ООО «Альянс-книга КТК»
Тел: (495) 258-91-94, 258-91-95
ww.alians-kniga.ru
обработал: jtp
ООО «СОЛОН-ПРЕСС»
103050, г. Москва, Дегтярный пер., д. 5, стр. 2
Формат 60x88/16. Объем 26 п. л. Тираж 1000