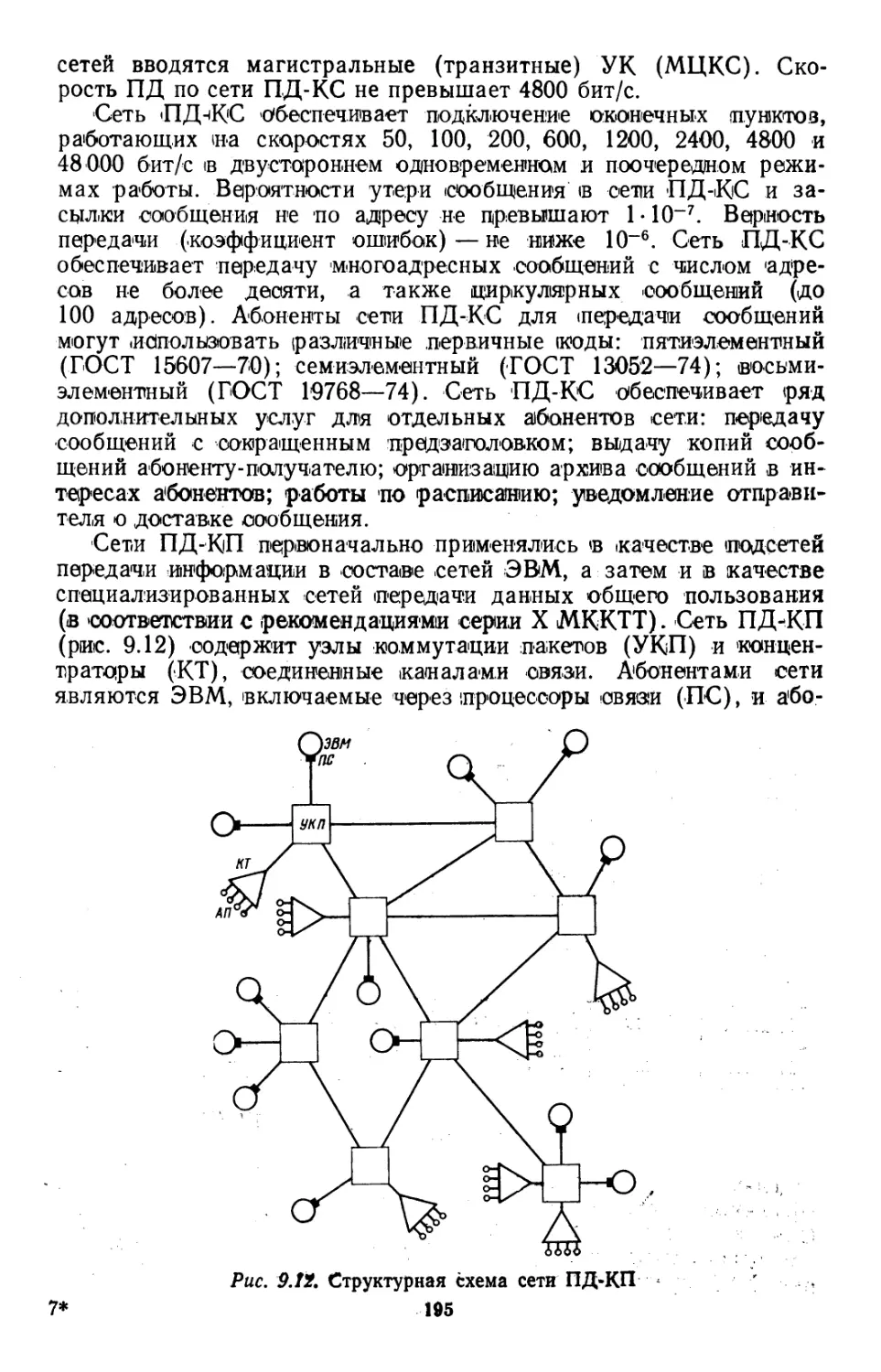
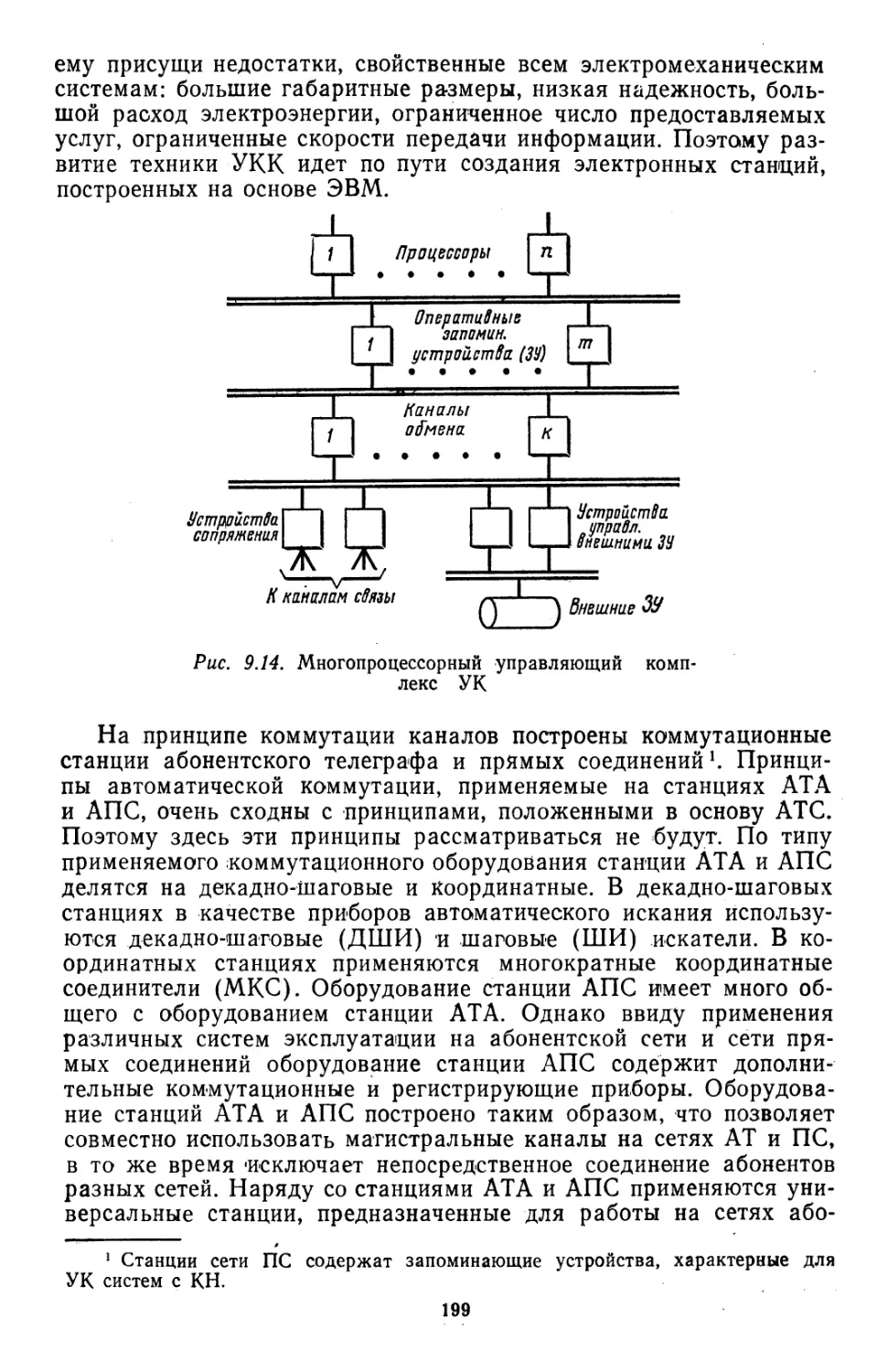
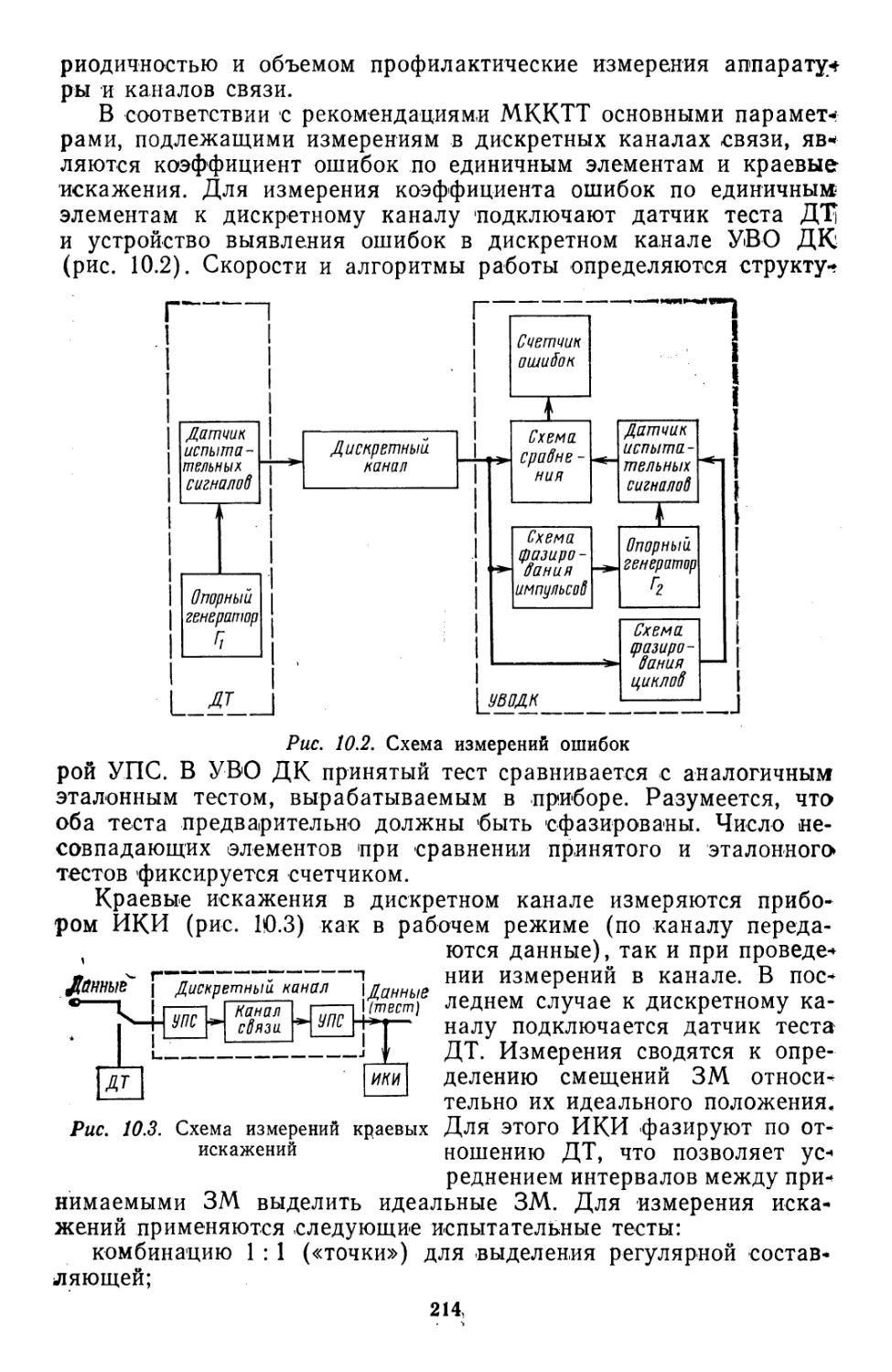
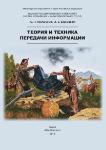
/










































































































































































































































Текст
Г.А.Емельяиор, В.О.Ше pu <*
ПЕРЕДАЧА
ДИСКРЕТНОЙ
Н- ОР А И
Г. А.Емел ья нов, В.О.Шварцман
ПЕРЕДАЧА
ДИСКРЕТНОЙ
ИНФОРМАЦИИ
Допущено Министерством связи СССР
в качестве учебника для студентов
электротехнических институтов связи
МОСКВА
«РАДИО И СВЯЗЬ»
1982
ББК 32.881
Е60
УДК 621.394(075.8)
Емельянов Г. А., Шварцман В. О.
Е60 Передача дискретной информации: Учебник для
вузов. — М.: Радио и связь, 1982. — 240 с, ил.
В пер.: 80 к.
Излагаются принципы передачи дискретной информации (ПДИ) и
образования дискретных каналов. Описываются методы фазирования в
системах ПДИ и их реализация, методы повышения верности передачи
дискретной информации и надежности систем и сетей ПДИ.
Рассматриваются передающие и приемные оконечные устройства, сети передачи
информации, основы факсимильной связи.
Для студентов вузов связи, обучающихся по курсу «Передача
дискретной информации».
2402040000—018 ББК 32.881
Е 148—82
046(01)—82 6Ф1
РЕЦЕНЗЕНТЫ: А. С. СЕЛИВАНОВ, О. И. ГОРШКОВА,
В. П. ШУВАЛОВ, Н. Б. ЗЕЛИГЕР, Б. Р. СЕРГИЕВСКИЙ,
Л. Н. ЩЕЛОВАНОВ, О. С. ЧУГРЕЕВ, Г. Г. ЯНОВСКИЙ, В. X. ХАРИТОНОВ
Редакция литературы по электросвязи
Геннадий Алексеевич Емельянов,
Владимир Осипович Шварцман
ПЕРЕДАЧА ДИСКРЕТНОЙ ИНФОРМАЦИИ
Ответственный редактор \ А. А. Кошевой]
Редакторы Н. М. Улановская, В. Н. Вяльцев
Художник Л. В. Б р ы л е в
Художественный редактор Р. А. Клочков
Технический редактор Г. И. Колосова
Корректор Л. А. Буданцева
ИБ № 194
Сдано в набор 27.07.81 г. Подписано в печать 4.11.81 г.
Т-28628 Формат 60Х90Л6 Бумага тип. № 2 Гарнитура литературная
Печать высокая Усл. печ. л. 15,0 Усл. кр.-отт. 15,0 Уч.-изд. л. 16,69
Тираж 12 000 экз. Изд. № 18833 Зак. № 101 Цена 80 коп.
Издательство «Радио и связь». 101000 Москва, Главпочтамт, а/я 693
Типография издательства «Радио и связь> Госкомиздата СССР
101000 Москва, ул. Кирова, д. 40
© Издательство «Радио и связь», 1982.
Посвящается
Кошевому Андрею Алексеевичу
Предисловие
Главной задачей одиннадцатой пятилетки, определенной
«Основными направлениями экономического и социального развития
СССР на 1981—1985 годы и иа период до 1990 года», являются
неуклонный подъем материального и культурного уровня жизни
народа, создание лучших условий для всестороннего развития
личности на основе дальнейшего повышения эффективности всего
общественного производства, увеличение производительности труда.
Важным фактором, способствующим решению поставленных
задач, является развитие средств связи, состоящее в продолжении
формирования Единой автоматизированной сети связи страны
(ЕАСС) на базе новейших систем передачи информации.
Для решения этой сложной задачи необходимо подготовить
высококвалифицированных специалистов, обладающих знанием
теории и техники передачи и коммутации дискретной информации.
Подготовка таких специалистов осуществляется «в вузах связи.
Настоящий учебник написан в соответствии с программой по курсу
«Передача дискретной информации», утвержденной
Министерством связи СССР. Он может оказаться полезным и для
студентов других специальностей, а также инженеров,
занимающихся вопросами передачи дискретной информации.
Авторы выражают благодарность В. П. Шувалову, А. С.
Селиванову, О. И. Горшковой, Н. Б. Зелигеру, Б. Р. Сергиевскому,
В. X. Харитонову, О. С. Чугрееву, Г. Г. Яновскому за ценные заме-
чания, высказанные при рецензировании книги, а также проф~
JA. А. Кошевому! за научное редактирование книги.
Предисловие, введение, гл. 1 и 4 написаны Г. А. Емельяновым;
гл. 2, 3, 8, 9, 10 — В. О. Шварцманом, гл. 5 — Н. В. Захарченко»
гл. 6, 7, 11 — С. Д. Светом.
Замечания по книге просьба (направлять в издательство «Радио
и связь» по адресу: 101000, Москва, Главпочтамт, а/я 693.
Авторы
Введение
При создании автоматизированных систем планирования и
управления, дистанционного управления объектами,
телесигнализации, передачи документальных сообщений и другой информации
решающее значение имеет электросвязь — область техники,
занимающаяся вопросами передачи информации на расстояние с
помощью электрического тока. Потребность в услугах электросвязи
промышленности, сельского хозяйства, органов управления
увеличивается в связи с плановым кооперированием производства.
Одной из основных особенностей научно-технической революции
является непрерывный рост информационных потоков во многих
сферах человеческой деятелыности и прежде всего в сфере
управления народным хозяйством. Правильное и своевременное
использование информации — один из важнейших резервов повышения
эффективности и качества общественного производства.
Обеспечить дальнейшее развитие и повышение эффективности
автоматизированных систем управления и вычислительных
центров можно путем последовательного объединения их в
Общегосударственную систему сбора и обработки информации (ОГАС).
Технической базой ОГАС являются сети вычислительных центров
коллективного пользования и Общегосударственная система передачи
данных (ОГСПД). Создание ОГСПД будет проходить в три этапа.
На первом этапе обеспечиваются первоочередные потребности
абонентов с помощью уже существующих сетей телеграфной связи
(скорость передачи 60 бит/с), телефонной сета общего
пользования (скорость передачи 600 бит/с) и сети передачи данных
(скорость 200 бит/с). На втором этапе будут созданы
специализированные сети передачи данных (скорость передачи—до 4800 бит/с).
На третьем этапе намечено внедрение цифровой сени передачи
данных (скорость передачи от 50 до 48 000 бит/с).
К системам передачи дискретных сообщений относится система
телеграфной передачи — самый старый вид электрической связи.
Изобретателем электрического телеграфа был член-корреспондент
Петербургской Академии наук П. Л. Шиллинг. Построенная им в
1832 г. линия телеграфной связи содержала многие элементы,
используемые и в настоящее время.
Продолжателем работ П. Л. Шиллинга был другой
выдающийся русский ученый академик Б. С. Якоби — изобретатель первого
в мире буквопечатающего телеграфного аппарата (1850 г.). Им же
впервые осуществлена передача телеграфных сигналов по одному
проводу, разработан принцип синхронной передачи по одному
проводу и телеграфной трансляции.
4
Большой вклад на разных этапах развития техники
телеграфной связи внесли американцы Морзе и Юз, англичанин Уитстон,
француз Бодо. Много и плодотворно потрудились на поприще
телеграфии советские изобретатели, ученые и инженеры (А. Ф. Шо-
рин, Л. М. Тремль, А. П. Игнатьев, Л. Н. Гурин, А. А. Дубовик^
и др.)> разработавшие современные аппараты и системы
телеграфной связи.
Сеть телеграфной связи Советского Союза, оснащенная
современным оборудованием, характеризуется значительной разветвлен-
ностью, большим числом предоставляемых услуг, максимальной
доступностью для населения и учреждений. Ежедневно
предприятия связи страны передают более миллиона телеграмм, кроме
того, действует сеть абонентского телеграфирования (AT), в которую
включены заводы, учреждения, организации. Разветвленная сеть
телеграфных каналов кроме передачи телеграмм по сетям общего
пользования и AT обеспечивает также технологическую и
производственную связь предприятий многих министерств и ведомств, а
также передачу метеорологических данных, телеметрических
сигналов, материалов из Москвы практически для всех периферийных
газет, информации с мест корреспондентов различных газет и
агентств и др. Наша страна имеет телеграфную связь по системе
«Телекс» с абонентами 84 стран. Несмотря на быстрое развитие
междугородной телефонной связи и авиапочты, телеграфный
обмен ежегодно увеличивается, причем особенно быстро по сети AT.
Важное место в электросвязи занимает передача изображений
газетных полос по каналам связи факсимильными аппаратами,
что позволяет организовать децентрализованную печать
центральных газет одновременно во многих городах СССР.
В курсе «Передача дискретной информации» изучаются
вопросы построения оконечных устройств передачи дискретных
сообщений, дискретных каналов связи, устройств преобразования
сигналов. Рассматриваются методы фазирования в системах ПДИ, а
также методы повышения верности передачи и надежности систем
ПДИ. Передача информации может быть осуществлена только
при наличии широко разветвленной сети ПДИ. В курсе
значительное внимание уделяется изучению принципов построения сетей
ПДИ, узлов и станций коммутации каналов и коммутации
сообщений. Излагаются также основы факсимильной связи.
Таким образом, курс «Передача дискретной информации»
изучает широкий круг сложных инженерных задач. Он базируется
на теоретических основах практически всех предыдущих
дисциплин и особенно курсов «Теория передачи сигналов», «Импульсные
устройства», «Основы дискретной автоматики». В заключение
необходимо отметить, что степень детализации рассмотрения
различных вопросов регламентировалась программой настоящего
курса с учетом специфики специализации «Автоматические системы
коммутации и телефонная связь» в рамках специальности
«Автоматическая электросвязь».
5
ГЛАВА 1
Основные понятия и принципы передачи
дискретной информации
+
1.1. ИНФОРМАЦИЯ, СООБЩЕНИЕ, ИСТОЧНИК
И ПОЛУЧАТЕЛЬ ИНФОРМАЦИИ. СИСТЕМА ПДИ
Дать точное определение понятий «информация» и
«сообщение» достаточно сложно, поскольку они относятся к классу
первоначальных. Под термином «информация» понимают различные
сведения, которые получает потребитель. Академия наук СССР
рекомендует следующие определения: информация — это сведения,
являющиеся объектом хранения, передачи и преобразования. В
соответствии с положениями марксистской философии информация
является 'свойством материи отражать сущность одних объектов в
других объектах. Понятие информации определено на основе
развития ленинской теории отражения. Категория «отражение» как
свойство всей материи является более общим, чем «информация».
Отражение относится к материи в целом, а информация — только
к человеку, животным, растениям и машинам. Примерами
информации могут служить наблюдения, измерения, речь, изображения
и т. д.
Информацию, представленную в определенном виде, называют
сообщением. Всякое сообщение является совокупностью сведений
о состоянии какой-либо материальной системы, которые
передаются человеком (или устройством), наблюдающим эту систему:
другому человеку (или устройству), обычно не имеющему
возможности получить эти сведения из 'непосредственных наблюдений.
Наблюдаемая материальная система вместе с наблюдателем
представляет собой источник информации, а человек или устройство,
которому предназначаются результаты наблюдения, — получатель
информации.
На всякое сообщение, переданное от источника к получателю несет
информацию. Если принятые сообщения не снимают неопределенности о ситуации,
которые они представляют, или хотя бы не уменьшают ее, то такие сообщения
информации не несут. Например, получателю заранее известно, что завтра в
14 час. 21 мин. начнется частичное солнечное затмение. Если получатель полу-
чит сообщение об этом событии, то никакой информации поступившее
сообщение не несет. Если же получателю вообще неизвестно о предстоящем затмении,
то принятое сообщение принесет максимум информации, ибо оно полностью
снимает неопределенность ситуации. Если же в сообщении содержатся сведения о
том, что завтра примерно в 14 час. начнется затмение, а получатель об этом не
знает, то поступившее сообщение также несет информацию, ибо оно уменьшило
неопределенность ситуации.
Источник информации может вырабатывать непрерывное или
дискретное сообщения. Примером непрерывных сообщений могут
6
служить сообщения об уровне жидкости в сосуде. Если два
сообщения такого источника не тождественны, то они могут
отличаться между собой как угодно мало. При этом, как бы мало не
отличалось сообщение 1 от сообщения 2, всегда возможно сообщение
3, которое отличается от сообщения 1 еще меньше, чем
сообщение 2. Такое множество сообщений не может быть
пронумеровано. Если число сообщений конечно, то эти сообщения можно
пронумеровать. Подобные сообщения называются дискретными.
Таким образом, для того чтобы узнать, является ли источник
информации дискретным или непрерывным, надо рассмотреть все
множество сообщений, выдаваемое за рассматриваемый интервал
времени, которое мог бы создать данный источник за данный
интервал времени. Если это множество конечно, то источник
вырабатывает дискретные сообщения (дискретную информацию), если
нет — то непрерывные сообщения. Непрерывные сообщения можно
превратить в дискретные. Для этого из бесконечного множества
сообщений следует отобрать определенное количество (N),
которое приближенно может характеризовать все остальные.
Например, сообщение о величине звукового давления перед микрофоном
(в телефонии и радиовещании) непрерывно. Если же сведения о
звуковом давлении передавать через определенные моменты
времени в виде набора из N значений давления, то сообщение
превратится в дискретное.
При формировании дискретных сообщений, представляющих
аналоговые процессы, существенное значения имеют такие
понятия, как уровни квантования и шаг дискретизации. Уровни
квантования — это значения непрерывной величины, которые
представляются дискретными сообщениями. Шаг дискретизации
определяется интервалом между соседними уровнями квантования. При
правильно выбранном шаге дискретизации и уровнях квантования
качество принятого сообщения будет не хуже непрерывного. Такое
преобразование используется в телефонии при передаче речевого
сигнала (система с импульсно-кодовой модуляцией). В
дальнейшем будут рассматриваться только дискретные сообщения (дис-
скретная информация).
Информацию, содержащуюся в дискретном сообщении, можно
оценить количественно. Если источник сообщений передает N
возможных сообщений с равной вероятностью p=l/N, то количество
информации (в битах)
'coo6 = bg2l//? = log2W. (1.1)
При N=2 количество информации равно 1 бит. Такая
информация содержится в сообщении, которое устраняет неопределенность
путем выбора одного из двух равновероятных для получателя
событий. Чем больше возможных сообщений может передать
источник сообщений, тем больше степень неопределенности у
получателя сообщений о том, какое из сообщений может быть передано,
тем больше информации несет каждое сообщение. Если источник
сообщений может передавать 32, 64 или 128 равновероятных сооб-
7
щений, то в каждом из них соответственно содержится 5, 6 или
7 бит. Если передаваемые сообщения неравновероятны, то
количество информации в них уменьшается.
Рассмотрим пример двух сообщений. Пусть вероятность одного
сообщения ри Другого —р2. Очевидно, что Pi+P2=l. Количество
информации в сообщении
/сооб= 1/Л bg2 1/Л+ l/p2log2 l/p2= —рг log2P!-p2 log2p2-
- —Pilog2Pi—(1—^i)log2(l—Pi). (1.2)
Зависимость /СОоб от р{ изображена на рис. 1.1. Видно, что
максимум информации содержится при pi = P2 = 0,5. Если pi=l (рг=
=0) или Pi = 0 (P2=1), то сообщение не несет информации, ибо
оно заранее известно получателю.
Чтобы сообщение было передано получателю, необходимо
воспользоваться каким-либо физическим процессом (например,
звуковыми волнами, магнитным полем, током и т. д.).
Изменяющаяся физическая величина, отображающая сообщение, называется
сигналом. Совокупность средств, предназначенных для передачи
сигнала, называется каналом связи. В понятие канал включается
не только физическая среда, (в
которой (распространяется сигнал, но
!И совокупность технических средств,
предназначенных Дли передачи
'сигналов.
Процесс передачи дискретных
СООбЩвНИЙ 'СОСТОИТ IB ТОМ, ЧТО ОНИ
impеобразуются >по о предел енному
закону в сигналы, которые могут
передаваться ш каналу связи
получателю. Зная загон, связывающий
„ сообщение (и сигнал, получатель мо-
о,г о,ь о,в o,8 itc жет 1ВЬ1ЯВИТЬ содержащуюся в сооб-
РисУи. Зависимость /Сооб= щении информацию. Канал связи
=<p(jt7]) вместе с источником (информации и
ее получателем -при заданных
методах преобразования сообщения \в сигнал и «наоборот называют
системой связи. Если передаются дискретные сообщения, то
систему связи называют системой передачи дискретных сообщений или
системой передачи дискретной информации (ПДИ).
1.2. ПРЕОБРАЗОВАНИЕ СООБЩЕНИЯ В СИГНАЛ
Каждому дискретному сообщению должно соответствовать
определенное число. Совокупность этих чисел составляет алфавит
сообщения. Числа можно представлять различными системами
счисления. Наиболее распространенной является десятичная система
счисления, в основании которой лежит число 10. Любое целое
число в десятичной системе может быть представлено в виде #=
= ап- lO»-^- ... +а3- Ю2+а2- 101+ai • 10°, где а{ — коэффициенты
0,8
0,6
0,4
^*^N
\
\
к
\
V
л
8
разрядов числа (0, 1, 2,...,9). Если принять а{=5 и а2=3, то
jV=3-101+5-10°=35. Если в основании системы счисления лежит
не число 10, а любое другое число, то
N=an!?-l+... + a8R*+-abR1 + a1R°t (1.3)
где R — основание системы счисления. Например, на древнем
Востоке пользовались двенадцатиричной системой счисления1 с
основанием ,/?=12.'Цифр (коэффициентов разрядов) ,в этой системе
было 12 (0, 1, 2,..., 9, 10, \). Здесь значками 9, f обозначены
цифры, которые в десятичной системе обозначаются как 10, 11.
Число 35 в двенадцатиричной системе счисления запишется как
2\. Действительно, N=2-12* + |• 12°=24+11 = 35.
В вычислительной технике и технике связи практическое
значение имеют восьмеричная (R — 8), четверичная (# = 4), троичная
(R = 3) и двоичная (R = 2) системы счисления. Восьмеричная
система содержит 8 цифр (R=0> 1, 2,... ,7). Число 35 в этой системе
запишется как 43: Af = 4-81 + 3-8° = 32 + 3 = 35. Соответственно в
четверичной и троичной системах число 35 может быть
представлено как 203 и 1022:
ЛГ = 2-4а + 0-41 + 3-4° = 32 + 0 + 3 = 35;
^^ЬЗз + О-З^г-З^г.З0^ 27 + 0 + 6 + 2 = 35.
Наибольшее распространение в технике связи получила
двоичная система счисления. Это обусловлено тем, что для передачи и
приема каждого из чисел достаточно уметь запоминать,
передавать и различать лишь две цифры 1 и 0 (аг = 0, 1; R = 2). Число
35 в двоичной системе счисления записывается как 100011:
tf=1.26 + 0.24 + 0.2» + 0.2a+l-2l+l-2° =
-32 + 0 + 0 + 0 + 2+1 = 35.
Из приведенных примеров видно, что с уменьшением
основания системы счисления уменьшается число используемых цифр, но
возрастает количество разрядов. Так, в двенадцатиричной,
десятичной и восьмеричной системах для записи числа 35 требовалось
два разряда, в четверичной — три разряда, в троичной — четыре
разряда, а в двоичной — шесть разрядов.
Совокупность цифр, образующих соответствующее
определенному сообщению число, называется кодовым словом. Каждому
разряду кодового слова можно поставить в соответствие какой-
либо параметр электрического сигнала, например амплитуду. На
рис. 1.2 в качестве примера приведено превращение кодовых слов,
соответствующих числу 35, ib сигналы с разными амплитудами
(при разных системах счисления). Время (длительность)
передачи каждого разряда числа выбрано одинаковым. Электрический
1 Остатки двенадцатиричной системы счисления сохранились до наших дней:
Циферблат часов разделен на 12 ч; в русском языке сохранилось понятие числа
«дюжина», мебельные гарнитуры и посудные сервизы изготовляются на 12 или
6 персон и т. д.
9
сигнал, передаваемый в течение определенного отрезка времени и
соответствующий одному разряду кодового слова, называется
единичным элементом, а длительность его передачи — единичным
интервалом. Совокупность единичных элементов, отображающих
кодовое слово, называется кодовой комбинацией, которая характе-
Передаваемое
сообщение
Щнование^С}
\}апись числа\КС
m
Тридцать пять
/?=12
г\
А
ы
л
t
R=70
35
J.
Т0
Го
t
R=8
43
А
&
То
t
R=4
203
.
А
Т0
Го
Ч
t
R=3
1022
,
А
Ji
ъ
То
То
Ь
R=2 \
100011 |
Л
То
То
То
То
То
То
Л
Рис. 1.2. Примеры кодовых комбинаций с различными основаниями кода R
ризуется основанием кода R и числом разрядов (единичных
элементов) /г. Между максимальным количеством чисел, которые
можно представить кодом N, основанием кода R и числом
разрядов п существует соотношение
N = Rn.
(1.4)
Количество информации, содержащейся в одном, единичном
элементе кодовой комбинации (при условии равновероятности
передачи каждого из N знаков), равно /e.9=log^. При #=2
количество информации /е.э=1 бит. Поэтому единичный элемент кодовой
комбинации с основанием кода, равным двум, иногда называют
битом. При У?=4, /е.э=2 бит единичный элемент называют диби-
том\ при /? = 8, /е.э=3 бит единичный элемент называют трибитом
и т. д. Очевидно, что с увеличением основания кода количество
информации, заключенное в единичном элементе, возрастает, на
одновременно уменьшается помехозащищенность распознавания
элемента.
В технике передачи дискретной информации наибольшее
распространение получили коды с основанием 2. Такие коды часто
называют двоичными, или бинарными. Основной причиной широкого
использования двоичных кодов являются простота реализации,
надежность элементов двоичной логики, малая чувствительность к
действию внешних помех и т. д. Поэтому в дальнейшем во всех
случаях (если только не будет оговорено особо) рассматриваются
двоичные коды. Примером двоичного кода является
Международный телеграфный код № 2 (МТК-2), в котором каждому
передаваемому знаку соответствует пятиразрядная кодовая комбинация
(ЛГ=25=32). Для передачи цифр, знаков препинания, а также
некоторых других условных знаков используют те же кодовые
комбинации, что и для передачи букв. Поэтому в приемнике
предусмотрены три регистра: «Рус», «Циф», «Лат» (для приема тек-
10
ста на латинском шрифте). Код МТК-2 является равномерным,
поскольку для передачи каждого знака используется одинаковое
число единичных элементов (табл. 1.1).
Числа
в
десятичной
форме
0
1
2
3
4
б
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
2.5
2)6
27
28
29
30
31
2*
0
0
0
0
0
0
0
0
0
0
0
0
1 0
1 °
о
0
Те же
форме
23
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
числа в
двоичной
(двоичный код
22
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
0
0
о
0
1
1
1
. 1
0
о
о
0
1
1
1
1
21
о
0
1
1
0
0
1
1
0
0
1
1
0
0
1 1
1
0
0
1
1
0
0
1
1
0
0
1
1
о
0
1
1
)
2°
0
1
0
1
о 1
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1 1
0
1
0
1
0
1
0
1
0
1
Таб.
Телеграфные знаки
РУС.
ЦИФ.
Перевод на русский
Т | 5
Возврат каретки
О
X
н
м
9
Пробел
Щ
f
Перевод строки
Л
Р
Г
И
П
ц
Ж
1 Е
з
д
Б
с
ы
ф
ь
А
в
И
)
4
Ш
8
0
=
3
Ч-
Кто там?
' ?
I 6
■Э
1
2
1 Ю
Перевод на цифры
У
я
К
7
1
1 (
Перевод яа латинский
лица 1.1
ЛАТ.
Т
О
н
N
М
L
R
G
I
Р
С
V
Е
Z
D
В
S
Y
F
X
А
W
J
и
Q
К
Устройства, осуществляющие кодирование, называются
кодерами. У получателя сообщений имеется другое устройство —
декодер, назначением которого является отождествление каждой при*
нятой кодовой комбинации с соответствующим кодовым словом.
При двусторонней связи обычно оба устройства конструктивно
объединены и образуют кодек (кодер — декодер).
'Процесс преобразования сообщения в сигнал помимо
кодирования содержит операцию модуляции. Сигналами называют все
возможные носители сообщений. В более узком смысле они
представляют собой колебания электрического тока, параметры кото-
и
рого меняются в соответствии с кодовой комбинацией. Если в
качестве переносчика выбран переменный ток синусоидальной
формы, то можно модулировать его амплитуду (AM), частоту (ЧМ)
или фазу (ФМ). Если переносчикЬм является последовательность
импульсов прямоугольной формы, то можно изменять их
амплитуду (АИМ), ширину (ШИМ), частоту следования (ЧИМ) или фазу
(ФИМ). При передаче сигналов постоянным током можно
использовать токи одного направления (/, 0) или токи двух направ-
ний (+/, —/)• Выбор вида модуляции обусловливается
требованиями к помехоустойчивости системы связи, типом канала связи,
технико-экономическими показателями и т. д.
Процесс, обратный процессу модуляции и состоящий в
выделении кодового слова из принятого модулированного -сигнала,
называется демодуляцией. Устройства, осуществляющие модуляцию и
демодуляцию, называются устройствами преобразования сигналов
(УПС), или модуляторами и демодуляторами. При
конструктивном совмещении модулятора и демодулятора образуется модем.
Скорость модуляции определяется числом единичных
элементов, передаваемых ib единицу времени и измеряется в бодах.
(Бод —скорость модуляции, при которой 1 единичный элемент
передается в 1 с.) Поэтому скорость модуляции
В=1/т0, (1.5)
где то — продолжительность передачи единичного элемента
(единичный интервал), с. i
1.3. ЭНТРОПИЯ ИСТОЧНИКА ДИСКРЕТНЫХ СООБЩЕНИЙ
Выше было показано, как определить количество
информации, содержащейся в отдельных сообщениях. Однако в ряде
случаев этого недостаточно. Необходимо знать среднее количество
информации, приходящееся на одно сообщение. Предположим, что
источник информации вырабатывает независимые сообщения.
Среднее количество информации Я (Л), приходящееся на одно
сообщение (например, на один знак текста), определяется на основе
знания вероятностей P(ai) появления знаков а\ на выходе
источника [9]:
H(A)=-2P(ai)\og2P(ai). (1.6)
Пример 1.1. Определить энтропию источника сообщений, если он может
выдавать N=5 знаков с вероятностями P(ai)=0,4; Р(а2) =0,1; Р(аз)=0,2;
Р(а4) =0,1; Р(а5) =0,2.
Решение:
5
ЯМ>= -5/fo)log2fo)= — (0,4 log2 0,4 + 0,1 log2 0,1 +
1
+ 0,2 1og20,2 + 0,l log20,l + 0,2 1og20,2) = 2,12 бит/зн.
Пример 1.2. Решить предыдущую задачу при условии одинаковой
вероятности появления каждого из пяти знаков.
12
Решение. При Р{йг) = 0,2
5 ' ,
И (А) = —^P(ai) log2 P (at) = — 5-0,2 log2 0,2 = 2,32 бит/зн.
l • . -
Анализируя формулу (1.6), нетрудно прийти к заключению, что
энтропия источника есть величина вещественная и
положительная. Она достигает максимального значения при равной
вероятности передачи каждого из N возможных сообщений:
//ma:c(,4) = log2W. (1.7)
Если вероятность передачи какого-то сообщения (знака) равна
единице, то энтропия равна нулю. В передаче такого знака нет
смысла, поскольку результат заранее известен получателю.
Энтропия источника характеризует его информационную емкость.
Источники с малой энтропией не являются информативными. Они
выдают знаки, которые и без этого с большой вероятностью известны
получателю. Аналогично можно определить среднее количество
информации, приходящейся на один разряд сообщения, состоящего
из п разрядов:
Н(х) = Н{А)/п. (1.8)
Пример 1.3. Определить Н(х) для кода МТК-2 (см. табл. 1.1), если
известно, что с учетом неравновероятности появления знаков текста энтропия
источника сообщений Я (Л) =4,36 бит/зн. Определить максимальное значение
Н(Х), т. е. Нтах(х).
Решение. В соответствии с (1.7) и (1.8)
Птах (Л) = log2 32 = 5 бит/зн.;
Н (х) = 4,36/5 = 0,87 бит/разряд;
Нтах (х) = 5/5=1,0 бит/разряд.
Зная Н(х) и Нтах(х), можно судить об избыточности
источника сообщений:
И=\-Н{х)1Нтах{х). (1.9)
В примере 1.3 избыточность составляет 0,13. Это означает, что
источник выдает разряды сообщения, которые в информационном
смысле недогружены на 13% по сравнению с потенциальными
возможностями.
1.4. ПОМЕХИ В КАНАЛЕ СВЯЗИ
И ВЕРНОСТЬ ПЕРЕДАЧИ ИНФОРМАЦИИ
Известно, что помехами в канале связи называются
посторонние электрические возмущения, которые затрудняют правильность
определения вида принимаемых единичных элементов. По способу
воздействия на сигнал помехи делятся на аддитивные и
мультипликативные, а по форме — на гармонические, импульсные и
флуктуационные (более подробно см. гл. 2). Помехи, при
достаточной их интенсивности, приводят к ошибкам в приеме
единичных элементов и знаков. Верность характеризуется безошибоч-
13
ностью передачи сообщения за определенный отрезок времени.
Оценкой ее может служить отношение числа неправильно
принятых сообщений (знаков, цифр) пош к общему числу переданных
сообщений /г0бщ. Верность оценивается частостью ошибок.
Частость ошибок, измеренная на реальных связях за короткий
интервал времени (например, 10 мин, 1 ч), будет разной, если
сеансы одинаковой длительности проводят в различные часы суток.
Например, ночью ошибок всегда меньше, чем днем, что
объясняется снижением загрузки сети связи и уменьшением количества
помех. Поэтому можно говорить о максимальной, минимальной и
средней частостях ошибок, указывая обязательно длительность
сеансов измерения.
Наиболее объективной оценка получается при определении
количества ошибок за весьма большие интервалы времени (недели,
месяцы, годы). В этом случае среднее относительное количество
ошибок даст вероятность ошибки: Р0ш = 1*тЯош/Яобщ-
"обпГ00
Если для получателя сообщений (наиболее удобной
характеристикой верности является частость ошибок по сообщениям (знакам,
цифрам, блокам и т. д.), то для оценки качества средства связи
более удобна оценка верности при приеме единичных элементов,
характеризуемая коэффициентом ошибок по элементам,
^ош == ^ош/^общ == ^ош/^-* »
В — скорость модуляции, Бод; Т — сеанс измерения', с. При Т-+оо
коэффициент ошибок переходит в вероятность ошибочного приема
рош. Вероятность ошибочного приема знака (сообщения) Р0ш
всегда больше рош. Она зависит от величины рош, распределения
ошибок по разрядам кодовой комбинации, способов передачи
сообщений и многих других причин (более подробно см. гл. 6).
Очень часто верность передачи оказывается ниже требуемой.
Поэтому необходимо принять меры по повышению верности. Один
из методов повышения верности принимаемых сообщений основан
на улучшении качественных показателей каналов, что достигается
обычно либо устранением самих причин появления ошибок, либо
включением в канал некоторых дополнительных устройств,
уменьшающих влияние помех. Следует заметить, что улучшение
качественных характеристик каналов с целью повышения (верности
приема всегда связано с определенными материальными затратами, \
которые в ряде случаев могут оказаться весьма высокими. Второй
метод основан на внесении в передаваемый сигнал определенной
избыточности. Избыточность налагает на сигнал какие-то
дополнительные условия, проверка соблюдения которых на приеме
позволяет обнаружить факт искажения сигнала, а также
отождествить принятый искаженный сигнал с соответствующим
неискаженным. Наибольшее распространение при этом методе повышения
верности получили избыточные коды.
В простейшем случае телеграфный пятиразрядный код
преобразуется в избыточный, если к первичной комбинации прибавить
14
еще один разряд, но так, чтобы число единиц в кодовой
комбинации стало четным. Например, буквам А, Б и В телеграфного кода
будут соответствовать кодовые комбинации 110000, 100111, 110011,
в которых шестой разряд является проверочным. Таким образом,
в кодовых комбинациях часть разрядов используется в качестве
информационных, а часть (в данном случае шестой разряд) — в
качестве проверочных. Если при передаче в линии произошла
одиночная ошибка, например в комбинации буквы Б во втором
разряде (110111), то специальное устройство в приемнике обнаружит
эту ошибку, поскольку число единиц стало нечетным. Отсюда
следует, что избыточные коды всегда содержат избыточную
информацию (разряды), которая и позволяет обнаружить ошибку.
Количество избыточной информации в кодовой комбинации равно*
числу дополнительных разрядов. Остальную информацию, в
отличие от избыточной, называют полезной информацией. Устройства,,
которые предназначены для повышения, верности с помощью
избыточных кодов, называются устройствами защиты от ошибок
{У 30).
1.5. ПОНЯТИЕ О КЛАССИФИКАЦИИ КАНАЛОВ СВЯЗИ
Каналы, предназначенные для передачи непрерывных
сообщений, называют непрерывными, а предназначенные для дискретных
сообщений — дискретными, т. е. каналы отличаются по характеру
сигналов на входе и выходе. С математической точки зрения
дискретный канал можно определить алфавитом единичных
элементов на его входе at (i=l, 2,..., п) и выходе а$ (/=1, 2,..., /z), a
также вероятностями перехода единичного элемента одного вида
(передаваемого) в элемент того же вида или другого вида в
пункте приема P(aj/ai). Значения вероятностей P(aj/ai) зависят от
характера ошибок в дискретном канале, т. е. от интенсивности
ошибок и их статистического распределения во времени. Если при
передаче 1-го единичного элемента принят элемент такого же вида
(/=■/), то считается, что ошибки нет. Если при передаче i-то
элемента принят элемент нового вида, который не предусмотрен
алфавитом aj (например, i=/z+l), то его можно использовать для
стирания принятого знака. При 'гф\ и 1фп-\-\ считают, что
произошла ошибка.
Дискретные каналы классифицируются в зависимости от
свойств вероятности переходов P(aj/ai). Каналы, в которых
P(ajlai) не зависит от времени для любых i и /, называются
стационарными. Если P(aj/ai) зависит от времени, то каналы
называются нестационарными. Каналы, в которых P(aj/ai) не зависит
от значений ранее принятых элементов, называются каналами без
памяти. При зависимости P(a^ai) от значений ранее принятых
или после последующих элементов возникает канал с памятью. В
симметричных каналах вероятность перехода Р (aj/ai)= const не
зависит от i и /. В противном случае канал становится
несимметричным. Заметим, что большинство каналов, образуемых по ка-
15
бельным и радиорелейным линиям связи, симметричны и
обладают памятью. Каналы космической связи симметричны и памятью
(Не обладают.
Дискретные каналы задаются не только входным и выходным
алфавитом и вероятностью перехода P(cijlai), но и совокупностью
ограничений таких, как допустимая скорость модуляции 5,
количество передаваемых сообщений N, пропускная способность и др.
Между допустимой скоростью модуляции В (Бод) и шириной
полосы пропускания канала AF (Гц) существует зависимость
(предел Найквиста):
лри передаче с двумя боковыми полосами
B<AF; (1.10)
при передаче с одной боковой полосой
5<2AF. (1.11)
1.6. ПРОПУСКНАЯ СПОСОБНОСТЬ ДИСКРЕТНОГО КАНАЛА
Скорость передачи информации определяется значением
среднего количества информации, получаемой на выходе канала связи
за единицу времени:
V = /cp/T0cp, (1.12)
где тоср — среднее значение длительности единичного элемента;
1с$=Н(х)—Н(х/х*). Величина Н(х/х*) характеризует потери
информации в канале связи, например, из-за помех или
несоответствия канала спектру передаваемых сигналов.
Пример 1.4. Определить скорость передачи информации в канале связи,
если энтропия источника сообщений Я (я) =0,87 бит/разряд, потери в канале
связи #(*/**) =0,01 бит/разряд, а передача ведется равномерным кодом со
скоростью модуляции В=600 Бод.
Решение. При тоср=1/#
V= В [Н (х) — Н (*/**) = 600- [0,87 — 0,01] = 516 бит/с.
Пропускной способностью канала называется максимально
возможная скорость передачи информации (бит/с), которую можно
реализовать для данного канала:
^тпах = 'max'T'O min-
Для двоичного (бинарного) канала без помех /тах=«1,0
бит/разряд; Т0тгп=1/В, а
Стах = В. (1.13)
В реальных условиях передачи достичь указанной пропускной
способности не удается, что связано с наличием помех в каналах
связи. При этом С всегда меньше В.
Для многопозиционных каналов, в которых используются коды
с основанием /?>2, пропускная способность Стах>В и зависит
только от свойств канала (допустимой скорости модуляции,
вероятности ошибок в канале, распределения ошибок и т. д.). Наличие
16
помех в дискретном канале связи снижает пропускную
способность. Пропускная способность дискретного двоичного
стационарного симметричного канала без памяти [20]
Gmax = B\l-pomlog2l/pom—(l-p0m)log2YZ^\ (1Л4>
Зависимость относительной пропускной способностичдвоичного
канала G = CmaxlB от вероятности ошибки при приеме единичного
элемента /?0ш приведена на рис. 1.3. При отсутствии помех (р0ш=
= 0)Gma*=l,0. В диапазоне 0<рОш<0,5 пропускная способность
1>2
0,8
Рис. 1.3. Зависимость от- ^
носительной пропускной
способности G от
вероятности ОШИбкИ Рот В
ДВОИЧНОМ дискретном кана- 0 ^ Q ^ Q^ ^ .
ле
<j<1. При /?Ош^0,5 исчезает зависимость между принятыми и
переданными сигналами, поэтому G = 0. Этой вероятностью можно
характеризовать обрыв канала связи.
1.7. ПОНЯТИЕ О НАДЕЖНОСТИ СИСТЕМ ПЕРЕДАЧИ
ДИСКРЕТНОЙ ИНФОРМАЦИИ
Система передачи дискретной информации, как и любая
другая сложная техническая система, не может работать безотказно
бесконечно долгое время. Событие, заключающееся в полной или
частичной утрате системой работоспособности, называется
отказом. Применительно к системе передачи данных отказом можно
назвать любое событие, (вызывающее задержку передаваемой
информации 1на время, большее допустимой задержки: 4ад>*доп.
Допустимая задержка информации определяется временем, в
течение которого принимаемая информация не потеряла своей
ценности. Так, при передаче информации о местонахождении поезда
или самолета сообщение должно поступить к получателю раньше,
чем поезд или самолет прибудет в назначенный пункт. В
противном случае сообщение теряет смысл.
Допустимое время задержки сообщения обусловливается
процессом, который обслуживает система передачи данных. В
приведенном примере время задержки может составлять минуты. При
регулировании других процессов время задержки может равняться
секундам. В отдельных случаях (регулирование быстротекущих
химических реакций, наведение ракет в системе ПВО и т. д.)
время задержки не должно превышать долей секунды. Поэтому одна
и та же система передачи данных может работать длительное вре-
17
^Рош]
мя безотказно при больших допустимых задержках и очень часто
отказывать при малых. Свойство системы, обеспечивающее
нормальное выполнение всех заданных функций, называется надеж-
ностью. Надежность системы передачи данных характеризуется
средним временем наработки на один отказ Го, средним временем
восстановления после отказа Тъ, коэффициентом готовности Кт и
вероятностью безотказной работы P(t). Среднее время наработки
на отказ Т0 является наиболее простым и употребительным
критерием надежности. На практике значение этого критерия
определяется на основании статистических данных из выражения
T>=itT" (U5)
где Ti—время безотказной работы между i выходами системы из
строя; N— количество выходов из строя.
Среднее время восстановления Тв зависит от того, как быстро
удается обнаружить и устранить повреждение. Коэффициент
готовности Кт характеризует вероятность того, что в любой момент
времени система будет исправно действовать:
КГ = Т0/(Т0 + ТЬ). (1.16)
Вероятность безотказной работы P(t) показывает, >с какой
вероятностью система может работать без единого отказа в течение
времени /. Одним из наиболее распространенных способов
повышения надежности отдельных узлов и системы в целом является
резервирование (более подробно о способах повышения
надежности см. гл. 10).
1.8. СТРУКТУРНАЯ СХЕМА СИСТЕМЫ ИДИ
И ПРЕДЪЯВЛЯЕМЫЕ К НЕЙ ТРЕБОВАНИЯ
Система передачи дискретной информации (СПДИ), обеенечи-
вающая двустороннюю передачу информации, может содержать
большое число источников и получателей сообщений,
передатчиков, приемников и линий связи. Требования, предъявляемые к
ОПДИ, удобнее рассматривать на примере системы
одностороннего действия с одним источником и одним получателем сообщений
(рис. 1.4). Кодовые комбинации первичного кода поступают от
источника информации в передатчик, который состоит из
устройства защиты от ошибок (УЗО) и устройства преобразования
сигналов (УПС). Принятые по каналу связи сигналы поступают в
приемник и, пройдя через УПС и УЗО, поступают к получателю
информации. Важнейшими требованиями, которые получатель
информации предъявляет к СПДИ, являются требования к верности
передачи, надежности функционирования СПДИ и сроку доставки
информации (скорости передачи информации). В систему
передачи дискретной информации может входить дискретный канал, либо
18
канал ПД, либо тракт ПД (см. рис. 1.4). Источник информации
и получатель информации в состав СПДИ не входят.
Дискретный канал представляет собой совокупность УПС и
канала связи и предназначен для передачи дискретных сигналов.
Устройство преобразования сигналов предназначено для
спектрального согласования, а также для согласования по амплитуде
Канал передачи данных
Дискретный канал
УЗО Ш УПС U-I Канал 1—U УПС Щ УЗО Н-Ч
Приемтк_АПД^
И УЗО Н УПС НЧ Канал Т—Н
| Передатчик АПД \
УПС Н
УЗО
Н ГУ Ы
Тракт передачи данных
1 Приемник АПД |
Получатель
информации
Рис. 1.4. Структурная схема системы передачи дискретной информации
источника информации с каналом связи. В пункте приема
согласуется по амплитуде выход канала связи с входом получателя
информации. Дискретный канал характеризуется максимально
допустимой 'скоростью модуляции, вероятностью ошибки р0ш и
(надежностью. Никаких специальных мер для повышения верности
передачи и надежности дискретного канала не предусмотрено.
Следовательно, качество передачи информации в СПДИ целиком
зависит от реально существующих характеристик канала и УПС.
Канал передачи данных представляет собой совокупность
дискретного канала и устройств защиты от ошибок. Наличие УЗО
гарантирует заданную верность передачи. С целью повышения
верности передачи требуется вводить избыточность е передаваемое
сообщение, что снижает пропускную способность системы. Канал
передачи данных характеризуется заданной верностью,
эффективной скоростью передачи информации и надежностью.
Эффективная скорость передачи информации (или средняя скорость
передачи) 1/Эфф определяется отношением числа единичных элементов,
принятых получателем информации, к общему времени передачи.
От скорости передачи информации V [см. (1.12)] она отличается
тем, что не вся информация, получаемая на выходе канала,
поступает к получателю — часть сообщений может быть забракована и
переспрошена. Поэтому Уэфф^У. Специальных мер по повышению
надежности в канале передачи данных (не предусматривается.
Тракт передачи данных представляет собой совокупности
взаимно резервированных каналов передачи данных (двух или
более) и групповых устройств (ГУ). Тракт обеспечивает передачу
информации с заданными эффективной скоростью, верностью и
надежностью. Приведенные требования являются основными и
далеко не исчерпывают всех требований, предъявляемых с СПДИ.
19
1.9. ПОНЯТИЕ О СЕТЯХ ПЕРЕДАЧИ
ДИСКРЕТНОЙ ИНФОРМАЦИИ
Сеть ПДИ представляет собой совокупность оконечной
аппаратуры передачи данных (АПД), каналов связи и узлов
коммутации (если последние имеются). Сеть ПДИ решает задачу
доставки сообщений по заданному адресу с обеспечением требуемых
качественных показателей по времени доставки, верности и
надежности. Сети ПДИ являются вторичными поскольку они
предназначаются для передачи только дискретной информации (сеть ПД
или сеть ТГ).
По принадлежности сети ПДИ делятся на сети общего
пользования и ведомственные; по способу распределения
информации — на коммутируемые и некоммутируемые. Связь абонентов в
некоммутируемых сетях осуществляется по постоянно
закрепленным (некоммутируемым) каналам. В коммутируемых сетях канал
представляется абонентам лишь на время передачи сообщения.
Коммутацию осуществляют узлы коммутации, где информация
распределяется двумя, основными способами: либо путем
создания временного прямого канала между абонентами (коммутация
каналов), либо путем организации поэтапной передачи сообщения
через узлы (коммутация сообщений). В последнем случае
сообщение записывается в узле коммутации и при наличии свободного
канала передается в направлении к получателю. По скорости
передачи информации сети разделяют на низкоскоростные (до 200—
300 бит/с), среднескоростные (до 10 кбит/с) и высокоскоростные
(свыше 10 кбит/с).
ГЛАВА 2
Сигналы в системах ПДИ. Каналы связи
+
2.1. КАНАЛЫ СВЯЗИ И ИХ ХАРАКТЕРИСТИКИ
Сети ПДИ, как и другие вторичные сети, организуются на базе
каналов первичной сети ЕАСС. Для передачи дискретной
информации используются каналы связи, образуемые в системах
передачи с разделением по частоте и времени, а также физические
цепи проводных линий связи. Для обеспечения высокой верности
передачи стремятся сохранить форму передаваемых сигналов при
прохождении их по каналам и цепям связи. Известно, что спектр
сигнала на выходе четырехполюсника 5Вых(со) связан со спектром
сигнала на входе 5вх(со) соотношением 5Вых(<о)—3ВхС<о)Я(а>), г^е
К (со) —коэффициент передачи канала связи. Идентичность
спектров сигналов на выходе и входе канала связи является условием
отсутствия искажений.
Искажениями называются нежелательные изменения
передаваемого сигнала, включая также изменения, вызванные появлени-
20
ем дополнительных сигналов, возникающих из-за самого
передаваемого сигнала. Следовательно, условия отсутствия искажений*
сигналов с учетом того, что Я(со)=/С(<о)ехр iq)((o), могут быть
записаны так: /C((o)=const, ф(|(о)=(о/, где /С(со) —амплитудная
характеристика (АЧХ), а ф(со)—фазовая характеристика- (ФЧХ)
канала связи.
Рассмотрим, насколько характеристики реальных каналов и
физических цепей соответствуют условиям отсутствия искажений'
•сигналов. Частотные характеристики физических цепей кабельных
и воздушных линий связи представлены на рис. 2.1. На этом же'
рисунке показаны (пунктиром) характеристики, обеспечивающие-
отсутствие искажений сигналов. Форма характеристик каналов:
систем передачи с частотным разделением определяется наличием
каналообразующих полосовых фильтров. В качестве типичного
представителя этих каналов рассмотрим канал ТЧ, примерные
характеристики которого представлены на рис. 2.2. Системы
передачи дискретной информации с временным разделением сигналов
используют или физические цепи, или каналы систем с частотным
разделением. Поэтому характеристики каналов систем с
временным разделением сигналов соответствуют характеристикам на-
рис. 2.1 или 2.2.
Рис. 2.1. Примерные характеристики Рис. 2.2. Примерные характеристики
физических цепей линий связи канала ТЧ
Сравнение характеристик реальных физических цепей и
каналов с характеристиками, обеспечивающими отсутствие
искажений, показывает их существенные различия, особенно в отношении
/((со). Характеристики физических цепей приближаются к
характеристикам идеального фильтра нижних частот (ФНЧ), а
каналов— к характеристикам полосового фильтра (ПФ), показанным
на рис. 2.1 и 2.2 штрих-пунктиром.
Таким образом, можно указать на два фактора, вызывающих
искажения сигналов при передаче по физическим цепям и каналам
связи: 1) ограничение спектра, 2) неравномерность АЧХ и
нелинейность ФЧХ. Помимо этих факторов причинами искажений
сигналов являются нелинейность характеристик, дрожание фазы,
явление эхо, сдвиги несущих частот, а также непостоянство характе-
21
гристик канала в течение времени и наличие помех. В каналах
связи действуют аддитивные помехи, т. е. случайные процессы,
налагающиеся на передаваемые сигналы, и мультипликативные
помехи, проявляющиеся в виде случайных изменений характеристик
канала.
Поскольку каналы образуются в линиях связи различных типов
с помощью разных систем передачи, их характеристики могут
значительно отличаться друг от друга. Для передачи дискретной
информации в основном используются каналы ТЧ, имеющие
нормированные характеристики. Поэтому ниже, за исключением особо
оговоренных случаев, будут рассматриваться некоммутируемые
каналы ТЧ.
Нелинейные искажения возникают в канале ТЧ как вследствие
зависимости его остаточного затухания от уровня входного
сигнала, так и вследствие нелинейности амплитудной характеристики
группового тракта, в состав которого входит канал ТЧ.
Нелинейность группового тракта систем с частотным разделением может
привести к тому, что при перегрузке групповых усилителей
продукты нелинейности одного канала ТЧ попадут в полосу
пропускания другого канала ТЧ. Для каждого отдельного канала ТЧ такие
продукты нелинейности являются не искажениями, а помехами,
так как зависят от случайной величины — общей загрузки
группового тракта. Это вызывает необходимость нормирования
суммарной мощности группового сигнала во избежание перегрузки
линейных (групповых) усилителей. Соответственно ограничивается
допустимое количество каналов ТЧ, занятых ПДИ. В последнее
время ведутся работы в направлении снижения уровня передачи в
этих каналах1.
Причиной дрожания фазы часто является нестабильность
электропитания. Эхо в двухпроводной системе может происходить из-за
^рассогласований на концах или на переходе между двухпроводной
и четырехпроводной частями канала. За счет непостоянства
коэффициента передачи происходят изменения уровня сигнала на
приеме. Эти изменения в реальных каналах связи весьма
разнообразны по своему характеру. Так, различают (рис. 2.3) плавные
~Рмакс
^лер^^отк
^лер^ Цтк
Рис. 2.3. Изменения
уровня сигнала в
канале связи
'(/) и скачкообразные (//) изменения уровня сигнала (иногда их
называют изменениями остаточного затухания), кратковременные
занижения уровня, кратковременные и длительные перерывы.
1 В настоящее время мощность (уровень) сигнала передачи данных
составляет 50 мкВт (—13 дБ), тонального телеграфа — 135 мкВт (—8,7 дБ), а
телефонной передачи —32 мкВт (—14 дБ).
22
Плавными изменениями уровня называют такие, при которых
отклонение уровня от номинального значения /?Ном до максимальнога
(минимального) Phom±A/Wx: происходит за время, несоизмеримо'
большее длительности единичных элементов передаваемого
сигнала то. К скачкообразным изменениям уровня (III) относятся те,
при которых изменение уровня от значения Рном до /?ном max
происходит за время, соизмеримое с то.
Значительные занижения уровня сигнала приводят к
искажениям принимаемых сигналов и, как следствие, к,ошибкам.
Занижения уровня сигнала уменьшают его помехозащищенность, что
также вызывает рост числа ошибок. И, наконец, в синхронных
системах снижение уровня сигнала приводит к нарушению
синхронизации и затрате определенного времени на вхождение в режим
синхронизации при восстановлении нормального уровня. Поэтому в
современных системах ПДИ имеются специальные устройства,
которые блокируют приемник и его систему синхронизации при
уменьшении уровня сигнала ниже заданного значения Арп- По
этой причине занижение уровня на величину, большую или равнук>
Арп, называется перерывом. В каналах связи помехи могут также
возникать из-за нестабильности генераторов поднесущих частот
аппаратуры передачи. В результате затрудняется выделение на
приеме когерентного колебания при ФМ или возникают искажения
сигнала ЧМ.
Аддитивные помехи подразделяются на сосредоточенные по
частоте (гармонические), сосредоточенные во времени
(импульсные) и флуктуационные. Помеха, сосредоточенная по частоте
(рис. 2.4а), имеет спектр значительно уже полосы пропускания
канала. Импульсная помеха (рис. 2.46) представляет собой
последовательность кратковременных импульсов, разделенных
интервалами, превышающими время переходных про-
K/W
цессов в канале. Флуктуационную помеху (рис.
2.4в) можно представить как
последовательность непрерывно следующих один за другим
импульсов, имеющую широкий спектр,
выходящий за пределы полосы пропускания канала.
Импульсную помеху можно рассматривать как
крайний случай флуктуационной, когда ее
энергия сосредоточена в отдельных точках
временной оси, а гармоническую помеху — как другой
крайний случай, когда вся энергия
сосредоточена в отдельных точках частотной оси. Причи- Рис- 2-4- Помехи:
нами флуктуационных помех являются в основ- £ ~ гар^°™!!!;с„кая1
^ i, J „ , , „ ^ о — импульсная; в —
ном дробовой эффект и тепловой шум. Следо- флуктуационная
вательно, причины «флуктуационных помех
заложены в самой природе проводников; поэтому они принципиально'
неустранимы и можно лишь рассматривать способы их ограничения,
К флуктуационным помехам принято также относить помехи,
вызванные взаимным влиянием цепей в линиях связи (линейные
переходы), нелинейными искажениями (нелинейные переходы) в
23
попутным потоком1. Причинами импульсных помех являются:
влияние грозовых разрядов, радиостанций, работающих в импульсном
.режиме, линий электропередачи на линии связи; перегрузки
линейных усилителей; плохие контакты в оборудовании передачи и
питания; кратковременные перерывы в линейном тракте;
недостатки разработки и изготовления оборудования; нарушения правил
эксплуатации. Недостатки разработки и изготовления
оборудования приводят к тому, что импульсные помехи возникают при
толчках напряжения в питающей сети, переключениях с основных
элементов на резервные, проведении электрических измерений.
Помехи эксплуатационного характера возникают вследствие
работ по ремонту и реконструкции линейных и станционных
сооружений, профилактического обслуживания (переключение АРУ,
генераторного оборудования, дистанционного или местного
питания и т. п.), а также несанкционированных действий
техперсонала—таких, например, как подключение измерительных приборов
:к действующему каналу, ошибочная коммутация и т. п.
Причинами селективных помех являются недостатки разработки и
изготовления аппаратуры систем передачи, приводящие к попаданию в
каналы связи остатков несущих и контрольных частот, гармоник
переменного тока промышленной частоты, а также влияние
радиостанций на линии связи и линейные переходы.
2.2. ИСКАЖЕНИЯ ВИДЕОСИГНАЛОВ
ПРИ ПЕРЕДАЧЕ ПО ФИЗИЧЕСКИМ ЦЕПЯМ
Рассмотрим сначала передачу по физической цепи
видеосигналов, вырабатываемых источниками информации. Спектр
одиночного импульса (рис. 2.5а) характеризуется спектральной плотностью,
которую можно определить с помощью интеграла Фурье:
00
S(©)= f/(*)exp(—i&tfdt, (2.1)
—оо
где f(t)—рассматриваемый сигнал; о = 2л^ — круговая частота.
В случае одиночного прямоугольного импульса
ftt\ = \Uo ПРИ — W2<*<To/2; (22)
(О при -т0/2>г>т0/2.
Подставляя условия (2.2) в выражение (2.1), получаем
S(©) = t/0 f exp(—i(oQdf = t/0T0 зшя/т°, (2.3)
J я / ти
-Т0/2
Наибольший практический_интерес представляет спектральная
плотность амплитуд S(w) = |S (со) |, показанная на рис. 2.56. По-
1 Линейные переходы и попутный поток подробно рассматриваются в курсе
сЛинейные сооружения связи», а нелинейные переходы — в курсе
«Многоканальная связь».
24
скольку при передаче дискретной информации кроме
прямоугольных импульсов используют импульсы с плавным изменением
огибающей, на рис. 2.6а показан один из таких импульсов — косинус-
квадратичный f{t)=cos2(u0t, а на рис. 2.66 — спектральная
плотность его амплитуд.
№
3>*
1
а)
Рис. 2.5. Прямоугольный видеоимпульс (а) и его спектральная
плотность амплитуд (б)
и0га \Ш\
а)
Рис. 2.6. Косинус-квадратичный импульс (а) и его спектральная плотность
амплитуд (б)
При передаче периодической последовательности импульсов?
(период повторения Т=ахо) для определения спектра удобно»
применять ряд Фурье. Поскольку сигнал является четной
функцией времени, амплитуды гармоник будут равны:
ск=
2U*
sin(n k/a)
_ U,
(2.4)«
л k/a
где а — скважность импульсной последовательности. При передаче*
«точек», т. е. такого сигнала, у которого интервал между
импульсами равен длительности импульса (Г=2то, ее = 2), амплитуды
гармоник будут равны:
ск=и0
sin (я k/2)
nk/2
С0 =
"о.
2
(2.5>
Спектр «точек» (рис. 2.7а) показан на рис. 2.76. На том же
рисунке для сравнения показан спектр импульсной
последовательности 1 :5 (а=6), используемой в качестве испытательной в
телеграфии (рис. 2.7в).
25
40»
T=2Tn
~Ъ/2
№*
р,щ
о,вщ
О То/2
а)
rO,2W0
1/Т
з/т
Ю
5/Т
Анализируя выражения для спектра одиночного импульса и
периодических последовательностей импульсов, можно сделать
следующие выводы:
линейчатый спектр периодически повторяющихся импульсов
вписывается в спектр одиночного импульса (с учетом масштабного
множителя 1/Т);
спектры занимают бесконечно широкую полосу частот;
амплитуды гармоник
убывают с ростом частоты,
следовательно, основная
энергия сосредоточена в
области низких частот (от 0 до
/=1/то);
с учетом последнего
можно приближенно
рассматривать конечную ширину
спектра, при этом чем
короче импульс, тем шире его
спектр;
чем более плавный
характер имеет форма импульса,
тем больше энергии
сосредоточено в низкочастотной
части спектра;
в спектре имеется
постоянная составляющая (в
спектре одиночного
импульса 5(0]| = f/ото).
Для оценки искажений
видеосигнала, вызванных
ограничением его спектра,
рассмотрим в соответствии
с § 2.1 прохождение
видеоимпульса через идеальный
ФНЧ, а затем
дополнительно учтем отклонения
характеристик физических цепей от идеального ФНЧ. В качестве
входного воздействия воспользуемся единичным скачком напряжения.
1 при t > т;
0 при t < т,
представленным графически на рис. 2.8. Выбор такого входного
воздействия обусловлен тем, что, во-первых, его использование
упрощает математические выкладки, во-вторых, одиночный
прямоугольный импульс конечной длительности можно представить как
последовательность двух единичных скачков напряжения
противоположного знака, сдвинутых во времени на величину длительности
импульса (рис. 2.9). И, наконец, зная характеристику
устанавливающегося процесса при воздействии единичного скачка,
26
\o,zw0
ш
0,07U0
0,ОЩ
IvfTT!>^rrh>» {
Q J/T б/Т
w
9
1Z/T 15/Т 78/Т
Рис. 2.7.
сигнал 1
Периодический прямоугольный
1 (а) и спектры сигналов 1 : 1
(б) и 1:5 (в)
а(/) =
(2.6)
по-
мощью теоремы свертывания можно найти устанавливающийся
процесс для произвольной формы воздействия.
Рис. 2.8.
Единичный скачок
напряжения
1*7
т.*,
тщ
а)
j i
'IT*
Mo
t+Го _
1 *
n
t
/
1 t
Рис. 2.9а
Представление прямоугольного
импульса (а)
совокупностью двух
единичных скачков
напряжения (б)
Рис. 2.10. Амплитуд-
но- и фазочастотная
характеристики
идеального ФНЧ
/си=
(2.7*
Пусть на вход идеального ФНЧ, амплитудно- и фазочастотная?
характеристики которого имеют следующий вид (рис. 2.10):
[ /С (0) = /Со ПРИ ю<соГР;
0 при со>согр;
ф (со) = со t0 при 0 < со < оо, (2.8J
где t0—групповое время задержки фильтра, в момент /=0
подается видеосигнал, имеющий форму ступенчатой функции
U0 при />0;
0 при *<0.
Эта функция, как известно, может быть представлена следующим*
образом:
/ст(0 =
(2.9>
fCT(t) = U0l 1/2+l/n^-i^d А
(2.10*
Для получения сигнала на выходе идеального ФНЧ умножим все
компоненты входного сигнала на модуль коэффициента передач»
фильтра и вычтем из аргумента синуса сдвиг фаз на каждой из
частот:
^вых(9 = *>0
2 nj
1 С К (ю) sin (со t — т t0)
da
Ф
(2.11)
Подставив в (2.11) значение коэффициента передачи из (2.7) т
(2.8), получим ,
*/вых(9 = */о*0
l/2+l/jtj"
©гр ('-<•)
sin (со t — со
&d»l
(2.12>
27
Произведя в (2.12) замену переменных у=«о(/—to), получим
*/вы* (О
=и0к0\
о
sin у
У
dy
(2.13)
Учитывая, что функция
^синусом, получаем
х
С sin I
J У
dy = six (называется интегральным
f/BHx(0 = ^o^0[l/2+l/Jtsi(orP(/-g].
(2.14)
Сигнал на выходе идеального ФНЧ, рассчитанный по (2.14),
показан на рис. 2.11. Из рисунка следует, что напряжение на
выходе ФНЧ не сразу достигает установившегося значения UoKo, a
после переходного процесса. Поскольку
si(0)=0, то при t=\U UBbLX(t) = UoKo/2t
следовательно, переходный процесс
происходит около момента времени t=t0.
Область нарастания напряжения
называется фронтом переходного процесса.
Запаздывание средней части фронта по
отношению к времени включения напряжения на
входе ФНЧ равно времени задержки
последнего.
Кроме того, из рис. 2.11 видно, что по
достижении установившегося значения
сигнал не остается постоянным, а имеет затухающие выбросы.
Амплитуда первого, самого большого выброса в рассматриваемом
случае достигает 9% установившегося значения.
Время нарастания переходного процесса tu определяется из
треугольника ABC (см. рис. 2.11), в котором АС является
касательной к кривой переходного процесса в точке t=t0:
ВС _ U 0 Ко
Рис. 2.11. Сигнал на
выходе идеального ФНЧ
при подаче на его входе
единичного скачка
напряжения
t»=-
tg4>
\dUBax(t)
dt
h=t„
(2.15)
Дифференцируя выражение (2.15), получаем [dUBUX(t)/dt]t=tlt =
=|£/оКасоГр/л, откуда время нарастания
tH = я/<ог
1/2/,
(2.16)
Таким образом, время нарастания в идеальном фильтре обратно
пропорционально граничной частоте.
Рассмотренный идеальный ФНЧ с бесконечно крутым срезом
и бесконечно большим затуханием в. полосе непропускания должен
иметь бесконечно большое число звеньев и, следовательно,
бесконечно большое время задержки. Благодаря такой идеализации
удается сравнительно просто получить весьма (наглядные результаты,
близкие к реальным. В подтверждение этого рассмотрим переход-
28
ный процесс с ФНЧ с произвольным коэффициентом передачи и
линейной фазовой характеристикой:.
/С (со) = /С (со) ехр (—i со f); <р(со) = со*0. (2.17)
В этом случае напряжение на выходе
00
*/.ых (0 = ^^ + -- PC ИSi" "{t ~ 'fl) d со. (2.18)
2 ji J со
о
Крутизна переходного процесса <в точке /=/0
г- оо -• оо
rdJWWl i^«L f/<-(fi))cos(co^—cogdto = -^- Г/С (со) d
~' Lo Jt=ta о
CO.
(2.19)
Подставляя (2.19) в (2.15), получаем время нарастания
гн= «*• . (2.20)
00
( /С (со) d со
о
Из (2.20) следует, что время нарастания в ФНЧ с
произвольным коэффициентом передачи обратно пропорционально площади
амплитудно-частотной характеристики фильтра. Для получения
аналогии с идеальным фильтром вводится понятие эффективной
полосы пропускания А/7=Асо/2я. Последняя определяется путем
построения идеального ФНЧ, для которого выполняется условие
(рис. 2.12)
00
/f0AcD = J/f(CD)ciCD. (2.21)
о
Подставляя (2.21) в (2.20), получаем
лК0 =_iL__L. (2.22)
н оо Дсо 2AF '
| К (со) d со
о
оо
Во избежание вычислений интеграла Г/С(со) dco, можно прибли-
о
женно считать ширину полосы пропускания реальных фильтров
равной частоте, на которой коэффициент передачи достигает
половины своего значения при нулевой частоте
(см. рис. 2.12). кц\
Переходные процессы в реальных ФНЧ
довольно близки по своему виду к таковым
в идеальном фильтре. Следует только
заметить, что чем плавнее переход АЧХ реаль- о ш и2р ~
ного ФНЧ от полосы пропускания к полосе
задерживания, тем меньше колебательные т^дно-частотной^р^ктс-
выбросы переходного процесса. Можно так- ристики реального ФНЧ
29
же показать, что колебательные отклонения ФЧХ реальных цепей
от прямолинейной ФЧХ идеального ФНЧ вызывает дополнительные
искажения, проявляющиеся в удлинении хвостов и увеличении
верхнего выброса кривой переходного процесса.
2.3. ИСКАЖЕНИЯ МОДУЛИРОВАННЫХ СИГНАЛОВ
ПРИ ПЕРЕДАЧЕ ПО КАНАЛАМ СВЯЗИ
Поскольку, как было показано в 2.2, спектр видеосигнала
источника информации содержит низкочастотные составляющие,,
включая постоянную составляющую, непосредственная передача
видеосигналов по каналам связи с характеристиками типа
полосового фильтра невозможна. Поэтому на передающем конце
канала спектр сигнала переносят в диапазон более высоких частот, а
на приемной стороне делают обратное преобразование.
Преобразование видеосигнала в высокочастотный сигнал осуществляется в
процессе модуляции, а обратное преобразование — при
демодуляции. Модулированное колебание отличается от переносчика
спектром более сложной формы, которая зависит от характера
модулирующего сигнала и вида модуляции. Так как пропускная
способность канала при передаче дискретной информации
определяется шириной полосы пропускания и соотношением мощностей
сигнала и помехи, то основными критериями при оценке различных
методов модуляции являются ширина спектра и
помехоустойчивость.
Из курса «Теория передачи сигналов» известно, что спектр
сигнала, модулированного по амплитуде последовательностью
двоичных сигналов, содержит частоту сигнала переносчика (несущую
частоту) соо и две боковые полосы частот: верхнюю и нижнюю. В
качестве примера на рис. 2.13 показан спектр AM сигнала при
модуляции «точками». Форма симметрично расположенных
относительно соо боковых полос спектра амплитудно-модулированного
щ
№
V
N
»о--2? и° *¥ *♦£ °
Рис. 2.13. Спектр AM сигнала при дискретной
модуляции «точками»
сигнала аналогична форме спектра модулирующего сигнала (см.
рис. 2.76); огибающая спектра (показана пунктиром на рис. 2.13)
представляет собой смещенный на соо спектр одиночного сигнала,
но спектр модулированного сигнала вдвое шире. Поэтому из
физических соображений можно полагать (и доказать это строго ма-
30
тематически), что при совпадении несущей частоты со средней
частотой идеального ПФ, имеющего полосу пропускания сог—coi
вдвое шире, чем ФНЧ в случае видеосигнала, переходный процесс
огибающей AM сигнала совпадает с переходным процессом
видеосигнала. Поэтому все выводы § 2.2 относительно переходного
процесса распространяются на огибающую AM сигнала. В частности,
время нарастания огибающей 4 = 2я/(о)2—coi) = 1/А/, где Д/=^2—fi.
Более подробные исследования этого вопроса [24] показывают,
что при передаче с помощью частотно- и фазомодулированных
сигналов информации по каналам связи возникают переходные
процессы огибающей, частоты и фазы, причем во всех случаях
время нарастания примерно такое же, как при AM.
2.4. СКОРОСТЬ МОДУЛЯЦИИ
И ШИРИНА ПОЛОСЫ ПРОПУСКАНИЯ КАНАЛА
Как было показано, ограничение полосы пропускания сверху
частотой /гр в случае видеоимпульсов или ограничение полосы
частот Д/ при передаче модулированных сигналов приводит к
замедлению переходного процесса нарастания амплитуды при AM,
частоты при ЧМ, фазы при ФМ. Для определения времени
нарастания при передаче еемодулированных импульсов и при различных
методах двоичной модуляции можно пользоваться следующими
выражениями: при передаче видеосигнала и AM ОБП tH=l/2Af
(так как при передаче видеосигналов Д/=/гр—0=i/rp), а при
передаче AM, ФМ и ЧМ сигналов /Н=1/Д/.
Максимальная скорость дискретной модуляции определяется
длительностью переходного процесса. Так как зависимости tn от
Д/ при различных видах модуляции идентичны, связь между
полосой пропускания и длительностью переходного процесса
рассмотрим на примере самого простого случая — передачи
видеосигналов. При подаче на вход канала с характеристикой передачи ФНЧ
видеосигнала прямоугольной формы (рис. 2.14а) напряжение на
его выходе согласно (2.14) по принципу суперпозиции (рис. 2.146)
и*ы*(0 =-^ [si<M'-'o»-siсоГР(<-*о-т0), (2.23)
я
где То — длительность сигнала на входе. При подаче на вход
этого же канала двух импульсов, разделенных интервалом, равным
длительности импульсов (рис. 2.15), напряжение на выходе
канала согласно принципу суперпозиции
^вых (*) = (U0 /Со/я) [si согр (t—g—si согр (/ —10—т0) +
+ sicorp(*—10—2т0) — sicorp(f—t0—Зт0)]. (2.24)
Результаты расчетов по (2.24), представленные на рис. 2.16,
показывает, что при уменьшении полосы частот ниже /гр=1/2то
различать импульсы становится все труднее, расширение полосы
частот выше /гр приводит к увеличению крутизны фронтов
импульсов. Причина трудности различения соседних единичных сигналов
31
при /Гр<1/2то заключена в переходных процессах, приводящих к
взаимному перекрытию соседних, а иногда и не только соседних
импульсов. Это явление называется межсимвольными искажения-
ми (МСИ). Наличие МСИ оказывает мешающее действие при
определении информационных значений аигналов в процессе их
приема.
Рис. 2.14. Сигнал на входе (а) и
выходе (б) идеального ФНЧ
_г
i_
Рис. 2.15.
Последовательность импульсов на
входе ФНЧ
Так как между скоростью двоичной модуляции В и
длительностью импульсов то имеется простое соотношение В=1/т0, то
Bmax—Sfrv при передаче видеоимпульсов и AM ОБП и Втах=(тр
при AM, ФМ и ЧМ. Эти соотношения получили название пределов
4 VI \ Л
5)
Рис. 2.16. Сигнал на выходе ФНЧ при подаче на его вход
последовательности импульсов согласно рис. 2.15:
a—fTV = 2/T- 6 — fTV = \/T; *-/гр=1/2Г; г -/гр=1/ЗГ; d-frv =
= 1/4Г
Найквиста. Рассуждения, приводящие к пределам Найквиста,
справедливы только для двоичной модуляции, когда каждый
единичный элемент сигнала несет один бит информации. При
передаче дискретных сообщений пределы Найквиста не являются
абсолютными [9, 10], так как в этом случае передаваемые числа не
32
произвольны, а принадлежат фиксированному конечному
множеству. При этом после приема очередной единичный элемент
становится полностью известен, а значит, известны и переходные
процессы в последующие моменты времени, что позволяет их
компенсировать на приеме и, следовательно, исключить влияние данного
сигнала на последующие. В реальных каналах такая компенсация
затруднительна, так как из-за наличия помех возможны случаи
неправильного приема отдельных единичных элементов сигналов;
в результате произойдет неправильная компенсация переходных
процессов и, как следствие, увеличение числа ошибок.
Пределы Найквиста были ниже указаны для идеального
фильтра с прямоугольной АЧХ и линейной ФЧХ. В реальных
фильтрах и, следовательно, реальных каналах связи длительность
переходного процесса больше, чем в идеальных, поэтому «а
практике скорость дискретной модуляции выбирают несколько
меньшей, чем указанные выше, а именно: 5практ=1»4А/ Для
видеоимпульсов и AM ОБП; Впракт^О^бА/ для AM, ФМиЧМ. При этом в
случае плавного и симметричного относительно несущей частоты
нарастания затухания канала величину Af определяют при
затухании 6 дБ.
2.5. ЭНЕРГЕТИЧЕСКИЕ СПЕКТРЫ СИГНАЛОВ
Как известно из курса ТПС, детерминированная функция
времени не может быть переносчиком информации. Поэтому
рассмотрение сигналов как детерминированных процессов (периодические
последовательности импульсов) может быть до некоторой степени
оправдано только сравнительной простотой и наглядностью
физических процессов, что позволяет получить представление о ряде
характеристик р>еальных сигналов.
Каждое сообщение независимо от вида модуляции может
рассматриваться как одна из реализаций случайного процесса. При
этом среднее значение случайного процесса a(t) и дисперсия D(t)
могут быть определены в виде:
£>(*) = о» (9 = £ [xuh-a{t)\*Pt,k, (2.25)
Ь=1
где xt,h — значение k-й реализации в момент t\ Ptyk — вероятность
появления xt,k- Применительно к рассматриваемым процессам
Q(t)—среднее значение напряжения (тока), а а2(/)—среднее
значение мощности, которое выделяется переменной составляющей
на сопротивлении i?=l Ом. В качестве спектра таких сигналов
рассматривается спектр функции корреляции, характеризующий
2—101 33
скорость изменения всех реализаций сигнала в среднем.
Напомним, что корреляционная функция определяет степень зависимости
между значениями сигнала, наблюдаемыми в различные моменты
времени. Если такая зависимость не наблюдается (белый шум),
то корреляционная функция описывается дельта-функцией и при
неизменной величине имеет постоянное значение на всей оси
времени.
Между функцией корреляции и энергетическим спектром
существует зависимость, которая определяется известным
преобразованием Винера — Хинчина.
Случайные процессы, которыми описываются рассматриваемые
сигналы, можно считать близкими к стационарным, т. е. таким, у
которых среднее значение и дисперсия, не меняются во времени.
В большинстве случаев указанные процессы характеризуются
свойством эргодичности, которое заключается в том, что
усреднение по множеству реализаций дает такой же результат, как и
усреднение во времени одной реализации. При таком допущении
корреляционная функция определяется в виде:
т
Цт) = Нт-±г ^x(t)x(t + x)dt.
(2.26)
Ее можно получить экспериментально на основе измерений
специальными приборами. По значениям k(x) для различных
сигналов определены энергетические
J) 1 0 о 1 i / спектры. Существенно, что
основная энергия, определяющая воз-
*" можность приема сигналов, на-
ц)
~\
в)
П
ZL
в)
л
!Н)
ппг
Рис. 2.17. Пример
дискретной
последовательности {aj и
соответствующих ей
последовательностей сигналов
Рис. 2.18. Непрерывные составляющие
энергетического спектра,
соответствующие сигналам рис. 2.17
34
ходится в полосе частот, которая для сигналов различного вида
была определена ранее. Это подтверждает рекомендации по
выбору полосы пропускания, которые были определены на основе
анализа детерминированных процессов.
В качестве примера рассмотрим случайную последовательность
(рис. 2.17а) и соответствующий ей двухполярный сигнал (рис.
2.176). Энергетический спектр импульсной последовательности
(рис. 2.176) показан на рис. 2.186. Основная энергия
сосредоточена в диапазоне частот от 0 до /=1/то(©то/2=я). Чем уже
импульсы, тем шире энергетический спектр сигнала. Аналогичный
характер имеет энергетический спектр (рис. 2.18в) однополярного
сигнала (рис. 2.17<з). Незначительные низкочастотные
составляющие (рис. 2.18г) имеет биимпульсная последовательность (р;ис.
2.17г), при которой единица исходной последовательности
передается в виде 10, а 0 — в виде 01. Дуобинарная последовательность
(рис. 2.17(9) образуется из исходной {Л*} по правилу Ck=Ak+
+С^_1+1, а затем {С*} преобразуется в передаваемую по каналу
связи последовательность Bk=Ck-\-Ck-\—1. В соответствующем ей
энергетическом спектре отсутствует составляющая на частоте f=
= 1/2т0. Аналогично путем соответствующего кодирования
исходной последовательности получаются биполярная (рис. 2.17е) и
модифицированная биполярная последовательность (рис. 2Л7ж)ч а
также соответствующие им энергетические спектры (рис. 2.18е и ж).
2.6. КРАЕВЫЕ ИСКАЖЕНИЯ И ДРОБЛЕНИЯ
В результате наличия искажений (рис. 2.196) и действия
помех (рис. 2.19в) форма видеосигнала на выходе цепи (рис. 2.19г)
отличается от его формы на входе цепи (рис. 2.19а).
Пороговое устройство на выходе цепи восстанавливает
прямоугольную форму элементов сигнала (рис. 2.195). При этом
значащие моменты (ЗМ)1 образуются в те моменты времени t'u B
которые напряжение сигнала 1на выходе цепи обращается в нуль (в
случае двухполярного сигнала). Аналогичное явление имеет
место и при передаче модулированных сигналов: огибающая сигнала
на входе приемника дискретного канала из-за ограничения
спектра частот, неидеальности АЧХ и ФЧХ, а также под действием
помех отличается по форме от сигнала на входе канала. В
результате этого ЗМ на приеме не совпадают с соответствующими
значащими моментами на передаче U. При этом всегда имеет место
неравенство t'i>tu так как из-за конечного времени
распространения ЗМ на приеме запаздывают по сравнению с
соответствующими ЗМ на передаче. Если все ЗМ на приеме запаздывают на
одинаковое время t3, то сдвиг сигнала во времени будет простым
без искажения его формы (с сохранением взаимного
расположения ЗМ).
1 Значащим называется момент, в который происходит смена значащей
позиции (например, от «+» к «—»).
2* 35
£
-J
ZSZ
Ъ-1
a)
~T
Y
Наличие в каналах связи искажений и помех приводит к
несоответствиям ЗМ, которые можно разделить на четыре группы
(рис. 2.20). К первой группе относятся несоответствия,
начинающиеся от идеального ЗМ1 и заканчивающиеся на интервале
последующего единичного элемента (точки а, б, з), т. е. смещения
ЗМ вправо относительно идеального ЗМ. Ко второй группе
относятся несоответствия, начинающиеся на предшествующем
идеальному ЗМ интервале и оканчивающиеся
в идеальном ЗМ (точки г, д), т. е.
смещения ЗМ влево относительно
идеального ЗМ. К третьей группе относятся
несоответствия, начинающиеся и
оканчивающиеся внутри одного единичного
элемента (точки в, г), т. е. появление
лишних ЗМ по сравнению с ЗМ на
передаче. К четвертой группе относятся
несоответствия, начинающиеся на
одном ЗМ и заканчивающиеся на другом
ЗМ (точки и, к), т. е. пропадание ЗМ
по сравнению с ЗМ на передаче.
Несоответствия двух первых групп приводят
к изменению длительности значащего
интервала, а несоответствия двух
других групп — изменению знака внутри
единичного интервала. Поэтому
искажения значащих интервалов можно
разделить на краевые искажения и
дробления. В отличие от шумов и
искажений АЧХ, ФЧХ и др., которые характеризуют канал связи и
относятся к первичным характеристикам, краевые искажения и
дробления характеризуют дискретный канал, их относят ко
вторичным характеристикам.
Мота приемного
\реле
0
d=
^
Рис. 2.19. Форма сигнала
при наличии искажений к
помех в цепи
Передача
Прием
Искажения
ол
а и
ш
J_17
а о о г д е т
Рис. 2.20. Краевые искажения и дробления ~
Краевым искажением называется несоответствие значащих
моментов и значащих интервалов идеальным значащим моментам и
1 Идеальным называется ЗМ, отстоящий от отсчетного ЗМ на целое число
единичных интервалов времени.
36
кгу
интервалам, приводящее к отклонению длительности принятых
значащих интервалов относительно переданных. Краевые
искажения характеризуются величиной смещения ЗМ относительно
идеального ЗМ: Mi = ti—£3. Обычно вместо абсолютной величины
краевых искажений используют относительную величину б»=
=f.(Ati/xo) • 100%, где то — единичный интервал. Эта величина
называется степенью индивидуальных искажений. Смещения ЗМ
относительно идеального ЗМ вправо принято считать
положительными, а влево — отрицательными. Алгебраическая разность
между максимальной и минимальной степенями индивидуального
искажения называется степенью синхронного искажения: tc=
= (в/то) -Ш0% = Шгшгх—AtmiJTo) • 100% =59-100%, где В —
скорость модуляции, Бод; ktmax — максимальное положительное
смещение ЗМ; Atmin — максимальное
отрицательное смещение ЗМ.
Естественно, что 0 зависит также от
интервала, на котором производится анализ.
Чтобы исключить эту зависимость, для его
определения следует брать достаточно
большой интервал времени. Различают краевые
искажения трех видов: случайные,
регулярные и характеристические. Случайным
называется искажение, обусловленное
действием нерегулярных мешающих факторов:
импульсных помех, кратковременных занижений уровня и
перерывов, флуктуационных помех. Величина этих искажений изменяется
во времени по случайному закону (рис. 2.21).
Значения случайного краевого искажения (имеется в виду
индивидуальное искажение) обычно аппроксимируют случайным га-
уссовским процессом с нулевым средним и среднеквадратическим
отклонением a6=uQB/sy где иэ — эффективное значение
напряжения помехи;' s=tjumax= \/AFumax — крутизна нарастания фронта
сигнала до величины итах. Плотность распределения -вероятности
Рис. 2.21.
Распределение вероятностей
случайных краевых
искажений
W4U=
УШОсд
ехр
б
2с*
УШь^
ехр
«L
■т
Регулярное искажение характеризуется постоянным по
величине увеличением (или уменьшением) длительности единичных
элементов, занимающих одну значащую позицию, за счет уменьшения
(или увеличения) длительности единичных элементов,
занимающих другую значащую позицию. Такие искажения возникают
вследствие асимметрии устройств передатчика и приемника
(например, уровня порогового устройства) или изменения
характеристик канала связи, приводящих к появлению постоянной
паразитной составляющей, которая накладывается на передаваемый
сигнал. Характеристическое искажение обусловливается переходными
процессами, 'когда при передаче различных сочетаний единичных
элементов их амплитуды не достигают или превышают (за счет
37
колебательных «выбросов») установившегося значения,
соответствующего значащей позиции. Длительность единичного интервала
на выходе дискретного канала при этом меняется в зависимости от
вида предыдущего интервала. Характеристические искажения
являются проявлением межсимвольных искажений в тех случаях,
когда переходный процесс в течение единичного интервала не
достигает установившегося значения, т. е. ^н>т0, и, следовательно,
не соблюдается предел Найквиста. При передаче периодической
последовательности несимметричных комбинаций (например, один
плюс, пять минусов или два плюса и три минуса) величина
характеристических искажений в каждом случае остается постоянной.
При передаче знакопеременных симметричных комбинаций
(например, точек — один плюс, один минус и т. п.)
характеристические искажения отсутствуют. При передаче текста, т. е. случайной
последовательности единичных элементов, величина
характеристических искажений становится случайной.
Дроблением значащих интервалов называется одно- или
многократное изменение значащей позиции внутри значащего
интервала. Причинами дроблений являются помехи, уровень которых
превышает уровень полезного сигнала (в основном импульсного
характера), и кратковременные перерывы.
2.7. ТРЕБОВАНИЯ К КАНАЛАМ СИСТЕМ ИДИ
Нормирование каналов ТЧ производилось в основном
применительно к телефонной передаче. При этом учитывались и
требования телеграфной передачи 1. Передача данных потребовала
нормирования ряда дополнительных характеристик, которые
несущественно сказываются на качестве передачи телефонных
сигналов, а именно: ФЧХ, импульсные шумы, кратковременные
перерывы, сдвиги несущих частот.
Нормирование фазочастотной характеристики канала ТЧ
осуществляется путем регламентирования значения неравномерности
группового времени замедления (ГВЗ), которая для одного
переприемного участка должна лежать ниже ломаной кривой,
показанной на рис. 2.22. При N переприемах неравномерность ГВЗ
возрастает в N раз. При передаче данных перерывом считают нали-
jq jj чие понижения уровня Дрп^
'" ' = 17,4 дБ. Перерывы делят на
1Щма\
Щ5 щ№
кратковременные и длительные.
Такое разделение обычно
связывают с критерием отказа: 1^кр.пеР<
<^отк; ^дл.пер>^отк. Для КОММуТИ-
руемых каналов ТЧ существует
'ЦШ7 w i,f^zo 2,5 уцкГц следующая норма: 4р.пер^300 мс.
Рис. 2.22. Нормирование частотной Рекомендуемая доля кратковре-
характеристики ГВЗ менных перерывов на одном пере-
1 Эти нормы изучаются в курсе «Многоканальная связь».
38
приемном участке не должна превышать 1,5-10~5 за 90% часовых
отрезков времени. В канале ТЧ протяженностью 12 500 км
допускается следующая частость появления кратковременных изменений
уровня сигнала длительностью более 0,5 мс в течение 1 ч: не более
одного повышения в пределах 2,2—6,0 дБ; не более десяти
понижений в пределах 2,2—6,0 дБ; не более одного понижения в
пределах 6,0—17,4 дБ. Относительное время понижения сигнала более
чем на 17,4 дБ не должно превышать 8-10-5 ч. Скачкообразные
изменения уровня сигнала на одном переприемном участке не
должны превышать ±0,43 дБ, а скорость плавных изменений
уровня должна быть не более 0,43 дБ/с. Расхождение поднесущих
частот на переприемном участке ограничивается величиной 1 Гц.
Кроме того, наряду со скачкообразными изменениями уровня
сигнала в каналах связи имеют место скачки фазы, которые пока не
нормируются.
Нормирование импульсных помех производится путем
ограничения времени превышения ими заданных порогов анализа. При
этом на одном переприемном участке в точке с относительным
уровнем 4,34 дБ (на выходе канала ТЧ) доля времени, в течение
которой импульсные шумы превышают 200, 400 и 600 мВ, должна
быть не более 5-Ю-5; 2 -10-5 и ЬЮ-5, а для 90% часовых сеансов
измерений — 20- КН; 8- Ю-6 и 5-10"6.
ГЛАВА 3
Принципы построения дискретных каналов
+
8.1. МЕТОДЫ ПРИЕМА ДВОИЧНЫХ СИГНАЛОВ
При восстановлении переданного сообщения по сигналу,
принятому из канала с искажениями и помехами, можно судить
только о вероятности того, что был передан тот или иной сигнал из
множества используемых. Приемник на основе анализа
принимаемого сигнала и с учетом всех известных сведений о характере
источника и свойств канала связи должен принять решение о том,
какое элементарное сообщение из возможного множества было
передано. Процесс отождествления принимаемого элемента сигнала
с определенным кодовым символом реализуется в процессе
демодуляции. В результате действия помех и искажений в канале
связи приемеик может принять неправильное решение, т. е.
отождествлять принятый сигнал не с фактически переданным символом, а
с каким-то другим, в результате чего возникает ошибка.
Как известно из курса ТПС, вероятность ошибки определяется
отношением энергии полезного сигнала к энергии помехи.
Поэтому одной из важнейших задач приемника является повышение
этого отношения, которое обычно реализуется во входном блоке
(рис. 3.1). Другой -важнейшей задачей приемника является выде-
39
ление из принимаемого сигнала модулирующей функции, т. е.
демодуляции. И, наконец, третья задача — принятие решения,
которое реализуется в решающем устройстве. Способы приема в
зависимости от метода выделения модулирующей функции можно
разделить на две группы: когерентные и некогерентные. При коге-
Входной &!0к
, (фильтрация
(для улучшения
1 отношения
сигнал/помеха)
Детектор
1 в bio e ление
модулирующего малевания)
Решающее
устр-до 1
(пороговое ила
схема
сравнения)
Рис. ЗА. Обобщенная
структурная схема
приемника
рентном детектировании используются опорные сигналы,
представляющие собой точные копии передаваемых (с точностью до
начальной фазы). При некогерентном детектировании априорные
сведения о начальной фазе несущей частоты не учитываются.
Приемник принимает решение на основе анализа принимаемого
элемента сигнала. Время анализа не превосходит то, так как па
истечении этого периода происходит прием следующего элемента
сигнала. По видам принятия решения (регистрации) реальные
методы приема можно разделить на три группы: корреляционные,
интегральные, стробирования. Метод стробирования является
наиболее простым. Он состоит в том, что принимаемый сигнал
анализируется на интервале то в одной точке и результат сравнивается с
некоторым порогом и принимается решение.
Структурная схема устройства регистрации методом
стробирования показана на рис. 3.2. На одни входы логических
элементов И\ и Яг подаются напряжения с входного устройства
(рис. 3.3а). На вторые входы этих элементов подаются короткие
импульсы из системы синхронизации по элементам, следующие
через интервалы времени то (рис. 3.36). Так как искажения
принимаемых элементов сигналов за счет переходных процессов
наиболее велики по краям, а помехи мало зависят от момента
времени, то момент стробирования выбирают в середине элемента
сигнала. Управляющие импульсы с выходов #ь Яг поступают на
входы триггера; на его выходе образуются единичные элементы
длительностью то, полярность которых зависит от того, из какой
схемы— И\ или Я2 — поступил управляющий импульс (рис. З.Зб).
Из рис. 3.3 видно, что при искажении краев единичных элементов,
поступающих от входного триггера, длительность выходных
единичных элементов не изменяется и остается равной то. Допустимые
пределы смещения ЗМ, при которых происходит правильная
регистрация, составят .0^(то—аТ)/2—£, где а — длительность стро-
бирующего импульса; £ — смещение момента регистрации
относительно середины сигнала. При идеальной синхронизации (|=0)
с учетом того, что а<т0, 0~О,5то. ^
Первоначально метод стробирования был применен в
приемниках с электромеханическими регистрирующими устройствами,
схема одного из которых представлена на рис. 3.4. Как видно из
рисунка, для уменьшения величины а используется уменьшение дли-
40
ны контакта в секторе распределителя (Д/1<Д0- Поэтому метод
стробирования часто называют методом укороченного контакта.
Хотя решение производится в средней, наименее подверженной
искажениям, части элементарного сигнала, имеется определенная
вероятность принятия ошибочного решения. Стремление уменьшить
Входное
устр-8о
'
—
Схема
сравнения
И И/
Т
Cmpodupt/ющие
импульсы
г
Схема
сравнения
И2
]
'
Выходное устр-до
17
Л
v
I—1
1*
LJ 1 1 L
Г а]
1 . 1 1 1
5)
1
_*-
г'
t
в)
Рис. 3.2. Структурная схема регист- Рис. 3.3. Временные ди-
рирующего устройства методом стро- аграммы при методе
бирования стробирования:
а — входное устройство;
б — регистрирующие
импульсы; в — выходное
устройство
вероятность этой ошибки приводит к идее принятия решения на
основе не однократного, а многократного анализа сигнала. Такой
метод регистрации называется интегральным, а решение
выносится в моменты времени tv на основании сравнения полученной
суммы отсчетов от 0 до то. При суммировании нескольких отсчетов
складываются как полезные сигналы, так и мгновенные значения
помехи. Но величина полезного сигнала во всех слагаемых
одинакова, * поэтому их сумма растет пропорционально числу отсчетов
на интервале /г, а ее квадрат — пропорционально /г2. Средний же
квадрат суммы независимых случайных величин растет
пропорционально л. В результате выигрыш интегрального метода в
отношении сигнал/помеха равен п.
При дискретном суммировании отсчетов приходящий
единичный элемент стробируют в нескольких (обычно трех — пяти)
точках. Решение принимается по правилу большинства: если при
стробировании во всех трех точках или в двух из них
зафиксирована единица, то считают, что принята единица. Для повышения
точности регистрации при дискретном суммировании отсчетов
отдельным отсчетам придаются различные веса. Так, в каналах с
краевыми искажениями отсчету в середине единичного элемента
соответствует больший вес, чем отсчетам по его краям. Выигрыш
в отношении сигнал/помеха пропорционален числу отсчетов на
интервале анализа то, которое равно /г=то/7\ где Т — интервал
корреляции помехи. Поскольку техническая реализация
непрерывного интегрирования проще, чем дискретного, оно получило
наибольшее распространение.
41
Структурная схема интегрального метода регистрации
представлена на рис. 3.5. Поступающие с выхода детектора сигналы через
входной триггер подаются на интегрирующие (накопительные)
элементы (/?, С, а затем на один из входов элементов И. В
моменты, соответствующие концу элемента сигнала (tv—kxo, где £—1,
Регистрирующие
импульсы
Рис. 3.5. Схема интегрального метода
регистрации
Рис. 3.4. Электромеханическое
регистрирующее устройство, реализующее метод строби-
рования:
1 — укороченный контакт; 2 — щетка; 3 — выход
распределителя; 4 — регистрирующий элемент (реле)
2...), на другие входы элементов И поступают регистрирующие
импульсы из системы синхронизации по элементам. В результате
этого в дифференциальном трансформаторе происходит
сравнение энергии сигналов, накопленных в схемах 7?ь С\ и /?2> С2. В
зависимости от того, в какой из этих схем энергия больше,
выходной триггер занимает то или иное положение. Элемент сигнала
будет зарегистрирован правильно,
если правильная полярность
сигнала сохранилась на сумме
интервала времени, большей то/2.
Работа схемы иллюстрируется
диаграммой на рис. 3.6, из
которой видно, что схема может
обеспечивать правильный прием при
наличии дроблений и краевых
искажений.
Сущность корреляционного
метода приема заключается в том,
что решение о конкретной
реализации сигнала выносится на
основе сравнения с порогом случай-
Lo лЫ го , го w
I I I If] I i I I
□ LMLJi up
a)
5)
B)
X
2)
3)
Рис. З.6. Временные диаграммы при
интегральном методе:
а — искаженные единичные элементы;
б — заряд С\\ в — заряд С2; г —
регистрирующие импульсы; д—сигналы
выходного триггера
42
ной величины г' = \r\(t)r(t)dfc
в фиксированный момент времени
0^р<т0. Здесь r(t) —
функция, описывающая принимаемую
смесь сигнала и помехи, a y\(t) —опорное напряжение. При
этом различают взаимно корреляционный метод приема, при
котором опорное напряжение r\(t) отличается от
передаваемого сигнала только начальной фразой несущей, и
автокорреляционный метод приема, при котором опорное
напряжение представляет собой принимаемый сигнал, сдвинутый на
&То, где k=l, 2,... (обычно k=l, т. е. r\(t) =r(t—то). Полагая
т](/) = 1, приходим к алгоритму интегрального приема.
3,2. КОГЕРЕНТНЫЙ И НЕКОГЕРЕНТНЫЙ МЕТОДЫ
ДЕТЕКТИРОВАНИЯ
Оба метода детектирования могут применяться при любых
видах модуляции. Однако из-за большей сложности реализации
когерентные методы не применяют при AM и ЧМ, а используют
только при ФМ в сочетании с противоположными сигналами, что
позволяет получить выигрыш в помехоустойчивости. При двоичной
амплитудной модуляции передаются элементы сигналов
следующего вида:
iU [S2(t) = 0 при^ = 0,
где So — видеосигнал (обычно прямоугольной формы). На вход
приемника поступает колебание y(t)=Si(t)-\-n(t), где n(t)
—аддитивная помеха. Это колебание поступает на додетекторную
часть приемника,' состоящую из усилителя высокой частоты,
преобразователя высокой частоты в промежуточную и усилителя
промежуточной частоты, общим назначением которых являются
обеспечение необходимого уровня сигнала на входе детектора и
ограничение спектра сигналов и помех. Эта часть приемника
обеспечивает основную селекцию сигнала от помех и поэтому обозначается
на схеме (рис. 3.7) как полосовой фильтр (ПФ).
rr\nv,
Канал единиц,
№
№
\~^{jL
РНЧ
УС
РУ
ДО, ЬЧ Ус,
Канал нулей.
УС
П%
Д0г \-+\ Ус2
ПФ
Решение
Рис. 3.7. Структурная схема
некогерентного приемника AM
сигналов
lm
Рис. 3.8. Структурная схема
некогерентного приемника ЧМ сигналов
Детектор (ДО) выделяет огибающую сигнала, а фильтр
нижних частот (ФНЧ) обеспечивает подавление высокочастотных
составляющих помехи и побочных продуктов детектирования на
выходе детектора. С выхода ФНЧ сигнал поступает на решающее
43
устройство (РУ), которое различает единицы S\(t) и нули S2(t).
Это осуществляется сравнением величины напряжения сигнала на
выходе ФНЧ Ux с некоторым пороговым напряжением С/п и
принятием решения по правилу: в случае Ux>\Un Si({)=S\(t), Xi=l9
т. е. считают, что была передана единица, а при Ux<Un Si(t) =
=kS2(0, *г=0, т. е. считают, что был передан нуль. При
небольших отношениях мощности сигнала к мощности помехи на входе
приемника (Л20=ЯС/РЛ), не превышающих Ло~3, расчетных
формул нет. Если Л0>3-^-4, то вероятность ошибки при некогерентном
приеме определяется формулой [16] РОш~0,5ехр(—Л20/4).
Сигналы при двоичной частотной модуляции могут быть
записаны в виде
S.(0 = !Sl(0 = SoCOS(C°lf+4>l); 0<*<т0,
(S2 (t) = So cos (со 2t + ф2);
где o)i и ф1 — частота и фаза элемента сигнала при передаче
единицы; о)2 и фг — частота и фаза элемента сигнала при передаче
нуля. Обычно для формирования ЧМ сигналов в технике связи
используют генератор с переменной реактивностью,
обеспечивающий отсутствие скачков фазы, а для приема ЧМ сигналов
используют приемник с двумя фильтрами (рис. 3.8). При дальнейшем
рассмотрении предполагается, что полосы фильтров и полосы
сигналов 5i и 5г не пересекаются, т. е. отсутствуют перекрестные
помехи.
В этом случае схема приема каждого из сигналов аналогична
схеме на рис. 3.7. Отличие от случая AM заключается в наличии
на входе ограничителя амплитуды сигнала (О). Введение
ограничителя оказывается возможным, так как при ЧМ амплитуда
сигнала не является информационным параметром, поэтому ее
флуктуации за счет изменения характеристик канала могут быть
компенсированы усилением сигнала и последующим ограничением его
на постоянном уровне. В результате введения ограничителя
энергия единичных элементов сигнала становится постоянной и
одинаковой, равно как одинаковыми выбирают полосы пропускания
фильтров ПФ1 и ПФ2 и усиление в каналах единиц и нулей. В
каждом из каналов берется один отсчет величины огибающей,
значение которого подается на устройство Сравнения (УС), и в
зависимости от того, какой из отсчетов больше, принимается
решение о том, какой из двух символов передавался. Вероятность
ошибки при этом рОш = 0,4ехр(—Л20/2).
Вследствие использования двух сигналов с разными частотами
системе с ЧМ требуется, по крайней мере, вдвое большая полоса
частот, чем системе с AM. Однако системе с AM по сравнению с
системой с ЧМ присущ серьезный недостаток: для получения
одинаковой рош необходимо для каждого значения отношения
сигнал/помеха оптимизировать порог, что при флуктуации сигнала
устройства АРУ не могут полностью обеспечить. В системе с
ЧМ сравнение разности огибающих £/ш и С/С.ш производится с
нулевым порогом независимо от отношения сигнал/помеха и, следо-
44
вательно, всегда является оптимальным. Этим и объясняется
широкое применение ЧМ в системах передачи дискретной
информации. Системы передачи с AM и ЧМ «прозрачны», т. е.
обеспечивают передачу как изохронных, так и неиЗохронных сигналов со
скоростями, не превышающими предельной.
Сигналы при двоичной фазовой модуляции могут быть
записаны в виде:
ЗД=508т(сМ+яд; Ф, = (ф' = 0 ПРИ х = х-
1ф2 = я при х = х2.
Из курса ТПС известно, что при передаче дискретной
информации по идеальному каналу оптимальными в смысле
минимальной ошибки являются противоположные сигналы, которые
реализуются при условии |ф1— <p2|=3T. Абсолютная фазовая модуляция
заключается в том, что единичному элементу каждой полярности
(положительной или отрицательной) соответствует передача в
канал сигнала, сдвинутого по фазе на определенный угол ф
относительно несущей частоты генератора передатчика. Пример
передаваемой последовательности единичных элементов показан на рис.
3.9а. Несущая частота генератора изображена на рис. 3.96 и г. Во
время передачи
положительных единичных элемен-
"ген
б)
Чигн
а
г)
3)
тов напряжение сигнала на
ходится в фазе с
напряжением генератора (<р=0°), а
при передаче
отрицательных единичных элементов
напряжение сигнала
находится в противофазе с
напряжением генератора (ф =
= 180°), как это показано
на рис. 3.9в и д.
Демодуляция сигналов ФМ основана
на возможности их фазового
различения с помощью
детектора, чувствительного
к фазе сигнала. Для этого в
приемнике необходимо иметь
опорный сигна/i в
виде копии передаваемого
сигнала с точностью до фазы
Чюд[
а)
Ur
'сиги %
©
У=0
©
<f = 180
©
©
rvywwvv
^=/7
UU6H * '
Hi) A I ! I I
<P=0
©
9=180*
fee "*
0 0^/£ш'ш°»°^^^^
I I i I- ! I
Puc. 3.9. Временные диаграммы при ФМ
Л Следовательно, системы с ФМ
передают изохронные сигналы, т. е. системы «непрозрачны» по
.скорости передачи. Когерентный прием АФМ обеспечивает самую
высокую достоверность: Яош«0,5ехр(—h\) [16]. Фазовый
детектор (ФД) производит перемножение колебания, поступающего на
Qri°mBX^' С 0П°РНЫМ сигналом Son(/)=Sonsin(cDon*+(pon) (рис.
б.щ. Ьсли по каким-либо причинам фоп изменится на я, то
полярность напряжений, соответствующих единичным элементам
б! и 52, изменится на обратную, в результате чего вся
последовательность символов будет принята неправильно. Это явление, по-
45
лучившее название обратной работы, является существенным
недостатком АФМ.
От эффекта обратной работы свободен метод относительной
фазовой модуляции (ОФМ), при которой единичному элементу
каждой полярности соответствует передача в канал сигнала,
сдвинутого по фазе на определенный угол ф относительно фазы
предыдущего сигнала. Пусть при передаче положительного единичного
элемента фаза сигнала сдвигается относительно фазы предыдущего
сигнала на ф=180°, а при передаче отрицательного — на ф=0°.
Щ
"1
Ш
п
•W
УРОН
П
ФНЧ
\иФД J/lt)
Рис. 3.10. Обобщенная
структурная схема фазового
детектора:
П — перемножитель; ФНЧ — фильтр
низких частот (интегратор);
УФОН — устройство формирования
опорного напряжения
Решение
Рис. 3.11. Структурная схема
корреляционного (когерентного) приемника
Тогда (см. рис. 3.9) в течение времени передачи первого
(положительного) единичного элемента фаза сигнала противоположна
некоторой исходной фазе вспомогательного сигнала (рис. 3.9е). В
момент начала передачи второго (отрицательного) единичного
элемента изменения фазы сигнала не происходит, так как
отрицательному единичному элементу соответствует фазовый сдвиг <р=
=0° относительно предыдущего единичного элемента (рис. 3.9е,
ж). Для определения информации, заключенной в первом
единичном элементе сообщения, перед ним передают вспомогательный
единичный элемент, имеющий произвольную фазу несущей
частоты.
Относительная фазовая модуляция широко применяется в
системах передачи дискретной информации. При этом используют два
метода приема сигналов ОФМ: когерентный корреляционный и
некогерентный автокорреляционный. Структурная схема
корреляционного приемника показана на рис. 3.11. Опорное напряжение
формируется специальным устройством (УФОН). Создание такого
напряжения является сложной технической задачей, реализация
которой может быть осуществлена тремя способами: от
высокостабильного местного генератора опорных частот ГОЧ; с помощью
пилот-сигналов, передаваемых от генератора передатчика, и
выделением из принимаемого информационного сигнала. Первый
способ не обеспечивает необходимых синхронности и синфазности
из-за недостаточной стабильности частоты и фазы ГОЧ. Второй
способ не нашел широкого применения из-за неизбежных потерь
46
спектра и мощности при передаче пилот-сигналов. Наибольшее
распространение иашел третий способ.
Решение о том, какой символ был передан, принимается
устройством сравнения (УС) при сравнении полярности огибающей
принятого единичного элемента с полярностью огибающей
предыдущего единичного элемента, запоминаемого в элементе памяти
ЭП. Вероятность ошибки при этом, как показано в [16], р0ш~
~ (1/Ао "Кл)ехр(—h2o), т. е. помехозащищенность когерентного
приема при ОФМ выше, чем при некогерентном AM и ЧМ.
Структурная схема автокорреляционного приемника сигналов
ОФМ представлена на рис. 3.12. В качестве опорного напряжения
используется предыдущий единичный элемент, задержанный в
элементе памяти (ЭП) на время, равное его длительности. Фазовый
детектор (ФД) осуществляет сравнение фазы принятого
единичного элемента с фазой предыдущего элемента. В зависимости от
полярности напряжения Uj на выходе ФД принимается решение: при
[Л/>0 решающее устройство вырабатывает единицу, при £/j<0 —
нуль. Вероятность ошибки при этом (см. [16]) /?Ош=0,5ехр(—Л20).
Ю
д
\ пф [
;Ш
<РД
,
\
ЭП
л
,lt
РУ
)
Рис. 3.12. Структурная
схема
автокорреляционного (некогерентного)
приемника
От ИИ
УПС}
пер
"1
жр
\КПИ
=d I
Рис. 3.13.
Структурная схема УПСпер
Сравнивая выражения вероятности ошибки при когерентном и
некогерентном приеме сигналов ОФМ, видим, что первое меньше.
Это объясняется тем, что хотя при обоих методах приема
сигналов ОФМ опорное напряжение формируется :из принимаемого
сигнала, искаженного помехами, однако при некогерентном методе
фильтрация помех осуществляется только на интервале
длительности единичного элемента, а при корреляционном методе — на
значительно большем интервале. Заметим, что при Ло>3
различие в помехозащищенности обоих методов становится
незначительным.
3.3. СТРУКТУРНАЯ СХЕМА ДИСКРЕТНОГО КАНАЛА
Структурная схема дискретного канала (см. рис. 1.4)
содержит канал связи, УПСпер — устройство преобразования сигналов
передатчика, УПСПр — то же, приемника. Функции УПС и их
устройство зависят от типа канала связи. В случае каналов связи
систем передачи с частотным разделением УПСпер имеет структур-
47
ную схему, показанную на рис. 3.13, а УПСпр —н/а рис. 3.7, 3.8,
3.11, 3.12 в зависимости от метода модуляции. В схеме рис. 3.13
устройство модулятора (М) также определяется в зависимости от
метода модуляции. Сигнал от источника информации ИИ в виде
последовательности видеоимпульсов поступает на модулятор
УПСдер с генератором несущей частоты (Г). На выходе М в
зависимости от типа модулятора получается сигнал AM, ЧМ или ФМ.
Фильтр передатчика (ФПер) служит для ограничения спектра
сигнала, передаваемого в канал связи. При прохождении по каналу
связи сигнал подвергается воздействию искажений и помех и в
искаженном виде поступает на вход УПСпр. Прием сигналов
осуществляется в соответствии с принципами, изложенными в § 3.1
и 3.2.
В каналы связи систем с временным разделением (ИКМ или
дельта-модуляцией) дискретные сигналы ИИ могут быть введены
асинхронным или синхронным способом. Наибольшее
распространение получил асинхронный способ, который позволяет передавать
анизохронные дискретные сигналы (могут передаваться также и
изохронные сигналы). Способ основан на том, что каждый
значащий момент (фронт) в передаваемом дискретном сигнале
кодируется некоторой кодовой комбинацией, которая затем передается по
цифровому тракту (групповому тракту ИКМ или
дельта-модуляции). По информации, содержащейся в этой кодовой комбинации,
декодирующее устройство восстанавливает на приеме знак
элемента дискретного сигнала и его длительность. При передаче
сигналов известной структуры (например, стартстопных) сведения о
структуре сигнала можно использовать при передаче по
цифровому тракту, так как в этом случае информацию, характеризующую
длительность каждого элемента сигнала, можно не передавать;
это дает возможность повысить полезное использование
цифрового тракта.
Среди известных способов асинхронной передачи наибольшее
распространение получили способы наложения и скользящего
индекса с подтверждением (СИП). Наиболее простым из них
является метод наложения, заключающийся в том, что состояние
каждого элемента бинарной последовательности (рис. 3.14а)
опробуется регулярной последовательностью импульсов (рис. 3.146) и
111 и 111111 Ml 11111111111111111111111 u
0) t
11111л!лл1111И11И11М II ! ММлл 3
S) tj t2 t
i \m i ~E3 r~I >
у > t
Рис. 3.14. Временные диаграммы сигнала при
методе наложения
48
результаты этого опробования (р;ис. 3.14в) передаются по
цифровому тракту. На приеме по огибающей переданной последователь-
йости восстанавливается исходный сигнал (рис. 3.14г). Так как
передаваемый сигнал не синхронизирован с цифровым трактом,
т. е. ЗМ сигнала могут не совпадать со стро'бирующими
импульсами, восстановленный на приеме сигнал получит краевые
искажения. Как видно из рис. 3.146, шаг стробирования равен /0,
поэтому относительная величина искажений не превысит 6=(io/*n)X
X100 % ==' (B/fo) • 100 % = 1 OOAn, где tu — длительность единичного
элемента, с; В — скорость модуляции, Бод; /0 — частота
стробирования; т — число импульсов, стробирующих единичный элемент.
Так, при частоте дискретизации в тракте ИКМ /^=8000 Гц и
семиразрядной кодовой комбинации fo=7 /д=56000 Гц. В случае
б<5%; В = б.//100 = 5-56000/100 = 2800 бит/с.
Такая относительная низкая скорость передачи вызвана
большой избыточностью метода наложения, возникающей потому, что
при большом т, необходимом для получения малого б, большая
часть стробирующих импульсов, передаваемых по цифровому
тракту, не содержит информации и только подтверждает ранее
переданное состояние модулирующего сигнала. Коэффициент
использования дискретного канала k=to/tn при данном методе
численно равен величине относительного искажения, следовательно,
при уменьшении б во столько же раз ухудшается использование
цифрового тракта.
Из-за сбоев символов в закодированной последовательности (см.
рис. 3.14в, г, моменты t\ и fe) в принимаемом сигнале возникают
дробления или краевые искажения. В результате этого при
регистрации методом стробирования в середине единичного элемента
возможен ложный прием (ошибка) в том случае, когда
искаженная часть элемента сигнала совпадает с зоной регистрации (см.
рис. 3.14в, г, момент t\). Метод наложения широко используется в
тех случаях, когда требования простоты и низкой стоимости
аппаратуры превалируют над требованием высокого коэффициента
использования (например, при передаче на короткие расстояния).
При методе СИП ЗМ дискретного сигнала передается кодовой
комбинацией 5 из л символов, которые включают в себя
стартовый символ А и п—1 уточняющих символов В, определяющих с
погрешностью Ы положение ЗМ во времени по отношению к стро-
бирующей последовательности. В соответствии с диаграммой,
поясняющей принцип действия метода СИП (рис. 3.15), At=to/2n-1..
В данном методе после кодовой комбинации 5г-, фиксирующей ЗМ,
до следующей кодовой комбинации 5г+1 передаются символы
подтверждения С, значение которых, как при методе наложения,
совпадает со знаком передаваемого единичного элемента. Это дает
возможность отмечать ЗМ стартовым символом, знак которого
противоположен ранее переданным символам подтверждения. В
результате этого стартовый символ А содержит информацию о
возникновении перехода в сигнале и о направлении этого перехо-
49
да. Величину относительных краевых искажений можно найти
следующим образом: 6=t^(tu-2n-1). Коэффициент использования
дискретного канала при методе 'СИП в 2п~1 раза выше, чем при
методе наложения. Как показали исследования, процесс размно-
*п
CbL
а)
I 1 I I 1 I 1 I 1 1 I М 1 1 1 1 1
6)
р ^ Рис. 3.15. Временные ди-
J0 t аграммы сигналов при
I I I I I I I I I I I I I I I I I i i методе скользящего ин-
' ' м м м м м i м > м i > декса с подтверждением:
* JJJJ 1^Ц^ллЩ^|д]^л,Цл^1 I I I 1 I [лдллл I » последовательность; в —
У S S S S S S S S
закодированный методом
СИП сигнал; г
—принятый сигнал
жения ошибок при методе СИП возникает при сбое символов
подтверждения или стартовых символов и носит сложный
характер. Метод СИП находит широкое применение в аппаратуре для
магистральных связей.
3.4. ПРИНЦИПЫ ПОСТРОЕНИЯ МНОГОКАНАЛЬНЫХ СПДИ
В тех случаях, когда производительность источника
информации значительно меньше пропускной способности канала, для
улучшения использования последнего с целью повышения
экономичности системы производится одновременная передача
сообщения от нескольких источников, предназначенная в общем случае
разным получателям. Методы, на основе которых построены
многоканальные системы передачи, можно разделить на три группы:
схемное разделение; разделение по параметру сигнала; разделение
по адресу. К методам первой группы следует отнести
пространственное разделение, при котором каналы образуются в разных
физических цепях одной или разных линий связи. Другой метод
первой группы разделения — дифференциальный, основан на
применении развязывающих 2/г-полюсников, обладающих следующим
свойством: при включении источника энергии к одной из пар-
полюсов токи, возникающие в ветвях схемы, создают
отличающуюся от нуля разность потенциалов только в какой-либо одной паре
других полюсов. Цепи, образуемые с помощью развязывающих
2/г-полюсников, в отличие от физических цепей, называют
искусственными. К таким цепям относятся цепи типа «два провода —
земля» (пикаровские), «два провода — два провода» (фантомные)
и др. Дифференциальным методом можно реализовать
сравнительно небольшое число искусственных цепей (каналов).
Методы второй группы основаны на том, что сигналы
отдельных каналов в передающей части системы наделяются
некоторыми, заранее обусловленными признаками селекции, которые
позволяют выделить на приеме сигналы отдельных каналов из
группового сигнала. Признаками селекции могут быть амплитуда, часто-
50
та или фаза синусоидального переносчика и амплитуда, частота
следования, ширина, фаза, временное положение или форма
дискретного переносчика. При построении многоканальных систем
передачи дискретной информации на основе способов второй группы
используются в основном аддитивные методы формирования
групповых сигналов, при которых последние получаются
суммированием канальных сигналов. К неаддитивным, так называемым
комбинационным, методам разделения относят методы, в которых
разделение сигналов основывается на различии в комбинациях
сигналов разных каналов.
Методы третьей группы основаны на добавлении к сообщениям
разных источников или частям этих сообщений специальных
кодовых групп-адресов, позволяющих на приеме выделять
сообщения разных источников. Следует отметить некоторую условность
принятой классификации методов разделения. Во-первых,
пространство можно рассматривать как признак селекции наряду с
другими вышеуказанными признаками. Во-вторых, все
многоканальные системы передачи обеспечивают доставку информации
определенному получателю-адресату, т. е. являются адресными:
при пространственном разделении передача по адресу
обеспечивается разносом каналов в пространстве (разные физические цепи
или разные линии); при синхронном временном разделении
адресом служит фиксированный временной интервал, занимаемый
сигналами данного канала; при частотном разделении адресом
является определенная полоса частот, отведенная для сигналов
данного канала. Таким образом, вышеперечисленные системы
разделения также можно рассматривать :как адресные, но адрес в них
присутствует как бы иеявно. В системах третьей группы сигналы
разных каналов могут иметь взаимно перекрывающиеся частотные
спектры и временные интервалы, в связи с чем требуется наличие
явно выраженного адреса обычно в виде специальной кодовой
комбинации.
Увеличение числа методов разделения достигается
использованием комбинаций признаков селекции второй группы и
сочетанием методов разных групп. Из многочисленных методов разделения
сигналов наибольшее применение в многоканальных системах
ПДИ получили пять: пространственный, временной (синхронный),
частотный, комбинационный и адресный, а также комбинации этих
методов (рис. 3.16). При частотном разделении (ЧР) полоса
частот группового канала разделяется на несколько более узких
полос, каждая из которых используется для образования отдельного
канала (рис. 3.17а). Передача каждого сигнала по каналу
осуществляется все время, и все сигналы смешиваются. При
временном разделении (ВР) групповой канал используется поочередно
через регулярные интервалы времени для передачи сообщений от
различных источников информации (рис. 3.176). Системы
временного разделения, в которых под канал для каждого источника
информации отводится постоянный интервал времени, получили
название систем синхронного временного разделения СВР. При СВР
51
осуществляются циклическое сканирование источников
информации, считывание единичных элементов или символов и
последующее их перемешивание в единый поток группового канала (рис.
3.18а). В связи с тем, что обычно источники дискретной
информации работают нерегулярно (активные периоды составляют менее
Защитные
и i интервалы времени
а)
Рис. 3.16. Методы
разделения сигналов в
СПДИ
Рис. 3.17. Разделение
каналов по частоте (а),
времени (б)
10%, а иногда и менее 1% времени), в групповом канала СВР
остаются свободные отрезки времени (рис. 3.186).
Аналогичное недоиспользование пропускной способности
группового канала имеет место и в многоканальных системах с ЧР в
те периоды времени, когда не производится передача информации
по отдельным каналам. Повысить полезное использование про-
1-й. цикл
2-й цикл
Источника
информации
0 1 234
Условные- обозначений:
| i \-свод~одные птрвзки времени
ШЛ-данные Ш-ь
Щ$гадрес. Mi
Рис. 3.18. Временные диаграммы систем с ВР (а), СВР (б),
АВР (в)
52
пускной способности группового канала при ВР можно путем
выделения времени для передачи информации только тем
источникам информации, которые в данный момент находятся в активном
состоянии. Такая система деления получила название системы
асинхронного временного разделения — АВР (рис. 3.18в).
В системах СВР признаком, по которому сигналы отдельных
каналов различаются на приеме, является фиксированное
временное положение отдельных каналов в групповом канале. Поскольку
в системах АВР этим признаком воспользоваться нельзя,
приходится вводить в информацию, передаваемую по каждому из
каналов, специальный отличительный признак-адрес. Принцип
действия простейшей системы передачи с АВР иллюстрируется рис. 3.19,
где ИИ\—ИИ4 — источники информации, К\—Ка — кодеры, Дх—
Да — декодеры, М — устройство временного объединения — муль-
типлексер, Дм — устройство временного разделения — демульти-
плексер, ГрК — групповой канал, Икх — #/с4 — индивидуальные
каналы. При обнаружении в результате непрерывного
сканирования изменения ЗМ в канале от ИИ\ кодер К% вырабатывает
определенную кодовую комбинацию — адрес, соответствующий номеру
данного Ик{. Адреса
индивидуальных каналов К через (^)ИК7 П~"
ГрК
Дм
Ij^jJ—71 I kjriii
\к. V N л.
\Дз\—Цмр
—I ***г\
4*J—-Лпу
мультиплексер М
последовательно подаются в ГрК и на
приемном конце демульти-
плексером ДМ распределя- ^^щ г
ются по адресам к декоде- vjjjj/-—[*>
рам Д. Последние после
получения адресов вырабаты- ^^—["^"
вают значащие моменты и
направляют их В Ик ПОЛу- Рис- &19. Структурная схема системы АВР
чателей информации.
Недостатком многоканальных систем с АВР и чередованием битов или
ЗМ является необходимость использования больших адресов,
передаваемых с каждым ЗМ.
Точность, с которой кодер К фиксирует ЗМ в Я/с,
регламентируется скоростью передачи информации в ГрК.-Чем меньше эта
скорость, тем больше может быть временной интервал между ЗМ
и ближайшим сканирующим импульсом, т. е. тем большие
краевые искажения сигнала могут возникнуть за счет сканирования.
Аналогичные причины могут приводить к возникновению краевых
искажений в Д.
Весьма распространенным видом комбинационного способа
является многократная модуляция, при которой модулируемый
параметр может принимать больше двух значений. Наибольшее
применение многократные методы нашли при относительной фазовой
модуляции, где каждой комбинации единичных элементов,
передаваемых по отдельным каналам, ставится в соответствие
определенное изменение фазы несущей частоты. При передаче по N
каналам двоичных единичных элементов общее число их комбина-
58
ций равно 2^> следовательно, необходимо иметь 2^ значений
фазовых сдвигов несущей частоты. Поскольку фазовые сдвиги
соседних единична элементов выбирают кратными некоторому
минимальному угЛУ» то Афтгп = 2я/2^. Таким образом, при наиболее
распространенных дву- и трехкратных ОФМ (ДОФМ и ТОФМ)
Дф2_я/2. д<рз=я/4. Правило кодирования при ДОФМ
иллюстрирует табл. 3.1 (Рекомендация V.26' МККТТ).
Символ 1-го каИала
Символ 2-<го каНала
Разность фаз
Дф = фп—фтг-1
0
0
я
~~4~
0
1
4
Та
1
0
7я
4
блица 3.1
1
1
5я
4
Из привеДенного следует, что модемы ДОФМ реализуют
кодирование со значностью кода i/?i=4, а ТОФМ — 7?2 = 8.
При ДОФ^ для пеРеДачи информации по первому двоичному
каналу исполь3Уются> например, фазовые сдвиги я/2 и Зя/2, а по
второму двои*11101^ каналУ 0 и я, что иллюстрируются векторными
диаграммами Рис* 3-20. (сплошными линиями показаны фазовые
положения взоров отдельных каналов, а пунктиром — фазовые
положения векторов при совместной работе двух каналов). Таким
образом, люб0** комбинации единичных элементов в каждом из
двоичных каНаЛОВ соответствует определенный сдвиг по фазе.
Демодулятор Д0ФМ устроен так, что при сдвиге фаз между пре-
180-
Г
/
225*'
J
2-тгровадный. нашил тч
45°
2-й канал
^0
J
--Vj7J"
270°
0,3 0,981,18 1,35 WW
a) '•
2-npoВодный, канал 14
Канал fl/J
1-й канал
Рис 3 20 Фазовая диаграмма
'сигналов ДОФМ
Рис 3$t- Распределение
частит ' п двухпроводном канале
ТЧ для Модема-200 (а) и Мо-
14 ДЛ дема-1200 (б)
О ЦЛШЩй U 1,7 2,3 3,4
4 б)
54
дыдущим и последующим единичными элементами на 45° на
выходах обоих каналов получаются нули, при Аф=225° — единицы,
при Аф=135° на выходе первого канала — нуль, второго —
единица и при А<р=315° на выходе первого канала — единица, а
второго — нуль. При ДОФМ на той же скорости модуляции, что и
при ОФМ, обеспечивается вдвое большая эффективная скорость
передачи, поскольку каждое фазовое состояние соответствует не
одному биту информации (как при ОФМ), а двум битам (по
одному в каждом канале).
Аналогично ДОФМ может быть построена трехкратная
относительная фазовая модуляция (ТОФМ). При этом снижается
помехозащищенность по сравнению с ДОФМ и сильно усложняется
оборудование. Поэтому для увеличения удельных скоростей
передачи свыше до 3—4 бит/Гц совместно используются амплитудная
и фазовая модуляции.
3.5. УСТРОЙСТВА ПРЕОБРАЗОВАНИЯ СИГНАЛОВ
Устройства преобразования сигнален (УПС) делятся на одно- и
многоканальные. К одноканальным УПС относятся модемы,
входящие в состав аппаратуры передачи данных. Модемы различают по
скорости передачи, типу сети и виду сигнала. Низкоскоростной
Модем-200 согласно Рекомендации V.21 МККТТ (ГОСТ 20852—75)
обеспечивает ПД асинхронным и синхронным способами по
коммутируемым и некоммутируемым двух- и четырехпроводным
каналам ТЧ и физическим цепям со скоростями до 200 бит/с. В нем
используется двухпозиционная ЧМ с характеристическими
частотами, показанными на рис. 3.21а. Среднескоростной Модем-1200
обеспечивает передачу данных синхронным или асинхронным
способом со скоростями 600 и 1200 бит/с по каналам ТЧ
(коммутируемым и некоммутируемым). Он может содержать обратный
канал, скорость модуляции в котором равна 75 бит/с. В этом
модеме используется ЧМ с характеристическими частотами,
показанными на рис. 3.216. Модемы 200 и 1200 имеют с каналом связи
стык С1, а с оконечным оборудованием данных (ООД) i— стык
С2. В соответствии с Рекомендацией V.24 стык С2 содержит цепи
обшего применения (ЦС-100) и цепи для взаимодействия с
устройством автоматического вызова УАВ (ГОСТ 20768—75) >—
ЦС 200 (рис. 3.22).
оод тми.
\ средства,
сопрятения)
ЦС серии 100
ЦС серии 100
@
ЦС серии 200
АКД (падем)
Устройство }
автомат.
вызова
Канал связи
АКД
(модем)
Канал ПД
ООД
(абонентский,
пункт)
Рис. 3.22. Стыки АКД и ООД
55
Модем-2400 в соответствии с Рекомендациями V.26 и V.26 бис
предназначен для синхронной передачи данных по каналам ТЧ со
скоростями 1200 бит/с (метод модуляции ОФМ) и 2400 бит/с
(ДОФМ).
Модем-4800 в соответствии с Рекомендацией V.27 обеспечивает
синхронную ПД со скоростью 4800 бит/с по четырехпроводным
некоммутируемым каналам ТЧ. В модеме используется ТОФМ,
при которой фаза изменяется в зависимости от вида
последовательности из трех единичных элементов — трибита (табл. 3.2).
Трибит
Изменение фазы, град
001
0
000
45
010
90
011
135
in
180
Т
по
225
аблица 3.2
100
270
101
315
т-+
Модем-9600 в соответствии с Рекомендацией V.29 обеспечивает
синхронную ПД со скоростями 4800, 7200 и 9600 бит/с по
четырехпроводным некоммутируемым каналам ТЧ. В модеме применяется
16-позиционная амплитудно-фазовая модуляция (рис. 3.23).
Модем-48000 в соответствии с Рекомендациями V.35 и V.36
обеспечивает ПД по первичным широкополосным каналам (с
полосой частот 60—108 кГц) со скоростью 48 000 бит/с.
У ПС НЧ-4800, 9600 и 96000 пред-'
назначены для ПД по физическим
цепям (длиной 10—20 км)
соответственно со скоростями 4800, 9600,
96000 бит/с.
У ПС ТТ обеспечивает ПД по
коммутируемым и
некоммутируемым телеграфным каналам со
скоростью до 200 бит/с.
Многоканальные УПС
реализуются в виде аппаратуры для
магистральных, зоновых .и городских
телеграфных связей. Многоканальная
аппаратура системы передачи с
частотным разделением (ЧР),
работающая по каналу ТЧ, называется
аппаратурой тонального телеграфирования (ТТ), а аппаратура для
орга-низации телеграфных каналов в диапазоне частот, лежащих
выше канала ТЧ (3400—6000 Гц), — аппаратурой надтонального
телеграфирования. Основные характеристики аппаратуры этих
типов приведены в табл. 3.3.
Аппаратура ТТ-17П и ТТ-48 используется на магистральных
связях, ТНТ-6 и ТТ-12 — на зоновых. Наряду с аппаратурой с ЧР
используется многоканальная аппаратура с ВР (табл. 3.4).
56
Рис. 3.23. Фазовая диаграмма
сигналов Модема-9600
Таблица 3.3
Параметр
Тип модуляции и
расстояние между несущими
частотами, Гц
Число каналов в канале
ТЧ
Скорость модуляции, Бод
ТТ-17П
ЧМ 180
17
50—76
ТНТ-6
ЧМ 1<80
4—6
50—75
ТТ-48
ЧМ ISO, 240, 480
24, 12, 6
50, 100, 200
ТТ-12
ЧМ 120,240,4^0
©4, 12, 6
50, 100, 200
Аппаратура ЧВТ-2 применяется на магистральных связях. Ее
достоинством по сравнению с аппаратурой с ЧР является
большее число телеграфных каналов в одном канале ТЧ;
недостатком — «непрозрачность» каналов: аппаратура ЧВТ-2 рассчитана
только на стартстопную передачу кодом МТК-2, тогда как
аппаратура с ЧР имеет «прозрачные» каналы. Аппаратура ЧВТ-11
применяется на зоновых и городских связях; ТВУ-'12 и ДАТА —
на городских связях. На абонентских линиях городских сетей (на
участке от абонента AT или ГОС до АТС) применяется
устройство разделения абонентских линий УРАЛ, позволяющее по
двухпроводной физиче'ской цепи кабеля осуществлять одновременно
телефонные переговоры и телеграфную передачу (50—200 бит).
В устройстве УРАЛ применяется амплитудная модуляция,
несущая частота 28 кГц используется в направлении абонент — АТС,
64 кГц — в обратном направлении.
Таблица 3.4
Параметр
Тип модуляции
Число каналов
Скорость
модуляции, Бод
Иапользуемые
каналы
Групповая
скорость передачи
в канале, бит/с
ТВУ-12
Амилитудно-
импульсная
12
До 200
Четырехпровод-
ная физическая
цепь кабеля
65 000
ДАТА 3/6
Метод
наложения
3/54-1
До 200
Двухпроводная
физическая
цепь кабеля
2400/4800
ЧВТ-2
Частотная
44/28
50/75
ТЧ
2400
чвт-п
Частотная
11(8) v
50(75)
ТЧ или
двухпроводная
физическая цепь
кабеля
600
ГЛАВА 4
Методы фазирования в системах ПДИ и их реализация
+
4.1. ЗАДАЧИ СИНХРОНИЗАЦИИ И ФАЗИРОВАНИЯ
Две последовательности событий являются синхронными, если
соответствующие события в них происходят одновременно.
Синхронизация есть процесс установления и поддержания
синхронного состояния. В системах связи одна последовательность событий
имеет место в передатчике, а другая — в приемнике. Хотя эти
последовательности и сдвинуты относительно друг друга на
постоянное время (время прохождения сигнала), их принято считать
синхронными, если одноименные события в последовательностях
происходят через равные промежутки времени. При передаче
дискретных сообщений сигналы представляют собой последовательности
элементов определенной длины. Поэтому необходима
синхронизация отсчетов времени в передатчике и приемнике. Очень часто
отсчеты времени называют тактами, а синхронизацию отсчетов
времени — тактовой синхронизацией. На приемном конце
переданное сообщение восстанавливается путем обработки каждого
элемента сообщения решающим устройством (устройством
регистрации элементов). Синхронная последовательность отсчетов
времени, из которой формируются импульсы опроса решающего
устройства, должна находиться в определенном фазовом отношении к
принимаемым единичным элементам дискретного сообщения.
Расстояние между импульсами опроса- зависит от способа
обработки дискретных сообщений. Известны два способа обработки
кодовых последовательностей элементов (кодовых комбинаций,
блоков) — обработка в целом и поэлементная обработка. В
первом случае кодовая комбинация определяется как единый
сложный сигнал. Если кодовая комбинация содержит п единичных
элементов длительностью т0, то опросные импульсы должны
следовать с интервалами /гто и совпадать с началом (концом) каждой
принимаемой кодовой комбинации. Во втором случае опросные
импульсы должны следовать с интервалом т0 и находиться в
определенном фазовом отношении к принимаемым единичным
элементам, обеспечивающим наибольшую помехозащищенность приема.
После приема решения о каждом элементе кодовой комбинации
принимается решение о букве, знаке и т. д., соответствующих
данной кодовой комбинации. И в этом случае в приемнике должны
существовать синхросигналы, отмечающие начало и конец
кодовой комбинации. В связи с изложенным различают две стороны
синхронизма: по элементам и по циклам (кодовым комбинациям,
блокам).
Синхронизм по элементам, или синхронизация, есть процесс
установления соответствия между значащими моментами единич-
58
ных элементов на передаче и приеме. Фазирование по циклам, или
синхронизация по циклам, есть процесс установления
соответствия между границами кодовых комбинаций на передаче и приеме.
В аппаратуре передачи дискретных сообщений синхронизацию
осуществляет устройство синхронизации (УС), а фазирование по
циклам i— устройство фазирования по циклам (УЦФ). Обычно
функционирование этих устройств тесно связано.
Необходимость синхронизации возникает также и при додетек-
торной обработке сигнала. В этом случае необходимо в точке
приема обеспечить генерирование высокочастотного сигнала,
частота которого в любой момент времени равна частоте несущей
(или промежуточной частоте) принимаемого сигнала. При
когерентной обработке сигнала это равенство должно
выполняться с учетом фазы. Иными словами, в фазо-когёрентной системе, в
которой фаза несущей при демодуляции неизвестна, должны быть
синхронизированы принимаемая несущая и местная опорная
несущая. Синхронизация несущей является частным случаем
синхронизации отсчетов времени. Особенно наглядно необходимость
синхронизации и фазирования по циклам можно показать на
примере синхронной системы передачи дискретных сообщений (рис. 4.1),
Рис. 4.1. Схема, поясняющая принцип синхронной
связи
Кодовая комбинация, состоящая из пяти элементов каждый
длительностью то, образуется непрерывно работающим передающим
распределителем станции за один оборот. Если щетки
распределителей станций А и Б имеют одинаковую угловую скорость
(распределители синхронизированы) и одинаковую фазу (осуществлено
цикловое фазирование), то к линии связи в каждый момент
времени подключаются одноименные контакты распределителей.
Информация от Клх попадает в ЭМ\, от Кл2 — в ЭМ2 и т. д.
Нарушение фазирования по циклам приведет к неправильному приему
всей информации, так как к линии будут подключены
разноименные контакты.
59
4.2. ОБНАРУЖЕНИЕ ФАЗОВЫХ РАССОГЛАСОВАНИЙ
И ПОДСТРОЙКА ФАЗЫ
Фазирование по элементам (синхронизация) передающего и
приемного распределителей в системах ПДИ может
поддерживаться за счет стабильности генераторов привода
распределителей. Однако современные высокостабильные генераторы не могут
обеспечить достаточной степени синхронизации. Покажем это на
примере. Обозначим коэффициент нестабильности генератора
k=\M\if, (4.1);
где / — номинальное значение частоты абсолютно стабильного
генератора; А/ — отклонение частоты генератора от номинального
значения в реальных условиях. Колебания такого генератора
сместятся на один период по отношению к колебаниям с номинальной
частотой за время
<i=l/A/. (4.2)
Из (4.1) и (4.2) получим t\=\l/kf. Так как частота задающего
генератора обычно численно равна скорости модуляции В (в бо-
дах) до ty = l/kB. Учитывая, что в самом неблагоприятном случае
частоты генераторов передатчика и приемника могут отклониться
от номинального значения в противоположные стороны, получаем
/'i=4/2 kB.
Обозначим через 8Д0П допустимую погрешность синфазности,
под которой будем понимать максимальное расхождение двух
генераторов по фазе в процентах от длительности единичного
элемента то. Тогда время сохранения синфазности
Т = вдоп/200кВ. (4.3)
В табл. 4.1 приведены значения времени сохранения
синфазности при различных к и В. Погрешность синфазности, при которой
еще обеспечивается работа синхронных систем связи, еДОп~400/о.
Из анализа таблицы очевидно, что требуются меры по
поддержанию точности синхронизации, т. е. меры по автоматической
подстройке частот генераторов.
Таблица 4.1
Скорость моду-
. ляции, Бод
50
,1400
Время сохранения синфазности
при коэффициенте нестабильности
10-6
6 один 40 с
8,33 с
| ю-6
1 ч 6 мин 40 с
1 мин 23 с
В большинстве существующих синхронных систем ПДИ для
подстройки частот генераторов используют метод фазовой
автоподстройки частоты (ФАПЧ), сущность которого состоит в срав-
60
нении фазы принимаемой последовательности сигналов с фазой
сигналов генератора тактовой последовательности приемника
(местного генератора). При расхождении частот указанных
последовательностей изменяются и их фазовые соотношения.
Расхождение фаз обнаруживается в фазовом дискриминаторе ФД, на
выходе которого возникает напряжение, пропорциональное величине
расхождения фаз. Это напряжение через инерционный элемент
воздействует на управляющее устройство УУ местного генератора,
изменяя его частоту в требуемую сторону. Инерционный элемент
усредняет напряжение на выходе ФД за относительно
продолжительное время, так как в противном случае любое случайное
отклонение фазы может вызвать ложное регулирование местного
генератора.
Упрощенная функциональная схема устройства обнаружения
расхождения фаз и подстройки частоты приведена на рис. 4.2, а
Вход
О—^
в
ъ
] С
№К0-#^
СднЫФНЧ
УУ
а)
I П I
б)
JZL
6)
ы и
г)
ь
Рис. 4.2. Упрощенная
функциональная схема устройства
обнаружения расхождения фаз
Г^ШеТТ.
д)
®
t
временная диаграмма его
работы — на рис. 4.3. Сигнал,
поступающий на вход приемника (рис.
4.3а), и сигнал местного
генератора (рис. 4.36) подают на вход
фазового дискриминатора, который
выполнен на логических схемах
равнозначности. На одну из этих
схем сигналы местного генератора поступают через инвертор.
С выхода схем равнозначности инвертированные относительно
ДРуг друга сигналы (рис. 4.3в, г) поступают на сумматор, где они
складываются (рис. 4.36). Если поступающие из линии сигналы и
сигналы местного генератора совпадают по частоте, а их фазы
е)
Рис. 4.3. Временная диаграмма
работы схемы 4.2:
а — последовательность
элементов входящего сигнала; б —
последовательность импульсов
местного генератора; в —
импульсы совпадения; г —
импульсы несовпадения; д —
суммарный сигнал (при
совпадении частот); е — суммарный
сигнал (при несовпадении
частот)
61
сдвинуты на 90° (что соответствует синхронному и синфазному
режимам работы), то постоянная составляющая на выходе
сумматора (рис. 4.3d) практически равна нулю. При изменении одной из
сравниваемых частот или при изменении фазового соотношения
изменяется постоянная составляющая сигнала на выходе
сумматора. Например, при увеличении частоты местного генератора (на
рис. 4.36 показано пунктиром) увеличивается длительность
положительных сигналов на выходе сумматора (рис. 4.3е). Постоянная
составляющая становится положительной. При уменьшении
частоты местного генератора она становится отрицательной.
Постоянная составляющая импульсной последовательности,
выделяемая инерционным элементом — фильтром нижних частот,
воздействует через управляющее устройство на генератор,
изменяя его частоту в требуемую сторону. В качестве управляющего
устройства в подстраиваемом генераторе можно использовать
стабилитроны, динамическая емкость которых зависит от величины
приложенного напряжения. Частота местного генератора
изменяется при изменении емкости стабилитрона, которая вносится в
колебательный контур генератора. Рассмотренная схема служит
лишь иллюстрацией к методу ФАПЧ и, конечно, не является
единственно возможной.
Широкое распространение получила схема, представленная на
рис. 4.4. Она функционирует следующим образом.
Информационные сигналы проходят дифференциальную цепочку ДЦ, а затем
ФД
Вход]
1 гп
ЛИ ЫВьтр
о
1р
V
Синхросигналы
4±
Мвстный
генератор
"~1
№
ИЗ
Рис. 4.4. Упрощенная схема обнаружения расхождения
фаз с импульсным фазовым детектором
выпрямляются (точки Б и В). Полученные короткие импульсы,
соответствующие моментам смены полярности в принимаемом
сигнале, подаются на две схемы совпадения Hi и И2. На вторые
входы этих схем подаются прямоугольные тактовые колебания от
местного задающего генератора (на одну из схем И — через
инвертор). В этих колебаниях переходы от отрицательной
полярности к положительной должны совпадать с короткими импульсами
в точке В. Если местные колебания отстают по фазе от
принимаемого сигнала (рис. 4.5, диаграмма Г), то короткие импульсы
пройдут на выход одной схемы совпадения, например И^ Если
местные колебания опережают по фазе, то короткие импульсы
62
пройдут на выход другой схемы — И2. Эти короткие импульсы
образуют сигнал [/р.ф, характеризующий знак расхождения фаз,
который управляет работой триггера Т. Сигналы с выхода
триггера Т через инерционный элемент ИЭ воздействуют на местный
генератор, изменяя его фазу (частоту) в требуемую сторону.
В высокоскоростных системах ПД часто используют
резонансные устройства синхронизации, в которых последовательность от-
счетных импульсов (тактовые импульсы) г
формируется из последовательности ин- -i i—i i—i t
формационных сигналов путем выделения I I I I L ""
основной частоты сигнала с помощью вы- ^ А А *
сокоизбирательных узкополосных филь- "^ ' '
тров. д А А А А А
{Местный генератор отстает
ТДЛДГШГ '
\Местный генератор опережает
АПЛЛЛЯ»
Рис. 4.5. Временные
диаграммы работы устройства /v
, с импульсным ФД (для
точек А, Б, В, Г схемы рис.
4.4)
4.3. ОПРЕДЕЛЕНИЕ СИНХРОННОГО И СТАРТСТОПНОГО
СПОСОБОВ ФАЗИРОВАНИЯ
Все способы фазирования по циклам можно разбить на две
группы:
безмаркерные, при которых фазирование по циклам
осуществляется только за счет передачи фазовой комбинации во время
отсутствия передачи информации;
маркерные, при которых во время передачи информации по
каналу передаются специальные сигналы («маркеры») для
фазирования по циклам.
Кроме того, способы фазирования по циклам можно разделить
на две группы по другому признаку:
синхронные, при которых циклы заранее определенной длины
следуют непрерывно друг за другом, следовательно, в приемнике,
сфазированном по циклам, заранее известны моменты начала и
конца принимаемых циклов;
стартстопные, при которых после окончания одного цикла
последующий цикл может начаться в любой момент времени. В
общем случае длина цикла тоже может быть произвольной,
следовательно, в приемнике заранее неизвестны моменты начала и конца
принимаемых циклов.
При синхронном методе передачи (см. рис. 4.1) единичные
интервалы одинаковы и составляют т0. Следовательно, единичные
элементы передаются через одинаковые промежутки времени т0,
поэтому на приемной станции имеется возможность предсказывать
время прихода наиболее устойчивой части единичного элемента,
•это позволяет увеличить вероятность правильной регистрации
единичного элемента. При синхронном способе передачи распре-
63
делители после установления связи работают непрерывно вне
зависимости от того, передается по линии связи полезная
информация или нет. При установлении соединения между синхронными
передатчиками и приемниками требуется определенное время для
установления синхронности и синфазности.
При стартстопном способе передачи перед началом передачи
сообщения передается сигнал (единичный элемент или
комбинация) начала передачи i— «старт», а после окончания сигнал
конца — «стоп». Промежуток между этими сигналами заполняется
информационными единичными элементами, следующими друг за
другом через фиксированные интервалы времени (значащие
интервалы) .
Синхронизация между распределителями передатчика и
приемника в стартстопных системах поддерживается лишь в пределах
времени, необходимого для передачи одного знака.
Распределитель приемника запускается под действием стартового элемента,
а останавливается под действием стопового элемента. Во время
нахождения распределителя приемника на «стопе» имеющиеся
расхождения скоростей и фаз распределителей приемника и
передатчика сводятся к нулю.
При стартстопном способе передача кодовых комбинаций
является асинхронной, так как каждая кодовая комбинация может
начинаться в любой момент времени после окончания ранее
переданной комбинации. Передача единичных элементов является
синхронной, что иллюстрируется на примере кода МТК-2 (рис. 4.6).
Сшрто-
Вый
элемент
Ь
[троирующие
♦ *
/
U
2
h
*
з
ro
импульсы
t
4
ч
*
s
*0
Информационные элементы
~7
Столо6ый\
элемент
< т*
Рис. 4.6. Стартстопный цикл
4 в 12 16 2D 24 R
Рис. 4.7. Зависимость РВос от
Как видно из рисунка, при стартстопной работе каждая кодовая
комбинация начинается со стартового (бестокового) элемента
сигнала, за которым следуют информационные элементы. Кодовая
комбинация завершается стоповым элементом (токовым),
имеющим большую длительность, чем другие элементы. В режиме
непрерывной передачи кодовых комбинаций неправильный прием
маркера (при синхронной передаче) либо элементов «старт»,
«стоп» (при стартстопной передаче) приведет к потере цикловой
фазы.
Процесс восстановления фазы носит случайный характер и
зависит от кодового рисунка последовательности. При
равновероятен
ном появлении всех кодовых комбинаций вероятность
восстановления фазирования по циклам иллюстрируется зависимостью
PBoc=f{R)y где R — число переданных кодовых комбинаций
(рис. 4.7). Видно, ,что Рвос — 0>9 для R — 8. Это значит, что время
восстановления цикловой фазы с вероятностью 0,9 составит 60то.
Все кодовые комбинации, принятые в этом промежутке, будут
зафиксированы неверно. Для повышения помехоустойчивости
системы фазирования маркерам часто придают более сложную форму
(например, форму кодовых комбинаций длиной 2—5 единичных
элементов). В синхронных системах из-за инерционности
фазирующих устройств подобные явления не наблюдаются, что
обеспечивает лучшую помехоустойчивость.
Преимуществами стартстопного способа фазирования по
циклам перед синхронным являются: немедленное вхождение в фазу
(не требуется время на фазирование циклов при установлении
соединения или после кратковременного перерыва связи); моменты
начала подачи блоков могут быть произвольными; длина блоков
также может быть произвольной. Недостатками стартстопного
способа фазирования по циклам по сравнению с синхронным
являются: меньшая пропускная способность системы связи
вследствие того, что маркеры (стартовые и стоповые сигналы)
передаются с каждым блоком информации, причем их приходится выбирать
довольно длинными для уверенной дешифрации; меньшая
помехоустойчивость вследствие того, что искажения стартового и
стопового сигналов могут привести к полному срыву приема длинного
блока информации. Стартстопный способ фазирования нашел
широкое применение в телеграфии, где благодаря сравнительно
дешевым каналам и невысоким (по сравнению с передачей данных)
требованиям к верности передачи определяющим является
требование к простоте и низкой стоимости оконечного оборудования,
рассчитанного на работу в коммутируемых сетях. При передаче
данных стартстопный способ передачи используется только для
работы на низких скоростях (до 300 Бод). При работе со
средними и высокими скоростями передача данных осуществляется
только синхронным способом.
4.4. СТРУКТУРНЫЕ СХЕМЫ УСТРОЙСТВ СИНХРОНИЗАЦИИ
Устройство синхронизации с пилот-сигналами. Сущность
синхронизации пилот-сигналами состоит в том, что тактовая частота
передающего распределителя подается на приемный
распределитель по отдельному каналу связи. Преимуществом этого способа
является его простота. Однако канал для передачи тактовых
сигналов занимает такую же полосу частот, что и канал для
передачи информационных сигналов. Поэтому использование способа
экономично при большом числе (более 8—10) информационных
каналов, идущих в одном направлении и работающих от одного и
того же привода (задающего генератора).
3—101 65
Резонансные устройства синхронизации. В резонансных
устройствах синхронизации (рис. 4.8) синхроимпульсы (тактовые
импульсы) выделяются непосредственно из информационной
последовательности элементов с помощью узкополосных фильтров, как
правило высокоизбирательных резонансных контуров,
настроенных на частоту /0=1/т0. Однако в спектре двухполярных
информационных сигналов такой составляющей нет. В этих условиях для
селекции синхросигнала необходимо осуществить нелинейное
преобразование, которое сводится к тому, что сигналы
информационной последовательности (рис. 4.8а) дифференцируют, выпрямляют
(рис. 4.86) и формируют в прямоугольные сигналы длительностью
то/2 (рис. 4.8в). В этой последовательности содержится частота
«^H^ZftZtetetS
ыц=*
Инф.
сигнал
а)
Ш " J U 111:*
В
Рис. 4.8. Структурная схема резонансного уст- П П Г] П П П £
ройства синхронизации и временные диаграм- q
мы (для точек А, Б, В, Г, Д, Е и Ж схемы)
fo= 1/то. Напряжение с частотой f0 выде- A/WWW"
ляется резонансным контуром (рис. 4,8г) ПППППППП *
п формируется усилителем-ограничите- ^UUUULIULI
дем (рис. 4.8д). Далее колебания прямо- | | | | | | | | t
угольной формы вновь дифференцируют Е
и формирующим устройством преобразу- I I I | I ] I I *
ют в две последовательности тактовых ^ ~ ^"
сигналов (рис. 4.8е, ж), сдвинутых отно-. Ф
сительно друг друга на то/2. Наличие двух (а не одной) тактовых
последовательностей необходимо для обеспечения работы
устройств регистрации и регенерации единичных элементов.
Основным узлом, обеспечивающим работу УС, является
резонансный контур. Амплитуда напряжения на его выходе зависит
от частоты появления коротких импульсов, соответствующих
значащим моментам (см. рис. 4.86) информационной
последовательности, т. е. от ее кодового рисунка. Наибольшее напряжение
возникает при приеме комбинации 1 : 1. Изменение амплитуды
гармонического колебания приводит к некоторому сдвигу фазы тактовых
импульсов, которое в значительной степени устраняется с по-
\?ощью усилителя-ограничителя при преобразовании
гармонического колебания в прямоугольные импульсы. Рассмотрим работу
резонансного контура при отсутствии искажений элементов
принимаемой последовательности. Каждый импульс (см. рис. 4.8в),
действующий на входе, вызывает появление на выходе
резонансного контура затухающего гармонического колебания,
совпадающего с частотой настройки контура. Если импульсы действуют с
интервалами, которые меньше времени затухания колебаний
контура, то амплитуда на выходе контура растет до установившегося
66
значения. В процессе установления амплитуды устанавливается и
фаза выходного сигнала.
Прекращение поступления импульсов на вход контура вызовет
затухание колебаний на его выходе. Через время /с колебания
затухнут полностью, что приведет к прекращению работы
аппаратуры в целом. Время затухания колебаний в контуре зависит от
величины добротности контура Q. Для увеличения времени
затухания добротность следует увеличивать. При этом увеличивается
точность фазирования, но с другой стороны увеличивается время
синхронизации и повышаются требования к стабильности
элементов контура. Исходя из этих противоречивых требований обычно
выбирают добротность контура Q = 80-M20.
Таким образом, недостатком резонансных УС является то, что
даже короткие перерывы связи приводят к потере синхронизма.
Кроме того, резонансные УС предъявляют дополнительные
требования к кодовому рисунку информационной последовательности,
которая не может (без потери синхронизма) содержать длинные
последовательности элементов одного и того же знака. Для
избежания случаев потери синхронизма при приеме информационных
сигналов одного и того же знака в аппаратуре ПДИ в некоторых
случаях устанавливают специальные устройства (скремблеры).
Последние формируют кодовый рисунок сообщения на передаче
таким образом, чтобы в нем не встречались подобные сочетания
последовательности единичных элементов. Обратное
преобразование на приемном конце осуществляется дескремблерами.
Заметим, что недостаток (требования к кодовому рисунку)
присущ не только резонансным УС, но и другим УС. Однако
наиболее ярко он выражен именно в резонансных УС.
Преимущество резонансных УС состоит в простоте их
реализации, что особенно заметно в высокоскоростных системах передачи
дискретной информации. Поэтому такие УС нашли широкое
применение в цифровых системах передачи речи с ИКМ.
Устройства синхронизации с непосредственным воздействием
на местный генератор. Эти устройства можно разделить на два
вида:
устройства с релейным управлением, в которых УУ изменяет
управляющий сигнал £/уцР время от времени; в промежутках
управляющий сигнал остается постоянным и не зависит от величины
рассогласования фаз синхроимпульсов и информационных
сигналов;
устройства с плавным управлением, в которых УУ непрерывно
действует на генератор, а управляющий сигнал Uyap
пропорционален величине рассогласования фаз.
Функциональная схема УС с релейным управлением приведена
на'рис. 4.9. Особенностью УС с релейным управлением является
управляющее устройство УУ, которое может иметь ограниченное
количество положений. В данном случае оно двухпозиционное. В
зависимости от того, какая из схем — Hi или И2 — выдала
импульс, триггер Т установится в то или иное положение. Реле, уп-
3* 67
равляемое триггером, подключит к резонансному контуру
генератора конденсатор С{ или катушку индуктивности L\ (в результате
этих переключений образуется управляющий сигнал £/упР).
Генератор будет выдавать соответственно нижнюю или верхнюю
частоту (/н или /в). Номинальное значение частоты /н должно быть не-
Вход\
Г
<РД ■
"~1
А I
\ДЦ[^\Выпр.
IE
рЕЬ-fl
bU
Синхросигналы
Местный
генератор
ь-
'Ш
ГГЙ
Рис. 4.9. Функциональная
схема УС с релейным
управлением
М
иупр
\ZA,
■м-k
UZJL-U
сколько ниже, а частоты /в — несколько выше номинального
значения тактовой частоты принимаемых единичных элементов /т. С
учетом возможной нестабильности генераторов передатчика и
приемника обычно выбирают следующую девиацию частоты:
(/в—/н)/2« (2—3)fT(*nep+ftnp), где йпер, £Пр — коэффициенты
нестабильности генераторов передатчика и приемника
соответственно. Таким образом, зависимость частоты от величины
расхождения фаз будет иметь ступенчатый характер.
Рассмотренное двухпозиционное устройство имеет следующий
недостаток: во время перерыва связи или длительной передачи
информационных элементов одного и того же знака расхождения по
фазе будут непрерывно возрастать, так как частота генератора
заведомо отличается от средней частоты на величину девиации.
Устройства с плавным управлением отличаются от устройств с
релейным управлением лишь управляющим устройством,
обеспечивающим плавное изменение частоты генератора в зависимости
от величины расхождения фаз. Эта зависимость близка к
линейной. Для управления частотой генератора используют какой-либо
управляемый реактивный элемент, например варикап (устройство,
емкость которого зависит от величины приложенного напряжения).
Изменение частоты генератора (а следовательно, и фазы) во
времени будет иметь плавный характер. Это позволяет добиться
высокой точности поддержания синфазности. При правильно
подобранном инерционном элементе достигается точность ±(1—2)%
длительности единичного элемента. В этом состоит основное
преимущество УС с плавным управлением.
Общими недостатками всех устройств синхронизации с
непосредственным воздействием на генератор (по сравнению с
устройствами без непосредственного воздействия) являются
следующие: снижение стабильности генератора примерно в 10 раз вслед-
68
ствие воздействия на один из его параметров; невозможность
использования одного генератора для работы нескольких УС;
устройства синхронизации с непосредственным воздействием на
генератор применяются тогда, когда требуется простота схемы или
когда устройства без непосредственного воздействия на генератор
трудно реализовать, например при высоких скоростях модуляции.
Устройства синхронизации без непосредственного воздействия
на генератор. В устройствах синхронизации без непосредственного
воздействия на генератор фаза подстраивается в промежуточном
преобразователе ПП, через который проходит местное тактовое
колебание (генерируемая последовательность тактовых
импульсов). В качестве промежуточного преобразователя чаще всего
используется делитель частоты следования импульсов. Устройства
синхронизации с делителем частоты возможно реализовать
целиком на дискретных элементах, что упрощает их изготовление,
настройку и эксплуатацию. Часто такие устройства называют
устройствами с дискретным управлением (или дискретными
устройствами синхронизации). Принцип изменения фазы в процессе
деления частоты можно пояснить, пользуясь рис. 4.10а.
fT
fj
[г_
—>
fav= Щш
ФУ
—-*■
СДИИ
~w\
й) Управляющие
1 М 1 М 1 1 1 1 1 1 I 1 1 1 1 1 I I N 1 1 М $
I l 1 1 ^
Дополнительный л\ \ t
импульс и' \
111 м 11111 in 11111111111111 i
1 l *!-{-* 1 „
Исключенный я) i t
импульс \ i
1 1 II 1 1 1 1 1 1 M 1 1 1 1 I 1 1 1 1 1 1 II 1 t
J 1 -Л-Ь-М I _^
сигналы # *'
Рис. 4.10. К принципу изменения фазы в процессе деления частоты:
а — структурная схема деления частоты; б — нормальный процесс деления на
8; в — добавление импульса; г —исключение импульса
Генератор вырабатывает колебание высокой частоты, в т раз
большее тактовой частоты: f вч =tnfTi где т — коэффициент
деления делителя. Формирователь превращает синусоидальное
колебание в последовательность импульсов с частотой следования
/Вч- < Далее частота этой последовательности импульсов делится
на определенное число га, например, делителем в виде цепочки из
двоичных счетчиков. Процесс деления иллюстрируется временной
диаграммой, представленной на рис. 4.106. На рисунке
изображены исходная последовательность импульсов с частотой fB4 и
получаемая на выходе тактовая последовательность с частотой /т.
Коэффициент деления га = 8. В этом случае на выход выдается
каждый восьмой импульс входной последовательности импульсов.
Если на вход делителя подать дополнительный импульс через
схему добавления и исключения импульсов (СДИИ), то фаза
выходных импульсов (рис. 4.10в) сместится в сторону опережения
на величину, равную периоду колебаний генератора: Д/=1//вч .
69
Дополнительные импульсы не должны совпадать во времени с
импульсами высокочастотного генератора. Если один из импульсов,
подаваемых на делитель, исключить, то фаза выходных импульсов
сместится на ту же величину At в сторону отставания (рис. 4.Юг).
Таким образом, добавлением и исключением импульсов легко
изменять фазу тактовой последовательности в нужную сторону.
Устройство синхронизации с дискретным управлением
показано на рис. 4.11. На выходе генератора с формирователем образу-
П
Лрини-\
мпемые\
сигнал ы\
ЛИ
Г Н
УЛ
\Выпр.
u?h
[Такт частота f
\(синхроимпульсы)
PC
Ь
~~1
&-
УУ
Рис. 4.11. Функциональная схема устройства
синхронизации без непосредственного воздействия на
генератор
ется последовательность импульсов с частотой fB4 =2mfT. Затем
делитель на 2 образует две последовательности импульсов f вч =
= mfT, сдвинутые относительно друг друга на полтакта. Одна из
последовательностей подается через схему запрета в делитель
частоты на т. Полученная тактовая частота подается на фазовый
дискриминатор (на схемы Hi и И2 подаются тактовые
последовательности, сдвинутые относительно друг друга на полтакта).
При синфазности принимаемых сигналов и местных тактовых
колебаний импульсы на выходах фазового дискриминатора
отсутствуют. При расфазировке короткие импульсы появятся на
выходе схемы И{ или И2 в зависимости от знака расхождения фазы
(влияние реверсивного счетчика PC будет пояснено ниже; пока
будем считать, что он отсутствует). Если импульс появится на
выходе Иь то он откроет схему И3, которая пропустит один импульс
с выхода делителя на 2 на выход делителя на т. Этот импульс
будет расположен в середине между основными импульсами,
проходящими через схему запрета. Под действием этого
дополнительного импульса фаза тактовой последовательности сдвинется в
сторону опережения на один шаг At. Если импульс появится на
выходе схемы И2, схема запрета закроется и таким образом исклю-
чится один импульс на входе делителя. В результате фаза
тактовой последовательности сдвинется на один шаг At в сторону
отставания.
4.5. ПАРАМЕТРЫ УСТРОЙСТВ СИНХРОНИЗАЦИИ
И ИХ ВЛИЯНИЕ НА ХАРАКТЕРИСТИКИ СИСТЕМ ИДИ
При рассмотрении структурных схем УС предполагалось, что
единичные элементы входящей информационной
последовательности не искажены и измеренное расхождение фаз между
границами (значащими моментами) и синхроимпульсами достаточно
точно характеризует истинное рассогласование фаз. В реальных
условиях наблюдается смещение ЗМ от их идеального положения.
Эти смещения возникают под действием помех и других
искажающих факторов (скачков уровня, фазовых искажений и т. д.). Как
было показано (см. гл. 2), смещения ЗМ распределяются в
большинстве случаев по нормальному закону и даже в режиме син-
фазности приводят к корректированию фазы, поскольку часть
смещений б ЗМ будет совпадать при работе местного генератора
в режиме отставания, а другая часть при работе в режиме
опережения. Учитывая, что смещения б ЗМ в сторону опережения и
отставания равновероятны, влияние этих искажений можно
уменьшить, включив между дискриминатором и УУ усредняющий
(инерционный) элемент. Сигнал на выходе усредняющего элемента
появляется в том случае, если число смещений ЗМ в одну сторону
превысит число смещений в другую сторону. В устройстве
синхронизации без непосредственного воздействия на генератор роль
инерционного элемента выполняет реверсивный счетчик. Таким
образом, с помощью инерционного элемента можно уменьшить
случайную составляющую смещений ЗМ (краевых искажений).
Регулярная составляющая краевых искажений (преобладания)
может привести к ложному корректированию фазы в УС (ложной
синхронизации).
Устранить ложную синхронизацию можно путем перехода от
корректирования по всем ЗМ (двухполюсное корректирование) к
корректированию по части ЗМ (например, по ЗМ,
соответствующих переходам полярности в информационной последовательности
от нуля к единице или наоборот). Такое корректирование
называется однополюсным. Желательно, чтобы переход от
двухполюсного корректирования к однополюсному осуществлялся только при
появлении преобладаний в принимаемом сигнале.
Рассмотрим основные параметры УС и порядок их выбора с
учетом влияния УС на характеристики систем ПДИ на примере
УС без непосредственного воздействия на генератор.
Шаг коррекции фк — выраженное в долях единичного элемента смещение
фазы тактовых импульсов на выходе делителя при добавлении или исключении
одного импульса: фк=Д//то=1/т.
Коррекционный эффект —ак— величина, характеризующая увеличение
смещения фазы синхроимпульса (тактовых импульсов) в зависимости от величины
71
рассогласования фаз. Различают УС с постоянным и переменным коррекционны-
ми эффектами. В УС с постоянным ак фаза тактовых импульсов смещается за
каждый шаг корректирования на величину то/m независимо от величины
рассогласования фаз. В УС с переменным ак фаза тактовых импульсов за каждый
шаг корректирования смещается на акт0//л в зависимости от величины
фазового рассогласования. Коэффициент ак может принимать значения от 1 до г при
условии г<.т.
Угол коррекции фк.э — выраженное в долях единичного элемента смещение
фазы тактовых импульсов при регистрации одного значащего момента: фк.э=
= акфк = акА//т0.
Минимальный период корректирования tmin — наименьшее время, в
течение которого корректирование не производится. Это время зависит от
длительности единичного элемента То и времени усреднения в инерционном элементе
(емкости реверсивного счетчика S).
Поскольку корректирование производится путем сравнения фаз коротких
импульсов, соответствующих ЗМ информационной последовательности, и
полупериодов тактовой частоты, то наиболее часто корректирование будет
происходить при приеме информационной последовательности типа 1 : 1 («точки»), так
как в этой последовательности содержится наибольшее число значащих
моментов. Сигнал на выходе реверсивного счетчика PC появится после получения
5 импульсов одного и того же знака с выхода ФД. Поэтому
tmin = Sx0 = S/Bt (4.4)*
где В — скорость модуляции, Бод.
Погрешность (точность) синхронизации е — величина, характеризующая
наибольшее отклонение фазы синхросигналов (тактовых импульсов) от их
оптимального положения, которое с заданной вероятностью может произойти при
работе УС. Погрешность синхронизации целесообразно рассматривать как
сумму двух погрешностей — статической и динамической:
е = ест + 8дин. (4.5)
Статическая погрешность еСт — выраженное в долях единичного элемента
т0 фазовое отклонение тактовых импульсов при приеме неискаженной
информационной последовательности элементов. Величина еСт определяется
параметрами УС: еСт = Фк+фг, где фк — шаг коррекции; фг — относительное смещение
фазы тактовых сигналов из-за нестабильности генераторов передачи и приема
за время между сигналами управления.
Промежуток времени между сигналами управления является случайной
величиной и зависит от числа анализируемых коротких импульсов,
соответствующих значащим моментам информационной последовательности. Число ЗМ в
принимаемом информационном сигнале определяется статистикой сообщений и
видом кодовых комбинаций, используемых для передачи этих сообщений
(кодового рисунка сообщения). Обозначим через у параметр кодового рисунка
сообщения, характеризующий число ЗМ, приходящихся на единичный интервал.
Очевидно, что при передаче комбинации 1 : 1 («точки») у= 1 и промежуток
времени между сигналами управления составит t=XoS, что соответствует
минимальному периоду корректирования £mtn (4.4).
При передаче единичных элементов одного и того же знака у=0 и
промежуток времени между сигналами управления бесконечен. Для всех
промежуточных кодовых рисунков 1>г/>0. В реальных условиях передачи для
большинства применяемых кодов значение у близко к 0, 5. Поэтому
* = 2т05. (4.6)
Так как фг=(£пер+£пр)*/то, а фк=1/т, выражение (4.5) с учетом (4.6) и
условия £Пер = £пр можно представить в виде
eCT = (l/m) + 4kS. (4.7)
Пример 4.1. Определить допустимую нестабильность генераторов k, если4
в устройстве синхронизации использованы делитель с т=100 и реверсивный
счетчик емкостью 5=5. Допустимая средняя статическая погрешность не
должна превышать 2%. >
72
Решение:
eCT-(l/m) 0,02-0,01 r .
k~ AS ~ 4-5 ~5'Ш *
Динамическая погрешность еДИн — выраженное в долях единичного
элемента То фазовое отклонение тактовых импульсов, вызванное искажениями
элементов информационного сигнала (смещениями значащих моментов). Как было
показано, искажения длительности принимаемых элементов могут вызвать
появление ложных сигналов управления на выходе ФД, а следовательно, и на
выходе инерционного элемента. Эти сигналы могут осуществить ложное
корректирование УС в сторону рассогласования фаз. В [3] показано, что при
нормальном распределении смещений ЗМ входящей последовательности со средним
значением, равным нулю, и среднеквадратическим отклонением а0 случайная
величина един также распределена по нормальному1 закону с дисперсией
а2 = (а0/25т)1/я72 = 0,628 o0/Sm. (4.8)
Формула (4.8) справедлива для больших m (m«100). Анализ формулы
показывает, что для уменьшения динамической погрешности необходимо увеличить
произведение Sm, что приведет к увеличению времени синхронизации.
В реальных условиях работы СПДИ помимо случайной составляющей
искажений единичных элементов имеют место И регулярные искажения,
приводящие к возрастанию динамической погрешности. Поэтому при расчете
параметров УС стремятся выбрать их таким образом, чтобы погрешность еДИн,
вызванная случайной составляющей искажений, не превышала 5% длительности то-
Пример 4.2. Смещения ЗМ в канале связи распределены по нормальному
закону со средним значением бСр = 0 и среднеквадратическим отклонением a<>=
= 8%. Выбрать коэффициент деления m и емкость реверсивного счетчика 5,
обеспечивающих еДИн<5% с вероятностью 0,0005.
Решение. Емкость реверсивного счетчика 5 определим путем анализа
произведения т5, входящего в (4.8). Для этого необходимо вычислить значения
Од. Оно определяется из условия Р[един^0,05] =0,9995. Последнее связано с
0,05
о~д зависимостью Р [един < 0,05] = 1—2 \ ф (един) d едиЫ.
Здесь ф (8дИН) = у-д ехр ( - е*ин/2а*)
0,05
£= °'05
Так как I ф (еДИН) d един = у= \ ехр ( — /2/2) dt = Ф (г),
— ОО —00
где Ф(г) —табулированная функция, то z, а затем и ад определяется из
уравнения
Р [еДин < 0,05] = 0,9995 = 1 — 2 Ф (г).
Из таблицы для Ф(г) =0,0005/2 получаем г=3,5, откуда ад = 0,05/3,5=0,0143.
Из (4.8) находим 5m >0,628a0/a2=0,628- 0,08/(0,0143)2« 175. Если выбрать
т=128, что обеспечивается установкой семи ячеек бинарного делителя частоты
(27=128), то 5 = 2. Тогда 5т=2-128 = 256>175.
Пример 4.3. Определить вероятность появления еДИн более 5%, если т—
= 100, 5=8, а a0=10%.
Решение. Из (4.8) определяем а= У10,628• 0,1/100• 8 = 0,0089. Вероятность
Р(|един|>0,05) = 1—Ф(0,05/0,0089) = 1— Ф(5,6) «2-10-*.
Наличие погрешности синхронизации приводит к снижению верности либо,
при достаточно больших значениях е, к перерыву связи.
На рис. 4.12 показано изменение вероятности ошибок в приеме единичных
элементов при частотной и фазовой модуляции (когерентный прием) в
зависимости от а-отношения удельной мощности сигнала к спектральной плотности
помехи [23]. Из графика видно, что при частотной модуляции и а=4 разница
73
в вероятности ошибок при отсутствии погрешности в синхронизации (е=0) и
при погрешности 10% (е=0,1т0) составляет один порядок.
Время синхронизации tc — время, необходимое для корректирования
первоначального расхождения фаз Дф между тактовыми импульсами
(синхроимпульсами) и входящей последовательностью ин-
0 12 3 4 5 об формационных сигналов. Первоначальное
расхождение фаз случайно и может лежать
в пределах от 0 до |±я (от 0 до i±t0/2).
Для УС с постоянным коррекционным
эффектом при условии отсутствия краевых
искажений в принимаемых сигналах время
синхронизации зависит от первоначального
сдвига фаз Лф и кодового рисунка
сообщения у (числа ЗМ, приходящегося на один
элемент): tc=(Smly)A<p. В общем случае
величина tc является случайной,
распределение которой определяется композицией
распределения случайных величин Лф и г/.
Рассмотрим граничный случай, когда
Аф максимален и равен то/2. При приеме
информационной последовательности типа
1 : 1 («точки») и у=\\ tc та*=5тто/2* При
приеме текста (г/=0,5) время
синхронизации
Рис. 4.12. Зависимость
вероятности ошибки от точности
синхронизации (£=1200 Бод):
1 — для е=0; 2 — для 8-5%; 3 —
ДЛЯ 8=10%
t<&max — Sjn^o •
(4.9)
Время поддержания синфазности tu.c — время, в течение которого фаза
синхросигналов не выйдет за допустимые пределы рассогласования еДОп при
прекращении работы УС по подстройке фазы. Подстройка фазы может
прекратиться по причине обрыва канала связи или резкого ухудшения его
качества, а также в случае долговременного поступления на вход приемника
информационных элементов одного и того же знака. Следовательно, время /п.с
определяет допустимое время обрыва в канале связи, при котором ранее
установленная синфазность сохраняется. Время tn.c может быть определено по (4.3).
Величина 8Д0П определяется исправляющей способностью приемника \х
(способностью приемника правильно регистрировать единичные элементы при наличии
искажений). Тогда *=|i/(200 кВ).
Поскольку величина исправляющей способности аппаратуры ПДИ
определяется ее схемой и способом регистрации элементов и заранее известна, то
увеличение /п.с при заданной скорости модуляции может быть достигнуто лишь
уменьшением коэффициентов нестабильности задающих генераторов.
Вероятность срыва синхронизации РСс — вероятность того, что фаза
синхросигналов, под действием помех сдвинется на величину, большую |то/2|.
Подобный переход фазы синхросигналов (тактовых импульсов) в соседний
элемент полностью нарушает работу синхронной системы связи, так как
распределители передачи и приема «разойдутся» на элемент, что приведет к
нарушению фазирования по циклам. Уменьшить величину Рс.с можно увеличением
времени усреднения сигналов, поступающих с ФД, т. е. увеличением емкости
реверсивного счетчика S. Это в свою очередь приводит к увеличению времени
синхронизации tc и снижению периода корректирования. Поэтому задача
снижения Рс.с и выбора периода усреднения (емкости S) является вариационной.
В результате ее решения необходимо определить оптимальную характеристику
того параметра, который наиболее важен в конкретных условиях. Резко
уменьшить Рс.с можно путем использования режима принудительного выключения
УС. При возрастании краевых искажений, которое характеризуется их
дисперсией а2о, выше определенного предела подается сигнал на прекращение
корректирования фазы синхроимпульсов. Установившаяся фаза поддерживается 4за счет
стабильности генераторов передатчика и приемника. Разумеется, что. время, на
которое отключается УС, не должно превышать времени потери синхронизма.
74
x =
Рассмотрим вопрос о выборе емкости реверсивного счетчика S
при наличии искажений элементов информационной
последовательности. Смещение ЗМ от их идеального положения может
вызвать на выходе ФД появление истинного сигнала (когда сигнал
совпадает с направлением корректирования). Обозначим
вероятность появления истинного сигнала на выходе ФД (на входе
реверсивного счетчика) через р. Вероятность противоположного
события — появления на входе реверсивного счетчика ложного
сигнала (сигнал противоположен направлению корректирования) —
будет равна q=A—р. Вероятность появления ложного сигнала q'
на выходе реверсивного счетчика емкостью равна ;[23]
<t= (f)S - (4.10)
(g/pf +1
С увеличением S пропорционально увеличиваются время
синхронизации /с (4.9), статическая погрешность гст (4.7), период
корректирования im\n (4.4), но уменьшается динамическая
погрешность еДин. Для определения периода корректирования
необходимо знать среднее число импульсов х на входе реверсивного
счетчика, вызывающих один импульс на его выходе. В [23]
приведено соотношение для вычисления х:
— [l И- (4.11)
Пример 4.4. Уровень искажений сигналов информационной
последовательности таков, что ^ = 0,4; /?=0,6. Определить необходимую емкость
реверсивного счетчика для обеспечения ^/=10~3, а также, во сколько раз увеличатся
период корректирования и время синхронизации по сравнению со случаем q=0t2;
Решение. По (4.10) и (4.11) определяем необходимую емкость 5 и среднее
число импульсов х. Для первого условия S = 32, *=160. Для второго условия
5=8, £=13,3. Период корректирования возрос в 160/13,3» 12 раз.
Из (4.11) видно, что в самом неблагоприятном случае, когда
<7->0,5, величина x-*S2. Иными словами, период корректирования
при приеме искаженных сигналов пропорционален квадрату
коэффициента усреднения S. При отсутствии искажений слагаемое
статистической погрешности <рг, обусловленное смещением фаз
синхроимпульсов из-за нестабильности генераторов (4.7), равно
4kS. Если считать, что при приеме искаженных сигналов 4min
пропорционально S2, то устойчивая работа УС обеспечивается при
условии [23]
l/m>4£S, (4.12)
поскольку второе слагаемое (4.7) является в общем случае
случайной величиной и его влияние на сумму постоянной и случайной
величины должно быть уменьшено.
Пример 4.6. Емкость счетчика, выбранная исходя из вероятностей q и р,
составляет 5 = 8. Определить требуемую нестабильность задающих генераторов,
обеспечивающих устойчивую УС, если т=64, 128, 256. После выбора
коэффициента нестабильности генераторов определить статическую погрешность
синхронизации 8С т.
75
Решение. Из (4.12) определяем, что при т=64 &<0,6-10-4; при т=128
£<0,3-Ю-4; при т=256 £<0,15-10-4. Выбираем £=10-5. Далее по (4.7)
вычисляем 8ст=(1/64)+4-10-5-8 = 0,0159; вСт= (1/128)+4-Ю^5-8 = 0,0081; еСт =
= (1/256)+4-10~5-8 = 0,0042. Видно, что во всех вариантах построения УС
статическая погрешность не превышает 1,6% То.
4.6. СТРУКТУРНЫЕ СХЕМЫ УСТРОЙСТВ ФАЗИРОВАНИЯ
ПО ЦИКЛАМ
Устройство фазирования синхронной системы (безмаркерной).
Принцип работы устройства можно пояснить, пользуясь схемой
синхронной системы с механическими распределителями Р на т
элементов (рис. 4.13а). Однако описываемые принципы в равной
Передающее оконечное
устр-во
Команда на
переход
в решим
фазирования
НУ
ДФК
Приемное оконечное
. устр-во
л
^1
Канал
1
УС
Ы дшп
is a)
Начало е<^
Переход £§ Перта Переход
в рабочий. % § в решим в рабочий.
режим 'к а- фазирования режим
работы Переходу 1§
НУ
Фазирование Передача,
полезных
сообщений.
Фазирование
J)
Передача
'полезных^
сообщений
Рис. 4.13. Устройство фазирования синхронной
системы (безмаркерное):
— упрощенная структурная схема; б — временная
диаграмма
степени относятся и к электронным распределителям. В начале
работы или в режиме покоя, пока информация от передающего
наборного устройства НУ не поступает, в канал передается вполне
определенная комбинация от датчика фазовой комбинации ДФК.
На примере элементы этой фазовой комбинации попадают в
дешифратор ДШФК, который реагирует только на эту комбинацию.
Если распределители работают не в фазе, то регистрируемая
комбинация будет отличаться от фазовой и дешифратор не сработает.
Отсутствие срабатывания дешифратора фазовой комбинации в
конце каждого цикла указывает на расхождение цикловой фазы.
В этом случае рт управляющей схемы УС подаётся импульс, ко-
76
торый смещает фазу приемного распределителя. Такое смещение
приемного распределителя в конце каждого цикла будет
происходить до момента установления правильной фазы. В режиме син-
фазности дешифратор под действием фазовой комбинации
сработает и выключит (заблокирует) управляющую схему. С этого
момента распределители будут находиться в фазе.
Временная диаграмма при безмаркерном способе фазирования
показана на рис. 4.136. Кроме случая первоначального вхождения
в фазу показан также случай потери и восстановления цикловой
фазы во время передачи полезных сообщений.
Недостаток безмаркерного способа состоит в том, что после
любого нарушения цикловой фазы приходится прекращать
передачу сообщений и переводить систему в «режим фазирования».
При этом должна быть снята блокировка с управляющей схемы.
Другим недостатком является отсутствие постоянного контроля за
правильностью цикловой фазы во время передачи информации.
Расхождение фазы обнаруживается по появлению большого числа
ошибок, т. е. со значительным запаздыванием. Причем
расхождение фазы обнаруживается в приемнике, а передачу информации
необходимо прекращать в передатчике. Чтобы перевод в режим
фазирования производился автоматически, нужно организовать
связь между приемником и передатчиком одного направления
передачи по каналу обратного направления. При обнаружении
расхождения фазы на станции Б из приемника подается команда в
передатчик этой же станции. По такой команде прерывается
передача информации и передатчик переходит в режим фазирования.
Приемник на станции А дешифрирует фазовую комбинацию и
подает команду в передатчик своей станции о прекращении
передачи информации. Таким образом, режим фазирования
устанавливается в обоих направлениях передачи. Следовательно, отказ
устройств или канала одного направления передачи автоматически
приводит к отказу в противоположном направлении передачи
(вдвое увеличивается число отказов для каждого из
направлений). Это тоже является недостатком безмаркерного способа.
Цикловая фаза при описанном способе поддерживается
благодаря тому, что заранее известна длина принимаемых приемником
кодовых комбинаций. Моменты их начала раз и навсегда
определены во время режима фазирования. В этом смысле здесь
осуществляется синхронное фазирование циклов. Если длина кодовых
комбинаций меняется во время передачи или если моменты начала
комбинаций произвольны, то безмаркерный способ применять
нельзя.
Преимуществом безмаркерного способа, как видно из его
названия является то, что во время передачи информации не
снижается пропускная способность системы связи на передачу
«маркеров».
Устройство фазирования синхронной системы (маркерной).
Устройство маркерного фазирования по циклам показано на рис.
4.14а. К одному из контактов передающего распределителя Р под-
77
Пер
Пр
ДМ
гг-^Р
№
\JtoHM_j
НС U
1Г
а)
ДШ'М
ключается датчик маркера (фазовой комбинации) ДМ. За
каждый цикл распределителя передается один элемент кодовой
комбинации маркера. Если комбинация содержит п элементов, то для
ее передачи потребуется п циклов работы распределителя! Длина
фазовой комбинации и ее вид выбираются так, чтобы добиться
минимальной вероятности ложного фазирования. Другими
словами, фазовая комбинация
должна представлять такую
последовательность элементов,
вероятность появления которой с
1 любого другого контакта
распределителя практически
равна нулю.
На приеме к
соответствующему контакту распределителя
подключается дешифратор
маркера ДШМ, выход которого
соединен с управляющей схемой
УС. При расхождении
распределителей по фазе дешифратор
не обнаруживает маркера.
Поэтому через каждые п циклов
управляющая схема смещает
ми
Датчик
маркера^
' Кодовые -
комбинации-
: в канале
s~
* ♦ * i
пц=з
Сигналы маркера
5)
Рис. 4.14. Устройство фазирования син
хронной системы (маркерное):
а-упрощенная схема системы (НУ- '"^"Г"™ ^^ СМещае]
наборное устройство); б-временная РаспРЗДелитель на ОДИН КОН
диаграмма такт. Такой сдвиг будет проис-
ходить до тех пор, пока
дешифратор не зарегистрирует маркера. После этого управляющая
схема блокируется. Распределители с данного момента будут
вращаться синфазно.
В режиме синфазности с выхода дешифратора через каждые п
циклов поступает фазирующий импульс, подтверждающий
наличие правильной цикловой фазы. При потере синфазности
поступление фазирующего импульса прекратится. Спустя некоторое
установленное время, например (3—5) п циклов, снимается
блокировка с управляющей схемы и система переходит в режим поиска.
Снимать полезную информацию с контактов передающего
распределителя в этом случае не нужно. Временная диаграмма для
маркерного способа фазирования показана на рис. 4.146.
Устройство фазирования, использующее стартстопный способ.
Принцип работы устройства, использующего стартстопный способ
фазирования, можно проиллюстрировать с помощью структурной
схемы (рис. 4.15а) и временной диаграммы (рис. 4.156). При
отсутствии полезных сообщений распределители стоят на стопе как
в передатчике, так и в приемнике. При поступлении сообщения в
передатчике запускается передающий распределитель. В начале
кодовой комбинации (блока информации) передается стартовый
сигнал. В приемнике этот стартовый сигнал обнаруживается
дешифратором, после чего запускается приемный распределитель и
производится прием блока информации. По окончании передачи
78
полезной информации передающий распределитель
останавливается и устанавливается в начальное положение. В конце блока
передается столовый сигнал. После него могут передаваться
комбинации покоя или сразу может начаться стартовый сигнал.
Оба используемых здесь маркера (стартовый и стоповый
сигналы) могут представлять собой в простейшем случае единичные
элементы разной полярности. Для повышения устойчивости
работе/?
Пр
команда на
останодку
распределителя и. ^
запуск
датчика
Датчан
стопового
сигнала.
НУ
-Команда
на запуск
датчика
з_
i
Датчик
стартового^-1
сигнала
{Дешифратор
I стопооого
сигнала
Канал
Команда на
\ запуск рас -
лределителя
а)
Команда на
остановку
, . распре де-
Т~У^ жителя
[стартового]
сигнала
щ}кс
НУ
Команда
на запуск
распределителя
5л о к информации.
Комбинация
покоя
Стартовый Полезная' Стоповый
сигнал информация сигнал
Стартовый Полезная
сигнал информаиия
Рис. 4.15. Устройство фазирования, использующего старт-
стопный способ:
а — упрощенная схема системы передачи (НУ — наборное
устройство); б — временная диаграмма
ты устройства маркерам придают более сложную форму,
например форму кодовых комбинаций из нескольких единичных
элементов. Преимущества и недостатки, а также область применения
рассмотренных выше устройств были рассмотрены в 4.3.
ГЛАВА 5
Передающие и приемные оконечные устройства
♦
5.1. НАЗНАЧЕНИЕ И СТРУКТУРНЫЕ СХЕМЫ
Оконечные устройства предназначаются для преобразования
сообщений в электрические сигналы, передачи их с заданной
скоростью в канал связи (передающая часть), распознавания
сигналов на приеме и преобразования их в сообщения в удобной для
79
потребителя форме (приемная часть). Структурная схема
передающего устройства представлена на рис. 5.1. В формировании
элементов кодовых комбинаций при передаче дискретного
сообщения участвуют кодирующее устройство, накопитель, передающий
распределитель и выходное устройство.
ШсЖ
Выход
| Преобразователь {J
Г*] „Аналог-код" i •
1 i
i t-
Аналоговое сообщение
Рис. 5.1. Структурная схема передающего устройства
Кодирующее устройство преобразует передаваемый знак
(дискретное сообщение) в кодовую комбинацию. В современных
дискретных системах независимо от вида передаваемой информации
используются двоичные равномерные коды. Накопитель служит
для запоминания и хранения элементов кодовой - комбинации до
полной передачи ее в канал. Из кодирующего устройства в
накопитель сообщения передаются параллельным кодом. Передающий
распределитель служит для последовательного считывания
элементов (разрядов) кодовой комбинации с накопителя. На вход
накопителя информация поступает параллельным кодом, а считыва-
ется с него последовательным.
Выходное устройство обеспечивает преобразование элементов
кодовой комбинации в единичные элементы, форма и полярность
которых определяются входными устройствами канала. Если
передающее оконечное устройство используется для передачи
информации от ЭВМ, то в устройстве сопряжения (УС) формируются
/-элементные кодовые комбинации, которые записываются в
накопитель. Для передачи по дискретному каналу аналоговых
сообщений в оконечном устройстве имеется преобразователь «аналог—
код». Блок управляющих импульсов (БУИ) обеспечивает
формирование тактовых импульсов из сигналов задающего генератора
(ЗГ). Частота тактовых импульсов /у.п определяет скорость
модуляции.
Согласование ввода информации в накопитель и считывание
при передаче в выходное устройство осуществляются правильным
выбором тактовых частот /у.п и /УЯ Если кодовая комбинация со-
80
стоит из / элементов, то тактовая частота ввода информации в
накопитель /у.ц должна быть в / раз меньше тактовой частоты
распределителя передачи /у.п. Длительность элементарного сигнала
при этом составляет /0=l/fy.n, а время передачи /-элементной
кодовой комбинации (кодового слова) Ti=lto=l/f7J1.
Структурная схема приемника (рассматриваются цепи после
демодулятора) представлена на рис. 5.2. Приемник обеспечивает
Вход
Входное
устройство
(ВУ)
\РегистрируюА
ш,ее
устройство
W
УФП Н БУИ
L1J
ГЗГ
к УС с ЭВМ
Г Ж T"TT"h
Накопитель
Щ
L.J
*Ш
\пределитель
УФЦ
Устройство управления
1
Дискретное или
аналоговое сообщение
щ,ее
документы—
юЙхнияиоЩ
бражения
1
-*\/7peodpaso-\
3\6атель i-
\„Ш-амат*
*L I
Рис. 5.2. Структурная схема приемного устройства
восстановление'переданных единичных элементов по форме и
амплитуде, их регистрацию, определение моментов начала и
конца кодовых комбинаций и отдельных единичных элементов, а
также декодирование получаемых комбинаций и последующее
документирование или отображение принятых сообщений/ Входное
устройство восстанавливает форму и амплитуду поступающих из
канала единичных элементов. В регистрирующем устройстве
производится распознавание поступающих единичных элементов, в
результате чего выносится решение о поступлении «О» и «1». В
зависимости от метода регистрации с блока управляющих
импульсов (БУИ) на регистрирующее устройство поступают импульсы,
соответствующие серединам или началам единичных элементов.
Эти импульсы вырабатываются устройством синхронизации (УС).
Результаты регистрации отдельных элементов с помощью
приемного распределителя записываются в / ячеек памяти накопителя.
Устройство фазирования по циклам (УФЦ) определяет начало
кодовых слов и обеспечивает запись 1-го элемента кодовой
комбинации в 1-й элемент памяти. Правильное декодирование
возможно только после накопления всех элементов кодовой
комбинации. В зависимости от конкретного назначения приемника
управляющий импульс (/у.ц) считывает информацию параллельным
кодом или на устройство сопряжения УС с ЭВМ, или на
преобразователь «код—аналог». В этом случае информация может фиксиро-
81
ваться на носителе в закодированном виде (например, на
перфоленте, перфокарте). Если получаемое сообщение необходимо
зафиксировать в виде знаков, отпечатываемых на бумаге или
отображаемых на экране, то сообщения с накопителя подаются на
декодирующее устройство. Если сообщение регистрируется в
аналоговой форме, полученная комбинация в блоке «код—аналог»
преобразуется в очередную точку отсчета, которая фиксируется
графически или на экране отображающего устройства.
5,2. КЛАССИФИКАЦИЯ ОКОНЕЧНЫХ УСТРОЙСТВ
Различают оконечную аппаратуру для передачи данных и
передачи телеграфных сообщений (в зависимости от вида
передаваемой информации):
стартстопную, в которой синфазность поддерживается в
течение одного кодового блока, и синхронную, в которой фаза с
определенной точностью поддерживается непрерывно в течение всего
периода работы;
однократную, в которой за время цикла передается
информация от одного датчика (источника), и многократную, в которой за
рабочий цикл передается информация от двух или более
источников. Многократная аппаратура выполняет функции временного
разделения канала.
По устройству и схеме включения передатчика и приемника
аппаратура может быть дуплексной, в которой одновременно
возможны передача и прием, и симплексной, имеющей или
передатчик, или приемник и обеспечивающей либо передачу, либо прием.
Если аппаратура имеет передатчик и приемник, а работают они
поочередно, то аппаратура называется полудуплексной.
В зависимости от используемой элементной базы аппаратура
делится на электронную, механическую, электронно-механическую.
В настоящее время широкое применение находят
электромеханические аппараты, в которых в качестве электрических устройств
используются приемный электромагнит и двигатель. Начинают
внедрять электронно-механические аппараты, в которых все узлы
электронные, а устройства печати и продвижения носителя —
механические.
5.3. ОСНОВНЫЕ УЗЛЫ ПЕРЕДАЮЩЕЙ ЧАСТИ
ОКОНЕЧНОГО АППАРАТА
Кодирующие устройства. В электромеханических аппаратах
используются механические кодирующие устройства с
комбинаторными линейками, принцип действия которых ясен из рис. 5.3.
При нажатии клавиши клавишный рычаг опускается вниз и
действует на левый или правый скос комбинаторной линейки,
перемещая ее вправо или влево. Линейка, шарнирно связанная с
промежуточным рычагом, заставляет его поворачиваться вокруг оси.
Таким образом^ комбинаторная линейка с промежуточным рыча-
82
гом является двоичным элементом, способным находиться в одном
из двух положений (0 или 1). Так как клавишный рычаг проходит
над пятью линейками, то число возможных положений линеек
(комбинаций) будет равно 25=32.
Если сообщение поступает не от человека, а от ЭВМ или от
другого автоматического устройства, то оно чаще всего фиксиру-
Рис. 5.3. Кодирующее устройство
электромеханического аппарата:
1 — промежуточный рычаг; 2 — ось;
3 — клавиша; 4 — клавишный рычаг
Рис. 5.4. Кодирующее устройство при
считывании с перфоленты:
1 — лентопротяжное отверстие; 2 — кодовое
отверстие; 3 — перфораторная лента; 4 —
ось; 5 — наборный рычаг
ется на каком-либо носителе. Когда в качестве носителя
используется перфолента, передача производится с трансмиттера. В этом
случае функции кодирующего устройства выполняют наборные
рычаги трансмиттера (рис. 5.4). Отверстие на ленте соответствует
единице, а отсутствие его — нулю. Пять наборных рычагов в
нужный момент времени прижимаются к ленте. При наличии
отверстия наборный рычаг поворачивается по часовой стрелке
(состояние 1), при отсутствии отверстия рычаг остается в состоянии 0.
Для запоминания следующей комбинации все рычаги после
передачи предыдущей поворачиваются против часовой стрелки, иголки
выходят из отверстий и лента перемещается на один шаг.
В электронно-механических аппаратах в качестве
кодирующего устройства можно использовать диодную матрицу (рис. 5.5).
Входы (№ знака)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 П 15
9999999999999999
ы
kk
К
Кккк
к
kk
Т^^г^ |^<^ Г^^ Г^^ Г^^ 1^^ Г^^Т^^^»
№
к
Ык
к
pfc,?fe,KK
ы
ш
0
А-й разряд
0
, 3-й разряд
ж
£ и разряд
0
1-йразряд
Рис. 5.5. Схема кодирующего устройства на диодах
83
При поступлении отрицательного сигнала на один из входов
такой же сигнал появится на некоторых выходах. Например, при
подаче отрицательного сигнала на вход 12 на выходах 3 и 4
сигналы появятся, а на выходах 2 и 1 — нет. Следовательно, на выходе
кодирующего устройства возникнет кодовая комбинация 1100, что
соответствует числу 12 в двоичной системе счисления. Сигналы с
выходов кодирующего устройства поступают на накопитель.
Накопители. Комбинаторные линейки электромеханического
аппарата выполняют функции не только кодирующего устройства,
но и накопителя. Кодирующее устройство состоит из клавиш и
комбинаторных линеек. После нажатия клавиши и перемещения
комбинаторных линеек происходит блокировка линеек с помощью
запорной скобы. Блокировка клавиатуры осуществляется на
время передачи одного знака (рис. 5.6). Совокупность клавиш,
комбинаторных линеек и блокирующего устройства называется
клавиатурным комбинатором.
Рис. 5.6. Кулачковый распределитель электромеханического аппарата:
/ — контактный рычаг; 2 — контактные пружины; 3 — изоляционная прокладка;
4 — комбинаторные линейки; 5 — клавишные рычаги; 6 — запорная скоба
В электронно-механических аппаратах для накопления
информации можно использовать любые двоичные элементы:
сердечники с ППГ, триггеры с управлением по одному или двум входам,
поляризованные реле. Число двоичных элементов в накопителе
равно элементности кодовой комбинации.
Передающие распределители. В электромеханических
аппаратах функции распределителя выполняет кулачковый
распределитель (см. рис. 5.6), состоящий из шести кулачков с вырезами
(кулачковая муфта), расположенными по винтовой линии. При
вращении кулачковой муфты контактные рычаги, взаимодействуя с
кулачками, позволяют 1 раз за оборот замкнуться
соответствующей контактной пружине. Если комбийаторная линейка смещена
влево, а промежуточный рычаг повернут по часовой стрелке, в
линию передается токовый элемент. Если линейка смещена вправо,
84
то соответствующий промежуточный рычаг удерживает
контактный и пружина не замыкается.
На рис. 5.7 представлена функциональная схема передатчика
электронно-механического телеграфного аппарата, распределитель
и накопитель которого выполнены на двоичных элементах.
Длительность цикла распределителя равна семи единичным
элементам. В начале цикла работы ячейка 7 распределителя сигналом,
гти
Распределитель
\7 _ i \\ ? \ з \ \ \
I в
ао\
\ЛНакопи-
^утель
Рис. 5.7. Функциональная схема передатчика телеграфного
аппарата на двоичных элементах
поступающим на вход 2, устанавливается в состояние «1». После
этого под действием тактовых импульсов состояние «1»
перемещается от ячейки к ячейке. При считывании «1» с очередной
ячейки в точках 4У 5, 6, 7, 6\ 9 появляются импульсы, которые
считывают информацию с элементов памяти накопителя. Сигналы с
накопителя через общую шину поступают на выходное устройство.
Функции выходного устройства в электромеханических аппаратах
выполняют контактные пружины (см. рис. 5.6), а в электронных
и электронно-механических аппаратах — электронные реле на
транзисторах.
5.4. ОСНОВНЫЕ УЗЛЫ ПРИЕМНОЙ ЧАСТИ
ОКОНЕЧНОГО АППАРАТА
Входные устройства преобразуют принимаемые электрические
сигналы в вид, удобный для их дальнейшей обработки, т. е.
согласовывают электрические параметры канала связи с входными
параметрами оконечных станционных устройств.
В электромеханических аппаратах в качестве входных
устройств могут использоваться поляризованные и неполяризованные
85
реле или электромагниты. В электронно-механических приемниках
применяется несколько видов входных устройств. Большинство из
них использует способ модуляции принимаемых сигналов
импульсами высокой частоты и последующей демодуляции. На рис. 5.8
показано входное устройство, выполненное на сердечниках с ППГ.
5.9. Наборные
устройства:
а — электромеханическое (1, 5—
ограничивающие штифты; 2 —
пружина; 3 — наборный рычаг;
4 — кулачок; 5 — вилка якоря;
€ — якорь электромагнита; 7 —
меч; 9 — Т-образный рычаг; /0—
дешифраторные линейки); б —
-" электронное
Распределитель
приема
Регистрирующее
устройство
Накопитель I
Накопитель Ж
К дешифратору
$)
При поступлении положительного единичного элемента ячейка
ЯП! находится в состоянии «1». Во время появления тактовых
импульсов (fyK) в выходной обмотке ЯП1 будет генерироваться
серия отрицательных импульсов, устанавливающих триггер в
состояние «1». Если из линии поступает отрицательный единичный
элемент, на выходе ячейки ЯП2 появляется серия отрицательных
импульсов, удерживающих триггер в состоянии «О». При приеме
однополюсных токовых единичных элементов (переключатель в
положении 1П) включается обмотка подмагничивания, что
позволяет получать в выходных обмотках ЯП1 и ЯП2 импульсы при
наличии или отсутствии тока во входной цепи.
Регистрирующие устройства и накопители приема. В
современных электромеханических и электронно-механических аппаратах
86
регистрация единичных элементов производится способом строби-
рования в средней части элемента (гл. 2). Рассмотрим
регистрацию единичного элемента в телеграфном аппарате СТА-М67.
Наборный механизм аппарата (рис. 5.9а) состоит из наборной муфты
с пятью кулачками 4У расположенными по винтовой линии, пяти
наборных рычагов 3, связанных шарнирно с пятью мечами 7,
якоря электромагнита 6 и его вилки 5. При вращении наборной
муфты, представленной на рисунке одним кулачком 4, происходят
поочередные повороты каждого из наборных рычагов 3. Так как
одно из плеч каждого наборного рычага шарнирно соединено с
одним из пяти мечей 7, то вращение муфты приводит к движению
мечей. Меч, двигаясь вперед, наталкивается левым или правым
выступом на одну из вертикальных частей вилки якоря 5 в
зависимости от состояния электромагнита. Во время соприкосновения
меча с вилкой якоря конец меча перемещается к левому или
правому ограничивающему штифту / или 8. После окончания
воздействия соответствующего кулачка на соответствующий рычаг
последний под действием пружины 2 переходит в исходное положение
и толкает меч. Конец меча ударяет по соответствующему плечу
Т-образного рычага 9. Так как мечи шарнирно соединены с дешиф-
раторными линейками 10, то происходит перемещение линеек
влево или вправо. По окончании оборота муфты дешифраторные
линейки занимают положения, соответствующие поступившей
комбинации.
Так как регистрация каждого единичного элемента происходит
в момент столкновения меча с вилкой якоря, то для регистрации
информации в наиболее неискаженной части элемента наборный
механизм имеет фазоустановитель, позволяющий изменять
исходное положение наборной муфты. В электронном наборном
устройстве (рис. 5.96) коррекционное устройство обеспечивает выдачу
тактовых импульсов в моменты поступления середин единичных
элементов. При каждом очередном тактовом импульсе «fl»
перемещается с одной ячейки распределителя в другую. На выходах
ячеек появляются сигналы, которые могут поступать на входы
ячеек накопителя 1. Если из линии поступает положительный
элемент, триод Т закрыт и в соответствующую ячейку памяти
накопителя записывается «1». Если из линии поступает отрицательный
элемент, триод Т открыт, сигнал из ячейки распределителя через
диод и открытый триод Т проходит мимо ячейки накопителя,
которая сохраняет состояние «О».
Установка двух накопителей необходима в тех случаях, когда
за время от середины 5-го информационного элемента до середины
1-го информационного элемента приемник не успевает
дешифровать и отпечатать поступивший символ.
В электромеханическом аппарате дешифраторные линейки
выполняют функции накопителя //, а мечи и Т-образные рычаги —
функции накопителя /.
Декодирующие устройства предназначены для преобразования
информации, хранящейся в накопителе //, в сообщение, представ-
87
ляемое конечным числом символов алфавита. Независимо от
элементной базы декодирующее устройство реализует логическую
операцию умножения. Декодирующее устройство на все
комбинации может быть представлено многополюсником с п входами и N
выходами. Число входов п равно количеству элементов в кодовой
комбинации, а число выходов — числу используемых кодовых
комбинаций N. В электромеханических аппаратах функции
накопителя // выполняют пять дешифраторных линеек. На
внутренних сторонах линеек (см. рис. 5.96) имеются прямоугольные
вырезы, расположенные так, что в любом из 32 возможных
положений всех линеек (Л/г=25=32) прямоугольные вырезы на всех
линейках совпадут лишь в одном месте. В образованный при этом
паз западает тяга (на рис. 5.96 не показана), соответствующая
одной из букв выходного алфавита.
Электронный дешифратор четырехэлементного кода
представлен на рис. 5.10. Триггеры схемы являются элементами
накопителя //. На одной из вертикальных шин дешифратора напряжение
появится только в том случае, если на все подключенные к
соответствующей шине диоды поступает напряжение с триггеров
накопителя.
шшшш
-0+Е, I
^
V
WW\
www,
ш
www
www
iii iii
№f
Ей
W\
Ш
WW
w
WW
WW
www
WW]
I
w
w
Ш
WWW
WW
w A
WW\
w
tfTfffftf
EL
ГТ
FT ,
<LJ
<LJ
Ti\-
<u-
Y0 YJ \ YJ X YS YB Y7 Y8 Y9 YW Y11 \ \ \ Ytf j
Рис. 5.10. Электронный дешифратор
Устройство документирования и отображения. В
электромеханических аппаратах СТА-М67 используется печатающее
устройство с типовым рычагом (рис. 5.11). Тяга 2, запавшая в
образованный дешифраторными линейками паз, поднимается вверх с
помощью печатающей скобы 1. С тягой 2 связан типовой рычаг 3,
на котором укреплен тип 4 с выгравированным знаком. При
подъеме тяги 2 типовой рычаг опускается вниз и ударяет типом
88
по красящей 5 и бумажной 6 лентам. В результате на бумажной
ленте отпечатывается знак.
Рассмотрим последовательность отпечатывания знака в
электронно-механическом аппарате, в котором применяется
печатающее устройство с типовым колесом (рис. 5.12). Все знаки
алфавита размещены по окружности типового колеса. На общей оси с
типовым колесом расположен ферромагнитный диск с зубцом.
Вокруг диска на равном расстоянии друг от друга находятся
катушки, надетые на подковообразные магниты. Каждая катушка
датчика соответствует определенному знаку на типовом колесе.
Рис. 5.11. Печатающее
устройство с типовым рычагом:
J — печатающая скоба; 2 — тяга; 3 —
типовой рычаг; 4 — тип; 5 — красящая
лента; 6 — бумажная лента
Дешифратор
ни . ..jttt
/ 2 3 4 ' ЩЗОЯЗ?
1 2 29 32
Рис. 5.12. Схема
электронно-механического приемника с типовым
колесом:
/ — накопитель //; 2 — диск с зубцом;
3 — типовое колесо; 4 — лента; 5 —
печатающий рычаг; 6 — ось
Предположим, что при дешифрации сигнал появился на 29-м
выходе. При прохождении зубца мимо соответствующей катушки
откроется схема И2э и через схему ИЛИ сигнал поступит на
печатающий электромагнит. Таким образом будет отпечатан 29-й
символ. Одновременно импульс подается на накопитель //, и на
дешифратор передается следующая комбинация.
Электромеханические способы печати позволяют вести запись
со скоростью до 1200 зн./мин. Для увеличения скорости печати
применяют безударные способы записи изображений, например
электростатический и электромеханический.
Электростатический способ основан на том, что на
поверхностный слой специальной бумаги наносится скрытое
электростатическое изображение. В качестве записывающего элемента
используется прямоугольная матричная головка с точечными электродами
89
(рис. 5.13). При приеме и декодировании знака к соответствующим
точечным электродам подается высокое напряжение. На бумаге
появляется скрытое изображение знака в виде зарядов частиц на
поверхностном слое бумаги. Изображение проявляется ксерогра-
фическим методом с помощью специальных порошков, а затем
закрепляется путем подогрева и размягчения термостатического слоя
бумаги.
Сечение ..
печатающей
голо&ки
Рис. 5.13. Устройство, использующее
электростатический способ записи:
/ — зафиксированное изображение; 2 —
видимое изображение; 3 — порошок для
проявления изображения; 4 — невидимое
изображение; 5 — печатающие головки; 6 — камера для
закрепления
Рис. 5.14. Устройство записи на
перфоленту:
/ — дешифраторная линейка; 2 —
комбинаторный рычаг; 3 и 4 — оси; 5 — ползун; 6 —
шарнир; 7 — пуансонная линейка; 8 — пуансон;
9 — перфораторная лента
Электрохимический способ записи знаков на бумагу основан
на свойстве некоторых реактивов изменять цвет при прохождении
через нрх электрического тока. Если увлажнить подобным
реактивом бумагу и поместить ее между матричной головкой и
сплошной металлической пластиной, то при подаче на электроды
напряжения от декодирующего устройства через бумагу в точках,
определяющих контур знака, будет протекать ток. В результате
химической реакции образуется вещество, окрашивающее эти участки
бумаги в тот или иной цвет. Достоинствами электростатического
и электрохимического способов записи являются высокая
надежность и высокая скорость, а также бесшумность работы устройств
записи. К недостаткам следует отнести необходимость применения
специальной бумаги и потребность в последующей обработке при
появлении знаков.
Если информация предназначена для ввода в ЭВМ или какой-
либо автомат, то запись производится на перфоленту или перфо-
90
карту с помощью специальных перфорирующих устройств,
принцип действия которых можно уяснить из рис. 5.14. После приема
комбинации дешифраторные линейки аппарата устанавливаются
в определенные положения (левые или правые). Комбинаторный
рычаг под действием дешифраторных линеек перемещают
пуансоны. Опускаясь вниз, ползун через концы пуансонных линеек давит
на пуансоны, в результате чего пробиваются круглые отверстия в
ленте. Если пуансонная линейка переместилась влево, то ползун
не нажимает на пуансон и отверстие в ленте не пробивается.
Применение реперфораторных и трансмиттерных приставок позволяет
автоматизировать переприем телеграмм.
5.5. УСТРОЙСТВА ОТОБРАЖЕНИЯ ИНФОРМАЦИИ
Устройством отображения информации называется
совокупность технических средств, предназначенных для преобразования
кодированной информации, поступающей от различных
источников, в форму, пригодную для зрительного восприятия человеком.
Если информация воспроизводится на экране электронно-лучевой
трубки, то устройство отображения называется электронным
(УЭО). В современных УЭО воспроизводится информация двух
видов — знаковая и графическая. Знаковая информация
воспроизводится в виде одиночных знаков — букв, цифр и специальных
условных символов или групп знаков, называемых формулярами.
Графическая информация воспроизводится в виде графических
конфигураций. В качестве элементов графики используются
отрезки прямых, окружности и их дуги, эллипсы и др.
Таким образом, отображение сводится к «стыковке» и
отображению элементов графики. В УЭО можно предусмотреть
возможность изменения отображаемой информации оператором. В состав
УЭО (рис. 5.15) входят:
накопитель отображаемого массива (НОМ) для хранения
подлежащей отображению информации;
промежуточный регистр отображаемого слова (ПРС),
содержащий накопители кода выбора позиции луча, кода знака, кода
элемента графики, признаки массива.
Информация
1
ПРС
ном
КодпозйА
ционироА
вания
Код
знака
Код
эг
Признак
ТПЛ
Sr
Рис. 5.15. Структурная схема устройства электронного
отображения
9.1
Основная информация при формировании знака из элементов
графики проходит через тракт позиционирования луча (ТПЛ),
тракт формирования знака (ТФЗ) и тракт формирования графики
(ТФГ). Соответствующие элементы графики заданного массива
вырабатываются блоком микропрограммного управления (БМУ).
Различают четыре метода генерирования знаков на экране
ЭЛТ: матричный, растровый, полиграммный и функциональный.
При матричном методе
поперечному сечению электронного луча
придается форма
воспроизводимого на экране знака. Электронный
луч, попадая на люминофор
экрана трубки, «печатает»
соответствующий знак. При этом
используются специальные знаковые
электронно-лучевые трубки (ЗЭЛТ),
основной частью которых
является матрица—металлическая
пластина с отверстиями
(трафарет). Матрица изменяет форму
поперечного сечения луча ЭЛТ (рис.
ЭматрГцТй луч после 5.16). Матричный метод
формирования знаков находит
ограниченное применение из-за сложности изготовления матрицы,
критичности в ее настройке, ограниченности номенклатуры знаков.
При растровом методе на экране электронно-лучевой трубки
формируется растр, размер которого соответствует размеру знака.
В тех точках экрана, где образуется воспроизводимый знак,
производится засветка луча. При формировании знака используются
растры трех типов: спиральный (рис. 5.17а), линейчатый (рис.
5.176) и точечный (рис. 5.17в). Заметим, что при растровом
методе закон перемещения луча по экрану электронно-лучевой трубки
остается неизменным при воспроизведении любого знака.
Рис. 5.16. Модуляция луча при
матричном способе генерирования
знаков:
/ — электронный луч до матрицы; 2 —
матрица; 3 -
а) б) "' 6)
Рис. 5.17. Основные типы растров
При полиграммном методе электронный луч перемещается по
контуру некоторой сложной фигуры — полиграмме (рис. 5.18а),
представляющей собой комбинацию контуров всех отображаемых
92
знаков. Выбор изображения знака из полиграммы производится
засветом соответствующих ее частей (рис. 5.186). При
функциональном методе электронный луч перемещается на экране ЭЛТ
по контуру воспроизводимого знака. На рис. 5.19 показаны
основные типы аппроксимации знаков, используемых в функциональном
методе: точечная, кусочно-линейная и комбинированная (с
использованием отрезков прямых линий и кривых).
}АБК .....
шзу tK fR *R
Рис. 5.18. Формиро- Рис. 5.19. Формирование изобра-
вание изображений жений знаков при "функциональ-
знаков при полиграм- ном методе
мном методе:
а — полиграмма; б —
изображение знаков
5.6. РЕКОМЕНДАЦИИ МККТТ,
ОТНОСЯЩИЕСЯ К ОКОНЕЧНЫМ УСТРОЙСТВАМ
Международный консультативный комитет по телефонии и
телеграфии МККТТ определил требования, которым должны
удовлетворять оконечные устройства. Совокупность таких требований
определяет государственные стандарты на электрические
параметры, алгоритмы работы, способы передачи, процедуры включения
оконечных устройств в Единую автоматизированную сеть связи
и т. д.
Оконечные установки должны обеспечивать один из следующих
способов передачи: двустороннюю поочередную передачу;
двустороннюю одновременную передачу; двустороннюю одновременную
передачу и двустороннюю поочередную передачу с возможностью
переключения. На телеграфных сетях оконечные устройства
можно включать как по двух-, так и по четырехпроводной схеме.
Оконечные устройства, используемые на сетях абонентского
телеграфирования (АТ-50) и на сетях передачи данных (ПД-200),
включаются только по четырехпроводной схеме. В настоящее время в
качестве оконечных устройств широко применяются стартстопные
телеграфные аппараты со следующими техническими данными:
Номинальная скорость передачи, Бод .... 50; 100; 200
Код МКТ-2
Длительность цикла передачи, ед. эл .... 7,5
Назначение элементов:
первый стартовый
второй — шестой информационные
последующие полтора элемента ...... стоповые
93
Пропускная способность при скорости
модуляции 50 Бод, зн./мин 400
Номинальная исправляющая способность, % . . 28
Количество регистров 3 (Рус, Лат, Циф)
Использовать стартстопные аппараты с приведенными выше
техническими данными при передаче данных трудно, так как
общее число кодируемых знаков во всех трех регистрах N=78 для
представления машинной информации оказывается
недостаточным. Поэтому при передаче данных (точнее, для вводно-выводных
устройств передачи и обработки данных) МККТТ рекомендовал
использовать оконечные устройства, работающие кодом МТК-5,
который видоизменен применительно к русскому языку (ГОСТ
13052—74). Оконечные устройства имеют следующие технические
данные:
Номинальная скорость модуляции, Бод .... 50; 100; 200
Код МКТ-2
Длительность цикла передачи, ед. эл 11
Назначение элементов:
первый стартовый
второй — восьмой информационные
девятый , для повышения
верности при
методе проверки на
четность
десятый и одиннадцатый стоповые
Пропускная способность при скорости
модуляции 200 Бод, зн./мин 1100
Номинальная исправляющая способность, % . . 30
Количество регистров 2 (Рус, Лат)
Аппарат должен обеспечивать печать 64 графических символов
при наличии 80 символов в одной строке. Аппарат не должен
давать более одного ошибочного символа на 106 принятых при
работе на себя. Средний ресурс до капитального ремонта должен быть
не меньше 10 000 ч. Разность между фактической средней
скоростью модуляции сигналов и номинальной скоростью не должна
превышать 0,1%. Столь высокие требования к верности передачи
гм надежности работы аппарата обеспечивают качественную связь
при передаче данных.
ГЛАВА 6
Методы повышения верности передачи
дискретной информации
♦
6.1. ПОТОК ОШИБОК В РЕАЛЬНЫХ КАНАЛАХ
В реальных условиях прием двоичных символов всегда
происходит с ошибками. Это означает, что вместо символа «1» прини-
94
мается символ «О» и наоборот. Ошибки могут возникать из-за
помех, действующих в канале связи, и особенно помех импульсного
характера; изменения за время передачи характеристик канала:
снижения уровня передачи, нестабильности амплитудно- и фазо-
частотных характеристик канала; кратковременных перерывов;
ремонтно-профилактических работ на линии во время сеанса
связи. Часть указанных причин носит эксплуатационный характер и
в принципе может быть устранена такими мерами, как
повышение качественных показателей аппаратуры связи и особенно
коммутационной техники, повышение технической культуры
обслуживающего персонала и др.
Улучшению качества канала связи, особенно на линиях
большой протяженности, способствует включение таких устройств, как
фазовые корректоры, регенеративные ретрансляторы и т. д.
Несмотря на подобные меры, при работе по современному
дискретному каналу вероятность ошибки (на единичный элемент) будет не
меньше 10~3—10~4, однако при передаче данных допускается,
чтобы Рот не превышало Ю-6. Появление ошибок Ъбычно носит
случайный характер и, как правило, является следствием
совокупности мешающих факторов, часть которых может быть вообще
неизвестна. Поэтому целесообразно исследовать свойства потока
ошибок. Математическим аппаратом при этом является теория
случайных процессов, которая позволяет строить формальные модели
потоков ошибок в различных каналах связи. Имея такие модели,
можно выбирать соответствующие меры повышения
помехоустойчивости.
Однако, несмотря на большое количество моделей ошибок, их
практическое использование ограничено. Поскольку реальные
потоки ошибок носят, как правило, нестационарный характер,
затрудняются простое математическое описание модели и ее
практическое использование. Поэтому разумный критерий качества,
пригодный для всех дискретных каналов, заключается в
нормировании вероятности ошибки для данного вида сообщений. Так,
вероятность ошибки при телеграфной связи составляет примерно
3-10-5 (на знак), а при передаче данных — не более 10~6 (на
единичный элемент). Для обеспечения этих норм улучшения только
качественных показателей канала может оказаться недостаточно.
Поэтому основной мерой является применение специальных
методов повышения верности. Эти методы можно разбить на две
группы. К первой группе относятся методы увеличения
помехоустойчивости приема единичных элементов, связанные с выбором уровня
сигнала, отношения сигнал/помеха, ширины полосы канала,
статистикой ошибок в канале связи и т. п. Ко второй группе относятся
методы обнаружения и исправления ошибок, основанные на
искусственном введении избыточности в передаваемое сообщение.
95
6,2. ИЗБЫТОЧНОСТЬ СИГНАЛОВ ДИСКРЕТНОЙ
ИНФОРМАЦИИ
Понятие «избыточность» определяется средним количеством
информации, содержащемся в передаваемом сообщении. При
двоичном кодировании в условиях равновероятности передаваемых
двоичных символов «О» и «1» каждый единичный элемент
содержит максимальное количество информации: /ma3C = log2/? = log22=
=>1 бит, где R =2 — основание кода. Если же единичные
элементы поступают в канал с разными вероятностями, то один
единичный элемент переносит меньшее количество информации. В этом
случае говорят, что в сигнале есть избыточность. Ее можно
оценить как отношение /ma*//cp>l. Поскольку пропускная
способность определяется в виде С=/Ср/то, где то ■— длительность
передаваемого единичного элемента, то систему передачи надо строить
так, чтобы /ср было максимальным, т. е. требовать, чтобы среднее
количество информации /ср было равно 1тах (1 бит для двоичного
кода).
Практически во всех системах передачи дискретной
информации это условие выполняется. Но в этом случае при отсутствии
избыточности, когда любая комбинация двоичных символов
представляет собой передаваемое сообщение, обнаружить ошибки в
принятой кодовой комбинации невозможно. Чтобы обнаружить
ошибку и даже определить место ошибочно принятого единичного
элемента, необходимо увеличить объем сигнала, представляющего
кодовую комбинацию.
Увеличить избыточность передаваемого сигнала мoжнow
по-разному. Так как объем сигнала V=PA\FTy где Р — мощность
сигнала, Вт; AF — ширина его спектра, Гц; Т — время передачи
сигнала, с, то его увеличение возможно за счет увеличения Р, &F и Т.
Практические возможности увеличения избыточности за счет
мощности и ширины спектра сигнала в системах передачи
дискретной информации по стандартным каналам резко ограничены.
Поэтому основное развитие получили методы повышения верности
приема, основанные на увеличении времени передачи. Эти
методы реализуются системами без обратной связи и системами с
обратной связью. В системах без обратной связи
(однонаправленных системах) для повышения верности приема используются
следующие основные способы:
1) помехоустойчивое кодирование, т. е. использование кодов,
исправляющих ошибки;
2) многократная передача кодовых комбинаций;
3) одновременная передача кодовой комбинации по
нескольким параллельно работающим каналам.
Иногда применяют комбинации этих способов. Многократное
повторение кодовой комбинации является самым простым
способом повышения достоверности и легко реализуется, особенно в
низкоскоростных системах ПДИ. Аналогом такого способа
является использование пониженной скорости для работы АПД. На
96
каналах невысокого качества такой способ получил широкое
практическое применение. В АПД многих типов, работающих по
каналам тональной частоты, предусматриваются две и более скорости
модуляции (600 и 1200 Бод). На большие расстояния работа
ведется с малой скоростью.
При использовании многократного повторения за истинный
сигнал принимают тот, который большее количество раз появлялся в
многократно повторенной последовательности сигналов. Так, если
при пятикратном повторении буквы А получена
последовательность ААБАБ, то принимается решение в пользу буквы А. Если же
ни одна из букв не повторяется, то принятое сообщение
ликвидируется (стирается).
Существенным недостатком такого способа является большое
увеличение времени передачи и, следовательно, такое же
уменьшение скорости. Если кодовая комбинация повторяется п раз, то
скорость снижается в п раз. Несмотря на отмеченные недостатки»
из-за большой простоты реализации этот способ успешно
используется при космической фототелеграфной передаче: например, при
передаче снимков Марса с космической станции «Маринер»
применялось пятикратное повторение каждого отсчета видеосигнала
изображения. Для оптимального приема повторение есть
увеличение времени накопления сигнала, что, естественно, приводит к
лучшему усреднению флуктуационного шума канала связи.
Способу многократного повторения аналогичен способ
передачи одной и той же информации по нескольким параллельным
каналам связи. При приеме может быть использован мажоритарный
принцип (голосование). В этом случае необходимо иметь не менее
трех каналов связи, которые нужно выбирать таким образом,
чтобы ошибки в них были независимы. При двух параллельно
работающих каналах в передаваемую информацию можно вводить
избыточность, позволяющую обнаруживать ошибки. При
обнаружении ошибки в одном канале информация может браться из
другого канала. Обнаруживать ошибки можно и путем контроля
параметров сигнала с помощью детекторов качества. Существенным
достоинством таких систем являются их высокая надежность и
малое время задержки информации потребителю. Основным
недостатком многоканальных систем, так же как и систем с
повторением, является неэффективное использование избыточности.
Более эффективно избыточность используется при применении
помехоустойчивых кодов для исправления ошибок. При этом в
кодовые комбинации вводится постоянная, заранее рассчитанная
избыточность (дополнительные элементы, сформированные по
известным правилам). Структура кода и его исправляющие
возможности рассчитываются для некоторого идеализированного канала с
известной статистикой ошибок. Однако свойства реального
канала непостоянны и могут резко отличаться от выбранной модели.
Могут быть ситуации, когда канал находится в хорошем состоянии
и дополнительные избыточные разряды не нужны. Однако (и это
бывает чаще) канал может находиться в таких состояниях, когда
4—101 97
/
введенной избыточности оказывается недостаточно для
исправления всех ошибок.
Статистика ошибок, возникающих в реальных каналах связи,
изучена недостаточно и плохо поддается формализации. Поэтому
правильный выбор исправляющего ошибки кода представляется
чрезвычайно трудной задачей. В связи с этим в СПДИ такие
коды находят ограниченное применение. Кроме того, при увеличении
числа исправляемых ошибок резко усложняется построение
декодирующего устройства, что также является серьезным
препятствием для реализации этих методов. Повысить верность передачи
без существенного снижения пропускной способности можно,
вводя переменную избыточность в сообщение в зависимости от
состояния канала. Такие системы являются адаптивными, т. е.
приспосабливающимися к условиям канала. Для их построения нуж-
по уметь оценивать на приеме статистику ошибок в канале и
передавать эти данные на передающую станцию. Таким образом,
необходимо иметь дополнительный обратный канал от приемника к
передающей станции и поэтому вся система связи оказывается
системой с обратной связью.
Системы ПД с обратной связью делятся на три большие
группы: системы с решающей обратной связью (РОС), системы с
информационной обратной связью (ИОС) и системы с
комбинированной обратной связью (КОС). Характерной особенностью
используемых на практике подобных систем является повторение
переданной кодовой комбинации в случае обнаружения ошибки.
В системах с РОС передаваемое сообщение кодируется
обнаруживающим ошибки кодом, на приемной стороне проверяется
наличие искажений в кодовой комбинации. Если ошибки обнаружены,
то по обратному каналу посылается сигнал переспроса. Получая
этот сигнал, передатчик повторяет переданную комбинацию. В
случае отсутствия сигнала «переспрос» по обратному каналу можно
передавать полезную информацию в сторону передающей станции.
В системах с ИОС решение о наличии ошибок (или ее
отсутствии) принимает передающая станция. Приемник по обратному
каналу передает либо принятую кодовую комбинацию, либо
специальные сигналы, имеющие меньший объем, чем
информационные, но характеризующие качество приема принятой полезной
информации. Эти сведения называются квитанциями. Таким
образом, в системах с ИОС по обратному каналу передается либо
вся полезная информация, либо информация о ее отличительных
признаках. Решение о правильности принятой комбинации
принимает передающая станция.
Сравнивая системы с РОС и с ИОС можно заметить, что в
системах с ИОС не требуется специальное кодирование сообщений
для обнаружения ошибок. Поэтому реализация систем с ИОС
более проста, особенно в низкоскоростных системах ПДИ, где
переданные и принятые по каналу обратной связи сообщения может
сравнивать оператор.
98
Системы с КОС представляют собой сочетание
информационной и решающей обратных связей. В таких системах решение о
выдаче информации абоненту или о повторной передаче может
приниматься и в приемнике, и в передатчике СПДИ, а канал
обратной связи может использоваться для передачи как квитанций,
так и решений о неправильно принятой кодовой комбинации.
Системы с КОС обладают высокой помехоустойчивостью.
В общем случае во всех системах с ОС для повышения
верности приема обычно используется помехоустойчивое кодирование.
6.3. ПРИНЦИПЫ ПОМЕХОУСТОЙЧИВОГО КОДИРОВАНИЯ
В обычном равномерном непомехоустойчивом коде число
разрядов в кодовых комбинациях определяется числом сообщений и
основанием кода. Так, если необходимо передать 32 буквы
алфавита двоичным кодом, то необходимая длина кодовой комбинации
(число разрядов) определяется как /z=log232=5. Любая из пя-
тиэлементных кодовых комбинаций представляет собой какой-то
знак алфавита. Если в процессе передачи такой кодовой
комбинации произойдет одна ошибка, то принятая кодовая комбинация
будет интерпретироваться приемником как кодовая комбинация,
соответствующая другому знаку. Например, буква «я» (11101)
при искажении 1-го разряда с 1 на 0 будет «прочитана» как буква
«у» (11 100). Таким образом, возникающие в кодовых
комбинациях ошибки обнаружить невозможно, поскольку нельзя отличить
ошибочную комбинацию от безошибочной. Все 32 кодовые
комбинации разрешены, и возникающие ошибки просто переводят одну
разрешенную комбинацию в другую, также разрешенную.
Обнаружить ошибку в данном случае может только получатель, прочтя
принятое текстовое сообщение. За счет огромной языковой и
смысловой избыточности текста можно легко восстановить переданное
сообщение. Кстати, это является одной из причин, по которым на
телеграфной сети общего пользования не применяется
помехоустойчивое кодирование, так как в данном случае «оптимальным»
декодером является сам получатель телеграммы.
Коды, у которых все кодовые комбинации разрешены к
передаче, называются простыми или равнодоступными. Очевидно, что
при передаче цифровой информации восстановление ошибочно
принятых цифр невозможно. Цифровая информация избыточностью
не обладает. Ясно, что текстовое сообщение, принятое с ошибками,
верно восстанавливается только за счет содержащейся в нем
избыточности. В этом состоит идея помехоустойчивого кодирования:
в передаваемую кодовую комбинацию необходимо внести по
определенным «грамматическим» правилам избыточность (признаки
разрешенной комбинации). Правила внесения избыточности, т. е.
признаки, должны быть известны не только на передаче, но и на
приеме. (Попробуйте дать прочитать телеграмму человеку, не
знающему языка, на котором она написана!) Если на приемной
стороне эти признаки в кодовой комбинации не обнаруживаются,
4* 99
то считается, что произошла ошибка (или ошибки). В противном
случае (при наличии признаков) считается, что кодовая
комбинация принята правильно (является разрешенной).
Внесение избыточности при использовании корректирующих
(помехоустойчивых) кодов обязательно связано с увеличением
п — числа разрядов (длины) кодовой комбинации. Таким
образом, все множество N0=2n комбинаций можно разбить на два
подмножества: подмножество разрешенных комбинаций, т. е.
обладающих определенными признаками, и подмножество
запрещенных комбинаций, этими признаками не обладающих.
Помехоустойчивый код отличается от обычного тем, что в канал передаются не
все кодовые комбинации N0i которые можно сформировать из
имеющегося числа разрядов п—N0i а только их часть N, которая
составляет подмножество разрешенных комбинаций:
N<N0. (6.1)
Если в результате искажений переданная кодовая комбинация
переходит в подмножество запрещенных кодовых комбинаций, то
ошибка будет обнаружена. Однако если совокупность ошибок в
данной кодовой комбинации превращает ее в какую-либо другую
разрешенную, то в этом случае ошибки не могут быть
обнаружены. Выясним, в скольких возможных случаях код может
обнаружить ошибки.
Поскольку любая из N разрешенных комбинаций может
превратиться в любую из N0 возможных, то общее число таких
случаев равно N-N0. Очевидно, что число случаев, в которых ошибки
обнаруживаются, равно N(N0—N), где No—N — число
запрещенных комбинаций. Тогда доля обнаруживаемых ошибочных
комбинаций составит
N(N.-N)Bi_jr_ (б2)
NN0 N0 '
Например, если Af0=100, N=20, то ошибка обнаруживается в
80% случаев. Аналогичное рассуждение можно провести и для
случая исправления ошибок, если рассматривать код,
исправляющий ошибки. При использовании этого кода нужно произвести
разбиение множества {Bj} (/=1, 2, ..., N0—N) всех запрещенных
комбинаций на N непересекающихся1 подмножеств {Мк}. Каждое
из подмножеств {Мк} приписывается одной из передаваемых
кодовых комбинаций Ah- Способ приема состоит в том, что если
принята комбинация Bj^Affe*, то считается, что передана Ah, т. е.
если принятая кодовая комбинация осталась в том же
подмножестве, что и переданная, то принимается решение о приеме
комбинации Ак.
Сказанное можно проиллюстрировать рис. 6.1, где приняты
следующие Обозначения: A\...AN — множество разрешенных (пе-
1 Непересекающимися называются множества, не имеющие ни одного
общего элемента.
* Bj^Mh — элемент Bj принадлежит (е) множеству Мк.
100
редаваемых) комбинаций; B\...BNo-N— множество всех
возможных запрещенных комбинаций, в которые в результате различных
ошибок могут перейти комбинации {Аъ}, Ми М2 ..., MN —
подмножества, на которые разбиты запрещенные комбинации.
Способ приема состоит в том, что если принимается кодовая
комбинация {Ви В2 или £3, принадлежащая подмножеству М\),
то считается, что передавалась комбинация А{ (показано на
рисунке стрелками). Если действительно комбинация Si (или В2у
В3) образовалась из Аи то ошибка исправлена. Если принятая
кодовая комбинация переходит в другое подмножество М2, то
декодер примет ошибочное решение о передаче комбинации А2.
Очевидно, что, каким бы образом не разбивалось множество {Bj} на
подмножества {Mk}> ошибка всегда исправляется в N0—N
случаях.
Общее число переходов комбинаций AN в комбинации BNo-N
равно N(N0—N), а это есть число всех обнаруживаемых
ошибочных комбинаций. Отношение числа исправляемых ошибочных
комбинаций к числу обнаруживаемых
Л*=И—=±9 (б.з)
N(N0 — N) N v '
где N — число разрешенных комбинаций. Формулы (6.2) и (6.3)
получены из единственного условия N<.N0 и поэтому
справедливы для любого кода, у которого N<.N0r Такие коды всегда
способны исправлять ошибки. Очевидно, что способность исправлять
ошибки зависит от способа приема, т. е. от способа разбиения на
подмножества {Mk}. В свою очередь способ приема зависит от
характера ошибок в канале передачи.
Пример 6.1. Возьмем трехразрядный двоичный код. Тогда N=23=8
кодовых комбинаций: 000, 001, 010, ОН, 100, 101, 110, 111. Отберем из этих
Рис. 6.1. Исправление ошибок
помехоустойчивым кодом
Рис. 6.2. Представление кодовых
комбинаций в трехмерном пространстве
101
комбинаций только те, у которых имеется четное число единиц («О» — также
четное число). Имеем четыре кодовые комбинации: 000, 011, 101, ПО, —
которые назовем разрешенными, поскольку каждая из них обладает одним и тем
же признаком — четностью числа единиц.
Этот признак известен на приеме, и поэтому декодер в состоянии
обнаружить все нечетно-кратные ошибки, поскольку они нарушают условие четности.
Удобно представить кодовую комбинацию точкой в трехмерном
пространстве (рис. 6.2). Разрешенные кодовые комбинации обозначены большими
кружочками. Поясним теперь идею исправления одиночной ошибки.
Все пространство точек разобьем на две области (поверхность, отделяющая
эти области, заштрихована). В одну область войдут точки (кодовые
комбинации): 000, 101, 001, 011; в другую — 100, ПО, 010, 111. Теперь будем
передавать только две комбинации из этих областей, например ПО и 001 (N=2).
Условимся, что в канале действует только одиночная ошибка. Пусть передается,
например, комбинация 001. Одиночная ошибка может перевести эту комбинацию
в неразрешенные: 101, ОН, 000. Нетрудно заметить, что все эти ошибочные
комбинации принадлежат той области, которой принадлежит и передаваемая
комбинация 001. Поэтому при приеме одной из ошибочных комбинаций 101, 011
или 000 декодер исправит их на переданную комбинацию 001, т. е. исправит
одиночную ошибку.
6.4. КОДОВОЕ РАССТОЯНИЕ. ЧИСЛО ОБНАРУЖИВАЕМЫХ
И ИСПРАВЛЯЕМЫХ ОШИБОК А
Для того чтобы можно было обнаруживать и исправлять
ошибки, разрешенная комбинация должна как можно больше
отличаться от неразрешенной. Если ошибки действуют независимым
образом (как случайные независимые события), то вероятность
преобразования одной кодовой комбинации в другую будет тем
меньше, чем большим числом разрядов они различаются. Если
интерпретировать кодовые комбинации как точки в пространстве, то
отличие выражается в близости этих точек, т. е. в расстоянии
между ними.
Количество разрядов, которыми отличаются две кодовые
комбинации, можно принять за расстояние между ними. Для
определения этого расстояния нужно сложить две кодовые комбинации
по модулю 2 и подсчитать число единиц в полученной сумме.
Например, две кодовые комбинации 01011 и 10010 имеют расстояние,
равное 3, так как
11001 — число единиц равно 3.
Обозначим кодовое расстояние через d. Легко проверить, что
в простом (некорректирующем) коде МТК-2 кодовое расстояние
меняется от 1 до 5. Кодовое расстояние d, равное 5, соответствует
случаю
00000 ф 11111 = 11111,
a d=<l, например, — случаю
101110 00111 = 10000.
102
В дальнейшем интерес будет представлять только
минимальное кодовое расстояние или расстояние Хэмминга, которое
обозначим через d0. Итак, у простого кода
<Lin = d0=l. (6.4)
Рассмотрим, чему равно d0 помехоустойчивого кода (пример
6.1). Для передачи использовались комбинации, содержащие
четное число единиц: 000, 101, ПО, 011. Легко убедиться
непосредственным подсчетом, что любые две кодовые комбинации
отличаются не менее чем двумя разрядами, т. е. d0^2. При исправлении
одиночной ошибки использовались только две кодовые
комбинации ПО и 001. В этом случае rf0=3. Очевидно, что при d0>2 код
способен обнаруживать и исправлять ошибки. При d0=l такой
возможности нет.
Итак, приходим к выводу, что помехоустойчивые коды
должны иметь кодовое расстояние d0^2. Нужное кодовое расстояние
устанавливается введением определенного количества
дополнительных разрядов в кодовую комбинацию. Так, чтобы простой пя-
тиэлементный код сделать кодом, обнаруживающим все нечетно-
кратные ошибки, нужно увеличить длину каждой кодовой
комбинации на один разряд: 1 10 0 0 0 или 10 0111 и т. д. Количество
обнаруживаемых и исправляемых ошибок тесно связано (см.
пример 6.1) с минимальным кодовым расстоянием d0. Эта связь
определяется следующим образом.
Обозначим число (кратность) обнаруживаемых ошибок через
/0, а число исправляемых ошибок — через /и. Ошибка не
обнаруживается, если одна разрешенная комбинация переходит в другую
разрешенную. Следовательно, для обеспечения возможности
обнаружения всех ошибок кратностью до t0 включительно
необходимо, чтобы кодовое расстояние определялось неравенством
d0 > t0+l. (6.5)
Это соотношение иллюстрируется рис. 6.3. Переход от одной
точки к другой на рис. 6.3 соответствует искажению одного разряда.
Ьр раз-
рейх,
кодовая ком-
динация
О. 2-яраз-
peui.
кодовая коп
бинацид
Запрещ.
кодовая комбинация
Од-яразреш.
кододая
комбинаций
Рис. 6.3. Зависимость кодового расстояния от do
и /
103
Для обеспечения возможности исправления всех ошибок
кратности до tu включительно необходимо, как было установлено
выше, чтобы принятая кодовая комбинация осталась в
подмножестве запрещенных комбинаций, которое ей принадлежит (на рис. 6.3
эти подмножества отделены пунктирными линиями). В этом
случае кодовое расстояние
4>2*н+1. (6.6)
Из (6.5) и (6.6) следует, что если код исправляет все ошибки
кратностью £и, то число ошибок, которые он может обнаружить,
равно t0 = 2tm. Чтобы код обнаруживал ошибки кратностью t0 и
исправлял ошибки кратностью *и, кодовое расстояние должно
быть равно
4>>'о + *и+1. (6.7)
Формулы (6.5) — (6.7) указывают на минимальное количество
обнаруживаемых и исправляемых ошибок. Обнаруживаться и
исправляться будут ошибки и большей кратности, поскольку
расстояние между отдельными кодовыми комбинациями может быть
больше чем d0. Однако процент исправляемых ошибок невелик.
Необходимое кодовое, расстояние rf0» а значит, и
корректирующая способность кода определяются его относительной
избыточностью, под которой понимают отношение
R'=J?—A = -L-t (6.8)
[п п
где г — число избыточных (проверочных) разрядов, an — общее
число разрядов в кодовой комбинации.
Очевидно, что количество дополнительных разрядов г связано
с кодовым расстоянием d0. Кодовое расстояние будет тем
большим, чем больше избыточность кода и чем равномернее
распределены расстояния между разрешенными кодовыми комбинациями.
Однако точных формул, связывающих величины \г и d0, нет. Такая
формула известна только для кода с d0=3:
r>log2(/z+l). (6.9)
Для остальных случаев известны только верхние и нижние оценки
кодового расстояния. Так, граница Плоткина дает верхнюю
границу кодового расстояния dQ при заданном основании кода R, числе
разрядов в кодовой комбинации п и числе информационных
разрядов &, т. е. d0(верхн)(#fe—l)^n(<R— l)Rk-{; для двоичных кодов
*<"ТТ^- (6Л0)
Граница Варшамова—Гильберта определяет нижнюю границу для
числа проверочных разрядов, необходимого для обеспечения
заданного кодового расстояния do:
2rwln>l+§CLi, (6.11)
1=1
где С1п-\ — число сочетаний из п—1 элементов по i элементам.
104
6.5. КЛАССИФИКАЦИЯ ПОМЕХОУСТОЙЧИВЫХ КОДОВ
Помехоустойчивые коды (рис. 6.4) делятся на блочные и
непрерывные. К блочным относятся коды, в которых каждому
сообщению соответствует блок из п символов (разрядов) или блоки с
разным числом символов. В связи с этим блочные коды делятся
на равномерные и неравномерные. Широкое практическое
применение нашли равномерные коды. К неравномерным кодам отно-
Помехоустойчивые
коды
\
блочные
коды
1 1
Равномерные 1
/ коды
1 Неравномерные
коды
1
Разделимые
коды
1
1 Неразделимые
коды
1
{Систематические коды
И
[Несистематические коды
1
Циклические 1
[ коды \
"1
1 Коды
Хемминга
—
I
Непрерывные 1
коды
1
i
СВерточные 1
коды
Коды с постоянным 1
Весом
Коды с контрольным 1
суммирован.
Рис. 6.4. Классификация корректирующих кодов
сится, например, код Морзе. Непрерывные коды, к которым
относятся рекуррентные (называемые также сверточными),
представляют собой непрерывные последовательности единичных
элементов, не разделенные на блоки. В таких кодах избыточные
разряды помещаются в определенном порядке между
информационными.
Равномерные блочные коды делятся на разделимые и
неразделимые. В разделимых кодах элементы информационной и
проверочной частей кодовой комбинации всегда стоят на определенных
местах. В неразделимых кодах деление на информационные и
проверочные разряды отсутствует. К таким кодам относится код с
постоянным весом: например, рекомендованный МККТТ
телеграфный код № 3 — семиразрядный код «3 из 7» с постоянным весом,
равным 3*.
Разделимые коды в свою очередь делятся на систематические
(линейные) и несистематические (нелинейные). Код называется
* Весом кодовой комбинации называется число содержащихся в ней
единиц. Любая комбинация кода № 3 содержит три единицы: 1001010 или
0011001 и т. д.
105
линейным, если любая разрешенная кодовая комбинация может
быть получена в результате линейной операции над набором k
ненулевых линейно-независимых кодовых комбинаций. В
систематических кодах проверочные элементы формируются линейным
преобразованием информационных. Эти коды в системах ПДИ
получили наибольшее применение.
Нелинейные коды указанным выше свойством не обладают и
применяются значительно реже. Примером несистематического
кода является код с контрольным суммированием. В этом коде
проверочные разряды записываются в виде суммы единиц в кодовой
комбинации (см. итеративный код).
Различают два метода формирования проверочной группы:
поэлементный и в целом; последний характерен для широко
распространенных полиноминальных кодов (и их разновидности —
циклических). Среди систематических кодов большое применение
нашли коды Хэмминга. Эти коды, обеспечивающие d0=3, позволяют
исправить одну ошибку. Помехоустойчивые коды могут иметь
основание (значность) и больше 2. Однако в связи со сложностью
построения кодирующих и декодирующих устройств они на
практике применяются значительно реже двоичных.
6.6. КОДЫ ХЭММИНГА
Коды Хэмминга относятся к линейным систематическим кодам
с d0=3 и do=4, в которых проверочные разряды формируются
линейным преобразованием информационных разрядов. Правило
нахождения проверочных разрядов является основной задачей
корректирующих кодов. Это правило будем определять в виде
некоторого линейного оператора R. Существуют два принципиально
отличных друг от друга оператора формирования:
I. b^Rtia,}, t=l, 2,..., г; (6.12)
II. {br} = R{a}l<k. (6.13)
В первом случае каждый элемент bi проверочной части
определяется своим оператором Ri-{a,j} — обозначает подмножество тех
информационных элементов, которые участвуют в формировании
fti-ro проверочного разряда. Таким образом, для нахождения г
проверочных разрядов необходимо последовательное применение
г различных операторов Ri (проверок).
Во втором случае оператор R действует сразу на все
множество разрядов информационной части, определяя тем самым в
целом проверочную часть кодовой комбинации. Ко второму случаю
относятся циклические коды. Обнаружение и исправление ошибок
кодом Хэмминга сводится к определению и последующему
анализу «синдрома». Под синдромом понимают совокупность
элементов, сформированных суммированием по модулю 2 принятых
проверочных элементов и вычисленных проверочных элементов по
106
принятым информационным элементам по тому же правилу,
которое применяется для их определения.
Рассмотрим код Хэмминга с поэлементным формированием
проверочной группы.
Для определения Ьи Ь2, ..., Ьг на передающей стороне
пользуются операторами 7?ь ..., Rr, bi=iRi{di}, где {а*} — множество
информационных элементов данной кодовой комбинации. На
приемной стороне по принятой совокупности информационных
элементов {аг}* вычисляются с помощью тех же операторов </?* новые
проверочные элементы b'i=\Ri{ai}* (знак * означает принятые
элементы кодовой комбинации, которые из-за ошибок в канале
могут отличаться от переданных). Далее принятые проверочные
элементы foi*, fo2*, •••> Ьг* складываются по модулю 2 с
вычисленными Ъ'\> Ьгъ ..., Ъ'г\
ФЬ[ Ь'2...Ь'Г
(6.14)
^1 ^2« • • ^Г
В результате сложения получается некоторая кодовая
комбинация—синдром или вектор ошибки. Допустим, что все а{
приняты верно, тогда {аг} = {аг}* и, значит, {^*} = {Ь;}, т. е.
вычисленные проверочные элементы по {аг}* такие же, как и на передаче.
Если при приеме проверочных элементов также не произошло
ошибок, то
В этом случае все разряды синдрома будут представлены нулями:
CiC2...Cr=^00 „0.
Если где-то происходят ошибки, то в составе синдрома появятся
единицы. Это и есть способ обнаружения ошибок кодом
Хэмминга. Поскольку код Хэмминга имеет минимальное кодовое
расстояние do=3, то это означает, что код может исправить одну ошибку,
т. е. указать номер позиции в кодовой комбинации, где
произошла ошибка (что для двоичных кодов достаточно). В одном из
вариантов такого кода между видом синдрома и номером
ошибочной позиции имеется однозначное соответствие. Двоичное число
синдрома представляет собой условный номер (в десятичной
системе) того разряда в кодовой комбинации, где произошла
ошибка. Построение такого кода должно сводиться к установлению
вида операторов {Ri} на основании сопоставления двоичного числа,
представляющего синдром, с элементом множеств {а*} и {&*}, в
которых произошла ошибка.
Покажем, как это можно сделать. Будем исходить из наличия
одной ошибки. Если ошибка происходит только в проверочном
элементе, то в составе синдрома будет одна единица. Рассмотрим
в качестве примера код (9,5), у которого \г=9—5=4, что обеспе-
107
чивает d0=3. Появление единицы в синдроме происходит
следующим образом:
ФЬ1Ь*Ь3ЬА
Ъ[ Ь'2 Ь'.6 &* — нет ошибок;
00 00
1000 — ошибка в Ь\ (число 8);
0100 — ошибка в Ь72 (число 4);
0010 — ошибка в &'3 (число 2);
0001 — ошибка в Ь\ (число 1).
Условные (десятичные) номера этих разрядов будут
соответственно 8, 4, 2, 1. Появление большего числа единиц будет
связано с ошибками в информационной части {а^. По существу
безразлично, какие условные номера присваивать информационным
элементам а*. Будем присваивать их по порядку возрастания
двоичного числа синдрома (в этом 'случае, как показывает анализ,
схемные решения кодера и декодера такого кода оказываются
более простыми). Запишем по порядку в виде таблицы числа,
представляющие синдром (табл. 6.1).
Таблица 6.1
Число
синдрома,
десятично
условный номер
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
с,
0
0
0
0
0
0 1
0
1 1
Элементы
Сг
0
0
0
1
1 1
1
1
0
0
0
0
1
1
1
1 1
синдрома
Сг
0
1
1
0
0
1
1
0
о 1
1
1
0
о
1
1
1
с4
1
0
1
0
1
0
1
0
1
0
1
о
1
0
1
Элементы
кодовой
комбинации с ошибкой
■ ь,
Ьг
fli
ь2
02
аз'
а4
Ьх
а5
06
а7
а8
а9
аю
аи
Итак, все элементы кодовой комбинации имеют условные
номера, соответствующие своему двоичному числу,
представляющему синдром. Теперь осталось определить {/?*} — операторы
формирования проверочных элементов по информационным.
Напомним, что единственное линейное преобразование, которое можно
совершать над информационными элементами, — это суммирова-
108
ние (в данном случае суммирование по модулю 2)1. Построим
алгоритм 91 так, чтобы он включал в себя информационные
элементы, ошибка в которых приводила быт к появлению единицы «1» в
младшем разряде синдрома (С*). Для этого необходимо отобрать
те {#г}> у которых при возникновении ошибки появляется единица
в том же младшем разряде синдрома {С4}. Наличие «1» в
младшем разряде С а соответствует проверочному элементу ЬА. Кроме
того, эта «1» есть в синдромах с номерами 3, 5, 7, 9, 11, 13, 15, что
соответствует информационным элементам а\, a<i, a^ as, a-j, ag, an.
Таким образом,
j^1:fc4=:a1ea2©a4ea6ea7ea9©aii-
Для девятиразрядной кодовой комбинации b±=a\ ©a2 ©а4 Ф as.
Если в одном из этих элементов произойдет ошибка, то это
неизбежно приведет к изменению Ъ± с «О» на «1» или с «1» на «О».
Следовательно, когда на приемной стороне определим Ь\, то
окажется, что Ъ\ФЪ±. Это приведет к наличию «1» в первом
младшем разряде синдрома.
Для формирования проверочного элемента &з, в синдроме
которого единица стоит на второй позиции (второй разряд),
отбираем информационные элементы, имеющие «1» во втором
разряде своих синдромов, т. е. а\, аз, а4, ав, ау, аю, an-
^2:&з=%Фаз®а4®Дб®а7©а1о®аш
<%3: &2 = а2©азеа4©а8©а9еа10©а11; (6.15)
j?4: Ъх = аъ@а^® а7®ав® аь®а10® ап.
Приведенные соотношения можно компактно отобразить в виде
так называемой проверочной матрицы Н. Она состоит из п
столбцов и г строк. Номера информационных элементов, участвующих
в суммировании, обозначаются единицами. Проверочные
элементы представляются в виде единичной матрицы Ег. Для
рассматриваемого кода (9, 5)
10 0 0 0 1
10 1110
10 110
110 11
н
(9,5)
: 1 0 0 0 i
i 0 1 0 0:
:0 0 1 0:
:00 0 1 :
U,
К
к
\bt
(6.16)
аг а2 а3 а4 а5
В (6.16) пунктиром показана единичная матрица Ег. Из 1-й
строки следует, что для формирования Ь\ нужно взять элемент as: 61 =
= a5. Из 2-й строки следует, что &2=а2©аз© а^ Соответственно
из 3-й и 4-й строк fe3=ai©a3 ©a4; 64=ai©a2®a4 фа5.
Рассмотрим конкретный пример.
Пример 6.2. Имеется комбинация информационных элементов 11001. Для
кода Хэмминга построить разрешенную комбинацию кода (9,5) и показать, что
данный код исправляет одну ошибку.
1 1 ©1 = 0; 0©1 = 1; 0© 0=0. Легко проверить, что эти операции являются
линейными.
109
Воспользуемся проверочной матрицей (6.16). Имеем:
flx = l; a2=l; а3 = 0; аА = 0; а5=1; Ь1 = аъ=\;
Ь2 = а2 © а8© а4 = 1 © °Ф ° = 1;
&з = «1Ф ««© «4 = 1 © о © ° = i;
^4 = % Ф ^2 Ф ^4 Ф «5 = 1 © 1 Ф 0 © 1 - 1 .
т. е. 6x626364-^1111.
Разрешенная комбинация имеет вид 11001 1111. Пусть произошла ошибка в аз,
т. е. приняли 111011111. Убедимся, что ошибка исправляется. Для этого
вычислим по информационной части принятой кодовой комбинации новые провероч*
ные разряды:
Ь\ = а5 = ] '>
62 = а2®Яз®а4 = °;
63 = а1©аз©а4 = 0;
Ь\ = а[ ф (% ф а\ © а5 = 1,
т. е. 6'i6,26,36,4=1001. Найдем синдром
hb2bzh 1111
® ьхь2ьъь^®\ о о 1;
CiC2C3C4 0 110
ОНО — есть число 6. На 6-м условном номере согласно табл. 6.1. стоит
информационный элемент а3. Следовательно, значение принятого а'3 нужно исправить:
вместо «1» нужно поставить «О». Кодовая комбинация принята правильно.
6,7. ЦИКЛИЧЕСКИЕ КОДЫ
Циклические коды относятся к классу линейных
систематических кодов и обладают всеми их свойствами. Удобно
рассматривать кодовые комбинации циклического кода не в виде
последовательности нулей и единиц, а в виде полинома некоторой
степени. Любое число в любой системе счисления можно
представить в общем виде как
F (х) = ап-г хп-х + ап-2 хп~2 + ... + аг х + а0, (6.17)
где х — основание системы счисления; а\ — цифры данной системы
счисления; п—1, п—2,... — показатель степени, в которую
возводится основание, и одновременно порядковые номера, которые
занимают разряды, начиная от старшего, кончая нулевым. Для
двоичной системы х=2, а аг- либо «О», либо «1». Например, двоичную
последовательность 01001 можно записать в виде полинома от
аргумента х:
F(2) = 0.24+b23 + 0.22 + 0.2' + 1.20;
F(x) = 0.x*+l-x* + 0'X2 + 0'X+l-x» = x*+l.
Очевидно, что при записи кодовой комбинации в виде
многочлена единица в i-м разряде записывается членом х1~ху а нуль
вообще не записывается. Представление кодовых комбинаций в виде
но
многочленов позволяет установить однозначное соответствие
между ними и свести действия над комбинациями к действию над
многочленами. Так, сложение двоичных многочленов сводится к
сложению по модулю 2 коэффициентов при равных степенях
переменной х. Например,
X? + X2+1 l.^ + ^ + 0-X+l
ш х+1 я ®0.х* + 0-х2 + х+\
х* + х2 + х ' х?+х2 + х+0 '
Умножение производится по обычному правилу умножения
степенных функций, однако полученные коэффициенты при данной
степени складываются по модулю 2. Например,
(x* + x2 + 0+l)(x+l) = x* + x* + Q+x + x* + 0+l==x* + x2 + x+l.
Деление также осуществляется, как обычное деление
многочленов; при этом операция вычитания заменяется операцией
сложения по модулю 2*>:
ф**+о+*2+*+Ц*+1
** + ** яЗ + Л.2+1
&х3 + х2
Ш х* + х2
Ш х+1
О*
Коды названы циклическими потому, что циклический сдвиг ап-2,
Яп-з,..., Яг, аь Яо, fln-i разрешенной комбинации an-i, an-2>...
..., аи flo также является разрешенной комбинацией. Такая
циклическая перестановка при использовании представления в виде
полиномов появляется в результате умножения данного полинома
на х. Если V(x)=an-ixn-l+an-2Xn-2+ ... +а\Х+ао9 то V(x)x=
=an-iXn-\-an-2Xn-l+ ... +aiX2+aoX0. Чтобы степень многочлена не
превышала п—1, член ап-\хп заменяется единицей, поэтому
V(x) x = F(x) = ап-2хп-{ + ... + а±х2 + а0х + ап-1.
Например, имеем кодовую комбинацию 0101110->л:5+л;3+л:2+х.
Сдвинем ее на один разряд. Получим
1011100 -+х* + х* + х* + х2.
Очевидно, что
х« + х* + х* + х2 = х(хъ + х* + х2 + х).
Теория построения циклических кодов базируется на разделах
высшей алгебры, изучающей свойства двоичных многочленов.
Особую роль в этой теории играют так называемые неприводимые
многочлены, т. е. полиномы, которые не могут быть представлены
в виде произведения многочленов низших степеней. Такой много-
ф
* Сложение и вычитание двоичных чисел дают один и тот же результат:
1ф1=0; 1© 1=0 и т. д.
111
член делится только на самого себя и на единицу. Из высшей
алгебры известно, что на неприводимый многочлен делится без
остатка двучлен хп-\-\. В теории кодирования неприводимые
многочлены называются образующими полиномами, поскольку они
«образуют» разрешенные кодовые комбинации (таблица
неприводимых полиномов дана в приложении).
Идея построения циклического кода сводится к тому, что
полином, представляющий информационную часть кодовой
комбинации, нужно преобразовать в полином степени не более п—1,
который без остатка делится на образующий полином Р(х).
Существенно при этом, что степень последнего соответствует числу
разрядов проверочной части кодовой комбинации. В циклических
кодах проверочная часть получается сразу, т. е. используется
алгоритм {bi}—iR{ak}. Тогда все разрешенные комбинации
циклического кода, представленные в виде полиномов, будут обладать
одним признаком: делимостью без остатка на образующий полином
Р(х). Построение разрешенной кодовой комбинации сводится к
следующему:
1. Представляем информационную часть кодовой комбинации
длиной k в виде полинома Q(x).
2. Умножаем Q(x) на одночлен хг и получаем Q(x)xr, т. е.
производим сдвиг ^-разрядной кодовой комбинации на г разрядов.
3. Делим многочлен Q(x)xr на образующий полином Р{х),
степень которого равна г.
В результате умножения Q(x) на хг степень каждого
одночлена, входящего в Q(x).9 повышается на г. При делении
произведения xrQ(x) на образующий полином степени г получается частное
С(х) такой же степени, что и Q(x). Результаты этих операций
можно представить в виде
Q(*)*r =С{х)фШ$ (6.18)
Р (х) W P (х) V ;
где R(x) —остаток от деления Q(x)xr на Р{х). Поскольку С(х)
имеет такую же степень, что и Q(x), то С(х) представляет собой
кодовую комбинацию того же 6-разрядного кода. Степень остатка
не может быть, очевидно, больше степени образующего полинома,
т. е. его наивысшая степень равна г—1. Следовательно,
наибольшее число разрядов остатка не превышает г. Умножив обе части
(6.18) на Р(х), получим
Q(x)xr = C(x)P(x)@R(x)
или
F(x) = C(x)P(x) = Q(x)jf®R(x) (6.19)
(знак вычитания заменяется знаком сложения по модулю 2).
Очевидно, что F(x) делится на Р(х) без остатка. Полином F(x)
представляет собой разрешенную кодовую комбинацию циклического
кода.
Из (6.19) следует, что разрешенную кодовую комбинацию
циклического кода можно получить двумя способами: умножением ко-
112
довой комбинации простого кода С(х) на образующий полином
Р(х) или умножением кодовой комбинации Q(x) простого кода на
одночлен хг и добавлением к этому произведению остатка R(x)>
полученного в результате деления произведения на образующий
полином Р(х). При первом способе кодирования информационные
и проверочные разряды не отделены друг от друга (код
получается неразделимым). Это затрудняет практическую реализацию
процесса декодирования. При втором способе получается
разделимый код: информационные разряды занимают старшие позиции,
остальные п—k разряды являются проверочными. Этот способ
кодирования широко применяется на практике.
Пример 6.3. Дана кодовая комбинация 0111. Построить циклический код
с d0=3. Исходя из требуемого do=3, определим количество
проверочных элементов г, равное показателю степени образующего
полинома. В данном случае можно воспользоваться формулой 2г^п+\.
Так как число информационных элементов известно (k = 4),
то, учитывая, что n = k+r, имеем 2r^^ + r+l=r+5. Отсюда г=3.
Следовательно, необходим код (7,4). По таблице образующих полиномов (табл. 6.2)
при г=3 определяем Р(х) = хъ+х2+\.
Решение:
1) Q(x)=x2+x+l;
2) умножаем Q(x) на Л'3 (так как г=3):
Q (х) .*з = (х2 + х + 1) х* = х* + х4 + *3;
3) делим Q(x)x3 на Р(х):
хь + х* + х* |x3 + *2+l
®х* + х* + х* ^TjTT
XZ + X2
®х* + х2+\
г
Значит, R(x) = \ и Q(x)xr/P(x)=xr+\Q\/P(x);
4) получаем
F(x) = Q (х) х2фЯ (х) = х* + х* + *3 + 1.
Этот полином соответствует кодовой комбинации
0 111 0 0 1
k г '
Все указанные операции можно производить и над двоичными числами:
1) <2(0ii) =0 111;
2) Q(o,i)*3 (0.0 = 0111000;
3) Q(01)*3(o,l):P(0,l) т. е.
011100011101
0 0 110 0.
1 1 0 1 '
0 0 0 1
101-*Л;2-|-1; 1_1;
113
Таблица 6.2
г
2
3
4
5
6
7
8
9
10
11
IS
Pr(x)
x*+x+l
x*+x+l
xb+x+l
x5+x*+\
x*+xb+x3+x*+\
x5+x^+x2+x+\
xe+x+l
x6+x5+x*+x+\
хЪ+х3+\
х7+х*+х2+х+\
х7<+хЬ+х3\+х*+\
х*>+х7+х6+х5+х*+х+1
х*+х*+х5+х+\
х*+х5+х3+х*+\
*9+*Ч-*7+*6+*5+*3+1
л'10+*4+*3+*+1
*10+л:9+л;б+л:Ч-*4
+х*+х*+х+\
xii+xl0+x*+x*+x*+x+1
х"+х*+х*+х2+1
х1*+х"+х*+х*+х
хМ+х*+х3+х*+\
Ч-яЧ-л^+лЧ-!
Двоичная запись
многочлена Р(х)
111
1011
10011
100101
111101
110111
1000011
1100111
10001001
10001111
10011101
111100111
100011101
101100011
1000101101
1111101001
10000011011
11001111111
111100001011
100101000101
110Ы101001П
| 1001000001101
4) F (0,1) =Q(O,1)*3(O>1)0 1 = 0111000 0 0001 = 0_1 11 (ИМ
k г
Построим теперь разрешенную кодовую комбинацию первым способом: F(x) =
= С(х)Р(х). Произведем умножение, представляя полиномы двоичными
числами:
114
0 111
0 0 111
0 0 0 0
ffi ®0 1 1 1
Ш0 1 1 1
0 10 0 0 11 '
F(0,1) = 0 10 0 0 11.
Видно, что в полученной кодовой комбинации нельзя выделить информационные
и проверочные разряды.
6.8. ОБНАРУЖЕНИЕ ОШИБОК ПРИ ЦИКЛИЧЕСКОМ
КОДИРОВАНИИ
Обнаружение ошибок при циклическом кодировании сводится к
делению принятой кодовой комбинации на тот же образующий
полином, который использовался при кодировании (вид его,
разумеется, должен быть известен на приеме). Если ошибок в
принятой кодовой комбинации нет (или они такие, что данную
передаваемую кодовую комбинацию превращают в другую
разрешенную), то деление на образующий полином произведется без
остатка. Если при делении получится остаток, то это и
свидетельствует о наличии ошибки. Остаток от деления в циклических кодах
играет роль синдрома.
Пример 6.4. В качестве разрешенной кодовой комбинации возьмем
кодовую комбинацию, полученную в примере 6.3: F(x)=x5+xA+x*+l, а Р(х) =
=х6+х2+\, или в двоичном виде F(0, 1) =0111001; Р(0, 1) = 1101. Допустим,
что в информационной части произошла ошибка в старшем (7-м) разряде
(разряды считаем справа налево). Принятая кодовая комбинация имеет вид
1111001. Произведем операцию обнаружения ошибки
m 1 1 1 1 0 0 1 11101
Ш 1 1 0 1 '
10 11
0 0 10 0 0
Ф 110 1
m 10 11
^ 110 1
1 1 0
Наличие остатка ПО свидетельствует об ошибке.
6.9. ОПРЕДЕЛЕНИЕ МЕСТА ОШИБКИ. ВЫБОР
ОБРАЗУЮЩЕГО ПОЛИНОМА
Остаток от деления — синдром циклического кода, не равный
нулю, — свидетельствует о наличии ошибки. В кодах с
образующим полиномом степени г остаток представляется в виде полино-
115
ма, степень которого меньше г. Это означает, что количество
различных ненулевых остатков может быть равным 2Г—1. Для кода
Хэмминга с d0=3 их количество равно числу элементов кодовой
комбинации п (2r^/z+l). Можно показать, что номер разряда, в
котором произошла ошибка, однозначно связан с видом
получающегося при этом ненулевого остатка. Это позволяет по виду
синдрома (остатка) определить место ошибки.
Таким образом, для исправления ошибок необходимо
обеспечить условие, при котором количество различных ненулевых
остатков будет равно количеству элементов п (при исправлении
одной ошибки) или числу комбинаций из п по *и, где /и —
количество ошибок, исправляемых кодом. Это, например, означает, что в
коде с /г= 15 при /и=2 следует иметь C2is=105 остатков, что
обеспечивается при г=7 (27—1 = 127). Следовательно, нужно
выбрать образующий многочлен с г=7 и код (15,7).
Следует подчеркнуть, что не все неприводимые многочлены
позволяют формировать 2Г—1 различных остатков. Это присуще
только определенному классу многочленов, которые именуются
«примитивными». Так, Ру(х)=х*-\-х+1 удовлетворяет указанному
требованию, а Р2(#)=*4+*3+*2+*+1 — нет, т. е. Р\(х)
—примитивный многочлен.
Пример 6.5. Пусть для кода (15, 11) с г = 4 имеются дза полинома
ошибок: jE"i(л:) =л:0= 1 и £2(л:) =л:5. В качестве образующего полинома выберем
Р\{х)=х*+х6+х2+х-\-\. Нетрудно видеть, что для х°=\ и для х5 будет
одинаковый остаток Ri(x) = l(Ri(0,1) =0001). Если же выбрать Р2{х) =х*+х+\>
то в первом случае имеем R(x) = \, а во втором — R2(x)=x2+x [убедитесь, что
в этом случае все 15 многочленов Е(х) дают различные остатки].
Исходя из приведенных соображений в качестве образующих многочленов
используют примитивные многочлены. Их признаком является наличие остатка,
равного единице только для х° и хп, где п — количество элементов в кодовой
комбинации. Между п и г для таких полиномов имеется зависимость 2г = п—1.
Здесь п — максимальное количество элементов, при котором число
различающихся ненулевых остатков равно п—1. Поэтому в таблицах образующих
полиномов указываются только примитивные полиномы.
• Для определения места ошибки в циклическом коде
существует несколько методов, основанных на анализе синдрома i?(x).
Принятую кодовую комбинацию F'(x) можно представить в виде
F/(x)=F(x) (&Е(х), где Е(х) —многочлен ошибки. Например,
если F(09 1) =01110111, а £(0, 1) = 10000000, то f*(0, 1) = 111 10111.
Остаток от деления принятой кодовой комбинации F'n(x) на Р(х)
равен остатку от деления на Р(х) кодовой комбинации ошибки
Еп(х), если
Fn(x) = Fn(x)QEn(x).
Это условие справедливо, если код способен исправлять
количество ошибок /и, равное или меньшее веса комбинации £п(0,1).
На основе этого свойства можно заключить, что синдром не
зависит от переданной кодовой комбинации, а определяется лишь
наличием ошибок. Указанное свойство можно использовать для
определения ошибочно принятого элемента.
116
Предположим, что ошибка произошла в старшем разряде
переданной кодовой комбинации а\. В этом случае R\(x) —есть
остаток от деления принятой комбинации Fn(x) на Р(х). Такой же
остаток Ri(x) получается, если разделить на Р(х) комбинацию
ошибки, т. е. многочлен хп~1. Но такой же остаток
получится при ошибке в разряде а2, если F'n(x) умножить на х.
То же будет и при ошибке в разряде а3, если Fn(x) умножить
на х2у и т. д. Это свойство (основанное на свойстве цикличности)
лежит в основе следующего приема исправления ошибки, который
мы рассмотрим на конкретном примере.
Пример 6.6. Дан код (11,7) с Я(0,1) = 10011. Пусть передается
разрешенная комбинация
Fn (0,1) = 10 110 11110 0.
1. Ошибка произошла в старшем (ai) разряде, тогда
fj£(0,l) = 0 0 110 11110 0.
Следовательно, многочлен ошибки
Е (0,1) = 1 0 0 0 0 0 0 0 0 0 0 или *1С.
Разделив f (0,1) на Р(0,1), получим
001 101 1 1 10 0)1001 1
© 10 0 11
10 0 0 1
©10 0 11
110 0 1
10 10 0
© 1 0 0 1 1
0 111
^(0,1)-= 0 1 1 1.
Теперь разделим £(0,Г) на Р(0,1):
10000000000|1001 1
© 1 0 0 1 1
©
0 0 0 1 10 0 0
10 0 11
10 110
© 1 0 0 1 1
1 0 1
©10 0
0 0
1 1
10 0 110 1
1 1 1
Убеждаемся, что остатки совпадают.
2. Примем .F'(ОД) = 10111111100. Оказалось, что fli(0,l)=^0. Определить
место'ошибки (известно, что код исправляет одну ошибку).
а) Определяем #о(0,1) =0111 как остаток от деления х10-=Е(х)=хп"1 на
Р(х).
б) Определяем остаток Яг(0,1) от F'(0,1). Если Rx(0,1) =£/М0,1), то
дописываем к F'(Q,\) справа 0 и находим #2(0,1) (осуществляем сдвиг влево на
один разряд). Если i?2(0,1)^^0(0,1), то дописываем еще один 0 и т. д. до тех
117
пор, пока iRi(0,l)=#o(0,l), где t —число сдвигов. Номер ошибочного элемента
ai+l на единицу больше числа приписанных нулей:
101111111000000110011
m I— _ _
10011 101000011 01
0 0 10 0 1 1
Ф 10 0 11
0 0 0 0 0 |1 1 0 0[ 0
ji'oTTio
m ; !
Ш 10 0 11
о ojfo'I'lo о
е i""o о' 1 1
■o'TT'ii *
где #i(0,l) = 1100; »/?г(0Л) = 1011; /?3(0,1) = 101; i?4(0,l) =(/?0(0,l) =
= 0111. Поскольку число сдвигов равно четырем, то t=4 и искаженный разряд
ai+i = a5- Следовательно, исправленная кодовая комбинация имеет вид
10110111100, т. е. соответствует переданной.
6.10. МАТРИЧНОЕ ПОСТРОЕНИЕ СИСТЕМАТИЧЕСКИХ
КОДОВ С ПОЭЛЕМЕНТНЫМ ФОРМИРОВАНИЕМ
ПРОВЕРОЧНОЙ ГРУППЫ
Теоретической базой для построения систематических кодов
(Хэмминга, циклических и др.) является раздел высшей алгебры,
изучающей свойства многочленов, состоящих из дискретных
элементов. В данной главе нет возможности рассматривать подобные
алгебраические системы. Поэтому дальнейшее изложение будет
содержать только основные результаты алгебраической теории
помехоустойчивого кодирования. Читатели, желающие подробнее
рассмотреть эт,и вопросы, могут воспользоваться [17,24].
Пусть имеется разрешенная кодовая комбинация а\а^...
... аф\Ъч... Ьг систематического (/г, &)-кода, где а\... а& —
множество информационных элементов; Ъ\...ЪГ — множество
проверочных элементов. Как уже указывалось выше, в систематических
кодах проверочные элементы являются линейной комбинацией
информационных. Значение любого проверочного разряда
Ь% = atl a1eai2a2e..,e aik aki (6.21)
где atk — числа, равные 0 или 1. Сложим по модулю 2 две
разрешенные кодовые комбинации систематического кода
a1a%...ahb1 ... Ьт
a[a2...akb[ ... b'r
(ai©ai) (а2@а2).. .(br@b'r)
С учетом (6.21) получим
bt © Ъ\ = ап (аг © а[) © al2 (a2 © а'2) ©... © (ak + a'k) аш (6.22)
118
т. е. проверочные разряды суммы двух разрешенных комбинаций
образуются так же, как и для каждой разрешенной
комбинации, — суммированием информационных разрядов. Отсюда
вытекает, что сумма двух и более разрешенных комбинаций дает
также разрешенную комбинацию. Это позволяет определить все
множество разрешенных комбинаций, располагая исходным
ограниченным набором разрешенных кодовых комбинаций. Выбор
исходных кодовых комбинаций должен осуществляться исходя :из
следующих условий [23, 24]:
1) все исходные комбинации должны быть различны;
2) нулевая комбинация не должна входить в число исходных;
3) все исходные комбинации должны быть
линейно-независимы. Условие линейной независимости состоит в том, что <х\а,\ ф
ф агЯгф • • • аианФОу если хотя бы один из коэффициентов а* не
равен нулю;
4) каждая исходная кодовая комбинация должна содержать
число единиц не меньше чем do, т. е. co^do, где со — вес кодовой
комбинации; .
5) между любыми двумя исходными кодовыми комбинациями
кодовое расстояние должно быть не меньше do.
Если такие комбинации найдены, то они однозначно
определяют систематический (/г, &)-код.
Удобно исходные комбинации записывать в виде матрицы Gn,fe,
имеющей k строк и п столбцов и называемой производящей:
Gn,k =
«11
ka
«fti
a12..
Й22 ••
°ki ■
■ alk
■ a4h
••«ftfe
bn
hi
bkl
Ьц.
Ьгг--
Ькг-
Лг
-Ьгг
■ ■bkr
k строк.
k+r=n столбцов
Эту матрицу можно представить двумя подматрицами —
информационной и проверочной. Информационная подматрица имеет
к столбцов (т. е. матрица размером kXk), проверочная
подматрица — г -столбцов. Таким образом,
lan аЛ9... алъ Ълл ...Ьл
Gn.k =
'11 "12
а21а
22-
*lk и11
a2k ^21
У1Г
^2Г
Wiak2^-akkbkl--' hr\
информационная проверочная
матрица матрица
Установлено, что в качестве информационной подматрицы удобно
брать единичную матрицу
100...О
Ebb —
010...0
000... 1
(6.23)
119
записанную в канонической форме. Это квадратная матрица
размером kXk. Проверочная подматрица, обозначаемая как СГуку
строится путем подбора различных r-разрядных комбинаций,
удовлетворяющих следующим условиям:
1. В каждой строке подматрицы Cr,k должно быть не менее
do—1 единиц.
2. Сумма по модулю 2 двух любых строк должна иметь не
менее do—2 единицы.
3. Двоичные числа, представляющие собой строки матрицы,
должны возрастать от 1-й строки к последующей (это условие не
обязательное).
Полученная таким образом матрица Сг,& приписывается справа
к единичной матрице Е&, в результате чего получается
производящая матрица Gn,^. Рассмотрим пример построения производящей
матрицы систематического кода.
Пример 6.7. Пусть длина кодовой комбинации п = 7. Код должен
исправить одну ошибку. Тогда из неравенства do^2tn-\-\ находим, что do=3.
Пользуясь условием, что при d0=3 r^log2(/z+l), находим г = 3. Тогда k=4.
Запишем все возможные проверочные комбинации (из трех элементов) в
порядке возрастания соответствующих двоичных чисел: 000; 001; 010; 011; 100;
101; ПО; 111. Из этих восьми чисел отберем только те, которые удовлетворяют
перечисленным выше условиям для матрицы Сг,л.
1. В каждой строке не менее do—1 единиц: do—1=2. Этому условию
удовлетворяют комбинации: 011; 101; ПО; 111.
2. Сумма двух любых комбинаций должна иметь не меньше do—2=1
(единиц). Легко убедиться, что выбранные кодовые комбинации удовлетворяют
этому требованию, например,
е
0 1 1
1 1 0
1 о Г
е
1 0 1
1 1 1
0 1 0'
0 ] 1
1 0 1
1 1 0
и т. д.
Располагая эти комбинации в порядке возрастания двоичных чисел, получим
проверочную подматрицу Сг,&:
С3,4 =
0 1 1
1 0 1
1 1 0
1 1 1
Объединяя (6.23) и (6.24),
ского кода (7,4):
(6.24)
получаем производящую матрицу систематиче-
°7.4 =
10 0 0
0 10 0
0 0 10
0 0 0 1
0 1 Г
1 0 1
1 1 0
1 1 1
1
2
3
4
(6.25)
Из этой матрицы можно составить все разрешенные кодовые комбинации, т. е.
всего 24= 16. Четыре из них являются строками производящей матрицы, а 11
находятся суммированием по модулю 2 различных строк матрицы (6.25). (Эти
П комбинаций читателю предлагается получить самостоятельно, суммируя
строки 1+2; 1+2+3; 1+2 + 3+4 и т. д. При этом можно убедиться, что
минимальное кодовое расстояние равно 3.)
Как известно, проверочные разряды представляют собой
линейную комбинацию информационных разрядов. Правила нахождения
проверочных разрядов при поэлементном формировании
определяло
ются операторами вида bi = Ri{cii} (см. § 6.6). Эти операторы
можно найти с помощью производящей матрицы. Для каждой
производящей матрицы Gn,k существуют свои операторы #г{Дг},
которые образуют определенную систему проверок. При этом
построение операторов сводится к следующему.
Первый оператор служит для формирования проверочного
разряда Ь\ из информационных разрядов, соответствующих единицам
первого столбца подматрицы Сг,л.
Для второй проверки используется второй проверочный
разряд, состоящий из информационных элементов, соответствующих
единицам второго столбца подматрицы Сг>л, и т. д. Число
проверок равно количеству столбцов подматрицы Сг>ь, т. е. количеству
проверочных элементов кода.
Рассмотрим производящую матрицу кода (7, 4):
10 00 0 1111
0 100 10 12
00 10 110 3
0 00 1 11 1|4.
количество столбцов, равное
количеству проверочных разрядов.
Согласно приведенным выше правилам
Ь± = #i W= я2 Ф аз® я4;
Ь2 «= R2 {at} = аг® а3 Ф аь
bd=R3{ai}=a1 e я2 Ф а4-
Однако гораздо, удобнее проверочные соотношения составлять с
помощью так называемой проверочной матрицы Н, содержащей г
строк и п столбцов. Матрица Н образуется следующим образом.
Вначале строится единичная матрица Ег размером гХг:
G7,4 =
— номера информационных
разрядов.
Ег =
100.
о'ю.
001.
000.
к которой слева приписывается подматрица Dft,r, содержащая k
столбцов и г строк; каждая строка этой подматрицы
соответствует столбцу проверочных разрядов подматрицы Сг,ь производящей
матрицы Gn.k'.
Dkr =
bn b21 b31..
"12, #22 "32 • •
Ai
bk2
hr hrbZT.
121
JkT
Таким образом,
Н
\ьп
\Ьц
к
ь21..
Кг--
К-
-bkl
• bh2
• bkT
10.
01 .
00.
..0
..0
..1
С помощью этой матрицы операция кодирования осуществляется
очень просто. Позиции, занимаемые единицами в i-й строке
подматрицы Dktr, определяют те информационные элементы, которые
участвуют в формировании *-го проверочного разряда.
Пример 6.8. Построить проверочную матрицу Н кода (7, 4),
производящая матрица которого имеет вид:
11 0 0 0 0 1 1
G ярюо ю i|
*»« 0 0 1 0-1 1 0|
I 0 0 0 1 л 1 1 If
Образуем матрицу Dfc,r = D4,3 (процесс образования этой матрицы схематично
показан стрелками)
61А~
Замена строк матрицы на столбцы называется транспонированием матри-
цр1. Матрица D3,4 является транспонированной по отношению к подматрице
С4,3: D3,4=CT4,3. Итак,
Н
7.4"
|0111 1001
1011 010
1101 001[
а^ДгЯз, а^
Эти соотношения совпадают с полученными из производящей матрицы.
h=a2®a8®aA;
b2=a1®a3®a4;
Проверочная матрица обычно используется при построении
кодирующих и декодирующих устройств, поскольку она определяет
алгоритмы нахождения bi=\Ri{ai}. Несколько иным путем эта
матрица строится для кода Хэмминга (см. § 6.6). Поскольку
между производящей матрицей и проверочной существует
однозначное соответствие, то в принципе безразлично, какой из них
задавать код. По указанным причинам чаще используется провероч-
122
ная матрица. Она удобна еще и тем, что по ее виду легко
определить минимальное кодовое расстояние do, а значит, и
корректирующие способности кода. Из теории кодирования известно, что
кодовое расстояние d0 на единицу больше минимального веса
столбцов подматрицы Dk,r- Например, для матрицы Н кода (7, 4)
минимальный вес со столбцы 011; 101; 110 равен 2. Сложив со с
единицей, получим rf0= co+il = 3.
6.11. МАТРИЧНОЕ ПРЕДСТАВЛЕНИЕ
ЦИКЛИЧЕСКИХ КОДОВ
Циклический код определяется подобранными определенным
образом k исходными комбинациями. Их также записывают в
виде производящей матрицы. Для формирования строк
производящей матрицы разделимого циклического кода берут не
произвольные комбинации информационного кода Q(x), а только те из н;их,
которые содержат единицу в одном разряде Qi(x), где i=l,..., k.
Эти комбинации умножают на хг и находят остаток от деления
Qi{x)xrIP{x), который будет равен Ri(x). Тогда нстроку
производящей матрицы записывают в виде Qi(x)xr@Ri(x). Матрица,
состоящая из этих строк, разбивается также на две подматрицы:
G„,* = |E£, Сг§*|,
где Еть — единичная транспонированная подматрица, содержащая
Qi{x) комбинаций информационного кода; Сг>л— подматрица с
числом столбцов г и строк k, образованных остатками от деления
Ri(x).
Производящая матрица содержит k комбинаций циклического
кода. Остальные 2k—к—1 комбинаций получают суммированием
по модулю 2 строк матрицы во всевозможных сочетаниях.
Последняя комбинация является нулевой.
Пример 6.9. Дано л = 7; £=4; Р(х)=хъ+х+\\ Р(0,1) = 1011. Нужно
построить производящую матрицу. Поскольку k = 4, то отберем следующие
комбинации Qi(x):
Q (0,1) :Qi = 0001; Q2 = 0010; Q3 = 0100; Q4 = 1000.
Найдем 1-ю строку производящей матрицы
F1(x) = Q1(x)x*/P(x).
После преобразований получим остаток Ri(x)=x+l. Имеем Л(0,1) =0001011.
Аналогично находим F2(x) и т. д.:
F2 (0,1) = 0010110;
Fz (0,1) = 0100111;
,р4 (0,1) = Ю00101.
Производящая матрица G7,4 имеет вид:
10 0 0 1 0 111
G poioiio
7'4 0 10 0 1111*
| 1 0 0 0 1 0 1 I
Сравните эту матрицу с матрицей G7f4 из примера 6.8.
123
Строки матрицы G7,4 являются первыми 4 комбинациями циклического кода.
Пятая комбинация является нулевой. Остальные 11 комбинаций получаются
суммированием по модулю 2 всех сочетаний строк матрицы.
6.12. ПРИНЦИПЫ ПОСТРОЕНИЯ КОДИРУЮЩИХ
УСТРОЙСТВ
Код с поэлементным формированием проверочной группы.
Аппаратурная реализация формирователя кодовой комбинации —
шифратора, обеспечивающего определение вида единичных
элементов корректирующей группы, может быть выполнена с
помощью структурной схемы, приведенной на рис. 6.5. В данном
случае рассмотрен вариант кода с &=5 и г=4. В основу схемы
положен сдвигающий регистр на п ячеек. В первые k ячеек регистра
записываются значения информационных элементов, поступающие
в параллельном коде непосредственно из источника сообщений.
Сдвигающий регистр
| 9
В
М2
7 \
6
П2
5
М2
ч
1-й
'разряд
J
2-й
разряд
2
»
3-й
разряд
7
4-й
разряд
Источник сообщений 1
Рис. 6.5. Кодер Хемминга
Проверочные элементы записываются в остальные г ячеек, где
они формируются по ранее определенному правилу, т. е. в
соответствии с условными номерами информационных элементов,
составляющих проверочные группы. Так, в ячейку 6 регистра следует
записать корректирующий элемент 1. Значение этого элемента (О
или 1) определяется суммированием по модулю 2
информационных элементов первой проверочной группы, что соответствует
номерам 3, 5, 7, 9 и т. д.
В приемном устройстве решаются следующие задачи:
преобразование последовательного /z-элементного кода в
параллельный и запись кодовых комбинаций в ячейки параллельного
регистра;
анализ принятых кодовых комбинаций с целью выявления
ошибки и определения ее места;
исправление обнаруженной ошибки;
124
преобразование исправленной информационной группы
элементов в последовательный ^-элементный код*
Преобразование последовательного кода в параллельный
осуществляется электронными преобразователями различных видов,
например сдвигающим регистром. Таким образом, в конце
очередной /г-разрядной кодовой комбинации значения элементов
записываются в регистре. Из ячеек регистра кодовая комбинация
поступает в устройство анализа и исправления ошибок, которое
выполняет функции дешифратора.
Структурная схема декодера кода (9, 5) приведена на рис. 6.6.
С ячеек девятиразрядного запоминающего регистра единичные
элементы поступают в устройство анализа, в качестве которого
используются сумматоры по модулю 2. На каждый из г сумматоров
Регистр
1-й разряд 2-й разряд J-й разряд 4-й разряд 5-й разряд
Рис. 6.6. Декодер Хемминга
поступают соответствующий принятый проверочный элемент (&'*)
и та совокупность информационных элементов, которая
определяет его значение в соответствии с требованиями проверок по
проверочным группам. Так, сумматор № 1 соответствует первой
проверочной группе; № 2 — второй и т. д. Результаты суммирования
(О либо 1) записываются в ячейке г-разрядного параллельного ре-
125
гистра, выполняющего функции индикатора ошибок (ИО). На
выходе регистра ИО может появиться одно из 2Г—1 двоичных чисел,
определяющих условный номер ошибочно принятого элемента.
В данном примере таких чисел может быть только 9. Младший
разряд, определяемый первой проверочной группой, записывается
в ячейке № 1. На практике отмечаются только ошибки, возникшие
в информационной группе. Для рассматриваемого случая (k=5)
в индикаторе ошибок может быть записано только шесть
двоичных чисел: 0000, ООН, 0101, ОНО, 0111, 1001, первое из которых
указывает на отсутствие ошибок, последующие указывают на
наличие ошибки в первой, второй и т. д. элементах информационной
части. Двоичные числа определяют условный номер элемента,
принятый при составлении проверочных групп. Например, 0101
означает № 5, что соответствует элементу № 2 в информационной
группе.
Автоматическое определение «омера элемента, в котором
обнаружена ошибка, производится с помощью цифровых фильтров,
настроенных на числа ООП, 0101, ОНО, 0111, 1001. На выходе
соответствующего фильтра отклик возникает лишь в случае, когда
в регистре индикатора ошибки записано двоичное число,
соответствующее данному фильтру. Принцип построения таких фильтров
ясен из схемы, где функции фильтра выполняет схема
совпадения (И) на четыре входа.
Предположим, что ошибка произошла в элементе № 1
(старший разряд информационной части кодовой комбинации). В этом
случае в индикаторе ошибок будет сформировано число 3 (ООП).
Чтобы это число дало отклик на выходе, необходимо обеспечить
формирование единиц на всех четырех входах этого фильтра. Для
этого с третьей и четвертой ячеек следует подавать напряжение
через инверторы (схема «НЕ»). Любое другое число,
сформированное в регистре ИО, не будет соответствовать настройке
фильтра 0i и отклика на его выходе не даст.
Процесс исправления ошибки сводится к тому, чтобы
инвертировать (изменять знак) ошибочно принятый элемент комбинации.
Это происходит в устройстве для исправления ошибок, которое
представляет собой регистр сдвига, обеспечивающий наряду с
исправлением ошибки преобразование параллельного кода в
последовательный. Инверсия ошибочно принятого информационного
элемента осуществляется его суммированием по модулю 2 с
единицей, формируемой на выходе цифрового фильтра,
соответствующего данному элементу. Если ошибки нет, то на выходе фильтра
будет нуль, при наличии ошибки — единица. В случае, когда
ошибки нет (независимо от того нуль или единица представляют
данный элемент), суммирование элемента с нулем результата не
изменит, ибо 1 ©0=1; 0®0=0. Наличие ошибки инвертирует
элемент, т. е. 1 © 1=0; 0© 1 = 1.
Сумма по модулю 2 реализуется схемой совпадения, на входы
которой соответственно поступают элемент информационной ком-
126
бинации и напряжение, снимаемое с выхода цифрового фильтра
после инвертирования схемой «НЕ». Этот принцип
иллюстрируется рис. 6.7. Буквой Я* обозначен элемент информационной
комбинации i-го разряда, буквой Я* — элемент на выходе фильтра,
контролирующего И^ Исправленные элементы поступают в
ячейки регистра сдвига. Регистр сдвига устройства исправления
ошибок содержит одну дополнительную ячейку. После записи в
ячейки 1—5 регистра исправленные элементы продвигаются
тактовыми импульсами. После первого тактового импульса на выход
регистра поступит элемент 5-го разряда, затем 4-го и т. д.
(If ty Uz nz U3 П3 Ufy /fy U5 П5 \
Такт, импульсы
Рис. 6.7. Устройство исправления ошибок декодера
Хемминга
Циклический код. Кодирующее устройство должно обеспечить
аппаратурную реализацию описанной последовательности
процессов, определяющих формирование кодовых комбинаций. Для
этого необходимо:
информационную группу из k кодовых элементов,
сформированную старшим разрядом справа, сдвинуть слева направо на г
элементов;
представленный таким образом полином G(x)xr следует
разделить на образующий полином Р(х) степени г и определить
остаток от деления R{x), имеющий степень не более г—1;
двоичное число, представляющее полином R(x) и состоящее
из г элементов, записать за сдвинутой вперед информационной
группой, состоящей из k элементов. Записать старшим разрядом
справа.
Рассмотрим функционирование аппаратуры, обеспечивающей
выполнение указанных процессов. Для определенности будем
исходить из того, что Р(х)=х*-\-х+\ и G (х) =х*+х2+х+\.
Сдвиг информационной группы из г элементов производится с
помощью регистра задержки (РЗ). В данном случае регистр
содержит четыре ячейки. Элементы информационной группы
подаются на вход первой ячейки регистра, начиная со старшего
разряда. Через четыре такта элемент старшего разряда появится на
выходе регистра. С пятым тактом входная ячейка будет свобод-
127
на от поступления элементов информационной группы, и в
регистр следует вводить проверочную группу, представляющую
полином R(x).
Формирователь проверочной группы представляет собой
сдвигающий регистр с обратными связями между ячейками. Эти
связи осуществляются через сумматоры по модулю 2. Указанная
схема осуществляет деление G(x)xr на Р(х). Делимое в виде
кодовой группы, представляющей полином G(x)xr, подается на вход
сдвигающего регистра, а полином Р(х) вводится в регистр в виде
соответствующим образом подобранной структуры обратных
связей через сумматоры. Проверочная группа последовательно
формируется на выходе регистра. Простота устройства главным
образом и определила широкое распространение циклических
кодов.
Число ячеек сдвигающего регистра выбирается равным
степени образующего полинома, а число сумматоров по модулю 2 на
единицу меньше его веса
йулй Sl 52- (вес полинома определяется
количеством его членов).
В рассматриваемом примере
Вых°д вес полинома равен трем.
Следовательно, должно быть
п два сумматора. Структурная
схема формирователя пред-
J ставлена на рис. 6.8.
Рис. 6.8. Схема деления на Р(х) Предположим, что в
некоторый момент to в ячейки
регистра при разомкнутом ключе К вводятся четыре разряда
информационной группы (старший разряд в выходной ячейке). Таким
образом, в исходном положении ячейки будут находиться в
состоянии 1101 (соответственно номерам ячеек). С некоторой
задержкой At после /о, но до прихода очередного тактового импульса
ключ К замыкается.
В момент прихода тактового импульса единица старшего
разряда «выталкивается» на выход и одновременно поступает на
сумматор si, где складывается по модулю 2с единицей
младшего разряда. В результате первая ячейка окажется в состоянии
«О». Одновременно с этим единица, которая определяла
состояние первой ячейки в сумматоре 5г, складывается с единицей
старшего разряда и сумма подается на вторую ячейку. Поэтому
вторая ячейка также перейдет в состояние «О». Третья ячейка
перейдет в состояние второй, т. е. «1», а четвертая — в состояние
третьей, т. е. «0».
Таким образом, после первого такта ячейки из состояния 1101
перейдут в состояние 0010, что соответствует двоичному числу
0100. На втором такте на выходе будет нуль и одновременно
появятся нули на выходах сумматоров S\ и S2. Состояние ячеек
после второго такта будет 0001. Третьему, четвертому и пятому
тактам будут соответствовать состояния 1100, ОНО, ООН.
Ж
Такт\
I №\
Ш
-с/"о
128
Если представить состояние ячеек регистра в виде двоичных
чисел (старшим разрядом в четвертой ячейке), то будем иметь:
1-й такт —0100; 2-й такт—1О00; 3-й такт —ООП; 4-й такт —
ОНО; 5-й такт—1100. Эти числа соответствуют первому, второ-
остаткам от деления числа 101110000 на 10011. Дейст-
му и т. д
вительно,
^ 101110000
® 1001 1
е;
0100;0
6"боо:о
е
1000Ю
Го of 1
\ 1 о о 11
10100
1-й остаток
2-й остаток
е
:0'0 1 1;0 3-й остаток
'оооо'о
©
;0 1 1 0:0 4-й остаток
О'О 0 00
;1 100: 5-й остаток
Упрощенная структурная схема устройства формирования
кода приведена на рис. 6.9. Такая схема содержит регистр
задержки РЗ, обеспечивающий сдвиг информационной группы на
четыре такта, и формирователь проверочной группы, включающий
регистры сдвига и сумматоры по модулю 2 в цепи обратной связи.
В схеме также имеются два ключа К\ и/Сг, обеспечивающие
необходимую последовательность функционирования. В положении,
когда JCi замкнут, а /С2 разомкнут, информационная часть кода
подается на вход схемы, т. е. в первую ячейку регистра
задержки, и *через S\ в первую ячейку
сдвига^: По окончании четырех Регистр задержки
тактов'старший разряд
информационной группы
записывается в последние ячейки обоих
регистров. Во время пятого
такта информационная группа
начинает поступать на выход
схемы. С этого момента К\
размыкается, а Кч замыкается.
Начиная с пятого такта
формирователь проверочной груп-
ЩЩШ
L1
г
Рис. 6.9.
Формирователь циклического
кода
пы будет функционировать в соответствии с ранее описанной
процедурой. После девятого такта /С2 размыкается, a К\ замыкается.
С этого момента формирователь проверочной группы работает как
обычный регистр сдвига, выталкивая на выход записанные в
ячейках кодовые импульсы проверочной группы. Одновременно в
регистры начинает поступать новая группа информационных эле*
ментов.
5 101
129
6.13. ИТЕРАТИВНЫЙ КОД
Итеративные коды характеризуются наличием двух или более
систем проверок внутри каждой кодовой комбинации. Покажем
принцип построения итеративного кода на следующем примере.
Предположим, что передается первичный код ^(0, 1) = 10111
00101 11100 01001 11101.
Сначала информационные элементы по группам записываются
в виде таблицы:
1-я группа — 10111,
2-я группа —00101,
3-я группа— 11100,
4-я группа — 01001,
5-я группа — 11101.
Далее к каждой строке ;и к каждому столбцу дописываются
проверочные элементы в соответствии с каким-либо правилом
кодирования. Например, для кода с одной проверкой на четность
получим
101 1 1
00101
1 1 100
01001
1 1 101
1 1010
£
1 1.
Число единиц четно как по строкам, так и по столбцам.
Полученные кодовые комбинации являются комбинациями
простейшего двумерного кода, проверочные разряды которого
сосредоточены в нижней строке и правом столбце. Каждый
информационный разряд кодовой комбинации входит в состав двух
итерируемых кодов с проверкой на четность (по строкам и столбцам).
Передача комбинации итеративного кода обычно происходит
последовательно от первой строки до последней. Приведенный код
является простейшим итеративным кодом с do=4. Этот код
обнаруживает все ошибки кратности до трех и все ошибки нечетной
кратности.
Длина кодовой комбинации, число информационных разрядов
и минимальное кодовое расстояние очень просто выражаются че-
s
рез соответствующие параметры итерируемых кодов: п= П щ,
где 5 — кратность итерирования (^количество итерируемых ко-
s
дов); k= П ku где щ, kiy d0i — параметры итерируемых кодов;
S
d0= П doiy где П — знак произведения. Для данного примера
130
п=П\Хп2=36\ k = k\Xk2 = 25\ d0=2X2=4 (поскольку
итерируемые коды с проверкой на четность имеют кодовое расстояние
d0=2). В зависимости от свойств итерируемых кодов
итеративный код может быть как систематическим, так и
несистематическим, разделимым и неразделимым и т. д.
Метод исправления ошибок очень прост. Если не
выполняется проверка на четность для /-й строки и /-го столбца, то
элемент, стоящий на пересечении /-й строки и /-го столбца,
заменяется на обратный. При использовании в качестве итерируемых
кодов систематических кодов к итеративному коду также
применим матричный способ описания. Можно показать [4], что
производящая матрица итеративного кода, использующего два
систематических кода с производящими матрицами GA и GB, равна
G = GAXGS, где GaXGb есть векторное произведение производя-
11011
011
щих матриц. Так, если использовать Ga = |mi I и &в
до
G = Ga X Gb '■
1000 10101
0100 1001 1
0010 01 101
0001 0101 1
Такая матрица позволяет сформировать код п=9, k=4y d0=4.
Даже простейший итеративный код обладает высокими
обнаруживающими способностями. При действии пакетов ошибок
обнаруживается любой пакет ошибок длиной /-f-1 и менее, где I —
длина строки.
Существенным недостатком итеративных кодов,
использующих проверки на четность, является их избыточность,
составляющая обычно 15—20% и значительно превышающая избыточность
эквивалентных по свойствам циклических кодов. Однако при
использовании программных методов кодирования (декодирования)
с помощью ЭВМ проще работать с итеративными кодами.
Поэтому на практике они используются в системах передачи данных,
в которых применяются программные методы повышения
верности.
6.14. ПРИНЦИПЫ ИСПОЛЬЗОВАНИЯ ДЕТЕКТОРОВ
КАЧЕСТВА СИГНАЛОВ
Рассмотренные методы защиты от ошибок основаны на
анализе кодовой структуры принимаемой комбинации. Применяется
и другой способ защиты, основанный на анализе таких
параметров принимаемого сигнала, как амплитуда, фаза и др. Если эти
параметры сильно отклоняются от своих номинальных значений,
то это говорит о наличии помехи, которая может вызвать
появление ошибки.
Таким образом, фиксируя отклонения тех ;или иных
параметров сигнала, превышающие заданный предел, можно судить о
5* 131
возможности появления ошибки в принимаемом сообщении.
Устройства, которые выполняют эти функции в АПД, называются
детекторами качества сигнала. Существенно, что
рассматриваемые методы не требуют внесения избыточности в передаваемый
сигнал и, следовательно, не снижают скорости передачи.
Рассмотрим работу детекторов качества, использующих для
контроля длительность сигнала и его амплитуду. При
использовании длительности входной сигнал после обработки поступает
на выходное устройство, формирующее прямоугольные импульсы,
соответствующие элементам кодовых комбинаций. Констатация
недопустимой интенсивности помехи сводится к измерению
смещений фронтов импульса относительно их номинальных
положений. Известно, что при смещениях, превышающих исправляющую
способность приемника, появляются ошибки. Таким образом,
фиксируя значительные величины смещений (краевые искажения),
можно с определенной вероятностью судить о наличии ошибок.
Принцип работы такого детектора иллюстрируется рис. 6.10.
Если смещения фронта единичного элемента попадают в
разрешенную зону шириной А (заштрихованные полосы), то считается,
что смена 'полярности происхо-
Л
f^l
ISH
N К
№
1
1
.И,
1.
г0
дит правильно -и принимаемая
кодовая комбинация верна.
Если смещение превосходит
величину Д, то вырабатывается
сигнал возможной
ошибочности элемента (принимаемой Рис. 6Ж Принцип работы детектора ка-
комбинации. На выбор величи- чества по длительности единичного
злены А влияют следующие про- мента
тиворечивые требования:
1. Если Д делать малым, то детектор качества будет очень
часто принимать решение об ошибке. Тем самым скорость
передачи информации будет снижаться из-за необходимости
повторов «ошибочно» принятых
комбинаций.
2. При большом Л
детектор будет чаще
принимать решение о
правильности принятой
комбинации, хотя в ней и
будут ошибки (детектор не
может обнаружить
ошибку, если дробление
попало в разрешенные.зоны).
Таким образом, будет
снижаться верность
передачи.
Рис. 6.11. Принцип работы детектора ка- ■ Установлено, что эф-
чества по амплитуде сигнала фективность работы тако-
132
го детектора качества небольшая. Более высокие качественные
показатели обеспечивает детектор качества, анализирующий
форму сигнала на выходе демодулятора (а не на выходе порогового
устройства, как в первом случае). Идея работы такого детектора
изображена на рис. 6.Hi. Здесь в соответствующие зоны попадает
амплитуда сигнала на выходе модулятора в моменты времени,
соответствующие идеальным границам единичных элементов. Если
амплитуда сигнала в момент действия тактовых импульсов,
отмечающих .идеальные границы элементов, отличается от
номинальных уровней а+н и и~п более чем на ±6%, то вырабатывается
сигнал ошибки.
В заключении отметим, что совместное использование
нескольких детекторов качества и корректирующих кодов (даже с
малой избыточностью) позволяет повысить верность передачи в
несколько сотен раз, практически не снижая пропускной
способности системы передачи.
ГЛАВА 7
Применение обратной связи
для повышения верности передачи
+
7.1. ЦЕЛЕСООБРАЗНОСТЬ ПРИМЕНЕНИЯ
ИЗБЫТОЧНЫХ КОДОВ
Использование помехоустойчивого кодирования приводит к
необходимости либо увеличивать время, отводимое для передачи
данного сообщения, либо при сохранении требуемого времени
передачи сокращать длительность элемента кодовой комбинации,
увеличивая тем самым полосу частот канала связи. В обоих
случаях за одно и то же время можно передать сообщение простым
кодом (без избыточности), увеличив соответствующим образом
длительность единичного элемента1. Как правило, уменьшение
длительности элемента приводит к увеличению вероятности
ошибки. Последняя возрастает за счет уменьшения анергии
сигнала. Отсюда следует, что вероятность ошибочного приема
элемента при избыточном кодировании должна быть больше, чем
при простом.
Если ухудшение верности не компенсируется исправляющей
способностью кода, то избыточность не повышает, а понижает
верность приема. Желательно выяснить, при каких условиях
целесообразно применять избыточное кодирование. Рассмотрим
случай приема кодовой комбинации с избыточностью (k —
информационных элементов иг — проверочных) и приема комби-
1 Предполагается, что энергия сигнала остается постоянной.
133
нации простого кода, содержащей всего k элементов.
Предполагается, что средняя мощность сигналов и время, отведенное для
передачи, одинаковы для двух случаев.
Чтобы выяснить целесообразность применения
корректирующих кодов по сравнению с простыми, нужно ввести меру,
позволяющую сравнивать их характеристики. В качестве такой
возможной меры удобно рассматривать эквивалентную вероятность
ошибки рэ, которая представляет собой вероятность ошибки при
декодировании кодовой комбинации помехоустойчивого кода,
приходящуюся на один элемент:
Рэ = Р(ш/п. (7Л)
Сравнивая эту величину с вероятностью ошибки при приеме
единичного элемента простого кода Ро, которая всегда
предполагается известной, можно установить, при каких условиях
корректирующий код позволяет повысить помехоустойчивость приема.
Очевидно, в связи с уменьшением длительности единичных
элементов корректирующего кода (Гс — постоянно) их энергия
будет составлять часть энергии элемента простого кода:
Еъ = — Еоп, (7.2).
п
где £оп — энергия единичного элемента простого кода. Поэтому
вероятность ошибочного приема одного элемента в
корректирующем коде будет больше, чем в простом. Ошибка может быть
исправлена только за счет корректирующих свойств кода. Поэтому
вероятность ошибки в приеме знака может быть либо меньше
Лип.пр, либо равна ей.
Если прием сигнала осуществляется поэлементно на фоне
флуктуационной помехи типа белого шума, то вероятность
ошибочного приема единичного элемента при простом коде равна
[20]
Ро = 0,5-Ф0(?й), (7.3)
где ф0 — интеграл вероятностей; /z2=£0/-/Vo=PctoAVo —
отношение энергии сигнала к спектральной мощности белого шума; у —
коэффициент, зависящий от вида используемых сигналов.
Для использования корректирующего кода с неизменной
длительностью кодовой комбинации при увеличении п нужно
уменьшить длительность единичного элемента то. Тогда с учетом (7.2)
получим
Роко„ = 0,5-Ф0(УкГпук). (7.4)
Нетрудно видеть, что /\жорр>Л). Теперь найдем вероятность
ошибки Рду применяя код, исправляющий ошибки. Если ошибки
действуют независимым образом, то вероятность появления i
ошибок определяется выражением
Pi k = Cn P 0 корр (1 "окорр) > ('-5/
где С\ — число сочетаний из п по L Так как t ошибок
исправляются, то остаются ошибки кратностью больше t. Следовательно,
134
* ош.испр— У. *ik— / ^« * 0 коор(* * о корр/ • ('-6)
Тогда в соответствии с (7.2) имеем
р([) — р /„_
*э —* ош.испр/'1,—
2 С" Р0 коор (1 -Р0 норрГ'Ч / Я. (7.7)
Пример 7.1. Рассмотрим код Хэмминга (7,4), исправляющий одну
ошибку, и простой код с k = 7. Пусть Р0= Ю-"2. Длительности кодовых комбинаций
считаем одинаковыми. Поскольку при использовании избыточного кодирования
энергия сигнала уменьшится в 7/4 раза, то Аторр>Л). Из равенства Р0=
= 0,5—Фо(уЬ), задаваясь Р0=10~2, по таблицам Ф0 найдем, что у/1 = 2,33. За
счет уменьшения энергии в 7/4 раза y^opp = 7/4 =1,33. Отсюда получим
Рокорр = 0,5—Ф0(1,33) =3,7.5. Ю-2.
Теперь подставляя Рокорр в (7.8), найдем
— I ^ С? ^0 корр О
**э — ^ош.испр/Л —\ZdC7P0 корр (Х —Р0 корр)
л» 3,5-КГ3
Из расчета видно, что Р{э{) <Р0, т. е. Р0/Рэ^2,8б.
Таким образом, помехоустойчивость повысилась в 2,86 раза, что говорит о
целесообразности применения корректирующего кода, исправляющего одну
ошибку. Если исходить из того, что п увеличивается при сохранении длительности
единичного элемента (т<>=const), то, значит, полоса канала не расширяется, но
при этом увеличиваются энергетические затраты, поскольку £0корр = £о. В этом
случае Рош.ИСпр = 0,0032, а Р<2>э = 5- Ю"4. Поскольку Р0=10~2, то Ро/Р<2>э«20.
Подчеркнем, что Р(1>э~3,5-10_3 получено в условиях сохранения энергии, но
при увеличении полосы канала, а Р(2)э«5-10~4 в условиях сохранения полосы,
но при увеличении энергетических затрат.
При пакетном распределении ошибок условия
целесообразности применения кодов исправляющих ошибки еще жестче. И
поэтому известна лишь небольшая группа кодов, исправляющих
пакетные ошибки. В большинстве своем коды могут исправлять
независимые ошибки. К сожалению, даже в этих случаях сильно
усложняется практическая реализация кодирующих и декодирующих
устройств.
Подавляющее большинство специалистов считают, что
наиболее рациональными являются системы передачи информации, в
которых избыточные коды используются только для обнаружения
ошибок. Но в этом случае возникает необходимость применения
обратного канала связи.
7.2. СРАВНЕНИЕ ЭФФЕКТИВНОСТИ СИСТЕМ С РОС
И ИСПРАВЛЕНИЕМ ОШИБОК КОДОМ
Для сравнения систем введем коэффициент эффективности,
учитывающий как полезный эффект (уменьшение вероятности
ошибочного приема), так и затраты на его достижение:
Яэфф-log, («/*). (7.8)
135
где а=Р0ш.пр/Лш1.корр — выигрыш в защите от ошибок; Р0ш.пр—»
вероятность ошибки при использовании простого кода; Рош.корр —
вероятность ошибки при использовании корректирующего кода;
g=gu-\-gc; gH, gc—информационная и схемная избыточности
соответственно. Величина £и=ЛИзб/#пр определяется относительным
снижением скорости передачи за счет использования избыточного
кода. При этом считается, что полоса канала остается
неизменной. Схемная избыточность gc=\i(Cn^/Co)9 где Спд — объем
аппаратуры с применением корректирующего кода; С0 — объем
аппаратуры с применением простого кодирования; \i — весовой
коэффициент, позволяющий сравнивать g"H и gc по
технико-экономическим показателям. Для кодов с исправлением ошибки
£и = #изб/#пр = (k + ГУГ = 1 + '/*•
Объем аппаратуры [4] при использовании такого кода возрастает
примерно в 1,5 раза. Итак, £С~1Д
Пример 7.2. Сравним эффективность применения кода Хэмминга (7,4),
обеспечивающего исправление одной ошибки, и системы с РОС. Примем, что
ошибки независимы и Р0=Ю""2. В случае простого кода
^ош.пр=1-(1-^)* = 0'04:
в случае кода Хэмминга
Ляп.изб = 2 - <! - Ро)" - п Р»"О - ^о)"-1» 0,003.
Следовательно, выигрыш в верности
. а = 0,04/0,003^13.
При этом затраты увеличиваются на
£h=^+-^) = 1+Y = 1'75; Л=1.Б. Тогда £ = £и + £с = 3,25.
Отсюда коэффициент эффективности в случае применения кода, исправляющего
ошибки,
Теперь рассмотрим эффективность применения системы с РОС. В этой
системе используются коды с обнаружением ошибок. Будем исходить из того, чта
ошибочно принятый знак поступит потребителю только в том случае, когда
ошибка на приеме не будет обнаружена. Известно, что вероятность
обнаружения ошибок корректирующим кодом гораздо выше, чем вероятность их
исправления. Даже при независимых ошибках соотношение между этими
вероятностями достигает нескольких порядков. Еще выше это соотношение при пакетных
ошибках. Поэтому величина а, определяющая полезный эффект, сильно
возрастает по сравнению с кодом, исправляющим ошибки.
Естественно, что возрастают и затраты как в части дополнительного
снижения пропускной способности за счет переспросов, так и за счет увеличения
объема аппаратуры. Однако, как правило, выигрыш значительно перекрывает
затраты.
При использовании кода (7/4) в режиме обнаружения ошибок можно
показать, что обнаруживаются все одно-, двух-, пяти- и шестикратные ошибки, а
также 80% всех трех- и четырехкратных ошибок. Поэтому при Р0=10~2вероят-
136
ность необнаруженной ошибки будет равна Ря. о «0,65-Ю-8. Тогда «==.
= 0,04/0,65-10~5«6000. Рассмотрим затраты
g» = {l + Ik) N-NPom '
где N — количество переданных сообщений; N/N—NP0m — количество
сообщений подлежащих переспросу. Очевидно, N/N—NP0m=lI\—Poin. В данном
случае Рош=1—(1— Р0)п = 0,07. Следовательно,
В этом случае £с=2,5, откуда g=gH+£c = 1,88+2,5=4,38;
in n\ a 6000
«> = log27=log2 —«10.2.
Итак, по сравнению с системой связи, использующей для повышения
верности код с исправлением одиночной ошибки, система с обратной связью дает
выигрыш в 5,1 раза, откуда следует ее преимущество.
К основным достоинствам систем с обратной связью можно
отнести следующие:
1. Приспосабливаемость (адаптация) к изменяющимся
условиям канала, т. е. число повторений неправильно принятых
комбинаций должно полностью определяться состоянием канала и
автоматически поддерживаться на уровне, необходимом для
достоверного прохождения сообщений. В системах без ОС при
использовании канала с переменными параметрами сложность кодирования,
мощность и длительность сигнала приходится выбирать так, чтобы
в наихудшем состоянии канала обеспечивалась заданная верность
приема. В системах с ОС можно ориентироваться на среднее и
даже самое благоприятное состояние канала.
Поскольку система с ОС является адаптивной, то и
избыточность сообщений, характеризующаяся частостью повторений,
также переменна.
2. Возможность использования только кодов обнаруживающих
ошибки. Известно, что обнаруживающая способность кодов при
одной и той же избыточности всегда выше исправляющей (из
всего количества а обнаруженных ошибок исправить можно только
сг/2 ошибок).
3. Простота схемной реализации кодирующих устройств по
сравнению с устройствами, реализующими кодирование с
исправлением ошибок.
Единственным недостатком систем с ОС является уменьшение
скорости передачи информации в тех случаях, когда ошибки
отсутствуют, а обратный канал используется недостаточно
эффективно, так как он предназначается только для коррекции ошибок.
7.3. АЛГОРИТМЫ РАБОТЫ СИСТЕМ С РОС
Системы с РОС (см. гл. 6) получили наибольшее практическое
распространение. По алгоритму функционирования различают
системы с ожиданием решающего сигнала, с непрерывной передачей
137
и повторением группы знаков, с накоплением кодовых
комбинаций; по способу осуществления запроса — с временным и
адресным переспросами; по числу переспросов — с ограниченным и
неограниченным количеством переспросов.
Системы с РОС и ожиданием решающего сигнала. В этих
системах очередной знак передается только после приема по каналу
обратной связи сигнала, характеризующего качество приема
предыдущего знака. Передача по основному каналу ведется кодом,
обнаруживающим ошибки. Если на приемкой стороне ошибка не
обнаружена, то передается сигнал «Подтверждение». При
обнаружении ошибки передается сигнал «Запрос». Следовательно,
передача каждого знака, содержащего n=k-\-r элементов,
задерживается на время ожидания
T0K = 2tP + tc + tal + ta2f (7.9)
где /р — время распространения сигнала между передающей (А)
и приемной (Б) станциями; tv=LAhjc (с — скорость
распространения сигналов); tc — длительность ответного (решающего)
сигнала; /а1 и /а2 — время анализа принятых сообщений на приемной
и передающей сторонах. Очередные знаки передаются через
интервал АТ=пт0-\-Тож. При этом величина информационной
избыточности
п to 4" Тож * тр 4" г т0 Ч~ 7"ож 1 [ т т /i f710Y
k т0 k т0 k
где Г1 = <Гож/то>. Знак <> означает, что результаты деления
следует брать с избытком. Из (7.10) следует, что на один
информационный элемент приходится дополнительно (г+п)/&
элементов. Например, при k=7 и г=4 передача равносильна передаче
избыточным кодом, у которого количество проверочных элементов
в 2 раза больше информационных.
Функциональная схема системы с РОС и ожиданием
приведена на рис. 7.1. Переданная кодовая комбинация со станции А
анализируется приемным устройством по уровню помех (при превы-
Рис. 7.1.
Функциональная схема системы с РОС
и ожиданием:
а — ст. А: 1 — источник
сообщений; 2 — кодер; 3 —
модулятор; 4 — запоминающее
устройство; 5 —
формирователь «Подтверждение>; 6 —
формирователь «Запрос»;
7 — приемник; б — ст. Б: 1—
приемник; 2 — декодер; 3 —
устройство запоминания
ошибок; 4 — выходное
устройство; 5 — формирователь
«Стирание»; 6 — формирователь
«Запрос»; 7 — формирователь
«Ошибка не обнаружена»;
8 — формирователь
«Ошибка»; 9 — формирователь
«Подтверждение»; 10 —-
модулятор
cm. A
В к 1 *\
а)
ст. 5
тП
"Н Г»Шн"Т1-Ч~~^Т~
S)
138
шении уровнем порогового значения формируется сигнал
«Стирание») и одновременно поступает в'УЗО, где происходит
обнаружение ошибки. Бели формируется сигнал «Ошибка не
обнаружена», то принятый знак подается в выходное устройство и на
формирователь сигнала «Подтверждение». Наличие сигнала
«Ошибка» приводит к формированию сигнала «Запрос». Этот же сигнал
будет формироваться и при сигнале «Стирание».
При приеме на станции А сигнала «Подтверждение»
формируется сигнал, по которому из источника сообщений в канал
поступает следующий знак. При приеме сигнала «Запрос» из ЗУ
поступает в канал ранее переданный знак, т. е. происходит
повторение. Системы с ожиданием эффективны, если справедливо
неравенство
k + r>>ToJx0. (7.11)
Системы с РОС и ожиданием являются самыми «медленными»
по скорости передачи информации среди всех систем с РОС при
невыполнении условия (7.11). Обычно условие (7.11) выполняется
при передаче с низкими скоростями, а также при передаче
информации между ЭВМ центров коммутации сообщений, где длины
кодовых комбинаций составляют величины порядка тысяч элементов,
а время ожидания невелико.
Системы с РОС и непрерывной передачей. В этих системах по
прямому каналу идет непрерывная передача сообщений,
закодированных кодом, обнаруживающим ошибки. Сигнал подтверждения
не передается. Одновременно с передачей в канал информация
записывается в ЗУ. При обнаружении ошибки по обратному каналу
посылается сигнал «Переспрос». В такой системе скорость
передачи будет выше, чем в системе с РОС и ожиданием.
Однако при построении систем с РОС и непрерывной
передачей возникают трудности. Действительно, пусть в некоторый
момент закончился прием кодовой комбинации, в которой
обнаружена ошибка, и в этот же момент начинается передача сигнала
«Переспрос» по обратному каналу. К этому моменту по прямому
каналу уже ведется передача следующей кодовой комбинации; если
время распространения сигнала в канале превышает длительность
кодовой комбинации ято, то уже закончилась передача одной или
даже нескольких кодовых комбинаций. Еще столько же
комбинаций будет передано до того момента, пока будет принят и
декодирован сигнал переспроса.
Таким образом, если передача ведется непрерывно, а сигнал
переспроса имеет ту же длительность, что и кодовая комбинация,
то за время, прошедшее между обнаружением ошибки и приходом
повторенной кодовой комбинации, будет ррииято еще М
комбинаций, т. е.
M = <2(LAB/cnT0+l)>, (7.12)
где LAB — расстояние между корреспондентами; с — скорость
распространения сигнала.
139
Получателю кодовые комбинации должны быть выданы в том
же порядке, в каком они передавались. Поэтому М комбинаций,
примятых после обнаружения ошибки, должны храниться в
некотором буферном устройстве памяти до момента, пока не будет
принята повторенная комбинация. Поскольку и в повторенных
комбинациях может быть ошибка, то емкость буферной памяти
нужно увеличить еще в несколько раз. Чтобы уменьшить
вероятность переполнения памяти, объем ее нужно увеличить.
Технически это сложная задача, поскольку кроме большого объема
памяти устройство должно иметь сложную систему ввода и вывода
информации. Поэтому на практике используют несколько
видоизмененную систему с РОС, в которой после обнаружения ошибки
приемник блокируется, т. е. не принимает М следующих
комбинаций. В передающей части устройство памяти
(накопитель-повторитель) всегда хранит Л1+1 последних переданных
комбинаций. После получения сигнала «Переспрос» повторяется не только
ошибочно переданная комбинация, но и все остальное содержимое
накопителя.
Рассмотрим подробнее работу системы с РОС и блокировкой в
дуплексном варианте построения, в которой сигналом «Запрос»
является разрешенная кодовая комбинация (рис. 7.2). По сигналу
Рис. 7.2.
Функциональная схема системы с
РОС и блокировкой:
/ — датчик ЗК; 2 — кодер;
3 _ буферный накопитель;
4 — ключ; 5 — устройство
управления; 6 — дешифратор
ЗК; 7.— декодер; 8 —
блокиратор
«Ввод» передаваемая информация поступает в кодер, кодируется
кодом, обнаруживающим ошибки, и передается в дискретный
канал связи. Одновременно она запоминается в буферном
накопителе. В приемнике противоположной станции принимаемый сигнал
поступает в декодер. Если ошибки декодером не обнаруживаются,
то информационные элементы, накопленные в буферном регистре
декодера, поступают потребителю информации.
При обнаружении ошибки вырабатывается сигнал «Ошибка»,
который, во-первых, стирает содержимое буферного регистра
декодера и, во-вторых, через устройство управления воздействует на
датчик комбинации «Запрос», которая посылается на
противоположную станцию. Кроме того, устройство управления прерывает
сигнал «Ввод» и прекращает передачу информации. После
передачи комбинации «Запрос» информация, поступившая и накоплен-
%ВвоР
Z
1
В канал
\
J
ц
4
А
Клотре—\
Жителю
й
\ Дискретный
канал
140
ная в буферном накопителе, через ключ К передается в дискрет-
ный канал. На противоположной станции комбинация «Запрос*
регистрируется дешифратором запросной комбинации (ЗК),
который вырабатывает специальный сигнал. Этот сигнал поступает
в устройство управления, которое работает аналогично: посылает
комбинацию «Запрос» и за ней содержимое буферного
накопителя. Временная диаграмма работы системы приведена на рис. 7.3.
Емкость ЗУ
Повторение
Передатчик
Ст.Б\
I 7 [ 2 J 4 \ 1 п2а 3 ** I ^0
I у I I ПпПтппРШ/й I ^ч,
блокировка
приемника
Рис. 7.3. Временная диаграмма системы с РОС и
блокировкой
i Из диаграммы следует, что емкость запоминающего устройства
должна быть равна
(к+г)%0+Тож
где T07K = 2tp + tdaiUP + tail+t
(k + r) т0
'аапр = (А + г)тО-
(7Л31
Примем, что время анализа /ai = 42= (&+r)to. Тогда
2U
> (7.141
(k + r)x0 ' (k + r)x0
При этом время блокировки приемников равно TaJl=Mtk9 где
4=(£+г)т0. Как видно из диаграммы, при получении сигнала
«Запрос» на станции А кодовые комбинации из буферного
накопителя передаются после передачи сигнала «Запрос» на станцию Б*
Если отсутствие ошибки при приеме ЗК гарантируется, этого
можно не делать. Однако, когда команда принята с ошибкой, реакции
ей на ошибку должна быть передача ЗК. Целесообразнее
сделать «запас» на один знак. Тогда независимо от наличия или
отсутствия ошибки при приеме ЗК следует начинать повторение
после передачи ответного сигнала. Время блокировки выбирается
таким, чтобы приемник не принимал других знаков, кроме знака
с ошибкой. Пользуясь выражением (7.17), можно определить
максимальную дальность связи, обеспечиваемую при заданном
объеме памяти буферного ЗУ. Для этого в (7.13) необходимо
подставить значение
* ож == **р "Г 'запр "Г *al ~Г *а2 = * ;
ГДе V распр — £> *-)т\
(М-1)
*8апр
Ураспр
(П + г) С (/запр + tal + ta2)
2В 2
141
а2>
5 = -!-.
Для рассматриваемого случая с учетом (7.18) имеем
Dmax = ^^-(M-3),
где В — скорость модуляции. Анализируя эти формулы, можно
сделать вывод о том, что чем больше скорость передачи и длина
канала, тем больше потери пропускной способности. Повысить
пропускную способность можно, пользуясь адресной системой с
РОС. В таких системах кодовые комбинации (знаки) включают и
сообщение об адресе. В качестве адреса используется номер
знака в пределах блока, состоящего из нескольких кодовых
комбинаций. Идея повышения пропускной способности заключается в том,
что принятые кодовые комбинации в виде блока из п знаков в
пункте приема анализируются. Все нормально принятые знаки
записываются согласно адресам в ячейки ЗУ, а знаки с ошибками
стираются, и их 'Номера запоминаются в устройстве накопления
адресов. После окончания приема очередного блока эти адреса
передаются по обратному каналу в пункт передачи. По этим
адресам производится извлечение соответствующих знаков из ЗУ и
осуществляется их повторная передача. В результате повторной
передачи все ячейки ЗУ приемного пункта оказываются
заполненными и блок выдается потребителю. Если и при повторной
передаче части адресов выявятся ошибки, то указанный процесс
повторяется до тех пор, пока не будут заполнены все ячейки ЗУ.
Прекращение поступления адресов по обратному каналу на пункт
передачи свидетельствует об окончании передачи всех знаков
данного блока.
В этой системе каждая ошибка приводит к меньшим
дополнительным затратам времени: Д/ = 2/р + /а, где /р — время
распространения, а /а — общее время анализа ошибки и адреса. Отсюда
и выше пропускная способность таких систем. Однако адресные
системы с РОС характеризуются и более сложной аппаратурной
реализацией. На практике они используются только на связях с
тяжелыми условиями приема.
7.4. СИСТЕМЫ С ИНФОРМАЦИОННОЙ
ОБРАТНОЙ СВЯЗЬЮ
Принцип работы системы с ИОС был рассмотрен в гл. 6. По
алгоритмам функционирования различают: системы с ИОС и
ожиданием (подтверждением); системы с ИОС и непрерывной
передачей; системы с ИОС и с адресным повторением. Эти алгоритмы
аналогичны алгоритмам соответствующих систем с РОС.
Решение о выдаче информации потребителю или о ее стирании и
необходимости повторной передачи в системах с ИОС принимается
передатчиком системы.
Передача с подтверждением иллюстрируется структурной
схемой на рис. 7.4. Знаки через ключевую схему в виде
последовательного простого кода поступают в канал А—Б и буферное ЗУь
142
На станции Б принятая кодовая комбинация поступает в
накопитель и на вход анализатора, который определяет вид принятой
комбинации: информационная или циклового фазирования.
Информационная комбинация с выхода анализатора через выходное
устройство подается в обратный канал. Комбинация фазирования
поступает в цепь фазирования (на схеме обозначено Ф).
1 Н 2
Откр. \ f
Закр.
^
10
I f Т"
1
1 5
]
о \ФГ~
ГГ Т1
1
6 \1
1 TJ
ц J
г 1 I
4К
Li.
8 I
а) В)
Рис. 7.4. Функциональная схема системы с ИОС с подтверждением
а — ст. А: У — источник сообщений; 2 — ключ; 3 — формирователь кодовых
комбинации; 4— выходное устройство; 5 — формирователь команд; 6 — ЗУ1; 7 —
формирователь сигнала «Запрос»; 8 — формирователь сигнала «Стирание»; 9 — схема
сравнения; /0—входное устройство; б — ст. Б: 1 — ключ; 2 — ЗУ2 (накопитель); 3 —
анализатор; 4—входное устройство; 5 — получатель информации; 6 — формирователь
сигнала «Стирание»; 7 — формирователь сигнала «Норма»; 8 — выходное устройство
После приема на станции А информационная комбинация
сравнивается с переданной, хранящейся в ЗУь Результат сравнения
представляется в виде формирования одного из двух сигналов:
«Запрос» либо «Стирание». Если переданный и принятый по
каналу обратной связи знаки совпадают, формируется сигнал
«Запрос», открывающий ключевую схему, через которую на передачу
из источника сообщений подается очередное сообщение. Если
совпадения нет, формируется сигнал «Стирание». Этим сигналом
запирается ключ (прекращается передача очередного сообщения) и
подается команда в канал А—Б. Поступление этой команды на:
станцию Б приводит к формированию сигнала «стирание»,
которым стирается соответствующая кодовая комбинация, ранее
принятая на станции Б и находящаяся в ЗУ. Вслед за командой о>
выявлении ошибки со станции А на станцию Б повторно
поступает и записывается вместо стертого то сообщение, которое привело
к формированию команды на стирание.
Если ошибка на станции А схемой сравнения не обнаружена,,
то на станцию Б передается очередная кодовая комбинация беа
предшествующей ей команды на стирание. В этом случае на
выходе анализатора формируется сигнал «Норма», открывающий-
ключ, через который из ЗУг ранее принятое сообщение выдается
потребителю. Таким образом, если ошибок нет, то на передачу
каждого сообщения затрачивается время Г=2/к+2/р, где tK —-
длительность передаваемого сообщения; tv — время
распространения сигнала. Наличие ошибки приводит к увеличению времени Г,
143
поскольку Т=2/к+А>+2/р, где tc — длительность команды на
стирание.
. В системах с ИОС и непрерывной передачей знаки из
источника сообщений выдаются непрерывно. Выдача прерывается только
при появлении специального сигнала, возникающего при
необходимости повторений. Такие системы называются системами с
опережающей коррекцией. Их функционирование иллюстрируется
временной диаграммой на рис. 7.5. Каждый сигнал, переданный
Ы Передатчик f
Приемник t
Рис. 7.5. Временная
диаграмма работы
системы с ИОС с
непрерывной передачей
на станцию Б со станции А, возвращается обратно и
сравнивается с переданным знаком, хранящимся в ЗУ станции А (в
данном примере с задержанным на 5/к по отношению к знаку,
который передается). При обнаружении расхождения формируется
сигнал «Стирание». В рассматриваемом примере при сравнении
знака Б, принятого по обратному каналу, со знаком Б,
находящимся в ЗУ станции А, формируется сигнал «Стирание».
Поэтому вместо знака ж, который следовало передавать за
знаком £, передается сигнал «Стирание» (отмечен штриховкой).
Одновременно блокируется приемник станции А. Время
блокировки определяется величиной задержки, т. е. ^бл=5/к. Поэтому
четыре знака, следующих за б, а также знак «Стирание», которые
передаются на станцию А по обратному каналу, на этой станции
приняты не будут.
Знак «Стирание», принятый станцией Б, отпирает для передачи
по обратному каналу цепь ЗУ станции Б. Поэтому после
передачи сигнала «Стирание» на станцию А и ЗУ поступают знаки б, в,
г, д, е. Факт приема сигнала «Стирание» на станции Б
свидетельствует, что среди записанных в ЗУ этой станции знаков есть
ошибочный. Этот знак (определяется задержкой на время 5tK), как и
пять следующих за ним, стирается. В данном случае емкость
накопителя ГНак = 6/к.
Анализируя приведенную схему, можно сделать вывод, что
помехоустойчивость обратного канала должна быть выше, чем
прямого, а помехоустойчивость знака «Стирание» должна быть
значительно выше помехоустойчивости информационных знаков. Это
обусловлено тем, что ошибка- в приеме знака «Стирание»
удваивает время перерыва в поступлении знаков. В результате
снижается пропускная способность системы.
В рассмотренных системах с ИОС по обратному каналу
передавалась полностью ошибочно принятая информационная >комби-
,нация. Такие системы называются системами с ретрансляционной
144
обратной связью. В этом случае ширина полосы обратного канала
должна быть такой же, как и у прямого канала, что является
основным недостатком (кроме невысокой скорости передачи)
подобных систем.
Существуют разновидности систем с ИОС, в которых по
обратному каналу передаются не сами информационные комбинации, а
только некоторые сведения (квитанции), характеризующие в той
или иной степени принятые кодовые комбинации. Например, по
прямому каналу можно передавать информационные разряды, а
по обратному — соответствующие проверочные разряды,
сформированные по определенному выбранному способу кодирования. В
этом случае полоса обратного канала может быть меньшей. Если
каждой передаваемой кодовой комбинации соответствует своя
квитанция, то такая система с ИОС называется полной. Системы с
ИОС, где одна квитанция соответствует нескольким кодовым
комбинациям, называются системами с укороченной ИОС. Системы
с ретрансляционной обратной связью, очевидно, являются
вариантом полной системы с ИОС, поскольку в качестве квитанции
используется сама переданная кодовая комбинация.
7.5. СИСТЕМЫ С ОБРАТНОЙ СВЯЗЬЮ [5]
Для передачи данных по некоммутируемым телеграфным
каналам и сети абонентского телеграфа нашла применение
низкоскоростная аппаратура передачи данных «Аккорд-50». Эта
аппаратура, работающая со скоростями 50 и 100 Бод, обеспечивает
частость ошибки по пятиэлементным знакам не более Ю-6 при
частости ошибки в дискретном канале по элементам 2-Ю-4.
Аппаратура «Аккорд-50» является полудуплексной и предназначается
для работы по каналам с двухпроводным окончанием, в том числе
и по сети AT.
В аппаратуре «Аккорд-50» применен принцип РОС с
ожиданием. Передаваемые пятиэлементные знаки группируются в блоки,
длина которых не должна превышать 65 знаков, после чего
кодируются циклическим кодом, обнаруживающим ошибки. Код
содержит 13 проверочных разрядов; образующий полином имеет вид
*13+*12+*6+*3+*+l- Проверочные разряды также передаются в
виде стартстопных кодовых комбинаций (используются три
знака). Сигналы обратной связи («Запрос» и «Подтверждение»)
передаются по обратному каналу также в виде стартстопных пяти-
элементных комбинаций. В аппаратуре «Аккорд-50» применяется
временной способ организации обратного канала: вначале по
телеграфному каналу передаются кодовые комбинации, после чего
по этому же каналу в обратном направлении передаются сигналы
обратной связи.
Для передачи данных по некоммутируемым каналам тональной
частоты и коммутируемой телефонной сети общего пользования
применяется среднескоростная аппаратура «Аккорд-1200». Эта
аппаратура, работающая со скоростями 600 и 1200 Бод, обеспёчЙБа-
145
ет частость ошибок по семиэлементным знакам не более 10~6 при
частости ошибки в дискретном канале по единичным элементам
2-Ю-4. В аппаратуре используется синхронная работа, система
повышения верности — РОС с блокировкой. Передаваемая кодовая
комбинация содержит 240 информационных разрядов, четыре
служебных разряда и 16 проверочных разрядов. Информационная
часть кодовой комбинации составляется из 30 восьмиразрядных
знаков (каждый знак содержит семь информационных и один
проверочный, дополняющий семиразрядный знак до восьмиразрядного
с четным числом единиц). Четыре служебных разряда позволяют
образовать 16 различных сочетаний, из них три используются для
циклической нумерации передаваемых комбинаций (передаваемые
кодовые комбинации нумеруются так: А, В, С, А, В,...).
Остальные 13 сочетаний служебных разрядов используются в процессе
циклового фазирования, а также для других целей, не
относящихся к повышению верности. Шестнадцать проверочных разрядов
служат для кодирования передаваемой информации
обнаруживающим ошибки циклическим кодом. Образующий полином имеет
вид х16+х12+хь+1.
Для обнаружения ошибок применяется не только этот
циклический код, но и проверочные разряды, дополняющие каждый
передаваемый в кодовой комбинации знак до четного числа единиц.
Канал обратной связи организуется путем частотного
разделения используемых каналов тональной частоты. Сигнал «Запрос»
передается комбинацией «Нажатие плюс», а сигнал
«Подтверждение» — комбинацией «Нажатие минус». Наличие только трех
номеров для циклической нумерации передаваемых блоков
ограничивает емкость буферного накопителя до двух комбинаций;
однако, учитывая большую их длину, такой емкости буферного
накопителя достаточно для работы на расстояниях в несколько тысяч
километров. В аппаратуре «Аккорд-1200» предусмотрено
использование укороченных кодовых комбинаций (132 разряда), что
приводит к повышению скорости передачи информации по каналам с
высокой частостью ошибок (обычно коммутируемые каналы).
ГЛАВА 8
Принципы построения сетей передачи
дискретной информации
+
8.1. НЕКОММУТИРУЕМЫЕ И КОММУТИРУЕМЫЕ СЕТИ
ПЕРЕДАЧИ ДИСКРЕТНОЙ ИНФОРМАЦИИ
Сети передачи дискретной информации (СПДИ), относящиеся
к вторичным сетям Единой автоматизированной сети связи
(ЕАСС), представляют собой совокупность оконечных пунктов
146
(ОП) и линий (каналов). Оконеч-ные пункты содержат комплекс
устройств, позволяющих источнику (получателю) информации
осуществлять ввод-вывод дискретных сообщений. В комплекс этих
устройств входят вводно-выводные устройства, предназначенные
для превращения сообщения в сигнал на передаче и обратного
превращения на приеме, и аппаратура передачи дискретной
информации (АПДИ). Назначением АПДИ является превращение
сигналов, поступающих от вводно-выводных устройств, в вид,
удобный для передачи по каналам, и повышение верности
передачи дискретной информации. В состав СП, кроме того, может
входить и аппаратура обслуживания, предназначенная для
установления соединения, контроля, документирования и т. д.
Оконечный пункт, расположенный непосредственно у пользователя —
абонента СПДИ, называется абонентским пунктом {АП).
Каналы передачи дискретной информации представляют собой
совокупность технических средств и среды распространения,
которые обеспечивают при подключении оконечных пунктов передачу
с помощью электрических сигналов дискретных сообщений от
источников информации к ее получателям.
Сети, в которых абоненты связаны друг с другом постоянно
закрепленными (арендованными) каналами, причем каждый
канал используется для обмена информацией только между этими
абонентами, называются некоммутируемыми (рис. 8.1). Для
передачи информации между п абонентами необходима сеть из N=
= n(n—!1)/2 двусторонних каналов. Такая сеть называется полно-
связной. Применение сетей такого типа экономически оправданно
Рис. 8.1. Сеть
некоммутируемых каналов
Рис. 8.2.
Децентрализованная система коммутации
только в тех случаях, когда имеется необходимость в непрерывном
взаимодействии одних и тех же абонентов, передаче между ними
потоков информации, полностью исчерпывающих пропускную
способность каналов, в сочетании с очень высокими требованиями ко
времени установления соединения, высокой верности и надежно-
147
сти передачи сообщений. Поэтому такие сети находят применение
в основном в сферах управления технологическими процессами в
промышленности, на транспорте и в военном деле.
Чтобы любой из п абонентов имел возможность обмениваться
информацией со всеми (п—1) абонентами, каждый оконечный
пункт должен иметь (п—1) входов-выходов. В противном случае
каждый из абонентов сети во время обмена информацией с
каким либо другим абонентом окажется не в состоянии обеспечить
связь с другими абонентами сети. Учитывая случайный характер
нагрузки и, следовательно, малую вероятность одновременного
обмена информацией каждого из ОП со всеми (п—1) остальными,
можно (естественно, при ухудшении качества обслуживания)
ограничиться меньшим числом входов-выходов, при этом в ОП для
подключения абонентов к любому каналу должен иметься
переключатель на (п—1) положений (рис. 8.2). Такая сеть называется
сетью с децентрализованной системой коммутации. Число мест —
точек коммутации, — в которых осуществляется соединение в
такой сети, NK=n(n—\).
Более эффективной в большинстве случаев оказывается
централизованная система коммутации, осуществляемая не у
отдельных абонентов, а в одном или нескольких местах — узлах
(станциях) коммутации (УК). Таким образом, назначением УК
является распределение информации в сети. При централизованной
коммутации в одном узле требуемое число каналов N=n, т, е»
меньше, чем при децентрализованной коммутации в (п—1)/2 раз,
а число точек коммутации остается тем же самым (рис. 8.3). При
централизованной системе коммутации есть возможность
уменьшить вдвое (N'K=n(п—1)/2) необходимое число точек коммутации,
так как централизация позволяет устанавливать любое
соединение не через две, а через одну точку коммутации (рис. 8.4). При
этом все абоненты могут быть одновременно заняты обменом
информацией, т. е. имеет место неб локирующаяся схема коммутации.
\А6г
ц\
Рис. 8.3. Централизованная система Рис. 8.4. Неблокирующаяся схема
коммутации коммутации
148
При меньшем, чем N'K, числе точек коммутации не все
абоненты имеют возможность обмениваться информацией одновременно.
В такой системе возможны блокировки, когда все точки
коммутации заняты и некоторое число абонентов (тем большее, чем
меньше точек коммутации) не могут осуществить обмен
информацией до освобождения точек коммутации1. Число точек коммутации
существенно влияет на сложность, габаритные размеры, стоимость
коммутационного оборудования и его эксплуатацию. В то же
время число точек коммутации определяет качество обслуживания
абонентов: вероятность блокировки и время ожидания.
Таким образом, в результате замены децентрализованной сети
на централизованную с одним узлом коммутации, с одной
стороны, может быть получен значительный технико-экономический
эффект от уменьшения числа каналов (и их длины) и сокращения
коммутационного оборудования, с другой стороны, возникает
возможность блокировок и, как следствие, увеличение времени
доставки информации (получателю. Нахождение разумного
компромисса между этими противоречащими друг другу факторами
составляет основную задачу построения сетей связи, в частности
сетей ПДИ.
В централизованной сети с одним УК линии между
абонентами и УК (абонентские линии) могут оказаться очень длинными,
что неэкономично, так как эти линии являются индивидуальными.
Это особенно существенно в сетях ПДИ, для которых характерны
небольшая плотность абонентов и .небольшое относительное время
работы. Естественно поэтому стремление к уменьшению длины
абонентских линий, что может быть достигнуто двумя путями:
увеличением числа УК iHa сети и тем самым приближением УК к
абонентам или 'применением концентраторов, т. е. устройств,
объединяющих нагрузку группы близко расположенных абонентов с
учетом неодновременности их работы, что позволяет уменьшить
число каналов на участке УК — концентратор.
Таким образом, оказывается целесообразным построение сетей
с несколькими УК. Для обеспечения 'возможности 'взаимодействия
всех абонентов сети с несколькими УК необходимо все УК
соединить друг с другом (линии, соединяющие УК, называются
магистральными). По тем же соображениям, по которым соединять
оконечные установки через УК целесообразнее, чем применять
децентрализованную систему коммутации, имеет смысл для связи
всех УК друг с другом использовать специальные УК для
коммутации магистральных линий. Узлы, в которые не включаются
оконечные установки, называют узлами верхнего уровня по
отношению к узлам нижнего уровня, служащим для подключения
абонентов. Сеть с узлами двух и более уровней называется иерархической^
Узлы, в которые включают абонентские линии, называются
оконечными, а узлы, в которые включают соединительные линии, —»
1 Это связано с концентрацией, о которой см. ниже.
149
транзитными. Наряду с оконечными и транзитными встречаются
смешанные узлы.
Транзитные узлы в свою очередь могут соединяться между
собой магистральными линиями, т. е. могут образовываться
транзитные узлы более высоких уровней. Информация от одного
абонента может проходить через несколько транзитных узлов и два
оконечных узла: исходящий и входящий.
Сеть, содержащая УК, называется коммутируемой сетью.
Такая сеть при случайно изменяющемся характере потоков
информации позволяет более полно использовать 'пропускную
способность каналов связи, которые являются самой дорогостоящей
частью любой сети. Поэтому 'коммутируемые сети нашли широкое
применение для передачи дискретной информации. В силу
вышеизложенных достоинств на сетях ПДИ в основном применяют
централизованные коммутируемые сети иерархической структуры.
Децентрализованные коммутируемые сети используются только в
космических системах связи из-за сложности реализации на
искусственном спутнике Земли узла коммутации.
Узлы централизованных сетей могут соединяться по принципу:
«каждый с каждым», радиальному или радиально-узловому. При
соединении по принципу «каждый с каждым» (рис. 8.5а) количе-
е) д) В)
Рис. 8.5. Принципы построения сетей:
а — «каждый с каждым»; б — радиальный; в — радиально-узловой
ство пучков каналов ПДИ на сети получается очень большим и
равно п(п—1)/2, где п — число узлов на сети, а емкость каждого
пучка соответственно мала. А, как известно, качество
обслуживания абонентов (число отказов или задержанных выше
нормативного времени соединений) тем хуже, чем меньше емкость
пучка каналов. Сети с большим числом пучков каналов обладают
высокой «жизучестью», так как при выходе из строя каналов
основного направления (непосредственно связывающих данные
узлы) имеется большое число каналов обходных направлений,
связывающих данные узлы через другие узлы коммутации.
При радиальном принципе соединения узлов (рис. 8.56)
количество пучков каналов на сети равно (п—1), т. е. в п/2 раз
меньше, чем в случае соединения каждого узла с каждым. При этом
150
и пучки каналов становятся крупнее, так как в каждом из них
объединяется нагрузка к (п—1) узлам. Несмотря на указанные
достоинства, этот принцип построения сетей обладает низкой
«живучестью» (возможность выхода из -строя всей сети в случае
повреждения центрального узла) и неприемлем для сетей,
охватывающих большие территории, поскольку связи между соседними
узлами чрезмерно удлиняются. При радиально-узловом принципе
построения сети образуются узлы различных классов (так, на
рис. 8.5в доказаны узлы трех классов). Число пучков каналов
между узлами в этом случае равно (п—1).
Для обеспечения высокой «живучести» сети, сокращения
длины линий между узлами, имеющими большое взаимное тяготение,
и сохранения достаточно больших пучков каналов применяют
комбинированный принцип построения, при котором узлы I
класса соединяются между собой по принципу «каждый с каждым», а
остальные узлы — с узлами I класса по радиально-узловому
принципу; при этом в отдельных случаях между соседними узлами,
имеющими большое взаимное тяготение, организуются прямые
связи. Для повышения пропускной способности сети (уменьшения
числа отказов в установлении соединений и времени передачи
информации), ее надежности и живучести оконечные узлы
включаются в два ближайших транзитных узла. Кроме того, при
наличии больших потоков информации отдельные оконечные узлы
соединяются друг с другом. Определение оптимального числа
узлов и мест их размещения на сети представляет собой сложную
технико-экономическую задачу, потому что три увеличении числа
узлов на сети сокращаются расстояния между узлами, за счет
объединения нагрузки увеличиваются пучки каналов и,
следовательно, сокращается общая стоимость каналов. В то же время
увеличение числа узлов приводит к росту стоимости
оборудования коммутации и ухудшению электрических характеристик
трактов передачи дискретной информации.
8.2. ТРЕБОВАНИЯ К СЕТЯМ ПЕРЕДАЧИ
ДИСКРЕТНОЙ ИНФОРМАЦИИ
Сети передачи дискретной информации должны обеспечивать
доставку по адресу сообщений заданного объема за
установленное время и с нормированными качественными -показателями.
Требования к различным показателям сети могут значительно
отличаться в зависимости от того, в каких системах и для каких
целей используется передаваемая информация. Весьма важным
показателем является время доставки сообщения, т. е. время от
начала ввода сообщения в ОП до окончания приема сообщения
в другом ОП. При 'передаче плановой или статистической
информации время доставки может исчисляться минутами, часами и
даже сутками. Время передачи большинства телеграмм может
достигать десятков минут и часов. При работе в режиме диалога
человека с ЭВМ задержка ответа более чем на 2—3 с недопусти-
151
ма. Это связано с тем, что при проведении расчетов на ЭВМ в
процессе научной или конструкторской работы происходят
непрерывное обдумывание и удержание информации <в
кратковременной памяти человека на время ожидания ответа и этот ответ
должен быть быстрым.
Еще более жесткие требования -ко времени доставки
сообщении предъявляются к системам управления быстропротекающими
процессами, доставка информации в которых должна быть
согласована со скоростью протекания процесса и поэтому может
измеряться долями секунды.
Время доставки сообщения определенного объема в
некоммутируемых сетях определяется реальной скоростью «передачи по
каналам, а в коммутируемых сетях зависит от способа и времени
распределения информации в узлах коммутации. Объемы
передаваемой информации и допустимые сраки их доставки для
различных систем, использующих сети ПДИ, представлены на рис. 8.6.
яг-fc
к 1 сутки
10*
MV
lДоставка
сообщений.
(8 т. v. телеграф)
Передача больших
массивов'
/данных
\-1мин
/
7""*
/
Передача Программу
/*-
/
Л
Диалоговые
системы
Справочные
системы
/
Л
системы у
Телеулравле-] / J
ние У теле - I / /
/метрик а /
xL i ел ел
/
~Г
/
~г
<200
бит
-««4е
•шоо
бит
W 102
10 й
10"
105
10°
1Q1
10ь
Объем передаваемой информации., бит
Рис. 8.6. Сроки доставки дискретных сообщений
Требования к скоростям передачи дискретной информации
вытекают из объемов передаваемой информации и допустимых сроков
их передачи. Скорость работы телеграфных аппаратов составляет
несколько десятков бит в секунду. Одна из стандартизованных
скоростей телеграфирования — 50 бит/с — соответствует средней
скорости работы оператора на клавиатуре 400 зн./мин. Оператор
высокой квалификации может работать со скоростью до
600 зн./мин, а в отдельные моменты времени и до 800 зн./мин, что
соответствует скорости телеграфной передачи 100 бит/с.
Для передачи данных МККТТ рекомендует (Рекомендация
ХЛ) следующие скорости: 50, 200, 300, 600, 1200, 4800, 9600 и
48 000 бит/с. При этом скорости 200—300 бит/с определяются воз-
152
можностью восприятия человеком содержания печатного текста.
При беглом чтении (просмотре) возможны большие скорости. При
воспроизведении текстовой и графической информации на дисплее
применяют скорость передачи .порядка 2400 бит/с. При обмене
информацией между ЭВМ важно обеспечить столь малое время
передачи, чтобы не происходило задержек в их работе. Для этого
информация передается со скоростями 4800, 9600 и 48 000 бит/с и
выше. Диапазон скоростей от 200 до 4800 бит/с характеризует
и возможности передачи по наиболее широко используемым для
ПД каналам тональной частоты (в том числе и коммутируемым).
Скорость 9600 бит/с используется для передачи по
некоммутируемым каналам ТЧ. Для ПД со скоростью 48 000 бит/с
используются первичные групповые кал алы.
Рисунок 8.6, на котором нанесены линии, соответствующие
скоростям передачи 200, 4800 и 48 000 бит/с, иллюстрирует степень
удовлетворения требований различных автоматизированных
систем к передаче требуемых объемов информации в установленное
время.
Требования к верности передачи определяются назначением,
информации и должны соразмеряться, с одной стороны, с
последствиями, которые влекут за собой искажения при передаче, а с
другой стороны, с затратами, которые необходимы для повышения
верности. Так, если допустимая вероятность ошибки при
телеграфной передаче составляет 3-10-5, то в некоторых системах
передачи данных она не должна превышать 10~9. Верность передачи
по коммутируемым сетям зависит как от методов повышения
верности, так и от системы распределения информации в УК.
Требование к доставке информации по заданному адресу
регламентируется вероятностью засылки сообщения не по адресу и
вероятностью потери сообщения в сети. Оба эти параметра в
значительной степени связаны с системой распределения информации в УК.
Из- сказанного следует, что основные характеристики
коммутируемой сети ПДИ (время доставки, верность, вероятность
доставки по адресу) в значительной степени определяются
принятой на сети системой распределения информации в узлах
коммутации.
Коммутируемые сети ПДИ наряду с рассмотренными выше
основными могут обеспечивать абонентам следующие доцолни-
тельные услуги:
вызов по сокращенному адресу или прямой вызов (например,
нажатием кнопки) для облегчения и ускорения соединения с
часто вызываемыми абонентами;
многоадресную передачу или передачу информации по
заранее обусловленным опискам адресов (циркулярная передача);
идентификацию абонентов, т. е. получение подтверждения об
установлении соединения с желаемым адресатом;
организацию замкнутых групп абонентов, т. е. создание
внутри сети подсетей с правом или без права выхода к другим
абонентам;
153
приоритеты в отношении первоочередной передачи
информации для отдельных групп абонентов или отдельных категорий
сообщений;
задержанную доставку сообщений, т. е. передачу в заранее
обусловленное -время;
обмен информацией между ОП, АПД которых работает с
разными скоростями, кодами, методами передачи (синхронный, старт-
стопный, пакетный).
Возможности выполнения дополнительных услуг в
значительной степени определяются принятой на сети ПДИ системой
коммутации.
К сетям ПДИ, как и ко всем другим сетям связи,
предъявляются требования по надежности, живучести, экономичности и
способности к дальнейшему развитию. Требование к надежности
означает, что сеть должна обеспечивать длительное
функционирование с поддержанием всех вышеуказанных характеристик в
заданных пределах. Требование к живучести означает, что сеть
должна сохранять возможность передачи сообщений для
наибольшего числа абонентов при повреждениях каналов связи и узлов
коммутации. Экономичность сети предполагает минимизацию
расходов ,на ее создание и эксплуатацию при условии выполнения
сетью требований абонентов. Требование возможности
дальнейшего развития обусловлено тем, что потоки информации,
передаваемые по сетям ПДИ, возрастают, причем во многих случаях
загрузку сети невозможно точно определить, пока сеть не 'начнет
функционировать. Показатели коммутируемых сетей в отношении
надежности, живучести и экономичности в значительной степени
определяются 'Принятой на сети системой распределения
информации в УК.
8.3. СПОСОБЫ РАСПРЕДЕЛЕНИЯ СИГНАЛОВ
Распределение сигналов может быть осуществлено теми же
методами, что и их разделение. Это следует из того, что в
процессе распределения в УК происходит передача информации
между каналами, разделенными одним из описанных в гл. 3 способов.
Отличие коммутации от передачи заключается в том, что в
многоканальных устройствах передачи разделяются сигналы каналов,
связывающих закрепленные друг за другом 'пары: источник
информации— получатель информации (ИИг-—ПИ;), тогда как в
устройствах коммутации осуществляется образование различных
сочетаний ИИ^—ПИ; в соответствии с адресом вызываемого nHj,
который указывает вызывающий ИИг-. Поэтому очевидно, что
распределение сигналов может осуществляться, во всяком случае, по
тому же признаку, что и их разделение.
Пространственное разделение является исходным, так как
абоненты любой сети связи отличаются именно своим
пространственным положением. Всякое другое разделение, кроме
пространственного, связано с некоторым преобразованием. Например, частотное
154
разделение преобразует пространственно разделенные 'каналы в
каналы, разделенные по частоте (преобразование пространство —
частота).
В начале развития техники связи пространственное
разделение сигналов сочеталось с пространственной коммутацией. Затем
появились системы передачи с частотным и временным
разделением, а коммутация продолжала оставаться пространственной.
Это приводило к тому, что в устройствах коммутации для
сопряжения систем передачи с системами 'коммутации приходилось
производить двойное преобразование, например,
частота—пространство на входе УК и пространство—частота на его выходе.
Очевидно, что целесообразно избегать таких преобразований, т. е.
применять единые методы разделения и коммутации. Последнее
получило название интеграции первого рода, в отличие от
интеграции второго рода — объединения систем передачи и
коммутации различных видов информации. Преобразования одного вида
разделения сигналов в другой позволяют строить системы
передачи и коммутации, содержащие какой-либо один из
рассмотренных способов разделения и распределения. Например, может быть
построена чисто временная система распределения независимо
от того, со скольких направлений и каким способом разделения
образованы каналы в УК. Действительно, пусть в УК входят
цепи с п направлений и каждая из них содержит ./V каналов. При
этом одним из способов преобразования все эти nN каналов
могут быть приведены к одному виду разделения, например
временному. Это позволит осуществлять их чисто временное
распределение.
Из многих признаков, по которым можно осуществлять
распределение сигналов дискретной информации, практическое
распространение получили пространственный и временной, а также
их сочетания. Широко применяемый в системах передачи
частотный метод разделения не нашел практического применения в
системах коммутации, несмотря на наличие большого числа
изобретений в этой области, так как все предложенные реализации пока
оказываются дорогими и сложными.
Наиболее перспективными являются системы передачи с
временным разделением, которым в силу вышесказанного
соответствует временная коммутация; поэтому на новых сетях ПДИ в
основу интеграции положен временной метод. Классификация
применяемых методов распределения сигналов, показанная на рис.
8.7, иллюстрирует их общность с методами разделения рис. 3.16.
Устройства, реализующие пространственный метод
распределения, прошли путь от механических и электромеханических
соединителей с ручным управлением до электронных соединителей с
управлением по записанной программе (от ЭВМ). Общим для
всех этих устройств является то, что для каждого соединения
входящего и исходящего каналов устанавливается свой путь в
пространстве, который не совпадает ни с одним другим путем. При этом
каждая точка коммутации в процессе соединения используется
155
только для данного соединения, например входящего канала I с
исходящим /. Поэтому общее число точек коммутации при
большом число входящих N и исходящих М каналов оказывается
велико пропорционально N-M. Во временных системах
распределения каждая точка коммутации используется многократно, т. е.
Система коммутации каналов
Системы с накоплением
Рис. 8.7. Методы распределения сигналов
является общей для элементов 'сообщений между разными
каналами, проходящими через нее в разные интервалы времени. Это
значительно сокращает потребное число точек коммутации и
позволяет значительно уменьшить объем коммутационного
оборудования (поля). Различают две разновидности временного способа
распределения — синхронный и асинхронный (адресный).
Синхронное временное распределение. При синхронном
временном распределении (СВРП) каждому каналу [входящему или
исходящему) соответствует определенное временное положение.
Элементы информации, соответствующие данному каналу, занимают
в групповом тракте фиксированный временной интервал. В
отличие от УК с пространственным распределением, в УК с
временным распределением точкой подключения является не канал, а
линейный тракт. На входе в узел коммутации УК все линейные
тракты объединяются в единый групповой тракт, а на его
выходе — разделяются. Процесс СВРП сводится к изменению
временного положения канала. Например, «соединению» 2-го канала с
7-м соответствует в каждом цикле прием информации на 2-й
временной позиции и ее передача на 7-й временной позиции. Это
смещение во времени осуществляется путем записи сообщения во 2-й
временной позиции в запоминающее устройство ЗУ и ее
считыванием в 7-й временной позиции. Запоминаемой частью сообщения
может, например, являться единичный элемент1. Число каналов,
1 В технике распределения и обработки дискретных сообщений единичный
элемент обычно именуют битом. Естественно, что в данном случае этот термин
не должен отождествляться с единицей измерения количества информации.
НС
которое может обслужить коммутатор, построенный по методу
СВРП, тем больше, чем короче длительность цикла «запись —
считывание» в ЗУ и чем меньше скорость передачи данных.
Для увеличения числа каналов переходят от распределения
.единичных элементов к распределению знаков. В результате
этого каждую временную позицию в цикле занимает не единичный
элемент (содержащий обычно 1 бит .информации), а байт, чтго
позволяет при той же длительности цикла коммутировать в 8 раз
больше каналов. Правда, при этом необходима память на 8
разрядов. Пропускная способность (число каналов) синхронного
коммутатора байтов при двусторонней связи определяется из
выражения p = 8/2Tv = A/Tvt где Т — длительность цикла
запись—считывание ЗУ; v — скорость ПДИ, бит/с. Например, в случае Т=
= 1 мс и ^ = 600 бит/с pi = 6600 каналов, а при ^=9600 бит/с
Р2=410 каналов. Таким образом, даже на основе ЗУ со
сравнительно небольшим быстродействием имеется возможность
построить синхронные временные коммутаторы, удовлетворяющие
потребностям ПДИ с большой перспективой. Поскольку
быстродействие ЗУ непрерывно растет, то в ближайшем будущем могут быть
построены СВРП на тысячи среднескоростных и сотни
высокоскоростных (48 кбит/с) каналов ПДИ.
Характерным для сетей ПДИ является наличие разных
скоростей передачи ПДИ. При наличии линейных трактов с разными
скоростями передачи число временных положений в цикле опре-
k
деляется следующим выражением:г = — V] vt nit где vx — скорость
Vi£A
передачи в классе i\ V\<v2< ... <Vk\ m— число каналов со
скоростью Vi\ k — число классов скоростей. Рассмотрим в качестве
примера следующий случай (табл. 8.Ь), когда г=36, т. е. цикл
состоит из 36 временных положений (рис. 8.8). Синхронная
временная коммутация наиболее эффективна для обработки .изохронных,
сигналов. С меньшей эффективностью ее можно применять для
коммутации неизохронных сигналов [метод СИП и т. п. (см.
гл. 3)].
Таблица 8.1
Параметр
Vi, бит/с
п{
Величина г для класса
1-го
600
4
2-го J 3-го
2400
4
4800
2
Асинхронное временное распределение. В основу асинхронно-
временного распределения (АВРП) положены те же принципы,
что и в основу асинхронно-временного разделения (АВР) (см.
U7
гл. 3), но с той разницей, что при АВРП происходит
переадресация значащих моментов: вместо адреса входящего канала ЗМ
получает в УК адрес исходящего канала. Узел коммутации АВРП
имеет память (ОЗУ) с числом областей, равным числу входящих
каналов (за каждым каналом закреплена своя область). В
область памяти входящего канала под управлением сигнала набора
Яки,,
р
2
\\ 1
УЛ \ \
\п \
и
Л J 1 1
Г1
И J
Г п
1 Г
я„
fi
т\\
J ГИ
A J И
щ L
П г
щ\
\v\i
\г
ц\\\
И11
я
ш
и
г
ГР
d
N
йь
у<
т\
VU 1 1 1
й| 1
Ш
ГИ
11 У
Jff
йит/G
то
woo
ZU00
2Ш
ZhOO
гиоо
600
600
Номер временного интербала
Рис. 8.8. Пример синхронного цикла
номера записывается код исходящего канала. При обнаружении
ЗМ (кода адреса) в данном исходящем канале устройство
управления УУ дает сигнал на считывание информации из данной
области памяти. Считывание осуществляется по адресу исходящего
канала, в котором специальным устройством формируется ЗМ.
Для уменьшения краевых искажений, как и в системах с АВР,
необходимо увеличивать скорость передачи по станционному
тракту.
Поскольку в УК большой емкости приходится оперировать
адресами длиной до двух десятков единичных интервалов, то,
учитывая, что один ЗМ приходится в среднем на два единичных
интервала, количество обрабатываемой информации на один
передаваемый бит в УК с АВРП может быть в 10 раз больше, чем
УК с СВРП. С учетом этого в УК с АВРП приходится
ограничивать число подключаемых каналов с высокой скоростью передачи
и предоставлять им приоритет в обслуживании по сравнению с
каналами с низкими -скоростями передачи.
В отличие от синхронных УК, в УК с АВРП сигналы не
только не регенерируются, но и получают дополнительные краевые
искажения (по тем же причинам, что и в системах передачи с
АВР). Достоинством распределения ЗМ является то, что оно
обеспечивает полную прозрачность коммутируемых каналов. Поэтому
УК с АВРП находят применение в системах ннзкоскоростных
неизохронных сигналов при сравнительно невысоких требованиях к
верности передачи, что имеет место, например, в традиционной
телеграфии.
Наряду с распределением ЗМ в УК с АВРП может быть
осуществлено распределение единичных интервалов, однако при этом
примерно вдвое уменьшается пропускная способность УК и
теряется прозрачность. Еще большие ограничения 'прозрачности имеют
место при распределении более длинных частей сообщения: бай-
158
тов, пакетов и целых сообщений, однако во всех случаях, кроме
распределения ЗМ имеется возможность путем регенерации
сигналов в УК повысить верность передачи. При распределении
единичных интервалов обеспечивается передача произвольным кодом
с определенной скоростью. При распределении знаков (байтов)
обеспечивается возможность передачи только определенным
кодом с определенной скоростью. При распределении сообщений и
пакетов, т. е. отрезков сообщений длиной в десятки и сотни
знаков, имеется возможность передачи через УК сообщений
(пакетов) только определенного формата.
Различные методы АВРП образуют как бы некоторый ряд, в
котором один метод отличается от другого длиной
распределяемого отрезка сообщения (рис. 8.9). Методы распределения ЗМ и
/ Адрес передается | Адрес передается 8
да сообщения **=—|—^ составе сообщения
j Ш
Коммутация ЗММ \, *■ ч KV
I Т V—v—'
/С/С Коммутация Коммутация
fumoS знакод (дайтоб) ^}
Рис. 8.9. Методы коммутации
единичных интервалов (особенно первый) -по своим свойствам
близки коммутации каналов (КК), реализуемой
пространственным распределением. Таким образом, метод АВРП является
универсальным в том отношении, что позволяет осуществлять
коммутацию всех видов: от коммутации прозрачных каналов (на
основе распределения ЗМ) до коммутации сообщений (см. § 8.4).
В зависимости от длины накапливаемой в УК части
сообщения изменяются свойства системы коммутации. При наиболее
короткой накапливаемой части ЗМ система распределения
обеспечивает наиболее полное сходство характеристик с системой КК.
При увеличении длины накапливаемой части сообщения (переход
от ЗМ к единичным интервалам, байтам) происходит частичная
потеря свойств, присущих системе КК: все более утрачивается
прозрачность сквозного канала и все больше проявляются
возможности, присущие системам с накоплением: сопряжение разных
скоростей, кодов, форматов и др. Следовательно, при -переходе
от способа коммутации каналов к способам коммутации с
накоплением в системах АВК четкая граница в отношении длины
накапливаемой части информации отсутствует.
Чем длиннее распределяемый отрезок, тем большая память
требуется в УК и тем большие задержки сообщения в нем
происходят. По мере увеличения длины коммутируемого отрезка
уменьшаются удельные затраты производительности УК (на единицу
информации).
При коммутации коротких отрезков сообщений (до байта
включительно) практически реализуема лишь передача адреса до
сообщения. При более длинных отрезках возможна передача ад-
159
реса'йак до сообщения, так и в его составе. Однако используется
только второй метод, так как в этом случае оказывается
возможным выбирать в каждом УК наиболее выгодное направление
передачи: более короткое, менее загруженное другими сообщениями.
8.4. СИСТЕМЫ КОММУТАЦИИ В СЕТЯХ ПДИ
Распределение потоков сообщений с целью доставки каждого
сообщения по адресу осуществляется на узлах коммутации с
помощью коммутационных устройств. Система распределения
потоков сообщений в УК шолучила название системы коммутации. Под
коммутацией в сетях ПДИ условимся понимать совокупность
операций, обеспечивающих в узлах коммутации передачу
информации между входными и выходными устройствами (каналами) в
соответствии с указанным адресом.
Известны две основные системы коммутации: коммутация
каналов (КК) и коммутация с накоплением (КН). Коммутацией
каналов называется совокупность операций при соединении
каналов связи, дискретных каналов или каналов передачи данных для
получения сквозного канала, связывающего через узлы
коммутации один ОП с другим. При этом выражение «соединение каналов»
еледуеф. понимать не только в смысле физического соединения, но
и более широко — как занятие, резервирование средств передачи
и коммутации для пары взаимодействующих ОП на время сеанса
связи. Таким образом, при коммутации каналов сначала
организуется сквозной канал передачи дискретной информации между
взаимодействующими абонентами через узлы коммутации, а
затем осуществляется передача информации.
Коммутацией с накоплением называется совокупность
операций при приеме на УК сообщения или его части, накоплении и
последующей передачи сообщения или его части в соответствии
с содержащимся в нем (ней) адресом.
В.сети с КК (рис. 8.10а) процесс передачи состоит из
следующих операций:
вызывающий абонент Абп с помощью вызывного устройства
посылает по абонентской линии в узел КК заявку на соединение
с абонентом Абт, содержащую условный адрес вызываемого
абонента;
аппаратура коммутации узла КК по полученной заявке
осуществляет соединение абонентской линии Аб.линп с абонентской
линией Аб.линт, если абоненты принадлежат одному узлу КК,
или соединительной линией между узлами, к которым
принадлежат указанные абоненты (сквозной канал может быть
организован через несколько промежуточных узлов КК, где
осуществляется аналогичная коммутация);
после организации сквозного канала связи абонент Абт
-получает из узла КК сигнал 'вызова, а абонент Абп — сигнал
установления соединения;
160
происходит передача информации между абонентами; при этом
обмен может быть одно- и двусторонним, так .как обычно
коммутируются двусторонние каналы связи;
после завершения сеанса передачи информации и получения
от абонента сигнала отбоя аппаратура коммутации узлов КК
разрушает ранее установленные соединения каналов.
ЕН-И
оп
ДГ/НЭ
оп
Е&-АПДИ
Рис. 8.10. Сети ПДИ с коммутацией:
а — кангалов; б — сообщений или пакетов
При отсутствии свободного канала или его неисправности на
любом из участков в заданном направлении (соединительная
линия между узлами КК, абонентская линия между узлом КК »
Абт) или отсутствии свободных станционных устройств в УК
соединение абонентов не может быть установлено; узел коммутации
посылает Абп сигнал отказа в обслуживании (сигнал занятости).
Для установления соединения Абп должен повторить заявку на
соединение. Такой способ обслуживания, при котором вызов
(заявка на соединение), поступивший в момент отсутствия
свободных линий или станционных устройств получает отказ
(теряется), называется обслуживанием с потерями.
6-101
161
.При системе коммутации с накоплением (КН) ОП имеет
постоянную прямую 'связь со своим УК (иногда с несколькими) и
передает на него информацию, а затем эта информация поэтапно
передается через узлы коммутации другим абонентам, причем в
случае занятости исходящих каналов информации запоминается
в узлах и передается по мере освобождения 'каналов в нужном
направлении. Известны две разновидности системы с
накоплением: система коммутации сообщений (КС) и система
коммутации .пакетов (КП). В сети с КС (рис. 8.106) процесс передачи
следующий:
вызывающий абонент Абп передает в узел коммутации
подлежащее передаче сообщение вместе с условным адресом
абонента Абт\
в узле КС сообщение запоминается и по адресу определяется
капал, по которому оно должно быть передано;
если канал к соседнему узлу КС свободен, то сообщение
немедленно передается на соседний узел КС, в котором повторяется
та же операция;
если канал к соседнему узлу КС занят, то сообщение хранится
в устройствах памяти вплоть до освобождения канала;
хранэддойеся сообщения устанавливаются в очередь по
направлениям передачи с учетом категории срочности.
Такой способ обслуживания, при котором заявка, поступившая
в момент отсутствия свободных линий или приборов, ожидает их
освобождения, называется обслуживанием с ожиданием.
В сети с КП (рис. 8.106) процесс передачи следующий:
•вводимое в сеть сообщение разбивается на части — пакеты
длиной обычно до 1000—2000 единичных интервалов, содержащие
адрес ОП получателя; указанное разбиение осуществляется или
в оконечном пункте, если он содержит ЭВМ, или в ближайшем
к ОП УК;
если разбиение сообщения на пакеты происходит в УК, то
дальнейшая передача пакетов осуществляется по мере их
формирования, не дожидаясь окончания приема в УК целого сообщения;
в узле КП пакет запоминается в оперативной памяти (ОЗУ)
и по адресу определяется канал, по которому он должен быть
передан;
если этот канал к соседнему узлу свободен, то пакет
немедленно передается на соседний узел КП, в котором повторяется
та.же операция;
если -канал к соседнему узлу занят, то пакет может небольшое
время храниться в ОЗУ до освобождения канала;
при хранении пакеты устанавливаются в очереди по
направлениям передачи, причем длина очереди обычно не превышает
3—4 пакетов. Если длина очереди превышает допустимую,
пакеты стираются из памяти ОЗУ и их передача должна быть
повторена.
Пакеты, относящиеся к одному сообщению, могут
передаваться по разным маршрутам (рис. 8.11) в зависимости от того, по
№
какому из них в данный момент они с наименьшей задержкой
могут прийти к адресату. В связи с тем, что время прохождения
по сети пакетов одного сообщения может быть различным (в
зависимости от маршрута и задержек в УК), порядок их прихода
в ОП (к получателю) может не соответствовать порядку пакетов
Рис. 8.11. Маршруты передачи пакетов от ВЦ1 и АП1 к ВЦ2 и АП2
в передаваемом сообщении. Способ передачи пакетов одного
сообщения получателю в произвольном порядке, -при котором упорЯт
дочение возлагается на абонента-получателя информации,
называется режимом передачи датаграмм. Наряду с передачей дата-
грамм в сетях с КП используется режим виртуального канала,
при котором упорядочение пакетов в сообщении осуществляется
в УК, выдающем сообщение ОП — получателю. ; 'it
Обслуживание КП следует отнести к комбинированному
'.методу: с ограниченным ожиданием и отказом. «; /■-.? ,;
Кроме рассмотренных выше сетей с коммутацией: каналов
сообщений и пакетов — применяют комбинированные сети, вклют
чающие разные комбинации этих методов коммутации.
8.5. КОНЦЕНТРАЦИЯ В СЕТЯХ ПДИ
Для того чтобы обеспечить -выполнение всех требований",
которые предъявляются абонентами, сеть ПДИ должна обладать
определенной пропускной способностью, т. е. возможностью
передачи в единицу времени требуемого объема информации.
Передаваемый по сети объем информации определяется
производительностью включенных в нее источников информации и
характером их работы. На рис. 8.12 показано изменение интенсивности
нагрузки на входе в систему распределения информации УК сети
ПДИ. Эту систему можно построить так, что ее пропускная
способность будет соответствовать прямой АВ, т. е. она сможет npoU
6* »163
пустить весь поток информации даже в моменты пиковых
значений без отказов и задержек. Однако такая система была бы
неэкономична, так как в остальные промежутки «времени,
продолжительность которых значительно превосходит периоды тиков
нагрузки, ее пропускная способность используется неполностью. Ин-
7
I 5
I з
\\^0 ю 20 30 40 50 00 70 -С
Рис. 8.12. Интенсивность потока нагрузки на
входе в УК
туитивно более удачной представляется система, пропускная
способность которой соответствует прямой ВГ на рис. 8.12. В
пиковые моменты обрабатывается только часть поступающей
нагрузки; остальная нагрузка обрабатывается несколько позднее — в
пределах заштрихованных областей, расположенных ниже
прямой ВГ. Заштрихованные области, лежащие выше прямой ВГ, не
должны (Превышать области, расположенные ниже ее. В
противном случае, когда пропускная способность представляется
прямой ДЕ, система окажется не в состоянии обработать весь поток
информации, т. е. возникает шерегрузка системы.
. На принципе сглаживания пиковых нагрузок неравномерного
потока информации основан процесс концентрации, широко
используемый в сетях ПДИ для повышения использования
пропускной способности каналов и устройств распределения информации
в УК. В отличие от статической процедуры разделения каналов в
многоканальных системах передачи, концентрация представляет
собой динамическую процедуру распределения меньшего числа
выходных каналов в соответствии со случайным характером
потока сообщений, поступающего от большого числа входных
каналов. Концентрация то существу происходит только во времени,
так как она учитывает неравномерность потока сообщений во
времени. Техническая реализация устройств концентрации может
быть пространственной или временной. В обоих случаях система
может иметь или не иметь устройства памяти. При наличии
бесконечно большой памяти это будет система с ожиданием, при
конечной памяти с ожиданием и отказами при отсутствии
памяти— с отказами. Пространственная концентрация осуществляется
с помощью устройств, которые электрически подключают группу
из п входов (каналов) к группе из т выходов (каналов), причем
п>т. При этом входные и выходные каналы обычно имеют
одинаковые характеристики (полосу частот, скорость передачи). Уст-
164
ройства пространственной концентрации широко применяются в
сочетании с системами передачи с пространственным, частотным
и синхронным временным разделением сигналов.
Временная концентрация осуществляется на принципах
асинхронно-временного разделения -сигналов (см. гл. 3). При
пространственной концентрации обычно осуществляется концентрация
целых сообщений или групп сообщений, т. е. выходной канал /
предоставляется входному каналу i на все время передачи
одного или нескольких сообщений. При асинхронной временной
концентрации выходной канал / может предоставляться входному
каналу i для передачи как целых сообщений, так и отдельных
частей: слов, знаков единичных элементов, ЗМ. Вследствие этого
асинхронно-временная концентрация может обеспечить большую
эффективность (отношение числа входных к выходным каналам),
чем пространственная, так как использует не только лаузы
между входящими сообщениями, но и паузы внутри сообщений.
Поэтому в ряде случаев асинхронно-временную концентрацию
применяют в качестве дополнительной ступени концентрации в
системах с 'Пространственной коммутацией и разделением (так
называемое «статистическое уплотнение»). Процесс концентрации
лежит в основе построения коммутируемых сетей связи. Это уже
отмечалось в § 8.1 при переходе от некоммутируемой сети к сети
с децентрализованной системой коммутации, когда на основе
эффекта концентрации было уменьшено число входов-выходов ОП
и соответственно сокращено число соединительных линий ОП с
УК. Там же было показано, как с помощью концентрации может
быть сокращено оборудование распределения информации по
адресу (уменьшено число точек коммутации) в сети с
централизованной коммутацией.
Отмеченный технико-экономический эффект за счет
концентрации создается не безвозмездно, а ценой ухудшения качественных
показателей системы: возникновением отказов или задержек в
передаче информации, которые отсутствуют в системах без
концентрации (например, некоммутируемых сетях).
8.6. СРАВНЕНИЕ СИСТЕМ КОММУТАЦИИ
Система коммутации в значительной степени определяет
свойства сети в целом, в том числе и перечень возможных услуг,
предоставляемых абонентам. Сравним различные системы
коммутации но технико-экономическим характеристикам и перечню услуг,
которые они представляют абонентам.
Использование каналов связи. Основным преимуществом
системы КС перед КК является высокая эффективность
использования магистральных каналов, которая при КС достигает 80%, а
в ЧНН может приближаться к 100%. Такая высокая
эффективность при КС определяется наличием очередей сообщений,
записанных в памяти узлов. Наличие очередей может приводить к за-
165
Рмс 8.13. Зависимость
использования канала К от емкости
пучка S
держке сообщения в сети, измеряемой минутами и даже десятка-
Ми минут.
В сетях с КК загрузка каналов ограничивается допустимым
процентом отказов из-за занятости всех каналов в пучке, которая
обычно принимается равной 1—2%. В теории массового
обслуживания для систем с отказами
между долей вызовов, получивших
отказ ро, и числом каналов в
пучке S установлены соотношения,
которы^ иллюстрируются рис.
8.13. Например, при ро = 2%
соотношение между числом каналов в
пучке S и коэффициентом их
использования в ЧНН К
характеризуется следующими величинами:
5=2, /С=12,5%, S=4, /C=25%';
S=10, /С=50%; S'=20, /(=65%.
Поскольку каналы состоят, как
правило, из нескольких участков,
вероятность отказа на составном
канале (общие потери) р0.п будет больше вероятности отказа на
каждом из участков в отдельности (1—p0i):
п
Ро.п«1— ПО— Poi)>
где п — число участков каналов, участвующих в соединении.
Поэтому фактический коэффициент использования каналов в ЧНН
окажется меньше, чем указано выше. Так, если на каждом из
четырех участков сети р<н = 2%, общие потери вызовов составят
Ро.п=8%. Увеличение потерь вызовов приводит к росту
повторных вызовов, вследствие чего повышается загрузка каналов и
увеличивается вероятность отказа в соединении. Поэтому ухудшение
качества обслуживания ниже известного предела приводит к
лавинообразному возрастанию числа повторных вызовов и, как
результат, к нарушению действия сети с КК-
На сетях с КК за абонентами закрепляются оба направления
передачи — прямое и обратное (рис. 8.14а), а обмен между
абонентами на сетях ПДИ в большей части бывает односторонним
с чередующимися периодами передачи и приема. Только на
телеграфных сетях общего пользования осуществляется двусторонняя
•передача информации. При передаче информации в одном
направлении обратное направление не используется для передачи
информации, что приводит к двукратному снижению
использования каналов на сетях с КК по сравнению с сетями с КН (рис.
8.146). Эффективность использования каналов на сетях с КК
несколько снижается еще и потому, что между узлами образуется
не один пучок каналов, как на сетях с КН (рис. 8.14в), а
несколько отдельных, более мелких пучков (рис. 8.14г) с разными
скоростями передачи. На сетях с КП из-за наличия постоянной оче-
166
реди иа передачу обеспечивается теоретически столь же
высокое использование каналов, как на сетях с КС. То обстоятельство,
что длина очереди на передачу в системах с КП по сравнению с
КС гораздо меньше, не ухудшает сколько-нибудь заметно исполь-
Ш-
АПЩ
УКК
а)
УКК
АПДИ
^П4/ИИ
з
Один Высокоскоростной.
канал для РЛ от ad.
дш классов
9)
—I ^200 бит/с
УКК
з
S
600 бит 1с
s
2400 Вит/с
г)
Рис. 8.14. Использование двусторонних каналов при
системе: а — КК; б — КН и пучков каналов при
системе: в —КН; г —КК
зования каналов — важно то, что очередь хотя и небольшая, но
существует. Необходимо отметить, что в системах с накоплением
информации в центрах коммутации есть возможность улучшения
использования магистральных каналов (рис. 8.15а — при КК; рис,
8Л56 — при КН) путем повышения скорости передачи по ним.
У ш 1
u бит/с
УПК
600
бит/с
УКК
600
бит/с
УКК
AI
600 -
бит/с L
АПДИ
УКН
а)
УКН
УКН
600
tium/c
P~Q
У600
бит/с
0-0
9600
бит/с
P-Q
АПДИ
п
200 А™И
бит 1С U
6)
Рис. 8.15. Скорости передачи ДИ при:
а-КК; б-КН
167
Кроме информации от абонентов по каналам сети передается
служебная информация: номера абонентов, запросы на
дополнительные услуги, подтверждения о доставке и т. п. На сетях с КК
основная часть служебной информации передается лишь в начале
связи, во время установления соединения, после чего может быть
передан большой объем 'полезной информации. Поэтому доля
последней в общей загрузке каналов на сетях с КК максимальна.
На сетях с КС и КП доля полезной информации меньше, так как
служебная информация передается с 'каждым сообщением
(пакетом). Наименьшей доля полезной информации будет, естественно,
на сетях с КП, поскольку длина пакетов сравнительно невелика
и, кроме того, для управления потоками пакетов требуется
передача служебной информации. Например, на действующих сетях с
КП доля .полезной информации составляет около 10—20% и
предполагается ее увеличить до 30—40%.
Нормальное функционирование сети с коммутацией
сообщений не зависит от неравномерности суточной нагрузки, а сетей с
коммутацией каналов и коммутацией пакетов существенно
зависит, что приводит к необходимости использования
дополнительных каналов или ограничения входящей нагрузки.
Следовательно, количество магистральных каналов зависит от шести
факторов: неравномерности суточной нагрузки; наличия очередей в
узлах коммутации; двустороннего или одностороннего характера
использования канала; возможности повышения скорости
передачи по межузловым каналам; дробления пучков при КК,
обусловленного разными скоростями передачи по каналам;
необходимости в передаче служебной информации.
Следует отметить, что приведенный анализ использования
каналов предполагает постоянную загрузку канала информацией
после установления соединения. Такое условие далеко не всегда
выполняется. Так, при обмене данными оператора АП с ЭВМ
активный период составляет от 1 до 10% времени сеанса связи.
В этом случае закрепленный 'канал при КК будет в паузах
простаивать. ^ГI.pи КП этого простоя может не быть, так как
межузловые каналы закрепляются не за абонентом, а находятся в
коллективном пользовании.
Существенное влияние на эффективность сети ПДИ оказывает
использование абонентских линий, поскольку их удельный вес в
общей стоимости сети при малой плотности абонентов весьма
велик. Система КС допускает весьма высокую загрузку абонентской
линии —в среднем до 0,8 Эрл (по сравнению с 0,1—0,3 Эрл в
системах с КК). Для сети с КС характерно также отсутствие
загрузки линии повторными вызовами, возможными в сетях с КК
и КП. Это иногда позволяет в сети с КС сократить число
абонентских линий и оконечных установок для абонентов,
обладающих высокой загрузкой. В телеграфной сети общего пользования,
где загрузка оконечных установок обычно большая, последнее
168
преимущество КС оказывается очень важным. В сетях с КП
использование абонентских линий вдвое лучше, чем в сетях с КК,
за счет одностороннего характера передачи, но хуже, чем в
сетях с КС.
Таким образом, можно сделать ©ывод о том, что наилучшее
использование пропускной способности магистральных каналов и
абонентских линий обеспечивает система с КС, а наименьшее —
система с КК. Улучшить использование пропускной способности
межузловых каналов в системе с КК можно, (Применяя
многоканальные системы разделения сигналов с АВР.
Преобразование скоростей, кодов, алгоритмов. Весьма
важным следствием наличия накопления в УК является возможность
выдачи информации, отличающейся от принятой такими
признаками, как 'код, скорость и др. В сетях с КН все абоненты,
независимо от скоростей передачи и принятых в их оконечных
установках кодов, могут связаться с любым другим. В сетях с КК
абоненты в зависимости от скорости передачи их оконечной
установки включены в отдельные подсети. Абонент одной подсети не
может связаться с абонентом другой.
Верность передачи информации. Сети с КН обеспечивают
большую верность передачи информации, чем сети с КК, так как
повышение верности производится не в длинном сквозном канале,
а в межузловых каналах.
Предоставляемые сетью услуги. Одна из особенностей сетей
с КС — простота организации многоадресной (циркулярной)
связи. В сетях с КК можно также создать многоадресные
соединения, но лишь в тех случаях, когда в оконечных установках не
используется обратная связь для повышения верности. Низкое
качество существующих каналов делает невозможным отказ от
применения обратной связи, .поэтому осуществление многоадресной
связи в сетях с КК весьма ограничено. Кроме того, установление
многоадресной связи в сетях с КК требует незанятости всех
абонентов, которые должны участвовать в соединении. Это условие
трудно выполнимо, особенно при значительном числе адресов,
поскольку вероятность незанятости всех требуемых абонентов резко
падает с увеличением их числа.
Радикальный способ уменьшения вероятности занятости
абонентов заключается в резком снижении допустимой нагрузки
абонентских линий (т. е. в реализации достаточно высоких скоростей
передачи), что может быть обеспечено в цифровых сетях
передачи данных. К тому же цифровые сети с КК позволяют в
большинстве случаев обходиться без специальных мер защиты от
ошибок, что способствует дальнейшему улучшению перспектив
многоадресной передачи на сетях с КК.
Таким образом, организация многоадресной связи является
существенным преимуществом сетей с КС В перспективных
цифровых сетях передачи данных с КК эта особенность сетей с КС
может в какой-то степени утратить свое значение. Характерной
особенностью метода КС является легкость введения категорий
169
срочности, различаемых по допустимому времени доставки
сообщения получателю («приоритет сообщений»). Эта особенность —
прямое следствие того, что сообщение может быть задержано в УК
значительное время. В сетях, в которых длительная задержка
сообщения исключена (КК, КП), использование 'приоритетов
сообщений практически невозможно. Единственная возможность
введения приоритетов здесь состоит в предоставлении (или
непредоставлении) соединения с УК («приоритет абонентов»). Это
соединение может быть предоставлено немедленно, .несмотря на
загрузку сети, за счет отказа в соединении абонентам низшей
категории. Часто используется ожидание освобождения занятого пути
в течение небольшого отрезка времени.
Естественным следствием наличия большой памяти в узле КС
является возможность задержанной доставки сообщения, т. е.
выдачи информации получателю в удобное для него время (а не во
время работы отправителя). Задержанная доставка — это услуга,
полезная <при организации связи на территориях большой
протяженности, охватывающих ряд часовых поясов.
Память (и соответственно очереди) в УК оказывает
непосредственное влияние не только на загрузку каналов, но и на
способность работы узла в режиме диалога. Совершенно очевидно, что
достаточно большой объем памяти приводит к 'появлению
значительных задержек <в передаче информации через УК. Вследствие
этого узлы КС не способны передавать информацию в режиме
диалога. Наиболее близки требованиям работы в режиме диалога
узлы КК. Узлы КП задерживают .информацию в своей памяти на
большее время, чем узлы КК, однако суммарное время
нахождения пакета в сети (доли секунд — единицы секунд) обычно
.приемлемо для диалоговой связи.
Скорость передачи сообщений. По сравнению с сетями с КС
сети с КК обеспечивают в принципе большую скорость передачи
сообщений за счет исключения времени накопления сообщений в
узлах. Однако это преимущество сетей с КК весьма
относительно, если учитывать возможность передачи сообщений между
узлами КС со скоростями, более высокими, чем скорости
поступления информации от абонентов.
Основной целью при разработке системы КП было
обеспечение высокой скорости доставки информации от ИИ ее
(получателю. Для работы в интерактивном режиме время передачи пакета
по сети КП в одном направлении не должно превышать 0,5 с.
Если считать, что пакет в среднем проходит четыре УК транзитом,
то с учетом оконечных УК цикл запись—считывание в ЗУ
происходит 5 раз. Полагая, что среднее время ожидания очереди в
каждом УК равно времени передачи одного пакета, получим, что
это время, равное циклу запись—считывание в ЗУ, составляет
0,05 с. При длине пакета 2000 бит скорость передачи на
межузловом участке должна составлять 2000/0,05=40 кбит/с. Обычно
используется стандартизованная величина скорости передачи
48 кбит/с.
170
Необходимо отметить, что при КП высокая скорость передачи
информации обеспечивается для однопакетных сообщений,
которые преобладают в сетях ЭВМ. Для длинных сообщений скорость
передачи на сетях с КП снижается за счет большой удельной
доли адресной и другой управляющей информации и
перемешивания пакетов одних сообщений с пакетами других сообщений.
Поэтому для передачи длинных сообщений более эффективными
оказываются сети с КК.
Устойчивость сети к перегрузкам. Понятие устойчивости сети к
перегрузкам, вообще говоря, неоднозначно и может определяться
по-разному. Если под устойчивостью к перегрузкам понимать
обеспечение максимально возможной пропускной способности в
условиях перегрузки, то сеть с КС наиболее устойчива вследствие
практически неограниченной памяти в узлах коммутации. В
случаях значительной шерегрузки (например, при повреждениях или
при непредвиденном возрастании нагрузки) на сетях с КК и КП
может быть обеспечена нормальная передача информации только
для малой части абонентов, а большая часть абонентов будет
получать отказы.
Из проведенного сравнения следует, что нет оснований
противопоставлять разные системы коммутации, каждая из них имеет
рациональные области применения, определяемые характером
потоков нагрузки на сети и требованиями абонентов. В то же
время ни одна из систем коммутации не обеспечивает эффективного
построения сети связи для достаточно широкого класса
сообщений и разнообразных требований абонентов. Вследствие этого в
последнее время начали разрабатываться гибридные сети, в
которых используется не одна, а две или даже три системы
коммутации.
Сочетание разных систем коммутации особенно
целесообразно на сетях, объединяющих большое число абонентов с
отличающимися друг от друга величинами нагрузки, характером ее рас-
предения во времени, объемами сообщений, используемой
оконечной аппаратурой. На таких сетях при малой средней нагрузке и
передаче сообщений большими массивами в -небольшое число
адресов доля потерь времени на установление соединений
сравнительно невелика и предпочтительнее использовать систему с КК.
При передаче же многоадресных сообщений, необходимости
обеспечения приоритетности сообщениями высокой категории
срочности и при большой загрузке абонентских установок более
эффективно использовать систему КС. При передаче коротких
сообщений в интерактивном режиме наиболее целесообразна система
с КП.
В качестве одного из вариантов такого совмещения
рассмотрим сеть, построенную на основе систем КК и КП. Известно, что
при отказах порядка 1% использование пропускной способности
каналов в системе КК не превышает 50%. Остальные 50%
пропускной способности могут быть использованы для передачи
пакетов при сравнительно небольшом увеличении отказов. Длинные
171
сообщения в такой сети передаются методом КК, реализуемым на
основе коммутации байтов, а короткие и многоадресные —
методом КП. Последний в случае необходимости обеспечивает также
преобразование скоростей, кодов и способов передачи.
Достоинством рассматриваемой сети является использование общего
пучка каналов для передачи сообщений всех видов.
Разрабатываются совмещенные сети ПДИ, в которых
предусматривается адаптивное перераспределение пропускных
способностей между разными системами коммутации в зависимости от
состояния входных потоков.
8.7. УПРАВЛЕНИЕ В СЕТЯХ ПДИ
Современные сети ПДИ охватывают огромные территории с
удаленными друг от друга разнообразными оконечными пунктами
и узлами коммутации, большим числом систем передачи разных
типов и действуют в сложных условиях постоянного изменения
потоков информации, состояния систем передачи, узлов
коммутации. Обеспечение нормальной работы сети и ее развития в
условиях изменяющихся внешних воздействий осуществляется
системой управления. Таким образом, к перечисленным в § 8.1 трем
основным элементам сети ПДИ: ОП, УК и каналам — следует
добавить четвертый — систему управления. Именно система
управления призвана объединить в одну слаженно действующую
структуру отдельные элементы сети и обеспечить выполнение
возложенных па нее задач.
Основной задачей системы управления сетью ПДИ являются
обеспечение доставки сообщения по адресу в заданное время с
установленным качеством, включая поддержание в рабочем
состоянии отдельных технических средств (ОУ, УК, каналов), выбор
путей передачи информации в УК в соответствии с адресом и
приоритетом с учетом состояния сети, преобразование
информации в соответствии с заданным алгоритмом, управление потоками
информации в УК и ОП. В задачи управления входят также
материально-техническое обеспечение нормальной работы и
развития сетей, планирование этого развития, создание правил
пользования сетями и тарификация услуг связи, регулирование
отношений с абонентами.
Функции управления реализуются с помощью трех основных
процессов:
сбора информации о заявках абонентов на обслуживание
сетью, состоянии каналов и оборудования ОП и УК, ходе
технологического процесса, включая передачу управляющей
информации от объектов контроля к устройствам управления;
•выработки решения о необходимости и возможности принятия
тех или иных мер по обеспечению оптимального
функционирования отдельных средств или сети в целом на основе имеющейся
информации о состоянии сети и в соответствии с алгоритмами
системы управления;
172
реализации принятого решения путем выдачи -необходимых
команд и передачи сигналов управления ria исполнительные
органы объектов управления и (или) обслуживающему персоналу.
Из вышеизложенного следует, что система управления может
выполнять свои функции техническими средствами,
действующими по заранее заданному алгоритму, либо часть функций
выполнять техническими средствами, а часть — обслуживающим
персоналом, либо только обслуживающим персоналом. Системы
первого типа называются автоматическими, второго типа —
автоматизированными. Большинство существующих систем управления в
сетях ПДИ относится ко второму типу.
На принцип организации системы управления сетью ПДИ
накладываются два противоположных требования. С одной стороны,
оптимизация работы сети в целом требует возможности
воздействия из единого центра на все ресурсы на основе знания потоков
информации и состояния средств всей сети, т. е.
централизованного управления. С другой стороны, сложность и большие
пространственные размеры сетей, быстротечный характер изменения
потоков информации, высокие требования к надежности и
живучести сети и, наконец, неэффективность передачи на большие
расстояния значительных потоков контрольной и управляющей
информации требуют децентрализации управления. Компромиссное
решение заключается в сочетании того и другого принципов на
основе многоуровневой системы управления: централизованной в
отдельных регионах и децентрализованной в масштабах сети в
целом.
Функции системы управления и алгоритмы ее работы зависят
от того, является ли сеть коммутируемой или нет и какая
система коммутации принята на сети. В некоммутируемых сетях ПДИ
применение 'концентрации приводит к тому, что при превышении
интенсивности нагрузки некоторого предела информация будет
теряться (в системах с отказами) или накапливаться (в системах
с ожиданием). Избежать перегрузки системы можно путем
управления входящими в сеть потоками информации, т. е. путем
введения запоминающих устройств у абонентов-источников
информации (то, что в теории передачи сигналов называется
управляемым источником).
При передаче информации из одного узла коммутируемой
сети к другому может использоваться несколько путей, проходящих
через различные УК. Порядок выбора таких путей определяется
так называемым планом распределения информации. План
распределения информации определяет очередность выбора
исходящих направлений из данного узла ко всем остальным УК сети.
План распределения информации для сети представляет собой
совокупность планов распределения для всех ее узлов. Принцип,
который заложен в основу большинства используемых в сетях
ПДИ планов распределения информации, следующий: информация
должна, как правило, проходить по кратчайшему пути. При
невозможности использования кратчайшего пути могут предусмат-
173
риваться обходные пути, причем для каждой связи
предусматривается определенное число обходных направлений, используемых
в заданной очередности или в случайном порядке. Крайним
является случай передачи сообщений с использованием всех
возможных путей. Критерием длины пути обычно служит число
транзитных участков.
Необходимо иметь в виду, что
1и-оп'о л ьзов ани е об ходи ого
пути, с одной стороны,
увеличивает в ероятно сть
уменьшения задержки в
передаче сообщений, но,
с другой стороны,
использование 1более длинного
путл увеличивает
загрузку сети ih тем самым
Рис. 8.16. Фрагмент коммутируемой сети ухудшает условия ДО-
ставки других сообщений.
Наряду с числом транзитных участков критериями длины пути
могут служить длина шути (ib километрах), надежность шути,
время задержки в УК и др.
План распределения информации рассмотрим на примере
фрагмента сети, представленного на рис. 8.16. Для передачи
некоторого потока информации из УКа в УКг , можно использовать
пути, содержащие разное число транзитных участков. Кратчайшим
является путь АГ, который принято называть направлением пер-
вого выбора. Более длинный путь АБГ, содержащий два
транзитных участка, называется соответственно направлением второго
выбора. Аналогично определяются направления третьего и
последующих выборов. Пути выбора всех узлов фрагмента сети с УКг
обозначены на рис. 8.16 стрелками с цифрами. В случае
совпадения по длине нескольких лутей, как это имеет место в
рассматриваемом примере для направлений ДЕГ и ДАГ, содержащих по
два транзитных участка, очередность выбора устанавливается
произвольно или с учетом других факторов (длины пути в
километрах, надежности пути и т. д.). При получении на УК адреса
узла, в который включен абонент-получатель информации, в
соответствии с планом отыскивается свободный кайал в
направлении первого выбора и производятся соединение (в УК системы с
КК) или передача сообщения (в УК систем с КН). Если
свободные каналы в направлении первого выбора отсутствуют, то в
зависимости от принятого алгоритма обслуживания сообщений
данного приоритета или отыскивается свободный канал в
направлении второго выбора и т. д., или абоненту передается сигнал
отказа (сигнал «Занято» в УК систем с КК), или сообщение
записывается в ЗУ (в УК систем с КН). Аналогичный процесс
повторяется во всех УК по выбранному пути передачи информации.
В процессе функционирования при значительных изменениях
нагрузок или пропускных способностей ветвей и УК сети перво-
174
начальный шлан распределения информации может окдзаться ,не-
оптимальным. Система управления, обеспечивающая оперативную
коррекцию плана распределения информации в соответствии с
изменяющейся ситуацией на сети, называется системой,
динамического управления. Методы динамического управления
распределением информации в УК делятся на детерминированные и
статистические. В свою очередь оба эти метода делятся щ
разовые и групповые. В детерминированных методах маршруты
определяются применительно к ситуации на сети в данный момент
времени без учета предшествующих ситуаций. Статистические
методы позволяют корректировать маршруты на основе анализа
накапливаемых данных о вероятности установления соединения
или о задержках в передаче сообщений (пакетов) в том или
другом направлении, полученных в 'процессе обслуживания
предыдущих заявок. Разовые методы определяют маршруты для каждой
заявки в отдельности, а групповые — для группы заявок.
При выборе того или иного метода управления стремятся по
возможности уменьшить служебную управленческую информацию,
передаваемую по сети. Важным требованием является также
исключение возможности образования «петель», что может
происходить в случае занятия или неисправности каналов всех
направлений к какой-либо УК. Если, например, при передаче
информации из УКа в УКб (рис. 8.16) ветви аАБ и аБг окажутся
неисправны или перегружены, система управления должна не
допустить возникновения циркуляции сообщений по кольцу аАГ—ссге—'
аЕД—адд—аАг и т. д.
Волновой метод выбора оптимального плана распределения
информации относится к разовым детерминированным. Он состоит
в том, что при поступлении на УК заявки (вызова) на
установление соединения .по сети передаются три «волны» сигналов:
поисковая П, ответная О и заключительная 3. Поисковая волна
сигналов, которая при поступлении заявки на соединение посылается
с УКг и транслируется всеми узлами сети, служит для отыскания
входящего узла УК; (узла назначения). Ответная волна сигналов
посылается входящим узлом УК; после получения поискового
сигнала и транслируется всеми узлами сети. При этом
происходит маркировка <пути между исходящими и входящими узлами.
По мере прохождения ответной волны прекращается трансляция
волны П. Заключительная волна сигналов посылается исходящим
УКг после получения им ответного сигнала. Сигналы
заключительной волны делятся на два типа: первый тип обеспечивает
установление соединения по кратчайшему пути; второй тип
сигналов волны 3 распространяется к остальным УК сети и служит
для стирания в них всей информации, относящейся к поиску
входящего УК; при установлении рассматриваемого соединения.
Для осуществления выбора пути на каждом УК и для
каждого выхода должна храниться следующая информация: .номер
входящего УК, вид сигнала (поисковый, ответный и заключитель-
175
ный), номер и другие характеристики исходящего узла, т. е.
узла, откуда поступил сигнал.
Волновой способ требует передачи при каждом вызове по всем
направлениям сети достаточно большого объема информации,
причем объем служебной информации возрастает в моменты
увеличения загрузки сети и снижается при сокращении числа вызовов.
Это приводит к увеличению времени установления соединения и
дополнительной нагрузке каналов сети, что особенно ощутимо на
низкоскоростных сетях, где увеличение времени соединения и
перегрузки сети могут оказаться значительными.
Метод рельефов является групповым детерминированным.
Сеть описывается функцией, получившей название рельефа.
Покажем, как задается функция рельефа на примере сети,
представленной на рис. 8.17. Выберем некоторый произвольный узел а и
Рис. 8.17. Пример сети с функцией рельефа
будем считать его приемником информации. Присвоим каждой
ветви ац целочисленные значения, определяемые количеством
ветвей между узлом а и тем узлом из пары (i, /), который наиболее
удален от узла а по пути, определяемому ветвью ац. Так, ветвь
<Хаб получит значение «1», ветвь (Хбв— значение «2», ветвь авг —
значение «3» и т. д. Набор целых чисел представляет собой
<а-рельеф сети. Будем говорить, что ветвь имеет а-высоту, равную
/г, если в а-рельефе ей присвоено значение п. Такие рельефы для
любого узла сети должны быть известны, и задача поиска
оптимального пути сводится к последовательному выбору ветвей с
минимальными высотами.
Рассмотрим алгоритм выбора пути на -примере передачи
сообщения из узла л в узел а. Очевидно, что имеются два пути,
оптимальных по критерию минимума узлов — пути лвба и лежа. При
централизованном способе, когда рельефы известны
центральному управляющему устройству, производится соответствующая
коммутация узлов на одном из двух указанных путей и собще-
нне передается. При децентрализованном способе в каждом узле
известны только веса исходящих и входящих ветвей. Поэтому <при
использовании второго метода управления устройство управления
176
анализирует высоты ветвей узла и. сообщение направляется по
ветви с меньшей высотой (пусть по алв). 'На узле в вновь
производится анализ высот магистралей, в результате чего выбирается
ветвь <Хвб и т. д., пока сообщение не поступит в узел а.
В том случае, когда одна из ветвей повреждена и условие
оптимальности не выполняется, функция рельефа меняется в
соответствии со следующим правилом: если высота ветви, по которой
сообщение передается из узла, больше высоты ветви, по которой
сообщение поступило в узел (или они равны), то высота
входящей ветви увеличивается на единицу. Пусть в сети рис. 8.17, для
которой сформирован а-рельеф, вышла из строя ветвь аба-
Рассмотрим, как и в предыдущем примере, передачу сообщения из
узла л в узел а. При централизованном способе сразу
выбирается путь лежа. При децентрализованном способе на узле л нет
информации о состоянии ветви аба и сообщение, как и в первом
случае, направляется в узел в, а затем из узла в — в узел б. Из
узла б информация поступает в узел вив соответствии с
правилом ветви (Хвб, присваивается а-высота, равная 3; последняя прис-
вается также и ветви абе. Ветви аЖа и аеж сохраняют прежнюю
а-высоту. Сообщение передано по пути, не являющемуся
оптимальным. Возможность повторения выбора этого пути не исключена,
однако при этом ветви аВб и аЛе примут а-высоты, равные 4, и
затем сообщение из узла л в узел а будет передаваться по пути
лежа. В скобках на рис. 8.17 указаны истинные а-высоты для
случая выхода из строя ветви аба. Когда ветвь аба вновь начнет
действовать, первоначальный рельеф восстанавливается при условии,
что ветви аба будет присвоена прежняя высота, а в смежных
ветвях высоты будут уменьшены на единицу.
Формирование рельефа может производиться или в моменты
изменения состояния технических средств сети, или периодически.
В первом случае рельефы корректируются только в той части
сети, в которой рельеф необходимо изменить. Во втором случае
необходимая частота коррекции рельефа выбирается, с одной
стороны, как можно больше, чтобы уменьшить время существования
неправильного рельефа, а с другой стороны, как можно меньше
для сокращения объемов служебной информации в сети. В
реальных сетях ПДИ время коррекции рельефов составляет 0,5—5 мин,
что обеспечивает достаточную оптимизацию плана распределения
информации. Количество служебной информации при методе
рельефов значительно меньше, чем при волновом методе.
Динамические методы управления не обеспечивают
перераспределения потоков информации при значительном увеличении
общей нагрузки сети, поэтому в настоящее время
разрабатываются адаптивные методы управления, обеспечивающие наряду с
режимом перегрузки и требуемое качество обслуживания (метод
динамического управления с ограничением нагрузки).
ГЛАВА 9
Построение сетей телеграфной связи
и передачи данных
+
9.1. СЕТЬ ТЕЛЕГРАФНОЙ СВЯЗИ
Принципы построения. Телеграфная сеть страны состоит яз
четырех коммутируемых сетей:
сети общего пользования (ОП), по которой передаются
телеграммы, принятые в городских отделениях связи (ГО), районных
узлах связи (РУС) или непосредственно на телеграфных узлах и
доставляемые адресатам (учреждениям, предприятиям, частным
лицам);
сети абонентского телеграфирования (AT), по которой
передаются телеграммы или организуются телеграфные переговоры
между установленными у абонентов этой сети оконечными
абонентскими установками;
сети международного абонентского телеграфирования «Телекс»,
по которой передаются телеграммы или организуются
телеграфные переговоры между оконечными установками абонентов этой
сети, находящихся в нашей стране и за ее рубежами;
международной телеграфной сети стран социалистического
лагеря Европы «Гентеке», по которой осуществляется обмен
телеграммами между предприятиями связи нашей страны и
социалистических стран Европы.
Кроме перечисленных в состав телеграфной сети страны
входит сеть некоммутируемых (арендованных) каналов.
Телеграфная сеть является самой старой и наиболее
разветвленной сетью низкоскоростной системы передачи дискретной
информации. Она построена по комбинированному принципу, при
котором узлы высшей категории соединяются по. принципу
«каждый с каждым», а узлы более низкой категории — по радиально-
узловому принципу. На сети имеются узлы трех типов (рис. 9.1):
главные узлы (ГУ), расположенные в Москве, столицах
некоторых союзных республик и крупных областных (краевых) центрах,
где пересекаются большие потоки телеграфных сообщений;
областные узлы (ОУ), являющиеся центрами областных телеграфных
связей; районные узлы (РУ), являющиеся центрами районных
телеграфных связей. Телеграфный узел Москвы является
центральным узлом и выполняет функции руководящего в
оперативном отношении узла на телеграфной сети страны. Главные узлы
между собой, с ОУ своей зоны и в некоторых случаях с ОУ
других зон соединяются по принципу «каждый с каждым».
Областные узлы соединяются с соответствующими ГУ, в зону которого
они входят, и с РУ своей зоны. Районные узлы соединены с ОУ,
178
в зону которых они входят, и с сельскими и городскими отделе-
ниями1.
Телеграфная сеть страны непрерывно развивается и
совершенствуется. Перспективная телеграфная сеть страны в соответствии
с принципами ЕАСС будет иметь структуру, представленную на
Рис. 9.1. Структура телеграфной се- Рис. 9.2. Перспективная структура
ти телеграфной сети
рис. 9.2. В ее состав будут входить транзитные узлы (ТУ),
оконечные местные станции (ОМС), коммутационные подстанции (ПК),
магистральные каналы между ТУ, ТУ и ОМС, между ОМС, а
также абонентские линии, соединяющие ГОС, РУС, ОС
(отделение связи сельское) и абонентские установки (Аб) с ОМС и ПК.
Транзитные узлы, соединяемые по принципу «каждый с каждым»,
служат для организации связи между ОМС. Путем первого
выбора является путь от одного ОП (Аб, ГОС, РУС, ОС) до
другого через ОМС (пунктир на рис. 9.2). Путь второго выбора
проходит через входящий ТУ (ТУ4 на рис. 9.2). Путь третьего
выбора проходит через исходящий ТУ (ТУ3 на рис. 9.2). И, нако-
1 Отдельные абоненты AT, а также городские отделения ГО включаются.
непосредственно и в узлы других типов.
179
нец, путь четвертого выбора проходит через оба эти ТУ (ТУз и
ТУ4 на рис. 9.2).
Организация телеграфной сети общего пользования. Сеть
общего пользования предусматривает организацию по всей стране
отделений связи (ГО, РУС, ОС), куда отправители сдают
телеграммы и которые обеспечивают доставку телеграмм
непосредственно получателю. Телеграмма может быть адресована в
любой населенный пункт страны, где имеется отделение или узел
связи. Телеграмма, полученная от отправителя, прежде чем она
доставляется адресату, (подвергается ряду последовательных
операций.
Проследим, например, путь передачи телеграммы из
предприятия г. Н на завод в г. М (рис. 9.3). Написанную телеграмму
курьер доставляет в ближайшее к (предприятию городское
отделение связи г. Н, где ее принимают, оформляют и передают в
областной узел связи. Здесь телеграмма сортируется по
направлению и передается в главный узел, где ее вновь сортируют по
направлению и /передают в ОУ, а затем в ГО связи г. М,
обслуживающее завод-адресат. Из ГО телеграмма доставляется
адресату. Из этого простого примера видно, что вследствие
узлового (построения телелраф-
! гу н,°й сеТ|И характерным яв-
/ТуГ\ s~*\ ' /1гГ\ ляется 'большой объем тран-
nTL^rih^^ зитной .корреспонденции. В
1 ' Ч_У ч_У I \/ 1 рассмотренном примере те-
^у/4^-^ леграмма претерпела три
^ *г\ переприема: ib ТО >г. Н она
s~-^sf м\ явилялась исходящей, в ГО
/"^у\ /7554 г- -М — входящей, а в ос-
\JmpaH3um)y~*^pMM)\ s^j ПИ ] тальных — транзитной. На
V^/ ^ \~У крупных узлах сети общего
(пользования транзитная на-
Рис. 9.3. Путь телеграммы . грузка 'Составляет до 80—
90% общей ih а грузки. В
-среднем «каждая (передаваемая телеграмма -преторпев-ает 11р.и
переприема, a ib отдельных (случаях — шесть-семь.
Если процесс переприема телеграмм не автоматизирован, то в
каждом пункте переприема телеграмму необходимо вручную
принять, рассортировать по направлениям и затем вручную передать.
Неавтоматизированный способ переприема требует большего
парка телеграфлой аппаратуры и числа телеграфистов на каждом
пункте переприема, вызывает замедление в передаче телеграмм,
связанное с внутриузловой обработкой, и является источником
появления ошибок в передаваемом тексте. Заметим, что по своей
сущности описанный способ коммутации относится к КС
Автоматизированные системы переприема телеграмм в узлах
коммутации лишены отмеченных недостатков. Автоматизация
процессов переприема телеграмм развивалась в двух направлениях:
по пути коммутации сообщений и коммутации каналов. Соот-
180
ветственно сеть общего пользования включает в себя две сети: с*
•переприемом и сеть прямых соединений (ПС). В узлах
коммутации сети с переприемом телеграмм вначале использовалось
полуавтоматическое коммутационное оборудование системы
реперфораторного переприема (АТОЛ), затем — автоматическое
электромеханическое оборудование («Лиман») и в последние годы —
электронные центры коммутации сообщений (ЦКС-Т). В узлах
коммутации сети прямых соединений применяется автоматическое-
коммутационное оборудование с электромеханическими
соединителями (шаговыми, координатными), а в последнее время
—электронное оборудование на базе ЭВМ. Узлы коммутации на сети
ПС построены в основном на основе системы КК, но содержат в>
себе элементы КС (устройство памяти для хранения избыточной
нагрузки).
Полуавтоматические системы реперфораторного переприема..
Схема системы автоматизации транзита телеграмм с отрывом кч
транспортировкой перфоленты (АТОЛ), получившая широкое
распространение особенно на небольших узлах, представлена на*
рис. 9.4. Транзитные телеграммы, поступающие в узел по входя--
Перфоленты
ТР
1
9>
* э
\
}
алы
■с
г
1
Транспортер
Рис. 9.4. Структурная схема системы АТОЛ
щим каналам, принимаются на телеграфные аппараты с репер--
форатором РП. Телеграфист отрывает перфоленту с текстом
телеграммы, вставляет ее в прорези бланка, на котором пишет
адрес назначения, и отправляет ш транспортеру на сортировку..
Сортировщик назначает телеграмму на соответствующий
исходящий канал и отправляет ее по транспортеру к соответствующему
трансмиттеру ТР. Применение системы АТОЛ повышает
производительность труда по сравнению с неавтоматическим переприе-'
мом на 35—40% за счет возможности выполнения телеграфистом-
вспомогательных операций (оформление бланков, ведение
журнала) во время передачи телеграмм. Система обеспечивает
высокий коэффициент использования каналов (k = 0,8), но не дает
заметного выигрыша в скорости прохождения телеграмм через узел
вследствие сохранения ручной сортировки.
Автоматические системы реперфораторного переприема.
Упрощенная схема одной из систем без отрыва ленты («Лиман»), где--
автоматизированы все основные и большинство вспомогательных:
181
операций по переприему телеграмм, представлена на рис. 9.5.
В начале каждой телеграммы (перед ее текстом) передается
маршрутный индекс, с помощью которого производится
автоматический выбор дальнейшего направления ее следования. Маршрут-
;ный индекс состоит из шести цифр, из которых первые три (ма-
Рп>
]дх TPffx
^
HP
о
КС
Рписх Щсх j^nT^"
IFF вн
Рис. 9.5. Структурная схема
автоматизированного переприема
ггистральный индекс) обозначают зону (ОУ), а вторые три
(местный индекс) — оконечный пункт назначения телеграммы (ГО или
РУС). Маршрутный индекс проставляется оператором в месте
отправления телеграммы: магистральный — по таблице
магистральных индексов, местный — по заявлению отправителя
телеграммы. Если местный индекс отправителя неизвестен,
проставляется условный местный индекс 991.
Помимо маршрутного индекса в начале телеграммы
передается: порядковый номер (трехзначный) и индекс категорийности
(П — простая, С — особо срочная, В — требующая особого учета,
К — срочная и т. п.). Все это вместе с маршрутным индексом
составляет предзаголовок. Телеграмма заканчивается передачей
двух знаков конца телеграммы (ЗКТ), служащих для отделения
-одной телеграммы от другой.
В кодовом регистре (КР) накапливается и анализируется
адрес телеграммы, принятой реперфоратором приема РПВх. На
основе анализа адреса КР управляет работой коммутационной
системы КС, которая осуществляет соединение трансмиттера
приема ТРВХ с исходящим каналом требуемого направления. В
случае занятости исходящего канала ТРВх соединяется с
выравнивателем нагрузки (ВН), состоящим из РПИСх и ТРИСх. Накопленные
:в РПнсх телеграммы передаются с помощью ТРИсх в исходящий
канал в те 'промежутки времени, когда канал не занят
передачей с ТРвх. Телеграммы, имеющие местный шифр 991, попадают
на специальное рабочее место, где они коммутируются вручную.
Применение системы «Лиман» обеспечивает резкое
уменьшение числа телеграфистов по сравнению с полуавтоматическими
лгереприемными станциями и сокращение сроков прохождения
телеграмм. Однако это достигается за счет значительного
увеличения и удорожания коммутационного оборудования (по сравнению
*с системой АТОЛ в 4—5 раз) и ростом в 1,5 раза численности
^обслуживающего аппаратуру технического персонала. Это
обусловлено использованием в системе «Лиман» большого количества
182
недостаточно надежной электромеханической аппаратуры (репер-
фораторов, трансмиттеров, телеграфных* аппаратов, реле,
искателей). Поэтому эта система .нашла ограниченное применение.
Дальнейшее развитие автоматизированных систем коммутации*
телеграфных .сообщений идет по пути замены
электромеханических коммутационных приборов электронными устройствами и ЭВМ.
Система прямых соединений. Система прямых соединений (ПС)
на телеграфной сети общего пользования заключается в
предоставлении тому или иному ГО или РУС временного прямого
соединения через узлы коммутации каналов с другими ГО или РУС..
Схема телеграфной связи по системе ПС приведена на рис. 9.6-
Ошечныц. Urr rm A j TPaJ!lT \ TPa"3«m- i Rr rm г ! ^ ! Оконечный.
линия w , w , w , rmzw-
Рис. 9.6. Схема связей по системе ПС
Аппараты ГО и РУС подключаются местными соединительными*
линиями к близлежащим узлам коммутации, которые
соединяются друг с. другом пучками магистральных каналов. Телеграфные*
аппараты оконечных пунктов, подключаются к вызывным
приборам ВП, обеспечивающим посылку ,на узел сигналов вызова,
набора .номера, отбоя, а также осуществляющим автоматические
включение и выключение телеграфного аппарата в соответствии с
сигналами, поступающими от узла.
Для передачи телеграммы по системе ПС телеграфист одного»
оконечного пункта набирает на вызывном приборе номер
вызываемого оконечного .пункта, в результате чего коммутационные*
приборы узлов автоматически устанавливают требуемое
соединение каналов между этими пунктами. С трансмиттера первого
оконечного пункта осуществляется автоматическая передача
предварительно отперфорированных телеграмм, принимаемых аппаратом-
другого оконечного пункта. Для образования прямого
телеграфного канала между вызывающим и вызываемым оконечными-
пунктами необходимо наличие свободных магистральных каналов-
между всеми узлами, участвующими в этом соединении, и
местной линии между последним узлом и вызываемым пунктом.
Число каналов на низовой сети (от ОУ до ГО или РУС)
обычно мало (2—3), поэтому такие каналы гораздо чаще
оказываются занятыми, чем каналы магистральной сети. Если связь
первого оконечного пункта ТО{ с последним узлом коммутации (ст. Г'
на рис. 9.6) может быть получена со сравнительно малой
вероятностью отказа (1—5%), то на участке местной линии от ст. Г дс
второго оконечного пункта Г02 вероятность отказов может
достигать 20—30% (при нагрузке 0,2—0,3 Эрл). При этом
вызывающий пункт будет получать частые отказы и через некоторое времда
183
повторять вызовы. В результате бесполезно занимаются
магистральные каналы и коммутационные приборы узлов, замедляется
шрохождение телеграмм, расходуется время телеграфистов на
ловторные вызовы.
Кроме того, для передачи телеграммы непосредственно в
оконечный пункт зоны другого узла необходимо знать номер,
присвоенный этому пункту. А в случае адресования телеграммы в
городское отделение связи необходимо еще знать часы работы
-отделения, так как в ряде случаев доставка телеграмм из ГО
производится не круглосуточно. Как правило, отправитель
телеграмм этих сведений предоставить не может, а иметь
соответствующие справочники во всех отделениях связи слишком неудобно.
Поэтому в случае занятости местной линии к оконечному пункту
^оказалось более целесообразным осуществлять на последнем уз-
~ле -прием входящих телеграмм на реперфоратор и /передачу их в
^оконечный пункт по мере освобождения местной линии. Таким
образом, система ПС по принципу построения является
комбинированной: на магистральном участке она построена но принципу
КК, а на низовом участке содержит реперфораторный переприем,
основанный на принципах КС
На первых этапах развития сети ПС использовались
коммутационные узлы с декадно-шаговыми соединителями, на которых
применялась открытая нумерация. В дальнейшем на сети ПС при
шаличии регистрового оборудования предусматривается ввести
.шестизначную нумерацию: три первые цифры определяют номер
:узла, а последние три — номер оконечного пункта. Узлам ПС
присваиваются номера от 101-го до 599-го, ГО — от 001-го до 499-го,
РУС — от 500-го до 599-го. Аппараты оконечных пунктов
оборудованы автоответчиками, с которых для подтверждения
правильности установления соединения посылается текст с наименованием
► оконечного пункта. Система ПС за счет весьма полной
автоматизации процессов соединения обеспечивает повышение
производительности труда по сравнению с системой АТОЛ в 3—4 раза,
поэтому она широко используется на телеграфной сети ОП.
Помимо внутрисоюзной системы ПС существует международ- .
лная телеграфная сеть общего пользования «Гентекс» для обмена
телеграммами между телеграфными предприятиями стран
социалистического лагеря. Оконечными пунктами являются аппараты,
установленные на ЦТ столиц этих государств и наиболее
крупных городов. В отличие от внутрисоюзной сети ПС, «Гентекс»
.является обособленной сетью, работает по системе с отказами
(без переприема телеграмм в оконечном узле), на ней принята
пятизначная нумерация с двузначным номером узла.
Система абонентского телеграфирования. Телеграфная связь
общего пользования не в полной мере удовлетворяет интересы
предприятий и учреждений, нуждающихся в оперативной связи с
: получением незамедлительных обратных сообщений. Телеграммы,
как правило, накапливаются, прежде чем курьер предприятия
.доставляет их в отделение связи. Процесс передачи и последую-
184
щей доставки телеграмм дресату также требует определенного
времени. Большое число телеграмм, доставлянмых в отделение-
связи к концу рабочего дня для предприятий и учреждений,
создает значительные пики нагрузки на сети ОП, что приводит к
замедлению прохождения телеграмм от отправителя до адресата*
Перечисленные недостатки системы ОП отсутствуют в
системе абонентского телеграфирования (AT), в основу которой
положен принцип максимального приближения услуг телеграфа к;
предприятиям и учреждениям. Это достигается установкой
оконечных телеграфных аппаратов непосредственно в предприятиях:
и учреждениях. Предприятие, имеющее такой аппарат,
включенный через соединительную линию в коммутационные станции
сети AT, становится абонентом этой сети, которому
предоставляются возможности:
получения по немедленной системе соединения с любым
другим абонентом этой сети и ведения с ним телеграфного
переговора по полудуплексной системе;
передачи телеграмм другим абонентам сети AT независимо
от присутствия обслуживающего персонала у приемного аппарата;
соединения со станционным аппаратом своего узла
коммутации для передачи сообщения абонентам, не включенным в сеть.
AT (например, абонентам сети ПС);
приема информации, поступившей от абонента другой сети
через местный узел коммутации.
Развитие сети AT приводит к значительной разгрузке сети
общего пользования и в первую очередь от транзитной
корреспонденции. При этом в существенной степени снимаются пики
нагрузки, определяющиеся телеграммами, поступившими от
предприятий к концу рабочего дня. Система AT во многом
аналогична системе ПС, однако если в системе AT можно мириться с
занятостью каналов и необходимостью повторных вызовов, то в*
сети ПС, как указывалось, это нерационально. Поэтому в сетях
AT принцип коммутации каналов строго выдерживается на всехг
стадиях соединения.
Схема абонентской телеграфной связи приведена на рис. 9.7..
Оборудование оконечной установки сети AT аналогично оборудо-
А6. установка. Станция AT Станция AT Adi устанобка_
г—1
I
Т НВП
m
АПНМ НМ
\ Канал [
ЛУЫУК ШП
I СП ■
ВПН Т
Рис. 9.7. Схема абонентской телеграфной связи
ванию оконечного пункта сети ПС. В качестве оконечной
телеграфной аппаратуры в основном 'применяются рулонные
аппараты. Использовать рулонные аппараты на абонентских связях
значительно удобнее, так как нет необходимости наклеивать
телеграфную ленту на бланк, а при отсутствии абонента сообщение-
фиксируется на рулоне. Поскольку на сети AT применяются лен-
185
точные и рулонные аппараты, на всех ленточных аппаратах
установлены счетчики числа знаков в строке. Это устройство
обеспечивает при передаче с ленточного аппарата на рулонный
включение сигнализации на передающем аппарате о необходимости
подсылки знаков перевода строки и возврата каретки.
К аппарату придается устройство автоответа, позволяющее
принимать сообщение в случае отсутствия абонента. Вызывной
•прибор (ВП), оборудованный номеронабирателем, вызывной и
«отбойный кнопками и двумя сигнальными лампочками, позволяет
производить вызов узла коммутации (станции AT) и
автоматическое включение аппарата по команде с узла. Абонентские
установки соединены соединительными линиями (СЛ) с ближайшими
«станциями AT. Вызов центра коммутации производится нажатием
^кнопки вызова на ВП. Аппаратура абонентской панели (АП)
регистрирует сигнал вызова, и устройство коммутации (УК)
приводится в состояние готовности приема адресного блока (в сети
AT — импульсов набора номера). При этом на вызывной прибор
/посылается сигнал «Разрешение набора .номера».
Кроме абонентской панели и устройства 'коммутации
аппаратура узла включает в себя переходное устройство (ПУ),
обеспечивающее подключение к центру междугородных каналов. После
установления соединения с требуемым абонентом сообщение
передается из одного абонентского пункта в другой.
В настоящее время на сети AT применяется открытая
повторительная система нумерации. Нумерация подразделяется на
основную и местную. Главным и крупным областным узлам
коммутации присваиваются номера от 40-го до 79-го '(основная
нумерация), а остальным центрам — от 80-го до 99-го (местная
нумерация). Полный номер абонента состоит из двузначного номера
станции и номера (одно-, дву-, трех- или четырехзначного)
оконечного пункта. Количество знаков в номере абонента зависит от
характеристик устройства коммутации (емкости, структуры).
Предполагается ввести в сети AT единую шестизначную систему,
при которой количество знаков номера не зависит ни от числа
узлов переприема, ни от характеристики узла коммутации.
Разновидностью абонентского телеграфа является
международный абонентский телеграф «Телекс», предназначенный для
обеспечения документальной связью посольств, торгпредств,
иностранных корреспондентов и других абонентов, передающих
сообщения в другие страны. Эта сеть объединяет до 100 стран. На
сети «Телекс» применяют систему набора номера абонента с
помощью диска или с клавиатуры телеграфного аппарата. В
последнем случае телеграфный аппарат вызывающего абонента
включается сразу же после посылки сигнала вызова. Набор номера
вызываемого абонента осуществляется путем передачи на узел
коммутации стартстопных комбинаций. Все сигналы,
поступающие со станции на аппарат абонента, также передаются старт-
стопными сигналами («Ответ станции», «Соединение», «Занято»
и др.).
186
9.2. СЕТИ ПЕРЕДАЧИ ДАННЫХ
Развитие 'передачи данных явилось следствием интенсивного
роста потребностей в обмене информацией между электронным»
вычислительными машинами. Поэтому развитие СПД самым
тесным образом связано с изменениями, происходящими как в
технике самих ЭВМ, так и особенно в характере их использования.
Рост объемов передаваемых данных обусловлен в первую очередь-
повышением производительности ЭВМ и появлением
возможности их работы в режиме разделения времени, позволяющем
большому числу абонентов одновременно и независимо друг от друга"
использовать вычислительные средства. На базе ЭВМ и сете»
ПД создаются автоматизированные системы сбора, хранения ir
обработки информации, автоматизированные системы управления-
Наличие развитой сети ПД позволяет осуществить переход or
отдельных вычислительных центров к многомашинным
вычислительным комплексам — сетям ЭВМ. Это обеспечивает
дистанционное обслуживание большого числа абонентов мощными
средствами вычислительной техники и эффективное использование
производительности ЭВМ, а значит, и решение задач по созданию
Общегосударственной автоматизированной системы сбора и
обработки информации (ОГАС) ,на базе государственной сети
вычислительных центров ГСВЦ и Общегосударственной сети передачи
данных (ОГСПД).
Для начального этапа создания СПД характерен обмен
информацией между ЭВМ и ЭВМ и,их пользователями в режиме
пакетной обработки1, т. е. последовательной (без перерывов)
передачи для обработки не одного сообщения, а группы сообщений —
пакета. На последующих этапах наряду с пакетной обработкой
широко используется режим запрос—ответ (в системах массового
обслуживания, например, службе предварительного заказа
билетов), а также режим диалога.
Для начального этапа развития ОПД характерно создание
ряда частных сетей, назначение которых — обмен данными в тех
или иных ведомственных системах сбора и обработки
информации, АСУ или системах массового обслуживания. Появление
сходных, но несовместимых СПД приводит к неоправданному
распылению средств на создание таких сетей и низкому использованию»
наиболее дорогостоящей их части — каналов связи. Поэтому от
частных сетей переходят к созданию СПД коллективного
пользования (ОГСПД), удовлетворяющих потребности большинства
пользователей. За пределами ОГСПД остаются, как правило,
абоненты технологических АСУ, работающих в реальном масштабе
времени, например АСУ управления воздушным или
железнодорожным движением, АСУ энергосистем и т. д. Для передачи
данных используют:
1 Пакетную обработку не следует путать с рассмотренным выше методов
пакетной коммутации.
187
некоммутируемые каналы связи: каналы ТЧ, первичные
широкополосные каналы, каналы телеграфной сети;
Общегосударственную сеть телефонной связи (ОГФТС);
сеть абонентского телеграфирования (AT);
специализированные сети ПД.
Передача данных осуществляется по физическим цепям и ка-
гналам систем передачи с частотным и временным разделением
-сигналов. Физические цепи используются для ПД на
сравнительно небольшие расстояния (в основном в городах) со скоростями
-от десятков бит в секунду до сотен мегабит в секунду.
В системах с частотным разделением сигналов для ПД
используют главным образом каналы ТЧ, реже — каналы ТГ и
широкополосные каналы. Скорости ПД по каналам ТЧ в
соответствии с Рекомендацией V.6 МККТТ выбирают из ряда 0,6; 1,2; 2,4;
-3,6; 4,8; 7,2; 9,6 кбит/с. Реже используются скорости 0,2—0,3 и
12—14 кбит/с. По каналам ТГ данные передаются со скоростями
50, ЮО и 200—300 бит/с, по широкополосным каналам первичных
трактов — со скоростями 48—96 кбит/с, а вторичных трактов —
примерно 0,5 Мбит/с, третичных трактов — примерно 2,5 Мбит/с,
Максимальные скорости ПД по каналам систем с временным
разделением определяются скоростью передачи в цифровом тракте и
достигают десятков мегабит в секунду.
Передача данных может осуществляться в следующих
режимах:
1) односторонняя передача сообщений, при которой
сообщения могут передаваться только в одном направлении;
2) двусторонняя поочередная передача сообщений
(поочередно в каждом из направлений);
3) двусторонняя одновременная передача сообщений, при
которой сообщения могут передаваться одновременно в обоих
направлениях.
Наиболее характерным для ПД является режим 2. Передача
данных в этом режиме в соответствии с ГОСТ 22731—77
включает в себя следующие последовательные фазы: 1) установление
звена ПД1; 2) передачу сообщений; 3) завершение передачи.
Первая фаза — интервал времени, необходимый для
осуществления процедур запроса передачи или запроса приема сообщения,
результатом которых должно быть подключение оконечного
оборудования данных (ООД). Вторая фаза — интервал времени,
необходимый для передачи сообщений. Третья фаза — интервал
времени, необходимый для возвращения звена ПД в нейтральное
состояние, в результате чего ООД отключается.
Все (возрастающая потребность в передаче данных приводит
к необходимости .использования дш этой цели наиболее
разветвленной сети связи — ОГФТС. Передача данных по сети ОГФТС
осуществляется после установления соединения с помощью номе-
1 Звеном ПД называется совокупность оконечных установок ПД,
соединенных одним каналом связи и работающих с одинаковой скоростью и единым
кодом.
188
рона'бирателя телефонного аппарата или автоматического
вызывного устройства (УАВ) и последующего (переключения
.коммутируемого канала на аппаратуру ПД (рис. 9.8).
При .передаче данных по -сети ОГФТС дискретные сигналы
данных «в результате (модуляции в УПС (превращаются в сигналы
тональных частот, а на приеме происходит обратное щреобразова-
\уав
оод
Рис. 9.8. Передача данных по сети ОГФТС
ние. Полный цикл функционирования 1авена ПД в этом случае
состоит т тяти фаз; к трем фазам в случае некоммутируемых
каналов связи (добавляются еще две: нулевая, 'соответствующая
установлению соединения в коммутируемой сети, и четвертая —
разъединение <в 'коммутируемой сети. Поскольку ОГФТС не
предназначалась для передачи данных, ее некоторые характеристики
(неравномерность АЧХ :и нелинейность ГВЗ, кратковременные
перерывы, импульсные помехи и др.), <не оказывающие заметного
влияния на качество передачи речи, значительно снижают
верность 'передачи данных. .Верность определяется в основном
помехами, возникающими в электромеханическом оборудовании
городских АТС, поэтому ее величина зависит от типа АТС: в
координатных коэффициент ошибок составляет 2-Ю-5; в декадно-шаго-
вых — до 2-10-2. Загруженность АТС также влияет на верность
передачи. Междугородные соединения обычно имеют гораздо
лучшие показатели но верности (на один-два порядка). Внедрение
координатных и квазиэлектронных, а затем и электронных АТС
и МТС 'будет способствовать значительному повышению качества
передачи данных по ОГФТС.
Для повышения верности передачи по сети ТФ-ОП до
требуемой 'величины применяются устройства защиты от ошибок.
До последнего (времени скорость передачи данных по ОГФТС
не превышала 1200 бит/с. Согласно Рекомендации V.21 МККТТ
(ГОСТ 20852—75) двусторонняя одновременная передача данных
по ОГФТС осуществляется со скоростями до 200—300 бит/с, а
согласно Рекомендации V.23 (ГОСТ 20865—76) двусторонняя
поочередная ПД — со скоростями 600 и 1200 бит/с. Успехи в
развитии модемов и адаптивных корректоров позволили в последнее
время перейти на более /высокие скорости — 2400 и 4800 бит/с
(в соответствии с Рекомендациями V.26 бис и V.27 МККТТ).
Современная АПД позволяет обеспечить 'верность передачи данных
по ОГФТС не ниже 10"6.
Число абонентов ОПД ibo «много раз /меньше числа телефонных
абонентов (порядка 0,5—2%). Для подавляющей части абонентов
189
Ж
ПД характерны малые объемы данных, что (позволяет давке при
скорости передачи 1200 бит/с обеспечить длительность одного
сеанса 'передачи данных не более единиц минут (сотые доли эрлан-
га). Столь относительно малое число абонентов ПД и короткие
сеансы передачи свидетельствуют о {невозможности
отрицательного влияния передачи данных на работу ОГФТС.
При необходимости передачи по ОГФТС малых объемов
данных могут использоваться многочаетотные тастатурные
телефонные аппараты. Передача данных осуществляется манипуляцией
на тастатуре телефонного аппарата после установления
соединения, а прием данных 'происходит на вычислительном -центре с
помощью модема, который (преобразует многочастотные сигналы от
тастатурных телефонных аппаратов «в дискретные 'сообщения. При
передаче ib .интерактивном режиме паузы приводят к увеличению
общей длительности сеанса ПД, «вследствие чего в некоторых
случаях возможно негативное влияние систем ПД на работу
ОГФТС. Поэтому интерактивный режим передачи требует в
основном построения специализированных сетей передачи данных. Сеть
ОГФТС не может быть использована для ПД ib случаях, когда
нагрузка, «создаваемая абонентом ПД, (Превышает присущую для
телефонных абонентов величину, абоненты ПД нуждаются в
специфических услугах, не обеспечиваемых ОГФТС (например, в
многоадресной связи), сеть не 'Обеспечивает в нужных направлениях
необходимых режимов (например, автоматическое /установление
междугородного соединения), время установления соединения или
надежность сети не удовлетворяют требования абонента.
Сеть абонентского телеграфа (AT), .имеющая значительно
меньшую .емкость по сравнению с телефонной и обеспечивающая
работу только кодом МТК-2 со скоростью 60 бит/с, обладает еще
более ограниченными (возможностями в отношении ПД:
низкая пропускная 'способность (5—6 эн/с);
большое время установления соединения (несколько десятков
секунд);
недостаточные «верность (коэффициент ошибок ~ Ю~4) и
надежность.
Достоинством сети AT для ПД является то, что она построена
на основе дискретных каналов, к которым может быть
непосредственно подключена ООД. Сеть AT быстро развивается ib
«количественном отношении и оснащается новым коммутационным
Оборудованием, построенным на основе ЭВМ, что (расширяет
возможности ее использования ,и для ПД.
Специализированные (коммутируемые сети ПД создаются для
удовлетворения 'всех рассмотренных в § 8.2 (потребностей
абонентов, которые не могут быть обеспечены передачей данных ио
сетям ОГФТС и AT. На специализированных сетях ПД используют
различные методы коммутации: коммутацию .каналов (КК) и
коммутацию с накоплением (КН). Сети ПД с КК могут 'быть
асинхронными и синхронными. На асинхронных юетях можно приме-
190
пять как асинхронные, так и синхронные 'Системы (передачи в
сочетании с асинхронной системой коммутации.
Большинство создаваемых и действующих сетей ПД с КК
является асинхронным. В них используются как асинхронные ка-
н-алы, образованные с помощью систем с ЧР и АВР, так и
синхронные каналы систем с СВР. К сетям такого типа относятся
действующая сеть ПД со скоростью передачи до 200 (бит/с (сеть
ПД-200) 1й создаваемая сеть ПД со скоростью передачи до
2400 бит/с (сеть ПД-КК). Эти сети построены по радиально-узло-
вому принципу, имеют три уровня иерархии, используются общие
с телеграфными сетями AT и ПС узлы .коммутации, что позволяет
удешевить создание и техническую 'эксплуатацию сетей ПД. На
верхнем уровне организуются транзитные узлы коммутации, на
втором уровне — оконечные узлы, оборудованные оконечной
станцией (ОМС), и на третьем уровне — узлы, оборудованные
подстанцией (ПК). Транзитные узлы создаются <в местах пересечения
достаточно больших потоков нагрузки. Оконечные узлы
размещаются в областных (республиканских, краевых) щентрах и
выделенных городах с достаточно большой нагрузкой. Подстанции
используются для коммутации нагрузки от удаленных трупп
абонентов и концентрации нагрузки. Оконечные пункты сети
(абоненты) ©ключаются »в ОМС и в подстанции. Обеспечивается также
возможность непосредственного подключения отдельных
оконечных .пунктов к станциям транзитных узлов.
На сети ПД-КК среднее время установления соединения
декадным Способом при работе на скорости до 200 бит/с не превышает
40 с, ia 1при работе на скорости до 2400 'бит/с— 15 с (при
клавиатурном способе набора). При внедрении цифровых систем
передачи и электронных станций коммутации время установления
соединений на сети ПД-КК 'будет еще меньше. Гарантируется
коэффициент ошибок при передаче (по знакам) не более Ы0_6.
Сеть ПДЖК обеспечивает потребителям (следующие виды
услуг: двухточечную связь, многоадресную связь от одного пункта
передачи ж нескольким пунктам приема, циркулярную связь,
многоадресную двустороннюю связь между несколькими абонентами
(конференц-евязь), три .категории срочности вызовов,
сокращенный набор номера, связь по расписанию, перенаправление
входящего вызова от одной абонентской установки к (другой по заранее
составленному расписанию или по заявке абонента. На всех
участках -сети ПД-КК передача данных осуществляется по
электрически четырехпроводным дискретным каналам,
обеспечивающим одновременную работу в обоих направлениях. Применяется
единая и для перспективных телеграфных сетей восьмизначная
система нумерации, в которой первые два знака определяют
категорию абонента, последующие три знака — номер вызываемой
станции, а последние три знака — номер абонента указанной
категории в вызываемой станции.
На сети ПД-200 для каждой категории устанавливается
единая по числу набираемых знаков /шестизначная система нумера-
191
ции: шервые три злака определяют номер вызываемой станции, а
последние три знака — номер абонента (служебной установки) в
указанной станции.
Для :передач.и данных «по сети ПД-200 .могут использоваться
пункты •коллективного 'пользования, которые размещаются на
предприятиях связи (обычно на областных телеграфах). Данные
в эти пункты абонентами-отправителями доставляются в виде
стандартных 5- или 8-дорожечйых перфолент. Получателю данные
доставляются также в виде перфолент персоналом предприятия
сгази.
Синхронной называется сеть, .в которой ©се оконечные
устройства синхронизируются централизованно, а асинхронные (старт-
стопные) абонентские установки «включаются в сеть через
устройства сопряжения, преобразующие их сигналы в синхронные
(рис. 9.9). Синхронные сети создаются чисто 'цифровыми, в
которых поток цифровой информации доводится непосредственно до
Синхр.
оод
Асинхр.
\ оод
Ближние
Синхр.
| ООД
Асинхр.
1 оод
Удаленнь
jd
/g i
Синхр.
УПС
Асинхр.
УПС-
'оненты
Синхр.
модем
Асинхр.
модем
нГоненты
^V^ ч
Концентратор
6Ь к/ит/с
Синхр. линия
УН
Синхр.
линия
Рис. 9.9. Включение ООД в синхронную сеть ПД
абонентов (рис. 9.10). Они характеризуются хорошим
использованием шропускной способности каналов, высокой верностью
передачи дискретной информации, более (простым и, следовательно,
дешевым коммутационным оборудованием <и оборудованием
оконечных установок.
Синхронные сети обеспечивают предоставление абоненту
широкого спектра услуг, (коммутацию .высокоскоростных сигналов
(.вплоть |дю 48 1кбит/с), высокую (Верность «без применения
специальных устройств защиты от ошибок. Благодаря этому по
синхронной сети оказывается возможным передавать как
многоадресные, так й циркулярные сообщения. Применение временных
192
устройств .коммутации, построенных ла быстродействующих
электронных элементах, в сочетании с общим «каналом сигнализации
и передачей вызова после полного -набора номера со скоростью
передачи данных уменьшает время установления соединения до
0,5—1,0 с, что отвечает самым жестким требованиям абонентов
СПД.
Синхр.
ойоруд.
оо~рад~от-
к и
данных (00Д)\
9,6; 56
tafum/c
МГ.полу-
\комплект
каншвщ
оборуд.
(А но)
2,<t-56 Kb'umlc
Afc линия
С тан и,,
полуком-
ллент
\канамоОр\
о fib руд.'
(Ш)
Мультиплексор
лердой
ступени
(М-1)
•
JSLI
•
•
Устрой-
ст8о
сопряжения
•
•
AM-U
с ко Ы м-1
Подстанция (концентратор)
-
Метстани,.
соед. линия__
2,М8Мбит/с
•.. • • ■ • "-J
^
^ 1
1
13 1
/таци
омм^
^ 1
^ 1
«U 1
tr> 1
=а&
1
II
Рис. 9.10. Структурная схема синхронной сети ПД
Синхройные сети ПД-КК являются одним из «новых типов
'Специализированных сетей ПД общего пользования*,"для .которых
МККТТ выработал новые рекомендации сфрии X. Характерной
особенностью этих рекомендаций{является to, что в них тгредпо-
лагаетоя реализация сетью значительно 6ojiee широких функций
по сравнению с""существующими' (коммутируемыми сетями. Так,
сеть .выполняет функции сопряжения непосредственно с оконечным
оборудованием данных ООД (рис. 9.11а), а .не через 'аппаратуру
передачи данных АПД, как это имеет--место в существующих
коммутируемых сетях (рис. 9.116). Стык между ООД и линией
осуществляется с помощью аппаратуры окончания 'канала данных
(АКД) к которая 'является принадлежностью администрации
«связи, а не а'бонёнпга. ;
Передача сообщений в соответствии с РекомендШиями JC:50
и Х.51 производится 8- или 10-битным,и -конвертами, В; 87б1итйом
конверте первый единичный элемент (бит) отводйтоя для целей
фазирования, а последний — статусный, указывает йа ха^айтер
передаваемой в конверте информации: ib установленном
соединении при отсутствии (вызов'а передается 1, при вызове и о^бфе-^б.
В Ю^битном конверте первый бит является 'статусным, а вдбрО?: —
1 Другим типом таких сетей являются сетиs с коммутацией пактов.
7—101 Ш
отводится для фазирования 'конвертов. В полосе частот канала
со скоростью передачи 64 1кбит/с может быть образовано
различное число каналов (табл. 9.1); 4 кбит отводится для служебных
целей. Конверты по времени передаются шоследовательно,
начиная с .конверта первого канала до /кодверта -последнего канала,
далее (циклы ^повторяются.
Лринадлет -
ноешь
. абонента.
оад
Лринадлем- \
ноешь админи-\
страции. \
сети. |
н I
l
Т
I Щ
Линия
i—*
^Помещение абонента.
j
Стык метду Щ
и сетью j
I
Принадлежность абонента. \
ОВД
АПД
I
Стык метду сетьнЬ
и оборудованием аМ
I
I
Линия
нента
^омещение^йомттш^
6)
Рис. 9.11. Сопряжение ООД с АКД:
а — в сетях ПД нового типа; б — в существующих сетях ПД
Как синхронные, так и асинхронные оети ПД с КК
обеспечивают передачу изохронных и неизохронных (стартстопных)
сигналов. Степень «прозрачности асинхронной оети (ом. § 3.2 и 8.7)
определяется способом каналоабразоваиия и коммутации.
Синхронные сети -наиболее приспособлены для 'передачи изохронных
сигналов. Для -передачи по «ним неизохронных сигналов
используются .методы, описанные в гл. 3.
Таблица 9.1
Число
каналов
5
10
20
80
Скорость передачи по
каналу, кбит/с, при конверте
8-битном
12,8
6,4
3,2
0,8
10- битном
Ш,0
6,0
3,0
0,75
Полезная
скорость, кбит/с
9,6
4,8
2,4
0,6
В сетях передачи данных .используются оба вида коммутации
с .накоплением: 'коммутация сообщений м /пакетов. Сети ОД-КС
строятся ino .рад'иально-узлово'му принципу. Они обычно содержат
три уровня .«ом-мутации: магистральный, зоновый и низовой.
Построение таких сетей обычно (начинается с зонового уровня, б
котором зоновый УК (ЗЦКС) «выполняет функции МЦКС и
взаимодействует ic абонентскими установками, как непосредственно
включенными в него, так и через сеть ТФ-ОП. По мере роста числа
абонентов установки подключаются к низовым УК (НЦКС)
или концентраторам (КТС). Для объединения отдельных зоновых
194
сетей вводятся магистральные (транзитные) УК (МЦКС).
Скорость ПД по сети ПД-КС не превышает 4800 бит/с.
Сеть ЛДЖ'С обеспечивает подключение оконечных (пунктов,
работающих та скоростях 50, 100, 200, 600, 1200, 2400, 4800 и
48 000 бит/с IB двустороннем одновременном и поочередном
режимах работы. Вероятности утери сообщения <в сети ПД-КС и за-
сщл-ки сообщения не по адресу не превышают 1 • 10~7. Верность
передачи (коэффициент ошибок)—не ниже 10~6. Сеть ПД-КС
обеспечивает передачу многоадресных сообщений с числом
'адресов не более десяти, а также циркулярных, сообщений (до
100 адресов). Абоненты сети ПД-КС для (передачи сообщений
могут (Исйользовать различные .первичные «соды: пятиэлементный
(ГОСТ 15607—70); семизлементный (ГОСТ 13052—74); восьми-
элементный (ГОСТ 19768—74). Сеть ПД-КС обеспечивает ряд
дополнительных услуг для отдельных абонентов сети: передачу
сообщений с сокращенным предзатоловком; выдачу копий
сообщений абоненту-получателю; организацию архива сообщений в
интересах абонентов; работы по расписанию; уведомление
отправителя о доставке сообщения.
Сети ПД-КП первоначально применялись <в .качестве «подсетей
передачи информации в составе сетей ЭВМ, а затем и в качестве
специализированных сетей (передачи данных общего пользования
(в соответствии с рекомендациями серии X МККТТ). Сеть ПД-КП
(рис. 9.12) содержит узлы коммутации пакетов (УКП) и
'концентраторы (КТ), соединенные (каналами связи. Абонентами сети
являются ЭВМ, включаемые через'.процессоры связ1й (ПС), и або-
IMJ-o.
7*
Рис, 9.12. Структурная схема сети ПД-КП
195
нентокие пункты (АП), включаемые через концентраторы (КТ).
Различают АП двух типов: пакетные, передающие и
принимающие пакеты, и знаковые, -ведущие обмен с КТ отдельными
знаками (например, етартстопню). В 'последнем случае функции пакето-
образования на передаче и разделения пакета на знаки при
приеме выполняет КТ. Пакетное (взаимодействие ЭВМ .с сетью
обеспечивает ПС. Обычно концентратор (его .иногда называют
терминальным процессором) позволяет 'подключить несколько
десятков АП и .имеет несколько выходов «УЮТ.
Сети ПД-КП работают в режимах передачи детаграмм и
виртуального соединения. Взаимодействие абонентов сети .ПД-КП
осуществляется по определенным правилам — протоколам,
имеющим различные уровни иерархии. Наивысший уровень занимают
'«протоколы обмена между процессами в ЭВМ, которые являются
протоколами пользователей и выходят за рамки системы передачи
данных. Протоколы передачи данных имеют более низшй
уровень. Поскольку в сети одновременно функционируют протоколы
различных уровней, осе протоколы должны быть взаимно увязаны
и построены так, чтобы протокол более высокою уровня не влиял
на протоколы низших уровней. Полная разработка протоколов
МККТТ еще не завершена, 'но сетевые протоколы для
виртуального соединения уже утверждены (Рекомендация Х.25).
Рекомендация Х.25. рассматривает стык ООД пакетного типа
с АКД. Процедуры передачи служебных сигналов и сигналов
данных на стыке должны подчиняться правилам, .которые условно
разделены на три уровня.
Уровень 1 — физический, определяющий характеристики цепей
и сигналов, необходимых для установления, поддержания и
разрушения физического шединения между ООД (АП, ЭВМ) и
АКД (УПС); электрические характеристики и 'процедуры
установления соединения и разъединения должны соответствовать
Рекомендации Х.21 или Х.21бис.
Уровень 2 — передача данных, определяющий процедуры
передачи информации между двумя узлами сети с исправлением
ошибок и подтверждением прием:а: все сигналы должны передаваться
в форме кадров с форматом, изображенным на рис. 9.13. Кадры
Флатик
0111U1D
Адрес
8 Sum
УпраВлвнав
8 Sum
Информация
/V Sum
Кодозащита
16 Sum
Флажок
01111НО
Рис. 9.13. Формат кадра в сети ПД-КП
отделяются друг от друга .специальным знаком, называемым
«флажком», .которым обычно начинаются и заканчиваются кадры.
Один и тот же флажок может использоваться как закрывающий
для одного кадра и открывающий для следующего. В
Рекомендации Х.25 предусмотрены .хоешал-ьяые -меры для обеспечения
196
«прозрачности» передачи, т. е. независимости от
последовательности передаваемых бит. С этой целью на 'передаче проверяется
все содержимое, заключенное между двумя флажками, с тем,
чтобы «е допустить появления флажковой последовательности. Если
обнаруживается .пять единиц подряд, то после пятой единицы
вставляется бит 0. Поэтому флажковая последовательность в
кадре на приеме появиться не может. На приеме необходимо
проверять содержание кадра, при этом должен отбрасываться бит 0,
следующий за пятью идущими «подряд битами 1.
Передача информации 'между смежными .пунктами (УКП, КТ,
ПС) производится с возможностью обнаружения ошибок на
приеме и их исправления путем переспроса. В поле управления
передаются команды .или ответы на (Команды, а также порядковые
номера кадров. Обмен .командами и ответами необходим для
подтверждения приема кадров, запроса повторной передачи,
временной остановки, восстановления обмена кадрами.
Уровень 3—пакетный, обеспечивающий передачу пакетов по
сети связи в соответствии с адресами, 'маршрутизацию,
упорядочение пакетов внутри сообщений. Информационное поле кадра
состоит из поля управления протоколов высокого уровня и самой
информационной последовательности, называемой полем данных.
Первое поле содержит все сведения, необходимые {для
прохождения сообщения по сети связи от отправителя к получателю. Так,
поле управления .протоколов высокого уровня может содержать
идентификаторы отправителя и получателя, приоритетность
сообщения, указатели применяемого кода и типа сообщения, его
номер, порядковый номер канала, по которому оно поступило на
узел, и др. Указанные признаки вносятся протоколами более
высокого уровня на первоначальных этапах формирования пакетов:
Максимальная длина поля данных в пакете «Данные» равна
128 октетам. Разрешаются и другие максимальные длины: 16, 32,
64, 256, 521 и 1024 октета. В служебных пакетах («Запрос
вызова», «Входящий вызов» и др.) абонентские данные отсутствуют.
9.3. УЗЛЫ КОММУТАЦИИ
Узел коммутации (УК) представляет собой совокупность
взаимосвязанных технических средств приема, обработки,
распределения и передачи информации. Назначением УК являются прием
сигналов, поступающих по входящим каналам ('цепям), обработка
сообщений (например, перекодирование) или их частей
(например, адреаной части) выбор пута дальнейшей передачи сообщения
или его частей, т. е. (распределение информации, и передача
информации по выбранному пути. Следует подчеркнуть, что
основной является функция (распределения информации. Кроме того,
УК выполняют еще ряд функций: контроль за прохождением со*
общений по сети, повышение верности <я ^надежности передачи,
обеспечение приоритетности передачи и т. п.
197
Оборудование, с помощью которого УК выполняют
вышеуказанные функции, распределено в трех основных функциональных
цехах: кроссе, цехе управляющих устройств (УУ) и цехе устройств
коммутации. В кроссе устанавливается линейное оборудование,
назначением которого является обеспечение взаимодействия УК
с оконечными устройствами или другим УК (аппаратура систем
^передачи, переходные устройства и т. п.), а также устройства для
долговременных (кроссовых) соединений. Устройства коммутации
обеспечивают выполнение основной функции УК — распределение
информации по адресам, а устройства управления управляют
работой всех элементов УК и контролируют правильность
выполнения ими своих функций. К коммутационным устройствам помимо
основных, служащих для распределения информации, относятся
устройства концентрации, повышающие использование пропускной
способности распределяющих устройств.
Узлы коммутации классифицируют по различным признакам:
методу коммутации, элементной базе коммутационного
оборудования, виду передаваемой информации, степени автоматизации,
месту в сети, емкости, способу управления и др. Среди этих
признаков главными, определяющими потенциальные и реальные
возможности УК, являются два первых. По реализуемым методам
коммутации различают УК с коммутацией каналов (УК КК),
коммутацией сообщений (УК КС), коммутацией пакетов (УК КП)
и УК с комбинированными методами коммутации. По элементной
базе коммутационного оборудования различают УК
электромеханические (например, координатные) и электронные1. Узлы
коммутации должны обеспечивать возможность независимого
наращивания как производительности, так и числа точек подключения,
должны быть надежными, экономичными и иметь гибкую
конструкцию. Этим требованиям наилучшим образом отвечают УК с
многопроцессорным блочным принципом построения (рис. 9.14).
Как видно из рисунка, все компоненты УК имеют блочный
характер и включены параллельно к общим шинам, что дает
возможность постепенно и независимо увеличить число блоков и
рационально организовать резервирование. В качестве процессоров
обычно используются минипроцессоры, а в последнее время —
-микропроцессоры. Узлы коммутации на сетях ПД часто называют
центрами коммутации (например, центр коммутации каналов ЦКК),
а на сетях ТГ—станциями. Дальнейшее изложение материала
производится в соответствии с основными классификационными
признаками.
Большинство существующих узлов коммутации каналов (УКК)
построено на основе коммутационного оборудования с
пространственным разделением и контактными элементами коммутаций
(искателями, реле, координатными соединителями). И хотя такое
оборудование успешно эксплуатируется уже не один десяток лет,
1 В отличие от телефонных сетей, на сетях ПДИ не применяют
квазиэлектронных УК.
198
ему присущи недостатки, свойственные всем электромеханическим
системам: большие габаритные размеры, низкая надежность,
большой расход электроэнергии, ограниченное число предоставляемых
услуг, ограниченные скорости передачи информации. Поэтому
развитие техники УКК идет по пути создания электронных станций,
построенных на основе ЭВМ.
£
Процессоры
1
I
Оперативные
заоомин.
устройства (ЗУ)
Каналы
обмена
Устройства
сопряжения
ЕГД
Ж ж
ИЛ
Устройства
jnpatin.
внешними ЗУ
К каналам связы
П Л Внешние ЗУ
Рис. 9.14. Многопроцессорный управляющий
комплекс УК
На принципе коммутации каналов построены коммутационные
станции абонентского телеграфа и прямых соединений1.
Принципы автоматической коммутации, применяемые на станциях АТА
и АПС, очень сходны с принципами, положенными в основу АТС.
Поэтому здесь эти принципы рассматриваться не будут. По типу
применяемого коммутационного оборудования станции АТА и АПС
делятся на декадно-шаговые и Координатные. В декадно-шаговых
станциях в качестве приборов автоматического искания
используются декадно-шаговые (ДШИ) и шаговые (ШИ) искатели. В
координатных станциях применяются многократные координатные
соединители (МКС). Оборудование станции АПС имеет много
общего с оборудованием станции АТА. Однако ввиду применения
различных систем эксплуатации на абонентской сети и сети
прямых соединений оборудование станции АПС содержит
дополнительные коммутационные и регистрирующие приборы.
Оборудование станций АТА и АПС построено таким образом, что позволяет
совместно использовать магистральные каналы на сетях AT и ПС,
в то же время -исключает непосредственное соединение абонентов
разных сетей. Наряду со станциями АТА и АПС применяются
универсальные станции, предназначенные для работы на сетях або-
1 Станции сети ПС содержат запоминающие устройства, характерные для
УК систем с КН.
199
нентского телеграфа, прямых соединений и передачи данных
(АТ-ПС-ПД).
Новые универсальные станции являются электронными и
построены на основе асинхронной временной (адресной) коммутации
(АВК). Разрабатываются универсальные электронные станции на
основе синхронной временной коммутации (СВК).
В электромеханических станциях первого поколения с декадно-
шаговыми искателями используется принцип непосредственного
управления с оконечного устройства, в станциях второго
поколения — косвенное управление с прямым и обратным исканием (с
индивидуальными регистрами и пересчетчиками), а в станциях
с координатными соединителями — косвенное управление с
обходным исканием (с помощью групповых регистров и маркеров).
Соединение абонентов со станцией и друг с другом устанавливается
автоматически приборами станции, управление которыми
осуществляется набором номера на номеронабирателе вызывного
прибора. Сигналы для абонентов («Приглашение к набору номера»,
«Соединение установлено», «Занято» и др.) выдаются станцией по
соединительной линии путем изменения величины и полярности
тока и высвечиваются на вызывном приборе абонентской
установки.
Основные характеристики применяемых типов
электромеханических станций приведены в табл. 9.2. Здесь приняты следующие
обозначения: А — автоматическая, AT — абонентский телеграф,
ПС — прямые соединения, Ш — шаговая, К — координатная, ПД —
передача данных.
Перспективные электронные УК для телеграфии и передачи
данных предоставляют абонентам такие услуги и автоматизируют
такие процессы коммутации, .которые трудно или невозможно
реализовать с помощью электромеханического оборудования,
например: сокращенный набор номера; связь па расписанию;
автоматическую выдачу справочной информации, в том числе счетов на
оплату; автоматическую конференц-связь; обработку дискретной
информации, Поступающей в щироком диапазоне скоростей, и др.
Электронная станция коммутации ЭСК-А построена на
принципе асинхронно-временной коммутации значащих .моментов. В
зависимости от комплектации и программы она может быть
использована в качестве транзитной или оконечной для телеграфной
сети (при скорости 50—100 бит/с) и передачи данных (при
скорости до 2400 бит/с), Станция ЭСК-А рассчитана на подключение
S00— 16000 каналов различных скоростей, в том числе 200
бит/сне более 94%, до 1200 бит/с —не более 4%, 2400 бит/с —не более
2%. Структурная схема станции ЭСК-А представлена на рис. 9.15.
Ка схеме приняты следующие обозначения; Пр, Пер — приемники
и передатчики линейных сигналов, БВК — блоки входящих
каналов* УУ^—устройства управления, АКК — адресно-кодовый
коммутатор, ОЗУ— оперативное запоминающее устройство, БИК — блок
исходящих каналов, ВК—вычислительный .комплекс, ПКО — пульт
контроля и отображения, УЦКС — устройство циркулярной и кон-
200
Таблица 9.2
Тип станции
АТАч57-1 ■ ■ "
АТА-57^2 ■
АТА-К
АТА-МК-2
АТКн20
АПС-Ш-1
' ■' '
АПС-Ш-2
АПС-К
АТ-ЛС-П Д
«Никола Тесла»
ПТС-К
АТК-ПД ^
Тип коммутационных
приборов
ДШИ-100
ШИ-25/4
ШИ-25/4
МКС 20X10X6
МКС 10X20X6
МКС 20X10X6
ДШИ-100
ШИ-25/4
ШИ-25/4
МКС 20X10X6
МКС 20X10X6
МКС 10X20X6
МКС 20X20X3
: МКС 20X10X6
МКС 20X10X6
[ Наличие регистро-
1 вого оборудования
Нет, но может
быть
дооборудовано
То же
Есть
У>
— » —
Нет
— » —
Есть
— » —
— » —
— » —
— » —
Скорость
работы, бит/с
50—75;
50—75
50^75
60^75
50—75
50—75
50—75
50—75
50; 100; 200
50; 100; 200
50; 100; 200
50; 100; 200
Число
абонентских
линий
До 1000
До 300
100—600
10 или 20
20
До 300
До 200
До 500
До 4000
Число
магистральных
каналов
До 800
До 300
До 800
4 или 8
6
До 60
7—8
До 800
До 400
До 6000 точек
подключения
40—160
До 20
1 24—60
' До 8
Место установки
Главные и крупные узлы
Средние областные узлы
Крупные и средние узлы
Районные узлы
— » —
Республиканские,
областные и крупные узлы
Небольшие областные
узлы
Главные, крупные и
средние узлы
Главные и крупные узлы
-»-•■'
Районные узлы
—» —
ференц-связи, МК — мультиплексный канал, УС — устройство
связи.
Алгоритм работы станции следующий. В исходном состоянии
л ячейке ОЗУ УУ АКК, соответствующей i-му входу, записано
состояние «ожидание вызова»; в адресной части этой ячейки записан
«нулевой» адрес. При поступлении вызова по i-му входу станции
Вход
ИЗ-]
0-| Пр |-|
о-\пр \-
о-| пр р
ш
—*
ш
С
I220
ш I
w>i/r/r И-
НГ1
УС
♦ * *
wj|ш|| л/
■*J
-*|ш
М УЦКС
*
L[/7^J-o
и
&/Ы
Рис. 9.75. Структурная схема ЭСК-А
стоповая полярность меняется на стартовую. Образовавшийся
фронт сигнала формирует на входе БВК требование на
обслуживание. Это требование в совокупности с требованиями,
поступившими от других входов, образует очередь на входе данного БВК.
После обслуживания всех поступавших на БВК требований более
высокого приоритета начинает обслуживаться i-e требование. При
этом от f-ro входа в УУАКК считываются адрес Л* и бит
полярности.
По адресу Лг- из ОЗУ извлекается содержимое f-й ячейки, и
после анализа ее состояния производится обращение к УУ через
УС. Управляющее устройство сообщает адрес Ау—адрес
свободного канала УУ, а УУ АКК в свою очередь заносит в УУ по адресу
Ау вызывающего входа Л*. Затем УУ АКК переводит i-ю ячейку
ОЗУ АКК в состояние «трансляция», а в адресную часть ячейки
заносит адрес Лу.
Приняв адрес Лг-, управляющее устройство через УС
запрашивает у ВК первое управляющее слово для установления
соединения по i-му входу. Расшифровав это слово, УУ формирует
сигнал «Подтверждение вызова» и не менее чем через 3 с — сигнал
«Приглашение к набору». В виде кодовых слов, включающих
адрес Ai и бит полярности, упомянутые сигналы через МК, БИК и
j-й передатчик попадают в приемную линию i-ro абонента
станции. После приема сигнала «Приглашение к набору» абонент
начинает посылать /на -i-й вход станции сигналы набора номера.
Каждый фронт этих сигналов обрабатывается в БВК и УУ
АКК аналогично тому, как обрабатывался фронт сигнала «Вы-
202
зов». Однако после извлечения содержимого ячейки из ОЗУ АКК
управляющее устройство АКК расшифровывает состояние
«трансляция» и в соответствии с этим состоянием и адресом Ау
формирует кодовое слово, включающее Ау и бит полярности. Через УС
это слово попадает в УУ, где к нему добавляется информация
о времени прихода фронта. В результате последовательной
обработки фронтов сигнала .набора номера i-ro абонента в у-и канале
УУ накапливаются знаки номера вызываемого абонента. По мере
накопления знаков они поочередно через УС пересылаются в ВК.
Там с помощью каталогов свободных линий и записанной
программы поисков начинается процесс поиска свободного выхода
станции, ведущего к вызываемому абоненту. В конце этого
процесса определяется адрес Aj свободного выхода станции.
С помощью УС адрес Aj вместе со следующим управляющим
словом ВК пересылается в УУ по адресу Ау. В соответствии с этим
управляющим словом УУ через УС и требуемое УУ АКК
переводит у-ю ячейку ОЗУ УУ АКК в состояние «трансляция», а в
адресную часть данной ячейки заносит адрес Лу, после чего в
сторону /-то выхода станции формируется сигнал «Вызов» в виде
кодового слова. Через МК, БИК и у-й передатчик этот сигнал
поступает на /-й выход станции.
Приняв сигнал «Вызов», устройство, подключенное к у-й
точке подключения станции, вырабатывает сигнал «Подтверждение
вызова», который вследствие состояния «трансляция» ОЗУ УУ
АКК по адресу Ау попадает в УУ, где происходит оценка
длительности этого сигнала. При благоприятном исходе оценки УУ
через УС запрашивает из ВК новые управляющие слова и с их
помощью аналогично описанному доводит процесс установления
соединения до конца.
Завершающим этапом установления соединения являются
посылка f-му абоненту сигнала «Соединение установлено» и запись
в адресной части i-й и /-й ячеек ОЗУ УУ АКК адресов Aj и Лг-.
После такой записи в i-й и /-й ячейках любые фронты,
появляющиеся на i-м входе, с помощью приемника, БВК, ОЗУ АКК, УУ
АКК, БИК транслируются на у-й выход и наоборот. Таким
образом, 1-я точка подключения станции оказывается скоммутирован-
ной с у-й точкой подключения.
Большинство соединений в СПД и ТГ является двусторонним,
поэтому если ЗМ передаются из канала i в канал у, то должна
быть обеспечена возможность их передачи из канала у в канал i.
Для этого в ОЗУ вводится второй вход. При этом
коммутационное устройство в целом можно рассматривать как четырехпровод-
ное, в котором каждое направление обслуживается отдельно, а
переход к двухпроводной системе осуществляется в БВК и БИК.
С целью обеспечения высокой надежности все оборудование, за
исключением Пр и Пер, дублируется, в результате чего среднее
время наработки станции на отказ составляет 5 лет при времени
восстановления 0,5 ч.
203
Электронная подстанция ЭСК-Б обеспечивает автоматическую
коммутацию каналов от абонентов сетей AT и ПД и оконечных
пунктов сети ПС между собой и с соединительными линиями к
опорной станции ЭСК-А. Подстанция рассчитана на включение от
32 до 256 каналов и линий и не имеет постоянного
обслуживающего персонала. Она построена на тех же принципах и
обеспечивает те же качественные показатели, что и ЭСК-А. Установление
всех соединений в ЭСК-Б происходит под управлением опорной
станции.
Перспективные электронные УК для синхронной сети
построены по принципу СВК, который иллюстрируется на рис. 9.16. При
Последовательный. дШ
Последовательный, ввод
Байтовое
ЗУ
Данные"
БВК
Память для данных
ВЦ)
Память тапнслятора
шреса
тн
'□
байтовое
ЗУ
Данные
Рис. 9.16. Синхронная коммутация
этом предполагается, что в системах передачи осуществляется
чередование байтов (конвертов). При приеме каждого байта
входного потока его преобразуют в параллельную форму, готовую к
занесению в память для хранения данных. В это же время БВК
вырабатывает величину i — номер данного канала. С помощью
этого I, играющего роль адреса (или с помощью числа,
полученного из i путем сложения), байт запоминается в ячейке i памяти
для данных. Обозначим записанный байт через B(i), указывая
таким образом, откуда он пришел.
Номер канала i также поступает на вход транслятора адреса,
где по нему выбирается адрес /, определяющий входной канал,
из которого выход i получает свои данные. Таким образом, адрес/
используется в памяти для данных при считывании Д(у)-го байта
данных, ранее введенного в память из входного канала /. Когда
наступит время канала /, аналогичным образом будет считан байт
ВЦ) и величина /, полученная из ячейки памяти для адресов /,
будет использована в качестве адреса в памяти для данных. На
выходе байт данных преобразуется в последовательную форму,
после чего байты опять передаются в правильном чередующемся
порядке.
Байт, поступающий из определенного канала, не может быть
введен до тех пор, пока соответствующий номер канала не
появится в кадровом цикле; в связи с этим байт должен храниться в
памяти. Так как для каждого канала в кадре выделяется вре-
204
менное окно независимо от того, находится канал в пользовании
или нет, то для каждого канала должно быть предусмотрено
соответствующее время, а также место в памяти для данных и в
памяти для адресов. Каждый байт сопровождается указательным
битом, позволяющим отличить данные оу сигналов управления.
Если сигналы управления не передаются через коммутационное
устройство, указательный бит все равно следует передавать,
поскольку он указывает, используется ли в данное время байтовое
окно, и различает фактические данные (которые могут быть
одними нулями) от пустого байта, передаваемого в отсутствие
передачи данных. Таким образом, память будет девятиразрядной.
Каждое канальное окно в кадре вызывает три цикла памяти:
два цикла в памяти для данных и один — в памяти для адресов.
Эти два запоминающих устройства могут быть отдельными
устройствами или совмещенными в одно устройство, в котором
последовательно происходят все три цикла. С появлением
полупроводниковых запоминающих устройств, весьма экономичных
благодаря своим малым габаритным размерам, предпочтение, видимо,
будет отдано, раздельным запоминающим устройствам.
Управляющий процессор должен иметь возможность обращаться к
каждому из них. Из памяти для данных он получает управляющие
сигналы, включая селектирующие данные (набранный номер) от
абонента, и возвращает их обратно в эту память для дальнейшей
передачи. Пользуясь памятью транслятора адреса, управляющий
процессор может определить, свободна ли данная линия, после
чего поместить в нее указатели I и /, определяющие состояние
коммутируемых соединений. Резервную емкость памяти для
адресов ножно использовать и для выполнения других функций
управления коммутацией, хотя память для данных может быть
полностью занята.
Автоматические узлы коммутации сообщений прошли большую
эволюцию, начиная от узлов с электромеханическими реперфора-
торами (АТОЛ — «Лиман») до современйых узлов, построенных
на базе ЭВМ.
Основные компоненты современного телеграфного УКС
показаны на рис. 9.17. Устройство сопряжения УС ЭВМ с каналами
связи после преобразования уровня и контроля искажений
поступивших дискретных элементов формирует из цих знаки или блоки
сообщений и передает их в ЭВМ для накопления сообщений в
оперативном запоминающем устройстве ОЗУ. Сформированные в
ОЗУ массивы сообщений после анализа и обработки переносятся
на внешние запоминающие устройства ВЗУ большой ёмкости
[накопители на магнитных барабанах (НМБ), дисках (НМД),
лентах (НМЛ)] для постановки в очередь на передачу в канал
связи и для архивации. При передаче сообщения учитываются из
ВЗУ в ОЗУ и через УС последовательно выдаются в каналь*
связи. ,. . . / ... '....
Управление процессом коммутации и контроль за состоянием
УКС и каналов связи осуществляются системой математического
;2в5
~~Penepqwpa- Транс- Печатпанл
mop миттер ycm-oo
cm\
обеспечения СМО и службой функционального контроля и
управления СФКУ. Последняя, имея в своем составе специальные
рабочие места телеграфного обмена и пульт управления, выполняет
полуавтоматическое управление процессом коммутации при
возникновении ситуаций, требующих вмешательства оператора.
Накопители НМЛ служат для
ведения журнала всех
входящих и исходящих
сообщений, архивной записи
полного текста всех
обработанных узлом сообщений и
записи сообщений, требующих
справок из-за искажений
адресной части. Кроме того, в
НМЛ записывают
избыточные сообщения при перепал*
нении НМД в случае
перегрузок в сети, вызванных
]*** o^rSrSrSj резким увеличением числа
I НМЛ цМд\ поступающих сообщений или
^зЗ J повреждениями на сети. В
Рис. 9.17. Структурная схема УКС таких слУчаях срочные
сообщения передаются но
прямым и обходным путям, а несрочные — хранятся в НМЛ до
получения возможности передачи.
Передаваемые через автоматические УКС сообщения должны
иметь нормализованное расположение отдельных элементов в
соответствии с принятым на сети форматом (рис. 9.18). Адресная
часть включает номер сообщения, категорию срочности, адрес
получателя, указатель циркулярной передачи и т. п.
Начало
сообщения
Адресная
часть
Начало
справочной
части
\Ъ
Заголовок
г ' — *
Начало
текста
Текст
Коней,
текста
Рис. 9.18. Формат сообщения в сети ПД-КС
Справочная часть заголовка обычно содержит номер
входящего канала, адрес отправителя, дату и время подачи сообщения,
количество знаков в сообщении. Все элементы сообщения
кодируются одним из кодов, принятых в сети. Длины (число знаков)
всех служебных частей сообщения строго регламентированы.
Длина текста обычно ограничивается 300—500.знаками на сетях ТГ
и 1000—2000 знаками на сетях ПД.
Основными техническими характеристиками УКС являются
пропускная способность и надежность. Пропускная способность
УКС характеризуется числом сообщений, проходящих через си*
206
стему в единицу времени, определяется отношением
производительности (быстродействия) процессора ЭВМ к числу операций,
затрачиваемых на обработку одного сообщения средней длины, и
составляет от одного до десятков сообщений в секунду.
Непрерывное круглосуточное функционирование УКС в
процессе эксплуатации обеспечивается надежностью технических
средств и соответствующей конфигурацией его структуры. Для
повышения надежной работы УКС применяется метод
структурного резервирования с организацией синхронного процесса
обработки информации параллельно в основной и резервных частях
системы. При такой организации, в случае выхода из строя
основной части системы, обработка информации продолжается в
резервной части и проводятся необходимые восстановительные и
ремонтные работы. Наибольшее распространение получили
дублированные системы (рис. 9.19а). Дополнительного повышения
надежности дублированной системы можно достичь путем
блочного резервирования, при котором основная структура УКС
резервируется по частям (рис. 9.196). В крупных узлах
телеграфной сети общего пользования устанавливается УКС, в котором
управляющим комплексом являются ЭВМ единой серии (ЕС
ЭВМ), а все остальные устройства построены на элементной
базе ЕС ЭВМ — ЦКС—Т.
Каналы Каналы
а) ё)
Рис. 9.19. Схема резервирования ЦКС:
а — ветвей; б — блоков
Узлы коммутации пакетов (УКП) строятся на -базе мини-ЭВМ,
Процедуру обработки пакетов информации на УКП можно
представить в виде совокупности нескольких укрупненных этапов:
приема поступающих по входным каналам знаков, накопления
принимаемых знаков и формирования из них пакетов, анализа
заголовков пакетов по адресным и категорийным признакам, выбора
пути последующей передачи пакетов, завершающегося
определением номера исходящего канала и постановкой пакета в очередь
для выбранного канала, и, наконец, выдачи пакетов в выходной
канал. Для нормального функционирования необходимо, чтобы
производительность ЦКП была достаточной для выполнения
этапа приема знаков по входным каналам в реальном масштабе
времени при произвольной загрузке каналов. В противном случае
могут возникнуть потери знаков, что недопустимо. Для
обеспечения этого требования программа приема обычно имеет высший
приоритет по отношению к другим программам. Остальные этапы
реализуются программами более низких приоритетов и
выполняются по мере завершения очередного этапа обработки заголовка
207
пакета с учетом как категории срочности пакета, так и
приоритета соответствующей программы.
Процессы1 в мини-ЭВМ, которые реализуют процедуру
обработки пакетов в УКП, представлены на рис. 9.20. Каждому
входящему в УКП каналу соответствует процесс, обеспечивающий
прием пакета и запись его во входную очередь, расположенную
в той области ОЗУ мини-ЭВМ, которая выделяется для этой це-
IBxod из канала
связи
vnypa Кода
осуществляет
автономное хранение па -
кетоб, используя
•\ пинец очереаи
VZZZZZZZZZZZZ.
У//////////Щ
У////////ШЩ
ХНачало очереди ~L
Список указателей
входной очереди
Т ШнёиТочёрёйй
Нанять для
пакетов
Матрица
маршрутов' "
Начало очереди
Список указателей
выходной очереди.
коней, очереди
Процесс х.
коммутации 0~ерелт\.
начало входной очере-\
duj обращается за све-\
дениями в матрицу мариА
рутов и cmaSum у ка- \
затель до Входную
очередь
/
Аппаратура вывода
использует
для автономногоиз-\
влечения пакетов
1 Выход Бшнал
связи *
Рис. 9.20. Процедура обработки пакетов в УКП
ч'"'-1 Процесс является; реализацией некоторой части программы, имеющей са
мостоятелбный Характер.
208
ли процессом распределения памяти. Указатель адреса,
определяющий место хранения соответствующего пакета, помещается в
очередь указателей адресов. Процесс коммутации выбирает по
очереди указатели входной очереди (с учетом приоритетов) и
определяет местоположение адреса очередного пакета. После этого
процесс коммутации обращается к матрице маршрутов, которая
содержит перечень исходящих каналов, расположенных в
порядке их предпочтительного использования для каждого из адресов,
и помещает указатели пакетов в соответствующие выходные
очереди исходящих каналов. Каждому исходящему каналу
соответствует процесс, который поочередно выбирает из выходной
очереди указатели пакетов и размещает пакеты в ОЗУ перед
отправкой их к следующему узлу «или абоненту-'получателю.
ГЛАВА 10
Методы повышения надежности систем и сетей ПДИ
10.1. НАДЕЖНОСТЬ СПДИ
Одним из основных требований, предъявляемых к системам
ПДИ (СПДИ), является требование высокой надежности.
Система может не соответствовать заданным нормам по надежности в
следующих случаях: требуемая верность передачи обеспечивается,
но время передачи заданного объема информации превышает
нормативное; время передачи в пределах нормы, но верность
передачи ниже требуемой; верность передачи ниже требуемой и
время передачи больше нормативного. В конечном счете требуемая
верность может быть обеспечена рассмотренными в гл. 6 и 7
способами, однако это влечет за собой увеличение времени передачи
сообщения. Поэтому снижение надежности системы ПДИ
обусловливается превышением допустимого времени передачи.
Отметим, однако, что задержка в передаче сообщения ме всегда
вызывает отказ СПДИ. Дело в том, что обычно время передачи
сообщения с целью создания -некоторого резерва выбирают
несколько большим, чем требуется для его передачи со средней
скоростью. Поэтому к отказам будут приводить не все задержки, а
только те, которые превосходят этот резерв времени, называемый
критерием отказа. Его величина определяется в значительной
мере характером передаваемой информации. При передаче
медленно стареющей информации критерий отказа может составлять
десятки минут и даже часы, а при передаче быстро стареющей
информации секунды >и даже доли секунды.
Отказы делятся на постепенные и внезапные. Поскольку
постепенные отказы в значительной мере выявляются при
испытаниях элементов и устройств в процессе производства и при
техническом обслуживании в процессе эксплуатации, то
преобладающее влияние на надежность тракта ПДИ оказывают внезапные
8—101 209
отказы. Системы передачи данных относятся к классу
восстанавливаемых систем. Длительность устойчивого отказа обусловлена
временем его устранения, которое зависит от построения СПДИ и
АПДИ, системы контроля, квалификации обслуживающего
персонала, наличия резервного и запасного оборудования, системы
ремонта. Система ПДИ состоит из двух основных частей: каналов
связи и АПДИ. Поэтому надежность СПДИ определяется
надежностью^ каналов связи и АПДИ. Вопросы надежности АПДИ,
являющейся разновидностью радиоэлектронной аппаратуры,
рассматриваются в курсе «Основы дискретной автоматики».
Надежность каналов связи имеет свою специфику, связанную с тем, что
каналы организуются с помощью разных систем передачи, имеют
протяженность от нескольких до многих тысяч километров, в них
входят как линейные сооружения, так и станционные устройства.
Отказы каналов связи в значительной мере определяются не
только надежностью линейных сооружений и станционной
аппаратуры, ,но и системой организации технической эксплуатации и
квалификацией техперсонала. Анализ статистических данных
показал, что отказы в каналах целесообразно разделить на три
группы: длительные (от нескольких десятков минут до нескольких
часов), средней длительности (от 3 до 30 мин), кратковременные
(менее 3 мин). Длительные отказы возникают весьма редко в
результате повреждения кабеля и общих станционных устройств.
Отказы средней длительности, как правило, имеют место при
повреждении отдельных узлов станционного оборудования, а
также в результате действий техперсонала. Наиболее
многочисленными являются кратковременные отказы. В большинстве случаев
;(80%) они возникают в результате повреждений аппаратуры
^плохие контакты и др.) или действий обслуживающего
персонала, 20% составляют кратковременные отказы, вызванные
импульсными помехами. Как правило, кратковременные отказы —
самовосстанавливающиеся.
10.2. РАСЧЕТ ОСНОВНЫХ ХАРАКТЕРИСТИК
НАДЕЖНОСТИ СПДИ
В качестве основных показателей надежности СПДИ обычно
выбираются коэффициент готовности Кг и наработка на отказ Т
(см. гл. 1). При расчетах надежности СПДИ различной
структуры представляют в виде последовательно-параллельно соединенных
элементов (рис. 10.1). Если функции распределения времени
безотказной работы и функции распределения времени
восстановления элементов показательны, то расчет упрощается путем замены
последовательно соединенных элементов одним эквивалентным
элементом, показатели надежности которого рассчитываются
следующим образом:
*;-.fl*r«; r=i/jM/r,, (10Л):
210
рде кн _ коэффициент готовности i-ro элемента; Г* — наработка
на отказ 1-го элемента; п — число, последовательно соединенных
элементов. При тех же предположениях совокупность т
параллельных элементов может быть заменена одним эквивалентным с
показателями надежности:
т к"
Й-1-П('-*«); г=— ^ (Ю.2);
Е^п(1-«,>
/=i s=i
где Krj — коэффициент готовности /-го элемента; К™ —
коэффициент готовности s-ro элемента [s*£'j\\ Г,-— наработка на отказ
кжт—-о-1
, „_, * fDDO -СИ / г *
D--OOfOOO О+СЮ--О
юо-о—о4
1 I
IsqqD ■СР
Рис. ЮЛ. Система с последовательно-параллельным
соединением элементов
jjro элемента; Xj — время восстановления /-го элемента. Этими
элементами являются отдельные устройства АПДИ и отдельные
виды отказов каналов связи.
10.3. МЕТОДЫ ПОВЫШЕНИЯ НАДЕЖНОСТИ СПДИ
Повышение надежности СПДИ обычно связано с введением
избыточности, улучшением качества изделий (и системы
технического обслуживания. Поэтому при решении задач повышения
надежности АПД необходимо учитывать и экономические факторы.
Наибольшая экономическая эффективность АПД достигается при
комплексном решении задач повышения надежности ,на всех
этапах разработки и производства АПД. Наименьшая суммарная
стоимость АПД с определенным уровнем надежности достигается
в том случае, когда мероприятия по ее обеспечению
закладываются на самых ранних стадиях проектирования и уточняются на
всем протяжении разработки и изготовления АПД. В процессе
технической эксплуатации также могут быть проведены
существенные мероприятия по повышению надежности. Вопросы
повышения надежности каналов связи изучаются в курсах «Линейно-
кабельные сооружения связи» и «Многоканальная связь».
В некоммутируемых сетях надежность ОПДИ повышают
резервированием, т. е. введением дополнительных элементов (сверх
*8 211
необходимых для ее работы), способных взять на себя функции
основных элементов в случае их отказа. В качестве
резервируемого элемента может быть выбран как отдельный узел, блок или
АПДИ в целом, так и переприемный участок канала связи или
весь канал- и, наконец, вся СПДИ в целом. Обычно применяют
сочетание резервирования отдельных участков и СПДИ в целом.
Резервные элементы могут быть «подключены к основным в
течение всего времени и работать в одинаковом с ними режиме или
подключаться только при отказе основных элементов.
Резервирование первого вида называется постоянным, второго —
резервированием замещением. Так, если для повышения надежности
электронного УК применить параллельную работу двух ЭВМ, каждая
из которых имеет Т= 350 ч, то при круглосуточном обслуживании
(г =1,5 ч) можно обеспечить Г2 = 4,6 года, а при .применении трех
параллельно работающих ЭВМ и односменном обслуживании
(т=18ч) Гз=5,8 лет.
Обнаружение отказов и определение отказавшего устройства
производятся с помощью системы функционального контроля ФК.
Чем быстрее устанавливается факт отказа и чем точнее
определяется отказавшее звено, тем меньше т и, следовательно, тем
выше /Сг. Точность поиска неисправных устройств определяется в
каждой конкретной системе исходя из технико-экономических
соображений. Действительно, при повышении точности определения
места неисправности ускоряется процесс восстановления
комплекса, но усложняется, удорожается и становится менее надежной
система ФК. Поэтому оптимальным обычно оказывается
отыскание с помощью ФК неисправных функционально законченных
устройств и поиск неисправных типовых элементов замены (ТЭЗ)
с помощью диагностического контроля или методом пробных
замен с использованием запасных ТЭЗ. Примерно та'к же обстоит
дело с отысканием неисправностей каналов связи. Обычно
целесообразно с помощью системы ФК отыскивать неисправный
канал в целом, а локализацию отказавшего переприемного или
усилительного участка и отыскание мест повреждения внутри
усилительного участка производить диагностическими .измерениями.
Помимо функционального контроля техническое
обслуживание на этапе эксплуатации СПДИ предусматривает проведение
регламентных работ, текущего, среднего и капитального ремонта.
К регламентным работам относятся плановые мероприятия по
выявлению и устранению причин, вызывающих отказы
аппаратуры в течение последующего периода эксплуатации. Ремонтные
работы заключаются в проведении текущего, среднего и
капитального ремонта. Текущий ремонт заключается в восстановлении
отказавшей аппаратуры на месте ее эксплуатации, а средний —
в восстановлении неисправного ТЭЗ или блока. Средний ремонт
обычно производится в специальной мастерской или на заводе.
При капитальном ремонте выполняются сложные работы. Он
производится обычно на заводе-изготовителе аппаратуры или
специальном ремонтном заводе. Техническая эксплуатация СПДИ
212
производится в соответствии с эксплуатационной документацией,
устанавливающей порядок технического обслуживания, объем и
периодичность регламентных работ, порядок текущего ремонта,
сдачи элементов аппаратуры в ремонт, порядок пополнения
запасного имущества и приспособлений для ремонта (ЗИП), а
также перечень средств (инструменты <и контрольно-измерительные
приборы КИП), которыми необходимо пользоваться для
технического обслуживания и текущего ремонта.
При регламентных работах заменяются отдельные ТЭЗ или
блоки. Замена неисправных элементов или элементов с
ухудшенными параметрами на исправные при регламентных работах
увеличивает срок наработки на отказ. Однако простой аппаратуры
в этот период и затраты средств на замену элементов приводят к
снижению коэффициента готовности. Поэтому вопрос о
периодичности и объеме регламентных работ решается исходя из условия
минимизации суммарных потерь от собственно регламентных
работ и потерь в результате ухудшения эффективности
функционирования АПДИ и каналов связи, а также затрат на последующий
аварийный ремонт. Ремонт производится сразу же после
обнаружения отказа заменой поврежденных ТЭЗ и блоков
соответствующими элементами из ЗИП, который входит в состав комплекта
АПД. По мере расходования ЗИП в процессе эксплуатации
комплект АПД восполняется. Поврежденные ТЭЗ и блоки отправляют
в ремонтные мастерские и на заводы, отремонтированными
элементами пополняется ЗИП. Система ремонта строится так, чтобы
расходы на эксплуатационное обслуживание были
минимальными. Для этого должны быть соответствующим образом выбраны
объем ЗИП и время ремонта, поскольку большой объем ЗИП
обеспечивает быстрое восстановление при отказах, но требует
больших затрах и площадей для хранения; при -слишком малом
объеме ЗИП и несвоевременном его восполнении время
восстановления может увеличиваться из-за отсутствия необходимых
резервных элементов.
10.4. ИЗМЕРЕНИЯ В СПДИ
Наряду с функциональным контролем для предупреждения и
сокращения времени отказов СПДИ производятся электрические
измерения различных параметров. После монтажа
осуществляется настройка СПДИ, которая состоит из измерений и коррекции
отдельных характеристик канала передачи данных, дискретного
канала и канала связи. После настройки производят
паспортизацию системы ПДИ и ее участков. В процессе эксплуатации
ведется постоянный или периодический контроль соответствия
параметров и характеристик аппаратуры и каналов заданным
нормированным значениям. В тех случаях, когда параметры
аппаратуры и каналов выходят за пределы нормы и связь становится
невозможной (отказ), проводят углубленные измерения
характеристик. Для снижения простоев СПДИ проводятся с различной пе-
213
риодичностью и объемом профилактические измерения аппарату*
ры и каналов связи.
В соответствии с рекомендациями МККТТ основными
параметрами, подлежащими измерениям в дискретных каналах связи,
являются коэффициент ошибок по единичным элементам и краевые
искажения. Для измерения коэффициента ошибок по единичным
элементам к дискретному каналу 'подключают датчик теста ДТ?
и устройство выявления ошибок в дискретном канале УВО ДК
(рис. 10.2). Скорости и алгоритмы работы определяются структур
Г"
Датчик
испытательны*
сигналов
Опорный
генератор]
Дискретный
канал
Счетчик
ошибок
Схема,
сравне -
Датчик
испыта -
тельных
сигналов
Схема
фазиро -
гН дани я
импульсов
Опорный
генератор\
L_^L_l
\jbom_
Схема
(разиро-
вания
циклов
Рис. 10.2. Схема измерений ошибок
рой УПС. В УВО ДК принятый тест сравнивается с аналогичным
эталонным тестом, вырабатываемым в приборе. Разумеется, что
оба теста предварительно должны быть сфазированы. Число
несовпадающих элементов 'при сравнении принятого и эталонного
тестов фиксируется счетчиком.
Краевые искажения в дискретном канале измеряются
прибором ИКИ (рис. Ш.З) как в рабочем режиме (по каналу
передаются данные), так и при проведе*
нии измерений в канале. В пос^
леднем случае к дискретному
каналу подключается датчик теста
ДТ. Измерения сводятся к
определению смещений ЗМ относи^
тельно их идеального положения.
Рис. 10.3. Схема измерений краевых Для этого ИКИ фазируют по от-
искажений ношению ДТ, что позволяет ус«
реднением интервалов между при-*
нимаемыми ЗМ выделить идеальные ЗМ. Для измерения
искажений применяются следующие испытательные тесты:
комбинацию 1 : 1 («точки») для выделения регулярной
составляющей;
Дйнныё~ j Дискретный канал
" I
Канал
связи
УПС
I Данные
I (тест)
ДТ
ИКИ
214,
комбинацию 1:5 и 5:1 для оценки характеристических
искажений;
квазислучайную последовательность для оценки общих
искажений.
В канале связи измеряют уровни передачи и приема,
остаточное затухание, фазочастотные искажения, сдвиг частот, уровень
среднего ,невзвешенного шума, коэффициент нелинейных
искажений, кратковременные перерывы и импульсные помехи. Порядок
измерений большинства перечисленных параметров изучают в
курсах «Измерения в технике связи» и «Основы многоканальной
связи и РРЛ». Наиболее специфичными параметрами, в значительной
мере характеризующими качество каналов связи при передаче
-дискретных сообщений, являются кратковременные перерывы и
•импульсные помехи. Для измерения кратковременных перерывов
«и импульсных помех используются приборы АИПП (анализатор
♦импульсных помех и перерывов) и ПОУИ (прибор оценки уровня
передачи и импульсных помех).
10.5. ПОВЫШЕНИЕ НАДЕЖНОСТИ СЕТЕЙ ПДИ
Надежность сети ПДИ характеризуется ее способностью
обеспечить своевременную и с требуемым качеством (верностью)
доставку сообщений заданного объема по адресу. Как и в случае
ЧЭПДИ по некоммутируемым каналам, надежность
коммутируемых сетей ПДИ определяется непревышением установленного
времени доставки сообщений. Надежность сети ПДИ зависит не
только от надежности ее узлов и ветвей, но и в значительной
степени определяется конфигурацией сети, методом коммутации и
принятой на сети системой управления. Надежность ветвей и
узлов сети определяется в соответствии с §10.1—10.3. Аналогичны
описанным в § 10.4 и методы повышения их надежности. Однако
коммутируемые сети ПДИ имеют дополнительные резервы
повышения надежности, вытекающие из возможности направления
информации по обходным путям при перегрузке или отказах
основных путей.
В коммутируемых сетях при возрастании нагрузки могут
возникнуть задержки в передаче сообщений. Поэтому важным
средством повышения надежности коммутируемой сети ПДИ является
выбор оптимального способа коммутации и системы управления
распределением потоков нагрузки и ее поступлением на входы сети.
■Повышению надежности СПДИ способствует также разделение
передаваемой информации на категории по важности, что
.позволяет системе управления в критических ситуациях обеспечивать
первоочередную передачу наиболее важной информации. Наличие
обходных направлений на сети СПДИ в значительной степени
определяется ее конфигурацией. Однако большое число обходных
направлений приводит к структурной избыточности и,
следовательно, удорожанию сети. Наконец, важным фактором
повышения надежности сети является наличие ремонтно-восстановитель-
215
ной службы. Сложность и разнообразие факторов, определяющих
надежность коммутируемой сети, привели к отсутствию до нас*
тоящего времени удобных методов расчета их надежности.
ГЛАВА 11
Основы факсимильной связи
+
11.1. ФАКСИМИЛЬНАЯ СВЯЗЬ КАК СРЕДСТВО ПЕРЕДАЧИ
НЕПОДВИЖНЫХ ИЗОБРАЖЕНИЙ
Передача неподвижных изображений по каналам
электросвязи называется факсимильной связью. В настоящее время эта
область связи претерпевает бурное развитие в связи с резко
возросшими потребностями в быстрой и надежной передаче самой
различной документации как общего, так и специального назначения.
Несколько лет назад факсимильная техника стояла в стороне
от цифровых систем передачи информации, используя в основном
традиционные аналоговые методы передачи. В настоящее время
ускоренными темпами развиваются цифровые факсимильные
системы связи, что позволяет включать их в общие сети передачи
данных. При этом появляется возможность использования
современных методов и устройств цифровой техники передачи дискрет*
ной информации. В таких системах факсимильные аппараты ста-»
новятся одними из оконечных устройств универсальных систем
связи.
Принцип осуществления факсимильной связи заключается в
следующем: передаваемое изображение разбивается на
элементарные площадки. Усредненные яркости этих площадок при
отражении (либо пропускании) падающего на них светового потока
преобразуются в электрические импульсы, которые в
определенной последовательности передаются ш каналу связи. На приеме
эта импульсы в той же последовательности преобразуются в
элементы изображения на каком-нибудь носителе записи. В
результате получают копию изображения (факсимиле).
Передаваемые изображения могут быть самыми
разнообразными. Подавляющее большинство изображений является двухграда-
ционным, т. е. содержит всего два уровня яркости (черное и
белое). К таким изображениям относятся чертежи, графики,
метеокарты, газеты и другая документация. Кроме того, возможна
передача и полутоновых изображений (фотографий), а также цвет-
<ных изображений. В этом случае вместо термина «факсимильная
связь» используют термин «фототелеграфная передача»,
поскольку носителем записи чаще всего выступает фотопленка. Система
связи в обоих случаях одинакова и может быть представлена
структурной схемой рис. 11.1.
Передаваемое изображение (оригинал) можно рассматривать
как совокупность большого числа элементов, способных в раз-
216
ной степени отражать падающий на них свет. При представлении
изображения в виде этих элементов (площадок) учитываются
свойства человеческого зрения. Человеческий глаз способен
различать на единице площади только конечное число площадок с
различной яркостью. При увеличении числа таких участков они
воспринимаются как единое изображение.
Рис. 11.1. Структурная схема
факсимильной связи:
I — оригинал; 2 — анализирующее
устройство; 3 — развертывающее устройство; 4 —
привод; 5 — светооптическая система; 6 —
фотоэлектрический преобразователь; 7 —
электрический узел; 8 — УПС; 9 — канал
связи; 10 — УПС приема; 11 —
синтезирующее устройство; 12— записывающее
устройство; 13 — копия (факсимиле)
Образование элементарных площадок — растр-элементов —
происходит за счет перемещения, создаваемого светооптическои
системой светового луча, по, поверхности передаваемого
изображения. Отраженный световой поток попадает на
фотоэлектрический преобразователь. Процесс перемещения луча называется
разверткой, в результате действия которой изображение
разбивается на строки. В простейшем случае развертка может
осуществляться лучом, скользящим по поверхности изображения,
перемещающегося по плоскости (как показано на рис. 11.1). Узлы
передающих аппаратов, обеспечивающие анализ изображения,
объединяются в группу анализирующих устройств.
В приемных аппаратах осуществляется обратное
преобразование переданных электрических сигналов в той же
последовательности, что и на передаче. Соответствующие световые или
электрические сигналы вызывают окрашивание элементарных площадок
на поверхности носителя записи, т. е. осуществляется запись
изображения, являющегося копией оригинала. Совокупность
устройств, осуществляющих эти преобразования, объединяется в
группу синтезирующих устройств.
11.2. ПРЕИМУЩЕСТВА И НЕДОСТАТКИ
ФАКСИМИЛЬНЫХ СПОСОБОВ ПЕРЕДАЧИ
Факсимильный способ передачи информации является
универсальным: он позволяет передать практически любые сведения,
содержащиеся на бланке. Это выгодно отличает его от кодовых
методов передачи, где характер сообщения ограничен выбранным
кодом.
Огромным достоинством факсимильных методов является их
документальность, что, вообще говоря, не может обеспечить ни
один другой вид электрической связи. При факсимильных
методах передачи полностью исключаются ошибки по вине оператора,
возможна полная автоматизация процесса передачи, не нужно
передавать каждый знак сообщения в отдельности. И, наконец,
одним из достоинств факсимильных методов является большая по-
217
I 2 | 7 \9\ 7 I //
мелоустойчивость, которую не может обеспечить никакой другой
вид связи (за исключением телевидения). Поясним это подробнее-
Рассмотрим изображение буквы П размером 2X1 мм2 при
передаче газетного текста. Такое изображение в соответствии с
параметрами факсимильной аппаратуры передачи газет будет пред-,
ставлено 400 элементарными площадками, часть из которых
соответствует черному полю, а часть — белому. Условимся, что при
отражении светового луча от черного элемента соответствующий:
электрический сигнал будет равен нулю, а при отражении от
белого—единице. Таким образом, одну букву будут представлять
400 единичных элементов — единиц и нулей. При телеграфной?
передаче эта буква кодируется пятиэлементным двоичным кодом..
Поэтому для ее передачи требуется пять единичных элементов.
Если считать, что для передачи одного единичного элемента
требуется мощность Р0, то общая мощность, расходуемая при
факсимильном способе передачи буквы, будет составлять
величину, в 80 раз большую. Последнее получается за счет большой-
информационной избыточности способа передачи изображения,
который и обеспечивает высокую помехоустойчивость. Кроме
избыточности, получающейся за счет самого способа передачи,
изображения обладают еще одним важным свойством,
позволяющим выделять их на фоне шума. Точки изображения (рис. 11,2а>
а) Ю
Рис. 11.2. Факсимильные изображения:
а — буквы; б — помехи
образуют связанные структуры (контура). Изображение помехи
(рис. 1 L.26) такими свойствами не обладает. Именно за счет этих
связей человек и узнает данное изображение. Чтобы разрушить
эти связи, помеха должна обладать очень большой мощностью.
Поэтому изображение, принятое даже по плохому каналу связи,,
может быть восстановлено. На пис. 11.3 показано изображение
буквы, искаженное шумом, содержащее более 50% ошибок.
218
• ••• • •
«Расплатой» за высокую помехоустойчивость факсимильной
связи является низкая эффективность использования отведенного
для передачи канала связи. Другими
словами, факсимильные системы связи
обладают самой низкой пропускной
способностью по сравнению с другими видами
связи. Объясняется это теми же
свойствами — избыточностью изображений и
способом их передачи.
Известно, что полезная информация
большинства двухградационных
изображений занимает лишь малую часть пере-
. даваемого бланка. Так, в случае
текстовых изображений белое поле, не
несущее полезной информации, занимает по
площади около 90%. Если оценить
вероятности появления черных и белых
площадок, то оказывается, что они не равны
друг другу. Например, в газетном
изображении вероятность появления черного
элемента равна 0,2, а вероятность появления белого —0,8.
Пользуясь формулой Шеннона, найдем, что среднее количество
информации, приходящееся на один элемент изображения, равно
• ••
»• •
• • •
• • •
• • •
• ••
• • •
• • •
• • •
» • • •
• • • •
• • •
• • •
Рис. 11.3. Зашумленное
изображение буквы
Л* = — 2 Pi lo& pi « 0,75 бит.
В действительности это количество еще меньше, так как
появление черных и белых элементов на изображении нельзя считать
независимым событием. С учетом этой зависимости можно полу-
•чить, что /ср=0,25 бит. Поскольку пропускная способность С=
-//то (бит/с), то пропускная способность при факсимильном
способе передачи будет, по крайней мере, в 4 раза меньше
пропускной способности при передаче такого же объема информации
телеграфным способом за счет малого количества информации
содержащегося в единичных элементах изображения. Более
детальный анализ показывает, что в действительности пропускная
способность факсимильных систем будет еще ниже.
В рассмотренном выше примере передачи буквы проигрыш
можно оценить отношением числа передаваемых единичных
элементов при двух способах передачи. Очевидно, что передача
изображения буквы по сравнению с кодовым способом будет
происходить в 80 раз дольше, поэтому для сохранения того же времени
передачи по^требуется расширить полосу частот канала в 80 раз!
В низкой эффективности использования канала связи и
заключается основной недостаток факсимильных систем. Для его
устранения в современных системах используются цифровые
способы представления и кодирования сигналов, позволяющие
повысить пропускную способность факсимильных систем.
219
11.3. СВОЙСТВА И ХАРАКТЕРИСТИКИ
ФАКСИМИЛЬНЫХ ВИДЕОСИГНАЛОВ
Сигнал, получаемый на выходе фотоэлектрического
преобразователя, называется видеосигналом. Характер и свойства
видеосигналов определяются свойствами исходного изображения и
параметрами анализирующих устройств факсимильного аппарата.
Чтобы выяснить, как влияют параметры факсимильного
аппарата на характеристики видеосигнала, предположим сначала, что
развертка изображения осуществляется бесконечно тонким лучом,
т. «е. световой точкой. Рассмотрим фрагмент изображения,
состоящего из черных и белых полос различной ширины (рис. 11.4а).
При равномерном перемещении луча (перпендикулярно этим
линиям отраженный световой .поток Ф будет иметь вид, показанный
на р:ис. 11.46. Этот поток преобразуется в фотоэлектрическом
•преобразователе <в сигнал, форма которою полностью совпадает
с формой отраженного светового потока. В данном случае
исходное изображение содержит всего два уровня яркости и поэтому
фототок имеет импульсный характер.
II
\Cmpom Шдеоспектр
(О
kl
б)
д) *
Рис. 11.4. К принципу
образования видеосигнала
Рис. 11.5. Качественный вид спектра
' видеосигнала
Примем для простоты, что при передаче черного поля сигнал
равен нулю, а при прохождении -белого — единице. Будем
интересоваться шириной спектра электрического сигнала. Очевидно,
максимальная ширина спектра сигнала будет определяться
минимально возможной длительностью самого короткого импульса в
представленной реализации видеосигнала. Из рисунка видно, что
самая маленькая длительность импульса определяется шириной
самого тонкого штриха на изображении. Таким образом, приходим
. к выводу, что при сделанных выше (предположениях ширина
спектра полностью определяется характером изображения,
220
Действительно, если изображение представляет собой белое
поле, /причем размеры поля не ограничены, то фототок является
просто постоянным током (рис. 11.4в). Если изображение состоит
из чередующихся тонких белых и черных штрихов, то
максимальная частота фототока будет определяться минимальной толщиной
штриха, который необходимо передать. Таким образом, спектр
видеосигнала может начинаться от нуля и простираться до высоких
частот. При этом верхняя граничная частота будет определяться
длительностью самого короткого импульса видеосигнала. Однако
реальный световой луч имеет конечные размеры и ие является
идеальной световой точкой. Эти размеры (а также скорость
перемещения луча) и определяют фактическую ширину спектра
сигнала.
Пусть сечение луча (апертура) имеет форму прямоугольника
шириной d. В этом случае яркость отдельных точек изображения
будет заменяться интегральной яркостью площади изображения,
покрытого пятном. Если расстояние между двумя штрихами или
их толщина меньше величины d, то различить их невозможно.
Величину, обратную dy называют разрешающей способностью.
Она «показывает, сколько линий может быть разрешено
(отличимо) сканирующим лучом на 1 мм длины. Таким образом,
минимальная ширина штриха, которая может быть «прочитана» лучом,
не может быть меньше d. Следовательно, и длительность самого
короткого импульса определяется этой величиной.
Выбор разрешающей способности полностью определяется
требованиями, предъявляемыми к качеству изображений и их
назначению. Так, для передачи обычной документации достаточно иметь
четкость 3—4лин/мм, для передачи газет—16; 24; 32лин/мм.
Существуют факсимильные системы с более высокой
разрешающей способностью — 400 лин/мм (например, для факсимильной
передачи микрофильмов, данных микроскопии и др.).
Предположим, что луч равномерно перемещается по
изображению со скоростью v см/с. Пусть .изображение состоит из черно-
белых штрихов шириной d. Тогда максимальная частота (в
герцах)
Fmax = v/2d. (11.1)
Поскольку световое пятно имеет конечные размеры, то
фронты видеосигналов будут «размыты» за счет того, что при
попадании светового пятна на границу черно-белого перехода
фотоэлемент воспроизведет сигнал, амплитуда которого пропорциональна
суммарной интенсивности отраженного светового потока от
границы черно-белого перехода. Поэтому форма электрического
сигнала будет близка к трапецеидальной. Происходит расширение
длительности импульса, которое приводит к апертурным
искажениям, т. е. размытию (расфокусировке) границ деталей
воспроизводимого изображения (копии). Для борьба с этим явлением в
современных факсимильных аппаратах применяют специальные
электронные устройства, формирующие из видеосигнала импуль-
221
еы, близкие к прямоугольным. Примерный вид спектра
факсимильного сигнала показан ,на рис. 1L5. Наличие очень низких ча*
стот (в том числе и постоянной составляющей) — специфическая
особенность спектра видеосигнала, затрудняющая его передачу
по каналам связи.
Продолжим рассмотрение (параметров факсимильных
аппаратов. Размер d или диаметр (если пятно имеет круглую форму)
тесно связан с шагом развертки б. Шагом развертки (подачей)'
называется расстояние между осями соседних двух строк
развертки. Выбор шага развертки также зависит от характера
изображения. Чем меньше размер деталей в передаваемом
изображении, тем меньше должен быть шаг развертки. Обычно шаг
развертки берется равным d или чуть большим. Если d значительно
меньше б, то между строками будут оставаться неосвещенные
полосы, вследствие чего на копии станет заметна строчная
структура изображения.
Помимо разрешающей способности определяющим параметром
является 1/6 — плотность развертки или разрешающая
способность по кадру.
Длина строки определяется расстоянием между краями
изображения и берется всегда несколько больше поперечного размера
бланка, подлежащего передаче. Скорость развертки определяется
числом строк развертки, передаваемых в минуту.
Важным параметром факсимильного аппарата является
индекс взаимодействия или модуль взаимодействия, который
нормирует отношение длины строки развертки к шагу развертки,
умноженному на я, т. е.
M = L/nb. (11.2)
При барабанной развертке длина строки L соответствует длине
окружности барабана, на котором закрепляется оригинал.
Поэтому
M = nD/nb = D/&. (11.3)
При совместной работе факсимильных аппаратов с равными
индексами взаимодействия с разными длинами строк .имеет место
увеличение или уменьшение изображения на приеме с
сохранением пропорциональности геометрических размеров по длине и
ширине оригинала. При неравенстве модулей взаимодействия
нарушаются геометрические размеры принятой копии. При Л1Пер>^пр
копия будет удлинена в направлении кадровой развертки, а при
Мцер<Л1пр изображение будет сжато в том же направлении.
МККТТ рекомендует для аппаратуры передачи полутоновых
изображений Л1 = 352, для штриховых изображений Л1 = 264, для
аппаратуры передачи гидрометеокарт Л1 = 576. Аппаратура
передачи газет имеет индексы взаимодействия Af = 3G60; 4600; 3020; 4800.
При определении скорости передачи можно пользоваться
параметром «скорость развертки» — число строк в минуту. Однако в
этом случае приходится оговаривать либо длину строки, либо мо-
222
дуль взаимодействия. Более универсальной характеристикой
скорости может ^служить величина площади бланка, передаваемого
за 1 мин:
B = Q/T, (11.4);
где Q — площадь бланка, дм2; Т — время передачи бланка, мин.
11.4. РАЗВЕРТЫВАЮЩИЕ УСТРОЙСТВА
В настоящее время используются развертки двух типов:
барабанная и плоскостная. При барабанном способе развертки
разложение изображения на элементарные площадки осуществляется
за счет вращательного движения барабана, на котором закреплен
оригинал, и поступательного движения светового
развертывающего элемента, образуемого светооптической системой. Возможен
вариант, когда световой луч неподвижен, а барабан осу*
ществляет вращательное и одновременно поступательное
движения. Очевидно, строчная развертка осуществляется при
вращательном движении барабана, а кадровая — при поступательном
движении либо самого барабана, либо светового пятна
относительно барабана. Линия развертки (получается винтообразной
(как стружка на токарном станке). Основными достоинствами
развертки барабанного типа являются относительная простота
конструктивного выполнения и возможность получения -больших
скоростей вращения (а значит, и скорости передачи бланка). К
недостаткам развертки следует отнести ограничение формата
бланка по длине и ширине, сложность закрепления бланка на
барабане, его деформацию дри больших скоростях вращения
барабана, невозможность создания автоматической системы передачи.
Разновидностью барабанного способа развертки является
дуговая развертка, принятая в отечественной аппаратуре передачи
газет «Газета-2». Пр,и этом способе оригинал на передаче или
фотопленка на приеме размещаются внутри цилиндрической
камеры и разряженным воздухом прижимаются к стенкам камеры.
Внутри камеры с помощью вращающейся оптической системы
развертывающий элемент перемещается по окружности, формируя
строчную развертку. Кадровая развертка образуется за счет
перемещения самой камеры вместе с оригиналом ил.и носителем
записи. Дуговая развертка позволяет производить запись на
рулонной фотопленке (рис. 11.6).
Более широкое применение получили плоскостные системы.
В таких системах строчная развертка обычно осуществляется с
помощью качающегося и вспомогательного сферического зеркал,
а развертка по кадру осуществляется перемещением оригинала
■с помощью конвейера в направлении, перпендикулярном строкам
(рис. 1 L.7). В плоскостных системах световое пятно, создаваемое
оптической системой, проецируется на поверхность зеркала,
которое отклоняется относительно своей оси с помощью кулачкового
механизма — эксцентрика. При отклонении зеркала световое лят-
223
но перемещается от одного края изображения до другого,
образовывая строку развертки. Равномерная скорость пятна
обеспечивается заданным /профилем кулачка. Время обратного хода луча
используется для передачи вспомогательных сигналов. За время
передачи каждой строки оригинал перемещался на расстояние,
равное шагу кадровой развертки.
Рис. 11.6. Дуговая
развертка:
/ — экспонированная пленка;
2 — неподвижная оптическая
гистема; 3 — эмульсионная
зторона; 4— рулон
фотопленки; 5 —оптическая головка;
6 — объектив; 7 — призма
Достоинствами плоскостной развертки являются:
неограниченная длина бланка, что позволяет автоматизировать процесс
передачи сообщений; простота закрепления оригинала, который Hfc
деформируется в процессе передачи. К недостаткам плоскостной
развертки следует отнести: сложность обеспечения требуемой
линейности развертки вдоль строки и ограничение скорости
развертки по строке за счет возникновения сильного механического
удара кулачкового механизма в момент перехода с прямого хода
луча на обратный.
Рис. 11.7.
Плоскостная развертка с
помощью качающегося
зеркала:
а — принцип
развертки; б — принцип
образования строки
развертки;
/ — осветитель; 2 —
качающееся зеркало; 3 — ось
зеркала; 4 — сферическое
зеркало; 5 — оригинал
изображения; 6 —
протягивающее устройство;
7 — фотоэлектрический
преобразователь
Для получения больших скоростей вместо качающегося
зеркала используют вращающуюся многогранную призму. В некоторых
факсимильных аппаратах плоскостная развертка осуществляется
с помощью электронно-лучевой трубки. Развертывающий элемент
образуется трубкой и с помощью оптической системы
проецируется на оригинал. В последние годы все чаще стали использовать
немеханические способы строчной развертки, при которых строка
изображения образуется с помощью ряда миниатюрных
фотодиодов, коммутируемых электронным образом.
224
Выразим верхнюю граничную частоту спектра сигнала через
параметры развертывающих устройств. Выше при выводе
формулы (11.1) не учитывались размеры бланка, определяемые типом
факсимильного аппарата. Рассмотрим случай барабанной
развертки. Известно, что Fmax определяется минимальными
штрихами на изображении, равными шагу развертки. Один период
колебания фототока образуется двумя полосами (черной и белой). По
окружности барабана диаметром D может уложиться nD/2d ло-
лос. Это максимальное количество полос, которое передается за
один оборот барабана. Бели учесть, что v = N/60t где N — число
оборотов барабана в минуту, то
Fmax = nDN/2d60 = nDN/l20d. (11.5)
Для плоскостной развертки
Fmax = LN/l20d, (11.6)
где L — длина строки, а N — число строк <в минуту. Зная
параметры развертывающих устройств (скорость развертки, длину
строки и шаг кадровой подачи), легко определить время
передачи бланка изображения. Если длина барабана равна /, то общее
число строк есть //б. Для передачи этого количества строк при
скорости развертки N оборотов в минуту необходимо время (в
минутах)
T = l/W. (11.7)
В аппаратах с плоскостной разверткой / — длина передаваемого
бланка, а ./V — число строк, передаваемых в минуту. С учетом
(11.4) из (11.7) получим, 4to/ = 7W, а из (11.6) — L=l20dFmax/N.
Тогда
В = Q/T = 1ЦТ =120 б dFmax. (11.8)
11.5. СВЕТООПТИЧЕСКИЕ СИСТЕМЫ ФАКСИМИЛЬНЫХ
АППАРАТОВ
Задачей светооптической системы факсимильного
передающего аппарата является формирование развертывающего элемента
(растр-элемента). Он формируется различными оптическими
устройствами: линзами, объективами, зеркалами, диафрагмами и др.
Как правило, оветооптические системы факсимильной аппаратуры
выполняются по принципу образования растрового элемента,
выделяемого диафрагмой на оптической проекции освещенного
участка изображения. Такой принцип показан на рис. 11.8.
Светящееся тело осветителя / с помощью линзы 2 проецируется на
поверхность изображения 3. На изображении образуется ярко
освещенный участок, размеры которого несколько больше тела осветителя.
С помощью объектива 4 освещенный участок изображения
проецируется на плоскость диафрагмы 5. Форма и размер диафрагмы
оцределяют размеры растрового элемента, который воздействует
на фотоэлектрический преобразователь 6, размещенный за диа-
225
фрагмой. В факсимильной аппаратуре применяются в основном
прямоугольные растровые элементы, большая сторона которых
располагается вдоль строки ('по кадровой развертке), а меньшая
сторона следует по направлению строчной развертки.
Важное значение имеет правильный выбор осветителя. Как
правило, это точечные источники света — лампы накаливания с
сосредоточенной нитью, баллоны
которых изготовляются из стек-
s ла высокого качества и
специальной формы. Особые требования
предъявляются к питающим уст*
4 ройствам осветителей, поскольку
световая отдача зависит от тем*
пературы нити, определяемой
питающим напряжением. Обычно
j осветители питаются от высоко*
- / \ стабильных источников перемен*
jTN- ного тока частотой 400—2000 Гц,
чем обеспечивается стабильность
Рис. 11.8. Принцип работы светоотп- светового потока и исключается
тической системы возможность появления колеба*
ний яркости при изменении пита*
ющего напряжения. В отдельных случаях осветители питаются от
источников постоянного тока. В этом случае резко возрастают тре*
бования к стабилизации напряжения.
В последнее .время «традиционные» осветители — лампы
накаливания — заменяются лазерными источниками света, которые
обладают многими /преимуществами:
отсутствием сложных фокусирующих систем, в которых
теряется до 20% мощности светового потока, диаметр луча
практически можно считать .световой точкой;
большей мощностью осветителя при достаточно малых
габаритных размерах;
монохроматичностью излучения, т. е. излучением на одной
длине волны, а не в широком спектре, как в случае ламп
накаливания. Это .свойство позволяет «получать отраженный поток с
однородными свойствами, что улучшает качество принятой копии.
Основным недостатком лазерных источников света является
меньший коэффициент отражения от обычных изображений,
поскольку излучение имеет не «'белый», а красный, зеленый или
голубой цвет. Этот недостаток можно устранить применением
специальных покрытий для изображения оригинала.
11.6. ФОТОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
В качестве устройства, преобразующего изменения светового
потока в изменения электрического тока, в факсимильных
аппаратах применяются 'пассивные и активные фотоэлектрические
преобразователи. К .пассивным преобразователям относятся вакуум-
226
ные и твердотельные фотоэлементы, фотодиоды, фоторезисторы, а
к активным — (вакуумные и твердотельные фотоумножители.
В преобразователях всех типов используется явление фотоэффекта
(внешнего или внутреннего).
Явление внешнего фотоэффекта основано на способности
некоторых металлов излучать во внешнюю среду электроны под
воздействием падающего света, а явление внутреннего
фотоэффекта — на способности материалов менять электропроводимость при
воздействии светового излучения.
В качестве металлов для фотокатодов (эмиттеров электронов)
обычно используются металлы щелочной группы (цезий, натрий,
сурьма и др.).
В простейшем случае фотоэлемент представляет собой
вакуумный баллон с двумя электродами — фотокатодом и анодом. При
попадании на поверхность фотокатода светового излучения
«выбитые» электроны начинают двигаться к положительно
заряженному аноду, образуя фототек, величина которого прямо
пропорциональна величине падающего светового потока. Это
означает, что изменения фототока прямо пропорциональны
изменениям яркости передаваемого изображения. Зависимость величины
фототока от светового потока называется световой
характеристикой (рис. 11.9).
Рис. 11.9. Световая характеристика Рис. 11.10. К пояснению принципа работы
фотоэлектронного умножителя
Для .использования в факсимильной технике наиболее
пригодными оказались активные преобразователи — вакуумные и
твердотельные фотоумножители (ФЭУ). Принцип работы вакуумного
фотоумножителя иллюстрируется рис. 11.10. Вылетевшие из
катода под воздействием света фотоэлектроны направляются не на
анод (как в фотоэлементе), а на ближайший положительно
заряженный электрод, называемый эмиттером (или динодом).
Такой электрод также выполняется из металла, способного отдавать
электроны. По мере приближения к диноду электроны
ускоряются, их кинетическая энергия возрастает и они «ударяются» в ди-
нод, выбивая ^из него новые вторичные электроны. Этот новый ,и
более мощный поток электронов попадает на следующий динод
и так далее до тех пор, пока усиленный во много раз
электронный поток не достигнет анода. В результате такого лавинообраз-
227
наго .процесса происходит умножение электронного .потока, а
значит, и большое усиление фототока. Современные ФЭУ имеют от
2 до 15 ступеней умножения, и их интегральная чувствительность
достигает ШОА-лм.
Выходной ток ФЭУ можно определить из выражения /ФЭч =
=*эап, где 1"э —-первичный ток с фотокатода на первый диод; п —
число динодов; а — интегральная чувствительность ФЭУ.
Максимальная величина фототока ФЭУ в -современных факсимильных
аппаратах не превышает 100 мкА. Эта величина является
максимально допустимой, так как при больших значениях нарушается
линейность световой характеристики ФЭУ. Поскольку ФЭУ
можно рассматривать как многокаскадный усилитель -постоянного
тока, предъявляются жесткие требования к стабильности питающих
напряжений, которые у вакуумных ФЭУ достигают 1500—2000 В.
Большая величина анодных напряжений является основным
недостатком ФЭУ. Существуют твердотельные фотоумножители,
которые, обладая всеми качествами вакуумных преобразователей, не
требуют высоких напряжений питания. Но у этих умножителей
размер фотокатода очень мал (1 мм2), что затрудняет их
использование в факсимильной аппаратуре.
Фотоэлектрические 'преобразователи всех типов можно
рассматривать как безынерционные устройства, работающие в
полосе вплоть до десятков и сотен мегагерц.
11.7. СИНТЕЗИРУЮЩИЕ УСТРОЙСТВА
Синтезирующие устройства приемных аппаратов состоят из
устройства развертки, определяющего последовательность приема
элементов изображения, и записывающего устройства,
регистрирующего элементарные площадки при создании копии
изображения оригинала. В случае записи на светочувствительные
материалы узел записи содержит также светооптическую систему.
По способу записи синтезирующие устройства делятся на
закрытые и открытые. При закрытом (фотографическом) способе
записи регистрация производится с помощью светового луча на
светочувствительный материал — фотобумагу или фотопленку,
которые (помещаются в изолированную от света кассету. При этом
способе получаем высокое качество копии как для двухградацион-
ных, так и полутоновых изображений. При открытом способе
записи регистрация производится на открытой для света бумаге.
Такой способ позволяет в некоторой степени контролировать
качество записи на приеме. К открытым способам относятся:
электрохимический, электротермический, электрографический, ферро-
графический и с помощью чернил. Рассмотрим несколько
способов записи,
Фотографическая запись. Устройство закрытой
фотографической записи содержит модулятор света и светооптическую
систему. В аппаратах с фотографической записью в качестве
модулятора света используется газосветная лампа тлеющего разряда, а
228
в аппаратах приема газетных полос — ламсты дугового разряда.
Оба световых источника являются .точечными. В газоразрядных
лампах свечение образуется за счет ионизации, которая приводит
к возникновению тлеющего разряда. В лампах дугового разряда
свечение образуется за счет разряда в парах ртути и гелия.
Световые характеристики ламп являются линейными, т. е. яркость
свечения прямо пропорциональна проходящему току
видеосигнала. Частотные характеристики .светового потока равномерны в
широком диапазоне частот, что позволяет попользовать большие
скорости передачи видеосигналов. Дуговые газоразрядные лампы
имеют меньшую инерционность и обеспечивают лучшую
частотную характеристику и соответственно лучшее воспроизведение
штрихов на высоких линейных скоростях развертки, достигающих
30 000 мм/с. Наибольшая интенсивность излучения газоразрядных
ламп находится в спектре световых волн длиной 0,3—-0,6 мкм, что
соответствует сине-голубому и оранжево-красному цветам.
Светоонтические системы, применяемые в синтезирующих
устройствах, несколько проще применяемых в анализирующих
устройствах. Световой пучок газосветной лампы предварительно
проецируется на плоскость диафрагмы. Освещенная диафрагма с
помощью объектива проецируется на носитель записи
(фотобумагу или фотопленку). Форма и размер растрового элемента
задаются диафрагмой. В синтезирующем устройстве чаще всего
применяется квадратный или прямоугольный растровый элемент,
причем большая сторона располагается в направлении кадровой
развертки и обычно равна шагу подачи.
Принципиальная схема устройства зап'иси показана на рис*
11.11. Барабан со светочувствительной бумагой или пленкой, на
которой производится запись, помещается в светонепроницаемую
Рис. 11.11. Взаимодействие . _л
узлов записывающего уст- $ //_^ / I
ройства с фотографической ^^\У (~~ ( I *
записью: у^\Лр ' 4 |j ? / | \
/ — газосветная лампа (освети- ^——"[ ^V^'^db'-^'^Б''Й*"^ 'jSlTfei ^
тель —- газосветная лампа); 2— ^Л&^^~~~- lJJT&^t^JZ-jI^^^"^^^ ^ /
конденсорная линза; 3 — диа- vsks^r/ Т [ \ ^ 1
фрагма; 4 — объектив; 5 — ба- ХЗ^ I ■ Каретка |/4< /
оабан с Фотобумагой в кассете: \ I ч/
рабан с фотобумагой в кассете; А \
6— светонепроницаемая кассета
со щелью; 7 — щель в кассете
К
кассету, которая закрепляется неподвижно на аппарате. В момент
записи в кассете открывается неподвижная щель, обращенная
внутрь аппарата и защищенная от «постороннего света. Барабан,
находящийся внутри кассеты, вращается, а световой луч,
формируемый светооптической системой, движется вдоль щели,
последовательно засвечивая элементарные площадки фотоматериала. За
время развертки по строке барабан повернется на некоторый угол,
поэтому следующая строка прочертится лараллельно предыдущей.
Развертка по кадру достигается вращением барабана.
Электрографическая запись. Большая стоимость и
длительность обработки светочувствительных материалов вызвали необ-
229
ходимость разработки более экономных способов записи на
высоких скоростях развертки. В шоследние годы широкое
применение получили принципиально новые способы воспроизведения «
электрографические, позволяющие получать готовые отпечатки
текстов, рисунков и других оригиналов в результате простых и
экономичных операций. Сущность электрографических способов
состоит в получении на фотополупроводниковом или
изоляционном слое скрытого электростатического изображения. При
электрографическом способе равномерный электрический заряд
наносят на всю 'Поверхность фотополупроводникового слоя.
Потенциальный рельеф образуется в результате последующего
экспонирования, при котором различные участки фотополупроводникового
слоя изменяют свой начальный потенциал пропорционально
падающей на них световой энергии.
Наибольшее распространение получили два
электрографических способа. В первом на фотополупроводниковом слое, нанесенном
на металлическую подложку, сначала получают порошковое
изображение, которое затем переносится на обычную писчую бумагу,
В другом способе изображение получают непосредственно «на
бумаге, покрытой фотополупроводниковым слоем. Такая бумага
называется электрографической. На этой бумаге запись
производится с помощью иголок, образующих линию развертки,
коммутируемых электронным образом.
Электрохимическая запись. Наибольшее распространение
получили запись на электрохимическую бумагу и запись обычными
чернилами. При электрохимическом способе в качестве носителя
записи используется специальная бумага,
которая при определенных условиях
является проводником электрического тока
и под его действием окрашивается.
Электрохимическая запись производится на
электрохимической бумаге ЭХБ. В
синтезирующих устройствах с плоскостной
разверткой для открытой записи
.используется пишущее устройство в виде
спирали и контактирующей линейки (рис.
11.12). При вращении барабана со
спиралью точка касания спирали и линейки
создают развертывающий элемент,
который равномерно перемещается, образуя
строку развертки. Одновременно за
полный оборот спирали бумага
протягивается валиками «а один шаг подачи по
кадровой развертке. При записи на
электрохимическую бумагу разрешающая способность не превышает
4 линий/мм. Простота устройства и возможность получения
непрерывной записи и автоматизации процесса приема делают
этот способ одним из самых -надежных в условиях постоянной
эксплуатации факсимильных связей.
230
Рис. 11.12. К пояснению
принципа
электрохимической записи:
1 — линейка; 2 — спираль
Разновидностью электрочувствительной бумаги является
электротермическая бумага,, позволяющая осуществить запись
электротермическим способом, применяемым в аппаратах как с
плоскостной, так и с барабанной разверткой. Пишущим элементом
является металлическая игла, скользящая по поверхности бумаги
в направлении строки (развертки. Напряжение видеосигнала,
приложенное к металлической .поверхности барабана и иглы,
пробивает верхний слой бумаги и обнажает графитизированный
бумажный слой, вследствие чего в месте прикосновения иглы возникает
почернение.
В факсимильной аппаратуре общего пользования широко
используется чернильный способ записи на обыкновенной писчей
бумаге. Пишущий узел выполнен в виде иглы с капилляром
внутри, которая контактирует с бумагой при подаче
соответствующего сигнала изображения. Игла укреплена на гибкой мембране:
движением мембраны управляет электромагнит, то обмоткам
которого протекает ток записи. Такой способ записи применяется в
отечественном фототелеграфном аппарате «Штрих».
11.8. ПЕРЕДАЧА ФАКСИМИЛЬНЫХ СИГНАЛОВ
ПО КАНАЛАМ СВЯЗИ
Непосредственная передача видеосигнала по стандартным
каналам ТЧ невозможна, поскольку спектр видеосигнала
факсимильного изображения содержит постоянную составляющую и в
основном сосредоточен в области низких частот. Поэтому
необходимо осуществлять перенос спектра в полосу пропускания выб*
ранного канала связи. Эта операция осуществляется модуляцией
сигнала в основном амплитудной и частотной. Кроме того, в
цифровых факсимильных системах применяются импульсные способы
модуляции. Частотная модуляция применяется при работе
факсимильных аппаратов по радиоканалам в коротковолновом
диапазоне. Амтлитудная модуляция используется .при передаче по
проводным и радиорелейным каналам. Рассмотрим особенности
применения AM.
При модуляции несущей частоты канала видеосигналом
факсимильного изображения возникает спектр частот, который
состоит из участков спектра исходного видеосигнала от нуля до
Ртах и двух боковых полос, которые сформировались в
результате модуляции. Причем нижняя аюлоса перекрывается частично
видеоспектром факсимильного сигнала (рис. 11.13). Из-за этого
перекрытия возникают искажения передаваемого сигнала, что
недопустимо. Для устранения этих искажений используется AM двух
видов: двухполосная передача с симметричным ограничением
боковых полос и передача с асимметричным подавлением боковых
полос (AM ОБП). При первом способе передаваемый спектр
частот располагают в средней части канала ,или несколько сдвигают
его к верхней граничной частоте, а боковые полосы располагают
симметрично несущей. Дополнительная комшенсация влияния час-
231
тот видеосигнала происходит в балансном модуляторе (рис 11.14)
передатчика, на выходе которого отсутствуют токи частот
видеосигнала. Напряжение видеосигнала подводится к средним точкам
обмоток трансформатора и при полной симметрии схемы не
наводит напряжения во вторичной обмотке.
* нес 'тех шах \вс
Рис. 11.13. Спектр частот AM сигнала
факсимильного изображения
Выбор несущей частоты при симметричном ограничении
боковых полос определяется следующими соображениями. Для
уменьшения искажений, -возникающих при модуляции, стараются
обеспечить возможно большее отношение /нес/^та*. Поэтому
предпочтительнее располагать спектр сигнала в области высоких частот.
При ЭТОМ ПрИйИМаЮТ, ЧТО /нес + ^таа:=/в, ГДе /„ — ВврХНЯЯ ЧаСТО-
та канала. При этом уменьшается и область перекрытия с
исходным спектром. Однако низкочастотная часть полосы канала не
используется, что экономически невыгодно. Устранение влияния
низкочастотного спектра и практи-
м г чески полное использование поло-
Т сы канала достигается способом
ибых асимметричного ограничения боко-
jL iBbix полос. В этом случае несущая
выбирается ближе к верхней
граничной частоте канала. Нижняя
боковая полоса при этом проходит
полностью, а верхняя боковая
полоса частично подавляется
специальным фильтром однопол ошой передачи. Фильтр должен обладать
кооооим(мепр1иЧ|Ной по отношению ik (Несущей частоте
характеристикой (изменения 'коэффициента пропускания.
Этот способ передачи широко применяется при передаче газет
по первичным или вторичным трактам, а также по каналам
тональной частоты. Однако при передаче способом AM ОБП к
каналу связи предъявляются более жесткие требования по
выравниванию характеристики времени замедления. Это вызвано двумя
причинами: во-первых, передача ведется с более высокой
скоростью, при этом уменьшается длительность элементарных
импульсов; во-вторых, при асимметричном ограничении боковых по-
232
Рис. 11.14. Схема балансного
модулятора
лос появляется паразитная модуляция сигнала по фазе и его
спектр «несколько расширяется — появляются новые компоненты,
которые обязательно должны быть сохранены на (Приеме для
исключения искажений сигнала.
11.9. УСТРОЙСТВА СИНХРОНИЗАЦИИ И ФАЗИРОВАНИЯ
Для совместной работы 'передающего и приемного аппаратов
требуется, чтобы скорости разверток обоих аппаратов были
одинаковы, т. е. осуществлялась синхронизация скоростей разверток, а
начало разверток -происходило одновременно, т. е.
осуществлялось фазирование. При неравенстве скоростей разверток
происходят удлинение или укорочение строк, что в конечном итоге
приводит к перекосу изображения по направлению кадровой
развертки. В факсимильной аппаратуре общего назначения и в
аппаратуре передачи гидрометеокарт допускается перекос изображения
не более ll мм -на каждые 100 мм длины развертки по кадру; к
аппаратуре передачи газетных полос предъявляются еще более
жесткие требования. Равенство скоростей разверток достигается
применением автономной, принудительной или сетевой
синхронизации. Независимо от способа синхронизации приводом разверти*
вающего устройства служит синхронный .реактивный или
синхронный гистерезисный двигатель, скорость вращения якоря которого
определяется только частотой питающего напряжения.
Если угол перекоса обозначить через а, то легко показать, что
tg* = (L/b)(AN/N),
где L — длина строки изображения; б — шаг подачи; AN —
разность скоростей вращения приемного и передающего барабанов;
N — скорость вращения передающего бара'бана. Поскольку
ANIN—Av/v = Af/f, то между частотой питающего напряжения,
числом оборотов барабана и линейной скоростью движения
пятна существует линейная зависимость и условие правильного
воспроизведения .копии состоит в выполнении неравенства Af/f^
^(8/L)tg a, где tg a — заданная величина перекоса.
Учитывая приведенную выше норму перекоса, tga^0,01.
Тогда при 6 = 0,2 мм, L = 200 мм А///^10~5. Эта величина и
определяет требования к стабильности задающих генераторов
передатчика и приемника.
Рассмотрим сущность способов синхронизации. При
автономной синхронизации устройства, осуществляющие развертку на
передающей и приемных сторонах, независимы друг от друга, но
скорости их должны быть равными. Реализация такого способа
достигается применением высокостабильных задающих
генераторов на передаче и приеме, управляющих частотой питания
синхронных двигателей разверток.
Принудительная синхронизация устройств (развертки
осуществляется специальными сигналами, передаваемыми передатчиком
по каналам связи. Частным случаем принудительной синхрониза-
233
ци.и является способ сетевой синхронизации, отри котором
двигатели приемника и передатчика питаются единой сетью
электроснабжения. При принудительном способе синхронизации
«передаваемый в начале или конце каждой строки сигнал строчной
синхронизации фиксирует на приемной части начало строчной
развертки. Кроме того, передаются и синхронизирующие сигналы
кадровой развертки, которые управляют соответствующим
генератором на приеме.
Кроме синхронизации необходимо осуществлять «фазирование
аппаратов. Для этого перед началом связи передатчик передает
информацию о 'фазовом положении оригинала. Фазовые импульсы
возникают при прохождении черной полосы, которую наносят по
краю оригинала. На приемной станции барабан
развертывающего устройства располагается так, чтобы в моменты прихода из
канала фазовых импульсов стык краев бланка (сшивка)
располагался перед записывающим элементом. После установления
фазирования начинается передача полезного изображения. В
течении всего времени передачи фазирование обеспечивается
стабильностью привода за счет выбранного способа синхронизации.
Существуют автоматические, полуавтоматические и ручные способы
фазирования. При принудительной синхронизации процессы
фазирования полностью аналогичны процессам строчной и кадровой
синхронизации телевизионных систем.
В специальной аппаратуре передачи газет точность
фазирования должна быть не больше 3 мм. Фазирование осуществляется
автоматически. Кроме того, предусмотрен визуальный контроль
за точностью фазы принимаемых сигналов.
11.10. ОРГАНИЗАЦИЯ ФАКСИМИЛЬНОЙ СВЯЗИ
ПО КАНАЛАМ СВЯЗИ
Для факсимильной передачи используются стандартные
каналы тональной частоты, групповые каналы кабельных и
радиорелейных линий, спутниковые каналы связи, коротковолновые
радиоканалы, физические цепи, соединительные линии городских
телефонных сетей. При организации факсимильной связи по
каналам тональной частоты применяются две схемы включения:
1) четырехпроводная схема (рис. 11.15), предусматривающая
организацию прямых дуплексных связей между городами;
2) двухпроводная схема (рис. 11.16), отличающаяся от четы-
рехпроводной тем, что в ней на участке между факсимильным
аппаратом и аппаратурой высокочастотного уплотнения связь
осуществляется по двухпроводной схеме 'включения с
использованием кабелей и средств автоматической коммутации городских
телефонных цепей. На магистральном участке связь организуется
по четырехпроводной схеме. При этом коммутация каналов ТЧ
может производиться либо вручную, либо с применением средств
междугородной автоматики. Переход от двухпроводной цепи к
четырехпроводной осуществляется с помощью дифференциальной
. 234
системы. Она позволяет организовать соединение с 'Приемной
факсимильной станцией только на время, необходимое для передачи
факсимильного сообщения, а в остальное Бремя канал ТЧ
используется для передачи телефонных разговоров.
Соединительная
линия ГТС
^Передающий
\сраксимиль-
\ный аппарат
1 Приемный
шюксимиль—
\ный аппарат
1 Аппаратура
уплотнения.
Hi
Соединительная
линия ГТС
Аппаратура
уплотнения
Приемный 1
(раксимиль-Л
ныи аппарат \
Передающей 1
(раксимиль-\
ныи аппарагА
Рис. 11.15. Организация факсимильной связи
по четырехпроводной схеме
При двухпроводной схеме включения передача изображений в
обоих направлениях осуществляется поочередно, обычно с
помощью аппаратуры «Штрих». При использовании симплексных
аппаратов, например таких, как «Нева», переключение линий
АТС с передающего на приемный аппарат производится
дополнительным устройством без разрыва линии.
Факсимильн.
приема -
передающий
аппарат
АТС
К4
Линия
дальней !
сбяш
)
Ш лиФ-
^система
приема
Kh
ш
приема
Диф.
{система
{передачи
ни
и
Канал междугородней, адто -
матической связи
АТС
Факситльн.
приема -
передаю цил
аппарат |
Тис< 21,16. Организация факсимильной связи по двухпроводной схеме
К каналам связи, использующимся для факсимильной
передачи, предъявляются довольно жесткие требования, особенно в
отношении фазовой характеристики. Для безыскаженной передачи
требуется, чтобы групповое время замедления во всей рабочей
полосе частот было постоянным. Однако это практически нельзя
обеспечить даже с помощью корректоров. При использовании
корректоров фазовой характеристики характер изменения группового
времени является колебательным относительно заданного
постоянного уровня.
235
При передаче факсимильных сигналов через искусственные
спутники земли (ИСЗ) информация вначале 'передается по
каналам наземных систем на станцию спутниковой связи. Затем она
через спутник ретранслируется на землю и затем по каналам
наземных систем поступает на приемный факсимильный аппарат.
Этим способом /в настоящее время передается большая часть
газетных полос, что .позволяет обеспечить одновременный прием во
многих пунктах Дальнего Востока, Средней Азии и других
регионов страны. В спутниковых каналах связи, так же как и в
радиоканалах, в основном используется частотная модуляция, которая
как известно, обладает большей помехозащищенностью. В
зависимости от тита спутника применяется как автономная, так и
принудительная синхронизация. Передача центральных газет в
пункты децентрализованного печатания осуществляется по сети
циркулярной связи с -помощью специальной факсимильной
аппаратуры.
Факсимильный способ передачи позволяет обеспечить выпуск
газет на всей территории Советского Союза в день их выхода в
Москве. Аппаратура передачи газет осуществляет одновременную
передачу текста и газетных иллюстраций полной газетной полосы
с полезным запечатанным полем 558X392 мм. Передача ведется
по групповым широкополосным трактам в полосе 240 -кГц. По
таким трактам можно организовать 60 типовых каналов ТЧ. Для
передачи одной газетной /полосы по каналам вторичной группы
требуется 3 мин. При этом обеспечивается высокая разрешающая
способность (не менее 16 лин/мм). Передача газет ведется
одновременно сразу в несколько приемных пунктов. Для ведения
служебных переговоров наряду с основным каналом используется
отдельный стандартный канал тональной частоты. При приеме
изображения на фотопленку образуется позитивная или
негативная копия передаваемой страницы газеты, .которая применяется
для последующего полиграфического процесса.
Аппаратура факсимильной передачи газет .имеет ряд
специфических особенностей. Основными являются высокая линейная
скорость развертки, достигающая 30 000 мм/с, при этом
неравномерность скорости за счет механических качаний при совместной
работе передатчика «и приемника не должна превышать 0,03 мм.
Повышенные требования предъявляются к стабильности частоты
синхронизации. Нестабильность не превышает 2-10-7.
Допустимый перекос полосы за счет расхождения частот синхронизации —
не больше 3 мм по высоте кадра (меньшая сторона газеты), а
разброс фазирования — меньше 5 мм. Перечисленные требования
обусловили довольно сложную конструкцию приемопередающей
аппаратуры. Так, развертка осуществляется дуговым способом,
применяются безредукторные приводы, отдельные для вращения
барабана и обеспечения поступательного движения каретки с
оптическими устройствами.
Повышенные требования предъявляются и к характеристикам
канала. Так, время замедления для каналов вторичной группы не
236
должно превышать 5 мкс (при организации обычной
факсимильной связи время замедления 250 мкс).
Для повышения эффективности (использования канала связи,
т. е. для увеличения скорости 'передачи, в аппаратуре передачи
газет «Газета-2» используется способ амплитудной модуляции с
подавленной боковой полосой (АМОБП).
Для передачи газет в отдаленные районы страны
используются спутниковые каналы связи системы «Орбита». При
использовании асинхронных спутников «Радуга» применяются автономные
способы синхронизации, которые реализуются проще.
11.11. ЦИФРОВЫЕ ФАКСИМИЛЬНЫЕ СИСТЕМЫ СВЯЗИ
В последние годы усиленными темпами развиваются
цифровые системы факсимильной связи, в которых реализуются все
известные преимущества дискретных методов передачи. При
цифровом построении систем фиксимальная аппаратура перестает
быть специфической, требующей аналоговых методов 'передачи
сигнала, и становится одним из разнообразных оконечных
устройств универсальных систем связи.
Основным преимуществом дискретного (представления
видеосигналов является возможность применения известных методов
кодирования для устранения избыточности и резкого повышения
пропускной способности каналов связи.
При передаче двухградационных изображений задача
дискретизации решается значительно проще, шоскольку сам сигнал уже
является дискретным по уровню. Требуется только дискретизация
по времени. В случае передачи полутоновых изображений
необходима дополнительная дискретизация >по уровню, поэтому эта
задача практически не отличается от задачи, стоящей (перед
разработчиками цифровых телевизионных систем. Кроме методов
кодирования, для повышения помехоустойчивости можно применять
методы избыточного кодирования, т. е. применять корректирующие
коды, а также системы с обратной связью. Поясним кратко идею
эффективного кодирования.
В цифровом виде видеосигнал можно представить
последовательностями (сериями) единиц и нулей. Эти последовательности
кодируются следующим образом. В канал передаются не сами
серии, а только информация об их длине, выраженная
двоичными числами. В этом случае число символов, переданных в канал,
будет существенно меньше числа символов, содержащихся в
строке цифрового видеосигнала. Возможно одновременное
кодирование сразу нескольких строк цифрового видеосигнала, что
позволяет еще больше сократить объем передаваемых элементов.
Такой метод, например, применен в зарубежной аппаратуре
передачи газет «Пейджфакс». Аппаратура позволяет .по каналу
первичной группы (48 кГц) передавать газетную 'полосу за 6,5 мин;
для аналоговой передачи при тех же условиях требуется 20 мин.
Методы эффективного кодирования имеют существенный
недостаток: чем эффективнее кодируется исходный объем сообщений,
237
тем хуже помехоустойчивость метода. Поэтому применение этого
метода сопровождается мерами по повышению помехоустой*
чивости передаваемого сигнала. Используются как
корректирующие коды, вносящие дополнительную избыточность в
передаваемые кодовые комбинации, так ,и методы, основанные ;на
использовании собственной избыточности, присущей видеосигналу
изображений. Последние объединяются в группу методов фильтрации
сигналов на фоне помех и в своей основе используют идеи и
принципы теории оптимального приема сигналов. Так, в аппаратуре
«Газета-3» используются как методы эффективного кодирования,
так и методы фильтрации цифрового видеосигнала.
СПИСОК ЛИТЕРАТУРЫ
1. Блох Э. Л., Попов О. В., Турин В. Я. Модели источника ошибок в каналах
передачи цифровой информации. — М.: Связь, 11971.
2. Бородин Л. Ф. Введение в теорию помехоустойчивого кодирования. — M.i
Сов. радио, 1968.
3. Генкина Н. Ф., Куликов Ю. П., Курочкин Л. Н. Передача дискретной
информации и телеграфия — М.: МЭИС, 1975.
4. Гойхман Э. Ш., Лосев Ю. И. Передача информации в АСУ. М.: Связь, 1976.
5. Передача дискретной информации и телеграфия/Гуров В. С, Емелья*
нов Г. А., Етрухин Н. Н., Осипов В. Г./2-е изд. — М.: Связь, 1974.
6. Емельянов Г. А., Шварцман В. О. Передача дискретной информации и
основы телеграфии. — М.: Связь, 1973.
7. Емельянов Г. А., Савицкий Ю. И. Установления процесса корректированию
при стартостопном приеме телеграфных сигналов. — В кн.: Труды учебн.
институтов связи. — М., 1966, вып. 29*
8. Зелигер Н. Б. Основы передачи данных. — М.: Связь, 1974.
9. Зюко А. Г., Коробов Ю. Ф. Теория передачи сигналов.— М.: Связь, 1972*
10. Кловский Д. Д. Теория передачи сигналов. — М.: Связь, 1973.
11. Копничев Л. Н., Лещук И. А. Документальная электросвязь. — М.: Связь*
1977.
12. Кошевой А. А. Телеметрические комплексы летательных аппаратов. — M,i
Машиностроение, 1975.
13. Малиновский С. Т. Сети и системы передачи дискретной информации и
АСУ. —М.: Связь, 1979.
14. Мизин А. И., Уринсон Л. С, Храмешин Г. К. Передача информации в сетях
с коммутацией сообщений. — М.: Связь, 1972.
15. Назаров М. В., Кувшинов Б. И., Попов О. В. Теория передачи сигналов.^
М.: Связь, 1970.
16. Пенин П. И. Системы передачи цифровой информации. М.: Сов. радио, 1976.
17. Питерсон Л. Коды, исправляющие ошибки: Пер. с англ./Под ред. Р. Л. До-
брушина. — М.: Мир, 1964, J>
18. Самойленко С. И. Помехоустойчивое кодирование. — М.: Наука, 1966,
19. Тихонов В. И. Статистическая радиотехника. — М.: Сов. радио, 1966.
20. Финк Л. М. Теория передачи дискретных сообщений/2-е изд., перераб. »
доп. — М.: Сов. радио, 1970.
21. Харкевич А. А. Борьба с помехами. М.: Наука, 1965.
22. Шувалов В. П. Прием сигналов с оценкой их качества. — М.: Связь, 1979.;
(Статистическая теория связи. Вып. 12.)
23. Шляпоберский В. И. Основы техники передачи дискретных сообщений, M,s
Связь, 1973.
24. Шварцман В. О., Емельянов Г. А. Теория передачи дискретной информа*
ции. — М.: Связь, 1979.
238
ОГЛАВЛЕНИЕ
Стр.
Предисловие 3
Введение . . 4
Глава 1. Основные понятия и принципы передачи дискретной информации 6
1.1. Информация, сообщение, источник и получатель информации. Система
ПДИ 6
1.2. Преобразование сообщения в сигнал 8
1.3. Энтропия источника дискретных сообщений 12
1.4. Помехи в канале связи и верность передачи информации .... 13
1.5. Понятие о классификации каналов связи 15
1.6. Пропускная способность дискретного канала 16
1.7. Понятие о надежности систем передачи дискретной информации . . 17
1.8. Структурная схема системы ПДИ и предъявляемые к ней требования 18
1.9. Понятие о сетях передачи дискретной информации 20
Глава 2. Сигналы в системах ПДИ. Каналы связи 20
2Л. Каналы связи и-их характеристики 20
•2.2. Искажения видеосигналов при передаче по. физическим цепям . . 24
2.3. Искажения модулированных сигналов при передаче по каналам связи 30
2.4. Скорость модуляции и ширина полосы пропускания канала ... 31
2.5. Энергетические спектры сигналов . . 33
2.6. Краевые искажения и дробления . 35
2.7. Требования к каналам систем ПДИ 38
Глава 3. Принципы построения дискретных каналов 39
3.1. Методы приема двоичных сигналов . ; 39
3.2. Когерентный- и некогерентный методы детектирования 43
3.3. Структурная схема дискретного канала 47
3.4. Принципы построения многоканальных СПДИ 50
3.5. Устройства преобразования сигналов 55
Глава 4. Методы фазирования в системах ПДИ и их реализация . 58
4.1. Задачи синхронизации и фазирования 58
4.2. Обнаружение фазовых рассогласований и подстройка фазы ... 60
4.3. Определение синхронного и стартстопного способов фазирования . . 63
4.4. Структурные схемы устройств синхронизации 65
4.5. Параметры устройств синхронизации и их влияние на характеристики
систем ПДИ . 71
4.6. Структурные схемы устройств фазирования по циклам .... 76
Глава 5. Передающие и приемные оконечные устройства .... 79
5.1. Назначение и структурные схемы 79
5.2. Классификация оконечных устройств 82
5.3. Основные узлы передающей части оконечного аппарата .... 82
5.4. Основные узлы приемной части оконечного аппарата 85
5J5. Устройства отображения информации 91
5.6. Рекомендации МККТТ, относящиеся к оконечным устройствам . . 93
Глава 6. Методы повышения верности передачи дискретной информации 94
6.1. Поток ошибок в реальных каналах 94
6.2. Избыточность сигналов дискретной информации 96
6.3. Принципы помехоустойчивого кодирования 99
6.4. Кодовое расстояние. Число обнаруживаемых и исправляемых ошибок 102
6.5. Классификация помехоустойчивых кодов 105
6.6. Коды Хэмминга 106
6.7. Циклические коды ПО
6.8. Обнаружение ошибок при циклическом кодировании 115
239
Стр.
6.9. Определение места ошибки. Выбор образующего полинома . . . 115
6Л!0. Матричное построение систематических кодов с поэлементным
формированием проверочной группы 118
6.11 Матричное представление циклических кодов . ...... 123
6Л2. Принципы построения кодирующих устройств 124
6.13. Итеративный код . . . 130
6.14. Принципы использования детекторов качества сигналов . . . . 131
Глава 7. Применение обратной связи для повышения верности передачи 133
7.1. Целесообразность применения избыточных кодов 133
7.2. Сравнение эффективности систем с РОС и исправлением ошибок кодом 135
7.3. Алгоритмы работы систем с РОС 137
7.4. Системы с информационной обратной связью . 142
7 .'5. Системы с обратной связью . 145
Глава 8. Принципы построения сетей передачи дискретной информации 146
8.1. Некоммутируемые и коммутируемые сети передачи дискретной
информации 146
8.2. Требования к сетям передачи дискретной информации .... 161
8.3. Способы распределения сигналов 154
8.4. Системы коммутации в сетях ПДИ J 60
8.5. Концентрация в сетях ПДИ 163
8.6. Сравнение систем коммутации 165
8.7. Управление в сетях ИДИ , 172
Глава 9. Построение сетей телеграфной связи и передачи данных 178
9.1. Сеть телеграфной связи 178
9.2. Сети передачи данных 187
9.3. Узлы коммутации 197
Глава 10. Методы повышения надежности систем и сетей ПДИ . , 209
10.1. Надежность СПДИ 209
10.2. Расчет основных характеристик надежности СПДИ 210
10.3. Методы повышения надежности СПДИ 2111|
10.4. Измерения в СПДИ 213!
10.5. Повышение надежности сетей ПДИ 215]
Глава 11. Основы факсимильной связи 216J
11.1. Факсимильная связь как средство передачи неподвижных изображений 21 а
11:2. Преимущества и недостатки факсимильных способов передачи . . 217J
11.3. Свойства и характеристики факсимильных видеосигналов . . . 220]
11.4. Развертывающие устройства 223]
11.5. Светооптические системы факсимильных аппаратов . 225]
11.6. Фотоэлектрические преобразователи 2261
11.7. Синтезирующие устройства 2281
11.8. Передача факсимильных сигналов по каналам связи 231]
11.9. Устройства синхронизации и фазирования 2Щ
НЛО. Организация факсимильной связи по каналам связи .... 234
11.11. Цифровые факсимильные системы связи 23л
Список литературы 23»