/















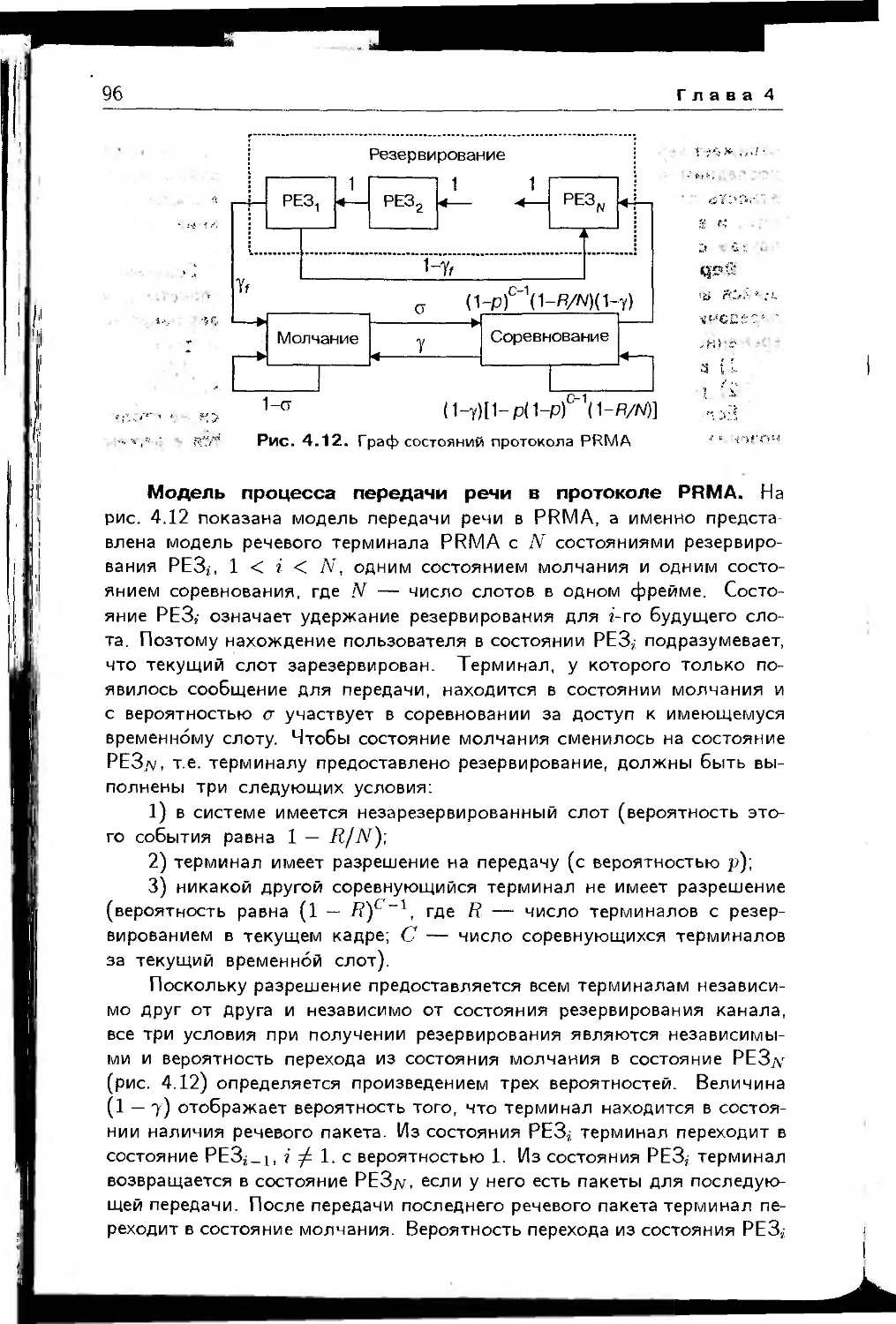
















Текст
-к
В. И. Комашинский
А. В. Максимов
СИСТЕМЫ ПОДВИЖНОЙ РАДИОСВЯЗИ С ПАКЕТНОЙ ПЕРЕДАЧЕЙ ИНФОРМАЦИИ
Основы моделирования
ПОДЛЕЖАТ ВОЗВРАТУ ШЛШЕО
РФ МП¥ FA
Москва
Горячая линия - Телеком 2007
Введение
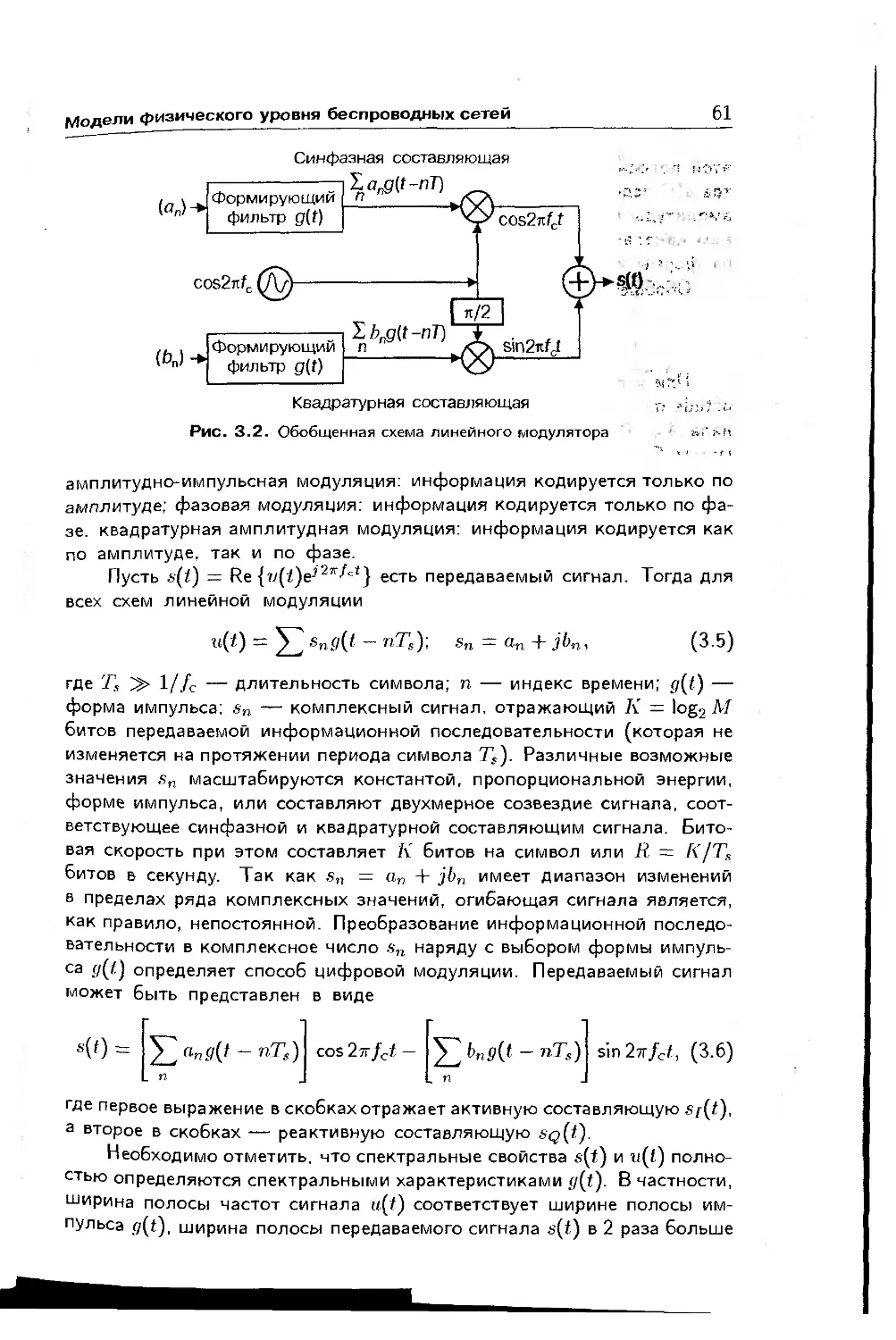
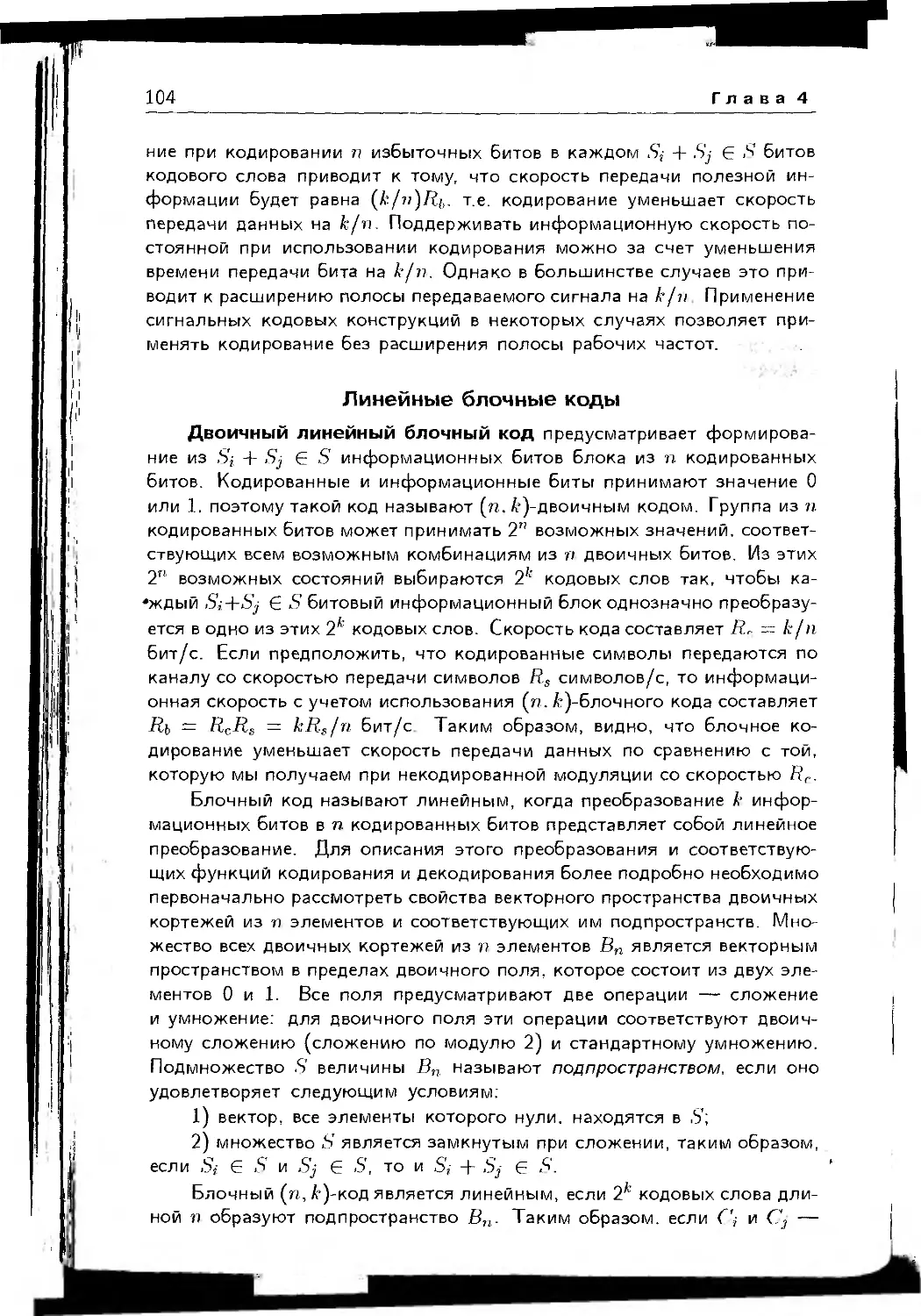
Для того чтобы определить степень актуальности темы монографии. целесообразно рассмотреть тенденции развития беспроводных сетевых технологий и факторы, их обусловливающие.
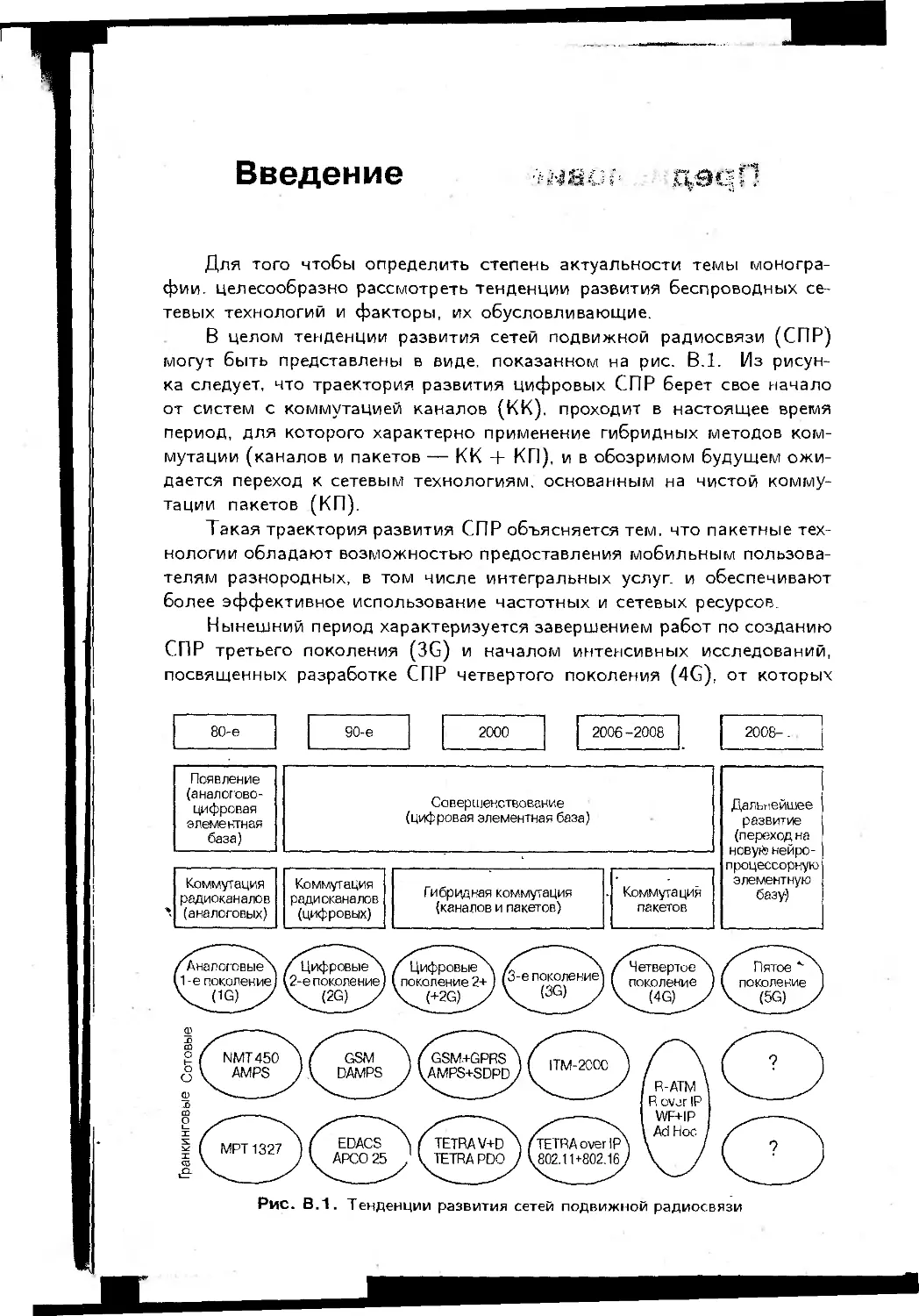
В целом тенденции развития сетей подвижной радиосвязи (СПР) могут быть представлены в виде, показанном на рис. В.1. Из рисунка следует, что траектория развития цифровых СПР берет свое начало от систем с коммутацией каналов (КК). проходит в настоящее время период, для которого характерно применение гибридных методов коммутации (каналов и пакетов — КК + КП), и в обозримом будущем ожидается переход к сетевым технологиям, основанным на чистой коммутации пакетов (КП).
Такая траектория развития СПР объясняется тем. что пакетные технологии обладают возможностью предоставления мобильным пользователям разнородных, в том числе интегральных услуг, и обеспечивают более эффективное использование частотных и сетевых ресурсов.
Нынешний период характеризуется завершением работ по созданию СПР третьего поколения (3G) и началом интенсивных исследований, посвященных разработке СПР четвертого поколения (4G), от которых
80-е 90-е 2000 2006 -2008 2008-.
Появление (аналоговоцифровая элементная база) Совершенствование (цифровая элементная база) Дальнейшее развитие (переход на новую нейро-процессорную элементную базу-)
Коммутация радиоканалов (аналоговых) Коммутация радиоканалов (цифровых) Гибридная коммутация (каналов и пакетов) Коммута ция пакетов
Рис. В.1. Тенденции развития сетей подвижной радиосвязи
ожидается формирование более естественной среды общения для мобильных пользователей.
Дело в том. что широко используемые в настоящее время сети второго поколения (2G и 2.5G) ориентированы преимущественно на передачу речевых сообщений, вместе с тем более 80 % информации человек воспринимает и обрабатывает в визуальной форме (речь составляет менее 10 %). Поэтому можно предположить, что внедрение СПР третьего и четвертого поколений (в 3G применяется гибридная коммутация КК + КП. но преимущество отдается КП, а в 4G предположительно будет применяться чистая КП), поддерживающих обмен не только речевыми сообщениями, но и изображениями, текстами, данными и компьютерными программами в необходимых для каждого пользователя пропорциях, позволит повысить эффективности взаимодействия людей при совместном решении самых разных задач.
Кроме того, внедрение СПР третьего и в дальнейшем четвертого поколений позволит существенно сократить имеющийся в настоящее время разрыв между спектром услуг, предоставляемых для фиксированных и мобильных пользователей.
Возрастание спроса на многообразие беспроводных сетевых технологий объясняется разнообразием условий их применения и постоянно расширяющимся спектром прикладных процессов (индивидуальных и коллективных). Различие требований для разнородных приложений практически исключает возможность построение одной беспроводной системы, которая могла бы удовлетворить весь спектр требований одновременно
Представление о перспективах развития СПР с пакетной передачей информации, обеспечивающих обмен различными видами информации между людьми или устройствами, определяет своего рода коммуникационный рубеж XXI века. Эти перспективы позволят обеспечить обмен разнородной информацией с любой точки Земли. Сети будут использоваться также для взаимного соединения мобильных наладонных и портативных компьютеров. В домашних условиях эти сети позволят, помимо обеспечения соединений между компьютерами, телефонами и системами безопасности, оперировать с новым классом интеллектуальной домашней электроники, которая сможет взаимодействовать друг с другом и с Интернетом. Интеллектуальные здания смогут оказывать помощь престарелым и немощным людям, контролировать состояние заболевших, реагировать на чрезвычайные ситуации. Беспроводная видеосвязь может использоваться для создания классов дистанционного обучения, дистанционных тренажеров, дистанционных госпиталей в любой точке мира.
Огромную область как коммерческого, так и специального применения могут иметь беспроводные датчики, коммерческое применение которых включает контроль повреждения зданий и мостов, скопления углекислого газа, распространения химических веществ и газов в месте аварии. Беспроводные датчики смогут самоконфигурироваться в сеть для
интеграции и обработки данных измерения с целью последующей передачи информации в центр контроля. Специальное применение включает навигацию, опознавание, ориентирование, идентификацию целей и слежение за ними, обнаружение химического и бактериологического нападения, управление боевыми роботизированными системами и т.д.
Кроме прочего, беспроводные сети позволят обеспечивать работу распределенных систем управления с дистанционными устройствами, датчиками и исполнительными механизмами, связанными между собой беспроводными каналами связи. Такие сети необходимы для управления мобильными элементами, действующими без участия человека, и позволят сократить стоимость технического обслуживания и реконфигурации по сравнению с распределенными системами управления, использующими проводные линии связи, например, в процессе автоматизации промышленного производства.
Быстрое расширение области применения беспроводных сетей предполагает необходимость их постоянного развития. Важнейшим фактором развития любой системы является генерация альтернатив. Альтернативы построения СПР включают варианты построения и реализации протоколов на всех уровнях архитектуры. Исследование альтернатив построения СПР осуществляется на моделях. Поскольку сети относятся к категории сложных антропогенных систем, обычно требуются разработка множества различных моделей (применяется многомодельный под ход) и проведение с использованием этих моделей многокритериального анализа и синтеза СПР и ее элементов. Типичной задачей гнализэ является исследование эффективности определенной альтернативы, а типичной задачей синтеза — выбор эффективных (оптимальных) альтернатив из множества допустимых.
Многоуровневая модель сетей радиосвязи с пакетной передачей информации является исходной макромоделью, позволяющей эффективно применять системный подход при моделировании различных процессов в их логической взаимосвязи.
Глава 1
Многоуровневая модель сетей подвижной радиосвязи с пакетной передачей информации -
Анализ и синтез систем и СПР является задачей достаточно сложной. При решении таких задач часто используется процедура декомпозиции — преобразование сложной задачи в несколько блоков простых задач. Процесс декомпозиции предполагает четкое определение процедуры решения в рамках отдельного блока и его взаимодействие с остальными блоками. В результате достигается упрощение исходной задачи и. кроме того, появляется возможность независимой модернизации отдельно каждого из блоков без изменения остальной части системы.
При декомпозиции часто используют многоуровневый подход. Он заключается в том, что все множество блоков распределяют по уровням, которые выстраиваются в иерархию, т.е. имеются вышележащие и нижележащие уровни. Множество блоков, составляющих каждый уровень, сформировано таким образом, чтобы для выполнения своих задач они обращались с запросами только к блокам непосредственно примыкающего нижележащего уровня. С другой стороны, результаты работы всех блоков, принадлежащих некоторому уровню, могут быть переданы только блокам соседнего вышележащего уровня. Такая иерархическая декомпозиция предполагает четкое определение функции каждого уровня и интерфейсов между уровнями.
Интерфейс определяет набор примитивных операций, выполняемых нижним уровнем в интересах верхнего. В результате иерархической декомпозиции достигается относительная независимость уровней и возможность их простой и независимой модификации.
Средства сетевого взаимодействия также могут быть представлены в виде иерархически организованного множества блоков. При этом блоки нижнего уровня могут решать все вопросы, связанные с надежной передачей электрических сигналов между двумя соседними узлами. Блоки более высокого уровня организуют транспортировку сообщений в пределах всей сети, пользуясь для этого средствами нижележащего уровня. А на верхнем уровне работают блоки, предоставляющие пользователям доступ к различным службам — файловой, печати и т.п.
Многоуровневое представление средств взаимодействия в СПР имеет свою специфику, связанную с тем, что в процессе обмена сообщениями- участвуют две мобильные системы, т.е. необходимо организовать согласованную работу двух «блуждающих иерархий». При передаче со-
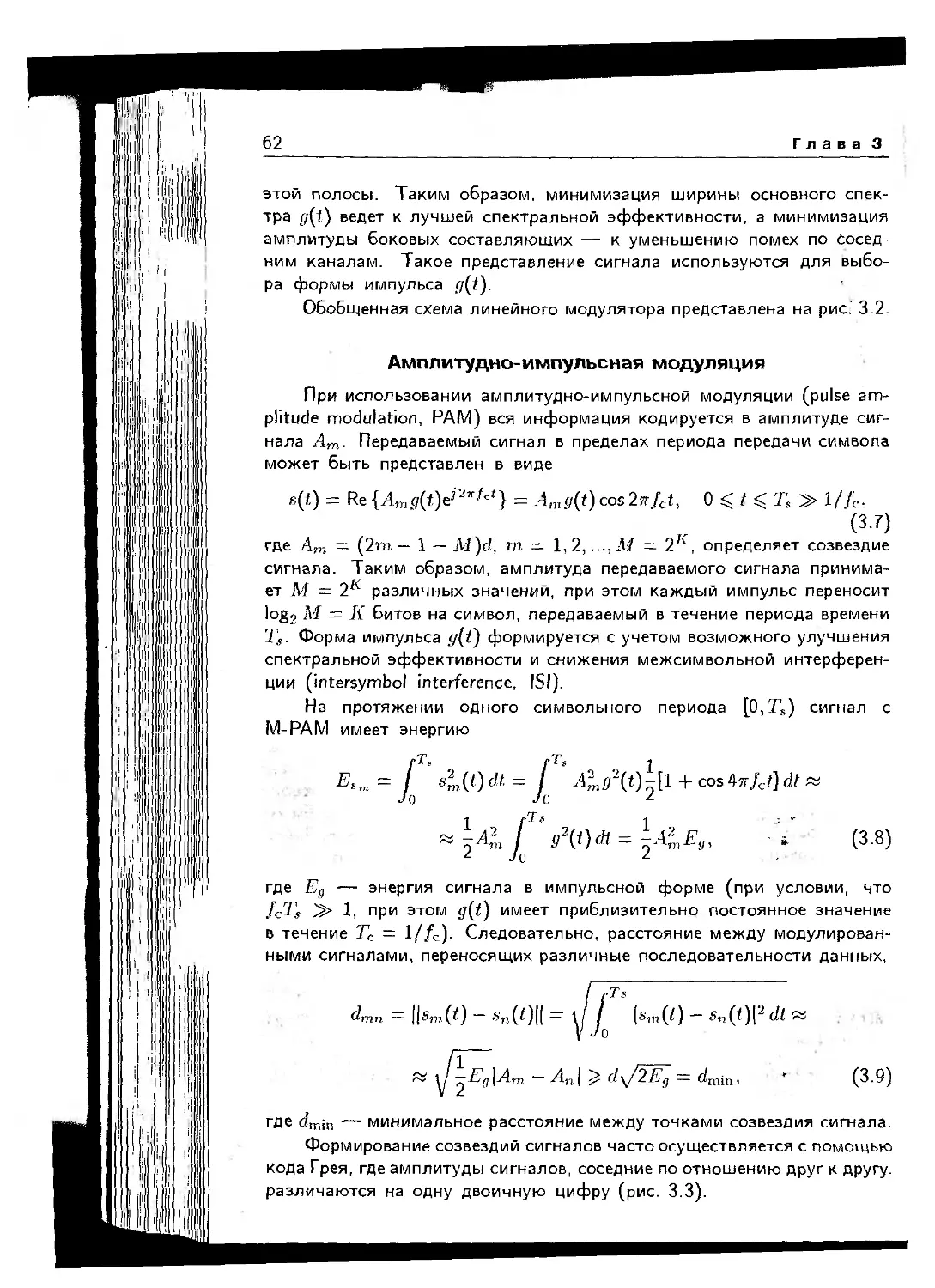
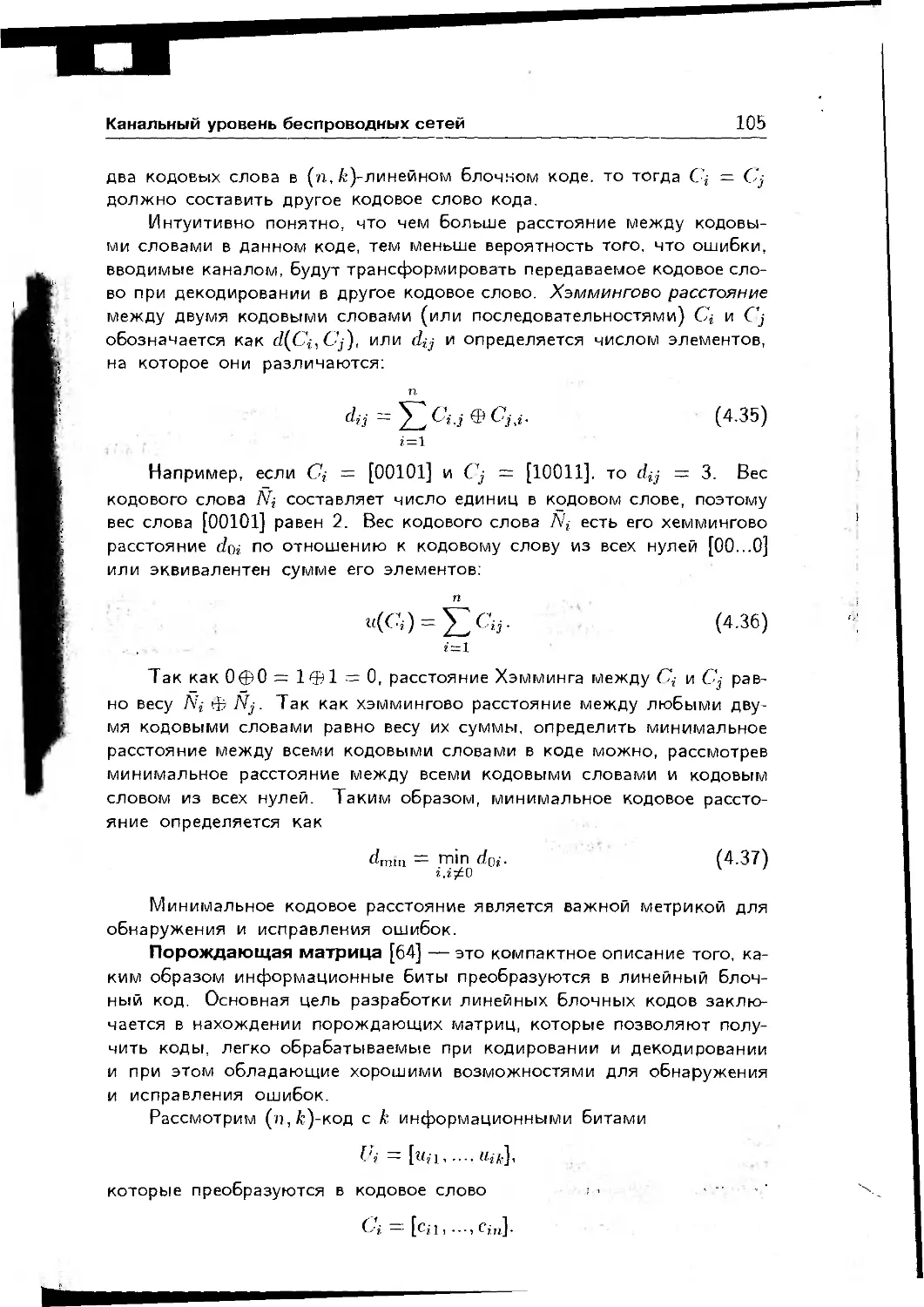
Интерфейсы управления
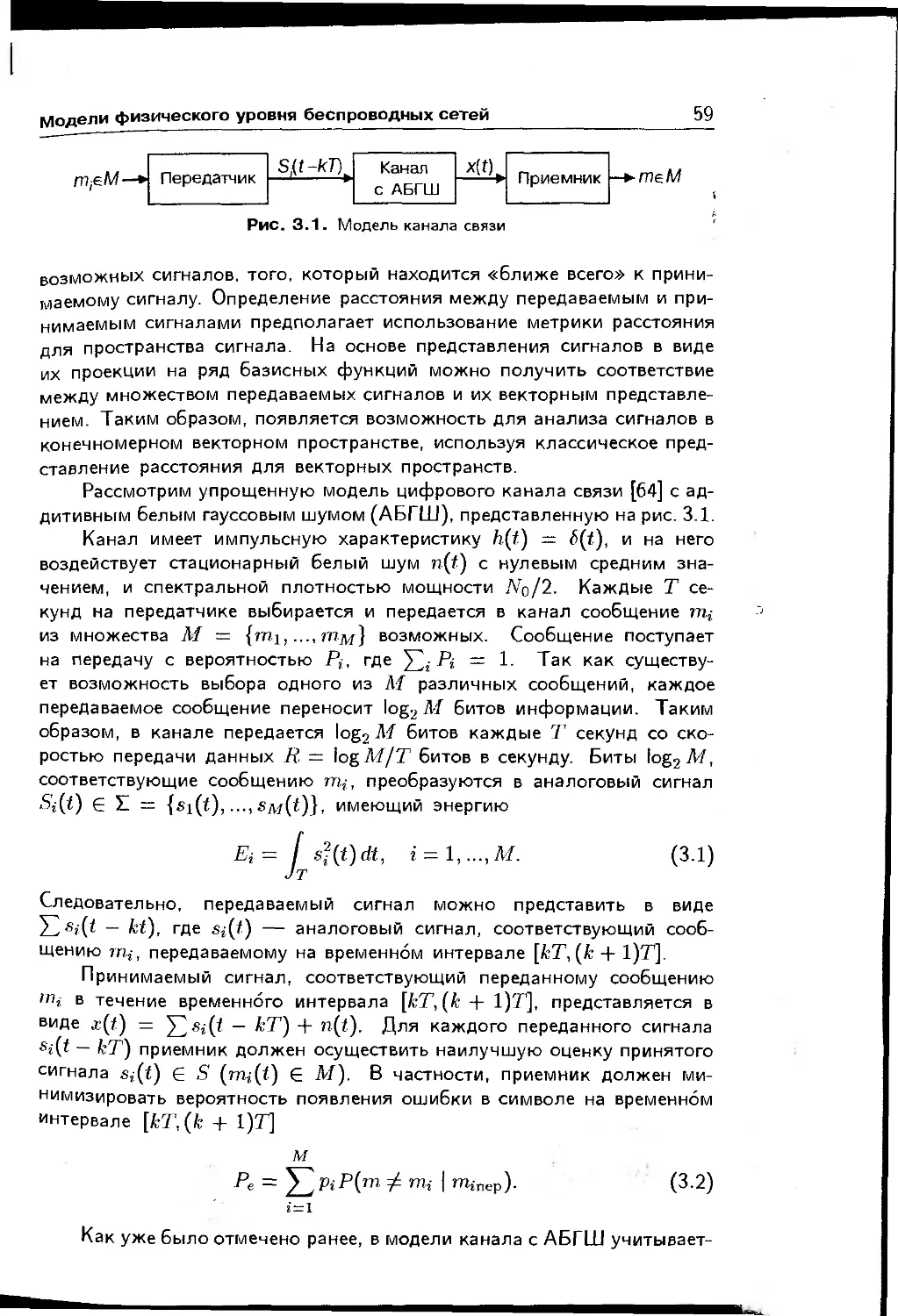
Рис. 1.1. Связи между смежными уровнями
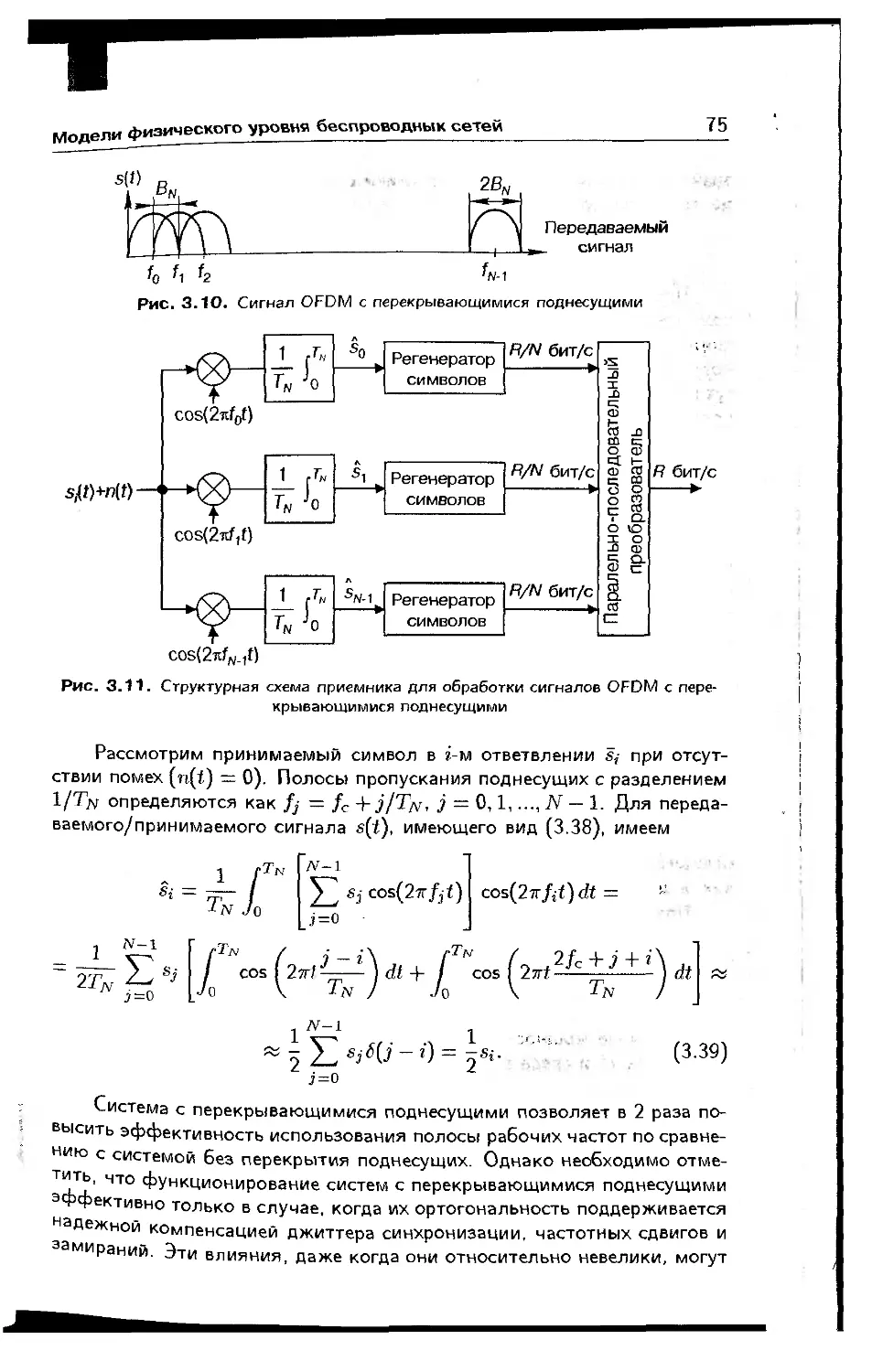
общений оба участника сетевого взаимодействия должны подчиняться множеству соглашений. Например, они должны согласовать уровни и форму радиосигналов, способ определения длины сообщений, договориться о методах контроля достоверности и т.п. Другими словами, соглашения должны быть определены для всех уровней, начиная от самого низкого — уровня передачи битов — до самого высокого, реализующего сервис для мобильных пользователей.
Процедура взаимодействия двух узлов может быть описана в вид₽ набора правил взаимодействия каждой пары соответствующих уровней обеих участвующих сторон. Формализованные правила, определяющие последовательность и формат сообщений, которыми обмениваются сетевые компоненты, лежащие на одном уровне, но в разных узлах, называются протоколом.
Модули, реализующие протоколы соседних уровней и находящиеся в одном узле, также взаимодействуют друг с другом в соответствии с четко определенными правилами и с помощью стандартизованных форматов сообщений. Эти правила принято называть интерфейсом. Интерфейс определяет набор сервисов, предоставляемый данным уровнем соседнему уровню. На рис. 1.1 показаны связи между отдельно взятым уровнем и уровнями лежащими выше и ниже его.
Средства каждого уровня должны отрабатывать, во-первых, соб ственный протокол, а во-вторых, интерфейсы с соседними уровнями.
Иерархически организованный набор протоколов, достаточный для организации взаимодействия узлов в сети, называется стеком коммуникационных протоколов.
Коммуникационные протоколы могут быть реализованы как программно, так и аппаратно. Протоколы нижних уровней часто реализуются комбинацией программных и аппаратных средств, а протоколы верхних уровней, как правило, чисто программными средствами. Один и тот же алгоритм может быть запрограммирован с разной степенью эффективности. Точно так же и протокол может иметь несколько программных реализаций.
Кроме того, на эффективность взаимодействия устройств в сети влияет качество всей совокупности протоколов, составляющих стек, в частности, то, насколько рационально распределены функции между
протоколами разных уровней и насколько хорошо определены интерфейсы между ними.
В сетях подвижной радиосвязи протоколы реализуются не только мобильными компьютерами и абонентскими системами, но и другими сетевыми устройствами — базовыми станциями, беспроводными мостами, коммутаторами мобильной сети и т.д.
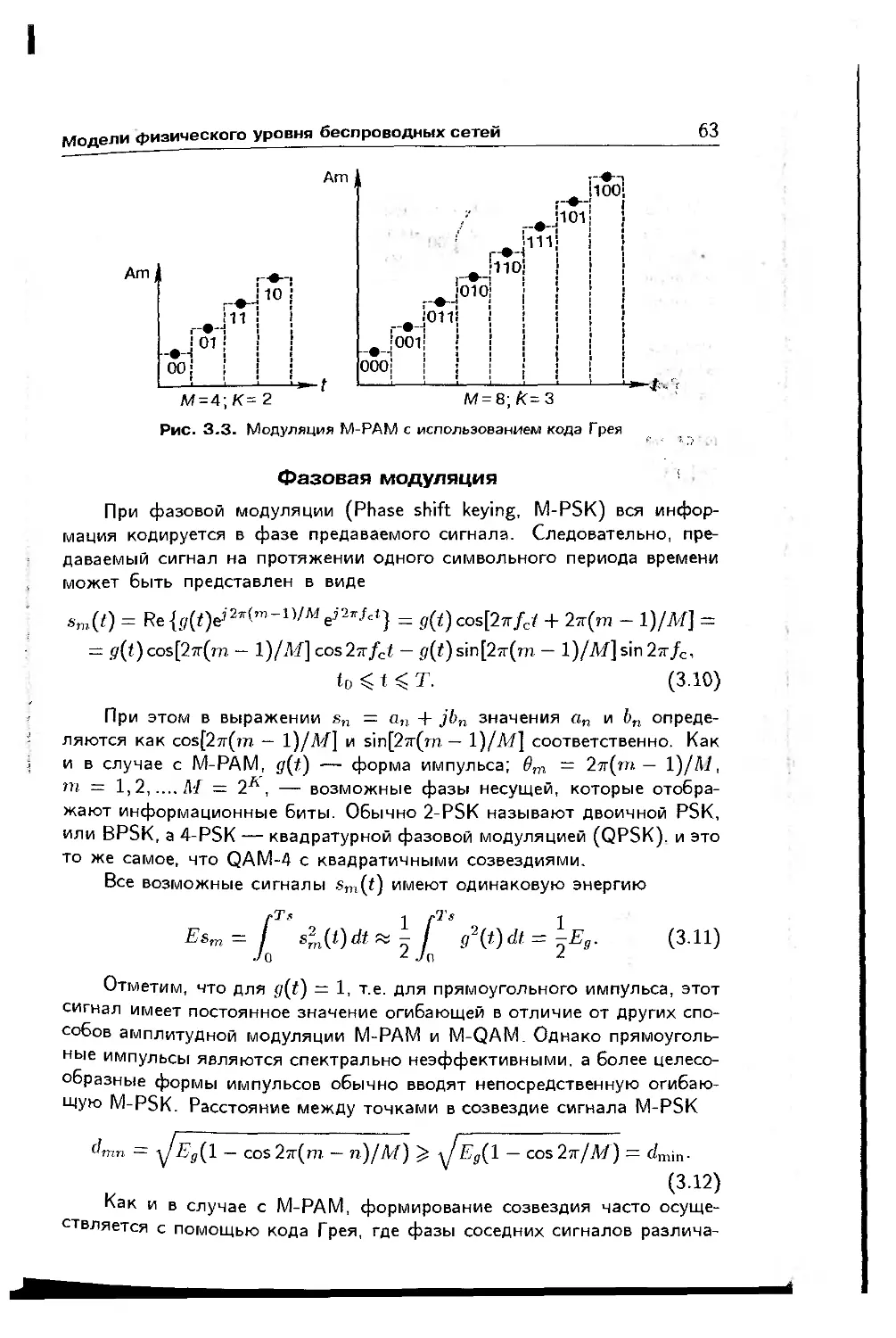
1.1. Модель OSI
Из того, что протокол является соглашением, принятым двумя взаимодействующими объектами, в нашем случае двумя работающими в сети мобильными системами, совсем не следует, что он обязательно является стандартным. Но на практике при реализации сетей стремятся использовать стандартные протоколы. Это могут быть фирменные, национальные или международные стандарты [46].
В начале 80-х годов ряд международных организаций по стандартизации — ISO. ITU-T и некоторые другие— разработали модель, которая сыграла значительную роль в развитии всех видов сетей (в том числе и беспроводных). Эта модель называется моделью взаимодействия открытых систем (Open System Interconnection. OSI), или моделью OSL Модель 0SI определяет различные уровни взаимодействия систем, дает им стандартные имена и указывает, какие функции должен выполнять каждый уровень. Модель 0SI была разработана на основании большого опыта, полученного при создании компьютерных сетей.
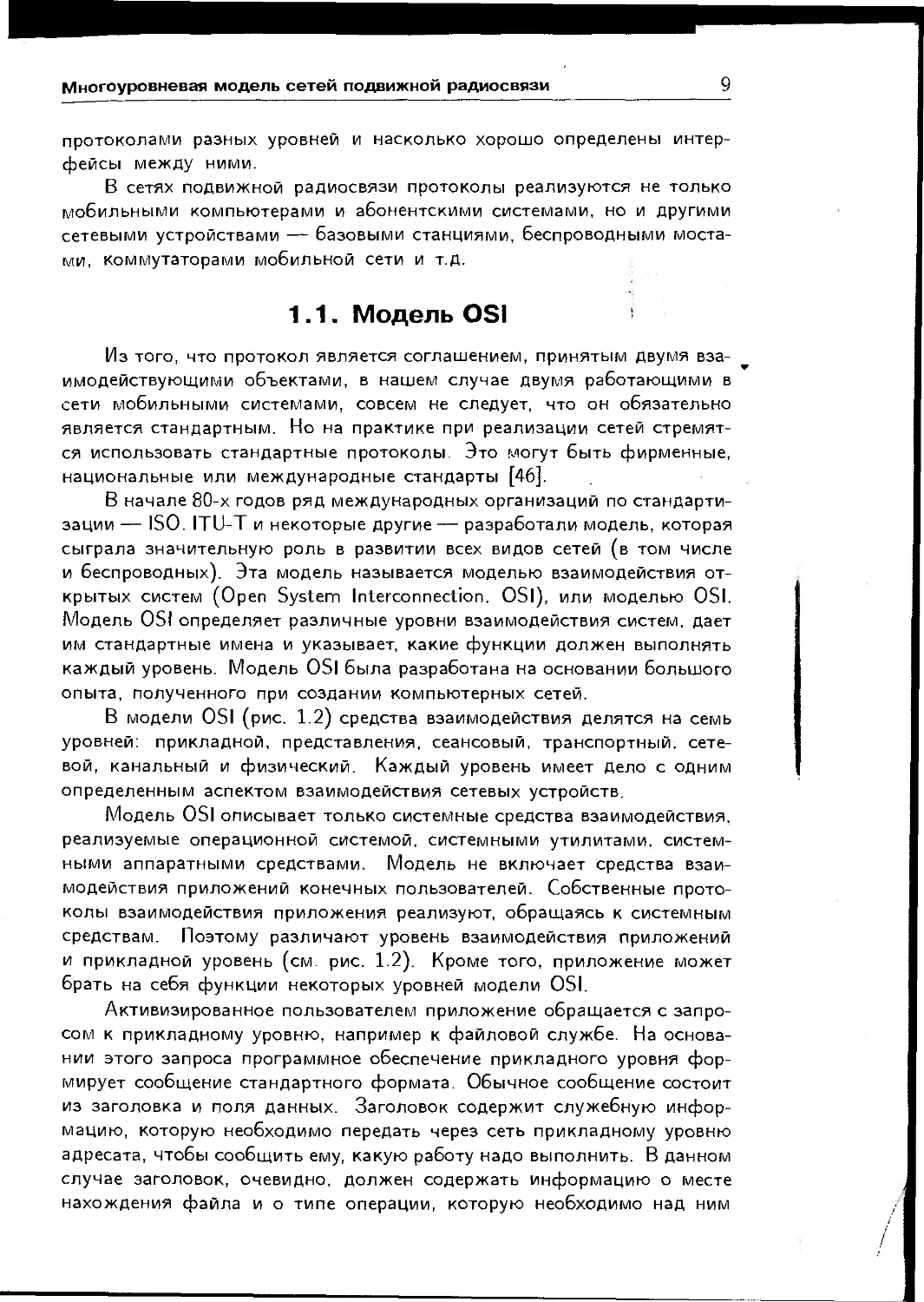
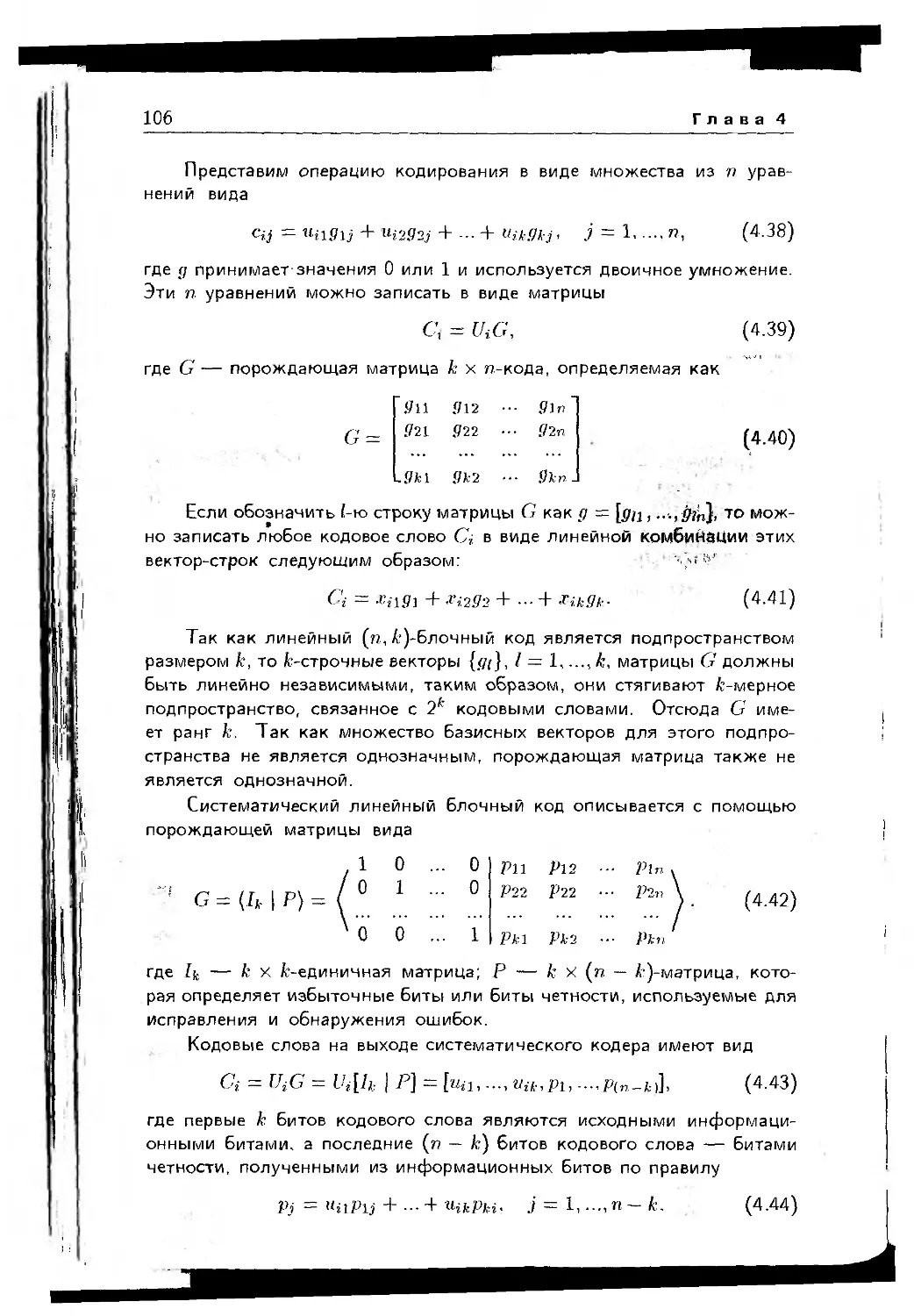
В модели 0SI (рис. 1.2) средства взаимодействия делятся на семь уровней: прикладной, представления, сеансовый, транспортный, сетевой, канальный и физический. Каждый уровень имеет дело с одним определенным аспектом взаимодействия сетевых устройств.
Модель 0SI описывает только системные средства взаимодействия, реализуемые операционной системой, системными утилитами, системными аппаратными средствами. Модель не включает средства взаимодействия приложений конечных пользователей. Собственные протоколы взаимодействия приложения реализуют, обращаясь к системным средствам. Поэтому различают уровень взаимодействия приложений и прикладной уровень (см. рис. 1.2). Кроме того, приложение может брать на себя функции некоторых уровней модели OSI.
Активизированное пользователем приложение обращается с запросом к прикладному уровню, например к файловой службе. На основании этого запроса программное обеспечение прикладного уровня формирует сообщение стандартного формата. Обычное сообщение состоит из заголовка и поля данных. Заголовок содержит служебную информацию, которую необходимо передать через сеть прикладному уровню адресата, чтобы сообщить ему, какую работу надо выполнить. В данном случае заголовок, очевидно, должен содержать информацию о месте нахождения файла и о типе операции, которую необходимо над ним
Прикладной 'X Прикладной
\4 процесс процесс ' к у
Прикладной Прикладной
уровень уровень
Уровень Уровень
представления * * представления
Сеансовый Сеансовый
уровень уровень
Транспортный Транспортный
уровень уровень
Сетевой . . Сетевой
уровень уровень
Канальный Канальный
уровень уровень
Физический Физический
уровень уровень
- — Физическая среда
Рис. 1.2. Модель взаимодействия открытых систем ISO/OSI
выполнить. Поле данных сообщения может быть пустым или содержать какие-либо данные, например, те. которые необходимо записать в удаленный файл. Но для того чтобы доставить эту информацию по назначению, предстоит решить много задач, ответственность за которые несут нижележащие уровни.
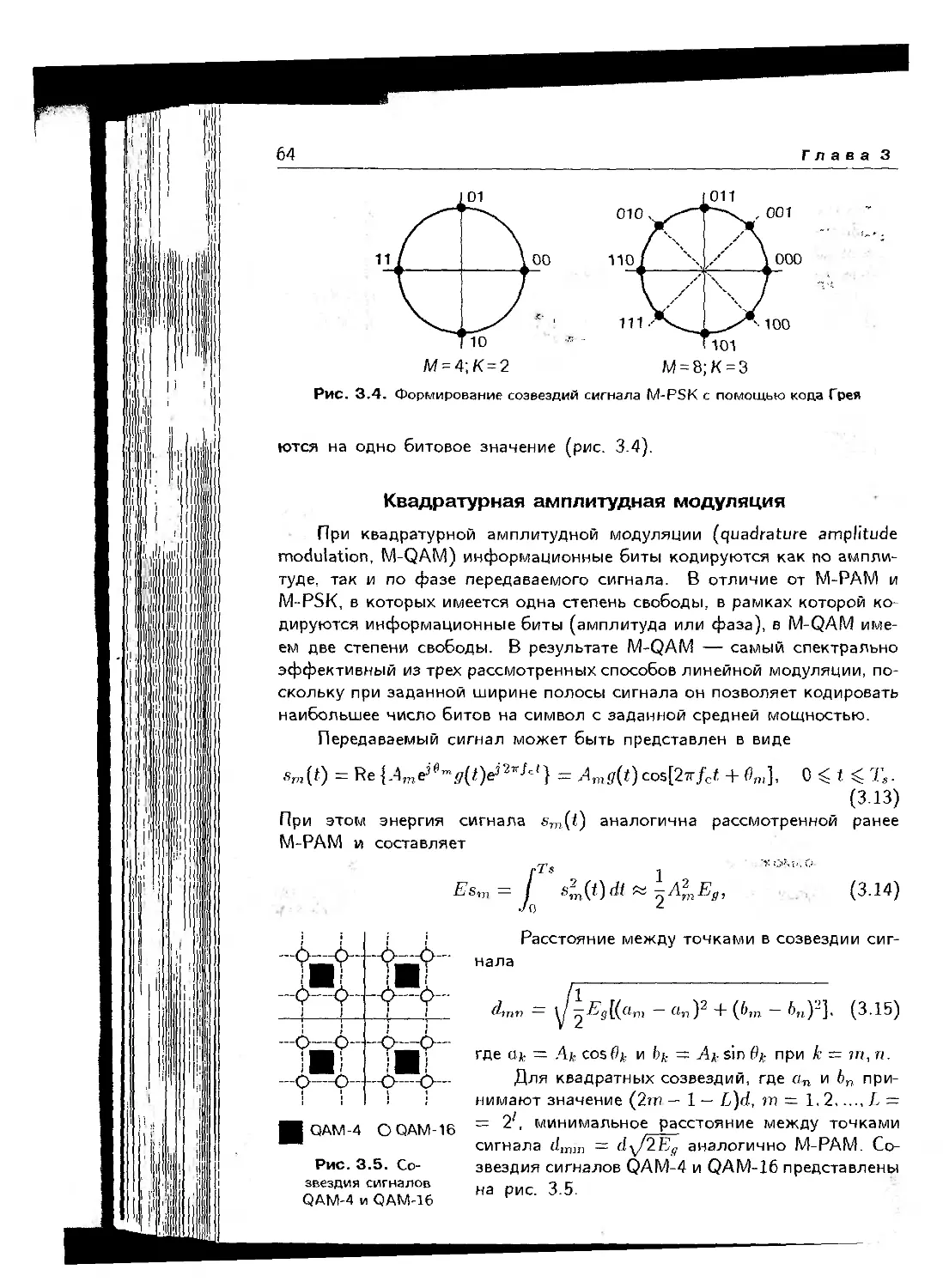
После формирования сообщения прикладной уровень направляет его вниз по стеку уровню представления. Протокол уровня представления на основании информации, полученной из заголовка прикладного уровня, выполняет требуемые действия и добавляет к сообщению собственную служебную информацию — заголовок уровня представления, в котором содержатся указания для протокола уровня представления машины-адресата. Полученное в результате сообщение передается вниз сеансовому уровню, который в свою очередь добавляет свой заголовок, и т.д. (протоколы канального уровня помещают служебную информацию не только в начале сообщения в виде заголовка, но и в конце, в виде так называемого «концевика», содержащего контрольную последовательность кадра). Наконец, сообщение достигает нижнего, физического уровня, который собственно и передает его по линии связи адресату. К этому моменту сообщение «обрастает» заголовками всех уровней (рис. 1.3).
. Когда сообщение по сети поступает на устройство адресата, оно принимается его физическим уровнем и последовательно перемещается вверх с уровня на уровень. Каждый уровень анализирует и обра-
Рис. 1.3. Вложенность сообщений различных уровней
батывает заголовок своего уровня, выполняя соответствующие данному уровню функции, а затем удаляет этот заголовок и передает сообщение вышележащему уровню.
В модели OSI различают два основных типа протоколов. В протоколах с установлением соединения (connection-oriented) перед обменом данными отправитель и получатель должны сначала установить соединение и, возможно, выбрать некоторые параметры протокола, которые они будут использовать при обмене данными. После завершения диалога они должны разорвать это соединение. Телефонная связь — это пример взаимодействия, основанного на установлении соединения.
Вторая группа протоколов — протоколы без предварительного установления соединения (connectionless). Такие протоколы называют также дейтаграммными. При этом отправитель просто передает сообщение, когда оно готово.
Сети проводной связи обычно строятся в соответствии с уровневой моделью OSI, что существенного упрощает построение сетей, хотя во многих случаях и ведет к некоторой потере эффективности и качества работы из-за сложности оптимизации всей сети Однако большая пропускная способность и надежность каналов проводной сети позволяют эффективно использовать буферизацию данных в процессе их перемещения от протоколов высокого уровня до протоколов низкого уровня и для передачи по каналу при получении доступа, при этом при высокой скорости передачи потери качества работы из-за" такого изолированного построения протоколов получаются достаточно малыми.
В сетях подвижной радиосвязи в ситуация совсем иная. Радиоканалы могут иметь весьма низкое качество работы, к тому же связность пользователей и топология сети могут изменяться во времени. Фактически понятие радиоканала достаточно расплывчато из-за самой природы распределения радиоволн. Динамичный характер и низкое качество беспроводного канала связи указывают на то, что радиосети с высокими рабочими характеристиками Должны оптимизироваться для этого канала, приспосабливаться к его изменениям, а также учитывать мобильность пользователей. Таким образом, протоколы, применяемые в проводных сетях и в СПР с пакетной передачей информации (ППИ), могут иметь существенные отличия. В перспективных СПР с ППИ целесообразно строить адаптивные стеки протоколов.
Для дальнейшего развития СПР и беспроводных сетевых технологий в целом потребуются новые технологические решения в следующих направлениях:
• формирование адаптивного стека протоколов для беспроводных сетей;
• эмпирические исследования и моделирование беспроводных каналов связи, функционирующих в новых диапазонах частот;
• поиск способов уменьшения недостатков беспроводных каналов, улучшения качества обслуживания пользователей и повышения эффективности использования спектра при осуществлении связи по беспроводным каналам;
• разработка протоколов управления мобильностью и маршрутизации, которые обеспечивают пользователям предоставление интегральных услуг в движении;
• разработка новых аппаратных средств (в том числе на основе нейропроцессоров) для маломощных мобильных сетевых компьютеров и связных терминалов:
• улучшение способов совместного использования приложений беспроводной связи.
Для решения этих проблем необходимо проведение исследований в различных областях, включая физическую среду, обработку сигналов, построение протоколов, разработку программного обеспечения, конфигурирование аппаратного оборудования и т.д.
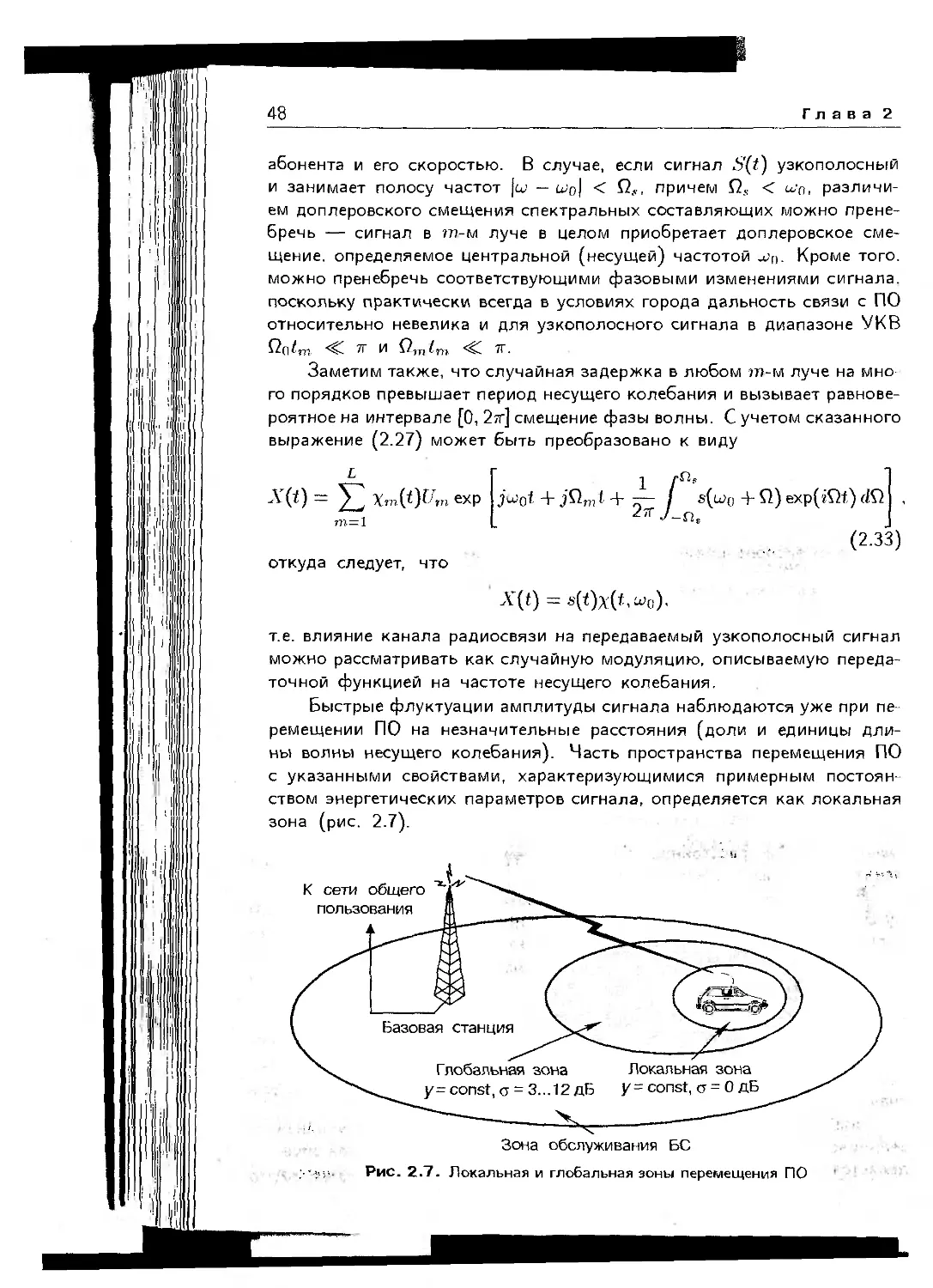
Физическая среда сетей подвижной радиосвязи
Беспроводная физическая среда позволяет пользователям постоянно находиться в подключенном режиме (on line) независимо от местоположения и степени мобильности, что не не характерно для других сред (витая пара, коаксиальный кабель или оптическое волокно). Вместе с тем характеристики физической среды СПР (используемый диапазон радиочастот, механизмы распространения радиоволн, характеристики рельефа местности, свойства антропогенных окружающих объектов, параметры подстилающей поверхности и т.д.) в значительной степени
влияют на многие особенности построения СПР (структуру, топологию, протоколы функционирования, спектр предоставляемых услуг и реализуемых приложений и т.д.).
Особенность физической среды СПР такова, что радиосигнал подвержен воздействию шумов, помех, затенения, влияния многолучевого распространения. Кроме того, возникают дополнительные проблемы из-за того, что при перемещении пользователя перечисленные отрицательные эффекты меняются во времени непредсказуемым образом.
Если мобильный абонент находится в движении, то в результате воздействия физической среды сигнал, передаваемый по беспроводному каналу, испытывает случайные флюктуации во времени из-за постоянно изменяющихся характеристик отражения и затухания. Таким образом, параметры радиоканала, в отличие от проводного, изменяются во времени по случайным законам, что затрудняет построение систем связи с гарантированными рабочими характеристиками.
Заметные изменения сигнала происходят при перемещении от источника на расстояния 100...1000 м, а затенения проявляются на расстояниях, соизмеримых с размерами объекта, создающего препятствие для распространения радиоволны (10... 100 м на улице и еще менее внутри зданий).
Физический уровень
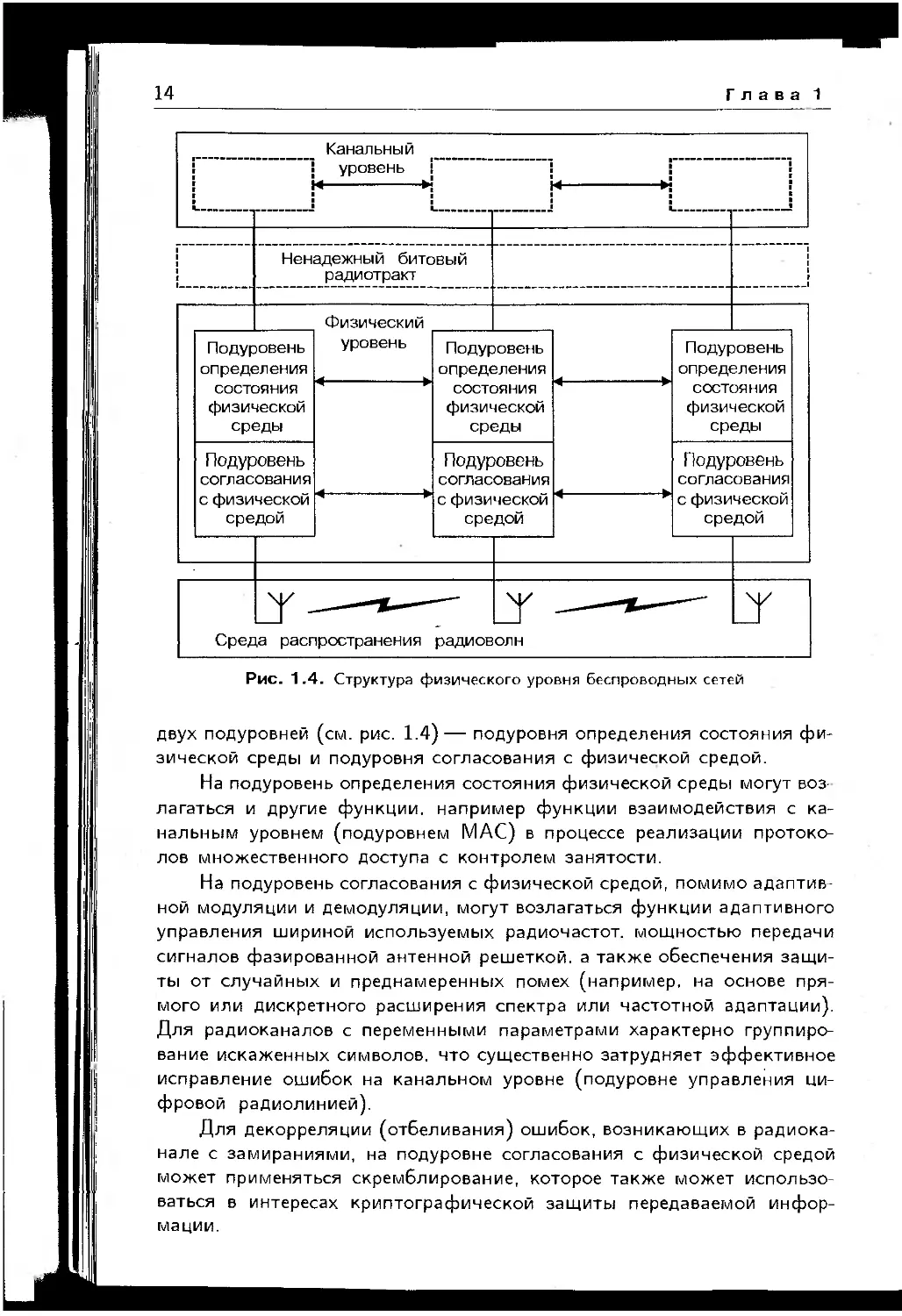
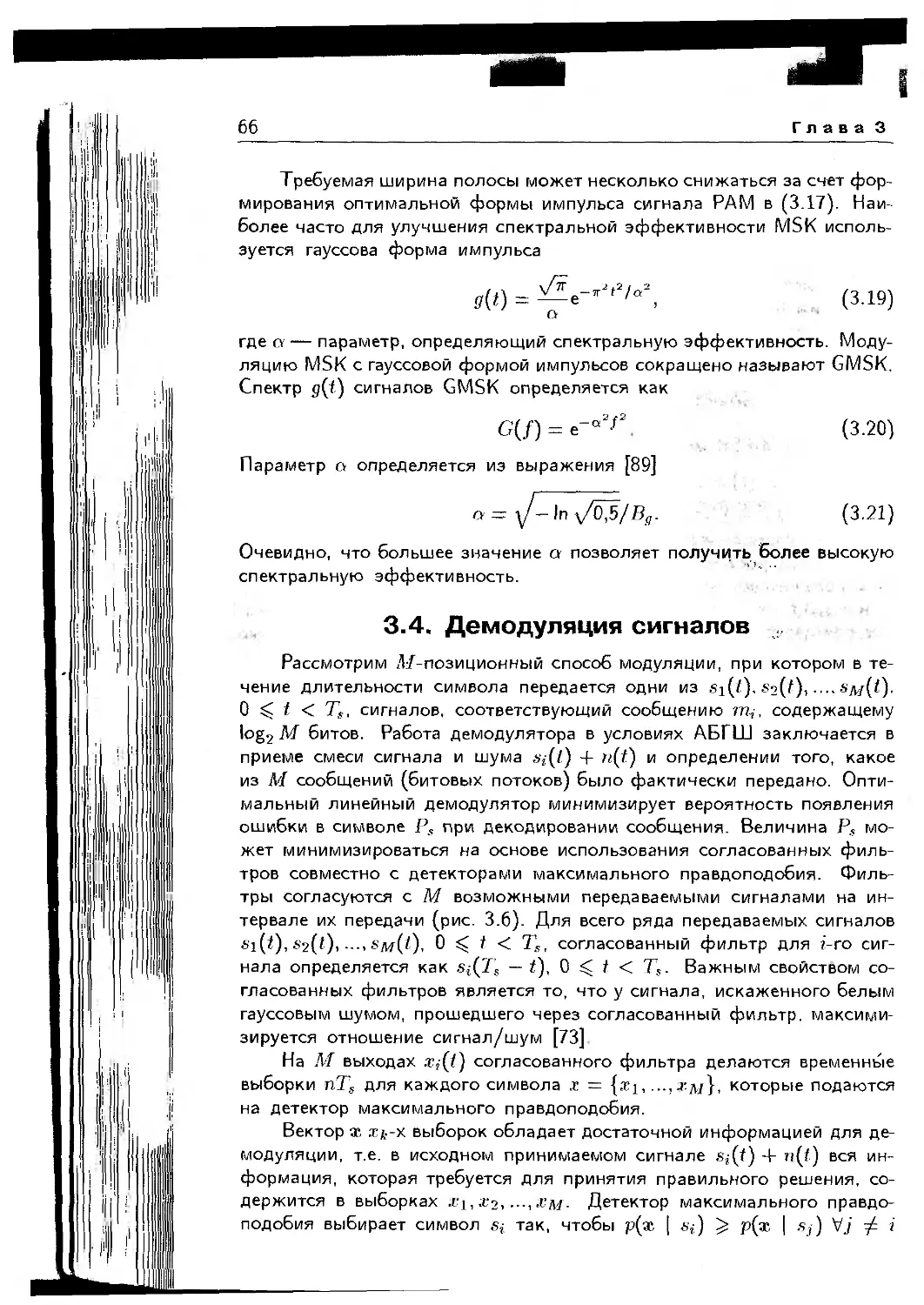
Физический уровень предназначен для того, чтобы обеспечить виртуальную радиолинию для передачи последовательности битов между любой парой абонентских радиотерминалов (любым радиотерминалом и станцией радиодоступа), соединенных радиоканалом. Основная логическая функция физического уровня заключается в обеспечении механизма беспроводной передачи (рис. 1.4) для подуровня управления доступом к беспроводной среде (Medium Access Control, МАС). Для выполнения этой функции на физическом уровне используют радиомодем, который на передающей стороне осуществляет преобразование входящих битов, поступающих из более высокого уровня (подуровня управления радиодоступом), в манипулированные радиосигналы, передаваемые по радиоканалу, а на приемной стороне осуществляет их обратное преобразование в битовую последовательность. На этом уровне важно учитывать ряд характеристик радиоканала, таких как диапазон частот, полоса пропускания радиоканала, помехозащищенность и другие. Эффективное использование спектра рабочих частот предполагает применение робастных и эффективных методов формирования и обработки сигналов в радиоканалах с переменными параметрами. В большинстве существующих СПР способы модуляции сигналов не адаптируются к условиям ведения связи. Если удается достоверно оценивать текущие характеристики радиоканала, то имеется возможность адаптации вида сигнала к условиям ведения связи, для этого физический уровень может формироваться из
— Канальный уровень 4 - - ь — — —
L я * U L —
Ненадежный битовый радиотракт
Физический
Подуровень определения состояния физической среды уровень .... W Подуровень определения состояния физической среды ..... ..... к. Подуровень определения состояния физической среды
р - . ..... . .. . ... W. я " 1 f ь.
Подуровень согласования с физической средой Подуровень согласования с физической средой Подуровень согласования с физической средой
Я F
Сред LY (а распространения радиов Ьг -—*-— олн Ьг
Рис. 1.4. Структура физического уровня беспроводных сетей
двух подуровней (см. рис. 1.4)— подуровня определения состояния физической среды и подуровня согласования с физической средой.
На подуровень определения состояния физической среды могут возлагаться и другие функции, например функции взаимодействия с канальным уровнем (подуровнем МАС) в процессе реализации протоколов множественного доступа с контролем занятости.
На подуровень согласования с физической средой, помимо адаптивной модуляции и демодуляции, могут возлагаться функции адаптивного управления шириной используемых радиочастот, мощностью передачи сигналов фазированной антенной решеткой, а также обеспечения защиты от случайных и преднамеренных помех (например, на основе прямого или дискретного расширения спектра или частотной адаптации). Для радиоканалов с переменными параметрами характерно группирование искаженных символов, что существенно затрудняет эффективное исправление ошибок на канальном уровне (подуровне управления цифровой радиолинией).
Для декорреляции (отбеливания) ошибок, возникающих в радиоканале с замираниями, на подуровне согласования с физической средой может применяться скремблирование, которое также может использоваться в интересах криптографической защиты передаваемой информации.
Комплекс «радиомодем — среда распространения радиоволн — радиомодем» (см. рис. 1.4) представляет собой «ненадежный» битовый тракт, в котором сложность физического радиоканала скрыта внутри тракта. Физический уровень связан с канальным уровнем через интерфейс.
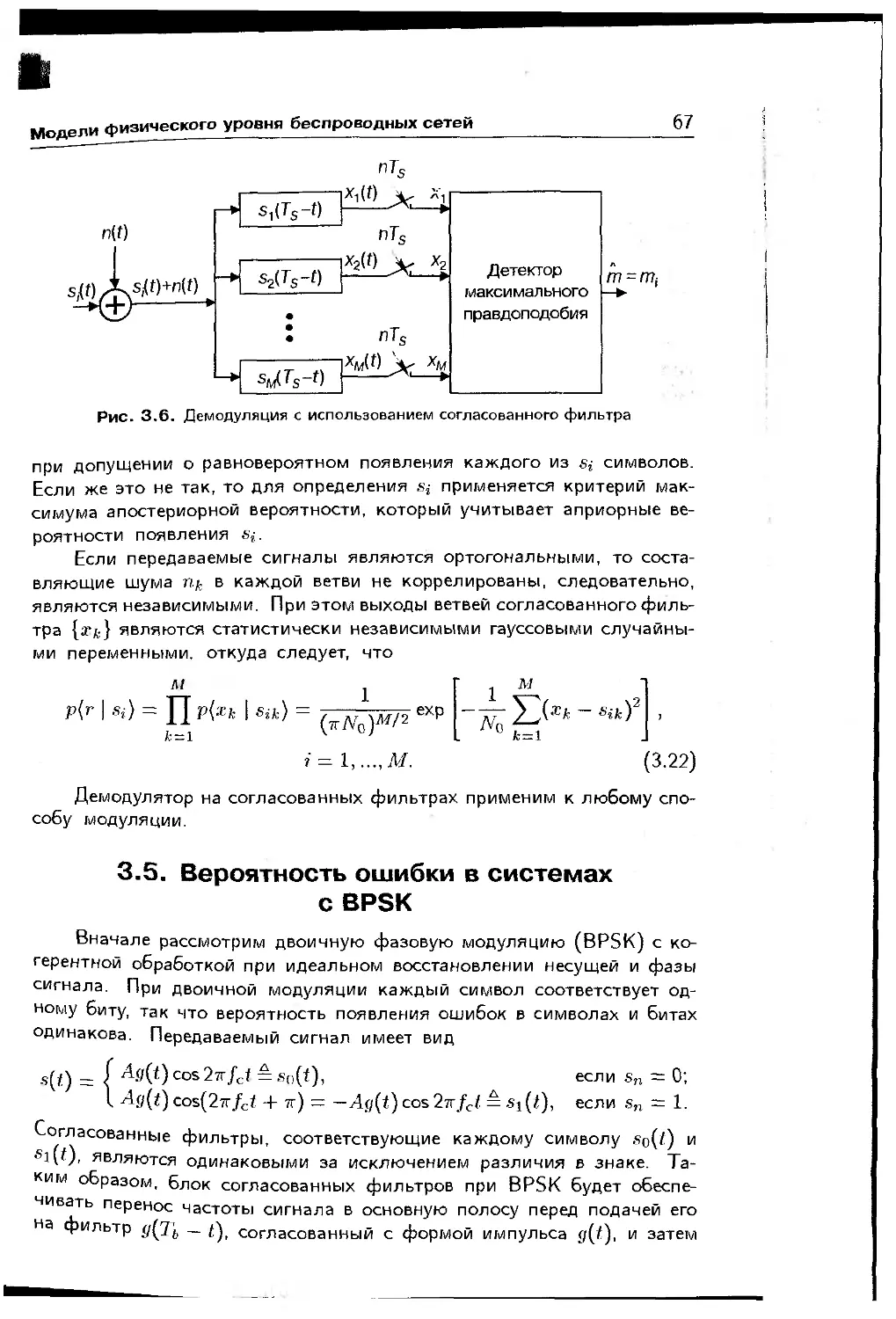
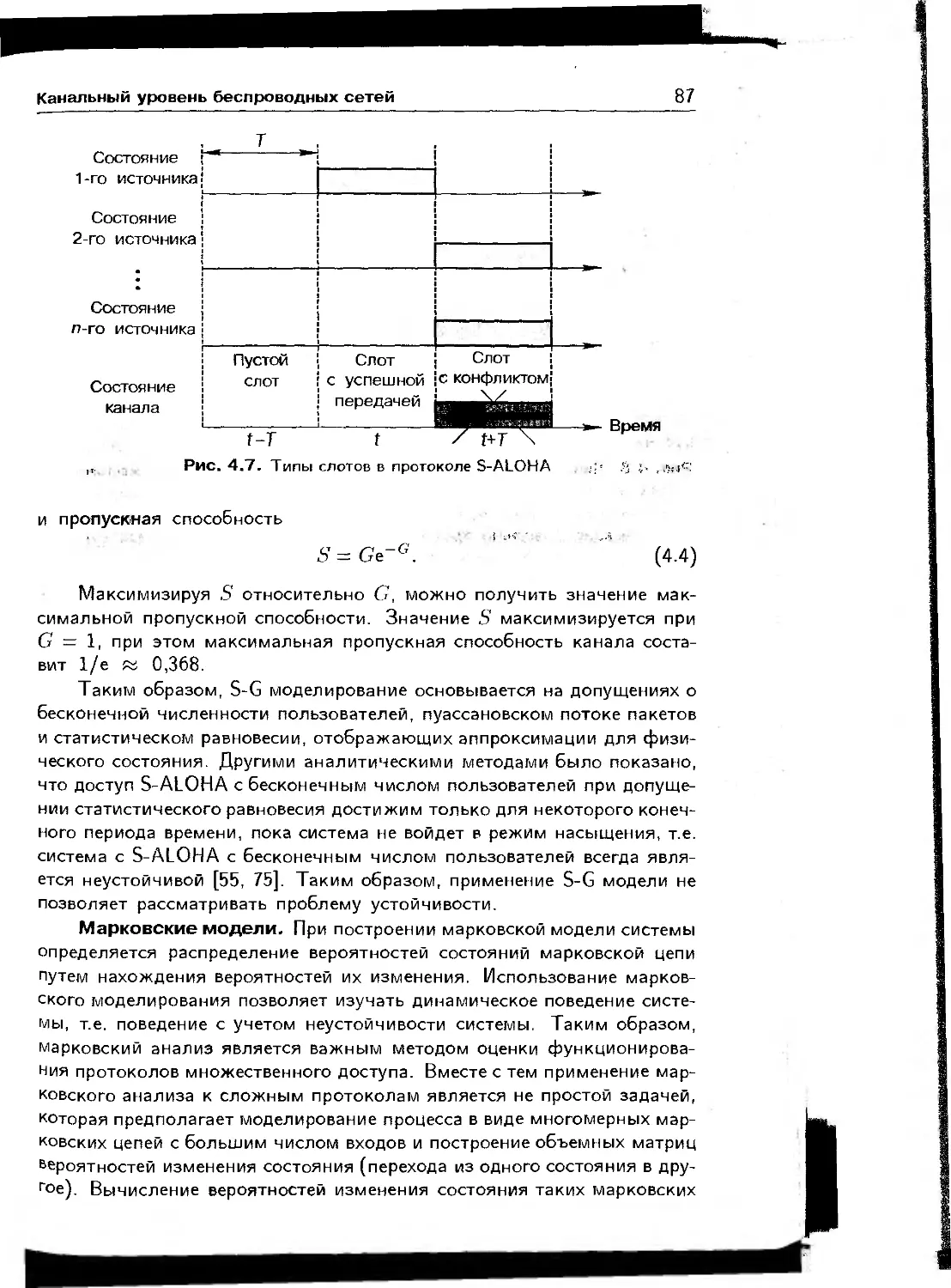
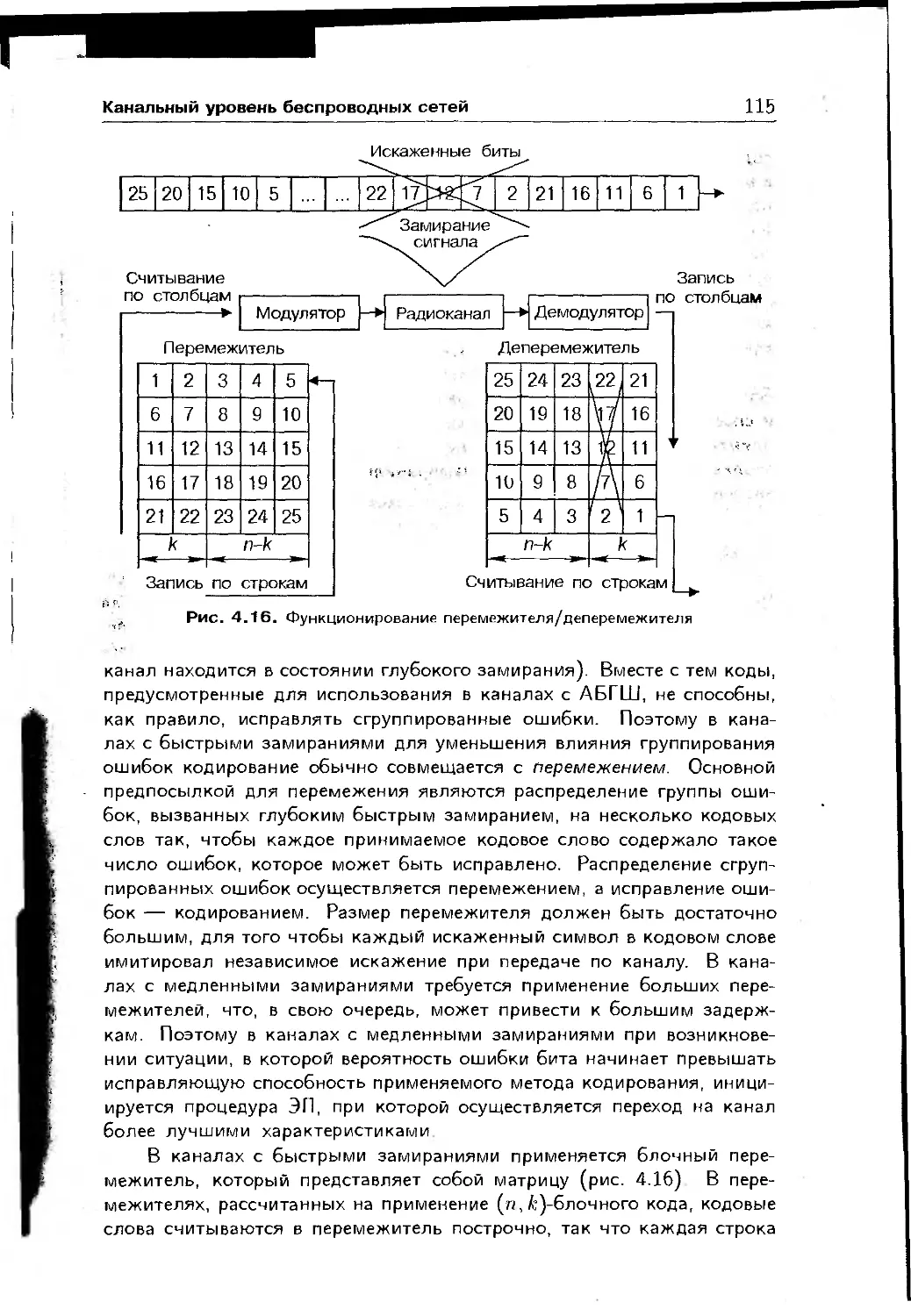
Канальный уровень
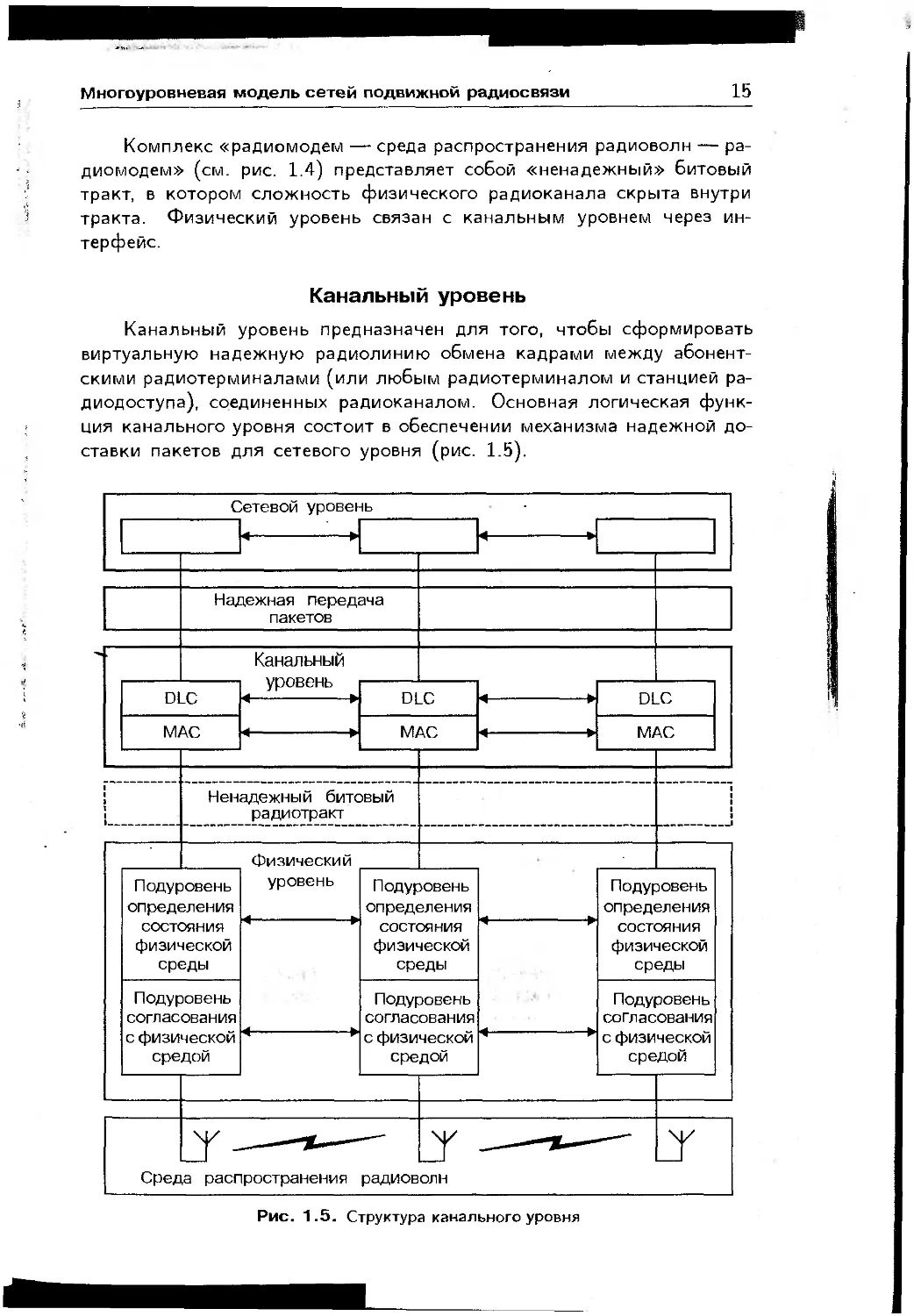
Канальный уровень предназначен для того, чтобы сформировать виртуальную надежную радиолинию обмена кадрами между абонентскими радиотерминалами (или любым радиотерминалом и станцией радиодоступа), соединенных радиоканалом. Основная логическая функция канального уровня состоит в обеспечении механизма надежной доставки пакетов для сетевого уровня (рис. 1.5).
Рис. 1.5. Структура канального уровня
Канальный уровень отвечает за организацию доступа к радиоканалу множества абонентов. В радиоканале с множественным доступом принятый каждой абонентской станцией (или базовой станцей) сигнал является элементом потока радиосигналов, передаваемых группой пользователей. Функции согласованного объединения и разделения радиосигналов многих пользователей возлагаются на подуровень (см. рис. 1.5) управления радиодоступом (МАС). На этом подуровне могут использоваться протоколы управления детерминированным доступом с частотным (МД-ЧР), временным (МДВК), кодовым (МДКР) разделением ресурсов, различные протоколы случайного множественного доступа (СМД) и протоколы гибридного множественного доступа (ГМД).
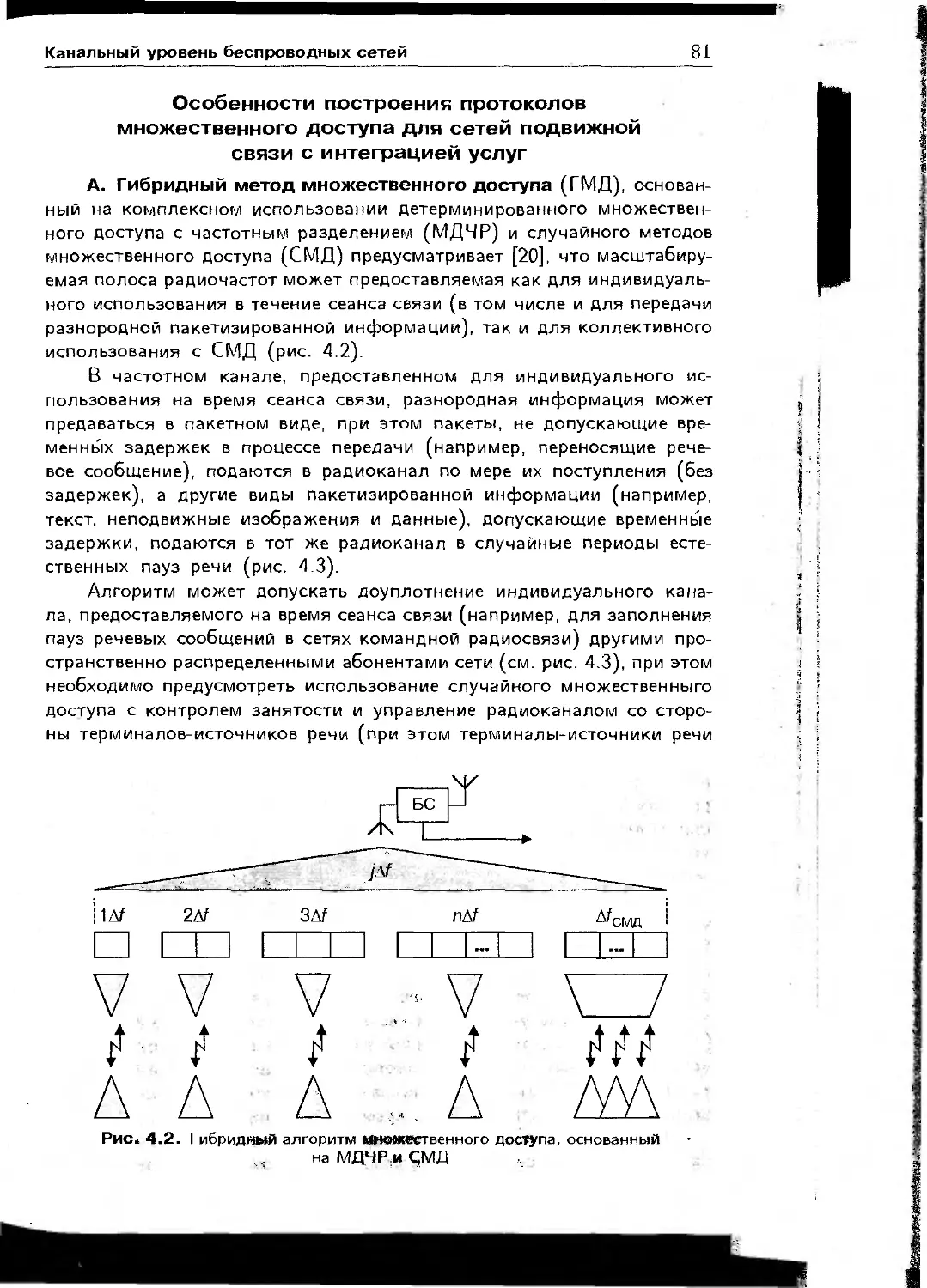
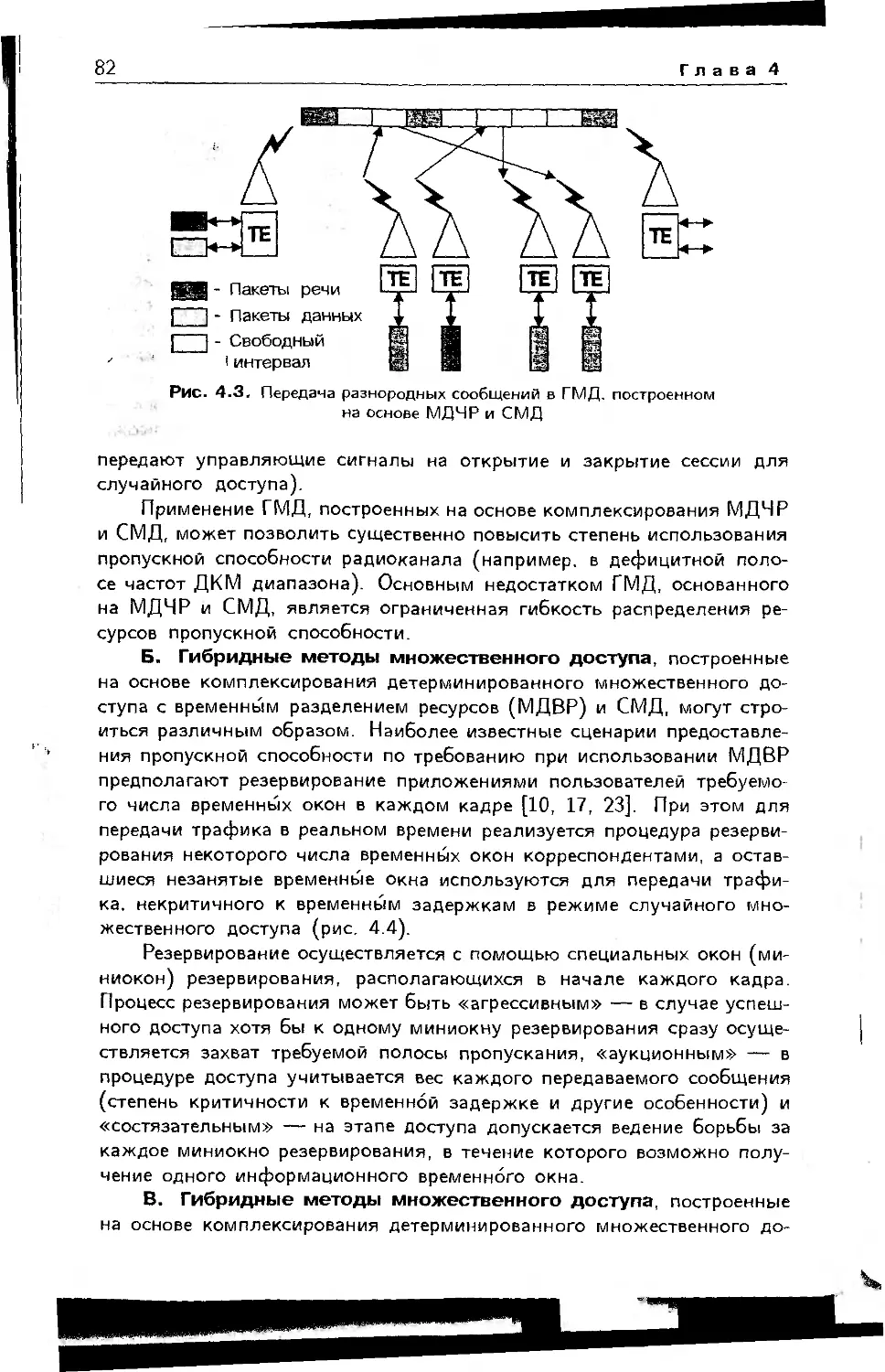
Особенностью протоколов ГМД является комплексирование детерминированного и случайного множественного доступов, что позволяет предоставлять мобильным пользователям более широкий спектр услуг, ориентированных как на коммутацию каналов, так и на коммутацию пакетов. В последнее время большое внимание уделяется разработке адаптивных протоколов ГМД, способных обеспечить мобильным пользователям интегральные услуги на основе предоставления масштабируемой полосы пропускания по запросу. Еще одной из важных особенностей протоколов ГМД является обеспечение высокой степени использования пропускной способности радиоканала.
Характерной чертой радиоканала является его общедоступность, которая, с одной стороны, обеспечивает возможность беспроводного доступа между множеством пространственно распределенных мобильных абонентов, а с другой — подвергается воздействию случайных и преднамеренных помех. Поэтому важнейшей функцией канального уровня является обеспечение требуемой достоверности обмена пакетами. Эта функция возлагается на подуровень управления цифровой радиолинией (Data Line Control, DLC). По существу передающий модуль DLC осуществляет обычное или помехоустойчивое адаптивное кодирование, а приемный модуль — операцию декодирования, в случае обнаружения неисправленных ошибок приемный модуль может инициировать процедуру повторной передачи искаженного пакета. Алгоритм, выполняющий эти задачи, распределен между паритетными модулями DLC, находящимися на обоих концах радиолинии. В протоколах канального уровня, используемых в локальных СПР, заложена определенная структура связей между абонентскими радиотерминалами и способами их адресации. Хотя канальный уровень и обеспечивает доставку пакета между любыми двумя оконечными устройствами локальной СПР, но делает это только в сети с определенной топологией связей (полнодоступной, радиальной, многоскачковой), для которой он был разработан. Канальный уровень функционирует в интересах предоставления услуг сетевому уровню.
Протокол канального уровня также должен предоставлять метку, обозначающую, к какому протоколу сетевого уровня относится инкапсулированная в кадр полезная информация и соответственно какой
из протоколов сетевого уровня должен обрабатывать пакет на станции-получателе. При отсутствии какой-либо метки логический объект-получатель канального уровня не будет иметь возможности определить, каким образом передавать содержимое кадра вверх по стеку протоколов.
Сетевой уровень
Организация сети беспроводной связи достаточно сложна Сеть должна находить конкретного пользователя среди миллионов распределенных по всему миру подвижных терминалов Она должна затем направить вызов пользователю, который может перемещаться со скоростью более 100 км/ч. Ограниченные ресурсы сети должна распределяться справедливо и эффективно при изменении потребностей и местоположения пользователей. Кроме того, в настоящее время имеется обширнейшая инфраструктура проводных сетей, системы телефонной связи, Интернет, волоконно-оптические системы, которые используются для подключения беспроводных систем к глобальной сети Сложнейшие процедуры поддержки мобильности и маршрутизации возлагаются на сетевой уровень.
Сетевой уровень реализует свои функции путем обмена сетевыми сервисными блоками при помощи сетевых соединений (датаграммных и виртуальных). При этом сетевые процедуры (протоколы сетевого уровня) реализуются на сети в целом, тесно связаны с ее топологией и процессами, затрагивающими обмен информацией между узлами коммутации. При этом большинство функций, реализуемых протоколом сетевого уровня, носит характер распределенных процедур. Распределенные процедуры состоят из одного или нескольких паритетных процессов на каждой из двух или более географически разнесенных точек. Паритетные процессы сетевого уровня имеют общую цель, которую они достигают совместно на основе обмена и обработки информации. Алгоритм достижения общей цели с помощью всех паритетных процессов является распределенным алгоритмом или протоколом.
Распределенный алгоритм состоит из множества локальных алгоритмов (ЛА), каждый из которых выполняется некоторым паритетным процессом. Локальный алгоритм, выполняемый одним из паритетных процессов, включает выполнение различных операций над имеющимися данными, кроме того, в различных точках алгоритма выполняется либо посылка данных одному или большему числу других паритетных процессов, либо чтение (или ожидание поступления) данных, посланным другим паритетным процессом.
В простейшем распределенном алгоритме порядок выполнения операций различными ЛА полностью детерминирован (один ЛА может выполнить несколько операций и передать результаты другому ЛА, который выполнит с ними некоторые операции и возвратит полученные результаты), в этом случае только один ЛА действует в каждый момент
П0Д1:1 /1.1 I I I 1. I r\ i У
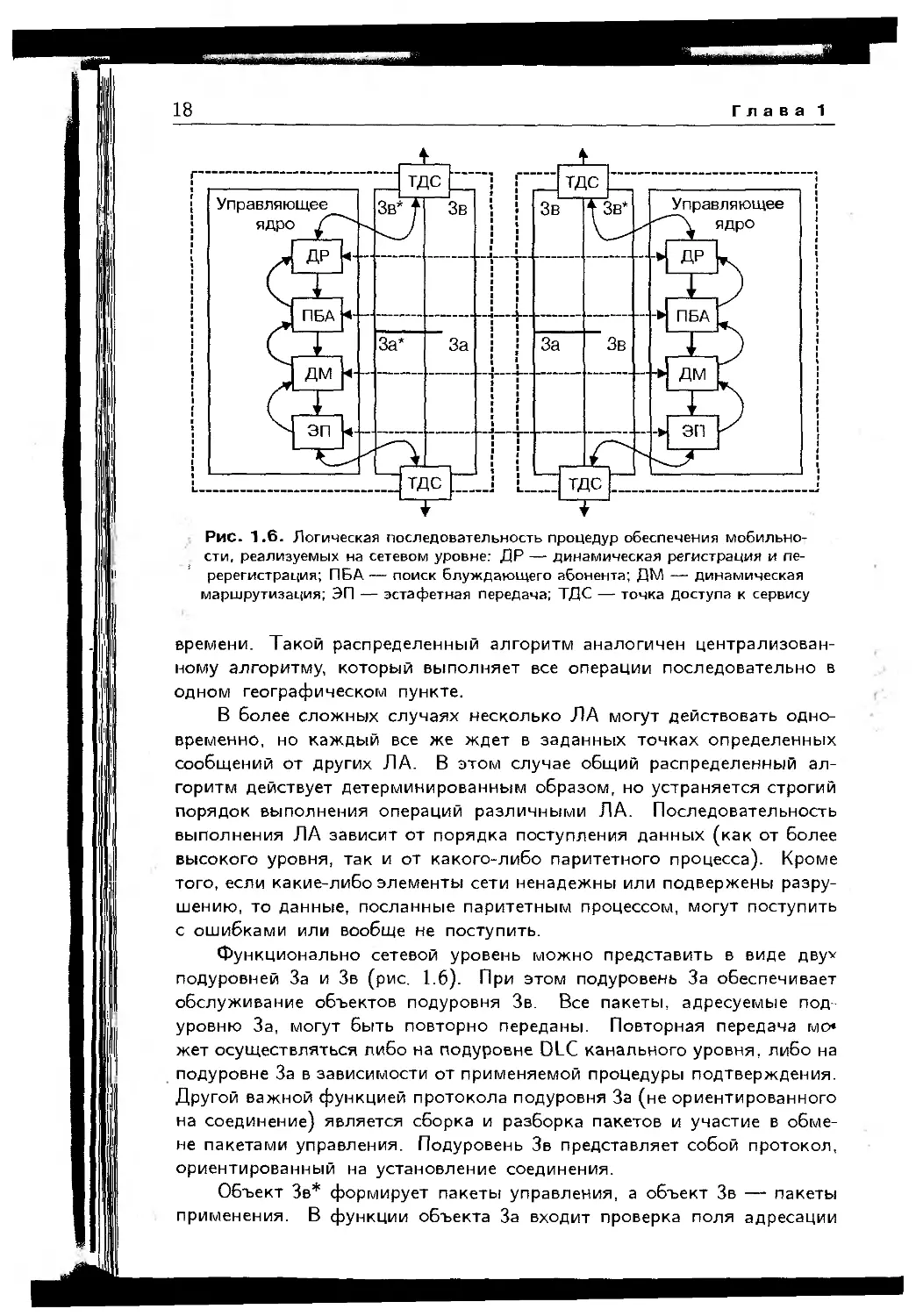
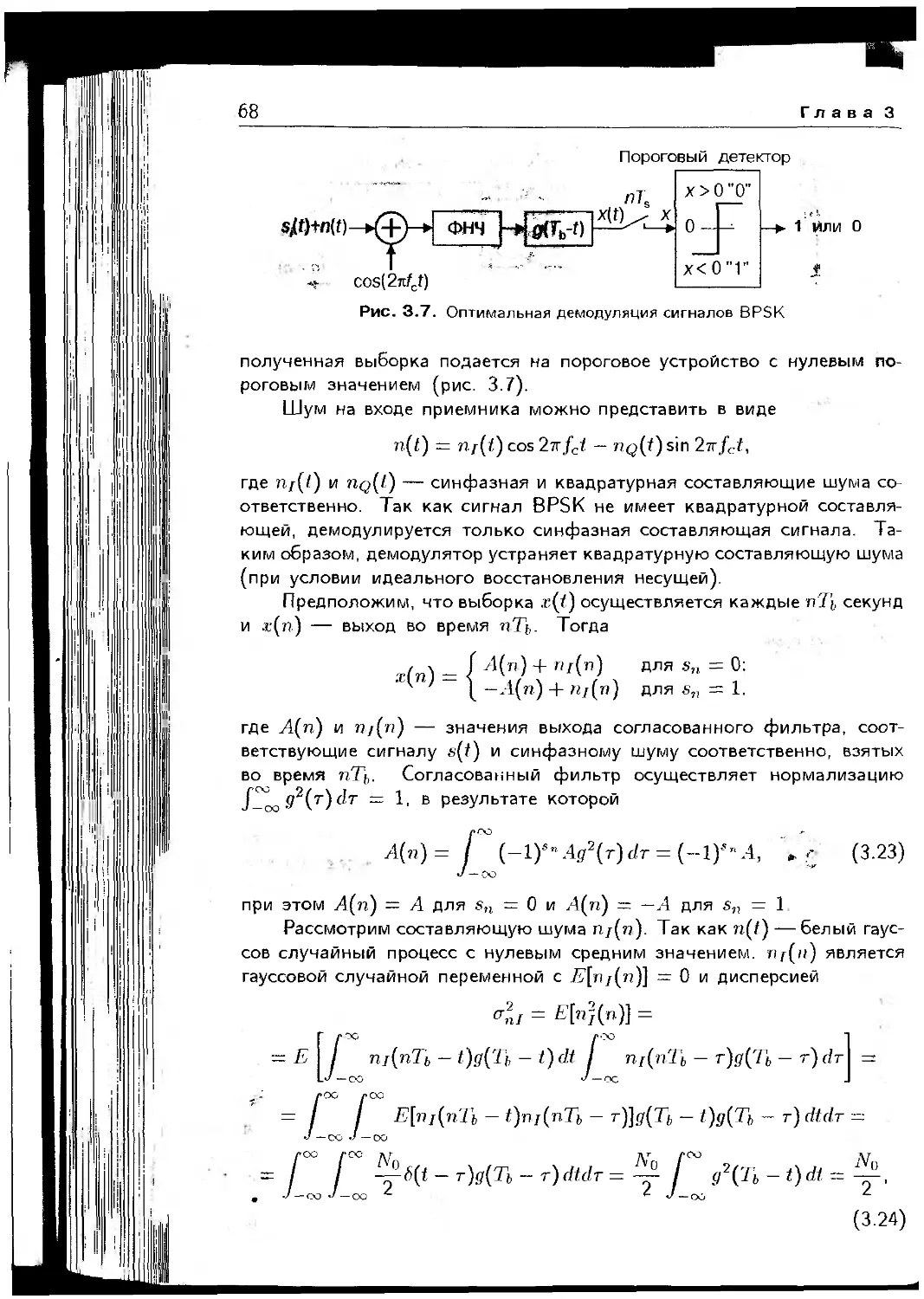
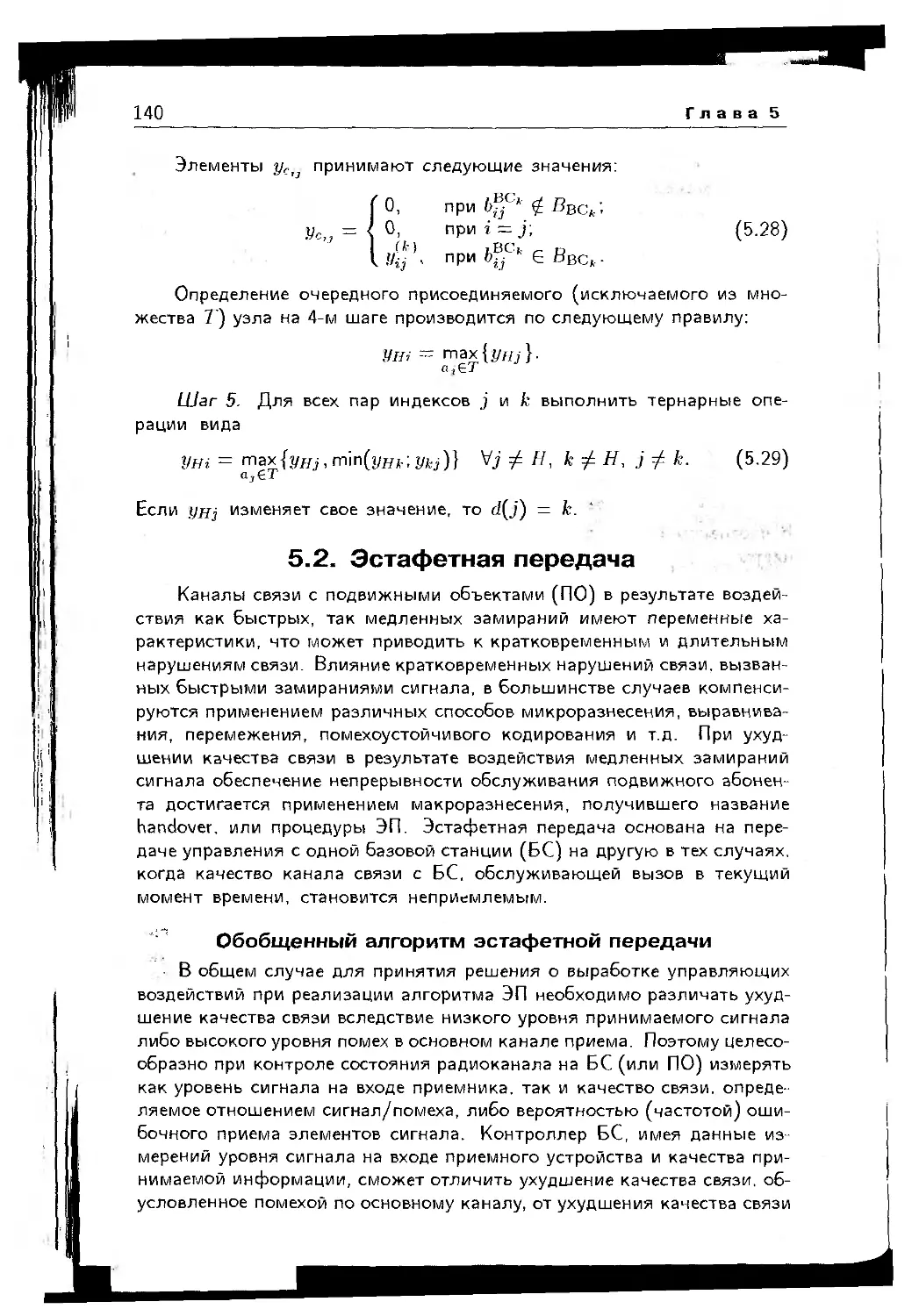
Рис. 1.6. Логическая последовательность процедур обеспечения мобильности, реализуемых на сетевом уровне: ДР — динамическая регистрация и перерегистрация; ПБА — поиск блуждающего абонента; ДМ — динамическая маршрутизация; ЭП — эстафетная передача; ТДС — точка доступа к сервису
времени. Такой распределенный алгоритм аналогичен централизованному алгоритму, который выполняет все операции последовательно в одном географическом пункте.
В более сложных случаях несколько ЛА могут действовать одновременно, но каждый все же ждет в заданных точках определенных сообщений от других ЛА. В этом случае общий распределенный алгоритм действует детерминированным образом, но устраняется строгий порядок выполнения операций различными ЛА. Последовательность выполнения ЛА зависит от порядка поступления данных (как от более высокого уровня, так и от какого-либо паритетного процесса). Кроме того, если какие-либо элементы сети ненадежны или подвержены разрушению, то данные, посланные паритетным процессом, могут поступить с ошибками или вообще не поступить.
Функционально сетевой уровень можно представить в виде двух подуровней За и Зв (рис. 1.6). При этом подуровень За обеспечивает обслуживание объектов подуровня Зв. Все пакеты, адресуемые подуровню За, могут быть повторно переданы. Повторная передача мо« жет осуществляться либо на подуровне DLC канального уровня, либо на подуровне За в зависимости от применяемой процедуры подтверждения. Другой важной функцией протокола подуровня За (не ориентированного на соединение) является сборка и разборка пакетов и участие в обмене пакетами управления. Подуровень Зв представляет собой протокол, ориентированный на установление соединения.
Объект Зв* формирует пакеты управления, а объект Зв — пакеты применения. В функции объекта За входит проверка поля адресации
всех пакетов, поступающих от одноуровневых объектов, чтобы различить пакеты управления и пакеты применения. Объект За* непосредственно взаимодействует с управляющим ядром и участвует в обмене пакетами управления, которые генерируются при реализации всех процедур поддержки мобильности. Протокол Зв использует услуги протокола За для осуществления процедур управления мобильностью (динамической регистрации и перерегистрации, поиска «блуждающих» абонентов, динамической маршрутизации и эстафетной передачи). Высокая сложность этих процедур в некоторых случаях (например, при реализации эстафетной передачи) усиливается необходимостью их параллельного и взаимосвязанного выполнения. В самом общем виде взаимосвязь процедур, реализуемых на сетевом уровне, представлена на рис. 1.6.
В проводных сетях процесс информационного обмена (с установлением соединения или без него) может быть осуществлен только в случае, если достоверно известны местоположения и адреса источника и получателя сообщений. Аналогично обстоит дело и в сетях связи, обслуживающих мобильных пользователей, но в этом случае требуется поддержка процедур регистрации и перерегистрации абонентов на базовых станциях (БС) сети (см. рис. 1.6), зоны обслуживания которых они пересекают.
При децентрализованном управлении сетью процесс установления соединения предполагает последовательное проведение процедур поиска «блуждающего» абонента (что возможно только в случае успешного проведения процедур регистрации и перерегистрации) и маршрутизации.
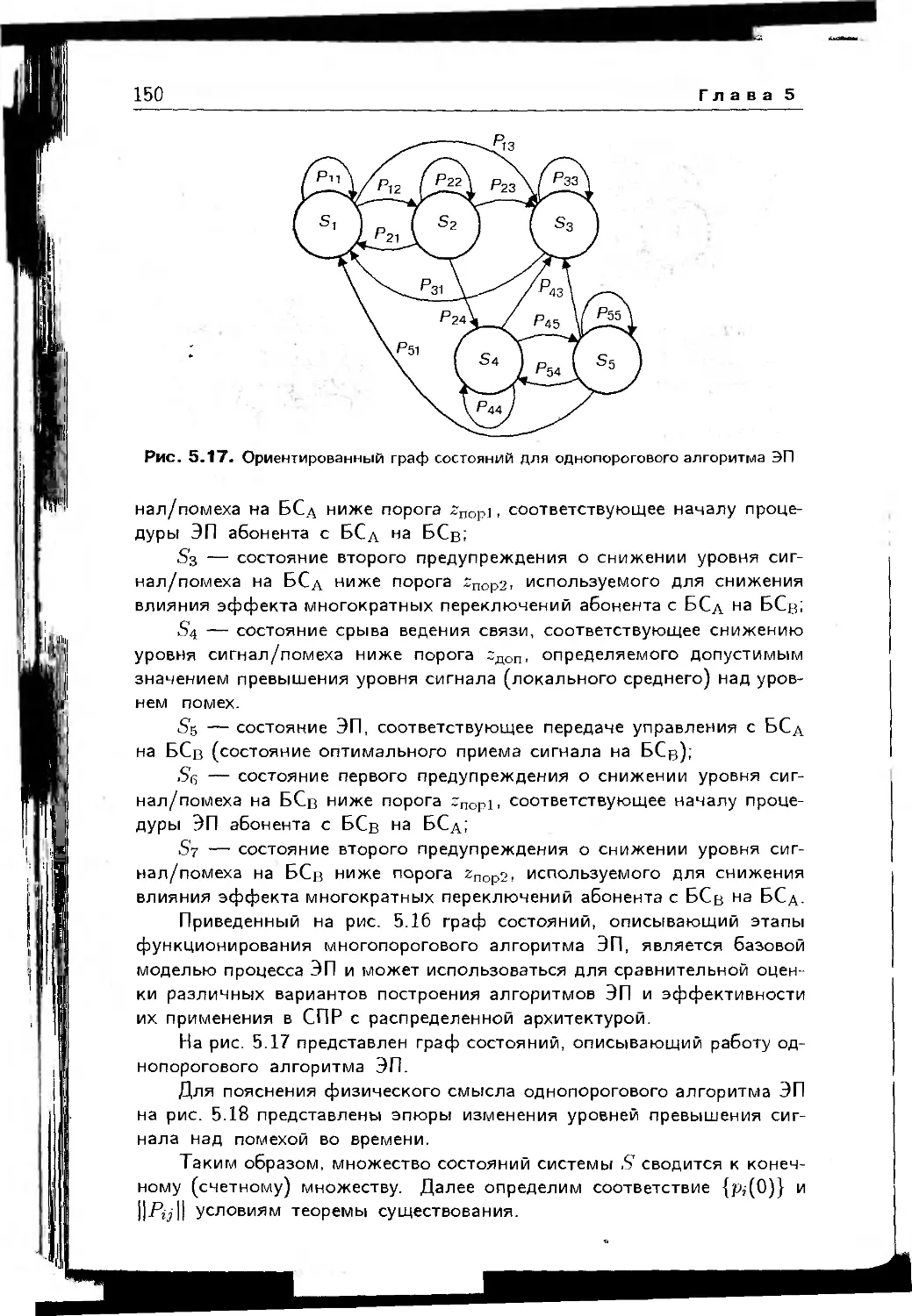
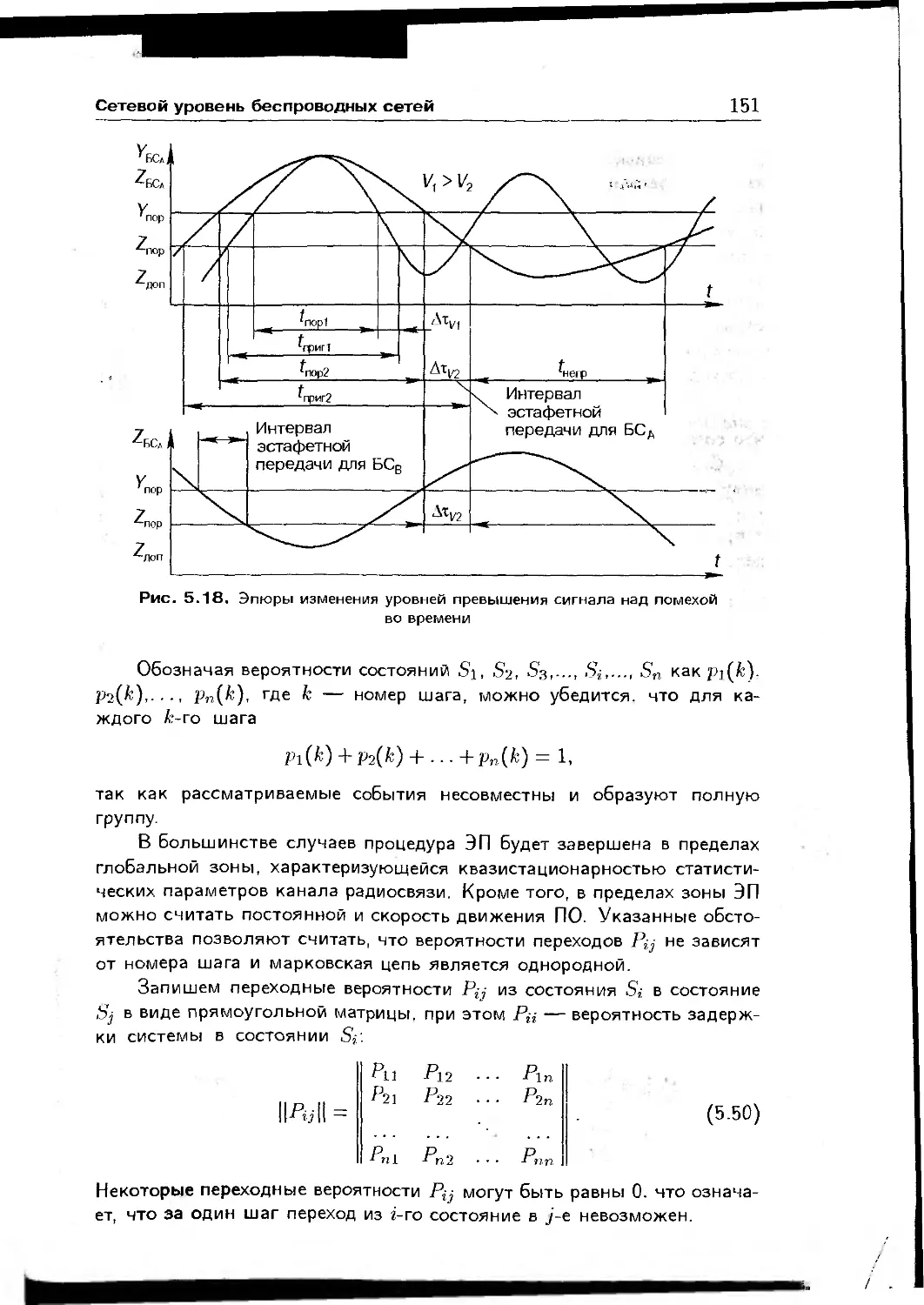
И наконец, возможность обеспечения непрерывного обслуживания абонентов обеспечивается путем реализации процедуры эстафетной передачи (ЭП) подвижного абонента при его перемещении из зоны обслуживания одной БС в другую.
Транспортный уровень
На пути от отправителя к получателю пакеты могут быть искажены или утеряны. Хотя некоторые приложения имеют собственные средства обработки ошибок, существуют и такие, которые ориентированы на надежное соединение. Работа транспортного уровня заключается в том, чтобы обеспечить приложениям или верхним уровням стека — прикладному и сеансовому — передачу данных с той степенью надежности, которая им требуется. Модель OSI определяет пять классов сервиса, предоставляемых транспортным уровнем. Эти виды сервиса отличаются качеством предоставляемых услуг: срочностью, возможностью восстановления прерванной связи, наличием средств мультиплексирования нескольких соединений между различными прикладными протоколами через общий транспортный протокол, а главное — способностью к обнаружению и исправлению ошибок передачи, таких как искажение, потеря и дублирование пакетов.
Выбор класса сервиса транспортного уровня определяется, с одной стороны, тем, в какой степени задача обеспечения надежности реша
ется самими приложениями и протоколами более высоких, чем транспортный, уровней, а с другой стороны, этот выбор зависит от того, насколько надежной является вся система транспортировки данных в СПР. Так как транспортные средства СПР изначально относятся к категории ненадежных, целесообразно обратиться к наиболее развитому сервису транспортного уровня, который работает, используя максимум средств для обнаружения и устранения ошибок — с помощью предварительного установления логического соединения, контроля доставки сообщений с помощью контрольных сумм и циклической нумерации пакетов, установления тайм-аутов доставки и т.п.
Как правило, все протоколы, начиная с транспортного уровня и выше, поддерживаются программными средствами абонентских радиотерминалов — компонентами их сетевых операционных систем.
Сеансовый уровень
Сеансовый уровень обеспечивает управление диалогом для того, чтобы фиксировать, какая из сторон является активной в настоящий момент, а также предоставляет средства синхронизации. Последние позволяют вставлять контрольные точки в длинные передачи, чтобы в случае отказа можно было вернуться назад к последней контрольной точке вместо того, чтобы начинать все с начала. В каждом случае созданный протокол сеансового уровня узкоспециализирован для конкретного применения. Пока не существует всесторонне полезного набора элементов протокола сеансового уровня, который мог бы послужить широкому кругу приложений, и лучшим решением является разработка новых сеансовых протоколов по мере надобности.
Уровень представления
Этот уровень обеспечивает информационную прозрачность различных прикладных уровней СПР, а именно гарантирует то. что информация, передаваемая прикладным уровнем, будет понятна прикладному уровню в другой системе. При необходимости уровень представления на передаче выполняет преобразование форматов данных в некоторый общий формат представления, а на приеме выполняет обратное преобразование. Таким образом, прикладные уровни могут преодолеть, например, синтаксические различия в представлении данных. На этом уровне могут выполняться сжатие, шифрование и почти любое другое мыслимое преобразование прикладного потока данных, которое может быть вообще полезным (возможна также поддержка представлений, специфических для конкретных приложений).
Прикладной уровень
Прикладной уровень — это в действительности просто набор разнообразных протоколов, с помощью которых пользователи СПР могут
получать доступ к разделяемым ресурсам, а также организовать совместную работу, например, с помощью протокола электронной почты. Единица данных, с которой оперирует прикладной уровень, обычно называется сообщением. Существует очень большое разнообразие протоколов прикладного уровня.
Прикладные процессы
Прикладные процессы выполняет обработку данных для нужд одного или группы пользователей. Они являются основными, все остальные процессы в сети выполняют вспомогательную роль. Функции, реализуе мые в области прикладных процессов, могут быть как простыми, например, передача речевых сообщений, данных, изображений, сигналов навигации, опознавания, ориентирования и т.д., так и чрезвычайно сложными, например, управление экономическими, политическими, образовательными, научными, военными и другими сложными явлениями в целом. В последнем случае прикладные процессы задают конкретную ориентацию СПР и определяют ее структурно-функциональную архитектуру.
Абстрактная многоуровневая модель является ключевой при разработке как отдельных сетевых устройств, так и сетей в целом. С ее помощью невыполнимая задача синтеза и анализа целой сети может быть разбита на несколько меньших по размеру и вполне разрешимых задач, а именно разработки моделей алгоритмов протоколов индивидуальных уровней, их отдельное и совместное исследование, совершенствование (модернизация) и внедрение.
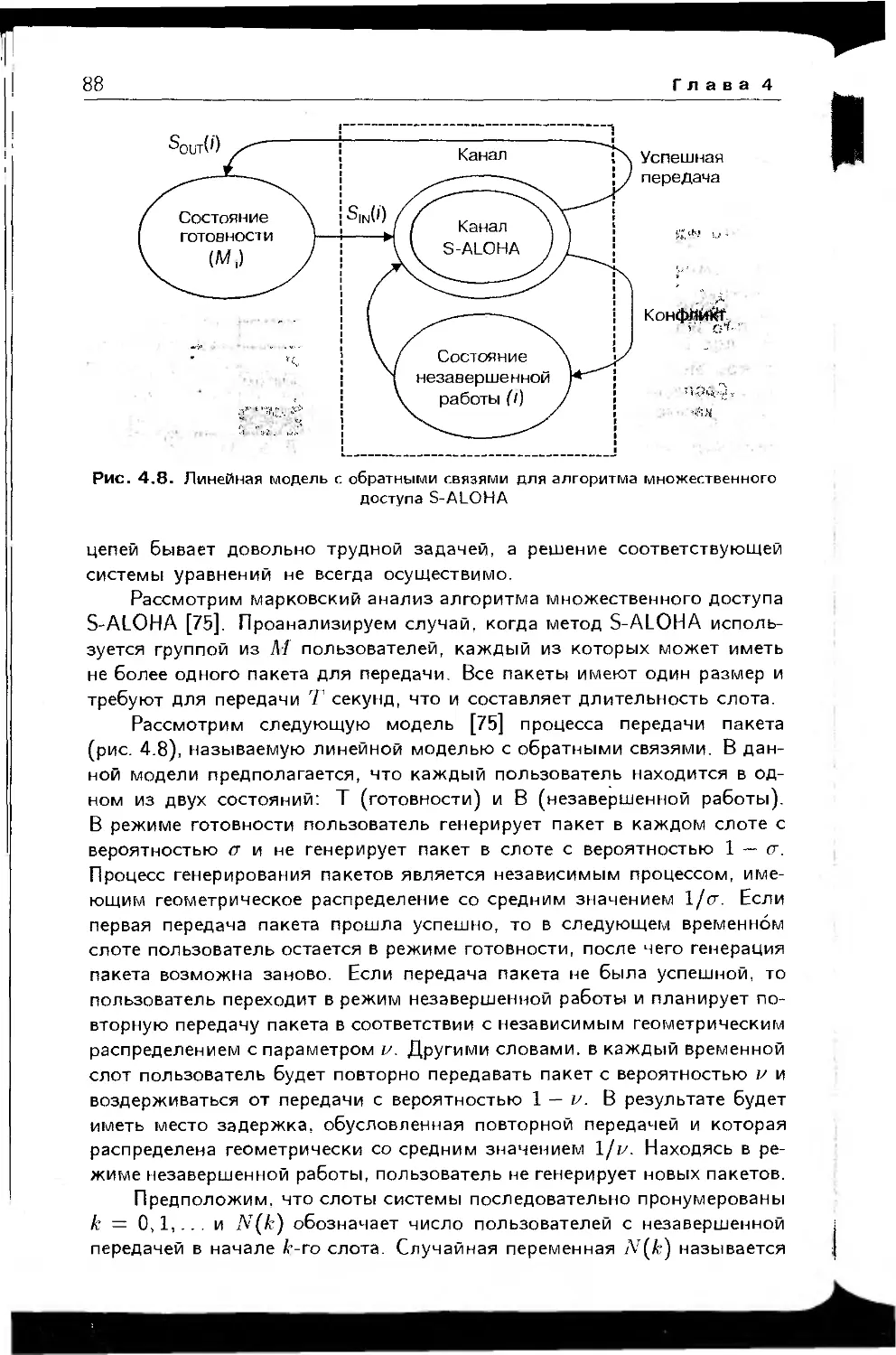
1.2. Логическая архитектура абонентских радиотерминалов и станций радиодоступа
Особенностями абонентских радиотерминалов СПР с ППl/l являются пакетный радиоинтерфейс и преимущественно программная реализация процессов формирования и обработки цифровой информации. Эти особенности определяют универсальность возможностей радиотерминалов по обмену в общедоступном радиоканале разнородной нагрузкой, которая разделяется на основе отличительных признаков, закладываемых в заголовки пакетов. Таким образом, общее пакетное представление информации формирует широкие возможности по обслуживанию интегральной нагрузки мобильных пользователей. Абонентский радиотерминал (APT) СПР с ППИ может являться многофункциональным устройством, обеспечивающим функции хранения, обработки, распределения и защиты информации и способным поддерживать как текущие, так и перспективные информационные потребности мобильных пользователей.
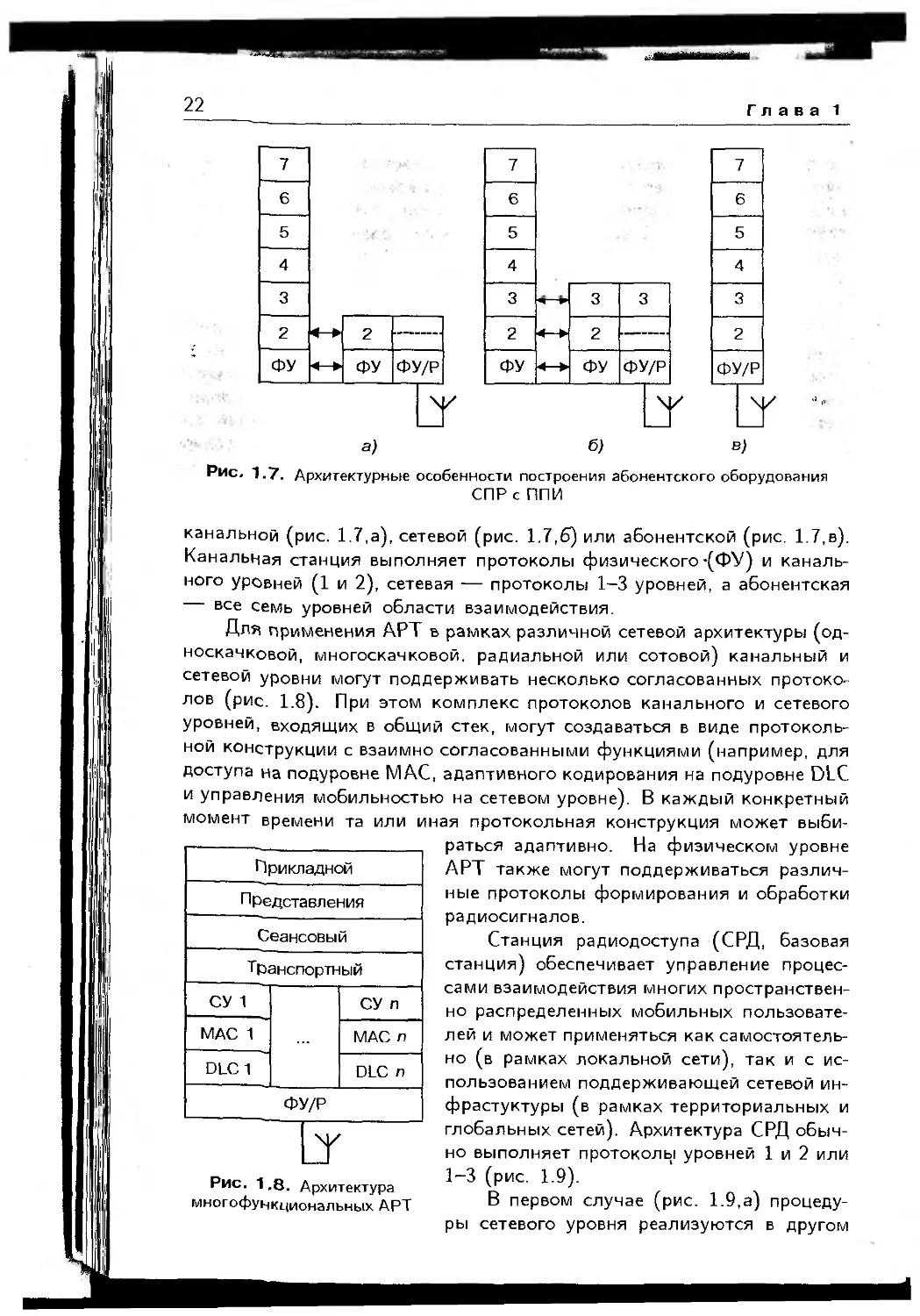
Для расширения возможностей по реализации прикладных процессов APT может содержать две части: терминальное оборудование и радиостанцию Р (рис. 1.7,а и 6). На радиостанцию могут возлагаться Функции реализации протоколов только нижних или всех уровней. В зависимости от числа реализуемых протоколов радиостанция может быть
Рис. 1.7. Архитектурные особенности построения абонентского оборудования СПР с ППИ
канальной (рис. 1.7,а), сетевой (рис. 1.7,6) или абонентской (рис. 1.7,в). Канальная станция выполняет протоколы физического-(ФУ) и канального уровней (1 и 2), сетевая — протоколы 1-3 уровней, а абонентская все семь уровней области взаимодействия.
Для применения APT в рамках различной сетевой архитектуры (од-носкачковой, многоскачковой. радиальной или сотовой) канальный и сетевой уровни могут поддерживать несколько согласованных протоколов (рис. 1.8). При этом комплекс протоколов канального и сетевого уровней, входящих в общий стек, могут создаваться в виде протокольной конструкции с взаимно согласованными функциями (например, для доступа на подуровне МАС, адаптивного кодирования на подуровне DLC и управления мобильностью на сетевом уровне). В каждый конкретный момент времени та или иная протокольная конструкция может выби-
раться адаптивно. На физическом уровне APT также могут поддерживаться различные протоколы формирования и обработки радиосигналов.
Станция радиодоступа (СРД, базовая станция) обеспечивает управление процессами взаимодействия многих пространственно распределенных мобильных пользователей и может применяться как самостоятельно (в рамках локальной сети), так и с использованием поддерживающей сетевой ин-фрастуктуры (в рамках территориальных и глобальных сетей). Архитектура СРД обычно выполняет протоколы уровней 1 и 2 или 1-3 (рис. 1.9).
В первом случае (рис. 1.9,а) процеду-
Рис. 1.8. Архитектура многофункциональных APT
ры сетевого уровня реализуются в другом
Рис .1.9. Варианты построения архитектуры СРД
устройстве (например, коммутаторе мобильной сети). Во втором случае (рис. 1.9,6) СРД может совмещать функции коммутации. Станция радиодоступа может поддерживать один (рис. 1.9,а) или несколько (рис. 1.9,6) стеков протоколов.
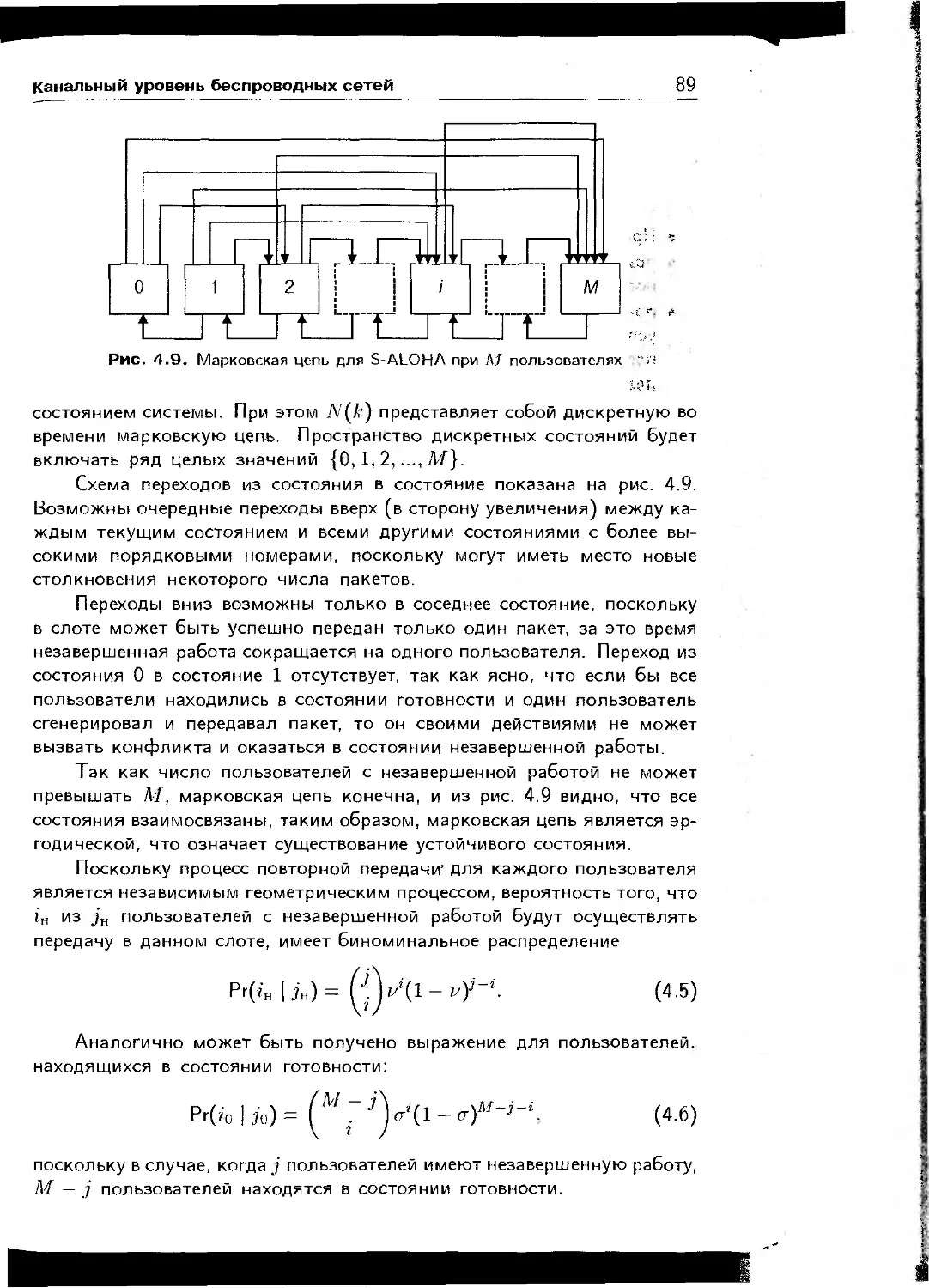
1.3. Обобщенная логическая архитектура локальных сетей
Локальные сети подвижной радиосвязи (ЛСПР) поддерживают локальную мобильность пользователей, охватывают небольшое географическое пространство и характеризуются возможностью обеспечения до-саточно высокой скорости передачи. При применении в иерархической системе управления ЛСПР обычно является принадлежностью системы управления конкретного уровня иерархии и функционально ориентирована на решение его задач. Наиболее широкое применение находят три конфигурации локальных сетей:
• односкачковая сеть (все пользователи находятся в общей зоне электромагнитной доступности и осуществляют обмен сообщениями по принципу каждый с каждым);
• многоскачковая сеть (пользователи обмениваются пакетами через несколько промежуточных радиотерминалов);
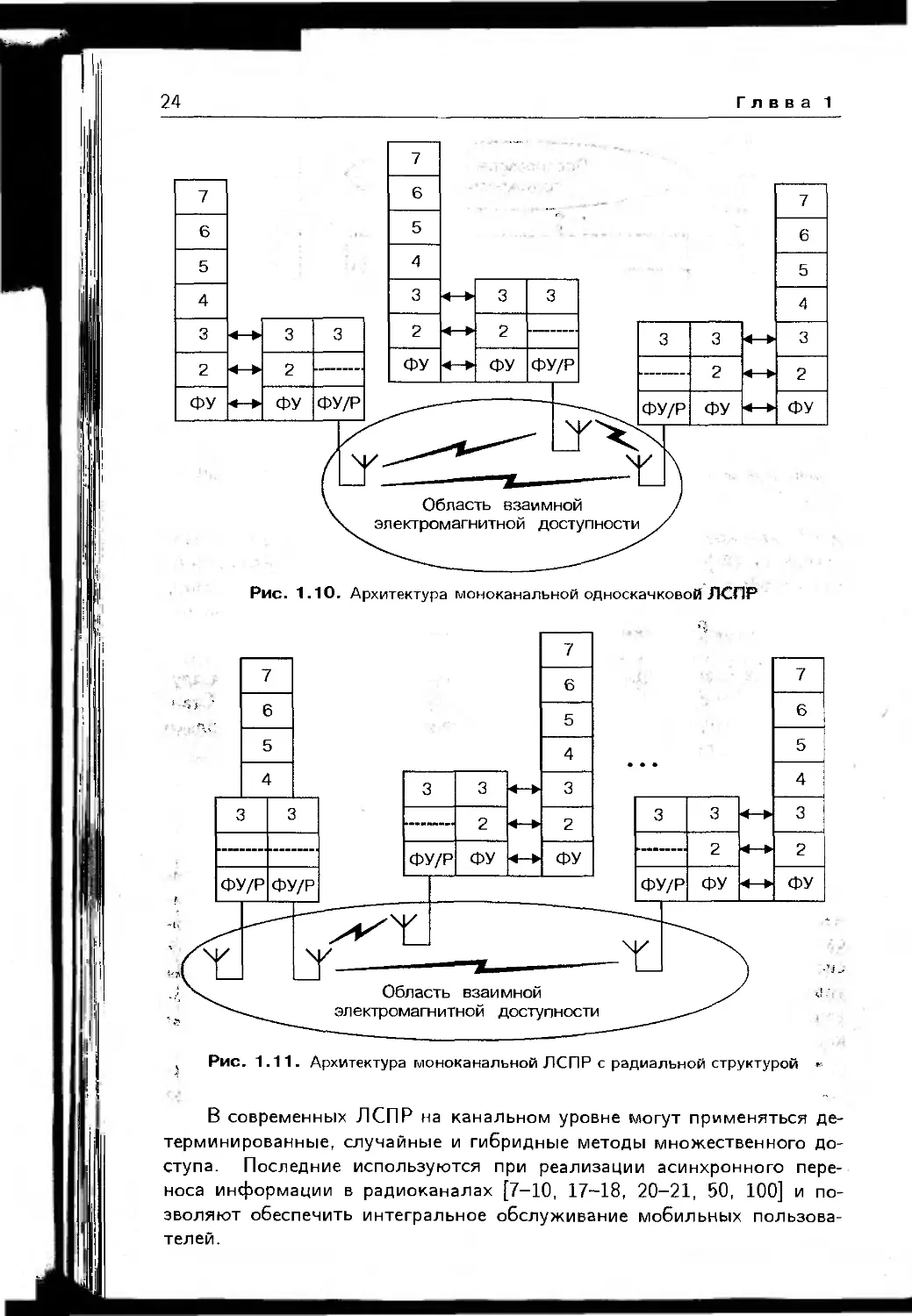
• звездообразная (радиальная) сеть, в которой весь информационный обмен осуществляется через центральную (базовую) станцию или точку доступа (рис. 1.10-1.12).
Рис. 1.11. Архитектура моноканальной ЛСПР с радиальной структурой ••
В современных ЛСПР на канальном уровне могут применяться детерминированные, случайные и гибридные методы множественного доступа. Последние используются при реализации асинхронного переноса информации в радиоканалах [7-10, 17-18, 20-21, 50, 100] и позволяют обеспечить интегральное обслуживание мобильных пользователей.
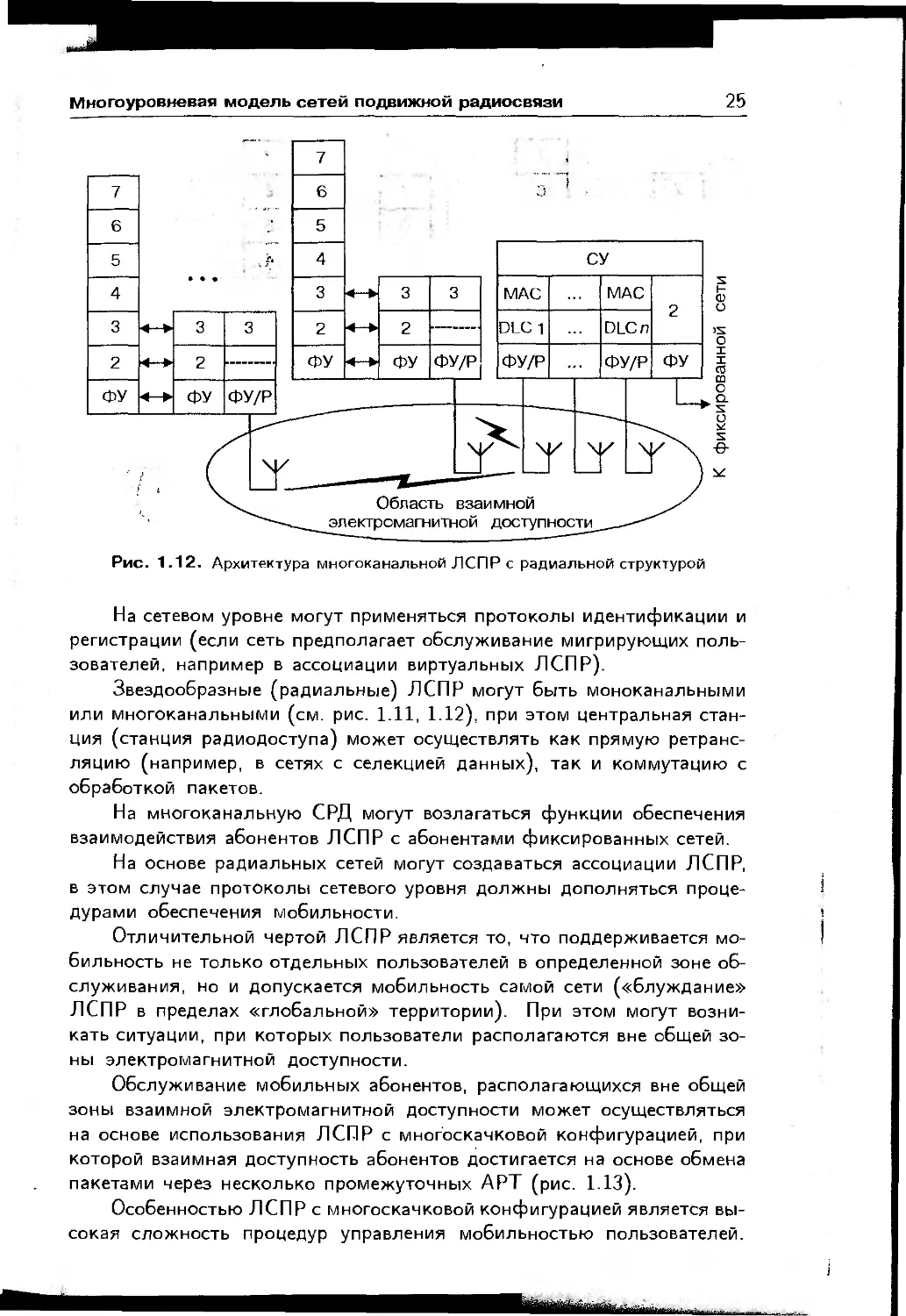
Рис. 1.12. Архитектура многоканальной ЛСПР с радиальной структурой
На сетевом уровне могут применяться протоколы идентификации и регистрации (если сеть предполагает обслуживание мигрирующих пользователей, например в ассоциации виртуальных ЛСПР).
Звездообразные (радиальные) ЛСПР могут быть моноканальными или многоканальными (см. рис. 1.11, 1.12), при этом центральная станция (станция радиодоступа) может осуществлять как прямую ретрансляцию (например, в сетях с селекцией данных), так и коммутацию с обработкой пакетов.
На многоканальную СРД могут возлагаться функции обеспечения взаимодействия абонентов ЛСПР с абонентами фиксированных сетей.
На основе радиальных сетей могут создаваться ассоциации ЛСПР, в этом случае протоколы сетевого уровня должны дополняться процедурами обеспечения мобильности.
Отличительной чертой ЛСПР является то, что поддерживается мобильность не только отдельных пользователей в определенной зоне обслуживания, но и допускается мобильность самой сети («блуждание» ЛСПР в пределах «глобальной» территории). При этом могут возникать ситуации, при которых пользователи располагаются вне общей зоны электромагнитной доступности.
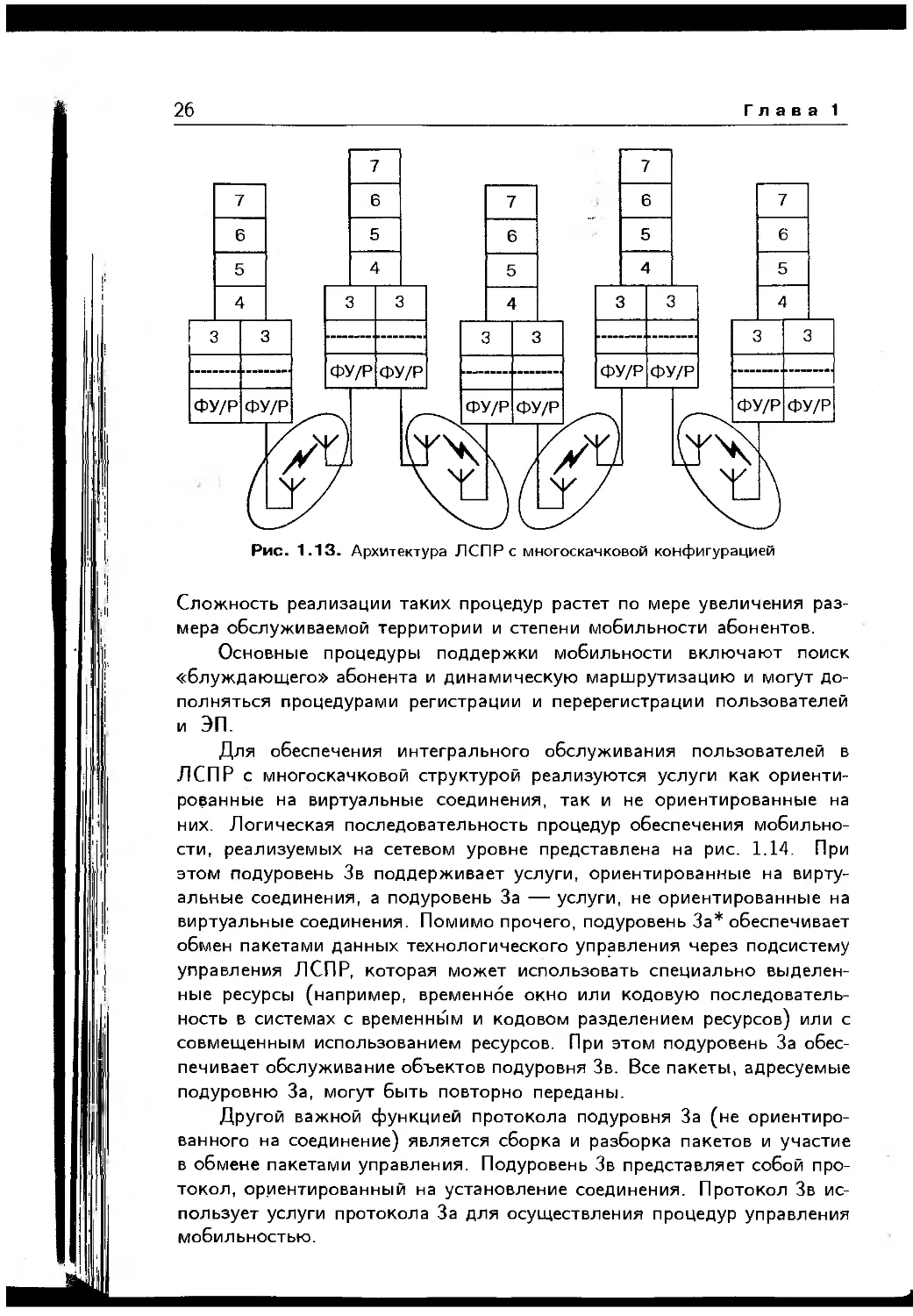
Обслуживание мобильных абонентов, располагающихся вне общей зоны взаимной электромагнитной доступности может осуществляться на основе использования ЛСПР с многоскачковой конфигурацией, при которой взаимная доступность абонентов достигается на основе обмена пакетами через несколько промежуточных APT (рис. 1.13).
Особенностью ЛСПР с многоскачковой конфигурацией является высокая сложность процедур управления мобильностью пользователей.
Сложность реализации таких процедур растет по мере увеличения размера обслуживаемой территории и степени мобильности абонентов.
Основные процедуры поддержки мобильности включают поиск «блуждающего» абонента и динамическую маршрутизацию и могут дополняться процедурами регистрации и перерегистрации пользователей и ЭП.
Для обеспечения интегрального обслуживания пользователей в ЛСПР с многоскачковой структурой реализуются услуги как ориентированные на виртуальные соединения, так и не ориентированные на них. Логическая последовательность процедур обеспечения мобильности, реализуемых на сетевом уровне представлена на рис. 1.14. При этом подуровень Зв поддерживает услуги, ориентированные на виртуальные соединения, а подуровень За — услуги, не ориентированные на виртуальные соединения. Помимо прочего, подуровень За* обеспечивает обмен пакетами данных технологического управления через подсистему управления ЛСПР, которая может использовать специально выделенные ресурсы (например, временное окно или кодовую последовательность в системах с временным и кодовом разделением ресурсов) или с совмещенным использованием ресурсов. При этом подуровень За обеспечивает обслуживание объектов подуровня Зв. Все пакеты, адресуемые подуровню За, могут быть повторно переданы.
Другой важной функцией протокола подуровня За (не ориентированного на соединение) является сборка и разборка пакетов и участие в обмене пакетами управления. Подуровень Зв представляет собой протокол, ориентированный на установление соединения. Протокол Зв использует услуги протокола За для осуществления процедур управления мобильностью.
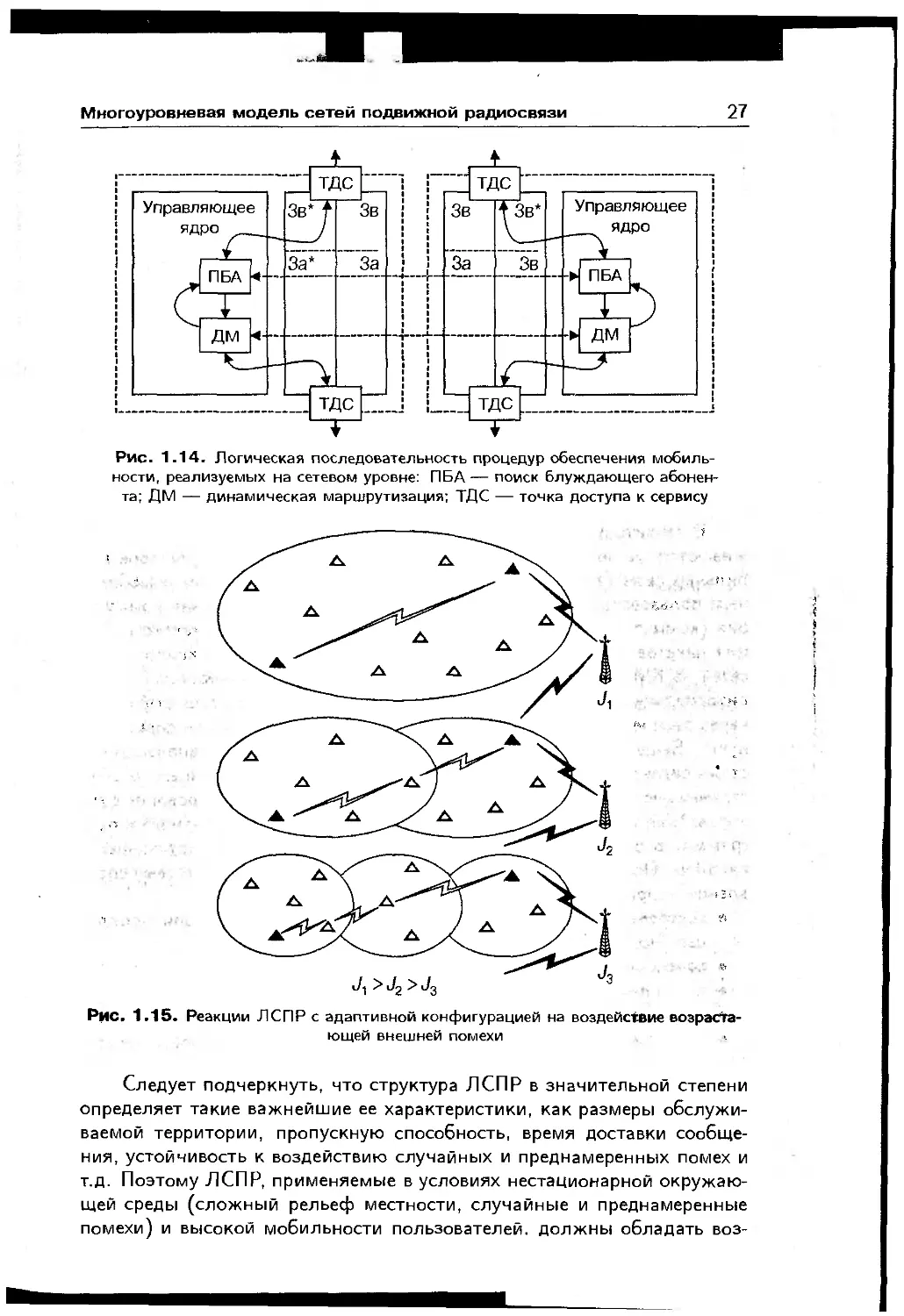
Рис. 1.14. Логическая последовательность процедур обеспечения мобильности, реализуемых на сетевом уровне: ПБА — поиск блуждающего абонента; ДМ — динамическая маршрутизация; ТДС — точка доступа к сервису
Рис. 1,15. Реакции ЛСПР с адаптивной конфигурацией на воздействие возрастающей внешней помехи
Следует подчеркнуть, что структура ЛСПР в значительной степени определяет такие важнейшие ее характеристики, как размеры обслуживаемой территории, пропускную способность, время доставки сообщения, устойчивость к воздействию случайных и преднамеренных помех и т.д. Поэтому ЛСПР, применяемые в условиях нестационарной окружающей среды (сложный рельеф местности, случайные и преднамеренные помехи) и высокой мобильности пользователей, должны обладать воз
можностью к адаптации ее структуры к изменяющимся внешним условиям. К категории таких ЛСПР относятся ЛСПР с многоскачковой конфигурацией, адаптация структуры которых заложена в протоколах сетевого уровня (в протоколе динамической маршрутизации).
При воздействии возрастающей помехи (рис. 1.15) происходит сокращение зон взаимной ЭМ доступности APT (изменение связности абонентов сети), что отражается в периодически обновляемых таблицах маршрутизации. Для обновления таблиц маршрутизации на сетевой уровень возлагаются функции периодического сбора информации о взаимной связности APT.
1.4. Обобщенная логическая архитектура территориальных сетей подвижной радиосвязи
В территориальных СПР функции мобильности абонентов поддерживаются посредством взаимодействия APT, СРД и коммутаторов мобильных сетей (КМС). Для предоставления интегральных услуг мобильным пользователям в КМС может поддерживаться гибридная коммутация (коммутация каналов и коммутация пакетов) или чистая коммутация пакетов. Кроме того, в отличие от коммутаторов фиксированных сетей на КМС возлагаются функции управления мобильностью. В территориальных СПР функции поддержки мобильности осуществляются через распределенную систему управления (выделенную или совмещенную). Выделенная система управления (например, общеканальная система сигнализация) представляет собой сеть передачи данных, осуществляющую технологическое управление сетью. Функционирование сети управления обеспечивается с помощью специального аппаратного и программного обеспечения по отдельным (физическим или виртуальным) каналам. Основными функциями, которые возлагаются на систему управления территориальных СПР, являются:
• обеспечение динамической регистрации и перерегистрации мобильных пользователей:
• поиск «блуждающих» абонентов;
• динамическая маршрутизация;
• коммутация; «
• поддержка непрерывности обслуживания мобильных абонентов (эстафетная передача).
Взаимосвязь элементов (APT. СРД. КМС) территориальной СПР представлена на рис. 1.16.
В существующих СПР каналы управления (каналы сигнализации) обеспечивают передачу сигналов взаимодействия по сети управления (сети сигнализации) через транзитные сигнальные узлы коммутации (СУК) (см. рис. 1.16). На оконечных (и транзитных) коммутаторах мобильной сети (ОКМС и ТКМС) на основе использования возможностей
элементов системы управления — сигнальных точек (СТ) и СУК — реализуются процедуры управления мобильностью и осуществляется управление коммутацией.
С помощью системы сигнализации осуществляется как управление мобильностью (динамическая адресация, регистрация и перерегистрация мобильных пользователей, поиск блуждающего абонента, эстафетная передача), так и стандартные функции управления сетью (распределение сетевых ресурсов, выбор направлений и составление виртуальных каналов, установление, поддержка и прекращение функционирования соединений на сетевом уровне и т.д.). В самом общем виде модель взаимодействия элементов сети и системы управления территориальных СПР с ППИ представлена на рис. 1.17.
В верхней части рис. 1.17 отображена архитектура плоскости (уровня) пользователя, которая включает соответствующие компоненты (APT, СРД, КМС и КФС). В нижней части показана архитектура плоскости управления, содержащая сетевое управляющее ядро (состоящее из компонент, распределенных в плоскостях управления APT, СРД, КМС), взаимодействующее с компонентами управляющего ядра элементов фиксированной сети (в частности, входящего в состав КФС), протоколы управления, реализуемые на 1—3 уровнях мобильной и фиксированной сетей, и каналы управления (радиоканалы на интервалах АРТ-СРД и каналы сигнализации между КМС и КФС).
1.5. Поддержка мобильности пользователей
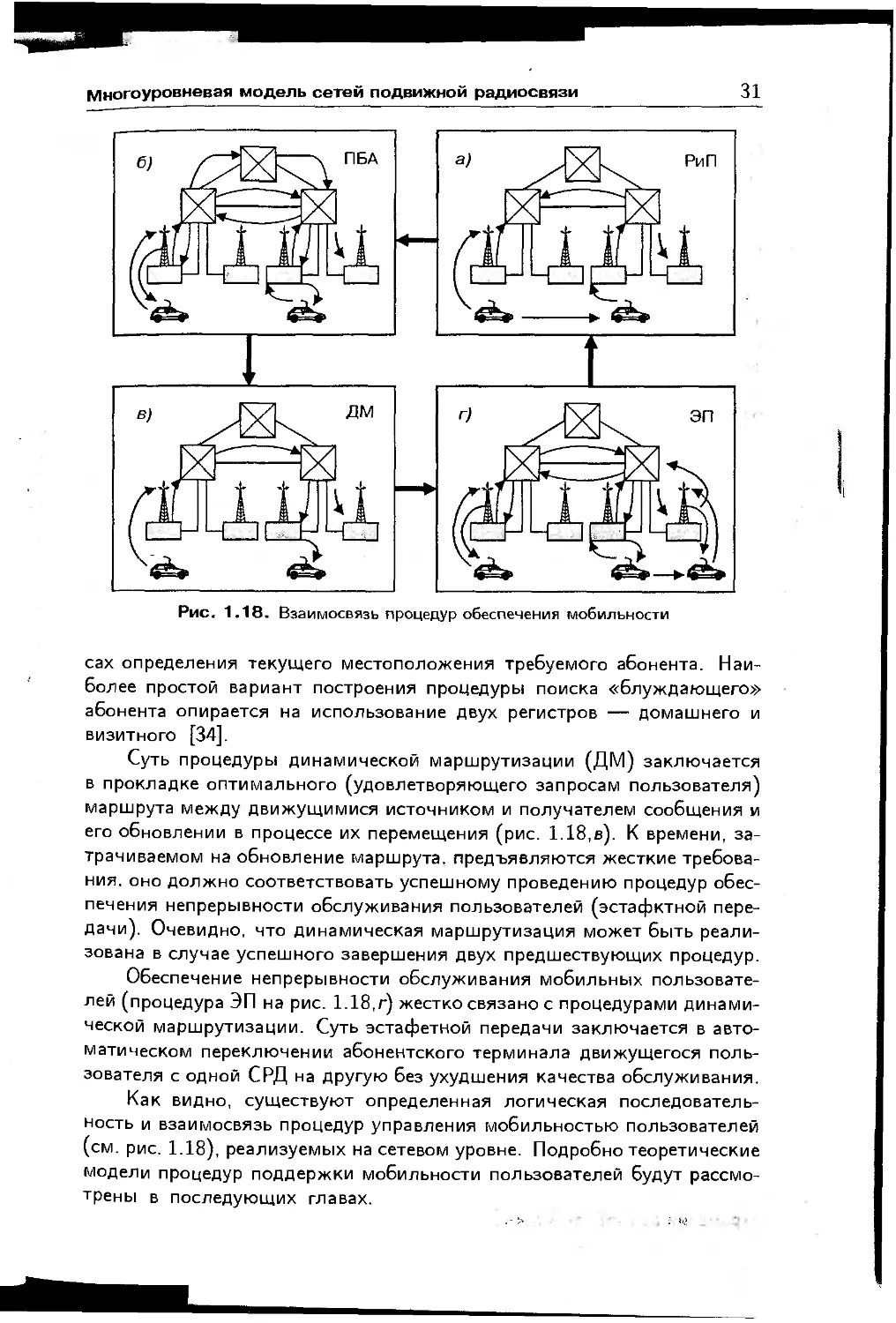
Процедуры поддержки мобильности пользователей относятся к категории наиболее сложных. На рис. 1.18 представлен комплекс процедур, обеспечивающих поддержку мобильности и их взаимосвязь.
Необходимость процедуры регистрации и перерегистрации мобильного абонента объясняется тем, что установление исходящих (и входящих) виртуальных соединений может быть успешно осуществлено только в случае, если известны адреса источника и получателя сообщения. Сетевой адрес мобильного абонента изменяется в процессе его перемещения по распределенной коммутационной среде, и поэтому на КМС должна отражаться адресная информация о мобильных пользователях, находящихся в зоне ее обслуживания (для установления входящих виртуальных соединений). Для этого используются процедуры регистрации и перерегистрации (РиП) (рис. 1.18,а).
Поиск «блуждающего» абонента в распределенной коммутационной среде (рис. 1.18,6) может быть успешно осуществлен, если предварительно реализована процедура его регистрации и перерегистрации. Суть процедуры поиска «блуждающего» абонента заключается в последовательном (или параллельном) опросе визитных («домашних») регистров одного или всех (части) КМС, входящих в состав сети, в интере-
Рис. 1.18. Взаимосвязь процедур обеспечения мобильности
сах определения текущего местоположения требуемого абонента. Наиболее простой вариант построения процедуры поиска «блуждающего» абонента опирается на использование двух регистров — домашнего и визитного [34].
Суть процедуры динамической маршрутизации (ДМ) заключается в прокладке оптимального (удовлетворяющего запросам пользователя) маршрута между движущимися источником и получателем сообщения и его обновлении в процессе их перемещения (рис. 1.18,в). К времени, затрачиваемом на обновление маршрута, предъявляются жесткие требования. оно должно соответствовать успешному проведению процедур обеспечения непрерывности обслуживания пользователей (эстафктной передачи). Очевидно, что динамическая маршрутизация может быть реализована в случае успешного завершения двух предшествующих процедур.
Обеспечение непрерывности обслуживания мобильных пользователей (процедура ЭП на рис. 1.18,г) жестко связано с процедурами динамической маршрутизации. Суть эстафетной передачи заключается в автоматическом переключении абонентского терминала движущегося пользователя с одной СРД на другую без ухудшения качества обслуживания.
Как видно, существуют определенная логическая последовательность и взаимосвязь процедур управления мобильностью пользователей (см. рис. 1.18), реализуемых на сетевом уровне. Подробно теоретические модели процедур поддержки мобильности пользователей будут рассмотрены в последующих главах.
Г л а в а 2
Моделирование физической среды беспроводных сетей
j -< ij
#, t
'f *
Беспроводный радиоканал является сложной средой для обеспечения надежной связи с высокой скоростью передачи. Он не только подвержен воздействию шумов, помех, затенений, многолучевого распространения, но и вносит дополнительные проблемы из-за того, что эти отрицательные воздействия при перемещении пользователя изменяются во времени непредсказуемым образом. Моделирование изменения мощности принимаемого сигнала, обусловленных процессами распространения сигналов и их затенением, требуется как при анализе, так и синтезе СПР.
Заметные изменения сигнала происходят при перемещении от источника на расстояние 100..1000 м, а затенения проявляются на расстояниях, соизмеримых с размерами объекта, создающего препятствие для распространения волны (10..100 м на улице и еще менее внутри зданий). Изменения характеристик беспроводного канала в результате многолучевого распространения сигналов проявляются на небольших расстояниях, соизмеримых с длиной волны.
В дальнейшем основное внимание будет уделено распространению радиоволн в диапазонах от 0,3...3 до 3...30 ГГц.
При построении моделей распространения радиоволн в наземных беспроводных системах следует учитывать отражение и рассеяние от естественных и антропогенных объектов.
Для построения точных моделей при небольшом числе многолучевых составляющих используются уравнения Максвелла. Модели конкретной трассы распространения радиоволн в значительной степени зависят от геометрических и диэлектрических свойств области, через которую распространяется сигнал. Когда имеется большое число составляющих многолучевого сигнала или геометрия и диэлектрические свойства среды распространения неизвестны, обычно используют статистические модели.
2.1. Особенности построения моделей распространения волн в СПР
Электромагнитные волны распространяется в среде, где они отражаются. рассеиваются и преломляются земной поверхностью, зданиями. растениями и другими объектами. Полные характеристики распространения радиоволн можно получить, решая уравнения Максвелла при
определенных условиях, которые отображают физические характеристики создающих препятствия объектов. Для этого требуется вычисление эффективной площади отражающих объектов с большой и сложной структурой. Поскольку эти вычисления трудно выполнимы, а во многих случаях отсутствуют необходимые для этого параметры, для получения характеристик распространения сигналов часто используются методы аппроксимации, не требующие решения уравнений Максвелла.
Наиболее простые аппроксимации предполагают определение траектории распространения радиоволн. Этот метод описывает распространение электромагнитных волн путем представления волнового фронта в виде элементарных частиц, модель позволяет определить влияние отражения и преломления на волновой фронт, но не учитывает более сложное явление рассеяния, учитываемое дифференциальными уравнениями Максвелла. Простейшей моделью определения траектории распространения радиоволн является двухпараметрическая модель, которая точно описывает распространение сигнала, когда имеется один прямой путь' между передатчиком и приемником и один отраженный. На равнинной местности отраженная волна обычно возникает при отражении радиосигнала от земли. Двухпараметрическая модель служит хорошей аппроксимацией для отображения распространения радиоволн вдоль магистральных дорог, в сельской местности и над водой.
Часто сложность и разнообразие условий функционирования радиоканалов затрудняет построение их точной детерминированной модели. В этих случаях широко используют статистические модели. Примером статистических моделей могут служить релеевские и логнормальные замирания, которые позволяет прогнозировать затухание, вызываемое перемещением и различными препятствиями. Когда на характеристики канала оказывают значительное влияние геометрические и диэлектрические свойства среды распространения радиоволн, статистические модели зачастую оказываются слишком грубыми и не позволяют получить полезную информацию. Это характерно для пространства внутри помещений, где характеристики распространения резко изменяются в зависимости от типа объекта (фабрика, офис, цех с металлообрабатывающими станками и т.д.). Для таких сред при прогнозировании характеристик распространения радиосигналов применяют компьютерное моделирование [92].
Предположим, что передаваемый сигнал имеет вид
s(0 = (2.1)
где u(t) — немодулированный сигнал с полосой В и мощностью передачи ; fc — частота несущей; — произвольная начальная фаза. Обычно при проведении анализа исключается последняя часть выражения, определяющая фазу е1<27Г/о*+^о) принимаемого сигнала, поскольку она является постоянным множителем для всех составляющих принимаемого сигнала, включая луч, распространяющийся по линии прямой видимости через свободное пространство, и всех отраженных, рассеянных и преломленных многолучевых составляющих. Помимо случайной
фазы принимаемый сигнал будет иметь доплеровский сдвиг частоты в каждой из составляющих принятого сигнала, равный ?:cos$/A, где 0 — угол прихода составляющей сигнала, v — скорость движения приемника, А = с//,- — длина волны радиосигнала. В первом случае будем пренебрегать доплеровским сдвигом, так как для обычных скоростей движения в городе транспортных средств (80 км/ч) и частот (в пределах 1 ГГц) он составляет менее 70 Гц [64, 81]. Также предполагается, что не-модулированный сигнал является реальной величиной, поскольку это не повлияет на модель потерь на трассе и позволяет упростить уравнения.
2.2. Детерминированные модели
Затухание радиосигналов в свободном пространстве
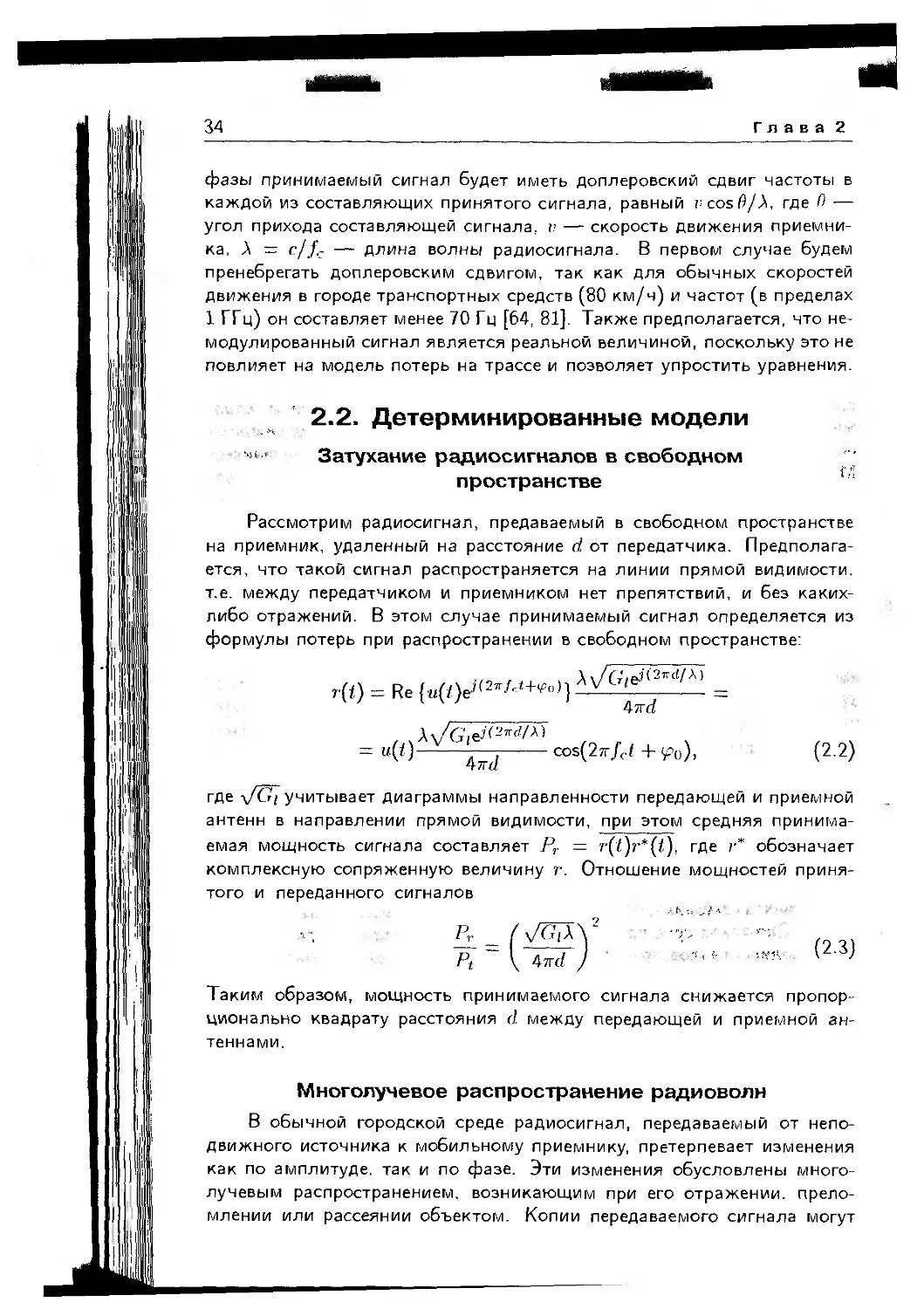
Рассмотрим радиосигнал, предаваемый в свободном пространстве на приемник, удаленный на расстояние d от передатчика. Предполагается, что такой сигнал распространяется на линии прямой видимости, т.е. между передатчиком и приемником нет препятствий, и без каких-либо отражений. В этом случае принимаемый сигнал определяется из формулы потерь при распространении в свободном пространстве:
ф) = Re {и(/)еЯ2-.М+^о)} =
4тг d
= —т—j---------cos(2tt Jrt + v?o),
чтга
(2.2)
где y/Gi учитывает диаграммы направленности передающей и приемной антенн в направлении прямой видимости, при этом средняя принимаемая мощность сигнала составляет Pr — где ?•* обозначает
комплексную сопряженную величину г. Отношение мощностей приня-
того и переданного сигналов
РГ
Pt
Таким образом, мощность принимаемого сигнала снижается пропорционально квадрату расстояния d между передающей и приемной антеннами.
Многолучевое распространение радиоволн
В обычной городской среде радиосигнал, передаваемый от неподвижного источника к мобильному приемнику, претерпевает изменения как по амплитуде, так и по фазе. Эти изменения обусловлены многолучевым распространением, возникающим при его отражении, преломлении или рассеянии объектом. Копии передаваемого сигнала могут
затухать по мощности, задерживаться по времени, сдвигаться по фазе и/или частоте по сравнению с прямой волной. В узкополосных каналах воздействие многолучевости приводит к тому, что принимаемый сигнал изменяться по амплитуде.
При построении моделей расстояния выбраны таким образом, чтобы на распространение не оказывала влияние кривизна Земли [64, 81]. Если передатчик, приемник и отражатели неподвижны, то позитивные и негативные эффекты вследствие многолучевого распространения, а также задержки по отношению к лучу, распространяющемуся по линии прямой видимости, являются постоянными. Однако, если источник сигналов или приемник перемещаются, то характеристики многолучевого распространения изменяются во времени, эти временные изменения могут быть учтены в случае, когда число, местоположение и характеристики отражателей известны, в противном случае необходимо использовать статистические модели.
Ошибка аппроксимации при учете траекторий распространения радиоволн является наименьшей, когда приемник удален от ближайшего объекта, создающего рассеяние, на расстояние многих длин волн и все рассеивающие объекты являются достаточно большими по сравнению с длиной волны и достаточно гладкими (как это имеет место, например, при отражении от окон). Сравнение результатов решений, полученных методом анализа траекторий распространения радиоволн, с эмпирическими данными показывает, что модель вполне адекватна для сельских районов и городских улиц, где передатчик и приемник подняты невысоко над землей [49].
Наиболее точная модель, учитывающая траектории распространения лучей, включает все составляющие многолучевого сигнала с учетом затухания, преломления и рассеяния. В этой модели учитываются все геометрические и диэлектрические свойства зданий, окружающих передатчик и приемник, и поэтому эти модели требуют проведения дополнительных измерений на этом участке местности. Компьютерные программы, основанные на этой модели и использующие для вычислений базу знаний о зданиях, находящихся на выбранном участке местности, в настоящее время имеются [92] и достаточно широко используются для планирования СПР как на улице, так и внутри зданий.
Первоначально будет рассмотрена двухлучевая модель, позволяющая определять изменения сигнала в результате сложения луча, отраженного от земли, и прямого луча. Эта модель адекватно отражает процесс распространения сигнала в районах с небольшим числом отражателей. например сельских или шоссейных дорог. Затем рассматривается десятилучевая модель, которая позволяет определять изменения сигнала, распространяющегося вдоль прямой улицы со стоящими с обеих ее сторон домами при условии, что передающая и приемная антенны расположены ниже уровня домов. 1/1, наконец, будет рассмотрена обобщенная модель, позволяющая предсказывать распространение сигналов при любом размещении зданий и приемопередатчиков.
Двухлучевая модель предполагает наличие данных только о высотах антенн, для построения десятилучевой модели необходимы исходные данные о высотах антенн и ширине улицы, а для построения обобщенной модели требуется не только наличие этих параметров, но и подробная информации о геометрии и диэлектрических свойствах окружающих зданий
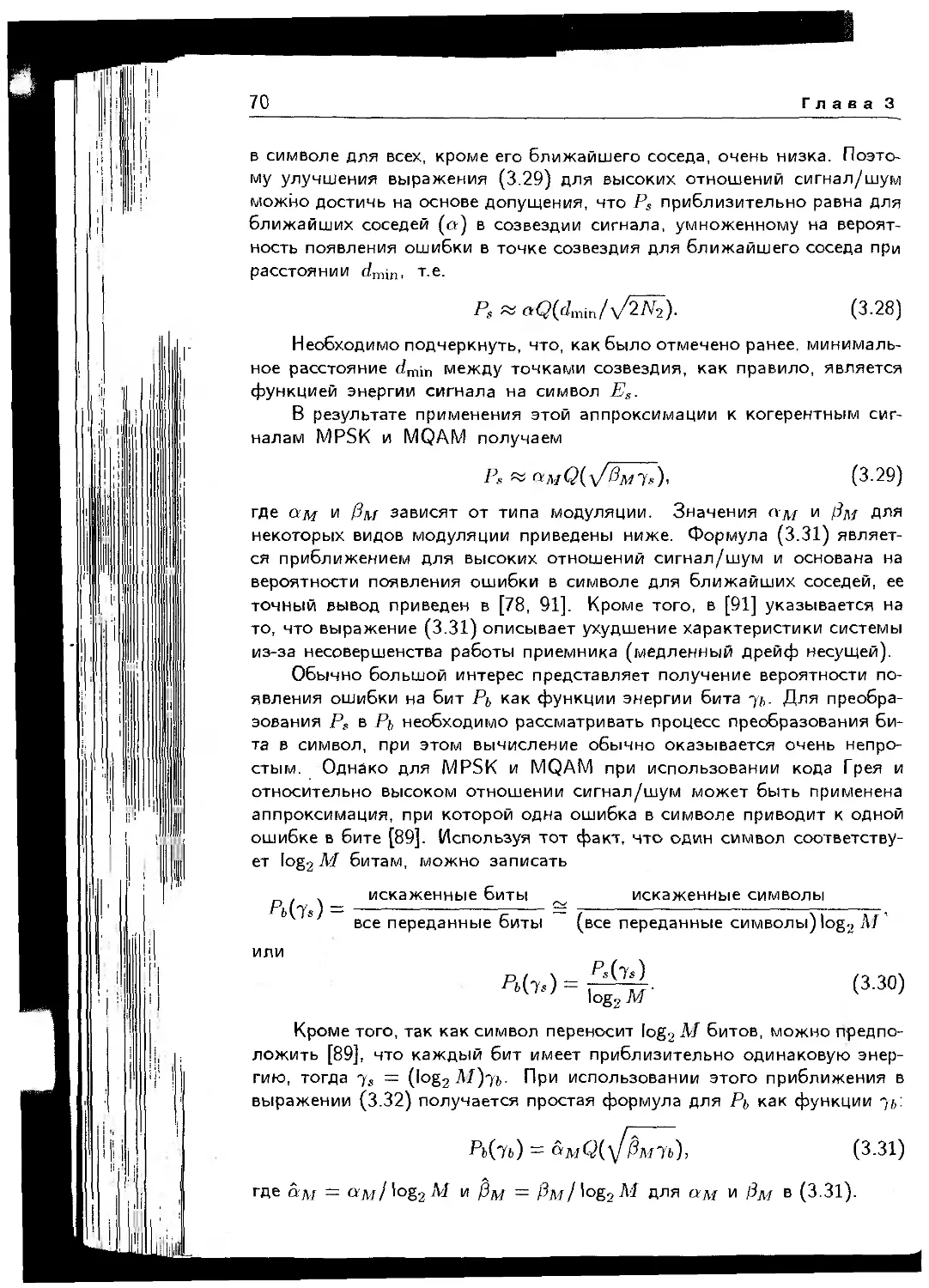
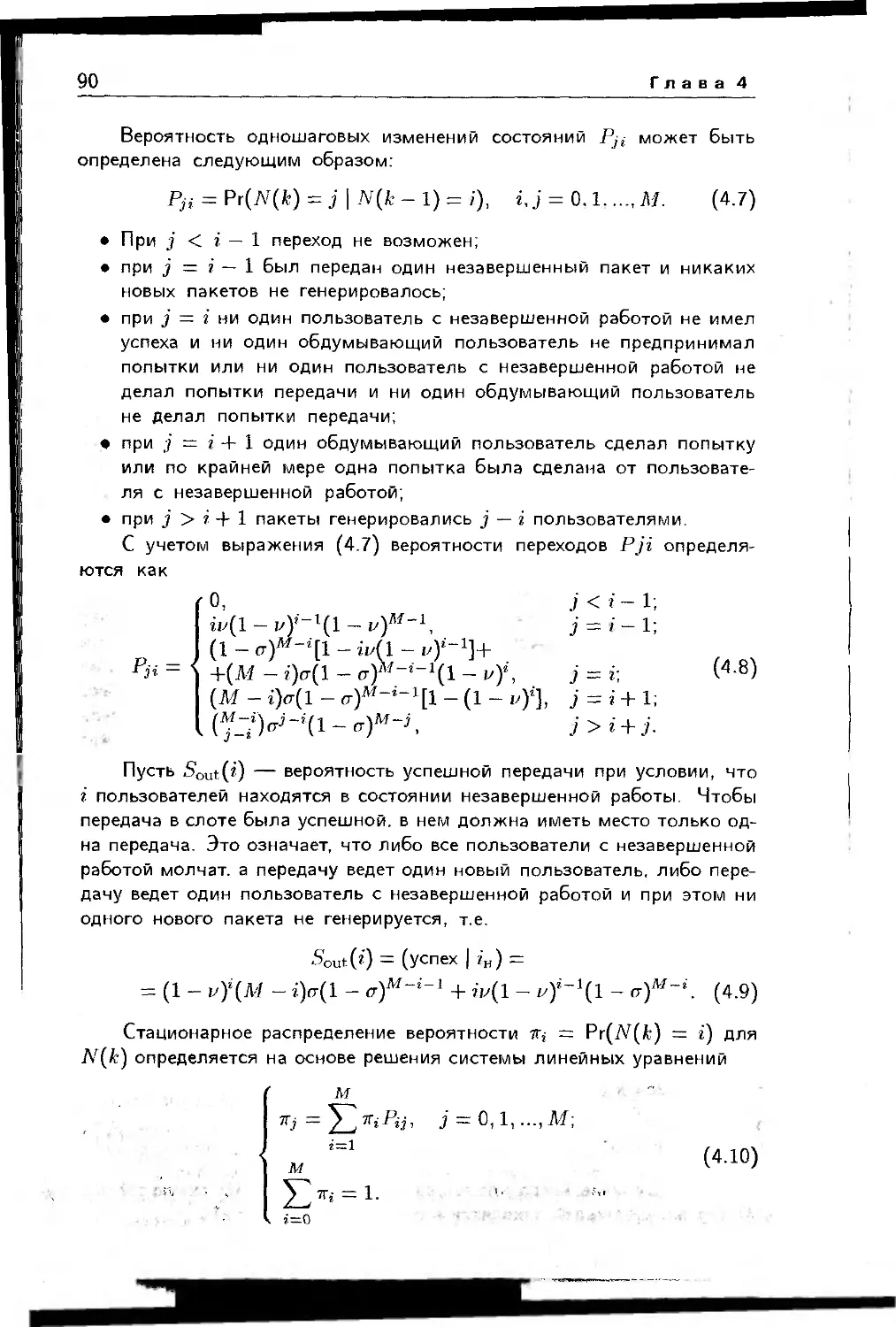
Двухлучевая модель распространения радиоволн
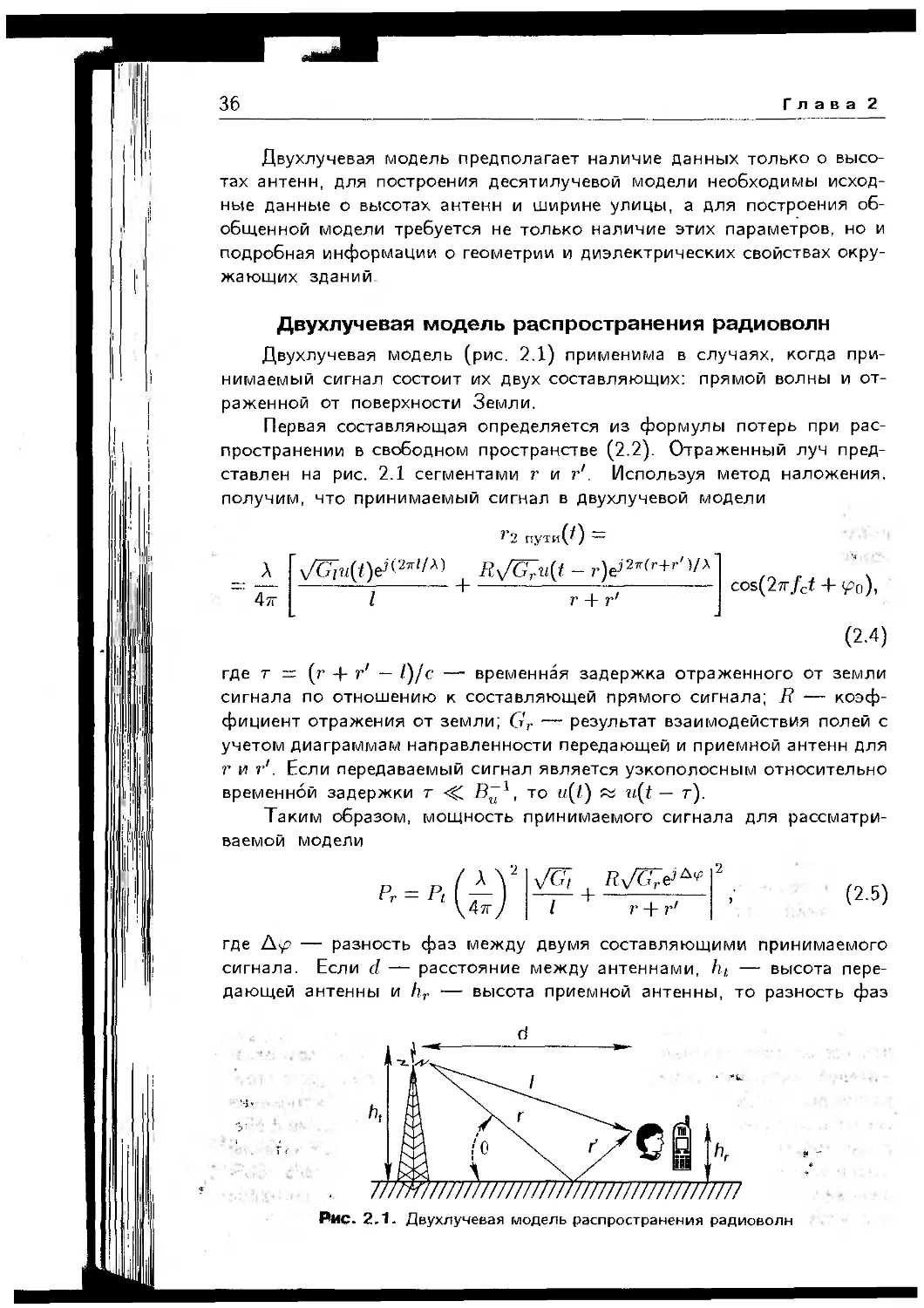
Двухлучевая модель (рис. 2.1) применима в случаях, когда принимаемый сигнал состоит их двух составляющих: прямой волны и отраженной от поверхности Земли.
Первая составляющая определяется из формулы потерь при распространении в свободном пространстве (2.2). Отраженный луч представлен на рис. 2.1 сегментами г и г'. Используя метод наложения, получим, что принимаемый сигнал в двухлучевой модели
2 пути
(/) =
А
4тг
x/Gjw(/)eJ(27r//A- Ry/G^u(t - г)^7г(г+г' }/х
I г 4- г'
cos(2tt/cZ + у?о),
(2-4)
где т — (г 4- г' — Г)!с — временная задержка отраженного от земли сигнала по отношению к составляющей прямого сигнала; R — коэффициент отражения от земли; Gr — результат взаимодействия полей с
учетом диаграммам направленности передающей и приемной антенн для г и г'. Если передаваемый сигнал является узкополосным относительно временной задержки т В~\ то u(t) к u(t — г).
Таким образом, мощность принимаемого сигнала для рассматриваемой модели
р, = р, (Л)2 +
\4тг/ I г 4- г'
(2-5)
где Ау? — разность фаз между двумя составляющими принимаемого сигнала. Если d — расстояние между антеннами, ht — высота передающей антенны и hr — высота приемной антенны, то разность фаз
;0
Рис. 2.1. Двухлучевая модель распространения радиоволн
определяется как
=
2тг(г' + г — /) 2тгс/ А = ~
(2.6)
Как было отмечено ранее, уравнение (2.5) хорошо согласуется с эмпирическими данными [91]. Разброс по задержке для двухлучевой мо-
дели — это дополнительная задержка при отражении от земли т =
= (г + г' - Г)/с. [73, 78]
Коэффициент земного отражения определяется как
sin 0 — Z
sin 0 + Z ’
(2-7)
где
Г уДг — COS2 0
( у/с г — COS2 0
для вертикальной поляризации;
для горизонтальной поляризации;
(2-8)
ег — диэлектрическая постоянная подстилающей поверхности, которая для земли или дорожного покрытия приблизительно равна диэлектрической постоянной диэлектрика (sr = 15).
Из (2.6) следует, что если cl достаточно велико, то г + г' — I ~ % 2hthr/d, тогда
Ду? » dirhthrlXd.
* (2.9)
Для асимптотически большого значения d имеем г + г' к I к d, 0 ~ 0, Gt Gr и R & —1. Подстановка этих аппроксимированных значений в выражение (2.5) показывает, что мощность принимаемого сигнала приблизительно составляет
/Ху/СГЛ ~ /МцИЛ 2 р
\ 4ят/ J \ Xd J *
/ y/G~ththr V
d2 ) '
(2.Ю)
Таким образом, при больших значениях d мощность принимаемого сигнала снижается обратно пропорционально четвертой степени d.
Аппроксимация для критического расстояния dc может быть получена путем подстановки Ду? вместо тг в (2.9), что дает dc = ^hthr/X. Полученный параметр используется при построении сотовых систем связи Для определения оптимального размера ячейки (соты).
Если взять среднее от максимального и минимального значений в выражении (2.5), то полученные усредненные потери мощности могут быть аппроксимированы путем деления кривой потерь мощности на две области. Для d < dc среднее снижение мощности с расстоянием соответствует потерям в свободном пространстве. Для d dc уменьшение мощности в зависимости от расстояния описывается законом убывания обратно пропорционально четвертой степени от расстояния (2.10).
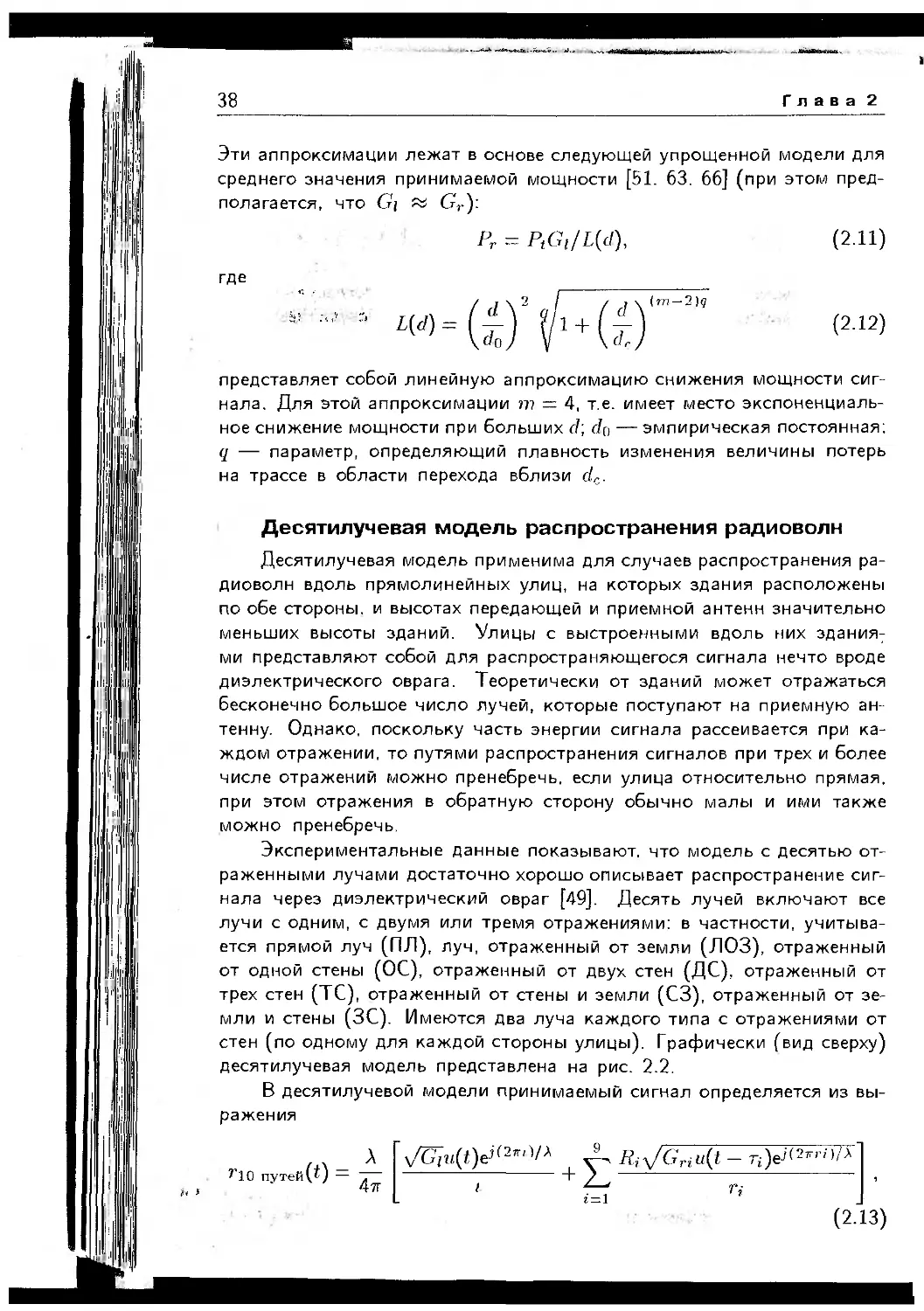
Эти аппроксимации лежат в основе следующей упрощенной модели для среднего значения принимаемой мощности [51. 63. 66] (при этом предполагается, что Gi Gr\.
где
Pr = PtGt/L(d),
L{d) =
(2.11)
(2-12)
представляет собой линейную аппроксимацию снижения мощности сигнала. Для этой аппроксимации 77? = 4, т.е. имеет место экспоненциальное снижение мощности при больших d; do —-эмпирическая постоянная; q — параметр, определяющий плавность изменения величины потерь на трассе в области перехода вблизи dc.
Десятилучевая модель распространения радиоволн
Десятилучевая модель применима для случаев распространения радиоволн вдоль прямолинейных улиц, на которых здания расположены по обе стороны, и высотах передающей и приемной антенн значительно меньших высоты зданий. Улицы с выстроенными вдоль них здания7 ми представляют собой для распространяющегося сигнала нечто вроде диэлектрического оврага. Теоретически от зданий может отражаться бесконечно большое число лучей, которые поступают на приемную антенну. Однако, поскольку часть энергии сигнала рассеивается при каждом отражении, то путями распространения сигналов при трех и более числе отражений можно пренебречь, если улица относительно прямая, при этом отражения в обратную сторону обычно малы и ими также можно пренебречь.
Экспериментальные данные показывают, что модель с десятью отраженными лучами достаточно хорошо описывает распространение сигнала через диэлектрический овраг [49]. Десять лучей включают все лучи с одним, с двумя или тремя отражениями; в частности, учитывается прямой луч (ПЛ), луч, отраженный от земли (ЛОЗ), отраженный от одной стены (ОС), отраженный от двух стен (ДС), отраженный от трех стен (ТС), отраженный от стены и земли (СЗ), отраженный от земли и стены (ЗС). Имеются два луча каждого типа с отражениями от стен (по одному для каждой стороны улицы). Графически (вид сверху) десятилучевая модель представлена на рис. 2.2.
В десятилучевой модели принимаемый сигнал определяется из выражения
ПО путей(1) — .
4тг
у^Ы(1)е1(2"'1/л А Д,^6н«(1-7-0еЛ:-,» ')/<
' Ti
(2.13)
Передатчик
Рис. 2.2. Графическое представление десятилучевой модели
где — длина пути г’-го отраженного луча: г,; = (г, — Г)/с, Gr, — усиление приемной антенны, соответствующее ?'-му лучу. Для каждого отраженного луча коэффициент будет представлять собой либо коэффициент с одним отражением, задаваемый выражением (2.7), либо, если луч соответствует нескольким отражениям, произведению коэффициентов, соответствующих каждому отражению. Диэлектрические постоянные, используемые в (2.7), приблизительно такие же, как и для земли, потому для вычислений /7, используется ег = 15. Если предположить, что u(t) » u(t — Ti) для всех г, то в соответствии с (2.13) принимаемая мощность
(2-14)
где Ду?, — 2тг(гг- — I)/А. Разброс по задержке для каждой модели определяется равным max,;[(гг- — /)/с].
Снижение мощности с расстоянием как для десятилучевой модели (2.14), так и для эмпирических моделей для города [54, 91, 98] при условии, что передающие антенны расположены выше и ниже окружающих зданий, обычно пропорционально d~' даже на относительно больших расстояниях. Снижение мощности обратно пропорционально квадрату расстояния, что обусловлено преобладанием лучей, затухающих пропорционально d~ ', в комбинации с лучами, отраженными от земли (двухлучевая модель), в которых затухание происходит пропорционально d~4. В других эмпирических исследованиях [51, 53, 102] имеются данные о снижении мощности с расстоянием пропорционально с/~7, где 7 находится в пределах от 2 до 6.
Обобщенная модель распространения радиосигналов
Обобщенная модель распространения радиосигналов может использоваться для прогнозирования напряженности поля и задержки распространения для любых конфигураций зданий и при любом размещении антенн [71, 76, 92]. Для этой модели необходимы точные данные о
зданиях (высота, местоположение и диэлектрические свойства) и местоположениях передатчика и приемника относительно зданий. Обобщенная модель распространения радиосигналов может применяться для расчетов задержки и мощности сигнала при конкретной конфигурации передатчик-приемник.
В обобщенной модели распространения радиосигналов используют методы геометрической оптики при определении направления распространения прямого сигнала и составляющих отраженного сигнала, а также составляющих сигнала, получаемых в результате преломления и диффузного расселения зданиями.
Не существует предела для числа составляющих многолучевого сигнала в заданном месте расположения приемника; интенсивность каждой составляющей вычисляют, исходя из местоположения зданий и их диэлектрических свойств. Обычно прямой и отраженные лучи вносят преобладающие составляющие в принимаемый сигнал. Однако в местах, близко расположенных к поверхностям рассеяния или преломления, которые обычно отделены от прямого и отраженных лучей, эти составляющие могут оказаться преобладающими.
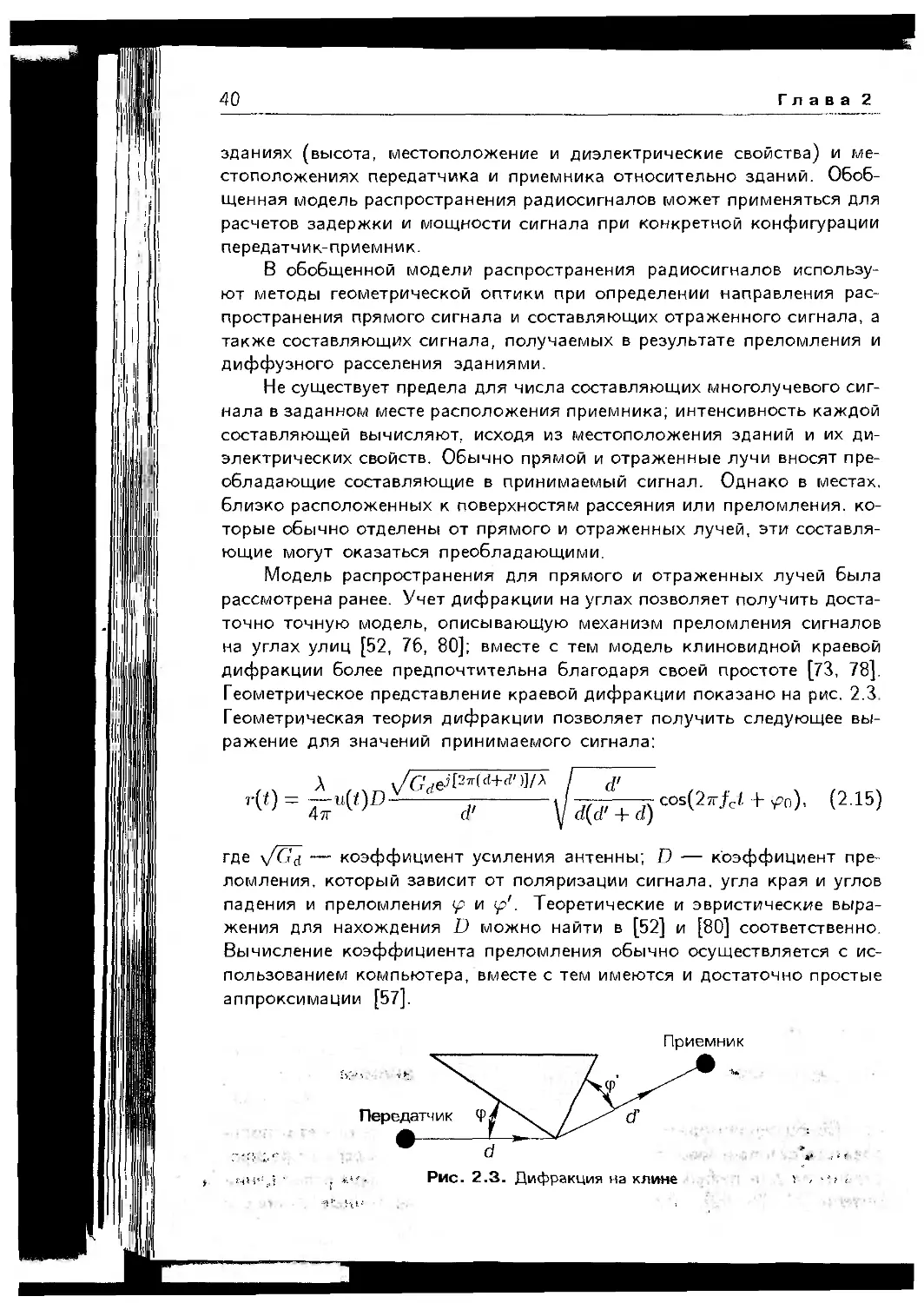
Модель распространения для прямого и отраженных лучей была рассмотрена ранее. Учет дифракции на углах позволяет получить достаточно точную модель, описывающую механизм преломления сигналов на углах улиц [52, 76, 80]; вместе с тем модель клиновидной краевой дифракции более предпочтительна благодаря своей простоте [73, 78]. Геометрическое представление краевой дифракции показано на рис. 2.3 Геометрическая теория дифракции позволяет получить следующее выражение для значений принимаемого сигнала:
A \/Gne^27r(d+cl' / ~d'
’<'>=<215>
где \/Gd — коэффициент усиления антенны; D — коэффициент преломления. который зависит от поляризации сигнала, угла края и углов падения и преломления tp и 9?'. Теоретические и эвристические выражения для нахождения D можно найти в [52] и [80] соответственно. Вычисление коэффициента преломления обычно осуществляется с использованием компьютера, вместе с тем имеются и достаточно простые аппроксимации [57].
Приемник
Рис. 2.4. Рассеяние
Рассеянный луч, показанный на рис. 2.4 в виде сегментов s' и 8, претерпевает потери на трассе пропорционально отношению s и s'. Такая зависимость обусловлена дополнительными потерями на расходимость пучка, которые испытывает луч в результате рассеяния Принимаемый сигнал, подвергшийся Передатчик рассеянию, определяется из уравнения радиолокации [95]:
А\/€Го-е^(27г(‘'+‘',,/Л ;.(/) = д(1) V ? 4tss,-------cos(2tt/c/+M
(2-16) где <т — эффективная площадь рассеивающего объекта; \/(<s — коэффициент усиления антенны. Значение зависит от шероховатости, размера и формы рассеивающего объекта. Имеются эмпирические значения для различных зданий [93].
Общая величина электромагнитного поля в точке приема определяется на основе учета всех составляющих, обусловленных многолучевым распространением. Таким образом, если имеется прямой луч. Nr отраженных, Nci преломленных и Ns диффузнорассеянных лучей, то в целом принимаемый сигнал
4ТГ88'
. А
Лэбобщ(0 — ~7~~
Ч7Г
Z = 1
)eJ(2zr(s,+s'))/A
- п')^27ГГ'1х} г,-
8, S,
cos(2tt/</ + у?о), (2.17)
1
где — временная задержка конкретной составляющей многолучевого сигнала. Принимаемая мощность Робобщ = £’|)’обобщ(1)|2-
Любая из составляющих многолучевого сигнала может иметь дополнительный коэффициент затухания, если путь распространения блокируется зданиями или другими объектами. В этом случае коэффициент затухания создающего препятствия объекта умножается на коэффициент, отображающий потери на трассе распространения составляющей сигнала. Эти потери вследствие затухания могут изменяться в широких пределах в зависимости от материала и размеров объекта. В качестве средней эмпирической величины изменений обычно используются значение потерь из-за затухания равное 12 дБ.
2.3. Эмпирические модели
Большинство беспроводных систем связи функционируют в сложной среде распространения волн, которую невозможно моделировать точно, определяя траекторию распространения лучей и потери на трассе
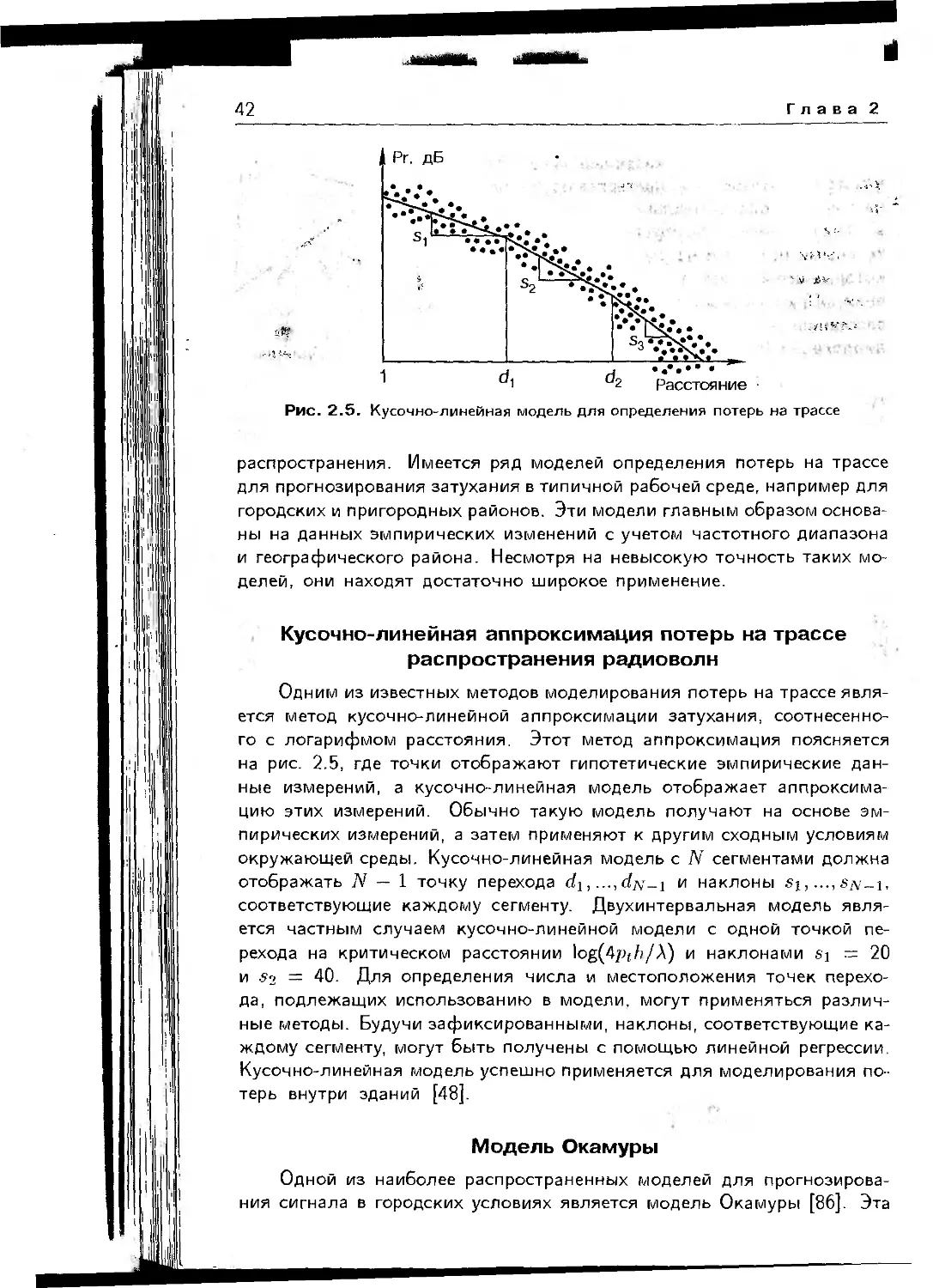
Рис. 2.5. Кусочно-линейная модель для определения потерь на трассе
распространения. Имеется ряд моделей определения потерь на трассе для прогнозирования затухания в типичной рабочей среде, например для городских и пригородных районов. Эти модели главным образом основаны на данных эмпирических изменений с учетом частотного диапазона и географического района. Несмотря на невысокую точность таких моделей, они находят достаточно широкое применение.
Кусочно-линейная аппроксимация потерь на трассе распространения радиоволн
Одним из известных методов моделирования потерь на трассе является метод кусочно-линейной аппроксимации затухания, соотнесенного с логарифмом расстояния. Этот метод аппроксимация поясняется на рис. 2.5, где точки отображают гипотетические эмпирические данные измерений, а кусочно-линейная модель отображает аппроксимацию этих измерений. Обычно такую модель получают на основе эмпирических измерений, а затем применяют к другим сходным условиям окружающей среды. Кусочно-линейная модель с N сегментами должна отображать N — 1 точку перехода c/j,..., ф\-_. । и наклоны sj ,.... соответствующие каждому сегменту. Двухинтервальная модель является частным случаем кусочно-линейной модели с одной точкой перехода на критическом расстоянии log(4/>//?/А) и наклонами si — 20 и Si = 40. Для определения числа и местоположения точек перехода, подлежащих использованию в модели, могут применяться различные методы. Будучи зафиксированными, наклоны, соответствующие каждому сегменту, могут быть получены с помощью линейной регрессии. Кусочно-линейная модель успешно применяется для моделирования потерь внутри зданий [48].
Модель Окамуры
Одной из наиболее распространенных моделей для прогнозирования сигнала в городских условиях является модель Окамуры [86]. Эта
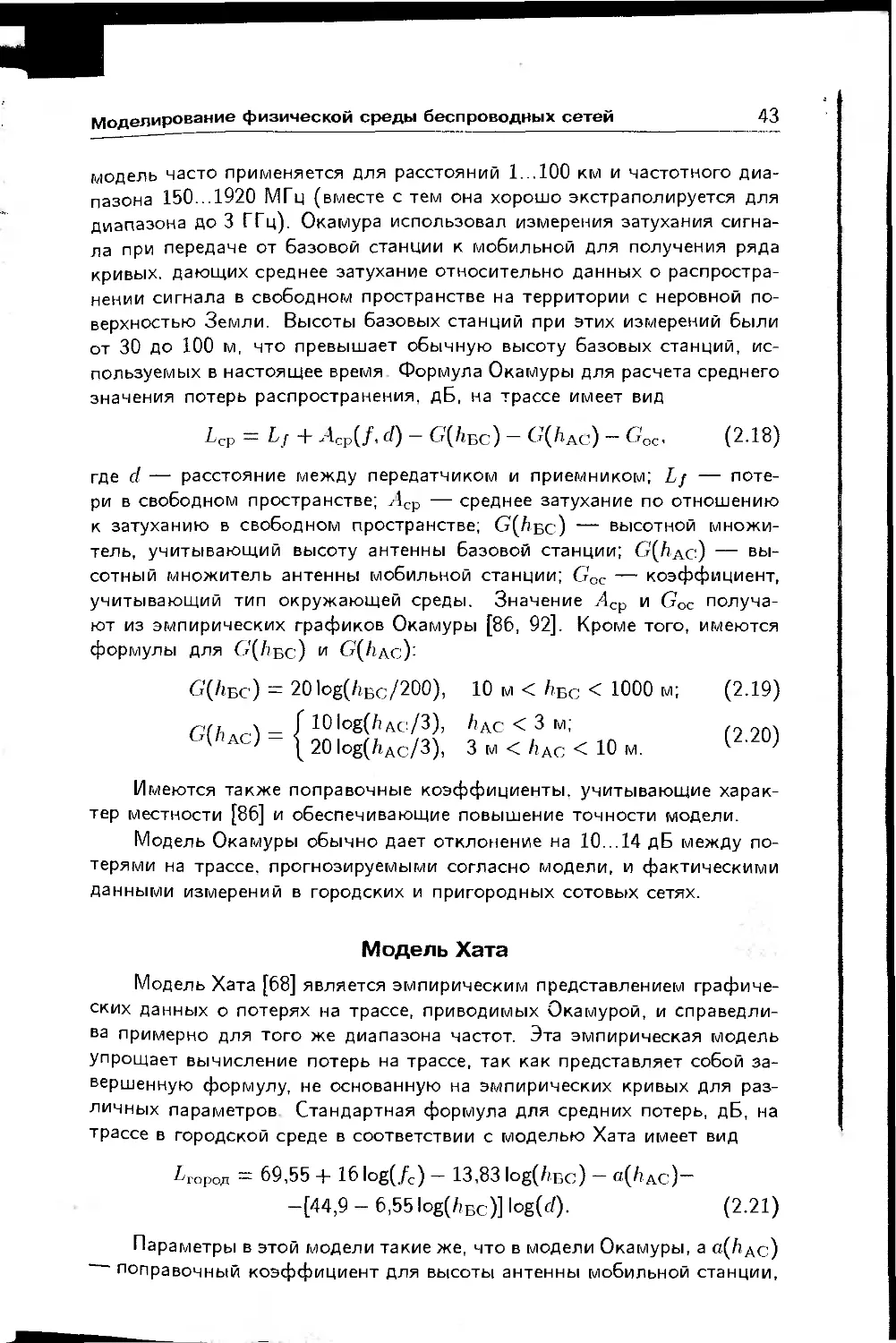
модель часто применяется для расстояний 1...100 км и частотного диапазона 150...1920 МГц (вместе с тем она хорошо экстраполируется для диапазона до 3 ГГц). Окамура использовал измерения затухания сигнала при передаче от базовой станции к мобильной для получения ряда кривых, дающих среднее затухание относительно данных о распространении сигнала в свободном пространстве на территории с неровной поверхностью Земли. Высоты базовых станций при этих измерений были от 30 до 100 м, что превышает обычную высоту базовых станций, используемых в настоящее время Формула Окамуры для расчета среднего значения потерь распространения, дБ, на трассе имеет вид
Lcp — Lj + Дср(/, d) — G(/ibc) — G(/»ac) — G'oc,
(2-18)
где d— расстояние между передатчиком и приемником; Lf — потери в свободном пространстве; Зср — среднее затухание по отношению к затуханию в свободном пространстве; G(Aec) — высотной множитель, учитывающий высоту антенны базовой станции; G(Aac) — высотный множитель антенны мобильной станции; Goc — коэффициент, учитывающий тип окружающей среды. Значение Лср и Goc получают из эмпирических графиков Окамуры [86, 92]. Кроме того, имеются формулы для G(/7ec) и G'(Aac):
G(/»bc) = 20 log(/zBC/200), 10 м < Ьъс < 1000 м; (2.19)
СКЬ.гЛ = [ 10l°g(/jAc/3), Аас<Зм; . }
( 20 log(/iAc/3), 3 м < /где < 10 м. '
Имеются также поправочные коэффициенты, учитывающие характер местности [86] и обеспечивающие повышение точности модели.
Модель Окамуры обычно дает отклонение на 10...14 дБ между потерями на трассе, прогнозируемыми согласно модели, и фактическими данными измерений в городских и пригородных сотовых сетях.
Модель Хата
Модель Хата [68] является эмпирическим представлением графических данных о потерях на трассе, приводимых Окамурой, и справедлива примерно для того же диапазона частот. Эта эмпирическая модель упрощает вычисление потерь на трассе, так как представляет собой завершенную формулу, не основанную на эмпирических кривых для различных параметров Стандартная формула для средних потерь, дБ, на трассе в городской среде в соответствии с моделью Хата имеет вид
^город = 69,55 + 16 log(/c) — 13,83 log(/zbc) — «(/где)—
-[44,9 - 6,55 log(/?БС)] log(cZ). (2-21)
Параметры в этой модели такие же, что в модели Окамуры, а а(Лдс) поправочный коэффициент для высоты антенны мобильной станции,
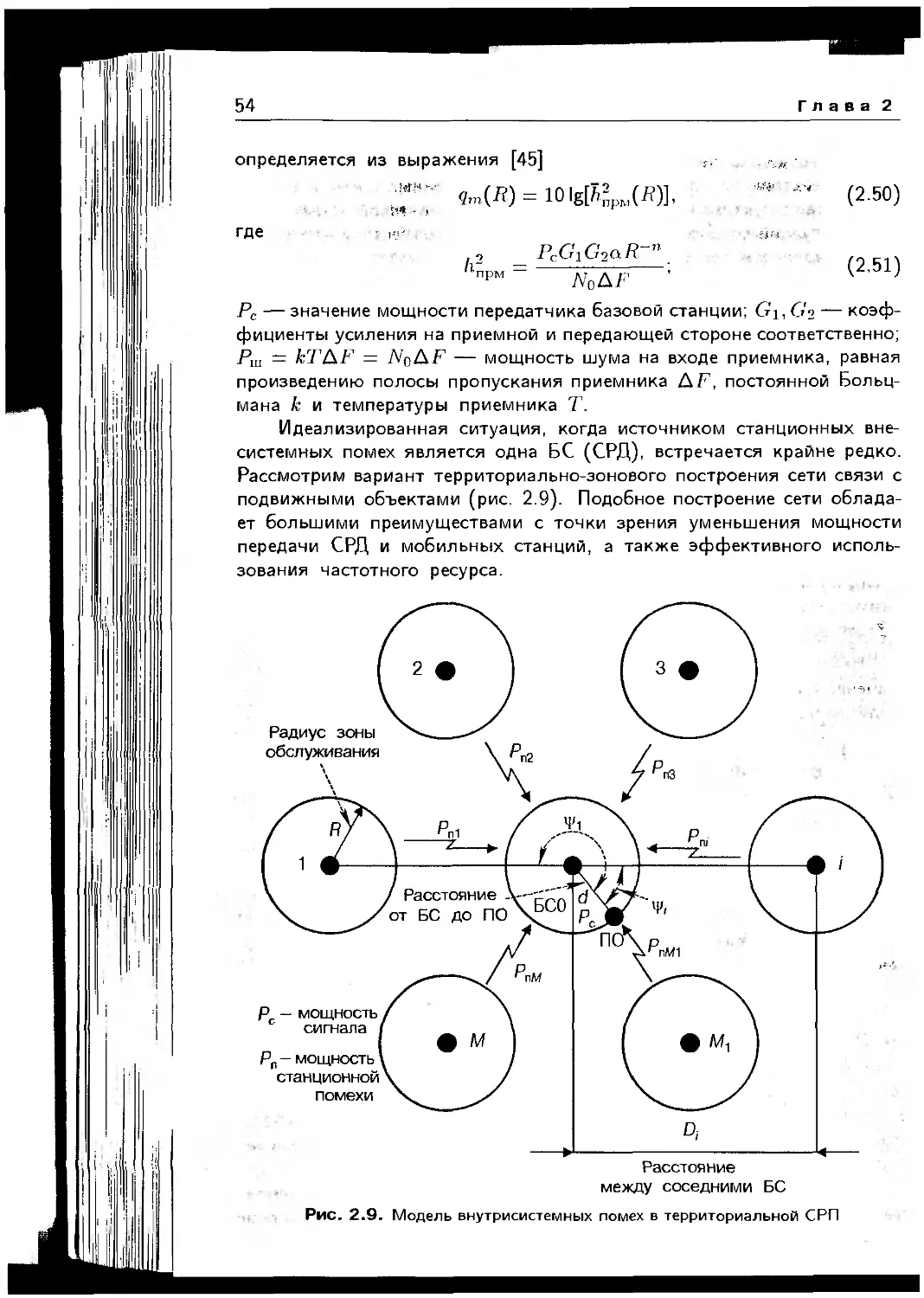
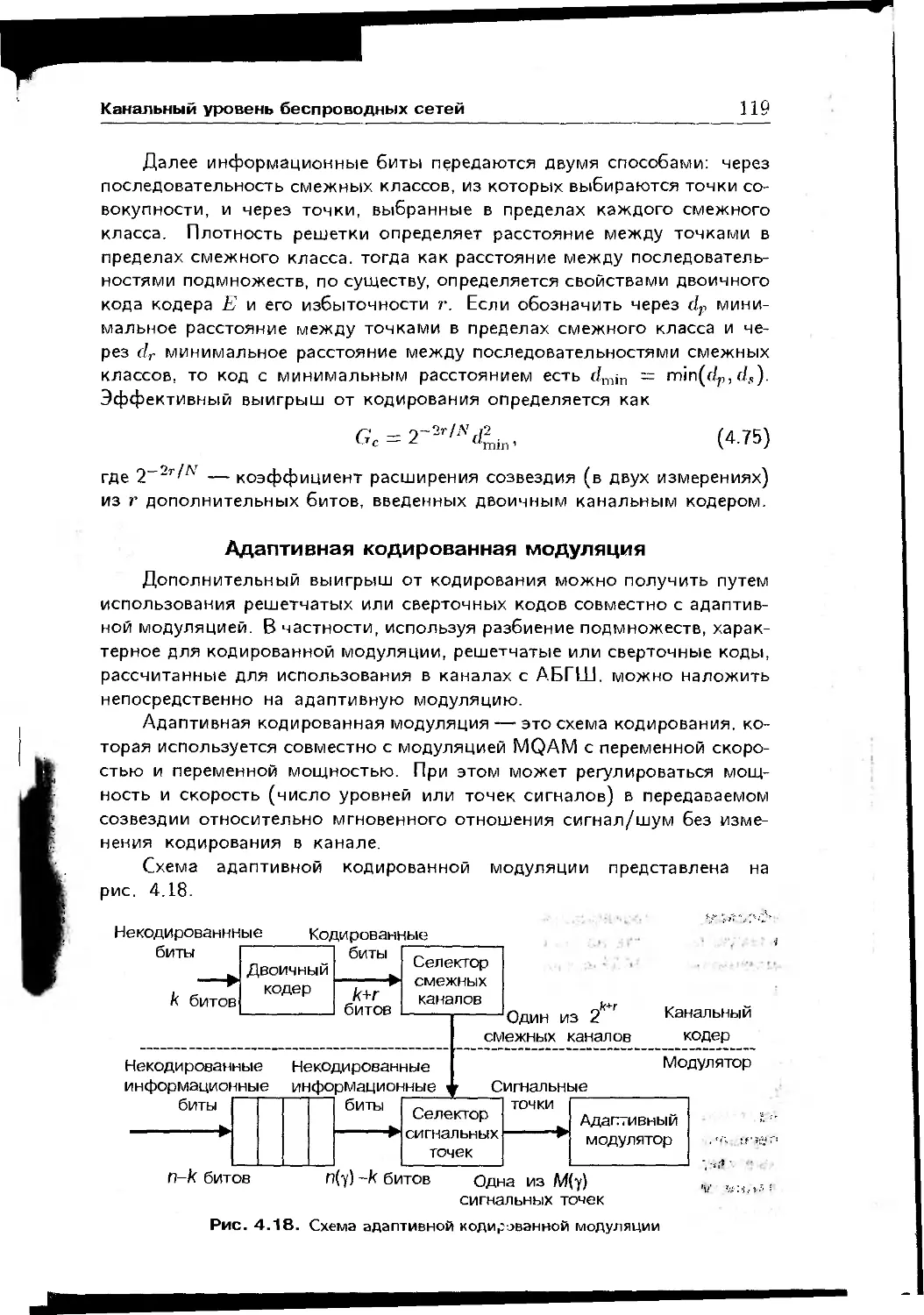
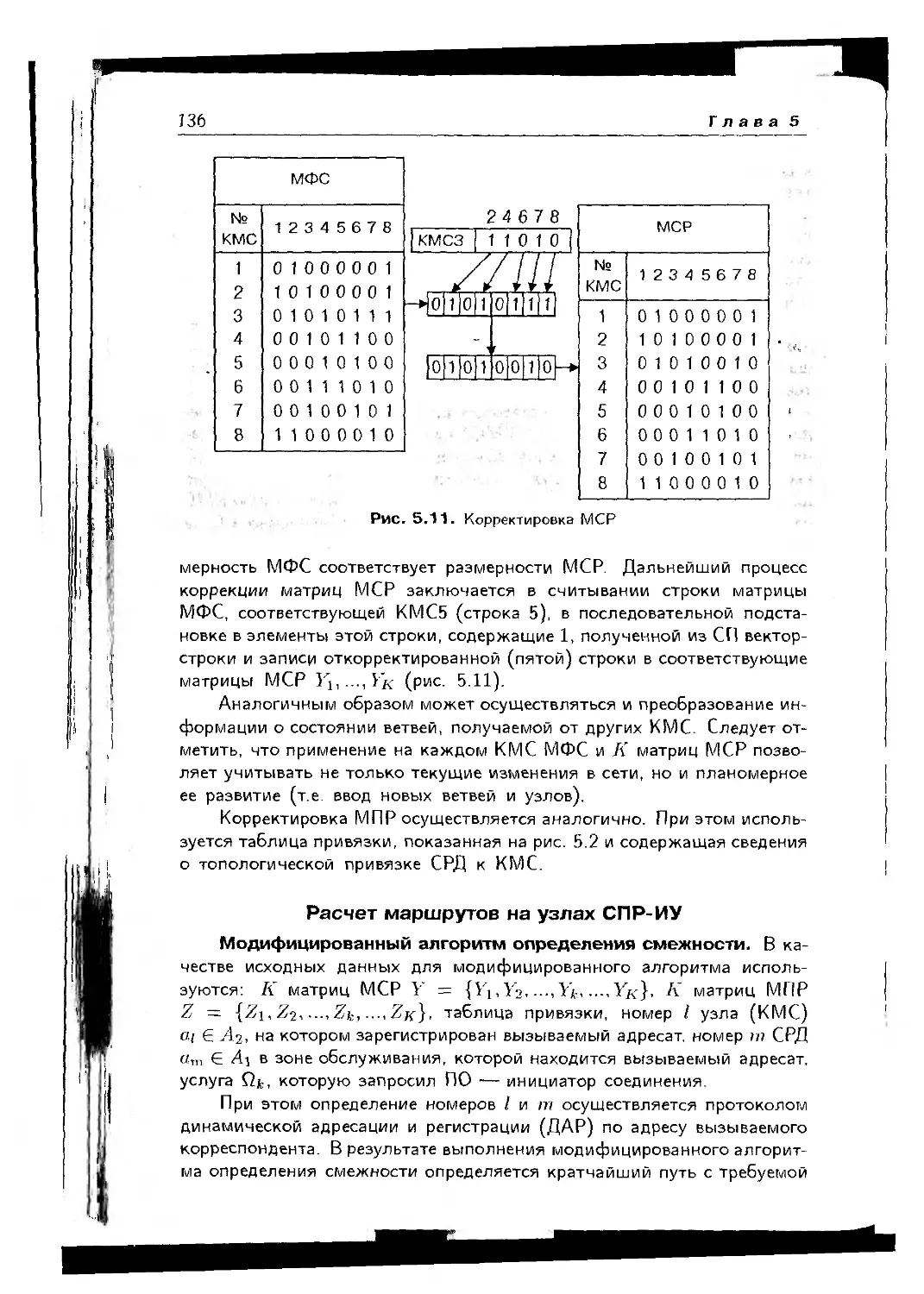
учитывающий зону охвата [67, 92] Внесены определенные корректировки в модель для города, а также в модели распространения сигналов в пригородных и сельских районах:
^пригород — Дорол 2[log(/c/28)]2 - 5,4; (2.22)
/«„•и, = Ьгород - 4.78[log(/c)]2 - 18,33[log(/c)] - 40.98. (2.23)
В модели Хата не требуется использование поправочных коэффициентов в зависимости от конкретной трассы, как это имеет место в модели Окамуры. Модель Хата хорошо аппроксимирует модель Окамуры для расстояний d > 1 км. Таким образом, она хороша для первого поколения сотовых систем, но не позволяет моделировать с достаточным качеством современные сотовые системы с меньшим размером ячеек.
Модифицированная модель Хата
Модель Хата была расширена до 2 ГГц Европейской кооперацией на основе проведенных научно-технических исследований (EURO-COST) следующим образом [59, 64]:
£*город — 46,3 + 33,9 log(/c) - 13,82 log(/?Ec) - «(ЛАс)-
-[44,9 - 6,55 log(//Ec)] log(C/) - С'м, (2.24)
где а(Лдс) — тот же самый поправочный коэффициент, что и раньше. а См = 0 дБ для городов среднего размера пригородов и 3 дБ для больших городов. Эта модель называется модифицированной моделью Хата и ограничивается следующими предельными параметрами: 1,5 ГГц < /с < 2 ГГц; 30 м < /?бс < 200 м; 1 м < /где < Ю м; 1 км < d < 20 км.
Модель Уолфица-Бертони
Модифицированная модель Хата не учитывает влияние дифракции от поверхностей крыш и зданий. Для учета этих влияний была разработана модель Уолфица-Бертони [99]. В этой модели при прогнозировании средней интенсивности сигнала на уровне улицы учитывается дифракция. В модели полагается, что потери на трассе являются произведением трех составляющих:
L=P0Q2Pj, (2.25)
где Ро — мощность сигнала на входе приемника при распространении радиоволн в свободном пространстве для ненаправленных антенн; Q' учитывает снижение мощности сигнала, обусловленное препятствиями в виде зданий, которые затеняют приемник на уровне улицы: /’| учитывает потери сигнала из-за дифракции. Модель принята для стандарта IMT-2000.
Имеются и другие эмпирические модели [92] для определения потерь на трассе.
———— ——' '
Простейшая модель определения потерь на трассе
В связи со значительными различиями в уменьшении мощности сигнала с расстоянием и в данных измерения характеристик распространения сигнала при проведении различных эмпирических исследований трудно получить общую модель, охватывающую все особенности распространения сигналов в городе и пригородной зоне. Использование моделей, учитывающих траектории распространения радиоволн, необходимо для получения хороших аппроксимаций значений мощности сигнала в точке приема и важно для определения общих характеристик системы, а также лучших мест расположения базовых станций. Однако при проведении компромиссного экспресс-анализа различных вариантов построения систем иногда удобнее использовать простую модель, которая учитывает общие особенности распространения сигнала, не прибегая к сложным моделям определения потерь на трассе, которые так или иначе сами являются аппроксимацией реального канала. Поэтому часто используется следующая упрощенная модель для определения потерь на трассе как функции расстояния, в которой коэффициент потерь на трассе -) обычно находится в пределах от 2 до 6 и является единственным параметром:
Pr = PtK(d0/d)\ (2.26)
где А — безразмерная постоянная, которая зависит от характеристики антенн и среднего затухания, вносимого препятствием; do — эталонное расстояние. Модель (2.26) справедлива только для расстояний d > c/q.
2.4. Статистические модели физической среды
В локальных и территориальных беспроводных сетях наиболее часто используется физическая среда, характеризующаяся применением механизма распространения радиоволн вдоль земной поверхности и диапазоном частот в полосе от 30 МГц до 5 ГГц и более. Для такой физической среды характерна схожесть свойств, оказывающих существенное влияние на процессы функционирования СПР. Эти свойства канала радиосвязи в значительной степени обусловливаются периодическим или постоянным перемещением подвижного объекта (ПО), неоднородностью параметров среды распространения радиоволн, наличием явлений отражения (переизлучения), рассеяния, поглощения излучаемой энергии радиосигналов, случайными и неслучайными помехами [6, 38, 67, 77]. Поэтому канал радиосвязи в СПР обладает переменными параметрами и для него характерны замирания сигналов различной природы:
• быстрые, определяемые интерференцией копий сигнала, пришедших в точку приема по многим путям (обусловливаются многолучевостью распространения радиоволн):
• медленные, вызванные затенением трассы распространения, рельефом, растительностью и местными предметами; ...
Рис. 2.6. Многолучевое распространение радиоволн в условиях города
• очень медленные, соответствующие изменениям дальности связи и вариациям рефракционных свойств атмосферы.
Скорость (частость) вышеуказанных типов флуктуаций существенно зависит от диапазона используемых частот, скорости перемещения ПО и типа местности.
Наличие быстрых флуктуаций параметров сигналов вызвано частотно-временной дисперсией передаточной функции канала передачи, являющейся следствием многолучевого распространения радиоволн при многочисленном отражении от предметов, окружающих ПО (станцию радиодоступа). Из-за случайного изменения длин лучей напряжение на входе приемника представляет собой сумму отдельных колебаний с произвольными амплитудами и случайными фазами Интерференция этих колебаний и является основной причиной флуктуаций амплитуды и фазы результирующего колебания. Число лучей в результирующей волне случайно и при движении корреспондента меняется во времени (рис. 2.6).
Время существования каждого луча определяется временем незате-нения отражающего объекта относительно передатчика и приемника и также является случайным. Различные условия отражения и пути распространения лучей придают случайный характер значениям амплитуды и фазы, а перемещение корреспондента в определенном направлении вызывает в лучах различные доплеровские смещения частоты, зависимые от того, насколько направления на отражающие объекты отличаются от направления движения корреспондента.
Учитывая сказанное выше, для случая непрерывного излучения сигнала вида s(t) = exp{J(wt + y?o)} сигнал на входе приемника может быть представлен в виде [36]
£
X(t,u) = \,..(0Гг, ехр[)(ш + Qm)(< - tm) + jVf)], (2.27)
где Um — комплексная амплитуда, определяемая условиями отражения радиоволн; tm — задержка сигнала в m-м луче; Q,n — доплеровское смещение частоты в т-м луче.
Q,„ = w—cos(^m), (2.28)
4** С
определяемое скоростью 1по движения ПО и углом между вектором
скорости 1'по и направлением на отражающий объект.
Функция \m(f) характеризует время существования ?л-го луча и имеет вид
v _ Г !• [7т(1)-/т(2)]. 12 ngy
где Zm(l), 6п(2) — моменты появления и исчезновения m-го луча.
Число лучей L, реализовавшихся за время наблюдения, является случайной величиной, закон распределения которой хорошо аппроксимируется пуассоновским распределением вида
m) = ^rexp(-^), (2.зо)
где 4 — среднее число лучей, наблюдаемое в единицу времени [33, 77].
Моменты появления Zm(l). т = I.L. образуют за время наблюдения простейший поток [36, 77], в котором интервалы А/„, = [/„,(1) — —между моментами появления двух лучей независимы и распределены экспоненциально с плотностью вероятности
ехр(—£At), (2-31)
где среднее значение А/ = 1Д‘.
Причины, ограничивающие случайное время «жизни» каждого луча tm = tTO(2) — те же, что и причины, определяющие интервал времени между моментами появления двух последовательно возникающих лучей, — это движение корреспондентов, затенения от рельефа местности и окружающих объектов. Следовательно, тП1 является также экспоненциально распределенной случайной величиной, среднее значение которой
г = Л/Гпо, (2.32)
где Л — среднее расстояние, при перемещении на которое полностью меняется лучевая структура сигнала.
Время существования луча ограничено, поэтому пришедший по нему сигнал будет принят в точке наблюдения как высокочастотный импульс длительностью тто, комплексная амплитуда которого равна Um, а частота смещена относительно несущей на Qm. По условиям отражения комплексная амплитуда в луче может рассматриваться как нормально распределенная случайная величина со средним значением, по ансамблю лучей равным нулю [6, 67, 77]. Квадратурные составляющие принятого колебания в этом случае можно определить как независимые нормально распределенные случайные величины с нулевыми средними значениями и равными дисперсиями.
Доплеровское смещение частоты сигнала в ??г-м луче — случайная величина , для которой плотность распределения вероятностей определяется распределением точек отражения в окрестности движущегося
абонента и его скоростью. В случае, если сигнал S(t) узкополосный и занимает полосу частот |w — Wo| < Os, причем Од < о.’о, различием доплеровского смещения спектральных составляющих можно пренебречь — сигнал в m-м луче в целом приобретает доплеровское смещение. определяемое центральной (несущей) частотой лп- Кроме того, можно пренебречь соответствующими фазовыми изменениями сигнала, поскольку практически всегда в условиях города дальность связи с ПО относительно невелика и для узкополосного сигнала в диапазоне УКВ
й 7Г.
Заметим также, что случайная задержка в любом я?-м луче на мно го порядков превышает период несущего колебания и вызывает равновероятное на интервале [0, 2тг] смещение фазы волны. С учетом сказанного выражение (2.27) может быть преобразовано к виду
-V(7) = У? exp juJot + jOnit + ~~ s(w0 4- Q) exp(zQt) dQ
(2.33) откуда следует, что
A'(t) = s(tyx(t,w0).
т.е. влияние канала радиосвязи на передаваемый узкополосный сигнал можно рассматривать как случайную модуляцию, описываемую передаточной функцией на частоте несущего колебания.
Быстрые флуктуации амплитуды сигнала наблюдаются уже при перемещении ПО на незначительные расстояния (доли и единицы длины волны несущего колебания). Часть пространства перемещения ПО с указанными свойствами, характеризующимися примерным постоянством энергетических параметров сигнала, определяется как локальная зона (рис. 2.7).
Рис. 2.7. Локальная и глобальная зоны перемещения ПО
При достаточно Большом числе нерегулярных составляющих (лучей) сигнала (L > 4) их суммарное колебание согласно центральной предельной теореме представляет собой, как уже отмечалось выше, нормальный процесс, а огибающая этого процесса г является случайной функцией и в пределах локальной зоны описывается распределением Релея с плотностью распределения вероятностей ш(г):
ш(’’) = ехР \~i~2 ) ' ’’ > °' ° (2-34)
<7 \
где гг — параметр распределения Релея. При этом среднее значение амплитуды в пределах локальной зоны (локальное среднее значение амплитуды) и локальное среднее значение мощности сигнала (локальное среднеквадратическое (эффективное) значение амплитуды сигнала) определяются соответственно как
М [г] = т = viler, M[r2] = р = (гэф)2 = 2<т2.
(2.35)
(2.36)
В рамках принятой модели канала связи флюктуации фазы сигнала могут быть описаны равномерным распределением в интервале [0,2тг] с плотностью ш(^>) = тг/2.
Использование для описания быстрых флуктуаций амплитуды сигнала релеевского закона распределения означает признание факта отсутствия в сигнале регулярной составляющей, что справедливо в условиях большого города и подтверждается экспериментально [6, 67, 77]. В условиях пригорода данное предположение в общем случае неверно, что отмечается в целом ряде работ, описывающих результаты натурных экспериментов [6, 38, 77]. Здесь наблюдается наличие существенной регулярной компоненты 0 сигнала, и модель (2.34) становится неадекватной экспериментальным данным. В этом случае выражение для плотности распределения огибающей сигнала будет соответствовать обобщенному закону Релея:
(2-37)
где 70(.) — модифицированная функция Бесселя комплексного аргумента первого рода, нулевого порядка. Если в = 0, т.е. регулярная составляющая отсутствует, выражение (2.37) переходит в (2.38).
Среднее значение случайной величины г из (2.37) определяется как
(2.38)
гДе 7i() — модифицированная функция Бесселя комплексного аргумента первого рода, первого порядка.
В дальнейшем используется параметр К, определяющий отношение локальных средних мощностей регулярной и случайной компонент сигнала:
К = (Г2/2>2. (2.39)
Следует отметить, что уже при К = 0,4 наблюдается заметное отклонение закона распределения амплитуды от релеевского. На практике же натурные эксперименты [6, 38, 77] показывают, что вне условий большого города параметр К принимает значения в диапазоне от 2 До 13.
С учетом (2.39) выражение (2.38) запишем в виде, который используем в дальнейшем:
г = <т\/ тг/2?), (2.40)
где
Г) = [(1 + /<)/о(А72) + А/^К/г)] ехр(А’/2). (2.41)
Релеевское распределение вероятностей амплитуды сигнала, характеризующее быстрые интерференционные замирания, является условным, справедливым лишь в пределах локальной зоны (см. рис. 2.7) на небольших отрезках времени, в течение которых значение параметра распределения Релея
а = гэф/-\/2 = ryJlfT: (2.42)
можно считать практически постоянным. Для длительных временных интервалов такая идеализация^неправомерна, поскольку случайные изменения затухания радиоволн вследствие затенений от рельефа, растительности и местных строений вызывают флюктуации эффективного (среднего) значения напряжения сигнала (а следовательно, и его мощности).
В ряде работ [6, 38. 45. 77] по подвижной радиосвязи отмечалось, что при перемещении ПО на расстояния, превышающие размеры локальной зоны, параметр распределения Релея (локальное среднее значение амплитуды, локальное среднеквадратическое значение амплитуды, локальное среднее значение мощности сигнала) быстрых флуктуаций медленно изменяется в соответствии с логнормальным законом распределения. который при измерении, например, случайной величины у — г2ф в логарифмических единицах имеет вид
-(j/) = ехр Г-(У-^>21 , " (2.43)
У/АТГСу *-&у
где у = 10 Ig(r^) выражено в логарифмических единицах: <т?/ — среднеквадратическое отклонение (рассеяние) уровня сигнала от своего среднего значения; ут — медианное значение уровня сигнала при логнормальном распределении его значений, совпадающее с его средним значением.
Рис. 2.8. Флюктуации сигнала в канале подвижной радиосвязи
Зона, при перемещении в которой подвижного объекта выполняется условие ут = const, называется глобальной (см. рис. 2.7). Размеры глобальной зоны составляют примерно 500x500 м [6, 67].
Таким образом, в пределах глобальной зоны амплитуда сигнала флуктуирует по сложному закону
wi(r | уУЖу) dy,
(2.44)
где сщ(г | у) — условная плотность распределения вероятности вида (2.34) для условий большого города и (2.37) в общем случае;
соответствует (2.43).
Флуктуации амплитуды сигнала в глобальной зоне имеют характерный вид и представлены на рис. 2.8. Из рисунка видно, что на медленные флюктуации локального среднего значения амплитуды т накладываются быстрые флуктуации амплитуды сигнала. Флуктуации амплитуды рассматриваются относительно поступательного движения ПО в глобальной зоне. Величина Д£лок характеризует размеры локальной зоны, где по определению выполняется условие г — const. При этом величина С'о на оси ординат определяет минимально допустимое значение амплитуды сигнала на входе приемника подвижного объекта (СРД), при котором обеспечивается заданное качество приема информации. Выполнение условия т < Uo означает отказ канала передачи.
Из анализа рис. 2.8 следует, что имеются два типа отказов канала передачи. В первом случае выполняется условие г < Uq. Отказ данного типа определим как отказ канала передачи по критерию мгновенной амплитуды. Во втором случае (г < Un) отказ данного типа определим отказом по критерию усредненной амплитуды. Аналогично, рассматривая флюктуации мгновенной мощности (или эффективного значения напряжения) сигнала на входе приемника, можно выделить условия отказа канала по критериям мгновенной и средней мощности (или мгновенного и среднего среднеквадратического значения амплитуды сигнала).
Одним из основных факторов, снижающих достоверность приема
радиосигналов, наряду с замираниями являются случайные помехи. Наличие помех в радиоканале обусловлено свободным доступом к среде распространения. Вследствие этого прием радиосигналов осуществляется как в присутствии собственных шумов аппаратуры (флюктуационных помех), так и внешних помех, среди которых особую группу занимают станционные помехи.
Флуюктуационная помеха представляет собой непрерывный случайный процесс во времени. Мгновенные значения флюктуационной помехи имеют нормальный закон распределения с плотностью распределения вероятностей
’фп(.г) = ~т==--------exp
фп
(2-45)
где сГфп = г2 = [/фпэф/2 — дисперсия флюктуационного процесса, равная квадрату эффективного (действующего) значения.
Станционные помехи являются случайными (в смысле случайности совпадения частот работающих радиостанций) и сосредоточенными по спектру. Они обусловлены, как правило, одним или несколькими сигналами посторонних радиостанций. Поэтому статистические свойства помех и сигналов в значительной степени схожи. В частности, огибающая станционных помех Un, так же, как и сигнала, в большинстве случаев распределена по закону Релея с плотностью вероятностей ш((/п) вида (2.34), где 2<т2 = Рп = (бгпэф)2; Рп — средняя мощность помех; Л'„эф — эффективное значение напряжения помех.
Эффективное значение напряжения случайных сосредоточенных помех на входе приемника, выраженное в децибелах по отношению к 1 мкВ, как и для сигналов, называют уровнем помех и обозначают через
.г, т.е. .г = 201§(Г'пэф) = 10lg(Fn).
Случайный процесс изменения во времени уровней помех, согласно статистическим исследованиям, так же, как и уровней сигналов, описывается логнормальным законом распределения с плотностью вероятностей ш(л) вида (2.43). Борьба с внешними помехами требует применения целого ряда мероприятий, конкретизируемых в каждом отдельном случае в зависимости от механизма воздействия, структуры, статистических свойств, месторасположения их источников, от требуемого качества радиоприема.
Таким образом, при обеспечении связи с ПО в канале радиосвязи будут иметь место шумы местного окружения (аддитивные помехи) и замирания сигнала (мультипликативные помехи), обусловленные, во-первых, многолучевым распространением радиоволн и, во-вторых, затенениями от рельефа местности и строений. Кроме того, в случаях, когда в области взаимной электромагнитной доступности находится несколько станций радиодоступа, некоторые из которых используют одни и те же (или соседние) частотные каналы, появляются станционные помехи.
Рассмотрим модель беспроводного канала связи при одновременном воздействии на принимаемый сигнал станционных помех и шумов приемника (флуктуационной помехи). При статистической независимости флуктуаций мощности сигнала и помехи для совместной плотности их распределения справедливо выражение [67]
Рп) = ехр + (П-Wn „ , (2 46)
2тг<Тр [ 2а() 2<т~
где Рет, Рпт — медианные (средние) значения средней мощности сигнала и помехи в пределах глобальной зоны соответственно; <т0 — стандартное отклонение значений Рс, Рп от среднего значения.
Введем следующие обозначения: z = у — х — превышение уровня сигнала у над уровнем помех х, q — у/Рт — значение уровня сигнала при заданном уровне шумов. Тогда совместное распределение локальных средних превышений сигнала над шумом и сигнала над помехой можно записать в виде
,) = » ехр [_ (» - ^)г + «-•-*") + , (2.47)
где <т|', = <т~ + <т? = <т‘ + п-2 + <т~.
Величина сгу, которая для районов с городской застройкой имеет значение 6...9 дБ, а для районов с холмистой местностью определяется согласно модели Лонгви-Райса [6, 38. 40, 67] из выражения
п ГКш) дшТ] A/?(d)
101g 6 + 0,55\/—-^- 0,004—при —^-^^ 4700;
V А А А
13.9 при A/?(d)/A > 4700.
(2.48) где Ah(d) = Д6[1 — 0.8 ехр(—0.02d)] — диапазон изменения выступов для отдельных элементов местности на дистанции d; А — длина волны, м.
Среднее значение уровня сигнала в точке приема можно выразить как [38, 49, 77]
ут = 10 lg(Pm) = 10 lg[acPfr-’1]. (2.49)
где Рт — медианное значение мощности сигнала в точке приема; Рс мощность передатчика БС. Вт; п — коэффициент, определяемый на основе характеристик потерь распространения радиоволн (п = 2...5);
ас — нормирующий коэффициент, который зависит от условий распространения радиоволн, несущей частоты сигнала и высот передающей и приемной антенны.
Среднее значение превышения уровня сигнала над уровнем шумов также пропорционально г~п, на краю зоны при г = R минимально и
определяется из выражения [45]
qtn(R) - 10lg[^„,.(/?)].
где •
, _ P'GiGzaR-” ’прм “ NokF '
(2.50)
(2.51)
Рс — значение мощности передатчика базовой станции; G'i, G? — коэффициенты усиления на приемной и передающей стороне соответственно; Рш = kTkF = NokF — мощность шума на входе приемника, равная произведению полосы пропускания приемника kF, постоянной Больцмана к и температуры приемника Т.
Идеализированная ситуация, когда источником станционных внесистемных помех является одна БС (СРД), встречается крайне редко. Рассмотрим вариант территориально-зонового построения сети связи с подвижными объектами (рис. 2.9). Подобное построение сети обладает большими преимуществами с точки зрения уменьшения мощности передачи СРД и мобильных станций, а также эффективного использования частотного ресурса.
Расстояние
между соседними БС
Рис. 2.9. Модель внутрисистемных помех в территориальной СРП
Поскольку случайная амплитуда сигнала на входе приемника гП!- = _ [<пг. от каждой из неподвижных сторонних СРД характеризуется ре-леевским распределением (2.34) с параметром распределения сг?. плотность вероятности мгновенной мощности Рш- имеет экспоненциальное распределение со средним значением Рт = 2<т?, которое представляет собой среднюю локальную мощность помехи на входе приемника.
Величина Рп; является случайной с логарифмически нормальным распределением, имеющим следующие среднее значение и дисперсию [6, 45. 77]:
m(Pm:) = exp[ln(Pni) + o-ni/2] = pmi ехр[<т2г-/2]; (2.52)
D(Pni) = [exp(r“J - l]m(Pni)2 = Pmi exP^nOlexP^ni) ~ ЧХ2-53) где crni — стандартное отклонение Рп от среднего значения: Pni = Рт, — медианное значение мощности сигнала на входе приемника, удовлетворяющее выражению (2.50).
Интерферирующие волны от всех М источников помех в точке приема создают результирующую (эквивалентную) волну. Суммарное колебание, исходя из положений центральной предельной теоремы, представляет собой нормальный процесс.
Принимая сгэкв за эквивалентное стандартное отклонение локальной средней мощности результирующей интерференционной волны (эквивалентной помехи) от среднего значения, вышеуказанные статистические моменты для результирующего колебания можно выразить в виде [6, 77]
м
т(Рп) = У*, т(Рш); (2.54)
м
D(P„) = £ D(Pni) = [ехр(гэ2кв) - 1]т(Рп).' (2.55)
«“1
Отсюда эквивалентное стандартное отклонение локального среднего значения мощности составной интерференционной волны (эквивалентной помехи) от своего среднего значения
Откуда, используя (2.55). (2.56), получаем
.2 _
ЭК В
-2п
где Pni — мощность г-го источника помехи; г,- — дальность до /-го источника помехи.
Учитывая, что среднее значение мощности принимаемого сигнала уменьшается по мере удаления мобильного абонента от передающей базовой станции пропорционально г~п, среднее значение превышения уровня сигнала над эквивалентной помехой в пределах глобальной зоны для выбранной точки можно определить как [67]
zm(r) = 101g
а.Рсг“’’е'7-/210ОЛСТп”:в
(2.58)
Уточненная модель радиоканала СПР позволяет учитывать быстрые и медленные замирания сигналов, а также влияние на качество связи внутрисистемных помех. Она вполне пригодна для анализа эффективности функционирования локальных (однозоновых) и террриториаль-ных (многозоновых) СПР.
я-
\ %
Г л а в а 3
Модели физического уровйя беспроводных сетей
-V гН/ я
Основное назначение физического уровня — обеспечение переноса битов через беспроводную среду в интересах подуровня МАС. Кроме того, на физический уровень обычно возлагаются функции управления установлением и разрывом соединений, выполнения мониторинга среды и с учетом ее состояния управления выбором вида используемых сигналов, скоростью и мощностью их передачи.
Основными протоколами физического уровня являются протоколы, обеспечивающие преобразования цифровых сигналов в манипулированные радиосигналы на передаче и обратное преобразование на приеме. Важнейшими характеристиками физического уровня являются скорость и достоверность передачи битов.
Особенностью физического уровня беспроводных сетей является то, что при связи в движении в результате воздействия многолучевости и затенений радиосигналы претерпевают во времени случайные флюктуации. Кроме того, в радиоканале с множественным доступом условия распространения радиосигналов с разными корреспондентами обычно существенно отличаются (по дальности связи, по величине случайных помех, по степени воздействия медленных и быстрых замираний и т.д.). При этом случайным образом во времени независимо изменяются характеристики каналов от каждого из абонентов, находящихся в пределах одной точки доступа, что определяет необходимость применения на физическом уровне адаптивных протоколов формирования и обработки радиосигналов. Комплексное применение адаптивных протоколов на физическом и канальном уровнях особенно эффективно при пакетной передаче информации, при которой выбор типа модуляции и помехоустойчивого кода может осуществляться по принципам «от абонента к абоненту» и «от пакета к пакету».
Достижения, сделанные за последние 30 лет в области обработки цифровых сигналов, позволили сделать цифровые приемопередатчики более малогабаритными, дешевыми, быстродействующими и более эффективными с точки зрения использования мощности в сравнении с аналоговыми Кроме того, использование цифровой модуляции и пакетных методов передачи позволяет иметь ряд других преимуществ, включая более высокие скорости передачи данных, мощные способы исправления ошибок, устойчивость к дефектам канала, более эффективные протоко-
лы множественного доступа и более высокую безопасность и надежную скрытность. В частности, способы многоуровневой модуляции обеспечивают более высокие скорости передачи по сравнению с аналоговой при одинаковой ширине полосы.
Выбор для физического уровня сетей подвижной связи конкретного способа цифровой модуляции осуществляется, исходя из стремления достичь:
• высокой скорости передачи данных;
• высокой спектральной эффективности (минимальной занятости ширины спектра);
• высокой энергетической эффективности (минимальной требуемой мощности передачи);
• робастности к нестационарности характеристик канала;
• робастности к условиям использования мобильного аппаратного оборудования;
• низкой стоимости.
Эти показатели часто несовместимы, и поэтому выбор типа модуляции осуществляется, исходя из поиска наилучшего компромисса между ними.
В настоящее время широко применяют два вида цифровой модуляции: линейная и нелинейная. Нелинейная модуляция, как правило, имеет постоянную огибающую сигнала, поэтому ее также называют модуляцией с постоянной огибающей. Линейная модуляция имеет лучшие спектральные свойства, чем нелинейная, поскольку последняя приводит к расширению спектра. Вместе с тем большинство способов линейной модуляции не поддерживают постоянства огибающей сигнала. Модуляция с непостоянной огибающей более восприимчива к изменениям амплитуды вследствие замираний и интерференции. Кроме того, в передающих устройствах целесообразно использование нелинейных режимов работы усилителей мощности, при которых они обладают высоким КПД и отличаются дешевизной и конструктивностью. Вместе с тем такие усилители не применимы для модуляции с непостоянной огибающей.
Линейная модуляция включает амплитудно-импульсную модуляцию (РАМ), фазовую манипуляцию (PSK) и квадратурно-амплитудную модуляцию (QAM). К нелинейными способами модуляции относятся частотная манипуляция (FSK) и манипуляция с минимальным частотным сдвигом (MSK).
3.1. Модель канала т '*
При цифровой модуляции последовательность битов конечной длины кодируется в один из нескольких передаваемых сигналов. Интуитивно понятно, что работа приемника должна быть направлена на минимизацию вероятности ошибочного приема на основе выбора из множества
т,еМ—• Передатчик Канал с АБГШ Приемник -►me/W
Рис. 3.1. Модель канала связи
возможных сигналов, того, который находится «ближе всего» к принимаемому сигналу. Определение расстояния между передаваемым и принимаемым сигналами предполагает использование метрики расстояния для пространства сигнала. На основе представления сигналов в виде их проекции на ряд базисных функций можно получить соответствие между множеством передаваемых сигналов и их векторным представлением. Таким образом, появляется возможность для анализа сигналов в конечномерном векторном пространстве, используя классическое представление расстояния для векторных пространств.
Рассмотрим упрощенную модель цифрового канала связи [64] с аддитивным белым гауссовым шумом (АБГШ), представленную на рис. 3.1.
Канал имеет импульсную характеристику h(t) = 6(f), и на него воздействует стационарный белый шум n(f) с нулевым средним значением, и спектральной плотностью мощности Л'о/2. Каждые Т секунд на передатчике выбирается и передается в канал сообщение т,: из множества М = {mi,..., 7П\г} возможных. Сообщение поступает на передачу с вероятностью Р, , где Pi = 1- Так как существует возможность выбора одного из М различных сообщений, каждое передаваемое сообщение переносит log2 М битов информации. Таким образом, в канале передается log2 М битов каждые Т секунд со скоростью передачи данных R = logA//7 битов в секунду. Биты log2 М, соответствующие сообщению т.;, преобразуются в аналоговый сигнал Si(t) € Е = {si(f),имеющий энергию
Ei = [ s?(t)dt, i — (3.1)
Jt
Следовательно, передаваемый сигнал можно представить в виде - kt), где Si(t) — аналоговый сигнал, соответствующий сообщению mi, передаваемому на временном интервале [кТ, {к + 1)Т].
Принимаемый сигнал, соответствующий переданному сообщению ,77г в течение временного интервала [кТ, (к + 1)Т], представляется в виде x(t) = ^2si(t — кТ) + n(t). Для каждого переданного сигнала si(t — кТ) приемник должен осуществить наилучшую оценку принятого сигнала Si(t) G S (mi(t) G М). В частности, приемник должен минимизировать вероятность появления ошибки в символе на временном интервале [кТ,(к + 1)Т]
м
Ре = ^PiP(m mi I minep). (3.2)
i=l
Как уже было отмечено ранее, в модели канала с АБГШ учитывает
ся передаваемый модулированный сигнал s(t) = Re {it(i)ej2’rf/} и шум n(Z) со средним нулевым значением и спектральной мощностью Л'о/2. В этом случае сигнал, поступающий на прием, может быть представлен в виде r(f) z= ,s(/) + п(/). Соотношение сигнал/шум на входе приемника определяется как отношение мощности принимаемого сигнала Рг к мощности шума в пределах ширины полосы передаваемого сигнала S(t) и обозначается как у. Принимаемая мощность Рг определяется с учетом мощности передачи, потерь распространения на трассе с учетом воздействия затенений (медленных замираний) и многолучевости (быстрых замирания). Мощность шума определяется исходя из ширины полосы предаваемого сигнала и его спектральных свойств 5(/). В частности, если ширина полосы модулирующего сигнала ??(/) равна В (т.е. <((/) имеет ненулевые частотные составляющие в пределах полосы [—/?,/?]), то ширина полосы передаваемого сигнала 5(/) будет равна 2В. Так как белый гауссов шум л(£) имеет однородную спектральную плотность мощности А'о/2, полная мощность шума в пределах ширины 2В составляет N = NoB. Откуда следует, что
_ л_
7 ~ N^B
Величина у часто выражается через энергию сигнала на бит или на символ Es в виде
Я Es _ Еь 7 ~ N^B “ NOBTS ~ N0BTt ’
где Ts — длительность передачи символа; 7/, — время передачи бита (при двоичной модуляции 7) = В, и Es = Еь). При найквистовском представлении символа данных (Ts = 1/В) требуемая ширина полосы сигнала эквивалентна отношению В = \./Ts. При этом для многоуровневого сигнала ys = Es/Nq, а для двоичного сигнала уь = Е’ь/^У-Величины 7S и )(, часто называют отношением сигнал/шум на символ и на бит соответственно. Для сравнительного анализа характеристики различных систем удобно использовать вероятность появления ошибки на бит Рь как функции от уь. Однако для Af-ичных сигналов вероятность появления ошибки на бит зависит как от вероятности появления ошибки на символ, так и от особенности преобразования битов в символы. Поэтому, как правило, вероятность появления ошибки на символ Ps вычисляется как функция от ~.s в соответствии с концепцией пространства сигналов, а затем определяется значение Pi, как функция от уь, используя при этом точную или приближенную оценки.
(3.3)
(3.4)
3.2. Линейная модуляция
При линейной модуляции поток информационных битов кодируется по амплитуде и/или фазе передаваемого высокочастотного сигнала. Существуют три основных вида многопозиционной линейной модуляции:
Синфазная составляющая
Квадратурная составляющая
Рис. 3.2. Обобщенная схема линейного модулятора
амплитудно-импульсная модуляция: информация кодируется только по амплитуде: фазовая модуляция: информация кодируется только по фазе. квадратурная амплитудная модуляция: информация кодируется как по амплитуде, так и по фазе.
Пусть s(/) = Re {?/(/)ej27r^ct} есть передаваемый сигнал. Тогда для всех схем линейной модуляции
«(<) = 52 SnffG - nX); sn = an+jbn, (3.5)
где Ts 1//с — длительность символа; п — индекс времени; g(t) — форма импульса: sn — комплексный сигнал, отражающий К = log2 М битов передаваемой информационной последовательности (которая не изменяется на протяжении периода символа Ts). Различные возможные значения s„ масштабируются константой, пропорциональной энергии, форме импульса, или составляют двухмерное созвездие сигнала, соответствующее синфазной и квадратурной составляющим сигнала. Битовая скорость при этом составляет К битов на символ или R = К/Т\ битов в секунду. Так как s„ = an + jbn имеет диапазон изменений в пределах ряда комплексных значений, огибающая сигнала является, как правило, непостоянной. Преобразование информационной последовательности в комплексное число $п наряду с выбором формы импульса </(Z) определяет способ цифровой модуляции. Передаваемый сигнал может быть представлен в виде
<0 =
52 -пТ^
- п
cos 2тг/с£
52 ~ nT^
sin 2тг_/с./, (3.6)
где первое выражение в скобках отражает активную составляющую Sp(<), а второе в скобках — реактивную составляющую s<j(/).
Необходимо отметить, что спектральные свойства s(t) и л(/) полностью определяются спектральными характеристиками g(t). В частности, ширина полосы частот сигнала м(1) соответствует ширине полосы импульса </((), ширина полосы передаваемого сигнала s(t) в 2 раза больше
62
Глава 3
Е.
(3.8)
»
т
данных,
(t) [ dt
о
(3.9)
И.
сигнала.
протяжении одного символьного периода [0,Т8) сигнал с имеет энергию
Фтйп 1
dmn — ll^ni(^) &п
о J
J ^,</"(t)-[l + cos 4тг/с7] dt
'Т S
aK^dt = |
0
~ 1
2
этой полосы. Таким образом, минимизация ширины основного спектра д(1) ведет к лучшей спектральной эффективности, а минимизация амплитуды боковых составляющих — к уменьшению помех по соседним каналам. Такое представление сигнала используются для выбора формы импульса g(t).
Обобщенная схема линейного модулятора представлена на рис. 3.2.
Амплитудно-импульсная модуляция
При использовании амплитудно-импульсной модуляции (pulse amplitude modulation, РАМ) вся информация кодируется в амплитуде сигнала Ат. Передаваемый сигнал в пределах периода передачи символа может быть представлен в виде
s(f.) = Re {Am<7(t)ej27r/ct} = Amg(t) cos 2?rfct, 0 < / < 7Л » l/fc.
(3.7) где A,n — (2m — 1 — M)d, m = 1, 2,..., M = 2Л , определяет созвездие сигнала. Таким образом, амплитуда передаваемого сигнала принимает М = 2К различных значений, при этом каждый импульс переносит log2 М = К битов на символ, передаваемый в течение периода времени Tf. Форма импульса g(f) формируется с учетом возможного улучшения спектральной эффективности и снижения межсимвольной интерференции (intersymbol interference, ISI).
На
М-РАМ
о
— энергия сигнала в импульсной форме (при условии, что
где Ед
fcTs 1, при этом g(t) имеет приблизительно постоянное значение в течение Tr = l/fc). Следовательно, расстояние между модулированными сигналами, переносящих различные последовательности
где — минимальное расстояние между точками созвездия
Формирование созвездий сигналов часто осуществляется с помощью кода Грея, где амплитуды сигналов, соседние по отношению друг к другу, различаются на одну двоичную цифру (рис. 3.3).
100;
010
ООО;
М = 8;К=3
М = 4;К = 2
Рис. 3.3. Модуляция М-РАМ с использованием кода Грея
Фазовая модуляция
При фазовой модуляции (Phase shift keying, M-PSK) вся информация кодируется в фазе предаваемого сигнала. Следовательно, предаваемый сигнал на протяжении одного символьного периода времени может быть представлен в виде
sm(t) = Re{ff(t)eJ'2Hm-1)/M е7’2^1} = g(t) cos [2^/ + 2тг(т - 1)/М] = = g(t) cos[27r(m — 1)/М] cos2tt/c/ — <7(t)sin[2?r(m — 1 )/M] sin 2тг/с.
t0 t T. (3.10)
При этом в выражении s„ = ап + jbn значения ап и Ьп определяются как cos[27r(m — 1)/Л/] и sin[27r(m — 1)/М] соответственно. Как и в случае с М-РАМ, </(/) — форма импульса; 0т = 2тг(т — 1)/Л7, т = 1,2,.... М = 2К, — возможные фазы несущей, которые отображают информационные биты. Обычно 2-PSK называют двоичной PSK, или BPSK, a 4-PSK — квадратурной фазовой модуляцией (QPSK). и это то же самое, что QAM-4 с квадратичными созвездиями.
Все возможные сигналы sm(t) имеют одинаковую энергию
fTs > ИТ! > I
ESm=J0 (311)
Отметим, что для </(t) = 1, т.е. для прямоугольного импульса, этот сигнал имеет постоянное значение огибающей в отличие от других способов амплитудной модуляции М-РАМ и M-QAM. Однако прямоугольные импульсы являются спектрально неэффективными, а более целесообразные формы импульсов обычно вводят непосредственную огибающую М-PSK. Расстояние между точками в созвездие сигнала M-PSK
dmn = yjЕд(}. — cos 2тг(ш — п)/М) yjЕд(1 — cos lir/M) = dmin.
(3.12)
Как и в случае с М-РАМ, формирование созвездия часто осуществляется с помощью кода Г рея, где фазы соседних сигналов различа-
64
Глава 3
ются на одно битовое значение (рис. 3.4).
(3-14)
Es.
тг)
п
Тя.
(3.13)
При этом энергия сигнала sm(t) аналогична рассмотренной ранее М-РАМ и составляет
Jo
Расстояние между точками в созвездии сигнала
^2mEs,
Рис. 3.4. Формирование созвездий сигнала M-PSK с помощью кода Грея
Квадратурная амплитудная модуляция
При квадратурной амплитудной модуляции (quadrature amplitude modulation, M-QAM) информационные биты кодируются как по амплитуде, так и по фазе передаваемого сигнала. В отличие от М-РАМ и M-PSK, в которых имеется одна степень свободы, в рамках которой кодируются информационные биты (амплитуда или фаза), в M-QAM имеем две степени свободы. В результате M-QAM — самый спектрально эффективный из трех рассмотренных способов линейной модуляции, поскольку при заданной ширине полосы сигнала он позволяет кодировать наибольшее число битов на символ с заданной средней мощностью.
Передаваемый сигнал может быть представлен в виде
sm(t) = Re {.4meje™Xz)ej2’r'M} = Amg(t) cos[2?rfct + d,„],
Рис. 3.5. Созвездия сигналов QAM-4 и QAM-16
где a j. = Ak cos 0* и !>/ — Ai- sin ф- при к — m, n.
Для квадратных созвездий, где </„ и Ьп принимают значение (2m — 1 — L)d, m = 1,2......L —
— 2Z, минимальное расстояние между точками сигнала d,mn = d\/2Ev аналогично М-РАМ. Созвездия сигналов QAM-4 и QAM-16 представлены на рис. 3.5.
3.3. Нелинейная модуляция
При нелинейной модуляции передаваемые сигналы s(i) имеют по-стоЯННую огибающую, что делает их менее чувствительными к искажениям амплитуды, вводимых каналом или аппаратным оборудованием, и позволяет применять эффективные нелинейные усилители мощности с высоким КПД. Платой за это является более низкая спектральная эффективность.
Для формирования сигналов с постоянной огибающей информационные биты, как правило, кодируются по частоте, и в этом случае модуляцию называют частотной манипуляцией (frequency shift keying, M-FSK).
Сигнал M-FSK может быть представлен в виде
sm(i) = A cos[2tt/c7 + 2тгатД/сЗ], 0 < t Т„, (3.16)
где ат = (2т — 1 — М). т = 1.2.....М = 2к. Следовательно, минимальный разнос между различными символами равен 2Д/С.
Самым простым способом формирования сигнала M-FSK является использование М генераторов, работающих на различных частотах fc + «тД/с, при этом модулятор управляет переключением генераторов при передачи каждого символа на период Ts. Однако при этом во время переключений будет происходить разрыв фазы, обусловленный фазовыми сдвигами между генераторами. Прерывистость фазы ведет к расширению спектра, что нежелательно.
Способом получения M-FSK, который исключает прерывистость фазы, является частотная манипуляция одной несущей. В данном случае модулированный сигнал будет иметь вид
sm(t) = A cos
2тг/с/ + 2тгД
= A cos[2%/cf + 0(f)],
(3.17)
где u.(f) = ang(t - nTs) представляет собой сигнал М-РАМ, модулированный информационным битовым потоком, как было рассмотрено ранее. Очевидно, что при этой реализации фаза 0(f) является непрерывной. Поэтому эту реализацию M-FSK называют FSK с непрерывной фазовой или CPFSK.
При небольших /3 ширина полосы передачи s(f) [89]
В5 » Л1Д/С + 2В, (3.18)
где В = Вд — ширина полосы модулирующего сигнала М-РАМ //.(/), для сравнения ширина полосы при линейной модуляции Bs к 2Вд. Таким образом, ширина спектра, занимаемая CPFSK, по сравнению с линейной модуляцией увеличивается более, чем вдвое, а спектральная эффективность снижается по мере увеличения числа битов на символ К = log2 М.
Сигналы MSK —этот особый случай FSK, где частотное разнесение составляет Д/с = Q$/Ts и является минимально необходимым для ортогональной обработки сигнала с минимальной шириной полосы частот.
Требуемая ширина полосы может несколько снижаться за счет формирования оптимальной формы импульса сигнала РАМ в (3.17). Наиболее часто для улучшения спектральной эффективности MSK используется гауссова форма импульса
</(/) = (3.19)
где а — параметр, определяющий спектральную эффективность. Модуляцию MSK с гауссовой формой импульсов сокращено называют GMSK. Спектр д(7) сигналов GMSK определяется как
G(f) = е-“2/2. (3.20)
Параметр о определяется из выражения [89]
а=у/-1п '/05/Вд. (3.21)
Очевидно, что большее значение а позволяет получить более высокую спектральную эффективность.
3.4. Демодуляция сигналов ...
Рассмотрим Д7-ПОЗИЦИОННЫЙ способ модуляции, при котором в течение длительности символа передается одни из si(/). 82(1),.... вл/(1). 0 ^ / < 7), сигналов, соответствующий сообщению т,. содержащему log2 М битов. Работа демодулятора в условиях АБГШ заключается в приеме смеси сигнала и шума *y(/) + n(t) и определении того, какое из М сообщений (битовых потоков) было фактически передано. Оптимальный линейный демодулятор минимизирует вероятность появления ошибки в символе Ps при декодировании сообщения. Величина может минимизироваться на основе использования согласованных фильтров совместно с детекторами максимального правдоподобия. Фильтры согласуются с М возможными передаваемыми сигналами на интервале их передачи (рис. 3.6). Для всего ряда передаваемых сигналов S1(1), s/ty ..., 8м(/), 0 t < Ts, согласованный фильтр для i-ro сигнала определяется как s/T^ — t), 0 5^ t < Ts. Важным свойством согласованных фильтров является то, что у сигнала, искаженного белым гауссовым шумом, прошедшего через согласованный фильтр, максимизируется отношение сигнал/шум [73]
На М выходах .!,•(/) согласованного фильтра делаются временные выборки л.Т5 для каждого символа х = {.tj, ...,Д’д/}, которые подаются на детектор максимального правдоподобия.
Вектор а*. ,тц.-х выборок обладает достаточной информацией для демодуляции, т.е. в исходном принимаемом сигнале s/t) + п(1) вся информация, которая требуется для принятия правильного решения, содержится в выборках .1’1, ,1’2,..., .гду. Детектор максимального правдоподобия выбирает символ .s, так, чтобы р(эс. | s/ р(х | sj) V./ ф i
nls
Рис. 3.6. Демодуляция с использованием согласованного фильтра
при допущении о равновероятном появления каждого из Si символов. Если же это не так, то для определения Sj применяется критерий максимума апостериорной вероятности, который учитывает априорные вероятности появления Si.
Если передаваемые сигналы являются ортогональными, то составляющие шума пк в каждой ветви не коррелированы, следовательно, являются независимыми. При этом выходы ветвей согласованного фильтра {ач} являются статистически независимыми гауссовыми случайными переменными, откуда следует, что
лг 1 1 м
p{r I Si) = П р{хк I sik) = (^о)М/2 ехр g(.r, - sik)2 ,
? = 1,...,ЛТ (3.22)
Демодулятор на согласованных фильтрах применим к любому способу модуляции.
3.5. Вероятность ошибки в системах с BPSK
Вначале рассмотрим двоичную фазовую модуляцию (BPSK) с когерентной обработкой при идеальном восстановлении несущей и фазы сигнала. При двоичной модуляции каждый символ соответствует одному биту, так что вероятность появления ошибок в символах и битах одинакова. Передаваемый сигнал имеет вид
Ag(t) cos 2irfct = so(t), если sn ~ 0;
Ag(t) cos(2tt/cZ + ~) = — Ay(t) cos 2~/'c/ = Si(/), если s„ ~ 1.
r
огласованные фильтры, соответствующие каждому символу sq(/) и являются одинаковыми за исключением различия в знаке. Таким образом, блок согласованных фильтров при BPSK будет обеспечивать перенос частоты сигнала в основную полосу перед подачей его на фильтр д(Ть - /), согласованный с формой импульса </(/), и затем
4<) =
Пороговый детектор
Рис. 3.7. Оптимальная демодуляция сигналов BPSK
полученная выборка подается на пороговое устройство с нулевым пороговым значением (рис. 3.7).
Шум на входе приемника можно представить в виде
п(7) = n[(f) cos 2тг fct — riQ(f) sin 2тг fct,
где П/(7) и n<j(7) — синфазная и квадратурная составляющие шума соответственно. Так как сигнал BPSK не имеет квадратурной составляющей, демодулируется только синфазная составляющая сигнала. Таким образом, демодулятор устраняет квадратурную составляющую шума (при условии идеального восстановления несущей).
Предположим, что выборка ,г(7) осуществляется каждые пТь секунд и i(n) — выход во время пТь. Тогда
т(„\ _ / Ж") + »КП) для sn = 0: ' ' ' ( — А(п) + п/(п) для s„ = 1.
где А(п) и п/(п) — значения выхода согласованного фильтра, соответствующие сигналу s(/) и синфазному шуму соответственно, взятых во время nTf,. Согласованный фильтр осуществляет нормализацию f _oa д2(т) dr = 1, в результате которой
А(л) = У Hy”V(r)dr = (-l)’"A, . (3.23)
при этом А(л) = А для 8„ = 0 и А(л) = —А для s„ = 1
Рассмотрим составляющую шума п/(п). Так как п(/) — белый гауссов случайный процесс с нулевым средним значением. пт(») является гауссовой случайной переменной с Е{п/(п)] = 0 и дисперсией
ап1 = ^[«/(п)] =
= Е У ni(nTb-t)g(Tb-t)dt У П[(пТь - т)д(Ть - r)dr =
= У У E[nj{nTb ~ t)ni(nTb - r)]g(Tb - t)g(Tb - г) dtdr =
= У У - т)д(Ть - r)dtdr = J д2(Ть - 7) dt = ~,
(3.24)
где
последнее равенство вытекает из нормализации формы импульса
7 Декодирование BPSK заключается в использовании выражения = (—1)'"А + П[(п) для определения оценки s„ для каждого п. Назовем эту оценку s„. Отметим, что точки созвездия сигнала для BPSK соответствуют А и —А. так что dmin = 2А. Вероятность появления ошибки в бите Ръ есть вероятность того, что s„ s„. Оценка s которая минимизирует Ръ, является оценкой, при которой пороговым детектором присваивается значение s = 0, если s„ 0, и $ = 1, если sn < 0 (как показано на рис. 3.7). В последующем вероятность появления ошибки определяется как ;
Рь = р[.5„ = 0 | s„. = l]p[sn = 1] + p[s„ = 1 | s„ = 0]p[s„ = 0].
Из порогового правила принятия решения и допущения о равновероятности поступления сигналов на входы следует, что Ръ — 0,5р[п/(п) < < -А] + 0.5р[п./(п) > А].
Учитывая симметричность гауссова распределения, получаем две’ эквивалентных составляющих Ръ- Таким образом
( .1 \ / А \ [ «
ГГц// \уО,5Ло/ \а/2Лго/
(3.25) где •• 11Л
Q(~) = P(.r > z) = -L [ e~^dx.
V Z7T Jz
Учитывая, что А = \/Еь, окончательное выражение для (3.25) имеет вид
Ръ = Q^Eb/Q,5N^) = Q(\/2^). (3.26)
Вероятность ошибки при линейных видах модуляции в каналах с АБГШ
Для двоичной модуляции может быть получено выражение для определения точной вероятности появления ошибки [73, 89]. Однако вычисление вероятности появления ошибки становится все более сложным по мере увеличения размера созвездия сигнала, поскольку появляется много разных факторов, влияющих на появление ошибки в символе. Точное определение Ps для некоторых типов модуляции сигнала можно найти в [73, 89].
В [89] был получен простой единичный предел являющийся разумной аппроксимацией для Ps:
Ps (3f - (3-27)
где dmin минимальное расстояние между точками в созвездии. Однако этот предел не является полностью корректным для высоких отношений сигнал/шум, поскольку при этом вероятность появления ошибки
в символе для всех, кроме его ближайшего соседа, очень низка. Поэтому улучшения выражения (3.29) для высоких отношений сигнал/шум можно достичь на основе допущения, что Ps приблизительно равна для ближайших соседей (о) в созвездии сигнала, умноженному на вероятность появления ошибки в точке созвездия для ближайшего соседа при расстоянии dmm. т.е.
Ps к aQ(dmin/y/2N^). (3.28)
Необходимо подчеркнуть, что, как было отмечено ранее, минимальное расстояние dmin между точками созвездия, как правило, является функцией энергии сигнала на символ Es.
В результате применения этой аппроксимации к когерентным сигналам MPSK и MQAM получаем
Ps ам(2(у/Вм'ч'в), (3.29)
где о/и и 0м зависят от типа модуляции. Значения »м и 0М для некоторых видов модуляции приведены ниже. Формула (3.31) является приближением для высоких отношений сигнал/шум и основана на вероятности появления ошибки в символе для ближайших соседей, ее точный вывод приведен в [78, 91]. Кроме того, в [91] указывается на то, что выражение (3.31) описывает ухудшение характеристики системы из-за несовершенства работы приемника (медленный дрейф несущей).
Обычно большой интерес представляет получение вероятности появления ошибки на бит Ръ как функции энергии бита Для преобразования Ps в Pi, необходимо рассматривать процесс преобразования бита в символ, при этом вычисление обычно оказывается очень непростым. Однако для MPSK и MQAM при использовании кода Грея и относительно высоком отношении сигнал/шум может быть применена аппроксимация, при которой одна ошибка в символе приводит к одной ошибке в бите [89]. Используя тот факт, что один символ соответствует log2 М битам, можно записать
, искаженные биты искаженные символы
jTM'Yg ) —- —_- -___—------- ~ --------—___— __—........
все переданные биты (все переданные символы) log2 А/ или
Р‘Ь) = <3 30>
Кроме того, так как символ переносит log2 М битов, можно предположить [89], что каждый бит имеет приблизительно одинаковую энергию, тогда 7а = (log2 A7)7j. При использовании этого приближения в выражении (3.32) получается простая формула для Ръ как функции 77,:
Рь(7ь) = 0м^ъ), (3.31)
где ам = ам/^2М и 0М = / \og2 М для ам и 0М в (3.31).
Приближенные вероятности ошибки на символ и на бит при АБГШ [64] приводятся ниже:
BPSK, BFSK: Ps = Ръ = „ (3-32)
QPSK, QAM-4: Ps = 2Q(y/b), Ръ = Q(VWb)', (3-33) QAM-16: Ps = Рь = (3/A)Q(y/^j5y, (3.34)
QAM-64: Ps = (7/2)Q(77s/21). Pb = (7/12)Q(V^W?)- (3.35)
Дифференциальные способы модуляции обычно более трудно поддаются анализу, и для них вероятности появления ошибок на бит и на символ нельзя найти в завершенном виде. Выражение для DPSK в завершенном виде определяется как
Ps = Рь = (1/2) exp(-7i). (3.36)
Хорошим приближенным выражением для определения Ръ при DQPSK является выражение [89]
Г°° / О? 4- 1 / <7.2 -I- \
Ръ » / xexpl ———) IQ(ax)dx - -exp (— ) I0(ab), !ъ \ 2 J \ л J
(3.37) где а ад 0,767^/5^ и t % 1,85^/yj-
Выражения, позволяющие получить численные значения Р-,. для QPSK и DQPSK, показывают, что для достижения одинаковой вероятности появления ошибки при использовании DQPSK требуется увеличить -отношение сигнал/шум на 2,8 дБ более, чем при применении QPSK. Это увеличение мощности объясняются тем, что одна ошибка в символе при DPSK обычно приводит к появлению двух ошибок в битах. Необходимо отметить, что в условиях белого гауссова шума модуляции типа BPSK и QPSK имеют одинаковые характеристики. Это обусловлено тем фактом, что синфазная и квадратурная составляющие шума являются независимыми, поэтому QPSK можно считать как два сигнала BPSK, один из которых передается в действительной плоскости, а другой — в мнимой.
3.6. Особенности модуляции на нескольких несущих
Модуляция на нескольких несущих предполагает деление передаваемого потока битов на нескольких подпотоков и передачу их по различным подканалам. Во многих случаях при идеальных условиях Распространения радиоволн подканалы являются ортогональными, при этом модуляцию на нескольких несущих часто называют ортогональным частотным мультиплексированием (Orthogonal Frequency Division Multiplexing, OFDM). При использовании OFDM скорость передачи по каждому из подканалов намного меньше, чем общая скорость передача данных, и ширина полосы подканала намного меньше, чем полная
ширина полосы системы. Число подпотоков выбирается так, чтобы гарантировать, что каждый подканал будет иметь ширину полосы меньше, чем ширина полосы когерентности канала, и все подканалы испытывают относительно равномерное замирание. При этом межсимвольная интерференция в каждом подканале невелика. При дискретной реализации OFDM, часто называемой дискретным мультитоном (Digital Multi-Tone, DMT), межсимвольную интерференцию можно полностью исключить, используя циклический префикс.
На протяжении последних нескольких лет интерес к модуляции на нескольких несущих возрос, однако данный вид модуляции не является новым методом — он широко использовался в КВ радиосвязи еще в конце 1950-х годов. В последние 10 лет модуляция на нескольких несущих широко применяется в системах цифрового радиовещания в Европе [73], в проводных технологиях HDSL [81] и беспроводных сетях (например, в стандартах IEEE 802.11 и 802.16). Модуляцию на нескольких несущих можно реализовать несколькими способами, и поэтому часто ее называют по-разному: частотное мультиплексирование (FDM) [49]. векторное кодирование [92], дискретный мультитон [81] и ортогональное частотное мультиплексирование (OFDM) [90].
В настоящее время существуют различные мнения относительно того, является ли модуляция на нескольких несущих лучше для каналов с межсимвольной интерференцией, чем передача на одной несущей с выравниванием.
Ортогональное частотное мультиплексирование (OFDM)
Самой простой формой модуляции на нескольких несущих является деление потока данных на множество подпотоков для передачи их по различным ортогональным подканалам, расположенных на различных поднесущих. Число подпотоков выбирается таким образом, чтобы сделать время передачи символов в каждом подпотоке намного больше, чем разброс задержки в канале, и сделать ширину полосы подпотока меньше, чем ширина полосы когерентности канала. В этом случае в подпотоках будет иметь место незначительная межсимвольная интерференция.
Рассмотрим систему с шириной основной полосы частот В (ширина полосы пропускания 2В) и требуемой скоростью передачи данных /?. Предполагается, что ширина полосы канала Вс В. Значение числа подканалов N устанавливается достаточно большим, так чтобы ширина полосы подканала в основой полосе была By — B/N Вг. что гарантирует относительно равномерное замирание в каждом подканале. Битовый поток делится на Л’ подпотоков, которые подвергаются линейной модуляции (как правило, с использованием MQAM или MPSK) на поднесущих частотах и затем предаются параллельно по N подканалам. Для случая, когда подканалы используются без взаимного перекрытия
Рис. 3.8. Структурная схема передатчика сигналов с множеством неперекрываю-щихся поднесущих
008(271^,0
Рис. 3.9. Структурная схема приемника сигналов с множеством неперадфываю-щихся поднесущих
частот, fn = fr npByv), п = 0,..., N — 1. На рис. 3.8 и 3.9 показаны структурные схемы передачика и приемника системы с множеством несущих без взаимного перекрытия подканалов.
Скорость передачи данных в каждом подпотоке Rt-- — R/N, время
передачи одного символа в каждом подпотоке Тдг. Сигнал, передаваемый в течение одного символа 7,v, определяется в виде
{Л-1 )
52 sng(t)jw > , (3.38)
п=0 )
где sn — сложный символ, связанный с n-й поднесущей. Если предположить использование для передачи g{t) импульсов в форме приподнятого косинуса, то Ты = 0,5(1 + Т)/Вы, где (3 — коэффициент свертки (например, для прямоугольных импульсов Т,у = 0,5/В,у).
Подпотоки передаются в своих ортогональных подканалах с шириной полосы пропускания 2В,у, формируя полную ширину полосы пропускания N2Bn = 2В и скорость передачи NRjv = R.
Таким образом, такая форма модуляции с множеством несущих не влияет на скорость передачи данных или ширину полосы сигнала по сравнению с системами, функционирующими на одной несущей, но она почти полностью исключает межсимвольную интерференцию, при этом, поскольку подканалы имеют Вд- Вс, они испытывают относительно небольшое частотно-селективное замирание. Рассмотренный метод OFDM без перекрытия подканалов по существу является аналогом множественного доступа с частотным разделением каналов. Преимуществом использования подканалов без взаимного перекрытия является то, что небольшие частотные сдвиги и нестабильность синхронизации не оказывают сильного влияния на ортогональность подканалов. Однако этот способ не является эффективным с точки зрения экономного использования спектра. Улучшить спектральную эффективность OFDM можно путем введения взаимного перекрытия поднесущих. При этом поднесущие должны оставаться ортогональными настолько, чтобы их можно было разделить в демодуляторе приемника.
Необходимо отметить, что поднесущие в основной полосе cos(2?rJ/Тл), j = 1,2,..., формируют множество ортонормальных базисных функций в интервале [0, Т„], кроме того, можно показать, что множество поднесущих с меньшим частотным разделением не образует ортонормальное множество в [0, Тп]. Это означает, что минимальное частотное разнесение, необходимое для того, чтобы поднесущие оставались ортогональными на периоде интервала передачи символов [0, Ту], равно 1/7дг. Таким образом, если использовать импульсы с формой приподнятого косинуса и с /3 = 1, то необходимо иметь Ты — 1/Вы и разделение поднесущих на Вы- Так как ширина полосы пропускания каждого подканала равна 20д-, полосы пропускания подканалов в этой системе могут перекрываться, как показано на рис. 3.10.
Очевидно, что для разделения перекрывающихся поднесущих необходима другая, чем показанная на рис. 3.9, структура приемника. В частности, для демодуляции в перекрывающихся подканалах может использоваться приемник со структурой, представленной на рис. 3.11.
Рис. ЗЛО. Сигнал OFDM с перекрывающимися поднесущими
COS(2rJN1t)
Рис. 3.11. Структурная схема приемника для обработки сигналов OFDM с пере-крывающимися поднесущими
Рассмотрим принимаемый символ в ?-м ответвлении Sj при отсутствии помех (n(t) — 0). Полосы пропускания поднесущих с разделением 1/1дг определяются как fj — fc+j/TN, j = 0,1,..., N - 1. Для переда-ваемого/принимаемого сигнала s(t), имеющего вид (3.38), имеем
Система с перекрывающимися поднесущими позволяет в 2 раза повысить эффективность использования полосы рабочих частот по сравнению с системой без перекрытия поднесущих. Однако необходимо отме-что функционирование систем с перекрывающимися поднесущими чэсрективно только в случае, когда их ортогональность поддерживается надежной компенсацией джиттера синхронизации, частотных сдвигов и миРаний. Эти влияния, даже когда они относительно невелики, могут
76
значительно ухудшить характеристики системы из за взаимных помех по соседним подканалам [78].
Особенности замираний на поднесущих
Преимущество модуляции на множестве несущих заключается в том, что каждый подканал является относительно узкополосным, что снижает воздействие межсимвольной интерференции. Однако каждый подканал может быть подвержен амплитудным замираниям, которое могут вызывать существенное увеличение вероятности ошибки в некоторых подканалах. Если мощность передачи на поднесущей Р,- и замирание на той же поднесущей а,:, то на входе приемника отношение сигнал/шум ";i = Pi&i /(NqB), где В —ширина полосы подканала. Если л,- велико, то отношение сигнал/шум в г'-м подканале довольно низкое, что может привести к высокой вероятности появления ошибок. В беспроводных каналах под воздействием быстрых и медленных замираний величина n-j будет существенно изменяться как во времени, так и в пространстве. Амплитудные замирания могут значительно снижать характеристики канала, поэтому необходимо осуществлять их компенсацию. Существуют несколько способов снижения влияния амплитудных замираний, включая частотное выравнивание, предварительное кодирование, кодирование на поднесущих и адаптивное выравнивание частотных характеристик
Частотное выравнивание. При частотном выравнивании замирание ог; по существу компенсируется в приемнике, при этом в период присутствия замирания принимаемый сигнал умножается на l/о;, что дает суммарную мощность сигнала. Вместе с тем, так как входящие шумы (вместе с сигналом) также умножается на 1/лу, мощность шума (помех) также становится равной N^B/af. Таким образом, суммарное отношение сигнал/шум после выравнивания частоты остается таким же, как и до выравнивания [73].
Предварительное кодирование. При предварительном кодирова-используется то же самое действие, что и при выравнивании часто-за исключением того, что замирание компенсируется не на прием-
нии ты, нике, а на передатчике. Для реализации этого способа требуется, чтобы передатчик знал о наличии и величине замирания в подканале лг-. Если в этом случае мощность полезного принимаемого сигнала в i-м подканале есть Pi и среда вводит в подканал замирание л,-, то передатчик передает в г-й подканал сигнал с мощностью Р,/п?. При этом мощность принимаемого сигнала Рглг“/от = Рг, что и требовалось. Необходимо подчеркнуть, что компенсация сигнала осуществляется на передатчике (а не в приемнике), поэтому мощность шума остается без изменений и равной N()B. Существуют две основные проблемы, связанные с предварительным кодированием в системах беспроводной связи. Во-первых, предварительное кодирование не эффективно в каналах с быстрыми замираниями. Фактически необходимы очень большие пределы изменения
мощности для компенсации в радиоканале релеевских замираний. Другой проблемой является необходимость наличия на передатчике точной оценки характеристики радиоканала.
Адаптивное выравнивание. В основе адаптивного выравнивания лежит управление скоростью и мощностью передачи сигналов в каждом подканале. Как и в случае адаптивной модуляции, это предполагает знание на передатчике величины замираний в подканалах {ог), i — 1.N.
В этом случае имеется возможность оптимизировать мощность и скорость передачи сигналов в каждом подканале в интересах максимизации пропускной способности в общем канале. Пропускная способность системы OFDM на N подканалах с шириной полосы каждого из них 7?дг (в рамках основной полосы) и выигрышах в подканалах {оу), i = 1, ...,7V, соответственно определяется как
N ( ? р \
?. = 1 '
при этом оговаривается ограничение по мощности в подканалах
Pi = Р. Для максимизации выражения (3.40) требуется решение задачи динамического оптимального распределения мощности передачи Pi между подканалами [89].
Кодирование подканалов. Под кодированием подканалов понимается преобразование входящих битов в кодовое слово длинной N, где /V — число подканалов в системе с множеством несущих. Если большинство подканалов имеет высокое отношение сигнал/помеха, то большая часть битов кодового слова будет принято правильно и ошибки, возникшие в нескольких плохих каналах, можно исправить. Этот способ хорошо подходит для случаев, когда каждый подканал имеет независимые замирания. Если замирания в подканалах будут коррелированы, то это значительно снизит влияние кодирования.
Глава 4
Канальный уровень беспроводных сетей
Характерной чертой радиоканала является его общедоступность, которая, с одной стороны, обеспечивает возможность осуществления беспроводного доступа множества пространственно распределенный мобильных абонентов, а с другой — обусловливает воздействие случайных и преднамеренных помех. Канальный уровень беспроводных сетей призван обеспечить управление радиодоступом (эта функция возлагается на подуровень МАС) и требуемую достоверность обмена данными (эта функция возлагается на подуровень DLC).
4.1. Подуровень доступа к беспроводной среде
Протоколы множественного доступа беспроводных сетей могут быть как распределенными, так и централизованными (в зависимости от типа сетевой архитектуры, в которой они применяются). Кроме того, по принципу функционирования они различаются на протоколы случайного, гарантированного и гибридного доступа. Краткая классификация беспроводных МАС протоколов представлена на рис. 4.1.
В протоколах случайного доступа предусматривается соревнование узлов за доступ к ресурсу. При этом пакет передается успешно в том случае, если попытку передачи делал только один узел. При одновременной передаче пакетов несколькими узлами происходят конфликт и разрушение пакетов. Восстановление разрушенных в результате конфликта пакетов осуществляется взаимодействующими узлами в соответствии с принятыми правилами. В протоколах с гарантированным доступом процесс передачи от различных узлов происходит организованно В целом может применяться мультиканальный, моноканальный или гибридный доступ. Гарантированный мультиканальный доступ основан на применении частотного, временного, кодового разделения ресурсов или их комбинации. Доступ к моноканалу обычно осуществляется двумя способами, при первом из них используется принцип ведомый-ведущий, при котором ведущий опрашивает каждый узел, а опрашиваемый узел
Рис. 4.1. Классификация беспроводных протоколов МАС
Канальный уровень беспроводных сетей
ю
отправляет в ответ данные (протоколы опроса), при втором используется распределяемый маркер, при наличии которого станция имеет право передачи данных, после чего маркер передается следующей станции (протоколы с ЭП).
В простейших гибридных протоколах (основанных на комплексиро-вании детерминированного и случайного множественного доступа) предусматривается предоставление пользователям одной части ресурса (например, одного временного окна или частотной полосы) для гарантированного доступа, а другая часть ресурса используется для случайного множественного доступа Гибридные протоколы доступа [17. 20-25, 96] могут также основываться на использовании механизма запроса ресурса (например, ширины полосы рабочих частот, числа временных окон или объема кодового пространства). При этом узел посылает запрос на базовую станцию, в котором указывается, какую полосу, сколько времени или какой объем кодового пространства необходимо предоставить для передачи данных. Запросы обычно посылаются на основе использования протоколов случайного доступа. После получения запросов от пользователей базовая станция распределяет ресурсы для восходящего потока данных и посылает узлам уведомление о назначении. В зависимости от интеллектуальных характеристик БС гибридные протоколы доступа делятся на протоколы доступа с резервированием на время сеанса связи (Connect Reservation Access, CRA) co случайным резервированием (Random Reservation Access, RRA) и протоколы формирования запроса (Demand Assignment, DA)
В протоколе с резервированием на время сеанса связи пользователю предоставляется затребованный ресурс, который он использует во своему усмотрению (например, для двухточечной передачи разнородных пакетизированных сообщений).
В протоколе со случайным резервированием базовая станция не использует каких-либо правил для резервирования полосы пропускания восходящего потока данных.
В протоколах формирования запроса базовая станция управляет передачей данных восходящего потока данных согласно их требованиям к качеству обслуживания (Quality of Service, QoS). При этом базовая станция собирает все запросы от узлов и использует алгоритмы планирования для распределения полосы пропускания.
Особенности функционирования гибридных протоколов доступа и протоколов опроса предполагают наличие центрального узла. Поэтому они относятся к категории централизованных МАС-протоколов. Протоколы случайного доступа могут работать в рамках любой архитектуры. Протоколы на основе маркера могли бы использоваться как распределенные МАС-протоколы, но практического применения не находят из соображений низкой надежности. Из-за нестабильности параметров беспроводного канала весьма вероятна потеря маркера, при этом восстановление маркера в сети будет приводить к значительным потерям пропускной способности сети.
Особенности построения протоколов множественного доступа для сетей подвижной связи с интеграцией услуг
А. Гибридный метод множественного доступа (ГМД), основанный на комплексном использовании детерминированного множественного доступа с частотным разделением (МДЧР) и случайного методов множественного доступа (СМД) предусматривает [20], что масштабируемая полоса радиочастот может предоставляемая как для индивидуального использования в течение сеанса связи (в том числе и для передачи разнородной пакетизированной информации), так и для коллективного использования с СМД (рис. 4.2).
В частотном канале, предоставленном для индивидуального использования на время сеанса связи, разнородная информация может предаваться в пакетном виде, при этом пакеты, не допускающие временных задержек в процессе передачи (например, переносящие речевое сообщение), подаются в радиоканал по мере их поступления (без задержек), а другие виды пакетизированной информации (например, текст, неподвижные изображения и данные), допускающие временные задержки, подаются в тот же радиоканал в случайные периоды естественных пауз речи (рис. 4.3).
Алгоритм может допускать доуплотнение индивидуального канала, предоставляемого на время сеанса связи (например, для заполнения пауз речевых сообщений в сетях командной радиосвязи) другими пространственно распределенными абонентами сети (см. рис. 4.3), при этом необходимо предусмотреть использование случайного множественныго доступа с контролем занятости и управление радиоканалом со стороны терминалов-источников речи (при этом терминалы-источники речи
Рис» 4.2. Гибридный алгоритм множественного доступа, основанный , на МДЧР и СМД
Рис. 4.3. Передача разнородных сообщений в ГМД, построенном на основе МДЧР и СМД
передают управляющие сигналы на открытие и закрытие сессии для случайного доступа).
Применение ГМД, построенных на основе комплексирования МДЧР и СМД, может позволить существенно повысить степень использования пропускной способности радиоканала (например, в дефицитной полосе частот ДКМ диапазона). Основным недостатком ГМД, основанного на МДЧР и СМД, является ограниченная гибкость распределения ресурсов пропускной способности.
Б. Гибридные методы множественного доступа, построенные на основе комплексирования детерминированного множественного доступа с временным разделением ресурсов (МДВР) и СМД, могут строиться различным образом. Наиболее известные сценарии предоставления пропускной способности по требованию при использовании МДВР предполагают резервирование приложениями пользователей требуемого числа временных окон в каждом кадре [10, 17, 23]. При этом для передачи трафика в реальном времени реализуется процедура резервирования некоторого числа временных окон корреспондентами, а оставшиеся незанятые временные окна используются для передачи трафика, некритичного к временным задержкам в режиме случайного множественного доступа (рис. 4.4).
Резервирование осуществляется с помощью специальных окон (миниокон) резервирования, располагающихся в начале каждого кадра. Процесс резервирования может быть «агрессивным» — в случае успешного доступа хотя бы к одному миниокну резервирования сразу осуществляется захват требуемой полосы пропускания, «аукционным» — в процедуре доступа учитывается вес каждого передаваемого сообщения (степень критичности к временной задержке и другие особенности) и «состязательным» — на этапе доступа допускается ведение борьбы за каждое миниокно резервирования, в течение которого возможно получение одного информационного временного окна.
В. Гибридные методы множественного доступа, построенные на основе комплексирования детерминированного множественного до-
Рис. 4.4. Гибридный алгоритм множественного доступа, основанный на МДВР и СМД
ступа с кодовым разделением ресурсов (МДКР) и СМД, могут также строиться различными способами [21, 88, 96]. С целью интегрального обслуживания кодовые каналы могут распределяться между источниками сообщений в требуемой пропорции с закреплением на все время передачи сообщения для приложений, не допускающих временных задержек, и без закрепления, в режиме «конкуренции» за ресурс (только на время передачи одного информационного пакета) для приложений, не критичных к временным задержкам (рис. 4.5).
Известно [96], что увеличение числа активных пользователей в радиоканале с МДКР приводит к возрастанию взаимных помех (вероятности появления ошибок в канале). Учитывая, что требования к вероятности ошибки в радиоканале при передаче различных видов сообщений существенно отличаются, необходимо гибко управлять соотношением числа различных источников информации (коэффициентов множественного доступа источников речи Кмдр и источников данных Л’мдд). Коэффициент А’МдР отражает число речевых пакетов, которое может обрабатываться в радиоканале одновременно, и при этом вероятность ошибки в каждом отдельном пакете не превысит граничного для речи порога (Дошдопр АОШр).
Аналогично Кмпд отражает число одновременно передаваемых пакетов данных, при котором вероятность ошибки в каждом пакете не превысит заданного для данных порога значения (Рошдопд РОШд). В этом случае условие успешной одновременной передачи пакетов речи и пакетов данных в тактированном радиоканале с МДКР может быть
Кодовые каналы
Источники разнородной нагрузки, критичной к временном задержкам
Рис. 4.5. Гибридный алгоритм множественного доступа,-основанный на МДКР и СМД
Источники нагрузки, не критичной к временном задержкам
представлено в виде
Р(К)^Рошр УА^А'мдр,
va<camm, ( , .,2;',
где Р(А) — вероятность ошибки в пакете при осуществлении К одновременных передач в течение временного окна, при этом К передач осуществляют источники пакетов речи и пакетов данных.
В реальных условиях допустимое значение вероятности ошибки в речевом пакете существенно выше, чем в пакете данных (Рошр > РОШд). таким образом, Кмдр > Кмрд-
Если общее число пользователей, одновременно передающих пакеты, составляет А ST А'мдд, то все А’ речевых пакетов и пакетов данных принимаются с требуемым качеством (Рош Рошд) и (Рош С РОШр)
Если А'мдд < А' А'мдр, то среди всех К пакетов речевые пакеты принимаются с требуемым качеством (_Рога Рошр), тогда как пакеты данных не принимаются с требуемым качеством (Рош Рошд) и, если Амдр < А', то все речевые пакеты и пакеты данных не принимаются с требуемым качеством (Рош > Рошр) и (Рош > Рошд)-
На рис. 4.6 показана диаграмма изменения границы назначения кодов для источников речевых сообщений и источников сообщений данных.
Гибридные методы множественного доступа, основанные на МДКР и СМД, позволяют предоставлять пропускную способность в соответствии с запросами пользователей, при этом для обслуживания одного абонента могут назначаться несколько кодов или один код, обеспечивающий требуемую скорость передачи в общем радиоканале.
1-1 i ... к Временное окна
Рис. 4.6. Графическое представление пороговой модели для гибридных методов, множественного доступа, основанных на МДКР
Методы моделирования протоколов множественного доступа
Динамическое поведение беспроводных систем с множественным доступом характеризуется системной нестабильностью. При этом обычно возникает следующие вопросы:
• в результате чего возникает неустойчивость системы?
• каким образом строить математические модели систем и как их применять для получения численных решений?
• как системные параметры влияют на динамику систем?
Основными инструментальными средствами, позволяющими моделировать системы с множественным доступом и получать численные оценки производительности и задержки, являются пуассоновские и марковские процессы.
Пуассоновские модели (или S-G моделирование). Метод S-G моделирования был разработан для оценки функционирования протокола доступа «чистая» ALOHA для беспроводной сети, развернутой в Гавайском университете. Поскольку принцип S-G моделирования достаточно прост, то метод распространился на другие протоколы, основанные на борьбе за ресурсы. В этом методе используются следующие допущения.
1. Трафик создается бесконечным числом пользователей, совместно создающих независимый пуассоновский поток со средним числом S пакетов на временной сегмент.
2. Суммарное число новых пакетов и повторных передач в канале (создающих нагрузку) может аппроксимироваться пуассоновским процессом со скоростью G пакетов на временной сегмент.
3. Существуют условия устойчивого состояния системы (предполагается. что имеет место состояние статистического равновесия).
В качестве стандартной единицей измерения трафика может использоваться эрланг. По определению, эрланг — это время занятия канала, разбитого на слоты по Т секунд каждый; трафик, составляющий один пакет в течение Т секунд, определяет величину 1 эрл. В соответствии с этим определением пропускная способность S не может превысить 1 эрл. В случае отсутствия конфликтов передачи пропускная способность моноканала будет ограничиваться пределами 0 < S < 1. Далее необходимо отметить, что если предлагаемая нагрузка незначительна, то будет мало конфликтов и незначительное число вызванных ими повторных передач, таким образом, при небольшой нагрузке S ~ G. При высокой нагрузке в канале будет происходить большое число столкновений и вызванных ими повторных передач, при этом S G, т.е. S будет стремиться к 0.
При пуассоновском потоке вероятность того, что k пакетов генерируется в течение конкретного временного слота при среднем значении нагрузки G пакетов за слот,
Gke~G
Рг(*) = (4.1)
к!
При S-G моделировании пропускная способность S описывается как функция трафика канала G. Рассмотрим доступ тактированная ALOHA (Slotted-ALOHA) и построим S-G модель.
Так как пропускная способность представляет собой часть времени, в течении которого канал переносит полезную информацию (не «конфликтующие» пакеты), то в устойчивом состоянии пропускная способность равна S. При тактированном доступе ALOHA каждый переданный пакет будет передан успешно при условии, что одном в том же слоте не будут передаваться другие пакеты. Откуда следует, что
S = GPr(0), (4.2)
где Рг(0) — вероятность отсутствия столкновений, которая представляет собой вероятность того, что ни один другой пакет не будет сгенерирован в уязвимый временной интервал равный продолжительности одного пакета (рис. 4.7). Из выражения (4.1) следует, что средняя скорость поступления пакетов составляет G, и поэтому вероятность того, что в интервале времени, равном продолжительности передачи одного пакета, конфликтов не будет,
Рг(О) = e~G г : (4.3)
Рис. 4.7. Типы слотов в протоколе S-ALOHA 3 ; , л.ч*-.'
и пропускная способность
S — Ge G.
(4-4)
Максимизируя S относительно G, можно получить значение максимальной пропускной способности. Значение S максимизируется при G = 1, при этом максимальная пропускная способность канала составит 1/е rs 0,368.
Таким образом, S-G моделирование основывается на допущениях о бесконечной численности пользователей, пуассановском потоке пакетов и статистическом равновесии, отображающих аппроксимации для физического состояния. Другими аналитическими методами было показано, что доступ S-ALOHA с бесконечным числом пользователей при допущении статистического равновесия достижим только для некоторого конечного периода времени, пока система не войдет в режим насыщения, т.е. система с S-ALOHA с бесконечным числом пользователей всегда является неустойчивой [55, 75]. Таким образом, применение S-G модели не позволяет рассматривать проблему устойчивости.
Марковские модели. При построении марковской модели системы определяется распределение вероятностей состояний марковской цепи путем нахождения вероятностей их изменения. Использование марковского моделирования позволяет изучать динамическое поведение системы, т.е. поведение с учетом неустойчивости системы. Таким образом, марковский анализ является важным методом оценки функционирования протоколов множественного доступа. Вместе с тем применение марковского анализа к сложным протоколам является не простой задачей, которая предполагает моделирование процесса в виде многомерных марковских цепей с большим числом входов и построение объемных матриц вероятностей изменения состояния (перехода из одного состояния в дру-гое). Вычисление вероятностей изменения состояния таких марковских
Рис. 4.8. Линейная модель с обратными связями для алгоритма множественного доступа S-ALOHA
цепей бывает довольно трудной задачей, а решение соответствующей системы уравнений не всегда осуществимо.
Рассмотрим марковский анализ алгоритма множественного доступа S-ALOHA [75]. Проанализируем случай, когда метод S-ALOHA используется группой из М пользователей, каждый из которых может иметь не более одного пакета для передачи. Все пакеты имеют один размер и требуют для передачи Т секунд, что и составляет длительность слота.
Рассмотрим следующую модель [75] процесса передачи пакета (рис. 4.8), называемую линейной моделью с обратными связями. В данной модели предполагается, что каждый пользователь находится в одном из двух состояний: Т (готовности) и В (незавершенной работы). В режиме готовности пользователь генерирует пакет в каждом слоте с вероятностью <т и не генерирует пакет в слоте с вероятностью 1 — а. Процесс генерирования пакетов является независимым процессом, имеющим геометрическое распределение со средним значением 1/а. Если первая передача пакета прошла успешно, то в следующем временном слоте пользователь остается в режиме готовности, после чего генерация пакета возможна заново. Если передача пакета не была успешной, то пользователь переходит в режим незавершенной работы и планирует повторную передачу пакета в соответствии с независимым геометрическим распределением с параметром гл Другими словами, в каждый временной слот пользователь будет повторно передавать пакет с вероятностью iz и воздерживаться от передачи с вероятностью 1 — гл В результате будет иметь место задержка, обусловленная повторной передачей и которая распределена геометрически со средним значением 1/р. Находясь в режиме незавершенной работы, пользователь не генерирует новых пакетов.
Предположим, что слоты системы последовательно пронумерованы k = 0,1,... и N(k) обозначает число пользователей с незавершенной передачей в начале k-ro слота. Случайная переменная АГ(А-) называется
Рис. 4.9. Марковская цепь для S-ALOHA при Л/ пользователях “Н
состоянием системы. При этом N(k) представляет собой дискретную во времени марковскую цепь. Пространство дискретных состояний будет включать ряд целых значений {0,1, 2,..., М}.
Схема переходов из состояния в состояние показана на рис. 4.9. Возможны очередные переходы вверх (в сторону увеличения) между каждым текущим состоянием и всеми другими состояниями с более высокими порядковыми номерами, поскольку могут иметь место новые столкновения некоторого числа пакетов.
Переходы вниз возможны только в соседнее состояние, поскольку в слоте может быть успешно передан только один пакет, за это время незавершенная работа сокращается на одного пользователя. Переход из состояния 0 в состояние 1 отсутствует, так как ясно, что если бы все пользователи находились в состоянии готовности и один пользователь сгенерировал и передавал пакет, то он своими действиями не может вызвать конфликта и оказаться в состоянии незавершенной работы.
Так как число пользователей с незавершенной работой не может превышать М, марковская цепь конечна, и из рис. 4.9 видно, что все состояния взаимосвязаны, таким образом, марковская цепь является эргодической, что означает существование устойчивого состояния.
Поскольку процесс повторной передачи’ для каждого пользователя является независимым геометрическим процессом, вероятность того, что if, из j„ пользователей с незавершенной работой будут осуществлять передачу в данном слоте, имеет биноминальное распределение
Рг(гн Ы = 0)^(1 - (4.5)
Аналогично может быть получено выражение для пользователей, находящихся в состоянии готовности:
Рг(?о I >о) = (М 7 а’(1 - а)м->-г. (4.6)
\ г /
поскольку в случае, когда j пользователей имеют незавершенную работу, М — j пользователей находятся в состоянии готовности.
Вероятность одношаговых изменений состояний Pj, может быть определена следующим образом:
Рц = Pr(W(fc) = j | N(k - 1) = /), i,j = (4.7)
• При J < i — 1 переход не возможен;
• при j = i — 1 был передан один незавершенный пакет и никаких новых пакетов не генерировалось;
• при j = i ни один пользователь с незавершенной работой не имел успеха и ни один обдумывающий пользователь не предпринимал попытки или ни один пользователь с незавершенной работой не делал попытки передачи и ни один обдумывающий пользователь не делал попытки передачи;
• при j = i + 1 один обдумывающий пользователь сделал попытку или по крайней мере одна попытка была сделана от пользователя с незавершенной работой;
• при j > i + 1 пакеты генерировались j — i пользователями.
С учетом выражения (4.7) вероятности переходов Pji определяются как
О,
w(l — i/)!~l(l — р)м-1,
(1 - r)M"[l - w(l - I/)’"4+ +(М - г)<т(1 - гт)^-’-^! - I/)», (М - 0г(1 - - (1 - р)г],
J < ?- 1;
j = i- 1;
j =
j =i + 1;
j > i + j.
(4.8)
Пусть Sout(?) — вероятность успешной передачи при условии, что г пользователей находятся в состоянии незавершенной работы. Чтобы передача в слоте была успешной, в нем должна иметь место только одна передача. Это означает, что либо все пользователи с незавершенной работой молчат, а передачу ведет один новый пользователь, либо передачу ведет один пользователь с незавершенной работой и при этом ни одного нового пакета не генерируется, т.е.
5out.(0 = (успех | гн) -
= (1 - - г)сг(1 - <т)м-;-1 + й/(1 - "У' (1 ~ (4.9)
Стационарное распределение вероятности тг, = Pr(7V(fc) = г) для N(k) определяется на основе решения системы линейных уравнений
м
='^27Г’1>гз- j = о, 1,...,М;
(41°)
£^ = 1-
. г-О
Пропускная способность (ожидаемое число слотов, в течение которых передача осуществлялась успешно)
м
S = Рг(успеха) = (4.11)
г=0
Среднее число пользователей N, находящихся в состоянии незавершенной работы,
м
N (4.12)
i=0
Применяя формулу Литла, имеется возможность рассчитать среднюю задержку доставки пакета
П = ВДп + 1, (4.13)
где Sin — средняя скорость передачи в канале,
Sin = (Af - A')cr. (4.14)
Наличие 1 в правой части уравнения (4.13) показывает значение интервала времени, затраченного на первую передачу пакета. В условиях устойчивого состояния Sin = S. Из уравнений (4.11)—(4.13) в итоге следует, что
D = M/S - 1/cr + 1. (4.15)
Моделирование протоколов множественного доступа для беспроводных сетей с интеграцией услуг
Ранее были рассмотрены общие особенности построения протоков множественного доступа для сетей подвижной связи с интеграцией услуг. Более подробная модель гибридного алгоритма множественного доступа, основанного на МДВР и СМД, будет рассмотрена в последующих разделах в рамках одной из разновидностей [74] протокола PRMA, разработанного для беспроводных сетей с центральной станцией.
Феноменологическая модель PRMA. Предполагается, что терминалы имеют возможность передавать информацию двух видов, периодическую (критичную к временным задержкам) и случайную (не критичную к временным задержкам). Речевые пакеты всегда передаются как периодическая информация. Пакеты данных могут относиться к виду случайных, если они передаются по отдельности, или периодическими, если передаются в составе большого информационного массива. Характер передаваемого потока указывается в заголовке каждого пакета.
В процессе подготовки к передаче поток битов распределяется по временным слотам (окнам), при этом каждое окно содержит один па
кет. Временные окна группируются во фреймы. В составе фрейма каждый слот может быть зарезервированным или свободным, информация о состоянии слота широковещательно передается БС в канале обратной связи. Зарезервированный слот может использоваться только терминалом, который успешно осуществил резервирование и у которого есть информация для передачи на БС.
Доступ к каналу осуществляется на основе конкуренции. Для того чтобы терминал мог получить доступ к каналу, он конкурирует с другими терминалами за право получения свободного (незарезервированного) слота. Для участием в конкуренции абонентского терминала должно выполняться два условия: во первых, должен быть в наличии свободным текущий временной слот (не зарезервированный), во-вторых, терминал должен иметь разрешение на передачу. Разрешение предоставляется в соответствии с состоянием генератора псевдослучайных чисел. Терминал делает попытку передачи установочного пакета с вероятностью разрешения Р. Вероятность разрешения является проектной переменной PRMA.
В конце каждой передачи пакета в восходящей линии базовая станция передает подтверждение (в случае правильного приема информационного пакета). Терминал, который посылал установочный пакет, резервирует этот временной слот для будущих передач. При этом все терминалы воздерживаются от использования зарезервированного временного слота в последующих фреймах. Терминал, получивший резервирование, считается выигравшим конкурентную борьбу за использование временного слота. В конце передачи информации терминал в своем зарезервированном слоте дополнительно ничего не передает. Такое положение требует формирования и передачи от базовой станции сообщения обратной связи (negative acknowledgment, NACK), означающего, что слот снова свободен.
Может случиться так, что когда терминал передает запрос на резервирование, другой терминал поступает также. В этом случае возникает конфликт, базовая станция обычно не обнаруживает ни одного из запросов и оба терминала, вовлеченных в конфликт, вынуждены будут повторно передавать свои запросы.
В случае, если столкнувшиеся пакеты поступают на базовую станцию с различными уровнями сигналов (от разно удаленных терминалов), то БС иногда имеет возможность выделить один пакет с более сильными сигналом (эффект захвата).
Если происходит конфликт, то пакеты запроса передаются повторно до тех пор. пока базовая станция не подтвердит их успешный прием или пока информационный пакет не будет отброшен терминалом из-за слишком большой задержки. Максимальное время задержки речевого пакета определяется ограничениями по задержке при передаче речи, а пакета данных — требованиями по задержкам прикладных процессов. Поэтому, когда система PRMA оказывается перегруженной, скорость стирания речевых пакетов и задержка при передаче пакетов данных возрастают.
Передача пакетов данных осуществляется в режиме случайного доступа. Терминал передает пакеты данных, не критичных к временным задержкам, в течение не зарезервированных временных слотов. В случае успешной передачи запросного пакета на передачу данных терминал не получает права резервирования следующего слота. При этом, если у терминала есть для передачи другие пакеты, он должен конкурировать за получение последующих не зарезервированных временных слотов в начале каждого фрейма. В случае конфликта запросные пакеты передаются повторно с вероятностью разрешения повторной передачи гораздо меньшей, чем вероятность разрешения повторной передачи периодических (например, речевых) информационных пакетов. Это делается для того, чтобы снизить задержку передачи речевых пакетов. Другими словами, система предоставит приоритет периодической информации по отношению к случайной.
Размер буфера для случайных и периодических пакетов данных (допускающих передачу с задержкой) может быть достаточно большим. Влияние перегрузки сети на передачу случайных данных проявляется в возрастании задержки пакетов (а не в стирании, как в случае передачи пакетов речи).
Параметры системы PRMA — длительности фрейма и слота. Протоколы PRMA предполагают передачу пакетов фиксированной длины. Каждый пакет включает информацию пользователя и заголовок. Пусть информационная скорость передачи одного источника составляет Rs бит/с, техническая скорость передачи в канале Rc бит/с и требуемый размер заголовка Н битов на пакет. Длительность фрейма Т задается при проектировании системы. Количество исходной информации на пакет составляет RST битов, а полная длительность пакета составляет RST + Н битов.
Во фрейме переносятся RCT битов. Следовательно, число временных слотов (пакетов) в каждом фрейме
N =
ReT
RST + H
(4.16)
пакетов на фрейм, где [а.-] — наибольшее целое значение х. Продолжительность временного слота составляет т = Т/N с.
Модель источника речи. Источник речи можно представить в виде системы, находящейся в одном из двух состояний передачи — речевого всплеска или паузы, которые определяются детектором речевой активности. При передаче речевых сообщений различаются всплески речи и паузы, паузы возникают и при прослушивании собеседника. Имеются также минивсплески и минипаузы, обусловленные короткими промежутками молчания, характеризующиеся соответствующими знаками препинания в непрерывной речи. В большинстве случаев, применяется «медленный» детектор речевой активности, который реагирует только
Рис. 4.11. Модель быстрого детектора речевой активности
на основные всплески речи и паузы, и «быстрый» детектор, реагирующий на минивсплески и минипаузы.
Медленный детектор речевой активности моделируется дискретным во времени марковским процессом, включающим два состояния (рис. 4.10). Вероятность того, что всплеск речи со средней длительностью /j заканчивается во временном слоте длительностью т,
7 = 1 - exp(-r//i). (4.17)
Эта вероятность перехода из состояния «речь» в состояние «пауза». Вероятность того, что промежуток молчания со средней длиной /,2 заканчивается в течение длительности временного слота т,
<т = 1 — ехр(—r/t2)- (4.18)
В быстром детекторе речевой активности (рис. 4.11) имеются три состояния: разговор («речь»), молчания («пауза») и интервал с минипаузой («минипауза»). Вероятность перехода из состояния «пауза» в состояние «речь» во время какой-либо паузы равна <т (4.18). Минипромежуток имеют среднюю продолжительность /4, и вероятность перехода из состояния «минипауза» в состояние «речь»
<ты = 1 - ехр(—т//4). (4.19)
В конце речевого миниимпульса со средней длительностью имеет место переход из состояния «речь» в состояние «ми ни пауза», если только этот импульс не является последним в разговорном импульсе. Вероятность того, что миниимпульс помещается в какой либо временной слот,
7Ы = 1 - ехр(-т/13). (4.20)
Средняя доля разговорных мини импульсов в основном разговорном импульсе представляет собой отношение ti/fa+ti). Поэтому отношение сг = (/.3+/4)Л1 (4.21)
отражает вероятность того, что какой-то речевой миниимпульс является последним в основном разговорном импульсе. Таким образом, вероятность перехода из состояния «речь» в состояние «пауза» составляет П7Ы, и вероятность перехода из состояния «речь» в состояние «минипауза» составляет (1 — а)7м.
Вероятность получения разрешения на передачу. Соревнующийся абонентский терминал — это терминал, имеющий пакеты для передачи и не имеющий резервирования. Терминал передает пакет во временном слоте, если:
1) в системе имеется свободный слот;
2) терминал имеет разрешение на передачу.
Если по обратной связи от базовой станции указывается на столкновение на этапе резервирования, то терминал возвращается в режим соревнования. Вероятность получения разрешения р является проектным параметром системы. В общем случае параметр р является независимым во времени и одинаковым для всех терминалов. Получение разрешения на передачу для каждого терминала является независимым от других терминалов.
Задержка речи и размер буфера. Поскольку речевая связь допускает только небольшие временные задержки, время доставки пакета должно быть меньше максимального допустимого времени задержки Дпах- Речевой терминал имеет буфер для хранения пакетов, ожидающих передачу, который используется по принципу «первый пришел, первым обслужен». Емкость буфера соответствует В пакетам. Если буфер заполнен и поступает еще пакет, то терминал отбрасывает (уничтожает) наиболее долго хранимый пакет и ставит в очередь новый речевой пакет. Терминал всегда делает попытку очередной передачи, начиная с самого «старого» из оставшихся пакетов. С учетом используемого механизма отбрасывания необходимый размер буфера для речевых пакетов
в = [Дпах/Т] (4.22)
пакетов, где [.г] обозначает целую часть (с округлением в сторону большего значения) величины ж; Т — длительность фрейма. При анализе поведения PRMA с учетом отбрасывания пакетов используется другая переменная D, которая определяется как максимальное время ожидания передачи, измеренное в единицах длительности временного слота:
D = [ДпахМ (4.23)
где г — длительность слота.
Применение марковской модели для изучения функциональных характеристик протокола PRMA
Марковский анализ позволяет изучить динамическое поведение системы и получить количественные оценки ее относительной неустой
чивости.
(Н)[1~р(1-р)с“1(1-я/л/)1
Рис. 4.12. Граф состояний протокола PRMA
Модель процесса передачи речи в протоколе PRMA. На рис. 4.12 показана модель передачи речи в PRMA, а именно представлена модель речевого терминала PRMA с N состояниями резервирования РЕЗ,, 1 < i < N, одним состоянием молчания и одним состоянием соревнования, где /V — число слотов в одном фрейме. Состояние РЕЗ,- означает удержание резервирования для г-го будущего слота. Поэтому нахождение пользователя в состоянии РЕЗ,; подразумевает, что текущий слот зарезервирован. Терминал, у которого только появилось сообщение для передачи, находится в состоянии молчания и с вероятностью <т участвует в соревновании за доступ к имеющемуся временному слоту. Чтобы состояние молчания сменилось на состояние РЕЗлч т.е. терминалу предоставлено резервирование, должны быть выполнены три следующих условия:
1) в системе имеется незарезервированный слот (вероятность этого события равна 1 — R/N);
2) терминал имеет разрешение на передачу (с вероятностью р);
3) никакой другой соревнующийся терминал не имеет разрешение (вероятность равна (1 — /?)С-1, где R — число терминалов с резервированием в текущем кадре; С — число соревнующихся терминалов за текущий временной слот).
Поскольку разрешение предоставляется всем терминалам независимо друг от друга и независимо от состояния резервирования канала, все три условия при получении резервирования являются независимыми и вероятность перехода из состояния молчания в состояние РЕЗ.у (рис. 4.12) определяется произведением трех вероятностей. Величина (1 — 7) отображает вероятность того, что терминал находится в состоянии наличия речевого пакета. Из состояния РЕЗ,; терминал переходит в состояние PE3,-i, i 1. с вероятностью 1. Из состояния РЕЗ,; терминал возвращается в состояние РЕЗуу, если у него есть пакеты для последующей передачи. После передачи последнего речевого пакета терминал переходит в состояние молчания. Вероятность перехода из состояния РЕЗ,;
Рис. 4.13. Упрощенный граф состояний протокола PRMA
в состояние молчания — это вероятность того, что речевой импульс закончится в самом последнем фрейме. Вероятность такого перехода
7/ = (4.24)
В модели, представленной на рис. 4.12, показано, что если конкурирующий терминал (при соревновании) не получает резервирования до окончания речевого импульса, то он переходит в состояние молчания с вероятностью 7.
Марковская модель процесса передачи речевых пакетов. Протокол PRMA может моделироваться как N + 2-мерный марковский процесс, где Л' — число слотов во фрейме. Поскольку каждый терминал может находиться в одном из N + 2 состояний, как показано на рис. 4.12, и в связи с тем, что один терминал может удерживать в состоянии резервирования один заданный слот, Rj может принимать значения 0 и 1. При наличии в системе М терминалов число ее состояний может достигать 2Л Л/2 [84]. В этом случае точный марковский анализ процесса представляется сложным. При традиционном подходе состояния РЕЗх, РЕЗг РЕЗ,у используются для отображения состояния терминала при резервировании. Поэтому в качестве аппроксимации можно предположить, что все терминалы представлены общим состоянием РЕЗ. Такой подход позволяет применить марковский анализ к системам PRMA.
На рис. 4.13 показана диаграмма состояний упрощенной системы PRMA.
Пусть М — общее число терминалов, обслуживаемых упрощенной системой PRMA, при этом С), Rt, St — число терминалов в состояниях соревнования, резервирования и олчания в течении /-го временного слота соответственно. При этом Г‘(, Rt и ,5) являются случайными переменными в системе {0.1,..., Л/}, {0,1, ...,1V} и {0,1,..., М} соответственно при Ct + Rt + St = М. Вектор системы {Ct,Rt,St} определен тогда, когда определены любые две переменные из C't, Rt и St. Без потери универсальности выбираем {С}, /?<}. В этом случае {Ct, Rt} служит описанием состояния системы. Поскольку система в заданном состо
янии в момент времени t зависит только от предыдущего состояния в момент f - 1 и не зависит от предыстории системы до момента I — 1. то {Ct, Я/} будет марковским процессом.
Пусть состояния CR, RS, CS, SC обозначают следующие четыре события, которые могут произойти в Ям временном интервале в каждом терминале:
CR — событие, заключающееся в том, что новый терминал из состояния соревнования может перейти в состояние резервирования;
RS — событие, состоящие в том, что терминал из состояния резервирования перешел в состояние молчания;
CS — событие, состоящее в том, что терминал из состояния соревнования перешел в состояние молчания;
SC — событие, состоящее в том, что новый терминал перешел в состояние соревнования из состояния молчания.
События CR, RS, CS и SC имеют место в результате изменения состояний системе из (С) = С, Rt = Я) в (Ct+i = С — 1. = R + 1),
(C‘t+i = С. -Rt+i = R — 1), (Ct+i = С — l.Rt+i = Я) и (С’г+1 = = С + = Я) соответственно. Пусть Pr{?’,J} | C',R] — веро-
ятность одношагового перехода из состояния системы (G) = С, Rt = R).
При проведении анализа пренебрегают случаем, при котором в одно и тоже время на двух (или нескольких) терминалов происходит событие SC или CS. Это допущение справедливо в силу того, что размер слота мал, и поэтому вероятность того, что на двух или более терминалах происходит событие SC или CS в одном и том же временном слоте, незначительна. В этом случае вероятность одношагового перехода
Pr(/,j |G, Я) =
Рг(нет SC. да CR. да CS),
Рг(нет SC. да CR. да CS),
Рг(нет SC, нет CR. нет RS, да CS),
Рг(нет SC, да CR, да CS)+
4- Рг(да SC, да CR, да CS), Рг(нет С, да RS, нет CS)+
+ Рг(да SC, да RS, да CS), Рг(нет SC, нет CR, нет RS, нет CS)+
+ Рг(да SC, нет CR, нет RS, да CS),
Рг(да SC, да CR, нет CS),
Рг(да SC, да CR, нет CS),
Рг(да SC. нет CR, нет RS, нет CS),
i = С - 2, j = R+ 1;
i = С - 2. j = Я - 1;
i = С - 1, j = R.
i = С - 1. j = Я.+ 1;
i = C, j = Я - 1;
i = C, j = R;
i = c, j = Я. + 1;
i = C + 1, j = R - 1;
i = C + 1, j = Я;
в других случаях,
где отсутствие х (нет .г) означает, что х не имеет места в t-м слоте, «да х» означает, что событие х происходит в одном терминале в /-м слоте; Pr(;r,y) — вероятность того, что происходят как х, так и у.
Таблица 4.1
Событие Вероятность
Отсутствие SC Имеет место SC Отсутствие CS Имеет место CS Имеет место CR Имеет место RS Отсутствие CR, отсутствие RS Имеет место CR, имеет место CS Имеет место CR. отсутствие CS (1 - 1 — (1 — r)S ~ Srr (1 -- )с й 1 - Су Су Сри(1 — R/N) yfR/N (1 - yf)R/N + (1 - C»(l - R/N) С(С - l)pu(l - R/N)y Сри(1 - R/N)(l - (С - lb)
Вероятности этих событий и их комбинаций приводятся в табл. 4.1 при S = Л/ — С — R и и = (1 — р)с“1(1 — у). В этой таблице вероятность Рг(нет CR, нет PS) представляет собой простое перемножение Рг(нет CR) на Рг(нет RS), так как CR и RS не могут произойти в одном и том же слоте.
Возможные варианты, при которых имеют место «нет CR» и «нет RS»:
1) слот зарезервирован и передаваемый пакет в текущем слоте не является последним пакетом в разговорном импульсе;
2) слот имеется, но конкурирующим терминалам не удается получить разрешение или разрешение получают несколько терминалов.
Для вероятностей Рг(да CR, да CS) и Рг(да CR, нет CS), поскольку события CR и CS могут происходить только на различных конкурирующих терминалах в течении одного слота в случае, если CR происходит на терминале С и на других С — 1 терминалах, подставляя вероятности из табл. 4.1 при = (1 — o’)5, t>i = l — (1 — <r)s, получаем
Pr(z,j |С,Я) =
Ь0С(С - 1>(1 - R/N)y, boR/NyfCy,
М(1 - 77)R/N + (1 - C»(l - R/N)]C’y,
ЬоСрт(1 - R/N)(l - (С - 1)у)+
+b1C(c - l)pw(l - R/N)y, b0R/Nv(l - C) + bAR/N~/fC\.
< [(1 - 7/ )/?/7V + (1 - C»(i - R/N)] x x[60(l - Су) + 6iC7j,
hCp«(l - R/N)(l - (C - l)y),
b.R/Ny^l - C7),
[(1 - yf)R/N + (1 - C»(l - R/N)]x x[6i(l - G)],
0
г = C — 2, j = R + 1;
i = C - 1, j = R1;, г = C — 1, j — R\
г - C - 1, j = R+l;
i = C, j — R — 1;
i = C. J = Я;
i = C, j = R+ 1;
i = C +1, j = R — 1;
i = C + 1, j = R;
в других случаях.
Распределение вероятности Pr(C, R) можно получить на основе решения системы линейных уравнений размерности (Л/ — N/2 + 1)(N + 1)
для М > N:
N M-R
рг(л л = Е Е Рг<г’ j ।с'R) Рг(с’д) " <4-25) R=O С=О
И
N M-i
ЕЕ Pr(»’j) = 1- <4-26)
J=o i=O
Критерий устойчивости системы. Как было показано ранее, система может иметь множество точек равновесия [85], включая точки устойчивого и неустойчивого равновесия. В точке устойчивого равновесия любое небольшое отклонение состояния системы приводит к статистическому дрейфу обратно в направлении точки равновесия. В точке неустойчивости равновесия небольшое нарушение состояния уводит в сторону от точки устойчивого равновесия
Количество равновесий конкурирующих терминалов отображается корнями с уравнения [84]
1 + -] с +
СГ-1
г = М,
(4-27)
где г — вероятность равновесия зарезервированных временных слотов,
ср(1 —р)с Ч1-?)
7/ + СР(1 - - 7)'
(4-28)
Уравнение (4.27) может быть представлено в виде F(c) = М, где F(c) называется функцией равновесия системы.
В системе с двумя устойчивыми состояниями могут происходить колебания между двумя устойчивыми точками равновесия. Этот процесс похож на явление, имеющее место в системе ALOHA. Как и в системе ALOHA, неустойчивость системы PRMA может быть поделена на две области: безопасная область, состоящая из состояний системы, начиная от исходного состояния (С-о = 0, Rq = 0) до точки неустойчивого равновесия (СИДИ), и опасная область, включающая все другие состояния системы.
Устойчивость системы может измеряться с помощью параметра FET (среднее время первого выхода в опасную область, если считать от первоначально свободного канала). Для PRMA значение параметра FET можно получить на основе решения системы уравнений [75]
с„ к
Tij = 1 + Е Е Рг('"’ т I
п=0 т=0
где г 1» ©, Cu; j = 0.1. Л, К;
к _ Г АГ, n,i<Cu', t [ Ru, n,i=Cu;
(4-29)
(4.30)
Tjj — время первого выхода из состояния (г. J). т.е. число передач, которые система совершила до того, как перешла в опасную область первый раз из состояния (?,/).
Вероятность сброса речевых пакетов
Hirop(C', Я) — 7/ -
7/ [1 - (1 - 7/>2Л] [1-(i-т/КТ
7K-1/)B-1K-^B7V]
+ [l-(l-TfKT [1-(1_7/)PN]2
(4.31)
где D — максимальное время ожидания пакета; В — размер буфера для размещения речевых пакетов; // = р(С,Я) = 1— р(1 — р)с (1 — E/7V)(1 — — 7) — вероятность отсутствия успеха на этапе конкуренции. При этом средняя вероятность сброса речевых пакетов
Л" M-R
I drop — Е Е ^гор(С,Я)Рг(СЯ).
R-О С=0
(4-32)
Пропускная способность определяется как доля временных слотов. в течение которых осуществляется успешная передача информационных пакетов. Исходя из этого определения, пропускная способность в состоянии (С, Я)
S(C, гЯ) = R/N(l - 7/) + Ср(1 - р)с-\1 - э)(1 - R/N). (4.33)
где первое слагаемое — вероятность резервирования слота, который не является пустым, следующим за речевым импульсом; второе слагаемое — вероятность нерезервирования слотов, которые передают речевые пакеты. Средняя пропускная способность данной системы
N M — R 4*
S=E Е адЯ)Рг(С'.Я). (4.34)
R=V С = 0
4.2. Подуровень управления цифровой радиолинией
Подуровень управления цифровой радиолинией (Data Line Control, DLC) размещается между сетевым уровнем и подуровнем МАС. Сетевой уровень передает на подуровень DLC через межуровневый интерфейс данные (пакет), адресную информацию об узле назначения и требования к качеству транспортных услуг. Для выполнения требований к качеству услуг на подуровне DLC имеется комплекс средств борьбы с ошибками:
• коды обнаружения ошибок:
• коды с коррекцией ошибок, называемые также системами прямого исправления ошибок (Forward Error Correction, FEC);
• протоколы с автоматическим запросом повторной передачи (Automatic Repeat Request, ARQ), которые используются избирательно с учетом вида передаваемой информации.
Коды обнаружения ошибок, как правило, используются совместно с протоколами ARQ. При этом приемник с ARQ отклоняет блоки данных, имеющие обнаруженные ошибки, после чего передатчик передает этот блок повторно.
Коды прямого исправления ошибок позволяют как обнаружить, так и исправить искаженные символы, не прибегая к ARQ. Схемы FEC наиболее часто используют в беспроводных сетях, где повторная передача не всегда эффективна, а уровень ошибок достаточно высок.
Кодирование с исправлением ошибок в беспроводных каналах
Основной причиной использования кодирования с исправлением ошибок в беспроводных сетях является необходимость снижения вероятности появления ошибки в битах Ръ. Более существенное уменьшение Ръ, как правило, предполагает применение более эффективного кода. Эффективность кодирования определяется степенью снижения требуемого уровня отношения сигнал/шум (7) для систем с кодированием по сравнению с системами без кодирования (подразумевается, что используется один и тот же вид модуляции) для достижения допустимой вероятности ошибки (рис. 4.14).
Из рис. 4.14 видно, что выигрыш при Ръ = 10“4 меньше, чем при Ръ = 10~6. При низких отношениях сигнал/шум некоторые коды могут вносить отрицательный выигрыш, это объясняется тем, что дополнительная избыточность, вводимая кодом, не обеспечивает достаточный выигрыш в работе. Очевидно, что при проектировании систем стараются избегать использования кодов с отрицательным выигрышем при известных 7, однако в системах подвижной связи это не всегда возможно, поскольку в результате воздействия быстрых и медленных зами-
Рис. 4.14. Выигрыш от кодирования
раний 7 претерпевает значительные изменения во времени. При этом быстрые замирания будут вызывать группы ошибок и снижение качество связи, а медленные замирания могут приводить к прерыванию обслуживания мобильных пользователей (рис. 4.15). Вместе с тем, как следует из рис. 4.15, применение кодирования с исправлением ошибок позволяет снизить требования к уровню *у (на величину выигрыша от кодирования) и за
Состояние канала при использовании кода 3
===== Пригодное состояние канала у^удоп
“ — Не пригодное состояние канала у < удог]
Рис. 4.15. Влияние различных кодов на степень использования беспроводного канала в сети связи с подвижными объектами
счет этого увеличить длительности пригодного состояния беспроводного канала тпр (периоды, в течение которых у 7доп) и снизить длительности его непригодного состояния тнпр (периоды, в течение которых у < 7ДОП).
Для обеспечения непрерывности обслуживания в условиях затенений в сетях подвижной связи (на сетевом уровне) применяются специальные процедуры эстафетной передачи (handover), в основе которых лежит оценка характеристик радиоканала при связи с рабочей и соседними базовыми станциями и автоматическое переключение на каналы с требуемыми характеристиками.
Комплексное использование кодирования с исправлением ошибок и процедур ЭП позволяет, с одной стороны, обеспечить требуемую эффективность кодирования (только за счет автоматического переключения на каналы с требуемыми характеристиками), а с другой — снизить поток ЭП (за счет увеличения длительности пригодного состояния канала) и снизить при этом вероятность перерыва связи, ведущейся в процессе движения.
Из анализа рис. 4.15 также очевидна целесообразность применения в сетях подвижной связи адаптивного кодирования, при котором мощность применяемого кода меняется в зависимости от изменения отношения сигнал/шум в канале. В системах подвижной связи с интеграцией услуг, в которых базовой станцией одновременно обслуживается несколько разноудаленных пользователей, целесообразно в канале с каждым пользователем применять наиболее подходящий код, обеспечивающий требуемую достоверность и скорость передачи для каждой из предоставляемых услуг при максимальной степени использования ресурсов пропускной способности беспроводной среды.
Платой за повышение достоверности передачи информации может являться как увеличение сложности кодов, так и уменьшение скорости передачи данных или увеличение ширины полосы сигналов. В частности, если скорость передачи полезной информации то использова
ние при кодировании л избыточных битов в каждом .8',- + .5} 6 5 битов кодового слова приводит к тому, что скорость передачи полезной информации будет равна {k/n)Rb, т.е. кодирование уменьшает скорость передачи данных на к/п. Поддерживать информационную скорость постоянной при использовании кодирования можно за счет уменьшения времени передачи бита на k/n. Однако в большинстве случаев это приводит к расширению полосы передаваемого сигнала на к/и Применение сигнальных кодовых конструкций в некоторых случаях позволяет применять кодирование без расширения полосы рабочих частот.
Линейные блочные коды
Двоичный линейный блочный код предусматривает формирование из Si + Sj Е S информационных битов блока из п кодированных битов. Кодированные и информационные биты принимают значение 0 или 1. поэтому такой код называют (л . А’)-Двоичным кодом. Группа из п кодированных битов может принимать 2" возможных значений, соответствующих всем возможным комбинациям из л двоичных битов. Из этих 2п возможных состояний выбираются 21' кодовых слов так, чтобы ка-*ждый S;+Sj Е S битовый информационный блок однозначно преобразуется в одно из этих 2* кодовых слов. Скорость кода составляет /<’, = к/п бит/с. Если предположить, что кодированные символы передаются по каналу со скоростью передачи символов Rs символов/с, то информационная скорость с учетом использования (л. А’)-блочного кода составляет А?;, = RCRS = kRs/n бит/с Таким образом, видно, что блочное кодирование уменьшает скорость передачи данных по сравнению с той, которую мы получаем при некодированной модуляции со скоростью Rr.
Блочный код называют линейным, когда преобразование к информационных битов в п кодированных битов представляет собой линейное преобразование. Для описания этого преобразования и соответствующих функций кодирования и декодирования более подробно необходимо первоначально рассмотреть свойства векторного пространства двоичных кортежей из п элементов и соответствующих им подпространств. Множество всех двоичных кортежей из л элементов Вп является векторным пространством в пределах двоичного поля, которое состоит из двух элементов 0 и 1. Все поля предусматривают две операции — сложение и умножение: для двоичного поля эти операции соответствуют двоичному сложению (сложению по модулю 2) и стандартному умножению. Подмножество S величины Вп называют подпространством, если оно удовлетворяет следующим условиям:
1) вектор, все элементы которого нули, находятся в ,8’;
2) множество S является замкнутым при сложении, таким образом, если Si Е S и Sj Е S, то и S, + Sj Е S.
Блочный (л, А1 )-код является линейным, если 2к кодовых слова длиной п образуют подпространство Вп. Таким образом, если Г/ и С3 —
два кодовых слова в (п, &)-линейном блочном коде, то тогда Q - Cj должно составить другое кодовое слово кода.
Интуитивно понятно, что чем больше расстояние между кодовыми словами в данном коде, тем меньше вероятность того, что ошибки, вводимые каналом, будут трансформировать передаваемое кодовое слово при декодировании в другое кодовое слово. Хэммингово расстояние между двумя кодовыми словами (или последовательностями) С) и Cj обозначается как <7(6), Cj), или dij и определяется числом элементов, на которое они различаются:
п
dij = Ci.j Ф Су,г- (4.35)
г = 1
Например, если Ci = [00101] и Q = [10011], то dij = 3. Вес кодового слова 7V) составляет число единиц в кодовом слове, поэтому вес слова [00101] равен 2. Вес кодового слова JV, есть его хеммингово расстояние dts, по отношению к кодовому слову из всех нулей [00...0] или эквивалентен сумме его элементов:
п
u(Ci) = Y.CiG (4-36)
г=1
Так как ОфО = 1ф1 = 0, расстояние Хэмминга между 6) и Cj равно весу Ni ф Nj. Так как хэммингово расстояние между любыми двумя кодовыми словами равно весу их суммы, определить минимальное расстояние между всеми кодовыми словами в коде можно, рассмотрев минимальное расстояние между всеми кодовыми словами и кодовым словом из всех нулей. Таким образом, минимальное кодовое расстояние определяется как
dmm — mm dgi. (4.37)
г.гфО
Минимальное кодовое расстояние является важной метрикой для обнаружения и исправления ошибок.
Порождающая матрица [64] — это компактное описание того, каким образом информационные биты преобразуются в линейный блочный код. Основная цель разработки линейных блочных кодов заключается в нахождении порождающих матриц, которые позволяют получить коды, легко обрабатываемые при кодировании и декодировании и при этом обладающие хорошими возможностями для обнаружения и исправления ошибок.
Рассмотрим (п,А)-код с k информационными битами
Ci = [ыг1..к,:;-],
которые преобразуются в кодовое слово । ’
Представим операцию кодирования в виде множества из п уравнений вида
сц = «ii.9ij + Uizgoj + ... + иц-дкз, .7 = 1.n, (4.38)
где g принимает значения 0 или 1 и используется двоичное умножение. Эти п уравнений можно записать в виде матрицы
С, = UiG, (4.39)
где G — порождающая матрица к х n-кода, определяемая как
911 ,912 ,91л
.921 .922 ,92л
.,9*1 ,9*'2 ••• 9кп.
(4.40)
Если обозначить 1-к> строку матрицы G как д = [.(щ, ...,.9?п}, то можно записать любое кодовое слово Ci в виде линейной комбинации этих вектор-строк следующим образом:
G: = -^1.91 + .<’i2ff2 + ... + -rik9k-
(4.41)
Так как линейный (пД')-6лочный код является подпространством размером к, то fc-строчные векторы {ffi}, I — 1,..., к, матрицы G должны быть линейно независимыми, таким образом, они стягивают fc-мерное подпространство, связанное с 2к кодовыми словами. Отсюда G имеет ранг к. Так как множество базисных векторов для этого подпро
странства не является однозначным, порождающая матрица также не является однозначной.
Систематический линейный блочный код описывается с помощью порождающей матрицы вида
G = (й | Р) =
0
1
о
о Pll РГ2 Pin
о /'22 ?22 Р2п
1 Рк1 Рк2 ••• Ркп
(4.42)
где Р — к У. fc-единичная матрица; Р — к х (п — &)-матрица, которая определяет избыточные биты или биты четности, используемые для исправления и обнаружения ошибок.
Кодовые слова на выходе систематического кодера имеют вид
Ci = UiG = Ui[lk I P] = [иц,..., Wit,Pl,...,P(n-л-)], (4.43)
где первые к битов кодового слова являются исходными информационными битами, а последние (п — к) битов кодового слова — битами четности, полученными из информационных битов по правилу
Pi = UilPlj + ••• + UikPki- j = k.
(4.44)
Отметим, что любая порождающая матрица для (л, &)-линейного блочного кода может быть приведена с помощью операций-строк и операций-стобцов к порождающей матрице систематического вида.
Матрицы контроля четности и проверка синдрома [64]. Матрица контроля четности используется для декодирования линейных блочных кодов с помощью порождающей матрицы G. Матрица контроля четности Н, соответствующая порождающей матрицы G = [Zj. ( Р] определяется как
Н = [1п_к]Р\ (4.45)
Легко проверить, что GHT = где обозначает к х (?»— — Е)-матрицу из всех 0. Напомним, что кодовое слово Ci при кодировании получают путем умножения последовательности информационных битов Ui на порождающую матрицу G: Ci == UiG. Таким образом, имеем
СЛЯТ = ViCkC = 0„_fc (4.46)
для любой выходной последовательности Ui, где0„^. обозначает вектор-строку из всех нулей длиной (n — k). В результате умножение любого неискаженного кодового слова на матрицу контроля четности приводит к вектору из всех нулей. Это свойство используется для определения того, является ли принимаемый вектор действительным кодовым словом или он искажен, на основе процедуры проверка синдрома, рассмотренной ниже.
Предположим, что 7?— принятое кодовое слово (полученное после передачи в канал кодового слова С). При отсутствии в канале ошибок R = С. Однако, если в процессе передачи кодовое слово С искажается, то один или большее число кодированных битов в R будет отличаться от аналогичных в С. Поэтому принимаемое кодовое слово можно записать в виде
R = С + с, (4.47)
где е = [щ£2...<"•/>] — вектор ошибки, указывающий на то, какие кодированные биты были искажены в канале. Синдром R определяется как
S = RHP (4.48)
Если 7? является действительным кодовым словом, то R = С) для конкретного ?, и тогда согласно (4.46) S = С)НТ = 0„щ.. Следовательно, синдром равен вектору из всех нулей, если передаваемое кодовое слово не искажено или искажается так, что принимаемое кодовое слово относится к числу действительных кодовых слово в коде (но которое отличается от передаваемого кодового слова). Если принимаемое кодовое слово R содержит обнаруживаемые ошибки, тогда синдром определяет комбинацию ошибок, полученную в передаваемом кодовом слове, и эти ошибки можно будет затем исправить. Необходимо отметить, что
синдром — функция только комбинации ошибки е, а не передаваемого кодового слова С, поскольку
S' = RHT = (С + е)Ят = СНТ + еЯт = 0„_А. + еНт. (4.49)
Так как S = е7?т соответствует п — к уравнениям с л неизвестными, существует 2к возможных комбинаций ошибки, которые могут показать данный синдром S’. Однако самой вероятной комбинацией ошибки является комбинация с минимальным весом, соответствующая наименьшему числу ошибок, вводимых в канал. Таким образом, если комбинация ошибки ё является самой вероятной ошибкой, связанной с данным синдромом S', то передаваемое кодовое слово, как правило, декодируется в виде
С = R+c = C+e + e. (4.50)
В случае, когда самая вероятная комбинация ошибки имеет место, т.е. ё = е, С = „С, т.е. искаженное кодовое слово правильно декодируется.
Предположим, что обозначает кодовое слово (n.k)-кода с минимальным весом (исключая кодовое слово из всех нулей). Тогда CWHT = является суммой г/т,п в колонках Нт, поскольку dmjn равняется числу единиц (весу) в кодовом слове с минимальным кодовым весом. Так как ранг //‘ принимает самое большее значение п — к. подразумевается, что минимальное расстояние (л, 1)-блочного кода ограничивается сверху значением
drain ^n-fc+1. (4-51)
Циклические коды. Для циклических кодов характерно то, что если /7-битовая последовательность С — (cqCi••t’n-1) является кодовым словом, то последовательность 111 — (с„_1С] ...сга_2), полученная с помощью циклического сдвига на одну позицию вправо, также является кодовым словом. Циклическая природа таких кодов имеет хорошую структуру, которая позволяет значительно упростить процедуры кодирования и декодирования по сравнению с умножением матриц, используемым при кодировании и декодировании в обычных линейных блочных кодах. Поэтому большинство линейных блочных кодов, используемых на практике, является циклическими кодами.
При формировании циклических кодов вместо порождающих матриц используются порождающие многочлены. Порождающий многочлен д(А) для (??. Ая)-циклического кода имеет степень п — к и может быть представлен в виде
</(А ) = Уо + f/iA' + ... + <7г)_/,А” к, (4-52)
где <ji принимает значения 0 или 1 и у0 = yn-k = 1-
Информационную А’-битовую последовательность (мо---«г--1) также записывают в виде многочлена
u(A) = uq + <zyA + ... + щ-_1А'" 1. (4.53)
Кодовое слово из заданной А’-битовой информационной последовательности получают с помощью коэффициентов порождающего многочлена, умноженных на многочлен сообщения, т.е. кодовое слово С = = (cqCi...c„-i) получают как
с(А) = «(A)ff(A') = со + С! А + ... + Cn-iA’"-1. (4.54)
Кодовое слово, полученное с помощью многочлена с(А), является действительным кодовым словом для циклического кода с порождающим многочленом </(А) тогда и только тогда, когда с(А) делится на д(Х) Без остатка, т.е.
(«5>
при этом степень многочлена </(А) меньше к.
Необходимо напомнить, что систематические линейные блочные коды имеют первые к кодированных битов, соответствующих информационным Битам, а оставшиеся кодированные биты соответствуют Битам четности. Циклический код можно представить в систематическом виде путем умножения многочлена сообщений и и(А’) на Хп~к с результатом
А”-А:«(А') = м(;А"^ + uiXn~t+l + ... + «i-pV-1. (4.56)
Эта процедура сдвигает биты сообщения на к позиций в правую часть кодового слова. Далее осуществляется деление (4.56) на </(А'), в ре-зультате которого получается
Хп~ки(Х) р(Х)
~ 'д(Х) “ } + ^(А)’ (4 57)
где q(A') —многочлен степени к—1: р(А) — многочлен остатка степени п — k — 1. В результате умножения (4.57) на <у(А') получается
А"-^(А) = <7(А).(7(А) + р(А). (4.58)
Добавление р(Х) к обеим частям (4.58) дает
р(А)+А— fcu(A) = q(A)g(A). " (4.59)
Это означает, что р(А’) + Хп~ки(Х) действительно кодовое слово, потому что оно делится на Jf(A') без остатка. Кодовое слово описывается с помощью п коэффициентов многочлена кодового слова р(А’) + +А'”~а и(А'). Отметим, что можно выразить р(А) (степени п — к — 1) в виде
р(А) =р0 +1>1А + ... + pn_fc_iA”_i’_1. (4.60)
Комбинация (4.56) и (4.60) дает
р(Х) + Л'"-АЫ(Л’) =
— Ро + Pi А + ...pn-k-iXn к 1 + иоА” *4-t/iA" + ... + «к-i А” 1.
(4-61)
Таким образом, кодовое слово, соответствующее этому многочлену, имеет первые k битов, соответствующих битам сообщения ио,...,м*-, и последние п — k битов, соответствующих битам четности р0, что соответствует систематической форме.
Отметим, что многочлен систематического кодового слова вырабатывается в три этапа:
первый —умножение многочлена сообщения и «(A) на Хп~к,
второй — деление Хп~ки(ХУ) на д(Х) для получения остатка многочлена р(А’) (наряду с частным многочленом ?(А'), который не используется),
третий — добавление /’(А') к Хп~ки(Х) для получения (4.61).
Умножение и деление многочлена легко реализуется с помощью регистров с обратной связью [64, 94]. Таким образом, формирование кодового слова для систематических циклических кодов имеет небольшую сложность и низкую стоимость.
Рассмотрим, каким образом можно исправить ошибки в канале с циклическим кодированием. Многочлен, соответствующий передаваемому кодовому слову, имеет вид
с(А) = «(А>(А). (4.62)
Принимаемое кодовое слово можно также записать в форме многочлена как
г(А) = с(А) + е(А’), (4.63)
где б(А') — многочлен ошибки степени п — 1 с коэффициентами, равными 1, в случае, если ошибки имеют место. Многочлен синдрома для принимаемого кодового слова s(A') определяется как остаток, когда г(А) делится на ,q(X), так что s(A') имеет степень п — k — 1 и удовлетворяет выражению
г(А) = 9(A')ff(A) + s(A) (4.64)
для какого-либо частного многочлена 4(A). С учетом (4.62) и (4.63)
е(А) = с(А) + г(А) = («(А) + 4(А))</(А) + -<А), (4.65)
т.е. многочлен синдрома ,s(A) идентичен многочлену ошибки б(А)
Синдром получаем с использованием схемы деления подобной той, которая используется для создания кода. Как было отмечено ранее, эта схема деления реализуется, как правило, с использованием регистра с обратными связями, в результате чего реализация имеет низкую сложность и низкую стоимость.
Декодирование с жестким решением. Вероятность появления ошибки для линейных блочных кодов зависит от того, использует декодер мягкие решения или жесткие. При декодировании с жестким решением (Hard Decision Decoding, HDD) каждый бит кодового слова при обработке в приемнике демодул и руется как 0 или 1, т.е. демодулятор обнаруживает каждый бит (символ) по отдельности. Например, при BPSK принимаемый символ демодулируется как 1, если он ближе к и как 0, если он ближе к — у/Ёь. При жесткой форме декодирования не предполагается использование информации, полученной при демодуляции, которая может применяться декодером канала. В частности, при использовании BPSK расстояние принимаемого бита от \/Ёъ до —у/~Ёъ может использоваться в декодере канала для принятия лучших решений о передаваемом кодовом слове. Когда эти расстояния используются в декодере канала, то его называют декодированием с мягким решением. Декодирование с мягким решением, как правило, не используется в блочных кодах из-за его сложности.
При декодировании с жестким решением, как правило, используется декодирование по минимальному расстоянию. При декодировании по минимальным расстояниям п битов, соответствующих кодовому слову, в начале демодул и руются и с выхода демодулятора поступают на декодер. Декодер сравнивает принятое кодовое слово с 2к возможными кодовыми словами, составляющими код, и принимает решение в пользу кодового слова, которое является ближайшим по хэмминговому расстоянию (различается наименьшим числом битов). Математически для принимаемого кодового слова R декодер реализует формулу
Выбрать Ct так, чтобы d(Q, 7?) d(C\, R) Vi ф j.
Если существует более одного кодового слова с одним и тем же минимальным расстоянием для R, то декодер выбирает одно из них случайным образом. Методы декодирования с минимальным расстоянием отбирают на приеме то кодовое слово, которое наиболее вероятно было передано (декодирование по методу максимального правдоподобия), т.е. выбирается Cj, удовлетворяющее правилу
P(fi|Q). 7-1....2*.
Декодирование по минимальному расстоянию можно использовать как для обнаружения, так и для исправления ошибок. Обнаружение ошибки в блоке данных может использоваться как для отбраковки (сброса) данных, так и для повторной передачи данных (на основе протокола ARQ). Исправление ошибок позволяет восстановить искаженные данные. При исправлении ошибок процесс декодирования с минимальным расстоянием гарантирует, что принимаемое кодовое слово, лежащее в пределах расстояния Хэмминга I от передаваемого кодового слова, будет декодироваться правильно. Фактически декодер для (п, А’)-кода может
обнаруживать 2” — 2* возможных комбинаций ошибок. Причиной является то, что существует 2к — 1 необнаруживаемых ошибок, соответствующих случаям, при которых искаженное кодовое слово точно совпадают с кодовым словом из множества возможных кодовых слов (размером 2s'), но которые не соответствует предаваемым кодовым словам. Так как существует 2” — 1 возможных комбинаций ошибок, это дает 2” — 2к необнаруживаемых комбинаций ошибок.
'Ч1
Вероятность появления ошибки при декодирования с жестким решением г5 ‘
Вероятность появления ошибки Ре определяется как вероятность того, что переданное кодовое слово не будет принято правильно. При декодировании с жестким решением принимаемое кодовое слово не будет восстановлено правильно, если оно содержит больше! битовых ошибок. Таким образом, вероятность появления ошибки ограничивается сверху вероятностью того, что в кодовое слове появится более, чем t ошибок. Если ошибки битов в кодовом слове возникают в канале с АБГШ, то
п
£ С^(1-р)”-Л (4.66)
1=! + 1
где р — Ps — вероятность ошибки на бит. Знак неравенства в (4.66) может быть заменен равенством в случае, если декодер исправляет точно t или меньшее число ошибок в кодовом слове и не может исправить более чем I ошибок. Код, обладающий таким свойством, называют совершенным кодом.
Вероятность появления ошибки на бит после декодирования принимаемого кодового слова обычно зависит от конкретных кодера и декодера, в частности, от того, как биты преобразуются в кодовые слова. Вероятность появления битовой ошибки часто аппроксимируется выражением [64]
1 ”
£ JC'Ml-рГ-Л (4.67)
1=! + 1
которое при t — 1 упрощается до Ръ % р — р(1 — р)"-1.
При высоких отношениях сигнал/помеха наиболее вероятным условием появления ошибки в кодовом слове является его трансформация в вид ближайших соседей. Ошибки трансформации в вид ближайших соседей дают пару (верхний и нижний) пределов для вероятности появления ошибки. Нижним пределом является вероятность появления ошибки в кодовом слове при трансформации в вид ближайшего соседа
находящегося на расстоянии dminj " г;
” t4-68)
Верхний (объединенный) предел допускает возможность трансформации в вид всех других 2к — 1 кодовых слов находящихся на расстоянии dmin от предаваемого кодового слова. Таким образом, объединен^ ный предел допускает в 2к — 1 раз большую (чем в (4.68)) вероятность ошибки заданного кодового слова для всех его ближайших соседей, находящихся на расстоянии dm;n:
' Pf (2к - 1) £ С£п?(1 (4.69)
l=t+i
Когда число кодовых слов, находящихся на расстоянии dmin, велико или отношение сигнал/шум мало, оба эти предела являются слабыми.
Более жесткий верхний предел можно получить, применяя предел Чернова (Р(АГ х) ф е-т 72 для переменной X, имеющей гауссово случайное распределение с нулевым средним и единичной дисперсией, для вычисления вероятности появления ошибки кодового слова. Используя этот предел, можно показать [79], что вероятность декодирования кодового слова из всех нулей как J-го кодового слова с весом cVj ограничивается сверху величиной
т)^[М1-р)Г’/2- (4-7°)
Так как вероятность декодирования ошибки ограничивается сверху вероятностью появления ошибки в кодовом слове, которое состоит из всех нулей, для любого из других кодовых слов верхний предел может быть получен как
2fc
P^EW-PFj/2- (4.71)
1 = 2
Этот предел требует распределения весов {ал,}, j — 1,...,2к, для всех кодовых слов (а не для кодового слова из всех нулей, соответствующего j = 1) в коде. Более просто верхний предел может быть получен из (4.37) на основе использования значения <7rn,,i вместо индивидуальных весов кодовых слов. В результате такого упрощения получается предел
2*
Ре (2к - 1) ^[4р(1 - p)]dmin72. (4.72)
1=2
Необходимо отметить, что вероятность появления ошибки в кодовом слове Ре зависит от Рг, которое является функцией евклидова рас
стояния между точками модуляции, связанными с передаваемыми символами. Фактически наилучшие коды для каналов с АБГШ не должны основываться на расстоянии Хэмминга, они должны основываться на максимизации евклидова расстояния между кодовыми словами после модуляции. Однако для этого необходимо, чтобы кодирование канала было связано модуляцией (это основная концепция кодированной модуляции при решетчатом и турбо-решетчатом кодировании).
Недвоичные блочные коды
Недвоичный блочный код имеет свойства, аналогичные двоичным кодам, он преобразует К информационных символа в кодовые слова длиной N. Однако N символов каждого кодового слова выбираются не из двоичного алфавита, а из алфавита размерностью q > 2. Таким образом, символы кодового слова могут принимать любое значение в диапазоне {0,1, — 1}. Обычно q = 2к, так что к информационных
битов могут быть преобразованы в один символ кодового слова.
Самым известным недвоичным блочным кодом является код Рида-Соломона (PC), широко используемый в сотовых цифровых сетях (в частности, при реализации пакетной передачи данных в сетях с CDPD) Коды PC используют N = q — 1 =t'2A —1 и А’ = 1,2.N—1. Значение Л"
определяет возможности исправления ошибок. В частности, код PC может исправить до I — 0,5(Л? — Л ) ошибочных символов в кодовом слове. В первичных кодах минимальное расстояние между кодовыми словами определяется как число символов, на которое различаются кодовые слова. Коды PC обеспечивают минимальное расстояние ф||1Г| = N — К + 1. которое является наибольшим возможным минимальным расстоянием между кодовыми словами для любого линейного кода с одинаковыми длинами входного и выходного блоков кодера.
Так как при недвоичном кодировании (в частности, при использовании кодов PC) вырабатываются символы, соответствующие 2к битам, они хорошо согласуются с Л/-позиционными способами модуляции (при М — 2к). В частности, при 2/-позиционной модуляции каждый символ кодового слова передается по каналу как одна из 2к возможных точек созвездия. Если вероятность появления ошибки, связанная с модуляцией (вероятность появления ошибки в точке принимаемого созвездия для другой точки созвездия, чем передаваемая точка), есть Рм, то вероятность появления ошибки, связанной с недвоичным кодом, ограничивается сверху величиной
N
Е ^Р^(1-Рл/Г-< '= " (4.73)
j=t+i
Блочное кодирование и перемежение ч,
В каналах с быстрыми замираниями при демодуляции ошибки имеют тенденцию к группированию (в период времени, когда беспроводный
Искаженные биты
Рис. 4.16. Функционирование перемежителя/деперемежителя
канал находится в состоянии глубокого замирания). Вместе с тем коды, предусмотренные для использования в каналах с АБГШ, не способны, как правило, исправлять сгруппированные ошибки. Поэтому в каналах с быстрыми замираниями для уменьшения влияния группирования ошибок кодирование обычно совмещается с перемещением. Основной предпосылкой для перемежения являются распределение группы ошибок, вызванных глубоким быстрым замиранием, на несколько кодовых слов так, чтобы каждое принимаемое кодовое слово содержало такое число ошибок, которое может быть исправлено. Распределение сгруппированных ошибок осуществляется перемежением, а исправление ошибок — кодированием. Размер перемежителя должен быть достаточно большим, для того чтобы каждый искаженный символ в кодовом слове имитировал независимое искажение при передаче по каналу. В каналах с медленными замираниями требуется применение больших перемежителей, что, в свою очередь, может привести к большим задержкам. Поэтому в каналах с медленными замираниями при возникновении ситуации, в которой вероятность ошибки бита начинает превышать исправляющую способность применяемого метода кодирования, инициируется процедура ЭП, при которой осуществляется переход на канал более лучшими характеристиками
В каналах с быстрыми замираниями применяется блочный перемежитель, который представляет собой матрицу (рис. 4.16) В перемежителях, рассчитанных на применение (п,/^-блочного кода, кодовые слова считываются в перемежитель построчно, так что каждая строка
содержит (п. А:)-кодовое слово Содержимое перемежителя считывается в модулятор по столбцам для последующей передачи в канал. Во время передачи биты в одном и том же кодовом слове разносятся на d — 1 от других битов, поэтому биты в одном и том же кодовом слове испытывают независимое замирание, если разнесение во времени больше, чем время когерентности канала ((с/ — 1)7}, > Тг). Деперемежитель — это матрица, идентичная перемежителю. Биты из демодулятора считываются в деперемежитель по столбцам, а из деперемежителя построчно, так что каждая из них содержит кодовое слово.
Основная цель применения перемежения — декорреляция ошибок. Большинство разработанных кодов предназначены для каналов с АБГШ и способны исправлять независимые ошибки, поэтому эти коды плохо применимы в каналах с замираниями. Применение перемежение позволяет в каналах с быстрыми замираниями применять коды, предназначенные для каналов АБГШ.
Кодированная модуляция
Теорема Шеннона показывает возможность снижения как требуемой энергии сигнала, так и ширины полосы на основе использования кодирования. Однако традиционные способы кодирования с исправлением ошибок, такие, например, как блочные и сверточные коды, позволяют снизить мощность передачи сигнала за счет расширения полосы рабочих частот, поскольку добавленные избыточные биты увеличивают битовую скорость передачи [ЮЗ].
Появление спектрально-эффективного кодирования связано с разработкой кодированной модуляции [60] для совместной оптимизации модуляции и кодирования с исправлением ошибок. Эта совместная оптимизация позволяет получить значительный выигрыш при использовании кодирования без расширения полосы рабочих частот. Первая разработанная модуляция с р.ешетчатым кодированием, в которой используется многоуровневая/фазовая модуляция сигнала и простое сверточное кодирование, продолжает превосходить более новые разработки [69].
Существует пять элементов, необходимых для получения кодированной модуляции:
1) обычный кодер, блочный или сверточный, который преобразует к некодированных информационных битов в к + г кодированных;
2) селектор подмножества, который использует кодированные биты для выбора одного из 2п+к подмножеств созвездия JV-мерных сигналов;
3) селектор точек, который использует п — к дополнительных некодированных бита для выбора одной из 2"'~' сигнальных точек в выбранном подмножестве;
4) карта созвездия, которая преобразует выбранную точку из .V-мерного пространства в последовательность из ZV/2 точек в двумерном пространстве,
5) модулятор QAM.
Одна из 2 Одна из 2 сигнальных точек сигнальных точек
Рис. 4.17. Общая схема кодирования
Первые две ступени называют канальным кодированием, а остальные — кодированием, или модуляцией источника.
На рис. 4.17 показана основная схема решетчатого кодирования.
Приемник, по существу, реализует шаги обратные модуляции и ко-i дированию: после демодуляции сигналов QAM и обратного преобразования 2/N созвездия декодирование выполняется в два этапа: на первом этапе определяются точки в пределах каждого подмножества, которые находятся ближе всего к точкам принимаемого сигнала; на
втором вычисляется последовательность подмножеств по методу максимального правдоподобия.
Оптимальное формирование совокупности созвездия сигналов обеспечивает дополнительно 1,53 дБ выигрыша от формы (для асимптотически большого Л ) независимо от схемы канального кодирования. Однако улучшение характеристики, достигаемое за счет выигрыша от формы, компенсируется соответствующей сложностью отображения созвездия, которое растет экспоненциально с N. Размер созвездия на передаче определяется средним ограничением мощности и не влияет на выигрыш от кодирования источника (или канала).
Выигрыш от кодирования канала вытекает из выбора всех возможных последовательностей сигнальных точек. Если рассматривать последовательность из К входных битов как точку в Лг-мерном пространстве (пространство последовательности), то этот выбор используется для гарантии какого-то минимального расстояния clmin в пространстве последовательности между возможными входными последовательностями. Ошибки обычно появляются тогда, когда последовательность приобретает форму своего ближайшего соседа, и в каналах с АБГШ эта вероятность ошибки является убывающей функцией rf^in. Таким образом, можно уменьшить вероятность ошибки за счет увеличения зазора между каждой точкой в пространстве последовательности на фиксированную величину («растяжение» пространства). Однако это приведет к пропорциональному увеличению мощности. При этом никакого выигрыша от
сетевого кодирования не получается. Поэтому эффективное усиление мощности канального кода является минимальным квадратом расстояния между допускаемыми точками последовательности (точки последовательности, полученные в результате кодирования), умноженными на плотность допустимых точек последовательности. В частности, если минимальное расстояние и плотность точек в пространстве последовательности обозначить через do и Д(, соответственно, а те же величины, полученные в результате кодирования, — через <7т;п и Д, то обнаружение последовательности по способу максимального правдоподобия дает выигрыш от кодирования канала равный
(4-74) «б До >
Второе отношение в этом выражении называется коэффициентом расширения совокупности и равно 2-г (на размер N) для избыточности г битов в кодере Е [69]
Выигрыша кодирования в (4.74) несколько снижается из-за исправления последовательностей, имеющих более чем одного ближайшего соседа в пространстве последовательностей, что увеличивает вероятность обнаружения последовательности с ошибками. Эти потери в выигрыше кодирования характеризуются коэффициентом ошибок, который для обычных решетчатых кодов приводится в [69].
Кодирование каналов осуществляется с использованием разбиения совокупности решеток. Решетка — это дискретная совокупность векторов в реальном евклидовом TV-пространстве, которая формирует группу при обычном сложении векторов, поэтому сумма или разность любых двух векторов в решетке также находится в решетке. Подрешетка — это подмножество решетки.
Пространство последовательности для некодированной модуляции M-QAM является Лг-кубом, поэтому минимальное расстояние между точками определяется аналогично двумерному случаю. Путем ограничения входных последовательностей тем, что они лежат на решетке в Лт-пространстве, которое является более плотным, чем в Лг-кубе, можно увеличить поддерживая при этом одну и ту же плотность (или, что эквивалентно, одну и ту же среднюю мощность) в совокупности передаваемых сигналов. Л'-куб — это решетка, однако для каждого Л > 1 существуют более плотные решетки в /V-мерном пространстве. Нахождение самой плотной решетке в TV-мерном пространстве — хорошо известная математическая проблема, и она была решена для всех N, для которых сложность декодера является управляемой. После того как стала известна самая плотная решетка, можно сформировать подмножества разбиения или смежные классы решетки путем преобразования любой подрешетки. Выбор разбиения подрешетки будет определять • размер разбиения, т е. число подмножеств, которые селектор подмножеств должен выбрать.
Далее информационные биты передаются двумя способами: через последовательность смежных классов, из которых выбираются точки совокупности, и через точки, выбранные в пределах каждого смежного класса. Плотность решетки определяет расстояние между точками в пределах смежного класса, тогда как расстояние между последовательностями подмножеств, по существу, определяется свойствами двоичного кода кодера Е и его избыточности г. Если обозначить через dP минимальное расстояние между точками в пределах смежного класса и через dr минимальное расстояние между последовательностями смежных классов, то код с минимальным расстоянием есть r/mjn = m'in(dT,ds). Эффективный выигрыш от кодирования определяется как
Ge = 2-2^'^in, (4.75)
где — коэффициент расширения созвездия (в двух измерениях)
из г дополнительных битов, введенных двоичным канальным кодером.
Адаптивная кодированная модуляция
Дополнительный выигрыш от кодирования можно получить путем использования решетчатых или сверточных кодов совместно с адаптивной модуляцией. В частности, используя разбиение подмножеств, характерное для кодированной модуляции, решетчатые или сверточные коды, рассчитанные для использования в каналах с АБГШ. можно наложить непосредственно на адаптивную модуляцию.
Адаптивная кодированная модуляция — это схема кодирования, которая используется совместно с модуляцией MQAM с переменной скоростью и переменной мощностью. При этом может регулироваться мощность и скорость (число уровней или точек сигналов) в передаваемом созвездии относительно мгновенного отношения сигнал/шум без изменения кодирования в канале.
Схема адаптивной кодированной модуляции представлена на рис. 4.18.
сигнальных точек
Рис. 4.18. Схема адаптивной кодированной модуляции
Кодирование источника (модуляция) выполняется следующим образом. Созвездие сигналов представляет собой квадратную решетку с регулируемым числом точек совокупности сигналов, поэтому имеется возможность перемещать отображения созвездия перед выбором точки без изменения характеристики кода. т.е. при проектировании выбранное подмножество в Л’-мерном пространстве на последовательность из N/2 подмножеств в двумерном пространстве, из которого выбирается сигнальная точка MQAM. Размер совокупности сигналов MQAM, из которой выбирается сигнальная точка, определяется на основе изменения мощности, которая регулируется относительно мгновенного отношения сигнал/шум и исходя из допустимой вероятности появления ошибки.
Имеется [64] приближенное выражение, связывающее вероятность появления ошибки с размерностью передаваемого сигнала:
Рь * 2е'1’5[5б,'с/(м“п], (4.76)
где М — размер созвездия передаваемого сигнала. Имеется возможность регулирования числа точек созвездия М и мощности сигналов относительно мгновенного отношения сигнал/шум для поддержания постоянного кэффициента ошибок [64]:
Л/(7) = 1 -
1,57<?с Р(7) ln(Pfc/2) Р
(4.77)
Скорость передачи в битах составляет logAf(7), а скорость передачи данных — logAf(7) — 2r/lV. Поэтому скорость передачи данных максимизируется путем максимизации 7r[log2 М] относительно среднего ограничения скорости. Исходя из этого можно получить оптимальное управление мощностью для данной схемы модуляции:
Р (0. 7<7о//<с,
(4.78)
где 7о — глубина замирания на частоте среза; Кс — KGC- Таким образом, кодированная модуляция увеличивает эффективную передаваемую мощность на Gc относительно характеристики не кодированной модуляции MQAM с переменной скоростью. Эффективность исполь-
зования спектра
И?8’®)*’'1’'
(4.79)
где 7дс — -уо/Кс. Если коэффициент расширения созвездия не включает коэффициент усиления кодирования, то для получения скорости передачи данных необходимо из (4.79) вычесть 1r/N. Более подробные сведения о рассмотренной схеме адаптивной кодированной модуляции можно найти в [64].
Глава 5
"i.
Сетевой «уровень беспроводных сетей
Сетевой уровень служит для выполнения функций обмена пакетами (сетевыми сервисными блоками) при помощи сетевых соединений. При этом сетевые процедуры реализуются на сети в целом, тесно связаны с ее топологией и процессами, затрагивающими обмен информацией между узлами коммутации мобильной сети. Большинство функций, реализуемых протоколами сетевого уровня, носит характер распределенных процедур, состоящих из одного или нескольких паритетных процессов на каждой из двух (и более) географически разнесенных точек. Паритетные процессы сетевого уровня имеют общую цель, которую они достигают совместно на основе обмена необходимой информацией. К числу наиболее сложных распределенных процедур, реализуемых на сетевом уровне, относятся алгоритмы маршрутизации и эстафетной передачи (ЭП, handover).
5.1. Маршрутизация в сетях подвижной связи с интеграцией услуг
Основными компонентами сетей подвижной связи с точки зрения маршрутизации являются (рис. 5.1):
• подвижные абоненты, носители мобильных станций, создающие разнородный поток заявок;
• станции радиодоступа (СРД) — базовые станции, обеспечивающие радиодоступ ПО к услугам:
• коммутаторы мобильной связи (КМС)*, осуществляющие процедуры маршрутизации заявок ПО.
Сложность задачи маршрутизации в сетях подвижной связи с интеграцией услуг (СПР-ИУ) обусловливается разнородностью услуг и подвижностью пользователей — отправителей и получателей информации, приводящая к необходимости отслеживания их местоположения в сети, а также к перемаршрутизации разнородного трафика при реализации процедуры ЭП.
* В контексте излагаемого материала считается, что такие важнейшие элементы сети подвижной связи, как контроллер базовой станции и транскодер, входят в состав коммутационной системы.
I
СРдГХ*СРД2'ХСРДз'%СРД4'ХСРД5'%ЬРДб
СРД7
СРД1&.СРД1
СРД 27У СРД 26.,/СРД 25-/СРД 24.,/с^д 23у СРД 22
Х-СРД1дХ-СрД0
flA
СРД14\СРД15
СРД1&.СРД1
СРД2йУ,СРД21
— Станция радиодоступа
Ш_ Коммутатор мобильной связи
Рис. 5.1. Вариант структуры СПР-ИУ
Разнородность услуг проявляется в различных требованиях к характеристикам информационного обмена, основными из которых с точки зрения маршрутизации, являются время задержки пакетов, джиттер и необходимая полоса пропускания [31, 37, 39, 41].
Различные требования к полосе пропускания требуют определения путей, имеющих необходимый ресурс пропускной способности. Кроме того, необходимо учитывать характеристики радиоинтерфейса, из которых наиболее существенное влияние на процессы маршрутизации оказывают широковещательность радиоканала и зависимость ресурса пропускной способности от отношения сигнал/помеха в беспроводном канале. При этом влияние радиоинтерфейса на процесс маршрутизации в СПР-ИУ сказывается на пропускной способности радиоканала между ПО и СРД (рис. 5.2).
Поддержание требуемого качества обслуживания подразумевает, что алгоритм маршрутизации должен обеспечивать изменение плана распределения разнородного трафика (ПРРТ) в соответствии с изменениями ресурсного состояния СПР-ИУ. При этом под ресурсным состоянием понимается топологическая структура СПР-ИУ и пропускная способность ее элементов, а изменения состояния могут происходить в результате выделения части ресурса пропускной способности для обслуживания разнородного трафика и выхода из строя или появления новых структурных элементов (СРД и КМС). участвующих в маршрутизации.
Представим сеть СПР-ИУ в виде совокупности графов с одинаковой узловой основой:
G={Gk], k = l,...,K,
(5.1)
1Ф1...Н-1 |...|м|
Свободная Занятая
часть часть
Рис. 5.2. Влияние радиоинтерфейса на ресурс пропускной спдсЬбйостй радйбкйн нала доступа APT к СРД । ,
где G\. — топологическая структура СПР-ИУ, в которой определяются оптимальные (кратчайшие) пути для О; группы услуг. Структура Gk представляет собой совокупность множества узлов А и множеств ветвей Вк- Gk(A,Bk), к = 1,2,...,К.
Множество узлов А представляется совокупностью двух множеств:
А — А± U А*}',
Aj = {aj},{xj,yj}, j =1,2,...,ЛТ;
А2 = {ai}, {xi,yi}, ?'=1,2,
(5.2)
(5.3)
(5.4)
где Aj — множество корреспондирующих узлов; А? — множество остальных узлов.
Множество ветвей Вк является совокупностью множеств ветвей связи (ВС) между узлами — КМС множества Аг и ветвей привязки (ВП)
узлов — СРД из множества Ai к узлам — КМС из множества
(5.5)
Bi- = Bj3cfc U Евпк,
Мощность каждого из множеств Ввск и Ввпл, является переменным параметром, зависящим от ресурсного состояния СПР-ИУ:
Ввск = C'b ^=|BBcJ, А’=1,2, ...,/<; (5.6)
Ввщ={СЧ’ /л = |ВВПк| Л’= 1,2, (5.7)
Элементами множества Л] в сети СПР-ИУ, вариант структуры которой представлен на рис. 5.1, будут являться СРД, а элементами множества А'2 — КМС. Такое деление оправдано тем, что станции СРД обеспечивают радиодоступ подвижных абонентов в СПР-ИУ (т.е. передачу заявок ПО на предоставление разнородных услуг СПР-ИУ), а КМС — перенос пакетов между корреспондирующими абонентами.
Элементами множеств Ввс* и Ввп* будут являться соответственно ветви связи и ветви привязки, обладающие полосой пропускания Стр1
Такое представление топологической структуры позволяет отразить ресурсное состояние элементов сети и на этой основе найти пути, обладающие необходимой (затребованной) полосой пропускания.
Допустим, что каждый из узлов множества Aj генерирует 1\ потоков заявок на услуги из множества Q с интенсивностями А^.. к = = 1,2,.... К. Предположим, что в СПР-ИУ имеется Z = {л}- I = 1, 2....,т, корреспондирующих пар, между которыми имеется совокупность маршрутов М = {Л/д.}, Л/д, = {/.(]{.’'}, 11 — 1,2,.... />CBik, к — — 1,2, где ЛСБд, — коэффициент связности г;-й корреспондирующей пары подвижных абонентов при обеспечении услуги О/,, К — мощность множества услуг Q.
При этом в узле а,- в любой момент времени t может иметься некоторое число разнородных заявок, принятых к обслуживанию и адресованных узлу a.j в виде данных из w-j битов. Изменяющиеся во времени матрицы нагрузок И*(/) = ||w'fj,||, к = 1,2,...,К, размером М х определяют работу по передаче пакетов, которую должна выполнить СПР-ИУ. Обозначим через ж(рд.) интенсивность линейного потока 27 корреспондирующей пары, проходящего по маршруту //;/,. измеряемую в единицах данных (битов, пакетов, сообщений и т.д.) в секунду.
Для поддержания качества обслуживания в СПР-ИУ алгоритм маршрутизации. очевидно, должен обеспечивать эффективное использование имеющегося ресурса пропускной способности При этом показателем эффективности может выступать стоимостная функция вида [5]
Е (5-8)
иВвп,.
где каждая функция D,j является монотонно возрастающей и определяется следующим образом:
___112_+ d-F-( ij
(5-9)
где — пропускная способность ветви 1 £ Ввс* U Ввп*, измеряемая в единицах данных (битов, пакетов, сообщений и т.д.) в секунду; dij —задержка из-за обработки на узле £ AiE>A-> и передачи в ветви
£ Две* U Вши; By — суммарный линейный поток по всем путям, содержащим ветвь £ /фс, U Двп* между узлами a,, a.j £ Л1 А->-
Задача оптимальной маршрутизации состоит в том, чтобы распределить входной поток с интенсивностями Г) между несколькими путями для каждой корреспондирующей пары таким образом, чтобы общий результирующий поток в сети минимизировал стоимостную функцию (5.8). При этом набор всех путевых потоков M/Ofc) I zi G Е Mik, Mik Е £ М} должен удовлетворять ограничениям:
А
Е Е X/Ofc) = ri для всех сг £ Z;
к—1 ШкёЛЛк
x(pik') > о Для всех ftlk Е Mik И Mik Е М.
(5.10)
(5.U)
Ограничение (5.10) является условием сохранения потока, а ограничение (5.11) — условием неотрицательности потока.
Суммарный поток Ft] по ветви равен сумме путевых потоков, проходящих по этой ветви: ,
А
^• = Е Е ’! '• ''г (5-12)
Сформулируем задачу маршрутизации с учетом (5.12) следующим образом: минимизировать стоимостную функцию: ' • '
т'пЕ/л,., Е Е
к — 1 £btj
при следующих ограничениях:
(5.13)
А
Е Е XP/fc) = ri для всех zi С (5.14)
& = 1 CMik
x(fiik) > 0 ДЛЯ всех p(kJ = р(Са, C^pl) = 1 - р* vi Мк Е М.
P*f:P
Таким образом, задача оптимальной маршрутизации сформулирована в терминах неизвестных путевых потоков {.г(/щ,) | £ Z. Цц- G
£ Mik G М}. Решение данной задачи выражается в терминах кратчайших путей.
Выбор стоимостной функции вида (5.8) основан на предположении о том, что достаточно «хорошую» маршрутизацию можно получить, оптимизируя средние уровни проходящего по ветвям трафика и не обращая внимания на его другие вероятностные характеристики. Стоимостная функция (5.8) не чувствительна к нежелательным явлениям, связанным с большой дисперсией и корреляционными интервалами между моментами поступления и моментами передачи. Другими словами, стоимостная функция чувствительна к длине пути (первому моменту входного процесса) и не чувствительна к задержкам на каждой ветви (узле), которая зависит от второго и более высоких моментов входного процесса.
Улучшить маршрутизацию можно, используя информацию о длинах очередей. Однако в больших сетях практически невозможно сделать так, чтобы все узлы были информированы о длинах очередей. Это связано с тем, что даже при условии непревышения дополнительной нагрузки, связанной с передачей информации о длинах очередей и допустимого предела, задержка при передаче этой информации может привести к тому, что эта информация устареет.
В связи с этим решение задачи оптимальной маршрутизации ограничено рассмотрением зависимости стоимостной функции от первого момента входного процесса и основано на распределении входного трафика по кратчайшим путям. При этом адаптация маршрутизации к ресурсному состоянию сети, чувствительному к передаваемому трафику, обеспечит косвенный учет длин очередей на узлах СПР-ИУ.
Алгоритм адаптивной маршрутизации в СПР-ИУ
В соответствии с формальной постановкой задачи в качестве основы построения алгоритмов адаптивной маршрутизации в СПР-ИУ целесообразно использовать алгоритмы поиска кратчайших путей, описанные в [1-4, 12, 15, 16, 26, 27, 29, 30].
Разобьем все множество разнородных услуг Q, предоставляемых ПО в СПР-ИУ, на группы в зависимости от требуемой полосы пропускания:
Q = {Qi,...,Qa......QK}, k = l.........К,
таким образом, чтобы выполнялось следующее условие:
Г'(!) -> Г’(2) Л'(А)
"тр тр '-'’тр ••• V Тр •
(5.16)
(5.17)
где С*'р — полоса пропускания, требуемая для группы услуг О/..
Алгоритм адаптивной маршрутизации в СПР-ИУ, децентрализовано выполняемый на КМС, должен выполнять следующие функции:
• определение состояния СПР-ИУ;
• коррекцию плана распределения разнородного трафика (ПРРТ) в соответствии с состоянием сети:
• перемаршрутизацию трафика при изменении привязки ПО к СПР-ИУ в результате его перемещения.
В соответствии с выполняемыми функциями алгоритм адаптивной маршрутизации в СПР-ИУ должен включать три основных блока: контроль ресурсного состояния элементов сети, а также отслеживание местоположения ПО и направления их перемещения при обеспечении ЭП; обмен сообщениями о состоянии элементов СПР-ИУ и местоположении ПО между узлами сети, на которых определяются маршруты; корректировка ПРРТ на узлах СПР-ИУ.
Контроль параметров состояния СПР-ИУ
Для адаптации алгоритма маршрутизации к ресурсному состоянию элементов сети на каждом КМС должна отслеживаться информация о текущем наличии свободного РПС. Эта информация может быть представлена в виде К матриц смежности ресурсных (МСР) У’*, к = 1, ...,Л', характеризующих ресурсное состояние ветвей между КМС, и К матриц ветвей привязки ресурсных (МПР) Zk, характеризующих ресурсное состояние ветвей привязки СРД к КМС (рис. 5.3). Кроме перечисленных матриц, на КМС хранится таблица привязки (ТП) и матрица физической связности (МФС), в которых содержатся сведения о топологической структуре СПР-ИУ. Количество строк ТП рзвно числу станций радиодоступа в СПР-ИУ, причем номер строки соответствует номеру СРД. Количество столбцов равно двум, при этом в первом столбце указывается номер КМС, а во втором столбце — номер привязки СРД к КМС (номер элемента). Пример таблицы привязки показан на рис. 5.3. Размерность МФС соответствует размерности МСР.
Размерность матриц У). равна Ах = 0,1,10, где У — число КМС в ТСПР-ИУ. При этом элементы матриц 1). могут принимать два
Рис. 5.3. Представление информации о состоянии СПР-ИУ .
Занятая часть ресурса пропускной < а способности . КМД СРД13
СРД1
ПА-А
Ресурсное состояние ветви привязки БС13 отражает ресурсное состояние КМД СРД13
Ресурс пропускной способности КМД СРД13
Ресурс пропускной способности ветви __привязки СРД1
Рис. 5.4. Отражение ресурсного состояния КМД на ресурсное состояние оконечной ветви привязки СРД
Ресурс пропускной способности КМД СРД1,'х< используемый для соединения ПА-В и ПА-Г
Ресурс пропускной ' способности КМД СРД1
ПА-В
СРД 13
значения: 1 и 0. Значение 1 соответствует наличию в ветви 6^. соединяющей узлы КМС, и KMQ, ресурса пропускной способности, необходимого для обеспечения затребованной подвижным абонентом услуги группы Qj, а 0 — отсутствию такого ресурса.
Информация о ресурсном состоянии ветвей привязки СРД к КМС хранится в виде матриц MBP Z^, к = Количество строк .V ма-
триц Zk определяется числом КМС в составе СПР-ИУ. а число столбцов S равно максимальному числу СРД, которые могут быть «привязаны» к одному КМС. При этом элементы матрицы Zk также принимают два значения: 1 и 0. Причем 1 отражает наличие ветви 1, что свидетельствует о том, что ветвь привязки СРД а; G Ai к КМС а? £ Aj обладает требуемой полосой пропускания для реализации запрошенной услуги группы йь а 0 — отсутствие такой ветви, что говорит о недоступности СРД а, £ Aj для ПО. При этом ресурсное состояние ветви привязки отражает ресурсное состояние КМД СРД. Для этого КМС. к которому «привязана» СРД, контролирует использование пропускной способности КМД. и при задействовании ее части для соединения ПО, находящихся в зоне обслуживания одной СРД, «считает», что такая же часть пропускной способности задействована и в оконечной ветви привязки данной СРД. Подобная ситуация показана на рис. 5.4.
При изменении текущего ресурсного состояния сети узлы (КМС) осуществляют обмен служебными сообщениями, по которым корректи
руются матрицы Уд. и Zi- в соответствии с реально сложившейся ситуацией
Количество матриц Уд- и Zj-, хранящихся на каждом КМС, соответствует числу групп предоставляемых в сети СПР-ИУ интегральных услуг. При этом матрицы Уд. и Zi- характеризуют ресурсную структуру сети СПР-ИУ. обладающую требуемым РПС для обеспечения услуги Од.
В своей совокупности матрицы Уд. и Zk, к = 1, К, описывают потенциальные возможности СПР-ИУ по предоставлению интегральных услуг. В частности, матрицы Уд и Zi описывают возможности СПР-ИУ по предоставлению услуги Qi, требующей минимальной полосы пропускания Стр? = Дст;п, а матрицы У# и Zu — возможности по предоставлению Од. группы интегральных услуг, требующих максимальной полосы пропускания Стр1 = /<Дст;п.
Для поддержания мобильности абонентов на сетевом уровне во время сеанса связи обеспечивается эстафетная передача, суть которой заключается в следующем. При движении ПО-А в направлении, указанном стрелкой (см. рис. 5.1), на границе зоны обслуживания СРД 1 будут ухудшаться параметры, характеризующие качество цифрового радиоканала (например, отношение сигнал/шум, коэффициент ошибок), что приведет к изменению доступности предоставляемой услуги для ПО. В этом случае КМС2 выдает команду на контроль доступности этой услуги для этого ПО в соседних зонах обслуживания (ячейках) (рис. 5.5).
часть часть
Рис. 5.5. Поддержание мобильности ПО на сетевом уровне
Рис. 5.6. Нумерация элементов множества услуг fl
Контроль доступности может осуществляться как абонентскими радиотерминалами, так и станциями радиодоступа. При превышении доступного РПС определенного порогового значения в зоне обслуживания СРД13узел КМС2 выдает команду на переключение абонентского радиотерминала ПО-А на эту СРД. При этом на КМС1, к которому подключена СРД13, осуществляется «активизация» вычисленного кратчайшего пути. После передачи управления узел КМС1 становится узлом-инициатором переданного соединения.
Формирование и корректировка ПРРТ осуществляется алгоритмом адаптив
ной маршрутизации на основании информации о ресурсном состоянии элементов СПР-ИУ, которая может быть получена в результате контроля
параметров качества цифрового радиоканала, определяющих доступный РПС. Пронумеруем совокупность услуг, требующих выделения различ
ной и неизменяемой в течение сеанса связи полосы пропускания, входящих в множество Q (5.16) в порядке возрастания требуемой полосы пропускания Стр так, как показано на рис. 5.6:
Q = {fit............QA'}, (5.18)
где К — число групп услуг (мощность множества услуг) У-ФСП, предоставляемых в СПР-ИУ. При этом для услуги Q] требуется минимальная полоса пропускания ДСПпп, а для QA- — максимальная Д6'тах = = Л'ДСт1П.
Для обеспечения гарантированного качества обслуживания при передаче разнородного трафика алгоритм маршрутизации должен «уметь» определять пути с требуемой полосой пропускания. В связи с этим, кроме информации о топологической структуре, данный алгоритм должен обладать информацией о ресурсном состоянии СПР-ИУ. Для обеспечения адаптации к поступающей нагрузке, очевидно, необходимо от слеживать использование имеющегося ресурса полосы пропускания на элементах (ветвях) сети, что может быть осуществлено путем контроля (определения) свободного (незадействованного) ресурса.
Под свободным ресурсом С'св понимается полоса пропускания, достаточная для обеспечения соответствующей услуги из множества (5.16) с гарантированным качеством Оценка С'-в должна осуществляться с учетом максимально допустимой длины очереди.
Ресурс пропускной способности (РПС) на элементах сети можно оценить на основе анализа укрупненных состояний. При этом наиболее важными для маршрутизации разнородного трафика являются следующие состояния, когда свободный ресурс пропускной способности С'св:
Рис. 5.7. Изменение ресурсного состояния элементов СПР-ИУ
• не достаточен для обеспечения ни одной из услуг О/,. СПР-ИУ:
О < Сев < Z\cmjn;
• достаточен для обеспечения одной из К услуг 0/;: < Ссв С
< С*-21 С(2) < С < С(3) < (' < Га+1) k — 1 2 К-
V'Tp « V Тр \ '-'СВ V- тр > V -тр '-'СВ тр 1 & —
• достаточен для обеспечения всех Л' услуг СПР-ИУ: С’св > Скр.
Отмеченные укрупненные состояния ветвей сети вырабатываются на основе оценки РПС Ссв. Граница, разделяющая состояния доступности (1, 2,k) и (А- + 1.А) услуг, устанавливается в виде + Со, где Со — часть полосы пропускания, которая позволяет обеспечить передачу служебного трафика об изменении ресурсного состояния ветвей по сети во время предоставления А’-й услуги.
В процессе функционирования сети могут складываться ситуации, при которых имеющегося РПС Ссв для реализации A-й услуги в какой-либо ветви к (или будет недостаточно. При этом данная ветвь исключается из множества Ввс\ = } (или Ввп, = {^Пк})- Раз-
решение на предоставление А’-й услуги на данной ветви предоставляется после того, как РПС Ссв достигнет необходимой величины С^ + Ср. где Ср — часть полосы пропускания, позволяющая выявить тенденцию спада нагрузки на ветви Ь®Ск (или Ь®Пк) и оценить достаточность высвободившейся части полосы пропускания для предоставления любой из 1,...,А‘ услуг (рис. 5.7).
Формирование верхней границы Со в отсчете от свободного РПС Ссв
в ветви позволяет сделать плавающим установленный для нее диапазон перехода к нижней границе Ср.
Значения границ Ср и Ср для ветвей сети могут Быть найдены методом статистического моделирования.
Исходным параметром моделирования может Быть время перехода ^перех из состояния, определяемого одной границей, в состояние, характеризуемое другой границей. Это время invpex должно Быть значительно большим времени реакции алгоритма адаптивной маршрутизации. ^перех ^реак-
Процесс перехода от одних укрупненных состояний ветви к другим во времени поясняется на рис. 5.7. Величина занятой части полосы пропускания в ветви откладывается по оси ординат и представлена в виде ступенчатой линии. Каждая ступенька соответствует изменению занятой полосы пропускания в ветви. Шириной ступеньки характеризуется время пребывания ветви в состоянии занятости полосы пропускания до уровня, обозначенного данной ступенькой. Моменты перехода из одного состояния в другое отмечены кружочками. Укрупненные со
стояния, соответствующие свободному уровню пропускной способности Сев = С’тр\ k = 1,2,.... К. обозначены как С\-- С*._ь С\, СЧ, С'з. Величина Сзапр означает запрет на предоставление (недоступность) любых услуг в данной ветви.
Алгоритм контроля , оценки ресурсного состояния элементов СПР-ИУ'в графическом виде представлен на рис. 5.8.
Формирование и обмен служебными сообщениями о состоянии элементов сети
Основой адаптации маршрутизации к ресурсному состоянию СПР-ИУ является обмен узлов — КМС между собой служебными сообщениями о ресурсном состоянии ветвей ВС и ВП. Управляющая информация в служебных сообщениях представляется в виде сведений об укрупненных состояниях ветвей. С точки зрения предоставления сетью СПР-ИУ К услуг возможны К + 1 укрупненных состояний ветвей. Для кодирования (Л' + 1) состояния требуется использование /-разрядного кода, где / = log2(/< + 1).
Сведения о состоянии ветвей вырабатываются системой управления КМС с помощью процедур вычисления величины доступного РПС ветвей, включенных в этот узел.
При переходе от одного состояния ветви к другому в КМС щ формируется служебный пакет, передаваемый на все другие КМС сети. Служебный пакет (СП) состоит из заголовка и информационной части (рис. 5.9).
Заголовок должен содержать сведения о номере узла-отправителя СП; о типе ветви (ветви связи, соединяющей КМС между собой, или ветви привязки, соединяющей КМС cij со СРД cij) и об объеме информационной части. Кроме того, в заголовок может включаться признак
новизны передачи.
Информационная часть СП включает элементы, число которых выбирается равным d для ВС и т для ВП. При этом d и т — число ВС и ВП соответственно, включенных в КМС согласно структуре сети. Каждый элемент рассчитан на за-
Смежные КМС согласно МФО пись в нем сведении о состоянии _
одной ветви, выработка которых 4 6
производится системой управления КМС по состоянию этой ве-
тви.
Рассмотрим для примера формирование информационной части СП для КМС5 в выбранной для примера сети (рис. 5.10). Формируемый в КМС5 СП содержит информацию об изменении состояния ВС и должен включать в ин-
НУО ТВ(к) ОИЧ ПН 0 1
Ч.Т., - v •• - - '
Заголовок Информационная часть
НУО — номер узла-отправителя
ТВ(к) — тип ветви с указанием номера R ОИЧ — объем информационной части ПН — признак новизны
Рис. 5.9. Формат пакета служебного сообщения
Рис. 5.10. Распространение служебной информации в СПР-ИУ
формационной части два элемента. В первый (младший) элемент должен записываться код состояния ветви, связывающей КМС5 с КМС4, а во второй элемент — код состояния ветви, соединяющей КМС5 с КМС6.
Служебный пакет об изменении состояний ВП, формируемый на КМС, в информационной части должен содержать элементы, число которых равно числу столбцов в МПР Zk- Распределение информации состояния ВП по элементам информационной части производится аналогично вышеописанному.
После сформирования СП подлежит передаче на все КМС волновым методом. В этом случае вначале СП от КМС-источника циркулярно передается на все смежные с ним КМС. В каждом из них он запоминается в специальных массивах памяти, организованных в виде списков из М сообщений. В соответствии с видом служебного сообщения система управления КМС образует два самостоятельных списка — список, содержащий информацию о состоянии ветвей связи (СВС), и список, содержащий информацию о состоянии ветвей привязки (СВП). Всякое вновь принятое с определенного КМС сообщение будет перезаписываться на место размещения прежнего. Такая организация на КМС списков СВС и СВП позволит ускорить переход от процедур приема сообщений к процедурам их дальнейшей передачи по сети. Уменьшение этого времени достигается за счет того, что поступающие в КМС служебные сообщения не подвергаются сразу обработке, связанной с коррекцией матриц У* и Zi~. а после фиксации в определенном списке циркулярно передаются на другие смежные КМС. При этом направление, по которому поступило сообщение, из схемы циркулярной передачи исключается. Таким последовательным перемещением служебного сообщения от одних КМС
к другим все КМС оповещаются о возникших изменениях состояний ветвей. включенных в тот или иной КМС.
Рассмотрим особенности распространения служебного сообщения по сети на примере его передачи от КМС5. Допустим, что изменилось состояние ветви связи между КМС5 и КМС4 (см. рис. 5.10). означающее, что доступный ресурс пропускной способности этой ветви уменьшился и перестал обеспечивать предоставление услуг.
Служебный пакет, выработанный при обнаружении этого измене-ния'на КМСб, на первом шаге передается от КМС5 на КМС6. На втором шаге от КМСб он циркулярно передается на КМС4 и КМС7. На третьем шаге от КМС4 и КМС7 служебный пакет будет передан на КМСЗ и КМС8 соответственно. На четвертом шаге от КМСЗ он будет передан на КМС2, а на пятом — от КМС2 на КМС1. В процессе передачи по сети служебное сообщение может поступать на отдельные КМС неоднократно. Чтобы исключить возможную при этом многократную циркулярную передачу одного и того же сообщения с какого-либо КМС на другой КМС может предусматриваться проверка получаемых СП на новизну. При совпадении признаков новизны ранее принятого и вновь поступившего сообщения с одинаковыми адресами осуществляется запрет циркулярной передачи. Этим обеспечивается затухание «волны» распространения служебной информации по сети.
Информация о состоянии ветвей, передаваемая в СП в виде /-разрядных сведений, не пригодна для коррекции МСР Уц и МПР 2’/:, к = 1.А’, элементы которых принимают значение 1 или 0. Требуется преобразование /-разрядных сведений о состоянии ветвей в одноразрядные индексы матриц.
Кодовая комбинация Ц /-разрядного кода соответствует такому состоянию ВС (ВП), при котором данная ветвь обеспечивает предоставление 1, ...,k услуг СПР-ИУ. Следовательно, в элементах строк l'i....,l). (Zi,..., /Д), соответствующих данной ветви, должна быть зафиксирована 1, а в этих же элементах строк 1Т+ь Л'к’ (Zk+i, , Должен быть зафиксирован 0. Возьмем для примера СП, формируемый на КМСб при изменении состояния ВС, соединяющей КМС5 с КМС4 (см. рис. 5.10). Информационная часть СП будет содержать сведения о состоянии ВС, соединяющих КМСб с КМС4, а также КМС5 с КМСб и иметь коды Ik-i и А-. Сведения о состоянии, соответствующие ВС. соединяющей КМСб с КМСб (/*), говорят о том, что эта ветвь обеспечивает предоставление услуг Qi...Q/-. Сведения о состоянии, соответствую-
щие ветви ВС, соединяющей КМСб с КМС4 (/*-—т), показывают, что данная ветвь обеспечивает предоставление только первых Qx,.... О/,--1 услуг. Следовательно, преобразование /-разрядных сведений в одноразрядные индексы должно быть индивидуальным для каждой матрицы МСР 1’ Так, после преобразования получаются следующие вектор-строки: для 11 — 01, для 1)-~1 — 11, а для l’t+i — 00.
Для коррекции МСР используется матрица физической связности (МФС), содержащая сведения о топологической структуре СПР-ИУ. Раз-
Рис. 5.11. Корректировка МСР
мерность МФС соответствует размерности МСР. Дальнейший процесс коррекции матриц МСР заключается в считывании строки матрицы МФС, соответствующей КМС5 (строка 5), в последовательной подстановке в элементы этой строки, содержащие 1, полученной из СП вектор-строки и записи откорректированной (пятой) строки в соответствующие матрицы МСР У),...,Ук (рис. 5.11).
Аналогичным образом может осуществляться и преобразование информации о состоянии ветвей, получаемой от других КМС. Следует отметить, что применение на каждом КМС МФС и К матриц МСР позволяет учитывать не только текущие изменения в сети, но и планомерное ее развитие (т.е. ввод новых ветвей и узлов).
Корректировка МПР осуществляется аналогично. При этом используется таблица привязки, показанная на рис. 5.2 и содержащая сведения о топологической привязке СРД к КМС.
Расчет маршрутов на узлах СПР-ИУ
Модифицированный алгоритм определения смежности. В качестве исходных данных для модифицированного алгоритма используются: К матриц МСР У = {Yi, Y2> •••, ¥<.Yr}, К матриц МПР
Z = {Zi, Z2,..., Zk, •••, Zi<}, таблица привязки, номер I узла (КМС) ci Е А%, на котором зарегистрирован вызываемый адресат, номер in СРД ат £ А, в зоне обслуживания, которой находится вызываемый адресат, услуга Qfc, которую запросил ПО — инициатор соединения.
При этом определение номеров I и т осуществляется протоколом динамической адресации и регистрации (ДАР) по адресу вызываемого корреспондента. В результате выполнения модифицированного алгоритма определения смежности определяется кратчайший путь с требуемой
полосой пропускания Стр1 от СРД, в эоне радиодоступа которой находится ПО, запросивший услугу ГД-, до КМС, на котором зарегистрирован ПО — получатель. Определение кратчайшего пути осуществляется после получения заявки ПО, запросившего услугу Од,. Требование ПО через СРД поступает на КМС привязки, где по номеру вызываемого адресата определяется КМС, на котором зарегистрирован вызываемый адресат. Определение КМС, на котором зарегистрирован вызываемый адресат, может осуществляться с использованием базы данных адресов СПР-ИУ.
Сущность алгоритма заключается в поэтапной проверке на смежность узлов (КМС) СПР-ИУ. составляющих маршрут обмена. Рассмотрим модифицированный алгоритм определения смежности.
Шаг 1. Определение доступности APT вызываемого ПО. По номерам I и с помощью таблицы привязки определяется номер элемента привязки s = 1,2, По номеру s в строке I МПР Zk определяется значение элемента привязки. Если zjs = 1, то осуществляется переход на шаг 2. В противном случае (если = 0) — конец алгоритма.
Шаг 2. Из МСР Kfc, соответствующей затребованной услуге О/-, выбирается строка {у;,}, где I — номер узла а;, на котором зарегистрирован вызываемый ПО.
Шаг 3. Определение смежности осуществляется путем поразрядного логического умножения (конъюнкции) выбранной строки {уь} и строки {унг}, соответствующей узлу а//, на котором производятся вычисления по формуле
{ун} А {уд;} = {уР,}, (5.19)
где {yPi} — результат логического умножения (конъюнкции).
Шаг4. Проверка на смежность. Если ург- = 1G {yPi}, то конец. При этом i соответствует номеру узла, являющегося соседним в кратчайшем пути. Может оказаться, что элементов у,,, = 16 {?/;.;} несколько. В этом случае по определенному правилу выбирается один из них.
В противном случае, если ypi = 1 {угД, то переход на шаг 5.
Шаг 5. Формирование вектор-строки {?/h 1} узлов Л-го яруса удаленности от узла a.j. По номерам уц = 16 {Уи } из МСР 1д. выбираются г-е строки, соответствующие узлам гц. Вектор-строка узлов /?-го яруса удаленности формируется путем логического поразрядного сложения (дизъюнкции) элементов выбранных строк:
Ш V {уу} V ... V {угу} = {ур1}. (5.20)
Шаг б Определение смежности осуществляется путем поразрядного логического умножения (конъюнкции) строк уцг и уы-
{уш} б {yhi} = {ypi}. (5.21)
Шаг 7. Проверка на окончание. Если yVi = 1 6 {yR:}, то h := h + 1. При этом i соответствует номеру узла, являющегося соседним в кратчай
шем пути. Может оказаться, что элементов ypt = 16 {t/pi} несколько. В этом случае по определенному правилу выбирается один из них
В противном случае, если ypi = 1 {?/7С}- то переход на шаг 5.
Модифицированный алгоритм Дийкстры
Определение кратчайших путей с заданной полосой пропускания для услуг, ориентированных на соединения. Рассмотренный выше модифицированный алгоритм определения смежности позволяет определять кратчайшие пути с заданной полосой пропускания C'ip1 при каждом поступлении запроса от ПО. Однако при большой нагрузке в сети и частом изменении ее ресурсного состояния целесообразно исполь зовать модифицированный алгоритм Дийкстры, обеспечивающий определение путей от заданного ко всем остальным узлам сети до момента поступления запроса от ПО. Для его применения в условиях СПР-ИУ необходима его модификация. В качестве исходных данных данный алгоритм использует информацию о ресурсном состоянии СПР-ИУ в виде К матриц смежности ресурсных (МСР) У)., k = 1,..., АГ.
Используя различные критерии оптимальности в модифицированном алгоритме Дийкстры. можно обеспечить адаптацию маршрутизации к разнородным требованиям по качеству интегральных услуг, предоставляемых в СПР-ИУ. Так. для услуг, требующих определенной и фиксированной полосы пропускания (постоянной скорости передачи), используется критерий минимального ранга пути.
Рассмотрим модифицированный алгоритм Дийкстры определения кратчайших путей с заданной пропускной способностью, использующий критерий оптимальности минимальный ранга пути. Данный алгоритм состоит из последовательности следующих шагов.
Шаг 1. Корректировка матриц смежности ресурсных У*-, к = 1. АГ, после получения СП об изменении ресурсного состояния СПР-ИУ.
Шаг 2. Преобразование матриц МСР Уд. в матрицы весов У)? осуществляется путем замены элементов у^ матриц У}., равные 0. на элементы, равные эс:
{1 Ц:1 , ;< ч
1- при у\. = 1;
(к} J
ос, при у); = 0.
ШагЗ. Формирование начальных условий: = Я, т.е. rf(f) = Я,
i де 1JV, к = ДЯ;
Г={оь«2.....;} \ ан; а;, ан 6 А?, (5.22)
где Т — множество неприсоединенных узлов — КМС; а,- — элементы множества узлов — КМС. определенного выражением (5.4).
В множество неприсоединенных узлов — КМС Т на начальном эта-пе выполнения алгоритма включаются все узлы, за исключением того, на котором производятся вычисления.
Шаг 4. Определение очередного узла, исключаемого из множества неприсоединенных узлов Т:
УН, = min {yHj }. • (5.23)
at€T »
Если найдется несколько вершин, удовлетворяющих условию (5.23), то выбирается любая из них: , ч
Т = Т\а,. (5.24)
Шаг 5. Корректировка матриц весов Y* и векторов пуДей Dfi'- Для каждого о,- 6 Т выполняется тернарная операция вида
Ущ = min[w;, (yHi + Vij )], (5.25)
Если ущ изменит свое значение, т.е. если ущ = (ун-, + ?A'j). то <7(,() = i. В противном случае соответствующий элемент вектора DH не изменяется.
Шаг 6. Определение конца процесса. Если мощность множества Т равна единице, то все оптимальные пути найдены. В противном случае осуществляется переход к шагу 4
В результате выполнения модифицированного алгоритма Дийкс-тры строятся К векторов кратчайших путей D^\ соответствующих К ресурсным структурам СПР-ИУ. Структура вектор-строки имеет следующий вид:
1)^' = \d(k),d(2),...,d(N)\, f’’ (5.26)
где Н — индекс начального узла ан; d(i) — индекс вершины, непосредственно предшествующей вершине с индексом i в кратчайшем пути.
Определение кратчайших путей для услуг, неориентированных на соединения. Для услуг, не требующих фиксированной полосы пропускания (постоянной скорости передачи), целесообразно использовать в качестве критерия оптимальности максимальную пропускную способность max Сев- При этом возможен вариант, при котором будут определяться пути с полосой пропускания, не меньше минимально требуемой.
При этом на шаге 2 необходимо из К матриц МСР Y1-, к = 1, 2,..., К, сформировать матрицу весов Y’c = ||, элементы которой определя-
ются по следующему правилу:
Ус„ = maxlfcj/^}, к = 1,2,.(5.27)
(fc) где у- — элементы матриц .[ • •
(5.28)
У.
Элементы ус< принимают следующие значения:
"0, при вВс*;
= 0, при i = j;
J/ij\ при G BBCf
Определение очередного присоединяемого (исключаемого из множества Г) узла на 4-м шаге производится по следующему правилу:
'/ш = max {t/ну}.
«}GT
Шаг 5. Для всех пар индексов j и k выполнить тернарные операции вида
Ун, = max{yffj,min(yHk;ykj)} Vj Н, к Н, j / к. (5.29)
Если i)Hj изменяет свое значение, то d(J) = к.
5.2. Эстафетная передача
Каналы связи с подвижными объектами (ПО) в результате воздействия как быстрых, так медленных замираний имеют переменные характеристики, что может приводить к кратковременным и длительным нарушениям связи. Влияние кратковременных нарушений связи, вызванных быстрыми замираниями сигнала, в большинстве случаев компенсируются применением различных способов микроразнесения, выравнивания, перемежения, помехоустойчивого кодирования и т.д. При ухудшении качества связи в результате воздействия медленных замираний сигнала обеспечение непрерывности обслуживания подвижного абонента достигается применением макроразнесения, получившего название handover, или процедуры ЭП. Эстафетная передача основана на передаче управления с одной базовой станции (БС) на другую в тех случаях, когда качество канала связи с БС, обслуживающей вызов в текущий момент времени, становится неприемлемым.
Обобщенный алгоритм эстафетной передачи
В общем случае для принятия решения о выработке управляющих воздействий при реализации алгоритма ЭП необходимо различать ухудшение качества связи вследствие низкого уровня принимаемого сигнала либо высокого уровня помех в основном канале приема. Поэтому целесообразно при контроле состояния радиоканала на БС (или ПО) измерять как уровень сигнала на входе приемника, так и качество связи, определяемое отношением сигнал/помеха, либо вероятностью (частотой) ошибочного приема элементов сигнала. Контроллер БС, имея данные измерений уровня сигнала на входе приемного устройства и качества принимаемой информации, сможет отличить ухудшение качества связи, обусловленное помехой по основному каналу, от ухудшения качества связи
Рис. 5.12. Обобщенная блок-схема алгоритма эстафетной передачи
из-за недостаточного уровня принимаемого сигнала. На рис. 5.12 представлена обобщенная блок-схема алгоритма ЭП, реализующего двухпараметрическую процедуру принятия решения о проведении ЭП.
Реализация алгоритма ЭП в общем случае подразумевает оценку качества канала связи между ПО и БС, сравнение результата оценки с альтернативными, проведенными на других БС, принятие решения на передачу управления (по результатам сравнения) и обмен необходимой служебной информацией между БС по каналам управления.
Определим временной интервал, необходимый для ЭП тупр, как
Тупр — Дт?, + Дтпку,
(5.30)
где Дт,, — время, необходимое для достоверной оценки уровня сигнала в зависимости от скорости ПО; Дтпку — время, затрачиваемое сетью БС на принятие решения об ЭП и передачу команды управления.
При этом отрезок времени Дтпку является постоянной величиной и определяется длительностью передачи формализованных данных (пакетов) в соответствии с принятым протоколом обмена командами управления в системе управления сетью.
Если известны интервал А/. для оценки локального среднего значения принимаемого сигнала и скорость движения объекта 1пО. то время, необходимое для проведения измерения уровня сигнала с требуемой достоверностью оценки, можно определить как
ДД(<т,;,(„1 min)
Ат, =--------—--------- при Упо = const. (5.31)
I по
Определим интервал оценки локального среднего значения сигнала AL, минимизирующий дисперсию оценки локального среднего Для этого замирающий сигнал, принимаемый в некоторый момент времени t на БС, представим в виде
,S'(t) = ?’(/) exp[Jti’(Z)], • (5.32)
где </’(/) — фаза; r(t) — огибающая сигнала.
Разобьем г(/) на два сомножителя:
’’(/) = m(/)rn(7), (5.33)
где ?n(Z) и ro(t) — функции, описывающие медленные и быстрые замирания сигнала соответственно.
Если т(У) соответствует некоторой точке местности У, в которой в момент i проводится измерение характеристик сигнала, то ш(У) представляет собой локальное среднее значение огибающей сигнала (рис. 5.13).
В этой ситуации выражение (5.33) будет иметь вид [77]
г(У) = т(У)т0(У). (5.34)
Для равнинной местности функция ?7/(У) является константой, в случае же холмистой местности »п(У) меняется по закону изменения рельефа местности. Таким образом, т(У) можно использовать для нор мализации текущего сигнала ?-(У). При этом функция гд(У) описывает уже замирания нормализованного сигнала, взвешенные по скорости ПО, поскольку содержит информацию о текущей скорости ПО (постоянной на интервале оценки локального среднего ?7<(У)). Приведенные рассуждения справедливы для рассматриваемого процесса ЭП. поскольку за интервал Тупр, выделяемый для передачи управления и достигающий единиц секунд, скорость ПО существенно не изменяется.
Для получения значений »’о(У). содержащих косвенную информацию о текущей скорости ПО, необходимо «очистить» результирующее
колебание г(У’) от медленных замираний m(Y). Текущие значения г(У) могут быть получены непосредственным измерением на БС. Значение компоненты медленных замираний сигнала т(У), связанной только с потерями сигнала на пути распространения, определяется усреднением огибающей г(У) сигнала S(t) в области Y.
Оценка среднего »п(х) отличается от истинного его значения т(ж) (см. рис. 5.13) и определяется выражением [77]
т{х) = т{х)^- [ r0(Y)dY. -ц- (5.35)
Локальные средние, рассчитанные с помощью (5.35), обычно называют текущими средними. Данные, полученные на расстоянии L по обе стороны от точки z, используют для определения среднего значения в точке х. Член г0(У) определяет собой текущий сигнал, свободный от изменения локальных средних. Значение Го(У) можно получить, разделив текущее значение принимаемого сигнала г(У) на локальное среднее ?7?(У).
Для оценки точности определения локального среднего т(У) определим дисперсию оценки, которую при знании корреляционных свойств принимаемого сигнала можно представить в виде [77]
, 1 f2t / У \
Р-ЗУ ]Rr(Y)dY, (5.36)
где 7?Г(У) — ковариационная функция огибающей процесса, характеризующего быстрые замирания.
Если используется райсовская модель быстрых замираний сигнала, то автоковариационная функция огибающей наблюдаемого процес
са 7?Т(У) имеет вид
ЯДУ) = {М[т(У)]}2[7Д/ЗУ) + 27<-70(/ЗУ)cos(^’ cos©)]. (5.37)
где -7q( ) — функция Бесселя нулевого порядка; <3 — волновое число: 7\ = U~/(2<т2) — коэффициент Райса — параметр, определяющий отношение локальных средних мощностей регулярной и случайной компонент сигнала; © — угол между направлением на ПО и вектором скорости V; Л7[гт?.(.г)] = Л7[г(У)] = ^/тг/(2сгае) — локальное среднее; а = {(1 + Я)Д(7</2) + 7iJ1(7i/2)}exp(A72).
После преобразований (5.37) получаем
4( Y) = г I fl - 57) ко(Ж) + 27<.7о(/ЗУ) cos(/?y cos ©)] dY.
J о
(5.38)
Проведенный анализ зависимости cr“.j(.y ( = ДУ, 7, = const) показывает, что точность оценки определяется интервалом усреднения 2L и при L —" оо имеем сг^у) 0.
Для определения точности оценки обычно используется разброс полученной оценки на уровне ±<т:
1 ст = 201g
77l(;r) - ’
(5.39)
или вероятность того, что разница между /7г(ж) и сгд(У) не превысит 1 дБ.
Анализ зависимости (5.39) показывает (рис. 5.14,а,б), что точность оценки определяется интервалом усреднения, коэффициентом Райса, углом 0. При этом рациональные значения интервала усреднения реализаций процесса г(У) лежат в пределах 20А L 200А [77]. когда <тт(У’) —* 1 дБ и ниже.
Рис. 5.14. Точность определения локального среднего при непрерывном (а) и дискретном (6) усреднении
Для определения локального среднего значения принимаемого сигнала наряду с аналоговым (непрерывным) усреднением на практике часто используется дискретное усреднение по выборкам принимаемого сигнала. В этом случае параметрами, определяющими качество оценивания уровня сигнала, являются количество выборок и интервал между ними (рис. 5.14.6)
Рассмотрим сигнал выборки
г[г] = г[г.$], (5.40)
где S — период выборки; i — целое число. В этом случае несмещенная оценка локального среднего значения сигнала определяется из выражения
1 ЛГ-1
™ = ^2 Е гИ- (5-41)
: ' z I
Как и при аналоговом усреднении, дисперсия полученной оценки может использоваться для измерения точности этой оценки:
7V-1JV-1
<4 = Е Е Л/[г(г)г(у)] - (5.42)
J v “ *—' *—'
г=0
Используя выражение (5.37) для автоковариационной функции, а также свойство ее симметрии, можно преобразовать (5.42) к виду
(5.43)
где S — период выборки в длинах волн A; N — [L/S] — количество выборок; L — общий период выборки.
Исследования [77] показывают, что N, К, S и в оказывают независимое влияние на при этом увеличение N при S — const ведет к увеличению интервала усреднения и снижению разброса ошибки оценки на уровне ±сг. Если S < А/2, то дискретная оценка локального среднего приблизительно эквивалентна оценке при непрерывном усреднении (при одинаковых интервалах усреднения).
Определим текущую скорость ПО. Для этого воспользуемся положениями теории выбросов случайных процессов [43, 77], согласно которой среднее количество выбросов случайного процесса (среднее число пересечений наблюдаемым процессом заданного уровня) является функцией скорости ПО.
Рис. 5.15. Зависимость нормированного значения среднего числа пересечений уровня от нормированного порога р
Для определения числа пересечений случайным процессом, характеризующим быстрые замирания огибающей сигнала уровня А, требуется знание совместной плотности вероятностей огибающей сигнала ?•(!) и ее производной »'(/), поскольку
(5.44)
В случае райсовского закона распределения огибающей сигнала среднее число пересечений наблюдаемым процессом заданного уровня А определяется в соответствии с выражением
п(г = А) = у х/2тг(/< + 1)рехр(—Л' - (К + l)p2)J0(2py/K(K + 1)),
(5.45) где V — скорость ПО; Д — длина волны несущего колебания; р = = А/Л/[г2] — нормированный уровень порога; Л1[г2] — среднеквадратическое значение огибающей принимаемого сигнала.
На рис. 5.15 представлена зависимость среднего числа пересечений уровня наблюдаемым процессом от нормированного порогового уровня р. При этом наблюдаемый процесс представляет собой быстрые замирания сигнала, аппроксимируемые райсовским законом распределения, а среднее число пересечений является нормированной по скорости движения ПО величиной.
Таким образом, регистрируя на БС число пересечений наблюдаемым процессом заданного уровня и используя обратную функциональную зависимость У = f-1(n), можно получить действующее значение скорости ПО. Полученная скорость ПО может использоваться для управления процедурой принятия решения о начале ЭП ПО.
Использование для выбора БС, обслуживающей ПО, критерия максимального (наибольшего среди всех альтернатив) уровня принимаемого сигнала может привести к частым переключениям ПО с одной БС на другую. хотя качество связи в обоих каналах (ПО — СРД1 и ПО ~ СРД2) удовлетворяет требуемому, а также дополнительным затратам вычислительного и канального ресурсов. Уменьшения подобного эффекта (эффекта «пинг-понга») можно достичь использованием многопороговых критериев для принятия решения об ЭП. Для исключения многократных обратных передач управления с одной БС на другую помимо оцененных значений текущего уровня сигнала необходимо знать вероятностные тенденции его изменения.
Для получения расчетных значений прогнозируемых уровней сигнала (определяемых с некоторой вероятностью) могут использоваться различные методы. Например, описанный в [82] метод Винера пригоден, когда известна периодичность изменений, которые претерпевает сигнал. Однако реально невозможно предвидеть любую периодичность в изменениях уровня сигнала, поскольку на этот уровень большое влияние оказывают рельеф местности и перемещение объекта.
Описанные в [13, 14] методы прогнозирования, основанные на использовании линейной и квадратичной регрессии, требуют использования большого количества исходной информации, что в свою очередь ведет к определенным требованиям к памяти устройства прогнозирования (ПО или БС). Кроме того, получаемые с помощью линейной регрессии уровни сигнала в большинстве случаев больше реальных значений [83].
В [83, 97] описываются методы, основанные на применении функций усреднения пройденного пути и сглаживания (простого экспоненциального и двойного экспоненциального сглаживания). В первом случае при проведении расчета (прогноза) предъявляются высокие требования к памяти устройства прогноза, поскольку необходимо хранить данные, полученные на всем интервале измерения. Методы экспоненциального сглаживания предполагают хранение только текущей информации об уровне сигнала, на основании которых и производится расчет прогнозируемого на время т уровня сигнала. Исследования [97] показывают, что метод двойного экспоненциального сглаживания является более приспособленным к изменениям в условиях ведения связи и исходных данных расчета, в частности, к изменениям рельефа местности, времени прогноза и коэффициента сглаживания. При этом для краткосрочных прогнозов т < 2 с среднеквадратическая ошибка прогноза слабо зависит от коэффициента сглаживания. В соответствии с методом двойного экспоненциального сглаживания расчетный уровень сигнала может быть получен в виде
УА.т = [2S'W - SM] + -^-[SW - ,S’P]]r! (5.46)
1 — о
c[i]
где dm — ^z-и однократно экспоненциально сглаженный уровень сигнала, определяемый из выражения
SW =ОУу1,,„+(1-а)4т_1; " (5.47)
— m-й дважды экспоненциально сглаженный уровень сигнала,
определяемый из выражения
,8^ =Q,5li] + (i_a)S[i]_i. (5.48)
у'л т — т-й расчетный уровень сигнала, соответствующий уровню сиг-
нала на БСд со временем расчета г; Уд.т — текущее значение уровня сигнала от БСд; уд,т — расчетное значение уровня сигнала от БСд; а — коэффициент сглаживания.
Таким образом, алгоритм ЭП, в основе которого заложен принцип контроля уровня сигнала (локального среднего) и прогнозирования вероятностных тенденций его изменения, должен способствовать поддержанию непрерывности и требуемого качества информационного обмена при перемещении абонента по территории, обслуживаемой СПР. при низкой вероятности многократных передач управления.
Оценка эффективности однопороговых и многопороговых алгоритмов эстафетной передачи В [82, 97] обосновывается применимость для СПР теоремы взаимности. При этом считается, что объекты с рассеивающим и переизлуча-ющим действиями, определяющие многолучевость, рассредоточены по пути распространения радиоволн. Для упрощения оценки эффективности алгоритмов ЭП предполагается, что срыв связи при ЭП может быть обусловлен только медленными замираниями сигнала. Данное ограничение будет снято ниже при оценке эффективности алгоритмов ЭП, адаптивных к скорости ПО.
Рассмотрим операции, выполняемые при реализации процедуры ЭП, как операции, развивающиеся в виде случайных процессов, ход и исход которых зависят от случайных факторов. Для определения числовых характеристик, определяющих эффективность подобных операций, необходимо построить некоторую вероятностную модель явления, в данном случае — процесса ЭП, учитывающую сопровождающие его случайные факторы.
Условимся, что в рассматриваемой системе используется стратегия ЭП. контролируемая сетью взаимодействующих БС. Согласно данной стратегии процесс ЭП заключается в оценке текущего состояния вероятностной системы S, представляющей из себя совокупность базовых станций, абонента ПО и каналов радиосвязи между ними, и в принятии решения об изменении состояния при выполнении некоторых детерминированных условий. Таким образом, случайный процесс передачи управления (ЭП) от одной БС (БСд) к другой (БСв) при перемещении ПО по территории, обслуживаемой СПР, представляется процессом с дискретными состояниями, где возможные состояния системы S (Si, Sz, Sn) можно перечислить одно за другим, а сам процесс
состоит в том, что система S меняет свое состояние только в дискретные моменты времени ti.t?, • • Ль
Возможность абстрагирования от непрерывного времени и перехода к дискретному объясняется пороговой сущностью процедуры принятия решения об изменении системой S текущего состояния. При этом основной причиной данных действий являются медленные замирания сигнала. Для адекватного отражения влияния медленных замираний на процесс ЭП интервал дискретизации Д = Д. — в принятой модели должен соответствовать времени между коррелированными отсчетами реализаций сигнала на входе приемного устройства БС Д = Д- —/jt-i <
Рис. 5.16. Ориентированный граф состояний, описывающий процесс эстафетной передачи при использовании многопорогового алгоритма ЭП
— интервал корреляции по медленным замираниям. Представление процесса ЭП в виде процесса с дискретными состояниями и дискретным временем позволяет в качестве первого приближения к полному описанию реального процесса ЭП рассматривать марковскую цепь. Действительно, чтобы процесс ЭП в системе S описывался цепью Маркова, необходимо соблюдение марковского свойства, которое формулируется следующим образом: вероятность перехода в некоторое состояние S; в момент tk+i при условии, что в момент Д. система S находится в состоянии Sj, зависит только от состояния Sj и не зависит от того, как и когда система перешла в это состояние.
Для обоснования марковского характера процесса ЭП воспользуемся теоремой существования [42], согласно которой при заданном счетном множестве состояний S, последовательности распределений и
матрице ||Ру||, удовлетворяющих условиям нормировки:
5>г(0)=1, р,(0) 0: ^Рц = 1. Pij^Q, (5.49)
’ j
существует вероятностное пространство и определенная на нем марковская цепь с множеством состояний 5, начальным распределением {?л(0)} и матрицей переходных вероятностей ||/у||- Для доказательства справедливости положений приведенной теоремы для полученной дискретной цепи S удобно воспользоваться ориентированным графом состояний (рис. 5.16), элементы которого при использовании многопорогового алгоритма ЭП, представляют собой:
S1 — состояние оптимального приема сигнала на БСд;
Sa — состояние первого предупреждения о снижении уровня сиг-
Рис. 5.17. Ориентированный граф состояний для однопорогового алгоритма ЭП
нал/помеха на БСд ниже порога ;_'IIopi, соответствующее началу процедуры ЭП абонента с БСд на БСв;
S3 — состояние второго предупреждения о снижении уровня сигнал/помеха на БСд ниже порога ~Пор2. используемого для снижения влияния эффекта многократных переключений абонента с БСд на БСв;
S4 — состояние срыва ведения связи, соответствующее снижению уровня сигнал/помеха ниже порога сдоп, определяемого допустимым значением превышения уровня сигнала (локального среднего) над уровнем помех.
Sg — состояние ЭП, соответствующее передаче управления с БСд на БСв (состояние оптимального приема сигнала на БСв);
Sq — состояние первого предупреждения о снижении уровня сигнал/помеха на БСв ниже порога ;Пор1. соответствующее началу процедуры ЭП абонента с БСв на БСд;
S7 — состояние второго предупреждения о снижении уровня сигнал/помеха на БСв ниже порога гпор2, используемого для снижения влияния эффекта многократных переключений абонента с БСв на БСд.
Приведенный на рис. 5.16 граф состояний, описывающий этапы функционирования многопорогового алгоритма ЭП, является базовой моделью процесса ЭП и может использоваться для сравнительной оценки различных вариантов построения алгоритмов ЭП и эффективности их применения в СПР с распределенной архитектурой.
На рис. 5.17 представлен граф состояний, описывающий работу однопорогового алгоритма ЭП.
Для пояснения физического смысла однопорогового алгоритма ЭП на рис. 5.18 представлены эпюры изменения уровней превышения сигнала над помехой во времени.
Таким образом, множество состояний системы S сводится к конечному (счетному) множеству. Далее определим соответствие {р;(0)} и ]|ТгД| условиям теоремы существования.
Рис. 5.18. Эпюры изменения уровней превышения сигнала над помехой во времени
Обозначая вероятности состояний Sy, S2, S3,..., Si,..., Sn как p?(k)... pn(k), где k — номер шага, можно убедится, что для ка-
ждого к-го шага
Р1(/г) + р2(&) + • -+pn(k) = 1, так как рассматриваемые события несовместны и образуют полную группу.
В большинстве случаев процедура ЭП будет завершена в пределах глобальной зоны, характеризующейся квазистационарностью статистических параметров канала радиосвязи. Кроме того, в пределах зоны ЭП можно считать постоянной и скорость движения ПО. Указанные обстоятельства позволяют считать, что вероятности переходов Pij не зависят от номера шага и марковская цепь является однородной.
Запишем переходные вероятности из состояния S,; в состояние Sj в виде прямоугольной матрицы, при этом Рц — вероятность задержки системы в состоянии S;:
11^11 =
Ри
Pnl
Pl? -.. Pin
Рп ... Pin
(5.50)
Некоторые переходные вероятности Р^ могут быть равны 0. что означает, что за один шаг переход из г-го состояние в j-e невозможен.
Имея ориентированный граф состояний с соответствующей ему матрицей переходных вероятностей (МПВ) и зная начальное состояние системы, можно определить безусловные вероятности состояний pi(k'). Pz(k')...Рп(к) после любого шага k (через определенный интервал вре-
мени). Положим, что в начальный момент времени = О (А* = 0) система находится в состоянии Si — состоянии оптимального приема сигнала с требуемым качеством при обслуживании вызова ПО базовой станцией БСд, т.е.
А(0) = 1;
V/ = 2___п Р,(0) = 0.
(5.51)
что согласуется с условием нормировки (5.49).
Определив вероятности нахождения системы в том или ином состоянии на k — 1 шаге (вероятность гипотезы о нахождении системы на k — 1 шаге) и учитывая, что условные вероятности перехода в состояние S при каждой гипотезе тоже известны и записаны в матрицу переходных
вероятностей, получаем систему разностных уравнений:
p,(fc) = pi(t - l)Ai + p2(k - l)P2i + + Pn(k - l)P„i;
/’г(А) = 1>1{к - 1)P|2 + p2(k - 1)P22 + ... + pn(k - 1)P„2;
(5.52)
. Pn(k) = pi(k - l)Pln + p2[k - 1)P2„ + ... + pn(k - l)Pnn.
Таким образом, вероятности состояний системы Р,(А) после /его шага определяются через вероятности состояний системы после (А — 1)-го шага с помощью рекуррентного выражения вида
п
Р,{к} = ^р^-^Рц- (5-53)
j=i
Для рассматриваемой системы S, занятой обслуживанием ПО при его перемещениях по территории, охваченной СПР, матрица переходных вероятностей в соответствии с ориентированным графом состояний (рис. 5.16) примет вид
С *• Л Ри Рп Лз Р14 0 0 0
Р21 Р22 Р2з Р24 Р25 0 0
Рз1 Рз? Р33 Р34 Р35 0 0
0 0 0 1 0 0 0 (5.54)
'i 0 0 0 Р54 Р55 P’s 6 Рг>7
Pei 0 0 Р64 Рв5 Рвв Рб7
Р7) 0 0 Р74 Р75 Рув Р77
При этом»Значения элементов матрицы (5.54) согласуются с условием нормировН» (5.49).
Для определения элементов МПВ при использовании прогнозирования качества канала связи ориентированный граф состояний, приведенный на рис. 5.16, представим в виде, показанном на рис. 5.19. Если прогнозирование качества канала связи не используется, то ориентированный граф состояний, моделирующий работу многопорогового алгоритма ЭП. приобретает вид, представленный на рис. 5.20. С другой стороны, ориентированный граф состояний, приведенный на рис. 5.17. модифицируется к виду, представленному на рис. 5.21. если прогнозирование качества канала связи используется, или к виду, представленному на рис. 5.22, если прогнозирование качества канала связи не используется.
При этом будем использовать следующие обозначения:
^тек — текущее значение превышения уровня сигнала (локального среднего) над уровнем помех, принимаемых на БСд;
— текущее значение превышения уровня сигнала (локального среднего) над уровнем помех, принимаемых на БСв:
-прог — прогнозируемое на интервале Ат С ткор значение превышения уровня сигнала (локального среднего) над уровнем помех на БСд;
"прог — прогнозируемое на интервале Дт <С 7"кор значение превышения уровня сигнала (локального среднего) над уровнем помех на БСв.
На рис. 5.19 используются следующие обозначения:
> "прог "Доп) А [(~|е1. > "пор!) V (гтек > "поргА "nopl)],
С? — (‘-тек > ^nopl) V ("прог > "пор2 A ZteK > "Пор2 А Спрог > "Чор|)А
А (~пор2 > "прог "доп V "тек > "пор2 V "Чрог > "nop2)V
V {("прог < 2доп) А [("тек > "пор?) V ("Чек > "Доп А "прог > '-'гор?)]}:
Ch ("пор2 А *-прог "доп) А [(-Тек A "nopl)^ ("Чек > ~пор2А
А "прог > "Пор1)]>
С*4 ("тек > "nopl) V ("прог А "пор2 A ZTeK > Znop2 А Ч)рог А "пор1)А
А ("пор2 А ~прог А —доп V "тек > 2пор2 V -прог > "nop2)V
V [(2прог < "Доп) А [(-тек А "пор?) V ("тек А "доп А -прог > "порг))]-
Для определения переходных вероятностей Ptj необходимо задать совместную n-мерную плотность распределения случайных величин ~lt Zk...........-и, учитывая при этом, что медленные замирания сигнала
аппроксимируются нормальным законом распределения:
прог
п
1
a1...any/(2Tr)N&
(гд - mP)(z„ - т„)
fJ,V
(5.55)
Р^тек < *догЗ
Связь
тек < znorv
p'zTeK>2nopV
P(^k<z
P(ZTGK
’ znop 1 >2тек~2ло p2)
P(-Znop 1 >zTeK'^znop2^
Р^тек^пор2^
Рис. 5.19, Ориентированный граф состояний системы S при использовании многопорогового алгоритма ЭГ| с прогнозом качества • канала связи
Р^тек л2пор1)
Срыв в
ведении
связи
Эстафетная
передача
Состояние
2-го
предупреж-
дения
Состояние
1-го
предупреж-
пор > ^ек
~2доп^
Состояние
2-ГО
предупреж-
дения
р<2Л|
!К^П0р1 )
P'znop1>zi
Оптимальны
уровень
приема
Состояние
-го
предупреж-j дения
154 Г л а а а
ёбуемым качеством (БСд)
Р^тек*^ znop2^
РЦтор1 >zre.K^znop2^
Р^ек^пор!'
^гтекс’2пор1)
Р(2пор > ^ек ^2доп]
Связь с требуемым качеством (BCg)
СЛ
Рис. 5.20. Ориентированный граф состояний системы S при использовании однопорогового алгоритма ЭП с прогнозом качества канала связи
Рис. 5.21. Ориентированный граф состояний системы S при использовании однопорогового алгоритма ЭП без прогноза качества канала связи
Рис. 5.22. Ориентированный граф состояний системы S при использовании многопорогового алгоритма ЭП без прогноза качества канала связи
где z = у—х — превышение уровня сигнала у над уровнем помех х; т^, Шц — среднее значение р-й и //-й переменной в распределении (5.55); <71,...,стдг — среднее квадратическое отклонение действующих значений zY, z2,..., , zn от среднего значения; А — определитель кор-
реляционной матрицы R, составленной из коэффициентов корреляции Rn,v между значениями 2i,zo z^,.. ., zn:
1 Я1,2 Ri,3
R = R?.\ R3.1 1 Й3.2 R2,3 1 ^2,n Ratn ; (5.56)
Rn,i R,i.2 Rn,3 1
y — алгебраическое дополнение R^,v элемента определителя.
Используя данное выражение для случайных параметров Z] — г£к, . ..В _
*-2 "тек’ "прогн1 *'4
-прогн- получаем
^(^1,^2, -3, *4) ~
d 4
--------------'—7= ехР
СГ1СГ2<Тз<Т447Г2 VД
(~Л - rn^(zv - mv) № ————
1
л
(5.57)
После преобразования
выражение (5.57) приобретает вид
..в .А в ^"тек ’ "тек > ^прогн’ ^прогн
1
1
2(1 - 7?2)(1 - 7?1)
.А _ гЛ -12 'прогн ^прогн /
ехр
(1 -
| 2/?1 у тек ~тек/кх'прогн "прогн ^1^2
+
"тек '
«1
.В __ - В \2 /В _гВ \(„В _ zB
прогн прогн/ 27? 'Л'тек ^тек/\^прогн ''прогн
г4 ^3^4
(5.58)
где R\ — коэффициент пространственной (временной) корреляции между сечениями случайного процесса г^к(/) (между текущим и прогнозируемым значениями); До — коэффициент пространственной (временной) корреляции между сечениями случайного процесса z^,K(t) (между текущим и прогнозируемым значением, которое в общем виде можно представить как 77(т) = ехр(—ат), где а = 1/ткор — величина, обратная интервалу корреляции.
Экспериментально установлено, что коэффициент корреляции эффективных напряжений сигналов и помех, дБ, достаточно хорошо ап
проксимируется гауссовой кривой [43] или односторонним экспоненциальным распределением.
Воспользуемся выражением для коэффициента корреляции по медленным замираниям, приведенным в [33, 77], которое в явном виде содержит скорость ПО:
7Т7г0Г 2L
r > О,
Ry(z)(T) = exp
~ ехр
£rov I • I
—I sm s^olr-
(5.59)
где 7 — £,L/ir, 7~' — средняя горизонтальная дальность прямой видимости; го — расстояние между передатчиком и приемником сигнала (ПО и БС); L — усредненное значение периметра проекций мешающих объектов (холмов, объектов застройки), рассредоточенных по трассе распространения радиосигнала; V — текущая скорость ПО; — угол между прямой, соединяющей приемник и передатчик сигнала, и направлением перемещения ПО (вектором скорости ПО); £ — средняя плотность мешающих объектов.
Для получения элементов матрицы переходных вероятностей, построенной на основе ориентированных графов состояний (см. рис. 5.21. 5.22), описывающих работу алгоритмов ЭП без прогноза качества канала связи, следует воспользоваться двухмерным распределением:
Таким образом, интегрируя выражения (5.58) и (5.60) в пределах, задаваемых условиями переходов (см. рис. 5.19-5.22), можно получить соответствующие вероятности переходов, использование которых, согласно (5.53), при начальных условиях (5.51) позволяет оценить изменение во времени безусловных вероятностей пребывания системы в состояниях, определяемых видом графа (см. рис. 5.16 и 5.17).
На рис. 5.23 и 5.24 представлены результаты оценки эффективности функционирования СПР. По оси У отложены состояния рассматриваемой системы по оси Z — вероятности нахождения системы в данный состояниях, по оси X — модельное время.
Анализ зависимостей, полученных в результате моделирования, позволяет сделать вывод о том. что разрабатываемый алгоритм ЭП будет обеспечивать более высокие характеристики качества обслуживания ПО в том случае, если используется:
• прогноз качества канала связи для определения тенденций изменения отношения сигнал/помеха на входе приемника;
• многопороговый критерий ЭП.
Применение прогнозирования позволяет предотвратить передачу управления на соседнюю БС, если дальнейшее изменение отношения
Рис. 5.23. Результаты оценки эффективности функционирования СПР при использовании однопороговых алгоритмов эстафетной передачи' а — без прогноза состояния канала, 6 — с прогнозом состояния канала
сигнал/помеха на входе приемника данной БС носит убывающий характер, вследствие чего снижается вероятность нахождения системы в состоянии ЭП. а также уменьшается вероятность срыва при ведении связи (рис. 5.23, 5.24). ,s?:, , #-4,
Рис. 5.24. Результаты оценки эффективности функционирования СПР при использовании многопороговых алгоритмов эстафетной передачи: а — без прогноза состояния канала связи; б— с прогнозом состояния канала связи
Сравнение результатов моделирования, приведенных на рис. 5.23, показывает, что применение нескольких порогов ЭП позволяет снизить вероятность многократной передачи управления и, как следствие, понизить затраты вычислительного и канального ресурсов, а также значительно увеличить суммарную вероятность нахождения системы S в
состояниях приема сигнала с требуемым качеством на БСд и БСв-
Следует отметить, что выигрыш, предполагаемый от использования многопорогового алгоритма ЭП с прогнозом качества канала связи, может быть достигнут за счет усложнения программного обеспечения БС и несущественной доработки аппаратной части.
Существенным недостатком рассмотренных алгоритмов ЭП является их ориентация на ПО, перемещающиеся с некоторой средней скоростью. При этом порог принятия решения о начале процедуры ЭП ,гПор зафиксирован и настроен таким образом на некоторое действующее значение скорости ПО 1по = 1’фикс. что в конечном счете ведет к неэффективному использованию пригодного состояния канала связи абонентами, пересекающими зону ЭП с меньшими скоростями < Сф11кс, и срыву связи при С'по > 1'фикс- Таким образом, алгоритм ЭП, преследуя цель эффективного использования абонентом пригодного состояния канала и предотвращения срывов в связи, должен обладать свойством адаптации к скорости движения ПО с регулированием порога принятия решения о проведении ЭП.
Более детальный анализ процесса обслуживания абонента ПО на этапе ЭП показывает, что срыв связи может быть обусловлен не только снижением уровня сигнала на входе приемного устройства ниже допустимого, но и несоответствием между требуемым и затрачиваемым временем на проведение ЭП. Ориентированный граф состояний для однопорогового алгоритма ЭП, позволяющий учесть данную особенность, представлен на рис. 5.25.
Из рис. 5.17 видно, что среднее время /~,п на передачу управления при фиксированном пороге принятия решения о начале процедуры ЭП Спор можно определить как
7эп(~пор) = (5.61)
где tnpnr — среднее время пригодного состояния канала; /пор — среднее время выброса случайного процесса z — у — х (превышения уровня сигнала у над уровнем помех .г) над уровнем спор.
Среднее время пригодного состояния канала УКВ радиосвязи между ПО и БС определяется как средняя длительность выброса случайного процесса г над допустимым значением ~доп [43, 77]:
(5.62)
где F[C] — интеграл Лапласа; щ(с) — плотность распределения превышения уровня сигнала над уровнем помех z. аппроксимируемая нормальным законом распределения:
1 .___ехр
</2^
2 <7?
(5.63)
РИС. 5.25. Ориентированный граф состояний системы S при использовании одно-порогового алгоритма эстафетной передачи без прогноза качества канала связи с . , адаптацией к скорости подвижного объекта
<7- — среднеквадратическое отклонение (рассеяние) z от своего среднего значения; zm — медианное значение превышения уровня сигнала над уровнем помех при нормальном распределении его значений, совпадающее с его средним значением; Афон = А’[~доп] — среднее число выбросов процесса г(<) относительно порога 2ДОП на интервале наблюдения [43]:
V — pvn (zm ~ -лги)'] <4 641
Аден — „ ехр , (5.64)
2тг 2<тт
где /?"(0) = <РRz(r)/dr2 — вторая производная при г = 0 от нормированной функции корреляции процесса изменения отношения сигнал-помеха во времени.
По аналогии с (5.62) среднее время <пор превышения процессом -(f) порога дПор можно определить как
Коэффициент корреляции процесса г(<) можно определить через коэффициенты корреляции процессов, описывающих изменение уровней
сигнала </(/) и уровней станционных помех а:(1): t’.s. •
(5.66)
Таким образом, между средним временем на осуществление ЭП и скоростью ПО при фиксированном пороге спор существует обратная зависимость:
т ~доп
ехр
2г2
^пор ) I __________ -Д(£доп ’ ^пор)
2<т~ . J До
(5.67)
поскольку ^/—7?"(0, До) = До.
Наличие закона распределения возможных скоростей ПО о>(До) и функциональной зависимости Д, = /(F) позволяют определить закон распределения щ(/>п) среднего времени на передачу управления Д, путем применения функционального преобразования вида
щ(^п) =^Р’рэп)]|0'|, (5.68)
где «’(Тзп) = /-1(До) — функция, обратная зависимости Д, = /(До); |V>'| — модуль первой производной функции Д, = /(До).
В качестве законов распределения скорости движения ПО можно использовать:
• одностороннее экспоненциальное распределение, согласно которому более вероятны медленные скорости ПО:
ш(До) = ~ exp ; (5.69)
’zcp \ V ср /
• равномерное, по которому скорости ПО равноверб^+ны во Всем диапазоне возможных значений [ДшпДпах];
"(До) = - * ; ’ ' (5.70)
* max Ид in
• нормальное, согласно которому возможные значения скорости ПО группируются вокруг некоторого среднего значения Vcp с разбросом <Ту:
/< \ 1 (До Др)
"(До) = -----exp i------- 5--
<TvV2tt L 2ov
(5.71)
В соответствии с (5.67) и (5.68) плотности распределения ДД) Для рассмотренных частных случаев приобретают следующий вид:
• в случае экспоненциального распределения скоростей ПО вида (5.69).
“(йп) = * р A A J_) (5.72)
Ар *эп \ Ар *эп /
• для равйёмерного распределения скоростей ПО вида (5.70).
^эп)= (5.73)
г max * min
• при нормальном распределении скоростей ПО вида (5.71):
гт \ 11 (^4(гдоп, гПОр) — 1ср£эп)" q . .
А»)=--^р-ехр--------------------А-----------. (5.74)
^Тр V Z7T Ап ‘'эп.
Очевидно, что ЭП будет успешно проведена только тогда, когда после снижения сигнала на входе приемника базовой станции ниже порога *пор. время, отводимое на передачу управления на другую БС, окажется больше или равно требуемому. В этом случае вероятность срыва связи, например, для БСд определяется как
^ЭП ~ ^{(чек гдоп V -пор > -тек S5 -доп) Л (?пу < ^треб)} i (5-75)
где зпор — фиксированный порог принятия решения об инициации процедуры ЭП; tTpe6 — ГуПр — требуемое время на ЭП, определяемое в соответствии с (5.30).
При использовании алгоритма ЭП с адаптацией к скорости ПО порог принятия решения о начале процедуры ЭП 2пор устанавливается в соответствии с измеренным значением скорости ПО (5.45), чем достигается выполнение условия баланса между требуемым и фактическим временами на передачу управления.
Использование оптимального (по скорости ПО) порога г*ор —- var вместо некоторого фиксированного зпор = const позволяет избежать потерь связи из-за возникающего при перемещениях ПО несоответствия между потребным и фактическим временем /.,п на передачу управления. В этом случае, с одной стороны, выполняется граничное условие баланса /.,п = тупртр<?б, с другой — максимизируется вероятность связи при заданной скорости ПО.
Значение оптимального в указанном смысле порога принятия решения о начале процедуры ЭП г*ор можно определить путем решения уравнения баланса относительно параметра гпор:
/эп(Е
-пор) — Тупр треб()•
(5.76)
В соответствии с (5.30) и (5.64) выражение (5.67) приобретает следующий вид:
1 _ /г । ^on
Un /~.В"(0, V)
ехр
2бт:
Рис. 5.27. Зависимость порога начала ЭП от средней мощности сигнала
Рис. 5.26. Зависимость порога начала ЭП от скорости перемещения ПО
Рис. 5.29. Зависимость порога начала ЭП от допустимого отношения сигнал-помеха
Рис. 5.28. Зависимость порога начала ЭП от длительности передачи команд управления
— min)
4" ^тПку •
(5.77)
Полученная зависимость г*ор = /(Гпо) при фиксированных значениях дцоп, т, Дтпку, а также зависимость г*ор от других параметров модели представлены на рис. 5.26-5.30.
При использовании алгоритма ЭП, адаптивного к скорости ПО, вероятность срыва связи для одной БС (например, для БСд)
^эп = ^{[лтек < •“Доп] V [гпор > г^ек ;доп Л f„y < ^тр-гб]}, (5.78)
где с*ор = /(Гпо) — порог принятия решения о начале процедуры ЭП, изменяющийся в соответствии со скоростью ПО. /треб = тупр — f(Vno)
Рис. 5.30. Зависимость порога начала ЭП от дисперсии превышения уровня сигнала над уровнем помехи
Рис. 5.31. Зависимость вероятности связи от скорости движения ПО при фиксированном и адаптивном порогах принятия решения о начале процедуры ЭП
— требуемое время на осуществление ЭП. являющееся также функцией скорости ПО.
Вероятность срыва связи в системе из двух БС при использовании алгоритмов ЭП, может быть получена на основе использования ориентированного графа состояний (см. рис. 5.25).
На рис. 5.31 представлены результаты исследований характеристик обслуживания подвижных абонентов при использовании алгоритмов ЭП с фиксированным порогом принятия решения о начале процедуры ЭП и адаптацией к скорости ПО, полученные в соответствии с выражениями (5.75), (5.78) в предположении независимости законов распределения ш(з) и ш(С,у).
Полученные результаты позволяют сделать вывод о том, что использование фиксированной настройки порога спор обеспечивает низкие потери при ведении связи только на скоростях ПО, близких к скорости настройки. Повышение мобильности (увеличение скорости перемещения ПО) ведет к значительному росту вероятности срыва связи при ЭП. Повышение фиксированной настройки порога спор, эквивалентное настройке алгоритма ЭП на большую среднюю скорость ПО, ведет к неэффективному использованию пригодного состояния канала связи и, как следствие, к снижению вероятности связи. Использование адаптации к скорости ПО позволяет выровнять вероятность срыва связи при ЭП практически во всем диапазоне возможных скоростей ПО (см. рис. 5.31). Анализ графиков показывает, что увеличение временных затрат на передачу команд управления снижает эффект от использования алгоритма ЭП адаптивного к скорости ПО и повышает вероятность срыва связи при ЭП.
1. Абрамов М.Г. Процедура квазистатической маршрутизации потоков информации в сетях с коммутацией пакетов // Цифровые системы передачи и интегральные сети. СБ. трудов. — М ЦНИИС, 1989 — С. 75-84.
2. Бакаев Н.С. Адаптивное управление маршрутизацией на основе информации о состоянии ветвей сети // Техника средств связи. Сер. ТПС, 1989. Вып. 7, с. 20-32.
3. Бакаев Н.С. Децентрализованный способ динамического управления потоками, основанный на матричном методе определения длин кратчайших путей // Техника средств связи. Сер. ТПС. 1979. Вып. 4 (37). с. 34-42.
4. Бакаев Н.С., Ломакина М.А., Малиновский А.А. Децентрализованное динамическое управление потоками на сети связи с узлами и оконечными станциями // Техника средств связи. Сер. ТПС, 1981. Вып. 2 (1), с. 40-48.
5. Бертсекас Д., Галлагер Р. Сети передачи данных: Пер. с англ. — М.: Мир, 1989. — 544 с.
6 Дмитриев В.И. Линии связи через средневысотные ретрансляторы. — СПБ.: ВАС, 1990
7. Комашинский В.И. Архитектура и принципы построения Беспроводных ATM-сетей интегрального обслуживания // 3-я межведомственная НТК «Проблемы сбора обработ-ки и передачи информации в сложных радиотехнических системах». — Пушкин: ПВВУРПВО, 1997.
8. Комашинский В.И. Многоуровневая архитектура беспроводных ATM сетей // 6-я Международная конференция «Региональная информатика» Тезисы докладов. Ч. 1. — СПб., 1998. С. 66.
9. Комашинский В.И. Оптимальное децентрализованное управление информационными потоками в беспроводных ATM-сетях с пространственно распределенной архитектурой // 3-я межведомственная НТК «Проблемы сбора обработки и передачи информации в сложных радиотехнических системах». — Пушкин: ПВВУРПВО, 1997.
10. Комашинский В.И., Буренин Н.И. Технология асинхронного переноса информации в радиоканалах и интегральное обслуживание мобильных пользователей // 6-я Международная конференция «Региональная информатика». Тезисы докладов. Ч. 1. — СПБ, 1998. С. 60
11. Комашинский В.И., Буренин Н.И. Особенности построения беспроводных ATM сетей // Сборник трудов СПИРАН. — СПБ., 1998.
12. Комашинский В.И., Максимов А.В. Гибридный адаптивный алгоритм маршрутизации для сетей персональной связи // Радиотехника. 2001. № 1. С. 61-67.
13. Комашинский В.И., Максимов А.В. Разработка алгоритма эстафетной передачи для сетей связи с подвижными объектами // 52-я НТК. посвященная Дню Радио. Тезисы докладов. — СПб.: Отделение НТОРЭС им. Попова. 1997. С. 33—34.
14. Комашинский В.И., Максимов А.В., Смирнов Д.А. Аналитическая модель процесса эстафетной передачи // Сборник трудов 34-й ВНК. ВАС. 1998.
15. Комашинский В.И., Портнов В.А. Управление потоками в сетях подвижной радиосвязи с интеграцией служб // Радиотехника. 2002. № 6. С. 8-15.
16. Комашинский В.И., Портнов В.А. Эффективность функционирования сетей подвижной радиосвязи с интеграцией служб // Радиотехника 2002 № 1. С. 3-9.
17 Комашинский В.И., Сиверс М.А., Бабков В.Ю. Интегральное обслуживание мобильных пользователей с использованием технологии асинхронного переноса информации в радиоканалах // Международный форум МАС-98 «Глобализация и персонализация инфокоммуникацион-ных услуг». — М , 1998.
18 Комашинский В.И., Сиверс М.А., Бабков В.Ю. Интегральное обслуживание мобильных пользователей // Вестник связи. 1998. № 5.
19. Комашинский В.И., Смирнов Д.А, Гибридные методы множественного доступа к беспроводным ATM сетям // 54-я НТК НТОРЭС им. Попова. — СПб., 1999.
20. Комашинский В.И., Смирнов Д.А., Шнуренко С.А. Алгоритм совместной пакетной передачи различных видов сообщений в перспективной сети связи с подвижными объектами при использовании многостанционного доступа с частотным разделением каналов // 51-я НТК ГУТ им. М.А. Бонч-Бруевича. — СПб.. 1995.
21. Комашинский В.И., Смирнов Д.А., Шнуренко С.А. Синтез и анализ алгоритмов многостанционного доступа в перспективных системах подвижной радиосвязи с кодовым разделением каналов с помощью аппарата Е-сетей // 51-я НТК. Тезисы докладов. — СПб/. ГУТ им. М.А. Бонч-Бруевича, 1998. С. 57.
22. Комашинский В.И., Смирнов Д.В., Шнуренко С.А. Возможности использования беспроводных ATM технологий при построении перспективной сотовой системы подвижной радиосвязи // 9-я НТК. — СПб.: СПВВИУС, 1997.
23. Комашинский В.И., Смирнов Д.В., Шнуренко С.А. Построение перспективной сотовой системы подвижной радиосвязи на основе использования ATM технологии // 51-я НТК ГУТ им. М.А. Бонч-Бруевича. — СПб., 1995.
24. Комашинский В.И., Шнуренко С. А. Пропускная способность сотовых пакетных радиосетей / 51-я НТК. Тезисы докладов. — СПб/ Отделение НТОРЭС им. Попова, 1996. С. 82-83.
25. Комашинский В.И., Шнуренко С.А Предоставление услуг мультимедиа подвижным абонентам в ССПО с пакетной передачей информации // НТС. Труды академии. № 61. — СПБ.: ВАС. 1996. С. 45-50.
26. Коршун В.Г. Выбор и оценка эффективности способов маршрутизации в СОД. — Л.: ВАС, 1986. — 116 с.
27. Кофман А. Введение в прикладную комбинаторику: Пер. с франц, под ред. Б.А. Севастьянова. — М.: Наука, 1975. — 479 с.
28. Куликов А.Н., Пономарев Г.А., Сковронский А.Ю. // Радиотехника и электроника. 1982. Т. 27. № 12. С. 23-85.
29. Лазарев В.Г., Лазарев Ю.В. Динамическое управление потоками информации в сетях связи. — М.: Радио и связь, 1983. — 216 с.
30. Лазарев В.Г., Паршенков Н.Я. Управление потоками данных на сети коммутации пакетов с виртуальными каналами // Системы управления информационными сетями. СБ. тр. Академии наук СССР. — М.: Наука, 1983. — С. 19-29.
31. Нетес В.А. Качество обслуживания на сетях связи. Обзор Рекомендаций МСЭ-Т // Сети и системы связи. 1999. № 3. С. 11-15.
32. Павлова В.А., Рубинштейн Г.Р. Сравнительный анализ методов расчета потерь распространения радиоволн метрового диапазона // Труды НИ ИР, 1988. № 4, С. 56-59.
33. Пономарев Г.А., Тельпуховский Е.Д., Куликов А.Н. Пространственная корреляция поля УКВ в условиях города // Радиотехника и электроника. 1984. № 10. С. 1021-1025.
34. Построение перспективной сотовой системы подвижной радиосвязи на основе использования беспроводных ATM технологий / В.И. Комашинский и др. // 51-я НТК ГУТ им. М.А. Бонч-Бруевича. — СПБ., 1998.
35. Пышкин И.М., Дежурный И.И., Талызин В.Н. и др. Системы подвижной радиосвязи // Под ред. И.М. Пышкина. — М.: Радио и связь, 1986. — 326 с.
36. Распространение ультракоротких волн в городах // Итоги науки и техники. Сер. «Радиотехника», Т. 42. 1991.
37. Руководящий документ отрасли РД.45.123-1999 «Порядок применения технологии асинхронного режима переноса на Взаимоувязанной сети связи России». — М.: Мининформсвязи РФ, 2000.
38. Связь с подвижными объектами в диапазоне СВЧ / Под редакцией УК. Джейкса. Пер. с англ, под ред. М.С. Ярлыкова, М.В. Чернякова. — М.: Связь, 1979. — 529 с.
39. Столингс В. Современные компьютерные сети. 2-е изд. — СПб.: Питер. 2003. — 783 с. Серия «Классика computer science».
40. Сухопутная подвижная радиосвязь: В 2 кн. Кн. 1. Основы теории / И.М. Пышкин, ИИ Дежурный. Р.Т. Пантикян и др.. Под ред. В.С Семинихина, И.М. Пышкина. — М.: Радио и связь. 1990. — 423 с.
41. Таненбаум Э. Компьютерные сети. — СПб.: Питер, 2002. — 848 с. Серия «Классика computer science». i. .
42. Терентьев В.М. Методика обоснования требований к обобщенным техническим показателям систем управления сетями многоканальной радиосвязи. — Л: ВАС, 1989. — 52 с.
43. Тихонов В.И. Выбросы случайных процессов. — М: Наука. 1970.
44. Трубин В.Н. Статистический анализ внутрисистемных помех в сотовых сетях связи // Труды НИ ИР (НПО Радио ГН И ИР) № 4. — М.: Радио и связь, 1988. С. 49-55.
45. Финк Л.М. Теория передачи дискретных сообщений. — М.: Сов. радио. 1970.
46. ХалсаллФ. Передача данных, сети компьютеров и взаимосвязь открытых систем. Пер. с англ. — М/. Радио и связь, 1995. — 408 с.
47. Шаров А.Н., Степанец В.А., Комашинский В.И. Сети радиосвязи с пакетной передачей информации / Под ред. А.Н. Шарова. — СПб.: ВАС, 1994. — 216 с.
48. Akerberg D. Properties of a TDMA Picocellular Office Communication System // Proc. IEEE Globecom. 1988. P. 1343-1939.
49. Amitay N. Modeling and computer simulation of wave propagation in linealy line-of-sight microcells // IEEE Trans. Vehic. Technol. 1992. Vol. VT-41, № 4. P. 337-342.
50. ATM Wireless Access for Mobile Multimedia: Concept and Architecture // IEEE Pers. Commun. 1996.
51. Berg J.-E., Bownds R., F. Lotse. Path loss and fading models for microcells at 900 MHz // Vehic. TechnoL Conf. 1992. P. 666-671.
52. Bergljung C., Olsson L.G. Rigorous diffraction theory applied to street microcell propagation // Globecom Conf. Rec. 1991. P. 1292-1296.
53. Borjeson H., Bergljung C., Olson L.G. Outdoor microcell measurements at 1700 MHz // Vehic. Technol. Conf. Rec. 1992. P. 927-931.
54. Butitude R.J.C., Bedal G.K. Propagation characteristics on micro-cellular urban mobile radio channels at 910 MHz // IEEE J. Selected Areas Commun. 1989. Vol. SAC-7, №- 1. P. 31-39.
55. Carleial A.B., Hellman M.E., Bistable behavior of ALOHA-type systems // IEEE Trans. Commun. 1975. Vol. COM-23. P. 401-410.
56. Chamberlin K.C., Luebbers R.J. An evaluation of Longley-Rice and GTD propagation models // IEEE Trans. Antennas Propagat. 1982. Vol. AP-30, N-’ 11. P. 1093-1098.
57. Chan G.K. Propagation and coverage prediction for cellular radio systems // IEEE Trans. Vehic. Technol 1991. Vol. VT-40, № 4. P. 665-670.
58. China S.T.S. 1700 MHz urban microcells and their coverage into buildings // IEEE Antennas Propagat. Conf. Rec. 1991. P. 504-511.
59. European Cooperative in the Field of Science and Technical Research EURO-COST 231. Urban transmission loss models for mobile radio in the 900 and 1800 MHz bands. Revision 2, The Hague, Sept 1991
60. Gallager R.G. Low-density particy-check codes // IEEE Trans. Inform. Theory. 1962. P. 21-28
61. Goldsmith A., Chua S. Adaptive coded modulation for fading channels // IEEE Trans. Commun 1998. P. 595-602.
62. Goldsmith A.J, Greenstein L.J., Foschini G.J. Error statistics of real-time power measurements in cellular channels with multipath and shadowing // IEEE Trans. Vehic. Technol. 1994. Vol. 43, № 3, P. 439—446.
63. Goldsmith A.J., Greenstein L.J. A measurement-based model for predicting coverage areas of urban microcells // IEEE J. Selected Areas Commun. 1993. Vol. SAC-11, № 7. P. 1013-1023.
64. Goldsmith A.J. Wireless Communication. — Stanford, 2003.
65. Gundmundson M. Correlation model shadow fading in mobile radio systems // Electr. Lettrs. 1979. Vol. 27. P. 2145—2146.
66. Harley P. Short distance attenuation measurements at 900 MHz and 1.8 GHz using antenna heights for microcells // IEEE J. Selected Areas Commun. 1989. Vol. SAC-7, № 1. P. 5-11.
67. Hata M. Radiolink design of cellular land mobile communication systems // IEEE Trans. 1982. Vol. VT-31, № 1. P. 25-31.
68. Hata M. Empirical formula for propagation loss in land mobile radio services // IEEE Trans. Vehic. Technol. 1980. Vol. VT-29, № 3. P. 317-325.
69. Heegard C., Wicker S.B. Turbo Coding. — Boston: Kluwer Academic Press. 1999.
70. IEEE Journal Select Areas Commun. Special Issue on Channel and Propagation Modeling for Wireless Systems Design, April 2002 and Aug. 2002.
71. Ikegami F., Takeuchi S., Yoshida S. Theoretical prediction of mean field strength for urban mobile radio // IEEE Trans. Antennas Propagat. 1991. Vol. AP-39, № 3. P. 299-302.
72. Imai H., Hirakawa S. A new multilevel coding method using error correcting codes // IEEE Trans. Inform. Theory. 1977. Vol. IT-23, № 3. P. 371-377.
73. Jakes W.C. Jr. Microwave Mobile Communications — New York: Wiley, 1974. Reprinted by IEEE Press.
74. Khalil H. Stochastic Modelling for Wireless Communication Networks-Multiple Access Methods. U.U.D.M. Project Report 2003.
75. Kleinrock L., Lam S.S. Packet Switching in a multi-access broadcast channel: Performance evaluation // IEEE Trans. Commun. 1975. Vol. COM-23. P. 410-423.
76. Lawton M.C., McGeehan J.P. The application of GTD and ray launching techniques to channel modeling for cordless radio systems // Vehic. Technol. Conf. Rec. 1992. P. 125-130.
77. Lee W.C.Y. Mobile Communications Design Fundamendals. — N.Y., 1995.
78. Lee W.C.Y. Mobile Communications Engineering. — New York: McGraw-Hill, 1982.
79. Lin S., Costello J.D.J. Error Control Coding: Fundamentals and Applications. — Prentice Hall, 1983.
80. Luebbers R.J. Finite conductivity uniform GTD versus knife edge diffraction in prediction of propagation path loss // IEEE Trans. Antennas Propagat. 1984. Vol. AP-32, № 1. P. 70-76.
81. McKown J.W., Hamilton R.L. Ray tracing design tool for radio networks // IEEE Network. 1999. Vol. 5, № 6. P. 27-30.
82. Munoz-Rodriguez D., Catrevmole K.W. Hand-off procedure for fuzzy desined radio cells // IEEE 37th Veh. Tech. Conf. Record, 1987.
83. Munoz-Rodriguez D., Lara-Rodriguez D. Multi-Threshold and Signal Trend Forecasting Algorithms for Hand-off in Cellular Communication // CRASEED. 1990. Vol. 1. № 4.
84. Nanda S. Analysis of Packet Reservation Multiple Access: Voice Data Integration for Wireless Networks // IEEE GLOBECOM'90, San Diego, 1990. P. 1984-1988.
85. Nanda S., Goodman D.J., Timor U. Performance of PRMA: A Packet Voice Protocol for cellular systems // IEEE Trans. Veh. Technol. 1991. Vol. 40. № 3. P. 584-598.
86. Okumura T., Ohmori E., Fukuda K. Field strength and its variability in VHF and UHF land mobile service // Review Electrical Communication Laboratory. 1968. Vol. 16, № 9-10. P. 825-873.
87. Proakis J.G. Digital Communications. 4th ed. — New York: McGraw-Hill, 2001.
88. Pursley M.B., Taipale D.J. Error probabilities for spread-spectrum packet radio with convolutional codes and Viterbi decoding // IEEE Trans. Commun. 1987. Vol. COM-35. P. 1-12.
89. Rappaport T.S. Wireless Communications — Principles and Practice, 2nd ed. — Prentice Hall, 2001.
90. Rummler W.D. Моте on the multipath fading channel model // IEEE Trans. Commun. 1981. Vol. COM-29, № 3. P. 346-352
91. Rustako A.J., Jr., Amitay N., Owens G.J., Roman R.S. Radio propagation at microwave frequencies for line-of-sight microcellular mobile and personal communications // IEEE Trans. Vehic. Technol. 1991. Vol. VT 40, № 1. P. 203-210.
92. Schaubach K., Davis N.J., Rappaport T.S. A ray tracing method for predicting path loss and delay spread in microcellular environments // Vehic. Technol. Conf. 1992. P. 932-935.
93 Seide S.Y., Rappaport T.S., Jain S., Lord M.L., Singh R. Path loss, scattering, and multipath delay statistics in four European cities for digital cellular and microcelluar radiotelephone // IEEE Trans Vehic. Technol. 1991. Vol. VT-40, № 4. P. 721-730.
94. Sklar B. Digital Communications — Fundamentals and Applications — Prentice Hall, 1988.
95. Skolnik M.l. Introduction to Radar Systems. 2nd ed. — New York: McGraw-Hill. 1980.
96. Soroushnejad M. Geraniotis E. Multi-access strategies for an integrated voice/data CDMA packet radio network, submitted to IEEE Trans. Commun. 1991.
97. Sullivan W.G., Glaycombe W.W. Fundamentals of Forecasting — Reston Publishing Company, Inc., 1979.
98. Wagen J.-F. Signal strength measurements at 881 MHz for urban microcels in downtown Tampa // Globecom Conf. Rec. 1991. P. 1313-1317.
99. Walfisch J., Bertoni H.L., A theoretical model of UHF propagation in urban environments // IEEE Trans. Antennas Propag. 1988. P. 1788-1796.
100. WATM net: A Prototype Wireless ATM System for Multimedia Personal Communication / Dipankar Raychaudhuriet al. // IEEE J. Select. Areas Commun. 1997. Vol. 15, № 1.
101. Wei L.-F. Coded M-DPSK with built-in time diversity for fading channels // IEEE Trans. Inform. Theory. 1993. Vol. IT-39. No. 6. P. 1820-1839.
102. Whitteker J.H. Measurements of path loss at 910 MHz for proposed microcell urban mobile systems // IEEE Trans. Vehic. Technol. 1988. Vol. VT-37, № 6. P. 125-129.
103. Wicker S.B., Kim S. Codes, Graphs, and Iterative Decoding. — Boston- Kluwer Academic Press. 2002.
104. Wilson D.G. Digital Modulation and Coding. — Prentice Hall, 1996.
105. Wong W.C., Greenstein L.J. Multipath fading models and adaptive equalizers in microwave digital radio // IEEE Trans. Commun. 1984. Vol. COM-32, № 8. P. 928-934.