/



























































































































































































































































































































































































































































































Автор: Гуров В.С. Емельянов Г.А. Етрухин Н.Н. Осипов В.Г.
Теги: электротехника электроника радиотехника телеграфия издательство связь
Год: 1974



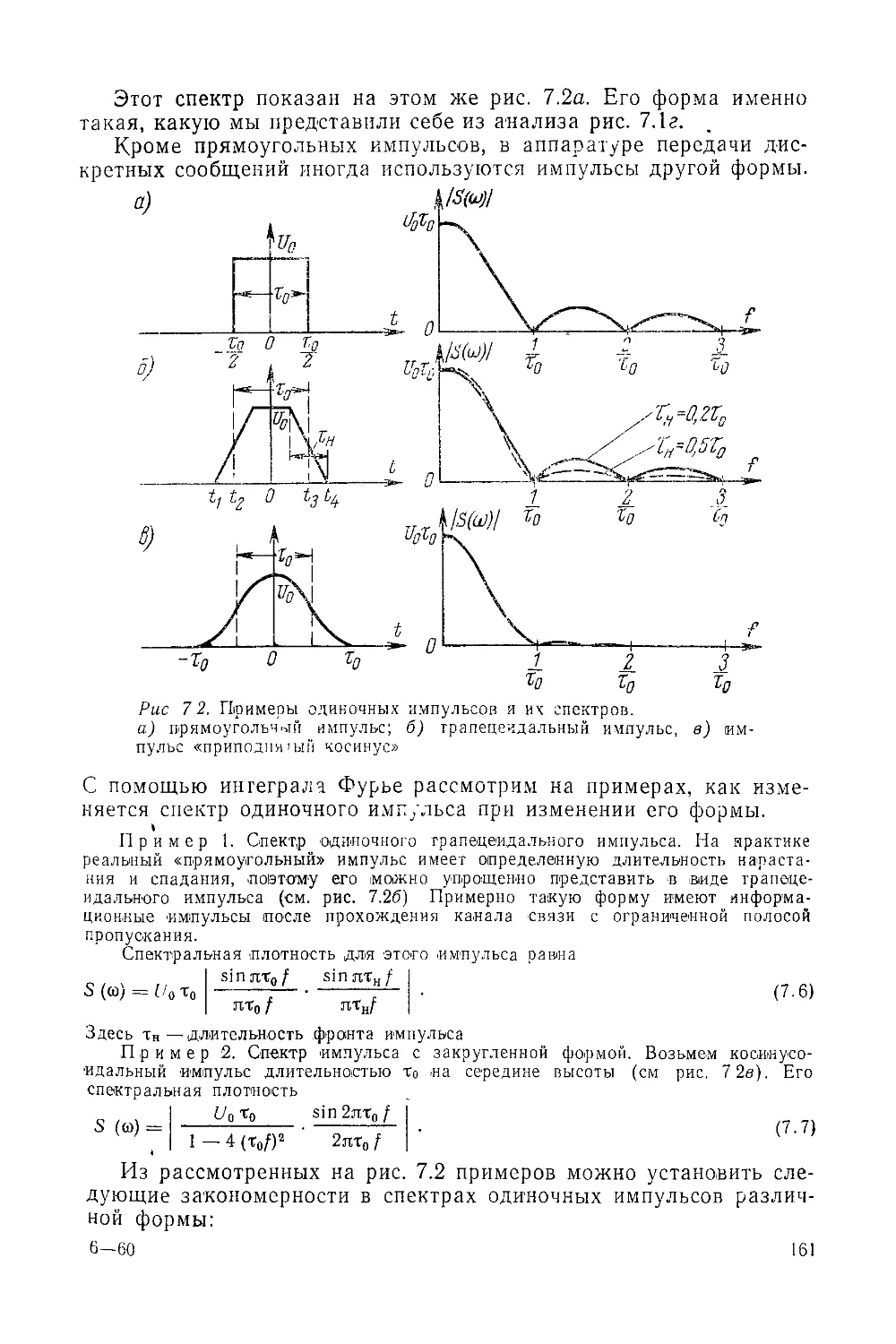
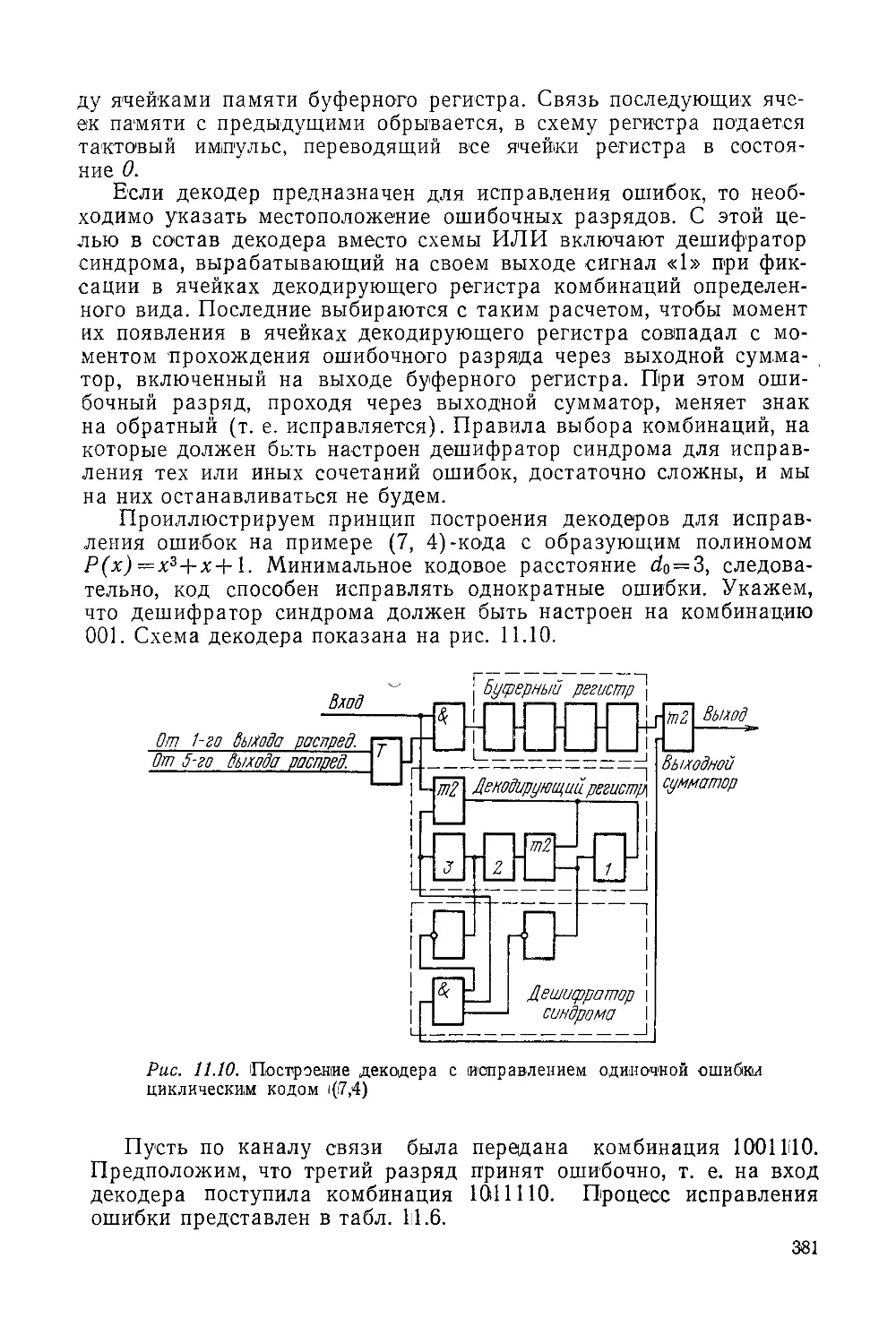
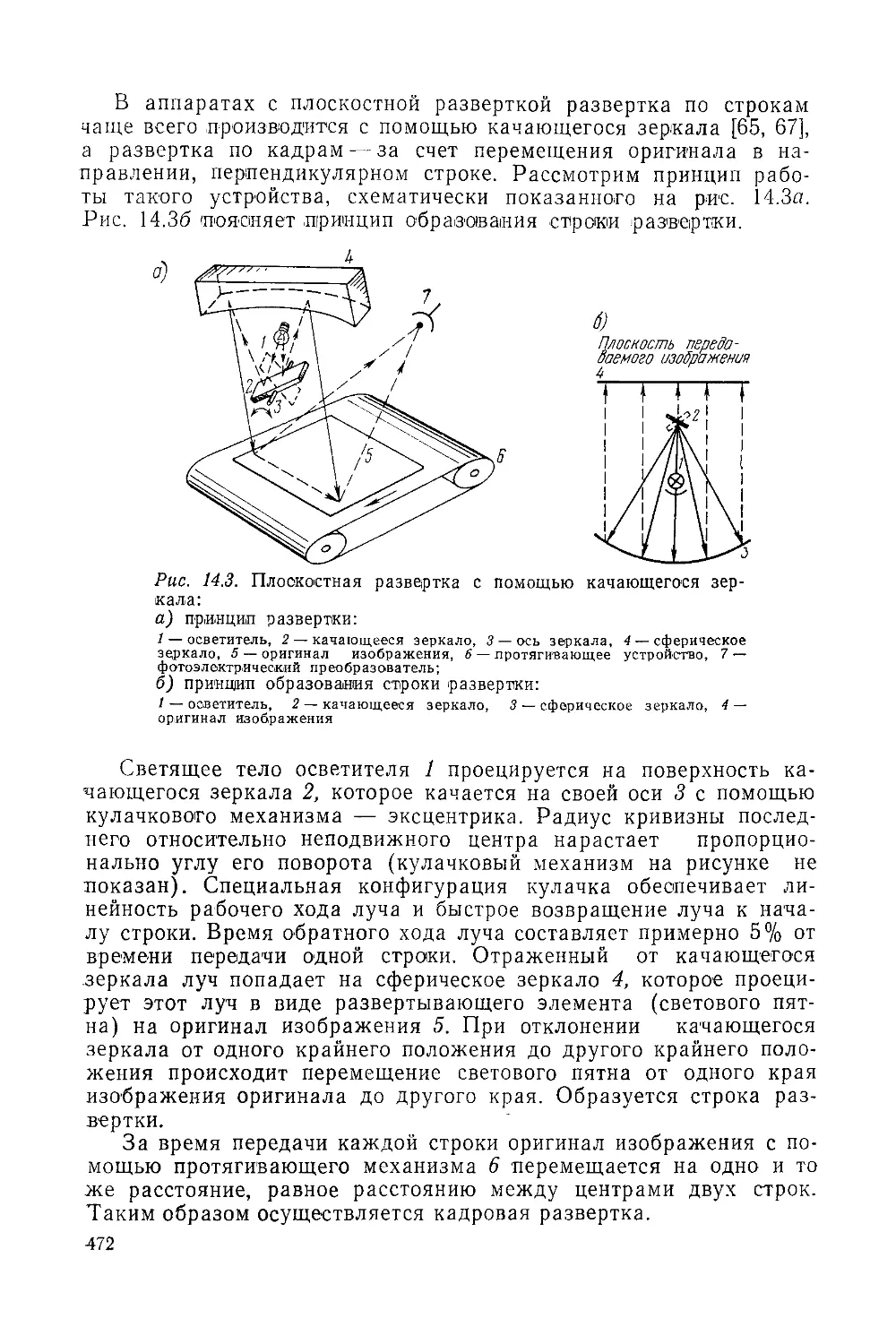
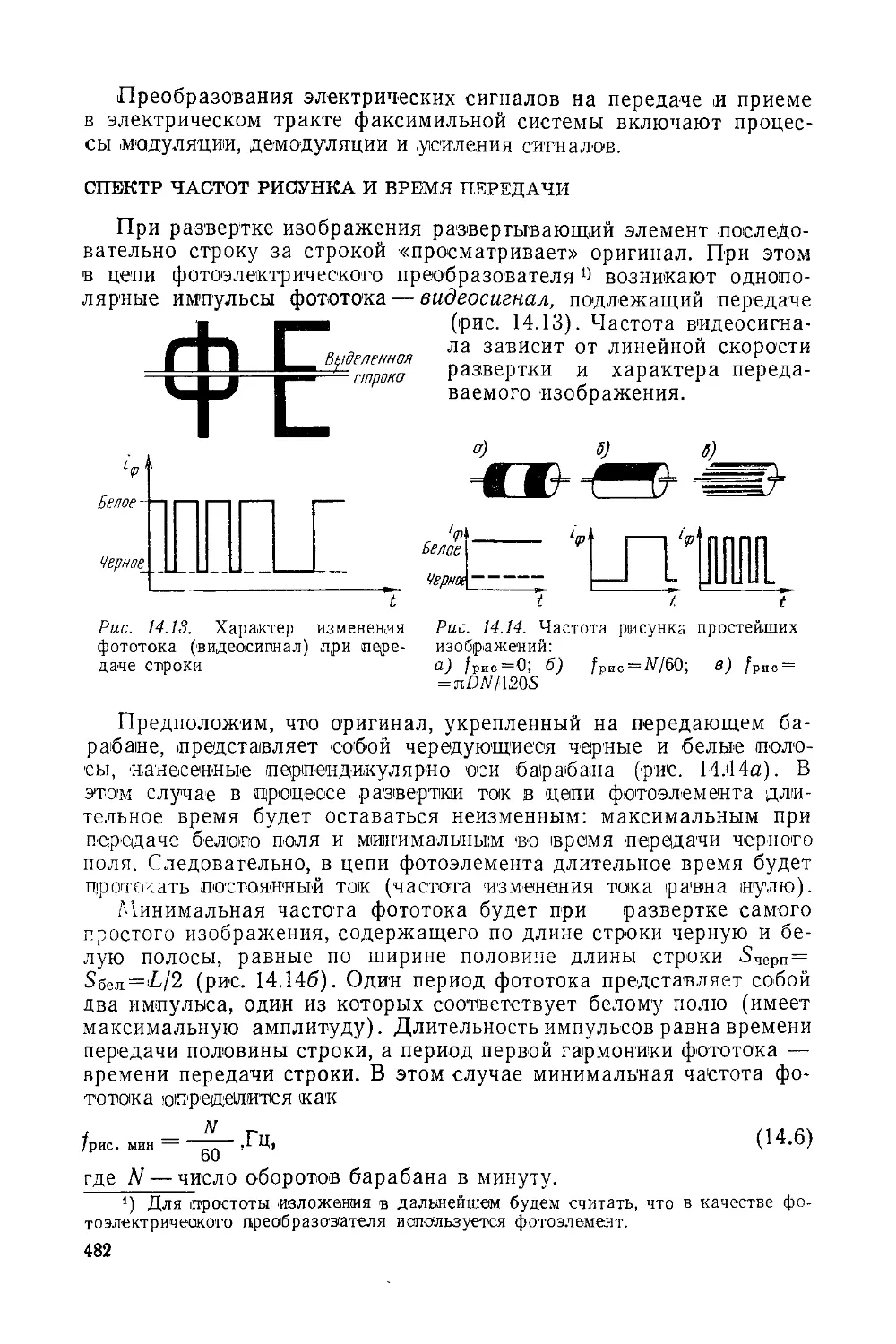
Текст
ПЕРЕДАЧА
ДИСКРЕТНОЙ
ИНФОРМАЦИИ
И ТЕЛЕГРАФИЯ
ИЗДАНИЕ 2-е, ДОПОЛНЕННОЕ,
ПЕРЕРАБОТАННОЕ
Допущено Министерством связи СССР
в качестве учебника для
электротехнических институтов связи
ИЗДАТЕЛЬСТВО «СВЯЗЬ»
МОСКВА, 1974
6Ф1.1
П27
УДК 621.3.052+621.394
Авторы: В. С. Гуров, Г. А. Емельянов, Н. Н. Етру-
хин, В. Г. Осипов-
П27 Передача дискретной информации и телеграфия.
Учебник для институтов связи. Изд. 2-е, доп., перераб.,
М., «Связь», 1974.
526 с с ил.
На обороте тит. л. авт.: В. С. Гуров, Г. А. Емельянов, Н. Н.
Етрухин, В. Г. Осипов.
Первое издание учебника вышло в 1969 г. Излагаются основы пере-
дачи дискретной информации, описываются дискретные элементы, пере-
дающие оконечные и приемные оконечные устройства, каналы связи.
Рассматриваются процессы фазирования, процессы, сопровождающие пере-
дачу дискретных сообщений по каналам связи, принципы повышения вер-
ности с применением специальных кодов- и способов. Описываются по-
строение и эксплуатация сетей передачи дискретных сообщений.
Учебник предназначен для студентов электротехнических институтов
связи.
30401—071
п-----------
045(01)—74
67—74
6Ф1.1
РЕЦЕНЗЕНТЫ: С. И. САХАРЧУК, М. Н. АРИПОВ
© Издательство «Связь», 1974 г.
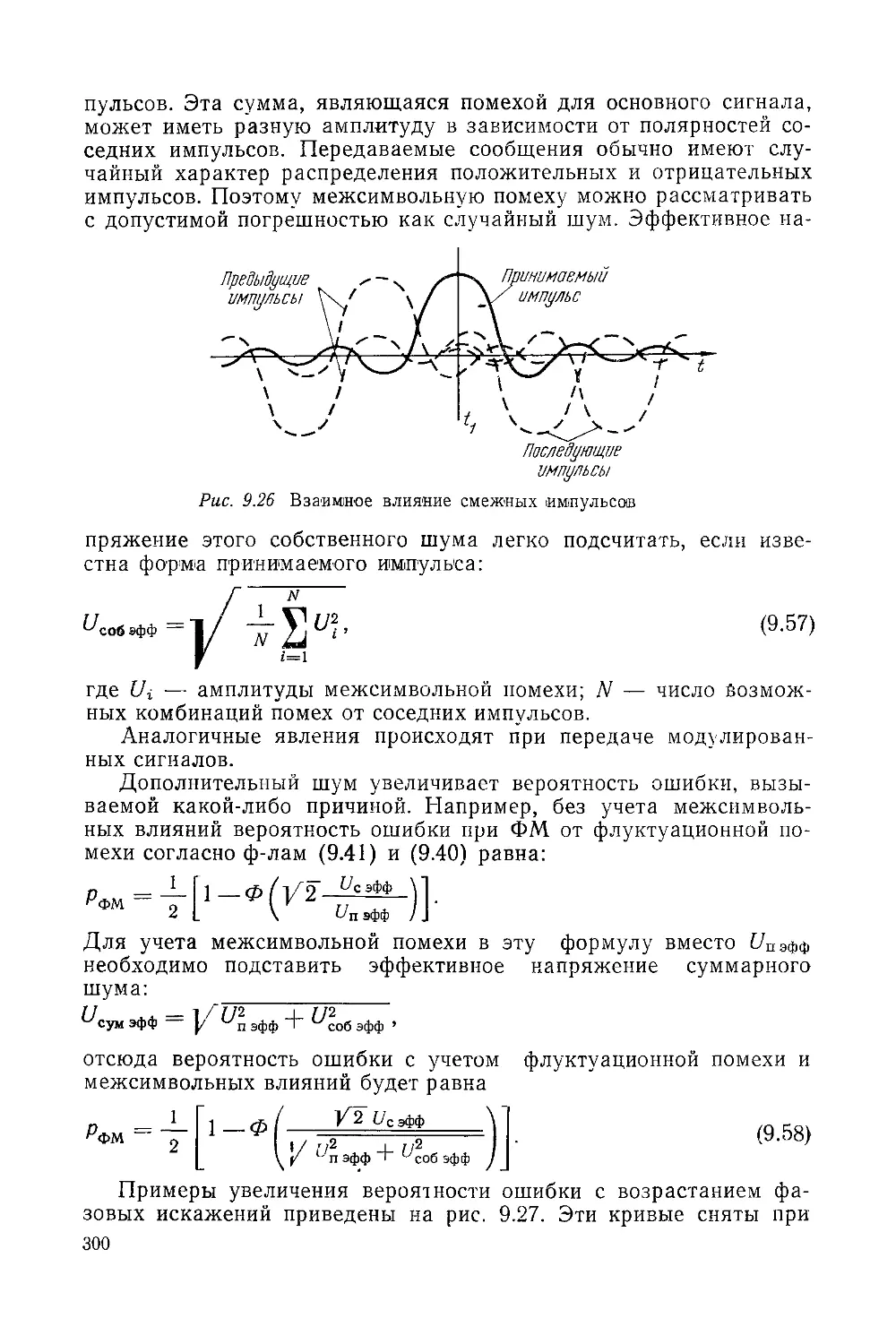
П редисло в и е
В настоящем учебнике излагаются основные вопросы техники
передачи дискретных сообщений, рассмотрены принципы построе-
ния систем и сетей передачи дискретных сообщений и телеграф-
ных сетей. Основное внимание уделено методам обеспечения вы-
сокой пропускной способности и верности передачи. При рассмот-
рении оконечных передающих устройств подробно проанализирова-
ны вопросы искажений сигналов при синхронной и стартстопной
передаче и исправляющей способности приемников. Изложены
принципы построения дискретных каналов и аппаратуры пере-
дачи данных, оценивается качество передачи дискретных сооб-
щений.
Материал учебника охватывает вопросы, относящиеся как к ши-
роко известному виду электросвязи — телеграфной связи, так и к
относительно новому виду электросвязи — передаче данных.
В технике передачи данных терминология недавно стандартизи-
рована (ГОСТ 17657—72 «Аппаратура передачи данных. Терми-
ны и определения»). В настоящем учебнике она используется при
рассмотрении вопросов, касающихся аппаратуры передачи данных.
При изложении материала, касающегося телеграфной связи, и не-
которых общих вопросов применяется давно сложившаяся тер-
минология. Для общих понятий в главах 1 и 2 приведены два тер-
мина, если новый термин из ГОСТ 17657—72 не совпадает с обще-
употребительным термином из телеграфии.
Одна из глав учебника посвящена вопросам факсимильной
связи.
Учебник предназначен для студентов факультета «Автомати-
ческая электросвязь» (специальность 0702) электротехнических
институтов связи. Он может быть полезен широкому кругу инже-
нерно-технических работников связи.
Введение, главы 8v-10 и 14 написаны В. С. Гуровым, гл. 1—5 и
§§12.8—12.10— Г. А. Емельяновым, гл. 6, 7, 9 и 13 — Н. Н. Етру-
хиным, гл. 11 и §§ 12.1—12.7 — В. Г. Осиповым.
Авторы выражают благодарность М. Н. Арипову и С. А. Сахар-
чуку за тщательное рецензирование книги и критические замеча-
ния, способствовавшие улучшению книги.
Замечания по книге следует направлять в издательство «Связь»
(Москва 101000, Чистопрудный бульвар, д. 2).
Авторы
В ведение
Директивами XXIV съезда КПСС по пятилетнему плану раз-
вития народного хозяйства СССР на 1971—1975 гг. предусматри-
вается дальнейшее развитие средств связи на основе использова-
ния новейших технических средств. В целях совершенствования
планирования народного хозяйства и управления предусматрива-
ется развернуть работы по созданию и внедрению автоматизиро-
ванных систем планирования и управления отраслями, террито-
риальными организациями, объединениями, предприятиями, т. е.
намечается создание общегосударственной автоматизированной си-
стемы сбора и обработки информации для учета, планирования и
управления народным хозяйством на базе государственной сети
вычислительных центров и единой автоматизированной сети свя-
зи страны (ЕАСС). Таким образом, средствам связи отводится
существенная роль в развитии нашей страны. При создании авто-
матизированных систем планирования и управления (АСУ) ре-
шающее значение имеет электросвязь, область техники, занимаю-
щаяся вопросами передачи информации на расстояние с помощью
электрического тока.
Электросвязь охватывает различные виды связи, каждый из
которых определяется характером передаваемой информации. Так,
например, телефонная связь служит для передачи звуковой ин-
формации (речи, музыки), занимающей определенную полосу ча-
стот. Телеграфная связь предназначена для передачи информации,
представляющей собой любой’текст, написанный с помощью оп-
ределенного алфавита. Информация (сообщение) в виде чертежа,
рисунка, фотографии передается посредством факсимильной связи.
По способу приема виды связи делятся на документальные и
недокументальные. Телеграфная и факсимильная связи являются
документальными. Факсимильная информация передается в на-
стоящее время в основном с использованием аналоговых методов,
при которых передача информации осуществляется непрерывным
4
сигналом. В последние годы ведутся интенсивные разработки в
области применения дискретных, импульсных методов передачи
факсимильных сообщений.
В курсе «Передача дискретной информации и телеграфия» с од-
ной стороны рассматриваются виды связи, обеспечивающие пере-
дачу дискретных сообщений, а с другой стороны, все виды доку-
ментальной связи. Поэтому наряду с такими видами связи, как
телеграфная и факсимильная, в курсе изучается сравнительно мо-
лодой вид связи — передача данных (ПД).
Международный консультативный комитет по телефонии и те-
леграфии (МККТ) следующим образом определил понятия «дан-
ные» и «передача данных». Данные — это информация, представ-
ленная в формализованном виде, позволяющем передавать или об-
рабатывать ее при помощи технических средств. Данные, имеющие
законченный для обработки и передачи вид, называются сообще-
нием данных. Передача данных — это область электросвязи,
целью которой является передача сообщений данных для обра-
ботки техническими средствами, например, вычислительными ма-
шинами, или передача результатов обработки потребителям.
Передача данных как вид связи возникла вследствие широко-
го применения электронных вычислительных машин в процессе
автоматизации производства и управления и имеет ряд общих
черт с телеграфной связью: например, передача осуществляется
также импульсными методами.
В то же время этот вид связи существенно отличается от теле-
графной связи: требует повышения скорости передачи по кана-
лам, повышения верности передаваемой информации.
К системам и аппаратуре передачи данных предъявляются по-
вышенные требования по надежности, т. е. способности работать
длительное время без отказов и обеспечивать быстрый ремонт в
случае отказа. Эти требования обычно связаны с важностью про-
цессов автоматизации, которые нарушаются при отказе системы
передачи данных.
Оба вида электросвязи — телеграф и передачу данных — часто
объединяют в одну область, называемую передачей дискретных
сообщений.
Сеть связи представляет собой совокупность каналов связи, оп-
ределяемых видами сообщения, для передачи которых она служит.
Намечается создать сети телеграфной связи, сети связи для пе-
редачи данных и сети факсимильной связи, включая передачу
газет.
Общегосударственные сети телеграфной связи включают в себя
сеть между предприятиями Министерства связи СССР и сеть або-
нентского телеграфа, которая предназначена для непосредственно-
го обмена и ведения телеграфных переговоров между абонентами
этой сети.
Намечается широкое внедрение факсимильных методов переда-
чи документальных сообщений различных видов.
5
Все сети факсимильных связей должны строиться на базе
стандартных тч или широкополосных каналов.
В заключение кратко остановимся на истории развития тех-
ники телеграфной, факсимильной связей и передачи данных.
Первой практической системой электрического телеграфа бы-
ла система, предложенная и осуществленная в 1832 г. русским
ученым, членом-корреспондентом Петербургской Академии наук
П. Л. Шиллингом. Он же впервые разработал телеграфный код.
В период 1839—1850 гг. другой русский ученый академик
Б. С. Якоби продолжил работы Шиллинга в области телеграфии,
в результате чего был создан первый в мире буквопечатающий
телеграфный аппарат. В телеграфных аппаратах Якоби впервые
был применен принцип синхронного и синфазного вращения ме-
ханизмов на приемной и передающей станциях.
В 1837 г. американец Морзе разработал свою систему — теле-
графный аппарат и специальный код, которые позднее были усо-
вершенствованы и более столетия широко используются на теле-
графных связях. В настояшее время код Морзе применяется на
радиотелеграфных связях.
В последующие годы, используя идеи и принципы, заложенные
в работах Шиллинга и Якоби,- большой вклад в развитие теле-
графной техники внесли Юз (США) и Уинстон (Англия). В 1874г.
французом Бодо был изобретен многократный буквопечатающий
телеграфный аппарат, который широко применялся за рубежом и
в России.
В нашей стране средства телеграфной связи получили особен-
но сильное развитие после Великой Октябрьской социалистической
революции. Развитие телеграфного аппаратостроения происходи-
ло в двух направлениях. Создавались быстродействующие много-
кратные синхронные оконечные аппараты, обладающие большой
пропускной способностью. Был создан и широко применялся на
связях в 1938—1949 гг. девятикратный телеграфный аппарат. Он
был разработан инженерами А. Д. Игнатьевым, Л. П. Гуриным и
Г. П. Козловым, удостоенными за эту разработку звания лауреа-
тов Государственной премии. С помощью этого аппарата осуще-
ствлялась передача одновременно девяти телеграфных сообщений
в двух направлениях. Однако многократные аппараты были слож-
ны по своему устройству и эксплуатации.
Другим направлением разработок являлось создание простых
и удобных в эксплуатации аппаратов с клавиатурой типа пишу-
щей машинки с использованием стартстопных принципов передачи.
В 1929 г. был создан первый советский стартстопный аппарат
(А. Ф. Шориным). Затем в 1931 г. был сконструирован стартстоп-
ный аппарат БТА-31 (Л. И. Тремлем). Эти аппараты печатали
текст на бумажной ленте. В эксплуатации они находились до
1938—1941 гг., а затем были вытеснены более совершенным аппа-
ратом СТ-35. Претерпев ряд модернизаций и усовершенствований,
снабженный устройствами автоматизации, СТ-35 в настоящее вре-
мя является основным аппаратом на сети телеграфных связей.
6
страны. Последняя модификация аппарата носит название
СТА-М67 и оборудована устройствами автоматики.
Начиная с 1937 г., велись разработки телеграфных аппаратов,
печатающих передаваемый текст на рулоне бумаги. Такие аппа-
раты получили название рулонных. В этой группе аппаратов бы-
ло разработано большое число вариантов (РТА-37, АРТА-38,
АРТА-50 и др.). В настоящее время промышленность выпускает
рулонный аппарат РТА-60.
Одновременно с развитием оконечной аппаратуры совершенст-
вовалась аппаратура образования каналов телеграфной связи. До
Великой Отечественной войны основным линейным средством та-
кой связи был стальной провод. Каналы тонального телеграфа
были распространены мало, и первые -отечественные системы ТТ
были изготовлены только в 1937 г. на заводе «Красная Заря».
После 1945 г. тональное телеграфирование получило особенно
сильное развитие. В это время были проведены разработки, и на-
чался серийный выпуск аппаратуры типа ТТ-12/16 с частотной
модуляцией и аппаратуры надтонального телеграфирования
НТ-ЧМ-4. Большой вклад в создание аппаратуры тонального те-
леграфирования внесли В. Н. Амарантов и А. А. Дубовик. В кон-
це пятидесятых годов были разработаны 17--канальная аппарату-
ра на транзисторах типа ТТ-17П и одноканальная аппаратура на
транзисторах ОТТ-2С. В последние годы была разработана и на-
шла широкое применение аппаратура частотно-временного теле-
графирования ЧВТ, разработана новая аппаратура тонального те-
леграфирования ТНТ-6, ТТ-48 и аппаратура с амплитудно-импульс-
ной модуляцией типа ТВУ-12.
Наличие простого оконечного аппарата с клавиатурой типа
пишущей машинки и большого числа каналов тонального телегра-
фирования позволило приблизить средства телеграфной связи к по-
требителю, установив оконечные аппараты непосредственно в уч-
реждениях и на предприятиях. Была создана абонентская систе-
ма телеграфной связи. Одновременно была разработана система
автоматизированной обработки телеграмм в транзитных и оконеч-
ных пунктах — система с отрывом и переносом ленты, система ко-
довой коммутации телеграмм, а также система прямых соедине-
ний, в которой каждая телеграмма или группа телеграмм переда-
ется без переприема путем электрического транзита из пункта от-
правления в пункт назначения.
Факсимильные методы передачи сообщения1) начали разви-
ваться в СССР с 1931 г. Были созданы аппараты ЗТФ-4А и ФТ-5,
а затем в 1937—1938 гг., — аппараты ФТ-37 и ФТ-38. В послевоен-
ные годы были созданы новые факсимильные и фототелеграфные
аппараты ФТАМ, ФТАП, «Ладога», «Нева», «Арагви» и «Штрих».
Фототелеграфные методы широко используются для передачи
*) Для методов передачи и аппаратуры, предназначенных для передачи по-
лутоновых изображений (фотографий), приняты более узкие старые термины —
«фототелеграфия», «фототелеграфная аппаратура» (подробнее см. гл. 14).
7
газет в отдаленные пункты страны для осуществления децентрали-
зованной их печати.
Развитие техники передачи данных (ПД) началось в США в
начале 50-х годов. В нашей стране этот вид передачи получил так-
же быстрое развитие. Ярким примером использования ПД явля-
ется наземный автоматизированный командно-измерительный ком-
плекс, обслуживающий полеты советских космонавтов. Широкие
перспективы в настоящее время имеют системы передачи данных,
используемые для управления народным хозяйством.
Технической основой автоматизированных систем управления
(АСУ) являются электронно-вычислительные машины (ЭВМ) и
сеть передачи данных. Намеченная в директивах XXIV съезда
КПСС задача по созданию общегосударственной автоматизирован-
ной системы сбора и обработки информации для учета, планиро-
вания и управления народным хозяйством (ОГАС) требует раз-
вития средств передачи данных для организации связи между ЭВМ
и между ЭВМ и потребителями информации.
Обмен данными между ЭВМ на первом этапе развития АСУ
будет в основном осуществляться по каналам низкоскоростных си-
стем передачи данных, в частности, по каналам телеграфной свя-
зи. В дальнейшем, по мере увеличения информационных потоков,
будут все шире использоваться средне- и высокоскоростные систе-
мы передачи данных.
ГЛАВА 1
Основные принципы передачи
дискретных сообщений
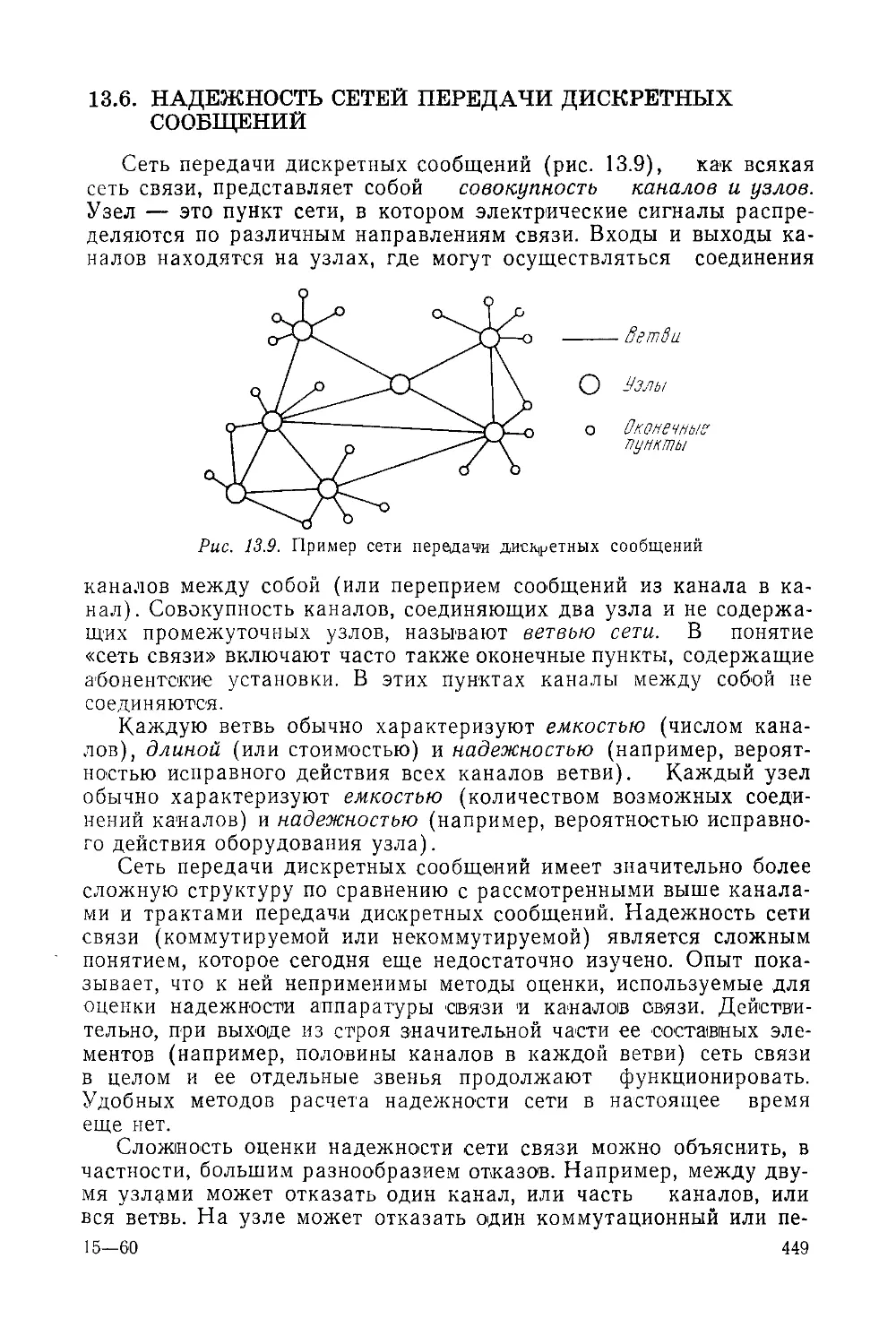
1.1. СТРУКТУРНАЯ СХЕМА ПЕРЕДАЧИ ДИСКРЕТНЫХ
СООБЩЕНИЙ. СООБЩЕНИЯ И СИГНАЛЫ
Система передачи дискретных сообщений, как и любая дру-
гая система связи, служит для передачи информации, содержа-
щей сведения о событиях или предмете. Информацию можно пе-
редать на расстояние к получателю. Подлежащая передаче инфор-
мация содержится в сообщении. По своей структуре сообщения
могут быть непрерывными и дискретными. Например, при телефо-
нировании или вещании сообщением является непрерывное изме-
нение во времени звукового давления. В конечном интервале ам-
плитуд величина звукового давления может принять любое зна-
чение. Образуется непрерывное сообщение, которое характеризу-
ется множеством значений передаваемой величины на протяжении
времени передачи. Дискретные сообщения характеризуются ко-
нечным числом значений передаваемой величины. При телеграфной
передаче — это конечное число знаков, букв и цифр. Подлежащее
передаче сообщение должно быть преобразовано в электрический
сигнал. Естественно, что между сообщениями и сигналами дол-
жно существовать однозначное соответствие, чтобы при обратном
преобразовании можно было бы получить переданные сообщения.
Преобразование сообщения в сигнал происходит в передатчике, а
обратное преобразование — в приемнике.
Сигналы, отображающие сообщения, также могут быть непре-
рывными (аналоговыми) и дискретными.
Линия связи служит для переноса сигнала на определенное
расстояние с минимальными искажениями. Практически сигнал
всегда искажается из-за воздействия различного рода помех, а
также из-за несовершенства передатчика, линии и приемника.
Совокупность технических средств — комплекс оконечной и
промежуточной аппаратуры, каналы и линии связи, — предназна-
ченная для передачи и приема дискретных сообщений от источни-
ка сообщений до получателя сообщений, называется системой пе-
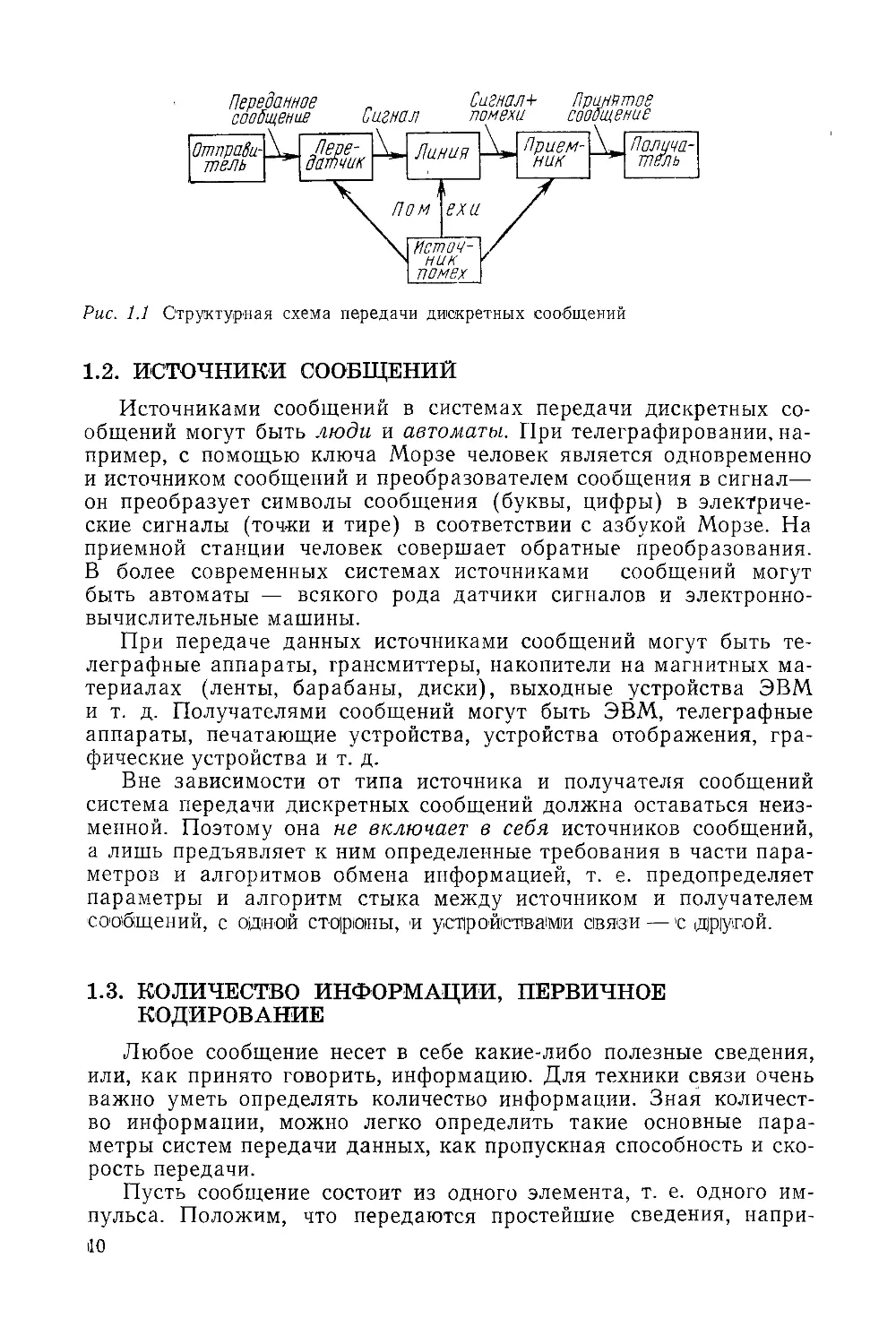
редачи дискретных сообщений. Структурная схема системы пере-
дачи дискретных сообщений приведена на рис. 1.1.
9
Рис. 1.1 Структурная схема передачи дискретных сообщений
1.2. ИСТОЧНИКИ СООБЩЕНИЙ
Источниками сообщений в системах передачи дискретных со-
общений могут быть люди и автоматы. При телеграфировании, на-
пример, с помощью ключа Морзе человек является одновременно
и источником сообщений и преобразователем сообщения в сигнал—
он преобразует символы сообщения (буквы, цифры) в электриче-
ские сигналы (точ-ки и тире) в соответствии с азбукой Морзе. На
приемной станции человек совершает обратные преобразования.
В более современных системах источниками сообщений могут
быть автоматы — всякого рода датчики сигналов и электронно-
вычислительные машины.
При передаче данных источниками сообщений могут быть те-
леграфные аппараты, трансмиттеры, накопители на магнитных ма-
териалах (ленты, барабаны, диски), выходные устройства ЭВМ
и т. д. Получателями сообщений могут быть ЭВМ, телеграфные
аппараты, печатающие устройства, устройства отображения, гра-
фические устройства и т. д.
Вне зависимости от типа источника и получателя сообщений
система передачи дискретных сообщений должна оставаться неиз-
менной. Поэтому она не включает в себя источников сообщений,
а лишь предъявляет к ним определенные требования в части пара-
метров и алгоритмов обмена информацией, т. е. предопределяет
параметры и алгоритм стыка между источником и получателем
сообщений, с одной стороны, и устройствами связи —с другой.
1.3. КОЛИЧЕСТВО ИНФОРМАЦИИ, ПЕРВИЧНОЕ
КОДИРОВАНИЕ
Любое сообщение несет в себе какие-либо полезные сведения,
или, как принято говорить, информацию. Для техники связи очень
важно уметь определять количество информации. Зная количест-
во информации, можно легко определить такие основные пара-
метры систем передачи данных, как пропускная способность и ско-
рость передачи.
Пусть сообщение состоит из одного элемента, т. е. одного им-
пульса. Положим, что передаются простейшие сведения, напри-
110
мер, «двигатель включен» и «двигатель выключен». Следователь-
но, импульс должен принимать два различных состояния, соот-
ветствующих двум возможным сообщениям. Очевидно, что пере-
даваемое сообщение дает довольно грубую оценку состояния дви-
гателя. Если теперь решим передавать десять различных сообще-
ний, характеризующих различные режимы работы двигателя, то
импульс должен принимать десять различных состояний. В этом
случае прием одного импульса даст получателю больше инфор-
мации о состоянии двигателя, чем в первом случае. Таким обра-
зом, количество информации, содержащееся в одном импульсе,
зависит от количества состояний, которые импульс мю1жет
принять.
Обозначим число состояний элемента через т и предположим,
что сообщение состоит из п элементов. Тогда число возможных
сообщений будет равно
N = тп, (1.1)
т. е. можно передавать информацию о N—'tnn состояниях двига-
теля.
Приведенные рассуждения показывают, что число возможных
сообщений является мерой количества информации, содержащей-
ся в сообщении. На практике, однако, удобнее пользоваться не ве-
личиной N, а некоторой функцией от этой величины. Вид функции
надо выбрать так, чтобы выполнялось логическое требование: при
увеличении числа элементов, к примеру, вдвое количество инфор-
мации также должно возрасти вдвое. Поскольку число элементов
п находится в показателе степени (1.1), то лучше применять ло-
гарифмическую функцию
Z = alog62V, (1.2)
или
I = a logb тп = an log* т,
где 1 — количество информации; а — постоянный коэффициент,
b — основание логарифма.
Условились считать а—1, а логарифм брать двоичным (Ь = 2).
Тогда / = log2Ar или
^=nlog2m. (1.3)
В этом случае количество информации выражается в битах (го-
ворят также «в двоичных единицах»). Один единичный элемент
содержит один бит информации, т. е. если т.=2, а п=1, то Z=4.
В двоичных системах количество информации равно числу им-
пульсов: 1=п.
Двоичная система — наиболее выгодная. Важным преимуще-
ством ее является простота реализации схем, осуществляющих
запоминание, коммутацию, кодирование и т. д. Для этого доста-
точно иметь элементы с двумя устойчивыми состояниями (триг-
геры, ключи и т. п.). Эти элементы просты и устойчивы в работе.
11
Двоичные системы, кроме того, имеют наилучшую помехозащи-
щенность.
Формула, выведенная для определения количества информа-
ции, справедлива лишь при условии, когда все возможные сообще-
ния равновероятны.
Сигналы, полученные от источника сообщений после преоб-
разования их в последовательность электрических посылок (еди-
ничных элементов) тока или напряжения, называются первичными.
При передаче данных сообщения поступают в передающую часть
аппаратуры передачи данных в виде первичных сигналов. В слу-
чае телеграфирования сообщения преобразуются в первичные сиг-
налы с помощью передатчика телеграфного аппарата. Так, на-
пример, замыкание и размыкание контактов телеграфного ключа
аппарата Морзе есть преобразование сообщений в первичные сиг-
налы. В буквопечатающих аппаратах сообщения преобразуются
в сигналы автоматически с помощью шифрирующих устройств.
Если дискретный сигнал имеет п значений, то их можно запи-
сать в виде последовательности ui, и2. и3, . . ип. Пронумеровав
эти значения, можно пользоваться последовательностью их номе-
ров 1,2, 3, . . ., п, т. е. вместо значений сигнала Ui, и2, и3, . . ип
можно передавать числа 1, 2,- .. ., п. Числа привыкли записывать
в десятичной системе счисления, т. е. с помощью десяти цифр от
О до 9. Но их можно записать и в другой системе счисления. Так,
любое число может быть записано следующим образом:
N = . . . a3R2 + c^R1 + c^R0,
где R — основание системы счисления; alt а2, а3 . .. — коэффи-
циенты разрядов, принимающие значения от 0 до R— 1.
В системах передачи дискретной информации обычно исполь-
зуется двоичная система счисления. Числа в этой системе запи-
сываются двумя цифрами 0 и 1.
Примеры десятичных чисел и равных им двоичных чисел при-
ведены в табл. 1.1.
ТАБЛИЦА 1.1
Десятич- ные числа Двоичные числа Дес ятич- ные числа Двоичные числа Десятич- ные числа Двоичные числа Десятич- ные числа Двоичные числа
0 0 8 1000 16 10000 60 111100
1 1 9 1001 17 10001 70 1000110
2 10 10 1010 18 10010 80 1010000
3 11 11 1011 19 10011 90 юною
4 100 12 1100 20 10100 100 юною
5 101 13 1101 30 11110
6 по 14 1110 40 101000
7 111 15 1111 50 110010
112
ТАБЛИЦА 1.2
Чясла в деся- тичной форме Те же числа в двоичной форме (двоичный код) Телеграфные связи
2< 23 22 21 2° Рус. Циф. Лат.
0 0 0 0 0 0 Перевод на русский
1 0 0 0 0 1 Т 5 т
2 0 0 0 1 0 Возврат каретки
3 0 0 0 1 1 0 9 0
4 0 0 1 0 0 Пробел
5 0 0 1 0 1 X Щ н
6 0 0 1 1 0 н N
7 0 0 1 1 1 м м
8 0 1 0 0 0 Перевод строки
9 0 1 0 0 1 Л ) L
10 0 1 0 1 0 Р 4 R
И 0 1 0 1 1 Г Ш G
12 0 1 1 0 0 И 8 I
13 0 1 1 0 1 п 0 Р
14 0 1 1 1 0 Ц С
15 0 1 1 1 1 Ж = V
16 1 0 0 0 0 Е 3 Е
17 1 0 0 0 1 3 + Z
18 1 0 0 1 0 д Кто там? D
19 1 0 0 1 1 Б В
20 1 0 1 0 0 С S
21 1 0 1 0 ' 1 Ы 6 Y
22 1 0 1 1 0 Ф э F
23 1 0 1 1 1 Ь 1 X
24 1 1 0 0 0 А — А
25 1 1 0 0 1 в; 2 W
26 1 1 0 1 0 Й Ю J
27 1 1 0 1 1 Перевод на цифры
28 1 1 1 0 0 У • 7 и
29 1 1 1 0 1 Я I Q
30 1 1 1 1 0 К ( К
31 1 1 1 1 1 Перевод на латинский
13
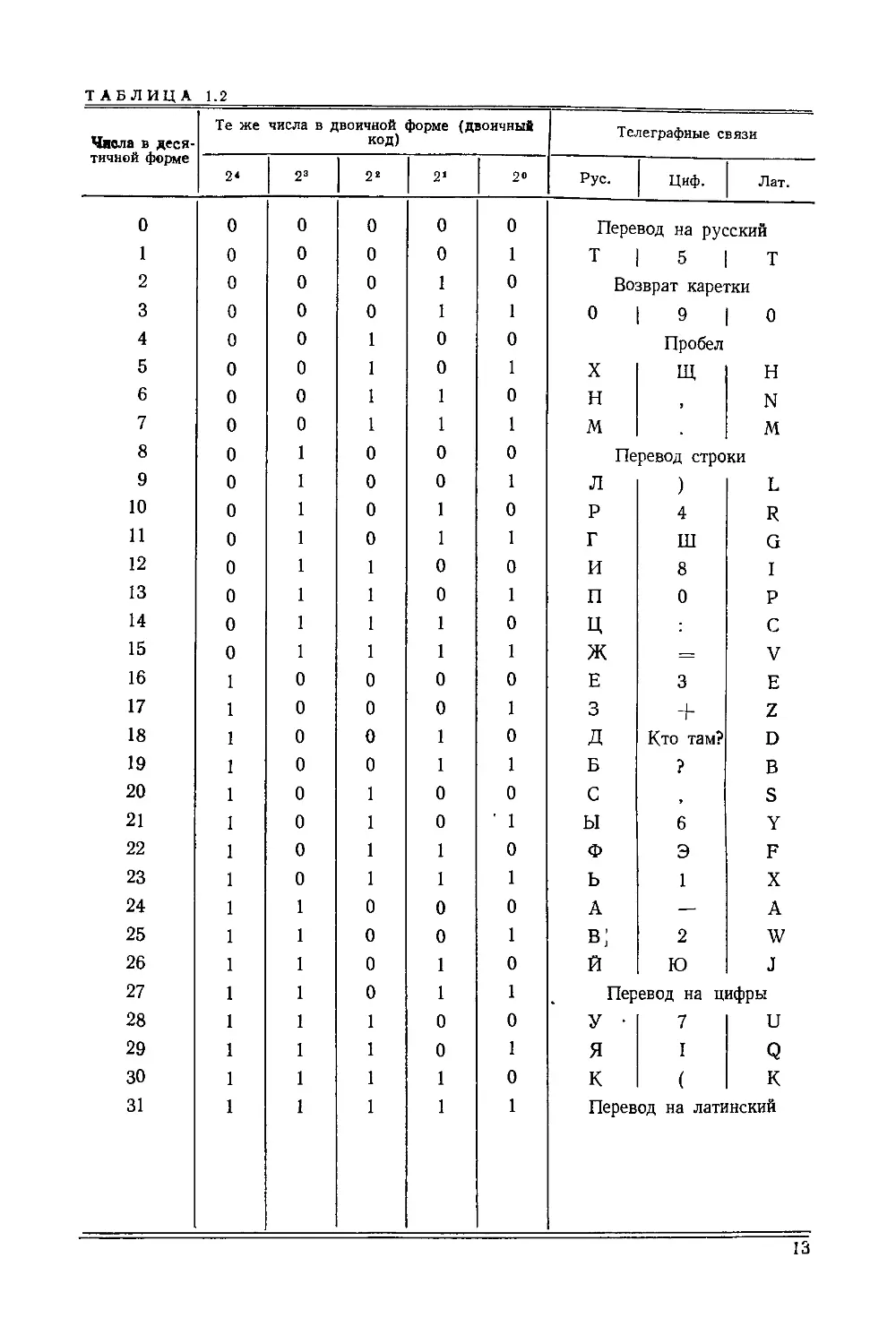
Процесс преобразования элементов сообщений в соответствую-
щее им число называют кодированием. При передаче телеграфных
знаков, например, каждая буква и цифра занумерованы. Для пе-
редачи сигналов используются пять разрядов двоичных чисел.
Каждый символ двоичного числа представляет собой определен-
ный разряд числа 2.
Пятизначное число достаточно для передачи текста телеграмм.
В табл. 1.2 показано использование двоичных чисел (двоичного
кода) в телеграфном аппарате.
Полученные в результате кодирования числа носят название
кодовых комбинаций. Отдельные двоичные цифры называются эле-
ментами комбинаций, а соответствующие им электрические сигна-
' О I
I Знаки ।
I " I / I
I Числа в десятичной форме I
!------,--------1-------»--------[
I I
j Числа в Ябоичной форме ।
\ 0 0 1 1 1 / 1 0 о о \
I Кодовая Кодовая i
I комбинация комбинация |
>|,|,Ь|Л I,,
I ZgJ Го. kjo/ffiofl Го_ I ИоД Jo I Jo, JoJ
i i
I Элементарные I
l посылки I I
лы — единичными элементами
(в телеграфии — элементарны-
ми посылками). На рис. |1.2 по-
казан процесс кодирования
двух знаков М и А.
(единичные
элементы)
Рис. 1.2. Процесс кодирования
знаков М и А
В рассмотренном коде все знаки и цифры передаются кодовы-
ми комбинациями, содержащими одинаковое число единичных эле-
ментов. Поэтому подобные коды называются равномерными. В не-
равномерных кодах длина комбинаций различна. Примером мо-
жет служить код Морзе.
Если в применяемом коде все кодовые комбинации использо-
ваны для передачи сообщений, как это имеет место в данном слу-
чае, то такой код называется обыкновенным. В технической лите-
ратуре его называют также простым, равнодоступным, или доста-
точным кодом.
1.4. СКОРОСТЬ ПЕРЕДАЧИ ИНФОРМАЦИИ И СКОРОСТЬ
МОДУЛЯЦИИ. ПРОПУСКНАЯ СПОСОБНОСТЬ КАНАЛОВ
СВЯЗИ
Скорость передачи информации определяется количеством ин-
формации, передаваемой в единицу времени, и измеряется в бит/с.
Скорость модуляции определяется количеством единичных эле-
14
ментов (элементарных посылок), передаваемых в единицу време-
ни, и измеряется в бодах:
В = (1.4)
т0
В двоичных системах каждый единичный элемент несет один
бит информации. Если все единичные элементы несут информа-
цию, то скорость передачи информации и скорость модуляции рав-
ны между собой:
Смакс=В, бит/с. (1.5)
Однако в реальных условиях к единичным элементам, которые
несут информацию, добавляют специальные единичные элементы
для служебных целей, например, для синхронизации и фазирова-
ния. Кроме того, как будет показано ниже, для обеспечения тре-
буемой верности приема также необходимы единичные элементы
(элементарные посылки). Поэтому, как правило,
С<В. (1.6)
Пример. Обычный стартстопный телеграфный аппарат передает букву
семью элементами: стартовый — 20 мс, 5 кодовых — по 20 мс, столовый — 30 мс.
Общая продолжительность передачи буквы — 150 мс. При автоматизированной
работе буквы передаются непрерывно. Скорость модуляции по ф-ле (1.4):
В= 1:0,02 = 50 бод. Скорость передачи информации определим так: число пере-
даваемых букв в секунду равно 1:0,15, в каждой букве пять информационных
элементов, отсюда С=5/0,15=33,3 бит/с.
Для многопозиционных систем, например, двух-, трехкратных
и т. д. видов модуляций, скорость передачи информации может
превышать скорость передачи сигналов (скорость модуляции):
Смакс^Д'
Пропускная способность системы передачи дискретных сообще-
ний, или скорость передачи информации, зависит в основном от
ширины спектра частот, отводимого для работы системы, а также
от вида модуляции и интенсивности помех. Ширина канала опреде-
ляет длительность нарастания переходного процесса при модуля-
ции какого-либо параметра несущей частоты. Как будет показано
в гл. 7, длительность нарастания
(1.7)
при передаче с двумя боковыми полосами и
(1.8)
2Д F
при передаче с одной боковой полосой или передаче в нч канале
(без модуляции). Здесь AF — ширина канала.
При предельной скорости модуляции длительность элементар-
ной посылки (единичного элемента) т0 может быть равна времени
ее нарастания, т. е. то=(н. Тогда
В = ДЕ, бод (1.9)
15
для передачи с двумя боковыми полосами и
В==2ДГ, бод (1.10)
для передачи с одной боковой полосой.
1.5. ПОНЯТИЕ О ВЕРНОСТИ И НАДЕЖНОСТИ СИСТЕМ
ТЕЛЕГРАФИИ И ПЕРЕДАЧИ ДАННЫХ. ПОНЯТИЕ
О ПОМЕХОУСТОЙЧИВОМ КОДИРОВАНИИ
Важнейшими показателями качества систем передачи данных
и телеграфных систем являются их верность и надежность. Вер-
ность характеризуется безошибочностью передачи сообщения за
учетный отрезок времени. Оценкой ее может служить отношение
числа правильно принятых символов сообщения (знаков, цифр,
элементов сообщения) к общему числу переданных символов сооб-
щения. На практике чаще пользуются понятием потеря достоверно-
сти, которая оценивается частостью ошибок:
(1.11)
лобщ
где пОш — число неправильно принятых символов сообщения;
«общ—общее число переданных символов сообщения.
Частость ошибок, измеренная на реальных связях за корот-
кий интервал времени (например, 10 мин, 1 ч), оказывается раз-
ной в разные сеансы измерений. Например, ночью ошибок всег-
да меньше, чем днем, что объясняется снижением загрузки сети
связи и уменьшением количества помех. Поэтому можно гово-
рить о максимальной, минимальной и средней частости ошибок,
указывая обязательно длительность сеансов измерения.
Наиболее объективной оценка получается при определении
количества ошибок за весьма большие интервалы времени (неде-
ли, месяцы, годы). В этом случае среднее относительное количе-
ство ошибок даст вероятность ошибки:
р0Ш=Нш (1.12)
Лобщ-ж «общ
Для повышения верности приема информации принимают спе-
циальные меры. Так, например, можно одну и ту же информа-
цию передавать по нескольким независимым путям, а на приеме
производить выборку голосованием. Чем брлыпе независимых
путей, тем меньше вероятность неправильного приема. Аналогич-
ную операцию можно произвести, если одно и то же сообщение
передавать по одному каналу несколько раз.
Верность приема можно увеличить, использовав помехоустой-
чивые коды. В ,отличие от обыкновенного кода в помехоустойчи-
вых (корректирующих) кодах из общего числа кодовых комбина-
ций, Которые можно получить из п элементов, для передачи ин-
формации используется только часть комбинаций.
16
Одним из самых простых корректирующих кодов является
международный код № 3. Каждая комбинация этого кода состоит
из семи единичных элементов (посылок). Число комбинаций при
равномерном семизначном коде равно 27=128. Из них 35 обла-
дают общим свойством: отношение числа посылок «единиц» к чис-
лу посылок «нуль» в одной комбинации остается постоянным и
равным 3/4. Следовательно, можно составить телеграфный код,
в котором все кодовые комбинации будут обладать указанным об-
щим свойством. Если перед приемным аппаратом включить спе-
циальное анализирующее устройство, которое будет выключать
приемник при нарушении соотношения 3/4 в приходящей комби-
нации посылок, то аппарат не отпечатает неправильного знака. На-
рушение соотношения 3/4 может произойти в канале связи под
действием помех, в результате в кодовой комбинации появится
ошибка. Таким образом, с помощью помехоустойчивого кода мож-
но на приемной стороне обнаруживать ошибки в принятых ком-
бинациях.
В простейшем случае телеграфный пятиразрядный код преоб-
разуется в помехоустойчивый, если к первичной комбинации при-
бавить еще один разряд, но так, чтобы число единиц в кодовой
комбинации стало четным. Например, буквам А, Б и В телеграф-
ного кода будут соответствовать кодовые комбинации 110000,
100111, 110011, в которых шестой разряд является проверочным.
Таким образом, в кодовых комбинациях часть разрядов исполь-
зуется в качестве информационных, а часть (в данном случае ше-
стой разряд)—в качестве проверочных. Если в линии произошла
одиночная ошибка, например, в комбинации буквы Б во втором раз-
ряде (110111), то специальное устройство в приемнике обнаружит
эту ошибку, поскольку число единиц стало нечетным. Отсюда
следует, что корректирующие коды всегда содержат избыточную
информацию (разряды), которая и позволяет обнаружить ошиб-
ку. Количество избыточной информации в кодовой комбинации
равно числу дополнительных разрядов. Остальную информацию,
в отличие от избыточной, называют полезной информацией.
Кроме двоичных (двухпозиционных) кодов возможны и много-
позиционные коды, использующие системы счисления с основани-
ем более двух.
Система передачи дискретной информации, как и любая дру-
гая сложная техническая система, не моЖет работать безотказно
бесконечно долгое время. Событие, заключающееся в полной или
частичной утрате системой работоспособности, называется отка-
зом. Применительно к системе передачи данных отказом может
быть названо любое событие, вызывающее задержку передавае-
мой информации на время, больше допустимой задержки:
^зад > ^доп- (1 -13)
Допустимая задержка информации определяется временем, в
течение которого принимаемая информация не потеряла своей цен-
ности, Так, например, при передачи информации о местонахожде-
17
нии поезда или самолета сообщение должно поступить к получате-
лю раньше, чем поезд или самолет прибудет в назначенный пункт.
В противном случае сообщение теряет смысл.
Допустимое время задержки сообщения обусловливается про-
цессом, который обслуживает система передачи данных. В приве-
денном примере время задержки может составлять минуты. При
регулировании других процессов время задержки может равнять-
ся секундам. В отдельных случаях (регулирование быстротекущих
химических реакций, наведение ракет в системе ПВО и т. д.) вре-
мя задержки не должно превышать долей секунды. Поэтому одна
и та же система передачи данных может работать длительное вре-
мя безотказно при больших допустимых задержках и очень часто
отказывать при малых допустимых задержках. Свойство системы,
обеспечивающее нормальное выполнение всех заданных функций,
называется надежностью. Надежность системы передачи данных
характеризуется средним временем наработки на один отказ Т„ и
средним временем восстановления после отказа Тъ.
Среднее время наработки на отказ Тп является наиболее про-
стым и-употребительным критерием надежности. На практике зна-
чение этого критерия определяется на основании статистических
данных:
r. = ^V]7-p.6.., (>.14)
1=1
где Т’раб г — время безотказной работы между i выходами системы
из строя; .V — количество выходов из строя.
Среднее время восстановления зависит от того, как быстро уда-
ется обнаружить и устранить Повреждение-
Коэффициент готовности системы Кг объединяет оба параметра
и характеризует степень исправного действия системы в любой мо-
мент времени:
1.6. ПОНЯТИЕ О СИНХРОННОМ И СТАРТСТОПНОМ
ПРИНЦИПАХ РАБОТЫ ОКОНЕЧНЫХ УСТРОЙСТВ.
ПАРАЛЛЕЛЬНЫЙ И ПОСЛЕДОВАТЕЛЬНЫЙ СПОСОБЫ
ПЕРЕДАЧИ
Различают два способа передачи посылок: асинхронный и син-
хронный. Примером асинхронного способа передачи может слу-
жить простейшая схема телеграфирования с помощью аппарата
Морзе (рис. 1.3). Информация со станции А на станцию Б пе-
редается с помощью ключа на станции А. При нажатии ключа в
линию поступает ток («рабочая посылка»), при отпускании — тока
не поступает («посылка покоя»). Приемник (электромагнит) на
станиии Б притягивает свой якорь при поступлении рабочей по-
18
сылки и отпускает при поступлении посылки покоя. Таким обра-
зом, при приеме используется один из признаков передаваемого
сигнала (начало токовой и начало бестоковой посылок) для того,
чтобы отметить момент поступления информационного элемента.
Для выполнения этой операции в линию не передается какой-либо
специальный сигнал.
Передача кодовых комбинаций (например, пятиразрядных) мо-
жет быть осуществлена по схеме, изображенной на рис. 1.4. На-
Рис, 1.3. Простейшая схема связи
с помощью аппарата Морзе
Рис. 1.4. Простейшая схема для пе-
редачи пятиразрядных кодовых ком-
бинаций
бор кодовой комбинации осуществляется на станции А с помощью
пяти ключей Кл1—Кл^. В положении ключей, показанном на схе-
ме, передается комбинация 00110. В качестве приемника исполь-
зуются пять электромагнитов на станции Б. Очевидно, что пере-
становка ключей (набор комбинаций) Кл<—Кл5 должна происхо-
дить одновременно. В описанной схеме также применен асинхрон-
ный принцип работы. Основной ее недостаток состоит в использо-
вании пяти линий связи.
При синхронном способе передачи, посылки передаются через
одинаковые промежутки времени т0. Поэтому на приемной стан-
ции имеется возможность предсказывать время прихода наиболее
устойчивой части посылки, а следовательно, увеличить вероят-
ность ее правильного приема.
Простейшая схема для синхронного способа передачи (рис. 1.5)
может быть получена преобразованием схемы 1.4. Для этого необ-
ходимо как на передающей стороне (ст. А), так и на приемной
стороне (ст. Б) установить распределители. Оба распределителя
имеют по пять контактов. Если'щетки распределителей на прием-
ной и передающей станциях вращаются так, что к линии связи в
каждый момент времени подключены одноименные контакты рас-
пределителей, то информация (импульс) от Кл^ попадает в ЭМ\,
от Кл2 — в ЭМ2 и т. д. Передача всей кодовой комбинации будет
закончена за один цикл (оборот) распределителя.
Такой режим совместной работы (вращения) распределителей
называется синхронным и синфазным. Понятие «синхронный» ха-
рактеризует равенство скоростей вращения щеток, а «синфазный»—
соблюдение и поддержание вполне определенного соотношения их
19
Рис. 1.5. Схема, поясняющая принцип синхронной связи
фаз. Для правильного приема кодовых комбинаций необходимо,
чтобы начало передачи посылки совпадало с началом ее прие-
ма (в телеграфии — фазирование по посылкам) и чтобы посыл-
ки, передаваемые с к-го контакта распределителя передачи, по-
пали на к-й контакт распределителя приема (фазирование по
циклам).
Кроме синхронного способа передачи широко применяется еще
стартстопный способ передачи. При синхронном способе передачи
распределители после установления связи работают непрерывно
вне зависимости от того, передается по линии связи полезная ин-
формация или нет. При установлении соединения между синхрон-
ными передатчиками и приемниками требуется определенное вре-
мя для установления синхронности и синфазности. При старт-
стопном способе передачи перед началом передачи сообщения пе-
редается сигнал (посылка или комбинация) начала передачи —
«старт», а после окончания сигнал конца — «стоп». Промежуток
между этими сигналами заполняется информационными единич-
ными элементами, следующими друг за другом через фиксирован-
ные интервалы времени (значащие интервалы).
Синхронизация между распределителями передатчика и при-
емника в стартстопных системах поддерживается лишь в преде-
лах времени, необходимого для передачи одного знака. Распре-
делитель приемника запускается под действием стартовой по-
сылки, а останавливается — под действием стоповой посылки. Во
время нахождения распределителя приемника на «стопе» имею-
щиеся расхождения скоростей и фаз распределителей приемника
и передатчика сводятся к нулю.
20
Элементы кодовой комбинации можно передавать в линии свя-
зи параллельно (см. рис. 1.4) или последовательно (см. рис. 1.5).
При равенстве длин единичных элементов время передачи кодо-
вой комбинации во втором случае в пять раз больше, чем в пер-
вом. Выигрыша в пропускной способности нет. Однако стоимость
устройств и средств, обеспечивающих передачу информации, во
втором случае в несколько раз ниже, так как наиболее дорогим
элементом в комплексе связи является линия связи.
1.7. ПОНЯТИЕ О КАНАЛАХ СВЯЗИ, ДИСКРЕТНЫХ
КАНАЛАХ, КАНАЛАХ И ТРАКТАХ ПЕРЕДАЧИ
ДИСКРЕТНЫХ СООБЩЕНИЙ
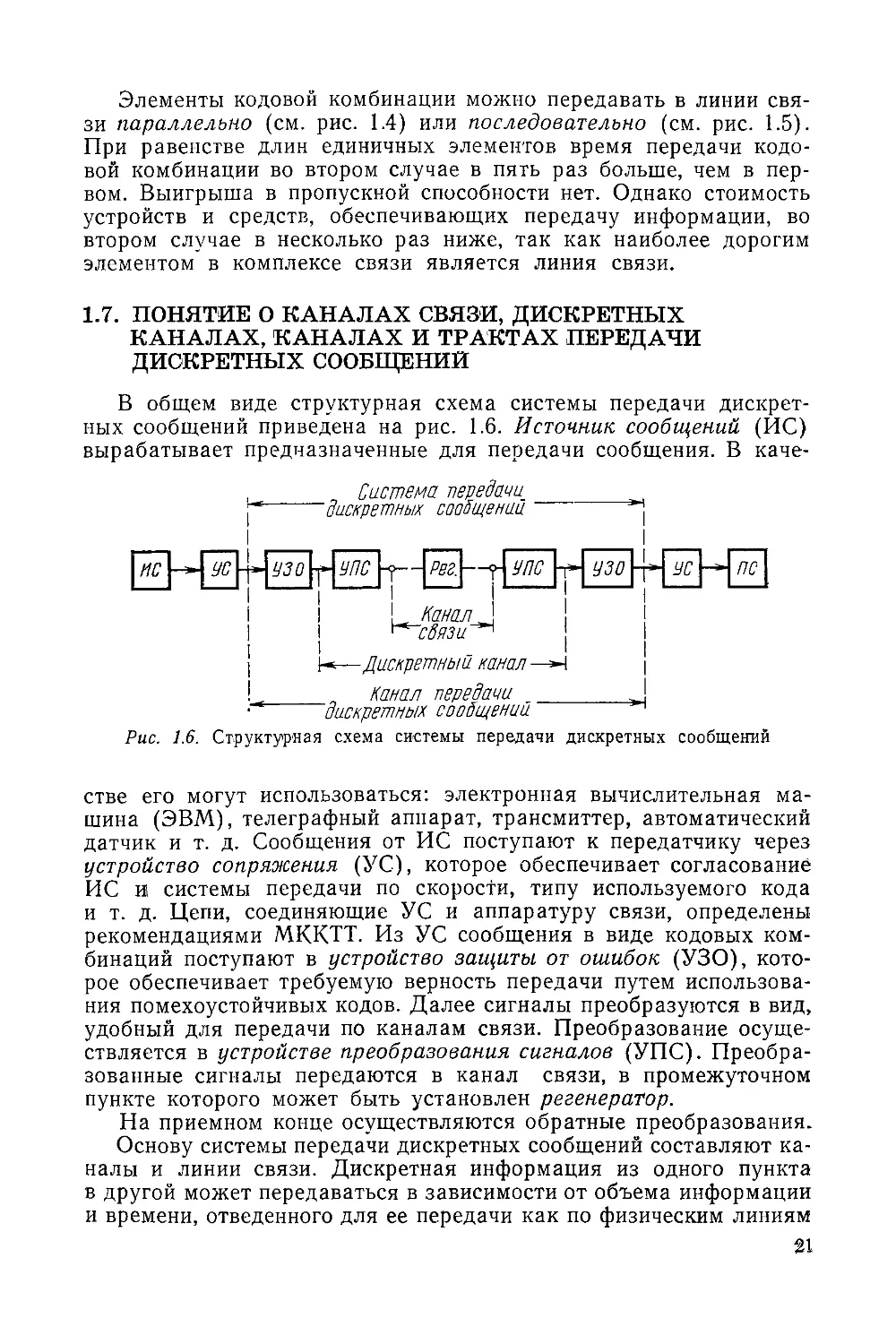
В общем виде структурная схема системы передачи дискрет-
ных сообщений приведена на рис. 1.6. Источник сообщений (ИС)
вырабатывает предназначенные для передачи сообщения. В каче-
, Система передачи
г* дискретных сообщений *
ПС
УС -* ПС
—Дискретный канал
Канал передачи ___
дискретных сообщений
Рис. 1.6. Структурная схема системы передачи дискретных сообщений
стве его могут использоваться: электронная вычислительная ма-
шина (ЭВМ), телеграфный аппарат, трансмиттер, автоматический
датчик и т. д. Сообщения от ИС поступают к передатчику через
устройство сопряжения (УС), которое обеспечивает согласование
ИС и системы передачи по скорости, типу используемого кода
и т. д. Цепи, соединяющие УС и аппаратуру связи, определены
рекомендациями МККТТ. Из УС сообщения в виде кодовых ком-
бинаций поступают в устройство защиты от ошибок (УЗО), кото-
рое обеспечивает требуемую верность передачи путем использова-
ния помехоустойчивых кодов. Далее сигналы преобразуются в вид,
удобный для передачи по каналам связи. Преобразование осуще-
ствляется в устройстве преобразования сигналов (УПС). Преобра-
зованные сигналы передаются в канал связи, в промежуточном
пункте которого может быть установлен регенератор.
На приемном конце осуществляются обратные преобразования.
Основу системы передачи дискретных сообщений составляют ка-
налы и линии связи. Дискретная информация из одного пункта
в другой может передаваться в зависимости от объема информации
и времени, отведенного для ее передачи как по физическим линиям
21
"(кабелям) постоянным током, так и по каналам связи, организо-
ванным путем уплотнения физической линии. При небольших ско-
ростях (50 бод) для передачи дискретной информации используют-
ся телеграфные каналы, обычно каналы тонального телеграфирова-
ния. Отличительной особенностью этих каналов является то, что
они приспособлены для передачи информации в двоичной форме.
Для ввода данных в каналы связи в этом случае могут быть ши-
роко применены телеграфные аппараты и приборы телеграфной ав-
томатики.
При более высоких скоростях (600, 1200, 2400, 4'800, 9600 бод)
для передачи информации используют стандартные каналы тональ-
ной частоты. Однако канал тч хорошо приспособлен лишь для пе-
редачи телефонных сообщений. При использовании его для переда-
чи других видов информации, в частности для передачи данных,
возникает ряд трудностей. Так, например, при передаче данных
приходится, во-первых, применять устройства преобразования сиг-
налов (модемы), позволяющие использовать всю полосу частот ка-
нала и обеспечивающие наибольшую помехоустойчивость; во-вто-
рых, приходится корректировать имеющиеся в канале тч большие
фазо-частотные искажения либо мириться со снижением скорости
передачи; в-третьих, в каналах .тч большое количество кратковре-
менных перерывов и импульсные помехи сильно снижают верность
передачи данных. В телефонной практике с этими помехами не
борются, так как вследствие малой длительности они не влияют на
качество телефонного разговора.
При скоростях модуляции, превышающих 9600 бод, используют
групповые тракты систем высокочастотного телефонирования и те-
левизионные каналы.
Установка оборудования, позволяющего передавать по стан-
дартному каналу связи двоичную информацию, преобразует стан-
дартный канал связи в дискретный канал. Дискретный канал
представляет собой совокупность стандартного канала связи и
устройств преобразования сигналов. Он предназначен для пере-
дачи и приема дискретной информации и характеризуется скоро-
стью модуляции в бодах. Включение в дискретный канал уст-
ройств, обеспечивающих требуемую верность передачи сообще-
ний, преобразует его в канал передачи дискретных сообщений
(канал передачи данных, канал передачи дискретной информа-
ции) .
Канал передачи дискретных сообщений (ПДС), представляю-
щий собой совокупность дискретного канала и УЗО, предназна-
чен для передачи дискретной информации и характеризуется ско-
ростью передачи информации (бит/с), а также обеспечиваемой
верностью передачи.
При низкой надежности каналов передачи дискретных сооб-
щений часто применяют их резервирование. В этом случае на-
дежность системы передачи дискретных сообщений повышается.
На рис. 1.7 показана структурная схема системы с постоянным
резервом (параллельная работа). Два канала ПДС объединены
22
групповым устройством. Групповое устройство может объединять
и большее число каналов, образуя тракт передачи дискретных со-
общений (информации), который характеризуется скоростью пере-
дачи, ее верностью, а также надежностью работы.
Каналы и тракты ПДС образуют сети ПДС, которые являются
одним из видов вторичных сетей, так как по ним передается лишь
один вид информации (например, данные или телеграфные сооб-
I
I
I
I
।
I-
] Канал передача дискретных сообщений I I
j *________(информации) । I
Трактп передачи дискретных сообщений (информации^
Рис 1 7. Структурная схема двухканального тракта передачи данных
щения). Вторичные сети базируются на основе первичной сети
связи. В состав сети ПДС, кроме каналов и трактов, входят так-
же абонентские устройства (устройства приема и передачи ин-
формации) и узлы коммутации.
В узлах коммутации дискретная информация распределяется
двумя основными способами: 1) путем создания временного пря-
мого тракта передачи сообщений (коммутация каналов) либо 2)
путем организации переприема сообщений с их промежуточной
записью и дальнейшей передачей в направлении к получателю
(коммутация сообщений).
Кроме коммутируемых каналов можно использовать некомму-
тируемые (выделенные), если обмен нагрузки у абонентов до-
статочен для 13'агруз‘ки постоянно действующего (прямого) канала
ПДС.
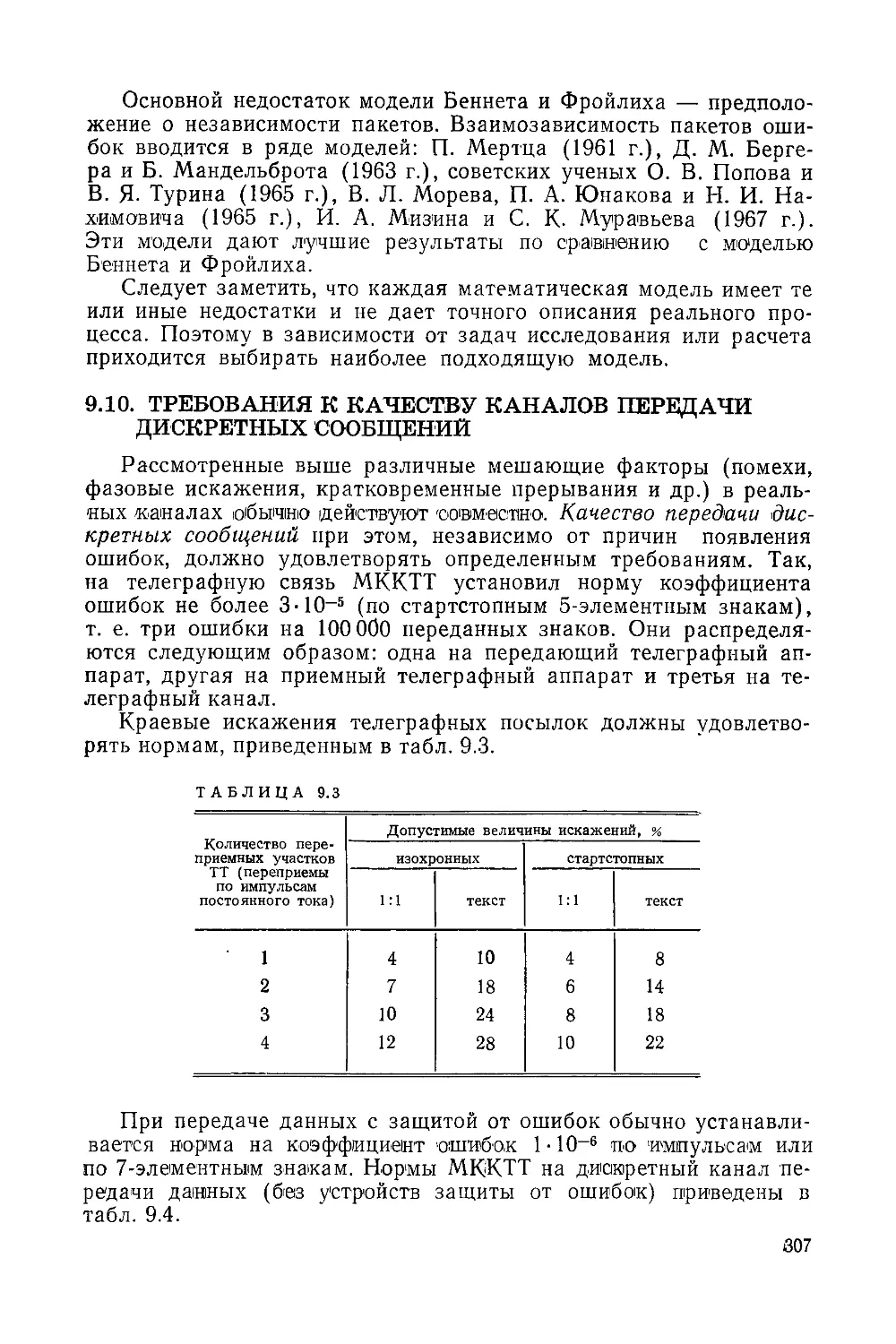
1.8. ОСНОВНЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К СИСТЕМАМ ТЕЛЕГРАФИИ И ПЕРЕДАЧИ
ДИСКРЕТНЫХ СООБЩЕНИЙ
Основные требования, предъявляемые к системе передачи
дискретных сообщений (СПДС), связаны с ее основными харак-
теристиками: пропускной способностью, верностью и надежно-
стью.
Выбор типа системы по пропускной способности зависит от
объема передаваемой информации. Различают низкоскоростные,
среднескоростные и высокоскоростные СПДС. Для передачи дан-
23
>ных предполагается использовать следующие типы систем ПДС:
— систему, работающую по абонентской сети коммутируемых
каналов низкой частоты со скоростью модуляции (порядка 504-
4-200 бод);
— систему, работающую по выделенным телеграфным кана-
лам с низкой скоростью модуляции <50-4-200 бод;
— систему, работающую по сети коммутируемых тч каналов
со средней скоростью модуляции 2004-11'200 бод;
— систему, работающую по выделенным тч каналам со сред-
ней скоростью модуляции 600—9600 бод;
— систему, работающую по выделенным широкополосным
(групповым и телевизионным) каналам со скоростью модуляции
выше 12 000 бод.
Требования к верности передачи, как правило, выбираются со-
измеримыми с ошибками, которые вносятся источником сообще-
ний. Для телеграфной передачи потери достоверности по зна-
кам не должны превышать 10~3. Вероятность ошибки, вносимая
ЭВМ, лежит в пределах от 10~6 до Ю-10. Поэтому и вероятность
ошибок при передаче данных имеет тот же порядок.
Требования к надежности системы ПДС могут быть различ-
ными в зависимости от целевого назначения системы приема и
обработки информации. Однако надо помнить, что повышение на-
дежности тесно связано со сложностью и стоимостью системы.
ГЛАВА 2
Искажения двоичных сигналов
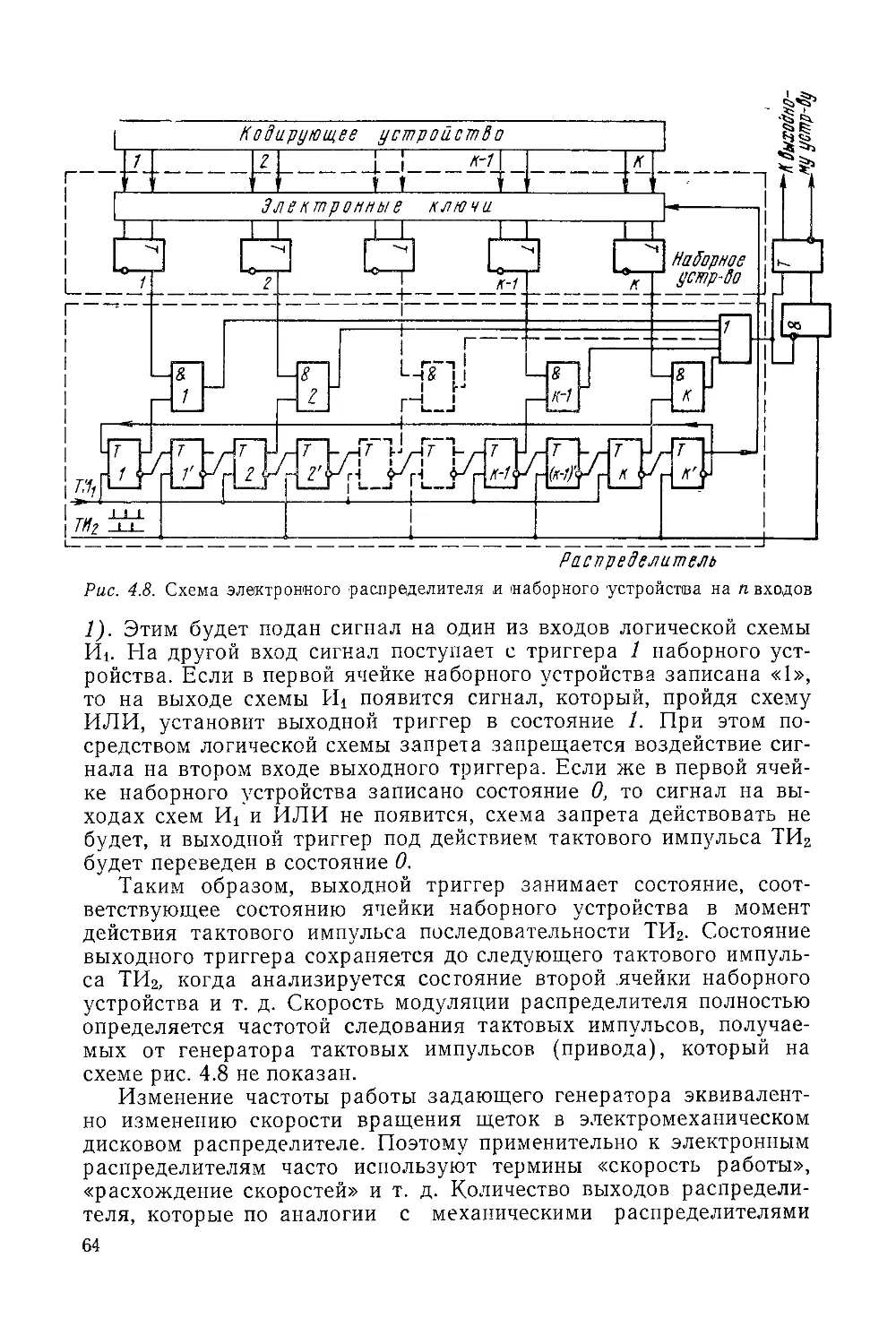
2.1. ОЦЕНКА КАЧЕСТВА СВЯЗИ ПО ИСКАЖЕНИЯМ
ПРИНИМАЕМЫХ СИГНАЛОВ
Простейшая схема для передачи двоичных сигналов постоян-
ным током одного направления (однополюсная работа) приведена
на рис. 2.1. При замыкании ключа Кл на станции А в линии про-
ходит ток, и электромагнит станции Б при-
тягивает свой якорь (срабатывает). Таким
образом, работа якоря электромагнита со-
ответствует работе ключа.
На рис. 2.2 приведены кривые тока,
характеризующие работу приемного элек-
тромагнита. Кривая а показывает измене-
ние эдс, действующей на входе линии, кри-
вая б — ток, протекающий в обмотках
Рис. 21. Простейшая схе-
ма для передачи двоич-
ных сигналов
электромагнита. Если после выключения тока линия не остается
изолированной, а соединяется с землей, то кривая спадания тока
обратно симметрична относительно кривой нарастания тока. Для.
Рис. 2.2. Кривые, характеризующие работу схемы1 на рис. 2.1
2.Т
простоты рассмотрения будем считать, что ток срабатывания элек-
тромагнита равен току отпускания, а время движения якоря пре-
небрежительно мало по сравнению с длительностью замыкания и
размыкания ключа.
Если выбрать ток срабатывания электромагнита гср равным по-
ловине рабочего (установившегося) значения тока в электромаг-
ните, то работа якоря электромагнита полностью соответствует
работе ключа, т. е. временные интервалы (значащие интервалы)
притянутого положения якоря равны временным интервалам за-
мыкания ключа, хотя и сдвинуты по времени на время распростра-
нения сигнала и время срабатывания электромагнита (кривая в).
Однако в линии (или каналах) связи всегда действуют помехи,
искажающие форму сигнала на входе приемника. На рис. 2.3 по-
Рис. 2.3. Кривые, характеризующие работу схемы
на рис. 2.1 при действии в линии токов помех
казаны кривые токов помех в линии (кривая в) и суммарная кри-
вая рабочего тока и токов помехи (кривая г). В результате дей-
ствия помех значащие интервалы работы электромагнита стали
отличаться от интервалов замыкания ключа. В этом случае при-
нято говорить, что в принятых значащих интервалах возникли вре-
менные искажения относительно переданных значащих интерва-
лов.
Если из последовательности интервалов работы якоря электро-
магнита при отсутствии помех (кривая а на рис. 2.4) вычесть ин-
тервалы работы якоря при наличии помех (кривая б на рис. 2.4),
то можно получить последовательность временных несоответствий
26
принятых интервалов относи-
тельно переданных (рис. 2.4б).
Эти несоответствия служат
мерой искажений принятых
двоичных сигналов относи-
тельно переданных.
Рассмотренный пример мо-
жно распространить и на бо-
лее общий случай передачи
двоичных посылок, когда пере-
о
Рис. 2.4. 'Последовательность временных
интервалов:
а) .переданные интервалы; б) принятые
интервалы; в) временное несоответствие
принятых и переданных интервалов
дача в канале связи осуществ-
ляется с частотным преобразо-
ванием — модуляцией. Из-за
неидеальности амплитудных,
частотных и фазовых характе-
ристик канала связи, а также под действием различного вида по-
мех форма элементов (посылок) в приемнике может исказиться в
любой степени. Эти искажения могут быть устранены подачей сиг-
Рис 2 5. Последовательность
значащих интервалов
налов на пороговое спусковое устройство, например, триггер. На
его выходе получаются прямоугольные посылки, однако искаже-
ния в длительности и знаке посылок остаются.
На рис. 2.5 изображена последовательность значащих интерва-
лов, создаваемых на передающем конце. Точки а, б, в, г и т. д.
отстоят друг от друга по оси времени на время единичного интер-
вала то- В зависимости от кода передаваемой комбинации в этих
точках может происходить смена посылок типа 0 на посылки ти-
па 1 или же наоборот. Моменты времени, в которые знак посылки
на передающем конце может измениться на противоположный
(точки а, б, в, г и т. д.), называются моментами модуляции (ММ).
Моменты времени, в которые знак посылки действительно изме-
нился (точки а, б, г, е), называются значащими моментами моду-
ляции (ЗММ).
При приеме последовательности посылок соответственно разли-
чают моменты восстановления (МВ) и значащие моменты восста-
новления (ЗМВ).
При наличии в каналах связи мешающих факторов ЗМВ сме-
щены относительно ЗММ. На рис. 2.6 показана последовательность
переданных и принятых значащих интервалов и последователь-
ность их временных несоответствий. Рассматривая последова-
тельность несоответствий, можно выделить четыре группы, отли-
чающиеся друг от друга:
I группа — несоответствия, начинающиеся от ЗММ (или иде-
ального ЗМВ) и заканчивающиеся на интервале последующего
27'
единичного элемента (точки а, б, з). Здесь можно говорить о сме-
щении ЗМВ вправо относительно ЗММ. Это смещение хорошо за-
метно, если сравнить последовательности а и б;
II группа —• несоответствия, начинающиеся на предшествую-
щем идеальному ЗМВ интервале и оканчивающиеся в идеальном
ЗМВ (точки г, д). Здесь появилось смещение ЗМВ влево относи-
тельно ЗММ;
Рис. 2 6. Последовательность посылок:
а) переданных; б) принятых; в) временное несоответствие переданных и приня-
тых посылок
III группа — несоответствия, начинающиеся и заканчивающие-
ся внутри одного единичного элемента (см. интервал между точ-
ками в и г). Это несоответствие сопряжено с появлением лиш-
него числа ЗМВ по сравнению с ЗММ;
IV группа — несоответствия, начинающиеся от МВ и закан-
чивающиеся на другом МВ (точки и, к). Это несоответствие соп-
ряжено с пропаданием ЗМВ по сравнению с ЗММ.
Заметим, что несоответствия I и II групп не сопровождаются
разрывом знака значащего интервала (0 или 1), а вызваны лишь
изменением его длительности. Несоответствия III и IV групп вы-
званы изменением знака внутри единичного интервала, всего еди-
ничного интервала либо внутри последовательности единичных ин-
тервалов одного типа (последовательность 1 или 0).
В соответствии с изложенным, искажения значащих интерва-
лов (посылок) можно разделить на краевые и дробления по-
сылок.
Краевые искажения — это изменение длительности принятых
значащих интервалов (посылок) относительно переданных. Крае-
вые искажения вызываются смещениями МВ относительно их иде-
ального положения. Вследствие неодинакового смещения МВ пер-
вый значащий интервал удлинен на 0t=i4—А, а четвертый знача-
щий интервал укорочен на 02=tf4—13. Величины i0t и 02 есть инди-
видуальные искажения значащих интервалов, которые могут ха-
28
растеризоваться относительной величиной индивидуальных иска-
жений:
й _ Ёк ЮО %, 62 = 100 %. (2.1)
Tq т0
При достаточно большой последовательности значащих интерва-
лов (посылок) можно считать, что полная зона возможных смеж-
ных смещений ЗМВ составляет
© ~ ^макс Лиин» (2-2)
где ^макс — максимально возможное смещение ЗМВ вправо отно-
сительно идеального положения; /Мин — максимально возможное
смещение ЗМВ влево относительно идеального положения. Сме-
щение ЗМВ вправо считают положительным, а влево — отрица-
тельным.
Относительная величина общих искажений бесконечной после-
довательности значащих интервалов (посылок)
бо6щ = — 100% = /макс~/мин ЮОо/о =В(гмакс-Си) 100%, (2.3)
т0 То
где В — скорость модуляции, бод.
Пример. Смещения ЗМВ составляют: £Макс=3 мс, ^мин=4 мс. Надо оп-
ределить общие искажения при жорссти модуляции 25 и 50 бод.
При В =125 бод
«бобщ = 25 [0,003 — (— 0,004)] 100% = 17,5%;
при В = 50 бод
бо6щ = 50 [0,03 - (- 0,04)] 100% = 35%.
По своему характеру краевые искажения могут быть разделе-
ны на три вида: преобладания бпр, характеристические 6хар и слу-
чайные бел-
Если искажения отдельных посылок (0Ь , остаются
постоянными во времени (по величине и знаку), то их относят к
искажениям, называемым преобладаниями. Выражаются эти ис-
кажения в удлинении всех посылок одного знака (полярности) за
счет укорочения посылок другого знака.
Особенностью характеристических искажений является зависи-
мость их величины от характера передаваемой последовательности
посылок. Эти искажения появляются в тех случаях, когда переход-
ный процесс не успевает установиться за время единичного эле-
мента (элементарной посылки) или когда он имеет колебательные
«выбросы». Длительность посылки (на выходе фильтра или кана-
ла) при этом меняется в зависимости от вида предыдущих по-
сылок.
При передаче периодической последовательности несимметрич-
ных комбинаций (например, типа 1:5, 5:1, 2:3) величина харак-
теристических искажений в каждом случае является постоянной.
Если посылки передаются в хаотической последовательности, то
величина характеристических искажений будет переменной. Мак-
29
симальной она будет при прохождении самой неблагоприятной
комбинации. При передаче комбинации 1 :1 («точек») характери-
стические искажения отсутствуют.
Случайные искажения вызываются обычно помехами и являют-
ся случайной величиной, меняющейся во времени.
В общем случае принимаемые посылки подвержены действию
искажений трех указанных типов одновременно:
^общ ^пр + ^хар + 6сл- (2.4)
Общая величина искажений будет также случайной величиной.
Дроблением значащих интервалов (посылок) называется искаже-
ние, состоящее в смене полярности сигнала во время передачи по-
сылки. При этом полярность может измениться как на части дли-
тельности посылки, так и на всей ее длительности и даже на дли-
тельности нескольких подряд следующих посылок одной полярно-
сти. Действие дроблений сопровождается изменением числа ЗМВ
по сравнению с ЗММ.
Случай, когда изменяется знак всей посылки, с равным основа-
нием может быть отнесен к индивидуальному краевому искаже-
нию посылки на 100% (см. рис. 2.6, точки и, к). Момент начала
дробления и его продолжительность /др носят случайный харак-
тер.
2.2. ЗАКОНЫ РАСПРЕДЕЛЕНИЯ СМЕЩЕНИЙ ЗМВ И
ДЛИТЕЛЬНОСТИ ДРОБЛЕНИЙ. СТАТИСТИЧЕСКИЕ
МЕТОДЫ ОЦЕНКИ ИСКАЖЕНИЙ
Величина смещений значащих моментов восстановления в ре-
альных каналах связи определяется большим количеством фак-
торов, многие из которых являются случайными. Поэтому смеще-
ния ЗМВ также можно рассматривать как случайный процесс, ко-
торый может быть изучен с помощью статистических методов.
Для выяснения статистической структуры смещений ЗМВ су-
ществуют специальные приборы — анализаторы искажений, опре-
деляющие закон распределения смещений. С помощью анализато-
ра можно выяснить, какое количество ЗМВ из общего числа при-
нятых сместилось относительно идеального положения на задан-
ную величину. Результаты измерений сводятся в таблицы. Приве-
дем одну из них в качестве примера (табл. 2.1).
Каждый из рассматриваемых моментов может попасть в ука-
занные в табл. 2.1 интервалы с определенной вероятностью.
Графической интерпретацией приведенной таблицы может слу-
жить гистограмма наблюдений (рис. 2.7а), т. е. график, построен-
ный из прямоугольников, основаниями которых служат интервалы
смещений, а высоты пропорциональны повторяемости смещений
ЗМВ. По оси ординат отложено отношение частости повторения
смещений щ к ширине интервала Ах. Гистограмма дает наглядное
представление о характере распределения смещений ЗМВ. Одна-
ко для расчетов желательно аппроксимировать ее непрерывной
30
функцией, которая бы как можно точнее соответствовала результа-
там измерений. Форма гистограммы, представленной на рис. 2.7а,
позволяет предположить, что последняя может быть достаточно
точно аппроксимирована нормальным законом распределения.
Т А Б.’Л.И Ц'А 2.1
Смещения МВ А х % Повторяемость смещений п. Нормированная час- тость п1 A
(—50)ч-(—11) 0 0
(—11)=(—9) 1 0,000376
(-9)=(-7) 8 0,00298
(-7)=(-5) 41 0,0154
(—5)ч-(—3) 141 0,053
(-3)-Ч+Ц 290 0,109
(-1Ж+1) 370 0,139
(+1Ж+3) 275 0,104
(+3)^(+5) 156 0,0587
(+5Н(+7) 40 0,01501
(+7)-^(+9) 7 0,00264
(+9)=(+11) 1 0,000376
(+11К(+50) 0 0
Сумма 1330=2 щ
Как известно, плотность вероятностей нормального закона рас-
пределения определяется соотношением
<р(х)=—1^е , (2.5)
а у 2л
где х — случайная величина, в данном случае смещение ЗМВ; а—
среднее арифметическое значение случайной величины; о — сред-
неквадратичное отклонение случайной величины от среднего зна-
чения а.
Нормальный закон распределения полностью характеризуется
параметрами а и сг. Определим эти параметры по результатам на-
блюдений, приведенным в табл. 2.1. Среднее значение случайной
величины может быть найдено по формуле
2 Х;П;
а = —— .
2 П[
Среднеквадратичное отклонение определяется соотношением
а = |/2щ-(хг-аТ2 _ (2.7)
(2.6)
31
В приведенных формулах есть одно из значений смещений
ЗМВ. Обычно эти значения берут равными серединам интервалов.
В результате расчетов найдем: а—16/1330=0,0121 «0% и ст=
=У 11086/1330 « 2,9 %
Рис. 2.7. Распределение смещений ЗМВ:
а) гистограмма; б) сравнение гистограммы с вычисленной кри-
вой нормального распределения
По полученным параметрам а и ст построена кривая плотности
вероятностей нормированного нормального распределения, приве-
денная на рис. 2.76. Кривая вычисляется по формуле
Ф(2) = -^е 2, (2.8)
у 2л
где
z = х-^ . (2.9)
о
Из рисунка видно, что соответствие между теоретическим и
измеренным распределениями вполне хорошее. Поэтому можно
считать, что в рассмотренном случае смещения ЗМВ распреде-
лены по нормальному закону. Многочисленные измерения, прове-
денные на проводных каналах связи при передаче двоичной инфор-
32
мации с помощью анализаторов искажений, также подтверждают,
что в большинстве случаев распределение смещений ЗМВ подчи-
нено нормальному закону распределения. Однако это не исключа-
ет возможности иных распределений смещений ЗМВ в других ус-
ловиях.
Зная закон распределения смещений ЗМВ, можно определить
вероятность появления искажения, превышающего наперед задан-
ную величину. Как известно, площадь кривой плотности вероятно-
стей равна единице, т. е.
Сс
J <р(х)ск=1. (2.Ю)
— Со
Вероятность того, что случайная величина превысит наперед
заданное значение 6 (без учета знаков) равна
—5 оо д
р(|х|)>б)= J q(x)dx+ J(p(x)dx = l— J <р(х) dx. (2.11)
—со & —6
Для нормального закона эту формулу можно привести к из-
вестным функциям:
Переходя к нормированной функции нормального распределе-
ния, имеем
Г +<*
р(|х|>6)= * [е 2dt+ 1- -L- fe“ 2 dt, =Ф(/)+[1-Ф(У],
Г2т1 _M L -оо J (2.12)
где Ф(^) — табулированный интеграл вероятностей:
ф « = й J e’v <2-13’
Ф(^) — эта же функция, но от аргумента fa:
+tt _4_
0(Q = -L-fe 2 dx-
у 2л J
-----00
t —§~а . _ б + а
а ’ 1 о
(2-14)
(2.15)
Пример. Известно, что закон распределения ЗМВ нормалей. Его пара-
метры а=2% и о=3%. Нужно определить вероятность появления искажений
более 6=10%. По приведенным выше формулам рассчитываем
, 10 — 2 104-2
— = 2,67; Н = _ =4,0; Ф (/) = 0,0038; 1 — Ф (Гг) = 0,00003.
о о
Искомая вероятность р( |х| >6) =0,00383.
2—60 33
Функция распределения длительности дроблений может быть
определена по результатам статистических наблюдений с помо-
щью счетно-регистрирующих устройств. Эти устройства позво-
ляют выяснить число дроблений и длительность каждого из них.
Полученные результаты обрабатываются методами математиче-
ской статистики так же, как краевые искажения.
Многочисленные измерения, проведенные на проводных кана-
лах связи при передаче двоичной информации с помощью счетно-
регистрирующих устройств, показали, что для подавляющего боль-
шинства каналов кривые распределения длительности дроблений
близки к логарифмически-нормальному закону, т. е. по нормаль-
ному закону распределена не длительность дроблений х, а ее ло-
гарифм In х.
Логарифмически нормальное распределение определяется вы-
ражением
(1п х—т.}2
tW =-----е ~, (0<х<оо), (2.16)
х о V 2л
где х — случайная положительная величина (длительность дроб-
ления); т — среднее значение величины 1пх; о — среднеквадра-
тичное отклонение случайной ве-
Рис. 2 8 Распределение количества
дроблений на проводных каналах
связи по часам суток
личины от значения т.
Количество дроблений, дейст-
вующих в течение определенного
отрезка времени, зависит от часа
суток. На рис. 2.8 приведена ти-
пичная зависимость количества
дроблений от часа суток. Общее
количество дроблений за сутки
принято за 100%. Видно, что в
дневное время искажений типа
дробления значительно больше,
чем в ночное время. Количество
дроблений особенно резко воз-
растает между 8 и 9 часами. Это
позволяет предположить, что одной из главных причин появления
дроблений являются всякого рода эксплуатационно-технические
работы на магистралях связи (линейные и станционные).
2.3, ПРИНЦИПЫ ИЗМЕРЕНИЙ ИСКАЖЕНИЙ ЗНАЧАЩИХ
ИНТЕРВАЛОВ (ПОСЫЛОК)
Измерения искажений значащих интервалов сводятся к изме-
рению смещений ЗМВ относительно их идеального положения.
Зная максимальное смещение ЗМВ вправо и минимальное влево,
определяют общие искажения в соответствии с ф-лой (2.3)
60бщ = -макс~^и* 100%.
*о
34
На рис. 2.9а изображена последовательность переданных неис-
каженных посылок. Те же посылки, но подверженные искажениям,
показаны на графике рис. 2.96. Если эту последовательность про-
дифференцировать, то образуются короткие импульсы, соответст-
вующие ЗМВ (график на рис. 2.9в). Если имеется последова-
тельность коротких импульсов, расположенных в идеальных МВ
а С в г д е м: $
Рис. 2.9. Временные диаграммы, поясняющие принцип измерения ис-
кажений посылок
(кривая на рис. 2.9 г}, то можно сравнить последовательность
ЗМВ с идеальными МВ. Для этого последовательность дифферен-
цированных импульсов предварительно выпрямляется. На графи-
ке рис. 2.96 показаны совмещенные последовательности идеальных
и значащих МВ. Расстояния между ними ti, tz, ta, t6, /7, t& и t9 есть
смещения ЗМВ относительно идеальных МВ. Между точками г и
д последовательности действует дробление, в результате чего об-
разовались два новых ЗМВ. Для рассматриваемого случая макси-
мальное (положительное) смещение вправо Дакс = 4, а минималь-
ное (отрицательное) смещение влево ^МИН-’ ^9 (смещения /4 и Д
не учтены, т. е. они относятся к дроблению посылки). Поэтому
добщ = 100 % = 100 %.
То т0
Структурная схема прибора, работающего на основе изложен-
ного принципа измерений, приведена на рис. 2.10. Подлежащие
измерению значащие интервалы (посылки) подают на вход диф-
ференцирующей цепочки С, Rt.
Дифференцированные короткие импульсы выпрямляются и с
нагрузочного резистора R{ поступают в формирующее устройство,
выход которого соединен с модулирующим электродом электрон-
нолучевой трубки. С помощью колебаний опорного генератора и
фазовращателя на экране трубки получается круговая развертка-
За время одного единичного интервала луч совершает один обо-
2* 35
рот, так как частота опорного генератора равна скорости модуля-
ции. Если бы искажения посылок отсутствовали, то все значащие
МВ совпадали бы с идеальными, и короткие импульсы с выхода
формирующего устройства модулировали бы яркость луча точно
через время то. На экране трубки светилось бы одно и то же ме-
сто в круговой развертке луча. Это место соответствует нулевым
Рис. 2.10. Измеритель искажений посылок:
а) структурная схема; б) изображение на экране
1— формирующее устройство, 2— модулирующий электрод, 3 — элек-
троннолучевая трубка, 4 — фазовращатель на 90°, 5 — опорный генератор
искажениям. Разброс светящихся точек около нулевой отметки
свидетельствует о наличии смещений ЗМВ. Полная зона свечения
(рис. 2.106) равна величине общих искажений 60бщ- Дробления
проявляются в виде появляющихся изредка свечений вйе устойчи-
вой зоны краевых искажений.
С помощью описанного прибора можно определить составляю-
щие общих краевых искажений — бпр, 6хар и 6СЛ- Величина 6пр
легко определяется по двум устойчивым точкам свечения (см.
рис. 2.105).
Определение величины бхар основано на том факте, что при
передаче комбинации 1:1 характеристические искажения отсутст-
вуют. Поэтому, если из величины бОбш> измеренной на произволь-
ной последовательности посылок («текст»), вычесть величину
6общ> измеренной на комбинации 1:1 («точки»), то можно получить
значение характеристических искажений.
Величина случайных искажений вычисляется по ф-ле (2.4):
^СЛ = ^общ ' (бпр бхар).
ГЛАВА 3
Двоичные элементы систем передачи
дискретных сообщений
3.1. СХЕМЫ РЕАЛИЗАЦИИ ЛОГИЧЕСКИХ ОПЕРАЦИЙ,
ПРИМЕНЯЕМЫХ В ТЕХНИКЕ ПЕРЕДАЧИ ДИСКРЕТНЫХ
СООБЩЕНИЙ
В аппаратуре передачи дискретных сообщений широко исполь-
зуются устройства, реализующие логические операции. Рассмот-
рим схемы некоторых из этих устройств.
Схема инвертора (схема НЕ) реализует логическую операцию
отрицания (у—х). Один из возможных вариантов схемы НЕ при-
веден на рис. 3.1а, а ее условное обозначение — на рис. 3.16.
В)
Рис. 31. Принципиальная схема ин-
вертора (а) и ее условное обозначе-
ние (б)
aJ
При отсутствии отрицательного напряжения на базе транзисто-
ра последний закрыт, а на выходе действует коллекторное напря-
жение —Ек (у=х). При подаче отрицательного напряжения на
базу транзистор открывается. На выходе действует напряжение,
практически равное нулю.
Схема совпадений (схема И) реализует операцию логического
умножения — конъюнкцию (y—xix2). Сигнал на выходе схемы по-
является только при наличии сигналов на всех входах устройства.
Если хотя бы на одном входе сигнала нет, то на выходе устрой-
ства сигнал также отсутствует.
На рис. 3.2а изображена схема И на полупроводниковых дио-
дах. Если R~^>r, то при хотя бы одном открытом диоде напряже-
ние на выходе схемы будет практически равно нулю. Только тог-
да, когда на все входы одновременно поступят отрицательные сиг-
налы, запирающие диоды, на выходе появится отрицательное на-
пряжение —Е.
Схема И на транзисторах может быть выполнена, например,
последовательным их соединением (рис. 3.26). Сигнал на выходе
37
появляется лишь при наличии сигнала на всех входах. Условное
обозначение схемы И показано на рис. 3.2в.
Схема ИЛИ реализует операцию логического сложения —
дизъюнкцию (у=Х\-\-Хг). Сигнал на выходе схемы появляется в
а) яа полупроводниковых диодах; б) на транзисторах; в) услов-
ное обозначение
том случае, когда хотя бы на одном из входов имеется сигнал.
На рис. 3.3а изображена схема ИЛИ, выполненная на диодах.
Схема на транзисторах выполняется параллельным их соедине-
Рис. 3.3. Схемы ИЛИ:
а) на диодах; б) на транзисторах; в) условное обозначение
нием (рис. 3.36). Условное обозначение схемы ИЛИ приведено на
рис. З.Зе.
Схема импликатора реализует операцию импликации (у —
=х1->-х2=х1-|-х2). Сигнал на выходе устройства появляется тог-
да, когда отсутствует сигнал на первом входе или присутствует на
втором входе. Схема импликатора образуется соединением схем
38
НЕ и ИЛИ (рис. 3.4/z). Условное обозначение схемы дано на
рис. 3.46.
Схема запрета (схема НЕТ) реализует логическую операцию
отрицания импликации fz/ = .ri+x2=xx2). Схема НЕТ строится пу-
Рис. 3.4. Принципиальная схема импликатора
обозначение (б)
(а) и ее условное
тем объединения схемы инвертора и схемы И (рис. 3.5). Сигнал
на выходе устройства появляется в том случае, если на первом
входе сигнал присутствует, а на втором входе — отсутствует.
Рис. 3.5. Принципиальная схема НЕТ (а) и ее условное обозначе-
ние (б)
Схема отрицания равнозначности реализует логическую опера-
цию сложения по модулю 2 (у=х{ ф х2) и образуется параллель-
ным соединением двух схем запрета. Сигнал на выходе устройст-
ва появляется тогда, когда входные сигналы имеют различную
полярность. Схема и ее условное обозначение показаны на
рис. 3.6.
Схема равнозначности реализует логическую операцию отрица-
ния сложения по модулю (y—xt@x2) и строится объединением
двух схем И. При этом на оба входа второй схемы И подают ин-
вертированные сигналы с входов 1 и 2. Сигнал на выходе устрой-
ства появляется тогда, когда оба входных сигнала имеют одина-
ковую (положительную или отрицательную) полярность. Схема и
ее условное обозначение приведены на рис. 3.7.
39
Описанные схемы для реализации логических операций могут
быть реализованы не только на транзисторах, но и на других эле-
ментах: электронных лампах, электромеханических реле, безна-
кальных тиратронах, магнитных элементах и т. д.
Рис. 3.7. Принципиальная схема равнозначности (а) и ее услов-
ное обозначение (б)
3.2. ИНТЕГРАЛЬНЫЕ ЛОГИЧЕСКИЕ СХЕМЫ
Развитие микроэлектроники позволило создать миниатюрные
и долговечные логические схемы, все элементы в которых объеди-
нены между собой, заключены в общий корпус и представляют не-
разделимое целое. В этом .состоит основной признак интеграль-
ной схемы. Особенности технологии производства интегральных
схем во многом определили и их электрическую схему. Так, напри-
мер, изготовление транзисторов в полупроводниковых схемах инте-
грального типа проще и дешевле, чем изготовление резистора боль-
шого номинала. Кроме того, проще изготовить одновременно два
или больше транзисторов с ухудшенными, но допустимыми пара-
метрами, чем один транзистор с высокими параметрами. Таким
образом, принцип — чем проще схема, тем легче ее изготовить —
неприменим к технологии интегральных схем.
Степень интеграции схемы измеряется количеством компонен-
тов и межкомпонентных соединений, которые могут быть созданы
одновременно групповыми методами в едином технологическом
40
процессе. Наиболее высокую степень интеграции имеют монолит-
ные полупроводниковые (твердые) схемы. Заметим также, что в
интегральных схемах преимущественно используются кремниевые
транзисторы типа п-р-п. Это связано с технологией производства.
Транзисторы типа п-р-п обладают лучшими электрическими пара-
метрами.
В настоящее время, как правило, изготовляют не отдельные
логические схемы, а серии интегральных схем, выполняющих раз-
нообразные логические функции. Однако в любую схему входят
составные элементы, выполняющие логические функции И—НЕ
или ИЛИ—НЕ. Поэтому при классификации интегральных схем
исходят из сопоставления именно этих (основных) схем.
Схема И—НЕ реализует логическую операцию отрицания ум-
ножения (y—'XiXz). Сигнал на выходе схемы появляется тогда,
когда на одном или на обоих его входах отсутствуют сигналы. Ча-
сто эту схему называют элементом Шеффера.
Схема ИЛИ—НЕ реализует логическую операцию отрицания
сложения (y=>Xi-{-Xz). Сигнал на выходе схемы появляется тогда,
когда ни на одном из входов нет сигналов. Эту схему часто назы-
вают элементом Пирса.
Все схемы, выполняющие указанные логические операции, мо-
жно разделить на две группы:
1) схемы, в которых обе логические операции И (ИЛИ) и НЕ
выполняются при помощи одних и тех же транзисторов. Отлича-
ются эти схемы только видом цепи базы транзистора: с непосред-
ственной связью (рис. 3.8а), с резистивной связью (рис. 3.86), ре-
Рис. 3.8. Основные логические схемы И—НЕ (элемент Шеффера):
а) с непосредственной связью; б) с резистивной связью; в) услов-
ное обозначение
зистивно-емкостной связью (рис. 3.9а) и с объединенными эмит-
терами (рис. 3.96);
2) схемы, в которых обе логические операции И (ИЛИ) и НЕ
осуществляются различными частями схемы: операция НЕ —
при помощи инвертора, а операция И (ИЛИ) — схемами, реали-
зующими операции умножения (сложения).
41
<7/
Рис. 3 9. Основные логические схемы ИЛИ—НЕ (элемент Пирса) •
а) с резистивно-емкостной связью; б) с объединенными эмиттерами, в) ус-
ловное обозначение
Отличаются эти схемы элементами И (ИЛИ), которые могут
быть выполнены на резисторах, диодах и транзисторах. Соответ-
ственно различают резистивно-транзисторные (рис. 3.10а), диод-
Рис ЗЛО Основные топические схемы:
а) резисторно-транзисторная схема ИЛИ—НЕ; б) диодно-транзисторная схе-
ма И—НЕ; в) транзисторно-транзисторная схема И—НЕ
но-транзисторные (рис. ЗЛОб), транзисторно-транзисторные (рис.
3.10 в) интегральные схемы.
Внутри указанных типов транзисторных интегральных логиче-
ских схем можно выделить несколько подтипов, которые отлича-
ются наличием дополнительных компонентов.
3.3. ДВОИЧНЫЕ ПЕРЕКЛЮЧАЮЩИЕ УСТРОЙСТВА.
НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ. ОСНОВНЫЕ
ПАРАМЕТРЫ
Переключающие устройства, имеющие два устойчивых состоя-
ния равновесия и способные очень быстро переходить из одного
устойчивого состояния в другое под действием управляющего сиг-
нала, называют двоичными. Обозначим одно устойчивое состояние
устройства цифрой 0, другое — цифрой 1. Работу устройства мож-
но пояснить, пользуясь его пусковой характеристикой, выражаю-
щей зависимость выходного сигнала £Вых от входного £вх. На
42
рис. 3.14 изображена идеальная характери-
стика двоичного устройства.
'Предположим, что к моменту 'появления
входного сигнала двоичное устройство на-
ходилось в состоянии 0. До тех шор пока
значение входного сигнала Евх остается
меньше некоторой пороговой величины
+£пор, состояние двоичного устройства не
изменится. При Евх^Етр устройство скач-
ком перейдет в состояние 1. Дальнейшее
увеличение входного сигнала (или прекра-
щение его действия) не изменит состояния
устройства. Чтобы изменить состояние, не-
обходимо подать управляющий сигнал про-
тивоположной полярности Двх<—Дпор.
Рассмотренная пусковая характеристи-
ка любого двоичного устройства имеет вид
прямоугольной петли, ширина которой оп-
Рис. 3.11. Пусковая ха-
рактеристика двоичного
переключающего устрой-
ства
ределяется значениями порогового срабатывания. Чем уже петля,
тем при меньших значениях Епор происходит срабатывание, т. е.
тем выше чувствительность устройства. Время, в течение которого
устройство способно перейти из состояния 0 в состояние |1 или на-
оборот, называется временем потерь tB0T в двоичном устройстве.
Пусть на входе двоичного устройства действует сигнал прямо-
угольной формы длительностью то (рис. 3.12а/ На выходе устрой-
ства форма сигнала будет иметь вид, изображенный на рис. 3.126.
Наличие времени потерь вызывает некоторое укорочение устано-
вившегося значения выходного сигнала по отношению к входному.
Вносимое укорочением искажение
6ПОТ = — юо% = юо%,
То то
(3.1)
где т' — время, в течение которого действует выходной сигнал ус-
тановившегося значения.
Отношение т'/то назовем коэффициентом отдачи двоичного уст-
ройства р:
т) = 21100% = (1 — 6ПОТ) 100% = (1—В/пот)100%, (3.2)
То
где В — скорость модуляции, бод.
Поскольку время потерь tam предопределяется конструкцией
переключающего устройства и не зависит от скорости передачи, то
с увеличением скорости модуляции (уменьшением т0) коэффициент
отдачи устройства линейно уменьшается. При определенной ско-
рости модуляции В коэффициент отдачи уменьшается настолько,
что устройство перестает выполнять свои функции. Предельная
скорость, при которой устройство еще способно выполнять свои
функции, называется допустимой скоростью работы.
43
Двоичные переключающие устройства могут быть контактными
(т. е. иметь контактный выход) и бесконтактными. К контактным
электромеханическим двоичным устройствам относятся реле. К бес-
контактным двоичным устройствам относятся триггерные схемы,
построенные на элементах электроники (электронных лампах,
транзисторах, безнакальных тиратронах и т. д.) и на магнитных
элементах с прямоугольной петлей гистерезиса.
Рассмотрим некоторые из двоичных устройств.
Рис. 3.12. Кривые, характеризующие работу дво- Рис. 3.13. Эскиз реле
ичного переключающего устройства
3.4. ПОЛЯРИЗОВАННЫЕ ТЕЛЕГРАФНЫЕ РЕЛЕ
Поляризованное реле состоит из постоянного магнита, элек-
тромагнита и якоря с контактами (рис. 3.13). Постоянный магнит
NS создает магнитные потоки Ф\ и Ф2, проходящие через воздуш-
ные промежутки и а2. В положении якоря реле, изображенном
на рисунке, ai<a2, поэтому Ф1>Ф2- Якорь реле будет притягивать-
ся к левому полюсному наконечнику, а язычок якоря — прижи-
маться к левому контакту.
При включении в обмотку реле источника тока создается маг-
нитный поток Фг, который проходит последовательно через оба
воздушных зазора. Если направление Ф, противоположно Фъ а
его величина больше Ф±—Ф2, то якорь реле будет переброшен к
правому контакту. После выключения источника тока якорь ос-
танется притянутым к правому контакту под действием потока
ф'=ф2—фь
Таким образом, поляризованное реле характеризуется нали-
чием двух источников магнитодвижущей силы, перемещением яко-
ря реле под совместным действием двух магнитных потоков и за-
44
висимостыо положения якоря от направления тока, протекающе-
го через обмотки реле.
Основными параметрами реле, от которых зависит качество
его работы, являются:
— чувствительность, характеризуемая пороговым значением
тока (ток срабатывания), при котором якорь реле начинает пере-
брасываться к противоположному контакту;
— время трогания якоря — время, в течение которого ток в
обмотках реле нарастает от нуля до величины тока срабатывания.
Это время зависит от индуктивности и активного сопротивления
обмоток;
— время потерь, которое складывается из времени, необходи-
мого на перелет (движение) якоря от одного контакта к другому
и времени вибрации якоря у контакта (пот—'^дв + ^виб/
— коэффициент отдачи реле: р=(1—Лтот/то) 100% =
= (1— Btn0T) 100%.
Условные обозначения поляризованных телеграфных реле по-
казаны на рис. 3.14 а, б. Для определения направления движения
контактного язычка придерживаются сле-
дующего правила: если ток, протекающий
по обмотке реле, направлен по часовой
стрелке, то язычок переброшен к правому
контакту, если против часовой зтрелки, —
к левому контакту -(рис. 3.446).
Работа реле во многом зависит от его
регулировки. Последняя может быть про-
ведена нейтрально или с преобладанием.
Нейтральная регулировка характеризуется
замыканием на одинаковое время якорем
каждого из контактов реле при Пропуска-
нии через его обмотку одинаковых по про-
должительности и амплитуде посылок тока
обоих направлений. Как правило, поляри-
зованные реле регулируют нейтрально. При
этом расстояние между полюсной над-
ставкой сердечника и якорем При левом по-
ложении якоря и соответствующее расстоя-
ние в2 при правом положении якоря одинаковы (рис. 3.14в). Си-
лы, удерживающие якорь в том и другом состоянии при отсутст-
вии тока в обмотках, также одинаковы. Для переброса якоря от
одного контакта к другому в этом случае потребуются одинаковые
силы, а следовательно, одинаковые величины порогового значения
тока. При регулировке с преобладанием расстояния Hi и в2 неоди-
наковы. Поэтому и токи срабатывания для переброса якоря от пра-
вого контакта к левому и наоборот неодинаковы.
На рис. 3.15 приведены кривые, характеризующие работу реле.
Нейтрально отрегулированное реле не вносит искажений при вос-
произведении управляющих сигналов (рис. 3.15а). При регулиров-
ке с преобладанием длительность воспроизводимых посылок од-
45
Рис. 3.14. Условное обоз-
начение поляризованного
реле
ной полярности, например 0, всегда на одну и ту же величину
больше длительности посылок противоположной полярности
(рис. 3.156).
Рис. 3.15. Кривые, характеризующие работу по-
ляризованного реле при различных регулировках:
а) нейтральной; б) с преобладанием
Чувствительность реле может быть повышена уменьшением
расстояния между полюсными надставками и якорем реле, а так-
же уменьшением магнитного потока Фо=Ф!+Ф2- Повышение чув-
ствительности реле сопровождается уменьшением контактного дав-
ления при отсутствии управляющего тока.
Коэффициент отдачи реле увеличивается при сокращении вре-
мени потерь /Пот = (дв+(виб. Последнее, в свою очередь, может быть
достигнуто путем уменьшения расстояния между контактами и
применения гибкой конструкции язычка якоря. Пбчти полностью
устраняется вибрация при использовании контактного язычка, со-
стоящего из двух плоских пружин (рис. 3.16). При столкновении
46
с контактом -пружины изгибаются, вслед-
ствие чего практически вся кинетическая
энергия удара -поглощается трением пру-
жин.
3.5. СИММЕТРИЧНЫЙ ТРИГГЕР
НА ТРАНЗИСТОРАХ
Широкое распространение в системах
передачи дискретных сообщений получи-
ли триггеры. Принцип действия триггера
известен из курса «Импульсная техника»
и поэтому здесь не излагается. Заметим
лишь, что управление работой триггера
Контакты
Рис. 3.16. Констукция языч-
ка якоря рэле
может осуществляться разнополярными импульсам,; по одному
входу или однополярными импульсами по двум входам. Часто ис-
пользуется триггер с управлением по счетному в коду.
Принципиальные схемы триггеров с различными способами уп-
равления, их диаграммы напряжений и условные обозначения при-
ведены на рис. 3.17—3.19.
Рис 3.17. Триггер с управлени-
ем по одному -входу
а) принципиальная схема; б)
диаграмма напряжений; в) ус-
ловное обозначение
Симметричный триггер можно образовать, объединяя основные
логические схемы ИЛИ—НЕ. На рис. 3.20 показана такая схема,
составленная из интегральных схем с резистивной связью. Кон-
структивно триггер изготовлен в виде единой твердой схемы.
47
tflbiXg
Рис. 3.18. Триггер v
управлением по двум
входам:
а) принципиальная
схема; б) диаграмма
напряжений; в) услов-
ное обозначение
Рис. 3.19. Триггер с управлением по счетному входу:
а) принципиальная схема; б) диаграмма напряжений; в) условное обозначение
Рис. 3.20. Схемы триггера на интегральных логических
схемах:
а) принципиальная схема; б) функциональная схема
48
3.6. ЭЛЕКТРОННОЕ ТЕЛЕГРАФНОЕ РЕЛЕ
Электронное телеграфное реле, выполненное на полупроводни-
ковых приборах, является бесконтактным аналогом поляризован-
ных электромеханических телеграфных реле. Применение элек-
тронных реле в значительной степени повысило надежность рабо-
ты устройств и упростило эксплуатацию аппаратуры, так как от-
пала необходимость в регулировке и чистке реле. Резко возрос
срок службы реле и допустимая скорость работы.
Принципиальная схема электронного реле, использующего те-
леграфную батарею ±60 В, приведена на рис. 3.21. Реле состоит
из входного фильтра, формирующего триггера, генератора пря-
моугольных импульсов, управляющей схемы, ключевой схемы и
Рис. 3.21. Принципиальная схема электронного телеграфно-
го реле
выходных фильтров. Питание реле осуществляется от батареи
—24 В.
Входные сигналы поступают на симметричный триггер, выпол-
ненный на транзисторах Л и Т2. Необходимое смещение на базах
транзисторов обеспечивается резисторами R3 и Т?4 совместно с де-
лителем напряжения RiR2 и опорным диодом Д1. Сформирован-
ные прямоугольные сигналы с выхода триггера управляют тран-
зисторами Т3 и 7\ схемы управления, которые работают в ключе-
вом режиме.
Генератор прямоугольных импульсов представляет собой двух-
тактный генератор (транзисторы Т3 и Тв) с трансформатором Tpt.
Генератор работает в режиме насыщения с частотой 25-4-35 кГц.
Колебания генератора трансформируются в Тр2 или в Тр3 в за-
висимости от того, какой из транзисторов схемы управления от-
крыт. Если открыт транзистор Т3 (транзистор Т4 при этом закрыт),
то колебания от генератора трансформируются через Тр2. При за-
крытом транзисторе Т3 (транзистор Г4 открыт) колебания возни-
кают на обмотках трансформатора Тр3. Напряжение, снимаемое
49
на вторичных обмотках трансформаторов Тр2 и Тр3, управляет
ключевыми транзисторами Д—7%. При наличии напряжения на
трансформаторе Тр2 (напряжение на трансформаторе Тр3 в это
время отсутствует) открыты транзисторы и Т3. На выход реле
коммутируется напряжение —60 В. Если же существует напря-
жение на Тр3, то открыты транзисторы Т9 и Ты (транзисторы Т1
и Т3 при этом закрыты). На выход поступает напряжение 4-60 В.
Качественные характеристики электронного реле значительно
лучше характеристик электромеханического реле.
Вследствие практической безынерционности элементов схемы
на низких скоростях модуляции (504-1200 бод) коэффициент отда-
чи, реле близок к 100%. Собственные искажения, вносимые реле,
не превышают 1%.
Указанные преимущества электронного телеграфного реле обе-
спечили ему широкое применение.
3.7. ДВОИЧНЫЕ ЭЛЕМЕНТЫ НА МАГНИТНЫХ
СЕРДЕЧНИКАХ С ПРЯМОУГОЛЬНОЙ ПЕТЛЕЙ
ГИСТЕРЕЗИСА
В качестве двоичных элементов часто используют магнитные
материалы с прямоугольной петлей гистерезиса (ППГ). К ним от-
носятся магнитные материалы, у которых отношение остаточной
индукции Вг к максимальной индукции Вт больше 0,8. Из при-
меняемых материалов наибольшее распространение получили фер-
риты — неметаллические, прессованные сердечники из марганца
и магния. Обычно ферритовые элементы с ППГ изготовляются в
виде колец диаметром 14-17 мм и высотой 14-4 мм.
Для характеристики прямоугольное™ петли гистерезиса поль-
зуются коэффициентом прямоуголыюсти (рис. 3.22а): р — Вг/Вт.
Ферриты имеют два устойчивых состояния равновесия: когда фер-
рит намагничен до индуктивности — Вг и когда феррит намагни-
чен до -\-Вг. Обычно состояние равновесия — Вг обозначают че-
рез 0, а +ВГ — через 1. В любом из устойчивых состояний фер-
рит может находиться как угодно долго. Переход его из одного
состояния в другое происходит под действием внешнего магнитно-
го поля, которое создается током, протекающим через обмотки
сердечника. Число обмоток на сердечнике зависит от назначения
феррита в переключающем устройстве
Для надежного перемагничивания сердечника необходимо соз-
дать поле с напряженностью Нт>Нс. Для большинства сущест-
вующих сердечников Нт^5 Нс.
Рассмотрим работу магнитного элемента (рис. 3.226). Пред-
положим, что за счет пропускания импульса тока Д через обмотку
wx сердечник перемагнитился до Д-Вт. После окончания импуль-
са тока Д индукция изменится незначительно — до величины
+ ВГ. Следовательно, сердечник займет устойчивое состояние 1.
Условно считают, что в это состояние сердечник перемагничивает
50
ток, протекающий от конца обмотки к ее началу (начала обмо-
ток на рис. 3.226 обозначены точкой). Аналогично можно переве-
сти сердечник в состояние 0, если пропустить импульс тока 73 че-
рез обмотку ws в противоположном направлении — от начала об-
мотки к ее концу. Исходя из этого, ток Ц называют током записи,
а ток 13 — током считывания. При каждом воздействии импуль-
сов токов и 73 в обмотке будет индуцироваться напряжение,
Рис. 3.22. Двоичный переключающий элемент на сердеч-
нике с ПТ1Г:
а) петля гистерезиса; б) схема включения обмоток;
в) диаграмма токов и напряжений; г) условное обозна-
чение
величина которого зависит от скорости изменения магнитного по-
тока в сердечнике и его величины.
Импульс, возникающий на обмотке w2 при действии тока запи-
си 71, в практических схемах обычно не используется, поэтому для
его ограничения в цепь данной обмотки включают диод или тран-
зистор.
Если импульсы тока записи Ц отсутствуют, а импульсы тока
считывания действуют, то на выходе переключающего устройства
(обмотка w2) будет возникать небольшое напряжение, обусловлен-
ное изменением индукции от —Вт до —Вт. Эти сигналы называют-
ся импульсами помехи. Они тем меньше, чем выше коэффициент
прямоугольности петли р. Так как сигнал помехи, имея ту же по-
лярность, что и полезный сигнал, может вызвать ложное сраба-
тывание переключающего устройства, то допускается использо-
вание сердечников, для которых отношение иПомМсиг<0,05.
51
На рис. 3.22в показана диаграмма токов и напряжений в дво-
ичном элементе. Условное изображение магнитных сердечников в
схемах показано на рис. 3.22 г.
Если в полупроводниковых триггерных схемах состояние дво-
ичного элемента определялось непрерывно по величине выходно-
го напряжения, то для определения состояния магнитного элемен-
та необходим специальный считывающий импульс. Если при дей-
ствии этого импульса на выходе появляется сигнал, то сердечник
находится в состоянии 1; в противном случае — сердечник нахо-
дится в состоянии 0.
3.8. ПРИМЕРЫ СХЕМ С ИСПОЛЬЗОВАНИЕМ ДВОИЧНЫХ
ЭЛЕМЕНТОВ
ВКЛЮЧЕНИЕ ПОЛЯРИЗОВАННОГО РЕЛЕ С ПОДМАГНИЧИВАЮЩЕЙ
ОБМОТКОЙ
Необходимость в преобразовании однополюсных посылок в
двухполюсные возникает чаще всего при включении телеграфных
аппаратов, работающих в режиме однополюсной работы, в стан-
ционные устройства: каналы тонального телеграфа, станции або-
нентского телеграфа и т. д.
Простейшая схема преобразования, приведенная на рис. 3.23,
содержит телеграфное поляризованное реле с двумя обмотками:
рабочей и компенсационной. В рабочую обмотку реле включен те-
леграфный аппарат. С помощью переменного резистора Rr в це-
пи устанавливается ток /р, равный 40-:--60 мА, необходимый для
нормальной работы аппарата. Ток в компенсационной обмотке
подбирается так, чтобы при преобразовании не возникало иска-
жений посылок. Ток в цепи рабочей обмотки устанавливается по
экспоненциальному закону, а спадает по колебательному из-за ем-
кости искрогасительного контура аппарата, показанного на рис.
3.24. Из кривых, приведенных на рисунке, видно, что при подбо-
ре тока в компенсационной обмотке /к<0,5 /р.
ДЕЛИТЕЛЬ ЧАСТОТЫ ИМПУЛЬСОВ В 2” РАЗА
Делитель частоты следования импульсов в два раза можно
выполнить на триггере со счетным входом. Принципиальная схе-
ма такого делителя приведена на рис. 3.25а. Триггер изменяет свое
состояние с приходом каждого управляющего (входного) импуль-
са. Выходной сигнал дифференцируется, в результате чего нап-
ряжение в точке А схемы имеет вид двухполярных остроконеч-
ных коротких импульсов. Диод Д пропускает на выходной зажим
только импульсы положительной полярности. Таким образом, ча-
стота следования импульсов уменьшается в два раза (рис. 3.256).
Соединяя последовательно п каскадов из триггеров со счет-
ным входом, можно получить бинарный делитель частоты следо-
вания импульсов в 2” раза.
52
Телегр am
Рис. 3.23. Включение реле с компенсационной об-
моткой
Рис. 3.25. Принципиальная схема (а) и диаграмма напряжений делителя
частоты следования импульсов в два раза (б)
53
РЕГИСТРЫ СДВИГА
Регистром сдвига называется устройство, предназначенное для
запоминания и преобразования двоичной информации. Состоит
это устройство из такого последовательного соединения п двоич-
ных переключающих элементов, при котором обеспечивается пе-
резапись состояния (0 или 1) предыдущего элемента на последую-
щий. Такую перезапись иногда называют передвижением инфор-
мации вдоль регистра сдвига.
В тех случаях, когда для управления регистром используется
одна последовательность импульсов и под действием каждого им-
пульса осуществляется перезапись информации с предыдущего
элемента на последующий, регистры сдвига называют однотактны-
ми. Если же сначала под действием импульса одной последова-
тельности информация перезаписывается с предыдущего основно-
го элемента на последующий вспомогательный двоичный элемент,
а затем под действием импульса другой последовательности — со
вспомогательного элемента на последующий основной, то такие
регистры называют двухтактными.
Отличительной чертой однотактных регистров сдвига являет-
ся наличие в цепях связи двоичных элементов элемента задержки.
В качестве последнего обычно используется конденсатор. Функ-
ВхоЗ
Г
Т
w
схема од-
сдвига на
Рис. 3.26. Структурная
нотактного регистра
триггерах
циональная схема однотактного ре-
гистра сдвига на триггерах показа-
нии? на «а рис. 3.26.
______ Поступившая на вход 1-й ячей-
ки информация переключит триггер
из состояния 0 в состояние 1. Пер-
вый же тактовый импульс, посту-
пивший по цепи считывания, вер-
нет триггер в состояние 0.
на выходе триггера появится импульс, кото-
В результате этого
рый, пройдя цепь задержки, переведет триггер 2-й ячейки в состоя-
ние 1. Следующий тактовый импульс возвратит триггер 2-й ячей-
ки в состояние 1 и т. д. Таким образом, состояние 1 передвигает-
ся вдоль регистра на одну ячейку под действием каждого такто-
вого импульса. При этом предполагается, что на вход 1-й ячей-
ки новая информация не поступает.
Наличие цепей задержки между ячейками необходимо принци-
пиально, так как считывающий (тактовый) импульс является за-
прещающим к импульсу записи. Поэтому действие тактовых им-
пульсов и импульсов записи должно быть разнесено во времени,
что и достигается введением временной задержки.
Если же задержка импульсов осуществляется на элементах про-
межуточной памяти, то регистры называются двухтактными (рис.
3.27). Тактовые импульсы по цепи ТИ^ сдвигают записанное в
ячейку состояние 1 на элемент промежуточной памяти, а такто-
вые импульсы по цепи ТИ2 продвигают ее на следующую ячейку.
Обычно тактовые импульсы ТИ]. и ТИ2 сдвинуты относительно друг
друга на половину периода.
54
Схемы однотактного регистра сдвига с ППГ, емкостной связью
между элементами и ключевым транзистором приведены на
рис. 3.28.
Тактовые импульсы, которые поступают в обмотки считывания,
одновременно подаются на базу ключевого транзистора КТ и за-
77/г
Рис. 3.27. Структурная схема двухтактного регистра
сдвига на триггерах
пирают его. Поэтому на время перемагничивания сердечников и
заряда конденсатора С цепи всех обмоток записи практически
обрываются (оказываются включенными через сопротивление кол-
тп
Рис. 3.2S. Схема однотактного регистра сдвига с ключевым
транзистором
лектор—эмиттер закрытого транзистора). По окончании действия
тактового импульса транзистор КТ открывается и его сопротив-
ление становится практически равным нулю. Энергия, накоплен-
ная в конденсаторе С, перемагничивает последующий сердечник в
состояние 1.
ГЛАВА 4
Передающие оконечные устройства
4.1. НАЗНАЧЕНИЕ И СТРУКТУРНАЯ СХЕМА
Передающие оконечные устройства предназначены для преоб-
разования информационных символов сообщения в кодовые ком-
бинации и последующего преобразования элементов кодовой ком-
бинации в электрические сигналы. Простейшим примером око-
нечного передающего устройства может служить ключ аппарата
Морзе. Преобразование символа сообщения — буквы или цифры
в кодовую комбинацию производится человеком, который знает
код Морзе. В соответствии с этим кодом человек замыкает и раз-
мыкает ключом цепь электрического тока, преобразуя элементы
кодовых комбинаций (точки, интервалы, тире) в последователь-
ность электрических сигналов.
В современных более сложных оконечных передающих устрой-
ствах, например, в передатчиках телеграфных буквопечатающих
аппаратов, в передатчиках данных, в датчиках систем автоматики
и т. д., указанные выше преобразования осуществляются автома-
тически.
На рис. 4.1 приведена структурная схема передающего оконеч-
ного устройства.
Рис. 4.1. Структурная
схема оконечного пере-
дающего устройства:
1 — кодирующее устройство,
2 — передающее наборное
устройство; 3 — распреде-
литель передачи; 4 — выход-
ное устройство; 5 — датчик
служебных разрядов: 6 —
привод; 7 — управляющее
устройство
Информационный символ от источника сообщений поступает
в кодирующее устройство 1, где он автоматически преобразуется
в кодовое число. Как правило, в современных дискретных систе-
мах связи независимо от вида передаваемой информации исполь-
зуются двоичные равномерные коды. Следовательно, посредством
кодирующего устройства подлежащий передаче символ сообще-
56
ния преобразуется в ^-разрядное двоичное число. Разряды двоич-
ного числа, появляющиеся на выходе кодирующего устройства
одновременно (параллельный код), поступают в наборное устрой-
ство (накопитель) 2. Передающий распределитель 3 последова-
тельно преобразует каждый разряд двоичного числа (0 или 1) в
электрический сигнал определенной длительности, которая опре-
деляется скоростью работы распределителя. Выходное устройство
4 формирует электрические посылки, обладающие необходимой
мощностью, полярностью и формой. Если, например, передача ве-
дется постоянным током, то форма посылки должна быть прямо-
угольной. Двоичному числу «11» соответствует токовая посылка, а
числу «О» — бестоковая посылка.
В состав кодовой комбинации мопут быть включены служебные
разряды, которые предназначены для синхронизации и фазирова-
ния приемного оконечного устройства. При стартстопном методе-
передачи — это стартовая и стоповые посылки. Служебные раз-
ряды вырабатываются датчиком служебных разрядов 5.
В целом передающее устройство приводится в действие стаби-
лизированным приводом 6, который определяет скорость передачи
оконечного передающего устройства. Метод передачи (синхрон-
ный или стартстопный) зависит от алгоритма действия управляю-
щего устройства 7.
4.2. ВВОД ИНФОРМАЦИИ В ПЕРЕДАЮЩИЕ ОКОНЕЧНЫЕ
УСТРОЙСТВА
Сообщения могут вводиться в передающее устройство двумя,
способами: вручную и автоматически.
При ручном способе ввода человек, работая на клавиатуре ти-
па клавиатуры пишущей машинки, вводит в оконечное передаю-
щее устройство символы сообщения (буквы, цифры, знаки препи-
нания и т. д.). Скорость ввода сообщения в данном случае отно-
сительно невелика и определяется физическими возможностями
человека. Средняя скорость работы на пишущей машинке для ря-
дового работника составляет примерно 250—300 знаков в минуту.
В отдельные моменты работы при благоприятных сочетаниях зна-
ков скорость может доходить до 380—400 знаков. Очевидно, что
скорость работы оконечного передающего устройства должна быть
выше, чем скорость ввода информации. Иными словами, скорость
работы передатчика и скорость ввода информации должны быть
согласованы. Так, например, при скорости ввода информации
380—400 знаков в минуту скорость вывода должна быть не менее
400 знаков в минуту. Если каждый знак передается -последова-
тельно 7,5 посылками (стартовая, 4 кодовых и 1,5 стоповая), то-
скорость модуляции составит
В = = 50 бод.
60
57
В тех случаях, когда источником сообщений является не чело-
век, а автоматизированное устройство, скорость ввода информа-
ции, а следовательно, и скорость работы передающего устройства
может быть значительно повышена. Информация в передающее
оконечное устройство в этом случае вводится автоматически ли-
бо непосредственно от источника сообщений (электрический ввод)
либо с промежуточного носителя. В качестве промежуточного но-
сителя могут использоваться перфорированные ленты, перфориро-
ванные карты, магнитные носители, кинолента и т. д. Запись на
промежуточный носитель обычно производят в двоичном коде. В
случае использования перфорированной ленты (рис. 4.2) двоичное
Уис 4 2 Образец б-дорожечной перфорированной ленты
число (код) записываются в виде отверстий в ленте, пробитых в
определенном порядке. При этом цифре 1 соответствует отверстие
в ленте, а цифре 0 — отсутствие отверстия. Число дорожек перфо-
ленты равно числу разрядов двоичного числа, образующего код.
На рисунке изображена запись пятиразрядным международным
телеграфным кодом № 2.
Набивку отверстий на леше (перфорирование) производят с
помощью перфоратора (принцип действия перфоратора описан в
разд. 5.10). Информация считывается трансмиттером (принцип
действия трансмиттера описан в разд. 4.9). В связи с тем что за-
пись на промежуточном носителе уже произведена в виде кода,
в передающем оконечном устройстве при вводе информации с но-
сителя отпадает необходимость в кодирующем устройстве. Инфор-
мация в виде посылок (единичного интервала) кодовых комбина-
ций поступает сразу в накопитель (наборное устройство). Ско-
рость считывания информации с промежуточных носителей может
достигать нескольких тысяч и даже десятков тысяч знаков в ми-
нуту.
В соответствии со скоростью ввода информации выбирается и
скорость работы оконечного передающего устройства. Если в ка-
честве источника сообщений используется электронная вычисли-
тельная машина (ЭВМ), то возможен непосредственный (элек-
трический) ввод информации в накопитель передающего оконеч-
ного устройства. Для этого в ЭВМ предусмотрено согласующее
устройство СУ, которое преобразует информацию в двоичное чис-
ло. Разрядность последнего соответствует числу входов накопи-
теля передающего устройства.
Ввод кодовой комбинации в накопитель, в принципе, может
быть осуществлен либо последовательно, либо параллельно. Для
осуществления ввода на стыке между СУ и накопителем передаю-
58
щего устройства предусмотрены дополнительные цепи взаимодей-
ствия, которые регламентируются рекомендациями МККТТ. При-
меры цепей взаимодействия приведены на рис. 4.3.
Рис. 4.3. Цепи взаимодействия
оконечного передающего уст-
ройства и ЭВМ
Кодовая комбинация поступает из УС в накопитель передат-
чика по сигналу запроса очередной комбинации ЗОК, который вы-
рабатывается 'в оконечном передающем устройстве. Получив ЗОК,
согласующее устройство по цепи Инф передает очередную кодо-
вую комбинацию. Скорость передачи обусловлена частотой считы-
вания, которая поступает в СУ из передатчика по цепи Такт. Пе-
редача каждой кодовой комбинации подтверждается импульсом
сопровождения ИС, который передается по отдельной цепи. Та-
ким образом, скорость ввода сообщения строго соответствует ско-
рости работы оконечного передающего устройства и задается им.
Очевидно, что темп работы ЭВМ должен быть согласован со ско-
ростью работы оконечного передающего устройства, или, как при-
нято говорить, аппаратура передачи дискретной информации «ве-
дет» ЭВМ.
В реальных устройствах дискретной информации число допол-
нительных цепей превышает число указанных выше цепей, так как
функции согласующих устройств сложнее, чем это было рассмот-
рено.
4.3. КОДИРУЮЩИЕ УСТРОЙСТВА
Кодирующее устройство предназначено для превращения сим-
вола сообщения (например, букв, цифр, команд) в п-разрядное
двоичное число (кодовую комбинацию). Кодирующее устройство
имеет N входов и п выходов. Число входов кодирующего устройства
связано с числом выходов соотношением: N—mn, где m — основа-
ние кода. В двоичных системах т = 2, поэтому N = 2n. Получен-
ное соотношение справедливо, если используется обыкновенный
код, т. е. каждое возможное п — разрядное двоичное число соот-
ветствует какому-либо символу сообщения. Так, например, в те-
леграфном коде МТК-2 все пятиразрядные двоичные числа соот-
ветствуют определенным знакам. Поэтому кодирующее устройст-
во имеет 5 выходов и 32 входа.
Механическое кодирующее устройство применяется в телеграф-
ных аппаратах и других оконечных устройствах с относительно
низкой скоростью передачи. Широкое распространение получило
кодирующее устройство с комбинаторными линейками, предназ-
наченное для кодирования информации с клавиатуры типа пишу-
5Э
щей машинки. Принцип действия устройства поясняется рис. 4.4.
При нажатии клавиши А линейка № 1 переместится вправо, а
при нажатии клавиши Б--1 влево. Если под клавишным рычагом
разместить п линеек и выбрать скосы на них определенным обра-
зом, то при нажатии клавиши образуется «-разрядная простран-
ственная комбинация положения линеек. Число возможных ком-
вид
с5оку
Рис. 4.4. Схема, поясня-
ющая принцип действия
кодирующего устройства
с комбинаторными ли-
нейками:
1 — комбинаторные линейки;
2 —клавиши; 3 — клавишный
рычаг
Липецка Н--1
бинаций равно 2”. Для кодирования 32 знаков (каждому знаку
соответствует своя клавиша) необходимо разместить под клавиш-
ными рычагами пять комбинаторных линеек.
Механическое кодирующее устройство снабжено дополнитель-
ными приспособлениями, которые блокируют клавиши от одно-
временного нажатия, блокируют всю клавиатуру на время пере-
дачи предыдущей комбинации и т. д., т. е. обеспечивают после-
довательный процесс ввода информации в накопительное устрой-
ство. Если же под клавишными рычагами расположить 7 комби-
наторных линеек, то число возможных комбинаций будет 27= 128.
Пусть требуется закодировать 32 символа сообщения. Тогда
из 128 возможных комбинаций можно отобрать только те, кото-
рые обладают каким-либо общим свойством, например, число еди-
ниц в комбинации равно 3. Число комбинаций, обладающих ука-
занным свойством, равно числу сочетаний из 7 по 3. Так как
т т\(п — т)\ ’
то
Из 35 разрешенных комбинаций возьмем требуемые 32 комби-
нации, в соответствии с которыми выполняются скосы на комби-
наторных линейках. Данное кодирующее устройство кодирует ин-
формацию корректирующим кодом.
60
Электронными кодирующими устройствами могут быть любые
устройства, способные преобразовывать десятичное число в двоич-
ное. Подобные устройства могут быть выполнены на электромаг-
нитных, электронных, магнитных, пневматических и других двоич-
ных элементах. В качестве примера рассмотрим простейшее ко-
дирующее устройство, выполненное в виде диодной матрицы.
На рис. 4.5 приведена схема кодирующего устройства на 16
входов. Для кодирования символа на соответствующий вход по-
Рис. 4.5. Схема кодирующего устройства на диодной матрице
дается отрицательный потенциал. На выходе устройства появляет-
ся двоичное число (кодовая комбинация). Например, при переда-
че символа № 3 на выходе устройства возникнут потенциалы в
1- и 2-м разрядах, что соответствует комбинации ООП (разряды
записаны справа налево), т. е. числу 3, записанному в двоичной
системе счисления. Односторонняя проводимость диодов предот-
вращает шунтирование данной выходной шины со стороны нес-
кольких входных шин, подключенных к ней.
4.4. НАБОРНЫЕ УСТРОЙСТВА (НАКОПИТЕЛИ)
Кодовая комбинация, полученная в кодирующем устройстве,
фиксируется наборным устройством. Имеющиеся в нем механиче-
ские или электрические накопительные элементы, число которых
равно числу разрядов кода п, могут принимать одно из двух ус-
тойчивых состояний 0 или 1. Передача кода из кодирующего уст-
ройства в накопитель происходит параллельно (т. е. одновремен-
но), а считывание осуществляется распределителем последова-
тельно через интервалы времени, равной длительности элементар-
ной посылки. Поскольку наборные устройства органически свя-
заны с работой распределителя, то возможные варианты их пост-
роения рассматриваются в следующем разделе.
4.5. РАСПРЕДЕЛИТЕЛИ
Оконечные передающие устройства могут работать в синхрон-
ном или стартстопном режиме. Режим работы зависит от построе-
ния управляющего устройства, которое определяет алгоритм дей-
ствия распределителя. Распределитель предназначен для пооче-
редной передачи в строго определенные моменты времени разря-
61
дов кодовой комбинации, накопленной в наборном устройстве, на
выходное устройство. Таким образом, распределитель преобразует
параллельный код в последовательный. Скорость передачи оконеч-
ного передающего устройства полностью определяется скоростью
работы распределителя.
Распределители могут быть электромеханическими и электрон-
ными.
Электромеханические распределители используются при отно-
сительно низких скоростях модуляции (до 2004-300 бод). По кон-
структивному признаку их можно разделить на дисковые, кулач-
ковые и релейные.
Дисковые распределители состоят из колец и щеток, вращаю-
щихся по окружности. Принцип построения дискового распреде-
лителя ясен из (рис. 4.6. Выходы ячеек (механического наборного
Рис. 4.6 Схема, поясняющая принцип действия
дискового электромеханического распределителя
устройства соединены с контактами кольца I, разделенного по ра-
диусам изолирующими прокладками. Сплошное кольцо соедине-
но с линией. При вращении щеток в линию последовательно пе-
редается кодовая комбинация, накопленная в наборном устрой-
стве. Смена кодовых комбинаций в наборном устройстве происхо-
дит в момент прохождения щеток между последним к-м и первым
контактами кольца I. Щетки распределителя вращаются электро-
двигателем, скорость которого стабилизируется. От стабильности
скорости вращения щеток зависят искажения передаваемых посы-
лок. При высоком качестве изготовления диска распределителя
и нестабильности скорости вращения щеток порядка 10-4 искаже-
ния передаваемых посылок не превышают 1—2%. Скорость моду-
ляции оконечного передающего устройства может быть опреде-
лена по формуле
В = —, бод, (4.1)
60
62
где N — число оборотов щеток распределителя, об/мин; к— число
контактов распределителя.
Рассмотренный распределитель работает непрерывно, т. е. в
синхронном режиме.
Кулачковый распределитель (рис. 4.7) состоит из неподвиж-
ных контактных пружин 1 и вращающихся кулачков с вырезами
Рис. 4.7. Схема, поясняющая принцип действия кулачкового
механического распределителя:
/— контактные пружины; 2— кулачки распределителя, 3 — электродви-
гатель; 4 — наборное устройство
(скосами) или выступами 2. Кулачки закреплены на одной оси и
вращаются электродвигателем <3. При вращении распределителя
поочередно замыкаются контактные пружины и накопленная в
наборном устройстве кодовая комбинация последовательно пере-
дается к выходному устройству. Преимуществом кулачковых рас-
пределителей является их компактность. Однако из-за трудности
регулировки контактных пружин и погрешностей в изготовлении
вала с кулачками искажения передаваемых посылок выше, чем у
дисковых распределителей. Искажения достигают 5—7%.
Скорость передачи также определяется по ф-ле (4.1).
Релейные распределители в отечественной оконечной аппара-
туре практически не применяются.
Электронные распределители получили широкое распростране-
ние в технике передачи дискретной информации, особенно на сред-
них и высоких скоростях модуляции. Электронный распредели-
тель может быть реализован на любых двоичных элементах. На
рис. 4.8 приведена схема синхронного распределителя на к кон-
тактов, выполненная на двухтактном регистре сдвига (принцип
работы подобного регистра изложен в разд. 3.8). Данная схема
является электронным аналогом механического распределителя
(см. рис. 4.6).
Кодовая комбинация из кодирующего устройства переносится
параллельно в запоминающие ячейки (триггера) наборного уст-
ройства в тот момент, когда состояние 1 в распределителе записа-
но в элементе промежуточной памяти (к') между последним к-м
и 1-м контактами распределителя. Первым, следующим после это-
го момента, тактовым импульсом последовательности ТИ2 состоя-
ние 1 переместится на первый контакт распределителя (триггер
63
к-1
к
~l
1_1
Электронные ключи
Кодирующее устройство
ТЛ П
На дор ное к
устр-Во ~ J-J
Распределитель
— &
- 1
*—8
г- Z Г
Рис. 4.8. Схема электронного распределителя и наборного устройства на «входов
1). Этим будет подан сигнал на один из входов логической схемы
И1. На другой вход сигнал поступает с триггера 1 наборного уст-
ройства. Если в первой ячейке наборного устройства записана «1»,
то на выходе схемы И1 появится сигнал, который, пройдя схему
ИЛИ, установит выходной триггер в состояние 1. При этом по-
средством логической схемы запрета запрещается воздействие сиг-
нала на втором входе выходного триггера. Если же в первой ячей-
ке наборного устройства записано состояние 0, то сигнал на вы-
ходах схем И| и ИЛИ не появится, схема запрета действовать не
будет, и выходной триггер под действием тактового импульса ТИ2
будет переведен в состояние 0.
Таким образом, выходной триггер занимает состояние, соот-
ветствующее состоянию ячейки наборного устройства в момент
действия тактового импульса последовательности ТИ2. Состояние
выходного триггера сохраняется до следующего тактового импуль-
са ТИ2, когда анализируется состояние второй .ячейки наборного
устройства и т. д. Скорость модуляции распределителя полностью
определяется частотой следования тактовых импульсов, получае-
мых от генератора тактовых импульсов (привода), который на
схеме рис. 4.8 не показан.
Изменение частоты работы задающего генератора эквивалент-
но изменению скорости вращения щеток в электромеханическом
дисковом распределителе. Поэтому применительно к электронным
распределителям часто используют термины «скорость работы»,
«расхождение скоростей» и т. д. Количество выходов распредели-
теля, которые по аналогии с механическими распределителями
64
иногда называют «числом контактов», определяется числом управ-
ляющих импульсов, под действием которых кольцевой счетчик
(регистр) возвращается в исходное состояние. Число выходов рас-
пределителя, «аж травило, равно числу элементов кодовой комби-
нации.
Описанный распределитель может быть выполнен на базе ин-
тегральных логических схем, что обеспечивает малые габариты
устройства и его высокую надежность.
Синхронный режим работы распределителей можно перевести
в стартстопный, изменив алгоритм действия управляющего уст-
ройства.
4.6. УПРАВЛЯЮЩИЕ УСТРОЙСТВА И ПРИВОД
На рис. 4.9 показан стартстопный кулачковый распределитель.
Управляющее устройство состоит из ведущей муфты 2, которая
укреплена на оси двигателя 1, и ведомой муфты 3, укрепленной
Рис. 4.9. Схема, поясняющая принцип действия кулачкового стартстопного ме-
ханического распределителя:
1 — электродвигатель; 2 — ведущая муфта; 3 — ведомая муфта; 4 — наборное устройство;
5 — контакт датчика служебных разрядов; 6 — кушачок датчика служебных разрядов^
7— кулачки распределителя; Z—л —контакты распределителя
на оси распределителя. В исходном состоянии муфты расцеплены.
При .вводе кода в наборное устройство 4 -муфты оцепляются, и рас-
пределитель начинает вращение. По окончании одного оборота
муфты вновь расцепляются. Этим обеспечивается один цикл ра-
боты. За время цикла на выходное устройство должны поступить
последовательно стартовая, n-кодовых и стоповая посылки. Стар-
товая и стоповые посылки вырабатываются датчиком служебных
разрядов, который представляет собой контакт 5, расположенный
над стартстопный кулачком распределителя 6. В исходном сос-
тоянии (распределитель стоит на стопе) контакт 5 замкнут. Как
только распределитель начинает вращаться, контакт 5 размыкает-
ся — к выходному устройству транслируется стартовая посылка
длительностью то. После этого последовательно замыкаются на
время то кодовые контакты I-i-n, а затем вновь — контакт датчи-
ка служебных разрядов. По прошествии времени, соответствующе-
3—60 65
го длительности стоповой посылки, 1муфты управляющего устрой-
ства расцепляются, и распределитель останавливается, т. е. воз-
вращается в исходное состояние.
Скосы кулачков распределителя 7 расположены один относи-
тельно другого по винтовой линии. Величина скоса определяет дли-
тельность элементарных посылок (контактное деление). В совре-
менных телеграфных аппаратах контактное деление неравномер-
ное. Длина стоповой посылки (контакта) в 1,5 раза превышает
длину остальных посылок (единичных интервалов).
Пример Определить число оборотов распределителя в минуту, если ис-
пользовано 7,5-контактное деление распределителя, а скорость модуляции со-
ставляет 50 бод
В соответствии с формулой
6СЯ 60-50
.V =----= —----= 400 об-мин.
К 7,5
В аналогичном режиме может работать и электронное управ-
ляющее устройство, структурная схема которого изображена на
рис. 4.10. Непрерывно работающий генератор тактовых импульсов
Рис. 4.10. Стартстоппое управ-
ляющее устройство
Г генерирует сигналы с частотой q В, Гц. Здесь q — коэффициент
деления частоты делителем. При вводе информации из кодирую-
щего в накопительное устройство на вход стартстопного устройст-
ва ССУ поступает сигнал «Пуск». Ключ Кл открывается, и такто-
вые импульсы из ГТ И поступают на вход делителя. На его выхо-
де частота тактовых сигналов равна скорости модуляции В. Эти
сигналы после формирователя поступают на распределитель пере-
дачи и одновременно на счетчик импульсов Сч. После отсчета тре-
буемого количества импульсов на выходе счетчика появится сиг-
нал «Стоп», который вернет стартстопное устройство в исходное
положение и закроет ключ Кл. Цикл работы распределителя на
этом заканчивается. При равномерном контактном делении для
обычной телеграфной передачи 5-элементным кодом счетчик дол-
жен отсчитать 7 импульсов. Эпюры напряжений в управляющем
устройстве для такого случая изображены на рис. 4.11.
Практическая схема электронного стартстопного распредели-
теля будет рассмотрена ниже (см. рис. 4.17).
Точность длительности исходящих с оконечного передающего
устройства посылок (значащих интервалов) зависит от стабиль-
ности работы распределителя, т. е. от стабильности скорости его
66
работы. Последняя, в свою очередь, определяется качеством ра-
боты привода.
В электромеханических передающих устройствах в качестве
привода используются электродвигатели, скорость которых ста-
билизируется тем или иным способом, изучаемым в специальных
Рис. 4 11. Эпюры напряжений, поясняющие работу схемы уп-
равляющего устройства -на рис. 4.10
курсах. Обеспечиваемая нестабильность скорости вращения оси
электродвигателя должна быть не хуже 10-3.
В электронных распределителях приводом служит задающий
генератор. Обычно задающий генератор стабилизируют с помощью
кварца или камертона. Схемы генераторов с кварцевой или ка-
мертонной стабилизацией изучаются в курсе «Теория нелинейных
электрических цепей». Расчеты показывают, что для обеспечения
заданного процента искажений исходящих посылок (0,54-1,5%)
коэффициент нестабильности частоты генератора не должен быть
выше, чем 10~4.
4.7: ВЫХОДНЫЕ УСТРОЙСТВА
.Выходные устройства формируют однополюсные или двухпо-
люсные посылки (значащие интервалы) требуемой амплитуды и
передают их в канал связи.
В низкоскоростных передающих оконечных устройствах ис-
пользуются либо механические контакты распределителя (см. рис.
4.6, 4.7), либо электромагнитные поляризованные реле. Подобные
выходные устройства могут работать со скоростью не выше
100 бод. На более высоких скоростях в качестве выходных уст-
ройств используют электронные реле (см. рис. 3.17) или триг-
геры.
3* 67
4.8. ПЕРВИЧНЫЕ КОДЫ
При передаче телеграмм передаются буквы русского алфавита
(32 символа), цифры, знаки препинания, некоторые служебные
знаки, а также буквы латинского алфавита, необходимые при ра-
боте с другими странами и в некоторых национальных республи-
ках. Для размещения всех перечисленных символов в отечествен-
ных телеграфных аппаратах используются три регистра. Для ра-
боты на избранном регистре предварительно нажимается клавиша
регистра «Рус», «Лат» или «Циф». В капал связи передается со-
ответствующая кодовая комбинация, а в кодирующем устройстве
передвигается в требуемое положение специальная запорная ли-
нейка. Запорная линейка позволяет работать только в одном ре-
гистре, клавишные рычаги знаков, расположенные в других реги-
страх, упираются в выступы запорной линейки и не могут быть
нажаты вниз.
Кодовые комбинации пятиэлементного кода МТК-2 были при-
ведены в табл. 1.2 (см. гл. 1). При передаче данных между око-
нечным устройством и ЭВМ, а также при взаимодействии ЭВМ
между собой требуется передавать ряд вспомогательных служеб-
ных комбинаций, которые не могут быть переданы пятиэлемент-
ным кодом. Поэтому для передачи данных был разработан вось-
миэлементный код. Кодирование символов осуществляется семи-
элементным двоичным кодом. Кодирование символов осуществля-
ется семиэлементным двоичным кодом. Восьмой элемент кода
служит для обнаружения ошибки в информации и формируется
по принципу четности: если в семиэлементной кодовой комбина-
ции нечетное число единиц, то восьмой проверочный элемент бу-
дет равен 1; если же число единиц четное, то восьмой элемент
будет равен 0. В качестве оконечных устройств должны исполь-
зоваться специально разработанные оконечные передающие и при-
емные устройства, работающие на восьмиэлементном коде.
Вновь разработанный код ТОСТ 13052—67 приведен в табл. 4.1.
Кодовая таблица содержит 256 кодовых позиций, размещенных в
16 столбцах и 16 строках. Рядом с десятичными порядковыми но-
мерами строк и столбцов даны их двоичные изображения в виде
четырехразрядных двоичных чисел для строк и трехразрядных
двоичных чисел для столбцов. Каждый символ содержит четыре
разряда, указанные в строке, и три разряда, указанные в столбце.
Для удобства пользования таблицей каждая позиция обозна-
чается дробным десятичным числом, в котором числителем явля-
ется порядковый номер столбца, а знаменателем — порядковый
номер строки данной кодовой комбинации. Например, буква Я
русского алфавита обозначается дробью 15/1. Элементы кодовой
комбинации должны передаваться в следующей последовательно-
сти: 31, Э-z, ..Э-1. Расположение букв, цифр и других знаков в
коде обеспечивает сохранение принятого в нашей стране стан-
дартного расположения на клавиатуре русских и латинских букв
и цифр.
68
Т АБЛИЦА 4.1
Номер и строки Регист ры Э, эв ЭБ 1-й регистр 2-й регистр
Номер столбца 0 1 1 1 2 3 4 | 5 | 6 | 7 8 I 9 | 10 | 11 12 13 14 15
0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1
1 1
Э7ЭеЭ5 э4 Э, | э2 | э, |
0 1 2 3 4 5 6 7 8 9. Ю 11 12 13 14 15 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 Пусто НЗ НТ кт кп Кто? Да Зв ВШ ГТ ПС ВТ ПФ ВТ 2-й per 1-й per АР, СУх СУ2 СУ3 СУ4 Нет Синх КБ Стир КН Зм ар2 РИ4 РИз РИ2 РЦ Пробел 1 » № -О- % 8< / ( ) * + / 0 1 2 3 4 5 6 7 8 9 > ? А В С Д Е F g Н / J К L М N о р Q R S т и Y W X Y Z [ ] Л / а b с d е f g h i j k 1 m n 0 p q r s t u V w X У z q Ю a 6 Ц Д e Ф Г X и й к л м н О п я р с т У ж в ь ы 3 ш э щ ч ю А Б Ц Д Е Ф Г X И й к л м н о п я р с т У ж в ь ы 3 ш э щ ч Забой
Примечания. 1. Позиции 4/0, 7/11 — 7/13 — резервные.
2. На позициях 8/10 — Ы/15 повторяются символы позиций 0/0 — 3/15
3. Графические символы
2/4 —знак денежной единицы 2/7—знак ударения
2/6 — коммерческое «И» 2/10 — звездочка
4 Служебные символы
7/14 — черта сверху
13/15 — подчеркивание
APi — авторегистр 1,
АРг — авторегистр 2,
вк — возврат каретки,
ВТ — вертикальная табуляция
ГТ — горизонтальная табуляция,
ВШ — возврат на шаг,
Да — подтверждение,
л Зв — звонок,
СО
Зм — замена,
КБ — конец блока,
КП—конец передачи,
КТ — конец текста,
Кто? —кто там’
Нет — отрицание
НЗ — начало заголовка,
НТ — начало текста,
ПС — перевод строки,
ПФ — перевод формата,
РИ — разделитель информации,
Синх — синхронизация,
Стир — стирание,
СУ — символ управления.
1-й per.-1-й регистр,
2-й per —2-й регистр
4.9. ПЕРЕДАЮЩАЯ ЧАСТЬ ЭЛЕКТРОМЕХАНИЧЕСКОГО
ТЕЛЕГРАФНОГО АППАРАТА
ОСНОВНЫЕ СВЕДЕНИЯ ОБ АППАРАТЕ СТА-М67
Основным стартстопным телеграфным аппаратом, применяе-
мым на телеграфной сети Министерства связи СССР, является
однократный буквопечатающий аппарат СТ-2М. Аппарат, снаб-
женный приставками автоматизации (трансмиттерной и реперфо-
раторной), называется СТА-2М. Этот аппарат и его более позд-
ние модификации СТ-2МФ (СТА-2МФ), СТА-М67 широко ис-
пользуются и для передачи данных на низких скоростях.
Аппарат СТА-М67 состоит из передающей и приемной частей.
Некоторые узлы аппарата, например, привод, являются общими
для (передающей и приемной частей аппарата. Эти узлы будут
рассмотрены ib описании передающей части аппарата.
Основные технические характеристики аппарата СТА-М67 сле-
дующие:
номинальная техническая скорость телеграфиро-
вания (модуляции) — 50 бод
эксплуатационная пропускная способность:
— при ручной работе • — 1700 слов/ч
— при автоматической работе — 2400 »
питание двигателя аппарата:
— от сети переменного тока — 127+в
— от сети постоянного тока — 110±20 »
дальность действия по физической цепи сталь-
ных 4-миллиметровых воздушных линий связи:
— при однополюсной работе — 250—300 км
— при двухполюсной работе — 400—500 »
то же, при однополюсной работе по кабельным
линиям и до 50 »
масса аппарата (без упаковки) — 35 кг
ПРИВОД АППАРАТА СТА-М67
Привод телеграфного аппарата является общим для передаю-
щей и приемной частей, а также для приставок автоматизации
и дополнительных устройств. В качестве привода применяется
коллекторный электродвигатель типа ДТА-40. Скорость враще-
ния вала составляет 3060 об/мин. Полезная мощность 45—55 Вт.
Движение от вала двигателя с помощью червячных передач пе-
редается на распределители передачи и приема, а также на ме-
ханизмы перевода регистров,' лентопротяжный механизм, печа-
тающий механизм и т. д. Постоянство скорости вращения вала
двигателя поддерживается электроконтактным регулятором, ук-
репленным на валу двигателя. Нужная скорость вращения вала
двигателя подбирается по стробоскопическому методу с помощью
камертона.
7(1
На головке регулировочного винта электроконтактного регу-
лятора нанесены два белых и два черных сектора. Концы стерж-
ней камертона снабжены тонкими пластинками, которые при ко-
лебании стержней камертона образуют периодически открывае-
мую щель. Частота колебаний камертона равна 102 Гц. Если
через щель наблюдать за секторами винта электроконтактного
регулятора, то они кажутся неподвижными при скорости враще-
ния вала 3060 об/мин.
Если скорость вращения вала электродвигателя больше ука-
занной выше, то будет наблюдаться кажущееся медленное вра-
щение секторов, совпадающее с действительным вращением ва-
ла электродвигателя. Если же скорость вращения вала электро-
двигателя меньше 3060 об/мин, то кажущееся вращение секто-
ров будет направлено обратно действительному.
Изменяя регулировку винта, добиваются номинальной скоро-
сти, когда секторы кажутся неподвижными.
ПЕРЕДАТЧИК АППАРАТА СТА-М67
Передатчик аппарата состоит из клавиатуры, кодирующего
устройства с комбинаторными линейками, наборного механиче-
ского устройства, кулачкового распределителя и стартстопного
управляющего устройства.
Для автоматической передачи предусмотрена трансмиттерная
приставка. Взаимное расположение деталей передатчика показа-
но на рис. 4.12.
При нажатии клавиши 1 перемещается вниз клавишный ры-
чаг 2, который давит на скосы комбинаторных линеек 3. Линей-
ки смещаются вправо или влево, образуя пространственную ком-
бинацию, которая соответствует коду знака. Вместе с комбинатор-
ными линейками перемещаются пять захватывающих рычагов 4,
которые представляют собой механическое наборное устройство.
При движении комбинаторной линейки вправо (рис. 4.126) голов-
ка захватывающего рычага 4 захватывает горизонтальное плечо
контактного рычага 5. Если же линейка смещается влево, то гори-
зонтальное плечо контактного рычага остается свободным.
Одновременно с перемещением комбинаторных линеек начи-
нает работать стартстопное управляющее устройство. Под нажи-
мом клавиши поворачивается спусковая линейка 6 (рис. 4.12в),
которая посредством системы рычагов — спускового 7, запорного
8, промежуточного 11 и стартстопного 12 — освобождает ведомую
часть фрикционного сцепления 9. Кулачковый распределитель 10
начинает вращаться. На рис. 4.13 конструкция фрикционного сце-
пления приведена более подробно.
Преобразование пространственной параллельной кодовой ком-
бинации, которая накоплена на захватывающих рычагах наборно-
го устройства, в последовательную комбинацию электрических по-
сылок осуществляется кулачковым распределителем. Профиль ско-
сов на кулачках изображен на рис. 4.1Г26.
71
Рис. 4.12 Взаимное расположение де-
талей .в передающей части аппарата
СТА-М67:
а) кодирующее устройство; б) и в)
взаимодействие деталей:
/ — клавиши, 2— клавишные рычаги, 3 —
комбинаторные линейки, 4 — захватываю-
щие рычаги, 5 — контактные рычаги, 6 —
спусковая линейка, 7— спусковой рычаг,
8—запорный рычаг, 9 — ведомая часть
распределителя, 10— кулачковый распреде-
литель (кулачковая муфта), 11 — промежу-
точный рычаг, 12— стартстопный рычаг,
13 —контактная 'система, 14 — толкатель,
15 — запорная скоба, 16 — запорная ли-
нейка
72
В стоповом положении распределителя скосы пяти кулачков
распределителя 10, взаимодействующих с выступами контактных
рычагов, расположены так, что выступы не могут в них запасть.
Только скос шестого кулачка располагается под выступом шесто-
го (стартстопного) контактного рычага. Поэтому шестой контакт
контактной системы 13 (см. рис. 4.126) замкнут, а в линию пере-
дается токовая (стоповая) посылка. При начале движения кулач-
Рис. 4.13. Фрикционное сцепление передат-
чика:
1 — кулачковый распределитель, 2 — ведущая ось
распределителя, 3 — соединительный барабан, 4 —
ведомый диск, 5 — фильцевые прокладки, 6 — ве-
дущие диски, 7 — нажимная шайба, 8 — старт-
стопный рычаг
нового распределителя шестой кулачок размыкается и в линию по-
ступает бестоковая (стартовая) посылка. Таким образом, систе-
ма из шестого кулачка и шестого контакта служит в передатчике
датчиком служебных разрядов.
Через время, равное длительности одной элементарной посыл-
ки, То над выступом первого контактного рычага расположится
скос' первого кулачка распределителя. Если его горизонтальное
плечо свободно, контакт замкнется и в линию поступит токовая
посылка; если горизонтальное плечо захвачено головкой захваты-
вающего рычага, контакт не замкнется и в линию будет передана
бестоковая посылка. Перемещение контактного рычага в положе-
ние, соответствующее замыканию контактов, происходит под дей-
ствием толкателя 14 (см. рис. 4.125).
Аналогично изложенному передаются посылки с остальных кон-
тактов передатчика. После передачи в линию пяти кодовых посы-
лок вновь замыкается стартстопный шестой контакт, а через
1,5 То — расцепляется фрикционное сцепление, так как зуб ведо-
мой муфты упирается в стартстопный рычаг. На этом процесс пе-
редачи одного знака (цикл передатчика) заканчивается.
Для того чтобы набранную на захватывающих рычагах кодо-
вую комбинацию невозможно было разрушить во время ее пере-
дачи (преждевременное нажатие клавишного рычага), в передат-
чике предусмотрена запорная скоба 15 (см. рис. 4426 и в). За-
падая между выступами захватывающих рычагов 4, скоба не
позволяет им изменить занятого положения во время вращения
распределителя. По окончании цикла передачи скоба поднимается
специальным кулачком.
Для перевода регистров имеются регистровые клавиши «Циф»,
«Рус» и «Лат». Нажатие этих клавиш перемещает запорную ли-
нейку 16 с прямоугольными зубцами. Зубцы запорной линейки
располагаются под клавишными рычагами тех знаков, которые в
73
данном регистре отсутствуют. Поэтому невозможно нажать кла-
вишу другого регистра, не нажав перед этим желаемую регист-
ровую клавишу.
ТРАНСМИТТЕРНАЯ ПРИСТАВКА
Трансмиттерная приставка служит для автоматической пере-
дачи сообщений, записанных на бумажной перфорированной ленте.
Принцип считывания информации с перфорированной ленты с
помощью электромеханических устройств поясняется рис. 4.14.
Имеется пять рычажков с иголками и пять контактных перьев.
Рис. 4.14. Схема, поясняющая принцип действия трансмит-
тера
1—перфолента; 2 —полочка; 3 — крышка: 4 — лентопротяжное колесо,
5 — иголка; 6 — контактное перо
Перфорированная лента 1 кладется на полочку 2 и прижимается
крышкой 3. Лентопротяжное колесо 4 продвигает перфоленту на
один шаг после каждого никла (оборота) распределителя. Игол-
ки 5 приподнимаются, если находят в ленте отверстие, и изменя-
ют положение контактных перьев 6, замыкается верхний контакт.
Если отверстия нет, то игла не поднимается и замыкается ниж-
ний контакт. Распределитель передает кодовую комбинацию в ка-
нал связи.
Трансмиттерная приставка в передающей части аппарата
СТА-М67 (рис. 4.15) располагается над передатчиком аппарата и
состоит из платы трансмиттера, пяти трансмитверных рычагов с
иголками и лентопротяжного механизма. Для передачи посылок
используется кулачковый распределитель передатчика.
При автоматической работе с помощью блокировочного вали-
ка 1 захватывающие рычаги 2 отводятся от горизонтальных плеч
контактных рычагов 3. Одновременно над штифтами 4 контактных
рычагов располагаются носики трансмиттерного рычага 5. Под
действием управляющей скобы 6 в исходном стоповом положе-
нии все трансмиттерные рычаги с иголками находятся в опущен-
ном состоянии и удерживают своими носиками штифты контакт-
ных рычагов. После пуска кулачкового распределителя 7 управ-
ляющая скоба освобождает трансмиттерные рычаги, и они под
действием пружины стремятся подняться вверх, освобождая при
74
этом штифты 4 контактных рычагов. Однако трансмиттерные
рычаги могут переместиться только тогда, морда иголка данного
рычага не встречает на своем пути сплошного поля ленты, а по-
падает в отверстие. В этом случае соответствующий контактный
рычаг 3, будучи свободным, при попадании его выступа на срез
кулачка распределителя замкнет контактные пружины $ и в ли-
15 5 14 11 10 9
Рис. 4.15. Кинематическая схема трансмигтерной приставки:
1— блокировочный эксцентричный валик; 2 — захватывающие рыча-
ги; 3 —контактные рычаги; 4 — штифт; 5 — трансмиттерный рычаг;
6 — управляющая скоба; 7 — кулачковая муфта передатчика; 8 —
контактные пружины: 9— лента; 10 — лентопротяжный рычаг; 11 —
лентопротяжная собачка; 12— лентопротяжная звездочка: 13 — Фик-
сирующий рычаг; 14 — крышка и полочка; 15 — плата трансмиттер-
ной приставки
нию будет послана токовая посылка. При встрече иголки со
сплошным местом на ленте носик трансмиттерного рычага 5 бу-
дет удерживать штифт 4 контактного рычага и контактные пру-
жины не замкнутся.
Шаговое продвижение ленты 9 осуществляется лентопротяж-
ным рычагом 10, лентопротяжной собачкой И и лентопротяжной
звездочкой 12 во время передачи стоповой и стартовой посылок.
Рычаг 13 фиксирует положение храповика И. Лентопротяжным
рычагом управляет скоба 6 трансмиттера. Во время автоматиче-
ской работы клавиатура аппарата запирается посредством бло-
кировочного валика 1. Непрерывное вращение кулачкового рас-
пределителя, необходимое для автоматической работы, достига-
ется посредством нарушения связи между стоповым рычагом и
выступом ведомого диска фрикционного сцепления. Лента 9 фик-
сируется над иголками трансмиттерных рычагов при помощи
крышки и полочки трансмиттера 14. Весь механизм трансмиттер-
ной приставки собран на плате 15.
75
Некоторые детали трансмиттерной приставки на рис. 4.15 не
показаны. К ним относятся устройства, останавливающие рабо-
ту приставками при отсутствии бумажной ленты, устройства
маркировки ленты, пропущенной через трансмиттерную пристав-
ку, и т. д.
ДОПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА В ПЕРЕДАЮЩЕЙ ЧАСТИ АППАРАТА
К дополнительным устройствам аппарата относятся счетчик
знаков, автоответчик, автостоп и звонковая сигнализация. Пос-
ледние три устройства связаны как с передающей, так и с при-
емной частью аппарата, т. е. являются функционально общими
для аппарата в целом.
Счетчик знаков необходим при совместной работе передатчи-
ка аппарата ленточного типа с приемником аппарата рулонного
типа. Он необходим для того, чтобы при передаче последнего зна-
ка строки (в строке 60 знаков) оператор, работающий на ленточ-
ном аппарате, не забыл передать комбинации «Перевод строки»
и «Возврат каретки».
В аппарате СТА-М67 используется счетчик знаков механи-
ческого типа, который после передачи 59-го знака замыкает кон-
такты цепи питания сигнальной лампы и прекращает счет. В ис-
ходное положение счетчик возвращается при нажатии клавиши
«Возврат каретки».
Автоответчик используется при работе аппарата в коммути-
руемых сетях — сети абонентского телеграфирования и сети пря-
мых соединений. После того как произошло соединение абонен-
тов (телеграфных аппаратов), оператор вызывающей стороны мо-
жет удостовериться в правильности произведенного соединения.
Для этого он передает со своего аппарата комбинацию цифро-
вого регистра и сразу за ней комбинацию «Кто там?». Телеграф-
ный аппарат вызванного абонента после приема этих комбина-
ций автоматически (без вмешательства оператора) отвечает ком-
бинацией автоответа, например, «...я Горький, ГО-112».
В аппарате СТА-М67 применен автоответчик механического
типа. Он состоит из барабана, на котором укреплены 20 комби-
наторных планок. На планках набирается код автоответа, кото-
рый может содержать 20 кодовых комбинаций. При получении
комбинации «Кто там?» включается передатчик аппарата и ша-
говое устройство автоответчика, продвигающее барабан на один
шаг после передачи каждого знака. Вырезы и выступы комбина-
торных планок воздействуют на отростки контактных рычагов
передатчика, обеспечивая передачу в линию требуемого знака.
После передачи всех 20 знаков автоответчик прекращает ра-
боту.
Автостоп служит для выключения двигателя аппарата, если
прием или передача не ведутся более 1 мин. Двигатель вновь
включается после приема первой комбинации из линии или же
нажатием клавиши «Лат» передатчика. В аппарате использован
76
автостоп механического типа. С автостопом конструктивно сое-
динен счетчик времени работы аппарата, отсчитывающий актив-
ную работу аппарата в часах.
В аппарате СТА-1Ч.67 предусмотрена звонковая сигнализация,
которая срабатывает при нажатии на клавишу «Ю» после после-
довательного перевода на латинский и цифровой регистры. При
этом звонят звонки на приемном и передающем аппаратах столь-
ко раз, сколько раз нажата клавиша «Ю».
4.10. ПЕРЕДАЮЩАЯ ЧАСТЬ ЭЛЕКТРОННОГО
СТАРТСТОПНОГО ТЕЛЕГРАФНОГО АППАРАТА
Развитие электроники и микроэлектроники позволило заме-
нить ряд узлов электромеханического телеграфного аппарата на
электронные, что повысило надежность работы аппарата и уст-
ранило большинство операций по чистке, смазке и регулировке
аппарата. Один из возможных вариантов построения передаю-
щей части аппарата рассмотрен ниже.
Стартстопное управляющее устройство и привод аппарата 'вы-
полнены на электронных элементах (рис. 4.16л). Скорость моду-
tp tp Zj
19,2кГц
IIUIIUIII
11=192
8.
Сброс
Т
[7~| -1-- 1 1 1 Щ
-k I 4 распределителю
J—* bill ~TB?
п=15 - >l IAl -дЦ-
'К распребелителю
и наборному устр-Ву
i)
Вход белителя'
о-132
Выход белителя
п-192
ТНг
В а0от а ССУ
Стоп
Пуск Пуск ртоп
................................................................IIIIIIIIIIIIII.
ссо
От наборного
устр-Ва
to
t
“t
t
7,510
7
1
Puc. 4.16. Функциональная схема (а) и временная диаграмма (б) привода
и стартстопного управляющего устройства электронного телеграфного ап-
парата
ляции передатчика определяется частотой задающего генерато-
ра Г и коэффициентом деления делителя. Для рассматриваемо-
го варианта частота генератора составляет 19,2 кГц. При коэф-
фициенте деления 192 на выходе формирующего устройства дей-
ствуют тактовые импульсы с частотой 100 имп/с. На выходе триг-
гера со счетным входом образуются две последовательности так-
товых импульсов, сдвинутых относительно друг друга на поло-
77
вину периода. Частота действия импульсов — 50 имп/с, что со-
ответствует скорости модуляции 50 бод. Для изменения скорости
модуляции достаточно изменить коэффициент деления делителя
или частоту задающего генератора.
Стартстопное управляющее устройство состоит из триггера и
делителя частоты. Временная диаграмма работы стартстопного
устройства приведена на рис. 4.166.
При начале передачи знака от наборного устройства по цепи
«Пуск» поступает сигнал, который устанавливает триггер в со-
стояние 1. Высокочастотные импульсы от генератора Г через
схему И начинают поступать в делитель. Первый импульс на вы-
ходе делителя появится через то/2, далее импульсы действуют че-
рез эти же интервалы времени. Делитель на 15 отсчитывает 15 им-
пульсов и возвращает триггер в исходное положение. При этом де-
литель возвращается («=192) в исходное нулевое состояние по
цепи «Сброс». Логическая схема И перестает пропускать импуль-
сы от задающего генератора. Управляющее устройство возвраща-
ется в исходное стоповое состояние. Цикл работы устройства со-
ставляет 7,5 то-
Кодирующее и наборное устройства в описываемом аппарате—
механические (рис. 4.17). При'нажатии клавиши 7 под действием
Рис. 4.17. Взаимодействие деталей кодирующего и наборного устройства:
J— клавиша; 2 —клавишный рычаг; 3 — комбинаторная линейка; 4 — контактный рычаг;
5 —спусковая линейка; 6 — пусковой контакт; 7 — запорная скоба
клавишного рычага 2 передвигаются пять комбинаторных линеек
3, которые левыми плечами воздействуют на пять контактных ры-
чагов 4 наборного устройства. При движении линейки вправо за-
мыкается правый контакт (состояние 0), при движении влево —
левый контакт (состояние 1). Одновременно опускается спусковая
линейка 5. Замыкается пусковой контакт 6, в схему ССУ подает-
ся пусковой импульс. Триггер ССУ, сработав, замыкает цепь
электромагнита ЭМ. Запорная скоба 7 фиксирует положение ком-
бинаторных линеек до окончания стартстопного цикла, что запре-
щает изменение пространственного положения линеек при нажа-
тии клавиши до окончания передачи знака.
73
Распределитель и выходное устройства — электронные (рис.
4.18). Распределитель работает аналогично схеме, рассмотренной
ранее (ом. рис. 4.8). Временная диаграмма работы распределите-
Рис. 4.18. Функциональная схема передающей части электронного стартстопного
телеграфного аппарата
ля приведена на рис. 4.19. При нажатии клавиши триггер ССУ за-
нимает положение 1. С его выхода записывается «1» на вход рас-
пределителя. Одновременно через схему ИЛИ! и схему запрета
Рис. 4.19. Временная диаграмма работы передатчика
этот же сигнал поступает в выходной триггер и устанавливает его
в состояние 0. (Сигнал на выходе схемы ИЛИ2 в этот момент от-
сутствует). В линию передается стартовая посылка. Через т0/2 по-
действует первый импульс тактовой последовательности ТИЬ ко-
торый сдвинет «1» в распределителе в элемент промежуточной па-
мяти регистра. Еще через т0/2 будет действовать первый импульс
79
последовательности ТИг, который сдвигает «1» в регистре в пер-
вую ячейку. Через схему И, соответствующую первому элементу
кодовой комбинации, поступит сигнал на вход схемы ЙЛИ2 и да-
лее в выходной триггер. Так как в первой ячейке наборного уст-
ройства записана «1», то выходной триггер перейдет в состояние
1. Далее под действием тактовых импульсов последовательности
ТИ2 передаются 2—5 посылки. Шестым и седьмым импульсами
ТИ2 выходной триггер устанавливается в состояние 1. Цикл рабо-
ты распределителя заканчивается на восьмом импульсе тактовой
последовательности ТИь когда последний триггер регистра пере-
водится из состояния 1 в состояние 0. В этот момент с последнего
триггера распределителя подается импульс управления в триггер
ССУ. Триггер ССУ возвращается в исходное состояние (состояние
0). Время продвижения «1» по регистру сдвига распределителя
равно 7,5 то-
В описанном устройстве распределитель одновременно выпол-
няет функции делителя на 15 управляющего устройства. Электрон-
ный телеграфный аппарат так же, как и механический, снабжен
вспомогательными и дополнительными устройствами (счетчик зна-
ков, автоответчик, автостоп и т. д.) и устройствами автоматики,
которые здесь не рассматриваются.
4.11. УСТРОЙСТВА СЧИТЫВАНИЯ С ПРОМЕЖУТОЧНЫХ
НОСИТЕЛЕЙ. ТРАНСМИТТЕРЫ
Информация в аппаратуру передачи данных обычно вводится
с какого-либо промежуточного носителя, реже применяется непо-
средственный электрический ввод. Чаще всего в качестве носите-
ля используется бумажная перфолента. Возможно также исполь-
зование магнитной ленты и перфокарт. Гораздо реже применяют
другие типы носителей, например, киноленты.
Запись на промежуточный носитель производится в двоичном
коде.
УСТРОЙСТВА СЧИТЫВАНИЯ С БУМАЖНОГО НОСИТЕЛЯ
(ТРАНСМИТТЕРЫ)
Согласно рекомендациям М.ККТТ перфолента должна изготов-
ляться из промасленной бумаги толщиной 0,05-4-0,15 мм с расстоя-
нием 2,54 мм между центрами перфораций. Для передачи данных
обычно используется восьмидорожечная перфолента, для телегра-
фирования — пятидорожечная лента. В первой семь элементов
знака предназначены для передачи информации (см. табл. 4.1), а
восьмой является проверочным? он перфорируется в результате
проверки кодовой комбинации на «четность» (см. разд. 1.5).
Конструкция считывающего устройства (трансмиттера) опре-
деляется скоростью считывания. Механические трансмиттеры,
принцип действия которых был описан в разд. 4.9, устойчиво ра-
80
ботают при скорости считывания 25—30 знаков в секунду (ско-
рость модуляции до 200 бод). При больших скоростях использует-
ся фотоэлектрический метод считывания. Если в телеграфных уст-
ройствах трансмиттеры могли выполняться как в виде приставок
к телеграфному аппарату, так и в виде отдельных устройств, со-
держащих собственный привод и распределитель, то в аппаратуре
передачи данных трансмиттеры в подавляющем числе случаев
представляют собой автономное устройство.
Рассмотрим принцип действия фотоэлектрического трансмитте-
ра для считывания информации с пятидорожечной перфоленты
(рис. 4.20).
Перфо-
лента^
Рис. 4.20. Структурная схема фотоэлектрического трансмиттера
Блок считывания состоит из пяти кодовых и одного синхрони-
зирующего фотодиодов. Фотодиоды расположены в один ряд
поперек под лентой. Сверху располагается лампа подсветки. При
движении ленты ток, текущий через фотодиод, в моменты време-
ни, когда над последним оказывается отверстие, резко возрастает,
так как на фотодиод попадает прямой свет от лампы подсветки.
Таким образом, в момент прохождения над фотодиодами комби-
нации перфорированных на ленте отверстий на 5 выходах блока
фотодиодов появляется пространственная комбинация электриче-
ских импульсов, соответствующая расположению перфорационных
отверстий на ленте. С шестого выхода поступают синхроимпуль-
сы, которые требуются при синхронном методе ввода информации
в канал. Эти импульсы возникают при прохождении под фотодио-
дом отверстий ведущей дорожки перфоленты.
Импульсы, возникающие на выходе фотодиодов, при неболь-
шой скорости модуляции непригодны для непосредственной пере-
дачи в канал, так как вследствие набегания отверстия на ленте
на фотодиод они сглаживаются. Поэтому на выходе фотодиодов
предусмотрены формирующие устройства, которые превращают
эти сглаженные импульсы в прямоугольные посылки. Формирова-
ние импульсов осуществляется путем их усиления и ограничения
81
по максимуму. Сформированные посылки поступают на триггеры,
где полученная комбинация импульсов запоминается. Для пере-
дачи посылок в линию служит распределитель.
Механизм продвижения ленты обеспечивает постоянство скоро-
сти продвижения, пуск и остановку ленты, а также осуществляет
реверс ленты (изменяет направление движения) в случае необхо-
димости повторения информации (рис. 4.21). В механизме про-
в схему упри Вл
двигателями 1 ц 2
Рис. 4.21. Схема, поясняющая принцип действия фототраа-миттера.
/„ведущий двигатель; 2 и 3 — вспомогательные двигатели; 4— 6)6 <ны с лен-
той; 5 — тормозной электромагнит, 6 — прижимной электромагнит 7 —якорь
электромагнитов; 8— перфолента; 9 — неподвижный упор; 10 — освепыель;
Ц ~ блок фотодиодов
движения ленты применены три электродвигателя. Один из них —
ведущий 1 — обеспечивает собственно протягивание ленты, а два
вспомогательных — 2 и 3 — служат для намотки ленты на бобины
4 и создания требуемого ее натяжения. Ведущий электродвигатель
вращается непрерывно. Управление движением ленты осуществля-
ется с помощью тормозного 5 и прижимного 6 электромагнитов.
Если необходимо протянуть ленту, то обесточивается тормозной
электромагнит 5 и срабатывает прижимной электромагнит 6. При
этом 1-й ролик, укрепленный на якоре 7 электромагнита, прижи-
мает ленту к непрерывно вращающемуся ведущему ролику, а 2-й
ролик освобождает-ее. Для остановки ленты 8 срабатывает тор-
мозной электромагнит, обесточивается прижимной: 1-й ролик от-
ходит от ленты, 2-й ролик прижимает ленту к неподвижному упо-
ру 9.
Скорость ввода информации, или скорость работы фототранс-
миттера, достигает 500 знаков/с, что соответствует скорости мо-
дуляции 3000 бод.
В качестве носителя могут использоваться перфокарты. Обыч-
но используют 80-колоночные карты и значительно реже 40-коло-
82
ночные. Непосредственная передача информации с перфокарты в
оконечное передающее устройство крайне неудобна. Поэтому ока-
залось неизбежным введение переходного звена — различного ро-
да преобразователей: «с карты на ленту» и «с ленты на карту».
После переноса информации с карты на ленту (бумажную или
магнитную) ее считывание осуществляется с помощью трансмит-
тера или магнитного считывающего устройства.
УСТРОЙСТВА СЧИТЫВАНИЯ С МАГНИТНОГО НОСИТЕЛЯ
В качестве магнитного носителя может использоваться магнит-
ная лента, применяемая для звуковых записей (ширина ленты
6,5 мм). Запись посылок на ленту производится последовательно.
Например, в аппаратуре «Дейтафон» (США) посылки записыва-
ются на скорости модуляции 75 бод. Скорость протяжения ленты
при записи составляет 4,76 см/с. Посылки типа «1» записываются
на частоте 150 Гц, а посылки типа «0» — на частоте 220 Гц.
Информация считывается на скорости 38,1 см/с. Поэтому ско-
рость модуляции составляет 600 бод, а передаваемые колебания
имеют частотномодулированный спектр со средней частотой
1480 Гц и девиацией частоты ±280 Гц. Полученные сигналы мож-
но без применения устройств преобразования сигналов (УПС) пе-
редавать в стандартный канал тч. На стандартной кассете в 300 м
можно записать 400 000 элементарных посылок (единичных эле-
ментов) .
Запись и считывание информации на магнитную ленту мож-
но производить параллельно. В этом случае используются блоки
записывающих и считывающих магнитных головок, число кото-
рых равно числу дорожек на магнитной ленте. При таком спосо-
бе записи обычно используются узлы оборудования накопителя
на магнитной ленте (НМЛ), применяемые в ЭВМ. Более подроб-
но устройства записи и считывания подобного типа рассматрива-
ются в курсе «Электронные вычислительные машины и вычисли-
тельная техника».
ГЛАВА 5
Приемные оконечные устройства
5.1. НАЗНАЧЕНИЕ И СТРУКТУРНАЯ СХЕМА ПРИЕМНОГО
ОКОНЕЧНОГО УСТРОЙСТВА
Приемные оконечные устройства предназначены для преоб-
разования электрических посылок (единичных и значащих интер-
валов), поступающих из канала связи, в соответствующие прихо-
дящим кодовым комбинациям информационные символы. Инфор-
мационные символы могут'представлять собой буквы, цифры,
команды и т. д. Если информационные символы записываются на
промежуточный носитель (бумажная лента, рулон бумаги, перфо-
рированная лента и т. д.), то приемник должен содержать печа-
тающее устройство.
Таким образом, функции приемника могут быть сведены к
следующим:
— приему электрических посылок, составляющих кодовую
комбинацию;
— определению моментов начала и конца кодовой комбина-
ции;
— определению начала и концов каждого из единичных интер-
валов (элементарных посылок), входящих в кодовую комбинацию;
• — определению знака (полярности) каждого принятого еди-
ничного интервала (посылки);
— дешифрации принятой комбинации;
— записи расшифрованного символа на носитель.
В некоторых типах приемных оконечных устройств запись сим-
вола на промежуточный носитель отсутствует, так как принятая
кодовая комбинация в виде электрических посылок передается не-
посредственно получателю сообщения, например, ЭВМ.
Структурная схема приемного оконечного устройства представ-
лена на рис. 5.1.
Кодовые комбинации электрических значащих интервалов (по-
сылок) поступают на входное устройство 1, которое формирует
прямоугольные двоичные значащие временные интервалы в соот-
ветствии со знаком единичного элемента (элементарной посылки).
С помощью распределителя приема 2, который работает синхрон-
но и синфазно с распределителем передачи, принятые посылки
84
поступают в приемное наборное устройство 3. В наборном устрой-
стве принятые посылки запоминаются (накапливаются). Когда
заканчивается прием всей кодовой комбинации, информация из
наборного устройства параллельным кодом передается в дешиф-
рирующее устройство 4.
Рис. 5.1. Структурная схема приемного оконечного устройства:
J — входное устройство; 2 — распределитель приема; 3 — приемное на-
|борное устройство; 4 — дешифрирующее устройство, 5 — печатающее
устройство; 6 — привод; 7—коррекционное устройство
Таким образом, кодовая комбинация, поступившая на вход ра-
спределителя в виде последовательного кода, преобразуется в па-
раллельный код.
Дешифрирующее устройство преобразует «-разрядное двоич-
ное число в соответствующее десятичное число. Поэтому дешиф-
ратор, имеющий п входов, обеспечивает N=2n выходов. Это спра-
ведливо, если прием ведется с помощью обыкновенного кода и все
кодовые комбинации являются разрешенными. Сигналы с выхо-
дов дешифратора воздействуют на печатающее устройство 5, ко-
торое фиксирует один из N возможных символов.
Приемное оконечное устройство приводится в действие с по-
мощью привода 6, который аналогичен приводу передатчика.
Определение моментов начала и конца кодовой комбинации, а
также определение начал и концов каждой из элементарных по-
сылок, входящих в кодовую комбинацию, осуществляется совме-
стным действием распределителя и коррекционного устройства 7,
5.2. ПРИЕМ ИНФОРМАЦИИ ОКОНЕЧНЫМ ПРИЕМНЫМ
УСТРОЙСТВОМ
Восстановление на приеме переданного символа сообщения
возможно только после того, как известны все элементарные по-
сылки (единичные элементы), образующие кодовую комбинацию.
Поэтому все знаки элементарных посылок данной кодовой комби-
нации должны запоминаться (накапливаться) вплоть до оконча-
ния ее приема.
85.
Накопление знаков посылок происходит в наборном устройст-
ве приемника. Последнее должно содержать столько накопитель-
ных элементов, сколько разрядов имеет применяемый код. При
этом необходимо, чтобы каждый разряд кода запоминался опре-
деленным элементом наборного устройства. Иными словами, пер-
вая посылка кодовой комбинации должна запоминаться первым
элементом наборного устройства, вторая — вторым и т. д.
Обеспечение избирательного накопления принимаемых посы-
лок в наборном устройстве осуществляется распределителем прие-
ма, с помощью которого каждый элемент наборного устройства
подключается к входному устройству в строго определенные мо-
менты времени: первый элемент во время прихода из канала свя-
зи первой посылки, второй элемент — второй посылки и т. д. Это
возможно, если приемный распределитель работает синфазно с
распределителем передачи.
Процесс, при котором элемент наборного устройства подклю-
чается к входному устройству через строго определенные проме-
жутки времени (чаще всего через время одной элементарной по-
сылки То), называется фазированием по посылкам1). Однако для
правильного накопления кодовой комбинации только фазирования
по посылкам недостаточно. Необходимо также, чтобы первая по-
сылка была воспринята первым элементом накопителя, вторая
вторым и т. д. Процесс, при котором соблюдается указанное ус-
ловие, называется фазированием по циклам.
Если принятые посылки не искажены по длительности, то обе-
спечение избирательного накопления не представляет труда. В ре-
альных условиях принимаемые посылки подвержены искажениям
(краевые искажения и дробления). Поэтому приходится прини-
мать специальные меры, которые позволяют определить правиль-
но знак принятой посылки даже при наличии искажений. Процесс
определения знака принятой посылки называется регистрацией
посылок (единичных интервалов).
5.3. ФАЗИРОВАНИЕ ПО ПОСЫЛКАМ И ПО ЦИКЛАМ
СИНХРОННЫЙ СПОСОБ ПРИЕМА
Одним из основных требований устойчивой работы оконечных
приемных устройств является обеспечение синфазности между не-
прерывно работающими передающим и приемным распределите-
лями. Синфазность приемника должна поддерживаться автомати-
чески в течение всего периода работы аппаратуры, так как ее по-
теря приводит к приему сплошь ошибочной информации, т. е. по-
теря синфазности вызывает полное прекращение связи.
Синфазность между принимаемыми посылками и отметками на-
чала и конца посылок, вырабатываемых приемным распределите-
*) В телеграфии используется термин «фазирование по посылкам», в аппа-
ратуре передачи данных — термин «синхронизация».
86
лем, если работа происходит в течение длительного времени, не
может быть обеспечена лишь за счет стабильности скорости при-
водов. Поясним это на примере.
Пример. Коэффициент нестабильности приводов передающего и прием-
ного распределителей к=И0-4. Определить время, в течение которого фазы при-
емного .и передающего распределителей разойдутся на одну элементарную посыл-
ку (единичный элемент), т. е. связь прекратится, если 'скорость модуляции со-
ставляет 60, 100, .200, 600, 1200 бод.
Коэффициент нестабильности привода
где / — частота следования границ элементарных посылок, вырабатываемых аб-
солютно стабильным приводом; fi — частота следования значащих моментов,
вырабатываемых приводом с учетом всех факторов, вызываемых нестабильно-
стью привода.
Время, в течение которого фаза привода сместится на время одного еди-
ничного элемента (элементарной посылки), составит
t = ^-
К
Если (учесть, что дестабилизирующие факторы могут изменить .в наихудшем
случае скорость -передающего распределителя в одну сторону, а скорость прием-
ного распределителя — в другую, время расхождения по фазе на единичный
элемент составит
> = — 1
“ 2к = 2В ’
где В—скорость модуляции, бод.
По ф-ле (6.3) можно подсчитать, через какое время прекратится связь при
различных скоростях. Данные расчета сведены в табл. 5.1.
ТАБЛИЦА 5.1
(5.2)
(5.3)
В, бод 50 100 200 600 1200
t,c 100 50 25 8,33 4,16
В реальных условиях связи, при наличии краевых искажений
принимаемых посылок, синфазность между границами идеальных
посылок (МВ) и отметками начала и конца посылок, вырабаты-
ваемых приемным распределителем, должна поддерживаться с
точностью до нескольких процентов от длительности элементар-
ной посылки. Если точность фазирования по посылкам должна со-
ставлять 5% от т0, то время устойчивой работы по сравнению с
рассмотренным примером сократится в 20 раз. Очевидно, что од-
ним лишь уменьшением коэффициента нестабильности приводов
добиться устойчивой работы распределителей нельзя. Необходимо
подстраивать в процессе работы скорости распределителей. Как
правило, подстраивают скорость приемного распределителя под
скорость передающего распределителя, т. е. под скорость следова-
ния принимаемых элементарных посылок.
87
Подстройка скорости привода (в электронных оконечных уст-
ройствах — подстройка частоты задающего генератора или ча-
стоты генераторов тактовых импульсов) может осуществляться по
специальным (коррекционным) посылкам, которые вырабатыва-
ются в передатчике датчиком служебных разрядов, или же по гра-
ницам информационных посылок4).
Фазирование по циклам достигается передачей специальной
фазирующей комбинации, которая предшествует передаче инфор-
мации основного сообщения. Фазирующая комбинация заранее из-
вестна, т. е. известен знак каждого единичного элемента внутри
комбинации. Если известен знак (полярность) каждого принимае-
мого разряда, то можно обеспечить подключение соответствующе-
го номера ячейки наборного устройства в момент прихода из ка-
нала связи аналогичного разряда кодовой комбинации.
СТАРТСТОПНЫЙ СПОСОБ ПРИЕМА
Отличительной особенностью стартстопного способа приема яв-
ляется то, что передающий и приемный распределители работают
вместе только в течение приема одной кодовой комбинации (одно-
го цикла). В промежутках между передачей комбинаций передаю-
щий и приемный распределители не работают, или, как принято
говорить, стоят на стопе. Это положение распределителей являет-
ся исходным, и расхождение фаз между распределителями рав-
но нулю. При поступлении в приемник первой посылки (старто-
вой), которая вырабатывается в передатчике датчиком служеб-
ных разрядов, запускается приемный распределитель. По окон-
чании приема кодовой комбинации (из канала в приемник посту-
пает стоповая посылка) он останавливается.
Таким образом, при стартстопном способе приема расхождение
по фазе между распределителями передачи и приема происходит
только в течение длительности одной кодовой комбинации (цик-
ла). Во время нахождения распределителей на стопе в промежут-
ке между двумя соседними циклами расхождение фаз сводится к
нулю. Поэтому требования к стабильности приводов могут быть
значительно снижены по сравнению с требованиями к йриводам
синхронных систем, так как расхождение фаз накапливается не
за длительный промежуток времени, а только за время передачи
одной кодовой комбинации.
Наличие в кодовой комбинации стартовой и стоповой посылок,
которые определяют моменты начала и конца кодовой комбина-
ции, позволяет легко осуществить фазирование по циклам.
Фазирование по посылкам при стартстопной передаче происхо-
дит за счет обеспечения необходимой стабильности скорости при-
водов в течение одного цикла. Для устойчивого цииклового фази-
рования необходимо, чтобы приемный распределитель останавли-
*) Более подробно устройства фазирования по посылкам (синхронизация)
и по циклам рассматриваются в гл. 6.
88
вался (стопировался) в момент прихода из линии середины стопо-
вой посылки. В противном случае при искажении длительности
стоповой посылки момент стопирования может совпасть с искажен-
ной ее частью, на которой будет приниматься знак (полярность),
противоположный знаку (полярности) стопа, т. е. знак стартовой
посылки. Тогда распределитель приема не остановится и начнет
совершать следующий цикл. Цикловое фазирование нарушится.
Нарушится одновременно и фазирование по посылкам (синхрони-
зация). Это приведет полностью к неправильному приему кодо-
вых комбинаций.
Для того чтобы цикл работы приемного распределителя за-
канчивался к моменту приема середины стоповой посылки, необ-
ходимо, чтобы скорость работы приемного распределителя была
несколько выше скорости передающего распределителя. На рис.
5.2 изображены циклы работы передающего и приемного рас-
Цикл приемного распределители 6\5 г,,
Цикл приемного распределителя 6,75V„
Рис. 5.2. Диаграмма циклов работы передающего и прием-
ного распределителей
пределителей, при использовании пятиэлементного обыкновенно-
го кода (МТК-2) и длительности стоповой посылки 1,5 то. Не-
трудно заметить, что соотношение скоростей передающего и при-
емного распределителей должно составить
т = 1,11.
6,75т0
В некоторых случаях (например, в телеграфных аппаратах)
стопирование приемного распределителя происходит по окончании
приема первой трети стоповой посылки. Тогда т = 7,5 то/6,5 то=
= 1,15.
5.4. СПОСОБЫ РЕГИСТРАЦИИ
ОБЩИЕ СВЕДЕНИЯ
Процесс регистрации посылок (единичных интервалов) состоит
в выявлении правильного знака (полярности) принятой посылки
при наличии в ней искажений: как краевых, так и дроблений. Наи-
более распространены способы регистрации: 1) стробированием;
2) интегрированием и 3) комбинированный.
89
Кроме перечисленных способов, в последнее время все чаще
используют способ регистрации со стиранием, который применяется
в системах с обнаружением ошибки на приеме.
РЕГИСТРАЦИЯ СТРОБИРОВАНИЕМ
Сущность способа регистрации стробированием состоит в том,
что накопительный элемент наборного устройства приемника под-
ключается к входному устройству на время, которое значительно
меньше длительности единичного элемента (элементарной посыл-
ки). Момент подключения накопительного элемента к входному
устройству часто называют моментом, или временем регистрации.
Момент регистрации посылки должен совпадать с приходом из ка-
нала связи наиболее устойчивой части посылки. При действии
краевых искажений наиболее устойчива средняя часть посылки.
Именно в момент прихода средней части посылки ее надо реги-
стрировать.
На рис. 5.3 изображен дисковый распределитель приемника.
Если приемный распределитель работает
синфазно с входящими
Рис. 5.3. Регистрация посы-
лок с помощью дискового
распределителя приемника
распределителя в точ-
посылками, то момент нахождения щетки
ке 1 совпадает с началом посылки, а момент нахождения щетки в
точке 2— с концом посылки. Подключение накопительного элемен-
та к входному устройству происходит в средней части посылки.
Минимальное время регистрации посылки а определяется време-
нем срабатывания накопительного устройства.
Если регистрацию производить точно в середине посылки
(рис. 5.4а), то допустимые пределы смещений ЗМВ, при которых
еще будет происходить правильная регистрация, составят
т0 — а
(5.4)
2
Изменение фазы входящих посылок относительно момента ре-
гистрации или сдвиг момента регистрации относительно середины
посылки (рис. 5.46) на величину g уменьшает допустимые преде-
лы смещений ЗМВ на эту же величину. Здесь
то-а
2
(5.5)
90
Значение g определяется точностью фазирования приемного рас-
пределителя. При идеальном фазировании £=0.
Регистрация стробированием может быть реализована и на
электронных элементах. Структурная схема такого устройства по-
Рис. 5.4. Временная диаграмма, поясняющая способ регистрации
стробированием:
а) стробирование в середине посылки; б) стробирование с опереже-
нием
казана на рис. 5.5. Устройство содержит два логических элемен-
та И. На одни входы этих элементов подается напряжение со сто-
роны входного устройства, а на другие — короткие регистрирую-
Стродирующие (регистр)
'импульсы от приемного
распределителя
в)
Искаженные посылки
I |д Входное
J Q устр-во
„ % а. । Регистри-
рующие
t импульсы
_____Выход
_____ t триггера
Рис. 5.5. Структурная схема устройства для регистрации посылок строби-
рованием (а) и диаграмма, поясняющая способ регистрации (б)
щие импульсы от распределителя приемника, следующие через
интервалы времени то- Если приемный распределитель сфазиро-
ван, то импульсы регистрации действуют в середине входящих по-
сылок.
С выходов ячеек И управляющие импульсы поступают на вход
триггера, где образуются посылки, знак которых зависит от того,
с какой схемы — Hi или И2 — поступил управляющий импульс, а
длительность определяется частотой повторения регистрирующих
импульсов, т. е. то. При искажении краев посылок, поступающих
от входного устройства, длительность выходных посылок остает-
ся неизменной и равна т0 (рис. 5.56/
91
Допустимые смещения ЗМВ в рассмотренном устройстве за-
висят практически только от точности фазирования распредели-
теля, так как длительность стробирующего импульса пренебрежи-
тельно мала по сравнению с то- Поэтому в ф-ле (5.5) можно пре-
небречь величиной а.
РЕГИСТРАЦИЯ ИНТЕГРИРОВАНИЕМ
Сущность интегрального метода регистрации состоит в том, что
во время приема на накопительном элементе накапливается энер-
гия посылки в течение времени длительности элементарной посыл-
ки (единичного элемента). Для схемы на рис. 5.3 это время соот-
ветствует времени прохода щеток от точки 1 до точки 2. В момент,
соответствующий концу посылки (точка 2), происходит считыва-
ние накопленного знака. Считывающие импульсы формируются
распределителем приема так же, как и при регистрации строби-
рованием, но момент их действия соответствует не середине, а кон-
цу посылки.
Регистрирующие
Рис. 5.6. Структурная схема устройства для регистрации
посылок интегрированием (а) и диаграмма, поясняющая
способ регистрации (б)
Структурная схема устройства и диаграммы, поясняющие прин-
цип интегрального способа регистрации, приведены на рис. 5.6.
92
Регистрирующее устройство содержит два интегрирующих кон-
тура RiCi и R2C2, два логических элемента И и дифференциаль-
ный трансформатор. На входы интеграторов подаются сигналы от
входного устройства, которые заряжают конденсаторы и С2.
При приеме положительной посылки («1») заряжается конденса-
тор Ct, при приеме отрицательной посылки («О») — конденсатор
С2. Постоянная времени заряда конденсаторов в несколько раз
превышает то, поэтому напряжение на конденсаторах будет из-
меняться пропорционально времени их заряда. Если в течение вре-
мени интегрирования то входное устройство находилось более чем
то/2 в состоянии 1, то при действии считывающего импульса боль-
ший разрядный ток пройдет через логический элемент от кон-
денсатора С\. Выходной триггер займет состояние 1. Если же
входное устройство более чем то/2 находилось в состоянии 0, то
больше зарядится конденсатор С2, и выходной триггер перейдет
(опять же в момент действия считывающего импульса) в состоя-
ние 0. Посылка будет зарегистрирована правильно, если при дей-
ствии краевых искажений и дроблений правильный знак посылки
сохранился на сумме промежутков времени более то/2 (рис. 5.66).
КОМБИНИРОВАННЫЙ СПОСОБ РЕГИСТРАЦИИ
Сущность комбинированного способа регистрации состоит в
том, что приходящую посылку стробируют в нескольких точках,
например, в трех точках (рис. 5.7). Результат определяют по боль-
Рис. 5.7. Временная диаграмма, поясняющая комбиниро-
ванный способ регистрации
шинству. Если в двух или трех точках регистрации зафиксирован
знак «1», то и выходной элемент перейдет в состояние 1.
При стробировании только в центре посылки комбинированный
способ регистрации переходит в регистрацию стробированием, а
при очень большом количестве проб в интервале длительности по-
сылки т0 — в интегральный способ регистрации. Комбинирован-
ный способ регистрации в телеграфной технике и технике переда-
чи данных широкого распространения не получил.
93
РЕГИСТРАЦИЯ СО СТИРАНИЕМ
В рассмотренных выше способах регистрации регистрирующее
устройство давало однозначный ответ о том, какой знак посылки
принят «1» или >«0». В условиях сильных помех .в канале связи
может случится, что /возникающие смещения ЗМВ превысят
.предельно допустимую (величину {ом. -ф-лу (5.5) ] или же будут дей-
ствовать смещения ЗМВ и дробления, которые изменят -знак при-
нимаемой посылки на время, большее, чем то/2. В этих случаях
/при методе регистрации ст1ро1б'И|ро1ва1нием и интегрированием про-
изойдет неправильная регистрация (посылки.
С целью уменьшения случаев неправильной регистрации ис-
пользуют способ регистрации со стиранием. Если возникает сом-
нение в правильности принятого знака, то на вход регистрирую-
щего устройства поступает специальный сигнал — стирание. Ко-
довая комбинация при этом в дешифратор не поступает, а стира-
ется. Стертую комбинацию переспрашивают до тех пор, пока она
не будет зарегистрирована правильно.
Наиболее просто реализовать способ регистрации со стирани-
ем, используя устройства комбинированного способа регистрации
(см. рис. 5.7). Однако здесь.определение знака производится не
по большинству, а по обязательному совпадению всех трех проб.
Если хотя бы одна из трех проб определила противоположный
знак регистрируемой посылки, то посылка (а следовательно, и ко-
довая комбинация) стирается. Качество приема посылок при этом
резко повышается, так как регистрируются только те посылки,
смещения ЗМВ в которых не превышают величины 02 (расстояние
между идеальным МВ и первым моментом регистрации, или же
последним моментом регистрации и идеальным МВ). Разумеется,
что повышение качества приема приводит к частым переспросам
комбинаций, содержащих посылки, в которых смещение ЗМВ
больше, >02, но меньше 0t [см. ф-лу (5.5)] и которые бы не вызвали
ошибки при регистрации стробированием. Эти неоправданные пе-
репросы снижают пропускную способность связи.
Таким образом, при регистрации со стиранием повышение ка-
чества приема сопряжено с потерей пропускной способности.
5.5. СРАВНЕНИЕ РАЗЛИЧНЫХ СПОСОБОВ РЕГИСТРАЦИИ
ПРИ ИСКАЖЕНИИ ПОСЫЛОК
Произведем качественную оценку устойчивости различных спо-
собов регистрации посылок при искажении краев и дроблениях.
Для простоты анализа будем считать, что распределители приема
идеально сфазированы с распределителями передачи, т. е. смеще-
ния моментов регистрации относительно их идеального положения
отсутствуют. Максимально допустимое смещение ЗМВ относитель-
но идеального положения, при котором регистрация посылок бу-
дет происходить правильно, будет различно для разных способов
регистрации. Для регистрации методом стробирования это смеще-
94
ние при условии отсутствия преобладаний равно 0='(то—а)/2 [см.
ф-лу (5.4)]. Если а«то, то 0жт0/2 = 0,5 т0.
Для способа регистрации интегрированием сумма смещений
ЗМВ, ограничивающих посылку, внутри интегрируемого интерва-
ла должна быть меньше, чем то/2 (рис. 5.8). В наиболее неблаго-
Рис. 5 8. Определение допустимы <
смещений ЗМВ при регистрации
интегрированием
приятном случае, когда смешения левого ЗМВ вправо и правого
ЗМВ влево равны между собой, допустимое максимальное смеще-
ние ЗМВ составит
0 е)прав + 0лев ~ = 0,25т„.
2 4 °
Для комбинированного способа регистрации допустимое сме-
щение ЗМВ (см. рис. 5.7) не может превышать величины 02.
Так как обычно места расположения первого и третьего момен-
тов регистрации при комбинированном способе выбирают в пре-
делах (0,34-0,4) т0 от идеальных границ посылки, то и допусти-
мое смещение ЗМВ составит 0 ж (0,34-0,4) т0.
Таким образом, наиболее устойчивым способом регистрации
при краевых искажениях посылок является способ стробирования,
а наименее устойчивым — способ интегрирования.
Если в канале связи действуют только дробления посылок, то
наиболее устойчивым способом регистрации является интеграль-
ный способ, так как все дробления продолжительностью ^др<то/2
не вызывают неправильной регистрации посылки.
При регистрации стробированием дробление любой длительно-
сти, которое по времени совпадает с моментом регистрации, вызы-
вает неправильный прием посылки. При комбинированном способе
регистрации ошибка в приеме возникает, если дробление перекро-
ет два момента регистрации, т. е. его длительность /ДР> (0,14-0,2)т0-
При длительности дробления fOT>To все способы регистрации рав-
ноценны, так как во всех случаях посылка будет зарегистрирова-
на неправильно.
Качественная оценка устойчивости способов регистрации при
совместном действии краевых искажений и дроблений, т. е. оцен-
ка методов регистрации в реальных условиях связи затруднитель-
на. Это связано с тем, что необходимо учитывать как вероятно-
сти появления смещений определенной величины, так и вероят-
ности появления дроблений заданной продолжительности. Прове-
денные в этой области исследования показали, что на каналах ка-
95
бельных, воздушных и радиорелейных линий связи наиболее ус-
тойчивым является метод регистрации стробированием. Поэтому
в подавляющем большинстве приемных оконечных устройств ис-
пользуется способ регистрации посылок стробированием.
5.6. ПОНЯТИЕ ОБ ИЗОХРОННОМ (СИНХРОННОМ) И
СТАРСТОПНОМ ИСКАЖЕНИЯХ ПОСЫЛОК
Способ фазирования циклов распределителей приемных око-
нечных устройств в значительной мере определяет допустимые
смещения ЗМВ, при которых регистрация посылок происходит
еще правильно. Рассмотрим сначала регистрацию посылок при
ст-артстопном способе фазирования циклов. На диаграмме а
рис. 5.9 принятая комбинация не искажена. Распределитель прие-
Рис. 5.9. Регистрация посылок при -искажении стартовой посылки
ма, который начинает работать при получении стартовой посылки
(точнее в момент получения стопстартного перехода), вырабаты-
вает моменты регистрации через интервалы времени 1,5 то, то, т0
и т. д. (диаграмма б). Моменты регистрации при идеальном фази-
ровании по посылкам (при идеальной синхронизации) располо-
жены точно в середине принимаемых кодовых посылок. Поэтому
допустимые смещения ЗМВ составят
вдоп=^. (5.6)
На диаграмме в (см. рис. 5.9) показана последовательность, в
которой искажена только стартовая посылка (стопстартный пере-
ход смещен вправо на величину ©старт)- Допустимые смещения
ЗМВ, для точек в, г, д, е уменьшились по сравнению с предыду-
96
щим случаем на величину ©старт, так как стробирующие импульсы
(диаграмма г) сдвинулись вправо на эту же величину ©СТарт:
®доп = ®доп ® старт- (^-7)
Таким образом, при смещении ЗМВ влево на величину ©'доп про-
изойдет неправильная регистрация знака.
Из ф-лы (5.7) следует, что
©доп = ®доп ®старт> (^-8)
т. е. допустимое смещение ЗМВ при стартстопном способе фази-
рования циклов определяется суммой смещений стопстартного и
кодовых ЗМВ.
Сумму смещений ЗМВ и стопстартного перехода называют
стартстопным смещением:
®старт = ®код ®старт- (^-9)
Если это смещение больше допустимого (©ст>©доп.), то про-
изойдет ошибка в регистрации знака. Если же 0Ст<©Доп, то ошиб-
ки в регистрации знака не произойдет.
Отсчет времени цикла при стартстопном фазировании циклов
начинается от стопстартного перехода. Поэтому легко определить
Рис. 5.10. Определение смещения ЗМВ при стартстопном способе фазиро-
вания циклов
изображены на рис. 5.9, совмещены по стартстопному переходу. Ин-
тервалы между ЗМВ неискаженной последовательности составят:
от 0 до а — то/ от 0 до в — 3 то; от 0 до г — 4 т0 и т. д. Интервалы
между ЗМВ искаженной последовательности составят: от 0 до
а—г'; от 0 до в — 2т0+т'; от О до г — Зт0+т' и т. д. Разность ме-
жду неискаженными (теоретическими) интервалами и искажен-
ными интервалами равна: от 0 до а — (то—т'); от 0 до 8 —
(то—г'); от 0 до г — (то—т') и т. д. Нетрудно видеть, что все интер-
валы исказились на величину то—т/=©старт-
В рассмотренном примере кодовые посылки были изображены
неискаженными. Предположим теперь, что третий ЗМВ( (точка
4—60 97
г) смещен влево на величину ©код- На рисунке это смещение по-
казано пунктиром. Тогда разность между действительным интер-
валом 0—г' и теоретическим интервалом 0—г составит 4то—(Зто+
—©код) = (То—Тх) +@код= ©старт + ©код=©ст- Но ©ст — есть
величина стартстопного смещения. Поэтому МККТТ изложил оп-
ределение стартстопного искажения посылок в следующей форму-
лировке: стартстопным искажением называется величина
=0стмакс ,1ООо/о> (5ДО)
То
где ©ст — максимальная измеренная разность между поступивши-
ми и теоретическими интервалами, разделяющими любой ЗМВ и
стартстопный переход. При этом смещение стартстопного перехо-
да условно полагается равным нулю, а теоретические интервалы
определяются относительно этого нулевого перехода.
Если выразить допустимое стартстопное смещение в процентах
от длительности единичного элемента (элементарной посылки), то
««00 = --100%. (5.11)
То
Условием неправильной регистрации будет неравенство
«ст > «доп - (5-12)
Рассмотрим теперь смещения ЗМВ при синхронном способе фа-
зировании циклов.
На рис. 5.11 показана идеальная последовательность посылок,
Рис. 5.11. Определение смещений ЗМ1В при синхронном спосо-
бе фазирования
тельность посылок на приеме, в которой ЗМВ смещены (5.116).
Разность между принятыми и идеальными (теоретическими) ин-
тервалами составляет: для интервала от 0 до а— (то+©а)—т<>; для
интервала от 0 до б — (2т0+©б)— 2т0; для интервала от 0 до г—
(4то—©г) —4т0 и т. д.
Согласно рекомендациям МККТТ величина изохронного (син-
хронного) искажения оценивается максимальной разницей между
98
поступившими и теоретическими интервалами, разделяющими два
любых ЗМВ, отнесенной к длине элементарной посылки т0, т. е.
6СИН= 0М°КС~0МИН • 100 %. (5.13)
т0
Для рассмотренной на рис. 5.11 последовательности величина
©макс = ©а, а ©мин=—©Г. ПОЭТОМУ
6СИН=- еа-(-0г). . 100о/о = e.a+.gr. 100%.
to t0
Нетрудно заметить, что величина 6СИн совпадает с величиной
общих искажений посылок '60бщ (см. ф-лу (2.3)].
При регистрации посылок способом стробирования (при усло-
вии расположения момента регистрации точно в середине посыл-
ки) ошибка в определении знака посылки произойдет в том слу-
чае, если ©макс или ©мил, по абсолютной величине превысит допу-
стимое смещение ©дОп= (то—а)/2 [см. ф-лу (5.4)]. Выражая 0ДОП в
процентах от длительности посылки, имеем
6доп=^-Ю0%. (5 14)
При достаточно большой последовательности посылок ©Мии=
= ©макс- Поэтому условием неправильной регистрации является
^син/2 бдоп- (5.15)
Так как величины стартстопного искажения 6СТ и синхронного
искажения 6СИн случайны, то можно говорить о законе распреде-
ления этих величин. Рассмотрим закон распределения величины
синхронного искажения, исходя из предпосылки, что смещения ЗМВ
распределены по нормальному закону с параметрами а и о
(см. гл. 2).
Рис. 5.12. Преобладания в принятых посылках:
а) переданная последовательность; б) принятая последова-
тельность
Изображенная на рис. 5.126 принятая последовательность по-
сылок имеет преобладания на посылки типа «1» относительно пе-
реданных посылок (рис. 5.12а). Величина преобладания (6пр=2а.
4* 99
Длительность принятого значащего интервала между любыми
двумя ХМВ (не обязательно соседними) может быть определена как
/ = пт0+ £' + £", (5.16)
где п — число единичных интервалов, разделяющих рассматривае-
мые ХМВ; g', g"— случайные величины смещения переднего и зад-
него ХМВ соответственно.
Все принятые интервалы можно разделить на четыре группы,
а именно интервалы между:
— четными ХМВ: /=пто+В'+g";
— нечетными ХМВ: ^2=ято+£'+?";
— нечетными и четными ХМВ: = пто+£'+?"—12а;
— четными и нечетными ХМВ: / = пто + /+?//+|2а.
Соответственно:
Й2 = + I"
бэ = Г + Г-2а
= V + V + 2а
(5.17)
Если случайные величины смещений ЗМВ распределены нор-
мально, то величины 61—64 также распределены нормально с ма-
тематическими ожиданиями:
М [6J = M[g' + g"] = О,
М [62] = М [g' + g"J = о, (518)
М[ё3] = М£' + £"-2а] = -2а |
M[6j = M[g' + g" + 2a] = 2a
Среднеквадратические отклонения случайных величин 61—64
одинаковы и равны
Y = Yi = Y2 = Y3 = Y4 = /(<*')2 + (о")2 = о J/2. (5.19)
В относительно длинной последовательности посылок число ин-
тервалов всех перечисленных типов одинаково, поэтому плотность
распределения вероятностей случайной величины 6 можно пред-
ставить в виде
Ф (6) =- 0,25Ф (6Х) + 0,25<р (62) + 0,25ф (63) + 0,25ф (64) (5.20)
или
. б2 (6—2а)= (6+2а)2
ф(6) =----^т=-е -----v=-e 2v2 -----‘ е (5.21)
2у /2л 4у /2л 4у /2л
При отсутствии преобладаний (а = 0)
ф(5)=—1=-е . (5.22)
у у 2л
Кривая распределения плотностей вероятностей ф(6) для слу-
чая ау=0 приведена на рис. 5.13. Форма кривой для случая а=0
не отличается от приведенной на рис. 2.7 б.
100
Очень часто из-за особенностей технической реализации изме-
рительных приборов измеряют не интервалы, разделяющие любые
две границы, а только расстояния между соседними ЗМВ (знача-
щие интервалы). Из рассмотренных ранее четырех групп интерва-
лов здесь измеряются только два: t3 и /4. Получаемая при этом
плотность распределения вероятностей
<р (6') = 0,5<р (63) + 0,5ф (64) =
(б—2а)2 (6-f-2a'2~|
2?2 е 2v2
(5.23)
иллюстрируется рис. 5.14.
Рассмотрим теперь закон распределения величины стартстоп-
ного искажения. Смещение любого ЗМВ в кодовой комбинации
можно представить в виде [см. ф-лу (5.9)]: ©ст г=©код г+@старт- За-
дача отыскания закона распределения сводится к нахождению ве-
роятности события, состоящего в том, что стартстопное смещение
0СТ j любого ЗМВ внутри кодовой комбинации не превысит вели-
чины |бст, т. е.
<о( | 0CTJ <ДТ). (5.24)
С некоторыми допущениями можно считать, что случайные ве-
личины ©код» и ©старт независимы и распределены по нормально-
му закону с параметрами а и о. Однако случайные величины 0СТ»
зависимы, поскольку в них входит одно и то же слагаемое ©старт-
Поэтому для определения функции распределения величины старт-
стопного искажения следует рассматривать совместное распреде-
ление зависимых случайных величин.
Дисперсия случайной величины 0СТ »
D [0сТ ,] = D [©старт + 0код;] = D [0старт] + D [@код£] = 2<Л (5.25)
а среднеквадратическое отклонение
а [©ст d = ° V2- (5.26)
На рис. 5.15а показана принятая пятиэлементная стартстоп-
ная комбинация, имеющая три границы между кодовыми посылка-
ми (три ЗМВ). Эта комбинация принята с преобладанием на по-
сылки типа «1». Величина преобладания бпр:=2а. Отсчет времен-
ных интервалов произведен относительно идеального положения
стопстартного перехода. Но по формулировке величины стартстоп-
101
ного искажения [(см. ф-лу (5.10))] отсчет временных интервалов
производят от действительного положения стопстартного перехо-
да. Такая последовательность временных интервалов изображена
Рис. 5.15. Стартстопная кодовая комбинация с преобладанием:
а) начало отсчета от идеального положения стопстартного пе-
рехода; б) начало отсчета ют реального стопстартного пере-
хода
на рис. 5.156. Нетрудно видеть, что математические ожидания ве-
личин 0СТ i поочередно равны — 2 а и нулю:
М [0ста] = — 2а;
Л4[0ств] = О;
М [®ст г] = —2а.
Корреляционный момент между случайными зависимыми вели-
чинами, например, между ©ста и 0СТв равен (нуль сверху означа-
ет, что величина центрирована):
*а_в = М [(0ста) (0СТВ)1 = М [(©старт + 0а) (0старт + 0В)] =
= Л1 [0старт] + М [0старт 0а] + М. [0старт • 0В] + М [0а • 0В] = о2,
так как последние три члена равны нулю в силу независимости
перемножаемых величин, а оставшийся первый член выражает
дисперсию величины ©старт-
Коэффициент корреляции между величинами 0а и 0В
г = --------—-------=-----—- = 0,5. (5.27)
о [0СТ а]о [0Ст в] о К2 ° К2
Аналогично можно показать, что коэффициент корреляции ме-
жду любыми 0СТ постоянен и равен 0,5.
При передаче стартстопных комбинаций пятиэлементным те-
леграфным кодом № 2 (см. табл. 1.2) могут встретиться комби-
нации, содержащие один, три или пять ЗМВ. Четного количества
ЗМВ кодовые комбинации содержать не могут. Если обозначить
через а, р и у вероятности того, что наудачу взятая кодовая ком-
бинация содержит соответственно один, три или пять ЗМВ, то ве-
102
роятность того, что ни один ЗМВ ни в одной из кодовых комби-
наций не сместится более, чем на -6Ст, составит
Р (В) = а Рг (В) + Р Р2 (В) + Y Ps (В).
(5.28)
Здесь Pt(B), Рз(В) и Р5(В) — соответственно вероятности то-
го, что | ©ст г| <бст в комбинациях, содержащих один, три и пять
ЗХМВ.
Статистика сообщений на русском языке, передаваемых кодом
№ 2, показывает, что из большого количества кодовых комбина-
ций 19,8% содержат один ЗМВ, 66% —три ЗМВ и 14,2% — пять
ЗМВ. С учетом этого ф-лу (5.28) можно представить в виде
Р (В) = 0,198?! (В) + 0,66Р3 (В) + 0,142Р5 (В). (5.29)
Вычисление значения Р(В) по ф-ле (5.29) для различных зна-
чений параметров смещений ЗМВ а и о весьма затруднительно
и производится на электрон-
ных вычислительных машинах.
Результаты расчета представ-
ляются в виде графиков, по
которым для каждой реаль-
ной связи при известных а и
о можно найти вероятность
(о|Ост i| =Сбст= 1— Р(В), а сле-
довательно, определить веро-
ятность ошибки, если прирав-
нять 5 к величине исправляю-
щей способности приемника.
На рис. 5.16 показано семей-
ство кривых 1—Р(В)=<р(6ст)
при а = 0.
Рис. 5.16. Зависимость вероятности
1—Р(В) от 6 при различных а
Пример. Определить вероятность ошибки при приеме знаков, если а=0
и о=110%. Исправляющая способность приемника — 40%.
По графикам, приведенным на рис. 6.16, находим, что 1—Р(В)ж0,01 -(точ-
ное значение 0,0105). Разумеется, что связь с вероятностью -ошибки »10-2 яв-
ляется очень плохой.
В заключение заметим, что в случае нормального закона рас-
пределения смещений ЗМВ величина стартстопного искажения,
так же как величина синхронного искажения, полностью определе-
на параметрами а и о.
5.7. ИСПРАВЛЯЮЩАЯ СПОСОБНОСТЬ ПРИЕМНЫХ
ОКОНЕЧНЫХ УСТРОЙСТВ
Способность приемных оконечных устройств правильно реги-
стрировать искаженные входящие посылки называется исправляю-
103
щей способностью приемника. Численно величина исправляющей
способности приемника равна максимально допустимой величине
искажений, при которых регистрация осуществляется еще пра-
вильно. Следует различать исправляющую способность приемника
по краевым искажениям ip, и по дроблениям v.
ИСПРАВЛЯЮЩАЯ СПОСОБНОСТЬ ПО КРАЕВЫМ ИСКАЖЕНИЯМ
Исправляющая способность по краевым искажениям численно
равна относительному смещению одной из границ посылок от иде-
ального положения, при котором еще возможна правильная реги-
страция посылки. Различают три вида исправляющей способности
по краевым искажениям: теоретическую, эффективную и номи-
нальную.
Теоретическая исправляющая способность рт рассчитывается,
исходя из конструктивных или схемных данных приемного оконеч-
ного устройства в предположении, что оно работает в идеальных
условиях, т. е. соблюдается идеальное фазирование по посылкам.
Таким образом, цт==|6доп-
В соответствии с (5.14) и (5.11) теоретическая исправляющая
способность синхронного приемника
рт=бдоп -ЮОо/о, (5.30)
2Т0
а теоретическая исправляющая способность стартстопного прием-
ника
(н)
рт=6доп = ^-Ю0%. (5.31)
То
Эффективная исправляющая способность рЭфф измеряется для
данного (конкретного) оконечного приемного устройства в реаль-
ных условиях эксплуатации. Очевидно, что ,Иэфф<Щг, так как на
результаты измерения скажутся факторы, снижающие исправляю-
щую способность: погрешности работы приемника, погрешности
фазирования и т. д.
Номинальная исправляющая способность iiH0M представляет со-
бой минимальную величину п3фф, определенную в реальных усло-
виях эксплуатации для многих оконечных приемных устройств
данного типа. Очевидно, чго }1Ном<Цэфф-
ИСПРАВЛЯЮЩАЯ 'СПОСОБНОСТЬ ПО ДРОБЛЕНИЯМ
Исправляющая способность по дроблениям численно равна от-
носительной максимальной длительности дробления, не вызываю-
щей неверной регистрации посылки:
v=^-lOOo/o. (5.32)
то
Различают теоретическую vT, номинальную vHOm и эффективную
Чэфф исправляющие способности.
104
Интересно сравнить предельные значения iiT и vT для различ-
ных способов регистрации посылок. Для метода регистрации стро-
бированием
щ = . 100о/в ~ . ЮО% =50 %
2т0 2т0
vT = о %
Для метода регистрации интегрированием при условии равно-
вероятного искажения посылки с двух сторон и.т = 25% и vT = 50%-
Номинальная исправляющая способность современных оконеч-
ных устройств по краевым искажениям составляет: 1) для син-
хронных приемников механического типа примерно 304-35%; 2) то
же, электронного типа 404-48%; 3) для стартстопных приемников
электромеханического типа 304-36%; 4) то же, электронного типа
404-46%.
(5.33)
5.8. РАСПРЕДЕЛИТЕЛИ И НАБОРНЫЕ УСТРОЙСТВА
Приемные распределители обеспечивают избирательную реги-
страцию последовательно поступающих посылок и их распределе-
ние по запоминающим ячейкам наборного устройства. Приемные
распределители аналогичны передающим распределителям, реали-
зуются на тех же двоичных элементах и могут работать как в син-
хронном режиме, так и в стартстопном режиме. На рис. 5.17 по-
казана схема синхронного электронного распределителя, выпол-
ненного на двухтактном триггерном регистре сдвига.
Рис. 5.17. Электр онтый синхронный распределитель на п выходов
Тактовая последовательность ТИ2 возвращает триггеры Г, 2' ...
к' в состояние 0 и устанавливает триггеры 2, 3, ... 1 в состояние 1
в средней части входящих посылок. С помощью логической схе-
мы И регистрирующие импульсы стробируют знак входящей по-
сылки и направляют его в накопительные ячейки наборного уст-
ройства. Последние могут быть выполнены на любом двоичном
элементе. Заполняются накопительные элементы последовательно,
а считывание информации с них происходит параллельно (одно-
временно) между последним (к) и первым регистрирующими им-
пульсами распределителя.
105
Механические распределители (дисковые или кулачковые) ана-
логичны рассмотренным ранее (см. рис. 4.6 и 4.7).
Электромеханические наборные устройства могут выполняться
в различных конструктивных модификациях. Одна из таких моди-
фикаций, используемая в стартстопных телеграфных аппаратах, а
также стартстопный кулачковый распределитель будут подробно
рассмотрены в разд. 5.11.
5.9. ДЕШИФРАТОРЫ
Дешифрирующее устройство предназначено для преобразова-
ния «-разрядного двоичного числа, записанного в накопительных
элементах наборного устройства в параллельном коде, в соответ-
ствующее ему десятичное число, которое определяет принятый ин-
формационный символ (знак, букву, команду и т. д.).
МЕХАНИЧЕСКИЕ ДЕШИФРАТОРЫ
Принцип действия механического дешифратора поясним на
примере дешифратора со шкивами (рис. 5.18).
Рис. 5.18. Схема, поясняющая прин-
цип действия дешифратора со шки-
вами
Рис. 5.19. Схема, поясняющая прин-
цип действия дешифратора с линей-
ками
Дешифратор состоит из пяти шкивов, которые могут переме-
щаться на определенное число «шагов». Число шагов и направ-
ление перемещения каждого шкива при приеме токовой посылки
показаны на рисунке стрелками с цифрами. Каждый шкив связан
со своим электромагнитом, который подключен к накопительному
элементу наборного устройства. Тросик, охватывающий все шки-
вы, связан с типовой колодкой, на которой размещены 32 типа *) с
*) Типом называется металлический брусок, на котором выгравирован ин-
формационный символ.
106
изображениями букв и цифр (или других знаков), подлежащих
отпечатыванию.
Пусть на наборном устройстве зарегистрирована комбинация
10100 (буква С в коде М.ТК-2). Тогда шкивы передвинутся так,
как это показано пунктиром на рис. 5.18, а типовая колодка пе-
редвинется вправо на 16 + 0+4+0+0=20 шагов. Таким образом,
число 20, записанное ранее в двоичной форме (10100), преобразо-
валось в десятичную форму. На типе № 20, который расположен
на типовой колодке, выгравирована буква С. При перемещении
колодки на 20 шагов буква С окажется против печатающего моло-
точка.
Другим типом механического дешифратора, нашедшего широ-
кое применение в телеграфных аппаратах, является дешифратор с
линейками, число которых равно числу разрядов дешифрируемого
двоичного числа. Каждая из линеек может перемещаться под дей-
ствием сигнала из накопительного элемента наборного устройства.
Вырезы в линейках выполнены так, что при дешифрации кодовой
комбинации вырезы под рычагом (рис. 5.19) совпадают только в
одной из N=2n возможных позиций. Под действием пружин ры-
чаг западает в образующийся паз всех линеек. Число рычагов рав-
но числу позиций, т. е. N. Например, при приеме комбинации 10101
(буква Ы в коде МТК-2) линейки 1, 3, 5 передвинутся на один
шаг влево, а линейки 2 и 4 — вправо. Сплошной паз образуется
под 21-м рычагом. Нетрудно видеть, что 10101 есть запись деся-
тичного числа 21 в двоичной форме.
ЭЛЕКТРОННЫЕ ДЕШИФРАТОРЫ
Наиболее простым является матричный дешифратор на диодах.
Рассмотрим схему матричного дешифратора для двухэлементного
кода. В нем число входов и=2, а число выходов М=22=4. Сигна-
лы с выходов наборного устройства воздействуют на ключевые
схемы К+ и Кл2, которые коммутируют диоды матрицы (рис.
5.20). Для простоты анализа электронные ключевые схемы заме-
Рис. 5.20. Матричный диодный дешифратор на четыре
выхода
1'07
йены механическими контактами. Пусть принимается комбинация
10, как это показано на рисунке. Положительное напряжение -)-Е
для всех выходов, кроме Вых2, шунтировано диодами. Поэтому
сигнал появится только на Вых2, т. е. на выходе, соответствующем
числу 2 в двоичной системе счисления (10). При комбинации 00
сигнал появится на Вых0 и т. д. Матричный дешифратор можно
построить на любое число выходов N=2n.
На рис. 5.21 изображена схема пирамидального дешифратора
на ключевых схемах на /V~=23=8 выходов. Ключи выполняются
~Рис. 5.21. Пирамидальный дешифратор на восемь выходов
на электронных элементах, но на схеме они заменены механиче-
скими контактами. Пусть принимается комбинация 111 (число 7
в десятичной системе счисления). Сигнал появится на Вых7 де-
шифратора.
Возможны также и другие способы построения электронных
дешифраторов, основанных на преобразовании двоичного числа в
десятичное.
5.10. УСТРОЙСТВА ВЫВОДА СООБЩЕНИЙ
ОБЩИЕ СВЕДЕНИЯ
Принятая и дешифрированная информация должна быть вы-
ведена из оконечного приемного устройства к получателю инфор-
мации. В зависимости от типа и целевого назначения получателя
сообщений принятые символы либо выводятся на промежуточный
носитель, либо непосредственно поступают к получателю в виде
электрических сигналов (электрический вывод сообщений).
В качестве промежуточного носителя могут быть использова-
ны многие материалы: бумага, магнитная пленка, химические
пленки, фотоматериалы и т. д. Запись принятых символов на но-
сителе также многообразна. Это — печать, перфоотверстия, гра-
фики, световое, и графическое отображение на экранах пультов и
других устройствах индикации и т. д. Наибольшее распростране-
108
ние в настоящее время получили выводные печатающие и перфо-
рирующие устройства, а также устройства для вывода сообщений
непосредственно к получателю сообщения, например, к ЭВМ.
ПЕЧАТАЮЩИЕ УСТРОЙСТВА
Отпечатывание символов на носитель, например, на обычную
бумагу, может производиться контактным или бесконтактным спо-
собом. При контактном способе нанесение символов на носитель
осуществляется посредством контакта органа записи с носителем.
Воздействие, оказываемое органом записи на носитель, может
быть механическим, тепловым, электрохимическим, магнитным,
электрическим, электромагнитным и т. д. В результате воздейст-
вия изменяется качественно поверхность носителя.
Простейшим способом печати является печатный способ с ме-
ханическим (ударным) воздействием на носитель, как это сдела-
но в обычной пишущей машинке. Носитель в данном случае может
иметь форму бумажной ленты или рулона бумаги. В соответствии
с этим, например, телеграфные аппараты подразделяют на ленточ-
ные и рулонные. Орган записи (тип) может быть укреплен на ти-
повом рычаге, типовом колесе или типовой колодке.
Упрощенная конструкция печатающего устройства на бумаж-
ную ленту с помощью типовых рычагов приведена на рис. 5.22. В
Рис. 5.22. Упрощенная кон-
струкция печатающего уст-
ройства с типовыми рыча-
гами:
1—5 —- дешифраторные линейки;
6 — тяговый рычаг. 7 —печата-
ющий кулачок, 8 — печатающая
дружина, 9 — шток с печатаю-
щей скобой, 10— типовый рычат;
// — тип, 12 — красящая лента.
13— бумажная лента, /4 —печа-
тающий, валик
12
-13
3
—14
образовавшийся паз дешифраторных линеек 1—5 западает тяго-
вый рычаг 6 (дешифрация). При повороте печатающего кулачка 7
под действием печатающей пружины 8 начинает подниматься шток
9, который поднимает вверх запавший тяговый рычаг. Типовой
рычаг 10 поворачивается против часовой стрелки и ударяет типом
// по красящей 12 и бумажной 13 ленте, находящейся на печа-
тающем валике 14. Отпечатывается знак, после чего бумажная и
красящая ленты продвигаются на один шаг.
109
Подобным образом осуществляется печать и на рулоне бума-
ги. В этом случае после отпечатывания знака продвигается на один
шаг вся каретка, с укрепленным на ней рулоном бумаги. При от-
печатывании последнего знака строки каретка автоматически воз-
вращается в исходное положение (возврат каретки), а рулон бу-
маги перемещается вверх на одну строчку (перевод строки). Ана-
логичные функции предусмотрены в любой пишущей машинке.
Скорость вывода сообщений в устройствах печати с типовыми
рычагами относительно невелика и обычно не превышает 400—
1600 знаков в минуту (скорость модуляции 50-4-200 бод). Несколь-
ко большей скорости вывода достигают, используя устройства пе-
чати с типовыми колесами. В этих устройствах типы 1 расположе-
ны по окружности типового колеса 2. На одном валу с типовым
колесом расположен датчик кода 3 (рис. 5.23). Он образует элек-
Рис. 5.23. Упрощенная кон-
струкция печатающего уст-
ройства с типовым колесом:
1— типы; 2 — типовое колесо,
3— датчик кода; 4— печатаю-
щий молоточек; 5 — печатающий
электромагнит; 6 — бумажная
лента; 7 — красящая лента
трическую или механическую кодовую комбинацию того символа,
который в данный момент расположен под печатающим молоточ-
ком 4. Эта комбинация сравнивается с комбинацией, принятой из
канала связи. При их совпадении срабатывает схема И, через пе-
чатающий электромагнит 5 проходит импульс тока и печатающий
молоточек отпечатывает знак на бумажной ленте 6 через крася-
щую ленту 7. Типовое колесо может вращаться непрерывно или
шагами. Время, затрачиваемое на отпечатание знака в устройст-
вах с типовым колесом, меньше времени печати устройств с типо-
выми рычагами. Поэтому скорость вывода увеличивается пример-
но в два раза и достигает 3000—3200 знаков в минуту. С помощью
типового колеса можно осуществить печать и на рулоне бумаги
(рис. 5.24).
Элементом, непосредственно отпечатывающими знак, является
трехрядное (по числу регистров) типовое колесо и печатающий
110
молоточек, которые расположены на специальных каретках. Ти-
повое колесо 1 вращается шагами. В тот момент, когда под печа-
тающим молоточком 2 будет находиться дешифрированный знак,
происходит его отпечатывание. Бумага рулона и красящая лента
расположены между типовым колесом и печатающим молоточком.
Рис. 5.24. Конструкция печатающего устройства для печати на ру-
лон бумаги:
1— типовое колесо; 2— печатающий молоточек, 3 — каретка типового колеса;
4 — каретка печатающего молоточка; 5 — направляющий стержень; 6 — вал
печатающего молоточка; 7 — тросы перемещения кареток; 8 — тросовый ба-
рабан; 9 — возвращающая пружина
Каретки типового колеса 3 и печатающего молоточка 4 пере-
мещаются по направляющим стержням 5 и 6 с помощью подвиж-
ных тросов 7. Перемещение происходит шагами на один знак
вдоль отпечатываемой строки посредством тросового барабана 8.
После отпечатывания строки из линии поступает комбинация «Воз-
врат каретки». В результате ее дешифрации освобождается воз-
вращающая пружина 9, воздействующая на возвращающий меха-
низм тросового барабана. Обе каретки возвращаются в начало
строки.
При получении из линии комбинации «Перевод строки» бума-
га рулона продвигается вверх (в направлении, перпендикулярном
движению кареток) на одну строку. Механизм передвижения бу-
маги на рис. 5.24 не показан.
Значительное увеличение скорости печати на рулон бумаги до-
стигается параллельным способом печати. На одном валу укреп-
ляют типовые колеса, число которых равно числу знаков в строке.
Таково же число датчиков кода, наборных устройств, печатающих
молоточков и электромагнитов. Цикл печати всей строки выпол-
няется за один оборот типовых колес, которые вращаются непре-
рывно. По окончании цикла бумага передвигается на одну стро-
ку. Скорость печати достигает 1000—1200 строк в минуту или же
(при числе знаков в строке, равном 69) 69 000—72 800 знаков в
минуту.
111
Принцип действия устройства печати с электрическим воздей-
ствием на носитель поясняется рис. 5.25. В качестве органа запи-
си используются матричные печатающие головки 1 с 35 (5X7) то-
Рис. 5.25. Схема, поясняющая
принцип действия печатающего
устройства с электростатиче-
ской записью:
1 — матричные печатающие головки;
2 — носитель; 3 — порошок для про-
явления изображения, 4 — видимое
изображение; 5 — камера для за-
крепления
чечными электродами. Каждый электрод соединен с выходами де-
шифратора так, что на головке возникает потенциальный рельеф
дешифрированного знака. Затем происходит разряд потенциалов
рельефа через носитель на корпус. В качестве носителя 2 может
быть применена стандартная рулонная бумага, покрытая полисти-
рольной пленкой, на которой образуется невидимое электростати-
ческое изображение символа. Далее изображение проявляется пу-
тем обработки носителя специальным порошком 3, оседающим в
местах носителя с повышенным потенциалом электростатического
поля. Полученное видимое изображение 4 закрепляют подогревом
в камере для закрепления 5. Скорость записи достигает тысяч
строк в минуту.
В электроннолучевых печатающих устройствах (ЭЛПУ) в ка-
честве приемника знаков используются специальные трубки типа
«Характрон». Полученные на экране трубки знаки снимаются фо-
тографическим способом. Принцип действия ЭЛПУ поясняется
рис. 5.26.
Фотокатод 1 трубки 2 освещается через конденсор 3, объектив
4 и матрицу 5 электрической лампой 6. Матрица имеет прорези по
форме всех знаков, подлежащих фиксации. Поэтому на фотокатод
проектируется изображение всех знаков, которые имеются на мат-
рице. Серебряно-цезиевый фотокатод нанесен непосредственно на
стекло трубки. В результате освещения за фотокатодом образуется
электронное изображение всех знаков матрицы. С помощью си-
стемы отклоняющих катушек по строкам 7 и столбцам 8 и дейст-
вия специального дешифрирующего устройства, содержащего де-
шифраторы по горизонтали 9 и вертикали 10, через диафрагму 11
на экран трубки проектируется изображение только того знака,
который принимается в данный момент времени, и в то место,
которое соответствует положению данного знака в строке. После
заполнения экрана принятыми знаками изображение через объек-
тив 12 фотографируется на пленку 13, а луч перемещается в исход-
112
^^троист^^ Печатающее устройство
Рис. 5.26. Печатающее устройство на электроннолучевой трубке (ЭЛПУ):
1 — фотокатод трубки, 2 — трубка; 3 — конденсатор, 4 — объектив, 5 — матрица. 6 —
электрическая лампа; / — отклоняющая катушка по строкам; 8 — отклоняющая катуш-
ка по столбцам, 9 — дешифратор по горизонтали; 10— дешифратор по вертикали,
11 — диафрагма, 12 — объектив; 13 — фотопленка
ное положение. ЭЛПУ обеспечивает съем принятой информации
со скоростью 1'5 000 строк в минуту.
Возможны другие варианты устройств записи (печати) на но-
ситель, которые здесь не рассматриваются.
ПЕРФОРИРУЮЩИЕ УСТРОЙСТВА
Перфорирующие устройства предназначены для пробивания в
носителе отверстий круглой, прямоугольной или иной формы. Ча-
ще всего в качестве носителя применяется лента (перфолента) или
тонкий картон в виде карты (перфокарты). Отверстия, как прави-
ло, пробивают механическим воздействием на носитель, хотя не
исключены и иные способы: прожигание отверстий электрической
искрой или лучом лазера. Количество отверстий и их расположе-
ние на носителе содержат сведения о записанной информации.
Принцип действия перфоратора с записью на ленту поясняет-
ся рис. 5.27. Бумажная лента 1 расположена между подвижными
пуансоном 2 и неподвижной матрицей 3. Отверстие в бумаге про-
бивается при воздействии рычага 4 через наборную линейку 5 на
пуансон, если линейка занимает левое (показано пунктиром) по-
ложение. Если линейка 5 сдвинута вправо, рычаг на пуансон не
воздействует и отверстия не пробиваются. Число наборных линеек
и пуансонов в устройстве перфорирования соответствует числу по-
сылок в кодовой комбинации. При использовании телеграфного ко-
да МТК-2 их число равно пяти.
Положение наборных линеек (правое или левое) соответствует
кодовой комбинации записываемого знака. После записи знака
бумажная лента протягивается на один шаг с помощью лентопро-
тяжного устройства. Внешний вид перфорированной пятидорожеч-
113
ной ленты был показан на рис. 4.2. Для записи информации кодом
ГОСТ 13052—67 (см. табл. 4.1) применяется семи- или восьмидо-
рожечная лента. В этом случае перфорирующее устройство содер-
жит 8 пуансонов и наборных линеек.
Аналогичным образом наносятся отверстия (в большинстве
случаев прямоугольной формы) и на перфокарту.
Рис. 5.27. Схема, поясняющая
принцип действия перфорирую-
щего устройства:
/ — бумажная лента; 2— пуансон;
3 — матрица; 4 — рычаг; 5 —набор-
ная линейка
Рис. 5.28. Цепи .взаимодействия оконечного
приемного устройства и ЭВМ
ЗАПИСЬ ИНФОРМАЦИИ НА МАГНИТНУЮ ЛЕНТУ
В современных системах передачи дискретных сообщений все
большее распространение получает запись информации на маг-
нитный носитель. Принцип записи и считывания информации с ма-
гнитной пленки был изложен в разд. 4.11.
НЕПОСРЕДСТВЕННЫЙ ВЫВОД СООБЩЕНИЙ
Для непосредственного (электрического) вывода сообщений из
оконечного приемного устройства в приемник информации (ЭВМ)
в последней предусматривается согласующее устройство УС.
Кодовая комбинация принятых посылок (единичных интерва-
лов) запоминается на накопительных устройствах наборного уст-
ройства приемника (рис. 5.28). После того как в накопителе бу-
дет записана вся кодовая комбинация, в УС по цепи ИГ передают
импульс готовности (импульс вывода) и приступают к выводу ко-
довой комбинации. Вывод может осуществляться либо параллель-
но, либо последовательно. В первом случае число информационных
цепей равно числу разрядов кодовой комбинации п. Скорость вы-
вода соответствует частоте тактовых импульсов, передаваемых по
цепи ТАКТ из оконечного приемного устройства в УС. Таким
образом, в системе оконечное устройство — ЭВМ, темп работы
задается оконечным устройством.
114
Принятая кодовая комбинация в УС проверяется по служеб-
ным признакам. Если в кодовой комбинации обнаруживается
ошибка, то комбинация запрашивается снова из наборного устрой-
ства по цепи «Запрос повторения». Запросы повторения можно де-
лать в течение времени, пока оконечное устройство принимает по-
следующую кодовую комбинацию. Поэтому скорость вывода ин-
формации в ЭВМ, как правило, значительно превышает скорость
приема информации оконечным устройством. После приема по-
следующей комбинации ранее накопленная в наборном устройстве
комбинация стирается и заменяется новой.
В реальных условиях число цепей стыка между оконечным уст-
ройством и ЭВМ значительно превышает число рассмотренных вы-
ше цепей, так как функции УС включают ряд дополнительных,
здесь не рассмотренных операций. Число цепей на участке стыка
между АПД и устройством сопряжения, а также электрические
параметры сигналов обмена регламентируются рекомендациями
мкктт.
5.11. ПРИЕМНАЯ ЧАСТЬ ЭЛЕКТРОМЕХАНИЧЕСКОГО
СТАРТСТОПНОГО ТЕЛЕГРАФНОГО АППАРАТА
ОБЩИЕ СВЕДЕНИЯ
Приемную часть оконечного устройства электромеханического
типа рассмотрим на примере аппарата СТА-М67. Она состоит из
входного устройства, приемного распределителя, наборного и де-
шифрирующего устройств, устройства фазирования циклов (кор-
рекционное устройство) и устройства печати. Кроме того, имеются
механизм продвижения бумажной и красящей лент, регистровый
механизм и ряд других вспомогательных устройств. Приемник так-
же снабжен реперфораторной приставкой.
ВХОДНОЕ УСТРОЙСТВО
Входным устройством в аппарате СТА-М67 является неполя-
ризованный электромагнит, якорь которого управляет работой
коррекционного и наборного устройств. Электромагнит состоит из
двух катушек, насаженных на сердечник. Для обеспечения удоб-
ства регулировки и повышения надежности работы предусмотрен
механизм, обеспечивающий плавную регулировку величины воз-
душного зазора между якорем и сердечником электромагнита. Ве-
личина зазора устанавливается перемещением переводного рыча-
га при помощи микрометрического винта. Рабочий ток в прием-
ном электромагните 40—50 мА.
' ПРИЕМНЫЙ РАСПРЕДЕЛИТЕЛЬ
Приемный распределитель (рис. 5.29) выполнен в виде муфты
с кулачками (наборная муфта) 1. Муфта свободно сидит на глав-
ной оси приемника 2 и связана с ней фрикционным сцеплением.
116
Последнее представляет собой два ведущих диска 3, между кото-
рыми помещена наборная муфта с двумя ведомыми дисками 4.
Между ведущими и ведомыми дисками вставлены войлочные шай-
бы 5. Нижний ведущий диск связан с главной осью и может пере-
мещаться по ней. При помощи пружины 6 наборная муфта зажи-
мается между ведущими дисками. В верхней части наборной муф-
Л7
Рис. 5.29. Кулачковый распре-
делитель и коррекционное уст-
ройство:
/ — наборная муфта. 2 — главная
ось приемника; 3 — ведущие диски,
4— ведомые диски; 5 — войлочные
шайбы; 6 — пружина; 7 — столовый
рычаг; 8 — запорный (блокировоч-
ный) диск; 9— электромагнит; 10 —
якорь электромагнита; 11— стопо-
вая скоба; 12 — эксцентричный винт,
13 — штифт; 14 — промежуточный
рычаг; /5 —запорный рычаг
ты имеется столовый рычаг 7, жестко связанный с муфтой. Под
стоповым рычагом расположен запорный диск с вырезами 8, бло-
кирующий якорь электромагнита в момент регистрации принятой
посылки.
УСТРОЙСТВО ФАЗИРОВАНИЯ (КОРРЕКЦИОННОЕ УСТРОЙСТВО)
Коррекционное устройство обеспечивает стартстопное цикловое
фазирование и фазирование посылок в приемном распределителе.
В исходном (стоповом) положении по обмоткам электромагни-
та 9 протекает ток и якорь его 10 притянут. Наборная муфта не-
подвижна, так как столовый рычаг 7 (см. рис. 5.29) упирается в
стоповую скобу 11. При получении стартовой (бестоковой) по-
сылки электромагнит отпускает, головка эксцентричного винта 12,
укрепленного на якоре, воздействует па штифт 13. Штифт через
промежуточный рычаг 14 приподнимает запорный рычаг 15, кото-
рый освобождает стоповую скобу 11. Теперь стоповая скоба мо-
жет поворачиваться на оси. Наборная муфта, увлекаемая фрикци-
онным сцеплением, начинает вращение. В конце одного оборота
муфта останавливается, так как стоповый рычаг упрется в стопо-
вую скобу (к этому моменту из линии приходит стоповая посыл-
ка, и якорь электромагнита притянут). Диаграмма цикла работы
распределительной муфты была приведена на рис. 5.2.
Заметим, что система, включающая стоповую скобу и запор-
ный рычаг, может поворачиваться по окружности относительно
оси распределительной муфты с помощью фазоустановителя (на
116
рис. 5.29 не показан). Это позволяет менять начальную фазу
распределителя, что необходимо для расположения моментов ре-
гистрации посылок в средней части посылок, т. е. осуществлять
фазирование по посылкам.
НАБОРНОЕ УСТРОЙСТВО
При вращении наборной муфты каждый из пяти ее кулачков 1,
расположенных по винтовой линии, взаимодействует с одним из-
плеч наборного рычага 2 (их также пять). Наборный рычаг пово-
рачивается на некоторый угол (рис. 5.30). Второе плечо наборного
Рис. 5.30. Наборное устройство:
1 — наборный иулачок; 2 — наборный рычагу
3 — мечеоб.разный рычаг; 4 —еилка якоря; 5 —
ограничивающие штифты; 6 — якорь электро-
магнита; 7—пружина наборного рычага; 8 —
Т-образный рычаг; 9 — дешифраторная линейка^
рычага шарнирно соединено с мечом 3. При повороте наборного
рычага меч двигается по направлению к вилке якоря 4 и наталки-
вается на нее левым или правым концом. В момент встречи меча
3 с вилкой 4 поступательное движение меча прекращается, и он
поворачивается в вырезе наборного рычага. При этом конец меча1
отойдет к правому ограничивающему штифту 5, если якорь элек-
тромагнита 6 отпущен, и к левому—если якорь притянут. По окон-
чании взаимодействия наборного кулачка с наборным рычагом
последний под действием пружины возвратится в исходное по-
ложение. Меч переместится вперед и ударит по соответствующему
плечу Т-образного рычага 7, который передвинет дешифратор пуку
линейку 8.
Момент передвижения дешифраторной линейки можно задер-
жать путем ее запирания. После освобождения от запирания ли-
нейка перемещается дальше под действием пружины наборного
рычага. Обычно все пять линеек заперты до окончания приема
всей кодовой комбинации. Затем они освобождаются одновре-
менно и перемещаются. Таким образом, происходит преобразова-
ние последовательного кода на входе наборного устройства в па-
раллельный код на его выходе.
1,17'
Для устойчивой работы наборного механизма время регистра-
ции посылки должно быть меньше ее длительности, а момент ре-
гистрации должен располагаться в середине посылки, т. е. прием
посылок осуществляется способом регистрации стробированием.
Передача знака принятой посылки в накопительный элемент на-
борного устройства происходит при взаимодействии вилки якоря
и одного из концов меча. Это и есть момент регистрации посыл-
ки. Если к этому моменту вилка якоря займет правильное поло-
жение, то посылка будет зарегистрирована правильно. Момент
взаимодействия меча и вилки якоря (момент регистрации) может
быть расположен в любой части принимаемой посылки (в том чис-
ле и в середине посылки) путем изменения начальной фазы рас-
пределительной муфты. Последнее достигается перемещением сто-
повой скобы с помощью фазоустановителя.
Минимальное время, которое необходимо для перемещения
якоря электромагнита в положение, соответствующее полярности
принятой посылки, складывается из времени трогания якоря (при
срабатывании или отпускании) и времени его движения. Это вре-
мя значительно меньше времени одной посылки то. Поэтому аппа-
рат обладает исправляющей способностью. Номинальная исправ-
ляющая способность составляет 32-4-35 % для стартстопных иска-
жений краев посылок.
Для того чтобы вилка якоря не могла переместиться во время
ее взаимодействия с мечом, предусмотрен механизм блокировки
(рис. 5.31). На наборной муфте сверху закреплен блокировочный
Рис. 5.31. Механизм блокировки якоря электромагнита:
1 — блокировочный диск; 2—пружина блокировочного рычага; 3—
блокировочный рычаг; 4 — вилка якоря; 5 — лризма
диск 1 с пятью вырезами, в которые под действием пружины 2 мо-
жет западать одно из плеч блокировочного рычага 3. На вилке
якоря 4 укреплена трехгранная призма 5, которая взаимодейству-
ет с блокировочным рычагом при его западании в вырез блоки-
ровочного диска. Острие этого рычага при движении располагает-
ся слева или справа от призмы якоря, препятствуя его перемеще-
нию.
.118
Взаимное расположение кулачков наборной муфты и блокиро-
вочного диска выбрано таким, что при западании блокировочного’
рычага в вырез блокировочного диска происходит взаимодействие'
меча с вилкой якоря. Якорь из одного положения в другое может
перейти только тогда, когда блокировочный рычаг будет находить-
ся на выступе блокировочного диска.
ДЕШИФРИРУЮЩЕЕ И ПЕЧАТАЮЩЕЕ УСТРОЙСТВА
Принцип действия дешифратора с линейками, используемого в-
приемнике аппарата СТА-М67, изложен в разд. 5.9.
Печатающее устройство показано на рис. 5.32. Оно начинает
работать в конце оборота наборной муфты 1. Шестой кулачок,
расположенный на муфте, воздействует на расцепляющую скобу 2,
Рис. 5.32. Механизм печати знаков:
/—наборная муфта; 2 — расцепляющая скоба; 3 — ведущая зубчатка; 4 — ведомая
зубчатка, 5 — сцепляющая пружина; 6 — печатающий кулачок; 7—привод печа-
тающего рычага; 8 — печатающий рычаг; 9 — шток; 10— печатающая скоба, 11—
тяговый рычаг; 2 — дешифраторные линейки; /3 —шиповый рычаг; 14 — лента
тяговый рычаг; 12 — дешифраторные линейки. 13— шиповый рычаг, 14 — лента,
15 — расцепляющий кулачок
которая позволяет войти в зацепление ведущей 3 и ведомой 4 зуб-
чаткам храпового сцепления под действием сцепляющей пружи-
ны 5. После этого начинает вращаться печатающий кулачок 6,
имеющий форму эксцентрика. С печатающим кулачком связан
привод 7 печатающего рычага 8, который за один оборот печатаю-
щего кулачка совершает движение вверх и вниз (некоторые дета-
ли привода на рисунке не показаны). Такое же движение совер-
шает шток 9 с укрепленной на нем печатающей скобой 10. При
движении вверх печатающая скоба 10 зацепляет зуб тягового ры-
чага 11, запавшего в пазы дешифраторных линеек 12, и поднима-
ет его вверх. Движение тягового рычага передается на типовой
рычаг 13, который и отпечатывает знак на ленте 14. В конце обо-
рота 'печатающего кулачка расцепляющая скоба 2, скользящая
-нижним плечом по поверхности расцепляющего кулачка 15 ведо-
мой зубчатки 4, отводит ее от ведущей зубчатки, и храповики
расцепляются. Печатающий механизм останавливается. Во время
отпечатывания предыдущего знака на наборном механизме накап-
ливается последующий знак.
ВСПОМОГАТЕЛЬНЫЕ УСТРОЙСТВА
Устройство продвижения бумажной ленты (рис. 5.33) состоит
из лентопротяжного рычага 1 с роликом 2, лентопротяжной собач-
ки 3 и лентопротяжного колеса 4. Двигаясь вверх, шток 5 вытал-
Рис. 5.33. Механизм протяжения бумажной ленты:
1— лентопротяжный рычаг; 2 — ролик; 3—лентопротяжная со-
бачка; 4 — лентопротяжное колесо; 5 — шток печатающего меха-
низма; 6 — ось печатающего валика; 7 — печатающий валик;
8— прижимной ролик, 9 — блокировочная скоба; 10— блокиро-
вочная собачка
кивает ролик, находящийся в углублении, и заставляет повер-
нуться лентопротяжный рычаг 1, в результате чего лентопротяж-
ная собачка 3 переходит на следующий зуб. При отпускании што-
ка под действием пружины ролик проваливается в углубление,
вследствие чего лентопротяжная собачка совершает движение
вверх, передвигая на один зуб лентопротяжное колесо 4. Специ-
альный механизм передает вращение колеса на ось 6 печатающе-
го валика 7. Совместное действие прижимного ролика 8 и враща-
‘ющегося печатающего валика 7 вызывает продвижение ленты.
Механизм перевода регистров показан на рис. 5.34. На каж-
дом типовом рычаге напаяно по три гравированных знака. Ближе
всего к оси рычага — русская буква, в середине — цифра, на са-
мом верху — латинская буква. Тот или иной знак, имеющийся на
120
типовом рычаге, отпечатывается путем передвижения печатающе-
го валика 1 вместе с осью вдоль ее длины. Бумажная лента при?
этом располагается против одного из знаков, имеющихся на типо-
вом рычаге. Регистровое устройство приводится в действие реги-
стровой муфтой 2, связанной с непрерывно вращающейся осью-
фрикционным сцеплением.
Рис 5 34. Механизм перевода регистров.
/ — печатающий валик, 2 — регистровая муфта, 3 — переводной ку-
лачок, 4 — переводной рычаг, 5 —пружина, 6 — вилка, / — регист-
ровые кулачки, 8 —захватывающие рычаги, 9— переводная тяга
Под действием пружины 5 печатающий валик стремится занять-
крайнее заднее положение, соответствующее печатанию русских,
букв. При повороте переводного кулачка 3 на некоторый угол пе-
реводной рычаг 4 отклонится влево и, растягивая пружину 5 с по-
мощью вилки 6, передвинет печатающий валик 1 вперед, обеспе-
чивая печатание цифр. При дальнейшем повороте переводного ку-
лачка печатающий валик продвинется в крайнее переднее положе-
ние и обеспечит печатание латинских букв. Угол поворота пере-
водного кулачка определяется тем, какой из регистровых кулач-
ков 7 будет захвачен захватывающим рычагом 8. Выбор положе-
ния, в котором должна остановиться регистровая муфта, осущест-
вляется специальными переводными тягами 9. Последние работа-
ют аналогично «буквенным» тяговым рычагам, западая в соот-
ветствующие сквозные пазы дешифраторных линеек.
В отличие от буквенных тяговых рычагов переводные тяги 9'
в нижней своей части не имеют зубчатой рейки, а с помощью спе-
циальных поперечных отростков соединяются с захватывающими
рычагами 8. При движении тяги вверх поворачивается соответст-
вующий захватывающий рычаг, зуб его приближается к регистро-
вому кулачку 7 и останавливает регистровую муфту 2.
Так как часть русских букв (наиболее редко встречающихся)
размещена на свободных местах цифрового регистра, то для прие-
12 Г-
ма их должна быть предварительно передана регистровая комби-
нация «Циф». Чтобы слово с буквами, расположенными на циф-
ровом регистре, не было бы разделено пробелами, при переводе
регистра производится блокировка продвижения ленты. Механизм
•блокировки ленты приводится в действие вторым поперечным от-
ростком переводной тяги. При подъеме тяги отросток поворачи-
вает блокировочную скобу 9 (см. рис. 5.33), вследствие чего бло-
кировочная собачка 10 встает на пути лентопротяжного рычага,
'препятствуя его движению. Поэтому лентопротяжная собачка 3
.не срабатывает, и лента не протягивается.
Устройство протягивания красящей ленты (рис. 5.35) работает
так же, как и устройство продвижения бумажной ленты после от-
Рис. 5.35. Механизм протяжения красящей ленты:
1— лентопротяжный рычаг; 2 — храповое лентопротяжное колесо, 3 —
ось лентопротяжного колеса; 4 — оси катушек; 5—катушки с красящей
лентой, 6 — конические шестерни, 7лентоводитель, 8 — красящая лен-
та
'печатывания каждого знака. Продвижение ее обеспечивается бла-
годаря наличию второго углубления на штоке. Это углубление на-
ходится с противоположной стороны относительно углубления ме-
ханизма продвижения бумажной ленты. При движении штока
вверх и вниз лентопротяжный рычаг поворачивается, собачка пе-
ремещается на один зуб и передвигает на один зуб храповое лен-
топротяжное колесо 2.
Движение с оси 3 лентопротяжного колеса передается на оси 4
катушек с красящей лентой 5 с помощью конических шестерен 6.
Специальный переводной механизм изменяет направление движе-
ния ленты, когда она полностью смотана с одной из катушек.
Для удобства чтения печатаемого текста имеется лентоводи-
тель 7, подводящий красящую ленту 8 к бумажной только на вре-
мя печати знака и отводящий ее сразу после печати.
422
ДОПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
К дополнительным устройствам приемника относятся функциональные де-
шифраторы комбинаций «Кто там?» и «Звонок».
Воздействие на автоответчик передатчика (запуск автоответчика) происхо-
дит только при приеме идущих подряд двух кодовых комбинаций: «Перевод на>
цифры» и «Кто там?». Если между этими комбинациями есть третья, то авто-
ответчик пущен не будет. Две подряд идущие комбинации («Циф» и «Кто там?»)
выявляются функциональным дешифратором. Звонковая сигнализация срабаты-
вает при приеме двух подряд следующих комбинаций — «Перевод на цифры» и-
«Ю» или же «Перевод на латинский» и «Ю». При этом звонок сработает столько
раз, сколько раз подряд придет комбинация «Ю». Выделение комбинаций звон-
ковой сигнализации производится функциональным дешифратором.
Устройство и принцип действия дополнительных устройств здесь не рас-
сматриваются.
РЕПЕРФОРАТОРНАЯ ПРИСТАВКА
Упрощенная схема реперфоратэрнои приставки приведена на.
рис. 5.36. При перестановке дешифраторных линеек 1 приемника»
наборные рычаги 2 реперфораторной приставки отведены в сторо-
ну с помощью скобы отвода (на рис. 5.36 отсутствует).
Приставка работает од-
новременно с печатью знака.
В начале работы печатаю-
щего устройства посредством
системы рычагов освобожда-
ется скоба отвода и приводит-
ся в движение перфорирую-
щий рычаг 3. Освободившиеся
наборные рычаги 2 ощупыва-
ют вырезы дешифраторных
линеек 1 и западают в них, ес-
ли линейка смещена в поло-
жение, которое соответствует
приему токовой посылки. Та-
ким образом, комбинация, на-
бранная на дешифраторных
линейках приемника, переда-
ется на наборные рычаги при-
ставки. Посредством верти-
кальных рычагов 4 перемеща-
ются пуансонные пальцы 5.
При попадании наборного ры-
чага в вырез дешифраторной
линейки вертикальный рычаг
переместит пуансонный палец
вправо, и его утолщенная
часть расположится над пуан-
соном 6. Поэтому при движе-
ние. 5.36. Упрощенная схема реперфора-
торной приставки:
1 — дешифраторная линейка; 2 — наборный ры-
чаг; 3 — перфорирующий рычаг; 4 — вертикаль-
ный рычаг; 5—пуансонный палец; 6 — пуан-
сон; 7— бумажная лента; 8 — лентопротяжная
собачка; 9—10 — рычаги лентопротяжного меха-
низма
123'
.иии перфорирующего рычага вниз пуансон пробьет отверстие в бу-
мажной ленте 7, предназначенной для перфорации.
Продвижение перфоленты осуществляется лентопротяжной со-
бачкой 8, связанной с перфорирующим рычагом 5 рычагами 9 и 10.
-5.12. ПРИЕМНАЯ ЧАСТЬ ЭЛЕКТРОННОГО СТАРТСТОПНОГО
ТЕЛЕГРАФНОГО АППАРАТА
Один из возможных вариантов построения приемной части элек-
тронного аппарата изображен на рис. 5.37. Привод и стартстопное
управляющее устройство не отличаются от аналогичных устройств,
Привод
П1г
^7
Вход
бумажная
лента
Типовое
колесо
Вход.
триггер г"
Стпарстоше
устр-во
Регистриру-
ющее устр-ео
Накопитель!
&
Распредели-
тель
Рис. 5.37 Структурная схема электронного телеграфного старт-
стопного аппарата
Датчик кода
Д Накопитель!
8
~3
~8
Дешифра-
тор
&
которые были описаны при рассмотрении передающей части аппа-
рата (см. рис. 4.17).
Распределитель выполнен на двухтактном триггерном регистре
сдвига. В исходном состоянии все ячейки распределителя находят-
ся в состоянии 0. Триггер стартстопного устройства также нахо-
дится в состоянии 0. При приходе из линии стопстартного перехо-
да триггер стартстопного устройства занимает положение 1. В пер-
вую ячейку регистра распределителя записывается .«1». Одновре-
менно открывается схема И привода, и импульсы от задающего
генератора поступают на вход делителя. Через время то/2 в цепи
ТИХ (рис. 5.38) подействует первый тактовый импульс, который
переведет первую ячейку регистра в состояние 0, а вторую ячей-
ку — в состояние 1. Еще через т0/2 информация в регистре под
действием первого тактового импульса последовательности ТИ2
будет сдвинута в третью ячейку. Второй тактовый импульс после-
довательности ТИ1 сдвинет «1» в четвертую ячейку регистра. На
ее выходе появится напряжение, которое через конденсатор в виде
короткого (стробирующего) импульса поступает на один из входов
логической схемы И] регистрирующего устройства. На другой вход
.124
подано напряжение с входного триггера. Регистрация входного
сигнала происходит в средней части посылки короткими строби-
рующими импульсами. Этим обеспечивается исправляющая спо-
собность приемника, которая достигает 43—46%. Аналогично в мо-
менты действия тактовых импульсов ТИ, регистрируются осталь-
ные кодовые посылки стартстопной комбинации. С выходов схем И
Лум
Рис. 5.38. Временная
диаграмма стартстоп-
ного цикла приемника
Работа.___
триггера\о
7,5т,
____________ Стоп
ZZZZT Г7
8,5То
t
Д
Стоп
t
регистрирующего устройства сигналы, соответствующие знаку при-
нятой посылки, запоминаются в накопительных элементах накопи-
теля I. Заполнение накопителя I происходит последовательно по
мере регистрации посылок.
Седьмой тактовый импульс последовательности ТИ{ возвра-
щает последнюю ячейку распределителя в состояние 0. На нулевом
выходе ячейки появляется сигнал, который, воздействуя на триггер
стартстопного устройства, возвращает его в исходное состояние 0.
Схема И закрывается и делитель сбрасывается в исходное поло-
жение.
Стартстопный цикл приемника, продолжавшийся 6,5т0, закон-
чился (ср. рис. 5.2 и 5.38). По окончании цикла открываются элек-
тронные ключи и осуществляется параллельный перенос кодовой
комбинации в накопитель II, где кодовая комбинация записывает-
ся в виде 5-разрядааго двоичного числа. Распределительная, реги-
стрирующая и накопительная (накопитель /) части приемника мо-
гут принимать следующую кодовую комбинацию. Одновременно с
приемом следующей кодовой комбинации (если, конечно, она пе-
редается) происходит дешифрация предыдущей комбинации.
Дешифратор в рассматриваемом варианте представляет собой
сложную схему И. В тот момент, когда с датчика кода печатающе-
го устройства будет подана та же самая кодовая комбинация, ко-
торая хранится в накопителе II, схема И сработает и на ее выходе
появится сигнал, от которого сработает печатающий электромаг-
нит ЭМ. Печатающий молоточек ударит по типовому колесу, и на
бумажной ленте отпечатается дешифрированный знак. Заметим,
что вал е типовым колесом и датчиком кода вращается непрерывно,
и один оборот вала происходит за время, несколько меньшее, чем
длина стартстопного цикла приемника.
Электронный телеграфный аппарат так же, как и электромеха-
нический,. оборудован приставками автоматизации, вспомогатель-
ными и дополнительными устройствами, которые здесь не рассмат-
риваются. •
125
ГЛАВА 6
Устройства фазирования и стартстопно-
синхронные системы
6.1. ТРЕБОВАНИЯ К УСТРОЙСТВАМ ФАЗИРОВАНИЯ
ПО ПОСЫЛКАМ И КЛАССИФИКАЦИЯ ЭТИХ УСТРОЙСТВ
Синфазность работы передающих и приемных распределителей
достигается с помощью устройств фазирования по посылкам (в
аппаратуре передачи данных, называемых также устройствами
синхронизации) и устройств фазирования по циклам. В системах
со стартстопный принципом передачи тактовые генераторы вклю-
чаются на короткое время, а затем стопируются. При этом фази-
рование по посылкам автоматически достигается за счет имеющей-
ся стабильности тактовых генераторов передатчика и приемника.
Необходимости в специальных устройствах фазирования по посыл-
кам в таких системах нет. Принцип фазирования по посылкам в
данном случае называют автономным. В системах с синхронным
принципом передачи, в которых тактовые генераторы работают не-
прерывно, приходится специально подстраивать (корректировать)
тактовый генератор приемника под тактовый генератор передат-
чика. Для этого в приемнике предусматривается специальное
устройство фазирования по посылкам. Иногда его называют также
коррекционным устройством.
Необходимость коррекции легко доказать с помощью расчета
времени, за которое два генератора разойдутся по фазе на задан-
ную величину. Обозначим коэффициент нестабильности генератора
К = -LA/макс I (6,1)
/н
где fs — номинальное значение частоты генератора; А/Макс — мак-
симальная величина отклонения частоты генератора от номиналь-
ного значения в реальных условиях.
Колебания такого генератора сместятся на один период по от-
ношению к колебаниям с номинальной частотой за время Л =
=-—-— Подставим |А/Макс| из (6.1), тогда Так как
|Д/макс|
обычно частоту задающего генератора берут численно равной ско-
рости модуляции в бодах, то <ti=А/кВ.
126
Учитывая, что в самом неблагоприятном случае частоты гене-
раторов передатчика и приемника могут отклониться от номинала
в противоположные стороны, имеем /2=1/2кВ.
Обозначим через едоп допустимую погрешность синфазности,
под которой будем понимать максимальное расхождение двух ге-
нераторов по фазе в процентах от длительности единичного эле-
мента. Тогда время сохранения синфазности
т ______ едоп _
доп 200/сВ ’
(6.2)
Определим время сохранения синфазности для разных скоро-
стей при использовании кварцевых генераторов (киМО-5). До-
пустимая погрешность синфазности, при которой еще обеспечивает-
ся работа синхронных систем связи, составляет едОП~400/о. Время
сохранения синфазности, подсчитанное по (6.2) для этих условий,
приведено в табл. 6.1.
ТАБЛИЦА 6.1
Скорость модуляции, бод Время сохранения синфазности, с
50 460
1200 17
48000 0,4
Полученные величины времени сохранения синфазности совер-
шенно недостаточны для практики (при использовании синхронно-
го принципа передачи). Поэтому необходимо подстраивать фазу
генератора в приемнике под фазу принимаемых сигналов, т. е. под
фазу генератора передатчика.
С помощью |ф-лы |(6.2) легко убедиться в ’Пригодности автономного прин-
ципа фазирования по посылкам для стартстопных систем. Например, в совре-
менных стартстопных телеграфных аппаратах скорость передачи определяется
скоростью вращения двигателя. При этом к»1-10'г. Для скорости В —50 бод и
допустимого фазо'вого 'расхождения еДОп=40% получим Тдоп=0,4 с. Однако пе-
редача одного знака продолжается лишь 0,112 с (от начала стартовой посылки
до начала стоповой посылки).
В технике передачи дискретных сообщений к устройствам фа-
зирования по посылкам синхронных систем предъявляются следую-
щие требования:
— высокая точность подстройки фазы даже при работе по ка-
налам с высоким уровнем помех (обычно допускается погрешность
синфазности порядка едоп ±3% от длительности элементарной по-
сылки) ;
— малое время вхождения в фазу как при первоначальном
включении аппаратуры, так и после перерывов связи;
— сохранение синфазности при кратковременных перерывах
связи.
127
Фазирующие устройства можно разделить на две группы по ви-
ду источника эталонной фазы, используемого в приемнике для орга-
низации корректирования местной фазы:
1. Со специальными пилот-сигналами, предназначенными для
передачи тактовой частоты. На практике нашли применение два
способа: а) с модуляцией одного пилот-сигнала; б) с двумя немо-
дулированными пилот-сигналами. Недостатками этой группы уст-
ройств является снижение уровня основного сигнала, чувствитель-
ность к нелинейным искажениям канала связи и неравномерности
частотной характеристики времени замедления.
2. С подстройкой под основной принимаемый сигнал. Устройства
данной группы чаще всего применяются на практике и, в свою оче-
редь, могут быть разбиты на две подгруппы:
— с подстройкой под специальные, выделенные фазирующие
посылки (элементы), передаваемые среди рабочих (информацион-
ных) посылок;
— с подстройкой под рабочие посылки.
Ап-
позици-
онные
Трех-
позици-
онные
Рис. 6.1. Классификация устройств фазирования по посылкам
128
На практике обычно применяется подстройка под рабочие по-
сылки, позволяющая без снижения пропускной способности обеспе-
чивать требуемую точность синфазности.
Фазирующие устройства с подстройкой под основной сигнал
можно разделить по способу выделения тактовой частоты из основ-
ного сигнала еще на две группы:
1. С резонансной системой, обычно с полосовым фильтром (так
называемые резонансные устройства). Преимуществом таких уст-
ройств является простота, однако они имеют и ряд недостатков:
быстрое пропадание тактовой частоты при перерывах связи, боль-
шое время фазирования, чувствительность к характеру передавае-
мой информации и к нестабильности фильтра и скорости передачи.
2. С системой автоматического регулирования, которую можно
свести к эквивалентной резонансной системе, но которая не имеет
перечисленных выше недостатков.
На практике обычно используются устройства последней
группы.
Описанная классификация приведена на рис. 6.1. На нем пока-
зана также более подробная дальнейшая классификация, обосно-
ванная в последующих разделах.
6.2. ПРИНЦИПЫ ДЕЙСТВИЯ УСТРОЙСТВ ФАЗИРОВАНИЯ
С СИСТЕМОЙ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Устройства с системой автоматического регулирования можнс
построить двумя способами:
1) с непосредственным воздействием на местный генератор;
2) без непосредственного воздействия на местный генератор. .
Различие двух указанных видов устройств легко уяснить, рас-
смотрев их упрощенные структурные схемы (рис. 6.2). Для этих.
Рис. 6.2. Структурные схемы уст-
ройств с системой автоматического
регулирования:
а) с непосредственным воздействием
на местный генератор; б) без непо-
средственного воздействия на мест-
ный генератор
с)
устройств, как для любой системы автоматического регулирования,
характерно наличие замкнутой петли регулирования. Основными
элементами этих фазирующих устройств являются:
— генератор Г, вырабатывающий местные тактовые колебания,
— фазовый дискриминатор ФД, определяющий величину (или
только знак) расхождения фазы между местными колебаниями и
принимаемыми посылками и выдающий сигнал ДРф, соответствую-
щий величине (или знаку) расхождения фаз;
5—60 129
— инерционный элемент ИЭ, который усредняет напряжение
для выявления систематической фазовой погрешности, вызы-
ваемой расхождением фаз передатчика и приемника, и умень-
шения случайных фазовых расхождений, обусловленных помеха-
ми (иногда инерционный элемент отсутствует);
— управляющая схема УС, которая вырабатывает управляющий
сигнал [/упр, воздействующий на фазу местных тактовых колеба-
ний таким образом, чтобы имеющееся расхождение уменьшалось
до минимальной величины, допускаемой в схеме.
В устройстве с непосредственным воздействием на генератор
'(рис. 6.2а) регулируется частота и фаза генератора. В устройстве
»без непосредственного воздействия на генератор (рис. 6.26) управ-
ляющее устройство подключается к промежуточному преобразова-
телю ПП, способному изменять фазу проходящих через него коле-
баний. В качестве промежуточного преобразователя чаще всего
используется делитель частоты следования импульсов.
6.3. УСТРОЙСТВА ФАЗИРОВАНИЯ ПО ПОСЫЛКАМ
С НЕПОСРЕДСТВЕННЫМ ВОЗДЕЙСТВИЕМ НА МЕСТНЫЙ
ГЕНЕРАТОР
В данных устройствах управляющая схема регулирует частоту
и фазу местного генератора, поэтому такие устройства фазирова-
ния часто называют устройствами с автоподстройкой фазы. По ха-
рактеру изменения частоты их можно разделить на два класса:
1) устройства с релейным управлением, в которых управляю-
щая схема изменяет управляющий сигнал t/ynp (рис. 6.2а) время
от времени; в промежутках управляющий сигнал остается постоян-
ным и не зависит от величины рассогласования фаз;
2) устройства с плавным управлением, в которых управляющая
схема непрерывно действует на генератор, причем управляющий
сигнал пропорционален величине рассогласования фаз.
Структурная схема фазирующего устройства с релейным управ-
лением показана на рис. 6.3, а временные диаграммы его рабо-
ты — на рис. 6.4.
На фазовый дискриминатор с одной стороны подаются прини-
маемые посылки (точка А на рис. 6.3 и 6.4), а с другой стороны —
тактовые колебания от местного задающего генератора (точка Г).
!В показанной схеме использован фазовый дискриминатор, ра-
ботающий на импульсном принципе. Принимаемые посылки прохо-
дят дифференцирующую цепочку ДЦ, а затем выпрямляются (точ-
ки Б и В). Полученные короткие импульсы, соответствующие мо-
ментам смены полярности в принимаемом сигнале, подаются на
две схемы совпадения И1 и Иг. На вторые входы этих схем пода-
ются прямоугольные тактовые колебания от местного задающего
генератора (на одну из схем И — через инвертор Инв). В этих
колебаниях переходы от отрицательной полярности к положитель-
ной должны совпадать с короткими импульсами в точке В. Если
азо
местные колебания отстают по фазе от принимаемых посылок
(рис. 6.4, диаграмма Г), то короткие импульсы пройдут на выход
одной схемы совпадения, например, Ир Если местные колебания
опережают по фазе, то короткие импульсы пройдут на выход дру-
гой схемы Иг. Эти короткие импульсы образуют сигнал /7рф, ха-
рактеризующий знак расхождения фаз.
Рис. 6.3. Структурная схема устрой-
ства с релейным управлением
Рис. 6.4. Временные диаграммы?
работы устройства с релейным-
управлением (показаны для<
точек А, Б, В и Г схемы иа
рис. 6.3)
Особенностью фазирующего устройства с релейным управле-
нием является управляющая схема, которая может иметь только*
ограниченное количество положений. В данном случае она двух—
позиционная. В зависимости от того, какая из схем (И] или Иг)"
выдала импульс, триггер Т установится в то или иное положение..
Реле, управляемое триггером, подключит к резонансному контуру
генератора конденсатор С\ или катушку индуктивности L) (эти пе-
реключения образуют управляющий сигнал U-ущ). Генератор будет
выдавать соответственно нижнюю или верхнюю частоту (^или/г)-
Номинальное значение частоты fj должно быть несколько ниже, а
частоты f2 — несколько выше номинального значения тактовой ча-
стоты принимаемых посылок fT. С учетом возможной нестабильно-
сти генераторов передатчика и приемника обычно выбирают следу-
ющую девиацию частоты:
«(2 -V- 3) fT (/^рд + /спри), (6.3>
где кПрд, Кпрм — коэффициенты нестабильности генераторов соот-
ветственно передатчика и приемника.
Таким образом, зависимость частоты от величины расхождения
фаз будет иметь ступенчатый, «релейный» характер (рис. 6;5а).
Ширина «петли гистерезиса» этой характеристики определяется
конечной чувствительностью управляющей схемы (триггера и ре-
5* J38
ле). Графики изменения частоты f и фазы ф тактового колебания
во времени для такого устройства показаны на рис. 6.56.
Конденсаторы С2 и С3 на схеме рис. 6.3 выполняют роль инер-
ционного элемента.
Рассмотренное двухпозиционное устройство имеет следующий
недостаток: во время перерыва связи или длительной передачи по-
Рис. 6.5. Характеристики двухпозиционного устройства с ре-
лейным управлением:
а) зависимость частоты от расхождения фаз; б) изменение
частоты и фазы во времени
сылок одного знака расхождение по фазе будет непрерывно воз-
растать, так как генератор имеет частоту, заведомо отличающуюся
от средней на величину девиации частоты. Этот недостаток отсут-
ствует в трехпозиционном устройстве. Генератор, кроме частот
и f2, должен иметь также среднюю частоту:
= (6.4)
настраиваемую на частоту генератора передачи (или на номиналь-
ную тактовую частоту). В этом случае расхождение генераторов
по фазе при обрыве канала будет обусловлено только неточностью
настройки частот генераторов и их собственной нестабильностью
(рис. 6.6).
Расхождение
раз
Рис. 6.6. Характеристики трехпозиционного устройства с ре-
лейным управлением:
а) зависимость частоты от расхождения фаз; б) изменение
частоты и фазы во времени
Устройства с плавным управлением отличаются от устройств
<с релейным управлением лишь управляющей схемой, которая дол-
жна обеспечивать плавное изменение частоты генератора в зависи-
мости от величины расхождения фаз. Эта зависимость обычно
1132
имеет примерно линейный характер (рис. 6.7а). Для управления
частотой генератора используют какой-либо управляемый реактив-
ный элемент, например, варикап (конденсатор, у которого емкость
зависит от величины приложенного напряжения).
нием:
а) зависимость частоты от расхождения фаз; б) измене-
ние частоты и фазы во времени
Изменение частоты генератора (а следовательно, и фазы) во
времени будет иметь плавный характер (рис. 6.76). Благодаря это-
му можно добиться высокой точности поддержания синфазности.
При правильно подобранном инерционном элементе достигается
точность ±(14-2)% от длительности элементарного импульса.
В этом состоит основное преимущество фазирующего устройства с
плавным управлением.
Общими недостатками всех фазирующих устройств с непосред-
ственным воздействием на генератор (по сравнению с устройства-
ми без непосредственного воздействия) являются:
— снижение стабильности генератора примерно в ГО раз вслед-
ствие воздействия на один из его параметров;
— невозможность использования одного генератора для работы
нескольких фазирующих устройств;
— трудность получения малого времени вхождения в фазу, свя-
занная с тем, что в таких устройствах уменьшение времени вхож-
дения в фазу приводит к заметному увеличению погрешности син-
фазности.
Фазирующие устройства с непосредственным воздействием на
генератор применяются тогда, когда требуется простота схемы или
когда устройства без непосредственного воздействия на генера-
тор трудно осуществить, напрймер, при высоких скоростях пере-
дачи.
6.4. УСТРОЙСТВА ФАЗИРОВАНИЯ ПО ПОСЫЛКАМ БЕЗ
НЕПОСРЕДСТВЕННОГО ВОЗДЕЙСТВИЯ НА МЕСТНЫЙ
ГЕНЕРАТОР
В этих устройствах фаза подстраивается в промежуточном пре-
образователе ПП, через который проходит местное тактовое коле-
бание (см. рис. 6.26). В качестве промежуточного преобразователя
чаще всего используется делитель частоты следования импульсов.
133
Фазирующие устройства с делителем частоты возможно реали-
зовать целиком на дискретных элементах, что упрощает их изго-
товление, настройку и эксплуатацию. Часто такие устройства на-
зывают устройствами с дискретным управлением (или дискретны-
ми устройствами фазирования).
f)
Рис. 6.8. К принципу изменения фазы в процессе деле-
ния частоты:
а) структурная схема деления частоты; б) нормальный
процесс деления на 8; в) добавление импульса; г) ис-
ключение импульса
Принцип изменения фазы в процессе деления частоты можно
пояснить, пользуясь рис. 6.8а. Генератор вырабатывает колебание
высокой частоты, в m раз больше тактовой частоты:
fB4 = mfT. (6.5)
Величину пг называют коэффициентом деления делителя. Форми-
рователь превращает синусоидальное колебание в последователь-
ность импульсов с частотой следования fs4. Далее последователь-
ность импульсов делится на т, например, делителем в виде цепоч-
ки из двоичных счетчиков. Процесс деления иллюстрируется вре-
менной диаграммой, представленной на рис. 6.86. На рисунке
изображена исходная последовательность импульсов с частотой
/вч и получаемая на выходе тактовая последовательность с часто-
той f?. Коэффициент деления взят т = 8. При этом на выход вы-
дается каждый восьмой импульс входной последовательности им-
пульсов.
Если на вход делителя подать дополнительный импульс через
схему добавления и исключения импульсов (СДИИ), то фаза вы-
ходных импульсов (рис. 6.8в) сместится в сторону опережения на
величину, равную периоду колебаний генератора:
Д/=— . (6.6)
/вч
134
Смещение фазы тактовых импульсов в долях элементарной посыл-
ки при добавлении (или исключении) одного импульса называют
шагом коррекции:
Аф = — . (6.7)
То
Заметим, что дополнительные импульсы не должны совпадать
по времени с импульсами высокочастотного генератора. Если один
из импульсов, подаваемых на. делитель, исключить, то фаза вы-
ходных импульсов сместится на ту же величину At в сторону от-
ставания (рис. 6.8г).
Таким образом, путем добавления и исключения импульсов лег-
ко изменять фазу тактовой последовательности импульсов в нуж-
ную сторону. Как можно понять из приведенного описания дейст-
вия схемы, представленной на рис. 6.8а, делитель частоты следо-
вания импульсов необходим в этой схеме для достижения неболь-
шой величины шага коррекции.
Рис. 6.9. Пример структурной схемы устройства с дис-
кретным управлением
Пример фазирующего устройства с дискретным управлением
показан на рис. 6.9. На выходе генератора с формирователем об-
разуется последовательность импульсов с частотой
2/вч = 2mfT. (6.8)
Затем делитель на 2 образует две последовательности импульсов
с частотой
(вч = (6.9)
сдвинутые друг относительно друга на полтакта.
Одна из последовательностей подается через ключ (схему НЕТ)
в делитель частоты на т. Полученная тактовая частота подается
на фазовый дискриминатор (на схемы Hi и И2 подаются тактовые
последовательности, сдвинутые друг относительно друга на пол-
135
такта). Действие фазового дискриминатора было пояснено при
объяснении рис. 6.3.
При синфазности между принимаемыми посылками и местны-
ми тактовыми колебаниями импульсы на выходах фазового дис-
криминатора отсутствуют. При появлении расфазировки короткие
импульсы появятся на выходе схемы И) или схемы И2 в зависи-
мости от знака расхождения фазы. (Влияние реверсивного счет-
чика будет пояснено ниже; пока будем считать, что он отсутствует).
Если импульс появится на выходе И[, то он откроет схему И3, ко-
торая пропустит один импульс с выхода делителя на 2 на вход де-
лителя на т. Этот импульс будет расположен в середине между
основными импульсами, проходящими через схему НЕТ. Под дей-
ствием этого дополнительного импульса фаза тактовой последова-
тельности сдвинется в сторону опережения на один шаг At. Если
же импульс появится на выходе схемы И2, то он закроет схему
НЕТ и таким образом исключит один импульс на входе делителя.
В результате фаза тактовой последовательности сдвинется на один
шаг At в сторону отставания.
Работу описанного дискретного устройства фазирования можно пояснить
временными диаграмм а ми, приведенными на рис. 6.10. На верхней диаграмме
рис. бЛЮа показаны короткие импульсы, соответствующие фронтам приходящих
Г_1_i__L_J_i_L__
J
(ТНиТЛЛЛЛТЕ-
r_и____u___11
Рис 610. Временные диаграммы ра-
боты устройства с дискретным управ-
лением:
а) при нормальных условиях; б) при
наличии преобладания
посылок. Ниже показана местная последовательность импульсов, подаваемая на
фазовый дискриминатор. Работу фазирующего устройства можно представить
так. Если фронты приходящего сигнала будут все время совпадать с отрица-
тельными полупериодами тактовой частоты |(как показано на двух верхних диа-
граммах рис. 6.10а), то управляющие импульсы появятся на одном из выходов
фазового дискриминатора, и будет происходить подстройка фазы. Если, наоборот,
фронты все время совпадают с положительными полупериодами, то управляю-
щие импульсы появляются на другом выходе дискриминатора. Будет происхо-
дить подстройка фазы в другую сторону. В обоих случаях в результате под-
стройки фазы тактовые импульсы расположатся так, что их значащие моменты
(переходы от отрицательной полярности к положительной) совпадут с фронта-
ми приходящих посылок (нижняя диаграмма на рис. 6Л0а).
Работа дискретного устройства фазирования иногда может нарушиться при
появлении преобладаний в принимаемом сигнале. На примере рис. 6.106 видно,
что фронты принимаемых посылок могут совпадать и с отрицательными, и с
положительными полупериодами тактовой частоты. В результате фаза будет
колебаться вокруг первоначального положения. Систематического сдвига фазы в
нужную сторону, к правильному положению, не будет. Этот недостаток дис-
кретных устройств фазирования можно устранить, если корректировать только
по одной границе принимаемого импульса. Правда, при этом будет возникать
ошибка подстройки, равная половине величины преобладания.
136
В реальных условиях границы принимаемых импульсов колеб-
лются в обе стороны от своих номинальных положений. Эти коле-
бания вызываются действием помех и других искажающих факто-
ров (фазовых искажений, скачков уровня и т. п.). Поэтому с вы-
ходов схем И], И2 фазового дискриминатора непрерывно будут по-
ступать импульсы, вызывающие ложную подстройку фазы и сни-
жающие тем самым точность фазирования. Например, случайное
срабатывание схемы Hi подряд три раза приведет к сдвигу на три
шага в сторону опережения.
Влияние краевых искажений импульсов можно уменьшить,
включив инерционный элемент между фазовым дискриминатором и
управляющей схемой. Обычно для этого используется реверсивный
счетчик, имеющий два входа и два выхода. Входы счетчика подклю-
чаются к выходам фазового дискриминатора (к выходам схем И] и
И2 на рис. 6.9), а его выходы — ко входам управляющей схемы.
Если импульсы поступают только по первому входу, то они запи-
сываются в счетчик, и после каждых S входных импульсов (S —
емкость счетчика) на первом выходе появится один импульс. Если
импульс поступит по второму входу, то он уменьшит число импуль-
сов, зарегистрированных по первому входу, на единицу. Допустим,
что по первому входу до этого поступило S—1 импульсов. Следую-
щий импульс по первому входу привел бы к выдаче одного импуль-
са по первому входу. Но если вместо импульса по первому входу
начали поступать импульсы по второму входу, записанное число
начнет уменьшаться. После поступления S—1 импульсов по второ-
му входу счетчик возвращается в исходное состояние. Если после
этого поступит S—1 импульсов по второму входу, то следующий
импульс приведет к выдаче импульса уже по второму входу.
Такие свойства реверсивного счетчика очень удобны для усред-
нения случайных последовательностей импульсов. В нашем случае
реверсивный счетчик будет выдавать импульсы в управляющую
схему только тогда, когда число фазовых отклонений в одну сто-
рону в среднем больше числа отклонений в другую сторону.
Погрешность синфазности, обеспечиваемая дискретными устрой-
ствами, зависит как от выбранного шага коррекции Д<р, так и от
емкости реверсивного счетчика S. На практике для обеспечения
высокой точности выбирают A<p=l-j-3%, S = 5-yl0. При этом пог-
решность синфазности составляет е=±(14-3)Дф.
Для устройств фазирования по посылкам важно также время
фазирования, т. е. максимальное время, необходимое для подстрой-
ки фазы с точностью до погрешности синфазности. Время фазиро-
вания дискретных устройств фазирования зависит от многих фак-
торов. Если интегрирующего элемента нет, а начальное расхожде-
ние фаз составляло О,5то, то потребуется О,5то/Л^=0,5т шагов для
полного устранения расхождения (т — коэффициент деления дели-
теля). Отсюда время фазирования будет равно
тфаз = -^, (6.10)
137
когда значащие моменты следуют непрерывно, т. е. передаются
«точки». При передаче «текста» значащие моменты встречаются
в среднем в три раза реже, поэтому время фазирования увели-
чится до
^фаз (6-11)
При наличии реверсивного счетчика время фазирования уве-
личится. Его можно определить по следующей формуле:
Q
Тфаз = — т8т0. (6.12)
Эти формулы не учитывают краевых искажений принимаемых
посылок. Наличие искажений может заметно увеличить время фа-
зирования.
Таким образом, коэффициент деления т и емкость реверсивно-
го счетчика S должны выбираться, исходя из двух противоречи-
вых требований — точности и времени фазирования. Например,
если исходя из требований высокой точности выбрано т=100, то
при емкости реверсивного счетчика 5=10 по ф-ле (6.12) полу-
з
чается Т$33 = —100- 1Ото= 1500-го, т. е. довольно большое время фа-
зирования.
Если требуется уменьшить время фазирования при заданном т,
то может быть применен принцип переменного коррекционного эф-
фекта. Под коррекционным эффектом понимают отношение сме-
щения фазы тактовых импульсов (в долях единичного элемента)
после приема одного значащего момента Дфт к шагу коррекции Дф:
акэ = ^. (6.13)
А<р
В описанной выше схеме дискретного устройства коррекцион-
ный эффект является величиной постоянной и равной 1. Это зна-
чит, что величина сдвига фазы после приема одного значащего мо-
мента все время постоянна (она равна Д<р) и не зависит от сте-
пени расхождения фаз. Однако можно сделать так, чтобы величи-
на сдвига зависела от степени расхождения фаз. Если расхожде-
ние большое, то фаза импульсов местного генератора смещается
на угол Дфт, больший чем Дф. При этом ускоряется процесс вхож-
дения в фазу. Когда расхождение становится небольшим, величи-
на смещения Дфт соответственно уменьшается. Это обеспечивает
малую погрешность синфазности.
Устройства фазирования но посылкам без непосредственного
воздействия на местный генератор не имеют недостатков, свой-
ственных устройствам с непосредственным воздействием (см. конец
разд. 6.3). Поэтому такие устройства, в частности устройства с
дискретным управлением, получают все большее применение на
практике.
138
6.5. ТРЕБОВАНИЯ К УСТРОЙСТВАМ ФАЗИРОВАНИЯ
ПО ЦИКЛАМ И КЛАССИФИКАЦИЯ ЭТИХ УСТРОЙСТВ
Устройства фазирования по циклам в современной аппаратуре
передачи дискретных сообщений должны обеспечивать:
— высокую помехоустойчивость, исключающую возможность
ложной установки фазы;
— автоматическое вхождение в фазу и поддержание фазы (без
участия человека-оператора);
— малое время вхождения в фазу как при первоначальном
включении аппаратуры, так и после кратковременных перерывов
связи;
— возможность последовательного соединения нескольких уча-
стков связи.
Все способы фазирования по циклам можно разбить на две
группы:
1. Безмаркёрные, при которых во время передачи информации
по каналу не передаются специальные сигналы для фазирования
по циклам. Фазирование по циклам осуществляется за счет пере-
дачи фазовой комбинации во время отсутствия передачи инфор-
мации.
2. Маркерные, при которых во время передачи информации по
каналу передаются специальные сигналы («маркёры») для фази-
рования по циклам.
Кроме того, способы фазирования по циклам можно разделить
на две группы по другому признаку:
1. Синхронные, при которых циклы заранее определенной дли-
ны следуют непрерывно друг за другом. Следовательно, в прием-
нике, сфазированном по циклам, заранее известны моменты на-
чала и конца принимаемых циклов.
2. Стартстопные, при которых после окончания одного цикла
последующий цикл может начаться в любой момент времени. В об-
щем случае длина цикла тоже может быть произвольной. Следо-
вательно, в приемнике заранее неизвестны моменты начала и кон-
ца принимаемых циклов.
Эти термины не следует путать со стартстопный и синхронным
способами передачи. В частности, стартстопный1 метод фазирова-
ния циклов широко применяется в синхронных системах передачи
данных (использующих синхронный принцип передачи посылок).
6.6. БЕЗМАРКЕРНЫЙ СПОСОБ ФАЗИРОВАНИЯ ПО ЦИКЛАМ
Безмаркерный способ можно пояснить, пользуясь рис. 6.11а,
на котором показана синхронная система с распределителями Р
на пг элементов. Для наглядности изображены механические рас-
пределители, но описываемые принципы применимы в равной сте-
пени и к электронным распределителям.
В начале работы или в режиме покоя, пока информация от пе-
редающего наборного устройства НУ не поступает, в канал пере-
139
дается вполне определенная комбинация от датчика фазовой ком-
бинации ДФК. На приеме элементы этой фазовой комбинации по-
падают в дешифратор фазовой комбинации ДШФК, который реа-
гирует только на эту комбинацию. Если распределители не в фа-
зе, то регистрируемая комбинация будет отличаться от фазовой, и
дешифратор не сработает. Отсутствие срабатывания дешифратора
фазовой комбинации в конце каждого цикла указывает на pac-
д') Передающее оконечное Приемное оконечное
' устр-во устр-во
Рис. 6.11. Безмаркёрный способ фазирования по циклам:
а) упрощенная структурная схема системы передачи дискрет-
ных сообщений; б) временная диаграмма
хождение цикловой фазы. В этом случае от управляющей схемы
УС подается импульс, который смещает фазу приемного распреде-
лителя. Такое смещение приемного распределителя в конце каж-
дого цикла будет происходить до тех пор, пока не установится
правильная фаза.
В режиме синфазности дешифратор под действием фазовой
комбинации сработает и выключит (заблокирует) управляющую
схему. С этого момента распределители будут находиться в фазе.
Временная диаграмма при безмаркерном способе фазирования
показана на рис. 6.116. Кроме случая первоначального вхождения
в фазу показан также случай потери и восстановления цикловой
фазы во время передачи полезных сообщений.
Недостатком безмаркерного способа является то, что после лю-
бого нарушения цикловой фазы приходится прекращать передачу
полезной информации в передатчике и переводить систему в «ре-
жим фазирования-». При этом должна быть снята блокировка с уп-
140
равляющей схемы. Другим недостатком является отсутствие пос-
тоянного контроля за правильностью цикловой фазы во время пе-
редачи информации. Расхождение фазы приходится обнаруживать
по появлению большого числа ошибок, т. е. со значительным за-
паздыванием.
Расхождение фазы обнаруживается в приемнике, а передачу
информации необходимо прекращать в передатчике. Чтобы пере-
вод в режим фазирования производился автоматически, можно
связь между приемником и передатчиком одного направления пе-
редачи осуществить по каналу обратного направления передачи.
При обнаружении расхождения фазы на станции Б из приемника
подается команда в передатчик этой же станции. По такой коман-
де прерывается передача информации, и передатчик переходит в
режим фазирования. Приемник на станции А дешифрирует фазо-
вую комбинацию и подает команду в передатчик 'своей станции о
прекращении передачи информации. Таким образом, режим фази-
рования устанавливается в обоих направлениях передачи. Следо-
вательно, отказ одного направления передачи автоматически при-
водит к отказу противоположного направления передачи (вдвое
увеличивается число отказов для каждого из направлений переда-
чи) . Это тоже является недостатком безмаркерного способа.
Цикловая фаза при описанном способе поддерживается благо-
даря тому, что в приемнике заранее известна длина принимаемых
кодовых комбинаций. Моменты их начала раз и навсегда опреде-
лены во время режима фазирования. В этом смысле здесь осуще-
ствляется синхронное фазирование циклов. Если длина кодовых
комбинаций меняется во время передачи или если моменты начала
комбинаций произвольны, то безмаркерный способ применять
нельзя.
Преимуществом безмаркерного способа, как видно из его наз-
вания, является то, что во время передачи информации не снижа-
ется пропускная способность системы связи на передачу «мар-
керов».
6.7. МАРКЕРНЫЙ СПОСОБ ФАЗИРОВАНИЯ ПО ЦИКЛАМ
Устройство маркерного фазирования по циклам показано на
рис. 6.12а. Как и на предыдущем рисунке, для наглядности изоб-
ражены механические распределители Р. К одному из контактов
передающего распределителя подключается датчик маркера (фа-
зовой комбинации) ДМ. За каждый цикл распределителя переда-
ется один элемент кодовой комбинации маркера. Если комбинация
содержит п элементов, то для ее передачи потребуется п циклов
работы распределителя.
Длина фазовой комбинации и ее вид выбираются так, чтобы
добиться минимальной вероятности ложного фазирования. Други-
ми словами, фазовая комбинация должна представлять такую по-
следовательность элементов, вероятность появления которой с лю-
бого другого контакта распределителя практически равна нулю.
14t
На приеме к соответствующему контакту распределителя под-
ключается дешифратор маркера ДШМ, выход которого соединен
с управляющей схемой УС. При расхождении распределителей по
фазе дешифратор не обнаруживает маркера. Поэтому через каж-
дые п циклов управляющая схема смещает распределитель на один
контакт. Такой сдвиг будет происходить до тех пор, пока дешиф-
Датчик ।-------1 I------1 г-
маркера J I-----------1 I------1
как ♦ ♦ ♦ * ।
комбинации | || II И II /
7 канале---\ Л-
Преылки маркера
Рис. 6.12. Синхронный маркерный способ фазирова-
ния по циклам:
а) упрощенная структурная схема системы передачи
дискретных сообщений; б) временная диаграмма
(НУ — наборное устройство)
ратор не зарегистрирует маркер. После этого управляющая схема
блокируется. Распределители с данного момента’ будут вращаться
<сннфазно.
В режиме синфазности с выхода дешифратора через каждые п
щиклов будет поступать фазирующий импульс, подтверждающий
наличие правильной цикловой фазы. При потере синфазности пос-
тупление фазирующего импульса прекратится. Спустя некоторое
установленное время, например (34-5) п циклов, снимется блоки-
ровка с управляющей схемы, и система перейдет в режим поиска.
•Снимать полезную информацию с контактов передающего распре-
делителя в этом случае не нужно.
Временная диаграмма для маркерного способа фазирования
показана на рис. 6.126.
Преимуществами маркерного способа фазирования перед без-
маркерным способом являются:
— наличие непрерывного контроля за правильностью цикло-
вой фазы;
— возможность независимой работы двух направлений пере-
дачи;
442
— отсутствие необходимости специально выключать информа-
ционные сигналы на время поиска фазы.
Недостаток маркерного способа — снижение пропускной спо-
собности связи из-за необходимости регулярной передачи маркера
(фазовой комбинации).
Показанный на рис. 6.12а маркерный способ фазирования яв-
ляется синхронным. На временной диаграмме (рис. 6.126) все ко-
довые комбинации имеют одинаковую длину. Описанный синхрон-
ный способ имеет большое время вхождения в фазу, поскольку фа-
зовая комбинация передается медленно, по одному импульсу за
каждый цикл.
Стартстопный способ фазирования можно проиллюстрировать,
структурной схемой, приведенной на рис. 6.13а, и временной диа-
граммой на рис. 6.136. При отсутствии полезных сообщений рас-
s)
информации
Комбинация
покоя
Стартовый,
сигнал
Полезная
информация
сигнал
Стартовый,
сигнал
Полезная
информа-
ция
Рис. 6.13. Ста-ртстопный маркерный способ фазирования по циклам:
а) упрощенная структурная схема системы передачи дискретных со-
общений; б) временная диаграмма (НУ — наборное устройство)
пределители Р стоят на стопе как в передатчике, так и в прием-
нике. При поступлении сообщения в передатчик запускается пере-
дающий распределитель. В начале кодовой комбинации (блока
информации) передается стартовый сигнал. В приемнике этот
ма
стартовый сигнал обнаруживается дешифратором, после чего за-
пускается приемный распределитель, и производится прием блока
информации.
По окончании передачи полезной информации передающий рас-
пределитель останавливается и устанавливается в начальное по-
ложение. В конце блока передается столовый сигнал. После него
могут передаваться комбинации покоя или сразу может начать-
ся стартовый сигнал.
Оба используемые здесь маркера (стартовый и столовый сиг-
налы) могут представлять собой в простейшем случае единичные
импульсы разной полярности. Для повышения помехоустойчивости
системы фазирования этим сигналам часто придают более слож-
ную форму (например, форму кодовых комбинаций длиной 5—15
единичных импульсов).
Преимуществами стартстопного способа фазирования по цик-
лам перед синхронным являются:
— немедленное вхождение в фазу (не требуется время на фа-
зирование циклов при установлении соединения или после крат-
ковременного перерыва связи);
— моменты начала передачи блоков могут быть произволь-
ными;
— длина блоков может быть произвольной.
Недостатками стартстопного способа фазирования по циклам
по сравнению с синхронным являются:
— меньшая пропускная способность системы связи вследствие
того, что маркеры (стартовые и стоповые сигналы) передаются с
каждым блоком информации, причем их приходится выбирать до-
вольно длинными для уверенной дешифрации;
— меньшая помехоустойчивость вследствие того, что искажения
стартового и стопового сигналов могут привести к полному срыву
приема длинного блока информации.
В зависимости от требований, предъявляемых к дискретной си-
стеме связи, могут применяться все три перечисленных способа
фазирования циклов — безмаркерный, синхронный маркерный и
•стартстопный маркерный. В современных стартстопных телеграф-
ных аппаратах, например, используется последний способ.
€.8. СРАВНЕНИЕ СИНХРОННОГО И СТАРТСТОПНОГО
ПРИНЦИПОВ РАБОТЫ ОКОНЕЧНЫХ УСТРОЙСТВ
Все современные оконечные устройства используют один из
двух принципов передачи — синхронный или стартстопный. Син-
хронные телеграфные аппараты типа Бодо начали применяться
«ще в конце прошлого века. Но они были сложными по конструк-
ции, требовали высококвалифицированного технического персона-
ла и специально обученных операторов, умеющих работать «в
такт». Временной принцип уплотнения, использовавшийся в син-
хронных аппаратах, затруднял вынос рабочих мест на расстояние
(например, в городские отделения связи). Стартстопный принцип
144
работы позволил создать малогабаритный и удобный в эксплуата-
ции телеграфный аппарат, имеющий следующие преимущества:
— работа на стартстопном аппарате по своей простоте сравни-
ма с работой на пишущей машинке;
— относительная простота конструкции, благодаря чему аппа-
рат не требует постоянного квалифицированного обслуживания;
технический уход за ним также сравним с уходом за пишущей ма-
шинкой;
— постоянная готовность к работе, так как отсутствует надоб-
ность «вхождения в связь» (установление синфазности); этс преи-
мущество особенно важно при работе по коммутируемой сети, ког-
да время вхождения в связь может оказаться соизмеримым с дли-
тельностью передачи сообщения;
— стартстопный принцип передачи в сочетании с частотным
способом уплотнения позволяет легко выносить аппараты в любое
место (например, в городские отделения связи, к абоненту).
Благодаря перечисленным преимуществам стартстопные аппа-
раты стали широко применяться примерно с тридцатых годов. Вна-
чале они использовались лишь на коротких расстояниях. По мере
улучшения качества телеграфных каналов и линий, в особенности
в связи с широким внедрением аппаратуры тонального телеграфи-
рования, стартстопные аппараты стали широко применяться и на
дальних расстояниях. В настоящее время они являются основной
оконечной телеграфной аппаратурой связи.
Сравним стартстопные и синхронные оконечные устройства по устойчивости
к краевым искажениям. Пусть на выходе канала, т. е. на входе приемного око-
нечного устройства действуют краевые искажения, распределенные по нормаль-
ному закону со среднеивадратическим отклонением (Ткан (считаем, что среднее
арифметическое значение а=0).
При стартстопном способе передачи и приема степень стартстопного иска-
жения складывается из смещения стопстартного перехода и смещения значащих
моментов кодовых посылок. С допустимой для практики погрешностью можно
считать, что смещения стопстартного перехода и 1смещения значащих моментов
кодовых посылок независимы друг от друга. Известно, что сумма двух неза-
висимых случайных величин, распределенных по нормальному закону, дает слу-
чайную величину, также распределенную по нормальному закону с параметром
°ст=]/ Oi + ог. (6.14)
В нашем случае (Т1 = (Т2=(Ткая, поэтому
ост= j/ToKaH. (6.15)
При синхронном способе передачи и приема
°синх ~ °кан- (6- 16)
Условием неправильной регистрации посылок является появление смещений
значащих моментов, превышающих величину исправляющей способности прием-
ника ц. При одинаковой вероятности неправильной регистрации посылок оСт =
= <Тсинх, откуда допустимые искажения в канале
°к“доп = о". доп . (6.17)
Следовательно, для обеспечения одного и того же качества работы оконеч-
ных устройств краевые искажения посылок при стартстопном способе передачи
145
должны быть в 1,41 раза меньше искажений посылок при синхронном способе
передачи.
Сравним теперь стартстопные и синхронные оконечные устройства по устой-
чивости к дроблениям посылок. При стартстопном приеме дробление, действую-
щее во время стоповой посылки, приведет к ложному запуску приемного рас-
пределителя («ложный старт»). Если вслед за этим приходит действительная
стартовая посылка, то происходит нарушение фазирования по циклам. Это при-
водит к неправильному приему ряда знаков до тех пор, пока приемный распре-
делитель случайно не войдет в правильную цикловую фазу. Аналогичное явление
может быть вызвано дроблением стартовой посылки (произойдет «ложный
стоп»). В синхронных системах подобного явления не наблюдается, поскольку
их устройства циклового фазирования работают с большой инерцией.
Таким образом, стартстопные устройства имеют по сравнению с
синхронными два недостатка: худшую устойчивость к краевым
искажениям посылок и худшую устойчивость к дроблениям посы-
лок. Вследствие этого в реальных рабочих условиях, когда состоя-
ние канала меняется, синхронная система обеспечивает лучшее ка-
чество принимаемой информации и реже отказывает.
Возникает вопрос, нельзя ли объединить преимущества каждой
из рассматриваемых систем, исключив их недостатки. Предпола-
гается, что в качестве оконечных аппаратов целесообразно исполь-
зовать удобные стартстопные аппараты, а в каналах связи исполь-
зовать помехоустойчивый синхронный принцип работы. Такие си-
стемы связи разработаны и начинают все больше применяться.
Они получили название стартстопно-синхронных систем (СТС си-
стем). Примером СТС системы является аппаратура частотно-вре-
менного телеграфирования типа ЧВТ, описанная в гл. 8.
6.9. ПРИНЦИПЫ ДЕЙСТВИЯ СТАРТСТОПНО-СИНХРОННЫХ
СИСТЕМ
Рассмотрим общие принципы построения стартстопно-синхрон-
ных систем1). Основной задачей, решаемой при построении СТС
системы, является согласование аритмичной работы оконечного
стартстопного аппарата со строго фиксированными моментами
начала и конца циклов синхронной системы.
Пусть моменты Ч, ^2, h и т. д. (рис. 6.14) соответствуют началу
каждого синхронного цикла передачи, а моменты tB и tK — началу
Старттпопная
передача tH
Синхронная^
передача t1
Рис. 6.14. К принципу согласова-
ния стартстопной и синхронной
работы
и концу стартстопного цикла. При ручной работе время между
концом одного стартстопного цикла и началом последующего цик-
ла может изменяться в широких пределах.
* ) При составлении разд. 6.9—'6J12 использована книга: В. И. Шляпо-
берский «Элементы дискретных систем связи», изд. 2-е, М., Воениздат, 1965
146
Из рис. 6.14 следует, что если первый стартстопный цикл на-
чался в момент tB, то передача этого знака в синхронный канал
может начаться в момент t2. Вследствие аритмичной работы старт-
стопного аппарата время задержки tx\, tx2, ... может принимать лю-
бые значения от 0 до Тс, где Тс — длительность синхронного цик-
ла. Поэтому передающая часть любой СТС системы должна содер-
жать накопительное устройство, которое принимает кодовые ком-
бинации знаков от оконечного аппарата и выдает их спустя неко-
торое время в синхронный распределитель. Это устройство назы-
вается СТС преобразователем передачи.
Приемная часть должна содержать аналогичное устройство,
принимающее кодовые комбинации из синхронного канала и пе-
редающее их в оконечный приемный аппарат. Функция СТС преоб-
разователя приема значительно проще, чем функции преобразова-
теля передачи. Общая структурная схема СТС системы показана
на рис. 6.15.
Сгпартстопно-синхронная система.
Рис. 6 15. Общая 'структурная схема стартстопно-синхронной системы
Одним из путей построения СТС преобразователей является использование
промежуточного носителя (обычно перфоленты) для накопления информации
(рис. 6 16). В такой системе преобразователь передачи представляет собой старт-
Рис. 6.16. СТС система, построенная с использованием приборов те-
леграфной автоматики
стопный реперфоратор РПФС1 и синхронный трансмиттер ТРМС, а на приеме,
наоборот, — синхронный реперфоратор РПФС и стартстопный трансмиттер
ТРМст. Преимуществом этого пути является простота реализации, поскольку
реперфораторы и трансмиттеры являются распространенными приборами авто-
матизации телеграфных связей. Применение перфоленты позволяет хранить в
накопителе практически неограниченный объем информации. Однако использо-
вание электромеханических приборов делает СТС систему громоздкой и нена-
дежной. Наличие петли перфоленты замедляет прохождение информации и тем
самым затрудняет ведение телеграфных переговоров.
Перечисленные недостатки можно устранить путем использования специаль-
но разработанных СТС преобразователей, осуществляющих автоматическое со-
пряжение стартстопного и синхронного циклов с задержкой передаваемой инфор-
мации не более 2ТС.
147
В общем виде СТС преобразователь передачи (рис. 6.17а) дол-
жен состоять из следующих узлов:
стартстопного приемника, который принимает и регистрирует
информацию, поступающую от оконечного стартстопного аппара-
та СТА;
накопителя, запоминающего полученную информацию;
— управляющего устройства, регулирующего процессы съема
информации со стартстопного приемника в накопитель и с нако-
пителя на синхронный распределитель.
Рис 6.17. Структурная схема СТС преобразователей:
и) передачи; б) приема
Преобразователь приема (рис. 6.176), осуществляющий обрат-
ные операции, должен состоять в общем виде из следующих узлов:
— накопителя, запоминающего принимаемую из синхронного
канала информацию;
— стартстопного передатчика, передающего принятую комби-
нацию в приемный стартстопный аппарат;
— управляющего устройства, запускающего стартстопный пе-
редатчик после приема каждого знака из синхронного канала.
Во многих случаях преобразователь приема может отсутство-
вать как самостоятельное устройство.
Рассмотрим требования, предъявляемые к построению СТС си-
стем. Основное условие работоспособности СТС систем с конечным
объемом накопителя
Гс<Тст, (6.18)
где Тст и Тс — продолжительности соответственно стартстопного и
синхронного циклов, т. е. длительность синхронного цикла не долж-
но. превышать длительности стартстопного цикла. При несоблюде-
нии этого условия и автоматической работе часть знаков пропадет
за счет того, что синхронный распределитель не успеет передать в
канал всю поступающую информацию. Поэтому неравенство (6.18)
должно соблюдаться в течение всей работы, даже с учетом возмож-
ных отклонений скоростей стартстопного аппарата и синхронного
канала.
148
Стартстопные оконечные аппараты обычно имеют удлиненную
стоповую посылку. Это обстоятельство очень благоприятно для по-
строения СТС систем. Для пояснения рассмотрим вначале времен-
ные диаграммы для случая, когда стартстопный аппарат имеет
равномерное контактное деление (рис. 6.18а).
Пусть стартстопный аппарат имеет 7-контактный цикл. С уче-
том возможных колебаний скорости продолжительность стартстоп-
ного цикла будет изменяться в пределах от Тст—АТ до Тст+АТ,
где АТ — максимальная величина отклонения. Продолжительность
цикла стартстопного поиемника на входе СТС преобразователя
устанавливается равной 6,5/0 (где t0— длительность единичного
элемента), как в обычных аппаратах. Продолжительность син-
хронного цикла передачи, исходя из неравенства (6.18), прини-
мают не более Тст—АТ. Такой же величины должен быть и
синхронный цикл приема. Стартстопный цикл в сторону приемно-
го оконечного аппарата, который выдается синхронным распреде-
лителем, будет равен синхронному циклу приема ТСт—АТ. Нако-
нец, стартстопный цикл приемного аппарата при номинальной ско-
рости будет равен 6,5(0-
Отсюда видно, что СТС системы, рассчитанные на работу со
стартстопными аппаратами, имеющими равномерное контактное
деление, должны иметь укороченный синхронный цикл, т. е. рабо-
тать с заведомо большей скоростью. Это приводит к снижению ус-
тойчивости работы приемного стартстопного аппарата, поскольку
он будет получать укороченные импульсы.
Если, например, скорость модуляции стартстопного аппарата равна 50 бод
(/о = 2О мс), а отклонение скорости не превышает ±2%, то длительность син-
2
хронного цикла должна быть не более 7-ЙО— ууу, 7-120=137^2 мс. В этом слу-
чае каждый элемент в синхро-ином канале будет равен 1-37,-2/7=19,6 -мс, т. е.
укоротится на 0,4 мс. Запас устойчивости приемного стартстопного аппарата по
регистрации пятого импульса уменьшится на -lil % (сдвиг середины пятого эле-
мента достигает 2,-2 мс).
Теперь рассмотрим временную диаграмму (см. рис. 6.186) СТС
системы, рассчитанной на работу с аппаратами, имеющими удли-
ненную стоповую посылку (7’ст = 7,5(о) • На диаграмме показаны
длительности -циклов в стартстопном канале на передающей сторо-
не, затем в синхронном канале и, наконец, в стартстопном канале
на приемной стороне. Продолжительность синхронного цикла уста-
навливается на O,5fo короче стартстопного, т. е. Tc = 7t0. Это обес-
печивает как полную развязку циклов, так и оптимальные условия
передачи. В частности, возможное укорочение стартстопного цикла
из-за нестабильности приборов АТ всегда меньше О,57о (например,
при нестабильности скорости ±2% АТ=О,14(0). Продолжитель-
ность импульсов в синхронном канале можно установить to, что
обеспечит устойчивую работу приемного телеграфного аппарата.
Таким образом, наибольшая устойчивость связи достигается в
СТС системах, рассчитанных на работу с оконечными аппаратами,
имеющими неравномерное контактное деление (удлиненную стопо-
вую посылку).
-US'
g
d) Стартстопный. цикл передачи
f--------------------------------------
М М М М М М I 11 I
I ,~—-Стартстопный канал । 1
| ,g Jcm.no ж । ।
Г Стартстопный цикл приема | |
Синхронный цикл передачи I
--------~п--------:---------------Г
. ------ Синхронный канал ।
________Синхронный цикл приема________j |
__________________Тот, пер____________э
________Стартстопный цикл передачи
,—•— Стартстопный канал ।
е Тот пр।
Стартстопный цикл приема
Рис. 6.18. Временные диаграммы работы СТС системы
контактным делением (а) и с удлиненным стопом (б)
Стартстопный цикл передачи
Н ш Jo, ,
Cm < ']
Стартстопный канал Тот. пр 1
Стартстопный цикл приема
. Tc-7tp
Синхронный цикл передачи
. -Синхронный канал к
Синхронный цикл приема
_ Сет. пер
Стартстопный цикл передачи
, Стартстопный канал Тот. пр
Стартстопный цикл приема
при передающем телеграфном аппарате с равномерным
6.10. КЛАССИФИКАЦИЯ СТАРТСТОПНО-СИНХРОННЫХ
СИСТЕМ
Стартстопно-синхронные системы в зависимости от используе-
мых схемных элементов можно разделить на электромеханические
и электронные.
СТС системы можно разделить также на однократные и много-
кратные. На практике чаще всего СТС системы строятся много-
кратными. По принципу построения они ничем не отличаются от
однократных. Разница состоит лишь в количестве используемых
преобразователей и в числе контактов синхронных распределите-
лей. Поэтому все сказанное об однократных схемах полностью от-
носится и к многократным.
Существенным вопросом, который возникает при построении
многократных СТС систем, является порядок передачи в канал
импульсов различных оконечных аппаратов. Применяют три основ-
ных способа распределения — последовательный, смешанный в
комбинированный (рис. 6.19).
о)
б)
в)
Лкртт Лкрат
П \ 1 \ 2 \ 3 \ 9 \ 5 \Ст П \1 | Z | J | » | 6 \Ст
1крат Л крат Шкрат Шкрат
/7|/ |5|z77
to
to
П' I /7"| Г I 7
-| ТиЛкраты I 1
I I I I I I I I I I I I I I
IuH краты
HI крат
Рис. 6.19. Три способа передачи импульсов различных крат
(подканалов) в многократных системах:
а) последовательный; б) смешанный; в) комбинированный
При последовательном способе (рис. 6.19а) в синхронный ка-
нал сначала передаются импульсы, относящиеся к кодовой ком-
бинации первого крата (подканала), затем второго, третьего и т. д.
При смешанном способе, например, в двукратной системе (рис.
6.196) в синхронный канал сначала передаются первые импульсы
первого и второго крата, затем вторые импульсы, потом третьи и
т. д. Такой способ передачи применяется в многократных СТС си-
стемах с передачей всех семи импульсов в синхронный канал. Он
позволяет упростить приемную часть системы за счет исключения
СТС преобразователя, так как независимо от числа крат соседние
импульсы каждого крата по времени разнесены на to, где to — про-
должительность импульса, передаваемого оконечным стартстопный-
аппаратом.
Комбинированный способ (рис. 6.19s) как бы объединяет в се-
бе оба рассмотренных способа. Он чаще всего применяется в четы-
151
рех- и восьмикратных системах, что также позволяет упростить
приемную часть, так как при уменьшении числа крат вдвое сохра-
няется смешанное распределение контактов.
По принципу действия СТС преобразователей все стартстопно-
сннхронные системы можно разделить на следующие две группы:
1) цикловые СТС системы, в которых согласование оконечного
передающего аппарата с синхронным каналом осуществляется на
протяжении цикла;
2) импульсные СТС системы, в которых согласование осущест-
вляется в пределах одного импульса.
Рассмотренные выше временные диаграммы отражают работу
цикловых СТС систем. В импульсных СТС системах стартстопный
приемник преобразователя регистрирует отдельно каждый им-
пульс, который спустя некоторое время, не превышающее длитель-
ности единичного элемента, передается в синхронный канал.
Рассмотренная классификация стартстопно-синхронных систем
изображена на рис. 6.20. На рисунке показано также деление цик-
ловых СТС систем на три группы, описанные в следующем разделе.
Рис 6 20 Классификация стартстопио-синярон-ных систем
152
6.11. ЦИКЛОВЫЕ СТС СИСТЕМЫ
Рассмотрим структурную схему передающей части цикловой
СТС системы (рис. 6.21а). Стартстопная работа преобразуется в
синхронную в этой системе следующим образом.
Стгиртпстопные циклы
н а к н $ к н ® к н г к н к н е к н
Нг I a 11 о 11 6 I [ г 11 У 11_____11 е
\^TCr\ | | ! |
и,г _К_ Jv _К_ А_ _К_
-------------1-----1------1------I------I------1------1-
Синтронные циклы
Рис. 6.21. Передающая часть цикловой СТС системы:
а) структурная схема; б) временные диаграммы работы
Под действием пускового (стартового) импульса, поступающего
от оконечного стартстопного аппарата СТА во входное устройство,
срабатывает стартстопно-коррекционное устройство ССКУ, которое
ча время стартстопного цикла приема (6,5/0) запускает генератор
управляющих импульсов ГУИ\. За время 6,5/0 на стартстопный
распределитель поступит семь управляющих импульсов, вследствие
чего он совершит полный цикл, выдавая последовательно на каж-
дый из семи накопительных элементов наборного устройства по
одному регистрирующему импульсу. Так как все накопительные
элементы подключены ко входному устройству, то за время старт-
стопного цикла приема наборное устройство зарегистрирует один
153
пусковой, путь кодовых и один столовый импульсы. Как только
стартстопный цикл приема окончится, со стартстопного распредели-
теля параллельно на все элементы наборного устройства поступит
импульс записи U3i, которым информация, зарегистрированная на-
борным устройством, переписывается на первый накопитель Нх, а
наборное устройство освобождается для приема следующего знака.
Спустя некоторое время tx (промежуток времени от момента
окончания стартстопного цикла приема до начала ближайшего
синхронного цикла) информация с накопителя Н, импульсом запи-
си U32, поступающим от синхронного распределителя на управляю-
щее устройство, будет переписана на накопитель Н2. Импульс U32
подается перед началом каждого синхронного цикла. С накопителя
Н2 информация будет последовательно считана синхронным рас-
пределителем и посредством выходного устройства передана в син-
хронный канал.
Таким образом, накопитель Н} является тем буферным устрой-
ством, которое согласует аритмичную стартстопную работу со стро-
го фиксированными моментами начала синхронных циклов. Нако-
питель Н2 необходим для хранения передаваемой информации в
течение всего синхронного цикла.
Когда импульсы записи [/31 и U32 по времени не совпадают, пе-
редаваемые кодовые комбинации знаков хранятся в в течение
времени tx<Tc. Однако в реальных условиях импульсы могут сов-
пасть. В этом случае окажутся совмещенными по времени процес-
сы записи информации в Н[ и считывания из него. Такое совпаде-
ние двух операций может вызвать искажение записываемой ин-
формации, так как процесс считывания по отношению к записи яв-
ляется запрещающим. Для устранения указанного явления необхо-
димо, чтобы управляющее устройство в случае совпадения импуль-
сов U3l и U32 обеспечивало запись информации в Hi и запрещало
считывание с него. При этом tx будет равно Тс, а в течение очеред-
ного синхронного цикла в канатт будет передаваться комбинация
покоя.
Изложенная последовательность работы узлов цикловой СТС
системы от момента приема информации из стартстопного канала
до передачи ее в синхронный канал иллюстрируется временными
диаграммами, изображенными на рис. 6.216. Как видно, продолжи-
тельность нахождения информации в накопителе Нх зависит от то-
го, в какой момент времени по отношению к синхронному циклу
окончится стартстопный цикл приема. При автоматической работе
оконечного аппарата и при Тс<ТСт время tx постепенно уменьшает-
ся до нуля, затем после совпадения U3\ и Нз2 становится равным Тс
и далее опять уменьшается.
При рассмотрении структурной схемы на рис. 6.21а исходили из того, что в
синхронный канал передаются все семь импульсов, принимаемых от оконечного
аппарата (пусковой, пять кодовых и столовый). Однако, исходя из рассмотрен-
ного принципа работы цикловой СТС системы, пусковой и столовый импульсы в
синхронный канал можно и не передавать. В зависимости от числа импульсов,
передаваемых в синхронный канал, различают цикловые старстопно-синхронные
системы с пяти-, шести- и семиимпульсным преобразованием.
154
При пятиимпульоном преобразовании в синхронный канал за цикл передает-
ся только пять кодовых импульсов, что позволяет на 2/7 (т. е. на 28,6%) умень-
шить скорость 'модуляции в канале. При шестиимпульоном преобразовании, кро-
ме пяти кодовых, в синхронный канал передается один коррекционный импульс
(пусковой или столовый). В этом случае скорость модуляции в синхронном ка-
нале уменьшается на 1/7 (т. е. на 14,3%). При семиимпульоном преобразовании
скорости модуляции в стартстопном и синхронном каналах будут одинаковы.
Выбор числа импульсов, передаваемых в канал, определяет не только ско-
рость модуляции. От этого зависит сложность и помехоустойчивость системы,
так как при передаче в канал менее семи импульсов на приемном конце необ-
ходимо обеспечить восстановление пускового и стопового импульсов, а также
выдачу всей стартстопной комбинации с нормальной скоростью телеграфиро-
вания.
В частности, при пяти- и шестиимпульоном 1П|реобразо1ваниях.
приемная часть СТС системы получается сложной, при семиим-
пульсном — значительно упрощается. При пятиимпульсном преоб-
разовании не обеспечивается защита приемного аппарата от срыва
со стопа.
Выбор того или иного способа преобразования зависит от тех
требований, которые предъявляются к СТС системе.
6.12. ИМПУЛЬСНЫЕ СТС СИСТЕМЫ
Рассмотрим структурную схему передающей части импульсной
стартстопно-оинхронной системы (рис. 6.22а). Основным элемен-
том преобразователя является стартстопный приемник. Отличие
его от аналогичных устройств цикловых систем состоит в том, что
в нем отсутствует стартстопный распределитель, а наборное уст-
ройство рассчитано на
регистрацию только од-
ного импульса. Согла-
сование стартстопной
работы с синхронной
достигается тем, что
генератор управляю-
щих импульсов ГУ И
синхронизируется не-
прерывно работающим
высокочастотным зада-
ющим генератором ЗГ.
Временные диа-
граммы работы рас-
сматриваемой схемы
показаны на рис. 6.23а
—ж. В начале пусково-
го импульса (диаграм-
ма а), поступающего
во входное устройство,
запускается стартстоп-
но-коррекционное уст-
ройство ССКУ, которое,
Рис. 6.22. Структурные схемы импульсной СТС
системы:
а) передающая часть; б) приемная часть
155
как и в цикловых преобразователях, на время стартстопного цик-
ла приема ('6,5/о) включает ГУ И. Фаза управляющих импульсов
(диаграмма б), подаваемых на исправляющее устройство ИУ,
жестко связана с фазой задающего генератора ЗГ, частота которо-
го в К раз выше частоты телеграфирования. При достаточно боль-
шом К (К=25-т-бО) смещение управляющих импульсов от середи-
ны принимаемых будет весьма незначительным. Так, при /(=50
фаза управляющих импульсов устанавливается с точностью до 2%.
д Стоп |ПIZLljJZI 5 \Стт\ П 7
5_______Р Р Ю 1Ж
о________I___1_1___I____I I I
г I I I I 1^1 I I I I I I I I I I I
д__________I___LJ___I___I I I________
~Стоп ]/7 ГФ <?ГФГФ 'РФ [7
Стоп
Рис 6.33. Временные диаграммы работы импульс-
ной СТС системы
Посредством исправляющего устройства принимаемые импуль-
сы будут формироваться до нормальной длительности t0 (диаграм-
ма в) и подаваться на наборное устройство. На другой вход набор-
ного устройства непрерывно подаются считывающие импульсы с
частотой fc = i/tg (диаграмма г), которые по отношению к управ-
ляющим импульсам смещены по фазе, по крайней мере, на поло-
вину периода задающего генератора. Под действием этих импуль-
сов информация, накопленная в наборном устройстве, считывается
на вход схемы запрета СЗ (диаграмма д).
На СЗ подаются также считывающие импульсы. Благодаря та-
кому включению каждый импульс, поступающий с выхода набор-
ного устройства, запрещает один считывающий импульс. С выхода
СЗ импульсы (диаграмма е) поступают на счетный вход триггера,
•содержащегося в выходном устройстве. В синхронный канал будут
подаваться сигналы, показанные на диаграмме ж.
Из изложенного следует, что при стоповом положении оконеч-
ного аппарата в синхронный канал будут передаваться «точки» со
скоростью l/t0 бод.
Таким образом, в импульсных СТС преобразователях согласо-
вание стартстопной и синхронной работы достигается в пределах
одного импульса благодаря использованию одного высокочастот-
156
ного генератора, синхронизирующего стартстопный ГУИ, который
формирует считывающие импульсы, управляющие работой выход-
ного устройства.
Для обеспечения надежного преобразования необходимо соб-
люсти неравенство (6.18), которое применительно к импульсному
преобразованию примет вид
ai>a2, (6.19)
где — число считывающих импульсов, поступивших на схему за-
прета за время ti: — число импульсов, поступивших от телеграф-
ного аппарата на вход преобразователя за то же время С.
При применении оконечных аппаратов с удлиненным стопом это
неравенство выполняется при fc=B (где В— номинальная скорость
модуляции) для всех практически возможных превышений скоро-
сти оконечного аппарата. Если же используются аппараты с рав-
номерным контактным делением, то необходимо, чтобы fc было
больше В на столько процентов, на сколько может возрасти ско-
рость оконечного аппарата.
Рассмотрим структурную схему приемной части импульсной
СТС системы (см. рис. 6.226). Преобразователь приема состоит из
входного и выходного устройств, исправляющего устройства ИУ,
синхронного генератора управляющих импульсов ГУИ, формирую-
щего устройства ФУ и схемы запрета СЗ. Временные диаграммы
работы этой схемы показаны на рис. 6.23з—м.
Схема работает следующим образом. Принимаемая из синхрон-
ного канала последовательность импульсов (диаграмма ж) с по-
мощью управляющих импульсов (диаграмма з) исправляется
(диаграмма и). Затем каждое изменение полярности принимаемого
сигнала преобразуется в ФУ в короткие положительные импульсы
(диаграмма к), которые подаются на схему запрета СЗ. Импульсы
с выхода СЗ (диаграмма л) и преобразованные импульсы (диа-
грамма к) подаются раздельно на два входа триггера выходного
устройства, который формирует первоначальную комбинацию
(диаграмма м, ср. с диаграммой а). Эта последовательность им-
пульсов передается на приемный стартстопный аппарат.
Основным преимуществом импульсных СТС систем по сравне-
нию с цикловыми является простота. Количество элементов, необ-
ходимое для реализации однократной импульсной СТС системы,
примерно в 3—4 раза меньше количества элементов, потребного
для построения цикловой системы. Однако импульсным системам
свойственен существенный недостаток: если при стоповом положе-
нии оконечного передающего аппарата один из импульсов, переда-
ваемых в синхронном канале, будет зарегистрирован неправильно,
тс на приемный аппарат будет послан пусковой импульс (произой-
дет («срыв со стопа»).
Применение импульсных СТС систем может быть рекомендова-
но на каналах, в которых вероятность сбоя элемента сравнительно
мала (например, меньше, чем Ю^Э-Ю-4) или в тех случаях, когда
главным фактором является простота построения системы.
157
ГЛАВА 7
Особенности спектров и переходных
процессов при передаче дискретных
сообщений
7.1. СПЕКТРЫ ИМПУЛЬСОВ ПОСТОЯННОГО ТОКА
В технике передачи дискретных сообщений часто приходится
определять ширину полосы частот, которую должен иметь канал
связи для того, чтобы пропустить импульсные сигналы с заданной
скоростью, или допустимую скорость передачи в канале, если за-
дана ширина полосы пропускания. Для этого необходимо уметь
рассчитывать спектры сигналов при различных методах модуляции
и различном характере передаваемых импульсных последователь-
ностей, а также уметь рассчитывать переходные процессы, возни-
кающие при передаче через каналы связи. Переходные процессы —
важнейшая особенность передачи дискретных сигналов, с которой
приходится считаться на практике.
Спектры и переходные процессы рассматривались в общем ви-
де в курсе «Теория линейных электрических цепей». В настоящей
главе общая теория спектров и переходных процессов применяется
для объяснения процессов в системах передачи дискретных сооб-
щений. Учитываются особенности, с которыми приходится иметь
дело при передаче по реальным каналам связи, такие как фазо-
частотные искажения, малое соотношение несущей и модулирую-
щей частот, частотная и фазовая модуляции, многократная фазо-
вая модуляция и т. д. На основе изучения спектров и переходных
процессов определяется полоса пропускания фильтров в системах
частотного телеграфирования и допустимая скорость в системах
передачи данных.
В телеграфии и передаче данных широко используются им-
пульсы постоянного тока различной формы. Чаще всего применя-
ются импульсы прямоугольной формы. Такую форму обычно имеют
информационные и синхронизирующие импульсы при отсутствии
заметных искажений.
Как известно из курса «Теория линейных электрических цепей»,
периодический сигнал любой сложной формы можно представить
в виде суммы гармонических колебаний с частотами, кратными
частоте повторения этого сигнала. Эти колебания называют гар-
мониками спектра сигнала.
158
С помощью ряда Фурье можно вычислить спектры сигнала при
передаче двоичных прямоугольных импульсов. Обозначим длитель-
ность импульса то, а длительность паузы между импульсами
(а—1)то- Период повторения при этом будет равен
Т = ат0. (7.1)
Коэффициент а называется скважностью импульсной последова-
тельности. Такие сигналы при а=2 и а = 6 показаны на рис. 7.1а, в.
Рис. 7.1. Периодические сигналы, состоящие из прямо-
угольных импульсов:
а), б) форма сигнала 1:1 («точки») и его спектр; в), г)
форма сигнала 1:5 и его спектр
В телеграфии эти сигналы называют сигналами вида 1 : 1 («точ-
ки») и вида 1 : 5.
159
Амплитуды гармоник после вычисления с помощью ряда Фурье
будут равны
Л k
sin —
а
Постоянная составляющая равна
Со = • (7.3)
Здесь UQ — амплитуда сигнала; k — номера гармоник (£=1, 2, 3,
4, ...).
Вычисленные спектры для сигналов при а = 2 и а = 6 показаны
на рис. 7.16, г.
Рассмотрение этих частных случаев и общей ф-лы (7.2) позво-
ляет заметить следующие закономерности спектра последователь-
ности прямоугольных импульсов типа «1 :(а—1)»:
1. Амплитуда спектральных составляющих спадает по закону
функции
Эта функция показана в виде пунктирной огибающей на рис. 7.1г.
2. Амплитуда спектральных составляющих обращается в нуль
на частотах 1/т0; 2/то; 3/т0 и т. д.
3. В основной области частот от нуля до 1 /т0 располагается
а—1 гармоник через равные промежутки.
4. Постоянная составляющая (компонента с нулевой частотой)
равна Co='t7o/a.
5. Амплитуда гармоник, близких к нулевой частоте, стремится
к величине 2С0.
Если предположить, что период повторения Т становится все
больше и больше, то при рассмотрении рис. 7.1г можно понять,
каким будет спект^ одиночного прямоугольного импульса. Для вы-
числения этого спектра в приведенных формулах надо положить
а—>оо. Спектр будет иметь такую же форму, какая показана на
рис. 7.1г, но на участке от нуля до частоты 1/т0 будет располагать-
ся бесконечно большое количество гармоник. Спектр станет
сплошным. В отличие от него спектр периодической функции назы-
вают линейчатым (или дискретным).
Математически спектр одиночного импульса, как всякой непе-
риодической функции, необходимо определять уже не рядом Фурье,
а интегралом Фурье. Спектр амплитуд одиночного прямоугольного
импульса (рис. 7.2a), вычисленный с помощью интеграла Фурье,
имеет вид
S(®)= U0T0 . (7.5)
JTTg f
Здесь S(a>)—спектральная плотность амплитуд; f — частота.
160
Этот спектр показан на этом же рис. 7.2а. Его форма именно
такая, какую мы представили себе из анализа рис. 7.1г.
Кроме прямоугольных импульсов, в аппаратуре передачи дис-
кретных сообщений иногда используются импульсы другой формы.
Рис 7 2. Примеры одиночных импульсов и их спектров.
а) прямоугольный импульс; б) трапецеидальный импульс, в) им-
пульс «приподпя।ый косинус»
С помощью интеграла Фурье рассмотрим на примерах, как изме-
няется спектр одиночного импульса при изменении его формы.
Пример 1. Спектр одиночного трапецеидального импульса. На практике
реальный «прямоугольный» импульс имеет определенную длительность нараста-
ния и спадания, поэтому его 1можно_упрощенно представить в виде трапеце-
такую форму имеют информа-
связи с ограниченной полосой
р а вн а
(7.6)
идального импульса (см. рис. 7.2б) Примерно
ционные импульсы после прохождения канала
пропускания.
Спектральная плотность для этого импульса
sinnTo/ sinnTH/ I
S(m) = (/oto .................. — •
ЛТд f Л.Тц/ I
Здесь тн—длительность франта импульса
Пример 2. Спектр импульса с закругленной формой. Возьмем косинусо-
идальный импульс длительностью т0 на середине высоты (см рис. 7 2в). Его
спектральная плотность
„ , , | Uoxo sin2n-r0/
о ((D) = --------------- • ---------
11-4 (Т0/)2 2лт„ /
(7.7)
Из рассмотренных на рис. 7.2 примеров можно установить сле-
дующие закономерности в спектрах одиночных импульсов различ-
ной формы:
6-60
161
1. Спектры имеют один и тот же характер: основная энергия
сосредоточена вблизи нулевой частоты; при увеличении частоты
спектральная плотность падает.
2. Спектры бесконечно широкие, однако практически можно го-
ворить о конечной ширине спектра, если отсечь высокие частоты,
на которых расположена незначительная часть энергии, например,
1 или 10% энергии сигнала.
3. Основная часть энергии расположена в диапазоне от нуля до
частоты f= 1/то-
4. Чем более плавный характер имеет форма импульса, тем
быстрее спадает энергия с увеличением частоты, тем более «ком-
пактно» она сосредотачивается в диапазоне от нуля до частоты
f = 1/т0-
Выше для прямоугольных импульсов было замечено, что форма
огибающей спектра периодического сигнала совпадает с формой
спектра одиночного импульса. Эта взаимосвязь справедлива и при
других формах импульсов. Всегда линейчатый спектр периодически
повторяющихся импульсов вписывается в спектр одиночного им-
пульса этой же формы.
1.2. СПЕКТРЫ МОДУЛИРОВАННЫХ СИГНАЛОВ
СПЕКТРЫ ПРИ АМПЛИТУДНОЙ МОДУЛЯЦИИ
Модулированный сигнал представляет собой несущий сигнал,
один из параметров которого меняется во времени по закону мо-
дулирующего сигнала. Несущий сигнал обычно представляет со-
бой гармоническое колебание или последовательность импульсов.
Если модулирующая функция x(t) меняется во времени от ну-
ля до единицы, т. е.
0<х(0<1, (7-8)
то амплитудномодулированный сигнал запишется так:
и (/) = им + Sin (^ + ф1). (7.9)
1+ пг
Здесь сос — круговая несущая частота сигнала; <pi — начальная фа-
за несущего колебания; m — коэффициент глубины модуляции, ко-
торый равен отношению полуразмаха модуляции к среднему зна-
чению сигнала:
m к Чр 2 __ Цы Uo „ . Q.
где UK, Uo — соответственно максимальная и минимальная ампли-
туды модулированного колебания.
Для получения спектров модулированных импульсов нет необ-
ходимости разлагать их в ряд Фурье. Достаточно внать спектраль-
ное разложение модулирующих' импульсов x(t), которое затем
подставляется в выражение (7.9). Возьмем, например, периодиче-
162
ские прямоугольные импульсы (рис. 7.3а, б), т. е. рассмотрим слу-
чай амплитудной манипуляции. Длительность элементарной по-
сылки обозначим то, а период следования Т = ато, где а — скваж-
ность импульсной последовательности. Модулирующие импульсы
согласно ф-лам (7.2) и (7.3) можно записать в виде ряда Фурье
(при С70=1)
зт k
sin —
cos k Й t,
(7.П)
где Q — круговая частота повторения:
Q = *L.
т
(7.12)
Подставив (7.11) в (7.9), после простого группирования членов
можно получить
«(0= tV(1 ,.^+,2т sin (®</+Ф1) +
а (1 + т)
л k
» sin —
+ У! -VF- <sin l^+ k Q)Z + + sin kQ* +
а (1 + т)
fe=1 а (7.13)
Подставляя m = l, легко получить формулу для наиболее часто
применяемой 100-процентной модуляции.
Формула (7.13) показывает, что, как всякое модулированное
колебание, импульсный сигнал с AM. имеет, кроме несущей часто-
ты, еще верхнюю и нижнюю боковые полосы. Компоненты верхней
боковой имеют частоты сос+^П, а компоненты нижней боковой —
частоты гос—6П. Амплитуда компонент зависит от коэффициента
модуляции т и скважности импульсной последовательности а.
В ф-ле (7.13) k обозначает номера боковых частот (Л =1,2,3,4,...).
Таким образом, амплитуда несущей
нес —
а (1 — т) + 2/п
а (1 -f- т)
(7.14)
а амплитуда боковых составляющих
^бок
2т
а (1 + т)
л k
sin —
а
(7.15)
л k
а
Для 100-процентной модуляции получим
гг ____ Um . j 1 _ Um
С'нес— , ибок
а а
л k
sin —
а
(7.16)
л k
а
163
6*
Примеры спектров AM сигналов вида 1 : 1 (а=2) и 1 :5 (а = 6)
вычисленные по этим формулам, показаны на рис. 7.3в, г. Для рас
чета взяты два коэффициента глубины модуляции: т=0,5ит=1
Рис. 7.3. AM сигнал и примеры его спектра при передаче прямоугольных сиг-
налов вида 11:1 и 1:5:
а) форма модулирующих импульсов; б) форма AM сигнала; в) спектры при
т=0,5; г) спектры при т=\\
Рассматривая рис. 7.3, можно заметить ряд закономерностей в
спектрах импульсных сигналов с AM:
1. Форма боковых полос спектра модулированного сигнала ана-
логична форме спектра модулирующих импульсов.
2. Спектр модулированного сигнала вдвое шире спектра моду-
лирующих импульсов.
3. Форма спектра всегда симметрична относительно несущей
частоты, т. е. нижняя и верхняя боковые полосы имеют одинаковую
форму.
4. Амплитуда несущей частоты вписывается в огибающую спек-
тра при 100-процентной модуляции. При уменьшении коэффициен-
164
та модуляции энергия несущей возрастает, а энергия боковых по-
лос падает.
Легко доказать, что все эти закономерности справедливы и для
импульсов с формой, отличной от прямоугольной. Они верны не
только для периодических последовательностей импульсов, но и
для одиночных импульсов. Отсюда вытекает, что нет необходимо-
сти каждый раз вычислять спектры модулированного сигнала.
Зная спектр модулирующих импульсов, легко сразу нарисовать
спектр амплитудномодулированного сигнала, опираясь на перечис-
ленные закономерности.
СПЕКТРЫ ПРИ ФАЗОВОЙ модуляции
Обозначив, как выше, модулирующую функцию x(t), можно
записать модулированный сигнал так:
«(t) = UM sin |<лс/ + + Дер jx(/)-. (7.17)
Здесь UM — амплитуда сигнала; Дф— величина изменения началь-
ной фазы.
Такой сигнал изменяет во время модуляции свою начальную
фазу от ф1— _1 до ф]+ — и обратно при изменении модулирую-
щего сигнала х(1) от 0 до 1 и обратно. Величину
m = ^_
ФМ 2 ’
(7.18)
характеризующую максимальное отклонение фазы от среднего зна-
чения, называют индексом фазовой модуляции.
После тригонометрического преобразования этот сигнал мож-
но записать следующим образом:
и (t) = Ua {sin ^(ос t 4- Ф1— j cos [Дф х (01 +
+ cos + фх — sin [Дф х (£)]j. (7.19)
Для нахождения спектра ФМ сиг-
нала достаточно найти спектры функ-
ций соБ[|Дфх(Т)] и sin[A<px(if)]. Этот
метод пригоден для любых случаев.
Чаще iBoero на практике июпользу-
ется модуляция скачком. Ее называют
фазовой манипуляцией. В данном слу-
чае, гр. е. для прямоугольных модули-
рующих импульсов, можно воспользо-
ваться для расчета 'более простым и
наглядным методом. Рис. 7.4 показы-
Рис. 7.4. Представление ФМ сигнала в виде
AM сигнала^
а) модулирующий сигнал; б) вспомогательный
AM сигнал; в) немодулированная несущая;
г) результирующий ФМ сигнал
1'65
вает, что сигнал с манипуляцией на ;180° можно рассматривать как
сумму амплитудноманипулированного сигнала с вдвое большей
амплитудой и немодулированного колебания, фаза которого про-
тивоположна фазе несущей AM сигнала. Эту закономерность мож-
но обобщить на случай любой величины фазового скачка (Д<р=#
=А180°). Следовательно, фазовую манипуляцию на угол ±Д<р мож-
но рассматривать как сумму AM сигнала и немодулированной не-
сущей. Отсюда можно сделать вывод, что спектр сигнала, мани-
пулированного по фазе, совпадает по форме со спектром AM сиг-
нала (за исключением несущей).
Таким способом можно найти выражение для сигнала с фазовой мани-
пуляцией на ±Дф для случая передачи прямоугольных импульсов со скважно-
стью а. Воспользуемся ф-лой (7.16) для -спектра AM сигнала. Амплитуда не-
сущей после вычислений получается равной
инее= ]А(а— 1 + cos Дф)2 4- sin2 Дф, (7.20)
а амплитуда боковых составляющих ((верхних и нижних с частотами соответ-
ственно coc + feQ или о)с—kQ) получаются равными:
.. 2U*
^бок —
Л k
sin —
а А<р
---т— sin,—
л k
а
(7.21)
Из этих выражений видно, что амплитуды всех -спектральных составляющих
зависят -от величины фазового скачка Дф и скважности импульсной последова-
тельности.
Для фазовой манипуляции на Дф=Л®0° получаются более простые фор-
мулы:
1/м(а-2) . 2[/м
^нес— > ^бок—
л k
sin —
а
л k
(7.22)
а
Примеры спектров, рассчитанных по этим формулам, для сигна-
лов вида 1 : 1 и 1:5 при Дф=±90° и Дф=(180° показаны на рис.7.5.
Их скважности равны соответственно а = 2 и а = 6. Из рисунка
видно, что если манипуляция производится на 180° и передаются
«точки» (а = 2), то несущая в спектре исчезает.
Если фазовая модуляция производится не скачком, то спектр
необходимо вычислять более сложным путем — по общей ф-ле
(7.19). При модуляции не скачком спектр ФМ сигнала не совпа-
дает по форме со спектром AM сигнала.
При передаче дискретных сообщений используется не только
двухпозиционная фазовая модуляция. Все шире применяются ме-
тоды двукратной (четырехпозиционной) и трехкратной (восьми-
позиционной) фазовой модуляции (ДФМ и ТФМ), которые рас-
сматриваются в гл. 8. Величина скачка фазы сигнала в этих слу-
чаях может принимать соответственно четыре и восемь значений.
Абсолютная величина скачков фазы может иметь при ДФМ два
значения (например, |Д<р| =90° и 180°), а при ТФМ — четыре зна-
166
чения (например, |Дф| =45°, 90°, 135° и 180°). Пусть периодически
повторяется один и тот же скачок с разными знаками (например,
+ 45° и —45°), а затем довольно долго повторяется другой ска-
чок и т. д. Для таких случаев применимы полученные выше резуль-
таты. Спектр боковых полос, сохраняя одну и ту же форму, при
изменении величины скачка будет изменять свою амплитуду.
°’7Ш^ ГДЛ
\/0,55UM
0,15 Uм
f + 1
с г
‘о
0,21 UM
ic-2
, С Ъ
м
yO,b'7UM IZAJ
/0,33 им
D,07UM
5
С Т20
Рис 7 5 Примеры спектров ФМ сигналов при .передаче прямоугольных сигналов
вида '1 1 и '1:5:
а) при Дф = ±90°; б) при Дф=Ф80°
Для более сложных случаев, когда чередуются скачки фазы
разной величины, приведенные формулы несправедливы. Спектр
может измениться значительно. Необходимо особо обратить вни-
мание на следующую возможность при ДФМ и ТФМ. Если друг за
другом будут следовать скачки одного знака, например, +90°, то
вектор сигнала получит дополнительное вращение. Скорость этого
вращения определяется скоростью модуляции В в бодах и вели-
чиной скачка Дер. Это эквивалентно изменению несущей частоты на
Д/ -ЛДФ. (7.23)
р 360°
Таким образом, при методах ДФМ и ТФМ спектр модулирован-
ных импульсов может быть несимметричным относительно несущей
частоты.
СПЕКТР ПРИ ЧАСТОТНОЙ МОДУЛЯЦИИ
Изменение частоты при частотной модуляции и прямоугольном
модулирующем сигнале происходит скачком, т. е. имеет место ча-
стотная манипуляция. При этом изменение частоты производится
при постоянстве амплитуды сигнала и без разрывов фазы.
Как и выше, обозначим модулирующую функцию x(t). Тогда
модулируемый сигнал можно записать в виде
и(t) = UMsin{<вс£ + фх + Дю С [2х(t) — I]di}. (7.24)
167
Здесь Uu — амплитуда сигнала, а Д<о=2лД/: — девиация частоты,
т. е. величина максимального отклонения мгновенной частоты от
несущей.
Обозначим вторую составляющую мгновенной фазы в выраже-
нии (7.24)
©(/) = Дсо J [2х (0 — 1] dt (7.25)
и назовем ее переходной фазой. После простого тригонометриче-
ского преобразования можно записать
и (0 = Uu [sin (act + tpj cos 0 (t) + cos (coc( + <px) sin 0 (()]. (7.26)
Для нахождения спектра ЧМ сигнала надо найти спектры функций cos 0(0
и sin 0(7). Пусть частота изменяется через равные промежутки времени от ниж-
ней рабочей частоты icoH=ico0—Дсо к верхней рабочей частоте Шв = соо+Асо и об-
ратно (рис. 7.6а), что соответствует передаче прямоугольных «точек». Легко
найти, что переходная фаза будет изменяться по пилообразному закону (рис.
7.66). Разложив функции cos 0(0 и sin 0(0, можно вычислить спектр при час-
тотной манипуляции «точками». Амплитуда несущей получается равной
л тчм
sin—5—
Днес — U м
л /пчм
2
(7.27)
амплитуды нечетных боковых составляющих (верхних и нижних) с частотами
соответственно или ис—йй при k=\, 3, 15, ... равны
и _
неч бок —
л
Л
cos 2
тЧМ — &
(7.28)
а амплитуды четных '(при А=2, 4, 6, ...) равны
т, _
с чет бок—
л
л тчм
^чм зш 2
тчм &
(7 29)
Здесь /пчм — индекс частотной модуляции, равный отношению девиации ча-
стоты Аш к частоте повторения Й = 2л/Г:
А со
й" = тлл
(7.30)
Примеры спектров ЧМ сигналов при передаче «точек», рассчи-
танных по этим формулам, показаны на рис. 7.7. Из рисунка вид-
но, что форма спектра сильно зависит от индекса модуляции и мо-
жет значительно отличаться от формы спектров при AM и , ФМ.
Заметим, что при индексах модуляции, близких к единице, основ-
ная энергия содержится в несущей и двух первых боковых. Отсю-
да можно сделать вывод, что ширина спектра ЧМ сигнала равна
ширине спектра сигналов с AM или ФМ при индексах модуляции
меньше единицы. При увеличении индекса модуляции количество
боковых частот, имеющих заметную энергию, возрастает. Если
увеличение индекса модуляции вызывается увеличением девиации
168
частоты (при постоянстве частоты повторения импульсов), то воз-
растает ширина спектра. Именно этот случай показан на рис. 7.7.
Еще больше спектр усложняется при передаче сигналов, в ко-
торых длительности нажатия частот сои и сов различны (например,
сигналов вида 1:5). В данном случае спектр становится несим-
метричным относительно несущей частоты.
0,76
1
0,Н mat,t
О/Ь „
f 0,02 аоз
Рис. 7.6. Законы измене-
ния частоты и фазы при
частотной манипуляции
прямоугольными «точ-
ками»:
а) мгновенная частота;
б) текущая фаза
0,0} о J
двь
0,50
о г/
I I F
05/
дгв /п*/,2
| доз
0,2/2
0,382
О
°,5
0,213
Л -1± £, ± 13
/71=3
7П
о роз
Рис. 7.7. Примеры спектров ЧМ сигналов в слу-
чае передачи прямоугольных «точек» при разных
индексах частотной модуляции m чм и постоян-
ной частоте повторения импульсов 62
-J—f
о т о
При телеграфировании и передаче данных по проводным ли-
ниям обычно используются индексы модуляции от 0,8 до 2. Выбор
индекса модуляции и девиации частоты описывается в разд. 7.7.
Рассмотрение спектров модулированных сигналов позволяет за-
метить, что методы модуляции можно разделить на две группы.
В первой труппе зависимость между модулирующим и модули-
рованным сигналами выражается простой функцией, благодаря че-
му спектр боковой полосы модулированного сигнала имеет такую
же форму, как спектр модулирующих импульсов. Таким свойством
обладает амплитудная модуляция, а также фазовая модуляция
прямоугольными импульсами. Эти методы можно назвать «линей-
ными».
Во второй группе зависимость между модулирующим и моду-
лированным сигналами выражается сложной функцией. Спектр мо-
дулированного сигнала не похож на спектр модулирующих им-
169
пульсов. Так обстоит дело при частотной модуляции, а также при
фазовой модуляции непрямоугольными импульсами. Эти методы
модуляции назовем «.нелинейными».
7.3. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ ПЕРЕДАЧЕ
ИМПУЛЬСОВ ПОСТОЯННОГО ТОКА
В аппаратуре передачи дискретных сообщений импульсы пос-
тоянного тока часто проходят через цепи с ограниченной полосой
пропускания, например, фильтры нижних частот, усилители. При
этом они изменяют свою форму вследствие возникновения переход-
ных процессов. Появление переходного процесса всегда связано с
изменением спектра сигнала на выходе цепи по сравнению со
спектром сигнала на ее входе (с отсечением части спектра, либо с
внесением амплитудно-частотных или фазо-частотных искажений).
Чем заметнее переходный процесс, тем больше возможность
ухудшения качественных показателей аппаратуры, тем сильнее на
импульс влияют шумы, колебания уровня и другие мешающие фак-
торы. Это нежелательное явление в аппаратуре и каналах переда-
чи дискретных сообщений устранить полностью невозможно. Од-
нако на практике влияние переходных процессов удается умень-
шить до допустимой величины путем применения различных мер.
Изучение переходных процессов целесообразно начать со слу-
чая передачи импульсов постоянного тока, поскольку этот случай
наиболее прост. Переходные процессы в различных конкретных
схемах изучались в курсах «Электротехника» и «Теория линейных
электрических цепей». Полученные там формулы невозможно при-
менить в системах передачи дискретных сообщений, поскольку кон-
кретная схема канала или фильтра либо бывает неизвестна, либо
слишком сложна. Поэтому главное внимание необходимо уделить
переходным процессам на выходе цепей, которые заданы только
своими частотными характеристиками (амплитудно-частотной и
фазо-частотной).
Расчет переходных процессов в данном случае состоит из трех
этапов. Вначале составляется математическая запись входного сиг-
нала. Пусть, например, на вход фильтра в момент t — Q подается
постоянное напряжение Uo (рис. 7.8а). Следовательно, входной
сигнал представляет собой так называемую ступенчатую функцию
|° при Z<01 (731)
(Uo при £>0j
С помощью интеграла Фурье можно найти ее спектр и записать
входной сигнал в следующем виде:
(оо
1 , 1 fsinco^ ,
v + — \-~7Tda
2 nJ®
о
(7.32)
Эта запись показывает, что ступенчатый сигнал с амплитудой
Uq состоит из постоянной составляющей U0/2 и бесконечной суммы
170
евх
О
Рис. 7.8. Переходный процесс в иде-
альном ФНЧ:
а) сигнал на входе; б) сигнал на вы-
ходе; в) иитепральный синус
синусоидальных компонент с амплитудами Uada/n<£>, спадающими
с увеличением частоты по закону параболы.
Затем берется математическая запись частотных характеристик
фильтра. В общем случае фильтр нижних частот (ФНЧ) может
иметь произвольные амплитудно-частотную и фазо-частотную ха-
рактеристики А (со) и а (.со) (рис. 7.9а). Рассмотрим вначале наи-
Рис. 7.9. Частотные характеристики произвольного
(а) и идеального (б) фильтров нижних частот
более простой случай так называемого ксидеального» ФНЧ (рис.
7.96), у которого в полосе пропускания коэффициент передачи пос-
тоянный, а фазовая характеристика линейна:
А (со) = Ао при
А (со) = 0 при
а (со) = со tQ
со &)Гр
со >согр
(7.33)
где t0 — групповое время замедления фильтра.
Наконец, на третьем этапе находим математическую запись вы-
ходного сигнала, умножая все спектральные компоненты входного
сигнала на амплитудно-частотную характеристику и вычитая из
аргумента спектральных компонент фазо-частотную характеристи-
ку. С помощью ф-л (7.32) и (7.33), например, получим для произ-
вольного фильтра
“гп
С Р ^(ю)sR1 [ю (— a(to)l а
J со
о
(7.34)
где А(0) —значение А(со) на нулевой частоте.
17.1
Для идеального фильтра это выражение упрощается:
(7.35)
Его можно записать так:
^вых(0 Q “Ь siсоГр(7 Q] . (7.36)
L z л • J
Здесь появилась функция
Г sin и .
six= —-dy, (7.37)
о
которая называется интегральным синусом и находится по табли-
цам (см., например, [43]). Она является нечетной функцией (см.
рис. 7.8в).
Рассчитанный по ф-ле (7.36) выходной сигнал показан на
рис. 7.86. Из рисунка видно,- что переходный процесс происходит
около момента времени (=70- Область нарастания напряжения на-
зывается фронтом переходного процесса. Фронт переходного про-
цесса на выходе фильтра запаздывает по отношению к моменту
включения напряжения на входе фильтра. Эта задержка равна
групповому времени замедления фильтра. При t = t0 амплитуда
достигает половины установившегося значения. Кроме того, можно
заметить, что по достижении установившегося значения сигнал не
остается постоянным, а претерпевает затухающие колебания (выб-
росы). Первый выброс самый большой, в данном случае он равен
9% от установившегося значения. В принципе, полностью сигнал
устанавливается лишь через бесконечно большое время. Аналогич-
ные выбросы предшествуют нарастанию.
Заметим, что идеальный .фильтр -нереализуем. Фильтр с бесконечно крутым
срезом и бесконечно большим затуханием должен иметь бесконечно большое
число звеньев и, следовательно., бесконечно большую величину времени замед-
ления. В данном примере взята конечная величина .времени замедления Харак-
теристики практических фильтров могут быть путем коррекции лишь прибли-
жены к изображенным на рис. 7.96. Несмотря на идеализацию, рассматриваемый
случай очень полезен, поскольку он легко анализируется и в то же время дает
результаты, близкие к практическим.
Из рис. 7.8 также видно, что напряжение на выходе фильтра
нарастает плавно, а не скачком. Время нарастания 7Н приближен-
но можно определить из треугольника АВС, в котором линия АС
проведена с крутизной, равной крутизне переходного процесса в
точке i = t0'.
(.g __б'рЛо _ Г с/^вых (В 1
1н L dt ]/=/„ ’
172
Время нарастания
Г duBblx (t) 1 v
L di J/= t„
С помощью ф-лы (7.36) получаем
тг 1
= — = 77- > (7.39)
wrp Ч гр
где frp — граничная частота фильтра. Таким образом, время нара-
стания в идеальном фильтре обратно пропорционально граничной
частоте фильтра.
Более подробный анализ для фильтров с произвольной формой амплитудно-
частотной характеристики показывает, что в общем случае время нарастания
определяется площадью амплитудно-частотной характеристики фильтра:
л А (0)
~ •
J X(<o)dco (7-4°)
о
Для реальных фильтров это выражение можно приближенно заменить формулой
где АД — ширина полосы пропускания. Для ФНЧ ширину полосы пропускания
можно приближенно считать равной частоте, на которой амплитудно-частотная
характеристика спадает до половины своего значения при нулевой частоте (по
другому, затухание нарастает на 6 дБ по сравнению с затуханием на нулевой
частоте). Пример определения ширины полосы пропускания ДЙ = 2лДД показан
Рис. 7 10. Фильтр с весьма плавным срезом.
а) частотная характеристика; б) переходный процесс
(r=.t—/0)
на рис. 7.10а. Следует отметить, что такой способ определения ширины полосы
пропускания отличается ют других известных, при которых ширина полосы бе-
рется на уровне 3 дБ.
Рассмотрим теперь ФНЧ (см. рис. 7.10а), у которого амплитуд-
но-частотная характеристика в полосе пропускания плавно изме-
няется по закону косинуса. Тем же путем, который применен вы-
ше, можно найти выражение для выходного сигнала при таком
ФНЧ. Рассчитанная кривая показана на рис. 7.106. Характерной
чертой этого переходного процесса является отсутствие колеба-
тельных выбросов. Практика показывает, что чем плавнее переход
173
от полосы пропускания к полосе задерживания в амплитудно-час-
тотной характеристике, тем меньше колебательные выбросы пере-
реходного процесса.
7.4. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ ПЕРЕДАЧЕ
МОДУЛИРОВАННЫХ СИГНАЛОВ
В телеграфии и при передаче данных по каналам связи обыч-
но передаются модулированные сигналы. Ширина канала всегда
строго ограничена, что приводит к возникновению на выходе кана-
ла переходных процессов, сильно влияющих на качество передачи.
Канал можно представить в виде эквивалентного полосового
фильтра. В настоящем параграфе рассматриваются переходные
процессы в относительно узкополосных фильтрах, у которых шири-
на полосы пропускания значительно меньше величины средней ча-
стоты. К таким фильтрам можно отнести почти все фильтры си-
стем тонального телеграфирования (кроме фильтров самых ниж-
них каналов). Закономерности этих переходных процессов в основ-
ном справедливы и для относительно широкополосных систем, к
которым можно отнести, например, системы передачи данных по
телефонным каналам. Некоторые особенности процессов в' относи-
тельно широкополосных системах отдельно рассмотрены в § 7.6.
Фазо-частотные характеристики фильтров считаются линейными.
Влияние фазовых искажений подробно рассмотрено в § 7.5.
Методика расчета переходных процессов для модулированных
сигналов остается такой же, какая была использована в предыду-
щем параграфе. Зная спектр входного сигнала и частотные харак-
теристики фильтра, определяется спектр, а затем и временная
функция для выходного сигнала.
ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ АМПЛИТУДНОЙ МОДУЛЯЦИИ
Если полосовой фильтр симметричен относительно своей сред-
ней частоты, а несущая частота также расположена симметрично,
т е. совпадает со средней частотой фильтра (рис. 7.11а, б), то вы-
числение переходного процесса в данном случае довольно просто.
При этом верхняя и нижняя боковые полосы сигнала находятся в
одинаковых условиях. Анализ показывает, что в рассматриваемом
случае огибающая переходного процесса по форме совпадает с пе-
реходным процессом в эквивалентном *) фильтре нижних частот
(рис. 7.11s). Поэтому все закономерности, полученные в предыду-
щем параграфе, распространяются на огибающую переходного
процесса ири симметричном расположении несущей. В частности,
плавный срез уменьшает выбросы. Время нарастания с учетом
ф-лы (7.41) будет равно
*) Частотная характеристика эквивалентного ФНЧ получается путем сдвига
характеристики полосового фильтра вниз на величину Ыс.
174
где AF=A(o/2n — ширина полосы пропускания полосового фильтра
на уровне 6 дБ, которая вдвое больше ширины полосы пропуска-
ния эквивалентного ФНЧ (см. рис. 7.11а).
Математически все это запишется так. Пусть входное напряжение имеет
вид (рис. 7.112а)
sBx (f) = U№ Oi (t) sin (&V + <Pi). (7.43)
где сое — круговая частота несущей; <pi — начальная фаза несущей; [/м — ам-
плитуда несущей; Oi(t) — единичная ступенчатая функция (равная 0 при /<0
и 1 при />0).
После вычисления для идеального фильтра выходное напряжение получится
в следующем виде:
«вых (0 = ^0 [4" + — si согр (Z— i0)l sin(coc<+<P1). (7.44)
I Z Л 1
Вычисленный по этой формуле выходной сигнал показан на
рис. 7.126. Видно, что огибающая имеет такую же форму, как пе-
реходный процесс на рис. 7.86.
о)
е8х
Рис. 7.11. Симметричный поло-
совой фильтр:
а) амплитудно-частотная ха-
рактеристика; б) симметрично
расположенная несущая часто-
та сигнала; в) эквивалентный
ФНЧ
Рис 7.12. Переходный процесс при
АМ в идеальном полосовом фильтре
при симметричном расположении не-
сущей частоты:
а) сигнал на входе; б) сигнал на вы-
ходе: в) интегральный косинус
Рассмотрим теперь новые закономерности, которые появляются
в полосовом фильтре, когда вышеприведенные условия не выпол-
няются, т. е. рассмотрим несимметричное расположение несущей в
несимметричном фильтре (рис. 7.13а). В данном случае верхняя и
нижняя боковые полосы сигнала находятся в разных условиях.
Анализ показывает, что при этом огибающая переходного процесса
175
по форме не совпадает с переходными процессами в двух возмож-
ных эквивалентных фильтрах нижних частот. Кроме того, при та-
ком варианте возникает не только 'переходный процесс по ампли-
Ч ч ч ч
ч ч ч ч
Рис. 7.13. Несимметричное расположение несущей частоты сиг-
нала:
а) при несимметричном полосовом фильтре; б) при идеальном
полосовом фильтре
туде, но также и переходный процесс по фазе. В общем виде вы-
ходное напряжение запишется (при линейной фазовой характери-
стике) так:
«вых W = UMM (т) sin [юст + (р + 0 (т)], (7.45)
где £7мЛ4(т)—огибающая; ф— начальная фаза выходного сигна-
ла; 0(т) — переходная фаза; r — t—10 (здесь t0— групповое время
замедления фильтра).
С помощью простых тригонометрических преобразований выра-
жение (7.45) можно представить так:
«вых W = [р (т) sin (Юст + (р) + q (т) cos (®ст + ср)], (7.46)
т. е. в виде двух колебаний, находящихся в квадратуре, у которых
переходному процессу подвержены только амплитуды. Функции
р(т) и q(x) называются соответственно синфазной и квадратурной
составляющими огибающей.
Расчеты показывают, что квадратурная составляющая исчезает
в случае «симметричного» фильтра. Квадратурная составляющая
обычно является нежелательной, так как она искажает форму сиг-
нала, и ее стараются уменьшить.
С помощью синфазной и квадратурной составляющих всегда
можно найти огибающую сигнала и переходную фазу:
(т) = |V(t) + ?2(t), (7-47)
0 (т) = аге tg^-Ф . (7.48)
Р(т)
Расчет для идеального фильтра при несимметричном располо-
жении несущей частоты сигнала (рис. 7.136) дает
^Чт+Ч^’Ч+Ч^Т] • (7Л9)
ЧЧ1 +» Ч - Ч <-14 Ч] <750)
176
где Дй— ширина фильтра; р — относительная величина сдвига
между несущей частотой сигнала и средней частотой фильтра:
„ 2Асо = 2 (со?— со0) г
Р ' АЙ Дй ‘
Здесь появилась функция
со
Рис. 7.14. Переходный процесс при AM >в идеальном полосовом
фильтре при несимметричном расположении несущей:
а) синфазная и квадратурная составляющие; б) огибающая пе-
реходного процесса
177
которая называется интегральным косинусом и находится по таб-
лицам (см., например, [43]). Она является четной функцией (см.
рис. 7.12s).
Вычисленные по ф-лам (7.49) и (7.50) составляющие показа-
ны на рис. 7.14а. Они рассчитаны для нескольких величин коэф-
фициента р.
Из рисунка можно заметить основное свойство квадратурной
составляющей: она существует лишь во время переходного про-
цесса, а в установившемся режиме исчезает.
На рис. 7.146 показаны огибающие для тех же значений коэф-
фициента р. Видно, что сдвиг несущей относительно середины по-
лосы пропускания фильтра увеличивает амплитуду опережающего
«хвоста» и приводит к появлению верхнего «хвоста», медленно до-
стигающего установившегося значения. Таким образом, общее вре-
мя переходного процесса заметно увеличивается. Однако крутизна
нарастания в средней части меняется незначительно. Поэтому вре-
мя нарастания можно и в этом
Рис. 7.15. Передача с частично подав-
ленной верхней боковой полосой:
а) частотная характеристика полосо-
вого фильтра; б) синфазная и квад-
ратурная составляющие и огибающая
переходного процесса при а=0,5
случае приближенно определять по
ф-ле (7.42).
Если несущую частоту расположить
у самого края полосы пропускания, то
становится возможной передача с ча-
стично подавленной одной боковой поло-
сой (ОБП). Рассмотрим для примера
фильтр, показанный на рис. 7.15а. Несу-
щую расположим в середине верхнего
-среза фильтра. При нечетно-симметрич-
ной относительно несущей частоты фор-
ме среза уменьшается влияние квадра-
турной составляющей. Рассчитанные со-
ставляющие и огибающая переходного
процесса для случая а=0,5 показаны на
рис. 7.-156. Крутизна переходного -процес-
са при передаче с ОБП увеличивается
примерно вдвое по сравнению с крутиз-
ной переходного -процесса при передаче
о-беих боковых полос.
ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ
ФАЗОВОЙ МОДУЛЯЦИИ
В случае передачи ФМ. сиг-
налов основной интерес пред-
ставляет переходный процесс
фазы. Пусть на входе фильтра
фаза несущего колебания изме-
нилась на Аф (от —Аф/2 до
Д-ф/2). Положим, что фильтр симметричен, и несущая частота сиг-
нала <ос совпадает со средней частотой фильтра со0. Можно найти
выходной сигнал
иБЫх (т) = Ци-44 W sin [соот + ф + 0т],
где огибающая равна
(т) = У Л2 (соо) cos3 + [2р(т)-Л (со0)J2 sin3
178
(7.52)
(7.53)
Рис. 7.16. Переходный процесс при ФМ в идеальном полосовом
фильтре:
а) нормированная переходная -фаза; 6) огибающая
179
а переходная фаза
© (Т) = arctg [ tg. (7.54)
L А (и0) 2 J
Например, для идеального полосового фильтра можно рассчи-
тать кривые, показанные на рис. 7.16. Синфазную составляющую
при этом находим по ф-ле (7.49).
Из рисунка видно, что при М$ = 180° фазового переходного про-
цесса нет (т. е. фаза на выходе фильтра изменяется скачкообразно),
но в этот момент амплитуда сигнала равна нулю. При остальных
величинах фазового скачка имеется переходный процесс длитель-
ностью около Ai~l/AF. Таким образом, длительность переходного
процесса фазы при ФМ со скачком менее 180° равна времени на-
растания огибающей при AM с двумя боковыми полосами. Процесс
имеет колебательные «выбросы». Можно показать, что переход-
ный процесс фазы при малых фазовых скачках похож по форме на
переходный процесс в эквивалентном ФНЧ.
ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ ЧАСТОТНОЙ МОДУЛЯЦИИ
При передаче ЧМ сигналов основной интерес представляет пе- '
реходный процесс частоты. Пусть на входе фильтра частота несу-
щего колебания изменилась на 2Дю( от юн=юо—Дю До Юв = юо+Дю,
где Дю — девиация частоты). Положим, что фильтр симметричен,
а рабочие частоты юн и сов располагаются симметрично по отноше-
нию к средней частоте фильтра юо (рис. 7.17а). Можно найти вы-
ходной сигнал
«вых (т) = икМ (т) sin [юот + <р + 0 (т)], (7.55)
где огибающая равна
/7иМ(т) = HMcos Дют /А2(юн) + {[2р (т)-Д(юн)] tg Дит — 2q (т)}\ (7.56)
а переходная фаза
0(т) = arc tg[2р (т) ~ А (с°н)1 tg Амт ~ 2q (Т) . (7.57)
А (<он)
Здесь синфазная и квадратурная составляющие p(t) и <?(т) вычис-
ляются для нижней рабочей частоты.
Нас интересует переходный процесс мгновенной круговой ча-
стоты, который можно найти дифференцированием переходной фа-
зы по времени
. , . d 0 (т)
Дю (т) =---— .
dr
После вычислений получим
Дсо (г) _ А (ин)__________2р (т) — А(сон)__________ gg)
Дю cos2 Дит А2 (ин) +{[2р(т) — Л (сон)] tg Дсот — 29(т)}2 '
На рис. 7.17 показаны графики переходных процессов частоты
и огибающей, вычисленные для идеального полосового фильтра.
180
Рис. 7.17. Частотная манипуляция:
а) симметричное расположение рабо-
чих частот относительно характери-
стики полосового фильтра; б) .и в)
переходные процессы мгновенной ча-
стоты и огибающей на выходе иде-
ального фильтра
181
Составляющие р(т) и ^(т) при этом находим по ф-лам (7.49) и
(7.50). Графики построены для трех относительных величин девиа-
ции частоты
Из рис. 7.17 видно, что переходный процесс частоты около точ-
ки т = 0 близок к линейному; его крутизна мало зависит от изме-
нения девиации частоты. Величина («выбросов» частоты возрастает
при увеличении девиации. Время нарастания переходного процес-
са частоты можно найти по формуле
(7.60)
Таким образом, время нарастания частоты при ЧМ равно времени
нарастания огибающей при AM с двумя боковыми полосами.
Амплитуда ЧМ сигнала вблизи точки т = 0 превышает устано-
вившееся значение, причем тем больше, чем больше девиация ча-
стоты.
Все предыдущие формулы для ЧМ были получены при усло-
вии, что рабочие частоты расположены симметрично относительно
средней частоты фильтра. При сдвиге рабочих частот крутизна пе-
реходного процесса уменьшается, но незначительно.
7.5. ВЛИЯНИЕ ФАЗО-ЧАСТОТНЫХ ИСКАЖЕНИЙ
В предыдущих параграфах переходные процессы были рассмот-
рены при условии линейной фазо-частотной характеристики. В ре-
альных каналах фазо-частотная характеристика обычно нелиней-
ная, что вызывает дополнительные искажения импульсов и моду-
лированных сигналов.
На практике трудно измерять фазо-частотные характеристики
каналов связи. Поэтому обычно измеряют групповое время замед-
ления (ГВЗ), представляющее собой производную от фазо-частот-
ной характеристики по частоте
/Г(Ю) = . (7.61)
dco
Типичные частотные характеристики фазы и группового време-
ни замедления полосового фильтра показаны на рис. 7.18. Фазо-
частотная характеристика нелинейна, а частотная характеристика
ГВЗ имеет подъемы у краев полосы пропускания. При передаче
по такому каналу спектральные компоненты сигнала, расположен-
ные у краев, будут приходить на вход приемника позже средних
спектральных компонент. В результате форма принятого сигнала
исказится.
Обычно частотную характеристику ГВЗ полосового фильтра
можно разложить на три компоненты: четно-симметричную, нечет-
но-симметричную и колебательную (рис. 7.19). Наиболее опасной
182
нечетно-симметричная
обычно является
она 'вносит наибольшую разницу
нижней боковых полос сигнала.
ц1г(ы');а(ы)
- tz(w)
Частота
Рис. 7.18. Типичные частот-
ные характеристики фазы и
группового времени замед-
ления полосового фильтра
компонента, поскольку
в условия передачи верхней и
Рис. 7.19. Три возможных ком-
поненты частотной характери-
стики |Г>ВЗ:
а) четно-симметричная; б) не-
четно-симметричная; в) колеба-
тельная
Для вычисления переходного процесса при наличии небольших колебатель-
ных отклонений можно использовать простые (формулы теории «парного эха».
Рассмотрим, например, фильтр нижних частот (рис. 7.20), у которого фазо-час-
5)
Опережающее
эхо
hxo
U(Z)h
Основной, сигнал
Суммарный
переходный
процесс
toxo
Отстающее'
эхо
Рис. 7.20. Метод «парного эха»:
а) частотные характеристики ФНЧ с небольшими фазовыми искажениями; б) схе-
матическое представление переходного процесса в виде суммы основного сигнала
и двух эхо-сигналов
Т
тотная характеристика имеет небольшие синусоидальные отклонения от прямой
линии:
со
а (со) = со 10 — b sin п л — , (7.62)
®гр
где Ь — максимальное отклонение от линейной зависимости, рад; п—• число по-
лупериодов в полосе пропускания (на рис. 7.20 взято ге=5).
Частотная характеристика Г.ВЗ тоже будет иметь колебательную неравно-
мерность
da (со) п л Ь пл Ь
tr (со) = —---= t0—--------cos-----
d со соГр соГр
(7.63)
Обозначим полный размах неравномерности 1Г1ВЗ через Ptr:
nab
МТ = 2----
®rp
(7.64)
183
Можно показать, что при такой фазо-частотной характеристике переходный
процесс при AM будет состоять из трех составляющих, среди которых первая
является переходным процессом при отсутствии фазовых искажений:
п
Ч ВЫХ (Т) — ио (Т) + „ ио
2 \ (Огр/ 2 \ а>гр1
В уравнении первый член называют основным сигналом, второй —
щим эхо-сигналом, а третий — отстающим эхо-сигналом.
Форма эхо-сигналов совпадает с формой основного сигнала, а
зависит только от максимального отклонения фазы:
б'ЭхО _
Uo ~ 2
Согласно выражению (7 64)
А /г ®гр A tг/гр
2п п п
(7.65)
опережаю-
амплитуда
(7.66)
отсюда
U ЭНО _ А ^г/гр
U,, ~ 2п
Поэтому можно оказать, что амплитуда эхо-сигналов зависит (при заданной /гр)
как от неравномерности 1ГВЗ, так и от числа полупериодов неравномерности в
полосе пропускания Опережение (или отставание) эхо-сигнала £эхо зависит от
числа прлупериодов неравномерности в полосе пропускания (при заданной /гр)
п я п
^ЭхО = = л,
®гр '-/гр
Опережение (или отставание) можно выразить через время нарастания пе-
реходного процесса, которое приближенно равно:
(7.67)
(7.68)
2/гр ’
откуда
/эхо л(7.69)
Пример расположения эхо-сигналов при b = 0,6 рад и пл;2 по-
казан на рис. 7.206. Как видно из этого схематического рисунка,
суммарный переходный процесс претерпевает значительные изме-
нения. Во-первых, он сдвигается в сторону опережения (при фазо-
вых искажениях, показанных на рис. 7.20а). Крутизна его при этом
почти не изменяется. Во-вторых, значительно увеличивается верх-
ний выброс. Наконец, в-третьих, появляется опережающий «хвост».
В целом переходный процесс заметно удлиняется.
Если фазовые искажения имеют противоположный характер, то
опережающее и отстающее эхо изменяют знаки на противополож-
ные. В результате значительно увеличится опережающий выброс
вниз, а сверху появится «хвост», медленно нарастающий к уста-
новившемуся значению. Фронт сдвинется в сторону отставания.
Итак, при фазовых искажениях колебательного вида переход-'
ный процесс перестает быть нечетно-симметричным относительно
своей средней точки. Фазовые искажения приводят к удлинению пе-
реходного процесса за счет «хвостов». Эти «хвосты» являются
184
своеобразной помехой для соседних импульсов; они вызывают по-
явление сильных взаимных влияний импульсов (так называемых
характеристических искажений).
Хотя пример расчета был приведен для фильтра нижних частот,
все полученные формулы и закономерности распространяются и на
переходные процессы в симметричных полосовых фильтрах при
расположении несущей частоты в середине фильтра. Но при этом
следует учитывать, что п — число полупериодов в половине полосы
пропускания, и вместо frp подставлять полуполосу \Fj2.
Метод парного эхо применим при неравномерностях частотных
характеристик колебательного вида. Примерно такие же искаже-
ния импульсов возникают и при других возможных формах нерав-
номерности ГВЗ: четно-симметричной и нечетно-симметричной (см.
рис. 7.19).
Фазовые искажения вызывают появление взаимных влияний
импульсов также при ЧМ и ФМ.
По приведенным выше формулам можно точно рассчитать до-
пустимые неравномерности фазы или ГВЗ. Задавшись допустимой
величиной эхо-сигнала Пэхо/[/о=0,14-0,2, получим по ф-ле (7.66)
допустимую неравномерность фазы Ьдоа = 0,2ч-0,4 рад. По выраже-
нию (7.67) можно определить допустимую неравномерность ГВЗ:
A tFдоп = у- = (0’2T°’4)ra (7.70)
На практике часто пользуются приближенной формулой
А/гдоп~-^> (7.71)
где С — скорость передачи, бит/с. Она справедлива при колеба-
тельных и четно-симметричных неравномерностях ГВЗ. Если не-
равномерность имеет нечетно-симметричный вид, то допустимая ве-
личина должна быть в несколько раз меньше, примерно
. . ~ ОдЗ
Л -г доп ~
(7.72)'
Если неравномерность ГВЗ имеет сложный характер, причем яв-
ной нечетно-симметричной компоненты не видно, то можно поль-
зоваться ф-лой (7.71).
Для уменьшения иза-
HMHOiro влияния импульсов
используются фазовые кор-
ректоры. Их устройство рас-
сматривается в курсе «Тео-
рия линейных электрических
цепей». Частотная характе-
ристика ГВЗ фазового кор-
ректора делается обратной
частотной характеристике
канала связи (рис. 7.21).
Рис 7 21. Корректирование частотной ха-
рактеристики ГВЗ с помощью фазового
корректора
185
Суммарная характеристика канала и корректора б'удут иметь мень-
шую неравномерность. Остаточная неравномерность обычно имеет
колебательный характер. Это объясняется тем, что конечное число
звеньев корректора позволяет получить нужные величины ГВЗ
лишь при конечном числе частот. В промежуточных точках полу-
чаются отклонения.
Использование фазовых корректоров позволяет в том же кана-
ле удвоить или утроить скорость передачи. Тщательное корректи-
рование фазо-частотных, а также амплитудно-частотных характе-
ристик позволяет достигнуть еще больших скоростей передачи.
7.6. ОСОБЕННОСТИ СПЕКТРОВ И ПЕРЕХОДНЫХ ПРОЦЕССОВ
ПРИ НИЗКОЙ НЕСУЩЕЙ ЧАСТОТЕ
При передаче импульсов с помощью низкой несущей частоты,
сравнимой по величине с шириной канала (т. е. в относительно
широкополосных каналах), возникают дополнительные искажения.
Например, при передаче данных по телефонным каналам несущая
частота всегда сравнима с величиной ширины канала. В системах
тонального телеграфирования -с этими искажениями приходится
считаться в самых нижних каналах.
Спектры импульсов постоянного тока, как уже указывалось в
§ 7.1, в принципе, занимают бесконечно широкую полосу (см., на-
пример, спектр сигнала 1 : 3 на рис. 7.22а). Это приводит к тому,
Рис. 7.22. Спектры при передаче сигналов '1:3:
а) для импульсов постоянного тока; б) для AM сиг-
нала с низкой несущей частотой fc
что заметная дополнительная часть энергии нижней боковой поло-
сы входного сигнала попадает в полосу пропускания канала. По-
строим, например, спектр AM сигнала при передаче импульсов со
спектром, показанным на рис. 7.22а. Согласно ф-ле (7.13) компо-
186
ненты нижней боковой полосы AM сигнала при т=\ будут равны
k
sin —
u(f)= sin - W + Ф11. (7.73)
а
Здесь а>с — круговая несущая частота сигнала; Q — круговая ча-
стота повторения модулирующего сигнала; ik— номер боковой ча-
стоты.
При возрастании номера k частота компоненты вначале приб-
лижается к нулю, пока 1ЙП<1(ос, а затем при £Q><oc она начинает
увеличиваться. Нижняя боковая частота как бы «отражается» от
оси ординат (рис. 7.226). Получается, что в полосу частот, содер-
жащую основные спектральные компоненты сигнала, попадают до-
полнительные спектральные компоненты нижней боковой полосы.
По отношению к основному сигналу эти «отраженные» компонен-
ты являются своеобразной помехой.
Эта «помеха» искажает переходный процесс при передаче сиг-
налов. Величина и форма «добавки» к переходному процессу зави-
сят от начальной фазы несущей <р, т. е. от того, в какой точке не-
сущего колебания произведена манипуляция (изменение амплиту-
ды при AM, частоты при ЧМ, фазы при ФМ).
Начальная фаза несущей в момент манипуляции может -иметь
любое значение от нуля до 2л, если несущая и тактовая частоты не
синхронизированы друг с другом. Вследствие этого кривая пере-
ходного процесса будет «качаться» внутри определенной области.
Например, для AM получена следующая формула для крайних
значений огибающей переходного процесса на выходе идеального
фильтра при симметричном расположении несущей:
АГкр(т)= UMA0
Айт
sin--
1.1. ДПт , Ай 2
______gj--------- ------
2 л 2 4ла>с АЙт
2
(7.74)
Здесь AQ = 2nAA — ширина полосы пропускания фильтра; <йс =
= 2л/с — несущая частота сигнала; UM— амплитуда AM сигнала;
Ао — коэффициент передачи фильтра.
Влияние величины несущей частоты <вс определяется третьим
слагаемым в этом выражении. При относительно высокой несущей
частоте (при АЙ/4пй0С1) третьим слагаемым можно пренебречь.
При этом остается обычная огибающая AM сигнала (сравни с
ф-лой (7.44)].
Пример вычисленных по ф-ле (7.74) крайних значений огибаю-
щей AM сигнала показан на рис. 7.23. Чтобы определить ширину
области качаний, приравняем МКр(т) = [7мА3/2. Отсюда
gj АЙТкач 1 gjn АЙТкач _ q
2 2<осткач 2
187'
Считая область качаний небольшой по сравнению с временем на-
растания, т. е. ДйтКач<С1, можно положить
AQtKa4 ___ . AQrKa4 AQrKa4
2 ~ 2 ~ 2
Тогда из приведенного условия получим
•са «при включении низкой несущей частоты
Отсюда полная ширина области качаний равна
Аткач = . (7.76)
2 31 /о
Таким образом, ширина области качаний фронта переходного
процесса составляет примерно 1/3 длительности полупериода не-
сущей.
Формула (7.76) показывает, что ширина области качаний пере-
ходного процесса определяется лишь несущей частотой и не зави-
сит от ширины фильтра, т. е. она остается постоянной в любой точ-
ке канала, в том числе и на входе фильтра, где спектр ничем не
ограничен. Следовательно, качание фронта — это не особенность
переходного процесса, а о'бщее свойство сигнала. При манипуля-
ции амплитуды переменного тока без привязки к его фазе дейст-
вует своеобразный закон неопределенности: момент включения пе-
ременного тока может быть определен по огибающей лишь с точ-
ностью, равной одной трети длительности полупериода переменно-
го тока. Аналогично обстоит дело при ФМ и ЧМ. Величина кача-
ний при этих методах модуляции также определяется ф-лой (7.76).
Из рассмотренных особенностей переходного процесса при низ-
кой несущей частоте вытекают три возможных способа устранения
вредного влияния качаний фронта.
1. Ограничение спектра входного сигнала (рис.
7.24), т. е. отказ от строго прямоугольной формы модулирующих
импульсов. Для этого на входе модулятора (который должен обла-
188
дать линейной модуляционной характеристикой) необходимо вклю-
чить фильтр нижних частот ФНЧ\. Если используется «линейный»
метод модуляции (AM или скачкообразная ФМ), то спектр моду-
лированного сигнала также будет ограниченным. При этом в поло-
несущеи
Преобразователь
Модулятор частоты
Преобра-
зователь
частоты Детектор
Пиния
I Переда- |
ющий ГА"
L___ рильтр I——
Генератор
несущей
S') ,, Передаю-
J Источник щии
импульсов Модулятор роль nip диния
| Приемный
fl рильтр
Приемный
шильтр
Т-! Генератор
1 несущей
Детектор
Синхрониз
устр-во
Рис. 7.24. Способы устранения вредного действия низкой несущей частоты-
а) ограничение спектра входного сигнала; б) применение преобразования
частоты; в) синхронизация несущей частоты с тактовой частотой
су канала дополнительная энергия нижней 'боковой полосы не по-
падет, что легко увидеть на рис. 7.226. Граничную частоту ФНЧ1
можно легко определить из этого рисунка:
frpiC/c + fi,’ (7.77)
где fc — несущая частота; fi — нижняя граница полосового фильтра.
Этот спосо'б менее эффективен при «нелинейных» методах мо-
дуляции (ЧМ, нескачкообразной ФМ).
2. Преобразование частот (рис. 7.246). Модуляция при
этом осуществляется на высокой несущей частоте. Далее спектр
ограничивается специальным фильтром (с одной стороны или с
обеих), что позволяет перенести затем его в низкочастотную об-
ласть без опасности возникновения качаний фронтов. Недостаток
данного способа — значительное усложнение схемы за счет преоб-
разователей частоты.
189
3. Синхронизация несущей частоты с переда-
ваемыми импульсами (рис. 7.24в). В этом случае манипу-
ляция будет производиться каждый раз при одной и той же фазе
несущей. Данный способ осуществим лишь в аппаратуре, исполь-
зующей синхронный способ передачи.
7.7. СВЯЗЬ МЕЖДУ СКОРОСТЬЮ ПЕРЕДАЧИ И ШИРИНОЙ
КАНАЛА
Изучение спектров сигналов и переходных процессов позволяет
установить связь между скоростью передачи и шириной исполь-
зуемого канала связи. Из спектральных характеристик можно оп-
ределить предельную скорость модуляции. Рассмотрим, например,
рис. 7.16, где показан спектр при работе импульсами постоянного
тока. Основная часть энергии при передаче «точек» содержится в
двух первых компонентах спектра: постоянной составляющей и
первой гармонике с частотой Д = 1/2то, где то — длительность эле-
ментарной посылки. Считая, что достаточно передавать лишь эти
две компоненты, получаем минимальную необходимую полосу ча-
стот (при работе импульсами.постоянного тока):
<7'78)
ZTq Z
где В — скорость модуляции, бод. Через такую полосу частот прой-
дет основная часть энергии сигнала не только при «точках», но и
при других видах сигналов. Это можно увидеть, к примеру, на
рис. 7.1г.
Предельная скорость модуляции при работе импульсами пос-
тоянного тока будет равна
Вмако = 2AF, (7.79)1)
При рассмотрении модулированных сигналов можно увидеть,
что предельная скорость снижается вдвое за счет передачи двух
боковых полос. Из рис. 7.3, на котором показан спектр AM сигна-
ла, видно, что для передачи основной доли энергии сигнала необ-
ходимо пропускать полосу от нижней первой боковой частоты
fc— 1/2tq до верхней первой 'боковой частоты fc + l/2-to- Минималь-
но необходимая полоса частот (при передаче модулированным сиг-
налом с двумя боковыми полосами) будет равна *
д/',,„= А- й- <7-80>
к То
Предельная скорость модуляции в этом случае будет равна
Вмакс = АЛ (7.81)
Рассматривая спектры модулированных сигналов с ФМ и ЧМ,
легко видеть, что ф-лы (7.80) и (7.81) справедливы и при этих ме-
тодах модуляции. В отношении ЧМ необходимо заметить, что фор-
*) Эта формула называется формулой Найквиста.
190
мулы справедливы лишь при индексах модуляции, равных или
меньших единицы:
Д/ 2Д/ .
тчм = V= р < b
Г D
(7.82)
где Д/— девиация частоты; F— частота повторения импульсов при
передаче ««точек»; В — скорость модуляции, бод. При ЧМ с индек-
сом модуляции, большим единицы, полоса частот должна быть
увеличена по сравнению с полосой, определяемой по ф-ле (7.80).
Чем больше девиация частоты, тем большая ширина полосы тре-
буется.
Изучение переходных процессов в каналах связи при передаче
импульсных сигналов позволяет уточнить вышеприведенные фор-
мулы. По заданной ширине канала и по форме его частотных ха-
рактеристик можно рассчитать конкретную кривую переходного
процесса на выходе канала. Это дает возможность 'более обосно-
ванно выбрать длительность элементарной посылки, т. е. опреде-
лить практическую скорость модуляции.
Рассматриваемый способ позволяет учесть вредное влияние
«выбросов» и «хвостов» переходного процесса, вредное влияние
фазо-частотных искажений, ухудшение от сдвига несущей частоты
относительно середины канала, полезный эффект от фазовых кор-
ректоров и т. д.
Для простоты можно положить, что переходный процесс проис-
ходит по линейному закону. На рис. 7.25а показана упрощенная
дуляции
а) упрощенная форма переходного процесса; б) пе-
редача «точек» при гго=<я; в) принимаемые «точки»
форма переходного процесса амплитуды модулированного сигнала.
Время нарастания определяется по приближенной ф-ле (7.42):
191
При передаче импульсных сигналов длительность единичного
элемента должна быть больше времени нарастания, чтобы сигнал
успевал достигнуть установившегося значения. Минимально воз-
можная длительность единичного элемента равна времени нара-
стания (рис. 7.256, в). Если дальше уменьшать длительность эле-
мента, то возникнут сильные характеристические искажения. Итак,
_ 1 _ / ~ 1
Т0МИН — — Тн ~ •
£*макс г
Отсюда Вмэкс« 2Д77, что совпадает с ф-лой (7 79)
Реальный переходный процесс имеет не линейную, а скруглен-
ную форму, поэтому его полная длительность превышает время на-
растания, определяемое ф-лой (7.41). В результате практически
достижимые скорости получаются меньше тех, которые были полу-
чены выше. Исходя из этого скорость модуляции дискретных сооб-
щений при работе импульсами постоянного тока
Впракт« 1.4ДА. (7.83)
При работе сигналами AM, ЧМ или ФМ с двумя боковыми полоса-
ми эта скорость уменьшается вдвое:
ВпраКт«0,7АА. (7.84)
Передача сигналов с частично подавленной одной боковой по-
лосой (ОБП), как было показано выше, позволяет почти удвоить
скорость модуляции (на практике повысить в 1,6-71,8 раза)^ По-
этому при методах передачи с ОБП практическая скорость моду-
ляции определяется выражением
ВпРакт-(1,1.4-1,25)АЕ. (7.85)
Все приведенные формулы справедливы при двухпозиционных
способах передачи. Для них скорость передачи С (в битах в секун-
ду) равна скорости модуляции В. Применение многопозиционных
способов позволяет увеличить скорость передачи в log2m по срав-
нению со скоростью модуляции, где т — число позиций сигнала:
C = Bjog2m. (7.86)
Так, например, четырехпозиционные способы (например, способ
двукратной относительной фазовой модуляции) .позволяют увелили-
чить скорость передачи канала в два раза, восьмипозиционные спо-
собы — в три раза.
Очень важно определить, что называется шириной полосы про-
пускания ДА в вышеприведенных формулах. Если затухание нара-
стает плавно и симметрично относительно несущей частоты, то
граница полосы пропускания определяется на уровне затухания
6 дБ. Если же в полосе пропускания имеются нечетносимметрич-
ные (относительно несущей частоты) и колебательные отклонения
затухания, то они не должны превосходить 2—3 дБ. Кроме того,
необходимо проверить, удовлетворяет ли неравномерность частот-
ной характеристики группового времени замедления требованию
A tT с Д tr доп яэ —— .
192
Если не удовлетворяет, то необходимо либо уменьшить скорость
передачи, либо откорректировать частотную характеристику ГВЗ.
При методе частотной модуляции нужно определять еще девиа-
цию частоты Д/. Как показано в гл. 9, целесообразно выбирать
коэффициент
|J = ^~0,7. (7.87)
На практике берут р^0,7. Отсюда девиация частоты должна
выбираться из условия
Д^<0,35ДК. (7.88)
Зная рабочую скорость модуляции и девиацию частоты, легко оп-
ределить индекс частотной модуляции по ф-ле i(7.82).
Рассмотрим применение вышеприведенных рекомендаций на
примерах.
Пример 1. Найти необходимую 'ширину полосы пропускания канала ТТ
с ЧМ для работы со скоростью 50 бод.
По ф-ле (7J84) -находим ДЕ»ВПракт/0,7=150/0,7=71 Гц. С запасом берем
ДГ«вО Гц. Учитывая, что на -расфильтровку между соседними каналами необ-
ходимо -оставить около 40 Гц, получим, что один канал займет полосу 80+40 =
= L20 Гц. Найдем теперь девиацию частоты по ф-ле '(7.88): Д/^0,35ДР=0,35-80=
= 28 Гц. ‘Берем Д/«Э0 Гц. Индекс частотной модуляции согласно (7.82) полу-
чается равным /пщц =2Д//В=2-30/50=11J2. Предельная скорость модуляции та-
кого канала по ур-нию :(7.81) будет ВМакс=ДГ=’80 бод.
Пример 2. Определить практическую скорость передачи информации в те-
лефонном -канале при использовании двукратной фазовой модуляции (ДФМ).
-Ширина пол-осы пропускания телефонного канала по частотной характери-
стике затухания ДГ=-ЗГОО Гц. Ширина по частотной характеристике ГВЗ при
наилучшей коррекции получается несколько меньше, ДР=3000 Гц. Предельная
скорость модуляции при ФМ -будет равна согласно |(7.'81) ВМакс=ДГ—3000 бод.
При ДФМ скорость передачи получится вдвое больше, т. е. Смаке =6000 бит/с.
Допустимая -неравномерность ГВЗ -в данном случае во -всей полосе пропускания
равна
При средней степени коррекции ширина полосы получится около ДЕ=
= 2600 Гц, поэтому практическая -скорость передачи при ФМ Впракт ~0,7-2600=
= 1820 бит/с.
При ДФМ скорость передачи получится вдвое больше, т.*е. Спракт«
«3600 бит/с. Допустимая неравномерность ГВЗ в полосе пропускания
Д/г доп» 1/Сдракт—1/3600 = 0,28 -МС.
Если фазо-вую коррекцию совсем не применять, то допустимые скорости
передачи будут еще меньше: до 11200 бит/с при ФМ и до 2400 -бит/с при ДФМ.
По коммутируемым телефонным каналам, которые имеют худшие фазовые и
амплитудно-частотные характеристики, -работают со скоростями 600-Э-1200 бит/с.
Установленные в этом параграфе закономерности позволяют
приближенно определять возможную скорость передачи при за-
данной ширине канала и, наоборот, необходимую ширину канала
при заданной скорости передачи дискретных сообщений. Более
точные результаты можно получить, проверив форму переходного
процесса -по тем формулам, которые приведены в предыдущих па-
раграфах. Дальнейшее уточнение может быть получено путем рас-
чета краевых искажений импульсов и вероятности ошибки, рас-
сматриваемых в гл. 9.
7—60 ‘193
ГЛАВА 8
Построение дискретных каналов
8.1. ПРИНЦИПЫ ОБРАЗОВАНИЯ КАНАЛОВ
Передача дискретной информации из одного пункта в другой в
зависимости от объема информации и времени, определенного для
ее передачи, может быть осущест1влена по физическим воздушным
и кабельным линиям или каналам связи, организованным путем
уплотнения физической линии. По физическим линиям передача
обычно ведется посылками постоянного тока, скорость передачи не
превышает 50 бод. В случае необходимости увеличения скорости
передачи информации или создания в определенном направлении
нескольких каналов передачи дискретной информации использу-
ются канал тч систем высокочастотного телефонирования и груп-
повые тракты этих систем, которые образуются путем частотного
уплотнения линий связи. Использование указанных каналов и
трактов для передачи данных и частотного телеграфирования на-
зывается вторичным уплотнением каналов и трактов.
При осуществлении вторичного уплотнения следует различать
два основных случая:
1) в спектре канала тч или группового тракта создается один
канал передачи двоичных сигналов. Обычно так организуются си-
стемы передачи данных на средней и высокой скоростях и факси-
мильная связь;
2) в спектре канала тч создается несколько каналов передачи
двоичных сигналов. Так организуются система передачи данных
на низкой скорости, системы частотного и временного телеграфи-
рования.
В первом случае система передачи двоичных сигналов будет
одноканальной, а во втором — многоканальной.
Деление канала тч в многоканальной системе на несколько
двоичных каналов может выполняться несколькими способами.
Существуют системы с делением каналов:
— по времени (временное деление канала тч);
— по частоте (частотное деление канала тч);
— по частоте и времени (частотно-временное деление каналов).
194
При временном делении на противоположных концах связи к каналу тч по-
очередно «а определенный отрезок времени подключаются передатчик и прием-
ник информации одного двоичного канала. Подключение осуществляется распре-
делителями (электронными или механическими), работающими на обоих концах
канала тч синхронно и сиифавно. Такой принцип (увеличения числа двоичных ка-
налов носит название принципа многократности. Каждый из образованных двоич-
ных каналов обычно называют кратом (рис. 8.1а). Число крат (каналов), кото-
Станция А
Z7 сектор I сектор
(крат) (крат)
Станция Б
Рис. 8.1. Охема, поясняющая принцип вторичного
а) многократная временная система; б) система
Двоичные каналы
'уплотнения:
частотного уплотнения
рое можно получить для передачи двоичных сигналов со скоростью 50 оод по*
каналу тч, определяется наибольшей скоростью передачи сигналов, обеспечивае-
мой аппаратурой вторичного уплотнения. Для различных современных систем
эта скорость составляет 24004-7200 бод. Таким образом, имеется возможность об-
разования от 48 до 144 пятидесятибодных синхронных каналов.
При частотном делении полоса частот канала тч с помощью фильтров де-
лится на несколько узкополосных частотных каналов, в каждом из которых с
использованием того или другого метода .модуляции образуется отдельный двоич-
ный канал (рис. 8.16). Число узкополосных каналов зависит от ширины канала
тч и необходимой скорости передачи посылок. При скорости работы по каждому
из двоичных каналов 150-4-100 бод оно колеблется от 1й до 24. Такой метод вто-
ричного уплотнения применяется при телеграфной передаче.
Если узкополосные двоичные каналы организуются в спектре
канала тч, т. е. в полосе 3004-3400 Гц, то их называют каналами
тонального телеграфирования (ТТ). Если же для образования нес-
кольких двоичных каналов выбирается спектр выше разговорного'
(34004-10000 Гц), то такие каналы называются каналами надто-
нального телеграфирования (НТ).
Каналы тч, предоставляемые для передачи дискретной инфор-
мации, могут быть организованы по двух- или четырехпроводной
схеме.
При двухпроводной схеме (рис. 8.2а) к абонентскому аппарату
подключается двухпроводная линия. Передача и прием сигналов
производится в разных частях спектра канала тч. Разделение на-
правления 'передачи и приема осуществляется разделительными
фильтрами (обычно вилкой фильтров Д и Л).
7* 195.
При четырехпроводной схеме (рис. 8.26) к абонентскому аппа-
рату подводится четырехпроводная линия. По одной паре ведется
передача, а по другой — прием сигналов. В данном случае весь
Рис. 8.2. Передача информации по двухпроводной (а) и четырехпроводной
(б) схемам
електр канала тч используется либо для передачи, либо для приема
сигналов. Скорость работы при этом может быть значительно вы-
ше,. чем в первом случае, когда для передачи и приема сигналов
используется соответственно менее половины спектра канала тч.
196-
Рассмотрим преимущества и недостатки различных методов вторичного уп-
лотнения.
При применении временной системы по каналу связи передается сигнал .зна-
чительной мощности. 'Поэтому эти системы хорошо ^приспособлены для работы
по радиоканалам. Вся мощность передатчика в данном случае расходуется для
передачи одного сигнала. Взаимного влияния между каналами нет, так как в
каждый момент времени передается только один сигнал, несущий информацию.
Недостаток .временного деления каналов заключается в сложности много-
кратной синхронной оконечной аппаратуры -и уменьшении маневренности связи
за счет усложнения системы выделения отдельных каналов или их групп.
Частотный метод деления каналов позволяет достаточно просто решать воп-
рос выделения или ответвления любого числа каналов. Кроме того, при этом
методе деления для работы может использоваться любая оконечная аппаратура.
К недостаткам частотного метода относятся следующие:
1. Уровень передачи в каждом частотном канале должен быть небольшим,
так как суммарный уровень всех частотных каналов, образованных в данном
канале тч или .групповом тракте, не должен превышать уровня токов, исполь-
зуемых при телефонировании. В противном случае канал связи, который вторич-
но уплотнен, окажется перегруженным и в соседних телефонных каналах или
групповых .трактах появятся помехи.
2. Значительная часть диапазона частот канала связи уходит на расфиль-
тровку между отдельными частотными каналами и, следовательно, непроизво-
дительно теряется.
'3 . Возможно взаимное влияние каналов как вследствие несовершенства
фильтров отдельных каналов, так и при перегрузках канала связи вследствие
нелинейных искажений сигналов.
Преимущества, присущие методам -временного и частотного делений канала
связи, реализованы в аппаратуре, использующей частотно-временной метод деле-
ния каналов. Это позволило получить большее -число двоичных каналов в канале
связи и сохранить гибкость связи.
Учитывая положительные и отрицательные стороны каждой из
систем вторичного уплотнения, можно сказать, что для работы по
радиоканалам целесообразно использовать временной метод вто-
ричного уплотнения, а для работы по телефонным каналам и груп-
повым трактам проводных линий связи — ча-стотный метод вторич-
ного уплотнения.
Рассмотрим различные виды каналов передачи двоичной ин-
формации.
8.2. ТЕЛЕГРАФНЫЕ КАНАЛЫ ПОСТОЯННОГО ТОКА
ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И КЛАССИФИКАЦИЯ СХЕМ
ТЕЛЕГРАФИРОВАНИЯ НА ПОСТОЯННОМ ТОКЕ
В зависимости от метода телеграфной работы схемы телегра-
фирования разделяются на симплексные и дуплексные.
Симплексным называется такой способ телеграфной передачи,
при котором передача ведется по одному проводу поочередно в
одну и дру-гую сторону.
Дуплексным называется такой способ телеграфирования, при
котором по одному проводу ведутся одновременно передача и
прием телеграфных импульсов.
Как при симплексном, так и дуплексном способах передача
может производиться импульсами тока одного или двух направ-
197
лений — однополюсная и двухполюсная работа соответственно.
При однополюсном телеграфировании рабочая посылка передает-
ся током (с амплитудой 7), а посылка покоя — прекращением пере-
дачи тока (или наоборот). В случае двухполюсного телеграфиро-
вания передача рабочей посылки ведется током одного направле-
ния (например, с амплитудой +/), а посылки покоя — током про-
тивоположного направления (с амплитудой —I).
Из сравнения рассмотренных методов телеграфирования мож-
но сделать следующие выводы:
1. Изменение входящего тока меньше сказывается на работе
приемных устройств при двухполюсной работе, так как в этом слу-
чае рабочая посылка и посылка покоя изменяются в равной степе-
ни. При однополюсной работе изменяется только токовая посылка.
2. Вследствие большей крутизны нарастания тока сигнала при
двухполюсной работе значительно меньше сказывается влияние
токов помех, имеющихся на линии.
Благодаря более высокой помехозащищенности система двух-
полюсного телеграфирования нашла широкое применение.
По принципу включения передатчика симплексные схемы теле-
графирования, работающие током одного направления, делятся на
схемы рабочего тока, в которых при отсутствии передачи контакты
передатчика разомкнуты и тока в линии нет, и схемы постоянного
тока, в которых при отсутствии передачи контакты передатчика
замкнуты и в линии постоянно протекает ток.
Дуплексные схемы телеграфирования подразделяются на диф-
ференциальные и мостиковые. В нашей стране в основном исполь-
зуются дифференциальные схемы, которые более просты и удобны
в эксплуатации.
СИМПЛЕКСНЫЕ СХЕМЫ ТЕЛЕГРАФИРОВАНИЯ
Для включения стартстопных аппаратов используется исключи-
тельно схема на постоянном токе. Это объясняется тем, что она
обеспечивает стабильный момент отпускания приемного электро-
магнита, который управляет пуском в ход приемника телеграф-
ного аппарата.
Принципиальная схема телеграфирования на постоянном токе
применительно к стартстопному аппарату СТА-М67 показана на
рис. 8.3. Все приборы в схеме включены последовательно, старт-
стопный контакт передатчика при отсутствии передачи замкнут
и в цепи течет ток.
При работе на расстояниях до 2004-250 км аппараты включа-
ются по схеме постоянного тока с линейной батареей на одной
станции. Для улучшения надежности работы аппарата (увеличе-
ния крутизны нарастания принимаемых импульсов) в цепь обычно
включают дополнительное сопротивление, что уменьшает постоян-
ную времени цепи. Это, в свою очередь, вызывает необходимость
увеличения напряжения линейной батареи. Для аппаратов
СТА-М67 напряжение батареи должно быть не менее 1004-120 В.
198
Для повышения устойчивости работы аппаратов, особенно на
линиях с пониженным сопротивлением изоляции, и увеличения
дальности связи рекомендуется включать линейную батарею на
обеих станциях или применять схему включения с реле.
Ст л
Ст 5
Стопстартн
копт пер
Стопстарт
конт пер
Рис. 8.3. Симплексная схема телеграфирования на постоянном токе с контро-
лем передачи без применения реле (применительно к аппарату СТА-М67):
Э — электромагнит стартстопного аппарата
Наряду с симплексными схемами, работающими токами одного
направления, были разработаны схемы, работающие токами двух
направлений. Последние в основном находят применение в мест-
ных цепях, так как реализация таких схем с последовательным
включением приборов передачи и приема затруднительна.
ДУПЛЕКСНЫЕ СХЕМЫ ТЕЛЕГРАФИРОВАНИЯ
При телеграфировании дуплексным методом схема включения
телеграфных аппаратов должна быть такой, чтобы происходило
разделение входящего и исходящего токов. Приемный аппарат
должен срабатывать от приходящих с противоположной станции
посылок и не срабатывать от посылок своего передатчика. Устрой-
ством, обеспечивающим такое разделение токов, в наиболее рас-
пространенной дифференциальной дуплексной схеме является по-
ляризованное реле с дифференциально включенными обмотками
(рис. 8.4а).
На рис. 8.46 приведена упрощенная дифференциальная дуплексная схема
для работы токами двух направлений. Для большей наглядности рассмотрим
работу схемы при условии отсутствия тока утечки на линии и равенстве напря-
жений батарей на станциях А и Б Замкнем рабочий контакт на станции А.
Ток в дифференциальной точке Д схемы в данном случае разветвится на две
части. Одна часть тока пройдет через линейную обмотку ЛО реле в линию и прием-
ное реле соседней станции (ст. Б). При этом направление тока в Л О таково,
что контактный язычок реле стремится перейти к контакту покоя Другая часть
тока пройдет через местную обмотку МО реле и балансный контур БК. Направ-
ление тока в МО таково, что контактный язычок реле стремится перейти к кон-
такту работы. Подбором элементов балансного контура добиваются того, чтобы
ток в линейной, рабочей обмотке /р был равен удвоенной величине тока в мест-
ной компенсационной обмотке /к i(/P=2/K).
Рассмотрим возможные состояния язычков реле на станциях
А и Б (и соответствующие им состояния электромагнитов прием-
ных аппаратов) при одновременной манипуляции ключами на
обоих станциях. В табл. ВЛ указаны 'возможные взаимные шоло-
199
Рис. 8.4. Схема включения обмоток дифференциального реле '(а)-, упрощенная
дифференциальная дуплексная схема телеграфирования (б); практическая диф-
ференциальная дуплексная схема телеграфирования (в); дифференциальная по-
лудуплексная схема телеграфирования (г);
к — стопстартный контакт телеграфного аппарата; Э— электромагнит телеграфного аппа-
рата, /р — ток в рабочей обмотке реле. —ток в компенсационной обмотке .реле
жения ключей') на станциях А и Б и соответствующие этим по-
ложениям напряжения в дифференциальных точках, токи в обмот-
ках реле, линии и состояние электромагнитов на станциях А и Б.
Таким образом, как видно из табл. 8.1, при дуплексной работе
приемным реле данной станции управляет передатчик соседней
станции независимо от того, какой из контактов передатчика дан-
ной станции замкнут.
В практических условиях, когда на линии имеется ток утечки,
а напряжения линейных батарей на обеих станциях неодинаковы,
дуплексная работа будет также протекать нормально, если линия
связи с достаточной точностью уравновешена балансным конту-
*) На .рис. 8.46 для простоты показана схема включения аппаратов Морзе.
Принципиальным в данном случае является то, что в дифференциальную точку Д
поступают различные комбинации напряжений .разной полярности.
200
ТАБЛИЦА 8.1
Станция А
Положение ключа «Замкнут» Напряже- ние в точке Да Токи в обмот- ках реле Положение якоря реле Состояние электро- магнита Ток в линии
Контакт работы — 4 у /1^ Контакт работы Под то ком 0
Контакт работы — \^к Контакт покоя Без тока 2/к^/р
Контакт покоя + Контакт работы Под током 2/к=/р
Контакт покоя to о 1 2 Контакт покоя Без тока 0
Станция Б
Положение ключа «Замкнут» Напряже- ние в точке Д& Токи в обмот- ках реле Положение якоря реле Состояние электро- магнита
Контакт работы — 4 у Контакт работы Под током
Контакт покоя + X 4 ^4 Контакт работы Под ТОКОМ
Контакт работы ^4 \ У 4 Контакт покоя Без тока
Контакт покоя 1 + 7 Контакт покоя Без тока
ром. Назначение последнего состоит в том, что он электрически
уравновешивает линейную цепь, обеспечивая условия, когда в уста-
новившемся и устанавливающемся режимах соблюдается равенство
7Р = 2/к, и форма тока в линейной и местной компенсационных об-
мотках реле будет одинакова. При этом будут соблюдаться усло-
вия работы, изложенные в табл. 8.1.
На рис. 8.4а показана практическая дифференциальная дуп-
лексная схема телеграфирования, работающая токами двух нап-
равлений. В схеме используются два оконечных стартстопных те-
леграфных аппарата — передающий и приемный. Передающее
Прд и контрольное КР реле обеспечивают передачу посылок на
противоположную станцию и контроль своей передачи. Токи пере-
дачи и приема разделяются дифференциально включенным прием-
ным реле Прм.
В спокойном положении контакты передатчика к замкнуты. Поэтому под
действием тока /р=2/к в рабочей обмотке Прд якорь этого реле находится у
левого контакта и в дифференциальную точку Д реле Прм от линейной батареи
подается напряжение положительной полярности ,(«+», ,см- табл. 8.1). При пе-
редаче и размыкании контакта к якорь реле Прд под действием тока /к перебра-
сывается к правому контакту и в точку Д реле Прм поступает напряжение отри-
цательной полярности («—», см. табл. 8.1). Дальнейшая работа дифференциаль-
ной схемы в части приема и передачи сигналов полностью соответствует табл 8.1
и упрощенной схеме рис. 8 46 *).
Контур из резистора R и конденсатора С предназначен для устранения пре-
обладаний в реле Прд. При разрыве цепи контактами передатчика спадание тока
в левой обмотке замедляется и становится возможным неискаженное воспроиз-
ведение якорем передающего реле импульсов передатчика.
Прием импульсов с линии осуществляет приемное реле Прм. Контрольное
реле КР повторяет работу реле Прд. Электромагнит контрольного аппарата
включен в цепь якоря КР и находится под током, когда якорь замыкает левый
контакт. Наличие КР улучшает условия работы Прд, так как в цепи его рабочей
обмотки нет передающего электромагнита, имеющего большую индуктивность.
ЦЕПИ ДЛЯ ТЕЛЕГРАФИРОВАНИЯ ПОСТОЯННЫМ ТОКОМ
Телеграфирование постоянным током осуществляется по одно-
проводным линиям с использованием земли в качестве обратного
провода, двухпроводным линиям и жилам подземных и морских
кабелей. Для однопроводных цепей используются воздушные ли-
нии со стальными проводами диаметром 3-4-6 мм. Для передачи
двухполюсных посылок применяют линейные батареи с напряже-
нием 120-4-160 В при входящем приемном токе 204-25 мА. Макси-
мальная дальность связи без применения трансляций в данном
случае составит 400-4-500 км, при использовании трансляций она
может быть увеличена до 2000 км.
Телеграфирование постоянным током по телефонным двухпро-
водным цепям позволяет получить дополнительную телеграфную
связь без затрат на подвеску проводов. Соответствующая схема
*) Следует заметить, что иа схеме рис. 8.4в показано включение стартстоп-
ного аппарата. Поэтому в состоянии покоя |(«стоп») через электромагниты аппа-
ратов течет ток, в отличие от схемы на рис. 8.45. Это отличие следует иметь в
виду при рассмотрении табл. 8.1.
202
приведена на рис. 8.5 и носит название схемы Пикара. Применяют
ее на двухпроводных телефонных цепях из стальных или медных
проводов. Рассмотрим принцип действия этой схемы.
Постоянный ток от передающего телеграфного устройства
поступает к средней точке трансформатора ЛТр, где вследствие
симметрии полуобмоток разветвляется на две равные части. На
Рис. 8.5. Телеграфирование пос-
тоянным током по схеме Пи-
кара:
ТЛ — телефонный аппарат; ЛТр —
линейный трансформатор; Т\,^ —
телеграфное устройство, Ф — фильтр
низкой частоты
приемном конце токи, текущие в каждой из полуобмоток ЛТр,
объединяются, и полный ток поступает на приемное телеграфное
устройстве Т%. Поскольку полуобмотки трансформатора выполня-
ются строго симметричными, а токи в полуобмотках текут в про-
тивоположных направлениях и равны друг другу, то в первичной
обмотке (в телефонной цепи) не будут наводиться токи помех от
телеграфной работы. Фильтры ФНЧ уменьшают влияние телеграф-
ных токов на телефонную передачу, подавляя высшие гармоники,
имеющиеся в телеграфном сигнале.
Дальность телеграфирования по схеме Пикара примерно такая
же, как и по однопроводным стальным цепям.
8.3. КАНАЛЫ ПЕРЕДАЧИ ДИСКРЕТНОЙ ИНФОРМАЦИИ
НА ПЕРЕМЕННОМ ТОКЕ (КАНАЛЫ ЧАСТОТНОГО
ТЕЛЕГРАФИРОВАНИЯ И ПЕРЕДАЧИ ДАННЫХ)
УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ СИГНАЛОВ (УПС)
При вторичном уплотнении каналов связи с целью передачи по
ним дискретной информации могут быть использованы различные
методы модуляции. Практическое применение нашли модуляции:
амплитудная (AM), частотная (ЧМ), относительная фазовая
(ОФМ), фазовая с передачей одной боковой полосы (ФМ ОБП)
(см. § 8.9). Модуляция осуществляется с помощью устройств пре-
образования сигналов УПС, обеспечивающих прямое и обратное
преобразование сигналов данных в вид, пригодный для передачи
по каналу связи.
Ввод информации в УПС может быть как асинхронным, так и
синхронным. В УПС с AM или ЧМ чаще используется асинхрон-
ный ввод; в УПС с ОФМ или ФМ ОБП — синхронный. Рассмотрим
структурные схемы УПС.
203
Схема УПС при асинхронном методе переда-
чи (приема). На рис. 8.6 показана в общем виде структурная
схема передатчика и приемника УПС в случае использования ме-
тода AM. или ЧМ. Назначение отдельных элементов схемы следу-
ющее. Модулятор М и генератор несущей частоты Г в совокупно-
сти преобразуют посылки постоянного тока в амплитудно- или ча-
стотномодулированные сигналы. Для ограничения спектра сигнала
Ul^nptj 1
УПС,
I
\К приемнику
I сигкипaS Ранных
Рис. 8.6. Структурная схема передатчика и -приемника УПС при передаче мето-
дом ДМ или ЧМ |(асинхронный принцип приема):
М — модулятор; Г —генератор, фильтр передачи; Фпрм — ФИЛЬТР приема; Ус — уси-
литель, Дм— демодулятор; Ф — фильтр низкой частоты; ВУ— выходное устройство, АРУ —
устройство автоматической регулировкой уровня
на выходе передатчика включают фильтр передачи Фпрд. На входе
приемной части УПС включен фильтр приема Фщ,м, функция ко-
торого состоит в подавлении токов различного рода помех, посту-
пающих с линии, и в выделении сигнала данного канала. При пе-
редаче двоичных сигналов с высокой скоростью по групповым
трактам полосовые фильтры приема и передачи служат также для
формирования частотной полосы канала передачи двоичной ин-
формации, так как каких-либо специальных фильтрующих уст-
ройств, предназначенных для этой цели, в аппаратуре вч уплот-
нения нет.
Усилительное устройство Ус предназначено для повышения
уровня принимаемого сигнала и поддержания его постоянным на
входе детектора. В системах, используемых AM, в усилительном
устройстве о'бычно предусматриваются специальные схемы авто-
матической регулировки уровня АРУ, а в системах с ЧМ в каче-
стве усилительного устройства применяется нелинейный усилитель-
ограничитель, обеспечивающий постоянство фиксированного уров-
ня амплитуды сигнала на своем выходе.
В демодуляторе Дм амплитудно- или частотномодулированный
сигнал преобразуется в посылки постоянного тока. В каналах с
AM демодулятор представляет собой обычный амплитудный детек-
тор, т. е. выпрямитель. В каналах с ЧМ демодулятор состоит из
частотного детектора (дискриминатора), преобразующего частот-
номодулированные сигналы в амплитудномодулированные, и ам-
плитудного детектора, преобразующего амплитудномодулирован-
ный сигнал в посылки постоянного тока. На выходе Дм стоит
фильтр нижних частот Ф, подавляющий высшие гармоники
выпрямленного сигнала и остатки несущей частоты и тем самым
улучшающий форму принятого сигнала. После Ф находится
204
выходное устройство ВУ, обеспечивающее необходимую мощность
посылок на выходе канала. В качестве одонечного устройства мо-
жет быть использовано обычное электромеханическое или элек-
тронное реле.
Схема УПС при синхронном методе передачи
(приема). Если устройство преобразования сигналов предназ-
начено для синхронной передачи (приема) информации и в нем
используются такие методы модуляции, как ОФМ, ФМ с ОБП, то
его схема (рис. 18.7) по сравнению со схемой на рис. 8.6 значитель-
Рис. 8 7. Структурная схема передатчика и приемника УПС при синхронном ме-
тоде приема:
М — модулятор; Г —генератор; СМ — синхронизация модулятора; ОД, 2 — опорный генера-
тор; Фпрд — фильтр передачи; Ф прм — фильтр -приема; Ус — усилитель, Дм — демодулятор:
ВУ — выходное устройство; Рег — регенератор
но усложняется. Дополнительными элементами в этом случае бу-
дут устройства синхронизации модулятора СМ, схема выделения
когерентной (синхронной) несущей, осуществляющая синхронный
принцип приема, и коррекционное устройство -с регенератором Рег,
обеспечивающие регенерацию сигналов на приеме, т. е. восстанов-
ление длительности импульсов и их синхронизацию.
При синхронном режиме работы обычно все тактовые частоты,
необходимые для работы устройств синхронизации и фазирования
по циклам устройств защиты от ошибок УЗО, а также несущая
частота канала передачи двоичной информации получаются от од-
ного опорного генератора передачи О1\. На приеме соответствен-
но имеется опорный генератор приема ОГ2.
В зависимости от конкретной схемы реализации аппаратуры в
ней могут либо отсутствовать отдельные узлы, показанные на
структурных схемах рис. 8.6 и 8.7, либо может несколько видоизме-
няться порядок их включения. Следует отметить, что схемы УПС,
показанные на рис. 8.6 и 8.7, по принципу действия являются схе-
мами симплексными, т. е. передают двоичную информацию в од-
ном направлении—от передатчиков к приемнику. Для создания
дуплексной связи необходимо взять по два комплекта УПС, по-
казанных на рис. 8.6 и 8.7, на каждый дискретный канал. Один
комплект УПС служит для передачи информации в одну сторону,
а другой —• в противоположную.
Рассмотрим более подробно способы включения УПС в канал
связи.
205
ВКЛЮЧЕНИЕ УПС В КАНАЛ СВЯЗИ
Низкоскоростные (телеграфные) системы пе-
редачи двоичной информации. В проводной связи ис-
пользуется несколько систем частотного телеграфирования. Одно-
канальные системы позволяют организовать в телефонном канале
одну телеграфную связь. Последняя может быть организована
вместо телефонного разговора либо одновременно с телефонным
разговором. В первом случае, установив обычную телефонную
связь, абоненты по взаимной договоренности включают в телефон-
ный канал вместо телефонного аппарата устройство преобразова-
ния сигналов, связанное с оконечным телеграфным аппаратом, и
осуществляют передачу информации. Применение такой системы
при низкой скорости работы нецелесообразно, так как спектр те-
лефонного канала используется неэффективно.
Более выгодна вторая система, при которой в спектре телефон-
ного канала кроме телефонного разговора организуется еще одна
(или несколько) телеграфная связь. Многоканальные системы поз-
воляют в одном телефонном канале или на одной цепи установить
одновременно большое число дуплексных телеграфных связей. Су-
ществуют два типа аппаратуры, этих систем:
1. Аппаратура тонального телеграфирования (ТТ), позволяю-
щая в двух- или четырехпроводном телефонном канале организо-
вать 124-24 дуплексных телеграфных связи в зависимости от ши-
рины полосы телефонного канала и его типа (двух- или четырех-
проводный), каждая из которых работает на скорости 504-75 бод.
В последнее время аппаратура ТТ выпускается также на ско-
рость работы 100 и 200 бод. При этом в четырехпроводном канале
организуют соответственно 12 или 6 дуплексных телеграфных
связей.
2. Аппаратура надтонального телеграфирования (НТ), позво-
ляющая организовать на двухпроводной физической цепи в диа-
пазоне частот 34004-10 000 Гц несколько (от 4 до 20) телеграф-
ных связей, также работающих на скорости 504-75 бод.
На рис. 8.8а, б приведены структурные схемы и диаграмма рас-
пределения спектров телеграфных каналов при работе многока-
нальной аппаратуры ТТ по двухпроводному каналу тч. Дуплексный
телеграфный канал образуется парами симплексных каналов ТТ
с несущими Fi и Fi2, F2 и Гц и т. д. Вилка разделительных фильт-
ров прямого и обратного направлений передачи ФДК, состоящая
из фильтров нижних и верхних частот, разделяет спектры частот
телеграфных каналов прямого и обратного направлений. Просле-
дим путь передачи телеграфных сигналов на несущей частоте на
примере 2-го канала ТТ.
Двоичные посылки постоянного тока от телеграфного аппарата
Тгпрд поступают на модулятор М2. С помощью модулятора несу-
щая частота F2, посылаемая генератором Г2, модулируется, огра-
ничивается по спектру для предотвращения взаимного влияния со-
седних каналов ТТ полосовым фильтром Фпрдг и поступает
206
к____________v.______________________/
Дуплексный канал ТТ
Рис. 8 8. Схема многоканальной системы ТТ, работающей по двухпроводному
каналу тч (а)', распределение спектров частот прямого и обратного каналов (б):
Т — телеграфный аппарат, Г — генератор, М — модулятор, Фпрд —Фильтр передачи, ФДК —
фильтры Д и К. прямого и обратного направлений передачи, Фпрм- Фильтр приема, Ус ~
усилитель, Д — демодулятор, ВУ — выходное устройство
в двухпроводный телефонный канал. На приеме спектр данного
канала ТТ выделяется полосовым фильтром приема Фпрм2, усили-
вается усилителем Ус и демодулируется демодулятором Д. Демо-
дулированные телеграфные посылки затем усиливаются и форми-
руются в оконечном устройстве ВУ и поступают на приемный те-
леграфный аппарат Т2ПрМ.
Подсобным же образом производится передача и по остальным
каналам в прямом и обратном направлениях. На приемном конце
каждое из направлений передачи отделяется от другого фильт-
ром ФДК, а спектр частот каждого канала ТТ выделяется поло-
совым фильтром данного канала Фщ>м.
207
Структурная схема многоканальной аппаратуры ТТ, работаю-
щей по четырехпроводному каналу тч, и распределение спектров
телеграфных каналов показаны на рис. 8.9а, б. Работа этой схемы
в части канала ТТ аналогична предыдущему случаю.
Рис. 8.9. Схема многоканальной системы ТТ без группового преобразования ча-
стоты, работающая по четырехпроводному каналу тч (а) ((сокращенные наиме-
нования узлов в схеме те же, что и на рис. 8.8); распределение спектра (б)
Аппаратура надтонального телеграфирования предназначается
для дополнительного уплотнения физических цепей телеграфными
связями. Принцип построения этой >аппа1рату|ры аналогичен прин-
ципу, показанному на структурной схеме рис. 8.8а. Несущие
частоты передатчиков выбираются в надтональном спектре. Диа-
грамма, поясняющая распределение спектров телефонного и теле-
графных каналов при НТ, показана на рис. 8.10.
Рис. 8.10 Распределение спектра в системе НТ
При описании принципов построения аппаратуры ТТ (см. рис.
8.8а и 8.9а) предполагалось, что для каждого канала ТТ имеются
индивидуальные фильтры и генераторы, т. е. физически сущест-
208
вуют все 12 (для схемы на рис. 8.8а) или 24 (для схемы на рис.
8.9а) индивидуальных фильтров и генераторов, настроенных на 12
или 24 различные частоты.
В аппаратуре ТТ и НТ часто применяется также метод группо-
образования. В данном случае в аппаратуре ТТ или НТ физически
существует только небольшое число индивидуальных генераторов
и фильтров, необходимых для создания набора частот каналов ос-
новной группы. Все остальные частоты линейного спектра образу-
ются с помощью групповой модуляции и демодуляции частот ос-
новной группы. Этот принцип построения аппаратуры ТТ пояс-
няется структурной схемой, приведенной на рис. 8.11, и схемой
преобразования частот на примере отечественной аппаратуры
ТТ-17П (рис. 8.Г2).
Как видно из схемы на рис. 8.12, исходная II группа каналов (каналы с 7-,го
по 12-й) передается в спектре 1,464-2,5 кГц без преобразования; каналы с 4-го
по 6-й образуются путем преобразования частотного спектра исходной группы
каналов. Для переноса этого спектра в спектр частот 0,384-1,42 кГц, отводимый
для I группы каналов, используется нижняя боковая полоса частот, образую-
щаяся в амплитудном модуляторе ГМ i(cm. рис. 8.11) при воздействии на исход-
ный спектр 1,464-12,5 кГц несущей частоты 2,88 кГц. Вследствие этого спектр
7-го канала исходной группы размещается по шкале частот на месте 6-го канала
системы ТТ, а спектр 12-го канала переносится на место 1-го канала системы ТТ.
Происходит инверсия частот.
Аналогичным образом из 7—11-го каналов исходной группы путем группово-
го преобразования спектра частот модулятором ГМ |(,рис. 8.44) с помощью несу-
щей 4,86 кГц получаем 43—17-й каналы системы ТТ. В данном случае также
используется нижняя боковая полоса частот преобразования и происходит ин-
версия частот. При этом инвентируются и рабочие частоты (частоты нажатий)
каналов, которые подвергаются преобразованию, т. е. верхняя и нижняя рабо-
чие частоты меняются местами, а именно: если телеграфной посылке положитель-
ной полярности без преобразования частоты соответствует передача в линию
нижней рабочей частоты канала, то после преобразования ей будет соответство-
вать верхняя рабочая частота канала на линейном выходе аппаратуры. Послед-
нее недопустимо, так как приводит к «обратной работе» при сопряжении с систе-
мами ТТ, где отсутствует преобразование частоты. В аппаратуре это явление
устраняется изменением направления тока на входах модулятора и приемного
реле путем установки соответствующих перемычек.
Применение принципа группообразования в отечественной ма-
локанальной аппаратуре ТНТ-6 позволило создать универсальную
аппаратуру телеграфной связи, работающую по двух- или четырех-
проводным каналам в тональном и надтональном спектрах частот.
Во всех модификациях используется стандартная группа каналов
с ограниченным числом разнотипных частотнозависимых эле-
ментов.
Группообразование дает возможность сконструировать более
высококачественные фильтры каналов ТТ и НТ, упрощает техно-
логию производства аппаратуры; в каналах ТТ, расположенных в
нижней части спектра канала тч, уменьшает начальные искажения
при модуляции за счет возможности выбора для исходной группы
каналов оптимального соотношения между частотой модуляции и
частотой несущей.
209
to
о
Исходная группа
Каналы /3-17 Каналы 7-12 Каналы 1-6
Группа I
Упвй12
РрВц ~ ni ~
Г гр ip
Прд7 - ~ -
Группа I
Прд? - ~
%87
TiptPT.
ПРд/2 HW
УтгрдИ
ПрВ,! |-[%г
/м =2260 Гц
1460+2500Гц
1460+2320Гц
ГФрпрд
зво+шогц
ЧетпырехпроВодный
канал ти
Ann. Ви
роОания
2540+3400 Гц
7 =4860Гц
Линия
Ann. Ви
]— телефона.
роВа/ш
1460~2500Гц Группа!
380+1420 Гц \ ----i'i
гт
' ЧЛ1М
ГО ГДМ ФНЧ,
1460+2500ГЦ
r^Jry
s 4>'—
^прт
7р 2280Гц.
- Прм7
1460+ 2500ГЦ Группа!!!
2640 +34 00 Гц
ГУ 1ДМ ФНЧ3
Фпрм а
Прм7
Риалы 13-17 Каналы 7-12 Каналы 1-6
/н=4860Гц\
Рис. 8.11. Структурная схема многоканальной системы ТТ с групповым 'Преобразованием частоты, работающей
по четырехпроводному каналу тч (система ТТ-17П):
Ф — фильтр; ГМ — групповой модулятор; ГУ — групповой усилитель; ГФ — групповой фильтр. Г — генератор несущей частоты,
ГДМ — групповой демодулятор
Чскодная группа
каналоб
----- Спектр в канале тч ---------------
Рис. 8.12 Схема преобразования спектров частот в схеме на рис. 8.11
В соответствии с рекомендацией МККТТ на сетях могут приме-
няться системы ТТ с AM и ЧМ, работающие со скоростями 50, 100
и 200 бод. Распределение несущих частот для многоканальных си-
стем рекомендуется делать через 120, 240 или 480 Гц (более под-
робно о выборе несущих частот для систем AM и ЧМ см. в §§ 8.4
и 8.5). Скорости работы этих систем соответственно равны 50, 100
и 200 'бод. При этом в спектре канала тч (3004-3400 Гц) разме-
щаются 24, 12 или 6 каналов ТТ.
При работе со скоростями 100 и 200 бод согласно рекоменда-
ции МККТТ должен использоваться только метод ЧМ. В аппара-
туре ТТ, выпускаемой в нашей стране, применяется исключительно
метод ЧМ, и она рассчитана на работу со скоростями 50, 75, 100
и 200 бод. Скорость 75 бод также допускается рекомендациями
МККТТ.
Среднескоростные системы передачи двоич-
ной информации (системы передачи данных).
Среднескоростные системы передачи двоичной информации, или
системы передачи данных, предназначены для передачи двоичных
сигналов со скоростями 6004-10 000 бод. В качестве канала связи
в них используются двухпроводные коммутируемые и четырехпро-
водные некоммутируемые (выделенные) каналы тч.
Некоммутируемым называется канал тч, используемый для пос-
тоянного, в течение заданного промежутка времени, соединения
между двумя оконечными установками передачи данных. Такой
канал не проходит через коммутационное оборудование телефон-
ной станции.
Коммутируемым называется канал тч, с помощью которого або-
нент через автоматическую или ручную телефонную станцию вре-
менно соединяется с другим абонентом. Такой канал может про-
ходить через ряд коммутаторов. По своему принципу построения
коммутируемый канал должен каждый раз составляться из раз-
личных каналов тч. Проверить частотную характеристику такого
канала оказывается практически невозможным, так как сам ка-
211
нал тч для передачи данных существует лишь короткое время, не-
обходимое для передачи информации. После этого он «рассыпа-
ется», превращаясь 'в ряд отдельных каналов тч.
Структурная схема некоммутируемого канала передачи данных
(канал ПД) показана на рис. 8.13. При большой протяженности
АУПД
сл
АУПД
Рис. 8.13. Структурная схема выделенного канала передачи данных:
АУПД — абонентское устройство передачи данных, сл — соединительная линия.
ВЧ — аппаратура высокочастотного телефонирования, КУ — корректирующее
устройство
магистрали и высокой скорости передачи может оказаться необ-
ходимым включение в тракт передачи устройств, корректирующих
фазо-частотную характеристику канала связи (КУ).
В случае некоммутируемых каналов тч в полосе 3004-3400 Гц
передачу данных можно вести со скоростью 2400 и 4800 бод на
расстояние до 4000 км и со скоростью Г200 бод на расстояние
10 0004-12 000 км. Системы передачи данных, работающие со ско-
ростями свыше 4800 бод, находятся в настоящее время в стадии
разработок и не получили пока широкого распространения на се-
тях. При этом для передачи данных используется весь спектр ка-
нала тч.
МККТТ рекомендует на некоммутируемых каналах применять
двойную относительную фазовую модуляцию, скорость передачи
2400 бод и несущую частоту канала ПД if нес = 1800 Гц.
Структурная схема канала ПД, организованного по двухпро-
водному коммутируемому каналу тч, показана на рис. 8.14, а диа-
грамма распределения спектров — на рис. 8.15а, б.
Рис. 8.14. Структурная схема организации коммутируемого канала пере-
дачи данных:
ТА — телефонный аппарат; П — переключатель; АПД — аппаратура передачи данных;
ИС — источник сообщений; АТС — автоматическая телефонная станция; ИКДН — ис-
ходящий комплект дальнего набора, ВЧ — аппаратура высокочастотного телефониро-
вания; ВКДН— входящий комплект дальнего набора
Как видно из схемы, канал тч может предоставляться пооче-
редно либо для телефонной передачи, либо для передачи данных.
Переключение осуществляется переключателем П либо вручную
оператором после предварительной договоренности по телефону,
либо автоматически при получении по каналу тч определенного
сигнала переменного тока. Последний может представлять собой
212
набор нескольких частот, посылаемых одновременно, или опреде-
ленный модулированный сигнал. Тогда в переключателе П должно
быть предусмотрено специальное приемное устройство, срабаты-
вающее от служебного сигнала и переключающее схему на режим
Рис. 8.15. Распределение спектра в двухпроводном канале тч, исполь-
зуемом для передачи данных:
а) одновременно в обоих направлениях; б) поочередной в каждом из
направлений
Работа по двухпроводному каналу тч может производиться
одновременно в обе стороны (дуплексная связь) либо поочередно
в одну и другую сторону (полудуплексная связь).
При одновременной работе в обе стороны спектр канала тч с
помощью фильтров делится на два подканала (см. рис. 8.15а). Ра-
бота происходит аналогично работе канала ТТ по двухпроводному
каналу тч. В соответствии с рекомендацией МККТТ скорость ра-
боты в каждом направлении передачи может достигать 200 бод и
должен использоваться метод ЧМ. Канал № 1 {передача вызы-
вающей станции) должен иметь характеристические частоты, рав-
ные fH=980 Гц и /в = 1180 Гц; канал № 2 (прием на вызывающей
станции) — /н= 1650 Гц и ifB= 1850 Гц.
При поочередной передаче данных спектр двухпроводного ка-
нала тч делится с помощью фильтров на канал прямой передачи
данных, который занимает почти весь спектр канала тч, и обрат-
ный служебный канал, предназначенный для передачи контрольно-
го сигнала (или сигнала автозапроса для работы устройств защи-
ты от ошибок, см. гл. Ф1), который занимает небольшой участок в
нижней части спектра канала тч (см. рис. 8.156). По прямому ка-
налу передача может вестить со скоростью 600 или 1200 бод при
использовании метода ЧМ. Характеристические частоты должны
быть равны: при скорости 600 бод fH= 1300 Гц и /в=1700 Гц, а при
скорости 1200 бод — fH= 1300 Гц и |fB = 2ipO Гц. В обратном кана-
ле для передачи контрольного сигнала должны применяться ско-
рость 75 'бод и метод ЧМ с характеристическими частотами
Л,=390 Гц и /в=450 Гц.
Схема построения канала ПД в соответствии с рис. 8.156 мо-
жет быть использована и на некоммутируемых каналах тч, если не
2ia
нужна высокая скорость передачи. При этом по четырехпроводно-
му каналу тч может быть организована дуплексная связь. При
работе по каналам ПД, организованным на коммутируемой сети,
может использоваться синхронный или асинхронный принцип пе-
редачи.
Высокоскоростные системы передачи двоич-
ной информации. Для передачи данных со скоростями, пре-
вышающими пропускную способность одного канала тч (практи-
чески 12004-4800 бод), можно использовать, во-первых, широкопо-
лосные строенные каналы тч (аналогично каналам радиовещания)
и, во-вторых, групповые тракты систем вч телефонирования. На
первом этапе развития сети передачи данных и те и другие будут
предоставляться абонентам как некоммутируемые каналы.
Абонент \сл
Аппаратура вч К-12
Рй тнал
Передача
~| Линия
\B-ii канал
W
I
=ЛкГщ /'Ы/= 120 кГц
--- ----
Лк
лпр
и канал -*—
ГМ HP ЛУс
!2--В0кГц
12-С0кГц
гд
HP ЛУс
Юув-н-ШАхГц I
1 тнал —ilS/-
I
Прие-^
' I . -
| Г и канал
I Стандартный
12~кан блок
Рис. 8.16. Структурная схема организации канала передачи данных по
объединенному (сдвоенному) каналу связи:
ИС — источник сообщения, АПД — аппаратура передачи данных; ФПД — фильтр ка-
нала передачи данных (полоса пропускания равная сумме полос пропускания каналов
9, 10 и 11); М—модулятор канала, Д — демодулятор канала; Ф — фильтр телефон-
ного канала, ГМ — групповой модулятор: ГД — групповой демодулятор; Г —генератор
групповой несущей, НФ — направляющий фильтр, ЛУс — линейный усилитель
В строенном канале скорость передачи может быть до 12 000
бод. Структурная схема организации таких каналов приведена на
рис. 8.16. При передаче данных по групповому (первичному) трак-
214
ту 12-канальной группы с шириной спектра до 48 кГц оказывается
возможным работать со скоростью до 40 000 бод при использова-
нии аппаратуры с ЧМ и до 60 000 бод при применении аппарату-
ры с ДОФМ. Структурная схема, поясняющая принцип включения
устройства преобразования сигналов аппаратуры передачи данных
в тракт 12-канальной группы, показана на рис. 8.17. МККТТ ре-
60-кап о с но 8н группа
60-108кГц п
rmi гтг 3!2ц360кГц
сл
I Линия
IW Г 5
| ^ОМОбДМА f=620
, \6O-1O8
\505108
кСц
360-208
-- 608=656
60-108 м
~ 656=506
312Н552кГц
5065552
ГМ
' 12=252кГц
ИС - АПД
| Д I Г = 666 кГц
0^5О2-552кГц\
> [р г = 566 кГц
-- 6565502
-А08Н256
- 3605608
3125552 кГц
I Аппаратов а
i А-бВ
312-300
\В\г^620кГи.
Рис. 8.17. -Структурная -схема организации широкополосного канала передача
данных по групповому -12-канальному тракту:
ИС — источник сообщения; АПД — аппаратура передачи данных; К. ФО — каналоформирующее
оборудование
комендует в спектре 12-канальной первичной группы вести -синхрон-
ную передачу со скоростью 48 000 бод, использовать метод AM с
частичным подавлением одной боковой полосы и подавлением не-
сущей частоты.
При необходимости еще -большего увеличения скорости переда-
чи можно занять более широкий спектр частот, например, спектр
60-канальной системы. Как видно из схемы, приведенной на рис.
8.17, УПС высокоскоростной системы подключается на вход груп-
пового модулятора М через каналоформирующее оборудование
К.ФО, с помощью которого формируется высокоскоростной дис-
кретный канал. Это оборудование включает полосовые фильтры
канала передачи данных ФПД, которые исключают влияние этого
канала на соседние групповые тракты, занятые для телеграфиро-
вания. Кроме того, в состав ДФО входят корректирующие устрой-
ства, обеспечивающие необходимую фазо-частотную и амплитудно-
частотную характеристики канала ПД, а также компенсирующие
фазовые и амплитудные искажения всех элементов тракта вч те-
лефонирования и полосовых фильтров канала ПД.
215
8.4. ПОНЯТИЕ О ДИСКРЕТНЫХ КАНАЛАХ,
ОБРАЗОВАННЫХ СИСТЕМАМИ С ИКМ
Начиная с 4962 г., на 'сетях связи различных стран стали появ-
ляться системы с импульсно-кодовой модуляцией (ИКМ). В этих
•системах сигналы в линейном тракте передаются в цифровой фор-
ме. Система ИКМ с временным делением каналов (в дальнейшем
под системами ИКМ будем понимать только системы с временным
делением каналов) занимают все более значительное место на се-
тях Советского Союза. Передача сообщений с помощью ИКМ от-
крывает принципиально новые возможности для передачи дискрет-
ных сигналов. Принципы работы системы ИКМ рассматриваются
в курсах «Теория передачи сигналов» и «Многоканальная связь»
[25].
В реальных системах ИКМ для передачи сигналов каждого ка-
нала применяется 8-разрядный код (28=Й56, п=8). Поэтому для
передачи кодовой комбинации, определяющей амплитуду дискрета
данного канала, на временной оси отводится некоторый временной
промежуток. На рис. 8.18 показан временной спектр (размещение
Канальный
интербал
। Кодовая I Кодовая
I группа I группа
11-го канолой,-го канала
i i
i I
I Кодовая \0й канал
। группа синхрона -
\3-го канала' опции
Кодовая ।
группа ।
1-го канала I
I
I
125 мкс
Рис. 8.18. Временной спектр (размещение символов внутри цикла времен-
ной системы) современной 30-канальной ИКМ системы
символов внутри цикла временной системы) для современной си-
стемы ИКМ на 30 каналов. Во временном спектре имеется 30 ка-
нальных интервалов (1—15 и 17—31), предназначенных для пере-
дачи телефонных сигналов; 16-й канальный интервал отводится
для организации служебных каналов; нулевой канальный интер-
вал отводится для передачи синхрокомбинации.
Из принципа действия системы ИКМ следует, что импульсы, со-
ответствующие кодовым посылкам каждого из каналов, будут сле-
довать с частотой дискретизации (для современной ИКМ систе-
мы с частотой 8000 имп/с, т. е. через 125 мкс). Следовательно, че-
рез 125 мкс в линию будут направляться первый импульс первого
канала, второй импульс первого канала и т. д. Если все первые,
вторые и т. д. импульсы кодовой комбинации каждого из каналов
разместить на временной оси, то они образуют последовательность
импульсов, следующих со скоростью 8000 бод. Эту последователь-
216
ность импульсов можно назвать импульсной несущей. Совокуп-
ность импульсных несущих всех 8 разрядов кодовой комбинации
одного телефонного канала образует групповой тракт индивиду-
ального телефонного канала, имеющий импульсную несущую-
64 ООО бод. И, наконец, совокупность последовательностей импуль-
сов, несущих информацию о всех 30 каналах ИКМ системы, обра-
зует импульсную несущую линейного тракта, равную 1,92 Мбод.
Передача сигналов данных по ИКМ системам может быть осу-
ществлена принципиально двумя способами: 1) по телефонным ка-
налам ИКМ систем, которые подобно телефонным каналам частот-
ных систем, могут быть вторично уплотнены AM сигналами дан-
ных (рис. 8.19а) ;i 2) путем ввода сигналов, данных непосредствен-
но в групповой ИКМ тракт (рис. 8.Г96).
При вторичном уплотнении телефонного ИКМ канала следует
учитывать, что в этих каналах несколько повышены шумы, за счет
эффекта квантования и частотный спектр в линейном тракте ис-
пользуется не полностью. На самом деле в спектре тч телефонного
канала передача данных с AM может производиться со скоростью
максимум 4800 бод. В то же время для организации одного ИКМ
канала используется линейный спектр, позволяющий передавать
импульсы со скоростью 64 000 бод, т. е. принципиально вместо од-
ного телефонного канала ИКМ системы можно организовать пере-
дачу сигналов данных со скоростью 64 000 бод. В то же время сле-
дует отметить, что ИКМ телефонные каналы имеют ряд преиму-
ществ по сравнению с телефонными каналами, образованными с
помощью систем частотного уплотнения.
Преимуществом ИКМ каналов являются меньшие искажения
характеристик группового времени распространения, отсутствие
сдвига частот, толчков затухания и фазы, импульсных помех.
В ИКМ системах нет ограничений в отношении загрузки группово-
го тракта: при необходимости все каналы системы могут быть ис-
пользованы для вторичного уплотнения.
Еще большие преимущества имеет способ непосредственного-
ввода двоичной информации в групповой ИКМ тракт, минуя низко-
частотное оборудование телефонных каналов. При этом возможны
высокие скорости передачи двоичной информации. Как было отме-
чено выше, вместо одного телефонного канала в ИКМ системе
можно передавать при синхронном вводе двоичную информацию
сс скоростью 64 000 бод (при 8-разрядных кодовых комбинациях
и частоте дискретизации 8 кГц). Возможен асинхронный ввод при
несколько меньшей скорости передачи..
Рассмотрим подробнее возможные способы ввода сигналов дан-
ных в групповые ИКМ тракты [31, 33].
Двоичные сигналы могут передаваться путем модуляции ими
импульсных несущих ИКМ системы, минуя низкочастотное обору-
дование телефонных каналов. Для этой цели могут быть исполь-
зованы'
а) импульсная несущая линейного тракта (1,924 Мбод для
30-канальной системы с ИКМ);
217
813
Рис. 8.19. Структурная схема, 'поясняющая принцип ввода дискретной информации:
а) в телефонный канал; б) в групповой тракт ИКМ системы
Метод „ скольолщего индекса^
б) импульсная несущая группового тракта индивидуального те-
лефонного канала, работающего со скоростью 64 кбод;
в) поскольку групповой тракт передачи одного индивидуаль-
ного телефонного канала в системе с ИКМ можно представить в ви-
де суммы нескольких (например, 8) синхронных двоичных каналов
(СДК), работающих со скоростью передачи 8000 бод каждый, лю-
бой такой СДК может быть использован для передачи двоичной
информации.
Это дает возможность увеличить гибкость системы в слу-
чае использования одного телефонного канала для одновременной
передачи сигналов вторичного уплотнения телеграфными связями,
передачи данных с различными скоростями, факсимильной связи.
Передача двоичной информации по каналам ИКМ может быть
реализована несколькими методами, отличающимися друг от дру-
га коэффициентом использования импульсной несущей (отношение
скорости передачи двоичной информации к величине импульсной
несущей в бодах), устойчивостью к сбоям в импульсной несущей
и стоимостью реализации аппаратуры, в которой применяется дан-
ный метод.
Общий принцип ввода двоичной информации в групповой тракт
состоит в том, что в групповом тракте ИКМ выделяется некоторая
часть посылок — импульсная несущая и производится манипуля-
ция этой несущей вводимым двоичным сигналом. Частота и фаза
несущей не зависят от частоты и фазы посылок двоичного сигна-
ла. Ввод информации состоит в согласовании на передающей стан-
ции вводимого сигнала с несущей, а также в выделении и восста-
новлении сигнала на приемной станции.
Двоичная информация может вводиться синхронным или асин-
хронным способом.
При синхронном способе все источники двоичной информации
(абоненты), сигналы которых объединяются в один многоканаль-
ный сигнал, питаются от общего задающего генератора. Если от-
дельные источники двоичной информации (абоненты) размещены
в различных пунктах, то тактовая частота подается к ним по сое-
динительным линиям. При этом возникает необходимость в ком-
пенсации флуктуаций времени распространения сигналов по соеди-
нительным линиям для обеспечения синфазности работы абонента
и аппаратуры ИКМ. По этой причине синхронный способ ввода
оказывается сравнительно простым на коротких линиях или же в
тех случаях, когда источники информации находятся в одном пунк-
те на небольшом удалении от задающего генератора.
Значительно более перспективными в практике являются асин-
хронные методы ввода двоичной информации. В этом случав не
требуется взаимная синхронизация задающих генераторов оконеч-
ных устройств и аппаратуры ИКМ. И хотя при асинхронном вводе
коэффициент использования импульсной несущей снижается (по
сравнению с синхронным вводом), данные методы нашли наиболь-
шее расиространение, так как они позволяют создать гибкую сеть
дискретных каналов в системах с ИКМ.
220
Рассмотрим возможные асинхронные методы сопряжения аппа-
ратуры вторичного уплотнения и систем с ИКМ. Известны следу-
ющие методы сопряжения [33]: метод наложения; адресно-кодовый
метод; метод измерения интервала; метод «скользящего индекса».
Перечисленные методы могут быть использованы для вторичного
уплотнения любой импульсной несущей: линейного тракта ИКМ,
группового тракта индивидуального телефонного .канала ИКМ,
СДК- Приводимые ниже количественные характеристики различ-
ных методов относятся к случаю уплотнения одного СДК, работа-
ющего со скоростью 8000.бод.
Рассмотрим подробнее два метода, нашедшие практическое
применение.
Метод наложения. На передаче состояние каждого двоич-
ного канала испытывается непрерывной последовательностью
стробирующих импульсов (рис. 8.20). В зависимости от полярно-
а)
I I I I I I I I I I I I I L
Дь U-L7^ t
Рис. 8 20. Диаграммы, .поясняющие ме- д) ’"I—-------1 i--
тод ‘наложения: |________I I
а) импульсная несущая; б) двоичный I [ I
сигнал, подлежащий передаче; в) по- . . . . . .
следовательность манипулированных им- I I I I I___________I I
пульсов на -передаче; г) -последователь- . t
ность манипулированных импульсов на v i I |
приемном конце --1--------1----------1--
сти двоичного сигнала в СДК поступает или не поступает серия
стробирующих импульсов. На приемной стороне по огибающей
этой серии восстанавливается исходный телеграфный сигнал. На
рис. 8.20а изображена импульсная несущая (стробирующие им-
пульсы), вырабатываемая генераторным оборудованием передаю-
щей станции ИКМ. На диаграмме рис. 8.206 показан двоичный
сигнал, подлежащий передаче. С помощью схемы И создается по-
следовательность манипулированных импульсов -(рис. 8.20в), ко-
торая вводится в групповой ИКМ сигнал. На приемной станции
каждый импульс манипулированной последовательности растяги-
вается на весь тактовый интервал (рис. 8.20г).
Поскольку последовательность стробирующих импульсов (импульсная не-
сущая) не синхронизирована с -передаваемым двоичным (сигналом, значащие мо-
менты воспроизведения (ЗМВ) могут -быть смещены и могут .возникнуть крае-
вые искажения двоичных -посылок, .величина которых равна
6 = —100%, (8.1)
то
где t—время отставания стро-бирующего импульса от ближайшего к нему зна-
чащего момента -манипуляции (ЗММ); т0 — длительность единичного элемента1)
*) Тер-мин «единичный элемент» согласно ГОСТ 17667—72 принят для аппа-
ратуры передачи данных. Общепринятым термином в телеграфии является экви-
валентный термин «элементарная посылка».
221
двоичного сигнала. Максимальная величина искажении может быть определена
по формуле
бмакс = Ю0% = — , (8.2)
То tn
где Тс — период следования стробирующих импульсов; т— число импульсов,
стробирующих один единичный элемент.
Предельное число телеграфных каналов со скоростью передачи 50 бод и мак-
симальными искажениями 6макс^5% '(т=20), которые можно получить в СДК
сь скоростью передачи 8000 бод, составит
8000
П~ 50-20 ~8‘
(8-3)
Большая избыточность при методе наложения позволяет обес-
печить высокую достоверность передачи при минимальной стоимо-
сти. Метод наложения использован в аппаратуре ТВУ-12 (см.
гл. 10).
Метод «скользящего индекса». Из импульсной несу-
щей СДК для каждого двоичного канала выделяется последова-
тельность тактовых импульсов
•Л ’
;| I---------1-------------1-7 ЗММ
S) fnnirnillllllllllllllirТик
________
Г г Г | I I I I I-1 I > I | »“ СДК
I бшиАЦз-кЦ" l!:ii
Комб. Знак
(ТИК) (рис. 8.216), частота следо-
Рис. 8.21. Диаграммы, поясняющие ме-
тод «скользящего индекса»:
а) последовательность импульсов на пе-
редаче; б) последовательность тактовых
импульсов канала; в) кодовая комбина-
ция, характеризующая передаваемую
информацию
вания которых определяется скоростью передачи двоичных сигна-
лов и необходимой точностью восстановления ЗМВ. На передаче
определяется положение ЗММ (рис. 8.21а) между двумя соседни-
ми ТИК и результат измерения представляется в виде двоичного
числа. Непосредственно за ближайшим к ЗММ тактовым импуль-
сом в канал передается стартовый им'пульс, обозначающий нали-
чие ЗММ, и кодовая комбинация о его положении и полярности
(рис. 8.21в). Эта кодовая группа передается в канал теми же так-
товыми импульсами, относительно которых определялось положе-
ние ЗММ. Следовательно, информация о подлежащем передаче
двоичном сигнале передается сразу же после появления ЗММ.
При скорости следования ТИК 250.бод для передачи положе-
ния ЗММ с точностью 6^5% ( тактового интервала) кодовая
комбинация состоит из пяти импульсов. Первый — стартовый, три
последующих описывают положение ЗММ в интервале и пятый
импульс указывает на полярность перехода. С помощьк) метода
«скользящего индекса» в СДК со скоростью передачи 8000 бод мо-
жет быть организовано п = 8000/50 -5=32 двоичных канала со ско-
ростью 50 бод.
222
Описанные методы позволяют организовать передачу любых
двоичных асинхронных -сигналов без ограничения кода, т. е. поз-
воляют создавать так называемые |«прозрачные каналы».
8.5. СТРУКТУРНАЯ СХЕМА И ПРИНЦИП ДЕЙСТВИЯ
ДИСКРЕТНОГО КАНАЛА С AM
ОСНОВНЫЕ ЭЛЕМЕНТЫ ОБОРУДОВАНИЯ КАНАЛА ТТ с AM
Принцип действия дискретного канала с AM рассмотрим на
примере многоканальной системы тонального -телеграфирования
ТТ с AM. Структурная схема такой системы, а также вид сигналов
в характерных точках схемы показаны на рис. 8.22. Назначение
основных элементов канала было рассмотрено в § 8.3 при описа-
нии схемы УПС (см. рис. 8.8).
Рис. 8 22. Структурная схема многоканальной системы ТТ-АМ:
Т — телеграфный аппарат, ПТУ — переходное телеграфное устройство; Г — генератор, М —
модулятор, Ф — фильтр, Ус — усилитель, Д — детектор, РПрм —реле приема; АРУ— устрой-
ство регулировки уровня приема
Новым элементом является переходное телеграфное устройство
(ПТУ). Оно предназначено для преобразования на передаче одно-
полюсных посылок, которыми работают большинство старстопных
телеграфных аппаратов, в двухполюсные посылки, необходимые
для работы модулятора канала ТТ. На -приеме ПТУ осуществляет
функцию обратного преобразования. Указанное устройство — ха-
рактерная и неотъемлемая часть современной аппаратуры ТТ как
с AM, так и с ЧМ.
Передатчик канала ТТ, как -видно из схемы на рис. 8.22, со-
стоит из генератора, модулятора и фильтра передачи. К генера-
торам несущих -частот предъявляются два основных требования:
стабильность частоты и стабильность выходного уровня. В совре-
менной аппаратуре ТТ с AM наибольшее применение нашли инди-
223
видуальные электронные (в настоящее время чаще всего транзи-
сторные) генераторы. Схемы и устройство их ничем не отличаются
от описываемых в специальных курсах.
Модулятор в аппаратуре ТТ с AM представляет собой четырех-
полюсник, затухание которого резко изменяется от небольшой до
очень значительной величины и наоборот — в зависимости от по-
лярности телеграфных посылок, поступающих на него. Обычно раз-
ность между затуханием модулятора при посылке положительной
полярности и затуханием, вносимым модулятором при посылке от-
рицательной полярности, составляет не менее 34,7ч-43,4 дБ.
В качестве элементов схемы, изменяющих свое сопротивление
под действием приходящих посылок разной полярности и тем са-
мым изменяющих затухание модулятора, в настоящее время ис-
пользуются исключительно купроксные или германиевые полупро-
водниковые выпрямители.
Приемное устройство состоит из четырех основных частей: уси-
лителя, детектора, устройства АРУ и выходного устройства. Сово-
купность полосовых приемных фильтров канала ТТ и приемного
устройства образуют приемник канала ТТ с AM. На рис. 8.22 по-
казаны основные части приемника и диаграммы сигналов в раз-
личных точках схемы.
Приемник работает следующим образом. Пришедшие с линии
модулированные сигналы переменного тока распределяются по со-
ответствующим каналам фильтрами ФПрм, усиливаются до необхо-
димого уровня усилителем Ус и поступают на детектор Д. Послед-
ний преобразует амплитудномодулированный сигнал в низкочас-
тотный модулирующий сигнал (посылки постоянного тока). В де-
текторе осуществляется нелинейное преобразование спектра, в ре-
зультате которого пришедший амплитудномодулированный сигнал
детектируется (выпрямляется).
На выходе детектора включено выходное устройство ВУ. Чаще
всего это механическое поляризованное реле типов РП-4, РПС или
ТРЛ (телеграфное реле линейное). Иногда между выходом детек-
тора и поляризованным реле включают формирующее устройство
(усилитель постоянного тока), увеличивающее крутизну фронта
тока в обмотках реле. Благодаря этому повышается помехоустой-
чивость приемника канала ТТ.
Схема включения реле может быть различной. На рис. 8.22 по-
казана схема, в которой на поляризованное реле поступают одно-
полюсные сигналы, поэтому оно имеет две обмотки. Через рабо-
чую обмотку проходит рабочих ток /р, а через компенсационную
или подмагничивающую обмотку — ток /к- При поступлении на
приемник напряжения несущей частоты ток в рабочей обмотке ста-
новится больше тока, протекающего по подмагничивающей об-
мотке, и якорь реле перебрасывается к контакту покоя (к нижне-
му контакту на рис. 8.22). При отсутствии напряжения несущей
на входе приемника ток в рабочей .обмотке становится меньше то-
ка в обмотке подмагничивания, и якорь реле перебрасывается к
контакту работы (к верхнему контакту на рис., 8.22).
224-
В соответствии с рекомендацией МККТТ цифре 0, стартовому
сигналу и рабочей посылке стартстопного кода должно соответ-
ствовать отсутствие несущей, а цифре 1 и стоповому сигналу (по-
сылке покоя) стартстопного кода — передача несущей по каналу
ТТ. Для неискаженного приема телеграфных посылок между /р и
/Е должно соблюдаться следующее соотношение: IK = IVI2. При из-
менении тока /р, вызванном изменением уровня сигнала в канале
ТТ вследствие нарушения соотношения /к = -/р/2, принимаемые те-
леграфные посылки начнут искажаться (рис. 8.23) . Для устране-
Рис. 8.23. Графики, поясняющие из-
менение длительности посылок при
изменениях уровня приема:
1 — форма посылки при завышенном уров-
не сигнала, 2 — форма посылки при нор-
мальном уровне сигнала; 3 — форма по-
сылки гири заниженном уровне сигнала,
—соответствующие длительности по-
сылок
ния этого нежелательного явления в приемнике ТТ с AM всегда
предусматриваются-устройства, компенсирующие изменения уров-
ня .приема сигналов ТТ, т. е. устройства автоматической регули-
ровки уровня (АРУ).
Однако всем схемам АРУ присущи недостатки: они инерцион-
ны, поэтому не могут компенсировать быстрые изменения уровня;
работа их зависит от характера и продолжительности предыду-
щей посылки, т. е. применение АРУ приводит к появлению допол-
нительных так называемых характеристических искажений теле-
графных сигналов (см. подробнее в гл. 9).
ВЫБОР НЕСУЩИХ ЧАСТОТ КАНАЛОВ
Для тонального телеграфирования используются каналы тч с
полосой эффективно передаваемых частот 3004-3400 или 3004-
4-2700 Гц. Несущие частоты крайних каналов ТТ при этом не мо-
гут быть ниже 300 Гц и выше 3400 или 2700 Гц. Для обеспечения
минимального влияния между каналами ТТ, обусловленного нели-
нейными искажениями 2-го порядка, вызванными нелинейностью
устройств канала тч, несущие частоты каналов ТТ должны быть
нечетно кратны определенной частоте, принятой за основную, т. е.
/„нес = (2*+1Ио. (8-4)
где k— 1, 2, 3 ....
Из ф-лы (8.4) легко получить
/л нес f(„_1) ие« = %?<>• (8'5)
225
8—60
Определим минимальную величину разности частот несущих
двух рядом расположенных каналов: fnuec—f(n-n нес-
На рис. 8.24 показано взаимное расположение пхл?; и ;. пуска-
ния фильтров рядом расположенных каналов. Из ргсункл видно,
что интересующее нас расстояние /Пнес—/<п-1)нес образуется из
Рис. 8.24. Взаимное расположение полос пропускания
филыгров рядом расположенных каналов
двух половин полосы пропускания каждого из каналов и полосы
расфильтровки между каналами, необходимой для того, чтобы ча-
стотные характеристики затухания смежных каналов смогли на-
расти, на частотах соседних каналов, до необходимой величины.
В § 7.6 [см. (ф. 7.84)] было показано, что минимальная ширина
полосы пропускания связана со скоростью телеграфирования для
AM соотношением
0,7А^ИИн = ВпраКт- / (8.6)
Для скорости 50 бод, обычно используемой в системе с AM,
имеем ААМИн~71 Гц. Учитывая неравномерность характеристики
затухания фильтров на краях полосы пропускания, принимают,
что величина ДГМИН должна быть равна ДГмин=80 Гц.
По конструктивным соображениям, исходя из реальных величин
добротности катушек индуктивности фильтров, ширина полосы рас-
фильтровки АГрасф должна быть равна не менее 40 Гц. Учитывая
эти соображения, получаем
L-Vd=2 т + л7?оасф= 120 Гц‘ (87)
Если fn нес—f(n-i) нес =420 Гц, то Го = 60 Гц. Поскольку первая не-
сущая частота должна быть нечетной гармоникой Го и должна ле-
жать выше 300 Гц, находим /1 = 7-60 = 420 Гц. Таким образом, по-
лучаем следующий ряд чисел, определяющих несущие каналов ТТ:
/1=420; /2 = 540; /3 = 660, ..., /,8 = 24 060, ..., /24 = 3180 Гц.
Формулы для определения величины несущёй частоты любого
канала номера п имеют вид:
f п = (2п -]- 5) 60, Гц или }„ = 300 120п, Гц. (8.8)
226
Из этих формул следует, что в канале тч с эффективной полосой
пропускания 300-4-2700 Гц может быть размещено 18 каналов ТТ,
а в тч канале с полосой пропускания 3004-3400 Гц — 24 канала ТТ.
8.6. СТРУКТУРНАЯ СХЕМА И ПРИНЦИП ДЕЙСТВИЯ
ДИСКРЕТНОГО КАНАЛА С ЧМ
ОСНОВНЫЕ СВЕДЕНИЯ
Недостаточная устойчивость действия каналов с AM на длин-
ных связях, характерных для сети Советского Союза, обусловлен-
ная чувствительностью этих каналов к колебаниям уровня и низ-
кой помехозащищенности (см. подробно в гл. 9), привели к при-
менению в каналах дискретной информации более совершенных
способов модуляции — частотной и фазовой, при которых устой-
чивость связи повышается в значительной мере. В этом параграфе
будут рассмотрены принцип действия и устройство дискретного
канала с частотной модуляцией на примере канала тонального те-
леграфирования с ЧМ (ТТ с ЧМ).
Более высокая помехоустойчивость и очень малая чувствитель-
ность к колебаниям уровня — основные причины широкого рас-
пространения систем с ЧМ в настоящее время. Недостатком ука-
занных систем является большая чувствительность к нестабильно-
сти несущей частоты канала.
ОСНОВНЫЕ ЭЛЕМЕНТЫ ОБОРУДОВАНИЯ КАНАЛА ТТ с ЧМ
Структурная схема канала ТТ с ЧМ показана на рис. 8.25, а
форма напряжения сигнала в точках, обозначенных цифрами 1, 2,.
Зит. д., — на рис. 8.26. Все входящие в тракты передачи и прие-
Рис 8 25. Структурная схема канала ТТ с ЧМ:
ЧМ — частотный модулятор; Ф — фильтр; Ус — усилитель; ОА —
ограничитель амплитуд, ЧД — частотный детектор; АД — ампли-
тудный детектор
ма устройства уже были описаны в § 8.3 при рассмотрении схемы
УПС (см. рис. 8.8).
Генератор несущей и частотный модулятор в канале ТТ с ЧМ
обычно представляют собой органически связанное единое целое,
так как элементы модулятора являются одновременно элементами
колебательного контура генератора. Совокупность генератора не-
сущей и модулятора преобразует приходящие посылки постоянно-
го тока в частотномодулированное колебание (диаграммы 1, 2 на
рис. 8.26). Из-за нестационарных процессов, возникающих при пе-
редаче ЧМ сигнала через фильтры, форма сигнала на выходе
фильтров искажается (диаграмма 3).
8* 227
Усилитель Ус служит для
предварительного усиления
сигнала и обеспечения нор-
мальных условий работы огра-
ничителя амплитуд. Он не дол-
жен вносить искажений в фор-
му сигнала (диаграммы 4, 5).
Ограничитель амплитуд ОА
является весьма важным эле-
ментом тракта приема канала
ТТ с ЧМ. Ограничивая ампли-
туды положительных и отрица-
тельных волн частотномодули-
рованного сигнала, он почти
полностью устраняет влияние
искажений формы амплитуды
сигнала (за счет нестационар-
ных процессов, а также за счет
изменений уровня сигнала в те-
лефонном канале) на длитель-
ность принимаемых телеграф-
ных посылок. На выходе огра-
ничителя амплитуд формирует-
ся частотномодулированный
сигнал постоянного уровня вне
зависимости от изменений
уровня на входе приемника ка-
нала ТТ (диаграмма 6). Кроме
того, наличие ограничителя ам-
плитуды уменьшает воздейст-
вие сосредоточенных помех,
поскольку при одновременном
прохождении через него сиг-
Рис. 8.26. Форма частотномодулирован- нала и помехи последняя по-
лых колебаний при передаче и приеме давляется.
Частотный детектор (дис-
криминатор) ЧД преобразует частотномодулированный сигнал в
амплитудномодулированный (диаграммы 7' и 7").
Амплитудные детекторы АД служат для выпрямления тока ам-
1плитудн'01модули1р’01ванно1го сигнала. После >а1м'пл'итудны1х детекторов
обычно включают А^С-фильтры нижних частот, подавляющие ос-
татки несущих в демодули|ро1ван1ном сигнале. Напряжение с 'выхо-
да АД подается на выходное устройство канала ТТ (диаграммы
8' и 8") *>. Выходным устройством может служить электромагнит-
ное или электронное реле. На рис. 8.25 показано включение прием-
*)'В случае применения в качестве выходного устройства электронного реле
или включения перед электромагнитным выходным реле усилителя постоянного
тока (см. например, рис. 8.28) полярность напряжений на эпюрах 8' и 8" должна
быть одного знака.
228
ного электромагнитного реле Прм, на выходе которого формиру-
ются телеграфные посылки (диаграмма 9).
Рассмотрим теперь более подробно устройство основных эле-
ментов схемы, приведенной на рис. 8.25. В качестве примеров при-
водятся схемы отечественной транзисторной аппаратуры ТТ-17П.
Частотный модулятор и генератор несущей
частоты. К частотному модулятору предъявляются следующие
требования:
— он не должен создавать паразитной амплитудной модуляции;
— вносимые им искажения должны быть минимальны;
— схема его должна быть проста и надежна в эксплуатации;
— процесс модуляции не должен зависеть от величины тока
модулирующих телеграфных посылок;
— совместно с генератором несущей частоты он должен обес-
печивать высокую стабильность частоты при изменении темпера-
туры, питающих напряжений и т. д.
Выполнение перечисленных требований является сложной ин-
женерной задачей.
В технике тонального телеграфирования нашли применение ре-
лейные (контактные) и диодные (бесконтактные) модуляторы.
В обоих случаях с помощью модуляторов в такт с приходящими
двухполюсными телеграфными посылками переключаются элемен-
ты в колебательном контуре генератора, вследствие чего соответ-
ствующим образом меняется генерируемая частота, т. е. осущест-
вляется частотная модуляция несущей частоты.
В современной аппаратуре применяются исключительно бескон-
тактные модуляторы. В этих модуляторах элементы контура могут
переключаться любым нелинейным элементом, резко изменяющим
свое сопротивление в зависимости от полярности приложенного к
нему напряжения: электронной лампой, транзистором, лампой с
холодным катодом, полупроводниковым диодом и т. д. На практи-
ке применяются в основном полупроводниковые диоды.
На рис. ,8.127 приведена типовая схема передатчика канала ТТ с ЧМ с диод-
ным модулятором. Генератор выполнен на транзисторе Л, в коллекторную цепь
которого по автотрансформаторной схеме, для уменьшения шунтирующего влия-
ния транзистора на контур, включен колебательный контур iZ-iCi (обмотка 1
трансформатора Тр). Модуляция осуществляется с помощью диодных мостов ЛЕ
и М2, включающих в обмотку III трансформатора Тр либо емкость С2, либо ин-
дуктивность Lz.
Если от телеграфного аппарата не подается напряжение, то оба диодных
моста Mi и Mz имеют большое сопротивление и обмотка III оказывается прак-
тически разомкнутой. Частота генератора в данном случае определяется только
элементами 'Li и Ci. Величина последних подбирается так, чтобы .генерировалась
средняя частота канала.
При поступлении на -модулятор посылки отрицательной полярности откры-
вается мост М2 и к обмотке III подключается индуктивность i2, вследствие
чего в обмотку I трансформатора пересчитывается дополнительная индуктивность
Евн, которая оказывается подключенной параллельно основной индуктивности Li.
Общая индуктивность колебательного контура уменьшается, и генератор гене-
рирует верхнюю частоту передачи fB. В аппаратуре ТТ-17П величина индуктив-
229-
Рис 8.27. Схема передатчика аппаратуры ТТ-17П с безрелейным модулятором
ности Li выбрана так, что подключение ее вызывает генерацию колебаний ча-
стоты fB=lfcp+50 Гц.
Когда на модулятор поступает досылка положительной полярности, мост ЛК
открывается, а мост Л42 закрывается. К обмотке Ш, а следовательно, через ин-
дуктивную связь к колебательному контуру оказывается подключенной емкость
С2. Общая емкость колебательного контура увеличивается, и генератор генери-
рует нижнюю частоту канала fH=fCp—50 Гц.
Усилитель и ограничитель амплитуд. Пройдя
приемный полосовой фильтр, частотномодулированный сигнал
усиливается и поступает на ограничитель амплитуд (см. рис. 8.25).
Отличительная особенность работы усилительных ступеней в схеме
приемника канала ТТ состоит в том, что при значительном увели-
чении уровня приема они начинают работать в режиме ограни-
чения.
Наличие ограничителя амплитуд перед частотным детектором
устраняет влияние изменений уровня приема на процесс демоду-
ляции ЧМ сигнала. Тем самым устраняются искажения телеграф-
ных сигналов типа преобладаний, которые возникают при демо-
дуляции без ограничителя уровня.
Из большого числа различных типов схем ограничителей уров-
ня на 'практике нашли применение две основные схемы:
1) ламповая, в которой ограничение осуществляется за счет се-
точных токов;
2) транзисторная двухтактная, изображенная на рис. 8.28 (на
этом рисунке приведена .также полная схема приемника).
Рассмотрим принцип работы двухтактного ограничителя амплитуд на тран-
зисторах.
Ограничитель, схема которого представлена на рис. 8.28, .выполнен на тран-
зисторах Ti—Ti по двухтактной схеме с трансформаторной связью между сту-
пенями. При малых уровнях сигнала обе ступени работают в режиме усиления.
При повышении уровня они переходят в режим ограничения.
230
®ильтр приема
Усилитель -
ограничитель
1---------Усили Частот- \Амплитуд-\Выхооь;е устр-во
PPzTycmp-во ||даа% \нш детеыый детек- \Усилитель постоянного
Г блокировки mof> | т°Р I mow
нтстр-оо \‘"иш \mu
Г блокировки \м№,°\ mf> |
^-приемника -b и ‘----f-
Li
Рп
ПРМ=^
ТР^.
%!
7Ж
+<
Т-К
-1?в\
-7 в^
Рис 8 28 Схема приемника аппаратуры ТТчР7П
' ГП L
!тпйт
। V J чнШ-
Режим работы транзисторов первых двух ступеней приемника выбран таким,
что при отсутствии сигнала на входе приемника коллекторные токи их малы.
В случае подачи на вход приемника сигнала с нормальным уровнем последний
через трансформаторы со средней точкой Tpt и Тр2 подается на базы транзи-
сторов Т1,2 и T31i Подаваемые на базы транзисторов Тх и Тнапряжения рав-
ны по величине, но сдвинуты по фазе на Г80°. Тот из транзисторов, на базу ко-
торого поступает отрицательная полуволна напряжения сигнала, открывается, и
в его коллекторной цепи течет ток. Одновременно начинает протекать ток в це-
пи базы.
Увеличение уровня на входе ограничителя приведет к возрастанию тока в
цепи базы Это, в свою очередь, вызывает увеличение тока в цепи коллектора.
Однако величина тока коллектора ограничена резисторами R2 и Ri, включен-
ными в цепь питания транзисторов Поэтому нарастание его будет происходить
медленнее, чем нарастание тока базы. Начиная с некоторого значения, увели-
чение уровня сигнала на входе ступени уже не приводит к увеличению уровня
на выходе, т. е ступень будет работать в режиме ограничения. При этом огра-
ничение полуволн тока будет происходить за счет верхней отсечки в коллектор-
ной цепи транзистора Поскольку в ограничителе применена двухтактная схема,
ограничение обеих полуволн будет симметричным, и приемник будет работать с
минимальным и и ск а ж ен и я ми
Вторая ступень ограничителя выполнена аналогично первой. Так как на ее
вход подается уже усиленный сигнал, то ограничение должно начинаться при
больших уровнях на входе ограничителя Это достигается увеличением напря-
жения на коллекторах Тз и 1\, снимаемого с резистора Rs,.
После второй ступени ограничителя сигнал имеет форму прямоугольных им-
пульсов с частотой следования, равной частоте приходящего синусоидального
сигнала Изменение уровня сигнала на входе ограничителя в широких пределах
практически не изменяет амплитуды и формы этих импульсов. С выхода второй
ступени ограничения сигнал через трансформатор Tps подается на однотактный
каскад усилителя мощности (транзистор ТУ), в коллекторную цепь которого
включен частотный детектор .или дискриминатор.
Частотный детектор (дискриминатор). Рассмот-
рим принцип действия частотного детектора на примере схемы,
приведенной на рис. 8.28.
Преобразование часготномодулированных сигналов в сигналы,
-модулированные по амплитуде, может быть выполнено при помо-
231
щи электрической схемы, затухание которой изменяется в зави-
симости от частоты. В аппаратуре ТТ с ЧМ в качестве таких ча-
стотнозависимых элементов используются исключительно резонанс-
ные контуры. Резонансные контуры СЩ включены последователь-
но в коллекторную цепь, причем для простоты рассуждений будем
считать, что контур СЩ настроен на частоту /в, а контур С2Ь2—
на частоту fa').
При резонансе токов контур имеет большое сопротивление на
частоте резонанса и на нем создается большое падение напряже-
ния соответствующей частоты. Если, например, из канала тч пос-
тупает сигнал с частотой /в, то между точками 1—2 создается
большое падение напряжения, в I обмотке Тр\ индуктируется боль-
шое напряжение, которое затем выпрямляется амплитудным де-
тектором Дь Выпрямленное напряжение будет также значитель-
ным. Это напряжение поступает на верхнее плечо усилителя пос-
тоянного тока (У,ПТ, транзистор Т6), в коллекторную цепь которо-
го включена обмотка I приемного реле РПрм- В это время резонанс-
ный контур L2C2, настроенный на частоту /н, будет иметь незначи-
тельное сопротивление, поэтому во II обмотке Тр5 и, следователь-
но, во II обмотке приемного реле появится малый ток. При полу-
чении из канала сигнала с частотой /н работать будет контур Ь2С2,
и основной ток пройдет по II обмотке реле. В случае средней ча-
стоты <f0 падение напряжения на обоих контурах примерно одина-
ково. Рисунок 8.29 поясняет принцип действия частотного демо-
дулятора.
Зависимости резонансных сопротивлений контуров zY и z2 и вы-
прямленных напряжений Ui и U2 от частоты изображаются кри-
выми, показанными на рис. 8.26а. Усилители постоянного тока
и Т2 работают в линейном режиме, поэтому токи, протекающие в
обмотках реле РПрм прямо пропорциональны напряжениям Ux и U2\
так как обмотки приемного реле включены дифференциально, то
реле реагирует на разностное напряжение С7Ре3 = к('Н1—t/2), где
к — коэффициент усиления УПТ. Зависимость этого напряжения
от частоты характеризует кривая it7pe3 на рис. 8.29.
Графическим построением из кривых, приведенных на рис.
8.29а и б, можно найти временную зависимость разностного напря-
жения и тока в обмотках приемного реле (рис. 8.29в). Зная токи
срабатывания реле приема iiCp и ii2cp можно определить форму вы-
ходного сигнала на выходе приемного реле (кривая 8.29а).
Конденсаторы С5, С6, включенные на выходе амплитудных де-
текторов Д] и Д2, совместно с резисторами R& и Rg являются
фильтрами нижних частот, задерживающими остатки несущей и
'высшие составляющие демодулированного колебания. Переменный
*) В действительности для получения большего линейного участка характе-
ристики частотного демодулятора контур CliLl настраивается на частоту пример-
но на 1,0 Гц выше fB, а контур C2Z-2 — на 10 Гц ниже fB.
232
t
.। Изменение
частоты
______на выходе
приемника
Рис. 8.29. Графики, поясняющие
работу частотного детектора
резистор 7?ю -служит для устранения односторонних преобладаний,
появляющихся в канале ТТ из-за его не строго симметричной, по
отношению к -средней частоте, суммарной -частотной характери-
стики.
Следует отметить, что наличие УПТ на выходе приемника улуч-
шает условия работы частотного и амплитудного детекторов и вы-
ходного реле канала ТТ.
ВЫБОР НЕСУЩИХ ЧАСТОТ КАНАЛОВ ТТ с ЧМ
При выборе несущих частот канала ТТ с ЧМ должны быть при-
няты во внимание соображения, рассмотренные выше при выборе
несущих канала ТТ с AM. Необходимо только учесть, что наимень-
шая чувствительность приемника ТТ с ЧМ будет на средней часто-
те канала /ср. Поэтому для того, -чтобы уменьшить влияние комби-
национных частот второго . порядка, возникающих в результате
взаимодействия рабочих частот (/в, /н, /ср) при прохождении через
нелинейные элементы канала, частоты /н и /в выбираются нечетно
кратными, а несущие частоты — четно кратными девиации часто-
ты ДК При указанном выборе частот комбинационные частоты вто-
рого порядка от взаимодействия /ср, /н и /в различных каналов,1
имеющие наибольшую мощность, попадают в середины полос
«расфильтров-ки» между -каналами или совпадают со средними ча-
стотами каналов /ср.
Совпадение комбинационных частот со средними частотами ка-
налов не имеет значения, так как чувствительность приемника на
средней частоте во много раз меныце его чувствительности на
крайних частотах /в и /н (частотах, соответствующих девиации ча-
стоты) .
233
Таким образом, для выбора несущих частот в канале с ЧМ не-
обходимо знать величину девиации частоты.
В гл. 7 [ф-ла (7 88)] было показано, что величина девиации частоты может
быть определена из соотношения
A/<0,35AF, (8.9)
где А/ —девиация частоты, а АТ—ширина полосы пропускания.
С другой стороны, величина АТ по ф-ле (784) может быть определена как
. г ^практ
AF = -^j-. (8.10)
В первой отечественной аппаратуре ТТ с ЧМ типа ТТ-12/17 максимальная
скорость телеграфирования была принята равной 76 бод. Тогда согласно ф-ле
(8.10) минимальная величина ширины полосы пропускания должна быть АТ=
= 0,75/0,7=il07 Гц. Однако, учитывая неравномерность полосы пропускания на
ее краях, величина АГ была принята равной 140 Гц. Подставляя это значение
в ф-лу (8.9), имеем Afsg 140• 0,35=60 Гц. Желая несколько увеличить возможное
число каналов, в аппаратуре ТТ-12/17 выбрали девиацию частоты А/=45 Гц
Поскольку средняя частота первого канала должна быть расположена как
можно ближе к краю полосы пропускания канала тч и быть четной гармоникой
девиации А/, то такой частотой для аппаратуры ТТ-12/117 ,(А/=4б Гц) является
/сР=450 Гц.
Учитывая высказанные выше соображения, значения частот
любого канала ТТ аппаратуры ТТ-12/17 могут быть определены по
формулам:
/срЛ, = 2(2М + 3)А/
fHN = (^N + 5)^f
feN^^ + 7)\f
(8.Н)
где N — номер канала; Д/— девиация частоты.
Средняя частота канала /ср .х может быть также определена по
более простой формуле:
v = 2 70 + 180/V. (8.12)
Из формулы /ср=2|(2У-|-3)Д/ следует, что расстояние между соседними не-
сущими в аппаратуре TT-UI2/17 составляет 4Д/=480 Гц. Так как ширина полосы
пропускания канала выбрана 140 Гц, то полоса расфильтровки между каналами
должна быть равна 180—140=40 Гц.
В аппаратуре ТТ-47П средние частоты fCp w выбраны в соответствии с ф-лой
(8.11); ширина полосы пропускания и полоса расфильтровки между каналами
взяты такими же, как в аппаратуре ТТ42/47; величина девиации частоты А/
принята равной 150 Гц. При этом несколько нарушаются соотношения (8.11) для
/п n, fa n и ,/ср n. Такое нарушение установленной закономерности несколько
увеличивает влияние между каналами в системе ТТ, но позволяет улучшить ка-
чественные показатели каналов ТТ (повысить помехозащищенность и уменьшить
искажения) за счет увеличения девиации частоты1).
Исследование, проведенное при разработке аппаратуры ТТ-17П, показало,
что девиация частоты А/=50 Гц дает возможность получить оптимальное соот-
ношение между увеличением взаимного влияния соседних каналов ТТ и повы-
шением помехоустойчивости аппаратуры.
*) Соотношения между величиной помехозащищенности, искажениями теле-
графных посылок и девиацией были рассмотрены в гл. 7.
234
При выбранной ширине полосы пропускания максимальная
скорость телеграфирования может быть 75 бод. В ряде систем, рас-
считанных на скорость телеграфирования 50 бод, распределение
несущих частот в каналах аппаратуры ТТ с ЧМ делают аналогич-
ным распределению частот в аппаратуре ТТ с AM, пользуясь при
этом указанной выше рекомендацией МККТТ и ф-лой (8.4).
8.7. ПРИНЦИП ОРГАНИЗАЦИИ ТРАНЗИТНЫХ СВЯЗЕЙ
И ВЫДЕЛЕНИЯ КАНАЛОВ ТТ
При организации телеграфной связи на большие расстояния
может возникнуть необходимость в создании комбинированных
связей, состоящих из телеграфных каналов различных типов. В
крупных телеграфных узлах при этом должен быть организован
транзит (переприем) сигналов с каналов одной системы ТТ на ка-
налы другой системы ТТ. Иногда требуется выделить некоторое
число телеграфных каналов на небольшом телеграфном предприя-
тии, расположенном на магистрали .связи, уплотненной многока-
нальной аппаратурой ТТ. Рассмотрим принципы организации тран-
зита и выделения каналов ТТ.
Для осуществления переприема в транзитных пунктах уста-
навливается оконечная аппаратура ТТ. Как видно из рис. 8.30, при
Рис. 8.30. Транзит (переприем) каналов ТТ:
а) схема организации переприема; б) схема выделения каналов ТТ в
пункте транзита
организации переприема выход приемника канала ТТ данной сис-
темы непосредственно соединяется со входом передатчика канала
ТТ другой системы. При этом в случае релейного модулятора и
выходного устройства в канале ТТ в транзитном пункте оказыва-
ются последовательно включенными два реле, что приводит к уве-
235
личению суммарной величины искажений. Поэтому желательно ис-
пользование бесконтактных модуляторов.
Организация переприема в пункте транзита позволяет выде-
лить любое количество каналов, а также осуществить транзитное
соединение каналов любых направлений. Недостаток переприема
заключается в значительном увеличении капитальных затрат
вследствие необходимости установки в пункте транзита двух мно-
гоканальных систем ТТ и в увеличении искажений в канале ТТ,
составленном из нескольких переприемных участков.
Принцип выделения каналов ТТ поясняет рис. 8.30. Если, на-
пример, пункт В расположен на магистрали АБ и для связи пунк-
тов А и В требуется 4 канала, а для связи пунктов В и Б — 5 ка-
налов, то возникает необходимость выделить в пункте В некоторое
число каналов из общего числа каналов, связывающих пункты А
и Б. Каналы могут быть выделены путем организации в пункте В
переприема по схеме на рис. 8.306. Такое выделение невыгодно,
так как требует установки в пункте В двух дорогостоящих много-
канальных систем ТТ.
Более выгодным является применение специальной аппарату-
ры выделения каналов. В качестве примера рассмотрим структур-
ную схему аппаратуры выделения каналов типа ТТ—ЧМ1). Прин-
цип работы этой аппаратуры поясняет рис. 8.31. Аппаратура поз-
Рис. 8.31. Схема, поясняющая принцип работы аппаратуры выделения
каналов ТТ-ЧМ-4:
ГУс — групповой усилитель; ДС — дифференциальная система; БК — балансный
контур; Выр— выравниватель; Ф — фильтр
воляет выделить частоты первых четырех каналов тонального те-
леграфирования из общего спектра частот телефонного канала.
Выделение осуществляется фильтром Ф, имеющим граничную ча-
стоту 1080 Гц. Частоты 1—4-го каналов направляются на прием-
ники, аналогичные приемникам аппаратуры ТТ; частоты 5—17-го
*) Аппаратура выделения каналов ТТ-ЧМ-4 [20] предназначена для совмест-
ной работы с системами ТТ типа ТТ-11Й/116 и TT-17II или аналогичными, имею-
щими то же распределение частот в линейном спектре.
236
каналов направляются через фильтр Ф и ряд вспомогательных
устройств (выравнивателей) к противоположной станции. Пере-
датчики 1—4-го каналов, расположенные в пункте выделения, под-
ключаются к ДС2. Сигналы от этих гаервдатчикав совместно с сиг-
налами, передаваемыми по каналам 5—1, направляются в тракт
передачи. Передача в противоположном направлении осуществля-
ется аналогичным образом.
8.8. ДЕЙСТВИЕ И УСТРОЙСТВО КАНАЛОВ ПЕРЕДАЧИ
ДИСКРЕТНОЙ ИНФОРМАЦИИ С ФАЗОВОЙ
МОДУЛЯЦИЕЙ
ПРИНЦИПЫ ФАЗОВОЙ МОДУЛЯЦИИ
Идея использования фазовой модуляции для передачи сигналов
и ряд практических схем были предложены А. А. Пистолькорсом
в 1932—1933 гг. Суть способа передачи сигналов заключалась в
том, что каждой смене полярности Двоичной посылки (положи-
тельной либо отрицательной или переходу от «1» к «О» либо от «О»
к «1») соответствует измене-
ние фазы несущей частоты,
передаваемой в линию. Для
простейшего случая этот угол
может быть равен 180°.
На рис. 8.32 показаны эпю-
ры, поясняющие данный спо-
соб передачи. Осуществить
модуляцию фазы на передаче
можно различными путями.
Одна из простейших схем при-
ведена на рис. 8.33.
Несущая частота подается
на первичную обмотку транс-
форматора Tpt, а напряжение
Рис. 8. 32. Эпюры, поясняющие способ
фазовой модуляции
двоичных посылок — в средние
точки тр<анофо|рматоров Тр! и Тр2. При напряжении двоичных сиг-
налов, большем чем напряжение несущей, диоды Д1—Д2 будут яв-
ляться электронными ключами, управляемыми только напряжени-
Рис. 8.33. Схема фазового модулятора
ем этих сигналов. В таких условиях сопротивление открытых дио-
дов можно принять равным 0, а сопротивление закрытых диодов —
бесконечности.
237
Учитывая сказанное, по схеме, приведенной на рис. 8.33, легко
можно проследить, что при поступлении положительной посылки
диоды Д1 и Д4 открыты, а диоды Д2 и Д3 закрыты. В случае по-
ступления отрицательной посылки откроются диоды Д2 и Д3 и,
наоборот, закроются диоды Д1 и Д4. Легко видеть, что при пере-
ходе от одной полярности посылки к другой фаза сигнала повора-
чивается на выходе схемы на 180°.
Для приема фазомодулировашюго сигнала необходимо иметь
так называемый фазовый детектор ФД, в котором изменение фа-
зы входного сигнала на 180° вызывало бы изменение полярности
выходной посылки. Прием может быть осуществлен по схеме, изо-
браженной на рис. 8.34, если о)н равняется шс- При равенстве ча-
Рис. 8.34. Схема приема фазомодулированного колеба-
ния
стот двух перемножаемых сигналов и определенном соотношении
фаз (для чего используется фазовращатель, см. рис. 8.34) резуль-
тирующий сигнал превращается в постоянную составляющую
(шс—шн=0), величина и знак которой определяются соотношением
фаз сигнала и несущей. Отсюда следует, что в качестве перемно-
жителя в фазовом детекторе может быть использована схема лю-
бого преобразователя частоты.
На практике широкое распространение для детектирования ФМ
сигнала нашли схемы балансного и кольцевого преобразователей
частоты. Простейшая схема приемного устройства ФМ сигналов,
/использующего кольцевой преобразователь частоты, показана на
рис. 8.35. Назначение фильтра приема ФПрм в этой схеме такое
ж, как и в канале ТТ с ЧМ.
Ър Л В К теле
Рис. 8.35. Схема фазового детектора
238
Ш '—М_У_Л_V V V \ г
^|А/\Л/
1 (ёЛАЛАЛАУ ’
Рас. 8 36. Эпюры, поясняющие
работу схемы фазового детек-
тора
Работа схемы поясняется рис. 8.36.
При поступлении с линии сигнала, сов-
падающего по фазе с колебанием,.по-
ступающим от местного генератора
(посылка положительной полярности)
диоды Д1 и Д4 будут открыты, а дио-
ды Д2 и Дз закрыты при приеме по-
ложительных полуволн. Во время от- iann
рицательных полуволн откроются дио-
ды Д2 и Дз и закроются диоды Д1 и
Поэтому через приемный аппарат
будет протекать ток в направлении
от точки В к точке Г (рис. 8.36, гра-
фики I, II, III). В случае поступления
сигнала в противофазе с колебанием
местного генератора (рис. 8.36, гра-
фик IV) при положительных полувол-
нах сигнала открываются диоды Д2 и
Дз, а при отрицательных — Д^ и Д4.
Поэтому выпрямленный ток (рис. 8.36,
график V) будет протекать через аппарат от точки Г к точке В.
Таким образом, выпрямленный ток является знакопеременным,
и его направление зависит от соотношения фаз сигнала и мест-
ного генератора.
Рассмотрение работы приемного устройства канала с ФМ по-
казывает, что одним из условий осуществления демодуляции ФМ
сигнала является наличие на приемном конце так называемого
опорного (когерентного) напряжения несущей, синхронного и син-
фазного с напряжением немодулированной несущей на передаче.
Создание такого опорного напряжения, фаза которого была бы по-
стоянной, является очень сложной задачей.
Принципиально возможны три способа получения указанног®
опорного напряжения:
1) от местного генератора, высокая стабильность частоты ко-
лебаний которого обеспечивает поддержание синфазности опор-
ного напряжения;
2) с помощью вспомогательных пилот-сигналов, передаваемых
непрерывно по тому же частотному каналу или по специальному
частотному каналу;
3) непосредственно из принимаемого сигнала информации.
Рассмотрим возможности использования каждого из перечис-
ленных способов.
Первый способ не обеспечивает необходимой синфазности и
синхронности колебаний, так как фаза и частота любого высоко-
стабильного генератора изменяются под влиянием ряда факторов:
изменения температуры окружающей среды, сдвига частот в кана-
ле связи, изменения напряжений питания, старения деталей и т. д.
И хотя эти флуктуации значений частоты и фазы при использова-
нии современных методов конструирования и высококачественных
239
элементов незначительны, они все же оказываются неприемлемы-
ми для практической реализации приемных устройств ФМ сигна-
лов.
Второй способ получения опорного напряжения также не на-
шел широкого применения, поскольку его реализация приво-
дит к потерям полосы пропускания в частотном канале и мощно-
стисипнала за счет необходимости передавать пилот-сигнал.
Наибольшее распространение нашли схемы выделения коге-
рентного напряжения непосредственно из принимаемого информа-
ционного сигнала. На рис. 8.37а показана схема выделения коге-
iWWWWh
4W\AAi
Рис. 8.37. Схема для выделения когерентной несущей fa); эпюры, пояс-
няющие принцип выделения (б)
рентной несущей из принимаемого сигнала, которая была предло-
жена А. А. Пи1столько|рсом и наиболее часто иапользуется в аппа-
ратуре передачи данных [2'9].
Входящие токи (рис. 8.376, график /) при модуляции изменя-
ют фазу на 180°. Если часть этих токов ответвить и выпрямить
двухполупериодным выпрямителем (график II), то первая гармо-
ника выпрямленного тока будет иметь двойную частоту без скач-
ков фазы (график III). Разделив полученную частоту на два, мож-
но сформировать когерентное колебание (трафик IV), заменяю-
щее местный генератор.
К сожалению, устройства деления частоты при кратковремен-
ном прекращении приема или от сильной помехи могут произволь-
но повернуть фазу опорного напряжения на 180°. Это вызовет из-
менение полярности фазового детектора на выходе на обратную,
т. е. приведет к «обратной работе». Прием станет невозможен, так
как все знаки будут приняты неправильно.
Физически явление двухзначности фазы на выходе делителя
частоты может быть объяснено тем, что деление может начаться
с любого периода колебания несущей, а это и приводит к сдвигу
фазы на 180°. Из-за отсутствия путей, позволяющих устранить по-
явление «обратной работы» при приеме ФМ сигналов, предложе-
ние А. А. Пистолькорса не находило широкого применения почти
20 лет.
240
ПЕРЕДАЧА СИГНАЛОВ ПО МЕТОДУ СРАВНЕНИЯ
В 1954 г. Н. Т. Петрович 1[29] предложил новый метод переда-
чи и приема сигналов, получивший название метода сравнения.
До сих пор при рассмотрении способов приема AM, ЧМ или ФМ
сигналов предполагалось, что для осуществления приема этих си-
гналов на приемном конце принятый сигнал должен быть сопо-
ставлен с какой-то постоянной характеристикой приемного устрой-
ства. Так, в случае приема AM сигнала амплитуда принятого сиг-
нала сравнивалась с некоторым порогом ограничения по минимуму
(чувствительность реле приемника), при приеме ЧМ сигнала не-
сущая частота сигнала сравнивалась со средней частотой дискри-
минатора, при ФМ сигнале — с фазой когерентного напряжения,
вырабатываемого в приемном устройстве.
Теоретическое и экспериментальное исследования характера
флуктуаций сигнала в каналах связи и анализ причин, вызываю-
щих эти флуктуации, показали, что характеристики сигналов из-
меняются медленно по сравнению с длительностью единичного эле-
мента при скоростях передачи, обычно используемых в технике
связи. Следовательно, на отрезке в несколько единиц или десят-
ков единичных элементов (в зависимости от скорости изменения
параметров в канале связи и скорости передачи) можно считать с
достаточной для практики точностью, что канал связи имеет по-
стоянные параметры, которые в последующий такой же отрезок
времени несколько изменяются.
Сказанное позволяет создать метод передачи сигналов (29], при
котором информация, переносимая каждым единичным элементом,
будет выявляться на приеме не путем сравнения ее с характери-
стиками приемника, а путем сравнения с одним из соседних (как
правило, предшествующих) единичных элементов (посылок). Та-
ким образом, метод сравнения базируется на сопоставлении пара-
метров сигнала, соответствующих разным моментам времени. На
передающем конце манипуляция каждой данной посылки должна
производиться также относительно предшествующей посылки.
Так как каждая посылка сопоставляется с предыдущей, то в
литературе установилось название этого метода как относительно-
го метода передачи сигналов. Этот метод передачи может быть
реализован применительно к различным видам модуляции. В за-
висимости от манипулируемого параметра он получил названия:
относительная амплитудная модуляция (ОАМ); относительная ча-
стотная модуляция (ОЧМ) и относительная фазовая модуляция
(ОФМ).
Структурная схема, приведенная на рис. 8.38а, и графики на
рис. 8.386 поясняют принцип относительного метода передачи сиг-
налов равнозначным кодом (единичные элементы имеют равную
длительность). Как видно из рис. 8.38а, запоминание и сравнение
посылок на передаче осуществляется в цепи посылок постоянного
тока (до манипуляции несущего колебания), а на приеме — на
несущей частоте (до детектирования посылок). Из рис. 8.386 сле-
241
дует, что в начале сеанса связи должна быть передана одна не не-
сущая информации вспомогательная посылка, которая, заполняя
элементы памяти на передаче и приеме, создает условное начало
отсчета для приема первой посылки сообщения.
Схему приема, показанную на рис. 8.38, называют схемой непо-
средственного сравнения. Имеется, однако, другая принципиаль-
Модуля- Линия связи
тор . .
Н (t)
8юд1
Элемент
памяти
Тзад = zo
Схема
'Ci-T
cM-f сравнения /
nw-Cci (перешожигмз) /
Принятое
сообщение
Несущее
колебание
Рис. 8.38 Структурная схема (а) и графики (б), поясняющие принцип
относительного метода передачи сигналов
ная возможность реализации схемы приемника канала с относи-
тельным методом передачи, показанная на рис. 8.39. В этой схеме
Рис. 8.39. Структурная схема приемного устройства с пос-
ледетекторным сравнением посылок
тем или иным способом устраняется манипуляция принимаемого
сигнала, после чего он фильтруется от помех узкополосным филь-
тром и используется для детектирования принимаемых посылок.
Посылки сравниваются после детектора, поэтому схема получила
название схемы последетекторного сравнения.
Поскольку в тракте выделения неманипулированной несущей
имеется узкополосный фильтр и для детектирования используется
«очищенное» напряжение, недостаток, свойственный схеме на
рис. 8.38 и выражающийся в снижении ее помехоустойчивости, в
схеме на рис. 8.39 отсутствует. Для удовлетворительной работы
242
этой схемы полоса пропускания в тракте неманипулированного
сигнала должна быть примерно в 10—15 раз меньше полосы ос-
новного канала.
Если стабильность частоты сигнала недостаточна и с помощью
линейного фильтра не удается обеспечить уменьшение полосы про-
пускания в тракте неманипулированного сигнала в 10—15 раз, то
можно использовать активный фильтр (схему с захватыванием ча-
стоты) или систему автоподстройки с соответствующей инерцион-
ностью.
Наиболее широкое распространение в технике передачи двоич-
ных сигналов нашел метод ОФМ. Это объясняется тем, что он
позволяет практически реализовать параметры двоичного канала
связи, приближающиеся по помехоустойчивости и пропускной спо-
собности к максимально достижимым теоретически (см. подроб-
нее в гл. 9). Большим достоинством данного метода является воз-
можность передачи на одной несущей частоте сигналов несколь-
ких каналов передачи двоичной информации. В настоящее время
реализована аппаратура, позволяющая передавать сигналы двух,
трех и более каналов передачи двоичной информации. При пе-
редаче сигналов двух каналов имеет место так называемая дву-
кратная система относительной фазовой модуляции (ДОФМ), а
при передаче сигналов трех каналов — трехкратная система
(ТОФМ).
Изобретение Н. Т. Петровича послужило началом широкого
внедрения фазовой модуляции в различные виды аппаратуры пе-
редачи дискретной информации.
МЕТОД ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИИ
Отличительной особенностью ОФМ является способ формиро-
вания передаваемого ФМ сигнала. Если при фазовой модуляции
фаза несущей изменяется при каждом изменении полярности пе-
редаваемых посылок (см. рис. 8.32), то при ОФМ она изменяется
при передаче каждого единичного элемента только одной поляр-
ности, например, отрицательной (рис. 8.40), или, что то же самое,
при поступлении каждого «0». Это значит, что при передаче под-
ряд нескольких отрицательных посылок (нулей) фаза несущей
будет изменяться с начала каждой элементарной посылки.
Для осуществления ОФМ необходимо условиться о едином для
передатчика и приемника соответствии между значениями посыл-
ки а, и значениями разности фаз ф;—фг-1 и полярности передавае-
мой посылки. Примем, например, что посылкам а^~1 соответ-
ствует <pj—<p,-i=!A<p=O и передача посылки положительной поляр-
ности +А, а посылкам (Ц = 0 тогда 'будет соответствовать
Ф,—Ф» -1=Аф= 180° и передача посылки отрицательной полярно-
сти — А, т. е.
di — 1 —> = 0 —> -[-А )
а. = 0^Дф= 180°— А {' -8j3)
243
Тогда закон манипуляции фазы несущего колебания при ОФМ бу-
дет следующим. При передаче посылки Oj = 0 фаза несущего ко-
лебания скачком изменяется на 180° по отношению к фазе (г—1)-й
посылки, а при передаче посылки а;=1 она остается такой же, что
и у (I—1)-й посылки.
а)
Рис. 8.40. Графики, поясняющие правило манипуляции
при ОФМ
Из предыдущего следует, что для формирования ОФМ сигнала
необходимо на входе фазового модулятора установить преобра-
зующее устройство. Структурная схема одного из таких устройств
представлена на рис. 8.41, а эпюры напряжений, поясняющие его
Рис. 8.41. Схема преобразующего устройства
работу, — на рис. 8.42. Заметим, что вследствие отсутствия како-
го-либо наперед заданного исходного состояния может иметь ме-
сто обратная работа счетного триггера. При этом кривую на рис.
8.42а следует как бы повернуть на 180°. Это приводит к изменению
начальной фазы выходного сигнала, но разность фаз соседних по-
сылок остается неизменной. В этом и заключается относитель-
ность рассматриваемого метода модуляции: передаваемая инфор-
мация полностью определяется скачком фазы в моменты модуля-
ции выходного сигнала и не связана с его начальной фазой.
244
Из рассмотрения рис. 8.4|1
и 8.42 видно, что для преобра-
зования передаваемой (моду-
лирующей) информации в вид,
необходимый для реализации
метода относительной фазовой
модуляции, используются ко-
роткие тактовые импульсы,
следующие со скоростью пе-
редачи В (то=‘1/5) и жестко
связанные с передаваемой ин-
формацией. Такая последова-
тельность тактовых импуль-
сов, как правило, всегда име-
ется в аппаратуре передачи
дискретной информации, так
как с целью обеспечения мак-
симальной помехоустойчиво-
сти обычно используется син-
хронный метод передачи и
приема сигналов. п о г *
1 „ Рис. 8.42. Графики, поясняющие раооту
Один из возможных вари- схем |На рис. 8.4i и 8.43
антов построения схем переда-
ющего преобразующего устройства приведен на рис. 8.43. Сравни-
вая эту схему со схемой на рис. 8.33, легко можно заметить, что
отличие схемы модулятора ОФМ состоит только в способе управ-
ления потенциалом в точках подачи напряжения несущей на фазо-
вый модулятор. С помощью транзисторной схемы, приведенной на
рис. 8.43, достигается синхронность работы модулятора и переко-
дируется исходный сигнал. Диаграммы, поясняющие временные
соотношения и принцип работы схемы рис. 8.43, показаны на рис.
8.42.
Рис. 8.43. Упрощенная схема .фазового модулятора и преобразующего устройства
с использованием тактовой частоты
245
МЕТОДЫ ПРИЕМА ОФМ СИГНАЛОВ
Метод сравнения фаз. Сначала рассмотрим метод прие-
ма, соответствующий схеме на рис. 8.38а. В данном случае непо-
средственно сравниваются фазы посылок на несущей частоте, по-
этому такой способ приема получил название способа сравне-
ния фаз.
Как ясно из рисунка, суть способа состоит в совмещении во вре-
мени I и (I—1)-й недетектированных посылок и сравнении фаз не-
сущей ф/ и фг-i этих посылок в схеме сравнения (фазовом детек-
торе). Покажем, что схема, приведенная на рис. 8.38, осуществляет
фазовую селекцию ОФМ сигналов [29].
Пусть на первый вход схемы сравнения (фазовый детектор)
поступает сигнал i-й посылки
‘£ci= Нс COS [(Ос(t—1{) +фн + фг], (8-14)
где фн — начальная фаза сигнала.
На второй вход фазового детектора должна поступить (i—1)-я
посылка, задержанная на т3.
Анализ работы рассматриваемой схемы показывает, что напря-
жение на выходе фазового детектора в момент отсчета будет
иметь вид
£фд = Лсо3 (Ф<~ Фг-i), (8.15)
где А — коэффициент передачи детектора. Из этой формулы непо-
средственно следует, что если ф,—ф<_1=0, то Е фд =+А; если фг—
—фг-1 = 180°, ТО £фД = —А.
'Рис 8 44. Графики, поясняющие работу фазо-
вого детектора с ОФМ, работающего по ме-
тоду сравнения фаз
Таким образом, соот-
ветствие, о котором усло-
вились выше [см. выраже-
ние (8.13)], выполняется,
и фазовый детектор вос-
произведет переданные
посылки правильно.
На рис. 8.44 показаны
диаграммы, поясняющие
работу фазового детекто-
ра ОФМ, работающего
по методу сравнения фаз.
На рис. 8.44а показан фа-
зомодулированный сигнал
eci, поступающий на вход
приемного устройства.
Этот сигнал соответствует
диаграмме рис. 8.42д и,
следовательно, является
результатом перекодиров-
ки исходного сигнала, подлежащего передаче (рис. 8.42а).
246
На диаграмме рис. 8.446 показано напряжение ec<i—i) (пред-
ставляющее собой сдвинутый на т0 во времени сигнал eci), пода-
ваемое на второй вход фазового детектора, на рис. 8.44 в — напря-
жение на выходе фазового детектора, а на рис. 8.44а — сигнал,,
принятый приемником после фильтрации высших составляющих и
формирования триггером (фильтры и триггер на схеме рис 8.38
не показаны). Как видно из сравнения рис. 8.42а и 8.44а, фазо-
вый детектор правильно воспроизводит переданную последова-
тельность посылок.
Метод сравнения полярности. Как отмечалось вы-
ше, метод непосредственного сравнения имеет более низкую поме-
хоустойчивость, чем метод последетекторного сравнения, который
применительно к ОФМ носит название метода сравнения поляр-
ностей. Это обстоятельство привело к широкому распространению
данного метода в аппаратуре с ОФМ1).
Одним из возможных вариантов построения приемного устрой-
ства является реализация для условий приема ФМ сигнала схемы
рис. 8.39. При приеме ФМ сигнала в качестве схемы, устраняющей
манипуляцию сигнала, и детектора часто применяется фазовый де-
тектор со схемой выделения синхронной несущей по методу Пис-
толькорса (см. рис. 8.37).
Математический анализ работы схемы, изображенной на рис. 8.39, достаточ-
но сложен (см., например, [29]). На основании анализа сделаны следующие вы-
воды. Если под действием помех, перерыва связи, нарушения режима работы
схемы или флуктуации сигнала, проходящего по линии связи, в цепи образова-
ния синхронной несущей произойдет скачок фазы, то на некоторое время нару-
шится правильность приема посылок. Рассмотрим наиболее характерный случай'
скачка фазы на 180°. Характерным является то обстоятельство, что возникающие
при этом ошибки носят локальный характер и охватывают в зависимости от
места появления скачка несущей один или два символа.
Если скачок фазы произошел на границе двух посылок 6,_1 и bit то иска-
жена будет только посылка й,. Если же скачок фазы произошел в средней части
посылки, то ошибочно могут быть приняты 6,-1 и bi посылки. Это объясняется'
тем, что хотя фаза напряжения на выходе делителя частоты в схеме на рис 8.37
(или в точке 2 схемы на рис. 8.39)) при помехе может скачком меняться на 180°, что'
приводит к «обратной работе», наличие в схеме на рис. 8.39 перемножителя (схемы
сравнения) 'устраняет «обратную работу», так как изменение полярности посылок
на его входах (точки 3 и 4) не будет изменять полярность посылок, полученных
в результате перемножения (+х)(-\-у) = (—х)(—у)=ху. Рассматриваемый про-
цесс иллюстрируется диаграммами, приведенными на рис. 8.45. На рис. 8.45а и б
показаны передаваемое сообщение в виде произвольно взятой комбинации и соот-
ветствующий ей сигнал ОФМ на входе фазового детектора (точка 1 на рис. 8.39).
На диаграмме рис. 8.45в показано синхронное напряжение, получаемое путем-'
удвоения и деления частоты входного сигнала (точка 2 на рис. 8.39), в котором
в моменты времени б и t2 под действием помех произошли скачки фазы на 180°.
Из рис. 8.45е и з видно, что если на выходе приемного устройства используется
стробирование сигнала в средней части посылки или осуществляется интеграль-
ный прием, т. е. используется синхронный принцип регенерации сигнала, то ска-
чок фазы в момент времени Л исказит только одну посылку (заштрихована на-
рис. 8.45з), а скачок фазы в момент времени t2 — две посылки при их регистра-
ции ^устройство стробирования на рис. 8.39 не показано).
*) Анализ различных способов приема ОФМ сигналов и особенности построе-
ния приемных устройств подробно изложены в [)29].
247'
Рис. 8. 45. Диаграммы, поясняющие работу
схемы приема ОФМ по методу сравнения
полярности посылок (см. рис. 8.39):
а) передаваемое сообщение; б) сигнал
ОФМ на выходе фазового модулятора и
входе фазового детектора (точка 1 на рис.
8.39); в) синхронное напряжение на входе
фазового детектора ‘(точка 3); д) посылки
на выходе элемента памяти ‘(точка 4); е)
посылки на выходе схемы сравнения (пе-
ремножителя, точка 5); ж) стробирующие
импульсы; з) посылки на выходе схемы ре-
генерации .(выход приемника)
Примечание Устройство стробирования (ре-
генератор) в схеме на рис. 8.39 не показано
В схеме на рис. 8.39 прием сиг-
налов ОФМ производится без ис-
пользования тактовых импульсов,
т. е. импульсов, соответствующих
периоду поступления единичного
элемента. При использовании так-
товых импульсов в схеме приема
сигналов ОФМ можно создать син-
хронный приемник, в котором будет
отсутствовать в явном виде элемент
памяти с временем задержки, точно
равным длительности единичного
элемента т3=то. Наличие регенера-
ции сигнала обеспечивает высокую
помехоустойчивость такого прием-
ного устройства.
Структурная схема приемного устройства ОФМ с использова-
нием способа сравнения полярностей при синхронной передаче
(приеме) приведена на рис. 8.46. Здесь левая часть схемы (до
X В
Рис. 8.46. Структурная схема приемного устройства ОФМ, работающего по ме-
тоду -сравнения полярностей с использованием тактовых импульсов
линии АА') представляет собой обычную схему фазового детекто-
ра, в котором для выделения когерентной несущей применена схе-
ма Пистолькорса. Средняя часть схемы (между линиями АА' и
248
Б Б') является синхронным приемником двоичных сигналов, сос-
тоящим из схемы формирования тактовых импульсов (коррекцион-
ное устройство) и регенератора. Правая часть схемы содержит
элементы, преобразующие принятую последовательность посылок
в исходную, поступившую на вход преобразующего устройства пе-
Рис. 8.47. Диаграммы, поясня-
ющие процесс приема сигна-
лов ОФМ по методу сравнения
полярностей с использованием
тактовых импульсов
Передающая часть, а) (передавае-
мый сигнал, б) преобразованный
сигнал на входе фазового модуля-
тора; в) фазомодулцраванный сигнал
на выходе передающего устройства
Приемная часть: 1 — фазомодулированный сигнал на входе фазового детектора (точка 1 нэ-
рне 84b); 2 — синхронная несущая на входе фазового детектора (точка 2), 3 — сигнал на
выходе фазового детектора до фильтрации (точка 3); 4—сигнал на входе регенератора’
(после фильтрации точка 4), 5 — тактовые импульсы, поступающие от коррекционного уст-
ройства на регенератор (точка 5), 6 —сигнал на выходе регенератора (точка 6); 7 —сигнал
на выходе дефференцирующей цепи (точка 7), 8 — сигнал на выходе выпрямителя (точка 8),
9—сигнал «а выходе схемы НЕТ (точка 9), 10 — принятый сигнал (выход триггера) Срав-
нение диаграмм (а) передающей и (10) приемной частей показывает, что сигнал принят
правильно
редатчика. Эти преобразования выполняются также с использова-
нием тактовых импульсов, т. е. синхронным методом.
Работа схемы, приведенной на рис. 8.46, иллюстрируется диа-
граммами на рис. 8.47.
249'
ПРИНЦИПЫ СОЗДАНИЯ В ОДНОМ ЧАСТОТНОМ КАНАЛЕ НЕСКОЛЬКИХ
КАНАЛОВ ПЕРЕДАЧИ ДВОИЧНОЙ ИНФОРМАЦИИ
Возможность сравнительно простыми средствами создать вод-
ном частотном канале несколько каналов передачи двоичной ин-
формации является одним из важных преимуществ метода фазо-
вой модуляции, способствовавших широкому распространению его
(в модификации относительной фазовой модуляции) в практике
передачи двоичных сигналов.
Принцип многократной ОФМ передачи заключается в том, что
каждой последовательности посылок, передаваемых по отдельным
каналам, присваивается определенное значение фазового угла не-
-сущего колебания. Если по каждому каналу передаются двоичные
посылки и число каналов равно N, то общее количество возмож-
ных комбинаций посылок будет равно 2М Следовательно, для /V-
кратной ФМ передачи необходимо использовать 2N различных
значений фазовых сдвигов несущего колебания.
Обычно значения разности фаз соседних посылок выбираются
кратными некоторому минимальному углу манипуляции, отлично-
му от 0 и равному
2тт
Лфмин=~. • (8.16)
В табл. 8.2 приведены значения Лфмин, рассчитанные по этой
формуле при различном числе каналов.
ТАБЛИЦА 82 ТАБЛИЦА 83
N 1 2 3 4 с Значение ин- 0 формационного символа Фазовое прираще- ние Дф=срср/_|
Д ср ТМИН 180 90 45 22,5 11,2 + 0 л
Рассмотрим более подробно двукратную систему ОФМ, кото-
рая обычно в литературе называется ДОФМ. При использовании
метода ДОФМ одной линейной фазоманипулированной посылкой
передается одновременно информация о двух информационных
символах (полярностях посылок), принадлежащих соответственно
двух различным двоичным каналам. Простейший способ формиро-
вания сигнала с ДОФ1М. состоит в линейном суммировании сигна-
лов ОФМ двух независимых информационных двоичных каналов
при условии, что несущие колебания этих сигналов находятся в
квадратуре (фазовый сдвиг между колебаниями несущих состав-
ляет (л/2 + ^л), где k — любое целое, наперед заданное число).
Пусть соответствие между значением информационного симво-
ла (полярностью посылок) в каждом из двух двоичных каналов
и значением информационного параметра (в случае ОФМ — при-
ращением фазы) одинаково и может быть записано в виде табл.
8.3, которая называется манипуляционным кодом.
250
Возможные фазовые положения несущей каждого из двоичных
каналов с ОФМ показаны на рис. 8.48 а.
/ на поп
Пл о°у
П канал
0°М
Рис. 8.48 Векторные диаграммы, поясняющие фазо-
вые положения векторов двух подканалов при
ДОФМ
а) фазовые положения векторов каналов, б) фазо-
вые положения вектора при совместной работе двух
телеграфных каналов
Пусть в момент действия i-й посылки фазовые положения не-
сущей обоих каналов располагались так, как это показано на
рис. 8.486 (векторы ai и ап). При этом фазовое положение не-
сущей, получаемой путем сложения исходных сигналов с ОФМ,
будет представлено вектором 12 . Поскольку речь идет об отно-
сительном методе модуляции, фазовое положение вектора несу-
щей при формировании предыдущей (I—1)-й посылки долж-
но быть принято за начало отсчета и в соответствии с выбранным
манипуляционным кодом соответствовать передаче значения « + »
как по первому, так и по второму двоичному каналу (см.
рис. 8.48 б).
Анализируя диаграмму на рис. 8.486, нетрудно заметить, что
при передаче, например, «—» по первому двоичному каналу и « + »
по второму двоичному каналу должно произойти приращение фа-
зы колебания суммарной несущей на угол л/2. Если по обоим дво-
ичным каналам передается «—», то приращение фазового угла
должно составить л и т. д.
Анализируя возможные ситуации, можно составить табл. 8.4,
которая одновременно отображает манипуляционный код в рас-
сматриваемом случае.
Учитывая, что значение фазы несущей предыдущей посылки яв-
ляется при относительном методе модуляции началом отсчета
для значений фаз несущей последующей посылки, векторная диа-
грамма на рис. 8.486 справедлива для любой пары соседних по-
сылок.
251
ТАБЛИЦА 8.4
Значение символа в двоичном канале Фазовое приращение суммарной несущей
I II
+ + 0
— + л/2
— — Л
+ — Зл/2
Рассмотрим, как изменяется значение фазового угла при работе двух двоич-
ных каналов методом синхронной относительной фазовой 'модуляции. Пусть по
двум двоичным каналам следуют посылки согласно диаграмме на рис. 8.49а.
а)<
I двоичный
канал
Лввоичный
канал
t
Фазовое прираще-
ние по отношению
к i-й посылке
Положение суммар-
ного _-вектора сигна-
ла ьв на выходе пе-
редатчика
Рис. 8.49. Диаграмма, поясняющая работу двух каналов
при ДОФМ
Примем, что исходное значение фазового угла равно нулю. Для нашей последова-
тельности могут быть вычислены значения приращений фазовых углов, с учетом
табл. 8.4 и того, что фаза колебаний i-й посылки изменяется относительно фазы
колебания предыдущей Д'—1)-й посылки.
Полученные значения показаны на диаграмме рис. 8.496. Здесь же показаны
положения вектора суммарной несущей. За начальное положение этого вектора
принято положение вектора при передаче по обоим двоичным каналам посылок
положительной полярности (Дср=О).
В приемной части аппаратуры с ДОФМ для приема i-й посылки
по каждому из двоичных каналов из задержанной (i—1)-й посыл-
ки надо образовать не одно, а два опорных напряжения, сдвину-
тых на 90°, которые должны быть определенным образом сфази-
рованы с приходящими посылками.
Из рассмотрения диаграмым на 8.486 легко можно установить
необходимый алгоритм работы детектора в нашем случае. Рас-
смотрим прием сигналов по первому двоичному каналу. Пусть век-
252
тор опорного напряжения, формируемого из колебаний предыду-
щей посылки, занимает положение, совпадающее с вектором
при передаче посылки положительной полярности (см. рис. 8.486
и рис. 8.50). Тогда фазовый детектор должен быть устроен так,
что при сдвиге фаз между опорным колебанием и регистрируемым
Рис. 8.51. Диаграмма взаимного рас
положения векторов опорных и при
нимаемых сигналов при ДОФМ
Рис. 8 50. Векторная диаграмма, пояс-
няющая свойство фазового детектора
в данный момент сигналом на 45° (315°) на его выходе возникало
напряжение положительной полярности (передача в первом двоич-
ном канале посылки положительной полярности), а при сдвиге
фаз между опорным колебанием и регистрируемым в данный мо-
мент сигналом на 135° (225°) на выходе фазового детектора воз-
никало напряжение отрицательной полярности (передача в пер-
вом двоичном канале посылки отрицательной полярности). В век-
торной форме работа фазового детектора одного двоичного кана-
ла показана на рис. 8.50.
На этой диаграмме показано также фазовое положение век-
тора опорного напряжения, в качестве которого используется ко-
лебание предыдущей посылки. При этом следует обратить внима-
ние на то, что вектор опорного колебания (а следовательно, и фа-
за опорного колебания) оказывается смещенным относительно воз-
можного фазового положения вектора i-й посылки (&s ) и, следо-
вательно, относительно фазы колебания i-й посылки на угол ±45°
или ± 135° *).
Правило работы фазового детектора второго двоичного канала
должно быть таким же. Для разделения первого и второго дво-
ичных каналов на приеме используются два одинаковых фазовых
детектора, которые питаются опорными напряжениями, сдвинуты-
ми по фазе одно относительно другого на 90°. Векторы опорных
напряжений, формируемых из (i—1)-й посылки для первого и вто-
‘) Сдвиг по фазе на -—Г5° эквивалентен -сдвигу -на 315°, а -сдвиг -на —136°
эквивалентен -сдвигу «а 225°.
253
рого двоичных каналов, и возможные фазовые положения суммар-
ного вектора ^показаны на рис. 8.51. Из рис. 8.51 легко можно
установить, что по отношению к вектору опорного колебания для
второго двоичного канала возможные фазовые положения векто-
ра г-й посылки (Ьх) оказываются также смещенными на ±45° и
±135°.
Для выполнения сформулированного выше правила работы фа-
зовых детекторов в аппаратуре ДОФМ необходимо, следователь-
но, создать два опорных колебания, сдвинутых на л/2 друг отно-
сительно друга и на ±л/4 относительно немодулированного сиг-
нала [см. рис. 8.51, угол между вектором Ьъ (++) и векторами
опорного напряжения]. Для реализации указанного алгоритма
схема приемного устройства строится так, что полученное из пре-
дыдущей (I—1)-й посылки когерентное с сигналом колебание по-
дается на два фазовращателя + л/4 и —л/4, с которых взаимно
ортогональные колебания подаются в качестве опорных напряже-
ний на два фазовых детектора.
Принцип приема сигналов ДОФМ. поясняется диаграммами, приведенными
на рис. 8.52 Пусть на -вход фазового детектора поступает фазомодулированное
колебание, имеющее соотношения фаз, показанные на рис. 8.52а (эти соотноше-
ния фаз соответствуют последовательности посылок в I и II каналах, показан-
ной на рис. 8.49а).
На диаграмме рис. 8.326' показана последовательность фаз, аналогичная диа-
грамме а, но смещенная для удобства сравнения фаз на одну посылку. На диа-
грамме з показано положение вектора опорного напряжения, полученного из
(I—1)-й посылки, путем дополнительного постоянного сдвига фазы колебания на
—л/4. Угол между векторами колебаний опорного напряжения и принимаемой
в данный момент f-й посылки показан на диаграмме г.
Пользуясь указанным выше правилом работы фазового детектора (Дср =
= 45° (315°)->ф ; Дф=135° (225°)->0 ), легко получить последовательность посы-
лок, которая появится на выходе фазового детектора первого (синфазного) кана-
на (рис. 8.526).
Аналогичные рассуждения для второго (квадратурного) двоичного канала
поясняются диаграммами рис. 8.52е—к.
На диаграммах е и ж показан сигнал, аналогичный сигналу диаграмм а и б.
На диаграмме з показано опорное напряжение, сформированное из (1—1)-й по-
сылки (заметим, что в квадратурном канале дополнительный постоянный сдвиг
фазы должен составлять ±л/4 и при этом опорные колебания синфазного в
квадратурного каналов оказываются сдвинутыми друг относительно друга на
л/2).
На диаграмме и показан угол между векторами опорного напряжения ,и при-
нимаемой i-й посылки, а на диаграмме к показана последовательность посылок,
которая появится на выходе фазового детектора второго (квадратурного) двоич-
ного канала *).
Сравнивая рис. 8.49а и рис. 8 526, к можно видеть что посылки приняты
правильно
Структурная схема одного из вариантов передающей части ка-
нала с ДОФМ показана на рис. 8.53. По существу, передатчик
’) Следует заметить, что посылки на диаграммах рис. 8.526 и к показаны в
виде, который они имеют на выходе интегрирующих (фильтрующих) и форми-
рующих элементов, включенных непосредственно за фазовыми детекторами пер-
вого и второго каналов.
254
ДОФМ в этом случае состоит из двух передатчиков однократной
ОФМ, в которых несущая имеет одну и ту же частоту, но отлича-
ется в I и II каналах по фазе на 90°. Сумматор производит сложе-
ние сигналов, полученных на выходах фазовых модуляторов. Оче-
Рис. 8 52. Диаграмма, поясняющая
принцип приема сигналов ДОФМ:
а), е) положение вектора сигнала Ьу
на входе приемника; б), ж) вектор
сдвинутый на одну посылку; в) век-
тор опорного напряжения 1 (синфаз-
ного) канала; г) разность фаз Д(р =
= (р,-—ф;-1 i-й и (!—1)-й посылок;
д) сигнал на выходе фазового детек-
тора I канала (после интегратора);
з) вектор опорного напряжения II
(квадратурного) канала; к) сигнал
на выходе фазового детектора II ка-
нала (после интегратора)
Икебана ___________I L.-iZcJ?
Рис 8 53 Структурная схема пере-
датчика ДОФМ, реализующего пре-
образование, показанное на рис. 8 48
/ — преобразующее устройство (см рис
8 43), 2 — фазовые модуляторы, 3 — фазе
вращатель Д<р = 90°, 4 — сумматор
видно, что схема, приведенная на рис. 8.53, осуществляет преобра-
зования, изображенные в векторном виде на рис. 8.486.
Другим вариантом построения схемы передатчика ДОФМ яв-
ляется схема, в которой два исходных двоичных сигнала I и II ка-
налов по определенному закону преобразуются в четверичный сиг-
нал, в соответствии со значениями которого и манипулируется фа-
за колебания несущей частоты [21].
Рассмотрим теперь структурные схемы приемных устройств
ДОФМ, работающих по методам сравнения фаз и сравнения по-
лярностей. Работа этих схем поясняется векторной диаграммой,
изображенной на рис. 8.51.
На рис. 8.54а показана структурная схема приемного устройст-
ва ДОФМ, работающая по методу сравнения фаз, а на рис. 8.54 6—
по методу сравнения полярностей.
255
канал
Рис. 8.54. Структурная схема .приемных устройств ДОФМ, использующих прин-
цип сравнения фаз (а) и принцип сравнения полярностей (б):
(а) / — фазовый демодулятор, 2 — линия задержки, 3 — фазовращатель; (б) 1—регенератор,
2— линия задержки, 3 — фазовращатель, 4 — умножитель частоты, 5 — узкополосный
фильтр, 6 — делитель частоты
В примерах фазовых детекторов, рассмотренных нами ранее, опорное напря-
жение (синхронное колебание) подавалось в средние точки фазового детектора
либо в фазе, либо в противофазе с приходящим из линии сигналом. При этом в
случае совпадения по фазе сигнала и опорного напряжения детектор выраба-
тывал положительное напряжение, а в случае противофазности— отрицательное
напряжение. Рассмотрим теперь работу фазового детектора ,в случае, когда опор-
ное напряжение поступает в средние тачки фазового детектора со сдвигом ф,=
= +45°. Схема такого детектора будет аналогична показанному на рис. 8.35,
только между точками АБ и генератором должен быть включен фазовращатель,
обеспечивающий фазовый сдвиг <p,=+45°.
Из рис. 8.51 видно, что вектор предыдущей и последующей посылок можег
иметь фазовый сдвиг Д<р2=0; 90; .180; 270, при этом фазовый сдвиг ф3 между
опорным колебанием, поданным в .средние точки фазового детектора со сдвигом
cpi = +46°, и сигналом будет оавен величинам, указанным в табл. 8.5.
ТАБЛИЦА 8.5
Фазовый сдвиг Д(р2 между i и (i—1)-й посылка- ми, град Фазовый сдвиг <р3 между опорным коле- банием, поданным на ФД со сдвигом ф1=—45°, и сигналом, град (I канал) Полярность посылки на выходе ФД Фазовый сдвиг <р3 между опорным коле- банием, поданным на ФД со сдвигом ф1=+ -|-45о, и сигналом, град (II канал) Полярность посылки на выходе ФД
0 +45 + —45 +
90 +135 — +45 +
180 —135 — +135 —
270 —45 + —135 —
Формы сигналов в фазовом детекторе, соответствующие указанным фазовым
сдвигам фз (и, следовательно, Афа), приведены на рис. 8.55. Из этих рисунков вид-
но, что при фазовых сдвигах ф3=±45° напряжение на выходе детектора после
усреднения положительно (графа 5 табл. 8.5), а при сдвигах ф3 = ±135°— отри-
цательно.
256
Аналогичным образом может (быть проведен анализ и для случая, когда
опорное напряжение подается на фазовый детектор со сдвигом <pi =—45°. Зна-
чения фазового сдвига <р3 при этом будут равны величинам, указанным в графе
2 табл. 8.5, а полярность напряжений будет соответствовать значениям, приве-
денным в графе 3 табл. 8.5.
и ____________ Рассмотрим теперь структурную схему
/ '*- приемного устройства ДОФМ для метода срав-
нения фаз, показанную на рис. 8.54а. Фазо-
Рис. 8.55. Формы сигналов в
фазовом детекторе
вращатели обеспечивают взаимное располо-
жение вектора *-й посылки и двух векторов
опорных напряжений Voc и U0K, образованных
из (I—1)-й посылки в соответствии с рис.
8.511.
Воспользовавшись табл. 8.5 и рис. 8.48, для
I и II каналов легко может быть составлена
табл. 8.6, показывающая, что схема рис. 8.54а
правильно воспроизводит полярности исходных
Поскольку для приема
по методу сравнения фаз
необходимо запоминание
фазы (t—1)-й посылки, ап-
паратура усложняется и тре-
буется высокая стабиль-
ность времени задержки тэ
линии задержки.
Рассмотрим прием сигна-
лов ДОФМ методом сравне-
ния полярностей. Структур-
ная схема приемника, реа-
лизующего этот метод, пока-
зана на рис. 8.546.
ТАБЛИЦА 86
Исходный сигнал в канале Фазовый угол <р сум- марного вектора на выходе передатчика, град Фазовый угол ф8 между опорной час- тотой и сигналом в канале, град Полярность посылки на выходе ФД в канале
I II
I II 1(ф1=—45'*) 11(Ф1=+45в)
+ + 45 4-45 —45 4- +
— + 135 4-135 4-45 — 4-
— — 225 —135 4-135 4- —
4- — 315 —45 —135 + —
Анализ, приведенный в {29], показывает, что для устранения
манипуляции в принятом ФМ сигнале необходимо учетверить фазу
и частоту сигнала, а для получения опорного напряжения произ-
вести деление частоты на четыре. Следовательно, если для выде-
ления опорного напряжения воспользоваться схемой Пистолькор-
са, то процесс выделения синхронной несущей внесет неопреде-
ленность четвертого порядка, т. е. фаза сигнала на выходе схе-
мы Пистолькорса может в начальный момент иметь с равной ве-
9—60 257
роятностью одно из четырех различных значений. Неопределен-
ность четвертого порядка в опорном напряжении, как показал
анализ [29], может привести не только к обратной работе, но и к
переходу символов из одного канала в другой и их инверсии. По-
этому в приемном устройстве ДОФМ принципиально должно быть
предусмотрено устройство, устраняющее неопределенность четвер-
того порядка.
В работе [27] показано, что, основываясь на цикличности, имею-
щейся в перестановке символов, и их инверсии при скачках фазы
и располагая сведениями о i и (i—1)-й посылках по синфазному
и квадратурному каналам с помощью логических элементов Й,
НЕ, ИЛИ можно создать схему устранения неопределенности.
ПРИНЦИП ТРЕХКРАТНОЙ ОФМ (ТОФМ)
Применяя рассмотренные выше методы, можно проанализиро-
вать работу и трехкратной системы ОФМ (ТОФМ). В этой систе-
ме схемы логических узлов передатчика и приемника будут более
сложными, чем в аппаратуре ДОФМ. Работа их описана в [26,28].
Векторная диаграмма
значений фаз при разном
сочетании передаваемых по-
сылок в одной из загранич-
ных систем ТОФМ приведе-
на на рис. 8.56. Эта аппара-
тура предусматривает ис-
пользование шести частот-
ных каналов, разнесенных
на 440 Гц друг от друга.
Рис. 8.56. Векторная диаграм-
ма, поясняющая принцип
ТОФМ
Каждый из частотных каналов уплотняется трехкратной системой
ОФМ. Скорость работы по каждому двоичному каналу выбрана
равной 325 Гц. Таким образом, суммарная скорость передачи в од-
ном телефонном канале составляет 325X3X6 = 5850 дв. ед/с.
8.9. ПРИНЦИП ПЕРЕДАЧИ ДВОИЧНОЙ ИНФОРМАЦИИ
В СИСТЕМЕ С ФМ С ЧАСТИЧНО ПОДАВЛЕННОЙ ОДНОЙ
БОКОВОЙ ПОЛОСОЙ (ФМ С ОБП)
Возможность реализации передачи (приема) ФМ сигналов с
частично подавленной одной боковой полосой частот при смещении
несущей частоты на край полосы пропускания канала открывает
новые пути для увеличения скорости передачи двоичной инфор-
мации по каналу связи.
258'
Соотношение между скоростями передачи сигналов, реализуе-
мых в системах с ФМ. ОБП и ФМ ДБП п|ри одинаковой форме
сигнала на выходе демодулятора, зависит от степени подавления
одной боковой полосы в системе с ФМ ОБП.
Частотный диапазон, занимаемый каждой из боковых полос
в системе с ФМ ДБП (ААдбп), равен половине диапазона, зани-
маемого спектром передаваемого сигнала (AFK). В однополосной
же системе ФМ частотный диапазон, занимаемый большей (не по-
давляемой) боковой полосой (АДовп), от которой зависит ско-
рость передачи сигналов в этой системе, может быть определен
следующим образом [22]:
+ (8-17)
где AFa=(fo—fc) — разница между частотой несущего колебания
f0 и средней частотой канала fc в системе ОБП, Гц.
Следовательно, коэффициент К, показывающий во сколько раз
увеличивается скорость передачи сигналов в системе с ОБП по
сравнению с системой ДБП, может быть определен следующим об-
разом:
_ АД)ВП
А ^ДБП
А Гк
—+ ДГо
АГк
2
(8.18)
В реальных
1,5 1,8.
условиях величина К может иметь значение
(8.19)
При этом помехоустойчивость снизится на 1,8<р<2,6 дБ. Реаль-
но в каналах передачи данных с ФМ ОБП достигается скорость
порядка 4800 бод. Если при этом использовать дополнительную
модуляцию сигнала ФМ по амплитуде, то можно увеличить ее еще
примерно в два раза. Таким образом, при комбинированном ме-
тоде ФМ—AM с ОБП можно получить скорость в телефонном ка-
нале 9600 бод.
Рассмотрим структурную схему одного из возможных вариантов аппаратуры
ФМ-АМ ОБП [il], приведенную на рис. 8.57. В этой аппаратуре двоичные под-
каналы А и В объединяются кодировщиком так, что образуется четырехпозицион-
ный сигнал, знак и амплитуда которого изменяются согласно табл. 8.7.
На передаче после преобразования в четырехуровневом кодировщике сиг-
налы скругляются фильтром нижних частот (Ф), при этом устраняется вредное
влияние низкой несущей (частоты и уменьшается взаимное влияние импульсов.
На выходе обычного балансного модул-ятора образуется сигнал несущей часто-
ты 2500 1Гц с четырьмя возможными состояниями, отличающимися либо фазой,
либо амплитудой (рис. 8.68а). В связи с этим балансный модулятор включают
по отличной от общепринятой схеме, а именно: несущую частоту подают на вход
модулятора, куда обычно подается сигнал, а напряжение сигнала подают в сред-
ние точки трансформатора балансного модулятора. При этом если плюсовые и
минусовые импульсы на входе модулятора имеют равные амплитуды, то в спектре
сигнала на выходе модулятора будет отсутствовать несущая частота. Для обес-
печения работы системы АРУ в приемнике в линию (посылается пилот-сигнал —
9* 259
частота fc-2500"a
'j 15 М 13 12 11
Рис. 8.57. Структурная схема аппаратуры с ФМ-АМ ОБП:
1 — фильтр нижних частот; 2 — балансный модулятор; 3 — фильтр ОБП;
4— усилитель; 5 — генератор несущей; 6 — корректор фазы и затуха-
ния; 7 — усилитель с АРУ; 8 — балансный демодулятор; 9 — фильтр
нижних частот; 10 — схема выделения нилот-сигнала; 11— дополняющий
фильтр; 12— детектор; 13 — полосовой фильтр; 14— ограничитель ам-
плитуд; 15 — генератор; 16 — делитель частоты
несущая частота, передаваемая с небольшим уровнем. Для обеспечения передачи
пилот-сигнала во входные импульсы вводят небольшую постоянную составляю-
.щую.
ТАБЛИЦА 8.7
Информация в подканалах Знак и амплитуда сигнала
А в
1 1 +U
1 0 +UIZ
0 0 —U/4
0 1 —и
Фильтр ОБП подавляет верхнюю боковую полосу, как показано па рис. 8.586.
Занимаемый в данном случае при передаче в телефонном канале спектр равен
примерно 5004-3000 1Гц.
На выходе
(рттра ОБП
^На входе
\tjmmpa
Частота
На входе допол-
няющего /рильтра
Г "\\На входе допол-
/ Ххняющего фильтра
-X.--------
£ Частота
Рис. 8.58. Векторная диаграмма (а), форма спектра на выходе передат-
чика (б) и форма опектра на выходе дополняющего фильтра (в) в
схеме на рис. 8.57
260
В приемнике после коррекции амплитудио- и фазо-частотных характеристик
канала корректором и усиления сигнал подается на балансный демодулятор. Не-
сущая частота на демодулятор подается от специальной схемы, выделяющей ее
из принимаемого сигнала. Схема выделения когерентной несущей представляет
собой, по существу, схему Пистолькорса, на входе которой добавлен дополняю-
щий фильтр, а сигнал с выхода, для уменьшения паразитной фазовой модуля-
ции несущей, затягивает генератор, частота которого равна 2/с- Частота коле-
бания, поступающего с выхода генератора, делится делителем частоты на два.
Полученный сигнал подается на балансный демодулятор.
Назначение дополняющего фильтра поясняется рис. 8.б8е. Фильтр подавляет
нижнюю боковую полосу, в результате получается симметричный узкий спектр,
из которого можно выделить схемой Пистолькорса когерентную несущую частоту.
На выходе демодулятора образуются четырехпозиционные импульсные сиг-
налы постоянного тока. В декодировщике производится разделение подканалов
А и В. Как видно из табл. 8.7, импульсы подканала А можно получить, анали-
зируя только полярность сигнала, а импульсы подканала В — анализируя толь-
ко амплитуду 'сигнала. Для обеспечения четкого разграничения амплитуд сиг-
нала в декодировщике на входе приемника установлен усилитель с быстродей-
ствующим АРУ, управляемый амплитудой принятого пилот-сигнала. Требуемая
точность поддержания уровня равна ±0,87 дБ.
При тщательной коррекции частотных характеристик канала
скорость модуляции может достигать 3000Ч-4000 бод за счет пе-
редачи с одной боковой полосой. Применение четырехпозиционно-
го сигнала позволяет удвоить полезную скорость передачи инфор-
мации.
8.10. ПРИНЦИПЫ ОРГАНИЗАЦИИ ДИСКРЕТНЫХ КАНАЛОВ
ПО РАДИОСВЯЗЯМ
Известно, что на коротковолновых радиолиниях связи наряду
с атмосферными и промышленными помехами наблюдаются частые
и глубокие изменения уровня принимаемого сигнала (фединги).
Поэтому на радиосвязях должна использоваться аппаратура обра-
зования дискретных каналов с большой помехоустойчивостью, ме-
нее чувствительная к изменениям уровня. В наибольшей степени
этим условиям удовлетворяет аппаратура с ЧМ и с ОФМ. Повы-
шение помехоустойчивости в аппаратуре с ОФМ достигается за
счет применения синхронного метода приема. В аппаратуре с ЧМ
повышение устойчивости действия связи достигается методом
сдвоенного приема, при котором одна и та же комбинация теле-
графных посылок одновременно передается по двум дискретным
каналам.
Известны два способа сдвоенного приема: способ пространст-
венного разнесения каналов и способ разнесения каналов по ча-
стоте. Рассмотрим принципы реализации этих способов на приме-
ре работы систем ТТ с ЧМ по радиоканалам.
При пространственном разнесении на приемном конце исполь-
зуются два радиоприемника и два комплекта ТТ (рис. 8.59). По-
мехоустойчивость повышается за счет того, что в пространственно
разнесенных точках приема (порядка 100 и более метров) изме-
нения уровня принимаемого сигнала независимы друг от друга.
При способе разнесения каналов по частоте требуется один при-
261
емник (рис. 8.60). На передаче сигналы одного телеграфного ап-
парата модулируют две несущие тональные частоты.
Исследования показали, что одновременное замирание двух
сигналов, отстоящих друг от друга на 400 Гц, маловероятно. По-
Ст. А ~ Ст. Б
Рис. 8 59. Структурная схема приема с разнесением каналов в просцран'стве
этому несущие частоты каналов ТТ при работе по этому способу
для каждой связи должны быть удалены не менее чем на 400 Гц.
Способ разнесения по частоте экономически более выгоден и
Станция А
Аппаратура Т1
От
телегр #
стар. ‘
кв
передать
Аппаратура ТТ
кв
приемник
вы* \ОГ
НстР\Ктелеер.
аппар.
Рис. 8.60. Структурная схема приема с разнесением каналов по частоте
обеспечивает лучшее качество связи. Основной трудностью реали-
зации указанных способов приема сигналов является создание
схем объединения двух каналов ТТ одной связи и автоматическо-
го выбора сигнала того канала ТТ, где он имеет больший уро-
вень. Обычное сложение сигналов по постоянному току путем
включения выходов двух каналов ТТ на одно реле не дает необ-
ходимого результата: в канале, где уровень приема в данный мо-
мент мал, вследствие большой усилительной способности канала
ТТ, шумы влияют настолько сильно, что, несмотря на нормальный
уровень приема в другом канале ТТ, прием осуществляется с ис-
кажениями.
262
Рассмотрим два возможных способа объединения каналов ТТ
одной связи. На |рис. 8.61а показана структурная схема сдвоен-
ного приема с использованием логарифмического расширителя.
Оба регулируемых усилителя РУс управляются от одного АРУ.
Усиление усилителей контролируется по каналу, в котором уро-
вень сигнала выше. Логарифмический расширитель ЛР обладает
Рис 8 61. Структурные схемы
сдвоенного приема с использова-
нием лог ариф м и ч е ск о го р а ошир'и -
теля (а) -и с использованием ог-
раничителя амплитуд (б):
ПФ— полосовой ф-ильтр, РУс — регу-
лируемый усилитель; АРУ — устройство
автоматического регулирования уровня,
ЛР — логарифмический расширитель.
ЧД — частотный детектор
нелинейной амплитудной характеристикой. При понижении уров-
ня сигнала на входе расширителя в два раза уровень сигнала на
его выходе уменьшается в четыре раза.
Уровень сигнала на выходе РУс в канале с большим входным
уровнем всегда остается постоянным. Вследствие этого он будет
постоянен и на выходе частотного детектора. В канале, в котором
наблюдаются замирания, уровень сигналов на выходе РУс падает
с увеличением затухания тракта распространения радиоволн. На
выходе ЛР он еще более ослабляется и, таким образом, на прием
практически не оказывает влияния, т. е. такой канал окажется бло-
кированным, и приемное реле будет уверенно работать от сигнала,
отчетливо выделяющегося на фоне разного рода помех.
Второй способ сдвоенного приема с автоматическим отбросом
слабого сигнала основан на применении ограничителя амплитуд
(рис. 8.616). В этой схеме используется свойство ограничителя ам-
плитуд подавлять сигнал с меньшей амплитудой при подаче на
его вход спектров двух сигналов с различным уровнем. Степень
подавления сигнала, имеющего более низкий уровень, тем больше,
чем больше разница уровней сигналов, поданных на вход ограни-
чителя амплитуд, и ниже порог ограничения. Этот способ сдваи-
вания каналов ТТ более прост и выгоден.
Хорошие результаты при работе по радиоканалам дает приме-
нение аппаратуры ТТ с ОФМ. Уплотнение радиоканала ОФМ мо-
жет быть сделано с использованием временного и частотного ме-
тодов вторичного уплотнения. Временное уплотнение требует
уменьшения длительности единичных элементов (при той же ско-
рости передачи в каналах) и поочередной передачи посылок от
263
каждого телеграфного аппарата. Частотное уплотнение требует
введения ряда поднесущих частот, на каждой из которых одно-
временно осуществляется передача своего сообщения. Анализ по-
казывает, что временной принцип уплотнения может быть реали-
зован при более низких стабильностях несущей частоты и требует
более простой аппаратуры. При частотном принципе уплотнения
длительность посылок на каждой поднесущей при равной суммар-
ной скорости передачи значительно больше, чем при временном
уплотнении, и, следовательно, посылки в меньшей степени подвер-
жены искажениям из-за многолучевого распространения, помех
и т. д.
Типичным примером аппаратуры ТТ с ОФМ, предназначенной
для работы по радиоканалам, является американская аппаратура
«Кинеплекс», подробное описание которой приведено в [26, 28, 30].
В этой системе имеется 20 несущих частот, на каждой из которых
с помощью ДОФМ образуется по два телеграфных канала. Кроме
того, предусмотрена служебная несущая частота для передачи им-
пульсов синхронизации. Все несущие располагаются в спектре
300-4-3400 Гц.
Селекция несущих частот на приеме осуществляется с помощью
коммутируемых высокодобротных электромеханических фильтров
500 1000 2500f0 3000 Г,Гц
Рис. 8.62. Графики (а), поясняющие распределение частот,
и вид резонансной характеристики коммутируемого фильт-
ра (б) в аппаратуре «Кинеплекс»
(добротность порядка 1000). Фильтры коммутируются синфазно:
отпираются в начале посылки и запираются в конце посылки, про-
изводя тем самым интегральный прием. Резонансная характери-
стика такого периодически коммутируемого фильтра показана на
рис. 8.626, а размещение несущих в спектре — на рис. 8.62а.
264
Как видно из рисунков, несущие частоты каналов располагают-
ся в нулевых точках резонансных характеристик фильтров. Так
как прием ведется интегральным способом, взаимное влияние со-
седних каналов незначительно. Такое устройство аппаратуры поз-
волило О1р1ганизо1вать в спектре 'канала ттч 40 телеграфных каналов,
работающих со скоростью 75 бод. В аппаратуре предусмотрена
возможность объединения нескольких телеграфных каналов в один
для повышения скорости работы, а также устройства сдвоенного
приема с разнесением по частоте.
Упрощенная функциональная схема передающего и приемного
трактов системы «Кинеплекс» показана на рис. 8.63. На входы
1,2,..40 передающего устройства включены телеграфные старт-
стопные аппараты. Кодопреобразователи, имеющиеся в каждом из
каналов, преобразуют 7,5-элементный стартстопный код в синхрон-
ный 7-элементный код и производят перекодирование полученного
кода в относительный. В манипуляторе фазы осуществляется дву-
кратная фазовая модуляция несущего колебания, поступающего
от тонального генератора несущих. Для формирования сигналов
синхронизации (синхроимпульсов) используется тональный гене-
ратор синхронизации, модулируемый по амплитуде с частотой мо-
дуляции (режим передачи точке). Напряжения после 20 фазовых
модуляторов линейно суммируются и поступают на радиопередат-
чик. Необходимые для описанных преобразований стабильные ча-
стоты вырабатываются с помощью стабильного опорного генера-
тора и синхронизирующего блока передатчика.
С выхода приемника сигнал поступает на 20 канальных фазо-
вых детектирующих устройств, содержащих электромеханические
фильтры, и блок синхронизации. Последний выделяет переданные
синхроимпульсы и с их помощью синхронизирует блок синхрони-
затора приемника. В фазовых детекторных устройствах осущест-
вляются частотная селекция одной из тональных частот сигналов,
интегральное накопление и детектирование ДОФМ сигнала с раз-
делением принятой на каждой частоте информации по двум кана-
лам. Детектирование производится по методу сравнения фаз. Ко-
допреобразователи на выходе каналов преобразуют синхронный
код в стартстопный, поступающий к приемным аппаратам.
Высокий уровень помех в радиотелеграфных каналах, величи-
на которого иногда превышает уровень сигнала, приводит к оши-
бочному приему телеграфных посылок, вызывая искажения зна-
ков. Это особенно недопустимо при передаче данных. Для резко-
го снижения числа ошибок в последнее время широко применяют-
ся так называемые помехоустойчивые коды. Подробно методы
повышения достоверности будут рассмотрены в гл. 11. Здесь же
кратко описывается распространенная система радиотелеграфиро-
вания, в которой применяется метод автоматического запроса и
повторения искаженной кодовой комбинации *).
*) Описывается система ELMUX2X2 Д7В (ФРГ), предназначенная для пе-
редачи (приема) корреспонденции в режиме двух двукратных систем по двум
отдельным радиоканалам или одной четырехкратной системы по одному радио-
каналу [8].
265
Рис 8.63. Упрощенная структурная схема аппаратуры «Кинеплекс»
>В системе с автоконтролем используется семиэлементный код с постоянным
соотношением 3/4 числа посылок работы к числу посылок покоя в одной кодовой
комбинации. При нарушении этого соотношения на приемном конце появляется
сигнал «ошибка», который, будучи переданным на передающий конец по обрат-
ному каналу связи, вызывает повторение неправильно принятой комбинации.
Структурная схема аппаратуры показана на рис. 8.64. Передача ведется с
трансмиттера. Посылки в последовательном 5-элементном коде поступают в сог-
ласующее устройство. Последнее преобразует поступившую на нее последова-
Рис. 8.64. Структурные схемы аппаратуры радиотелеграфирова-
ния с АЗО ЕЬМиХД'7В:
а) передачи; б) приема
тельную комбинацию посылок в параллельную комбинацию, а также образует
пусковой имиульс УМ, управляющий работой трансмиттера. Параллельная ком-
бинация посылок из согласующего устройства попадает в кодопреобразователь
5-значного кода в 7-значный с постоянным соотношением числа посылок работы
к числу посылок покоя в одной кодовой комбинации. Из кодопреобразователя 5/7
комбинация поступает в предварительный накопитель, где вся 7-элементная ком-
бинация задерживается до тех пор, пока специальный импульс управления не
продвинет ее в блок памяти. В блоке памяти в каждый данный момент запоми-
наются три кодовых комбинации (три переданных знака).
Предварительный накопитель, кроме функции транслятора кодовых комби-
наций выполняет также функцию образования кодовых импульсов служебной
комбинации, передаваемой по радиоканалу для поддержания синхронной рабо-
ты распределителей передачи и приема, при отсутствии передачи информации.
Из блока памяти 7-элементная комбинация в параллельном коде поступает
на электронный синхронный распределитель передачи. Последний имеет 14 элек-
трических контактов при двукратном режиме работы. С передающего распре-
делителя последовательная комбинация передаваемого знака попадает на моду-
лятор. Модулированные сигналы тональной частоты по соединительной линии
передаются на радиоцентр и осуществляют модуляцию несущей передатчика.
На приемном конце (рис. 8.646) модулированный сигнал от радиопередат-
чика через соединительную линию и тональный усилитель-выпрямитель ТУВ по-
ступает на регенератор. Регенерированные посылки с выхода регенератора по-
267
даются на синхронный приемный распределитель, имеющий то же число контак-
тов, что и передающий распределитель.
'Подсчет количества посылок работы и покоя ® 7-элементной кодовой комби-
нации осуществляется счетчиком импульсов. Если соотношение им-
пульсов 3/4 в комбинации не нарушено, то она в последовательном коде посту-
пает в накопитель знаков, где серия из семи последовательных импульсов преоб-
разуется в серию из семи параллельных импульсов. Из накопителя знаков эта
кодовая комбинация вся одновременно попадает в кодопреобразователь приема
7/5, где она преобразуется в 5-значный параллельный код. Из кодопреобразова-
теля 7/5 5-элементная комбинация поступает в преобразователь, где она преобра-
зуется в последовательную 5-элементную комбинацию, к ней добавляется стар-
товый и столовый импульсы, и она направляется в стартстопный приемный ап-
парат.
Если счетчик импульсов зафиксирует нарушение соотношения 3/4 посылок
работы и покоя в какой-либо кодовой комбинации, то на передающую станцию
посылается сигнал «ошибка», который останавливает передачу телеграмм этой
станцией и включает цикл повторения в блоке памяти. Повторяются три послед-
ние переданные знака. Повторение продолжается в обе стороны до тех пор, пока
не будет получено правильное соотношение импульсов в кодовой комбинации зна-
ка, вызвавшего передачу сигнала «ошибка».
ГЛАВА 9
Качество передачи дискретных сообщений
9.1. ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ КРАЕВЫХ ИСКАЖЕНИЙ
В гл. 2 были изложены принципы измерения краевых искаже-
ний. Рассмотрим теперь приборы для измерения краевых искаже-
ний. Различают измерители изохронных (синхронных) и старт-
стопных искажений. Имеются также приборы, которые позволяют
измерять те и другие искажения. Изохронные искажения можно
измерить, например, простейшим синхронным измерителем иска-
жений, построенным на электроннолучевой трубке (рис. 9.1а).
Опорный генератор 1 вырабатывает синусоидальное колебание с
частотой, численно равной скорости передачи. Датчик испытатель-
ных комбинаций передает в дискретный канал посылки. В каче-
стве испытательных комбинаций обычно используются «точки»,
несимметричные комбинации (например, 1:5 и 5:il), а также длин-
ная хаотическая комбинация, называемая «текст». Длина комби-
нации «текст» обычно выбирается более 100 единичных элементов.
МККТТ рекомендует, например, для телеграфии испытательный
«текст», содержащий 64 знака (более 400 единичных элементов),,
а для передачи данных на скоростях 600 бод и выше — «текст»
длиной 511 единичных элементов. Полученные на выходе дискрет-
ного канала импульсы (до регенератора) подаются на дифферен-
цирующую цепочку, на выходе которой образуются короткие им-
пульсы, отмечающие значащие моменты. Далее эти импульсы уси-
ливаются, формируются и подаются на модулятор яркости элек-
троннолучевой трубки.
С помощью колебаний опорного генератора 2 и фазовращате-
ля на экране трубки получается круговая развертка. За время
одного единичного элемента луч совершает один оборот. Синхрон-
ность вращения луча обеспечивается схемой фазирования по им-
пульсам. Если передатчик и приемник-находятся на одной станции
(при испытании канала «шлейфом» или при испытании оконечной
аппаратуры), то круговая развертка может быть получена с по-
мощью опорного генератора 1. Схема фазирования по посылкам в
этом случае не используется.
269
л п
4 и снастный
канал
n п К регенератору
АЛА
Рис. 9.1. Измеритель изохронных краевых искажений на электронно-луче-
вой трубке:
а) структурная схема; б) изображения на экране
Примеры изображений, получаемых на экране прибора, пока-
заны на рис. 9.16. Если бы искажений не было, то импульсы от
всех значащих моментов попадали бы в одну и ту же точку. Раз-
брос светящихся точек в пределах 15% окружности говорит о на-
личии случайных или характеристических искажений величиной
15 % Если при переключении на «точки» величина искажений рез-
ко уменьшается, то это — характеристические искажения. Преоб-
ладания легко определяются по двум устойчивым точкам. Дроб-
ления проявляются в виде появляющихся изредка свечений вне
устойчивой воны краевых искажений.
Недостатком описанного прибора является низкая точность
вследствие субъективности отсчетов по экрану электроннолучевой
трубки.
В последнее время все больше используются измерители иска-
жений, построенные на дискретных принципах. Они имеют повы-
шенную точность, поскольку автоматически дают отсчет величины
искажения без участия человека. Примером может служить старт-
стопный измеритель краевых искажений ИКИ—СТ, структурная
схема которого приведена на рис. 9.2, а временные диаграммы ра-
боты — на рис. 9.3.
270
Прибор предназначен для измерений на скоростях модуляции
50, 75 и 100 бод. Он работает следующим образом. Измеряемый
сигнал поступает на входной усилитель, который гальванически
развязывает измеряемую цепь от схем прибора, а также форми-
Рис. 9.2. Структурная схема измерителя стартсгопных краевых иска-
жений ИКИ-СТ
IIHIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIII
Рис. 9.3. Временные диаграммы прибора ИКИ-СТ:
1 — измеряемый сигнал; 2 — выход входного усилителя;
3 — вход распределителя шкалы; 4 — вход стартстопного
распределителя; 5, 6, 7 —первый, второй и третий выходы
распределителя
рует короткие импульсы, совпадающие по времени с значащими
моментами сигнала. Короткий импульс, соответствующий началу
стартовой посылки, включает стартстопное устройство, которое
начинает пропускать квантующие импульсы от задающего генера-
тора Г на делитель частоты. Кварцевый генератор работает на
частоте 240 кГц. От нее зависит погрешность стартования.
271
После делителя частоты импульсы попадают на распределй-
тель шкалы. За время одного единичного элемента поступает
25 импульсов, поэтому распределитель шкалы за это время по оче-
реди выдает по одному импульсу на каждый из своих 25 выходов.
При совпадении одного из импульсов с коротким импульсом, от-
мечающим фронт посылки, загорается соответствующая лампочка
шкалы.
Схема выбора перехода позволяет измерять искажения од-
ного значащего момента стартстопной комбинации (любого из ше-
сти) или всех шести значащих моментов.
За время одного единичного элемента делитель частоты выда-
ет еще один импульс в стартстопный распределитель. По проше-
ствии 6,5 элементов стартстопный распределитель запирает старт-
стопное устройство, и прибор возвращается в исходное состояние.-
Индикатор прибора может быть переключен на любую из че-
тырех шкал со следующими погрешностями отсчета: ±48% с по-
грешностью ±4%; ±24% с погрешностью ±2%, ±12% с погреш-
ностью ± 1 %; ± 6 % с погрешностью ± 0,5 %.
Дополнительная погрешность зависит от скорости модуляции:
на 50 бод ±0,15%; на 75 бод ±0,25%; на 100 бод ±0,3%-
При нормальном режиме работы лампочки индикатора заго-
раются на короткое время. Возможен второй режим, при котором
лампочки после зажигания не выключаются. В этом случае облег-
чается наблюдение максимальных величин искажения.
9.2. КРАЕВЫЕ ИСКАЖЕНИЯ ПОСЫЛОК ВСЛЕДСТВИЕ
ВЛИЯНИЯ ПОМЕХ
Общие понятия об оценке качества связи по искажениям при-
нимаемых двоичных сигналов (по краевым искажениям и по дро-
блениям) были даны в гл. 2. В настоящей главе эти понятия де-
тализируются и связываются с теми мешающими факторами, ко-
торые вызывают появление краевых искажений и дроблений.
Одним из главных мешающих факторов являются разнообраз-
ные помехи, добавляющиеся в канале связи к полезному сигна-
лу. По их характеру помехи можно разделить на три группы: гар-
монические, флуктуационные и импульсные. Бывают также помехи
смешанного характера.
Рассмотрим вначале искажения от гармонической помехи, пред-
ставляющей собой колебание синусоидальной формы. При ампли-
тудной модуляции посылка на выходе приемного фильтра будет
иметь вид, показанный на рис. 9.4я. Пусть в канале действует гар-
моническая одночастотная помеха, показанная на рис. 9.46. Сум-
марное напряжение сигнала и помехи в каждый момент времени
на выходе фильтра можно найти из векторной диаграммы, приве-
денной на рис. 9.4в:
Uобщ вых = ВЫХ 4~ вых- (9- 0
272
Поскольку помеха независима от сигнала и может в каждый
данный момент времени иметь любую фазу, суммарное напряже-
ние может принять любое значение от максимального С7Свых +
+'Упвых до минимального Соевых—Un вых- Суммарный сигнал на
выходе детектора будет иметь вид, показанный на рис. 9.4г. Вид-
Рис. 9.4. Влияние гармонической помехи при AM:
а) форма модулированного сигнала; б) форма помехи;
в) векторная диаграмма; г) форма импульса на выходе
детектора
но, что приемное реле (пороговая схема) может зафиксировать
момент начала посылки раньше нормального момента (максималь-
но на At) или позже (также максимально на At). При небольших
величинах краевых искажений треугольники АВС и DEF подоб-
ны, поэтому
A t__Un вых
С Uz вых
Здесь t-a — время нарастания переходного процесса, которое со-
гласно ф-ле (7.42) равно 1/AF, где AF — ширина полосы пропу-
скания канала, т. е. суммы всех полосовых фильтров, через кото-
рые проходит передаваемый AM сигнал.
При прохождении через приемный фильтр гармоническая по-
меха ослабляется, если ее частота близка к краю фильтра. Можно
записать так:
U — е~ °’115Л*ПРМ £/ . и _ и
где UB, Uc — напряжения помехи и сигнала на входе приемного
фильтра; AbnpM — приращение затухания приемного фильтра на
Й73
частоте помехи по сравнению с затуханием на средней частоте (в
децибелах).
Относительную величину краевых искажений в процентах оп-
ределим так:
ё = 2|ЛО Ю0%. (9.2)
*0
Здесь то — длительность элементарной посылки, равная 1/В, где
В — скорость модуляции, бод.
Отсюда искажения при амплитудной модуляции
блм = 2 — 100% = 2e-0’”5AinpM--— 100%, (9.3)
Сс вых *о Н Ь F
где Н-—отношение сигнал/помеха на входе приемного фильтра.
Следовательно, величина краевых искажений прямо пропорцио-
нальна отношению помеха!сигнал и отношению скорости модуля-
ции к ширине канала. Как будет показано ниже, эта закономер-
ность справедлива при любых видах модуляции.
Иногда отношение помеха/сигнал выражают через разность
уровней сигнала и помехи в децибелах (ApR):
^_ = ^ = е-°’115Дрд. ’ (9.4)
** Uc,
В середине полосы пропускания Д&прм=0, поэтому здесь поме-
ха будет вызывать максимальные искажения:
<9-5)
П&Г
При большой амплитуде помехи, как можно увидеть из рис.
9.4г, минимальное значение суммарного сигнала в средней части
посылки может опуститься ниже порогового уровня. Это означа-
ет, что некоторые посылки будут иметь дробления.
Рис. 9.5. Влияние гармонической помехи при ФМ:
а) форма модулированного сигнала; б) форма импульса на выходе
детектора
При фазовой модуляции на 180° посылка на выходе приемного
фильтра будет иметь вид, показанный на рис. 9.5ai На выходе ко-
герентного детектора сигнал будет иметь вид, показанный на
рис. 9.56. По аналогии с AM можно вывести формулу для иска-
жений при фазовой модуляции:
6ФМ = е-°’115Д^^7Ю0о/о
(9-6)
Отсюда видно, что краевые искажения от гармонической по-
мехи при ФМ вдвое меньше краевых искажений при AM.
Влияние помехи на краевые искажения при частотной моду-
ляции примерно такое же. Но здесь необходимо вычислить не
«раскачивание» фронта переходного процесса огибающей, а «рас-
качивание» фронта переходного процесса частоты. Можно вывести
такую формулу
-о,п5л6прм£^/^п| 1 >
°чм е H&F\ Af а ) /о’ 'А-‘>
где с — коэффициент, зависящий от формы фильтра и девиации
частоты; Afa — разность между частотой помехи и средней часто-
той канала; а — запас чувствительности приемного реле (отноше-
ние напряжения сигнала к на-
пряжению срабатывания ре-
ле); Af— девиация частоты.
Типичная зависимость ве-
личины искажения частоты
помехи, вычисленная по этой
формуле, показана на рис. 9.6
(кривая «ЧМ»), Она имеет
«двугорбый» вид. Ослабление
помех, частоты которых лежат
в середине полосы пропуска-
ния канала, объясняется дей-
ствием частотного дискрими-
натора в приемнике. Положе-
ние горбов зависит от вида ча-
стотной характеристики при-
емного фильтра А&прм. Обычно
они располагаются около ниж-
ней и верхней рабочих частот. Приближенная формула для макси-
мальной величины искажений будет иметь вид:
6 100%.
ЧМ макс уу д р
-а» Affl
О
Рис. 9.6. Зависимость искажений от ча-
стоты гармонической помехи при ДМ,
ФМ и ЧМ
(9.8)
Более подробный анализ показывает, что искажения зависят
от величины девиации частоты. Наименьшая величина искажений,
определяемая ф-лой (9.8), получается при
₽ = « 0,7. (9.9)
На рис. 9.6 для сравнения показаны также зависимости для
AM и ФМ. Видно, что максимальные краевые искажения от гар-
275
монической помехи при ЧМ вдвое меньше краевых искажений
при AM.
Пример. Определим норму на гармоническую помеху в телефонном ка-
нале. Передача данных осуществляется .методом ЧМ со скоростью В=1200 бод.
Допустимая величина краевых искажений от гармонической помехи 6=1%.
А, 1200
По ф-ле (9.8) получаем 4% = ..>100%, откуда отношение сигнал/помеха
3000 п
Н =40 (т. е. Дрд=В12 дБ).
Уровень сигнала передачи данных в точке с нулевым относительным уровнем
равен —13 дБ. Следовательно, уровень гармонической помехи в этой точке не
должен превышать —45 дБ.
Рассмотрим теперь искажения от импульсной помехи, представ-
ляющей собой весьма короткий импульс. Такую помеху на входе
приемного фильтра можно представить в виде так называемой
дельта-функции, т. е. прямоугольного импульса постоянного тока
с бесконечно малой длительностью то. Чтобы энергия импульса не
обратилась в нуль, предположим, что его амплитуда настолько
большая, что площадь импульса Ло=(7ото равна заданной величи-
не. Такая помеха имеет равномерный спектр, что можно увидеть,
например, из рис. 7.2а, если положить то = 0. Дельта-функцию мо-
жно записать так:
со
6(/) = Ceos со (d со.
л .)
о
(9.Ю)
Эту запись следует понимать так: дельта-функция представ-
ляет собой сумму бесконечного количества косинусоидальных ко-
лебаний с одинаковыми амплитудами А0/п и одинаковыми началь-
ными фазами. На выходе приемного фильтра со средней частотой
соо и полосой пропускания AQi = 2nAT1 помеха будет иметь такой
вид:
Ио+ sin дод
Un = -^~ f cosco(dco = 2AF, А---------—cosco0(. (9.11)
nJ 1 0 дем
Д 2. -----
2
Она имеет вид, показанный на рис 9.7. Максимальная величина
(считаем, что AFi^AF, где AF — ширина полосы пропускания ка-
нала) :
маке = 2 A F Ло. (9.12)
276
Вблизи максимума импульсную помеху можно рассматривать
как гармоническую помеху. Поэтому для AM и ФМ, подставив в
ф-ды (9.3) и (9.6) вместо амплитуды помехи величину 2ДЛ4о (счи-
таем также, что Л&прм»0), можно сразу получить формулы для
краевых искажений от импульсной помехи:
6ам = 4^-5100%; (9.13>
6фм = 2^-5100%. (9.14)
с/с
При частотной модуляции действие импульсной помехи вычис-
лить сложнее, так как разные частотные компоненты помехи по-
разному ослабляются частотным дискриминатором приемника.
Кроме того, действие помехи зависит от величины девиации час-
тоты. При обычно применяемом отношении р = 2Л//АЕ ~ 0,7 полу-
чается
6ЧМ »В 100%. (9.15}
(7с
Особенностью искажений от импульсной помехи является их
независимость от ширины канала. При увеличении ширины канала
возрастает крутизна переходного процесса, но одновременно уве-
личивается напряжение помехи на выходе приемного фильтра, что
видно из ф-лы (9.12).
Сравнение ф-л (9.13), (9.14) и (9.15) показывает, что искаже-
ния от импульсной помехи при ФМ вдвое, а при ЧМ в четыре ра-
за меньше, чем при амплитудной модуляции.
Рассмотрим, наконец, искажения от флуктуационной помехи,
представляющей собой колебание, мгновенное значение которого
является случайной величиной. Ее можно представить также в ви-
де случайной последовательности кратковременных импульсов,
следующих с такой большой частотой, что отдельные возмущения
от каждого из них взаимно перекрываются. В современных кана-
лах флуктуационная помеха обычно образуется в результате сло-
жения многих помех различного характера, вызываемых различ-
ными независимыми источниками. Спектр такой помехи очень ши-
рок. Установлено, что распределение амплитуд флуктуационной
помехи подчиняется нормальному закону.
В каждый момент времени флуктуационную помеху можно
представить в виде вектора НПвых(Х) со случайной амплитудой
Ппвых(Х) и случайной фазой. Векторная диаграмма будет иметь
такой же вид, какой показан на рис. 9.4а для гармонической по-
мехи t/n вых- Поэтому по аналогии с ф-лой (9.3) можно для AM
сразу написать
б = 2^пвых(/) _В_ юо%. (9.16>
АМ l/свых Д/б 7
Напряжение t/nBbixfO является случайной величиной, подчи-
няющейся нормальному закону. Следовательно, краевые искаже-
277
ния от флуктуационной помехи являются случайной величиной и
подчиняются нормальному закону.
Среднеквадратическая величина искажений
«.рам - /^7= 100«.
V с эфф Л *
где t/сэфф — эффективное напряжение сигнала на выходе при-
емного фильтра.
Учитывая, что эффективное напряжение флуктуационной по-
мехи на выходе приемного фильтра можно выразить как
^ФФ=УЖЖ (9.17)
получаем
®ср AM
Un эфф
и с эфф
— 100% =
Д F
-V-2B----100%,
^ВЫХ Л F
(9.18)
где Явых —отношение эффективных напряжений сигнала и помехи
на выходе приемного фильтра.
Для ФМ аналогичным способом найдем
срФМ /зЯвыхД/7
100%.
(9.19)
При ЧМ величина искажений зависит от величины девиации ча-
стоты. Анализ показывает, что минимальная величина искажений
получается при
§ = « 0,7- (9.20)
Для ЧМ
С ,__ ___Д
срЧМ~ 2ЯвыхД£
100%.
(9.21)
Сравнивая различные методы модуляции, можно записать
'-’ср am = Др фм ~ 2,82 6ср чм. (9.22)
Отсюда видно, что наименьшие искажения от флуктуационной
помехи возникают при частотной модуляции, а наибольшие —
при амплитудной модуляции. Фазовая модуляция занимает про-
межуточное положение.
Заметим, что в отличие от краевых искажений, вызванных гар-
монической или импульсной помехой, в данном случае искажения
могут иметь весьма большие величины. Однако вероятность боль-
ших искажений невелика. Вероятность появления искажений ,6,
превышающих заранее заданную величину бь определяется соот-
ношением
P(6>61)=l-0f^-\
\ *ср /
(9.23)
278
.где Ф(х) — интеграл вероятностей1), определяемый по таблицам:
Ф(х) = —L-
' /2л
__2
/2л
(9.24)
В табл. 9.1 приведены значения вероятностей для некоторых
значений 6i/6Cp. Видно, что с увеличением искажения вероятность
быстро падает.
ТАБЛИЦА 9.1
61/6ср 1 2 3 4 5 6
Г(б>б!) 0,32 4,5-10~2 2,7-10~3 6,3-10“5 5-10“7 2-10~9
Пример 1. Определить, с какой вероятностью появляются искажения более
16% в канале с ЧМ. Скорость модуляции В=50 бод, ширина канала &F= 135 Гц,
разность уровней сигнала и флуктуационной помехи на выходе приемного фильт-
Ра ^Двых =11 дБ-
50
Согласно ф-ле (9121) 6Срчм «е^0-115 • “^-^^100% =5%. Интересующее нас
отношение .61/6 срчм =115/5=3. Из табл. 9.1 находим, что вероятность появления
искажения более 15% равна 2,7-10~3.
Пример 2. Определить норму для флуктуационной помехи в телефонном
канале при передаче данных методом ЧМ со .скоростью B—T2O0 бод. Допустимая
среднеквадратическая величина краевых искажений от флуктуационной помехи
6=1%.
1200
По ф-ле (91211) получаем: ,1% = ——------ ТОО %, откуда отношение сиг-
нал/помеха Ндвых=Й0 |(т. е. Дрд=26 дБ).
Уровень сигнала в точке с нулевым относительным уровнем равен—13 дБ,
Следовательно, уровень флуктуационной помехи в этой точке не должен превы-
шать —39 дБ.
9.3. КРАЕВЫЕ ИСКАЖЕНИЯ ПОСЫЛОК ВСЛЕДСТВИЕ
ВЛИЯНИЯ ДРУГИХ МЕШАЮЩИХ ФАКТОРОВ
Не только помехи могут вызвать появление краевых искаже-
ний и дроблений Двоичных сигналов. Наиболее частыми другими
причинами искажений являются плавные и скачкообразные изме-
нения уровня сигнала, кратковременные прерывания канала, сдви-
ги частоты и скачки фазы принимаемого сигнала.
Плавные изменения уровня сигнала вызывают краевые искаже-
ния типа преобладаний в каналах с AM. Пусть, например, напря-
жение сигнала на выходе детектора уменьшилось с П\ до П2 (рис.
9.8а). Срабатывание приемного реле соответствует точке Д, в ре-
зультате принимаемый импульс укоротится (считаем вначале, что
*) Следует учесть, что в литературе используются еще другие формулы для
интегралов вероятностей. Йсе они легко пересчитываются в интеграл, определяе-
мый ф-лой (9.24).
279
порог срабатывания этого реле не изменяется). Из треугольника
АБВ легко найти
At = _ i'i
2 \ U2 )'
Полное укорочение импульса равно 21 А/1. Отсюда относительная
величина искажений для приемника с AM и постоянным порогом
— 100% = |(е-°'115Др — 1)| — 100%, (9.25)
A F ' ' \F '
^АМ
£1
Uz
где Ар — изменение уровня сигнала, дБ.
а) форма импульса на выходе детектора; б) зависимость искажений от ве-
личины изменения уровия
Зависимость искажений от величины изменения уровня пока-
зана на рис. 9.86. Следует заметить, что при уменьшении напря-
жения сигнала более чем вдвое (ниже—6 дБ) прием становится
вообще невозможен.
Как видно из рис. 9.86, изменения уровня могут вызвать боль-
шие искажения уровня. Поэтому в приемниках с AM всегда при-
меняют схемы АРУ, действие которых можно свести к подстройке
порогового уровня пропорционально изменению уровня сигнала.
Эти схемы уменьшают искажения в 5—10 раз.
Скачки уровня сигнала вызывают искажения при всех видах
модуляции. Скачками будем считать такие изменения уровня, ко-
торые заканчиваются за время, не превышающее длительность эле-
ментарной посылки То.
При AM искажения от скачков уровня можно определять по
ф-ле (9.25), поскольку схемы АРУ имеют инерционность и первые
посылки после скачка будут приниматься в условиях неизменного
порогового уровня. При ЧМ скачки уровня вызывают искажения
переходного процесса частоты (рис. 9.9а), т. е. краевые искажения.
Исследовав переходный процесс, можно получить формулу для
максимальных искажений (для случая, когда скачок совпадает
по времени с моментом манипуляции):
Ачм = 0,04|Ар| — 100%, (9.26)
A F
где Ар — величина скачка в децибелах.
280
Рассчитанные по этой формуле искажения показаны на рис..
9.9Д. Сравнение с рис. 9.86 показывает, что искажения от скачков
уровня при ЧМ в 2—4 раза меньше, чем при AM.
Рис. 9.9. Влияние скачков уровня при
На рис. 9.9а видно, что при больших величинах скачков уровня
возникают дробления посылок (при скачках порядка 12-?16 дБ).
Пример. Определить норму для скачков уровня в телефонном канале при
передаче данных .методом ЧМ со скоростью В=>112'00 бод Зададимся допустимой
величиной краевых искажений 6=5%.
1200
По ф-ле (9.26) получим 5% =0,041Ар | 100%, откуда |Др|=3,1 дБ.
П рерываниями канала связи считают занижения уровня при-
нимаемого сигнала на величину более 17 дБ. Если длительность-
прерываний короче длительности элементарной посылки т0, то они
приводят к появлению краевых искажений при всех методах мо-
дуляции. (Если длительность прерываний больше т0, то они вы-
зывают еще ошибки, которые рассматриваются в § 9.6). Для AM,
например, получена такая формула для краевых искажений от
кратковременных прерываний:
б 2^^100%, (9.27)
AM \ '
т0
где А^прер — длительность прерывания на входе приемного филь-
тра. Из этой формулы следует, что искажения пропорциональны
длительности прерывания и не зависят от ширины фильтра.
Для остальных методов формулы не получены.
Сдвиг частот передаваемого сигнала, встречающийся в теле-
фонных вч каналах, может вызвать преобладания в приемнике с
ЧМ (так же, как изменение уровня в приемнике с AM). Сдвиг ча-
стот в канале преобразуется на выходе частотного детектора в
сдвиг импульса постоянного тока (рис. 9.10а).
Треугольники АВС и DEF подобны, поэтому .
Здесь Д/ — сдвиг момента срабатывания приемного реле; /н —
281
время нарастания переходного процесса, приблизительно равное
1/iAf; df — сдвиг частот; А/ — девиация частоты сигнала.
Полное укорочение импульса равно 21 А/1. Отсюда относитель-
ная величина преобладания для приемника ЧМ
Л 100о/о = ИД._L_ 100%. • (9.28)
чм Д/ То А/ А/
Итак, величина преобладания прямо пропорциональна сдвигу
частот (рис. 9.106).
детектора и форма импульса на его выходе; б) за-
висимость искажений от .величины сдвига частот
В современных телефонных каналах сдвиги частот не превы-
шают ±5 Гц. Такие сдвиги вызывают пренебрежимо малые иска-
жения, если для передачи используется весь телефонный канал, а
девиация частоты велика. К примеру, при Af=400 Гц, В = 1200 бод
и А/7 = 3000 Гц получается ,бчм = О,5°/о- Следовательно, при переда-
че данных с помощью аппаратуры с ЧМ по телефонным каналам
(без частотного разделения) с влиянием сдвига частот можно не
считаться.
При использовании телефонного канала с частотным разделе-
нием влияние сдвига частот весьма ощутимо. Так, в системе то-
нального телеграфирования с ЧМ при Af=30 Гц, В —50 бод, AF =
= 80 Гц и том же сдвиге ±5 Гц имеем 6чм = Ю%.
Пример. Определить норму на сдвиг частот в телефонном канале, пред-
назначенном для тонального телеграфирования методом ЧМ со скоростью В =
=50 'бод. Зададимся допустимой величиной преобладания от сдвига частот 6=4%.
По ф-ле (9.28) получаем 4% = (| df 150/30-80) 100%, откуда норма на сдвиг
частот |af| =2 Гц.
282
Скачки фазы передаваемого сигнала могут возникать в теле-
фонных вч каналах, например, вследствие переключения с основ-
ного генераторного оборудования на резервное. Они вызывают ис-
кажения при ЧМ. и AM, а также при ФМ в приемниках с инер-
ционными схемами выделения опорного колебания. Для ЧМ, на-
пример, получена такая формула для искажения:
(9.29)
где Д<р — скачок фазы.
Рассчитанные по этой формуле искажения показаны на рис.
9.11. Видно, что скачки фазы величиной около 180° могут выз-
вать очень большие искажения,
приводящие к ошибкам.
Для других методов модуляции
формулы не получены.
Для полноты картины следует
упомянуть о характеристических
искажениях и искажениях от «ка-
чаний» фронта.
Характеристические искажения -
вызываются взаимным влиянием „ о
________„ „ Рис- 9-И- Зависимость искажении
импульсов, каждый из которых от величины скачка фазы при ЧМ
имеет передние и задние «выбросы»
переходного процесса. Более подробно эти искажения были рас-
смотрены в гл. 2. Наличие фазо-частотных искажений в канале мо-
жет значительно увеличить характеристические искажения.
Искажения от «качаний» фронта появляются при низкой несу-
щей частоте. Пользуясь ф-лой (7.76), получим относительную ве-
личину искажений от качаний при всех видах модуляции:
6 =--------100%.
2 л/0
(9.30)
Видно, что величина искажений от качаний фронта зависит лишь
от соотношения скорости передачи и несущей частоты. Рассчитан-
ные величины приведены в табл. 9.2.
чины на рассматриваемый канал. Если скачкообразное изменение какого-либо
параметра сигнала (или кратковременный перерыв) происходит <в многоканаль-
ном тракте, то появляются еще взаимные влияния каналов. Действуя на какую-
либо несущую, скачок вызывает .появление бесконечно широкого спектра, кото-
рый попадает в полосы пропускания остальных каналов. В каждом канале в мо-
283
мент скачка возникает помеха от остальные каналов, которая увеличивает ис-
кажения.
Приращение искажения зависит от разноса -и количества каналов, а также
ют помехоустойчивости приемника >(по этой причине приращение искажения осо-
бенно заметно при АМ). В некоторых случаях оно может во много раз превы-
шать искажение, вызванное прямым действием скачка.
9.4. СУММИРОВАНИЕ КРАЕВЫХ ИСКАЖЕНИЙ
В СОСТАВНЫХ КАНАЛАХ
При организации связей, состоящих из нескольких участков,
суммарные искажения посылок могут быть найдены, если изве-
стны искажения на каждом участке. Суммарная величина степе_-
ни изохронного искажения бсум цепи, состоящей из N последова-
тельно составленных участков, будет находиться в следующих пре-
делах:
ys,>sIy«>l/vsT (9.31)
t==l r t=l
Точного выражения для суммирования степени изохронного ис-
кажения до сих пор не найдено. Многие предлагавшиеся формулы
хорошо аппроксимируют реальные результаты при определенных
ограничениях (либо предельное число участков, либо незначитель-
ная величина характеристических искажений по сравнению с ос-
тальными видами искажений).
Для оценки максимально возможной величины степени изох-
ронного искажения при соединении N участков МККТТ рекомен-
дует пользоваться формулой
W f~~N N
4™ = У 6Хао + 1/ V 62 + V 62л , (9.32)
сум хар । I/ z_ пр 1 / сл ’ ' '
1 Г 1 1
где бхар — характеристические искажения; 6Пр — преобладания,
бел — случайные искажения.
При работе по каналу связи стартстопный методом передачи
суммарные искажения согласно рекомендациям МККТТ можно
найти из соотношения
= У, 8..Р + 1/ У Ч, + V + s;tp + 6>к. (9.33)
1 r 1 1
где бпер — степень искажения старстстопного передатчика; бек —
степень изохронного искажения, возникающего из-за отклонения
скорости передатчика от номинальной скорости.
Разумеется, что значения 6Хар, бсл, бпер и бск. входящие в ф-лы
(9.32) и (9.33), должны быть измерены при условии одинаковой
вероятности превышения измеренной величины.
284
9.5. ОЦЕНКА КАЧЕСТВА СВЯЗИ ПО КОЛИЧЕСТВУ ОШИБОК
При достаточно больших величинах помехи или других мешаю-
щих факторов возникают ошибки: вместо нуля регистрируется
единица или вместо единицы регистрируется нуль. Каждую невер-
но принятую посылку (или бит) называют ошибкой по посылкам
(по битам), или просто ошибкой. В приведенном на рис. 9.12 со-
•' Комбинация М!2*^Комбинация№3»\
Переданное , I | | ; | , , I I I ; |
сообщение —1—'~4“'—'—1—1—1—'—'—1—'—1—
Принятое , I I 1,1, I I , . Г , I I _
сообшение Ош ОшОш
Ц------------------блок--------------*
Рис. 9.12. Нахождение ошибок путем 'Сравнения переданного и
принятого сообщений
общении ошибки произошли в третьей и четвертой посылках ком-
бинации № 2 и в четвертой посылке комбинации № 3. Показанную
на этом рисунке картину можно условно записать в следующем
виде:
Сообщения Комбинации
№ 1 № 2 № 3
переданное 01011 00010 01111
принятое 01011 00100 01101
Здесь жирными цифрами отмечены ошибки.
Все ошибки можно разделить на переходы нуля в единицу
(0~>-1) и переходы единицы в нуль (1->0). Ошибка в комбинации
№ 3, например, является переходом единицы в нуль. Если вероят-
ности ошибок обеих категорий равны, то канал называется сим-
метричным, а в противном случае — несимметричным. Реальные
каналы обычно в большей или меньшей мере несимметричны.
Важным параметром является кратность ошибок, т. е. число
ошибок в одной комбинации. Так, в комбинации № 2 имеют ме-
сто две ошибки. Значит кратность равна двум. В комбинации № 3
произошла одиночная ошибка.
Кроме понятия ошибки по посылкам часто используется поня-
тие ошибка по знакам (по блокам). Знак считается ошибочно при-
нятым, если в нем содержится хотя бы одна ошибка по посылкам.
На рис. 9.12 знак № 1 принят безошибочно, знаки № 2 и № 3 при-
няты ошибочно. В целом весь показанный на рисунке блок при-
нят ошибочно.
На практике верность передачи информации обычно определя-
ют коэффициентом ошибок по посылкам (по битам), представ-
ляющим собой отношение числа неправильно принятых посылок
(бит) к общему числу переданных посылок (бит):
^ош = ^ош/^общ- (9.34)
285
Используется также коэффициент ошибок по знакам (блокам),
равный отношению числа неправильно принятых знаков (блоков)
к общему числу переданных знаков (блоков). Он вычисляется так-
же по ф-ле (9.34). При этом знаком называется буква, цифра, чи-
сло, знак препинания или другой символ, содержащийся в сооб-
щении. Блоком обычно называют группу бит или знаков, переда-
ваемую как единое целое при защите от ошибок.
Коэффициент ошибок измеряется за определенный интервал
времени, поэтому часто пользуются формулой
Лош = ^-, (9.35)
^раб * изм
где Сраб—рабочая скорость передачи, выраженная числом пере-
даваемых бит, знаков или блоков в одну секунду; Тазм— интер-
вал измерения, с.
Для получения достаточно точного результата обычно измеря-
ют до тех пор, пока не будет зафиксировано не менее десяти оши-
бок. Часто интервал измерения стандартизуется, чтобы можно
было сравнивать результаты измерений. Например, для измерения
коэффициента ошибок при передаче данных по телефонным'кана-
лам МККТТ рекомендует -интервал 15 мин. Коэффициент ошибок,
измеренный на реальных связях за короткий интервал времени
(например, за 15 мин, за 1 ч), оказывается разным в разные се-
ансы измерений. Наиболее объективная оценка получается при оп-
ределении количества ошибок за весьма большие интервалы вре-
мени (недели, месяцы, годы). В этом случае обычно говорят о
вероятности ошибки:
рош=Нт Д°ш_. (9.36)
"общ
В теории помехоустойчивости обычно вычисляется именно ве-
роятность ошибки.
9.6. ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ КОЛИЧЕСТВА ОШИБОК
Принцип действия приборов для измерения количества ошибок
можно пояснить, пользуясь структурной схемой на рис. 9.13. Дат-
чик испытательных сигналов вырабатывает определенные комби-
нации (например, 1:5, 5:1, «точки», «текст») и посылает их в ди-
скретный канал. На приемной стороне имеется такой же датчик,
который работает синфазно с принимаемыми импульсами. Приня-
тые импульсы и импульсы, вырабатываемые местным датчиком,
сравниваются. В случае несовпадения их знаков срабатывает счет-
чик ошибок. В этом счетчике могут подсчитываться как общее чис-
ло ошибок, так и различные другие сведения, например, отдель-
но переходы 0 в 1, отдельно двойные, тройные ошибки, ошибки по
комбинациям, пакеты ошибок.
В качестве примера р'асюмот|рим пульт выявления ошибок ВО-1
позволяющий оценивать достоверность информации в каналах при
286
Рис. 9.13. К принципу действия прибора для измерения коли-
чества ошибок
скоростях передачи 50, 100, 200, 600 и 1200 бит/с. Пульт состоит
из трех блоков: передатчика, приемника и модема (рис. 9.14). Мо-
дем с частотной модуляцией при скорости 1200 бод используется
лишь в случае измерения телефонных каналов.
Рис. 9.14. Структурная схема пульта выявления ошибок ВО-1
Передатчик содержит задающий генератор Г, делитель часто-
ты, датчик испытательных комбинаций и выходное устройство.
Генератор может работать в режиме синхронизации тактовыми
287
импульсами от внешней аппаратуры. Датчик испытательных ком-
бинаций может выдавать следующие комбинации: «нажатие 1»,
«нажатие 0», 1:1 («точки») и «текст» длиной 511 единичных эле-
ментов. Выходное устройство преобразует полученные от датчи-
ка импульсы в такую форму, которая необходима для подключе-
ния к телеграфному каналу или модему.
Входное устройство приемника обеспечивает на своем выходе
стандартную форму импульсов независимо от формы входных им-
пульсов. В приемнике имеется также датчик испытательных ком-
бинаций, такой же, как в передатчике. Скорость его работы опре-
деляется, как и в передатчике, задающим генератором и делите-
лем частоты. Поэлементное сравнение принимаемого и местного
сигналов осуществляется схемой сравнения методом стробирова-
ния. Необходимые при этом короткие импульсы образуются фор-
мирователем. Сигнал ошибки, выдаваемый схемой сравнения, по-
ступает в счетчик емкостью 9999. Кроме того, последовательность
импульсов ошибок выдается наружу, например, для записи на маг-
нитную пленку с целью последующего анализа распределения
ошибок.
Поэлементное фазирование принимаемых и местных комбина-
ций обеспечивается устройством фазирования импульсов путем ав-
томатической подстройки частоты задающего генератора. Подстрой-
ка может производиться либо под принимаемую информацию, ли-
бо под тактовые импульсы, получаемые от внешней аппаратуры.
Совпадение начал принимаемой и местной комбинаций достигает-
ся полуавтоматически с помощью устройства фазирования 'цик-
лов.
Если в канале возникает пачка ошибок длительностью более
300 мс, то это событие должно относиться к отказам канала. Счет-
чик блокируется специальной схемой после 300 мс. Количество та-
ких пачек ошибок (перерывов связи) подсчитывается на счетчике
емкостью 10.
Точность приборов для измерения количества ошибок опреде-
ляется в основном числом ложных ошибок, попадающих в счет-
чик из-за расфазирования этих приборов. На практике точность
измерений составляет 5-Ь 10 % •
9.7. ОШИБКИ ВСЛЕДСТВИЕ ВЛИЯНИЯ ПОМЕХ
Общие понятия о помехоустойчивости различных методов мо-
дуляции при воздействии различного рода помех изучаются в кур-
се «Теория передачи сигналов». В настоящей главе эти понятия
детализируются и связываются с теми конкретными методами пе-
редачи, которые нашли применение в технике передачи дискрет-
ных сообщений. Рассмотрим последовательно влияние флуктуаци-
онной, импульсной и гармонической помехи на вероятность
ошибки.
Влияние флуктуационных помех наиболее исследовано теоре-
тически и экспериментально. Изучение этого влияния полезно для
288
сравнения между собой различных методов модуляции и разных
схем приемников.
Определение вероятности ошибки рассмотрим на примере си-
стемы с фазовой манипуляцией. Приемник предполагается коге-
рентным1). Ошибку будет вызывать лишь синфазная составляю-
щая помехи, находящаяся в противофазе с сигналом и превышаю-
щая его по амплитуде (рис. 9.15а). Синфазная составляющая по-
1)
), Сигнал UCM
Квадратурная
составляющая у
Рис 915. К 'расчету вероятности ошибки от флуктуационной помехи
при ФМ-
а) векторная диаграмма сигнала и помехи; б) распределение мгновен-
ных значений синфазной составляющей помехи
мехи имеет нормальное распределение мгновенных значений х
(рис. 9.156):
Xs
w (х) = —1------е эфф . (9.37)
V 2 л с/п эфф
Здесь L/цэфф — эффективное напряжение помехи на выходе прием-
ного фильтра.
Ошибка при приеме сигнала с амплитудой L7CM произойдет в
том случае, когда синфазная составляющая помехи будет иметь
значения от — UCK до бесконечности. Вероятность сбоя будет
равна заштрихованной площади на рис. 9.156:
Лм
Рфм = J w W dx-
Учитывая, что общая площадь, охватываемая кривой (рис. 9.155),
равна единице и что кривая симметрична, можно записать
1 Гсм
?фм=^~ w(x)dx =
о г о
А) Когерентным называется такой способ приема двоичных сигналов, при
котором известная в месте приема начальная фаза несущей используется для
отделения сигнала от помехи.
2 U
е п эФФ dx.
10—63
289
Введем замену переменных z=-------'Тогда полученный интег-
П П эфф
рал будет похож на известный интеграл вероятностей, определяе-
мый по таблицам [42]:
х _zy
®(i)=wFfc (М8)
О
Отсюда
Рфм <9-39>
L \ оп эфф / J
Обозначим отношение сигнала к помехе на выходе приемного
фильтра
#вых - —сэфф = , (9.40)
С/п эфф V 2 эфф
тогда окончательно для ФМ получим
РфМ = у[1-ф(^2//вЬ«)]- (9-41)
сигнала и помехи для когерентных
методов приема
Кривая вероятности ошибки, вы-
численной для ФМ по ф-ле (9.41),
показана на рис. 9.16. Здесь же
для сравнения приведены кривые
для других методов модуляции: для
системы с активной паузой (АП) и
для системы с амплитудной мани-
пуляцией (AM) при когерентном
приеме.
Метод активной паузы иногда путают
с методом частотной модуляции. Разница
между ними заключается в следующем. На
.входе приемника АП посылки с разными ча.
стотами разделяются двумя полосовыми
фильтрами. Далее они детектируются как
сигналы с AM, и полученные посылки по-
стоянного тока воздействуют на одно вы-
ходное реле. Таким образом, система с
АП — это система с двумя параллельными
каналами с AM. Она занимает вдвое боль-
шую полосу частот. В приемнике с истин-
ной ЧМ двухчастотный сигнал принимается
как одно целое. Определяется изменение
его частоты.
При нахождении параметра НВЬ1Х в системе с AM. учитывает-
ся мощность сигнала нажатия. Мощность сигнала отжатия равна
нулю.
Из рис. 9.16 видно, что наименьшая вероятность ошибки полу-
чается при ФМ. При амплитудной манипуляции помехоустойчи-
вость хуже, чем при ФМ: по напряжению сигнала в 2 раза (или
на 6 дБ), по мощности передатчика в 4 раза. Система с АП зани-
290
мает промежуточное положение между AM и ФМ. По сравнению
с AM помехоустойчивость повышается по напряжению сигнала в
1,41 раза (или на 3 дБ), а по мощности передатчика — в 2 раза.
Сравним теперь с кривыми, приведенными на рис. 9.16, кри-
вые вероятностей ошибки при других методах передачи и приема,
применяемых в телеграфии и передаче данных. Рассмотрим в ча-
стности многопозиционные системы (приведенные выше кривые от-
носятся к простейшим двухпозиционным системам). Так, при дву-
кратной фазовой модуляции (ДФМ) сигнал имеет четыре пози-
ции по фазе (рис. 9.17 а). Такую систему можно представить со-
Рис. 9.17. Векторы сигнала при ДФМ:
а) четыре возможных позиции сигнала; б) представ-
ление векторов сигнала в виде суммы векторов двух
подканалов
стоящей из двух подканалов с обычной фазовой манипуляцией,
сигналы которых взаимно сдвинуты по фазе на 90°. В каждом
подканале фаза манипулируется на 180°. Если амплитуда сигнала
одного подканала обозначить ait то амплитуда суммарного сигна-
ла будет равна (рис. 9.176)
а = V = ]/2 аР (9.42)
Прием сигнала с ДФМ можно рассматривать как когерентный
прием сигналов двух подканалов. Каждый подканал будет реаги-
ровать лишь на свой сигнал и синфазную с ним составляющую
помехи. Следовательно, вероятность ошибки при ДФМ можно най-
ти по формуле для ФМ, уменьшив амплитуду сигнала в / 2 раз.
Согласно выражению (9.41) получаем для ДФМ
Рдфм= (9.43)
Аналогичные формулы можно вывести для трехкратной фазо-
вой модуляции (ТФМ) с восемью фазовыми позициями сигнала и
для системы с числом позиций т>8.
Сравнение систем многократной фазовой модуляции показано
на рис. 9.18. Видно, что переход от ФМ к ДФМ, увеличивающий
скорость в 2 раза, сопровождается снижением помехоустойчивости
на 3 дБ. Переход от ДФМ к ТФМ, увеличивающий скорость в
10* Й91
1,5 раза, снижает помехоустойчивость еще на 5 дБ. Дальнейшее
увеличение числа позиций дает все меньшее приращение скоро-
сти при довольно большом снижении помехоустойчивости.
Рассмотрим теперь помехоустойчивость некогерентного приема.
Можно показать, что наибольшая помехоустойчивость при некоге-
рентном приеме обеспечивается системой с активной паузой (АП).
Таким же способом, какой использован выше для ФМ, можно по-
лучить формулы вероятности ошибки для методов АП и AM.
Вероятность ошибки при некогеренгных способах приема пока-
зана на рис. 9.19. Здесь же пунктиром показаны кривые для АП
и AM при когерентном приеме. Как видно из рисунка, некогерент-
ный прием имеет худшую помехоустойчивость, чем когерентный,
однако ненамного. Ухудшение по вероятности ошибки получает-
ся примерно в 3 раза, а по напряжению сигнала — примерно на
1 дБ.
Для частотной модуляции при некогерентном детектировании
с помощью частотного дискриминатора расчет вероятности ошиб-
ки сложен. Вероятность ошибки зависит от отношения девиации
частоты к ширине канала. Минимум ошибок получается при коэф-
фициенте р = 2Л//ЛКл; 0,55, где \Б — ширина полосы пропускания
канала; А/ — девиация частоты. Вычисленная для (3 = 0,55 кривая
показана на том же рис. 9.19. Видно, что система с ЧМ при неко-
герентном детектировании и оптимальной величине девиации ча-
стоты несколько хуже системы с АП (примерно на 1 дБ).
292
Классический когерентный метод приема ФМ сигналов, как бы-
ло показано в гл. 8, на практике редко применяется вследствие
трудности избавления от «обратной работы». Чаще используется
метод относительной фазовой модуляции. Рассмотрим вероятность
ошибки для этого метода.
При приеме методом сравнения полярностей регистрация при-
нятой посылки осуществляется путем сравнения ее с предыдущей
посылкой после детектирования (по постоянному току). Вероят-
ность ошибки в посылках на выходе детектора определяется по
обычной ф-ле (9.41) для идеального приемника ФМ
Рдет = ^-[1-ф()/2^вых)]. (9.44)
Далее при сравнении происходит «размножение» ошибок. На-
пример, одиночная ошибка с выхода детектора превратится в двой-
ную ошибку. Она пройдет вначале как ошибка принимаемой по-
сылки, а затем как ошибка предыдущей посылки. Более сложные
процессы имеют место при многократной ошибке, но и в данном
случае вероятность ошибки на выходе перемножителя примерно
удваивается. Исходя из этого, на выходе приемника ОФМ со срав-
нением полярностей
Рофм СП « 1 - ф (V 2 Явых). (9.45)
этих методов с методами ФМ и
Рис. 9.20. Вероятность ошибки от флук-
туационной помехи гари ОФМ и ДОФМ
Можно вывести формулы и для других методов относительной
фазовой модуляции. Сравнение :
ДФМ произведено на рис. 9.20.
Из анализа кривых видно, что
метод сравнения фаз по поме-
хоустойчивости мало отличает-
ся от идеальной ФМ, а метод
сравнения полярностей — еще
меньше. Таким образом, метод
относительной фазовой моду-
ляции позволяет почти полно- |
стъю реализовать потенциаль- |
ную помехоустойчивость систе-
мы ФМ.
Рассмотрим теперь влияние
гармонической помехи на появ-
ление ошибок. Пусть на сигнал
с фазовой манипуляцией дей-
ствует гармоническая помеха с
частотой, равной частоте сиг-
нала (fn=i/c). Векторная диа-
грамма для этого случая пока-
зана на рис. 9.21а. Ошибка по-
явится в том случае, когда ре-
зультирующий вектор t/общ по-
293
Рис. 9.21. Векторные диаграммы при действии
гармонической помехи:
а) для ФМ; б) для ОФМ
падет в нижнюю полуплоскость. Последнее возможно при одновре-
менном выполнении двух условий: если амплитуда помехи ип!Л
больше амплитуды сигнала Ue м и если it/общ находится внутри сек-
тора 2амакс- Угол амакс находится из треугольника АОБ:
Полагая фазу помехи в интервале 0-?-2л; равновероятной, по-
лучаем следующее распределение вероятностей ошибки при пе-
редаче этого сигнала:
t/c м
arc cos -
- __ 2 <%макс _______Un м
РфМ “ 2л “ д
Из рисунка видно, что это соотношение справедливо и при пе-
редаче сигнала с противоположной фазой, а следовательно, и при
передаче всего сообщения. Обозначим отношение сигнал/помеха
на входе детектора
ис
Un м
(9.46)
Тогда окончательно для ФМ получим (при равенстве частот сиг-
нала и помехи)
Рфм = °
Рфм =-JrarCC°S//
при Н > 1
при Н < 1
(9-47)
Если частота помехи не равна частоте сигнала (fn^fc), то на
выходе фазового детектора, кроме постоянной составляющей, обо-
294
значающей принимаемый сигнал, появятся биения с разностной ча-
стотой. Поскольку сигнал перед фазовым детектором проходит че-
рез ограничитель амплитуд, то помеха может подавлять сигнал.
Поэтому вероятность ошибки может увеличиться.
При двукратной фазовой модуляции, как уже делилось выше,
можно воспользоваться формулой для ФМ, уменьшив амплитуду
сигнала в У 2 раз. Отсюда при равенстве частот помехи и сигна-
ла получим
Рдфм — О
Рдфм = VarCC0S W
при Н > ]/2
при Н <
(9.48)
На рис. 9.216 показана векторная диаграмма для относитель-
ной фазовой .манипуляции со сравнением фаз (|принимается «1»;
частота помехи равна частоте сигнала, поэтому помеха имеет од-
ну и ту же фазу во время принимаемой и задержанной посылок).
Ошибка произойдет, если угол между £70бщ1 и ПОбщ2 будет мень-
ше 90°. При приеме «0» ошибки не может быть, так как помеха по-
ворачивает векторы сигнала на один и тот же угол. Примененным
выше методом можно показать, что вероятность ошибки для ОФМ
со сравнением фаз при частоте помехи, равной частоте сигнала,
описывается уравнениями:
Рофмсф = ° приЯ>11
РоФМсф = 0-5 приЯ<1|
Если частота помехи не равна частоте сигнала, то вероятность
ошибки несколько уменьшается.
При некогерентной ЧМ, как показывает опыт, вероятность
ошибки определяется по ф-ле (9.49). В случае некогерентной AM
с постоянным порогом ошибка произойдет тогда, когда амплитуда
синусоидальной помехи превысит половину амплитуды сигнала.
Это можно записать следующим образом:
'’“»= ° прий>2| . (950)
Рам =0,5 при Н <2 I
^АМ нек ’ г J
Для когерентной AM методом, описанным выше для ФМ, мож-
но получить следующую формулу для вероятности ошибки:
Рам ког 0
1 Н
Рам ког = — arc cos —
при Н > 2
при Н < 2
(9.51)
Все полученные закономерности показаны на рис. 9.22. Как
видно из этого рисунка, гармоническая помеха не вызывает оши-
бок, пока указанное отношение больше 2 при AM, больше 1,41 при
ДФМ и больше 1 при остальных методах модуляции. Таким об-
разом, наихудшей устойчивостью к гармонической помехе облада-
ть
ет некогерентная AM, более устойчива когерентная AM. и ДФМ,
а еще более устойчива некогерентная ЧМ (по напряжнию сигна-
ла в 2 раза, или на 6 дБ по сравнению с некогерентной AM). От-
носительная ФМ со сравнением фаз несколько более устойчива,
чем ЧМ. Наиболее устойчива когерентная ФМ.
Рис. 9.22. Зависимость вероятности ошибки от отношения напряжений сигнала
и гармонической помехи:
а) при ФМ; б) при AM и ЧМ
Рассмотрим теперь влияние импульсной помехи на появление
ошибок. Выше было показано, что импульсная помеха, действую-
щая в канале, вызывает на выходе приемного полосового филь-
тра отклик, который начинает возрастать от нуля, достигает своей
амплитуды и затем спадает. Типичная форма импульсной помехи
была показана на рис. 9.7. Форма и ширина импульсной помехи
определяются шириной канала связи, т. е. они постоянны, поэтому
обычно их не измеряют.
Вблизи максимума импульсную помеху можно рассматривать
как гармоническую помеху с частотой, равной средней частоте
фильтра. В связи с этим для расчета вероятности ошибки от им-
пульсной помехи можно использовать все формулы, выведенные
для гармонической помехи (для случая равенства частот сигнала
и помехи). Коэффициент Н будет обозначать отношение ампли-
туды сигнала к наибольшей амплитуде импульсной помехи на вы-
ходе приемного фильтра:
Н = Ucm— . (9.52)
м (наиб)
Все выводы, сделанные в предыдущем разделе в результате
сравнения разных методов модуляции, остаются в силе и для им-
пульсной помехи. Однако поскольку эта помеха не существует в
канале все время, а появляется время от времени, то формулы
предыдущего раздела должны быть помножены на вероятность
появления импульсной помехи Рама. Например, для ФМ получается
РФК = 0 при Н > 1
Рфм. = аГс cos Н ПРИ Н < 1
296
(9.53)
Амплитуда импульсной помехи в реальных каналах изменя-
ется в широких пределах. Если известно распределение амплитуд
импульсных помех, то усредненную вероятность ошибки можно
найти с помощью интегрирования. Например, для ФМ:
1
Рфм. = (И) arc cos И dH, (9.54)
о
где w(H) — плотность распределения отношения амплитуд сигна-
ла и импульсной помехи на выходе приемного фильтра.
Практика показывает, что ошибки могут быть вызваны импуль-
сными помехами, амплитуда которых меньше амплитуды сигнала.
Однако при этом далеко не каждая импульсная помеха вызывает
ошибку. Импульсные помехи становятся наиболее опасными при
ЧМ и ФМ, если их амплитуда превышает амплитуду сигнала.
В таких случаях, как показала практика, почти каждая импульс-
ная помеха вызывает ошибку. При AM импульсные помехи стано-
вятся особенно опасными при отношении сигнал/помеха менее
Двух.
Пример. Определить норму на импульсные помехи в телефонном канале.
Зададимся вероятностью ошибки от импульсных помех р=\2-10_е.
Число ошибок ,в час при скорости С=11200 бит/с ’будет равно 1200-3600Х
Х2-Ю~6 = 8,6 ~ 9. Учитывая, что каждая импульсная помеха при ЧМ и ФМ вы-
зывает примерно одну ошибку, если амплитуда помехи превышает амплитуду
сигнала, норма будет равна 9 помех/ч.
Определим теперь порог, выше которого должна учитываться импульсная по-
меха. В точке с нулевым относительным уровнем сигнал равен —13 дБ, отсюда
его эффективное значение равно .170 мВ, а амплитуда V2-170=240 мВ Следо-
вательно, порог в этой точке должен быть равен Й40 мВ.
9.8. ОШИБКИ ВСЛЕДСТВИЕ ВЛИЯНИЯ ДРУГИХ
МЕШАЮЩИХ ФАКТОРОВ
Рассмотрим ошибки, вызываемые скачками уровня, кратковре-
менными прерываниями канала, скачками фазы сигнала и фазо-
частотными искажениями.
Скачки уровня сигнала на какую-либо величину ±Ар, как это
было показано в § 9.3, могут привести к дроблениям посылок и,
следовательно, к появлению ошибок. Примеры зависимости числа
ошибок на один скачок уровня от величины этого скачка показа-
ны для канала с ЧМ на рис. 9.23. Из этого рисунка видно, что
один скачок уровня может вызвать ошибки в нескольких импуль-
сах.
Количество ошибок сильно зависит от величины скачка уров-
ня и от скорости передачи. При большой скорости передачи (для
заданной ширины канала) вызывает ошибку один из десяти скач-
ков на 9 дБ и каждый скачок на 17 дБ.
В реальных каналах более опасной мешающей причиной явля-
ются занижения уровня на величину более 17 дБ, так называе-
мые прерывания канала связи. Эти прерывания считаются крат-
297
Рис. 9.24. Распределение длительностей кратко-
временных прерываний в телефонном канале.
Примечание. По оси ординат отложена вероят-
ность того, что длительность прерывания превышает
величину, указанную по оси абсцисс
Рис. 9.23. Количество ошибок
на один скачок уровня в кана-
ле с ЧМ
{современными, если их длительность меньше 300 мс. Прерывания
свыше 300 мс обычно считаются нерабочими состояниями канала
(отказами).
Типичное распределение длительностей кратковременных пре-
рываний в телефонном канале приведено на рис. 9.24. Из него
видно, что наибольшее количество прерываний (70%) имеет дли-
тельность короче 20 мс. Если длительность прерывания больше
длительности единичного элемента, то такое прерывание вызывает
пропадание импульсов. В течение такого разрыва вероятность
ошибки будет равна 0,5. Причем эта закономерность справедли-
ва при любом методе модуляции. Следовательно, количество
ошибок, вызванных одним прерыванием длительностью Гпрер, при-
близительно равно
иош « 0,5 . (9.55)
То
Зная частоту повторения прерываний и среднюю длину преры-
вания, можно с помощью ф-лы (9.55) определить вероятность
ошибки за длительное время. Но обычно поступают проще. Совре-
менные измерительные приборы позволяют определить суммарное
время прерывания сигнала ниже заданного порога (Др——17 дБ).
Если оно равно Дбтрер за время измерения Т, то вероятность ошиб-
ки из-за кратковременных прерываний будет равна:
рош = 0,5^Р. (9.56)
В реальных телефонных каналах кратковременные прерывания
являются главной причиной возникновения ошибок.
Пример. Определить норму на прерывания канала, т. е. долю времени, в
течение которого допустимо снижение уровня более чем на 17 дБ, при передаче
по каналу дискретных сообщений. Задана вероятность ошибки от прерываний
Рош ^11'" 10~\
298
По ф-ле (9 56) получаем 1-Ю-5^0,5 --—---.откуда доля времени равна
Д/прер/Т^2-П0-5.
Скачки фазы передаваемого сигнала, происходящие в канале
связи, также могут вызвать ошибки. На рис. 9.25 сплошными ли-
ниями показаны измеренные зависимости количества ошибок на
один скачок фазы от величины скачка фазы для каналов тональ-
ного телеграфирования с AM и ЧМ. Видно, что фазовые скачки
значительно сильнее влияют, на каналы с ЧМ. При ЧМ опасны
скачки порядка 50°, при AM — порядка 100°.
Все предыдущие закономерности были рассмотрены для одно-
канальных систем. Если скачкообразное изменение какого-либо
параметра сигнала (или кратковременное прерывание) происхо-
дит в многоканальном тракте, то появляется еще взаимное влия-
ние каналов, описанное в § 9.3. Для примера на рис. 9.25 пунктир-
Рис. 9.25. Вероятность ошибки при скачках фазы
(сплошные кривые — для одноканальиой систе-
мы, пунктирные — для многоканальной)
шыми линиями показаны зависимости количества ошибок от вели-
чины фазовых скачков, измеренные в 24-канальной системе то-
нального телеграфирования. Сравнение со случаем одного канала
показывает, что вероятность ошибки при AM сильно увеличилась;
при ЧМ она изменилась незначительно. Это объясняется более вы-
сокой помехоустойчивостью систем с ЧМ и, следовательно, мень-
шим действием помехи от соседних каналов.
Фазовые искажения в канале связи обычно сами не вызывают
ошибок в канале передачи дискретной информации, но увеличива-
ют количество ошибок, создаваемых другими причинами.
Как было показано в гл. 7, фазовые искажения вызывают уве-
личение «хвостов» передаваемого импульса. «Хвосты» могут иметь
положительную и отрицательную полярность. Для простоты рас-
смотрим передачу импульсов постоянного тока (рис. 9.26). В мо-
мент стробирования Ч на решающее устройство будет действовать
основной принимаемый импульс и сумма «хвостов» соседних им-
299
пульсов. Эта сумма, являющаяся помехой для основного сигнала,
может иметь разную амплитуду в зависимости от полярностей со-
седних импульсов. Передаваемые сообщения обычно имеют слу-
чайный характер распределения положительных и отрицательных
импульсов. Поэтому межсимвольную помеху можно рассматривать
с допустимой погрешностью как случайный шум. Эффективное на-
Рис. 9.26 Взаимное влияние смежных импульсов
пряжение этого собственного шума легко подсчитать, если изве-
стна форма принимаемого импульса:
/ Й
</^=1/ (9-57)
где Ui — амплитуды межсимвольной помехи; N — число Возмож-
ных комбинаций помех от соседних импульсов.
Аналогичные явления происходят при передаче модулирован-
ных сигналов.
Дополнительный шум увеличивает вероятность ошибки, вызы-
ваемой какой-либо причиной. Например, без учета межсимволь-
ных влияний вероятность ошибки при ФМ от флуктуационной по-
мехи согласно ф-лам (9.41) и (9.40) равна:
₽Фм = фр-ф(^2"пг4Н1'
£ L \ эфф / J
Для учета межсимвольной помехи в эту формулу вместо Ппэфф
необходимо подставить эффективное напряжение суммарного
шума:
сум эфф = ]/^п эфф + ^об эфф ’
отсюда вероятность ошибки с учетом флуктуационной помехи и
межсимвольных влияний будет равна
_ 1
^фм ~ 2
______Uс эфф_________
\/ эфф Н- ^соб эфф
(9.58)
Примеры увеличения вероятности ошибки с возрастанием фа-
зовых искажений приведены на рис. 9.27. Эти кривые сняты при
300
передаче данных по телефонному ка-
налу методом ДОФМ со скоростью
2400 бит/с. По оси абсцисс отложено
число переприемных участков. Нерав-
номерность группового времени замед-
ления (ГВЗ) возрастает пропорцио-
нально числу переприемных участков
(при отсутствии коррекции). Из рисун-
ка видно, что вероятность ошибки
сильно возрастает с увеличением фа-
зовых искажений. Видно также, что
коррекция фазовых искажений значи-
тельно улучшает достоверность.
Появление составляющей С/Соб эфф в
ф-ле (9.58) приводит к сдвигу вправо
кривой помехоустойчивости, изобра-
женной на рис. 9.16. Величина сдвига,
выраженная в децибелах, выражает
снижение помехоустойчивости от влия-
ние. 9.27. Влияние числа пере-
приемных участков на вероят-
ность ошибки
ния фазовых искажений. Этот сдвиг
обычно определяется при вероятностях ошибки порядка 10-4-4-10-6.
Примеры вычисленных зависимостей снижения помехоустойчи-
вости Ар от величины фазовых искажений показаны на рис. 9.28.
а)
Рис. 9.28. Снижение помехоустойчивости Ар при флуктуационной помехе для:
а) четно-оиммегричной; б) нечетно-симметричной неравномерностей частотной
характеристики группового времени замедления
По оси абсцисс отложено отношение максимальной неравномерно-
сти ГВЗ А£г к длительности единичного элемента на входе пере-
датчика то. Кривые вычислены для четно-симметричных и нечетно-
симметричных неравномерностей ГВЗ (типичные формы таких не-
равномерностей были приведены на рис. 7.19).
На рис. 9.28 видно, что к четно-симметричным искажениям наи-
менее чувствительна некогерентная ЧМ. Несколько более чувстви-
тельны когерентная и некогерентная AM, когерентная AM с од-
301
ной боковой полосой, когерентные ФМ и ДФМ. Относительная ФМ
со сравнением фаз еще более чувствительна. Особенно чувстви-
тельна к фазовым искажениям двойная относительная ФМ
(ДОФМ) со сравнением фаз.
К нечетно-симметричным искажениям наиболее устойчивы ко-
герентные AM и ФМ. Значительно чувствительнее остальные спо-
собы модуляции. Следует отметить, что на большинство методов
модуляции нечетно-симметричные искажения ГВЗ влияют силь-
нее, чем четно-симметричные, особенно при их большой величине.
Допустимая величина фазовых искажений зависит от заданно-
го снижения помехоустойчивости. Из рис. 9.28а и б можно сде-
лать вывод, что если задаться снижением помехоустойчивости
24-3 дБ, то в среднем допустима неравномерность ГВЗ, равная
длительности элементарного импульса (независимо от типа фазо-
вых искажений),
Д^гдоп«т0= 1/В, (9.59)
где С — скорость передачи, бит/с.
Практика подтверждает такой порядок нормы на фазовые ис-
кажения для четно-симметричных и колебательных неравномер-
ностей ГВЗ. Однако эта формула является приближенной, так как
в зависимости от вида модуляции влияние фазовых искажений
может изменяться.
Коррекция фазо-частотных искажений уменьшает Ар. Для при-
мера на рис. 9.29 показаны частотные характеристики ГВЗ теле-
Рис. 9.29. Частотные характеристики телефонного канала
с шестью переприемными участками
фонного канала с шестью переприемными участками. При переда-
че данных методом ОФМ со скоростью 1200 бит/с Ар составляло
3 дБ до коррекции и 0,4 дБ после коррекции. Таким образом,
вредное влияние искажений ГВЗ можно почти полностью устра-
нить с помощью фазового корректора.
302
9.9. ПОНЯТИЯ О ЗАКОНАХ РАСПРЕДЕЛЕНИЯ ОШИБОК
В реальных каналах связи ошибки вызываются многими при-
чинами. В проводных каналах наибольшее количество ошибок вы-
зывается кратковременными прерываниями и импульсными поме-
хами. В каналах радиолиний и радиорелейных линий заметное
влияние оказывают флуктуационные шумы. В каналах коротко-
волновых радиолиний основное количество ошибок вызывается из-
менениями уровня сигнала вследствие влияния замираний.
Во всех реальных каналах ошибки распределяются во времени
очень неравномерно. Законы распределения во времени мешаю-
щих причин определяют законы распределения ошибок. Напри-
мер, основная часть прерываний в некоммутируемых телефонных
каналах кабельных линий связи вызывается работами, проводимы-
ми техническим персоналом. Поэтому в ночное время, когда объем
таких работ резко сокращается, ошибок бывает меньше (рис.
9.30а). Похожая закономерность наблюдается в коммутируемых
каналах ГТС (рис. 9.306), где ошибки в основном создаются дро-
Часы суток
Рис. 9 30. Примеры распределения ошибок по часам суток-
а) для длинного некоммутируемого телефонного канала; б) для
канала городской телефонной сети
жанием контактов шаговых искателей под воздействием работы
соседних искателей.
Большое значение имеет «тонкая» структура распределения
ошибок во времени. Знание законов распределения ошибок поз-
воляет правильно выбрать код, длину блока и алгоритм для защи-
303
ты от ошибок, выбрать способы контроля и измерений качества
каналов передачи дискретных сообщений.
Для изучения законов распределения ошибок с помощью спе-
циальных приборов (анализаторов ошибок) анализируют стати-
стические свойства потока ошибок. Применяются два метода ана-
лиза — блочный и пакетный.
Блочный анализ сводится к делению всей передаваемой ин-
формации на блоки определенной длины и исследованию их по-
ражения ошибками. Обычно измеряют: а) зависимость вероят-
ности ошибки по блокам от длины блока; б) распределение коли-
чества ошибок (по битам) в одном блоке; в) количество ошибоч-
ных блоков, следующих подряд друг за другом.
Примеры зависимости вероятности ошибок по блокам (вероят-
ности поражения блока хотя бы одной ошибкой) />бл от длины
блока N показаны на рис. 9.31. Эти зависимости хорошо аппрок-
Рис. 9.31. Зависимости вероятности
ошибки по блокам от длины блока:
/ — кв радиотелеграфный канал; 2 —теле-
фонный канал (коммутируемый) кабельной
линии; 3 — телефонный канал радиорелей-
ной линии; 4— телеграфный канал кабель-
ной линии; 5 — телефонный канал кабель-
ной линии
симируются прямыми линиями (при логарифмических масшта-
бах). Для одной вероятности ошибки по битам (2ДО-3) пункти-
ром показаны еще две прямые линии. Если бы ошибки были не-
зависимы друг от друга, то вероятность поражения блока линей-
но зависела бы от длины блока, и прямая шла бы под углом 45°.
Если, наоборот, все ошибки были бы сгруппированы подряд в од-
ну группу, то вероятность поражения блока не зависела бы от
длины блока, и прямая была бы горизонтальна. Из рис. 9.31 вид-
но, что характеристики реальных каналов располагаются между
этими двумя предельными характеристиками. Следовательно,
ошибки в реальных каналах группируются, поэтому их нельзя счи-
тать независимыми друг от друга.
Аппроксимирующие прямые линии на рис. 9.31 можно записать
так:
Рбл = Р1^1-“, (9.60)
где — вероятность ошибки по битам (при N=\), а — коэффи-
циент группирования ошибок.
304
Для канала с независимыми ошибками а=0, а для идеализи-
рованного канала, в котором все ошибки сосредоточены в одной
группе, а=1. Коэффициент группирования ошибок является важ-
ным показателем канала. В реальных условиях наименьшее зна-
чение (0,34-0,4) он имеет для коротковолновых радиотелеграфных
каналов, наибольшее значение (0,64-0,7) — для каналов кабель-
ных магистралей.
Блочный анализ позволяет получить сразу ряд ответов на прак-
тические задачи, например, определить вероятность повторения
блокрв информации в системе с решающей обратной связью. В
этом его достоинство. Однако он имеет ряд недостатков. Найден-
ные характеристики пригодны лишь для оценки систем с одной
длиной блока, поэтому оптимизация системы защиты затрудняет-
ся. Кроме того, эти характеристики плохо связаны с природой ис-
точников ошибок.
Пакетный анализ свободен от указанных недостатков. Он ис-
ходит из предпосылки, что ошибки не являются независимыми, что
они группируются в так называемые «пакеты ошибок» (их назы-
вают также «пачками ошибок»). Выбираются параметры статис-
тического распределения пакетов во времени, которые затем изме-
ряются. Обычно используется понятие пакета с защитным интер-
валом: пакетом называется группа ошибок, внутри которой оши-
бочные биты отделены друг от друга менее чем k безошибочными
битами. Число k называют защитным интервалом (его называют
также критерием пакетообразования или интервалом объеди-
нения) .
Защитный интервал k выбирается в зависимости от конкретной
задачи. В частности, для исследования свойств помехозащитных
кодов интервал k должен быть соизмерим с длиной кодовой ком-
бинации. Для контроля качества каналов желательно, чтобы этот
интервал позволял выделять такие пакеты, которые независимы
друг от друга. Для сравнения результатов измерений желатель-
но использовать один и тот же интервал k. МККТТ рекомендовал
й=10 для измерений в телеграфных и телефонных каналах.
Выбрав защитный интервал, обычно измеряют:
1. Вероятность пакета ошибок, т. е. вероятность того, что сдан-
ного бита начнется пакет ошибок.
2. Распределение длин пакетов. Длиной пакета называют чис-
ло бит от первой ошибки до последней ошибки пакета. Одиночная
ошибка является, следовательно, пакетом длиной, раиной.
3. Распределение интервалов между пакетами.
4. Распределение количества ошибок в пакете.
Распределение длин пакетов ошибок в некоммутируемом теле-
фонном канале показано на рис. 9.32. Видно, что большинство па-
кетов имеют длину не более 5—8 бит.
Для аналитических исследований применяют математические
модели ошибок, т. е. математическое описание процесса возникно-
вения ошибок в реальных каналах. Требования, предъявляемые к
модели, следующие:
305
—- приемлемая точность;
— достаточно общий характер, чтобы при переходе от одного
менялась, а менялись бы только ее
канала к другому модель не
коэффициенты;
— сравнительная (просто-
та, т. е. небольшое число па-
раметров, описывающих мо-
дель;
Рис. 9.32. Пример распределения
длин пакетов ошибок для неком-
мутируемого телефонного канала.
Примечание. По оси ординат от-
ложена вероятность того, что длина
пакета превышает величину, указан-
ную по оси абсцисс
— возможность экспериментального измерения параметров мо-
дели.
Простейшей моделью является пуассоновское распределение,
т. е. модель независимых ошибок. В этом случае задается лишь
один параметр — вероятность ошибки рош- Исходя из него, опре-
деляют все необходимые характеристики, например, вероятность
поражения блока определенной длины, вероятность попадания п
ошибочных бит в блок длиной N бит. В течение длительного вре-
мени эта модель использовалась многими авторами. Практика,
однако, показала, что она часто приводит к грубым ошибкам.
Исторически первой моделью, учитывающей группирование
ошибок, является модель Э. Н. Гилберта, предложенная в 1960 г.
По этой модели канал может находиться в одном из двух состоя-
ний — «хорошем», когда ошибки отсутствуют, и «плохом», когда
возникают независимые ошибки с вероятностью Рошпл- Для опи-
сания модели необходимо задать еще вероятность РХп того, что
«хорошее» состояние при переходе к следующему биту сменится
на «плохое», и вероятность РПх того, что «плохое» состояние сме-
нится на «хорошее». Модель Гилберта удовлетворительно описы-
вает лишь каналы ГТС, в которых преобладают длинные и плот-
ные пакеты ошибок.
Другой распространенной моделью является модель В. Бенне-
та и Ф. Фройлиха, предложенная в 1961 г. Она основана на сле-
дующих предположениях: 1) ошибки группируются в пакеты; 2)
пакеты независимы; 3) ошибки в пакете также независимы. Эта
модель задается тремя параметрами:
— вероятностью появления пакета Рп, равной отношению чис-
ла пакетов к общему числу переданных бит;
— распределением вероятностей пакетов Ря(1) различной дли-
ны I;
— вероятностью ошибки в пакете рОшп-
Используя эти параметры, по формулам можно определить все
необходимые характеристики.
зов
Основной недостаток модели Беннета и Фройлиха — предполо-
жение о независимости пакетов. Взаимозависимость пакетов оши-
бок вводится в ряде моделей: П. Мертца (1961 г.), Д. М. Берге-
ра и Б. Мандельброта (1963 г.), советских ученых О. В. Попова и
В. Я. Турина (1965 г.), В. Л. Морева, П. А. Юнакова и Н. И. На-
химовича (1965 г.), И. А. Мизина и С. К. Муравьева (1967 г.).
Эти модели дают лучшие результаты по сравнению с моделью
Беннета и Фройлиха.
Следует заметить, что каждая математическая модель имеет те
или иные недостатки и не дает точного описания реального про-
цесса. Поэтому в зависимости от задач исследования или расчета
приходится выбирать наиболее подходящую модель.
9.10. ТРЕБОВАНИЯ К КАЧЕСТВУ КАНАЛОВ ПЕРЕДАЧИ
ДИСКРЕТНЫХ СООБЩЕНИЙ
Рассмотренные выше различные мешающие факторы (помехи,
фазовые искажения, кратковременные прерывания и др.) в реаль-
ных каналах обычно действуют 'совместно. Качество передачи дис-
кретных сообщений при этом, независимо от причин появления
ошибок, должно удовлетворять определенным требованиям. Так,
на телеграфную связь МККТТ установил норму коэффициента
ошибок не более ЗЛО-5 (по стартстопный 5-элементным знакам),
т. е. три ошибки на 100 000 переданных знаков. Они распределя-
ются следующим образом: одна на передающий телеграфный ап-
парат, другая на приемный телеграфный аппарат и третья на те-
леграфный канал.
Краевые искажения телеграфных посылок должны удовлетво-
рять нормам, приведенным в табл. 9.3.
ТАБЛИЦА 9.3
Количество пере- приемных участков Допустимые величины искажений, %
изохронных стартстопных
ТТ (переприемы по импульсам постоянного тока) 1:1 текст 1:1 текст
1 4 10 4 8
2 7 18 6 14
3 10 24 8 18
4 12 28 10 22
При передаче данных с защитой от ошибок обычно устанавли-
вается норма на коэффициент ошибок 1 • 10-6 по импульсам или
по 7-элементным знакам. Нормы МККТТ на дискретный канал пе-
редачи данных (без устройств защиты от ошибок) приведены в
табл. 9.4.
307
ТАБЛИЦА 9.4
Тип канала Скорость передачи бит/с Индивидуальные искажения, % Коэффициенты ошибок по импуль- сам
Коммутируемый теле- 200 ±(20-ь25) 1-10“4
фонный 600 1200 (если такая скорость возможна) ±(25-4-30) ±(30-=-35) 1 • 10~3 МО-3
Арендованный (неком- 200 ±(20ч-25)
мутируемый) телефонный 600 1200 ±(20-4-30) ±(25-4-35) 5-10—5
Для обеспечения требуемого качества передачи дискретных со-
общений предъявляются определенные требования к качеству ка-
налов связи, используемых для передачи этих сообщений. В част-
ности, характеристики некоммутируемых телефонных каналов дол-
жны удовлетворять таким нормам:
1. Остаточное затухание для двухпроводного канала должно
равняться 0 дБ; относительный уровень на его входе и выходе дол-
жен равняться 0 дБ. Остаточное затухание для четырехпроводно-
го канала должно (равняться —17 дБ; относительный уровень на
входе должен равняться —13 дБ, а на выходе +4 дБ.
2. Частотная характеристика остаточного затухания канала
должна лежать между заданными границами. На рис. 9.33а такие
границы показаны для двух и десяти иереприемных участков, от-
клонение берется относительно затухания на частоте 800 Гц.
3. Фазо-частотные искажения на практике оценивают частот-
ной характеристикой группового времени замедления (ГВЗ). Для
некорректированного одного переприемного участка неравномер-
ность ГВЗ относительно значения на частоте 1900 Гц должна
располагаться ниже ломаной кривой, показанной на рис. 9.336.
При соединении п переприемных участков нормы увеличиваются
в п раз. Для тонального телеграфирования и передачи данных со
скоростью Г200 бит/с и ниже эти нормы не важны.
Нормы на другие мешающие факторы (кратковременные пре-
рывания, импульсные, гармонические и флуктуационные помехи,
скачки уровня и сдвиг частот), имеющиеся в телефонных каналах,
были рассчитаны в предыдущих разделах по приведенным там
формулам и графикам.
Аналогичные нормы имеются на коммутируемые телефонные
каналы. Качественные показатели коммутируемых каналов замет-
но хуже, чем некоммутируемых. Нормы имеются также на более
широкие каналы: первичный широкополосный канал с полосой
примерно 48 кГц, вторичный широкополосный канал с полосой
примерно 240 кГц и т. д. Эти каналы могут использоваться для
высокоскоростной передачи данных.
308
Для предупреждения ухудшения качества каналов, связанно-
го с перегрузкой систем вч уплотнения, устанавливаются также
нормы на уровни мощности сигналов дискретных сообщений
(табл. 9.5). Следует заметить, что максимально допустимое коли-
чество каналов, занятых под передачу дискретных сообщений в
5)
Рис. 9.33. Нормы на частотные характеристики типовых телефон-
ных каналов:
а) остаточное затухание; б) групповое время замедления одного
переприемного участка
различных системах вч уплотнения, может ограничиваться. Так,
например, в 60-канальных системах вч уплотнения передачей дан-
ных по телефонному каналу с уровнем —15 дБ можно загрузить
100% каналов, а с уровнем —'13 дБ — лишь примерно 20% ка-
налов.
Приведенные в табл. 9.5 мощности относятся ко всему сигна-
лу, передаваемому по каналу связи. Если передаваемый сигнал
состоит из нескольких составляющих, то их суммарная мощность
309
ТАБЛИЦА 9.5
Вид передачи Допустимые величины мощности в точке с нулевым относи- тельным уровнем
средняя за час максимальная за час
мкВт дБ мкВт дБ
Передача данных по кана- лу: —-телефонному 50 либо 32 —13 либо —15 125 либо 80 — 9 либо —11
—первичному широкополос- ному 370 —4,3 1000 0
—вторичному широкополос- ному +2,9 2720 +4,3
Тональное телеграфирова- ние по телефонному каналу 1920 135 —8,7 2220 +3,5
(9.61)
должна удовлетворять условиям табл. 9.5. Так, например, в си-
стемах ТТ с небольшим числом каналов (<18) мощность и уро-
вень одного канала должны Определяться по формулам: ,
«7 = = 135 мкВ
N N
P1 = Pcp-101g7V = (-8,7-101g2V), дБ, (9.62)
где N — число каналов ТТ. В системах ТТ с большим числом ка-
налов (^18) необходимо делить уже не среднюю мощность, а
максимально допустимую:
W, = ^макс. = 2220 мкВ /9 б3)
Pi = РМКС - 201g N = 3,5 - 201g TV, дБ. (9.64)
Отсюда получаются уровни одного канала ТТ, приведенные в
табл. 9.6.
ТАБЛИЦА 9.6
4 6 12 16 17 18 24
Pi, дБ —15 —16,5 —19,5 —21 —21 —22 —24
При передаче данных по одному каналу часто передаются два
сигнала: основной сигнал передачи данных и сигнал контрольного
канала, по которому передаются запросы ошибочно принятых зна-
ков. Мощность может быть распределена между каналами поров-
ну, тогда каждый из них будет иметь уровень на 3 дБ ниже сум-
марного. Часто мощность распределяют не поровну: основной сиг-
нал берут с уровнем на 1 дБ ниже, а контрольный сигнал с уров-
нем на 7 дБ ниже суммарного уровня.
ГЛАВА 10
Аппаратура образования дискретных
каналов!
10.1. КЛАССИФИКАЦИЯ АППАРАТУРЫ ДЛЯ ПЕРЕДАЧИ
ДВОИЧНОЙ ИНФОРМАЦИИ
Все многообразие различных типов аппаратуры образования
дискретных каналов и передачи двоичной информации, имеющей-
ся в настоящее время на сети связи СССР, можно разделить на
следующие группы.
1. Низкоскоростная аппаратура для образования дискретных
каналов и передачи двоичной информации, которая подразделяет-
ся на:
а) аппаратуру для передачи двоичной информации со скоро-
стями 504-200 бод и частотным разделением каналов (аппарату-
ра тонального и надтонального телеграфирования);
б) аппаратуру для передачи двоичной информации со скоро-
стями 504-200 бод и временным разделением каналов. (Аппара-
тура ТВУ-12 для уплотнения местных телеграфных связей и аппа-
ратура частотно-временного телеграфирования ЧВТ).
2. Среднескоростная аппаратура для передачи двоичной ин-
формации со скаростями 6004-4800 бод.
В соответствии с указанными группами ниже приводятся крат-
кие сведения о построении и основных характеристиках аппара-
туры образования дискретных каналов, эксплуатируемой на свя-
зях нашей страны.
10.2. НИЗКОСКОРОСТНАЯ АППАРАТУРА ДЛЯ
ОБРАЗОВАНИЯ ДИСКРЕТНЫХ КАНАЛОВ
ДЛЯ ПЕРЕДАЧИ ДВОИЧНОЙ ИНФОРМАЦИИ
АППАРАТУРА ТОНАЛЬНОГО И НАДТОНАЛЬНОГО
ТЕЛЕГРАФИРОВАНИЯ
Аппаратура тонального и надтонального телеграфирования.
На сети Советского Союза используется несколько типов ап-
паратуры тонального телеграфирования: ВТ-34 с амплитудной мо-
дуляцией; ВТ-34-ЧМ, которая является модернизированной аппа-
ратурой ВТ-34 (переведена на частотную модуляцию); многока-
нальная ТТ-12/17; транзисторная одноканальная аппаратура
ОТТ-2С; транзисторная многоканальная аппаратура ТТ-17П,
ТТ-48; 6-канальная аппаратура ТНТ-6. Четыре последние типа ап-
зн
паратуры по своему техническому уровню соответствуют современ-
ным зарубежным системам ТТ.
Подробное описание аппаратуры ВТ-34 и ВТ-34-ЧМ можно
найти в [23]. Аппаратура типа ТТ-12/17,. ТТ-17П, ОТТ-2, ТТ-48,
ТНТ-6 описывается в [23, 51, 50, 53, 49].
Для уплотнения физических цепей четырьмя телеграфными ка-
налами используются аппаратура НТ-4, являющаяся модифика-
цией аппаратуры ТНТ-6, и аппаратура НТ-ЧМ-4, выпускаемые
нашей промышленностью. Указанная аппаратура подробно опи-
сывается |в [20, 53]. Основные характеристики приведены в табл. 10.1.
Аппаратура ТТ-17П является современной аппаратурой тональ-
ного телеграфирования. В качестве активных элементов в аппара-
туре используются транзисторы. В спектре 3004-3400 Гц система
ТТ-17П позволяет организовать 17 дуплексных каналов ТТ с ча-
стотной модуляцией. Распределение канальных несущих частот и
частот нажатий соответствует ф-ле (8.11). В аппаратуре примене-
но группообразование. Схема преобразования частот была приве-
дена на рис. 8.15, а структурная схема аппаратуры—на рис. 8.14.
Принципиальные схемы передатчика и приемника аппаратуры
ТТ-17П приведены на рис. 8.27 и 8.28, там же описывалась их ра-
бота.
В настоящее время промышленность выпускает модифициро-
ванную аппаратуру ТТ-17ПЗ, которая обеспечивает длительную
устойчивую работу аппаратуры на связях при скорости телеграфи-
рования 75 бод и имеет большие удобства эксплуатации. Модер-
низация аппаратуры заключалась: а) в применении на выходе
телеграфного канала электронного реле вместо механического ре-
ле РПС-11/3; б) в улучшении качества изготовления и настрой-
ки узлов аппаратуры, что позволило уменьшить искажения теле-
графных посылок и повысить стабильность работы аппаратуры;
в) в некоторых схемных коммутационных упрощениях, позволив-
ших улучшить условия эксплуатации аппаратуры [49].
Основные характеристики аппаратуры ТТ-17ПЗ приведены в
табл. 10.1.
Новая отечественная магистральная аппаратура тонального
телеграфирования типа ТТ-48 обеспечивает передачу телеграфных
сигналов со скоростями до 50, 100 и 200 бод по каналам ТТ, обра-
зованным путем деления спектра частот 3004-3400 Гц канала тч
на 24, 12 и 6 каналов. Аппаратура построена по индивидуальному
принципу, без группообразования. На стойке размещается 2 сис-
темы по 24 канала (ЧМ-120), 4 системы по 12 каналов (ЧМ-240),
8 систем по 6 каналов (ЧМ-480). Основные характеристики аппа-
ратуры ТТ-48 приведены в табл. 10.1.
В аппаратуре применен ряд усовершенствований и новых схем-
ных решений: блоки регуляторов преобладаний на основе магнит-
ных аналоговых запоминающих устройств позволяют управлять
каналами ТТ дистанционно с пультов контроля и измерений или
автоматически при помощи аппаратуры регулирования и контро-
ля (АРК-ТТ); изменена схема модулятора канала ТТ; изменена
.312
схема усилителя-ограничителя, в котором ступени усиления вы-
полнены по однотактной схеме, а ступень ограничения по двух-
тактной схеме; сделана универсальной система питания аппарату-
ры — она обеспечивает питание как от сети постоянного, так и пе-
ременного токов; местные телеграфные цепи передатчиков и при-
емников выполнены двухпроводными и с гальванической развяз-
кой. Напряжение на входе передатчика может быть ±20 или
±60 В, а на выходе приемника ±20 В. В аппаратуре применено
выходное электронное реле, которое допускает аварийные режимы
короткого замыкания или подачу встречной батареи 60 В, при
этом максимальный ток не должен превышать 120 мА.
Одноканальная аппаратура тонального телеграфирования
ОТТ-2С предназначена для вторичного уплотнения в четырехпро-
водном режиме телефонных каналов тч системы вч телефонирова-
ния, работающих по проводным (кабельным и воздушным) и ра-
диорелейным линиям связи. Аппаратура позволяет получить до-
полнительно к телефонному каналу один дуплексный телеграфный
канал, занимающий полосу частот 2500-7-2700 Гц. Спектр частот
до 2500 Гц и свыше 2700 Гц используется для передачи речи. Ос-
новные электрические характеристики аппаратуры приведены в
табл. 10.1. Принципиальные схемы передатчика и приемника ап-
паратуры несущественно отличаются от схем передатчика и при-
емника аппаратуры ТТ-17П (см. рис. 8.27 и 8.28).
Аппаратура тонального и надтонального телеграфирования
ТНТ-6 [53] является малоканальной системой частотного телегра-
фирования и предназначена для уплотнения каналов тональной ча-
стоты и физических цепей в тональном и надтональном спектрах.
Аппаратура разработана на базе аппаратуры ТТ-17П. Поэтому
схемы передатчика и приемника соответствуют рис. 8.27 и 8.28.
В отличие от всех ранее выпускавшихся систем ТТ аппаратура
ТНТ-6 (и все модификации на ее основе) является бесконтактной
системой частотного телеграфирования. В качестве выходного ре-
ле в каналах ТНТ-6 применено электронное (бесконтактное) ре-
ле типа ЭТР-М, выполняющее те же операции, что и поляризо-
ванное телеграфное реле типа РПС-11/3, РП-4 и др., применяв-
шиеся в других системах ТТ. Схема и принцип действия реле
ЭТР-М описаны в § 3.6.
В аппаратуре ТНТ-6 используется принцип группообразования,
благодаря чему, используя одну и ту же основную группу каналов
(с 7-го по 12-й каналы аппаратуры ТТ-17П), удалось получить не-
сколько модификаций аппаратуры. Схемы преобразований часто-
ты, выполняемые при создании различных модификаций аппара-
туры ТНТ-6, показаны на рис. 10.1.
Модификация ТТ-6 предназначается для организации шести двусторонних
телеграфных связей по четырехпроводным каналам тч.
Модификация ТТ-5 предназначается для организации пяти двусторонних те-
лефонных связей в верхней части спектра частот стандартных четырехпровад-
ных каналов тч. Необходимость данной модификации связана с тем, что на мно-
гих направлениях магистральной связи установлены две стойки каналов аппа-
ратуры ТТ-12/17 (каналы с 1-го по 12-й). Поскольку аппаратура ТТ-12/17 сейчас
313.
ыТ АБЛ ИЦ А 10.1
Параметры ТТ-12/17 ТТ-17П ОТТ-2С НТ-ЧМ-4 чвт ТВУ-12
Интервал между несу- щими- частотами, Гц 180 180 — 180 — —
Закон распределения средних частот в линей- ном спектре 270+180 М (номер канала N =1, 2..., 12 17) 270+180 N(N= = 1, 2,. . . , 17) — — —
Девиация частоты, Гц 45 50 55 45 ±200 (группо- вой сигнал)
Число каналов 12/17 17 1 4 44 12
Номинальный уровень передачи в каждом канале на линейном выходе, дБ —16,5/—18,241) —16,5/—18,24 —21,28 (для ТТ-17ПЗ) —21,71 +13,02±0,86 (стальная цепь),+5,21 ±0,86 (мед- ная цепь) 11,83 (для каж- дого частот. канала) На выходе пе- редатчика груп- пового трактат ±зв
Номинальный уровень приема в . каждом канале на линейном входе, дБ — 16,5/—18,241) —16,5/—18,24 —21,28 (для ТТ-17ПЗ) —4,34 Медная —13,89 цепь (в напр. Б) 1—17,37 (в напр. Д) Стальная (—20,84 цепь (в напр. Б) -28,22 (в напр. Д) 11,83 (для каж- дого частот. канала) На входе при- емника группо- вого тракта 30 мВ (мин)
') Числитель—для режима работы с выходной мощностью 270 мкВт, знаменатель—для выходной мощности 135 .мкВт,
Параметры ТНТ-6
НТ-4 ТТ-5А(Б)
Интервал между несу- щими частотами, Гц 180] 180
Закон распределения средних частот в линейном спектре См. рис. 10.2 См. рис. 10.1 в, г
Девиация частоты, Гц 50 50
Число каналов 4 5
Номинальный уровень передачи в каждом канале на линейном выходе, дБ -t+8,68+1,73 (стальная Ёцепь) +4,34±1,73 (мед- ная цепь) —4,34±1,73
Номинальный уровень приема в каждом канале на линейном входе, дБ Медная (—13,89+1,73 цепь (режим А) —17,37+1,73 (режим Б) Стальная (—20,84+ цепь + 1,73 (ре- ' жим^А)}! —30,4+1,73 (стальная цепь) —26,05±1,73 (медная цепь)
05
Продолжение табл. 10.1
ТТ-48
ТТ-5 ТТ-6 ЧМ-120 ЧМ-240 ЧМ-480
180 180 120 240 480
См. рис. 10.16 См. рис. 10.1 а 300+120 АГ (N=l, 2 24) 240+240 W (jV=1,2 12) 120+480 W (Af=l,2,..., 6)
50 50 30 60 120
5 6 24+24 12 6
—21,28 —14,5 -22,5 —19,5 — 16,5
-21,28 14,5 —22,5 —19,5 —16,5
Параметры ТТ-12/17 ТТ-17П ОТТ-2С НТ-ЧМ4 ЧВТ ТВУ-12
Допустимая скорость телеграфирования, бод До 70 До 75 До 75 До 70 До 75 (по 1-му каналу) До 200 (по 1-му каналу)
Искажения телеграфных сигналов при нормальном уровне приема и отсутст- вии помех (при максималь- ной скорости телеграфиро- вания), % 5-1-7 (скорость 50 бод) 6 5 5 20-1-25 50 бод—3%, 100 бод—4%, 200 бод-5%
То же, при плавном за- нижении и повышении уровня приема относитель- но нормального, % 10(—17,32-ь8,68 дБ) 10(— 21,71ч- -(-8,68 дБ) 8 (для ТТ— —17ПЗ) 8 8(—17,32ч-+8,68 дБ) 30ч-35 (—17,32-1- +8,68 дБ) —
То же, при разности между уровнями сигнала и сосредоточенной помехи 17,32 дБ (при максималь- ной скорости телеграфиро- вания), % 8-4-10 (скорость 50 бод) 13 11 12 304-35 —
То же, при сдвиге час- тот в телефонном канале, % 10-е-12 (скорость 50 бод; сдвиг ±4 Гц) 10 (скорость 75 бод; сдвиг ±10 Гц) 16(ско- рость 75 бод;сдвиг ±10 Гц) 5 (скорость 70 бод; сдвиг ±4 Гц) 23-1-30 (ско- рость 600 бод; сдвиг ±10 Гц) —
Потребляемая от сети мощность 24В; 15А—24В; 4А+220В; 400 мА 160 Вт 21 Вт 350 Вт 350 Вт ТВУ-12А-150ВА ТВУ-12Б-250ВА ТВУ-12+Р-75ВА
Габариты, мм 5 стоек 650x2500 1 стойка 2500 х X 650x260 180x326 Х644 1 стойка—650x2500 1 стойка— 400x650x2600 Блок—450 X X 650x600
Параметры ТНТ-6 ТТ-48
НТ-4 ТТ-5А(Б) | ТТ-5 | ТТ-6 ЧМ-120 ЧМ-240 ЧМ-480
Допустимая скорость телеграфирования, бод — До 75 50 100 200
Искажения телеграфи- рованных сигналов при нормальном уровне приема и отсутствии помех (при максимальной скорости те- леграфирования), % Не более 6 (скорость 75 бод) 5 5 5
То же, при плавном за- нижении и повышении уровня приема относитель- но нормального, % 10(—17,42-4-8,68 дБ) 10(—17,32-^+8,68 дБ) 7 при завышении уровня приема на 8,7 дБ и при занижении его на 17,4 дБ относительно номинального
То же, при разности между уровнями сигнала и сосредоточенной помехи 17,32 дБ (при максималь- ной скорости телеграфи- рования), % — Не более 13 12 при разности уровней сигнала и поме- хи 20 дБ
То же, при сдвиге частот в телефонном канале, % — Не более 22 (скорость 75 бод; сдвиг ±10 Гц) (5+2.5ДМ сдвиг 5 Гц (5+1,ЗД/)о/о сдвиг 5 Гц (5+0,7Д/)о/0 сдвиг 10 Гц
Потребляемая от сети мощность — При 127/220 В не более 85 ВА. При—24 В не более 70 Вт От сети напряжением 220В, частотой 50Гц —400ВА. От батареи напряжением —24В —300Вт
Габариты, мм Унифицированная стойка—866х X 657 X 257. Возможно размещение полукомплектов на тумбе—866 X X 657x257. На стандартной стойке высотой 2600 мм размещается 3 по- лукомплекта ТНТ-6 1 стойка базовой конструкции—2600 X X 650x250
Примечание. Цифры телеграфных искажений в аппаратуре ЧВТ приведены для группового сигнала при скорости телеграфирования 600 бод.
Пере Лин спектр । каналов дача Hex группа каналов । Несущая 1 частота ТТ- 5 1 1 Пр и Лин спектр ! каналов е м Нижняя боко- вая полоса I Несущая
яо 1Сяя Я Я |б 7| я о1Гй \° . 1<1я яя я iO яяяЮ ' частота
а,Зв 1,42 2,51 2,88 в,кГц 0, '38 1,42\ 1,46 2,5' 2,88 {,кГц
\ Нижняя боковая^ полоса 6) 1 Частота на 1 выходе индивид передатчиков Цех группа 1 каналов | | Лин спектр каналов ТТ-с Несущая 1 1 * 1 частота на | входе индивид приемников Нижняя боко- вая полоса 1 1 Лин спектр каналов Несуи часа ^ая ота
4,86 1 ?Ло я С оИ 4,86
0 0 7 46 Zfil\ 2 54 ^3,4 । ,1 . Частота на | Нижняя {выходе инди- 1 боковая 'вид передат- полоса । чинов | | f.x'ti 1 1 ! 0 1,46 ZJ21 1 1 1 Частота на входе инди- 1 1 .вид. прием- । । пинов 1 • 2,54 3,4 L ТяТц
I - ’ I „ тт~^
Лин спектр каналов\Hcx группа несущая
1 - -4_____jfananob Cz fTfifi fi 1*1 еГеПП 1 частота
“ ~ ''о,38 ш 1,еча г 1 Нижняя 1 ' Частота на I боковая 1 выходе инди- 1 полоса 1 \вид передаст - - 'спектр как Во 1^1 F1 И FI 5 2,88 к Гц ТТ
°° И ^2,5 {,кГц
[Частота на |
выходе инди-
\вид. передать
| Лин спектр i
каналод I
1»1 ю м й
I Частота на j
Входе индивид
приемников
~ТкГи
, Лин. спектр । Неснщая
| каналов । I | и частота
о ... ,
о.зя гмрви 2,5' 2,88f кГц
Нижняя I ^Частота на I
I боковая I I входе индивид,
полоса ' I приемников 1
Рис. 10.1. Схемы .преобразований спектров для различных модификаций аппаратуры ТНТ-6:
а) ТТ-6; б) ТТ-5; в) ТТ-5А; г) ТТ-5Б
не выпускается и в настоящее время повсеместно узкие каналы тч (с эффектив-
ной полосой передачи 3004-2700 Гц) заменяются широкими каналами тч (с эф-
фективной полосой 300-J-.3400 Гц), верхняя часть спектра при такой замене ос-
тается свободной. Таким образом, модификация ТТ->5 заменяет третью етойку
каналов аппаратуры ТТ-Т2/17. Кроме того, с помощью этой модификации можно
организовать 5 дуплексных телеграфных каналов в спектре частот 2540-^3400 Гц
с сохранением телефонного канала в спектре ЗОО-т-12400 Гц. Разделение телефон-
ного и телеграфных каналов производится разделительными фильтрами ДК-2,5,
входящими в комплекс аппаратуры вч уплотнения типа В-3-3.
Модификации ТТ-5А и ТТ-5Б предназначаются для организации 5 двусто-
ронних телеграфных связей по двухпроводным цветным или стальным цепям, а
также по двухпроводным соединительным линиям городских и пригородных ка-
белей связи.
Структурная схема модификации НТ-4, предназначенной для
организации 4 двухсторонних телеграфных связей по двухпровод-
ным цветным или стальным цепям в надтональном спектре частот,
2880 Гц
3180-^3820Гц
\Лин спектр\
щканала в
Несущая
я а. с глота
3^82
^(Режимв)
Нижняя
I боковая I
I полоса 1
0} | Иск гриппол
! каналов
Режим А
2,88
5860 Га
8580^5280Тц
Физическая
------о цели
8,tS8
боковая
полоса
Лин спектр Передача
каналов
8,кГи
I Частота |
'на выгоде
индивид передат-
чиков
3,18
1,68 2 z
частота ।
на выгоде 1
индивид приемников
Несуща
частота
Рис. 10 2. Структурная схема организации канала НТ в аппаратуре
ТНТ-6 (а) и схема преобразования частот (б):
/ — групповой преобразователь передачи, 2— генератор несущей передачи: 3 —
групповой усилитель передачи; 4 — линейное оборудование; 5 — дифференциальная
система; 6 — групповой усилитель присма; 7 — генератор несущей приема; * —
групповой преобразователь приема; 9 — фильтр нч, 10 — групповой усилитель
приема
320
показана на рис. 10.2а, а схема преобразования частот — на рис.
10.26. Аппаратура НТ-4 имеет две комплектации — комплекта-
цию А, в которой для передачи используется верхняя боковая по-
лоса частот, и комплектацию Б, в которой для передачи исполь-
зуемся нижняя боковая полоса частот. Изменение комплектации А
на Б, или наоборот, достигается заменой полосовых фильтров
ПФ а, ПФ б и генераторов несущих частот в ветвях передачи и
приема. Электрические характеристики каналов аппаратуры
ТНТ-6 аналогичны характеристикам каналов аппаратуры ТТ-17П
и приведены в табл. 10.1.
10.3. ВКЛЮЧЕНИЕ СТАРТСТОПНЫХ ТЕЛЕГРАФНЫХ
АППАРАТОВ В КАНАЛЫ ТТ
Местными телеграфными цепями называются цепи, по которым
передаются телеграфные сигналы постоянного тока от телеграф-
ного аппарата к каналу ТТ, и наоборот. В качестве оконечных те-
леграфных аппаратов в настоящее время используются исключи-
тельно стартстопные аппараты, которые, как известно, работают
однополюсными посылками. В то же время для управления рабо-
той модулятора канала тонального телеграфирования необходи-
мы двухполюсные посылки. Поэтому между каналом ТТ и старт-
стопным аппаратом включают переходное телеграфное устройство
(ПТУ). На рис. 10.3а показана принципиальная схема дуплекс-
ного ПТУ. Как видно из схемы, на передаче и приеме стоят от-
дельные телеграфные аппараты. Передающий телеграфный аппа-
рат включен в рабочую обмотку передающего поляризованного ре-
ле Pi. Вторая обмотка этого реле является компенсационной, и ее
действие на якорь противоположно действию рабочей обмотки.
Пусть с телеграфного аппарата поступает токовая посылка (контакты пере-
датчика П замкнуты). Тогда под действием тока /р якорь реле -будет находиться
у левого контакта и к модулятору канала ТТ по местной 'цепи поступит плюсовая
посылка тока '(-+ТБ). При поступлении от передатчика телеграфного аппарата
бестоковой посылки- (контакты передатчика П разомкнутся) ток /р -исчезнет я
под действием тока /к, протекающего по компенсационной обмотке, якорь реле
Pi перебросится к правому контакту. В канал ТТ -поступит минусовая посылка
тока -(—ТБ). Следовательно, с помощью реле Pi однополюсные посылки преоб-
разуются в двухполюсные.
На приеме двухполюсные посылки с выходного устройства канала ТТ посту-
пают на приемное реле переходного устройства Р2. В соответствии с полярно-
стью этих посылок реле Р2 перебрасывает якорь к правому или левому контакту.
Поскольку -напряжение от телеграфной батареи подано только иа один из кон-
тактов реле, то при работе якоря -происходит включение и выключение батареи
в цепи телеграфного аппарата. Таким -образом, двухполюсные посылки, поступаю-
щие -от -выходного устройства канала ТТ, преобразуются в -однополюсные посыл-
ки, -необходимые для работы электромагнита Э телеграфного аппарата.
Симплексная схема ПТУ показана на рис. 10.36. IB этом случае
в линию включается один телеграфный аппарат, который попере-
менно работает либо иак приемный, либо -как передающий.
Цри приеме двухполюсных посылок из канала ТТ работает реле Р2 я якорь
его через контакт 1 -посылает к телеграфному аппарату -однополюсные посылки.
Цепь тока замыкается от телеграфной батареи ТБ через обмотку реле Pi иа
11—60 321
# модулятору
канала ТТ
Телегр
am.
От якоря приемного
реле канала ТТ
Рис. 10.3. Принципиальные схемы переходного телеграфного устройства:
в) дуплексная; б) си-мплексная
К модулятору
канала ТТ
От якоря приемного
электромагнит телеграфного аппарата. При этом важным факторам является
устранение влияния цепи приема на цепь передачи. Для этой цели предусмотрен
резистор Лз- При переходе якоря реле Р2 к контакту 2 через него создается
цепь для тока 7Р, благодаря чему реле Pi удерживается у контакта 1. Для уст-
ранения подрабатывания реле Pi во время перелета якоря реле Р2 обмотка Р,
зашуитирована конденсатором С. В период нахождения якоря реле Р2 между
контактами конденсатор С, разряжаясь на обмотку реле Pi, способствует удер-
жанию его якоря у контакта покоя 1.
На передаче в состоянии покоя якорь реле Р2 находится у контакта 1 и
через электромагнит аппарата протекает ток от батареи —ТБ. Якорь реле Pi
в это время находится у левого контакта, я на модулятор канала ТТ подается
ллюс. При разрыве контакта передатчика телеграфного аппарата ток в рабочей
эбиотке реле Pi пропадает, и якорь его под действием тока компенсационной
обмотки перебрасывается к правому контакту, посылая на модулятор канала ТТ
минусовую посылку.
Как и в предыдущей схеме, для безыокаженной работы реле Pi должно быть
установлено определенное соотношение токов в рабочей и компенсационной об-
мотках.
В некоторых случаях возникает необходимость в переходе от
однопроводной физической цепи, по которой осуществляется теле-
графирование постоянным током, к каналу ТТ. Переходным уст-
ройством служит оконечная дуплексная трансляция (рис. 10.4).
382
Рис. 10.4. Схема переходного устройства с физиче-
ской цепи на канал ТТ
При включении в каналы ТТ станций абонентского телеграфа
и сети прямых соединений переходные устройства не требуются,
так как эти станции работают двухполюсными посылками в сто-
рону каналов тонального телеграфа.
10.4. АППАРАТУРА ВРЕМЕННОГО УПЛОТНЕНИЯ
ДЛЯ МЕСТНЫХ ТЕЛЕГРАФНЫХ СВЯЗЕЙ (ТВУ-12)
ОБЩИЕ СВЕДЕНИЯ
Телеграфная аппаратура временного уплотнения типа ТВУ-12
[45] предназначена для образования пучков телеграфных связей на
местной (пригородной и городской) телефонной сети. В качестве
линий связи используются жилы магистральных кабелей ГТС ти-
па ТГ с диаметром жил 0,44-0,7 мм и типа ТЗ с диаметром жил
0,84-1,2 мм. Аппаратура ТВУ-12 позволяет организовать 12 теле-
графных связей по одной четырехпроводной физической цепи и до-
пускает передачу стартстопный или синхронным способом любым
кодом со скоростью до 200 бод. Для передачи сигналов ио линии
связи используется принцип временного уплотнения. По физиче-
ской цепи передаются двухполюсные прямоугольные импульсы
длительностью 13 мкс, с амплитудой ±3 В. Основные технические
характеристики аппаратуры приведены в табл. 10.1.
ПРИНЦИП МОДУЛЯЦИИ
В аппаратуре применена амплитудно-импульсная модуляция
сигнала индивидуального канала с заполнением единичного эле-
мента серией импульсов (рис. 10.5). На передающей стороне со-
стояние индивидуального канала испытывается непрерывной по-
следовательностью квантующих импульсов (рис. 10.5а). Бинарная
комбинация индивидуального канала (рис. 10.56) передается в
групповом тракте серией импульсов (рис. 10.5s). На приемной
стороне по огибающей этой серии восстанавливается исходный сиг-
нал (рис. 10.5г).
11s 32S
Vi
5) .! 'Л
2)
t
Рис. 10.5. Эпюры, поясняющие
принцип передачи сигналов в ап-
параггуре ТВУ-Т12
Структурная схема аппаратуры
ТВУ-12 представлена на рис. 10.6.
1111 111 I э- Оконечные станции ТВУ-12А и
i t ТВУ-12Б отличаются друг от друга
।--1 ] только схемами индивидуальных
j------»- устройств.
\^о \ ТВУ-12А работает следующим
Illi I - образом. Двухполюсные посылки
постоянного тока поступают на сог-
ласующее устройство (СУ), которое
устраняет влияние времени переле-
та якоря механического телеграф-
ного реле, работающего в абонент-
ском комплекте, согласовывает сиг-
нал по уровню и удерживает инди-
видуальный канал в фиксированном
положении при отсутствии входящего тока. С согласующего устрой-
ства сигнал поступает на распределитель передачи. В передатчике
производится заполнение входного сигнала серией квантующих
импульсов и с помощью распределителя поочередно передается ин-
формация о состоянии каждого индивидуального канала в группо-
вой тракт.
Передатчик состоит из задающего генератора (ЗГ); распреде-
лителя; датчика синхронизирующих импульсов (ДСИ), посылаю-
324
щего по 13-му временному каналу сигналы синхронизации, необ-
ходимые для установления синхронной и синфазной работы пере-
дающего и приемного распределителей; выходного устройства
(ВУ).
Задающий генератор генерирует прямоугольные импульсы для
запуска распределителя и управления работой выходного устрой-
ства. Распределитель квантует сигналы, поступающие из СУ и по-
очередно передает состояние индивидуальных каналов к выход-
ному устройству. В выходном устройстве исправляется форма
квантующих импульсов, испорченных из-за конечного времени пе-
реключения транзисторов распределителя, и формируется выход-
ной сигнал необходимой формы и длительности, а также согласу-
ется выход передатчика с линией. Пройдя линию магистрального
кабеля, сигнал попадает на вход приемника группового тракта.
Чувствительность приемника составляет 30 мВ. Приемник осуще-
ствляет регенерацию сигналов и их распределение по индивиду-
альным каналам.
Приемник состоит из корректора (К), усилителя, порогового
устройства (ПУ), фазового детектора (ФД), подстраиваемого ге-
нератора (ПГ), схем синхронизации (СС) и восстановления вре-
менных интервалов (ВВП), распределителя.
Сигнал с линии через корректор частотной характеристики К
поступает на широкополосный усилитель, поднимающий ампли-
туду сигнала до 2 В. В пороговом устройстве из принятого сигна-
ла формируются прямоугольные импульсы, соответствующие пере-
даваемым сигналам. Порог срабатывания порогового устройства
выбран с учетом получения максимальной помехоустойчивости.
С порогового устройства импульсы поступают на схему фази-
рования, которая состоит из ФД и ПГ и необходима для поддер-
жания синфазной работы передающего и приемного распредели-
телей. Схема фазирования представляет собой схему фазовой ав-
топодстройки частоты. В качестве входных сигналов на ФД пода-
ются прямоугольные импульсы от подстраиваемого генератора и
порогового устройства. Выходной сигнал, пропорциональный рас-
хождению фаз импульсов, приходящих с линии и вырабатывае-
мых подстраиваемым генератором, воздействует на управляющий
элемент ПГ и заставляет его работать синфазно с ЗГ пере-
датчика.
При прохождении по линии сигнал изменяется по амплитуде и
длительности; принятый сигнал имеет «дрожащие» фронты, т. е.
временные интервалы переданного сигнала будут нарушены. Их
восстановление производится в схеме восстановления временных
интервалов методом стробирования середины импульса, сформи-
рованного в пороговом устройстве. Восстановленные импульсы
распределяются по индивидуальным каналам распределителем
приема, работающим синхронно с распределителем передачи. Син-
хронность работы распределителей обеспечивается схемой синхро-
низации (СС), получающей сигналы синхронизации по 13-му ка-
налу.
325.
Сигнал с распределителя приема 'поступает на электронные ре-
ле ЭР, которые восстанавливают по огибающей серйи квантую-
щих импульсов телеграфные посылки и преобразуют их в двухпо-
люсные посылки ±60 В.
В ТВУ-12Б функции согласующих устройств и электронных ре-
ле выполняет панель удаленного абонента (ПУА), которая обес-
печивает нормальную работу при удалении абонента да расстоя-
ние до 10 км от АТС и питание линейных цепей абонента. При
большой длине связи между оконечными станциями должны быть
включены регенераторы группового сигнала ТВУ-12Р, предусмот-
ренные в комплекте аппаратуры. Каждый из регенераторов уве-
личивает величину перекрываемого затухания на 34,7 дБ.
Станция ТВУ-12 устанавливается на центральном телеграфе
и соединяется с приборами АТА или магистральной аппаратурой
ТТ с помощью несимметричных (провод — «земля») двухпровод-
ных цепей и обеспечивает на выходе каждого индивидуального
канала двухполюсную работу ±60 В, 20 мА или ±20 В, 20 мА.
Абонент подсоединяется к аппаратуре ТВУ-12 по двухпровод-
ной симметричной физической цепи, при этом обеспечивается од-
нополюсная работа 0—120 В, 50 мА (при напряжении провод-—
«земля» 60 В), прохождение сигналов взаимодействия при работе
в системе АТА, защита от короткого замыкания и регулировка
преобладаний, возникающих вследствие влияния линии, и работа
с вызывными приборами любой конструкции.
Основные технические характеристики аппаратуры ТВУ-12 при-
ведены в табл. 10.1.
10.5. АППАРАТУРА ЧАСТОТНО-ВРЕМЕННОГО УПЛОТНЕНИЯ
(ЧВТ)
Аппаратура частотно-временного уплотнения (ЧВТ) [23, 48]
предназначена для работы по телефонным каналам кабельных,
воздушных и радиорелейных линий связи. При работе по четырех-
проводному телефонному каналу с шириной полосы частот 3004-
4-3400 Гц эта аппаратура позволяет получить 44 буквопечатаю-
щие стартстопные связи со скоростью работы 50 бод или 28 свя-
зей со скоростью работы 75 бод. Аппаратура ЧВТ может работать
и при меньшем числе каналов (11, 22, 33), но при этом исполь-
зуется часть спектра телефонного канала. Остальная часть спек-
тра может быть занята под передачу телефонных или фототеле-
графных сигналов.
Как следует из названия аппаратуры, в ней применяется ком-
бинированный частотно-временной метод вторичного уплотнения
телефонного канала. Суть этого метода заключается в том, что
частотный спектр телефонного канала с помощью фильтров под-
разделяется на 4 частотных подканала с эффективно передавае-
мой полосой частот 700 Гц. В каждом из подканалов обычными
методами организуется канал ТТ с ЧМ, позволяющий работать со
скоростью 600 бод. В частотном канале применяется асинхронный
326
принцип передачи. В свою очередь, каждый частотный подканал
уплотняется 12-кратной (при скорости 50 бод) или 8-кратной (при
скорости 75 бод) временной системой, использующей принцип син-
хронной передачи телеграфного сигнала. Каждый уплотненный
подканал является независимым и может работать самостоя-
тельно.
На рис. 10.7 показано распределение частотных подканалов
в линейном спектре. Для организации частотных групп применен
0,3 0,65 1,0 1,1 1,05 1,8 1,9 2,25 2,6 2,7 3,05 3,0
Рис. 10.7. Распределение частотных подканалов
аппаратуры ЧВТ в спектре канала тч
принцип группообразования. Сигнал четвертой (верхней) частот-
ной группы передается непосредственно в линию. Все остальные
частотные подканалы образуются в линейном спектре телефонно-
го канала путем группового преобразования спектра основного
четвертого частотного подканала.
Структурная схема аппаратуры ЧВТ показана на рис. 10.8а.
Как видно из схемы, оборудование подразделяется на две основ-
ные части: оборудование временного уплотнения и оборудование
частотных каналов. На рис. 10.86 показаны диаграммы, поясняю-
щие принцип работы аппаратуры ЧВТ. Цифры на схеме рис. 10.8а
соответствуют эпюрам на рис. 10.86.
Для удобства изображения эпюр на рис. 10.86 не соблюдается истинное со-
отношение между длительностью единичных элементов, поступающих от теле-
графных аппаратов в каждом индивидуальном канале (эпюра 2), и частотой
следования тактовых импульсов (эпюра /), и , как следствие, между длитель-
ностью единичных элементов, поступающих от телеграфного аппарата (эпюра 2),
и длительностью единичного элемента в групповом сигнале (эпюра 3). В дей-
ствительности, на один единичный элемент, поступающий от телеграфного
аппарата, должно приходиться порядка 154-118 тактовых импульсов, а длитель-
ность единичного элемента в каждом телеграфном канале примерно в 84-12 раз
больше, чем длительность единичного элемента в групповом сигнале.
Аппаратура работает следующим образом. Двухполюсные по-
сылки от телеграфного аппарата поступают на вход блока инди-
видуального телеграфного канала БТК, в котором происходят со-
гласование стартстопного цикла работы телеграфного аппарата с
синхронным циклом работы аппаратуры ЧВТ и регенерация сиг-
нала. Всего в аппаратуре имеется 44 блока телеграфных кана-
лов, по 11 блоков в каждой частотной группе.
Регенерированный сигнал с выхода БТК. поступает в блок
группового временного передатчика, где осуществляется поочеред-
ное подключение выходов телеграфных блоков с достаточно боль-
327
Рис. 10.8. а) Структурная
ВТК—блок телеграфного канала, ДСФ— датчик сигнала фазирова
нератор несущей, ДП — делитель передачи, СФТ— схема формиро
фазирования, Ргг — регенератор, ВУ—выходное устройство (точки,
шой скоростью к одной выходной цепи. Таким образом, на пере-
даче формируется сложный групповой сигнал. Формирование про-
изводится с синхронной скоростью 600 бод.
Групповой синхронный сигнал действует на частотный моду-
лятор передатчика частотного подканала системы. С выхода час-
тотного передатчика ЧМ сигнал, имеющий среднюю частоту fCp=
— 3050 Гц и девиацию частоты |АГ=±200 Гц, поступает либо не-
посредственно в линию (IV группа), либо на групповой преобра-
зователь передачи (I—III группы). В групповом преобразователе
передачи групповой ЧМ сигнал преобразуется, в результате чего
спектры сигналов каждой группы располагаются по шкале частот
так, как это показано на рис. 10.7.
С выхода группового преобразователя передаваемые сигналы
поступают сначала на полосовые фильтры ПФщ>я, ограничиваю-
щие их спектры и уменьшающие тем самым взаимное влияние ме-
жду частотными группами системы, а затем в телефонный канал.
328
схема аппаратуры ЧВТ:
ния, ЗГ — задающий генератор, ПФ — полосовой фильтр, Гнес—ге-
вания тактовой частоты, СС — схема синхронизации, ФАЗ — схема
отмеченные буквами, соответствуют одноименным точкам на рис. 10.9,
1'0.112, 10.1'3);
На приемном конце частотномодулированный сигнал каждой ча-
стотной группы выделяется приемными полосовыми фильтрами
/7Фири, преобразуется в групповом преобразователе приема в
спектр четвертой группы (2700-^3400 Гц) и подается на группо-
вой частотный приемник. Здесь сигнал преобразуется в сложный
групповой сигнал постоянного тока, посылки в котором следуют
со скоростью 600 бод. На вход частотного приемника IV группы
сигнал поступает после фильтра приема без дополнительного пре-
образования частоты.
При поступлении указанного сигнала на синхронный распреде-
литель приема, в котором используются метод стробирования и
синхронный принцип приема, происходит регенерация принятого
сигнала и распределение по одиннадцати входам приемной части
блока индивидуального телеграфного канала. В блоке телеграф-
ного канала синхронный цикл работы приемника согласуется со
стартстопным циклом работы телеграфного аппарата и формиру-
329
Рис. 10.8. б) эпюры, поясняющие ра-
боту схемы на рис. 10.8а:
1—тактовые импульсы передачи, 2 —по-
сылки, поступающие от телеграфных аппа-
ратов, 3 — прупповой сигнал, 4 — частотно-
модулированный групповой сигнал на пере-
даче, 5, 6, 7 — частотномодулированный
групповой сигнал на приеме, 8 — тактовые
импульсы приема, 9 — групповой сигнал на
ются телеграфные посылки 'на-
пряжением ±60 В, которые затем
поступают в приемник аппарата.
Синхронизация приемного и
передающего распределителей,
т. е. подстройка скорости прием-
ного распределителя под ско-
рость передающего распределите-
ля, производится по рабочим по-
сылкам путем изменения коэф-
фициента деления делителя в
групповом приемнике. Для фази-
рования синхронных распредели-
телей в каждой частотной группе
предусматриваются специальные
сигналы фазирования, которые
передаются по одному (12-му)
телеграфному каналу в каждой
группе.
Рассмотрим более подробно
устройство и работу отдельных
блоков временной части аппара-
туры [48]. Принцип действия час-
тотного передатчика и приемника
ничем не отличается от действия
обычных передатчика и приемни-
ка канала ТТ с ЧМ.
Блок задающего генерато-
ра ( 3 Г ). Задающий генератор предназ-
начен для генерирования высокостабиль-
ных по частоте импульсов, необходимых
для работы 'узлов аппаратуры ЧВТ. За-
дающий генератор состоит из стабилизи-
рованного кварцем автогенератора сину-
соидальных колебаний частотой 18 кГц,
триггера формирователя, усилителя им-
пульсов и схемы сигнализации с устрой-
ством переключения и а резервный гене-
ратор, что обеспечивает очень высокую
надежность этого ГУ.
Делитель передачи создает все по-
следовательности тактовых импульсов,
необходимых для работы передающих
временных узлов аппаратуры ЧВТ.
В блоке делителя передачи размещен
также датчик испытательных телеграф-
ных сигналов Испытательный сигнал
приеме, 10 — импульсы после распредели-
теля приема, 11 — имцульсы, поступающие
к телеграфным аппаратам
Блок телеграфного к а н
представляет собой комбинацию, соот-
ветствующую букве «Ы» стартстопного-
телеграфного кода.
ала (БТК). Блок предназначен для со-
гласования стартстопной работы телеграфного аппарата, или сигналов станции
абонентского телеграфирования (АТ), или прямых соединений (ПС) с синхрон-
ной работой временной системы. На передаче это согласование осуществляется
330
регенерацией телеграфных сигналов и преобразованием сигналов станции АТ
или ПС. На приеме в задачу согласования входит выделение из высокоскорост-
ного группового сигнала со скоростью следования импульсов 600 бод низкоско-
ростного сигнала данного канала, работающего со скоростью 50(75) бод. Сле-
довательно, элементы БТК работают в схеме группового распределителя приема.
Ниже рассматриваются принципы согласования стартстопной работы телеграф-
ного аппарата с синхронной работой телеграфного канала ЧВТ. Согласование ра-
боты канала ЧВТ с сигналами станций АТ и ПС, а также соответствующие эле-
менты схемы БТК" не описываются.
Рассмотрим принципы согласования на передаче. Низкоскоростной старт-
стопный сигнал со скоростью >50(75) бод поступает на входное устройство^ БТК
(рис. 40.9), где производится «привязка» этого сигнала к такту передающей час-
Рис. 10 9. Упрощенная схема блока телеграфного канала:
СРР — схема определения режимов работы. (При отартотопной работе цепь не задейство
вана)
ти временной системы. Сущность «привязки» заключается в том, что действи-
тельный момент начала (конца) телеграфной посылки смещается до совпадения
с ближайшим тактом работы устройства (750 или 1425 имп/с), в зависимости от
скорости передачи). «Привязанный» сигнал воздействует на входной триггер 7'вх.
Фронты принимаемых входным триггером посылок дифференцируются дифцепоч-
331
кой и подаются для запуска триггера стартстопного цикла Первым же приня-
тым переходным моментом на выходе триггер стартстопного цикла Гетц уста-
навливается в состояние, разрешающее запись «1» в первую ячейку регистра на
15. Один цикл работы этого регистра, переключаемого с частотой 750 имп/с, ра-
вен 20 мс (скорость 50 бод) Поэтому на выходе 7-й ячейки регистра на 15 через
10 мс, т. е. в серединах телеграфных посылок, появится последовательность еди-
ниц, запускающая с частотой 50 ;Гц блокинг-генератор БГ2, ведущий регистр на 7.
Импульсы, собираемые с выходов всех ячеек регистра на 7, поочередно усили-
ваются усилителем .импульсов анализа КИА и при помощи электронного комму-
татора обеспечивают стробирование состояния входного триггера Гвх в моменты
времени, соответствующие серединам единичных элементов. Выходной триггер
ТВых устанавливается при этом в состояние, соответствующее входному триггеру,
со сдвигом во времени, равным (ф&То1). Интервал времени между импульсами
стробирования строго фиксирован и равен длительности единичного элемента.
Седьмой импульс анализа середины посылки, кроме того, подается на триггер
стартстопного цикла ГСТц и устанавливает его в состояние, запрещающее за-
пись «1» в регистр на 115.
'Формирование длительности стоповой посылки осуществляется запретом за-
писи «>1» в регистр на |15 до тех пор, пока имеющаяся в нем «1» не выйдет из
последней ячейки, сдвинувшись при этом на -8 тактов (что соответствует 10 мс).
Сигнал с выходного триггера передачи Гвых, длительность посылок которого
строго равна То, подается на групповой выходной ключ передачи и далее на
распределитель передачи, находящийся в блоке временного передатчика (рис.
10.10). На рис. 10.9 и ,1О.'1О буквой. А отмечена точка включения блока ВТК.
Точка включения БТК в блок группового приемника отмечена на рис 10 9
и рис. ЧОЛЗ буквой 5; точка подключения БТК к блоку фазирования отмечена
на рис. 10.9 и 110.114 буквой В.
Временные диаграммы, поясняющие работу блока телеграфного канала в режи-
ме передачи телеграфных посылок, приведены на рис. .10.111.
Прием телеграфных посылок. Высокоскоростной групповой сиг-
нал, поступающий с блока группового приемника (рис. 110.9) со скоростью
600 бод, стробируется при помощи электронного коммутатора импульсом бло-
кинг-генератор а со скоростью 50 имп/с. (БГ3 запускается импульсами ют распре-
делителя приема, расположенного в блоке фазирования. Электронный коммутатор
выполняет функцию схемы И в приемном электронном распределителе. Кольце-
вая схема распределителя находится в блоке фазирования). Благодаря тому, что
электронный ключ пропускает посылки группового сигнала на выходное устрой-
ство в строго фиксированные моменты времени, соответствующие моментам прие-
ма сигналов данного телеграфного канала, происходит распределение группового
сигнала по отдельным телеграфным каналам и одновременное преобразование
высокоскоростного группового сигнала в низкоскоростной телеграфный сигнал
50 или 75 бод на выходе триггера приема Тпрм.
|С выхода Гпрм сигнал подается на левую и правую ячейки коммутации Кл
-и Кл электронного реле и осуществляет управление ими. В зависимости от по-
лярности принятого сигнала открывается ячейка коммутации Кл или Кл, кото-
рая проключает напряжение линейной батареи i-f-60 или —60 В на выход теле-
графного канала и далее к телеграфному аппарату. Генератор Г, показанный на
рис. 10.9, необходим для работы электронного реле.
Блок группового п е р е д а т ч и к а (рис. ГОЛО). Блок состоит из двух
частей: временного и частотного передатчиков. Рассмотрим работу временного
передатчика (ВП). Временной передатчик осуществляет последовательную пере-
дачу в частотный канал информации со всех 11 индивидуальных каналов данной
группы и, кроме того, формирует и передает в канал сигнал фазирования. ВП
содержит распределитель передачи ('регистр на Г2 и ячейки И с 1 по 1й-'ую), дат-
чик сигнала фазирования (БА, регистр 6, триггер I 3:3). Регистр на 12 является
кольцевой схемой распределителя передачи.
Состояние выходного ключа БТК каждого телеграфного канала анализирует-
ся импульсами стробирования, поступающими на ячейки И с кольцевой схемы,
при продвижении по регистру 12 единицы со скоростью 600 бод.
*) то — длительность единичного элемента.
332
Частотно-модулир. сигнал
8 канал связи
Рис. 10.10 Структурная схема груп-
пового передатчика (распредели-
тель передачи и частотный пере-
датчик)
tp 1 2 3 4 , 5 Стоп
«*-----------1----> --—4------•--------►
+50 Старт | |
-*-Г ' ___JZZZZ Г I____________________Г
сигнал п 20мс ZZZZJ L___J I Г
-60\---
Импцйьсы
ЭТ/7А^Н11111Ш111Н111Н1111НП11П1111Н1П1ПНПНПН1Ш11Н!||!НН11Н1111Н111Н11ННИ!1!111Н1111
частоты t
[коллектор) L--------------1 TZ--------------1 ~ I ....Г
Тртц "[
s ^Начало записи ।
жш
Импульс
середины
посылки
_J 1 г
'ноллект'11)\ Старт f |
Рис. 10.11. Эпюры, поясняющие принцип согласования стартстопной работы теле-
графного аппарата с синхронной работой телеграфного канала
Работа распределителя была описана ® § 4.5. Выходы всех ячеек И объеди-
вены схемой ИЛИ и поданы на вход эмиттерного повторителя ЭП. На выходе ЭП
в каждый момент времени, соответствующий поступлению тактового импульса от
блокинг-генерагора Б1\, будет появляться или отсутствовать сигнал в соответ-
ствии с состоянием передающего устройства данного телеграфного канала. С вы-
хода ЭП сигналы поступают на одно плечо группового триггера ТГр и на схему
«Запрет». Управление другим плечом триггера осуществляется импульсами ог
блокинг-генератора Б1\, подаваемыми через схему «Запрет» с частотой
600 имп/с.
При наличии сигнала на входе ЭП импульс с Б1\ запрещается, и групповой
триггер под действием входного сигнала устанавливается в одно положение.
При отсутствии импульса на входе усилителя импульс с Б1\ не запрещается и
устанавливает групповой триггер во второе положение. Таким образом, два со-
стояния выходного триггера каждого БТК передаются двумя состояниями груп-
иового триггера. Длительность посылки группового триггера в 42 раз меньше
длительности элементарной посылки, вырабатываемой передающей частью БТК,
так как за время одной элементарной посылки групповой триггер должен пере-
дать .информацию со всех 12 индивидуальных передатчиков — L1 блоков БТК и
передатчика сигнала фазирования. Последний выполнен в виде кольцевого ре-
гистра на 6, ведомого блокинг-генератором БГг. Запуск и синхронизация бло-
кинг-генератора осуществляются со второй ячейки распределителя передачи им-
пульсами с частотой 50 имп/с. Импульсы с 3 и 6-й ячеек кольцевого регистра
управляют работой триггера Т 3:3 с разделенными входами. Фазовая комбина-
ция считывается с триггера Т 3:3 в моменты времени, отведенные для передачи
информации 1,2-го канала.
334
В целях обеспечения надежной синхронизации приемного распределителя пс
рабочим посылкам одноименная полярность всех четных каналов передается од-
ним состоянием группового триггера, а эта же полярность нечетных каналов
другим состоянием группового триггера (закон соответствия показан на рис.
10.12). В результате при отсутствии работы на выходах ВТК (телеграфные кана-
Выход БТК Гр триггер Выход БТК
Гр триггер
Q - четн кон 4 0 - четн кап —
0 - нечет кап — 0 - нечет кин 4
/ 3513 //
ИВ31012 12 12 12 12 12 /2
Hili...nib...null и11и11 ml...Iiiiiii.I.........иi иiillinn i-rlin ppi (SOOuvnlc;
Выводы
ячеек
распределителя
Выходы триггера
3- 3 (канал 12 фази-
рования)
- Г й канал
•2~й канал
Канолы 3-9
на стопе
10-й канал
11-й канал
Групповой триггер
Рис. 10.12. Диаграмма временных сигналов в блоке группового передат-
чика
лы на стопе) групповой триггер работает в режиме передачи симметричных то-
чек, по которым на приемном конце может быть проведена синхронизация при-
емного распределителя.
Сигнал с выхода рруппозого триггера Др поступает на ЧМ модулятор груп-
пового частотного передатчика. Диаграмма временных сигналов в блоке группо-
вого передатчика приведена .на рис. ЙОЛЕ.
Групповой приемник (рис. /10.13) состоит из двух частей: частотного
приемника и схемы синхронизации. Схема частотного приемника обычна. После
частотной демодуляции амплитудномодулированные сигналы поступают на вход-
ной триггер Гвх, где они формируются в групповой сигнал, элементарные посыл-
ки в котором следуют со скоростью 600 бод. При помощи проключагеля / при-
нятый сигнал стробируется тактом приемной части временной системы. При этом
происходит регенерация группового сигнала и сопряжение асинхронно принятого
группового сигнала с синхронной скоростью работы приемной части временной
системы. Регенерированный сигнал с выхода триггера Гвых подается через си-
стему проключателей 2 на входы приемных частей всех блоков телеграфных ка-
налов.
Распределение сигналов по каналам осуществляется совместным действием
кольцевой схемы приемного распределителя, находящейся в блоке фазирования,
и электронного, коммутатора, находящегося на входе блока телеграфного канала
(см. рис. '10./14 и 10.9).
Схема синхронизации предназначена для подстройки скорости приемного рас-
пределителя под скорость передающего распределителя передающей станции.
Синхронизация осуществляется по рабочим посылкам. Фронты принятого груп-
пового сигнала дифференцируются дифференциальными цепочками Д я через
33S
У
Частотный приемник
О--------fc-
От груп. -
преобр.
частоты
ЧД
Схема К у стр-ам
сигнализ. сигнализ
Д Д
1
'(Гром.
fyMj npMs ф •
Запись „ 1 “
удлиняет"
регистр
От Олока
о---------
зад. генера-
тора
> ~БП
> Б Гг
ИДИ
18000имп/с
Регистр на Б
Запись „ 1
„ укорачивает
регистр
1°0
Ттюдстр
БГ3
Импульс
края
Б
И
— Б
|У-т[
-
Импульс
середины
Вход 1-го телегр.
—*- канала
—^(Блок БТК, прм 1г пр Мд)
* Вход ?-го телегр. канала
~ ~ ~у~1?-й телегр. канал
(канал фазирования)
К Влоку разирова-^
ния (точка Г)
импульс середины
Генератор
р— Схемы И
Редерсидный регистр
ИЛИ
Рис. 10.13 Структурная схема блока группового приемника (частотный .приемник и схема синхронизации)
схему ИЛИ и усилитель запускают БГз, который, в свою очередь, устанавли-
вает регистрирующий триггер подстройки Тподстр в состояние, подготавливающее
работу схемы сравнения (схема И). Схема сравнения сравнивает моменты при-
хода фронтов посылок относительно двух эталонных последовательностей им-
пульсов, сдвинутых друг относительно друга на 0,6 такта частоты 600 имп/с
(импульсы «края» и «середины» посылок группового сигнала). Первый из этих
импульсов, пришедший после импульса фронта, пройдя схему И, запускает толь-
ко свой блокинг-генератор, который устанавливает триггер подстройки в состоя-
ние, запрещающее работу схемы И, и продвигает «1» в реверсивном регистре в
соответствущую сторону. Двукратное подряд срабатывание одного и того же
блокинг-генератора («края» или «середины» посылки) приводит к появлению «1»
на одном из выходов реверсивного регистра. Запись «1» в одну из ячеек под-
стройки '(6 или 7) как бы «укорачивает» или «удлиняет» регистр на б (с пере-
менным коэффициентом деления). Этим самым как бы уменьшается или увели-
чивается скорость работы приемного распределителя, и он подстраивается под
передающий распределитель.
Блок фазирования служит для приведения в соответствие фазы при-
емного распределителя и фазы передающего распределителя по принимаемому
сигналу фазирования. Структурная схема устройства приведена на рис. 10.14.
Я.
емника
Яч. поРстр.
Регистр на 1Z
Дешифратор
Рис. 10.14. Структурная схема блока фазирования (распределитель приема и
схема фазирования)
Блок фазирования включает кольцевую схему приемного распределителя (ре-
гистр на 12) и собственно схему фазирования. Работа кольцевой схемы прием-
ного распределителя была описана в § 4.6. Продвигающие импульсы на распре-
делитель поступают от схемы синхронизации (коррекционного устройства) (точ-
ка Г на рис. 10.43 и рис. 40.14).
Рассмотрим работу собственно схемы фазирования. Входной триггер Тв^
(рис. 10.14) формирует низкочастотный сигнал, соответствующий 42-му времен-
ному каналу. Это происходит следующим образом. Групповой сигнал, поступаю-
337
щий со скоростью 600 бод (точки Б на рис. 10.13 и рис. 110.14), стробируется в
электронном ключе импульсами блокинг-генератора БГ2 в моменты времени, со-
ответствующие появлению сигнала на выходе 11-й ячейки распределителя. Одно-
временно блокинг-генератор является источником продвигающих (тактовых) им-
пульсов для избирательного регистра на 110 (дешифратора). С каждым переход-
ным моментом (с каждым фронтом) сигнала в первую ячейку дешифратора за-
писывается «1».
Если по данному каналу принимается сигнал фазирования (т. е. распреде-
лители сфазированы), переходные моменты следуют в нем через каждые два
такта блокинг-генерагора БГ2 (через интервалы, равные длительности трех эле-
ментарных посылок). Регистр такую комбинацию накапливает и с десятым так-
том на выходе схемы совпадений (схема И) появляется сигнал, свидетельствую-
щий о том, что данный канал есть канал фазирования. Сигнал декодирования
фазы, проинтегрированный благодаря действию электронного реле, запрещает
импульс подстройки. В случае кратковременного пропадания сигнала фазирова-
ния, влияния помех и пропадания уровня реле времени некоторое время (около
2 с) не отпускает и на -это время задерживает поиск фазирующего канала.
Рассмотрим, как будет вести себя схема при длительном от-
сутствии фазирующего сигнала. При этом могут иметь место три
случая:
1) переходные моменты отсутствуют — в первую ячейку де-
шифратора «1» не записывается;
2) за длительный промежуток времени имеется один переход-
ный момент — «1» записывается в первое кольцо дешифратора и
проходит до конца регистра, но схема совпадений И не срабаты-
вает;
3) по двенадцатому каналу принимается работа.
В данном случае, поскольку стартстопная комбинация не мо-
жет быть больше по длительности, чем восемь единичных элемен-
тов, и при этом в ней содержится не менее двух переходных мо-
ментов, «1» никогда не дойдет до конца регистра дешифратора (в
последовательности стартстопных комбинаций не может быть бо-
лее двух подряд строенных комбинаций), так как она будет за-
прещена схемой сброса и схема совпадений не сработает.
Во всех перечисленных выше случаях ключ сброса не запре-
тит «1» с выхода регистра выдержки времени и через 280 мс по-
сле начала анализа произойдет подстройка приемного распреде-
лителя. Подстройка будет происходить до тех пор, пока в 12-м
канале не появится сигнал фазирования, что свидетельствует о
том, что передающий и приемный распределители сфазированы.
Рассмотрим, как будет происходить подстройка распределите-
ля. Импульс подстройки запишет «1» в кольцо ячейки подстройки
только в тот момент, когда в распределителе «1» передвинется
в 12-е кольцо (именно поэтому все элементы устройства фазиро-
вания запускаются с выхода 11-й ячейки распределителя). Со сле-
дующим тактом появляется импульс на выходной обмотке 12-го-
кольца и одновременно во 2-м кольце появляется импульс с ячей-
ки подстройки. Этот импульс запрещает запись «1» в первое коль-
цо, в результате за один такт регистр делает как бы два шага.
Фаза приемного распределителя сдвигается скачком на один шаг
(канал), и приемник сигнала фазирования будет анализировать
следующий канал.
338
Аппаратура ЧВТ конструктивно выполнена в виде стойки шкаф-
ного типа с врубающимися блоками. На стойке размещено: обо-
рудование, необходимое для организации четырех частотных ка-
налов, питающее устройство, контрольное и измерительное обо-
рудование, а также вводные устройства. Основные электрические
характеристики аппаратуры приведены в табл. 10.1. Подробно ап-
паратура ЧВТ описана в [23, 48].
10.6. СРЕДНЕСКОРОСТНАЯ АППАРАТУРА ПЕРЕДАЧИ
ДАННЫХ
АППАРАТУРА «АККОРД-1200»
Конструктивно аппаратура «Аккорд-1200» [47] выполнена в ви-
де стола оператора, на котором размещены основные узлы устрой-
ства. Структурная схема стола оператора показана на рис. 10.15.
Аппаратура „Ашрд-ПОО
Приема-переда-
ющее УЗО
„Аккорд 1200
Устр-Во ВВода i
данных- j
фопсяизыВап.яьХ
ФСМ-6
Пульт управле-
ния и сигнали-
зации (МУС)
Д (БС)
блок
сопряже-
ния
блок модемов
„ (5МД)
Аппаратура
„Модем-1200“
Телефон-
ный
аппарат
Прибор
Выделен-
ных
АТС
Л МТС
Corp Во Выбора
данных-
перфоратор
ЛА-160
------<
I блок
I питания
6H-Z
блок
питания
6Л-1
блок
питания
6ПМ
Стол оператора-.
Рис. 10.15. Структурная схема стола оператора аппаратуры «Ак-
корд-1200» и схема подключения внешних устройств
Здесь же показано, как к аппаратуре «Аккорд-1200» подключает-
ся устройство повышения достоверности «Аккорд-1200 ПП», фото-
считывающее устройство ФСМ-6 и ленточный перфоратор ПЛ-150.
Как видно из рисунка, на столе оператора размещены: блок мо-
дем<?в (БМД) (аппаратура «Модем-1200» !)); блок сопряжения
(БС); пульт управления и сигнализации (ЛУС); прибор выделен-
ных каналов (ПВК); телефонный аппарат (ТА); блоки питания
(БП-2, БП-1, БПМ).
*) Термин «Модем» является сокращением слов «модулятор—демодулятор».
Этот термин может применяться, когда .модулятор и демодулятор объединены в
одном устройстве преобразования сигналов.
Э39
АППАРАТУРА «МОДЕМ-1200»
Устройство преобразования сигналов «Модем-1200» представ-
ляет собой приемо-передающий прибор настольного типа, обес-
печивающий:
— частотное разделение телефонного канала на два канала:
«прямой» и «обратный»;
— преобразование дискретных сигналов, поступающих в виде
двухполярных посылок прямоугольной формы от оконечного обо-
рудования данных, в частотномодулированные сигналы, пригодные,
для передачи по телефонным каналам;
— преобразование частотномодулированных сигналов, посту-
пающих из канала связи, в двухполюсные посылки прямоуголь-
ной формы;
— синхронизацию по тактам и регенерацию принятых сигна-
лов «прямого» канала.
Ввод и вывод информации осуществляются последовательным
кодом.
При работе по коммутируемым каналам устройство подключа-
ется к соединительной линии телефонного абонента вместе с те-
лефонным аппаратом типа ТА.-60 по схеме «директор—секретарь»,
имитируя основной аппарат. При работе по выделенным каналам
вместо телефонного аппарата применяется прибор выделенного ка-
нала (ПВК) . Принцип организации связи с помощью этой аппа-
ратуры был рассмотрен в гл. 8 (см. рис. 8.15). Рабочие частоты
«прямого» и «обратного» каналов выбраны в соответствии с реко-
мендацией МККТТ (основные характеристики аппаратуры приве-
дены в табл. 10.2).
Рассмотрим более подробно работу блока модемов БМД. Его
структурная схема показана на рис. 10.16.
Блок БМД работает в трех режимах: «Телефон», «Передача
(прием) данных», «Контроль».
В -режиме «Телефон» канал связи подключается к телефонному аппарату, а
питание подается только на дежурное устройство, принимающее вызов с проти-
воположной стороны канала связи и автоматически выключающее аппаратуру
при поступлении вызова.
В режиме «Передача |(п-рием) данных» канал связи подключен к аппаратуре
«Модем-,1-2-00», а -питание подается на устройства, участвующие -в передаче
(приеме) данных.
В режиме «Контроль» канал связи подключен к телефонному аппарату, пи-
тание подается на все устройства -прибора, а выход передающей части модема
подключен ко входу приемной части.
В зависимости -от установленного (с помощью специального ключа) вида ра-
боты на вход -передатчика может поступать либо дискретная информация в виде
«точек», формируемая в самом приборе, либо последовательность информацион-
ных импульсов со стороны о конечно го оборудования.
Генератор опорных -частот обеспечивает основные устройства аппаратуры
«Модем-11200» необходимыми тактовыми частотами, определяющими скорость
работы и рабочие частоты передающей части, приемной части, коррекционного
устройства и прибора выявления ошибок (ПВО). В передающей части БМД дис-
кретная -информация прямого и обратного каналов, поступающая в виде двух-
полюсных импульсов постоянного тока, преобразуется в ЧМ сигналы, -после чего
передается в канал связи. В приемной части БМД частотно-модулированные
сигналы прямого .и обратного каналов преобразуются в двухполюсные импульсы
340
ТАБЛИЦА 10 2
Параметры «Модем-1200» J «Аккорд-50» «Аккорд-1200 ПП»
Канал связи тг коммутируемый 2-проводный и выделенный 4-проводный Коммутируе- мый и некомму- тируемый телег- рафный с 2-про- водным оконча- нием ТГ коммутируемый 2-проводный и выде- ленный 4-проводный
Скорость работы, бод Прямой ка- ' нал—600, 1200 Обратный ка- нал—75 50, 100 Прямой канал—600 г 1200 Обратный канал—75
Метод модуляции ЧМ — ЧМ
Девиация частоты, Гц в прямом канале в обратном канале ±400/±200*) ±30 — ±400/±200 ±30
Средняя частота, Гц прямого канала обратного канала 1700±10/1500± ±10 420±2 — 1700±10/1500± 10 420±2
Уровень сигнала на вы- ходе модулятора прямого (обратного) канала, дБ Он—17,4 — Он—17,4
Номинальный диапазон сигнала на входе демоду- лятора прямого (обратно- го) канала, дБ —0,43н—34,7 — —0,43н—34,7
Принцип исправления ошибок — АЗО АЗО
Номинальная исправля- ющая способность коррек- ционного устройства, % — 40 40
Максимальная дальность связи, км, при скорости пе- редачи: 600 бод 1200 бод 14000н-18000 6000н-9000 (6 переприемных участков) — 14000н-18000’ (6 переприемных участ- ков)
34 L
Продолжение
Параметры <Модем-1200> «Аккорд-50» «Аккорд-1200 ПП»
Достоверность принима- емой информации (по зна- кам) при вероятности ис- кажений в канале j связи (по посылкам) — 3-10—7 2-10“4 1 10—6 2-10—4
Ввод и вывод данных (ввод данных—фотосчиты- вающее устройство FS-1500, вывод данных— ленточный перфоратор ПЛ-150) В соответствии с рекомендацией МККТТ V.24 Параллельный 5-элементным кодом МТК-2; 8-элементным кодом ГОСТ 13052—67 Параллельный 5, 6, 7-элементным двоич- ным кодом с признаком четности, нечетности или без признака; 8-элементным кодом с признаком четности или нечетности; последова- тельный двоичным ко- дом—блоками по 112 или 240 элементов
Питание, ]сеть перемен- ного тока 220 В, 50 Гц, 100 ВА- 220 В, 50 Гц, 250 ВА 220 В, 50 Гц, 850 ВА
Габаритные размеры, мм 234x573x653 490x598x1052 (шкаф со сто- лешницей) Шкаф « Аккорд- 1200 ПП»-480х 1482Х ХбОО. Стол оператора— 1500x598x882
Масса, кг 35 150 Шкаф—180, стол с ПЛ-150, FS-1500, при- бором ПВК—120 кг
*) В числителе при скорости 1200 бод, в знаменателе—при скорости 600 бод.
постоянного тока, несущие дискретную информацию. В приборе ПВК осущест-
вляется наклонная и 'плоская регулировки уровня сигнала. На выходе аппарату-
ры стоят полосовые фильтры, ограничивающие передаваемый спектр. Два кана-
ла (прямой и обратный) разделяются частотным методом.
При синхронном методе приема в аппаратуре используется коррекционное
устройство, обеспечивающее регенерацию принимаемых импульсов и выдающее
потребителю информации тактовые частоты приема.
ПРИНЦИП ПОСТРОЕНИЯ МОДУЛЯТОРОВ АППАРАТУРЫ
«МОДЕМ-1200»
В аппаратуре принят новый метод формирования ЧМ сигналов,
основанный на принципе изменения коэффициента деления дис-
кретного делителя. В результате на выходе модулятора обеспечи-
вается изменение частоты без влияния на стабильность генерато-
ра. Схема построения модулятора с использованием дискретных
делителей имеет следующие достоинства:
— она может быть выполнена в основном на простых элемен-
тах— триггерах, что обеспечивает простоту и надежность всего
передатчика данных, а также удобство конструирования с приме-
нением стандартных схем;
342
Рис. 10.16. Структурная схема аппаратуры «Модем-120» (блок БМД)
— обеспечивается простыми методами выбор необходимых,
скоростей и режимов передачи.
Схемы модуляторов прямого и обратного каналов идентичны..
Способы формирования ЧМ сигнала с использованием дискрет-
ных схем приводят, при отсутствии кратности рабочих частот мо-
дулирующей частоте, к появлению разрыва фазы при переходе от
одной частоты к другой. Эта особенность является причиной до-
полнительных краевых искажений сигнала на приемной стороне.
В рассматриваемых модуляторах сигнал формируется на высо-
кой несущей частоте импульсными схемами сложения и вычита-
ния, которые управляются информационными импульсами. Далее
частота этого сигнала делится делителем, имеющим коэффициент
деления 96, что обеспечивает малые краевые искажения.
Структурная схема модулятора приведена на рис. 10.17.
Рассмотрим принцип формирования верхней и нижней рабочих частот ча-
стотномодулированного сигнала при скорости работы до '1200 бод.
Путем последовательного деления частоты .153,6 кГц в задающем генераторе
создается сетка последовательностей импульсов, имеющих частоты следования,
показанные на рис. /10.17. Из последовательности импульсов с частотами следо-
вания 1153,6 и 9,6 йГц формируется суммированием в сумматоре 1 последователь-
ность импульсов со средней частотой следования 163,2 кГц.
При поступлении на модулятор от источника информации посылки плюсо-
вой полярности для получения на выходе делителя частоты с постоянным коэф-
фициентом деления 96,(2X48) верхней рабочей частоты 2,1 кГц, к последова-
тельности импульсов с частотой 163,2 кГц в сумматоре 2 добавляются импуль-
сы с частотой 38,4 кГц. На входе делителя оказывается сформированной после-
343
довательность импульсов с частотой 201,6 кГц, что соответствует частоте на вы-
ходе делителя 2,1 кГц.
Для получения нижней рабочей частоты 1,3 кГц из последовательности им-
пульсов со средней частотой 463,2 кГц в вычитающем устройстве 3 вычитается
.последовательность импульсов с частотой <38,4 кГц. Частота колебания на .входе
делителя в этом случае равна 42'4,8 кГц, что соответствует частоте на выходе
делителя 4,3 кГц.
Рис. 10.17. Структурная схема модулятора аппаратуры
«Модем-4200»
Необходимо заметить, что сложение и вычитание последовательностей им-
пульсов с разными частотами в приведенных выше схемах возможно потому, что
все колебания, участвующие в операциях сложения и вычитания, жестко свя-
заны по частоте и ‘фазе между собой и с частотой задающего генератора, так
как получены посредством деления задающей частоты 463,6 кГц. Поскольку опе-
рации сложения и вычитания частот в схеме осуществляются дискретным мето-
дом, колебания рабочих частот на выходе делителя будут равны номинальным
значениям только в промежутках времени, равных или кратных периоду поступ-
ления дополнительных импульсов с частотой 9,6 кГц <(,импульсы с частотой
9,6 кГц — цикл деления).
.При синхронной работе, когда скорости передачи равны Г200 или 600 бод,
в посылке укладывается целое число циклов деления (8 или 46 соответственно),
поэтому рабочие частоты в среднем за посылку равны номинальным и скачки
фаз на границах посылок отсутствуют.
При асинхронной работе в посылке может укладываться любое, в том числе
не целое число циклов деления. Поскольку внутри циклов деления дополнитель-
ные импульсы распределены неравномерно, то среднее за посылку значение ча-
стоты зависит от того, какая часть цикла деления добавляется в посылке к
целому числу циклов.
344
Очевидно, что при наибольших отклонениях частот от номинальных величию
будут и наибольшие скачки фазы на границах посылок, которые, как показал рас-
чет, в наихудшем случае приводят к краевым искажениям порядка 3%.
Для формирования ЧМ сигнала обратного канала, работаю-
щего со скоростью 75 бод, используется делитель с постоянным
коэффициентом деления 48. Скачки фазы при синхронной переда-
че со скоростью 75 бод, как и в прямом канале, отсутствуют. При
асинхронной работе краевые искажения будут значительно мень-
ше, чем в прямом канале, так как длительность информационного
импульса увеличивается в 16(8) раз, в то время как задающая
частота уменьшается всего лишь в 8 раз.
Схемы ЧМ приемника и регенератора приемника обычны и не-
имеют принципиальных отличий от аналогичных устройств, рас-
смотренных в гл. 8.
10.7. МОДЕМ С ПАРАЛЛЕЛЬНЫМ СПОСОБОМ ПЕРЕДАЧИ
СИГНАЛОВ В КАНАЛЕ
Примером модема, осуществляющего параллельную передачу
сигналов в канале связи, может служить модем типа ZATO3, раз-
работанный шведской фирмой Эриксон [1]. Модем предназначен
для работы по стандартному коммутируемому и выделенному ка-
налу тч со скоростью до 800 бод (100 знаков в секунду). Ввод,
данных производится по 8 параллельным цепям одновременно (на-
пример, от трансмиттера с 8-дорожечной перфолентой). Скорость-
по каждой цепи передачи до 100 бод. Две такие цепи объединя-
ются и используются для четверичной частотной модуляции одно-
го из четырех модуляторов. Модуляция осуществляется по каж-
дой цепи со скоростью 100 бод. За счет применения четверичного-
сигнала в каждом подканале передается по 200 бит/с.
Частота, Гц
Рис. 10.18. Распределение частот (а) и схема контура ЧМ-генерато-
ра (б) ъ модеме с параллельным способом передачи
Распределение полосы частот показано на рис. 10.18а. Для пе-
редачи данных используются следующие частоты:
подканал № 1— 960; 1000;1040;1080 Гц
» № 2—1230; 1270; 1310; 1350 »
» № 3—1650; 1690; 1730; 1770 »
» № 4—1920; 1960; 2000; 2040 »
Для синхронизации приемника в середине между основными
подканалами организован канал с частотами 1480 и 1520 Гц. Такое
расположение синхронизирующих частот выбрано с целью умень-
345.
шения влияния неравномерности частотной характеристики груп-
пового времени замедления.
Обратный канал, обеспечивающий при работе с устройством
защиты от ошибок (УЗО) запрос неправильно принятой комбина-
ции, расположен в нижней части полосы канала тч. В нем при-
менен также метод ЧМ. Рабочие частоты равны 390 и 450 Гц.
Скорость передачи по этому каналу — до 75 бод.
Структурная схема аппаратуры показана на рис. 10.19. При
поступлении на вход модема аппаратуры по паре цепей сигналов
Приемник
Передатчик
генераторы
Пиния
Таят
передачи
Понимаемые
Ранные обратно
го канола
Приемный
ьрильто
данных
Детектор несу-\
щей ойрот Ног-А
канала
Детектор несущей Ванных
Частотные
детекторы
Усилитель
с АРУ
Детектор __________
качества Детектор
I / качества
----» Ss
Общий
^\Схема синхро\ Такт
"TZ. низации
Пороговые
схемы
7]-------
Узкополосные
фильтры
приема
Приемный Передающий
ьрильтр
обратного
канала
шильтр
обратного
канала
W гене- Передаваемые
ратор данные обрат-
ного пинала
Несущая обратного
канала
Рис. 10.19. Структурная схема модема с параллельным способом передачи
ZATO3
в соответствии с табл. 10.3 ЧМ генераторы вырабатывают одну из
четырех рабочих частот, указанных в таблице.
ТАБЛИЦА 10.3
Сигнал на входе модема Замыкающиеся кон- такты (рис, 10.18 6) Частоты ЧМ ге- нератора
цепь 1 цепь 2
1 0 А или B-j-i Нижняя fx
1 0 В fz
0 1 С /з
0 0 Все контакты разомкнуты Верхняя ft
Операции объединения двух цепей, по которым передаются
.данные, и выработка сигналов для управления контактами ЧМ ге-
346
нератора производятся в кодировщике (см. рис. 10.19). Сигналы
от всех ЧМ генераторов объединяются в сумматоре, усиливаются
и подаются в линию. В приемнике сигналы проходят через при-
емный фильтр данных, усилитель с АРУ и затем разделяются уз-
кополосными фильтрами. На выходе детектора получаются посыл-
ки постоянного тока с четырьмя возможными уровнями. Порого-
вые схемы превращают 4-уровневый сигнал в три отдельных сиг-
нала, эквивалентных управляющим сигналам А, В и С в пере-
датчике. Принятые сигналы регенерируются схемами стробирова-
ния с помощью тактовой частоты приема, полученной из схемы
синхронизации. Образуемый в декодировщике 8-разрядный парал-
лельный код выдается в перфоратор или любое другое оборудо-
вание абонента.
По каналу синхронизации с помощью частотной модуляции пе-
редаются «точки» со скоростью 100 бод. Получаемые в приемни-
ке тактовые импульсы используются для регенерации основных,
принятых сигналов, а также выдаются абоненту.
Детектор качества сигнала данных, имеющийся в модеме, поз-
воляет обнаруживать ошибочно принятые (или сомнительные)
знаки. С этой целью, во-первых, фиксируются кратковременные
пропадания или снижения приемного уровня, а во-вторых, контро-
лируется правильность частотной модуляции. Появление в под-
канале сразу двух или нескольких частот, а также отсутствие ча-
стоты в подканале свидетельствуют о неправильном приеме знака.
К аппаратуре может быть добавлен также блок обнаружения;
ошибок, который включается на входе и выходе аппаратуры и
проверяет каждый знак на четность. При использовании равно-
весного кода (например, «4 из 8») контролируется его правиль-
ность.
Передатчик и приемник выполнены в виде настольных ящиков
небольших размеров. В блоках применен печатный монтаж. Пита-
ется модем от сети переменного тока напряжением 220 В.
Опыт эксплуатации описанного модема на коммутируемых ка-
налах показал возможность передачи с вероятностью ошибки по
знакам не более 1 • 10~5.
ТЛАВА 11
Методы и устройства повышения верности
11.1 ОБЩИЕ СВЕДЕНИЯ О МЕТОДАХ ПОВЫШЕНИЯ
ВЕРНОСТИ
КОРРЕКТИРУЮЩИЕ КОДЫ
Одним из наиболее важных требований, предъявляемых к си-
стемам передачи двоичной информации, является обеспечение вы-
сокой верности принимаемых сообщений. Частость появления оши-
бочных знаков, как правило, не должна превышать 10“64-10-7, в
то время как частость ошибочного приема единичного элемента в
современных дискретных каналах редко бывает меньше 10“3н-10~4.
Поэтому в системах передачи дискретной информации для повы-
шения верности принимаемых сообщений обычно применяют спе-
циальные меры, снижающие частость появления ошибок до неко-
торого допустимого уровня.
Существуют два метода повышения верности принимаемых со-
общений. Первый метод основан на улучшении качественных по-
казателей каналов, что достигается обычно либо путем устранения
самих причин появления ошибок, либо включением в канал неко-
торых дополнительных устройств, уменьшающих влияние помех.
Как известно, основными причинами, вызывающими ошибки, яв-
ляются импульсные помехи и кратковременные перерывы. Им-
пульсные помехи обычно появляются при снижении переходного
затухания между парами в одном кабеле, а также проникают из
цепей питания. Поэтому поддержание на должном уровне пере-
ходного затухания между парами в кабеле, а также улучшение
фильтрации в цепях питания, применение развязывающих питаю-
щих агрегатов приводит к существенному снижению потока им-
пульсных помех и улучшению качественных показателей канала.
Другая причина появления импульсных помех носит эксплуата-
ционно-технический характер. Поток импульсных помех значитель-
но возрастает при проведении обслуживающим персоналом все-
возможных профилактических работ на магистрали во время ра-
боты связи (всякого рода переключения, подключения измери-
тельных приборов, чистка контактов и т. д. и т. п.). Устранение
появления импульсных помех в данном случае может быть достиг-
нуто только путем повышения технической культуры эксплуатации
связей.
J348
Причиной возникновения кратковременных перерывов являет-
ся обычно низкое качество контактов аппаратуры связи, а также
причины, имеющие эксплуатационный характер. Значительное сни-
жение частости появления кратковременных перерывов достигает-
ся использованием аппаратуры связи с более качественными кон-
тактами (например, при замене декадно-шагового коммутацион-
ного оборудования на координатное, квазиэлектронное и электрон-
ное), а также повышением технической культуры эксплуатации
связей.
Значительное улучшение качества канала связи, особенно при
организации связей большой протяженности или использовании
сравнительно высоких скоростей передачи, достигается включени-
ем в канал дополнительных устройств — регенеративных трансля-
ций и фазовых корректоров. В ряде случаев это значительно по-
вышает верность приема.
Следует заметить, что улучшение качественных характеристик
каналов с целью повышения верности приема всегда связано с оп-
ределенными материальными затратами, которые в ряде случаев
могут оказаться весьма высокими. Поэтому огромное значение
имеют широко применяющиеся в технике передачи данных мето-
ды повышения верности приема, не требующие улучшения качест-
ва канала. Эти методы основаны на внесении в передаваемый сиг-
нал определенной избыточности. Вводимая в передаваемый сигнал
избыточность налагает на него какие-то дополнительные условия,
проверка соблюдения которых на приеме позволяет обнаружить
факт искажения сигнала, а также отождествить принятый иска-
женный сигнал с соответствующим неискаженным.
Любые методы внесения избыточности в передаваемый сигнал
связаны с увеличением так называемого объема сигнала, т. е. с
увеличением либо мощности сигнала, либо ширины спектра, ли-
бо времени передачи. Возможности повышения верности приема
путем увеличения мощности и ширины спектра при передаче дис-
кретной информации по стандартным каналам связи довольно ог-
раничены, поэтому преимущественное применение получил метод
введения избыточности путем увеличения времени передачи сиг-
нала. Этот метод может быть реализован в двух разновидностях—
использованием для передачи дискретной информации понижен-
ной по отношению к номинальному значению скорости и примене-
нием корректирующих кодов. Понижение скорости при работе по
каналам невысокого качества получило широкое применение. Так,
во многих типах АПД, работающих по каналам тч, предусматри-
ваются две и более скорости модуляции (например, 600 и
1200 бод), причем с меньшей скоростью обычно ведется работа на
большие расстояния, а также работа по каналам с суженной по-
лосой пропускания (3004-2700 Гц).
Применение корректирующих кодов является более эффектив-
ным методом повышения верности, чем работа с пониженной ско-
ростью. Заметим, что оба этих метода не следует противопостав-
лять друг другу. Использование корректирующих кодов является
349
методом более общим, а понижение скорости передачи можно счи-
тать частным случаем применения корректирующего кода. Рас-
смотрим некоторые понятия, связанные с корректирующими ко-
дами.
Обыкновенный (простой) код характеризуется тем, что отдель-
ные его кодовые комбинации могут отличаться друг от друга лишь
одним разрядом. Поэтому даже один ошибочно принятый разряд
приводит к замене одной кодовой комбинации другой и, следова-
тельно, к неправильному приему сообщения в целом. Корректи-
рующие (избыточные, помехоустойчивые) коды строят таким об-
разом, что для передачи информации используется лишь часть
кодовых комбинаций (разрешенные комбинации), отличающихся
друг от друга более чем в одном разряде. Все остальные комби-
нации для передачи не используются и относятся к числу неразре-
шенных (запрещенных). Нетрудно видеть, что при использовании
корректирующих кодов ошибка в одном разряде приводит к за-
мене разрешенной кодовой комбинации неразрешенной, что поз-
воляет обнаружить ошибку. При достаточно большом отличии раз-
решенных комбинаций друг от друга возможно обнаружение дву-
кратной, трехкратной и т. д. ошибки, поскольку они приведут к
образованию неразрешенных- комбинаций, а переход одной раз-
решенной комбинации в другую будет происходить под действием
ошибок более высокой кратности, являющихся результатом наи-
более интенсивных помех.
Поясним сказанное примером. Используем для передачи ин-
формации четырехразрядные кодовые комбинации, отличающиеся
друг от друга не менее чем двумя разрядами: ООП, ОНО, 1001,
1010, 1100, 1111, 0101, 0000. Пусть при передаче любой из этих
комбинаций (например, ООП) произошла одиночная ошибка, в ре-
зультате чего исказился первый разряд и принята комбинация
1011. Эта комбинация является неразрешенной, что и свидетель-
ствует о наличии в ней ошибки. Подберем далее четырехразряд-
ные комбинации, отличающиеся всеми четырьмя разрядами: ООП
и 1100. Легко убедиться, что при использовании этих комбинаций
обнаруживаются одно-, дву -и трехкратные ошибки, а не обнару-
живается лишь четырехкратная ошибка.
Этот же код, состоящий из двух кодовых комбинаций, может
использоваться и для исправления одиночных ошибок. Пусть, на-
пример, принята комбинация 1011. Эта комбинация отличается о г
разрешенной комбинации ООП одним разрядом, а от другой раз-
решенной 1100 — тремя. Таким образом, принятая комбинация
«ближе» к комбинации ООП, чем к комбинации 1100, что и дает
основание считать, что была передана комбинация ООП.
Легко видеть, что повышенная помехоустойчивость двух рас-
смотренных кодов связана с имеющейся в них избыточностью. Так,
первый код содержит восемь комбинаций, состоящих из четырех
разрядов каждая. В то же время в простом коде для образования
восьми комбинаций достаточно трех разрядов, а не четырех. Та-
ким образом, повышение помехоустойчивости потребовало введе-
350
ния дополнительного разряда. Второй код обладает еще большей
помехоустойчивостью, и это' потребовало еще большей избыточно-
сти — трех дополнительных разрядов.
Корректирующие коды так же, как и простые, могут быть рав-
номерными или неравномерными, двоичными или многопозицион-
ными. Использование неравномерных или многопозиционных ко-
дов приводит к значительному усложнению аппаратуры передачи
данных, поэтому применяются они весьма редко. В связи с этим в
дальнейшем будем рассматривать лишь двоичные равномерные
корректирующие коды. Последние делятся на два класса — блоч-
ные и непрерывные (рис. 11.1). При использовании блочных ко-
Рис. 11.1. Классификация корректирующих кедов
дов передаваемая информационная последовательность разбивает-
ся на отдельные кодовые комбинации (блоки), которые кодируют-
ся и декодируются независимо друг от друга. Непрерывные коды
представляют собой непрерывную последовательность разрядов и
разделение ее на отдельные блоки невозможно. Блочные коды, в
свою очередь, делятся на разделимые и неразделимые.
351
Разделимыми называются коды, в которых роль разрядов, вхо-
дящих в состав блока, разграничена: одни разряды являются ин-
формационными, другие — проверочными. Последние и вносят в
код избыточность, необходимую для обнаружения или исправле-
ния ошибок. В разделимых кодах информационные и провероч-
ные разряды занимают всегда одни и те же позиции в кодовой
комбинации. Разделимые коды обозначаются как (п, &)-коды, где
п — длина или число разрядов кода; k — число информационных
разрядов.
Неразделимые коды образуют в настоящее время немногочис-
ленную группу. К ним, в частности, относится рекомендованный
МККТТ стандартный телеграфный код № 3 — семиразрядный код,
каждая кодовая комбинация которого содержит три единицы и
четыре нуля.
Среди разделимых кодов различают коды систематические и
несистематические. Систематическими называются такие блочные
разделимые (п, 6)-коды, в которых проверочные разряды пред-
ставляют собой линейные комбинации информационных. Система-
тические коды образуют обширную группу кодов и очень широко
применяются на практике. Поэтому в дальнейшем наибольшее
внимание уделяется именно ’этим кодам и в, частности, их наи-
более известным разновидностям — кодам Хэмминга и цикличе-
ским кодам.
Число разрядов, которыми различаются две кодовые комбина-
ции, называется кодовым расстоянием между двумя комбинация-
ми. Так, кодовое расстояние между комбинациями ПОИ и 00010
равно трем, поскольку они различаются тремя разрядами — пер-
вым, вторым и пятым. Наименьшее из кодовых расстояний в коде
называется минимальным, кодовым или хэмминговым расстояни-
ем. Так, в трехразрядном коде с разрешенными комбинациями
101, ПО, 011, 000 минимальное кодовое расстояние равно двум.
Для простых кодов минимальное кодовое расстояние равно еди-
нице.
Минимальное кодовое расстояние связано с числом обнаружи-
ваемых и исправляемых ошибок следующим образом:
d0>a + l, (11.1)
d0>2^+l, (11.2)
где о — число обнаруживаемых ошибок; t — число исправляемых
ошибок; d0 — минимальное кодовое расстояние.
Корректирующие коды можно использовать для исправления
ошибок и одновременного обнаружения ошибок большей кратно-
сти. Можно показать, что в этом случае (при a>t)
d0>o + /+l. ’ (11.3)
Минимальное кодовое расстояние лишь частично характеризу-
ет корректирующие свойства кода, поскольку обычно обеспечива-
ется исправление и обнаружение ошибок и более высокой кратно-
сти, чем определяемое соотношениями (11.1) — (11.3).
352
Общее число всевозможных комбинаций кода длины п. равно
2П. Число разрешенных кодовых комбинаций определяется чис-
лом информационных разрядов и равно M=^2k = 2n~r, где г—•
число проверочных разрядов. Таким образом, число разрешенных
кодовых комбинаций в 2Г раз меньше общего числа комбинаций.
Избыточностью кода называют отношение г/п.. Вопрос о мини-
мально необходимой избыточности кода при заданных минималь-
ных кодовом расстоянии и длине кода в общем случае не решен.
Существует лишь ряд верхних и нижних оценок. Наиболее близ-
кое приближение обычно обеспечивает критерий Варшамова:
/ d„-2 \
r>iog2 1 + , (11.4)
где C’n-j — число сочетаний из п—1 элемента по i элементов.
Для некоторых кодов получены точные зависимости между чи-
слом проверочных и информационных разрядов при заданном ми-
нимальном кодовом расстоянии. Так, при d0=3 имеет место со-
отношение
r>log2(n+1), (11.5)
причем г — наименьшее целое число, при котором удовлетворяет-
ся неравенство (11.5).
11.2 . ПРИНЦИП ПОСТРОЕНИЯ СИСТЕМАТИЧЕСКИХ КОДОВ
Пусть комбинация Я1Я2.. -Ctk bib2.. .br, где Я1Я2...Яй — информа-
ционные, а &1&2- • -Ьг — проверочные разряды, является разрешен-
ной комбинацией систематического (п, &)-кода. В систематических
кодах проверочные разряды являются линейной комбинацией ин-
формационных. Это означает, что значение любого проверочного
разряда © ci2a2 ©...© с^аъ., где сц, ct2,.. .с^ — числа, рав-
ные 0 или 1. Нулевая (т. е. состоящая из одних нулей) комбинация
в любом систематическом коде является разрешенной, поскольку
линейная комбинация нулей есть нуль.
Сложим по модулю 2 две разрешенные кодовые комбинации
систематического кода:
a1a2...akb1b2...br @ а[ a2...akb\ b'r..b'r =
= («2® (6i©60 (^©^)-(&г©Л)-
Нетрудно видеть, что
bi © = сг1 aj © с{2 а2 ©... © cikak © cn а[ © сй я’ ©...
•••© cik a'k = сл (fli © flj) © сй (я2 © а'г) @...cffe (ak © я').
Таким образом, проверочные разряды суммы по модулю 2 двух
разрешенных комбинаций образуются по тому же правилу, что и
для каждой разрешенной комбинации. Отсюда сумма двух разре-
шенных комбинаций систематического кода также является раз-
12—60 353
решенной комбинацией. Легко видеть, что такое положение спра-
ведливо и при суммировании по модулю 2 любого количества раз-
решенных комбинаций систематического кода. Это обстоятельство
дает возможность определить все разрешенные кодовые комбина-
ции, располагая лишь ограниченным количеством разрешенных
комбинаций. Все разрешенные комбинации систематического ко-
да могут быть найдены следующим образом. Выберем несколько
(g) ненулевых разрешенных кодовых комбинаций. Сложим их во
всевозможных сочетаниях: по две, по три, по четыре...по g ком-
бинаций. Каждое сложение дает нам новую разрешенную комби-
нацию.
Процесс построения множества кодовых комбинаций можно вы-
разить как Хг = С1Х1@С2Х2@...фCgXg, где Хь xg — исходные ко-
довые комбинации; съ ..cg — коэффициенты, принимающие
значения 1 или 0. Придавая различным коэффициентам С{ значе-
ния 1 или 0, можно сложить исходные комбинации во всевозмож-
ных сочетаниях. Общее количество полученных комбинаций со-
ставит c2g+c3g+ ... csg. Учитывая g исходных кодовых комбина-
ций и одну нулевую, можно придти к выводу, что общее количе-
ство разрешенных комбинаций равно
4 + 4+ 4+- + 4 = 2*, ’ (11.6)
поскольку систематический код содержит 2h разрешенных кодо-
вых комбинаций. Это условие удовлетворяется при g=k.
Соотношение (И-6) справедливо в том случае, если комбина-
ции, получившиеся в результате сложений, не совпадают ни с
исходными комбинациями, ни с нулевой. Для этого исходные ком-
бинации должны быть выбраны специальным образом:
1. Все исходные комбинации должны быть различны; в про-
тивном случае при сложении будет получаться нулевая комбина-
ция.
2. Нулевая комбинация не должна входить в число исходных,
поскольку в результате сложения нулевой комбинации и какой-
либо исходной будет получаться та же исходная комбинация.
3. Все исходные кодовые комбинации должны быть линейно
независимы, т. е. должно соблюдаться равенство CiXi © c2%2 ©
© . . при всех значениях с,, за исключением ci=c2=. . .=
= cft = 0. В противном случае производные кодовые комбинации бу-
дут совпадать с исходными.
4. Каждая исходная кодовая комбинация, как и любая ненуле-
вая разрешенная комбинация, должна иметь вес не менее do- (На-
помним, что весом кодовой комбинации называется число единиц
в ней). Справедливость этого условия легко понять, если учесть,
что нулевая комбинация также является разрешенной, а кодовое
расстояние между парой любых кодовых комбинаций кода не дол-
жно быть меньше d0.
5. Кодовое расстояние между любыми парами исходных ком-
бинаций не должно быть меньше do-
354,
Подобранные определенным образом k исходных кодовых ком-
бинаций однозначно определяют систематический код. Исходные
комбинации принято записывать друг под другом в виде таблицы
(матрицы), состоящей из k строк и п столбцов и называемой про-
изводящей матрицей:
ап ai2---aik
®21 ^22’• ‘^2* ^21 ^22-•
^kl CLki-• ‘&kk -bkr
Обычно информационные разряды занимают первые k позиций
в кодовой комбинации. В этом случае производящую матрицу
удобно строить следующим образом. Строится единичная матри-
ца Ek, имеющая k столбцов и k строк:
1 0 ... О
О 0 ... 1
и к ней справа приписывается матрица Сг; ь, имеющая г столбцов
и k строк:
G=\\Ek, Сг;А|| =
10... 0 6П 612... &1Г
01... 0
00... 1 bkl bk2...bkr
(11.7)
.Матрица О при надлежащем образом подобранной матрице
СГ: к также является производящей. Строки приписанной матрицы
Cr-k находят перебором различных r-разрядных комбинаций, со-
держащих не менее do—1 единиц, при этом сумма по модулю 2
двух любых строк матрицы Сг,к не должна иметь менее d0—2 еди-
ниц. Матрица G записана в так называемой канонической форме.
Рассмотрим теперь пример построения систематического кода.
Пусть необходимо построить код п—7, обеспечивающий исправ-
ление одиночной ошибки. Согласно ф-ле (И-2), d0 = 3. Пользуясь
неравенством (11.5), найдем г=3. Соответственно & = 4. Построим
производящую матрицу кода (7,4):
G =
I <—< Г—* ——'I •— |
1 0 0 О {0 1 11
0 1 0 О 11 О 1 ]
0 0 1 0 |1 1 0|
° ° ° 1 |! 1__1 1
Строки приписанной части производящей матрицы (обведено
пунктиром) содержат не менее двух единиц. Сумма по модулю 2
двух любых строк приписанной матрицы не менее 1.
12* 355
Поскольку &=4, то код (7, 4) имеет 16 разрешенных комбина-
ций: первые четыре комбинации являются строками производящей
матрицы, пятая — нулевой, остальные одиннадцать комбинаций
найдем суммированием по модулю 2 всевозможных сочетаний
строк производящей матрицы:
1©2 1 1 0 0 1 1 0
1©3 1 0 1 0 1 0 1
1©4 1 0 0 1 1 0 0
2©3 0 1 1 0 0 1 1
2©4 0 1 0 1 0 1 0
3©4 0 0 1 1 0 0 1
1©2©3 1 1 1 0 0 0 0
2©3©4 0 1 1 1 1 0 0
1 © 3© 4 1 0 1 1 0 1 0
1©2©4 1 1 0 1 0 0 1
1©2@3©4 1 1 1 1 1 1 1
Нетрудно убедиться, что построенный код имеет минимальное
кодовое расстояние, равное 3.’
В систематическом коде процесс кодирования сводится к оп-
ределению г проверочных разрядов на основе известных k инфор-
мационных. Каждый проверочный разряд определяется с помощью
так называемого проверочного соотношения, а определение всех
г проверочных разрядов требует г проверочных соотношений. Про-
верочные соотношения принято записывать одно под другим в ви-
де таблицы (матрицы), называемой проверочной матрицей. Про-
верочная матрица содержит г строк и и столбцов, причем каждая
строка есть проверочное соотношение для определения значения
одного из проверочных разрядов. Образуется проверочная матри-
ца следующим образом. Строится единичная матрица Ет:
1 0 ... О
£ = 0 1 • • 0
О 0 ... 1
после чего к ней слева приписывается матрица Dk-,r, содержащая
k столбцов и г строк, причем каждая ее строка соответствует
столбцу проверочных разрядов производящей матрицы в канони-
ческой форме:
^21 • • bki 10 ... о
я = ||£А:г, £г|| =
^12 ^22
.. 6,2 01 ... 0
(11.8)
ь1г Ь2Г ... bkr 00 ... 1
Матрица (11.8) является проверочной. С ее помощью операция
кодирования осуществляется весьма просто. Позиции, занимаемые
356
единицами в г-й строке приписанной части проверочной матрицы,
определяют те информационные разряды, которые должны уча-
ствовать в формировании i-ro проверочного разряда. Так, напри-
мер, если первая строка проверочной матрицы имеет вид 1011100,
то проверочный разряд определится из соотношения ai©as@d4 ©
© Й5 = 0.
Декодирование также удобно осуществлять с помощью прове-
рочных матриц; при этом производится г проверок на четность в
соответствии с (11.8). Если хотя бы одна из проверок не равна 0,
то это означает, что в принятой комбинации имеются ошибки.
Проверка кодовой комбинации на приеме может быть выполне-
на сопоставлением принимаемых проверочных разрядов и про-
верочных разрядов, вычисленных на основе принятых информаци-
онных. Их сумма по модулю 2 называется синдромом. Характер-
ной особенностью синдрома является то, что он не зависит от вида
переданной комбинации, а полностью определяется ошибками,
поразившими принятую комбинацию. Между комбинацией син-
дрома и вызвавшей его комбинацией ошибки нет взаимно одно-
значного соответствия — одному и тому же синдрому соответству-
ют 2fe различных комбинаций ошибок. Так, нулевому синдрому
соответствует нулевая комбинация ошибок (т. е. безошибочный
прием), а также остальные 2fe—1 комбинаций ошибок, совпадаю-
щие с разрешенными кодовыми комбинациями (необнаруженные
ошибки). Только одна из комбинаций ошибок, соответствующих
ненулевому синдрому, может быть исправлена кодом. При этом за
каждым синдромом закрепляется такая исправляемая комбинация
ошибок, появление которой в канале наиболее вероятно. Заметим,
что синдром совпадает с комбинацией результатов проверки на
четность. Это легко проверить практически.
Для построенного ранее кода (7, 4) проверочная матрица име-
ет вид
Д =
0111100
10 110 10
1 1 0 1 О 0 1
(П-9)
Поэтому:
аъ — °2 © °3 © а4>
ав = а1©аз©а4,
a7 = ai©a2©a4,
где at, ..а4 — информационные разряды: as, аб, а7 — провероч-
ные. Декодирование производится путем вычисления проверочных
соотношений:
a2 ® a3 © at © aS
°1 © а3 © а4 ® ав ' '
Ol©a2®°4® «7
(П.Ю)
357
Если код используется для исправления ошибок (а данный код
может исправить одну ошибку), то на приемной стороне должно
быть заранее определено соответствие между видом синдрома и
видом исправляемой однократной ошибки. Установим это соответ-
ствие. Пусть ошибка подействовала в первом разряде (комбина-
ция ошибки 1000000). Применим к этой комбинации проверки
(11.9):
а2 © а3 © а4, © аб — 0 © 0 © 0 © 0 = 0,
ai® аз© at® ав — 1 @ 0 © 0 © 0 = 1,
а1 © © а4 © °7 = 1©0©0©0 = 1.
ТАБЛИЦА 11.1
Ошибка в в разряде Синдром
1 011
2 101
3 по
4 111
5 100
6 010
7 001
Таким образом, при действии ошибки в
1-м разряде синдром равен 011. Аналогично
можно получить виды синдромов и при дей-
ствии всех других возможных однократных
ошибок (табл. 1'1.1).
Пусть, например, в кодирующее устрой-
ство поступила информационная последова-
тельность 1101. Кодирующее устройство ко-
дирует эту последовательность согласно
(11.9): 1101001. Теперь предположим, что
при передаче произошла ошибка во 2-м раз-
ряде и комбинация 1101001 принята как
1001001. При декодировании в соответствии
с (11.10) будут получены следующие резуль-
таты:
1-я проверка 0@0©1©0=1,
2-я » 1©0©1©0 = 0,
3-я » 1©0ф1©1 = 1.
Таким образом, синдром равен 101, что свидетельствует о том,
что ошибочен именно 2-й разряд в принимаемой комбинации.
11.3. НЕКОТОРЫЕ СИСТЕМАТИЧЕСКИЕ КОДЫ,
ИСПОЛЬЗУЕМЫЕ НА ПРАКТИКЕ
ПРОСТЕЙШИЕ СИСТЕМАТИЧЕСКИЕ КОДЫ
Одним из самых простейших систематических кодов, получив-
ших практическое применение, является код с повторением, имею-
щий две разновидности. В одной из них имеет место S-кратное по-
вторение комбинации простого кода а±а2 . . . а^,:
ara2. . . ak ara2. . . ak ... ага2 ... ak.
Вторая разновидность кода с повторением характеризуется S-
кратной передачей каждого разряда:
О1 U2 С12 . . . и2 • • * G-k' • • ®Тг *
С о с
раз раз раз-
358
Код с повторением имеет длину n — Sk, число проверочных раз-
рядов r=k(S—1J, минимальное кодовое расстояние d0=S. Избы-
точность этих кодов равна (S—l)/S. Обычно применяется первая
разновидность кода с повторением, имеющая в условиях коррели-
рованных ошибок повышенную помехоустойчивость. Это обуслов-
лено тем, что входящие в одну проверку на четность разряды до-
статочно далеко отстоят друг от друга и с малой вероятностью по-
ражаются одним пакетом ошибок. Число повторений обычно равно
2 (d0=2) и гораздо реже 3 (do=3). Большая кратность повторе-
ний практически не используется.
Код с повторением характеризуется довольно высокими обна-
руживающими свойствами при действии пакетов ошибок. Так, при
5 = 2 всегда обнаруживаются пакеты ошибок длиной до п/2. Обна-
руживаются также все ошибки нечетной кратности. При 5 = 2 про-
верочная матрица имеет вид
H = \\Ek,Ek\\. (11.11)
Недостатком кодов с повторением является весьма высокая
избыточность. Даже при двукратном повторении она состав-
ляет 0,5.
Существует особая разновидность кода с двукратным повторе-
нием, обеспечивающая вдвое большее минимальное кодовое рас-
стояние (do = 4). Это так называемый код Бауэра (инверсный код).
При использовании данного кода комбинации с четным числом еди-
ниц повторяются в неизменном виде, а комбинации с нечетным
числом единиц — в инвертированном. Проверочная матрица име-
ет вид:
H = \\Ek,Ek\\, (11.12)
где Ek — матрица, полученная из единичной матрицы Eh путем за-
мены единиц нулями, а нулей — единицами.
При небольших длинах кодовых комбинаций (до (10—14) ин-
версный код по помехоустойчивости не уступает 'более сложным ко-
дам с такой же величиной избыточности.
Код с четным числом единиц (код с одной проверкой на чет-
ность, паритетный код), так же, как и код с двукратным повторе-
нием, обеспечивает d0 = 2, но обладает гораздо меньшей избыточ-
ностью. Независимо от длины кодовой комбинации этот код име-
ет один проверочный разряд, значение которого выбирается из ус-
ловия получения четного числа единиц в кодовой комбинации, т. е.
он определяется из соотношения
(Ц,® ak-
Проверочная матрица кода с четным числом единиц содержит
лишь одну строку:
Н = || 111 ... 1||. (11.13)
Как и код с двукратным повторением, рассматриваемый код об-
наруживает не только однократные ошибки, но и вообще все ошиб-
359'
ки нечетной кратности. Не следует, однако, думать, что оба кода
имеют одинаковую помехоустойчивость. При действии пакетных
ошибок помехоустойчивость кода с двукратным повторением го-
раздо выше.
Существует также код с двумя проверками на четность. Неза-
висимо от длины кодовой комбинации этот код имеет два прове-
рочных разряда, один из которых выбирается из условия четности
всех информационных разрядов, а второй — из условия четности
всех нечетных (или четных) по номеру информационных разрядов.
Так, при k=5 значения проверочных разрядов следующие:
61 = О1©О2©аЗ©а4©аБ.
^2 = а1©аЗ®аБ‘
Так же, как и код с четным числом единиц, рассматриваемый
код имеет минимальное кодовое расстояние с?о=2, но обладает
большей помехоустойчивостью, поскольку обнаруживает часть
ошибок четной кратности — все смежные, т. е. рядом расположен-
ные ошибки.
Проверочная матрица кода с двумя проверками на четность
имеет вид
н =
11111... 10
10101... 01
КОДЫ ХЭММИНГА
Кодами Хэмминга называются обычно коды с минимальным
кодовым расстоянием do=3, исправляющие все одиночные ошибки,
и коды с расстоянием d0=4, исправляющие все одиночные и обна-
руживающие все двойные ошибки. Коды Хэмминга с минимальным
кодовым расстоянием do=3 имеют длину п^2г—1 [см. ф-лу (11.5)].
Соответственно
(11.14)
Характерной особенностью проверочной матрицы этого кода с
d0=3 является то, что ее столбцы представляют собой любые раз-
личные ненулевые комбинации длиной г. Например, для кода Хэм-
минга (7,4) возможна такая проверочная матрица:
110 110 0
н= 0111010
1 1 1 0 0 0 1
Столбцы проверочной матрицы можно произвольно перестав-
лять, при этом корректирующие свойства кода не изменяются.
Коды Хэмминга с минимальным кодовым расстоянием do=4
образуются на основе рассмотренных кодов с do=3 путем введения
еще одного проверочного разряда, дополняющего кодовую комби-
нацию до четного числа единиц. Проверочная матрица данного ко-
360
да также образуется из проверочной матрицы кода Хэмминга с
do=3 путем приписывания справа нулевого столбца и приписыва-
ния дополнительной строки, состоящей из одних единиц. Прове-
рочная матрица, например кода (8,4), имеет вид
11011000
н == 0 1110 10 0
1 1 1 0 0 0 1 0
11111111
При декодировании кодовой комбинации, переданной кодом
Хэмминга с do=4, возможны три случая:
1) ошибок нет, тогда все проверки укажут на отсутствие оши-
бок;
2) одиночная ошибка, тогда все проверки укажут на наличие
ошибки;
3) двойная ошибка, тогда последняя проверка укажет на от-
сутствие ошибок, а остальные — на их наличие.
Как видно, двойная ошибка, не исправляемая кодом, происхо-
дит только тогда, когда результат хотя бы одной из первых четы-
рех проверок ненулевой, а результат последней проверки равен
нулю. Это и позволяет предотвратить выдачу потребителю иска-
женного сообщения, т. е. обнаружить двойные ошибки.
Иногда под кодами Хэмминга понимают особую разновидность
рассмотренных кодов с do=3, отличающуюся тем, что комбинация
синдрома совпадает с номером искаженного разряда, записанным
в двоичной форме. Так, при искажении, например, третьего разря-
да синдром имеет вид 011, четвертого— 100 и т. д. Эти коды ха-
рактеризуются особым порядком расположения проверочных раз-
рядов — на первом, втором, четвертом, восьмом, шестнадцатом и
т. д. местах. Большого распространения эти коды не получили, по-
этому подробно их рассматривать не будем.
11.4. ЦИКЛИЧЕСКИЕ КОДЫ
Циклические коды являются разновидностью систематических
кодов и обладают всеми их свойствами. Первоначально они были
созданы с целью упрощения схем кодирования и декодирования.
Впоследствии обнаружились их высокие корректирующие свойст-
ва, что и обеспечило им широкое распространение на практике.
При построении циклических кодов кодовые комбинации при-
нято представлять в виде полиномов
G (*) = a„_t х"-1 + а„_2хп-2 + ... агх + а0, (11.15)
где ао, вл, ..an-i — коэффициенты, принимающие значения 0 или
1. Например, комбинацию 1100101 можно записать как G(x) =
=х6+х5+х2+,'1.
Основное свойство рассматриваемых кодов состоит в том, что
циклический сдвиг разрешенной кодовой комбинации также яв-
361
ляется разрешенной кодовой комбинацией. Таким образом, если
комбинация 1000111 является разрешенной, то комбинации 0001)111,
00111'10 и т. д. также принадлежат к числу разрешенных. Нулевая
комбинация является разрешенной, поскольку циклический код
принадлежит к классу систематических. Заметим, что циклический
сдвиг нулевой комбинации есть также нулевая комбинация.
Можно показать, что циклический сдвиг эквивалентен умноже-
нию на х кодовой комбинации, записанной в виде полинома. Дей-
ствительно,
xG(x) — atl_}xn + an_2xra-1 + aix2 +аох-
Так как в кодовой комбинации, имеющей длину п, степень по-
линома не может превышать п—И |(в противном случае длина ко-
довой комбинации превысит п), то хп заменяется на 1. При этом
х G (х) = ап_2 хп~' + ... +агх2 +аох + ап^.
Следовательно, xG(x) является циклическим сдвигом комбина-
ции G(x).
Циклические коды принято определять с помощью так назы-
ваемых производящих полиномов Р(х) степени г. Производящая
матрица циклического кода может быть образована из производя-
щего полинома путем циклического сдвига последнего (или, что то
же самое, умножения его на х, х2,..., xfe-1):
Р(х)
хР(х)
X2 Р (х)
xk~lP(x)
(11.16)
Непосредственно из производящей матрицы ,(11.116) следует,
что все разрешенные кодовые комбинации циклического кода без
остатка делятся на производящий полином. Напомним, что здесь
и далее имеется в виду деление по модулю 2. Последнее выпол-
няется почти так же, как обычное деление, с той разницей, что в
процессе деления вычитание заменяется сложением по модулю 2.
Так, деление, например, полинома x6+xs+x3+1 на полином х2+
+х+1 (соответствующие двоичные формы 110100,1 и 111) произ-
водится так:
1101001
111
^110
111
10101
А101
^111
10
Двучлен 10 есть остаток от деления полинома 110)1001 на по-
лином 111.
362
То обстоятельство, что каждая разрешенная комбинация без
остатка делится на производящий полином, есть весьма удобный
способ определения принадлежности принятой кодовой комбина-
ции к числу разрешенных.
Рассмотрим принцип построения циклических кодов. Каждую
кодовую комбинацию G(x) простого ^-элементного кода умножим
на хг, а затем разделим на образующий полином степени г. В ре-
зультате умножения степень каждого члена Хг, входящего в поли-
ном G(x), повышается на г. При делении произведения xrG(x) на
Р(х) получается частное Q(x) такой же степени, что G(x). Кроме
того, если произведение xrG(x) не делится нацело на Р(х), то по-
является остаток R(x):
-.^l. = Q(x)©^W_. (11.17)
Поскольку частное Q(x) имеет ту же степень, что G(x), то оно
также является комбинацией простого ^-элементного кода.
Умножая обе части равенства (И.17) на Р(х), имеем
F(x) = Q(xjP(x) = xrG(x)@R(x). (11.18)
Таким образом, кодовая комбинация циклического кода может
быть получена двумя способами:-
1) умножением ^-элементной комбинации простого кода на об-
разующий полином Р(х)-,
2) умножением кодовой комбинации простого кода на одночлен
хг и добавлением к этому произведению остатка от деления про-
изведения xrG(x) на Р(х).
Отметим, что первый способ приводит к образованию неразде-
лимого кода. Неразделимость значительно усложняет процесс де-
кодирования, поэтому на практике используется второй способ по-
строения кодовых комбинаций. Очень важно, что этот способ дает
возможность получить производящую матрицу сразу в канониче-
ской форме;|
G=\\Ek- Сг;Д
где Cr- k — матрица, состоящая из г столбцов и k строк, причем
каждая строка есть остаток от деления строки единичной матри-
цы, дополненной г нулями, на образующий полином.
Кодирование и декодирование циклических кодов производят
обычно не на основе вычисления проверок на четность, а на основе
деления на образующий полином. Тем не менее при необходимо-
сти проверочная матрица может быть построена путем вычисления
так называемого проверочного полинома:
h(x) = *"+1 , (11.19)
Р-1 (х)
где P~i(x) — полином, сопряженный с образующим полиномом
Р(х). Напомним, что в сопряженных полиномах члены расположе-
ны в обратном порядке. Так, например, полиномы 100111 и HlilOOl
363
являются сопряженными. Первая строка проверочной матрицы
циклического кода есть проверочный полином h(x), умноженный
на (т. е. дополненный справа г—1 нулями). Последующие
строки проверочной матрицы есть циклический сдвиг первой.
Проверочная матрица может быть также построена обычным
способом, исходя из образующей матрицы. Надо заметить, что по-
строенная таким образом проверочная матрица внешне может от-
личаться от построенной с помощью проверочного полинома, одна-
ко обе матрицы всегда могут быть сведены к одному виду.
Приведем пример построения семиразрядного циклического ко-
да с do=3. Для построения кода требуются три проверочных раз-
ряда i(ir=3) и, следовательно, образующий полином должен быть
третьей степени. Пусть образующий полином Р(х) =х3+х+|1 =
=11011. (Принципы выбора образующего полинома будут рассмот-
рены позднее.) Образующая матрица имеет вид
1 0 0 0 1 0 1
0 10 0 111
°- 0010110
0 0 0 1 0 1 1
Напомним, что проверочные разряды 101 получились в резуль-
тате деления комбинации 1000000 на образующий полином 1011,
11111 — в результате деления 100000 на тот же образующий поли-
ном и т. д.
Проверочный полином равен
. , , х7 -{- 1 10000001 1 1 ioi
h (х) = -----1---:— =---------= 11101,
(Х3 + X + 1)-1 1101
следовательно, проверочная матрица имеет вид
Н =
1110100
0111010
0011101
Если же строить производящую матрицу из образующей, то по-
лучим матрицу
Н' =
1110 10 0
0 1110 10
110 10 0 1
которая отличается последней строчкой от ранее полученной мат-
рицы Н. Однако это отличие можно ликвидировать, если к послед-
ней строке матрицы Н' прибавить первую строку; при этом матри-
ца Н' совпадет с матрицей Н.
Корректирующая способность циклического кода полностью оп-
ределяется видом образующего полинома. Для некоторых цикли-
ческих кодов можно сформулировать довольно простые принципы
выбора вида образующего полинома.
364
Циклический код с d0=2. Образующий полином имеет
вид х+1. Этот полином позволяет строить код любой длины. Цик-
лический код с do = 2 обнаруживает любое нечетное количество
ошибок и полностью тождественен коду с четным числом единиц.
Образующим полиномом для
циклического кода с d0=2 может
быть также полином х2+х+1.
Код при этом имеет повышенную
помехоустойчивость —обнаружи-
ваются не только любые ошибки
нечетной кратности, но и любые
парные смежные ошибки (т. е.
пакеты ошибок длиной 2), а так-
же все парные ошибки, разделен-
ные одним неискаженным раз-
рядом.
Циклический код с d0=3.
Циклические коды с d0=3 есть
разновидность кодов Хэмминга.
Длина кодовой комбинации выби-
рается из условия п=2г—1. Обра-
зующим полиномом может быть
любой так называемый неприво-
димый полином степени г. (Поли-
ном называется неприводимым,
если он делится без остатка толь-
ко на единицу и на самого себя.)
ТАБЛИЦА 11.2
Степень полинома Вид полинома
1 1+х
2 x2+x-f-l
3 х3+х2+1
4 х4+х+1 х4+х3-Н х4-|-х34-х24-л-+1
5 Хб+х3+1 х5+х34-х2+х+1 х6-|-х4-|-х2+х4-1 Х64-Х44-Х3+х+1 Х54-Х44-Х34-Х2+1
Неприводимые полиномы до пятой степени включительно представ-
лены в табл. 11.2. Сведения о неприводимых полиномах более вы-
соких степеней приведены, например, |в [1, 3].
Циклический код с d0=4. Циклические коды с d0=4 есть
также разновидность кодов Хэмминга и строятся на основе обра-
зующих полиномов для кодов с do=3. Образующий полином цик-
лического кода с d0=4 есть произведение двучлена х+4 на непри-
водимый полином, который пригоден как образующий для кода с
d0=i3. Длина кодовой комбинации выбирается из условия п=
= 2т—,1; число проверочных разрядов равно r=m+ll. Так, напри-
мер, при п = 1 образующий полином имеет вид ('х-Н1)(’х3+х +1) =
= х4+х3 + х2+ 1.
Коды Боуза — Чоудхури — Хоквингема. Весьма
мощными кодами, обладающими высокой корректирующей спо-
собностью, являются коды Боуза—Чоудхури—Хоквингема. Длина
кодовой комбинации составляет п='2т—1. Производящий полином
находится как наименьшее общее кратное так называемых мини-
мальных полиномов йг(х):<
Р (х) = НОК {ах (х) а3 (х)...а, (х)... ado_2 (х)}. (11.20)
Минимальные полиномы для т^.7 представлены в табл. 11.3,
причем все они неприводимые.
365
ТАБЛИЦА 11.3
Минимальные полиномы при т, равном
1 2 3 4 5 6 7
1 х2+л-+1 №+%+1 х4+х+1 Х5+х2+1 №+*+1 ++%3+1
3 — — х4+х3+х2+ +х+1 +-+++№+ +х2+1 ++x4+++ +х+1 х’+х3+х2+ +х+1
5 — — — Х5+х4+%2 + +х+1 х6+х5+х2+ +х+1 х’+х4+х3+ +х2+1
7 — — + — Хв+%3+1 x’+x6+x5+ +х4+х2+%+1
Пусть необходимо построить код Боуза—Чоудхури—Хоквин-
гема с га = 31 и d0=‘5. Имеем
Р (х) = НОК {ах (х) а3(х)} = ах (х) а3 (х).
Поскольку в данном случае т = 5, то значения минимальных поли-
номов выписываем из 5-го столбца табл. М.З:
«4 (х) = х5 + Xs + 1, а3 (х) = х5 Д- х4 + х3 -г х2 + 1,
Р (х) = X10 + X9 + X8 + Xе + Xs + X3 + 1.
Коды Боуза—Чоудхури—Хоквингема обладают нечетными зна-
чениями минимального кодового расстояния d0. При желании ми-
нимальное кодовое расстояние можно увеличить на единицу, при-
менив образующий полином, равный произведению образующего
полинома кода Боуза—Чоудхури—Хоквингема на двучлен (х+11).
Так, в рассмотренном коде с d0=5 минимальное кодовое расстоя-
ние можно повысить до 6, если использовать образующий поли-
ном Р(х) = fx+l)(xlo + x9+x8 + x6+x5 + x3 + l.) = хи+х8 + х7+х5 +
+ X4 + х3 + X -Н1.
Заметим, что такой способ увеличения минимального кодового
расстояния применим к любым систематическим кодам с нечетным
минимальным кодовым расстоянием. Для этого в циклических ко-
дах изменяется описанным образом производящий полином, а в
нециклических кодах вводится дополнительная проверка на чет-
ность, охватывающая все информационные разряды аналогично
тому, как это было сделано в циклических и нециклических кодах
Хэмминга с do=4.
Циклические коды получили широкое распространение в систе-
мах передачи данных и используются в самой различной по назна-
чению аппаратуре передачи данных (АПД). Несмотря на то что
условия применения каждой конкретной АПД различны, а исполь-
зуемые каналы могут сильно отличаться по своим характеристи-
кам, имеется тенденция стандартизации методов повышения вер-
ности приема с помощью корректирующих кодов и, в частности,
стандартизации образующих полиномов. Это даст возможность в
ряде случаев совместно использовать аппаратуру различного про-
С66
изводства, комплектовать АПД различного назначения одними и
теми же функциональными узлами и т. д. В настоящее время для
среднескоростных систем передачи данных существует рекоменда-
ция МККТТ V.44, согласно которой для повышения верности
приема предлагается использовать обнаружение ошибок с по-
мощью циклического кода, имеющего длину кодовой комбинации
260, 500 и 9'80 разрядов, причем во всех случаях берется произво-
дящий полином вида х16+х12+х5-Ь1. Это код Боуза—Чоудхури—
Хоквингема с минимальным кодовым расстоянием б/0 = 4. Много-
численные испытания кода с указанным производящим полиномом
подтвердили его высокую эффективность. Даже при использовании
этого кода для передачи данных по коммутируемой телефонной
сети общего пользования (коэффициент ошибок по единичным эле-
ментам порядка 10-3 й более) частость ошибочного приема восьми-
разрядных знаков, из которых составлена информационная часть
кодовой комбинации, не превышает 10-6.
Теперь рассмотрим вопрос о выборе длины информационной
части кодовой комбинации циклического кода. Электронные вы-
числительные машины, являющиеся источником или потребителем
информации, передаваемой АПД, обмениваются с внешними ус-
тройствами либо непосредственно машинными словами (16, 24,
32 и т. д. разрядов), либо слогами («байтами»), содержащими
8 разрядов. Поэтому информационная часть кодовой комбинации
должна быть равна или кратна длине машинного слова, если ЭВМ
обменивается с внешними устройствами машинными словами, или
длине байта, если ЭВМ обменивается с внешними устройствами
байтами. Между тем, возможности циклических кодов не обеспе-
чивают свободного варьирования числом информационных разря-
дов при заданном минимальном кодовом расстоянии или заданном
числе проверочных разрядов. В связи с этим на практике часто
прибегают к укорочению циклического кода.
Укороченные циклические коды получаются из полных цикли-
ческих кодов, имеющих необходимое минимальное кодовое рас-
стояние (или число проверочных разрядов), но большее, чем тре-
буется, число информационных разрядов. Укорочение полного цик-
лического кода заключается в том, что для передачи информации
используются не все комбинации полного кода, а только те, кото-
рые содержат слева I нулей, причем эти нули в канал связи вовсе
не передаются. С матричной точки зрения укорочение на I разря-
дов заключается в вычеркивании из производящей матрицы I верх-
них строк и I левых столбцов.
Приведем пример построения укороченного циклического кода.
Пусть необходимо построить код, имеющий 5 информационных
разрядов и минимальное кодовое расстояние, равное 3. Как изве-
стно, при с?о==3 длина кодовой комбинации составляет м = 2г—1,
что позволяет строить коды с значениями п, k и г, приведенными в
табл. 111.4.
Таким образом, не существует циклических кодов с с(0 = 3, со-
держащих 5 информационных разрядов. Однако код с требуемыми
367
параметрами можно образовать из кода (15, 11), укоротив его на
6 разрядов. Производящим полиномом этого кода может быть
любой неприводимый полином четвертой степени, например, х4+
х+1 (см. табл. 11.2). Производящая матри- таблица пл
ца циклического цодщ-кода имеет вид 100000000001001 « k г
O1OOOOOUOOO11U1 — 001000000001111 3 1 2
000100000001110 7 4 3
* , 000010000000111 G(15,ll) = 000001000001010- 15 11 4
000000100000101 31 26 5
oooooouioooioii 000000001001100 63 57 6
000000000100110 ... ♦ . . ф * »
UUOOOOUOOO 1 U 0 1 1
Производящая матрица укороченного циклического (9, 5)-кода
получается из производящей матрицы (15, 11)-кода вычеркиванием
6 верхних строк и 6 левых столбцов:
0(9,5) =
1 0 0 0 0 0 1 0 1
0 1 0 0 0 1 0 1 1
0 0 1 0 0 1 1 0 0
0 0 0 1 0 0 1 1 0
000010011
Корректирующая способность укороченного циклического кода,
по крайней мере, не ниже корректирующей способности исходного
полного циклического кода. Техника кодирования и декодирова-
ния в обоих случаях одна и та же. Однако циклический сдвиг ко-
довой комбинации укороченного циклического кода не всегда
приводит к образованию разрешенной комбинации, поэтому укоро-
ченные коды относят к числу псевдоциклических.
11.5. НЕСИСТЕМАТИЧЕСКИЕ КОДЫ
Несистематические коды в технике передачи данных использу-
ются реже, чем систематические. Одним из наиболее известных ко-
дов этого типа является код с постоянным весом, который называ-
ют также кодом с постоянным отношением числа единиц и нулей.
В коде с постоянным весом разрешенными являются только те
комбинации, которые содержат определенное число единиц, оди-
наковое во всех разрешенных комбинациях. Среди кодов с посто-
янным весом наиболее широкое применение на практике получил
семиразрядный код с постоянным весом 3, каждая комбинация ко-
торого содержит 3 единицы и 4 нуля. Этот код рекомендован
368
МККТТ для использования при передаче телеграфных сообщений
по коротковолновым радиоканалам и известен как международ-
ный телеграфный код № 3.
Международный телеграфный код № 3 содержит 35 разрешен-
ных кодовых комбинаций, минимальное кодовое расстояние d0=2.
Код обнаруживает все одиночные ошибки, а также все ошибки не-
четной кратности. Из всевозможных ошибок четной кратности не
обнаруживаются только ошибки типа смещений (транспозиций),
при которых одна или несколько единиц в кодовой комбинации пе-
реходят в нули, а такое же количество нулей — в единицы. В пол-
ностью асимметричных каналах (т. е. каналах, в которых имеет
место переход или только единиц в нули, или только нулей в еди-
ницы). транспозиции не могут иметь места, поэтому коды с посто-
янным весом в таких каналах обнаруживают все ошибки. Именно
по этой причине коды с постоянным весом получили преимущест-
венное распространение в аппаратуре, работающей по коротковол-
новым радиоканалам, которые в заметной степени асимметричны.
Существенным недостатком кодов с постоянным весом являет-
ся то, что они принадлежат к числу неразделимых кодов, в комби-
нациях которых невозможно выделить информационные и прове-
рочные разряды. Это значительно затрудняет кодирование и де-
кодирование, резко усложняя и удорожая аппаратуру. Поэтому в
последнее время данные коды постепенно вытесняются системати-
ческими и, в частности, циклическими. Этому в немалой степени
способствует имеющаяся тенденция к созданию достаточно уни-
версальных устройств защиты от ошибок, пригодных для работы
на различных каналах, как проводных, так и коротковолновых.
Коды Бергера (коды с суммированием) также предназначены
для использования в асимметричных каналах. Минимальное кодо-
вое расстояние в этих кодах do=2. Существует ряд вариантов по-
строения кодов Бергера. В наиболее простом варианте кодирова-
ние происходит следующим образом: в информационной части ко-
довой комбинации подсчитывается число единиц, после чего фор-
мируются проверочные разряды, представляющие запись этого
числа в двоичной форме. Таким же образом формируются прове-
рочные разряды на приеме и сравниваются с принятыми провероч-
ными разрядами. Повышение верности с помощью кодов Бергера
дает приблизительно такие же результаты, как и использование
кода № 3, однако важнейшим достоинством кода Бергера является
его разделимость, резко упрощающая построение кодирующих и
декодирующих устройств.
Большое распространение в технике передачи данных получили
так называемые коды с инвертированными проверками на чет-
ность. Это несистематические коды, получаемые из систематиче-
ских инвертированием одного или нескольких проверочных раз-
рядов. Так, широко применяется код с нечетным числом единиц,
отличающийся от кода с четным числом единиц инвертированным
проверочным разрядом. Корректирующая способность кодов с ин-
вертированными проверками полностью совпадает с корректирую-
369
шей способностью систематических кодов. Значительным преиму-
ществом рассматриваемых кодов является то, что они не содержат
кодовых комбинаций, состоящих из одних нулей. Это обстоятель-
ство очень благоприятно для построения систем передачи данных,
поскольку отсутствие в коде нулевых комбинаций способствует
повышению устойчивости синхронизации (в синхронных системах)
и тем самым улучшает работу систем передачи данных. Кроме то-
го, в ряде случаев применение кодов с инвертированными провер-
ками, полученных из циклических кодов, позволяет гораздо более
эффективно обнаруживать нарушения цикловой синхронизации,
чем при использовании обычных циклических кодов. Такое свой-
ство кодов с инвертированными проверками в значительной сте-
пени повышает устойчивость работы системы передачи данных в
целом.
11.6. ИТЕРАТИВНЫЕ КОДЫ
Итеративные (.матричные) коды характеризуются наличием
двух или более систем проверок внутри каждой кодовой комбина-
ции. Принцип построения итеративного кода проще всего предста-
вить на конкретном примере.’ Запишем все информационные раз-
ряды блока, подлежащего передаче, в виде таблицы, которая, на-
пример, может иметь такой вид;|
10 111
0 0 10 0
1110 0
0 10 0 1
11110
Закодируем каждую строку таблицы каким-либо кодом, а за-
тем закодируем (не обязательно тем же кодом) каждый столбец.
Применим в качестве первого кода код с четным числом единиц,
а в качестве второго — с нечетным. Тогда получим
10 1110
0 0 1 0 0 1
1110 0 1
010010
11110 0
0 0 1111
Полученная комбинация есть кодовая комбинация простейше-
го двумерного итеративного кода, проверочные разряды которого
сосредоточены в правом столбце и нижней строке. Каждый инфор-
мационный разряд этого кода входит в комбинацию двух итери-
руемых кодов — кода с четным числом единиц и кода с нечетным
числом единиц. Передача комбинации итеративного кода обычно
370
происходит по строкам последовательно, от первой строки к по-
следней.
Могут быть образованы также многомерные итеративные коды,
в которых каждый информационный разряд входит в комбинации
трех, четырех и т. д. итерируемых кодов, однако многомерные ите-
ративные коды не получили большого распространения.
Свойства итеративного кода полностью определяются парамет-
рами итерируемых кодов, в зависимости от которых итеративный
код может быть как систематическим, так и несистематическим,
как разделимым, так и неразделимым. Длина кодовой комбина-
ции, число информационных разрядов и минимальное кодовое рас-
стояние итеративного кода очень просто выражаются через соот-
ветствующие параметры этих кодов:
s 'l
п= Пъ
1=1
S
k = гк
i=l
(11.21)
s
^о= П do i
i=l
где tii, kit dOi — параметры итерируемых кодов; S — кратность ите-
рирования.
Таким образом, простейший итеративный код, образованный
путем проверок на четность (нечетность) строк и столбцов, обла-
дает минимальным кодовым расстоянием d0=4 и поэтому позво-
ляет обнаруживать все ошибки кратностью до 3. Кроме того, об-
наруживаются все ошибки нечетной кратности. Не обнаруживают-
ся четырехкратные ошибки, располагающиеся в вершинах пра-
вильного четырехугольника, а также некоторые шестикратные,
восьмикратные и т. д. ошибки (рис. 11.2).
ZZ? 5) О О О О О • уо о о о о • 6) о о о о о •
о о о о о • о Ж о О X • о Ж о о ж •
о о о о о • о о о О о • О о XX о •
о X о X о • о о о о о • о о о о о •
о о 6 о о • о XX о о • О О XX о •
О О О О О • о О о о о • о Ж ° ° ж •
о м о Ж о • о о ж о X • о о о о о •
О О О о о • о О о о о • о о о о о •
• ••••• • • • • • • • • • • • •
Рис. 11.2. Некоторые ошибки, не обнаруживаемые
простейшим интеративным кодом
Простейший итеративный код обладает довольно высокими об-
наруживающими способностями при действии пакетных ошибок —
обнаруживается любой пакет ошибок длиной I +1 и менее, где
I — длина строки.
371
Наибольшее распространение на практике получили двумерные
итеративные коды. Длина строки обычно выбирается равной дли-
не одного знака первичного кода. В качестве итерируемых кодов
чаще всего используются коды с одной и двумя проверками на
четности и гораздо реже коды Хэмминга. При использовании до-
статочно длинных блоков .(длиной в несколько десятков знаков и
более) простая проверка на четность по строкам и столбцам обес-
печивает на реальных каналах связи коэффициент ошибок на знак
порядка 10-6, а применения кодов с двумя проверками на четность
и кодов Хэмминга — порядка 1iO_84-'1O-10.
Существенным недостатком итеративных кодов, использующих
для проверок по строкам и столбцам коды с одной или двумя про-
верками на четность, является их сравнительно высокая избыточ-
ность, которая обычно составляет 15—20% и значительно превы-
шает при прочих равных условиях избыточность циклических ко-
дов. Однако кодирование и декодирование с помощью ЭВМ таких
итеративных кодов обычно гораздо проще, чем циклических. По-
этому простейшие итеративные коды, несмотря на их высокую
избыточность, находят применение в системах передачи данных,
использующих программные способы повышения верности (в ча-
стности, в системах с коммутацией сообщений).
11.7. ЭФФЕКТИВНОСТЬ СИСТЕМАТИЧЕСКИХ
КОРРЕКТИРУЮЩИХ КОДОВ
Рассмотрим эффективность использования систематических
корректирующих кодов, обнаруживающих ошибки. Важнейшей
характеристикой таких кодов является коэффициент повышения
верности, определяемый как
Кпв = -^-, (11.22)
МОШ
где Кив—коэффициент повышения верности; РОш—частость по-
явления ошибочных кодовых комбинаций в дискретном канале
(т. е. до устройства защиты от ошибок); РНош — частость появле-
ния кодовых комбинаций с необнаруженными ошибками в канале
передачи данных (т. е. после устройства защиты от ошибок).
Характерной особенностью использования корректирующих ко-
дов является то, что их эффективность зависит от особенностей
распределения ошибок в каналах. Код, обнаруживающий какие-то
определенные сочетания ошибок, будет достаточно эффективен при
его использовании в таких каналах, где именно эти сочетания яв-
ляются преобладающими. Так, код с одной проверкой на четность
обнаруживает все ошибки нечетной кратности и может при неже-
стких требованиях к верности приема оказаться вполне пригод-
ным для работы по каналам с ЧМ. В то же время этот же код
практически бесполезен при работе по каналам с ОФМ, харак-
терной особенностью которых являются ошибки четной кратности.
372
Причина неодинакового поведения кода в различных каналах за-
ключается в различных закономерностях распределения ошибок
в них.
Известно, что корректирующий код, имеющий минимальное ко-
довое расстояние do, обнаруживает все сочетания ошибок крат-
ностью до d0—1 включительно. Поэтому вероятность необнаруже-
ния ошибки кодом можно определить как
Рнош = -^-P(d0, п) + ^±-»P(d0 + 1, ti) +...=
'-'п '-'п
(11.23>
где B(i)—количество t-кратных ошибок, необнаруживаемых ко-
дом; С*п — общее количество возможных t-кратных ошибок в ко-
довой комбинации длиной п, равное числу сочетаний из п по t,
P(i, п) — вероятность появления i-кратных ошибок в кодовой ком-
бинации длиной п. Эта вероятность всецело зависит от свойств
используемого канала.
Определение отношения В,/Сгп во многих случаях является
весьма трудоемкой задачей, особенно при больших значениях п.
Доказано, что для многих систематических кодов это отношение
сравнительно мало зависит от конкретной разновидности кода и
существует приближенное соотношение
^-«2-
(11.24>
с;
которое определяет отношение числа необнаруживаемых комби-
наций ошибок кратности t к общему числу возможных комбина-
ций ошибок этой кратности для кода в среднем. Заметим также,
что данное соотношение весьма близко к отношению числа комби-
наций ошибок, необнаруживаемых кодом, к общему числу воз-
можных1 ошибок без учета их кратности. Действительно, общее
число возможных комбинаций ошибок различной кратности от 1 до
п включительно равно 2П—4, причем из них не обнаруживаются
только те комбинации, которые совпадают с ненулевыми кодовы-
ми комбинациями, число которых равно 2ft—,1. Их отношение равно
2^ — 1 _ 2fe = 2-г
2п — 1 2П
Таким образом,
п
РВОШ^2~Г^Р(1, ri) = 2~r P&d0, ti), (И.25)<
i=d0
где P(^d0, п)—вероятность того, что в кодовой комбинации
длиной п будет больше или равно d0 ошибок. Напомним, что ве-
роятность поражения кодовой комбинации Рош ошибками записы-
373.
вается как Рош=-Р(^11, п)- Тогда коэффициент повышения верно-
сти кода можно определить как
Кп в = -----Р .........= 2Г Р (> 1 ’ п}— . (11.26)
Рнош 2~rP(^d0, п) P(>da,n)
Отношение Р(^\, n)IP(^d^, п) всегда больше 1. Поэтому ко-
эффициент повышения верности кода +п в почти всегда превышает
по величине 2Г. Для большинства систематических кодов величи-
на 2Г является довольно надежной оценкой снизу коэффициента
повышения верности Див-
Соотношение (11.26) определяет коэффициент повышения вер-
ности кода с помощью вероятности P(^d0, п), т. е. вероятности
того, что в кодовой комбинации будет больше или равно d0 оши-
бок. В ряде случаев удобнее пользоваться не вероятностями появ-
ления ошибок определенной кратности, а вероятностями появле-
ния пачек ошибок определенной длины. При этом напомним, что
пачкой ошибок называется комбинация ошибок, начинающаяся и
.заканчивающаяся ошибочными разрядами, между которыми мо-
гут располагаться как ошибочные, так и безошибочные разряды.
Высокими обнаруживающими свойствами при действии пачек оши-
бок обладают циклические коды. Циклический код, образованный
полиномом степени г, обнаруживает любую пачку ошибок дли-
ной г и менее. Справедливость этого положения легко понять,
•если учесть, что пачке ошибок длиной г и менее соответствует по-
лином ошибок степени меньше г и поэтому не делящийся нацело
на образующий полином Р(х). Следовательно, и кодовая комби-
нация, являющаяся суммой по модулю 2 переданной кодовой ком-
бинации и комбинации помехи, не будет делиться нацело на об-
разующий полином. Вследствие этого любая пачка ошибок дли-
ной г и менее всегда обнаруживается.
Приведем без доказательства еще положения, характеризую-
щие обнаруживающие свойства циклических кодов:
— количество пачек длиной г+1, не обнаруживаемых цик-
лическим кодом, составляет 1/2г—1 часть всех пачек длиной г+1;
— количество пачек длиной более г+1, не обнаруживаемых
циклическим кодом, составляет 1/2Г часть всех пачек ошибок
длиной от г+ 2 до п включительно.
Таким образом, для циклических кодов можно записать, что
Лош = -^гР(г + 1, п) + ^гР(>г + 2,п)^-17Р(>г, п),
(11.27)
где Р(>г, п)—вероятность поражения кодовой комбинации пач-
кой ошибок длиной более г разрядов. Вероятность поражения ко-
довой комбинации пачкой ошибок любой длины В(^1, и) равна,
и в этом легко убедиться, вероятности поражения кодовой комби-
нации ошибками. Поэтому коэффициент повышения верности при
использовании циклического кода равен
2Г Р{>Х' п)- . (11.28)
Р(>г, п)
374
Как и раньше, величина 2Г для большинства случаев является
довольно надежной оценкой снизу коэффициента повышения вер-
ности циклических кодов.
Таким образом, при использовании систематических кодов при-
ближенно можно считать, что вероятность необнаружения кодом
ошибочного блока в 2Г раз меньше, чем вероятность появления
ошибочных блоков на входе декодирующего устройства. Не сле-
дует, однако, думать, что обнаруживающие свойства систематиче-
ских кодов полностью определяются числом проверочных разря-
дов. Довольно существенное значение имеет вид проверочных со-
отношений, а для циклических кодов — вид образующего полино-
ма. Среди систематических кодов с одним и тем же числом прове-
рочных разрядов существуют так называемые «сильные» коды,
обеспечивающие на данных каналах коэффициент повышения вер-
ности, значительно превышающий величину 2Г. Имеются также
«слабые» коды, коэффициент повышения верности которых мень-
ше, чем 2Г. Поэтому при создании систем передачи данных всегда
отбираются «сильные» коды, наилучшим образом соответствующие
распределению ошибок в дискретных каналах и обеспечивающие
наибольшие значения коэффициента повышения верности. Имен-
но таким «сильным» кодом является упомянутый выше цикличе-
ский код с образующим полиномом х18+'х12+х5+1.
Следует отметить, что аналитические методы выбора «силь-
ных» кодов далеко не во всех случаях дают возможность действи-
тельно сделать такой выбор. Трудность задачи определяется весь-
ма сложным характером распределения ошибок, описать который
аналитически достаточно точно не всегда удается. Поэтому на
практике широкое распространение получили методы отбора ко-
дов, основанные на моделировании реальных потоков ошибок с
помощью ЭВМ. В настоящем разделе мы ограничимся рассмотре-
нием эффективности кодов, обнаруживающих ошибки, и не будем
рассматривать эффективность кодов, исправляющих ошибки, в
связи со сравнительно редким применением исправления ошибок
на практике.
11.8. ПРИНЦИПЫ ПОСТРОЕНИЯ КОДИРУЮЩИХ и
ДЕКОДИРУЮЩИХ УСТРОЙСТВ
ПОСТРОЕНИЕ КОДИРУЮЩИХ И ДЕКОДИРУЮЩИХ УСТРОЙСТВ
СИСТЕМАТИЧЕСКИХ НЕЦИКЛИЧЕСКИХ КОДОВ
Кодирование и декодирование систематических кодов сравни-
тельно несложно. На рис. 11.3 показана структурная схема коди-
рующего устройства (кодера) систематического (п, &}-кода. В со-
став его входят регистр сдвига на п разрядов и г сумматоров п®
модулю 2, каждый из которых может иметь много входов. Сум-
матор служит для формирования определенного проверочного раз-
ряда путем суммирования соответствующих информационных раз-
рядов. Последние записываются параллельно на первые k ячеек
375
регистра сдвига. Одновременно формируются проверочные раз-
ряды, которые записываются в последние г ячеек регистра сдвига.
Л од действием га тактов закодированная последовательность вы-
дается в дискретный канал связи.
Рис. 11.3. Построение кодера (п, й)-кода
На рис. 11.4 изображена структурная схема декодирующего ус-
тройства (декодера), предназначенного для обнаружения ошибок
и состоящего из регистра сдвига на п разрядов, г сумматоров по
Влад
Рис. 11.4. Построение декодера (п, А)-кода
•модулю 2 и схемы логического сложения ИЛИ. Принимаемая из
дискретного канала связи кодовая комбинация записывается па-
раллельно на п ячеек регистра сдвига. В случае отсутствия оши-
бок на выходах всех сумматоров, каждый из которых осуществляет
проверку на четность в соответствующей группе разрядов, форми-
руются нули. При наличии на выходах некоторых сумматоров
ошибок возникает сигнал «1». На выходе схемы ИЛИ при этом
появляется сигнал «ошибка».
Заметим, что многовходовые сумматоры по модулю 2 обычно
строятся с использованием сумматоров на два входа, причем для
построения сумматора на S входов требуются S—1 двух входовых
сумматоров. Рис. 11.5 иллюстрирует принцип построения много-
входового сумматора по модулю 2.
Рассмотренные схемы кодеров и декодеров систематических ко-
дов являются наиболее общими. В частных случаях они могут
быть существенно упрощены. Так, кодирование кода с четным чис-
лом единиц при последовательной передаче информации может
быть осуществлено с помощью триггера со счетным входом, опро-
кидывающегося при поступлении на его вход сигналов «1». Ус-
тройство такого кодера весьма просто (рис. 11.6): он состоит из
376
триггера со счетным входом, схемы И и схемы ИЛИ. В исходном
состоянии триггер находится в состоянии 0. Информация, подле-
жащая кодированию, поступает через схему ИЛИ на выход коде-
ра и одновременно на вход триггера. При поступлении 1-й едини-
цы триггер переходит в состояние 1, при поступлении 2-й единицы.
Входы
Рис. 11.5. Построение много-
входного сумматора по моду-
лю 2 (5=5)
От (к+1)- го выхода распределителя
Рис. 11.6. Вариант кодера кода
с четным числом единиц
триггер снова изменяет свое состояние (переходит в состояние
0), при поступлении 3-й единицы состояние триггера вновь меняет-
ся и т. д. Легко видеть, что состояние триггера со счетным входом
равно сумме по модулю 2 переданных разрядов. После ввода k
разрядов (т. е. всей информационной части кодовой комбинации)
открывается схема И и сформированный триггером проверочный
разряд передается на выход схемы. Одновременно передаваемый
импульс через схему ИЛИ воздействует на вход триггера, устанав-
ливая его в исходное состояние 0.
Декодеры систематических кодов довольно просты, если про-
изводится только обнаружение ошибок, но не исправление их. Ес-
ли же предъявляется требование исправления ошибок, то схемы
декодеров значительно усложняются. На рис. 11.7 показана схема
Рис. 11.7. Построение декодера с исправлением одиночной ошибки кодом
Хэмминга ’(7.4)
877‘
декодера для исправления одиночных ошибок семиэлементным ко-
дом Хэмминга, проверочная матрица которого есть (11.9), а виды
синдромов при действии однократных ошибок представлены в
табл. 14.1. В состав декодера входит регистр сдвига на п (п = 7)
разрядов, набор сумматоров по модулю 2, п + r схем совпадений,
г (г=3) инверторов НЕ. Работает схема следующим образом.
Закодированная последовательность поступает из дискретного s
канала на вход 7-й ячейки регистра сдвига и сдвигается в сторону
1-й ячейки. После ввода всей кодовой комбинации содержимое
регистра сдвига сдвигается еще на один такт, при этом разряды
принятой комбинации начинают проходить через сумматоры на
выход декодера. Одновременно определитель синдрома (ОС), ко-
торый состоит из набора сумматоров, включенных в соответствии
с проверочной матрицей (11.9), формирует комбинацию синдро-
ма. После этого открываются схемы Их—Из и сформированная
комбинация синдрома поступает в дешифратор синдрома (ДС),
состоящий из п схем совпадений и г инверторов. Схемы совпаде-
ний и инверторы включены в соответствии с табл. 11.1 с тем, что-
бы при синдроме 011 (ошибка в 1-м разряде) появлялся сигнал
на выходе схемы И4, при синдроме 101 (ошибка во 2-м разряде)
появлялся сигнал на выходе схемы И5 и т. д. Сигналы с выходов
схем совпадений поступают на сумматоры, включенные между
ячейками регистра сдвига. Если был искажен z-й разряд, то на
вход сумматора, включенного между i и (i—4)-й ячейками реги-
стра сдвига, поступает сигнал «1», который и меняет знак про-
ходящего через этот сумматор разряда на обратный (т. е. проис-
ходит исправление ошибки). После этого схемы Их—M3 закрыва-
ются и направленная кодовая комбинация последующими (п—4)
тактами выводится потребителю.
Как видно из сравнения рис. 111.4 и 111.7, исправление даже
однократных ошибок влечет за собой значительное усложнение де-
кодера. Декодеры еще более усложняются при исправлении мно- '
гократных ошибок.
ПОСТРОЕНИЕ КОДИРУЮЩИХ И ДЕКОДИРУЮЩИХ УСТРОЙСТВ
ЦИКЛИЧЕСКИХ кодов
Схемы кодеров и декодеров систематических кодов могут быть
упрощены, если наложить определенные дополнительные требова-
ния на структуру кодовых комбинаций. Значительное упрощение
достигается при использовании циклических кодов, кодовые ком-
бинации которых обладают свойством цикличности.
Рассмотрим вначале построение кодеров циклических (п, £) -
кодов. При их построении, как правило, используется деление по-
линома комбинации простого fe-кода, умноженного на хг, на обра-
зующий полином Р(х), что позволяет получить разделимый код.
Построение кодера показано на рис. 11.8а. В состав его входят
r-разрядный регистр сдвига, три ключа и двухвходовые сумматоры
по модулю 2, причем число их на единицу меньше числа ненуле-
378
вых членов образующего полинома Р(х). Структура логических
обратных связей в регистре сдвига полностью определяется видом
образующего полинома.
Р (х) = а0 х + а2 х2+.. .щ-i х^1 + аг хг.
Сумматоры Сь С2, .., Cr~i присутствуют в схеме в том случае,,
если соответствующие коэффициенты а2, - •ar-i равны 1.
Рис. 118 Построение кодера циклического (п, йркода
Работает схема следующим образом. Вначале ключ К2 закрыт,
а ключи /Ci и Кз открыты. Информационная последовательность-
(комбинация простого й-кода) поступает одновременно на выход
и входной сумматор. В процессе ее прохождения за k тактов в
ячейках регистра сдвига накапливаются г проверочных разрядов.
После &-то такта ключи Кз и Kj закрываются, а ключ К-, откры-
вается. Записанные в ячейках регистра г проверочных разрядов г
тактами поступают на выход кодирующего устройства.
Поясним действие схемы на примере циклического (7, 4)-кода.
Для этого кода Р(х) = х3 + х +1« 10.11, и схема кодирующего ус-
тройства имеет вид, изображенный на рис. 11.86. Функции ключей
выполняют схемы совпадений И4, Иг, И3 совместно с триггером 7\.
Пусть на вход кодирующего устройства поступает информацион-
ная последовательность .1001. В табл. 11J5 показано формирование
проверочных разрядов в ячейках регистра сдвига.
Проверочные разряды формируются за первые k (й=4) тактов
и за время последующих г (г = 3) тактов выводятся на выход ко-
дера. Сформированная таким образом комбинация 1001110 пере-
дается в дискретный канал связи.
Рассмотрим декодеры циклических кодов. Построение декоде-
ра для обнаружения ошибок показано на рис. 11.9. В состав де-
кодера входят: буферный регистр на k разрядов, декодирующий
регистр, схема которого подобна схеме кодера, схема ИЛИ и две
схемы И с триггером, выполняющие функции ключей. Работает
схема следующим образом.
379'
ТАБЛИЦА 11.5
Такты Информация Состояние ячеек
на входе на выходе 3 2 1
1 1 1 0 1 1
2 0 0 1 1 0
3 0 0 1 1 1
4 1 1 1 1 0
5 — 1 1 0 —
6 — 1 0 — —
7 — 0 — — —
Рис. 11.9. Построение декодера циклического кода с обнаружением
ошибок
Принимаемая последовательность записывается в ячейки бу-
ферного регистра и одновременно поступает в декодирующий ре-
гистр. На (&+1)-м такте схема Hfe+1 закрывается, благодаря че-
му в буферном регистре оказываются лишь информационные раз-
ряды принимаемой комбинации. Проверочные разряды продол-
жают поступать в декодирующий регистр. На («+1)-м такте,
после приема последнего разряда кодовой комбинации, откры-
вается схема Hfe+2. Если комбинация принята без ошибок, то в
ячейках декодирующего регистра будут записаны нули, а сигнал
«ошибка» будет отсутствовать. Наличие же в тех или иных ячей-
ках декодирующего регистра единиц свидетельствует об ошибках
в принимаемой информации. На выходе схемы ИЛИ в таком слу-
чае появляется сигнал «ошибка», который может быть использо-
ван для стирания ошибочно принятой информации, накопленной
в буферном регистре. Стирание содержимого производится путем
подачи запирающего сигнала на схемы запрета, включенные меж-
380
ду ячейками памяти буферного регистра. Связь последующих яче-
ек памяти с предыдущими обрывается, в схему регистра подается
тактовый импульс, переводящий все ячейки регистра в состоя-
ние 0.
Если декодер предназначен для исправления ошибок, то необ-
ходимо указать местоположение ошибочных разрядов. С этой це-
лью в состав декодера вместо схемы ИЛИ включают дешифратор
синдрома, вырабатывающий на своем выходе сигнал «1» при фик-
сации в ячейках декодирующего регистра комбинаций определен-
ного вида. Последние выбираются с таким расчетом, чтобы момент
их появления в ячейках декодирующего регистра совпадал с мо-
ментом прохождения ошибочного разряда через выходной сумма-
тор, включенный на выходе буферного регистра. При этом оши-
бочный разряд, проходя через выходной сумматор, меняет знак
на обратный (т. е. исправляется). Правила выбора комбинаций, на
которые должен быть настроен дешифратор синдрома для исправ-
ления тех или иных сочетаний ошибок, достаточно сложны, и мы
на них останавливаться не будем.
Проиллюстрируем принцип построения декодеров для исправ-
ления ошибок на примере (7, 4)-кода с образующим полиномом
Р(х) =х3+х+1. Минимальное кодовое расстояние с/о=3, следова-
тельно, код способен исправлять однократные ошибки. Укажем,
что дешифратор синдрома должен быть настроен на комбинацию
001. Схема декодера показана на рис. 11.10.
Рис. 11.10. Построение декодера с исправлением одиночной ошибки
циклическим кодом i(i7,4)
Пусть по каналу связи была передана комбинация 1001 ПО.
Предположим, что третий разряд принят ошибочно, т. е. на вход
декодера поступила комбинация 1011110. Процесс исправления
ошибки представлен в табл. 111.6.
381
ТАБЛИЦА 11.6
Такты Информация на входе декодера Состояние ячеек деко- дирующего регистра Информация на входе де- шифратора синдрома Информация на выходе деши- фратора синдрома Информация на выходе декодера
1 1 2 3
1 1 1 1 0 ' । — — 0 —
2 0 0 1 1 1 1 О 0 —
3 . 1 0 0 1 0 1 1 0 —
4 1 0 0 0 0 0 1 0 —
5 1 1 1 0 ООО 0 —
6 1 1 0 1 1 1 0 0 —
7 0 1 1 14 II 0 _о_1 1 0 1 0 —
8 — 0 1 0 1 0 1 0 1
9 — 0 0 1 0 1 0 0 0
10 — 0 1 0 0 0 1 1 0
11 — 1 0 0 0 1
На 7-м такте в ячейках декодирующего регистра завершается
формирование комбинации синдрома. Комбинация синдрома (об-
ведена в таблице пунктиром) отлична от нуля, что свидетельствует
о наличии ошибки. Далее в буферный и декодирующий регистры
подаются еще k (7г = 4) тактов, которые, во-первых, выписывают
информационные разряды через выходной сумматор на выход де-
кодера, а во-вторых, переформируют информацию в ячейках де-
кодирующего регистра. Как видно из табл. 11.6, на 9-м такДе в
ячейках декодирующего регистра сформирована комбинация 001,
на 10-м такте эта комбинация поступает на вход дешифратора
синдрома, на выходе которого возникает сигнал «1». В этот же
момент времени на выходной сумматор поступает искаженный
3-й разряд, который, проходя через сумматор, меняет знак на об-
ратный. Исправленная комбинация имеет вид 10011110.
Легко видеть, что в циклических кодах исправление однократ-
ных ошибок производится очень просто, почти столь же просто,
как и обнаружение ошибок. Простота декодирующих устройств
циклических кодов особенно наглядна при сравнении их с декоди-
рующими устройствами нециклических систематических кодов. В
этом легко убедиться, сравнивая рис. 11.7 и НЛО. Однако хотя
исправление многократных ошибок циклическими кодами и проще,
чем нециклическими, но все же в большинстве случаев достаточно
громоздко. Это обусловливается сложностью построения дешифра-
торов синдрома при исправлении многократных ошибок.
МАЖОРИТАРНОЕ ДЕКОДИРОВАНИЕ
Мажоритарный способ исправления ошибок, основанный на
принятии решения о значении того или иного разряда декодируе-
382
мой кодовой комбинации по большинству результатов проверок на
четность, обеспечивает значительное упрощение декодеров. Ма-
жоритарное декодирование применимо далеко не ко всем кодам,
а лишь к тем, структура которых обладает определенными осо-
бенностями. К числу таких кодов относятся, в частности, некото-
рые циклические коды, а также ряд более простых кодов, в том
числе коды с повторением при S>2. Ограничимся рассмотрением
весьма простого случая мажоритарного декодирования примени-
тельно к использованию кодов с разделенными проверками.
Как известно, каждая строка проверочной матрицы любого си-
стематического кода
^11 ^12 ^13 • • • ^1П
_ ^21 ^22 ^23 • • ^2Л
hn h-гз •
состоит из коэффициентов, входящих в соотношение проверки на
четность? hitXiQhizXz®.. .@hinxn=0. Линейные комбинации строк
проверочной матрицы также образуют проверочные соотношения.
Выполнив ц линейных операций над строками проверочной матри-
цы, можно (для некоторых кодов, разумеется) получить новую
матрицу
hi hi he • hn
hi hi hs • • hn
L = »
lyA • hn
которая характеризуется двумя важными свойствами:
11) один из столбцов содержит только единичные элементы;
2) юсе остальные столбцы содержит не более, чем по одному
единичному элементу.
Матрица L определяет ц проверок на четность для разряда, со-
ответствующего единичному столбцу. Добавив к этой совокупно-
сти проверок тривиальную проверку Xi—Xi, получим ц+1 незави-
мых проверочных соотношений для одного разряда Xi, причем
свойства матрицы L таковы, что каждый разряд кодовой комби-
нации входит только в одну проверку. Такая совокупность прове-
рок называется системой разделенных (ортогональных) проверок
относительно разряда хг-.
Мажоритарное декодирование осуществляется следующим об-
разом. Если в принятой кодовой комбинации ошибки отсутствуют,
то при определении значения разряда х, все ц+il проверки укажут
одно и то же значение (либо 1, либо 0). Одиночная ошибка в ко-
довой комбинации может вызвать искажение лишь одной провер-
ки, двойная ошибка — двух и т. д. Решения о значении разряда Xt
принимаются по большинству (т. е. мажоритарно) одноименных
результатов проверок. При этом декодирование безошибочно, если
число ошибок в кодовой комбинации не превышает ц/2, т. е. иска-
383
жено не более ц/2 проверок. Если все системы разделенных прове-
рок для каждого разряда кодовой комбинации содержат не менее
р,+ 1 разделенных проверок, то реализуемое минимальное кодовое
расстояние do=p,+ l.
Подчеркнем еще раз, что далеко не все коды допускают мажо-
ритарное декодирование, поскольку требования, предъявляемые к
структуре проверочной матрицы для осуществления такого деко-
дирования, удовлетворяются для очень немногих кодов.
Поясним принцип мажоритарного декодирования на конкрет-
ном примере. Пусть необходимо построить декодирующее устрой-
ство для циклического (15, 7)-кода Боуза—Чоудхури—Хоквинге-
ма, допускающего мажоритарное декодирование. Код имеет обра-
зующий полином Р(х) =х8+х7+х6+х4+1» 111 Oil 0001. Минималь-
ное кодовое расстояние с/о=5 и, следовательно, код способен ис-
править двукратную ошибку. Вычислим проверочный полином:1
h (х) = х + 1 = х7 + х3 + х 4-1 st; 10001011.
Р-1 (X)
Построим проверочную матрицу, в качестве первой строки ко-
торой используем проверочный полином, умноженный на хг~1, а
остальные строки получим циклическим сдвигом первой:
1000101 10000000
010001011000000
001000101 100000
000100010110000
Н ~ 00001000101 1000-
000001000101 100
000000100010110
000000010001011
Преобразуем проверочную матрицу следующим образом. Сло-
жим 1, 5, 7 и 8-ю строки матрицы:
1 ©5©7©8=i100000001000101.
Аналогично
2©3@6 ©7©8=0И1000000010001,
4 © 6 © 7©8 = 000101100000001.
Составим матрицу L, использовав для ее построения три полу-
ченные суммы и 8-ю строку проверочной матрицы Н.\
0 0 0 0 0 0 0 1 0 0 0 1 0 1 1
L = 1 0 0 1 0 0 0 0 10 0 0 0 0 0 0 1 0 0 0 0 0 1 0 1 0 0 0 1 1
0 0 0 10 1 1 0 0 0 0 0 0 0 1
Легко только из видеть, единиц, что в а все этой матрице один из столбцов состоит остальные столбцы содержат не более од-
384
ной единицы. Матрица L дает четыре независимых проверочных
соотношения с разделенными относительно члена а0 проверками:
Д0 = а1©а3©а7,
«о = «2@«в©«14,
«О — «4 © «12 © «13>
«О = «8 © «9 © «И-
Добавив к этим соотношениям тривиальную проверку ао=«о.
получим систему разделенных относительно ао проверок:
«о = «о,
«0= «2 ©«6© «W
«О = «4 ©«12 ©«13-
«0= «8 ©«9 ©«11,
«О = «1 © «3 © «7 •
Пусть при передаче был искажен разряд ав. Этот разряд вхо-
дит только во вторую проверку, поэтому четыре проверки дадут
правильный результат, а вторая проверка — неправильный. Ре-
шение о значении разряда ав принимается по критерию большин-
ства и поэтому будет правильным. Ошибочная регистрация раз-
ряда произойдет при действии трех и более ошибок, приводящих
к неправильным результатам трех и более проверок.
Мы получили систему разделенных проверок относительно раз-
ряда а0. Системы разделенных проверок для остальных разрядов
получаются циклическим сдвигом строк матрицы L. Произведя,
например, сдвиг на один разряд, получим
100000001000101
1 10000000100010
L'= 101100000001000’
1000101 10000000
откуда следует
«и ©«о® «2©«в,
«14=«1@«5©«13-
«14=«3©«11©«12>
«14 = «7 © «8 © «10‘
Кроме того, au=ai4.
Аналогичным образом можно получить системы разделенных
проверок и для всех других разрядов кодовой комбинации. Кроме
того, системы проверок для циклических кодов могут быть получе-
ны циклическим сдвигом какой-либо одной системы проверок.
Схема мажоритарного декодера циклического (15, 7)-кода по-
казана на рис. 11.11. Декодер состоит из «-разрядного регистра
13—60 385
сдвига, ключа, набора двухвходовых сумматоров по модулю 2 и
так называемого мажоритарного органа М, осуществляющего вы-
бор решения о значении декодируемого разряда в соответствии с
критерием большинства. Подключение сумматоров к ячейкам ре-
гистра сдвига производится в соответствии с системой разделен-
ие. 11.11. Построение мажоритарного декодера циклического (15,7)-
кода ic разделенными проверками
ных относительно разряда а0 проверок. Действует декодер следу-
ющим образом.
В начальном положении ключ К разомкнут, и регистр сдвига
заполняется разрядами принимаемой кодовой комбинации. После
заполнения регистра сдвига ключ К открывается и в регистр сдви-
га подается тактовый импульс. На выходах сумматоров формиру-
ются результаты разделенных проверок относительно разряда а0,
и мажоритарный орган выносит решение о значении разряда а0.
Далее в регистр подается еще один тактовый импульс, и мажори-
тарный орган выносит решение о значении разряда ai и т. д.
вплоть до декодирования разряда а^. Таким образом, декодиро-
вание кодовой комбинации осуществляется за 2п тактов: в тече-
ние первых п тактов заполняется регистр сдвига, а в течение по-
следующих определяются значения каждого из п разрядов.
КОДИРОВАНИЕ И ДЕКОДИРОВАНИЕ НЕСИСТЕМАТИЧЕСКИХ
КОДОВ
Мы не будем рассматривать принципы кодирования и декоди-
рования кодов с постоянным весом из-за сложности процессов ко-
дирования и декодирования, а также из-за ограниченного приме-
нения этих кодов. Что же касается кодирования и декодирования
кодов с инвертированными проверками, то эти процессы осущест-
вляются точно так же, как и для кодов, из которых получены дан-
ные коды, но схемы кодеров и декодеров последних обычно содер-
жат дополнительно необходимое число инверторов. Кодирование
и декодирование кодов Бергера весьма несложно, поэтому на их
технической реализации останавливаться не будем.
386
Итеративные коды не имеют каких-либо присущих только им
схем кодирования и декодирования. Построение последних полно-
стью определяется построением кодеров и декодеров итерируемых
кодов. В свою очередь, схемы кодеров и декодеров итеративных
кодов представляют собой комбинации схем кодеров и декодеров
итерируемых кодов с некоторыми вспомогательными устройствами.
Сравнивая кодеры и декодеры, описанные в настоящем разде-
ле, легко видеть, что для циклических кодов данные устройства
значительно проще, чем для других систематических кодов. Это
особенно заметно при декодировании кодов, исправляющих
ошибки.
Рассмотренные схемы кодирования и декодирования не явля-
ются единственно возможными. Это лишь схемы, наиболее часто
встречающиеся на практике.
11.9. ПРИНЦИПЫ ИСПОЛЬЗОВАНИЯ ДЕТЕКТОРОВ
КАЧЕСТВА СИГНАЛА
В предыдущих разделах были рассмотрены способы защиты от
ошибок, основанные на анализе кодовой структуры принимаемой
информации. Широко применяется и другой способ защиты от
ошибок, основанный на анализе некодовых параметров принимае-
мого сигнала (амплитуды, фазы, краевых искажений и др.). Зна-
чительные отклонения этих параметров от своих номинальных зна-
чений свидетельствуют о том, что принимаемый сигнал поражен
помехой, которая с большой вероятностью может быть причиной
ошибок. Таким Образом, фиксируя значительные отклонения тех
или иных параметров сигнала от своих номинальных значений,
можно в приемнике с определенной вероятностью обнаруживать
ошибки. Эти функции в АПД выполняет специальное устройство —
детектор качества сигнала. Применение детекторов качества по-
зволяет повысить верность принимаемых сообщений без внесения
кодовой избыточности в передаваемую информацию (т. е. переда-
вать информацию простым кодом) или использовать код, неслож-
ный в реализации, но обладающий невысокими корректирующими
свойствами, например, код с одной или двумя проверками на чет-
ность.
Детекторы качества сигнала могут быть охарактеризованы дву-
мя параметрами:
— коэффициентом повышения верности, который обычно опре-
деляется как
QnB = -^, (11.29)
ОШ
где РОш — частость появления ошибочных кодовых комбинаций в
дискретном канале без использования детектора качества сигнала;
Ан ош — частость появления ошибочных комбинаций в дискретном
канале при использовании детектора качества сигнала;
13* 387
— избыточностью, которая определяется как
Я = —,
Л +
(11.30)
где Pi — вероятность того, что безошибочная кодовая комбинация
зафиксирована детектором качества как ошибочная; Р^— вероят-
ность того, что ошибочная кодовая комбинация зафиксирована
детектором качества как ошибочная.
Естественно, что детектор качества стремятся выполнить так,
чтобы коэффициент повышения верности был достаточно велик
при приемлемой избыточности. Оба параметра детекторов качест-
ва тесно связаны друг с другом и улучшение одного из них в о!д-
ном и том же детекторе обычно влечет ухудшение другого пара-
метра.
Рассмотрим принцип работы простейшего детектора качества,
использующего для обнаружения ошибок смещения ЗМВ. Его
действие основывается на том обстоятельстве, что значительные
по величине смещения ЗМВ с большой вероятностью могут быть
следствием действия дроблений, которые, в -свою очередь, с боль-
шой вероятностью вызывают появление ошибок. Таким образом,
фиксируя краевые искажения значительной величины, можно с из-
вестной вероятностью обнаруживать ошибки. Принцип работы де-
тектора качества иллюстрирует рис. Ы.12, на котором изображена
Рис. 11.12. К принципу работы
детектора качества сигнала,
использующего -смещения ЗМВ
последовательность единичных элементов на выходе двоичного
устройства приемника. Около фронтов элементов изображены так
называемые разрешенные зоны (заштриховано^ шириной 2А. Если
смещения ЗМВ не превышают по величине А, то смена полярно-
сти происходит в пределах разрешенной зоны, и принимаемая ком-
бинация считается правильной. Если же смещение ЗМВ -превос-
ходит А, то детектор качества вырабатывает сигнал об ошибоч-
ности принимаемой комбинации.
Причиной смещения ЗМВ за пределы разрешенной зоны мо-
гут быть как дробления, так и краевые искажения. Чем меньше
ширина разрешенной зоны 2А, тем чаще детектор качества будет
-срабатывать ложно, реагируя на краевые искажения. С другой
стороны, расширение разрешенной зоны снижает коэффициент по-
вышения верности, поскольку с увеличением А возрастает вероят-
ность того, что начало и конец дробления расположатся в разре-
шенных зонах и детектор качества не обнаружит ошибку. Для
уменьшения вероятности такого события разрешенную зону сле-
дует сужать.
388
Как показали исследования, параметры описанного детектора
качества не слишком высоки; при ощутимых значениях коэффици-
ента повышения верности частость ложных срабатываний детекто-
ра качества (т. е. избыточность) довольно высока. Более высокие
качественные показатели обеспечиваются при анализе формы сиг-
нала на выходе демодулятора приемника, а не на выходе двоич-
ного устройства. Принцип работы такого детектора качества ил-
люстрирует рис. 11.13. На нем изображен сигнал на выходе демо-
уЛ/х|
Lj_______1_____।_____I______I_____I
I______________I___________I_____________-
t
Рис. 11.13. К принципу работы детектора качества сиг-
нала, использующего отклонения на выходе демодулято-
ра от номинального значения
дулятора, номинальные значения которого в моменты времени, со-
ответствующие идеальным границам посылок, равны ин+ и ын—
Идеальные границы посылок отмечаются тактовыми импульсами
ТИ. Если напряжение на выходе демодулятора в момент действия
тактового импульса отличается от ин+ или «н_ более чем на ±S%,
то детектор качества вырабатывает сигнал, свидетельствующий об
ошибочности принимаемой комбинации.
Детектор качества, построенный на описанном принципе, мо-
жет обеспечить повышение верности в несколько десятков раз при
избыточности, не превышающей 1%. Такие значения параметров
детектора качества легко реализуются при умеренных длинах ко-
довой комбинации (несколько десятков разрядов).
Еще более высокие показатели обеспечивают детекторы каче-
ства, использующие одновременное слежение за несколькими па-
раметрами сигнала в разных точках АПД. В одном из типов сред-
нескоростных АПД контролируется уровень принимаемого сигна-
ла на выходе приемного фильтра (детектор качества срабатывает
как при завышениях, так и при занижениях уровня, превышающих
определенную величину), а также уровень на выходе демодулято-
ра. Такое построение детекторов качества позволяет достичь очень
высоких показателей — повышение верности достигает нескольких
сот'раз при незначительной избыточности даже при малых длинах
кодовых комбинаций. Эти значения параметров следует признать
весьма высокими.
389
Детекторы качества сигнала и корректирующие коды не сле-
дует рассматривать как взаимоисключающие средства для повы-
шения верности. Напротив, наибольший эффект обычно достигает-
ся при совместном использовании корректирующих кодов и детек-
торов качества, которые хорошо дополняют друг друга. Действи-
тельно, детекторы качества наиболее надежно обнаруживают дей-
ствие достаточно интенсивных помех, приводящих к значительным
искажениям сигнала. Корректирующие коды, напротив, наиболее
успешно обнаруживают действие сравнительно слабых помех, вы-
зывающих появление малого количества ошибок в принимаемой
кодовой комбинации. Поэтому совместное использование детекто-
ров качества и корректирующих кодов позволяет значительно по-
высить устойчивость АПД к действию различного рода помех.
В заключение следует заметить, что при совместном использо-
вании корректирующих кодов и детекторов качества суммарный
коэффициент повышения верности 5ПВ меньше произведения
КпвОпв- Это происходит потому, что в некоторых комбинациях, по-
раженных помехами, ошибки обнаруживаются и корректирующим
кодом, и детектором качества сигнала одновременно.
11.10. СИСТЕМЫ ПОВЫШЕНИЯ ВЕРНОСТИ ПЕРЕДАЧИ
ДИСКРЕТНЫХ СООБЩЕНИЙ
Все известные системы повышения-верности передачи дискрет-
ной информации можно разделить на две группы:
1) системы без обратной связи,
2) системы с обратной связью.
В первом случае информация передается только в одном на-
правлении и для осуществления передачи достаточно располагать
симплексным каналом связи. Во втором случае принципиально не-
обходим канал обратной связи (обратный канал), по которому
организуется обратная -связь между приемником и передатчиком.
По обратному каналу тем или иным способом передаются сведе-
ния об условиях приема. Это обстоятельство позволяет при исполь-
зовании систем с обратной связью организовать передачу инфор-
мации с переменной избыточностью, увеличивая ее при тяжелых
условиях приема и доводя до минимума в те периоды времени,
когда влияние помех невелико.
В системах без обратной связи возможно использование как
простых, так и корректирующих кодов. При передаче с помощью
простых кодов верность информации всецело определяется каче-
ством дискретного канала связи и в большинстве случаев не удов-
летворяет требованиям потребителей. При использовании коррек-
тирующих кодов возможно применение как кодов, обнаруживаю-
щих ошибки, так и исправляющих их. Обнаружение ошибок позво-
ляет достичь практически любой верности передачи при невысокой
сложности оборудования, однако при этом всякое обнаружение
ошибок ведет к потере части информации, поскольку комбинации
с обнаруженной ошибкой потребителю не передаются. Такие поте-
390
ри информации допустимы только в очень редких случаях, что и
обусловливает весьма малое применение таких систем на практи-
ке. Исправлением ошибок позволяет достичь практически любых
требуемых значений верности приема при отсутствии потерь ин-
формации, однако при этом на код налагаются особые требования.
Такой код должен иметь кодовые комбинации длиной порядка де-
сятков тысяч разрядов и более. Это обстоятельство обусловлива-
ется тем, что на реальных каналах связи ошибки, как известно,
группируются в пачки, длины которых могут достигать весьма
больших значений, а эффективная коррекция пакетов требует при-
менения кодов с длиной кодовой комбинации, значительно превос-
ходящей длину пачек ошибок.
Техническая реализация указанных кодов чрезвычайно затруд-
нена, поэтому исправление ошибок в системах без обратной связи
почти не нашло применения. Отметим также, что все системы без
обратной связи характерны тем, что передатчик не получает под-
тверждений о приеме сообщений приемником. Это приводит к по-
явлению больших трудностей при создании систем передачи дан-
ных, к надежности которых предъявляются повышенные требова-
ния.
В связи с перечисленными факторами системы без обратной
связи применяются только тогда, когда канал обратной связи, в
принципе, отсутствует или его создание очень затруднено, а также
при очень жестких требованиях к времени задержки сообщения
(т. е. к промежутку времени между моментом поступления сооб-
щения на передающую АПД и моментом передачи ее потребите-
лю), когда всякое использование канала обратной связи приво-
дит к задержке сообщения сверх допустимого уровня.
Наиболее широкое применение в технике передачи дискретной
информации получили системы с обратной связью. В отличие от
систем без обратной связи в них повышение верности достигается
посредством повторения только неправильно принятой (искажен-
ной) информации. При этом обратный канал связи используется
для управления процессом повторения. Таким образом, в систе-
мах с обратной связью избыточность информации, характеризую-
щаяся частостью повторений, переменна и зависит от конкретного,
существующего в данный момент времени, состояния канала свя-
зи. Избыточность минимальна при отсутствии ошибок и увеличи-
вается по мере их возникновения.
Введение переменной избыточности в передаваемую информа-
цию может быть осуществлено различными способами. В системе
с информационной обратной связью (ИОС) решение о повторной
передаче сообщения принимает передающая станция на основа-
нии сравнения переданной информации и информации, принятой
по обратному каналу. В системах с решающей обратной связью
(РОС), называемой часто системой с переспросом, автозапросом,
системой с автоматическим запросом ошибок (АЗО), решение о
повторной передаче сообщения принимает приемная станция при
обнаружении ошибок в принятой комбинации. Существуют также
391
системы с комбинированной обратной связью (КОС), в которых
решение о повторной передаче может приниматься как на прием-
ной станции, так и на передающей, однако эти системы почти не
нашли применения, и мы их рассматривать не будем.
Рассмотрим логику работы системы с информационной обрат-
ной связью. При использовании ИОС приемник играет пассивную
роль — он не занимается обнаружением ошибок и только инфор-
мирует передатчик о том, какая же комбинация им принята. Эта
комбинация не передается сразу потребителю, а поступает в бу-
ферный накопитель и хранится там до тех пор, пока передатчик
не вынесет решения о ее верности и не известит приемник о при-
нятом решении. Информирование передатчика приемником проис-
ходит с помощью передачи по обратному каналу специальных
сигналов (квитанций), характеризующих в той или иной степени
принятые кодовые комбинации. Если в передатчике устанавливает-
ся, что принятая квитанция не соответствует переданному сообще-
нию, то делается вывод о том, что переданная ранее комбинация
принята приемником ошибочно. Передатчик принимает решение
о повторной передаче этой комбинации и посылает в приемник
специальную комбинацию «стирание», а потом — ошибочно при-
нятую кодовую комбинацию. Приемник, приняв комбинацию «сти-
рание», уничтожает накопленную в буферном накопителе ошибоч-
ную кодовую комбинацию и записывает на ее место принимаемую
вслед за комбинацией «стирание» кодовую комбинацию. Далее
приемник вновь информирует передатчик о принятой кодовой ком-
бинации и т. д. Кодовая комбинация в буферном накопителе при-
емника хранится до тех пор, пока у передатчика не будет уверен-
ности в ее безошибочности. После этого записанная в буферном
накопителе комбинация передается потребителю. Заметим, что
время хранения (или, что то же самое, емкость буферного нако-
пителя) зависит от конкретной разновидности ИОС и может быть
различным.
Формирование квитанций может осуществляться различными
способами. Если каждой принятой кодовой комбинации соответст-
вует своя квитанция, то такая ИОС называется полной. Если каж-
дой квитанции соответствуют две или более кодовых комбинаций
(т. е. число квитанций меньше числа кодовых комбинаций), то
такая ИОС называется укороченной. Для передачи квитанций и
кодовых комбинаций может быть применен корректирующий код,
причем по прямому каналу может передаваться только информа-
ционная часть (т. е. фактически — простым кодом), а по обратно-
му — соответствующие принятой информации проверочные раз-
ряды. При этом обычно r<k и соответственно число квитанций 2Г
меньше числа информационных комбинаций 2ft (укороченная
ИОС). Если r=k, то имеет место полная ИОС. Отметим, что наи-
более известной ИОС является вариант полной ИОС, когда пере-
даваемая по обратному каналу связи квитанция является повто-
рением принятой информационной комбинации. Этот вариант пол-
ной ИОС называется ретрансляционной обратной связью.
392
Рассматривая работу систем с ИОС, можно придти к выводу,
что не обнаруженные ошибки на приеме появляются в следующих
случаях:
1. При действии ошибок только в прямом канале, когда кви-
танции, соответствующие искаженной и неискаженной информа-
ционным комбинациям, совпадают (укороченная ИОС). При сов-
падении квитанций в передатчике невозможно обнаружить факт
ошибочного приема. Легко видеть, что в системах с полной ИОС
ошибки, действующие только в прямом канале, не могут привести
к образованию необнаруженных ошибок.
2. При действии ошибок и в прямом, и в обратном каналах.
Приемник посылает квитанцию, соответствующую принятой иска-
женной информационной комбинации. Посланная квитанция под
действием ошибок в обратном канале превращается в квитанцию,
соответствующую неискаженной информационной комбинации. В
этом случае обнаружение на передатчике ошибочного приема так-
же невозможно. Указанный источник необнаруженных ошибок
наиболее заметное влияние оказывает в системах с сильно укоро-
ченной ИОС, а наименее заметное — в системах с полной ИОС.
Более подробный анализ систем с ИОС показывает, что боль-
шое значение для обеспечения помехоустойчивости работы имеет
безыскаженная передача сигнала «стирание». Для этого в алго-
ритм ИОС вводят дополнительные усложнения, способствующие
повышению верности передачи данного сигнала и повышающие
поэтому верность системы в целом.
Таким образом, можно придти к выводу, что необходимое усло-
вие высокой верности передачи информации в системе с ИОС —
надежная передача сигнала «стирание» и использование полной
(или мало укороченной) ИОС. Последнее обстоятельство является
важнейшим недостатком систем с ИОС и обусловливает их срав-
нительно невысокую по сравнению с системами с РОС скорость
передачи полезной информации (при прочих равных условиях,
конечно). Это объясняется тем, что в системах с ИОС для пере-
дачи квитанций требуется обратный канал с такой же, как у пря-
мого канала скоростью работы. В системах с РОС по обратному
каналу передаются более сжатые сведения, поэтому к скорости
работы обратного канала предъявляются менее жесткие требова-
ния и может быть достигнута, как правило, более высокая ско-
рость передачи полезной информации.
11.11. СИСТЕМЫ С РЕШАЮЩЕЙ ОБРАТНОЙ СВЯЗЬЮ
Как уже указывалось выше, в системах передачи дискретной
информации с РОС необходимость повторения передачи устанав-
ливается приемником на основании анализа принимаемой комби-
нации. При обнаружении ошибок на передатчик по каналу обрат-
ной связи посылается сигнал «запрос», при получении которого
передатчик повторяет передачу искаженной информации. Обнару-
жение ошибок осуществляется путем использования корректирую-
щего кода, а также детекторов качества сигнала.
393
Легко видеть, что в системах с РОС по обратному каналу пе-
редаются только два служебных сигнала, один из которых соот-
ветствует правильному приему кодовой комбинации, а другой со-
ответствует обнаружению ошибки в ней. Практически часто огра-
ничиваются (в дуплексных системах) только передачей сигнала,
соответствующего обнаружению ошибок, — сигнала «запрос».
При этом неполучение сигнала «запрос» свидетельствует о безо-
шибочном приеме на приемной станции. Таким образом, по кана-
лу обратной связи в системах с РОС передаются очень сжатые
сведения, что позволяет использовать в качестве обратного канала
канал с малой скоростью работы. С другой стороны, обязательное
использование корректирующего кода приводит к уменьшению
скорости передачи полезной информации по прямому каналу. Тем
не менее суммарная скорость передачи полезной информации в
обоих направлениях, как правило, в системах с РОС существен-
но выше, чем в системах с ИОС, так как избыточность, вносимая
в передаваемую в прямом канале информацию, обычно невелика.
Следует также упомянуть еще об одном преимуществе систем
с РОС. То обстоятельство, что в обратном канале передаются
очень сжатые сведения, позволяет резко упростить его оборудова-
ние, В полудуплексных АПД- это приводит к значительному упро-
щению аппаратуры в целом. В системах с ИОС оборудование об-
ратного канала практически такое же, как и прямого, поэтому си-
стемы с ИОС по сложности оборудования часто превосходят си-
стемы с РОС.
Существует и применяется на практике большое количество
разновидностей систем с РОС, различающихся по тем или иным
признакам. Рассмотрим только некоторые из них. Наиболее про-
стая система с РОС —это система с ожиданием. Алгоритм работы
такой системы весьма прост. Передатчик по прямому каналу пе-
редает закодированную корректирующим кодом кодовую комбина-
цию и ожидает приема сигнала по обратному каналу. Если по об-
ратному каналу принимается сигнал, соответствующий правиль-
ному приему переданной кодовой комбинации, то передается сле-
дующая кодовая комбинация, если принимается сигнал «запрос»,
то повторяется переданная кодовая комбинация. Легко видеть,
что минимальное время передачи одной кодовой комбинации в си-
стеме с ожиданием равно
Т = /к + 2^ + ^сос, (Н.31)
где Т — минимальное время передачи кодовой комбинации; tK —
длительность кодовой комбинации; tv — время распространения
сигналов между передатчиком и приемником; /Сос — длительность
сигнала обратной связи.
Общее время передачи кодовой комбинации равно минималь-
ному при отсутствии повторений и составляет 2Т, ЗТ и т. д. при
двукратной, трехкратной и т. д. передаче.
Среди систем с РОС системы с ожиданием обеспечивают наи-
меньшую при прочих равных условиях скорость передачи полез-
394
ной информации. Однако при tK^>2tp + tc ос по скорости передачи
полезной информации системы с ожиданием не намного уступают
более сложным системам с РОС, превосходя их по простоте обо-
рудования. Вследствие этого системы с ожиданием обычно приме-
няются в тех случаях, когда длительность кодовой комбинации на-
много превышает сумму удвоенного времени распространения сиг-
нала по прямому каналу и длительность сигнала обратной связи.
Последнее часто имеет место при передаче информации с низкими
скоростями, а также при передаче информации между ЭВМ цент-
ров коммутации сообщений, когда используются большие длины
кодовых комбинаций — тысячи разрядов.
Широкое применение получила другая разновидность системы
с РОС — система с блокировкой. В этой системе передача очеред-
ной кодовой комбинации производится, не дожидаясь приема по
обратному каналу сигнала обратной связи, что позволяет сущест-
венно повысить скорость передачи полезной информации. Рас-
смотрим подробнее принцип работы данной системы применитель-
но к дуплексному варианту ее построения (рис. 11.14), в которой
сигналом «запрос» является разрешенная кодовая комбинаций.
Рис. 11.14. Функционная схема АПД с
РОС
По сигналу «ввод» передаваемая информация поступает в ко-
дер, кодируется кодом, обнаруживающим ошибки, и передается в
дискретный канал связи. Одновременно она запоминается в бу-
ферном накопителе. В приемнике противоположной станции при-
нимаемая последовательность поступает в декодер и декодирует-
ся в нем. Если при этом ошибок не обнаруживается, то информа-
ционные разряды, накопленные в буферном регистре декодера, по-
ступают к потребителю информации. Если обнаружена ошибка, то
вырабатывается сигнал «ошибка», который, во-первых, стирает со-
держимое буферного регистра декодера, а, во-вторых, через ус-
395
тройство управления воздействует на датчик комбинации «запрос»,
которая посылается на противоположную станцию. Кроме того,
прекращается выдача сигнала «ввод», а следовательно, и переда-
ча информации. После передачи комбинации «запрос» информа-
ция, накопленная в буферном накопителе, через ключ К передает-
ся в дискретный канал.
На противоположной станции комбинация «запрос» регистри-
руется дешифратором служебной комбинации, который вырабаты-
вает специальный сигнал. Последний поступает на устройство уп-
равления, которое производит те же операции, что и при получе-
нии сигнала обнаруженной ошибки: посылает комбинацию «за-
прос», вслед за чем передает содержимое буферного накопителя.
Временная диаграмма работы системы иллюстрируется рис.
11.115. Символ S обозначает искаженную кодовую комбинацию,
А Б В Г Д Е Ж 3 И К ЗК Г Д Е Ж 3 И К
Ст.А
Ст Б
Tj/i
Рис. 11.15. Временная диаграмма работы дуплексной системы
с РОС
комбинация «запрос» обозначена как ЗК. Из рис. 11.15 следует,
что емкость буферного накопителя, измеряемая числом запоминае-
мых кодовых комбинаций, должна составлять
М = 3+ . (11.32)
При этом время блокировки приемников составляет
7бл = Шк. (11.33)
Определенная таким образом величина емкости буферного на-
копителя является минимальной. Возможна также работа с уве-
личенной по сравнению с (11.32) емкостью. Это не нарушит нор-
мальную работу системы, так как одновременно увеличится вре-
мя блокировки приемников, т. е. лишь увеличится время, затрачи-
ваемое на переспрос.
Если комбинация «запрос», передаваемая станцией Б, исказит-
ся, то приемник станции А воспримет ее как искаженную кодовую
комбинацию; на станцию Б при этом будет передана запросная
комбинация и т. д. Процесс переспроса не изменится и сбоя в ра-
боте не произойдет. Искажение комбинации «запрос», передавае-
мой станцией А, не имеет значения, так как приемник станции Б,
будучи заблокированным, ее-не воспринимает.
396
При одновременном искажении комбинаций в обоих направле-
ниях сигналы «запрос» посылаются и в том, и в другом направле-
ниях. В результате происходит блокировка приемников. Передат-
чики начинают передавать информацию, накопленную в буферных
накопителях, после чего восстанавливается нормальная работа
связи.
Рассмотрим случай, когда в комбинации «запрос» имеется не-
обнаруженная ошибка. На противоположной станции искаженная
запросная комбинация воспринимается как разрешенная кодовая
и продолжается передача информации. В то же время приемник
станции, пославший запросную комбинацию, заблокирован. Ясно,
что при таком положении теряется М кодовых комбинаций.
Может возникнуть вопрос, зачем передается сигнал «запрос»
со станции А перед передачей информации из буферного накопи-
теля. Возможен случай, когда при передаче информации со стан-
ции Б на станцию А в одной из кодовых комбинаций появляется
ошибка, вследствие чего информационная кодовая комбинация
принимается как комбинация «запрос». Если бы в этой ситуации
станция А не передавала комбинацию «запрос», то приемник стан-
ции Б остался незаблокированным и принял вторично М комбина-
ций, накопленных в буферном накопителе станции А (т. е. имела
бы место так называемая «вставка» информации). С другой сторо-
ны, приемник станции А, заблокировавшись, не принял бы М кодо-
вых комбинаций, передаваемых станцией Б (т. е. имела бы место
потеря информации). Для предупреждения такого явления при
каждой фиксации сигнала «запрос» в канал связи посылается этот
же сигнал с целью перевести противоположную станцию в режим
переспроса. При этом всякий прием сигнала «запрос» приводит к
таким же последствиям, как и прием кодовой комбинации с об-
наруженной ошибкой; потерь и вставок информации не происхо-
дит.
Напомним еще раз, что описанная разновидность системы с
РОС является принципиально дуплексной системой. В том случае,
когда в одном из направлений отсутствует информация для пере-
дачи, прибегают к передаче так называемой «фиктивной» инфор-
мации, не выдаваемой из АПД потребителю. Необходимость в пе-
редаче «фиктивной» информации вытекает из требования поддер-
жания импульсной и цикловой синхронизации в канале передачи
данных с тем, чтобы обеспечить нормальные условия передачи сиг-
нала «запрос» в любой момент времени.
Часто встречаются полудуплексные системы передачи дискрет-
ной информации. При этом оказывается возможным сильно упро-
стить аппаратуру на обоих концах канала передачи данных за
счет упрощения оборудования обратного канала. В этих системах
сигнал «запрос» не является кодовой комбинацией используемого
в системе корректирующего кода; признаком появления сигнала
«запрос» является изменение полярности передаваемого по обрат-
ному каналу сигнала. Обратный канал организуется обычно (см.
гл. 10) с помощью частотного разделения канала тональной часто-
397
ты на два подканала: узкополосный обратный канал и прямой ка-
нал, ширина полосы пропускания которого лишь незначительно
меньше ширины полосы пропускания канала тональной частоты.
Необходимость частотного разделения прямого и обратного кана-
лов обусловливается тем, что полудуплексные системы передачи
дискретной информации рассчитываются обычно для работы по
двухпроводному каналу, а не по четырехпроводному, как дуплекс-
ные системы.
Работают полудуплексные системы в общих чертах так же, как
и описанная выше система, но с той разницей, что при правильном
приеме информации по обратному каналу передается сигнал одной
полярности, а при обнаружении ошибки передаваемая полярность
меняется на обратную. Сигнал обратной связи фиксируется при-
емником обратного канала, который на своем выходе в зависимо-
сти от принятой полярности вырабатывает сигналы «подтвержде-
ние» и «запрос», используемые для управления передатчиком пря-
мого канала. При появлении сигнала «запрос» передатчик прямого
канала повторяет информацию, накопленную в буферном накопи-
теле. При этом часть повторяемой информации, как и раньше, не
воспринимается приемником прямого канала противоположной
станции, который блокируется, снимая блокировку в момент при-
ема кодовой комбинации, ранее принятой ошибочно.
Здесь следует отметить, что в полудуплексных системах ем-
кость буферного накопителя не определяется ф-лой (Ы.32), так
как сигналы Обратной связи не передаются в цикле переспроса.
Величина емкости буферного накопителя, выражаемая числом за-
поминаемых комбинаций, может быть найдена из выражения
+ (11.34)
где г'ос — время надежной фиксации сигнала обратной связи. При
этом емкость буферного накопителя не должна быть меньше двух
кодовых комбинаций.
Рассмотренная система с РОС обладает одним существенным
недостатком, вытекающим из слабой помехозащищенности сигна-
лов обратного канала. Действительно, в ранее описанной дуплекс-
ной системе с РОС сигнал обратной связи (комбинация «запрос»)
являлся одной из разрешенных кодовых комбинаций корректиру-
ющего кода, поэтому необнаруженное искажение комбинации «за-
прос», приводящее, как мы видели, к потере части информации,
происходит весьма редко. Вероятность такого события значитель-
но меньше вероятности необнаруженной ошибки в кодовой комби-
нации. В полудуплексной системе с РОС сигналы обратной связи
корректирующим кодом не кодируются, вследствие чего вероят-
ность перехода сигнала «запрос» в сигнал «подтверждение» весь-
ма велика. Этому способствует также то обстоятельство, что прием
сигналов обратной связи обычно производится асинхронным ме-
тодом, который, как известно, наименее устойчив к действию по-
мех. Чтобы резко уменьшить вероятность потерь информации в
398
полудуплексных системах с РОС прибегают к циклической нумера-
ции передаваемых кодовых комбинаций? комбинации получают
определенный номер от 1 до ii-го, следующей комбинации вновь
присваивается 1-й номер и т. д. Каждая передаваемая кодовая
комбинация содержит в себе специальные служебные разряды, с
помощью которых и передается ее номер. На приеме контроли-
руется порядок следования номеров принимаемых комбинаций.
Наличие контроля позволяет распознавать нарушения в порядке
следования комбинаций (что 'бывает при вставке комбинаций или
их потере) и тем самым скомпенсировать сравнительно низкую по-
мехоустойчивость канала обратной связи. Естественно, что цикл
нумерации должен превышать число комбинаций, повторяемых в
процессе переспроса.
Рассмотренные разновидности систем с РОС относятся к так
называемым безадресным системам. Существуют также адресные
системы с РОС. В этих системах каждая передаваемая кодовая
комбинация снабжается номером ((«адресом»), причем в случае
обнаружения ошибки по каналу обратной связи посылается сигнал
«запрос», содержащий адреса ошибочно принятых комбинаций.
Передатчик, получив сигнал обратной связи, повторяет те кодовые
комбинации, адреса которых содержатся в сигнале обратной свя-
зи. Поскольку адресные системы, в отличие от безадресных, в цик-
ле переспроса передают только ошибочно принятые комбинации,
то они характеризуются и более высокой скоростью передачи по-
лезной информации. Тем не менее их применение ограничивается
гораздо более сложной аппаратурной реализацией; адресные си-
стемы используются только на связях с очень тяжелыми условиями
приема.
Рассмотрим вопрос о верности, обеспечиваемой системами с
РОС. Из принципа работы таких систем следует, что необнару-
женная ошибка имеет место только тогда, когда передаваемая ко-
довая Комбинация под действием помех исказится и будет принята
как разрешенная кодовая комбинация. Таким образом,
П ______ РОШ 1
ош РОС о « w
Опв ™
где Лип рос — вероятность ошибочного приема кодовой комбина-
ции в системе с РОС; Рош — как и ранее, вероятность появления
ошибочных кодовых комбинаций в дискретном канале; SnB — сум-
марный коэффициент повышения верности корректирующим ко-
дом и детектором качества сигнала; 1/т — некоторый коэффи-
циент, учитывающий дополнительное повышение верности, возни-
кающее при коррелированных ошибках вследствие особенностей
логики работы систем с РОС.
Поясним причину появления дополнительного повышения вер-
ности приема в системах с РОС. Действительно, при обнаружении
ошибок в принимаемой кодовой комбинации приемник блокирует-
ся на время, равное времени передачи содержимого буферного на-
копителя. Благодаря этому значительная часть пачки ошибок не
399
(11.35)
воздействует на приемник, уменьшая тем самым вероятность не-
обнаруженной ошибки. Дополнительное повышение верности тем
больше, чем больше время блокировки приемника и практически
составляет 5—10 раз.
Существует еще один источник дополнительного повышения
верности в системах с РОС, основанный на анализе кодовых ком-
бинаций, принимаемых в цикле переспроса. В указанных системах
во время переспроса блокируется не вход приемника, а его выход.
При этом декодер осуществляет декодирование поступающих в не-
го комбинаций. Если хотя бы в одной комбинации фиксируются
ошибки, то по обратному каналу вновь посылается сигнал «за-
прос» и переспрос повторяется. Описанный анализ кодовых ком-
бинаций, принимаемых в цикле переспроса, позволяет в значи-
тельной степени нейтрализовать действие пакетов (пачек) ошибок,
столь характерных для существующих каналов связи, и обуслов-
ливает дальнейшее увеличение коэффициента т.
Рассмотрим вопрос о скорости передачи информации в систе-
мах с РОС. В этих системах (как и в любых системах с обратной
связью) скорость передачи информации непостоянна—при отсут-
ствии переспросов она максимальна, а во время переспросов сни-
жается до нуля. Поэтому можно говорить о средней скорости пе-
редачи информации, равной отношению количества бит (или зна-
ков), принятых потребителем за какой-то достаточно продолжи-
тельный промежуток времени (например, за 1 ч), к величине про-
межутка. Среднюю или эффективную скорость передачи выража-
ют обычно в битах за секунду или в знаках за секунду.
В дуплексных системах с РОС информация передается в обе
стороны со скоростью модуляции В. Среднюю скорость передачи
информации
СДуП = 2ЯВ-^, бит/с, (11.36)
где k/ti — коэффициент, учитывающий избыточность использован-
ного корректирующего кода; R— коэффициент, учитывающий
уменьшение скорости передачи информации из-за переспросов
В полудуплексных системах информация передается в каждом
н-аправлении не одновременно, а попеременно, вследствие чего
средняя скорость передачи информации при прочих равных усло-
виях вдвое меньше:
СпоЛУДУп = ЯВ^-- (11’37)
Формулы (11.36) и (11.37) справедливы для систем с блоки-
ровкой. Для систем с ожиданием скорость передачи информации
ниже.
Здесь уместно заметить, что существуют и применяются два ва-
рианта дуплексных систем для работы по каналам тональной ча-
стоты при их четырех- и двухпроводном включении. В двухпровод-
400
ных системах разделение канала на два подканала, необходимых
для организации двух направлений передачи, достигается с по-
мощью фильтров. Поэтому полоса пропускания каждого из двух
подканалов довольно узка — несколько сот герц. Это сильно огра-
ничивает скорость телеграфирования. Для сравнения укажем, что
скорость модуляции в дуплексных системах, работающих по че-
тырехпроводным каналам тональной частоты, составляет обычно
1200—2400 бод, в полудуплексных системах, использующих обычно
двухпроводные каналы— 1200 бод, а в дуплексных двухпровод-
ных системах — 200 бод. Средняя скорость передачи информации
•в двухпроводных дуплексных системах в 5—>10 раз меньше, чем
в четырехпроводных дуплексных системах и в 3—5 раз меньше,
чем в полудуплексных.
На величину средней скорости передачи информации значи-
тельно влияет величина кодовой комбинации корректирующего ко-
да. Использовать очень большие значения длин кодовых комбина-
ций невыгодно, так как при этом увеличивается промежуток вре-
мени, затрачиваемый на переспрос, что снижает среднюю скорость
передачи информации. Время, затрачиваемое на переспрос, увели-
чивается потому, что время блокировки зависит не только от рас-
пространения сигнала, но и от длины кодовой комбинации. С дру-
гой стороны, слишком короткие кодовые комбинации также невы-
годны, поскольку такие комбинации для достижения заданной вер-
ности должны содержать гораздо большую избыточность, чем
комбинации относительно длинные. Поэтому существует некоторое
оптимальное значение длины кодовой комбинации, при которой
произведение R— максимально и, следовательно, скорость пере-
дачи информации также максимальна. Оптимальные значения
длин кодовых комбинаций существенно зависят от вида и качества
используемого канала и заданной верности. Максимальная ско-
рость передачи обеспечивается в среднем при следующих длинах
кодовых комбинаций:
1) для некоммутируемых каналов тональной частоты и теле-
графных каналов — 1000—2000 разрядов (R— «0,954-0,98);
2) для коммутируемых каналов тональной частоты и телеграф-
ных каналов— 100—500 разрядов (Rkjn0,74-0,9);
3) для коротковолновых радиоканалов — 60—100 разрядов
0,54-0,8).
При работе по некоммутируемым каналам максимальная ско-
рость передачи обычно не реализуется из-за того, что необходимая
для этого длина кодовой комбинации (1000—2000 разрядов) слиш-
ком велика и приводит к усложнению кодеров и декодеров. Прак-
тически длины составляют несколько десятков или сотен разрядов,
при этом величина Rkln лежит обычно в пределах 0,75-4-0,9. По-
этому средняя скорость передачи информации >в дуплексных си-
стемах с РОС составляет 1,5В4-1,8В >(бит/с).
Интересно сравнить средние скорости передачи в системах с
401
РОС и ИОС. Для достижения заданной верности системы с ИОС
приходится выполнять обычно в виде полных систем, вследствие
чего по обратному каналу передаются только квитанции. Скорость
передачи информации в данном случае даже без учета повторений
ошибочно принятых комбинаций составляет В, бит/с. Таким обра-
зом, скорость передачи информации в системах с ИОС в среднем
вдвое меньше, чем в системах с РОС.
В ряде случаев существенное повышение скорости передачи
информации может быть достигнуто за счет использования коррек-
тирующих кодов, обнаруживающих ошибки и частично исправля-
ющих их. Действительно, в системах с РОС с обнаружением оши-
бок даже однократная ошибка вызывает повторную передачу
всего содержимого буферного накопителя. При использовании ко-
дов, исправляющих ошибки малой кратности и обнаруживающих
ошибки большой кратности, ошибки, исправляемые кодом, не вы-
зовут появления переспросов. Это может заметно повысить ско-
рость передачи информации даже несмотря на увеличение избы-
точности корректирующего кода. Применение таких систем огра-
ничивается в основном сложностью декодеров АПД.
В заключение заметим, что при достаточно высокой вероятно-
сти ошибок и слабом их группировании (например, в космической
связи) системы с обратной связью оказываются малоэффективны-
ми, поскольку большую часть времени находятся в режиме повто-
рения информации, хранящейся в буферном накопителе. В этих
условиях наиболее рациональным решением является использова-
ние кодов с исправлением ошибок, несмотря на значительную слож-
ность декодирующих устройств.
11.12. ПРИМЕРЫ УСТРОЙСТВ ПОВЫШЕНИЯ ВЕРНОСТИ
Для передачи данных по некоммутируемым телеграфным кана-
лам и сети абонентского телеграфа нашла применение низкоско-
ростная аппаратура передачи данных типа «Аккорд-50». Эта ап-
паратура, работающая со скоростями 50 и 100 бод, обеспечивает
частость ошибки по пятиэлементным знакам не более Ю-0 при ча-
стости ошибки в дискретном канале по посылкам 2-10~4. Аппара-
тура «Аккорд-50» является полудуплексной и предназначается для
работы по каналам с двухпроводным окончанием, в том числе и по
сети АТ. Это обусловило характерные ее особенности, заключаю-
щиеся в том, что в аппаратуре используется стартстопный прин-
цип работы, а информация передается пятиэлементными комбина-
циями с 7,5-контактным делением. И то, и другое позволяет рабо-
тать по сети АТ, использующей аппаратуру тонального телеграфи-
рования типа ЧВТ, которая, как известно, допускает только старт-
стопную работу с 7,5-контактным делением со скоростью 50 бод.
В аппаратуре «Аккорд-50» применен принцип РОС с ожидани-
ем. Передаваемые пятиэлементные знаки группируются в блоки,
длина которых не должна превышать 65 знаков, после чего коди-
руются циклическим кодом, обнаруживающим ошибки. Код содер-
402
жит тринадцать проверочных разрядов, образующий полином име-
ет вид х13+х12+хв+х3+х+1. Проверочные разряды также пере-
даются в виде стартстопных кодовых комбинаций (используются
три знака). Сигналы обратной связи («запрос» и «подтвержде-
ние») передаются по обратному каналу также в виде стартстопных
пятиэлементных комбинаций.
В аппаратуре «Аккорд-50» применяется временной способ ор-
ганизации обратного канала: вначале по телеграфному каналу
передаются кодовые комбинации, после чего по этому же каналу
в обратном направлении передаются сигналы обратной связи.
Для передачи данных по некоммутируемым каналам тональной
частоты и коммутируемой телефонной сети общего использования
применяется среднескоростная аппаратура «Аккорд-1200». Эта
аппаратура, работающая со скоростями 600 и 1200 бод, обеспечи-
вает частость ошибок по семиэлементным знакам не более 10-6 при
частости ошибки в дискретном канале по единичным элементам
2-10-4. В аппаратуре используется синхронная работа, система по-
вышения верности — РОС -с блокировкой. Передаваемая кодовая
комбинация содержит в себе 240 информационных разрядов, 4 слу-
жебных разряда и 16 проверочных разрядов. Информационная
часть кодовой комбинации составляется из 30 восьмиразрядных
знаков (каждый знак содержит семь информационных и один про-
верочный, дополняющий семиразрядный знак до восьмиразряд-
ного с четным числом единиц). Четыре служебных разряда поз-
воляют образовать 16 различных сочетаний, из них три исполь-
зуются для циклической нумерации передаваемых комбинаций
(передаваемые кодовые комбинации нумеруются так: А, В, С, А,
В, ...). Остальные 13 сочетаний служебных (раз,рядов используются
в процессе джловопо фазирования, а также для других целей, не
относящихся к повышению верности. Шестнадцать проверочных
разрядов служат для кодирования передаваемой информации об-
наруживающим ошибки циклическим кодом. Образующий поли-
ном имеет вид xi8+ + + 1.
Для обнаружения ошибок применяется не только этот цикличе-
ский код, но и проверочные разряды, дополняющие каждый пере-
даваемый в кодовой комбинации знак до четного числа единиц.
Канал обратной связи организуется путем частотного уплотне-
ния используемого канала тональной частоты. Сигнал «запрос»
передается посылкой «нажатие плюс», а сигнал «подтвержде-
ние» — «нажатие минус». Наличие только трех номеров для цик-
лической нумерации передаваемых блоков ограничивает емкость
буферного накопителя до двух комбинаций, однако, учитывая
большую их длину, такой емкости буферного накопителя доста-
точно для работы на расстояниях в несколько тысяч километров.
Отметим, что в аппаратуре «Аккорд-1200» предусмотрено ис-
пользование укороченных кодовых комбинаций (132 разряда), что
приводит к повышению скорости передачи информации по каналам
с высокой частостью ошибок (обычно это коммутируемые каналы).
При этом вид образующего полинома не изменяется.
403
ГЛАВА 12
Сети передачи дискретных сообщений
12.1. ПОНЯТИЕ О СЕТЯХ ПЕРЕДАЧИ ДИСКРЕТНЫХ
СООБЩЕНИЙ
Сетью передачи дискретных сообщений называется совокуп-
ность оконечной аппаратуры передачи дискретных сообщений, ка-
налов связи и узлов коммутации ((если последние имеются). Все
сети передачи дискретных сообщений делятся на некоммутируе-
мые и коммутируемые. Некоммутируемые сети содержат только
оконечную аппаратуру и каналы, но не имеют узлов коммутации
(рис. 12.1а). Поэтому в таких сетях возможна связь между источ-
Рис. 12.1. Сети передачи дискретных сообщений:
а) иевоммутируемые; б) коммутируемые
никами и потребителями информации, соединенными друг с дру-
гом закрепленными (|«некоммутируемыми») каналами. Коммути-
руемые сети передачи дискретных сообщений непременно содер-
жат узлы коммутации, с помощью которых и образуется сквозной
канал связи («коммутируемый» канал) между любыми парами
абонентов сети (рис. 12.16). Использование магистральных кана-
лов связи в коммутируемых сетях, как правило, гораздо выше,
чем в некоммутируемых, вследствие чего они и получили более ши-
рокое распространение. Некоммутируемые сети обычно организу-
ются только в тех случаях, когда передаваемые объемы информа-
ции весьма велики, а также когда требуется очень малое время
404
установления -соединения между абонентами, которое не может
быть обеспечено существующими коммутируемыми сетями. Кроме
того, некоммутируемые каналы тональной частоты имеют сущест-
венно лучшие фазо-частотные характеристики, что позволяет ра-
ботать по ним с пю1выш'еины1ми скоростями модуляции — 2400 и
4800 бод.
По своей принадлежности сети можно разделить на ведомст-
венные, предназначенные для обслуживания строго ограниченного
круга абонентов, и сети общего пользования, назначением которых
является предоставление связи самым широким кругам потреби-
телей. По способам организации различают сети специализирован-
ные и неспециализированные. Специализированные сети создаются
на базе средств (узлов коммутации, а иногда и каналов), специ-
ально предназначенных для организации данной сети. Неспециа-
лизированные сети для своего построения обычно используют узлы
коммутации и каналы, входящие в состав в какой-либо другой
сети. Примером специализированной сети является, например,
сеть абонентского телеграфа, все средства которой (включая узлы
коммутации) были специально созданы для обеспечения предпри-
ятий страны абонентской телеграфной связью. Примером неспе-
циализированной сети является сеть передачи данных, образован-
ная включением оконечной аппаратуры передачи данных в теле-
фонную коммутируемую сеть общего пользования.
По предельно допустимой скорости модуляции различают сети
низкоскоростные (до 200 бод), среднескоростные (не более 5—
10 кбод) и высокоскоростные. В высокоскоростных сетях передачи
дискретных сообщений скорости модуляции составляют десятки и
более килобод.
Ко всем сетям передачи дискретных сообщений предъявляется
ряд требований, характеризующих качественные параметры сети.
Одно из самых основных требований — обеспечение необходимой
пропускной способности сети. Другое важное требование —обеспе-
чение необходимой надежности связи. В этой связи следует заме-
тить, что коммутируемые сети потенциально обладают гораздо бо-
лее широкими возможностями, чем некоммутируемые. В последних
повышение надежности связи достигается путем резервирования
(дублирования) самого ненадежного элемента сети —канала свя-
зи. Коммутируемые сети содержат обычно большое количество ка-
налов между узлами коммутации, поэтому специальных резервных
каналов не требуется — их роль могут играть каналы, свободные-
в данный момент времени от передачи информации.
Очень важным параметром сети является максимальное время
установления соединения с требуемым абонентом ((или максималь-
ное время доставки сообщения требуемому абоненту). Для сетей
передачи дискретных сообщений это время обычно нормируется.
Специальные меры для его снижения приходится принимать
только в коммутируемых сетях; в некоммутируемых сетях время
установления соединения с требуемым абонентом равно нулю.
405>
К коммутируемым сетям предъявляется также требование ми-
нимальной вероятности установления неправильного соединения.
Указанная вероятность обычно также нормируется. В некоммути-
руемых сетях она равна нулю.
Перечисленные требования к сетям передачи дискретных сооб-
щений являются наиболее общими. Предъявляются и другие тре-
бования, которые касаются других аспектов техники передачи дис-
кретных сообщений, здесь они подробно не рассматриваются.
В заключение заметим, что существует и применяется особая
разновидность сети, называемая многоточечной связью (рис. ,12.2).
Рис 12.2. Разновидность сети передачи дискретных
сообщений — !многоточечная связь
Эта разновидность имеет характерное построение — все абоненты
подключаются к одному каналу связи, который используется по-
очередно какой-либо парой абонентов для обмена информацией
между собой. Имеется большое количество различных способов
построения многоточечной связи, но обычно используется центра-
лизованный способ, при котором один из абонентов является глав-
ным и управляет работой всех остальных абонентов. При этом, как
правило, все абоненты могут получать соединение только с глав-
ным абонентом, но не друг с другом, а функции управления со сто-
роны главного абонента заключаются в периодическом поочеред-
ном опросе всех остальных абонентов с целью передать им инфор-
мацию или принять ее.
Многоточечное построение связи наиболее эффективно при об-
служивании линейно протяженных объектов (железные дороги,
речные пути, газопроводы, нефтепроводы и т. п.), при этом суще-
ственно экономятся затраты на каналы связи. Оконечная аппара-
тура в многоточечной связи обычно усложняется за счет включе-
ния специальных логических устройств, обеспечивающих поочеред-
ное использование общего канала связи.
Многоточечная связь пока не получила широкого распростране-
ния, поэтому ограничимся кратким изложением принципов ее ра-
боты.
12.2. ПОНЯТИЕ О СПОСОБАХ КОММУТАЦИИ
В сетях коммутации дискретных сообщений применяются два
способа коммутации? 1) способ коммутации каналов и 2) способ-
коммутации сообщений.
При коммутации каналов между вызывающим и вызываемым
абонентами с помощью узлов коммутации (узлов коммутации ка-
налов) образуется сквозной канал, по которому и передается ин-
406
формация. При коммутации сообщений абонент передает инфор-
мацию в узел коммутации (узел коммутации сообщений), к кото-
рому он подключен. Затем эта информация передается поэтапно от
одного узла коммутации сообщений ,к другому до тех пор, пока не
поступит в узел коммутации, к которому подключен абонент-полу-
чатель. Из этого узла информация передается получателю.
При использовании способа коммутации каналов передача осу-
ществляется следующим образом. Вызывающий абонент с помо-
щью имеющихся у него вызывных устройств посылает в узел ком-
мутации заявку на соединение, содержащую адрес вызываемого
абонента. Адрес вызываемого абонента передается обычно с по-
мощью номеронабирателя ((«дисковый» набор) и реже посредством
клавиатуры или тастатуры («клавиатурный» и «тастатурный» на-
боры). Узел коммутации, получив заявку на соединение, соединя-
ет один или несколько каналов связи, образуя сквозной коммути-
руемый канал между вызывающим и вызываемым абонентами
После этого абоненты обмениваются информацией; по завершению
сеанса связи установленное соединение разрушается. Если в про-
цессе установления соединения в нужном направлении не оказы-
вается незанятого канала, то вызывающему абоненту может быть
послан либо отказ от обслуживания (в этом случае мы имеем си-
стему коммутации каналов с отказами), либо он может ожидать
освобождения каналов .(система с ожиданием). В большинстве
случаев системы коммутации каналов строятся как системы с от-
казами, при этом удается обеспечить более высокое использование
каналов связи. Абонент, получивший отказ от обслуживания, за-
ново посылает на узел коммутации заявку на соединение.
При использовании способа коммутации сообщений информа-
ция передается следующим образом. Абонент-отправитель пере-
дает сообщение в узел коммутации сообщений, где оно запоми-
нается. В этом сообщении, кроме собственно текста, обязательно
содержится также служебная часть, включающая в себя все све-
дения, необходимые для осуществления передачи данного сообще-
ния по сети, в частности, адрес абонента-получателя. После ана-
лиза адреса абонента-получателя в узле коммутации сообщений
определяется, к какому из соседних узлов должно быть передано
это сообщение с тем, чтобы достичь узла коммутации, к которому
подключен абонент-получатель. В случае занятости канала к узлу,
в который должно быть передано сообщение, последнее хранится
в памяти узла коммутации вплоть до освобождения канала, после
чего передается по этому каналу к нужному соседнему узлу. Про-
цесс передачи сообщения по сети с коммутацией сообщений со-
стоит по сути дела из ряда переприемов сообщения на узлах ком-
мутации вплоть до достижения сообщением соответствующего око-
нечного узла.
Следует заметить, что если в момент достижения сообщением
оконечного узла абонент-получатель занят (принимает информа-
цию или передает), то сообщение опять-таки хранится в памяти
узла вплоть до освобождения абонента. Характерной особенностью
407
сети с коммутацией сообщений является то, что такие сети прак-
тически не имеют отказов, поскольку в случае занятости каналов
«сообщения запоминаются, и отказов от обслуживания не происхо-
дит. Перегрузка сети с коммутацией сообщений выражается не в
увеличении частости отказов, как в сети с коммутацией каналов, а
в увеличении задержек сообщения в сети.
12.3. СРАВНЕНИЕ СПОСОБОВ КОММУТАЦИИ СООБЩЕНИЙ
И КОММУТАЦИИ КАНАЛОВ
ИСПОЛЬЗОВАНИЕ КАНАЛОВ
Как следует из курса «Теория телефонных и телеграфных сооб-
щений», в системах с коммутацией каналов повышение использо-
вания пучка каналов влечет за собой увеличение потерь (т. е. от-
казов от обслуживания). Эта зависимость выражается известными
кривыми Эрланга. Допустимые потери принимаются равными 1 —
2% на один коммутационный участок. При этом использование
пучка в несколько десятков каналов не превышает 70%.
Так как коммутируемый канал составляется, как правило, из
нескольких коммутационных участков, то суммарные потери в нем
в несколько раз превышают потери, приходящиеся на один комму-
тационный участок. В системах с коммутацией сообщений исполь-
зование пучка каналов выше: в среднем оно составляет 80%, а в
пики нагрузки (в чнн) —954-99%. Поэтому в системах с комму-
тацией сообщений всегда требуется меньше каналов, чем в систе-
мах с коммутацией каналов.
Характерно, что 'фактическое использование каналов в системах
с коммутацией каналов обычно существенно ниже расчетных
цифр, определенных по кривым Эрланга. Это связано с тем, что
вызовы, не обслуженные сетью по причине занятости каналов,
вновь повторяются («вторичный поток») и увеличивают тем са-
мым загрузку сети. Увеличение нагрузки приводит к росту отка-
зов, что, в свою очередь, вновь увеличивает вторичный поток и т. д.
Для соблюдения установленных норм на потери приходится ис-
пользовать пучки существенно большей емкости, чем предписы-
вается кривыми Эрланга. В итоге в системах с коммутацией сооб-
щений, не подверженных влиянию вторичного потока вызовов,
обычно требуется в 2—3 раза меньше каналов, чем в системах с
коммутацией каналов.
Следует заметить, что в сетях передачи дискретных сообщений,
построенных на принципе коммутации каналов, влияние вторич-
ного потока вызовов гораздо сильнее, чем в телефонной сети при
том же способе коммутации. Причина заключается в разном ха-
рактере информации, передаваемой по этим сетям. В сетях пере-
дачи дискретных сообщений практически вся передаваемая инфор-
мация связана с какими-то определенными контрольными срока-
ми, в течение которых она должна быть передана получателю. По-
этому вызывающий абонент, стремясь уложиться в отведенный
408
контрольный срок, 'При получении отказа вновь и вновь повторяет
свой вызов до тех пор, пока не получит соединения с требуемым
абонентом. В телефонных сетях подавляющее число 'вызовов не
являются срочными и важными, поэтому вызывающий абонент,
получив один-два отказа, часто переносит свой следующий вызов
на более поздний срок или даже вовсе отказывается от него. Это
обстоятельство существенно снижает влияние вторичного потока в
телефонных сетях.
Есть еще одно обстоятельство, способствующее более высоко-
му использованию каналов в системе с коммутацией сообщений.
Как известно, потребители, передающие дискретные сообщения, в
подавляющем большинстве случаев работают по полудуплексной
системе. В системах с коммутацией каналов коммутируются ду-
плексные каналы, что вдвое снижает их использование по сравне-
нию с расчетным значением. В системах с коммутацией сообщений
оба направления дуплексного канала между центрами коммута-
ции сообщений используются независимо как два отдельных сим-
плексных канала. С учетом этого обстоятельства в сетях с ком-
мутацией сообщений требуется обычно в 4—6 раз меньше каналов,,
чем в сетях с коммутацией каналов.
УСТОЙЧИВОСТЬ К ПЕРЕГРУЗКАМ СЕТИ
Влияние вторичного потока особенно пагубно отражается на
сети с коммутацией каналов при резкой перегрузке сети, которая
обычно происходит или из-за непредвиденного возрастания на-
грузки или из-за повреждений в сети. В этих случаях вторичный
поток лавинообразно нарастает, в десятки раз превосходя вызвав-
ший его первичный поток, и вся сеть оказывается практически па-
рализованной.
Напротив, сеть с коммутацией сообщений очень устойчива к пе-
регрузкам. Если нагрузка резко возросла, то поступающие сообще-
ния будут записываться в память узла коммутации сообщений,
емкость которой можно считать практически безграничной. Сооб-
щения из памяти в каналы связи передаются постепенно, по мере
освобождения этих каналов.
ВИДЫ СОЕДИНЕНИЙ
Сеть с коммутацией каналов обеспечивает связь только между
совершенно однотипными абонентскими установками, работающи-
ми с одинаковой скоростью и использующими одинаковый вид моду-
ляции, одинаковый алгоритм повышения верности и т. д. и т. п.
Сеть с коммутацией сообщений может обеспечить работу между
совершенно разнотипными абонентскими установками. Так, напри-
мер, обыкновенный стартстопный телеграфный аппарат, исполь-
зующий пятиэлементный код МТК-2, работающий со скоростью-
50 бод и не имеющий каких-либо средств для повышения верности,
может через сеть с коммутацией сообщений обмениваться инфор-
409-
мацией с аппаратурой передачи данных «Аккорд-1200», которая
работает со скоростью 1200 бод кодом ГОСТ 130'52—67; для повы-
шения верности предусматривается решающая обратная связь в
сочетании с циклическим корректирующим кодом. Такая возмож-
ность обеспечивается благодаря тому, что при коммутации сооб-
щений процессы переприема информации на отдельных участках
полностью развязаны друг от друга и на каждом участке инфор-
мация может передаваться с разными 'скоростями, кодами и т. д.
Это обстоятельство существенно облегчает развитие сетей с ком-
мутацией сообщений, замену устаревшей оконечной аппаратуры
новой с иными принципами работы. В сети с коммутацией каналов,
напротив, при замене оконечной аппаратуры требуется одновре-
менная замена ее у всех абонентов, связывающихся друг с другом.
Значительная часть дискретных сообщений является многоад-
ресной, т. е. предназначенной одновременно многим абонентам,
или циркулярной, т. е. предназначенной одновременно всем або-
нентам сети. В системах с коммутацией каналов невозможно
передавать многоадресные и циркулярные сообщения, так как
для повышения верности используется обратная связь, которая
сводит возможность передачи таких сообщений практически к
нулю. Поэтому в этих системах указанные сообщения приходится
передавать как соответствующее количество одноадресных сооб-
щений, что представляет собой значительное неудобство. Напро-
тив, в системах с коммутацией сообщений, благодаря полной раз-
вязке процессов передачи сообщений на различных участках, ни-
каких ограничений на передачу многоадресных и циркулярных со-
общений нет.
Характерной особенностью сетей с коммутацией сообщений яв-
ляется возможность осуществления так называемой задержанной
доставки сообщения. При этом абонент-отправитель передает ин-
формацию в узел коммутации в удобное для него время, эта ин-
формация передается далее от одного узла к другому и достигает,
наконец, узла, в который включен абонент-получатель. Передача
информации получателю происходит с началом сеанса работы
этого абонента. При коммутации каналов необходимо, чтобы сеан-
сы работы вызывающего и вызываемого абонентов совпадали, что
в ряде случаев очень неудобно в связи со значительной разницей
поясного времени в пунктах, где расположены абоненты. Так, в не-
которых случаях приходится работать в ночное время.
В сетях с коммутацией сообщений возможно введение различ-
ных категорий срочности сообщений, причем каждой категории со-
ответствует определенный контрольный срок доставки сообщения
получателю. Сообщения с высокой категорией срочности, которым
соответствует малый контрольный срок доставки, передаются по
сети с опережением сообщений с низкой категорией срочности. Это
опережение достигается тем, что сообщения с высокой категорией
срочности передаются в канал связи в первую очередь и поэтому
хранятся в памяти узла коммутации сообщений меньшее время.
В сетях с коммутацией каналов также есть возможность вре-
410
дения категорий срочности, однако при этом приоритетность сооб-
щения высокой категории может быть достигнута только путем
прерывания передачи сообщения низкой категории срочности, что
является серьезным неудобством.
Значительным преимуществом сетей с коммутацией каналов
является то, что они, обладая пренебрежимо 'малыми задержками,
позволяют абонентам вес'ти работу в режиме диалога (перегово-
ра). Эта особенность коммутации каналов в ряде случаев оказы-
вается весьма важной ((например, при диалоге человека с ЭВМ).
В сетях с коммутацией сообщений из-за возможных заметных за-
держек, обусловливаемых полным переприемом сообщения в узлах
коммутации, практически исключается ведение работы в режиме
диалога.
ТРЕБОВАНИЯ К ФОРМАТУ ПЕРЕДАВАЕМЫХ
СООБЩЕНИЙ
Сети с коммутацией сообщений требуют точного соблюдения
определенных правил построения сообщения: все сообщения долж-
ны име'ть определенный формат, т. е. структуру. Автоматическая
обработка информации на узлах коммутации возможна лишь тог-
да, когда каждое сообщение содержит служебную часть, в кото-
рой находятся все признаки, обеспечивающие такую обработку.
В этой служебной части (она называется заголовком) содержатся
адреса абонентов-получателей, индексы категорий срочности, вре-
мя ввода сообщения в сеть, порядковый номер сообщения и т. д.
Кроме того, обязательно должны содержаться специальные при-
знаки, выполняющие функции разделения сообщения на служеб-
ную и информационную части (признаки начала заголовка, нача-
ла текста и т. д.), а также признаки, отделяющие одно сообщение
от другого. Необходимость представления всех передаваемых со-
общений в определенном формате является известным неудобст-
вом при практическом использовании коммутации сообщений.
В сетях с коммутацией каналов не требуется какой-либо опре-
деленный формат сообщения, и это является существенным пре-
имуществом.
ЗАГРУЗКА АБОНЕНТСКИХ ПУНКТОВ
В сетях с коммутацией каналов высокая загрузка оконечных
абонентских пунктов приводит к высокой вероятности занятости
абонента и оказывает поэтому очень большое влияние на вероят-
ность отказов сети. Вследствие этого предельная загрузка абонент-
ских пунктов в сетях с коммутацией каналов всегда ограничива-
ется (обычно она не должна превышать 0,2 эрланг). Если же за-
грузка превышает указанную величину, то приходится использо-
вать два, три и т. д. комплекта оконечной аппаратуры с тем, чтобы
загрузка каждого комплекта не превышала норму.
411
В сетях с коммутацией сообщений, где отсутствуют отказы, до-
пустима гораздо большая загрузка абонентских пунктов (до
0,8 эрланг). Поэтому в этих сетях возможна экономия в количе-
стве оконечной аппаратуры (и соответственно в количестве обслу-
живающего персонала).
СЛОЖНОСТЬ ОБОРУДОВАНИЯ
Неоспоримым преимуществом сети с коммутацией каналов яв-
ляется меньшая сложность оборудования узлов коммутации, мень-
ший ее объем и стоимость.
Из изложенного ясно, что оба метода коммутации имеют свои
преимущества и недостатки, и каждый из них имеет свою область
использования. В ряде случаев экономически эффективнее комму-
тация сообщений (за счет экономии в количестве каналов и око-
нечной аппаратуры), а в других — коммутация каналов (за счет
меньшей стоимости узлов коммутации). Кроме того, на выбор ме-
тода коммутации существенное влияние оказывают требования,
предъявляемые потребителями. Если необходимо введение катего-
рий срочности или введение многоадресной и циркулярной пере-
дачи, то используется коммутация сообщений. Если требуется ра-
бота в режиме диалога, то применима только система с коммута-
цией каналов. Поскольку требования потребителей обычно весьма
разнообразны, то при построении сетей передачи дискретных со-
общений все чаще прибегают к совместному использованию в од-
ной сети обоих методов коммутации. При этом в нижних звеньях
сети применяется, как правило, коммутация каналов, а в верх-
них— либо коммутация сообщений, либо и коммутация сообще-
ний, и коммутация каналов. Наряду с сетями, использующими оба
метода коммутации, существуют сети, в которых применяется или
только коммутация сообщений, или только коммутация каналов.
12.4. КОММУТИРУЕМЫЕ СЕТИ ПЕРЕДАЧИ ДИСКРЕТНЫХ
СООБЩЕНИЙ СССР
Среди сетей передачи дискретных сообщений различают сети
телеграфные и сети передачи данных. Все существующие теле-
графные сети являются низкоскоростными (50 бод) специализи-
рованными сетями, предназначенными для обеспечения телеграф-
ной связью предприятий и организаций, а также населения страны.
Телеграфные сети построены по трехступенчатой схеме: все узлы
коммутации подразделяются на главные (ГУ), областные (ОУ) и
районные (РУ) (рис. 12.3). Главные узлы располагаются в Моск-
ве, в некоторых столицах союзных республик и некоторых област-
ных центрах, в которых пересекаются значительные по величине
потоки телеграфной нагрузки. Все главные узлы соединены
пучками телеграфных каналов по принципу «каждый с каж-
дым» и с областными узлами своих зон, а иногда и с областными
узлами других зон. Областные узлы соединяются с главными
412
узлами, а также с районными узлами. Рай-
онные узлы соединяются с областными уз-
лами, а также со своими абонентами. Здесь
следует заметить, что построение телеграф-
ных сетей таково, что абоненты могут быть
включены не только в РУ, но и в узлы лю-
бой ступени (ОУ и ГУ).
Существуют следующие телеграфные
сети:
— телеграфная сеть общего пользования
(ТГОП). По этой сети передаются теле-
граммы, принятые в городских отделениях
связи и РУ в документальном виде от на-
селения, а также предприятий и организа-
ций;
— сеть абонентского телеграфирования
(АТ), по которой передаются телеграфные
сообщения, поступающие в электрическом
виде от ее абонентов. Абонентами сети АТ
являются различные предприятия и орга-
низации.
Имеются следующие сети передачи дан-
ных:
Л Spy гам ГУ
Рис. 12.3. Принцип пост-
роения телеграфных се-
тей связи:
------обязательные связи;
------необязательные свя-
зи, организуемые при дос-
таточных нагрузках
— низко скоростная, построенная на осно-
ве сети АТ. Это неспециализированная сеть,
образованная путем включения аппаратуры передачи данных (на-
пример, типа «Аккорд-50») в сеть абонентского телеграфирования;
— среднескоростная, построенная на основе коммутируемой
телефонной сети общего пользования. Это также неспециализиро-
ванная сеть, образованная путем включения аппаратуры передачи
данных (например, типа «Аккорд-1200») в телефонную сеть.
Перечисленные сети являются сетями общего пользования и
доступны поэтому самым широким кругам потребителей. В СССР
существуют также ведомственные сети, принадлежащие министер-
ствам путей сообщения, гражданской авиации, гидрометеослужбе,
а также ряду других ведомств. Ведомственные сети рассматривать
не будем.
12.5. ПРИНЦИПЫ ОРГАНИЗАЦИИ ТЕЛЕГРАФНОЙ СЕТИ
ОБЩЕГО ПОЛЬЗОВАНИЯ
ОБЩИЕ СВЕДЕНИЯ
Телеграфная сеть общего пользования состоит из трех допол-
няющих друг друга сетей:*
— сети реперфораторного переприема телеграмм с отрывом и
транспортировкой перфоленты ,(АТОЛ);
— сети реперфораторного переприема без отрыва и транспор-
тировки перфоленты (система «Лиман»);
— сети прямых соединений (сеть ПС).
413
РЕПЕРФОРАТОРНЫЙ ПЕРЕПРИЕМ С ОТРЫВОМ
И ТРАНСПОРТИРОВКОЙ ПЕРФОЛЕНТЫ (АТОЛ)
Система АТОЛ — 'полуавтоматическая система, основана на
принципах коммутации сообщений и очень просто реализуется тех-
нически, не требуя никакого специального коммутационного обо-
рудования. Транзитные телеграммы, поступающие в узел 'комму-
тации, печатаются телеграфным аппаратом и одновременно фикси-
руются на перфоленте. Каждая принимаемая телеграмма заканчи-
вается специальным признаком конца телеграммы ((шесть кодо-
вых комбинаций «пробел» и шесть кодовых комбинаций «лат»
кода МТК-2). Телеграфист, обнаружив признак конца телеграм-
мы, отрывает перфоленту с текстом телеграммы, вставляет ее в
прорези бланка, на котором указывает адрес назначения телеграм-
мы. Далее бланк с перфолентой по транспортеру поступает на сор-
тировку. Телеграфист-сортировщик, в соответствии с указанным
на бланке адресом, перекладывает телеграмму на нужный транс-
портер, который доставляет ее к рабочему месту, обслуживающе-
му требуемый исходящий канал. Здесь перфолента вынимается из
прорезей бланка, вставляется в трансмиттерную приставку теле-
графного аппарата и передается в канал.
Система АТОЛ существенно экономит ручной труд телеграфи-
ста по сравнению с неавтоматизированным транзитом (при неав-
томатизированном транзите телеграмма принимается только в ви-
де печатного текста, а принятый текст транспортируется к теле-
графному аппарату, обслуживающему требуемый исходящий ка-
нал, где телеграмма передается вручную). При использовании
данной системы исключается трудоемкая ручная передача теле-
граммы в исходящий канал, а использование исходящих каналов
весьма высокое — до 0,8 и даже более.
РЕПЕРФОРАТОРНЫЙ ПЕРЕПРИЕМ БЕЗ ОТРЫВА И
ТРАНСПОРТИРОВ1КИ ПЕРФОЛЕНТЫ
Эта система автоматическая, в ней почти полностью исключе-
ны все ручные операции (и, в частности, сортировка). Система
также основана на принципах коммутации сообщений, но техниче-
ски реализуется довольно сложно вследствие сложности процес-
сов автоматической обработки телеграмм. Все передаваемые теле-
граммы строятся в соответствии со вполне определенным форма-
том, содержащим все сведения, необходимые для автоматической
обработки. Требования к точности соблюдения формата весьма же-
сткие, так как автоматическая обработка телеграммы возможна
лишь при абсолютно точном соблюдении установленного форма-
та, а при его нарушении приходится прибегать к ручной обработ-
ке телеграмм.
Система обеспечивает столь же высокое использование кана-
лов, как и система АТОЛ, а время прохождения телеграммы через
узел за счет автоматизации обработки существенно сокращается —
с 20—25 мин до ,1—2 мин.
414
В рассматриваемой системе роль обслуживающего персонала
сводится в основном к наблюдению за работой оборудования.
Число телеграфистов резко сокращается. Однако при электроме-
ханической реализации оборудования, отличающейся невы'сокой
надежностью, численность обслуживающего персонала по сравне-
нию с системой АТОЛ даже возрастает. Кроме того, по сравне-
нию с системой АТОЛ капитальные затраты возрастают в 4—
5 раз. В настоящее время в СССР эта система реализована пока
только в электромеханическом варианте («Лиман»), проводятся
работы по внедрению электронного варианта, основанного на ба-
зе ЭВМ. В электронной системе, обладающей несравненно более
высокой надежностью, недостатки электромеханической системы
будут устранены. Использование электронных систем коммутации
сообщений в телеграфной сети общего пользования весьма перс-
пективно, особенно для транзитных узлов с большой нагрузкой.
Это обусловливается как весьма экономичным использованием
транзитных каналов, так и легкостью введения приоритетов (ка-
тегорий срочности), существующих на телеграфной сети общего
пользования, ведения циркулярной передачи и т. д.
ПРЯМЫЕ СОЕДИНЕНИЯ
Эта система также автоматическая, основана на Принципе ком-
мутации каналов с частичным использованием принципов комму-
тации сообщений. Процесс переприема телеграмм в транзитных
узлах заменен процессом автоматической коммутации (соедине-
ния) пункта передачи с пунктом приема. Для передачи телеграм-
мы по сети прямых соединений телеграфист пункта передачи (на-
пример, городского отделения связи) набирает на специальном
вызывном приборе номер вызываемого оконечного пункта (напри-
мер, какого-либо отделения связи другого города), в результате
чего коммутационные приборы узлов коммутации автоматически
устанавливают нужное соединение.
Вследствие того что загрузка абонентов в сети общего поль-
зования довольно высока '(до 0,2 Эрланг), вероятность занятости
вызываемого абонента также значительна, в то время как вероят-
ность занятости магистральных каналов в сети прямых соедине-
ний невелика ,(2%). Для исключения необходимости повторения
вызовов при занятости вызываемого абонента предусмотрена воз-
можность переприема телеграммы на узле коммутации, к которо-
му подключен вызываемый абонент. Для этого на узле коммута-
ции предусмотрены специальные рабочие места приема избыточ-
ного входящего обмена, которые используются не только для пе-
реприема телеграммы при занятости вызываемого абонента, но и
тогда, когда сеанс работы вызываемого абонента не совпадает с
сеансом работы вызывающего и соединиться по этой причине с
вызываемым абонентом невозможно. Кроме того, эти рабочие ме-
ста используются для приема так называемых неиндексирован-
ных телеграмм, т. е. телеграмм, в которых не указан индекс отде-
415
линия связи (таких телеграмм примерно 50%). Неиндекси1ро1ван-
ные телеграммы отправляются на стол справок для выяснения
индекса.
Таким образом, в сети прямых соединений используются как
элементы коммутации каналов, так и элементы коммутации сооб-
щений. При этом коммутация сообщений играет довольно ограни-
ченную роль, не участвуя в транзите на магистральных участках
сети. Поэтому использование магистральных каналов в сети пря-
мых соединений невелико, что типично для способа коммутации
каналов. Кроме того, при переприеме телеграмм в местах приема
избыточного входящего обмена дальнейшая их обработка повто-
ряется практически вручную — вновь производится набор номера
и т. д. Задержка телеграммы ‘в сети прямых соединений весьма не-
велика, но это только в том случае, когда не производится пере-
прием сообщений на рабочих местах приема избыточного входя-
щего обмена. Если же такой переприем производится, то эта за-
держка сравнима с задержкой в системе АТОЛ, иногда даже пре-
восходит ее.
В сети прямых соединений применяется шестизначная нумера-
ция— первые три цифры определяют номер узла коммутации, а
последние — номер оконечного пункта. Узлам присваиваются но-
мера от 101 до 599, что позволяет иметь до 600 узлов коммутации.
Оконечным станциям присваиваются номера от 001 до 499 (го-
родские отделения связи) и от 500 до 599 (районные узлы связи).
Практика показала, что использование прямых соединений на
магистральной сети не всегда экономически целесообразно; по-
видимому, наиболее целесообразно такое построение телеграфной
сети общего пользования, когда на магистральной сети дополни-
тельно используются электронные системы коммутации сообще-
ний.
12.6. ПРИНЦИПЫ ОРГАНИЗАЦИИ СЕТИ АБОНЕНТСКОГО
ТЕЛЕГРАФИРОВАНИЯ
Телеграфная сеть общего пользования в ряде случаев не может
в полной мере удовлетворить потребности предприятий и органи-
заций. Причина заключается в довольно большом сроке прохож-
дения телеграммы от момента подачи ее отправителям на пред-
приятие связи до момента ее вручения получателю. Значительную
долю указанного времени занимает доставка телеграммы из пред-
приятия связи получателю.
Этот недостаток устранен в сети абонентского телеграфирова-
ния-(АТ), в основу которой положен принцип максимального при-
ближения услуг телеграфа к потребителям, которыми могут быть
любые организации и учреждения. Оконечные телеграфные аппа-
раты размещаются на самих предприятиях и в организациях, бла-
годаря чему время доставки телеграммы сводится почти к нулю.
Построение сети АТ точно таксе же, как и сети прямых соеди-
нений, с той разницей, что возможность переприема сообщений в
416
узлах коммутации не предусматривается. Последнее объясняется
тем, что сеть АТ предназначена для обеспечения абонентов дву-
сторонними документальными телеграфными переговорами, ис-
ключающими возможность переприема сообщений. Здесь следует,
однако, отметить, что абоненты сети АТ могут соединиться со спе-
циальными рабочими местами телеграфной сети общего пользо-
вания и передать туда телеграмму в адрес любого получателя, ко-
торая затем будет передана по телеграфной сети общего пользо-
вания. Такая возможность является очень полезной в тех случаях,
когда адресат не является абонентом сети АТ, а также когда два
абонента сети АТ имеют несовпадающие по времени сеансы связи.
Характерная особенность сети АТ состоит в том, что используе-
мые в ней магистральные каналы являются общими с сетью пря-
мых соединений. Такое построение сети существенно повышает
использование магистральных каналов по двум причинам: во-пер-
вых, укрупняются пучки, а во-вторых, часы наибольшей нагрузки
в сетях ПС и АТ не совпадают. В сети прямых соединений часы
наибольшей нагрузки приходятся на вечернее время,(с 19 до 21 ч),
а в сети абонентского телеграфирования есть два явно выражен-
ных периода наибольшей нагрузки: в первой половине рабочего
дня (с 9 до 12 ч) ив конце рабочего дня |(с 16 до ,18 ч). Благодаря
несовпадению периодов наибольшей нагрузки удается существен-
но повысить использование магистральных каналов, объединив их
в общий пучок, доступный 'как сети ПС, так и сети АТ.
Следует сказать, что сети АТ и ПС, имеющие общие принципы
построения, допускают еще большую интеграцию. В 'новейших
станциях коммутации предусматривается совместное использова-
ние коммутационного оборудования обеими сетями — АТ и ПС.
Это еще больше повышает экономичность обеих сетей.
Нумерация, применяемая на сети АТ, открытая и повторитель-
ная. Узлам коммутации присвоена двузначная нумерация, а або-
нентам — одно, дву- или трехзначная, в зависимости от типа стан-
ции, в которую включен абонент. Полный номер абонента состоит
из номера станции, в которую он в'ключен, и номера абонента
внутри станции. Число знаков полного номера абонента может
быть различным — от трех до пяти. Характерной особенностью
нумерации, применяемой на сети АТ, является то, что набираемый
вызываемым абонентом номер полностью определяет маршрут ус-
тановления соединения ,(Поэтому нумерация и называется откры-
той). Поэтому вызывающий абонент должен представлять конфи-
гурацию сети, что крайне неудобно.
Принятая на сети АТ нумерация подразделяется на основную
и местную. Основные номера присваиваются узлам коммутации
АТ, расположенным в ГУ и крупных ОУ, при этом используются
номера от 40 до 79. Всем остальным узлам АТ присваиваются ме-
стные номера—от 80 до 99. Для соединения с абонентом, вклю-
ченным в узел коммутации, имеющий местную нумерацию, необ-
ходимо сначала набрать номер той станции с основной нумераци-
ей, в которую включена требуемая станция с местной нумерацией,
14—60 417
затем повторить номер станции с местной нумерацией столько раз,
сколько предстоит пройти транзитных узлов, а после этого — но-
мер абонента «внутри станции.
Таким образом, система нумерации, действующая в настоящее
время на сети АТ, весьма сложна и неудобна. В «ближайшее время
предполагается ввести единую шестизначную систему нумерации,
не зависящую ни от маршрута «соединения, ни от вида узлов ком-
мутации, подобно тому, как это сделано на сети прямых соеди-
нений.
В заключение следует сказать, что на сетях АТ и ПС, имеющих
в общем одинаковые принципы построения и использующих в ряде
случаев общие элементы (магистральные каналы, узлы коммута-
ции) принципы оплаты услуг различны. В сети АТ, в отличие от
сети ПС, предусмотрены специальные автоматические устройства,
тарифицирующие оплату исходящих соединений в зависимости от
дальности соединения и его продолжительности. В сети ПС (и во-
обще в телеграфной сети общего пользования) «оплата клиентами
услуг по 'передаче телеграммы производится непосредственно на
предприятии связи, поэтому специальных тарифицирующих уст-
ройств не требуется.
12.7. ОКОНЕЧНОЕ ОБОРУДОВАНИЕ И КАНАЛЫ,
ИСПОЛЬЗУЕМЫЕ В ТЕЛЕГРАФНЫХ СЕТЯХ.
ПРИНЦИПЫ СИГНАЛИЗАЦИИ
В качестве оконечного оборудования в телеграфных сетях при-
меняются телеграфные аппараты, работающие со скоростью 50 бод
кодом М.ТК-2. Какие-лйбо другие типы оконечных устройств не-
применимы из-за того, что многие используемые магистральные
каналы дойуакают только стартсгопную работу с 7,5-контактным
делением и скоростью 50 бод. В телеграфной сети общего пользо-
вания применяются только ленточные аппараты (типов СТА-2М. и
СТА М-67), а «в сети АТ—почти исключительно рулонные («в ос-
новном типа Т-51 и Т-63 производства ГДР). Все телеграфные ап-
параты оборудуются устройствами автоматики, а также автоот-
ветчиками — специальными устройствами, связанными с передат-
чиком и приемником телегра«фного аппарата.
Все операции по установлению соединения в сетях АТ и ПС
производятся с помощью специальных вызывных приборов, содер-
жащих номеронабиратель, кнопки и сигнальные лампочки. Вызыв-
ной прибор позволяет также включать телеграфный аппарат «на
себя» для предварительной заготовки перфоленты без занятия або-
нентской линии.
В состоянии покоя в местной линии протекает ток порядка
5—8 мА (питание аппарата со стороны станции). Вызов узла ком-
мутации абонентом осуществляется путем кратковременного ее
замыкания (на 250—300 мс) вызывной кнопкой, расположенной
на вызывном приборе. При этом ток в линии возрастает до рабо-
чей величины (40—50 мА). Узел коммутации, зафиксировав уве-
личение тока, посылает в сторону -абонента сигнал «Приглашение
418
к набору номера» в виде обрыва линии на 25 мс. При этом на вы-
зывном приборе зажигается лампочка «Приглашение к набору».
Абонент начинает набор номера с помощью дискового номерона-
бирателя. После окончания набора и установления соединения
узел коммутации посылает в сторону вызывающего абонента сиг-
нал «Соединение установлено» в виде изменения полярности в ли-
нии (направление рабочего тока обратно направлению тока по-
коя), на вызывном приборе загорается лампочка и запускается
электродвигатель телеграфного аппарата. Отбой производится пу-
тем кратковременного (1—2 с) нажатия на отбойную кнопку вы-
зывного прибора, благодаря чему происходит кратковременный
обрыв цепи. После приема сигнала отбоя производится переполю-
совка, и по цепи снова протекает ток покоя — 5—8 мА.
При поступлении входящего вызова Происходит лереполюсовка
в линии вызываемого абонента, после чего включается аппарат, и
ток в линии возрастает до рабочей величины. В случае занятости
вызываемого абонента или каналов со стороны узла вызываемо-
му абоненту посылается сигнал «Занято», представляющий собой
импульс тока рабочей полярности длительностью 200 мс. При этом
кратковременно включается и выключается аппарат вызывающего
абонента.
После установления соединения абоненты обмениваются сиг-
налами автоответа, а затем начинают передавать информацию.
Как правило, информация передается автоматически с перфолен-
ты, что улучшает использование каналов.
В настоящее время проводятся большие работы по модерниза-
ции телеграфной сигнализации. Так, рассматривается вопрос о за-
мене дискового набора клавиатурным, что позволит заметно ус-
корить процесс набора номера (клавиатурный набор применяется
в целом ряде зарубежных телеграфных сетей), а также о введе-
нии целого ряда дополнительных сигналов, передаваемых в виде
стартстопных пятиэлементных комбинаций. Предполагается ввести
специальные сигналы «Абонент поврежден», «Абонент отсутствует»
и т. д., использование которых даст дополнительные удобства.
В качестве абонентских линий в телеграфных сетях используют,
как правило, двухпроводные физические цепи кабелей ГТС и го-
раздо реже телеграфные каналы тонального и надтонального теле-
графирования, образованные, как правило, аппаратурой ТНТ-6.
В последнее время начинает применяться аппаратура с импульсно-
кодовой модуляцией типа ТВУ-12.
В качестве магистральных каналов используются телеграфные
каналы, образованные 'аппаратурой тонального телеграфирования
ТТ-17П, ЧВТ, ТТ-48. Широкое применение аппаратуры ЧВТ на
телеграфной сети общего пользования ограничивает способ работы
(только стартстопный с 7,5-контактным делением) и скорость
(только 50 бод).
Вопросы построения коммутационных станций, используемых
на телеграфной сети общего пользования, рассматриваются в дру-
гих разделах настоящей главы.
14*
419
12.8. КОММУТИРУЕМЫЕ СЕТИ ПЕРЕДАЧИ ДАННЫХ
Как уже указывалось, в настоящее время в СССР существуют
две коммутируемые сети передачи данных:1
— низкоскоростная, построенная на основе сети АТ путем
включения в нее аппаратуры передачи данных;
— среднескоростная, построенная на основе коммутируемой те-
лефонной сети также путем включения в последнюю аппаратуры
передачи данных.
Основной недостаток использования сети АТ для построения
сети передачи данных заключается .в ограниченных возможностях
существующей сети АТ. Допустимая скорость модуляции (50 бод)
для систем передачи данных слишком мала, а ограничение спосо-
ба работы в ряде случаев исключает возможность использова-
ния сети АТ вообще. Так, невозможно передавать информацию ко-
дом ГОСТ 13052—67, являющимся основным при построении раз-
личных автоматизированных систем управления. Кроме того, сеть
АТ, как и всякая сеть, построенная на принципе коммутации ка-
налов (в том числе и телефонная), обладает целым рядом ограни-
чений, изложенных в § 12.3.
Телефонная сеть позволяет применять существенно большую
скорость (1200 бод), любые коды и способы работы (асинхронный,
стартстопный и синхронный). Кроме того, по этой сети, наряду с
передачей данных, можно вести служебные телефонные (а не те-
леграфные, как в сети АТ) переговоры, что позволяет в ряде слу-
чаев использовать для обслуживания АПД малоквалифицирован-
ный персонал. Характерной особенностью телефонной коммутируе-
мой сети является возможность применения простейшей аппара-
туры передачи данных — многочастотной, техническая реализация
которой весьма проста. Немаловажно и то, что в телефонной сети
нет резкого ограничения предельно допустимой скорости: в настоя-
щее время общепринятыми являются скорости 600 и 1200 бод, в
будущем, по мере развития техники модемов, скорости вполне мо-
гут быть увеличены в 4—6 раз. В телеграфной сети скорость мо-
дуляции ограничена возможностями находящейся в коллективном
пользовании аппаратуры тонального телеграфирования. При не-
обходимости повышения скорости модуляции требуется замена
всей используемой на сети аппаратуры тонального телеграфирова-
ния, что очень сложно.
С другой стороны, телефонная коммутируемая сеть характери-
зуется существенно меньшим уровнем междугородной автоматиза-
ции, чем сеть АТ. Это в ряде случаев затрудняет использование
коммутируемой телефонной сети при передаче данных. Коммути-
руемая телефонная сеть характеризуется, как правило, большей
вероятностью ошибок, что обусловливается большим количеством
контактов в тракте передаче данных и худшим их качеством из-
за малой величины обтекающего тока. Кроме того, при малых
скоростях модуляции телефонная сеть менее экономична, чем теле-
графная, вследствие худшего использования каналов.
420
Перечисленные характерные особенности телефонной и теле-
графной коммутируемых сетей при использовании их для переда-
чи данных обусловливаются в основном различными принципами
построения этих сетей: при передаче данных по телефонной сети
модемы .входят в состав оконечной АПД, располагаемой у потре-
бителя, а при передаче данных по телеграфной сети модемы (т. е.
аппаратура тонального телеграфирования) располагаются на пред-
приятии связи и находятся в коллективном пользовании абонентов.
В телефонной сети узлы коммутации коммутируют аналоговые
сигналы, а в телеграфной — сигналы постоянного тока.
Многие недостатки сетей передачи данных, построенных на ба-
зе существующих коммутируемых телефонных и телеграфных се-
тей, обусловлены их неспециализированным характером. Действи-
тельно, сравнительно высокая вероятность ошибки в этих сетях
не ухудшает сколько-нибудь значительно качество телефонной и
телеграфной связи, ограничение способов работы в -сети АТ так-
же несущественно при телеграфных переговорах и т. д. Модерни-
зация телефонной и телеграфной сетей с целью доведения их воз-
можностей до уровня, отвечающего требованиям передачи дан-
ных, вряд ли целесообразна, так как требует больших капитальных
затрат. Поэтому для наиболее полного удовлетворения потребно-
стей передачи данных целесообразно создать специализированную
сеть передачи данных общего пользования, не обладающую недо-
статками неспециализированных сетей. Такая -сеть непременно
должна включать в себя и коммутацию сообщений, и коммутацию
каналов, отвечая тем самым разнообразным требованиям потреби-
телей. Что касается принципов построения сети с коммутацией ка-
налов, то, по-видимому, целесообразно специализированную сеть
передачи данных общего пользования строить и по типу телефон-
ной, и по типу телеграфной. Построение этой сети по принципу
телефонной сети обеспечивает более широкие возможности по
сравнению с построением по принципу телеграфной сети. С другой
стороны, сеть, построенная по принципу телеграфной сети, в неко-
торых случаях может оказаться экономичнее. Кроме того, в сети,
построенной по такому принципу, уже в настоящее время возмож-
но применение электронных узлов коммутации, в то время как
внедреиие эл-ек-рр-о-нных узлов на телефонных сетях гораздо слож-
нее. Следует также иметь в виду, что сеть, построенная по прин-
ципу телефонной сети, лучше сопрягается с системами с ИКМ, ко-
торые начинают применяться уже сейчас и получат самое широ-
кое распространение в будущем.
Несомненно, что в будущем узлы коммутации каналов, так же
как и узлы коммутации сообщений, будут выполняться на базе
ЭВМ. Использование ЭВМ в узлах коммутации каналов позволит
предоставить абоненту целый ряд новых услуг, которые невозмож-
но обеспечить существующей электромеханической техникой. Так,
применение ЭВМ позволит устанавливать соединения с заранее
определенным абонентом без набора номера вызывающим абонен-
том (номер вызываемого абонента записывается в памяти ЭВМ
421
и соединение устанавливается автоматически при вызове вызываю-
щим абонентом станции). Становится также возможной сеансная
работа, при которой узел коммутации автоматически соединяет
определенных абонентов в заранее установленное время, что очень
удобно для абонентов.
Дальнейшее развитие применения ЭВМ в узлах коммутации,
безусловно, приведет к расширению и углублению их функций.
Естественным результатом этого развития явится создание комби-
нированных узлов коммутации, использующих ЭВМ и обеспечива-
ющих работу как с накоплением информации (коммутация сооб-
щений), так и без накопления (коммутация каналов). При этом
одна часть абонентов, включенных в узел коммутации, может об-
служиваться по алгоритму коммутации сообщений, а другая —
по алгоритму коммутации каналов. Возможен и другой вариант
обслуживания, при котором вид коммутации будет определяться
по желанию абонента.
Наконец, следует упомянуть также о том, что в специализиро-
ванной сети передачи данных общего пользования должны быть
предусмотрены высокоскоростные каналы передачи данных. Такие
каналы уже созданы в ряде зарубежных стран; они образуют вы-
сокоскоростные сети. Характерной особенностью этих сетей являет-
ся то, что в них практически может быть применен только метод
коммутации каналов. Узлы коммутации каналов в данных сетях,
в принципе, мало отличаются от узлов коммутации, используемых
в низкоскоростных и среднескоростных сетях. Отличие заключает-
ся только в качестве контакта? он должен быть очень высокого ка-
чества— электронный или герконовый (ферридовый).
12.9. УЗЛЫ КОММУТАЦИИ КАНАЛОВ
ОБЩИЕ СВЕДЕНИЯ ОБ УЗЛАХ КОММУТАЦИИ КАНАЛОВ
По принципу коммутации каналов построены станции абонент-
ского телеграфа и в основной своей части — станции прямых со-
единений. В зависимости от типа коммутационных устройств стан-
ции АТА и АПС можно разделить на декадно-шаговые и коорди-
натные: в первых используются декадно-шаговые искатели, во вто-
рых — многократные координатные соединители.
В последнее время разработаны универсальные станции АТ-
ПС-ПД, которые могут быть использованы для коммутации ка-
налов в системах абонентского телеграфирования, прямых
соединений и передачи данных. Выпускаемые отечественной про-
мышленностью станции АТА и АПС перечислены в табл 12.1.
Принцип действия коммутационных станций рассмотрим на
примере станций АТА-57, АТА-МК-2, АПС-Ш, АПС-К и АТ-
ПС-ПД.
422
ТАБЛИЦА 12.1
Название Тип приборов искания Число абонентских установок Число магис- тральных каналов Область использования
АТ А-57-1 дши До 1000 До 800 Главные и крупные об- ластные узлы связи
АТА-57-2 дши До 300 До 300 Средние областные узлы связи
АТА-М дши 10 или 20 3 или 6 Районные узлы связи
АТА-К мкс От 100 до 600 и 30 станций АТА—М До 800 Крупные и средние уз- лы связи
АТА-МК-2 мкс 10 или 20 4 или 8 Районные узлы связи
АПС-Ш1 дши От 200 до 300 От 50 до 60 Главные и крупные об- ластные узлы связи
АПС-Ш2 дши От 100 до 250 От 7 до 8 Средние областные уз- лы связи
АПС-ШЗ дши От 40 до 50 3 или 4 Малые областные узлы связи
АПС-К мкс От 100 до 500 До 800 Главные, крупные и средние областные узлы связи
АПС-МК мкс От 10 до 600 От 4 до 16 Малые областные и рай- онные узлы связи
АТ-ПС-ПД До 1000 До 400 Главные и крупные об- ластные узлы связи
СТАНЦИЯ АТА-57
Функциональная схема станции приведена на рис. 12.4.
Для включения телеграфного аппарата в станцию рядом с
ним устанавливается вызывной прибор, снабженный номерона-
бирателем. Чтобы вызвать станцию, абонент должен нажать
вызывную кнопку на вызывном приборе. Ответ станции фикси-
руется лампочкой ответа. После этого набирается номер. При
установлении соединения включается электродвигатель теле-
графного аппарата, что и служит сигналом состоявшегося соеди-
нения. Сигнал занятости посылается кратковременным включе-
нием и последующим выключением электродвигателя телеграф-
ного аппарата.
Местные абоненты включаются в станцию через пары арен-
дуемого кабеля ГТС или воздушные линии. В станцию могут
включаться также удаленные абоненты, для которых устанавли-
вается специальная панель ПУА — панель удаленного абонента.
При поступлении вызова от абонента к абонентской панели
АП станции подключается распределитель вызова РВ- Один РВ
423
обслуживает 50 абонентов. Ступень предыскания выполнена по
схеме обратного искания на декадно-шаговых искателях вызова
ИВ, жестко связанных с первой степенью группового искания
1ГИ. При занятии ИВ-1ГИ распределитель вызовов отключается.
Из 1ГИ абоненту посылается сигнал ответа станции. Если або-
нент набирает местный номер (например, 25—58), то под дейст-
вием импульсов набора первой цифры 1ГИ встанет на вторую
Абоненты , ЛВонент->
ские
линии и I
Местный каналы I
Станция
ИВ 1ГИ ШГИ ПИ
Удаленный.
ПУ
ПГИ
'ггги
4 М7 О
.Коммута-
тор
I Метдуго-
I родные"
I линии
+---------
Рис 12.4. Функциональная схема станции АТА-67
декаду и займет ШГИ, от второй цифры ШГИ найдет выход к
линейному искателю ЛИ. Под действием двух последних цифр
ЛИ двумя вынужденными движениями произведет соединение с
требуемым абонентом.
При наборе номера соседней станции (например, 53—(15—44)
1ГИ занимает ПГИ, который, подняв щетки на третью декаду,
свободным исканием находит выход (через переходное устройст-
во ПУ) к 1УГИ соседней станции. Третья цифра номера соединит
1УГИ соседней станции с ШГИ. Последние три цифры номера
произведут соединение с требуемым абонентом соседней станции.
При наборе восьмизначного номера (например, 53—67—'21—
15) соединение пройдет через 1ГИ и ПГИ собственной станции,
ШГИ и ПГИ промежуточной станции и 1УГИ, ШГИ и ЛИ око-
нечной станции.
Описанная система нумерации абонентов получила название
открытой. Здесь абонент сам выбирает маршрут соединения че-
рез промежуточные станции. Для этого он должен представлять
конфигурацию сети, что нежелательно. Кроме того, при открытой
системе число цифр в номере переменно. Это создает определен-
ные неудобства в эксплуатации.
При закрытой системе нумерации предусматривается набор
номера требуемой станции и номера абонента этой станции. Вы-
бор маршрута соединения производится специальными регистра-
ми. Ими же управляются искатели промежуточных станций, уча-
ствующие в соединении. Устройство регистров довольно сложное.
424
Возможно, что при использовании средств вычислительной техни-
ки для управления сетью закрытая система нумерации окажется
приемлемой.
В настоящее время эффект закрытой системы нумерации до-
стигается при помощи повторительной системы нумерации, раз-
работанной ЦНИИС. Сущность ее состоит в том, что номер тре-
буемой станции набирается столько раз, сколько станций участ-
вует в соединении. Вместо номера 53—67—21—15 следует наби-
рать цифры 67—67—21 —15. При этом не требуется установка
специальных регистров управления. К станции АТА придается
ручной коммутатор, который используется для организации цир-
кулярных соединений, приоритетных соединений и т. п. Кроме
того, при недостаточном числе каналов связи, а также в часы
наибольшей нагрузки можно перейти на ручное обслуживание
вызовов по заказной системе обслуживания.
СТАНЦИЯ АТА-МК-2
Станция АТА-МК-2 построена с применением тех же элемен-
тов, что и координатные станции большей емкости (см. табл.
12.1). Основным коммутирующим устройством служит много-
кратный координатный соединитель МКС. Управляется МКС со
стороны управляющего устройства (маркера).
Функциональная схема станции приведена на рис. 12.5.
Рис. 12.5. Функциональная схема станции АТА-МК-2
Для вызова станции абонент нажимает вызывную кнопку на
вызывном приборе. В абонентской панели АП срабатывает реле,
которое коммутирует сигнал вызова к регистровому искателю
РИ. После подключения РИ вызывающему абоненту посылается
сигнал «Приглашение к набору номера». На вызывном приборе
зажигается лампа «Разрешение набора».
Для установления местного соединения необходимо набрать
две цифры. Если в станцию включено 10 абонентов, то их номера
содержат числа от 10 до 19- Импульсы набора номера поступают
425
в регистр Р, где фиксируются обе цифры номера. После этого ре-
гистровый искатель РИ освобождается. Одновременно регистр Р
занимает свободный блок распределителя БР. Если вызываемый
местный абонент свободен, то происходит проключение линии
между вызывающим и вызываемым абонентами через МКС. Ре-
гистр Р и блок распределителя БР освобождаются для обслужи-
вания очередного соединения. При занятости вызываемого або-
нента регистр Р посылает вызываемому абоненту сигнал «Заня-
то» и отключается.
Для установления иногороднего соединения при исходящем
соединении в качестве первой цифры номера абонент набирает
3 или 4. Регистр Р фиксирует эту цифру, занимает блок распре-
делителя БР, находит свободный канал в требуемом направлении
и производит проключение линии через МКС между АП вызы-
вающего абонента и переходным устройством ПУ. После этого
БР и Р освобождаются, а набираемые далее цифры номера транс-
лируются к вышестоящей станции. Параллельно номер вызывае-
мого абонента поступает в определитель зон 03, где анализи-
руется с целью тарификации стоимости устанавливаемого соеди-
нения.
В зависимости от зоны вызова работает счетное устройство
СУ переходного устройства ПУ занятого исходящего канала. Ес-
ли выходы к вышестоящей станции заняты, то абоненту посы-
лается сигнал «Занято» с одновременным освобождением всех
приборов, которые участвовали в соединении.
При входящем иногороднем соединении реле ПУ проключает
с помощью РИ сигнал вызова к любому из свободных регист-
ров Р. Регистр Р, подключившись, посылает к вышестоящей стан-
ции сигнал «Приглашение к набору номера». После этого из ре-
гистра вышестоящей станции транслируется номер вызываемого
абонента, который запоминается регистром. Р. Далее соединение
происходит так же, как и в местном соединении.
Станция АТА-МК-2 снабжена ручным коммутатором РК-3,
который позволяет:
— подключать станционный аппарат к любому абоненту стан-
ции;
— подключать станционный аппарат к вышестоящей станции
через любое ПУ;
— включать станционный аппарат на правах абонентской ус-
тановки;
— контролировать работу абонентов с помощью станционного
аппарата;
— принудительно разъединять абонентов.
СТАНЦИИ ПРЯМЫХ СОЕДИНЕНИЙ
Система прямых соединений имеет много общего с системой
абонентского телеграфирования. Она предназначена для предос-
тавления оконечным пунктам временных соединений с любым
426
другим оконечным пунктом или узловой станцией телеграфной
сети.
К основным отличительным особенностям системы ПС от сис-
темы АТ относятся:
— возможность реперфораторного переприема телеграммы при
занятости последнего участка соединения;
— абонентами системы ПС являются предприятия связи .(на-
пример, городские отделения, районные конторы связи), а не пред-
приятия других ведомств
Предположим, что ГО-121 Москвы вызывает ГО-8 Новосибир-
ска. При, установлении соединения оказалось, что участок между
центральной станцией Новосибирска и ГО-8 занят. Вызывавший
абонент (ГО-121) не получает отказа в соединении, а передавае-
мая телеграмма попадает на станцию АПС Новосибирска. При ос-
вобождении линии принятая на реперфоратор телеграмма автома-
тически или вручную будет передана в ГО-8. Таким образом, си-
стема ПС сочетает положительные качества абонентской сети со
способами реперфораторного переприема.
На сети ПС принята закрытая система нумерации. Номер со-
стоит из шести знаков: три знака используются для обозначения
станции и три знака для обозначения оконечного пункта. Для реа-
лизации принципа закрытой нумерации в составе коммутационно-
го оборудования станции ПС предусмотрены регистры и маркеры,
управляющие исканием. Эти устройства выпускаются в виде от-
дельных стоек, которые при использовании их совместно с обору-
дованием станции АТА-57 образуют станцию АПС-Ш, построен-
ную на декадно-шаговых искателях. Промышленность выпускает
также специальные станции ПС с координатными соединителями
(АПС-К).
Соединительные линии к абонентам и междугородные линии в
системе ПС организуются так же, как и в АТ.
Абоненты сети прямых соединений снабжены стартстопными
телеграфными аппаратами и -вызывными приборами. Телеграфные
аппараты автоматизированы: трансмиттерные и реперфораторные
приставки обязательны. В вызывном приборе предусмотрена воз-
можность включения аппарата «на себя» для предварительной за-
готовки перфорированной ленты. При поступлении из линии во
время заготовки перфоленты вызова аппарат автоматически вклю-
чается в линию.
Телеграфные аппараты оборудованы также автоответчиками, с
которых для подтверждения правильности состоявшегося соеди-
нения посылается текст с наименованием оконечного пункта.
СТАНЦИЯ АПС-Ш
Станция АПС-Ш, функциональная схема которой приведена
на рис. 12.6, построена с двумя ступенями группового искания и
ступенью линейного искания. Ступень предыскания выполнена на
шаговых искателях по схеме прямого предыскания. Вызов со сто-
427
роны оконечного пункта поступает на релейную панель ПКП и
через предыскатель ПИ на релейную панель подключения реги-
стра ПИР. Занимаются первый исходящий групповой ибкатель
I ИГИ и свободный регистр Р. В момент подключения регистра к
вызывающему оконечному пункту абоненту посылается сигнал от-
вета станции. Поступивший на станцию номер фиксируется реги-
стром. Если зафиксирован номер местного абонента, то из реги-
Рис. 12.6. Функциональная скема станции АПС-Ш
стра для осуществления дальнейшего искания передают только
последние три цифры номера. Эти знаки управляют работой I ИГИ
и местного линейного искателя ЛИМ. Происходит соединение с ме-
стным абонентом.
Если в регистре зафиксирован номер иногороднего абонента,
то регистр при помощи пересчетчика П преобразует номер вызы-
ваемой станции в двузначный десятичный номер. Под действием
импульсов набора номера работают I и ПИГИ своей станции и
занимается канал связи в требуемом направлении. На соседней
станции через переходное устройство ПУ и переключатель входя-
щих вызовов ПВВ занимается свободный регистр Р.
Шестизначный номер абонента из регистра вызывающей стан-
ции передается в регистр вызываемой станции. Далее регистр вы-
зываемой станции управляет входящим групповым искателем
ВГИ и входящим линейным искателем ЛИВХ, если поступивший
номер соответствует данной станции, или ВГИ и ПИГИ, если по-
ступивший номер соответствует соседней станции- В последнем
случае станция обеспечивает транзитное соединение.
В том случае, когда ЛИВХ определяет занятость местного або-
нента, информация через панель подключения реперфоратора
ППРф направляется к телеграфным аппаратам приема избыточ-
ных телеграмм. Далее телеграмма в виде репе|рф'орированной лен-
ты переносится к коммутатору низовой связи КИС, откуда пере-
дается в оконечный пункт после освобождения линии связи.
428
Категорийные телеграммы (пр,и занятости как оконечных, так
и промежуточных пунктов) попадают на коммутатор особой кор-
респонденции КОК. На коммутаторе отображается занятость ка-
налов связи и оконечных пунктов. Оператор КОК при освобожде-
нии занятого канала передает в него категорийную телеграмму.
Этим достигается приоритет в передаче категорийных телеграмм.
Циркулярное соединение в сторону магистральных связей осу-
ществляется при помощи циркулярных комплектов ЦК и комму-
татора КОК. Циркулярные соединения в сторону низовых пунктов
производятся со специального коммутатора СК низовой связи
Служебные связи на станции осуществляются через линейный
искатель станционной связи ЛИС. В контактное поле этих искате-
лей включаются аппараты стола справок, аппарат техника стан-
ции, а также приемные телеграфные аппараты для приема теле-
грамм, направляемых непосредственно на станцию или следующих
через данную станцию в городские отделения и РКС, не оборудо-
ванные установками ПС.
СТАНЦИЯ АПС-К
Станции координатной системы строятся на базе многократных
координатных соединителей МКС. МКС не осуществляет искания,
а лишь завершает его, соединяя вход, по которому поступил вызов,
с требуемым выходом. Искание осуществляется при помощи управ-
ляющего устройства —‘маркера.
Принцип работы станции АПС-К, за исключением некоторых
деталей обслуживания категорийной корреспонденции, аналогичен
принципу работы станции АПС-Ш.
Функциональная схема станции АПС-К приведена на рис. 12.7.
Рис. 12.7. Функциональная схема 'Станции АПС-К
429
При местном соединении сигнал вызова от абонента фиксирует-
ся срабатыванием реле в абонентской панели АП, к которой под-
ключается свободный маркер абонентского искания МАИ. Маркер
определяет линию, на которую поступил вызов, а затем находит
свободную промежуточную линию между звеньями А и В ступени
искания, а также свободный исходящий шнуровой комплект ИШК.
После этого МАИ освобождается для обслуживания других исхо-
дящих вызовов.
ИШК передает сигнал вызова через звено А ступени регистро-
вого искания РИ в маркер регистрового искания МРИ. МРИ отыс-
кивает свободную линию между звеньями А и В ступени РИ и под-
ключает к ИШК свободный 'регистр Р. После этого МРИ осво-
бождается. Из регистра Р через РИ, ИШК и АИ к абоненту пере-
дается сигнал, разрешающий набор номера. На вызывном приборе
загорается лампа «Приглашение к набору номера». Оператор наби-
рает номер вызываемого оконечного пункта. Импульсы набора по-
ступают в регистр Р, где запоминается весь номер, после чего ре-
гистр начинает управлять установлением соединения. Проанализи-
ровав первые три цифры номера, регистр фиксирует, что соедине-
ние исходящее, и передает информацию об этом в пересчетчик П,
который пересчитывает полученный трехзначный номер в двузнач-
ный номер (номер направления). Номер направления вновь посту-
пает в регистр Р. Регистр в соответствии с требуемым направлени-
ем занимает ступень исходящего группового искания ПРИ (через
РИ и ИШК). После занятия маркера МИГИ в регистр Р передает-
ся сигнал о готовности работы. Код направления по пар аллельным
проводам ,(с целью сокращения времени передачи) из регистра Р
поступает в МИГИ. Определив требуемое направление передачи,
МИГИ опробует исходящие каналы данного направления на заня-
тость и, найдя свободный канал, подключает к нему регистр Р
(через РИ, ИШК, звенья А и В ступени ИГИ). После этого
МИГИ освобождается. Освобождение МИГИ является сигналом
для занятия следующей ступени искания — входящей ступени
группового искания.
Б подключившийся маркер МВГИ из регистра Р поступает но-
мер требуемого абонента. Зафиксировав этот номер и установив
соединение, МВГИ освобождается. Одновременно в регистр Р пе-
редается сигнал о том, что соединение установлено. Регистр Р че-
рез схему пересчетчика П опробывает линию вызываемого оконеч-
ного пункта. Если линия свободна, то в АП вызываемого пункта
срабатывает вызывное реле. Пересчетчик П освобождается. Из АП
вызываемого абонента поступает вызов в ступень АИ, подключает-
ся маркер МАИ. Подключенный маркер с одной стороны занят АП
вызываемого абонента, а с другой стороны — через ступень С со
стороны ВГИ регистром Р. Маркер МАИ соединяет эти две точки
(звено А и звено С) и освобождается. Освобождение МАИ служит
сигналом к освобождению регистра Р. Соединение между вызыва-
ющим и вызываемым абонентами на этом заканчивается. Абонент-
ская панель АП вызывающего абонента через ступени АИ, ИШК,
430
ИГИ, ВГИ, звено С и ступень АИ оказывается подключенной к
абонентской панели АП вызванного абонента.
В том случае, когда промежуточные линии на ступенях искания
заняты или же занята абонентская линия при местном соединении,
в регистре Р формируется сигнал «Занято», который передается
вызвавшему абоненту.
При иногороднем соединении процесс соединения от вызываю-
щего оконечного пункта до ступени ИГИ происходит так же, как и
при местном соединении. Маркер МИГИ, получив из регистра Р
двузначный номер требуемого направления, опробует каналы связи
на занятость. Найдя свободный капал, МИГИ подключает к нему
ступень ИГИ и освобождается. Регистр Р станции вызывающего
оконечного пункта через переходное устройство ПУ, канал связи,
ПУ станции вызываемого пункта оказывается подключенным к вхо-
дящему шнуровому комплекту ВШК.
Из схемы ПУ вызываемой станции в регистр Р вызывающей
станции передается сигнал, подтверждающий состоявшееся соеди-
нение. В ответ на это регистр Р передает в ВШК команду на заня-
тие входящего регистра. ВШК через ступень РИ занимает регистр
Р на вызванной станции, откуда в регистр Р вызывающей станции
передается подтверждение о подключении. После этого регистр Р
вызывающей станции выдает весь накопленный номер на регистр Р
вызываемой станции, а сам освобождается. Далее процесс установ-
ления соединения на ступенях ВГИ и АИ вызываемой станции про-
исходит так же, как и при местном соединении. Отличие состоит в
порядке обслуживания при занятости местной линии абонента. Ес-
ли при опробывании местной линии пересчетчик П обнаруживает
занятость линии, то ступень ВГИ проключает соединение на або-
нентскую панель АП аппарата приема избыточного входящего об-
мена. Телеграммы, принятые на этот аппарат, после освобождения
местной линии передаются в оконечный пункт с коммутатора низо-
вой связи КНС. Таким образом, при занятости местной линии осу-
ществляется реперфораторный переприем.
Заметим также, что при иногороднем соединении маркер МИГИ
вызывающей станции в случае занятости каналов основного на-
правления пытается установить соединение по каналам обходного
направления. Если же оказываются занятыми и каналы обходного
направления, то МИГИ передает об этом информацию в регистр Р.
Регистр Р вызывающей станции вырабатывает сигнал «Занято» и
соединение разрушается.
Помимо описанных коммутационных элементов в состав стан-
ции АПС-К входит коммутатор особой корреспонденции КОК и
схемный коммутатор СК. Их функции не отличаются от изложен-
ных выше при описании станции АПС-Ш.
СТАНЦИЯ АТ-ПС-ПД
Станция АТ-ПС-ПД рассчитана для работы в автоматизирован-
ной сети с коммутацией каналов со скоростью до 200 бод. В нее
могут быть включены абонентские установки четырех типов:
431
— оконечные установки сети общего пользования (сети прямых
соединений), работающие со скоростью 50 бод;
— абонентские установки сети абонентского телеграфирования,
работающие со скоростью 50 бод;
— абонентские установки для передачи данных, работающие со
скоростью 100 бод;
— абонентские установки для передачи данных, работающие
со скоростью 200 бод.
На станции применяется единая шестизначная система нумера-
ции. Для обеспечения запрета в соединении между абонентами се-
тей разных типов используются автоматически формируемые обо-
рудованием станции индексы абонентов. Так, для абонентов сети
ПС используется индекс 1, сети АТА — индекс 2, сети ПД-1100 —
индекс 3 и сети ПД-200 .— индекс 4.
Станция может работать совместно с существующими станция-
ми АТА и АПС как декадно-шаговой, так и координатной систем.
Вызовы, поступающие от абонентов с индексами 2, 3 и 4, обслу-
живаются по системе с отказами, а от абонентов с индексом 1 —
по системе с отказами на магистральных участках и с реперфора-
торным переприемом на участке местных линий.
Предусмотрено совместное или раздельное использование кана-
лов ТТ в сетях АТА и ПС. Для сетей ПД-100 и ПД-200 возможно
только раздельное использование каналов связи.
Основным коммутационным элементом станции является много-
кратный координатный соединитель МКС. Для улучшения качест-
ва работы из телеграфного тракта исключены электромеханические
реле. Они заменены электронными реле.
Станция снабжена всеми дополнительными устройствами (КИС,
КОК, СК, тарификационные устройства и т. д.), которые позволя-
ют сохранить существующую на сетях АТА и АПС систему эксплу-
атации.
Дополнительные устройства на станции дают возможность про-
изводить измерение качественных показателей работы коммутаци-
онного оборудования, контроль и измерения приборов и каналов
связи, а также учет нагрузки на станции.
В одну оконечную станцию можно включать до 1000 оконечных
установок абонентов для каждого из указанных выше индексов и
до 400 магистральных каналов связи. Таким образом, станция АТ-
ПС-ПД является унифицированной станцией для всех видов низ-
коскоростных сетей передачи дискретных сообщений.
12.10. УЗЛЫ КОММУТАЦИИ СООБЩЕНИЙ
Узлы с коммутацией сообщений исторически появились значи-
тельно раньше узлов с коммутацией каналов. Действительно,
обычный ручной переприем телеграммы есть нечто иное-, как ком-
мутация сообщения. Однако все операции по переприему: чтение
адреса, перенос сообщения (телеграммы) с рабочего места прие-
ма телеграммы на рабочее место передачи, т. е. сортировка теле-
432
грамм, и передача телеграммы в нужном направлении произво-
дятся вручную. На процесс переприема требуется достаточно боль-
шое время, что приводит к задержке в доставке сообщения в око-
нечный пункт. Дальнейшее развитие узлов коммутации сообще-
ний шло по пути автоматизации операций по переприему. Появи-
лись системы реперфораторного переприема (АТОЛ), системы с
кодовой коммутацией электромеханического типа («Лиман»), Ав-
томатизация переприема потребовала строгого соблюдения в по-
рядке оформления сообщения — формата сообщений.
Сообщение помимо текста сообщения содержит признаковую
часть, состоящую из знаков: начала сообщения, порядкового номе-
ра, начала адреса, маршрутного индекса, категории срочности со-
общения, конца адреса, конца сообщения. В соответствии с этими
признаками узел коммутации направляет сообщение в требуемом
направлении.
Наибольшая степень автоматизации процесса коммутации сооб-
щений достигается применением в качестве устройств коммутации
электронных вычислительных машин (ЭВМ). Функциональная схе-
ма узла коммутации сообщений (КС), содержащего основную и
резервную ЭВМ, приведена на рис. 12.8.
Рис 12.8. Фуйиционалыная схема узла КС, выполненного на базе ЭВМ
Основным блоком машины является процессор, который обеспе-
чивает управление приемом и обработкой сообщений, а также уп-
равление работой всех узлов машины. Между процессорами основ-
ной и резервной машин проложен высокоскоростной канал межма-
шинной связи ДМС. Все входящие каналы, включенные в узел, обо-
рудованы преобразователями уровня сигнала ПУС и буферным ли-
нейным регистром БЛР. ПУС преобразует двухполюсные посылки,
поступающие из канала связи, в однополюсные с напряжением, ко-
торое необходимо для управления логическими схемами ЭВМ.
Преобразованные сигналы поступают в БЛР, где последователь-
ная форма кодовой комбинации преобразуется в параллельную.
433
Как только в БЛР накапливается один знак, подается сигнал за-
проса на ввод его в машину. Ввод накопленного знака должен про-
изойти до приема следующего знака из линии. В этой части работа
ЭВМ аналогична работе приемного оконечного устройства (см.
§ 5.12) и состоит из следующих операций:
— преобразования уровней входящих сигналов в уровни, необ-
ходимые для работы ЭВМ;
— определения моментов начала и конца кодовой комбинации;
— определения начала и конца каждой элементарной посылки;
— определения знака каждой посылки (регистрация посылки);
— накопления кодовой комбинации (знака);
— передачи знака из накопителя в ЭВМ.
Наиболее массовой операцией является определение начала и
конца элементарной посылки (определение ЗМВ). Если границы
посылок надо определить с точностью до 5-4-7% от их длительно-
сти, что обеспечивает исправляющую способность регистрации
43—45%, то каждую посылку надо сканировать 16 раз (точность
6,25%). При включении в узел КС, например, 200 каналов, рабо-
тающих со скоростью 100 бод, частость реализации операции ска-
нирования составит 16X100X200=320000 операций/с. Таким обра-
зом, скорость работы ЭВМ определяет число каналов связи (при
фиксированной скорости передачи), которые данная машина смо-
жет обслужить.
Операция по вводу знаков в ЭВМ, если используется пятиэле-
ментный код МТК-2, производится со скоростью, в пять раз мень-
шей, но эта скорость также достаточна велика. Поэтому процесс
обработки элементарных посылок и знаков (кодовых комбинаций)
должен выполняться в реальном масштабе времени.
Введенный в ЭВМ знак записывается в оперативную память
машины, которая может быть выполнена в виде магнитных ячеек,
образующих магнитное оперативное запоминающее устройство
МОЗУ. Обычно в памяти МОЗУ для каждого входящего канала
отводится своя зона на определенное количество знаков. При за-
полнении емкости зоны избыточная информация переписывается в
долговременную память машины. Элементы долговременной памя-
ти могут быть выполнены, например, в виде накопителя на магнит-
ной ленте, магнитном диске или магнитном барабане. После запи-
си сообщения в память машины начинается его анализ и передача
в требуемом направлении. В соответствии с информацией, содер-
жащейся в признаковой части, процессор выполняет программу
обработки сообщения:
— находит начало сообщения;
— проверяет правильность порядкового номера;
— определяет маршрут сообщения;
— определяет категорию сообщения.
После этого процессор находит свободный канал в требуемом
направлении и начинает передачу сообщения. Если свободных ка-
налов нет, то сообщение ставится в очередь в зависимости от сроч-
ности его категории.
434
Операции по передаче сообщения противоположны операциям
по его приему. Кодовые комбинации из долговременной памяти
переписываются в оперативную память и далее в виде параллель-
ного кода в БЛР передачи. Из БЛР передачи элементарные посыл-
ки в последовательном коде через ПУС передачи поступают в ка-
нал связи.
Помимо описанных операций, связанных непосредственно с при-
емом и передачей сообщений, ЭВМ выполняет также дополнитель-
ные функции, обеспечивающие рациональную систему эксплуата-
ции?
— длительное хранение переданных сообщений (архивация);
— анализ сообщений, принятых с искаженной признаковой
частью;
— управление каналами связи;
— накопление и обработка различных статистических данных,
характеризующих потоки нагрузки узла.
Как уже указывалось, в одну ЭВМ можно включать не только
однотипные, т. е. работающие на одной скорости, каналы связи, но
и разнотипные. Общее число включаемых каналов определяется
скоростью работы машины.
Таким образом, узел коммутации сообщений, выполненный на
базе ЭВМ, можно рассматривать как универсальный, который мо-
жет быть использован как в низкоскоростных, так и среднескорост-
ных сетях.
ГЛАВА 13
Методы повышения надежности систем
и сетей передачи дискретных сообщений
13.1. ОСНОВНЫЕ ПОНЯТИЯ О НАДЕЖНОСТИ
Среди требований к системам и сетям передачи дискретных со-
общений важное место занимает требование высокой надежности.
Особенно повышенные требования предъявляются к некоторым си-
стемам передачи данных. Эти требования обычно связаны с важ-
ностью и дороговизной тех процессов, которые обслуживаются си-
стемой передачи данных и, следовательно, нарушаются при отказе
этой системы. Поэтому ниже будем рассматривать в основном си-
стемы передачи данных (ПД), однако все рассматриваемые зако-
номерности можно применить и к телеграфным системам.
Требования надежности необходимо учитывать при определе-
нии характеристик всех элементов системы: конфигурации и прин-
ципов построения сети, структуры каналов передачи дискретных
сообщений, норм на каналы связи и оконечную аппаратуру.
Надежностью называют свойство изделия выполнять заданные
функции, сохраняя овои эксплуатационные показатели в заданных
пределах в течение требуемого промежутка времени. Прекращение
выполнения заданных функций или выход рабочих показателей за
заданные пределы называют отказом.
Системы передачи данных обычно относятся к классу восста-
навливаемых систем, т. е. систем, работа которых после устране-
ния отказа может быть продолжена. Появление отказов носит слу-
чайный характер. Поэтому для расчетов надежности используют
математический аппарат теории вероятностей.
Отказы делятся на внезапные (например, вследствие обрыва ли-
нии, короткого замыкания в схеме, пропадания электропитания)
и постепенные (например, вследствие старения деталей, уменьше-
ния усиления электронной лампы). Различают также отказы само-
устраняющиеся, для устранения которых не нужно проводить вос-
становительные работы (например, отказы вследствие помех от
грозы, кратковременных прерываний канала, плохих контактов,
ошибочных действий персонала), и устойчивые, для устранения
которых необходимо проводить восстановительные (ремонтные или
наладочные) работы (например, обрыв провода, перегорание тран-
436
зистора). Самовосстанавливающиеся отказы имеют, как правило,
небольшую длительность. Длительность устойчивого отказа опре-
деляется временем устранения отказа. Оно зависит от наличия ре-
зервных и запасных (Элементов, контрольно-измерительных прибо-
ров, от квалификации эксплуатационного персонала.
Различают полный и частичный отказ. Полным называют от-
каз, до устранения которого использовать систему ((элемент) по
назначению становится невозможным. Частичным называют отказ,
до устранения которого остается возможность хотя бы частичного
использования системы (элемента) по назначению.
Приспособленность изделия к обнаружению и устранению от-
казов называют ремонтопригодностью.
Длительность отказов характеризуют средним временем восста-
новления Тв. Оно может быть определено по результатам статисти-
ческих испытаний. Если за время испытаний произошло N отказов,
то среднее время восстановления будет равно
N
<1311
i=l
где Т’отш — длительность t-ro отказа.
Рабочее время характеризуется наработкой на отказ Tilt т. е.
средним временем работы между двумя соседними отказами. Оно
также может быть определено по результатам статистических ис-
пытаний. Если за время испытаний произошло N отказов, то нара-
ботка на отказ будет равна?
N
T’.-vE7’-»1' (13-2)
/V ЬяА
1=1
где Граб! — время исправной работы перед i-м отказом.
Важным параметром, производным от двух вышеприведенных,
является коэффициент готовности
КГ = Тн—
ТИ + ув
Подставив ф-лы (13.1) и (13.2) в (|13.3), можно получить еще
одну формулу для коэффициента готовности
_ ____Ураб общ___
Траб общ Ч- Тотк общ
(13.3)
(13.4)
где Ураб общ — общее время исправной работы за время испытаний,
Уоткобщ — общее время отказов за это же время испытаний.
Коэффициент готовности характеризует вероятность того, что
система будет находиться в исправном состоянии в произвольно
выбранный момент времени.
Наряду с вышеприведенными параметрами в теории надежно-
сти часто используют понятия интенсивности отказов и интенсив-
ности восстановления. Под интенсивностью отказов X понимают
437
число отказов в единицу времени на один элемент. Она может быть
определена по результатам статистических испытаний. Если из У
элементов за время Т отказало п элементов, то
%= —
NT
Типичная зависимость интенсивности
радиоэлектронной аппаратуры от времени
(13.5)
отказов для элементов
показана на рис. 13.1.
Рис. 13.1. Типичная зависимость
интенсивности отказов от времени
Характерными являются три участка. На участке приработки I от-
казывает много элементов, имеющих скрытые дефекты. Этот учас-
ток обычно стараются преодолеть путем тренировки аппаратуры
перед нормальной работой. Участок нормальной работы II имеет
примерно постоянную интенсивность отказов. На участке старения
III из-за износа элементов интенсивность отказов повышается, по-
этому дальнейшее использование аппаратуры становится нерацио-
нальным. Для участка нормальной работы с примерно постоянной
интенсивностью отказов справедливо следующее соотношение:
Х = —. (13.6)
Тя
Под интенсивностью восстановления ц понимают число восста-
новлений в единицу времени, характеризующее производитель-
ность ремонтно-настроечных работ. При постоянной интенсивности
восстановления справедливо следующее соотношение:
(13-7)
« в
Часто используют еще один параметр, а именно вероятность
безотказной работы, т. е. вероятность того, что за заданный отре-
зок времени не произойдет отказа. Ее можно определить по резуль-
татам статистических испытаний. Если за время I отказа-ло n(t]
элементов из испытываемых N изделий, то вероятность безотказной
работы
p(/) = t20 (13.8)
Эта величина однозначно связана с наработкой на отказ
t
p(t) — e Тя . (13.9)
438
При t/T^i эту формулу можно упростить:
р(0«1—(13.10)
* н
В зависимости от требований к системе передачи дискретных
сообщений в расчетах используются те или другие параметры на-
дежности.
13.2. КРИТЕРИИ ОТКАЗА
Рассмотрим теперь более подробно понятие отказа -примени-
тельно к системам передачи дискретных сообщений. В предыдущем
разделе было сформулировано, что отказом называют прекраще-
ние -выполнения изделием заданных -функций или выход рабочих
показателей за заданные пределы. Применительно к системам пе-
редачи дискретных -сообщений рабочими -показателями могут быть:
— пропускная способность (количество переданных знаков за
единицу времени);
— достоверность (количество ошибок в сообщении определен-
ной длины);
— -время на установление соединения;
— время на доставку сообщения от отправителя до получателя.
Граничное значение мешающего воздействия, разделяющее от-
казовое состояние изделия от нормального, назовем критерием от-
каза.
Для каналов передачи дискретных сообщений в качестве глав-
ного рабочего показателя обычно рассматривают пропускную спо-
собность. Пусть, например, за время Т необходимо передать сооб-
щение объемом V (Т) знаков. Если цанал передачи дискретных со-
общений имеет эффективную скорость передачи (при отсутствии
в канале связи прерываний и пакетов ошибок) С знаков в единицу
времени, то допустимая длительность мешающих воздействий бу-
дет равна
t^ = T-V-^ (13.11)
Эта величина /доп и есть в данном -случае критерий отказа. Пере-
рыв в передаче сообщений на время, превышающее приведет
к отказу.
Приме р. Имеется аппаратура -передачи данных, работающая со скоростью
2400 бит/с. -Ее помехозащитный код содержит Й4 информационных бита и 6 до-
бавочных (-проверочных и служебных) -бит. Требуется передавать '100 000 знаков
за 10 минут (знаки 8-элемент.ные). Проверить -пригодность аппаратуры -и опре-
делить критерий -отказа.
Длина кодовой комбинации, -в которой умещается 3 знака, -равна 30 битам.
Скорость передачи -равна 2400/30 = 80 кодовых комбинаций в секунду, т. е.
80X3=1240 знаков в секунду, -или -240 X 60=114 400 знаков в минуту. За 10 минут
можно передать )144 ООО знаков, следовательно, аппаратура подходит. Критерий
отказа по ф-ле (ИЗ.-Ы) будет равен:
100 000
^доп=Ю— j44oo « 10 — 7 = 3 мин.
439-
Если требование будет сформулировано с применением другого
рабочего показателя системы, то соответственно по-другому может
быть сформулирован критерий отказа.
13.3. НАДЕЖНОСТЬ АППАРАТУРЫ ПЕРЕДАЧИ
ДИСКРЕТНЫХ СООБЩЕНИЙ
Для обеспечения высокой надежности сложной системы, какой
является всякая система передачи дискретных сообщений, в пер-
вую очередь необходимо, чтобы каждый из входящих в нее элемен-
тов (оконечных устройств, каналов связи) имел максимально воз-
можную надежность. Рассмотрим вначале надежность аппаратуры.
Она определяется количеством и надежностью входящих в нее
схемных элементов. Примеры интенсивностей отказов А различных
схемных элементов приведены в табл. 13.1. Интенсивности отказов
ТАБЛИЦА 13 1
Наименование элемента • К-10s, 1/ч
Резистор постоянный непроволочный 0,01-4-0,4
Резистор переменный проволочный 0,2-=-1
Конденсатор бумажный или слюдяной 0,03-ь0,5
Диод полупроводниковый 0,034-0,5
Транзистор 0,04-4-1
Катушка индуктивности 0,07н-1
Реле 0,Зч-1
Переключатель 0,24-5
Пайка 0,0004-ь0,01
зависят от типа элемента, от его характеристик (например, вели-
чины сопротивления) и температуры окружающей среды.
Расчет надежности аппаратуры начинают с расчета наработки
на отказ отдельных функционально самостоятельных узлов (зада-
ющий генератор, фильтр, детектор и т. д.). Обычно отказ любого
схемного элемента приводит к отказу узла. Поэтому для расчета
надежности можно условно считать, что все элементы узла включе-
ны последовательно (рис. 13.2а). При этом не следует обращать
внимание на то, как элементы на самом деле соединены на прин-
ципиальной схеме узла. В случае последовательного соединения
интенсивности отказов складываются:
^обш = —~ + ^2 + Ч + •" + ^/1- (13.12)
* н общ
Для улучшения ремонтопригодности в современной аппаратуре
широко используется блочная конструкция. Она позволяет быстро
440
заменить отказавший съемный блок на запасной. При этом, во-пер-
вых, определять место повреждения можно с точностью лишь до
крупного узла, а не до схемного элемента. Во-вторых, избегают
пайки деталей. Все это резко уменьшает среднее время восстанов-
ления. При повреждении съем-
ных блоков оно составляет
обычно 7^ = 10-4-30 мин.
1надеж1ност1и:
|ПО1аледователыное соединение;
параллельное соединение
Рис. 13.2. Условные схемы для расче-
та
а)
б)
Если отказ любого рассмотренного узла приводит к отказу ап-
паратуры, то для расчета надежности можно условно считать,
что все узлы включены поледовательно, как на рис. 13.2а. В дан-
ном случае интенсивности отказов складываются по ф-ле (13.12),
а коэффициенты готовности перемножаются
КГобщ==Кв1Кг2Кгз..Кгп. (13.13)
Среднее время восстановления согласно ф-ле (13.3) можно найти
так?
гр ______ гр 1 Кг общ
1 в общ — * 1 н общ Т-
Аг общ
(13.14)
Наиболее действенным средством повышения надежности явля-
ется резервирование узлов. Если в аппаратуре используется прин-
цип резервирования, то для расчета надежности можно условно
считать, что резервирующие друг друга узлы включены параллель-
но (рис. 13.26). Если хотя бы один узел в этой схеме работоспосо-
бен, то отказа не происходит. В случае параллельного включения
интенсивности восстановления складываются:
Иобщ ~ Д Р-1 Иг I ~ • • • I ~ Нт> (13.15)
1 в общ
а величины, характеризующие неготовность, перемножаются:
1 - Кг общ = (1 - Кп) (1 - кг2)-(1 - Krm). (13.16)
Наработку на отказ согласно ф-ле (13.3) можно найти так:
^общ^о^-Зу^ . (13.17)
1 Аг общ
Надежность любой сложной условной схемы аппаратуры, со-
держащей ветви с последовательными и параллельными соедине-
ниями элементов или узлов, можно рассчитать, по очереди приме-
няя ф-лы (13.12) — (13.14) и (113.15) — (13:17).
441
Кроме рассмотренного расчетного метода, для определения надежности ап-
паратуры применяется также экспериментальный метод. Длительные испытания
аппаратуры или обобщение опыта ее эксплуатации позволяет определить пока-
затели ^надежности по ф-лам (13..1) и (13.2).
В процессе разработки аппаратуры рассчитывается надежность по вышепри-
веденной методике. Вначале расчеты производят по примерной структурной схе-
ме, причем характеристики надежности узлов берут по аналогии с существую-
щей аппаратурой. По мере разработки схем уточняются расчеты надежности
При этом выявляются узлы с низкой надежностью и принимаются меры к ее
повышению.
Экспериментальные испытания на надежность производятся для новых или
важных узлов еще на этапе разработки. Надежность всей аппаратуры обычно
измеряется при ее линейных испытаниях.
Кроме применения резервирования и блочной конструкции на-
дежность аппаратуры может быть повышена следующими мето-
дами:
— (путем использования облегченных режимов работы схемных
элементов (по мощности, напряжению, температуре);
— рациональным построением схем, позволяющим минимизи-
ровать число элементов и контактов переключателей;
— предварительной тренировкой аппаратуры для выявления
скрытых дефектов и преодоления участка I на рис. 13.1;
— путем обеспечения унификации и взаимозаменяемости бло-
ков.
13.4. НАДЕЖНОСТЬ КАНАЛОВ СВЯЗИ
Современные каналы связи, как правило, весьма сложны. Их
надежность определяется многими факторами:
— надежностью линейных сооружений (кабелей и т. п.);
— надежностью обслуживаемых и необслуживаемых проме-
жуточных усилительных пунктов;
— надежностью аппаратуры уплотнения оконечных станций;
— надежностью транзитных соединительных устройств (для не-
коммутируемых каналов) или коммутационных устройств (для
коммутируемых каналов);
— эксплуатационной надежностью, т. е. квалификацией техни-
ческого персонала и принятой системой технического обслужива-
ния (порядком извещения о неисправности, наличием резервных
средств, порядком устранения неисправностей и проведения про-
филактических работ, мерами предупреждения ошибочных дейст-
вий персонала и т. п.);
— количеством внутренних и внешних помех, по длительности
превышающих критерий отказа (от плохих контактов, взаимных
влияний каналов, влияния грозовых разрядов, линий электропере-
дачи, радиостанций, электрифицированных железных дорог
и т .п.).
Рассчитать эксплуатационную надежность и влияние помех на
надежность практически невозможно. Поэтому надежность кана-
лов связи определяют экспериментально — путем специальных ста-
тистических измерений и обобщения опыта эксплуатации.
Отказы в каналах связи принято делить на три группы: 1) дли-
тельные, 2) средней длительности и 3) кратковременные.
442
Длительные отказы, вызываются, в основном, повреждениями
кабеля и общих станционных устройств (например, источников
электропитания, генераторов несущих частот). Их длительность
колеблется от десятков минут до нескольких часов. Например,
среднее время восстановления для некоммутируемых каналов ка-
бельных магистралей Л, ~ 2-4-3 ч, причем оно не зависит от длины
канала, так как определяется системой технической эксплуатации
внутри участка магистрали. Интенсивность длительных отказов
Л=.14-2 отказа в год для тех же каналов длиной 1000 км, причем
она возрастает прямо пропорционально длине канала.
Отказы средней длительности вызываются в основном повреж-
дениями отдельных устройств станционного оборудования, перего-
раниями предохранителей и ошибочными действиями персона-
ла. Их длительность колеблется от нескольких секунд до 5-4-10 мин.
Зависимость среднего времени восстановления Тв от длины канала
кабельной магистрали показана на рис. 13.3а. Оно зависит от ко-
Рис 13 3. Примеры зависимости параметров отказов средней длительности от
длины канала:
а) среднее время восстановления; б) интенсивность отказов
личества переприемных участков, поскольку при отыскании места
повреждения сначала определяется тот переприемный участок, на
котором возник отказ. Интенсивность этих отказов тоже возрастает
с удлинением канала (рис. 13.36), причем также нелинейно, по-
скольку зависит от надежности оборудования переприемных стан-
ций.
Кратковременные отказы вызываются обычно помехами. В от-
личие от двух других групп отказов кратковременные отказы само-
восстанавливаются. Характеристики этих отказов (рис. 13.4) силь-
но зависят от допустимой длительности мешающих воздействий,
не приводящей к отказам, т. е. от критерия отказа, вычисленного
по ф-ле (13.11). Интенсивность кратковременных отказов линейно
зависит от длины канала.
Таким образом, канал связи можно представить в виде последо-
вательно соединенных трех элементов: источников длительных от-
443
казов, отказов средней длительности и кратковременных отказов.
Зная параметры надежности каждого из трех источников, можно
определить параметры канала связи по формулам последователь-
ного соединения (113.12) — (13.14).
Рис. 13.4. Примеры зависимости параметров кратковременных отказов от
критерия отказа:
а) среднее время восстановления; б) наработка на отказ
13.5. НАДЕЖНОСТЬ КАНАЛОВ И ТРАКТОВ ПЕРЕДАЧИ
ДИСКРЕТНЫХ СООБЩЕНИЙ
Надежность канала передачи данных (ПД) легко определяет-
ся, когда известны параметры надежности оконечной аппаратуры
передачи данных и канала связи. Простейшая схема канала ПД
состоит из двух оконечных аппаратур А и одного канала связи КС,
включенных последовательно (рис. 13.5). В этом случае для рас-
чета надежности используются ф-лы (13.12) — (13.14).
Рис. 13.5 Условная схема для расче-
та надежности каналов передачи
данных
Пример. Аппаратура передачи данных имеет Тн АПд =500 ч, Тв Апд =0,5 ч,
канал связи имеет 1нкс=2° ч> ^вкс ='12 м’и‘н- Определить показатели надеж-
ности канала передачи данных.
Определяем интенсивность отказов и коэффициенты готовности для аппара-
туры и канала связи по ф-лам 1(13.6) и |(13.>3):
11 11
ХАПП =--= 0,002 —; 7vKC = — = 0,050— ;
Апд 500 ч кс 20 - ч
500 20-60
^кс-^60+12 -°да-
444
По ф-ле (13.L2) находим общую интенсивность отказов и общую наработку
на отказ:
Хобщ = 0.002 + 0,050+ 0,002 = 0,054— ;
Т’нобщ = 1/0,054 = 18,5 ч.
По ф-ле (1i3.i1i3) находим общий коэффициент готовности:
/<гобщ = 0,999-0,990-0,999 = 0,988.
По ф-ле i(13.14) находим общее среднее время восстановления:
,1—0,988
Гв общ — 18,5 — 0,222 ч = 13,3 мин.
v, Уоо
Показатели надежности канала ПД в рассмотренном случае
практически совпадают с показателями канала связи, так как ка-
нал связи имеет значительно меньшую надежность по сравнению
с аппаратурой передачи данных.
Главным средством повышения надежности является резерви-
рование аппаратуры и каналов связи. Различают два вида резерви-
рования:
а) постоянное, при котором резервный элемент подключен к
основному в течение всего времени и находится в одинаковом с
ним режиме работы; этот вид резервирования см. на рис. 13.26;
б) резервирование замещением, при котором резервный эле-
мент подключается вместо основного при его отказе.
Второй вид, в свою очередь, разделяется на три группы по сте-
пени подготовленности резерва:
— ненаг|руженный («(холодный») резерв, когда резервный эле-
мент находится в выключенном состоянии;
— облегченный («теплый») резерв, когда резервный элемент
включен частично и работает в облегченном режиме;
— нагруженный («горячий») резерв, когда резервный элемент
полностью включен и нахо-
дится в режиме контроля.
Наибольшее повышение
параметров надежности дос-
тигается при «горячем» ре-
зервировании.
Если имеется группа од-
нородных элементов, воз-
можны два метода переклю-
чения резервных элементов
при резервировании замеще-
нием:
— закрепленный резерв
(рис. 13.6а), когда каждый
резервный элемент РЭ при-
креплен к определенному
.основному элементу ОЭ;
— скользящий резерв
Рис. 13.6. Резервирование замещением'
а) закрепленный резерв; б) скользящий ре-
зерв
445
(рис. 13.66), когда любой из группы резервных элементов РЭ мо-
жет заменять любой отказавший основной элемент ОЭ.
Наибольшее повышение показателей надежности обеспечивает
скользящее резервирование.
Все методы резервирования можно разделить еще на две груп-
пы:
— общее резервирование, при котором все составные элемен-
ты системы резервируются вместе;
— раздельное резервирование, при котором элементы резерви-
руются по частям.
Для случая резервирования замещением эти две группы иллю-
стрируются рис. 13.7.
Рис. 13.7. Резервирование замещением:
а) общее; б) раздельное
Общее резервирование является менее эффективным, чем раз-
дельное резервирование. Действительно, на рис. 13.7а отказ одного
из элементов в нижнем канале и одного из элементов в верхнем
канале приведет к отказу системы в целом. На рис. 13.76 к отказу
системы в целом приводят лишь одновременные отказы одноимен-
ных элементов, что случается реже.
Для организации резервирования замещением используются
переключающие устройства. Их значительно больше в схеме на
рис. 13.75. Если учесть надежность переключателей, то может ока-
заться, что раздельное резервирование не дает эффекта по сравне-
нию с общим резервированием или даже окажется хуже. Поэтому
на практике применяют общее резервирование, либо раздельное
резервирование с разделением лишь на небольшое число крупных
элементов, например, такое, которое изображено на рис. 13.76.
Переключатели могут переключаться вручную (при критериях
отказа порядка 1 мин и более) или автоматически (при жестких
критериях отказа порядка секунд или долей секунд). В любом слу-
чае необходимы контрольные устройства, обнаруживающие отказ.
Пример постоянного резервирования показан на рис. 13.8а. Два
канала ПД (или больше) объединяются групповыми устройствами
ГУ. В обоих каналах передается одна и та же информация. В свя-
зи с этим такую систему часто называют системой с параллельной
работой каналов ПД. В групповых устройствах принимаемая ин-
446
формация сравнивается по количеству ошибок; учитываются так-
же сигналы, поступающие из устройств, контролирующих каналы
связи и аппаратуру. В результате определяется более качествен-
ный канал ПД, из которого информация выводится к абоненту.
Совокупность каналов передачи данных, работающих совместно
с целью повышения надежности, образует тракт передачи данных
(см. рис. 13.8а). Каналы связи, используемые в одном тракте ПД,
Рис. 13 8. Постоянное .резер-
вирование:
а) система передачи данных
с параллельной работой ка-
налов ПД; б) условная схе-
ма для расчета надежности
желательно выбирать так, чтобы получить их максимальную неза-
висимость друг от друга. Желательно, чтобы они проходили через
разные системы вч уплотнения; еще лучше, если они будут прохо-
дить по разным географически разнесенным трассам. Это позволя-
ет уменьшить число совпадающих отказов.
Для расчета надежности тракта ПД с параллельной работой
можно составить условную схему, показанную на рис. 13.86. Каж-
дый канал ПД состоит из последовательно включенных двух аппа-
ратур А и канала связи КС. При определении параметров надеж-
ности отдельных каналов связи исключаются отказы, совпадающие
во всех каналах. Затем каналы ПД включаются параллельно. По-
следовательно с параллельным участком включаются два группо-
вых устройства ГУ и общая часть каналов связи ОЧКС, характе-
ризующая отказы, совпадающие во всех каналах связи. Расчет ве-
дется по формулам последовательного и параллельного включения
(13.12) — (13.17).
Пример. Оконечная аппаратура передачи данных имеет Тн АПд =500 ч,
^вАПД^О’Э ч, каналы связи одинаковые и имеют 7нКС =Й0 ч, ГвКс =0>2 ч=
= 12 мин без учета совпадающих отказов. Групповое устройство ГУ .имеет
ТнГу =il000 ч, ТвГу =0,5 ч = 30 мин, общая часть каналов связи имеет 7нОЧКС=
= 300 ч, ГвОЧКС=0,2 ч='Г2 мин.
Для одного канала передачи данных в предыдущем примере с такими же
исходными данными было получено Т№ КПд =!18,б ч, 7вКд[д = 13,3 мин, Кг^пд =
= 0,988.
Определяем интенсивность восстановления для одного канала передачи дан-
ных по ф-ле (13.7)
447
Для двух параллельно соединенных каналов передачи данных находим па-
раметры по ф-лам 1(13 15) — (13.17):
Нпар = 4,5-ф 4,5 = 9,0 — ;
7’впаР= ^ = о,н ч = 6’7 мии;
1 —7+пар = (1 — 0,988) (1 — 0,988) = 0,00014; Уг пар = 0,99986;
6,7 0,99986
77, пао == = 800 Ч.
ар 60 1 — 0,99986
Определяем интенсивности отказов и коэффициенты готовности для элемен-
тов тракта передачи данных:
1111
Кру= 1000 = 0’0010 ч ; ХОЧКС- 300 = 0,0033 ч ;
^=i=0’00125 4-;
1000 300
7Grv =------------= 0,9995; 7СПЦ„Г=-------------= 0,99933;
гГУ 1000 + 0,5 г очке 300 + 0,2
выше получено Кг пар — 0,99986;
X = 0,0010+0,0033+0,00125+0,0010 = 0,00655 — ;
11 АДч и
Т пп =------------= 153 ч;
нТПД 0,00655
Кг тпд = 0,9995 0,99933 0,99986 • 0,9995 = 0,9982;
1 —0,9982
Т„ тпп = 153 -----------= 0,276 ч = 16,5 мин.
вТПД 0.9982
При расчете надежности тракта ПД с резервированием замеще-
нием (см. рис. 13.7) следует различать два случая: 1) время заме-
ны на резерв меньше критерия отказа; 2) время замены на резерв
’больше ияритерия отказа. В первом случае можно считать, что ка-
налы передачи данных на рис. 13.7а или элементы на рис. 13.76
включены параллельно, и вести расчет по вышеприведенным фор-
мулам. Вместо надежности группового устройства следует учиты-
вать надежность переключающих устройств. Во втором случае
’переключение не избавляет от отказа. Поэтому наработка на от-
каз не изменится (надежностью переключателей в этом случае
обычно можно пренебречь):
Л,обЩ = 7\- (13.18)
Среднее время восстановления уменьшится до величины
Побщ = ТзамКг + П(1-Яг). (13.19)
где Тзам — время замены, необходимое для отыскания неисправ-
ного элемента, переключения и проверки исправности после пере-
ключения.
448
13.6. НАДЕЖНОСТЬ СЕТЕЙ ПЕРЕДАЧИ ДИСКРЕТНЫХ
СООБЩЕНИЙ
Сеть передачи дискретных сообщений (рис. 13.9), как всякая
сеть связи, представляет собой совокупность каналов и узлов.
Узел — это пункт сети, в котором электрические сигналы распре-
деляются по различным направлениям связи. Входы и выходы ка-
налов находятся на узлах, где могут осуществляться соединения
------BsmBti
О Узлы
о Оконечныл
пункты
Рис. 13.9. Пример сети передачи дискретных сообщений
каналов между собой (или переприем сообщений из канала в ка-
нал). Совокупность каналов, соединяющих два узла и не содержа-
щих промежуточных узлов, называют ветвью сети. В понятие
«сеть связи» включают часто также оконечные пункты, содержащие
абонентские установки. В этих пунктах каналы между собой не
соединяются.
Каждую ветвь обычно характеризуют емкостью (числом кана-
лов), длиной (или стоимостью) и надежностью (например, вероят-
ностью исправного действия всех каналов ветви). Каждый узел
обычно характеризуют емкостью (количеством возможных соеди-
нений каналов) и надежностью (например, вероятностью исправно-
го действия оборудования узла).
Сеть передачи дискретных сообщений имеет значительно более
сложную структуру по сравнению с рассмотренными выше канала-
ми и трактами передачи дискретных сообщений. Надежность сети
связи (коммутируемой или некоммутируемой) является сложным
понятием, которое сегодня еще недостаточно изучено. Опыт пока-
зывает, что к ней неприменимы методы оценки, используемые для
оценки надежности аппаратуры 'Связи и каналов связи. Действи-
тельно, при выходе из строя значительной части ее составных эле-
ментов (например, половины каналов в каждой ветви) сеть связи
в целом и ее отдельные звенья продолжают функционировать.
Удобных методов расчета надежности сети в настоящее время
еще нет.
Сложность оценки надежности сети связи можно объяснить, в
частности, большим разнообразием отказов. Например, между дву-
мя узлами может отказать один канал, или часть каналов, или
вся ветвь. На узле может отказать один коммутационный или пе-
15—60 449
реключающнй прибор, или группа приборов, или может полностью
нарушиться связь в отдельных направлениях, или полностью на-
рушиться связь во всех направлениях.
На сегодня нет четкой формулировки для критерия отказа сети
связи. Можно лишь в общем утверждать, что основное назначение
сети связи заключается в том, чтобы предоставлять абонентам воз-
можность обмениваться сообщениями друг с другом с некоторыми
заданными качественными показателями (достоверность, скорость
доставки, потери вызовов и т. п.). Следовательно, отказом сети
связи (Следует считать невыполнение этого основного назначения.
Сложное понятие надежности сети связи в настоящее время
рассматривают с трех сторон:
— надежность составных частей сети (каналов, ветвей, комму-
тационных приборов, узлов, оконечной абонентской аппаратуры и
т. д.);
— надежность сети связи в целом, т. е. надежность доставки
информации от отправителя к получателю; она определяется в
обычных условиях, когда отказы каналов и узлов случайно распре-
деляются по сети;
— живучесть сети связи, т. е. ее свойство сохранять работоспо-
собность с допустимым ухудшением при повреждениях большого
числа ветвей и узлов; она определяется для условий, когда отказы
(повреждения) каналов и узлов расположены планомерно, наибо-
лее тяжелым образом.
Начнем с рассмотрения надежности составных частей сети свя-
зи. В принципе, здесь могут быть применены способы повышения
надежности, описанные выше для каналов связи и аппаратуры ПД.
Новым элементом является оборудование узлов, представляющее
собой коммутационные станции в коммутируемой сети или пере-
ключающие (кроссировочные) устройства в некоммутируемой се-
ти. Методы повышения надежности коммутационных станций име-
ют некоторые особенности, поэтому рассмотрим их дополнительно.
Одна из особенностей — весьма высокие требования к надеж-
ности, поскольку выход из строя коммутационной станции лишает
связи сразу большое количество абонентов. Например, сегодня к
перспективным станциям задается такое требование: один отказ
всей станции длительностью не более 2 ч в течение 30 лет (т. е. ко-
эффициент готовности не менее М = 0,9999997).
Вторая особенность — тенденция к централизации управления
процессами коммутации и к использованию ЭВМ. Централизация
улучшает технико-экономические показатели станции, позволяет
предоставлять абонентам более широкий ряд услуг, но одновре-
менно затрудняет достижение высокой надежности.
Повышение надежности узла при использовании ЭВМ .может
достигаться разными способами. Часто применяется сдвоенная
ЭВМ (рис. 13.10а). При этом две ЭВМ работают одновременно
(параллельно). Обе машины одинаково обрабатывают все входя-
щие сообщения. Передачу исходящих сообщений ведет только од-
на (рабочая) машина, которая сообщает резервной машине о со-
450
стоявшейся передаче, после чего резервная машина стирает пере-
данное сообщение из очереди исходящего направления. Каждая
машина периодически сообщает о своем исправном состоянии в
устройство переключения на резерв. Если от рабочей машины не
поступает сигнал об исправности, то включается в работу резерв-
ная машина. Такой способ резервирования требует удвоения объ-
ема оборудования.
Рис. 13.10. Примеры коммутационных станций:
а) со сдвоенной ЭВМ; б) со строенной ЭВМ
В последнее время стала применяться строенная ЭВМ (рис.
13.106). Все входящие сообщения обрабатываются одновременно
тремя параллельно работающими машинами. Исходящие сообще-
ния передаются через мажоритарную схему, из которой каждый
бит выдается в результате голосования по принципу «два из трех».
При этом осуществляется исправление ошибок, возникающих в
ЭВМ. Одновременный выход из строя двух ЭВМ в таком коммута-
ционном узле не приводит к отказу узла.
Пример. Определить, можно ли перейти к односменному обслуживанию
ЭВМ, если вместо сдвоенной ЭВМ применить строенную ЭВМ. Одна машина
имеет 7’н=35О ч. При сдвоенной ЭВМ осуществляется круглосуточное (трехсмен-
ное) обслуживание, поэтому обеспечивается Тв а<4,5 ч. При строенной ЭВМ —
односменное обслуживание, поэтому время восстановления одной ЭВМ увели-
чится, например, до Тв «18 ч.
Вычислим наработку на отказ всего коммутационного узла для обоих слу-
чаев по формулам параллельной работы (13.15)— (13.17). Для сдвоенной ЭВМ
1 1 350
И = — = 0,667 —; Кг = —-------------- = 0,9957;
г 1,5 ч 350 + 1,5
Робщ = 2р. = 1,334 ; Тв общ = . __ =0,75 ч;
Ч 1,оа4
1 — Кг Общ = (1 — 0,9957)2 = 0.00432 = 0,0000184;
0 9999816
Кг общ = 1 0,0000184 = 0,9999816; Та сбщ = 0,75 т~—~т =40700«4.6 года.
0,0000184
15*
451
Для строенной ЭВМ
1 1 350
р. = — = 0,0556 —; Кг = —---------=0,951;
г 18 ч 350+18
1 1
Робщ — Зр, — 0,167 q ; Тв общ =Q 167 == 6 4;
1 —Кгобщ = (1 —0,951)3 = 0,0493 = 0,000117;
Лг общ = 1 — 0,000117 = 0,999883; Тн Общ = 6 ’qqqj? = 51 200 ч»5,8 года.
Рассмотренный пример показывает, что переход к строенной
ЭВМ позволил не только ввести односменное техническое обслужи-
вание вместо трехсменного, но и увеличить наработку на отказ.
Недостатком применения сдвоенной и строенной ЭВМ является
значительное удорожание коммутационной станции. Поэтому в
последнее время начинают использоваться более экономичные спо-
собы, возможные ,в ЭВМ, построенных по моду 'н-.ному принципу.
Модулем называется устройство, выполняюще е определенный на-
бор функций в полном объеме. Число однотипных модулей в ЭВМ
должно быть не меньше двух. При этом резервируется не ЭВМ в
целом, а отдельные модули. Резервирование модулей замещением
в таких ЭВМ, как правило, не применяется, поскольку потери вре-
мени на переключение нарушают работу ЭВМ. Внутри модулей
могут использоваться любые обычные способы повышения надеж-
ности, применяемые в аппаратуре.
В ЭВМ, построенных по модульному принципу, надежность мо-
жет быть повышена тремя способами:
— резервированием путем параллельной работы;
— модульным резервированием;
— программным резервированием.
При первом способе два (иногда три) одинаковых модуля па-
раллельно и синхронно решают одну и ту же задачу. Сравниваю-
щая схема контролирует их работу. При обнаружении расхожде-
ния автоматически определяется, какой из параллельно работаю-
щих модулей вышел из строя (путем контроля сигнала на чет-
ность, либо встроенными устройствами контроля, либо путем про-
пускания к;р.атко‘в|ре1МвН'Н'01го испытательного сообщения), исключа-
ют его из работы и начинают восстанавливать.
Второй способ (модульное резервирование) может быть приме-
нен там, где одинаковые модули одновременно обрабатывают раз-
ные задачи (например, для повышения емкости станции). При по-
вреждении одного такого блока оставшиеся блоки принимают на
себя все задачи, однако с некоторыми ограничениями. Такие огра-
ничения можно применить лишь к второстепенным задачам, кото-
рые терпят отсрочку (например, к подсчету трафика и т. д.).
Третий способ (программное резервирование) заключается в
том, что при повреждении модуля его функции принимает на себя
программа. При этом обычно снижается пропускная способность
коммутационной станции. Этот метод может применяться к моду-
лям, которые служат для разгрузки основной программы.
452
Способ резервирования выбирается в зависимости от типа мо-
дуля. Могут использоваться и три метода совместно. Пример
станции с применением сразу трех методов показан на рис. 13.11.
Входящие и исходящие каналы
Рис. 13.11. Пример коммутационной станции с
ЭВМ, построенной по модульному принципу
Перейдем к рассмотрению надежности сети связи в целом.
Н екоммутируемая сеть, т. е. сеть с фиксированными направле-
ниями связи между абонентами, состоит из рассмотренных выше
трактов и каналов передачи дискретных сообщений. Поэтому на-
дежность такой сети в целом характеризуется надежностью трак-
тов и каналов передачи дискретных сообщений. Основной метод
повышения надежности в такой сети — резервирование каналов
связи, проходящих по географически разнесенным магистралям.
Например, на рис. 13.12 показаны два тракта передачи данных, со-
держащих по два канала ПД (между абонентами 1—4 и между
абонентами 2—3). Остальные тракты передачи данных имеют по
одному каналу ПД.
Таким образом, для некоммутируемой сети достаточно исполь-
зовать методы расчета надежности, рассмотренные в предыдущих
параграфах.
Коммутируемая сеть, т. е. сеть с переменными направлениями
связи между абонентами, в своих узлах содержит новый сложный
элемент трактов и каналов передачи дискретных сообщений •—
453
коммутационное оборудование (для коммутации каналов или ком-
мутации сообщений). Основным качественным показателем такой
сети, как и рассмотренного выше канала передачи дискретных со-
общений, является пропускная способность. При этом должны вы-
полняться четыре условия?
1) вызывающий абонент обслуживается сетью в заданный срок
(устанавливается соединение в сети с коммутацией каналов, при-
Рис. 13.13. Пример коммутируе-
мой сети передачи дискретных со-
общений
нимается сообщение от абонента в сети с коммутацией . сообще-
ний) ;
2) сообщение доставлено полностью (в определенном объеме)
и в заданный срок;
3) сообщение доставлено заданному вызываемому абоненту;
4) сообщение доставлено с заданным качеством.
Особенность коммутируемых сетей состоит в том, что два пер-
вых условия могут нарушаться даже при исправности всех эле-
ментов сети. Так как коммутируемая сеть проектируется по зако-
нам теории массового обслуживания, то для удешевления сети пре-
дусматриваются определенные вероятности нарушения этих усло-
вий. Если нагрузка от других абонентов превысит расчетную, то
занятость каналов и оборудования увеличится, и вероятность на-
рушения также увеличится. Нарушение этих условий может про-
изойти также в том случае, если вызываемый абонент сам долго за-
нимает свою линию. Все эти ситуации называют перегрузкой сети.
Нарушения любого из четырех перечисленных условий из-за от-
казов отдельных элементов сети, или из-за неправильного их дей-
454
ствия, или из-за перегрузки сети будем относить к понятию надеж-
ность.
Коммутируемая сеть, как можно заметить, значительно отлича-
ется от некоммутируемой сети в смысле надежности. Во-первых,
принцип коммутации содержит в себе большие возможности ре-
зервирования, что облегчает достижение высокой надежности. Во-
вторых, в коммутируемой сети появляются новые причины отказов,
что затрудняет достижение высокой надежности. К этим новым
причинам можно отнести сложное коммутационное оборудование,
возможность доставки сообщения не тому абоненту, кому оно адре-
совано, и перегрузку сети. Отказы сети связи могут быть вызваны
следующими факторами:
— отказами отдельных участков канала передачи дискретных
сообщений (оконечной аппаратуры, каналов связи, коммутацион-
ных приборов);
— отказами групповых устройств коммутационных станций,
главным образом устройств управления процессами коммутации;
— ошибками при передаче сигналов управления между комму-
тационными станциями.
Уменьшение этих мешающих факторов повышает надежность
сети связи.
Наиболее важным способом повышения надежности является
связанная с коммутацией возможность выбора направления связи
между двумя заданными абонентами по нескольким независимым
путям. Современные коммутационные станции проектируются та-
ким образом, чтобы при отказе (или перегрузке) основного пути
(пути первого выбора) связь могла быть организована по обходно-
му пути (пути второго выбора) (рис. 13.13). Может быть преду-
смотрен второй обход (путь третьего выбора). Метод предоставле-
ния обходов — этот своеобразный метод
резервирования обеспечивается работой ус-
тройств управления процессами коммута-
ции.
На коммутируемых и некоммутируемых
сетях связи применяется еще одно средство
повышения надежности сети связи в це-
лом — система управления сетью. Чтобы
понять необходимость этой системы, рас-
смотрим для примера сеть, изображенную
на рис. 13.14. Сеть содержит пять узлов
А—Д. Емкости ветвей показаны цифрами.
Пусть в нормальных условиях ветвь Б—Д
используется для организации путей Б—Д (5 каналов), Б—Г (5 ка-
налов) и Б—В (10 каналов). При выходе из строя ветви Б—Д
прекратятся связи Б—Д, Б—Г, Б—В, а на участках Д—Г и Д—В
будет простаивать соответственно 5 и 10 каналов.
Можно произвести оперативное перераспределение каналов
между путями и организовать пути Б—А—Д, Б—А—Д—Г, Б—А—
—Д—В. При этом:
Рис. 13.14. К принципу
действия системы управ-
ления сетью
емкостью 20 каналов
455
— восстановятся связи Б—Д, Б—Г, Б—В, причем на этих и на
некоторых других связях уменьшится число каналов по сравнению
с нормальной ситуацией;
— число простаивающих каналов в сети уменьшится.
Таким образом, можно свести до минимума вредные последст-
вия отказа ветви или узла сети. Динамическое распределение пото-
ков с учетом всех изменений на сети и составляет основную задачу
системы управления сетью. Благодаря работе системы управления
сетью значительно повышается надежность сети.
Одно из необходимых условий работы системы управления
сетью — это разделение всей информации на категории по важно-
сти или срочности. Тогда лишь система управления сетью сможет
поддерживать в заданных пределах качество обслуживания более
важных сообщений за счет ограничения обслуживания менее важ-
ных сообщений.
Система управления сетью должна содержать:
— устройства контроля состояния каналов и узлов сети;
— устройства отображения состояния сети;
— устройства управления состоянием сети; в настоящее время
они представляют собой, как правило, пульты, управляемые вруч-
ную операторами, а в дальнейшем предполагается автоматизация
с использованием ЭВМ («программное управление»);
— устройства переключения каналов;
— средства передачи сигналов контроля и команд на переклю-
чение.
Система управления сетью работает по командам, вырабатыва-
|Р| Центр, пункт управления
I | Пункты управления
i Устр-Ва контроля и переключения
Рис. 13.15. Два типа систем управления сетью:
а) централизованный; б) децентрализованный
емым на узлах сети, и осуществляет резервирование. В этом ее от-
личие от системы управления процессами коммутации, которая
работает по командам абонентов и осуществляет коммутацию.
Различают два типа систем управления сетью (рис. 13.15):
— централизованную, в которой устройства отображения и уп-
456
равления сосредотачиваются на одном узле в центральном пункте
управления;
— децентрализованную, в которой управление состоянием сети
осуществляется из многих пунктов управления, при этом один из
пунктов назначается центральным.
Централизованная система управления сетью менее надежна,
поскольку выход из строя одного (центрального) пункта может
парализовать ее работу.
Так как сети связи являются весьма дорогими сооружениями,
то их использование должно быть возможно более эффективным.
Последнее обеспечивается системой управления сетью и достига-
ется выбором оптимальных направлений передачи информации.
В качестве критерия оптимальности применяют минимум затрат
на передачу сообщения или минимум длины пути сообщения от от-
правителя до получателя.
Рассмотрим, наконец, живучесть сети. Основным критерием для
оценки живучести является «связность» сети. Сеть связи называ-
ется связанной, если в ней может быть найден хотя бы один путь
(прямой или через транзитные пункты) для установления связи
между каждой парой действующих пунктов (узлов или оконечных
абонентских пунктов). Если же хотя бы один действующий або-
нентский пункт или узел не связан с остальной сетью, то связность
сети будет нарушена. Более тяжелым случаем нарушения связно-
сти сети является распадение сети на две части, не соединенные
друг с другом (или на несколько частей).
Сеть должна строиться таким образом, чтобы при выходе из
строя значительного количества узлов и ветвей сохранялась связ-
ность в оставшейся ее части и сохранялась возможность передачи
важнейшей информации, в том числе за счет прекращения переда-
чи менее важной информации.
Основной способ повышения живучести сети •— это правильный
выбор структуры (конфигурации) сети. Возможны три основных
вида структуры (рис. 13.16) :<
Рис. 13.16. Три основные структуры сетей:
а) полносвязанная сеть; б) древовидная сеть; в) сеть типа «сетка»
— полносвязанная сеть, в которой пункты соединяются по прин-
ципу «каждый с каждым»;
— древовидная сеть, в которой пункты соединяются между со-
бой минимумом ветвей без образования петель (замкнутых путей);
457
— сеть типа «сетка», в которой каждый пункт соединяется с
несколькими другими пунктами так, что образуются петли; этот
тип сети является промежуточным между двумя вышеуказанными
предельными типами.
Другие известные структуры являются частными случаями рас-
смотренных (рис. 13.17).
Рис. 13.17. Частные случаи структур сетей:
а) линейная; б) звездообразная; в) радиальная; г) радиально-узловая'
д) кольцевая (а, б, в, г — древовидные сети, д — сеть типа «сетка»)
Назовем порядком сети m минимальное число ветвей, одновре-
менный отказ которых нарушает связанность сети. Для полносвя-
занной сети m = N—1, где N — число пунктов сети (для рис. 13.16а,
например, Л7= 10, т = 9). Для древовидной сети т=1 |(см. рис.
13.166). Для сети на рис. 13.1 бе, в которой узлы имеют не менее
трех ветвей, т = 3. Для кольцевой сети, приведенной на рис. 3.176,
в которой каждый узел имеет по две ветви, т = 2. Число т слу-
жит мерой структурной избыточности сети и может поэтому слу-
жить приблизительной оценкой ее живучести.
Еще одним параметром для оценки живучести может служить
вероятность Р№ того, что рассматриваемый узел или абонентский
пункт связан с сетью. Пусть вероятность отказа одной ветви в сред-
нем равна рв. Тогда для сети первого порядка приблизительно
Рж=1-рв. (13.20)
Для сети второго порядка
Рж = 1-Р*. (13.21
Для сети третьего порядка
Рж-1-Р*. (13.22)
458
Рис. 13.18. Комбинированная структу-
ра реальной сети передачи дискрет-
ных сообщений
Сети первого порядка (древовидные сети) имеют наименьшую
живучесть, поэтому на практике их не используют. Самые живучие
сети — полносвязанные, однако они тоже не используются на прак-
тике, поскольку имеют большое число маломощных пучков кана-
лов, что сильно удорожает их. На
практике применяются комбини-
рованные структуры (рис. 13.18).
Наиболее важные узлы (узлы
высшего класса) соединяются по
принципу «каждый с каждым»,
узлы средних классов соединяют-
ся сеткой третьего порядка, полу-
ченной на основе радиально-узло-
вой схемы. Низовые абонентские
пункты соединяют с ближайшим
узлом, как правило, одной лини-
ей; важные абонентские пункты,
например, вычислительные цент-
ры, могут соединяться с сетью
двумя-тремя линиями.
Комбинированные структуры
позволяют достигнуть высокой
живучести седи и одновременно
выполнить важнейшее требова-
ние — минимум стоимости.
Кроме структуры на живучесть сети влияет также наличие рас-
смотренной выше системы управления сетью и ремонтно-восстано-
вительной службы с необходимыми запасными средствами.
13.7. ВЛИЯНИЕ СИСТЕМЫ ТЕХНИЧЕСКОГО
ОБСЛУЖИВАНИЯ НА НАДЕЖНОСТЬ ‘)
Системы передачи дискретных сообщений относятся к катего-
рии сложных восстанавливаемых систем, что предполагает органи-
зацию их технического обслуживания, в том числе поддержания
показателей надежности в процессе эксплуатации.
Техническое обслуживание можно разделить на два вида:
— плановое (профилактическое), проводимое регулярно с
целью предотвращения постепенных отказов и, следовательно, рос-
та интенсивности отказов, а также с целью выявления .и устранения
внезапных скрытых отказов, необнаруживаемых в процессе работы
системы;
— неплановое (оперативное), проводимое для восстановления
работоспособности системы после возникновения отказов, обнару-
живаемых в процессе ее работы.
Основными элементами технического обслуживания являются
выявление, локализация и устранение отказовых или предотказо-
вых состояний системы. Функции выявления и локализации отка-
*) В написании разд. 13.7 принимал участие Ю. А. Л е й б м а н.
459
зовых и предотказовых состояний выполняет контроль. В соответ-
ствии с этим различают:
— предупредительный контроль (прогнозирующий работоспо-
собность) ;
— контроль работоспособности;
— диагностический контроль.
Все виды контроля в той или иной мере способствуют повыше-
нию надежности. П редупредительный контроль при определенных
условиях способствует предотвращению отказов (например, позво-
ляет вовремя сменить стареющий элемент или подрегулировать
нестабильный показатель) и таким образом увеличивает наработ-
ку на отказ. Контроль работоспособности сокращает среднее вре-
мя восстановления за счет своевременного установления факта
отказа. Контроль работоспособности постоянно резервируемых
дублированных) элементов приводит, помимо выигрыша во вре-
мени восстановления, к увеличению наработки на отказ за счет
того, что уменьшение среднего времени восстановления уменьшает
вероятность совпадения отказов в дублированных элементах. Кон-
троль работоспособности элементов, - резервируемых замещением,
когда время замены меньше критерия отказа, также приводит к
увеличению наработки на отказ, поскольку такое резервирование
при некоторых допущениях приводится к схеме с постоянным ре-
зервированием.
Диагностический контроль позволяет быстро найти поврежден-
ный блок (локализовать отказ), что уменьшает среднее время вос-
становления.
В системах передачи дискретных сообщений обычно контроли-
руют следующие параметры: число ошибок (или запросов) за опре-
деленное время, краевые искажения посылок, уровень принимаемо-
го сигнала. Работоспособность отдельных блоков контролируется
по их основным рабочим характеристикам (у задающего генерато-
ра контролируется частота и уровень колебания и т. д.).
Контрольные устройства характеризуются верностью контроля,
выражаемой вероятностью безошибочной оценки состояния контро-
лируемого объекта. Достоверного контроля достигнуть не удается,
поскольку реальные контрольные устройства обладают ошибками
контроля двух видов — иногда регистрируют отказ при его отсут-
ствии (ложная тревога) и иногда не регистрируют появившийся
отказ (пропуск отказа). Верность контроля W в соответствии с ее
определением можно определить экспериментально с помощью
формулы
/ n m \
Г=1“‘т (SAZii+EA/2/’ (13,23)
' 1=1 j=i /
где Т — интервал измерения, выбираемый достаточно большим;
Д/н — продолжительность i-й ложной тревоги; Д^з — продолжи-
тельность /-го пропуска отказа; п, m — числа соответственно лож-
ных тревог и пропусков отказов за интервал измерения.
460
Обычно верность конпроля находиться в пределах 0,5—0,95.
Различают непрерывный и периодический контроль. Непрерыв-
ный контроль обеспечивает лучшую верность контроля. Периоди-
ческий контроль позволяет использовать одно контрольное устрой-
ство для контроля многих элементов, т. е. удешевляет систему.
Устройства, используемые вручную для периодического конт-
роля, называют измерительными приборами. На практике исполь-
зуют измеритель количества ошибок, измеритель краевых искаже-
ний, измеритель импульсных помех и кратковременных прерыва-
ний, измеритель уровня, осциллограф.
Измерительные приборы обычно делаются с количественной
оценкой, т. е. они позволяют получить величину измеряемого пара-
метра. Остальные контрольные устройства обычно делаются с до-
пусковой оценкой, т. е. дают возможность определить лишь соответ-
ствие или несоответствие измеряемого параметра установленным
допускам. Как правило, используется двоичный отсчет («норма» и
«авария»), иногда используется троичный отсчет («норма», «преду-
преждение», «авария»).
Контрольные устройства могут быть ручными, полуавтоматиче-
скими и автоматическими. Ручными считаются те устройства, кото-
рые более половины времени управляются вручную. Автоматичес-
кими считаются те устройства, операции в которых протекают в ос-
новном без вмешательства человека (управление оператором лишь
в течение 1—2% всего времени контроля). Полуавтоматические
устройства занимают промежуточное положение.
В настоящее время широко используются ручные устройства пе-
риодического контроля (измерительные приборы), автоматические
устройства непрерывного контроля, а также полуавтоматические
тестовые устройства для диагностического контроля. Начинают
применяться полуавтоматические и автоматические устройства пе-
риодического контроля.
Поскольку контроль не является самоцелью, то верность конт-
роля не может быть критерием его эффективности. По результатам
контроля предусматривается воздействие на контролируемый объ-
ект с целью поддержания его работоспособного состояния. Поэтому
критериями эффективности для совокупности средств обслужива-
ния в целом и контроля в частности могут быть надежностные
критерии. Удобным и достаточно общим показателем эффективно-
сти какого-либо средства обслуживания является соотношение ко-
эффициентов простоя или наработок на отказ обслуживаемой си-
стемы до и после введения оцениваемого средства.
Наряду с надежностными критериями пользуются стоимостны-
ми критериями эффективности средств обслуживания.
Одновременная оценка по надежностным и стоимостным крите-
риям позволяет оценивать, во что обходится повышение надежно-
сти системы при использовании в системе того или иного средства.
Такой подход является одним из путей оптимизации структур си-
стем передачи дискретных сообщений. Например, при проектиро-
461
вании системы может возникнуть вопрос, что целесообразнее для
повышения надежности/ повышать ли верность функционального
контроля и тем самым значительно усложнять средства контроля,
либо увеличить резервные средства основных устройств. Оценка
этих мероприятий по рекомендуемым критериям позволит ответить
на поставленный вопрос.
Рассмотрим функции других средств обслуживания.
Аппаратура отображения и управления предназначается для
визуального наблюдения за состоянием системы и ручного управ-
ления ею (переключения на резерв, проведения измерений, пере-
ключения режимов). Она представляет собой пульт с сигнальными
лампочками, ключами, кнопками и простейшими измерительными
приборами. Техник-оператор с такого пульта может обслуживать
большое количество трактов передачи дискретных сообщений.
Аппаратура служебной связи позволяет техническому персона-
лу вести переговоры с другими пунктами и со смежными служ-
бами.
Аппаратура телесигнализации предназначается для обмена слу-
жебными сигналами между противоположными станциями. Благо-
даря этому операторы имеют, на пультах сигналы о состоянии ап-
паратуры не только своей станции, но и противоположной. Это
позволяет операторам более уверенно управлять системой. С по-
мощью аппаратуры телесигнализации достигается одновремен-
ность переключения на обеих станциях при Использовании резер-
вирования по рис. 13.8а.
Аппаратура документирования предназначается для записи
служебных сигналов, характеризующих качество работы отдельных
узлов системы. Она освобождает техника-оператора от ведения
аппаратного журнала вручную и сохраняет сведения, помогающие
технику-оператору уточнять причину и характер повреждений и
улучшать порядок обслуживания системы.
Комплект запасного имущества и принадлежностей (ЗИП) и
ремонтные стенды предназначены для восстановления аппаратуры
путем замены вручную неисправного блока аппаратуры исправным
и последующего ремонта неисправного блока. Пример организации
замены поврежденных блоков показан на рис. 13.1'9.
Рис. 13.19. Пример организации
движения поврежденных бло-
ков
Все эти средства обеспечивают восстанавливаемость и доста-
точный уровень эксплуатационной надежности системы передачи
дискретных сообщений.
462
Пример структурной схемы службы передачи данных на круп-
ном вычислительном центре с учетом вышеописанных средств об-
служивания показан на рис. 13.20.
Большое значение имеет правильная организация технического
обслуживания: разграничение ответственности между службами,
порядок устранения неисправностей, порядок их учета, периодич-
ность и объем профилактических работ, наличие инструкций по по-
рядку устранения типовых неисправностей, обобщение опыта и
Рис. 13.20. Структура службы передачи данных
на крупном вычислительном центре
уточнение инструкций по обслуживанию и т. п. Важно постоянное
повышение квалификации технического персонала.
В качестве примера устройства периодического контроля рас-
смотрим пульт контроля и измерений ПКИ—ТТ, который применя-
ется в больших ЛАЦ тонального телеграфа. Этот пульт обслужи-
вает до 200 каналов ТТ и является рабочим местом техника, обслу-
живающего до 10 систем тонального телеграфа. С пульта можно
измерить:
— токи в местных цепях передачи и приема любого канала;
— преобладания телеграфных посылок (миллиамперметром);
— искажения телеграфных, посылок в цепях передачи и прие-
ма (измерителем искажений);
— уровень приема на входе системы ТТ.
Кроме того, при помощи пульта можно передать в измеряемый
канал испытательные сигналы 1 : 1, текст, нажатие плюса, нажа-
тие минуса.
463
Периодически подключаясь к разным каналам ТТ, техник-опе-
ратор имеет возможность своевременно заметить увеличение иска-
жений импульсов, пока еще не произошло отказа телеграфной свя-
зи, и принять меры к регулировке канала.
Измерение с пульта может быть произведено как без наруше-
ния действия связи (измерительные приборы подключаются парал-
лельно действующей связи), так и с нарушением связи (приборы
включаются «вразрез»). На пульте продублирована общестоечная
сигнализация обслуживаемых систем ТТ — о перегорании предо-
хранителей, пропадании батарей питания, пропадании уровней пе-
редачи и приема. С пульта можно производить служебные теле-
графные переговоры по служебным каналам любой из 10 обслу-
живаемых систем ТТ. Для этого в схеме пульта предусмотрен кон-
центратор на 10 телеграфных связей, в который включены 2—3 те-
леграфных аппарата. Имеются также два телефонных аппарата
для ведения служебных телефонных переговоров.
Применение пульта контроля и измерений каналов ТТ в круп-
ных ЛАЦ ТТ позволяет существенно повысить производительность
труда техника-оператора и увеличить надежность действия кана-
лов тонального телеграфа.
ГЛАВА 14
Основы факсимильной связи
14.1. ФАКСИМИЛЬНАЯ СВЯЗЬ КАК СРЕДСТВО ПЕРЕДАЧИ
НЕПОДВИЖНЫХ ИЗОБРАЖЕНИЙ
В соответствии с определением Международного консультатив-
ного комитета по телефонии и телеграфии (МККТТ) факсимиль-
ной1 связью называется передача неподвижных изображений (тек-
стовых документов, схем, чертежей, карт, фотографий и др.) по
электрическим каналам связи. При этом возможны два случая. В
первом случае при передаче графических материалов требуется
точное воспроизведение очертаний всех знаков, содержащихся в
оригинале, и лишь условное воспроизведение оттенков (полуто-
нов). Во втором случае необходимо также воспроизведение всех
оттенков (полутонов), содержащихся в оригинале. По принятой в
настоящее время терминологии оба случая включаются в общее
понятие — «факсимильная связь». Однако для второго случая пере-
дачи полутоновых изображений (фотографий) обычно использу-
ется старый термин «фототелеграфия».
Исходя из сказанного, в дальнейшем термин «факсимильная
аппаратура» употребляется для определения аппаратуры, предназ-
наченной как для передачи и приема штриховых, так и полутоно-
вых изображений. Ранее принятый в нашей литературе термин
«фототелеграфная аппаратура» будет применяться для аппаратов,
предназначенных для передачи только полутоновых изображений.
Сущность факсимильного метода передачи состоит в том, что
передаваемое изображение — оригинал, — расчленяется на от-
дельные элементарные площадки. Каждая из этих площадок спо-
собна в разной степени отражать падающий на нее свет.
Передача изображений по электрическим каналам связи осу-
ществляется путем преобразования световых излучений элементар-
ных площадок изображения в электрические сигналы. Усреднен-
ные яркости элементарных площадок поочередно, т. е. последова-
тельно во времени, преобразуются в электрические сигналы, про-
порциональные этим усредненным яркостям площадок. Процесс
*) Факсимиле ,(лат. facsimile — «делай подобное») — точное воспроизведение
рукописи, документа, чьего-либо почерка и т. п.; точное воспроизведение пере-
даваемого изображения на приеме.
465
последовательной во времени передачи яркостей элементарных
площадок изображения оригинала называется разверткой.
Элементарные площадки изображения образуются за счет пе-
ремещения по поверхности передаваемого изображения светового
пятна, создаваемого специальной светооптической системой. Это
световое пятно называется развертывающим элементом, а элемен-
тарная площадка, выделенная на поверхности оригинала, называ-
ется растровым элементом (или сокращенно растрэлементом). В
процессе развертки развертывающий элемент в определенном по-
рядке обегает всю площадь изображения оригинала.
В соответствии с яркостью выделяемого в данный момент раст-
рового элемента на выходе передающего аппарата создается элек-
трический сигнал, который передается через канал связи на при-
емный аппарат. В приемном аппарате электрические импульсы
вновь преобразуются в световые или электрические сигналы, спо-
собные вызвать о'к.рашив.аиие элементарных площадок на поверх-
ности носителя записи, т. е. производится запись изображения, яв-
ляющегося копией оригинала (факсимиле). Копия изображения
получается обычно с помощью светового пятна, перемещающегося
по поверхности приемного бланка, в качестве которого использу-
ется фотобумага или фотопленка *.
Световое пятно, перемещающееся по поверхности приемного
бланка, называется воспроизводящим элементом. Перемещение
воспроизводящего элемента производится по тому же закону, что
и движение развертывающего элемента на передаче, синхронно и
синфазно с последним. Происходит как бы последовательное копи-
рование всех элементов оригинала.
Развертывающий и воспроизводящий элементы при своем дви-
жении от одного края изображения к другому пробегают узкую по-
лосу изображения, называемую строкой. Совокупность строк, по-
крывающих изображение, образует растр.
Для подного подобия копии оригиналу необходимо, чтобы ярко-
сти воспроизведенных элементарных площадок соответствовали
яркостям элементарных площадок оригинала. Практически иде-
ально точная передача яркостей не нужна, поскольку копия вос-
принимается глазом человека, а глаз не может различать очень
мелкие детали и достаточно малые отличия яркости разных участ-
ков поля изображения. Поэтому на приемной станции достаточно
получить копию, которая при сравнении с оригиналом создавала
бы одинаковое зрительное впечатление. Удовлетворительное ка-
чество копии можно получить, передавая конечное число элемен-
тарных площадок и конечное число полутоновых градаций, т. е.
переходных градаций от самого черного до белого тона. Если раз-
меры передаваемых площадок и различия между последовательно
передаваемыми уровнями яркостей не превышают некоторых пре-
дельных для глаза значений, зрительное восприятие копии будет
подобно зрительному восприятию оригинала.
*) В современных факсимильных аппаратах используются и другие методы
записи изображения на приеме, они будут рассмотрены в § ,14.6.
466
По сравнению с кодовыми способами передачи информации
факсимильная передача имеет следующие преимущества:
— полная автоматизация процесса передачи; отпадает необхо-
димость в передаче каждого знака сообщения в отдельности;
— универсальность формы сообщения; имеется возможность
передавать любой графический материал: печатный текст, рукопи-
си (на любом языке, с использованием любого алфавита), черте-
жи и т. д.;
— исключаются ошибки в передаче по вине оператора, пере-
дающего корреспонденцию;
— большая помехозащищенность передачи; искажение одной
или нескольких элементарных площадок не вызывает существен-
ного искажения копии.
Наряду с этим факсимильному методу присущи недостатки:
— значительное снижение (по сравнению с кодовыми метода-
ми передачи) пропускной способности канала связи;
— отсутствие у большинства факсимильных аппаратов возмож-
ности контроля изображения в процессе приема.
14.2. СТРУКТУРНАЯ СХЕМА ФАКСИМИЛЬНОЙ СВЯЗИ
Структурная схема факсимильной связи показана на рис. 14.1.
Рассмотрим работу этой схемы.
Электрический тракт раксимиль-
Дуализирующее устр-во ной системы Синтезирующее устр-Во
: Барабан
| с оригиналом-
! передатчика ।
-------А I ’ ' luuy/l'i~
\наретка
мриВод, синхрония. и
сразир устр-ва
Электр, тракт
приемника
I; МоЦ™-
\нал. „
т-v-i- t> ~
1\свя-
J зи
Демоду-
лятор
!г
Устр-во ин6ерсии\
разы !
Барабан I
с копией ;
“1 xfilJ
ПриВод, синхрония. и
сразир устр-ва
2
J
Рис. 14.1. Структурная схема факсимильной связи:
/—передающий осветитель; 2 — оптическая система передатчика;
электрический преобразователь; 5 — осветитель приемника; 6 —оптическая система приемни-
ка; 7 — диафрв1гма
3 — диафрагма; 4 — фото-
В современных факсимильных аппаратах развертывающий эле-
мент имеет большую яркость и сравнительно небольшой диаметр
(0,14-0,3 мм). Он образуется с помощью специальной светоопти-
ческой системы, которая состоит из источника света, диафрагмы и
467
оптического устройства, формирующих развертывающий элемент
заданной формы и размеров. Для осуществления развертки всего
передаваемого изображения развертывающий элемент перемеща-
ется по поверхности оригинала с помощью развертывающего устрой-
ства. В /простейшем случае развертывающее устройство представ-
ляет собой вращающийся барабан, на котором закреплен ориги
нал. Вдоль барабана, параллельно его оси, движется каретка, на
которой смонтирована светооптическая система и фотоэлектриче-
ский преобразователь (например, фотоэлемент)1).
Часть светового потока развертывающего элемента, падающего
на элементарную площадку оригинала, отражается от растрового
элемента (элементарной площадки изображения). Величина отра-
женного потока лучистой энергии зависит от яркости растр-элемен-
та оригинала изображения; чем светлее растр-элемент, тем боль-
шая часть светового потока отражается от поверхности оригинала
и меньшая его часть поглощается поверхностью. Отраженный све-
товой поток попадает на светочувствительную поверхность фото-
элемента, на выходе которого образуется соответствующий этому
потоку электрический сигнал.
Величина электрического тока в цепи фотоэлемента зависит от
того, находится ли развертывающий элемент (световое пятно) на
светлом или темном элементе изображения. Чем светлее передава-
емый элемент рисунка, тем больше ток в цепи фотоэлемента.
Для передачи всего изображения необходимо, чтобы разверты-
вающий элемент осветил последовательно все точки оригинала.
Тогда передаваемые в линию электрические сигналы будут соот-
ветствовать каждому элементу изображения. Это условие выпол-
няется путем совместного вращательного движения барабана с
оригиналом и поступательного движения каретки со светооптичес-
кой системой и фотоэлементом. За каждый оборот барабана ка-
ретка перемещается на расстояние, равное диаметру светового
пятна. В результате согласованного движения барабана и каретки
развертывающий элемент описывает на поверхности барабана вин-
товую линию, пробегая по всем элементам рисунка.
Процесс выделения элементарных площадок на оригинале, раз-
вертка и преобразование яркостей элементарных площадок в соот-
ветствующие им электрические сигналы в совокупности называют-
ся электрооптическим анализом изображений [67, 66].
Светооптическая система, при помощи которой образуется све-
товой развертывающий элемент, развертывающее устройство, опре-
деляющее и осуществляющее последовательную передачу отдель-
ных элементов изображения, фотоэлектрический преобразователь,
преобразующий яркости элементарных площадок изображения в
электрические сигналы, составляют анализирующее устройство пе-
редающего факсимильного аппарата.
*) В качестве фотоэлектрических преобразователей в факсимильной аппара-
туре используются также фотоэлектронные умножители, фотосопротивления, фо-
тодиоды. Об их применении см. подробнее в § /14.3.
468
Электрические сигналы, образующиеся на выходе фотоэлемен-
та анализирующего устройства, перед передачей в канал связи
необходимо усилить и преобразовать в вид, удобный для передачи
по стандартному каналу. Эти преобразования осуществляются с
помощью модуляторов и усилителей, которые образуют электри-
ческий тракт передатчика факсимильного аппарата, включающий
в себя все элементы электрического тракта от нагрузки фотоэлек-
трического преобразователя (фотоэлемента) до выходных клемм
передатчика.
Электрический сигнал с выхода передатчика факсимильного
аппарата поступает в канал связи и передается на приемную сто-
рону. Канал связи входит в состав электрического тракта факси-
мильной системы (см. рис. 14.1).
После прохождения по каналу связи принятый сигнал должен
быть усилен и преобразован в первоначальный вид, т. е. необхо-
димо получить сигнал, полностью аналогичный тому, какой был
на нагрузке фотоэлектрического преобразователя на передаче.
Эти преобразования осуществляются с помощью усилителей и де-
модуляторов, которые образуют электрический тракт приемника
факсимильного аппарата. В состав электрического тракта прием-
ника входит также устройство инверсии фазы сигнала, назначе-
ние которого будет пояснено ниже.
Таким образом, электрический тракт приемной части факси-
мильного аппарата включает в себя все устройства от входных
клемм приемника до мощного выходного каскада, работающего
на записывающее устройство.
'Существует несколько способов записи изображений. Они бу-
дут рассмотрены в § 14.6. Здесь мы рассмотрим наиболее распро-
страненный способ — фотографический.
Усиленный и продетектированный на приемной станции сигнал
питает осветительную лампу, световой поток которой изменяется
в соответствии с принимаемым электрическим сигналом. Лампа
смонтирована на каретке, которая в процессе приема перемеща-
ется вдоль вращающегося барабана с закрепленной на нем свето-
чувствительной бумагой.
Свет от лампы при помощи оптической системы фокусируется
на поверхности барабана в световое пятно (воспроизводящий
элемент), имеющее такие же размеры, как и развертывающий
элемент на передающем барабане. Барабан и осветительная си-
стема помещены в светонепроницаемую камеру.
Вращение барабанов и движение кареток приемной и переда-
ющей станций должно быть синхронно и синфазно. Светлый эле-
мент передаваемого изображения создает больший ток в цепи
фотоэлемента и, следовательно, более яркое свечение лампы при-
емника, поэтому соответствующая точка на светочувствительной
бумаге будет сильно засвечена и после химической обработки ока-
жется черной. Таким образом, на приеме получают негативное
изображение.
46»
Для получения позитивного изображения необходимо в прием-
нике иметь устройство, инвертирующее фазу входящих сигналов.
'Процесс получения на приеме изображения из отдельных эле-
ментов путем поочередного во времени окрашивания достаточно
малых площадок, благодаря временной последовательности элек-
трических сигналов, называется электрооптическим синтезом изо-
бражения [67, 66]. Синтез изображения осуществляется синтези-
рующим устройством приемного факсимильного аппарата, кото-
рое состоит из развертывающего механизма, определяющего по-
следовательность приема отдельных элементов передаваемого изо-
бражения и записывающего устройства, регистрирующего отдель-
ные элементарные площадки для образования копии оригинала.
В случае записи на светочувствительные материалы устройство
записи содержит также светооптическую систему.
Выше было отмечено, что для правильного воспроизведения
изображения на приеме необходимо, чтобы устройства выделения
элементарных площадок изображения на оригинале и устройства
записи этих площадок на копии двигались с одинаковой скоро-
стью (синхронность движения) и начало развертки у них совпа-
дало (синфазность движения). Для обеспечения этих условий в
факсимильных аппаратах имеются специальные устройства син-
хронизации и фазирования, которые могут быть построены по
принципу автономной, принудительной или сетевой синхрониза-
ции. Подробно устройства синхронизации и фазирования рассмат-
риваются в § 14.7. Здесь же отметим, что синхронность скоростей
разверток является основным условием совместной работы пере-
дающей и приемной факсимильной аппаратуры. Незначительное
расхождение скоростей вызывает удлинение или укорочение строк
развертки, а следовательно, перекос изображения на копии. От-
сутствие же синфазности делает невозможным воссоздание копии
изображения на приеме.
14.3. АНАЛИЗИРУЮЩИЕ УСТРОЙСТВА
Анализирующие устройства факсимильных аппаратов состоят
из развертывающего устройства; светооптической системы; фото-
электрического преобразователя. Рассмотрим более подробно ус-
тройство и работу каждого из перечисленных узлов.
РАЗВЕРТЫВАЮЩИЕ УСТРОЙСТВА
По конструкции развертывающие устройства подразделяются
на барабанные и плоскостные. Принцип действия барабанной раз-
вертки был пояснен в § 14.2. На рис. 14.2 показаны два возмож-
ных варианта реализации барабанного развертывающего устрой-
ства.
В устройстве, показанном на рис. 14.2а, изображение на эле-
ментарные площадки разлагается за счет вращательного движе-
ния барабана, на котором закреплен оригинал передаваемого изо-
470
бражения, и поступательного движения светового развертываю-
щего элемента, образуемого светооптической системой. Последняя-
смонтирована на специальной каретке, которая с помощью ходо-
вого винта перемещается вдоль образующей барабана.
В устройстве, показанном на ipinc. 14.26, разложение изобра-
Рис. 14.2. Барабанное развертывающее устройство:
а) с кареткой, перемещающейся вдоль барабана
1 — двигатель привода, 2 барабан с оригиналом изображения, 3—каретка со свето-
оптической системой и фотоэлектронным преобразователем, 4 — ходовой винт, переме-
щающий каретку вдоль барабана, 5 —редуктор;
б) с неподвижной кареткой и вращательно-поступательным движением
барабана
/ — двигатель привода, 2 — барабан с оригиналом, 3 — редуктор, 4 — натравляющая
труба, обеспечивающая вращательное движение барабана, 5 —ходовой винт, обеспе-
чивающий продольное перемещение барабана, 6 — неподвижная каретка со светоопти-
ческой системой и фотоэлектронным преобразователем
жения на элементарные площадки производится за счет враща-
тельного и поступательного движений барабана, которые осуще-
ствляются с помощью ходового винта и механизма вращения ба-
рабана (на рисунке не показан). Каретка со светооптической си-
стемой и, следовательно развертывающий элемент в этом случае
остаются неподвижными.
Необходимо, однако, заметить, что в обоих случаях устройства
развертки обеспечивают относительное последовательное переме-
щение светового пятна в горизонтальном направлении относи-
тельно оригинала изображения {строчная развертка, обеспечива-
ется вращением барабана) и по вертикали {кадровая развертка,
обеспечивается перемещением каретки со светооптич-еской систе-
мой или перемещением в горизонтальном направлении вращаю-
щегося барабана). Линия развертки в обоих случаях представля-
ет собой винтообразную кривую. За время передачи одного блан-
ка по всей длине барабана происходит развертка одного кадра.
Основным достоинством барабанной развертки является ее-
простота. К недостаткам относятся: сложность крепления ориги-
нала, отсутствие возможности автоматизации процесса подготов-
ки оригинала для передачи, невозможность осуществления систе-
мы беспрерывной (конвейерной) передачи, деформация оригина-
ла при его закреплении на барабане.
Отмеченные недостатки отсутствуют при плоскостной разверт-
ке, которая нашла большое распространение в современных фак-
симильных аппаратах.
471.
В аппаратах с плоскостной разверткой развертка по строкам
чаще всего производится с помощью качающегося зеркала [65, 67],
а развертка по кадрам — за счет перемещения оригинала в на-
правлении, перпендикулярном строке. Рассмотрим принцип рабо-
ты такого устройства, схематически показанного на рис. 14.3а.
Рис. 14.36 поясняет принцип образования строки развертки.
Рис. 14.3. Плоскостная развертка с помощью качающегося зер-
кала:
а) принцип развертки:
1 — осветитель, 2 — качающееся зеркало, 3 — ось зеркала, 4 — сферическое
зеркало, 5 — оригинал изображения, 6 — протягивающее устройство, 7—
фотоэлектрический преобразователь;
б) принцип образования строки развертки:
/ — осветитель, 2— качающееся зеркало, 3— сферическое зеркало, 4 —
оригинал изображения
Светящее тело осветителя 1 проецируется на поверхность ка-
чающегося зеркала 2, которое качается на своей оси 3 с помощью
кулачкового механизма — эксцентрика. Радиус кривизны послед-
него относительно неподвижного центра нарастает пропорцио-
нально углу его поворота (кулачковый механизм на рисунке не
показан). Специальная конфигурация кулачка обеспечивает ли-
нейность рабочего хода луча и быстрое возвращение луча к нача-
лу строки. Время обратного хода луча составляет примерно 5% от
времени передачи одной строки. Отраженный от качающегося
зеркала луч попадает на сферическое зеркало 4, которое проеци-
рует этот луч в виде развертывающего элемента (светового пят-
на) на оригинал изображения 5. При отклонении качающегося
зеркала от одного крайнего положения до другого крайнего поло-
жения происходит перемещение светового пятна от одного края
изображения оригинала до другого края. Образуется строка раз-
вертки.
За время передачи каждой строки оригинал изображения с по-
мощью протягивающего механизма 6 перемещается на одно и то
же расстояние, равное расстоянию между центрами двух строк.
Таким образом осуществляется кадровая развертка.
472
Достоинство плоскостной развертки с качающимся зерка-
лом— ее простота, надежность в работе. Недостатки — сложность,
получения необходимой линейности развертки вдоль строки и ог-
раничение скорости развертки из-за механических ударов, возни-
кающих в кулачковом механизме в моменты перехода с прямого
хода луча на обратный.
ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ РАЗВЕРТЫВАЮЩИХ
УСТРОЙСТВ
Развертывающие устройства характеризуются рядом основных
параметров, определяющих качество воспроизведения копии изо-
бражения оригинала.
Качество воспроизведения изображений в значительной степе-
ни зависит от формы и размеров развертывающего элемента
(светового пятна). Конечные размеры пятна приводят к тому, что
яркости отдельных точек изображения заменяются интегральной
яркостью площади изображения, покрываемого пятном. Чем мень-
ше размеры пятна, тем выше качество (четкость) изображения.
Однако слишком малые размеры пятна не оправданы, так как
это увеличит время передачи и, кроме того, в передаваемом изоб-
ражении очень мало небольших элементов, различающихся по
яркости. Так, например, для рукописного текста минимальная
ширина штрихов букв лежит в пределах 0,24-0,3 мм. Машинопис-
ный текст содержит штрихи шириной до 0,15 мм, а газетный
текст — до 0,1 мм. Поэтому нецелесообразно выбирать размеры
пятна меньше минимально возможной ширины передаваемого'
штриха. Даже если это и сделать, Черное Бвлое Черное
то наступит предел разрешаю-
щей способности глаза человека,
который не различает два штри-
ха, отстоящие друг от друга на
расстоянии менее 0,054-0,07 мм
при рассмотрении с расстояния
250 мм, что соответствует угло-
вым размерам 14-1,5'.
В факсимильной связи исполь-
зуются две конфигурации пятна:
прямоугольная и круглая, кото-
рые соответствуют отверстию в
диафрагме светооптического уст-
ройства, образующего растровый
g. Путь
пятна
S Путь
пятна
Рис. 14.4. Установление фронта фото-
тока при различной форме светового
пятна
элемент (рис. 14.4).
Более предпочтительной является прямоугольная форма пят-
на. Это связано с тем, что при одинаковой площади пятен и ра-
венстве ap = dp, а следовательно, и равенстве отраженных свето-
вых потоков ширина прямоугольного пятна может быть в 4/л«
« 1,27 раз меньше диаметра круглого пятна.
При набегании пятна на штрих изображения (рис. 14.4) отра-
жаемый поток света при прямоугольном пятне изменяется быст-
47S
рее. Это обеспечивает большую крутизну установления тока в фо-
тоэлементе, а . следовательно, меньшую размытость границ изо-
бражения с разными оптическими плотностями (степенями почер-
нения) .
Выбор ар или диаметра dv, развертывающего элемента тесно
связан с шагом развертки б. Шагом развертки (подачей) называ-
ется расстояние между осями двух соседних строк изображения.
Выбор шага развертки также определяется характером передава-
емого изображения. Чем меньше размер деталей в передаваемом
изображении, тем меньше должен быть шаг развертки. Обычно
в факсимильной аппаратуре предусматривается возможность
иметь два шага развертки. Высота bv или диаметр dp растрово-
го элемента обычно берутся равными шагу развертки или немного
меньше его. При значительно меньших размерах растрового эле-
мента между строками остаются неосвещенные полосы изображе-
ния, вследствие чего на копии может оказаться заметной для гла-
за строчная структура изображения.
Плотность развертки (четкость изображения) определяется
числом строк разложения, приходящихся на 1 мм высоты рисун-
ка. Эта величина связана с шагом развертки следующим обра-
зом:
и =1/6. (14.1)
Обычно передача осуществляется с числом строк на милли-
метр не более 5. Лишь в случаях необходимости получения высо-
кокачественных полутоновых изображений четкость увеличивают
до 6—7 строк/мм.
Длина строки L определяется расстоянием между краями изо-
бражения. Длина строки берется несколько большей, чем величи-
на поперечного размера документа, подлежащего передаче.
Скорость развертки определяется числом строк развертки, пе-
редаваемых в минуту (строк1мин).
Направление развертки (рис. 14.5) определяет направление пе-
ремещения светового пятна (развертывающего элемента). Неза-
висимо от типа раз’вертки в факсимильной аппаратуре может быть
применена правая развертка (справа налево, сверху вниз) или
левая развертка (слева направо, сверху вниз).
Пробоя ЛеВая
Рис. 14.5. Направление развертки в аппаратах с ба-
рабанной и плоскостной развертками
474
Важным параметром фототелеграфного аппарата является ин-
декс взаимодействия, или модуль взаимодействия М, который нор-
мирует отношение длины строки к шагу развертки, умноженному
на л:
(14.2)
л о
При барабанной развертке длина строки L соответствует длине
окружности барабана nD, поэтому индекс взаимодействия
-М=4- (14.3)
о
Рекомендациями МК.К.ТТ установлен модуль взаимодействия, равный 352.
Допускается использование модуля, равного 264. В отечественных фототелеграф-
ных аппаратах используют модули 350 и 264.
При совместной работе факсимильных аппаратов с равными индексами взаи-
модействия, но при разных длинах строк имеет место уменьшение или увеличение
изображения на приеме при сохранении пропорциональности геометрических раз-
меров по длине и ширине оригинала. Отсутствие равенства индексов взаимодей-
ствия приводит к нарушению относительных геометрических размеров копии по
направлению строчной или кадровой развертки. Если Л4ПрД>Л1ПрМ, то изобра-
жение на приеме будет удлинено по направлению кадровой развертки. Если
Л4Прд<ЛГпрм, то изображение на приеме будет сжато по направлению кадровой,
развертки.
Основные параметры развертывающих устройств отечественных
факсимильных аппаратов различных типов приведены в табл. 14.1.
СВЕТООПТИЧЕСКИЕ СИСТЕМЫ
Светооптическая система определяет форму и размеры растро-
вого элемента и в значительной степени влияет на качество переда-
чи изображения. В состав ее входят элементы оптических устройств
(линзы, объективы, зеркала, призмы, принцип действия и устройст-
во которых рассматриваются в курсе физики) и осветитель. Воз-
можны две разновидности оптических устройств: с выделением эле-
ментарной площадки (растрэлемента) непосредственно на переда-
ваемом объекте и с выделением растрэлемента на оптическом изо-
бражении оригинала.
Схема оптических устройств для первого случая изображена на
рис. 14.6. При помощи конденсо'рной линзы 1 изображение нити
накала осветителя 2 отображается на диафрагме 3, в отверстии ко-
Рис. 14.6. Светооптическая система с об-
разованием растрового элемента <на ори-
гинале:
1 — конденсорная линза; 2 — осветитель; 3 —
диафрагма; 4, 6— линзы, 5 —призма
475
ТАБЛИЦА 14.1
Тип аппарата Назначение Тип развертки Максимальный раз- мер изображения, мм
«Нева» (ФДБ) Магистральный аппарат для передачи полутоновых и штриховых изображений Барабанная (светоопти- ческая система смещается относительно барабана) 220x300
«Ладога» (ФАК-Д) Передача гидрометео- карт. Передача только штриховых изображений Плоскостная (по строкам перемещением развертыва- ющего элемента качаю- щимся зеркалом, по кад- рам—перемещением ориги- нала) Ширина 480, длина не огра- ничена
«Призма» 4ФТАП-ЗД) Организация внутрипро- изводственной и внутри- учрежденческой связи. Пе- редача только штриховых изображений Плоскостная (по стро- кам—перемещением раз- вертывающего элемента ка- чающимся зеркалом, по кадрам— перемещением оригинала) Ширина 120, длина не огра- ничена
«Арагви» Организация факсимиль- рой связи по физическим цепям, линиям АТС и т. п. Передача только штрихо- вых изображений Барабанная (светоопти- ческая система неподвиж- на. Барабан смещается от- носительно светооптичес- кой системы) 220x135
•ФТА-ПМ Организация внутрипро- изводственной межучреж- денческой связи. Передала только штриховых изобра- жений Плоскостная (по строкам перемещением развертыва- ющего элемента качаю- щимся зеркалом, по кад- рам— перемещением ориги- нала) Ширина 220, длина не огра- ничена
торой концентрируется световой поток. Между линзами 1 и 4, со-
ставляющими единый изображающий объектив, образуется парал-
лельный пучок лучей, 'направление которого изменяется на 90°
призмой 5. Призма и линза 6 размещены на каретке и перемеща-
ются вдоль оси барабана. Осветитель 2, конденсорная линза 1, диа-
фрагма 3 и линза 4 остаются неподвижными. Линза 6 фокусирует
световое пятно на изображении. Отраженный от изображения све-
товой поток попадает на фотоэлемент либо непосредственно, либо
через систему линз, зеркал и т. д. (на рис. 14.6 не показаны).
Светооптические устройства с выделением растрового элемента
на оптическом изображении (рис. 14.7) отличаются тем, что изо-
бражающий объектив 1 и диафрагма 2~ располагаются на пути лу-
ча, отраженного от изображения. Короткофокусный объектив 1
дает изображение некоторой части освещенной поверхности ориги-
нала, а диафрагма 2 выделяет элемент изображения, подлежащий
передаче.
В современных отечественных фототелеграфных аппаратах (на-
пример, «Нева» и «ФТА-ПМ») используются светооптические уст-
476
Полезная длина строки, мм Направле- ние развертки Скорость развертки строк/мин Шаг развертки мм Форма разверты- вающего элемента Размеры растр- элемента мм Модуль (индекс взаимодей- ствия) Время передачи мин
200 Правое 60,120 (120,250) 0,2; 0,265 Прямо- угольная 0,15x0.2 350; 264 25; 12,5 (12,5; 6)
465 Левое 60, 90, 120 0,265 0,53 » 0,15X0,2 576; 288 11-4-43,4 (480 х Хб90 мм)
110 Левое 300 0,25 » 0,15x0,2 156 1,3 (120х X 100 мм)
200 Правое 120 0,2 » 0,15x0,2 350 6
200 Правое 120(250) 0,2 » 0,15x0,2 350 12,5 (220 х Х300 мм)
Рис 14.7. Светооптаческая система с выделением растрового элемента на опти-
ческом изображении оригинала
/—короткофокусный объектив, 2 — диафрагма, 3 — линза; 4 — конденсорная линза, 5 —
осветитель, 6 — фотоэлектрический преобразователь. (На рисунке показана светооптическая
система аппарата «Нева»)
477
ройства с выделением растрового элемента на оптическом изобра-
жении, так как при этом легко устраняется «ореол», образующий-
ся вокруг светового элемента растра, который ухудшает качество
передачи мелких деталей изображения.
Форма и размер диафрагмы определяют размер растрового
элемента. В факсимильной аппаратуре применяются растровые
элементы прямоугольной формы, у которых больший размер равен
шагу развертки. Растровый элемент располагается так, что его
меньшая сторона следует по направлению строчной развертки, а
большая сторона — по направлению кадровой развертки.
Светооптические системы аппаратуры с плоскостной разверт-
кой строятся также по принципу образования растрэлемента на оп-
тическом изображении, но обладают той особенностью, что в них
отраженный от изображения луч проходит по тому же пути, что и
луч, падающий от осветителя. Такав система получила название
автоколлиматорной трубы. Принцип действия ее поясняется рис.
14.8.
Накаленная нить осветителя 1 проецируется на зеркало 2, кото-
рое располагается под углом 45° к горизонтальной и вертикальной
оптическим осям. Зеркало 2 имеет в средней части отверстие,
вследствие чего световое пятно, спроецированное на плоскость,
Рис 14.8. Принцип действия автоколлиматорной трубы
перпендикулярную главной оптической оси, будет иметь затемнен-
ную среднюю часть, которая используется для прохождения отра-
женного от изображения светового луча. Объектив 3 выполняет
роль конденсора, он создает параллельный световой пучок, внутри
которого имеется участок, свободный от световых лучей, идущих
от осветителя, т. е. создается «коллиматорная труба»1). Отражен-
ный луч проходит через отверстие зеркала, проецируется на диа-
фрагму 4 и затем поступает на фотоэлектрический преобразова-
тель 5.
*) Коллиматор — устройство для получения пучка параллельных лучей.
478
Осветителем в анализирующих устройствах современных факси-
мильных аппаратов преимущественно служит лампа накаливания
с сосредоточенной нитью (источник точечного света). К питающе-
му устройству осветителя предъявляются весьма жесткие требова-
ния, так как его световая отдача резко 'меняется при изменении
температуры нити. Для исключения возможности появления коле-
баний яркости осветителя в такт с изменением амплитуды питаю-
щего напряжения на осветитель
подается высокостабильное пере-
менное напряжение частотой
4004-2000 Гц, чем обеспечивает-
ся постоянство светового потока.
Важное значение при выборе
источника света имеет характери-
стика спектральной интенсивно-
сти источника, т. е. зависимость
светового потока от длины вол-
ны света. Эта характеристика
должна 'быть согласована со спек-
тральной характеристикой фото-
преобразователя. Правильная пе-
редача яркостей элементарных
Длина 5олны, мк
Рис. 14.9. Зависимость относительной
видности глаза от длины волны све-
тового потока
площадок изображения будет обеспечена в том случае, если сум-
марная спектральная характеристика осветителя и фотопреобра-
зователя будет совпадать с кривой видности человеческого глаза
(рис. 14.9). Эта кривая показывает чувствительность глаза к раз-
личным длинам волн монохроматического излучения.
ФОТОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Применяемые в факсимильной аппаратуре фотоэлектрические
преобразователи основаны на использовании явления внешнего
фотоэффекта. В качестве фотоэлектрических преобразователей
применяются фотоэлементы и фотоэлектрические умножители
(ФЭУ), принцип действия которых излагается в специальных кур-
сах.
Сущность внешнего фотоэффекта состоит в том, что при паде-
нии светового потока на фотокатод, его поверхность испускает
электроны. Образуется ток фотоэлектрической эмиссии
1э = еФ, (14.4)
где е — интегральная чувствительность фотоэлемента, мкА/лм;
Ф — световой поток, лм.
Фотоэлементы должны без искажений воспроизводить изменения
величины светового потока, поэтому линейность световой характе-
ристики является одним из основных требований к ним. Этому тре-
бованию отвечает характеристика вакуумного фотоэлемента. Све-
товые характеристики (рис. 14.10) показывают зависимость фото-
тока от величины светового потока.
479
Кроме того, для правильного выбора электрического режима
работы фотоэлемента необходимо знать его вольтамперную харак-
теристику (рис. 14.11). В факсимильной аппаратуре иногда при-
Рис. 14.10 Световые ха-
рактеристики фотоэле-
мента
Рис. 14.11. Вольтамперные ха-
рактеристики фотоэлемента в
области начальных токов
меняются специфические режимы работы фотоэлемента (в области
начальных токов), поэтому представляет интерес именно началь-
ная часть вольтамперной характеристики. Из рисунка видно, что
фототок существует даже при малых отрицательных напряжениях
на аноде. Этот ток обусловлен теми электронами, энергия которых
достаточна для преодоления тормозящего поля между анодом и
катодом. Для прекращения фстотока
на анод надо подать отрицательное
напряжение, равное »0,7 В.
^jT~| Основным недостатком вакуумного
‘ фотоэлемента является очень малая
Ап [И величина интегральной чувствительно-
сти. Поэтому в факсимильной аппара-
-с=1— туре используют не фотоэлементы, а
_______________________ фотоэлектронные умножители. Прин-
цип действия фотоумножителя (рис.
Рис. 14.12. Фотоэлектронный 14.12) состоит в том, что фотоэлектро-
умножйгель____________ны, выходящие с поверхности фото-,
катода ФК, фокусируются на поверх-
ность эмиттера Дь потенциал которого выше потенциала катода
ФК. Вторичные электроны, число которых в несколько раз боль-
ше чем первичных, фокусируются на эмиттер Д2 и т. д. Если чис-
ло каскадов умножения в фотоэлектронном умножителе п, а коэф-
фициент вторичной эмиссии <т, то фототок умножителя
/ ггп
ФЭУ ~ •
(14.5)
Характеристики фотоэлектронных умножителей качественно
не отличаются от характеристик фотоэлементов. Световые характе-
ристики их также линейны, но чувствительность значительно выше.
Заметим, что высокая чувствительность ФЭУ реализуется лишь
при малых токах в нагрузке. При больших токах ФЭУ между эмит-
480
герами образуется пространственный заряд, который нарушает
фокусировку пучков электронов.
В табл. 14.2 приведены технические данные различных типов
фотоумножителей, используемых в фототелеграфных аппаратах.
ТАБЛИЦА 14.2
Наименование параметра ФЭУ-2 ФЭУ-19 ФЭУ-20 ФЭУ-26 ФЭУ-32
Тип катода Сурьмяно-цезиевый
Оптический вход Боковой Торцевой Боковой Боковой Торцевой
Число ступеней умноже- ния 1 13 1 7 11
Фокусировка электронов Электростатическая
Напряжение питания, В 220 1500-^2000 750ч-1400 750-:-1200 1250-4-1800
Интегральная чувстви- тельность, А/лм 0,4-10—3 10 10 10 25
Максимально допусти- мый ток, мкА — 200 100 75 50
14.4. ЭЛЕКТРИЧЕСКИЙ ТРАКТ ФАКСИМИЛЬНЫХ
АППАРАТОВ
ОБЩИЕ СВЕДЕНИЯ
Устройства электрического тракта в передающем и приемном
факсимильных аппаратах предназначены на 'передаче — для пре-
образования фототока, полученного от фотоэлемента или ФЭУ, в
сигналы, удобные для передачи по каналам связи; на приеме —
для преобразования сигналов, прошедших канал связи, в вид, обес-
печивающий нормальную работу записывающего устройства. Необ-
ходимость преобразования сигнала на передаче вызывается тем,
что спектр электрического сигнала на выходе фотоэлектрического
преобразователя (его обычно называют видеосигналом), как будет
показано ниже, может занимать полосу частот от /мин=0 Гц до
/макс Гц.
Для передачи факсимильных сообщений в настоящее время ис-
пользуются каналы: тональной частоты, групповые широкополос-
ные кабельных и радиорелейных линий, коротковолновых магист-
ральных радиолиний и ряд других, из которых ни один не приспо-
соблен для непосредственной передачи спектра видеосигнала из-за
несогласованности спектра его частот с полосой частот, пропускае-
мой каналом связи.
Преобразование электрического сигнала на приеме обусловли-
вается необходимостью получения на входе записывающего устрой-
ства из сигнала, приспособленного для передачи по каналу связи,
видеосигнала, аналогичного видеосигналу на передаче.
16—^60 481
Преобразования электрических сигналов на передаче и приеме
в электрическом тракте факсимильной системы включают процес-
сы модуляции, демодуляции и усиления сигналов.
СПЕКТР ЧАСТОТ РИСУНКА И ВРЕМЯ ПЕРЕДАЧИ
При развертке изображения развертывающий элемент последо-
вательно строку за строкой «просматривает» оригинал. При этом
в цепи фотоэлектрического преобразователя й возникают однопо-
лярные импульсы фототока — видеосигнал, подлежащий передаче
(рис. 14.13). Частота видеосигна-
ла зависит от линейной скорости
развертки и характера переда-
ваемого изображения.
о)
lfp
Белое
Черт
S)
S)
1Ч>
t t t t
Рис. 14.13. Характер изменения
фототока (видеосигнал) при пере-
даче строки
Рис. 14.14. Частота рисунка простейших
изображений:
и) б) в) /рис —
=nDN/120S
Предположим, что оригинал, укрепленный на передающем ба-
рабане, представляет собой чередующиеся черные и белые поло-
сы, нанесенные перпендикулярно оси барабана (рис. 14Л4а). В
этом случае в процессе развертки ток в цепи фотоэлемента дли-
тельное время будет оставаться неизменным: максимальным при
передаче белого поля и минимальным во время передачи черного
поля. Следовательно, в цепи фотоэлемента длительное время будет
протекать постоянный ток (частота изменения тока равна нулю).
Минимальная частота фототока будет при развертке самого
простого изображения, содержащего по длине строки черную и бе-
лую полосы, равные по ширине половине длины строки 5черп =
5бел=^/2 (рис. 14.146). Один период фототока представляет собой
два импульса, один из которых соответствует белому полю (имеет
максимальную амплитуду). Длительность импульсов равна времени
передачи половины строки, а период первой гармоники фототока —
времени передачи строки. В этом случае минимальная частота фо-
тотока юпредешится как
/рис. мин = -^-,Гц, (14.6)
60
где N— число оборотов барабана в минуту.
*) Для простоты изложения в дальнейшем будем считать, что в качестве фо-
тоэлектрического преобразователя используется фотоэлемент.
482
Максимальная частота фототока будет при передаче изобра-
жения, состоящего из расположенных по длине строки чередую-
щихся черных и белых полос, ширина которых S равна шагу раз-
вертки. Один период частоты фототока образуется при передаче
одной пары черно-белых полос за одну секунду. По окружности
барабана может расположиться nD12S пар полос. Здесь D — диа-
метр передающего барабана. Следовательно, частота сигнала
f рис. макс будет равна
, nDN я D N „
- ~2зДГ - 15JT Гц' <14J)
где S = dp в случае круглого развертывающего пятна и S — ap в
случае прямоугольного развертывающего пятна.
В аппаратах с плоскостной разверткой
/рис. макс = , Гц, (14.8)
где N — число строк, передаваемых в минуту, a S равно либо ар,
либо dp в зависимости от формы развертывающего элемента.
Из изложенного следует, что в спектре частот рисунка могут
присутствовать составляющие от нуля до /рис.макс, Гц.
На рис. 14.14а, б, в показаны идеализированные формы фото-
тока в виде прямоугольных импульсов. На самом деле световое
пятно переходит от белого поля к черному (и наоборот) постепен-
но и величина тока будет изменяться плавно по закону, близкому
к синусоидальному.
Определим время, необходимое для передачи бланка с изобра-
жением. Оно зависит от скорости вращения барабана N и шага
развертки б. При длине барабана I общее число строк, которое не-
обходимо передать, составляет //б. Для передачи этого количества
строк необходимо время
Т = ——, мин. (14.9)
6 N
В аппаратах с плоскостной разверткой I соответствует длине
передаваемого бланка изображения, a N—числу строк, передава-
емых в минуту.
СТРУКТУРНАЯ СХЕМА ЭЛЕКТРИЧЕСКОГО ТРАКТА
ФАКСИМИЛЬНОГО АППАРАТА
В факсимильной аппаратуре применяются два вида модуляции:
амплитудная и частотная.
Частотная модуляция применяется в основном при работе фак-
симильных аппаратов по коротковолновым радиоканалам. Сильные
колебания уровня принимаемого сигнала, характерные для этих
каналов, делают невозможным нормальную работу факсимильной
аппаратуры, в которой используется амплитудный метод модуля-
ции.
Структурная схема электрического тракта аппарата с ампли-
тудной модуляцией показана на рис. 14.15.
16* 483
Согласование спектра частот видеосигнала с полосой пропускания канала
•связи производится путем модуляции некоторой вспомогательной несущей /о, раз-
мещаемой в полосе канала связи, спектром частот видеосигнала. Преобразование
частотного спектра видеосигнала осуществляется амплитудным модулятором 1,
на который поступает видеосигнал от фотоэлемента и вспомогательная несущая fo
от специального генератора несущей частоты 2. Следует отметить, что преобра-
От фотоэлек-
трического пре
одразователя
Позитио
утр So
„ „ 7 8 9 10
В канол Из на- г—; г—> ।—> г—\В пиши-
? t> Н-н-Н Н С* —
связи нала сОя'—I I—I U-J I—\щему
зи Позитив УстР ty
устр-во
Рис. 14.15. Структурная схема электрического тракта аппарата с ам-
плитудной модуляцией
зование частоты позволяет простыми средствами осуществить и равномерное уси-
ление спектра частот видеосигнала. Это усиление осуществляется после преобра-
зования частоты обычными усилителями низкой частоты 3. Попытка усилить
спектр видеосигнала непосредственно многоступенными усилителями постоянно-
го тока (напомним, что спектр видеосигнала может содержать частоты мин,
приближающиеся к нулевой частоте) не обеспечивает необходимой стабильности
усиления из-за неустойчивости работы усилителей постоянного тока.
Вслед за модулятором или в сочетании с ним для преобразования сигналов
в соответствии с видом записи старится так называемое позитивное устройство 4.
Работа этого устройства будет пояснена ниже.
Перед поступлением в канал амплитудномодулированные колебания усилива-
ются ступенями предварительного 5 и выходного 6 усилителей, которые обеспе-
чивают необходимую мощность сигнала на входе канала связи.
Пришедшие на приемную станцию сигналы после предварительного усиления
усилителем 7 в зависимости от типа записывающего устройства либо детекти-
руются (выпрямляются) детектором 8, либо остаются непреобразованными.
Иногда позитивное устройство 9 сочетается с детектором и является частью элек-
трического устройства приемника. При фотографическом и электрохимическом
способах записи принятого изображения производится детектирование сигналов;
электротермическая запись ведется модулированными сигналами. Подробно раз-
личные виды записи факсимильных изображений рассмотрены в § .14.6.
Последним устройством электрического тракта является записывающая (око-
нечная) ступень усиления 10, которая обеспечивает уровень сигнала, необходи-
мый для нормальной работы пишущего устройства. Если в электрическом тракте
приемника производится детектирование сигнала, записывающий усилитель 10
выполняется в виде усилителя постоянного тока, а при отсутствии детектирова-
ния— по схеме усилителя низкой частоты.
Для повышения помехозащищенности факсимильной передачи
как на проводных каналах связи, так и на комбинированных про-
водных и радиоканалах применяют способ частотной модуляции
поднесущей частоты.
Структурная схема электрического тракта аппарата с частот-
ной модуляцией показана на рис. 14.16. Особенностью построения
схемы является то, что в канал связи, в зависимости от его свойств,
может выдаваться либо амплитудно-частотномодулированный сиг-
нал (АЧМ), либо частотномодулированный сигнал (ЧМ). Приме-
нение АЧМ обеспечивает высокое качество передачи изображения
при работе по проводным каналам, а метод ЧМ — устойчивую ра-
боту по радиоканалам. Такое построение факсимильного аппара-
та реализовано в отечественной аппаратуре «Ладога».
484
В схеме ла рис. 14..16 однополярные импульсы видеосигнала, снимаемые с
нагрузки фотоэлектрического преобразователя, воздействуют на электронную
лампу 1, работающую в режиме реактивной лампы '(как эквивалентная емкость).
Величина эквивалентной емкости, создаваемой лампой 1, зависит от величины
видеосигнала, т. е. от характера передаваемого изображения.
Передача
Рис. 14.16. Структурная схема электрического тракта аппарата, исполь-
зующего метод АЧМ
Эквивалентная емкость реактивной лампы подключена к контуру высокоча-
стотного управляемого генератора 2 так, что генерируемая им частота изменяет-
ся в зависимости от характера передаваемого изображения. Частота управляе-
мого генератора fynp примерно равна 100 кГц и при передаче изображения ока-
зывается промодулированной по частоте. Для переноса спектра частотномодули-
рованного сигнала в область полосы пропускания стандартного канала тч (3'00-4-
4-3400 Гц) используется преобразователь частоты 3 и .вспомогательный генера-
тор 4. Последний генерирует частоту /всп, отличающуюся от частоты fynp на
требуемую низкую частоту (порядка 2000 Гц).
В результате преобразования частот на выходе преобразователя 3 образуется
ряд составляющих, в том числе вспомогательная несущая /о, промодулированная
по частоте. Нижняя боковая полоса преобразованного сигнала выделяется филь-
тром нижних частот 5, который подавляет все остальные продукты преобразова-
ния. Частоты /уПр и /всп подобраны так, что на выходе фильтра получаются
нужные значения частоты при передаче черных и белых полей изображения *).
С выхода фильтра сигнал поступает на усилитель 6, после которого сигнал мо-
жет быть направлен по двум цепям.
При работе по радиоканалам сигнал через выходной усилитель 7 подается
на вход канала радиосвязи («Радио»). При работе по проводным каналам сигнал
поступает на частотноамплитудный преобразователь, на выходе которого созда-
ется сигнал АЧМ и затем через выходной усилитель 8 поступает на вход про-
водного канала связи («Провод»).
Частотноамплигудный преобразователь состоит из развязывающего усили-
теля 9 и частотного демодулятора 10. На выходе последнего образуется сигнал,
меняющийся по амплитуде в зависимости от частоты, определяемой характером
передаваемого изображения, но при этом также сохраняется частотная модуля-
ция сигнала. Сигнал усиливается усилителем 8 и подается в канал.
На приемном конце при приеме частот модулированного сигнала из радио-
канала (положение «Радио») сигнал поступает на фильтры 1, 2, ослабляющие
влияние радиопомех, и на амплитудный ограничитель 3, обеспечивающий пос-
тоянство амплитуды на его выходе при значительных колебаниях уровня сигна-
ла, поступающего на его вход из радиоканала. Кроме того, ограничитель ампли-
туд снижает влияние радиопомех. В результате ограничения сигнал на выходе
ограничителя амплитуд 3 приобретает трапецеидальную форму. Спектр такого •*)
•*) В отечественной аппаратуре «Ладога», например, передача черного поля
может вестись на частоте 1500 или 2000 Гц, а передача белого поля на частоте
2300 или 2600 Гц соответственно.
485
'сигнала содержит ряд гармоник, которые не должны проходить далее в тракт
приема. Фильтрация высших составляющих на выходе ограничителя 3 произво-
дится фильтром нижних частот 4 с частотой среза 2,8 кГц.
После фильтра 4 на вход частотного демодулятора 5 поступает синусоидаль-
ное колебание с изменяющейся в зависимости от характера передаваемого изоб-
ражения частотой, но постоянной амплитудой. Получаемый на выходе частотного
демодулятора 5 амплитудномодулированный сигнал также имеет остаточную
частотную модуляцию (сигнал АЧМ), которая, однако, не оказывает влияния при
дальнейших преобразованиях сигнала в тракте приема. Далее АЧМ сигнал уси-
ливается усилителем 6, формируется, для повышения контрастности записи уз-
лом 7, снова усиливается усилителем мощности 8 и подается на амплитудный
демодулятор 9, на выходе которого выделяется исходный видеосигнал. (AM. мо-
дулятор не реагирует на остаточную частотную модуляцию в АЧМ сигнале.)
Полученный видеосигнал поступает на записывающее устройство.
В тракте приема не показано позитивное устройство, которое может потре-
боваться в некоторых случаях. В рассматриваемой схеме создание позитивного
сигнала обеспечивается схемой частотного демодулятора 5. При необходимости
на выходе тракта перед записывающим устройством может быть включен также
мощный усилитель записи.
В случае приема АЧМ сигналов из проводного канала (положение переклю-
чателя «Провод») необходимость в предварительном преобразовании сигнала,
как это имеет место при приеме ЧМ сигнала из радиоканала, отпадает. Поэто-
му элементы преобразования из тракта исключаются, а в тракт включается удли-
нитель 10 для выравнивания уровня сигнала, который поступает на вход усили-
теля 6, являющегося общим при работе по проводным и радиоканалам.
Описанная структурная схема электрического тракта факси-
мильного аппарата содержит ряд узлов, которые не используются
при работе методом AM и в то же время эти узлы существенно ус-
ложняют схему построения аппарата. Поэтому наибольшее приме-
нение находят специальные передающая (AM—ЧМ) и приемная
(ЧМ—AM) приставки, подключаемые к выходу и входу факси-
мильного аппарата, работающего методом AM. Передающая при-
ставка преобразует сигналы AM в сигналы ЧМ. В состав ее вхо-
дят: предварительный усилитель, устройство для выделения огиба-
ющей амплитудномодулированного сигнала, частотный модулятор
и выходной усилитель. Приемная приставка преобразует сигналы
ЧМ в AM и состоит из полосового фильтра приема, амплитудного
ограничителя, частотного дискриминатора и выходного усилителя.
Следует отметить, что полоса частот ЧМ сигнала на выходе
приставки практически не отличается от полосы частот AM сиг-
нала.
Преимущества системы с ЧМ перед системой с AM состоят в
следующем: 1) применение ограничителя на приеме позволяет уст-
ранить искажения от колебания остаточного затухания в канале
связи в широком диапазоне; 2) система ЧМ не чувствительна к не-
линейным искажениям.
Принцип действия и устройство основных узлов электрического
тракта факсимильного аппарата (усилителей, амплитудного огра-
ничителя, генераторов несущих, частотного дискриминатора, амп-
литудного детектора, фильтров) знакомы читателю из смежных
курсов и подробно здесь не излагаются. Остановимся подробнее на
рассмотрении устройства и принципа действия некоторых узлов,
работа которых имеет особенности.
486
МОДУЛЯТОРЫ AM
К модуляторам факсимильных аппаратов предъявляются сле-
дующие основные требования?
— изменение огибающей модулированного колебания должно
как можно более точно отражать закон, которому следует модули-
рующее колебание видеосигнала;1
— модулятор не должен вносить заметных амплитудных и час-
тотно-фазовых искажений. В случае появления искажений их необ-
ходимо компенсировать в других элементах электрического тракта;
— затухание, вносимое модулятором, должно быть по возмож-
ности малым;
> — отношение уровня, получаемого от белого изображения, к
уровню, получаемому от черного изображения, на выходе модуля-
тора не должно значительно отличаться от этого же отношения на
входе модулятора.
Наибольшее распространение в факсимильных аппаратах полу-
чил двойной балансный модулято
маемое с нагрузочного резистора
Rn фотоумножителя, управляет
работой лампы Так как ми-
нус управляющего напряжения
приложен к сетке лампы, то при
значительных токах, проходящих
через фотоумножитель (токи бе-
лого поля изображения), анод-
ный ток через лампу JR умень-
шается, а при прохождении чер-
ного поля изображения увеличи-
вается. Модулирующее напряже-
ние Ui снимается с резистора Ri,
включенного в катодную цепь
лампы JIi. Через лампу Л2 про-
текает постоянный ток, создаю-
щий падение напряжения U2 на резисторе R2. Алгебраическая
сумма напряжений Ui и U2 приложена между средними точками
и а2 балансного модулятора.
Амплитуда сигнала несущей частоты на выходе модулятора за-
висит от приложенного к диодам управляющего напряжения, т. е.
от величины фототока. На рис. 14.18 приведены диаграммы напря-
жений, поясняющие работу балансного модулятора.
Регулировкой величины сопротивления резистора R2 устанав-
ливается негативный или позитивный режим работы передатчика.
Для получения нормального (позитивного) режима работы, когда
наибольший уровень несущей частоты соответствует белому полю
изображения, достаточно установить падение напряжения на ре-
зисторе R2, равное падению напряжения на резисторе R{ при про-
хождении перед передающей оптикой черного поля изображения
(рис. 14.18а). Для получения негативного режима работы падение
487
(рис. 14.17). Напряжение, сни-
Рис. 14.17 (Балансный модулятор фо-
тотелеграфного аппарата
напряжения на резисторе Т?2 должно быть равно падению напря-
жения на резисторе при прохождении 'белого поля изображения
(рис. 14.1186). Однако согласно рекомендациям МККТТ режим ра-
бот фототелеграфного аппарата — негативный или позитивный —
целесообразнее выбирать регулировкой в приемнике.
МОДУЛЯТОРЫ ЧМ
В аппаратуре факсимильной связи в качестве частотного моду-
лятора обычно используется электронная лампа, работающая в ре-
жиме реактивной лампы. Лампа подключается к колебательному
контуру управляемого генератора и осуществляет параметричес-
кую модуляцию частоты генерации этого генератора. Выходное ре-
активное сопротивление реактивной лампы изменяется в соответ-
ствии с изменением напряжения на нагрузке фотоэлектрического
преобразователя. При изменении фототока из-за изменения реак-
тивного сопротивления лампы изменяется эквивалентное сопротив-
ление колебательного контура, а вследствие этого изменяется и ге-
нерируемая частота. Осуществляется частотная модуляция.
АМПЛИТУДНЫЙ ДЕМОДУЛЯТОР И ЗАПИСЫВАЮЩАЯ СТУПЕНЬ
Принцип действия амплитудного демодулятора (детектора) и
усилителя мощности постоянного тока (записывающей ступени)
известен читателю из смежных курсов. Рассмотрим здесь упрощен-
488
ную схему электрической части приемника с фотографической за-
писью1) и диаграммы сигналов, приведенные на рис. 14.19а, б, для-
уяснения особенности работы детекторной ступени факсимильного
аппарата и принципов взаимодействия отдельных узлов приемного
электрического тракта.
ШШ
„V \________________/
7 t
Рис. 14.19. Упрощенная -схема приемника с фотозаписью (а) и
диаграммы сигналов в -нем (б)
Принятые из канала связи модулированные сигналы детектиру-
ются и через фильтр низкой частоты ФНЧ подаются на резистор-
/?1. Выделяемое на резисторе R\ напряжение управляет работой
лампы Ль в анодную цепь которой включена осветительная лампа
приемника. При помощи переключателя рода работы (негатив или-
позитив) можно изменять фазу напряжения, прилагаемого к сетке
лампы Л1, и этим либо запирать лампу при поступлении из линии-
максимального уровня сигнала (позитивный прием), либо ее от-
крывать (негативный прием).
Регулировкой величины сопротивления резистора /?2 устанав-
ливается величина запирающего напряжения диодов детектора,
чем обеспечивается ограничение снизу амплитуды входящих сигна-
лов (см. рис. 14.196). Это ограничение устраняет действие помех,,
возникающих в канале связи при передаче сигналов с минималь-
ной амплитудой.
’) Подробно различные способы записи рассматриваются -в § 14.7.
48S1-
14.5. ВЫБОР НЕСУЩИХ ЧАСТОТ В КАНАЛЕ СВЯЗИ И
СКОРОСТЬ ПЕРЕДАЧИ
Согласно рекомендациям МККТТ факсимильная передача по
проводным и радиорелейным каналам связи осуществляется мето-
дом амплитудной модуляции.
При модуляции несущей частоты канала /нес спектром частот
видеосигнала возникает спектр передачи (рис. 14.20), который со-
4
Рис. 14.20. Спектр частот фототе-
леграфного сигнала
стоит из участка от 0 до /макс (полоса частот видеосигнала) и уча-
стка /Нес — /макс, /нес, /нес +/макс. Как видно из рисунка, спектр ви-
деосигнала и нижняя боковая полоса модуляции (/нес — /макс) пе-
рекрываются, что приводит к появлению искажений передаваемого
сигнала. Для более эффективного использования каналов связи по
частоте необходимо подавлять или компенсировать частоты ви-
деосигнала. Последнее проще всего осуществить в балансной схе-
ме модулятора (см. рис. 14.17), на выходе которой отсутствуют
токи частот видеосигнала. Объясняется это тем, что напряжение
частот видеосигнала подается в данной схеме в средние точки об-
моток трансформаторов и не наводит поэтому напряжения в вы-
ходной обмотке.
Известны два метода передачи факсимильных сигналов по ка-
налам связи?
— двухполосная передача с симметричным ограничением боко-
вых полос;
— передача с асимметричным ограничением боковых полос.
При первом способе передачи передаваемый спектр частот (от
/нес—/макс До /нес +/макс) располагают в средней части канала
или несколько сдвигают его к верхней граничной частоте полосы
пропускания канала (рис. 14.2|1а), но при этом обе боковые поло-
Рис .14.24. Расположение спектра фототелеграфного сигнала в поло-
се частот канала связи при передаче.
а) двух боковых полос; б) при частичном подавлении верхней бо-
ковой полосы (ОБП)
490
сы амплитудномодулированного сигнала размещаются симметрич-
но относительно несущей частоты /нес.
Вьгбор несущей частоты /нес определяется следующими сообра-
жениями. Для уменьшения искажений, возникающих при модуля-
ции, стараются обеспечить максимально возможное соотношение
/нес//макс- Поэтому предпочтительно располагать передаваемый
спектр в области более высоких частот полосы канала связи. При
этом принимают, что /нес +/макс=/в, где /в — верхняя частота по-
лосы пропускания канала связи.
Если по ф-ле (114.7) рассчитать максимальную частоту .видеосигнала /макс
для скоростей передачи 7V= 120 об/мин и N=fX) об/мин и 6=0,2 мм (эти величи-
ны чаще всего используются при магистральной факсимильной связи), то для
аппарата «Нева», имеющего диаметр барабана 70 мм, легко .можно получить
следующие значения максимальной частоты видеосигнала: /макс 120=1465 Гц;
/макс 60 = 732 Гц. Тогда ДЛЯ /нес МОЖНО ПОЛуЧИТЬ: /нес=/в—/макс=3400—4465 =
= 1935 Гц при А1=40О об/мин и fHec=3400—<732 = 2668 Гц при N=60 об/мин.
, Естественно, что лучше выбрать /Heo=il935 Гц, так как при этом обеспечи-
вается более высокая скорость передачи факсимильной телеграммы.
Учитывая указанные соображения, МККТТ рекомендует использовать несу-
щую частоту /нес =4900 Гц -три передаче'по стандартным каналам с полосой ча-
стот 300-4-3400 Гц и /нес =4500 Гц, при передаче по каналам старых систем свя-
зи, имеющих полосу частот 300-4-2700 Гц.
Если характеристики качала связи таковы, что не обеспечивается высокое
качество копии на приеме (требования к каналам связи, предоставляемым для
факсимильной связи, будут изложены в § 44.8), можно несколько снизить ско-
рость передачи. МККТТ рекомендует следующие стандартные скорости 60, 90,
120 строк/мин.
Увеличение скорости передачи почти в два раза можно полу-
чить, применяя метод асимметричного ограничения боковых полос.
Несущая частота в данном случае выбирается ближе к верхней
граничной частоте канала связи (см. рис. 14.216). При этом ниж-
няя боковая полоса частот проходит через канал полностью, а верх-
няя боковая полоса частично подавляется в канале специальным
фильтром однополосной передачи. Фильтр должен обладать косо-
симметричной, по отношению к точке расположения несущей час-
тоты, характеристикой изменения коэффициента пропускания.
Способ асимметричного ограничения боковых полос широко
применяется при организации передачи газет по широкополосным
каналам связи в первичных и вторичных группах, а также по ка-
налам тч.
При асимметричном ограничении боковых полос к каналу связи
предъявляются более жесткие требования по выравниванию харак-
теристики времени замедления (более подробно см. в гл. 8). Это
объясняется двумя причинами. Во-первых, передача ведется с бо-
лее высокой скоростью, при этом уменьшается длительность эле-
ментарных импульсов; во-вторых, при асимметричном ограничении
боковых полос появляется паразитная модуляция сигнала по фазе
и его спектр несколько расширяется — появляются новые компо-
ненты сигнала, которые полностью должны быть сохранены на
приеме, чтобы не было искажений сигнала. Этот процесс иллюст-
рируется векторными диаграммами рис. 14.22.
491
Рис. 14.22. Векторные диаграммы AM при ограничении по-
лосы:
а) симметричном; б) несимметричном
При AM с симметричным ограничением боковых полос (рис
14.22а) вектор модуляции £7МОД, представляющий собой вектор-
ную сумму трех векторов — несущей (^(fli) ), нижней боковой
), верхней боковой ( Uy +F) ), — меняется по амплитуде,
но остается все время в фазе с вектором несущей частоты.
При асимметричном ограничении боковых полос (рис. 14.226)
вектор верхней боковой полосы ^(fH+ п имеет меньшую амплитуду
и поэтому результирующий вектор модуляции ГМОд меняется и по
амплитуде и по физе. На этом же рисунке видно появление новых
составляющих (векторы, направленные перпендикулярно вектору
несущей частоты). Несущая частота при асимметричном ограниче-
нии боковых полос выбирается равной 2800 или 3100 Гц.
Основные технические данные отечественных факсимильных ап-
паратов приведены в табл. 14.3.
ТАБЛИЦА 14.3
Наимено вание параме тра Тип аппарата
ФТА-ПМ «Арагви» «.Призма» «Ладога» «Нева»
Частота видеосиг- нала /макс, Гц 1100 (2300) 1100 1200 900-:-1800 (при шаге 0,265); 450н-900(при шаге 0,53) 550--2300
Способ модуля- ции AM (негатив) AM (негатив) AM (негатив) АЧМ-AM AM (позитив, негатив)
Несущие частоты, кГц 1,9; 1,5; (2,8; 1,9) 1,9; 1,5 3 Черное поле 1; 1,5; 2 Белое поле 2,3; 2,6 1,5; 1,9, 2,8
Скорость переда- чи, строк/м 120(250) 120 300 60; 90; 120 60; 120; 250
492
Следует обратить внимание на то, что передача при AM в боль-
шинстве аппаратов ведется негативным сигналом. При этом макси-
мальную величину сигнал будет иметь щри передаче белых полей
изображения, а минимальную при передаче черных полей. При по-
зитивном сигнале — наоборот.
МККТТ рекомендовал применение негативного сигнала при передаче полу-
тоновых изображений, поскольку при этом менее заметны искажения, которые мо-
гут появиться в процессе приема .изображения. На факсимильной сети страны в
последнее время осуществляется перевод всех связей на работу позитивным сиг-
налом, так как большинство факсимильных телеграмм представляют собой черно-
белые штриховые изображения, в которых преобладают белые поля. Поэтому
при позитивном сигнале значительно снижается загрузка канала тональной
частоты.
Более точной характеристикой скорости факсимильной передачи является не
число строк в минуту (так как при этом каждый раз приходится оговаривать
длину строки или модуль взаимодействия), а величина площади бланка, пере-
даваемого в минуту. Скорость передачи
где Q — площадь бланка, дм2; Т — время передачи бланка, мин.
Площадь бланка Q=IL. Выразив / и L через параметры факсимильного ап-
парата 18N и L= ------ [см. ф-лы ’(14.8) и (14.9)], получим
мм2
, (14.11)
мин
ИЛ'И
В = 1,2-10-4 Ор/макс, — . (14.12)
мин
Скорость передачи В для шага развертки 6=0,2 мм приблизительно равна:
при У = 60 строк/мин — 0,25 дм2/мин; при У=120 строк/мин — 0,5 дм2/мин; при
А' = 250 строк/мин — 1,0 дм2/мин.
14.6. СИНТЕЗИРУЮЩИЕ УСТРОЙСТВА
ОБЩИЕ СВЕДЕНИЯ
Синтезирующие устройства факсимильных аппаратов состоят
из: 1) развертывающего устройства, определяющего последова-
тельность приема отдельных элементов передаваемого изображе-
ния; 2) записывающего устройства, обеспечивающего регистрацию
отдельных элементарных площадок для образования копии ориги-
нала. В случае записи на светочувствительные материалы узел за-
писи содержит также светооптическую систему.
По способам записи синтезирующие устройства делятся на от-
крытые и закрытые. При открытом способе запись производится на
открытой для света бумаге. Это позволяет в определенной мере
контролировать качество принимаемого изображения непосредст-
венно во время сеанса приема факсимильной телеграммы. К откры-
тым способам относятся: электрохимический, запись изображения
чернилами на обычной бумаге (чернильная запись), электротерми-
ческий, феррографический и ксерографический.
493
При закрытом (фотографическом) способе запись производится
с помощью светового луча на светочувствительный материал (фо-
тобумагу, фотопленку), помещенный в изолированную от посторон-
него света кассету. Такой способ записи позволяет получить зна-
чительно более высокое качество копии изображения, особенно при
приеме полутоновых изображений.
Конструкция развертывающего устройства и устройства записи
существенно зависят от применяемого способа записи. Наибольшее
распространение в отечественной аппаратуре получили фотогра-
фический и электрохимический способы.
Рассмотрим более подробно принцип действия различных при-
емных устройств развертки и записи изображений.
ФОТОГРАФИЧЕСКАЯ ЗАПИСЬ
Развертывающие устройства в приемниках факсимильных ап-
паратов, использующих фотографический способ записи, принци-
пиально ничем не отличаются от таких же устройств в передающем
аппарате. Отличие состоит только в том, что барабан со светочув-
ствительной бумагой (или пленкой), на которой производится за-
пись, помещается в светонепроницаемую кассету, которая укрепля-
ется неподвижно на аппарате.'В момент записи в кассете открыва-
ется продольная щель, обращенная внутрь аппарата и защищен-
ная ст постороннего света. Барабан, находящийся внутри кассеты,
вращается, а световой луч, формируемый светооптической систе-
мой, движется вдоль щели, последовательно засвечивая элемен-
тарные площадки фотоматериала.
Принципиальная схема, показывающая устройство и взаимо-
действие элементов развертывающего и записывающего устройств
при закрытой фотографической записи, показана на рис. 14.23. За-
записыаающего усфойства с фотографической
записью:
1 — газосветная лампа (осветитель — модулятор света);
2 — конденсорная линза; 3 — диафрагма; 4 — объектив;
5 — барабан с фотобумагой в кассете; 6 — светонепрони-
цаемая кассета со щелью; 7 — щель в кассете
писывающее устройство закрытой записи состоит из модулятора
света и светооптической системы. В аппаратах с фотографической
записью в качестве модулятора света используется газосветная
лампа тлеющего разряда; в аппаратуре приема газетных полос
находят применение лампы дугового разряда.
494
Газосветная лампа тлеющего разряда состоит из двух электро-
дов — анода, в виде тарелочки с отверстием, и катода, представ-
ляющего собой сплошной стальной или молибденовый цилиндр с
углублением, — помещенных в стеклянном баллоне. Применяемые
в фототелеграфной аппаратуре газосветные лампы ТМН-2 (точеч-
ный неоново-аргоновый модулятор) заполняются смесью газов,
(неон, аргон). При прохождении от анода к катоду тока опреде-
ленной величины в углублении катода, вследствие ионизации моле-
кул газа и возникновения тлеющего разряда, образуется световой
кратер, светящийся в виде яркой точки. Через отверстие анода и
переднее стекло баллона свет выходит из лампы в виде узкого
пучка, поэтому лампу называют точечным источником света.
Формирование светового пятна на поверхности фотобумаги
(фотопленки) производится светооптической системой, принципи-
ально ничем не отличающейся от светооптической системы, исполь-
зуемой в анализирующем устройстве. Световой пучок газосветной
лампы 1 с помощью конденсорной линзы 2 проецируется на плос-
кость диафрагмы <3. Освещенная диафрагма с помощью объектива
4 проецируется на носитель записи 5, который располагается на ба-
рабане внутри светонепроницаемой кассеты 6, имеющей щель 7.
Форма и размер растрового элемента задаются диафрагмой. В син-
тезирующем устройстве чаще всего применяют квадратный или
прямоугольный растровый элемент, причем большая сторона рас-
полагается в направлении кадровой развертки и примерно равна
шагу подачи.
В зависимости от необходимости получения копии оригинала
в негативном или позитивном изображении в фототелеграфии
применяются два типа фотоматериалов:
— негативные, у которых светочувствительная эмульсия нано-
сится, как правило, на прозрачную .подложку (фотопленка):'
— позитивные, у которых светочувствительная эмульсия нане-
сена на непрозрачную подложку, как правило, на обычную бума-
гу (фотобумага).
Светочувствительные материалы характеризуются следующими
показателями: светочувствительностью, контрастностью, широтой,
максимальной оптической плотностью и оптической плотностью
вуали, которые могут быть определены по характеристической
кривой. Характеристические кривые (рис. 14.24а, б) показывает
зависимость оптической плотности D обработанного фотоматериа-
ла от логарифма экспозиции (количества освещения)1). В свою
отередь, экспозиция H=Et, лкс, оде Е—'освещенность, лк; t —
время экспозиции, с.
Характеристическая кривая имеет три области — недодержек,
пропорциональной передачи (правильных экспозиций) и передер-
жек. Для получения правильного воспроизведения полутоновых
изображений ток газосветной лампы (режим записи) должен быть
подобран так, чтобы экспозиция соответствовала среднему участку
характеристической кривой.
’) Оптическая плотность D измеряется прибором — денситометром
495-
a)
- Ofl-OJ-O/rOJ. 0 0,2 0,6 0,0 1,0 Ц 1,0 1,6 1,8 2,0 2? 2,0 2,6 ЦН
Рис. 14.24. Характеристические кривые светочувстви-
тельных материалов
ЭЛЕКТРОХИМИЧЕСКАЯ ЗАПИСЬ (ЭХЗ)
В синтезирующих устройствах для открытой записи чаще всего
применяется плоскостная развертка с пишущим и развертывающим
устройствами, выполненными в виде барабана с одним витком тон-
кой спирали, выступающей над его поверхностью, и тонкой линей-
ки, прижимающей специальную электрохимическую бумагу к спи-
рали (рис. 14.25). При вращении барабана со спиралью точка каса-
ния спирали и линейки создает развертывающий элемент, который
равномерно перемещается вдоль оси барабана, образуя строку
развертки. Одновременно за полный оборот барабана бумага про-
тягивается валиками на один шаг подачи по кадровой развертке.
Протяжка бумаги после начала цикла приема производится не-
496
прерывно, поэтому строки располагаются под очень небольшим уг-
лом, так же как в развертывающих плоскостных устройствах пе-
редающих аппаратов. Контактирующая площадка спирали и ли-
нейки — развертывающий элемент приема — имеет форму ромба
или параллелограмма, что не позволяет получить высокую разре-
шающую способность. При этом способе записи разрешающая спо-
собность не превышает четырех линий на миллиметр.
Рис. 14.25. Принципиальная
схема записывающего уст-
ройства в аппаратах с от-
крытой записью на электро-
химическую бумагу:
Рис. 14.26. Упрощенная схема кас-
када записи на электрохимическую
бумагу
1 — рулон электрохимической
бумаги; 2 — протягивающие
валки, 3 — пишущая линейка,
прижимаемая к бумаге и спи-
рали пружиной (на рисунке не
показана); 4— спираль, нало-
женная на барабан; 5 —элек-
трохимическая бумага
Электрохимическая бумага
(ЭХБ), применяемая для записи
в факсимильной аппаратуре, от-
носится к электрочувствитель-
ным бумагам, способным иод действием электрического тока из-
менять свою окраску. В результате электролиза и химических ре-
акций в месте протекания тока выделяется красящее вещество.
Густота окраски зависит от силы протекающего тока. Электрохи-
мическая бумага изготавливается, как правило, в виде рулона,
который устанавливается в герметизированной кассете, обеспечи-
вающей сохранность бумаги в увлажненном состоянии в тече-
ние длительного времени.
Упрощенная электрическая схема каскада записи приемника с
ЭХЗ приведена на рис. 14.26. Такой приемник используется в фак-
симильных аппаратах ФТАП и «Призма». Устройство развертки в
них выполнено так, как показано на рис. 14.25. Длина барабана
составляет 228 мм, а шаг спирали — 220 мм. Качество записи и то-
нальность окрашивания определяются характеристикой полутонов
ЭХБ и зависят от металла спирали и линейки.
Спираль и линейка изготавливаются из специальных сортов не-
ржавеющей стали толщиной по 0,2 мм. Следует заметить, что ли-
17—СО
497
нейка является активным электродом в химическом ‘процессе, по-
этому после использования двух-трех рулонов ЭХБ линейку необ-
ходимо заменять. Воспроизведение полутоновых изображений на
ЭХБ возможно с ограниченным количеством градаций из-за ее ма-
лой оптической широты (имеет место аналогия со светочувстви-
тельными материалами).
К достоинствам приемников с электрохимической записью мож-
но отнести:
— открытый способ записи;
— простоту записывающего устройства;
— возможность конвейерной передачи документов и автомати-
зации процесса приема.
Недостатки этих приемников следующие:
— необходимость хранения бумаги во влажном состоянии;
— наличие коррозии металлических частей аппаратуры из-за
вредных испарений;
— зависимость качества записи от температуры и влажности
воздуха в помещении.
УСТРОЙСТВО ЗАПИСИ НА ОБЫЧНУЮ БУМАГУ
(ЧЕРНИЛЬНАЯ ЗАПИСЬ) [8]
Для записи черно-белых штриховых изображений может быть
применено электромагнитное устройство с чернильной записью
(рекордер). Носителем в этом случае является обычная бумага,
закрепленная на барабане. Запись ведется пишущим роликом при
помощи специальных чернил (рис. 14.27).
Рис. 14.27. Упрощенная схема запи-
сывающего устройства для черниль-
ной записи на обычную бумагу (ре-
кордер):
/ — обмотка электромагнита рекордера; 2 —
якорь электромагнита; 3 — торсионный ва-
лик; 4— пишущий рычаг, 5 — пишущий ро-
лик; 6 —полюсные надставки электромаг-
нита; 7 — фильцевый ролик, 8 — красящая
лента, 9, 10 — ролики, поддерживающие
красящую ленту; И, 12 — шестерни при-
вода: 13— ролик передачи движения от
барабана к записывающему устройству;
14 — барабан с бумагой
Напряжение видеосигнала, поступая в обмотку поляризованно-
го электромагнита рекордера 1, воздействует на якорь 2, укреп-
ленный на оси 3 (торсионный валик). Один конец торсионного ва-
лика неподвижно закреплен в точке К. На втором конце, свобод-
но вращающемся в подшипнике, жестко насажен рычаг 4 с пи-
шущим роликом 5. Толщина грани ролика (0,24-0,3 мм) опреде-
ляет размеры развертывающего элемента.
498
При поступлении рабочего сигнала, соответствующего черному
полю изображения, якорь 2 поворачивается между полюсными
надставками 6 и, скручивая торсионный валик 3 на некоторый угол,
прижимает пишущий ролик к бумаге. При передаче белого поля
ток в катушках рекордера уменьшается и якорь 2 за счет упругос-
ти торсионного валика возвращается в нейтральное положение, от-
водя пишущий ролик 5 от поверхности бумаги.
Во время работы аппарата пишущий ролик все время смачива-
ется краской при помощи красящего устройства, состоящего из
фильцевого валика 7, пропитанного краской, кольцевой резиновой
ленты 8, вращающейся на роликах 9 и 10, и шестерен привода 11
и 12. В режиме приема рекордер опирается на поверхность бара-
бана роликом 13, последний обеспечивает вращение шестерен и
роликов пишущего устройства и непрерывную равномерную пода-
чу краски на пишущий ролик. Нажим красящей ленты на пишу-
щий ролик и величина зазора между пишущим роликом и поверх-
ностью бумаги могут регулироваться при помощи регулировочных
винтов (не показанных на рисунке). В процессе записи рекордер
остается неподвижным, а барабан с закрепленной бумагой пере-
мещается вдоль оси на шаг развертки за один оборот.
Чернильная запись применена в факсимильном аппарате
«Арагви». Максимальная частота записи с помощью рекордера —
1100 Гц. Разрешающая способность приемника — 4 лин/мм.
Достоинством метода записи с помощью чернил на обычную
бумагу является его простота, недостатком — его низкая разреша-
ющая способность и невозможность приема полутоновых изобра-
жений.
ПОНЯТИЕ ОБ ЭЛЕКТРОТЕРМИЧЕСКОЙ, ФЕРРОГРАФИЧЕСКОЙ
И КСЕРОГРАФИЧЕСКОЙ ЗАПИСИ
В некоторых зарубежных факсимильных аппаратах для записи изображе-
ния используется электротермическая бумага. В состав бумажной основы такой
бумаги входит порошкообразный графит, вследствие чего эта бумажная основа
имеет черный цвет и обладает малым сопротивлением электрическому току. Чер-
ная бумажная основа с одной стороны покрывается слоем металлизированного
лака, а с другой стороны — светлой токонепроводящей пленкой, состоящей из
смеси тиосульфата свинца и окиси титана. Для записи изображения электротер-
мическая бумага накладывается на металлическую поверхность барабана прием-
ного факсимильного аппарата.
Пишущий элемент — металлическая игла — скользит по поверхности элек-
тротермической бумаги вдоль строки развертки. При этом напряжение сигнала
изображения, приложенное между электродами ^(поверхностью барабана и пи-
шущей иглой), пробивает верхнюю пленку электротермической бумаги и обна-
жает графитизированную бумажную основу, вследствие чего в точке соприкос-
новения мглы возникает почернение. Степень почернения примерно пропорцио-
нальна величине тока записи. Недостатком этого способа записи является: ма-
лая разрешающая способность, низкая контрастность изображения.
Аппаратура такого типа не нашла применения у нас в стране из-за вредного
влияния пыли и дыма i(b состав которых входит свинец), выделяемых в процессе
записи изображения.
При феррографической. записи носителем служит магнитная пленка, а запи-
сывающим элементом — магнитная головка. Магнитная пленка укрепляется на
поверхности барабана. Во время записи на ферромагнитном слое пленки возни-
17* 499
кает магнитный рельеф изображения, которое проявляется путем нанесения на
поверхность магнитного бланка красящего порошка, обладающего магнитными
свойствами. Полученное изображение переносят контактным способом на обычную
бумагу, покрытую слоем клейкого вещества. Феррографическая запись обладает
достаточно высокой разрешающей способностью |(до 8 лин/мм) и хорошей полу-
тоновой характеристикой, обеспечивая при этом более высокие скорости записи,
чем рассмотренные ранее способы. Однако из-за сложности процесса получения
изображения феррографический способ записи в оконечной аппаратуре приме-
нения не получил. Запись на магнитную пленку применяют при переприеме фак-
симильных телеграмм. На ленточную магнитную пленку при помощи обычного
магнитофона записывают непосредственно электрические сигналы. Контроль за-
писи ведут с включенного параллельно факсимильного аппарата, имеющего от-
крытую запись. Качество переприема при этом резко улучшается, так как исклю-
чается этап оптического переприема транзитной факсимильной телеграммы.
Принцип ксерографической записи аналогичен феррографическому. На носи-
теле получают потенциальный рельеф изображения, т. е. его электростатическую
модель Затем носитель обрабатывают специальным красителем и полученный
красящий рельеф контактным способом переносят на бумагу.
В качестве носителя используют светочувствительный слой из порошка окиси
цинка. Перед экспозицией светочувствительный слой заряжается до отрицатель-
ного потенциала порядка нескольких сотен вольт. При экспозиции, т. е. засвечи-
вании, светочувствительный слой теряет электроны в степени, пропорциональной
силе света. Таким образом, после приема факсимильной телеграммы на ксеро-
графическом носителе образуется потенциальный рельеф, который используется
для переноса изображения.
В отличие от магнитного рельефа, который может воспроизводить изобра-
жение многократно, потенциальный рельеф используется, как правило, одно-
кратно.
Ксерографический способ обеспечивает практически неограниченную скорость
записи, поэтому в будущем он, возможно, может быть применен на сверхскорост-
ных факсимильных связях.
14.7. УСТРОЙСТВА СИНХРОНИЗАЦИИ И ФАЗИРОВАНИЯ
Для совместной работы приемного и передающего факсимиль-
ных аппаратов требуется, чтобы скорости разверток этих аппара-
тов были равны между собой (т. е. чтобы осуществлялась синхро-
низация разверток) и начало развертки происходило одновременно
(осуществлялось фазирование).
СИНХРОНИЗАЦИЯ
Незначительное отклонение скоростей приводит к удлинению
или укорочению строк развертки, что, в свою очередь, вызывает
перекос изображения по направлению кадровой развертки.
В факсимильной аппаратуре общего назначения и для переда-
чи гидрометеокарт допускается перекос изображения не более
1 мм на каждые 100 мм длины развертки по кадрам. К аппаратуре
для передачи газетных полос предъявляются еще более жесткие
требования.
Определим условия правильного воспроизведения изображения приемным
факсимильным аппаратом.
Правильное воспроизведение изображения может быть получено, если между
координатами воспроизводимой точки на копии и координатами точки на ориги-
нале существует прямопропорциональная зависимость:
х _ У
х-l У1
500
(14.13)
Если начальные положения точек установлены одинаковыми ,(условие син-
фазности разверток), то из ур-ния (14.4’3) вытекает, что между скоростями раз-
вертки на передаче и на приеме должно выполняться соотношение
Ух _ Уу
(14.14)
где vx— скорость перемещения точки по оси х; vy — скорость перемещения точ-
ки по оси у.
Скорость перемещения точки по строке (ось х) составляет
LN
v.= -. (14.15)
Скорость перемещения точки по кадру (ось у)
б Д'
— (14.16)
Для правильного воспроизведения необходимо на передаче и приеме разла-
гать одинаковое число строк в единицу времени, т. е. N=Ni. Учитывая эти сооб-
ражения, из выражений (14.14)— ('14.16) получим L/6='Li/6i; умножив обе части
равенства на 1/я, получаем Lln6 = Li/n8t, т. е.
М = М1. (14.17)
Таким образом, условием неискаженного воспроизведения изображения яв-
ляется равенство модулей взаимодействия передатчика и приемника. При равен-
стве скоростей Уу = иу1 принятое изображение подобно переданному и равно ему
по площади. В эксплуатации обычно .используется этот вариант.
Определим требования к стабильности синхронизирующих уст-
ройств. Учитывая указанную выше норму перекоса изображения,
можем написать, что Аох/оу1 /100. Из 'равенств (14.15) и
(14.16),'.чьиражая оу через ох, получаем
Л vx < б
vx 100 L
(14.18)
При 6 = 0,2 мм и Л=200 мм Лох/^х^Ю-5.
Между скоростью ох, числом строк (или числом оборотов бара-
бана) N и частотой f источника питания устройств, осуществляю-
щих развертку, существует линейная зависимость, поэтому требо-
вания к стабильности устройств синхронизации могут быть пред-
ставлены в следующем виде:
&Ух _ AN = А/ < jq-5
f* N f ""
(14.19)
Равенство скоростей разверток передающего и приемного фак-
симильных аппаратов может быть достигнуто способом автоном-
ной или принудительной синхронизации.
При автономной синхронизации устройства, производящие раз-
вертку, независимы друг от друга, но скорости их равны и высоко-
стабильны.
При принудительной синхронизации устройства развертки син-
хронизируются специальными сигналами, передаваемыми- от пере-
датчика к приемнику по каналу связи. Частным случаем принуди-
тельной синхронизации является способ сетевой синхронизации,
501
при котором питание двигателей передатчика и приемника осуще-
ствляется от единой сети электроснабжения.
Структурная схема, поясняющая способ автономной синхрони-
зации, показана на рис. 14.28.
Рис. 14.28. Структурная схема, поясняющая способ автономной синхронизации
Для обеспечения стабильности скорости двигателя развертыва-
ющего устройства в современных факсимильных аппаратах при-
меняются исключительно синхронные электродвигатели, питание
которых осуществляется при системе автономной синхронизации
от камертонных или кварцевых генераторов, имеющих стабиль-
ность частоты не хуже 10-5.
Известно, что скорость вращения синхронного двигателя и ста-
бильность скорости зависят от частоты и стабильности питающего
напряжения, при этом
п = -' 60, об/мин,
2р
где f — частота напряжения питания; 2р — число пар полюсов
двигателя. Из этого выражения следует, что высокая стабильность
частоты питающего напряжения обеспечивает высокую стабиль-
ность скорости вращения двигателя и, следовательно, высокую ста-
бильность скорости развертки.
В факсимильных аппаратах нашли применение синхронный реактивный и
синхронный гистерезисный двигатели ;[05]. Устройство и принцип действия этих
двигателей подробно рассматривается в смежных курсах, здесь напомним лишь
общие принципы их работы. Ротор синхронного реактивного двигателя имеет
обмотку типа «беличьего колеса». Эта обмотка служит для пуска двигателя. Под
действием переменного тока, проходящего через обмотку статора, образуется
магнитное поле, которое замыкается через ротор и индуцирует в стержнях об-
мотки «беличье колесо» электродвижущую силу. Токи в стержнях, в свою оче-
редь, взаимодействуя с током в обмотках статора, создают начальный пусковой
момент двигателя. Для поддержания вращения двигателя необходимо, чтобы
магнитное поле, образованное статором, перемещалось по его окружности, т. е.
необходимо создать равномерно вращающееся круговое магнитное поле. Такое
поле может быть получено при питании обмоток статора трехфазным током, ког-
да магнитные поля в обмотках смещены на 1100°.
Двигатели факсимильной аппаратуры, как правило, питаются двухфазным
током, и для получения вращающегося магнитного поля, магнитное поле, соз-
данное одной из обмоток статора, смещается на 90° путем включения последо-
вательно с этой обмоткой конденсатора определенной емкости. При этом резуль-
тирующее магнитное поле, созданное магнитными полями обеих обмоток, пере-
мещается по окружности. После достижения синхронной скорости, ротор будет
вращаться синхронно за счет того, что магнитное поле статора, замыкаясь через
ротор в разных его точках (пазах и выступах), будет иметь различное значение.
В результате возникают силы, направленные по оси ротора, и силы, перпендику-
лярные оси ротора — тангенциальные ((реактивные силы), заставляющие ротон
502
следовать за магнитным вращающимся полем статора. Короткозамкнутая об-
мотка «беличье колесо» при синхронном вращении двигателя не участвует в
его работе.
Синхронный гистерезисный двигатель отличается от реактивного тем, что
его якорь представляет собой гладкий цилиндр, собранный из колец специаль-
ного магнитного материала (викалой), чередующихся с медными кольцами. Ви-
калой обладает свойством сохранять магнетизм. Характеристики намагничива-
ния и размагничивания материала ротора отличаются друг от друга, образуя
широкую петлю гистерезиса, имеющую форму, близкую к прямоугольной. Маг-
нитное поле, создаваемое в роторе результирующим магнитным полем статора,
сохраняется, и на роторе как бы искусственно «.печатаются» магнитные полюса.
Поскольку место возникновения последних .в пространстве несколько отстает от
вращающегося магнитного поля статора, то возникает вращающий гистерезис-
ный момент, который увлекает ротор в сторону вращения магнитного поля, соз-
данного обмотками статора. Следовательно, при достижении синхронной скоро-
сти двигатель работает как синхронный с намагниченным ротором, максимальный
момент которого равен гистерезисному моменту. Пусковой момент создается за
счет токов Фуко, возникающих в массивном роторе.
Масса и размеры гистерезисного двигателя намного меньше равного по мощ-
ности синхронного двигателя.
В факсимильных аппаратах может использоваться способ при-
нудительной синхронизации. Сущность этого способа состоит в том,
что в начале или 'конце каждой строки в канал связи передают
сигнал строчной синхронизации, который на приемном конце за-
пускает генератор строчной развертки.
Для развертки по кадру передают сигнал кадровой синхрони-
зации, от которого запускается генератор кадровой развертки. Спо-
соб принудительной синхронизации, используемый в факсимиль-
ных аппаратах с электронными развертками, аналогичен способам
синхронизации телевизионных устройств.
При применении синхронных двигателей наиболее простым спо-
собом синхронизации является работа от общей сети электроснаб-
жения. Этот метод, например, используется в отечественных аппа-
ратах ФТАП и «Арагви».
Если сети электроснабжения в местах установки передатчика и
приемника не синхронизированы, то можно применить способ ав-
тономной синхронизации. Для этого в комплектации аппаратов
предусматривается приставка автономной синхронизации Ч Она
содержит камертонный генератор (частота 800 Гц, стабильность
5-10_6), делитель частоты на 16 и мощный усилитель, обеспечива-
ющий выходное напряжение 127 В и мощность около 30 Вт.
ФАЗИРОВАНИЕ
Наряду с установлением синхронизации разверток передающего
и приемного факсимильных аппаратов необходимо осуществить
фазирование аппаратов. Для этого перед началом передачи факси-
мильной телеграммы с передающей станции на приемную переда-
1) Приставка автономной синхронизации (ПАС) разработана для аппарата
ФТАПМ, но может использоваться и для других типов аппаратов, если послед-
ние питаются от сети переменного тока частотой 50 -Гц, напряжением 127 В и
потребляют мощность 25—30 ВА.
503
ют информацию о фазовом положении оригинала. В простейшем
случае на барабане передатчика (барабанная развертка) или на
транспортирующем механизме (плоскостная развертка) располо-
жена черная полоса, прилегающая к краю оригинала. При бара-
банной развертке черная полоса может быть расположена в месте
стыка (сшивки) краев изображения. Во время развертки изобра-
жения в момент прохождения этой полосы перед развертывающим
элементом на выходе передатчика возникают фазовые сигналы. На
приемной станции фаза развертывающего устройства устанавли-
вается так, чтобы в моменты прихода из канала связи фазовых
сигналов сшивка приемника располагалась перед записывающим
элементом. По окончании фазирования приступают к приему изоб-
ражения. В течение всего времени приема фаза сохраняется за
счет стабильности скорости привода (при автономной синхрони-
зации аппаратов).
Существуют автоматические, полуавтоматические и ручные спо-
собы фазирования. На рис. 14.29 показана принципиальная схема
Рис. 14.29. Принципиальная схема, поясняющая принцип
автоматического фазирования
автоматического фазирования, а на рис. 14.30 — схема полуавто-
матического фазирования.
При автоматическом фазировании в исходной позиции барабан
приемного аппарата находится в синфазном положении, т. е. пишу-
щее устройство расположено против сшивки барабана. После
включения аппарата, когда синхронный электродвигатель 1 начина-
ет вращаться, барабан остается неподвижным, поскольку его ось
не сцеплена с осью синхронного электродвигателя, так как собачка
2 удерживается якорем 3 и не соединяется с храповиком 4.
При поступлении фазового импульса срабатывает фазовый
электромагнит 5. Притягивая якорь 3, он освобождает собачку 2,
которая, западая в один из зубцов храповиков 4, насаженных на
ось синхронного электродвигателя и приемного барабана, осуще-
ставляет их сцепление. Такая автоматическая система фазирова-
ния применена в аппарате «Арагви».
Эта система проста и позволяет обеспечить достаточно высокую
точность фазирования. Однако ее нельзя применять при высоких
скоростях развертки, так как в моменты сцепления осей электро-
504
а) Форма уазоЬых импульсов, ..
поступающих от перева- d,UD
боем ого аппарата
Форма импульсоВ
раэОертт, посту-
лающих от прием-
Рис. 14 30. Принципиальная схема, поясняющая принцип полуавто-
матического фазирования (а); форма сигнала на экране электро-
лучевого индикатора (б)
двигателя и барабана возникают значительные механические уси-
лия, которые приводят к качаниям и могут вызвать поломку меха-
низма фазирования.
В аппарате «Нева» применена система полуавтоматического
фазирования, свободная от указанного выше недостатка (рис.
14.30а, б). Фазирование осуществляется за счет того, что электро-
двигатель приемного аппарата в первый период после включения
получает напряжение питания от генератора вспомогательной час-
тоты. Частота этого напряжения более высокая, чем частота на-
пряжения, которое вырабатывает генератор синхронной частоты.
В результате этого фазовое положение барабана на приемном
аппарате будет непрерывно изменяться относительно фазового по-
ложения барабана передающего аппарата и через некоторое время
наступит момент, когда фазовые положения аппаратов совпадут,
т. е. сшивки на барабанах передающего и приемного аппаратов
будут одновременно проходить перед объективом. Оператор опре-
деляет по индикатору электроннолучевой трубки, на экране кото-
рой появляется изображение фазового сигнала, момент установле-
ния синфазности.
Для получения изображения сигнала фазирования горизонталь-
ная развертка луча электроннолучевой трубки осуществляется при
каждом обороте приемного барабана благодаря размыканию кон-
тактов 3 и 4 кулачкового прерывателя Ki. Вертикальная развертка
505
луча образуется за счет фазовых импульсов, поступающих с пере-
дающего аппарата.
При установлении синфазности оператор нажимает кнопку
«Фаза», в результате чего к приемнику фазовых импульсов ПФИ
подключаются цепи от кулачкового датчика фазовых импульсов
и от выхода усилителя записи тракта приема.
В момент совпадения по времени в ПФИ фазовых импульсов,
поступающих от приемного и передающего аппаратов, в ПФИ сра-
батывает реле Р, которое подключает к синхронному двигателю
генератор синхронной частоты, переводя тем самым приемный ап-
парат в режим синхронной частоты, и самоблокируется (после
отпускания кнопки «Фаза») контактом Кз- Процесс фазирования
на этом будет закончен. Изображение фазового импульса на экра-
не электроннолучевой трубки зафиксируется в середине экрана и
будет иметь вид, показанный на рис. 14.306.
Процессы фазирования при принудительной синхронизации
здесь не рассматриваются, поскольку они полностью аналогичны
строчной и кадровой синхронизации телевизионных систем.
В заключение отметим, что согласно рекомендациям МККТТ
фазовые сигналы передают на уровне, соответствующем передаче
белого поля изображения. Частота передачи фазовых сигналов
обычно выбирается равной частоте несущей.
14.8. ОРГАНИЗАЦИЯ ФАКСИМИЛЬНОЙ СВЯЗИ
ПО ПРОВОДНЫМ КАНАЛАМ
Организация факсимильных связей по проводным каналам мо-
жет быть осуществлена по двум схемам:
1. Четырехпроводная схема включения (рис. 14.3|16z) предусмат-
ривает организацию прямых дуплексных связей, когда можно од-
новременно производить передачу и прием факсимильной телеграм-
мы. Эта схема обычно применяется для факсимильных аппара-
тов, установленных на телеграфах городов.
2. Двухпроводная схема включения (рис. 14.315) отличается от
четырехпроводной тем, что в ней на участке от факсимильного ап-
парата до аппаратуры высокочастотного уплотнения связь осуще-
ствляется по двухпроводной схеме с использованием кабелей и
средств автоматической коммутации городских телефонных цепей,
а на магистральном участке — по четырехпроводной схеме. При
этом коммутация каналов тч может производиться либо вручную,
либо с применением средств междугородной автоматики. Переход
от двухпроводной цепи к четырехпроводной осуществляется с по-
мощью дифференциальной системы. Эта система позволяет орга-
низовать соединение с приемной факсимильной станцией только
на время, необходимое для передачи факсимильного изображения;
в остальное время канал тч используется для передачи телефон-
ных разговоров.
При двухпроводной схеме включения передача может вестись
только в одном направлении. В случае необходимости передавать
506
tf) СоеЗин СоеЗин.
Рис. 14.31. Организация факсимильной связи по двухпроводной (а) к четырех-
проводной (б) схемам включения
факсимильное изображение в обоих направлениях передача долж-
на вестись по очереди.
Для организации факсимильной связи по двухпроводной схеме
чаще всего применяют приемо-передающие аппараты, например
«Арагви» и др. При использовании симплексных аппаратов, напри-
мер «Нева» и др., предусматривается дополнительное устройство
для переключения линий АТС с передающего на приемный факси-
Рис. 14.32. Характеристика
группового времени замед-
ления канала тч с фазовым
корректором
мильный аппарат без разрыва линии. Кроме элементов переключе-
ния, это устройство содержит автоматический регулятор уровня
для компенсации затухания различных соединительных линий, а
также релейную схему с вызывной лампочкой. На верхней части
устройства устанавливается телефонный аппарат, который исполь-
зуется для переговоров при отсутствии факсимильной передачи.
507
К каналам связи, предоставляемым для факсимильной переда-
чи, предъявляются довольно жесткие требования, особенно в отно-
шении фазовой характеристики, которая определяется групповым
временем замедления. Для безыскаженной передачи требуется,
чтобы групповое время замедления (ЛВЗ) имело постоянную ве-
личину во всей рабочей полосе канала. Практически обеспечить
ТАБЛИЦА 14.4
Наименование параметра Норма Примечание
Разность времени замед- ления Д t на разных час- тотах рабочей полосы , 0,4-103 Д (F—период изменения ГВЗ) 0,5-108 (/макс /макс максимальная частота рисунка) При колебательном харак- тере изменения ГВЗ При монотонном изменении ГВЗ
Амплитудно-частотная характеристика Линейна Уменьшение разрешающей способности приемника при частотных искажениях в ка- нале и наличии нескольких (и) переприемных участков (рис. 14.33)
Остаточное затухание при схеме связи: —четырехпроводной —двухпроводной 0 дБ 13,05-4-28,36 дБ На частоте 1900 Гц В зависимости от величины затухания абонентских линий
Плавные изменения ос- таточного затухания (дли- тельностью более 4 мин) до 1,74 дБ При применении метода ЧМ требования к плавным изме- нениям остаточного затухания не предъявляются
Мгновенные изменения остаточного затухания 1 дБ
Коэффициент нелиней- ных искажений канала тч не более 2У~п, % (п—число переприемных участков.) На вход канала тч подается измерительная частота800 Гц с уровнем—13,05 дБ
Разница уровней полез- ного сигнала и помехи на входе приемника при: ЧМ AM 26,1 дБ 34,8 дБ
508
постоянство группового времени замедления невозможно даже при
коррекции фазовой характеристики канала связи. После фазовой
коррекции групповое время замедления имеет колебательный ха-
рактер относительно постоянной величины (рис. 14.32).
В табл. 14.4 приведены требования к различным характеристи-
кам канала тч, предоставляемого для факсимильной передачи.
14.9. ОСОБЕННОСТИ ОРГАНИЗАЦИИ ФАКСИМИЛЬНОЙ
СВЯЗИ ПО РАДИОКАНАЛАМ
В настоящее время кв радиоканалы являются одним из основ-
ных средств организации факсимильной связи на дальние расстоя-
ния. На качество приема серьезное влияние оказывают замирания
сигналов и появление эхо-сигналов. Для уменьшения влияния этих
помех на качество изображения применяются направленные пере-
дающие и приемные антенны, используются методы приема на раз-
несенные антенны, правильно выбираются рабочие частоты в зави-
симости от времени суток и т. д.
Для передачи факсимильных сигналов было предложено не-
сколько способов. Из них практическое применение нашли метод
амплитудной модуляции радионесущей при частотной модуляции
поднесущей (AM—ЧМ) и метод частотной модуляции радионесу-
щей спектром факсимильного сигнала (ЧМ).
Метод AM—ЧМ характеризуется тем, что амплитудномодули-
рованный сигнал с выхода передающего аппарата поступает на
преобразующее устройство AM—ЧМ, например, приставку частот-
ной модуляции, описанную в § 14.4, и этим сигналом несущая ра-
диопередатчика модулируется по амплитуде. На приемном конце
совершаются обратные преобразования.
Структурная схема, реализующая способ AM—ЧМ, и спектр
частот в различных точках схемы изображены на рис. 44.34 а, б.
Преимущества способа AM—ЧМ следующие:
— простота используемой аппаратуры;
— возможность применения обычных радиотелефонных пере-
датчиков и приемников;
— незначительные искажения из-за колебаний уровня сигнала
в радиоканале и за счет замираний.
Недостатками способа являются:
— низкий коэффициент использования частот канала (полез-
ная информация фактически заключена в полосе частот 2 кГц при
ширине канала 7 кГц);
— малая скорость передачи (60 строк/мин);
— низкий коэффициент использования энергии радиопередат-
чика.
Несмотря на указанные недостатки, способ AM—ЧМ получил
широкое распространение.
При передаче по способу ЧМ спектр частот рисунка непосред-
ственно используется для модуляции частоты радиопередатчика.
Структурная схема и спектры частот в разных точках схемы при-
ведены на рис. 14.35 а, б.
509
0 1 2 3 4 5r'5n
Рис 14.33. Зависимость до-
пустимой /рис макс ОТ числа
переприемных участков
Далее осуществляется
тирование.
После выделения частот рисунка про-
изводится модуляция по частоте задаю-
щего генератора. Девиация частоты со-
ставляет 2004-400 Гц. При скорости пе-
редачи порядка 60 строк/'мин индекс ча-
стотной модуляции передатчика меньше
единицы, поэтому радиопередатчик ис-
пользуется с узкополосной ЧМ,
Приемник выполнен по схеме супер-
гетеродина с двойным преобразованием
частоты. После второго преобразования
образуется частотномодулированный
спектр, соответствующий общепринятому
(/в = 2300 Гц, fo=19OO Гц, ifH=1500 Гц),
ограничение и частотно-амплитудное детек-
7
Г'
>4!
—i Б
Х-—-
нес
Оа£тот1т^я_пристаВка
15 ^/4 ~7з~ 1~2~ lD -
I Соединит. । i JL
<j И-к
I линия 41— —
I
i_____________i
Радиопередатчик/
Радиоприемник ’
L
г
Рис. 14.34. Способ передачи факсимильных сигналов АМ-ЧМ:
а) структурная схема; б) спектры частот в разных точках схемы:
1—передатчик факсимильного аппарата, 2— амплитудный детектор, 3 — частотный моду-
лятор, 4— генератор несущей, 5 — амплитудный модулятор, 6 — генератор несущей радио-
канала, 7—выходной усилитель, 8 — усилитель высокой и промежуточной частот, 9 — ампли-
тудный детектор, 10— усилитель низкой частоты, 11—полосовой фильтр, 12— ограничитель
амплитуд, 13 — частотный детектор, 14 — усилитель, 15 — приемник факсимильного аппарата
К преимуществам способа ЧМ '(по сравнению со способом
AM—ЧМ) относятся:'
— более эффективное использование радиоканала;
— значительный выигрыш по мощности радиопередатчика;
— более высокая помехозащищенность вследствие сужения по-
лосы частот радиоканала.
Недостатками способа являются:
— необходимость в специальных узкополосных радиопередатчи-
ках и радиоприемниках;
— резкое повышение требований к стабильности генераторов и
гетеродинов.
510
1-й гетеродин
15 1й 7J 12 УНЧ
Рис. 14.35. Способ передачи факсимильных сигналов ЧМ:
а) структурная схема; б) спектры частот в разных точках схемы:
/—передатчик факсимильного аппарата, 2 — амплитудный детектор, 3 — частотный модуля-
тор, 4— генератор радионеаущей, 5 — выходной усилитель, 6 — усилитель высокой частоты,
7 — первый смеситель, 8 — первый гетеродин, 9 — усилитель промежуточной частоты, 10 —
второй смеситель, //—второй гетеродин, 12— усилитель низкой частоты, 13— фильтр ниж-
них частот, 14 — ограничитель амплитуд, 15 — частотный детектор, 16 — приемник факсимиль-
ного аппарата
14.10. ПЕРЕДАЧА ГАЗЕТ ПО ШИРОКОПОЛОСНЫМ
КАНАЛАМ СВЯЗИ [65, 68]
ОБЩИЕ СВЕДЕНИЯ
Основная щель фототелеграфной передачи газет состоит в регу-
лярной и своевременной передаче центральных и республиканских
газет в пункты их децентрализованного печатания. За счет децент-
рализации печати достигается значительное снижение расходов на
экспедицию мацриц газет, обеспечивается почти одновременный
выход в свет свежей газеты по всей территории СССР.
Для передачи газет используются специальные высокоскорост-
ные фототелеграфные аппараты и широкополосные каналы связи
первичных (60—108 кГц) и вторичных (312—552 кГц) групп. Меж-
ду типографиями и междугородными телеграфными станциями в
пунктах передачи и приема оборудуются двусторонние широкопо-
лосные соединительные линии. Для ускорения процесса передачи
газеты фототелеграфное оборудование устанавливается в непосред-
ственной близости от соответствующих цехов типографий.
Способы фототелеграфной передачи газет, в принципе, не отли-
чаются от способов, изложенных в предыдущих параграфах насто-
ящей главы. Однако требования к качеству воспроизведения копии
значительно повышаются. Если для обычной фототелеграфной пе-
редачи достаточно было иметь разрешающую способность (чет-
кость) воспроизведения 5—7 лин/мм, то для передачи газет чет-
кость необходимо увеличить до 12—32 лин/мм. Необходимость та-
кой высокой разрешающей способности объясняется тем, что при
передаче фотоиллюстраций газетных полос (растровых изображе-
ний) требуется на фотопленке воспроизводить без искажений точ-
ки диаметром 80—100 мк и промежутки между ними в 200 мк.
511
Передача газетной полосы требует увеличения до соответству-
ющих размеров и передаваемого бланка. Это приводит к значи-
тельному увеличению габаритов барабанов передающего и прием-
ного аппаратов, повышению требований к стабильности развертки
(равномерности вращения барабана) и сокращению времени пере-
дачи бланка. Чтобы время передачи бланка сохранялось в допусти-
мых технологическим процессом децентрализованной печати газет
пределах, возникла необходимость в значительном увеличении ско-
рости передачи, а следовательно, в использовании широкополосных
каналов связи.
КАНАЛЫ СВЯЗИ, ИСПОЛЬЗУЕМЫЕ ДЛЯ ПЕРЕДАЧИ ГАЗЕТ
Для передачи газет используются широкополосные каналы
первичных и вторичных групп.
Первичный групповой тракт (60—108 кГц) образуется при по-
мощи аппаратуры частотного преобразования на базе спектров ли-
нейных трактов (аппаратура К-12, К-24) или трактов первичных
групп (аппаратура К-60, К-300, К-1920, Р-600). Канал первичной
группы образуется на базе двух трактов первичной группы (прямо-
го и обратного) при помощи специального каналообразующего обо-
рудования, которое включается на входе и выходе тракта, и тран-
зитного оборудования, включаемого в пунктах высокочастотного
транзита. Используемые каналы первичных групп должны удов-
летворять нормам, обеспечивающим хорошее качество принимае-
мого изображения. С этой целью они оборудуются устройствами
коррекции амплитудно-частотных и фазо-частотных характеристик
канала. Кроме того, при организации каналов первичных групп
должна быть предусмотрена возможность поочередного использо-
вания одних и тех же каналов (каналообразующего и транзитного
оборудования) как для передачи газет, так и для передачи теле-
фонных сообщений. Это связано с тем, что газеты передаются по
каналам только 4—5 часов в сутки.
Вторичный групповой тракт (312—552 кГц) образуется на базе
спектров линейных трактов (аппаратура iK-6'О, К-300, Р-600,
К-1920П). Каналы вторичной группы образуются на базе двух ти-
повых трактов (прямого и обратного) вторичной группы при помо-
щи каналообразующего и транзитного оборудования. Так же, как
и в каналах первичной группы, должно быть предусмотрено обору-
дование для коррекции амплитудно-частотных и амплитудно-фазо-
вых искажений.
В предоставляемых для передачи газет трактах первичной и
вторичной групп характеристика времени замедления в рабочем
спектре частот корректируется так, чтобы запаздывание частот от-
носительно средней частоты канала не превышало 24 мкс для пер-
вичных групп и 5 мкс для вторичных групп (заметим, что при ор-
ганизации обычной факсимильной связи это время составляет
250 мкс).
512
СКОРОСТЬ И ВРЕМЯ ПЕРЕДАЧИ ИЗОБРАЖЕНИЙ
Скорость и качество являются основными параметрами системы
фототелеграфной передачи газет.
Скорость передачи (в аппаратах с барабанной разверткой) мо-
жет быть определена в соответствии с ф-лой (14.8)
N _ макс , об/мин. (14.20)
л D
Время Т передачи бланка (газетной полосы) может быть опре-
делено по ф-ле (|14.9). Значение /рис. макс'зависит от способа пере-
дачи спектра частот, образованного при модуляции несущей час-
тоты частотой рисунка, и ширины используемого канала связи. При
использовании амплитудной или частотной модуляции с асиммет-
ричным ограничением боковых полос /рис.макс= (0,854-0,9) AF, где
AF — рабочая полоса частот канала, в пределах которой ампли-
тудные и фазовые искажения соответствуют нормам, а с симмет-
ричным ограничением боковых полос /рис.макс = 0,5.AF.
Подставив соответствующие значения в ф-лы (14.20) и (14.9)
(при ар = 0,06 мм четкость 16,5 лин/мм), легко получить следу-
ющие величины: для способа передачи с симметричным ограниче-
нием полос при работе по каналам первичной группы N=
= 212 об/мин, а 7’ = 33,2 мин; при работе по каналам вторичной
группы N= 1180 об/мин, 7=6 мин. Для способа асимметричного
ограничения полос при работе по каналам первичной группы N=
= 382 об/мин, 7’= 18,4 мин, в каналах вторичной группы N=
= 2120 об/мин, Т = 3,3 мин.
ТРЕБОВАНИЯ К ЧЕТКОСТИ ПЕРЕДАЧИ
Удовлетворительное качество воспроизведения газетного текста
получается при четкости 10 лин/мм. Однако качество приема раст-
ровых иллюстраций может оказаться неудовлетворительным из-за
появления муара — специфического искажения, возникающего в
результате интерференции между линиями развертки и периодичес-
ки появляющимися точками растрового изображения. Муар может
быть уменьшен двумя способами: применением очень высокой чет-
кости или выбором такого соотношения между шагом развертки и
расстоянием между точками, образующими газетное изображение,
при котором муар становится мало заметным.
Устранение муара вторым способом при использовании относи-
тельно нешироких каналов связи более предпочтительно, так как
не увеличивается время передачи бланка. Исследования показыва-
ют, что для каждого типа растрового изображения можно подо-
брать такой шаг развертки, при котором явление муара исчезает.
Для наиболее употребительных типов растровых изображений шаг
развертки 6 = 0,06 мм.
513
ТРЕБОВАНИЯ К ОПТИЧЕСКИМ УСТРОЙСТВАМ И РАЗВЕРТЫВАЮЩИМ
УСТРОЙСТВАМ
Оптические устройства фототелеграфных аппаратов для переда-
чи газет должны обладать достаточно высокой разрешающей спо-
собностью, большой глубиной резкости и безореольностью. Недо-
статочная глубина резкости может привести (из-за неровностей
бумаги, неплотного прилегания бумаги к барабану и т. д.) к пони-
жению четкости воспроизведения на приеме. Наличие ореола при-
водит к уменьшению перепада уровней черного и белого полей на
передаче и уменьшает контрастность и резкость на приеме.
Для уменьшения искажений изображения форму светового пят-
на (растрового элемента) следует выбирать прямоугольной. Попе-
речный размер светового пятна на приеме должен строго соответ-
ствовать (с точностью до 5 мк) шагу развертки.
Передача газет предъявтяет жесткие требования к механическим качаниям
и равномерности подачи в развертывающих устройствах. Выполнение этих тре-
бований при значительных размерах барабана (Д=(195 мм, /=422 мм) и высоких
скоростях вращения барабана связано с определенными трудностями. В аппара-
туре передачи газет механические качания не должны превышать ± (0,024-
4-0,03) мм1). Для выполнения столь жестких требований электропривод и ба-
рабан укрепляются на строго горизонтальных массивных стальных плитах и
тщательно балансируются. Применяются безредукторные приводы. Приводы для
вращения барабана и обеспечения поступательной подачи оптических устройств
выполняются отдельными. Все детали аппарата изготовляются с высоким клас-
сом точности.
ТРЕБОВАНИЯ К УСТРОЙСТВАМ СИНХРОНИЗАЦИИ
И ФАЗИРОВАНИЯ
Особенно жесткие требования при передаче газет предъявля-
ются к устройствам синхронизации и фазирования. Допускаемый
за счет расхождения частот синхронизации передатчиков и прием-
ников накопленный перекос изображения — не более 2 мм. Отно-
сительная нестабильность задающих генераторов синхронизации,
обеспечивающих указанный суммарный перекос ['(см. ф-лы (14.118)
и (14/19)], составит 1,2-Ю-7. Такой нестабильностью обладают
специальные кварцевые генераторы образцовых частот.
В фототелеграфных аппаратах, которые работают по кабель-
ным и радиорелейным линиям связи, преимущественно использу-
ется метод автономной синхронизации передатчиков и приемников.
В связях, организуемых с помощью искусственных спутников зем-
ли, применяют метод принудительной синхронизации.
В газетных копиях абсолютно недопустим срез напечатанных
полей, который может произойти из-за неточного фазирования, так
как это приводит к браку в получении целой газетной полосы. По-
этому фазирование осуществляют при помощи автоматических уст-
*) Для аппаратуры общего назначения допускаются выбросы механических
качаний ±0,05 мм и более.
514
ройств, которые обеспечивают точность фазирования 3 мм. Иногда
в аппарате предусматривают визуальный 'контроль за точностью
фазы принимаемых сигналов.
СВЕДЕНИЯ О ФОТОТЕЛЕГРАФНЫХ АППАРАТАХ ДЛЯ
ПЕРЕДАЧИ ГАЗЕТ
Аппараты для передачи газет делятся на две группы: низкоско-
ростные (140ч-'240 строк/мин), работающие по каналам первичных
групп (604-1108 кГц) и высокоскоростные (1500-4-3000 строк/мин)
для работы по каналам вторичных групп (3124-052 кГц).
Первый отечественный аппарат для передачи изо'бражений га-
зетных полос (страниц) по каналам связи — аппарат ФТАГ «Газе-
та-1» — относится к группе низкоскоростных аппаратов.
Аппаратура ФТАГ предназначена для одновременной передачи
двух газетных полос по одному каналу первичной группы. Полоса
частот канала первичной группы (604-108 кГц) делится на четыре
подканала: подканал шириной 604-64 кГц, предназначенный для
передачи синхрочастоты; подканал 644-84 кГц — для передачи изо-
бражения газетной полосы с одного аппарата (канал а); подканал
844-400 кГц — для передачи изображения газетной полосы со вто-
рого аппарата (канал 5); подканал 1044-108 кГц — для служеб-
ной связи в направлении передачи. Служебная связь в сторону пе-
редающей станции создается по одному из каналов первичной груп-
пы обратного направления.
Образование указанных выше подканалов осуществляется дополнительным
канальным оборудованием (ДКО), состоящим из стоек СПО (стойка передачи
оконечная) и СПРО (стойка приема оконечная). Эти стойки содержат полосо-
вые фильтры для образования всех подканалов и фазовые корректоры для кор-
рекции подканалов А и Б. Кроме того, необходима установка дополнительного
оборудования ,в ЛАЦ МТС и пунктах транзита-
— стойки ЛАЦ МТС передачи '(СЛП) и приема (СЛПР), содержащие уст-
ройства для сопряжения соединительных линий к типографиям с аппаратурой
МТС, а также амплитудные и фазовые корректоры для выравнивания амплитуд-
но-частотных и фазо-частотных характеристик соединительных линий;
— стойки транзита (СТ) и стойки автоматической регулировки уровня груп-
повых трактов (САРУГ). Стойка САРУГ устанавливается в оконечных и проме-
жуточных пунктах и включается в первичные группы систем К.-24 и К-60 для
обеспечения требуемой стабильности остаточного затухания каналов.
Комплект аппарата «Газета-1» состоит из передающего
(ФТАГ-Д) и приемного (ФТАГ-П) аппаратов. Каждый из аппара-
тов может работать по лю'бому из каналов А или Б. Как правило,
работа по каналам А и Б идет одновременно.
:В аппаратах используется метод частотной модуляции с симметричным ог-
раничением боковых полос. Развертка в передатчике и приемнике — барабанная.
Принцип синхронизации — автономный. Высокостабильная задающая синхрони-
зирующая частота для питания приводов вырабатывается установкой образцо-
вых частот ЧО-8, которой снабжены как передатчик, так и приемник. Фазирова-
ние передатчика и приемника осуществляется автоматически. Для этого перед
началом работы от передатчика к приемнику посылают сигнал запуска (частота
1200 Гц) в течение 40 с. Далее в течение 80 с передают фазовые сигналы, пред-
ставляющие поочередные посылки сигнала «черное» (0,6% длительности строки)
и сигнала «белое» (0,6% длительности строки). После осуществления фазирова-
ния начинается передача изображения. Во время передачи синхронизм и фаза
515
передающего и приемного барабана поддерживаются за счет высокой стабиль-
ности синхронизирующей частоты.
В комплект передающей станции входят два аппарата ФТАГ-Д (один рабо-
тает по каналу А, и другой — по каналу Б), стойки СПО и ЧО-З. В комплект
приемной станции входят два аппарата ФТАГ-П, стойка СПРО и ЧО-З.
Процесс передачи газеты и ее децентрализованной печати состоит из:
— изготовления оригинала оттиска с каждой полосы газеты на бумаге по-
вышенного качества;
— фототелеграфной передачи газеты и ее приема в пунктах децентрализо-
ванной печати на фотопленку в виде негатива;
— фотохимической обработки пленок;
— проверки негативов, их ретуши и изготовления вторичной печатной фор-
мы путем светокопирования негатива на металлические пластины;
— матрицирования, стереотипирования и установки форм в ротационную
типографскую машину;
— печатания тиража газеты.
Для уменьшения времени передачи и сокращения технологического цикла
стремятся автоматизировать ряд процессов.
Новая аппаратура для передачи газет «Газета-2» рассчитана
на работу по каналам вторичных групп (312-4-552 кГц). В аппара-
туре применена амплитудная модуляция с частичным подавлением
одной боковой полосы (AM ОБП). Использование широкополосно-
го (240 кГц) канала и метода передачи AM ОБ1П позволило резко
увеличить скорость и сократить время передачи газетной полосы.
Комплекс оборудования «Газета-2» [8] состоит из оконечной пе-
редающей и приемной фототелеграфной аппаратуры, каналофор-
мирующего оборудования, оборудования для автоматической фото-
химической обработки принятых пленок, специального полиграфи-
ческого оборудования для изготовления металлических форм с при-
нятых фотопленок и измерительной аппаратуры. Отличительной
особенностью аппаратуры является применение в передающем и
приемном аппаратах системы дуговой развертки изображения. Та-
смещениц
камеры
Рис. 14.36. Принцип дуговой развертки в ап-
парате «Газета-Й»
516
кая система развертки позволяет осуществлять запись изображе-
ния и а рулонной фотопленке, что значительно сокращает время, за-
трачиваемое на перезарядку аппарата и упрощает эксплуатацию.
Принцип дуговой развертки поясняется рис. 14.36. Передавае-
мый оригинал газетной полосы и фотопленка на приемном аппара-
те размещаются в цилиндрической полости камеры и плотно при-
жимаются к ее поверхности пневматическим путем. Развертка по
строке осуществляется при помощи электродвигателя 1, вращаю-
щего оптическую систему 2, а развертка по кадру обеспечивается
за счет смещения камеры 3 на один шаг подачи за каждый оборот
оптической системы.
Процесс закрепления оригинала газетной полосы на передаче
и фотопленки на приеме автоматизирован и занимает всего не-
сколько секунд. Аппараты не нуждаются в фазировании после пе-
редачи каждой полосы, а камеры — в перемещении в исходное
положение, поскольку запись может осуществляться как при пере-
мещении камеры слева направо, так и при движении ее в обратном
направлении.
После закрепления газетной полосы на аппарате передающего
пункта, а на аппарате приемного пункта — фотопленки операторы
нажимают кнопки готовности к работе и аппараты автоматически
входят в связь и осуществляют передачу и прием. Работа отдель-
ных устройств аппарата отражается на световом табло, за которым
наблюдают операторы.
Основные технические характеристики аппаратов для передачи
газет по каналам связи даны в табл. 14.5.
ТАБЛИЦА 14 .5
Наименование параметра <Газета-1» «Газета-2» Мюрхед (Англия) Тохо-Денки (Япония)
Размер изображения, мм 610x420 610x420 610x420 610x420
Полезная длина строки, мм 570 570 570 570
Тип развертки Барабанная
Направление развертки Правое Правое и левое Правое Левое
Скорость развертки, строк/мин 143 3000 180; 240 1500; 2250
517
Продолжение
Наименование параметра «Газета 1» «Газета 2» Мюрхед (Англия) Тохо-Денки (Япония)
Шаг развертки, мм 0,06 0,04; 0,06 0,06 0,04; 0,06
Четность, лин/мм 16 24; 16 16 24; 16
Рабочий диапазон час- тот, кГц Канал А 66ч-82 Канал 5 864-102 Синхроканал 60,64-63,7 Канал служеб- ной телефонной связи 104,64-107,7 3154-552 Канал А 604-82 Канал 5 864-108 Синхрока- нал 834-85 3304-530
Модуль (индекс взаимо- действия) 3100 4600 3100 3100 4607 3067
Время передачи газетной полосы, мин 50 2,3 3,5 27 2,8 6,46
Частота видеосигнала Гц 10000 180000 18500 183000
Способ модуляции ЧМ AM-ОБП (позитив) АМ-ОБП (позитив) АМ-ОБП (позитив)
Девиация частоты, кГц ±2 — — —
Несущие частоты (нор- мали), кГц 764-72 964-92 500 6,4 104,84 508
518
Продолжение
Наименование параметра «Газета-1» «Газета-2» Мюрхед (Англия) Тохо-Денки (Япония)
Используемый сигнал связи Первичная группа 60-Н08 кГц Вторичная группа 312-н552 кГц Первичная группа 60н-108 кГц Вторичная группа 312-J-512 кГп
Синхронизация Автономная
Исходная частота син- хронизации, Гц 10” 5-Ю8 1333 1000 105
Нестабильность частоты синхронизации, не хуже ±2-10"7 +2-I07 — +2 10-7
Фазирование Автоматическое Полуавтома- тическое Автоматичес- кое
Носитель записи Фотопленка
Габариты, мм 1150x771x562 1250х1550х Х725 1270x1140Х ХбЗО 1200х1300х Х650
СПИСОК ЛИТЕРАТУРЫ
Общая литература:
1. Базилевич Е. В. и др. Передача данных. — В инф. сб. «Техника связи за ру-
бежом». |М., «Связь», (19'69, '176 с.
2. Гуров В. С., Емельянов Г. А., Етрухин Н. Н. Передача дискретной .информа-
ции и телеграфия. М., «Связь», 1909, 559 с.
3. Гуров В. С. и др. Основы передачи данных по проводным каналам связи. М.,
«Связь», 1964, Й1:1 с.
4. Зелигер Н. Б. Курс телеграфии, ч. 1. М., Связьиздат, 1961, 200 с.
5. Зелигер Н. Б. Лекции по телеграфии и передаче данных. Л., Изд-во ЛЭИС,
1'969, 1(94 с.
6. Копничев Л. Н. Принципы построения аппаратуры для передачи дискретной
информации. М., «Связь», /1197'2, 155 с.
7. Наумов П. А., Чанцов С. Д. Курс телеграфии, ч. 2. М., Связьиздат, 1961,
295 с.
8. Новиков В. В. и др. Основы телеграфии и телеграфные станции. М., «Связь»,
1970, 568 с.
9. Шварцман В. О., Зубовский Л. И.1 Беркман Н. А. Каналы передачи данных.
Под ред. В. О. Шварцмана. М., «Связь», ,1970, 304 с.
10. Шляпоберский В. И. Элементы дискретных систем связи. Изд. 2-е. М., Воен-
издат, 11965, 304 с.
/< главе 2
11. Брусиловский К. А. Измерение искажений импульсов в системах передачи
дискретной инфорамции. М., «Наука», 1965, -1'112 с..
12. Пуртов Л. П. и др. Элементы теории передачи дискретной информации. Под
общ. ред. Л. П. Пурт'ова. М., «Связь», 1972, 232 с.
К главе 3
13. Наумов Ю. Е. Интегральные логические схемы. М., «Советское радио», 1970,
432 с.
К главе 4
14. Супрун Б. А. Первичные коды. М., «Связь», 1970, 160 с.
К главе 6
15. Мартынов Е. М. Синхронизация в системах передачи дискретных сообщений.
М., «Связь», 1972, 216 с.
К главе 7
16. Гоноровский И. С. 'Радиосигналы и переходные явления в радиоцепях. М.,
Связьиздат, 1954, 326 с.
17. Давыдов Г. Б. Основы теории и расчета фазокорректирующих цепей. М.,
Связьиздат, 1958, 293 с.
18 Добровольский Г. В. Передача импульсов по каналам связи. М., Связьиздат,
i960, 216 с.
19 Зингеренко А. М. Определение длительности нарастания .переходных функций
по амплитудно-частотным характеристикам передающих систем. — «Радио-
техника», 1955, т. 10, № 7, с. 8—20.
К главе 8
20 Аппаратура надтонального телеграфирования НТ-ЧМ-4 и промежуточная ап-
паратура тонального телеграфирования. — В инф. сб.: «Техника связи». М.,
Связьиздат, 11957, с. 88.
520
21, Бобров Н. П. Передача дискретных сигналов с помощью фазо-разностной
манипуляции. — «Электросвязь», ,1960, № 6, с. 3—9.
22. Данилов Б. С. Помехоустойчивость передачи двоичной информации в систе-
ме ФМ с частично подавленной одной боковой полосой. — В сб. научных
трудов ЦНИИС, 11,965, № 1, с. 164—,17]2.
23. Емельянов Г. А., Базилевич Е. В., Выговский С. И. Частотное телеграфиро-
вание. М., «Связь», 1966, 272 с.
24. Мизин И. А., Уринсон Л. С., Храмешин Г. К. Передача информации в сетях
с коммутацией сообщений. М., «Связь», 1972, 319 с.
25. Многоканальная связь. Под ред. И. А. Аболица. М., «Связь», 1,971, 488 с.
26. Оргсвязь. — В инф. ;сб. «Техника связи за рубежом». М., Связьиздат, 1'960,
с. 98.
27. Пелехатый М. И. Устранение «неопределенности фазы» в приемнике двукрат-
ной фазовой телеграфии. — «Электросвязь», 1063, № 8, с. 191—23.
28. Передача цифровой информации. —• В сб. переводов под ред. С. И. Самой-
ленко. М., ИЛ, 1963, 479 с.
29. Петрович Н. Т. Передача дискретной информации в каналах с фазовой ма-
нипуляцией. (М., «Советское радио», 1965, 263 с.
30. Системы тонального телеграфирования. — В инф. об.: «Техника связи за ру-
бежом». М, Связьиздат, 1962, с. 206.
31. Штейн В. М. 'Некоторые вопросы построения систем связи с ИКМ. — «Элек-
тросвязь», 1966, № 3, с. 17—25.
32 Штейн В. М. Передача телефонных сообщений методом ИКМ. — «Электро-
связь», 4963, № 1, 2, с. 36—47.
33. Ярославский Л. И., Усов И. С., Штульман А. И. Передача дискретной ин-
формации по каналам систем с ИКМ. — В сб. научных трудов КФ ЦНИИС,
1970, № 6, с. 102—408.
К главе 9 (см. также [10, 11])
34. Амарантов В. Н. Искажения телеграфных импульсов в каналах тонального
телеграфирования с AM и ЧМ при гармонической и флуктуационной поме-
хах. — «Электросвязь», 1956, № 3, с. 65—74.
35. Балтер Ю. Б., Дарова П, И. Новые телеграфные измерительные приборы.
М., «Связь», 4972, 79 с.
36. Данилов Б. С. Помехоустойчивость высокоскоростных систем передачи циф-
ровой информации с фазовой и амплитудно-фазовой манипуляцией. — В сб.:
«Фазовая и относительная фазовая телеграфия». М., «Связь», 1967, с. 56—62.
37. Зингеренко А. М. Искажения длительности телеграфных импульсов при воз-
действии флуктуационных помех в системе с частотной модуляцией. — «Ра-
диотехника», 1956, т. 11, № 3, с. 70—80.
38 Зюко А. Г. Помехоустойчивость и эффективность систем связи. М., Связь-
издат, 4963, 320 с.
39. Мешков А. А., Мельников П. В., Зубовский Л. И. Измерение телефонных ка-
налов, предназначенных для передачи данных. М., «Связь», 1967, 52 с.
40. Морев В. Л. Передача данных по телефонным каналам в информационно-
вычислительных системах. М., «Связь», 4971, 46 с.
41 Статистика ошибок при передаче цифровой информации. Пер. с англ, под ред..
С. И. Самойленко. М., «Мир», 4966, 304 с.
42. Таблицы вероятностных функций. Том 2. М., Изд. АН СССР, 1959 (Библио-
тека математических таблиц, вып. 3), 344 с.
43 Таблицы интегрального синуса и косинуса. М., Изд. АН СССР, 1954, 473 с.
44. Теплов Н. Л. Помехоустойчивость систем передачи дискретной информации..
М., «Связь», 1964, 359 с.
К главе 10 (см. также [19, 22, 23])
45. Аппаратура временного уплотнения для местных телеграфных связей-
(ТВУ-1112). — «Вестник связи», 4970, № 2, с. 7—10.
46. Ярославский Л. И, и др. Телеграфная аппаратура временного уплотнения ка-
белей ГТС (ТВУ-12). — В инф. сб.: «Техника связи». Mi, «Связь», 1973, с. 96.
52 h
47 Каталог «Изделия радиопромышленности», т. 2, вып. «Аппаратура передачи
данных». М„ НИИЭИР, 1970,' 22 с.
48 Аппаратура частотно-временного телеграфирования ЧВТ-2. Техническое опи-
сание, 97 с.
49 Бухдрукер И. М. и др. Аппаратура тонального телеграфирования типа
ТТ-, 17ПЗ. — «Вестник связи», 1972, № 10, с. 18—22.
50. Глянцев Б. А. Магистральная аппаратура тонального телеграфирования
ТТ-48. — «Электросвязь», 1972, № 8, с. 8—48.
51 Новая аппаратура тонального телеграфирования ма полупроводниковых при-
борах ТТ-17П и ОТТ-2С — В инф. сб. «Техника связи», М, «Связь», 1965,
с. 127.
52 Телеграфная система уплотнения с фазовой модуляцией. Обзорная информа-
ция о зарубежной технике связи. Серия: «Телефония, телеграфия, передача
данных», 4970, № 5, с. 18—00.
53 Ярославский Л. И., Короп Б. В., Цвибель И. И. Малоканальная аппаратура
частотного телеграфирования. — В инф. сб.: «Техника связи». М., «Связь»,
1968, 119 с.
К главе 11 (см. также [11, 24])
54. Мартынов Ю. М. Обработка информации в системах передачи данных. М,
«Связь», 1:969, 200 с.
55. Питерсон У. Коды, исправляющие ошибки. М., «Мир», 4964, 338 с.
56 Удалов А. П., Супрун Б. А. Избыточное кодирование при передаче инфор-
мации двоичными кодами. М., «Связь», ,1964, 1270 с.
57 Харкевич А. А. Борьба с помехами. Изд. 2-е. М., Физматгиз, ,1965, ,275 с.
К главе 12 (см. также [24])
58 Базилевич Е. В., Прамнэк Г. Ф. Системы коммутации сообщений на базе тех-
ники ЭВМ. — В инф. сб.: «Техника связи за рубежом». М., «Связь», 1971,
1'80 с.
59 Коган В. С., Кравченко Э. Н., Грязнов Ю. М. Автоматические телеграфные
коммутационные станции. М., «Связь», 1970, 268 с.
Л' главе 13 (см. также [24, 58]j
60 Давыдов Г. Б., Рогинский В. Н. Проблемы построения сетей связи. — В сб.:
Информационные сети и коммуникации». М., «(Наука», 1968, с. 71—80
61 Дьяченко В. Ф., Лазарев В. Г., Саввин Г. Г. Управление на сетях связи. М.,
«Наука», 1967, 223 с
62 Козлов Б. А., Ушаков И. А. Краткий справочник по расчету надежности ра-
диоэлектронной аппаратуры. М., «Советское радио», 1966, 432 с,
63 Кульбак Л. И. Основы расчета обеспечения электронной аппаратуры запас-
ными элементами М., «Советское радио», 4970, 208 с.
64 Шишоиок Н. А., Репкин В. Ф., Барвинский Л. Л. Основы теории и эксплуата-
ции радиоэлектронной техники. М, «Советское радио», 119164, 551 с.
К главе 14
65 Мельник С. О. Оператор фототелеграфных связей. М., «Связь», 1969, 492 с.
66 Орловский Е. Л., Федорцев Б. Ф. Курс фототелеграфии. Л., Изд. ВКАС, 1955,
147 с.
67 Федорцев Б. Ф. Фототелеграфная техника. М., Воениздат, 4961, 248 с.
68 Фототелеграфная передача и децентрализованное печатание газет. — В сб.:
«Техника связи» под ред. С. И. Клыкова и М. Н. Стоянова. М.,
«Связь», 1974 , 279 с
ОГЛАВЛЕНИЕ
Стр.
Предисловие........................................................ 3
Введение........................................................... 4
Глава I1
Основные принципы передачи дискретных сообщений
1.1. Структурная схема передачи дискретных сообщений. Сообщения и сиг-
налы ............................................................. 9
1,2. Источники сообщений...........................................10
1.3. Количество информации, первичное кодирование .... .10
1.4. Скорость передачи информации и скорость модуляции. Пропускная
способность каналов связи .................................... 14
1.5. Понятие о верности и надежности систем телеграфии и передачи дан-
ных. Понятие о помехоустойчивом кодировании . . 16
1.6. Понятие о синхронном и стартстопной принципах работы оконечных
устройств. Параллельный и последовательный способы передачи . . 18
1.7. Понятие о каналах связи, дискретных каналах, каналах и трактах пе-
редачи дискретных сообщений...................................... 21
1 8. Основные требования, предъявляемые к системам телеграфии и пере-
дачи дискретных сообщений . . . . .... 23
Глава 2
Искажения двоичных сигналов
2.L. Оценка качества связи по искажениям принимаемых сигналов . . 25
2.2. Закон распределения смещений ЗМВ и длительности дроблений. Ста-
тистические методы оценки искажений ... ............30
2.3. Принципы измерений искажений значащих интервалов (посылок) . . 34
Глава 3
Двоичные элементы систем передачи дискретных сообщений
ЗЛ. Схемы реализации логических операций, применяемых в технике пе-
редачи дискретных сообщений....................................37
3.2. Интегральные логические схемы.................................40
3.3. Двоичные переключающие устройства. Назначение и классификация
Основные параметры................................ . . . . 42
3.4. Поляризованные телеграфные реле...............................44
3.5. Симметричный триггер на транзисторах..........................47
3.6. Электронное телеграфное реле..................................49
3.7. Двоичные элементы на магнитных сердечниках с прямоугольной пет-
лей гистерезиса...................................................50
3.8. Примеры схем с использованием двоичных элементов..............52
Глава 4
Передающие оконечные устройства
4.1. Назначение и структурная схема................................56
4.2. Ввод информации в передающие оконечные устройства .... 57
523
Стр.
4.3. Кодирующие устройства............................................. 59
4.4. Наборные устройства (накопители)...................................61
4.5. Распределители.....................................................61
4.6. Управляющие устройства и привод....................................65
4.7. Выходные устройства................................................67
4.8. Первичные коды.....................................................68
4.9. Передающая часть электромеханического телеграфного аппарата . . 70
4.10. Передающая часть электронного стартстопного телеграфного аппарата 77
4.11. Устройства считывания с промежуточных носителей (трансмиттеры) 80
Глава 5
Приемные оконечные устройства
5.1. Назначение и структурная схема приемного оконечного устройства . 84
5.2. Прием информации оконечным приемным устройством....................85
5.3. Фазирование по посылкам и по циклам................................86
5.4 Способы регистрации................................................89
5.5. Сравнение различных 'способов регистрации при искажении посылок 94
.5.6. Понятие об изохронном (синхронном) и стартстопном искажениях по-
сылок ......................•.......................................96
5 7. Исправляющая способность приемных оконечных устройств . . . 103
5.8. Распределители и наборные устройства..............................105
5.9. Дешифраторы.......................................................106
5.10. Устройства вывода сообщений......................................108
5.11. Приемная часть электромеханического стартстопного телеграфного
аппарата.............................................................. 115
5.12. Приемная часть электронного стартстопного телеграфного аппарата 124
Глава 6
Устройства фазирования и стартстопно-синхронные системы
6.1 Требования к устройствам фазирования по посылкам и классификация
этих устройств.........................................................126
6.2. Принципы действия устройств фазирования с системой автоматическо-
го регулирования ..................................................... 129
6.3. Устройства фазирования по посылкам с непосредственным воздей-
ствием на местный генератор ..........................................130
6.4. Устройства фазирования по посылкам без непосредственного воздей-
ствия на местный генератор.............................................133
6.5. Требования к устройствам фазирования по циклам и классификация
этих устройств....................................................... 139
6.6. Безмаркерный способ фазирования по циклам.........................139
6.7. Маркерный способ фазирования по циклам........................... 141
6.8. Сравнение синхронного и стартстопного принципов работы оконечных
устройств..............................................................144
6.9. Принципы действия стартстопно-еинхронных систем...................146
6.10. Классификация стартстопно-еинхронных систем......................151
6.11. Цикловые СТС системы.............................................153
6 12. Импульсные СТС системы...........................................155
524
Стр.
Глава 7
Особенности спектров и переходных процессов при передаче
дискретных сообщений
7.1. Спектры импульсов постоянного тока...........................158
7.2. Спектры модулированных сигналов..............................162
7.3. Переходные процессы при передаче импульсов постоянного тока . . 170
7.4. Переходные процессы при передаче -модулированных сигналов . . 174
7.5. Влияние фазо-частотных искажений.............................182
7.6. Особенности спектров и переходных процессов при низкой несущей
частоте...........................................................186
7.7. Связь между скоростью передачи и -шириной канала.............190
Глава 8
Построение дискретных каналов
8.- 1. Принципы образования каналов....................................194
8 2. Телеграфные каналы -постоянного тока.............................197
8.3 . Каналы передачи дискретной информации на переменном токе. (Ка-
налы частотного телеграфирования и передачи данных) .... 203
8.4 . Понятие о дискретных каналах, образованных системами с ИКМ . . 216
8 5. Структурная схема и принцип действия дискретного канала с AM . . 223
8.6 . Структурная схема и принцип действия дискретного канала с ЧМ . 227
8 7. Принцип организации транзитных связей и выделения каналов ТТ . 235
8.8 . Действие и устройство каналов передачи дискретной информации с
фазовой модуляцией .................................................. 237
8.9 Принцип передачи двоичной информации в системе -с ФМ с частично
подавленной одной боковой полосой (ФМ с ОБП)..........................258
8.10 . Принципы организации дискретных каналов по радиосвязям . . . 261
Глава 9
Качество передачи дискретных сообщений
9.1. Приборы для измерения краевых искажений...........................269
9.2. Краевые искажения посылок вследствие -влияния помех .... 272
9.3. Краевые искажения посылок вследствие влияния других мешающих
факторов..............................................................279
9 4. Суммирование краевых искажений в составных каналах .... 284
9.5. Оценка качества связи по количеству ошибок........................285
9.6. Приборы для -измерения количества ошибок..........................286
9 7. Ошибки вследствие влияния помех..................................288
9.8. Ошибки вследствие влияния других мешающих факторов .... 297
9.9. Понятия о законах распределения ошибок............................303
9.10. Требования к качеству каналов передачи дискретных сообщений . . 307
Глава ,10
Аппаратура образования дискретных каналов
10.1. Классификация аппаратуры для передачи двоичной информации . 311
10.2. Низкоскоростная аппаратура для образования дискретных каналов
для передачи двоичной информации......................................311
10.3. Включение стартсто-пных телеграфных аппаратов в каналы ТТ . . 321
525
Стр.
10.4. Аппаратура временного уплотнения для местных телеграфных связей
(ТВУ-12)............................................................. 323
10 5 Аппаратура частотно-временного уплотнения (ЧВТ) .... 326
10.6. Среднескоростная аппаратура передачи данных.....................339
10.7. Модем с параллельным способом передачи сигналов в канале . . . 345
Глава li'l
Методы и устройства повышения верности
14.1. Общие сведения о методах повышения верности...................348
1.1.2. Принцип построения систематических кодов.......................353
11.3 Некоторые систематические коды, используемые на практике . . 358
111 .4. Циклические коды..............................................361
11.5. Несистематические коды..........................................368
1,1.6. Итеративные коды...............................................370
14.7. Эффективность систематических корректирующих кодов .... 372
11.8. Принципы построения кодирующих и декодирующих устройств . . 375
1*1.9. Принципы использования детекторов качества сигнала .... 387
111.10. Системы повышения верности передачи дискретных сообщений . . 390
11.14. Системы с решающей обратной связью.............................393
1 LIP- Примеры устройств повышения верности...........................402
Глава 12
Сети передачи дискретных сообщений
12.1. Понятие о сетях передачи дискретных сообщений....................404
12 2. Понятие о способах коммутации...................................406
12 3. Сравнение способов коммутации сообщений и коммутации каналов . 408
12.4. Коммутируемые сети передачи дискретных сообщений СССР . . . 412
12.5. Принципы организации телеграфной сети общего пользования . . 413
126. Принципы организации сети абонентского телеграфирования . . . 416
12.7. Оконечное оборудование и каналы, используемые в телеграфных се-
тях. Принципы сигнализации.......................................418
12.8. Коммутируемые сети передачи данных...............................420
12.9. Узлы коммутации каналов .... 422
12.10. Узлы коммутации сообщений.................................... . 432
Гл ава 13
Методы повышения надежности систем и сетей передачи
дискретных сообщений
13.1. Основные понятия о надежности..............................436
13.2. Критерии отказа............................................439
13 3. Надежность аппаратуры передачи дискретных сообщений . . . 440
1'3.4. Надежность каналов связи..................................442
13 5. Надежность каналов и трактов передачи дискретных сообщений . 444
13.6. Надежность сетей передачи дискретных сообщений .... 449
13 7. Влияние системы технического обслуживания на надежность . . 459
Глава (14
Основы факсимильной связи
14.1 Факсимильная связь как средство передачи неподвижных изображений 465
14.2. Структурная схема факсимильной связи.............................467
526
Стр
14.3 Анализирующие устройства....................................... 470
14.4. Электрический тракт факсимильных аппаратов . ... 481
14.5. Выбор несущих частот в канале связи и скорость передачи . . . 490
14.6. Синтезирующие устройства...................................... 493
14.7. Устройства синхронизации и фазирования . . .... 500
14.8. Организация факсимильной связи по проводным каналам . . . 506
14.9. Особенности организации факсимильной связи по радиоканалам . . 509
14.10. Передача газет по широкополосным каналам связи ... 511
Список литературы .................................................. 520
Вадим Сергеевич Гуров,
Геннадий Алексеевич Емельянов,
Николай Никифорович Етрухин,
Валентин Грантович Осипов
ПЕРЕДАЧА ДИСКРЕТНОЙ
ИНФОРМАЦИИ И ТЕЛЕГРАФИЯ
Редактор Е. В. Комарова
Художник В. Горский
Тех-н. редактор Г. И. Колосова
Корректор Г. Г. Лев
Сдано в набор 26/II 1974 rs
Подписано в печ. 19/VI 1974 г.
Т-09696 Формат 60х90Лв Бумага писчая № 2.
33,0 усл.-п. л. 35,54 уч.-изд. л.
Тираж 15 100 экз. Изд № 15503 Зак № 60
Цена 1 р. 40 коп
Издательство «Связь», Москва 101000,
Чистопрудный бульвар, д 2
Типография издательства «Связь»
Госкомиздата СССР
Москва 101000 ул Кирова, д. 40